/

































































































































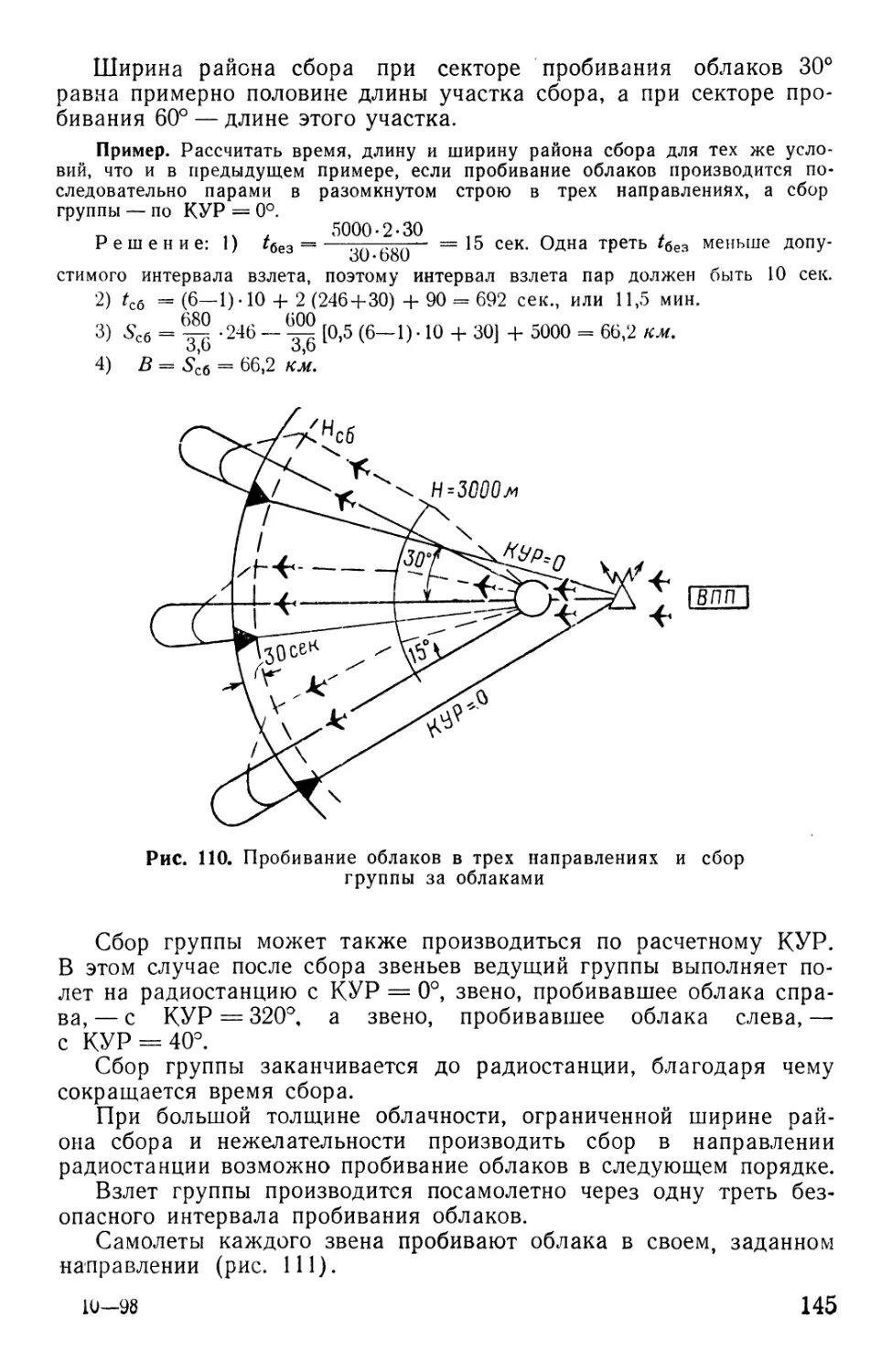




























































































Похожие




Текст
Н/1 Носов, ГИ. Цюпко, В.И.Петлюк
ВОЖДЕНИЕ
ОДНОМЕСТНОГО
САМОЛЕТА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СОЮЗА ССР
МОСКВА-1956
Н. А. НОСОВ, Г. И. ЦЮПКО, В. И. ПЕТЛЮК
ВОЖДЕНИЕ
ОДНОМЕСТНОГО
САМОЛЕТА
Под редакцией полковника Б АБАЙ Г. А.
г?) (I |U-4J2j||
/ ^sci/ib.narod.ru
^^^/scilib.naro^^
е к а
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СОЮЗА ССР
МОСК ВА — 1956
Н. А. Носов, Г. И. Цюпко, В. И. Петлю к
ВОЖДЕНИЕ ОДНОМЕСТНОГО САМОЛЕТА,
Под редакцией полковника БАБАЙ Г. А.
В книге рассматриваются основы теории и практики самолетовождения
применительно к полетам на одноместном самолете. Основное внимание при
этом уделено способам применения технических средств самолетовождения, во-
просам вождения групп самолетов и особенностям самолетовождения в раз-
личных условиях навигационной обстановки. Кроме того, в книге даются прак-
тические советы летчикам по подготовке и выполнению полета без штурмана.
Книга рассчитана на летчиков строевых частей ВВС, выполняющих полеты
без штурмана. Она может быть также полезной для курсантов авиационных учи-
лищ летчиков ВВС и летного состава ДОСААФ.
ВВЕДЕНИЕ
В полете без штурмана летчики одноместных самолетов выпол-
няют весь комплекс действий по самолетовождению. Полет на
бомбометание или стрельбу по наземным объектам, ведение раз-
ведки, перехват и уничтожение воздушного противника, перебазиро-
вание на другие аэродромы и т. д. требуют от летчиков подлинного
мастерства в самолетовождении.
Самолетовождение тесно связано с пилотированием, и успех
его во многом зависит от качества пилотирования самолета. Уме-
ние выдержать заданный режим полета (курс, скорость, высоту),
набрать.высоту или планировать с установленной вертикальной
скоростью, произвести разворот на заданный угол с определенным
радиусом при отсутствии видимого горизонта является обязатель-
ным условием точного выполнения самолетовождения.
Точное выполнение самолетовождения вне видимости земли и
горизонта обеспечено необходимыми приборами и устройствами,
разработанными советскими конструкторами. Современные дистан-
ционные гиромагнитные компасы работают устойчиво на всех
режимах полета и при любых эволюциях самолета. Девиация, вы-
зываемая магнитными массами самолета, компенсируется у них
почти полностью. Летчик с помощью ДГМК и авиагоризонта мо-
жет выдерживать с большой точностью магнитный курс в горизон-
тальном полете, при наборе высоты и снижении, а также произ-
водить развороты на заданный угол и заданный магнитный курс
при отсутствии видимости земли и горизонта.
Процесс самолетовождения все больше автоматизируется, что
особенно важно при полетах на больших высотах и скоростях.
Установленные на самолетах навигационные индикаторы, автома-
тически счисляя пройденный самолетом путь, позволяют просто и
удобно вести непрерывную ориентировку и отмечать место самолета
на карте. Навигационные индикаторы применяются в любых усло-
виях полета и освобождают летчика от сложных расчетов в уме
и глазомерной прокладки пути.
Комбинированный указатель скорости освобождает летчика от
сложных пересчетов скоростей, так как он показывает истинную и
приборную скорости одновременно.
Автоматический радиокомпас в сочетании с другими приборами
позволяет в сложных метеорологических условиях выйти на при-
1* 3
водную радиостанцию аэродрома посадки из любой точки района
полетов, по предвычисленному курсовому углу определить момент
прохода поворотного ориентира и выполнить полет от приводной
радиостанции в заданном направлении.
Автоматический наземный радиопеленгатор в течение несколь-
ких секунд определяет направление на самолет и передает необ-
ходимые данные экипажу, т. е. позволяет вести ориентировку, ис-
правление пути и выход на радиопеленгатор.
Неоценимую помощь экипажам оказывают наземные радиолока-
ционные станции обнаружения и наведения, позволяющие опреде-
лять с земли местонахождение самолета и элементы его движе-
ния — направление и скорость полета.
Задача каждого летчика состоит в том, чтобы постоянно изучать
непрерывно развивающиеся технические средства самолетовождения,
уметь мастерски применять их, сообразуясь с условиями полета,
повышать точность самолетовождения и строго соблюдать правила
безопасности полетов.
КРАТКИЕ СВЕДЕНИЯ ИЗ ИСТОРИИ РАЗВИТИЯ
САМО Л ЕТО В ОЖД Е Н И Я
Самолетовождение зародилось вместе с появлением самолета.
Творец первого в мире летательного аппарата тяжелее воздуха
А. Ф. Можайский для целей самолетовождения предусмотрел в обо-
рудовании аэроплана компас, указатель скорости, высотомер и
часы. Замечательный изобретатель считал, что определить место
самолета и направить его в заданную точку без этих приборов не-
возможно. Предусмотренная А. Ф. Можайским система оборудо-
вания самолета основными приборами сохранилась до настоящего
времени на всех отечественных и зарубежных самолетах.
Для большей уверенности в первое время маршрут полета про-
кладывался через крупные площадные ориентиры или вдоль линей-
ных ориентиров («по железке»), а сам полет выполнялся днем, при
видимости земли. Летчик сохранял направление полета по компасу,
определял на карте по пройденному расстоянию примерный район
положения самолета и, сличая карту с местностью, по крупным
ориентирам уточнял место самолета.
Так возникла визуальная ориентировка — старей-
ший способ определения места самолета в полете, в основе которого
лежит прокладка пути.
Необходимость выполнения полетов в сложных условиях по-
влекла за собой дальнейшее усовершенствование и появление новых
технических средств, обеспечивающих высокую точность самолето-
вождения. В 1913 г. конструктор В. А. Слесарев предложил за-
менить флюгерный указатель скорости устройством, имеющим мем-
бранную коробку. Испытания нового прибора для измерения воз-
душной скорости самолета дали хорошие результаты.
Выдающийся перелет знаменитого русского летчика П. Н. Не-
стерова с механиком Г. М. Нелидовым 24 мая 1914 г. по маршруту
Киев — Выхов — Витебск — Городок — Гатчина показал большие
возможности использования навигационных приборов, и в первую
очередь магнитного компаса, в интересах самолетовождения.
Точность определения места самолета прокладкой пути непре-
рывно повышалась. Основные способы прокладки были разрабо-
таны А. П. Журавченко, служившим в то время артиллеристом
эскадры тяжелых кораблей «Илья Муромец», а ныне являющимся
профессором, заслуженным деятелем науки и техники. В своем
5
труде «Артиллерийские вопросы а в и а ц и и» А. Н. Жу-
равченко в 1917 г., излагая теорию и практику самолетовождения,
показал, что точность получения места самолета счислением пути
по магнитному компасу, указателю скорости и часам составляет
примерно 3—5% от пройденного расстояния, и сделал вывод, что
с такой точностью прокладки пути можно начать серьезную работу
над освоением полетов за облаками и ночью.
Таким образом, наряду с визуальной ориентировкой все боль-
шее значение в самолетовождении начинает приобретать ориенти-
ровка при помощи технических средств.
С победой Великой Октябрьской социалистической революции
начался бурный рост всех отраслей авиационной науки и техники,
в том числе и самолетовождения.
Советские конструкторы и специалисты штурманского дела
В. Г. Немчинов, П. А. Домогаров, Б. В. Стерлигов, С. С. Тихменев
и другие, помимо усовершенствования приборов, разработали также
и методику определения и учета ошибок высотомера, указателя ско-
рости и компаса.
Полеты в сложных условиях требовали учета влияния ветра,
знания угла сноса и путевой скорости самолета.
Для определения некоторых навигационных элементов полета
в 1924 г. Н. Ф. Кудрявцев предложил визир. В 1926 г. Б. В. Стер-
лигов разработал новую конструкцию ветрочета, на котором выпол-
няется графическое решение навигационного треугольника скоро-
стей, а в 1927 г. штурман Л. С. Попов изготовил универсальную
навигационную счетную линейку, позволяющую решать основные
задачи самолетовождения. Все эти приборы, претерпев некоторые
изменения, существуют до наших дней.
В 1930 г. вышла книга Б. В. Стерлигова «Руководство
по воздушной навигации», в которой полно и подробно
рассмотрены практические вопросы самолетовождения.
В годы первых пятилеток в самолетовождение стали внедряться
радиотехнические средства. Советские ученые и конструкторы, ис-
пользуя открытие великого русского ученого А. С. Попова (1895г.),
создали радиотехнические угломерные системы самолетовождения.
Советские штурманы разработали способы использования этих
систем: полет на радиостанцию и от нее, определение линии поло-
жения и места самолета, определение момента выхода на заданную
линию пути и т. д.
В это же время усовершенствуются и разрабатываются новые
астрономические приборы и способы использования их в самолето-
вождении. Штурманы многоместных самолетов стали приобретать
навыки в определении астрономических линий положения, места
самолета и истинного курса полета.
Разработанные способы использования в самолетовождении
комплекса технических средств обеспечили летчикам нашей страны
выполнение ряда выдающихся перелетов.
В 1925 г. был совершен перелет группы самолетов по маршруту
Москва —Пекин (летчик М. М. Громов и другие).
6
В 1926 г. М. М. Громов совершил круговой европейский перелет
по маршруту Москва — Кенигсберг — Берлин — Париж — Рим —
Вена — Прага — Варшава — Москва.
В 1929 г. состоялся выдающийся перелет летчика С. А. Шеста-
кова и штурмана Б. В. Стерлигова из Москвы в Нью-Йорк, через
Тихий океан.
В 1936 г. экипаж в составе летчиков В. П. Чкалова и
Г. Ф. Байдукова и штурмана А. В. Белякова совершил героический
беспосадочный полет по маршруту Москва — Земля Франца Иоси-
фа — Северная Земля — бухта Тикси — Петропавловск-Камчат-
ский, Николаевск-на-Амуре — остров Удд (ныне остров Чкалов).
В июне 1937 г. этот же экипаж совершил перелет из Москвы че-
рез Северный полюс в Северную Америку (г. Ванкувер).
12 июля этого же года из Москвы через Северный полюс в США
был совершен второй беспосадочный перелет экипажем в составе
летчиков М. М. Громова и А. М. Юмашева и штурмана С. А. Да-
нилина.
27 июня 1938 г. летчик В. И. Коккинаки и штурман А. Н. Брян-
динский совершили беспосадочный перелет из Москвы на аэро-
дром Спасск в районе Владивостока на высоте 7000 м.
В том же году экипаж в составе летчиков В. С. Гризодубовой
и П. Д. Осипенко и штурмана М. М. Расковой совершили беспоса-
дочный перелет по маршруту Москва — Дальний Восток и установил
новый международный рекорд полета на дальность для женщин.
Эти и многие другие перелеты советских летчиков наглядно по-
казали могущество нашего воздушного флота и явились одновре-
менно всесторонней проверкой качества технических средств и раз-
работанных способов их использования, проверкой теории и прак-
тики самолетовождения.
К концу тридцатых годов было разработано много новых тех-
нических средств самолетовождения, базирующихся на последних
достижениях науки и техники. Особенно бурно в эти годы разви-
вались радиотехнические средства — наземные и самолетные ра-
диопеленгаторы и радиомаяки.
Вопросы теории и практики самолетовождения, разработанные
еще в довоенный период, нашли свое дальнейшее развитие в бое-
вых действиях советской авиации на фронтах Отечественной войны.
Защищая честь и независимость нашей Родины, советские летчики
в годы Великой Отечественной войны совершали боевые вылеты
днем и ночью, в различное время года, в сложных метеорологиче-
ских условиях, обрушивая смертоносный груз на головы фашист-
ских захватчиков.
В послевоенные годы огромный опыт самолетовождения в пе-
риод Великой Отечественной войны был изучен и обобщен с уче-
том развития современной реактивной и радиолокационной техники.
Для обеспечения полетов большими группами днем и ночью,
в любых метеорологических условиях, на всех высотах и на пре-
дельный радиус действия самолетов наши конструкторы и инже-
неры создали ряд ценнейших приборов, обеспечивающих самолето-
7
вождение в этих условиях. К ним относятся прежде всего круго-
вые и гиперболические системы самолетовождения, самолетные
панорамные радиолокаторы, радиовысотомеры, навигационные
индикаторы, дистанционные компасы, комбинированные указатели
скорости и др.
Таким образом, современная теория самолетовождения бази-
руется на последних достижениях науки и техники, на опыте Ве-
ликой Отечественной войны и опыте полетов в послевоенное время.
ГЛАВА ПЕРВАЯ
ОСНОВЫ САМОЛЕТОВОЖДЕНИЯ
§ 1. ОСНОВНЫЕ понятия
Путь самолета. Основная задача самолетовождения сводится
к умению провести самолет или группу самолетов из одной точки
земной поверхности в другую. В каждый момент полета проекция
самолета на земную поверхность дает отметку места самолета.
Линия на земной поверхности, проходящая через эти отметки, на-
зывается линией пути самолета.
Линия пути самолета может быть как заданной для пред-
стоящего полета, так и фактической, выполняемой в полете.
Линия пути от взлета до посадки, определяющая полет само-
лета (группы самолетов) из одной точки земной поверхности в дру-
гую, называется маршрутом.
Путевой угол. Угол между северным направлением истинного
(географического) меридиана и линией пути называется истин-
ным путевым углом (ИПУ).
Истинный путевой угол измеряется от северного направления
истинного меридиана по часовой стрелке в пределах от 0 до 360°.
Истинный путевой угол может быть з а данным (ЗИЛУ) и
фактическим (ФИЛУ). Угол между заданной и фактической
линиями пути называется
боковым уклоне-
нием (БУ). Боковое укло-
нение от заданной линии
пути может быть как пра-
вым, так и левым (рис. 1).
Ортодромия. Форма
Земли представляет собой
эллипсоид вращения —
шар, сжатый по оси вра-
щения. Но сжатие Земли
незначительно и поэтому
при решении большинства
задач самолетовождения
Землю принимают за
шар.
Рис. 1, Путь самолета и боковое уклонение
9
с
ю
Рис. 2. Ортодромия и локсо-
дромия
Путь самолета по дуге большого
круга называется ортодромией.
Расстояние по ортодромии между дву-
мя точками на земном шаре является
кратчайшим.
Ортодромия пересекает географиче-
ские меридианы под различными угла-
ми (рис. 2), вследствие чего полет по
ортодромии связан с частыми измене-
ниями путевого угла.
Локсодромия. Кривая линия на зем-
ной поверхности, пересекающая геогра-
фические меридианы под одним и тем
же углом, называется локсодро-
мией.
Локсодромический путь длиннее
ортодромического, но он удобен в са-
молетовождении тем, что полет совершается при постоянном путе-
вом угле. При малых расстояниях разница в длине между локсо-
дромией и ортодромией становится незначительной. Локсодромия
и ортодромия равны по величине и направлению на географических
меридианах и на экваторе (см. рис. 2).
Истинный курс самолета. Направление продольной оси самолета
относительно меридиана определяет курс самолета. Истинный
курс самолета (ИК) —это угол, составленный северным напра-
влением истинного меридиана и направлением продольной оси са
молета (рис. 3).
Рис. 3. Истинный курс самолета
Истинный пеленг и курсовой угол. Угол между северным на-
правлением истинного (географического) меридиана и направле-
нием на ориентир называется истинным пеленгом ориен-
тира (ИПО). Угол между северным направлением истинного ме-
ридиана и направлением на самолет есть истинный пеленг
10
самолета (ИПС). Истинные пеленги измеряются от северного
направления меридианов по часовой стрелке в пределах от 0 до
360° (рис. 4).
Направление от самолета на ориентир составляет с направле-
нием продольной оси самолета курсовой угол ориентира (КУО).
Курсовой угол измеряется от направления продольной оси самолета
по часовой стрелке в пределах от 0 до 360°.
Высота полета. Расстояние по вертикали от самолета до земной
поверхности называется истинной высотой полета (//Ист)«
Высота полета самолета относительно уровня аэродрома называется
относительной высотой (//отн), а относительно уровня моря —
абсолютной высотой (Afa6c).
Полет по маршруту может выполняться на различной высоте.
Изображение линии полета самолета по высотам на участках марш-
рута называется профилем полета. Профиль полета может
быть заданным и фактическим.
Скорость полета. Полет самолета, помимо высоты, характери-
зуется его скоростью. Скорость самолета относительно воздушной
массы называется истинной воздушной скоростью (V).
Скорость самолета относительно земной поверхности и ориентиров
на ней называется путевой скоростью (W).
Время полета. Время полета в самолетовождении имеет решаю-
щее значение. Каждое боевое задание выполняется в заданное
время. Без учета времени летчик не может вести прокладку пути,
определить путевую скорость и расчетное время прохода последую-
щих ориентиров.
11
§ 2. ТЕХНИЧЕСКИЕ СРЕДСТВА САМОЛЕТОВОЖДЕНИЯ
В полете в зависимости от условий навигационной обстановки
для решения задач самолетовождения могут быть использованы
различные средства.
Технические средства самолетовождения в зависимости от прин-
ципа действия и измеряемых величин принято подразделять на
общие, радиотехнические и астрономические
средства самолетовождения.
В истребительной авиации наиболее широкое применение нахо-
дят общие и радиотехнические средства самолетовождения.
К применяемым на самолетах общим средствам самолетовожде-
ния относятся барометрические высотомеры, указатели воздушной
скорости, магнитные компасы, часы, навигационные индикаторы,
предназначенные для счисления пути.
К радиотехническим средствам самолетовождения относятся
радиокомпасы, работающие совместно с наземными передающими
радиостанциями; наземные радиопеленгаторы, дающие возможность
определить направление на передающую самолетную радиостан-
цию; наземные радиолокаторы, позволяющие определять место
самолета с земли; радиовысотомеры.
‘Кроме того, в самолетовождении используются светотехнические
устройства и другие средства земного обеспечения самолетовожде-
ния: ориентирные знаки, сигнальные средства (дымовые шашки,
пирофакелы) и т. д.
Для различных расчетов и работы на картах при подготовке
к полету, а в некоторых случаях и при выполнении полета исполь-
зуются штурманские счетно-измерительные инструменты, графики,
номограммы, таблицы и другие справочные пособия.
§ 3. АВИАЦИОННЫЕ КАРТЫ И АЭРОЛОЦИИ
Карты являются важнейшим средством осуществления самоле-
товождения. Без наличия карты на самолете летчику запрещается
выполнять любой полет. Без карты нельзя вести ориентировку и
определить место самолета, а также выполнить полет к цели, оты-
скать ее и вывести самолет на аэродром посадки.
Картой называется условное изображение поверхности земного
шара на плоскости. Способ переноса географической сетки мери-
дианов и параллелей с глобуса на плоскость называется карто-
графической проекцией.
Расстояния на местности при переносе земной поверхности на
плоскость уменьшаются во много раз. Степень уменьшения рас-
стояний на карте называется численным масштабом. Вы-
ражается он дробью. Например, численный масштаб 1 : 1 000 000
означает, что все расстояния на местности при переносе на карту
уменьшены в 1 000 000 раз.
Отношение расстояния на карте к соответствующему расстоянию
на местности, выраженное в единицах измерения длины, назы-
12
вается линейным масштабом. Например, масштаб 10 км
в 1 см означает, что каждый сантиметр на карте соответствует
10 км на местности.
Кроме проекции и масштаба, каждая карта характеризуется
нагрузкой. Под нагрузкой понимают содержание карты, т. е.
насколько подробно на карте изображены земная поверхность,
ориентиры и местные предметы. Содержание карты определяется
прежде всего масштабом. Чем крупнее масштаб карты, тем подроб-
нее карта, тем больше на ней изображено деталей местности. На
содержание карты оказывает влияние также и ее назначение.
Основными полетными картами в истребительной
авиации являются карты международной проекции в масштабе
1 : 1 0,00 000 и равноугольной поперечно-цилиндрической проекции
в масштабе 1 : 500 000; 1 : 200 000 и крупнее.
Карта международной проекции в масштабе 1 : 1 000 000 имеет
незначительные искажения длин и углов. Локсодромия и ортодро-
мия на картах такой проекции в пределах одного листа проклады-
ваются в виде прямой линии.
Картографическая сетка карты в масштабе 1 : 1 000 000 нанесена
через Г и оцифрована на рамке каждого листа. Кроме того, для
удобства и более точного определения широты и долготы данной
точки на рамке каждого листа имеется дополнительная разбивка
градусной сетки через каждые 5'.
Карта в масштабе 1 : 1 000 000 изготовлена в нескольких красках,
рельеф местности изображается на ней горизонталями с отмывкой.
При необходимости пользоваться большим количеством листов
(более 9) нужно иметь в виду, что между листами карты воз-
можны значительные разрывы, которые приводят к известным труд-
ностям при их склейке.
Карта в масштабе 1 : 1 000 000 используется при решении задач
наведения истребителей на противника, при сопровождении истре-
бителями бомбардировщиков, при полете к характерной крупной
цели. Однако данный масштаб мало пригоден при боевых действиях
по объектам противника на поле боя. Отыскание мало заметных
целей в этом случае требует изображения более мелких деталей
местности и стало быть карт в более крупном масштабе (1 : 500 000;
1 : 200 000 и крупнее).
Локсодромию и ортодромию на картах в масштабе 1 : 500 000
и 1 :200 000 в пределах одного листа можно прокладывать прямой
линией.
Меридианы и параллели на картах масштаба 1 :500 000 прове-
дены через 30'.
На картах крупного масштаба (1 : 200 000 и крупнее), построен-
ных в равноугольной поперечно-цилиндрической проекции, нане-
сены вертикальные и горизонтальные линии, расстояние между ко-
торыми зависит от масштаба карты. При измерении направлений
на этих картах необходимо учитывать, что вертикальные киломе-
тровые линии не совпадают с направлением географических мери-
дианов на угол сближения меридианов у, который может иметь
13
максимальное значение 3°. (Значение его часто нанесено на ниж-
нем обрезе карты.) Поэтому при измерении путевого угла относи-
тельно вертикальной линии следует учитывать поправку на сближе-
ние меридианов.
Карты изготовлены в пяти красках, рельеф местности изображен
горизонталями с отмывкой.
В истребительной авиации также могут применяться карты
международной проекции в масштабе 1:2 000 000. Такая карта
обычно находится на борту самолета в качестве резервной и пред-
назначается для самолетовождения в тех случаях, когда самолет по
каким-либо причинам вышел за пределы основной полетной карты.
Аэролоции представляют собой подробные описания местности
в районе полетов по основным маршрутам. Они позволяют пра-
вильно оценить навигационную обстановку при решении вопросов
выбора маршрута и способов использования в самолетовождении
технических средств.
В аэролоции описан ландшафт местности, позволяющий судить
о возможности визуальной ориентировки и вынужденной посадки
самолетов; даны сведения о сети железных, шоссейных и грунтовых
дорог в данном районе; перечень опорных ориентиров и примерная
оценка видимости их с разных высот; климатическая оценка района
и наличие аэрометеорологических станций. Кроме того, в аэролоции
описана сеть аэродромов, их координаты и высоты над уровнем
моря, условия посадки в разное время, оборудование посадочными
системами, порядок посадки на аэродромах с использованием по-
садочных систем, а также указаны средства земного обеспечения
самолетовождения и наличие ночных трасс в районе полетов по
маршруту.
§ 4. ОСНОВНЫЕ ЗАДАЧИ САМОЛЕТОВОЖДЕНИЯ
Основными задачами самолетовождения являются:
1) точное выполнение намеченного маршрута с соблюдением
заданного профиля и режима полета;
2) вывод самолета (группы самолетов) на цель и на аэродром
посадки точно по месту и времени;
3) определение навигационных элементов, необходимых для
выполнения поставленных боевых задач (бомбометания, воздуш-
ного фотографирования и др.).
К навигационным элементам относятся высота и истинная воз-
душная скорость, угол сноса, путевая скорость, скорость и направ-
ление ветра, направление полета.
Этапами полета по маршруту, на выполнение которых направ-
лены действия экипажа, являются:
а) взлет и сбор группы самолетов;
б) выход на исходный пункт маршрута (ИПМ);
в) выход на заданную линию пути;
г) контроль и исправление пути;
14
д) определение исходных данных для выполнения боевой за-
дачи (бомбометание, фотографирование и др.);
е) отыскание цели и выход на нее;
ж) выход на исходный пункт обратного маршрута (ИПОМ);
з) полет по линии пути обратного маршрута;
и) выход на конечный пункт маршрута (КПМ);
к) роспуск группы и посадка.
Неотъемлемой частью самолетовождения является ориенти-
ровка— действия летчика по определению места или линии поло-
жения самолета в полете.
Геометрическое место точек, которые определяют возможное
местонахождение самолета, называется линией положения.
Линии положения могут быть определены с помощью общих, радио-
технических и астрономических средств самолетовождения и про-
ложены на карте либо в полете, либо на земле при подготовке
к полету.
Местом самолета (МС) называется точка на земной по-
верхности, над которой находится самолет в данный момент вре-
мени.
В зависимости от навигационной обстановки место самолета
определяется:
1) сличением карты с местностью в момент пролета над ориен-
тиром или отметкой момента пролета технических средств (радио-
маркеров, приводных радиостанций и др.);
2) счислением и прокладкой на карте пройденного самолетом
пути (в том числе и счислением пути с помощью автоматических
устройств);
3) определением и прокладкой на карте двух — трех линий по-
ложения самолета, пересекающихся между собой.
Место самолета может быть определено как экипажем (летчи-
ком) в воздухе, так и личным составом наземных радиотехнических
средств, а затем передано на самолет.
Ориентировка осуществляется систематически и в каждом по-
лете с точностью, необходимой для выполнения поставленного за-
дания.
ГЛАВА ВТОРАЯ
ПРИМЕНЕНИЕ ОБЩИХ СРЕДСТВ САМОЛЕТОВОЖДЕНИЯ
§ 5. ОПРЕДЕЛЕНИЕ И ВЫДЕРЖИВАНИЕ КУРСА ПО МАГНИТНОМУ
КОМПАСУ
Земной магнетизм
Магнитный курс самолета. Магнитный компас позволяет опре-
делить положение продольной оси самолета относительно направ-
ления, в котором устанавливается магнитная стрелка под влиянием
земного магнетизма. Направление, в котором устанавливается сво-
бодно подвешенная и уравновешенная магнитная стрелка, назы-
вается магнитным меридианом. Угол, составленный се-
верным направлением магнитного меридиана и продольной осью
самолета, называется магнитным курсом (МК). Магнит-
ный курс измеряется от северного направления магнитного мери-
диана по часовой стрелке в пределах от 0 до 360° (рис. 5).
Рис. 5. Магнитный курс самолета
16
Магнитное поле Земли. Свойство свободной магнитной стрелки
устанавливаться всегда определенным образом показывает, что
в пространстве, окружающем Землю, обнаруживаются силы, сви-
детельствующие о существовании магнитного поля.
Рис. 6. Магнитное поле и магнит-
ные полюсы Земли
Рис. 7. Магнитное склонение
Общая пространственная картина земного магнитного поля
представляется следующей. Магнитные силовые линии распростра-
няются из северного магнитного полюса, находящегося в южном
полушарии (<р = 69° ю. ш. иХ = 144° в. д.), и устремляются к юж-
ному магнитному полюсу, находящемуся в северном полушарии
(<? = 74° с. ш. и Х = 92° з. д.), образуя замкнутые кривые, охваты-
вающие огромное пространство вокруг Земли (рис. 6). Магнитная
стрелка в каждой точке Земли устанавливается вдоль магнитной си-
ловой линии, указывая своим северным концом направление на север.
Магнитные и географические полюсы на земном шаре не совпа-
дают. Линия, соединяющая магнитные полюсы, наклонена к оси
вращения Земли на 11°,5 и смещена от центра Земли примерно на
1140 км.
Магнитное склонение. Направление магнитной стрелки (магнит-
ного меридиана) на земной поверхности, как правило, не совпадает
с географическим меридианом.
Угол между северными направлениями географического и маг-
нитного меридианов называется магнитным склонением
(Дм). Если магнитная стрелка отклоняется к западу от географиче-
ского меридиана, то такое склонение называется западным (отри-
цательным). Магнитное склонение называется восточным (положи-
тельным), если магнитная стрелка будет отклоняться к востоку от
географического меридиана (рис. 7).
Величина магнитного склонения может достигать большого зна-
чения. Для определения и учета его на полетные карты наносятся
линии равных склонений — изогоны. Кроме того, для определения
2-98 17
Рис. 8. Карта магнитных склонений эпохи 1950 г.
величины магнитного склонения изготовляются специальные карты
магнитных склонений (рис. 8).
Магнитное наклонение. В каждой точке земного шара свободно
подвешенная магнитная стрелка (рис. 9) наклонена к горизонту
под некоторым углом (в северном полушарии — северным концом).
Обозначим величину полной силы земного магнетизма бук-
вой Т и разложим ее на две составляющие: силу Н— горизонталь-
ную составляющую и силу Z — вертикальную составляющую. Сила
Н направлена по горизонту вдоль меридиана и является единствен-
ной силой, удерживающей магнитную стрелку в направлении маг-
нитного меридиана. Угол наклонения 0 изменяется с изменением
широты места. Чем больше широта места, тем больше угол накло-
нения. На магнитном полюсе угол 6 равен 90°. Линии, проходящие
через точки земной поверхности с одинаковым углом наклонения,
называются изоклинами, или магнитными п а р а л л е-
л я м и. Линия с нулевым наклонением называется магнитным
экватором (рис. 10). Магнитный экватор проходит вблизи гео-
графического экватора.
Как видно из рис. 9, горизонтальная составляющая Н равна
Н=Т cos 0.
Таким образом, на маг-
нитном полюсе Н = 0 и
на магнитном экваторе
Н =Т. Отсюда можно
сделать вывод, что маг-
нитный компас в высоких
широтах становится мало
18
Рис. 10. Карта магнитных наклонений эпохи 1950 г.
Надежным в работе вследствие незначительной величины горизон-
тальной составляющей Н.
Магнитные аномалии. На Земле имеются районы с резким и
значительным изменением всех элементов земного магнетизма
(склонения, наклонения и величины Я). Такие районы называются
магнитными аномалиями. К примеру можно привести Курскую ано-
малию, где склонение в некоторых точках земной поверхности ме-
няется в пределах от —50° до +110°.
Такое резкое изменение магнитного склонения сказывается на
показании магнитного компаса, установленного на самолете, только
на малых высотах. С увеличением высоты полета влияние магнит-
ной аномалии на компас будет меньше. Например, при высоте по-
лета свыше 1500—2000 ж даже Курская аномалия не влияет на
работу магнитного компаса. Это обстоятельство следует иметь
в виду при выборе и изучении предстоящего маршрута.
Изменение магнитного поля Земли. Магнитное поле не остается
постоянным, оно непрерывно изменяется. Наблюдаются вековые
и суточные изменения элементов земного магнетизма, а также
магнитные бури. Вследствие векового изменения магнитного
земного поля изменяется величина магнитного склонения. Это изме-
нение в течение года достигает значительной величины (до +7 9').
Поэтому для учета магнитного склонения в интересах самолетово-
ждения не следует пользоваться картами старого издания.
Суточные изменения магнитного склонения достигают также не-
скольких минут, но практического значения для самолетовождения
не имеют.
Интенсивность возмущений в период магнитных бурь бывает
различной. Наиболее сильные магнитные возмущения охватывают
обычно весь земной шар. Продолжительность их может доходить до
нескольких часов. Более часто магнитные бури происходят преиму-
щественно в полярных и прилегающих к ним районах. В период
магнитных бурь стрелка ведет себя очень неспокойно и магнитное
склонение может меняться в пределах нескольких градусов. На-
блюдались магнитные бури, во время которых изменение магнит-
ного склонения достигало +10-т-20°. Учесть в полете изменение
склонения во время магнитной бури невозможно, так как это явле-
ние изучено недостаточно.
Перевод направлений
Компасный курс самолета. В конструкцию современного само-
лета входит много сортов стали, различной по своим магнитным ка-
чествам и свойствам. Поэтому самолет представляет собой как бы
большой магнит, обладающий собственным магнитным полем. Под
воздействием самолетного магнитного поля стрелка компаса, нахо-
дящегося на самолете, не устанавливается, в общем случае, по маг-
нитному меридиану, а составляет с ним некоторый угол. Отклонение
компасной стрелки от магнитного меридиана называется девиа-
20
цией. Направление, в котором устанавливается магнитная стрелка
компаса, установленного на самолете, называется компасным
меридианом.
Девиация характеризуется углом, составленным северными на-
правлениями магнитного и компасного меридианов. Девиация ком-
паса может быть положительной при отклонении магнитной стрелки
компаса к востоку от магнитного меридиана и отрицательной при
отклонении стрелки к западу от магнитного меридиана (рис. 11).
Рис. 11. Девиация Рис. 12. Перевод курсов
компаса
Угол между северным направлением компасного меридиана и
направлением продольной оси самолета называется ком-
пасным курсом (КК). Компасный курс измеряется от север-
ного направления компасного меридиана по часовой стрелке в пре-
делах от 0 до 360° (рис. 12).
Перевод курсов. В практике самолетовождения летчику прихо-
дится переходить от одного курса к другому. Например, магнитный
курс переводить в компасный или в истинный и наоборот.
Для перевода курсов, пользуясь рис. 12, можно вывести сле-
дующие соотношения:
ИК = КК + Дк + Дм;
МК = КК + Дк;
МК = ИК —Дм;
КК = МК —Дк;
КК = ИК —Дк —Дм.
Пример. Дано: МК = 326°; — —6°. Требуется найти КК.
Решение: КК = 326 — (—6) = 332°.
21
Перевод пеленгов. Пеленг ориентира и пеленг самолета также
могут быть истинными, магнитными и компасными. Для перехода
от одного значения пеленга к другому следует знать соотношения
между ними:
ИПС=МПО + Дм ± 180°;
НПО = КК + Дк + Дм + КУО;
МК = МПО — КУО.
Пример. Дано: КУО =115°; КК = 312°; = —6°; Дм = +4°. Требуется
найти ИПО.
Решение: ИПО = 312 — 6 + 4 + 115 == 65°.
Перевод путевых углов. Для перевода путевых углов пользуются
следующими соотношениями:
ИПУ = КПУ + Дм + Дк;
МПУ = ИПУ — Дм;
КПУ = ИПУ — Дм —Дк;
ИПУ = МПУ + Дм.
Пример. Дано: ИПУ = 358°; Дм == +5°; Дк = —8°. Требуется найти КПУ.
Решение: КПУ = 358 — 5 + 8 = 1°.
Компасы, применяемые в истребительной авиации
Для определения компасного курса в авиации используются
два типа магнитных компасов: совмещенные и дистан-
ционные.
Совмещенные — это такие компасы, у которых устройство от-
счета и картушка совмещены в одном приборе. Одним из совме-
щенных компасов является компас КИ-11.
У дистанционных компасов датчик с картушкой устанавливается
отдельно от указателей. Это позволяет установить картушку ком-
паса (датчик) в такое место, где влияние магнитных масс само-
лета будет наименьшим, и свести, таким образом, девиацию ком-
паса к незначительной величине. Указатель дистанционного компаса
устанавливается на приборной доске летчика так, чтобы было
удобно производить отсчет курса с сиденья.
В дистанционный компас дополнительно вводится гироскопиче-
ский датчик. Такое устройство позволяет контролировать разво-
роты самолета на заданные углы по показаниям указателя курса.
При этом ошибки в выполнении угла разворота незначительны.
Кроме того, гироскопический агрегат уменьшает креновую девиа-
цию компаса. Вследствие этого дистанционный гиромагнитный ком-
пас позволяет выдерживать заданные магнитные курсы при наборе
высоты и снижении самолета с достаточной для практики точно-
стью.
Совместная работа магнитного и гироскопического датчиков,
«отсеивая» явления северной поворотной ошибки и креновой де-
виации дистанционного компаса, избавляет указатель от «рысканья»
22
картушки, которое затрудняло использование совмещенного ком-
паса летчиком при выдерживании заданного курса.
Дистанционный гиромагнитный компас, имея большие преиму-
щества перед совмещенным компасом, стал главным компа-
сом. Он используется при выдерживании курса в горизонтальном
полете, наборе высоты и снижении, при разворотах самолета на за-
данные углы. Совмещенный магнитный компас является резервным
и используется в горизонтальном полете для систематической про-
верки работы дистанционного компаса путем периодического сли-
чения их показаний в полете.
Элементарная теория девиации
Магнитное поле самолета. Причиной возникновения самолетного
магнитного поля, отклоняющего картушку компаса от магнитного
меридиана, являются магнитные свойства стальных деталей само-
лета, радиоприборов, электрических устройств и соединительных
проводов. В результате воздействия на картушку компаса силы
магнитного поля Земли Н и силы магнитного поля самолета F кар-
тушка компаса устанавливается по равнодействующей этих двух
сил которая может быть и не направлена по магнитному мери-
диану (рис. 13).
В теории девиации магнитные массы, вызывающие девиацию,
принято подразделять по их магнитным свойствам на твердое и
мягкое железо.
Мягкое железо не обладает способностью сохранять маг-
нитные свойства. Поэтому в поле земного магнетизма оно получает
как бы «мгновенное» магнитное состояние, которое зависит от
формы мягкого железа и курса самолета.
Представим себе, что вблизи магнитной
стрелки помещен брусок мягкого железа
(рис. 14, а). Этот брусок под влиянием магнит-
ного поля Земли намагнитится и будет дей-
ствовать на стрелку с силой F, которая откло-
нит стрелку на угол Дк. Повернем теперь бру-
сок на 180°. Мягкое железо быстро перемагни-
тится в магнитном поле Земли, полюсы оста-
нутся в таком же положении, в каком были и
раньше. Девиация и по знаку, и по величине
также останется неизменной (рис. 14,6).
В теории девиации приняты следующие по-
ложения о намагничивании мягкого железа
в магнитном поле Земли:
1) намагничивание мягкого железа пропор-
ционально напряжению земного магнетизма,
которое меняется с переменой магнитной ши-
роты;
2) направление магнитной оси в намагни-
ченном мягком железе может не совпадать
Рис. 13. Действие сил
магнитного поля Зем-
ли и самолета на кар-
тушку компаса
23
Рис. 14. Влияние бруска мягкого
железа на магнитную стрелку
Рис. 15. Силы магнитного поля
мягкого железа, вызывающие
постоянную девиацию
с направлением магнитных силовых линий магнитного поля Земли
(магнитного меридиана). Например, на рис. 15 показано, что массы
мягкого железа в форме диска могут иметь магнитную ось под
углом к магнитному меридиану;
3) магнитные массы мягкого железа при повороте самолета на
360° сохраняют направление магнитной оси постоянным относи-
тельно магнитного поля Земли (магнитного меридиана);
4) магнитная индукция В в брусках мягкого железа зависит от
косинуса угла а между направлением магнитного меридиана и гео-
метрической осью бруска; магнитная индукция принимает макси-
мальное значение Н при расположении бруска вдоль меридиана и
равна нулю при расположении его поперек меридиана — брусок не
намагничивается (рис. 16).
Девиация, вызываемая мягким железом. Массы мягкого железа,
расположившись на самолете по кругу, могут приобрести направле-
ние магнитной оси под некоторым углом к магнитному меридиану
(см. рис. 15). Сила F, с которой магнитные массы действуют на
картушку компаса, будет отклонять картушку и создавать девиа-
цию компаса. При повороте самолета на 360° направление и вели-
чина силы F не изменятся, так как
Рис. 16. Намагничивание бруска мяг-
кого железа
магнитная ось масс мягкого же-
леза будет сохранять постоянный
угол с магнитным меридианом.
Разложим силу F на две состав-
ляющие: на силу ДА/, направлен-
ную по магнитному меридиану, и
силу а, направленную перпенди-
кулярно к магнитному меридиану.
Сила кН девиации не вызывает,
она только ослабляет действие
24
горизонтальной составляющей Н. Сила а вызывает девиацию, по-
стоянную по величине и знаку на всех курсах. Типовой график по-
стоянной девиации представлен на рис. 17.
Если принять степень уменьшения мягким железом горизон-
тальной составляющей Н равной X, то сила, которая удерживает
картушку компаса по магнитному меридиану, будет равна ХЯ.
Коэффициент X зависит от положения магнитного компаса на само-
лете. При расположении датчика дистанционного компаса вне со-
средоточения магнитных масс коэффициент X близок к единице.
Сила, вызывающая постоянную девиацию, обозначается А\Н.
Коэффициент А показывает, какой частью от ХЯ является сила а.
При современной установке датчиков дистанционных компасов на
самолетах коэффициент А незначителен и выражается в тысячных
долях единицы.
Рассмотрим теперь действие на картушку компаса масс мягкого
железа, представленного в виде тонких брусков, концы которых
удалены от компасной картушки так, что размерами самой кар-
тушки можно пренебречь. В этом случае (рис. 18, а) на курсе 0°
магнитная индукция бруска АБ равна нулю, следовательно, и де-
виация будет равна нулю. При повороте самолета по часовой стрелке
девиация на всех курсах в первой четверти окружности будет по-
ложительной; максимального значения она достигнет на курсе 45°
(рис. 18,6). На курсе 90° магнитная индукция бруска будет совпа-
дать с магнитным меридианом, следовательно, девиация снова бу-
дет равна 0° (рис. 18, в). При переходе самолета на курсы второй
четверти окружности девиация будет отрицательной; максималь-
ного значения она достигнет на курсе 135°, а нулевого — на курсе
180° (рис. 18, г, д). На курсах третьей четверти окружности девиа-
ция будет снова положительной, а в четвертой четверти — отрица-
тельной (рис. 18, е, ж, з). Типовая кривая девиации от магнитного
поля бруска мягкого железа представлена на рис. 19.
Такая девиация называется четвертной. Это значит, что
при повороте самолета на 360° она четыре раза обращается в нуль,
а на противоположных курсах сохраняет свою величину и знак.
Сумма четвертной девиации на противоположных курсах равна
25
ND
CD
Рис. 18. Действие сил магнитного поля мягкого железа на картушку компаса
удвоенной девиации, найденной на одном из противоположных
курсов.
Силы магнитного поля брусков мягкого железа зависят от по-
ложения бруска как относительно магнитного меридиана, так и от-
носительно продольной оси самолета. Пусть суммарный вектор сил
магнитного поля мягкого железа на каком-нибудь курсе самолета
Рис. 19. Кривая девиации от магнитного поля мягкого же-
леза (четвертная)
будет равен величине F (рис. 20). Разложим силу F на две состав-
ляющие. Силу d направим по зеркальному изображению магнитного
меридиана в продольной плоскости симметрии самолета, а силу е —
перпендикулярно силе d. Такие составляющие силы магнитного
поля мягкого железа принято рассматривать в теории девиации как
силы, производящие четвертную девиацию. Обозначим силы d и е
в зависимости от направляющей силы \Н через D\H и Е\Н.
Коэффициенты D и Е показывают, какой частью от \Н являются
силы d и е. Величины этих коэффициентов при дистанционной уста-
новке датчиков компаса незначительны и выражаются в тысячных
долях единицы.
Девиация, вызываемая твердым
железом. Твердое железо обладает
способностью долгое время сохра-
нять приобретенное им магнитное
состояние.
Стальные детали с магнитными
свойствами твердого железа, имею-
щиеся на самолете в значительном
количестве, создают вокруг себя по-
стоянное и довольно сильное магнит-
ное поле. Это магнитное поле вра-
щается вместе с самолетом и не за-
висит от магнитного поля Земли.
Суммарное магнитное поле от твер-
дого железа можно представить себе
в виде большого постоянного магни-
Рис. 20. Разложение силы магнит-
ного поля мягкого железа
та, имеющего магнитную ось, «север-
ный» и «южный» полюсы.
27
Рассмотрим действие на картушку компаса суммарной силы
магнитных полей твердого железа, расположенного для простоты
рассуждения в виде постоянного магнита вдоль продольной оси
самолета, и проследим за характером девиации, вызываемой дан-
ным бруском на различных курсах. На курсе 0е брусок имеет
силу Л*, направленную по магнитному меридиану. Девиация на
курсе 0° будет равна 0° (рис. 21, а). При повороте самолета по ча-
совой стрелке вместе с брусками будет поворачиваться и сила 7?,
вызывая положительную девиацию. На курсе 90° положительная
Рис. 21. Действие сил магнитного поля бруска твердого
железа на картушку компаса
девиация достигнет максимального значения, так как сила R будет
расположена под углом 90° к силе XZZ (рис. 21,6). При дальней-
шем повороте положительная девиация будет уменьшаться и на
курсе 180° достигнет нулевого значения (рис. 21,в). При переходе
курса 180° сила R магнитного поля твердого железа начнет вызы-
вать отрицательную девиацию, которая достигнет максимальной ве-
личины на курсе 270°. Одна из типовых кривых девиации, создавае-
мой магнитным полем твердого железа, представлена на рис. 22.
Такая девиация называется полукруговой. Это значит, что
при повороте самолета на 360° она два раза обращается в нуль, а
на противоположных курсах меняет свой знак, сохраняя величину.
Сумма девиаций на противоположных курсах от твердого железа
равна нулю.
Если силу R магнитного поля твердого железа разложить на
составляющие по продольной и поперечной осям самолета (рис. 23),
28
ТО полученные силы b и с будут создавать полукруговую девиацию.
Обозначим эти силы в зависимости от \Н через В\Н и СкН. Коэф-
фициенты В и С показывают, какой частью от являются силы
Ь и с. У дистанционных компасов коэффициенты В и С по вели-
чине незначительны.
Рис. 22. Кривая девиации от магнитного поля твердого же-
леза (полукруговая)
На основании этих рассуждений можно сделать следующее
предположение.
На картушку магнитного компаса самолета, находящегося
в горизонтальном положении, т. е. не имеющем ни продольного, ни
поперечного крена, действуют три пары горизонтальных сил. К пер-
вой паре относятся силы \Н и А\Н. Эти силы создаются магнит-
ным полем мягкого железа. При установке самолета на различные
курсы ось суммарного магнитного поля этих сил не меняет своего
направления относительно магнитного меридиана, а напряженность
магнитного поля остается без изменения. Но с переменой широты
места напряженность магнитного поля самолета изменяется, так
как намагничивание мягкого железа происходит пропорционально
напряжению земного магнетизма.
Сила XZ7 направлена к северу по магнитному меридиану. Коэф-
фициент X не изменяется с переменой магнитной широты, но вслед-
ствие изменения силы Н сама сила \Н
уменьшается при перемещении к полю-
су. Поэтому в высоких широтах сила \Н
становится незначительной, вследствие
чего использование магнитного компаса
становится затруднительным.
Сила А\Н составляет с магнитным ме-
ридианом угол 90° (положительная) или
270° (отрицательная). С изменением маг-
нитной широты изменяется величина А\Н.
Но так как сила АХ7/ изменяется во
столько же раз, во сколько раз изме-
няется сила ХВ, то величина девиации
остается без изменения. Например,
силы XZ7 и АХВ уменьшились вдвое, как
видно из рис. 24, а девиация при этом
29
осталась без изменения. Постоянная девиация с пере-
меной магнитной широты не изменяется.
Ко второй паре относятся силы ВкН и СкН. Они образуются
магнитным полем твердого железа. При повороте самолета повора-
чивается и магнитное поле. Так как магнитное поле твердого же-
леза не зависит от магнитного поля земли, то величина этих сил
остается постоянной и при перемене магнитной широты.
Сила ВкН направлена по продольной оси симметрии самолета
и составляет с магнитным меридианом угол, равный МК (положи-
тельная) или МК+1800 (отрицательная). Сила СкН направлена
перпендикулярно к продольной оси самолета и составляет с магнит-
ным меридианом угол, равный МК + 90° (положительная) или
МК + 270° (отрицательная).
Девиация, вызываемая силами ВкН и СкН с переменой магнит-
ной широты изменяется. Пусть сила
ной магнитной широты стала равной ве-
личине Х772 (уменьшилась). Девиация Дк
в этом случае стала больше. Таким обра-
зом, с переменой магнитной широты
значение полукруговой девиации компаса
изменяется.
Рис. 24. Изменение
сил \Н и А\Н с из-
менением широты (Дк
остается без измене-
ния)
Рис. 25. Изменение Дк
с изменением широты
(сила СКН не изме-
няется)
X/fj (рис. 25) с переме-
Рис. 26. Равнодействующая
горизонтальных сил, дей-
ствующих на картушку
компаса
К третьей паре относятся силы DkH и ЕкНу вызываемые пере-
менным полем мягкого железа. Магнитное поле, образующее эти
силы, поворачивается вместе с самолетом, а напряженность магнит-
ного поля меняется от максимального до нулевого значения в зави-
симости от угла между осью магнитного поля мягкого железа и
магнитным меридианом.
Силы DkH и ЕкН связаны с меридианом и осью самолета по
закону зеркального изображения магнитного меридиана в продоль-
ной плоскости оси симметрии самолета.
Сила DkH всегда положительная и составляет с магнитным
30
меридианом угол, равный 2МК, а сила Е\Н перпендикулярна Сило
Е\Н и составляет с магнитным меридианом угол 2МК + 90° (по-
ложительная) или 2МК + 270° (отрицательная). Силы D\H и Е\Н
с переменой широты изменяются пропорционально изменению ХЛ/, по-
этому производимая ими четвертная девиация остается без изменения.
На рис. 26 приведено построение шести горизонтальных сил,
действующих на картушку магнитного компаса самолета. Как
видно из рисунка, картушка компаса будет располагаться по на-
правлению составляющей этих сил Н1 и составит с направлением
силы Х7/ (с магнитным меридианом) угол, представляющий собой
суммарную девиацию компаса для определенного магнитного курса.
Устранение девиации
Летчику учитывать девиацию в полете неудобно, а иногда и не-
возможно (например, при частом изменении курса по командам
с земли, когда выполняется задача на перехват). Поэтому на совре-
менных компасах девиация устраняется полностью.
Постоянная девиация компенсируется поворотом датчика ком-
паса вправо или влево на величину постоянной девиации (с учетом
ее знака).
Полукруговая девиация компенсируется искусственным магнит-
ным полем, создаваемым поблизости от датчика компаса специаль-
ными магнитами. Задача в этом случае состоит в том, чтобы с по-
мощью магнитов создать силы, равные и противоположные возму-
щающим силам, и тем самым уничтожить их действие.
Четвертная девиация автоматически учитывается специальным
механическим устройством на указателе курсов.
Устранение постоянной девиации. Постоянная девиация на всех
курсах равна по величине и одинакова по знаку. Поэтому ее можно
найти как среднее арифметическое значений девиации, найденных
на четырех или восьми противоположных равноотстоящих курсах.
В полученный результат входит и установочная ошибка датчика
компаса, которая является следствием неточного расположения
курсовой черты датчика относительно продольной оси самолета.
Датчик должен быть установлен так, чтобы прямая, проходящая
через курсовую черту и центр картушки, была параллельна про-
дольной оси самолета.
Установочная ошибка компаса вместе с постоянной девиацией
устраняется поворотом датчика в горизонтальной плоскости на ве-
личину девиации и установочной ошибки.
Пример. 1) На четырех магнитных курсах получены следующие значения
девиации:
МК 0° 90° 180° 270°
Дк + 1° + 1° + 15° + 19°
31
2) Датчик показывает компасный курс 251°. Требуется устранить постоян-
ную девиацию и установочную ошибку.
Решение: 1) Определить постоянную девиацию и установочную ошибку:
+ 1 + 1 + 15 + 19______________________q0
акд =_ - — -+ у •
2) Повернуть котелок датчика так, чтобы курсовая черта датчика с деле-
ния 251° переместилась на деление, равное 251 + 9 = 260°.
3) Закрепить котелок датчика в этом положении.
Устранение полукруговой девиации. Методика устранения полу-
круговой девиации состоит в следующем:
1) устанавливают самолет на магнитный курс 0° и поперечным
магнитом доводят девиацию до 0°;
2) устанавливают самолет на магнитный курс 90° и продольным
магнитом доводят девиацию до 0°;
3) устанавливают самолет на магнитный курс 180°, определяют
девиацию и поперечным магнитом уменьшают ее величину в два раза;
4) устанавливают самолет на магнитный курс 270°, определяют
девиацию и продольным магнитом уменьшают ее величину в два
раза.
Полукруговая девиация будет устранена.
Теоретической основой данного метода является следующее.
На курсе 0 и 180° полукруговую девиацию создает сила СХН,
действующая перпендикулярно к продольной оси симметрии само-
лета. Для уничтожения ее действия надо поперечным магнитом
создать силу, противоположную по действию силе СкН, На курсе 90
и 270° полукруговую девиацию создает сила В\Н. Действие силы
В\Н можно уничтожить на этих курсах продольным магнитом.
Рис. 27. К вопросу устранения полукруговой девиации
Пусть на курсе 0° на картушку компаса действуют горизонталь-
ные силы СкН и Е\Н (рис. 27), а сила А\Н отсутствует. Магни-
том F мы уравновесили действие сил Е\Н и СкН и довели девиа-
цию до 0°. Если теперь установить самолет на магнитный курс 180°,
то очевидно, что девиацию на этом курсе нужно уменьшить в два
раза (см. рис. 27), так как она вызывается силой ЕХН и —Е\Н\
являющейся частью силы F. В самом деле, сила магнита F ча-
стично будет уравновешена действием силы С\НУ а сила —ЕкН
останется свободной. Уменьшая девиацию в два раза, мы уменьшим
32
силу F на величину —ЕкН. Таким образом, поперечный магнит
будет точно равен величине силы СкН и направлен в обратную сто-
рону.
Полукруговая девиация уничтожается с помощью девиационного
прибора, расположенного на датчике вблизи картушки компаса.
Он состоит из корпуса, двух поперечных и четырех продольных ва-
ликов. Два крайних продольных валика удлинены, выведены на-
ружу и обозначены буквами «С — Ю» и «3 — В». В двух про-
дольных (средних) и двух поперечных валиках перпендикулярно
вставлены магниты-уничтожители. При помощи удлиненных вали-
ков их можно поворачивать и тем самым создавать различное по
силе магнитное поле.
Пример I. Самолет установили на магнитный курс 0°. Компас показы-
вает 8°.
Решение: Девиация компаса —8°, удлинителем «С—Ю» доводим пока-
зание компаса до 0°.
2. Самолет установили на магнитный курс 90°. Компас показывает 98°.
Решение: Девиация компаса — 8°; удлинителем «3—В» доводим показа-
ние компаса до 90°.
3. Самолет установили на магнитный курс 180°. Компас показывает 182°.
Решение: Девиация компаса — 2°; удлинителем «С—Ю» уменьшаем де-
виацию в два раза, т. е. доводим показание компаса до 181°.
4. Самолет установили на магнитный курс 270°. Показание компаса 272°.
Решение: Девиация компаса —2°; удлинителем «3—В» уменьшаем де-
виацию в два раза, т. е. доводим показание компаса до 271°.
Уменьшение влияния четвертной девиации. Четвертная девиация
автоматически учитывается механическим устройством (компенса-
тором), размещенным в корпусе указателя курса. Принципиальное
устройство механического компенсатора сводится к тому, что ролик,
соединенный со стрелкой указателя, тесно соприкасается с круглой
лентой, которая при нали-
чии четвертной девиации
соответствующим образом
изгибается с помощью
винтов на величину, учи-
тывающую девиацию. При
обкатывании ролика по
ленте стрелке передается
дополнительное угловое
движение на величину де-
виации.
Для механической ком-
пенсации девиации само-
лет последовательно уста-
навливают через каждые
15° на магнитные курсы 0°,
15°, 30°, 45° и т. д.
На этих курсах опреде-
Рис. 28. Задняя стенка указателя курса с вин-
тами компенсатора девиации
ляется девиация, затем
показания указателя пово-
3—98
33
ротом соответствующего винта компенсатора, помещенного на зад-
ней стенке указателя (рис. 28), доводятся до величины магнитного
курса, на который в данный момент установлен самолет.
Пользование дистанционным гиромагнитным компасом в полете
Питание ДГМК следует включать не менее чем за 3—5 мин. до
вылета. Непосредственно перед взлетом для согласования показа-
ний магнитного датчика и указателя необходимо нажать кнопку
согласования и удерживать ее до тех пор, пока стрелка указателя
не прекратит движение. Остановка стрелки указателя показывает,
что согласование произведено. Время согласования при угле рас-
согласования потенциометров магнитного датчика и гироскопиче-
ского агрегата на 180° не превышает 9 сек. Когда ДГМК согласован,
им можно пользоваться для определения и выдерживания магнит-
ного курса и для контроля разворота самолета на заданный угол.
В полете при отклонении самолета от горизонтальной плоскости
(по любой из двух осей) на угол более 80° происходит рассогласо-
вание гироскопа с магнитным датчиком. Поэтому после выполнения
фигур высшего пилотажа, но не ранее чем через 25—30 сек. после
выхода самолета на прямолинейный курс необходимо нажать
кнопку согласования и вновь согласовать показания магнитного
датчика и указателя.
После устранения постоянной и полукруговой девиации датчика
и механического компенсирования четвертной девиации указателя
компас показывает магнитный курс самолета.
Для удобства пользования компасом в полете можно рекомен-
довать вращением кремальеры, находящейся в нижней части лице-
вой стороны указателя, подводить деление шкалы, соответствующее
заданному направлению полета, под вертикальную черту неподвиж-
ного отметчика курса. При отклонении стрелки указателя от верти-
кальной черты отметчика курса необходимо исправить курс, для
чего довернуть самолет так, чтобы стрелка указателя совместилась
с чертой отметчика.
§ 6. ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПОЛЕТА
Классификация высот полета
Высотой полета называется расстояние по вертикали от само-
лета до некоторого уровня, принятого за начало отсчета.
Наряду с направлением, скоростью и временем полета высота
является одним из важнейших элементов, определяющих положение
самолета в пространстве и траекторию его движения. Знание вы-
соты полета необходимо для пилотирования самолета, выдержива-
ния наивыгоднейшего (заданного) профиля полета, а также обеспе-
чения безопасности полета от столкновений самолета с земной по-
верхностью и препятствиями на ней. Особенно большое значение
имеет знание и точное выдерживание заданной высоты при проби-
34
вании облаков вниз, при бомбометании и воздушном фотографиро-
вании.
В зависимости от начального уровня отсчета различают следую-
щие высоты полета: барометрическую, относительную, истинную и
абсолютную (рис. 29).
Барометрической высотой /76ар называется высота
относительно принятой за нулевую изобарической поверхности, т. е.
поверхности равного атмосферного давления.
Относительной высотой /Уотн называется высота по-
лета относительно аэродрома вылета. Относительная высота отли-
чается от барометрической на разность давлений, переведенную
Рис. 29. Классификация высот полета
в метры, на уровне аэродрома вылета и в районе определения вы-
соты. Для сравнительно небольших расстояний изменением атмо-
сферного давления по маршруту практически пренебрегают и отно-
сительную высоту принимают равной барометрической.
Истинной высотой /Уист называется высота, измеряемая
относительно пролетаемой местности.
В горизонтальном полете самолета истинная высота непрерывно
изменяется соответственно изменению рельефа местности. Если вы-
держивать истинную высоту, то самолет должен непрерывно изме-
нять режим полета (лететь с набором или снижением), что затруд-
няет пилотирование. По этой причине полет обычно выполняется
с выдерживанием заданной относительной высоты, а истинная вы-
сота определяется периодически на маршруте, в районе цели и аэро-
дрома посадки.
Из рис. 29 видно, что //ист== М>тн—(± Д^Р)> где Д//р—превы-
шение (принижение) местности относительно уровня аэродрома.
Абсолютной высотой Набс называется высота, изме-
ряемая относительно уровня моря.
Знание абсолютной высоты необходимо при эшелонированном
движении самолетов по маршрутам и воздушным трассам в целях
сохранения заданного интервала высот между самолетами, взлетев-
шими с различных аэродромов. В этом случае абсолютная высота
3*
35
измеряется относительно изобарической поверхности с давле-
нием 760 мм рт. ст., что соответствует нормальному давлению на
уровне моря.
Высоту полета можно определять различными методами. В на-
стоящее время применяются два метода определения высоты по-
лета: барометрический и радиотехнический.
Барометрический метод измерения высоты
Барометрический метод определения высоты основан на прин-
ципе измерения атмосферного давления, закономерно убывающего
с высотой. Высотомеры, действие которых основано на этом прин-
ципе, называются барометрическими.
Закономерность изменения атмосферного давления по высотам
характеризуется барометрической ступенью. Барометриче-
ской ступенью называется высота, на которую надо подняться
или опуститься, чтобы атмосферное давление изменилось на
1 мм рт. ст. С увеличением высоты барометрическая ступень уве-
личивается. Вблизи земли барометрическая ступень равна 11 ж,
а на высоте 5000 м — 19 ж.
Барометрическая ступень изменяется постепенно в соответствии
с постепенным изменением атмосферного давления и температуры.
В общем случае с увеличением высоты полета температура воз-
духа понижается. Величина, на которую понижается температура
воздуха при увеличении высоты на 1 му называется вертикаль-
ным температурным градиентом /гр.
Температурный градиент зависит от географической широты
места, времени года и высоты; в среднем его принимают равным
0,0065 град, на 1 м.
Зная температуру воздуха у земли и вертикальный темпера-
турный градиент, температуру воздуха на высоте до 11000 м можно
определить по формуле
~ А) W
где tH — температура воздуха на высоте Н\
— температура воздуха у земли.
В стратосфере, на высотах более 11 000 ж, температура воздуха
принимается постоянной и равной —56,5° Ц.
Связь между высотой, давлением и температурой воздуха до вы-
соты 11 000 м выражается следующей формулой:
где Рн — давление воздуха на высоте Н в мм рт. ст.;
Pq — давление у земли в мм рт. ст.;
Го — абсолютная температура у земли.
36
Для высот более 11 000 м связь между атмосферным давлением
и высотой выражается формулой
_оо 77—11000
н 14 591 •
На основании этих формул производится расчет и тарировка
шкалы барометрического высотомера.
Таким образом, высота полета с помощью барометрического
высотомера измеряется не непосредственно, а косвенно, путем за-
мера атмосферного давления. По этой причине показания высото-
мера в общем случае не будут соответствовать истинной высоте
полета, что вызывает необходимость учета ошибок, свойственных
высотомеру как измерительному прибору, и ошибок, присущих
барометрическому методу измерения высоты.
Инструментальные ошибки высотомера. Высотомер, как и дру-
гие приборы, в основу работы которых положены упругие свойства
чувствительного элемента, имеет инструментальные ошибки.
Инструментальными ошибками называются погреш-
ности в показаниях прибора, происходящие вследствие несовершен-
ства изготовления его механизма, износа деталей, изменения упру-
гих свойств чувствительного элемента, люфтов и т. д. Эти ошибки
носят постоянный характер, поэтому их можно заранее определить,
а следовательно, и учесть.
Инструментальные ошибки высотомера определяются периоди-
чески путем выверки приборов в переносной барокамере или по
контрольному высотомеру.
После проверки высотомера его инструментальные поправки сво-
дятся в таблицу или наносятся на график.
При пересчете приборной высоты в истинную инструментальные
ошибки высотомера алгебраически прибавляются к приборной вы-
соте, а при пересчете истинной высоты в приборную — алгебраи-
чески вычитаются.
Методические ошибки высотомера. Как указывалось выше,
шкала высотомера рассчитывается по барометрическим формулам.
Так как давление и температура воздуха у земли не остаются
постоянными, а изменяются в зависимости от времени года и суток,
то условились производить эти расчеты, исходя из следующих на-
чальных условий:
— давление на уровне моря 760 мм рт. ст.;
— абсолютная температура воздуха на уровне моря 288°
(/о= 15°Ц);
— вертикальный температурный градиент —0,0065 град, на 1 м.
Рассчитанная по этим данным зависимость между высотой, тем-
пературой воздуха и давлением называется таблицей международ-
ной стандартной атмосферы, или таблицей нормального дня.
Деления шкалы высот наносят по положению стрелки, соответ-
ствующему тому давлению, которое будет наблюдаться на данной
цысоте полета согласно таблице стандартной атмосферы.
37
Очевидно, показания высотомера будут соответствовать истин-
ной высоте полета только при определенном состоянии атмосферы.
При расхождении фактических и принятых в расчет величин метео-
рологических элементов высота полета будет определена неточно.
Погрешности в показаниях высотомера, возникающие вследствие
несовпадения расчетных данных, положенных в основу тарировки
его шкалы, с фактическим состоянием атмосферы, называются
методическими ошибками.
Причинами методических ошибок являются несовпадение сред-
ней температуры столба воздуха с расчетной и изменение началь-
ного барометрического давления.
Величина и знак этих ошибок зависят от фактического состоя-
ния атмосферы, в которой выполняется полет, поэтому они могут
быть определены и учтены только непосредственно перед вылетом
или в полете.
Следует иметь в виду, что барометрический высотомер показы-
вает высоту относительно изобарической поверхности, поэтому с из-
менением рельефа местности по маршруту истинную высоту можно
определить, только учтя поправку на рельеф.
Температурная методическая ошибка высотомера. Сущность
этой ошибки заключается в том, что температура воздуха на уровне
моря непостоянна и меняется в зависимости от времени года и су-
ток. В зависимости от изменения температуры воздуха у земли бу-
дут изменяться температура и давление воздуха на высоте. Чтобы
уяснить, как эти изменения скажутся на показаниях высотомера,
выделим столб воздуха высотой 1000 м, в котором фактическое
давление и температура у земли равны расчетным. Если фактиче-
ский температурный градиент будет равен также расчетному, то
температура воздуха на высоте 1000 м согласно таблице нормаль-
ного дня будет равна +8,5°, давление 674 мм рт. ст., а средняя
температура воздуха 11,75°. В этом случае высотомер на верх-
ней границе столба покажет высоту 1000 ж, т. е. его показания бу-
дут точными.
При понижении температуры воздуха у земли, например
до —15°Ц, понизится температура воздуха и на высоте, средняя
температура столба воздуха станет равной —18,25°, вследствие
чего воздух уплотнится, верхняя граница столба опустится вниз и
прежнее давление 674 мм рт. ст. будет уже на меньшей высоте
(900 ж), а высотомер, как и прежде, замерив это давление, пока-
жет высоту 1000 м (рис. 30). При повышении температуры воздуха
у земли выше +15° верхняя граница столба воздуха с давлением
674 мм рт. ст. поднимется вверх, что приведет к заниженным пока-
заниям высотомера.
Таким образом, если фактическая температура воздуха у земли
ниже +15°Ц (точнее, если средняя температура столба воздуха
ниже расчетной), приборная высота полета будет больше истинной
и наоборот, если фактическая температура воздуха у земли выше
4-15° Ц, — приборная высота меньше истинной,
38
Температурная поправка высотомера может быть определена
по формуле
Д I.J _
288 ПР’
где /7пр — приборная высота;
Д/о — отклонение фактической температуры воздуха у земли
от+15°Ц.
Знак поправки определяется знаком Д/о.
Так, например, если фактическая температура воздуха у земли
равна —15° Ц, а приборная высота полета 2000 м, то температур-
_____________________________________3Q
ная поправка высотомера составит • 2000 =—210 м и, следо-
вательно, истинная высота полета будет равна 1790 м.
trp =-0,0065 %* t,rp-~O,0065 о/*
Рис. 30. Температурная методическая ошибка высотомера
Приближенно можно считать, что на каждые 3° отклонения
фактической температуры воздуха у земли от расчетной темпера-
турная методическая поправка высотомера равна 1 % от высоты.
Так как отклонения температуры у земли могут достигать больших
значений (от +30° до —50°), то температурную ошибку высотомера
необходимо учитывать.
Обычно это делается путем пересчета высоты на навигацион-
ной линейке.
Ошибка от изменения начального атмосферного давления. Ане-
роидные коробки высотомера реагируют на всякое изменение давле-
ния. На земле стрелки высотомера установятся на нуле только при
давлении 760 мм рт. ст. При уменьшении давления высота по высо-
томеру будет больше нуля, при увеличении давления стрелки зай-
мут положение на шкале левее нуля.
Таким образом, показания барометрического высотомера на
земле будут меняться с изменением атмосферного давления. Для
устранения этой ошибки необходимо перед взлетом установить
39
стрелки высотомера на нуль, тогда шкала давления установится на.
начальное давление на аэродроме взлета.
Однако этим полностью не устраняется ошибка, возникающая
вследствие непостоянства атмосферного давления у земли. С по-
мощью высотомера измеряется высота относительно уровня той изо-
барической поверхности, атмосферное давление которой установлено-
на высотомере перед взлетом. Но в один и тот же момент в раз-
личных точках на земной поверхности атмосферное давление может
быть различным, следовательно, и .на высоте полета в одной гори-
зонтальной плоскости оно будет разным. Если летчик при полете по
маршруту будет выдерживать заданную высоту по показаниям
барометрического высотомера, то истинная высота при полете даже
над равнинной местностью будет изменяться в зависимости от рас-
пределения атмосферного давления по маршруту (рис. 31).
Н*600
Ро~760 Ро=750 ' Z' ‘ Ро--7ЬО
Рис. 31. Ошибка высотомера от изменения давления у земли
Как видно из рис. 31, при уменьшении атмосферного давления
у земли истинная высота будет уменьшаться, при увеличении давле-
ния— увеличиваться; в первом случае самолет будет следовать со
снижением, во втором — с набором высоты.
Поправка высотомера за счет изменения атмосферного давления
по маршруту равна разности давлений в точке, над которой опре-
деляется высота, и в точке вылета, умноженной на барометриче-
скую ступень. Это положение летчик должен всегда учитывать при
посадке на чужом аэродроме, а также при посадке на своем аэро-
дроме в сложных метеорологических условиях после длительного
маршрутного полета.
Перед посадкой летчик должен запросить по радио фактическое
давление на уровне аэродрома и установить его на шкале высото-
мера. Этим самым ошибка, возникающая вследствие изменения дав-
ления, будет устранена и высотомер покажет высоту относительно
аэродрома посадки без погрешностей.
Учет рельефа местности. В горизонтальном полете и при по-
стоянном атмосферном давлении по маршруту высотомер будет
40
замерять высоту относительно уровня аэродрома взлета, т. е. не
будет учитывать рельефа местности. Чем разнообразнее рельеф
местности, тем больше будут расходиться показания высотомера
с истинным значением высоты (рис. 32). Следовательно, для опре-
деления истинной высоты полета необходимо из относительной вы-
соты алгебраически вычесть поправку за рельеф местности Д//р.
Рис. 32. Ошибка высотомера от изменения рельефа мест-
ности
Эта поправка равна разности высоты местности, над которой
находится самолет в‘ данный момент, и высоты аэродрома вылета.
Эти высоты определяют по полетной карте, на которой они даны
относительно уровня моря.
Если местность выше аэродрома вылета, поправка за рельеф
местности имеет знак «плюс», если ниже — знак «минус».
С учетом всех перечисленных поправок высота будет определена
с точностью до 7—8% //ИСт-
Пример. Относительная высота полета (приборная высота, исправленная на
инструментальную и температурную поправку) равна 5000 м, высота аэродрома
над уровнем моря 4-100 м, высота цели 4-600 м. Определить истинную высоту
полета.
Решение: 1) Определяем поправку за рельеф:
Д//р = 600 — 100 - + 500 ж.
2) Находим истинную высоту:
Яист - 5000 — (4-500) = 4500 м.
НАВИГАЦИОННАЯ ЛИНЕЙКА
Навигационная линейка предназначена для выполнения различного рода
штурманских расчетов. Она устроена по принципу обычной счетной логарифми-
ческой линейки, т. е. позволяет заменить действия над заданными числами бо-
лее простыми действиями над отрезками, из которых каждый представляет со-
бой в определенном масштабе логарифм числа.
С помощью линейки можно производить следующие расчеты:
1) делить, умножать, возводить в степень, извлекать квадратные корни из
заданных чисел и определять углы по их тангенсам или синусам и наоборот;
41
2) переводить значение скоростей из одних единиц измерения в другие;
производить расчеты, связанные соотношением S = Wt\ определять значение
истинной скорости и высоты полета по показаниям барометрического высото-
мера и указателя скорости и наоборот; находить угол сноса и путевую скорость
по данным шаропилотного ветра; производить расчет радиуса и времени раз-
ворота на 360° по заданной воздушной скорости и углу крена на развороте;
3) производить расчет прицельных данных для бомбометания и исходных
данных на фотографирование и др.
Решение большинства из перечисленных задач основано на действиях умно-
жения и деления. Для уверенной работы на линейке необходимо твердо знать
принцип этих двух действий над числами и твердо усвоить значение шкал и
цену их делений.
Линейка НЛ-10 (рис. 33) состоит из основания, движка и визирки.
На обеих сторонах основания и движка нанесены 17 шкал.
Шка лы 1 (расстояние — скорость) и. 2 (время) в совокупности предна-
значены для решения формулы S = 1И, определения времени разворота на 360°
и перевода скоростей, выраженных в км/час, в скорости, выраженные в м/сек,
и обратно. Они также могут быть использованы при делении и умножении
чисел.
Шкалы 3 (синусы), 4 (тангенсы) и 5 (радиусы разворота — расстоя-
ния — высоты) предназначены для расчета угла сноса и путевой скорости по
известному ветру и воздушной скорости и для нахождения значений тригономе-
трических функций углов.
На нижнем обрезе линейки нанесена шкала 6 квадратных корней из чи-
сел, нанесенных на шкалах 1 и 5. Шкала 6 совместно со шкалами 4 и 5 слу-
жит для расчета радиуса разворота, а также может быть использована для
возведения чисел в квадрат и извлечения квадратных корней.
Шкалы 7, 8 и 9 предназначены для пересчета высот полета по баро-
метрическому высотомеру в пределах от 400 до 12 000. м.
Для пересчета высот более 12 000 м служат шкалы 10, 14, 15 и ромбиче-
ский индекс с цифрой 11 на шкале 12. Эти шкалы рассчитаны для постоянной
температуры на высоте выше 11 000 м, равной —56,5° Ц. Так как в действи-
тельности температура воздуха на высоте 11 000 м может отличаться от рас-
четной, то, следовательно, будет допущена ошибка в определении высоты.
Величина поправки к исправленной высоте может быть определена по фор-
муле
ДЯ = 900 + 20 (Го + tH).
При пересчете приборной высоты в истинную поправка алгебраически при-
бавляется к исправленной высоте, а при пересчете истинной высоты в прибор-
ную алгебраически вычитается.
Шкалы И, 12, 14 и 15 предназначены для пересчета показаний обычного
указателя скорости. Они рассчитаны без учета сжимаемости воздуха, поэтому
ими можно пользоваться для пересчета скоростей полета до 500 км/час на
высотах до 5000 м.
Пересчет показаний комбинированного указателя скорости производится
по шкалам 11, 13, 14 и 15.
Шкала 16, предназначена для определения поправки в показании термо-
метра наружного воздуха на нагрев его чувствительного элемента, возникаю-
щий вследствие сжатия встречного потока. Этой шкалой обычно пользуются
при определении температуры наружного воздуха в полете с помощью термо-
метра, имеющегося на многоместных самолетах.
На боковом срезе линейки нанесена миллиметровая шкала /7, ко-
торая используется как масштабная линейка.
Порядок выполнения штурманских расчетов с помощью линейки НЛ-10 из-
ложен в тех параграфах, в которых рассматриваются соответствующие задачи
самолетовождения.
42
/7 / г
Рис. 33. Навигационная линейка НЛ-10
Расчет высоты полета
Чтобы точно определить или выдерживать в полете заданную
истинную высоту, необходимо учесть инструментальные и методи-
ческие ошибки высотомера. Для летчиков одноместных самолетов
эта задача чаще всего встречается при выполнении бомбометания
и воздушного фотографирования.
Пересчет заданной истинной высоты в приборную выполняется
перед вылетом следующим образом:
1) к заданной истинной высоте алгебраически прибавляется по-
правка за рельеф местности;
2) полученная относительная высота с помощью навигационной
линейки пересчитывается в показание точного высотомера, т. е. не
имеющего инструментальной поправки;
3) из найденной высоты для точного прибора алгебраически вы-
читается инструментальная поправка высотомера.
Пример. Заданная истинная высота полета 6000 м. Температура воздуха
у земли —14°, температурный градиент —4° на 1000 м. Поправка за рельеф
+300 м, Инструментальная поправка высотомера —100 м. Определить прибор-
ную высоту полета.
Решение: 1) Находим относительную высоту полета, алгебраически при-
бавляя к заданной истинной высоте поправку за рельеф местности:
/70ТН = 6000 + 300 = 6300 м.
2) Определяем температуру воздуха на высоте и сумму температур у земли
и на высоте:
tH = - 14 - (4 X 6) = - 38°;
/0 4-— 14 4-( — 38) = — 52°.
3) На навигационной линейке относительную высоту исправляем на вели-
чину температурной поправки. Для этого под сумму температур у земли и на
высоте полета на шкале 7 подводим ромбический индекс и против относитель-
ной высоты, взятой по шкале 8, отсчитываем на шкале 9 высоту точного вы-
сотомера. Она равна 6800 м.
Ключ для расчета на НЛ-10:
4) Учитываем инструментальную поправку высотомера, алгебраически вы-
читая ее из найденного значения высоты по прибору; получаем показание вы-
сотомера, которое соответствует истинной высоте полета 6000 м:
Япр = 6800 — (— 100) = 6900 м.
Расчет истинной высоты по заданной приборной производится
в обратном порядке,
44
Пример. Заданная высота полета по прибору 10 000 м. Инструментальная
поправка высотомера —100 м. Поправка за рельеф —400 м. Температура воз-
духа у земли +30°, на высоте полета —50°. Определить истинную высоту по-
лета.
Решение: 1) Определяем высоту по точному высотомеру, алгебраически
прибавляя к заданной высоте по прибору инструментальную поправку:
Япр. точи = 1° 000 + (—100) = 9900 м.
2) Устанавливаем ромбический индекс линейки на сумму температур
(—20°) и против 9900 отсчитываем на шкале 8 относительную высоту 10 200 я.
3) Учитываем поправ^ за рельеф и получаем истинную высоту:
Яист = 10 200 — (—400) = 10 600 м.
Выше рассмотрен порядок расчета истинной высоты при подго-
товке к полету. В полете летчику не представляется возможности
воспользоваться навигационной линейкой для учета температурной
методической поправки высотомера, поэтому он должен учитывать
ее приближенным подсчетом в уме, пользуясь правилом: на каждые
3° понижения температуры воздуха у земли относительно расчетной
температуры (+15°) уменьшить приборную высоту на 1% ее зна-
чения; при повышении температуры у земли на каждые 3° выше
+ 15° увеличить приборную высоту на 1%.
Так, например, если температура воздуха у земли равна —15°Ц,
а приборная высота полета с учетом инструментальной поправки
высотомера 6000 м, то относительная высота полета будет равна
5400 м (6000 — 0,1 Х 6000).
Учет температурной методической поправки высотомера на
НЛ-10 для высот более 12 000 м производится с помощью шкал 10,
14 и 15 с последующим учетом поправки Д//, возникающей за
счет расхождения расчетной (—56,5°) и фактической температуры
воздуха на высоте более 11 000 м.
Пример. Показание высотомера 13 500 м, инструментальная поправка
— 100 м. Температура воздуха у земли +35°, на высоте полета —40°. Опреде-
лить относительную высоту полета.
Решение: 1) Учитываем инструментальную поправку:
13 500 + (— 100) = 13 400 м.
2) Под ромбический индекс устанавливаем температуру —40° по шкале 10 и
против значения 13 400 на шкале 15 отсчитываем исправленную высоту 13 520 м
по шкале 14.
Ключ для расчета на НЛ-10:
3) Определяем поправку ДЯ и алгебраически прибавляем ее к исправлен-
ной высоте:
ДЯ = 900 + 20 (35° — 40°) = 800 м;
Яоти = 13 520 + 800 = 14 320 м.
45
Следует иметь в виду, что для высот более 11 000 м темпера-
турная поправка высотомера может быть учтена только на основа-
нии фактической температуры воздуха на высоте полета, т. е. непо-
средственно в полете. Поскольку определить до вылета температуру
воздуха на высотах более 11 000 м по температурному градиенту
не представляется возможным, летчик одноместного самолета не
учитывает температурной поправки и принимает показание высото-
мера за относительную высоту.
Безопасная высота полета
При полетах в условиях ограниченной видимости и в облаках
летчик должен знать безопасную высоту полета.
Безопасной высотой полета называется минимальная
высота полета по прибору, обеспечивающая безопасность от столк-
новений самолета с земной поверхностью и препятствиями на ней.
Относительная безопасная высота определяется по формуле
^отн ' ^мин 4“ 4“ ^пр 4“ А^бар»
где Лпр — высота искусственных сооружений.
Минимальная истинная высота над препятствиями Л7МИН уста-
навливается командиром в зависимости от уровня подготовки лет-
ного состава; в равнинной местности она должна быть не ме-
нее 400 ж, а в горной 600 м.
Относительная высота пересчитывается на навигационной ли-
нейке для введения температурной поправки, а затем исправляется
на величину инструментальной поправки высотомера.
Пример. Температура воздуха у земли —20°, температурный градиент —4е
на 1000 м. Заданная минимальная высота над препятствиями равна 400 м. Вы-
сота препятствий +50 м. Превышение местности +500 м. Давление на уровне
аэродрома 760 мм рт. ст., наименьшее давление на маршруте 755 мм рт. ст.
Инструментальная поправка высотомера —70 м.
Определить безопасную высоту полета по прибору.
Решение: 1) Определяем относительную высоту:
/70тн = 400 + 500 + 50 + (760—755) • 10 = 1000 м.
2) Учитываем на НЛ-10 температурную поправку по
tQ + tH = — 20—24 = — 44° и Яотн = 1000 м\
получаем
^пр. испр ~ ИЗО м.
3) Учитываем инструментальную поправку высотомера и получаем безопас-
ную высоту по прибору:
Япр. без = 1130 — (—70) = 1200 м.
В целях безопасности летчик при полете в сложных метеороло-
гических условиях не должен снижаться на маршруте ниже безопас-
ной высоты по прибору.
46
Пользование барометрическим высотомером в полете
Барометрический высотомер используется для выдерживания за-
данной и для определения фактической (истинной) высоты полета.
Для использования высотомера в полете необходимо перед взле-
том установить его на начальный отсчет.
В большинстве случаев за начальный отсчет принимают нуль
по шкале высот. При такой установке шкала давления устанавли-
вается на фактическое давление на уровне аэродрома.
Для эшелонирования самолетов по высотам при полете по воз-
душным трассам в сложных метеорологических условиях высотомер
принято устанавливать на начальное давление 760 мм рт. ст.
Если по заданию требуется выдержать истинную высоту полета
(бомбометание, фотографирование), летчик должен перед вылетом
рассчитать приборную высоту.
В полете показаниями высотомера руководствуются в основном
для фиксации и периодического контроля положения самолета по
высоте; сохранение же заданной высоты осуществляется пилотиро-
ванием самолета относительно линии видимого горизонта, а в слож-
ных метеорологических условиях — по показаниям авиагоризонта и
вариометра. Используя эти приборы в совокупности с высотомером,
летчик имеет возможность выдержать заданную высоту с точностью
до десятков метров.
При необходимости совершения посадки в сложных метеорологи-
ческих условиях по барометрическому высотомеру летчик должен
запросить по радио атмосферное давление на уровне аэродрома по-
садки и установить его на шкале давлений высотомера.
Показания высотомера при подъеме или снижении самолета не-
сколько запаздывают вследствие остаточного последействия на-
грузки. Запаздывание показаний высотомера достигает нескольких
десятков метров, что необходимо учитывать при пробивании обла-
ков и заходе на посадку.
§ 7. ОПРЕДЕЛЕНИЕ ВОЗДУШНОЙ СКОРОСТИ
Принцип измерения воздушной скорости
Воздушной скоростью называется скорость полета
самолета относительно воздушной среды.
Воздушная скорость измеряется с помощью аэродинамического
указателя скорости, представляющего собой металлический мано-
метр.
Указатели скорости бывают однострелочные (УС) и комбини-
рованные двухстрелочные (КУС).
Действия однострелочного указателя скорости основано на
принципе замера скоростного напора, т. е. давления воздушного
потока, набегающего на самолет.
47
Зависимость скоростного напора от воздушной скорости без
учета сжимаемости воздуха выражается формулой
где q — скоростной напор;
р — плотность воздуха на высоте полета.
Величина скоростного напора, как видно из формулы, зависит
от скорости полета и плотности воздуха. Поэтому, чтобы оцифро-
вать шкалу прибора в единицах скорости (а не в единицах давле-
ния), необходимо принять плотность воздуха постоянной. Так
обычно и поступают в практике. Но плотность одного и того же
слоя воздуха с течением времени может изменяться, а с подъемом
на высоту она закономерно убывает. По этой причине приборная
скорость в общем случае не будет равна истинной. Несмотря на
это, указатель скорости, работающий на принципе замера скорост-
ного напора, является удобным и необходимым пилотажным при-
бором.
Каждый тип самолета имеет определенный минимум подъем-
ной силы, при котором сохраняется его устойчивость и управляе-
мость. Но, как известно, при постоянном угле атаки подъемная сила
(?V*\ п
прямо пропорциональна скоростному напору (—). Следовательно,
если выдерживать безопасную скорость полета по прибору постоян-
ной, то тем самым будет обеспечена устойчивость и управляемость
самолета на любой высоте, что удобно для летчика.
Для целей же самолетовождения необходимо знать истинную
воздушную скорость для решения таких задач, как определение пу-
тевой скорости и угла сноса по данным о ветре, счисление и про-
кладка пути, контроль пути по дальности и т. п.
Таким образом, прибор, предназначенный для измерения воз-
душной скорости, должен одновременно удовлетворять требованиям
пилотирования и самолетовождения, т. е. измерять одновременно
скоростной напор и воздушную скорость полета.
На современных самолетах устанавливается комбинированный
двухстрелочный указатель скорости, в значительной мере удовлетво-
ряющий этим требованиям. Широкая стрелка КУС указывает при-
борную скорость, которой руководствуются в целях пилотирования,
особенно на малых скоростях, а узкая — стандартную истинную
скорость, которой руководствуются в целях самолетовождения.
Действие КУС основано на замере скоростного напора встреч-
ного потока воздуха с автоматическим введением поправки на плот-
ность воздуха с помощью анероидных коробок.
Зависимость между воздушной скоростью и скоростным напо-
ром с учетом сжимаемости воздуха для дозвуковых скоростей по-
лета выражается формулой
9-р[(1+0,145^М-1],
где Р — статическое давление воздуха на высоте полета.
48
На основании этой формулы производится расчет скоростного
напора и тарировка шкалы КУС для различных скоростей полета;
при этом расчет производится для условий стандартной атмосферы,
т. е. Pq= 1,33 кг/см2, р0 = 0,125 кг • сек21м* и ^0 = +15°Ц.
Ход манометрической коробки, замеряющей величину скорост-
ного напора, передается на обе стрелки КУС, вследствие чего они
поворачиваются на одинаковый угол, пропорциональный величине
приборной скорости.
Кроме этого, узкая стрелка за счет хода анероидных коробок
дополнительно поворачивается при изменении плотности воздуха и
указывает истинную стандартную скорость.
Таким образом, и воздушная скорость полета измеряется косвен-
ным методом — путем замера скоростного напора и статического
давления воздуха. По этой причине показания УС могут не соответ-
ствовать воздушной скорости полета, что вызывает необходимость
учета ошибок.
Ошибки в определении истинной скорости полета
по показаниям узкой стрелки КУС и их учет
Ошибки комбинированного указателя скорости подразделяются
на три группы: инструментальные, аэродинамические (установоч-
ные) и методические.
Инструментальные ошибки происходят от несовер-
шенства изготовления механизма прибора и износа его деталей
в процессе эксплуатации. Причины, вызывающие эти ошибки, ана-
логичны причинам, вызывающим инструментальные ошибки высото-
мера. Инструментальные ошибки КУС определяются периодически
путем проверки прибора, наносятся на график и учитываются при
определении скорости.
Аэродинамической ошибкой указателя скорости на-
зывается ошибка, возникающая вследствие искажения встречного
потока воздуха в месте установки приемника воздушных давлений.
На реактивных самолетах величина этой ошибки не превышает
точности измерения воздушной скорости аэродинамическим мето-
дом, поэтому в практике она и не учитывается. Достигается это
применением приемников воздушных давлений специальной кон-
струкции и выбором места их установки на самолете.
Сущность методической ошибки состоит в следующем.
Для условий стандартной атмосферы зависимость показаний узкой
стрелки КУС выражается формулой
Укус = 44,44 ИК / (т- + 1)и'29-1.
где VKyc — показание узкой стрелки КУС;
Гст—расчетная температура воздуха на высоте полета.
Эта формула получается после преобразования формулы зави-
симости скоростного напора от воздушной скорости с учетом ежи-
4-98 49
маемости воздуха и замены в первом члене статического давления
плотностью и температурой воздуха (Р = 287рГ).
Предположим, что на некоторой высоте Н температура воздуха
отличается от расчетной и равна Гфакт. В этом случае истинная воз-
душная скорость будет равна
^ист — 44,44 V /факт |/ + 1) —1 •
Разделив второе уравнение на первое, получим:
^ИСТ = |/ 7ФаКТ
^КУС ' ^ст
или
^ист ^кус J/ 288 — 0,0065// •
Из формулы видно, что показания узкой стрелки КУС будут соот-
ветствовать истинной скорости самолета только при полете в стан-
дартной атмосфере. В действительности фактическая температура
воздуха может отклоняться от стандартной в значительных преде-
лах (от —60 до +30°), что вызывает ошибку порядка 10—15% от
истинной скорости. Эта ошибка может быть учтена с помощью
НЛ-10, шкалы которой рассчитаны по выше приведенной формуле.
Таким образом, для определения истинной скорости необходимо
исправить показание узкой стрелки КУС на инструментальную и
методическую температурную поправки.
Пересчет заданной истинной скорости в показание КУС (стан-
дартную скорость) производится в следующем порядке:
1) заданная истинная скорость на НЛ-10 исправляется на тем-
пературную поправку;
2) из найденной стандартной скорости алгебраически вычитается
инструментальная поправка.
Пример. Заданная истинная скорость полета на высоте 5000 м равна
800 км/час. Температура воздуха на высоте полета —40°. Инструментальная
ошибка —10 км/час. Определить скорость полета по узкой стрелке КУС.
Решение: 1) Установить визирку по красной шкале высоты 13 на зна-
чение высоты 5 км и подвести под него температуру на высоте —40°, затем
против деления 800 на шкале 14 отсчитать по шкале 15 стандартную скорость;
она равна 840 км/час.
Ключ для расчета на НЛ-10:
2) Учесть инструментальную поправку:
7кус = 840 — (—10) = 850 км/час.
50
Перерасчет приборной скорости в истинную выполняется в об-
ратном порядке.
Пример. Заданная приборная скорость по узкой стрелке КУС равна
670 км/час. Высота полета 1000 м. Инструментальная поправка —10 км/час.
Температура воздуха на высоте —40° Определить истинную скорость полета.
Решение: 1) Учесть инструментальную поправку
7СТ = 670 — 10 = 660 км/час.
2) Произвести на НЛ-10 перерасчет стандартной скорости в истинную, для
чего необходимо под высоту 1 км подвести температуру —40° и против деле-
ния 660 шкалы 15 отсчитать по шкале 14 истинную скорость 600 км/час.
Ошибки в определении истинной скорости по показаниям
широкой стрелки КУС и их учет
В целях получения максимальной дальности полета самолета
летчику часто задается приборная скорость полета (по широкой
стрелке КУС). Чтобы произвести перед вылетом расчет полета, не-
обходимо пересчитать заданную приборную скорость в истинную.
В тех же случаях, когда при постановке задачи на полет задается
истинная скорость, часто приходится рассчитывать приборную ско-
рость в целях определения запаса горючего или предельной даль-
ности полета.
Для того чтобы рассчитать истинную скорость по заданной
приборной и наоборот, необходимо, кроме инструментальной
ошибки, учесть методические ошибки измерения истинной скорости
по широкой стрелке КУС: ошибку за изменение плотности воздуха
и ошибку за сжимаемость. Эти ошибки аналогичны методическим
ошибкам обычного указателя скорости.
Их сущность состоит в следующем.
Шкала указателя скорости тарируется для стандартной плот-
ности воздуха у земли.
В действительности фактическая плотность воздуха часто отли-
чается от расчетной. С увеличением высоты полета плотность воз-
духа уменьшается, поэтому при одной и той же истинной скорости
скоростной напор на высоте будет меньше,' ч*ем у земли, и, следова-
тельно, приборная скорость будет меньше истинной. Зависимость
между истинной и приборной скоростями выражается формулой
Уист=Упр1/-^.
где ро и 9н — плотности воздуха у земли и на высоте полета.
На основании этой формулы рассчитаны шкалы для пересчета
скоростей на НЛ-10 (при построении шкал плотность воздуха за-
менена температурой и давлением).
Эта формула не учитывает сжимаемости воздуха. Однако на
больших скоростях полета встречный поток воздуха затормажи-
вается, сжимается и его плотность увеличивается.
4‘
51
Попадая в манометрическую коробку, этот уплотненный Поток
сильнее обычного (несжатого) отклонит широкую стрелку, и указа-
тель покажет завышенную скорость.
Так как сжимаемость воздуха зависит не только от скорости по-
лета, но и от плотности воздуха (высоты полета), то учесть эту
ошибку при тарировке указателя скорости можно только для одной
какой-либо высоты. Практически это делается для стандартной
плотности воздуха у земли.
С подъемом на высоту плотность воздуха изменяется и, следова-
тельно, будет появляться дополнительная ошибка в определении
скорости.
На рис. 34 дан график поправок за сжимаемость в зависимости
от высоты и приборной скорости.
Рис. 34. График поправок к указателю скорости за сжимаемость воздуха
52
Из графика видно, что при скоростях полета до 500 км/час на
высотах до 5000 м эта ошибка незначительна и ею можно пре-
небречь.
Однако при полете со скоростью более 500 км/час, особенно на
больших высотах, ошибка за сжимаемость достигает значительной
величины и ее необходимо учитывать, определяя по графику.
Следует заметить, что показания узкой стрелки КУС свободны
от этой ошибки, так как она замеряет не скоростной напор, а его
отношение к давлению на высоте полета.
Пересчет заданной приборной скорости в истинную производится
в следующем порядке:
1) к приборной скорости алгебраически прибавляется инстру-
ментальная поправка;
2) по приборной скорости, исправленной на инструментальную
поправку, и высоте полета определяется поправка за сжимаемость
и алгебраически прибавляется к приборной скорости;
3) приборная скорость, исправленная на эти две поправки, на
НЛ-10 пересчитывается в истинную.
Пересчет истинной скорости в приборную производится в обрат-
ном порядке.
Пример. Заданная приборная скорость полета на высоте 10 000 м равна
500 км/час. Температура воздуха на высоте —50°. Инструментальная поправка
-гЮ км/час. Определить истинную скорость полета.
Решение: 1) Учитываем инструментальную поправку:
500 4- 10 = 510 км/час.
2) Выбираем из графика и учитываем поправку за сжимаемость:
510 — 27 = 483 км/час.
3) На НЛ-10 против высоты по прибору подводим температуру на высоте
и против скорости 483 на шкале 15 отсчитываем истинную скорость:
Уист = 835 км/час.
Ключ для расчета на НЛ-10:
Примечание. При пересчете приборной скорости в истинную и наобо-
рот на НЛ-9 поправка на сжимаемость не учитывается, так как шкалы скоро-
стей этой линейки построены с учетом сжимаемости воздуха.
Пример. Заданная истинная скорость на высоте 8000 м равна 800 км/час.
Температура воздуха у земли +22°, температурный градиент —6°,5 на 1000 м.
Инструментальная поправка 4-13 км/час.
Определить скорость полета по прибору.
53
Решение: 1) Определяем температуру воздуха на высоте полета:
^ = 22 —(6,5-8) = 30°.
2) Исправляем истинную скорость на плотность воздуха, а затем учиты-
ваем поправку за сжимаемость. Для этого на НЛ-10 против высоты 8000 м на
шкале 12 надо подвести температуру на высоте и против деления 800 км/час
по шкале 14 отсчитать на шкале 15 приборную скорость 515 км/час,
3) ОпределяехМ по И и 7пр поправку за сжимаемость: 7СЖ =—18 км/час.
4) Учитываем поправку за сжимаемость и инструментальную поправку:
Vnp = 515 — (—18) — (+13) = 520 км/час.
Таким образом, для данных условий скорость по широкой стрелке
520 км/час будет соответствовать истинной скорости полета 800 км/час.
Пользование комбинированным указателем скорости в полете
Комбинированный указатель скорости используется для выдер-
живания заданного режима скорости по маршруту или в зоне и
определения истинной скорости полета.
Показаниями широкой стрелки летчик руководствуется в целях
пилотирования, а узкой — в целях самолетовождения. Показаниями
узкой стрелки руководствуются также и в целях пилотирования, на-
пример, при наборе высоты и при полетах со скоростью, близкой
к максимальной.
Чтобы осуществлять точное самолетовождение, летчик перед
вылетом должен определить показание узкой стрелки КУС, соответ-
ствующее заданной истинной скорости, и строго выдерживать в по-
лете рассчитанную скорость. Точное выдерживание режима ско-
рости облегчает контроль пути по дальности и выход на заданные
ориентиры по времени. Непосредственно в полете истинную ско-
рость по показаниям узкой стрелки КУС можно определить прибли-
женным подсчетом в уме, пользуясь правилом: на каждые 5° пони-
жения температуры воздуха у земли относительно +15с уменьшить
приборную скорость на 1 % от ее значения, а при повышении тем-
пературы— увеличить на 1%. Необходимо иметь в виду, что на
высотах полета более 11 000 м температурная ошибка КУС близка
к нулю и, следовательно, показания узкой стрелки будут соответ-
ствовать истинной скорости полета.
§ 8. УЧЕТ ВЕТРА В САМОЛЕТОВОЖДЕНИИ
Одной из главных задач самолетовождения является вывод са-
молета в заданную точку.
При полете в штиль или в плоскости ветра для выполнения этой
задачи летчику достаточно в течение всего полета выдерживать
МК = ЗМПУ.
Если летчик будет соблюдать это условие при боковом ветре,
то самолет под влиянием ветра начнет уклоняться от заданного
пути в ту сторону, куда дует ветер.
54
Под воздействием воздушной скорости, развиваемой тягой дви-
гателя, и скорости ветра самолет будет перемещаться по равнодей-
ствующей этих двух скоростей.
Направление равнодействующей определит собой линию факти-
ческого пути, а величина ее — путевую скорость полета W (рис. 35).
Треугольник, составленный вектором воздушной скорости, век-
тором ветра и вектором путевой скорости, называется навит а-
ционным треугольником скоростей.
С ГЛ
Рис. 35. Навигационный треугольник скоростей
Элементами навигационного треугольника скоростей являются:
магнитный курс и воздушная скорость (вектор воздушной ско-
рости), направление и скорость ветра (вектор ветра), магнитный
путевой угол и путевая скорость (вектор путевой скорости).
Элементами навигационного треугольника скоростей также яв-
ляются угол сноса (УС) и угол ветра (УВ).
Углом сноса называется угол между продольной осью са-
молета и линией пути. Он измеряется от продольной оси самолета
вправо и влево до линии пути и имеет знак плюс (правый) и ми-
нус (левый).
Углом ветра называется угол между вектором путевой ско-
рости и вектором ветра. Он измеряется от линии пути по часовой
стрелке от 0 до 360°. Из рис. 35 следует, что
УВ = 8 —МПУ.
Из навигационного треугольника скоростей вытекают также сле-
дующие соотношения:
МПУ = МК+ (+УС);
МК —МПУ — (+УС);
УС = МПУ — МК.
Примеры: 1. МК = 50° 2. МПУ = 120° 3. МПУ = 315°
УС =+5° УС = —10° МК = 321°
МПУ » 55° МК == 130° УС =—6°
55
Зависимость угла сноса от воздушной скорости
и вектора ветра
Величина угла сноса зависит от воздушной скорости самолета,
скорости ветра и угла ветра.
Эта зависимость может быть выведена на основании теоремы
синусов из навигационного треугольника скоростей.
Как известно,
sin УС________________________ U
8йГув“ V ’
откуда
sin УС = — sin УВ.
Эта формула решается на НЛ-10. Ключ для расчета приведен
на самой линейке (см. рис. 33).
Пример. V — 700 км/час\ УВ — 55°; U = 60 км1час.
Ответ: УС = 4-4°.
Для приближенного определения величины УС подсчетом в уме
может быть получена упрощенная формула.
Учитывая, что для современных скоростей полета величина УС
обычно не превышает 10—15°, а синусы малых углов можно при-
нять равными самим углам, выраженным в радианах, получим:
УС и . WD
60 v sln УВ
или
vr, (7-60 . WD
УС = —у- sin У В.
Из последней формулы видно, что при постоянном угле ветра
УС тем больше, чем меньше воздушная скорость полета и чем
больше скорость ветра и наоборот.
При ветре, перпендикулярном к линии пути, угол сноса максима-
лен и определяется формулой
vr = £ЛС0
” ^макс у
На средних высотах скорость ветра достигает в сред-
нем 60—120 км/час, что при воздушной скорости 600 км/час даст
У С кс = 6-4-12°.
На больших высотах скорость ветра достигает 150—200 км/час
и более, что даже при воздушной скорости 900 км/час даст
УСмакс = 10=12°.
Следовательно, несмотря на современные большие скорости по-
лета, необходимо при расчете полета учитывать угол сноса.
56
Выражая угол сноса через величину УСмакс, получим:
УС = УСмакс sin УВ.
При углах ветра от 0 до 180° углы сноса положительные, а от
180 до 360° отрицательные.
Пример. V = 600 км/час-, УВ = 330°; U — 60 км/час.
Определить УСм; кг и УС.
Решение:
_ Ц-Ы 60.60
•макс “ у - 600 “ ’
УС УСмакс-51п УВ = 6-(—0,5) = —3°.
Зависимость путёвой скорости от воздушной скорости
и вектора ветра
Величина путевой скорости зависит от величин воздушной ско-
рости, скорости ветра и угла ветра. Эта зависимость может быть
получена из навигационного треугольника скоростей. По теореме
синусов (см. рис. 35) имеем:
W sin [180- (УС + УВ)]
V ~ sin УВ ’
но
sin [ 180 - (УС + УВ)] - sin (УС + УВ).
Окончательно получим:
Tr/ v sin (УС + УВ)
W V sin УВ
Полученная формула решается на навигационной линейке. При
этом к УВ прибавляется абсолютное значение УС независимо от
его знака. (Ключ для решения приведен на самой линейке — см.
рис 33.)
Пример. V = 620 км/час-, (7 = 50 км/час, У В = 120°.
Ответ: УС — 4 4°; W — 600 км/час.
Для приближенного подсчета путевой скорости в уме может
быть получена более простая формула. С этой целью из вершины
угла Б (см. рис. 35) опустим перпендикуляр БД на линию АВ. Из
рисунка видно, что:
4Д= УсозУС;
45 = t7cosyB.
Но так как АД + ДВ= W, то будем иметь!
W= I/cos УС + t/cos УВ.
Принимая cos УС равным единице, окончательно получим:
Г = И + t/cos УВ.
57
Из этой формулы следует, что максимальная путевая скорость
будет при УВ = 0° (попутный ветер), а минимальная — при
УВ = 180° (встречный ветер); при УВ, близком к 90° (боковой ве-
тер), путевая скорость примерно равна воздушной.
Пассивный полет
При боковом ветре летчик может вывести самолет в заданную
точку пассивным или активным полетом.
Пассивный полет — это полет без учета влияния ветра.
Он сводится к непрерывному совмещению продольной оси самолета
с направлением на заданную точку полета (рис. 36).
Рис. 36. Пассивный полет
Такой полет возможен при визуальной видимости заданной
точки или обозначении ее радионавигационными средствами.
Непрерывное совмещение продольной оси самолета с направле-
нием на заданную точку при наличии бокового ветра приведет
к искривлению линии фактического пути. Форма кривой пассивного
58
полета зависит от УВ и отношения воздушной скорости полета
к скорости ветра. На рис. 37 показаны кривые пассивного полета
для различных значений п и постоянного угла ветра (УВ = 60°).
Максимальное линейное боковое уклонение от прямолинейного
пути будет примерно на удалении 2/з общего расстояния от исход-
ной точки.
Пассивный полет прост по своему выполнению. Он широко при-
меняется в истребительной авиации при полете на радиостанцию
или пеленгатор при возвращении на аэродром посадки. Однако при
полетах на значительные расстояния боковой ветер приводит
к уклонению от заданного направления полета, удлиняет путь и
увеличивает время полета.
Активный полет
Для того чтобы самолет перемещался по заданной линии АБ,
необходимо учесть влияние ветра и направить ось самолета не в за-
данную точку полета 5, а развернуть в наветренную сторону на
величину угла сноса (рис. 38).
Курс самолета, взятый с учетом угла сноса, называется кур-
сом следования (МКслед).
МКслед = ЗМПУ-(±УС).
Время полета должно быть рассчитано по путевой скорости.
Если в полете фактический ветер по своему направлению и скорости
будет соответствовать ветру, принятому в расчет, и летчик строго
сохранит рассчитанные курс и воздушную скорость полета, то само-
лет пройдет по линии заданного пути и выйдет точно по времени и
месту в заданную точку. В этом случае линия фактического пути
самолета будет совпадать с линией заданного пути, а ФМПУ будет
равен ЗМПУ.
Неучет влияния бокового ветра даже при современных скоро-
стях полета может привести к значительному уклонению от задан-
ного пути и невыходу в назначенную точку. Например, при воздуш-
59
ной скорости полета порядка 900 км/час и скорости ветра
100—150 км/час боковой ветер может создать УС =6 -г-10°, что
при получасовом полете по прямой приведет к уклонению от задан-
ного пути на 50—75 км.
Каждый внеаэродромный полет по заданному маршруту необ-
ходимо выполнять с учетом влияния ветра, для чего перед вылетом
летчик обязан рассчитывать курсы следования по участкам
маршрута.
Расчет курса следования
Расчет курса следования основан на решении навигационного
треугольника скоростей.
Обычно с метеорологической станции дается метеорологическое
направление ветра, скорость которого выражена в м/сек. Метеоро-
логическое направление ветра (откуда дует) необходимо
перевести в навигационное направление (куда дует), т. е. изме-
нить метеорологическое направление ветра на 180°.
Рис. 39. Графический расчет курса следования
Скорость ветра, выраженная в м/сек, переводится в скорость,
выраженную в км/час, непосредственно на навигационной линейке
или подсчетом в уме. В последнем случае скорость в м/сек надо
умножить на четыре и полученный результат уменьшить на одну
десятую его значения. Так, например, если скорость ветра равна
15 м/сек, то, чтобы перевести ее в км/час, необходимо 15 умножить
на 4 и из 60 вычесть 6. В результате получим 54 км/час.
Определение расчетных значений УС и W может быть выпол-
нено графически и аналитически.
Графическое решение навигационного треугольника скоростей
сводится к следующему.
Через выбранную точку проводят магнитный меридиан, отклады-
вают в выбранном масштабе вектор ветра и в направлении
МПУ — линию заданного пути (рис. 39). Из конца вектора ветра
радиусом, равным воздушной скорости, делают засечку на линии
60
заданного пути. Засечка определит собой конец вектора путевой
скорости. Затем строят параллелограм, принимая вектор путевой
скорости за диагональ.
После этого транспортиром замеряют УС, а масштабной линей-
кой — путевую скорость.
Пример. МПУ — 70°; V — 500 км/час\ Ъ = 130°; U — 70 км/час. Опреде-
лить УС, МК и W.
Решение (см. рис. 39):
УС = 4- 7°; МК = 70 — (+7) = 63°; W = 530 км/час.
При аналитическом решении навигационного треугольника ско-
ростей используются ранее полученные формулы для определения
угла сноса и путевой скорости.
При помощи навигационной линейки курс следования рассчиты-
вается в следующем порядке:
1) определить угол ветра, как разность 8 и МПУ;
2) совместить заданное значение V с величиной УВ (или его
дополнением до 360°) на шкале синусов и против скорости ветра на
шкале синусов прочесть величину расчетного угла сноса;
3) не сдвигая движка, перевести визирку по шкале синусов на
сумму УВ + УС (независимо от знака УС) и на шкале расстояний
прочесть путевую скорость.
______V Ч___________I______V \1_________I______V
Пример. Перед полетом летчик измерил на карте ИПУ = 145°, магнитное
склонение данного района —5°, следовательно, ЗМПУ — 150°. Задано выдер-
живать воздушную скорость V ~ 800 км/час. Расстояние до цели 155 км. Перед
вылетом летчик получил данные о метеорологическом ветре: направление ветра
200° (откуда дует) и скорость ветра 12 м/сек. Произвести расчет полета.
Решение: 1) Перевести метеорологический ветер в навигационный:
8нав = 200— 180 = 20°;
U = 12 м/сек = 43 км/час,
2) Определить УВ:
УВ = 20 — 150 = 230° (дополнение до 360° будет равно 130е).
3) На навигационной линейке определить УС и W:
УС = — 2°; W = 775 км/час,
4) Определить МКСЛед:
МКслед~ 150-(-2)== 152°.
5) Определить путевое время полета:
t = 12 мин.
61
Летчик должен уметь быстрым подсчетом в уме определять
расчетные угол сноса и путевую скорость. Для этого рекомендуется
запомнить следующую таблицу:
У в УС W УВ
"\ "
0 0 V ±и 180°
15° (345) ±0,3 УСмакс V ±и 195° (165)
30° (330) ±0,5 УСмакс V ± 0,977 210° (150)
45° (315) + 0,7 УСмакс V ± 0,77/ 225° (135)
60° (300) + 0,9 УСмакс V ± 0,57/ 240° (120)
75° (285) i УСМакс V ± 0,37/ 255° (105)
90° (270) i УСмакс V 270° (90)
Примечания: 1. При углах ветра больше 0° и меньше 180° угол сноса
будет положительным (4-), при углах ветра больше 180° и меньше 360°—от-
рицательным (—).
2. При углах ветра больше 270° и меньше 90° путевая скорость больше
воздушной, при углах ветра больше 90° и меньше 270° путевая скорость
меньше воздушной.
Пример. ЗМПУ = 180°; V = 720 км/час; Ъ = 60°; U = 120 км/час. Опре-
делить УС, W и МК.
Решение: 1) УСмакс = = Ю°; УВ = 60 — 180 = 240°.
2) УС = 10-0,9 = —9°.
3) IV = 720 — 0,5-120 = 660 км/час.
4) МК = 180 — (—9) = 189°.
Курс следования и путевую скорость мы рассчитывали по про-
гностическому ветру, полагая, что в районе полета в момент вы-
полнения его будет именно данный ветер. Однако в действитель-
ности ветер может оказаться иным; тогда фактический угол сноса
не совпадет с расчетным. Линия фактического пути пройдет в сто-
роне от линии заданного пути, так как ФМПУ = МК + (+ УСфакт).
Угловая величина бокового уклонения определится как раз-
ность ФМПУ и ЗМПУ:
БУ = ФМПУ — ЗМПУ.
В полете летчик определяет боковое уклонение для исправле-
ния курса при отклонении самолета от линии заданного пути.
§ 9. СЧИСЛЕНИЕ И ПРОКЛАДКА ПУТИ
• Счисление и прокладка пути являются одним из основных спо-
собов контроля пути при полетах в любых навигационных условиях.
Счисление и прокладка пути применяются в любом маршрутном
полете. Без счисления и прокладки пути невозможно вести контроль
пути и ориентировку, определить район вероятного местонахожде-
ния самолета при восстановлении потерянной ориентировки и выйти
на цель в заданное время. Таким образом, счисление и прокладка
пути являются одним из обязательных элементов активного само-
летовождения.
62
Сущность счисления И прокладки пути сводится к определению
фактических элементов движения и получения по ним на карте
места самолета.
При счислении и прокладке пути могут быть два случая.
1) Перед вылетом летчик произвел расчет полета с учетом
влияния ветра. В этом случае, строго выдерживая рассчитанный
режим полета, летчик по путевой скорости и времени полета под-
счетом в уме определяет путь, пройденный самолетом, и отклады-
вает его на карте по линии пути от соответствующего ориентира.
Полученная точка будет местом самолета (рис. 40).
Рис. 40. Прокладка пути по известным ФПУ и W
2) До вылета расчет полета с учетом влияния ветра не произво-
дился. В полете летчик, используя указатель скорости и часы, под-
счетом в уме определяет путь, пройденный самолетом. По компасу
определяет направление движения самолета. На карте от последней
отметки МС глазомерно откладывает направление истинного курса
и пройденный путь самолета. При наличии ломаного маршрута
такая работа повторяется на каждом участке. Конец последнего
участка пути будет штилевым местом самолета (рис. 41).
При наличии на полетной карте вектора ветра летчик может
сместить штилевую точку в направлении ветра на величину W,
где U — скорость ветра; t — общее время полета от начала счисле-
ния пути.
Из рис. 41 видно, что определение МС штилевой прокладкой
сводится к построению навигационного треугольника скоростей на
каждом участке пути.
Этот случай счисления и прокладки пути чаще применяется при
восстановлении потерянной ориентировки с целью определения
района вероятного местонахождения самолета.
Место самолета, полученное счислением и прокладкой пути,
обозначается на карте треугольником с указанием времени. Вслед-
ствие ошибок] допускаемых летчиком при определении фактических
элементов движения самолета и прокладке пути на карте, получен-
63
Рис. 41. Определение МС штилевой прокладкой
ная точка МС фактически является центром некоторого района ве-
роятного местонахождения самолета.
Практически этот район принимается за круг с г = 3—5% пути
самолета от последней достоверной отметки места самолета.
Летчик^ занятый управлением самолета, не может воспользо-
ваться для счисления и прокладки пути штурманскими счетными и
измерительными приборами. Поэтому он должен уметь быстро и
точно вести счет в уме и осуществлять точную глазомерную про-
кладку на карте.
Быстрым подсчетом в уме летчик должен уметь правильно опре-
делять путевую скорость и путь, пройденный самолетом за любой
промежуток времени.
Для глазомерной прокладки пути следует использовать на карте
географическую сетку меридианов и параллелей, помня, что Г дуги
меридиана (или экватора) соответствует приблизительно 111 км.
Величина Г дуги параллели переменная и зависит от широты па-
раллели. Можно рекомендовать до полета определить среднее зна-
чение 1° параллели для данного листа карты и записать его на
рамке карты.
Для безошибочного глазомерного определения направлений не-
обходимо систематически тренироваться в нанесении на карте без
помощи транспортира различных углов и направлений.
§ 10. НАВИГАЦИОННЫЙ ИНДИКАТОР
При полетах на больших высотах и больших скоростях с пере-
менным режимом (например, при выполнении воздушного боя)
в сложных метеорологических условиях счисление и прокладка пути
значительно усложняются.
Для облегчения условий работы летчика советскими конструкто-
рами создан механический счетчик, ведущий автоматическое счисле-
64
ние пути, пройденного самолетом, что значительно облегчает сохра-
нение ориентировки в полете. Такой счетчик получил название н а-
вигационного индикатора (НИ).
Навигационный индикатор, непрерывно учитывая курс и ско-
рость полета, автоматически раскладывает проходимый самолетом
путь на две составляющие, направленные по осям прямоугольной
системы координат, по которым на карте в любой момент можно
определить место самолета.
Пусть самолет относительно некоторой начальной точки Б за определенное
время t при данной воздушной скорости V с магнитным курсом МК прошел
путь S = Vt (рис. 42).
Рис. 42. Путь самолета в прямоугольной системе коор-
динат
При наличии ветра за время t самолет будет отнесен на величину Ut и
окажется в точке А, которая будет местом самолета.
. Место самолета можно получить по двум составляющим Dc и £>в, получен-
ным в результате разложения векторов воздушной скорости и скорости ветра
по осям прямоугольной системы координат СОВ.
Координатные оси могут быть повернуты относительно магнитного мери-
диана на угол, называемый магнитным углом карты (УК).
Магнитным углом карты называется угол между северным напра-
влением магнитного меридиана и осью ОС прямоугольных координат.
Из рисунка видно, что составляющие £>с и Ов можно получить следующим
образом:
Рс = ^сб + Wcos (мк — ук) + ut cos (5 “ УК)>
DB = Г>Вб + Vt sin (МК — УК) + Ut sin (8 — УК).
5—98
65
Для получения координат Dq и Dq в приборе должно иметься устройство,
позволяющее устанавливать начальные координаты £>Сб и ОВб, магнитный угол
карты, скорость и направление ветра. В полете в прибор должны непрерывно
вводиться истинная воздушная скорость и магнитный курс.
Результаты счисления пути вырабатываются прибором в километрах в виде
двух чисел, которые являются прямоугольными координатами места самолета.
В любой момент полета, отсчитав координаты Dq и DB и отложив их на
планшете (карте), имеющем сетку прямоугольных координат, летчик получит
место самолета к моменту отсчета координат.
Точность определения места самолета по данным навигационного индика-
тора составляет 3—5% пути самолета от места установки (или уточнения) на-
Рис. 43, Комплект навигационного индикатора:
I — автомат скорости; 2 — счетчик координат; 3 — автомат курса; 4 — задатчик ветра; 5 — фильтры;
6 — распределительная коробка; 7 — трафарет
В комплект навигационного индикатора входят (рис. 43): автомат скоро-
сти /, счетчик координат 2, автомат курса 3, задатчик ветра 4, фильтры 5,
распределительная коробка 6, трафарет для нанесения координатной сетки 7.
На автомате курса и задатчике ветра имеются специальные ручки для уста-
новки угла карты.
Счетчик координат имеет две стрелки, одна из которых — с индексом «С»—
выдает координату Dq а другая — с индексом «В» — выдает координату £>в-
Подготовка навигационного индикатора к полету
Подготовка к полету с использованием НИ сводится к подго-
товке полетной карты, определению и установке исходных данных
на навигационном индикаторе.
Подготовка карты. Координатная сетка наносится на полетную
карту следующим образом: западнее и южнее района полетов на
карте прочерчиваются две взаимно перпендикулярные линии
(оси ОС и ОВ), после чего при помощи трафарета наносятся верти-
кальные и горизонтальные прямые (параллельные осям координат)
на весь требуемый район.
В зависимости от масштаба эти линии оцифровываются (через
20 км на карте масштаба 1 : 1 000 000).
Установка исходных данных на индикаторе. Перед вылетом не-
66
обходимо установить угол карты, направление и скорость ветра и
координаты исходной точки. Угол карты определяется при помощи
транспортира с учетом магнитного склонения и устанавливается на
автомате курса и задатчике ветра. На последнем устанавливаются
также навигационное направление ветра и скорость в км/час. При
отсутствии данных о ветре на задатчике ветра устанавливается ну-
левое значение вектора ветра. В этом случае индикатор будет вести
автоматическое счисление пути для штилевых условий.
Исходной точкой начала счисления пути может быть аэродром
или ИПМ. Начальные координаты исходной точки определяются
непосредственно по координатной сетке карты. Стрелки счетчика
координат устанавливаются на эти данные либо перед вылетом
(если ИПМ является аэродром), либо в момент пролета ИПМ (если
он в стороне от аэродрома).
Использование навигационного индикатора в полете
Определение места самолета. При помощи навигационного инди-
катора место самолета в полете определяется следующим образом.
По вращению малых (сигнальных) стрелок необходимо убедиться
в работе прибора, после чего отсчитать показания стрелок на шкале
счетчика (сначала отсчитать показание медленно перемещающейся
стрелки) и заметить время. Затем, пользуясь оцифровкой коорди-
натной сетки, по отсчитанным координатам получить МС и отметить
его на карте треугольником с указанием времени (рис. 44).
Навигационный индикатор допускает некоторые погрешности.
Поэтому в полете рекомендуется периодически исправлять показа-
ния навигационного индикатора: определять МС визуально или при
помощи радиотехнических средств,
производить отсчет координат на
карте и соответственно этим дан-
ным устанавливать стрелки счет-
чика. Благодаря эдому накопив-
шаяся к моменту определения МС
ошибка будет устранена.
Отметки МС, определенные при
помощи навигационного индика-
тора, позволяют осуществить кон-
троль пути, вывести самолет в за-
данный район и восстановить по-
терянную ориентировку.
Контроль пути. В полете, про-
изводя периодические отсчеты по
счетчику координат и получая по
ним отметки МС на карте, летчик
сопоставляет полученную линию
фактического пути с заданной,
Рис. 44. Определение МС при по-
мощи навигационного индикатора
чем контролирует путь по напра-
влению и дальности.
5*
67
Если получаемые по индикатору координаты летчик будет
периодически передавать на КП, на котором имеется такая же
карта с координатной сеткой как у летчика, то дежурный штурман
тоже может вести контроль полета.
Вывод самолета в заданный район. Навигационный индикатор
позволяет вывести самолет на аэродром посадки или в какой-нибудь
иной заданный район (рис. 45).
Определив при помощи индикатора на карте МС, летчик глазо-
мерно оценивает направление полета в заданный район и развора-
чивает самолет на необходимый угол. >
В момент прихода стрелок счетчика координат на деления, со-
ответствующие координатам заданной точки, самолет будет на-
ходиться в заданном районе.
Рис. 45. Вывод самолета в заданную точку полета
Восстановление ориентировки. В случае потери ориентировки
(например, после воздушного боя или после полета в облаках) по-
лученное при помощи индикатора место самолета ограничивает
район местонахождения самолета, что облегчает восстановление
ориентировки и вывод самолета на аэродром посадки.
Если летчик передает на КП координаты, отсчитанные по инди-
катору, то с земли ему могут оказать помощь в выходе на аэродром
посадки.
Определение бокового уклонения. При полетах по прямой на
значительные расстояния (например, на предельный радиус дей-
ствия) координатную сетку на полетную карту можно не наносить.
На автомате курса и задатчике ветра устанавливается УК ~
= ЗМПУ. В этом случае ось ОС будет совпадать с линией задан-
ного пути, а ось ОВ будет перпендикулярна ей.
68
За начало счисления
пути принимается ИПМ.
Стрелка с индексом «С»
в полете будет показывать
пройденное самолетом
расстояние, а стрелка с
индексом «В» — линей-
ное боковое уклонение
(рис. 46).
При изменении в поле-
те ЗМПУ необходимо со-
ответственно изменить и
угол карты.
Определение ветра.
Навигационный индикатор
Рис.
46. Определение ЛБУ при помощи на-
вигационного индикатора
позволяет определить ве-
тер на высоте полета как
при видимости земли, так
и вне видимости ее.
Перед полетом на задатчике
ветра необходимо установить ско-
рость ветра, равную нулю.
Для определения ветра намечается прямолинейный участок
маршрута протяженностью на 6—10 мин. полета. При отходе от
ИПМ летчик включает секундомер. В момент прохода характерного
ориентира (радиостанции) он определяет МС визуально (по про-
ходу радиостанции) и одновременно отсчитывает координаты по
индикатору и время по часам.
Рис. 47. Определение ветра при помощи навигационного индикатора
69
Штилевую отметку МС, определенную при помощи индикатора,
летчик соединяет линией с отметкой МС, полученной визуально
(или по радиостанции).
Направление ветра определяется глазомерно, а скорость ветра —
делением расстояния I//, выраженного в километрах, на путевое
время полета (рис. 47). Так, например, если расстояние между от-
метками МС на карте равно 10 км, а время полета 10 мин., то
скорость ветра будет равна 1 км/мин или 60 км!час.
НАКОЛЕННЫЙ ПЛАНШЕТ ЛЕТЧИКА
Наколенный планшет летчика предназначен для записи основных данных рас-
чета полета и некоторых фактических данных полета в воздухе. Он покрыт све-
тящимся составом, который позволяет пользоваться им и в ночном полете.
Планшет представляет собой комбинированный прибор, состоящий из
счетно-навигационного лимба, бортжурнала и полярного построителя (рис. 48).
Рис. 48. Наколенный планшет летчика
70
Счетно-навигационный лимб представляет собой шкалы расстояний и вре-
мени, деления которых нанесены по окружности. Лимб позволяет решать те
же задачи, которые решаются на соответствующих шкалах навигационной ли-
нейки. Необходимые установки производятся при помощи рукоятки, имеющейся
сбоку лимба. В середине счетно-навигационного лимба есть пластинка, на кото-
рую в зависимости от высот полета записываются обороты турбины и часовой
расход горючего для двух намеченных режимов полета.
В бортжурнале (пластина с графами: маршрут, S км, МПУ (МК) и t) на
земле записываются результаты расчета полета и другие необходимые сведения,
в воздухе записываются некоторые фактические данные полета.
На полярном построителе нанесены сетки прямоугольных и полярных
координат. Центр построителя является начальной и конечной точкой полета.
По показаниям счетчика навигационного индикатора на построителе можно по-
лучить место самолета. По угловой сетке определяется курс на аэродром, а по
концентрическим кругам — дальность (в км) от места самолета до аэродрома.
§ 11. ВИЗУАЛЬНАЯ ОРИЕНТИРОВКА
Визуальной ориентировкой называется определение
места самолета наблюдением и опознаванием ориентиров на мест-
ности. Она применяется в условиях видимости земли, когда ориен-
тиры, имеющиеся на местности, указаны на карте и могут быть
опознаны с данной высоты полета.
Визуальная ориентировка применяется тогда, когда позволяет
навигационная обстановка, и особенно при отыскании малоразмер-
ных целей для бомбометания; при разведке, когда нужно не
только найти, но и рассмотреть детали объектов наблюдения; для
выхода на заданную линию пути по створу ориентиров; для кон-
троля и исправления пути, определения навигационных элементов
(фактического путевого угла, угла сноса, путевой скорости, направ-
ления и скорости ветра) и т. д.
Мастерское владение визуальной ориентировкой есть одно из
важнейших требований, предъявляемых летчикам всех родов авиа-
ции.
Методика ведения визуальной ориентировки
Комплекс действий летчика при визуальной ориентировке со-
стоит: а) из прокладки пути для получения района местонахожде-
ния самолета на карте; б) сличения этого района с пролетаемой
местностью с целью опознавания ориентиров (естественных и искус-
ственных); в) определения места самолета.
Чем труднее условия ориентировки, тем тщательнее следует вести
прокладку при помощи навигационного индикатора или компаса,
указателя скорости и часов перед сличением карты с местностью.
Комплекс действий летчика по определению места самолета
визуальным способом состоит в следующем:
1) при помощи навигационного индикатора определяется район
местонахождения самолета;
2) карта ориентируется по странам света;
3) сличением найденного района на карте с пролетаемой мест-
ностью определяется место самолета.
71
При отсутствии на-
вигационного индика-
тора для визуальной
ориентировки использу-
ются часы, компас и
указатель скорости.
В этом случае необхо-
димо:
1) о р и е нтировать
карту по компасу;
2) по времени поле-
та определить расстоя-
ние от последнего до-
стоверно пройденного
ориентира;
3) по направлению
полета и пройденному
расстоянию найти район
местонахождения само-
Рис. 49. Ориентирование карты по компасу
1 J Jlcld nd Kdpic,
4) сличить этот рай-
он па карте с пролетаемой местностью, опознать характерный
ориентир и определить место самолета.
Чтобы быстро определить местонахождение самолета на карте
прокладкой пути, летчик должен уметь глазомерно с достаточной
точностью откладывать на карте направление полета и пройденное
расстояние. Этот навык прививается летному составу систематиче-
скими тренировками на земле.
Карта должна быть ориентирована по странам света. В полете
летчик должен держать ее так, чтобы направление истинных мери-
дианов на ней совпадало с направлением на север (по магнитному
компасу). Для этого карта развертывается таким образом, чтобы
линия истинного курса, проложенная мысленно на карте, была па-
раллельна оси симметрии са-
молета (рис. 49).
Успех сличения карты с
местностью зависит от видимо-
сти и характерности ориенти-
ров. Сличение карты с мест-
ностью заключается в умении
выбрать один или несколько
характерных ориентиров на кар-
те и отыскать их на местности
или, наоборот, выбрать харак-
терные ориентиры на местности
и отыскать их в ограниченном
районе на карте.
Если путь самолета прохо-
дит не точно над ориентирами,
Рис. 50. Определение места самолета
глазомерным пеленгованием ориентира
72
а на некотором удалении от них (две — три высоты полета), то
место самолета на карте определяется с помощью глазомерного пе-
ленгования опознанных ориентиров. На рис. 50 показано, как опре-
делить место самолета на карте в момент пролета реки, используя
найденный глазомерно курсовой угол на ориентир Б.
Для опознавания ориентиров летчик должен:
1) уметь быстро и безошибочно разбираться в топографических
знаках на карте и представлять себе по условному изображению
местности ее действительный вид с высоты полета;
2) обладать способностью выбирать характерные детали (при-
знаки) местности, которые проще и вернее всего могут быть опо-
знаны на карте;
3) опознав характерные ориентиры в стороне от линии пути,
уметь определить место самолета, используя для этого глазомерное
пеленгование или створ ориентиров;
4) определять с достаточной точностью дальность до ориентиров.
Успешное ведение визуальной ориентировки в полете на совре-
менном самолете с большими скоростями требует от летчиков от-
личного зь^ания района полетов.
Летчик должен прежде всего изучить общую характеристику
местности — совокупность рельефа и местных предметов (гидро-
графической сети, населенных пунктов, дорожной сети и почвенно-
растительного покрова), распознать которые можно при наблюде-
нии с воздуха. Уяснив общую характеристику местности, он обя-
зан изучить схему расположения опорных линейных и площадных
ориентиров района полетов, используя для этого карты различных
масштабов, аэролоции данной местности, фотоснимки основных
опорных ориентиров, сведения, составленные на основе опроса лет-
чиков, много летавших в этом районе.
Условия ведения ориентировки
Успешность ведения визуальной ориентировки зависит от усло-
вий полета, от характерности ориентиров и местности, над кото-
рыми совершается полет, от видимости ориентиров, времени года и
суток, высоты и скорости полета, условий обзора с самолета и т. д.
Ориентиры подразделяются на линейные, площадные
и точечные.
Линейными ориентирами являются реки, дороги, каналы, мор-
ское побережье и т. п.; площадными — города и крупные населен-
ные пункты, крупные озера, леса в степных местностях, крупные
железнодорожные станции и узлы; точечными — пересечения линей-
ных ориентиров, небольшие селения, пристани, рощи, отдельные
сопки, вершины гор, балки и др.
Условия видимости ориентиров являются важным обстоятель-
ством визуальной ориентировки, так как они определяют наиболь-
шее расстояние, с которого может быть опознан тот или иной ориен-
тир на местности. Днем дальность видимости ориентиров зависит
от величины, цвета и отражательной способности ориентиров, а
73
также от метеорологических условий (дымки, тумана, облачности,
степени прозрачности атмосферы, освещенности).
При средних условиях видимости очертания ориентиров можно
различать на расстоянии, равном десятикратной высоте, а их де-
тали — в зоне, радиус которой равен трем — пяти высотам полета.
С увеличением высоты полета видимость ориентиров в еще боль-
шей степени зависит от метеорологических условий (прозрачности
атмосферы, освещенности и т. д.). При отсутствии облачности круп-
ные ориентиры (озера, железнодорожные узлы, города) в прозрач-
ном воздухе могут быть видны на расстоянии более 100 км.
Дымка очень часто настолько ухудшает видимость ориентиров, что
они просматриваются лишь под небольшими углами или только
под самолетом. Крупные промышленные центры обычно закрыты
дымкой.
С увеличением высоты полета уменьшается возможность исполь-
зования большинства мелких ориентиров, пригодных для визуаль-
ной ориентировки на средних высотах. При визуальном наблюде-
нии можно определить предметы, величина которых не меньше
1/боо—Viooo высоты полета, причем лучше всего видны объекты,
резко выделяющиеся на общем фоне местности.
При наблюдении со средних и больших высот особенно хорошо
видны горные хребты. При хорошей видимости горные хребты вы-
глядят так, как они нанесены на картах крупного масштаба, вслед-
ствие чего облегчается сличение карты с местностью.
Основными ориентирами для визуальной ориентировки при по-
лете на средней высоте служат крупные населенные пункты, реки,
шоссе, озера, водохранилища, железнодорожные узлы, лесные мас-
сивы, взлетно-посадочные полосы, пересечения линейных ориенти-
ров и др.
Визуальная ориентировка затрудняется при полете над лесными
массивами, тайгой, степью, тундрой, пустыней, а также над мало-
населенными областями вследствие отсутствия характерных ориен-
тиров. В местности, бедной ориентирами, необходимо использовать
все мелкие ориентиры, нанесенные на полетные карты (овраги,
отдельные возвышенности, балки, тропы, колодцы, отдельные ху-
торы, озера и т. п.). При полете над малоориентирной местностью
летчик должен вести визуальную ориентировку периодически:
в нужный момент полета суметь перейти от прокладки и счисления
пути к визуальной ориентировке.
Визуальная ориентировка затрудняется также при полете над
однообразной местностью, с большим количеством однородных
ориентиров. Например, над районами с очень густой сетью дорог,
с обилием мелких озер, рек и мелких населенных пунктов, над
горами со сглаженными контурами. В такой местности, правда,
ориентиров достаточно, но они настолько однообразны, что выде-
лить из них что-либо характерное при визуальной ориентировке
трудно. В однообразной местности следует использовать ориентиры,
выделяющиеся на фоне объектов, создающих «пестроту» местности,
а также взаимное расположение ориентиров.
74
При полете в горном районе визуальная ориентировка затруд-
няется тем, что за склонами гор образуются ^просматриваемые
пространства. Дороги в горной местности малозаметны. Вид рек
меняется в зависимости от погоды: они либо почти полностью вы-
сыхают, либо становятся полноводными. Наличие светотеней услож-
няет опознавание ориентиров. При полете в горном районе для ви-
зуальной ориентировки используются отдельные вершины, конфи-
гурация хребтов, форма долин и ущелий, покров гор и их цвет.
Ведя периодически визуальную ориентировку, летчик легко может
ориентироваться при полетах даже за облаками по отдельным хо-
рошо изученным и возвышающимся над облаками вершинам гор.
Скорость полета будет оказывать влияние на условия ведения
визуальной ориентировки только на высотах, меньших 1000 м. Если
расстояние, на котором возможно детальное распознавание ориен-
тиров, взять равным пяти высотам, то при скорости 720 км/час и на
высотах, меньших 1000 ж, экипаж не будет располагать достаточ-
ным временем для визуального наблюдения. Это видно из приве-
денной ниже таблицы.
Время детального распознавания ориентиров в зависимости от высоты
полета в сек.
Скорость км}час Высота, м
200 400 600 800 1000 1500
720 5 10 15 20 25 37,5
Кроме того, малая высота, уменьшая обзор местности и сокра-
щая время наблюдения, затрудняет выбор ориентиров для опозна-
вания. При визуальной ориентировке на малой высоте нужно учи-
тывать, что ориентиры будут видны в перспективе, а не в плане,
как на средних и больших высотах, и на видимость будет оказы-
вать влияние рельеф местности: ориентиры, прикрытые складками
местности будут видны короткое время, а лежащие в стороне от
маршрута могут быть совершенно не видны.
Исключительно важное значение для визуальной ориентировки
в полетах на малой высоте имеют линейные ориентиры (в том числе
и небольшие речки, овраги, контуры лесов и т. п.). Они исполь-
зуются для контроля пути по направлению и по дальности.
При полете на малой высоте успешно опознаются складки мест-
ности: овраги, балки, небольшие возвышенности, мелкие реки и др.
Маршрутным полетам на малой высоте должна предшествовать
особенно тщательная подготовка летного состава. Ориентиры по
маршруту должны изучаться настолько подробно, чтобы в полете
летчик мог быстро и безошибочно распознавать их по конфигу-
рации, взаимному расположению объектов, рельефу и т. д. Визу-
альную ориентировку следует вести с упреждением, т. е. сначала
определить, где будет самолет к моменту сличения карты с мест-
ностью, а после этого ожидать появления ориентиров.
75
Зимой при свежевыпавшем снеге такие ориентиры, как реки и
озера, особенно в пасмурную погоду, почти не видны. В весенний пе-
риод при таянии снега и разливе рек искажается вид местности.
В эти периоды для ведения визуальной ориентировки следует
использовать ориентиры, контуры которых не подвергаются изме-
нениям и отчетливо видны на общем фоне местности.
При наличии облачности с разрывами визуальная ориентировка
затруднена: тени от облаков можно принять за лесные массивы,
озера или населенные пункты.
Различное время суток вносит свои особенности в ведение ви-
зуальной ориентировки. Особенности сказываются при полете в ве-
черние и утренние часы. Косые лучи солнца в это время заливают
всю местность сплошным красным светом и почти исключают ви-
зуальное наблюдение.
Сумерки сокращают дальность видимости ориентиров. Кроме
того, в сумерки прозрачность воздуха ухудшается из-за образова-
ния дымки и радиационных туманов. Появляется однотонность
в окраске, вследствие чего трудно выделить отдельные ориентиры и
детали земных объектов.
Визуальная ориентировка ночью в большой степени зависит от
освещения местности Луной и искусственного освещения населен-
ных пунктов, а также от светотехнических средств, установленных
в районе полетов.
§ 12. ОПРЕДЕЛЕНИЕ НАВИГАЦИОННЫХ ЭЛЕМЕНТОВ В ПОЛЕТЕ
Для -осуществления самолетовождения летчик должен уметь
определять в полете УС, БУ, ФМПУ, W и ветер. Указанные нави-
гационные элементы летчик может определить, используя в комп-
лексе с визуальной ориентировкой общие и радиотехнические сред-
ства самолетовождения.
Определение угла сноса, бокового уклонения и фактического
путевого угла
Для контроля пути по направлению летчику необходимо знать
УС, БУ и ФМПУ. Эти навигационные элементы определяются в та-
кой последовательности:
1) определить две — три отметки МС на прямолинейном уча-
стке маршрута протяженностью 50—100 км;
2) глазомерно оценить величину ФИПУ и, вычтя из него маг-
нитное склонение, получить ФМПУ;
3) определить БУ как разность ФМПУ и ЗМПУ (рис. 51).
Если летчик выдерживал МК = ЗМПУ, то БУ = УС. При нера-
венстве МК и ЗМПУ угол сноса определится как разность ФМПУ
и МКсг
УС = ФМПУ — МКср.
76
Рис. 51. Определение навигационных элементов полета по от-
меткам МС
Пример. По трем отметкам МС на карте летчик глазомерно оценил
ФИПУ = 285°, Дм = —5°, ЗМПУ == 283°, МКср выдерживался 283°. Определить
БУ и УС.
Решение:
ФМПУ - 285 — (-5) - 290°;
БУ = 290 — 283 = +7°;
УС = БУ = +7°.
Более просто величину и знак БУ летчик может получить сле-
дующим образом. По отметкам МС на карте мысленно провести
линию фактического пути и глазомерно оценить величину БУ, как
угол между линиями заданного и фактического пути. Знак БУ опре-
делится стороной уклонения.
В этом случае ФМПУ определяется как сумма ЗМПУ и БУ:
ФМПУ = ЗМПУ + (± БУ).
При выполнении маршрутных полетов на малых и средних вы-
сотах летчику иногда приходится определять линейное боковое
уклонение (ЛБУ) относительно заданного контрольного ориентира.
В этом случае линейное
боковое уклонение с доста-
точной для практики точ-
ностью может быть опреде-
лено по высоте полета и
вертикальному углу визиро-
вания (ВУ) на ориентир
(рис. 52). Высота полета
определяется по высотомеру,
а ВУ глазомерно, как угол
между вертикалью самоле-
та и линией визирования на
ориентир. ЛБУ находится
Рис. 52. Определение ЛБУ по высоте
полета и вертикальному углу
из соотношения:
ЛБУ = /ПдВУ.
77
Для глазомерной оценки величины линейного бокового уклоне-
ния относительно контрольного ориентира рекомендуется запомнить
следующую таблицу:
ВУ 26° 45° 56° 63° 71° 76° 80°
ЛБУ 0,5// Н 1,5/7 2/7 3/7 4/7 6/7
Пример. На высоте 5000 м самолет прошел слева от КО, на траверзе ко-
торого летчик глазомерно оценил ВУ, равный 55°. Каково было ЛБУ относи-
тельно ко?
Ответ: ЛБУ влево 7,5 км.
Угловое уклонение в зависимости от ЛБУ и пройденного рас-
стояния (рис. 53) определяется по формуле.
ЛБУ
^*пр
$пр
л.з.п.
Рис. 53. Определение БУ по линейному боковому
уклонению и пройденному пути
Эта формула решается на навигационной линейке следующим
образом:
ЛБУ [км]
Г
$Пр
Пример. Snp = 85 км, ЛБУ = 6 км (влево). Определить БУ.
Решение: БУ = 4°.
Для приближенного подсчета бокового уклонения формула
может быть упрощена, а именно:
БУ _ ЛБУ
Snp ’
откуда
60 ЛБУ
БУ = —ё—“
•^пр
78
или
Бу = 6ЛБУ,
^пр
где — пройденное расстояние в десятках километров.
Пример. Самолет прошел 80 км и уклонился влево на 7 км. Определить БУ.
Решение: БУ = = 5°.
о
Точность определения БУ, УС и ФМПУ изложенными спосо-
бами в основном зависит от точности определения МС.
Так как при полете на больших высотах точность определения
МС визуальным способом сравнительно невысока, то БУ и ФМПУ
более точно можно определить при помощи радиотехнических
средств.
Определение путевой скорости, путевого времени и пройденного
самолетом расстояния
Для осуществления контроля пути по дальности летчик должен
уметь определять путевую скорость самолета и расстояние, прохо-
димое самолетом за различные промежутки времени.
Путевая скорость определяется по пройденному самолетом рас-
стоянию за определенный промежуток времени по формуле
Наиболее точно путевую скорость можно определить про-
летом контрольного этапа. Для этой цели перед полетом намечается
КЭ протяженностью 60—100 км, начало и конец которого обозна-
чаются характерными ориентирами.
Замерив его длину на полетной карте с точностью до полкило-
метра, летчйк на земле составляет таблицу путевых скоростей.
Пример. 3*кэ = 60 км; V == 660 км/час.
Определить возможные значения W.
/кэ мин., сек. 4,50 5,00 5,10 5,20 5,30 5,40 5,50 6,00 6,10
W км/час 750 725 700 680 660 640 620 600 585
В полете по секундомеру бортовых часов необходимо точно за-
сечь моменты прохода начала и конца КЭ. Пользуясь заранее со-
ставленной таблицей, по времени пролета КЭ (/кэ) определить пу-
тевую скорость. При пролете КЭ необходимо точно выдержать за-
данный режим полета.
В практике самолетовождения летчику приходится определять
путевую скорость в полете и без предварительной подготовки. Бы-
79
стрым подсчетом в уме летчик должен уметь правильно определять
путевую скорость и путь, пройденный самолетом за любой проме-
жуток времени.
Для определения путевой скорости подсчетом в уме рекомен-
дуется руководствоваться следующими правилами:
I) Если пройденное расстояние делится на время полета без
остатка, необходимо поделить расстояние на время и определить
скорость в минуту, а затем, умножив результат на 60, получить
скорость в час.
Пример. 3 = 70 км\ t = 7 мин. Определить W.
70
Решение: W = = 10 км/мин или W == 10-60 = 600 км/час.
2) Если пройденное расстояние не делится на время без остатка,
а время является целой долей часа, то на полученное число долей
часа необходимо разделить пройденное самолетом расстояние.
Пример. 3 = 195 км\ ^=18 мин. Определить W.
Решение: 1)6 мин. = 3/ю часа.
пч 195-10 ссп
2) W = —-— = 650 км/час.
о
3) Если расстояние не делится на время без остатка, а время
не является целой долей часа, то необходимо приближенно опреде-
лить скорость в 1 мин. Для этого нужно изменить путевое время
так, чтобы оно составило целую долю часа; соответственно этому
изменить пройденное расстояние, после чего определить путевую
скорость по предыдущему правилу.
Пример. 3=100 км, t = 7 мин. Определить W.
Решение: 1) Определить приближенную скорость в 1 мин.:
100 : 7 = 14 км/мин.
2) Уменьшим время на 1 мин. и расстояние на 14 км:
Si = 86 км, ti = 6 мин.
Следовательно,
Ц7 — 86 • 10 = 860 км/час.
4) Если время полета определено с секундами, необходимо его
увеличить так, чтобы оно получилось в целых минутах и во столько
же раз следует увеличить расстояние, после чего определить W по
одному из вышеуказанных правил.
Пример. S = 54 км\ t — 4 мин. 30 сек. Определить W.
П V IV/ 108
Решение: Увеличим время и расстояние в два раза, тогда W = -д- =
= 12 км/мин, или
W = 12 • 60 = 720 км/час.
Пройденное самолетом расстояние S по известным путевой
скорости и путевому времени можно определить следующими спо-
собами:
80
1) Отделить запятой последнюю цифру у путевой скорости. Это
будет путь самолета за ]/ю часа (6 мин.). Полученное расстояние
увеличить (уменьшить) во столько раз, во сколько путевое время
больше (меньше) 6 мин.
Пример. W = 730 км/час\ £=18 мин. Определить 5.
Решение: 1) 5 за 6 мин. = 73 км.
2) 5 за 18 мин.= 73 • 3 = 219 км.
2) Вначале определить пройденное расстояние за 1 мин., а за-
тем за путевое время.
Летчику необходимо запомнить расстояние, проходимое само-
летом в одну минуту для скоростей полета от 600 км/час до
900 км/час.
W км/час 600 660 720 780 840 900
UX км млн 10 11 12 13 14 15
Пример. IT — 720 км/час — \2 км/мин\ t = 8 мин. Определить 5.
Решение: 5 = 12-8 = 96 км.
Определение расчетного путевого времени подсчетом в уме можно
производить двумя способами:
1) Определить путь самолета за 1 мин., а затем путевое время
для требуемого расстояния.
Пример. Самолет прошел 52 км за 4 мин. Определить расчетное путевое
время для оставшегося расстояния 78 км.
52
Решение: 1) W — — = 13 км/мин.
78
2) t = ггг- = 6 мин.
1о
2) Определить, во сколько раз пройденное расстояние больше
или меньше оставшегося, и во столько же раз изменить и путевое
время.
Рис. 54. Определение расчетного путевого вре-
мени по пройденному расстоянию
6-98
81
Пример. 50 км Самолет Прошел за 4 мин. Определить Путевое время для
*S*oct —" КМ.
Решение: S0CT — 75 км больше Snp = 50 км в 1,5 раза, следовательно,
t — 4 • 1,5 = 6 мин.
При наличии на карте отметок МС летчик может глазомерно
сопоставить отрезки пройденного и оставшегося пути и соответ-
ственно измерить путевое время (рис. 54).
Определение ветра в полете по отметкам МС на карте
Сущность способа сводится к решению навигационного треуголь-
ника скоростей, когда по известным векторам воздушной и путевой
скоростей определяется искомый вектор ветра (рис. 55).
Рис. 55. Определение ветра по отметкам МС
Для определения ветра в полете необходимо:
1) Точно пройти над ИПМ с МК — ЗМПУ и строго выдержать
режим полета (курс, скорость, высоту).
2) Через 6—10 мин. полета (в зависимости от удаления КО)
определить МС и нанести его на полетную карту.
Прямая на карте, соединяющая намеченный на линии заданного
пути КО с отметкой МС, будет вектором ветра за время полета.
Направление ветра оценивается глазомерно как угол между
меридианом и вектором ветра, скорость ветра определяется путем
деления величины Ut на путевое время.
Данный способ определения ветра предполагает видимость зем-
ной поверхности и наличие характерных ориентиров в районе опре-
деления ветра.
§ 13. ИЗМЕРЕНИЕ ВРЕМЕНИ
Учет времени в течение всего полета — один из важнейших эле-
ментов самолетовождения.
В основу измерения времени положено вращение Земли вокруг
своей оси, совершающееся строго равномерно в направлении с за-
пада на восток.
Один полный оборот Земли вокруг своей оси принято называть
сутками. Сутки являются единицей измерения времени. Они
делятся на часы, минуты и секунды. Более крупными
единицами измерения времени являются месяцы и годы.
82
Вращение Земли во-
круг своей оси мы наблю-
даем по кажущемуся вра-
щению небесной сферы:
по видимому перемеще-
нию светил в направлении
с востока на запад. Солнце,
совершая в течение суток
свое кажущееся движе-
ние, дважды пересекает
Рис. 56. Моменты верхней и нижней кульми-
нации Солнца
меридиан, проходящий че-
рез место данного наблю-
дателя. На рис. 56 изо-
бражена Земля, если смотреть на нее со стороны Северного полюса,
и меридиан наблюдателя.
Момент, когда Солнце находится в самой высокой точке над
горизонтом и проходит меридиан наблюдателя, называется верх-
ней кульминацией Солнца.
Момент, когда Солнце проходит продолжение меридиана на-
блюдателя в другом полушарии Земли, называется нижней
кульминацией Солнца. Моменты кульминации Солнца опре-
деляются очень точно и принимаются за начало отсчета суток.
Вести счет времени по истинному Солнцу оказалось неудобным,
так как продолжительность истинных солнечных суток в течение
года неодинакова. Самые длинные декабрьские сутки бывают ко-
роче сентябрьских суток на 51 сек. Это явление вызвано неравно-
мерностью обращения Земли вокруг Солнца. Чтобы в течение года
получить равномерные по своей продолжительности сутки, усло-
вились счет времени вести относительно условной точки, называе-
мой средним Солнцем.
Принято считать, что Земля обращается вокруг среднего Солнца
с равномерной скоростью по орбите, имеющей форму окружности,
поэтому продолжительность суток в любое время года будет оди-
накова. Положение среднего Солнца на небесной сфере астрономам
в каждый момент известно. Наши часы устанавливаются по сред-
нему солнечному времени.
Среднее солнечное время. Среднее солнечное время измеряется
углом отхода полуночной части
меридиана наблюдателя от сред-
него Солнца. Среднее солнечное
время называется также гра-
жданским временем. За на-
' - - чало отсчета среднего солнечного
времени принят момент нижней
кульминации среднего Солнца,
т. е. средняя полночь (рис. 57).
Из рис. 57 видно, что в мо-
мент нижней кульминации, на по-
Рис. 57. Среднее солнечное время луденной части меридиана наблю-
6*
83
дателя, обозначенной Н, будет 0 час. Когда Земля повернется на
90°, на полуденной части того же меридиана будет 6 час. среднего
времени и т. д.
В результате полного оборота Земли вокруг своей оси среднее
Солнце вновь пройдет через полуночную часть меридиана наблю-
Рис. 58. Местное время на раз-
личных меридианах
дателя.
Промежуток времени между
двумя последовательными нижними
кульминациями среднего Солнца на-
зывается средними солнеч-
ными сутками.
Местное время. Все наблюда-
тели, находящиеся на одном и том
же земном меридиане, начинают
счет суток одновременно, и в даль-
нейшем для них среднее солнечное
время будет одним и тем же. Сред-
нее солнечное время ца данном мери-
диане называется местным вре-
менем. Иногда его называют мест-
ным гражданским временем.
Разность местного времени ДГМ для двух меридианов равна раз-
ности долгот ДХ этих же меридианов, выраженной во времени
(рис. 58).
Местное время на меридиане Гринвича носит название грин-
вичского времени.- Местное время любого меридиана отли-
чается от гринвичского времени на долготу данного места, выра-
женную во времени.
Для перевода долготы, выраженной в дуговых единицах, в дол-
готу, выраженную в единицах времени, пользуются следующими
соотношениями:
360° = 24 час.
1° = 4 мин.
15° = 1 часу
15' = 1 мин.
15" = 1 сек.
1' = 4 сек.
Г' = Vis сек.
Пример. Местное время на меридиане с восточной долготой 18° равно
18 час. 25 мин. Определить для этого же момента местное время на меридиане
Гринвича, на меридиане с восточной долготой 39° и меридиане с западной дол-
готой 165°.
Решение: 1) Хв = 18° = 1 час. 12 мин.
Ггр = 18 час. 25 мин. — 1 час. 12 мин. = 17 час. 13 мин.
2) Хв = 39° = 2 час. 36 мин.
Тм= 17 час. 13 мин. 4-2 час. 36 мин. = 19 час. 49 мин.
3) Х3 = 165° = 11 час.
Гм = 17 час. 13 мин. ~ 11 час. » 6 час. 13 мин.
84
Поясное время. Применение местного времени в практике свя-
зано с большими неудобствами. Например, на параллели Москвы
на расстоянии 15,7 км местное время изменяется на 1 мин., а на
параллели, которая расположена севернее, изменение времени на
1 мин. происходит на меньшем расстоянии.
Увязать различное местное время в различных пунктах в работе
железнодорожного транспорта, связи и прочее было бы чрезвычайно
затруднительным. Это обстоятельство привело к созданию счета
времени по поясам, суть которого сводится к следующему.
Земной шар разделен на 24 часовых пояса с номерами от 0 до
23. Основное направление границ между поясами определяется
меридианами. Таким образом, ширина каждого пояса составляет
15°, или 1 час. Средние меридианы поясов отстоят друг от друга
также на 15°.
Фактические границы поясов проведены с учетом экономических,
административных, географических и государственных факторов.
Средним меридианом нулевого пояса является гринвичский
меридиан.
Для каждого часового пояса устанавливается единое время —
местное время среднего меридиана данного пояса. Следовательно,
поясным временем называется местное время среднего меридиана
часового пояса.
Время двух соседних поясов отличается ровно на 1 час, а раз-
ность времени любых поясов равна разности их номеров (рис. 59).
Территория Советского Союза охватывает 11 часовых поясов
(со 2-го по 12-й включительно).
Поясное время второго пояса называется московским вре-
менем.
Рис. 59. Поясное время
Максимальная разница во времени в нашей стране составляет
10 час. Если, например, в Москве 6 часов утра, то на Чукотке
в это же время уже 16 часов.
Декретное время. В СССР декретом Совнаркома от 16 июня
1930 г. все часы переведены на один час вперед относительно пояс-
ного времени. Следовательно, в каждом поясе часы идут по пояс-
ному времени соседнего восточного часового пояса.
85
Поясное время, увеличенное на 1 час, называется декрет-
ным временем. Декретное время введено для более полного ис-
пользования населением солнечного света в период с весны до
осени.
Перерасчет времени
В практике самолетовождения местное время часто приходится
перерассчитывать в поясное, поясное в декретное и наоборот. Для
выполнения таких расчетов необходимо знать соотношения между
местным, поясным и декретным временем (рис. 60).
гп = ггр + м
= Т'гр ± Л
Гд=Гп+1 ч.;
ЛР = Л, + х,
где Тм — местное время;
Тп — поясное время;
N — номер пояса;
X—долгота места (восточная или западная), выраженная во
времени;
7\ — декретное время.
Гринвичский Меридиан
меридиан места
Меридиан
пояса
№час.30яин.
N4= 5час,
Тгр = 8.50 Tj.-1l.20
ТП5* 13.50
Рис. 60. Расчет поясного времени
Примеры: 1. Дан о: Гм = 11 час. 20 мин. на меридиане Хв = 2 часа 30 мин.
Определить декретное время пятого пояса Гд.
Решение (рис. 60):
7^ = 11 час. 20 мин. — 2 часа 30 мин. + 5 час. = 13 час. 50 мин.:
Гд = 13 час. 50 мин. + 1 час = 14 час. 50 мин.
2. Д а н о: Самолет вылетел из пункта, расположенного в нулевом поясе,
в 10 час. 20 мин. Общее путевое время полета равно 4 часа 30 мин. Опреде-
лить время прибытия в Москву по московскому декретному времени Гд.
Решение: 1) Время прибытия в Москву по часам нулевого пояса:
Гц = 10 час. 20 мин. + 4 часа 30 мин. = 14 час. 50 мин.
86
2) Время прибытия в Москву по декретному времени второго пояса:
Гд = 14 час. 50 мин. + 2 часа 4- 1 час = 17 час. 50 мин.
Для определения моментов наступления рассвета и темноты,
восхода и захода Солнца имеются специальные графики и таблицы
Солнца. Для вычисления моментов восхода и захода Луны поль-
зуются таблицами Луны, которые ежегодно издаются в виде при-
ложения к Авиационному астрономическому ежегоднику. По табли-
цам Солнца и Луны можно определить для любого момента мест-
ное время того или иного явления для заданного пункта. Местное
время переводится в поясное и декретное время.
Подробное изложение порядка расчетов указано в самих гра-
фиках и таблицах.
Авиационные часы. Проверка времени
Авиационные часы бывают: самолетные (постоянно находящиеся
на борту самолета), наручные (личные штурманские часы) и сли-
чительные (хронометры), по которым сверяются самолетные и на-
ручные часы. Все эти часы показывают декретное время соответ-
ствующего пояса.
Для систематической проверки часов в авиационных частях
организуется проверка времени.
Проверка и установка часов на точное время осуществляются по
радиосигналам точного времени, которые передаются широковеща-
тельными радиостанциями в 7.00, 12.00, 19.00 и 2.00 по московскому
декретному времени. Часы проверяются с целью определения их
поправки и суточного хода.
Поправкой часов и называется разность между точным
временем Т и временем, которое показывают часы 7\:
и==Т—7\.
Если часы показывают меньше точного времени, поправка поло-
жительная, если больше — отрицательная. Для получения точного
времени поправка часов прибавляется к показанию часов со своим
знаком:
Т=7\±и.
Поправка часов, как правило, изменяется. Величина изменения
поправки за одни сутки называется суточным ходом часов о>.
Суточный ход считается положительным, если часы отстают, и
отрицательным, если часы спешат.
Пример. 10 мая =—50 сек.; И мая иъ ——10 сек. Определить суточ-
ный ход.
Решение: <о = —10 — (—50) = +40 сек.
Суточный ход может изменяться в зависимости от внешних
условий (температуры, толчков, вибрации и пр.).
87
Качество часов определяется постоянством суточного хода. Луч-
шими часами считаются те часы, у которых наименьшие колебания
суточного хода.
От точности показаний авиационных часов в значительной мере
зависит точность и безопасность самолетовождения. Поэтому часы
должны систематически проверяться.
Результаты систематической проверки сличительных часов (хро-
нометра) записываются в журнал учета поправок по форме:
Дата Точное время Показание часов Поправка Суточный ход Подпись
15.4 7.00.00 7.00.30 —30 сек.
16.4 7.00.00 7.01.10 — 1 мин. 10 сек. —40 сек.
17.4 7.00.00 7.01.25 —1 мин. 25 сек. —15 сек.
Определение поправки своих часов при помощи сличительных
часов производится следующим образом.
По сличительным часам намечается момент времени с целыми
минутами (лучше с упреждением на 1 мин.), и когда сличительные
часы покажут на 1 сек. меньше намеченного времени, по своим
часам отсчитать показания секундной, минутной и часовой стрелок.
Учтя поправку сличительных часов, получить точное время, после
чего определить поправку проверяемых часов.
При построении летного состава штурман, используя свои про-
веренные часы, для проверки часов у летного состава может дать
отсчет точного времени примерно в такой последовательности.
За 1 минуту до назначенного момента сообщается: «Дам отсчет
во столько-то часов и минут». За 20 секунд подается предупрежде-
ние «Осталось 20 секунд», а за 5 секунд — предупреждение «Вни-
мание». В назначенный момент подается команда «Отсчет».
Проверка показаний самолетных и личных часов летного со-
става в день полетов производится не ранее чем за два часа до
вылета.
ГЛАВА ТРЕТЬЯ
ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ
САМОЛЕТОВОЖДЕНИЯ
§ 14. ПРИМЕНЕНИЕ УГЛОМЕРНЫХ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
Полеты в различных навигационных условиях обеспечиваются
радиотехническими средствами самолетовождения, к которым отно-
сятся приемные и передающие радиостанции направленного и нена-
правленного действия.
Одни радиотехнические средства входят в состав самолетного
оборудования, а другие — в наземные средства обеспечения самоле-
товождения. При этом большинство наземных и самолетных радио-
технических средств используется совместно. Самолетные и назем-
ные радиотехнические средства, используемые для самолетовождения
совместно, составляют радиотехническую систему.
Наземные средства радиотехнических систем принято называть
радионавигационными точками (РНТ).
Все радиотехнические средства самолетовождения, применяемые
в истребительной авиации, могут быть разделены на три группы
в зависимости от того, какой элемент они определяют (направле-
ние, дальность или то и другое вместе):
1-я группа — угломерные (азимутальные) системы;
2-я группа — дальномерные системы;
3-я группа — угломерно-дальномерные (смешанные)
системы.
Наибольшее распространение в истребительной авиации полу-
чили угломерные и угломерно-дальномерные системы.
Угломерные радиотехнические системы позволяют определять
азимут самолета или РНТ.
К угломерным радиотехническим системам относятся:
1) наземная передающая радиостанция ненаправленного дей-
ствия (приводная аэродромная или широковещательная радиостан-
ция) и самолетный радиопеленгатор (автоматический радиокомпас);
2) наземная приемная радиостанция направленного действия,
(наземный радиопеленгатор) и самолетная приемно-передающая
(связная) радиостанция ненаправленного действия.
89
Угломерно-дальномерные системы позволяют одновременно из-
мерить направление (азимут) и дальность до самолета. К этой
группе относятся наземные радиолокационные станции.
На современных самолетах устанавливаются радиовысотомеры,
относящиеся к автономным (не связанным с наземными устрой-
ствами) радиотехническим средствам самолетовождения.
Курсовой угол и истинный пеленг радиостанции
Самолетный радиокомпас при помощи антенны направленного
действия позволяет определить направление на передающую радио-
станцию.
Угол между продольной осью самолета и направлением на пере-
дающую радиостанцию называется курсовым углом ра-
диостанции (КУР).
Курсовой угол отсчитывается от продольной оси самолета по
часовой стрелке от 0 до 360°.
Из принципа действия автоматического радиокомпаса известно,
что рамочная антенна автоматически устанавливается перпендику-
лярно направлению на радиостанцию. Это положение соответ-
ствует минимальному приему на рамку.
Однако вследствие искажения электромагнитных волн, приходя-
щих от радиостанции, вторичным полем излучения самолета на-
правление минимума приема рамки не совпадает с направлением
на радиостанцию и составляет с ним некоторый угол, называемый
радиодевиацией Др.
Угол между продольной осью самолета и направлением мини-
мума приема рамки называется отсчетом радиокомпаса
(ОРК).
Для получения курсового угла отсчет радиокомпаса необходимо
исправить на величину радиодевиации (рис. 61):
КУР = ОРК + (± Ар).
В сочетании с магнитным компасом радиокомпас позволяет из-
мерить истинный пеленг радиостанции, который используется
в самолетовождении для
Рис. 61. Радиодевиация
определения линии поло-
жения самолета или его
места.
Истинным пелен-
гом радиостанции
(ИПР) называется угол
между северным напра-
влением истинного мери-
диана, проходящего через
местоположение самолета,
90
Рис. 62. Пеленг радиостанции и пеленг самолета
и направлением на пеленгуемую радиостанцию. Истинный пеленг
отсчитывается от северного направления меридиана по часовой
стрелке от 0 до 360°.
Величина ИПР равна сумме истинного курса и курсового угла
радиостанции (рис. 62):
ИПР = ИК + КУР.
Определение радиопеленга
Комплекс действий летчика по определению направления на
радиостанцию с помощью АРК называется радиопеленго-
ванием.
Чтобы определить истинный пеленг радиостанции, летчик дол-
жен отсчитать показания магнитного компаса и радиокомпаса,
заметив при этом время.
Учитывая, что у современных магнитных компасов и радиоком-
пасов девиация и радиодевиация обычно скомпенсированы, для
получения истинного пеленга достаточно суммировать показание
магнитного компаса, исправленное на магнитное склонение, с от-
счетом по радиокомпасу.
Пример. Летчик отсчитал показание радиокомпаса, оно равно 127°. Маг-
нитный компас показывал 47°. Девиация у обоих компасов скомпенсирована.
Магнитное склонение данного района +5О. Определить ИПР.
Решение: ИПР = МК + (± Дм) + КУР = 47 + 5 + 127 == 179°.
Указатель курсовых углов летчика служит главным образом
для выдерживания направления полета на радиостанцию. Однако
летчик в полете может производить радиоцеленгование также в це-
лях определения места самолета.
При наличии на самолете указателя курсовых углов с поворот-
ной шкалой против неподвижного треугольного индекса летчик мо-
жет установить магнитный (или истинный) курс. Тогда против
острого конца стрелки указателя можно отсчитать величину маг-
нитного (или истинного) пеленга. Такой указатель курсовых углов
значительно ускоряет и упрощает работу по определению пеленга
радиостанции (рис. 63).
91
Рис. 63. Определение ИПР при по-
мощи указателя радиокомпаса
угла на слух переключатель
в положение «Рамка», нажать
Радиокомпас позволяет также
производить определение курсо-
вого угла на слух, по минимуму
Л слышимости сигналов радиостан-
ции.
Пеленгование на слух приме-
няется при обрыве или замыка-
нии (например, вследствие обле-
денения) открытой антенны, а
также при больших помехах,
когда стрелка указателя курсовых
углов в компасном режиме имеет
большие колебания и отсчет кур-
сового угла затруднителен.
Для определения курсового
рода работ необходимо поставить
рукоятку «Рамка» и отклонять ее
вправо или влево; при этом стрелка указателя курсовых углов бу-
дет быстро перемещаться по шкале в соответствующую сторону.
Заметить деления шкалы, на которых слышимость сигналов ра-
диостанции будет минимальной. За полный оборот стрелки будут
прослушиваться два минимума сигнала, отличающихся на 180°
один от другого. Остановить рамку около одного из минимумов и,
отклоняя рукоятку «Рамка» вправо или влево (без нажима), мед-
ленным поворотом рамки уточнить положение стрелки, соответ-
ствующее минимуму приема, после чего против конца стрелки от-
считать величину курсового угла.
Неопределенность курсового угла на 180° устраняется тем, что
летчик в большинстве случаев знает примерное направление от
самолета на радиостанцию.
Точность определения КУР в этом случае будет такая же, как
при автоматическом пеленговании.
Прокладка радиопеленга на карте
Зная местоположение радиостанции и значение истинного пе-
ленга, на каждом меридиане можно найти такую точку, в которой
ИПР будет равен заданной величине. Соединив эти точки плавной
кривой, получим линию равных пеленгов (азимутов), из
любой точки которой пеленг на радиостанцию будет одинаков.
Линия равных пеленгов является линией положения самолета.
Каждому значению ИПР соответствует своя линия равных пе-
ленгов (рис. 64).
Ввиду сравнительно малой дальности пеленгования в истреби-
тельной авиации линию равных пеленгов можно заменить «прямой
карты*», для прокладки которой необходимо перевести полученный
радиопеленг в истинный пеленг самолета (ИПС) и под этим углом
провести от радиостанции прямую,
92
Истинным П6‘
ленгом самолета
называется угол, за-
ключенный между се-
верным направлением
истинного меридиана,
проходящего через пе-
ленгуемую радиостан-
цию, и ортодромическим
направлением от радио-
станции на самолет.
Однако при пелен-
Рис., 64. Линия равных пеленгов (азимутов)
говапии радиостанций
на значительных удалениях самолета от радиостанции (особенно
в северных широтах) истинный пеленг самолета необходимо опре-
делять с учетом поправки на угол схождения меридианов о (рис. 65):
ИПС —ИПР ± 180° + а.
Поправка на угол схождения меридианов зависит от средней
широты листа карты, соответствующего району полетов, и разности
долгот точек, в которых находятся радиостанции и самолет:
О = (Хр — Хс) sin <f>Cp,
где Хр — долгота радиостанции;
Хс—долгота самолета (берется приближенно);
?ср — средняя широта листа карты района полета.
Знак поправки на угол схождения меридианов определяется
знаком разности Хр — Хс.
Примеры: 1. Дано: Хр = 46°; Хс 40°; <рср » 53°; ИПР = 50°. Опреде-
лить ИПС.
Решение: 1) а = (46 — 40) -0,8 = +5°.
2) ИПС = 50 + 180 + 5 = 235°.
2. Д а н о: ИПР = 300°; Хр = 60°;
Рис. 65. Поправка на угол схожде-
ния меридианов
Хс = 64°; <рср == 20°. Определить ИПС.
Решение: 1) ст = (60 — 64) -0,34 =
= —1°.
2) ИПС = 300 — 180 — 1 == 119°.
Поправку на угол схождения
меридианов имеет смысл учиты-
вать на средних и больших широ-
тах при разности долгот радио-
станций более 2°.
Для целей радиопеленгования
летчик должен заранее на земле
подготовить карту. Для этого от
2—3 радиостанций, намеченных
в данном районе для пеленгова-
ния, нужно провести прямые через
10° и оцифровать их значением
магнитных пеленгов радиостанций,
93
Такая оцифровка избавит летчика от необходимости в полете изме-
нять числовое значение магнитного пеленга радиостанции на 18СР
и учитывать магнитное склонение (вычислять истинный пеленг
самолета).
В полете по указателю курсовых углов и магнитному компасу
летчик определяет магнитный пеленг радиостанции МПР = МК +
+ КУР и находит на карте соответствующую прямую.
Желательно для каждой радиостанции прямые и их оцифровку
наносить своим цветом.
Угломерные радиотехнические системы в комплексе с общими
средствами самолетовождения позволяют решать следующие за-
дачи:
1) осуществлять полет на радиостанцию;
2) выполнять навигационные определения в полете от радио-
станции в заданном направлении;
3) производить полный контроль пути с определением МС, а
также контроль по направлению и дальности.
Указанные задачи могут быть успешно решены в любых нави-
гационных условиях при полете по маршруту, выводе самолета на
аэродром посадки, заходе и расчете на посадку по приборам и при
восстановлении потерянной ориентировки.
Полет на радиостанцию
При помощи радиокомпаса и общих средств самолетовождения
можно выполнить полет на приводную аэродромную или широко-
вещательную радиостанцию.
Такой полет применяется при возвращении экипажа на аэро-
дром посадки, при выходе на контрольный ориентир, обозначенный
радиостанцией, а также при восстановлении потерянной ориенти-
ровки.
Полет на радиостанцию может быть выполнен пассивным и
активным способами.
Пассивный полет. Сущность такого полета сводится к тому, что
летчик пилотирует самолет по указателю курсовых углов, удержи-
вая стрелку на нулевом делении. Этим самым продольная ось
самолета непрерывно совмещается с направлением на радио-
станцию.
Следовательно, условием пассивного полета является сохранение
равенства МК = МПР.
Для приведения стрелки в нулевое положение летчик довора-
чивает самолет в сторону отклонения стрелки, так как она всегда
указывает направление на радиостанцию (рис. 66).
При полете в штиль или в плоскости ветра, удерживая стрелку
указателя курсовых углов на нуле и выдерживая постоянный курс
по магнитному компасу, летчик выведет самолет точно на радио-
станцию.
При боковом ветре, чтобы удержать стрелку на нуле, летчик
вынужден будет систематически доворачивать самолет на радио-
94
станцию. Фактический путь самолета в этом случае представит
собой кривую линию, называемую радиодромией (рис. 67).
Рис. 66. Доворот самолета на радиостанцию
Кривизна радиодромии в разных точках ее различна. Вначале
она мала, поэтому при полете на радиостанцию курс сначала изме-
няется незначительно. По мере приближения к радиостанции кри-
визна радиодромии увеличивается и курс самолета будет изме-
няться более заметно. Причем увеличение курса самолета свиде-
тельствует об уклонении самолета от прямой влево, а уменьшение
курса — об уклонении вправо.
Рис. 67. Пассивный полет на радиостанцию
В непосредственной близости от радиостанции (300—500 м\
летчик вынужден энергично разворачивать самолет со значитель-
ным креном, чтобы удержать стрелку указателя курсовых углов
на нуле.
Величины максимального линейного бокового уклонения и уве-
личения путевого времени полета могут быть определены при по-
мощи специальных графиков (рис. 68).
Пример. Расстояние от ИПМ до радиостанции 300 км;
V = 600 км/час; УВ = 90°; U = 85 км/час.
95
Рис. 68. Графики максимальных боковых уклонений и уве-
личения времени при полете по радиодромии
Определить линейное боковое уклонение и увеличение времени при пассив-
ном полете на радиостанцию.
о И 600
Решение: 1) п = = -5— = 7,0.
U oU
2) По графику определить ЛБУ в процентах от S:
ЛБУ = 5% S = 0,05 • 300 = 15 км.
3) По графику определить увеличение времени полета:
Д/ = 1% = 0)01 -30 мин. = 18 сек.
Как видно из приведенного примера, при современных воздуш-
ных скоростях полета удлинение пути и увеличение путевого вре-
мени в полете на радиостанцию пассивным способом незначительны
и ими можно пренебречь. Однако при необходимости выполнить
полет на радиостанцию в строго заданном направлении возможное
уклонение следует учитывать.
Подход к радиостанции определяется по расчету времени, а при
боковом ветре — по резкому изменению курса самолета.
Момент пролета радиостанции определяется переходом стрелки
указателя курсовых углов с деления 0 на 180°. При проходе точно
над радиостанцией наблюдается сравнительно быстрый переход
стрелки. При проходе несколько в стороне от радиостанции стрелка
разворачивается на КУР = 180° медленнее, последовательно указы-
вая курсовые углы радиостанции от 0 до 180°. В этом случае мо-
мент прохода траверза радиостанции фиксируется приходом стрелки
указателя на КУР = 90°.
Если летчик, совершая полет на радиостанцию на малой высоте,
будет удерживать стрелку указателя курсовых углов на нуле, само-
лет с большей точностью (до 50—200 м) выйдет на радиостанцию.
Более точно выйти на радиостанции обычно не удается, так как
даже при небольшом боковом ветре в момент прохода радиостан-
ции пришлось бы увеличить крен самолета до 90°.
Следует иметь в виду, что при пролете радиостанции на боль-
шой высоте и с большой скоростью стрелка указателя курсовых
углов разворачивается на 180° с некоторым запазданием, что иногда
приводит к значительным ошибкам в определении местонахождения
96
радиостанции. В некоторых случаях эта ошибка может достигнуть
10— 15 км.
Высокая точность и надежность выхода на радиостанцию пас-
сивным способом, а также простота выполнения способствовали
широкому применению его нашими летчиками еще во время Вели-
кой Отечественной войны.
Разновидностью пассивного полета на радиостанцию (радио-
пеленгатор) является так называемый курсовой полет.
При курсовом полете летчик выдерживает направление полета
по магнитному компасу. Через 4—5 мин. полета доворотом само-
лета по указателю АРК на КУР, равный нулю, он определяет но-
вый курс, т. е. периодически совмещает продольную ось самолета
с направлением на радиостанцию.
Активный полет. Сущность полета на радиостанцию активным
способом заключается в том, что продольная ось самолета разво-
рачивается в наветренную сторону на величину угла сноса:
МК=ЗМПУ —(± УС).
Это равенство является условием активного полета, при кото-
ром самолет будет перемещаться по линии заданного пути.
При активном полете на радиостанцию летчик пилотирует само-
лет так, чтобы стрелка указателя курсовых углов была на деле-
нии, соответствующем значению КУР — 360 + (+УС), вместо
КУР = 0 при пассивном полете.
При правом сносе величина КУР = УС, при левом — КУР =
= 360° —УС (рис. 69).
Угол сноса определяется до вылета по шаропилотному или про-
гностическому ветру. При заходе на посадку по приборам угол
сноса сообщается с земли.
При неизвестном ветре при полете на радиостанцию угол сноса
можно подобрать в воздухе следующим образом.
Развернуть самолет на МК — ЗМПУ. Удерживая стрелку указа-
теля курсовых углов на нуле, по магнитному компасу определить
сторону уклонения. После
этого довернуть самолет в \<>
наветренную сторону на
4—5° и, выдерживая взя-
тый курс, продолжать еле------------1— ------------------—
дить за показаниями pa- v[J
диокомпаса. Если КУР не
изменяется, продолжать
полет с этим курсом. При \
изменении КУР более чем -----“
на 2°, увеличить илй умень-
шить взятое упреждение
на снос.
При современных скб- рис. gg. учет уГЛа СНоса при активном по-
ростях полета обычно бы-
лете на радиостанцию
7-98
97
вает достаточно одного — двух доворотов, чтобы подобрать снос,
которому будет соответствовать некоторый постоянный КУР, обес-
печивающий полет вблизи линии заданного пути.
Учитывая, что в районе радиостанции угол сноса может быть
иным, для более точного выхода на радиостанцию с расстояния
30—50 км необходимо перейти на пассивный полет.
Активный полет на радиостанцию целесообразно применять
при полете с сильным боковым ветром при значительных расстоя-
ниях до радиостанции, при необходимости точно пройти по линии
заданного пути, а также при пробивании облаков вниз с выходом
на приводную аэродромную радиостанцию.
При полете на радиостанцию курсовым и активным способами
счисление и прокладка пути являются обязательными элементами
в продолжение всего полета. В случае отказа радиокомпаса или
приводной радиостанции летчик, выполнявший счисление и про-
кладку пути, сможет успешно продолжать полет по заданному
маршруту.
При пассивном полете счисление пути из-за непрерывного из-
менения курса затруднено. Поэтому на пассивный полет следует
переходить с небольших расстояний до радиостанции (30—50 км).
Полет на радиопеленгатор
Наземные радиопеленгаторы позволяют определить направление
на самолет — магнитный пеленг самолета (МПС) в момент запроса
летчиком радиопеленга.
Для полета на радиопеленгатор летчик по соответствующей
схеме устанавливает с ним радиосвязь и по специальному кодовому
сигналу получает от оператора курс для полета на пеленгатор.
Оператор пеленгатора всегда передает летчику магнитный пе-
ленг радиопеленгатора (МПР), который соответствует магнитному
98
путевому углу от самолета на радиопеленгатор, т. е. дает направле-
ние «на себя» (рис. 70).
Полет на радиопеленгатор выполняется по магнитному компасу
путем периодического исправления курса соответственно радиопе-
ленгам, получаемым от наземного радиопеленгатора.
При полете на радиопеленгатор в штиль или в плоскости ветра
последующие пеленги не будут отличаться от первого (величина
Рис. 71. Полет иа радиопеленгатор пассивным способом
МПР остается неизменной), если самолет не уклоняется от линии
заданного пути. При наличии бокового ветра последующие пеленги
будут отличаться от предыдущего вследствие сноса самолета ветром.
Исправляя курсы следования соответственно получаемым пеленгам,
летчик проведет самолет по ломаной линии. Чем чаще летчик будет
запрашивать радиопеленг, тем ближе эта ломаная линия будет под-
ходить к радиодромии (рис. 71).
Запрос радиопеленга и исправление курса соответственно полу-
ченному радиопеленгу необходимо производить через 3—5 мин.,
а при подходе к радиопеленгатору — через 1—2 мин.
Момент пролета радиопеленгатора определяется по расчету вре-
мени, визуально (при видимости земли) и по изменению очередного
радиопеленга на 180°.
Так же, как и при полете на радиостанцию, счисление и про-
кладка пути при полете на радиопеленгатор являются обязатель-
ными на протяжении всего полета.
Навигационные определения при полете от радиостанции
Полет от радиостанции в заданном направлении по радиоком-
пасу без помощи магнитного компаса принципиально невыполним.
При полете.от радиостанции на любом курсе, с которым самолет
пройдет над радиостанцией, стрелка указателя курсовых углов будет
показывать 180°.
7* 99
При наличии бокового ветра, если летчик будет удерживать
стрелку указателя курсовых углов на КУР = 180°, самолет пройдет
по некоторой кривой и в заданную точку не выйдет (рис. 72).
Из сказанного следует, что
полет от радиостанции при по-
мощи радиокомпаса не может
осуществляться пассивным спо-
собом. Направление полета
должно сохраняться выдержи-
ванием курса по магнитному
компасу. Радиокомпас исполь-
зуется для контроля правиль-
ности выполнения полета по
заданной линии пути.
При полете от радиостанции,
находящейся в ИПМ, магнит-
ный пеленг самолета МПС =
= ФМПУ = МК + КУР + 180°.
Разность между ФМПУ и
ЗМПУ будет боковым уклоне-
нием (рис. 73).
Следовательно, чтобы опре-
делить боковое уклонение по радиостанции, необходимо точно
пройти над ней, выдержать в течение некоторого времени курс по-
лета, а затем определить магнитный пеленг самолета.
Рис. 73. Определение бокового уклонения по
радиостанции
Точный проход над радиостанцией необходим для правильного
определения бокового уклонения. На рис. 74 показано, что боко-
вое уклонение возникло вследствие неточного прохода радио-
станции.
При точном проходе радиостанции и выдерживании магнитного
курса, равного ЗМПУ, боковое уклонение будет равно углу сноса
и может быть определено по величине курсового угла:
БУ= УС = КУР — 180°.
100
Рис. 74. Возникновение бокового уклонения из-за
неточного прохода радиостанции
Если курсовой угол оказался больше 180°, снос правый, если
меньше 180°, снос левый (рис. 75 и 76).
Этот способ определения бокового уклонения наиболее доступен
для летчика.
Примеры: I. КУР = 190°; МК = ЗМПУ. УС = 190 — 180 = +10°; БУ = +10°.
2. КУР ==170°; МК=ЗМПУ. УС = 170 - 180 = -10°; БУ = —10°.
После определения бокового уклонения исправление курса для
выхода в заданную точку полета рекомендуется производить при
сравнительно небольшом расстоянии между этой точкой и радио-
станцией (рис. 77).
Лучше всего исправлять курс на полпути до заданной точки
В этом случае поправка в курс равна удвоенному боковому укло-
нению (МК = 2БУ). Момент выхода в заданную точку определится
по времени
^рст == ^пройд •
101
См
Пример. Выполняется полет за облаками. Ог радиостанции до заданной
точки расчетное путевое время 12 мин. Летчик строго выдержал МК =
= ЗМПУ = 90° и через 6 мин. определил по указателю курсовых углов
КУР — 190°. Исправить курс для выхода в заданную точку.
Решение: 1) БУ = 190 — 180 = 4 10°.
2) ПК = 2БУ =-—20°.
3) МКИспр = 90 — 20 = 70°.
4) Расчетное путевое время полета до заданной точки после исправления
курса 6 мин.
Исправление курса для выхода в заданную точку полета воз-
можно и не на середине линии пути. При наличии значительного
расстояния между радиостанцией и заданной точкой курс можно
исправить с расчетом выйти на линию заданного пути до выхода
в заданную точку. В этом случае величина БУ определяется
также по разности: КУР—180°. Курс исправляется в сторону ли-
нии заданного пути на 30°.
Момент выхода на линию заданного пути определяется по ука-
зателю курсовых углов:
— при правом уклонении в момент выхода на линию пути
КУР = 210°;
С/и
Рис. 78. Исправление курса для выхода па ЛЗП до заданной точки
102
— при левом уклонении в момент выхода на линию пути
КУР = 150°.
Разворот на прежний курс следует начинать с упреждением,
иначе за время разворота самолет пересечет линию заданного пути
и окажется с противоположной стороны ее.
После выхода на линию заданного пути необходимо взять
курс с упреждением на величину угла сноса (рис. 78). Если до
исправления МК = ЗМПУ, то МКслед — ЗМПУ — (+УС).
Пример. ЗМПУ = 82°; МКср = 82°; КУР = 188°.
Решение: 1) БУ = 188 — 180 = +8°.
2) МКиспр = 82 — 30 —52° (для следования к линии заданного пути).
3) КУР = 210° (в момент выхода на линию заданного пути).
4) МКслед = 82 — (+8) = 74° (для дальнейшего полета к заданной точке).
Угол доворота самолета на 30° вызван удобством определения
величины КУР (210° или 150°) и тем, что самолет быстрее выходит
на линию заданного пути. Вообще исправлять курс для выхода на
линию заданного пути можно на любую величину, при этом изме-
нится лишь курсовой угол, определяющий момент выхода на линию
заданного пути.
Таким образом, если ИПМ обозначен радиостанцией, то летчик,
используя радиокомпас и общие технические средства самолетово-
ждения, может определить УС, БУ, ФМПУ, поправку в курс и тем
самым проконтролировать путь самолета при полете в сложных
метеорологических условиях.
Навигационные определения при полете от радиопеленгатора
Наземный радиопеленгатор, расположенный в ИПМ, также
может быть использован для определения навигационных элемен-
тов. Если запросить условным сигналом магнитный пеленг и после
получения изменить его на 180°, летчик получит величину ФМПУ
для момента запроса. Разность фактического и заданного путевых
углов даст боковое уклонение БУ = ФМПУ — ЗМПУ.
Для упрощения работы в воздухе следует рекомендовать при
подготовке к полету на карте примерно на середине пути и в обе
стороны от нее нанести несколько линий радиопеленгов и оцифро-
вать их в значениях МПР. Это избавит летчика от необходимости
переводить в воздухе величину МПР в ИПС (рис. 79).
Порядок выполнения полета в этом случае будет следующим:
1) отойти от радиопеленгатора с МК = ЗМПУ (или с курсом,
взятым с упреждением на угол сноса);
2) в расчетное время (примерно через 5 мин. после отхода от
радиопеленгатора) по установленному коду запросить пеленг радио-
пеленгатора и после получения определить на карте величину и
знак бокового уклонения;
3) в зависимости от оставшегося расстояния исправить курс для
выхода в заданную точку.
Момент выхода в заданную точку определяется по времени и
контрольным запросам радиопеленга, который должен быть ра-
вен ЗМПУ + 180°.
103
Пример. ЗМПУ = 70° (МПР = 250°). В полете выдерживался МКср — 70°.
Пройдя половину общего пути, летчик запросил пеленгатор и получил
МПР = 245°.
Решение: Уклонился влево на 5°. Для выхода в заданную точку необ-
ходимо взять МК — 80°.
Использование боковой радиостанции
Радиостанция, расположенная в стороне от линии пути, может
быть использована летчиком для определения рубежа, достигнутого
самолетом по дальности. В этом случае также рекомендуется до
полета нанести на карту линии радиопеленгов и оцифровать их зна-
чениями МПР (рис. 80).
В полете летчик, получив магнитный пеленг радиостанции (ра-
диопеленгатора), отыскивает
на карте соответствующую
линию радиопеленга, ко-
торая и определит собой ру-
беж положения самолета
по дальности. Для большей
точности следует использо-
вать линии радиопеленгов,
пересекающие линию пути
под углами, близкими к 90°
(в пределах 60—120°).
Пролет траверзы радио-
станции может быть прибли-
женно определен в момент
Рис. 80. Подготовка полетной карты для
контроля пути по дальности с помощью
угломерных систем
прихода стрелки указателя
радиокомпаса на КУР = 90
или 270°.
104
Выход на линию заданного радиопеленга
Выход на линию заданного радиопеленга применяется с целью
определения момента разворота над заданной точкой в сложных
условиях и для выхода на радиостанцию с заданного направ-
ления.
Решение задачи сводится к определению величин КУР по задан-
ному пеленгу радиостанции, который в этом случае равен путевому
углу (рис. 81). Поскольку МПР = МК + КУР, то в момент нахож-
дения самолета над заданной точкой курсовой угол будет равен
КУР11р--- МПР — МК,
где КУРпр — предвычисленный курсовой угол радиостанции;
МК — магнитный курс, с которым самолет вышел на линию
заданного радиопеленга.
Рис. 81. Разворот над заданной точкой при помощи радио-
компаса
Для определения момента выхода на линию заданного радио-
пеленга необходимо перед полетом на карте от радиостанции про-
ложить в заданном направлении линию, измерить величину МПР,
учесть магнитное склонение и определить предвычисленный КУР.
На линии радиопеленга написать МПР и КУРпр.
Чтобы по предвычисленному курсовому углу точнее определить
момент разворота над заданной точкой, следует рекомендовать вы-
бирать радиостанцию так, чтобы она была ближайшей к заданной
точке, а КУРпр был близок к 90 или 270°. В этом случае измене-
ние курсового угла в полете будет наиболее быстрым и точность
определения момента выхода на линию заданного радиопеленга ока-
жется наибольшей. Совершенно нельзя использовать для этой цели
радиостанцию, курсовой угол которой близок к 0 или 180°.
105
Рис. 82. Разворот над заданной точкой при помощи
радиопеленгатора
В полете при следовании к линии заданного радиопеленга кур-
совой угол радиостанции будет непрерывно изменяться, прибли-
жаясь к КУРпр. Если радиостанция расположена справа, стрелка
указателя курсовых углов перемещается по шкале вправо, если
слева — стрелка перемещается влево. В тот момент, когда самолет
будет находиться на линии заданного радиопеленга, стрелка указа-
теля курсовых углов покажет величину КУРпр.
Разворот скоростного самолета по КУРпр на радиостанцию или
на следующий заданный курс необходимо начинать с некоторым
упреждением, зависящим от радиуса разворота.
Если в полете фактический курс самолета будет отличаться от
расчетного, то необходимо уточнить и величину КУРпр. Очевидно,
что при заданном МПР на сколько увеличится курс самолета, на
столько же уменьшится предвычисленный курсовой угол радиостан-
ции, т. е. все время должно сохраняться равенство: МПР = МК +
КУРпр = const.
Точность выхода самолета в заданную точку составляет 3—5%
от расстояния до радиостанции.
Пример. МПР = 150°; МК = ЗМПУ = 100°. Определить КУРпр.
Решение: КУРпр = 50°. В полете МКфакт оказался равным 105°. Следо-
вательно, КУРпр должен быть равен 45°. Разворот нужно начать при КУР ^40°.
Для определения момента разворота над заданной точкой мо-
жет быть использован также и наземный радиопеленгатор, располо-
женный в стороне от линии пути.
Перед полетом на карте определяется и записывается величина
МПР от заданной точки разворота.
В полете летчик периодически запрашивает радиопеленгатор и
определяет момент начала разворота. Если пеленгатор справа от
линии пути, то до пролета заданной точки радиопеленг будет
меньше заданного, а после пролета ее больше; если пеленгатор
слева от линии пути, наоборот (рис. 82).
106
Определение места самолета пеленгованием двух радиостанций
При полете вне видимости земли МС можно определить пеленго-
ванием двух радиостанций. Для этого в возможно минимальное
время определяются курсовые углы обеих радиостанций, заме-
чаются кк, рассчитываются и прокладываются ИПС1 и ИПС2. Точка
пересечения линий радиопеленгов будет местом самолета (рис. 83).
Рис. 83. Определение МС пеленгованием двух радиостанций
Данный способ предполагает отсчет курсовых углов по обеим
радиостанциям в один и тот же момент, иначе пеленгование необ-
ходимо приводить к одному моменту. Поскольку летчику в воздухе
трудно осуществить быструю перестройку радиокомпаса с одной
радиостанции на другую, определение МС летчики истребительной
авиации выполняют в групповом полете.
Практика определения МС по двум радиостанциям в групповом
полете сводится к следующему.
а) До полета. Наметить на карте 2—3 радиостанции для пе-
ленгования, провести линии радиопеленгов и оцифровать их значе-
ниями МПР.
Ведомый настраивает свой радиокомпас обычно на приводную
аэродромную радиостанцию, а ведущий — на вторую радиостанцию.
б) Вполете. При необходимости определить МС, по команде
ведущего «Отсчет» оба летчика по своим станциям отсчитывают
значения КУР и МК и вычисляют каждый по своей радиостанции
магнитный пеленг;
МПР == КУР + МК.
107
Ведомый сообщает ведущему значение МПР, после чего веду-
щий, имея одновременно измеренные магнитные пеленги двух ра-
диостанций, на заранее подготовленной карте быстро определяет
точку пересечения соответствующих линий радиопеленгов, которая
и будет местом самолета.
При хорошей слаженности и четкости работы обоих летчиков
место самолета по двум радиостанциям может быть определено
с достаточной точностью.
Определение места самолета по радиопеленгатору
и одной радиостанции
При полете на радиостанцию пассивным способом, запросив
у бокового радиопеленгатора радиопеленг, можно определить МС
как точку пересечения линии истинного пеленга самолета, отложен-
ной от радиостанции, с линией радиопеленга от радиопеленгатора
(рис. 84).
Рис. 84. Определение МС по радиопеленгатору и радиостанции
Способ предполагает заблаговременную прокладку на карте
линий радиопеленгов от радиопеленгаторов с оцифровкой их значе-
ниями МПР.
Ошибки и точность радиопеленгования
При использовании угломерных радиотехнических систем возни-
кает ряд ошибок, зависящих от условий распространения радио-
волн, точности работы аппаратуры и от летчика, производящего
радиопеленгование. Рассмотрим некоторые из этих ошибок.
Известно, что измерение курсового угла радиокомпасом основано
на предположении, что радиоволны от передатчика распростра-
няются по ортодромии.
В действительности же ряд явлений вызывает искривление на-
правления движения радиоволн, что приводит к ошибкам при изме-
рении курсовых углов. К таким явлениям относятся береговой, гор-
ный и ночной эффекты.
108
Береговой эффект про-
является при пеленговании назем-
ной радиостанции с самолета, на-
ходящегося над морем (рис. 85).
Различные электрические свойства
среды над сушей и водной по-
верхностью приводят к преломле-
нию радиоволн при переходе их
из одной среды в другую, а сле-
довательно, И К неправильному Рис. 85. Ошибка в определении пе-
показанию радиокомпаса. Эта же леига из-за берегового эффекта
ошибка свойственна и наземному
радиопеленгатору. Для уменьшения ошибки следует производить
определение радиопеленга в районах, из которых направление на
радиостанцию близко к перпендикуляру относительно линии раз-
дела двух сред.
Горный эффект проявляется в том, что радиоволны, встре-
чая на своем пути препятствия (горы), во-первых, отражаются от
них, чем создают поля вторичного излучения, и во-вторых, огибая
их, меняют свое направление.
Следовательно, на самолет могут приходить как прямые, так и
отраженные от гор радиоволны. Это вызывает колебание стрелки
указателя курсовых углов и приводит к ошибке в измеренном пе-
ленге. Ошибки горного эффекта достигают иногда 10—20°, учету
они не поддаются, однако сказываются только при полете вблизи
гор. При полете на высоте, в 1,5—2 раза превышающей высоту
горного хребта, ошибки горного эффекта уменьшаются настолько,
что с ними можно не считаться.
Ночной эффект, связанный с одновременным приходом на
самолет поверхностной и отраженной от ионизированных слоев
радиоволн, проявляется особенно сильно в часы перед восходом и
после захода солнца, когда происходит быстрое изменение плот-
ности и высоты ионизированных слоев. Влияние его выражается
в беспорядочных колебаниях стрелки указателя курсовых углов
в некотором секторе (до нескольких десятков градусов). Ошибки
от ночного эффекта принимают максимальные значения на корот-
ких волнах и увеличиваются с удалением от радиостанций.
При наличии сильного ночного эффекта пользоваться радиоком-
пасом для пеленгования практически невозможно. Однако выполне-
ние пассивного полета на радиостанцию с небольших удалений воз-
можно и при наличии ночного эффекта.
Наземные радиопеленгаторы благодаря наличию особых антен-
ных устройств влиянию ночного эффекта почти не подвержены.
Аппаратура самолетного и наземного оборудования радиотехни-
ческих систем имеет свои ошибки. Например, у радиокомпаса мо-
жет быть некоторая несогласованность показаний указателя курсо-
вых углов с действительным углом поворота рамки; у наземного
радиопеленгатора может оказаться неточное ориентирование антенн
по меридиану. Такого рода ошибки могут быть заранее выявлены,
109
уменьшены или полностью устранены. У радиокомпаса ошибки,
связанные с точностью работы аппаратуры (в том числе установоч-
ная ошибка рамки и радиодевиация), выявляются и устраняются
при проведении радиюдевиационных работ на земле.
Ошибки наземного радиопеленгатора выявляются облетом
радиопеленгатора и учитываются в виде поправок при определении
радиопеленга.
Точность радиопеленгования зависит также от точности отсчета
курса и курсового угла радиостанции летчиком. Чем точнее летчик
произведет отсчет курса и курсового угла радиостанции, тем точнее
будет определен радиопеленг. Поэтому даже при неспокойных
атмосферных условиях летчик должен стремиться возможно точнее
производить отсчеты по магнитному компасу и радиокомпасу, осред-
няя их показания за некоторый период времени (0,5—1 мин.).
Следует также учитывать, что неточная настройка радиокомпаса
на пеленгуемую радиостанцию является, как правило, причиной
неустойчивых его показаний, что приводит к значительным ошибкам
в определении направления на радиостанцию. Поэтому точная на-
стройка радиокомпаса является необходимым условием повышения
точности радиопеленгования.
При измерении радиопеленга наземным радиопеленгатором могут
быть допущены ошибки в результате неточного определения мини-
мума и неточного отсчета на азимутальной шкале. Уменьшение этих
ошибок достигается выводом среднего значения из серии отсчетов.
Практически средняя ошибка определения радиопеленга прини-
мается равной +2°. Следовательно, самолет будет находиться не
на линии, а в некотором секторе с углом в 4°, а место самолета,
определенное пеленгованием двух радиостанций, будет центром не-
которой площади вероятного положения самолета, полученной в ре-
зультате пересечения двух таких секторов. Для удобства оценки ве-
личины района вероятного местоположения самолета данную пло-
щадь принимают за круг (рис. 86).
Рис. 86. Ошибка в определении МС по двум радиостан-
циям
110
Для угломерных радиотехнических средств радиус круга вероят-
ного местоположения может быть подсчитан по формуле
V sl + sl
г = 0,0175-----ДП,
’ sin ф ’
гдеЗ^ и S2—расстояния до радиостанций;
ДП—ошибка в определении пеленга;
ф—угол пересечения пеленгов (угол станций).
Анализируя формулу, можно сделать вывод, что для определе-
ния места самолета с наименьшей ошибкой следует использовать
радиостанции, расположенные возможно ближе к самолету и пе-
ленги которых пересекались бы под углом, близким к 90° (во вся-
ком случае не менее 30° и не более 150°).
При пересечении пеленгов под углом в диапазоне 60—120°
ошибка в определении МС колеблется в пределах 5—8% от сред-
него расстояния до пеленгуемых радиостанций.
Пример. Расстояния от РНТ до самолета в момент определения МС равны:
51 = 120 км\ S2 — 180 км. Угол пересечения пеленгов ф=90°. Ошибка в опре-
делении пеленга АП = +2°. Определить радиус круга вероятного местополо-
жения самолета.
Решение: г = 7,5 км, что составляет 5% от среднего расстояния до пе-
ленгуемых радиостанций.
§ 15. ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ СОВМЕЩЕННОГО УКАЗАТЕЛЯ
ДГМК И АРК
В современном дистанционном гиромагнитном компасе указа-
тель с помощью сельсинной системы связан с автоматическим ра-
диокомпасом. Общий вид шкалы совмещенного указателя представ-
лен на рис. 87.
Рис. 87. Совмещенный ука-
затель ДГМК и АРК:
1 — неподвижная шкала КУР;
2 — стрелка курсозадатчика; 3 —
ручка для установки стрелки кур-
созадатчика; 4 — стрелка радио-
компаса; 5 — шкала магнитного
курса и радиопеленга; 6 — отметки
курсовых углов; 7 — неподвижный
нуль-индекс; 8 — отметки углов
сноса
ш
Совмещение в одном указателе показаний гиромагнитного ком-
паса и радиокомпаса позволяет летчику делать отсчет не только
курса самолета, но и пеленгов радиостанции и самолета. Это облег-
чает выполнение активно-
го полета на радиостан-
цию, позволяет выполнить
полет от нее и упрощает
расчет на посадку само-
лета вне видимости земли.
Компасный курс само-
лета отсчитывается по ос-
новной (внутренней) шка-
ле 5 против верхнего не-
подвижного индекса 7,
магнитный пеленг радио-
станции — по той же шка-
ле против острия стрелки
радиокомпаса 4, а магнит-
ный пеленг самолета —
против обратного (укоро-
ченного) конца этой
стрелки. По дополнитель-
ной (наружной) шкале 1
стрелка радиокомпаса
дает отсчет курсовых
углов радиостанции.
Для удобства пользо-
вания в полете компасом
нажатием ручки указате-
ля 3 летчик устанавливает
стрелку курсозадатчика 2
на заданный компасный
курс по шкале курсов.
В горизонтальном по-
лете шкала курсов с кур-
созадатчиком ориентиро-
вана по странам света от
датчика ДГМК, а стрелка
направлена на работающую
радиостанцию. Индекс 7 в
верхней части указателя и
шкала 1 курсовых углов
радиостанции поворачива-
ются вместе с самолетом.
При полете на радио-
станцию в отсутствии бо-
кового ветра положение самолета на линии заданного пути опреде-
ляется по совмещению стрелки радиокомпаса и стрелки курсозадат-
чика, установленного на величину ЗМПУ (рис. 88).
112
Если по каким-либо причинам самолет окажется в стороне от
линии заданного пути, то возникает угол а между стрелками ра-
диокомпаса и курсозадатчика, а также угол у между курсозадат-
чиком и верхним неподвижным индексом (рис. 88, в). *
В этом случае самолет необходимо развернуть в сторону линии за-
данного пути на угол у
(рис. 88, г). По мере
приближения самоле-
та к линии заданного
пути угол между стрел-
ками радиокомпаса и
курсозадатчика будет
уменьшаться. В мо-
мент выхода самолета
на линию заданного
пути стрелки совместят-
ся, а после разворота
на радиостанцию они
совпадут с неподвиж-
ным индексом или
с делением на непо-
движной шкале, соот-
ветствующим величине
и знаку угла сноса
(рис. 88, д).
Чтобы не пересечь
линию заданного пути,
разворот самолета на
радиостанцию начина-
ют выполнять заблаго-
временно.
При выходе с любо-
го направления на ли-
нию заданного радио-
пеленга курсозадатчик
устанавливается летчи-
ком на МК, равный
заданному МПР. Мо-
мент совпадения стре-
лок радиокомпаса и
курсозадатчика свиде-
тельствует о выходе са-
молета на линию задан-
ного радиопеленга.
При полете от ра-
диостанции выход на линию заданного пути или линию радио-
пеленга летчик контролирует по совмещению обратного конца
стрелки радиокомпаса со стрелкой курсозадатчика, установленного
на величину ЗМПУ или МПРзад (рис. 89).
8-98
113
При пеленговании радиостанций с целью определения места са-
молета совмещенный указатель позволяет летчику непосредственно,
без дополнительных вычислений, отсчитывать пеленг радиостанции
или пеленг самолета.
§ 16. РАДИОДЕВИАЦИЯ
Причины и характер радиодевиации
Возникновение радиодевиации объясняется свойством металли-
ческих частей самолета (фюзеляж, плоскости, антенны и пр.) пере-
излучать электромагнитные волны.
Радиоволны, встречая на пути своего распространения металли-
ческую поверхность самолета, наводят в ней токи высокой частоты,
в результате чего создаются вторичные поля. Фронт волны резуль-
тирующего электромагнитного поля, полученного в результате сло-
жения поля радиостанции и вторичных полей, излучаемых дета-
лями самолета, может не совпадать с фронтом волны электромаг-
нитного поля радиостанции. Вследствие этого рамка радиокомпаса,
автоматически устанавливающаяся в плоскости фронта волны, по-
кажет не действительное направление на радиостанцию, а направ-
ление, искаженное вторичным полем самолета.
Ошибка в измеренном направлении на радиостанцию, возникшая
вследствие этого явления, называется радиодевиацией (Др).
Рассмотрим зависимость радиодевиации от направления на ра-
диостанцию.
Как известно, электромагнитная волна представляет собой сово-
купность электрического и магнитного полей. Вектор электрического
поля Е и вектор магнитного поля Н всегда взаимно перпендику-
лярны, а направление распространения, изображаемое вектором
Умова-Пойнти1нга (У), перпендикулярно к векторам Е и Н. По-
скольку электрическое и магнитное поля существуют всегда нераз-
рывно, то для простоты рассуждений в дальнейшем будем рассма-
тривать в точке приема только
вектор магнитного поля, а не всю
электромагнитную волну.
Представим себе, что продоль-
ная ось самолета составляет с на-
правлением на радиостанцию угол
45°. В точке А на самолете рас-
положена рамка радиокомпаса.
Вектором Н в этой точке показана
напряженность магнитного поля
радиостанции, направление кото-
рого перпендикулярно направле-
нию распространения приходящей
радиоволны (рис. 90).
Разложим вектор И на две
составляющие: Яо — направлен-
ную параллельно продольной оси
Рис. 90. Радиодевиация на курсовом
угле 45°
114
самолета и Нп — перпендикулярно продольной оси самолета. Со-
ставляющие HQ и Нп вследствие вторичного излучения самолета
получают дополнительные приращения ДЯ0 и Д/7П. Причем уста-
новлено, что для современных самолетов магнитное поле вторич-
ного излучения в направлении, перпендикулярном продольной оси
самолета, в несколько раз больше, чем магнитное поле вторичного
излучения вдоль оси самолета.
Таким образом, в направлении продольной оси самолета на
рамку будет воздействовать магнитное поле HQ 4- Д/70, а в перпен-
дикулярном направлении Нп 4- Д/7П.
Результирующее магнитное поле Нр будет являться геометри-
ческой суммой этих двух полей. Направление результирующего
магнитного поля Нр не совпадает с направлением приходящего
магнитного поля Н.
Рамка радиокомпаса установится своей плоскостью вдоль на-
правления силовых линий результирующего магнитного поля, по-
этому продольная ось рамки отклонится от направления на радио-
станцию на тот же угол Др, на который отклонилось магнитное
поле под воздействием вторичного излучения. Это отклонение будет
максимальным при величине КУР = 45°.
Если радиостанция находится на направлении продольной оси
самолета (КУР = 0 или 180°), то составляющая магнитного поля
отсутствует и направление результирующего магнитного поля Нр
совпадает с направлением поля радиостанции Н. Очевидно, что
в этом случае ошибки в определении направления не будет. Следо-
вательно, на курсовых углах 0 и 180° радиодевиация равна нулю
(рис. 91).
Если радиостанция находится на направлении, перпендикуляр-
ном к продольной оси самолета (КУР = 90 или 270°), отсутствует
8*
115
составляющая магнитного поля Нп. В этом случае отклонения ре-
зультирующего поля Нр также не будет, а следовательно, и ошибки
в определении направления не произойдет. Таким образом, на кур-
совых углах 90 или 270° радиодевиация также равна нулю (см.
рис. 91).
Из наших рассуждений видно, что с изменением курсового угла
результирующий вектор магнитного поля изменяется как по вели-
чине, так и по направлению относительно вектора магнитного поля
приходящей волны. Следовательно, с изменением курсового угла
изменяется и величина и знак радиодевиации.
Кривая радиодевиации имеет четвертной характер; она обра-
щается в нуль на курсовых углах радиостанции 0; 90; 180; 270° и
достигает максимальной положительной величины на курсовых
углах 45; 225° и максимальной отрицательной величины на курсо-
вых углах 135 и 315°.
Величина радиодевиации зависит также от типа самолета и
места установки рамки. На современных самолетах она достигает
15—20°. Поэтому неучет радиодевиации может дать значительную
ошибку при определении направления на радиостанцию.
Для исключения этой ошибки в радиокомпасе применена меха-
ническая компенсация радиодевиации. Действие механического
компенсатора состоит в том, что он, будучи связан с осью рамки,
заставляет стрелку указателя курсовых углов автоматически по-
вернуться не только на угол поворота рамки, но и дополнительно на
угол радиодевиации. В результате этого указатель радиокомпаса
покажет непосредственно курсовой угол радиостанции.
Радиодевиационные работы на самолете
Определение радиодевиации производится один раз в год в пе-
риод подготовки самолетов к летней эксплуатации, а также в слу-
чаях изменения или дополнительной установки радиооборудования
и при подготовке к ответственным полетам и перелетам.
Радиодевиация определяется на земле по невидимой радиостан-
ции, работающей в среднем диапазоне волн радиокомпаса и уда-
ленной не менее чем на 100 км, или по видимой радиостанции, рас-
положенной не ближе 1—2 км (не менее трех длин волн) от само-
лета. При этом самолет должен находиться на площадке, удален-
ной от стоянок, ангаров и металлических полос не менее чем
на 200—300 м.
Радиодевиационные работы на самолете включают в себя подго-
товку к выполнению радиодевиационных работ, устранение уста-
новочной ошибки рамки, определение и компенсирование радиоде-
виации, определение остаточной радиодевиации и составление
графика.
Определение радиодевиации по невидимой радиостанции. Само-
лет по радиокомпасу устанавливается последовательно на 24 курсо-
вых угла и на каждом из них определяется радиодевиация
Др = КУР —ОРК.
116
При этом курсовой угол вычисляется как разность МПР и МК.
МК определяется как разность магнитного пеленга и курсового
угла удаленного ориентира (рис. 92).
Порядок работы при определении радиодевиации следующий:
1) заказать работу выбранной радиостанции;
2) из центра площадки девиационным пеленгатором измерить
магнитные пеленги одного — двух удаленных ориентиров;
3) на карте масштаба 1 : 500 000 определить истинный и магнит-
ный пеленги радиостанции относительно центра площадки;
4) установить самолет на площадке и подготовить радиокомпас.
Рис. 92. Определение радиодевиации по невидимой
радиостанции
Подготовка радиокомпаса состоит в проверке его исправности и
устранении установочной ошибки. Устранить установочную ошибку
рамки можно следующим образом.
Установить на самолете девиационный пеленгатор делениями
0—180° параллельно продольной оси и с помощью его развернуть
самолет продольной осью точно на радиостанцию (по курсовому
углу ориентира). Включить радиокомпас и заметить показание
стрелки указателя курсовых углов. Если она окажется не на нуле,
то радиокомпас имеет установочную ошибку.
Для устранения установочной ошибки рамки радиокомпаса на
самолетах-истребителях необходимо:
— отвернуть крепежные винты указателя курсовых углов и от-
делить его от приборной доски;
— ослабить зажимные винты корпуса указателя;
— при включенном радиокомпасе повернуть корпус прибора от-
носительно его шкалы так, чтобы стрелка стала на нуль;
— закрепить корпус указателя в этом положении и установить
указатель на приборную доску;
5) установить самолет по радиокомпасу на ОРК = 345° и с по-
мощью девиационного пеленгатора определить курсовой угол ориен-
тира. То же самое проделать через каждые 15° для остальных кур-
117
совых углов радиостанции. Полученные курсовые углы ориентира
записать в протокол;
6) заполнить протокол для всех 24 значений ОРК, по магнит-
ному пеленгу и курсовым углам ориентира определить магнитные
курсы, а по магнитному пеленгу радиостанции и полученным маг-
нитным курсам рассчитать курсовые углы радиостанции.
Вычислить радиодевиацию как разность КУР и ОРК-
Результаты определений и расчетов заносят в протокол.
Примечание. Магнитные курсы для соответствующего ОРК можно
определять также пеленгованием самолета в хвост при помощи девиационного
пеленгатора.
Для компенсации радиодевиации нужно проделать следующее:
1) вынуть компенсатор из блока рамки и снять скобу-ограничи-
тель с диска компенсатора;
2) установить нуль шкалы радиодевиации против деления 345°
(по азимутальной шкале) и вращением регулировочного винта, на-
ходящегося против этого деления, добиться, чтобы стрелка-указа-
тель отклонилась по шкале на величину радиодевиации, соответ-
ствующую ОРК = 345°;
3) проделать ту же операцию для остальных ОРК через каж-
дые 15°, устанавливая нулевое деление шкалы поправок диска ком-
пенсатора последовательно против делений 345; 15; 330; 30 и т. д.
на азимутальной шкале; при такой последовательности работы по-
ложительная и отрицательная радиодевиации будут чередоваться
между собой, что исключит опасные натяжения пружины компенса-
тора;
4) проверить точность установки радиодевиации на компенса-
торе, для чего последовательно установить диск компенсатора на
каждый из 24 ОРК по азимутальной шкале; при точно установлен-
ной радиодевиации отклонение стрелки-указателя для всех ОРК
будет соответствовать величине радиодевиации;
5) после установки радиодевиации компенсатор снова устано-
вить в блок рамки.
Примечание. Необходимо помнить, что при компенсировании радио-
девиации следует соблюдать ряд мер предосторожности, в противном случае
можно легко деформировать или сломать пружину компенсатора и вывести его
из строя. Нельзя допускать уменьшения радиодевиации более чем на 5° ввин-
чиванием регулировочного винта за один прием, так как это вызовет резкий
перегиб пружины и неминуемо приведет к ее поломке. Поэтому, если макси-
мальная величина радиодевиации превышает 5°, то ее следует компенсировать
за два и более приема (цикла).
6) Произвести контрольное определение радиодевиации на
24 курсовых углах с целью выявления ошибок компенсации.
Радиодевиация считается скомпенсированной, если остаточная
величина ее не превышает +2°. Если контрольное определение ра-
диодевиации показало, что на некоторых курсовых углах ее вели-
чина превышает +2°, необходимо произвести докомпенсирование
радиодевиации.
118
Для этого необходимо снять компенсатор и, устанавливая диск
на те значения ОРК, где обнаружена большая остаточная радио-
девиация, вращением регулировочных винтов увеличить или умень-
шить отклонение стрелки-указателя на величину остаточной радио-
девиации.
После докомпенсирования необходимо вторично произвести кон-
трольное определение радиодевиации.
Рис. 93. Определение радиодевиации по видимой
радиостанции
Пример. Определяется радиодевиация по невидимой радиостанции: МПР ==
= 82°; МПО = 134°.
При ОРК = 0° девиационным пеленгатором измерен КУО = 52°, при
ОРК = 15°, КУО = 70° и т. д. Определить радиодевиацию.
Решение: 1) MKt = МПО — КУО = 134 -52 = 82°;
КУР = МПР — МК = 82 — 82 = 0°;
Др = КУР —ОРК = 0°.
2) МК2 = 134 — 70 = 64°;
КУР = 82 — 64 = 18°;
Др = 18 — 15 = +3°
Определение радиодевиации по видимой радиостанции. Сущ-
ность данного способа сводится к тому, что самолет по радиоком-
пасу последовательно устанавливается на 24 ОРК и на каждом из
них при помощи девиационного пеленгатора, установленного по про-
дольной оси самолета, производится визирование на антенну види-
мой радиостанции. Этим самым на шкале девиационного пеленга-
тора мы отсчитаем курсовой угол радиостанции (рис. 93).
Последовательность выполнения радиодевиационных работ
остается такой же, как и при определении радиодевиации по неви-
димой радиостанции.
§ 17. РАДИОТЕХНИЧЕСКИЙ МЕТОД ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА
Радиотехнический метод определения высоты полета основан на
измерении времени распространения электромагнитной волны от
самолета до поверхности земли и обратно. Электромагнитные коле-
бания, вырабатываемые передатчиком, излучаются через передаю-
щую антенну вниз, отражаются от земной поверхности и прини-
маются приемной антенной (рис. 94).
119
С приемной антенны колебания поступают в приемник, усили-
ваются и подаются на индикатор. По времени прохода электромаг-
нитной волны от самолета до земной поверхности и обратно на
индикаторе определяется
истинная высота полета.
Прямой сигнал
Рис. 94. Принцип действия радиовысотомера
Радиовысотомеры де-
лятся на две группы: ра-
диовысотомеры больших
и радиовысотомеры ма-
лых высот.
На одноместных само-
летах устанавливаются
радиовысотомеры малых
высот. Они предназначе-
ны для определения истин-
ной высоты полета в пре-
делах от 0 до 1200 м. Не-
прерывные безинерцион-
ные показания истинной
высоты необходимы при
пробивании низких облаков, при посадке в условиях ограниченной
видимости, при полетах на малой высоте в тумане и над морем.
Радиовысотомер малых высот может быть использован также
для определения истинной высоты при бомбометании и для фото-
графирования с малых высот.
В горизонтальном полете самолета радиовысотомер обычно
используется совместно с барометрическим высотомером. По баро-
метрическому высотомеру выдерживают заданную высоту полета,
а с помощью радиовысотомера определяют истинную высоту и на
основании этого вносят поправки в выдерживании! высоты по баро-
метрическому высотомеру.
При использовании радиовысотомера необходимо иметь в виду
следующее. При полете с сохранением постоянной относительной
высоты показания радиовысотомера будут меняться в зависимости
от изменения рельефа местности. Радиовысотомер фиксирует изме-
нение высоты при пролете отдельных крупных строений, горных
вершин, густого лиственного леса, а также отмечает момент пере-
хода с суши на море.
Пользуясь этим свойством, радиовысотомер можно использовать
для контроля пути по дальности в полете над облаками путем от-
метки характерных изменений рельефа.
На виражах с креном более 30° показания радиовысотомера не-
устойчивы и дают большие ошибки.
В полете над горами с пикообразными вершинами радиовысото-
мер отмечает расстояние не от вершин гор, а от их склонов, что
вызывает значительные ошибки в определении истинной высоты.
Наиболее устойчивы показания радиовысотомера при полете над
водной поверхностью.
120
§ 18. ПРИМЕНЕНИЕ НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
ДЛЯ САМОЛ ЕТОВОЖДЕН ИЯ
Наземная радиолокационная станция представляет собой им-
пульсную приемно-передающую радиостанцию. Измерение углов
(азимутов) основано на направленном излучении радиоволн пере-
датчиком и направленном
приеме приемником отра-
женных импульсов, а оп-
ределение дальности — на
измерении времени прохо-
ждения импульсов. На-
земные радиолокаторы по-
зволяют также определять
и высоту полета само-
летов.
Наземные радиолока-
ционные станции обна-
Рис. 95. Определение МС при помощи на-
земной радиолокационной станции
ружения и наведения
(РСОН) выполняют задачи по обнаружению самолетов противника
и наведению на них своих истребителей. Кроме того, они успешно
могут использоваться для управления полетами и наблюдения за
самолетами в воздухе, что особенно важно при полетах в сложных
метеорологических условиях и на больших высотах. Практикой,
установлено, что радиолокационные станции могут успешно вести
одиночные самолеты и группы самолетов на высотах до их практи-
ческого потолка в пределах своего радиуса действия.
Радиолокационные станции дают возможность обнаруживать са-
молеты в воздухе на значительных расстояниях. Дальность обнару-
жения самолета определяется дальностью распространения УКВ и
может быть рассчитана по следующей формуле:
где D— расстояние в км;
и Н2—высоты над землей приемной и передающей антенн в ж.
По азимуту и дальности от радиолокационной станции до само-
лета можно определить место самолета на карте (рис. 95).
Рис. 96. Ошибка определения МС при помощи
наземной радиолокационной станции
Радиолокац ионные
станции определяют
азимут и дальность са-
молета с некоторыми
ошибками. Поэтому
точка пересечения ли-
ний положения пред-
ставляет собой центр
некоторого района ве-
роятного местоположе-
ния самолета, прини-
маемого на практике
за круг (рис. 96).
121
Радиус вероятного местоположения самолета г зависит от типа
станции и дальности до самолета. Его можно определить по сле-
дующей формуле:
г=1/(Д£)г + (0,017ДД£))2 ,
где Д£> и ДД— точность определения координат самолета радиоло-
.кационной станцией;
D — дальность от самолета до радиолокационной станции.
Определение места самолета является основой решения различ-
ных задач самолетовождения с помощью наземных радиолокацион-
ных станций.
Управление полетами с земли
При полетах в сложных навигационных условиях днем и ночью,
когда значительно усложняется самолетовождение, дежурный штур-
ман командного пункта путем подачи команд с земли может помочь
летчику проконтролировать и исправить путь самолета, а также вы-
вести самолет (группу) в район цели или аэродрома посадки.
Дежурный штурман при помощи радиолокационной станции ве-
дет наблюдение за полетом самолета (группы), определяет факти-
ческие элементы его движения, сравнивает их с заданными и при
необходимости подает команды летчику (ведущему группы) для из-
менения режима полета. В этом случае операторам радиолокацион-
ной станции даются указания о секторе наблюдения и темпе пере-
дачи на командный пункт координат самолета (группы).
Порядок управления полетами с земли сводится к следующему.
После взлета и сбора группы ведущий устанавливает связь
с командным пунктом.
По указанию с КП операторы радиолокационной станции при-
ступают к наблюдению за полетом группы и передаче на команд-
ный пункт через установленный интервал координат,группы (азимут
и дальность).
По полученным координатам планшетисты определяют на карте
место группы. Соединив несколько отметок МС, штурман получит
на карте линию фактического пути и ФМПУ (рис. 97).
Рис. 97. Определение навигационных элементов полета при
помощи наземной радиолокационной станции
122
Сопоставляя линию
фактического пути с за-
данным маршрутом, штур-
ман определяет БУ.
В зависимости от прой-
денного и оставшегося
расстояния до цели (КО)
определяется поправка в
курс. Командой с земли
дежурный штурман дает
указание летчику об ис-
правлении курса на тре-
буемую величину.
По расстоянию между
несколькими отметками
Рис. 98. Вывод самолета в район цели при
помощи наземной радиолокационной станции
МС на карте и времени
пролета их определяется фактическая путевая скорость. Для более
точного определения путевой скорости необходимо брать отметки
МС не менее чем через 4—6 мин. полета, а время получения их
засекать по секундомеру.
По оставшемуся времени до заданного момента прибытия на
цель и расстоянию до цели определяется требуемая путевая ско-
рость.
Если прежняя воздушная скорость не обеспечивает своевремен-
ного выхода на цель, с командного пункта подается команда лет-
чику (ведущему группы) о соответствующем увеличении (умень-
шении) воздушной скорости.
По магнитному курсу, углу сноса, воздушной и путевой ско-
ростям штурман может определить ветер в районе полета группы.
Непрерывное наблюдение за полетом самолетов позволяет пе-
риодически сообщать ведущему летчику с земли о местонахожде-
нии группы, что облегчает сохранение ориентировки в полете.
При выходе самолетов на малозаметную наземную цель’ радио-
локационная станция облегчает ее отыскание. В тот момент, когда
фактические азимут и дальность группы до цели совпадут с расчет-
ными, ведущий предупреждается о выходе в район цели и о необхо-
димости перехода к визуальному поиску ее (рис. 98).
После выполнения задания дежурный штурман при помощи ра-
диолокационной станции может вывести самолеты на аэродром по-
садки. Определив место самолета (группы), дежурный штурман
сообщает его летчику и одновременно указывает курс следования
на аэродром посадки и время полета. Если радиолокационная
станция находится на аэродроме посадки, то курс полета на аэро-
дром определяется изменением азимута на 180° с учетом магнит-
ного склонения (рис. 99). Если станция расположена вне аэродрома,
то магнитный курс следования на аэродром определяется построе-
нием на планшете и передается летчику.
Время полета определяется по расстоянию до аэродрома и по
воздушной скорости.
123
Последующие положения самолета (группы) также наносятся
на планшет; при необходимости (для более точного следования
группы на аэродром) штурман вносит исправления в режим
полета.
Следует иметь в виду, что непосредственно над радиолокацион-
ной станцией имеется непросматриваемая зона (мертвая воронка),
радиус которой возрастает с увеличением высоты пролета станции.
Очевидно, что для увеличения времени пребывания самолета
в зоне облучения антенны радиолокатора штурман КП должен по
мере приближения самолета к радиолокационной станции давать
указания летчику о постепенном уменьшении высоты полета.
Рис. 99. Вывод самолета на аэродром посадки при помощи
наземной радиолокационной станции
Вывод самолета на аэродром посадки командами с земли
успешно применяется и в случае потери ориентировки летчиком,
что может иногда иметь место после воздушного боя. Летчик, по-
терявший ориентировку и требующий помощи в ее восстановлении,
должен включить сигнал бедствия на самолетном радиоответчике,
запросить по радио кодовой фразой свое место и курс для выхода
на аэродром посадки. При необходимости и по возможности он дол-
жен увеличить высоту полета для того, чтобы быстрее войти в зону
действия радиолокационной станции.
Если на индикаторе кругового обзора радиолокационной станции
по каким-либо причинам невозможно опознать импульс самолета,
просящего помощь, летчику задается контрольный курс, с которым
он следует 2—3 мин., или дается указание встать в круг,
124
Контроль с земли за выполнением маршрутных полетов
За выполнением маршрутных полетов, как правило, при помощи
наземных радиолокационных станций организуется контроль точ-
ности самолетовождения. Сущность этого контроля сводится к сле-
дующему.
Оператор радиолокационной станции, осуществляющий наблюде-
ние за полетом самолетов, через определенные промежутки времени
сообщает на командный пункт координаты самолетов (группы).
Планшетист соответственно получаемым координатам наносит на
планшет отметки МС с указанием времени и, соединяя их, получает
линию фактического пути, которая позволяет контролирующему
лицу судить о правильности и точности выполнения заданного
маршрута.
По результатам контроля во время разбора полетов произво-
дится оценка точности самолетовождения и указываются ошибки,
допущенные экипажем в воздухе.
Радиолокационные станции используются также для контроля
полета экипажей в заданные зоны (пилотажа, стрельб и пр.). В слу-
чае если летчик вышел не в свою зону, о чем можно судить по от-
меткам на планшете, он предупреждается об этом и выводится в за-
данный район.
ГЛАВА ЧЕТВЕРТАЯ
СБОР И РОСПУСК ГРУПП
§ 19. РАСЧЕТ ЭЛЕМЕНТОВ РАЗВОРОТА
Такие задачи самолетовождения, как сбор групп, выход на ли-
нию заданного пути, погашение избытка времени отворотом от
маршрута на заданный угол и др., успешно могут быть решены
только при учете и точном выдерживании элементов разворота.
При расчете элементов разворота обычно задаются воздушной
скоростью и углом крена ₽ на развороте и на основании этого
определяют радиус R и время разворота /ур на заданный угол.
Как известно из аэродинамики,
где g — ускорение силы тяжести.
Подставив в формулу значение g и вместо скорости в м/сек ско-
рость в км/час, после преобразования получим
z_v у
R = 0,0787 (а)
где R — радиус разворота в км\
V — воздушная скорость в км/час.
Время разворота на 360е равно длине окружности, поделенной
на воздушную скорость:
j SkR
*•360 у
или
/ЗС0 = 22 600 4,
где R— радиус разворота в км;
V— воздушная скорость в км/час.
Для расчета радиуса и времени разворота на 360° по этим
формулам на шкале 4 линейки НЛ-10 на делении 0,0787, соответ-
126
ствующем значению tg4°30', нанесен круглый индекс с надписью
«R», а на шкале 1 на делении «226» — индекс «t36o»-
Пример. Определить радиус и время разворота на 360° с креном 30°, если
заданная истинная скорость на развороте равна 800 км/час.
Решение: 1) Установить визирку на значение скорости в сотнях км/час
по шкале 6 и подвести под нее угол крена, отсчитывая его по шкале 4, а за-
тем против круглого индекса отсчитать по шкале искомое значение радиуса
разворота в километрах: R — 8,7 км.
2) Против значения скорости в км/час, уменьшенного в 100 (10) раз, на
шкале 1 установить значение радиуса разворота в километрах (или значение,
увеличенное в 10 раз), а затем против индекса ^60 отсчитать по шкале 2 время
разворота на 360°; Z36o = 4 мин. 8 сек.
Ключ для расчета на НЛ = 10:
В тех случаях, когда время разворота определяется по воздуш-
ной скорости и углу крена, расчет удобнее производить по формуле
^0 = 0,177^, (0
где V — скорость в км/часг
Значение числа 0,177 на шкале 4 примерно соответствует tg 10°.
Пример. Воздушная скорость 650 км/час, крен на развороте 20°. Опреде-
лить время разворота на 360°.
Решение: Под деление 650 на шкале 5 подвести угол крена 20°, затем
против деления 10° отсчитать на нижней шкале время разворота в секундах:
6бо = 316 сек., что соответствует 5 мин. 16 сек.
Ключ для расчета на НЛ-10:
Имея время полного разворота, нетрудно определить время раз-
ворота на любой угол /ур
t
ур ‘зво 360 •
Для контроля точности выполнения разворота часто руковод-
ствуются угловой скоростью, которая определяется по формуле
127
или
О) = 0,016 4г,
К
где со — угловая скорость разворота в град/сек-,
V— воздушная скорость в км/час-,
R— радиус разворота в км.
По формулам (а) и (б) рассчитана таблица радиусов и времени
разворота на 360° для различных скоростей и углов крена.
Из таблицы и формул видно, что с увеличением воздушной ско-
рости увеличивается радиус и время разворота: при увеличении ско-
рости в два раза время разворота увеличивается вдвое, а радиус —
в четыре раза. При полете на заданной воздушной скорости у лет-
чика остается единственный путь для уменьшения радиуса разво-
рота — увеличение угла крена на развороте.
Однако на больших высотах, а также в сложных метеорологи-
ческих условиях летчик не может разворачиваться с очень большим
креном вследствие уменьшения запаса тяги двигателя или необхо-
димости соблюдения безопасности полета.
В групповом полете маневрирование креном и скоростью для из-
менения радиуса разворота еще более ограничено. Разворот группы
самолетов должен выполняться без нарушения боевого порядка
строя. Очевидно, чтобы сохранить заданные дистанции между само-
летами, их угловые скорости (а значит, и время разворота) должны
быть равны.
Следовательно,
R
или
гхвед
где V и R — соответственно скорость и радиус разворота ведомого
самолета;
^вед и ^?вед — скорость и радиус разворота ведущего самолета группы.
Найдем соотношение углов крена ведомого и ведущего группы
самолетов:
, __ V2 ^вед __ V2 ^вед
Но так как
V _ Я
^вед ^вед *
то окончательно получим
tg 0 = 7^- • tg Рвед •
Лвед
128
ьо
ю
Таблица радиусов и времени разворота на 360е
£ 10° 15° 20° 30° 40° 50°
R км *360° мин. сек. R км *360° мин. сек. R км *360° мин. сек. R км *360° мин. сек. R км *360° мин. сек. R км *360° мин. сек.
500 11,2 8—25 7,4 5—34 5,4 4—05 3,4 2—33 2,3 1—46 1,6 1—15
550 13,5 9—15 8,9 6—06 6,5 4—30 4,2 2—50 2,8 1—56 2,0 1-22
600 16,1 10-05 10,6 6—41 7,8 4—55 5,0 3—06 3,4 2—07 2,4 1—30
650 19,0 10—56 12,4 7—14 9,2 5—20 5,8 3—21 4,0 2—17 2,8 1—38
700 21,9 11-46 14,4 7-45 10,6 5—45 6,7 3—37 4,6 2—28 3,2 1—45
750 25,1 12—36 16,6 8-24 12,2 6—08 7,7 3—52 5,3 2—38 3,7 1—52
800 28,5 13-27 18,8 8—55 14,0 6—32 8,8 4—08 6,0 2—49 4,2 | 2—00
850 32,4 14—17 21,3 9—28 15,7 6—57 9,9 4—23 6,8 2—59 4,8 2—07
900 36,2 15—08 23,7 10-00 17,4 7—22 11,0 4—39 7,5 3—10 5,4 2—15
950 40,4 15-58 26,5 10—33 19,5 7—47 12,4 4—54 8,5 3—20 6,0 2—22
1000 44,6 16—50 29,5 11-08 21,7 8—12 ' 13,6 5—10 9,3 3—31 6,6 2—30
1050 49,0 17—40 32,5 11—40 24,0 8—35 15,0 5—25 10,3 3—42 7—2 2—37
1100 54,0 | 18—30 | 35,6 12—12 26—2 9-00 | 16,4 | 5—40 11,4 | 3—52 | 8,0 | 2-44
Из формул следует, что скорости и тангенсы углов крена ведо-
мых самолетов пропорциональны их радиусам разворота. Внутрен-
ний крайний самолет строя разворачивается с наименьшим радиу-
сом и поэтому он должен иметь наименьшую скорость и наимень-
ший крен по отношению к остальным самолетам. Внешний крайний
самолет разворачивается с наибольшим радиусом, следовательно,
его скорость и угол крена на развороте больше, чем у других са-
молетов строя. Практически назначается один угол крена, так как
они мало отличаются (на 1 —1°,5) друг от друга.
Радиусы разворота внешнего и внутреннего ведомых отличаются
от радиуса разворота ведущего на величину интервала I между
данными самолетами:
R = А?вед ±
При симметричном строе интервал равен половине ширины
строя. Таким образом, для данной группы самолетов и высоты по-
лета режим ведущего на развороте определяется шириной строя.
Он должен быть таким, чтобы ведомые самолеты имели достаточ-
ный запас скорости и могли свободно сохранять свое место в строю.
В начале разворота летчик внешнего крайнего самолета должен
увеличить скорость от исходной до заданной, а внутреннего край-
него — уменьшить. По этой причине ведущий должен вводить
группу в разворот плавно, постепенно увеличивая крен от нуля до
заданного значения.
Возможность изменения скорости ведомыми на развороте зави-
сит от типа самолета и высоты полета. Как известно, с увеличением
высоты избыток скорости самолета уменьшается. Поэтому в общем
случае режим полета ведущего на развороте определяется в зави-
симости от типа самолета, ширины строя, высоты полета и подго-
товки ведомых.
Проследим на конкретном примере зависимость элементов разво-
рота крайних самолетов строя от режима полета ведущего.
Пример. Пусть эскадрилье в составе 12 самолетов в строю «клин звеньев»
требуется выполнить разворот с курса 0° на курс 120°. Определим элементы
разворота строя, если истинная воздушная .скорость ведущего равна 700 км/час,
угол крена на развороте 20°, интервал между ведущим и крайним внутренним
самолетом 230 м, а между ведущим и крайним внешним — 310 м.
Решение: 1) Определяем радиус и время разворота ведущего на 120°:
72
Я = 0,078.-^р^^10,6 км-
. 700 120 _
<iso 0,177- 2()о • 360 ~ 11о сек.
2) Определяем радиусы разворота крайних самолетов строя:
Явт = Ю,6 — 0,23 = 10,37 км,
/?вн = 1^,6 + 0,31 = 10,91 км.
130
3) Находим скорости и углы крена на развороте:
10 37
VBT = 700—д = 685 км/час\
tg ₽вт = 0,365- = 0,356, (Звт = 19°,5;
Увн = 700- = 715 клочат,
tg0BH = 0-365-^у = 0,375, (Звн = 20°,5.
Следовательно, скорость крайнего внешнего самолета должна быть больше
на 15 км/час, чем скорость ведущего, а крайнего внутреннего — меньше на
15 км/час, угол крена для всех самолетов составляет примерно 20°.
Рис. 100. Уклонение от ЛЗП при неучете радиуса
разворота
Из анализа зависимости элементов разворота можно сделать
следующий вывод: развороты скоростных самолетов выполняются
с большими радиусами, неучет которых может привести к ошибкам
самолетовождения.
Если, например, ведущий группы в маршрутном полете начнет
разворот на новый курс над поворотным ориентиром без учета ра-
диуса разворота, то это приведет к тому, что группа сразу же после
отхода от ориентира будет иметь линейное боковое уклонение, что
усложнит дальнейший полет.
Как видно из рис. 100, линейное боковое уклонение равно
ЛБУ = 7? (1—cos УР).
При УР — 90° ЛБУ = /?, при УР=180° ЛБУ = 27?.
Если, например, разворот выполняется со скоростью 800 км/час
и креном 20° на угол 135°, то линейное боковое уклонение при этом
9* 131
будет около 24 км. Очевидно, чтобы точно выйти на линию задан-
ного пути, разворот на новый курс необходимо начинать заблаго-
временно, не доходя до поворотного ориентира на величину линей-
ного упреждения разворота (рис.
Рис. 101. Линейное упреждение раз-
ворота
101).
Из рисунка имеем
VP
ЛУР-tftg^,
где ЛУР — линейное упреждение
разворота.
Если же по заданию требуется
точно пройти над ориентиром, то
радиус разворота учитывается при
прокладке маршрута.
В маршрутных полетах раз-
вороты с одного курса на другой
без учета радиуса разворота до-
пустимы только при углах раз-
ворота, не превышающих 30°.
В этом случае боковое уклонение при скоростях полета 600—
800 км/час не будет превышать половины радиуса разворота.
Радиус и время разворота необходимо также учитывать при
маневрировании по направлению в целях пристраивания к другим
самолетам или выхода в заднюю полусферу воздушной цели. Если,
например, летчик при сближении с воздушной целью на встречных
курсах начнет разворот на попутные курсы, когда цель будет на-
ходиться на траверзе его самолета, то к концу разворота он ока-
жется в стороне от цели на расстоянии почти двух радиусов разво-
рота и отстанет от нее на время, равное времени разворота на 180°.
В большинстве случаев это приведет к тому, что цель удалится
за пределы визуальной видимости и на ее догон потребуется зна-
чительное время.
§ 20. СБОР ГРУПП В ПРОСТЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ
Задача сбора самолетов в воздухе впервые возникла и успешно
была решена еще в годы гражданской войны, когда на некоторых
фронтах были организова1ны крупные авиаотряды с задачей нанесе-
ния массированных ударов с воздуха по войскам интервентов и
белогвардейцев.
Сбор авиагрупп в этот период осуществлялся на маршруте по-
лета к цели или же на круге над аэродромом взлета. Значительный
шаг вперед в разработке способов сбора был сделан в 1930 г. при
подготовке к первомайскому воздушному параду. В этом параде по
предложению Б. В. Стерлигова сбор авиагрупп впервые произво-
дился способом «петли», который получил впоследствии широкое
распространение в практике ВВС.
132
В период Великой Отечественной войны 1941 —1945 гг., а также
в послевоенный период нашли широкое применение новые способы
сбора, разработанные советскими летчиками и штурманами.
В зависимости от обстановки сбор групп истребительной авиа-
ции в простых метеорологических условиях может осуществляться
на круге над аэродромом или пунктом сбора; разворотом на
170—180°; разворотом «все вдруг» на постоянный угол или сходя-
щимся веером; маневрированием скоростью; на маршруте с прохо-
дом контрольных ориентиров в заданное время.
Сбор авиагруппы является одним из важных этапов в органи-
зации и выполнении полета на боевое задание. От правильной орга-
низации сбора зависит своевременность выполнения задачи, такти-
ческий радиус действия группы, скрытность и внезапность ее дей-
ствий.
Поэтому при организации сбора необходимо отдавать предпочте-
ние тому способу, который обеспечивает минимальную затрату вре-
мени, наибольшую простоту и надежность сбора, скрытность ма-
невра от радиолокационной разведки противника.
Сбор группы на круге. Сбор на круге может производиться над
аэродромом взлета, над характерным ориентиром или РНТ, распо-
ложенным в стороне от аэродрома.
Способ применяется для сбора небольших групп (подразделе-
ний) и состоит в следующем.
Взлет группы производится посамолетно, парами или звеньями.
Ведущий группы взлетает первым и следует по большому кругу над
аэродромом или заданным пунктом сбора.
Ведомые взлетают в установленной очередности, догоняют ве-
дущего, срезая путь на разворотах, и пристраиваются к нему. Если
взлет производится по одному, то в начале происходит сбор само-
летов в звенья, а затем уже каждое звено занимает заданное место
в боевом порядке.
Способ прост по выполнению и обеспечивает высокую надеж-
ность и безопасность сбора, однако занимает сравнительно много
времени и требует хорошей визуальной видимости.
Сбор разворотом на 170—180°. Способ применяется для сбора
подразделений и частей и состоит в следующем.
Ведущий (ведущее звено) взлетает первым и следует в направ-
лении взлета в течение половины времени взлета всей группы плюс
некоторый запас (0,5—1 мин.), необходимый для выхода последнего
самолета (звена) в точку начала сбора, затем разворачивается на
170—180°.
Остальные ведомые (звенья) взлетают в порядке очередности и
следуют за ведущим.
Обнаружив ведущего на обратном курсе, ведомые разворачи-
ваются в его сторону и занимают заданное место в боевом порядке
(рис. 102). Для обеспечения пристраивания командир каждого
звена (пары) в момент начала разворота на обратный курс подает
команду. Сзади идущее звено (пара) начинает разворот на при-
страивание через половину интервала взлета после этой команды.
133
Время взлета и сбора группы рассчитывается по формуле
^сб 1) А^взл 4" ^180 2/зап,
где п—число взлетающих единиц (звеньев, пар или самолетов);
А/взл—интервал взлета;
4ап—запас времени, необходимый для выхода замыкающего
в точку начала сбора.
Данный способ наиболее целесообразно применять, когда взлет
производится в направлении, противоположном направлению полета
к ИПМ.
Пример. Взлет группы производится звеньями через 20 сек. Определить
время полета ведущего до начала разворота и время сбора, если в группе
3 звена. Время разворота на 180° равно 2 мин., а запас времени 30 сек.
Решение. 1) Ц = 0,5(3 — 1) • 20 + 30 = 50 сек.
2). +б = (3—1) • 20+120 = 2 • 30 =220 сек., или 3 мин. 40 сек.
Сбор разворотом «все вдруг» сходящимся веером. Сущность спо-
соба состоит в следующем.
Ведущий группы взлетает по счету средним. Первым взлетев-
ший самолет (звено) после набора заданной высоты выдерживает
направление полета по курсу взлета. Остальные ведомые выдержи-
вают направление полета также по курсу или по впереди идущему
самолету (рис. 103).
После взлета и набора заданной высоты последним самолетом
(звеном) ведущий подает сигнал для сбора и разворачивается на
90°; ведомые по этому сигналу одновременно разворачиваются
в указанную сторону на заранее рассчитанные углы и на повышен-
ных скоростях смыкаются сходящимся веером курсов.
После разворота полет может происходить с набором высоты.
Точка смыкания выбирается над характерным ориентиром или ра-
диостанцией.
Как видно из рисунка, ведомые, следующие позади ведущего,
разворачиваются на угол а, а следующие впереди — на угол, рав-
ный 180°—а. Угол а определяется по формуле
. I
л1Увед^взл ’
134
где I—расстояние по перпендикуляру от прямой взлета до ориен-
тира сбора;
Д/взл — интервал взлета;
щ — количество интервалов между данным самолетом и само-
летом ведущего;
1/вед — скорость ведущего.
Скорость ведомых после разворота определяется по формуле
17= — .
Sin а
Время от начала взлета до конца сбора равно
^сб :== (п 1) А^взл Ч“^90 ~Ь" ^зап“1 •
v вед
Данный способ может применяться в тех случаях, когда ИПМ
расположен в стороне от направления взлета.
Пример. Произвести расчет сбора группы в составе трех звеньев, если ин-
тервал взлета между звеньями равен 20 сек., высота сбора 800 jw, время на-
бора высоты 30 сек., скорость ведущего 600 км/час, время разворота на 180°
составляет 2 мин., а расстояние до точки сбора равно 20 км.
Решение: 1) Находим угол а и определяем углы разворота звеньев:
. 20 000-3,6 спо
^а = -Ь600.20— 6’0:а^8°-
Следовательно, угол разворота головного звена должен составлять 100°, ве-
дущего — 90° и замыкающего — 80°.
2) Находим скорость ведомых звеньев после разворота:
.. 600 600
V sin 80° 0,98 ~612 км!час
Рис. 103. Сбор разворотом „все вдруг* сходящимся веером
135
3) Определяем время сбора:
/с6 = (3-1) 20 + 60 + 30 + = 250 сек., или /сб = 4 мин. 10 сек.
Сбор разворотом «все вдруг» на постоянный угол. Сущность дан-
ного способа состоит в том, что ведущий (ведущее звено) взлетает
первым, набирает заданную высоту и следует на этой высоте по
курсу взлета. После взлета и выхода на заданную высоту замыкаю-
щего самолета ведущий подает по радио сигнал начала сбора и сам
разворачивается в направлении точки сбора на угол ав больше 90,
но меньше 180° (рис. 104).
Рис. 104. Сбор разворотом „все вдруг* на постоянный угол
Ведомые по этому сигналу одновременно разворачиваются на
одинаковый угол, равный 180° — ав, и на заданной скорости смы-
каются.
Так, например, если угол разворота ведущего равен 120°, то
ведомые должны разворачиваться на угол 60°. Очевидность этого
положения вытекает из свойств равнобедренного треугольника. При
равных скоростях полета пути, проходимые ведомыми самолетами,
должны быть равны пути ведущего. Это значит, что стороны тре-
хугольника, по которым происходит полет при смыкании, должны
"быть равны, а следовательно, должны быть равны и углы, прилежа-
[Щие к этим сторонам.
Точка сбора выбирается над характерным ориентиром или РНТ.
Полет к этой точке после разворота может происходить с набором
.высоты.
Время взлета и сбора этим способом равно:
=== 2 (л 1) А^взл 4” ^зал 4“ *
Способ целесообразно применять в тех случаях, когда ИПМ на-
ходится в стороне от направления взлета.
Пример. Рассчитать время сбора группы для условий предыдущего при-
мера, если ав = 120°.
Решение: 1) /120 = 80 сек.
2) Сб = 2(3 — 1)20 + 30 + 80 = 190 сек., или 3 мин. 10 сек.
Сбор маневрированием скоростью. Сбор маневрированием ско-
ростью выполняется по принципу догона.
Ведущий группы взлетает первым и следует на заданной ско-
рости с набором высоты на ориентир сбора.
Если направление взлета не совпадает с направлением полета
к цели, вблизи аэродрома намечается ориентир, на который должны
выходить все самолеты после взлета и далее следовать к ориентиру
сбора.
Остальные ведомые взлетают в порядке установленной очеред-
ности, на повышенной скорости догоняют ведущего и пристраи-
ваются к нему. Направление полета при догоне выдерживается по
магнитному компасу или самолетному радиоотметчику системы опо-
знавания.
Пристраивание может быть последовательным и одновременным.
В первом случае ведомые осуществляют догон на заданной макси-
мальной скорости и поочередно пристраиваются к ведущему. Во
втором случае скорость догона ведомых возрастает от ведущего
к замыкающему, поэтому их пристраивание происходит одновре-
менно.
Время догона с учетом разгона и торможения самолета подсчи-
тывается по формуле
^взл Евед /р 4- tT
**= ДУ 1 2 ’
где Увед—скорость ведущего во время сбора;
АV — разность скоростей ведущего и замыкающего;
Zp—время разгона;
/т—время торможения.
Длина участка сбора и высота сбора определяются по формулам:
^сб == ^зам ^д>
^сб ^в^д>
где VB— вертикальная скорость набора высоты.
Время взлета и сбора рассчитывается по формуле
^сб ^взл ^д ^зап*
Сбор маневрированием скоростью выполняется во время полета
к цели, что обеспечивает увеличение радиуса действия группы, по-
этому он должен широко применяться при полетах на самолетах,
обладающих большим диапазоном скоростей.
137
Пример. Произвести расчет сбора группы в составе трех звеньев с одно-
временным пристраиванием, если интервал взлета между звеньями равен
20 сек., скорость ведущего звена 400 км/час, замыкающего 600 км/час, время
разгона 40 сек., торможения 20 сек., вертикальная скорость набора высоты
20 м/сек.
Решение: 1) Скорость ведущего звена 400, второго 500 и замыкающего
600 км/час.
2) - ‘ “
3)
/ = 20(3— 1) =40 сек.
40-400 40 + 20
'* = -10(Г + —~ = 110 сек-
<>сб = ’1Ю== 18 400 ж, или 18,4 км.
4)
5) //сб= 110-20 = 2200 м.
6) /Сб = 40 + ПО + 30 = 180 сек., или 3 мин.
Сбор на маршруте с проходом контрольных ориентиров в задан-
ное время. Способ применяется для сбора нескольких однородных
или смешанных групп в общий боевой порядок и выполняется сле-
дующим образом.
Каждая группа после сбора в районе своего аэродрома следует
на главный контрольный пункт (ГКП) с расчетом пройти его в за-
данное время (рис.
105).
ГКП головной группой определяется в зависи-
(расчетного) времени прохода ИПМ. Последую-
Время прохода
мости от заданного
щим группам время прохода ГКП назначается с учетом временного
интервала между группами. Временной интервал рассчитывается
по формуле
+ ^гл. стр +
где tD—временная дистанция между группами в боевом порядке;
^гл.стр—временная глубина строя;
Д/— возможная ошибка в выходе на ГКП.
ГКП назначается -в направлении полета к цели с учетом распо-
ложения аэродромов базирования.
Кроме ГКП, каждой группе может задаваться ГКП-1 и время
его прохода, чтобы обеспечить точный выход на ГКП.
Угол схождения групп к ГКП должен быть по возможности не-
большим, чтобы обеспечить зрительную связь между группами при
сборе.
1.38
Обнаруженные в полете неточности выхода на ГКП по времени
гасятся на участке ГКП-1 —ГКП маневрированием скоростью или
изменением длины маршрута.
Процесс сбора обычно контролируется с КП с помощью радио-
локационных станций обнаружения; при наличии ошибок подаются
команды об изменении режима’ полета той или другой группе.
Основным достоинством способа является то, что в ходе сбора
группа продвигается к цели; специальный маневр для сбора отсут-
ствует.
Сбор на маршруте по бортовой приводной радиостанции. Способ
применяется для встречи истребителей с бомбардировщиками при
сопровождении. Он может также применяться для сбора однород-
ных групп в условиях ограниченной видимости при наличии на са-
молете ведущего приводной радиостанции.
Бомбардировщики после взлета и сбора следуют по маршруту,
периодически информируя истребителей о своем местонахождении.
В колонне бомбардировщиков следует самолет с работающей при-
водной радиостанцией (рис. 106).
Рис. 105. Сбор на маршруте по бортовой при-
водной радиостанции
Истребители, взлетев в заданное время, выполняют пассивный
полет по АРК на приводную радиостанцию до момента выхода на
зрительную связь с бомбардировщиками.
Полет истребителей в этом случае осуществляется на повышен-
ной скорости и происходит по кривой погони.
Способ прост по выполнению и обеспечивает высокую надеж-
ность и безопасность сбора, однако в условиях радиопомех со сто-
роны противника надежность сбора уменьшается.
§ 21. СБОР ГРУППЫ ЗА ОБЛАКАМИ
Меры безопасности при пробивании облаков вверх и вниз.
Успешное выполнение групповых полетов за облаками обеспечи-
вается четкой организацией полетов и управления ими с КП, надеж-
ным метеорологическим и радиотехническим обеспечением.
Пробивание облаков вверх и вниз, сбор и роспуск группы за
облаками производится по заранее разработанным схемам. Для
обеспечения выполнения маневра сбора, роспуска и посадки исполь-
зуются радиотехнические и светотехнические средства и их системы.
139
Рис. 107. Последовательный вход самоле-
тов в облака на безопасных интервалах
одновременном пробивании облаков
— входом самолетов в облака на
валах;
Перед вылетом органи-
зуется разведка погоды с
целью определения толщины
облаков, их характера, ви-
димости и условий полета в
облаках.
Безопасность полета при
пробивании облаков обеспе-
чивается:
— правильным выбором
направления сектора проби-
вания облаков и размыка-
нием самолетов на безопас-
ные углы расхождения при
в нескольких направлениях;
безопасных временных интер-
— строгим выдерживанием режима полета.
Сектор пробивания облаков вверх и вниз намечается так, чтобы
была исключена возможность столкновения самолетов с земной
поверхностью, препятствиями на ней и самолетами других частей.
При одновременном пробивании облаков в нескольких направ-
лениях перед входом в облака группа должна разомкнуться на без-
опасные углы, равные не менее чем двойной ошибке в выдержива-
нии заданного курса полета.
Если принять, что ошибка в выдерживании заданного курса лет-
чиком не превышает 7°, то безопасный угол расхождения (БУР)
равен 15°.
Безопасный интервал входа в облака (/без) дол-
жен быть таким, чтобы исключалась возможность догона при про-
бивании облаков в одном направлении за счет возможного измене-
ния скорости впереди идущим самолетом до V — ДУ, а сзади иду-
щим— до У-|-ДУ. Поэтому дистанция между самолетами (5без)
при входе в облака должна быть такой, чтобы время возможного
догона за счет ошибок в выдерживании скорости было большим
или равным времени пробивания облаков (рис. 107).
Безопасный временной интервал входа в облака можно найти
по формуле
. _2bVh
Гбез— УВУ’
где h — толщина слоя облаков;
Ув — средняя вертикальная скорость;
ДУ—ошибки в выдерживании скорости.
Взлет самолетов должен производиться через интервалы, равные
безопасному временному интервалу пробивания облаков, которые
должны строго соблюдаться до точки входа в облака. Для этого
пробивание облаков следует производить по курсу взлета. Если
140
интервал взлета или посадки превышает безопасный интервал про-
бивания облаков, вход самолетов в облака осуществляется с интер-
валом взлета или посадки.
В целях сохранения заданных интервалов и обеспечения без-
опасности полета экипажи должны строго выдерживать заданный
режим полета в облаках (курс, скорость, вертикальную скорость
и угол крена на разворотах), который устанавливается в зависи-
мости от типа самолета и подготовки летного состава.
В зависимости от обстановки пробивание облаков вверх может
производиться различными способами. Наиболее общими способами
пробивания облаков являются: последовательно по одному или па-
рами в сомкнутом строю в одном направлении; последовательно по
одному или парами в сомкнутом строю в двух-трех направлениях;
одновременно звеном в одном или разных направлениях.
В зависимости от способа пробивания облаков, состава группы
и направления полета к цели сбор, группы может осуществляться
на петле, маневрированием скоростью, на веере курсов и сочета-
нием нескольких способов.
Пробивание облаков в одном направлении и сбор группы за
облаками. Способ применяется для сбора небольших групп при
облачности большой толщины.
Ведущий группы взлетает первым, за ним в установленной оче-
редности взлетают ведомое через интервалы, равные безопасному
интервалу пробивания облаков.
После взлета каждый летчик выводит самолет в точку начала
пробивания облаков, устанавливает заданный режим набора и с за-
данным курсом пробивает облака (рис. 108).
Сбор группы после выхода самолетов за облака может осуще-
ствляться на петле (если направление полета к цели противопо-
ложно направлению пробивания облаков) или маневрированием
К цели
Рис. 108. Пробивание облаков в одном направлении и сбор группы за об-
лаками
141
скоростью (когда направление полета к цели совпадает с направ-
лением пробивания облаков).
Для сбора на петле ведущий, выйдя за облака и набрав задан-
ное превышение над ними (300—500 ж), засекает время, переводит
самолет в режим горизонтального полета и следует с прежним кур-
сом в течение времени-Л, затем разворачивается на 180° и следует
с обратным курсом до конца пристраивания ведомых.
Ведомые после выхода на высоту сбора переходят в горизон-
тальный полет с прежним курсом и выдерживают его в течение
времени t\, затем разворачиваются на 180° в сторону разворота ве-
дущего и визуально пристраиваются к нему.
Время горизонтального полета t\ до начала разворота на при-
страивание для любого самолета определяется по формуле
tt = 30 сек. + 0,5 Vee,,
где 30 сек. — время, потребное для перехода на заданный режим
сбора;
тг0 — число сзади идущих самолетов по отношению к дан-
ному самолету.
Время, затрачиваемое на взлет и сбор группы этим способом,
очевидно, будет равно сумме времени взлета группы, времени про-
бивания облаков и разворота на 180° последнего самолета
4б = 4зл + /н + Лео + 2-30 сек.
Время от момента окончания сбора до выхода группы на радио-
станцию (которая часто будет являться ИПМ) будет больше вре-
мени, определяемого по данной формуле, на время пробивания
облаков /н, которое с достаточной для практики точностью может
быть определено как частное от деления высоты сбора на среднюю
вертикальную скорость набора плюс одна минута на взлет само-
лета и выход его в точку начала пробивания облаков, т. е.
/н = + 60 сек.
Длина района сбора 5сб, как видно из рис. 105, может быть
подсчитана по формуле
^сб — + ^сб (0,5/взл + 30 сек.) + R.
При сборе группы маневрированием скоростью ведущий после
набора заданной высоты сбор-a продолжает полет с прежним кур-
сом на заданной минимальной скорости. Каждый последующий ве-
домый, набрав заданную высоту сбора, переходит в горизонталь-
ный полет, увеличивает скорость до заданной и с прежним курсом
на догоне пристраивается к ведущему. Направление полета при
догоне ведомые могут также выдерживать по системе опознавания.
142
Время сбора группы и длина района сбора в этом случае опре-
деляются по формулам:
^сб ^ВЗЛ + + ^д»
•5*сб ===:: 4“ ^замЛм
LU ПП ’ ОЙМ ДУ
где V3aM—скорость полета замыкающего самолета;
1/н—средняя истинная скорость набора.
Способ прост по выполнению, однако для сбора, особенно боль-
шой группы, затрачивается много времени.
Рис. 109. Пробивание облаков с разворотом
и сбор группы за облаками
Пример. Рассчитать время и длину района сбора группы из 12 самолетов,
если высота нижней кромки облаков 200 м, верхней 5200 м, средняя верти-
кальная скорость набора 30 м/сек, истинная скорость набора 680 км/час, истин-
ная скорость сбора 600 км/час, высота сбора 5600 м, крен на разворотах 30°,
возможная ошибка в выдерживании скорости +30 км/час, пробивание облаков
последовательно по одному в одном направлении, а сбор группы на петле.
Решение:
1) h = 5200 — 200 = 5000 м.
. 5000-2-30 __
2) /без 30-680 15 сек”
Д/взл = 15 сек.; /взл = (12-1)-15 = 165 сек.
3) /ы = + 60 = 246 сек., или 4 мин. 06 сек.
4) ^18о == 90 сек.; R = 5 км.
5) ^сб = 155 + 246 + 60 + 90 = 561 сек., или 9 мин. 21 сек.
Время от начала взлета до выхода группы на радиостанцию будет больше
времени сбора на 4 мин. 06 сек,
6) $сб = -246 + (0,5-165 + 30) + 5000 = 72 км.
и,о о,о
В целях сокращения времени, и особенно участка сбора, проби-
вание облаков рекомендуется производить с разворотом в обла-
ках (рис. 109).
В этом случае каждый самолет от точки входа в облака с за-
данным курсом набирает высоту, равную половине заданной вы*
143
соты сбора, затем разворачивается в облаках на 180° и с преж-
ним режимом пробивает облачность в направлении на радио-
станцию.
Сбор группы производится после прохода радиостанции на петле
или маневрированием скоростью обычным порядком.
Длина района сбора определяется по формулам:
5сб = 0,5 7Н/Н + 0,5 Кб4зл + 2/? (ПРИ сборе на петле),
5сб = 0,5 + Узам/Д (при сборе догоном).
Данный вариант выгоден тем, что ведущий группы может за
облаками отметить момент прохода радиостанции, что особенно
важно для выхода на курс следования в маршрутном полете.
Пробивание облаков в трех направлениях и сбор группы за
облаками. Для сокращения затраты времени на сбор большой
группы пробивание облаков целесообразно производить в трех на-
правлениях с разностью курсов между соседними направлениями
не менее 15°.
Взлет группы производится по одному или парами через одну
треть безопасного интервала пробивания облаков. Если это время
меньше безопасного интервала взлета, то взлет производится через
допустимые интервалы.
Первым взлетает ведущий группы, за ним командиры второго и
третьего звеньев. В такой же последовательности взлетают их ве-
домые.
После взлета каждый летчик (пара) выходит на ориентир на-
чала размыкания и пробивания облаков, доворачивает самолет на
заданный курс и на заданном режиме пробивает облака.
Если пробивание облаков производится в разомкнутом строю
пар, то после выхода на ориентир размыкания ведущие пар го-
ловного звена пробивают облака с курсом взлета, а ведущие пар
ведомых звеньев отворачивают на 30° во внешние стороны и про-
бивают облака с этим курсом (рис. НО).
Одновременно с этим в каждой паре ведомые отворачивают от
своего ведущего во внешнюю сторону на 15° и с новым курсом про-
бивают облака до набора высоты 3000 ж, затем доворачивают са-
молет в сторону своих ведущих на 15° и на параллельных с ними
курсах продолжают пробивание облачности.
Выйдя за облака, ведомые снова доворачивают в сторону своих
ведущих на 15—20° и визуально пристраиваются к ним, после
чего каждое звено собирается на своей петле.
По окончании сбора командир каждого звена по АРК
с КУР = 0 следует на радиостанцию и во время полета визуально
пристраиваются к ведущему группы.
Время сбора и длина района сбора определяются по формулам:
4б = 4зл + 2 (tn + 30 сек.) + /]80;
^сб= КА + Кб (0,5/взл + 30 сек.) + /?,
где 4зл — время взлета всей группы.
144
Ширина района сбора при секторе пробивания облаков 30°
равна примерно половине длины участка сбора, а при секторе про-
бивания 60° — длине этого участка.
Пример. Рассчитать время, длину и ширину района сбора для тех же усло-
вий, что и в предыдущем примере, если пробивание облаков производится по-
следовательно парами в разомкнутом строю в трех направлениях, а сбор
группы — по КУР = 0°.
„ . 5000-2-30 .
Решение: 1) t6e3 = —— =15 сек. Одна треть Гбез меньше допу-
oU•OoU
стимого интервала взлета, поэтому интервал взлета пар должен быть 10 сек.
2) tc6 = (6—1) • 10 + 2 (246 + 30) + 90 = 692 сек., или 11,5 мин.
3) ,S’c6 = .246 — [0,5 (6— 1) • 10 + 30] + 5000 = 66,2 км.
4) В = 6*сб = 66,2 км.
Рис. ПО. Пробивание облаков в трех направлениях и сбор
группы за облаками
Сбор группы может также производиться по расчетному КУР.
В этом случае после сбора звеньев ведущий группы выполняет по-
лет на радиостанцию с КУР = 0°, звено, пробивавшее облака спра-
ва, — с КУР = 320°. а звено, пробивавшее облака слева, —
с КУР = 40°.
Сбор группы заканчивается до радиостанции, благодаря чему
сокращается время сбора.
При большой толщине облачности, ограниченной ширине рай-
она сбора и нежелательности производить сбор в направлении
радиостанции возможно пробивание облаков в следующем порядке.
Взлет группы производится посамолетно через одну треть без-
опасного интервала пробивания облаков.
Самолеты каждого звена пробивают облака в своем, заданном
направлении (рис. 111).
10—98
145
Рис. 111. Пробивание облаков последовательно по одному в трех на-
правлениях и сбор за облаками способом „догона“
Набрав высоту 3000 м, ведомые звенья доворачивают в сто-
рону ведущего группы на 15° и продолжают набор высоты на па-
раллельном с ним курсе до выхода на высоту сбора.
Сбор группы в зависимости от обстановки может осуще-
ствляться маневрированием скоростью или на расчетном магнит-
ном курсе.
При маневрировании скоростью (рис. 111) сбор самолетов каж-
дого звена осуществляется на догоне, после чего ведомые звенья
доворачивают на 20—30° в сторону ведущего группы и визуально
пристраиваются к нему.
Время взлета и сбора группы определяется по формуле
^сб ^взл +
При сборе группы на расчетном МК (рис. 112) командир каж-
дого звена после набора высоты сбора следует по прямой с преж-
ним курсом в течение времени взлета звена плюс 30 сек.
Рис. 112. Пробивание облаков последовательно по одному
в трех направлениях и сбор за облаками на расчетном
курсе
146
По истечении этого времени по команде своего командира звена
ведомые разворачиваются на заданный угол (близкий к 90°), вы-
держивая различные углы крена на развороте и выходят на расчет-
ный МК. Сбор звена производится за счет уменьшения крена ве-
домых на развороте, а сбор группы — догоном ведущего звена,
Время взлета и сбора в этом случае равно
А*б ^взл ~Ь “Ь* 30 сек. ^ур tд,
где
/ ___ 2 Кзед ^без
3 AV *
Пробивание облаков одновременно звеном в одном направле-
нии и сбор группы за облаками. Способ может применяться при
хорошей групповой слетанности и обеспечивает минимальную за-
трату времени на сбор.
Рис. 113. Пробивание облаков одновременно звеном
Взлет группы производится звеньями через интервалы, равные
безопасному интервалу пробивания облаков.
После взлета и выхода в точку начала пробивания облаков
командир звена подает команду на размыкание и, не изменяя
курса, на заданном режиме пробивает облака (рис. 113). Очеред-
ной ведомый переходит в набор по истечении выдержки времени,
определяемой по формуле
4. А^без
^ВЫД 17 >
v в
где А/Убез—безопасное превышение между самолетами.
Командир звена, выйдя на высоту сбора, переводит самолет
в горизонтальный полет и с прежним курсом следует до конца
сбора звена. Ведомые после выхода за облака визуально отыски-
вают ведущего и пристраиваются к нему.
Сбор группы больше звена производится на петле или маневри-
рованием скоростью в обычном порядке.
10*
147
Время и длина района сбора на петле определяются по фор-
мулам:
4б ==:: ^взл + ^выд ^180>
^*сб = КЛ + ^сб (^выд + 0,5/взл) + /?,
где 4ыд—время выдержки замыкающего самолета звена.
При сборе маневрированием скоростью время и длина района
сбора определяются по формулам:
^сб ^взл ^выд Ч~ д,
^сб = Ki Кн + ^выд) + Кам ^д*
Данный способ особенно целесообразно применять, когда на-
правление пробивания облаков совпадает с осью маршрута.
Пример. Рассчитать время и длину района сбора для тех же условий, что
и в предыдущем примере, если безопасные превышения между самолетами
в звене 300 м, взлет звеньями, пробивание облаков одновременно звеном в од-
ном направлении, а сбор группы на петле.
Решение: 1) Д^взл = ^без = сек.
2) ^взл = (3—1)-15 = 30 сек.
3) ^выд — — Ю сек. Для второго ведомого, 20 сек. для третьего и 30 сек.
для четвертого.
4) *18о = 90 сек.; R = 5 км\ tn = 246 сек.
5) ^сб = 30 + 246 + 30 + 90 = 396 сек., или 6 мин. 36 сек.
6) SC6 = V?-246 + (30 + 0,5-30) + 5000 = 59 км.
0^0 0)0
§ 22. ПОСАДКА САМОЛЕТОВ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ
УСЛОВИЯХ
Посадка в сложных метеорологических условиях выполняется
с помощью различных посадочных систем, включающих самолетное
навигационно-пилотажное и специальное оборудование, а также
различные наземные средства.
В Советском Союзе впервые в мире были разработаны системы
посадки по приборам и методика использования их. Первая система
посадки «Ночь-1» была разработана в 1930 г. В 1932 г. летчики
Байдуков и Жерновский успешно осуществили посадку в сложных
метеорологических условиях с помощью радиотехнической системы,
разработанной Н. А. Корбанским.
В настоящее время для обеспечения посадки по приборам при-
меняются надежные и совершенные системы посадки, являющиеся
комплексом радиотехнических и светотехнических средств.
В зависимости от характера посадочной системы заход и рас-
чет на посадку имогут выполняться самостоятельно летчиком или
осуществляться по командам, подаваемым с командного пункта.
Как в том, так и в другом случае заход на посадку может произ-
водиться с прямой или по коробочке.
148
Заход и расчет на посадку с прямой. Заход и расчет на посадку
с прямой применяются при выходе на аэродром посадки одиночных
самолетов и групп за облаками и выполняются следующим обра-
зом (рис. 114).
Выполняя полет выше облачности, летчик выводит самолет на
дальнюю приводную радиостанцию аэродрома с курсом, близким
к обратному посадочному курсу, и на подходе к ней запрашивает
у руководителя полетов разрешение и условия посадки.
Получив эти данные, летчик должен установить на барометри-
ческом высотомере давление на уровне аэродрома и включить ра-
диовысотомер РВ-2.
Рис. 114. Заход и расчет на посадку с прямой
В момент выхода на радиостанцию летчик пускает секундомер,
выполняет соответствующий маневр для точного выхода на поса-
дочный курс и продолжает полет с курсом, обратным посадочному
или близким к нему, в течение расчетного времени горизонтального
полета /г.п.
Это время должно быть таким, чтобы по его истечении само-
лет оказался на удалении от радиостанции, которое обеспечивает
пробивание облаков на заданном режиме и выход под облака на
заданной высоте (обычно 200 м) в точку, которая находится
в 30 сек. полета до дальнего маркерного пункта (ДМП).
С достаточной для практики точностью можно принять, что
е — с
° А Б — °ВГ*
Выразив эти расстояния через скорость и время, получим:
Vr.n(Yr. „ —30 сек.) Кн-
v в
Откуда
, // — 200 .. . „„
А-. п VBVr п ^сн сек.,
149
где Н — высота выхода на дальний маркерный пункт;
VCH — средняя истинная поступательная скорость снижения;
Vr. п — истинная скорость горизонтального полета от ДМП;
VB — вертикальная скорость снижения.
Так как над радиостанцией наблюдается воронка неустойчивой
работы радиокомпаса, то практически время горизонтального по-
лета может быть меньше расчетного на величину запаздывания
стрелки указателя курсовых углов в отметке момента прохода ра-
диостанции.
Для радиокомпаса с открытой антенной, расположенной в фо-
наре самолета, радиус этой воронки примерно равен двум высотам
полета, следовательно, время запаздывания равно
+ _ (2Н
* V
v г. п
По истечении времени „летчик выполняет разворот на поса-
дочный курс, выпускает шасси и на заданном режиме пробивает
облака, выдерживая заданное направление по магнитному компасу
и радиокомпасу, а высоту по РВ-2 и барометрическому высото-
меру. Пробив облака и выйдя на дальнюю приводную радиостан-
цию, летчик переключает радиокомпас на ближнюю приводную ра-
диостанцию, доворачивает самолет на посадочный курс, переводит
его в режим снижения и выпускает закрылки в посадочное положе-
ние. Над ближней радиостанцией летчик при необходимости снова
доворачивает самолет на посадочный курс и визуально (по светотех-
ническим средствам) уточняет расчет и производит посадку.
Посадка самолетов по командам с земли производится анало-
гичным образом. Разница состоит лишь в том, что после входа
самолета в зону действия наземных радиолокационных средств си-
стемы посадки, высота и положение самолета относительно поса-
дочного курса определяются на соответствующих индикаторах и
при наличии ошибок летчику подается команда для выхода на
глиссаду планирования.
Точный заход на посадку обеспечивается выполнением спе-
циального маневра после выхода на ДМП с маршрута. Приме-
няются маневры: отворот на расчетный угол; два разворота на 180°;
круг над радиостанцией; стандартный разворот.
Первые два маневра применяются при заходе на посадку оди-
ночных самолетов и групп, а последние два — в основном только
при заходе на посадку одиночных самолетов.
Отворот на расчетный угол (РУ) применяется при
выходе на дальнюю приводную радиостанцию с курсом, отличаю-
щимся от обратного посадочному не более чем на 45°, и выпол-
няется следующим образом (рис. 115).
В момент пролета радиостанции летчик отворачивает самолет
на курс, отличающийся от обратного посадочному на расчетный*
угол, и продолжает полет по прямой в течение времени /ГЛ1, затем
разворачивается на посадочный курс и производит снижение и по-
150
Рис. 115. Выход на посадочный курс отворотом на рас-
четный угол
садку, как описано выше. Ввиду малой величины РУ в треуголь-
нике АБР сторону БР можио принять за гипотенузу.
Тогда
tgpy—Hr--
v г. п *т. п
Эта формула решается на навигационной линейке.
Пример. Определить время горизонтального полета и расчетный угол отво-
рота, если высота выхода на ДМП равна 5000 м, средняя истинная скорость
снижения 500 км/час, средняя вертикальная скорость снижения до высоты
2000 м равна 30 м/сек, с 2000 до 1000 м — 20 м/сек и с 1000 до 200 м —
5 м/сек, угол крена на развороте 30°.
п 2 500 /5000—2000 , 2000—1000 . 1000—200 \ ,
Решение: 1Мг. п = — (-------------+-----------+-----------j +
+ 30 сек. = т^тг'(100 + 50 + 160) + 30 — 290 сек., или 4 мин. 50 сек.
600
2) Sr.n = Vr. п <r. п = yg -290 = 48 км.
3) Я = 0,078 ^^ = 4,9 0,.
tg 30°
2-4 9
4) tg РУ= = 0,21; РУ = 12°.
Величина РУ рассчитывается заранее для различных высот
полета, и данные расчетов сводятся в таблицу.
Маневр выхода на посадочный курс отворотом на РУ прост
в выполнении и требует минимальной затраты времени.
Два разворота на 180° применяются при выходе на ра-
диостанцию с магнитным курсом, близким к посадочному (рис. 116).
В момент пролета ДМП летчик доворачивает самолет на посадоч-
Рис. 116. Выход на посадочный курс выполнением
двух разворотов на 180°
151
ный курс, после чего сразу же разворачивается на обратный поса-
дочному и выдерживает прямую в течение времени tr п. По истече-
нии этого времени летчик разворачивает самолет на 180° в сторону
плоскости посадки и производит пробивание облаков в обычном
порядке. Угол крена на обоих разворотах выдерживается одина-
ковым.
Данный способ может также применяться при уходе на второй
круг.
Круг над радиостанцией применяется при выходе на
дальнюю приводную радиостанцию с магнитным курсом, отличаю-
щимся более чем на 45° от курса, обратного посадочному, и со-
стоит в следующем (рис. 117).
В момент пролета радиостанции летчик вводит самолет в раз-
ворот с заданным креном (например, 30°) и выдерживает его до
КУР = 270° при левом развороте или 90° при правом.
Рис. 117. Выход на посадочный курс с выполнением круга над ра-
диостанцией
В момент показания указателем курсовых углов заданного КУР
(270 или 90°) летчик постепенно уменьшает крен до половины
первоначального (до 15°) и, удерживая КУР = 270° (90°), выпол-
няет разворот на курс, равный обратному посадочному. За 5—10°
до этого курса летчик выводит самолет из разворота, уточняет курс
и следует по прямой в течение времени 4.™ затем разворачивается
в сторону первоначального разворота с креном 30° и пробивает
облака.
Для уменьшения времени выполнения маневра разворот сле-
дует выполнять в ту сторону, откуда самолет вышел на радиостан-
цию относительно направления захода на посадку.
Стандартный разворот применяется при выходе на
радиостанцию с курсом, близким к обратному посадочному или от-
личающимся от него не более чем на +45°, и выполняется следую-
щим образом (рис. 118).
152
В момент выхода на дальнюю радиостанцию летчик доворачи-
вает самолет на курс, обратный посадочному, и выдерживает его
в течение времени /г.п, которое определяется по формуле
/ _ #—200 v
Ггп — VBl/r.n Исн’
По истечении этого времени летчик разворачивает самолет с за-
данным креном вправо на 80°, затем переводит самолет в левый
разворот с тем же креном и со снижением выполняет его до выхода
на посадочный курс.
Заход и расчет на посадку по коробочке. Заход и расчет на по-
садку по коробочке применяется при уходе на второй круг и в за-
висимости от высоты нижнего края облаков может выполняться
в облаках или под облаками. Сущность метода состоит в следую-
щем (рис. 119).
В момент прохода ближней приводной радиостанции летчик за-
секает время и с набором высоты следует в течение одной минуты,
затем разворачивается влево на 90° и, переключив радиокомпас на
дальнюю приводную радиостанцию, следует по прямой.
При КУР = 240° летчик выполняет разворот на 90° и выдержи-
вает курс, равный обратному посадочному. Третий разворот выпол-
няется при КУР = 240°, а четвертый — при КУР = 290°.
Рис. 119. Расчет и заход на посадку методом „большая коробочка"
153
СП
4*
Рис. 120. Расчет и заход на посадку при помощи совмещенного указателя ДГМК и АРК
После выполнения четвертого разворота порядок расчета на по-
садку тот же, что и при заходе с прямой.
При правой коробочке второй и третий развороты выполняются
при КУР =120°, а четвертый — при КУР = 70°.
Выдерживание заданных курсов и разворот по КУР обеспечи-
вают точный расчет на посадку.
При управлении посадкой с КП положение самолета на маршруте
коробочки определяется на соответствующем индикаторе радиоло-
катора, на который заранее наносится этот маршрут.
В случае неточного выдерживания маршрута летчику дается
команда на изменение курса, а при подходе самолета к точке на-
чала разворота подается команда на разворот.
При наличии на самолете совмещенного указателя ДГМК и АРК
летчик на первом развороте добивается совмещения конца стрелки
курсозадатчика, установленного на курс взлета, с треугольным
индексом на внешней шкале (индексом, соответствующим
КУР = 90°). Стрелка курсозадатчика удерживается на треугольном
индексе 90° (по шкале КУР) до тех пор, пока стрелка радиоком-
паса не укажет КУР = 240°, после чего летчик выполняет второй
разворот (рис. 120). После окончания второго разворота стрелка
курсозадатчика должна быть совмещена с нижним треугольным
индексом.
Третий и четвертый развороты выполняются при соответствую-
щих курсовых углах радиостанции.
Выполняя четвертый разворот, летчик добивается совмещения
стрелок курсозадатчика и радиокомпаса с нулевым треугольником
шкалы КУР.
Совмещенный указатель облегчает летчику выполнить заход
и расчет на посадку вне видимости земли.
Исправление ошибок расчета на посадку
Исправление ошибок в процессе разворота на посадочный курс.
Вследствие неучета влияния ветра при выполнении маневра захода
на посадку и ошибок в пилотировании самолет может выйти
в точку начала разворота на посадочный курс с некоторыми ошиб-
ками. Эти ошибки должны быть исправлены в процессе разворота.
Правильность выхода на посадочный курс контролируется
в конце четвертого разворота примерно за 30° до его окончания.
При правильном развороте разница между углом доворота на по-
садочный курс по магнитному компасу и радиокомпасу не превы-
шает 1—2° и ею можно пренебречь. Следовательно, если стрелка
курсовых углов не доходит на 30° до нуля, а указатель курса маг-
нитного компаса на 30° до посадочного курса и в дальнейшем обе
стрелки перемещаются с одинаковой скоростью (первая к нулю,
вторая к курсу посадки), то разворот выполняется правильно.
Если же стрелка курсовых углов приближается к нулю с большей
угловой скоростью, чем указатель курса магнитного компаса
к курсу посадки, необходимо уменьшить крен, а если стрелка кур-
155
Рис. 121. Исправление ошибок выхода па посадочный курс на четвертом
развороте
совых углов приближается с большей скоростью, крен надо увели-
чить (рис. 121).
Изменяя крен, надо добиться, чтобы в конце разворота курсо-
вой угол был равен нулю, а магнитный курс — посадочному курсу.
Исправление ошибок после выхода из разворота на посадочный
курс. Если выход из разворота на посадочный курс выполнен не
точно и ошибка выхода превышает + 10°, необходимо исправить
курс.
Исправление курса после разворота производится на планиро-
вании до высоты 200 м отворотом самолета на угол, равный ошибке
выхода или же отворотом от направления на радиостанцию на
постоянный угол 10°.
Исправление курса отворотом самолета на
угол, равный ошибке выхода, производится следующим образом
(рис. 122).
Выдерживая по радиокомпасу направление полета на радио-
станцию (КУР = 0°), летчик замечает разность Да между задан-
ным посадочным и фактическим курсами. Если фактический курс
полета больше посадочного, самолет находится слева плоскости
посадки, а если меньше посадочного — справа.
Курс полета исправляют доворотом самолета на величину ошибки
в сторону, противоположную уклонению самолета от оси ВПП.
Рис. 122. Исправление ошибок выхода 4на посадочный курс
после четвертого разворота
156
После доворота определяют значение курсового угла к моменту
выхода в плоскость посадки.
Как видно из рисунка, курсовой угол к моменту выхода само-
лета в плоскость посадочного курса равен 360°+ 2 Да (при укло-
нении самолета влево КУР = 360° — 2Да, при уклонении самолета
вправо КУР = 2 Да).
Разворот на посадочный курс начинают, когда стрелка указа-
теля радиокомпаса не дойдет до расчетного курсового угла при-
мерно на 3—5° и выполняют его до КУР = 0°.
Пример. Заданный компасный курс посадки 270°. После разворота на по-
садочный курс при КУР = 0° компасный курс оказался равным 285°.
Произвести исправление курса.
Решение: 1) Самолет находится левее плоскости посадки:
Да = 270—285 = —15°.
2) Надо взять курс: МКиспр = 285 + 15 — 300°.
3) КУР в момент выхода в плоскость посадки равен 360 — 2-15 = 330°.
Разворот начинать при КУР = 332-4- 335°.
Рис. 123. Исправление ошибок выхода на посадочный курс
отворотом самолета на постоянный угол 10°
Исправление ошибок данным способом требует от летчика под-
счета Да и угла отворота, что представляет известную трудность.
Исправление ошибки выхода на посадочный
курс более просто можно произвести отворотом самолета от на-
правления «а радиостанцию на постоянный угол 10°. Сущность спо-
соба состоит в следующем (рис. 123).
После выхода из разворота на курс посадки (КУР = 0°) и об-
наружения ошибки Да летчик доворачивает самолет в сторону
плоскости посадки на угол 10° (заведомо больший возможного угла
сноса) и в дальнейшем выполняет полет по радиокомпасу на даль-
нюю приводную радиостанцию с КУР = 10° (350°). В процессе по-
лета к радиостанции по радиодромии курс постепенно будет при-
ближаться к посадочному.
При выходе самолета в плоскость посадки курс полета будет
отличаться от посадочного на 10°. В этот момент самолет довора-
чивают на КУР = 0°; в дальнейшем выполняют полет с курсом,
равным посадочному.
157
При этом ошибка в выходе на посадочный курс за счет дово-
рота самолета практически не будет превышать точности выдержи-
вания курса.
При выполнении посадки по командам с земли летчик выходит
На посадочный курс, руководствуясь указаниями с КП.
Наличие бокового ветра при снижении создает боковое уклоне-
ние самолета от плоскости посадочного курса, что вызывает необ-
ходимость учета сноса. Угол сноса на курсе посадки определяется
летчиком до вылета либо запрашивается у руководителя полетов
перед посадкой.
После точного выхода в плоскость посадки летчик доворачивает
самолет на курс полета с учетом угла сноса.
При сносе вправо необходимо выдерживать МК = МКП — УС,
а КУР = УС, при сносе влево — МК = МКП + УС, а КУР =
= 360 — УС.
Роспуск группы за облаками
Для сокращения времени при роспуске группы за облаками
маршрут полета следует выбирать так, чтобы после выполнения
задания группа выходила на аэродром посадки в плоскости взлетно-
посадочного курса. Размыкание группы по подразделениям может
производиться на маршруте полета к аэродрому маневрированием
скоростью или на петле в районе пробивания облаков. Роспуск
звеньев посамолетно на безопасные интервалы пробивания обла-
ков вниз производится, как правило, на петле перед входом
в облака.
При выходе на аэродром с посадочным курсом или курсом,
близким к нему, роспуск группы за облаками производится следую-
щим образом (рис. 124).
На подходе к аэродрому командир группы, получив разрешение
и условия посадки, передает ведомым по радио время полета от
радиостанции до точки входа в облака tr п, безопасный интервал
пробивания облаков вниз, курс посадки и следует на ДМП по ра-
диокомпасу.
В момент прохода радиостанции ведущий доворачивает группу
на посадочный курс и подает команду ведомым на размыкание по
звеньям.
По этой команде внутреннее по отношению к развороту звено
разворачивается на 180° и с курсом, обратным посадочному, сле-
дует в точку роспуска звена посамолетно. Каждое очередное звено
разворачивается через время, равное половине времени посадки
звена посамолетно.
В момент прохода траверза радиостанции командир каждого
звена засекает время и следует по прямой в течение времени /г.п,
затем подает команду на роспуск звена посамолетно. По этой
команде ведомый, в сторону которого должен происходить разворот,
разворачивается на 180° и на заданном режиме пробивает облака.
Очередной ведомый разворачивается на посадочный курс через
158
половину безопасного временного интервала пробивания облаков
вниз после начала разворота впереди идущего самолета.
Чтобы все самолеты звена входили в облака в одной и той же
точке, второй ведомый после разворота на посадочный курс следует
по прямой в течение времени, равного половине безопасного интер-
вала, третий — в течение времени, равного одному и четвертый —
полутора безопасным интервалам. По истечении указанных интер-
валов времени самолеты проходят в режим снижения. Пробив
облака, каждый летчик самостоятельно выводит самолет на радио-
станцию и совершает посадку.
Рис. 124. Роспуск группы за облаками при выходе на ДМП с поса-
дочным курсом
Продолжительность роспуска и посадки группы и длина района
роспуска рассчитываются по формулам:
Атос 2 А*. п 4“ 0 А^пос 4“ ^зсо»
^росп = К*, п [*г. п + 0,5 (л- 1) A^nocJ + 2/?,
где Д/пос — интервал посадки.
Пример. Высота полета за облаками 5000 м, толщина облачности 4500 м,
истинная скорость горизонтального полета 600 км/час, время разворота на 360°
равно 2 мин., радиус разворота 5 км, истинная скорость снижения 500 км/час,
средняя вертикальная скорость снижения до высоты 2000 м — 30 км/час,
с 2000 до 1000 м — 20 м/сек, с 1000 до 200 м— 5 м/сек, возможная ошибка
в выдерживании скорости +20 км/час.
Рассчитать время роспуска и посадки группы 12 самолетов и длину рай-
она роспуска.
„ 1Ч 4 2-20 /2700 . 1000 , 800\
Решение: 1) t6e3 = + -у 1 = 24 сек., Д/пос = 24 сек.
159
пч , 500/3000 1000 800\ ,
2) *г. п = goo ( ~30~ + ^2СГ + “5/ + 30 сек* = сек., ИЛИ 4 МИН‘ 50 Сек*
3) ^пос = 2-290 + (12—1)-24 + 120 = 964 сек., или 16 мин. 04 сек.
4) Spocn = yg [290 + 0,5 (12—1)-24] + 2-5 = 82 км.
При выходе на аэродром с курсом, близким к обратному поса-
дочному, роспуск группы производится в следующем порядке
(рис. 125).
Выйдя на дальнюю приводную радиостанцию, ведущий группы
берет курс, отличающийся от курса, обратного посадочному, на
расчетный угол отворота РУ и следует с этим курсом в течение
Рис. 125. Роспуск группы за облаками при выходе на ДМП с курсом, обрат-
ным посадочному
По истечении этого времени ведущий доворачивает группу на
курс, равный обратному посадочному, и подает команду на рос-
пуск группы посамолетно.
Крайний ведомый, в направлении которого происходит разво-
рот, по этой команде разворачивается на 180° и на заданном режиме
пробивает облака в направлении приводной радиостанции.
Последующие ведомые по одному через интервалы времени,
равные половине безопасного временного интервала, после начала
разворота впереди идущего самолета разворачиваются на посадоч-
ный курс и пробивают облака.
Чтобы все самолеты выходили под облака в одной точке (за
30 сек. полета до радиостанции), пробивание облаков вниз следует
начинать также в одной точке.
Время полета после разворота на посадочный курс до точки
входа в облака для любого самолета подсчитывается по формуле
Аг. и. р = 0,5 (А/ 1) ^6езг
160
где N— порядковый номер самолета при отвороте на посадочный
курс.
При роспуске группы этим способом время роспуска и посадки
будет меньше на время разворота на 180°, а длина района —
меньше на радиус разворота по сравнению с роспуском группы пре-
дыдущим способом.
При полете за облаками в составе большой группы в целях со-
кращения длины района роспуска вначале рекомендуется произ-
вести размыкание подразделений на петле над радиостанцией, а за-
тем каждое подразделение разомкнуть посамолетно в порядке,
описанном выше.
11-98
'.............. ☆ ==^=z===^^
ГЛАВА ПЯТАЯ
ШТУРМАНСКАЯ ПОДГОТОВКА И ВЫПОЛНЕНИЕ ПОЛЕТА
§ 23. СУЩНОСТЬ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ТЕХНИЧЕСКИХ
СРЕДСТВ САМОЛЕТОВОЖДЕНИЯ
Для осуществления полета от одной точки на земной поверх-
ности к другой летчик должен строго выдерживать заданный или
рассчитанный режим полета, а также производить навигационные
определения в целях контроля этого режима и сохранения ориен-
тировки. Навигационные определения элементов движения самолета
производятся при помощи различных технических средств самолето-
вождения.
Теория и практика показывают, что во всех условиях навига-
ционной обстановки полета наибольшая точность и безопасность
полета достигаются путем комплексного использования всех техни-
ческих средств самолетовождения, имеющихся в распоряжении
летчика. Универсальных средств самолетовождения не существует,
поэтому нельзя в течение всего полета использовать только одно из
них и пренебрегать другими. Летчики, отдающие предпочтение
одному какому-либо «излюбленному» средству часто при усложне-
нии обстановки попадают в затруднительное положение.
Для успешного выполнения любого полета надо умело исполь-
зовать различные технические средства самолетовождения. Так, на-
пример, чтобы выйти на наземный радиопеленгатор, летчик должен
запросить его пеленг, а затем выдерживать направление полета по
магнитному компасу. При выполнении полета на радиостанцию по
радиокомпасу летчик должен контролировать направление полета
по магнитному компасу, а пройденный путь — по скорости полета
и времени, чтобы убедиться в том, что он выполняет полет на за-
данную радиостанцию, а также знать свое местонахождение на
случай отказа радиокомпаса или создания помех приводной радио-
станции.
Средства самолетовождения выбирают, исходя из их возможно-
стей, обстановки полета и требуемой точности навигационных опре-
делений. Так, например, при полете ночью на значительном удале-
нии от радиостанции определить линию положения самолета при
помощи радиокомпаса с достаточной точностью не представляется
возможным. В этом случае ориентировку лучше вести по световым
162
ориентирам и пеленгам наземных радиопеленгаторов. Днем в про-
стых метеорологических условиях самолетовождение на средних
высотах может успешно осуществляться при помощи общих средств
и визуальной ориентировки. При полетах на больших высотах
ошибки навигационных определений по земным ориентирам дости-
гают больших значений. Поэтому для контроля пути должны быть
использованы радиотехнические средства, в том числе наземные
радиолокаторы.
При выборе средств самолетовождения необходимо также учи-
тывать простоту навигационных определений и затрату времени
на их выполнение. Так, из двух средств, дающих хотя и различ-
ную точность определения места самолета, но не ниже допустимой
на данном этапе полета, следует использовать то средство, при по-
мощи которого место самолета определяется наиболее просто и
быстро.
Комплексное применение средств самолетовождения также
означает, что результаты навигационных определений, полученные
при помощи одних средств, необходимо дублировать, уточнять при
помощи других средств. Например, определив место самолета про-
кладкой пути, необходимо уточнить его сличением карты с мест-
ностью или по линиям радиопеленгов. Рассчитав курс и время вы-
хода на поворотный ориентир, момент разворота на новый курс
при полете за облаками надо определить не только по времени, но
и по курсовым углам радиостанции и т. д.
Такое дублирование исключает грубые ошибки, повышает точ-
ность и надежность самолетовождения.
Комплексное применение средств самолетовождения означает,
наконец, что в любом полете, на любом его этапе радиотехниче-
ские и другие средства должны применяться совместно с общими
средствами.
Без общих средств самолетовождения невозможно осуществлять
непрерывное счисление пути, а без последнего практически невоз-
можны сложные маршрутные полеты.
Счисление и прокладка пути есть основа ведения ориентировки
как с помощью технических средств, так и визуально, и пренебре-
гать этой основой нельзя ни в одном маршрутном полете.
Таким образом, точность и безопасность самолетовождения
в значительной мере зависят от умения летчика использовать в по-
лете имеющиеся в его распоряжении средства самолетовождения
и от качества их подготовки к полету.
§ 24. ШТУРМАНСКАЯ ПОДГОТОВКА ПОЛЕТА
Маршрутный полет требует от летчика значительного напряже-
ния воли и правильного распределения внимания. Он всегда насы-
щен разнообразными действиями по осуществлению пилотирования,
осмотрительности, самолетовождения и т. д. Для успешного выпол-
нения этого комплекса работы каждый полет необходимо заблаго-
временно подготовить в штурманском отношении.
11* 163
Цель штурманской подготовки полета состоит в том, чтобы до
минимума сократить объем работы летчика в полете, выбрать наи-
выгоднейшие приемы самолетовождения, наметить план комплекс-
ного использования технических средств по участкам маршрута
в зависимости от характера задания и обстановки полета, произ-
вести выбор (расчет) режимов полета на каждом его этапе и тем
самым подготовить необходимые условия для успешного выполне-
ния предстоящего полета.
Штурманская подготовка полета начинается с момента получе-
ния задания на полет и проводится под руководством штурмана
группы по единому плану для всех летчиков.
В штурманскую подготовку полета входит выбор и прокладка
маршрута; изучение маршрута, метеорологических данных и средств
земного обеспечения самолетовождения (ЗОС); расчет полета; раз-
работка штурманского плана полета; подготовка навигационного
оборудования и личного снаряжения; контроль готовности к вылету.
Независимо от срочности вылета летному составу всегда должен
быть предоставлен необходимый минимум времени для штурман-
ской подготовки.
Выбор и прокладка маршрута
Маршрут полета, если он не указан в задании, намечает штур-
ман группы, исходя из поставленной задачи, а также тактической
и навигационной обстановки и утверждает командир группы.
В учебных полетах маршрут выбирается в соответствии с ха-
рактером летного упражнения.
Во всех случаях маршрут полета должен отвечать требованиям
скрытности и наиболее выгодного направления захода на цель,
надежности ориентировки по земным ориентирам и средствам ЗОС,
а также безопасности полета. Во всех случаях маршрут полета не
должен иметь большого числа изломов.
Маршрут полета определяется следующими основными точками:
ИПМ — исходный пункт маршрута, ППМ — поворотный пунктмарш-
рута, ПБР — пункт боевого расхождения, ЦЕЛЬ, ИПОМ — исход-
ный пункт обратного маршрута, КПМ — конечный пункт маршрута.
Основные точки маршрута намечаются так, чтобы обеспечива-
лась возможность и необходимая точность выхода на цель и аэро-
дром посадки после выполнения задачи. При полете в сложных
метеорологических условиях в качестве ИПМ и КПМ назначаются
радионавигационные точки, а также намечаются средства ЗОС,
обеспечивающие выход на цель.
По этим точкам маршрут прокладывается на полетной карте
четкой сплошной линией карандашом любого цвета, хорошо замет-
ного на фоне карты, с обязательным учетом радиуса разворота
самолета или группы. В зависимости от значения данного поворот-
ного пункта маршрута (ППМ) в отношении точности и безопас-
ности самолетовождения разворот самолета или группы на новый
курс может начинаться над ППМ, заканчиваться над ППМ или
производиться без захода на него (рис. 126).
164
Рис. 126. Разворот на
новый курс без захода
на ППМ
Рис. 127. Разворот на новый курс над ППМ
Для одноместных самолетов наиболее целесообразными яв-
ляются первые два способа.
Начинать разворот над ППМ (рис. 127) рекомендуется в тех
случаях, когда он является характерным ориентиром (или РНТ),
обеспечивающим достоверность определения места самолета. Если
же требуется точно по времени определить момент отхода от ориен-
тира и произвести этот отход с заданным курсом (например, при
выходе на цель, при отходе от ИПМ за облаками), то разворот це-
лесообразнее производить так, чтобы он заканчивался над ППМ
(рис. 128).
Чтобы провести линию пути с учетом радиуса разворота, необ-
ходимо от ППМ отложить по перпендикуляру к линии подхода
(или отхода) радиус разворота самолета и провести этим радиу-
сом дугу, а затем от следующего ориентира провести к этой дуге
касательную. Точка касания и будет являться точкой окончания
(или начала) разворота. Если по условиям погоды полет происхо-
дит при видимости земли, то вблизи этих точек следует выбирать
ориентиры для контроля выполнения разворота. Около точки на-
чала разворота по ходу полета на карте надписываются скорость,
угол крена на развороте и время разворота. При полете в составе
группы ведомые записывают данные элементов разворота для сво-
его самолета.
Если на прямолинейном участке маршрута путевой угол между
поворотными ориентирами и:
пути следует прокладывать
по локсодромии.
После прокладки линии
заданного пути намечают
контрольные ориентиры и
производят разметку пути.
Разметка пути состоит в
нанесении на карту расстоя-
ний, магнитных путевых
Рис. 128. Отход от ППМ с заданным
курсом
165
углов и компасных курсов, времени полета по участкам маршрута,
превышений местности и других данных, необходимых летчику в по-
лете. Она облегчает летчику выдерживание заданного направления
полета и выполнение различных расчетов.
Контрольные ориентиры намечаются на каждом участке марш-
рута на удалении 50—75 км друг от друга, а при полетах на боль-
ших высотах и в стратосфере— 100—125 км.
Справа от линии пути между контрольными ориентирами запи-
сывают расстояние, время полета до очередного контрольного ориен-
тира с точностью до 0,5 мин. и компасный курс. На прямолиней-
ных участках маршрута значения компасного курса записывают
через каждые 15—20 см карты и при изменении магнитного скло-
нения более чем на 1°.
Для ведения в полете счисления и прокладки пути целесооб-
разно участки между поворотными ориентирами разбить на двух-
или пятиминутные отрезки или на отрезки по 50 км. При такой
разбивке летчик в любой момент полета, зная время отхода
от ППМ, может определить штилевое место самолета расчетом
в уме или пользуясь показаниями навигационного индикатора.
Расчетное время прибытия на контрольные ориентиры записы-
вается справа от ориентира.
Отметки наиболее характерных высот местности по маршруту,
имеющие значение для безопасности полета или ориентировки, об-
водятся прямоугольниками. В районе цели отмечается превышение
местности (знаком плюс, если местность выше аэродрома взлета,
или знаком минус, если она ниже). Кроме того, на карту нано-
сится вектор ветра, зоны действия средств ЗОС по высотам и маг-
нитное склонение.
Все цифры при разметке пути необходимо наносить четко и
ясно, чтобы они не загромождали карту. В зависимости от наме-
ченного штурманского плана полета на карту могут наноситься и
некоторые данные предварительных расчетов полета. Так, при по-
лете в ясную погоду на карту желательно нанести сетку боковых
уклонений у контрольных ориентиров, а при полете вне видимости
земли — сетку линий радиопеленгов.
Подготовленная карта укладывается в планшет так, чтобы ею
в полете было удобно пользоваться. На район цели или аэродром
посадки (при перелетах) готовится карта крупного масштаба для
ведения по ней визуальной ориентировки.
Изучение маршрута, метеорологических данных и средств ЗОС
Одновременно с прокладкой маршрута на карте летчик изучает
его. Хорошее знание маршрута полета значительно облегчает ориен-
тировку и обеспечивает успешное выполнение задания.
Изучая маршрут, летчик должен запомнить основные линейные
ориентиры, ограничивающие полет по дальности и направлению;
взаимное расположение линейных и характерных площадных ориен-
тиров и возможности использования их для ориентировки по эта-
166
пам маршрута; общий характер местности и изменение рельефа по
маршруту; местонахождение аэродромов, запретных зон, входных и
выходных ворот; ориентиры, определяющие линию фронта или го-
сударственную границу.
Магнитные путевые углы, расстояние и путевое время по уча-
сткам летчик должен знать на память.
Наиболее тщательно изучаются район цели или аэродрома по-
садки (при перелетах), для чего, кроме полетной карты и карты
навигационной обстановки, используются карты крупного масштаба,
фотосхемы и другие справочные пособия. Большую помощь в из-
учении маршрута и района цели могут оказать летчики, ранее
летавшие в этом районе.
При изучении цели летчик должен наметить характерные ориен-
тиры, обеспечивающие быстрое отыскание цели, выяснить ее харак-
тер и размеры, противовоздушную оборону и превышение над аэро-
дромом вылета. На случай ухудшения метеорологической обста-
новки необходимо наметить вспомогательные ориентиры, обеспечи-
вающие отыскание цели.
Одновременно с изучением маршрута необходимо наметить
порядок использования средств ЗОС на различных этапах марш-
рута, определив при этом, какие из них будут использованы для
контроля пути по направлению и по дальности. Намечаются также
радионавигационные средства, обеспечивающие выход в район цели
и на аэродром посадки.
Данные о работе средств ЗОС, намеченных для использования
в данном полете, выбираются из перечня средств ЗОС.
Погода по маршруту изучается по последней синоптической
карте, метеорологическим бюллетеням, а также путем консультации
со специалистами метеорологической службы.
При полете за облаками перед вылетом обычно высылается са-
молет для разведки погоды в районе аэродрома и на маршруте.
Наиболее важными данными разведки являются сведения о факти-
ческом состоянии атмосферы.
В результате изучения метеорологических данных необходимо
иметь ясное представление о фактической погоде по маршруту и
о возможных изменениях ее за время полета. Особое внимание при
изучении погоды летчик должен обратить на распределение облач-
ности по маршруту и на возможность встречи в пути с опасными
явлениями погоды. При полетах в облаках и за облаками необхо-
димо запомнить высоту нижней кромки и толщину облаков, а также
выяснить характер облаков и условия полета в них.
Расчет полета
Расчет полета выполняется после прокладки маршрута и имеет
целью определить следующие элементы полета: продолжительность
взлета и сбора группы; продолжительность роспуска группы и по-
садки; длину участков пути между поворотными пунктами и общую
длину маршрута; путевое время по участкам маршрута и общую
167
продолжительность полета; резерв горючего (выраженный во вре-
мени) в зависимости от продолжительности полета и полного за-
паса горючего; время взлета и прохода ИПМ для выхода на цель
в заданное время; время посадки; наступление темноты и рассвета;
безопасную высоту полета.
Расчет полета подразделяется на предварительный и оконча-
тельный.
Предварительный расчет полета производится по
истинной воздушной скорости по участкам маршрута, и его данные
наносятся на карту. На основании предварительного расчета полета
определяется приближенно время взлета.
Окончательный расчет полета производится перед вы-
летом по данным о шаропилотном ветре (давностью не более
одного часа до вылета), и его результаты записываются в бортовом
журнале наколенного планшета. На основании окончательного
расчета назначается точное время вылета и прохода ИПМ.
Если выход на цель производится в заданное время, то на карту
целесообразно наносить и расчетное время выхода на контрольные
ориентиры. Это облегчит летчику контроль точности выполнения
полета по времени.
На карте компасные курсы и путевое время надписываются
справа от линии пути по направлению полета.
При отсутствии данных о ветре таблица расчетов полета запол-
няется по данным предварительного расчета.
Длина отдельных участков маршрута определяется по карте.
Общая длина маршрута определяется как сумма расстояний от
ИПМ до КПМ с учетом длины пути на разворотах.
Расстояние по дуге разворота подсчитывается по формуле
с — р УР
°УР~^ бо •
Общая продолжительность полета определяется как сумма вре-
мени взлета и сбора, полета до ИПМ, полета по маршруту, пре-
бывания над целью, роспуска и посадки. В истребительной авиа-
ции при боевых вылетах в общую расчетную продолжительность
полета включается время на ведение воздушного боя.
Время вылета определяется как разность заданного времени
выхода на цель и путевого времени полета до цели с момента
взлета. Время посадки рассчитывается как сумма времени взлета
и общей продолжительности полета.
Запас горючего, выраженный во времени, определяется как раз-
ность технической продолжительности полета группы на заданном
режиме и общей продолжительности данного полета, увеличенной
на 10% за счет возможных отклонений от маршрута.
Техническая продолжительность полета определяется на осно-
вании инструкций по расчету дальности и продолжительности по-
лета для данного типа самолета.
Если запас горючего не обеспечивает полет в течение времени,
равного 10% от общей продолжительности полета по маршруту,
168
необходимо произвести точный расчет расхода горючего по этапам
полета и на основании этого убедиться в возможности выполнения
полета при полной заправке самолета.
Время наступления темноты и рассвета рассчитывается по гра-
фикам или таблицам Солнца.
Пример. Произвести окончательный расчет полета группы в составе 12 са-
молетов для следующих условий:
Л) Маршрут и режим полета по участкам
Маршрут н ^ист 5 МПУ дк
ИПМ 2000 700 60 280 —2
Ориентир А 6000 800 140 280 —2
Ориентир Б 6000 800 60 220 + 2
Цель 6000 800 30 155 0
ИПОМ 6000 800 160 80 -3
Ориентир Д 6000 800 50 80 —3
КПМ 1000 600 — — —
2) Взлет группы парами через интервал 20 сек., сбор разворотом на 180°,
время разворота на 180° составляет 2 мин.; посадка по одному через интервал
30 сек.
Время полета от аэродрома до ИПМ равно 2 мин., а от КПМ до аэро-
дрома 3 мин.
3) Время удара 10 час. 30 мин., продолжительность пребывания над целью
5 мин.
4) Техническая продолжительность полета группы на высоте 6000 м равна
1 час 50 мин.
5) Ветер: на высоте 4000 м — направление 250°, скорость 70 км/час-, на вы-
соте 6000 м — направление 250°, скорость 80 км/час.
Решение: 1) На основании данных о ветре рассчитываем путевое время
и курсы следования по участкам маршрута. При этом расчеты для участков на-
бора высоты и снижения следует производить по ветру на высоте 4000 м.
Маршрут УВ УС W мк кк . t
ИПМ 330 —3 760 283 285 5
Ориентир А 330 —3 870 283 285 10-
Ориентир Б 30 +3 870 217 215 4
Цель 95 +6 800 149 149 2
ИПОМ 170 +1 720 79 82 13,30
Ориентир Д 170 +1 530 79 82 6
КПМ — — — —
2) Определяем время сбора и посадки, принимая время от начала взлета
до набора высоты сбора равным 1 мин.:
tC6 = (и - 1) Д^взл + Лзо + 2^зап = (6 - 1) -20 + 120 + 120 = 340 сек.,
или 5 мин. 40 сек.
^дос в (л — 1) + ^зсо == (12 — 1)-30 + 240 = 570 сек., или 9 мин. 30 сек.
169
3) Находим время взлета и прохода ИПМ:
время полета до цели с учетом взлета:
= 5,40 “f" 2 4- 5 4- 10 4- 4 ~ 27 мин.;
Гвзл = Гц — tn = 10 час. 30 мин. — 27 мин. = 10 час. 03 мин.
ЬОЛ IX ХА
Гипм = Т’взл + ^сб + ^ипм = Ю час. 03 мин. + 6 мин. 4- 2 мин. = 10 час. 11 мин.
4) Определяем общую длину маршрута и общую продолжительность по-
лета, резерв горючего во времени и время посадки:
*S*o6m = 30 4- 140 4" 60 4* 30 4- 160 4* 30 = 500 км\
t$ б = 27 4- 5 4- 2 4- 13,30 4- 6 4- 3 4- 9,30 = 66 мин.;
с учетом 10% навигационного запаса
^общ = 66 4- 0,1X66 = 73 мин.;
резерв горючего
^рез == ^техн ^общ s 110 73 — 37 мин.;
время посадки равно времени взлета плюс общая продолжительность полета
без 10% запаса:
Гпос = 16 час. 03 мин. 4- 1 час 06 мин. = 11 час. 09 мин.
5) На основании окончательного расчета полета заполняется бортовой
журнал, помещенный на наколенном планшете летчика.
Маршрут кк S Время Заметки
Взлет 10.03
ИПМ 285 60 10.11
Ориентир А 285 140 10.16
Ориентир Б 215 60 10.26
Цель 149 30 10.30
ИПОМ 82 160 10.37
Ориентир Д КПМ Посадка 82 50 10.50,30 10.56,30 11.09
Продолжительность полета 1 час 13 мин., резерв горючего на 37 мин. Без-
опасная высота 600 м.
При подготовке к полету рекомендуется также выбирать из ин-
струкций по расчету дальности и продолжительности полета рас-
ход горючего по высотам для режимов максимальной дальности и
максимальной продолжительности полета и записывать его
в справочную таблицу навигационного лимба. Сверху над каждой
высотой числителем записываются обороты, а знаменателем —
часовой расход для режима максимальной продолжительности.
После записи таблица закрывается прозрачной пластинкой.
170
На основании этих данных и оставшегося запаса горючего
в полете летчик с помощью навигационного лимба может опреде-
лить возможную продолжительность полета:
где G — запас горючего в л;
Q — часовой расход в л/час.
Для расчета с помощью лимба необходимо установить треуголь-
ный индекс по верхней шкале против деления, равного величине G,
а против деления, соответствующего величине Q, на внутренней
шкале прочитать величину t (см. рис. 48).
Например, если горючего осталось в баках 330 л, а часовой рас-
ход на заданном режиме равен 995 л/час, то предельная продолжи-
тельность полета будет равна 20 мин.
Зная это время и скорость полета, летчик может определить
дальность полета на оставшемся горючем.
Расчет тактического радиуса действия. Тактическим радиусом
действия называется расстояние, которое самолет или группа может
пролететь при заданном режиме полета с возвращением на аэро-
дром взлета. Он рассчитывается в целях определения возможной
дальности сопровождения, максимальной дальности перехвата, а
также определения рубежей досягаемости с данного аэродрома
базирования.
Радиус действия зависит от состава группы и натренированности
летного состава в выполнении взлета, сбора и посадки; профиля
и режима полета; времени пребывания над целью и ее атаки. Все
эти факторы учитываются при расчете.
Расчет тактического радиуса действия производится по формуле
Г) _ Gr. п 1 + *$сН
2?ср 2
где Ог. п — запас горючего для горизонтального полета в строю;
#ср — средний километровый расход горючего при полете
к цели и обратно;
5Н и 5СН — путь, проходимый группой за время набора высоты
и снижения соответственно.
Путь за время набора высоты и снижения выбирается из
инструкций по расчету дальности и продолжительности полета для
данного типа самолета в зависимости от состава группы и режима
полета.
В инструкциях же находят километровый расход горючего на
данной высоте и скорости при полете к цели и обратно. Средний
километровый расход определяется как полусумма найденных рас-
ходов.
Запас горючего для горизонтального полета на данной высоте
определяется следующим образом.
171
Из полной заправки самолета горючим вычитают его расход, не
связанный с горизонтальным полетом, и полученную разность умно-
жают на коэффициент, учитывающий запас горючего на полет
строем и навигационный запас. В зависимости от состава группы
этот коэффициент изменяется от 0,8 до 0,86 (чем больше группа,
тем меньше коэффициент).
В расход горючего, не связанный с горизонтальным полетом,
включается расход на работу двигателя на земле, на взлет и сбор,
на набор высоты, на воздушный бой или атаку цели, на снижение
и посадку. Эти данные определяются по инструкциям по расчету
дальности и продолжительности полета.
Таким образом:
Q. п = [Сполн — (G3eM + GC6 + Qi + Q. б + GCH 4- Gnoc)] k.
Пример. Определить радиус действия группы в составе 12 самолетов на
высоте 5000 м. Полная заправка самолета 2000 л, расход горючего, не связан-
ный с горизонтальным полетом, 530 л, средний километровый расход 1,5 л/км,
путь за время набора 30 км, путь за время снижения 40 км.
Решение: 1) Определяем запас горючего для горизонтального полета:
Gr. п = (2000—530)-0,8 = 1176 л.
2) Определяем дальность горизонтального полета:
о И?6 _0/1
Sr. п = "TV = 784 км.
Цо
3) Находим радиус действия:
Штурманский план полета
Штурманским планом полета называется заранее продуманный
порядок работы летчика по самолетовождению и бомбометанию.
Штурманский план регламентирует работу летчика в полете, позво-
ляет действовать по заранее намеченной системе, предотвращает
принятие необдуманных решений и обеспечивает согласованность
действий всех летчиков группы по самолетовождению и бомбомета-
нию. Тщательная разработка штурманского плана полета является
необходимым условием успешного выполнения полетного задания.
В результате разработки этого плана летчик, исходя из данной
обстановки, должен наметить способ выхода на ИПМ и на линию
заданного пути, порядок комплексного применения средств самолето-
вождения для контроля пути по этапам маршрута, способ и поря-
док выхода на цель, порядок самолетовождения на обратном
маршруте и выхода на аэродром посадки, способ восстановления
ориентировки на случай ее потери.
Кроме того, должны быть предусмотрены действия летчика на
случай изменения обстановки, а также на случай ухудшения погоды.
При групповом полете в штурманском плане указывается по-
рядок и способ сбора и роспуска группы на посадку.
172
Штурманский план полета составляется на каждый маршрутный
полет. При групповых полетах ведомые летчики составляют штур-
манский план на основании указаний штурмана подразделения
(части); содержание их планов должно соответствовать содержа-
нию штурманского плана ведущего.
Штурманский план может быть записан текстуально или состав-
лен в виде схемы с пояснениями, а также выучен на память.
Одновременно с разработкой штурманского плана ведется под-
готовка тех данных, которые потребуются летчику в полете для вы-
полнения задания. К таким данным относятся расчеты на проби-
вание облаков, расчеты для выхода на цель в заданное время, дан-
ные по бомбометанию, прокладка линий пеленгов на полетной
карте и т. д. Часть других данных может быть нанесена непосред-
ственно на карту, а другая часть сведена в удобные для пользова-
ния в полете таблицы.
Подготовка навигационного оборудования и контроль готовности
к вылету
Перед полетом летчик должен проверить навигационное обору-
дование самолета и убедиться в его исправности. Во время про-
верки устанавливается наличие всех приборов и графиков поправок
к ним, внешняя исправность приборов, точность показаний борто-
вых и личных часов; высотомер устанавливается на давление на
уровне аэродрома, устанавливаются исходные данные на навига-
ционный индикатор и т. д. Радиокомпас, помимо внешнего осмотра,
проверяется под током и настраивается на частоту аэродромной
приводной радиостанции, если по плану полета другие станции не
будут использоваться.
Все замеченные неисправности должны быть устранены до
вылета. Вылет на самолете с неисправным на-
вигационно-пилотажным оборудованием запре-
щается.
Завершающим этапом штурманской подготовки полета является
штурманский контроль ее качества. Ни один самолет не должен
быть выпущен в маршрутный полет без штурманского контроля
подготовки летчика. Контроль готовности к вылету проводится
соответствующими командирами и штурманами и имеет своим на-
значением установить возможность допуска летчика к полету для
выполнения поставленной задачи.
§ 25. ШТУРМАНСКИЕ ПРАВИЛА ВЫПОЛНЕНИЯ ПОЛЕТА
Основной порядок самолетовождения
Самолетовождение по заданному маршруту выполняется в опре-
деленном порядке, который является общим для всех родов авиа-
ции. В зависимости от условий и цели полета могут появляться не-
которые особенности, однако общий порядок самолетовождения
остается неизменным.
173
Основной порядок работы летчика по самолетовождению заклю-
чается в следующем. .
Заняв место в кабине самолета, летчик приводит в готовность
навигационно-пилотажное оборудование самолета (включает пита-
ние дистанционного компаса, электрического авиагоризонта и дру-
гих приборов, устанавливает стрелки высотомера на нуль и т. д.),
размещает планшет с картой и наколенный планшет в кабине так,
чтобы ими удобно было пользоваться в полете, проверяет на-
стройку АРК и устанавливает связь с радиопеленгатором и КП.
Вырулив на линию исполнительного старта и получив разреше-
ние на взлет, летчик записывает время и компасный курс взлета,
включает кнопку часов «Время полета», после чего производит
взлет.
При полете в составе группы в районе аэродрома или на марш-
руте осуществляется сбор самолетов в заданный боевой порядок,
после чего ведущий выводит группу на ИПМ.
Выход на ИПМ производится с таким расчетом, чтобы пройти
его на заданной высоте, скорости и с заданным курсом.
В момент прохода ИПМ на карте отмечается место самолета и
время отхода и включается навигационный индикатор. Выдерживая
заданный курс, сразу же после прохода ИПМ необходимо прове-
рить правильность взятого направления по земным ориентирам
или же по радиотехническим средствам и определить расчетное
время выхода на очередной контрольный ориентир.
Установив правильность взятого направления, летчик присту-
пает к контролю пути и уточнению (определению) путевой ско-
рости. При наличии уклонения от заданного маршрута произво-
дится исправление курса следования для точного выхода на оче-
редной контрольный ориентир.
При подходе к поворотному ориентиру летчик сосредоточивает
внимание на определении момента начала разворота на новый
курс. Момент начала разворота определяется по расчетному вре-
мени выхода на ориентир или по предвычисленному курсовому
углу радиостанции. В зависимости от обстановки определение мо-
мента начала разворота дублируется визуальной ориентировкой.
В дальнейшем самолетовождение от одного ориентира к другому
осуществляется подобным же образом.
На подходе к цели летчик определяет точность выхода на цель
по времени и при наличии ошибок выполняет предусмотренный
штурманским планом маневр для погашения избытка или нагона
недостатка времени.
Выполнив поставленную задачу, по команде ведущего группа
выходит на ИПОМ, смыкается и следует на КПМ.
Самолетовождение на обратном пути выполняется в таком же
порядке, как и на пути к цели.
В районе КПМ или аэродрома посадки группа размыкается,
каждый летчик выводит самолет на аэродром и совершает посадку.
Успех решения основных задач самолетовождения по этапам
достигается выполнением полета в строгом соответствии с намечен-
174
ным штурманским планом, выдерживанием расчетного режима
полета, умелым использованием всех средств самолетовождения
в комплексе для непрерывного ведения ориентировки и навигацион-
ных определений.
Выход на ИПМ
Выход на ИПМ выполняется наиболее простыми и надежными
способами без резких маневров при полете группой, а его проход
осуществляется точно по месту и времени с заданным режимом.
В тех случаях, когда направление подхода к ИПМ составляет
с линией заданного пути угол более 30°, намечается вспомогатель-
ный ориентир, обеспечивающий проход ИПМ с заданным курсом.
В зависимости от обстановки выход на ИПМ может осуще-
ствляться либо по компасу с курсом, рассчитанным на земле, либо
с использованием РНТ, установленной в ИПМ.
Выход на ИПМ по компасу применяется при полетах в усло-
виях видимости земной поверхности и осуществляется следующим
образом.
До вылета по шаропилотным данным о ветре определяется
компасный курс полета от аэродрома до ИПМ.
В полете, выдерживая расчетный курс, летчик одновременно ве-
дет контроль пути визуальной ориентировкой. После визуального
обнаружения ИПМ или вспомогательного ориентира осуществляется
маневр для точного прохода ИПМ с заданным курсом (рис. 129).
При полете ночью в качестве ИПМ намечается характерный,
хорошо знакомый световой ориентир или светотехническая точка.
Выход на ИПМ с использованием РНТ применяется при поле-
тах за облаками, в условиях ограниченной видимости, а также
в простых метеорологических условиях при отсутствии характерных
ориентиров на местности. В качестве ИПМ выбирается приводная
или широковещательная радиостанция.
В зависимости от обстановки точш
курсом может быть выполнен пассивнь
выходом на линию заданного ра-
диопеленга и выполнением круга
над радиостанцией.
Выход на радиостанцию
(ИПМ) пассивным полетом при-
меняется в том случае, когда на-
правление подхода к ИПМ отли-
чается от линии заданного пути не
более чем на 30°. Ведущий груп-
пы после сбора разворачивается
в направлении на радиостанцию и .
'с КУР = 0 выходит на нее. В мо-
мент прохода радиостанции веду-
щий доворачивает самолет на за-
данный курс, отмечает место, Pi
175
проход ИПМ с заданным
полетом на радиостанцию,
Рис. 130. Выход на ИПМ по
численному курсовому углу
станции
В этом случае полет к
л-з п- время и в дальнейшем выпол-
няет полет в заданном направ-
лении по магнитному компасу.
Выход на радиостанцию по
предвычисленному курсовому
углу применяется в тех слу-
чаях, когда радиостанция рас-
положена в стороне от точки
конца сбора (аэродрома) и
когда направление подхода к
Прадио- к ИПМ отличается от направ-
ления первого участка марш-
рута более чем на 30°.
ИПМ выполняется следующим образом.
До полета намечают точку начала разворота с таким расчетом,
чтобы по окончании разворота группа оказалась на продолжении
линии заданного пути, затем по карте измеряют путевой угол и
МПР в эту точку (рис. 130). Эта точка может быть выбрана на
удалении 1—2 мин. полета до ИПМ.
По окончании сбора ведущий с заранее рассчитанным курсом
выходит в точку начала разворота и, когда указатель курсовых
углов покажет КУР = МПР — МК, разворачивается для выхода на
линию заданного пути.
Выход на ИПМ с выполнением круга над радиостанцией при-
меняется в том случае, когда в качестве ИПМ выбрана радиостан-
ция сбора. Этот маневр выполняется следующим образом.
После окончания сбора и прохода траверза радиостанции веду-
щий с креном 15° разворачивается, удерживая стрелку указателя
КУР на 90 или 270° (рис. 131). Когда показание ДГМК будет
равно ЗМПУ + 180°, ведущий выходит из разворота, продолжает
полет с этим курсом в течение 1—2 мин. и выполняет разворот на
радиостанцию с креном 30°. После разворота ведущий по радио-
компасу выходит на радиостанцию, замечает время и в дальней-
шем выполняет полет в заданном направлении по магнитному
компасу.
Рис. 131. Выход на ИПМ после сбора группы над
радиостанцией
176
Выход на линию заданного пути
Выход на линию заданного пути является важнейшим моментом
в осуществлении точного самолетовождения. Точный и своевремен-
ный выход на линию заданного пути облегчает дальнейшее выпол-
нение полета и ведение контроля пути.
Выход на линию заданного пути состоит в подборе и выдержи-
вании такого курса следования, который при заданном режиме
обеспечивает полет вдоль намеченного маршрута.
Практически считается, что выход на линию заданного пути
произведен, если при данном курсе следования фактический путе-
вой угол отличается от заданного не более чем на 2°.
На одноместных самолетах могут применяться следующие спо-
собы выхода на линию заданного пути:
1) с курсом, рассчитанным до вылета;
2) подбором курса по земным ориентирам;
3) подбором курса по РНТ, расположенной на линии пути или
ее продолжении.
Выход на линию заданного пути с курсом, рассчитанным до вы-
лета, является основным способом. Он применяется в любых усло-
виях полета одиночных самолетов и групп, если известны данные
о ветре перед вылетом.
Сущность способа состоит в следующем. Не ранее чем за час
до вылета по заказу штурмана подразделения или части на метео-
рологической станции запускают шар-пилот и определяют ветер по
высотам. Метеорологическое направление ветра (откуда дует) из-
меняют на 180° для получения навигационного направления.
По данным шаропилотного ветра и заданного режима полета
рассчитываются углы сноса, путевые скорости, компасные курсы и
путевое время по участкам маршрута.
Данные расчетов записываются в бортовой журнал или на
карту. В полете, выйдя на исходный пункт маршрута, летчик уста-
навливает самолет на расчетный курс и на заданном режиме сле-
дует по маршруту, а затем уточняет правильность взятого направ-
ления визуальной ориентировкой или при помощи радиотехниче-
ских средств.
Положительная сторона способа состоит в том, что в полете
летчик пользуется готовыми данными и поэтому все внимание мо-
жет сосредоточить на ведении ориентировки.
Когда ветер до вылета неизвестен, а обстановка не позволяет
применить другие способы, выход на линию заданного пути произ-
водится с курсом, равным заданному путевому углу.
Возможные уклонения от линии заданного пути, возникающие
вследствие неучета ветра, определяются последующим контролем
пути, и на основании этого исправляется курс.
Выход на линию заданного пути подбором курса по земным
ориентирам может применяться в условиях хорошей видимости и
12-98 177
при наличии ориентиров на линии пути. Способ не требует расчетов,
поэтому применяется при срочных вылетах.
Подбор курса производится как по точечным ориентирам, рас-
положенным в створе линии пути, так и по линейным ориентирам,
направление которых совпадает с направлением полета по марш-
руту.
Выход на линию заданного пути по створу ориентиров выпол-
няется следующим образом (рис. 132).
Рис. 132. Выход на линию заданного пути по створу
ориентиров
На линии пути намечают 2—3 створных ориентира с таким рас-
четом, чтобы от одного из них был виден другой. На линию створа
выходят за 8—10 км до первого ориентира (ИПМ) и направляют
самолет носом вдоль линии створа.
Удерживая первый створный ориентир по продольной оси
самолета, замечают сход дальнего ориентира. Если он сходит
вправо, значит снос правый, поэтому необходимо изменить курс
влево, выйти снова на линию створа и взять курс меньше ЗМПУ.
Если же ориентир уходит влево, то курс необходимо изменить
вправо, выйти на линию створа и выдерживать его с поправкой на
снос (больше ЗМПУ). Чтобы быстрее осуществить подбор курса,
в начале маневра берут упреждение-на снос, который определяется
приближенно по направлению ветра. Если самолет следует по ли-
нии створа, замечают курс и в дальнейшем выполняют полет
с этим курсом. Третий ориентир используется для уточнения курса.
При наличии линейного ориентира подбор курса упрощается.
Самолет направляют вдоль ориентира и небольшими доворотами
добиваются, чтобы он следовал вдоль ориентира. После этого заме-
чают показание компаса и дальнейший полет выполняют с подо-
бранным курсом.
Выход на линию пути по створу ориентиров применяется также
и в ночное время, когда в качестве створных ориентиров можно ис-
пользовать светотехнические средства.
Выход на линию заданного пути подбором курса по РНТ при-
меняется в основном на обратном пути для выхода на КПМ, если
он обозначен радионавигационной точкой. Способ может также
применяться и при следовании к цели, если впереди ИПМ по ли-
нии пути имеется РНТ.
Данный способ представляет собой активный полет на РНТ,
сущность которого изложена выше.
178
Контроль пути
В длительном полете даже при точном выходе на линию задан-
ного пути самолет может уклоняться от заданного маршрута вслед-
ствие непостоянства ветра, неточного выдерживания заданного
режима полета и ошибок в навигационных измерениях. По этим же
причинам фактическая путевая скорость может отличаться от рас-
четной, что приведет к ошибкам во времени выхода самолета на
контрольные ориентиры. Чтобы пройти по заданному маршруту,
необходимо своевременно обнаруживать уклонения самолета от
линии заданного пути и исправлять их, т. е. в течение всего полета
вести контроль и исправление пути.
Контроль пути состоит в проверке соответствия фактического
пути заданному маршруту. Ориентировка, контроль и исправление
пути взаимно связаны между собой и являются единым процессом
работы летчика по осуществлению самолетовождения.
В результате ведения ориентировки летчик получает на карте
к определенному времени фактическое местоположение самолета и
направление полета. Сопоставляя эти данные с заданным маршру-
том, он устанавливает точность выдерживания маршрута и при на-
личии ошибок вносит изменения в режим полета.
Основным условием, облегчающим контроль пути, является со-
хранение заданного режима полета — курса, воздушной скорости
и высоты полета.
Точное выдерживание режима полета облегчает ведение ориен-
тировки, обеспечивает полет по заданному маршруту без больших
уклонений, что значительно упрощает самолетовождение.
Особенно точно летчик должен выдерживать рассчитанный курс
следования. Точно выдерживать курс — это означает вести само-
лет так, чтобы среднее показание компаса соответствовало задан-
ному курсу. В этих целях следует направление полета выдерживать
по визирным точкам на горизонте, периодически проверяя курс по
компасу. При полете в облаках для выдерживания направления
полета необходимо использовать компас совместно с авиагори-
зонтом.
Сохранение воздушной скорости и высоты полета также имеет
важное значение. От величины воздушной скорости зависит путе-
вая скорость и угол сноса, а с изменением высоты меняются усло-
вия полета (ветер) и расход горючего.
Сохранение заданного режима полета требует от летчика уме-
ния одновременно наблюдать за показаниями нескольких приборов.
Поэтому летчик должен систематически тренироваться в точном
выдерживании курса, скорости и высоты.
Контроль пути подразделяется на полный контроль, контроль
по направлению и по дальности.
Полный контроль пути состоит в определении места самолета.
Он ведется периодически в каждом полете в следующем порядке.
После прохода ИПМ или поворотного ориентира определяется рас-
12* 179
чётное время выхода на очередной контрольный ориентир и выдер-
живается курс следования.
За 1 —1,5 мин. полета до намеченного ориентира приступают
к определению места самолета заранее предусмотренным способом.
В зависимости от условий полета место самолета может быть за-
прошено с земли или определено летчиком самостоятельно. Летчик
может определить место самолета счислением и прокладкой пути
(глазомерно или с помощью навигационного индикатора), визуаль-
ной ориентировкой или по пеленгам РНТ.
По нескольким отметкам места самолета определяется фактиче-
ская путевая скорость полета, фактический путевой угол и боковое
уклонение. Эти данные дают возможность проконтролировать.пра-
вильность выдерживания заданного направления полета, определить
оставшееся расстояние и время полета до цели или контрольного
ориентира.
Контроль пути по направлению состоит в определении фактиче-
ского путевого угла и бокового уклонения от линии заданного пути.
Он должен проводиться непрерывно в течение всего полета. Особое
внимание контролю пути по направлению должно быть уделено
после разворота на новый курс, чтобы не допустить грубых ошибок
в выходе на линию заданного пути.
Контроль пути по направлению осуществляется следующим об-
разом. После прохода ИПМ (КО) строго выдерживается курс по-
лета и определяется боковое уклонение, по величине которого
можно судить о точности следования по линии заданного маршрута.
В зависимости от условий полета боковое уклонение может быть
определено по земным ориентирам, пеленгованием РНТ или по дан-
ным наземных радиолокаторов. В последнем случае оно опреде-
ляется штурманом КП и передается на самолет ведущему группы.
Определение бокового уклонения по земным ориентирам приме-
няется при видимости земли и наличии характерных ориентиров на
местности. Для повышения точности боковое уклонение следует
определять у характерных ориентиров.
При полетах в облаках и за облаками, при плохой видимости
боковое уклонение определяется пеленгованием РНТ, расположен-
ных на линии пути.
Контроль пути по дальности состоит в определении достигнутого
рубежа или оставшегося расстояния (времени полета) до цели или
контрольного ориентира и в зависимости от обстановки осуще-
ствляется счислением пути, визуально (по линейному ориентиру,
перпендикулярному к линии пути или траверзу бокового ориентира)
и по радиопеленгам боковых РНТ.
Основным условием, обеспечивающим контроль пути по даль-
ности и точный проход заданных ориентиров по времени, является
выдерживание установленного режима полета и особенно воздуш-
ной скорости.
Контроль пути по дальности счислением пути состоит в опреде-
лении пройденного самолетом расстояния по времени и скорости
180
полета. Он осуществляется в следующем порядке. В момент про-
хода контрольного ориентира отмечают время и в дальнейшем,
руководствуясь показаниями часов и минутными отрезками марш-
рута, определяют, на каком рубеже находится самолет в данный
момент. При полетах по неизвестному маршруту, например на пере-
хват, пройденное расстояние опре-
деляется по воздушной скорости
и временя полета подсчетом в
уме или по показаниям стрелок
навигационного индикатора.
Данный способ позволяет осу-
ществлять контроль полета неза-
висимо от видимости земной по-
верхности и наличия средств ЗОС,
поэтому он должен применяться
в любых условиях навигационной
обстановки в сочетании с контро-
лем пути визуально или с по-
мощью радиотехнических средств.
При видимости земли летчик
определяет пройденное самолетом
расстояние путем опознавания на
местности характерных ориенти-
ров. Наиболее просто и точно эта
Рис. 133. Контроль пути по даль-
ности по боковой радиостанции
задача решается в тех случаях,
когда маршрут полета проложен под углом, близким к 90°, относи-
тельно характерных линейных ориентиров. Отметка времени про-
лета таких ориентиров на карте дает возможность определить прой-
денное расстояние, путевую скорость и время полета, оставшееся
до очередного ориентира. Оставшееся время полета определяется
сопоставлением пройденного 5пр и оставшегося 50СТ расстояний.
Если, например, расстояние 60 км пройдено за 5 мин. полета, а
оставшееся расстояние равно 90 км, то время полета на этом уча-
стке будет в 1,5 раза больше пройденного, т. е. 7,5 мин.
При отсутствии линейного ориентира пройденный путь может
быть определен по характерному площадному ориентиру в момент
выхода на-его траверз.
Контроль пути по радиопеленгам боковых РНТ применяется
в полетах за облаками, ночью и над морем, главным образом
в целях определения момента выхода на поворотный пункт марш-
рута.
Для определения момента выхода на поворотный ориентир при
помощи радиокомпаса рассчитывают предвычисленный курсовой
угол (рис. 133).
За 1—2 мин. до расчетного времени выхода на ориентир наблю-
дают за показаниями стрелки указателя АРК. Когда стрелка по-
дойдет к курсовому углу, равному расчетному, выполняют разворот
на новый курс.
181
Если для контроля пути по дальности используется наземный
радиопеленгатор, то в полете запрашивают радиопеленги и по раз-
ности фактического и расчетного радиопеленгов судят об остав-
шемся расстоянии до ориентира.
Исправление пути
Если в результате контроля пути обнаружены ошибки в на-
правлении полета или неточное по времени прибытие к цели, лет-
чик должен исправить путь.
Исправление пути следует производить только в том случае,
когда достоверно установлено наличие ошибок и их величина пре-
вышает возможные ошибки того способа, которым осуществлялся
контроль пути.
Рис. 134. Исправление пути по направлению для выхода на КО
В зависимости от характера обнаруженной ошибки исправление
пути может производиться по направлению или по дальности.
Исправление пути по направлению производится в том случае,
когда величина бокового уклонения превышает 3°. В зависимости
от обстановки и величины уклонения исправление пути произво-
дится либо для выхода на очередной контрольный ориентир или
цель, либо для выхода на линию заданного пути.
Исправление пути для выхода на очередной
контрольный ориентир или цель производится при
небольших уклонениях от маршрута путем внесения поправки
в курс следования.
Если исправить курс только на величину бокового уклонения,
самолет будет перемещаться параллельно линии заданного пути на
расстоянии от нее, равном линейному боковому уклонению (ЛБУ).
Чтобы самолет из точки Б вышел на контрольный ориентир,
надо исправить курс так, чтобы путевой угол изменился на вели-
чину, равную сумме бокового уклонения и дополнительной поправки
(рис. 134), так как при небольшом изменении путевого угла прак-
тически можно считать, что угол сноса останется постоянным.
Для получения формулы, по которой определяется величина по-
правки в курс, рассмотрим рис. 134.
182
Из треугольника АБД и БДВ имеем
ЛБУ = 5’пр tg БУ =50CTtg ДП.
БУ и ДП обычно не превышают 10°, поэтому для практических
расчетов можно принять, что тангенсы углов равны самим углам.
Следовательно,
£пр
ДП = БУ -<Л- .
^ОСТ
Так как ПК = ДП-(-БУ, то будем иметь
ПК = БУ(1
На основании этой формулы поправка в курс может быть бы-
стро подсчитана в уме по правилу:
ПК = 1,5 БУ, если 5пр=0,5 5ОСТ;
ПК = 2 БУ, если ^ = 50^;
ПК = 3 БУ, если 5пр = 25ОСТ.
Вместо пройденного и оставшегося расстояния можно брать
пройденное и оставшееся время полета.
Боковое уклонение и поправка в курс при видимости земли мо-
гут также определяться по заранее нанесенной на карту сетке
боковых уклонений.
Чтобы после выхода на контрольный ориентир самолет следовал
по линии заданного пути, дополнительная поправка должна быть
исключена из курса следования, т. е. необходимо взять курс
МКз = МК2 - ДП.
Примеры: 1. Самолет от ИПМ следовал с магнитным курсом 120° и, пройдя
расстояние 30 км, уклонился влево от линии пути на 6°. Определить курс по-
лета на контрольный ориентир и курс после его прохода, если оставшееся рас-
стояние равно 62 км.
Решение: 1) Пройденное расстояние равно половине оставшегося, следо-
вательно,
ПК = 1,5-6 = 9°.
2) Самолет уклонился влево, необходимо курс увеличить:
МК2 = 120 + 9 = 129°.
3) Курс полета после прохода ориентира:
МК3 = 120 + 6 = 126°.
2. Самолет следовал от радиостанции в течение 5 мин. с МК = 240°. Опре-
делить новый курс для выхода на контрольный ориентир, если ЗМПУ = 230°л
оставшееся время 5 мин., КУР = 176°.
Решение: 1) ФМПУ = 240 + 176 — 180 = 236°.
2) БУ = 236 —230 = 4-6°.
3) ПК = 2БУ = 2 • 6 = —12°.
4) МК- 240 — 12 = 228°.
5) ус - ФМП У — МК - 236 — 240 = —4°
183
3. ЗМПУ — 30°; МК — 30°. Через 6 мин. полета от радиопеленгатора был
получен МПР — 214°. Определить поправку в курс, если оставшееся время по-
лета равно 4 мин.
Решение: 1) ФМПУ = МПР — 180 = 214 — 180 = 34°.
2) БУ = ФМПУ — ЗМПУ = 34 - 30 = +4°.
'3) ПК = 4 (1 + -|-) =-10°.
4) МКг = MKi — ПК = 30 — 10 = 20°.
Исправление пути по направлению выходом
на линию заданного пути производится в тех случаях,
когда боковое уклонение превышает допустимое по существующим
нормативам и выполняется следующим образом (рис. 135).
Определив боковое уклонение (визуальной ориентировкой или
с помощью навигационного индикатора и т. д.), самолет разворачи-
вают на 30—45° в сторону, противоположную уклонению, и выво-
дят на линию заданного пути. Далее продолжают полет с курсом,
равным алгебраической разности первоначального курса следова-
ния и БУ: МК2 = MKi—(+БУ). Так, например, если самолет
следовал с магнитным курсом 90° и уклонился вправо на 15°, то
после выхода на линию пути необходимо взять курс, равный 75°.
Для более точного определения бокового уклонения и момента
разворота на новый курс исправление пути следует производить
у характерного ориентира, расположенного на линии пути.
Исправление пути по дальности осуществляется для выхода на
цель или контрольный ориентир точно в заданное время.
Выход на цель в заданное время обеспечивается точным расче-
том времени взлета и строгим выдерживанием заданного режима
полета.
Если в результате контроля пути установлено, что при данном
режиме полета самолет выйдет на цель не точно по времени, необ-
ходимо изменить либо воздушную скорость, либо длину маршрута
так, чтобы обеспечить выход на цель в заданное время.
В групповом полете погасить избыток времени легче, чем ликви-
дировать опоздание. Поэтому взлет рекомендуется производить
с запасом времени в 1—2 минуты.
Выход на цель в заданное время изменением
воздушной скорости полета. Выполнение данного ма-
невра основано на том, что изменение путевой скорости пропорцио-
нально изменению воздушной скорости.
Рис. 135. Исправление пути по направлению выходом на
линию заданного пути
184
Рис. 136. Определение потребной воздушной скорости
Если для заданных величин (МПУ, V, направления и скорости
ветра) построить навигационный треугольник скоростей АБа, то
получим путевую скорость Wi. Пусть летчик увеличил воздушную
скорость на некоторую величину ДК Во вновь построенном нави-
гационном треугольнике скоростей АВК получим новую путевую
скорость W2 (рис. 136).
Из треугольников абВ, пренебрегая кривизной стороны аб, имеем
kW = AVcos УС.
Поскольку косинусы малых углов близки к единице, то практи-
чески можно считать, что ДIF = ДК Следовательно, на сколько
будет изменена воздушная скорость, на столько же примерно изме-
нится и путевая скорость.
Изменение угла сноса при этом будет незначительным, поэтому
для полета по заданному маршруту курс можно не изменять.
Путевая и воздушная скорости, обеспечивающие своевременный
выход на цель, определяются летчиком в воздухе следующим
образом.
По оставшемуся времени и расстоянию до цели подсчетом в уме
определяется требуемая путевая скорость, а также разница между
требуемой и фактической путевыми скоростями Д1К На эту вели-
чину и изменяется воздушная скорость.
Пример. Полет на цель выполняется с V = 750 км/час, которой соответ-
ствует W = 700 км/час. Когда до назначенного момента прибытия на цель оста-
лось 6 мин., расстояние до цели было 73 км. Какую воздушную скорость необ-
ходимо выдерживать, чтобы прибыть на цель в заданное время?
Решение: 1) U7ri0Tp = ----- = 730 км/час.
2) AU/ = U'noTp — ^факт = 730 — 700 = 30 км/час.
3) Епотр = 75U + 30 = 780 км/час.
Маневр воздушной скоростью зависит от величины диапазона
скоростей. Скорость при маневрировании должна быть не меньше
минимально допустимой скорости и не более 0,9 Кмакс для одиноч-
ного самолета.
Возможную ошибку во времени устранить маневрированием
скоростью можно лишь при наличии некоторого минимального рас-
стояния до цели.
185
Формулу для расчета этого расстояния можно получить, исходя
из следующих положений.
Пусть время опо’здания или время раннего прихода равно ДА
Чтобы прибыть на цель в заданное время, самолет, скорость кото-
рого равна V, должен увеличить скорость до 14акс или уменьшить
ДО ^мин-
Время опоздания
t ^МИН
ИЛИ
д/ ________________51
17 V
v v макс
где Si—расстояние, необходимое для ликвидации опоздания.
Время раннего прихода Д/р< п = 4акс— или
__ $2 $2
р-п- VMHH / ’
где S2 — расстояние, необходимое для погашения избытка времени.
Сравним расстояния Si и 32, полагая Д/оп = Д/р. п kt.
е ___ ^^макс д/.
°1 — 17 ZZV
vмакс v
<? __ УУмин д/
°2 — V—V
v v мин
Очевидно, что Si больше S2, так как 1/макс больше 1/мин, а при
полете в режиме скоростной дальности (Тгмакс—Ю меньше
(^-^мин).
Следовательно, расстояние Si и будет тем минимальным
расстоянием, на котором возможно ликвидировать опоздание.
Для погашения избытка времени оно будет даже больше необходи-
мого. Таким образом,
о ____ ^^макс \ +
° мин Д |/
где Змин—минимальное расстояние до цели;
1/макс — максимально допустимая воздушная скорость;
V — воздушная скорость полета на маршруте;
ДV — избыток скорости;
AZ — возможная ошибка выхода на цель.
Пример. Рассчитать £мин для VMaKC = 800 км/час,
V = 700 км/час и М == 1 мин.
Решение:
е 800-700 1
5МИН - 1()0 • 60 - 94 км.
Следовательно, на расстоянии до цели не менее 94 км летчик сможет лик-
видировать опоздание в 1 мин.
186
Чтобы в воздухе не производить перерасчет скорости для при-
бытия на цель в заданное время, летчик до полета должен выпол-
нить предварительные расчеты в такой последовательности.
До полета. Рассчитать5*мин, отложить его на карте по марш-
руту от цели и наметить характерный ориентир на расстоянии,
большем <£мин.
После получения данных о ветре рассчитать таблицу требуемых
скоростей. Для этого по <£мин и путевой скорости, рассчитанной для
заданной воздушной скорости полета по маршруту, определить
время полета до цели и расчетное время прохода КО. В преде-
лах 2Д/ с интервалом 30 сек, изменить в сторону увеличения и
уменьшения расчетное время прохода КО. Для этого времени рас-
считать путевые скорости и соответственно изменить воздушную
скорость.
Исходя из заданного времени прибытия на цель, определить и
записать на карте расчетное время прохода поворотных пунктов
маршрута, время прохода ИПМ и время вылета. Заданное время
прибытия на цель записывается на карте в районе цели красным
карандашом.
В полете. Подойдя к контрольному ориентиру начала ма-
невра, по фактическому времени выхода летчик выбирает из та-
блицы соответствующую воздушную скорость, которую выдержи-
вает до выхода на цель.
Пример. Заданное время прибытия на цель 8 час. 00 мин.; М = 1 мин.;
V С00 км/час\ Кокс = 720 км/час\ = 76 км (SMHH = 60 км).
Составить таблицу потребных скоростей с временным интервалом 30 сек.
Решение: 1) По V — 600 км/час и шаропилотному ветру определяем
W — 650 км/час\ время прибытия на КО должно быть 7 час. 53 -мин.
2) Составляем таблицу потребных скоростей:
Л<0 7.52 7.52,30 7.53 7.53,30 7.54
Жютр 570 610 650 700 760
^потр 520 560 600 650 710
3) В полете. Самолет вышел на КО в 7 час. 52 мин. Для прибытия на
цель в заданное время необходимо выдерживать V — 520 км/час.
Данный маневр достаточно точен и прост в выполнении. Однако
он имеет следующие недостатки:
1) Для выполнения этого маневра требуется наличие значитель-
ного диапазона скоростей, что ограничивает применение его в груп-
повом полете, на больших высотах и в стратосфере.
2) Для ликвидации даже сравнительно небольшой ошибки ма-
невр необходимо начинать на значительном расстоянии до цели.
3) Полет над территорией противника на пониженной скорости
для погашения избытка времени тактически невыгоден.
187
Выход на цель в заданное время изменением
длины маршрута. При опоздании время полета до цели
можно уменьшить сокращением длины маршрута в тех случаях,
когда это возможно.
Избыток времени можно погасить удлинением маршрута за счет
отворота от заданной линии пути на 60 и 45° или выполнением
петли. Отвернув от маршрута на 60 или 45°, летчик должен с но-
вым курсом пройти по прямой некоторое время /ц по истечении
которого развернуться в сторону линии заданного пути (рис. 137).
За время выполнения такого маневра самолет будет продолжать
продвигаться в направлении к цели и с момента начала маневра
до окончания его пройдет некоторое расстояние 5Пр.
Величины /1 и 5пр определяются по формулам:
Для угла отворота 45°:
Zi_l)7AZ_0,U360;
5пр = 2,8/? + 1,4 У/,;
Для угла отворота 60°:
tx — О,1/зсо;
5пр = 3,5/? + Vtv
При подготовке к полету значения ^иб^рДля различных избыт-
ков времени могут быть сведены в таблицу.
Контрольный ориентир, определяющий начало маневра, должен
быть расположен до цели на расстоянии не менее 5пр. Маневр
нецелесообразно начинать и слишком рано, так как в дальнейшем
вновь может образоваться избыток времени. Лучше всего маневр
начать за несколько минут до подхода к рубежу вероятной встречи
с истребителями противника. В этом случае двукратное изменение
курса при осуществлении маневра затруднит наведение истреби-
телей.
Порядок выполнения отворота от маршрута на 45 или 60° сво-
дится к следующему.
188
Обнаружив в полете избыток времени Д/, у заранее намеченного
КО необходимо изменить курс следования влево (вправо) на угол
45 или 60°.
По окончании разворота включить секундомер и продолжать
полет по прямой в течение времени значение которого находится
по таблице (графику), подготовленной на земле.
По истечении времени /1 остановить секундомер и произвести
разворот в обратную сторону на двойной угол (на 90 или 120°).
В конце разворота опять включить секундомер и снова на пря-
молинейном участке лететь в течение времени t\, после чего -взять
прежний курс и продолжать полет по маршруту. Избыток времени
будет погашен.
Отворот от маршрута на 45° целесообразно выполнять, когда
в составе большой группы необходимо погасить время в 1—2 мин.
Отворот на 60° применяется для погашения избытка времени
в 2—4 мин.
Погашение времени отворотом от маршрута не вызывает затруд-
нений при выполнении, но развороты при этом необходимо произ-
водить со строго рассчитанным режимом.
Ошибки, возникающие из-за неучета влияния ветра, незначи-
тельны и ими можно пренебречь.
Пример. Полет будет выполняться с V = 600 км/час. Время разворота на
360° составляет 3 мин., fl = 30°; предполагаемые избытки времени от 2 до
4 мин.; боевой магнитный курс 260°. Погасить избыток времени отворотом от
маршрута влево на 60°.
Подготовка к маневрированию состоит в следующем:
1) Рассчитать Л и <?пр и свести их в таблицу:
1 М ! 1 : 2,00 3,00 4,00
1,40 2,40 3,40
'^пр 34 км 44 км 54 км
2) Определить магнитные курсы для маневрирования:
MKf== 260-60 = 200°;
МК2 = 200 4- 120 = 320°.
3) Наметить характерный ориентир на линии пути на удалении не менее
54 км до цели.
Погашение избытка времени на петле. Выполне-
ние этого маневра состоит в следующем.
Обнаружив избыток времени, у характерного ориентира выпол-
нить разворот на 180° (или на 90°). По окончании разворота с но-
вым курсом лететь в течение времени:
/ _ ^300
ч— 2 >
189
где tx — время полета по прямой;
Д/ — избыток времени;
/зс0 — время разворота на 360°.
По истечении этого времени развернуться на обратный курс,
выйти на линию заданного пути и взять курс для полета в прежнем
направлении (рис. 138).
Петлю удобно строить вдоль линейного ориентира, что значи-
тельно упрощает выход на линию заданного пути после погашения
избытка времени.
Рис. 138. Погашение избытка времени па петле
При выполнении петли вдоль линии заданного пути обратный
магнитный курс подсчитывается по формуле
МКобр = МК± 180° + (±2УС).
Пример. При полете на цель МК = 60°; УС = —7°. Найти обратный курс.
Решение: МКобр = 60 + 180 + (—14) = 226°.
Данный маневр применяется для погашения большого избытка
времени (не менее времени разворота на 360°). Он может быть
использован также при необходимости значительно изменить время
удара группы. Поскольку его выполнение связано с разворотом на
180°, он применяется в полете небольшими группами.
Избыток времени, обнаруженный в полете, можно также пога-
сить путем выполнения нескольких виражей, что наиболее прием-
лемо для одиночного самолета или пары (звена).
Выход на цель
Выход на цель является наиболее ответственным этапом полета.
Он должен быть произведен точно как по месту, так и по времени.
Для достижения внезапности направление подхода к цели сле-
дует выбирать с учетом слабых мест ПВО и радиолокационной за-
190
Щиты цели, а также метеорологических условии и освещенности
(заходить со стороны солнца).
Применение маневра по направлению и высоте затрудняет ра-
диолокационное наблюдение, вводит противника в заблуждение
относительно объекта действий и тем самым облегчает выполнение
задачи.
В зависимости от обстановки и задачи полета выход на дель
может производиться от характерного ориентира по курсу и вре-
мени, наведением самолетов с земли и по визуальным сред-
ствам ЗОС.
При видимости земной поверхности на цель можно выходить
от характерного ориентира. В этом случае выбирается легко
опознаваемый ориентир, расположенный на удалении не более
30—50 км от цели. Курс и время полета от ориентира до цели рас-
считываются до вылета по шаропилотному ветру и строго выдер-
живаются в полете. Контроль пути и отыскание цели производятся
визуально.
Наведение самолетов на цель производится обычно с КП. По
данным радиолокационной станции обнаружения и наведения на КП
наносят положение самолетов в каждый данный момент, что дает
возможность судить о точности следования их по маршруту и вы-
хода в район цели.
При уклонении от маршрута штурман КП сообщает ведущему
группы поправку в курс, оставшееся время полета до цели и место*
нахождение группы. .
За 2—3 мин. до выхода на цель ведущий группы переходит на
визуальную ориентировку и по земным ориентирам отыскивает
цель.
При действиях по объектам на поле боя во избежание пораже-
ния своих войск необходима особая точность выхода на цель. Эта
точность достигается тщательным изучением местности летным со-
ставом, обозначением переднего края своих войск маркерными
радиомаяками и другими средствами, а также обозначением цели
артиллерийской стрельбой снарядами цветного дыма, скрещением
лучей прожекторов, созданием на своей территории искусственных
ориентиров из цветных дымов и различного рода знаков, указываю-
щих направление полета на цель. Эти мероприятия значительно
облегчают выход на цель и ее отыскание.
Обратный полет по маршруту
После выполнения боевой задачи ведущий должен собрать
группу и в заданном боевом порядке осуществить выход на обрат-
ный маршрут.
Уход самолетов от цели производится по команде командира
группы, а их сбор — на пути следования к ИПОМ. Для этого ве-
дущий выполняет заранее намеченный маневр по курсу или ско-
рости, давая ведомым возможность сомкнуться в боевой порядок.
191
Выход на ИПОМ осуществляется по компасу, а его отыскание —
визуальной ориентировкой. При ограниченной видимости или уходе
после атаки цели за облака выходить на ИПОМ следует по курсу
и времени, а также с помощью радиотехнических средств.
Самолетовождение на обратном маршруте выполняется в таком
же порядке, как и в полете к цели. Применение радиотехнических
средств самолетовождения на обратном маршруте надежно обеспе-
чивает возвращение на аэродром посадки, поэтому в качестве КПМ
рекомендуется выбирать аэродромную приводную радиостанцию.
Работа на карте в полете
Для осуществления самолетовождения летчику в полете прихо-
дится производить различные навигационные определения и связан-
ные с ними расчеты.
Запомнить результаты всех этих расчетов трудно, поэтому их
необходимо записывать. Записи необходимы также для проверки
выполнения заданного маршрута.
Однако практика полетов на больших скоростях показывает, что
производство различных записей летчиком затруднено, так как он
одновременно обязан пилотировать самолет, сохранять свое место
в строю, вести ориентировку и наблюдать за воздушным простран-
ством. Поэтому записывать следует только те данные, которые
•ложно использовать для контроля и исправления пути и восстанов-
ления ориентировки в случае ее потери. В ?тих целях ведущий
группы и ведомые при полетах в условиях видимости естественного
горизонта должны наносить на карту отметки места самолета, фак-
тические курсы по участкам маршрута, расчетное и фактическое
время прохода контрольных ориентиров. Записи должны вестись
с применением установленных обозначений и сокращений. Для
удобства работы карту необходимо сложить в планшет так, чтобы
она не передвигалась в нем, и все записи производить на целлу-
лоиде планшета.
Расчетное время прохода контрольных ориентиров на карте
следует записывать до вылета. При несовпадении этого времени
с фактическим последнее принято записывать над расчетным и под-
черкивать.
При отсутствии видимости естественного горизонта записи на
карте вести не следует, так как для этого требуется отвлекаться от
наблюдения за показаниями пилотажных приборов, что может при-
вести к потере летчиком представления о пространственном поло-
жении самолета.
В ночном полете пользование обыкновенной картой без освеще-
ния кабины невозможно, а сильное освещение кабины ослепляет
летчика. Поэтому в ионном полете следует использовать светящиеся
карты, а записи производить только в самых необходимых случаях.
Для ведения ориентировки необходимо хорошо изучить мар-
шрут полета и строго выдерживать расчетный режим полета. Зна-
192
ние маршрута должно быть доведено до такого совершенства, чтобы
летчик мог без помощи карты опознавать видимые ориентиры,
а также представлять себе район местонахождения самолета через
определенные промежутки времени при заданном режиме полета.
Расчет полета по участкам маршрута должен быть произведен
по данным шаропилотного ветра и его результаты записаны в со-
ответствующие графы наколенного планшета. Если по каким-либо
причинам не выдерживается заданный режим полета по участкам
маршрута, летчик по возможности должен записывать новые дан-
ные (курс, скорость, время) на карте или на наколенном планшете.
Восстановление ориентировки
Современные средства самолетовождения позволяют с достаточ-
ной точностью определять место самолета в любых условиях нави-
гационной и метеорологической обстановки, что полностью исклю-
чает случаи потери ориентировки.
Основными условиями, обеспечивающими предотвращение по-
тери ориентировки, являются хорошее знание района полетов, тща-
тельная подготовка к полету, организация надежного обеспечения
полетов средствами ЗОС, строгое выполнение в полете штурман-
ского плана и грамотное применение технических средств самолето-
вождения.
Для успешного выполнения задания летчик должен в течение
всего полета сохранять ориентировку.
При полете в составе группы каждый летчик должен системати-
чески определять место самолета, чтобы не оказаться беспомощным
в случае отрыва от группы или при выходе из строя ведущего. Ве-
дущий в свою очередь должен периодически информировать ведо-
мых о местонахождении группы, а также проверять их в знании
места группы. Ведомым летчикам должны быть заранее даны ука-
зания, как действовать в случае отрыва от группы.
Часто причиной потери ориентировки является переоценка
одних средств самолетовождения и пренебрежение другими. Неко-
торые летчики, надеясь, что они всегда выйдут на аэродром посадки
по радиокомпасу, не ведут счисления пути, не сличают карту
с местностью, пренебрегают запросом радиопеленга и при отказе
радиокомпаса, как правило, теряют ориентировку. Другие, наобо-
рот, отдают предпочтение визуальной ориентировке, поэтому часто
при полете ломаными курсами, а также при ухудшении погоды по-
падают в затруднительное положение.
Необходимо помнить, что только комплексное использование
средств самолетовождения надежно обеспечивает сохранение
ориентировки в любую погоду, в любом полете.
При выполнении задачи на перехват управление полетом осу-
ществляется с земли. Штурман КП должен не только задавать ре-
жим полета истребителям, но и информировать летчика о его место-
нахождении, а после выполнения задачи указывать курс и время
полета на аэродром посадки. Однако это не снимает с летчика обя-
13—98 193
занности по ведению ориентировки. Обстановка иногда может сло-
житься так, что наведение будет прервано (выход из строя радио-
станции на самолете, различные помехи и т. д.). Чтобы не ока-
заться в затруднительном положении, необходимо и в этом случае
вести ориентировку всеми доступными способами.
Практика показывает, что главными причинами потери ориен-
тировки является плохая подготовка к полету и пренебрежение
основными правилами самолетовождения. Причиной потери ориен-
тировки иногда является неподготовленность летчика к полету в не-
ожиданно усложнившихся метеорологических условиях, а также вы-
нужденное отступление от основных правил самолетовождения.
Ориентировка считается потерянной, если летчик не знает место-
нахождения самолета с точностью, необходимой для определения
дальнейшего направления полета и выполнения поставленной задачи.
При потере ориентировки у летчика, естественно, возникает
опасение за дальнейший исход полета и желание, как можно ско-
рее восстановить ориентировку. У неопытных летчиков это может
вызвать излишнюю поспешность в принятии решения и привести
к полету произвольными курсами на повышенной скорости. Такое
поведение усугубляет положение и, как правило, приводит к вы-
нужденной посадке.
Убедившись в потере ориентировки, летчик должен сохранять
спокойствие и выдержку, записать время, перейти на режим макси-
мальной дальности и, продолжая полет с прежним курсом, доло-
жить установленной кодовой фразой на КП о потере ориентировки.
При этом следует перейти на такую высоту, которая обеспечивает
надежную радиосвязь с КП и вход в зону действия радиотехниче-
ских средств самолетовождения. В распоряжении руководителя по-
летов имеется достаточно технических средств для оказания свое-
временной помощи летчику в восстановлении ориентировки. Уста-
новив связь с КП, летчик должен действовать согласно указаниям
руководителя полетов
Если по каким-либо причинам установить связь с КП не уда-
лось, летчик должен проверить свои расчеты, оценить создавшуюся
обстановку, уточнить, на сколько времени осталось горючего, и
приступить к восстановлению ориентировки самостоятельно.
При полете в составе группы необходимо запросить местонахож-
дение у других летчиков.
Если ориентировка потеряна вблизи государственной границы
или линии фронта, следует взять курс в сторону своего расположе-
ния, а затем уже приступить к восстановлению ориентировки.
Восстановление ориентировки необходимо начинать а определе-
ния места самолета. В этих целях летчик должен прежде всего
использовать навигационный индикатор. При его отсутствии или
неисправности место самолета определяется глазомерио счислением
и прокладкой пути, а затем уточняется визуальной ориентировкой
или прокладкой линии радиопеленга.
Для увеличения обзора местности и дальности действия радио-
технических средств, а также увеличения продолжительности полета
194
следует полет выполнять на средних высотах и ни в коем случае не
переходить на малые и бреющие высоты.
После восстановления ориентировки летчик должен, исходя из
характера задания, оставшегося запаса горючего и времени суток,
принять решение о продолжении полета по заданному маршруту
или о возвращении на аэродром посадки.
Если потеря ориентировки произошла после выполнения зада-
ния, а также в тех случаях, когда определить место самолета
в районе потери ориентировки не удалось, ее восстановление сле-
дует производить выходом на известную радиостанцию или пелен-
гаторный пункт либо выходом на линейный ориентир (характерный
световой ориентир).
Выход на приводную радиостанцию или радио-
пеленгатор является наиболее простым и надежным способом
восстановления ориентировки в любых условиях полета. Радиостан-
цию (радиопеленгатор) необходимо выбирать вблизи своего аэро-
дрома. При полете на радиостанцию (радиопеленгатор) необходимо
оценить правильность взятого направления по магнитному компасу,
внимательно.прослушать позывные радиостанции или запросить па-
роль у расчета радиопеленгатора. В полете необходимо стремиться
восстановить ориентировку до выхода на радиостанцию (радиопе-
ленгатор). Для этого необходимо отложить от нее обратный истин-
ный курс и сличать карту с местностью в полосе 10—15 км в обе
стороны от линии обратного курса.
Если до подхода к радиостанции ориентировка не восстановлена,
необходимо выйти точно на нее, поставить на карте отметку места
самолета, а затем уже следовать на аэродром посадки.
Восстановление ориентировки выходом на
линейный ориентир применяется при видимости земной по-
верхности и невозможности восстановления ориентировки при по-
мощи радиотехнических средств.
Для восстановления ориентировки этим способом необходимо
определить по данным навигационного индикатора или глазомерной
Рис. 139. Восстановление ориентировки выходом на линейный ориентир
13* 195
прокладкой пути район потери ориентировки, выбрать линейный
ориентир за пределами этого района, взять курс, перпендикулярный
линейному ориентиру, и продолжать полет до выхода на него
(рис. 139).
После выхода на линейный ориентир надо определить его общее
направление, выбрать на нем характерный ориентир, развернуться
в его сторону и, сличая карту с местностью, определить место са-
молета.
В ночном полете ориентировка может быть восстановлена выхо-
дом на характерный световой ориентир или светомаяк в таком же
порядке, как и выходом на линейный ориентир.
ГЛАВА ШЕСТАЯ
ОСОБЕННОСТИ САМОЛЕТОВОЖДЕНИЯ В РАЗЛИЧНОЙ
НАВИГАЦИОННОЙ ОБСТАНОВКЕ
Условия полета на больших и малых высотах в облаках и за
облаками, в горной местности, ночью, над морем и в Заполярье
являются сложными и требуют от летчика активного самолетовож-
дения с комплексным применением всех технических средств.
Основой сохранения ориентировки в сложной навигационной
обстановке полета являются счисление и прокладка пути, а важней-
шим условием точного самолетовождения — строгое сохранение лет-
чиком расчетного режима полета.
Самолетовождение в таких условиях выполняется обычным по-
рядком с учетом некоторых особенностей, вызываемых обстановкой
полета.
§ 26. САМОЛЕТОВОЖДЕНИЕ В ПОЛЕТАХ НА БОЛЬШИХ ВЫСОТАХ
И В СТРАТОСФЕРЕ
Навигационные условия полета
Высоты полета от 7000 до 12 000 м называются большими,
выше 12 000 м называются стратосферными.
При полете на большой высоте и в стратосфере увеличивается
дальность полета реактивных самолетов, возрастает дальность об-
наружения самолетов при помощи наземной радиолокационной
станции, увеличивается дальность действия средств связи и радио-
технических систем самолетовождения.
Однако наряду с этим сокращаются маневренные возможности
группы из-за уменьшения диапазона скоростей и скороподъемности,
ухудшается продольная и поперечная устойчивость самолета при
приближении к практическому потолку, что затрудняет выдержива-
ние заданного режима полета, возрастает минимально допустимая
скорость для выполнения разворота, а допустимые крены в группе
уменьшаются, вследствие чего радиус и время разворота достигают
больших значений. Например, если в групповом полете на средней
высоте разворот выполняется с 0 = 45° на истинной скорости
950 км/час (/? = 7,1 км), то в групповом полете на высотах, близ-
197
ких к потолку самолета, допустимый крен на развороте доходит до
10—15°, что даже при скорости 750 км/час дает величину
R = 25—16,5 км. Неучет радиуса разворота приведет в этом случае
к значительному уклонению. Поэтому при полетах на средних вы-
сотах и тем более на больших при прокладке маршрута необходимо
учитывать радиус разворота.
На больших высотах скорость ветра достигает 150—200 км/час,
а в некоторых случаях и более. Такой ветер даже при скорости по-
лета 900 км/час может создать угол сноса 10—Г5°, что за 30 мин.
полета приведет к уклонению от линии пути на 75—100 км. Неучет
влияния ветра на больших высотах может привести к потере ориен-
тировки.
Полеты на больших высотах и в стратосфере характеризуются и
некоторыми особенностями визуальной ориентировки. В ясную по-
году резко возрастает дальность видимости крупных ориентиров,
однако ухудшается видимость и распознавание мелких ориентиров
(небольшие населенные пункты, реки, проселочные дороги и др.).
При полетах на высотах 10 000—15 000 м значительные участки
местности под самолетом часто бывают закрыты облаками сред-
него и верхнего ярусов, а дымка или мгла, почти всегда имеющиеся
на высоте полета, ухудшают горизонтальную видимость. Все это
затрудняет визуальную ориентировку или делает ее невозможной.
Визуальная ориентировка с больших высот усложняется еше и
тем, что значительная часть земной поверхности закрыта фюзеля-
жем самолета. Так, например, если на высоте 1000 м ширина не-
просматриваемой площади составляет 1500 м, то при высоте по-
лета 15 000 м она достигает 21 км. Следовательно, при полете
в стратосфере летчик может не увидеть даже такие крупные ориен-
тиры, которые по своим размерам превышают 20 км. Для про-
смотра местности летчик должен создавать кратковременные глу-
бокие крены поочередно в обе стороны или в сторону ожидаемого
ориентира.
При глазомерном определении дистанции до ориентира неболь-
шая угловая ошибка в вертикальном угле дает значительную ли-
нейную ошибку. Хорошо подготовленный летчик при определении
МС визуально с высоты 12 000 м может допустить ошибку
в 10—15 км. Это не позволяет с достаточной для практических це-
лей точностью определить навигационные элементы (W и УС) по
•отметкам МС. Следовательно, при полетах на больших высотах и
в стратосфере необходимо применять радиотехнические средства
самолетовождения.
Особенности подготовки к полету
Штурманская подготовка к маршрутному полету на больших
высотах и в стратосфере проводится в том же объеме, что и к по-
лету на средних высотах, но с некоторыми особенностями.
Маршрут полета желательно прокладывать через характерные
ориентиры, хорошо видимые с данной высоты полета.
198
В качестве ИПМ и КПМ необходимо назначать радиостанцию
или радиопеленгатор аэродрома. Для выхода на малозаметную цель
следует использовать ближайший в ней ориентир, либо проложить
маршрут с заведомым уклонением от цели на характерный ориен-
тир. Первый КО от ИПМ необходимо намечать в районе оконча-
ния набора заданной высоты. Точка начала планирования также
должна быть обеспечена ориентиром. Расстояния между контроль-
ными ориентирами на маршруте должны быть больше, чем при по-
лете на средних высотах (в среднем 80—100 км).
В начале горизонтального полета для уточнения курса следова-
ния и времени полета намечается контрольный этап продолжитель-
ностью 5—6 мин. полета.
Маршрутный полет на большой высоте часто является полетом
на предельную дальность с длительным набором высоты и планиро-
ванием, что приводит к необходимости выполнения инженерно-
штурманского расчета полета.
Окончательный расчет полета на большой высоте во всех слу-
чаях необходимо выполнять по шаропилотным данным или по про-
гностическому ветру.
Ввиду того, что отдельные ориентиры могут наблюдаться с рас-
стояния 100 км и более, ширина изучаемой полосы маршрута
должна быть не менее 150—200 км.
В процессе изучения маршрута летчик должен выделить и хо-
рошо запомнить ориентиры, видимые с больших высот, а также
ясно представить себе их вид с этих высот.
Перед полетом необходимо особенно тщательно анализировать
метеорологическую обстановку, ибо от этого во многом зависит
успех всего полета.
Особенности выполнения полета
Выход на ИПМ обычно осуществляется визуально или с кур-
сом, рассчитанным на земле. Если в ИПМ расположена приводная
радиостанция, то выход на ИПМ осуществляется по радиокомпасу.
После прохода ИПМ летчик с рассчитанным курсом, набирая вы-
соту, продолжает полет к первому КО. Дистанционный компас, имея
незначительную креновую девиацию, позволяет длительное время
при наборе и планировании точно выдерживать рассчитанный курс.
Контроль пути в наборе летчик осуществляет счислением пути
и визуальной ориентировкой.
При наборе высоты с углом, близким к максимальному, ведение
ориентировки усложняется. Наличие промежуточных ветров, как
правило, изменяющихся с высотой, также уменьшает точность са-
молетовождения в полете с набором высоты. Учитывая эти особен-
ности, при контроле пути в этом случае следует больше использо-
вать радиотехнические средства самолетовождения.
Исправление пути в полете с набором высоты лучше произвести
на середине пути между ИПМ и ориентиром начала горизонталь-
ного полета. Боковое уклонение (БУ) может быть достаточно
199
точно определено при помощи радиотехнических средств, а по-
правка в курс берется равной 2БУ.
В конце набора заданной высоты летчик должен найти на
местности заранее намеченный по карте контрольный ориентир и,
уменьшив обороты двигателя, перевести самолет в горизонтальный
полет. В момент прохода КО записать время и, строго сохраняя
режим горизонтального полета, пройти контрольный этап для уточ-
нения курса следования и путевой скорости. При отсутствии види-
мости земли момент выхода на начало контрольного этапа опреде-
ляется по боковой радиостанции.
После пролета контрольного этапа при необходимости вводится
поправка в курс для выхода на следующий контрольный ориентир.
Следует избегать маневра скоростью с большими отклонениями
от расчетной воздушной скорости, так как это влечет за собой из-
менение в режиме работы двигателя, который рассчитан для наи-
большей дальности полета.
В горизонтальном полете летчик, строго сохраняя режим по-
лета, осуществляет контроль пути в основном теми же способами,
что и на средних высотах.
Выход на новую линию заданного пути после прохода ППМ на
большой высоте представляет некоторую трудность. С увеличением
высоты ширина непросматриваемой местности под самолетом увели-
чивается и летчику трудно наблюдать за поворотным пунктом, ко-
торый он может пройти не заметив.
В высотном полете наиболее приемлемым способом выхода на
новую линию заданного пути будет отход от ППМ с заданным
курсом (см. рис. 128).
В сложных метеорологических условиях момент начала разво-
рота определяется по предвычисленному курсовому углу радиостан-
ции или пеленгу радиопеленгатора.
Обратный полет до входа в зону действия радиостанции вы-
полняется с заранее рассчитанным курсом, после чего, обычно
в режиме планирования, выполняется полет по радиокомпасу на
приводную радиостанцию с периодическим запросом пеленга у на-
земного радиопеленгатора.
§ 27. САМОЛЕТОВОЖДЕНИЕ В ПОЛЕТАХ ЗА ОБЛАКАМИ И В ОБЛАКАХ
Навигационные условия полета
Полеты в облаках и за облаками относятся к полетам в слож-
ных метеорологических условиях и выполняются по приборам.
Во время Великой Отечественной войны наша авиация совер-
шала длительные полеты в облаках и за облаками, используя их
для достижения внезапности и маскировки при выходе на цели, при
выполнении разведки и поиска целей. Возможен и вынужденный по-
лет в облаках.
Самолетовождение за облаками и в облаках характеризуется
отсутствием видимости земных ориентиров и естественного гори-
200
зонта (при полете в облаках), ограниченной возможностью приме-
нения радиотехнических средств при полете в облаках нижнего
яруса, наличием атмосферных разрядов, мешающих приему, и воз-
можностью обледенения самолета, антенн радиооборудования и
приемника указателя воздушной скорости. Эти обстоятельства зна-
чительно усложняют самолетовождение.
Наиболее благоприятными для пробивания и полета являются
слоистые и слоистокучевые облака. В кучевых облаках точное само-
летовождение невозможно вследствие большой турбулентности воз-
духа. Вхождение в грозовые облака и полет в непосредственной
близости от них совершенно недопустимы, так как в этом случае
нарушается устойчивость самолета и вследствие сильных перегру-
зок самолет может быть разрушен.
Особенности подготовки к полету
При выполнении полета за облаками и в облаках следует учи-
тывать, что прямолинейный полет проще в выполнении и увеличи-
вает точность самолетовождения.
Маршрут выбирается с учетом надежного обеспечения полета
средствами ЗОС. ИПЛ4 и КПМ должны быть обозначены радиотех-
ническими средствами. Радиостанция или радиопеленгатор, уста-
новленные в ИПМ, позволяют в самом начале маршрута точно
отметить МС и контролировать в дальнейшем весь маршрут по-
лета. Радиостанция, установленная в КПМ, обеспечивает возвра-
щение самолетов в район посадки при отсутствии видимости земли.
При полете в облаках маршрут прокладывается с заведомым
уклонением от характерного ориентира в районе цели. Смещение
линии пути от этого ориентира должно быть не менее 5% от об-
щего расстояния, пройденного самолетом в облаках. Прокладка
маршрута с заведомым уклонением от характерного ориентира
в районе цели обеспечивает летчику возможность после выхода под
облака быстро уточнить свое местонахождение, развернуть самолет
на характерный ориентир, а уже от него производить выход на цель.
В начале маршрута полета в облаках намечается контрольный
этап, протяженность которого должна обеспечить возможность
уточнения курса и путевой скорости перед входом в облака.
При изучении маршрута необходимо тщательно изучить район,
намеченный для выхода из облаков, и обратить особое внимание
на рельеф местности и высокие препятствия.
Для каждого участка маршрута полета в облаках определяются
безопасные высоты полета по прибору, которые летчик должен за-
помнить. Снижаться под облака можно только до безопасной вы-
соты полета.
Для полета в облаках рекомендуется составить таблицу вре-
мени полета до точки выхода из облаков (4бл) в зависимости от
времени пролета контрольного этапа (7КЭ). Такая таблица со-
ставляется с учетом шаропилотного или прогностического ветра. По
длине контрольного этапа и путевым скоростям от максимальной
201
до минимальном определяется время пролета намеченного контроль-
ного этапа. Для этого вначале по 5КЭ и lFMaKC рассчитывают время
полета, которое затем изменяют на 10—15 сек. и определяют весь
диапазон путевых скоростей. По полученным путевым скоростям и
расстоянию полета в облаках рассчитывают время полета до мо-
мента выхода из облаков. Время пролета КЭ с различными путе-
выми скоростями и время полета в облаках сводятся в таблицу.
Такая таблица даст возможность летчику в полете быстро опре-
делить момент начала выхода из облаков в заданном районе по
времени пролета КЭ.
Пример. Длина контрольного этапа 42 км\ длина участка полета в облаках
158 км\ заданная воздушная скорость 650 км/час\ возможная скорость ветра
40 км/час. Следовательно, путевая скорость может измениться в пределах
690—610 км/час. Определить время полета в облаках /обл по времени пролета
контрольного этапа ^кэ.
Решение:
^кэ 3,40 3,50 4,00 4,10
^обл 13,40 14,30 15,00 15,40
Перед полетом в сложных метеорологических условиях необходимо
обратить внимание на безотказность действия антиобледенитель-
ного устройства, обогрева приемника воздушного давления и часов.
Во время предполетной подготовки летчики должны тщательно
изучить метеорологические условия полета, обращая особое внима-
ние на тип облаков, их вертикальную мощность, протяженность,
высоту нижней границы, видимость внутри облаков и возможность
обледенения. Для получения этих данных обычно организуют раз-
ведку погоды.
Особенности выполнения полета
Полет за облаками выполняется следующим образом.
После пробивания облаков и набора заданной высоты летчик
по радиокомпасу выводит самолет на ИПМ. В момент прохода ИПМ
(радиостанции) летчик доворачивает самолет на заданный магнит-
ный курс и отмечает время.
Чтобы уклонение от линии заданного пути за счет доворота са-
молета над ИПМ было незначительным, за облаками выполняется
специальный маневр выхода на радиостанцию, обозначающую ИПМ
(см. рис. 129, 130 и 131).
Дальнейший полет за облаками выполняется при строгом со-
хранении рассчитанного режима полета.
Через несколько минут после отхода от ИПМ пеленгованием
радиостанции, находящейся на линии заданного пути, летчик опре-
деляет боковое уклонение и при необходимости исправляет курс.
Контроль пути за облаками летчик осуществляет счислением и
прокладкой пути, используя при этом навигационный индикатор, и
202
пеленгованием боковых радиостанций, а при наличии «окон»
в облачности — визуально.
Момент выхода на поворотный пункт маршрута определяется по
расчетному времени, по предвычисленному курсовому углу боковой
радиостанции или пеленгу радиопеленгатора.
Контроль за полетом при помощи наземных радиолокационных
станций является надежным средством вывода самолетов в район
цели при полете за облаками.
При отсутствии облачности в районе выхода из-за облаков лет-
чик визуальной ориентировкой определяет МС и разворачивается
в определенную сторону на цель.
При наличии облачности летчик по расчету времени пробивает
облака в направлении характерного ориентира (желательно линей-
ного), заранее намеченного на карте. Определив свое местоположе-
ние в районе характерного ориентира, летчик по курсу и времени
выходит на цель.
Самолетовождение на обратном маршруте осуществляется по-
летом на радиостанцию, расположенную в КПМ.
Полет в облаках выполняется в такой последовательности.
После взлета летчик выводит самолет на ИПМ, который яв-
ляется входным ориентиром контрольного этапа. Над ИПМ запу-
скается секундомер, замечается время, ставится отметка МС. Кон-
трольный этап летчик проходит на 100—200 м ниже облаков, точно
выдерживая скорость и МК, равный ЗМПУ, или МК, рассчитанный
по шаропилотному ветру.
У выходного ориентира КЭ летчик останавливает секундомер, ста-
вит отметку МС и определяет визуально БУ. Если БУ превышает 3°,
летчик осуществляет доворот на ориентир, от которого с исправ-
ленным курсом входит в облака, не изменяя воздушной скорости.
При низкой облачности и плохой видимости вход в облака воз-
можен непосредственно над ИПМ. В этом случае ИПМ должен
быть обозначен радиотехническими средствами, при помощи кото-
рых летчик сможет проконтролировать путь по направлению в на-
чале полета в облаках.
После входа в облака от летчика требуется точное выдержива-
ние курса, скорости и высоты полета.
Контроль пути осуществляется теми же способами, что и при
полете за облаками. Если полет в облаках выполняется у самой
нижней границы их, летчик может периодически вести визуальную
ориентировку выходом под облака в районе характерных ориен-
тиров. Контрольные выходы под облака рекомендуется производить
также в том случае, когда участки маршрута полета в облаках до-
стигают значительной длины. Периодическая визуальная ориенти-
ровка немыслима без счисления и прокладки пути.
После пролета КЭ, пользуясь заранее составленной табличкой,
летчик определяет время полета в облаках. По истечении расчет-
ного времени полета летчик, не изменяя скорости и курса, выводит
самолет из облаков, отыскивает опорный ориентир и от него по
курсу и времени выходит на заданную цель.
203
§ 28. САМОЛЕТОВОЖДЕНИЕ В ПОЛЕТАХ НАД ГОРНОЙ МЕСТНОСТЬЮ
Навигационные условия полета
В ходе Великой Отечественной войны во время боевых действий
нашей авиации в боях на Северном Кавказе, в предгорьях Карпат
и на других театрах военных действий выявился ряд особенностей
самолетовождения, обусловливаемых навигационными условиями
полета в горах.
Навигационные условия в горной местности характеризуются
сложной метеорологической обстановкой, трудностью ведения ви-
зуальной ориентировки и увеличением ошибок навигационных опре-
делений, выполняемых при помощи угломерных и смешанных ра-
диотехнических систем.
Для горных районов характерны резкие изменения температуры,
сильные и быстро изменяющиеся ветры, ливневые осадки, частые
грозы летом, низкая облачность и туманы.
Имеющиеся над горами вертикальные воздушные потоки часто
достигают высоты, которая превышает на одну треть высоту хребта,
и затрудняют сохранение режима полета.
Визуальная ориентировка при полетах в горной местности слож-
нее, чем в равнинной. Это объясняется малым количеством харак-
терных ориентиров, наличием непросматриваемых пространств, со-
здаваемых обратными скатами гор и глубокими ущельями, значи-
тельным сокращением времени на опознавание ориентиров, распо-
ложенных на обратных скатах по отношению к полету. Вершины
гор часто закрыты облаками, а в низинах и ущельях стелится густая
дымка или туман. Все это подчас совершенно исключает визуаль-
ную ориентировку.
Горная местность характеризуется также ограниченностью
аэродромной сети.
Особенности подготовки к полету
Сложные метеорологические условия, ограниченность аэродром-
ной сети, трудность ведения визуальной ориентировки и ошибки
радиопеленгования, связанные с горным эффектом, предъявляют
особые требования к выбору маршрута и профиля полета.
При выборе маршрута полета необходимо учитывать видимость
ориентиров и целей, наличие аэродромной сети и средств ЗОС,
а также возможные ошибки от горного эффекта при пеленговании
радиостанций.
В качестве контрольных ориентиров и поворотных точек мар-
шрута обычно намечаются населенные пункты, изгибы рек, вер-
шины наиболее характерных гор, горные озера, перевалы, наезжен-
ные дороги. Следует избегать намечать ориентиры, расположенные
на обратных скатах гор по отношению к направлению полета, и
ориентиры, находящиеся в ущельях. Такие ориентиры обычно
видны под небольшими углами, а иногда только вертикально под
самолетом, что исключает возможность их обнаружения.
204
Маршрут полета лучше прокладывать над голыми склонами
гор: над лесистыми склонами формируются нисходящие потоки.
Профиль полета выбирается в зависимости от рельефа мест-
ности, метеорологических условий и видимости ориентиров на мар-
шруте.
Над вершиной горного хребта высота полета должна быть не
менее 600 м. Это объясняется тем, что на пути к вершине при на-
личии встречного ветра, а также после пролета вершины при нали-
чии попутного ветра самолет попадает в нисходящий поток воздуха
значительной силы.
При выборе радиостанций для пеленгования следует учитывать,
что ошибки от влияния горного эффекта уменьшаются при работе
в диапазоне коротких волн и при нахождении самолета и радио-
станции по одну сторону горного хребта.
При подготовке к полету летчик изучает рельеф местности по
маршруту полета, его превышение над уровнем моря и аэродрома и
определяет непросматриваемые пространства. Для изучения района
полетов и маршрута и для розыгрыша полета хорошо использовать
рельефные и стереоскопические карты, а также макеты, изобра-
жающие рельеф местности данного района.
При изучении метеорологических условий полета летчик особое
внимание обращает на высоту и характер облачности над горами и
в предгорьях. Если горные вершины закрыты облаками, то летчику
следует получить консультацию от метеоролога, на какой высоте
лететь, чтобы пройти над верхней границей этих облаков.
Летчик должен хорошо изучить сеть аэродромов для посадки на
них в том случае, когда свой аэродром окажется закрытым тума-
ном или низкой облачностью.
Особенности выполнения полета
Пробивание облаков вверх при следовании от ИПМ возможно,
если впереди по маршруту на дальности набора высоты нет гор,
закрытых облаками.
На первом участке маршрута летчик выводит самолет на линию
заданного пути с курсом, рассчитанным по шаропилотному ветру.
Поскольку в горном районе ветровой режим весьма неустойчив,
выход на линию заданного пути на последующих участках целе-
сообразно производить с МК = ЗМПУ. Однако при этом должен
осуществляться самым тщательным образом контроль счислением
и прокладкой пути на карте, визуальной ориентировкой, а также
при помощи радиотехнических средств.
Показания радиовысотомера в горной местности неустойчивы,
поэтому высота полета в основном определяется по барометриче-
скому высотомеру.
При полете выше гор самолетовождение выполняется обычным
порядком. Сохранение режима полета является главным условием
его выполнения.
205
Контроль пути визуальной ориентировкой осуществляется опре-
делением МС по характерным ориентирам в горах (вершины гор,
долины, скалы, ущелья, горные озера и т. д.).
При контроле пути при помощи радиотехнических средств в це-
лях повышения точности навигационных определений высоту полета
над горами следует держать не менее 1500 м. При пользовании
радиокомпасом необходимо осреднять несколько отсчетов АРК за
период 3—6 сек.
В ясную погоду полет можно выполнять ниже вершин гор, вдоль
ущелий и долин. Самолетовождение в этом случае является более
сложным, чем при полете над горами. Полет в непосредственной
близости от горных цепей и вершин создает трудность в сохранении
курса. Контроль пути осуществляется непрерывной визуальной
ориентировкой по характерным изгибам хребтов и долин, а также
приближенным счислением и прокладкой пути.
Заходить в долину или ущелье можно в тех случаях, если точно
известно, что они не имеют резких поворотов, не прерываются
горами, высота которых превосходит высоту полета, и лишь после
того, как летчик точно установит по карте их расположение и про-
верит основное направление по компасу.
При полете ниже гор нельзя срезать маршрут «на глазок», так
как при этом нарушается безопасность полета и возможна потеря
ориентировки.
В целях безопасности нельзя также допускать полет в облаках
ниже вершин гор. При значительном развитии облачности необхо-
димо набрать безопасную высоту не менее 600 м выше гор или вер-
нуться обратно, если высоту набрать невозможно.
Полет ниже гор должен быть прекращен также в тех случаях,
когда возникли сомнения в правильности визуальной ориентировки.
Для скрытого подхода к цели в горном районе нужно исполь-
зовать складки местности, а для облегчения отыскания цели заход
на нее необходимо строить по заранее выбранным вспомогатель-
ным ориентирам в районе цели.
Выход на цель в заданное время несколько затрудняется из-за
непостоянства высоты полета и изменения ветрового режима.
После выполнения задания выходить на аэродром посадки сле-
дует полетом на радиостанцию с периодическим запросом радиопе-
ленгов у наземного радиопеленгатора. Необходимо учитывать, что
дальность действия приводных радиостанций в горных районах
по сравнению с дальностью действия их в обычной местности сни-
жается почти вдвое.
Пассивный полет на радиостанцию, расположенную в горном
районе, возможен только для высот полета свыше 1500 м над го-
рами; колебания стрелки указателя курсовых углов при этом могут
достигнуть +5—10°. При пролете отдельных вершин и ущелий на
малых высотах возможны колебания стрелки указателя и в боль-
ших пределах, причем эти колебания обычно бывают резкими.
При высоте полета меньше 1500 м над горами следует предпо-
честь курсовой способ полета.
206
Во всех случаях полета на радиостанцию б горной местности
необходимо одновременно наблюдать за показаниями указателя
курсовых углов и указателя курса дистанционного компаса.
При пассивном полете на радиостанцию в целях безопасности
полета нужно учитывать возможное боковое уклонение при боковом
ветре, так как полет по радиодромии может приблизить самолет
к горным вершинам.
При восстановлении ориентировки летчик набирает высоту,
обеспечивающую видимость основных вершин. Ориентировка вос-
станавливается обычным порядком.
Поиск горного аэродрома сложен, поэтому летчик должен ис-
пользовать все возможности для выхода на аэродром посадки. При
необходимости ему должна быть оказана помощь с земли.
§ 29. САМОЛЕТОВОЖДЕНИЕ В НОЧНЫХ ПОЛЕТАХ
Навигационные условия полета
Условия полета ночью характеризуются плохой видимостью или
полным отсутствием видимости горизонта и земной поверхности,
затруднением в пользовании полетной картой и уменьшением точ-
ности навигационных определений, выполняемых при помощи ра-
диокомпаса, из-за влияния ночного эффекта.
Ограниченная видимость земной поверхности и наземных ориен-
тиров затрудняет визуальную ориентировку, а в некоторых случаях
и вовсе ее исключает. Например, в темную ночь на малых высотах
такие характерные ориентиры, как большие реки и озера, видны на
расстоянии 8—10 км, а железные дороги — до 1 км. С высот 3000—
5000 м эти ориентиры обычно совершенно не видны.
Степень видимости земных ориентиров ночью зависит от харак-
тера местности, времени года, фазы Луны, метеорологических усло-
вий и высоты полета. В лунную ночь дальность видимости харак-
терных ориентиров примерно в два раза больше, чем в темную
ночь, при этом наиболее удобным является наблюдение за местно-
стью в сторону Луны.
Визуальная ориентировка по световым ориентирам облегчается
благодаря значительной дальности их видимости. Например, в тем-
ную ночь с высот 2000—4000 м освещенные промышленные города
видны за 30—50 км, световые маяки — за 20—60 км. В ночном по-
лете несколько скрадывается расстояние до световых ориентиров,
что подчас вводит летчика в заблуждение относительно истинного
расстояния до ориентира. Счисление и прокладка пути могут
исключить подобную ошибку.
В темную ночь, особенно с больших высот, при отсутствии
характерных световых ориентиров визуальная ориентировка почти
полностью исключается.
Пилотирование самолета по приборам и отсутствие света в ка-
бине ограничивают возможность пользования картой. Кроме того,
контуры световых ориентиров на карте не совпадают с их действи-
тельным видом, что значительно затрудняет распознавание таких
207
ориентиров. Ведение визуальной ориентировки облегчается при на
Личии у летчика авиационной светящейся карты, которая облу-
чается ультрафиолетовым светом и позволяет читать ее в неосве-
щенной кабине.
Указанные обстоятельства требуют от летчика тщательной
штурманской подготовки к ночному полету и комплексного приме-
нения различных средств самолетовождения.
Особенности подготовки полета
Перед ночными полетами необходимо проводить тщательное из-
учение района полетов по картам, аэроснимкам и электрифициро-
ванной карте с действительными контурами световых ориентиров.
Особенно тщательно летчик должен изучать все даже мелкие
световые ориентиры в радиусе 15—20 км от аэродрома, что значи-
тельно облегчит его опознавание.
Маршрут ночного полета должен проходить через характерные
естественные ориентиры, видимые с данной высоты ночью. ИПМ и
КПМ обозначаются радиотехническими или световыми средствами.
Аэродром обычно обозначается световым маяком.
Для обеспечения надежного выхода на неосвещенную цель не-
обходимо проложить линию пути на характерный естественный
ориентир, расположенный в стороне от цели на удалении не менее
5% от расстояния между ИПМ и целью.
При подготовке к ночному полету большое значение имеет вы-
бор радиостанций для пеленгования. Для уменьшения влияния
ночного эффекта следует намечать те радиостанции, которые имеют
большие мощности и работают в диапазоне длинных волн.
Ночной маршрутный полет рассчитывается по шаропилотному
ветру. Основные данные по этапам полета заносятся летчиком
в табличку, которая берется в полет. Для ночного полета в таблице
рекомендуется записать прямоугольные координаты контрольных
ориентиров, поворотных пунктов маршрута и цели. Это исключает
необходимость пользования картой при контроле пути с помощью
навигационного индикатора.
Во время предварительной подготовки необходимо изучить све-
товые и характерные естественные ориентиры в полосе маршрута,
знать время наступления темноты, восхода и захода Луны, ее фазу.
В ночном полете летчик может неожиданно попасть в сложные
метеорологические условия. Поэтому еще при подготовке к полету
необходимо уделить самое серьезное внимание изучению погоды и
особенно возможности образования опасных явлений погоды по
маршруту и в районе аэродрома.
Особенности выполнения полета
Выход на ИПМ ночью осуществляется с расчетным курсом и
контролируется визуально (если ИПМ обозначен световым ориен-
тиром) или при помощи радиокомпаса (если в ИПМ расположена
радиостанция).
208
На линию заданного пути летчик может выходить с курсом,
рассчитанным на земле по шаропилотным данным, или по радио-
станции, находящейся на линии заданного пути, а при наличии на
линии пути световых ориентиров — по их створу. При этом в каче-
стве первого ориентира берется ИПМ.
Важнейшим условием точного самолетовождения в ночном по-
лете является строгое сохранение летчиком заданного режима по-
лета. Полет произвольными курсами в направлении случайных
световых ориентиров неминуемо приведет к потере ориентировки.
Контроль пути в ночном полете летчик осуществляет счислением
и прокладкой пути, визуально и при помощи радиотехнических
средств. Счисление и прокладку пути в ночном полете летчик обя-
зан производить в течение всего полета. Хорошее знание района
полетов, счисление и прокладка пути позволят летчику в любой
момент полета мысленно представить себе район вероятного место-
нахождения самолета, что облегчит ведение ориентировки без
сличения местности с картой.
Навигационный индикатор значительно облегчает счисление и
прокладку пути в ночном полете, при этом летчик использует
вместо карты координаты, записанные в таблице расчетов.
Учет времени полета является одним из главных условий сохра-
нения ориентировки в ночном полете. Как правило, выход на кон-
трольный ориентир и разворот на новый курс ночью производится
по времени или предвычисленному курсовому углу радиостанции.
Пользование шкалой секундомера бортовых часов является обя-
зательным элементом в ночном маршрутном полете. Секундомер
включают каждый раз в момент отхода от КО; в конце разворота
над ППМ его останавливают и вновь включают. Пройденное путе-
вое время отсчитывается по шкале секундомера.
Контроль пути визуальной ориентировкой ночью возможен лишь
с малых и средних высот и только при наличии характерных есте-
ственных и световых ориентиров. Сложные условия ночного полета
приводят к необходимости самого широкого применения в целях
контроля пути радиотехнических средств самолетовождения в ком-
плексе с общими средствами.
Определение МС следует производить при помощи наиболее
мощных радиостанций, расположенных вблизи линии пути.
При пеленговании радиостанций во время самого интенсивного
проявления ночного эффекта для получения пеленга необходимо
взять 3—4 отсчета и осреднить их, что уменьшит ошибку от ноч-
ного эффекта.
В ночном полете основной упор при контроле пути следует де-
лать на наземные радиопеленгаторы, так как они избавлены от
ошибок ночного эффекта. Автоматические радиопеленгаторы, ра-
ботающие на УКВ, являются надежным средством контроля пути
в ночном полете.
Наземные радиолокационные станции в ночных условиях также
с достаточно высокой точностью определяют место самолета, что
позволяет осуществлять контроль полетов с земли.
14—98
209
Исправление путП летчик должен производить только у Кон-
трольных ориентиров или по команде с командного пункта.
В боевой обстановке световых ориентиров при ночных действиях
будет очень мало, населенные пункты будут затемнены. Зато широ-
кое применение найдут прожекторы, светофакелы, светосигнальные
бомбы. Определение линии фронта можно уверенно производить по
трассам ракет, снарядов, по выстрелам орудий.
На цель нужно выходить от характерного ориентира с точно
рассчитанным курсом и временем полета с последующим визуаль-
ным поиском ее. Создаваемые очаги пожаров в ряде случаев могут
служить ориентирами для выхода на цель. Возможен выход на
цель с помощью радиотехнических средств и наземных радиолока-
ционных станций.
Во время Великой Отечественной войны наши летчики точно
выходили на цели, расположенные на поле боя, используя искус-
ственные световые ориентиры и лучи прожекторов, скрещиваю-
щихся над целью.
Выход на воздушные цели в ночных условиях осуществляется
наведением с КП при помощи радиолокационных станций.
Самолетовождение на обратном маршруте, как правило, выпол-»
няется полетом на радиостанцию или световой маяк. В обоих слу-
чаях полет контролируется при помощи общих средств самолетов
вождения.
При полетах ночью на радиостанцию с расстояний свыше 100—
150 км следует применять активный способ полета, переходя затем
на пассивный полет. Во всех случаях полета на приводную радио-
станцию, когда работа радиокомпаса неустойчива из-за влияния
атмосферных помех или ночного эффекта, следует проверять пра4
вильность направления полета запросом пеленгов наземного радио-
пеленгатора.
Самолетовождение ночью на малых высотах сложнее, чем днем:
значительно сокращается дальность видимости освещенных ориен-
тиров, что еще в большей степени усложняет визуальную ориен-
тировку; уменьшение дальности действия средств связи и радио-
технических средств ухудшает возможности контроля полетов
с земли. В этих условиях требуется еще более строгое сохранение
рассчитанного режима полета и непрерывное счисление и прсь
кладка пути. Надежным средством сохранения ориентировки при
полете ночью на малых высотах является навигационный инди-
катор.
Полет произвольными курсами, неучет времени полета, отсут^
ствие счисления и прокладки пути, неверие в показания приборов,
как правило, приводят в ночном полете к потере ориентировки.
Действия летчика в случае потери ориентировки остаются та>
кими же, как и днем. Однако плохая видимость затрудняет визу-
альное опр’еделение места самолета.
Основным способом восстановления потерянной ориентировки
ночью следует считать выход на радиостанцию или световой ориеш
тир (светомаяк). В последнем случае из района вероятного местом
210
нахождения летчик должен взять примерный курс в направлений
светового ориентира (маяка) и лететь с этим курсом до выхода
в зону видимости ориентира, опознать его, а при необходимости
выйти непосредственно на световой ориентир.
При восстановлении ориентировки ночью летчик ни в коем
случае не должен снижаться до малых высот, пытаясь полетом
с произвольными курсами визуально опознать местность. Это за-
труднит оказание помощи летчику по радио с земли.
§ 30. САМОЛЕТОВОЖДЕНИЕ В ПОЛЕТАХ НАД МОРЕМ
Навигационные условия полета
Самолетовождение над морем включает в себя решение ряда
специальных задач и имеет некоторые особенности, вытекающие из
навигационных условий полета над морем.
При . полетах вблизи береговой черты можно вести визуальную
ориентировку по береговым ориентирам, поэтому самолетовождение
в этом случае мало отличается от самолетовождения в обычных
условиях.
При полетах вне видимости береговой черты самолетовождение
значительно усложняется и характеризуется невозможностью веде-
ния визуальной ориентировки, снижением точности навигацион-
ных определений при помощи угломерных радиотехнических систем
из-за больших удалений от радиостанций и сложностью пилотиро-
вания самолета из-за полной или частичной невидимости горизонта.
Направление и скорость ветра, как правило, в 40—50 км от
суши изменяются. На высотах до 1000—2000 м изменение ветра
летчик может оценить по состоянию водной поверхности (ряби,
«барашкам»).
При полетах над морем погода и естественное освещение также
создают некоторые отличия по сравнению с полетом над сушей.
Так, например, при сплошной облачности высотой до 500 м тем-
ный фон моря создает условия, похожие на сумерки, и полет под
облаками значительно усложняется, ухудшается видимость и воз-
никает необходимость пилотирования самолета по приборам. При
кучевой облачности менее 10 баллов на поверхности моря появ-
ляются светлые пятна от лучей солнца, а резко выделяющиеся
темные пятна — тени от облаков — напоминают острова, что может
ввести летчика в заблуждение. При полетах на бреющих высотах
в штиль, когда поверхность моря зеркально гладкая, трудно опре-
делить высоту полета на глаз.
Особенности подготовки к полету
При подготовке полетных карт необходимо четко выделить бере-
говую черту (синим цветом), границу территориальных вод (крас-
ной линией), отметить отмели (красными штрихами) и фарватеры
(синими линиями), произвести дополнительную разметку географи-
14*
211
ческих координат по широте через 10' и по долготе через 15', на-
нести линии равных радиопеленгов тех радиостанций, которые на-
мечены для пеленгации. В качестве ИПМ и КПМ выбираются
характерные ориентиры на береговой черте, в КПМ обычно уста-
навливают радиостанцию.
Если цель расположена на береговой черте, то линию пути це-
лесообразно прокладывать с заведомым уклонением от нее на
характерный ориентир. Если цель является подвижной (корабль),
то маршрут прокладывается в заранее рассчитанную точку встречи.
При построении полета для поиска кораблей маршрут до района
поиска обычно прямой, а затем он строится по определенным схе-
мам в зависимости от способа поиска.
Готовясь к полету над морем, летчик должен особенно тща-
тельно изучить береговую черту и береговую полосу со всеми ха-
рактерными искусственными ориентирами на ней, фарватеры, от-
мели, места возможных стоянок кораблей и искажения береговой
черты, вносимые распространением льда при замерзании. Граница
льда наносится на карту.
Особенности выполнения полета
На линию заданного пути выходить следует с курсом, рассчи-
танным по шаропилотному ветру, определенному на суше или сооб-
щенному с корабля, или полетом от радиостанции (пеленгатора),
установленной в ИПМ на берегу.
До выхода в открытое море и при наличии характерных ориен-
тиров курс следования можно уточнить пролетом контрольного
этапа.
Контроль пути при полете над морем летчик производит счис-
лением и прокладкой пути, а также при помощи радиотехнических
средств. При видимости береговой черты проконтролировать полет
можно визуальной ориентировкой. В этом случае, летчик глазо-
мерно осуществляет пеленгацию, определяя МС по пеленгу и ди-
станции одного ориентира или пеленгам двух ориентиров. Во вто-
ром случае место самолета фактически определяется сопоставле-
нием положения самолета относительно визируемых точек (рис. 140).
Момент разворота над заданной точкой в море летчик опреде-
ляет по времени и предвычисленному курсовому углу. Выход
в район цели выполняется от берегового ориентира по курсу и
времени.
Для более уверенного и надежного вывода самолетов на по-
движйые и малозаметные морские цели могут, применяться следую-
щие способы наведения:
1) Периодическая радиоинформация. Самолет-разведчик, обна-
ружив цель в море, сообщает в радиодонесении место, состав, курс,
скорость и прочие данные о цели.
2) Береговая радиопеленгация. Координаты цели определяются
наземными радиопеленгаторами пеленгованием самолета-наводчика.
По этим данным производится расчет полета.
212
3) Полет на привод-
ную радиостанцию са-
молета-наводчика или
своего корабля, находя-
щихся в районе цели.
4) Полет при помо-
щи радиокомпаса и об-
щих средств самолето-
вождения от радиостан-
ции на борту корабля
(катера), место которо-
го летчику известно.
5) Лидирование.
Кроме того, марш-
рут полета до цели мо-
Рис. 140. Глазомерное определение МС визуаль-
ной пеленгацией береговых ориентиров
жет быть обозначен светящимися буйками, сброшенными самоле-
том-разведчиком.
Определение места корабля. При выполнении разведывательных
полетов над морем место корабля летчик может определить по пе-
ленгу и дистанции относительно места самолета, привязкой к бере-
говым ориентирам и обратной прокладкой.
Обнаружив корабль, летчик определяет место самолета, от ко-
торого на линии пеленга откладывает дистанцию до корабля. Полу-
ченная точка и будет местом корабля (рис. 141).
Летчик может сообщить на КП магнитный пеленг корабля и
дистанцию до него, что позволит непосредственно на КП опреде-
лить место корабля.
При видимости ориентиров место корабля определяется относи-
тельно этих ориентиров глазомерно или пеленгацией в створ. Во
втором случае двукратным заходом в створ «корабль-ориентир»
летчик замечает курсы и сообщает их на КП, где определяется
место корабля (рис. 142).
Для определения места корабля обратной прокладкой после
обнаружения корабля летчик записывает время и дальнейший полет
выполняет с постоянной скоростью; при изменении курса записы-
Рис. 141. Определение места корабля
относительно места самолета
вает время изменения и новое
значение курса. Выйдя на бере-
говую черту, летчик отмечает
МС и время, а после посадки
выполняет обратную прокладку
в следующем порядке.
От отметки МС на берегу
в обратном направлении проло-
жить истинные курсы и на каж-
дом из них отложить пройден-
ные расстояния по воздушной
скорости.
По известному ветру полу-
ченную штилевую точку сме-
15—98
213
стить в направлении, обрат-
ном направлению ветра, на
величину сноса самолета за
общее время полета, чем и
определится место самолета
в момент обнаружения ко-
рабля.
Относительно данного ме-
ста самолета нанести поло-
жение корабля (рис. 143).
Летчик может также опре-
делить (хотя и приближен-
но) курс и скорость корабля.
Курс корабля (кораблей)
определяется по компасу, для
Рис. 142. Определение места корабля при- чего самолет разворачивает
вязкой к береговым ориентирам параллельно или перпенди-
кулярно курсу корабля. Ско-
рость корабля определяется по буруну у носовой части и кильватер-
ной струе. Если таким образом скорость корабля определить не
удалось, то она принимается равной 3/4 максимальной скорости для
данного типа корабля (в соединении — самого тихоходного).
Расчет на встречу с кораблем и поиск кораблей в море. Летчи-
кам-истребителям приходится часто конвоировать свои корабли
в море. В этом случае необходимо произвести расчет на встречу
с кораблями, в результате которого определить точку встречи, курс
и время полета до нее. Порядок расчета заключается в следующем.
Получив заданное время выхода истребителей сопровождения
к конвоируемым кораблям, по линии пути кораблей от последнего
их места на карте откладывается расстояние, пройденное кораб-
лями за время полета истребителей до точки встречи.
От ИПМ в точку встречи прокладывается линия пути и произ-
водится расчет полета (рис. 144).
214
8 00
йТочна
1 ^^остре чи
c+loo (7 Л,) 8J5
£ 1
=□
Рис. 144. Определение точки встречи с кораблями
в море
Если же истребителям задается время вылета, то расчет на
встречу с кораблями выполняется аналогично расчету на перехват
воздушной цели.
После выхода в расчетную точку встречи в случае необнаруже-
ния кораблей производится поиск их с п о с о б о м «коробочка».
Сущность поиска способом «коробочка» состоит в том, что лет-
чик выполняет полет по прямоугольной расходящейся спирали,
осматривая определенный район (рис. 145).
Маневр может быть подготовлен заранее. Для этого от расчет-
ной точки встречи с кораблем последовательно откладываются от-
резки, перпендикулярные друг к другу, на удалении а= 1,75 d,
где d — дальность видимости. Через каждые два отрезка длина
последующих отрезков увеличивается на величину а. Для каждого
участка «коробочки» определяются курс и время полета. Резуль-
таты расчета обычно сводят в таблицу.
С целью обнаружения кораблей противника в море может быть
организован поиск- их способами «гребенка» или «окружность
встреч».
Способ «гребенка» применяется для поиска кораблей,
если известен только район их местонахождения в море.
Сущность способа заключается в том, что в заданный или рас-
считанный район посылается
определенный наряд самолетов,
в котором летчики на парал-
лельных курсах просматривают
одновременно весь район
(рис. 146).
Наряд самолетов опреде-
ляется по формуле
кт
N~ Tffd ’
где А — ширина района;
d — дальность обнаруже-
ния корабля в море.
Перекрытие между полоса-
ми наблюдения должно быть
от 25 до 50 %.
:. 145. Поиск кораблей в море спо-
собом „коробочка*
15*
215
Район поиска определяется следующим образом.
Находят радиус круга вероятного местоположения корабля,как
путь, пройденный кораблем с максимальной скоростью за время,
истекшее от момента обнаружения до момента прибытия самолетов
в точку обнаружения, которая принимается за центр. Площадь
поиска приводится к квадрату со сторонами, равными двум ра-
диусам.
Рис. 146. Поиск кораблей в море способом „гребенка*
После определения района поиска рассчитывается наряд само-
летов, строится на карте схема поиска и производится обычный
расчет полета.
Поиск способом «окружность встреч» приме-
няется в случае, когда был известен тип корабля и его первоначаль-
ное местоположение, а направление дальнейшего его движения
неизвестно.
Задача решается графическим построением на карте в следую-
щем порядке.
Из точки первоначального местоположения корабля на карте
нанести окружность вероятного положения его к моменту отхода
самолетов от ИПМ.
где t — время от момента обнаружения до выхода самолетов
на ИПМ.
Через ИПМ и первоначальную точку провести прямую и решить
задачу на встречу и догон (рис. 147).
216
На точках встречи и догона построить окружность, которая и
будет «окружностью встреч».
Из ИПМ провести касательные к «окружности встреч» и каса-
тельную дугу АБ радиусом, равным расстоянию от ИПМ до точки
догона.
Рис. 147. Поиск кораблей в море способом „окружность встреч*
Разделив дугу АБ на 1,75 d, получить необходимый наряд само-
летов, после чего произвести расчет полета по маршрутам само-
летов.
В указанных способах поиска кораблей выдерживание задан-
ной схемы поиска и расчетного режима полета является одним из
главных условий успеха поиска.
ГЛАВА СЕДЬМАЯ
ОСОБЕННОСТИ САМОЛЕТОВОЖДЕНИЯ ПРИ ВЫПОЛНЕНИИ
РАЗЛИЧНЫХ БОЕВЫХ ЗАДАЧ
§ 31. ПЕРЕХВАТ ВОЗДУШНЫХ ЦЕЛЕЙ
Перехват воздушных целей истребителями может осуществляться
из положения дежурства истребителей на аэродромах или барражи-
рования в зонах.
Как в том, так и в другом случае полет на перехват выпол-
няется при тесном взаимодействии летчиков-перехватчиков с бое-
выми расчетами командных пунктов и расчетами наземных радио-
локационных станций.
Боевой расчет КП, непрерывно наблюдая за полетом цели и
своих истребителей, производит вычисления на перехват и на осно-
вании их осуществляет наведение истребителей на цель.
Организация полетов истребителей на перехват включает после-
довательное выполнение следующих операций:
1) обнаружение воздушного противника с помощью наземных
радиолокационных станций и изображение воздушной обстановки
на КП;
2) определение момента подъема или рубежа перехвата (если
он не задан);
3) принятие решения командиром на перехват цели и доведе-
ние его до исполнителей;
4) выполнение непосредственных расчетов на перехват и наве-
дение истребителей на цель;
5) контроль за ходом воздушного боя и определение момента
выхода истребителей из боя для обеспечения своевременной по-
садки на заданном аэродроме;
6) привод истребителей после выполнения задачи на аэродром
посадки.
Успешное выполнение перехвата воздушной цели возможно
только при четкой и согласованной работе летчиков-перехватчиков,
боевых расчетов КП и радиолокационных станций, а также беспе-
ребойной работе средств связи и радиолокации, обеспечивающих
работу КП.
218
Для выполнения полетов на перехват каждый летчик-истреби-
тель должен быть хорошо подготовлен в штурманском отношении,
четко представлять порядок наведения, точно и быстро выполнять
команды, подаваемые с КП.
Наведение истребителей на воздушную цель выполняется на
основании штурманских расчетов, выполняемых на КП. Поскольку
эти расчеты производятся в целях обеспечения перехвата воздуш-
ной цели, то в дальнейшем мы будем называть их расчетами на
перехват.
Расчеты на перехват выполняются в предположении,
что цель будет следовать с неизменным курсом, на постоянной вы-
соте и скорости. Направление и скорость полета цели определяются
по засечкам цели на планшете или непосредственно по плану-инди-
катору радиолокатора, а ее высота — по индикатору высоты.
При каждом изменении режима полета цели задача на перехват
решается заново.
Так как в ходе наведения эти расчеты все время уточняются, то
практически нет надобности учитывать влияние ветра на полет
перехватчика.
В зависимости от сложившейся обстановки перехват может осу-
ществляться на попутно-пересекающихся курсах, на встречных кур-
сах с разворотом на попутные или попутно-пересекающиеся курсы
и на догоне. Разворот со встречных на попутные курсы произво-
дится для вывода истребителей в заднюю полусферу воздушной
цели.
Таким образом, чтобы осуществить перехват, необходимо по дан-
ным о режиме полета цели и заданному направлению атаки произ-
вести необходимые расчеты и на основании их осуществить наведе-
ние истребителей на цель.
Решение задачи на перехват на попутно-пересекающихся
курсах
Треугольник перехвата. Перехват на попутно-пересекающихся
курсах чаще всего происходит при позднем обнаружении воздуш-
ного противника, при наращивании сил истребителей в ходе боя,
а также в тех случаях, когда в результате маневра цели истреби-
тели оказались сзади нее. При перехвате на попутно-пересекаю-
щихся курсах истребители, сближаясь с целью, сразу занимают
тактически выгодное положение для атаки. По этой причине истре-
бителей, сближающихся с целью на встречных курсах, обычно
в конце наведения выводят на попутно-пересекающиеся курсы.
Рассмотрим решение задачи на перехват в общем виде. Пусть
к моменту готовности истребителей взять курс на перехват цель
находилась в исходной точке Ц и двигалась со скоростью Уц по
направлению ЦП\ в этот же момент истребители находились
в точке И на одной высоте с целью на удалении 5ИСХ от нее
(рис. 148).
219
Рис. 148. Треугольник пере-
хвата
Из треугольника ИПЦ
Очевидно, перехват в точке П про-
изойдет только в том случае, если цель
и истребители выйдут в эту точку одно-
временно. В этом случае:
. ЦП _ ип
“ Уи
ИЛИ ЦП __ Уц
ИП ~ 1/и •
Следовательно, при точном курсе
перехвата и постоянном режиме поле-
та цели расстояния, проходимые сбли-
жающимися самолетами в одинаковые
промежутки времени, пропорциональны
их скоростям полета.
на основании теоремы синусов имеем:
sin КУЦ sin КУИ
откуда
sin КУЦ =* sin КУИ,
где КУЦ—курсовой угол от истребителя на цель;
КУИ—курсовой угол от цели на истребитель.
Из формулы следует, что при постоянных скоростях сближаю-
щихся самолетов их курсовые углы остаются постоянными. Следо-
вательно, для быстрейшего перехвата цели, находящейся на удале-
нии визуальной или радиолокационной видимости, перехватчик дол-
жен подобрать такой курс, чтобы иметь цель под одним и тем же
курсовым углом.
Если курсовой угол уменьшается, надо отвернуть самолет от
цели, а если увеличивается — довернуть на нее. Это положение
может быть использовано также для контроля хода перехвата на
КП. Если линии, соединяющие одновременно поступающие от-
метки цели и истребителей, параллельны друг другу, истребители
идут на перехват правильным курсом, если же эти линии не парал-
лельны, надо исправить курс на перехват.
Курс полета на перехват, как видно из рис. 148, может быть
определен по формуле
МК = МПЦ ± КУЦ,
где МПЦ — магнитный пеленг от истребителей на цель.
Знак плюс берется, когда цель находится слева относительно
истребителей, а знак минус — когда цель справа.
Место перехвата (точка /7) может быть получено в точке пере-
сечения линии курса на перехват с линией пути цели, а время по-
220
лета — по расстоянию 5П от исходной точки истребителей до точки
перехвата и их скорости полета.
Рассмотренные выше положения лежат в основе различных спо-
собов решения задачи на перехват, в том числе глазомерного и
с помощью масштабно-временных линеек различных видов.
Последние два способа находят широкое практическое приме-
нение.
Определение исходных точек цели и перехватчика. Для решения
задачи на перехват надо знать, в каких точках будут находиться
цель и истребители к моменту выхода истребителей на курс, рас-
считанный на перехват. Эти точки принято называть исходными.
В процессе наведения исходные точки определяются прокладкой
пути цели и истребителей за время, затрачиваемое на расчеты и
передачу команд истребителям. Если же истребители находятся на
земле, то за их исходную точку принимают заранее установленный
исходный пункт наведения (ИПН), а исходную точку цели выносят
вперед по линии ее пути на время взлета, сбора и выхода истреби-
телей на ИПН. Это время подсчитывается заранее и обычно назы-
вается «пассивным» или временем боеготовности.
Для выполнения расчетов на перехват при вылетах истребите-
лей из положения дежурства надо знать их среднюю скорость по’-
лета с учетом скорости набора высоты и горизонтального полета.
Так как эту скорость при неизвестной точке перехвата определить
не представляется возможным, то расчеты производят по скорости
горизонтального полета на высоте перехвата.
Чтобы исключить ошибки в расчетах, возникающие вследствие
этой замены скоростей, надо на некоторое дополнительное расстоя-
ние УЦД/ вынести исходную точку цели. Формулу для подсчета
времени Д/ можно получить следующим образом.
Пусть к моменту выхода истребителей на ИПН цель находилась
в точке Ц (рис. 149).
Время полета цели до точки перехвата П равно
-Ь 4. п.
Время полета истребителей до этой же точки, определяемое по
их скорости горизонтального по-
лета Уи равно
/ — -4- /
17 г ^Г. 1Г
v И
Вычтя из первого равенства
второе, получим
д/ — t_____—
V И
где — время набора истреби-
телями высоты;
— путь истребителей за
время набора.
Рис. 149. Определение исходного
положения цели
221
Рис. 150. Графическое решение задачи
перехвата
Время М может быть
подсчитано заранее и сведе-
но в таблицу.
Таким образом, чтобы
найти исходную точку цели
при вылетах истребителей на
перехват из положения де-
журства надо от засечки цели
к моменту подачи команды
истребителям на взлет отло-
жить ее путь за время /пс и ДЛ
Графическое решение за-
дачи перехвата. По несколь-
ким засечкам цели опреде-
ляется ее скорость и направление полета. Исходные точки пели и
истребителей соединяются прямой. От точки Ц в произвольном
масштабе откладывается вектор скорости цели, затем из его
конца Ц\ радиусом, равным скорости истребителей, в этом же
масштабе делают засечку И\ на линии ИЦ (рис. 150).
Из точки И параллельно линии ИЦЦ проводится прямая до
пересечения с линией пути цели. Точка пересечения П есть искомая
точка перехвата.
Курс на перехват измеряется по карте, а время полета опреде-
ляется по расстоянию до точки перехвата и скорости истребителей.
Способ графического решения задачи на перехват применяется
при определении места встречи с кораблем в море; на этом же
принципе основано решение задачи на перехват воздушной цели
при помощи различных инстру-
ментов.
Решение задачи перехвата
при помощи масштабно-времен-
ных линеек. Время полета цели
и истребителей до точки пере-
хвата должно быть одинако-
вым. На этом принципе и осно-
ваны расчеты на перехват
с помощью линеек. Линейки из-
готовляются в масштабе карты
наведения; одна из них назы-
вается линейкой цели,
другая — линейкой истре-
бителей. Они имеют деле-
ния, которые соответствуют
расстоянию, проходимому само-
летом при данной скорости за
одну минуту.
Расчеты на перехват при
помощи линеек выполняются
следующим образом (рис. 151).
Рис. 151. Решение задачи перехвата
с помощью масштабно-временных
линеек
222
Рис. 152. Глазомерное решение
задачи перехвата
По нескольким засечкам цели на
планшете определяется ее скорость,
направление полета и точка исходного
положения к моменту готовности истре-
бителей взять курс на перехват. Ли-
нейка цели нулевым делением накла-
дывается на исходную точку цели Ц
вдоль ее направления полета, а линей-
ка истребителя — на исходную точку И.
Вращая линейку истребителя вокруг
точки И, добиваются пересечения обеих
линеек на одинаковых делениях вре-
мени. Точка пересечения линеек есть
расчетная точка перехвата. Время по-
лета на перехват отсчитывается по ли-
нейке, а курс измеряется по карте.
Глазомерное решение задачи перехвата. Глазомерное решение
задачи перехвата основано на том, что пути, проходимые сближаю-
щимися самолетами в единицу времени, соответственно пропорцио-
нальны их скоростям полета.
Чтобы глазомерно решить задачу перехвата, надо наметить на
линии пути цели точку перехвата, расстояния от которой до цели и
до истребителей были пропорциональны их скоростям полета, а за-
тем по карте отсчитать курс полета в эту точку (рис. 152).
Так, например, если скорость цели равна 600 км!час, а истреби-
телей 800 км!час, то расстояние от истребителей до точки перехвата
должно относиться к расстоянию от этой же точки до цели как 4 : 3.
Перехват с разворотом на попутные курсы
Расчет возможной дальности перехвата. Для успешного отраже-
ния налета авиации противника перехват должен осуществляться
на дальних подступах к прикрываемым войскам или объектам.
Однако дальность обнаружения воздушных целей не всегда позво-
ляет перехватывать их на желаемом рубеже.
Для оценки возможностей перехвата рассчитывается минималь-
ная дальность перехвата. Дальность перехвата будет минимальной,
когда перехват происходит на встречных курсах, так как скорость
сближения самолетов в этом случае будет максимальной.
На рис. 153 показана схема перехвата на встречных курсах
с разворотом истребителей на попутные курсы. Очевидно, от мо-
мента обнаружения цели до ее перехвата пройдет время, равное
сумме «пассивного» времени /пс, времени набора истребителями
высоты ZH, горизонтального полета и времени разворота на 180°/iso.
Истребители за это время успеют получить приказание на вылет,
взлететь, собраться и выйти в точку перехвата на заданной высоте.
Как видно из рис. 153,
(А>с + 4 + + Лзо) • («)
223
Принимая = и, после преобразования получим
и
С __ ^исх • Уц (^ПС + + ^18о) + п$н /^\
дп ~~ 1 + гг ’
где 5*п— расстояние от исходной точки истребителей до рубежа
перехвата;
^исх — исходная дальность до цели.
Из формулы следует, что для увеличения дальности перехвата
необходимо увеличивать дальность обнаружения и сокращать
время на оповещение и принятие решения, а также время взлета и
сбора истребителей.
Рис. 153. Схема перехвата с разворотом на попутные курсы
Дальность перехвата рассчитывается по этой формуле в тех
случаях, когда
^исх (Znc + tH + /\80)
что означает, что существует участок горизонтального полета. Если
эта разность получается меньше SH, то такого участка не будет.
Дальность до рубежа перехвата при 5П — 5Н = 0, как следует
из выражения (а), будет равна
^11 = ^исх — (/пс + tH + /180).
Если разность 5ИСХ — Уц (7ПС + АО получается отрицательной, то
перехват возможен только на догоне.
Примеры: 1. Вероятная высота полета цели 8000 м, скорость 600 км/час,
дальность обнаружения 310 км.
Время на оповещение и принятие решения командиром составляет 2 мин.,
на подготовку к вылету, взлет и сбор эскадрильи — 5 мин., время набора вы-
соты — 7 мин., путь за время набора 70 км, скорость горизонтального полета
800 км/час, время разворота на 180° составляет 2 мин.
Определить дальность до рубежа перехвата.
Решение: 1)^пс = 2 + 5 = 7 мин.
2) 5Ц = Уц (/пс + /ы + /180) = -gy (7 + 7 + 2) » 160 км.
224
3)
4)
5)
2.
£исх — (^пс -Мн + Лео) в 310 — 160 > SH (горизонтальный полет будет).
600 -П7Г
п~ 800 - °’70-
ЗЮ- 160 + 0,75-70 _ 202
Sn~ 1 + 0,75 1,75 116
Возможная дальность обнаружения цели на высоте 5000 м равна 220 км,
скорость полета цели 720 км/час, «пассивное» время 8 мин., время набора вы-
соты 5 мин., путь за время набора 50 км, скорость полета истребителей
800 км/час, время разворота на 180° составляет 2 мин.
Определить дальность до точки перехвата.
720
Решение: 1) 6*ц == (8 + 5 + 2) = 180 км.
2) £Исх — З’ц < SH (горизонтального полета не будет).
3) = £исх — = 220 — 180 = 40 км.
Если истребители находятся в воздухе на одной высоте с воз-
душной целью, то для дальности перехвата будем иметь:
Q _ *$*ИСХ 1Л1/180
°П — 1 . „
Время полета истребителей до точки перехвата получим, разде-
лив расстояние 5П на скорость истребителей:
^ИСХ УцЛвО
Vh-Vh •
4
650 км/час, исходное расстояние до цели
расстояние до точки перехвата, если истре-
с воздушной целью и пойдут на перехват
Пример. Скорость полета цели
92 км. Определить время полета и
бители находятся на одной высоте
со скоростью 750 км/час, а время разворота на 180° равно 2 мин.
Решение:
п I/ / _ 650
1) 1М180 — -2 — 22 км.
_ (92- 22).60 _
2) /п 750 + 650 3 МИН'
3) = -^--3 = 37,5 км.
Расчет рубежей подъема. Чтобы осуществить перехват на задан-
ном рубеже, надо не упустить момент подъема истребителей. По-
этому для наиболее вероятных высот и скоростей полета цели, наи-
более удаленной точки рубежа перехвата и средних норм боеготов-
ности истребителей рассчитывают рубеж подъема для различных
групп истребителей.
Рубежи подъема и перехвата наносят на карту и используют
для принятия решения на вылет (рис. 154).
При подходе цели к рубежу подъема истребителям подается
команда на взлет.
Расстояние от аэродрома истребителей до рубежа подъема опре-
деляется по формуле
^под = З’п + (^пс + + ^ур),
где tn — время полета до наиболее удаленной точки рубежа пере-
хвата с учетом набора высоты.
225
Рис. 154. Рубежи подъема и перехвата
Пример. Предполагаемая высота полета цели 6000 м, скорость цели
600 км/час, скорость истребителей 800 км/час, расстояние до рубежа перехвата
100 км, время набора истребителями высоты 6 мин., путь за время набора
60 км, «пассивное» время 5 мин., время разворота на 180° составляет 2 мин.
Определить дальность до рубежа подъема.
Решение:
п , (100-60).60 Q
1) ^г.п =----800 — = 3 мин>
2) = in + ^г. п = 6 + 3 = 9 мин.
3) $под = 100 + -^ (5 + 9 + 2) = 260 км.
Построение истребителями маршрута набора высоты. При пере-
хвате на больших высотах расстояние до точки перехвата может
оказаться меньше, чем путь, проходимый истребителями за время
набора высоты. Очевидно, если истребителей направить по прямой
в точку перехвата, то они выйдут туда раньше противника, но ниже
его (рис. 155). Чтобы перехват состоялся, истребители должны на-
брать часть высоты в районе аэродрома, а остальную — по мар-
шруту.
Так рекомендуется поступать при перехвате небольшими груп-
пами истребителей, а также при неясной обстановке.
Рис. 155. Набор высоты при перехвате
Рис. 156. График скороподъем-
ности
226-
Высоту, которую истребители должны набрать над аэродромом,
определяют по графику скороподъемности истребителей. Для этого
по горизонтальной оси графика нужно отложить разность 5Н — 5П,
восставить перпендикуляр к линии скороподъемности, а затем по
вертикальной оси высот отсчитать искомую высоту (рис. 156).
При перехвате большими группами маршрут набора высоты
строится с изломом с таким расчетом, чтобы его общая длина рав-
нялась пути за время набора. Удлинять путь следует в сторону про-
тивника (как показано на рис. 155-пунктирной линией), чтобы обес-
печить вывод истребителей на попутные курсы.
Линейка для решения задачи перехвата с разворотом на попут-
ные курсы. Линейка состоит из двух частей: линейки цели и
Рис. 157. Решение задачи на перехват с помощью линейки
перехвата
линейки истребителей (рис. 157). Обе части линейки из-
готовляются из прозрачного материала в масштабе карты наве-
дения.
Линейка цели имеет Т-образную форму. На рабочей части ли-
нейки нанесены минутные отрезки пути для различных скоростей
полета, а на выступах сделаны отверстия на одинаковых расстоя-
ниях друг от друга.
Линейки истребителей изготовляются каждая для какой-либо
одной типовой скорости полета. .Ширина линейки истребителей
должна быть равна двум радиусам разворота при данной скорости
и угле крена. По обрезам линейки наносятся минутные отрезки
пути для данной скорости.
Обе линейки сочленяются с помощью штифта (на линейке истре-
бителя) и отверстий (на линейке цели). Это сочленение делают
так, чтобы расстояние между линиями пути цели и истребителей
после выхода последних на попутные курсы было равно 3—5 км.
227
разворот
Рис. 158. Решение задачи на перехват с предварительным
выводом истребителей на встречно-параллельный курс
При таком положении истребители имеют большую возможность
выбора направления атаки, чем при выходе непосредственно
в «хвост» цели; кроме того, если противник не обнаружен в конце
разворота вследствие ошибок наведения или плохой видимости,
легче определить направление его дальнейшего поиска.
Расчеты на перехват при помощи линейки выполняются следую-
щим образом.
По нескольким засечкам цели на планшете определяется ее пу-
тевая скорость, направление полета и точка исходного положения
к моменту готовности истребителей взять курс на перехват. Ли-
нейка цели накладывается вдоль направления полета цели линией,
соответствующей данной скорости полета, а линейка истребителя
накладывается на исходную точку истребителей рабочим обрезом.
Перемещая линейку цели вдоль направления полета цели, доби-
ваются, чтобы отсчет времени против исходных точек цели и истре-
бителей на обеих линейках был одинаковым (см. рис. 157). При
таком положении линеек линия ИР будет линией курса на перехват,
точка Р — точкой начала разворота, а точка К — точкой окончания
разворота на курс, параллельный курсу цели. Команда на разворот
подается за 0,5—1 мин. до подхода истребителей к точке Р.
Если истребители преждевременно выходят в расчетную точку
начала разворота, а также при сближении на встречных курсах
или близких к ним, рекомендуется предварительно вывести истреби-
телей на маршрут, параллельный линии пути цели, а затем развер-
нуть их на 180° для захода в «хвост» противнику (рис. 158). Рас-
стояние между маршрутами должно быть равно двум радиусам
разворота плюс 3—5 км.
Команда истребителям на разворот, как видно из рисунка,
должна подаваться в тот момент, когда расстояние между засеч-
ками самолетов по линии пути цели будет равно
= ^ц/180 + (1/ц + Уи) /зап,
где /зап— время запаздывания в поступлении засечек на планшет
наведения и передачи команд истребителям.
228
При наведении непосредственно по индикатору радиолокатора,
когда время запаздывания исчисляется секундами, расстояние
между отметками самолетов к моменту разворота берется равным
== ^ц/180*
Расстояние от точки конца разворота истребителей К до точки
начала атаки П будет равно:
кп=-^~,
sin q ’
где d — 3-4-5 км;
q — раккурс цели.
При современных скоростях полета и раккурсе цели 1/4 это рас-
стояние в среднем равно 10—15 км. Его необходимо учитывать при
определении рубежа перехвата или построении маневра на перехват.
Расчет на перехват на заданном рубеже
с разворотом истребителей на попутные
курсы
Если рубеж перехв'ата задан, то расчеты на перехват сводятся
к определению момента подъема истребителей и первоначального
курса на перехват и могут быть выполнены следующим образом.
По нескольким засечкам цели определяется ее скорость, направ-
ление полета и точка перехвата (точка пересечения линии пути цели
рубежом перехвата).
На удалении 10—15 км до точки перехвата намечается вспомо-
гательная точка /71 и по расстоянию от последней засечки до этой
точки и скорости определяется время выхода цели в точку П\
(рис. 159). От точки /71 по перпендикуляру откладывается расстоя-
229
ние, равное радиусу разворота истребителей плюс 3—5 км (точка О).
Из точки О радиусом, равным радиусу разворота истребителей,
описывается дуга и к ней из исходной точки наведения проводится
касательная; точка касания есть расчетная точка начала разворота.
Курс полета в эту точку измеряется по карте.
Время подъема истребителей определяется по формуле
Люд = ^П1 — (Лс + Л + ^ур),
где tn—время полета истребителей до точки начала разворота
с учетом набора высоты;
ГП1 — момент выхода цели в точку П±.
В расчетное время истребителям подается сигнал на взлет. Если
расстояние до точки разворота обеспечивает набор высоты, то истре-
бители набирают ее по прямой, в противном случае часть высоты
набирают над аэродромом или маршрут строится с изломом пути.
В процессе наведения расчеты уточняются с помощью линейки
или специальных палеток.
Перехват с разворотом на попутно-пересекающиеся курсы
Перехват с разворотом на попутно-пересекающиеся курсы обес-
печивает вывод истребителей в тактически выгодное положение при
сближении с воздушной целью в кратчайшее время после ее обна-
ружения.
На средних высотах истребители в процессе разворота, маневри-
руя скоростью и креном, могут исправить ошибки наведения и за-
нять удобное положение для атаки.
На больших высотах, особенно в составе больших групп, эти
ошибки исправить труднее вследствие уменьшения маневренности
истребителей, что может привести к выскакиванию истребителей
вперед или к большому отставанию от цели.
При обнаружении цели на большой дальности этих ошибок
можно избежать путем предварительного вывода истребителей
в упрежденную точку, расположенную в стороне на 30—50 км от
маршрута цели, для последующего разворота на попутно-пересе-
кающиеся курсы и сближения с целью под углом 30—50° относи-
тельно направления ее полета.
Расчеты на перехват с разворотом на попутно-пересекающиеся
курсы выполняются следующим образом.
По нескольким засечкам цели на планшете определяется ее пу-
тевая скорость, направление полета, точка и время перехвата Тп.
От точки перехвата под углом 30—50° относительно направления
полета цели проводится линия заданного направления атаки и на
ней откладывается путь истребителей за 1,5—2 мин. (точка Д),
а по линии пути цели — путь цели за такое же время (точка /71).
Через полученные точки проводится прямая — уравнительный ру-
беж 771Д (рис. 160). Из точки К радиусом, равным радиусу разво-
рота истребителей, описывается дуга и к ней из ИПН проводится
230
S=250 км
Рис. 160. Решение задачи на перехват с разворотом на попутно-
пересекающиеся курсы
касательная. Точка касания есть точка начала разворота. Курс по-
лета в эту точку измеряется по карте. В практике эти расчеты
обычно выполняются с помощью специальных линеек или палеток.
Момент подъема истребителей определяется по формуле
Люд = Л1 — (4с + 4),
где 4—время полета истребителей от ИПН до точки перехвата.
В процессе наведения после разворота на попутно-пересекаю-
щиеся курсы расчеты уточняются при помощи масштабно-времен-
ных линеек или глазомерно.
Вследствие маневрирования цели по направлению истребители
иногда могут оказаться на продолжении линии пути цели на встреч-
ном курсе (рис. 161). В этом случае истребители могут быть выве-
дены в заднюю полусферу воздушной цели разворотом на попутно-
пересекающиеся курсы.
Рис. 161. Решение задачи на перехват с разворо-
том со встречных на попутно-пересекающие курсы
Расстояние между самолетами к моменту подачи команды истре-
бителям на разворот определяется по формуле
-- К/ур*
Угол разворота истребителей и расстояние 5П от точки начала
разворота до точки перехвата определяются по формулам:
УР = 180° + ?;
5n = 2/?ctg^,
где q — угол между линией пути цели и направлением полета
истребителей в точку перехвата, определяемый из выражения
cos q = .
* и
Так, например, если скорость полета цели 600 км!час, а истреби-
телей 800 км/час и крен на развороте 30° (R 9 км), то команду
истребителям на разворот при /зап = 0,5 мин. надо подавать тогда,
когда расстояние до цели будет равно 20 км, при этом угол разво-
рота истребителей будет равным примерно 220°.
Догон. Перехват на попутных курсах принято называть д о г о-
н о м. Для осуществления догона достаточно знать скорость, высоту
и курс полета цели. Однако практически посылать истребителей
в догон имеет смысл только в том случае, когда время догона не
превышает половины возможной продолжительности полета, а рас-
стояние до точки догона не превышает дальности надежной двух-
сторонней связи самолета с КП.
Расстояние до точки догона при вылетах истребителей из поло-
жения готовности № 1 определяется по формуле (рис. 162).
(Л,е + 4 + ^5=^-) - 5ИСХ.
232
Решив это выражение относительно 5Д и приняв ~ = п, окон-
V и
чательно получим
е (^пс + ^н) ^исх ^н
^Д
1 — п
Если догон происходит в конце набора высоты, то 5Д— £н = 0.
В этом случае
(4С + ZH) — 5ИСХ.
Эти формулы получены в предположении, что цель к моменту
подъема истребителей находилась на подходе к аэродрому взлета.
Если же цель к моменту подъема истребителей уже прошла аэро-
дром, то в формулах перед 5ИСХ надо ставить знак «плюс».
Время полета и расстояние до точки догона, когда истребители
находятся на одной высоте с целью, определяется по формулам:
/ __ ^*исх Уц
где А/ — исходная временная дистанция между воздушной целью
и истребителями.
Из формул следует, что чем больше скорость цели и исходная
дистанция и чем меньше скорость истребителей, тем больше время
и путь догона; при одной и той же разности скоростей время и путь
догона возрастают с увеличением скорости полета цели. Это на-
глядно подтверждается таблицей:
Скорость Д/ = 1 мин. Д/ = 2 мин.
цели | истребителя *Д | ^д *д ^д
600 700 6 70 12 140
600 800 3 40 6 80
800 1000 4 67 8 134
Следовательно, при перехвате скоростных целей на встречных
курсах надо точно определять момент начала разворота истребите-
лей на попутные курсы, так как даже при небольшом запаздывании
с разворотом (при опоздании на 30 сек. А/ составит 1 мин.) на
догон цели затрачивается большое время и возможность догона
уменьшается.
Примеры: 1. Противник прошел расчетную точку перехвата в 15 час.
30 мин. со скоростью 720 км/час и МК = 90°. Истребители в эту же точку вы-
шли в 15 час. 32 мин. и пошли в догон со скоростью 900 км/час. Определить
время и путь догона.
Решение:
720-2
900 — 720 6
900*8 1ПЛ
-7.-Н • = 120 км,
60
1) Ч
2) =
мин.
16-98
233
2. Воздушная цель к моменту подачи команды истребителям на взлет на-
ходилась на высоте 800 м, на удалении 50 км и следовала со скоростью
750 км/час в направлении аэродрома.
Определить расстояние до точки догона, если «пассивное» время равно
5 мин., время набора высоты 0,5 мин., путь за время набора 5 км, а скорость
полета истребителей 940 км/час.
750
Решение: 1) (Znc + tH) = -5,5 = 69 км.
91 п 750 ПЯ
2) п = 940 = °’8'
,ч „ 69 — 50-0,8-5 15 „
3) Ъ--------ПГ08-----= ад = 75 КМ-
3. Бомбардировщики противника следуют в направлении аэродрома истре-
бителей со скоростью 720 км/час на высоте 8000 м и к моменту подачи истре-
бителям команды на взлет находятся на удалении 120 км от аэродрома.
Определить, где произойдет догон, если «пассивное» время равно 5 мин.,
время набора высоты 7 мин., путь за время набора 84 км, а скорость горизон-
тального полета истребителей 850 км/час.
720
Решение: 1) Уц (/пс + ZH) = — • 12 = 144 км.
К концу набора высоты цель пройдет аэродром и удалится от него на
24 км, следовательно, часть высоты надо набрать над аэродромом.
2) = 144 — 120 = 24 км.
Сближение способом погони
Сближение способом погони состоит в том, что перехватчик все
время выдерживает курс в ту точку, где в данный момент нахо-
дится цель (рис. 163). Так как цель непрерывно перемещается,
перехватчик должен все время изменять курс, вследствие чего он
будет двигаться по кривой линии, называемой кривой погони.
Полет по кривой погони применяется при сближении истреби-
теля с воздушной целью при помощи самолетного радиолокатора.
Расчеты на перехват этим способом сводятся к определению вре-
мени полета и точки встречи.
234
Время полета истребителей по кривой погони определяется по
формуле
f ___ *$исх (Ки Кц COS КУИ) лл
4 пог 1/2 _ 1/2 *ои’
v и v ц
где КУИ—начальный курсовой угол от цели на истребитель;
^исх—начальное расстояние до цели.
Чтобы определить точку встречи, надо отложить от исходной
точки цели ее путь за время погони.
Для осуществления сближения способом погони перехватчик
должен иметь большую скорость, чем скорость цели, и все время
изменять курс, т. е. выполнять разворот с переменным радиусом
(креном). Величина минимального радиуса кривой погони тем
меньше, чем меньше исходное расстояние до цели и начальный кур-
совой угол истребителя и чем больше отношение скорости истреби-
теля к скорости цели.
При небольших исходных расстояниях до цели (10—15 км) и
малых встречных курсовых углах (до 40°) минимальный радиус
кривой погони должен быть 500—1000 м. Самолет-перехватчик
с таким радиусом развернуться, очевидно, не сможет, сойдет с кри-
вой погони и потеряет цель. Чтобы этого не случилось, наведение
истребителей, оборудованных бортовыми радиолокаторами, следует
производить с предварительным выводом их на попутно-пересекаю-
щиеся курсы. Это обеспечит простоту сближения с воздушной целью
после ее обнаружения в поле зрения индикатора радиолокатора.
Наведение
Процесс вывода истребителей в тактически выгодное положение
относительно воздушной цели путем указания им с КП режима по-
лета на перехват и передачи информации о цели принято называть
наведением. Наведение истребителей на воздушные цели вы-
полняется следующим образом.
Данные об обнаруженных воздушных целях поступают на КП.
Движение целей изображается на планшетах и выносных индикато-
рах. По мере поступления этих данных штурман КП определяет
скорость и направление полета цели, уточняет ее высоту и опреде-
ляет время подъема истребителей для перехвата цели на заданном
рубеже. При немедленном подъеме истребителей после обнаружения
цели штурман определяет рубеж перехвата.
Командир оценивает воздушную обстановку и в соответствии
с боевой задачей и расчетами штурмана принимает решение на
подъем истребителей на перехват. Решение командира немедленно
доводится, до исполнителей.
В процессе взлета и сбора истребителей штурман КП устанавли-
вает связь с ведущим группы, указывает ему исходный пункт на-
ведения, а также уточняет расчеты на перехват.
16* 235
В качестве ИПН назначаются характерные ориентиры или при-
водные радиостанции вблизи аэродрома за пределами мертвой во-
ронки радиолокационной станции.
При выходе истребителей на ИПН штурман приступает к наве-
дению их на заданную воздушную цель, указывая ведущему:
— курс полета в градусах
(трехзначным числом);
— время полета в минутах;
— высоту в гектометрах;
— истинную скорость в км!час
(если она не установлена зара-
нее).
Первоначальный курс опреде-
ляется от ИПН, поэтому истреби-
тели должны выходить на него
как можно точнее.
В процессе наведения, в зави-
симости от фактического располо-
жения цели и истребителей, расче-
ты на перехват уточняются и при
необходимости истребителям по-
дается команда на изменение ре-
жима полета.
На рис. 164 изображена последова-
тельность расчетов на планшете наве-
дения.
В 10 час. 12 мин. штурман получил
первую отметку цели, затем еще две
отметки и определил скорость полета
цели и предполагаемую линию пути. По
скорости полета цели и расстоянию от
последней отметки цели в 10 час. 15 мин.
(точка Ц) штурман определил время
полета цели до рубежа перехвата и
предполагаемый момент перехвата (точ-
ка П\ Тп = 10 час. 30 мин.).
После этого штурман ’с помощью
линейки перехвата или палетки опреде-
ляет время полета истребителей от ИПН
до то.чки перехвата (/н), подсчитывает
общее время с учетом передачи коман-
ды на взлет (/пс) и определяет момент
подъема истребителей:
Люд — — (fn + ^Пс) —
= 10 час. 20 мин.
Для этого момента он наносит рас-
четное положение цели и рубеж подъема.
Когда цель достигнет подъема, штур-
ман подает команду на взлет.
После выхода истребителей в ИПН
ведущему сообщают курс, время по-
лета до ТНР, высоту и скорость.
236
В случае изменения режима полета цели штурман производит перерасчет
данных на перехват и исправляет режим полета истребителей. За 2—3 мин. до
подхода истребителей к ТНР штурман уточняет курс в ТНР и определяет курс
после разворота с заданным креном. За 20—25 сек. до выхода в ТНР он по-
дает ведущему команду на разворот, указывая направление разворота, крен и
и курс после разворота. В процессе разворота штурман по необходимости
исправляет эти данные.
Если перехват состоялся, на планшете наведения штурман отмечает время
(10 час. 31 мин.) и место перехвата.
Для повышения точности наведения расчеты на перехват выпол-
няют непосредственно по индикатору кругового обзора. Порядок их
выполнения остается таким же, как и на планшете. Однако в этом
случае значительно сокращается время на определение данных
о цели и передачу команд истребителям в воздух.
Если на КП по каким-либо причинам не поступают данные об
истребителях, ведущему группы передается только информация
о цели. В информации указывается место и время обнаружения
противника, курс, высота и скорость его полета.
На основании этих данных ведущий должен самостоятельно
определить глазомерно курс на перехват. С поступлением на КП
данных о местонахождении истребителей наведение их заданием
режима полета немедленно возобновляется.
В период поиска цели с КП сообщается положение цели относи-
тельно направления полета истребителей.
Обнаружив цель визуально или с помощью бортового радиоло-
катора, ведущий должен немедленно доложить об этом на КП и
далее строить свой полет самостоятельно.
Если в ходе боя цель будет потеряна, ведущий должен также
доложить об этом па КП. Хотя в это время штурман КП и не дает
команд наведения, но он непрерывно следит за положением цели и
истребителей и в любой момент сможет возобновить подачу этих
команд.
На КП ведется контроль за продолжительностью полета истре-
бителей и в нужный момент подается команда на выход из боя
с расчетом своевременной посадки на заданном аэродроме.
По окончании воздушного боя штурман КП дает истребителям
курс на аэродром посадки и контролирует их полет до аэродрома.
Исправление ошибок наведения и расчет на повторное наведение
Ошибки наведения, возникающие от различных причин, исправ-
ляются в процессе выполнения разворота истребителями для вы-
хода в заднюю полусферу воздушной цели.
Необходимость управлять разворотом истребителей с КП при-
обретает особое значение при перехвате на больших высотах, где
вследствие большой скорости ветра (180—200 км1час) и большого
радиуса разворота ошибки наведения могут превышать дальность
визуального обнаружения цели.
Если при развороте истребители обгоняют цель и возникает воз-
можность выскакивания вперед, то им подается команда об умень-
237
шении крена; при отстава-
нии истребителей подается
команда об увеличении
крена.
Чтобы обеспечить пере-
хватчику возможность ма-
неврировать креном, в нача-
ле разворота необходимо за-
давать средний оптимальный
Рис. 165. Схема маневра при опоздании У „ Р
в выполнении разворота Если при наведении до-
пущено большое опоздание с
началом разворота истребителей, необходимо увеличить крен на
развороте и последующее наведение производить на попутно-пере-
секающихся курсах (рис. 165).
В тех случаях, когда изменением крена на развороте не удалось
исправить ошибки наведения и истребители оказались впереди
цели, штурман КП должен немедленно подать им команду для вы-
полнения маневра на отставание.
Маневр на отставание сводится к удлинению пути истребителей
(рис. 166) и осуществляется выполнением петли или отворотом от
курса цели на расчетный угол.
Как видно из рисунка, путь цели за время отставания истреби-
телей равен
цн = I + 4/? sin У Р + 25\ cos У Р,
где I = Д50 — Д3\.
Путь истребителей за это же время равен
Но время пролета этих расстояний целью и истребителями
должно быть одинаковым, следовательно:
Рис. 166. Маневр на отставание в горизонтальной
плоскости
238
Приняв 4^- — п,
после преобразования получим:
Si
R
sin УР
2 (п— соь УР)
2™УР \
360 )
I
R
Из формулы следует, что повторное сближение в кратчайшее
время достигается при угле отворота 90°. Подставив в равенстве
УР = 90°, получим:
- ~+ 4(1-1,57л)
□ 1 IX
-R— г2п •
По этой формуле построен график для определения длины
петли Si до точки начала разворота на обратный курс (рис. 167).
I
Рассмотрим порядок расчета маневра. Предположим, что истреби-
тели оказались впереди цели на 8 км, скорость которой равна
630 км/час, а скорость истребителей 900 км/час.
Требуется повторно вывести истребителей в хвост цели на уда-
лении 2 км от нее. Радиус разворота истребителей 5 км.
Для входа в график надо определить п и .
Для заданных условий они будут равны:
630 п 7 I Ю о
900 = 0’7 И =
По этим данным из графика выбирается отношение длины петли
к радиусу разворота: = 1,2, откуда Si = 1,2/? = 6 км.
Таким образом, чтобы при данных условиях произвести повтор-
ное наведение, необходимо выполнить петлю длиной 6 км перпенди-
239
кулярно к линии пути
цели, а затем развер-
нуть истребителей на
прежний курс.
Маневр на отстава-
ние выполнением петли
Рис. 168. Маневр на отставание отворотом на целесообразно приме-
расчетный угол / х
нять, когда -д больше
единицы. Если же это отношение меньше единицы, маневр на отста-
вание следует выполнять отворотом на расчетный угол, сущность
которого состоит в следующем.
Истребители по команде с КП отворачиваются от курса цели на
заданный угол УР, затем выполняют разворот в противоположную
сторону на угол, в два раза больший первоначального, после чего
снова выходят на курс цели (рис. 168).
Принимая во внимание, что при данном маневре Si = 0, можно
записать:
-~ + 4 (sin У Р
2т:/гУР \ __
360 ) ~
откуда
/ л / УР
R ~ Д 57,3 П Sin
ур).
По этой формуле построен график углов отворота (рис. 169).
По заданным и п по графику находят угол отворота и за-
дают его истребителям. Так, например, если истребители оказались
впереди цели на 2,5 км, то для повторного наведения при R = 5 км
и п == 0,8 угол отворота должен быть равен 80°.
t
Рис. 169. График расчетных углов отворота
240
Особенности самолетовождения при перехвате
Для успешного выполнения полета на перехват летчик должен
иметь высокую штурманскую подготовку, отлично знать район поле-
тов и район базирования своей авиации. Знание района полетов
должно быть доведено до такого совершенства, чтобы летчик из лю-
бой точки района мог взять направление на свой или другой задан-
ный аэродром посадки.
При прикрытии войск и объектов на поле боя летный состав
должен хорошо изучить опознавательные знаки и сигналы своих
войск, радиотехнические и другие средства, обозначающие линию
фронта, а также опорные ориентиры в районе барражирования.
Летчик должен иметь хороший штурманский глазомер и прибли-
женно выполнять расчеты в уме, так как часто обстановка может
сложиться так, что он вынужден будет самостоятельно осуществлять
самолетовождение.
Для своевременного выхода из боя и возвращения на аэродром
посадки необходимо заранее рассчитать возможную продолжитель-
ность полета самолета по высотам, а также включать перед взлетом
счетчик «Время полета» на бортовых часах.
На полетную карту должны быть заблаговременно нанесены осе-
вые маршруты с полным штилевым расчетом и разметкой пути.
Маршруты прокладываются от аэродрома в сторону вероятного на-
правления полета на перехват через характерные ориентиры. Нали-
чие таких маршрутов облегчает возвращение на аэродром посадки.
Если заранее известен район прикрытия наземных войск, то на
карте вблизи этого района намечаются характерные ориентиры или
радиостанции, которые должны служить ИПОМ и пунктами сбора
групп после воздушного боя. От этих ориентиров прокладываются
маршруты до аэродрома посадки.
Для получения целеуказаний с КП, а также для передачи на КП
своего местоположения полетную карту необходимо закодировать
по установленной системе.
Перед взлетом летчик должен проверить и настроить радиоком-
пас на аэродромную приводную радиостанцию, убедиться в исправ-
ности навигационного оборудования и установить исходные данные
на навигационном индикаторе.
При перехвате из положения «барражирования» истребители
выходят в зоны по общим правилам самолетовождения. Самолето-
вождение в зонах при видимости земли осуществляется точным вы-
держиванием курса и времени полета на каждом участке прямой
с контролем пути визуальной ориентировкой. В условиях ограничен-
ной видимости и за облаками маршрут барражирования выдержи-
вается по курсу, скорости и времени с контролем .разворота с одного
курса на другой по заранее рассчитанным курсовым углам находя-
щейся в районе барражирования радиостанции.
За барражирующими истребителями, особенно находящимися за
облаками, необходимо вести наблюдение на КП с помощью радио-
241
локационных станции и оказывать им помощь в сохранении ориен-
тировки.
Во время барражирования все летчики должны сохранять ориен-
тировку и находиться в готовности для выполнения команд наве-
дения.
При перехвате из положения «дежурство на аэродроме» после
взлета и сбора ведущий должен точно вывести группу на ИПН
с заданным курсом и в дальнейшем строго выдерживать заданный
режим полета на перехват, немедленно выполняя все команды
с земли. Невыдерживание заданного режима затрудняет наведение,
что в конечном итоге может привести к срыву перехвата.
В ходе перехвата каждый летчик должен сохранять ориенти-
ровку. Место самолета определяется по показаниям навигационного
индикатора, а при его отсутствии — глазомерной прокладкой пути
и уточняется визуальной ориентировкой или по информации с КП.
Знание своего положения необходимо не только для сохранения
ориентировки, но и для передачи его на КП по запросу штурмана,
что бывает необходимо при потере радиолокационного наблюдения
за истребителями, например, при перехвате на малых высотах,
в условиях радиолокационных помех и т. д.
После визуального обнаружения воздушной цели все летчики
группы должны отметить свое место, а в ходе воздушного боя
следить за основным направлением своего перемещения. Для
этого можно использовать Солнце, Луну (ночью) или характер-
ный линейный ориентир, расположенный по оси полета против-
ника.
После выхода из боя и сбора группы ведущий должен взять на-
правление на аэродром посадки и уточнить его по показаниям
магнитного компаса и радиокомпаса. Для полной уверенности
в правильном следовании на аэродром посадки следует запросить
курс у штурмана КП или радиопеленг на пеленгатор.
Дальнейший полет обычно выполняется по радиокомпасу на
приводную радиостанцию с контролем пути с помощью общих
средств и сличением карты с местностью.
§ 32. СОПРОВОЖДЕНИЕ
В зависимости) от обстановки сопровождение самолетов других
родов авиации истребителями может осуществляться от пункта
встречи до цели и обратно, от пункта встречи до заданного рубежа
или от заданного рубежа до аэродрома посадки сопровождаемой
группы.
Чтобы определить, до какого рубежа возможно сопровождение,
необходимо знать радиус действия истребителей на режиме сопро-
вождения.
При сопровождении ударная группа истребителей, маневрируя
по направлению, совершает полет со скоростью, превышающей ско-
242
рость сопровождаемой группы. Радиус (глубина) сопровождения
определяется по формуле
Re =0,5 V6tc,
где V6—скорость полета сопровождаемой группы;
/с — запас горючего у истребителей для сопровождения, выра-
женный во времени.
Время взлета на сопровождение определяется как разность за-
данного времени встречи и времени, необходимого на взлет, сбор
истребителей и полет их до пункта встречи с учетом набора задан-
ной высоты:
^взл == Т'встр (^сб “Ь ^ко)’
Штурманская подготовка на сопровождение организуется по об-
щим правилам. На маршруте полета смешанной группы намечаются
ориентиры, о проходе которых сопровождаемой группой сообщается
истребителям.
Для обеспечения сбора смешанной группы и возвращения истре-
бителей на аэродром посадки намечаются средства ЗОС. Сбор сме-
шанной группы осуществляется над аэродромом истребителей или
над радиостанцией, или на маршруте полета с проходом контроль-
ных пунктов в заданное время. Для увеличения надежности сбора
в последнем случае управление полетом истребителей до точки
встречи осуществляется с КП по данным радиолокационных стан-
ций.
Летчики-истребители, как и при самостоятельном маршрутном
полете, должны тщательно изучить маршрут сопровождения и обес-
печивающие полет средства ЗОС, произвести расчет полета, а также
знать свое место в строю при следовании к цели и обратно.
В полете истребители должны непрерывно вести ориентировку,
чтобы в любых условиях обстановки иметь возможность самостоя-
тельно осуществлять самолетовождение. С целью облегчения истре-
бителям ведения ориентировки, особенно при полете в сложных
условиях, ведущий смешанной группы должен периодически сооб-
щать истребителям их местоположение.
По окончании сопровождения истребители по общим правилам
выходят на аэродром посадки.
§ 33. ПОЛЕТ НА РАЗВЕДКУ И ПОИСК
Полет на разведку и поиск производится, как правило, в огра-
ниченном районе или полосе.
В целях маскировки он часто выполняется в сложных метеоро-
логических условиях и в сумерки без строгого выдерживания ре-
жима и профиля полета.
Самолетовождение в полете с переменным режимом требует от
летчика тщательной подготовки на земле и непрерывного сохране-
ния ориентировки в течение всего полета.
При подготовке к полету необходимо тщательно изучить пред-
стоящий район полета и проложить маршрут (ось маршрута) в пре-
243
делах видимости характерных линейных и площадных ориентиров,
опираясь на которые можно было бы все время сохранять визуаль-
ную ориентировку.
Если в целях скрытности от истребителей противника плани-
руется полет на отдельных участках маршрута в облаках, необхо-
димо наметить ориентиры начала входа и выхода из облаков. Вы-
ход из облаков следует намечать в районе крупных ориентиров,
обеспечивающих быстрое определение ЛАС визуальной ориенти-
ровкой.
Всестороннее обеспечение полета средствами ЗОС является не-
обходимым условием надежного самолетовождения.
Полет на разведку и поиск должен также контролироваться
с КП при помощи радиолокационных станций.
В случае необходимости летчику должна быть не только ока-
зана помощь в выходе на контрольные ориентиры, но и дана инфор-
мация о приближении к нему вражеских истребителей.
Перед вылетом необходимо проверить навигационное оборудо-
вание самолета, подготовить к работе навигационный индикатор и
настроить радиокомпас на аэродромную приводную радиостанцию.
Полет над своей территорией следует выполнять по заранее на-
меченному маршруту.
Линию фронта лучше всего пересекать на малой высоте на ма-
лоактивных участках, чтобы не быть замеченным радиолокацион-
ной станцией обнаружения противника.
Полет в заданном районе следует производить по намеченному
маршруту, не уклоняясь далеко от него без особой необходимости.
При вынужденном уклонении от маршрута лететь необходимо в пре-
делах видимости характерных ориентиров и, опираясь на них, непре-
рывно сохранять ориентировку. Особенно важно непрерывное со-
хранение ориентировки во время выполнения разведывательного
полета, в процессе которого летчик должен сообщать по радио раз-
ведданные с указанием точных координат местоположения целей.
Если летчик не может визуально определить место самолета на
карте в момент обнаружения цели, он должен передать на КП по-
казание счетчика координат навигационного индикатора. Штурман
КП в этом случае по координатам наносит на планшет место само-
лета, что дает возможность определить район расположения цели.
Одиночные полеты и полеты парой для действий по наземным
или воздушным целям связаны с частыми изменениями режима по-
лета, особенно когда маневр для атаки цели не предусмотрен зара-
нее. В этих условиях сохранение визуальной ориентировки пред-
ставляет значительную трудность. Еще большие трудности в сохра-
нении визуальной ориентировки встречаются при уходе от пресле-
дующих истребителей противника и применении резких маневров,
которыми летчик вводит противника в заблуждение.
Если обстановка вынуждает уклоняться от маршрута и приме-
нять частое маневрирование курсом, следует об этом донести на КП
и все время по показаниям радиокомпаса определять направление
на свой аэродром. В условиях ограниченной видимости, а также
244
в полетах за облаками ориентировка сохраняется с помощью нави-
гационного индикатора и периодическим запросом своего места
у штурмана КП. В момент запроса летчик должен набрать высоту,
обеспечивающую надежную связь с КП и вход в зону обнаружения
своих радиолокационных станций. Для этой цели заранее следует
нанести на карту дуги дальности связи и обнаружения по высотам.
После выполнения задания летчик должен уточнить свое место
визуальной ориентировкой или по данным навигационного индика-
тора и по радиокомпасу выйти в район аэродрома посадки.
§ 34. ШТУРМОВЫЕ ДЕЙСТВИЯ
Штурмовые действия по наземным целям выполняются, как
правило, с малых высот и с высот бреющего полета. При этом
создаются такие условия полета, которые характеризуются значи-
тельным усложнением ведения визуальной ориентировки, уменьше-
нием дальности действия радиотехнических средств и радиосвязи
самолета с землей, ограниченностью радиолокационного обеспече-
ния полета, уменьшением радиуса и продолжительности полета
реактивных самолетов, сложностью пилотирования самолета и не-
которой ограниченностью маневра группы.
Действуя по войскам противника на поле боя, авиация выпол-
няет свои задачи в тесном взаимодействии со своими наземными
войсками. Объекты штурмовых действий представляют собой в боль-
шинстве случаев малоразмерные или точечные цели, рассредоточен-
ные и хорошо замаскированные, что создает трудности в быстром
отыскании их, особенно при сильном противодействии огневых
средств войск противника. Сравнительная близость нахождения
целей от расположения своих войск требует весьма точного по
месту выхода самолетов на объекты штурмовых действий.
При действиях по объектам на поле боя точный по времени вы-
ход самолетов на цель является также одним из решающих факто-
ров. В случае взаимодействия с наземными войсками авиацию
часто вызывают с наблюдательного (командного) пункта, что тре-
бует проведения подготовки к полету в сокращенные сроки.
Сложность условий самолетовождения при штурмовых действиях
требует от летчиков отличной штурманской подготовки. Летчики
должны хорошо изучить конфигурацию линии фронта, знать обо-
значение переднего края расположения своих войск, уяснить точное
месторасположение целей относительно характерных ориентиров и
быстро распознавать сигналы целеуказания.
Маршрут полета прокладывается с учетом возможно большей
надежности выхода на цель. Опыт Великой Отечественной войны
показывает, что часто вблизи линии фронта создавались различные
искусственные характерные ориентиры (кусты цветных дымов,
электрифицированные знаки и пр.), от которых штурмовики по
курсу и времени точно выходили на заданные цели.
Характерными ориентирами для малых высот являются ориен-
тиры, имеющие вертикальные строения и расположенные на откры-
том месте или на возвышенностях.
245
При изучении маршрута особое внимание уделяется рельефу
местности и препятствиям на местности. Отдельные препятствия вы-
деляются на карте.
Особенно тщательно изучаются районы контрольных ориентиров
в радиусе возможных уклонений от них.
Безопасная высота полета определяется по участкам маршрута.
Учитывая сравнительно небольшую протяженность маршрута
полета при штурмовых действиях, расчет полета следует выполнять
по ветру, определенному в районе аэродрома.
Выход на ИПМ и линию заданного пути выполняется с курсом,
рассчитанным по шаропилотному ветру. Возможен подбор курса по
линейному ориентиру, а также пассивный полет на приводную
радиостанцию, расположенную недалеко от линии фронта.
Контроль пути на малых высотах и высотах бреющего полета
осуществляется счислением и прокладкой пути при помощи навига-
ционного индикатора. Сличение карты с местностью на малой вы-
соте при большой скорости полета отвлекает внимание летчика и
делает полет небезопасным. Чтобы летчик мог уделять больше вни-
мания осмотрительности, он должен хорошо знать район боевых
действий, что позволит ему реже прибегать к пользованию картой
в полете.
Особо важное значение имеет точное выдерживание рассчитан-
ного курса следования. Даже кратковременное невыдерживание
курса приводит к боковому уклонению, при котором летчик может
не обнаружить контрольный ориентир. Это затруднит определение
МС и может привести к потере ориентировки.
Если при подходе к КО (согласно расчетному времени) летчик
не видит его, он может увеличить высоту на 100—150 м (если по-
зволяет облачность) и уточнить свое место.
Выходить на цели лучше от характерных естественных или
искусственных ориентиров с точно рассчитанным курсом и временем
полета, а также по командам с земли.
Маневр захода на цель строится с учетом обеспечения безопас-
ности своих войск.
При наведении с земли от летчиков требуется четкое взаимодей-
ствие с командным (наблюдательным) пунктом.
Возвращение на аэродром посадки, как правило, выполняется
пассивным полетом на приводную радиостанцию или радиопелен-
гатор.
Восстановление ориентировки, потерянной при полете на малой
высоте или высотах бреющего полета, выполняется по общим пра-
вилам с предварительным переходом на средние высоты для увели-
чения обзора местности и для входа в зону действия радиотехниче-
ских средств связи и самолетовождения.
ОГЛАВЛЕНИЕ
Стр.
Введение .................................................................. 3
Краткие сведения из истории развития самолетовождения...................... 5
Глава первая. Основы самолетовождения
§ 1. Основные понятия..................................................... 9
§ 2. Технические средства самолетовождения............................... 12
§ 3. Авиационные карты и аэролоции........................................ —
§ 4. Основные задачи самолетовождения.................................... 14
Глава вторая. Применение общих средств
самолетовождения
§ 5. Определение и выдерживание курса по магнитному компасу . . 16
§ 6. Определение высоты полета............................... 34
§ 7. Определение воздушной скорости.......................... 47
§ 8. Учет ветра в самолетовождении............................ 54
§ 9. Счисление и прокладка пути.......................................... 62
§ 10. Навигационный индикатор............................................. 64
§ 11. Визуальная ориентировка ............................................ 71
§ 12. Определение навигационных элементов в полете........................ 76
§ 13. Измерение времени................................................... 82
Глава третья. Применение радиотехнических средств
самолетовождения
§ 14. Применение угломерных радиотехнических систем................ 89
§ 15. Особенности использования совмещенного указателя ДГМК и АРК 111
§ 16. Радиодевиация............................................... 114
§ 17. Радиотехнический метод определения высоты полета ........... 119
§ 18. Применение наземных радиолокационных станций для самолето-
вождения ......................................................... 121
Глава четвертая. Сбор и роспуск групп
§ 19. Расчет элементов разворота ................................... 126
§ 20. Сбор групп в простых метеорологических условиях............... 132
§ 21. Сбор группы за облаками.................'..................... 139
§ 22. Посадка самолетов в сложных метеорологических условиях ... 148
Глава пятая. Штурманская подготовка
и выполнение полета
§ 23. Сущность комплексного применения технических средств само-
летовождения .................................................. 162
§ 24. Штурманская подготовка полета............................ 163
§ 25. Штурманские правила выполнения полета.................... 173
247
Стр.
Глава шестая. Особенности самолетовождения
в различной навигационной обстановке
§ 26. Самолетовождение в полетах на больших высотах и в страто-
сфере ...................................................... 197
§ 27. Самолетовождение в полетах за облаками и в облаках....... 200
§ 28. Самолетовождение в полетах над горной местностью......... 204
§ 29. Самолетовождение в ночных полетах....................... 207
§ 30. Самолетовождение в полетах над морем..................... 211
Глава седьмая. Особенности самолетовождения
при выполнении различных боевых задач
§ 31. Перехват воздушных целей................................ 218
§ 32. Сопровождение........................................... 242
§ 33. Полет на разведку и поиск............................... 243
§ 34. Штурмовые действия...................................... 245
Никита Алексеевич НОСОВ, Григорий Иванович ЦЮПКО,
Владимир Иосифович ПЕТЛЮК
Вождение одноместного самолета
Редактор гвардии майор Медведев И. М.
Технический редактор Мясникова Т. Ф. Корректор Шебаршова А. А.
Сдано в набор 8.02.56 г. Подписано к печати 14.05.56 г.
Формат бумаги 60 X 921/le — 151 /2 печ. л. = 15,5 усл. печ. л. 15,934 уч.-изд. л.
Г-21236
Военное Издательство Министерства Обороны Союза ССР
Москва, Тверской бульвар, 18
Изд. № 6/7395. Зак. № 98
2-я типография имени К. Е. Ворошилова Управления Военного Издательства
Министерства .Обороны Союза ССР
Ленинград, 65, почтовый ящик № 343
Цена 6 р, 60 к.