/















































































































































































































































































































































































































































































Текст
Н.В.Ефимов, Э.Р.Розендорн
ЛИНЕЙНАЯ АЛГЕБРА И МНОГОМЕРНАЯ ГЕОМЕТРИЯ
Предметом книги является объединенный курс линейной алгебры и многомерной
аналитической геометрии. Главное место в ней занимают основы теории
конечномерных линейных пространств и линейных преобразований. В книге
изложена тензорная алгебра и на соответствующих примерах показаны ее
приложения. На примере групп преобразований читатель познакомится с
элементами теории групп. В последней главе дается введение в проективную
геометрию. Книга рассчитана на студентов механико-математических
факультетов университетов. Она может быть полезна студентам втузов,
инженерам и научным работникам разных специальностей, изучающим или
использующим методы линейной алгебры и многомерной геометрии.
ОГЛАВЛЕНИЕ
Предисловие 7 преобразования переменных.
Введение 9 Преобразования координат
Глава I. Линейные пространства 12 § 1. Сокращенная запись 57
§ 1. Аксиомы линейного 12 суммирования
пространства § 2. Линейное преобразование 60
§ 2. Примеры линейных пространств 15 переменных. Произведение линейных преобразований
§ 3. Простейшие следствия из аксиом линейного пространства 22 переменных и произведение матриц
§ 4. Линейная комбинация. Линейная зависимость 24 § 3. Квадратные матрицы и невырожденные преобразования 64
§ 5. Лемма о базисном миноре 27 § 4. Ранг произведения матриц 70
§ 6. Основная лемма о двух системах векторов 30 § 5. Преобразование координат при изменении базиса 72
§ 7. Ранг матрицы 32 Глава III. Системы линейных 76
§ 8. Конечномерные и бесконечномерные пространства. 34 уравнений. Плоскости в аффнииом пространстве
Базис § 1. Аффинное пространство 76
§ 9. Линейные операции в 37 § 2. Аффинные координаты 78
координатах § 3. Плоскости 80
§ 10. Изоморфизм линейных пространств 39 § 4. Системы уравнений Первой степени 84
§11. Соответствие между 42 § 5. Однородные системы 89
комплексными и § 6. Неоднородные системы 96
действительными пространствами § 7. Взаимное расположение 100
§ 12. Линейное подпространство 44 плоскостей
§ 13. Линейная оболочка 47 § 8. Системы линейных 108
§ 14. Сумма подпространств. Прямая сумма 51 неравенств и выпуклые многогранники
Глава II. Линейные 57 Глава IV. Линейные, билинейные 119
и квадратичные формы
§ 1. Линейные формы 119
§ 2. Билинейные формы 124
§ 3. Матрица билинейной формы 128
§ 4. Квадратичные формы 131
§ 5. Приведение квадратичной 134
формы к каноническому виду
методом Лагранжа
§ 6. Нормальный вид 137
квадратичной формы
§ 7. Закон инерции квадратичных 138
форм
§ 8. Приведение квадратичной 140
формы к каноническому виду
методом Якоби
§ 9. Положительно определенные 143
и отрицательно определенные
квадратичные формы
§ 10. Определитель Грама. 146
Неравенство Коши—Буняковского
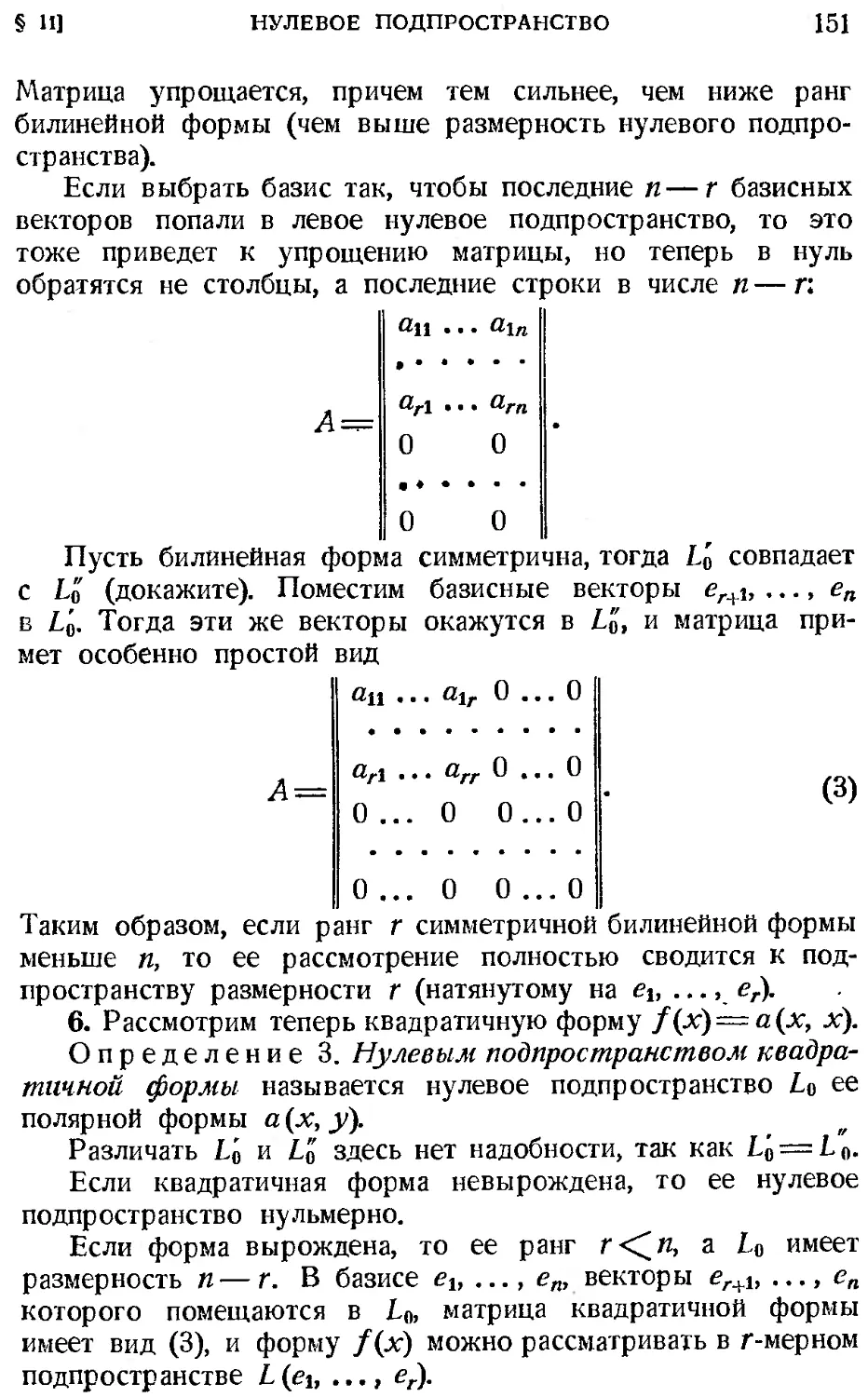
§ 11. Нулевое подпространство 149
билинейной и квадратичной
формы
§ 12. Нулевой конус квадратичной 152
формы
§ 13. Простейшие примеры 153
нулевых конусов квадратичных
форм
Глава V. Тензорная алгебра 157
§ 1. Взаимные базисы. 157
Контравариантные и
ковариантные векторы
§ 2. Тензорное произведение 166
линейных пространств
§ 3. Базис в тензорном 170
произведении. Координаты
тензора
§ 4. Тензоры билинейных форм 176
§ 5. Многовалентные тензоры. 180
Произведение тензоров
§ 6. Координаты многовалентных 184
тензоров
§ 7. Полилинейные формы и их 186
теиз оры
§ 8. Симметрирование и 188
альтернирование. Косые формы
§ 9. Второй вариант изложения 192
понятия тензорного произведения
двух линейных пространств
Глава VI. Понятие группы и 199
некоторые его приложения
§ 1. Группы и подгруппы. 199
Распределение базисов на классы
по данной подгруппе матриц.
Ориентация
§ 2. Группы преобразований. 206
Изоморфизм и гомоморфизм
групп
§ 3. Инварианты. Осевые 212
инварианты. Псевдоинварианты
§ 4. Т еиз орные в еличины 219
§ 5. Ориентированный объем 224
параллелепипеда.
Дискриминантный тензор
Глава VII. Линейные 230
преобразования линейных
пространств
§ 1. Общие сведения 230
§ 2. Линейное преобразование как 233
тензор
§ 3. Геометрический смысл ранга 237
и определителя линейного
преобразования. Группа
невырожденных линейных
преобразований
§ 4. Инвариантные 240
подпространства
§ 5; Примеры линейных 242
преобразований
§ 6. Собственные векторы и 249
характеристический многочлен
преобразования
§ 7. Основные теоремы о 252
характеристическом многочлене и
собственных векторах
§ 8. Нильпотентные 255
преобразования. Общая структура
вырожденных преобразований
§ 9. Канонический базис 259
нильпотентного преобразования
§ 10. Приведение матрицы 270
преобразования к жордановой
нормальной форме
§ 11. Преобразования простой 276
структуры
§ 12. Эквивалентность матриц 278
§ 13. Формула Гамильтона—Кэли 281
Глаза VIII. Пространства с 283
квадратичной метрикой
§ 1. Скалярное произведение 283
§ 2. Норма вектора 285
§ 3. Ортонормиров энные базисы 287
§ 4. Ортогональная проекция. 289
Ортогонализация
§ 5. Метрический изоморфизм 295
§ 6. k-ортогональные матрицы и к- 297
ортогональные группы
§ 7. Группа евклидовых поворотов 301
§ 8. Группа гиперболических 310
поворотов
§ 9. Тензорная алгебра в 320
пространствах с квадратичной
метрикой
§ 10. Уравнение гиперплоскости в 328
пространстве с квадратичной
метрикой
§ 11. Евклидово пространство. 331
Ортогональные матрицы.
Ортогональная группа
§ 12. Нормальное уравнение 337
гиперплоскости в евклидовом
пространстве
§ 13. Объем параллелепипеда в 339
евклидовом пространстве.
Дискриминантный тензор.
Векторное произведение
Глава IX. Линейные 344
преобразования евклидова
пространства
§ 1. Сопряженное преобразование 344
§ 2. Лемма о характеристических 347
корнях симметричной матрицы
§ 3. Самосопряженные 348
преобразования
§ 4. Приведение квадратичной 355
формы к каноническому виду в
ортонормированием базисе
§ 5. Совместное приведение к 357
каноническому виду двух
квадратичных форм
§ 6. Кососопряженные 361
преобразования
§ 7. Изометричные 364
преобразования
§ 8. Канонический вид 369
изометричного преобразования
§ 9. Движение твердого тела с 375
одной неподвижной точкой
§ 10. Кривизна и кручеине 377
пространственной кривой
§ 11. Разложение произвольного 380
линейного преобразования в
произведение самосопряженного и
изометричного преобразований
§ 12. Приложения к теории 383
упругости. Тензор деформацийи
тензор напряжений
Глава X. Поливекторы и внешние 387
формы
§ 1. Альтернация 387
§ 2. Поливекторы. Внешнее 393
произведение
§ 3. Бивекторы 399
§ 4. Простые поливекторы 410
§ 5. Векторное произведение 414
§ 6. Внешние формы и действия 421
над ними
§ 7. Внешние формы и 425
ковариантные поливекторы
§ 8. Внешние формы в трехмерном 433
евклидовом пространстве
Глава XI. Гиперповерхности 438
второго порядка
§ 1. Общее уравнение
гиперповерхности второго
порядка
§ 2. Изменение левой части
уравнения при переносе начала
координат
§ 3. Изменение левой части
уравнения при изменении
ортонормированиого базиса
§ 4. Центр гиперповерхности
второго порядка
§ 5. Приведение к каноническому
виду общего уравнения
гиперповерхности второго
порядка в евклидовом
пространстве
§ 6. Классификация
гиперповерхностей второго
порядка в евклидовом
пространстве
§ 7. Аффинные преобразования
§ 8. Аффнииая классификация
гиперповерхностей второго
порядка
§ 9. Пересечение прямой с
гиперповерхностью второго
438 порядка. Асимптотические
направления
§ 10. Сопряженные направления 468
439 Глава XII. Проективное 472
пространство
§ 1. Однородные координаты в 472
442 аффнииом пространстве.
Бесконечно удаленные точки
§ 2. Понятие проективного 476
445 пространства
§ 3. Связка плоскостей в 487
447 аффнииом пространстве
§ 4. Центральное проектирование 496
§ 5. Проективная эквивалентность 500
фигур
§ 6. Проективная классификация 507
451 гиперповерхностей второго
порядка
§ 7. Пересечение 514
гиперповерхности второго
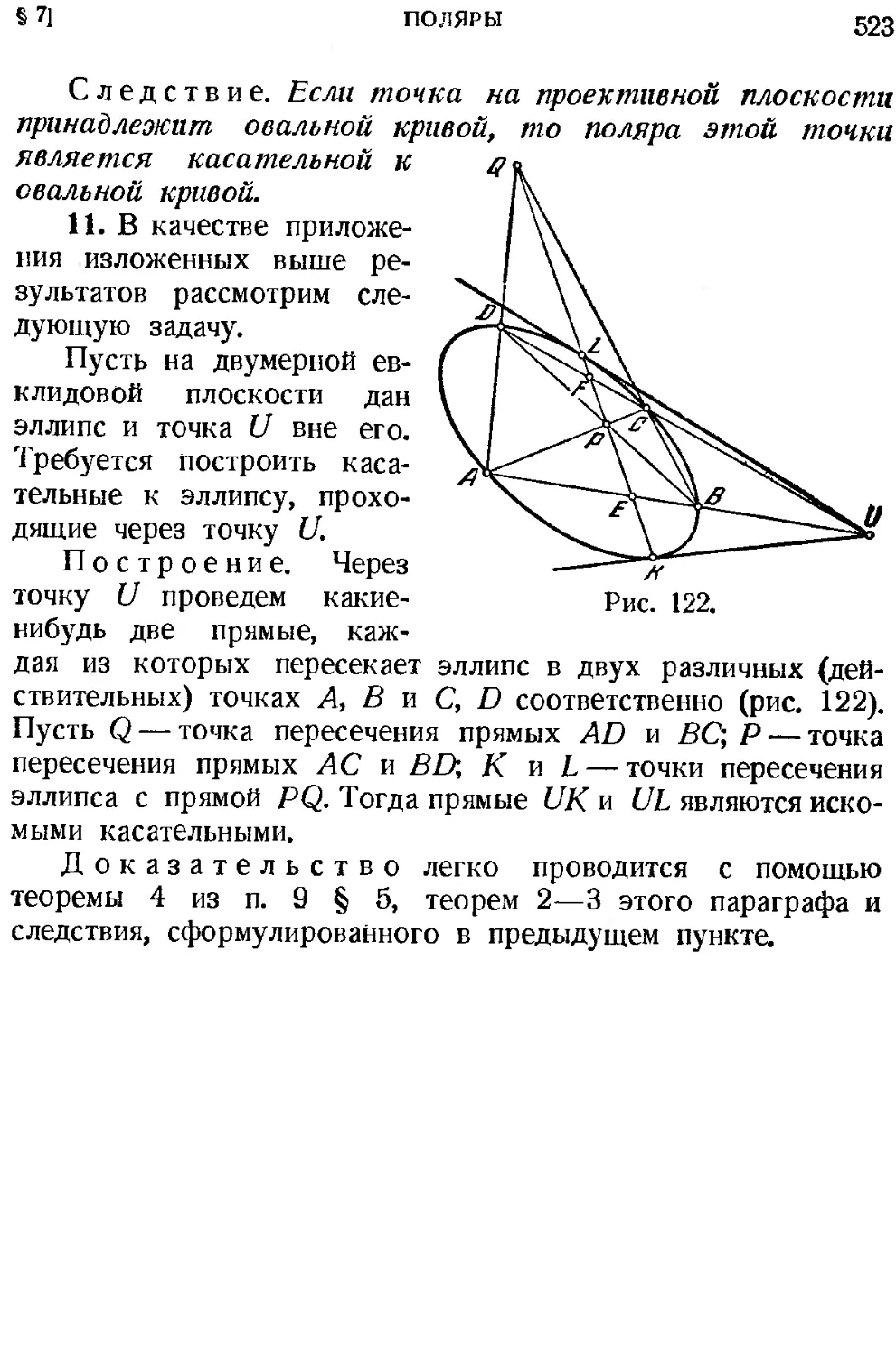
459 порядка и прямой. Поляры
464 Приложение. Доказательство 524
теоремы о классификации
линейных величин
465 Литература 528
ПРЕДИСЛОВИЕ
Настоящая книга задумана как учебник по объединенному
курсу линейной алгебры и аналитической геометрии. Замысел
книги возник в связи с лекциями Н. В. Ефимова, которые
читались для студентов механико-математического факультета
МГУ в 1964—1966 годах. Однако материал этих лекций
подвергнут авторами полной переработке и значительно
расширен.
Указанный лекционный курс проводился каждый раз во
втором семестре (как и теперь проводится в МГУ) при четы-
рех часах лекций и четырех часах практических занятий в
неделю. В настоящей книге ему приблизительно соответству-
ют главы I — VI, §§ 1 — 7 главы VII и главы VIII, IX, XI.
При этом §§ 8—13 главы VII, глава X и глава XII могут
рассматриваться в виде трех независимых дополнений к отме-
ченным "выше основным разделам. В МГУ этот материал не
входит в объединенный курс второго семестра и сообщается
с большей или меньшей степенью общности в других кур-
сах. Например, тематика параграфов 8—13 гл. VII (приве-
дение матриц к жордановой форме) входит в курс алгебры
на третьем семестре.
С точки зрения авторов основная часть книги и дополне-
ния различаются весьма условно. Книга имеет свою структу-
ру, достаточно определенную внутренними связями между
всеми ее разделами, независимо от распределения их по
кафедрам и лекционным курсам (объединенным или раз-
дельным, обязательным или факультативным). Что же касается
выбора вошедших в книгу разделов, то авторы старались
делать его с учетом потребностей других математических
дисциплин, а также механики и физики. Мы надеемся, что
весь материал- книги окажется полезным. Материал этот к тому
же вполне доступен. Во всяком случае, вся предварительная
8 ПРЕДИСЛОВИЕ
подготовка, которую мы предполагаем, может быть дана
в первом семестре в курсах аналитической геомерии и алгеб-
ры, как бы просто они ни читались. Нужно лишь твердое
знание элементарного материала по этим дисциплинам.
В частности, для гл. XII желательно предварительное зна-
комство с проективными преобразованиями и проективными
свойствами фигур на плоскости. Заметим еще, что в гл. X
читатель ради упрощения дела может пропустить пункты
13 — 23 § 3, весь § 5 и п. 10 § 7. После этих сокращений
материал гл. X может служить минимальной алгебраической
основой для теории многомерного интегрирования.
В заключение отметим, что уже первые пять глав настоя-
щей книги содержат материал, находящий широкие прило-
жения в математике, механике, физике. Эти главы, допол-
ненные отдельными вопросами из последующих глав, могу г
быть использованы при изучении математики в высших
технических учебных заведениях с повышенной математичес-
кой программой.
30 августа 1969 года
Н. В. Ефимов
Э. Р. Розендорн
ВВЕДЕНИЕ
В математике и в ее приложениях часто приходится рас-
сматривать некоторые множества объектов, для которых
установлены так называемые линейные операции: сложение
и умножение на число. Например, в механике рассматривают
всевозможные силы, приложенные к данному твердому телу.
Две силы, приложенные к одной точке, можно сложить, т. е.
заменить одной силой, приложенной к той же точке. Силу
можно умножить на число а, т. е. увеличить в а раз, сохра-
нив линию действия. В механике рассматривают также сло-
жение скоростей и умножение скорости на число; рассматри-
вают сложение ускорений и умножение ускорения на число.
Силы, скорости и ускорения различны по своей физической”
природе. Однако линейные операции, которые производятся
над ними, единообразны с геометрической точки зрения.
Поэтому в механике принят общий способ изображения этих
объектов в виде направленных отрезков. Тем самым все они
обслуживаются общими правилами сложения и умножения на
число геометрических векторов.
Но это обобщение идет гораздо дальше. Рассмотрим,
например, множество всех функций, непрерывных на число-
вой оси, или множество всех периодических функций с дан-
ным периодом, или множество всех алгебраических много-
членов. В каждом из этих множеств мы можем естественным
образом рассматривать линейные операции (понимая сумму
функций и произведение функции на число, как принято
в анализе). Объекты, о которых мы сейчас говорим, не по-
хожи на силы, скорости и ускорения или на геометрические
векторы. Линейные операции над ними также, не похожи на
линейные операции над векторными величинами механики
или над геометрическими векторами.
10
ВВЕДЕНИЕ
Однако здесь есть и нечто общее, позволяющее изучать
линейные операции абстрактно, отвлекаясь от конкретной
природы объектов.
Прежде всего, в любом нашем примере дело обстоит так,
что линейные операции над элементами данного множества
(то есть над объектами, из которых оно состоит) дают в ре-
зультате элементы того же множества. Именно, складывая
геометрические векторы или умножая их на число, мы полу-
чаем геометрические векторы; складывая непрерывные функ-
ции или умножая их на число, мы получаем непрерывные
функции. То же самое можно повторить про периодические
функции с данным периодом или про алгебраические много-
члены.
Кроме того, линейные операции, различные для разных
множеств, имеют ряд общих свойств (рассмотренных ниже,
в первой главе). Наличие общих свойств позволяет изучать
линейные операции вообще.
Изучая множества с данными в них линейными операци-
ями, их объединяют понятием линейного пространства. Теория
линейных пространств находит чрезвычайно широкие приме-
нения в современной математике и соседних с ней науках.
Определение линейного пространства будет сформулиро-
вано в ближайшем параграфе. Оно не будет содержать каких-
либо описаний элементов рассматриваемых множеств или
производимых линейных операций. Будут потребованы только
некоторые свойства линейных операций, общие для всех
частных случаев. Эти требования выражаются аксиомами ли-
нейного пространства. Следует заметить, что требования, ко-
торые выражены в аксиомах, весьма немногочисленны, и оста-
ется возможность добавлять к ним новые предположения.
Поэтому в общем понятии линейного пространства возникает
некоторая классификация, так что все-таки приходится иметь
дело не с единым линейным пространством, а с различными
классами линейных пространств, и теория, основанная на
аксиомах линейного пространства, разветвляется.
Прежде всего, все линейные пространства разделяются на
конечномерные и бесконечномерные. Конечномерные про-
странства (одномерные, двумерные, трехмерные и т. д.) изу-
чаются в линейной алгебре, которая является предметом этой
книги. Бесконечномерные пространства рассматриваются в раз-
личных разделах функционального анализа; у нас они будут
ВВЕДЕНИЕ
11
встречаться лишь эпизодически, для иллюстрации некоторых
общих выводов.
К числу конечномерных пространств принадлежит трех-
мерное пространство геометрических (свободных) векторов.
Это пространство содержит в себе бесконечно много дву-
мерных и одномерных пространств, называемых подпростран-
ствами (каждое двумерное подпространство состоит из векто-
ров, лежащих в одной плоскости, каждое одномерное
подпространство состоит из векторов, лежащих на одной
прямой). Таким образом, для одномерных, двумерных и трех-
мерных линейных пространств мы имеем геометрические
модели, с которыми естественно связаны наши наглядные
представления о векторах. При переходе к многомерным про-
странствам наглядность частично теряется, но теория этих
пространств сохраняет геометрический характер. Дело в том,
что ее основные понятия строятся путем заимствования
у трехмерного случая и надлежащего обобщения на много-
мерный. Не последнюю роль здесь играет сохранение геомет-
рической терминологии; например, говоря о разнообразных
множествах, мы называем их пространствами. Заметим кстати,
что элементы всяких линейных пространств принято называть
векторами. Вместе с тем линейные пространства называют
также векторными пространствами. Геометричность термино-
логии и основных понятий линейной алгебры помогает ее
контактам с геометрией. Мы имеем в виду здесь аналити-
ческую геометрию, причем многомерную, т. е. многомерный
аналог обычной (трехмерной) аналитической геометрии. Более
того, линейная алгебра и аналитическая геометрия настолько
тесно связаны, что между ними трудно провести четкую
грань. Мы и не будем к этому стремиться. Выше мы назвали
в качестве предмета нашей книги линейную алгебру. С та-
ким же основанием можно сказать, что ее предметом явля-
ется многомерная аналитическая геометрия.
ГЛАВА 1. ЛИНЕЙНЫЕ ПРОСТРАНСТВА
§ 1. Аксиомы линейного пространства
1. Пусть имеется множество L, состоящее из каких угод-
но элементов. Для обозначения элементов этого множества
мы будем употреблять малые буквы латинского алфавита
а, Ь,..., х, у,... Только в одном случае мы употребим даль-
ше аналогичным образом греческую букву 0. Вместе с эле-
ментами множества L будут рассматриваться числа или
любые действительные, или любые комплексные. Для обозна-
чения чисел мы воспользуемся малыми греческими буквами
а, р, ... (исключая 6).
2. Мы предполагаем, что в множестве L-определено поня-
тие равенства элементов. Это значит, что все элементы мно-
жества L некоторым образом распределены по классам (под-
множествам L) так, что разные классы не имеют общих эле-
ментов. При этом два элемента а, b считаются равными (а —
= Ь), если они принадлежат одному классу. Не исключается,
что каждый класс- состоит только из одного элемента;
в таком случае равенство а = Ь означает, что через а и b обоз-
начен один и тот же элемент множества L.
В дальнейшем мы будем иногда говорить, что соверша-
ется допустимая замена некоторого элемента множества L,
если вместо этого элемента берется любой другой элемент
одного с ним класса, иначе говоря, любой другой равный ему
элемент.
3. В ряде случаев вместо заранее данного разбиения мно-
жества L на классы равных элементов будут непосредствен-
но указываться условия допустимых замен (т. е. условия, при
которых элементы считаются равными). Тогда для произволь-
ного элемента а из L будет определен класс аЛТ состоящий
из всех элементов L, равных элементу а. Однако, чтобы полу-
чить требуемое распределение множества L по таким клас-
сам, нужно обеспечить следующие три обстоятельства:
АКСИОМЫ
13
§ Il
1) Сам элемент а должен войти в класс е#, то есть усло-
вия равенства должны быть такими, чтобы элемент а считал-
ся равным самому себе: а = а (иначе говоря, замена эле-
мента самим собой должна быть допустимой),
2) Если а — Ь, то должно быть Ь — а.
3) Если а = Ь и Ь — с, то должно быть а —с.
При соблюдении этих трех обстоятельств (и только в этом
случае) любые два элемента, входящие в класс &£, равны
между собой; кроме того, класс включает все элементы
множества L, равные какому-нибудь элементу этого класса.
Иллюстрация сказанного дается на примерах § 2.
4. Будем говорить, что в множестве L определены дейст-
вия сложения и умножения на число, если:
1) каждым двум элементам а, Ь из множества L сопо-
ставлен некоторый элемент того же множества L, называемый
их суммой; сумма элементов а, b обозначается через а -|- Ь;
2) каждому числу а и каждому элементу а из множества
L сопоставлен некоторый элемент того же множества L,
называемый произведением а на а или а на а; произведение
а на а обозначается через аа или аа.
Предполагается, что действия сложения и умножения на
число инвариантны относительно допустимых замен элемен-
тов множества L: ест а —а', b — b', то а-\-Ь = а’ -\-17
и аа = аа'.
Предполагается также, что соблюдены требования следу-
ющих восьми аксиом:
1) Для любых а, b из L
а-]-b — b-{-а.
Это свойство сложения называется перестановочным или комму-
тативным.
2) Для любых а, Ь, с из L
(а + Ь)-]-с — а 4-с).
Это свойство называется сочетательным или ассоциативным.
Оно позволяет писать сумму без скобок, считая а 4~ b 4~ с —
= (а 4-6) 4~ с ~ а (.Ь 4- с). Вследствие первой аксиомы без-
различен также и порядок записи слагаемых.
3) В множестве L существует элемент 0 такой, что
а-}-® — а
для любого а из L. Элемент 6 называется нулевым.
14
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ. I
4) Для любого элемента х из L существует элемент у
из L такой, что
х-]~у=8.
Элемент у называется противоположным для х и обозна-
чается через —х.
5) 1 • а = а.
6) а (Ва) = (аб) а.
7) (а р) а — аа -|- ^а.
8) а (а Ь) = аа ab.
В последних четырех аксиомах а и b означают произ-
вольные элементы из L; а и р — произвольные числа.
Отметим, что свойство, выраженное седьмой аксиомой,
называется распределительным или дистрибутивным для со-
множителя из L (эта аксиома разрешает распределять сомно-
житель из L по составляющим числового сомножителя). Вось-
мая аксиома выражает распределительное свойство для чис-
лового сомножителя.
5. Основное определение. Множество L, рассмат-
риваемое вместе с заданными в нем действиями сложения и
умножения на число, называется линейным пространством.
Подчеркнем, что в этом определении подразумевается, что
сложение и умножение удовлетворяют всем свойствам, пере-
численным в п. 4.
Восемь аксиом, сформулированных в п. 4, называют
аксиомами линейного пространства.
Как мы уже говорили во введении, элементы линейного
пространства принято называть также векторами, а само
линейное пространство можно называть векторным простран-
ством. Впрочем, очень часто множество L мы будем назы-
вать пространством, не употребляя никаких прилагательных,
но считая, что речь идет о векторном пространстве.
6. Если для векторов пространства L определено умно-
жение только на действительные числа, то L называется
действительным векторным пространством. Если определено
умножение векторов из L также и на комплексные числа,
то пространство L называется комплексным.
Всюду в дальнейшем, употребляя термин «произвольное
число», мы будем иметь в виду любое действительное число,
если речь идет о действительном пространстве, и любое ком-
плексное число, если речь идет о комплексном пространстве.
ПРИМЕРЫ
15
§ 2]
Значительная часть фактов, изложенных в ближайших
главах, относится и к действительным, и к комплексным
пространствам. В тех случаях, когда какое-либо свой-
ство справедливо -только для действительного или только
для комплексного пространства, это будет особо оговари-
ваться.
7. Иногда вместо умножения на числа рассматривается
умножение элементов из L на элементы произвольного алгеб-
раического поля U (с соблюдением тех же восьми аксиом
линейного пространства). В этом случае множество с задан-
ными линейными операциями называется линейным (пли век-
торным) пространством над полем U.
§ 2. Примеры линейных пространств
Предварительное замечание. Если относительно
какого-либо конкретного множества с заданными в нем ли-
нейными операциями утверждается, что оно есть линейное
пространство, то для доказательства этого утверждения нужно
проверить, что заданные операции в самом деле являются
линейными, то есть удовлетворяют требованиям восьми
известных нам аксиом.
1. Пространство геометрических векторов.
Рассмотрим в трехмерном евклидовом пространстве множество
всех геометрических векторов. Заметим, что два элемента
этого множества, т. е. два вектора, считаются равными в том
случае (и только в том случае), когда они коллинеарны,
имеют равные длины и направлены в одну сторону. Таким
образом, речь идет о свободных векторах, точка приложения
которых может выбираться произвольно.
Допустимые замены вектора заключаются в его парал-
лельных перенесениях к новым точкам приложения. Соблю-
дение трех условий п. 3 § 1 при этом очевидно. Линейные
операции над геометрическими векторами производятся хорошо
известным образом: сложение—по правилу параллелограмма,
умножение на действительное число а есть растяжение век-
тора в а раз. Обе операции инвариантны относительно допу-
стимых замен. В самом деле, если а —а’, b = b', то парал-
лелограмм, построенный на векторах а', Ь', получается парал-
лельным перенесением параллелограмма, который построен
на а, Ь; тем самым, вектор а' -\-tf получается параллельным
]6 ЛИНЕЙНЫЕ ПРОСТРАНСТВА [ГЛ. I
перенесением вектора а Ь, то есть а b — а' Ь'. Столь
же просто усматривается равенство аа — аа'.
Геометрические векторы с указанным определением ли-
нейных операций образуют действительное линейное прост-
ранство. Нулевым элементом здесь является вектор нулевой
длины. Если х—любой вектор, то в качестве противополож-
ного ему вектора у =— х следует понимать вектор той же
длины и противоположного направления. Требования аксиом
1)—8) п. 4 § 1 при этом соблюдены, в чем легко убедиться
при помощи простых геометрических рассуждений. Разу-
меется, в этом нет чего-либо случайного. Дело в том, что
геометрические векторы послужили исходной моделью для
общего понятия линейного пространства, т. е. в аксиомах
1) — 8) высказаны некоторые свойства линейных операций
над геометрическими векторами, хорошо известные в элемен-
тарной векторной алгебре.
Можно было бы спросить, почему в аксиомах 1) — 8) не
потребованы другие, столь же простые и важные свойства
геометрических векторов, которыми постоянно пользуются в
векторных выкладках? Например, что умножение любого век-
тора на число нуль дает нулевой вектор или что при умно-
жении любого вектора х на число —1 получается противо-
положный вектор —х. Оказывается, в этом нет надобности,
поскольку такие свойства можно уже доказать, т. е. вывести
из аксиом, что и будет сделано в § 3.
2. Нулевое пространство. Пусть L — множество,
состоящее только из одного элемента. Что представляет со-
бой этот элемент, нам безразлично. Обозначим его буквой 6.
Определим в множестве L линейные операции, полагая, что 6
в сумме с самим собой дает 0 и что при умножении 0 на
любое действительное число мы получаем также 0. Легко
убедиться, что в этом случае требования аксиом 1) — 8) соб-
людены. Таким образом, данное множество L является дейст-
вительным линейным пространством, состоящим из единствен-
ного, очевидно, нулевого элемента. Ясно, что с тем же успе-
хом множество L можно определить как комплексное прост-
ранство.
Замечание. Все другие (действительные или комплекс-
ные) линейные пространства обязательно имеют бесконечное
количество элементов. Именно, в п. 2 § 3 показано, что если
линейное пространство содержит хотя бы один элемент а,
ПРИМЕРЫ
17
§ 2]
отличный от нулевого, то для различных чисел аир эле-
менты аа и За также различны.
3. Координатное пространство. Пусть теперь L
означает множество, элементами которого служат всевозмож-
ные упорядоченные наборы действительных чисел, по п чисел
в каждом (п — зафиксированное натуральное число). Называя
какой-нибудь набор из п чисел упорядоченным, мы считаем,
что составляющие его числа занумерованы. (При этом они
не обязаны быть различными.) Имея в виду, что элемент х
из L есть набор чисел хь х2,..., х„, будем писать х —
= {х1; х2....хп]. Считая х произвольным, рассмотрим еще
один, также произвольный элемент _у4,..., Эле-
менты х.и у будем полагать равными в том и только в том
случае, когда Xi=_yt, Ха —у*..., хп = уп. Определим
линейные операции в L соотношениями
х-}-у= {%! x-t Ч-Уъ • • • > (О
ах = {ахь ах2,..., ах„}. (2)
Тогда требования первых двух аксиом линейного простран-
ства соблюдены, поскольку сложение действительных чисел
обладает перестановочным и сочетательным свойствами. Для
проверки аксиом 3), 4) достаточно указать в множестве L
нулевой элемент; именно:
9 = {0, 0,..., 0}. (3)
Вместе с тем ясно, что в L для любого х существует про-
тивоположный элемент — х; именно:
--Х={-----Х1(--Хо,..., — хп}. (4)
Аксиома 5) сразу усматривается из соотношения (2). Наконец,
аксиомы 6), 7), 8) соблюдаются вследствие соотношений (1),
(2), а также вследствие сочетательного и распределительного
свойств для умножения действительных чисел.
Таким образом, множество L с заданными линейными опе-
рациями является действительным линейным пространством.
Мы будем называть его действительным координатным про-
странством Кп.
Замечание. Рассматриваемое сейчас множество L не
позволяет считать множитель а в соотношении (2) комплекс-
ным числом, так как при комплексном а в правой части (2)
18
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. Г
получится набор комплексных чисел, не являющийся эле-
ментом множества L.
4. Обозначим на этот раз через L множество всех упо-
рядоченных наборов из комплексных чисел, по п чисел в
каждом.
Линейные операции определим формулами (1) и (2), считая
теперь, что a, Хр у}- (/=!,..., л)—комплексные числа. Как
и в предыдущем пункте, все аксиомы 1) — 8) соблюдены,
причем нулевой и противоположный элементы выражаются
формулами (3) и (4). Таким образом, L есть линейное прост-
ранство, комплексное, поскольку комплексны числа а. Мы
будем называть его комплексным координатным пространст-
вом Кп.
Замечание. Ничто не мешает нам, однако, в соотно-
шениях (1), (2) употреблять в качестве а только действитель-
ные числа (при комплексных Хр у}). В таком случае множе-
ство L оказывается действительным линейным пространством.
Отсюда ясно, что одни и те же предметы (например, упорядо-
ченные наборы комплексных чисел) могут служить в качестве
векторов различных линейных пространств. Поэтому в общем
определении § 1 линейным пространством называется не
просто множество L, а множество вместе с заданными в
нем линейными операциями, причем необходимо указывать,
из какого поля берутся множители а.
5. Пространство матриц. Как принято, будем на-
зывать прямоугольной матрицей, точнее, т \ п- матрицей таб-
лицу чисел, расположенных в т строчках по п чисел в каждой.
Если числа, составляющие матрицу, обозначены через aik
(z=l, 2,..., т; k=\, 2,..., л), а сама матрица — через а,
то будем писать
ЙЦ . Й1„
-- а21 й22 • • • а2и
Л/nl • • • Q-mn
Самой этой записью данные числа располагаются также и
по столбцам (число находится в строке с номером г и в
столбце с номером k). Наряду с подробной записью матрицы
в виде таблицы мы часто будем употреблять сокращенную
запись: „
° = li aih II-
ПРИМЕРЫ
19
§ 21
Условимся матрицу называть действительной или комплекс-
ной в случаях, когда она составлена соответственно из дейст-
вительных или из комплексных чисел.
Пусть L — множество всех т'Х.п-матриц, например дейст-
вительных. Две матрицы будем считать равными элементами
множества L в том и только в том случае, когда в них соот-
ветствующие места заняты одинаковыми, числами (т. е. на
пересечении i-й строки и Л-го столбца и в одной и в другой
матрице стоит одно и то же число). Установим в множестве
L линейные операции.. Именно, если a = ||a/fe||, b = —
произвольные матрицы из L, а — произвольное действитель-
ное число, то мы положим
= aik-\-bik\\, аа — || a.aik ||. (5)
Иначе говоря, при сложении т X //-матриц а и b мы попар-
но складываем одинаково расположенные в них числа и
bik; при умножении матрицы а на число а мы умножаем на а
все числа, составляющие матрицу а. Совершенно так же, как
в п. 3, можно установить, что линейные операции (5) удов-
летворяют требованиям аксиом 1)—8); при этом роль нуле-
вого элемента в L играет матрица 0, состоящая из одних
нулей (нулевая матрица), а противоположным элементом для
a = j| Ц служит матрица |j — a!tl ||. Тем самым L с линей-
ными операциями (5) является действительным линейным про-
странством. Аналогично множество всех комплексных т X п-
матриц с линейными операциями (5), где а — комплексное, яв-
ляется комплексным линейным пространством. Разумеется, рас-
сматривая комплексные т X «-матрицы, мы можем считать
а действительным; тогда мы получим действительное линей-
ное пространство тех же комплексных матриц.
Замечание. В частном случае т= \ (при данном п)
мы получаем матрицы, каждая из которых имеет только одну
строку (состоящую из п чисел). Линейное пространство та-
ких матриц есть не что иное, как координатное пространство
Кп (см. п. 3). При п=1 и данном т получаются матрицы,
имеющие только один столбец; ясно, что они также образу-
ют координатное пространство, именно Кт. Более того, про-
странство любых т X «-матриц можно рассматривать как
координатное пространство Ктп, поскольку ничто не меша-
ет установить для всех элементов матриц общую нумерацию
20
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. I
по какому-нибудь единому стандарту и выписать их в одну
строку или в один столбец.
6. Пространство непрерывныхфункций. Возь-
мем на числовой оси произвольный сегмент -ц sC т т2 и обо-
значим через L множество всех функций, непрерывных на
этом сегменте и принимающих действительные значения.
Имея в виду, что элемент х из L есть некоторая непре-
рывная функция х (т), Т] т т2, будем писать х={х(т)}.
Считая х произвольным, рассмотрим еще один также произ-
вольный элемент _у = {у(т)}. Элементы х и у будем считать
равными в том и только в том случае, когда х(т)—(т),
т. е. когда х(т) и _у(т) совпадают в любой точке т сегмента
Определим линейные операции в L, полагая
х+>={х(т)4-_у(т)}, ах={ах(т)}, (6)
где а -—действительное число. Иначе говоря, мы складываем
функции и умножаем их на числа обычным образом, как
принято в анализе. Существенно заметить, что при сложении
непрерывных функций и при умножении непрерывной функ-
ции на постоянную получаются снова непрерывные функции.
Легко убедиться, что линейные операции (6) удовлетворяют
требованиям аксиом 1)—8). При этом нулевой элемент О есть
функция, равная нулю во всех точках т сегмента [ti, т2]; для
элемента х={х(т)} противоположным служит {—х(т)|.
Таким образом, множество всех действительных непрерыв-
ных на функций с линейными операциями (6) есть
действительное линейное пространство.
Если в качестве L мы возьмем множество всех непрерыв-
ных на tj eg: т sC т2 функций с комплексными значениями,
т. е. функций вида х (т) = и (т) -ф- iv (т), то в этом множестве
можно задать линейные операции (6) при комплексном а.
Все аксиомы 1)—-8) здесь также удовлетворены, и мы полу-
чаем комплексное линейное пространство непрерывных функ-
ций с комплексными значениями. Аналогично примерам,
которые рассматривались в пп. 4 и 5, мы можем и в данном
случае множество непрерывных функций
х (т) = и (т) -j- iv (т)
сделать действительным линейным пространством, если в равен-
ствах (6) будем в качестве а допускать только действитель-
ные числа.
ПРИМЕРЫ
21
§ 21
7. Пространство интегрируемых функций1).
Рассмотрим всевозможные действительные функции, интегри-
руемые на сегменте Множество этих функций
обозначим через L.
Известно, что если мы изменим интегрируемую функцию
в одной точке как угодно (сохранив остальные ее значения),
то она останется интегрируемой, а интеграл от нее будет
равен тому же числу, что и до изменения. То же самое
можно сказать, если функция изменяется в нескольких точ-
ках и даже в бесконечном множестве точек при условии,
что это множество имеет меру нуль. Такого рода изменения
функции с точки зрения теории интегрирования несущественны.
Поэтому в вопросах теории интегрирования целесообразно не
различать две функции, если они совпадают на сегменте
"Ч т т2 почти везде, т. е. во всех точках сегмента ч т sC ч,
кроме, может быть, некоторого множества меры нуль.
В связи с этим условимся два элемента х={х(т)},
_у=[у(т)} множества L считать равными, если х(т)—_у(т)
почти везде на сегменте ч т «С ч- Соответственно допу-
стимая замена произвольного элемента Л'={х(т)}£ L заклю-
чается в любом изменении значений функции х(т) на любом
множестве меры нуль.
Легко убедиться, что такое определение равенства эле-
ментов L удовлетворяет трем требованиям п. 3 § 1. Для пер-
вых двух это очевидно. Пусть теперь у = х, то есть
у(т) — х(т) всюду, кроме некоторого множества меры
нуль; пусть z — х, то есть z(t) = x(-) всюду, кроме неко-
торого множества меры нуль. Тогда (т) = z (-с) всюду,
кроме, быть может, объединения множеств и <М>г. По
объединение двух множеств меры нуль есть множество меры
нуль. Следовательно, у(т) = г(т) почти всюду, а значит, y=z.
Таким образом, и третье требование удовлетворено: если
у — X, z=x, то у = z.
Если в множестве L определить линейные операции
согласно формулам (6) п. 6, то будут обеспечены и инвари-
антность линейных операций относительно допустимых замен,
и соблюдение всех аксиом 1)—8). Не останавливаясь на дока-
зательстве этих обстоятельств, заметим только, что в данном
') Читатель, не знакомый с теорией интегрирования, этот пункт
может пропустить.
22 ЛИНЕЙНЫЕ ПРОСТРАНСТВА [ГЛ Г
случае нулевым элементом является 9 = {0 (т)}, где 0(т)—-
любая функция, равная нулю почти везде на сегменте [4, те].
Множество' L с заданными линейными операциями называ-
ется пространством функций, интегрируемых на сегменте [т], т2|.
8. Контрпример. Обозначим через L множество всех
упорядоченных наборов действительных чисел по л(/1^>1)
чисел в каждом, т. е. множество того же вида, что и в п. 3.
Определим сумму двух элементов из L так же, как в п. 3:
х-гУ={хх-'гУъ х^-'гуъ..., хп^руп\. (7)
Умножение х на а пусть дается правилом
ах = {axt, х2,..., хп} (8)
(справа на а умножается только xt). Вследствие соотноше-
ния (7) аксиомы 1)—4) удовлетворены, причем
0 = {0, 0,..., 0}, —х={— X], — х2,...,— хп}.
Легко проверить также, что соблюдаются требования
аксиом 5), 6), 8). Вместе с тем аксиома 7) нарушена:
(a-}-P)x={(a-J-P)xi, xit..., х„},
ах -J- ₽х = {(а Р) Xi, 2х2, ..., 2х„}.
Таким образом, множество L с операциями (7), (8) не
является линейным пространством.
§ 3. Простейшие следствия из аксиом линейного
пространства
1. Перейдем к изложению обшей теории, т. е. к выводам
из аксиом 1)—8) независимо от частных особенностей кон-
кретных линейных пространств. Имеют место следующие
предложения:
1) В каждом линейном пространстве нулевой вектор
только один.
Доказательство. Пусть элементы 91 и 0.2 нулевые.
Вследствие аксиом 1) и 3) они совпадают:
02=02 01 = 0j =Op
Замечание. Разумеется, когда мы говорим, что нуле-
вой вектор только один, то мы не различаем равные векторы.
|В том же смысле следует понимать утверждение единствен-
§ 3]
простейшие следствия из аксиом
23
ности и в других теоремах (например, в следующем предло-
жении).
2) Для любого вектора х существует только один
противоположный вектор.
Доказательство. Предположим, что х Ji — 6 и что
хЦ-у2 = 0. Аксиомы 1)—4) позволяют записать следующую
цепочку равенств:
у., =уч -|- 6 =уч (х _У1) — (у2 -f- х) у\ —
—(х >2) Н- уз=б + Ji =Уь
то есть у-2 =yi.
3) Произведение любого вектора х на число 0 равно
нулевому вектору 6.
Доказательство. Для данного вектора х возьмем
противоположный вектор у. Используя аксиомы 2)—5) и 7),
получаем
0-х = 0-х -|- б = 0-х -j- (х -]-у) = (0 1)х -|-у = х -f-у = 0.
4) Произведение любого вектора х на число — 1 равно
вектору, противоположному для х, т.е. (—1)х = —х.
Доказательство. Нужно установить, что х-]-
-j-(—1)х = 0. Из предыдущего свойства и аксиом 5) и 7)
имеем
х-[-(— 1)х = (1 — 1)х = О-х = 0.
5) Произведение нулевого вектора 0 на любое число а равно
нулевому вектору.
Доказательство. Возьмем произвольный вектор х.
Используя аксиому 6) и свойство 3), находим
я0 = а (0 • х) = (а 0) х = 0 х = 0.
2. Замечания. 1) Из свойства 5) следует, что произ-
ведение ненулевого вектора на число, не равное нулю, все-
гда есть ненулевой вектор. В самом деле, если бы при А -Д 0,
а гД 0 было Аа = 0, то вследствие свойства 5) и аксиом
5)—6) мы получили бы
а = 1 = а=4-(М = =
\ К I к к
что противоречит условию а -Д 0.
24
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
(ГЛ. I
2) Если a р и а 0, то аа -ф $а. В самом деле, если
бы оказалось аа = $а, то аа (— Р) а = 0 или (а — р) а = 0,
что противоречит предыдущему, так как а—Рт^О и а 0.
3. В линейном пространстве определено действие вы-
читания. Именно, вектор х называется разностью век-
тора b и вектора а, если х-\~а = Ь, что записывается
х = b — а.
Докажем, что для любых элементов а и b разность
существует и единственна.
Существование. Докажем, что вектор х = Ь -\-
— 1)а является разностью b — а. Вследствие аксиом 2), 3),
5), 7) и свойства 3) имеем:
х а = b (— 1) а а = b (— 1 -|-l)a = Z>-|-O-a = Z>.
Единственность. Покажем, что если х является раз-
ностью b — а, то его всегда можно представить в виде
х = Ь-]-(—1)а. В самом деле, из равенства x-jy а — b с по-
мощью аксиом 2), 3), 5), 7) и свойства 3) получаем
х — л; —|— 0 = аг —(1— 1) а = х-I-а(— 1) cz = &—j—(— 1)а.
4. В дальнейшем мы будем пользоваться аксиомами линей-
ного пространства и свойствами, установленными в этом пара-
графе, без подробных пояснений. Вследствие аксиом и полу-
ченных здесь результатов выкладки, в которых участвуют
элементы линейного пространства, проводятся аналогично пре-
образованиям в элементарной алгебре, с той лишь разницей,
что нет умножения и деления векторов и нужно различать
число нуль и нулевой вектор.
В частности, можно переносить вектор из одной части
векторного равенства в другую, умножая переносимый век-
тор на минус единицу (или, что то же самое, заменяя его
противоположным вектором).
§ 4. Линейная комбинация. Линейная зависимость
1. Пусть дано конечное число элементов линейного прост-
ранства: a,b,c,...,q. Пусть далее а,р,у,...,х — произвольные
числа.
Определение 1. Всякий элемент х пространства L,
представимый в виде
х — аа -]- -ус -j- v.q,
§ 4] ЛИНЕЙНАЯ КОМБИНАЦИЯ. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ 25
называется линейной комбинацией элементов а, Ь, с,..., q.
Говорят также,' что х линейно выражается через a, b, с,...,q.
Определение 2. Линейная комбинация называется три-
виальной, если а = Р — р —... = х = 0, и называется нетри-
виальной, если среди чисел а, р,..., х хотя бы одно отлично
от нуля.
Определение 3. Система векторов а, Ь, с, ..., q
называется линейно зависимой, если существует нетривиальная
линейная комбинация векторов а, Ь, с,..., q, равная нулевому
вектору; иначе говоря, если справедливо равенство
аа-j- fib pc -]- ... --|-хс/ = 0,
где среди чисел а, р, р,... ,х хотя бы одно отлично от нуля.
Определение 4. Система векторов а, Ь, с, ... , q
называется линейно независимой, если равенство
аа -С pZ? pc -j- • • • + = 6
возможно только в том случае, когда
а = р — р - ... = х = 0.
2. Рассмотрим свойства введенных понятий.
1) Непосредственно из определений видно, что всякая ко-
нечная система векторов является либо линейно зависимой,
либо линейно независимой. Покажем, что система, состоящая
из одного вектора, линейно зависима тогда и только
тогда, когда этот вектор нулевой.
В самом деле, равенство а© — Ь при любом а, в част-
ности при а ф 0, установлено в п. 1 § 3. Пусть теперь
х =£ 0 и 0.x — 0. Тогда а = 0 согласно п. 2 § 3.
2) Если часть системы линейно зависима, то и вся
система линейно зависима.
Пусть известно, что в системе а,Ь,с, ..., q часть, со-
стоящая, например, из векторов с,..., q, линейно зависима.
Значит, существуют числа р, ..., х, не все равные нулю и
такие, что рс -1- ... v.q = 0. Но тогда линейная комбинация
0 • а 4~ 0 • b -j- ~[С -j- ... -J- v.q — 0 нетривиальна, поскольку
отличные от нуля числа имеются среди р, ..., х.
3) Если вся система линейно независима, то и любая
ее часть линейно независима.
Это вытекает непосредственно из предыдущего свойства.
В частности, нулевой вектор не может входить в линейно
независимую систему.
26
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. I
4) Если система линейно зависима, то в ней найдется
хотя бы один вектор, который линейно выражается через
остальные векторы этой системы.
В самом деле, если аа-ф--ф-ус-ф- ••• + v-q — ^, а среди
коэффициентов а, р, ...,-х есть отличные от нуля, то любой
из векторов, имеющих ненулевые коэффициенты, можно линей-
но выразить через остальные векторы системы. Так например,
если ау; О, то
Свойство 4) не только необходимо, но н достаточно
для линейной зависимости системы векторов. Именно, справед-
ливо следующее утверждение.
5) Если некоторый элемент системы является линей-
ной комбинацией остальных элементов этой системы,
то система линейно зависима.
Действительно, если
а —р7>4-7'с+
то
и линейная комбинация в левой части последнего равенства
нетривиальна.
6) Пусть аь ak — какие-нибудь векторы. Пусть
каждый из векторов Ci, cit ..., сп линейно выражается
через ait ..., ak:
С\ = аца1 -ф- ... -f- fbikak,
c2 — a2iai -ф- ... -ф- а2Лал,
cn — antai -ф- ... -ф- anftaft.
Пусть далее вектор b линейно выражается через
, (2^, Cj, • . . > Cn.
b = X1ai~|- ... -ф-Xftaft-ф-piCj-ф- ... -|-Р‘ясл-
Тогда вектор b линейно выражается через векторы
ai,..., ak.
Доказательство.
b — (Xi -ф- jijaii -ф- ... -ф- pnani) <21 -ф- • •
• • -ф- (X/, -ф- piaiA -ф- ... -ф- pnanfe)
§ 5] ЛЕММА О БАЗИСНОМ МИНОРЕ 27
§ 5. Лемма о базисном миноре
1. Пусть дана прямоугольная матрица А —1| 1|. Будем
рассматривать строчки этой матрицы как векторы координат-
ного пространства К,„ а столбцы — как векторы коорди-
натного пространства Кт (см. § 2, пп. 3—5). Тогда мы смо-
жем говорить о линейной зависимости и независимости строк
данной матрицы или о линейной зависимости и независимости
ее столбцов.
2. Пусть отмечено k разных строк и k разных столбцов
матрицы A(k^n, ksSL tn). Элементы ’) матрицы А, стоящие
на пересечении отмеченных строк и столбцов, сами образуют
некоторую, очевидно квадратную, матрицу В. Определитель
матрицы В называется минором порядка k данной матрицы А.
Отметим, если это возможно, еще одну строку и еще один
столбец матрицы А, не повторяя тех, которые уже были отме-
чены раньше. Теперь все отмеченные строки и столбцы своим
пересечением определяют некоторую квадратную матрицу С.
Определитель матрицы С есть минор порядка k -j-1 ма-
трицы А. Мы будем называть е₽о окаймляющим для перво-
начального взятого минора (т. е. для определителя матрицы В).
Замечания. 1) Если k = n или k = m, то для мино-
ров порядка k окаймляющих миноров нет.
2) Если А=1, то матрица В состоит из одного элемента
матрицы А. Миноры первого порядка представляют собой
численные значения элементов матрицы.
3. Определение 1. Минор матрицы называется базис-
ным, если он не равен нулю, а окаймляющие его миноры
либо все равны нулю, либо отсутствуют вовсе.
Определение 2. Столбцы матрицы, пересекающие
базисный минор, называются базисными столбцами. Анало-
гичная терминология употребляется для строк.
Замечание. Матрица может иметь несколько базис-
ных миноров и соответственно несколько систем базисных
) Элементами матрицы называют составляющие ее числа:
ап, als, ... Однако точнее следует сказать, что элементами ма-
трицы являются символы ап, а12, ... При этом два элемента a,-ft и
aji считают различными, если или ftytZ (не исключая воз-
можности, что ajh и aji обозначают одно и то же число). Заметим
еще, что в ряде случаев рассматриваются матрицы, где под а,-*
подразумеваются не числа, а какие-нибудь другие объекты, напри-
мер функции.
28
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. I
столбцов. Всякая матрица, кроме нулевой, имеет по крайней
мере один базисный минор и, тем самым, по крайней мере
одну систему базисных столбцов.
4. Лемма о базисном миноре. Столбцы матрицы,
пересекающие базисный минор, линейно независимы; всякий
столбец через них линейно выражается.
Эта же лемма, согласно определению 2, может быть
высказана так:
Базисные столбцы линейно независимы; любой столбец
матрицы линейно выражается через базисные.
Доказательство первого утверждения леммы — от
противного. Предположим, что базисные столбцы линейно
зависимы. Тогда линейно зависимы столбцы базисного минора.
Но в таком случае базисный минор равен нулю, что проти-
воречит его определению.
Доказательство второго утверждения. Будем считать
для определенности, что рассматриваемый базисный минор
имеет порядок г и занимает левый верхний угол матрицы:
<2ц ... atr ... а}/1 ... Qin
<2ri ... а гг ... агь ... агп
ат\ • • • атг • • • О-тЬ • • • ®тп
Обозначим этот базисный минор через D.
Возьмем произвольные индексы г, k (1 =g i =g m,
и составим определитель порядка г —1
Оц ... С1г <21*
<zrj ... агг агь
... а,г aik
Докажем, что Д,-* = 0. Рассмотрим три возможных случая:
1) 2sgr. В этом случае Д,* = 0, так как в нем послед-
няя строка совпадает с одной из предыдущих строк.
2) k г. В этом случае Д;* = 0 потому, что в нем по-
следний столбец совпадает с одним из предыдущих.
§ 5]
ЛЕММА О БАЗИСНОМ МИНОРЕ
29
3) i г, k~^>r. В этом случае определитель Д,-* является
окаймляющим для минора D и равен нулю потому, что
D — базисный минор.
Зафиксируем k и будем считать, что I пробегает всевоз-
можные значения от 1 до т.
Разложим Aik по элементам последней строки. Алгебраи-
ческие дополнения элементов последней строки обозначим
через Аь ..., Ar<J. При изменении I эти величины
остаются неизменными, так как алгебраическое дополнение
какого-либо элемента зависит только от его места в опре-
делителе, но не зависит от численного значения самого эле-
мента. В результате разложения получим
= А1ац ... -j- Arair -ф- Ar ^aik = 0, (1)
причем
= (2)
Соотношения (1) и (2) дают
aik = (— аП + • • • + ----yf) air-
Напомним, что k зафиксировано, I пробегает все значения
от 1 до т; поэтому
Формула (3) представляет А-й столбец матрицы (который
может быть взят произвольно) в виде линейной комбинации
базисных столбцов. Лемма доказана.
Замечание. Разумеется, аналогичная лемма имеет место
и для базисных строк.
5. Как следствие леммы о базисном миноре получается
следующая.
Теорема. Определитель квадратной матрицы равен
нулю в том и только в том случае, когда между столб-
цами этой матрицы имеется линейная зависимость. Ана-
логичное утверждение справедливо и для строк.
Доказательство. Если столбцы п X «-матрицы зави-
симы, то ее определитель равен нулю, что известно как одно
из основных свойств определителей. Покажем, что если
столбцы независимы, то определитель не равен нулю. В самом
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. Г
деле, если столбцы независимы, а определитель равен 0, то
должен найтись базисный минор М порядка <^п. Но тогда
имеется столбец, который не входит в систему базисных
столбцов, соответствующую минору М, и который линейно
выражается через эту систему, т. е. между столбцами имеется
зависимость, что противоречит предположению.
§ 6. Основная лемма о двух системах векторов
1. Пусть даны две системы векторов alt а2, ... , ah и bt,
Ьг, ..., bm из одного и того же линейного пространства.
Лемма 1 (основная). Если система Ь\, Ьг, ..., Ьт ли-
нейно независима, а каждый из векторов Ь, линейно выра-
жается через систему ait а2, ..., ak, то т k.
Доказательство проведем от противного. Предпо-
ложим, что Выпишем формулы, выражающие векторы
bt через векторы а/.
bi — anai -ф-
= -ф-
(1)
Ьт -1 — + • • • “Г am-l kak,
— ат1&1 + • • • H amk^k
и рассмотрим матрицу || a{j-1|. Если матрица || а,-у || нулевая,
то bi= ... =bm = <J и система bi, ..., bm линейно зави-
сима, что противоречит условию леммы. Пусть матрица || о.{]-|)
не нулевая. Тогда она имеет базисный минор, причем поря-
док базисного минора не превышает числа столбцов k. Число
строк в матрице ||at-y||, равное т, больше k и, следовательно,
больше числа базисных строк этой матрицы.
Таким образом, матрица 1|<Ч7 || имеет некоторую систему
базисных строк и еще по крайней мере одну строку, не
входящую в эту систему. Согласно лемме о базисном миноре
указанная строка линейно выражается через базисные. Но
это означает, что между строками матрицы имеется линейная
зависимость (см. § 4, п. 2, предложения 5 и 2). Напишем ее
в виде
11 {«и, ..., «нФ -ф- ... -ф- Xm {ат1, ..., ат,ф = {0, ..., 0}, (2)
где среди чисел ..., 'i~m есть отличные от нуля.
§ 6] ОСНОВНАЯ ЛЕММА О ДВУХ СИСТЕМАХ ВЕКТОРОВ
31
Умножим равенства (1) соответственно на Хъ Хт и
сложим их почленно. Учитывая линейную зависимость (2),
найдем
Xi^i -|- ... -j- (?-lal 1 4“ ••• 4* ^фат1) 4" • • •
... 4~ ak (4al* 4- • • • ~'Г ^mamk) = 0 • О1 4~ • • • 4~ 0 " аь ==
Система bi, ..., bm оказалась линейно зависимой, что невоз-
можно по условию леммы. Полученное противоречие пока-
зывает, что лемма 1 доказана.
2. Говорят, что векторы образуют линейно
независимую подсистему в системе а\, ..., ak(kесли
векторы а^, ..., линейно независимы и входят в систему
«в ....
Очевидно, что система аь ..., ak содержит (по крайней
мере одну) линейно независимую подсистему в том и только
в том случае, когда среди векторов alt ..., ak имеется хотя
бы один ненулевой.
3. Лемма 2. Пусть система векторов at, ..., аг,
arii линейно зависима, а ее подсистема at, ..., аг линейно
независима. Тогда вектор аг,^ линейно выражается через
векторы а1г ..., аг.
Доказательство. Имеем зависимость
4- • • ~Ь ^гаг 4- 4nar+i = (3)
где среди чисел Х1(..., Хг, Хг+1 есть отличные от нуля. Ясно,
что Xr+i не может быть равным нулю, так как в этом слу-
чае оказалась бы зависимой подсистема aj, ..., аг. Таким
образом, Хг+1 ф 0, и мы из формулы (3) находим
___[ Xj \ I ! Хг X
ar+i — I — -у—I ai 4~ • • • 4~— >—) ап
\ лг+1/ \ Аг+1/
что и требовалось доказать.
4. Определение. Пусть система .......ak содержит
линейно независимую подсистему, состоящую из г векторов.
Число г называется рангом системы ait ..., ak, если всякая
ее подсистема из большего числа векторов линейно зависима,
либо если таких подсистем нет совсем (is случае г = /г).
Коротко: рангом системы называется максимальное
число ее линейно независимых векторов.
Если все векторы системы ..., нулевые, то будем
говорить, что ее ранг равен нулю.
32 ЛИНЕЙНЫЕ ПРОСТРАНСТВА [ГЛ. I
5. Л е м м а 3 (обобщенная основная). Пусть каждый из
г векторов Ьь ..., bm линейно выражается через векторы
аъ • • • > аь- Тогда ранг системы Ьъ..., Ьт не больше ранга
системы аь ..., ak.
Доказательство. Обозначим через г ранг системы
tzi...ak. Если г —О, то справедливость утверждения
леммы 3 очевидна. Если r = k, то справедливость утвержде-
ния леммы 3 следует из леммы 1. В самом деле, ранг си-
стемы bit ..., bm по лемме 1 не больше k = f.
Пусть 0<^г<^/г. Тогда в системе аь ак найдется г
линейно независимых векторов. Пусть это будут векторы
аъ ..., аг. Добавляя к ним еще один вектор из системы
Qi....а*, всякий раз будем получать линейно зависимые
системы, а именно
аь ...,
at, ...,
ait ..., аГ, ak.
По лемме 2 каждый из векторов аг+1, ..., ak линейно
выражается через векторы ..., ar. С другой стороны,
по условию леммы каждый вектор Ьх, ..., Ьт линейно выра-
жается через все векторы ai, ..., ak. Отсюда и из предыду-
щего заключения следует, что каждый вектор bt, ..., brl
линейно выражается через аь ..., аг (см. § 4, п. 2, предло-
жение 6). Но тогда по лемме 1 число векторов в любой
линейно независимой подсистеме системы blt ..., bm не
больше г. Лемма 3 доказана.
§ 7. Ранг матрицы
1. Определение. Рангом матрицы называется макси-
мальное число ее линейно независимых столбцов.
Иначе говоря, ранг матрицы есть ранг системы ее столб-
цов, рассматриваемых как векторы координатного про-
странства.
Ранг матрицы А будем обозначать символом Rang А.
Если матрица А нулевая, то Rang А — 0, так как у пуле-
вой матрицы нет линейно независимых столбцов. Отметим,
что ранг ненулевой матрицы всегда положителен.
7]
РАНГ МАТРИЦЫ
33
2. Теорема о ранге матрицы. Ранг произвольной
матрицы равен максимальному порядку ее миноров,
отличных от нуля.
Доказательство. Если Rang А — 0, то А — нулевая
Матрица, и у нее нет отличных от нуля миноров. Естественно
Считать в этом случае, что максимальный порядок отличных
от нуля миноров равен нулю.
Пусть далее матрица А — не нулевая. Если некоторый ее
минор М порядка г не равен нулю, а все миноры более
высокого порядка равны нулю или отсутствуют вовсе, то М
является базисным минором. По лемме о базисном миноре
столбцы матрицы А, пересекающие минор 7И, линейно неза-
висимы. Поэтому Rang А г. По той же лемме любой стол-
бец матрицы А линейно выражается через базисные
столбцы. Отсюда, применяя лемму 3 § 6, находим, что
|Rang At^r. Таким образом, Rang^ = r, что и требовалось
доказать.
3. Из рассуждений, проведенных в предыдущем пункте,
(вытекает ряд важных следствий:
1) Ранг ненулевой матрицы равен порядку любого ее
базисного минора.
В самом деле, если М — произвольный базисный минор,
г — его порядок, то, повторяя предыдущие рассуждения,
находим, что Rang А — г.
2) Все базисные миноры ненулевой матрицы имеют
одинаковый порядок, равный ее рангу.
3) Если в матрице А минор Л1 базисный, то все ми-
норы более высокого порядка равны нулю (а не только
миноры, окаймляющие 714).
4) Максимальное число линейно независимых строк
произвольной матрицы А равно максимальному числу
ее линейно независимых столбцов (то есть, равно
рангу Л).
Доказательство. Если матрица А нулевая, то число
линейно независимых строк, как и число линейно независи-
мых столбцов, равно пулю. Пусть А — ненулевая матрица.
Транспонируем матрицу А. Тогда ее строки перейдут в столбцы
транспонированной матрицы А*, линейно независимые строки
перейдут в линейно независимые столбцы А*, а максималь-
ный порядок отличных от нуля миноров сохранится, поскольку
при транспонировании каждый из миноров сохраняет свое
34
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. I
числовое значение. Таким образом,
Rang А — Rang А*
и равен максимальному числу линейно независимых строк
матрицы А.
5) Если А — произвольная т^п-матрица, то Rang А
не превышает меньшего из двух чисел т и п.
4. Из предыдущего ясно, что ранг матрицы не изменяется
при перестановке ее столбцов или строк.
Кроме того, ранг матрицы не изменится, если к одному
из ее столбцов прибавить линейную комбинацию других
столбцов, поскольку такая операция не изменяет числовых
значений ее миноров.
Аналогично ранг сохраняется, если к одной из строк
прибавить линейную комбинацию других строк.
Перечисленные в этом пункте свойства обычно исполь-
зуются для вычисления ранга матрицы. Именно, данную мат-
рицу преобразуют так, чтобы ранг не изменился, но чтобы
в результате получилась матрица, у которой сразу виден
базисный минор.
§ 8. Конечномерные и бесконечномерные пространства.
Базис
1. Определение 1. Линейное пространство назы-
вается п-мерным, если в нем имеется линейно независимая
система, состоящая из п векторов, а всякая система, со-
стоящая из большего числа векторов, является линейно за-
висимой.
Число п называется размерностью линейного простран-
ства. Таким образом, размерность пространства — это
наибольшее число его линейно независимых векторов.
Например, пространство геометрических векторов (см. § 2,
п. 1) трехмерно, так как в нем имеется три независимых век-
тора, а любые четыре связаны линейной зависимостью. Гео-
метрические векторы, расположенные в одной плоскости,
образуют двумерное пространство; в нем любые два некол-
линеарных вектора линейно независимы, а всякие три вектора
линейно зависимы. Векторы, лежащие на одной прямой,
образуют одномерное пространство. Линейное пространство,
РАЗМЕРНОСТЬ. БАЗИС
85
§ 8]
содержащее единственный элемент — нулевой вектор 6,—
является нульмерным.
2. Все n-мерные пространства (и = 0, 1, 2, 3,...) образуют
класс конечномерных пространств. Но этим не исчерпывает-
ся множество всех линейных пространств вообще.
Определение 2. Линейное пространство называется
бесконечномерным, если для любого целого числа 7V^>0
в нем найдется линейно независимая система, состоящая из
N векторов.
Пример. Линейное пространство непрерывных на дан-
ном сегменте функций (см. § 2, п. 6) является бесконечно-
мерным. Чтобы убедиться в этом, достаточно рассмотреть
степенные функции 1, т, т2, ..., tN.
Нетрудно установить их линейную независимость. В са-
мом деле, любая их линейная комбинация представляет собой
многочлен степени не выше N
“О + «It + a2t2 + • • • + «А^ —Р G).
Но у всякого многочлена с ненулевыми коэффициентами
есть лишь конечное число корней, поэтому />(?) = О, т. е.
{р(т)} = 6 тогда и только тогда, когда
а0 = = а2 = . .. = аЛг= 0.
Тем-самым показано, что рассматриваемые элементы незави-
симы, а само пространство бесконечномерно, поскольку чис-
ло N может быть сколь угодно большим.
3. Введем весьма важное для дальнейшего
Определение 3. Система векторов eJ( ..., е„ в про-
странстве L называется базисом, если:
1) векторы Cj, ..., е„ линейно независимы;
2) любой вектор х из пространства L линейно выража-
ется 61, ..., еп, то есть
x = x1ei-\-...-\-xnen. (1)
Равенство вида (1) называется разложением вектора х
по базису 61, ..., е„; числовые коэффициенты хи хп
называются координатами вектора х в этом базисе.
4. Теорема. Линейное пространство п-мерно тогда
и только тогда, когда в нем есть базис, состоящий из п
векторов.
36
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ТТЛ. Г
Доказательство. 1) Пусть пространство L является
«-мерным. Это значит, что в нем есть линейно независимая
система ....... е„, состоящая из п векторов, а добавив
к ней произвольный вектор х из L, мы получим линейно
зависимую систему et, ..., е„, х. По лемме 2 из § 6 век-
тор х линейно выражается через векторы .... еп. Поэтому
система е}, ..., е„ образует базис в L.
2) Пусть L имеет базис elt ..., е„. Рассмотрим в про-
странстве L произвольную линейно независимую систему
векторов Ьь Ьт. По определению базиса каждый из
векторов bj линейно выражается через еь ..., еп. Поэтому
miQn в силу леммы 1 из § 6.
Значит, любая система векторов из L, содержащая более
чем п векторов, линейно зависима. Вместе с тем, базис
fi,..., еп образует линейно независимую систему, содержа-
щую п векторов. Таким образом, размерность L равна и.
Замечание. Как видно из проведенного доказательства,
в «-мерном пространстве любая независимая система из п
векторов является базисом.
Б. В качестве приложения доказанной в п. 4 теоремы
установим, что координатное пространство Кп является
«-мерным.
С этой целью рассмотрим в Кп векторы
«?! = {!, О, 0},
«=<»• 0|: <2>
«, = |0, 0.... I}.
Согласно определению линейных операций в Кп (см. § 2,
п. 3) любой вектор из Кп линейно выражается через векторы
₽i, ..., е„. Именно:
х — (Xi, х^, .., хп| — x^i —|— | ... | хпеп. (3)
Отсюда ясно, что линейная комбинация векторов eit еп
равна 6= {0, 0, ..., 0} только в случае, когда все ее коэф-
фициенты равны нулю. Значит, векторы eit ..., еп незави-
симы и составляют базис /<„, так что пространство Кп яв-
ляется «-мерным.
§ 9]
ЛИНЕЙНЫЕ ОПЕРАЦИИ В КООРДИНАТАХ
37
§ 9. Линейные операции в координатах
1. Пусть пространство L является n-мерным, а векторы
Ci, • • > еп образуют в нем базис.
Теорема 1. Разложение вектора по данному базису
единственно.
Доказательство. Пусть вектор х из L имеет два
разложения:
х = Х\в\ —|—... х„еп
и
х =Х1С14-... -4- хпеп.
Тогда
(J?i — xi)et -j-... -J- (хп — х„)е„ = б,
а так как векторы базиса линейно независимы, то
Xi —xi=... = x„ — х„ = 0,
откуда
Xj^X,...., хп = х„.
Теорема доказана.
Следствие. Все координаты нулевого вектора 9
равны нулю при любом выборе базиса:
6 —— 0 • -4~ 0 • е% 4-... -4~ 0 • еп. (1)
Теорема 2. При умножении вектора на число каж-
дая его координата умножается на это число. При сло-
жении двух векторов складываются их соответствую-
щие координаты.
Доказательство. Пусть даны векторы х, у. Разло-
жим их по базису:
x = Xie1-4-...4-xne„,
у — У1е14- • • 4~ Упеп-
Пусть а — произвольное число. Вследствие аксиом линей-
ного пространства имеем:
ах = a (xte! 4-... 4- хпеп) = (axi) б! 4-... 4- (ах„) еп.
Таким образом, вектор ах имеет координаты ахь..., ахп.
Далее, х - j-у = (xtet -J- • • • 4~ хпеп) 4“ (Уiei 4~ • • • 4~Упеп) =
= (-*14" Ji) ei 4- • • • + (хп 4"Ул) еп> то есть вектор х 4~у
имеет координаты хг 4"Уь • • •, хп -\~Уп-
88
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
2. Пусть a, b,..., q— произвольная
из L. Разложим каждый из них по базису:
G| • - • ] Ппепу
b — bi€i -[-... -J- Ьпет
Я = <71^ qnen
и наряду с векторами (2) рассмотрим матрицу ГЛ, образован-
ную их координатами:
м = ь, ... ьп Я1 ••• Яп
Тогда справедлива
Теорема 3. Ранг системы векторов (2) равен рангу
матрицы М.
Доказательство. Предположим, что между векто-
рами (2) имеется линейная зависимость
aa4-₽fc + ... + x? = e. (3)
Тогда из формул (1), (3), теоремы 2 и теоремы 1 имеем
a {«1,. 4“ Р - ”>^n} +•••“!-••Pin} = {0,.. .,0}. (4)
Иначе говоря, между строками матрицы 714 имеется ли-
нейная зависимость с теми же коэффициентами а, р, ... , х.
Обратно, из (4) следует (3). Аналогичные рассуждения можно
провести, взяв не всю систему (2), а какую-нибудь ее под-
систему и соответствующую подсистему строк матрицы М.
(т. е. те ее строки, в которых выписаны координаты векто-
ров выбранной подсистемы). Поэтому подсистема векторов
из системы (2) линейно независима тогда и только тогда,
когда линейно независима соответствующая подсистема строк
матрицы М. Значит, максимальное число линейно независи-
мых векторов системы (2) совпадает с максимальным числом
линейно независимых строк матрицы М. Теорема 3 доказана.
3. Если число векторов в системе (2) равно п, то мат-
рица М становится квадратной. В этом случае получаем
следствие предыдущей теоремы;
§ 101
ИЗОМОРФИЗМ ЛИНЕЙНЫХ ПРОСТРАНСТВ
39
В п-мерном пространстве система из п векторов ли-
нейно зависима тогда и только тогда, когда опреде-
литель матрицы координат этих векторов равен нулю:
Д — Det М — 0
(т. е. когда ранг матрицы Л4 меньше п).
Легко понять, что это утверждение по существу не отли-
чается от теоремы в п. 5 § 5. Оно нередко используется
при практической проверке линейной зависимости или неза-
висимости конкретных систем векторов.
§ 10. Изоморфизм линейных пространств
1. Пусть даны два линейных пространства L и L' и между
ними установлено взаимно однозначное соответствие, то есть:
1) каждому вектору а из L соответствует некоторый
вектор а' из //,'
2) разные векторы из L имеют разные образы в L';
3) образы элементов из L заполняют все I’.
Определение. Пространства L и £' называются
линейно изоморфными, если между ними можно установить
взаимно однозначное соответствие с соблюдением условий
(а —|— Ь) •— а —|— b,
(аа)' = аа'.
(1)
(2)
Взаимно однозначное соответствие, удовлетворяющее усло-
виям (1) и (2), называется линейным изоморфизмом про-
странств L и L’.
Иначе говоря, при линейном изоморфизме образ суммы
равен сумме образов, а образ произведения вектора на число
равен произведению его образа на это же число. Алгебраи-
ческие и геометрические свойства линейно изоморфных про-
странств совершенно тождественны.
Замечание. Линейный изоморфизм возможен лишь
при условии, что и в L, и в L' числовые множители берутся
из одного и того же алгебраического поля (например, оба
пространства L и L' действительны или оба комплексны). Так,
если L — комплексное, a L' — действительное, то условие (2)
невыполнимо потому, что в I.’ не определено умножение на
комплексные множители, допустимое в L.
40
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ I
Теорема 1. Для каждого п все действительные
п-мерные пространства линейно изоморфны между собой.
Теорема 1а. Для каждого п все комплексные
п-мерные пространства линейно изоморфны между собой.
Доказательства теоремы 1 и теоремы 1а формаль-
но совпадают, разница состоит лишь в том, что числовые
множители берутся из разных полей. Пусть L и L' оба
л-мерны, причем оба действительны или оба комплексны. Вы-
берем произвольный базис в каждом из них: еь еп£ L;
4> ..., I-1).
Пусть х—какой-либо элемент из L. Разложим его по
базису:
х = XiC] -I-... -{- хпеп.
Поставим в соответствие элементу х такой элемент
х! £ V, что
х! = хре\-\-...-\-хпеп.
Вследствие теоремы о единственности разложения век-
тора по базису такое соответствие взаимно однозначно. Про-
верим выполнение условий изоморфизма:
1) U + У)’ = Ui + >0 е’1 + • • • + Un + Уп) еп
= Uicj 4- - • • + хпе^) - j- (ytei 4-... 4-упе„) = х'
2) (ах)’ = (ах,) 44-...-)- (ах„) е'п — a (х^ -)-••• + *п4) =
= ах'.
Мы видим, что установленное соответствие между L и L'
удовлетворяет условиям (1), (2). Теорема доказана.
Замечание. Фактически доказано, что изоморфны лю-
бые два линейных пространства одинаковой размерности над
одним и тем же алгебраическим полем.
2. Вследствие доказанной теоремы все действительные
«-мерные линейные пространства изоморфны действительному
координатному пространству К„; все комплексные «-мерные
пространства изоморфны комплексному К„. Таким образом,
в теории «-мерных линейных пространств, не теряя общности,
можно ограничиться изучением пространств Кп.
’) Символ £ обозначает включение данного элемента в данное
множество. Запись e^L читается так: принадлежит /.».
§ 10]
ИЗОМОРФИЗМ ЛИНЕЙНЫХ ПРОСТРАНСТВ
3. Теорема 2. Линейное пространство, изоморфное
п-мерному, само является п-мерным.
Доказательство. Пусть дано n-мерное линейное
пространство L, и пусть L'—пространство, изоморфное L.
Докажем сначала, что при линейном изоморфизме образом
пулевого элемента 6 £ является нулевой элемент простран-
ства L'. Для этого возьмем произвольный элемент а’ £ L'
и его прообраз а £ L. Так как
а = a J- 6,
то
с' = (а + еу. (3)
Но по определению изоморфизма
(а 4-6)' = а'4-6'. (4)
Из (3) и (4) следует: а'-]-О' —а'. Поэтому образ 6' эле-
мента 6 является нулевым элементом пространства
Покажем далее, что если в L взять независимую систему
векторов, то их образы будут независимыми векторами в L'.
Пусть а, Ь, ..., q — независимая система в L. Рассмот-
рйм соотношение
аа' 4- р// 4- • • • 4- = 6'- (5)
По определению изоморфизма равенство (5) можно перепи-
сать так:
(аа 4- р& 4-... 4- х<?)' = 6'.
А так как прообразом нулевого элемента является нулевой
вектор из L, то
аа 4- [ib 4~ • • • 4~ *Я = 0- (6)
В силу линейной независимости векторов а, Ь, ..., q в L из
(6) следует, что
а — р =... = /. = 0. (7)
Таким образом, из (5) вытекает (7); значит, векторы а',Ь', ...
...,q' независимы в L’. Так как пространство L является п-мер-
ным, то в нем есть п линейно независимых векторов. Их
образы в L' также независимы. Значит, размерность L' не
меньше чем п. В этом рассуждении можно поменять ролями
L и Lr, и тогда получится, что размерность L не меньше, чем
42 ЛИНЕЙНЫЕ ПРОСТРАНСТВА ГГЛ. Г
размерность I.'. Поэтому размерность L' равна п, и теорема
доказана.
Следствие 1. Конечномерные пространства разных
размерностей не изоморфны.
Следствие 2. Бесконечномерное пространство не
изоморфно никакому конечномерному.
§ 11. Соответствие между комплексными
и действительными пространствами
1. Конечномерные комплексные и действительные линей-
ные пространства находятся в некотором соотношении, смысл
которого будет сейчас выяснен. Начнем с рассмотрения при-
мера.
Геометрические векторы, расположенные на одной прямой,
образуют одномерное действительное линейное пространство.
Это связано с тем фактом, что посредством умножения на
действительное число произвольный ненулевой вектор можно
преобразовать в любой другой коллинеарный ему вектор.
Геометрические векторы, расположенные на плоскости,
образуют двумерное действительное пространство. Здесь уже
нельзя фиксированный вектор преобразовать путем умноже-
ния в любой другой. Запас действительных множителей
слишком мал по сравнению с разнообразием векторов, вхо-
дящих в это пространство, и потому два вектора могут
оказаться линейно независимыми.
Запас комплексных множителей вдвое богаче. Поэтому
умножение векторов на комплексные числа можно определить
так, что совокупность геометрических векторов на плоскости
превратится в одномерное комплексное пространство. Для
этого нужно иметь возможность путем умножения преобра-
зовать всякий ненулевой вектор данной плоскости в любой
другой вектор той же плоскости.
Эта задача решается, если определить произведение гео-
метрического вектора на комплексное число следующим
образом.
Пусть а — произвольный вектор на плоскости. Будем
считать, что он отложен из начала координат. Пусть далее
а = р (cos у -ф- i sin <?) — комплексный множитель. Повернем
вектор а вокруг начала координат на угол <р, а затем умно-
жим на действительное число р. Полученный вектор обозна-
$ 11] КОМПЛЕКСНОЕ И ДЕЙСТВИТЕЛЬНОЕ ПРОСТРАНСТВА 43
чим через b и положим аа = Ь. Складывать векторы по-
прежнему будем по правилу параллелограмма.
При таком определении сложения и умножения все акси-
омы линейного пространства соблюдаются. Чтобы убедиться
в этом, достаточно заметить, что сами комплексные числа
изображаются векторами на плоскости и что у нас сложение
векторов и умножение комплексного числа а на вектор а
определены точно так же, как обычно определяют сложение
комплексных чисел и умножение комплексного числа а на
комплексное число а. Поэтому в нашем случае аксиомы
1)—8) соблюдены, поскольку они соблюдены для комплекс-
ных чисел. Теперь какой-нибудь один ненулевой вектор об-
разует линейно независимую систему, а любые два вектора
линейно зависимы (поскольку умножение включает поворот),
так что полученное комплексное пространство является одно-
мерным.
2. Мы видим, что одномерное комплексное пространство
и двумерное действительное пространство можно построить
из одних и тех же предметов, именно из векторов на пло-
скости, причем сложение векторов будет определено одина-
ково в обоих случаях.
Умножение определяется по-разному, что неизбежно, так
как различны запасы множителей. Подчеркнем, однако, что
умножение на действительные числа производится в этих
пространствах одним и тем же способом.
3. Легко убедиться, что рассмотренный пример является
частным случаем более общего явления: каждому комплекс-
ному линейному пространству соответствует действительное
пространство вдвое большей размерности, причем соответ-
ствие хотя и не является изоморфизмом, но очень похоже
на изоморфизм. Именно, справедлива
Теорема. Комплексное линейное пространство Сп
размерности п можно взаимно однозначно отобразить на
действительное линейное пространство Т2„ размерности
2п так, что соблюдается условие
(аb)'— а'b', (1)
а для действительных множителей X соблюдается условие
(ka)' = kar. (2)
44
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ I
Замечание. Как и в § 10, здесь штрихом помечается
образ в Lin элемента из Сп.
Доказательство теоремы. Согласно § 10 все
комплексные n-мерные пространства изоморфны. Поэтому мы
можем ограничиться рассмотрением любого из них. Возьмем
в качестве Сп комплексное координатное пространство. Пусть
а = {Xj -ф- IX.,, Х3-|-/Х4, •••> д ф /Л'2п}
— любой элемент из Сп. Сопоставим с ним элемент
П --Х%, Х§, Xfo • •,
из действительного координатного пространства, которому
мы придаем роль Lvn. Так как разложение комплексного
числа на действительную и мнимую части производится един-
ственным образом, то установленное между С„ и L2n соот-
ветствие взаимно однозначно. Справедливость (1) и (2) при
действительном Л усматривается с очевидностью.
Замечание. При п = 1 имеем
а — [х -ф- 1у], а' = [х, у},
что возвращает нас к исходному примеру.
4. В дальнейшем, говоря о геометрических векторах, мы
будем считать их элементами действительного пространства.
§ 12. Линейное подпространство
1. Пусть L — линейное пространство, L — некоторое мно-
жество элементов из L.
Определение. Множество L в пространстве L назы-
вается линейным подпространством, если соблюдены сле-
дующие условия:
1) для любых х, у из L их сумма х-{-у также входит
в L;
2) для любого х С L и любого числа а произведение
ах С L.
Замечание. Ради краткости мы будем во многих слу-
чаях линейное подпространство называть просто подпро-
странством.
2. Пусть L — линейное подпространство в L. Операции
сложения векторов и умножения их на числа, заданные в L,
ЛИНЕЙНОЕ ПОДПРОСТРАНСТВО
45
§ 12]
будем рассматривать применительно лишь к тем элементам,
которые входят в L. Тогда справедлива
Теорема 1. В линейном пространстве L каждое ли-
нейное подпространство L само является линейным про-
странством.
Доказательство. По определению подпространства
действия сложения и умножения на число не выводят за
пределы L. Аксиомы линейного пространства 1)—2) и 5)—8)
заведомо выполнены в L, так как они выполнены вообще
для всех элементов L. Поэтому для доказательства надо про-
верить только аксиомы 3) и 4), то есть установить, что
вместе с каждым элементом х из L в подпространство L
входит противоположный элемент — х и что 0 £ L.
По второму условию определения подпространства имеем
— х = (—1)-х С L.
Применяя первое условие, получаем
0 — х (— х) С L.
Теорема доказана.
3. Пересечением некоторой совокупности множеств назы-
вается совокупность тех элементов, которые одновременно
принадлежат всем рассматриваемым множествам. Пересечение
двух множеств и а® обозначается символом сЛ S3.
Эту запись мы неоднократно используем ниже.
Теорема 2. Пересечение любой совокупности подпро-
странств данного линейного пространства L тоже яв-
ляется линейным подпространством.
Доказательство для простоты изложения проведем
в случае двух подпространств и Lg. Пусть L3 = Lj £2,
а векторы х, у принадлежат L3. Рассматривая х, у как эле-
менты Li, по определению подпространства находим, что
х € Ьь ах £ Li (а—произвольное число). Точно так
же x-j-_yC Lg, ах g Lg. Но это значит, что x-j-_yC L3,
ах £ поэтому L3 удовлетворяет определению подпро-
странства. Теорема 2 доказана.
4. Примеры подпространств. 1) Множество L,
состоящее только из одного нулевого элемента 0 данного
46
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
[ГЛ. t
пространства, образует его подпространство. Действительно,
е_|-е=б g д «6=0^1.
2) В л8-мерном пространстве квадратных п X «-матриц
множество симметрических матриц ||aZft||, то есть таких, что
а/л = ал;, образует подпространство.
Множество кососимметрических матриц, характеризу-
ющихся тем, что aik — — aki, также образует подпростран-
ство в пространстве п X «-матриц.
3) В пространстве всевозможных функций, заданных на
отрезке тд т т2, каждое из следующих множеств обра-
зует линейное подпространство:
а) функции, непрерывные в некоторой внутренней точке т0
интервала т т2;
б) функции, непрерывные в интервале -ti
в) функции, непрерывные на всем отрезке [tj, t8];
г) функции, непрерывные на отрезке [тъ т2] вместе с их
производными до порядка N включительно, где N—про-
извольное целое положительное число;
д) функции, имеющие па отрезке [т1э т2] производные
всех порядков;
е) всевозможные многочлены, рассматриваемые на отрезке
[тд ta];
ж) многочлены, степени которых не превосходят фикси-
рованного целого числа N^>0.
В примере 3) каждое из перечисленных выше подпро-
странств содержится в предыдущем, и все они, за исключе-
нием последнего, бесконечномерны (последнее имеет размер-
ность 7V-|- 1).
з) Зафиксируем на отрезке [т1; т2] произвольное множе-
ство точек е-Х. Функции, равные нулю в точках множества
аЛ, также образуют подпространство. В качестве упражнения
предлагаем читателю выяснить, как зависит размерность этого
подпространства от выбора множества еХ.
4) Пусть L — трехмерное пространство геометрических
векторов в обычном евклидовом пространстве. Будем считать,
что векторы отложены из начала координат. Рассмотрим все
векторы, расположенные в какой-нибудь плоскости, прохо-
лящей через начало координат. Такие векторы образуют под-
пространство.
5 i3]
ЛИНЕЙНАЯ ОБОЛОЧКА
47
Доказательство того, что перечисленные выше подпро-
странства действительно удовлетворяют определению п. 1,
предоставляем читателю.
5. Укажем примеры подмножеств линейного пространства,
которые не являются подпространствами.
а) В трехмерном пространстве геометрических векторов
рассмотрим совокупность векторов, концы которых лежат
в фиксированной плоскости, не проходящей через начало
координат. Они не образуют подпространства, так как и
сумма двух векторов, и произведение вектора на любое
число (=£ 1) уже не входят в это подмножество.
б) В этом же пространстве рассмотрим векторы, концы
которых лежат на поверхности конуса с вершиной в начале
координат. Произведение любого вектора из рассматриваемого
множества на любое число снова принадлежит этому множе-
ству. Тем не менее указанное множество не является под-
пространством, так как операция сложения, вообще говоря,
выводит за его пределы.
§ 13. Линейная оболочка
1. Пусть в линейном пространстве L дана система векто-
ров alt ..., ак.
Определение. Множество всевозможных линейных
комбинаций вида
X = сцй! -|-... -}- а*ал
называется линейной оболочкой данной системы и обозна-
чается символом L(at, ..., ak).
Иногда говорят, что L(alt ..., —линейная оболочка,
натянутая на векторы аь ..., ak.
Теорема 1. Линейная оболочка любой системы век-
торов является линейным подпространством в простран-
стве L.
Доказательство. Возьмем из линейной оболочки
L(ai, ak) произвольные векторы х и у:
X = a.iai-\-...-\-a.kak6. L(ab •••• а/г)>
у—Pi^i -f-... -f- ^kak € ь (й1, • • • > йл).
Тогда
^4~.У = (а1~Ь₽1)й14--..~Ь(<хлЧ-₽л)а* € Ь(й1, ...» ak).
48 ЛИНЕЙНЫЕ ПРОСТРАНСТВА ГГЛ. Г
Кроме того, для любого числа X имеем
Хх —(Xa1)ai-{-...4-(bft)aft С L(ait ак).
2. Замечание. Линейная оболочка L (аь .... aft) может
совпасть со всем пространством L (например, если аь ...
..., ак— базис в L).
3. Теорема 2. Если каждый вектор системы ск,ст
линейно выражается через векторы системы alt .ak,
то
L(cb cm)czL(al, .... ak)').
Доказательство. Пусть х( L(ci..........ст\ т. е. вы-
ражается через Сь ..., ст. Тогда, согласно свойству 6) п. 2
§ 4, вектор х выражается через ai....ак. Следовательно,
х£ i(ai, ...» а.к). Таким образом,
L(c1( ..., .....ак).
Следствие. Линейная оболочка любой подсистемы
дачной системы векторов включается в линейную обо-
лочку всей данной системы.
Теорема 3. Если система аь ..., ак имеет ранг
г 0, то всякая ее линейно независимая подсистема, со-
стоящая из г векторов, является базисом в линейной
оболочке L(ai, ..., ak).
Доказательство. Система аь ..., ак ранга г(г^>0)
имеет линейно независимую подсистему, состоящую из г век-
торов.
Предположим для определенности, что линейно назави-
симы первые г векторов данной системы. Тогда, так как
ранг системы аь ..., ак равен г, то каждый из векторов
ак линейно выражается через векторы ai.............. аг.
Отсюда и по теореме 2
X (&1> •. •, аг, агЛ.\, • •, ак~) <—. / (oj, «- *, а^).
С другой стороны, по следствию из теоремы 2
L (ai. • • •, а^ <—L (й|, ..., аГ, йГ4-ь •.., аку.
Следовательно, L(alf ..., аг, а.^, ..., ак) совпадает с
I.(ai, ..., аг). Значит, каждый элемент х из L(at, ..., ак)
1) Символ г~ обозначает включение первого из указанных мно-
жеств во второе. Запись вида СаЙ* читается «еЛ? содержится
в ЛЗ» (при этом не исключено, что совпадает с о®).
5 13]
ЛИНЕЙНАЯ ОБОЛОЧКА
49
разлагается по аь ..., аг. Поэтому и вследствие независи-
мости векторов аь ..., а. они составляют базис в L (аь .,., ak).
Теорема 4. Если ранг системы аь ak равен г,
то L (alt ..., ak) является r-мерным подпространством.
Доказательство. Предположим, что г^>0. Тогда по
предыдущей теореме в L (at, • • •, аЕ) имеется базис из г эле-
ментов. Отсюда и по теореме из п. 4 § 8 L («ь .... ak)
имеет размерность, равную г. Предположим, что г — 0.
В этом случае ai — ... = ak — 0. Но тогда L(ai, ..., ak)
включает только 0 и, следовательно, имеет размерность 0.
4. Рассмотрим примеры. 1) Пусть а, Ь, с (а б)—
геометрические векторы, лежащие на одной прямой. В этом
случае L(a, b, c) = L(a) (рис. 1).
Рис. 1.
Здесь L (а) — одномерное подпространство, которое со-
стоит из всех векторов, лежащих на данной прямой; вектор а
в этом подпространстве составляет базис.
2) Пусть а, Ь, с — геометрические векторы, причем а и b
не коллинеарны, с = а-\-Ь. В этом случае L(a, b, c) — L(a, Ь)
(рис. 2), так что произвольный вектор х Q L(a, b, с) пред-
ставляется в виде х — аа -ф- pfe.
Здесь L(a, b) — двумерное подпространство, которое со-
стоит из всех векторов, компланарных с векторами а, Ь.
Векторы а, b составляют базис в L (а, Ь).
3. Пусть функции 1, т, т2, .... рассматриваются как
элементы линейного пространства L непрерывных функций,
заданных на отрезке [ti, tg]. Тогда 1(1, t, т2, ..., xN) есть
подпространство 1, состоящее из всех многочленов степени
не выше N.
5. В заключение отметим одно очевидное, но важное пред-
ложение: в конечномерном пространстве всякое подпро-
странство является линейной оболочкой некоторой си-
стемы элементов.
Для доказательства достаточно заметить, что в «-мер-
ном пространстве 1 всякое подпространство 1 конечномерно
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ. I
(причем имеет размерность л; это ясно, так как максималь-
ное число линейно независимых элементов в I не может
быть больше, чем в L). Но в таком случае либо L нуль-
мерно, и тогда L = L (6), либо L имеет базис qx, qr, и
тогда L — L(qit ..., qr).
В последнем случае подпространство L состоит из тех
и только тех векторов, которые имеют вид
= (1)
где tb tr — произвольные числа.
Пусть в пространстве L имеется базис еь еп, причем
х — х^ +... + хпеп, 4i = qnei 4- + • • + Чп^п
(здесь 1=1, ..., г; хь ..., хп — координаты вектора х; qu,
#S(-, •••> Чт—координаты вектора qj}.
Тогда формулу (1) можно заменить соотношениями в коор-
динатах
Х\ = 411^1 4” ^>'2^2 4- • • • 4" Ч1Л>
(2)
хп—4“ 4~ • • • 4" #nAг-
Соотношения вида (2) называются параметрическими
уравнениями подпространства L(qi, ..., qr).
§ 14]
СУММА ПОДПРОСТРАНСТВ. ПРЯМАЯ СУММА
51
§14. Сумма подпространств. Прямая сумма
1. Пусть в линейном пространстве L даны два линейных
подпространства Li и L?. Обозначим через L множество
всех векторов х, представимых в виде
Х = Xi -|- лу,
где Xi С Ii, € I'i (рис. 3). Легко убедиться, что L есть
линейное подпространство в L. В самом деле, возьмем вместе
с х С L еще вектор х' £ L, т. е.
а/ = xt х.},
где х[ £ Li, х$ £ L$ тогда вектор
X + х' = (лу -j- x'i) 4- (Xi 4- xj)
принадлежит L, так как _>у4--4 С Li, лу4^-4С Ьа- Кроме
того, ах — алу 4~ сау £ Ь> так как ®*t € М, «лу С
Подпространство L называется суммой подпространств
Lt и 12 и обозначается так: L = Li-,rLi. На рис. 3 показан
частный случай, когда L — L трехмерно, и Li двумерны.
2. Понятие суммы подпространств непосредственно пере-
носится на любое число слагаемых. Именно, пусть в про-
странстве L даны подпространства Llt ..., тогда их
сумма
L = Li 4- Li 4-... 4- Lk
есть линейное подпространство, состоящее из всех векторов
вида
х = х14-...4-хь где Xi С Li, ..., xk £ Lh. (1)
52
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ. Т
3. Определение. Если для каждого х £ L разложе-
ние (3) единственно, то L называется прямой суммой под-
пространств Li, .... L*.
Для обозначения прямой суммы мы будем пользоваться
знаком ф, например:
£ = М @ @ @ ^k-
Мы будем употреблять знак @ в тех
подчеркнуть, что речь идет именно о
статочные для того, чтобы сумма
случаях, когда нужно
прямой сумме.
В качестве примера
на рис. 4 показана пря-
мая сумма одномерных
подпространств и L*
Отметим, что сумма
Ц 4" Ь-j на рис. 3
не является прямой
суммой.
В двух следующих
пунктах даются усло-
вия, необходимые и до-
подпространств была
прямой суммой.
4. Теорема 1. Сумма L = Li-|-L* является
прямой суммой подпространств Ц,..., Lk тогда и только
тогда, когда ни одно из подпространств Li, ..., Lk не
имеет общих элементов, кроме б, с суммой остальных.
Доказательство. 1) Пусть дано, что пересечение
каждого из рассматриваемых подпространств с суммой опаль-
ных состоит только из нулевого вектора 6. Докажем, что
1 = Li @.. Lk. Предположим, что для вектора х С L
существуют два разложения:
х = Xi л'я -j-... -j- Xk, X — Jci -f- -|- xk, (2)
где Xj £ Lj, Xj £ Lj. Нужно проверить, что
Xj = Xj
(3)
для каждого из номеров /. Из (2) имеем
О — (Xj — А'1) -j- (Xg — Xg) -J-... -J- (xk — xft). (4)
§ 141
СУММА ПОДПРОСТРАНСТВ. ПРЯМАЯ СУММА
53
Положим У1 — — (Xi—xt). Тогда yt = xt—xt £ Lt,
= (х8 — х2)— Х/г) С Т2Тд., и потому
yt = 9, то есть Xi = х,.
Далее, вводя Уч~— (х2— х2), пользуясь равенством (4)
и тем, что L2 Р| (Li 4~ L3 -|-... L*) — 9, получаем x2 = xg.
Аналогично доказываются остальные равенства (3).
2) Пусть дано, что для любого xL L разложение (1)
единственно. Покажем, что, например, Lj не имеет с
L2 4-... -|- Lfe общих элементов, кроме 9. Предположим про-
тивное, т. е. что есть z 9 такой, что zL Lt, zL L2
... 4~ Но в таком случае z — zg . -|- zk, где z2 £ L2,...
..., zk С L*. Поэтому можно написать
9==z 4~(——0гл>
где z С Li, г2 £ L2, ..., zk £ Lk. С другой стороны,
9 = 9-|-94-. ..4-9.
Таким образом, для 9 с L получились два разных разло-
жения вида (1), что противоречит условию.
5. Теорема 2. L = Li4-..-4~^* является прямой
суммой подпространств Lt, .... Lk в том и только в том
случае, если всякая система ненулевых векторов aj.а*,
взятых по одному из каждого Lj (т. е. aj £ Lj, j —
= 1....k), линейно независима.
Доказательство. 1) Пусть L является прямой суммой
подпространств L\, Lk- Возьмем произвольные ненулевые
векторы аь ..., ak по одному из каждого Lj (aj £ Lj). До-
кажем, что они линейно независимы. Предположим, что си-
стема alt ..., ak зависима. Тогда один из этих векторов
линейно выражается через остальные. Будем считать для опре-
деленности, что at линейно выражается через а2, ..., ak. Но
в таком случае этот вектор принадлежит и Lt, и сумме
Т2-|_•••4“Lk, что противоречит теореме 1.
2) Пусть любая система ненулевых векторов at, ..., ak,
взятых соответственно из Lt....... Lk, линейно независима.
Докажем, что L = 1^Lk есть прямая сумма. Пред-
положим противное. Тогда по теореме 1 одно из подпро-
странств Llt ..., Lk имеет общий ненулевой вектор с суммой
остальных. Пусть, например, ненулевой вектор at принадле-
жит Li и L%-|-...4- L^ Тогда ai = at-^~.. ak{at L^,...
54 ЛИНЕЙНЫЕ ПРОСТРАНСТВА [ГЛ. I
a’k С £-*)• Вместо последнего соотношения можно напи-
сать а1 = ега2-|-..считая ег = 0 в случае а, —О и
беря в этом случае в качестве «,• любой вектор из L,-, лишь
бы он не был равен 0; если же а, ф 0, то будем считать
ег = 1 и at = al.
Тем самым указаны ненулевые векторы at, ak,
at £ которые связаны линейной зависимостью. Мы полу-
чаем противоречие с условием теоремы.
6. Если само пространство L разложено в прямую сумму
своих подпространств Lf, ..., Lk, то каждый вектор х раз-
лагается, и притом единственным образом, на компоненты
Xi, ..., хк, лежащие соответственно в Llt ..., Lk.
В частности, если et, еп — базис в L, то L разла-
гается в прямую сумму одномерных подпространств: L —
= Li ф •. • © Ln, где Li — линейная оболочка базисного век-
тора et (т. е. Lt состоит из векторов, которые получаются
умножением ег на всевозможные числа).
7. Теорема 3. Пусть в линейном пространстве L
имеются подпространства Lk и Ц, размерности которых
соответственно равны k и I. Если их пересечение имеет,
размерность т, то размерность их суммы Lk-\-Li равна
r = k~\~l — т1).
Для доказательства теоремы 3 потребуется
Лемма. В п-мерном пространстве всякую независи-
мую систему векторов в числе, меньшем чем п, можно
дополнить до базиса.
Доказательство леммы. Пусть еь ..., ek — неза-
висимая система векторов, k<^n. Найдется по крайней мере
один вектор такой, что eit ..., ек, ek+i — тоже незави-
симая система. Если бы такого вектора ек+1 не было, то
любой вектор из L можно было бы выразить черезе1г..., ек,
что противоречит условию k<^n.
Если k-\-\<^n, то рассуждение можно повторить и до-
бавить к системе еще один вектор, не нарушая линейной
независимости. Так можно продолжать до тех пор, пока
число векторов в системе достигнет п; тогда она превра-
тится в базис. Лемма доказана.
Доказательство теоремы 3. Положим Lm =
— Lk[]Li и выберем в подпространстве Lm базис ..., ет.
J) В частности, при т — 0 сумма Lk Д- Li будет прямой.
§ 14] СУММА ПОДПРОСТРАНСТВ. ПРЯМАЯ СУММА
Б5
Используя лемму, дополним его до базисов в подпростран-
ствах Lk и Lp
Cj, ..., ..., - базис в Lk,
^1, •••> em.rl, • ••, баЗИС В £./,
Сопоставляя определение суммы подпространств с опре-
делением линейной оболочки (см. § 13), найдем, что
Lft -I- Ll = L (Cl, а а а , С т а а а , С*, Стг1, • • • , е l)‘ (5)
Докажем, что векторы
^Ь • • • > ет> > ek> ет+Ъ • • > е1 (6)
линейно независимы. Предположим противное. Пусть суще-
ствует нетривиальная зависимость
а1е1 ~Ь • • • ~Ь а-тет ~Ь am+lem+l ~Ь • • •
• • • -|- akek "j_ afe+l^m+1 ~Ь • • • И- °ге1 — (7)
Среди чисел аЛ1Ь ..., а.г есть отличные от нуля, иначе
были бы линейно зависимы векторы et, ..., ет, em+l, ...,ek,
образующие базис в L*. Положим
a*+iem+i~|-- ..-J-arcz — ХФ 6. (8)
Из (8) следует, что х С Lh а из (7) следует, что х £ Lk,
поэтому х С Li [~| Lk. Следовательно, х линейно выражается
через векторы е1г ..., ет. Таким образом, имеется соотно-
шение вида
a*+lem+l -f- • • • -4- O-r^l = Pl^l ~Ь • • • ?mem- (9)
Равенство (9) означает нетривиальную линейную зависи-
мость между векторами еь ..., ет,е'т,ъ ...,е\, что невозможно,
поскольку указанные векторы образуют базис в Lz. Тем самым
мы получили противоречие, и независимость векторов (6)
доказана. Теперь соотношение (5) означает, что векторы (6)
образуют базис в ТЛ-|-1г. Следовательно, размерность
Lk -J- Li равна числу векторов в системе (6), то есть числу
r = k-\-l—т. Теорема 3 доказана.
8. Теорема 4. Размерность прямой суммы подпро-
странств равна сумме размерностей слагаемых. Объеди-
нение любых базисов, выбранных по одному в каждом сла-
гаемом, образует базис в прямой сумме.
56
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
ГГЛ. Г
Доказательство. Если слагаемых два, то первое
утверждение теоремы 4 вытекает из теоремы 3 с учетом
теоремы 1, вследствие которой т = 0.
Второе утверждение теоремы 4 в случае двух слагаемых
следует из доказательства теоремы 3, точнее, из того факта,
что система векторов (6) независима (в записи системы (6)
теперь нужно положить т = 0 и вычеркнуть векторы
^1, ..., Ст).
Заметим далее, что если Е, -ф- L2 -ф- L3 -ф- • • • 4* Lp есть
прямая сумма, то Et -J- L* Lt -ф- Е2 4~ Е3 = (Ei 4~ Е2) -ф- L3 и т. д.
также являются прямыми суммами. Поэтому в общем слу-
чае оба утверждения теоремы 4 доказываются по индукции.
9. Отметим, наконец, следующее сочетательное свой-
ство для прямых сумм: если
L = LV®L, (I)
Е = Е2©...фЕА, (II)
то
Е = Li ф Е2 ф • •. © Е*. (Ill)
Доказательство. Пусть х — любой элемент L. Имеем:
x — Xi-^-х, где Xi£Li, х £ Е. Так как х £ Е, то х =
= х2-|-... ф-xk, где х2£ Е2, ..., xk С Eft. Таким образом,
для любого х £ Е имеем
X == Xj —|— Х2 —1~ • • • 4“ (*)
где х; £ Lt. Обратно, из (*) следует х £ Е. Докажем един-
ственность (*). Пусть
x = xj©x2©...©Xft, x'i^Li.
Отсюда х=х'1-\-х’; здесь х' = х24~ • - •4_-г*- Следова-
тельно, х' С Е. Поэтому и согласно определению (I) полу-
чаем x[ — Xi, х' = х. Из последнего равенства и по опреде-
лению (II) находим x't — Xi для /=2, ..., k. Тем самым (III)
доказано.
Установленным свойством приходится пользоваться в слу-
чаях, когда разложение пространства (или подпространства) L
в прямую сумму производится последовательно: L — Li ф L',
Е' =Е2© L" и т. д. (см., например, гл. VII, § 10).
ГЛАВА II. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
ПЕРЕМЕННЫХ. ПРЕОБРАЗОВАНИЯ
КООРДИНАТ
§ 1. Сокращенная запись суммирования
1. В дальнейшем часто встречаются суммы, в которых
слагаемые обозначены одной буквой с индексами, например
••• ® таких случаях удобно применять
сокращенное обозначение суммирования:
N
ат + am+i + • • + aN = У Я/ = У, <4
i=m m^i^N
(читается: «сумма я, от 1=щ до №).
2. Свойства знака суммирования.
N
1) у а = Na, поскольку здесь повторяется N одииако-
« = 1
вых слагаемых, равных а при любом I.
2) Общий множитель можно выносить за знак суммы:
S cai = С У ai-
i=m i=m
2) У (fl« "1“ ^i) — У ai 4~ У ^i-
i==m i = m i~m
4) Величина суммы не зависит от того, какой буквой
обозначен индекс суммирования:
Лг W N
У ai~ ат~\~ am+i Ч~ ••• -|-аЛГ-1-|-O/V = У «]= У, Я/,.
i—m j=m k = m
5) Если суммирование производится по двум различным
индексам, каждый из которых меняется независимо от
58
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
[ГЛ. IT
другого, то порядок суммирования безразличен:
m2«/^A’2
При суммировании по разным индексам скобки обычно
А, / А, \ А, Л'2
опускают и вместо £ У а,-У пишут У У а,-7, под-
z = mx\j—m% ! i = mi J=tnt
разумевая, что слагаемые ах-у- сначала суммируются по j при
фиксированном i (внутренняя сумма), затем полученные вели-
чины суммируются по I (внешняя сумма). Пятое свойство
распространяется на случай суммирования по трем или боль-
шему числу разных индексов.
Отметим, что если пределы изменения одного индекса
зависят от другого индекса суммирования, то при перемене
порядка суммирования пределы изменения каждого из индек-
сов, вообще говоря, становятся другими; в частности,
6) При суммировании по двум (или нескольким) индексам
можно выносить из-под знака внутренней суммы множитель,
не зависящий от индекса внутреннего суммирования:
А, А, А, А,
У, У, Oij-bi = у bi У atj.
i=mi j=tnt i = mi J—mz
Перечисленные выше свойства знака У непосредственно
вытекают из правил арифметических действий и часто исполь-
зуются в дальнейшем.
3. Для сокращения записи условимся, что если пределы
изменения индекса суммирования не указаны, то подразуме-
вается суммирование от 1 до п, например:
£> = У
i i = 1
Кроме того, если суммирование от 1 до п ведется по не-
скольким индексам, не зависящим друг от друга, то мы бу-
дем писать один знак суммы и под ним все те индексы, по
§ 1] СОКРАЩЕННАЯ ЗАПИСЬ СУММИРОВАНИЯ 56
которым идет суммирование, то есть
п п п
2 ®'ijkl== Xj У Xj aijM‘
i, J, k i = 1 j = 1 k = 1
Дело в том, что ниже чаще всего встречается суммиро-
вание в пределах от 1 до п, где и— размерность рассма-
триваемых пространств.
Условимся, наконец, что если индексы суммирования под
знаком суммы совсем не указаны, то это значит, что сумми-
рование производится по всем тем индексам, каждый из ко-
торых под знаком суммы встречается два раза, причем по
каждому из таких индексов ведется суммирование от 1 до п.
Например,
a.-fej = сЛ4- а^+ ... +аЛ^«;
Xj Aiaijxj== У У Ajaiixi == У Ai У aijxp
7—1 1 = 1 7=1
Обратим внимание на внутреннюю сумму в правой части
последнего равенства. Общий член этой суммы зависит от
двух индексов, но суммирование ведется только по одному
из них (по индексу /'), так что результат суммы зависит от
п
другого индекса (от номера г). Полагая = Xj aijxj и поль-
7=1
зуясь сокращенными обозначениями, можно написать
Индексы, по которым ведется суммирование, часто назы-
вают немыми или заглушенными. Согласно свойству 4) п. 2
обозначение заглушенных индексов можно изменять в про-
цессе выкладок, например
J» = Xja17X/=Xja“X«, ...»«. (1)
Индексы, по которым суммирование не производится,
обычно называют свободными. Важно следить за тем, чтобы
свободные индексы в правой и левой частях каждого равен-
ства были обозначены одинаково. Так, например, равенства
(1) можно заменить следующей эквивалентной записью: У
У к Xj akjxj == У ak«.xa, k = 1, ..fl,
ГГЛ. II
60
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
но нельзя заменять обозначение свободного индекса только
в одной какой-нибудь части равенства.
Ниже мы увидим (см. гл. V), что во многих случаях
индексы удобно ставить сверху (X, а‘к и т. п.). При этом
следят за тем, чтобы в процессе выкладок нижние свободные
индексы оставались нижними, верхние свободные индексы
оставались верхними.
В дальнейшем будут встречаться суммы, под знаком кото-
рых имеется несколько заглушенных индексов. При упо-
треблении таких выражений независимые заглушенные индексы
необходимо обозначать различными буквами.
Например,
у =4. у в; (У =2 а1<-
Индексы / и р остались свободными (это значит, что пре-
дыдущая строчка заменяет /г2 равенств).
4. 3 а м е ч а н и е. В литературе широко употребляется
еще более краткая запись, при которой опускают не только
пределы суммирования и указание индексов, но и сам знак
суммы. При такой системе записи считают, например, что
Mzk —
k р. Л-Л k рл
Однако такая запись требует от читателя значительного
навыка, и мы опускать знак суммы не будем.
§ 2. Линейное преобразование переменных. Произведение
линейных преобразований переменных и произведение
матриц
1. Пусть xt, ..., хп— упорядоченный набор независимых
переменных. Пусть дана т X «-матрица:
Ьц ... bin
Напишем соотношения
brnl • • • bmn
У1 — ЬцХ) binxn.
(1)
Ут — bmiXi ... -j- ЬтпХп,
§ 2]
ПРОИЗВЕДЕНИЕ ПРЕОБРАЗОВАНИИ МАТРИЦ
61
где через yt, ут обозначены численные значения правых
частей (1); ясно, что ylf ..., ут изменяются в зависимости
ОТ X], ..., хп.
Система соотношений (1) называется линейным преобра-
зованием переменных xt, ..., хп в переменные у1г ..., ут;
числа называются коэффициентами линейного преобразо-
вания (1); составленная из них матрица В называется матри-
цей этого линейного преобразования. Будучи заданной, ма-
трица определяет линейное преобразование (1).
Замечание. Упорядоченный набор переменных xh...,x„
можно было бы рассматривать как переменную точку коор-
динатного пространства. Точно так же можно геометрически
истолковать yt, ..., ут. Однако представляется целесообраз-
ным линейное преобразование переменных определять как
чисто арифметическое (или алгебраическое) понятие, не
связывая с ним заранее каких-либо геометрических предста-
влений.
2. Пусть дана р X /«-матрица
«и ... aim
А=
@pi • • О-рт
Напишем соответствующее ей линейное преобразование пере-
менных в виде
^1—••• -j-aimym,
(2)
Zp--ар1У1 “F • • • артУт-
Здесь независимые переменные обозначены через yt,..., ут,
хотя соотношения (2) поначалу рассматриваются вне связи
с соотношениями (1).
Вместе с тем можно считать, что yit ..., ут в правых
частях (2) суть те же величины, которые определяются
равенствами (1) по переменным xlt ..., хп. В таком случае
Zi, ...» zp становятся функциями от независимых переменных
Xi....хп, а уь ..., ут получают роль посредников.
Если промежуточные переменные yt, ..., ут исключить
из равенств (1) и (2), то zit ..., zp будут выражены через
Xj, х„ явно. Чтобы провести эту операцию, нужно в пра-
вых частях (2) заменить _у7- их выражениями (1). После этого
62
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
[ГЛ. и
в каждом уравнении (2) каждая из переменных xt, ..., х„
встретится т раз. Приводя подобные члены и обозначая
получаемые коэффициенты через сц, с12, ..., напишем резуль-
тат в виде
^1 --сИ-*4~|- •••
(3)
zp----CpiXl ~Ь • • • ~Ь српхп-
Таким образом, мы снова имеем некоторое линейное пре-
образование переменных; его матрица
С11 ••• On
С —
Cpi . .. Срп
Определение. Линейное преобразование переменных
(3), полученное в результате исключения уь ут из (2)
и (1), называется произведением линейного преобразования
переменных (2) на линейное преобразование переменных (1).
При этом р X л-матрица С называется произведением р X т~
матрицы А на т X //-матрицу В. Символически:
С —АВ.
3. Найдем формулу, которая выражает любой элемент
матрицы С через элементы матриц А и В. Для этого нужно
фактически (а не на словах) произвести исключение величин
У1> Ут из соотношений (1) и (2). В целях экономии
выкладок запишем систему (1) сокращенно в виде
п
У)= ^bJkxk,
Л = 1
где /=1, 2.....т соответствуют номерам уравнений. Ана-
логично запишем систему (2):
т
Zi= 2 авУр
Z=l, р. Теперь имеем
т / п \ п / т \
zi== У а< / ( УЬ/^хр] = У( УД»/bf/ijX/g. (4)
7=1 /
S 2] ПРОИЗВЕДЕНИЕ ПРЕОБРАЗОВАНИИ МАТРИЦ
63
С другой стороны, равенствам (3) можно дать сокращенную
запись:
п
Zi == eik^k‘ (б)
Л = 1
Из (4) и (5) находим
т
Cik~— aijbjkt (6)
/=1
или
cik = ailblk~]- (7)
Выражение (7) называется произведением г-й строки ма-
трицы А на /г-й столбец матрицы В (по аналогии с извест-
ной из аналитической геометрии формулой, выражающей
скалярное произведение векторов через их координаты).
Число столбцов матрицы А должно быть равно числу
строк матрицы В, иначе произведение АВ не определено.
Число строк и столбцов произведения можно выразить по
схеме
(р X т)-{т X л)=(?ХП).
Два произведения АВ и ВА одновременно определены тогда
и только тогда, когда А и В — квадратные матрицы одина-
кового порядка.
Замечание 1. Разумеется, произведение матриц можно
было бы определить непосредственно с помощью формулы (7),
не учитывая ее происхождения из линейных преобразований.
Замечание 2. Умножение матриц, вообще говоря, не
коммутативно, в чем легко убедиться на примерах. Пусть
Д-1 1 ° л'_|| 0 0 ’ 5==| 0 1 II 0 0 1Г
Тогда
Лв = | 0 0 ВА = 1 0 0 II 1 0 0 ||-
4. Наборы переменных хг, у.-, zk запишем в виде матриц-
столбцов: Xi У1 ?! '
Х= , Y— , Z= •
Хп Ут ZP
64 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ [ГЛ. П
Тогда формулы преобразования переменных (1), (2) и (3)
можно записать в виде матричных равенств
Y~BX, Z=AY, Z—CX,
где С—АВ.
5. Укажем ряд тождеств, которые выражают свойства
умножения матриц:
1) А (ВС) — (АВ) С (ассоциативность); в силу этого свой-
ства произведение трех матриц АВС можно писать без
скобок;
2) (а А) В = А (аВ) = а АВ',
3) А (В + О = АВ 4-АС; (В -|- С) А = ВА -ф- СА.
Здесь а — произвольное число, А, В, С —- произвольные
матрицы, у которых число столбцов и строк обеспечивает
возможность выполнения указанных выше действий.
Доказательство тождеств 1), 2), 3) проводится без труда
и останавливаться на нем мы не будем.
6. Нам придется употреблять еще операцию транспони-
рования матрицы. Эту операцию мы будем обозначать звез-
дочкой, считая, что А*— матрица, полученная из матрицы А
заменой ее строк соответствующими (по номеру) столбцами.
Имеют место очевидные тождества
4) (А 4-В)* = А* ф-В*;
5) (аА)* = аА*.
Кроме того,
6) (АВ)* = В*А*.
В справедливости последнего тождества легко убедиться,
если принять во внимание, что произведение А на В строит-
ся по схеме: строка А на столбец В.
§ 3. Квадратные матрицы и невырожденные
преобразования
1. В этом параграфе мы рассмотрим более подробно ли-
нейные преобразования, при которых сохраняется число пе-
ременных. Таким преобразованиям соответствуют квадратные
матрицы.
2. Напомним, что определителем или детерминантом
«Хи-матрицы А = || aZy-|| называется величина
DetA= 2 8<й. ...4 01^,2... at пП, (1)
§ 3J
НЕВЫРОЖДЕННЫЕ ПРЕОБРАЗОВАНИЯ
65
где
О, если среди чисел 1Ь 1$,..., 1п
есть одинаковые;
—}— 1, если перестановка (ti,z2,
четная;
— 1, если перестановка (ij, /□,..., /„)
нечетная.
Индексы li, В,..., 1п принимают значения 1, 2,..., п.
В формуле (1) вторые индексы элементов матрицы А
взяты в натуральном порядке. Для иного их расположения,
а также в случае их повторений имеем
S = (2)
....'А
Докажем теорему, важную для дальнейшего.
Теорема. Определитель произведения матриц равен
произведению их определителей, то есть
Det АВ = Det /Det Я.
Доказательство. Используя (1), (2) и формулу (6)
предыдущего параграфа, получаем
Det/£=DetC = У. В,- f ch, ... а „ =
= J] ... in / 2 ainJnbJnn\ =
Ч,..-,1п \J\ / \j„ I
= S . ( S . binn =
A, • • ,jn Vi, • • An /
= 5] (Det А) 8Л.. j bj, ।... bJnn = Det A • D et B,
что и требовалось.
3. Квадратная матрица называется невырожденной или
неособенной, если ее определитель не равен нулю. Линей-
ное преобразование переменных лу,..., хп в переменные
У1,..., уп называется невырожденным или неособенным,
если оно имеет невырожденную квадратную матрицу.
Согласно п. 2 произведение невырожденных матриц есть
невырожденная матрица; произведение невырожденных ли-
нейных преобразований, переменных есть невырожденное ли-
нейное преобразование переменных.
66 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ |ГЛ. II
Невырожденная п X «-матрица Л имеет ранг г~п. Это
ясно, так как определитель такой матрицы является ее базис-
ным минором. Вырожденная матрица имеет ранг г<^п. Это
также ясно, так как определитель вырожденной матрицы равен
нулю и, следовательно, ее базисные миноры имеют порядок,
меньший п (либо их нет, но тогда г = 0). В понижении
ранга матрицы (сравнительно со стандартным случаем г=п)
и заключается ее вырождение.
4. Пусть дано невырожденное линейное преобразование
переменных с матрицей Д = ||я/у-||
У’1 — aitXi 4-... -J- ainxn,
Уп — "Г" • • ~~Н ^ПпАп-
(3)
Введем обозначение
А = Det А.
По условию A X 0. В таком случае система (3) с произволь-
но данными j'i,..., уп и неизвестными хъ..., хп имеет един-
ственное решение. Найдем его. Для этого удобно применить
формулы Крамера. Согласно этим формулам х^ выражается
в виде дроби, знаменатель которой есть А, а числитель
получается заменой Л-го столбца А столбцом из величин
Уь • • •, уп- Развертывая определитель, стоящий в числителе
такой дроби, получим
= -д (AfeTl + •••-)- ^пкУп)>
где через /1ц,,..., Ank обозначены алгебраические дополне-
ния элементов &-го столбца определителя матрицы А. Таким
образом,
*1=^ы----+4у^ I
......................... (4)
Равенства (4), выражающие хь..., хп через yt,..., у„
из формулы (3), представляют собой линейное преобразова-
ние переменных; оно называется обратным для линейного
преобразования (3), где уь..., уп выражаются через хь..., хп.
§ 3]
НЕВЫРОЖДЕННЫЕ ПРЕОБРАЗОВАНИЯ
67
Матрица преобразования (4) называется обратной для
(невырожденной) матрицы А преобразования (3); ее обозна-
чают через Л \ Таким образом, если
ЙЦ •. • а1п
А =
А = Det А ф О,
• &пп
то
АП1
Д
д
Ann
Д
Следует обратить внимание на то, что в матрице А~* по
строкам расположены алгебраические дополнения тех эле-
ментов матрицы А, которые в матрице А расположены в
соответствующих (по номеру) столбцах.
5. Так как равенства (4) выражают решение системы (3)
относительно неизвестных лу,..., хп, то подстановка выра-
жений (4) в правые части (3) должна дать в результате
У1 =Ji.
Уг= Уг,
(5)
Уп= Уп-
Такое преобразование называется тождественным', его
матрица обозначается буквой Е и называется единичной:
Е —
1 0 ... О
О 1 ... О
О 0 ... 1
Поскольку произведение преобразования (3) на обратное
ему преобразование (4) есть тождественное преобразование
(5), то, соответственно, произведение матрицы А на обратную
ей матрицу А~* есть единичная матрица Е:
АА~1 — Е. (6)
68
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
(ГЛ. II
6. Согласно п. 2 имеем из (6)
(Det A). (Det А~*)= 1.
Отсюда Det А"1 ф 0, и матрица А-1 невырождена. В та-
ком случае решение системы (4) относительно уъуп
единственно и, следовательно, совпадает с выражениями (3).
Поэтому подстановка выражений (3) в правые части (4)
должна дать тождественное преобразование
Xj = Xi,
Хл = Х&
хп = хп.
Одновременно получаем
А~1А = Е.
7. Итак, каждое невырожденное линейное преобразование
переменных хъ..., хп в yt......уп имеет единственное об-
ратное линейное преобразование переменных у1г уп в
xt,..., хп\ оно также невырождено; обратное ему есть ис-
ходное преобразование. Каждая невырожденная матрица имеет
единственную обратную; она также невырождена; обратная
ей есть исходная матрица.
8. Понятия обратного преобразования и обратной матрицы
можно определять несколько иным способом. Именно, пусть
даны два линейных преобразования переменных, которые мы
запишем сокращенно:
= aHxi <7)
с п X «-матрицей А = || || и
Xj----- Ь jk^ k
(8)
с и X «-матрицей В = || bjk ||. Тогда преобразование (8) можно
назвать преобразованием, обратным преобразованию (7), если
произведение преобразования (7) на преобразование (8) есть
тождественное преобразование
yi = ^t (9)
§ 3] НЕВЫРОЖДЕННЫЕ ПРЕОБРАЗОВАНИЯ 69
Соответственно матрицу В можно назвать обратной матри-
цей для А, если
АВ = Е. (10)
Невырожденность преобразования (7) и матрицы А можно
не оговаривать заранее. Она неизбежно следует из (10), так
как вследствие (10) (Det А) - (Det В) = 1, и поэтому Det Л 0.
Но при условии Det А 0 система (7) с неизвестными
Xi,хп и известными уь..., уп имеет единственное ре-
шение. Следовательно, выражения (8) с учетом (9), т. е. с
учетом, что г^—у^, должны совпасть с выражениями (4).
Тем самым мы возвращаемся к нашему первоначальному
определению обратного преобразования и обратной матрицы.
9. Если А и В невырождены, то имеет место тождество
(АВу1 = В 1А~\
Доказательство. Пусть ЕГ1 Л"1 — С; тогда
(АВ) С = (АВ) (В-1 А'1) = А (ВВ1) Л-1 = АЕА~1 =
— (АЕ) А~г — АА~1 — Е.
Следовательно, С=(АВ)~1 согласно п. 8; см. (10).
10. В предыдущем пункте мы воспользовались тем, что
для любой п X «-матрицы Л справедливо легко проверяемое
тождество: АЕ — Л (а также ЕА — А), где Е — уже извест-
ная нам единичная матрица. Можно сказать, что в умножении
матриц Е играет такую же роль, какую единица играет в
умножении чисел.
Замечали е. Легко доказать, что другой матрицы с та-
ким же свойством нет. Более того, если для какой-нибудь
одной невырожденной матрицы Л соблюдается равенство
АЕХ = А, то Et = Е. В самом деле,
£, = EEj = (A'1 A) Ei = Л’1 (AEi) = Л~*Л = Е.
И. Вместе с произведением матриц определены натураль-
ные степени матрицы: Л® = АА, Л3 — ЛЛЛ и т. д. Тем самым
определено понятие многочлена от матрицы:
Р (Л) = аоЛ" -j- aj Л” ' апИ Ч” 7X;> О1;
где ав,..., ап — числа, а Р (Л) есть п X «-матрица.
70
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
[ГЛ 1J
Принято считать, что любая п X «-матрица А в нулевой
степени равна единичной п X «-матрице Е:
А°=Е.
Поэтому слагаемое апЕ в выражении (11) играет роль сво-
бодного члена.
§ 4. Ранг произведения матриц
1. Пусть даны: т X «-матрица А — Цо/уЦ, «Хр-мат-
рица В — ||Z>,7||, т X р-матрица С=||с;у||, равная их произве-
дению: С—АВ. Имеет место
Теорема 1. Ранг произведения матриц не больше
ранга любого из сомножителей, то есть
Rang АВ^ Rang А, (1)
Rang АВ^В_ Rang В. (2)
Доказательство, Установим неравенство (2), Сначала
отметим два тривиальных случая:
1) Если Rang В~0, то матрица В нулевая. Тогда
С=АВ — тоже нулевая матрица, RangC=0 и (2) соб-
людено.
2) Если Rang 73 =р (где р — число столбцов матрицы В),
то (2) также соблюдено, поскольку Rang С не превосходит
числа столбцов р в матрице С.
Положим Rang /3= г и будем теперь считать, что 0 /
При таком предположении матрица В имеет некоторую
систему из г базисных столбцов и еще хотя бы один стол-
бец, не принадлежащий этой системе. Пусть для определен-
ности базисными являются первые г столбцов матрицы В.
Рассмотрим любой столбец с номером k, k^>r. По лемме
о базисном миноре он линейно выражается через базисные
столбцы:
Это же выражение в краткой записи имеет вид
Г
bjk — £ ^-sbjs,
5=1
здесь /=1,2, ..., п, а индекс k зафиксирован.
(3)
РАНГ ПРОИЗВЕДЕНИЯ МАТРИЦ
7
§ 4]
С другой стороны, по определению произведения матриц
имеем
(-ik ~~~ j Ьjk- СО
Из (3) и (4)
п 1г \ г 1 п \ г
Cik = 1 У asbjs j == 1 |Я5 2^ &Ч fs / == °~s C‘s’ (5)
/=1 \ 4=1 ( S=I \ У=| / 5=1
где 1 I т, индекс k зафиксирован и имеет такое же
числовое значение, как в формуле (3). Равенства (5) показы-
вают, что в матрице С любой столбец с номером k, k^>r>
линейно выражается через ее первые г столбцов:
cik
cmk
С11
ет1
-ф- .. . 4- 0. г
С1г
Стг
Отсюда и в силу леммы 3 из § 6 гл. I ранг системы всех
столбцов матрицы С не больше г, то есть Rang СО, и
неравенство (2) доказано.
Теперь для доказательства неравенства (1) достаточно
перейти к транспонированным матрицам. В самом деле,
согласно свойству 6) из п. 6 § 2,
С*— (АВ)* = В* А*.
(6)
Из (6) и вследствие установленного неравенства для вто-
рого сомножителя имеем
Rang С = Rang С* Rang А* — Rang А.
Тем самым теорема доказана полностью.
2. Во избежание недоразумений полезно сделать следую-
щее предупреждение по поводу доказательства неравенства (2).
Как было показано, в матрице С любой столбец с номером /г,
/г^>г, линейно выражается через ее первые А столбцов. Мы
не знаем, являются ли эти столбцы независимыми. Поэтому
нельзя утверждать, что Rang С = г. На простых числовых
примерах можно убедиться, что такое утверждение не толь-
ко не обосновано, по и неверно.
72 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ [ГЛ. II
3. Пусть даны: произвольная т X «-матрица А, невырож-
денная квадратная п X «-матрица В и невырожденная квад-
ратная >иХ«г’матРи,1а &'•
Имеет место
Теорема 2. Ранги произведений АВ и В'А равны рангу
матрицы А, то есть
Rang АВ — Rang А, если Det В ф 0 (7)
и
Rang/ТЛ = Rang Л, если Det В' 0. (8)
Иначе можно сказать, что ранг сохраняется при умно-
жении данной, матрицы на невырожденную матрицу
(слева или справа).
Доказательство теоремы 2. Пусть С —А-В.
Тогда Rang С=С Rang Л по теореме 1. Но вследствие невы-
рожденности В имеем: А = АВВ~А = СВ'\ так что Rang А
eg; Rang С по той же теореме 1. Тем самым (7) доказано.
Равенство (8) доказывается аналогично.
§ 5. Преобразование координат при изменении базиса
1. Во многих случаях встречается необходимость данный
базис заменить новым. Мы выведем сейчас формулы, по кото-
рым преобразуются координаты произвольного вектора при
переходе к новому базису.
2. Пусть Ln — линейное «-мерное пространство, еь..., еп —
его базис. Пусть е{,е'п — новый базис в L„. Разло-
жим каждый из векторов ej......е'п по старому базису; мы
получим
ej — Рцё\ 4- РучРг “И • • • -f~ Р\пеп’
£2 = <-Т -ф- РчяРъ Ропеп,
(О
еп---Pntex *+- Prdei ~f~ • • • “F Рппеп-
Коэффициенты этих разложений составляют квадратную «Х«*
матрицу
Рц • • • Pin
Р
ki... р>
§ 5]
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
73
3. Строка матрицы Р с номером I образована координа-
тами вектора е\ в первоначальном базисе. Так как новые
базисные векторы е'п независимы, то матрица Р не-
вырождена, т. е.
Det Р ^0. (1)
С другой стороны, если произвольно взять матрицу Р
при условии (1), то векторы е'т определяемые равен-
ствами (I), будут независимы в, следовательно, составят базис.
Таким образом, переход к любому новому базису опреде-
ляется заданием матрицы Р при единственном условии ее
невы рожден ности.
4. Пусть х—произвольный вектор из Ln. Разложим его
по старому и по новому базису:
x—^XjEj, х = ^.х-е[-
J i
Запишем формулы (I) сокращенно в виде
п
e'i — У Pi}ej, z = 1,..., п. (I)
7=1
Отсюда и из второго разложения х имеем
Сравнивая это разложение с первым, найдем
*7 = У PijX'i, п, (II)
i=l
или в подробной записи
л'1 = РцХ) 4- РцХ.: -|-... -|- PniXn,
Xi = РцХ) РцХ.> -|- . .. PniXn,
Хп — Р\пх\ + PinX'i + - .. + Рппх'п.
(П)
Формулы (II) выражают старые координаты х1гхп
вектора х через его новые координаты х{,.... х'п и пред-
ставляют собой линейное преобразование переменных х[,..., х'п
в переменные хьхп. Матрица этого преобразования есть
Р*, 1. е. получается транспонированием матрицы Р. Поэтому,
74
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
[ГЛ. II
обозначая через X и X' матрицы-столбцы, состоящие из
старых и новых координат вектора х, можем записать фор-
мулы (II) в виде матричного равенства
Х = Р*АА
(Па)
Преобразование (II) невырождено, так как
Det Р* = Det Р ф 0.
Таким образом, любому изменению базиса соответствует
невырожденное линейное преобразование координат каждого
вектора.
5. Новые координаты вектора выражаются через его
старые координаты с помощью линейного преобразования,
обратного преобразованию (II).
Мы напишем его в виде
Xi — QiiA'i Qi-2X« -4-... -f- Q.\nxn,
л‘2 = QsiXi -р ОлчХч -4—... Олпхп,
Хп QnlXl ~J- Qn2Xg —г • • • “Т" QnrXn
(III)
или сокращенно п /= Матрица преобразован! обратна матрице Р*: Q = 1 1Я (III), котор Qu • • • Qin = 1,..., п. (Ill) ую мы обозначим через Q, = (Р*Г1. (2)
Qni • • • Qnn
Заметим, что каждый из элементов матрицы Q равен
алгебраическому дополнению элемента матрицы Р с теми же
номерами строки и столбца, поделенному на DetP. Анало-
гично (Па) можно написать, что
X’ = QX. (П1а)
6. Равенство (2), связывающее матрицы Р и Q, можно
переписать двумя другими эквивалентными способами; именно:
P*Q = E, QP*=E. (3)
§ 5]
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
75
Для дальнейшего полезно равенства (3) в свою очередь
переписать еще в другой форме, используя для обозначения
элементов единичной матрицы Е так называемый символ
Кронекера 8/у-. По определению
{О, если I ф ],
1, если i = j.
Отсюда два матричных равенства (3) заменяются соот-
ветственно двумя системами числовых равенств:
Ц PziQz/ = 8Z/, £ ^iPu = (4)
i i
В первом из них /-я строка матрицы Р* умножается на
j-й столбец матрицы Q, а во втором /г-я строка матрицы Q
умножается на Z-й столбец матрицы Р*.
7. Заметим в заключение, что всякое невырожденное ли-
нейное преобразование переменных хь ..., хп в переменные
Ар х'п можно рассматривать как преобразование коор-
динат векторов в л-мерном линейном пространстве. В самом
деле, если нам дано преобразование (III), то мы знаем матри-
цу Q (Det Q ф 0). По ней мы найдем Р* = Ег* и Р = (Р*)*.
Зная матрицу Р, получим соответствующий базис е'1г е'п
по формулам (I).
ГЛАВА III. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ.
ПЛОСКОСТИ В АФФИННОМ
ПРОСТРАНСТВЕ
§ 1. Аффинное пространство
1. В линейном пространстве элементами являются векторы
как объекты линейных операций. Однако во многих задачах
в центре внимания оказываются геометрические факты, связан-
ные со взаимным расположением фигур (подмножеств) в рас-
сматриваемо.м пространстве, в то время как линейные операции
отступают на задний план.
Поэтому наряду с линейным пространством вводится по-
нятие аффинного пространства, элементы которого называются
точками. Точки аффинного пространства определенным образом
связаны с векторами линейного пространства (подобно тому,
как это делается в элементарной аналитической геометрии).
Условия этих связей даны в следующем пункте вместе с оп-
ределением аффинного пространства.
2. Пусть дано некоторое множество ?(, элементы кото-
рого будем называть точками и обозначать заглавными латин-
скими буквами А, В, ..., М, ... Пусть дано также некоторое
линейное пространство L. Пусть с каждой упорядоченной
парой точек из ?( сопоставлен вектор из L. Если паре точек
А, В соответствует вектор х, то напишем: х = АВ\ здесь
АВ есть только новое обозначение вектора х.
Первая из двух точек называется началом вектора АВ
вторая — его концом.
Определение. Множество $(, сопоставленное с линей
ным пространством L, называется аффинным пространством
если соблюдены следующие две аксиомы:
1) Для каждой точки А из ?1 и каждого вектора х из L
найдется и притом единственная точка В из §1 такая, что
АВ = х.
2) Если АВ — х, ВС—у, то АС—х-]-у (рис. 5).
77
§ 1]
АФФИННОЕ ПРОСТРАНСТВО
Аффинное пространство называется действительным или
комплексным, конечномерным или бесконечномерным в зави-
симости от того, действительным или комплексным, конечно-
мерным или бесконечномерным является соответствующее ему
линейное пространство L. Размерностью аффинного простран-
ства 81 называют число, равное размерности линейного про-
странства L.
Замечание 1. Всякое линейное пространство L можно
рассматривать как аффинное пространство 8(. Для этого
достаточно векторы назвать точками и каждой паре векто-
ров а, Ь, рассматриваемых s
как точки множества 81, по-
ставить в соответствие век-
тор b — а £ L.
Замечание 2. Всякое
аффинное пространство 81
можно рассматривать как
линейное. Для этого доста-
точно зафиксировать какую-
Z?
Рис. 5.
нибудь точку О простран-
ства 81. Тогда с произвольной точкой М £ 81 сопоставляется
ее радиус-вектор ОМ. Множество радиус-векторов всех то-
чек пространства 81 и составляет пространство L.
Замечание 3. В дальнейшем в конкретных случаях мы
каждый раз указываем, что является объектом нашего рас-
смотрения: аффинное или линейное пространство. Однако
можно раз и навсегда условиться рассматривать аффинное
пространство с отмеченной в нем точкой. Тогда в пашем
распоряжении будут и точки, и векторы.
3. Отметим два простейших свойства аффинного прост-
ранства.
Теорема 1. С каждой парой совпадающих точек
из 8( сопоставляется нулевой вектор из L.
Доказательство. Будем считать, что А — произволь-
ная точка и что с парой точек АА сопоставлен вектор z.
Пусть х — произвольный вектор из L. Тогда по первой
аксиоме аффинного пространства найдется точка В такая, что
АВ = х. Применяя вторую аксиому, получим
х z = z -ф- х — АА -j- АВ = АВ — х;
следовательно, z = f).
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ [ГЛ. III
Теорема 2. Если АВ = х, то В А = — х.
Доказательство. Пусть В А—у. Тогда
х 4- у = АВ -k ВА=~АА = О,
откуда у =— х.
§ 2. Аффинные координаты
1. Будем считать, что данное аффинное пространство ?1
является л-мерным, и введем в нем так называемую аффинную
систему координат.
Для этого в Й выберем произвольную точку О, которую
назовем началом координат, а в соответствующем линейном
пространстве L возьмем какой-нибудь базис еь еп. Пусть
М — произвольная точка из ?(. Вместе с началом координат
она определяет вектор ОМ £ L, который называется радиус-
вектором точки М. Разлагая радиус-вектор ОМ по базису
еЪ •••, eni получим
ом=.Vici хге.2 4- • • • 4- хпеп-
Коэффициенты этого разложения хъ хп называются аф-
финными координатами точки М (относительно выбранной
системы с началом О и базисом et, еп). Обратим внима-
ние на то, что аффинная система координат задается двумя
разнородными объектами — точкой О из аффинного простран-
ства и базисом еь ..., еп нз линейного пространства.
Координаты каждой точки М определены однозначно ввиду
единственности разложения вектора ОЛ1 по базису еп.
2. Пусть дана другая произвольная точка N с координа-
тами _У1, уп. Покажем, как выражаются координаты век-
тора MN через аффинные координаты точек М и N. Исполь-
зуя аксиому 2 и теорему 2 из § 1, находим
~MN= МО 4- ON— ON— ОМ =
—(j’i—-*ч) ci 4~ • • • 4~ О’«—хп>
так что вектор MN имеет координаты j/j — xlt ..., уп — хп.
Иначе говоря, чтобы получить координаты вектора MN,
нужно из координат его конца вычесть соответствующие
координаты начала.
§ 2]
АФФИННЫЕ КООРДИНАТЫ
79
3. Сохраняя выбранный базис, перенесем начало координат
из точки О в точку 01. Координаты Ot в первоначальной
системе обозначим через ап и будем считать их
известными. Найдем новые аффинные координаты хь ..., хп
произвольной точки Л1. (Старые координаты точки М обозна-
чаем через Xi, ..., хп.) Имеем векторное равенство
07Й = О01-|-0Гм,
или, что то же самое,
Xi^i . -j- хпеп = апеп -ф- Xi₽i хпеп.
Отсюда, вследствие единственности разложения вектора по
базису, находим
Х[ = х, -|- аь 7=1, ...» п.
4. Если начало координат остается на месте, но меняется
базис, то аффинные координаты точек преобразуются так же,
как координаты их радиус-векторов, то есть по формулам
§ 5 гл. II.
5. Предположим теперь, что от данной аффинной системы
координат с началом О и базисом еь ..., еп мы переходим
к новой системе с началом О' и базисом e't, ..., е'п. При
этом считаем известными координаты О' в старой системе
(ai, ..., ап), а также разложения векторов нового базиса по
старому базису:
e'i = ^Pijej.
Используя результаты двух предыдущих пунктов и § 5
гл. II, получим формулы, выражающие старые координаты
Л],..., хп произвольной точки М через ее новые коорди-
наты x'i,...,x'n,
Xi — ’^Pjix'j-^-ai, 7=1, ..., и. (1)
Наряду с формулами (1) имеют место обратные формулы
Q(* j (Xj Cl j) Qiy-X) । at,
где Q = (P*)-1 (cm. § 5 гл. Il), a't =— XQtjap
Преобразования аффинных координат неоднократно исполь-
зуются в дальнейшем.
80
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
[ГЛ. 111
§ 3. Плоскости
1. Пусть в «-мерном аффинном пространстве ?(„ зафикси-
рована произвольная точка А, и в соответствующем линейном
пространстве Ln зафиксировано произвольное г-мерное под-
пространство Lr.
Определение. Множество всех точек М аффинного
пространства, для которых AM С Lr> называется г-мерной
плоскостью, проходящей через точку А в направлении под-
пространства Lr (см. рис. 6, где г = 2).
Говорят также, что Lr есть направляющее подпростран-
ство этой плоскости. Очевидно, что каждая плоскость опре-
деляет однозначно
свое направляющее под-
пространство.
Рис. 6.
Точку М называют
текущей точкой плоско-
сти. На рис. 6 показаны
три положения Afb М2,
М3 текущей точки М.
2. Частные слу-
чаи. 1) Если г = 0, то
плоскость состоит из одной точки А. Поэтому каждую точ-
ку аффинного пространства можно рассматривать как нуль-
мерную плоскость.
2) Одномерная плоскость называется прямой линией
(короче, прямой).
3) Плоскость .’размерности п—1 называется гиперпло-
скостью.
4) При r=ti плоскость совпадает со всем простран-
ством ?[„.
3. В определении плоскости выделена точка А. Докажем,
что в действительности все точки плоскости равно-
правны.
Обозначим плоскость через Пг и зафиксируем произволь-
ную точку в С Щ. Надо доказать, что точка М принадлежит
плоскости Пг тогда и только тогда, когда BM С Lr (т. е. что
любая точка В может играть роль точки А).
Пусть BM С Lr (рис. 7). По определению плоскости
АВ С Lr. Отсюда и по определению подпространства AM —
§ 3]
плоскости
== АВ -j- ВМ £ Lr, поэтому М С Щ. Обратно, если М £ Пг,
то AM С следовательно, ВМ = AM — АВ С Lr.
4. Теор е м а. Всякая r-мерная плоскость в аффинном
пространстве сама является r-мерным аффинным про-
странством.
Доказательство. Пусть дано аффинное простран-
ство §1, которому соответствует линейное пространство £;
пусть Пг — плоскость, проходящая через точку А в напра-
влении подпространства Lr. Возьмем в плоскости П, две
произвольные точки М, N. По определению аффинного про-
странства им соответствует вектор MN £ L. По определению
плоскости векторы AM и__________________________
AN принадлежат подпро-'к \
странству Lr. Следовательно, \.
MN = AN — АМ £ Lr. \ У ~~---------
Таким образом, каждой \
упорядоченной паре точек
М, N плоскости Пг постав- “
лен в соответствие вектор Рис. 7.
MN из r-мерного линейного
пространства Lr. При этом соблюдение для Пг первой из
аксиом п. 2 § 1 вытекает из определения r-мерной плоско-
сти, а вторая из аксиом п. 2 § 1 справедлива для Пг по-
тому, что она соблюдается для всего аффинного простран-
ства ?(. Теорема доказана.
Замечание. Если плоскость проходит через начало
аффинной системы координат в направлении подпростран-
ства Lr, то совокупность радиус-векторов ее точек образует
линейное пространство, по определению совпадающее с под-
пространством Lr.
б. Пусть в аффинном пространстве 91 даны точки
Ао, А}, ... , Аг (в числе г -ф-1). Говорят, что эти точки нахо-
дятся в общем положении, если они не принадлежат одной
(г — 1 фмерной плоскости.
Читатель легко может проверить, что точки Ло, Аь..., Аг
находятся в общем положении тогда и только тогда, когда
векторы A0Ai, ... , АВАГ линейно независимы (рис. 8), причем
безразлично, какую из точек брать в качестве Ай (то
82
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ [ГЛ. Ilf
есть в качестве начала векторов, идущих из нее в другие
точки).
Из сказанного в этом пункте и из определения плоскости
следует, что через систему точек /%, At, ..., Аг, находящихся
в общем положении, проходит r-мерная плоскость и притом
только одна.
6. Предположим, что в пространстве зафиксирована
какая-нибудь аффинная система координат с началом О и
базисом еь ... , еп. Рассмотрим плоскость П„ проходящую
через точку А в направлении подпространства Lr.
Будем считать, что точка А имеет координаты pit ... , рп
и что Lr задается как линейная оболочка независимой системы
векторов qb ... , qr (см. гл. I, § 13, п. 5). Тогда радиус-век-
тор ОМ текущей точки плоскости можно записать в виде
OM = OAA-AM — OAA-tlqi-]- ... A-xrqr, (1)
где параметры tj, ... , тг независимо друг от друга пробегают
всевозможные числовые значения, а вектор О A —piCt -j- • ••
• •• -гРпАп (рис. 9).
Разложим векторы qt, ... , qr по базису еь ... , еп:
Ч} = + Чре^ + • •. -г 4jnen-
Координаты текущей точки М обозначим, как обыч-
но, через (хь ... , хп) и запишем векторное равенство (1) в
§ 3]
плоскости
координатах. В результате получим п числовых равенств
Х1------'711'4 ~Г ~Г • • • ~Г С1гАг
хп------f- ?2ят2 -f- • • • -f- Чгп^г ~ГРп-
(2)
Эти равенства называются параметрическими уравнениями
плоскости Пг (в данной системе координат). Обратим внима-
ние на то, что все уравнения системы (2) являются линейными
относительно координат текущей точки и параметров ту.
Верно и обратное: геометрическое место точек, опреде-
ляемых уравнениями (2) при всевозможных значениях ту, есть
плоскость, проходящая через точку А в направлении подпро-
странства Lr = L (qi, ... , дг). В самом деле, уравнения (2)
равносильны векторному равенству (1), которое означает, что
вектор AM £ Lr.
Если для системы (2) написать соответствующую однород-
ную систему, то естьрь ... , рп заменить нулями, то мы полу-
чим параметрические уравнения направляющего подпростран-
ства плоскости ПЛ.
7. Пр и м е р. Пространство, изучаемое в стереометрии,
является трехмерным аффинным пространством. В нем одно-
мерные и двумерные плоскости совпадают соответственно
с прямыми линиями и плоскостями, понимаемыми в элемен-
тарно-геометрическом смысле. Это нетрудно доказать различ-
ными способами, например, воспользовавшись результатами
предыдущего пункта и параметрическими уравнениями прямой
и плоскости, известными из элементарного курса аналитиче-
ской геометрии.
8. Важное замечание. В отличие от пространства,
изучаемого в элементарной геометрии, в аффинном простран-
стве не определены метрические понятия: расстояние между
точками и длины линий, площади и объемы фигур, углы
и перпендикулярность. При исследовании фигур в аффинном
пространстве изучаются лишь те геометрические свойства,
которые не зависят от метрических понятий. Тем не менее
такое исследование является содержательным и позволяет
решать многие задачи.
9. Прежде чем продолжить изучение плоскостей (а также
других фигур в аффинном пространстве), мы изложим в сле-
дующих параграфах необходимый для этого алгебраический
аппарат: системы уравнений первой степени.
84
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
(ГЛ. 111
§ 4. Системы уравнений первой степени
L Рассмотрим систему уравнений
anxi 4~ 4“ • •• 4" ainxn —t>i,
4- 4'а2лл'л ==^i>
amlxl 4~ amixi 4- • • • 4- атпхп = Ьт.
Буквы йц, ... , атп, bv, ... , bm обозначают
числа, хь ... , х„ — неизвестные.
Числа а,-7- называются коэффициентами системы
зуют т X «-матрицу
ЙИ • • а1п
О)
известные
(1) и обра-
• • • атп
которая называется основной матрицей системы (1). Будем
считать в дальнейшем, что матрица А не нулевая, то есть
что среди коэффициентов системы (1) есть отличные от нуля.
Числа bt, ... , bm называют свободными членами урав-
нений.
Матрица
аи ••• а\п
«ml • • • &тп Ьщ
называется расширенной матрицей системы (1).
Всякий упорядоченный набор чисел хъ ... , хп, подста-
новка которых вместо неизвестных обращает все уравнения
системы в арифметические тождества, называется решением
системы. Система называется совместной, если она имеет хотя
бы одно решение.
2. Теорема Кронекера — Капелл и. Для того
чтобы система (1) была совместной, необходимо и доста-
точно, чтобы ранг ее расширенной матрицы был равен
рангу основной матрицы'.
Rang В — Rang А. (2)
Доказательство. 1. Необходимость. Очевидно,
что
Rang В Rang А.
(3)
§ 4]
СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ
85
Обозначим через аь ..., ап столбцы матрицы А, через
b — столбец свободных членов и будем все эти столбцы рас-
сматривать как векторы координатного пространства К„.
Пусть система (1) имеет решение (лу, , хп). Это решение
обращает уравнения в систему числовых тождеств, которые
можно записать в виде одного векторного равенства
XjOi х2а2 . 4- хпап — Ь. (4)
Из формулы (4) следует, что векторы аь ... ,а„, b линейно
выражаются через векторы ... ,ап. По лемме 3 из § 6
гл. I и в силу определения ранга матрицы имеем
Rang В С Rang А. (5)
Из (3) и (5) следует равенство (2).
2. Достаточность. Пусть соблюдается равенство (2).
Матрица А по условию ненулевая, поэтому у нее есть базис-
ный минор порядка r = RangX2>®-
Допустим для определенности, что базисными являются
первые г столбцов а]г ... ,аг. Рассмотрим систему векторов
... ,аг, Ь. Эта система линейно зависима, ибо в против-
ном случае Rang В = г 4~ 1 г. Поэтому вектор b выра-
жается через линейно независимые векторы аь ... ,аг(см. гл. I,
§ 6, лемму 2):
ь=4*~ • • * 4~ (б)
Положим
Х1 = хь ... , хг = \п xr+i — ... = х„ = 0. (7)
Записав систему (1) в векторной форме (4) и подставив
в нее величины (7), получим тождество (6). Таким образом,
система (1) совместна: она имеет по крайней мере одно реше-
ние (7). Теорема доказана.
3. Отметим частный случай, когда число уравнений равно
числу неизвестных, и матрица А (в этом случае квадратная)
невырождена, то есть
ан ... а1п
£) = Det А =
#nl • • •
Тогда система (1) имеет единственное решение, которое
может быть найдено по правилу Крамера:
Xi -— 2) » >••• i Хп----- D . loj
86
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
[ГЛ. III
Здесь через Dj(b) обозначен определитель, который полу-
чается из D заменой его /-го столбца на столбец свободных
членов, то есть
«и ... «1 y_i «1 y+i ... а1п
Dj(b) =
(8)
ani • • • ап j~i bn ап /Л1 ... йпп
Замечание 1. Если обозначить через х вектор
(х1г , хп), записанный в виде столбца, то систему (1)
можно представить в виде матричного уравнения
Ах — Ь,
а формулы Крамера (8) — в виде матричного равенства
х=А 1Ь.
(1а)
(8а)
Переход от формулы (1а) к формуле (8а) получается умно-
жением обеих частей равенства слева на матрицу Л-1.
Замечание 2. Для практического решения систем
с большим числом уравнений и неизвестных формулы (8)
неудобны ввиду трудности вычисления определителей D и
Dj (b). Поэтому для решения таких систем разработан ряд дру-
гих методов, которые излагаются в руководствах по вычисли-
тельной математике.
4. Вернемся к рассмотрению системы (1) при произволь-
ных т и п, предполагая, что соблюдены условия совмест-
ности (2). Наша цель — найти все решения системы. Число г,
равное рангу матриц А и В, назовем рангом системы (1).
Будем считать для определенности, что базисный минор мат-
рицы А занимает в ней верхний левый угол (этого всегда
можно добиться изменением нумерации неизвестных и пере-
становкой уравнений). Обозначим этот минор через В:
ан • • • о1г
В =
#:0.
arl ... arr
Минор В является базисным и для матрицы В, поэтому
строки матрицы В с номерами г —}— 1, ... , т являются линей-
ными комбинациями первых г ее строк (см. гл. I, § 7). Это
значит, что уравнения с номерами r-j-1, ..., т представляют
§ 4]
СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ
87
собой линейные комбинации первых г уравнений, так что
система (1) эквивалентна системе
ai\xi ~г • • • ainxn — by
ar\xi + • • • + arnxn == br.
(Ю)
Оставим в левых частях лишь те слагаемые, коэффициенты
которых образуют базисный минор D, все остальные члены
перенесем направо:
а11х1 -}“••• “Ь alrxr — bi Qi r+iXr+i ... Qlnxru
(11)
-f- • • • -f- arrxr -— br — ar r+iXr+i — ... — amxn- .
Неизвестные xr^> ... , xn будем называть свободными. Им
можно придать любые числовые значения. Тогда неизвестные
хь ...-, хг однозначно определятся из системы (И) по фор-
мулам Крамера:
(12)
Здесь, как и выше, через а,- обозначены столбцы основной
матрицы А системы (10), через b — столбец свободных чле-
нов системы (10); символ Dj определяется формулой (9),
в которой нужно п заменить на г и вместо вектора b под-
ставить вектор b — хг,хаглЛ — ... — хпап.
Пользуясь свойствами определителей, разложим числитель
формулы (12). Мы получим
v __ Dj (b) Dj (ar+i) Dj (an)
J~~D-------p—Xr+i-...----------^-Xn
(7 = 1, .... r).
Введем обозначения
Pi—^’ ...D ->
Z=l, ..., r, A = r—j— I, .... n.
Тогда из (13)
Х1 =Р1 + 47+1 1 xr+l +
(13)
(14)
(15)
xr----P-r Qr^l r xr+l “H • • 4nrxn-
88
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
(ГЛ. III
Добавим сюда еще п—г очевидных равенств:
-С-+!>
(16)
•Vn — хп.
Всю совокупность равенств (15) и (16)
торным соотношением
заменим одним
век-
Чпг
О
О
Хп.
(17)
1
Формула (17) дает общее решение системы (1), поскольку
выражает все неизвестные лу, хп хг_.\, хп через сво-
бодные неизвестные хг+!, ..., хп, которым можно придавать
любые численные значения. Покажем, что при этом все воз-
можные решения системы (1) будут исчерпаны. В самом деле,
если ду, ..., xr, xr_^i, ..., хп — любое заданное решение си-
стемы (1), то хг+1, ..., хп имеют определенные численные
значения; подставляя их в систему (1) и повторяя предыду-
щие выкладки, получаем равенство (17).
5. Обозначим столбец в левой части равенства (17) через
х; столбцы в правой части этого равенства обозначим по
порядку их расположения через р, qrJr\, ..., qn. Тогда ра-
венство (17) примет вид
X—рА-хг+'Чг+\ 4- ... -\~xnqn. (18)
Равенства (18) и (17) следует понимать как равенства
между векторами координатного пространства Кп.
6. Следствие. Если система (1) совместна и ее
ранг г меньше числа неизвестных п, то эта система
имеет бесконечное множество решений.
Замечание. Выбор свободных неизвестных, вообще
говоря, можно делать по-разному. Однако не всякие и — г
неизвестных можно принять за свободные. Нужно, чтобы
в системе (1) коэффициенты при остальных г неизвестных
составили базисный минор матрицы А.
§ 5]
ОДНОРОДНЫЕ СИСТЕМЫ
89
§ 5. Однородные системы
1. Система уравнений
Oil Л'1 ~Г й1л хп = О,
(1)
"4“ • • • Н- ^тпХп — О
называется однородной; в этом случае правые части всех
уравнений равны нулю:
bt= ... =Ьт = 0. (2)
2. Однородная система всегда совместна. С одной сто-
роны, это вытекает из теоремы Кронекера — Капелли:
Rang В — Rang А, так как матрица В получается из Л добав-
лением нулевого столбца.
С другой стороны, сразу видно, что система (1) имеет
нулевое решение:
Xi — ... = хп = 0.
Нулевое решение однородной системы называется три-
виальным. Остальные решения, т. е. не состоящие только из
одних нулей, называются нетривиальными.
3. Как и раньше, будем рассматривать решения системы
(1) в качестве векторов координатного пространства Кп.
Теорема 1. Множество решений однородной си-
стемы образует в пространстве Кп подпространство раз-
мерности п — г, где г — ранг системы.
Доказательство. Вследствие условия (2)
‘J~ D
Поэтому в рассматриваемом случае р=6 и формула (18) §4
выражает любое решение х в виде линейной комбинации
векторов qr_^, ..., qn. Обратно, всякая линейная комбинация
векторов qr_^, ..., qn дает решение однородной системы (1).
Иначе говоря, множество X всех решений такой системы
есть линейная оболочка векторов qrJt.it ..., qn в Кп. Следова-
тельно, X является линейным подпространством в Кп.
Теперь убедимся, что векторы qrJri, ..., qn линейно неза-
висимы. С этой целью рассмотрим матрицу Г, составленную
90 СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ [ГЛ. III
координатами векторов qrjrb q„
Qr^i> • • • > qrr
Qr^.11 • • • Qni
Г =
Qr-tl r • • • Qnr
1 ... 0
0 ... 1
Нижний минор максимального порядка матрицы Г является
ее базисным минором (он равен единице, т. е. отличен от
нуля, и не имеет окаймляющих). Следовательно, столбцы Г
линейно независимы. Тем самым линейно независимы векторы
Qr^i> • • • > Qn-
Отсюда следует, что векторы ^r+i, qn составляют
базис в X. Но число их равно п — г. Значит, размерность X
равна п — г, и теорема доказана.
4. Пусть известна какая-нибудь линейно независимая си-
стема решений в числе п — п
Cll
*
cln
(3)
Тогда любое решение x системы (1) представляется в виде
линейной комбинации данных решений (3):
х — Tjti -j- ... -j- (4)
обратно, любая линейная комбинация вида (4) дает решение.
Оба утверждения сразу следуют из предыдущей теоремы.
Именно, согласно этой теореме подпространство X решений
системы (1) имеет размерность п — г; следовательно, решения
41, ..., сп _г составляют в нем базис.
Определение. Всякая линейно независимая система
решений в числе п—г называется фундаментальной для
системы уравнений (1).
В ы в о д. Чтобы решить однородную систему уравне-
ний (1), достаточно найти какую-нибудь фундаментальную
систему ее решений сь ..., с„_г. Тогда все решения системы
(1) даются формулой (4), в которой каждый из параметров
'Ч. • • , г независимо от других пробегает всевозможные
числовые значения.
§ 5]
ОДНОРОДНЫЕ СИСТЕМЫ
91
Замечание. Одна из фундаментальных систем решений
составлена столбцами матрицы Г. Эту систему решений дают
формулы (14) предыдущего параграфа.
5. Пример. Рассмотрим систему уравнений
Х1 -ф- хе -4- х3— х4=0, )
V V I V —0 (
Х% Лз —р Х& V. J
Здесь п — 4, г = ‘2. Значит, пространство решений имеет раз-
мерность п — г = 2. Следовательно, нам достаточно найти
какие-нибудь два независимых решения, например:
Xi — 0, Xi = 0, х3=1, х4=1;
Xj = 2, х2 — —1, х3 ——1, Xi = 0.
Отсюда получаем общее решение системы (5):
Х1 0 2
Xi 0 — 1
х3 = 4 1 + т2 — 1
XI 1 0
6. Важные частные случаи. 1) Однородная си-
стема п уравнений с п неизвестными:
-ф- ... -|- ainXn — О,
I • • • И ---------- 0.
Относительно системы (6) мы отметим только следующую
теорему, которая часто используется в приложениях линей-
ной алгебры.
Теорема 2. Система вида (6) имеет нетривиальное
решение тогда и только тогда, когда ее определитель
равен нулю:
D = Det || aiy|]=0.
Действительно, в этом и только в этом случае г =
— Rang А <4 и и размерность пространства решений положи-
тельна: и — г ~> 0.
92 СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ (ГЛ. III
2) Однородная система п—1 независимых уравнений с п
неизвестными:
(7)
®Л-1 1-^1 Ч- • • • «П -1 /А П == 0- .
Условие независимости уравнений означает, что (прямоуголь-
ная) матрица Л = ||о;7{| системы (7) имеет ранг г — п—1.
В этом случае пространство решений одномерно (и — г=1)>
и для получения общего решения системы (7) достаточно
найти одно ее нетривиальное решение. Покажем, как это
сделать.
Составим вспомогательную квадратную матрицу А по-
рядка и, которая получается из матрицы А прибавлением
сверху новой строки; именно:
«01 • °ОЛ
А=г-- «11 • °1л
ап 1 1 • • 1 п
где ам, аВп—произвольные числа. Через Лву обозначим
алгебраические дополнения элементов аВ]- в матрице А. Тогда
величины
aci — -^oi> • • •» хп — (^)
образуют решение системы (7). В самом деле, подставим ве-
личины (8) в уравнение с номером Z; мы получим сумму
произведений элементов одной строки матрицы А на алге-
браические дополнения элементов другой строки, равную, как
известно, нулю:
«П^01 ~|~ ••• ~}~Я/лАп —0-
Таким образом, числа (8) действительно удовлетворяют си-
стеме (7).
Обозначим через /Ну минор матрицы А порядка п— 1,
который получается вычеркиванием столбца с номером /:
Ди ... «1 y_i «1 y+i ... а1л
а-п ач j 1 ач /+1 • •
®п-1 1 • • • @п-1 j-1 /д! * •• ®л-1 п
ОДНОРОДНЫЕ СИСТЕМЫ
93
§ 5]
Тогда А>у- = (—1/+1 Mj. Среди миноров Mj имеется по край-
ней мере один, не равный нулю (базисный минор матрицы А),
поэтому решение (8) нетривиально. Общее решение системы
(7) можно записать в виде
Xj = {— 1)/+1 /И/t,
где т — произвольное число. Иначе говоря, решение системы
(1) пропорционально минорам максимального порядка матри-
цы А, взятым с чередующимися знаками. Иногда это записы-
вают так:
... =/И1:(—/И2):/И3: ...
7. Выше, в п. 3, мы доказали, что однородная система
уравнений первой степени ранга г определяет в «-мерном
линейном пространстве L„ подпространство размерности
п—г. Покажем, что верно и обратное. Именно, справедлива
Теорема 3. Всякое подпространство размерности k
в пространстве Ln с данным базисом является подпро-
странством решений некоторой однородной системы ли-
нейных уравнений ранга п—k.
Доказательство. Пусть в Ln даны базис еь ..., еп
и подпространство L*. Возьмем в этом подпространстве k
независимых векторов, которые мы обозначим •••
..., е'п, используя лемму из п. 7 § 14 гл. I, дополним их до
базиса в L„:
е^, ..., еп—jj, еп—..., еп. (9)
Подпространство Lk является линейной оболочкой векто-
ров e'n_k + i, ..., е'п. Поэтому вектор х из Ln лежит в Lfc
тогда и только тогда, когда его координаты в базисе (9),
имеющие номера 1, ..., п— k, равны нулю:
х- = 0 (Z=l, ..., n — k\ (10)
Формулы (10) представляют собой систему уравнений, опре-
деляющую Lk в базисе (9). Перейдем к исходному базису
Оь ..., еп.
Для этого воспользуемся формулами преобразования коор-
динат (см. гл. II, § 5)
x'i=^ QijXj, i= 1, ..., п.
94
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
ГГЛ. III
Отсюда получим искомую систему уравнений (11), эквива-
лентную системе (10):
У, QijXj=0, 1 = 1, п— k. (11)
/=1
Так как n X й'матР11ца Q = || Qi/ll невырожденная, то все ее
строки линейно независимы. Следовательно, ранг системы (11)
равен числу ее уравнений: r — n — k. Теорема 3 доказана.
8. Как видно из проведенного доказательства, конкретная
запись системы уравнений, определяющей зависит от вы-
бора базиса.
Кроме того, в данном базисе данное подпространство
может задаваться различными однородными системами урав-
нений. Это ясно, поскольку для системы (11) имеется беско-
нечное множество других, эквивалентных ей систем. Покажем,
как можно строить такие системы. Пусть
11ц ... hi n_k
н=ы=
hfl-k 1 • • • ^n-k n-k
— любая невырожденная квадратная матрица порядка п — k.
Фиксируя I, умножим уравнения (11) соответственно на числа
(1=1, ..., п — /г) и сложим их; затем выпишем найденные
соотношения, беря Z=l, п — k. Мы получим однород-
ную систему
п — h п
У, 1>п У, QijXj = 0
х==1 7=1
Если ввести числа
(/=1, ..., п — k). (12)
n — k
Rij— У hnQij
j=i
(Z=l, ..., n — k; /=1, «), (13)
то система (12) запишется более просто:
У RtjXj = 0 (1=1, n — k). (14)
7=1
Система (14), очевидно, есть следствие системы (И). Пока-
жем, что система (11) в свою очередь есть следствие си-
стемы (14). При каждом фиксированном /(1^/^л) фор-
§ 5]
ОДНОРОДНЫЕ СИСТЕМЫ
95
мулу (13) можно рассматривать как систему уравнений с не-
известными Qij и правыми частями Rij. Решая эту систему
по правилу Крамера для каждого J, находим, что
п — ь
Qi,= 2 <15)
а=1
где матрица = — обратная по отношению к матрице
Н=\\Ьн\\.
Формула (15) показывает, что коэффициенты системы (11)
выражаются через коэффициенты системы (14) с помощью
матрицы совершенно аналогично тому, как коэффи-
циенты (14) выражались через (И) с помощью матрицы || Иц ||.
Таким образом, системы (11) и (14) эквивалентны. Итак, по
данной системе (11) мы можем получить бесконечное мно-
жество эквивалентных ей систем вида (12), поскольку беско-
нечно многими способами можно выбирать невырожденную
матрицу Н.
Замечание. Если прямоугольные матрицы систем урав-
нений (11) и (14) обозначить соответственно через Q и R,
то две системы равенств (13) и (15) можно заменить двумя
матричными равенствами
R = HQ, Q = H'R.
Отсюда следует, что RangR = RangQ. Иначе говоря, все си-
стемы вида (14), которые мы строим поданной системе (11),
имеют один и тот же ранг, равный п — k.
Пример. Система
Xi -|~ — xs — xt— О,
Xi — Xi —j— X3 —|— X& = 0
определяет в четырехмерном линейном пространстве некото-
рое двумерное подпространство Li. Беря
получим в качестве (14) систему
Xi = 0, Xi — хз — Xt = О,
которая определяет то же самое подпространство Li, что и
данная система (иначе говоря, мы заменяем данные уравнения
их полусуммой и полуразностыо).
96 СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ [ГЛ ГИГ
9. В заключение параграфа докажем, что линейное невы-
рожденное преобразование переменных сохраняет ранг си-
стемы уравнений (1). Запишем систему (1) в виде матричного
равенства
АХ = 0, (1л)
где Л = || a{j || есть /и у/г-матрица коэффициентов, X— мат-
рица-столбец неизвестных xt, ., х„, нуль в правой части
обозначает нулевую и'/ 1-матрицу. Пусть дана замена пере-
менных X'=QX (см. формулы (III а) и (III) § 5 гл. II;
Q — невырожденная п X «-матрица). Тогда
Х = Р*Х', (13)
гдеР = || Рм || = (Q1)*. Подставляя (16) в (1а), получим матрич-
ную запись рассматриваемой системы уравнений в новых пере-
менных (х{, , х'п):
(АР*)Х' = 0,
или подробнее
2 ( У, а1лрЛ хк = 0, I = 1.........tn.
! k — I \а — I /
Матрица Р невырождена, так что
Rang АР* = Rang А
согласно п. 3 § 4 гл. II. Тем самым утверждение, сформули-
рованное в начале этого пункта, доказано.
§ 6. Неоднородные системы
1. Пусть дана неоднородная система
। ср У / —- (1)
/=1
где /=1, ..., tn и среди чисел есть отличные от нуля.
Допустим, что система совместна, то есть Rang А — Rang В—г.
Пусть {x|J, ..., Хп] — некоторое решение системы (1). Под-
ставив это решение в систему (1), получим тождества
I п
у н(7х;=^-. (2)
7 = 1
§ 6]
НЕОДНОРОДНЫЕ СИСТЕМЫ
97
Вычтем тождества (2) из уравнений (1). В результате полу-
чится система (3), эквивалентная системе (1):
У, aij(Xj — х}) = 0. (3)
Положим Xj — xaj = iij', тогда получим однородную систему
2 aijitj—Q.
/=1
(4)
Пусть для системы
ная система решений
уравнений (4) известна фундаменталь-
(5)
В таком случае, согласно результатам п. 4 § 5, любое
решение системы (4) выражается в виде линейной комбинации
векторов (5), то есть
Uj-- X1C1J + • • • + ^П-Г^Л-Г р (6)
где tnr—произвольные числа. Так как ttj — Xj — xj,
то из (6) находим
ХГ—•••+гп-гСп_гу), (7)
Назовем xj, ..., х„ частным решением системы (1). Сумма,
стоящая в скобках в формуле (7), представляет собой обшее
решение системы (4).
Система (4), полученная из системы (1) заменой правых
частей нулями, называется однородной системой, соответ-
ствующей системе (1).
Формула (7) показывает, что справедлива
Теорема 1. Общее решение неоднородной системы (1)
представляется в виде суммы произвольного частного
решения этой системы и общего решения соответствую-
щей ей однородной системы.
2. Геометрическое истолкование множества
решений неоднородной системы линейных
Уравнений, Рассмотрим n-мерное аффинное пространство 31п.
Зафиксируем в нем какую-нибудь аффинную систему коор-
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
(ГЛ. III
динат. Тогда каждому решению Xj, хп системы (1) можно
поставить в соответствие точку пространства с координа-
тами хь , хп. Имеет место
Теорема 2. Все решения системы (1) образуют в
плоскость размерности п — г.
Доказательство. Все решения системы (1) даются
формулой (7). Ввиду независимости векторов (5) эта формула
есть не что иное, как параметрические уравнения некоторой
плоскости размерности п—г (см. § 3, п. 6). Теорема 2
доказана.
Теорема 3. В аффинном пространстве $[„ и в любых
аффинных координатах всякая плоскость Пт может
быть задана системой линейных уравнений вида (1) и
ранга г = п — т.
Доказательство. Пусть плоскость Пт проходит через
точку А, имеющую координаты (xj, ..., х„), в направлении
подпространства Lm. Перенесем начало аффинной системы
координат в точку А, сохраняя прежний базис. Координаты
текущей точки М в исходной системе обозначим через
(xt, ..., хг), в новой системе — через (хь ..., х„); последние
совпадают с координатами вектора AM С Ьт. По теореме 3
из § 5 подпространство Lm задается некоторой однородной
системой линейных уравнений ранга г = п—nv.
п
^aijXj — 0, l—\,...,r.
Учитывая, что Xj — Xj— х°-, получаем
п
2 aijtXj — х") = 0.
7=1
Положив bi — ^aijXj, найдем систему уравнений
2 UijXj- = bh i=l, ..., г, (8)
/=1
которая имеет тот же ранг г — п— т и определяет Пт
в исходных координатах. Теорема 3 доказана.
3. Следствие. Плоскость задается однородной систе-
мой линейных уравнений тогда и только тогда, когда
она проходит через начало координат.
§ 6]
НЕОДНОРОДНЫЕ СИСТЕМЫ
99
4. Важный частный случай. Гиперплоскость за-
дается одним линейным уравнением
апхп = Ь.
Б. Каждое из уравнений (8) можно рассматривать как
уравнение некоторой гиперплоскости. Поэтому каждую пло-
скость размерности т можно рассматривать как пересечение
некоторых гиперплоскостей в количестве т — п.
6. Если система линейных уравнений несовместна, то
геометрически это означает, что нет пи одной точки, принад-
лежащей сразу всем гиперплоскостям, которые задаются
уравнениями системы.
7. Очевидно, что при переходе к новым аффинным коор-
динатам вид уравнений (8) меняется. Кроме того, данная пло-
скость Пт в данной системе аффинных координат может
задаваться различными системами уравнений. Это ясно, по-
скольку для системы (8) имеется бесконечное множество дру-
гих, эквивалентных ей систем. Так, например, можно взять
любую невырожденную квадратную матрицу /7 = || Лг
i, j=l, 2, г, и написать следствия системы (8):
a«ixj — M = 0. (9)
Если ввести обозначения
а'ч= Л b'i = S Л--Л.
а = I а = I
то уравнения (9) запишутся более просто:
2 a-'tjXj — b'i, (10)
7=1
Система уравнений (10) не только следует из системы (8),
но является эквивалентной ей (что доказывается так же, как
аналогичное утверждение в п. 8 § 5).
Возможность перехода от системы (8) к разным системам
вида (10) геометрически означает, что Пст можно определять
как пересечение различных наборов независимых гиперпло-
скостей в числе п — т. Независимость гиперплоскостей еле-
100
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
(ТЛГПГ
дует понимать в том смысле, что ранг совместной системы (10)
уравнений этих гиперплоскостей имеет максимально возмож-
ное значение, т. е. равен числу уравнений (г — п — т).
§ 7. Взаимное расположение плоскостей
1. Пересекающиеся плоскости. Во всем этом
параграфе размерности плоскостей и подпространств обозна-
чены индексами снизу. Пусть две плоскости Щ и П( в аф-
финном пространстве имеют общую точку А. Примем эту
точку за начало аффинной системы координат. Когда текущая
точка М пробегает плоскость Пл (или ПД вектор AM про-
бегает подпространство Lk .(соответственно £?). Поэтому вопрос
Рис. 10.
о взаимном расположении двух
пересекающихся плоскостей
естественно связан с рассмот-
рением подпространств Lk и Lt
в векторном пространстве Ln.
Используя свойства подпространств (гл. I, §§ 12—14),
нетрудно установить следующие факты:
1) Если плоскости П* и Hz пересекаются, то их пересе-
чением является некоторая плоскость П„ (на рис. 10 взято
k — l—2, т— 1).
Замечание 1. Не исключена возможность, что Пт
состоит из одной точки (/«— 0). Это видно на примере двух
пересекающихся прямых или прямой и плоскости (рис. 11).
В общем случае по одной точке могут пересекаться две пло-
скости, сумма размерностей которых не превышает размер-
ности пространства, например двумерные плоскости в четырех-
мерном пространстве.
§ 71
ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ
101
Замечание 2. Мы не исключаем и другого крайнего
случая, когда одна из двух плоскостей целиком принадлежит
другой. Например, ЩсгП/, k<^l, тогда Пт = П*, (на рис. 12
k — m— 1, Z=2).
2) Если плоскости Щ и П, пересекаются по плоскости Пт,
то существует единственная плоскость Пг размерности г =
= k -|~ I — т, содержащая Пь и Uz, причем ни в какой пло-
скости меньшей размерности Щ и П* не могут одновременно
поместиться. Направляющее подпространство Lr плоскости Пг
является суммой направляющих подпространств Lk и Lt. Эта
сумма является прямой суммой тогда и только тогда, когда Щ
и П; пересекаются по одной точке (/и = 0, см. рис. 13).
Рис. 12.
Рис. 13.
В частном случае, когда k-\-l—т = п, роль плоскости Пг
выполняет все пространство (при г — п — З см. рис. 10).
3) Если пересекающиеся плоскости II*. и IIZ содер-
жатся в какой-нибудь плоскости Пг, то размерность их пере-
сечения m^k~\-l — г. В частности,
—п (1)
для любых двух пересекающихся плоскостей из 21„.
4) Если плоскости П* и Hz проходят через точку А
в направлении подпространств L* и Lz соответственно и
если Lk содержится в Lz, то плоскость Щ содержится в пло-
скости IIZ. Если при этом k = I, то II* совпадает с Hz (также
и L* совпадает с Lz).
2. Параллельные плоскости. Пусть теперь пло-
скость II* определяется точкой А и подпространством Lk,
а плоскость Hz — точкой В и подпространством Lz. Будем
считать, что l^k.
Определение. Плоскость П* параллельна плоскости Hz,
если Lkc^Li.
Позволим себе также говорить, что в этом случае пло-
скость Hz параллельна плоскости П*.
102
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
(ГЛ (И
Замечание 1. Согласно этому определению включение
Щ ст Пг является частным случаем параллельности.
Замечание 2. Если Щ параллельна П/, причем k — l,
то Ц совпадает с Lz.
Замечание 3. Легко убедиться, что при « = 3 частные
случаи k = l=\, k — l—2 и k= 1, I— 2 согласуются
с понятием параллельности прямых и плоскостей, известным
из элементарной геометрии (рис. 14).
Пусть в произвольной аффинной системе координат две
плоскости П и П' одинаковой размерности заданы
Рис. 14.
системами линейных уравнений. Пользуясь определением парал-
лельности, нетрудно установить следующее утверждение.
Для того чтобы П и II' были параллельны, необходимо
и достаточно, чтобы соответствующие однородные си-
стемы уравнений были эквивалентны.
В частности, две гиперплоскости параллельны тогда и
только тогда, когда в одних и тех же координатах они
задаются уравнениями
TZjjVi + ... 4- апхп-\- Ь = 0
и
atXi 4~ • • • 4“ апхп 4" Ь' — О
(2)
(2')
с пропорциональными коэффициентами при переменных:
£1 ап
а'1~ а'п
Для совпадения гиперплоскостей (2) и (2') необходимо и
достаточно, чтобы были пропорциональны все коэффициенты
§ 7]
ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ
103
их уравнений:
— = ____________________
а;-"- Ь-п-
Теорема 1. Пусть в аффинном пространстве
даны плоскость Щ и точка В. Тогда существует един-
ственная плоскость Щ размерности k, проходящая через
точку В параллельно П/г. Если В £ Щ, то Щ совпадает
с П/г; если точка В расположена вне ПА, то плоскости Щ
и К* не пересекаются.
Доказательство настолько подготовлено предыду-
щим, что не требует изложения.
3. Скрещивающиеся плоскости.
Определение. Две плоскости называются скрещиваю-
щимися, если они не пересекаются и не параллельны.
Хорошо известно, что в трехмерном пространстве §[3 две
прямые линии, то есть одномерные плоскости, могут скрещи-
ваться, тогда как прямая линия и двумерная плоскость в
скрещиваться не могут. С повышением размерности простран-
ства оно становится более просторным, в результате чего
появляется возможность строить в нем скрещивающиеся пло-
скости разных размерностей, а не только одномерные. Ниже
сформулирована теорема 2, содержание которой можно рас-
сматривать как общий прием построения скрещивающихся
плоскостей. Именно, пусть в аффинном пространстве дана
ПЛОСКОСТЬ Пг (/<«). ВоЗЬМеМ ПРОИЗВОЛЬНУЮ ПЛОСКОСТЬ life
так, чтобы ПА и Пг не были параллельны и пересекались;
плоскость, по которой они пересекаются, обозначим через Пт.
Пусть Пг — плоскость наименьшей размерности, содержа-
щая Щ и Пг. Мы знаем, что r = k-\-l—т.
Теорема 2. Если k-\-l — т<^ п, то всякая k-мерная
плоскость, которая параллельна Пй и не лежит в Пг,
скрещивается с IIZ.
Следствие. Если целые числа k, I, т, п удовлетво-
ряют неравенствам
Osg т k, 0^т<^1, k-ф-1 — т<^п,
то в найдутся скрещивающиеся плоскости П* и IIZ
с направляющими подпространствами и L{, пересечение
которых Lm — Lk [] Lz имеет размерность т.
104
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
[ГЛ. ПГ
Доказательство теоремы 2. Так как r—k-\-
—т<^п, то плоскость Пг не исчерпывает собой всего
пространства 81„. Это позволяет взять (с большим произволом)
точку С, не лежащую в Пг. Обозначим через П* плоскость
размерности k, проходящую через точку С параллельно П*.
Ясно, что И* не содержится в Пг и что, выбирая по-разному
точку С, мы можем получить любую A-мерную плоскость,
удовлетворяющую условию теоремы. (См. рис. 15, на кото-
ром А = Z== 2, г = 3, п = 4, и трехмерные плоскости условно
Рис. 15.
изображены в виде параллелепипедов.) Докажем, что пло-
скости Пг и И* скрещиваются. Заметим, что плоскость П*
не параллельна П/, так как в противном случае или LkczLi
или Lt az Lk, что противоречит условию расположения пло-
скостей И* и Пг.
Теперь докажем, что Щ и Пг не пересекаются. Проведем
через точку С вспомогательную r-мерную плоскость И',
параллельную Пг. Тогда ЩсгП', и поэтому Щ не может
пересечь Пг, ибо в противном случае точка их пересечения
принадлежала бы параллельным плоскостям Пг и Щ. Следо-
вательно, И* скрещивается с Пг. Теорема 2 доказана.
Пусть в «-мерном аффинном пространстве даны скре-
щивающиеся плоскости life и Пг с направляющими подпро-
странствами I* и Lb причем Lk Q Ll = Lm, A—|-Z— т<^п.
Теорема 3. Существует единственная плоскость Пг+1
размерности r-(-l=(A-J-Z—т)-]~ 1, содержащая пло-
скости Пй и II/.
§ 7]
ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ
105
Доказательство. Выберем произвольную точку А С Щ
и зафиксируем произвольную точку В £ Пг; обозначим через
L(AB) линейную оболочку вектора АВ (рис. 16). Допустим,
что существует какая-то плоскость П, содержащая Пk и Пг;
пусть L — ее направляющее подпространство. Очевидно, что L
должно содержать Lfc, Lt и L (АВ), а следовательно, и сумму
этих подпространств. Обозначим эту сумму через Lry\.
Lr^i — Lk-\- Ll-\- L (AB) cz L.
Обратно, если L — любое подпространство, включаю-
щее Lr+l, то плоскость П, проходящая через точку А в на-
правлении L, будет содержать Щ и Пг. В самом деле, так
Рис. 16.
как А £ П и Lk cz L, то Щ cz П; так как Л ( П и АВ £ L,
то В СП, так как В £ П и Lt cJL, то Пг cz П.
Мы получим среди всех плоскостей П искомую плоскость
Пг+1 минимальной размерности г -ф- 1 в том единственном
случае, когда в качестве L берется Lr+1. Подсчитаем г -ф- 1. С этой
целью рассмотрим L'—Lk-\-Li и обозначим размерность L'
черёз р. По теореме 3 из § 14 гл. I имеем p = k-]-l— т.
Ниже мы покажем, что Lr+1 = L' -ф- L (АВ) ерь прямая сумма;
поэтому размерность Lr+\ равна р-1-1, то есть (гД-1) =
— (k -ф-1 — т) -ф- 1.
Итак, нужно установить, что Lr+1 = L' ф L (АВ). Для
этого достаточно показать, что вектор АВ не принадлежит
подпространству L'. Предположим противное. Пусть АВ £ L'.
Тогда по определению суммы подпространств существуют
106 СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ (ГЛ. ПГ
'векторы х, у такие, что
х € Ь*, у С Llt АВ = х-]-у. (3)
, По первой аксиоме аффинного пространства найдется точка С
1 такая, что АС=х, причем С С Щ- По второй аксиоме аффин-
ного пространства
I1 x4-Cfi — АССВ = АВ. (4)
Учитывая (3), (4), находим, что
BC=^-yeLt, (5)
так что С £ Uz. Получается, что плоскости Щ и П, имеют
общую точку С, но это невозможно, поскольку плоскости
Щ и Пг скрещиваются. Тем самым доказательство теоремы 3
! завершено.
Замечание. Рис. 16 лишь частично иллюстрирует тео-
1 рему 3. Например, если размерности Щ и Пг больше т и
различны между собой, m^l, T[r+l^IL^^[n, то, как не-
трудно подсчитать, п 7; полностью нарисовать такую ситуа-
цию невозможно. Однако мы и ниже часто будем поль-
1 зоваться рисунками, изображающими фигуры в пространствах
малых размерностей (п=2, 3, иногда л = 4) для иллюстра-
ции определений и рассуждений, относящихся к любым «-мер-
ным пространствам.
4. Проведенные выше рассуждения показывают, что плос-
кости Щ и Hz, о которых идет речь в теореме 3, не содер-
жатся ни в какой плоскости меньшей размерности, чем г —f- 1.
Поэтому справедлива также
Теорема 4. Если скрещивающиеся плоскости Hft и Hz
лежат в плоскости П6, то
s^(k-\-l — /«)-]-1. (6)
(Здесь, как и выше, т — размерность пересечения LfeQLz.)
Следствие. Если в имеются скрещивающиеся
плоскости П/( и IIZ положительных размерностей, то
k^n — Ч, 1^п — Ч. (7)
Неравенства (7) следуют из соотношения (6) при s = «,
так как для скрещивающихся плоскостей k — m^l, I — m^l.
Частный случай. Гиперплоскость не может скрещи-
ваться с какой-либо плоскостью положительной размерности.
§ 7] ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ 107
5. Сохраняя обозначения предыдущего пункта, сформули-
руем достаточное условие пересечения двух плоскостей.
Теорема 5. Если в даны плоскости П/г и Пг такие,
что
k -ф-1 — т^п, (8)
где т—размерность пересечения Lm направляющих под-
пространств Lk и L[, то IIft и Пг пересекаются.
Доказательство. Исключая тривиальный случай, когда
какая-нибудь из данных плоскостей совпадает со всем про-
странством, имеем
k < п, 1<^п. (9)
В расположении двух данных плоскостей могут быть лишь
три возможности:
либо IIft параллельна IIZ,
либо плоскости IIft и Пг скрещиваются,
либо они пересекаются.
Если Щ параллельна Пг, то для размерности т пересече-
ния соответствующих им подпространств Lk и Lz имеем
/и = min (Л, /) (10)
и соотношения (9) и (10) противоречат неравенству (8). Если ПЛ и
Пг скрещиваются, то соблюдается неравенство (6) при s = п, что
тоже противоречит условию (8). Остается предположить, что
Щ и Пг пересекаются. Теорема 5 доказана.
Замечание. Нетрудно доказать, что в условиях тео-
ремы 5 фактически соблюдается равенство k-\-l — щ = п.
Однако в вычислениях оценочного характера легче проверить
неравенство, чем равенство, поэтому достаточное условие
пересечения плоскостей мы сформулировали в виде неравен-
ства (8).
6- Укажем алгебраическую интерпретацию теоремы о пере-
сечении плоскостей.
Пусть даны две неоднородные порознь совместные системы
линейных уравнений, ранги которых равны rt и г2. Объеди-
ним эти две системы, то есть будем рассматривать совместно
все входящие в них уравнения. Для такой «объединенной»
системы составим соответствующую ей однородную систему
К обозначим ранг последней через г0.
108
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ
ГГЛ. ПТ
Если ,по «объединенная-» неоднородная
система уравнений совместна.
В самом деле, если данные системы уравнений определяют
плоскости Щ и Пг, то однородная система, соответствующая
объединению данных систем, определяет Lm — Lk[\Lt. Соот-
ветственно имеем: k = n— гь 1—п — гг, т—п — г0. Таким
образом, k -ф-1 — т — п-\-гй — (н -ф- г2) 2= п, и, следовательно,
плоскости Щ и Пг пересекаются. А это и означает совмест-
ность объединенной системы.
В качестве упражнения рекомендуем читателю доказать
сформулированное в этом пункте утверждение чисто алгеб-
раически, опираясь не на теорему 5, а на теорему Кроне-
кера — Капелли, и проверить попутно, что из неравенства
Л-фг^Го на самом деле следует равенство П га =/"о-
§ 8. Системы линейных неравенств и выпуклые
многогранники
1. В этом параграфе мы будем рассматривать действитель-
ное «-мерное аффинное пространство ?ГЯ, считая, что в нем
дана аффинная система координат.
2. Пусть через некоторую точку С имеющую коор-
динаты (х?, ... , Хп), проведена прямая в направлении век-
тора I, координаты которого обозначим {4.../„}. Согласно
п. 6 §«3 эту прямую можно задать параметрическими уравне-
ниями
Xt~Xi 1=1, (1)
— оо -ф- °°-
Пусть на прямой (1) выбраны какие-нибудь точки А и В.
Соответствующие им значения параметра т обозначим t, и та.
Предположим, что 'ti<T'c2.
Определение. Множество точек прямой, удовлетво-
ряющих неравенствам
Ti t t2,
называется отрезком АВ.
3. Если точка А имеет координаты (аь ... , ап), точка В
имеет координаты (bt, ... , &„), то в качестве направляющего
вектора прямой можно взять вектор 1= АВ. Тогда — а,-,
§ 8]
ВЫПУКЛЫЕ МНОГОГРАННИКИ
109
и для текущей точки прямой имеем
Xi = 04 + {bi — о,) т = (1 — t) at -ф-
причем т = 0 в точке А, х = 1 в точке В, так что отрезок АВ
задается теперь неравенствами 0 sg t sg 1. Положим 1 — t = а,
т = р. Тогда для точек отрезка АВ и только для них имеем
Xi=a.Oi -j-ffc,-, Z=l, ... , п, (2)
а 0, р 0, а р = 1.
Точка, в которой a = p = i, называется серединой от-
резка АВ.
4. Определение. Множество точек действительного
аффинного пространства называется выпуклым, если вместе
с каждыми двумя своими точками А, В оно содержит отре-
зок АВ.
Простейшими примерами выпуклых множеств могут слу-
жить: отрезок, плоскость любой размерности, все простран-
ство 31„.
Множество, состоящее из одной точки, п пустое множе-
ство также считаются выпуклыми.
Непосредственно из определения следует, что пересечение
любой совокупности выпуклых множеств само является выпук-
лым множеством. В самом деле, если точки А, В принадлежат
пересечению некоторой совокупности выпуклых множеств, то
отрезок АВ принадлежит каждому из этих множеств, а зна-
чит, и их пересечению.
5. Пусть в пространстве дана произвольная гипер-
плоскость
AjXj -ф- ... -ф- Апхп -ф- С=0. (3)
Гиперплоскость (3) разбивает пространство на две части, назы-
ваемые открытыми полупространствами. Их точки характе-
ризуются неравенствами
2 AiXi + С<0 и £ AiXi + С> 0 (4)
соответственно. Присоединяя к открытому полупространству
гиперплоскость (3), мы получим так называемое замкнутое
полупространство. Одно из них состоит из точек, координаты
но
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
(ГЛ. III
которых удовлетворяют неравенству
£А*/ + С<0. (5)
Другое:
2А^4-С^0. (6)
6. Существенно, что рассматриваемое пространство яв-
ляется действительным. В комплексном случае никакая гипер-
плоскость не разделяет пространства, подобно тому как одна
прямая не разделяет трехмерного действительного простран-
ства. Подробнее это означает, что если точки А и В в ком-
плексном пространстве не принадлежат какой-либо гипер-
плоскости, то их можно соединить линией, не пересекающей
этой гиперплоскости. Напротив, в действительном простран-
стве, если точки А и В принадлежат двум разным открытым
полупространствам (4), то любая кривая, соединяющая А и В,
пересекает гиперплоскость (3). Доказательство опускаем.
7. Теорема 1. Каждое полупространство является
выпуклым множеством.
Доказательство проведем, например, для полупространства
(5). Пусть точки А и В принадлежат этому полупространству.
Тогда
и для произвольной точки X отрезка АВ, учитывая (2), полу-
чаем
2 A,xt + С= Ai (aai + С(а-|- ₽) =
=а (S А,<И + С) + ₽ (£ Aibi + С) < 0.
Таким образом, точка X принадлежит полупространству (5).
Но точка X на отрезке АВ взята произвольно, значит, весь
отрезок АВ принадлежит полупространству (5), что и требо-
валось установить.
8. Определение. Пересечение конечного числа полу-
пространств (если оно не пусто) называется выпуклым много-
гранником.
Мы ограничимся рассмотрением многогранников, образо-
ванных пересечением замкнутых полупространств.
С наглядной точки зрения выпуклый многогранник пред-
ставляет собой кусок пространства, высеченный несколькими
§ 81
ВЫПУКЛЫЕ МНОГОГРАННИКИ
111
гиперплоскостями (при л = 3 см. рис. 17). Этот кусок может
простираться в бесконечность
Рис. 17.
(рис. 18). Может случиться
также, что многогранник целиком содержится в некоторой
A-мерной плоскости k<^n (см.
Если имеется т полу-
пространств, задаваемых не-
равенствами
п
У AtjXj 4~ Cj гС О,
у=1
i— 1, ... , т, (7)
то многограннику (пересече-
нию полупространств (7))
принадлежат те и только те
Рис. 19.
точки, координаты которых
удовлетворяют системе неравенств
АцХ14~ • • • 4~ Ainxn 4- Ci О,
(8)
С другой стороны, если система вида (8) совместна, то
она определяет многогранник, образованный пересечением
полупространств (7).
Замечание. Очевидно, что неравенство вида (6) можно
всегда заменить неравенством вида (7), умножив все его коэф-
фициенты на (—1).
9. Многогранник называется п-мерным параллелепипедом,
если в некоторой аффинной системе координат он задается
112
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
(ГЛ. пг
неравенствами вида
Xi
1=1, ... , П,
(9)
где Е/, t]i — какие-нибудь числа. В частности, говорят, что
параллелепипед построен на независимых векторах ех, , еп,
приложенных к точке О, если он задается неравенствами
0<х;«:1, 1 = 1, ... , п, (10)
в координатах с началом О и базисом еь ... , еп.
Неравенства (9) всегда можно привести к виду (10) с по-
мощью преобразования аффинных координат.
л-мерный параллелепипед при п=1 представляет собой
отрезок, при п=2— параллелограмм.
Часть параллелепипеда (10), расположенная в какой-нибудь
из гиперплоскостей Х; = 0 или х,-=1, сама является
(л— 1)-мерным параллелепипедом и называется (л— 1)-мерной
гранью параллелепипеда (10). Можно рассматривать грани этих
(л— 1)-мерных параллелепипедов, грани их граней й т. д. Таким
путем получается набор ^-мерных параллелепипедов разных
размерностей k, п— 1 l.Bce они называются ^-мерными
гранями исходного параллелепипеда (10). Одномерные грани
называются ребрами, их концы — вершинами параллелепи-
педа. Можно показать, что вершинами параллелепипеда (10)
являются те и только те точки, у которых каждая из коор-
динат равна либо нулю, либо единице.
Пример. В трехмерном евклидовом пространстве с задан-
ной декартовой прямоугольной системой координат (х, у, г)
рассмотрим прямоугольные параллелепипеды, ребра которых
параллельны координатным осям. Пусть (х0, _ув, д0) — коор-
динаты центра параллелепипеда, а, Ь, с — длины его ребер,
параллельных осям х, у, z соответственно. Обозначим через
множество тех параллелепипедов указанного вида, центры
которых лежат в кубе | х | I, |у | £, | z | sS В, длины ребер
не превышают tj. Каждому параллелепипеду из множества ох?
можно поставить в соответствие точку шестимерного аффин-
ного пространства с координатами (х0, у0, z0, а, Ь, с).
Тогда само множество можно рассматривать как шести-
мерный параллелепипед
— I Xq То
0 а Tj, 0 sC т),
§ 81
ВЫПУКЛЫЕ МНОГОГРАННИКИ
113
Заметим, что геометрические фигуры одного пространства
часто бывает удобно рассматривать как точки другого про-
странства.
10. Определение. Множество точек в аффинном про-
странстве называется ограниченным, если координаты
всех точек этого множества удовлетворяют неравенству
| Xi | М (2И 0 — некоторое число).
Пользуясь формулами § 2, нетрудно проверить, что это
определение не зависит от выбора аффинной системы коор-
динат. Множество ограничено в том и только в том случае,
если оно содержится в некотором параллелепипеде.
11. Определение. Выпуклой оболочкой множества
точек в аффинном пространстве 21 называется такое выпуклое
множество cz 81, которое содержится в любом выпуклом
множестве, содержащем
Иначе говоря, выпуклая оболочка представляет собой
пересечение всевозможных выпуклых множеств, содержащих
W &
Рис. 20.
данное множество говорят также, что является наи-
меньшим выпуклым множеством, содержащим (рис. 20).
Пример. Выпуклой оболочкой двух точек А, В является
отрезок АВ.
Можно доказать, что выпуклая оболочка любого конеч-
ного числа точек является ограниченным выпуклым много-
гранником и что всякий ограниченный выпуклый много-
гранник вида (8) представляет собой выпуклую оболочку
некоторой конечной системы точек, называемых его вер-
шинами.
114
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
[ГЛ. Ill
12. Покажем одно геометрическое построение, которое
бывает полезно в вопросах о выпуклых оболочках.
Пусть дано выпуклое множество и точка М. Построим
всевозможные отрезки вида MX, при X £ и множество
точек всех таких отрезков обозначим через 33 (рис. 21).
Справедлива
Теорема 2. Множество <33 является выпуклой обо-
лочкой объединения [J М.
Доказательство. Если М £ &3, то <33 = и утверж-
дение теоремы очевидно. Пусть точка М не принадлежит
множеству о/?. Любое выпуклое множество, содержащее
с/У U М, обязано содержать все <33, поэтому нам достаточно
проверить выпуклость <33. Пусть точки А, В £ <33. Тогда
точка А лежит на некотором отрезке MX, а точка В — на
некотором отрезке М У, где X, У С (рис. 22). Нам нужно
Рис. 21. Рис. 22.
установить, что отрезок АВ целиком содержится в множе-
стве <33. Пусть С—произвольная точка отрезка АВ. Тогда
(если исключить тривиальные случаи совпадения какой-либо из
точек А, В с какой-нибудь из точек М, X, У), будем иметь
МА = ХМХ, 0<Х<1,
МВ = 1>.МУ, 0<р<1;
MC=aMA + PMB, aSsO, р^О, а-|~р=1.
На отрезке ХУ найдется точка Z такая, что
MZ=~MX-y^My,
У 1 ’V
§ 81
ВЫПУКЛЫЕ МНОГОГРАННИКИ
115
где v = аХРн 0<А<Д. Точка Z содержится в множе-
стве оЛ вследствие выпуклости последнего. Легко видеть,
что
7MC=vMZ,
то есть, что точка С принадлежит отрезку MZrzeB. Тем
самым теорема 2 доказана.
13. Отметим простейшие свойства выпуклой оболочки.
1) Множество esZ совпадает со своей выпуклой оболочкой
тогда и только тогда, когда оно выпукло.
2) Если ДсзД, то выпуклая оболочка множества еД
содержится в выпуклой оболочке множества sAg.
Эти два свойства вытекают непосредственно из опре-
делений выпуклого множества и выпуклой оболочки.
3) Пусть — [J и пусть ©Д— выпуклая обо-
лочка множества оД. Тогда выпуклая оболочка мно-
жества совпадает с выпуклой оболочкой объединения
еД [J &Д.
Доказательство. Д ДсД IJ еД; поэтому
содержится в выпуклой оболочке множества &Д |J ©тД.
С другой стороны, — выпуклое множество, содержащее
еД и поэтому выпуклая оболочка объединения ©Д (J ©Д
содержится в orf. Таким образом, множество и выпуклая
оболочка множества ©Д (J ©Д совпадают.
14. Пусть в аффинном пространстве 9( даны точки Ао,
Д1,..., Ар с радиус-векторами а0, аъ...,ар соответственно.
Имеет место
Теорема 3. Выпуклая оболочка системы, точек А^,
Д,..., Ар задается формулой
X = Иойо -J- СЦЙ! -|- . . . -ф- О-рйр, (11)
где х—радиус-вектор произвольной точки из выпуклой обо-
лочки, числа а0,..., ар удовлетворяют условиям
а0-ф-а1-|~...-ф-ар=1, )
an5s0, af^O.....ap2s0. J '
Доказательство проведем посредством индукции по числу
точек. Для двух точек теорема 3 справедлива, так как при
Е=1 формулы (11) и (12) задают отрезок ДД.
116
СИСТЕМЫ УРАВНЕНИЙ И ПЛОСКОСТИ 1ГЛ. Ш
Пусть теорема 3 доказана для /> + 1 точек. Рассмотрим
точки Ао, ...,Ар, их выпуклую оболочку обозначим до-
бавим еще одну точку Ap+i с радиус-вектором аРл1' и построим
выпуклую оболочку а® объединения Q АрлХ. По свойству
3 п. 13 множество <33 совпадает с выпуклой оболочкой си-
стемы точек Ао, Аь ...» Ар, Ap+i. По теореме 2 множество <33
состоит из всевозможных отрезков АР^Х, где Л С
Радиус-вектор х точки X дается равенством (11). Обо-
вначим через у радиус-вектор произвольной точки отрезка
Ap+tX. Тогда
y = ax-j-pap+i, а + р=1, а 2^0, 02=0. (13)
Положим
P,= aaf, 1 = 0,.,., р\ ₽Р+1 = Р. (14)
Из формул (11) — (14) получаем
У = !+о + • • • + Ррйр 4- РР+1 ap+i, 1
₽о+...+₽р+₽Р+« = 1, ₽/^0, /=о,...( р+1. Г >
Таким образом, каждая точка множества <33 удовлетворяет
соотношениям (15). Обратно, подставив величины (14) в
формулы (15), получим для у выражение вида (13), где х
удовлетворяет соотношениям (11) и (12). Это значит, что
каждая точка, удовлетворяющая условиям (15), принадлежит
множеству <33. Теорема 3 доказана.
15. Определение. Выпуклая оболочка системы точек
Ло, Ai,..., Аг, находящихся в общем положении, называется
r-мерным симплексом с вершинами Ао, Аь ..., Аг.
Из теоремы 3 следует, что симплекс с вершинами АО,...,АГ
задается формулами (11) и (12) при р=г. При этом числа
ae,..., аг называются барицентрическими координатами точки
симплекса, имеющей радиус-вектор х.
Частные случаи:
нульмерный симплекс — одна точка;
одномерный симплекс — отрезок;
двумерный симплекс —треугольник;
трехмерный симплекс — треугольная пирамида.
Точка симплекса, в которой все барицентрические
динаты р авны между собой I a0 =... = a, = —гд),
коор-
назы-
вается центром симплекса.
§ 81
ВЫПУКЛЫЕ МНОГОГРАННИКИ
117
Пусть Тг — симплекс с вершинами Дь Аь .... А„ и пусть
Ai0, AiltAik — какие-нибудь из его вершин. Л-мерный
симплекс, который является выпуклой оболочкой вершин
At0, Ait, •••> ^tk’ называется k-мерной гранью симплекса Тг.
Одномерные грани, то есть отрезки, соединяющие вер-
шины, называются ребрами симплекса.
Две грани размерностей Лиг — (k 4~ 1)называются противо-
положными гранями симплекса Тг, если они не имеют общих
вершин. Рекомендуем читателю в качестве упражнений дока-
зать, что симплекс является выпуклой оболочкой пары про-
тивоположных граней, что противоположные грани симплекса
всегда располагаются в скрещивающихся плоскостях и что
отрезок, соединяющий центры противоположных граней, про-
ходит через центр симплекса.
16. Докажем, что л-мерный симплекс в л-мерном пространстве
представляет собой пересечение замкнутых подпространств
в числе л1.
Пусть Ао, At, ..., А„ — вершины симплекса Тп. Примем
До за начало координат, базис выберем следующим образом:
et = АоДь е2 == АдАз, ..., е„ = AqA„.
Тогда соотношения (11) и (12) (при р = п) в координатах
примут вид
-У1 — л j,
Ха = ctg,
-------- Cfn,
ао 4~ ai 4~ • • • И- ап — и
«о 0, at 2= 0, ..., ап О,
откуда следует, что
Xt 0, xs 0, ..., хп О,
Xi 4- хг 4-... 4“ хп 1.
(16)
(17)
С другой стороны, из (17) вытекает (16), если положить
az = Xt для I = 1,..., л, a0 = 1 — (xi 4" хъ 4" • • • Таким
образом, системы (16) и (17) эквивалентны и задают один и
тот же симплекс Тп (при л = 3 см. рис. 23).
118
СИСТЕМЫ УРАВНЕНИИ И ПЛОСКОСТИ
[ГЛ. ПГ
Система неравенств (17) показывает, пересечением каких
полупространств образован симплекс Тп.
17. Мы говорили выше, что многогранник можно пред-
ставлять себе как кусок пространства, «высеченный» несколь-
кими гиперплоскостями. Можно доказать, что если многогранник
ограничен, то число m этих
«высекающих» гиперплоско-
jK стей, то есть число полу-
/М пространств, пересечением
которых образован много-
гранник, обязательно превы-
шает размерность простран-
___*- ства.
Наименьшему возмож-
ному числу m = n-\- 1 cool-
ie ветствует симплекс.
Рис. 23. Отметим попутно, что
слово «симплекс» (simplex)
в переводе с латинского означает «простой».
18. Пусть задан многогранник системой неравенств вида
(8), и пусть дана функция
z — Со ~Ь • • • спхп, (18)
где Со, сь сп — числовые коэффициенты, х1г...,хп—
координаты точки из 9(„.
Задача о нахождении максимума и минимума функции (18)
на многограннике (8) имеет настолько важное значение для
приложений (в частности, в экономике), что исследование этой
задачи и разработка численных методов ее решения выдели-
лись в самостоятельную область, которая получила название
«линейного программирования».
С другой стороны, отметим, что геометрическая теория
выпуклых многогранников является существенным подспорьем
для алгебраической теории линейных неравенств.
ГЛАВА IV. ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ
И КВАДРАТИЧНЫЕ ФОРМЫ
§ 1. Линейные формы
1. Предположим, что в линейном пространстве L задана
числовая функция векторного аргумента, т. е. каждому век-
тору х поставлено в соответствие число а (х).
В этой главе мы будем понимать функцию а(х) обще-
принятым образом, именно будем считать ее инвариантной;
это значит, что значение а(х) не зависит от выбора базиса
в пространстве L.
Замечание. В некоторых дальнейших главах нам при-
дется отказаться от общепринятой точки зрения и рассмат-
ривать функции, численное значение которых определяется
для данного х £ L (или для данных х, у,... С Ь) при помо-
щи базиса в L и может от выбора базиса зависеть. Впрочем,
и в этом случае можно вернуться к общепринятой точке
зрения, расширив понятие области определения функции.
В самом деле, если через g обозначить множество всех ба-
зисов пространства L, то мы можем рассматривать функцию
а(х, е), где х £ L, е £ g. Мы получаем обычную (инвари-
антную) функцию а (х), если а (х, ё) = а (х) для всех е £ g.
Определение. Функция а (х) называется линейной,
если:
1) а (х -}-_у) = а (х)-|- а (у) для любых векторов х, у из L;
2) а (ах) — аа (х) для любого числа а и любого вектора
х из L.
В качестве значений функции а(х) будем брать действи-
тельные числа, если L действительно, и будем допускать
комплексные числа, если L комплексно.
2. Примеры. 1) Пусть х = х^еу-ф-...-|-хпеп, где
..., еп — базис в L. В каждом базисе еь ..., еп положим
a(x) = Xi. Тогда свойства 1) и 2) п. 1 для й(х) соблюдаются,
но а(х) не удовлетворяет определению линейной функции,
поскольку зависит от выбранного базиса.
120 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ ГГЛ. IV
2) Пусть L — пространство многочленов степени не выше
п. Пусть каждому многочлену х (т) из L ставится в соответ-
ствие число а (х) по формуле
*2
с(х)=$ x(y)dt, (1)
где т, sg т sg т2 — заданный отрезок числовой оси. Ясно, что
числовое значение а (х) не зависит от выбора базиса в L.
Условия 1) и 2) п. 1 соблюдены вследствие известных
свойств определенного интеграла. Таким образом, функция (1)
является линейной функцией в пространстве L.
Замечание. Линейную функцию (1) можно рассматри-
вать также в бесконечномерном пространстве непрерывных
функций, заданных на произвольно выбранном отрезке [т{, tjj
при условии, что tj Ti, та 5s т2, или в пространстве всех
интегрируемых на [т{, tj] функций (тоже бесконечномерном).
3. Пусть в пространстве L дана линейная функция а (х).
Считая, что пространство L является «-мерным, зафиксируем
в нем произвольный базис еъ ..., еп и разложим вектор х
по этому базису: х = XjCj -ф-... -ф- хпеп. Тогда линейная
функция запишется в виде
а (х) — a (Xici + • • • + хпе„) = xta (с,) -ф-... -ф- хпа (е„). (2)
Обозначим через значение функции а (х) на базисном
векторе е£
ап = а(еп). (3)
Если базис фиксирован, то с,- — вполне определенные числа.
Подставив величины (3) в равенство (2), получим выражение
функции а(х) в виде однородного многочлена первой степени
относительно координат вектора х:
а С*7) — Q1X1 -ф- flgX2 -ф-... -J- апхп. (4)
4. Однородные многочлены степени k принято называть
формами степени А; при k — 1 употребляют термин «линей-
ные формы», при А —2— термин «квадратичные формы».
Согласно формуле (4) всякая линейная функция а (х) в
«-мерном линейном пространстве является линейной формой
относительно координат ее аргумента х.
В связи с этим линейные функции обычно называют ли-
нейными формами.
§ И
ЛИНЕЙНЫЕ ФОРМЫ
121
5. В пространстве Ln перейдем к новому базису e't,., е'п
по формуле
о)
(см. § 5 гл. II). В новом базисе линейная форма будет иметь
новые коэффициенты а\:
а (х) = а\х[ -j- АЛ + • • • + а'пх'п.
Найдем a'i, пользуясь тем, что эти числа являются значени-
ями формы а(х) на новых базисных векторах:
а\ = а (4).
Пользуясь выражением (I) для векторов е'{ и линейно-
стью функции а(х), находим
й» — й Pijej) = ^ija (fj) =
Итак,
= (5)
Мы видим, что формула (5) совершенно аналогична формуле (I).
6. Докажем, что закон преобразования коэффициентов,
выраженный формулой (5), обеспечивает инвариантность
значений функции, которая в базисе еъ ..., еп задается форму-
лой (4).
С этой целью используем формулы (III) и (4) из § 5
гл. II. Положим в новом базисе
а W = S a'iXi = S Qik*k\ (6)
I ) К
Заметим, что в формуле (6) и в других аналогичных слу-
чаях индексы суммирования в скобках нужно обозначать
разными буквами, иначе возникнет путаница при раскрытии
скобок. Раскрываем скобки и делаем перегруппировку сла-
гаемых:
diXi -- У, 0-jXkPlfi.ik-- У) У) Pifl.lk'j------- У)
i i, j, k j, k i j, k
(7)
где — символ Кронекера. Если j ф k, то 8y* = 0, и та-
кие слагаемые учитывать не нужно. Если /=Л, то 8у-у= 1,
122 ЛИНЕЙНЫЕ, билинейные И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
так что cijxftjj = djXj. Поэтому
2 ajx^‘jk == У ajxг СО
j. k j
Сопоставляя формулы (6) — (8), окончательно имеем
a (*) = У a'ix'i = У ajXj,
i j
то есть численное значение величины а(х) при изменении
базиса сохраняется.
7. В линейном пространстве L (быть может, бесконечно-
мерном) рассмотрим всевозможные линейные формы, то есть
числовые линейные функции одного векторного аргумента.
Будем понимать сумму функций и произведение функции на
число в обычном (арифметическом) смысле. Имеет место
Теорема 1. Множество L* всех линейных функций,
заданных в пространстве L, представляет собой линейное
пространство.
Доказательство. Докажем прежде всего, что сум-
ма двух произвольных линейных функций а(х), Ь(х) также
является линейной функцией. Положим
с (х) = а (х) b (х).
Тогда
с (х+у) — а (-*+.У) + b (x+j)=[a (х) + а (у)] +
+ IP (-*) + ь О)] = [« (х) -ф- b (х)] 4- [а (у) b О)] = с (х) с(».
Кроме того,
с (ах) = а (ах) -J- Ь (ах) = аа (х) -ф- (х) = а [а (х) -J- b (х)] =
= ас (х).
Таким образом, линейность суммы доказана.
Покажем теперь, что если линейную функцию умножить
на произвольное число X, то получится линейная функция.
Пусть с (х) = Ха (х). Тогда
с (х 4-у)=Ха (х 4- у)—Ха (х) 4- Ха (у) = с (х) 4- с (у).
Далее
с (ах) = Ха (ах) = Хаа (х) — ас (х).
Тем самым показано, что Ха(х)—линейная функция. Итак,
если а(х), b(x) £ L*, то а(х)4~Ь(х) £ L* и Ха(х) £ L*
при любом X.
Нулевым элементом L* является (линейная) функция 6 (х),
равная нулю для любого вектора х.
ЛИНЕЙНЫЕ ФОРМЫ
123
§ И
Функция (— 1)* а(х) является противоположной для а(х).
Нетрудно проверить, что для L* выполняются все аксио-
мы линейного пространства, откуда и вытекает справедли-
вость теоремы 1.
8. Определение. Линейное пространство L* всех
линейных функций, определенных на L, называется сопря-
женным пространству L.
Замечание. Согласно определению линейной функции
в сопряженном пространстве допускается умножение на такие же
числа, как и в исходном; иначе говоря, если L — действительное,
то и L* — действительное, если L — комплексное, то и L* —
комплексное.
9. Теорема 2. Если линейное пространство п-мерно,
то сопряженное ему пространство также п-мерно.
Доказательство. Введем в L базис eit..., еп и раз-
ложим по нему произвольный вектор х из L:
х = Xj£?i х$е% -ф-... —|— хпеп.
Тогда произвольный вектор а из сопряженного пространства
L*, то есть линейная функция а(х), записывается в виде
а (х) = aiXi —j- а%х% —J-... —J- апхп
и однозначно определяется заданием набора коэффициентов
(tzi,..., а„). Этот набор можно рассматривать как вектор из
координатного пространства Кп. При сложении линейных
функций и умножении их на число соответственно складыва-
ются и умножаются на число их коэффициенты. Поэтому
в данном случае L* изоморфно координатному пространству
Кп. Теорема 2 доказана.
ДО. В заключение параграфа рассмотрим геометрический
смысл линейной формы. Для этого используем аффинное
пространство ?(„, считая векторы из Ъп радиус-векторами
точек из ?(„, отложенными из некоторой точки О. Будем счи-
тать, что значение функции а (х) в точке А равно ее зна-
чению на векторе х—ОА. Тем самым функция а(х) будет
определена в
Справедливы следующие утверждения:
1) Множество точек, в которых линейная функция а(х)
принимает постоянное значение, представляет собой гипер-
плоскость.
124 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
2) Всякая гиперплоскость представляет собой геометри-
ческое место точек, в которых некоторая линейная функция
сохраняет постоянное значение.
3) Гиперплоскости, соответствующие разным значениям
данной линейной функции а(х), параллельны.
4) Гиперплоскость, на которой а(х)=О, проходит через
начало координат.
Для доказательства этих фактов достаточно записать ра-
венство а(х) = с в координатах
aixi “Ь ачхз Ч- • • • апхп — с
и воспользоваться результатами §§ 6, 7 гл. III.
§ 2. Билинейные формы
1. Числовая функция а (х, у) двух векторных аргументов
х, у называется билинейной, если она линейна по каждому
аргументу, то есть
1) а(Х1 + х<ъУ}=а(хьу)-\-а(хъу),
а (ах, у) — аа (х, >);
2) а (х, yi +_у2) — а (х, _n) -J- а (х, у$,
а (х, ау) = аа (х, у).
Здесь х, у, хъ х8, уь у3—любые векторы пространства
L, а — произвольное число.
2. Пусть L — линейное «-мерное пространство, еь...
..., еп—базис в нем, и пусть аргументы билинейной функции
разложены по этому базису:
X == J] Xiei’ У ~
Тогда
a(x,y)=a(^ixlei, ^укек)='^>х{Ука (еь еД (1)
Введем обозначения:
O-ik ® (^Ь (2)
Тогда получим
a(x,j)= У, aikxtyk. (3)
i, fc=I
Формула (3) выражает функцию а(х,у) в координатах по
данному базису.
§ 2]
БИЛИНЕЙНЫЕ ФОРМЫ
125
Многочлен в правой части формулы (3) называется били-
нейной формой. Вместе с ним билинейной формой называют
и самую функцию а(х,у). Числа aitt называются коэффици-
ентами данной формы в базисе еь..., еп. В качестве аргу-
ментов х, у можно рассматривать векторы как действитель-
ного, так и комплексного линейного пространства. Соответ-
ственно говорят, что форма а(х,у) дана в действительном
или в комплексном пространстве. В последнем случае в ка-
честве значений формы а(х, у) допускают комплексные
числа; коэффициенты aik в этом случае также являются,
вообще говоря, комплексными числами.
3. Легко доказать, что множество всех билинейных форм,
заданных в линейном пространстве L, тоже образует линей-
ное пространство (если понимать сложение форм и умноже-
ние их на число в обычном арифметическом смысле; см. § 1,
где доказательство проведено для линейных форм).
4. В данном базисе еь..., еп рассмотрим одночленные
билинейные формы
У)=х.Ук- (4)
Из (2) и (3)
а (х, у) = У, aikIik (х, у). (5)
Если взять x = et, у — ет при любых фиксированных
I и т, то 11т=1, а все остальные формы (4) будут равны
нулю. Отсюда следует, что формы (4) независимы. Поэтому
они образуют базис в пространстве билинейных форм.
Формула (5) дает разложение билинейной формы (1) по
базису (4).
Базис (4) состоит из я2 элементов. Следовательно, про-
странство билинейных форм имеет размерность л2.
5. Билинейная форма а(х,у) называется симметричной,
если для любых х,у £ L
а (х, у)—а {у, х).
Билинейная форма а(х,у) называется кососимметричной,
если для любых х, у £ L
а(х,у)= — а (у, х).
В случае симметричной билинейной формы коэффициенты
симметричны: aik=aki (см. формулу (2)). В случае кососим-
метричной формы aik = —aki и, в частности, a;i~0. Как
(7)
126 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
симметричные, так и кососимметричные билинейные формы
образуют подпространства в пространстве всех билинейных
форм с аргументами из L. Чтобы найти размерности этих
подпространств, построим в них базисы.
Симметричную билинейную форму можно записать в виде
а (х, у) = У, aik (xtyk + xk jf) + У ацх{yt. (6)
i<Z.k i
Рассмотрим формы
= + при 1фк,
hi {х,у)=х1У1.
Билинейные формы (7) линейно независимы и симметричны,
а любая симметричная билинейная форма выражается через них
по формуле вида (6). Поэтому формы (7) составляют базис в
подпространстве всех симметричных билинейных форм. Количе-
ство элементов в базисе (7) равно С„-}-л = у п(п-\-1). Та-
кова Же и размерность подпространства симметричных форм.
Отсюда следует, что при любом выборе независимых сим-
метричных билинейных форм W\(x,y), Wjy(x,y) в числе
N = 1) произвольная симметричная форма может
быть представлена в виде
N
а(х,у)= У \wt(x,y),
i = \
где X,- — числовые коэффициенты.
Для кососимметричных билинейных форм имеем
а (х, у) = У aik (х^у» — xkyi),
i<k
и в качестве базиса можно взять формы
7 ik (х, у) — xtyk — xkyt.
Их общее число равно N=-^-п(п—1). Следовательно, при
любом выборе кососимметричных независимых форм wh...
.получаем для произвольной кососимметричной формы
БИЛИНЕЙНЫЕ ФОРМЫ
127
§ 21
a(x,j) представление
Лг
a(x,j) = ^iWi(x,y\
6. Теорема. Пространство билинейных форм является
прямой суммой подпространства симметричных и подпро-
странства кососимметричных билинейных форм.
Доказательство. Очевидно, что билинейная форма
является одновременно симметричной и кососимметричной
тогда и только тогда, когда она нулевая. Отсюда и из тео-
ремы 1 § 14 гл. I следует, что сумма рассматриваемых под-
пространств является прямой суммой.
С другой стороны, всякая билинейная форма а(х,у)
может быть представлена в виде суммы симметричной и косо-
симметричной форм, именно
а (х, у) — ~ (а (х, у) 4- а (у, х)) -f - у (а (х, у)—а (у, х)).
Следовательно, прямая сумма рассматриваемых подпространств
совпадает со всем пространством. Теорема доказана.
7. Пусть делается переход к новому базису:
4 = (8)
В новом базисе
x='£x'ie'i, у—^у^е'ц.
Вследствие инвариантности формы а(х,у) имеем
а (х, у) = J1, aikXi yk — У, a’^x'ty'k, (9)
где aik — новые коэффициенты. Разумеется, инвариантность
формы а(х,у) не означает инвариантности ее коэффициентов
(вообще говоря, а,:* ф aik). Найдем выражения коэффициен-
тов a'ik через старые alk. Воспользуемся тем, что значения
формы на базисных векторах совпадают с коэффициентами
формы:
aik=a{e'i, ek). (10)
Вместо новых базисных векторов e’i, ek подставим в (10) их
выражения (8):
a (ei, e'k) — а ( У У Pklet},
128 ЛИНЕЙНЫЕ. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ. [ГЛ. IV
Теперь, ввиду линейности формы а(х,у) по каждому из
аргументов, получаем
Р j jP kla /> ^z)*
Таким образом,
п
a'ik— У, ajiPijPki- 0)
Замечание. Выражения (1) можно получить иным спо-
собом, исходя из (9). Именно, так как, согласно § 5 гл. И,
Xj — У) PijXi, Уi У PMyk,
то из (9) имеем
У a-jiXjyi — У a-flP ijP kix'iy'k = У a'ikx'iy'k.
Отсюда снова находим (1). Вместе с тем видно, что не только
(I) следует из (9), но и (9) следует из (1). Таким образом,
инвариантность формы влечет за собой закон преобразова-
ния ее коэффициентов согласно равенствам (I); в свою оче-
редь преобразование коэффициентов по закону (I) гаранти-
рует инвариантность формы.
§ 3. Матрица билинейной формы
1. Пусть дана произвольная билинейная форма. Запишем
ее в развернутом виде:
а (х, у) = У aikXi yk ==
= ацХ1 У1 аыХ]у2 zzinXi_yn ~Ь
OviXsyi а^Х^у^ -|- ... а*пх%уп -|-
+ anixnyi + + аппхпуп.
Если выписать отсюда таблицу коэффициентов, то получится
квадратная матрица, которая называется матрицей билиней-
ной формы:
«11 ZZ12 ... ZZjn
л __ «21 аЧЛ . . • «2п
«П1 «п2 • • • апп
МАТРИЦА БИЛИНЕЙНОЙ ФОРМЫ
129
§ 3]
В данном базисе матрица билинейной формы полностью
ее определяет, так как дает все ее коэффициенты.
2. Допустим, что совершается переход к новому базису
e'i = ^p4ei-
В новом базисе форма а(х,у) имеет другую матрицу
Д' = |]а^Ц. Элементы a,:fc матрицы Д' выражаются форму-
лами (I) предыдущего параграфа. Преобразуем эти формулы
так, чтобы получить матричное соотношение, выражающее (I)
целиком. Для этого запишем (1) в виде
a«==£P>7(ayzPw) (1)
J. i
и введем величины
ajiPki* (a)
I
Вследствие (1) и (a)
ол = £Р(/> (₽)
i
Составим матрицу C = ||cyft||, считая, как обычно, что первый
индекс дает номер строчки, второй — номер столбца.
Соотношения (а) и ф) рассмотрим с точки зрения умно-
жения матриц. При изменении индекса I величина ау7 пробе-
гает строчку матрицы А, а величина Pki — строчку матрицы
Р. Таким образом, в (а) записано произведение строки на
строку. Чтобы превратить строку в столбец, достаточно
транспонировать матрицу. Соответственно в соотношении (а)
будем рассматривать второй множитель под знаком суммы
как элемент матрицы Р* (транспонированной матрицы Р).
Тогда получим произведение строки матрицы А на столбец
матрицы Р*. Иначе говоря, (а) эквивалентно матричному
равенству
С = ДР*. (ой)
Теперь рассмотрим формулу ф). Здесь сразу замечаем, что
справа имеем произведение строчки на столбец. Тем самым
из ф) следует
А' = РС. фО
Из (<xj) и фО получаем искомую формулу
Д'= РДР*. (2)
130 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Формула (2) выражает матрицу билинейной формы в новом
базисе через матрицу этой формы в старом базисе и матри-
цу Р, с помощью которой делается переход от старого
базиса к новому.
3. Выводы из формулы (2). Заметим, что Р и Р* —-
невырожденные матрицы. Отсюда и по теореме о ранге про-
изведения матриц (гл. II, § 4)
Rang 4' = Rang А. (3)
Определение. Рангом билинейной формы называется
ранг ее матрицы.
Вследствие равенства (3) ранг билинейной формы является
инвариантом относительно изменений базиса и тем самым
представляет собой величину, которая связана с самой фор-
мой, независимо от ее координатного представления. Несколько
позже (в § И) для ранга билинейной формы будет дано
геометрическое истолкование.
4. Рассмотрим определитель матрицы билинейной формы
в некотором базисе:
А = Det А.
В другом базисе Д' = Det А'. Из формулы (2) и теоремы
о перемножении определителей следует, что
Д' = A. (Det Pf. (4)
Таким образом, определитель матрицы билинейной формы не
является инвариантом, а изменяется при переходе к новому
базису по формуле (4).
5- Пусть даны какая-нибудь билинейная форма а (х, у) ==
— У aijxiyp У которой определитель Д ф 0, и произвольная
линейная форма b(x)='^ibixi. Тогда можно так выбрать у,
чтобы а(х,у) = Ь(х) для любого х £ L (при фиксирован-
ном у). Для этого достаточно найти (ji, ..., из системы
i /Уj —
определитель которой равен Д =4 0. Таким образом, одна
билинейная форма а(х,у) как бы содержит в себе всевоз-
можные линейные формы, заданные в L.
КВАДРАТИЧНЫЕ ФОРМЫ
131
§ 4]
§ 4. Квадратичные формы
1. Пусть билинейная форма а(х,у) является симметричной:
а (у, х) = а (х, у). Это равносильно тому, что в любом базисе
симметрична ее матрица: А* = А. В самом деле,
--а (pb а (^fe> ei)--aki-
Отождествим оба аргумента формы а(х,у). Тогда получим
а (х, х) = а (х, _у) при у — х.
Функция а(х,х) называется квадратичной формой, отве-
чающей данной симметричной билинейной форме а(х,у).
Исходная (симметричная) билинейная форма а(х,у) назы-
вается полярной для квадратичной формы а(х,х).
2. Докажем, что полярная билинейная форма однозначно
определяется своей квадратичной формой.
Пусть дана числовая функция /(х) векторного аргумента.
Предположим, что /(х) есть некоторая квадратичная форма,
т. е. /(х)=а(х, х), причем а(х,у) нам неизвестна. Чтобы
найти ее, рассмотрим /(x-j-j), где х, у — произвольные
векторы. Пользуясь свойствами билинейной формы и ее сим-
метричностью, имеем
/ (х+J) = а (* + У, х + J) = а (х, х) -J- а (х, у)
+ «Ux)+ a(j,j)=/(x)+ 2fl(x,j)+/(j)-
Отсюда получаем искомое выражение
a(x,j)=l[/(x+j)-/(x)-/O)]. (1)
3. Формулу (1) можно принять за определение квадра-
тичной формы. Именно можно сказать, что /(х) называется
квадратичной формой, если левая часть формулы (1) является
билинейной функцией.
Следует заметить, что определение квадратичной формы
не предусматривает наличия базиса; тем самым, оно приме-
нимо в бесконечномерных пространствах.
4. Пример. Пусть L — линейное пространство функций,
непрерывных на отрезке [0, 1].
Рассмотрим функцию
f(x)=\[x{f)Ydt,
о
аргумент которой х = х(/)£ L.
132 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Имеем
4 [/Х* + J)—f(x) = $ х (t)y (0 dt.
о
(2)
Нетрудно непосредственно проверить, что в правой части
равенства (2) стоит билинейная форма. Таким образом, f(x)
есть квадратичная форма в бесконечномерном пространстве L.
В дальнейшем (§ 10) мы увидим, что отсюда можно полу-
чить важные выводы, например доказывать интегральные
неравенства, опираясь на чисто алгебраические теоремы.
5. Вернемся к «-мерному случаю. В «-мерном простран-
стве рассмотрим квадратичную форму и запишем ее выраже-
ние через координаты аргументов.
Пусть а(х,у)=а(у,х), х=у. Тогда
f(x}=a (х, х)=£ aikXiXk =
= anXiXjai2XiX2-j- ... -j- OinXiX„-j-
—|— «31X3X1 —j— «33X3X3 ~... “f* ^2дХзХл —|—
4~ aitlxnxl 4~ aniXnX^, ~b • • • 4“ annXnXn,
(3)
Если принять во внимание симметричность коэффициен-
тов, то члены суммы (3), кроме диагональных, естественно
объединяются в пары. При этом получается часто употреб-
ляемая запись квадратичной формы в виде
f (х) = «их) 2 «13X1X3 -J- 2«13Х1Х3 -J-... -j- 2«i„x1x„ -|-
4~ «33X2 4“ 2 «33X3X3 2а2пХзХп
4-........................4- (4)
4- аппх‘п-
Заметим, что в первой строчке формулы (4) выписаны все
члены, содержащие хь
6. Матрицей квадратичной формы называется матрица ее
полярной билинейной формы
«11 ... «1П
А=
«П1 ... Опп
§ 41
КВАДРАТИЧНЫЕ ФОРМЫ
133
Из этого определения сразу следует, что матрица квадратич-
ной формы преобразуется по формуле
А' — РАР*,
которая доказана в предыдущем параграфе.
7. Ранг квадратичной формы по определению равен рангу
ее матрицы: г — Rang А.
8. Квадратичные формы имеют важные геометрические
приложения, которые рассматриваются ниже, в гл. VIII и XI.
Сейчас мы не будем связывать с квадратичными формами
какие-либо геометрические объекты и будем рассматривать
их свойства с алгебраической точки зрения.
9. Если в некотором базисе окажется, что все коэффи-
циенты aifc = 0 при i k, то говорят, что в этом базисе
квадратичная форма имеет канонический вид
/(х) — ацх1 -}- ai2xi -j-... -J- аппх„.
Для того чтобы получить канонический вид квадратич-
ной формы, базис нужно выбрать специально. В произволь-
ном базисе квадратичная форма будет полной, то есть будет,
вообще говоря, иметь все члены.
Приведение квадратичной формы к каноническому виду
является важной задачей как в теоретических вопросах, так
н в прикладной математике. Ниже будут даны два метода
приведения квадратичной формы к каноническому виду: ме-
тод Лагранжа и метод Якоби.
10. Если форма приведена к каноническому виду, то ее
матрица становится диагональной:
«11
О
А —
«22
(5)
О
«пп
Так как ранг квадратичной формы есть инвариант, то он
равен числу отличных от нуля диагональных элементов мат-
рицы (5).
134 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Если ранг — г п, то после надлежащего изменения но-
меров матрицу (5) можно записать в виде
а”... О
а” 0
О "• о
11. Замечание. Если привести к каноническому виду
квадратичную форму, то одновременно приведется к диаго-
нальному виду и ее билинейная форма
а (хг У) = ЙЦ-*лУ1 “Ь аппХ„уп.
§ 5. Приведение квадратичной формы к каноническому
виду методом Лагранжа
1. Пусть дана квадратичная форма f (х) — а (х,х). Вслед-
ствие формулы (4) § 4 мы можем в любом базисе записать
f(x) в виде
/(х) = ацх1 Ч- 2alix-lxi-\-...-]- 2ainx1xn-\- g(xs,..., хп), (1)
где g—квадратичная форма, не включающая хи
Запись вида (1) позволяет доказать возможность приве-
дения квадратичной формы к каноническому виду по индук-
ции.
Теорема. Каждую квадратичную форму с помощью
невырожденного линейного преобразования можно привести
к каноническому виду.
Замечание. Здесь речь идет о преобразовании пере-
менных, именно числовых аргументов хь..., хп многочлена
(1). Но теорему можно понимать и геометрически, поскольку
всякое невырожденное преобразование переменных можно
рассматривать как преобразование координат при переходе
к новому базису (см. гл. II).
2. Доказательство теоремы. Квадратичная форма
от одного переменного всегда имеет канонический вид anx'i.
Примем как предположение индукции, что любую квадра-
тичную форму от (п—1) числовых аргументов можно при-
вести к каноническому виду невырожденным линейным пре-
образованием (п—1) переменных.
МЕТОД ЛАГРАНЖА
135
§ 5]
Рассмотрим произвольную квадратичную форму /(х) от
и числовых аргументов:
/(х) = 2 aijXiXj'
Пользуясь предположением индукции, докажем, что ее можно
привести к каноническому виду невырожденным линейным
преобразованием п переменных. Возможны два случая:
1) Первый случай. В квадр'атичной форме /(х) хотя
бы один из коэффициентов ait при квадратах переменных
отличен от нуля. Не нарушая общности, можем считать, что
именно По данным коэффициентам формы /(х) со-
ставим следующее линейное преобразование:
У1---ЯцХ1 С1ПХП
~~ Xg,
(2)
Матрицу этого преобразования обозначим Q:
«11 «12 • • • «1п
О 1 ... О
О 0 ... 1
Преобразование (2) невырождено, так как Det Q=ап Q.
Отметим также, что невырожденность преобразования (2) вы-
текает из его обратимости, которая в свою очередь сразу
видна из формул (2).
Возведем в квадрат выражение и разделим на аи ф 0:
-—yl = -— (ацХ1 «1«х2 + «1Пхп)*=
“11 “11
= йцХ] -j— 2GigXjXg -1~... -j- 2aJnXjXn -{- (х2,..., xn),
где <р— некоторая квадратичная форма аргументов х2, ...,х„,
т. е. <р не включает xt. Введем еще одну квадратичную фор-
му тех же аргументов х2,..., хя, положив
(х2,..., х„) = g(x2,..., х„) — (х2..х„),
136 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
где g(xs,..., хп) дана записью /(х) в виде (1). Тогда по-
лучим
/(*) = ~У1 + Ф (*& • • •. -*-»)>
«11
или, что то же самое,
/С*Э=У1 + Ф (№ • • • > Уп)-
аи
По предположению индукции существует такое невырож-
денное преобразование переменных в числе п—1
— .S k = 2,...,n, (3)
1=2
которое приводит к каноническому виду форму ф:
ф0’9>.... Уп) = +... + bnnz*n.
Дополним преобразование (3) так, чтобы в нем участво-
вали все п переменных. Именно, положим
zi =Уъ
Zi== 0-j
zn~ Ип^Уз + • • • + ЯппУп- ,
Преобразуем переменные хь..., хп в переменные уь...
..., уп по формулам (2), а затем переменные yt,..., уп преобра-
зуем по формулам (4). В результате получим преобразование
переменных хьхп в переменные zt,...,zn, которое при-
водит исходную квадратичную форму к каноническому виду
f (х) = -J- ZSl + Ь^2 -г • • • + bnnZn-
а11
Последнее преобразование является невырожденным, так как
представляет собой произведение невырожденных преобразо-
ваний (2) и (4).
2) Второй случай. В квадратичной форме /(х) все
диагональные коэффициенты аи равны нулю. Тогда преды-
дущие рассуждения неприменимы. Но какой-нибудь из коэф-
фициентов отличен от нуля; пусть это будет Тогда квад-
ратичная форма имеет вид
/(х) = 2olsXiXg -j-... (5)
§ 6]
НОРМАЛЬНЫЙ ВИД КВАДРАТИЧНОЙ ФОРМЫ
137
Сделаем преобразование:
Xj Xf —]— Х2,
Х2 = Xj — X2,
X3 = XS,
(6)
Преобразование (6) обратимо и, следовательно, является не-
вырожденным.
Подставив величины (6) в квадратичную форму (5), по-
лучим
/(х) = 2а12х| — 2а12х§ (7)
Слагаемое 2а12Х| не может исчезнуть при приведении по-
добных членов, так как все члены квадратичной формы, ко-
торые не выписаны в выражении (5), не содержат произве-
дения XjX8 и не могут в результате преобразования (6) дать
величину xf.
Далее квадратичную форму (7) можно невырожденным
преобразованием привести к каноническому виду, поскольку
дело свелось к первому случаю: коэффициент при х? отличен
от нуля.
Тем самым рассуждения индукции завершены и теорема
доказана.
3. 3 а м е ч а н и е. Из доказательства видно, что квадра-
тичную форму с действительными коэффициентами можно
привести к каноническому виду с помощью невырожденного
линейного преобразования, которое также имеет действитель-
ные коэффициенты.
§ 6. Нормальный вид квадратичной формы
1. Пусть квадратичная форма /(х) приведена к канониче-
скому виду
Г
f<x) = ^laiixsi, (1)
i=l
где а11г..., a,r^0, г — ранг/(х).
2. Допустим, что мы имеем дело с комплексным прост-
ранством и разрешаем себе пользоваться линейными
138 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
преобразованиями с комплексными коэффициентами. Положим
У1 = УацХь если i^r, 1
у{=хь если i^>r. )
Из (1) и (2) получим
(3)
считая, что уп уг+1,..., уп— новые координаты век-
тора х. Выражение (3) называется нормальным видом квад-
ратичной формы /(х). Заметив, что преобразование (2) невы-
рождено, сделаем вывод:
В комплексном пространстве всякую квадратичную
форму можно с помощью невырожденного линейного пре-
образования привести к нормальному виду (3).
3. Ограничимся теперь действительными пространствами
и действительными линейными преобразованиями. Учитывая,
что среди коэффициентов ац могут быть отрицательные, по-
ложим
yi = 'K[aiilxi, если i^r, 1 <4
yi = xh если 1^>г. )
Если первые k коэффициентов ац положительны, а осталь-
ные отрицательны, то из (1) и (4) мы получим
/(х) —у I + >.. -j-yl — >|+i —...— у}. (5)
Выражение (5) также называется нормальным видом формы
f[x). Таким образом, в действительном пространстве с по-
мощью невырожденных действительных линейных преобра-
зований всякую квадратичную форму можно привести к
нормальному виду (5).
4. В следующем параграфе мы докажем, что в действи-
тельном пространстве число положительных и число отрица-
тельных членов в формуле (5) не зависит от того, каким
именно (действительным) преобразованием квадратичная фор-
ма приведена к нормальному виду.
§ 7. Закон инерции квадратичных форм
1. Пусть в действительном пространстве дана квадратич-
ная форма ранга г:
f[x)=^iaihxixte,
§ 7] ЗАКОН ИНЕРЦИИ КВАДРАТИЧНЫХ ФОРМ 139
где {xj — координаты вектора х в некотором базисе ei,...
• • • j crt.
Пусть ё1,ёп— какой-нибудь базис, в котором /(х)
имеет нормальный вид:
+ (1)
Здесь {_>',}— координаты вектора х в базисе ёь..., ёп.
2. Число положительных и число отрицательных членов в
формуле (1) называется соответственно положительным и от-
рицательным индексом формы; разность между положитель-
ным и отрицательным индексом называется ее сигнатурой.
3. Теорема (закон инерции квадратичных форм). Поло-
жительный и отрицательный индексы являются инвари-
антами квадратичной формы, то есть не зависят от
выбора базиса, в котором она имеет нормальный вид.
Доказательство. Пусть имеется еще один базис
В1>...,ёп, в котором форма f(x) имеет нормальный вид:
f(x)=z\-\-...-\-z*m — ?Д+1—— z2r, (2)
где {zj— координаты х в базисе ёь ..., ёп. Нужно доказать,
что
k — m.
Предположим, что k У т, например k т. Рассмотрим
формулы преобразования координат
Zi^Quyp (3)
Заметим, что матрица Q коэффициентов Qtj невырождена.
Подставим выражения (3) в формулу (2). Мы должны
получить выражение (1); таким образом, имеем тождество
г1 Ч~ • • • Ч~ — ?т+1—•..—zf=yl ~j~yk —J'ft+l—...—Уг
(4)
т. е. равенство, верное при любых Ji,..., уп уГлъ ..., ут
считая, что Zi, ..., zn выражены через уь ..., уп с по-
мощью (3).
Составим вспомогательную однородную систему уравнений
Qu J’i Ч" • • • Ч" Qia-Ул = О»
О-ггйУ\ Ч~ • • • Ч- О-ткУк — 0.
(5)
140 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
В системе (5) число неизвестных больше числа уравнений
вследствие предположения k т. Поэтому система (5) имеет
нетривиальное решение .,yk. Подставим это решение в
тождество (4), взяв дополнительно
уь^ = ...=уг=угл1==...==уп = Ъ. (6)
В результате, учитывая (3), (5) и (6), получим
У1~^-• •---------— ?т+1— ••• — (7)
Однако это невозможно, так как левая часть (7) строго по-
ложительна, тогда как правая либо отрицательна, либо равна
нулю. Значит, k не может быть больше т. Совершенно
аналогично устанавливается, что т не может быть больше,
чем k. Поэтому k = m. Теорема доказана.
§ 8. Приведение квадратичной формы к каноническому
виду методом Якоби
1. Пусть дана квадратичная форма/(х), которая расписана
в координатах в некотором базисе et,..., е„.
f(x) — а (х, х) — V aikXiXk.
Как известно,
®ik--------------------------&
Составим матрицу квадратичной формы /(х):
Оц «12 013 • • • й1л
^21 аа °23 • • •
A o3i о32 с33 ... а3п •
&п1 • • • ^пп
Рассмотрим так называемые главные миноры матрицы А:
Д ___п А _______I Он 012
а1 — Оц, а2 —
Ogj «2'2
Oil 012 013
^3— Ogi 022 Os3 A„ = DetA. (1)
031 О32 Озз
МЕТОД ЯКОБИ
141
§ 8]
Кроме того, для удобства записи дальнейших формул введем
величину До, считая До=1.
Метод Якоби проходит в предположении, что все главные
миноры матрицы А отличны от нуля:
Д, 7^ О, Д2 Ф 0, ..., Дп Ф 0. (2)
При этих предположениях ищется специальный новый
базис такой, чтобы
8j = £>11£’1,
= Рц 8] Р^е^,
ek = Pklel Pkite + • • • “Ь Pkkekt
еп—Pniei р 4~ £*пп^п* J
Для того чтобы привести квадратичную форму f(x) к
каноническому виду, достаточно для любого k(l<^ke^ri)
обеспечить условия
a(e'i, e'k)=atk = 0 при i — 1, 2, ..., k—1. (4)
Тогда a'kt тоже будут равны нулю (вследствие симметрич-
ности матрицы квадратичной формы), и отличными от нуля
окажутся лишь коэффициенты при квадратах числовых аргу-
ментов.
2. Заметим, что для выполнения условий (4) достаточно
потребовать соблюдения равенств
a(eh e'k) — 0, Z= 1, 2,..., k—1, k=l, 2,n. (5)
В самом деле, из (5) и (3) имеем
a (Ai, e'k) — а (Рц?1 Рц^ь te) =
= P,-ie(<?i, te) ~г • • Рн^ (et> е*) = 0.
Для упрощения дальнейших выводов добавим к (5) дополни-
тельное равенство
a(ek, е'к)=1. (6)
3. При k — 1 условия (5) исчезают и остается только (6),
из которого, с учетом первой строчки формул (3), находим
1 = о (eb Cj)=Риа (еь ei) — Рцвн-
142 ЛИНЕЙНЫЕ. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Отсюда
р ___________________________—
11 Си ’
поскольку ЙЦ Ф 0.
Учитывая обозначения (1), можно написать
4. Дальше будем проводить рассуждение по индукции.
Допустим, что уже определены все коэффициенты, входящие
в первые k—1 строк формул (3). Для нахождения коэффи-
циентов, входящих в строку с номером k, запишем условия
(5) и (6) вместе
«(О, 4) = 0, ..., a(ek_t, ек) = 0, a(ek, e'lt)=l. (7)
Отсюда, используя (3), получим для искомых коэффициентов
систему уравнений
anPki + апРkt +... Ч- atkPkk — 0,
ak-i iPki Ч~ ak-i t Pkt + • • • 4" ak-t kPkk —
ak\Pki + QktPkt otkkPkk = i-
(7a)
Определитель системы (7a) совпадает c и отличен от
нуля вследствие предположения (2). Поэтому искомые коэффи-
циенты РА1, ..., Ркк найдутся. Остается проверить, что по-
строенное преобразование невырождено. С этой целью найдем
из системы (7а) коэффициент Ркк. Применяя правило Крамера,
получим
Оц ... О1А_1 о
akl ••• ak k-1 1
Далее, используя треугольную структуру матрицы преобразо-
вания (3), найдем определитель D этой матрицы:
г)__р р р _________А». Aj ___ 1
и — РпР2г...Рпп — У1-ys... Лп — дл-
Таким образом, D ф 0, а значит, преобразование (3) невы-
рождено.
§ 9] ЗНАКООПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ ФОРМЫ 143
5. Теперь мы можем определить и коэффициенты квадра-
тичной формы в новом базисе е[,..., е'п. Достаточно вычис-
лить лишь диагональные коэффициенты, так как осталь-
ные заведомо равны нулю. Используя (3), (7) и (8), на-
ходим
аьь = о (ей, Ck) — a (Pkiei • • • + Pkkek> ~
— Pkka(ek> e'k) = Pkk = -^’
Значит, в базисе, который построен по методу Якоби,
(х;/+ д1 (^)2+ •. •+4^ W.
“1 “а ап
§ 9. Положительно определенные и отрицательно
определенные квадратичные формы
1. В этом параграфе будем рассматривать только дейст-
вительные пространства.
Пусть в линейном пространстве, хотя бы бесконечно-
мерном, задана квадратичная форма /(х).
Определение 1. Форма/(х)называется положительно
определенной, если /(х)^>0 для всех х ф 0.
Заметим, что /(0) = О всегда. В самом деле, так как 0 =
= 0 • z и f (х) = а (х, х), где z — произвольный вектор,
a (x> У) — билинейная функция, то
/(0)=c(O-z, 0-z') = 0-a(z, z) = G.
Определение 2. Квадратичная форма /(х) называется
отрицательно определенной, если /(х)<^0 для любого
х ф 0.
Очевидно, что достаточно рассмотреть положительно опре-
деленные формы, поскольку отрицательно определенные полу-
чаются из них сменой знака.
2. Ограничиваясь квадратичными формами в конечномер-
ных (л-мерных) пространствах, укажем прежде всего ряд
простых необходимых признаков положительной определен-
ности. Пусть в каком-нибудь базисе еъ..., еп дана квадра-
тичная форма
/(х) = а (х, х) = 2 aikXjXk.
Как нам известно, а^ — а^е,, e/t).
144 линейные, билинейные И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
1) Если /(х) является положительно определенной, то
ац^>0 при всех 1=1, 2, п.
Доказательство.
ац = а{еь et)=f (ег)>0.
Замечание. Это условие вовсе не достаточно для по-
ложительной определенности формы. Пример: форма
f(x)=xj -}- 1 OOOxjXo xf
имеет ац= 1^>0, но на векторе (— 1, 1) принимает отрица-
тельное значение.
2) Если форма f(x) положительно определена, то опре-
делитель ее матрицы положителен:
A = DetX>0.
Для доказательства приведем f(x) к каноническому виду.
Пусть е'1,...,е'п — канонический базис, то есть базис, в кото-
ром f(x) имеет канонический вид:
/•(х) = а'п (xtf+... а'пп(xtf.
Согласно предыдущему признаку все
Обозначим через Д' определитель матрицы формы f(x)
в канойическом базисе. Имеем
Д' =
о
^пп
— Цц ... апп 0.
О
С другой стороны, по формуле (4) § 3
A' = A(DetP)2,
значит, Д^>().
Замечание. И это условие не является достаточным
для положительной определенности квадратичной формы.
Пример: форма
f(x)= — х\~ х82
имеет Д^>0, однако /(х)=с0.
3) В «-мерном пространстве каждая положительно опре-
деленная форма имеет ранг п. Доказательство вытекает из
неравенства Д ф 0.
§ 91
ЗНАКООПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ ФОРМЫ
145
3. Теорема (критерий Сильвестра). Для положитель-
ной. определенности квадратичной формы необходимо и
достаточно, чтобы все главные миноры ее матрицы были
положительны.
Доказательство необходимости. Пусть форма
fix) положительно определена. Возьмем произвольный базис
еь • • , ek,..., еп и построим линейную оболочку L(eb ..., ek).
Будем теперь рассматривать квадратичную форму fix) не на
всем пространстве, а лишь на подпространстве L(еь ..., ek).
Если х £ L(ei....ek), то x={xlt..., xk, 0,..., 0} и
ь
fix)— 2 aijXiXj.
Все остальные члены, у коэффициентов которых хотя бы
один из двух индексов больше k, исчезают за счет нулевых
значений координат.
Форма fix) на подпространстве Е(еь..., ek) является по-
ложительно определенной, так как она положительно опре-
делена на всем пространстве. Поэтому определитель формы
fix), рассматриваемой на 1Де\...ek), положителен:
ап ••• aik
аы • • • akk
Но Д* — главный минор порядка k матрицы квадратичной
формы fix), индекс k может принимать значения 1, 2,..., п.
Тем самым необходимость признака доказана.
Доказательство достаточности. Пусть Дь "Ъ- 0
при k= 1,..., п.
Приведем квадратичную форму к каноническому виду
методом Якоби. Получим
fix)=£ (x;r+ix^+...+ixtf.
Если х ф 6, то хотя бы одна из координат х* ф 0, и, следо-
вательно, /(х)^>0. Теорема доказана.
4. Обратим внимание на двумерный случай. Пусть
f = ax'2 -]- 2bxy су2,
146 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
где на этот раз числовые аргументы формы обозначены
через х, у.
Условие Сильвестра сводится к неравенствам
а b
b с
а^> 0,
— ас — Ь* 0.
Разумеется, в двумерном случае теорему Сильвестра можно
установить без какой-либо специальной теории, поскольку
для положительной определенности необходимо а^>0 и при
0
f= № + № + •
§ 10. Определитель Грама. Неравенство
Коши—Буняковского
1. Предположим, что в произвольном линейном прост-
ранстве L (может быть, бесконечномерном) дана квадратичная
форма f(x)=a(x, х) и конечная система векторов pi,...,pk.
Определение. Определителем Грама для квадратич-
ной формы а(х,х) и системы векторов pi,...,ptl называется
величина
a(pi,pi) ... a(plt pk)
G(Pi, .,Pk)==
a(pk,Pi)--- a(pk,pk)
С определителями такого вида приходится часто иметь
дело в математической физике и интегральных уравнениях.
2. Теорема. Пусть пространство L действительно,
а квадратичная форма а (х, х) положительно определена.
Тогда, если векторы р1,...,рк линейно независимы, то
О(рь ...,Pk)>0. Если векторы рь ...,Pk зависимы, то
G(pi,...,pk) — G.
Доказательство. 1) Пусть векторы рь ..., pk
линейно независимы. В таком случае они составят базис в
своей линейной оболочке L (р\, ..., рк). Произвольный вектор
х С L(pi,, Pk) можно записать в виде
X — XiPi • 4“ xhPk'
§ 10] НЕРАВЕНСТВО КОШИ — БУНЯКОВСКОГО 147
Будем рассматривать f(x) на векторах из L (pi,..,, pk).
В базисе р1} ..., pk имеем
ь
f(x)= У, a^Xj
i. 7=1
(даже если исходное пространство L бесконечномерно).
Так как f(x) положительно определена на всем простран-
стве L, то она положительно определена и на подпростран-
стве L (рь ..., pk), так что
«11 ... «1й
0.
(1)
«*1 • - • akk
Заметим, что = a(pit pj). Отсюда и из (1)
G(pi, /’*)=Лй>0.
2) Пусть теперь pi, ..., pk линейно зависимы. Тогда най-
дутся числа X]....Хь не все равные нулю, для которых
XjPi ХЛрй = 0.
Учтем, что
а(х, 0) = О
и подставим в это тождество
х =Pt, 6 == Xipi -j- ... -j- ХЛр*.
Придавая I значения 1, ..., k, получим однородную систему k
линейных уравнений с k неизвестными
Xia(pi, Pi)+ ... +Х*«(Р1, Ра) = 0,
Х1«(рь pi)-}- ••• ~^~^ka(Pk> Pk) — 0,
Эта система заведомо имеет нетривиальное решение X,, ..., ХЛ.
Поэтому ее определитель равен нулю:
G(Pi.....Р*)=0.
Теорема доказана.
3. Важный частный случай. В условиях доказан-
ной теоремы рассмотрим систему, состоящую из двух векто-
ров pi, р2. Имеем
a (Pi, Pi) a (pi, ръ) >
а (ръ Pi) a (pir р3)
148 линейные, билинейные и КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Если раскрыть этот определитель, учитывая симметричность
билинейной формы, то получится неравенство
(pi, Ps)]2 < a (pi, pi) • a (р2, pt), (2)
которое называется неравенством Коши — Бундовского.
При этом знак равенства имеет место тогда и только
.тогда, когда векторы рг и р2 линейно зависимы.
4. Рассмотрим пространство непрерывных функций, задан-
ных на каком-нибудь отрезке ti^zt^to. В этом простран-
стве рассмотрим квадратичную форму
*2
/(х) = $ [X (0]в dt
(в связи с этим см. выше, § 4, п. 4).
Для f(x) полярной билинейной формой является
h
а(х,У) = \ x(t)y(t)dt.
Нетрудно сообразить, что f(x) положительно определена.
В самом деле, если непрерывная функция x(t) отлична от
тождественного нуля, то
J [х(/)]2Л> 0.
6
Поэтому в данном случае можно применить неравенство (1).
В результате получим неравенство Коши — Буняковского для
интегралов:
[^2 /а ^2
\ х (t)y (t) dtl ( [X (О]2 dt Л [у (/)|2 dt. (3)
fi J h fi
Знак равенства в формуле (3) имеет место в том и только
в том случае, когда система x(t),y(t) линейно зависима, или,
проще сказать, когда одна из функций x(t), y(f) пропорцио-
нальна другой (например, y(t) = Cx(t), С = const).
Этот пример показывает, как алгебраические теоремы
работают за пределами собственно алгебры и дают возмож-
ность получить результаты из анализа. Общей основой таких
приложений является построение в бесконечномерном функ-
циональном пространстве конечномерных линейных оболочек.
НУЛЕВОЕ ПОДПРОСТРАНСТВО
149
§ П]
§11 . Нулевое подпространство билинейной
и квадратичной формы
1. Пусть а(х, у) — билинейная форма, заданная в про-
странстве L.
Определение 1. Будем называть правым нулевым под-
пространством формы а (х, у) множество всех элементов у,
для каждого из которых при любом х £ L соблюдается
равенство
а (х, у) — 0. (*)
Это определение, очевидно, не зависит от размерности и
может быть использовано в бесконечномерном случае.
Правое нулевое подпространство будем обозначать Lg.
Аналогично определим левое нулевое подпространство L'g,
именно: у £ Lg, если а (у, х) = 0 при любом х £ L.
2. Докажем прежде всего, что Lg на самом деле
является линейным подпространством. ПустьУьУ'з С То- Тогда
а(х,уд — 0, а(х, у/2) = 0 при любом х. Но отсюда следует, что
«(х, У! J’2) = а (х, J’i) -]- а (х, >'2) = 0,
а (х, “J’i) = аа (х, i) = 0.
Таким образом, yt -4-у3 £ Lg и ayt С Ц.
Совершенно аналогично доказывается, что подпростран-
ством является и Lg.
3. Далее будем рассматривать и-мерное пространство.
Зафиксируем в нем базис а, ..., еп и запишем билинейную
форму в координатах:
а{х, y)=^laijXlyJ,
где а,7 — a(eh ej).
Покажем, что у С То тогда и только тогда, когда
У;а,7уу = 0 (1)
при всех значениях I (i= 1, 2, ..., я). Для этого напишем
тождество
aijyjjxt. (а)
Если выполняются условия (1), то выполняется и (*).
С другой стороны, из условия (*) следует, что в правой
ZaiJxiyj=X(X
150 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
части равенства (а) все коэффициенты при Xi обращаются
в нуль, а это и дает нам систему (1).
Точно так же, у £ L'o тогда и только тогда, когда
2 вцУ, = 0 (2)
при всех значениях j (j=\, 2, л).
Равенства (1) и (2) представляют собой системы уравне-
ний, определяющие и в координатах.
По теоремам о линейных системах (см. гл. III) (размер-
ность £о) = (размерность Ь'й) = п—г, где г — ранг били-
нейной формы а (х, у), т. е. ранг ее матрицы.
Отсюда следует, что ранг билинейной формы можно опре-
делить геометрически. Именно, ранг формы а (х, у) равен
разности между размерностью всего пространства и размер-
ностью нулевого подпространства этой формы (какое здесь
брать нулевое подпространство — правое или левое, — без-
различно, так как их размерности одинаковы).
4. Определение 2. Билинейная форма называется
невырожденной, если размерность Ь'й (или Ц) равна нулю.
В остальных случаях билинейная форма называется вырож-
денной.
Иначе говоря, билинейная форма вырождена, если ее
нулевые подпространства имеют ненулевую размерность, или
(что то же самое) если ее ранг меньше размерности про-
странства: г <^п, или если определитель ее матрицы равен
нулю: Д = Пе1Д = 0.
5. Предположим, что билинейная форма а\х, j) вырождена,
т. е. ее ранг г<Г«. Введем в пространстве специальный
базис еь е2, ..., еп такой, чтобы ег+ь ..., еп£ Ц. Для этого
нужно сначала выбрать линейно независимые векторы из L'o
(число их как раз равно размерности £о), а затем дополнить
их до базиса во всем пространстве. Посмотрим, как при
таком выборе базиса будет выглядеть матрица билинейной
формы. Если j=r-[- 1, ..., п, то вследствие определения
aij — a(eb еу) = 0.
Таким образом,
°и ... а1г 0 ... 0
Л___ аа ... air 0 ... О
@ni ... апг 0 ... 0
§ И]
НУЛЕВОЕ ПОДПРОСТРАНСТВО
151
Матрица упрощается, причем тем сильнее, чем ниже ранг
билинейной формы (чем выше размерность нулевого подпро-
странства).
Если выбрать базис так, чтобы последние п—г базисных
векторов попали в левое нулевое подпространство, то это
тоже приведет к упрощению матрицы, но теперь в нуль
обратятся не столбцы, а последние строки в числе п — г:
«и • • • «1л
«/•1 • агп
О О
Пусть билинейная форма симметрична, тогда Ц совпадает
с Ц (докажите). Поместим базисные векторы er+i, , еп
в £q. Тогда эти же векторы окажутся в £о, и матрица при-
мет особенно простой вид
«и ... «V- 0 ... О
аг\ ... агг 0 ... О
О ... О 0 ... О
(3)
о ... о о ... о
Таким образом, если ранг г симметричной билинейной формы
меньше п, то ее рассмотрение полностью сводится к под-
пространству размерности г (натянутому на et, ..., ег).
6. Рассмотрим теперь квадратичную форму /(х) = а(х, х).
Определение 3. Нулевым подпространством квадра-
тичной формы называется нулевое подпространство £0 ее
полярной формы а (х, _у).
Различать Lg и Ц здесь нет надобности, так как Li = L0.
Если квадратичная форма невырождена, то ее нулевое
подпространство нульмерно.
Если форма вырождена, то ее ранг r<^n, a Lo имеет
размерность п—г. В базисе еь ..., еп, векторы er+i, ..., еп
которого помещаются в Lo, матрица квадратичной формы
имеет вид (3), и форму /(х) можно рассматривать в г-мерном
подпространстве Z.(fi, ег).
152 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
§ 12. Нулевой конус квадратичной формы
1. Наряду с данным линейным пространством L будем
рассматривать аффинное пространство 81, считая, что элемен-
тами L являются радиус-векторы точек из 8(.
2. Определение. Множество точек аффинного про-
странства называется конусом с вершиной О, если вместе
с каждой своей точкой М, не совпадающей с О, оно содержит
всю прямую ОМ (при и = 3 см. рис. 24).
IB некоторых случаях одну точку О
удобно рассматривать как конус, со-
стоящий только из вершины. Простей-
шими примерами конусов могут слу-
жить любая плоскость, проходящая че-
рез точку О, а также все простран-
ство 81.
3. Пусть в пространстве L дана
квадратичная форма f(x). Ее можно
рассматривать и в аффинном простран-
стве 31, считая, что значение /(х) в
Рис 24 точке М определяется при х—ОМ,
т. е. равно f (ОМ).
Обозначим через Ко множество тех точек аффинного про-
странства, в которых квадратичная форма /(х) равна нулю
(М£ Кв, если /(О7Й) = 0).
Теорема 1. Множество Кй представляет собой конус
с вершиной в начале координат.
Доказательство. Может случиться, что Ко состоит
из одной точки О (например, если пространство действитель-
ное, а форма /(х) положительно определена). Тогда утверж-
дение верно, поскольку мы условились одну точку рассмат-
ривать как конус.
Предположим, что существует точка М ф 0, для которой
___ /W —°
при х—ОМ.
Проведем через О и М прямую и возьмем на ней
любую точку М* (рис. 25). Положим ОМ* — X*. Тогда
х* — Кх, где X — некоторое число. Следовательно,
f(x*)=/(Хх)=а (Хх, Хх)=Х2а (х, х) — X2 f (х)=0.
§ 13J
ПРИМЕРЫ НУЛЕВЫХ КОНУСОВ
153
Таким образом, с каждой точкой М ф 0 множество Ко
содержит и все точки прямой ОМ (рис. 25).
4. Определение. Множество K# называется нулевым
конусом квадратичной формы /(х).
б. Следует обратить внимание на то, что конус не является,
вообще говоря, линейным подпространством: если /(х) = 0,
/(_у) = 0, то может быть /(х-|-_у) ф 0.
6. Теорема 2. Нулевое подпро-
странство квадратичной формы всегда
является частью нулевого конуса этой
формы:
Lo a Ко.
Замечание. £0 определено как мно-
жество векторов в линейном простран-
стве, а Ко — как множество точек в аф-
финном пространстве.
Поэтому, говоря о включении Ц>с:Ко,
нужно подразумевать, что Lo есть точеч-
ное множество концов радиус-векторов из Рис. 25.
нулевого подпространства.
Доказательство теоремы. Пусть у С Lo, У = ОМ.
Тогда а(х, _у) = 0 при любом х. Положим х=у; получим
а (у, У}—— Следовательно, у С Ко в том смысле,
что 714 С Ко, где 7И — конец вектора у.
§13. Простейшие примеры нулевых конусов
квадратичных форм
1. Рассмотрим более подробно частные случаи, встречаю-
щиеся в элементарной аналитической геометрии. Будем счи-
тать, что квадратичная форма не равна нулю тождественно
и приведена к нормальному виду.
2. Действительная плоскость (п = 2).
1) — — х|. Здесь г — 2 и размерность Lo равна
нулю. Следовательно, Lo состоит только из нулевой точки.
Нулевой конус Ко определяется уравнением xf — х| = 0 и
распадается на две прямые: xi = x2, xt —— х2. Из-за малой
размерности конус не является поверхностью, а представляет
собой линию, состоящую из двух пересекающихся прямых
(рис. 26).
154 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
2) /(x) = xjЗдесь также г —2 и размерность Lo
равна 0. Нулевой конус определяется уравнением Xi-j-x| = 0
и состоит из одной точки. Иногда говорят, что такое уравне-
ние определяет мнимый конус.
3) f(x) — x\. Здесь г = 1, размерность L® равна 1. Конус Ко
определяется уравнением х| = 0, следовательно, Ко состоит
из точек, для которых Xi = 0. Нетрудно сообразить, что
в данном случае Lo должно совпадать с Ко- В самом деле,
размерность Lo равна 1, а по предыдущему Lo должно войти
в нулевой конус, так что Lo и будет единственной прямой
A'i = 0, содержащейся в Ка. Конус Ко определяется уравне-
нием второй степени. В рассматривае-
мом случае говорят, что у Ко каждую
точку оси х2 нужно считать дважды.
В записи квадратичной формы уча-
ствует только один квадрат: xf. Это
произошло потому, что базисный век-
тор е2 помещен в нулевое подпро-
странство.
3. Трехмерное действи-
тельное пространство (л = 3).
1) /(х)=-j- — xf. Здесь
г = 3 и размерность Lo равна нулю,
определяется уравнением — х| = 0.
Нулевой конус
Если рассматривать пространство с элементарной точки
зрения, с углами, расстояниями и т. п„ то такое уравнение
определяет круглый конус с осью на оси х3 и прямым углом
между образующими.
Евклидово пространство в данном случае служит мо-
делью линейного пространства. Однако нужно иметь в виду,
что в линейном (и в аффинном) пространстве не опреде-
лены углы, нет правила измерения расстояний и потому
не имеет смысла понятие «круглый конус». Все же это
не препятствует использованию евклидова пространства
в качестве модели линейного (или аффинного) пространства.
Дополнительные свойства, евклидова пространства только
помогают наглядности описаний.
2) /(х) = х|-(-х|-)-х|. Здесь г = 3, размерность Lo равна
нулю, Ко определяется уравнением xf -]- х| х| = 0. Это —
мнимый конус; в действительном пространстве он имеет одну
только нулевую точку.
§ 131
ПРИМЕРЫ НУЛЕВЫХ КОНУСОВ
155
3) /(х)=х|4“х2- Здесь г = 2, размерность Lo равна 1.
Таким образом, Lo представляет собой одномерное линейное
подпространство, то есть прямую, проходящую через начало
координат. Конус Ко определяется уравнением xf -j- = О
и состоит из точек вида (0, 0, х3), т. е. представляет собой
множество точек третьей оси. Так как LoczKo> то ясно, что
£о — та же самая прямая (третья координатная ось). Только
следует иметь в виду, что в Ко каждая точка этой прямой
считается не один, а два раза.
Заметим, что третий базисный вектор es помещен в Lo.
Поэтому в представлении формы исчезло все, что связано
с третьей координатой.
4) f(x) = xl — Здесь г = 2, размерность L# равна 1.
Конус Ко определяется уравнением — х% = 0. Левая часть
этого уравнения разлагается на два множителя первой сте-
пени, так что конус Ко состоит из двух плоскостей. В каче-
стве модели линейного пространства будем рассматривать
евклидово пространство. Тогда Ко изобразится в виде пары
плоскостей, которые проходят через ось х3, пересекаются
под прямым углом и пересекают плоскость х3 = 0 по бис-
сектрисам координатных углов (рис. 27).
В этом примере подпространство Lo можно найти двумя
способами: путем вычислений или из геометрических сообра-
жений. Рассмотрим оба пути.
156 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ [ГЛ. IV
Запишем полярную билинейную форму и приравняем ее
нулю:
Нужно найти такие _У = (_У1, _Уа, .Уз), Для которых это уравне-
ние соблюдается при любом х — (х1, х2, х3). Ясно, что
= а _у3 может принимать любые значения. Таким
образом, Lo совпадает с третьей координатной осью.
Получить этот результат геометрическим путем, как дела-
лось в предыдущем примере, непосредственно нельзя. Известно,
что Lo—прямая, проходящая через начало координат, но
таких прямых в Хо много, и выделить одну из них в каче-
стве Lo сразу не удается.
Однако можно поступить иначе. Заметим, что в запись
квадратичной формы не входит третья координата. Это зна-
чит, что третий базисный вектор помещен в Lo. Ввиду одно-
мерности нулевого подпространства отсюда следует, что оно
совпадает с третьей координатной осью.
5) f(x)=xl. Здесь r= 1, размерность L# равна 2, конус Ко
имеет уравнение xf — 0 и является плоскостью Xj = 0 (дважды
взятой). Lq геометрически представляет собой ту же самую
ПЛОСКОСТЬ Xi = 0.
4. Замечание. Выше рассмотрены все варианты, кото-
рые могут встречаться при изучении Lo и К(1 в двумерном
и трехмерном действительных пространствах. В самом деле,
произвольную квадратичную форму можно привести к кано-
ническому виду, а затем, если понадобится, умножить на
(—1). Тем самым дело сведется к одному из рассмотренных
выше случаев.
ГЛАВА V. ТЕНЗОРНАЯ АЛГЕБРА
§ 1. Взаимные базисы. Контравариантные
и ковариантные векторы
1. Пусть L — линейное n-мерное пространство, L* — со-
пряженное ему (то есть пространство всех линейных форм,
заданных на L; см. выше, •§ 1 предыдущей главы). Введем
в L произвольный базис еь ..., еп. Координаты произволь-
ного вектора х из L в базисе еь еп будем обозначать
{х1, ..., х"}. В сопряженном пространстве выберем базис
е1(х), ..., еп(х) так, чтобы значения линейных форм е'(х)
на векторах образовали единичную матрицу:
= (1)
где —символ Кронекера (8}=1 при i=j, О при
* -A-jY
Определение. Базис ^(х), ..., е"(х) в L*, удовлет-
воряющий условиям (1), называется взаимным с данным
базисом ..., еп в L.
Из определения следует, что для данного базиса суще-
ствует единственный взаимный базис и что он задается фор-
мулами
е1 (х) == 1 • х1 0 • хи + ... -|- 0 • х",
е® (х) = 0 • х1 -|- 1 • х® -j- ... 0 • х",
е"(х)=(Ьх1-|-(Ьх®-|- ... +1-х".
2. В пространстве L перейдем к новому базису е^,..., еп’.
Для удобства дальнейших обозначений формулы (I) из § 5
гл. II мы запишем теперь несколько иначе, именно:
(I)
158
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
Здесь и далее мы помечаем штрихами индексы, относя-
щиеся к новому базису; никакого другого специального
смысла символам Г, 2', /г' мы не придаем, так что
1'=1, 2'=2, ..., rf = n. Теперь в матрице Р по строкам
изменяется верхний индекс, по столбцам изменяется нижний
индекс:
Р1, Р*. ... Рп.
pl pi рп
р____ *2' г9' *2'
Рп’Р*п' ... Рп'
Пусть произвольный вектор х из L разложен по старому
и по новому базису:
x—x1ei-}- ... -^-xnen=xvei’-\- ... -}-хп'еП'.
Формулу (III) из § 5 гл. II, выражающую новые коорди-
наты через старые, запишем так:
= (П)
Матрицу коэффициентов правых частей равенств (II) будем
обозначать через Q. При этом нужно считать, что верхний
индекс изменяется по столбцу, а нижний — по строке:
Qi' Qf ... Qn
QI' QI' ... Q3„'
Of Q* ... Qn
При указанной здесь расстановке индексов и в матрице
Р, и в матрице Q штрихованный индекс означает номер
строки, нештрихованный индекс — номер столбца. Равенства
Q = (P*)-\ Р = ^УЛ (2)
остаются в силе, а формулы (4) из § 5 гл. И принимают вид
= (3)
Соотношениями (2) и (3) мы часто будем пользоваться ниже,
не оговаривая этого дополнительно.
3. В сопряженном пространстве L* возьмем базис
ег(х), ..., еп'(х), взаимный с новым базисом в L, т. е.
§ И
КОНТРАВАРИАНТНЫЕ И КОВАРИАНТНЫЕ ВЕКТОРЫ
159
удовлетворяющий условиям
=8?,'. (4)
Найдем формулы перехода от базиса ек (х) к базису ек’ (х).
Заведомо справедливы соотношения вида
?'(х)=^Л»е‘(х) (5)
с некоторыми коэффициентами Л*. Поэтому дело сводится
к вычислению коэффициентов Л* по заданным Рд. Из (4),
(5), (I) и (1) имеем
8?' = ек' (М = 2 лГ? (^) = 2 Ake* ffi =
k k \ i J
= S Ak^ek (et) = 2 A%ptft.
i, k i, k
Следовательно,
2Л*Рр = 8?'. (6)
a
Обозначим матрицу искомых коэффициентов правых частей
(5) через А, считая, что штрихованный индекс означает номер
строки, нештрихованный означает номер столбца, то есть
изменяется по строке. Тогда все равенства (6) равносильны
одному матричному равенству
АР*=Е, (7)
где, как обычно, звездочка означает транспонирование. Из (7)
получаем
Л=(Р*)_1 = О.
Таким образом,
ек' (x) = ^iQkkek{x). (I*)
4. Пусть произвольная линейная форма и(х), т. е. элемент
пространства L*, разложена по старому и по новому базису:
и(х) = «1С1 (х)-|- ... -4-ипе"(х) = И1-е1'(х)4- ••• -\-иП'еп' (х).
Найдем формулы, которые выражают новые координаты
формы и(х), т. е. коэффициенты разложения п(х) по базису
е1 (х), через ее старые координаты. Для этого вспомним, что
коэффициенты искомых формул составляют матрицу, обрат-
160
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
ную и транспонированную к матрице формул (I*). Но обра-
щение и транспонирование матрицы Q дает Р. Таким образом,
(п*)
5. Мы видим, что формулы (I*) и (П*) получаются из
известных нам формул (I) и (П), если поменять ролями ма-
трицы Р и Q.
6. Для большей наглядности приведем следующую схему.
В пространстве L te""1 'to'' 1! II £ В пространстве £*
* X !! " ' Ч». 7 + II + о W : М + * + Л- м * Ч. » ' з a s £ £ u(x) = Uje‘ (X)+ ••• ... +п„е«(л)е£* n(x) = nrev (x)+ ... -I-k/wca* ₽=((?*)-*
7. Назовем сверткой элемента й = й1е:1-|- ... -\-апеп из
L с элементом п (х) = ще1 (х)... ипеп(х) из L* число,
которое обозначается через (й, и) или (и, а) и определяется
равенством
(а, и) — нца1-}- ... -j-nna', = ^luf!a'1.
Очевидно, что свертка есть инвариант, поскольку она пред-
ставляет собой не что иное, как значение инвариантной
формы и(х) = WiX1 + • • + на векторе х — а = ахех
... +й"е„.
Инвариантность свертки можно вывести также как след-
ствие формул (П) и (П*). В самом деле,
А' Ь’\ а / X ₽ /
- 2 (S W) «У=2 =2 w •
а, (3 \ А' / а. ₽ А
§ 1J КОНТРАВАРИАНТНЫЕ И КОВАРИАНТНЫЕ ВЕКТОРЫ 161
8. Очевидно, что свертка обладает следующими двумя
свойствами:
А) При умножении и или х на число свертка (и, х)
умножается на то же число:
(аи, х)=(и, ах) = а(и, х).
Б) Свертка распределительна по сложению:
(и-{-и', х) = (и, x)-j-(«r,
(и, х ~]~х')=(и, x)-j-(H«
9. Обратим внимание на полную симметрию взаимоотно-
шений L и L*. Рассмотрим свертку
(и, х)=И1Х14- ••• 4-ипхп.
Если здесь элемент и из L* фиксирован, а х={ х1.....х" }
из L произвольно изменяется, то свертка (и, х) представляет
собой линейную форму с числовыми аргументами х1,..., х",
принятую в качестве и. При этом L можно считать коорди-
натным пространством. Ничто не мешает нам, однако, счи-
тать также и элементом координатного пространства, именно
тем элементом, который определяется коэффициентами формы
(и, х), и писать и = { , ц„}.
Будем теперь предполагать, что фиксирован элемент
х — {х1, ..., х"} из L, а меняется и = { щ,..., ип}. В таком
случае свертка (и, х) есть линейная форма с числовыми
аргументами щ, ..., ип. Мы можем принять в качестве х
не набор {х1.....хп\ коэффициентов этой формы, а саму
форму. Тем самым элементы х £ L получают точно такое же
истолкование по отношению к элементам и С L*, какое эле-
менты и £ L* имеют по отношению к элементам х £ L. Иначе
говоря, если пространство L* есть сопряженное для L, то
L можно рассматривать как сопряженное для L*.
10. Симметрия взаимоотношений L и L* уже усматри-
валась выше при переходе от формул (I), (II) к формулам
(I*), (II*) (см. также таблицу, приведенную в п. 6). Наряду
с этим следует иметь в виду, что одно из пространств L и
L* (именно L) принято в качестве исходного. Это обстоя-
тельство сказывается на терминологии, о которой говорится
в следующем пункте.
11. Преобразование по формуле (I) с матрицей Р назы-
вается преобразованием по ковариантному закону.
162
ТЕНЗОРНАЯ АЛГЕБРА
ГГЛ V
Преобразование по формуле (II) с матрицей Q называется
преобразованием по контравариантному закону.
В данном пространстве L координаты каждого вектора
преобразуются по контравариантному закону. В сопряженном
пространстве координаты векторов преобразуются по кова-
риантному закону.
В соответствии с этим векторы данного пространства L
принято называть контравариантными, а элементы сопряжен-
ного пространства — ковариантными векторами.
12. В тензорном исчислении принято в случае ковари-
антного закона преобразования пользоваться нижними индек-
сами, в случае контравариантного закона преобразования
пользоваться верхними индексами. В соответствии с этим мы
пометили верхними индексами координаты векторов из L.
Расстановка индексов у элементов матриц Р и Q делается
с таким расчетом, чтобы индекс суммирования, дважды встре-
чающийся в выражении общего члена суммы, один раз был
нижним индексом и один раз — верхним (См. таблицу п. 6).
Если же под знаком суммы имеются свободные индексы, по
которым нет суммирования, то такие же индексы (соответст-
венно верхние или нижние) ставятся у величины, полученной в
результате суммирования. Соблюдение этих правил помогает
определять законы преобразования величин, получаемых в
результате суммирования. Вместе с тем эти правила застав-
ляют, например, обозначать верхними индексами номера ба-
зисных ковариантных векторов.
13. Ниже, в пределах этой главы, мы будем всюду счи-
тать, что выбираемые в L и L* базисы взаимны. Базис
в L*, взаимный с базисом {et} £ L, будем обозначать через
{е1} (упрощая прежнее обозначение е*(х)\ Произвольный
элемент в I* будет обозначаться через и (или v и т. п.)
вместо и(х) (или и(х) и т. п.).
14. Новое определение сопряженного про-
странства. Понятие сопряженных пространств можно изло-
жить несколько иным способом, так что их взаимное равно-
правие будет видно сразу из самого определения.
Пусть L и L* — два линейных пространства; ради про-
стоты изложения мы с самого начала предположим, что они
конечномерны и имеют одну и ту же размерность = п. Пред-
положим, что с любой парой элементов х С L, а £ L* сопо-
ставлено число; мы обозначим его через (х, и) и назовем
§ 1] КОНТРАВАРИАНТНЫЕ И КОВАРИАНТНЫЕ ВЕКТОРЫ 163
сверткой элементов х, и, если имеют место следующие
свойства:
1) Распределительное свойство по каждому элементу:
(х, ll1JrUi) = (x, izi) + (x, и2),
(%1 + х2> и)=(Х1, и) + (х2, и)
для любых х, хъ х2 £ L, и, иь и2 £ L*.
2) Сочетательное свойство относительно умножения на
число любого элемента:
(ах, и) = (х, аи) = а(х, и).
3) Свойство невырожденности: если ап линейно
независимы в L и (о1; и) = 0, (ап, и)=0, то и есть ну-
левой элемент в L*. Аналогично, если blt ..., bn линейно
независимы в L* и (х, bi)—0, .... (х, fc„)=0, то х есть
нулевой элемент в L.
Пространства L и L* могут быть оба действительными
или оба комплексными; соответственно этим двум случаям
все числа, о которых здесь говорится, предполагаются дей-
ствительными или комплексными.
Обозначим через elt ..., еп произвольный базис в L,
через ё1, ..., ё"—произвольный базис в L*. Пусть х =
= '£ixlei£' L, u—'^tukeh^ L*. Вследствие свойств 1) и 2)
имеем
(х, а) = 2 aix'ilk, (8)
где а* —(e;, ё*). Таким образом, свертка выражается в виде
билинейной формы (8). Легко убедиться, что свойство 3),
т. е. условие невырожденности, означает невырожденность
билинейной формы (8). Легко убедиться также, что свертки
(х, и) можно задавать формулой (8) по-разному, пр о из-
k k
вольно назначая числа at, лишь бы иметь Det о/ ф 0;
условия 1), 2), 3) будут при этом соблюдены.
Пространства L и L* назовем (взаимно) сопряженными,
если для них задана свертка и если они рассматри-
ваются вместе с данной сверткой. При нашем
теперешнем определении мы можем для данного L построить
бесконечно много различных сопряженных пространств L*
(точнее говоря, по-разному сопряженных с L). Желая
164
ТЕНЗОРНАЯ АЛГЕБРА
1ГЛ. V
исключить такую неопределенность, мы определим понятие
эквивалентности линейных пространств, сопряженных по-раз-
ному с данным L.
Обозначим через L* и L| два «-мерных пространства,
сопряженных с L. Назовем их эквивалентными в смысле
сопряженности с L, если между ними существует линейный
изоморфизм такой, что
(х, и) = (х, if),
(9)
где х — произвольный элемент из L, и—произвольный эле-
мент из L*, 1/— соответствующий ему по изоморфизму эле-
мент Lg.
Легко убедиться, что все линейные пространства, сопря-
женные с данным L, эквивалентны между собой. Чтобы
доказать высказанное утверждение, достаточно установить,
что если для L и L* дана (произвольная) свертка, то для
любого базиса еь еп £ L найдется единственный взаим-
ный с ним базис е1, ... , еп в пространстве L*. Иначе говоря,
е1, ... , еп £L* можно найти (единственным образом) так, что
(ег, е*) = В?.
Для доказательства рассмотрим произвольный базис ek,
с помощью которого задана свертка формулой (8). Будем
искать первый вектор е1 базиса е1, ... , еп в виде
е1 = ^ё1 -ф- -ф-... -ф- а„ёл.
Мы должны иметь (еь е1)=1, (е% е1)=0, ... , (еп, е1)=0.
Отсюда
a’aj + + а"ап = 1,
+ • • • + а"ап = °>
(Ю)
anPi -ф- Ола2 -ф- ... -ф- а^рп — 0.
Система (10) однозначно разрешима, так как Det af Ф 0.
Аналогично, полагая е2=[Дё’ -ф- ... -ф- р„ё'!, найдем е2 из усло-
вий (^ е2)—0, (<?а, е2)= 1, (еа, е2) = 0, ..., (<?„, е<2) = 0.
Продолжая процесс, найдем все векторы е\ ... , еп £ L* такие,
что (е,-, efc) = 8* Они составят независимую систему. В самом
деле, пусть
§ 1] КОНТРАВАРЙАНТНЫЕ И КОВАРИАНТНЫЕ ВЕКТОРЫ 165
Свертывая левую и правую части этого равенства с вектором
ek С L, найдем
6*)’
или Xfc = 0 (k=\, 2,..., и), поскольку (ek, е')=В* и
(ek, 0*)=О. Тем самым доказано, что для любого базиса
fi, ... » е„ С L существует взаимный базис е1, ... , еп в
пространстве L* при любом задании сопряженности меж-
ду L и L*.
Докажем единственность. Допустим, что для данного базиса
fi, • • • , fn € найдутся в пространстве L* два взаимных
базиса: е\ и e‘t. Имеем: (ek, е') = В* и (eh, e‘)=8j,. Отсюда
(ek, f‘—е‘) = 0 для всех k—\, ..., п и при любом
Z=l, 2...... п. Отсюда и по условию невырожденности
находим е\— е’ = 0*, или f‘=f‘.
Пусть теперь х=ххе14- • • • 4~ хпеп (г L, « = ще’
... 4“ чпеп Е L*, где е{ и ек — взаимные базисы. Формула (8)
теперь принимает вид
(Х, W) = X,H1-f- ... -\-Xnlln. (11)
Вместе с тем доказана эквивалентность всех пространств,
сопряженных с L. В самом деле, пусть L* и LJ— два про-
странства, сопряженных с L, ех, ... , е„— любой базис в L,
f1, ... , еп — взаимный с ним базис в L*, (f1/, ..., (епу —
взаимный с fi, ... , еп базис в LJ. Установим линейный изо-
морфизм между L* и L|, полагая
и'=П1 (е1)' -|- ...J- п„ (fПУ, if £ L|,
в качестве соответствующего элемента для произвольного
н = Hjf14- • • • + wnf", « € Ь*•
Тогда вследствие (И)
(х, и)=(х, if).
Теперь ясно, что новое определение сопряженных пространств
по существу не отличается от ранее изложенного. Достаточно
заметить, что с произвольным элементом и £ L* сопоставляется
линейная форма
(х, и)=«1Х1 -j- чпхп,
где иь ... , ип — коэффициенты (постоянные координаты дан-
ного вектора и £ L*).
166 ТЕНЗОРНАЯ АЛГЕБРА (ГЛ. V
§ 2. Тензорное произведение линейных пространств
1. Пусть даны линейные пространства L и L, одновре-
менно действительные или комплексные (возможно, беско-
нечномерные). С помощью векторов из £ и £ мы построим
некоторые новые объекты, множество которых обозначим
через Т.
Прежде всего, элементами Т будем считать всевозможные
пары векторов ab, где а £ £, b £ £. Кроме того, в качестве
элементов Т будем рассматривать всевозможные наборы таких
пар, взятых каждый раз в конечном числе. Никаких других
элементов в Т уже не будет. Иначе говоря, любой элемент
t £ Т имеет вид
/={аЛ, ... , akbk}, (1)
где аь ... , ak£ L, Ьь ... , bk £ L. Смысл этого равенства
заключается только в том, что элемент множества Т,
обозначенный буквой t, есть набор пар axbi, ... , akbb.
Договоримся на первом месте пары всегда писать элемент
из £. Если £ и £ совпадают, то пары векторов, которые
составляют элементы множества Т, считаются упорядочен-
ными, т. е. порядок записи векторов в паре существен. Таким
образом, в случае £ = £, а £ L,b £ £, вообще говоря, ab ф Ьа.
2. Для дальнейшего оказывается более удобным пару cb
называть произведением а на Ь, кроме того, вместо слов
«набор пар» употреблять слово сумма. Соответственно
вместо (1) будем писать
t = -j- ... + okbk, (Г)
где ai, ... , ak£ L, bi, ... , bk £ L. Заметим, что очень часто
пару ab называют формальным произведением а на Ь, а сумму
(1') — формальной суммой. Далее мы увидим, что указанная
арифметическая терминология имеет достаточно оснований.
3. Для множества Т мы введем три условия эквивалент-
ности, т. е. условия, при которых некоторые элементы Т счи-
таются равными. Именно:
1) формальная сумма не зависит от порядка слагаемых;
2) (а -J- Ь) с = ас -j- be,
где а, b — любые векторы из £, с — любой вектор из £; ана-
логично a(b с)= ab ас, где а С £, Ь, с £ £;
§ 2] ТЕНЗОРНОЕ ПРОИЗВЕДЕНИЕ ПРОСТРАНСТВ 167
3) (аа) b — a (ab), где а, b — любые векторы, взятые соот-
ветственно из L и L, а — любое число (действительное, если
L и L — действительные пространства, комплексное, если эти
пространства комплексны).
Замечание. Мы не упомянули еще одно условие экви-
валентности как само собой разумеющееся (его следовало бы
поставить на самом первом месте), именно, что при допусти-
мой замене векторов ... , ак, blt ... , bfi элемент t подвер-
гается допустимой замене, то есть переходит в равный себе.
4. Условия п. 3, другими словами, означают, что мы счи-
таем допустимыми заменами элемента
:== °i^i 4" • • • 4" € Т (2)
а) изменение порядка записи пар а^, ..., в сумме (2);
б) замену одной пары суммой пар или замену суммы пар
одной парой согласно 2) п. 3; . например, если == ajто
пару aibi в составе t допустимо заменить суммой a'tbi -f- а[Ьй
в) перенос числового сомножителя от одного вектора дан-
ной пары к другому вектору той же пары.
Вместе с этим два элемента tlt £ Т считаются равными
в том и только в том случае, когда с помощью конечного
числа допустимых замен их можно привести к одному и тому
же набору пар элементов из L и L.
5. В множестве Т мы введем линейные операции.
1. Суммой двух элементов множества Т
t -|“ . . . -|“
— 01^1 4“ Ombm
назовем элемент этого множества, который представляет собой
набор пар элемента t, объединенный с набором пар эле-
мента t':
t-\-V = 01^14" ... 4" ak^k 4- с1^1 4- • •. 4- ambm-
2) Произведение элемента t на число а определим равен-
ством
al = (aai) bi 4~ ... 4- (аа/;)
Вследствие п. 4 сумма и произведение а! инвариантны
относительно допустимых замен элементов t и Г.
168
ТЕНЗОРНАЯ АЛГЕБРА
|ГЛ. V
Докажем, что множество 7 вместе с такими линейными
операциями является линейным пространством.
Прежде всего заметим, что аксиомы 1), 2) и 5) — 8) линей-
ного пространства с очевидностью соблюдаются для Т вслед-
ствие данного сейчас определения линейных операций и вслед-
ствие условий 1) и 3) п. 3. Остается проверить аксиомы
3) и 4).
Чтобы проверить аксиому 3), нужно обнаружить в Т нуле-
вой элемент. Покажем, что нулевым элементом в Т является
пара 60, где 6 — нулевой элемент £, 6 — нулевой элемент L.
Для этого предварительно установим, что каким бы ни был
элемент b£ L, имеем 66 = 6Ь (аналогично 66 = afi для любого
а £ L). В самом деле, согласно условию 3) п. 3
66=6 (0 • Ь) = (0 • 6) b = ВЬ.
Отсюда
ab + 68 = ab 4- Bb = (a -f-6) b = ab.
Наконец, если t=a1b1-\- ... -|-akbk — любой элемент из Т,
то
f4-66=0^14- ... 4-(«Л + е6) = аА4- ... -\-akbk = t.
Тем самым соблюдение третьей аксиомы линейного прост-
ранства для Т установлено.
Четвертая аксиома проверяется без труда. Именно, для
любого t£T противоположным элементом является (—1)-/.
Действительно,
t4- (—* i)- f=сЛ 4-... 4- ak^k 4-
+(— i)(«A4~ ••• 4~сЛ);=(<г1 + (— •••
• • (с* (— О ak) bk — 6 • bi 4~ • • 4- ® —
= се4- ... 4-бё=ее.
Доказательство нашего утверждения по поводу множества Т
полностью завершено.
6. Определение. Линейное пространство Т с учетом
конструкции его элементов в виде сумм произведений эле-
ментов из L и L называется тензорным произведением про-
странства L на L. Для его обозначения употребляется
§ 2] ТЕНЗОРНОЕ ПРОИЗВЕДЕНИЕ ПРОСТРАНСТВ 169
символическая запись
T=L®1.
Элементы пространства Т, рассматриваемые как суммы
произведений элементов из L и L, называются тензорами над
пространствами L и L.
7. Наряду с пространствами L и L рассмотрим сопряжен-
ные им пространства L* и L* и введем еще одну операцию,
называемую сверткой элементов из Т с элементами из L*
и из L*.
Возьмем сначала в качестве элемента Т одну пару ab,
а £ L, b £ L. Пусть п£ L*. Свертку пары ab по ее второму
(правому) элементу с элементом и (правую свертку) обозна-
чим через (ab, й) и определим равенством
(ab, ii) = a(b, а). (3)
Здесь (Ь, и) есть свертка элемента b £ L с элементом и £ L *,
понимаемая в смысле п. 7 § 1 этой главы. Так как (Ь, и)—
число, то свертка (3) является вектором, коллинеарным а,
т. е. вектором из L.
Свертка пары ab по ее первому (левому) элементу с
элементом г> £ L* (левая свертка) обозначается и определяется
согласно равенству
(у, ab) = (v, a)b.
Это есть вектор из L, коллинеарный с вектором Ь.
Свертку элемента t — aibi -f- например
правую с элементом и £ L*, определим почленно:
(oi^i -{- • • • Ч- atPk> н) = ai (Ръ и) + • • • 4~ ak (b/,, и).
8. Свертка элемента t £ Т с элементом £ L* или с
элементом и £ L* инвариантна относительно допустимых
замен элемента t.
Доказательство. Согласно определению свертки и
вследствие п. 7 § 1 этой главы свертка распределительна
относительно сложений элементов из Т, L и.£; числовые со-
множители выносятся за знак свертки. Поэтому при допу-
стимой замене элемента t получается также допустимая заме-
на его свертки с и или v.
170 ТЕНЗОРНАЯ АЛГЕБРА (ГЛ. V
Следствие. Если два элемента t\, Т равны, то
свертки ti и по правым элементам их пар с одним и тем
же элементом и С L* также равны (разумеется, анало-
гичное утверждение имеет место для сверток по левым
элементам').
§ 3. Базис в тензорном произведении.
Координаты тензора
1. Пусть теперь L и L конечномерны; обозначим их
размерности соответственно через л и т. Пусть ег, , еп —
базис в L, ёь... , ёт— базис в L. Рассмотрим Т—L(x)L.
Лемма. Если
• • • ~Ь etfln — (1)
где а.} £ L, то
at — a^—... =ап = 6. (2)
Доказательство. Рассмотрим в L* базис е\ ... , еп,
взаимный с данным базисом в L. Возьмем левую свертку
равенства (1) с вектором е\ На основании п. 7 § 2 мы полу-
чим равенство:
(с1, <?i)Й1(е1, сДо-)- ... -[-(е1, еп)ап =
= (е\ 0)0 = 0-0 = 0.
Отсюда
1 • 21 —0 • а2 —|— ... —J— 0 • ап = 0.
Следовательно, ai = 0. Аналогично найдем остальные равенства
(2), свертывая (1) с е\ ... , еп. Лемма доказана.
2. Теорема 1. Всевозможные пары etej линейно не-
зависимы в пространстве Т.
Доказательство. Пусть имеется соотношение
= (3)
i. i
где а,-у — некоторые числа. Равенство (3) можно записать
в виде
So
i \ J 1
КООРДИНАТЫ ТЕНЗОРА
171
§ 3]
Отсюда и из предыдущей леммы следует, что
= ® (4)
j
для каждого номера I. А так как Sj — векторы базиса, то
из (4) следует, что аг^ = 0. Теорема 1 доказана.
Теорема 2. Пары егё] образуют базис в простран-
стве Т.
Доказательство. Пусть t £ Т; имеем: t — а^
. ..-\-akbk. Разложим векторы ob..., ak £ L по базису
еъ ..., еп, а векторы Ьь ... , bh £ L — по базису ..., ёт.
Тогда после группировки членов получим
п tn
t='Ei S (5)
i~1j = 1
где — некоторые числовые коэффициенты. Согласно (5)
любой элемент из Т линейно выражается через пары егё}.
Отсюда и из теоремы 1 следует теорема 2.
Следствие. Если L и L имеют размерности пит,
то тензорное произведение Т= L (£) Ь конечномерно и
имеет размерность пт.
3. Теперь мы специально рассмотрим три случая тензор-
ного произведения двух пространств, когда либо оба прост-
ранства совпадают, либо одно из них является сопряженным
к другому.
Пусть L — пространство размерности п, L* — сопряжен-
ное ему; пусть et,..., еп — базис в L; е1, ... , еп — взаимный
с ним базис в L*.
1) Тензорное произведение L на L будем обозначать
через Т%. Согласно п. 2 любой элемент t £ Tg = L Q L имеет
разложение
t=^eiej. (6)
Элементы произведения 71 = L (х) L называются двухвалент-
ными контравариантными тензорами над пространст-
вом L.
2) Произведение L* на L* обозначим через Т®. Элементы
этого произведения называются двухвалентными ковариант-
172
ТЕНЗОРНАЯ АЛГЕБРА
1ГЛ V
ними тензорами над L. Для любого t£ Т% = L* (х) L*
имеем
(7)
3) Произведение L на L* обозначим через Т]; его эле-
менты называются двухвалентными смешанными тензо-
рами над L. Для любого Т[ = L (х) L* имеем
t = ^<.ei(J. (8)
Замечание. Элементы самих пространств L и [*, т. е.
контравариантные и ковариантные векторы, называются также
одновалентными тензорами (контра- и ковариантными -соот-
ветственно).
4. Коэффициенты разложений (6), (7), (8) называются опре-
деляющими числами или координатами своих тензоров
в базисе еь ... , еп пространства L. Они помечаются верх-
ними или нижними индексами в зависимости от структуры
тензора (как именно, видно из (6), (7), (8)).
Замечание. Поскольку тензоры определяются коорди-
натами, то часто, когда говорят «дан тензор», пишут при этом
его координаты, например t" (подобно тому, как в аналити-
ческой геометрии говорят: дана точка (х, _у)).
5. Элементы произвольной квадратной п X «-матрицы
можно принять за координаты некоторого тензора в данном
базисе. Их заданием в виде таблицы (т. е. соответственно
индексам) всегда будет определен некоторый тензор в Т1,
а также в 7j и в Т\. При переходе к новому базису коор-
динаты тензоров преобразуются по специальным законам,
отвечающим 7^, и Т{. Найдем эти законы.
6. Для координат тензоров из Т% = L (х) L имеет место
контравариантный закон преобразования по обоим индексам.
Это значит, что если мы в пространстве L перейдем
к новому базису
ev=^P[eb (9)
то новые координаты тензора t £ будут выражаться через
его старые координаты по формулам
(I)
й J
§ 3]
КООРДИНАТЫ ТЕНЗОРА
173
Доказательство. Для формул (9) обратными яв-
ляются
еi — 2 О/е i'-
Отсюда
* = У, = У, /Q'iei' У <$еЛ =
i> A i1 Г /
С другой стороны,
t=^'i'evef. (11)
Сравнивая (10) и (11), получим (I), что и требовалось.
7. Закон преобразования (I) выведен нами как следствие
инвариантности тензоров f ( относительно выбора базиса
в пространстве; мы воспользовались этой инвариантностью
в тот момент, когда сравнивали (10) и (11). Наоборот, ин-
вариантность тензоров t С Т1 следует из (1). Подробнее: если
в базисе еь ..., еп С L произвольно даны числа т'7 (z, J =
= 1, 2, ..., ri) и если при переходе к другому базису
е^, ..., еп> £ L по формулам (9) они заменяются числами т,1'?
согласно (I), то
У t’-'i'eref — £
Доказательство. Применяя (9) и (I), получим
2 (S Q{) (1>к) =
= S (S (S Qfpj') eiej =2 т“₽8‘8^=2
8. Для координат тензоров из T$ = L* (x)L* имеет место
ковариантный закон преобразования по обоим индексам:
(И)
Для координат тензоров из Т\ — L (х) L* имеет место контра-
вариантный закон преобразования по верхнему индексу и
ковариантный по нижнему:
4=^jQiPf- 0П)
Обе формулы (II) и (III) выводятся, исходя из инвариант-
ности тензоров в и Т[ относительно выбора базиса в L,
174
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ V
вполне аналогично формуле (I). При этом для вывода фор-
мулы (II) нужно вместо (9) использовать известные нам
равенства
= (12)
Для вывода (Ill) следует использовать и равенства (9), и
равенства (12).
Замечание. В свою очередь инвариантность тензоров
в Г» и Г{ в том смысле, как это объяснено в п. 7 для 77,
следует из (И) и (III).
9. Линейные операции над тензорами в 77, и Т{
выражаются в координатах по обычным правилам.
1) При сложении тензоров их координаты складываются:
например, если
t — С Т20, s='^a,'eieJ (Е Т%,
то
€ т2.
Разумеется, сложение тензоров разной структуры не опреде-
лено. Если бы мы вздумали складывать их координаты, то
не получили бы инвариантного результата.
2) При умножении тензора на число все его координаты
умножаются на то же число; например, для 1 (
10. Выражение свертки в координатах требует несколько
более подробного объяснения. Пусть даны двухвалентный
контравариантный тензор t — £ Т„ и ковариантный
вектор w = 2w«e‘ С L*. Рассмотрим, например, правую сверт-
ку t с вектором и. Имеем
(7, и)=(2т'уе1-еу, ^lukek)='Sl^'Uk^i(ej, ek)~
—2 =2 CS tiktik) ei.
Таким образом, в результате этой свертки мы получаем не-
который вектор x = € Е, координаты которого нахо-
дятся путем суммирования по второму индексу т'/;
Аналогично в случае левой свертки
(и, 0=2(2^4)^,
§ 3]
КООРДИНАТЫ ТЕНЗОРА
175
мы получаем вектор = С L, координаты которого
находятся путем суммирования по первому индексу т'7:
И. Если £ L, то правая
свертка
(t, х) = 2(2г/АУ)ег.
Это есть вектор zz = 2?z;e‘ € L*, т. е. вектор сопряженного
к L пространства. Координаты его находятся путем суммиро-
вания по второму индексу
«• = 2'Г«-У-
Левая свертка представляет собой также вектор из L* и сво-
дится к суммированию по первому индексу
12. В случае 1 = £ Т\ возможна свертка и с век-
тором x='£xkek ( 1ис вектором u — ^ukek £ L*. Именно:
& х)==(^^е.е>, ^ixkek') = ^iJxkei^> ek) = £(£У)ег.
Аналогично
& «) = (S 2 «Z) = 2 xijuk (ер е V = £ (£ 47*)
Таким образом, если х £ L, то (#, х) £ L. Если и g L*, то
(t, и) Е L*.
13. Для t £ Т\ возможна внутренняя свертка, которая
заключается в замене каждой пары afii в составе t = аА~|-...
...-\-akbk C L, bt £ L*) сверткой (a,-, Zz;). Это определение
не связано с выбором базиса, поэтому внутренняя свертка
смешанного тензора t есть инвариантное число, зависящее
только от выбора элемента t из пространства Т\.
Если обозначить внутреннюю свертку t через (t), то
в произвольном базисе имеем
(О = 2 (ен е') = 2 S = + т2 + • • • + т«-
Отсюда также можно вывести инвариантность внутренней
свертки как следствие формулы (III). В самом деле, из (III)
имеем
S 4=S =S 4
k’ i, j \k' } i, j k
176
ТЕНЗОРНАЯ АЛГЕБРА
ГГЛ V
14. Мы видим, что свертка во всех случаях приводится
в координатах к суммированию по одному контравариантному
(верхнему) индексу и по одному ковариантному (нижнему)
индексу. При этом общее число валентностей, т. е. общее
число индексов, которыми помечены координаты тензоров,
понижается на две единицы. В тех случаях, когда остается
один индекс, результат свертки есть одновалентный тензор (век-
тор из L или из L*), Например, свертка ^itkiuk = x’ оставляет
один свободный индекс (верхний) и дает вектор ^x'ej £ L.
В тех случаях, когда свободных индексов не остается (как
в п. 13), получается числовой инвариант. Поэтому числовые
инварианты часто называют тензорами нулевой валентности.
§ 4. Тензоры билинейных форм
1. Пусть в линейном n-мерном пространстве L дана ин-
вариантная билинейная форма а(х, у), х, у £ L. Если в L
задан базис еь ..., еп, то в этом базисе форма а (х, у) имеет
координатное представление:
а(х, y)==^laiJxiyf. (1)
Пусть делается переход к новому базису в L:
ev = ^pivei-
В новом базисе форма а (х, у) получает другое координатное
представление с новыми коэффициентами Согласно § 3
гл. IV
ar/' = S aijPvPir
Таким образом, коэффициенты билинейной формы в L пре-
образуются по ковариантному закону для каждого индекса
(см. (И) п. 8 § 3). Поэтому с формой а(х, у/) можно сопо-
ставить тензор из Та, именно
Он называется тензором данной билинейной формы. Из п. 7
§ 3 следует, что тензор а сопоставляется с формой а(х, у)
инвариантно (т. е. он один и тот же независимо от выбора
базиса в пространстве L).
Обратно, любому тензору (2) из отвечает билинейная
форма в L. В самом деле, если сделать левую свертку (2)
ТЕНЗОРЫ БИЛИНЕЙНЫХ ФОРМ
177
§ 4]
с вектором £ L, а затем найденный вектор (из L*)
свернуть с вектором j = € Ь> то получится правая
часть (1). Тем самым с тензором а сопоставляется билинейная
форма
а(х, j) = ((x, a), y) = YlaiJxiyl. (3)
Инвариантность такого построения билинейной формы в L
по заранее данному тензору в 7% очевидна, поскольку свертка
есть инвариант.
2. Чтобы установить аналогичную связь с теорией били-
нейных форм для тензоров из Т% и Т{, нужно рассматривать
билинейные формы от двух ковариантных векторных аргу-
ментов и билинейные формы, у которых один из векторных
аргументов является контравариантным, другой — ковариант-
ным. И те и другие формы определяются как функции
с числовыми значениями, линейные по каждому аргументу.
Кроме того, должна быть потребована их инвариантность,
т. е. независимость их числовых значений от выбора базиса
(см. ниже, пп. 3, 4).
3. Билинейная форма а (и, д) с двумя ковариантными
аргументами u='£iuiet £ L*, v='£viei £ L* имеет коорди-
натное представление
а (и, т))=2 a^UfVj
с коэффициентами
а,, — а(е\ е1}.
Отсюда и из (1*) п. 3 § 1
аг' i' = а (е1', е?) — а (е‘, Q*' Qj' — £ a1' Of QT.
Таким образом, коэффициенты формы а (и, г») преобразуются
по контравариантному закону для каждого индекса (см. (I)
н. 6 § 3). Поэтому с формой а (и, v) инвариантно сопостав-
ляется тензор из То, именно
а = У j.
Обратно, любому заранее данному тензору а £ Т% отвечает
в виде свертки инвариантная билинейная форма
а (и, щ)=((п, a),
178
ТЕНЗОРНАЯ АЛГЕБРА
1ГЛ. V
4. Для билинейной формы а(х, и) с двумя разнородными
аргументами х = £ L, и — £ L* имеем
а (х, и) = 2 a{x?tij,
где
а{=а(ер е^).
Отсюда
а{' — а (е.„ еГ) = а (ер Р\, Q? = £ а/Р', QT.
Таким образом, коэффициенты формы а(х, и) преобразуются
по ковариантному закону для нижнего индекса и по контра-
вариантному— для верхнего. Поэтому с формой а(х, и)
инвариантно сопоставляется тензор из Т\, именно
Обратно, любому заранее данному тензору а С Т\ отвечает
билинейная форма
а(х, х), и) = у aix‘tij.
5. Заметим, что валентности тензора формы противопо-
ложны валентностям ее аргументов. Например, если некоторый
аргумент формы является ковариантным, то соответствующий
ему индекс тензора этой формы будет контравариантным
(верхним).
6. Формулы (2) и (3) п. 1 устанавливают взаимно одно-
значное соответствие между билинейными формами в L и
тензорами в Т%. Очевидно, это соответствие является изомор-
физмом относительно линейных операций. Таким образом,
в смысле линейной алгебры теория тензоров в Т% равносильна
теории форм а(х, у) в L. То же самое можно сказать по
поводу теории тензоров в и в Т{ и теории форм а (и, т>)
и а(х, и).
Однако построение отдельной теории тензоров (помимо
теории форм) необходимо. Во-первых, дело в том, что в
рамки теории форм не укладывается операция свертки. Во-
вторых, тензоры сопоставляются не только с формами, но и
со многими другими объектами алгебры в геометрии (а также
механики и физики). Такое сопоставление, прежде всего,
позволяет общими методами строить инварианты рассматри-
ваемых объектов (чаще всего в виде сверток). Кроме того,
§ 41 ТЕНЗОРЫ БИЛИНЕЙНЫХ ФОРМ 179
отсюда возникает возможность выражать связи между объек-
тами в виде тензорных уравнений, т. е. в виде равенств
между тензорами. Важной особенностью тензорных уравнений
является их инвариантность.
7. Именно, пусть имеется, например, уравнение
тг, = 0. (4)
Оно означает, что в данном базисе все координаты некото-
рого тензора из 7^ равны нулю. Но тогда координаты этого
тензора равны нулю в любом другом базисе. Арифметически
это обстоятельство усматривается из формулы (I) п. 6 § 3,
но по существу оно непосредственно проистекает из самого
определения тензоров из как инвариантных объектов
(уравнение (4) выражает инвариантный факт, что тензор
-f = 2 есть нулевой элемент в Т^). Разумеется, то же
самое можно сказать про уравнения вида и т* = 0.
Вследствие инвариантности тензорных уравнений для до-
казательства их справедливости достаточно сделать проверку
в каком-нибудь одном, по возможности удобном базисе. Это
простое соображение будет часто применяться в дальнейшем.
8. Укажем один признак, позволяющий распознавать
двухвалентные тензоры.
Пусть некоторый объект А определен в любом базисе
еj, ..., еп пространства L координатами а^, но мы не знаем,
как изменяются его координаты при переходе от одного
базиса к другому. Имеет место предложение:
Если свертка координат aik по какому-нибудь индексу
с координатами любого контравариантного вектора всегда
имеет по оставшемуся свободному индексу ковариант-
ный закон преобразования, то сами координаты а^ пре-
образуются по ковариантному закону для каждого
индекса.
Доказательство проведем для свертки по первому
индексу. Пусть x — ^lxiei— произвольный контравариантный
вектор (т. е. х ( рассмотрим свертку
bk = Xlailtxi.
По условию мы можем рассматривать bk как координаты
некоторого вектора b £ L* (в базисе е1...е"). Возьмем в L
еще один, также произвольный вектор = Тогда
(А _у) == у; bkyk = 2 (5)
180
ТЕНЗОРНАЯ АЛГЕБРА
(ГЛ. V
есть инвариант. Следовательно, правая часть (5) есть коор-
динатное представление инвариантной билинейной формы.
Отсюда и вследствие п. 1 наше предложение доказано.
Замечание. На основании доказанного предложения
объекту А инвариантно сопоставляется тензор из Т$. Соот-
ветственно это предложение можно считать признаком кова-
риантных двухвалентных тензоров.
9. Аналогично, если
является контр авар иантным вектором при любом выборе
ковариантного вектора аг, то a,k есть двухвалентный контра-
вариантный тензор. Если
yk — У, atxf
является контравариантным вектором при любом выборе
контравариантного вектора х1, то — смешанный тензор.
Оба утверждения сводятся (подобно предыдущему) к
пп. 3, 4.
§ 5. Многовалентные тензоры. Произведение
тензоров
1. Поскольку определено тензорное произведение двух
пространств, тем самым определено также тензорное произ-
ведение пространств, взятых в любом числе. Достаточно
перемножать их последовательно в каком-либо порядке. Если
даны линейные пространства Lt, Е2, L3, то произведение
7'=(Е1 (х) Е2)(х) Е3 имеет в качестве своих элементов фор-
мальные суммы любого конечного числа слагаемых вида
(ab)c, где а С Lt, b С L2, с g L3. Условия эквивалентности
и соответственно допустимые замены элементов Т получаются
сочетанием условий эквивалентности элементов произведения
Lt (х) Eg на Е3 и произведения Lt на Eg. Например,
((a' а") Ь)с = (а'Ь) с -|- (а"Е) с;
((аа) Е) с = (а (аЕ)) с = (аЕ) ас,
где а — число. Кроме того, мы дополнительно потребуем
условие эквивалентности ассоциативного характера
(аЕ) с = a (be).
§ 5] ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ 181
Оно означает тождество (Ц 0 L2) 0 L3 = Lj 0 (I2 0 La) и
позволяет писать аЬс вместо (аЬ)с или а(Ьс). Линейные
операции в Т определены вместе с произведением Ц 0
на L3. Одновременно определена, и свертка, левая — с элемен-
тами из L*, правая — с элементами из L3. Можно определить
также свертку по средним элементам троек с элементом
и £ L*, полагая
(сцЬ^+ akbkck, и)—fa, и)алС1 -f-...-j-fa, u)akck.
Эта свертка есть элемент произведения Li 0 L3.
2. Тензорное произведение любого числа пространств
определяется по индукции.
3. Пусть дано линейное пространство L. Положим
7'₽=(L0L0...0L)0(L*0L*0...0L*),
где имеется р сомножителей L и q сомножителей L*. Эле-
менты из Тр будем называть тензорами над пространством L,
контравариантными р раз и ковариантными q раз (или
имеющими р контравариантных и q ковариантных валент-
ностей). Для единообразия обозначим также L через Т10 и L*
через Г}, что согласуется с условием, по которому элементы
из L и L* называются одновалентными тензорами.
4. Поскольку каждое пространство Тр является линейным,
то для тензоров в каждом из этих пространств определены
линейные операции. Сложение тензоров из разных прост-
ранств Тд\ И Тд} мы не определяем.
б. Помимо линейных операций над тензорами в каждом
lpq, мы определим произведение тензоров, взятых из каких
угодно, хотя бы различных пространств и
Пусть г С Тд\, s С Произведением г на s назовем
упорядоченную пару rs, понимаемую как элемент тензорного
произведения Тд[ 0 7^. Вообще говоря, rs ф sr. В согласии
с п. 1 имеем для любых г, s, t
(rs)t = r(st).
Соответственно получаем произведение трех тензоров: rst—
=(rs)t=r(st\ Вместе с тем определено произведение тен-
зоров для любого числа сомножителей.
182
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
6- Допустим, что г и s могут быть представлены в од-
ночленном виде, т. е. в виде произведения элементов из
L и L*:
Г • • @Р1Ь1 • • • S -— tZj . .. UpcJ)\ ... bq^f
где
Oj, ..., ^Pi> •••} apn£. bit •••> bqt) bit bqs £ L •
Тогда
rs = 01... aPlbi... bqfii... apfii... bgs.
Здесь порядок записи сомножителей из одного пространства
(L или £*) существен. Однако учитывать здесь взаимное
расположение каких-нибудь двух элементов из разных про-
странств не имеет смысла, поскольку такие элементы разли-
чаются сами собой. Поэтому в любом произведении элемен-
тов из L и L* мы всегда будем выписывать сначала все
элементы из L, потом все элементы из L*, сохраняя задан-
ный порядок элементов и в том и в другом случае. Таким
образом,
rs = at... aPlai... aPsbi... b91bi... b9s.
7. Положим a = ai...aPl, считая, что щ, ..., aPl могут
быть какими угодно элементами из L. Если pi = O, то усло-
вимся считать а=1. Аналогично будем понимать а, b и Ь.
Тогда произвольные тензоры г и s (г £ Тр\, s £ 7^;) можно
записать символически в виде:
г = У, ab, s = У\аЬ.
На основании изложенного в п. 1, произведение rs можно
получить путем почленного умножения первой из этих сумм
на вторую. Учитывая п. 6, имеем
rs = У aabb.
Отсюда ясно, что rs £
8. Пусть t £ Tpq, причем ps^\, 9^1. Аналогично пре-
дыдущему положим a = ai...ap, b = bi- ..bg,
t=^ab.
Выберем среди 1, 2, ..., р некоторый номер I и среди
1, 2, q — номер т. Обозначим через а' произведение всех
§ Б] ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ 183
элементов ар, за исключением аь через Ь'— произ-
ведение всех элементов bi, bq, за исключением Ьт. Назо-
вем внутренней сверткой тензора t по /-м элементам L и
по от-м элементам L* объект
(Ozm = S(«z,
Здесь (az, hm)—свертка элемента at С L с элементом
bm С L*> т. е. число (свое для каждого слагаемого суммы).
Таким образом, свертка (t)lm есть тензор из 7^2}. Если
р—1^1 и q—1^1, то к тензору (t)m можно в свою
очередь применить операцию свертки; мы получим тензор из
Тр~%. Разумеется, обе операции можно сделать сразу; на-
пример,
(ОН = ((01)2= У(«ь ^i)(«2> Ьч)а-А...арЬ-А...Ьд.
Если p = q, то можно исчерпать все валентности тензора t
и получить, как говорят, его полную свертку (число).
9. Свертки двух тензоров, которые мы рассматривали
выше, всегда можно свести к внутренней свертке одного
тензора. Для этого достаточно данные тензоры перемножить
и сделать внутреннюю свертку их произведения. Например,
свертка элемента х £ L с элементом и £ L* есть внутрен-
няя свертка произведения xw, правая свертка тензора i ( 7,
с элементом и С L* есть (ta)|.
10. В заключение этого параграфа мы должны сделать
ряд весьма существенных замечаний по поводу операций над
тензорами. Прежде всего, вследствие сказанного в п. 1, ли-
нейные операции в Tq инвариантны относительно допустимых
замен элементов в Tpq. Произведение rs £ fgi+gi Г € Tpqi,
s £ Tpq& инвариантно относительно допустимых замен элемен-
тов г и s в Tq[ и Tpql, т. е. при таких преобразованиях оно
само получает также допустимую замену в Без этих
свойств определение линейных операций над тензорами и
произведения тензоров было бы бессмысленным.
11. Из сказанного в п. 1 этого параграфа и в п. 8 § 2
следует, что при допустимой замене тензора t в Tq свертка
(tfm испытывает также допустимую замену в 7q~\. Отсюда
имеем: если то (^)т = (^)т-
184 ТЕНЗОРНАЯ АЛГЕБРА (ГЛ. V
Доказательство. Равенство t'.> == tx означает, что
с помощью допустимых замен тензоров и их можно
привести к одному и тому же набору t произведений эле-
ментов из L и L*. Но тогда (ft)m и с помощью допу-
стимых замен сведутся к
12. В наших определениях мы нигде не использовали
базисов. Поэтому линейные операции над тензорами, а также
операции перемножения тензоров и внутренней свертки дают
результаты, инвариантные в смысле независимости от выбора
базиса.
В частности, полная свертка тензора есть числовой инва-
риант.
§ 6. Координаты многовалентных тензоров
1. Пусть et, ..., еп — базис в L, е1, ..., еп — взаимный
с ним базис в L*. Из теоремы 2 § 3 (по индукции) следует,
что всевозможные произведения вида состав-
ляют базис в Тд.
Таким образом, для любого t £ Тд имеет место разло-
жение
t = У т'.1 ‘' '.Ре, ...е, ел...еч.
Числа т71 ' ;р определяют тензор t и называются его коор-
Л "‘Jq
динатами в базисе еь ..., еп пространства L. В данном ба-
зисе они могут задаваться произвольно, т. е. как бы ни
взять числа по ним всегда будет определен
рый тензор. При этом часто пишут: t —
также: дан тензор Т/1”’;р. Следует иметь в виду,
*1 '"Jq
что фактическое задание какого-нибудь конкретного
некото-
говорят
однако,
тензора,
хотя бы только трехвалентного, требует довольно сложной
информации в виде таблиц, поскольку численные значения
координат должны быть указаны для каждой комбинации
индексов.
2. При переходе к новому базису Ту*’”/ преобразуются
по контравариантному закону для каждого верхнего индекса
§ 6]
КООРДИНАТЫ МНОГОВАЛЕНТНЫХ ТЕНЗОРОВ
185
и по ковари антному закону для каждого нижнего индекса.
Именно:
Л ‘ ‘ Ч = У ‘ ’ [р Q*1... QzPpyi... ph, (*)
jy.-.iq ii.--.jq «1 ip j1 jq
где суммирование идет по нештрихованным индексам.
Доказательство. Согласно (I), (I*) § 1
ev = ^Plveb е1' = ^$е1.
Для этих формул обратными являются
Cl = У Qi4> е — У Plve1'.
Отсюда
t — У xP"lP ei ...е{ eh... eh =
2j Jf-iq 1 'р
= У (У 4W1... Q‘?M...ph} ер. ..ерЛ.. .еЧ (1)
h’-h ч ^«р A jg) h ‘р 4 ’
С другой стороны,
t — У Л' ’ • • • ер eh... eh. (2)
K'-lq 1 v
Сравнивая (1) и (2), получим (*), что и требовалось.
3. Закон преобразования (*) выведен нами как следствие
инвариантности тензоров t С 1Р (мы воспользовались инва-
риантностью t, когда сравнивали (1) и (2)). Наоборот, инва-
риантность тензоров t С T‘q следует из (*); именно, вслед-
ствие (*)
X ^ip ,lPe - е -eji ejq-— \ Ji" ’?- ,.е. eh...eh.
Ji — jq 1 P ii — Jq '1 *P
Выводить это равенство из (*) мы не будем, отсылая чита-
теля к п. 7 § 3, где сущность дела показана в частном
случае.
4. Линейные операции над тензорами, взятыми в каком-
нибудь Tq, выражаются в координатах по обычным прави-
лам: при сложении тензоров их координаты складываются,
при умножении тензора на число — умножаются на то же
число.
5. При умножении тензора г С 7^} на тензор s £ 7^
каждая координата тензора г умножается на каждую коор-
186
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
динату тензора s и все такие произведения являются коор-
динатами тензора rs С Тр}фр|. Например, если г = У г,е‘,
s=’£sjef, г, s £ Ti, то гs = у г,-Sye‘W $ Т* полагая г$ =
= получим tl}-=riSj.
Замечание. Вообще говоря, rs ф sr. Неравенство rs
и sr легко усмотреть также в координатах. В самом деле,
полагая sr = t=^,tt получим /=У sJrieiel— ^isirJe,eJ.
Отсюда ti}- = Sfj и ti} Ф t(j.
6. Координаты свертки (f}m получаются из координат тен-
зора t путем суммирования по одному верхнему и одному
нижнему индексу, причем верхний индекс занимает место
с номером /, а нижний — с номером пг. Сущность дела здесь
лучше всего пояснить на конкретном примере. Пусть
t='Xial^eiejeae^.
Тогда, например,
(01 = У (ei> е₽) a‘k^iek = 2 = Zj fS
j. k \ ₽ /
Таким образом, координатами (^) являются суммы вида
У где суммирование идет по первому верхнему и вто-
₽
рому нижнему индексам.
§ 7. Полилинейные формы и их тензоры
1. Пусть дана инвариантная числовая функция a(xit..., xq,
и1, ..., пр) от векторных аргументов хь ..., xq £ L,
их, ..., ир С L*. Такая функция называется полилинейной
формой, если она линейна по каждому своему аргументу.
2. Пусть в пространстве L выбран базис еь ..., еп,
а в пространстве L*— взаимный с ним базис е\ еп.
Тогда каждый контравариантный аргумент xk С L данной
формы может быть разложен по базису eit еп:
xk = У, XkCt = x\ei 4-... Ч- xnken.
Аналогично каждый ковариантный аргумент разлагается по
е\ .... еп:
uk = ^Uje‘ — ще1 -j- • • • + ипеп.
ПОЛИЛИНЕЙНЫЕ ФОРМЫ И ИХ ТЕНЗОРЫ
187
§ Л
Отсюда
а(хь Хд, и1, ир) =
= aQix{1eji, .... 24 А •••> 2«V'₽)-
Тем самым вследствие линейности формы получается ее коор-
динатное представление
а(хь ...,xv и\ uP) = ^a\\\\ljpxJil ...х^-и1г..ир1р, (1)
где
4-"'^=а(ч> •••’%> е''> еЪ (2)
— коэффициенты правой части (1). Согласно (2) они пред-
ставляют собой значения формы на базисных векторах.
3. При переходе к новому базису е^, еп- в L имеем
ef = Ур1гек- (3)
}k 4-i Jk v ’
Соответственно в L*
a=Jq.v*. (4)
В новом базисе координатное представление формы будет
иметь новые коэффициенты. Вследствие инвариантности
формы они также являются ее значениями на базисных век-
торах (разумеется, новых). Таким образом,
а1,"’,Р = а(е..., е.>, ..., е1Р). (5)
Из (5) с учетом (2), (3) и (4) найдем
аЧ • ‘ • 1р — V аЧ ‘ • 'j>Q4 ... Q'ppA... piq (6)
h---jq A ‘p h jq
где справа суммирование идет по нештрихованным индексам.
Мы видим, что закон (6) преобразования коэффициентов
инвариантной полилинейной формы а(хь ..., xq, и1, ..., ир)
совпадает с законом (*) § 6 преобразования координат
тензора в Тр. Следовательно, с каждой формой а(xt, xq,
и1, ир) инвариантно сопоставляется тензор в Г£:
а = ‘'.'%% • • • eipetl • • • (7)
он называется тензором данной формы.
188
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
Обратно, каждому тензору (7) отвечает инвариантная
полилинейная форма (1), Заметим, что эта форма представ-
ляет собой полную свертку произведения axt... Xqti1.. .ир.
§ 8. Симметрирование и альтернирование. Косые формы
1. Рассмотрим в базисе <т, ..., еп £ L полилинейную форму
а (х, у, z,..., t) = £ aijk.. . У (О
и соответствующий ей (ковариантный) тензор Форма
(1) называется симметричной по данной паре аргументов,
если их перестановка не меняет значения формы. Например,
а (х, у, z, t) симметрична по первому и третьему аргу-
ментам, если а(х, у, z, ..., t)= a(z, у, х..I) при любых
х,у, z, i С L.
Симметрия формы по данной паре аргументов влечет сим-
метрию ее тензора по соответствующей паре индексов;
в нашем примере имеем симметрию тензора по первому и
третьему индексам: aijit...s = akji ...s- В самом деле,
O-ijk...5 — о (е,, еj, ек, ..., е5) — а (ек, е j, е^, •.., е5) — акр§•
Обратно, если, например, 0,7*...^ = Ofe7,-...«> т0
a(x,y,z, ..., t)=Ylaijk,.,sxiylzk.ts — Ylakji..,sx^ylzk...f =
— £aijk.'.sziy,xlt ... ts — a(z,y,x, ..., t).
Полилинейная форма называется симметричной, если она
симметрична по каждой паре аргументов; симметричной форме
соответствует симметричный тензор.
2. Форма (1) называется кососимметричной по данной
паре аргументов, если их перестановка меняет знак формы.
Например, а(х,у, z, ..., t) кососимметрична по первому и
третьему аргументам, если а (х, у, г,..., t) — — a(z,y,x,...,t)
при любых х, у, z,..., t; тензор такой формы кососимме-
тричен по первому и третьему индексам, т. е. a/y-fe...s=—akji...s-
Полилинейная форма называется кососимметричной или
косой, если она кососимметрична по каждой паре аргументов;
кососимметричной форме соответствует кососимметричный
тензор.
Косая форма не меняет своего числового значения при
любой четной перестановке ее аргументов. При любой нечет-
§ 8]
СИММЕТРИРОВАНИЕ И АЛЬТЕРНИРОВАНИЕ
189
ной перестановке аргументов косая форма умножается на
минус единицу.
3. Симметрия или косая симметрия формы от ковариант-
ных аргументов и соответственно контравариантного тензора
определяется в полной аналогии с предыдущим. В случае
смешанного тензора свойства симметрии или косой симметрии
могут иметь место для нижних индексов или для верхних
индексов. Но для пары индексов, из которых один нижний,
другой верхний, эти свойства не инвариантны. Например, для
тензора а* в некотором базисе возможно равенство =
(/, А==1, 2....и); однако при переходе к другому базису
оно, вообще говоря, нарушится.
4. Если а (х, у, z, ..., f) — произвольная полилинейная
форма, то с ней по определенному стандарту может быть
сопоставлена симметричная форма от тех же аргументов.
Именно:
(а (х, у, z,..., 0)=S а (х, у, z,..., t),
где сумма справа берется по всем перестановкам символов
х, у, z,..., t‘, пг — число этих символов (число аргументов).
Эта операция называется симметрированием и обозначается
круглыми скобками. В частных случаях т = 2 и от = 3 имеем
(а (х, у)) = X {а _у) _j_ а (у, х)},
(а (х, у, z)) = — {а (х,y,z)-[-a (у, z, х) +
-j- a (z, х, у) Ц- а (у, х, z) Ц- а (х, z,y)-j-a (z, у, х)}.
Симметрированию формы соответствует симметрирование ее
тензора; например:
а(*Л = "2Г “Ь ’
a(W —-^p{aijk + ajhi -]- akij -j- ajik -]- alkj -j- akjl}.
Если сама форма а симметрична, то (d)=a.
5. С симметрированием тензора полилинейной формы при-
ходится, например, иметь дело в тех случаях, когда аргументы
этой формы отождествляются. Именно, если
190
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
— билинейная (вообще говоря, не симметричная) форма, и мы
строим квадратичную форму а(х,х), то происходит приведе-
ние подобных членов:
aiftx£xft -j- aftfxftx£ = (aik -j- aki) х{хк = 2a(ik}xtxk.
Коэффициентами полученной квадратичной формы называются
числа они составляют ее (симметричную) матрицу. По-
лярной для а(х,х) является форма (а(х,_у)). Аналогично «(,7*)
называются коэффициентами кубичной формы а(х, х, х),
которая получается путем отождествления аргументов трили-
нейной формы a(x,y,z).
6. Операция альтернирования заключается в том, что
с произвольной полилинейной формой а(х,у, z, f) по
определенному стандарту сопоставляется кососимметричная
(косая) форма от тех же аргументов. Она обозначается квад-
ратными скобками и определяется равенством
[а (х,у, z,..., 0]{^1 а (Х’У>z’ • • • ’~ -S2 а ' • - *)}.
где первая сумма берется по всем четным перестановкам
символов х, у, z,..., t, вторая — по всем нечетным. Например:
[а (х, _у)] = А- {а (х, у)—а (у, х)},
[а (х, У,г)] = -^-{а (х, y,z)+a (у, z, х)
-J- a (z, х, у) — а (у, x,z) — а (х, z, у) — a (z, у, х)}.
Соответственно имеем операцию альтернирования тензора:
1 / ч
яр/]— 2] (^«/ a-ji)’
а[<А1 = 3] ajki~r akij aJik aikJ akji\
Если форма а косая (кососимметрична по всем аргументам),
то [а] - а.
7. Отметим два простых свойства множества косых форм:
1) При отождествлении хотя бы двух аргументов
косая форма обращается в нуль.
СИММЕТРИРОВАНИЕ И АЛЬТЕРНИРОВАНИЕ
191
§ 81
В самом деле, пусть, например, совпадают первые два
аргумента косой формы; тогда
а{у,у, z, — — а(у,y,z,t).
Следовательно, 2а (у, у, z, ..., 0 = 0.
2) Если число аргументов косой формы, превышает
размерность пространства, то форма тождественно
равна нулю.
В самом деле, в этом случае аргументы связаны линей-
ной зависимостью и, следовательно, один из них линейно
выражается через остальные. Пусть, например, х = оу -j- flz -|-
—| — X/. Тогда
а(х, у, z,..., t) =
= о.а(у,у, z,..., f)-\-$a(z,y, z,...,f}-\- ... -\-\a(t,y,z, ...,0,
и вследствие первого свойства а(у,у, z,.... 0 = 0,...
.... a (t, у, z,..., t) = 0. Отсюда а (х, у, z,..., t) = 0.
8. Рассмотрим косые формы, у которых число аргументов
равно размерности пространства.
Пусть а (х, у,..., 0 — произвольная косая форма от п
аргументов х, y,...,t, принадлежащих «-мерному простран-
ству L. Зафиксируем в L произвольный базис еь ..., еп и
разложим по нему аргументы формы. Согласно п. 2 § 7
имеем
а (х, д/,..., 0 = Ц аг,,-г... 1пх^у*> ... 0», (2)
где
ahh ...ln = a ieii> О2, • • • > е«„)-
Из определения косой формы и свойства 1) предыдущего
пункта
a(ei,, <?,-2,..., eir) = а(еь еъ ..., е„),
то есть
а1Рг ...in = . inal 2... «• (3)
Подставив (3) в (2), мы видим, что в данном базисе рас-
сматриваемую форму можно представить в виде
а(х,у,..., 1) — ац. (4)
192
ТЕНЗОРНАЯ АЛГЕБРА
[ГЛ. V
где А — определитель, составленный из координат аргументов:
А = 2 8Zli,... tn xiiy‘! ... =
X1 X9 ... хп
у1 у2 ... уп
? /2 ... ё
(5)
Коэффициент Д12...п будем называть основным коэффи-
циентом косой формы (2). Все остальные ее коэффициенты
равны либо нулю, либо ±Ci8...„ (в соответствии с форму-
лой (3)).
Если ai2...n = 0> то косая форма a(x,y,...,t) равна
нулю тождественно.
Если С12...п7^0, то а(х,у,..., t) отлична от нуля, когда
аргументы линейно независимы.
Из формул (4) и (5) следует, что с точностью до число-
вого множителя в пространстве L существует лишь одна
косая форма от п аргументов.
В самом деле, если данная форма а(х, у,..., t) не равна
нулю тождественно, Ь(х,у,..., t) — любая другая косая форма
от п аргументов, то
Ь(х,у,..., = ,.п- Д = В-а(х,у,..., t),
где
О 2 ... п
Р «12... п’
Заметим, что все рассуждения этого пункта проведены в дан-
ном базисе, использована лишь косая симметрия форм, но не
использована их инвариантность. Этим мы воспользуемся
в следующей главе при рассмотрении кососимметричных
полилинейных функций, числовое значение которых не инва-
риантно по отношению к смене базиса.
9. Более детальному изучению косых форм и кососиммет-
ричных тензоров специально посвящена десятая глава.
§ 9. Второй вариант изложения понятия тензорного
произведения двух линейных пространств
1. В начале этой главы, в § 2 мы определили тензорное
произведение Т—L как множество, элементами которого
являются любые конечные наборы пар, составленных элемен-
тами из L и L. Таким образом, если в качестве элементов L
§9]
ТЕНЗОРНОЕ ПРОИЗВЕДЕНИЕ (ВТОРОЙ ВАРИАНТ)
193
и L выбраны конкретные объекты, то элементы L 0 L так-
же вполне конкретны (наборы пар этих объектов). В кон-
струкцию L ® L нам пришлось включить описание допусти-
мых замен и линейных операций для элементов множества
\ L ® L, чтобы сделать его линейным пространством. Поскольку
нам пришлось конструировать линейное пространство L$L,
то изложение понятия тензорного произведения выглядело
довольно сложным.
Мы изложим сейчас определение тензорного произведения
L 0 L снова, совершенно независимо от предыдущего. Оно
будет более экономно в том отношении, что в качестве L0 L
будет • заранее взято некоторое линейное пространство Т
(смысл равенства 7'=L0L будет заключаться в установле-
нии лишь некоторых взаимоотношений между элементами
L, L и Т). К сожалению, это новое определение будет обла-
дать своими недостатками. Дело в том, что в новой конст-
рукции тензорного произведения L 0 L останется значитель-
ный произвол (в отличие от старой конструкции, где эле-
менты L 0 L вполне определены элементами L и L). Поэтому
первоначально далее определяется по данным L и L не одно
тензорное произведение L 0 L, а множество разных. Но затем
мы определим некоторое естественное понятие изоморфизма этих
тензорных произведений, в силу которого они окажутся изо-
морфными (эквивалентными) друг другу, а также тензорному
произведению L на L в смысле нашей старой конструкции
§ 2. Конечно, чтобы изложить эти вещи, придется также
потратить известный труд; в общем итоге экономии изложе-
ния по сравнению с первоначальным вариантом, пожалуй,
не будет.
2. Мы все-таки даем этот новый вариант изложения поня-
тия тензорного произведения, имея в виду, насколько
возможно, помочь читателю уяснить себе следующий
вопрос.
Пусть сказано, что линейное пространство Т является
тензорным произведением линейного пространства L на линей-
1ное пространство L. Ограничимся сейчас конечномерным слу-
чаем. Тогда размерность Т равна произведению размерностей
L и L. Но, разумеется, одного лишь этого соотношения раз-
194
ТЕНЗОРНАЯ АЛГЕБРА
|ГЛ. V
мерностей недостаточно, чтобы охарактеризовать Т как тен-
зорное произведение L 0L. Дело в том, что в конкретных
случаях конструкцию тензорного произведения, описанную
в § 2, мы можем не усмотреть. Более того, все три прост-
ранства L, L и Т могут быть даны с точностью до линей-
ных изоморфизмов, а тогда формальные суммы, описанные
в § 2, заменятся элементами совсем другой природы. Поэтому
ответ на вопрос, что значит, что Т является произведением
L ® L, в такой общей ситуации на основе § 2 по существу
нельзя и дать. Для этого требуется само определение тен-
зорного произведения высказать в более общей форме, что
и будет дальше сделано.
3. Пусть даны линейные пространства L и L размерностей
п и m соответственно. Пусть дано также линейное простран-
ство Т, размерность которого равна произведению пт. Все
пространства L, L и Т предполагаются одновременно действи-
тельными или одновременно комплексными.
Пусть далее дано некоторое отображение f пары про-
странств L, L в пространство Т. Это значит, что с произ-
вольной парой элементов а, а, где а £ L, а QL, сопоставлен
элемент t £ Т. Будем для простоты писать
t = aa, (1)
отождествляя тем самым пару аа с ее образом t=f(a,a)
в пространстве Т. Условимся и в дальнейшем на первом месте
пары Писать элемент пространства L; если L совпадает с L,
то пару в правой части равенства (1) будем считать упоря-
доченной; таким образом, вообще говоря, аа ф аа, то есть
элементы, которые в пространстве Т отвечают в силу ото-
бражения f парам аа и аа, не обязаны совпадать.
Предположим, что имеют место следующие свойства ото-
бражения f.
1. Распределительное свойство относительно
каждого элемента пары:
(а -ф- Ь) а — аа -ф- Ьа, (2)
а (а -ф- Ь} — аа -j- ab (3)
для любых a,b £ L, a,b £ L.
§9]
ТЕНЗОРНОЕ ПРОИЗВЕДЕНИЕ (ВТОРОЙ ВАРИАНТ)
195
2. Сочетательное свойство:
(а а) а — а (аа) = а (а а) (4)
для любых а С L, а £ L и для любого числа а (действитель-
ного или комплексного в зависимости от того, действительны
или комплексны пространства L, L, Т).
В силу свойств (2), (3), (4) вместо слова пара можно
с достаточным основанием употреблять слово произведение.
Соответственно этому равенство (1) следует читать так: эле-
мент t пространства Т есть произведение элемента а из L
на элемент а из L.
Замечание. Сейчас равенства (2), (3), (4), в отличие
от сходных равенств § 2, выражают свойства отображения
/, а не условия допустимых замен в Т. Дело в том, что
допустимые замены уже заданы в Т заранее, одновременно
с определением Т в качестве линейного пространства.
3. Свойство невырожденности отображе-
ния /: если элементы аь ...,ап линейно независимы в L,
элементы Йь ..., ат линейно независимы в L, то система
а(йА (z = 1, 2,..., и; /г = 1, 2,..., т) их попарных произведе-
ний линейно независима в Т.
Согласно предыдущему некоторые элементы пространства
Т являются произведениями элементов пространств L и L.
Например, вследствие (4) нулевой элемент в Т является про-
изведением нулевого элемента L па любой элемент L, или
любого элемента L на нулевой элемент L. Однако не каждый
элемент Т есть произведение какого-нибудь элемента L на
какой-нибудь элемент L. Вместе с тем легко доказать сле-
дующее утверждение: каждый элемент t является линей-
ной комбинацией произведений элементов из L и L.
Доказательство. Пусть еь еп — базис в L,
ё1,...,ёт — базис в L. Тогда вследствие условия (3) система
всех попарных произведений е;й/г есть базис в Т (поскольку
размерность Т равна пт). Таким образом, любой элемент
t £ Т может быть представлен в виде
t = ^tike^k. (5)
Здесь z— 1, 2, Утверждение доказано.
196 ТЕНЗОРНАЯ АЛГЕБРА [ГЛ. V
Замечание. Если положить У, t,ket = ёк = ак, то
равенство (5) примет вид
t — ^akak. (6)
Тем самым каждый элемент t £ Т можно представить в виде
суммы произведений элементов из L и L.
4. Определение. Линейное пространство Т размер-
ности пт, рассматриваемое вместе с данным отображением f
в него пары линейных пространств L, L размерностей п и т
соответственно, называется тензорным произведением L на L,
если f удовлетворяет условиям (1), (2), (3) п. 2. Символически
T=L ® L.
Элементы пространства Т, рассматриваемые в виде ли-
нейных комбинаций произведений элементов из L и L, т. е.
в виде (5) или в виде (6), называются тензорами над L и L.
Числа tlk в равенстве (5) называются координатами тензора
t в базисе (или в базисах е{ и е* пространств L и £.).
5. Покажем, как построить отображение f со свойствами
(1), (2), (3) п. 2.
Одновременно уясним себе степень произвола в этом
построении.
Предположим сначала, что отображение f уже дано. Пусть
ег и е* — произвольные базисы в L и L. Тогда вследствие
свойства (3) попарные произведения определяемые ото-
бражением /, составляют базис в Т. Допустим, что мы знаем
et g L, ёь £ L и £ Т. В таком случае мы полностью знаем
отображение /, т. е. для любых х L, х £ L знаем произ-
ведение хх в пространстве Т. В самом деле,
х = У х‘е{, х = У xkek. (7)
Отсюда и вследствие свойств (1). (2)
хх — У х‘е^ = £x‘xkei6k. (8)
Таким образом, если отображение f существует, то оно
однозначно определяется заданием произвольных базисов ег
и ёк в L и L и заданием базиса eik в Т, элементы которого
суть попарные произведения е, на ёк, т. е. eik = et6k (послед-
ние равенства следует понимать так, что eik есть образ пары
еь ёк именно при отображении /).
§91
ТЕНЗОРНОЕ ПРОИЗВЕДЕНИЕ (ВТОРОЙ ВАРИАНТ)
197
Но легко видеть, что по этим же условиям найдется
искомое отображение f. В самом деле, пусть даны et £ L,
L и eik£T А = 1,2,wi); считаем, что
каждая из этих систем линейно независима в своем прост-
ранстве. Назначим eik в качестве образов пар eit ёк относи-
тельно искомого отображения /, т. е. положим etek — eik.
Эти равенства обеспечить можно, так как число всех равно
п, число всех ek равно т, а число всех eik равно пт. После
этого на произвольной паре х, х, где х и х даны равен-
ством (7), определим f по равенству (8).
Для построенного таким путем отображения / свойства
(1) и (2) п. 3 с легкостью проверяются. Проверим, например,
тождество (2).
Пусть у = ^у’е1. Тогда
(х 4- у) X — 2 (х1 +У) Xkeiek = £ xlxkeiek
-f- = хх 4- ух.
Чуть труднее проверить третье свойство, т. е. невырожден-
ность построенного отображения f. Возьмем какую угодно
новую пару базисов аг и ak в L и L. Нам нужно показать,
что попарные произведения aza/; (т. е. образы пар ait ak в Г)
линейно независимы. Имеем
П/'--PyGiy Clk'-----Pk'€k.
Отсюда
ar = (9)
Мы видим, что векторы линейно выражаются через etek.
Следовательно, ранг системы в пространстве Т не
больше ранга системы егёЛ.
Но из (9) получаем
etek = QfQfe (Ю)
Здесь величина Qj' стандартным образом определены по Р1.,
(см. § 1). Аналогично определены Q* по Р*-. Из (10) за-
ключаем, что ранг системы etek не выше ранга системы
Следовательно, ранги этих систем равны. А так как система
eiSk по условию независима в Т, то независима и система
(так как имеет тот же ранг, равный общему числу
векторов).
Итак, мы доказали существование нужных нам отобра-
жений и полностью выяснили произвол в их конструкции.
198 ТЕНЗОРНАЯ АЛГЕБРА [ГЛ. V
6. Возвращаясь к определению п. 3, заключаем, что L@L
определено нами с произволом точно таким же, какой имеется
в выборе отображения f.
7. Обозначим через <р произвольное взаимно однозначное
отображение f — ср (/) пространства Т на себя, которое является
линейным изоморфизмом этого пространства (см. § 10 гл. I).
Обозначим через У7 суперпозицию отображений f и ср; симво-
лически: = Это равенство следует понимать так: сна-
чала f переводит произвольную пару а, а(а( L, а £ L) в эле-
мент t пространства Т, затем <р переводит t в f = cp(Z).
Определение. Тензорные произведения L на L, уста-
новленные с помощью отображений f и f, будем называть
изоморфными, если /7 = а>/, где ср — какой-нибудь линейный
изоморфизм Т на себя. Тензоры t и f будем называть соот-
ветствующими по данному изоморфизму тензорных произве-
дений, если —
Согласно этому определению все тензоры, построенные
с помощью /, отображаются в тензоры, построенные с помощью
= Чтобы пояснить, почему рассмотрение тензоров,
построенных с помощью /, равносильно рассмотрению их
образов при изоморфизме, встанем на арифметическую точку
зрения, т. е. будем рассматривать тензоры в координатах.
Пусть (е.ёд.)' = ср(е,ёк), t — Тогда
t'=^tik(e^k)', (11)
где t,k — точно те же числа, что и в равенстве (5). Таким
образом, при изоморфизме соответствующие тензоры в соот-
ветствующих базисах имеют одни и те же координаты. Таким
образом, при изоморфизме меняется только изображение тен-
зоров в виде тех или иных элементов пространства Т. Но
координаты тензоров, а следовательно, и все уравнения, отно-
сящиеся к ним в каких-либо задачах, остаются без изменений.
8. Укажем, наконец, следующее предложение, доказатель-
ство которого предоставим читателю: если f и f — два отобра-
жения пары пространств L и L в пространство Т, удовлет-
воряющие условиям (1), (2), (3) п. 3, то найдется изоморфизм <р
пространства Т на себя такой, что /' = ср/.
Отсюда следует
Теорема. Все тензорные произведения данного линей-
ного пространства L на данное линейное пространство L
изоморфны друг другу.
ГЛАВА VI. ПОНЯТИЕ ГРУППЫ И НЕКОТОРЫЕ
ЕГО ПРИЛОЖЕНИЯ
§ 1. Группы и подгруппы. Распределение базисов
на классы по данной подгруппе матриц. Ориентация
1. Пусть дано множество G, для элементов которого уста-
новлено понятие равенства (или допустимой замены, см. § 1
гл. I), и задана некоторая операция, называемая операцией
умножения. Эта операция с каждой парой элементов а, b из G,
взятых в определенном порядке, сопоставляет некоторый
элемент с того же множества. Символически пишут c = ab
и говорят, что с есть произведение а на Ь. При этом пред-
полагают, что произведение ab инвариантно относительно
допустимых замен сомножителей а и Ь.
Определение. Множество G с заданной в нем опе-
рацией умножения называется группой (относительно этой
операции), если соблюдены требования следующих аксиом:
1. Для любых а, Ь, с С G
(ab) с=а (be).
2. Существует элемент е ( О такой, что для любого а С G
имеет место равенство
ае = а.
Элемент е называется единицей группы.
3. Для любого о ( О существует х С G такой, что
ах= е.
Этот элемент называется обратным для а и обозначается
через а '.
2. Из аксиом 1, 2, 3 легко выводятся следующие пред-
ложения:
а) Если ах = е, то ха = е.
Доказательство. Согласно аксиоме 3 существует
у С G такой, что ху~е. С другой стороны, если ах — е,
200
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
(ГЛ. VI
то а = ае = а(ху) = (ах)у — еу, откуда а — еу. Следова-
тельно, ха — х (еу) — ху — е.
б) еа — а для любого a f О.
Доказательство. По аксиоме 3 и по доказанному
существует х такой, что ах = е и ха = е. Таким образом,
еа - (ах) а = а (ха) — ае — а.
в) Если ах — е, ау = е, то у = х.
Доказательство. Имеем у =уе =у(ах) — (уа)х —
— ех — х.
Доказанные теоремы означают, что в группе нет необхо-
димости различать левый и правый обратные элементы, а также
левую и правую единицы. Кроме того, в группе всегда и притом
однозначно определено действие, обратное групповому умно-
жению; именно, уравнение ах = Ь имеет единственное реше-
ние: х — а ЛЬ, а уравнение ха — Ь— единственное решение
х — Ьа *. Отсюда следует, наконец, что каждая группа имеет
только одну единицу. В самом деле, если ае = а и ае* — а,
то, как доказано, е* — е.
3. Важным примером группы является множество всех
невырожденных п X л-матриц (или действительных, или комп-
лексных) с операцией умножения, которая определена в § 2
гл. II. Единицей в группе невырожденных пХ‘и'матРиЦ
является единичная матрица Е; матрица, обратная к данной
невырожденной, строится согласно пп. 4—8 § 3 гл. II. Про-
верку первой аксиомы группы для умножения матриц (т. е.
ассоциативности: (АВ) С = А (ВС)) предоставляем читателю.
Пример матриц показывает, что умножение в группе,
вообще говоря, не коммутативно (см. выше, п. 3 § 2 гл. II).
4. Группа называется коммутативной или абелевой, если
для любых ее элементов а, b имеет место равенство ab = ba.
Впрочем, в этом случае групповую операцию часто называют
сложением, соответственно вместо ab часто пишут а Ь.
Тогда единицу абелевой группы называют нулевым элементом.
Примеры. 1) Каждое линейное пространство является
абелевой группой относительно операции сложения элементов.
Это ясно, поскольку первые четыре аксиомы линейного про-
странства в точности совпадают с тремя аксиомами группы
при дополнительном условии коммутативности.
2) Множество всех действительных чисел, отличных от
нуля, образует коммутативную группу относительно операции
§ 1] ПОДГРУППЫ. КЛАССЫ БАЗИСОВ. ОРИЕНТАЦИЯ 201
обычного умножения. Единицей этой группы является число
единица, элементом, обратными числу X, является число X-1.
5. Определение. Некоторое подмножество G элемен-
тов группы называется ее подгруппой, если из а £ G, b g G
следует ab £ G и из а g G следует а"1 g G.
Отсюда, в частности, е С G. Тем самым при указанных
условиях требования аксиом 1—3 п. 1 соблюдены для G,
и подмножество G само является группой относительно той же
операции умножения, какая задана во всей группе G. Единица
группы G является единицей любой ее подгруппы.
6. Примеры подгрупп. 1)В произвольной группе G
единица е образует подгруппу, состоящую из одного эле-
мента.
2) Всю группу G можно рассматривать как ее подгруппу.
3) Если линейное пространство L рассматривается как
группа относительно операции сложения, то любое его под-
пространство является подгруппой. Рекомендуем читателю
построить пример подгруппы в L, которая не была бы под-
пространством.
4) В группе действительных чисел, не равных нулю (см.
пример 2 п. 4), все положительные числа образуют подгруппу.
5) В этой же группе есть другая подгруппа, состоящая
из двух элементов — чисел X = 1 и X = — 1.
6) В группе всех действительных невырожденных
п X «-матриц рассмотрим подмножество G, состоящее из
матриц с положительным определителем. Из теоремы об
определителе произведения матриц (гл. 11, § 3) следует, что
G — подгруппа.
В самом деле, если А, В £ G, то Det АВ — Det А Det В 0,
следовательно, АВ С G. Если А £ G, то Det A“* = (Det А)~*^>0
и, значит, А-1 £ G.
7) В группе всех действительных (или комплексных) невы-
рожденных п X «-матриц рассмотрим подмножество G, состоя-
щее из всех матриц, определитель которых имеет модуль = 1.
Легко убедиться, что G является подгруппой. В самом деле,
если А, В С G, то | Det АВ | = | Det А | • | Det В | = 1, следо-
вательно, АВ £ G; если А£ G, то I Det А-1 | = | Det А j ’= 1;
I следовательно, A-1 g G.
202
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
7. Пусть в группе всех невырожденных п X «-матриц
выделена некоторая подгруппа О. Рассмотрим линейное «-мер-
ное пространство L (действительное, если G состоит из дей-
ствительных матриц; комплексное, если эти матрицы комп-
лексны). Возьмем в L какой-нибудь базис еь ..., еп и перейдем
к другому базису
ei’ = ^ Pt-ei
(1)
при условии, что коэффициенты Ру составляют матрицу Р
из подгруппы О.
Для сокращения записи вместо (1) удобно писать
е’ — Ре,
(1а)
понимая (1а) как матричное равенство, в котором элементами
матриц-столбцов е и е' являются векторы, элементами квад-
ратной матрицы Р — числа:
Р\- ...Pi-
е -
е —
Р =
р, рп,
1 п • * • tn
Беря в качестве Р всевозможные матрицы из G, мы будем
получать, таким образом, разнообразные базисы е'\ они составят
некоторый класс базисов; обозначим его через ё (е). Будем
говорить, что класс ё (е) порожден базисом е по данной под-
группе G.
8. Из того, что G является подгруппой, вытекает важная
Теорем а. Если какой-нибудь базис е' принадлежит ё (е),
то класс, порожденный базисом е', совпадает с ё (е). Сим-
волически: ё (/) = ё (е).
Доказательство. Пусть е" — произвольный базис.
Предположим, что е" С ё (/). Это значит, что существует
матрица Р' £ G, для которой е'' = Р'е'. С другой стороны,
е' С ё (е). Соответственно имеем матрицу Р ( G, для кото-
рой е' — Ре. Отсюда е"={Р'Р)е. Но так как G — подгруппа
и так как Р С G, Р'( G, то Р'Р С G. Следовательно,
е" С ё (е). Таким образом, каждый базис из ё (Е) входит
в ё (е), т. е. класс ё (е') включен в класс ё (е).
Заметим теперь, что в случае е’ = Ре, Р G, будет
е = Р~1е’, причем P~l С G (так как G— подгруппа). Иначе
говоря, если е’ С ё (е), то е С ё (ег). Значит, в предыдущем
§ 1 ] ПОДГРУППЫ. КЛАССЫ БАЗИСОВ. ОРИЕНТАЦИЯ 203
L — евклидова плоскость
рассуждении <? (е) и (е') можно поменять ролями. Поэтому
класс S (с) включен в класс ё (/). Тем самым (5" (с') = й'(с)
и теорема доказана.
Замечание. Так как выбор базиса, порождающего класс,
безразличен в пределах этого класса, то в дальнейшем вместо
ё (с) мы часто будем писать просто ё.
9. Из доказанного в предыдущем пункте утверждения
следует, что множество всех базисов в £ разделяется на классы
по заданной подгруппе О так, что каждый базис входит точно
в один класс (два класса либо совсем не имеют об-
щих базисов, либо пол-
ностью совпадают). Каж-
дый класс S инвариантен
относительно данной под-
группы О;это означает,что
для любого базиса е £ ё
в для любой матрицы
Р £ G будет е' — Ре £ ё.
(То есть после преобра-
зования с помощью лю-
бой матрицы подгруппы G
любой базис класса с?
опается в этом классе.)
10. Пример. Пусть
линейное пространство лежащих в ней векторов), G — под-
группа действительных матриц второго порядка, определи-
тели которых равны по модулю единице. Тогда каждый класс ё
состоит из базисов с одной и той же площадью базисного
параллелограмма (рис. 28) (разным классам отвечают разные
значения этой площади). В самом деле, пусть
er = aei4-pe2, e# = В<?2. (2)
Обозначим через S площадь базисного параллелограмма для
ci, е.’, через У—аналогичную площадь для е^, е%. Из (2)
имеем
5' = S | аВ — Рт |.
Если матрица Р преобразования (2) принадлежит G, то
| аВ — рр | = 1 и £' = <£'. Обратно, если 6'' = S, то Р С О.
11. Пусть £ снова обозначает линейное н-мерное про-
странство. Будем предполагать его действительным. Обозначим
204 ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ [ГЛ. VI
теперь через О подгруппу, состоящую из всех п X «-матриц
с положительным определителем.
Возьмем в L произвольный базис е и построим класс ё (с)
по подгруппе G; будем далее обозначать этот класс через ё.
Очевидно, что класс ё не исчерпывает всех базисов про-
странства L.
В самом деле, если Р — какая-нибудь п X «-матрица с от-
рицательным определителем, то базис ё = Ре не входите ё.
Возьмем такой базис ё и построим по подгруппе О класс ё (ё);
будем его обозначать дальше через ё'.
Покажем, что других классов, кроме ё и ё', в данном
случае нет. Для любого базиса е" пространства L найдутся
невырожденные матрицы Р' и Р" такие, что е” = Р"е и
е" = Р,ё. Из последнего равенства и из соотношения ё = Ре
имеем: е" = (Р'Р) е; следовательно, Р' — Р'Р. Отсюда Det Р" =
— Det Р' Det Р. Так как Det Р 0, то определители матриц Р'
и Р’ имеют разные знаки. Значит, один из них положителен.
Если DetP"^>0, то е* £ ё; если DetP'3>0, то ё’,
что и требовалось установить.
12. Итак, все базисы пространства L разделяются по под-
группе О (Р £ О, если DetP^>0) на два класса.
13. Если два базиса пространства L принадлежат какому-
нибудь одному из этих двух классов, то они называются
одинаково ориентированными. Два базиса называются про-
тивоположно ориентированными, если они входят в разные
классы.
Базисы, входящие в какой-нибудь один из этих
классов, принято называть также положительно ориентиро-
ванными (или правыми); тогда базисы другого класса
называют отрицательно ориентированными (или левыми).
Л ю б о й из двух классов можно шыбрать в качестве класса
положительно ориентированных базисов. Если этот выбор
сделан, то говорят, что в пространстве L задана ориен-
тация.
14. Разумеется, чтобы высказать понятие ориентации про-
странства, нет необходимости предварительно говорить о груп-
пах. Мы выскажем сейчас это важное понятие еще раз, дру-
гими словами, так, что группы при этом упоминаться не
будут.
§ 1 ]
ПОДГРУППЫ. КЛАССЫ БАЗИСОВ. ОРИЕНТАЦИЯ
205
Пусть Ci....еп и ег>, ..., еп- — два произвольных базиса
пространства L. Имеем
(3)
где коэффициенты Р\> составляют невырожденную матрицу Р,
то есть Det Р 0.
Если DetP^>0, то базис еу называется одинаково ориен-
тированным с базисом е,; если DetP<^0, то базис е{> назы-
вается противоположно ориентированным с базисом ег.
15. Имеют место следующие предложения:
1. Если базис Cf одинаково ориентирован с базисом eit
то et одинаково ориентирован с с,-. В самом деле, согласно (3)
векторы е{> выражены через е,- при помощи матрицы Р;
обратно, векторы с, выражаются через еу с помощью матрицы
Р1. Таким образом, Det Р-1 = (Det Р)’1 0.
2. Если два базиса одинаково ориентированы с третьим,
то они одинаково ориентированы между собой. В самом деле,
пусть векторы е? выражены через с помощью матрицы Р,
пусть векторы ег-< выражены через eL с помощью матрицы Р'
и DetP^>0, Detp'^>0. Тогда векторы выражаются
через с помощью матрицы Р'Р1 и мы получаем
Det (PT1) = Det Р' • Det Р"1 > 0.
3. Если два базиса противоположно ориентированы
с третьим, то они друг с другом ориентированы одинаково.
В самом деле, если DetP<^0, DetP'<^0, то Det^P *)^>0.
16. Выберем в пространстве L произвольный базис е{ и
назовем его положительно ориентированным (или правым).
Назовем также положительно ориентированным (или правым)
всякий другой базис, который одинаково ориентирован с ₽,•;
назовем отрицательно ориентированным (или левым) всякий
базис, который противоположно ориентирован с базисом с;.
Тем самым все базисы пространства L будут распределены
на два класса. Вследствие трех предложений, доказанных
в п. 15, любые два базиса из одного класса одинаково ориен-
тированы друг с другом; любые два базиса из разных клас-
сов ориентированы противоположно. Указанные классы равно-
правны, т. е. любой из них можно выбрать в качестве класса
положительно ориентированных базисов. Если этот выбор
сделан (назначением базиса е,), то гов.орят, что в пространстве
[задана ориентация.
206 ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ [ГЛ. VI
17. В заключение заметим, что понятие ориентации суще-
ственно связано с тем, что базис рассматривается как упоря-
доченный набор векторов. Если нумерация векторов базиса
меняется так, что два вектора обмениваются номерами, а осталь-
ные сохраняют свои номера, то ориентация базиса меняется
на противоположную. В самом деле, пусть базисы е, и е?
связаны соотношением (3), и пусть сделано указанное изме-
нение нумерации векторов е?. При этом в матрице Р про-
изойдет перестановка двух строк и, следовательно, опреде-
литель этой матрицы изменит знак.
§ 2. Группы преобразований. Изоморфизм
и гомоморфизм групп
1. Пусть имеется некоторое множество 7И, элементы кото-
рого условимся называть точками.
Говорят, что задано преобразование множества М, если
каждой точке х из М поставлена в соответствие некоторая
точка у того же множества М. Символически пишут
У =f(x).
При этом у называют образом точки х, а точку х—про-
образом точки у.
Преобразования f и g считаются равным и, если g(x) —
—f (х) для любой ТОЧКИ X £ М.
Преобразование f называют взаимно однозначным или
обратимым, если каждая точка у С М является образом
некоторой и притом единственной точки х£ М. В этом
случае преобразование, которое произвольной точке y—f(x)
ставит в соответствие ее прообраз х, называется обратным
для исходного преобразования f и обозначается f1:
y=f(x), x^f'ly).
Преобразование е называется тождественным, если
е (х) == х
для любой точки х из М. Ясно, что тождественное преобра-
зование обратимо, причем =
В частном случае, когда Л4 — числовая прямая — оо
оо, понятие преобразования совпадает с понятием
функции, заданной на всей прямой. Если функция t=f(x)
§21
ГРУППЫ ПРЕОБРАЗОВАНИЙ
207
имеет (однозначную) обратную функцию g(t), также заданную
на всей прямой —со <^-|-оо, то эта обратная функция
задает обратное преобразование (символически: f~l=g\
2. Пусть ср, f — какие-нибудь преобразования множества М.
Произведением ср на f мы будем называть преобразова-
ние /, которое действует по формуле
Х(х) = ср[/(х)]
для любой точки х из М. Символически будем писать '/ = ср f.
В случае, когда М — числовая прямая, произведение пре-
образования t — ср (т) на преобразование/=/(т) есть сложная
функция t — <р[/(т)]. Произведение преобразований, вообще
говоря, не коммутативно (например, sh3 х ф sh х3).
Для любого преобразования / произвольного множества
М имеем очевидные тождества
fe = ef=f, (1)
а если f обратимо, то
ffl = e. (2)
Ограничиваясь рассмотрением взаимно однозначных пре-
образований, укажем, что
если fg=e или gf=e, то g—f~\ (3)
Произведение преобразований ассоциативно, то есть
ф(ср/) = (фср)/ (4)
для любых трех преобразований / ср, ср множества М. Это
ясно, поскольку каждое из преобразований (4) действует по
формуле у — {ср [/(х)]}.
Если преобразования ср, f обратимы, то оба произведения
ср/ и /ср тоже обратимы, причем
('?/Г1=Г1'?-1. (5)
Взаимная однозначность каждого из преобразований ср/ и /ср
непосредственно следует из взаимной однозначности <р и /,
формула (5) вытекает из (1)—(4), так как
(/-1ср-1)(ср/) =/-1 (<р-»ф)/=/-1е/=/-1/= е.
3. Из определений и свойств, изложенных в пп. 1, 2, сле-
дует, что всевозможные обратимые преобразования заданного
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
множества 7И образуют группу относительно умножений пре-
образований.
4. Определение. Всякая совокупность О преобразо-
ваний множества 7И называется группой преобразований этого
1множества, если О образуют группу относительно умножения
щреобразований.
Из третьей аксиомы группы следует, что в любую группу
|Преобразований могут входить только обратимые преобразо-
вания. Можно сказать поэтому, что любая группа преобразо-
ваний множества Л1 является подгруппой в группе всех обра-
тимых преобразований этого множества.
5. Ниже, в пределах этой главы мы будем рассматривать
только обратимые преобразования, часто не оговаривая этого
дополнительно.
6. Пусть Q—какая-нибудь совокупность преобразований
множества 7И. Так как равенство (5) соблюдается для любых
трех преобразований, то О будет группой, если:
а) из принадлежности О двух преобразований /, сле-
дует, что /о С О и с₽/ g О;
б) из принадлежности О некоторого преобразования /
следует существование и принадлежность О обратного ему
преобразования /-1.
Отсюда уже вытекает принадлежность О тождественного
преобразования е; оно является единицей группы О (см. в связи
с этим формулы (1) и (2)).
7. В качестве важного примера укажем группу всех не-
вырожденных (действительных или комплексных) линейных
преобразований п переменных. Множество А1 в этом случае
есть /ьмсрное координатное действительное или комплексное
пространство. То, что невырожденные линейные преобразо-
вания составляют группу, фактически показано в § 3 гл. II;
именно, там установлено, что произведение невырожденных
линейных преобразований есть невырожденное линейное пре-
образование, и преобразование, обратное к невырожденному
линейному, является таким же. Тем самым соблюдены условия
а) и б) п 6.
8. Пусть О, О'—какие-нибудь группы, и пусть группа G
отображена на О'. Условимся для обозначения образов упо-
треблять штрихи; например, а'£ G'—образ элемента а £ G.
Определение. Взаимно однозначное отображение О
на О' называется изоморфизмом, если образ произведения
§ 21
ГРУППЫ ПРЕОБРАЗОВАНИИ
209
равен произведению образов; символически:
(a/?)' = a'b'. (6)
Докажем, что при изоморфизме образ а'единицы е группы О
является единицей в группе О'. В самом деле, пусть а' — любой
элемент группы О'; он соответствует некоторому элементу а
группы О. Имеем: ае = а; следовательно, по определению
изоморфизма
а'е' — (ае)' — а', (7)
то есть е’— единица в О'.
Если существует изоморфизм О на О', то группы О и О'
называются изоморфными друг другу. При изоморфизме все
соотношения между элементами одной группы переносятся
на другую. Поэтому с точки зрения теории групп изоморфные
группы имеют одинаковое строение. Достаточно изучить одну,
чтобы знать другую.
Примеры. 1) Пусть О—группа всех действительных
невырожденных «Хи-матриц, О'—группа всех действитель-
ных невырожденных линейных преобразований л переменных
(рассматриваемых как преобразования координатного прост-
ранства Кп). Сопоставим с произвольной матрицей А из О
линейное преобразование из О', имеющее матрицу А. Тем
самым группа О будет взаимно однозначно отображена на О'.
Установленное отображение является изоморфизмом, поскольку
преобразование с матрицей АВ есть произведение преобра-
зований с матрицами А и В. При этом изоморфизме все груп-
повые соотношения, в частности все подгруппы, переносятся
из О в О’. Например, подгруппе матриц из О, определитель
которых по модулю равен единице, отвечает определенная
подгруппа в О'. Она состоит из линейных преобразований
с единичным модулем определителя. Позднее мы познако-
мимся с некоторыми другими важными соответствующими
друг другу подгруппами в О и в О'.
2) Если линейные пространства L и L’ линейно изоморфны,
то они изоморфны и как группы. Обратное, вообще говоря,
неверно. В самом деле, из §§ 10, 11 гл. I следует, что «-мер-
ное комплексное пространство Сп и действительное простран-
ство L<2n размерности 2я изоморфны как группы (относи-
тельно операции сложения векторов), в то время как они не
являются линейно изоморфными пространствами.
210
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
3) Используя п. 6, нетрудно проверить, что совокупность
линейных функций при всевозможных л^О образует
группу преобр азований числовой прямой — со со.
Обозначим эту группу через О. Ее называют группой линей-
ных преобразований числовой прямой. Пусть О'—группа
действительных чисел л (л 0) относительно умножения;
Поставив в соответствие каждому преобразованию f =
число л, мы получим изоморфное отображение G на G', кото-
рое является, частным случаем примера 1) при п=1. Выше,
в п. 6 § 1, были указаны две подгруппы в группе О'. Им
соответствуют в О две подгруппы, определяемые условиями:
1) л = ± 1; 2) Х>0.
Первая из этих подгрупп состоит всего из двух преобра-
зований: тождественного отображения числовой оси < = т
и зеркального отражения t = — t.
Вторая подгруппа состоит из бесконечного множества
преобразований, именно из всех линейных преобразований,
сохраняющих направление числовой осп.
9. Определение. Отображение группы О в группу О'
называется гомоморфизмом, если образ произведения любых
двух элементов из О является произведением их образов
в О'.
Иначе говоря, требуется лишь соблюдение условия (6).
При этом может случиться, что а' = Ь' при а ф Ь и что неко-
торые элементы группы О' не являются образами каких бы
то ни было элементов из О. Гомоморфизм будем символи-
чески обозначать так: G-+G'.
Ясно, что изоморфизм есть частный случай гомомор-
физма.
Другой частный случай гомоморфизма мы получим, поста-
вив в соответствие каждому элементу произвольно выбранной
группы О единицу какой-либо группы О'. Тогда имеем:
а' — е', b' — e', (ab)' = е' = а'Ь', и (6) соблюдено.
10. Теор ем а. При любом гомоморфизме О—^О' образ
группы О является подгруппой в О'.
Доказательство. Образ группы О обозначим через О.
Пусть а', Ь'— произвольные элементы из 0, а, b — какие-
нибудь из их прообразов. Вследствие (6) умножение не выво-
дит за пределы G-.
a'b' — О.
(8)
§2]
ГРУППЫ ПРЕОБРАЗОВАНИИ
211
Из (6) следует также, что
а'(а = (аа 1)' = е'.
(9)
Аналогично п. 8 (см. формулу (7)) устанавливается, что
образ е' единичного элемента группы G является единицей
в О’. Поэтому (9) означает, что
(аТ1 =(«-*)'С О- (Ю)
Соотношения (8) и (10) показывают, что О удовлетворяет
определению подгруппы.
Замечание. Можно доказать, что совокупность всех
прообразов единичного элемента группы О' при гомомор-
физме G—>G' образует подгруппу в О; эту подгруппу назы-
вают ядром гомоморфизма G—>G'. На доказательстве оста-
навливаться не будем.
11. Рассмотрим некоторые примеры гомоморфизмов, важ-
ные для дальнейшего.
Пустя G—группа всех невырожденных действительных
п X л-матриц, О'— группа действительных чисел X (Х^£0)
относительно умножения. Построим следующие отображения
G в G':
1) Каждой матрице А£ О ставится в соответствие одно
и то же число Х=1.
2) Все матрицы, у которых DetA^>0, отображаются
в число X = -j-l; все матрицы, у которых DetA<^0, имеют
своим образом число X ——1.
3) Пусть зафиксировано любое действительное число о.
Каждой матрице А £ G ставится в соответствие число X =
х=[Ое1Л|Х
4) Матрице А ставится в соответствие Х = | Det Д|°, если
Det А > 0, Х=—|DetA|a, если DetA<0.
Во всех четырех примерах имеем гомоморфизм G—>0'.
В первом — вследствие того, что вся группа G отображена
в единицу группы G'. В трех остальных — вследствие теоремы
об определителе произведения матриц.
Вместо группы чисел X (X 0) можно взять изоморфную
ей группу линейных преобразований t = Xt (Х^О) числовой
прямой. Тогда мы получим четыре гомоморфизма, в которых
образами G являются группы преобразований числовой пря-
мой, состоящие соответственно
1) из одного тождественного преобразования: t — z;
212 ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ 1ГЛ. VI
2) из двух преобразований: t = t и t —— т;
3) из всех преобразований t — у которых к^>0;
4) из всех линейных преобразований t = (Х^О).
Оказывается, что перечисленные выше в этом пункте
четыре вида отображений G и G' исчерпывают все вообще
возможные гомоморфизмы О в О'. Это утверждение будет
существенно использовано в следующем параграфе (см., § 3,
п. 8). Там же будут даны указания по поводу его доказа-
тельства.
§ 3. Инварианты. Осевые инварианты.
Псевдоинварианты
1. Пусть дано /г-мерное линейное пространство L, которое
для упрощения дальнейших формулировок мы будем считать
действительным. Предположим, что в L выбран и зафикси-
рован класс базисов S по некоторой подгруппе О невырож-
денных (действительных) п X п-матриц.
Наряду с пространством L рассмотрим некоторое множе-
ство Т, конкретная природа элементов которого формально
не имеет значения. Фактически же в качестве Т нам будут
встречаться совокупности геометрических объектов простран-
ства L или каких-либо алгебраических объектов, связанных
с этим пространством.
Пусть задана числовая функция а двух аргументов: про-
извольного элемента t из множества Т и произвольного ба-
зиса е из класса
a=ty(t, 4 (1)
Предположим, что значения функции (1) действительны
и для всевозможных Т заполняют всю числовую ось
— со < с <00 (ПРИ любом фиксированном е).
Можно представлять себе, что (как часто бывает в гео-
метрии) правая часть (1) есть символическая запись некоторой
функции от координат объекта t. Соответственно вместо (1)
можно написать
а = ф(Xi, ... , хл), (1')
где х^ ... , Xn—координаты t относительно базиса е,
т. е. числа, которые каким-либо способом определяют объект t
при задании базиса е.
§3]
ИНВАРИАНТЫ И ПСЕВДОИНВАРИАНТЫ 213
Пример. Объект t есть параллелограмм, построенный
в евклидовой плоскости на упорядоченной паре векторов р, q:
р = {хъ х2}, q={yi, J'2};
в качестве (!') напишем (в данном случае)
a = Xiy.2— х9уь
Здесь подразумевается, что Xi, и _уь у.2 суть координаты
р и q в некотором базисе е; тогда хь х2, уь _у2 можно считать
координатами t в том же базисе. Если е брать в классе
ортонормированных базисов евклидовой плоскости, то число а
будет ориентированной площадью параллелограмма t.
2. Пусть дано значение а — ф (£, ё). Предположим, что от
базиса е мы переходим к любому другому базизу ё того же
класса <?:
e' = Pe, Р G.
Потребуем, чтобы число а' = ф(£, ег) определялось зада-
нием числа а и матрицы Р без каких-либо дополнительных
сведений по поводу объекта t и исходного базиса е. Иначе
говоря, мы будем считать, что а' является функцией от а и от
элементов р\' матрицы Р = Символически:
a'=f(a, Р). (2)
Кроме того, будем предполагать, что для каждой мат-
рицы Р из О функция (2) задает обратимое преобразование
числовой оси —со а -|- со, которое мы будем обозна-
чать символом fP. Мы будем часто вместо выражения (2)
употреблять равносильную ему запись
а'— /р(а).
3. При соблюдении требований пунктов пп. 1,2 будем
говорить, что в пространстве L на множестве Т задана
скалярная величина а относительно группы G. Формула (2)
называется законом преобразования скалярной величины а.
4. Функцию f(a, Р) нельзя выбирать произвольно. Усло-
вия п. 2 накладывают на нее жесткие ограничения, сущность
которых заключается в том, что преобразования a'~fp(a)
составляют группу. Точнее, имеет место
214
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
Теорема. Закон преобразования скалярной величины
есть гомоморфизм группы матриц G в группу всех обра-
тимых преобразований числовой прямой.
Пояснение. Формула (2) ставит в соответствие каждой
матрице Pf G преобразование a’—fP(a) числовой прямой
— со а -|~ оо. Теорема утверждает, что это соответствие
есть гомоморфное отображение.
Обозначим через И множество преобразований a'=fP(a),
отвечающих всевозможным матрицам Р из G; тогда из сфор-
мулированной теоремы и пп. 10 и 4 § 2 вытекает
Следствие. Множество Н есть группа преобразо-
ваний числовой прямой — сс<^ а <со.
Доказательство теоремы. Поскольку обрати-
мость каждого преобразования a'—fP(a) дана, а все обра-
тимые преобразования числовой прямой—- со а со
составляют группу, то достаточно проверить, что
fp’fp — fp’p
(3)
для любых матриц Р, Р’ из О. Возьмем произвольный базис
е б $ и рассмотрим базисы е' —Ре, е” = Ре’= (Р’Р)е.
Обозначим через а, а’, а" значения скалярной величины (1)
в базисах е, е’ и е" соответственно. Согласно п. 2 имеем
а"=/(а', Р') = /(а, Р’Р). (4)
Из (2) и (4) получаем условие на функцию f
Р), P') = f(a, Р'Р). (5)
Правой части равенства (5) соответствует преобразование fP>P.
Сложной функции, стоящей в левой части равенства (5), соот-
ветствует преобразование, равное произведению fP<fP. Поэтому
соотношение (5) (где а — любое число, — оо а -ф- ос)
равносильно формуле (3). Теорема доказана.
5. Замечание. В справедливости теоремы можно убе-
диться с помощью несколько более наглядных соображений.
В самом деле, пусть матрица Р £ G дает переход от
базиса е к базису е', а матрица Р' £ G — переходит ог ба-
зиса е’ к базису е". Тогда матрица Р'Р С G дает непосред-
ственный переход от е к е". Пересчитаем значения нашей
величины, исходя из базиса е и переходя к базису е" один
раз — через посредство базиса е', другой раз — непосредст-
венно. Если fP'fP 7^ fP'P, то мы получим разные результаты,
§3] ИНВАРИАНТЫ И ПСЕВДОИНВАРИАНТЫ 215
что недопустимо, так как для каждого объекта из Г в каждом
бдзисе класса § значение величины должно быть однозначно
определенным. Следовательно, fpfp~fp'P, что и требуется.
6. Каждый гомоморфизм группы G в любую группу пре-
образований числовой прямой задает в пространстве L неко-
торую скалярную величину.
Поясним это подробнее. Пусть некоторый гомоморфизм
ставит в соответствие матрице Р С G обратимое преобразо-
вание fP числовой прямой, то есть функцию a' —fp (а), задан-
ную на всей прямой и имеющую обратную функцию, тоже
заданную на всей прямой. Положим f(a, P)=fp(a). Тогда
из (3) следует (5) и (4), откуда вытекает однозначная опре-
деленность величины а во всех базисах класса
Мы должны построить множество Т, то есть определить
геометрические объекты f, на которых была бы задана ска-
лярная величина а с данным законом преобразования/(а, Р).
Это можно сделать по-разному. Например, в качестве t можно
взять точку числовой прямой, которая имеет координату а
в обычной декартовой шкале. Одновременно следует считать,
что в классе е выбран произвольный базис е. При переходе
к новому базису е' — Ре перейдем на числовой прямой к дру-
гой шкале по формуле a'=fP(a). Будем считать, что в ба-
зисе е’ той же точке t отвечает ее координата а’ в новой
шкале. Тогда все требования пп. 1, 2 будут соблюдены.
7. Особенно часто встречаются так называемые линейные
геометрические объекты или линейные скалярные величины,
которые характеризуются тем, что преобразования fp линейны,
то есть закон преобразования (2) имеет вид
a’=f(P)a.
В этом случае вместо (5) имеем более простое соотно-
шение
/(р)/(^')=/т. (6)
наложенное только на матрицы Р, Р' (любые из О).
Соотношение (6) легко вывести сразу, без ссылки на (5).
В самом деле, если
a'=f(P)a, а" =а’,
то
а" = /(Р)/(Г)а.
216
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
С другой стороны, мы должны иметь непосредственно
а"=/(Р/У)а.
Тем самым выполняется (6).
8. Пусть теперь G— группа в сех действительных невы-
рожденных «Хп-матриц (п фиксировано).
Как сообщалось (без доказательства) в п. 11 § 2, все
гомоморфизмы Q в группу действительных чисел (по умно-
жению) сводятся к четырем видам отображений, которые
перечислены в п. И § 2.
Это же утверждение можно высказать так:
Если числовая функция f(P) от матричного аргумента
удовлетворяет соотношению (6) для любых Р, Р' £ G, то:
1) либо /(Р)=1 для всех Р Q G;
2)либо/(Р)=1 для Р( О, DetP>0, и/(Р) = —1
для PC G, DetP<0;
3) либо /(Р) = |DetРj’ для всех PC G (здесь а — какое-
нибудь данное действительное число);
4) либо f(P) — ± | Det Р |а, где знак плюс имеет
место для Р С G, DetP^>(), знак минус—-для Р С G,
DetP<0.
Заметим, что случаи 3) и 4) включают, в частности, случаи
1) и 2) при о = 0. Заметим, что мы исключаем из рассмот-
рения тривиальный случай, когда/(Р) является тождественным
нулем (/(Р) = 0 для всех Р С G).
Доказательство высказанного утверждения мы могли бы
провести лишь с помощью некоторых средств, изложенных
в дальнейших главах. Поэтому мы даем это доказательство
в специальном приложении (см. Приложение в конце
книги).
Но мы воспользуемся высказанным утверждением теперь
же. Оно позволит нам перечислить все возможные виды линей-
ных величин. Именно, существуют лишь следующие четыре
вида линейных скалярных величин:
1) Инварианты, то есть величины, не зависящие от выбора
базиса. Их закон преобразования
а = а
(I)
для любой матрицы Р. Группа Н состоит из одного тождест-
венного преобразования числовой оси.
§ 3 ] ИНВАРИАНТЫ И ПСЕВДОИНВАРИАНТЫ 217
В предыдущих главах мы неоднократно предполагали, что
имеем дело именно с такими величинами (например, когда
рассматривали линейные, квадратичные, билинейные и поли-
линейные формы).
2) Осевые (или аксиальные) инварианты. Их закон пре-
образования таков:
( а, если DetPJ>0,
а | — а, если Det Р 0.
Здесь группа Н состоит из двух линейных преобразований
а' = а и а' — —а.
Название «осевые инварианты» выражает зависимость этих
величин от ориентации координатных осей. Они не меняются
при переходе к новому базису с сохранением ориентации, но
меняют знак, если ориентация базиса заменяется на противо-
положную.
Пример. К числу осевых инвариантов принадлежит
ориентированная площадь ориентированного параллелограмма
на евклидовой плоскости. Эта величина положительна, если
пара векторов, определяющих параллелограмм и его ориен-
тацию, одинаково ориентирована с базисом, отрицательна —
в противном случае. Элементы множества Т — всевозможные
ориентированные параллелограммы на евклидовой плос-
кости.
3) Псевдоинварианты веса а. Их закон преобразования
имеет вид
а'=а | Det Р |°, (III)
где о — заданное действительное число.
Здесь каждой матрице Р ставится в соответствие линей-
ное преобразование а' = Ха при X = | Det Р |°. Группа Н состоит
из всех линейных преобразований а' = Ха с положительным
коэффициентом X.
Пример. Согласно § 3 гл. IV определитель матрицы
инвариантной билинейной формы преобразуется по закону
A' = A(DetP)2.
Таким образом, величина Д относится к числу псевдоин-
вариантов веса о = 2. Множество Т в этом примере состоит
218
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
из всевозможных инвариантных билинейных форм, заданных
в пространстве L.
4) Осевые псевдоинварианты веса а:
( a|DetP|a, если DetP>0,
аГ==( —a|DetP|°, если DetP<0, (IV)
где о — заданное действительное число.
9. Если G—какая-нибудь группа действительных п X «-мат-
риц, то скалярные величины с законами преобразования (I),
(II), (III) и (IV) называются соответственно инвариантами, осе-
выми (или аксиальными) инвариантами, псевдоинвариантами
веса а и. осевыми (или аксиальными) псевдоинвариантами
веса а относительно группы G. В случае группы матриц,
у которых |DetP|—1, псевдоинварианты не отличаются от
инвариантов, а осевые псевдоинварианты — от осевых инва-
риантов.
Если же наложить условие DetP=;-|-l, то все четыре
класса величин становятся неразличимыми (сводятся к инва-
риантам относительно указанной группы).
Отметим попутно, что группу матриц с определителем,
равным единице, обычно называют унимодулярпой группой
(как в действительном, так и в комплексном случае).
10. Термин «инвариант» часто употребляется в более широ-
ком смысле, чем в пп. 8, 9.
Именно, инвариантами какой-либо группы преобразований
называются всевозможные объекты, свойства и величины,
сохраняющиеся при применении любого преобразования из
данной группы.
Очевидно, что каждый инвариант некоторой группы яв-
ляется инвариантом для любой ее подгруппы. Обратное неверно:
инвариант подгруппы может не быть инвариантом всей группы.
В этом смысле можно сказать, что чем обширней группа
преобразований, тем меньше у нее инвариантов, но зато они
отражают более устойчивые, более глубокие свойства реаль-
ного мира.
Геометрия распадается на ряд разделов, в каждом из ко-
торых исследуются инварианты какой-нибудь определенной
группы преобразований того или иного пространства. Так
например, в элементарной геометрии рассматриваются свой-
ства фигур в трехмерном евклидовом пространстве, сохра-
§41
ТЕНЗОРНЫЕ ВЕЛИЧИНЫ
219
няющиеся при любом движении фигуры как твердого тела
(иначе говоря, инварианты группы движений трехмерного
евклидова пространства). В следующих главах мы познако-
мимся с несколькими важными группами преобразований и
с некоторыми их инвариантами.
§ 4. Тензорные величины
1. Здесь мы определим некоторые классы величин, род-
ственные тензорам и включающие их как частный случай.
Геометрическим истолкованием этих величин мы сейчас за-
ниматься не будем. Мы будем только предполагать, что в
каждом базисе они задаются известным набором чисел (коор-
динат) и что при переходе к новому базису эти числа пре-
образуются так же, как коэффициенты полилинейных форм.
Чтобы не осложнять изложения громоздкими формулами, бу-
дем считать, что определяющие числа (координаты величин)
помечены двумя индексами (нижним и верхним). Соответст-
венно будем рассматривать формы от двух векторных аргу-
ментов (один из которых контравариантный, другой ковари-
антный). Переход к любому числу индексов тривиален.
2. Пусть в линейном л-мерном пространстве L дана били-
нейная форма а(х,и\ х £ L, и £ L*. Если в L введен базис
et,..., еп, а в L* — взаимный базис е1,..., е", то х = x'et ..
.. ,-\-хпеп, 11 = 11^ . .-\-ипеп, и форма а(х, и) получает
координатное представление
а (х, «) = У, акх1ик,
где
аь. = a (eit ek). (1)
При переходе к новому базису имеем
= ^'=Vq^_ (2)
Коэффициенты координатного представления формы при
этом изменятся. Новые коэффициенты akJ, будут выражаться
через старые коэффициенты ак тем или иным способом в зависи-
мости от характера самой формы как скалярной величины.
Именно, может случиться, что числовое значение а(х, и)
данной формы на произвольной паре векторов х, и заменится
220
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
новым значением а'(х, и); тогда закон преобразования
а(х, и) в а'(х, и) определит закон преобразования в а?,'.
Мы будем предполагать, что данная форма как скалярная
величина относится к одному из четырех классов, указанных
в п. 7 предыдущего параграфа. Соответственно рассмотрим
четыре случая.
3. 1) Форма а(х, и) является инвариантом. В этом случае
а? = а’ (е?, ек') — а (е?, ек).
Отсюда с учетом (1) и (2) получаем
с1)
Это есть известный нам закон преобразования координат
(двухвалентного смешанного) тензора.
2) Форма а(х, и) является осевым инвариантом. В этом
случае
а|' = а' (е?, ек>) = ± а (ер, ек>),
где имеем знак плюс, если DetP^>0, знак минус, если
DetP<^0. Отсюда с учетом (1) и (2)
при том же условии насчет знака в правой части.
Величины, у которых определяющие числа а1? преобразу-
ются по закону (II), называются осевыми (или аксиальными)
тензорами.
3) Форма а(х, и) является псевдоинвариантом веса а.
В этом случае
ак.' = а'(ер, ек') = а (ер, eh‘) [ Det Р j0.
Отсюда с учетом (1) и (2)
ак: = | Det Р |° akP\,Q%. (III)
Величины, у которых определяющие числа ак: преобразу-
ются по закону (III), называются псевдотензорами веса а.
4) Форма а(х, и) является осевым псевдоинвариантом
веса о. В этом случае
а^, = a1 (ер, ек') — ±а (er, ек') | Det Р |°
§41
ТЕНЗОРНЫЕ ВЕЛИЧИНЫ
22Г
п соответственно
± | Det Р
аР,
(IV)
где справа берется знак плюс, если DetP^>0, знак минус,
если Det Р 0.
Величины, у которых определяющие числа преобразу-
ются по закону (IV), называются осевыми (или аксиальными)
псевдотензорами веса а.
4. Законы преобразований (I) — (IV) для выведены
нами как следствие соответствующих законов преобразова-
ния (I)-(IV) § 3 для скалярной величины а(х, и). Легко
показать, что и обратно, если ak. преобразуются по законам
(I) — (IV), то для скалярной величины
а (х, и) = У аРк'иь
имеют место соответственно законы преобразований
(l)-(IV) § 3.
5. В этом параграфе мы считали, что преобразование (2)
определяется любой невырожденной матрицей Р. Можно
предполагать, что матрицы Р берутся из некоторой группы
G, а допустимые базисы составляют соответствующий класс ё.
Тогда высказанные выше определения дадут нам четыре
класса тензорных величин относительно группы G.
6. Будем рассматривать совокупность чисел а* как точку
координатного пространства К (размерности /г2). Тогда лю-
бой из четырех законов (I) — (IV) определяет по заданной
матрице Р £ G некоторое преобразование пространства К
(разумеется, свое для каждого закона (I) — (IV)). Обозначим
это преобразование для какого-нибудь одного закона (I)—(IV)
через fp. Справедливы утверждения:
а) Множество всех fp (Р t G) является некоторой груп-
пой Н преобразований пространства К.
в) Отображение G на Н, при котором матрице Р С G
соответствует преобразование fp £ Н, является гомоморфиз-
мом; именно
fp'fp—fp’P (3)
для любых матриц Р', Р £ G.
Доказательство аналогично п. 4 § 3.
222
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
Соотношение (3) чрезвычайно важно. Если бы оно не
имело места, то законы (I) — (IV) были бы бессмысленны,
так как различные переходы к новому базису — непосредст-
венно или через промежуточные базисы—давали бы разные
результаты.
7. Из законов преобразований (I) — (IV) следует, что обра-
щение в нуль всех координат тензорной величины в одном
базисе влечет за собой обращение в нуль всех ее координат
в любом другом базисе: если й? = 0, то а*' = 0.
8. Если определяющие числа тензорной величины (любого
из четырех классов) помечены многими индексами, то внизу
пишутся те из них, по которым в законах преобразований
(I)—(IV) идет суммирование с верхними индексами элемен-
тов матрицы Р. Число нижних индексов называется ковари-
антной валентностью тензорной величины. Остальные индексы
пишутся сверху; число их равно контравариантной валентности.
Замечание. Скалярные величины любого из четырех
классов, о которых говорилось в § 3, можно рассматривать
как тензорные величины (соответствующего класса) нулевой
валентности.
9. Пусть Т означает множество всех тензорных вели-
чин какого-нибудь одного из классов (I) — (IV) и какой-
нибудь одной структуры в отношении валентностей (т. е.
с одним и тем же числом нижних и верхних индексов). Тогда,
если над элементами Т производить линейные операции,
как в координатном пространстве (т. е. сумму величин
строить путем сложения их соответствующих координат,
произведение величины на число — путем умножения на
это число всех ее координат), то в результате будут
получаться тензорные величины того же множества Т.
Убедимся в этом, взяв для простоты в качестве Т мно-
жество двухвалентных смешанных псевдотензоров дан-
ного веса а. Рассмотрим два псевдотензора из У с коорди-
натами ак и Ьк в некотором базисе. В новом базисе полу-
чим ак, bk. Можно считать, что а? выражены уже напи-
санным в п. 3 равенством (III). Аналогично
bk: = | Det Р\°^ь№оК. (Ша)
Складывая (III) и (Ша) почленно, получим
«д' + bk: = I Det Р Г 2 ) РдСГ.
§ 4]
ТЕНЗОРНЫЕ ВЕЛИЧИНЫ
223
Таким образом, сумма двух тензорных величин из Т
имеет точно тот же закон преобразования, что и каждая из
этих величин. Умножая обе части равенства (Ш) на произ-
k' fl
вольное число а, увидим, что аа? выражается через аа, по
тому же закону.
10. Если две тензорные величины принадлежат Т, то
равенство между ними имеет инвариантный характер. Под-
робнее, пусть, например, для а* и Ьк имеем в одном базисе
равенства при любых /, k. Тогда в любом другом
базисе Чтобы убедиться в этом, достаточно заме-
тить, что, согласно п. 9, разность Z>* — а* есть тензорная
величина и, следовательно, обращение ее в нуль не зависит
от базиса.
Замечание. Разумеется, в одном базисе равенство
Ьк = а[ возможно для любых величин а[, b';. Но если эти
величины взяты из разных классов (I) — (IV), т. е. имеют
разные законы преобразований, то при переходе к новым
базисам равенство нарушится.
11. Произведение двух любых тензорных величин,
взятых из каких угодно классов (I) — (IV), строится
путем умножения каждой координаты одной величины на
каждую координату другой (в одном и том же базисе). По-
лученная величина будет относится к одному из классов
(1) — (IV) в зависимости от выбора сомножителей. Например,
если есть псевдотензор веса bi — псевдотензор веса с2,
то а/7»™будет (четырехвалентным) псевдотензором веса
В самом деле, при указанных предположениях
а-' = | Det Р р У afPi'Q*,
bf = | Det Р р у b™PJj’Qm.
перемножая эти равенства, получим
a-'b"' = | Det Р Г1+°2 у aib^PrP^QkQ^.
12. Отметим, что произведение двух осевых тензоров
есть обычный тензор. Произведение обычного тензора на
осевой есть осевой тензор.
13. Свертка по одному верхнему и одному нижнему
индексу тензорной величины одного из классов (I) — (IV)
224
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
[ГЛ. VI
дает тензорную величину того же класса. Полная свертка
приводит к скалярной величине того же класса. Например,
свертка двухвалентного смешанного псевдотензора веса а
есть псевдоинвариант веса а. В самом деле, из (III) имеем
= | Det Р Г аМ = | Det Р |° ^
таким образом, для величины а = 2 °” получается закон пре-
образования вида (III) § 3.
§ 5. Ориентированный объем параллелепипеда.
Дискриминантный тензор
1. Пусть в линейном /г-мерном пространстве L выбран
некоторый базис еъ ..., еп и тем самым задана ориентация
пространства (см. § 1). Возьмем в L упорядоченный набор
произвольных векторов хь х2, ..., х„, и каждый из них
разложим по данному базису:
Xi = xjej... -^-х"еп,
хп = х,пе1-1г- ... +х”е„.
Матрицу, составленную из коэффициентов этих разложений,
т. е. из координат векторов xt, ..., х„ по базису еь ..., ет
обозначим через X.
Сопоставим с упорядоченным набором векторов Xi,..., хп
число D(xb ..., хп), равное определителю матрицы X:
х{ .. • Х1
О(хъ хп)= •
Хп . п • хп
При переходе к другому базису
ei' = ^Pvet (1)
мы сопоставим с тем же набором векторов xlt хп число
1У(х1, хп), равное определителю матрицы X', которая
составлена из координат векторов Xi, .... хп по базису
еу, .... е„/.
ДИСКРИМИНАНТНЫЙ ТЕНЗОР
225
§ 5]
Легко найти закон преобразования величины D(xt,хп);
Именно, вместе с (1) мы имеем для координат любого век-
тора следующие равенства:
х1' = ^Q'ix\
Отсюда получаем матричное равенство
X' = XQ*.
Следовательно,
Dr (xi...х„)=Det X' = Det X Det Q* =
= Det Q* D(xt,..., x„).
Но, как мы знаем, Q* = P-1. Таким образом, имеет место
соотношение
D'(xb .... xn) = ± | Det Р |-1 D(xb ..., хп\ (2)
где справа следует брать знак плюс, если DetP^>0, знак
минус, если DetP<^0,
Мы видим, что D(xit хп) является осевым псевдо-
инвариантом веса а ——1, который определен на всех упо-
рядоченных наборах из п векторов каждый. Заметим, что
D(xit ..., х„)^>0, если векторы х1г ..., хп линейно неза-
висимы и упорядоченный набор Xi, ..., хп ориентирован
положительно (т. е. одинаково с базисом еь еп).
2. Из свойств определителя непосредственно следует, что
D(xi, х„) представляет собой полилинейную форму, т. е.
функцию, линейную по каждому своему векторному аргу-
менту.
Форма D(xb ..., х„) является косой, т. е. кососиммет-
ричной по любой паре аргументов (поскольку определитель
меняет знак при перестановке двух строк).
Разлагая определитель согласно его непосредственному
определению, получаем координатное представление формы
D(xlt хп) в базисе еь .еп:
D(x\, ..., х„)=2\... inxi хпп-
Здесь 8,- ^ = 0, если среди индексов 1Ь ..., /п имеются
одинаковые; 8г . z =-ф 1, если Zb ..., i„ составляют чет-
ную перестановку натуральных чисел 1,2, ..., /г; 8^ ... { =
= — 1, если перестановка ..., in нечетная.
226
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
1ГЛ. VI
Отсюда и из предыдущего пункта следует, что 8,t... f
является осевым ковариантным псевдотензором веса с =—1.
Ясно также, что 8,-... кососимметрпчен по любой паре
индексов.
Замечание. Можно прямым путем убедится, что если
мы подвергнем 8^ ... ^ преобразованию по чисто ковариант-
ному закону вида (IV) § 4, то получим числа
8,- , = ± | Det Р 8,- ... 1Р\\ ... Р» (3)
1 ••• п 1 " 1 1п
точно такие же, как 8,-^ ... Именно, 8г' ... ,-^=0, если среди
индексов есть одинаковые; 8- .- = ±1 в зависимости от
1 ••• 1п
четности перестановки i[ ... i'n. Для пояснения мы заметим
только, что если zj = l, zj —2, ..., Гп=п, то сумма в пра-
вой части (3) равна DetP; поэтому 8р2'...„' =-j-1; осталь-
ные случаи предоставляем читателю.
3. Пользуясь формой D(xi, ..., хп), можно построить
новую косую форму от А'ь ..., хп, которая уже будет осе-
вым инвариантом, т. е. будет только знаком реагировать на
ориентацию базиса, сохраняя во всех базисах свою абсолют-
ную величину. Но для этого нам придется привлечь на по-
мощь некоторую инвариантную квадратичную форму.
Возьмем по своему усмотрению какую угодно инвариант-
ную квадратичную форму а (х, х) прн единственном условии,
чтобы она была невырожденной. В произвольном базисе
еь ..., еп эта форма имеет определенное координатное пред-
ставление и вместе с ним определенную матрицу Д; при этом
Д==Ое1Д=£0. При переходе к новому базису согласно (1),
форма а(х, х) получит новую матрицу А'. Если Д'—Det Д',
то, как нам известно,
Д' —Д (DetP)2.
Отсюда
= /|ДТ |DetPj. (4)
Перемножая почленно (2) и (4), найдем
/Ж£'(-*1. •••> х„) = ±/[Д|О(х1, .... х„).
Таким образом, косая полилинейная форма ]/| Д | D (xt,..., хп)
является осевым инвариантом.
§ 5]
ДИСКРИМИНАНТНЫЙ ТЕНЗОР
227
4. Отсюда сразу следует, что в произвольном базисе
eit еп числа
% г,
являются координатами некоторого осевого тензора. Его на-
зывают дискриминантным тензором для формы а(х, х).
В гл. VIII—X дискриминантный тензор будет существенно
использован.
5. Пусть $1 — действительное аффинное «-мерное про-
странство, соответствующее линейному «-мерному простран-
ству L.
Возьмем произвольную точку А £ ?1 и произвольные век-
торы Xi, ..., С L в числе, равном размерности. Пусть
далее Л1 — какая-нибудь точка пространства?!, определяемая
равенством
ЛЛ1 == -ф- ... -j-tnx„,
где tj, ..., — действительные числа. Если ть ..., т„ изме-
няются независимо друг от друга при условиях 0 sg: ==g 1
(k—1......п), то всевозможные получаемые при этом точки
составляют некоторую пространственную фигуру, которая
называется параллелепипедом, построенным на векторах
Л'1, ..., хп, приложенных к точке А. При п = 2 параллеле-
пипед называется также параллелограммом (см. выше, § 8
гл. III).
Пусть пространство L ориентировано заданием базиса
eh ..., еп. Тогда, если векторы xlt ..., хп линейно незави-
симы, то построенному на них параллелепипеду приписы-
вается положительная или отрицательная ориентация. Именно,
параллелепипед считается положительно ориентированным,
если положительно ориентирован упорядоченный набор век-
торов Xi, ..., хп.
6. Мы хотим с каждым параллелепипедом сопоставить
некоторое число, которое по аналогии с трехмерным евкли-
довым пространством естественно было бы назвать его объе-
мом (в двумерном случае — площадью). Учитывая эту аналогию,
мы предъявим к искомой величине следующие требования:
1) Объем должен зависеть только от векторов хь ..., хп,
но не от точки А.
2) Объем должен быть положительным числом в случае
положительной ориентации параллелепипеда, отрицательным —
228
ПОНЯТИЕ ГРУППЫ И ЕГО ПРИЛОЖЕНИЯ
1ГЛ. VI
в случае отрицательной ориентации; должен быть нулем,
если векторы хь х„ линейно зависимы (тогда весь па-
раллелепипед лежит в гиперплоскости).
3) Абсолютная величина объема должна быть инва-
риантом.
4) При удлинении одного из векторов хь ..., хп в а раз
объем должен увеличиваться в о. раз.
5) Если xi — х\ -j- x't, то объем параллелепипеда, по-
строенного на векторах хь х.>, ..., хп, должен равняться
сумме объемов параллелепипедов, построенных на xj, х2, ...
..., хп и x'i, Хо, ..., Хп, аналогичное свойство должно иметь
место в отношении остальных векторов набора хь хп.
Оказывается, что указанные требования по существу
определяют объем как функцию от xt,..., х„. В самом деле,
они означают, что эта функция должна быть полилинейной
формой от Хь ..., х„, кососимметричной по каждой паре
аргументов; как числовая величина она должна быть осевым
инвариантом.
Но в точности такими свойствами обладает полилинейная
форма У |,Д |D(хь ..., х„), приведенная в п. 3. С другой
стороны, согласно изложенному в § 8 гл. V, всякая другая
полилинейная форма, обладающая теми же свойствами, про-
порциональна форме У | Д \D(xh ..., х„). Таким образом,
если объем ориентированного параллелепипеда, который по-
строен на векторах хь..., х„, обозначить через V(х.,..., хп), то
V(x1( .... х„)=СУ|ДТР(х1, х„), (5)
где С—любая инвариантная постоянная (разумеется, отлич-
ная от нуля).
7. Мы можем менять постоянную С и форму а(х, х),
определитель Д которой участвует в равенстве (5). Однако
множитель G У\Д | в правой части (5) будет единственным
образом определен, если мы по своему усмотрению назначим
параллелепипед с единичным объемом, т. е. произвольно возь-
мем линейно независимые векторы at, ..., ап и потребуем,
чтобы оя)=1. Определяя указанным способом
С У1 Д |, получим формулу:
V(xb
. ч D(Xt, хп)
n)^D(Ol.......«„)•
§ 5]
ДИСКРИМИНАНТНЫЙ ТЕНЗОР
229
Таким образом, измерение объемов в аффинном пространстве
однозначно определяется произвольным выбором единицы
объема. Мотивированный выбор единицы объема естественно
делается в линейных пространствах, наделенных метрикой;
66 этом см. гл. VIII.
8. Если при замене базисов мы будем использовать не
всю группу невырожденных матриц, а ограничимся ее унимо-
дулярной подгруппой G, то не будет надобности в квадра-
тичной форме а {х, х), так как относительно G сама величина
D(xi, ..., хп) является инвариантом. При этом необходимо
также ограничиться базисами из некоторого класса отно-
сительно унимодулярной подгруппы G. Допустим, что класс
выбран. Полагая в этом случае
V(*i -*«)=СО (хь..., хп), (6)
получим объем как инвариант относительно унимодулярной
подгруппы. Так как D(eh ..., е„)—1, то С= Vg, где
Уо = V (еь ..., е„) есть объем параллелепипеда, построенного
на базисных векторах еь..., еп. Заметим еще, что можно
в формуле (6) взять С=1; тогда V(elt ..., еп)—1, то есть
параллелепипед, построенный на базисных векторах , ет
имеет единичный объем. В данном случае все базисы выбран-
ного класса & характеризуются тем, что для них V = -ф-1.
9. Точно также вспомогательная квадратичная форма а(х,х)
не нужна, если рассматривается какой-либо класс базисов S (е)
по подгруппе матриц с единичным модулем определителя. В та-
ком случае объем тоже выражается формулой (6), но является
осевым инвариантом. Будем считать, как и выше, что С=1.
Тогда параллелепипед, построенный на векторах базиса е, сно-
ва будет иметь объем V == -ф-1, а все базисы класса S будут
характеризоваться тем, что для них |У| = 1. При этом
V = -ф-1 или V = — 1 в зависимости от ориентации про-
извольного базиса класса £ (<?) по отношению к исходному
базису е.
Чтобы подчеркнуть зависимость знака объема от ориента-
ции, часто употребляют термин «ориентированный объем
параллелепипеда».
ГЛАВА VII. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
ЛИНЕЙНЫХ ПРОСТРАНСТВ
I § 1. Общие сведения
1. Определение. Отображение у = Ах, х £ L, у £ L,
линейного пространства L в себя (или на себя) называется
линейным, если
A (a-Vj рх2) = а А (лу) -j- р А (х^) (1)
для любых векторов л'ь х« £ L и любых чисел а, [3. Здесь
и в дальнейшем числовые множители действительны или
комплексны в зависимости от того, действительно или комп-
лексно пространство L.
Отображение у— Ах называют также линейным преобра-
зованием пространства L; иногда говорят, что А(х) есть ли-
нейный оператор в L.
Линейные преобразования представляют собой многомерное
обобщение линейной функции одного числового аргумента
f(x) — kx. Их разнообразие быстро растет с повышением
размерности.
При записи линейных преобразований скобки обычно
опускают и вместо А(х) пишут Ах.
Простейшими примерами линейных преобразований могут
служить тождественное преобразование
Ех = х (2)
и нулевое преобразование
0х — 0,
где слева 0 есть символ линейного преобразования, которое
каждому вектору х ставит в соответствие нулевой вектор.
2. Произведение двух любых линейных преобразований А
и В линейно:
АВ (axi -j- рх2) = А (аВх! -j- $Bxs) — zABxi -ф рАВх*
ОБЩИЕ СВЕДЕНИЯ
231
§ И
3. Для линейных преобразований определяются операции
сложения и умножения на числа:
(Л -J- В) х = Ах Вх, (а А) х — а Ах. (3)
Нетрудно показать, что преобразования А-[-В и аА тоже
линейны и что множество линейных преобразований прост-
ранства L само является линейным пространством. Роль нуле-
вого вектора в пространстве линейных преобразований вы-
полняет пулевое преобразование 0. Доказательство этих
утверждений предоставляем читателю.
4. Наличие трех операций: умножения линейных преобра-
зований, сложения и умножения их на числа — позволяет
строить многочлены от преобразований:
Р (А) = «оА" Ап 1 -j-... -j- an_i А Ц- а„В, (4)
где ау- — числа; степени преобразования определяются повтор-
ным умножением: А2 = АА, А3 = ААА и т. п. Для любого
преобразования А по определению считают, что
А° = В, (5)
так что слагаемое а„В в многочлене (4) играет роль свобод-
ного члена.
5. Предполагая пространство конечномерным, введем в
нем базис elt..., еп.
Предположим, что нам известны образы базисных векто-
ров Aeh в данном базисе, то есть известны коэффициенты
разложений:
А^=£А;а. (6)
Тогда известна матрица величин А*. Один из индексов по-
ставлен сверху, а другой снизу не случайно. Ниже мы по-
кажем, что А есть тензор с такими валентностями. Положим
|А{ •••
•••
A,1, А’ ... А«
Знак * поставлен потому, что гораздо чаще в приложениях
линейных преобразований встречается не эта матрица, а
транспонированная, и для нее оставлен более простой сим-
вол А.
232 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
Покажем, что, зная матрицу А, можно для любого х вы-
числить у:
У = ^y‘ei = Ах = А ek).
Воспользуемся линейностью преобразования А:
у — ^Ае* — У xkAajea.
Изменив обозначение одного из индексов, получим
у=S ^ei==S (S ег>
i \ k )
откуда
У = у, A'kXk, z = 1,.... л. (7)
/?= 1
Эта координатная запись равносильна одному матричному
равенству
Легко проверить, что разные матрицы А и В задают в
данном базисе разные линейные преобразования.
Итак, линейное преобразование у = Ах векторов прост-
ранства L выражается в виде линейного преобразования пере-
менных (7), которое в матричной форме записывается т е м ж е
самым равенством у—Ах. Оно называется коорди-
натным представлением линейного преобразования А.
6. Используя формулы (3) и (7), нетрудно проверить, что
при сложении линейных преобразований их матрицы скла-
дываются, при умножении линейного преобразования на число
матрица умножается на то же число, так что пространство
линейных преобразований «-мерного линейного простран-
ства L изоморфно пространству п X «-матриц. Аналогич-
но § 2 гл. II можно показать, что при умножении двух
линейных преобразований их матрицы перемножаются. Тож-
дественному преобразованию соответствует единичная матри-
ца Е, нулевому преобразованию соответствует матрица, со-
§ 2] ЛИНЕЙНОЕ преобразование как тензор 233
стоящая из нулей. Согласно сказанному равенства (2) — (5)
можно в равной мере понимать и как выражения для пре-
образований, и как выражения для матриц.
7. Укажем некоторые обобщения понятий, введенных в
этом параграфе. Пусть даны два линейных пространства L
и L'. Линейным отображением пространства L в пространство
L' или линейным оператором из L в L' называется функция
у = Ах, которая каждому вектору х С L ставит в соответ-
ствие некоторый вектор у из L' и удовлетворяет условию
линейности (1). При L'=L получаем линейное преобразование,
определенное в п. 1. Для линейных операторов определены
действия сложения и умножения на число согласно формулам
(3); можно показать, что множество всех линейных отобра-
жений пространства L в L’ само образует линейное прост-
ранство.
Если каждое из пространств L и L' рассматривать как
группу относительно сложения векторов, то любой линейный
оператор L —- L' представляет собой гомоморфизм. Если про-
странства L и L' конечномерны и в них выбраны базисы,
то линейный оператор L —> L’ задается матрицей и выражается
в виде линейного преобразования координат векторов, но в
отличие от п. 4 матрица, вообще говоря, будет прямоуголь-
ной. При совпадении размерностей L и L' оператор А имеет
квадратную матрицу.
Пусть даны три линейных пространства L, L', L", и пусть
рассматриваются два линейных отображения:
1) у = Вх, где х £ L, у С L’,
2) z — Ау, где у £ L’, z £ L".
Произведение АВ оператора А на оператор В опреде-
ляется формулой
z = АВх = А (Вх)
и отображает L в L". Линейность АВ доказывается так же,
как в п. 1.
§ 2. Линейное преобразование как тензор
1. Будем считать, что пространство L является и-мерным.
Рассмотрим линейное преобразование = Ах пространства
L. Оно определено инвариантно, то есть независимо от каких
бы то ни было базисов.
234
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
Теперь нас интересует тензорная природа преобразования.
В пространстве L перейдем к новому базису ev, ...,еп'.
Тогда
Aek' = ^lA'lk-ea>.
Как выражаются через А}.? Нетрудно сообразить, что
имеет место тензорный закон преобразования, соответствую-
щий расстановке индексов. Это можно установить без всяких
вычислений. Действительно, совокупность всех векторов х
из L совпадает с множеством всевозможных одновалентных
контравариантных тензоров. Свертка 2^ Л/.Уг при любом х £ L
дает одновалентный контравариантный тензор у\ которому
соответствует один вполне определенный вектор у= УУс,-,
независимо от базиса е{. Отсюда на основании известного
признака (гл. V, § 4, пп. 8, 9) заключаем, что Л/, — тензор,
и сразу можем написать закон преобразования его опреде-
ляющих чисел:
i, k О)
Таким образом, каждому линейному преобразованию инва-
риантно сопоставляется тензор
Д = (2)
из Т\ = Ь0Ь*, где е\ еп £ L*— базис, взаимный с
ci,... , еп.
Верно и обратное: всякому двухвалентному смешанному
тензору можно инвариантно сопоставить линейное преобразо-
вание, поскольку свертка тензора (2) с вектором x — x'ei
.,.-\-хпеп дает контравариантный вектор:
у —yiei 4~. • -+УЧ» y, = '^jAitxk,
не зависящий от выбора базиса еь еп.
2. Можно рассматривать линейные отображения L в £*,
L* в L, L* в L* и аналогично предыдущему доказать, что
им также соответствуют двухвалентные тензоры.
Покажем, как расставить индексы, зная уже, что преобра-
зование представляет собой тензор.
Пусть, например, п — Ах, где х £ L, и С L*. Перейдем
к координатной записи. Вектор х контравариантный, его
§ 2] ЛИНЕЙНОЕ ПРЕОБРАЗОВАНИЕ КАК ТЕНЗОР
235
координаты помечаются индексами сверху: {xl!}. Буква А
должна иметь нижний индекс k, чтобы можно было провести
свертку по k. Вектор и ковариантный, его координаты по-
мечаются индексами снизу: {и,-}.
Поэтому в результате свертки должен получаться кова-
риантный вектор. Это значит, что и другой индекс у буквы
А должен быть нижним:
И/= S Aikxh.
Эта запись соответствует тому, что линейное отображение
пространства L в сопряженное пространство L* сопостав-
ляется с дважды ковариантным тензором А,-*.
Аналогично для преобразования y — Bv сопряженного
пространства L* в L имеем координатное представление вида
у =
так что соответствующий тензор В11 является дважды контра-
вариантным.
3. Пусть А — линейное преобразование пространства L.
Матрица А этого преобразования в данном базисе ..., е„
записывается так:
А} А1 ... А>
д __ ^‘2 • • •
А? А" ... А"|
При переходе к новому базису ец,еп> получится новая
матрица А', элементы которой выражаются формулой (1).
Запишем формулу (1) в матричной символике. Для того чтобы
не спутать порядок умножения матриц, лучше написать их
подробно.
Строчки матрицы Р развертываются по верхнему индексу:
р;> ... Р«
pi, р", рп
Г) _ 2 1 2 • • • 1 2'
Р'п' Р3п- ... Рп'
236 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
Строчки матрицы Q развертываются по нижнему индексу:
Qf Qf ... QV
Q = Qf Qf ... Qf
Qf Qf ... Qf
Формулу (1) можно переписать так:
с ь
Отсюда получаем искомое матричное выражение
A'=QAP*
или
A'=QAQ-\ (la)
где, как обычно,
Q = (P*V.
4. Из полученных матричных формул вытекают очень
важные следствия.
Поскольку Q — невырожденная матрица, то из формулы
(1а) следует, что Rang А’ — Rang А. Таким образом, ранг мат-
рицы А есть инвариант. Далее, инвариантом является опре-
делитель линейного преобразования, поскольку
Det А' = Det Q Det A (Det Qf1 = Det A.
Инвариантом является также полная свертка тензора А,;
2 Аа — + А% -|-... -j- Л",
а
которая представляет собой след матрицы линейного преоб-
разования.
Следует заметить, что когда мы говорим «определитель
матрицы» или «след матрицы», не указывая, какому объекту
эта матрица отвечает, то вопрос об инвариантности не ясен.
Например, и определитель, и след матрицы билинейной формы
не являются инвариантами.
5. Пусть А — линейное преобразование пространства, и
пусть тем же символом А обозначена матрица этого преоб-
разования в произвольно выбранном базисе. Предыдущий
пункт позволяет ввести следующие определения:
§ 3] ГРУППА НЕВЫРОЖДЕННЫХ ПРЕОБРАЗОВАНИИ 237
1) Рангом преобразования А называется ранг матрицы А.
2) Определителем преобразования А называется опреде-
литель матрицы А.
3) Следом преобразования А называется след матрицы Л,
Геометрический смысл ранга и определителя преобразо-
вания рассмотрен в следующем параграфе.
§ 3. Геометрический смысл ранга и определителя
линейного преобразования. Группа невырожденных
линейных преобразований
1. Пусть в векторном «-мерном пространстве L задано
линейное преобразование А. Предположим, что Rang А = г.
Обозначим через или через A(L) образ пространства
L, то есть множество элементов у вида у = Ах, где х про-
бегает все L.
Теорема 1. Множество rAt = А(Е) есть линейное
подпространство размерности г в пространстве L.
Доказательство. Имеем
у — Ах = А (£ xke^ = £ xkAek.
Следовательно, = A (L) представляет собой линейную обо-
лочку векторов Аеь ..., Аеп; но, как известно, линейная
оболочка данной системы векторов есть подпространство,
размерность которого равна рангу этой системы векторов.
Координаты векторов Aet,..., Аеп образуют строки матрицы
А, так что размерность A(L) равна рангу А. Теорема доказана.
2. Обозначим через полный прообраз нулевого вектора
6 при преобразовании А, то есть множество всех тех векторов
х пространства L, для которых Ах = 0. Множество назы-
вают ядром преобразования А.
Теорема 2. Если Rang А = г, то ядро е-Р" преобразо-
вания А является подпространством размерности п — г
в пространстве L.
Доказательство, х С тогда и только тогда, когда
Ах = Ъ. Записав это векторное равенство в координатах в
произвольном базисе еь...,еп, получим систему однородных
линейных уравнений, ранг которой равен г:
A\x1~\-...-\-Ainxn = O,
Afx14-... + А£х" = 0.
U)
238
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
ТТЛ- VH
Согласно § 5 гл. 111 множество векторов, координаты
которых удовлетворяют системе (1), является подпростран-
ством размерности п— г, что и требовалось доказать.
3. Теоремы 1 и 2 позволяют дать два геометрических
определения ранга преобразования, эквивалентных первона-
чальному алгебраическому определению (§ 2, п. 5).
1) Ранг линейного преобразования равен размерности
образа всего пространства L.
2) Ранг линейного преобразования равен разности между
размерностью пространства и размерностью ядра преобразо-
вания (то есть полного прообраза нулевого вектора).
4. Пусть г<^п. Рассмотрим действие преобразования А
с геометрической точки зрения.
При этом нам будет удобно не делать разницы между
линейным пространством L и соответствующим ему аффинным
пространством ?(, отождествляя каждую точку из с ее
р адиус-вектор ом.
Рассмотрим неоднородную систему уравнений
^A'jx1—у1, г=1,..., я, (2)
гдеЛ = !!.Л}[| — матрица рассматриваемого линейного пре-
образования. Эта система разрешима тогда и только тогда,
когда вектор _у=Ус1-{-•••+УЧ1 принадлежит подпростран-
ству = /(£). Для каждого у С множество решений
системы (2) образует плоскость размерности п — г, парал-
лельную подпространству ©-/ ‘ (см. в связи с этим §§ 6, 7
гл. 111). Очевидно, что каждая точка пространства принадле-
жит одной из таких плоскостей.
Таким образом, все пространство расслаивается на парал-
лельные плоскости размерности п—г, каждая из которых
отображается в одну точку подпространства
5. Определение. В случае, когда Rang А — и, пре-
образование А называется невырожденным.
Можно дать другие эквивалентные условия невырожден-
ности:
1) Det / ф О,
2) o# = /(L)=L,
3) ®/Г = 6.
Каждый элемент пространства L имеет в этом случае
прообраз и притом единственный. Это можно проверить
§ 3]
ГРУППА НЕВЫРОЖДЕННЫХ ПРЕОБРАЗОВАНИЙ
239
непосредственно, решив систему (2) по правилу Крамера.
Обозначив через Д* элементы обратной матрицы А'1, получим
или в символической форме
= (3)
Преобразование (3) является линейным преобразованием,
обратным данному.
6. Т е о р е м а 3. Множество всех невырожденных ли-
нейных преобразований образует группу преобразований
пространства L.
Доказательство. Из теоремы о ранге произведения
матриц (гл. II, § 4) следует, что преобразование АВ невы-
рождено, если невырождены Л и В. Далее Det Д-1 =
— (Det Д)'*7-0, поэтому обратное преобразование Д1 не-
вырождено. Таким образом, множество невырожденных ли-
нейных преобразований пространства L удовлетворяет опре-
делению группы преобразований (см. § 2 гл. VI).
7. Т е о р е м а 4. В п-мерном линейном пространстве
невырожденное линейное преобразование А определяется
однозначно, если заданы: произвольная система п незави-
симых векторов х1г..., хп в качестве прообразов и про-
извольная система п независимых векторов yh ..., уп
в качестве образов.
Доказательство. Векторы х1эхп примем за
базис в L и разложим по этому базису векторы У\,..., уп
Уь — ak-Xi -j-... -J- dkX№ (4)
Матрица А искомого преобразования в базисе xltхп
однозначно определяется заданием векторов (4), поскольку
ее столбцы образованы координатами этих векторов (Д*= а\,
см. выше, п. 5 § 1). Det А ф 0 вследствие независимости
векторов (4). Тем самым теорема 4 доказана.
8. Выясним геометрический смысл определителя линей-
ного преобразования Д.
С этой целью будем пользоваться понятием объема парал-
лелепипеда (см. § 5 гл. VI). Определим класс базисов по
подгруппе матриц с единичным модулем детерминанта и возь-
мем один из базисов <?ь..., еп этого класса. Обозначим 1/0
ориентированный объем параллелепипеда, построенного на
240 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
векторах eltе,„ и вычислим ориентированный объем V
параллелепипеда, построенного на векторах Aej...... Аеп.
Учитывая, что координаты векторов Дег образуют столбцы
матрицы А, получаем согласно формуле (6) § 5 гл. VI
V= Vft Det А.
Следовательно, при данном линейном преобразовании все
объемы изменяются в одно и то же число раз, и детерминант
преобразования является коэффициентом этого измене-
ния. В случае невырожденного преобразования получаем Vj£0,
причем базисы ., еп и Aeit Аеп имеют одинаковую
ориентацию, если Det/^>0, и противоположную ориента-
цию, если Det/I<^0. В случае вырожденного преобразова-
ния Det/4 = 0, векторы Аеь..., Аеп линейно зависимы,
V = 0. Заметим еще, что равенство (5) может быть непо-
средственно выведено из теоремы об определителе произве-
дения матриц.
§ 4. Инвариантные подпространства
1. Определение. Подпространство L'd. называет-
ся инвариантным подпространством преобразования у = Ах,
если Ах С L' для каждого х С L'. (Символически можно
записать A (JLr) cz L'.)
Примерами инвариантных подпространств могут служить
подпространства и введенные в § 3. Докажем это:
1) Ах £ <М для любого вектора х £ L, в частности для
любого х С поэтому А (<ь<) с:
2) Если х б. то Дл' = 6£ так что Л (©Т^) с:
Нулевое подпространство (состоящее из одного вектора 6)
инвариантно для любого линейного преобразования А, по-
скольку Л6 = 6.
2. Пусть L' — подпространство, инвариантное относитель-
но А. Тогда преобразование А не выводит за пределы L'
векторы, принадлежащие L'. Тем самым в подпространстве
L' определено линейное преобразование
у = Ах, х £ L’, yQL’. (1)
Мы будем говорить, что преобразование А, заданное
в пространстве L, индуцирует преобразование (1) в инвари-
антном подпространстве L'. Иногда удобно индуцированное
ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА
241
§ 4]
преобразование обозначать другим символом (отличным от
буквы А), например А'. Тогда А'х = Ах, если х £ А'х
не определено, если х не принадлежит L'.
Если преобразование А невырождено, то индуцированное
преобразование А' тоже невырождено, и потому A(L') =
— A'(L')~L'. Это ясно, поскольку в противном случае на-
шелся бы вектор х £ L' cziL, х ф 6, для которого Ах — 6.
3. Если подпространство L не инвариантно относительно
А, то найдется вектор х Q L, для которого Ах не принадле-
жит L. Поэтому А не индуцирует в подпространстве L ни-
какого Преобразования.
4. Покажем, что если известно инвариантное подпростран-
ство L’, то можно упростить матрицу преобразования, по-
местив в U несколько базисных векторов.
Пусть векторы еъ..., ek £ L'. Тогда их образы принад-
лежат L' и разлагаются по этим же векторам:
Aei = A\et -j- A^e/j,
Aek — 4~ • • • 4“ А i,ek.
Дальше идут, вообще говоря, более длинные разложения:
Ae^+i — Afe-piei 4" • • • 4~ Ah-i^Ck А;г| 1е*-р i 4" • • -4~ + i en>
Aen— Anej . 4- Апе^ 4- An^ ct-pi 4~ • • *4"
Таким образом, в рассматриваемом случае матрица преоб-
разования (транспонированная по отношению к матрице ко-
эффициентов выписанных разложений) запишется так:
А' ... А1 Afe.pi Ah
А* ... AUfe+i ... Akn
ДЩ ... Ak+l
О ..............
Afe+1 ...Л"
(2)
5. Рассмотрим важный частный случай, когда пространст-
во L является прямой суммой двух ненулевых инвариантных
242
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
подпространств L' и L":
L = L'@ L", A (U) cz L', A (L") cz L".
Выберем базисы в L' и L":
Ci, ..., С/, £ L , • • • > £п С С •
Тогда по теореме 4 из § 14 гл. I векторы еь еп обра-
зуют базис пространства L. В таком базисе выкладки пре-
дыдущего пункта применимы и к еь ек и к efelb
поэтому матрица А распадается на два автономных «ящика-*
А =
k\ k
О
О (n—k'jXfji—k)
Эти «ящики» представляют собой матрицы линейных пре-
образований, индуцированных на £' и L".
Тем самым изучение преобразования всего пространства
в целом сводится к изучению его действия в L’ и L”.
6. Ниже, в § 10, используется
Л е м м а. Если L = L' ф L" и подпространства L', L"
инвариантны относительно А, то А (L) = A (L') ф А (£")•
Доказательство. Если L есть сумма L' и L” (хотя
бы и не прямая), то, как нетрудно проверить, Л(£) =
= A (L') 4~ A (L''). С другой стороны, вследствие инвариант-
ности U и L" имеем
Отсюда
A(L')<=L', A(L")czL”.
A(L') П Л(£")сГ П L",
но сумма L' п L" прямая, поэтому //["!£" = 6. Следовательно,
Д(Т')П A(L")=6 и, значит, Л(Г)+Л (L")= Л(Г)ф Л(Т"),
что и требовалось доказать.
§ 5. Примеры линейных преобразований
Предварительное замечание. Рассматривая при-
меры преобразований, удобно не делать разницы между ли-
нейным пространством L и соответствующим аффинным про-
странством (как в п. 4 § 3).
§ 5]
ПРИМЕРЫ ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ
243
1. Подобие. Размерность пространства L любая. Пре-
образование задается формулой
Ах = \х
для любого х и некоторого фиксированного \ называемого
коэффициентом подобия. Все векторы «растягиваются» в оди-
наковое число раз (при |X | <^ 1 — фактически сжимаются).
В этом случае каждое подпространство является инвариант-
ным. Матрица подобного преобразования «-мерного про-
странства при произвольном выборе базиса имеет вид
X О
О X
А = кЕ—
DeU^X".
Тождественное преобразование Е можно рассматривать
как подобие с коэффициентом, равным единице, а пулевое
преобразование 0 — как подобие с коэффициентом, равным
•нулю. В пространстве всех линейных, преобразований, задан-
ных на L, подобные преобразования А = )Е образуют одно-
мерное подпространство (прямую, проходящую через точки
0 и Е).
2. /1 = 3. Пусть х = {х\ х2, х3}—произвольный вектор,
_У = {У, У, У }— его образ. Преобразование у = Ах зада-
дим формулами
у1 — х1 х2 -ф- х3,
у2 = X1 X2 X3, (1)
у3 = 2х’ -ф- х2 — х3.
Ясно, что преобразование вырожденное, причем Rang А — 2.
Образом всего пространства служит подпространство = А(Е),
задаваемое уравнением
у2=у.
Найдем полный прообраз произвольной точки yt = a,
y2=a, y3 = b плоскости еМ = А(Е) (рис. 29). При указанных
значениях у1, у2, у3 система (1) совместна; первое уравнение
можно отбросить, и останутся два уравнения, определяющие
прямую:
х1 х2 -j- х3 = a,
2х' -ф- х2 — х3 = Ь,
которую обозначим через
244
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
(ГЛ. VII
Найденная прямая и есть искомый прообраз. При разных а
и b все такие прямые параллельны между собой и покры-
вают все пространство. На рис. 29 буквой &К обозначена
прямая, которая является полным прообразом 6. Точки,
не лежащие на плоскости Л(Т), прообразов не имеют.
Рис. 29.
3. и = 2. Преобразование у = Ах зададим формулами
Матрица преобразования А =
вольную точку М и ее образ М'.
оси х1. Продолжим этот отрезок
k 0 II
I. Возьмем произ-
Отрезок Л1Л1' параллелен
до пересечения с осью х2
в точке К (рис. 30). Тогда при любом выборе точки М
имеем
КМ' _
КМ ~~
k.
§ 5]
ПРИМЕРЫ ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ
245
Если | k | 1, то отрезок КМ сжимается. Если k <^0, то
точки М и М' лежат в разных полуплоскостях х’^>0 и
Такое преобразование называется сжатием по направле-
нию оси х1 к оси х2. Название «сжатие» условно; при |Л|^>1
следовало бы говорить «растяжение».
с матрицей А —
правлении оси х2
ходит растяжение, см. рис. 32).
0 II
представляет собой сжатие в на-
я ||
оси х1 (при | k | > 1 фактически проис-
б. Преобразование
У = Л1Х1,
Л2х2
(2)
246
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
|называется сжатием по направлениям двух осей |см. рис. 33,
1на котором ki = , k-2 = 2^.
Рис. 33.
Матрица
II О
А = j О Д
преобразования (2) является
Положим
1
диагональной:
II 1 0
I О Д’
Тогда Л = АД = ДА. Поэтому преобразование с матрицей
А можно получить как суперпозицию сжатия в направлении
§ 5]
ПРИМЕРЫ ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ
247
оси х1 к оси х'г и сжатия в направлении оси х2 к оси х\
произведенных в любом порядке. Преобразования такого вида
часто встречаются в теории упругости.
Легко проверить, что в каждом из примеров пп. 3—5 оси
х1 и № являются инвариантными подпространствами.
6. Пусть L = L’ © L"; размерность L какая угодно, под-
пространства L' и L" не нулевые. Пусть L' и L"— инва-
риантные подпространства преобразования А, которое в L'
индуцирует тождественное преобразование, а в L”— подобие
с коэффициентом к Такое преобразование называется сжа-
тием с коэффициентом X к подпространству V в направлении
подпространства L".
Представив х в виде х = х' ~[-х", х' £ Ь', х" С Т",
получим
Ах — х'
Пусть векторы еь ..., е1г образуют базис в £', векторы
ehvu ..., еп-—базис в L". Тогда в базисе е1г ..., еп матрица
преобразования А имеет вид
1 О
о
Отметим, что линейная оболочка L ..., любой
подсистемы базиса еъ е„ представляет собой инвариант-
ное подпространство.
7. Положив в предыдущем примере Х = 0, получим пре-
образование, которое называется проекцией пространства L
на подпространство L' в направлении подпространства L".
Проекцию можно определить непосредственно следующим
образом. Если х—любой вектор из L, то он однозначно
представляется в виде х — х'~\-х", где х' £ L', х" £ L".
Тогда проекция х на L' в направлении L" есть Ах = х'.
Проекция является вырожденным преобразованием, образом
всего L служит L', а полным прообразом нулевого вектора
является L".
8. Далее в виде примера мы даем следующую важную
для дальнейшего конструкцию. Пусть в пространстве L
248
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
зафиксирован базис е1г ..., еп. В этом базисе преобразование,
которое мы обозначим G„(X) или, короче, G, зададим форму-
лами
G<?i = Хе1,
Geg = тд —Хс^,
Ge3 = е» -j- Хе3,
Ge„ =
ел-1 ^'еп-
Матрица этого преобразования в базисе eit еп назы-
вается п-мерной
числу X:
жордановой клеткой, соответствующей
Gn (Х)=
х 1 О
X 1
X
На главной диагонали жордановой клетки стоят X, на парал-
лельной соседней сверху диагонали — единицы, остальные
элементы — нули.
Подпространства вида Ь(еь ..., ek), k<^n, являются
инвариантными, в каждом из них преобразование задается
жордановой клеткой Gft(X) размерности k.
Очевидно, что преобразование О„(Х) вырождено тогда и
только тогда, когда Х = 0. В этом случае e^ = G(L)=
= L(ei, ..., е^Л), <sr=L(ei).
Рассмотрим подробнее трехмерный случай при Х = 0.
Преобразование Л = 03(0) задается формулой
так что
У1 0 1 0 X1
У1 _—: 0 0 1 X2 >
У ООО X3
у* = X2, J2 = х3 У= 0.
Каждая прямая, параллельная оси х1 и пересекающая пло-
скость х1 = 0 в точке (0, а, V), переводится в точку с коор-
динатами {а, Ь, 0), расположенную на плоскости Xя —0.
Если оси х1, х\ Xя взаимно перпендикулярны, то можно
§ 6]
СОБСТВЕННЫЕ ВЕКТОРЫ
249
считать, что сначала все пространство проектируется на пло-
скость (х*, х'л), а затем эта плоскость накладывается на
Рис. 34.
плоскость (х1, х2) так, что положительная полуось х2 совме-
щается с положительной полуосью х1, положительная полуось
х3 совмещается с положительной полуосью х2 (рис. 34).
§ 6. Собственные векторы и характеристический
многочлен преобразования
1. Определение. Собственным вектором данного
линейного преобразования А называется всякий ненулевой
вектор х, удовлетворяющий условию
Ах=\х, (1)
где X — какое-нибудь число.
Число X называется собственным значением преобразо-
вания А, соответствующим данному собственному вектору х.
Для краткости говорят: «X — собственное значение дан-
ного собственного вектора». Собственный вектор переходит
в коллинеарный ему вектор. В действительном пространстве
собственное значение показывает, во сколько раз собствен-
ный вектор «вытягивается» (при | X | 1 фактически «сжи-
мается»).
250
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
Нетрудно сообразить, что если х — собственный вектор,
то ах — также собственный вектор при любом ат^О, и что
линейная оболочка каждого собственного вектора представ-
ляет собой инвариантное одномерное подпространство (инва-
риантную прямую).
2. Во многих вопросах алгебры и ее приложений встре-
чается необходимость найти все собственные векторы данного
линейного преобразования. Займемся этой задачей.
Рассмотрим линейное преобразование у = Ах. Рассмотрим
вместе с ним тождественное преобразование Е. Мы имеем
Ех = Е при любом х( L. Поэтому условие (1), при кото-
ром х является собственным вектором данного преобразова-
ния, можно записать в виде
(А —ХЕ)х = 0.
(2)
Пусть преобразование у —Ах представлено в некотором
базисе еь .... еп формулами
ук = У Акх}\ k = 1, ..., п.
(3)
Так как единичная матрица Е = ||8*|1, то вследствие (3)
соотношение (2) равносильно следующей системе однородных
уравнений:
£(А* — Х8)) х1 = 0, k = 1..
(4)
где х1, ..., х"—координаты собственного вектора х в ба-
зисе еь ..., еп, X—собственное значение вектора х.
Определение. Матрица А — \Е системы (4) назы-
вается характеристической матрицей данного преобразо-
вания А, ее определитель
p(X) = Det(A —ХЕ)=
А| — X Аг ... А!.
Al А1-Х ... А1
А" А“ ... А" —X
называется характеристическим определителем преобразо-
вания А.
Очевидно, что jp(X) есть многочлен степени п относи-
тельно X. Его называют характеристическим многочленом
матрицы А (или преобразования А).
СОБСТВЕННЫЕ ВЕКТОРЫ
251
§ С]
Общий план решения задачи о собственных векторах сво-
дится тегерь к следующему. Сначала составляется так назы-
ваемое характеристическое уравнение
р(Х) = О. (5)
Равенство (5) необходимо и достаточно для того, чтобы
система (4) имела нетривиальные решения. Поэтому в ком-
плексном пространстве корни уравнения (5) и только они
являются собственными значениями преобразования А. В дей-
ствительном пространстве собственными значениями являются
все действительные корни и только они. Допустим, что все
корни Хъ ..., Х„ найдены. Предположим для определенности,
что мы имеем дело с действительным пространством. Тогда,
отбросив все комплексные корни, будем последовательно
перебирать остальные. Каждый из них подставим в систему (4).
Каждый раз эта система получит определенные числовые
коэффициенты.
Ранг полученной системы будет некоторым числом г,
причем г<^л, так что система будет иметь п—г независи-
мых решений. Найдя их, мы найдем тем самым п — г неза-
висимых собственных векторов с одним и тем же собствен-
ным значением, равным взятому корню. Их линейная обо-
лочка, с исключением из нее нулевого вектора, дает все
собственные векторы с тем же собственным значением. Это
следует из теоремы о множестве решений линейной одно-
родной системы уравнений.
Перебрав таким способом все действительные корни ха-
рактеристического уравнения, мы найдем вообще все соб-
ственные векторы данного преобразования.
В случае комплексного пространства нужно перебрать
все корни Xi, ..., Х„.
3. Примеры. 1) Подобие представляет собой преобра-
зование, для которого все ненулевые векторы являются соб-
ственными с одним и тем же собственным значением, равным
коэффициенту подобия.
2) Преобразование Ся(Хо) (см. выше § 5, п. 8) имеет
только один линейно независимый собственный вектор. Дей-
ствительно, для G„(X0) характеристический многочлен />(Х)==
= (Хо — X)" имеет единственный корень Х = Х0 кратности п.
При Х = Хо характеристическая матрица G„(X0)— Хв£ имеет
ранг п—1 (ненулевой минор порядка п—1 получается
1252
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
вычеркиванием левого столбца и нижней строки). Поэтому си-
стема вида (4), составленная для преобразования G,, (Хо), имеет
при Х = >0 только одно линейно независимое решение. Из
формул (3) § 5 видно, что собственным является вектор ег.
3) Преобразование двумерной действительной плоскости
лл+2х2, )
У = — x’J-x2 J
не имеет собственных векторов, так как П(Х) = Х‘-—2X-J-3
не имеет действительных корней.
Предоставляем читателю найти собственные значения и
собственные векторы в остальных примерах § 5.
§ 7. Основные теоремы о характеристическом
многочлене и собственных векторах
1. Теорема 1. Ранг характеристической матрицы
при фиксированном X есть инвариант относительно изме-
нения базиса.
Доказательство. Теорема является следствием общего
предложения об инвариантности ранга матрицы линейного
преобразования, поскольку характеристическая матрица есть
матрица преобразования А — \Е.
2. Т е о р е м а 2. Характеристический многочлен р (X)
инвариантен относительно преобразования базиса.
Доказательство. Пусть А и А' — матрицы данного
преобразования в базисах eh ..., е„ и е[, ..., е’п, Р — ма-
трица перехода от первого базиса ко второму, Q = (P*)~I.
Согласно § 2 имеем
А' — ХЕ=А' — XE' — Q(A — X/:')QJ (1)
(Е' — Е, так как тождественное преобразование в любом
базисе имеет единичную матрицу). Из (1) находим
Det (Д' — Х£) = Det Q Det (Д — XL) Det Q"1 = Det (Д — XL).
Замечание. Запишем характеристический многочлен
в виде
р(Х) = (-1)«(Х«-Р1Х"-‘+^«-2- ... +(-1)>„].
Нетрудно проверить, что — след матрицы Д, рп = Det А.
Из теоремы 2 вытекает инвариантность всех коэффициентов
§ 7]
ТЕОРЕМЫ О ХАРАКТЕРИСТИЧЕСКОМ МНОГОЧЛЕНЕ
253
/ДХ), в частности pt и рп. Тем самым мы получили другое
доказательство инвариантности определителя и следа матрицы
преобразования.
3- Теорема 3. Если Ь = Ц@ Li и ненулевые
инвариантные относительно А подпространства, то
р(к)—р1(к)р^(к), где pi(E), р8(Х) — характеристические
многочлены преобразований, индуцированных в Ц и Ь%.
Доказательство. Пусть еь ek — базис в Lj,
т* ь1, • • • > еп — базис в Т2. Согласно § 4 в базисе eif еп
пространства L матрица А—\Е имеет вид
<7ц—X д12 ... <21/;
7721 7782-----X - • • 72g*
А-ЛЕ =
<7*1 77*2 ... а**-----X
77*+1 *+1 — X . . . а*41 п
О .........................
<7л *|-1 • • • 7Znn——X
Отсюда
Det (А — Х£) =
77ц— X <212 ... <21*
77'21 7728 — X . .. <ZS*
77*1 77*2 ••• 77**—X
77*-<-1 *+1 ------X ... <2*+1 п
*4-1 • • • 77nrt X
==Р1(Х)-/72(Х).
4. Теорема 4. Если некоторому собственному значе-
нию X отвечает т линейно независимых собственных век-
торов, то их линейная оболочка L является т-мерным ин-
вариантным подпространством, а индуцированное в L пре-
образование есть подобие с коэффициентом X.
Доказательство. Пусть eit ет — линейно неза-
висимые собственные векторы, соответствующие числу X.
Возьмем произвольный вектор х из L — L(е\,..., <?m), разло-
жим его по базису elt ..., ет подпространства L и применим
к нему данное преобразование А.
254
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
Получим
Ах = A (xiei + ... -|-хтет) = х'Аег -|- ... -\-хтАет =
= х1^ хтУет — Ух б; L,
откуда и вытекает теорема 4.
5. В приложениях линейной алгебры очень важную роль
играет вопрос об упрощении матрицы линейного преобразо-
вания за счет выбора подходящего базиса.
Теорема б. Матрица преобразования А диагональна
тогда и только тогда, когда базис состоит из собствен-
ных векторов.
Доказательство. 1) Если базис elt еп состоит
из собственных векторов преобразования Д то
Aet = Xjgj,
Aei — Х2<?2,
(2)
где Xj, Х2, ..., Xn—собственные значения (вообще говоря,
различные). Коэффициенты правых частей равенств (2) обра-
зуют матрицу А*, которая в данном случае совпадает с ма-
трицей А:
Преобразование у=Ах в
ное представление
этом базисе имеет координат-
Ji = XjXj,
у % Х2Хо,
(4)
Уп---
§ 8] НИЛЬПОТЕНТНЫЕ ПРЕОБРАЗОВАНИЯ 255
2) Пусть дано, что в некотором базисе ei, .... еп матри-
ца А имеет диагональный вид
О Апп
Тогда Л* = А,
Aet —
Ае2 = -^2^2,
Аеп = Апеп,
а это значит, что все базисные векторы собственные, при-
чем л/==Л-. Теорема доказана.
Замечание. Преобразование (4) можно представить как
произведение п сжатий; сначала производится сжатие с коэф-
фициентом Xj к подпространству L (е2, ..., еп) в направлении
L(<?i), затем сжатие с коэффициентом Х2 к подпространству
L(ci, <?3, • ••> в направлении Ь(е2) и г. д. Нетрудно про-
верить, что сжатия можно проводить в любом порядке. (При
фактически получаются «растяжения».)
6. Примеры п. 3 предыдущего параграфа показывают,
что базиса из собственных векторов может не быть, а тогда
матрицу преобразования нельзя привести к диагональному
виду. Вопрос о том, как в таком случае можно упростить
матрицу преобразования, рассматривается ниже, в §§ 9, 10.
§ 8. Нильпотентные преобразования. Общая структура
вырожденных преобразований
1. В этом параграфе рассматриваются вырожденные ли-
нейные преобразования в n-мерном пространстве L, действи-
тельном или комплексном — безразлично.
2. Определение. Преобразование В называется ниль-
потентным, если Вр = 0 для какой-либо положительной
степени р.
Иначе говоря,
Врх = ® для любого х £ L. (1)
256
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
Наименьшее (натуральное) число р, для которого соблю-
дается (1), называется высотой нильпотентного преобразо-
вания.
Замечание. Если Врх — 0 для некоторого числа р
и некоторого вектора х С L, то для этого вектора х и лю-
бого (целого) т^>р имеем
Втх = Вт~р (Врх) = ВтрЬ = 0.
Простейшим примером нильпотентного преобразования
может служить нулевое преобразование 0; его высота равна
единице.
Всякое нильпотентное преобразование вырождено.
Это ясно: если BP = Q, то Det (Вр) — (Det Bf = 0; значит,
DetB = 0.
Однако нильпотентные преобразования — это не просто
частный случай вырожденных преобразований; они являются
основным элементом в структуре любого вырожденного пре-
образования. Именно, справедлива
Теорема. Пусть В — вырожденное линейное преобра-
зование пространства L. Тогда
L = L1®Lil (2)
где Lt, Li — инвариантные подпространства, причем:
1) преобразование, индуцированное в Lb ниль патентно;
2) если подпространство Li не нулевое, то индуциро-
ванное в нем преобразование невырождено.
Короче, можно сказать, что В нильпотентно в Lt и не-
вырождено в Li. В частности, преобразование В нильпо-
тентно в пространстве L, если размерность равна п (Li=L),
а размерность /.2 равна нулю (La —0) и только в этом случае.
Доказательство см. ниже, п. 4; оно опирается на вспомо-
гательные предложения, изложенные в п. 3.
3. Рассмотрим последовательные степени данного выро-
жденного преобразования В:
В, В\ В\ ..., Вк, ...
Обозначим через ядро преобразования Вк, через —
образ всего пространства L при преобразовании Вк. Пусть
— размерность Согласно п. 1 § 3
г* = Rang (В*).
§ 8]
НИЛЬПОТЕНТНЫЕ ПРЕОБРАЗОВАНИЯ
257
Исследуем свойства последовательностей подпространств
<Жк и (А=1, 2, ...).
1) <Мк при любом k является инвариантным подпро-
странством для преобразования В.
Доказательство. Если х С то существует у £ L
такой, что Bky = x. Отсюда находим
Вх = В (Вку) = ВкЛЛу = Вь (By) £ <Жк.
2) Имеют место следующие включения'.
J. I 0^*1 > 0^*2 >... > о/К*к > 6^/гц-1 * • • (3)
В самом деле, включения (3) следуют из предыдущего
свойства, так как = В (^к) cz <^к.
3) Справедливы соотношения
n'>ri'^>...'^>rp^rp = rp^ = ...=rk^=..., (4)
где р — некоторое натуральное число. Вместе с тем
<Жь = <Жр при k>p.
В инвариантном подпространстве <Мр индуцируется не-
вырожденное преобразование.
Доказательство. Из (3) видно, что гу- 5= гу+1. Вслед-
ствие вырожденности В имеем 1\<^п. Ранги гу- неотрица-
тельны, поэтому строгих неравенств в последовательности (4)
может быть лишь конечное число. Пусть р — наименьшее
натуральное число, для которого соблюдается равенство
= (5)
Если гр = 0, то, очевидно, rk — Гр — 0, о^к=оУ%р = 6 при
k"y>p. Пусть гр5=1. Тогда из (5) и (3) следует, что В
индуцирует в подпространстве е^р невырожденное преобра-
зование, ТО есть e/Zp+1=B(e^p)=e/Zp, ОТКуда е^р+2 =
— B(e^p+i) — B (ы^р) — Ы^р. Аналогично е^р + 9 — е^р, ...
..., <Мк~<Мр при любом k^>p. Вместе с тем гк — гр при
k^>p. Третье свойство доказано полностью.
4) Имеют место следующие включения:
CL 2 CZ . .. CZ к CZ ft+i CZ . .. (6)
При этом
&И к—<е,Ир, если k>p, (7)
где р — наименьшее число, удовлетворяющее условию (5).
258 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
Доказательство. Включения (6) очевидны. В самом
'деле, если х £ то Вкх — 0 и Вк^х — В (Вкх) = 6, так
что х £ ©4"ft+i.
По теореме 2 § 3 размерность nk подпространства ©Г’’*
равна п — rk. До тех пор, пока ранги rk строго убывают
с ростом k, размерности строго возрастают. Для kp^p
все ранги rk одинаковы; вместе с тем одинаковы и размер-
ности пр, прль пь, ... Отсюда и из (6) следует (7).
5) k при любом k является инвариантным подпро-
странством преобразования В. Преобразование, индуциро-
ванное в k, нильпотентно.
Доказательство. Инвариантность при /г=1
следует из соотношений а при Л}>1—-
из включений (6), поскольку Вk. Ниль-
потентность преобразования, индуцированного в оче-
видна, так как Вк{^И*)=6.
4. Доказательство теоремы п. 2. Покажем, что
Ь = ^Гр®^р, (8)
если р удовлетворяет условию (5). Поскольку В нильпотентно
в и невырождено в <^р, то гем самым будет получено
искомое разложение (2) (/:, = Wz’p, L2 = &$p). Мы знаем, что
сумма размерностей и е//р равна п, поэтому для полу-
чения формулы (8) достаточно проверить, что
®^Р П = (9)
(см. в связи с этим § 14 гл. I).
Равенство (9) докажем от противного. Пусть х ф 6,
х £ ©-^°р [~| <Мр. Рассмотрим векторы
х, Вх, ..., Врх — ^. (10)
Все они принадлежат <Мр (вследствие инвариантности <^р).
Обозначим через у последний из векторов системы (10),
отличный от 6 (у = Вкх, где k — некоторое число, 0 k <^р).
Тогда будем иметь
у yt 0, By — 6, у £ e/Zp. (11)
Но (И) противоречит невырожденности преобразования В
в подпространстве <^р. Тем самым (9) установлено, и тео-
рема доказана.
§ 9]
КАНОНИЧЕСКИЙ БАЗИС
259
5. 3 а м е ч а н и я. 1) Из п. 3 видно, что высота нильпо-
тентного преобразования, индуцированного в подпростран-
стве равна р (здесь, как и выше, р — наименьшее из
чисел, удовлетворяющих условию (5); при k<^p с ростом k
происходит расширение подпространств k и сужение под-
пространств при k^p подпространства &Е’k и уже
не изменяются).
Таким образом, подпространство ©А’р может быть.найдено
как ядро преобразования Вк при любом k^p. Аналогично
<^p==B*(L) при k^p.
2) Нетрудно заметить также, что при k<^p пересечения
Q e^k содержат ненулевые векторы, поэтому суммы
® не являются прямыми и не исчерпывают всего
пространства L.
§ 9. Канонический базис нильпотентного преобразования
1. Рассмотрим еще некоторые вопросы, связанные с ниль-
потентными преобразованиями. Сначала введем терминологию,
важную для дальнейшего.
Будем говорить, что векторы cj, а2, ..., ak образуют
серию длиной k относительно преобразования В (не обя-
зательно нильпотентного), если эти векторы не нулевые,
и если
Bai = ait Bai — as, ..., Ва1гЛ~ ak, Bak = 8. (1)
Вектор Ci будем называть старшим или первым, вектор
aft— младшим или последним вектором серии (1). Если
о О, Ba = f>, то будем говорить, что а образует серию,
состоящую из одного вектора, и является в ней одновре-
менно старшим и младшим.
Базис пространства L будем называть каноническим от-
носительно преобразования В, если он состоит из одной
серии или из нескольких серий, не имеющих друг с другом
общих векторов.
2. Отметим следующие свойства нильпотентных преобра-
зований:
1) Если в пространстве L имеется серия относи-
тельно нильпотентного преобразования В, содержащая k
векторов, то высота этого преобразования pysk.
260 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
В самом деле, в серии вида (1) Вк лах = ak ф 6, откуда
p^>k — 1.
2) Если высота нильпотентного преобразования В
равна р, то существует серия относительно В длиной р
и нет более длинных серий.
Доказательство. По определению высоты в про-
странстве существует вектор х такой, что Вр~1хфВ. Тогда
векторы
х, Вх, В*х, ..., Врхх
образуют серию длиной р, так как среди них нет нулевых
(в противном случае Вр~Гх был бы нулевым) и B(Bp ix) —
= Врх = В. Более длинной серии в пространстве быть не
может по предыдущему свойству.
3) Всякая серия линейно независима.
Доказательство. Напишем для (произвольной) серии
(1) соотношение
\ai (*)
Подействуем на обе части этого равенства оператором В* *.
Мы получим X1cft = 0, так как B^ai =?ak, B^aj—B при
i^>l. Поскольку ak ф 0, находим Х1==0. Теперь, действуя
на (*) оператором Bk~\ найдем — 0. Продолжая процесс,
получим, что все числа Xft = 0. Утверждение доказано.
Следствие. Если п—размерность пространства L,
р — высота нильпотентного преобразования в L, то
р^п.
4) Если в пространстве L для некоторого преобразо-
вания В существует канонический базис, то преобразова-
ние В нильпотентно и его высота равна числу векторов
в самой длинной серии этого базиса.
Доказательство. Пусть elt ..., еп — канонический
базис, и пусть в самую длинную из его серий входит k век-
торов. Тогда для каждого базисного вектора имеем: Bkej — B.
Возьмем произвольный вектор х £ L, разложим его по ба-
зису еь ..., еп и применим к нему преобразование В,{:
Вкх = Вк (л-1 а +... + Хпеп) = х1 В "а +... + хпВкеп = 0.
§ 9]
КАНОНИЧЕСКИЙ БАЗИС
261
Это значит, что преобразование В нильпотентно и его вы-
сота p^k. С другой стороны, по свойству 1) имеем p^k.
Следовательно, p—k.
3. Примеры. 1) Для нулевого преобразования 0 любой
вектор образует серию длиной А=1, поэтому любой базис
пространства L является каноническим относительно 0. Не-
трудно заметить, что если преобразование В имеет высоту
р=1, то оно является нулевым (В = 0).
2) Рассмотрим преобразование Gn(0) (см. п. 8 § 5 при
Х = 0). По определению преобразования G„(0) существует
базис Ci, ..., еп, состоящий из одной серии:
Gn(0)еп = еп_л....Оп(0)е^ = еь Gn(0)e1 = 6.
Отюда и из свойства 4) в п. 2 следует, что преобразование
G„(0) нильпотентно и его высота р = п.
Отметим, что матрица этого преобразования в заданном
базисе eit ..., еп — вырожденная «-мерная жорданова клетка
О
1
О
3) Пусть в базисе е1....... еп некоторое преобразова-
ние В задается матрицей, в которой вдоль главной диагонали
располагается несколько вырожденных жордановых клеток
разных размерностей, а остальные элементы — нули. Эту
матрицу символически запишем так:
(2)
Не ограничивая общности, можно считать, что /ci 2г 2г...
так как изменением нумерации базисных векторов
можно добиться перестановки клеток, идущих вдоль диаго-
нали матрицы В.
262
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
(ГЛ. VII
Для наглядности выпишем полностью матрицу вида (2)
с тремя клетками размерностей = 4, k.2 = 3 и k3 = 1:
О4(0) О
G3(0)
О G,(0)
0 10 0 0 0 0 0
0 0 10 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 I 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 о|
(2а)
Одномерная клетка Gt(O) состоит из одного числа нуль.
В пределах каждой из клеток Gfc(0) размерности k >=2 над
главной диагональю расположена диагональ из единиц.
Между двумя соседними клетками эти единицы разделены
нулем.
Таким образом, одна диагональ матрицы (2а), как и вообще
любой матрицы вида (2), состоит из единиц, прерываемых
нулями. Эта диагональ расположена непосредственно над
главной диагональю матрицы. Все остальные элементы ма-
трицы — нули.
Вследствие (2) базис еь ..., еп канонический; он состоит
из Z попарно непересекающихся серий, длина наибольшей из
них kb Отсюда следует, что В — нильпотентное преобразо-
вание с высотой p = ki. Линейная оболочка каждой серии,
входящей в базис, является инвариантным подпространством.
Этот пример включает в себя два предыдущих как част-
ные случаи. Если ki=\, то все клетки одномерные, каждая
из них состоит из одного числа нуль, вся матрица нулевая,
и преобразование В нулевое. Если Z= 1, то матрица В со-
стоит из одной клетки: E? = G„(O).
Нетрудно видеть, что и обратно, если для преобразова-
ния В существует канонический базис и попарно непересе-
кающиеся серии базиса расположены одна за другой, то
матрица преобразования В в таком базисе имеет вид (2).
Каждой серии соответствует клетка ОЛн(0), размерность кото-
рой ka равна числу векторов в серии.
§ 9]
КАНОНИЧЕСКИЙ БАЗИС
263
4. Последний из рассмотренных выше примеров охваты-
вает всевозможные нильпотентные преобразования. Это сле-
дует из основной теоремы (теоремы 1), которую мы чуть
дальше сформулируем и докажем.
5. Лемма. Пусть дана система векторов, которая
представляет собой объединение нескольких серий. Тогда,
если последние векторы всех этих серий составляют ли-
нейно независимую систему, то и вся данная система
векторов линейно независима.
Доказательство удобнее провести после основной теоремы.
Теорема 1. Для каждого нильпотентного преобра-
зования существует канонический базис (далеко не един-
ственный).
Доказательство теоремы мы проведем кон-
структивно, т. е. фактически покажем, как построить
канонический базис. Пусть В — нильпотентное преобразова-
ние высоты р в /2-мерном пространстве L.
Рассмотрим уже знакомую нам последовательность вклю-
чений
1 CZeB'2 CZ. ..CZeB' k CZ fc+1 CZ... CZ = L,
где ©T^k — ядро преобразования Bk. Построим следующие
подпространства:
cTs = B^), ^3 = В^(^П3), ...,
Мы имеем В(Д'Г)) = 0. Следовательно, все е2Г2, Д^'3,..., р
принадлежат (<ДГi cz ©ВД. С другой сторо.ны,
^';+1 = В1 (©Г/+1) = В‘~1 В (©гГ/+1) cz В1-1 (®гГг) =
(так как B(<a4'"ij^)cz&4/'i). Таким образом,
еТр CZ еТр_! CZ... CZ ©ЙД CZ ©<Гj.
Пусть kj — размерность eft'п, — размерность
Выберем в базис, векторы которого обозначим
£>Р рР • рР—\ рр-- 1-
*’ V S+*’ * л-/
• • *> •••> ent. (3)
Точка с запятой разделяет две группы векторов, каждая
из которых имеет некоторый специальный характер; эти
группы помечены верхним индексом.
1264
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
Выбор базиса (3) производится при следующих условиях.
В качестве первой группы, т. е. еР, берется любой базис
в e%zp; в качестве второй группы, т. е. е?-1, берется любое
дополнение еР до базиса е/Гр_, и т. д.
Поскольку еР £ о/ь= Врл (<s^р), то все эти векторы
имеют прообразы относительно Вр \ Возьмем для вектора ер
какой-нибудь прообраз е1.. Имеем еР=Вр 1 (е!). Вместе с тем
мы получаем для каждого i (i—1, ..., Z.’p) серию длины р:
е\, ej — В (<?/), ..., еР = Вр 1 (el);
Вр(е})=0.
Аналогично при kp i кр_л векторы еР~1 имеют про-
образы е) относительно ВР~\ поскольку при этих значе-
ниях I будет еРл g e/fP~l = Вр~* (©^z=p_i). Соответственно для
каждого I kp^i) получается серия длины р—1: с/,
\el = В (el), ..., еР~' = Вр‘2 (еЦ; Bpi (el) = 6. Продолжая про-
цесс, мы получим систему векторов, которую запишем сокра-
щенно по следующей схеме:
0)
Здесь в каждой строке из каждой группы выписан только
последний представитель; например, в первой строке из
группы ер, .... еР записан только .
h- 1 kp kp
В схеме (4) некоторые группы могут не существовать.
Например, если с-%р совпадает с e%"p_i, то вторую группу
в схеме (4) следует вычеркнуть. Заметим еще для пояснения,
что если, например, = 3 (/с2 =/г:(), то во второй строке
схемы (4) выпадает группа ер., и следующая строка имеет ту
же длину. В схеме (4) серии расположены по столбцам и
§ 9]
КАНОНИЧЕСКИЙ БАЗИС
265
идут снизу вверх. Нижний индекс можно рассматривать как
номер серии, верхний индекс дает номер вектора внутри
серии. Таким образом, в верхней строке расположены по-
следние векторы серий. Они образуют базис в и, следо-
вательно, линейно независимы; отсюда и по лемме заклю-
чаем, что независимы все векторы системы (4). Докажем, что
общее число I их равно п, т. е. размерности L. Очевидно,
Z— tii -J- k% -|- k3 -j-... -|- kp
(5)
(напомним, что в схеме (4) каждый написанный столбец на
самом деле представляет собой символическое обозначение
нескольких столбцов). Пусть — ранг преобразования Вк на
подпространстве ©Т"fc+i (которое является инвариантным отно-
сительно Вк, так как Вк (©^*+1) = k+i cz *+0-
Учитывая, что k — ядро Вк в подпространстве имеем:
И1=«2 — Рь ^2 Pb
«2 = Пз Ра, Л3=Рй
ир-1 — пр Рр-р ^р — Рр-р
ир = и.
Отсюда п — «j -|~ pi 4-... -J-
4“ Pp-i = nt 4~ ^1, 4~ ... kp.
Следовательно, 1=п, и тео-
рема доказана.
На рис. 35 дана иллю-
страция схемы (4) в случае,
когда и = 4, Р = 3, «1 — 2,
Рис. 35.
а пространства е/Г2 и е/Г3, будучи одномерными, совпадают.
Замечание. Если доказывать только факт сущест-
вования канонического базиса, то можно ограничиться
более краткими рассуждениями, воспользовавшись индукцией
по высоте преобразования. Именно, пусть в пространстве L
задано нильпотентное преобразование В некоторой высоты
/>4~ 1 =Э=2. Тогда в подпространстве <^i = B(L) преобразова-
ние В имеет высоту р. Пусть в канонический базис
найден (если р— 1, то любой базис в <Mi является канони-
ческим). Начальные векторы серий этого базиса дополним
прообразами относительно В, удлинив тем самым каждую
266
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
из серий на один вектор. Затем совокупность последних
векторов серий дополним до базиса в подпространстве ©•/'Y
В результате получим систему векторов в числе rt-j-Hi — n
(Г1 = Rang В = размерности с<,), независимую в силу леммы
и потому образующую базис в L, очевидно, канонический.
6. Вернемся к доказательству леммы. Мы всегда можем
считать, что данная система векторов записана по схеме (4).
Составим произвольную линейную комбинацию всех векторов
этой системы и приравняем ее нулевому вектору. В подроб-
ной записи мы получим следующее равенство, в левой части
которого все суммы берутся только по нижнему
индексу:
У, «и* Ч- У af ~ 'ei ”1+• • •+S +2 чч +
*p >!рЛ П>
+S °* - -1 + S <*f - -2+• • •+S a«! e'i+• • •
ftp kpl ki
кр kp~i
+У’а^!=е; (6)
*p
здесь —-некоторые числа (коэффициенты линейной ком-
бинации). Расположение написанных сумм соответствует
схеме (4). Под знаком каждой суммы указано число, до
которого идет суммирование по i, причем начинается сумми-
рование после числа, написанного под знаком предыдущей
суммы той же строки (в первых суммах каждой строки
суммирование начинается от единицы).
Если в схеме (4) какая-нибудь группа столбцов отсутст-
вует, то в соответствующем столбце соотношения (6) будем
считать множители а? равными нулю.
Подействуем па обе части равенства (6) оператором Вр *.
Мы получим из последней строки
или
= 6 (7)
kp
§ 9]
КАНОНИЧЕСКИЙ БАЗИС
267
(все остальные члены суммы (3) при воздействии на них
оператором Вр~1 дадут в результате 6).
Если последние векторы всех серий образуют независимую
систему, то и часть еР, ..., еР этой системы независима.
Тогда из (7) имеем
а! = О, ..., а* =0.
Теперь вычеркнем в соотношении (6) нижнюю строку. На
оставшуюся часть подействуем оператором Вр~“. Аналогично
предыдущему получим, что числа а,5, а/, которые участвуют
во второй снизу строке, все равны нулю. Продолжая процесс,
установим, что вообще все а? = 0. Лемма доказана.
7. Пусть В — нильпотентное преобразование с высотой р.
Обозначим через lj число серий длины j в некотором
каноническом базисе преобразования В.
Теорема 2. Для каждого j (j -С р) число lj является
инвариантом относительно перехода к другому канони-
ческому базису преобразования В.
Доказательство. Для базиса, который построен в
доказательстве предыдущей теоремы, имеем по построению
lp = kp, lj = kj—kB" l\=ni — k..
Рассмотрим совершенно произвольный канонический базис.
Заметим, что последние векторы всех его серий должны
попасть в Обозначим общее число этих векторов через п\,
число попавших в е?Гр через k'p, число попавших в е%р i
через к'р\ и т. д.
Имеем
kp ' kp, kр _ \ kp \, ..., ni Пу (8)
так как в каждом случае число независимых векторов не
больше размерности содержащего их пространства. Пусть
п' — число всех векторов рассматриваемого произвольного
базиса. Тогда согласно доказательству предыдущей теоремы
(см. равенство (5))
tf=n{-\-k^-\-...-\-kp,
। , , , , (8а)
п — «1 «2 Д-... Д- kp.
Так как ri = n, то из (8) и (8а) находим п\ — пъ k'j=kj. Но
1р — kp, lj — kj kj^\, 2 - j <Др, l\ — щ k.,.
Следовательно, l'j = lj при любом j. Теорема доказана.
268 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ VII
Замечание. Сущность доказательства предыдущей тео-
ремы можно высказать в двух словах следующим образом:
размерности kj и щ подпространств е#'у и инвариантны
по самому определению этих подпространств; но для любого
канонического базиса все lk выражаются через kj и П\.
Следовательно, инвариантны и все 1^.
8» Нетрудно выразить lk через ранги преобразований В'
на данном пространстве L.
Обозначим ранг В’ на L через г у. По предыдущему имеем
nj = nj+i Рг
Вместе с тем
Яу = И—Гу, Иу+1—« —Гу+1.
Из написанных равенств получаем
Ру=Гу—Гу+1.
Таким образом, при 2^/<^р
lj — kj — — — Pj = r pt — 2Гу4* г /+! (9)
Кроме того,
А = ч — 2г, г8, Zp = грЛ. (9а)
Замечание. Каждой серии канонического базиса отве-
чает жорданона клетка в матрице (2). Поэтому формула (9)
выражает количество lk жордановых клеток размерности k
в матрице (2) для всех значений k (1 k и). Заметим еще,
что, полагая г0 — п (как ранг Вп = Е) и г* —0 при k>-p
(поскольку при имеем £?* = ©), мы можем вместо (9)
и (9а) пользоваться только формулой (9):
lk = rk_i — 2г*4-г*+1;
(9)
здесь можно брать любое 1.
9. Отметим очевидный факт, используемый в дальнейшем.
Преобразование В вырождено тогда и только тогда,
когда оно имеет собственное значение, равное нулю.
10. Теор е м а 3. Для того чтобы линейное преобразо-
вание В в п-мерном пространстве L было нильпотентным,
необходимо и достаточно, чтобы его характеристический
многочлен имел вид р(к) — (—Х)л,
§ 9]
канонический базис
269
Доказательство. Необходимость вытекает из тео-
ремы 1, так как в случае нильпотентного преобразования В
характеристическая матрица В — к£ в каноническом базисе
имеет на диагонали элементы (—к), а ниже диагонали нули,
и потому
р (к) = Det {В — к£) = (—- к)п.
Достаточность сейчас доказывать не будем, так как она
вытекает из следующей, более общей теоремы.
11. Пусть В — вырожденное преобразование; пусть
p(k) = (—l)"kmi(k —ка)"12 ... (к —ку)т/ (10)
— его характеристический многочлен. Корни к2, ..., к?-
(вообще говоря, комплексные) все разные.
Согласно теореме § 8 имеем
L = Li (J) 1-2, (И)
причем В нильпотентно на Lj, невырождено на Т2 (Ц и
инвариантны относительно В).
Теорема 4. Размерность Li равна кратности mi
нулевого корня многочлена р(к). На подпространстве
преобразование В имеет характеристический многочлен
(к) = (— 1)« - "Ч (к — к.)"1* ... (к — ку)"»/.
Доказательство. По теореме S § 7 имеем соот-
ветственно (И)
Р(^=Р^)рг(У). (12)
Пусть «1 — размерность Li. По теореме 3 (по ее уже дока-
занной части)
pi(k) = (—1У«к«*. (13)
Сравнивая (10), (12) и (13), находим: щ^т^ С другой
стороны, если tii<^mi, то ра(к) должен иметь нулевой корень
кратности mi — nt'y>0. Однако это невозможно, поскольку
преобразование В на /2 невырождено. Таким образом, щ = т\.
Отсюда, а также из (10), (12) и (13) следует и второе
утверждение теоремы.
Замечание 1. Ясно, что достаточность в теореме 3
является частным случаем теоремы 4 при nii = n.
Замечание 2. Обозначим через р высоту преобразова-
ния В в Li. Имеем: р -С поскольку высота преобразования
270
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
не превышает размерности пространства. С другой стороны,
мы знаем, что Li может быть определено как ядро преобра-
зования В,! при любом k~^p. Поэтому, если кратность тл
нулевого собственного значения известна, то мы можем
найти Lj как ядро преобразования Вт^ не вычисляя р.
§ 10. Приведение матрицы преобразования
к жордановой нормальной форме
1. Определение. Говорят, что матрица А имеет жор-
данову нормальную форму, если вдоль ее главной диагонали
расположены жордановы клетки, а остальные элементы —
нули:
(М 0
• О)
о
Не исключена возможность, что в матрице (1) ki — kj или
'ki — lj для некоторых номеров I, j.
Напомним, что каждая жорданова клетка есть kt X
матрица вида
к 1 0
Gfc.(M = ./ ... ! .
о
Жорданова клетка первого порядка состоит из одного числа Хг:
Gi(M = h/ll> ^(О^ОИ-
2. Т е о р е м а. В п-мерном комплексном пространстве
L для каждого линейного преобразования А существует
базис, в котором матрица этого преобразования имеет
жорданову нормальную форму. При переходе к другому
аналогичному базису матрица А сохраняется с точностью
до перестановки клеток.
Базис, о котором идет речь в теореме, будем называть
каноническим. Это название согласуется с терминологией § 9:
случай, рассмотренный в § 9, получается, когда все к, —0.
§ Ю]
ЖОРДАНОВА НОРМАЛЬНАЯ ФОРМА
271
Замечание. Доказательство этой теоремы для нильпо-
тентных преобразований дано в § 9. Предыдущие результаты
позволяют свести изучение общего случая к рассмотрению
нильпотентных преобразований.
Доказательство теоремы (вместе с вспомогательными
предложениями) изложено ниже.
3. Вспомогательные предложения. Пусть дано
лийейное преобразование А в n-мерном пространстве L.
Положим
А — аЕ=В,
где а — некоторое число.
Лемма 1. Если В нильпотентно в L и, следовательно,
имеет канонический базис, то А в этом базисе имеет
снсорданову нормальную форму (1), где все
Доказательство. В каноническом базисе преобра-
зование В имеет матрицу
(2)
Этот же самый базис et, еп является каноническим для А
вследствие тождества
Gfc.(a) = Gft.(0) + a£,
которое в подробной записи выглядит так:
а 1 0 а 1 0 ' « 1 — 1 0 1 0 0 1 0 0 1 + а 1 0 1 0 ' > . (3)
Вследствие (2) и (3) матрица преобразования А в базисе
еь • • • > еп имеет жорданову нормальную форму
О*Д«) 0
Gfc2(a)
0
^72 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. V1I
Лемма 2. Пусть X,, Ху—корни характеристиче-
ского многочлена преобразования А. Тогда преобразование
В— А — а.Е имеет характеристический многочлен, корни
которого суть Xj—а, Ху-— а, причем кратность
корня — а равна кратности корня Т/.
Доказательство. Лемма 2 вытекает из тождества
Det (В — ХЕ) == Det (Л — аЕ — XЕ) =р (Л + а).
Лемма 3. Некоторое подпространство L инвариантно
относительно преобразования В=А — \Е тогда и только
тогда, когда оно инвариантно относительно преобразо-
вания А.
Доказательство. 1) Пусть L инвариантно относи-
тельно А. Это значит, что если х £ L, то Ах £ L, а тогда
Вх — Ах—Хх С L.
2) Если L инвариантно относительно В, то оно инва-
риантно и относительно А, так как А = В — (—Х)Е.
4. Докажем существование канонического базиса для
произвольного линейного преобразования А, заданного в
и-мерном комплексном пространстве L.
Пусть Хъ ..., Ху — различные между собой корни харак-
теристического многочлена р(Х) преобразования А, так что
р(X) = (- 1)« (X - X,)mi (X - Х2р ... (X - Хур, (4)
где mi — кратность корня Х; (г=1, 2, ...,/), тЛ тг ...
m.j — п. Рассмотрим вырожденное преобразование
Bi = А — XtE. Обозначим через Lj ядро преобразования
B^’—BjBi ... Bj=(A —Х,Ер
и положим B™l(L)—L. Мы знаем, что
L=Lt®L, (5)
причем В] нильпотентно в Lj. По теореме 1 из § 9 в L(
существует базис, канонический для Вь Этот же базис
является каноническим и для преобразования А, рассматри-
ваемого в Lj (Li и L инвариантны относительно А по лемме 3).
Соответственно разложению (5) имеем
^(X)=/7j(X)/)(X),
где по теореме 4 § 9 /?1(Х)=(—I)'"1 (X — Xj)'"1, а
р(Х) = (—1)"""1(Х—ХД”*2 ... (X —Хур.
ЖОРДАНОВА НОРМАЛЬНАЯ ФОРМА
273
§ 101
Теперь рассмотрим А в инвариантном подпространстве L
и, рассуждая аналогично предыдущему, получим
1 = (6)
где L3— инвариантное подпространство размерности т% в
котором существует канонический базис для преобразования
В^ —А—коЕ, а вместе с тем и для преобразования А. Под-
пространство La определяется как ядро преобразования
B?s = В9В* ... /Д = (А — ^Е)т\ (7)
рассматриваемого в L. Однако если рассматривать преобразо-
вание (7) во всем пространстве L, то его ядро должно
содержать La и имеет ту же самую размерность т%. Поэтому
La — ядро преобразования (7), рассматриваемого во всем
пространстве L. Из (5) и (6) получаем L — Li ф L3 ф L.
Продолжая этот процесс, мы после /-го шага придем
к разложению
L = L1©La@...@L/, (8)
где L{ — ядро преобразования В™‘ = (А — ^;Е)т‘; размер-
ность Lt равна т,. В каждом из Lt преобразование А имеет
канонический базис. Объединение этих базисов дает искомый
базис всего пространства L.
Замечание. Изложенное доказательство дает способ
фактического приведения А к нормальной жордановой форме,
причем в доказательстве указано, как найти канонический
базис. Но можно написать жорданову форму преобразова-
ния А, минуя построение канонического базиса. Такая воз-
можность вытекает из следующего пункта.
5. Докажем однозначную определенность
жордановой нормальной формы матрицы данного преобразо-
вания. Пусть канонический базис еь еп найден; матрица
преобразования А имеет в нем вид (1). Предположим, чго
жордановы клетки, соответствующие расположены в пер-
вых г строках матрицы (1). Тогда линейная оболочка первых г
базисных векторов образует подпространство Ц в разложениях
вида (5) и (8):
L1 = L(e1, ..., er), L — L(er+l, ..., еп) = Тоф...фLj.
Преобразование В1 — А — У.1Е нильпотентно в L(. Базис
et, ..., ег подпространства Lj является каноническим для Вц
количество и длины серий этого базиса (относительно Lt)
274
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
равны количеству и размерностям жордановых клеток, соот-
ветствующих числу X, в канонической матрице преобразова-
ния А. Количество серий различной длины в каноническом
базисе нильпотентного преобразования определяется по фор-
муле (9) § 9. Применительно к рассматриваемому случаю
величины rft равны рангам преобразований Z© рассматрива-
емых в Lj, или, что то же самое, размерностям подпространств
В* (Lx). Покажем, что в формулу (9) § 9 вместо rk можно
подставить ранги преобразований В1‘, рассматриваемых во
всем пространстве L. Пусть — ранг В* в пространстве L.
Тогда Rk равно размерности В* (L).
Б силу невырожденности В, в подпространстве L имеем
L = В, (L) = В* (L) =... = В* (L).
Согласно п. 6 § 4 находим
В? (L) = Bf (L, © L) = В* (LJ © Bf (1) = Bf (L,) © L. (9)
Обозначим через s размерность L. Из (9) получаем
Rk — rl; © s>
так что (поскольку s не зависит от k) имеем
Rki — 2Rk © Rk+i = fk-i — ^rk~\~rk+i (10)
(правая часть (10) входит в формулу (9) § 9).
Аналогичные рассуждения применимы к остальным вырож-
денным преобразованиям В, —А— \Е.
Вывод. Пусть llk — количество жордановых клеток раз-
мерности 1, соответствующих собственному числу X,-, в
матрице данного преобразования А, записанной в канониче-
ском базисе. Тогда
4 = Rang (А — \E)k l — 2 Rang (А — \Е)к ©
© Rang (А - X©/ '1. (11)
Все слагаемые в правой части формулы (11) не зависят от
выбора базиса. Теорема п. 2 доказана полностью.
6. Пусть канонический базис найден. Тогда каждое из
подпространств Lb входящих в разложение (8), само пред-
ставляется в виде прямой суммы инвариантных подпространств,
в каждом из которых преобразование задается одной жор-
даиовой клеткой. Полиномы вида (X — X©, равные с точ-
ностью до знака характеристическим многочленам этих
§ 10]
ЖОРДАНОВА НОРМАЛЬНАЯ ФОРМА
275
жордановых клеток, называются элементарными делите-
лями матрицы преобразования A; k — порядок жордановой
клетки.
Количество элементарных делителей данной степени k
с данным собственным значением Хг равно числу llk (см. (11)).
В теории матриц доказывается, что элементарные делители
могут быть вычислены, если известны общие наибольшие
делители миноров порядка s матрицы А — >.Е для s = 1,..,, п.
Тем самым дается другой способ нахождения нормальной
жордановой формы матрицы А.
7. Теорема п. 2 справедлива в действительном простран-
стве в предположении, что все корни />(Х) действительны.
Доказательство в точности повторяет пп. 3—5.
8. Если в действительном пространстве L задано преобра-
зование А, у которого некоторые корни характеристического
многочлена комплексны, то вместо (4) имеем
Р (*) = (— 1)"- т & — КТ1 ... (А - р (Ч (1 2)
где р(Х) — полином степени т, не имеющий действительных
корней, mi mk т — п. Соответственно разложению
(12) получаем разложение пространства L на инвариантные
подпространства: L = Lt ©... © Lk @ L, где L(- — подпро-
странство размерности nil (ядро преобразования (А — \Е)т'),
в котором А имеет одно собственное значение Хг, a L —
подпространство размерности т, в котором А невырождено и
не имеет ни одного собственного вектора. В каждом из L,
можно выбрать канонический базис. В L выберем базис
как угодно. Тогда матрица А примет вид
О». . 0
Д --
0 А
где G(I>, ..., G(fe> — нормальные жордановы формы матриц
преобразования А в подпространствах Ц, ..., Lk; А — невы-
рожденная т X /«-матрица. Вопрос о дальнейшем упрощении
матрицы А (за счет специального выбора базиса в L, упро-
щающего клетку А) мы не будем рассматривать.
276
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
§11 . Преобразования простой структуры
1. Определение. Линейное преобразование А в про-
странстве L называется преобразованием простой структуры,
если в L существует базис, состоящий из собственных век-
торов этого преобразования.
В случае преобразования простой структуры жорданова
нормальная форма матрицы состоит из одномерных жорда-
новых клеток. Фактически мы уже встречались выше с пре-
образованиями простой структуры в п. 5 § 7.
Сейчас установим два признака существования базиса из
собственных векторов.
2. П е р в ы й признак (достаточный). Если характе-
ристический многочлен линейного преобразования А ком-
плексного пространства L не имеет кратных корней, то
в L существует базис из собственных векторов преобра-
зования А.
Доказательство. В условиях признака разложение
(8) § 10 содержит п различных одномерных инвариантных
подпространств Li, При этом каждое L, является
линейной оболочкой собственного вектора ег. Согласно § 14
гл. I векторы еь ...,еп образуют базис в L.
3. Второй признак (необходимый и достаточный).
В комплексном пространстве L существует базис из соб-
ственных векторов преобразования А тогда и только
тогда, когда для каждого корня п, характеристического
многочлена p(i) ранг матрицы А — \Еравен разности п — т{,
где т{—-кратность этого корня, п — размерность про-
странства L.
Доказательство. 1) Необходимость. Пусть
существует базис из собственных векторов. В этом базисе
матрица преобразования А диагональна (см. § 7, формулу (3)),
а характеристическая матрица имеет вид
Л! — X
о
А— ХЕ =
Х2— X
(1)
о
Х„-Х
так что
P(X) = Det(A —ХЕ) = (Х1 —Х)(Х2 —X) ... (Х„ — X).
§ 11! ПРЕОБРАЗОВАНИЯ ПРОСТОИ СТРУКТУРЫ 277
Если, например, Xj имеет кратность т\, то есть
Xi = Х3 = ... = Хтр
^m,4-l 7^ ^T> • • • > 7^ Xj,
то на диагонали матрицы (1) при X —Xj первые тг элемен-
тов равны нулю, а остальные отличны от нуля, поэтому
R ang (А — Х,Е) = п — mt. (2)
Ввиду инвариантности /?(Х) и ранга характеристической ма-
трицы равенство (2) не зависит от выбора базиса.
2) Достаточность. Согласно п. 4 § 10 размерность
подпространства Lt равна кратности корня X,-. Если
Rang (А — Х,Е) = п — tnh (3)
то собственному значению Xf соответствует от, линейно неза-
висимых собственных векторов (см. § 6, п. 2). Все они нахо-
дятся в подпространстве L, и образуют в нем базис. Если
(3) соблюдается для каждого номера I, то объединение таких
базисов для всех /=1,...,у дает базис пространства L (см.
§ 14 гл. I), причем полученный базис состоит из собственных
векторов.
Доказательство второго признака завершено.
Замечание. В условиях второго признака преобразо-
вание А действует в каждом из Lt- как подобие с коэффи-
циентом Хг (см. в связи с этим § 7, и. 4).
4. Оба сформулированных признака справедливы в дей-
ствительном пространстве при дополнительном условии, что
все корни характеристического многочлена действительны.
Доказательство предоставляем читателю.
5. Из результатов § 10 следует, что произвольное линей-
ное преобразование А в комплексном линейном пространстве
L (а также в действительном пространстве при условии, что
р(Х) имеет лишь действительные корни) можно представить
в виде суммы
A = B-f-C,
где В — нильпотентное преобразование, С — преобразование
простой структуры (см. формулы (1) и (2) § 10).
278
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ)
[ГЛ. VII
§12 . Эквивалентность матриц
1. Определение. Две и Хи-матрицы А и В назы-
ваются эквивалентными, если существует невырожденная
пХя'матРича Q такая, что B=QAQ~l (матрицы А, В, Q
либо все действительны, либо все комплексны).
Геометрический смысл этого определения состоит в сле-
дующем: если А рассматривать как матрицу некоторого
линейного преобразования в произвольно выбранном базисе
...,еп, то матрица В задает то же самое преобразование
в другом базисе ег, еп>, причем Q= (Р*)1, где Р —
матрица правых частей формул:
^=i;pk
(см. формулу (1а) из § 2).
Нетрудно проверить, что если А эквивалентна В, то В
эквивалентна А и что две матрицы, порознь эквивалентные
третьей, эквивалентны между собой. Тем самым вся совокуп-
ность матриц (либо действительных, либо комплексных) рас-
падается на непересекающиеся классы эквивалентных между
собой матриц.
2. Пусть И— некоторая подгруппа матриц. Если в опре-
делении эквивалентности брать матрицы Q из Н, то получим
матрицы, эквивалентные относительно данной подгруппы Н.
Разные матрицы, эквивалентные данной относительно Н,
выражают одно и то же линейное преобразование в разных
базисах, принадлежащих одному классу базисов по под-
группе Н.
3. Из результатов § 10 следует, что для каждой комплекс-
ной п X «-матрицы А существует эквивалентная ей матрица
G, имеющая нормальную жорданову форму. Перестановка
клеток в матрице G переводит ее в эквивалентную матрицу
G', так как переходу от G к G' соответствует с геометриче-
ской точки зрения перестановка некоторых наборов векторов
в одном базисе. Процесс нахождения матрицы G, эквивалент-
ной А, называют приведением матрицы А к жордановой нор-
мальной форме,
Две матрицы, жордановы нормальные формы которых
различаются собственными значениями, количеством или раз-
мерами жордановых клеток, не эквивалентны между собой.
§ 12]
ЭКВИВАЛЕНТНОСТЬ МАТРИЦ
279
4. Если для данной матрицы А известна ее нормальная
жордапова форма G, то матрица Q в равенстве
G=QAQ~1 (1)
может быть найдена следующим путем. Умножив обе части
(1) справа на Q й перенеся все члены в одну сторону, по-
лучим равенство
GQ—QA = 0, (2)
которое можно рассматривать как однородную систему линей-
ных уравнений, в которой неизвестными являются элементы
матрицы Q. Любое решение такой системы, удовлетворяющее
дополнительному условию
Det Q ф 0, (3)
дает нужную матрицу Q. При больших п этот способ ста-
новится очень трудоемким, так как система (2) содержит г?
уравнений.
Разработаны другие методы нахождения матриц G и Q
по заданной матрице А; один из них фактически изложен
нами в §§ 9 и 10 *).
5. Пример. Привести к жордановой нормальной форме
л I 4 1 I
матрицу А = ____। g •
Решение. Составляем характеристический многочлен:
/>(') =
= Х2— lOX-f-25,
откуда Z1 = k2 = 5. Далее
A — =
находим
! I, Rang (A — XjE)— 1.
Сумма кратности корня Xj и ранга (А — \Е) превышает л = 2,
поэтому для преобразования с матрицей А не существует
базиса из собственных векторов. В такой ситуации (/г = 2,
корень Xi кратный, базиса из собственных векторов нет)
для жордановой нормальной формы имеется единственная
!) Кроме того, см., например, Ф. Р. Г ан тм а хер, Теория
матриц, «Наука», 1967.
•280 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
возможность: двумерная жорданова клетка, соответствующая
данному )., = 5:
(4)
Можно рассуждать иначе. Нетрудно подсчитать, что
(А —).,Е)2=0,
поэтому ранги последовательных неотрицательных степеней
матрицы (А — XJ?) образуют такую последовательность:
г0 = 2, /1=1, г2=Гз= ... =0.
Подставляя rt в формулу (11) § 10, находим, что число
одномерных жордановых клеток в матрице G равно нулю,
число двумерных — единице, что согласуется с формулой (4).
Найдем теперь матрицу Q. Подставив в (2) A, G и
Q = | S11 Я14 I, получим систему уравнений
II ЧГ21 Уаа ||
Qu 012 Ом = о,
— Qn 012 4“ 0«2 = 0,
Q21 -|- Q22 — о,
— Q21 — O22 = о.
(5)
(Все индексы написаны внизу, так как тензорная природа
формул нас сейчас не интересует.) Последние два уравнения
системы (5) являются следствием первых двух, из которых
находим
Qu = a, Qis = Ъ,
Ом = —а — Ь,
O22 — и -ф-
где а, b — произвольные числа. Нужно обеспечить условие (3):
а
— а — b
Det Q =
b
а-\-Ь
= (а4-Ь)2^ 0,
откуда аф — Ь. Никаких других ограничений на а, Ь не
накладывается.
ФОРМУЛА ГАМИЛЬТОНА — КЭЛИ
§ 13]
Взяв, например, а = 1, b = 0, получим
281
Нетрудно проверить, что равенство (1) соблюдается.
§ 13. Формула Гамильтона — Кэли
1. Прямым следствием § 10 является тождество, извест-
ное под названием формулы Гамильтона—Кэли.
Пусть
= + ... ~Г Рп Р-Рп)
— характеристический многочлен линейного преобразования А.
Тогда р(А) есть нулевое линейное преобразование. Под-
робнее:
... +^+^£ = 0. (1)
2. Доказательство. Сейчас в наших рассуждениях
будем считать пространство комплексным. Согласно п. 4 § 10
мы имеем
Р(Х)=(-1)"(Х-Х1)"’* ... (Х-х/А (2)
Соответственно
р (Д) == (—1)л (А — \Е)т' ... (А - ХуДр', (3)
в чем легко убедиться, одновременно перемножая скобки
в правых частях (2) и (3). Используя обозначения п. 4 § 10,
вместо (3) можно написать
р(А) = (—1W ... Вр. (4)
Порядок сомножителей в (3) и (4) безразличен, потому что
здесь встречаются только произведения операторов А и Е,
которые перестановочны.
Пусть х— произвольный вектор из L. Так как L есть
сумма Li, то можно написать разложение
х = X1-J- ... -j-Xj, где xt С Li, 1=1,...,/. (5)
282 ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ (ПРОСТРАНСТВ) [ГЛ. VII
С другой стороны, по определению и £г имеем
^!-(ьг)=е. (6)
Теперь видно, что
р (Д) х = 6
вследствие (4) — (6), поскольку в формуле (4) сомножители
можно писать в любом порядке. Таким образом, формула (1)
доказана.
Формула Гамильтона — Кэли верна не только в комплекс-
ном, но и в действительном пространстве, поскольку дей-
ствительное пространство всегда можно расширить до ком-
плексного. Подробнее: имея данный базис, следует позволить
рассматривать векторы с комплексными координатами; линей-
ное преобразование А при этом естественно распространится
на полученное комплексное пространство (его матрицу А
нужно оставить без изменения).
ГЛАВА VIII. ПРОСТРАНСТВА
С КВАДРАТИЧНОЙ МЕТРИКОЙ
§ 1. Скалярное произведение
1. Пусть L — действительное линейное пространство.
Введем в пространстве L новую операцию — скалярное умно-
жение векторов.
Действие скалярного умножения ставит в соответствие
каждой паре векторов х, у из L действительное число, кото-
рое обозначается (х, у) и называется скалярным произведе-
нием вектора х на вектор у.
По аналогии с элементарной аналитической геометрией
потребуем соблюдения следующих свойств:
1) Коммутативность: (х, у) = (у, х).
2) Распределительность (дистрибутивность): (лу х2,_у) =
3) Однородность: (ax,j) = a(x,_y) для любого действи-
тельного числа а.
4) Невырожденность: если (x,y) = G при фиксированном
х и любом у ИЗ L, ТО X — 6.
Здесь всюду х, у, лу, х2 —произвольные векторы про-
странства L.
2. Обратим внимание на то, что в элементарной аналити-
ческой геометрии перечисленные выше свойства скалярного
произведения доказываются как теоремы, а здесь мы рассма-
триваем эти свойства как аксиомы, включая их в определение
скалярного произведения.
3. Второе и третье свойства вместе означают линейность
скалярного произведения по первому аргументу. Вследствие
коммутативности имеет место линейность и по второму аргу-
менту.
Итак, скалярное произведение (х, у) представляет
собой билинейную форму, симметричную согласно первому
свойству и невырожденную вследствие четвертого свойства.
Действительно, четвертое свойство означает, что нулевое
подпространство билинейной формы (х,у) нульмерно,
284
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ (ГЛ. VIII
откуда и вытекает ее невырожденность (см. выше, гл. IV,
§ И).
4. Очевидно, справедливо и обратное утверждение:
Каждую невырожденную симметричную билинейную
форму g(x,y), заданную в пространстве L, можно принять
в качестве скалярного произведения, положив
^,y)=g(x,y)
для любых х,у £ L.
Замечание. Разумеется, скалярное произведение зависит
от выбора формы g(x,y). Если в качестве скалярного произ-
ведения выбирать разные формы, то для данной пары векто-
ров х, у пространства L скалярное произведение будет
получать, вообще говоря, разные численные значения.
5. Пусть в пространстве L введено скалярное произведе-
ние (x,y)=g(x,y).
Предполагая пространство д-мерным, возьмем в нем про-
извольный базис е1г ..., еп. Если x="£xl eh y — ^ykek, то
скалярное произведение запишется в координатах так:
(x,y')=g(x,y) = ^gikxiyk, (1)
гДе gik — коэффициенты билинейной формы g(x,y) в дан-
ном базисе еь , еп. Они являются значениями этой формы
на базисных векторах, то есть их скалярными произведениями.
Таким образом,
(O,o0 = £<fc (2)
причем gtk=gki- Равенства (2) составляют таблицу умноже-
ния базисных векторов.
Если правые части таблицы (2) даны, то тем самым
однозначно определено скалярное произведение любой пары
векторов х,у (согласно равенству (1)).
6. Определение 1. Векторы х,у называются ортого-
нальными, если (х,у) = 0.
В координатах условие ортогональности векторов х,у
имеет вид
£ gift x*’xfc=0.
Определение 2. Вектор х ортогонален подпростран-
ству L', если (х,у) = 0 для любого у£ L'.
Заметим, что если L' имеет размерность k, то для орто-
гональности вектора х подпространству К достаточно, чтобы
НОРМА ВЕКТОРА
285
§ 2]
х был ортогонален к каким-нибудь независимым векторам
в числе kx лежащим в L'. В самом деле, если независимые
векторы ait..., ak лежат в U и если (х, = 0, ..., (х, ай) = О,
то для любого у £ L имеем у — X1 аг ... -|- Xft<zft, откуда
(х,_у)~X1 (х, • • • -f-Xfe(x, ak)=0.
Определение 3. Подпространства L', L" называются
ортогональными, если (х, j) = 0 для любого х £ L' и лю-
бого у £ L".
Определение 4. Подпространство L" называется
ортогональным дополнением подпространства Lr в прост-
ранстве X, если L' и L" ортогональны и их прямая сумма
совпадает с L.
Замечание. Подчеркнем, что ортогональность векторов
и ортогональность подпространств существенно зависит от
того, какая именно билинейная форма g(x,y) взята в каче-
стве скалярного произведения (х, _у) в пространстве L.
§ 2. Норма вектора
1. Пусть в линейном пространстве L задано скалярное
произведение.
Определение. Нормой вектора х называется- число
||-х-1]=л*) - (О
Норма является обобщением понятия модуля или длины
вектора, известного из элементарной геометрии.
Скалярное произведение (х, х) является действительным
числом, но оно может не быть положительным, так что норма
вектора может оказаться мнимой. Условимся считать, что
радикал в формуле (1) может быть либо неотрицательным
действительным числом, либо мнимым числом с положитель-
ным множителем при I (/ —-|-]/—1).
2. Из определения нормы следует, что
||ах||= | а | ||х||
для любого х С Ь и любого числа а.
В частности,
||_х|| = ||х||, |]6]| = о. (2)
Ненулевые векторы, норма которых равна нулю, называ-
ются изотропными. Изотропные векторы существуют тогда
286
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
и только тогда, когда квадратичная форма (х, х) не яв-
ляется знакоопределенной.
3. Квадратичная форма 11 х 1|2 = (х, х) называется метри-
ческой формой рассматриваемого пространства.
Она определяется билинейной формой (х, у) и в свою
очередь определяет ее как свою полярную форму. Таким об-
разом, задание скалярного произведения и задание квадратич-
ной формы для измерения норм векторов равносильны. По-
этому пространства с заданным скалярным произведением
называют также пространствами с квадратичной метрикой.
Если пространство n-мерно, то метрическая форма в ко-
ординатах имеет вид
II X || 2 = (X, х) = У, g,-ftxjxfe.
4. Теорема. Если метрическая форма является по-
ложительно определенной, то для любых двух векторов
х, у £ L соблюдается неравенство
11-*+Я^1И1 + 11Л- (3)
Доказательство. Используем неравенство Коши—
Буняковского (см. § 10 гл. IV)
(х, у)* (х, х) • (у, J). (4)
Учитывая (4), находим, что
Пл'+у112 = (л'+У> -v+j) = (x, х)4-2(х, j)4-Cv, J’)<
==^(х, х)+2 У(х, х)-(у, у)4-(у, y) = (||x||4-||j'i!)2>
откуда следует (3).
Замечание. Из (3) следует, что если метрическая
форма положительно определена, то
|| X—у II IIXII — IIу ||, || x+j II IIXII4- IIу ||.
5. Рассмотрим аффинное пространство 31, которому соот-
ветствует линейное пространство L с квадратичной метрикой.
Для каждой пары точек А, В из 31 определим расстоя-
ние р(А, В), полагая его равным норме вектора АВ:
р(А, Д)=||АД||. (5)
Имеем
р(Д В) = р(Д, А), р(А, А) = 0. (6)
Формулы (6) следуют из (2) и (5).
§ 31
ОРТОНОРМИРОВАННЫЕ БАЗИСЫ
287
6. В случае положительно определенной метрической
формы (х, х) расстояние между точками равно нулю только
тогда, когда точки совпадают, и, кроме того, для любых
трех точек А, В, С из 81 соблюдается неравенство треугольника
Р(А C)sgp(A £) + р(А С). (7)
Неравенство (7) следует из неравенства (3) и формулы (5).
7. Если между точками аффинного пространства 81 опре-
делено расстояние по формуле (5), то говорят, что в аффин-
ном пространстве 81 задана квадратичная метрика. В аф-
финных координатах квадрат расстояния имеет выражение
Р2(А —л**), (8)
где Хр.-.х"—аффинные координаты точки А, х‘-,..., х”—
аффинные координаты точки В.
Правую часть (8), квадратичную относительно разностей
координат произвольных точек А и В, называют метриче-
ской формой пространства 81.
§ 3. Ортонормированные базисы
1. В пространстве с квадратичной метрикой базисы не
равноправны. Среди них есть такие, которые наиболее удоб-
ны с точки зрения данной метрики.
Именно, базис еьеп можно выбрать так, чтобы мет-
рическая форма g(x, х) имела в нем нормальный вид
II X || 3 = g(X, Х) = (X1)3 +... + (xft)3 - (Xfe + ‘)3 - ... - (Хга)2.
Тогда скалярное произведение двух векторов представится
так:
ху—ххух -}-••• + — хк + ]ук +1 —... — х”У!.
Ясно, что скалярные произведения (ег, — если г=А/,
то есть при z j базисные векторы ортогональны. При этом
|1 е,-1|3 = 1, если z — 1,...,Л;||<?г- ||3= — 1, если l = k -ф-1,..., и.
Тем самым векторы базиса нормированы так, что квадраты
их норм по модулю равны единице. Векторы et называются
единичными, если i^zk, мнимоединичными, если iz^kA-1.
Вообще вектор а называется единичным, если ||с||3=1,
мнимоединичным, если || а ||3= — 1.
§88 ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Определение. Базис eh ..., еп, удовлетворяющий
перечисленным в этом пункте условиям, называется орто-
нормированным.
Теорема 1. В п-мерном линейном пространстве
с заданной квадратичной метрикой всякий набор из по-
парно ортогональных единичных или мнимоединичных век-
торов общим числом п является базисом, в котором
метрическая форма имеет нормальный вид.
Доказательство. Пусть eit..., еп — указанный набор
векторов. Убедимся, что они линейно независимы. Рассмотрим
соотношение
-j- = 6.
Отсюда, умножая скалярно на еь получим
4 (<?!> ei) 4* ^2 (е2> о) 4~ - • • 4* (еп> о)=(6. о).
Но по условию (eit <?4 = ± 1, (е}-, = 1); кроме того,
(0, е1) = 0. Следовательно, ki = 0. Аналогично докажем, что
Х2 = 0,..., Х„ = 0. Таким образом, установлено, что векторы
еь..., е„ независимы и, значит, действительно составляют
базис.
Так как g(eit £>,) = (£>,-, г,) —± 1, g(eit е}) = (еь еу) = 0,
то форма g(x, х) в базисе еь..., еп имеет нормальный вид.
2. Наряду с доказанной выше теоремой 1 мы отметим
следующее утверждение.
В n-мерном линейном пространстве всегда можно задать,
причем единственным способом, такую квадратичную метри-
ку, что произвольный заранее данный базис £>1... ek,
ek +1, . •, еп станет ортонормированным, его векторы еь ..., ek
станут единичными, а векторы ek +1, , еп — мнимоединич-
ными; здесь k — также любое заранее данное целое число
от 0 до п.
Доказательство. Искомая метрика однозначно оп-
ределяется заданием метрической формы g(x, х), которая
в базисе еь..., ek, _[_ ь..., еп имеет вид
g(.X, X) = (х1)2 4-... + (Xs)2 - (Xй + I)2 - . .. - (Xй)2.
3. Согласно закону инерции квадратичных форм число
единичных и число мнимоединичных векторов не зависит от
выбора базиса, ортонормированного в данной квадратичной
метрике.
§ 41 ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ- ОРТОГОНАЛИЗАЦИЯ 289
Определение. Число k единичных векторов орто-
нормированного базиса называется положительным индек-
сом пространства с данной квадратичной метрикой.
Если k = n или если k = 0, то пространство называется
евклидовым.
Если lsC/ггСп—1, то пространство называется псевдо-
евклидовым.
Особенно большое значение имеет псевдоевклидово про-
странство при k — n—1. Оно называется пространством
Минковского и при п = 4 играет важную роль в теории
относительности.
§ 4. Ортогональная проекция. Ортогонализация
1. В этом параграфе мы рассмотрим евклидово простран-
ство L, то есть линейное пространство со знакоопределенной
метрической формой. Будем считать метрическую форму по-
ложительно определенной. (Случай отрицательно определен-
ной метрической формы отдельного рассмотрения не требует.
Это будет ясно из § 5.) Размерность пространства L может
быть бесконечной.
Пусть в L дано подпространство L'. Допустим, что век-
тор х С L представляется в виде суммы
х — х' -\-х, (1)
где xf С L', а х ортогонален к L'. Тогда вектор х' называ-
ется ортогональной проекцией вектора х на подпростран-
ство U. Ортогональная проекция вектора х на L' единственна.
В самом деле, пусть имеется другое разложение x=xj-|-A»
где х[ С L', Xt ортогонален к L'. В этом случае V — х[ =
= xt — х; отсюда
(х' — xj)2 — (х' — х[, xf — лу) — (Xi — х, х! — x’i) = 0, (*)
так как V — х[ £ L', а х и J?i ортогональны к L’. Из (*)
следует, что У — х'1 = в, то есть xt = x[, поскольку метри-
ческая форма пространства положительно определена.
Частный случай, когда L трехмерно, L’ двумерно,
показан на рис. 36.
Преобразование пространства L, которое каждому вектору
х ставит в соответствие вектор хг согласно формуле (1),
тоже называется ортогональной проекцией (или ортогональ-
ным проектированием) на L’.
290
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Если пространство L рассматривается как точечное,
a L' — как плоскость в нем, то точка М' с радиус-вектором
ОМ —xf называется ортогональной проекцией на L точки М,
имеющей радиус-вектор 0М = х (рис. 36).
2. Докажем, что ортогональная проекция М' точки М
на L' представляет собой ближайшую к М точку в L'.
Пусть у—ON—произ-
вольный вектор подпро-
странства L’. Нужно дока-
зать, что
Г|Х—
(2)
причем равенство в (2) до-
стигается только тогда, когда
у — х' (то есть когда N со-
впадает с М', рис. 36).
Положим х!—у—уь Тогда х—у=х-[-уь и
h’—-VlP=(^+Jb *+Уд=
= Plle+IUi||2+2(x, J1) = ||x||’ + ||Jl|l2, (3)
поскольку (x, _у!) = 0 вследствие ортогональности вектора х
подпространству L', содержащему у'.
Заметим, что
ji)=2=o
ввиду положительной определенности метрической формы
рассматриваемого пространства. Поэтому (2) следует из (3).
Равенство в (2) достигается лишь тогда, когда Ji = 6 (го
есть когда y — xJ).
3. Пусть
L' = L(zb..., zk\
где Zi,.zk— некоторая конечная независимая система век-
торов из L. В этом случае для нахождения ортогональной
проекции V заданного вектора х на подпространство L’ до-
статочно надлежащим образом вычислить коэффициенты
а!...aft в разложении
X'-----O-iZi -J-...
§ 4] ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ- ОРТОГОНАЛИЗАЦИЯ 291
С этой целью запишем условие ортогональности вектора
х — х— х' каждому из векторов Zj
(х— х', zj) — O. (5)
Подставив разложение (4) в (5) и используя свойства ска-
лярного произведения, получаем для а,- систему линейных
уравнений
*
V(^.( z7)a.=(x> Zj), (6)
>=i
Определитель системы (6) представляет собой опреде-
литель Грама для положительно определенной квадратичной
формы (х, х) и независимых векторов zi,zk. Поэтому
он положителен (см. § 10 гл. IV), а система (6) однозначно
разрешима. Тем самым искомая проекция найдется.
4. Ниже нам потребуется следующая
Лемм а. Пусть в пространстве с положительно опре-
деленной метрической формой имеется система попарно
ортогональных векторов at,..., ak, то есть (alt Ok) — 0
при I ф k. Если ни один из этих векторов не нулевой, то
они линейно независимы.
Доказательство. Рассмотрим соотношение
XiCi ^kak — (7)
Умножим (7) скалярно на ар
at) ~h • • • Н- ^ft (ai> aft) —(аь 0)- (8)
Так как а^б, а метрическая форма положительно опреде-
лена, то (аь ai) = || 1|2 ф 0. Остальные скалярные произ-
ведения в левой части (8) обратятся в нуль по условию
леммы; (аь б)_ 0 из-за участия нулевого вектора. Следова-
тельно, Xi = 0. Аналогично устанавливается, что Х2 = ...
... = = 0. Лемма доказана.
5. Пусть в пространстве L дана упорядоченная система
линейно независимых векторов еь..., ek. Речь будет идти
о замене этой системы другой системой векторов, ортого-
нальной и в некотором смысле эквивалентной данной. С этой
целью проводится геометрическое построение, называемое
процессом ортогонализации. Оно напоминает процесс выбора
базиса при приведении квадратичной формы к каноническому
виду методом Якоби.
292
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Новая система векторов ек> строится с соблюде-
нием следующих условий:
1) О' С Е(о), О- € L-(eb е$,...,
е? С L (е1г..., ei},..., е& £ L (о, ek).
2) Векторы ек< попарно ортогональны.
3) Система ех>,ек> линейно независима.
В таком случае говорят, что новая система векторов по-
лучена из первоначальной системы еь..., ek процессом
ортогонализации.
Если данная система состоит из трех векторов еь е$, ел
в трехмерном евклидовом пространстве, то новую систему
еу, е#, е9> построим так:
первый вектор сохраним
(О'=0);
второй вектор проведем к нему
ортогонально в плоскости, про-
ходящей через ег и <?2;
третий вектор проведем орто-
гонально этой плоскости (рис. 37).
Переходя к случаю большей
размерности, нужно четвертый
вектор располагать перпендикулярно данному трехмерному
пространству и т. д. В общем случае положим
О' = еъ
е$ = <?2 «О',
О’ = е9 4~ рО' Ю’,
(9)
ew—ek 4“ 4- 4~ • • • ^k-ier-
Из формул (9) следует, что векторы е? расположены в нуж-
ных линейных оболочках и являются ненулевыми вследствие
независимости векторов elt ... , ek.
Остается подобрать коэффициенты а, р, ... так, чтобы
векторы е? были попарно ортогональны. Тогда система
О', , ek' будет независимой по лемме п. 4.
Найдем а. Мы имеем
(О’, О’) = (О, О')4-а(О’, О')—о,
отсюда
§ 4) ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ. ОРТОГОНАЛИЗАЦИЯ 293
Деление выполнимо, так как (ер, б1') = (е1, Вектор
(—a<?j) представляет собой ортогональную проекцию е2 на
L(et) (рис. 38).
Дальше обеспечим ортогональность третьего вектора пер-
вым двум:
(ег, er) = (c3, er) + P(ga-, М+тС*!', gr) = 0>
for, eS') = (e3, ea') + ₽far, M+l(gi', ga') = °-
Подчеркнутые члены обращаются в нуль, а (е^, е^) ф О
по построению. Поэтому находим
(с», С]-) g (е„ е2')
(е,',ег)’ р (е2-, М’
Формулы (9) и (11) геометрически означают, что для пост-
роения вектора е3’ нужно из вектора е3
тональную проекцию на подпространство
Дальше процесс идет аналогично.
(И)
7 =
вычесть его орто-
L(ei, <?2) (рис. 39).
6. В процессе ортогонализации иногда бывает важно обес-
печить соблюдение еще двух дополнительных условий.
4) При любом /(1=C/=C k) система еу, ... , е? ориенти-
рована так же, >как система е1г ... , е».
5) || ev ||=1.
Формулы (9) гарантируют соблюдение условия 4). В самом
деле, из (9) имеем
Ci = er,
е3 = — аец -f- е2>,
£k — —— • • • — -j“ Ck’i
294
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
так что в матрице, выражающей et через е?, левый верхний
минор порядка j (при любом j^k) положителен (равен-|-1).
Для того чтобы обеспечить условие 5), достаточно после
проведения ортогонализации каждый из полученных векторов
разделить на его норму.
Замечание. Нетрудно доказать (например, по индукции),
что условия 1)—5), перечисленные в пп. 5 и 6, по данной
системе et, ... , ek однозначно определяют систему векторов
сц, .... ek-.
7. Многочлены Лежандра. В математическом ана-
лизе и его приложениях приходится использовать разложение
произвольных функций в ряды по данным функциям, рас-
сматривая такие разложения функций аналогично разложениям
векторов по данному базису. При этом удобно иметь аналоги
ортогонального базиса; таковыми являются ортогональные
системы функций. Одним из простейших примеров ортого-
нальных систем являются многочлены Лежандра.
В пространстве непрерывных функций на отрезке [—1, 1]
вводится квадратичная метрика со скалярным произведением
(х, у)— $ x(f)y{t)dt. (12)
- 1
Соответственно
11 <= 5 (13)
Мы уже рассматривали выражение (13) и доказали, что это
квадратичная форма (см. § 4 гл. IV). Следует обратить вниг
мание на ее положительную определенность: ||х ||2 0, причем
|1х||2 = 0 тогда и только тогда, когда непрерывная функция
x(t) = 0 во всех точках отрезка.
Возьмем систему одночленов
1, t, t*, t3, ... , tk, ...
(И)
и применим к ней процесс ортогонализации. В результате
получим последовательность многочленов
/о (0 = 1, А (0=t, А (0=f8 -1 А (0=
о
(15)
§ 5] МЕТРИЧЕСКИЙ ИЗОМОРФИЗМ 295
Номера многочленов (15) выбраны так, чтобы они совпа-
дали с их степенями. Коэффициенты многочленов вычисляются
согласно формулам (9) с учетом (10), (11), (12) и (14).
После специальной нормировки вида
где выбираются из условия
Р*(1)=Ъ (16)
получаем последовательность многочленов Pk(t) (степени
А = 0, 1, 2,...), называемых многочленами Лежандра. Можно
доказать, что
Л(0=24да{(<’-1П. (П>
Учитывая замечание в п. 6, для этого достаточно проверить,
что все многочлены (17) попарно ортогональны (здесь удобно
применить интегрирование по частям), и чго они удовлетво-
ряют условию (16).
Можно доказать также, что
|| Р* (01|2 = 2*4-1*
Таким образом, система многочленов Лежандра ортого-
нальна, но не нормирована (нормырк неравны единице).
§ 5. Метрический изоморфизм
1. Определение. Два пространства L и L' с квадра-
тичной метрикой называются метрически изоморфными друг
другу, если между ними существует линейный изоморфизм,
при котором скалярное произведение любой пары векторов
в L равно скалярному произведению их образов в L'. Линей-
ный изоморфизм при этом условии называется метрическим
изоморфизмом (о линейном изоморфизме см. § 10 гл. I).
Замечание. Метрически изоморфные пространства имеют
одинаковые свойства не только линейные, но и метрические,
т. е. основанные на понятии скалярного произведения. Поэтому
достаточно среди множества метрически изоморфных про-
странств изучить одно, чтобы знать остальные.
2. Теорема 1. Пространства с квадратичной мет-
рикой, имеющие одинаковые размерности и одинаковые
296
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
положительные индексы, метрически изоморфны между
собой.
Доказательство. Пусть L и L' оба я-мерны и имеют
один и тот же положительный индекс k (О «J k «5 п). Согласно
§ 4 мы можем в L найти ортонормированный базис et, ... , е„,
а в V— ортонормированный базис ер, еп-. Эти базисы
имеют одинаковое число единичных векторов, равное А; будем
считать, что в каждом из этих базисов единичными являются
первые k векторов.
Пусть х — произвольный вектор пространства L. Разло-
жим его по базису eit ... , е^. х = x'et -ф- ... -ф-хпеп. Поста-
вим в соответствие вектору х тот вектор х' £ L', который
в базисе ер, ...,еп' имеет такие же координаты: х' =
= х’ер-\-хпеп-. Тем самым между L и L' установлен
линейный изоморфизм (см. § 10 гл. I). Рассмотрим два произ-
вольных вектора х, у пространства L и их образы х7, у' в L'.
Так как в базисах е\, ... , еп и ер, ... , <?„ метрические формы
пространств L и L' имеют одинаковые координатные пред-
ставления, а координаты векторов х, у совпадают соответст-
венно с координатами векторов х', у, то (х, д/) = (х', У).
Таким образом, установленный между L и L' линейный изо-
морфизм является метрическим изоморфизмом. Теорема до-
казана.
Для пространств L и L' с квадратичной метрикой спра-
ведлива также следующая
Теорема 2. Если пространство L имеет размер-
ность п и положительный индекс k(0^k^.n), а прост-
ранство L' метрически изоморфно ему, то L' также имеет
размерность п и положительный индекс k.
Доказательство. Пусть еь ... ,еп — ортонормирован-
ный базис в L, первые k векторов которого единичные;
пусть векторы е^, ... , еп< £ L' соответствуют векторам
еь ... , еп по изоморфизму. Так как метрический изоморфизм
является линейным изоморфизмом, то, повторяя доказатель-
ство теоремы 2 § 10 гл. I, найдем, что размерность L' равна п
и что еу, ..., еп> составляют базис в V. Из определения мет-
рического изоморфизма сразу следует, что базис е^,..., еп< £ L'
ортонормированный и что первые k его векторов и только
они единичны. Теорема доказана.
Следствие. Псевдоевклидовы пространства с различ-
ными размерностями или с различными положительными
§ 6)
k ОРТОГОНАЛЬНЫЕ МАТРИЦЫ И ГРУППЫ
297
индексами не изоморфны. Евклидово пространство не изо-
морфно никакому псевдоевклидову.
Замечание. Однако нет надобности отдельно изучать
и-мерные квадратично-метрические пространства с положи-
тельными индексами k и п— k. Достаточно у одного из них
сменить знак метрической формы, чтобы получить другое.
§ 6. fe-ортогональные матрицы
и fe-ортогональные группы
1. Рассмотрим л-мерное пространство с квадратичной мет-
рикой с данным положительным индексом /г (0 /г л).
Пусть в этом пространстве берутся два любых базиса
еъ ... , еп и ец, ... , еп> при условии, что оба они ортонор-
мированные и в каждом из них единичными являются первые k
векторов.
Напишем по обычному стандарту формулы перехода от
первого базиса ко второму:
(О
Матрица Р, составленная из коэффициентов этих формул,
в данном случае обладает специальной природой. Постараемся
ее выяснить. С этой целью напишем метрическую форму про-
странства в базисе ех, ... , еп:
|| х ||« = (х1)® + ... + (х*)® — (х"")2 — ... — (х'!)'2. (1)
Наряду с этой формой рассмотрим матрицу
1 О
—1
у которой на первых k местах по главной диагонали стоит-f- 1,
на остальных местах главной диагонали—1, а все остальные
элементы равны нулю. Очевидно, что матрица О метрической
формы в базисе eh , е„ совпадает с матрицей Ek:
G=Ek.
298
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
В силу наших условий относительно рассматриваемых
базисов метрическая форма в базисе ег, ... , еп< имеет точно
такой же вид (1), как и в базисе еь ... , еп. Поэтому матрица G'
метрической формы в базисе е^, ... , еп- также равна
Gr=Ek.
С другой стороны, согласно общему закону преобразова-
ния матрицы квадратичной формы имеем
G' = PGP*.
Отсюда получаем следующий вывод: если матрица Р является
матрицей перехода от одного ортонормированного базиса
к другому ортонормированному базису, то
PEkP* = Ek; (2)
существенно, что в обоих базисах именно первые k векторов
являются единичными (остальные — мнимоединичными).
Легко понять, что одновременно доказано обратное утверж-
дение: если матрица Р удовлетворяет условию (2), если исход-
ный базис еь ... , еп является ортонормированным и если
первые k его векторов единичные (остальные — мнимоеди-
ничные), то базис 6г, ... , еп', полученный по формуле (I),
будет тоже ортонормированным, и его первые k векторов также
будут единичными.
2. Определение. Всякая n X «-матрица Р, удовлетво-
ряющая условию (2), называется k-ортогональной (О /г »).
Заметим, что это определение имеет чисто алгебраический
характер; его можно было бы высказать вне связи с геомет-
рией квадратично-метрических пространств.
3. Всякие Л-ортогональные матрицы невырожденные. В са-
мом деле, очевидно, что Det£^ = ±l.
Отсюда и из (2)
DetP-DetP* — 1, (3)
следовательно, DetP ф 0. Из (3) видно также, что DetP = ± 1.
4. Вследствие (2) имеем P{Ek — ЕкР*, или (так как
EkEk — Е)
p-'=EkP*Ek. (4)
Мы видим, что операция обращения матрицы, трудоемкая
в общем случае, для ^-ортогональных матриц сводится к one-
§ 6] ^-ОРТОГОНАЛЬНЫЕ МАТРИЦЫ И ГРУППЫ 299
рациям транспонирования и умножения на Ек (последнее озна-
чает только смену знака некоторых элементов).
5. Теорема. В группе всех невырожденных п X п-мат-
рпц k-ортогональные матрицы составляют подгруппу.
Мы обозначим ее через Ок и будем называть /г-ортого-
нальной подгруппой (или группой).
Доказательство. Пусть 0fe обозначает пока просто
множество всех й-ортогональных п X «-матриц. Возьмем из
две любые матрицы Р\, Ръ тогда Р\ЕкР\ — Ек, Р%ЕкР$ = Ek.
Отсюда
(PiP2) Ek (PtP2y = Pi (J\EkP%) Pt = PiEkPt = Ek.
Таким образом, если Pt С Ок, Р^ С Ок, то С Ок.
Возьмем из Ок произвольную матрицу Р; тогда РЕкР* = Ек.
Отсюда и вследствие (4)
Р 1Ек (Р1)* = Р1Ек (ЕкР*Ек)* = P'Ek (EkPEk) =
= р-'ЕкРЕк = Ек.
Таким образом, если Р£ Ок, то Р”1 С Ок. Теорема доказана.
Замечание. Согласно п. 3 все Ок(0k«5п) входят
в подгруппу п X «-матриц с единичным модулем определи-
теля.
6. Множество всех ортонормированных базисов в про-
странстве с квадратичной метрикой с данным положительным
индексом представляет собой не что иное, как класс базисов,
который определен по группе Ок каким-нибудь одним орто-
нормированным базисом этого пространства (см. § 1 гл. VI).
Геометрия пространства с квадратичной метрикой имеет
предметом своего изучения инварианты относительно группы Ок
в классе ортонормированных базисов. Говоря об инвариантах,
мы понимаем этот термин в широком смысле; именно, мы
имеем в виду не только инвариантные числовые величины
(как, например, скалярное произведение, норма вектора), но
также инвариантные объекты (например, плоскости) и инва-
риантные отношения (например, отношение ортогональности).
7. Заметим теперь, что любой класс базисов по группе Ок
является классом ортонормированных базисов в некоторой
(вполне определенной) квадратичной метрике.
В самом деле, пусть еъ ..., еп — произвольный базис
линейного пространства L. Согласно п. 2 § 3 существует
300
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
(вполне определенная) квадратичная метрика, в которой базис
еь ... , еп является ортонормированным и имеет в качестве
единичных первые k своих векторов. Тогда класс базисов,
определенный по группе Ок базисом е1г ... , еп, будет состоять
из ортонормированных базисов именно в этой метрике.
8. Вывод. Таким образом, множество всех базисов линей-
ного «-мерного пространства расслаивается на классы по
группе Ok так, что каждому классу отвечает своя квадратич-
ная метрика, в которой базисы этого класса являются орто-
нормированными.
Одновременно определяется бесконечное множество квад-
ратично-метрических пространств на одном и том же, образно
говоря, линейном «каркасе» L. Все они метрически изоморфны
между собой; геометрии этих пространств алгебраически
тождественны, так как все они имеют своим предметом инва-
рианты группы Ок. Однако с точки зрения линейного простран-
ства L эти квадратично-метрические пространства различны,
поскольку одна и та же пара векторов х, у пространства L
имеет в них разные численные значения скалярного произве-
дения. Все сказанное мы поясним чуть позднее на примерах
(см. §§ 7, 8).
9. Будем считать, что квадратичная метрика выбрана.
Пусть ^-ортогональная матрица Р определяет переход от орто-
нормированного базиса еъ ... , еп к ортонормированному
базису ci', ... , еп<. Одновременно рассмотрим соответствую-
щее преобразование координат
х1' — Qiх'- (5)
Матрица этого преобразования Q —(Р*)'1. Убедимся, что
матрица Q также является Л-ортогональной. С этой целью
напишем следующую цепочку равенств:
QEkQ* = (p*)~tEkPr~1 = (РЕкР*У' = Ek' = Ек.
Мы получили соотношение QEkQ* = Ek', тем самым Л-орто-
гональпость Q установлена.
Итак, при переходе от одного ортонормированного базиса
к другому координаты произвольного вектора подвергаются
(как переменные) линейному преобразованию с Л-ортогональ-
ной матрицей.
Замечание. Линейные преобразования (5) переменных
х1, ... , хп в переменные х1, ... , Xя с ^-ортогональной мат-
§ 7]
ГРУППА ЕВКЛИДОВЫХ ПОВОРОТОВ
301
рицей Q могут быть охарактеризованы без обращения к пре-
образованию базисов и соответственно без обращения к мат-
рице Р. Именно, такие линейные преобразования и тольно они
сохраняют нормальный вид квадратичной формы; иначе говоря,
если матрица Q является Л-ортогональной (и только в этом
случае), то имеет место тождество
(х1')2 4- ... 4- (xft’)2 — (x<ft + П')2 — ... — (х"')2 ==
= (х1)2 4- ... 4- (х*)2 — (xfc+1)2 — ... — (х”)2,
в левой части которого х1, ... , х” выражены по форму-
лам (5).
10. Из предыдущего ясно, что множество всех линейных
преобразований переменных с й-ортогональными матрицами
составляет группу, изоморфную группе Ок, причем изоморфиз-
мом может служить отображение, которое матрице Р £ Оь отно-
сит линейное преобразование с матрицей Q —В этом
же можно убедиться с помощью формальных действий с мат-
рицами. В самом деле, если Ръ Р%£ Ок и Qi = (P*) *,
q2=(P*)-\ то QiQ^(PtY4PlYl=(PlP*Y1 = ((PiP*')*)*•
Мы видим, что произведению матриц Pit Р% отвечает произ-
ведение их образов, что служит условием изоморфизма.
§ 7. Группа евклидовых поворотов
1. В двумерном случае существуют два метрически неизо-
морфных пространства, соответственно положительным индек-
сам k= 1 и /г = 2.
Если k = 2, то в ортонормированием базисе метрическая
форма имеет вид
Jx||2 = (x1)24-(x2)2. (1)
Ей отвечает геометрия обычной евклидовой плоскости (где
скалярное произведение дается известной формулой (х, у) —
= х*_у* 4~ гДе определен угол между векторами, а три-
гонометрические функции углов даются в координатах также
хорошо известными формулами элементарной аналитической
геометрии и т. д.). Если Л=1, то
|| х Ц2 = (х1)2 — (х2)2. (2)
Метрической форме (2) отвечает двумерная геометрия
Минковского.
302
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ .МЕТРИКОЙ [ГЛ VIII
2. Здесь мы займемся формой (1). Начнем с рассмотрения
Л-ортогональных матриц. Впрочем, сразу же оговоримся, что
при п = 2, ^ — 2 (как и вообще при k = ri) й-ортогональные
матрицы просто называются ортогональными.
При п = 2, k = 2 имеем Ek — E. Поэтому общее условие
PEkP* = Ek для ^-ортогональности матрицы Р в данном
частном случае принимает вид: РР*=Е.
Пусть
Согласно сказанному, эта матрица ортогональна тогда и только
тогда, когда
Отсюда
р2 = 1,
70с —8р = 0,
Ikll10 Il-
li II 0 1 II
а7 + Р8 = 0> 1
^2 _ 1 _ J
(3)
а р
7 8
а 7
₽ 8
Здесь три различных уравнения. Ввиду простоты этой системы
не составляет труда найти все ее решения. В самом деле,
вследствие второго уравнения-системы (3) мы можем написать:
7 = — Хр, 8 — Ха, где X — новая неизвестная. Подставляя
эти выражения в последнее уравнение системы, получим
72 + 82 = X2 (а2 + р2) = X2 = 1.
Таким образом, Х = ±1. Чтобы выяснить геометрический
смысл выбора знака, подсчитаем определитель матрицы Р:
DetP =
а р
— Хр Ха
= Х(а2 + р2) = Х.
Следовательно, значениям Х = ±1 отвечают преобразования
базиса соответственно с сохранением или с нарушением ориен-
тации.
Используем теперь уравнение а2-|~р2= 1. Вследствие этого
уравнения a = cos0, p=sin0, где 0 — произвольный пара-
метр. Одновременно имеем: 7 = — Xsin0, 8=Xcos0. Тем
самым найдены все решения системы (3) и соответственно
все ортогональные матрицы (разумеется, только при п = 2).
§ 7]
ГРУППА ЕВКЛИДОВЫХ ПОВОРОТОВ
303
Ограничимся случаем X ==—|— 1. Тогда
cos0 sin 0
— sin 0 cos0
(4)
Формула (4) дает все ортогональные матрицы, для которых
DetP^>0 (т. е. DetP = -j-l). Легко понять, что они сами
по себе составляют группу (подгруппу всей ортогональной
группы). Это же обстоятельство усматривается из следующих
двух равенств:
cos ©1 sin ©1
— sin 0i cos-0!
|| cos 02 sin 02
il — sin 0.2 cos 02
___ cos (0! -|- 0.2) Sin (01 -j- 0.2)
— sin (0i6s) cos (01-1-02)
cos0 sin©
— sin0 cos0
cos(—0) sin(—0)11
— sin (— 0) cos (— 0) [I
Они легко проверяются и выражают тот факт, что произве-
дение матриц вида (4) и обращение матрицы вида (4) при-
водят к матрицам того же вида.
3. Возьмем на евклидовой плоскости ортонормированпый
базис Ci, es; см. рис. 40, где изображены ортогональные друг
другу векторы et, е2, которые ис-
ходят из начала координат и
имеют концы на единичной ок-
ружности (л1)2 -j- (л2)2 = 1.
Перейдем к новому базису
с помощью матрицы Р вида (4):
et’ — et cos 0 4- с2 sin 0, 1
> (5)
е^ — — Ci sin 0 —c2cos0.)
В силу первого из этих равенств
вектор Ci- является единичным и
составляет с вектором Ci угол 0
при обычном условии относи-
тельно ориентации углов (т. е. угол понимается с учетом
знака, как принято в тригонометрии). Второе равенство можно
написать в виде
Cg* = Ci cos ^0 —|—2“) sin \ Н—2
304
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Отсюда следует, что вектор е%, будучи единичным, составляет
с вектором et угол 0 -j- у. Значит, с вектором он состав-
ляет такой же угол 0, как вектор еу с вектором et. Иначе
говоря, базис er, е? получается поворотом на угол 0 базиса eh еа
целиком.
Таким образом, ортонормированный базис et, еа, произ-
вольно взятый в евклидовой плоскости, определяет по группе
матриц (4) класс базисов, которые получаются поворотом
базиса еь еа на всевозможные углы; все они ортонормированы
и одинаково ориентированы с базисом elt еа.
Замечание. Чтобы получить, исходя из базиса еь са,
класс базисов по всей ортогональной группе, нужно добавочно
построить .класс базисов по группе матриц (4), взяв в качестве
исходного базис eh — е3.
4. Преобразованию базиса по матрице Р отвечает преоб-
разование координат с матрицей Q = (P*y\ В данном случае
РР* = Е. Отсюда Q = P. Следовательно, если базис преобра-
зуется по формулам (5), то координаты произвольного вектора
преобразуются по формулам с той же матрицей:
х1' = х1 cos 0 -j- л2 sin 0,
х2' — — х1 sin 0 -|- Xs cos 0.
(6)
5. Сейчас мы рассматривали соотношения (6) как фор-
мулы преобразования координат данного вектора x=x,el -j-
-:,-х2е3 при повороте базиса еь es (рис. 41, а). Эти же фор-
мулы можно рассматривать с другой точки зрения. Именно,
§ 71
ГРУППА ЕВКЛИДОВЫХ ПОВОРОТОВ
305
можно считать, что базис et, не меняется, но что фор-
мулы (6) сопоставляют с произвольным вектором х — xiei -ф-
-|-х2с2 новый вектор л/ — x1'el -j- х^’е* В этом смысле фор-
мулы (6) являются координатным представлением в базисе eit et
некоторого линейного преобразования евклидовой плоскости;
мы обозначим его /0. Согласно формуле (6) вектор х' — 16х
имеет ту же норму, что и вектор х, и получается путем
поворота вектора х на угол (—6) (рис. 41,6). Так как угол
0 — общий для всех векторов, то при линейном преобразо-
вании х' — Цх все векторы поворачиваются одинаковым обра-
зом. Поэтому линейное преобразование /8 называют поворотом
евклидовой плоскости на угол (—0).
Множество всех поворотов (т. е. на всевозможные углы)
составляет группу поворотов евклидовой плоскости или, как
еще говорят, группу вращений. Она изоморфна группе матриц
вида (4), которая поэтому также называется группой пово-
ротов или вращений.
6. Преобразование, сохраняющее метрику пространства,
называется изометрическим (или изометричным).
Сейчас мы ограничимся некоторыми примерами, а в сле-
дующей главе изучим изометрические преобразования под-
робнее.
7. При любом повороте x' = I(ix метрические свойства
образов совпадают с метрическими свойствами прообразов
(норма образа равна норме прообраза: || х' || = || х ||; скалярное
произведение образов равно скалярному произведению прообра-
зов: (xJ, у') — (х, у)). Поэтому всякий поворот /0 является изомет-
рическим преобразованием. К числу изометрических преобра-
зований евклидовой плоскости относятся также зеркальные
отражения относительно некоторой прямой; например, преоб-
разование х1==х\ х* = — х*.
Ниже, в §§ 7, 8 гл. IX доказано, что на двумерной евкли-
довой плоскости произвольное изометрическое преобразо-
вание определяется в ортонормированном базисе координатным
представлением с произвольной ортогональной матрицей (с опре-
делителем любого знака); оно является либо вращением пло-
скости на некоторый угол, либо зеркальным отражением,
либо произведением некоторого вращения на зеркальное
отражение.
Замечание. Мы не учитываем параллельные сдвиги
евклидовой плоскости, смещающие начало координат, поскольку
306
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
евклидову плоскость рассматриваем сейчас как векторное
пространство.
8. В геометрии евклидовой плоскости рассматриваются
инварианты ортогональной группы. При этом сам факт инва-
риантности имеет чисто алгебраическую природу; например,
инвариантность норм векторов означает тождество (xr)a-j-
4(х2)2 — (х1)2 + (а2)2 «ак следствие формул (6) или формул
х1' = х1, х2' =— х2. С геометрической же стороны дела здесь
возможны два воззрения. Если ортогональная группа рассмат-
ривается как группа, порождающая класс ортонормированных
базисов, то инвариантность относительно этой группы озна-
чает равноправие таких базисов. Если ортогональная группа
рассматривается как группа, порождающая изометрические
линейные преобразования, то инвариантность относительно
этой группы означает сохранение метрических свойств фигур
(систем векторов) при поворотах и зеркальных отражениях.
9. Выше мы указывали, что в одном и том же линейном
пространстве можно по-разному ввести метрику, принимая за
скалярное произведение различные билинейные формы. Про-
иллюстрируем это на примере евклидовой плоскости.
Согласно элементарной геометрии на евклидовой плоскости
можно сравнивать длины и измерять углы; пусть единица
масштаба выбрана и в качестве базиса взяты векторы ait а2
единичной длины, ортогональные с элементарной точки зрения.
Тогда можно ввести скалярное произведение (х, у), полагая
(х, у)=х1>1фх8У2, (7)
где х = х*а{ х"аъ у —у'ах -|-_у2о2. Согласно §§ 1, 2 будут
определены, длины всех векторов, понятие ортогональное ги,
а по известной из элементарной аналитической геометрии
формуле можно будет выразить угол между векторами через
их длины и скалярное произведение. При этом длины и углы,
определенные посредством скалярного произведения (7), задан-
ного в базисе аь ait совпадут с длинами и углами, опреде-
ляемыми в элементарной планиметрии.
Теперь на этой же плоскости наряду с ее естественной
геометрией мы рассмотрим другую геометрию, введенную
искусственно. Для этого наряду с базисом аь а3 возьмем
какой-нибудь неортонормированный базис еь е2; см. рис. 42,
где для удобства дальнейшего изложения мы берем в каче-
стве единичный вектор, а в качестве ei — вектор длиною
ГРУППА ЕВКЛИДОВЫХ ПОВОРОТОВ
307
§ 7]
больше единицы и ортогональный к вектору е2. Исходя из
этого базиса, мы построим класс базисов по группе матриц (4),
т. е. по формулам (5). Введем на плоскости новую квадра-
тичную метрику, определив скалярное произведение той же
самой формулой (7), но считая теперь, что х1, х2, у1, у2—
координаты векторов х, у в базисе et, е2, изображенном на
рис. 42. В новой метрике векторы et, е.2 ортогональны и
имеют длины, равные единице; также ортонормированным
будет базис et’, е.2', определяемый формулами (5) при любом
значении 6. Короче говоря, в новой метрике повторится все,
что говорилось до настоящего пункта. Но изображается все
это с точки зрения старой метрики в искаженном виде.
Например, единичная окруж-
ность, которая в базисе еь
рис. 42 дается уравнением
(х1)2-|-(л®)-= 1, в смысле
старой метрики является
эллипсом. Произвольный ор-
тонормированный базис, оп-
ределяемый формулами (5),
составлен векторами еу, е#,
которые в старой метрике
не ортогональны, а идут по
двум сопряженным диаметрам
Чтобы убедиться в справедливости этих замечаний, доста-
точно установить метрический изоморфизм между евкли-
довой плоскостью с ее первоначальной метрикой и этой же
плоскостью с ее новой метрикой. Согласно § 5 (см. доказа-
тельство теоремы 1) мы получим метрический изоморфизм,
если установим линейный изоморфизм, при котором базисы,
изображенные на рис. 40 и 42, соответствуют друг другу.
Ради наглядности будем считать, что евклидова плоскость
дана в двух экземплярах II, и П2 соответственно рис. 40 и
рис. 42. Расположим П] и Па в трехмерном евклидовом про-
странстве так, как изображено на рис. 43. Именно, совместим
векторы, которые в плоскостях Пл и П2 обозначены через е*
(что можно сделать, так как мы взяли эти векторы одной
и той же длины, равной единице), после чего, поворачивая
плоскость П2 вокруг <?2, приведем ее в такое расположение,
чтобы концы векторов, обозначенных через еь оказались на
одном перпендикуляре к плоскости Пр Теперь каждому
308
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
вектору х плоскости П1 мы поставим в соответствие такой
вектор х' плоскости П2, который ортогонально проектируется
на плоскость ITj в вектор х. Очевидно, это соответствие
является линейным изоморфизмом; вместе с тем оно является
метрическим изоморфизмом, так как ортонормированному
базису плоскости соответствует базис плоскости П2, орто-
нормированный в ее новой метрике.
Из нашей конструкции сразу усматривается справедли-
вость сделанных выше
замечаний. Именно, что единичная
окружность в новой мет-
рике плоскости П4 яв-
ляется в ее старой мет-
рике эллипсом; что ба-
зисы, ортонормированпые
в новой метрике, состав-
лены векторами, которые
идут по сопряженным диа-
метрам этого эллипса.
В качестве новых метри-
ческих свойств векторов
в плоскости П4 берутся
свойства их прообразов
в плоскости П, (именно, в
качестве нормы вектора
в плоскости П2 берется
норма его прообраза в
скалярного произведения двух векто-
плоскости Hi; в качестве
ров на Па берется скалярное произведение их прообразов ПД
Отметим, в частности, что линейное преобразование /е, кото-
рое имеет в базисе е1г е2 плоскости П2 координатное пред-
ставление (6), есть поворот плоскости П2 в смысле новой
метрики; в первоначальной же метрике это преобразование
есть так называемый эллиптический поворот евклидовой пло-
скости. Название это связано с тем, что если параметр 0
изменяется, то образ х'—1$х фиксированного вектора х
описывает своим концом эллипс, проходящий через конец
вектора х", различным векторам х, у, z отвечают эллипсы,
подобные и подобно расположенные (см. рис. 44; все ска-
занное сейчас легко понять, если снова обратиться к рис. 43).
На рис. 44 заштрихованы две фигуры, одна из которых пере-
водится в другую некоторым эллиптическим поворотом.
§ 7]
ГРУППА ЕВКЛИДОВЫХ ПОВОРОТОВ
309
В геометрии, искусственно введенной нами на плоскости, эти
две фигуры следует считать одинаковыми (конгруэнтными),
то есть наложимыми одна на другую.
10. Можно было бы базис Cj, взять совершенно про-
извольно и, считая, что х — х’гт -|- х*е2, у=у1е1-\-у*еъ
ввести скалярное произведение по формуле
2
(х, y)=g(x, у)= 2 а(7х‘У, (8)
где билинейная форма g(x, у) выбрана как угодно, лишь бы
квадратичная форма g(x, х) была положительно определена.
Из § 5 следует, что мы получим двумерное пространство,
метрически изоморфное
евклидовой плоскости. Ис- а’
пользуя положительную
определенность g(x, х), s'
нетрудно доказать, что X f х \
окружности, то есть ли- I ( —Х-У.») pi
нии \ к
||х|| * — g(x, л) = const 'х. ______—s'
на плоскости со скаляр- ---------'
ным произведением (8), рис 44
с элементарной точки зре-
ния являются эллипсами.
Итак, мы видим, что на одной и той же плоскости можно
задать бесконечно много различных евклидовых метрик. Чтобы
более наглядно представить себе это обстоятельство, следует
заметить, что любой эллипс с центром в нулевой точке
является единичной окружностью в одной (вполне определен-
ной) евклидовой метрике. Таким образом, различных евкли-
довых метрик на плоскости «столько же, сколько» различных
эллипсов с общим центром.
11. Разумеется в линейных пространствах большей раз-
мерности тоже можно вводить разные изоморфные между
собой метрики. Так, например, в пространстве функций, не-
прерывных на отрезке [— 1, 1], можно ввести скалярное
произведение
(x,j)= $ 4(t}x(l}y$)dt, (9)
310
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VHI
где —произвольно выбранная положительная непрерыв-
ная функция. Тогда вместо формулы (13) § 4 будем иметь
II * (0112= Ь(0^(0^
Полученное пространство метрически изоморфно пространству
непрерывных функций со скалярным произведением (12) § 4,
заданных на [— 1, 1]. Метрическим изоморфизмом между
ними является, например, отображение, переводящее x(t)
в х(0/<?(0-
Отметим попутно, что пары функций, для которых обра-
щается в нуль скалярное произведение (9), называют ортого-
нальными с весом y(t) на отрезке [— 1, 1].
§ 8. Группа гиперболических поворотов
1. Теперь мы займемся (двумерной) геометрией Минков-
ского. Все наши построения мы будем вести на обычной
евклидовой плоскости. Возьмем па ней ортонормированный
базис еь и введем метрику Минковского с помощью
квадратичной формы
1У||8=(х1)2—(х8)2 (1)
в базисе elt е2. Соответственно имеем формулу для скаляр-
ного произведения
(х, у) = хУ — x2j2. (2)
В этой метрике ||е1|18=1, ||е2||2 =—1, (<?|( е2) = 0. Таким
образом, базис еь е± является ортонормированным и в мет-
рике (1), при этом вектор £>1 оказывается единичным, вектор
— мнимоединичным.
Чтобы сразу же почувствовать особенность метрики (1),
целесообразно начать с рассмотрения единичной окружности.
Так мы называем геометрическое место концов всевозможных
векторов, нормы которых по абсолютной величине равны
единице (считая, что все векторы приложены к нулевой
точке). В данном базисе единичная окружность определяется
уравнением | (х1)2 — (х2)81 = 1. Отсюда либо (х1)8 — (х2)2 — 1,
либо (х1)2— (х2)2 ——1. В евклидовой геометрии два послед-
них уравнения определяют в базисе еь сопряженные равно-
сторонние гиперболы, общими асимптотами которых служат
§ 8]
ГРУППА ГИПЕРБОЛИЧЕСКИХ ПОВОРОТОВ
811
биссектрисы координатных углов. Таким образом, единичная
окружность в метрике Минковского состоит из двух евкли-
довых гипербол; на одной из них лежат концы единичных,
на другой — мнимоединичных векторов (рис. 45). В отличие
от нашей терминологии единичной окружностью иногда назы-
вают только первую из этих
двух гипербол, а другую —
мнимоединичной.
Рассмотрим произволь-
ный вектор х = xlet -f- xse$,
идущий по какой-нибудь
асимптоте этих гипербол;
в этом случае | х11 = | х* |,
следовательно, || х ||2 = 0.
Таким образом, на асимпто-
тах лежат изотропные век-
торы, т. е. векторы с нуле-
вой нормой.
2. Важное замеча-
Рис. 45.
ние. На плоскости Минков-
ского не соблюдается нера-
венство треугольника. Это сразу видно на примере треуголь-
ника ОАВ (рис. 46), где векторы ОА и АВ изотропны (па-
раллельны асимптотам
гипербол). Если обозна-
чим ОА — х, АВ=у, то
Нх+.у11>!И1+11-И1=0
пли, в терминах расстоя-
ний,
Р(О, 5)>р(0, Л)+
+р(А В)=о.
Можно доказать, что
в любом псевдоевклидо-
вом пространстве найдутся три точки, для которых аксиома
треугольника не соблюдается. Доказательство предоставляем
читателю.
3. Пусть х, у — два неизотропных вектора. Предположим,
что они перпендикулярны друг другу в смысле Минковского,
312 ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIМ
и постараемся описать, что означает такая их перпендикуляр-
ность с евклидовой точки зрения. Из (2) мы имеем
(x,y) = x1yi—x2y2=0; тогда ((х1)2—(х2)2) • (Су1)2 — (_У2)2)=
=— (х2_у*—х’у2)2. Отсюда следует, что || х || 2 = (х1)2— (х2)2
и ||_у || 2 = (У)2— (_у8)2 суть числа разных знаков. Значит,
если один из векторов х, у имеет в метрике Минковского
действительную норму, то другой — мнимую; в евклидовом
смысле это означает, что векторы х, у либо их продолже-
ния пересекают разные гиперболы (х1)2— (х2)2 = ± 1. Тад
как сейчас нас интересуют только направления векторов х, у,
то без потери общности мы можем считать, что концы их
лежат на единичной окружности метрики Минковского. Пусть,
например, (х1)2 — (х®)2 = 1, О1)8—(у2)2 =— 1- Если ПРИ этом
(х, j/)=х1у1 — х2_у2 = 0, го (у1 — х1)2 — (у2 — х2)2 = О и, об-
ратно, из последнего соотношения следует (х, у)— 0. Но
равенство (_у! — х1)2 — (.у2 — х2)2 = 0 означает, что разность
у — х векторов х, у есть изотропный вектор, т. е. направлена
по некоторой координатной биссектрисе. А это равносильно
тому, что векторы х, у симметричны относительно другой
биссектрисы.
Итак, векторы х, у ортогональны друг другу в смысле
Минковского в том и только в том случае, когда в евкли-
довом смысле они расположены на лучах, симметричных отно-
сительно какой-нибудь из координатных биссектрис (рис. 47).
Заметим, что изотропный вектор х (лежащий на биссект-
рисе) ортогонален сам себе; в самом деле, (х, х) = || х ||2 = 0.
« 8]
ГРУППА ГИПЕРБОЛИЧЕСКИХ ПОВОРОТОВ
313
4. Изложенное в предыдущем пункте позволяет дать
евклидово описание всех базисов, ортонормированных в рас-
сматриваемой метрике Минковского. Именно, произвольный
ортонормированный базис составлен векторами еу, е%, концы
которых лежат на гиперболах (х1)2 — (х2)2 = ± 1 симметрично
относительно одной из их (общих) асимптот (рис. 48).
5. Рассмотрим теперь Л-ортогональные матрицы (п = 2,
k = 1), соответствующие двумерной метрике Минковского.
II а р II
Запишем любую из таких матриц в виде Р = • Согласно
II т 8II
определению /г-ортогопальпости имеем в нашем случае
II а р II 1 О II II а Т II II I О
|| 7 8 I 0 — 1 I I р 8 || —1| 0 — 1
Отсюда
а2 — р2 = 1, ау — р8 = 0, )
-р.— 8р = 0, 72 — 82=1. j
Найдем общее решение этой системы (трех уравнений). Вслед-
ствие второго уравнения системы (3) мы можем написать
7 = Хр, 8 = Ха, (4)
где X — новая неизвестная. Подставляя эти выражения в по-
следнее уравнение, получим
72— 82 = Х2(р2 — а2) = — Х2 = — 1.
Таким образом, Х = ±1. С другой стороны,
а р
DetP= f
Хр Ха
— Х(а2—р®) = Х.
Следовательно, значениям X = ± 1 соответствуют преобразо-
вания базиса с сохранением или с нарушением ориентации;
Используем теперь уравнение а2—р2=1. Его общее
решение имеет вид
а = ± ch 6, р = ± sh 6, (5)
где О— произвольный параметр. Однако можно считать, что
если а 0, то
a = chO, р = sh 0, —оо<^0<^-|-оо, (5a)
а если а<^0, то
а — — ch 6, р — — sh 6, — со 6 <^ —|— со, (56)
314
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIIt
поскольку остальные случаи (5) сводятся к (5а) или (56)
заменой 6 на —0.
Формулы (4), (5а) и (56) с учетом того, что Х = ±1,
дают все решения системы (3). Тем самым найдены все k-
ортогональпые матрицы при п = 2, k=l.
Подвергая исходный базис elt е2 преобразованию с про-
извольной ^-ортогональной матрицей, мы получим новый
базис еу, е-2''.
ei' — aej -1- ре2,
8е2,
(6)
у которого вектор с,- является единичным:
||ег||2 = а2_р2 = +1,
а вектор е2> — мнимоединичным:
||^-||e=TS-8e=-l.
Отсюда видно, что преобразование (6) не может перевести
вектор, конец которого лежит на одной из гипербол
(х*)2— (х2)2=±1, в вектор с концом на другой гиперболе.
6. Выясним евклидов геометрический смысл условий
а^>0 и а<^0. Так как базис е2 оргонормирован в евкли-
довой метрике плоскости, то, беря евклидовы скалярные
произведения, получим
(с/, е1) = а(е1, £i) = a. (7)
Таким образом, при а^>0 векторы и et составляют
острый угол, при а 0 —тупой. Отсюда заключаем: если
а 0, то вектор имеет конец на той же ветви гиперболы
(х1)2— (х2)2—1, что вектор (на рис. 48 это — правая
ветвь); если а<^0, то крицы векторов eit лежат на раз-
ных ветвях этой гиперболы.
7. Аналогично (7) можно р, у, 8 выразить через евклидовы
скалярные произведения векторов:
Р=(ег, е2), 1 = (е2-, щ), 8 = 0?2', е2).
Разные случаи расположения базиса et>, е# в зависимости от
знаков А, а и р показаны на рис. 49 и 50.
8. Рассмотрим матрицы Р при А = Ц-1, а^>0. Согласно
предыдущему
р= Ch6 Sh6 . (8)
sh 0 ch 0
§ 81
ГРУППА ГИПЕРБОЛИЧЕСКИХ ПОВОРОТОВ
315
Рис. 50.
316
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VII t
При переходе от ортонормированного (в метрике Минковского)
базиса еь е2 к новому базису с помощью матрицы Р вида
(8) получается ортонормированный базис е2>, с той же
ориентацией, что и е1; е2, кроме того, концы векторов е^,
е3- лежат на тех же ветвях гипербол (х1/ —(х2)2 = ± 1,
на каких лежат концы соответствующих векторов е1; е.2.
В двумерной геометрии Минковского матрицы вида (8)
играют такую же роль, что и матрицы (4) § 7 в евклидовой
двумерной геометрии.
9. Матрицы вида (8) составляют подгруппу всей Л-орто-
гональной группы при /г=1, п = 2. В самом деле, имеют
место равенства
ch 0) sh0j
sh ch ©j
ch02 sh02
sh 02 ch 02
ch (0i —02) sh (0i 4)
sh (0i -|- 02) ch (0j -j- 4)
ch 0 sh 0 1 ch (— 0) sh (— 0)
sh 6 ch 0 sh (— 0) ch (— 0)
Они легко устанавливаются и означают, что произведение
матриц вида (8) и обращение матрицы вида (8) приводит к
матрицам того же вида.
10. Преобразованию базиса по матрице Р отвечает пре-
образование координат с матрицей Q = (P*)_|:
х1' = х1 ch 0 — х2 sh 0,
х2' = — х1 sh 0 -f- x2 ch 0.
(9)
С другой стороны, аналогично п. 5 § 7 мы можем считать,
что базис е2, е2 не меняется, но что формулы (9) сопостав-
ляют с произвольным вектором х = xfeiх2е2 новый век-
тор х* = xve2 -j- х^'е^. В этом смысле формулы (9) являются
координатным представлением в базисе е2, е.2 некоторого
линейного преобразования плоскости. Мы обозначим его Нв.
По отношению к метрике Минковского это есть изометри-
ческое преобразование, аналогичное повороту х' = /ех пло-
скости с евклидовой метрикой. Поэтому преобразование
х? = НцХ называют гиперболическим поворотом плоскости;
название «гиперболический» связано с тем, что при фикси-
рованном х и при изменяющемся 0 конец вектора х' — Н^х
скользит по гиперболе (х1)2— (х2)2 = || х ||2 (рис. 51).
§ 8]
ГРУППА ГИПЕРБОЛИЧЕСКИХ ПОВОРОТОВ
317
Пусть на плоскости задана произвольная геометрическая
фигура W. Гиперболический поворот А/о переводит ее в не-
которую новую фигуру W'. По определению считают, что
фигуры W и W" конгруэнтны в метрике Минковского.
В евклидовой метрике они, вообще говоря, не конгруэнтны
(то есть не наложимы). Простейший пример показан на
рис. 52, где фигура и ее образ
обозначены W и W' и показаны
штриховкой.
11. Мы убедимся сейчас, что
аналогия между гиперболическим
и обычным (евклидовым) поворо-
Рис. 52.
целью выясним геомет-
том идет весьма далеко. С этой
рический смысл параметра 6 в гиперболическом повороте
х' = /7ех. Предположим для простоты выкладок, что х—^х1,
х2} — единичный вектор, т. е. что его конец лежит на гипер-
боле (х1)2 — (х2)2=1. Обозначим через 5(6) площадь криво-
линейного треугольника, который ограничен векторами
х, х' = Н%х и дугой гиперболы между их концами (рис. 53).
Будем считать, что 5^>0, если поворот от х к х' происхо-
дит против часовой стрелки, <$<^0 в противном случае.
Пусть х" = /7дех'; Д<$—приращение площади <5 (6) при пе-
реходе от х' к х"; До — ориентированная площадь парал-
лелограмма, построенного на векторах х' и х" (рис. 53).
Тогда
Да =
л"
.2’
.2"
= — (х1 )2 s h Д 6 —}— (х2’)2 sh Де — — sh ДО;
1з18
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
здесь использованы формулы (9) с заменой 0 на Дб и урав-
нение гиперболы (х1')2— (х2')2=1. С другой стороны,
Да=—1 sh де?^ — 1де,
где приближенные равенства имеют место с точностью до
величин высшего порядка малости относительно Д6. Отсюда
dS= — ~ М.
Таким образом, если учесть, что 5=0 при 6 — 0, то полу-
чим равенство
6 = — 25.
Заметим, что когда совершается обычный (евклидов) поворот
плоскости на угол 6, то каждый единичный вектор скользит
концом по единичной окруж-
ности, причем угол 6 по абсолют-
ной величине равен удвоен-
ной площади, которую заме-
тает поворачиваемый вектор.
Как видно из только что при-
веденных выкладок, аналогич-
ное явление имеет место и при
гиперболическом повороте. Еди-
ничный (или мнимоединичный)
вектор скользит концом по од-
ной из гипербол (х1)2— (х®)2 =
= ± 1 и заметает площадь,
равную по абсолютной вели-
чине половине «гиперболиче-
ского угла» 6.
12. Из формул (9) непо-
средственно видно, что гипер-
Рис. 53.
болический поворот имеет собственные векторы, направлен-
ные по (общим) асимптотам гипербол (х1)2 — (х2)2 — ± 1.
В самом деле, если вектор х = {х*, х2} лежит на первой
асимптоте, то х1 = х2, и тогда х*' = х2'; таким образом,
для первой асимптоты х' = /7ех = Х1х, где, как легко видеть,
Xj = ch 6 — sh 6.
§ 8]
ГРУППА ГИПЕРБОЛИЧЕСКИХ ПОВОРОТОВ
319
Аналогично для второй асимптоты х~{х1, —х'2} и х' =
= /7вх=Х2х, где
Х2 = ch 6 sh е.
Существенно заметить, что
XjX2--- •
(10)
При 6>0 имеем Х2^> 1; в этом случае плоскость
сжимается в X, раз к прямой х% — — Xi и вследствие (10)
во столько же раз рас-
тягивается в ортого-
нальном направлении
от прямой х2 = х1, что
показано на рис. 54 на
примере нескольких то-
чек. При этом все точки
плоскости, не лежа-
щие на инвариантных
прямых х2 = ±х1,
скользят по гипербо-
лам (х1)2 — (х2)2 =
— const, что наглядно
ясно (вследствие (10))
вне зависимости от рас-
суждений предыдущих
пунктов.
Если 6 <Г 0, то на-
сравнительно со случаем 6^>0,
правления растяжения
и сжатия меняются ролями
и направление движения точек по гиперболам изменяется на
противоположное.
13. Заметим в заключение, что на одной и той же евкли-
довой плоскости можно задать бесконечно много различ-
ных метрик Минковского. Каждой из них соответствует своя
пара сопряженных гипербол в качестве единичной окруж-
ности; обратно, любая пара сопряженных гипербол служит
единичной окружностью для некоторой (вполне определен-
ной) метрики Минковского.
Если гиперболы, составляющие единичную окружность
некоторой метрики Минковского, не являются равносторон-
ними, то указанная выше евклидова характеристика ортого-
нальности двух векторов в смысле Минковского (их симмет-
320
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
рия относительно одной из асимптот) теряет силу. Более
общим (во всех случаях верным) является следующее утверж-
дение: два вектора ортогональны в данной метрике Минков-
ского в том и только в том случае, когда они идут по двум
сопряженным диаметрам гцпербол, составляющих в этой
метрике единичную окружность. На доказательстве этого
утверждения мы останавливаться не будем.
Снабжая плоскость различными метриками Минковского,
мы получаем различные квадратично-метрические простран-
ства. Но, разумеется, все они метрически изоморфны друг
другу. Их геометрии тождественны с алгебраической точки
зрения, поскольку имеют своим предметом инварианты одной
и той же Л-ортогональной группы.
§ 9. Тензорная алгебра в пространствах
с квадратичной метрикой
1. Мы снова будем рассматривать квадратично-метриче-
ские пространства любой размерности. В этом параграфе мы
изложим тензорную алгебру в таких пространствах. Точнее
сказать, здесь будут указаны специальные положения тен-
зорной алгебры, связанные с наличием метрики. Заметим,
что тензорный аппарат оказывается полезным во многих
задачах теории квадратично-метрических пространств, осо-
бенно в тех случаях, когда обстоятельства вынуждают упо-
треблять произвольные (не ортонормированные) базисы.
2. Пусть Rn — линейное и-мерное пространство с задан-
ной метрической формой
МГ=£(-*. x) = ^gikxlxk, (1)
где х'= У х1е} в произвольном базисе еь ..., е„.
Соответственно для скалярного произведения имеем:
(х, у) = g(x, J) = 2 gik^y11. (2)
Тензор квадратичной формы (1) или, что то же самое, били-
нейной формы (2) называется метрическим тензором про-
странства Rn. Это есть ковариантный двухвалентный симмет-
ричный тензор, определяющие числа которого в базисе
еь .еп даются таблицей умножения базисных векторов:
(ez, ej)=gij.
§ 9] метрическая тензорная алгебра 321
3. Матрицу метрического тензора в базисе eit..., еп, т. е.
матрицу формы (2), обозначим G = ||g/ft||. Вследствие невы-
рожденности формы g(x, у) имеем: DetG^O. Поэтому су-
ществует обратная матрица G1. Элементы G1 по принятому
стандарту обозначают буквами g с индексами сверху:
По определению обратной матрицы имеем
(3)
4. Теорема 1. Величины являются определяющими
числами двухвалентного контравариантного тензора.
Замечание. Утверждение теоремы означает, что при
переходе к новому базису имеет место закон преобразования
= (4)
где gVk' — элементы матрицы, обратной матрице || gvk' || ко-
вариантного метрического тензора в новом базисе. Равенство
(4) надлежит вывести как следствие закона преобразования
gvk' = ^gikPrPkk; (4а)
который нам известен вместе с определением метрического
тензора. Однако прямой вывод (4), исходя из (4а), технически
затруднителен. Поэтому далее дается доказательство теоремы,
основанное на ранее изложенном признаке тензорных величин
(см. гл. V, § 4).
Доказательство теоремы. Рассмотрим простран-
ство Rn, сопряженное пространству Rn, и в нем базис е\..., еп,
взаимный с базисом еь ..., еп g Rn.
Построим преобразование и = С(х), которое каждому
вектору х= У хкек С Rn ставит в соответствие вектор «=
— £ Е Rn по формуле
«г = 2 £/*•**• (5)
Так как валентности здесь согласованы, то преобразование
ц —G(x) инвариантно.
С другой стороны, ввиду того, что Det G 0, образом
пространства Rn служит все пространство R„. Это значит,
что для каждого вектора и £ Rn найдется такой вектор
322
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
х € что и = С(х). Этот вектор х однозначно определяется
формулой
(6)
Для получения (6) достаточно решить систему уравнений
(5), считая хк неизвестными, — известными числами.
Формула (6) показывает, что при свертке gik с произ-
вольным ковариантным вектором Ид. получается одновалент-
ный контравариантный тензор. По известному признаку тен-
зорной величины заключаем, что glk—тензор, валентности
которого соответствуют распо-
ложению индексов. Теорема
доказана.
5. Тензор g‘k называется
контравариантным метрическим
тензором.
6. В пространствах с квад-
ратичной метрикой удобно ис-
пользовать вместе с данным
базисом еще так называемый
взаимный ему базис.
Определение. Базисы
еь ..., еп и е1,..., еп в Rn
(е!, ej)= 8‘.
Рис. 55.
называются взаимными, если
3 а м е ч а н и е. В отличие от гл. V, здесь данный и взаимный
базис берутся в одном пространстве. Ниже будет показано,
что понятие взаимных базисов в одном квадратично-метри-
ческом пространстве по существу сводится к понятию взаим-
ных базисов, лежащих в данном и сопряженном пространстве.
На рис. 55 изображены взаимные базисы еь е.2 и е1, е'2
на плоскости с обычной евклидовой метрикой. Согласно
определению взаимных базисов мы имеем в этом случае че-
тыре условия:
(е1, (е1, е2)=0,
е,)=0, (е\ е4)=1.
Из них следует, что вектор е1 перпендикулярен к вектору
е%, а вектор е2— к вектору ей кроме того, так как (е1, fj)2> О
и (е2, е2)^>0, то векторы е1, elt а также е2, е2 составляют
острые углы. Точный учет на рисунке условий (е1, et)= 1,
(в2, е2) = 1 требует задания масштабной единицы (этими уело-
МЕТРИЧЕСКАЯ ТЕНЗОРНАЯ АЛГЕБРА
323
§ 9]
ниями определяются длины векторов е1, е2 по данным векто-
рам е1г Ci). В двумерном евклидовом случае геометрически
ясно, что данный базис однозначно определяет взаимный ему.
Вместе с тем справедлива следующая общая теорема.
Теорема 1. Для произвольно заданного базиса
сь ..еп в Rn взаимный базис е\ ..., еп определяется всегда
и однозначно.
Доказательство. Векторы искомого взаимного базиса
можно представить в виде
= (7)
где — неизвестные числовые коэффициенты.
Правую и левую части равенств (7) умножим скалярно
па et. Учитывая, что
(eft, е,) = 8,-, (ea, ei) = gai, (8)
получим
Произведение неизвестной матрицы A —на извест-
ную невырожденную матрицу О дает единичную матрицу
£ = || 8* [|. Отсюда A = G-1, то есть A^ — g^. Таким образом,
получаем единственно возможные равенства
еь = 25^. (9)
Так как Det (g*a) О, то векторы е1...еп, определяемые
согласно (9), линейно независимы и, значит, составляют базис.
Остается непосредственной проверкой убедиться, что этот
базис действительно является взаимным с данным. Имеем
(eft, ei) = ^tgk^(.ea,
что и требуется. Теорема доказана.
7. Обращая формулы (9), получим
(10)
8. Умножая формулы (9) скалярно на ег, получим
(е‘, eft)=2gfta(«,Z> =
Отсюда находим таблицу умножения векторов взаимного
базиса
(е1, = (11)
324
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Правые части этой таблицы дают определяющие числа
контравариантного метрического тензора.
9. Пусть (х, у»)—произвольные векторы из Rn. Разложим
их по взаимному базису, причем координаты по этому базису
(здесь и в дальнейшем) будем помечать нижними индексами.
Умножая скалярно х на у и пользуясь формулами (11), по-
лучаем
{х, у) = ^ё,1х1Ук. (12)
Одновременно имеем
1И12=£Л-х*. (13)
Формулы (12), (13) взаимны с формулами (2), (1).
10. Пусть даны два вектора х, и С Rn- Разложим х по
базису еь ..., еп:
х == У, х'е^.
Вектор и разложим по взаимному базису е\..., еп:
и — У
Составим скалярное произведение
(и, х) = 5 ukx‘ (ек, ef) = J] Hftx‘8/ =
= lj 4kXk = ЩХ1 + • •. +
Мы видим, что в координатах вектора х по данному базису,
а вектора и — по взаимному базису скалярное произведение
(и, х) выражается в виде свертки. Разумеется векторы и и
х здесь можно поменять ролями; соответственно получим
(и, х)=и*Х! Ц-... -|- ипхп.
11. В пространстве Rn каждой линейной форме неодно-
значно соответствует некоторый вектор и £ Rn так, что
н(х)=(н, х). Иначе говоря, в Rn каждая линейная форма
единственным образом представляется в виде скалярного про-
изведения. В самом деле, в базисе еь ..., еп имеем
И (х) == UiX' -|-... нях”,
где «1, ...,нп — вполне определенные коэффициенты формы
и (х). Отсюда и (х) = (н, х), где и — У н,е‘ (е1, ..., еп —
взаимный базис).
12. Линейные формы пространства Rn являются элемен-
тами сопряженного пространства R„. Согласно предыдущему
§ 9] метрическая тензорная алгебра 325
пункту каждой форме и (х) £ R„ отвечает вектор и С Rn так,
что п(х) = (и, х).
Очевидно, что это есть взаимно однозначное соответствие
между Rn и Rn. Легко убедиться также в том, что оно пред-
ставляет собой линейный изоморфизм. В самом деле, если
ц(х)=(и, х) и и(х)—(г,, х), то и(х)-|-'п(х)=(п4-т), х) и
о.и (х) = (ап, х), где а — любое число.
13. Мы можем теперь не различать /?,* и Rn, если эле-
менты Rn заменить их образами в Rn при только что ука-
занном изоморфизме. Тогда каждый вектор из Rn одновре-
менно является вектором из R„. Соответственно говорят, что
пространство с квадратичной метрикой является самосопря-
женным (Rn = Rn).
Если х и и — любые векторы Rn, но один из них рас-
сматривается как вектор из Rn, а другой — как вектор из
Rn, то свертка их в смысле § 2 гл. V совпадает со скаляр-
ным произведением (п, х); при этом нужно считать, что
et,...,enQ Rn, е\..., еп С Rn.
14. Пусть данный базис et,...,en преобразуется с по-
мощью матрицы Р по формулам
= (14)
Если при этом вводится базис е1',..., еп', взаимный с
новым базисом ец, ..., еп<, то
= (15)
где, как обычно, Q = |j || = (Р*)-1. Доказывать формулы
(15) нет необходимости. В самом деле, согласно п. 13 опре-
деление взаимных базисов в Rn сводится к определению
взаимных базисов в Rn и Rn', поэтому для установления
формул (15) достаточно сослаться на результаты § 1 гл. V.
15. Пусть х — произвольный вектор из Rn- Мы можем
разложить его как по базису еь ...,еп, так и по взаимному
базису е1....еп:
x = J£x‘ei = ]>jxkek. (16)
Из формул (14) и (15) следует, что при переходе к но-
вому базису координаты х! преобразуются по контравариант-
ному закону, а координаты xk — по ковариантному:
х*" = 2 QiX1, xk’ = U Pk'Xk.
326 ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Поэтому х' и хь называют, соответственно, конгравариант-
ными и ковариантными координатами вектора х. Из (16),
(9) и (10) вытекают формулы
= (17)
= (18)
которые выражают (в данном базисе) ковариантные коорди-
наты вектора через его контравариантные координаты, а также
контравариантные координаты через ковариантные. Что каса-
ется самого вектора х, то его в равной мере можно считать как
контравариантным, так и ковариантным (поскольку R* —/?л).
Из сказанного в этом пункте следует, что каждый одно-
валентный тензор (контравариантный х1 или ковариантный
х/г), можно инвариантным образом представить в виде вектора
в Rn(2 x‘et или jL-xye7'). Одновалентные тензоры х‘ и xk
представляют собой один и тот же вектор в Rn в том и
только в том случае, когда они связаны условием (17) или
(18) (что безразлично, поскольку из (17) следует (18) и на-
оборот).
16. Теперь нетрудно сообразить, что в Rn и многовалент-
ные тензоры можно по желанию задавать ковариантными,
контравариантными или смешанными координатами. Пусть,
например,
а — У a,keiek
— двухвалентный контравариантный тензор, т. е. элемент
тензорного произведения Rn®Rn- Заменяя ek согласно (10),
найдем
а = S = 2 а‘,!е^еа = 5 a^g^e* = 5
Положим
(19)
Тогда тот же тензор представится в виде
а = У
т. е. в виде элемента тензорного произведения Rn®Rn-
Формулы (19) выражают такими словами: второй верхний
индекс тензора а спущен с помощью метрического тензора.
§ 9]
МЕТРИЧЕСКАЯ ТЕНЗОРНАЯ АЛГЕБРА
327
Из (19) и (3) следует
здесь нижний индекс снова поднят наверх.
В тензорных выкладках иногда приходится многократно
поднимать и опускать индексы (образно говорят—«жонгли-
ровать» индексами). Чтобы при этом не нарушить их перво-
начального расположения, можно закреплять соответствующие
места точками; например, в формуле (19) вместо ак лучше
писать а_к, чтобы подчеркнуть, что вниз спущен второй
индекс, а первый остался наверху.
17. Выше мы говорили, что и являются соответ-
ственно ковариантным и контравариантным метрическими
тензорами. Однако вследствие формул (3) и (10) имеет место
тензорное равенство
'Eigtke’el! = 'Ei^ketek.
Поэтому лучше говорить, что есть один метрический
тензор, a gik и g!/' суть его ковариантные и контравариант-
ные координаты.
18. Пусть теперь дано, что Rn имеет положительный индекс
k пусть Ci............еп — ортонормированный базис
в Rn при условии, что первые k его векторов единичные
(остальные — мнимоединичные). Тогда
G = ||g«||=Ek —
(20)
(см. § 3, п. 1). Отсюда
G-1 = || 1| = Е* = G.
(21)
Вследствие (21) базис е1, ..., еп, взаимный с базисом
еь ..., еп, также является ортонормированный и также имеет
в качестве единичных первые k векторов. Кроме того, из
(20) и (9), или из (21) и (10), следуют соотношения
е' — е;, i = 1, 2, ..., k;
е'
i — k —|- 1,
n.
328
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
Таким образом, единичные векторы взаимных ортонормиро-
ванных базисов соответственно совпадают, мнимоединичные—-
отличаются знаком. Наряду с этим, согласно формулам (17)
и (18), имеем
x'=xb I — 1, 2, .... k;
х‘ =—xh i = k-\- 1,..., п.
Аналогичные равенства имеют место для тензоров любой
валентности; мы напишем их в частном случае трехвалентного
тензора, у которого опускается первый индекс:
a‘Jl — a'il,
а А — —a'tl’
l=\, 2, ..., к,
I=== k —|— 1,..., iz.
19. В следующем параграфе мы укажем некоторые при-
меры приложений тензорной алгебры в пространствах с квад-
ратичной метрикой.
§ 10. Уравнение гиперплоскости в пространстве
с квадратичной метрикой
1. Мы будем здесь рассматривать аффинное квадратично-
метрическое пространство, т. е. аффинное пространство ?(,
соответствующее линейному пространству L с квадратичной
метрикой (см. § 2, п. 5). Пусть в 3( задана система аффин-
ных координат с любым началом и произвольным базисом
Ci, ..., еп. Пусть в этой системе координат дано уравнение
какой-нибудь гиперплоскости
А1Х*4- ... + С = 0
или, коротко,
^Akxb^C = G. (1)
При переходе к новому базису (с сохранением начала коор-
динат) мы имеем
xk='ZlPk'xk'.
Отсюда
S Акхь + С = 2 АкРкк.хк’ С = 2 Ak'Xk' -j- С, (2)
где положено
УРАВНЕНИЕ ГИПЕРПЛОСКОСТИ
329
§ W]
Последнее выражение в цепочке равенств (2) представляет
собой левую часть уравнения той же гиперплоскости в новой
системе координат. Из (2) и (3) следует, что с левой частью
уравнения гиперплоскости инвариантно сопоставлен вектор
п={А, .... Ап}
с ковариантными координатами Аг......Ап, то есть
п = Ate1 -J- ... 4- Апеп,
где е1, ...,еп — базис, взаимный с данным базисом eit ..., е„.
Что касается текущих координат х'.......хп произвольной
точки плоскости, то они по своему определению являются
контравариантными, поскольку представляют собой коорди-
наты радиус-вектора этой точки в данном базисе:
х — х1е1-\- ... -]-хпеп.
Согласно сказанному левая часть уравнения гиперплоско-
сти может быть написана в инвариантном виде с помощью
скалярного произведения
(я,х)4-С=0. (4)
2. Если (xj, ..., х") — какая-нибудь фиксированная точка
гиперплоскости и х0 — ее радиус-вектор, то С= — (п, х0),
и уравнение (4) принимает вид
(п, х — х0) = 0 (5)
или в развернутой форме
А(х*- х’)4- ... 4-Ап{хА — х?) = 0.
Из (5) следует, что вектор п ортогонален к любому век-
тору х — х0, лежащему в гиперплоскости. Таким образом,
вектор п есть нормаль к гиперплоскости, заданной уравне-
нием (1).
Контравариантные координаты нормали, т. е. координаты
вектора п в данном базисе et, ..., ет даются формулами
= (6)
где glk — метрический тензор.
3. 3 а д а ч а. В двумерном пространстве в некоторой
системе координат дана метрическая форма
]] х ||2 = 2 (х’)а 4“ 2х‘х2 4~ (х2)2,
830
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
(прямая (одномерная плоскость) Зх14х210 — 0 и точка
Л (1,1).
Найти основание перпендикуляра, опущенного на данную
прямую из точки А в данной метрике.
Решение. Имеем матрицу метрической формы: G =
12 1 II ~ „_1
j । |. Отсюда G =
, следовательно, g” = 1,
1 —1
.. —1 2
g12 = g2'— —1, g22=2. Из уравнения прямой находим
ее нормаль « = {3,4} в базисе е1, es. Чтобы получить коор-
динаты нормали в данном базисе et, еъ применим формулы (6)
А1 = g’M, + g’% = -1, Л2 = g24 + g2% = 5.
Отсюда получаем (в данной системе координат) уравнение
перпендикуляра к заданной прямой, проходящего через Л(1,1):
— 1 __ х2 1
—1 — 5 *
Решая это уравнение совместно с уравнением прямой MN,
найдем точку В (2,—4) — искомое основание перпендикуляра.
Если на плоскости (х1, х2) построен эллипс ||х|1= 1 (еди-
ничная окружность в заданной метрике), то направления пря-
мой MN и перпендикуляра АВ являются сопряженными отно-
сительно этого эллипса вследствие пп. 9, 10 § 7 (рис. 56).
Задача. В пятимерном псевдоевклидовом пространстве
с положительным индексом /г = 3 дана гиперплоскость х'-|-
ЕВКЛИДОВО ПРОСТРАНСТВО
331
§ 1Ц
Ц-х2-|-л'3-|-х5 Ц-х3 = 1 и точка А (1, 1,1, 1,1). Найти осно-
вание перпендикуляра, опущенного на эту плоскость из точки А.
Известно, что система координат определена ортонормн-
рованным базисом, первые три вектора которого единичные.
Решение. Из уравнения гиперплоскости находим ее
нормаль п= {.1, 1, 1, 1, 1} в базисе е1, ..., ев. Отсюда п =
= {1,1,1,-—1,—1} в базисе et, ..., ев (см. § 9, п. 18); таким
образом, имеем уравнения перпендикуляра
Х1 — 1 _ х2 — 1 _ х3— 1 ___ х4- 1 _ х» — 1
1 1 1 —1 —1 •
Решая их совместно с уравнением данной гиперплоско-
сти, найдем искомую точку: х1 ——3, х2 =—3, х'л =—3,
х4 = 5, хв = 5.
§11. Евклидово пространство. Ортогональные матрицы.
Ортогональная группа
1. Определение. Евклидовым линейным простран-
ством называется /г-мерное линейное пространство с квад-
ратичной метрикой при условии, что его метрическая квад-
ратичная форма g(x,x) положительно определена.
Евклидовым называют также n-мерное аффинное прост-
ранство, если соответствующее ему линейное пространство
является евклидовым.
В дальнейшем мы будем считать, что имеем дело именно
с таким пространством. Тем самым мы сможем рассматривать
и векторы и точки.
Евклидово n-мерное пространство будем обозначать Еп.
Для нормы вектора будем пользоваться символом модуля: |х|.
2. В евклидовом пространстве имеет место неравенство
Коши — Буняковского
(x,j)2^(x,x).(J4 j),
поэтому
(х,у) I J
V(x,x)/(y,y) Г'
причем равенство достигается тогда и только тогда, когда
векторы х, у коллинеарны (линейно зависимы).
Пользуясь этим обстоятельством, можно ввести угол между
векторами. Именно, если х, у— ненулевые векторы, то углом
332
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ {ГЛ. VIII
между ними назовем число <р, определяемое формулой
cos <р = (х’ , О -С ср к.
т |х|-|у|
Заметим, что <р = 0 тогда и только тогда, когда векторы
коллинеарны и одинаково направлены, а <р = к означает, что
векторы направлены противоположно.
Используя угол, можно записать скалярное произведение
так, как это делается в элементарной векторной алгебре:
(х,_у)=| x|.|_y|.cos<p.
3. В ортонормированием базисе еь еп имеем
| х |2 = (х1)2 -ф (х2)2 -ф ... -ф (хп)2,
(х, у) = хУ + х2У + ... + хУ*.
Таким образом, известные формулы аналитической геометрии
для длины вектора и скалярного произведения непосредст-
венно переносятся в многомерный случай.
4. Для произвольного единичного вектора е можно ввести
углы аь ..., а„, которые он образует с векторами ортонор-
мированного базиса еъ ...,еп. Косинусы этих углов cosab...
..., cosa„ называются направляющими косинусами вектора е
(в данном базисе). Нетрудно сообразить, что
е = Ci cos aj -ф cos a.2 -ф ... -ф еп cos a„
и что
cos2 a2 -ф- cos2 a2 -ф ... -ф cos2 an = 1
в полной аналогии с хорошо известными соотношениями
элементарной аналитической геометрии.
5. По определению н-.мерное евклидово пространство
является квадратично-метрическим пространством с положи-
тельным индексом k = ii. В пространстве Еп каждый орто-
нормированный базис состоит только из единичных векторов
(мнимоединичных нет). Если еь ..., еп — произвольный орго-
нормированный базис в Еп, то новый базис
ek- = ^Pk'ek О)
будет также ортонормированным в том и только в том случае,
когда матрица Р = ||Р£, || удовлетворяет условию Л-ортого-
нальности при k — n (см. § 6, равенство (2)). Но при k = n
§ 11)
ЕВКЛИДОВО ПРОСТРАНСТВО
333
матрица, обозначенная в § 1 символом Ek, превращается
в единичную матрицу Е. Отсюда заключаем: в евклидовом про-
странстве преобразование (1) ортонормированного базиса
О> .... еп дает снова ортонормированный базис е^, еп<
тогда и только тогда, когда
РР* = Е. (2)
6. Определение. Всякая п X «-матрица, удовлетво-
ряющая условию (2), называется ортогональной.
7. Согласно § 6 ортогональные п X «-матрицы составляют
подгруппу в группе всех невырожденных n X «-матриц.
Ее называют ортогональной группой п X «-матриц. Далее
она обозначается буквой О.
8. Множество всех ортонормированных базисов в данном
евклидовом пространстве Еп представляет собой не что иное,
как класс базисов по ортогональной группе, порожденный
каким-нибудь одним ортонормированным базисом.
Если дано линейное пространство Ln без метрики, то все
базисы в L„ расслаиваются на классы относительно группы О.
Каждый из этих классов можно считать состоящим из орто-
нормированных базисов, если в Ln ввести некоторую вполне
определенную евклидову метрику, отвечающую именно этому
классу. Евклидовы пространства, в которые превращается Ln
заданием в нем таких метрик, будучи различными, метри-
чески изоморфны между собой. Их геометрии алгебраически
тождественны в том смысле, что имеют предметом своего
рассмотрения инварианты одной и той же группы О.
В § 7 аналогичные веши были подробно изложены для
двумерного случая.
9. Вследствие равенства (2) (DetP)®=l. Отсюда для каж-
дой ортогональной матрицы
DetP = ± 1.
Таким образом, ортогональную группу можно рассматри-
вать в качестве подгруппы в группе матриц с единичным
модулем определителя (как и все А-ортогональные группы,
что уже отмечалось раньше).
Матрицы Р £ О, для которых DetP=-}~l> составляют
подгруппу О+ группы О.
Матрицам из О+ соответствует преобразование ортонорми-
рованных базисов с сохранением ориентации, что в некоторой
334
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
мере аналогично повороту (двумерного) базиса на евклидовой
плоскости (см. § 7). Такие преобразования базисов в про-
странствах любой размерности принято называть вращением
(вокруг неподвижного начала координат). В связи с этим
группу О+ часто называют группой вращений (см. также
§§ 7, 8 гл. IX).
10. Преобразованию ортонормированного базиса в Еп по
формулам (1) п. 5 соответствует преобразование координат
х1' = Л QiX* (3)
с матрицей Q = ||Q''|| = (P*)-1. Вследствие равенства (2) имеем
Q = P.
Таким образом, в евклидовом пространстве переходу от одного
ортонормированного базиса к другому по формулам (1)
с ортогональной матрицей Р соответствует преобразование
координат с той же самой ортогональной матрицей: Q = P.
11. Преобразование вида (3) переменных х\ хп в пере-
менные ал , ..., хп называется ортогональным, если ортого-
нальна его матрица. Ортогональные преобразования перемен-
ных можно охарактеризовать чисто алгебраически, без обра-
щения к ортонормированным базисам в Еп. Именно, это
те и только те преобразования вида (3), для которых имеет
место тождество
(*’7 + ... +(х«’)2 = (Л-7+ ... +(*Т
12. В пространстве Еп в ортонормированном базисе
е1г .еп метрическая форма имеет вид
| X | 2 = (А1)2 + ... +(А-"Д
Отсюда, если О— матрица этой формы, Е — единичная матрица,
то
О1 = G = E.
Таким образом, ga= 1, gik = ®
^“=1, g‘fc = 0 (Z ф k). Поэтому
(9) § 9
е =?k,
(Z -ф k) н точно так же
и на основании формул
т. е. если данный базис является ортонормированным в Еп,
то взаимный ему базис совпадает с ним. Вместе с тем для
§ 11]
ЕВКЛИДОВО ПРОСТРАНСТВО
335
любого тензора имеет место совпадение ковариантных, кон-
травариантных и смешанных координат с одинаковыми ин-
дексами; например,
aik = lLgmg^aa?,-=aik-
В частности, для любого вектора
xk = xk
(см. также п. 18 § 9). В связи со сказанным, если по харак-
теру задач, относящихся к евклидову пространству, оказы-
вается возможным ограничиться ортонормированными бази-
сами, то валентности тензоров не различают и все индексы
у векторов и тензоров пишут внизу (как, например, в тео-
рии упругости).
13. Укажем некоторую специальную запись любой орто-
гональной матрицы. Представим себе, что имеется таблица
углов, которые векторы нового ортонормированного базиса
образуют с векторами старого ортонормированного базиса:
et ... еп
“1 ₽i ... 71
«2 ₽2 ... 12
... ... ... ... ...
еп' ап ₽» ... 1п
Здесь использован условный алфавит: а, р, ..., у. Тогда,
согласно п. 4, имеем соотношения
ег< = ei cos at -j- cos pt -|- ... -j- en cos fi,
e„, = eicosa„-j-e2cosp„+ ... cos 7,..
Это есть подробная запись формул (1) с помощью напра-
вляющих косинусов новых базисных векторов. Вместе с тем
836
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
выписана и матрица Р. Таким образом, любую ортогональ-
ную матрицу с помощью направляющих косинусов можно
записать в виде
P =
cos at cos pi ... cos 71
cos a2 cos pa ... cos
cos a„ cos p„ ... cos
В связи с такой записью отметим следующее характери-
стическое свойство ортогональных матриц (присущее им и
только им). Именно, в случае ортогональной матрицы сумма
квадратов элементов одного столбца или одной строки равна
единице (вследствие нормировки базисов); сумма произведе-
ний соответствующих элементов двух столбцов или двух
строк равна нулю (вследствие ортогональности каждого из
базисов).
14. Так как Р~1 = Р*, то
cos at cos 7.0 ... cos a„
cos Pi cos p2 ... cos p„
cos 7i cos 7а ... cos
15. Из предыдущих двух пунктов и вследствие равенства
Q — P имеем формулы преобразования координат
Xj' = Л'1 COS «1 COS pl ... -j- Хп COS 71,
Xn' = X!C0sa„-]-X2C0spn-|- ... + X„COS7„.
Обратные формулы
Xj — Xf cos at -|- x2' cos a2 ... -|~ x„> cos a„,
x„ = xt- cos 7] -|- x2- cos 7а 4- ... xn- cos
получаются из условия Q 1=Q* (или Q '=P *).
§ 12]
НОРМАЛЬНОЕ УРАВНЕНИЕ ГИПЕРПЛОСКОСТИ
337
§ 12. Нормальное уравнение гиперплоскости
в евклидовом пространстве
1. Пусть в Еп дана система координат с произвольным
базисом еь..., еп и в этой системе задано уравнение гипер-
плоскости
AA-‘ + ...-i-Дл” + С = 0, (1)
здесь п == Де1 Апеп — нормаль гиперплоскости, е1,...
е" — взаимный базис (см. § 10).
Если в качестве п берется единичная нормаль /?0, а сво-
бодный член отрицателен (либо нуль), то уравнение (1) при
таких условиях называется нормальным. Положив в этом
случае свободный член С= —р(р^О), напишем нормаль-
ное уравнение в виде
(«о, х)—р = 0,
(2)
где х = x’ci хпеп— радиус-вектор текущей точки
гиперплоскости.
Чтобы привести общее уравнение (1) к нормальному
виду, достаточно умножить его на нормирующий множитель
/п = ±
1
I «I ’
выбрав знак с учетом условия тС<^0; тогда р — — тС~^>0
(если С = 0, можно условиться брать т со знаком плюс).
Очевидно, что и0 — тп есть единичный вектор.
Обозначим через у угол между п0 и х; из (2)
р = («0, х) = | х | cos у.
(3)
Как в элементарной аналитической геометрии, так и
в многомерном евклидовом пространстве такая величина на-
зывается проекцией вектора х на нормаль с положительным
направлением по вектору «о- Вместе с тем, нетрудно сооб-
разить, что р является расстоянием от начала координат до
гиперплоскости; в самом деле, из (3)
и р = |л-|, если cosy—1 (у = 0). Таким образом, р есть
длина самого короткого из радиус-векторов, имеющих кон-
338
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
цы на данной гиперплоскости. Частный случай двумерной
плоскости в трехмерном пространстве показан на рис. 57.
Если х* — радиус-вектор
некоторой точки /14*, не лежа-
щей на гиперплоскости, то число
8 = («о, х*) — р (4)
представляет собой расстоя-
ние от М* до данной гипер-
плоскости, взятое с некоторым
знаком (со знаком минус, если
М* и начало координат О ле-
•z’3 жат по одну сторону от гипер-
плоскости, со знаком плюс,
Рис. 57. если 214* и О лежат от нее
по разные стороны).
Чтобы убедиться в этом, рассмотрим текущую точку /И
гиперплоскости; если х — ее радиус-вектор, то из (3) и (4)
6 = («о, х*) — («о, х) = — (л0, х — л-*) = (и0, /14 * М),
может быть написано в виде
следовательно, 18 | | /14* /141, поэтому | 8 | есть длина самого
короткого из векторов /14* /14 (см. рис. 58, на котором раз-
мерность пространства равна трем).
2. В частном случае,
когда базис е1г..., еп
ортонормирован, взаим-
ный ему базис совпадает
с ним, и все рассмотрен-
ные соотношения полу-
чают полное сходство
с хорошо известными
фактами из элементарной
аналитической геометрии.
В этом случае
-ь 1
/И = Г-- ..
а нормальное уравнение
Xi cos а Хч cos р -ф- хп cos у — р = 0, (5)
где cos a, cos р,..., cos у— направляющие косинусы вектора п0.
ОБЪЕМ ПАРАЛЛЕЛЕПИПЕДА
339
§ 13]
В произвольном (косом) базисе форма записи (5) нормаль-
ного уравнения ие имеет смысла. Но принципиальная сторона
задачи о приведении общего уравнения к нормальному виду
и задачи о расстоянии от точки до гиперплоскости не услож-
няется. Нужно только иметь в виду, что нормирующий мно-
житель следует вычислять по общей формуле
т~
(см. § 9, п. 9).
3. Задача. На евклидовой плоскости дана прямая
6лл-}-8л'2 — 5 = 0 и точка Л1*(2, 1). Найти расстояние от
данной точки до данной прямой. Метрический тензор
известен: gn = 2, gj5! = gil= 1, go2=l (в заданной системе
координат).
Решение. Прежде всего проверим, что указанный мет-
рический тензор определяет евклидову метрику. Имеем:
2(x’)9-U2x,x9-]-(x9)a = (x,)'=;-(x1-]-x75s0, причем знак
равенства здесь достигается только в случае х’=х9 = 0.
Значит, метрический тензор действительно евклидов.
Обращая матрицу О, найдем: g11 = 1, gw = g81 =— 1,
gM = 2. Далее A = 6, Да = 8. Отсюда, согласно (6),
X?'7'AiAk = 68, т = 1/2 КТ?.
Таким образом, 8=15/2)/17.
§13. Объем параллелепипеда в евклидовом пространстве.
Дискриминантный тензор. Векторное произведение
1. Пусть метрика пространства Еп определена заданием
в некотором базисе еь ..., еп метрической формы
Положим g— Det \\gik ||. Так как в Еп метрическая форма
положительно определена, то g^>0.
Рассмотрим в Еп произвольный ориентированный парал-
лелепипед П, построенный на векторах хьхп. Согласно
§ 5 гл. VI мы можем определить ориентированный объем
V параллелепипеда П, полагая
V=c|/g D(Xi......хп); (1)
340
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ VIII
здесь с — некоторая постоянная, общая для всех параллеле-
пипедов. Выбор постоянной с означает выбор единицы объ-
ема. То обстоятельство, что в формуле (1) использован
дискриминант метрической формы, поможет нам связать еди-
ницу объема с единицей длины. Именно, в качестве единицы
мы возьмем объем «-мерного куба с единичной стороной,
иначе говоря, — объем параллелепипеда, построенного на
векторах ортонормированного базиса. Пусть е?,.... е„ — ка-
кой-нибудь ортонормированный базис, go — определитель мет-
рической формы в ба-
зисе е?......................................... е'п. Оче-
видно, go — 1.
С другой стороны,
матрица, составленная
из координат базисных
векторов по этому же
базису, является еди-
ничной; в базисе е°,...
D(e°,..., f°)=l. Наконец, по нашему условию
„О
> спл
L.., вп имеем
объем параллелепипеда, построенного на векторах е”,...
равен единице. В силу всех этих обстоятельств из формулы
(1) находим с=1. Таким образом, при нашем выборе еди-
ницы объема
V= VgD(xb..., x„). (2)
Отсюда следует, что объем параллелепипеда, построен-
ного па базисных векторах еь ..., еп, дается формулой
v=Vg. (3)
как в ортонормированием базисе g=l, то для
более
2. Так
ортонормированных базисов формула (2) приобретает
простой вид
V=D(xt,..., л-„).
3. Соответственно формуле (2) и согласно § 5
имеем дискриминантный тензор евклидова пространства
бом базисе еь..., еп
е.
гл. VI
в лю-
л-
(4)
Так как дискриминантный тензор кососимметричеп по всем
индексам, то система равенств (4) равносильна одному ра-
ОБЪЕМ ПАРАЛЛЕЛЕПИПЕДА
341
§ 13]
венству: е!а...п = (поскольку 8|2ф>л=;1). При п = 3 см,
рис. 59. В ортонормированных базисах
4. Всякое линейное подпространство Lk размерности k,
лежащее в Еп, само является евклидовым A-мерным про-
странством. В самом деле, для Lk определено скалярное
произведение любой пары векторов, поскольку оно опреде-
лено вообще во всем пространстве £л; метрическая форма
|х|а положительно определена в Lk, поскольку |х|а^>0
для любого х £ Еп, х 6.
5. В силу сказанного в Lfc определен объем любого па-
раллелепипеда (A-мерный объем). Если в Ед. дана ориентация
(заданием какого-нибудь базиса аь ..., ak), то в Ед определен
также ориентированный объем ориентированных параллеле-
пипедов.
6. Легко получить формулу, которая выражает А-мерный
объем параллелепипеда, построенного на произвольной системе
независимых векторов at...... ak в Еп. С этой целью при-
мем аь ..., а* в качестве базиса в линейной оболочке Lk
этих векторов. Метрический тензор подпространства Ед в базисе
<?!, ..., ak имеет координаты у(у —(а,-, ау). Отсюда и вслед-
ствие формулы (3)
(<zi, at) (<zb ... (<zb ak)
(as!, aO (a2, at) ... (a2, Од)
(a*, ai) (a*, aJ) ... (ak, ak)
Таким образом, квадрат искомого A-мерного объема дается
определителем Грама векторов .........ak.
7. В заключение параграфа укажем одно применение дискри-
минантного тензора. Рассмотрим в трехмерном евклидовом
пространстве векторное произведение д = [хХ.У] вектора
х — хХ х2е2 -ф- хХ( на вектор _У—J'X -j-J3^- Ока-
зывается, что ковариантные координаты векторного произве-
дения z = Д1С1 -|~ -ф- д3е3 даются следующей простой фор-
мулой:
= (5)
Из (5) сразу же получается формула, которая дает кон-
травариаптные координаты векторного произведения, т. е.
V2 = Det||I(7|| =
342
ПРОСТРАНСТВА С КВАДРАТИЧНОЙ МЕТРИКОЙ [ГЛ. VIII
его координаты в данном базисе еь е%, е3:
= (6)
Подчеркнем, что формулы (5) и (6) позволяют вычислять
векторное произведение в любом (вообще говоря, не орто-
нормированием) базисе.
Для доказательства формулы (5) заметим прежде всего,
что обе ее части являются одновалентными ковариантными
осевыми тензорами (ле-
вая часть есть осевой
тензор ввиду опреде-
ления векторного про-
изведения, поскольку
оно меняет знак при
смене ориентации ба-
зиса; правая — ввиду
участия дискриминант-
ного тензора, посколь-
ку он является осе-
вым). Равенства тен-
зорных величин инва-
риантны, поэтому до-
статочно проверить (5)
в каком-нибудь спе-
циально выбранном базисе. Если х и у зависимы, то фор-
мула (5), очевидно, верна,
в этом случае равны ну-
лю. Пусть х и у неза-
висимы. Возьмем базис
с первыми двумя векто-
рами — х, ег —у. В ка-
честве е-л возьмем еди-
ничный вектор, ортого-
нальный векторам еь
(рис. 60). Тогда вектор-
ное произведение z = Se3,
где — площадь паралле-
лограмма (еь е.>) (рис. 61).
Из определения взаимных базисов следует, что в данном случае
е’ = е3. Поэтому z — Se'*; значит, слева в (5) мы имеем
Zi = 0, z<t — 0, z3 — S.
так как левая и правая ее части
§ 13]
ОБЪЕМ ПАРАЛЛЕЛЕПИПЕДА
343
Так как = = 0, 0}, у = е2={0, 1, 0}, то
Sei«^y = eil2-
Поэтому справа в (5) имеем при z — 1, 2, 3 числа
£112 — 0, е212 = 0, е314 = eta = g.
Но Vg есть объем параллелепипеда (elt е3). А так как
вектор е3 единичный и ортогональный к <?i и еа, то этот
объем равен площади S. Таким образом, и фор-
мула (5) доказана.
ГЛАВА IX. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
ЕВКЛИДОВА ПРОСТРАНСТВА
§ 1. Сопряженное преобразование
1. Рассмотрим в и-мерном (действительном) евклидовом
пространстве Еп линейное преобразование у —Ах.
Определение. Линейное преобразование у = Ах на-
зывается сопряженным данному преобразованию А, если для
любых х и z из Еп имеет место следующее равенство ска-
лярных произведений:
(Ах, z) = (x, Az). (1)
2. Теорема. По данному преобразованию А сопряжен-
*
ное преобразование А определяется всегда и однозначно.
Доказательство. Для данного вектора z будем искать
вектор f так, чтобы соблюдалось равенство
(Ах, z) = (x, f) (2)
*
при любом х £ Еп. Найдя такой вектор Д положим Az — f.
Нужно доказать, что f существует, определяется однозначно
и линейно зависит от z. С этой целью введем базис et, ..., еп
и взаимный ему базис е1, ...,еп. Положим х — ек\ тогда,
если искомый вектор f существует, то
(А<?, z) = (ek, f). (3)
Скалярное произведение (ек, f) равно координате fk век-
тора f в базисе еь...,еп, поэтому из (3) находим fk —
— (Аек, z)\ значит, искомым вектором / может быть только
вектор
Az — 2 (Аек, z) еь. (4)
*
Покажем, что если f=Az дается формулой (4), то усло-
вие (2) соблюдается для любого х £ Еп. Разложим х по
§ 1]
СОПРЯЖЕННОЕ ПРЕОБРАЗОВАНИЕ
345
взаимному базису: х^х^1-^- ... -\-хпеп‘, подставив это раз-
ложение в левую часть равенства (2), получим
{Ах, z) = 2 xk (Ае\ z) — 2 xkfb — {х, f) — {x, Az).
Здесь использовано выражение для скалярного произведения
двух векторов, один из которых разложен по данному базису,
а другой — по взаимному.
Проведенные выкладки дают формулу (4) для вектора Az
*
и показывают, что другого значения для Az быть не может,
так что существование Az и его единственность установлены.
Линейность преобразования Az вытекает из формулы (4) и
линейности скалярного произведения по аргументу z. Теорема
доказана.
3. Выше в седьмой главе было доказано, что линейному
преобразованию А соответствует смешанный тензор А\. В про-
странстве без метрики верхний и нижний индексы тензора
никак не связаны между собой. Сейчас мы рассматриваем
пространство с квадратичной метрикой и можем поднимать
и опускать индексы любого тензора согласно § 9 восьмой
главы. Операции подъема и спуска индексов неоднократно
используются ниже. Поэтому мы должны принять соглашение
о-том, какой из индексов тензора А\ считать первым, а какой —
вторым.
Условимся, например, что верхний индекс тензора линей-
ного преобразования является первым, и наряду с символом Л*
будем писать A'.'k (считая Л^ = Л*).
Спустив верхний индекс, мы получим ковариантные коор-
динаты тензора преобразования
Aik —giaA.lt.
Подняв нижний индекс, получим контравариантные коорди-
наты тензора преобразования А
Л,* = 2«₽%.
4. Пусть в произвольном базисе ..., еп дана матрица
А —1| А\ || —1| Л’* || преобразования у = Ах. Найдем в этом же
базисе матрицу сопряженного преобразования А, которую мы
346 ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ. IX
обозначим || Л* || = || A\'k ||. Для этого рассмотрим скалярное
произведение
{Ах, z)= У, g^A^z*.
a, j, k
Кроме того, рассмотрим другое скалярное произведение
{х, Az) — У, gaJxfA"'kzk.
а, /, k
Мы получили две билинейные формы, которые должны быть
равны тождественно. Это возможно лишь тогда, когда совпа-
дают все их коэффициенты:
(5)
а а
Свертывая обе части равенства (5) с контравариантпым метри-
ческим тензором и используя формулу (3) § 9 гл. VIII,
получаем искомые выражения элементов матрицы преобразо-
«•
вания А:
(6)
Вместе с тем это есть выражение тензора сопряженного
преобразования через тензор данного преобразования.
Формулу (6) можно записать короче:
5. Наиболее простой вид связи между данным и сопря-
женным преобразование,м получается в ковариантных коорди-
натах. Именно, из (5) имеем
Таким образом, ковариантные координаты тензора сопря-
женного преобразования равны ковариантным координатам
тензора данного преобразования с транспонированными
индексами.
Сопряженное преобразование является очень важным поня-
тием; оно часто встречается в различных разделах математики
и ее приложений. Поэтому понятие сопряженного преобразо-
вания положено в основу проведенной ниже классификации.
ЛЕММА О ХАРАКТЕРИСТИЧЕСКИХ КОРНЯХ
347
§ 2]
6. Выделим те преобразования, которые наиболее просто
связаны со своими сопряженными преобразованиями:
*
1) А = А— самосопряженные преобразования;
*
2) А = — А — кососопряженные или косые преобразования;
Й:
3) А = А'1 — эти преобразования, как мы покажем дальше,
совпадают с изометрическими.
В дальнейшем будет доказано, что любое линейное пре-
образование в евклидовом пространстве сводится к произве-
дению самосопряженных и изометричных преобразований;
в связи с этим самосопряженные и изометричные преобразо-
вания мы исследуем особенно подробно.
Косые .преобразования играют важную роль в механике.
Мы разберем геометрический смысл косого преобразования
в трехмерном случае (§ 6).
§ 2. Лемма о характеристических корнях
симметричной матрицы
1. Пусть Л = ||Л,-*||— действительная матрица, р(Е) =
= Det(A—ХЕ)—ее характеристический многочлен. Спра-
ведлива
Лемм а. Если действительная матрица А симметрична,
то все корни ее характеристического многочлена дей-
ствительны.
2. Доказательство. Пусть X — произвольный корень
многочлена р(Х). Тогда, во-первых, система
= 0 (z=l, ...,п)
k
имеет ненулевое решение (лу....хп); во-вторых, число X
тоже является корнем р(Х), так как коэффициенты много-
члена действительные (здесь X — комплексное число, сопря-
женное числу X; аналогичный смысл верхняя черта имеет и
дальше). Докажем, что числа (Jq, ..., х„) образуют решение
(очевидно, нетривиальное) системы
—40^ = 0, /=1,
к
348 ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ. IX
В самом деле, согласно правилам действий над комплексными
числами, имеем
У (А*—— У1, (А* — = У, (Лik — ^tk) xk — О-
k k k
Таким образом,
У, Aikxk — У A ikxk —
k k
Первое из этих равенств умножим на xit второе на х;
и просуммируем по /:
У A ikXiXk = X У Х{Х{ X У | Xj | ,
i, k
У AikXkXi = X У XjXj = X УI Xi 14.
i, k
Матрица Aik симметрична, поэтому
У ikXjX^ —' AkiXtXk =
i, k i, k i, k
и, значит, X У | Xi |2 = X У | x, [2
Но решение (хъ ... , xn) не нулевое, т. е. У | хг |2 ф 0.
Следовательно, Х = Х. Таким образом, X — действительное
число. Лемма доказана.
3. Самосопряженные преобразования
1. Самосопряженное преобразование А характеризуется
*
условием А = А.
Вследствие равенства (5) § 1 матрица самосопря-
женного преобразования, данная в произвольном базисе, харак-
теризуется соотношением
= d)
Отсюда
Ajb^Akj. (2)
Таким образом, отличительным признаком самосопряженного
преобразования является симметрия матрицы ковариантных
координат его тензора.
§ 3]
САМОСОПРЯЖЕННЫЕ ПРЕОБРАЗОВАНИЯ
349
2. Вследствие (1) матрица самосопряженного и только
такого преобразования симметрична в ортонормнрованном
базисе: = Л*. Иначе говоря, в ортонормнрованном базисе
условие самосопряженности преобразования выражается мат-
ричным равенством А* = А, где А — матрица преобразования,
а звездочка — символ транспонирования.
3. Лемма 1. Все корни характеристического много-
члена самосопряженного преобразования действительны.
Доказательство. Мы знаем, что характеристические
корни преобразования инвариантны относительно изменения
базиса. Перейдем к ортонормнрованному базису. Тогда матрица
преобразования станет симметричной, и утверждение леммы 1
последует из результатов предыдущего параграфа.
Лемма 2. Пусть е собственный вектор самосопря-
женного преобразования А, подпространство Le — ортого-
нальное дополнение линейной оболочки вектора е. Тогда
Le является инвариантным подпространством для А.
Доказательство. Пусть х £ Le. Это значит, что
(х, е)=0. Вследствие самосопряженности (Ах, е)=(х, Ае).
Воспользуемся тем, что е — собственный вектор.
Имеем
(Ах, е)=(х, Ае)=(х, Хе)==Х(х, <?) = 0.
Иначе говоря, Ах £ Le; лемма 2 доказана.
Теорема. Для всякого самосопряженного преобразо-
вания найдется хотя бы один ортонормированный базис,
состоящий из собственных векторов.
Доказательство проведем по индукции. В одномер-
ном случае всякий ненулевой вектор является собственным,
поэтому для л= 1 теорема справедлива. Пусть л^>1— лю-
бое натуральное число. Предположим, что теорема справед-
лива для всякого самосопряженного преобразования в ЕпЛ.
Пусть А — самосопряженное преобразование в ЕП. Так
как все корни Р(Т) действительны, то найдется хотя бы один
собственный вектор е. Построим ортогональное дополнение Le
линейной оболочки вектора е. Подпространство Le имеет
размерность п—1 и является инвариантным подпространст-
вом относительно преобразования А. Поэтому А можно рас-
сматривать не на всем Еп, а только на Le, где А, очевидно,
тоже является самосопряженным. По предположению индук-
ции, в Le найдется ортонормированный баЗис е$, , еп,
350
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
состоящий из собственных векторов. Добавим к нему еди-
ничный вектор ₽i, коллинеарный собственному вектору е.
Вектор et ортогонален ко всем векторам е%, ... , еп, поэтому
в результате мы получим искомый базис elt ... , еп. Тео-
рема доказана.
Следствие. Всякое самосопряженное преобразование
в некотором ортонормированном базисе приводится к диа-
гональному виду.
Как мы знаем, матрица А в этом базисе записывается
так;
(3)
где Аъ ... , Х„ — совокупность всех корней характеристиче-
ского многочлена
/>(*) = (- 1)"(Х —Х,)(Х-К) ... (X-Х„); (4)
при этом собственное значение Хй соответствует собствен-
ному вектору еь (базисному вектору с тем же номером /г).
4. Лемма 3. Собственные векторы, соответствую-
щие различным по числовому значению характеристиче-
ским корням, ортогональны друг другу.
Доказательство. Пусть
Ах — Xjx, Ay = k^y,
где Xj ф k^. Первое равенство скалярно умножим на у, вто-
рое— на х и вычтем одно из другого:
(Ах, у) — (Ау, х)^).1(х, у) — ^(у, х) = (к — Х2)(х, у).
Вследствие самосопряженности
(Ах, у) — (Ay, х) = (Ах, _у)— (у, Ах) — 0,
отсюда (х, у) = 0. Лемма 3 доказана.
Лем м а 4. Если X — корень кратности т характе-
ристического многочлена самосопряженного преобразова-
ния А, то Rang (Л — Х£’) = и—т, так что корню X соот-
ветствует т линейно независимых собственных векторов.
§ 3]
САМОСОПРЯЖЕННЫЕ ПРЕОБРАЗОВАНИЯ
351
Доказательство. Согласно п. 3 существует базис,
в котором матрица преобразования А имеет диагональный
вид (3). В этом же базисе характеристическая матрица А — \Е
имеет вид
Xt — X
О
А — 1Е =
Х2 —X
(5)
О
Пусть, например, Xj является корнем кратности т харак-
теристического многочлена (4), то есть Х1 = Х2= ... =Хт,
Хт+1 Хь ... , X„^Xb Тогда в матрице (5) первые т диа-
гональных элементов обращаются в нуль, а остальные диа-
гональные элементы не равны нулю, так что
Rang (А — Xjf) — п — т.
(6)
Согласно § 2 гл. VII равенство (6) справедливо в любом
базисе. Согласно § 6 гл. VII корню Хх соответствует т неза-
висимых собственных векторов. Лемма 4 доказана.
5. Для построения ортонормированного базиса, состоящего
из собственных векторов самосопряженного преобразования,
прежде всего нужно найти корни характеристического много-
члена Хь Х2, ... , Х„. Все они вещественны, но могут быть
кратными. Отметим, какие из них имеют одинаковые значе-
ния. Пусть, например, Xt имеет кратность /я:
Xi = Х2 = ... = Хт =
Xm+i имеет кратность к:
Кп > 1 — ... — Xm+ft = X"
и т. д. Корню X' соответствует т линейно независимых соб-
ственных векторов ₽ь..., ет, координаты которых полу-
чаются из однородной линейной системы уравнений с матри-
цей А — ЕЕ. Линейную оболочку векторов е1; ... , ет обо-
значим L'm. Подпространство L'm инвариантно, и преобразование
действует в нем как подобие с коэффициентом X'. Поэтому
каждый вектор из L'm является собственным. Выберем в L'm
произвольный ортонормированный базис ё\, ... , ёт. Он может
быть получен путем ортогонализации системы векторов
О, • • > ет или из каких-либо других соображений.
352
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ. IX
Далее находим собственные векторы em+i, ... , соот-
ветствующие корню X"; обозначим через L* их линейную
оболочку. Подпространство L* является инвариантным, так же
как и L'm. Выберем в LI произвольный ортонормированный
базис em+i, ... , em+ft. Векторы ёт+1,..., являются собствен-
ными векторами преобразования, соответствующими корню X".
По лемме 3 каждый из этих векторов ортогонален любому
вектору из L'm (иначе говоря,
Следовательно, векторы ёц ... , ёт, ёт+1, ... , вместе
образуют ортонормированную систему.
Затем переходим к следующему корню, строим инвариант-
ное подпространство соответствующей размерности и орто-
нормированный базис в нем. Продолжая этот процесс, после
конечного числа операций получим искомый базис.
Пример 1. В трехмерном пространстве дан ортонор-
мированный базис eh eit е3 и в нем задано преобразование
J'i— х1-^-2хц — 4х3,
_у2 = 2xi — 2х2 — 2х3,
>’з — — j — 2xg -|- х3, .
где ставить индексы у координат — сверху или снизу, без-
различно, поскольку базис ортонормированный (см. гл. VIII,
§ 11, п. 12).
Матрица этого преобразования симметрична:
Д =
1 2 —4
2 —2 —2
— 4-2
В ортонормированием базисе симметричность матрицы служит
признаком самосопряженного преобразования.
Построим ортонормированный базис из собственных век-
торов. Пишем систему
В данном случае она имеет вид
(| 2---------------------О,
2л'1 + (— 2 — — 2х3 — О,
---4X1 ~(1 -----------------------X) Хд === О,
(7)
§ 3]
САМОСОПРЯЖЕННЫЕ ПРЕОБРАЗОВАНИЯ
353
Составляем характеристический многочлен
р(Х) = 1— к 2 — 4 1 1 КЗ | *= | КЗ = —(к3 —27к —54).
Его корни к, = 6, — —3.
Подставляя к, = 6 в систему (7), находим решение
(вектор):
ei = {2, 1, -2}.
Затем подставляем к3 — к3 = —3. Получается система ранга
один с двумя независимыми решениями. Эти решения нетрудно
выбрать так, чтобы они давали ортогональные векторы:
е2={1, 2, 2}, <?3={2, — 2, 1}.
Нормируя все найденные собственные векторы, получим
искомый базис:
ё, = {7з> ‘/3, -%},
^={7з, 7з. %}.
ёз = {8/з, —%> 7з}-
Матрица А преобразования А в новом базисе выписы-
вается сразу без вычислений: она имеет диагональный вид;
по диагонали стоят собственные значения, идущие в том же
порядке, в каком идут в базисе соответствующие им век-
торы:
О
О
— 3
6 О
О —3
О О
Пример 2. Размерность п = 2, базис elt произвольный.
В таком случае должна быть задана его метрическая харак-
теристика, то есть определяющие числа метрического тензора.
Пусть
gn=(ei, <°i)= 1, gn — (eb ей)=1,
g-21 = (г* el) — 1, gi'i — (^S> ei) — 4.
Базис «косой». Поэтому валентности существенны и нужно
следить за правильной расстановкой индексов. Пусть дано
354
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
самосопряженное линейное преобразование у —Ах:
У = х1 Ц- 4х2, 1
У = х‘4-х8. J
Требуется привести его к ортонормированному базису из
собственных векторов.
Прежде всего мы должны проверить, действительно ли
соблюдается условие самосопряженности. Именно, мы должны
убедиться, что матрица
71 =
71^
А1 А*
1 4
1 1
станет симметричной (см. (2)) после того, как будут спущены
индексы с помощью метрического тензора. Иначе говоря,
тензор
Aik === 2 ^'«^k
должен быть симметричным.
Фактически достаточно сравнить две компоненты этого
тензора: 71i4 и 712Ь Вычисляем их:
2
А« = У = guTla—gi4Tl| = 5,
« = 1
2
Аа== У, gstaA^ = giiAj-j-g^Af = 5.
а = 1
Таким образом, Ац—Ац. Самосопряженность .данного пре-
образования установлена, и можно применять общую теорию.
Система уравнений У (71) — Ко*)х' = 0 распишется так;
4х2 = 0, 1
—X)x2 = 0. )
Характеристический многочлен
1 —X
1
4
1 —X
р(Х) =
— х2 —2Х— 3
имеет корни Хх =—1, Х2=3.
'§ 41
ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ
355
При к = к1 получаем х'=2, х1 * * — —1 и тем самым соб-
ственный вектор Zt = {2, —1}. При Л = Х2 имеем собствен-
ный вектор Za = {2, 1}.
Эти векторы ортогональны в заданной метрике согласно
лемме 3.
Вычислим нормы этих векторов:
h|f = S&/^ = 4, ИМ = 2;
1|4Г==1Х^=12, ||/2| = 2/з.
Разделив векторы и Z2 на их нормы, получим искомый
базис
₽1 = {1> —Ya}, ₽2 = {1//з> Ya Уз}.
В этом базисе рассматриваемое преобразование имеет
матрицу
В многомерном случае аналогичная задача требует гораздо
больших вычислений.
§ 4. Приведение квадратичной формы к каноническому
виду в ортонормированном базисе
1. Мы знаем, что каждую квадратичную форму можно
привести к каноническому виду в некотором базисе.
Теперь задача ставится с дополнительным ограничением:
решение нужно провести, не выходя из класса ортонорми-
рованных базисов.
Пусть в ортонормированном базисе eh ..., е„ задана
квадратичная форма
f(X, Х) = ^ачХ1Х}.
Введем вспомогательное линейное преобразование у — Ах,
которое в исходном базисе еь ..., еп имеет такую же
матрицу, как квадратичная форма, то есть
Aj = а,,.
В силу ортонормированности базиса имеем Д‘ = /г?(см. § 9
гл. VIII). Кроме того, aij = aji. Значит, преобразование
356
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
у = Ах будет самосопряженным, поэтому можно найти базис
₽i, ..., ёп, состоящий из собственных векторов этого пре-
образования.
При переходе к базису ё1г ёп матрица преобразова-
ния у = Ах примет вид
А = QAQ\
а матрица квадратичной формы
А’ — РАР*.
Но старый и новый базисы ортонормированные, поэтому
матрица Р ортогональна; следовательно,
P = Q, P* = Pl = Ql.
Отсюда следует, что и в новом базисе матрицы квадратичной
формы и вспомогательного линейного преобразования сов-
падают: А' = А.
В базисе ёь ёп матрица преобразования А имеет
диагональный вид
V О
А = 3 ..
о \
поэтому квадратичная форма запишется в каноническом виде
f(X, X) = kjXi -f-... -f- lnx„.
Здесь Xi, ..., — характеристические корни преобразова-
ния А, соответствующие его собственным векторам ..., ё„.
Вывод. С каждой квадратичной формой, заданной в
ортонормированном базисе, естественно сопоставляется само-
сопряженное преобразование. Приведение этого преобразова-
ния к ортонормпрованному базису автоматически вызывает
приведение квадратичной формы к каноническому виду.
2. Пример. В ортонормированном базисе трехмерного
евклидова пространства дана квадратичная форма
f(x, х) — x‘i 4~ 4>'iX2 — 8xiх3 —
— 2x1 — 4х8л'3 4-
§ 5]
ПРИВЕДЕНИЕ ДВУХ КВАДРАТИЧНЫХ ФОРМ 357
Требуется привести ее к каноническому виду также в орто-
нормированием базисе.
Решение. Матрица квадратичной формы
1 2 —4
2 —2 —2
—4 —2 1
В предыдущем параграфе был рассмотрен пример само-
сопряженного преобразования именно с такой матрицей;
поэтому мы можем воспользоваться готовым результатом и
записать ответ:
f(x, х) = 6xi' — Зх| — Зл'з
в ортонормированием базисе
й = {2/з, 7з, -7з}>
Са —{Уз. 2/з> а/з}>
Сз={7з, -7з. Уз}.
§ 5. Совместное приведение к каноническому виду
двух квадратичных форм
к Пусть в линейном пространстве (без метрики) фикси-
рован произвольный базис elt еп и в нем даны две
квадратичные формы:
/(х, x)='^iaikxlxk, g(x, xj — ^gik^.
Ставится вопрос, можно ли найти базис, в котором обе
квадратичные формы примут канонический вид.
Теорема. Если хотя бы одна из двух квадратичных
форм положительно определенная, то найдется базис,
в котором обе формы получат канонический вид.
Доказательство. Пусть положительно определенной
является форма g(x, х). Введем в линейном пространстве
евклидову метрику, приняв форму g(x, х) в качестве метриче-
ской. Если в полученном евклидовом пространстве мы возьмем
произвольный ортонормированный базис, то метрическая фор-
ма g(x, х) получит нормальный вид. Затем перейдем к дру-
гому ортонормированному базису так, чтобы форма f(x, х)
привелась к каноническому виду. При этом нормальный вид
358
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
метрической формы, очевидно, не нарушится. Теорема до-
казана.
2. При практическом совместном приведении двух
квадратичных форм к каноническому виду нет необходимости
поиски нужного базиса разбивать на два этапа, как это
сделано в доказательстве теоремы.
Согласно § 4 квадратичную форму можно привести к
каноническому виду, оставаясь в классе ортонормированных
базисов. Такое приведение осуществляется с помощью неко-
торого самосопряженного преобразования. Факт самосопря-
женности преобразования не зависит от выбора базиса.
Поэтому поступим следующим образом.
Примем g(x, х) за метрическую форму и по коэффициен-
там формы f(x, х) будем искать в данном базисе вспомога-
тельное самосопряженное преобразование у = Ах. Его кова-
риантный тензор Aij должен быть симметричным и должен
определяться тензорным равенством Д-у==й;7, которое спра-
ведливо в любом базисе. Теперь для нахождения матрицы
преобразования А нужно только поднять индекс тензора А,у
с помощью метрического тензора:
АЪ=^А^а=^“ч- О)
Все величины в правой части этого равенства даны,
поэтому дело свелось к нахождению собственных значений
Х1( ..., Х„ и ортонормированного базиса из соответствующих
собственных векторов ёь ёп самосопряженного преобра-
зования с известной матрицей || ||; см. п. 5 § 3.
3. Можно сделать дальнейшие упрощения. Оказывается,
что для нахождения векторов ёь ..., ёп и собственных зна-
чений Хъ ..., Хп нет необходимости подсчитывать А^ — А11'..
В самом деле, учитывая (1), мы имеем
= (2)
поэтому система уравнений
S(A*-Z8*)*/=o (3)
при любом X эквивалентна системе
2 (flkj — = о. (4)
§ 5] ПРИВЕДЕНИЕ ДВУХ КВАДРАТИЧНЫХ ФОРМ 359
Именно, вследствие (1) и (2) имеют место равенства
У («А/ — Х&у) х’ = 2 Ska S (AJ — Х’>
j а i
У U/ — X’ = 2 в S («а/ — '>£«/) X1,
j “ j
из которых, очевидно, вытекает эквивалентность систем (3)
и (4).
Таким образом, дело сводится к решению системы (4).
При этом вместо характеристического многочлена pQ-) при-
ходится рассматривать многочлен
?W==Det(afty —
Но он имеет в точности те же корни (с учетом кратности),
что и характеристический многочлен
р (X) — Det {Ahj — Х8*).
Действительно, вследствие (2)
9(M=g-/’(x)
при любом X, где g = Det G^O. Таким образом, <?(Х) отли-
чается от />(Х) только множителем, который не включает X.
Следует заметить, что <?(Х) и система (4) пишутся сразу
nd данным квадратичным формам.
4. Подведем итоги. Итак, пусть в произвольном
базисе elt еп даны две квадратичные формы:
f(x, — g(x, x) = ^gijx‘x/,
причем g(x, x) — положительно определенная. Для совмест-
ного их приведения к каноническому виду решаем характе-
ристическое уравнение
Ч (М = Det (akJ — lgkj) = 0.
Пусть X,....ХА — его корни (все они действительны).
Эти корни поочередно подставляем вместо X в систему
(4) и для каждого корня находим решения {л/} этой системы,
причем если кратность корня X равна т, то найдется т
линейно независимых решений (см. лемму 4 из § 3). Эти
решения нужно выбирать так, чтобы они образовывали орто-
нормированную систему в метрике g(x, х).
360
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
Тогда все найденные решения дадут матрицу координат
векторов искомого базиса ёп. Если нумерация пра-
вильна, т. е. вектор отвечает корню ХА, то в базисе
ё1, ёп данные квадратичные формы примут вид
5. Пример, п = 2; даны формы
fix, х) = 2 (х1)3 + 1 Ох'х2 -|- 8 (х2)2,
g (х, х) = (х1)2 4- 2х’х2 -ф- 4 (х2)2.
Привести их совместно к каноническому виду.
Легко проверить, что g(x, х) — положительно определен-
ная форма; эго видно, например, из равенства g(x, х) —
= (х1 -j- х2)2 4~ 3 (х2)2. Совместное приведение возможно; его
можно проводить по изложенному рецепту.
Выпишем матрицы квадратичных форм
и составим характеристический многочлен
<?(X)=Det(F — XG) = 8 —4л|-
Его корни ^i — —1, Х2 = 3. Система (4) имеет вид
(2 — Х)х14~(5 — Х)х2 = 0, )
(5_к)х’4-(8 —4Х)х2=0. J
При Х = Х1 =—1 находим решение х1 = 2, х~ =—1
и пишем его в виде вектора Z1 = {2, —1}; при Х=).2 = 3
находим решение Za= {2, 1}. Векторы It и 1% ортогональны
в метрике g, потому что они являются собственными векто-
рами вспомогательного оператора, самосопряженного в мет-
рике g, и соответствуют разным собственным значениям.
Базис, в котором даны формы, не ортогональный в метрике g.
Поэтому ортогональность векторов Zt и Z2 сразу не видна.
Но для контроля вычислений читатель может убедиться, что
(Л, Zg)=g (Zj, Zs)=0.
Подсчитываем в метрике g нормы векторов It и Z2:
||4||—/Ж4)=2, ||z8|| = Ki(44)=Ki2.
КОСОСОПРЯЖЕННЫЕ ПРЕОБРАЗОВАНИЯ
361
§ 6]
Нормируем базис:
ё, = {1, - 1/2}, ё8 = {2,IV12, 1//12}.
В базисе ёь ё8 квадратичные формы имеют вид
/=-(а-74-3(>-9)8,
g= (>-‘)2+ (-*ЙЛ
Замечание. Векторы Ц и Z8 тоже образуют базис,
в котором обе формы имеют канонический вид, но с другими
коэффициентами при квадратах. Нормировка векторов lt и Z8
в метрике g нужна для того, чтобы можно было выписать
приведенные квадратичные формы без дополнительного вы-
числения их коэффициентов, используя найденные ранее
корни характеристического уравнения.
§ 6. Кососопряженные преобразования
1. Напомним, что линейное преобразование z = Ay в евкли-
довом пространстве называется кососопряженным или косым,
если А - — А.
Расписав это соотношение в каком-нибудь базисе, получим
Поэтому условие того, что А является кососопряженным,
в координатах (в произвольном базисе) записывается так:
S — — S gkaAl'i
ИЛИ
Aik —---Aki-
В ортонормированном базисе валентности тензоров равно-
правны, и матрица косого преобразования тоже будет косо-
симметричной.
Заметим, что линейное преобразование всегда можно
записать так, чтобы оно определялось ковариантными коор-
динатами. Для этого нужно аргумент у представить в данном
базисе:
У = Vei И- ySes 4~ • • • ~Ь УПеп<
а функцию z разложить по взаимному базису
z — ztel -j- Zge® znen.
362 ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ. IX
Тогда преобразование z — Ay записывается в виде
= S Aikyb,
где Ait.— ковариантный тензор преобразования А.
2. Докажем, что в трехмерном случае косое преобразо-
вание z — Ay можно представить в виде векторного умноже-
ния фиксированного вектора а на вектор у.
Теорема. Если z = Ay — кососопряженное преобразо-
вание в трехмерном евклидовом пространстве, то суще-
ствует единственный вектор а такой, что
? = [аХЛ
Замечание. Так как преобразование Ау инвариантно
относительно изменения базиса, то в равенстве Ду==[пХ-У]
вектор а не инвариантный, а аксиальный (одновалентный
аксиальный тензор).
Доказательство теоремы. Мы знаем, что
л-=Sa-йУ.
С другой стороны, если z = [a \у], то
Zt---Z-i У >
где — дискриминантный тензор.
Для того чтобы доказать теорему, нужно обеспечить сле-
дующие равенства:
--Aiki
где Aik— данный тензор, Aki —— Alk (I, k—l, 2, 3), a —
= {a’, a3, a3} — искомый вектор. Для трех координат век-
тора а получилась система девяти линейных уравнений.
Нужно доказать ее совместность, используя косую симмет-
рию данного тензора и специальный вид левой части.
Система уравнений записана в виде тензорного равенства,
поэтому можно проверять равенство в любых координатах,
и за счет специального выбора координат упростить задачу.
Для этого воспользуемся следующим соображением.
Определитель кососимметричной матрицы нечетного по-
рядка всегда равен нулю. (В трехмерном случае, который мы
§ 6]
КОСОСОПРЯЖЕННЫЕ ПРЕОБРАЗОВАНИЯ
363
рассматриваем, это свойство очевидно.) Поэтому билинейная
форма
f(u, vj—^AikU^,
соответствующая тензору является вырожденной, и ее
нулевое подпространство имеет размерность не меньше еди-
ницы.
Выберем ортонормированный базис еь е2, е3 так, чтобы
вектор е3 находился в нулевом подпространстве билиней-
ной формы (в правом или в левом — безразлично).
Тогда матрица Aik упростится следующим образом:
Aik---
О о
— Д12 О О
ООО
Основная компонента дискриминантного тензора е123—1,
потому что базис ортонормированный. Отсюда, как легко
подсчитать,
— as а2
О —а1
а1 О
Теперь очевидно, что для совпадения матриц || Aik || и
|| У eiaJta“ || нужно положить
а={а\ а2, а3} = {0, 0, —Д12}.
Никакой другой вектор не пригоден. Теорема доказана.
3. Механическая интерпретация. Фиксируем
в трехмерном евклидовом пространстве точку О и проведем
через нее прямую, коллинеарную вектору а. Примем эту
прямую за ось вращения. Найдем распределение линейных
скоростей точек твердого тела, вращающегося вокруг этой
оси с постоянной угловой скоростью ш = | а |. Линейная ско-
рость v зависит только от положения, которое движущаяся
точка занимает в данный момент времени. Это положение
характеризуется радиус-вектором О7И (движущаяся точка
тела проходит геометрическую точку М в пространстве).
Скорость v ортогональна плоскости, в которой лежат век-
торы а и у. Численная величина линейной скорости |т>| равна
364
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
произведению угловой скорости | а | на расстояние точки от
оси вращения, а это произведение совпадает с площадью
параллелограмма, построенного
на векторах а и у (рис. 62).
Поэтому при надлежащем вы-
боре ориентации базиса ско-
рость любой точки вращающе-
гося тела выражается форму-
лой v — [a X-Vl-
Таким образом, всякое ко-
сое преобразование Ау в Е3
можно интерпретировать как
распределение скоростей рав-
номерно вращающегося твер-
дого тела: точка с радиус-век-
тором у имеет мгновенную ли-
нейную скорость г> = Ау; вектор а угловой скорости (и тем
самым ось вращения) находятся согласно п. 2.
§ 7. Изометричные преобразования
1. Определение. Линейное преобразование I назы-
вается изометричным или изометрическим, если оно сохраняет
норму любого вектора:
М=1И-
(1)
В дальнейшем будем считать, что речь идет о линейных
преобразованиях в евклидовых пространствах.
2. Из определения вытекает, что если изометричное пре-
образование существует, то оно невырождено, поскольку
вырожденное преобразование должно какой-нибудь ненуле-
вой вектор обратить в нулевой. Поэтому изометричное пре-
образование z~Iy имеет обратное преобразованиеу = Г'г,
которое тоже является изометричным.
Замечание. Для обратимости изометричного преобра-
зования существенно считать, что пространство конечномерно.
3. Теорема. Если I—изометричное преобразование,
то (1х, 1у)—(х, у) для любой пары векторов х, у.
Следствие. Поскольку изометричное преобразование
сохраняет нормы и скалярные произведения, то оно со-
§ 7]
ИЗОМЕТРИЧНЫЕ ПРЕОБРАЗОВАНИЯ
365
храняет также угол между любыми двумя векторами,
т. е. угол между ними равен углу между их образами.
Доказательство теоремы. Подставим в формулу
(1) сумму х-\-у вместо вектора х и возведем обе части в
квадрат:
UU4-j)lia=k+jir
ИЛИ
(/(х-|~Л I(x -L.j))=(x-|-j> х-ф-Л
Используя линейность преобразования I, получим
(/х, /х)4-2(/х, 1у)-\-(1у, 1у) = (х, х)4-2(х, Л+СУ, Л
Но здесь (/х, /х) = || /х |f2 = (х, х), (1у, 1у) = || 1у |f — (у, у),
поэтому
(/х, 1у) = (х, Л (2)
Теорема доказана.
4. В дальнейшем будем считать, что рассматриваемое
евклидово пространство является л-мерным и будем обозна-
чать его через Еп.
В формуле (2) положим Iy = z. Тогда у = Г1г; отсюда
(/х, z) = (x, l lz). (2')
Когда вектор j, пробегает все пространство Еп, вектор z
тоже пробегает все Еп вследствие невырожденности L Таким
образом, равенство (2') соблюдается для любых векторов х,
z из Еп. Это значит, что
*
(3)
Замечание. Нетрудно проверить, что три условия (1),
(2) и (3) эквивалентны, т. е. каждое из них влечет два
других.
5. Соотношение (3) можно переписать так:
❖ *
П=Н=Е,
где Е — тождественное преобразование. Отсюда следует, что
матрица преобразования / является ортогональной в орто-
нормированном базисе. Поэтому изометричные преобразова-
ния — это те и только те, которые в ортонормированном
базисе имеют ортогональные матрицы.
366
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
6. Пусть вь ..., еп — ортонормированный базис; пусть
/б] = /цб! InlCtu
1еп = 11пв1 4“ hne* Ч~ •• 4~ Jnnen- .
Векторы 1еь 1еп тоже образуют ортонормированный
базис, так как изометричное преобразование переводит еди-
ничные векторы в единичные, а ортогональные в ортого-
нальные.
Согласно предыдущему матрица преобразования || ]ik ||
ортогональна.
Таким образом, всякому изометричному преобразованию
можно поставить в соответствие ортогональную матрицу, и
всякой ортогональной матрице — изометричное преобразова-
ние. Для любой пары ортонормированных базисов существует
единственное изометричное преобразование, переводящее один
из данных базисов в другой.
7. Отметим некоторые свойства изометричных преобразо-
ваний:
1) Если преобразование I имеет собственный вектор е,
т. е. если 1е = /е, то Х = ±1 (это сразу вытекает из
сохранения нормы вектора).
2) Det/ = ±1. В самом деле, определитель ортогональ-
ной матрицы всегда равен ±1, a Det/—инвариант; поэтому
для доказательства этого свойства достаточно рассмотреть
преобразование / в ортонормированном базисе.
Если Det/=-|-l, то базисы еь ..., еп и/еь ...,/е„ оди-
наково ориентированы, и мы имеем преобразование, анало-
гичное движению твердого тела.
Если Det/=—1, то базисы еъ ..., еп и Ieit .1еп
имеют различные ориентации, и мы имеем преобразование
типа зеркального отражения.
3) Если е — собственный вектор, Le — ортогональное до-
полнение линейной оболочки вектора е, то Le — инвариант-
ное подпространство.
Доказательство. Пусть х С тогда (1х, 1е) =
= (х, е) = 0. С другой стороны, (1х, 1ё)=\(1х, ё), так что
(1х, е)=0, то есть lx £ Le.
8. Рассмотрим примеры. Будем считать, что матрицы пре-
образований выписываются в ортонормированных базисах.
Ортогональность матриц (а следовательно, изометричность
§ 71
ИЗОМЕТРИЧНЫЕ ПРЕОБРАЗОВАНИЯ
367
приведенных ниже преобразований) устанавливается несложной
проверкой, которую мы предоставляем читателю.
1) Тождественное преобразование является изометричным.
2) Зеркальное отражение л-мерного пространства отно-
сительно гиперплоскости х1 = 0 переводит произвольный
вектор x = xte1-]-xiet-\-...-]-xnen в вектор 1х = — xtei-\-
этого преобразования имеет
ВИД
-\-х„еп. Матрица
— 1
О
1
О
1
Подпространство Xi = 0 является инвариантным, индуци-
рованное в нем преобразование — тождественным.
3) п=1. В одномерном пространстве изометричное пре-
образование либо тождественно: 1х — х, либо является зер-
кальным отражением: 1х= — х.
Действительно, в одномерном случае матрица I состоит
из единственного элемента /м; учитывая второе свойство пре-
дыдущего пункта, находим /ц Det |]|| = z±zl.
4) л = 2. Поворот плоскости на угол 0 является изомет-
ричным преобразованием (см. § 7 гл. VIII).
5) п — 3. Поворот пространства на угол 0 вокруг оси х3
задается матрицей
1=
COS0
sin 6
О
— sin 6
cos 6
О
О
О .
1
подпространства L (е3),
Вектор е3 является собственным,
L (et, е2) — инвариантными.
6) Многомерным обобщением предыдущего примера яв-
ляется поворот л-мерного пространства
ного подпространства L(e3> ..., е„):
вокруг (л — 2)-мер-
cos© — sin О
sin 0
COS0
1
0
О
1
368
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ IX
Подпространство L(e3, .... еп) остается неподвижным,
в нем индуцируется тождественное преобразование.
7) п = 4. Преобразование с матрицей
cos а — sin а 0 0
sin а cos а 0 0
т
1 0 0 cos р — sin р
0 0 sin р cos р
можно рассматривать как одновременный поворот простран-
ства в двух взаимно ортогональных направлениях: на
угол а вокруг плоскости L(e3, е4), на угол р вокруг пло-
скости L(et, е2).
Плоскости L(eJt е2) и L(e3, е4) являются инвариантными
подпространствами. Если углы а, р не кратны it, то преоб-
разование / не имеет собственных векторов, так как его
характеристический многочлен
^(Х)=(Х® — 2Х cosa-U 1)(^2 — 2Х cos £ —J— 1)
имеет лишь комплексные корни.
9. Чтобы лучше почувствовать специфику изометричных
преобразований в пространствах, размерность которых боль-
ше трех, сравним последний пример с поворотом трехмер-
ного пространства.
Будем считать, что пространства вращаются равномерно,
а- матрицы в примерах 5) и 7) п. 8 характеризуют поворот
за единицу времени. Тогда поворот за время t в трехмерном
случае задается матрицей
cos И — sin at 0
1(1}= sin Gt cos Gt 0 »
0 0 1
а в четырехмерном — матрицей:
cos at - — sin at 0 0
sin at cos at 0 0
/(0= 0 0 cosp/ sinp/
0 0 sin pi cos pi
Очевидно, что в трехмерном случае все точки оси вра-
щения неподвижны, а остальные точки пространства описы-
§ 8]
ИЗОМЕТРИЧНЫЕ ПРЕОБРАЗОВАНИЯ
369
вают окружности, у которых центры лежат на оси враще-
ния; плоскости этих окружностей перпендикулярны к оси
вращения. Каждая точка совершает полный оборот за одно
и то же время Т —
В четырехмерном случае картина иная. Неподвижной точ-
кой является только начало координат. Точки инвариантных
плоскостей L (еъ е^) и L (е3, е^) движутся по окружностям
с центром в начале координат, но периоды обращения
вокруг начала координат в этих двух плоскостях различны:
в плоскости L(et, е8) период 7'1~2~/а, в плоскости L (e;t, е^)
период 7'i = 2ir/p. Если углы а и р несоизмеримы, то каждая
точка пространства, не принадлежащая ни одной из этих
двух плоскостей, совершает движение по некоторой незамк-
нутой траектории, не имеющей самопересечений, и никогда
не возвращается в исходное положение. Действительно, для
того чтобы точка вернулась в исходное положение, необхо-
димо и достаточно, чтобы ее проекции на плоскости L (еь е8)
и L(e3, ei) одновременно вернулись в свои исходные поло-
жения, что невозможно вследствие несоизмеримости пери-
одов 7\ и 7\.
Если углы аир соизмеримы, то периоды Тг и также
соизмеримы, и в этом случае траектории всех точек замкнуты,
но они не будут,, вообще говоря, окружностями. В этом слу-
чае период обращения точек, не принадлежащих плоскостям
L(eb е2) и L(e3, ei), равен наименьшему общему кратному
периодов 7\ и Тъ.
§ 8. Канонический вид изометричного преобразования
1. Теорема. Для каждого изометричного преобра-
зования 1 в п-мерном евклидовом пространстве Еп суще-
ствует ортонормированный базис е^, ..., еп, в котором,
матрица преобразования имеет следующий канонический
вид:
О
7 =
(1)
о
370
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
Через здесь обозначена матрица поворота двумер-
ной плоскости на угол 6:
.___11 cos 6 — sin 6II
6 || sin6 cost) ||’
'Знак ± перед первым диагональным элементом матрицы
(1) совпадает со знаком определителя преобразования.
Клетки 1$. могут отсутствовать вовсе (см. первые три
примера п. 4 предыдущего параграфа) или же заполнять
всю диагональ (см. пример 7) из п. 4 § 7).
Доказательство теоремы см. ниже и. 8 этого параграфа.
2. Выясним геометрический смысл сформулированной тео-
ремы. Нетрудно проверить, что матрицу (1) можно предста-
вить в виде произведения
(2)
Формула (2) показывает, что преобразование I сводится к сле-
дующему.
Если Det/=—1, то сначала совершается зеркальное от-
ражение относительно гиперплоскости, которая в базисе
еь ..., еп имеет уравнение х± = 0 (если Det7= —1, то отра-
жения не происходит).
Затем линейная оболочка первых п — 4k базисных векто-
ров L(eb ..., остается неподвижной, а все простран-
ство последовательно поворачивается на углы 0Ь ..., 6k вокруг
(п—2)-мерных подпространств L(eb ..., enift, en_ill+:i, ...
..., е„), ..., L(et, ..., e„_2). Все двумерные плоскости
Le„_2*+o), ..., L(e^b <?„), в направлениях которых
происходят эти повороты, ортогональны между собой и
ортогональны подпространству L(et, ..., en_ik).
3. Следствия из теоремы п. 1. 1) Пусть изомет-
ричное преобразование I имеет Det/=—1. Тогда у него
существует собственный вектор, а при четном п — по край-
ней мере два независимых собственных вектора.
§ 8]
Изометричные преобразования
371
2) В двумерном евклидовом пространстве возможны лишь
три вида изометричных преобразований:
а) тождественное;
б) зеркальное отражение относительно некоторого одно-
мерного подпространства;
в) поворот на угол 0 (0 9 2к).
3) В трехмерном евклидовом пространстве возможны лишь
следующие четыре вида изометричных преобразований:
а) тождественное;
б) зеркальное отражение относительно некоторого дву-
мерного подпространства;
в) поворот на угол 0 (O<^0<^2ir) вокруг некоторого
одномерного подпространства;
г) произведение зеркального отражения относительно
некоторого двумерного подпространства на поворот вокруг
его ортогонального дополнения.
4. Переходим к доказательству теоремы, сформулирован-
ной в п. 1. Сначала (в пп. 5—7) установим вспомогательные
предложения, которые имеют также и самостоятельный интерес.
5. Лемма 1. В действительном линейном простран-
стве L для любого линейного преобразования существует
либо одномерное инвариантное подпространство, либо
двумерное инвариантное подпространство, причем такое,
что индуцированное в нем преобразование имеет положи-
тельный детерминант.
Доказательство. Если характеристический много-
член /?(Х) имеет действительный корень то, согласно § 6
гл. VII, этому корню соответствует собственный вектор,
линейная оболочка которого является инвариантным подпро-
странством.
Пусть р(Х) не имеет действительных корней. Тогда пре-
образование А не имеет ни одного собственного вектора.
В произвольном базисе еь еп запишем соотношение
(А — \Е)х — b, подставив в качестве X комплексный корень
a-j-ф характеристического многочлена р(к). Получится одно-
родная система линейных уравнений с неизвестными хп
и с комплексными коэффициентами, которую в матричной
форме можно записать так:
А — (я -ф- ф) Е
(3)
372
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
ГГЛ. IX
Определитель системы (3) равен нулю:
Det (X — (a -j- ф) £) =р (« 4“ ф) = О,
поэтому система (3) имеет нетривиальное решение (х\ х").
Выделим у него действительную и мнимую части
у* izl
уп lzn
(4)
и рассмотрим векторы
y=y'ei+ ••• +У"еп € L,
z = -e’ci ... -j- znen g L.
Теми же символами у и z будем обозначать элементы (у1,. .„у")
и (z1, ..zn) координатного пространства Кп. Подставив
решение (4) в систему (3), получим
О
б
=з (А — (а 4- ф) Е) (у 4- iz) = {Ay — ay 4- pz)+
4-i(Az — az — pj),
откуда
Ay = ay — pz,
Az = p_y 4- az.
(5)
Равенства (5) получены алгебраически как соотношения между
элементами координатного пространства Кп. Геометрически
формулы (5) выражают действие преобразования А на век-
торы у, z £ L, записанные в базисе et, ..., еп. Но преобра-
зование не зависит от выбора базиса, поэтому (5) можно
рассматривать как инвариантные векторные равенства в про-
странстве L.
Покажем, что векторы у и z линейно независимы. Прежде
всего, z ф 6, так как в противном случае первое из равенств
(5) означало бы наличие в L собственного вектора у{Ау = ау).
Поэтому, если между у и z существует линейная зависи-
мость, то
У=^. (6)
Подставив (6) во второе из уравнений (5), получим
Az — (a-l- Pt)z, что также противоречит отсутствию собст-
венных векторов преобразования А.
§ 8]
ИЗОМЕТРИЧНЫЕ ПРЕОБРАЗОВАНИЯ
373
Итак, у и z линейно независимы, их линейная оболочка
L(y, z} двумерна.
Формулы (5) показывают, что L(y,z) является инвариант-
ным подпространством преобразования А, и позволяют найти
определитель преобразования, индуцированного в L (у, z).
Этот определитель
а —
Р а
= а2-|-^>0,
поскольку заведомо отлично от нуля (иначе корень X = а
был бы действительным). Лемма 1 доказана.
6. Л е м м а 2. Пусть в евклидовом пространстве Еп
задано изометричное преобразование I, и пусть подпро-
странство Е' инвариантно относительно 1. Тогда орто-
гональное дополнение Е" подпространства £' также
является инвариантным подпространством.
Доказательство. Лемма 2 следует из того, что йзомет-
ричное преобразование невырождено и сохраняет ортогональ-
ность векторов. Действительно, если х£ Е',у С Е", то (х,у) = О
и (1х, 1у) — 0. Когда вектор х пробегает все подпростран-
ство Е', его образ 1х также пробегает все £' (см. п. 2 § 4
гл. VII); значит, вектор 1у ортогонален подпространству £'
и потому входит в £". Вектор у из £" можно взять произ-
вольно. Таким образом, Z(£")cz£".
7. Л е м м а 3. В двумерном евклидовом пространстве
всякое изометричное преобразование I с положительным
определителем представляет собой поворот на некото-
рый угол 9.
Доказательство. Возьмем ортонормированный базис
eit е* Пусть вектор М образует угол 9 с вектором еь Так
как длина 1ех равна длине то 1ег получается из eY пово-
ротом на угол 9. Вектор 1е% ортогонален 1еь и ориентация
нового базиса 1ех, 1е% такая же, как у исходного (поскольку
Det/^>0); следовательно, 1е% получается из <?9 поворотом
на такой же угол 9. Преобразование I сохраняет длины всех
векторов и углы между любыми двумя векторами, поэтому
все векторы поворачиваются на один и тот же угол 9.
В частности, при 9, кратном 2к, преобразование является
тождественным.
8. Доказательство теоремы. Леммы 1 и 2 позво-
ляют разложить пространство £я в прямую сумму одномерных
374
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
и двумерных инвариантных подпространств. Именно, по лемме
1 существует инвариантное подпространство Ещ, по лемме 2
его ортогональное дополнение Ё также инвариантно, к нему
можно снова применить лемму 1 и т. д. В результате получим
Е=Е(1)фЕ(8)Ф ... Ф₽(р), (7)
где р = п—k (k — число двумерных подпространств в сум-
ме (7)).
Будем считать, что в правой части формулы (7) сначала
выписаны одномерные подпространства, в которых преобра-
зование I имеет собственные значения ф 1, затем одномерные
подпространства, в которых собственные значения равны —1,
и, наконец, двумерные подпространства, в которых собствен-
ных значений нет (а определитель индуцированного преобра-
зования положителен в соответствии с леммой 1). Преобра-
зования, индуцированные в двумерных подпространствах,
входящих в сумму (7), представляют собой повороты на
некоторые углы 0Ь ..., вследствие леммы 3. В каждом
из подпространств Ещ, ..., Е(р) выберем ортонормированный
базис. Их объединение даст ортонормированный базис et,..., еп
пространства Еп, поскольку все попарно ортогональны.
В базисе еь ..., еп матрица преобразования примет вид
Заметив, что
. __I cos тс — sin тс
п sin тс cos тс
мы можем четное число минус единиц, стоящих на диагонали
матрицы (8), заменить вдвое меньшим числом клеток вида (9).
Геометрически это означает, что произведение двух зер-
кальных отражений плоскости относительно взаимно перпен-
дикулярных прямых равно повороту плоскости на угол тс.
§ 9] ТВЕРДОЕ ТЕЛО С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ 375
Если число минус единиц нечетно, то одна из них не
войдет в клетки вида (9), и ее можно переставить в начало
диагонали, изменив нумерацию базисных векторов.
В результате матрица I примет вид (1) (число k, вообще
говоря, изменится по сравнению с формулой- (8) за счет
появления новых клеток вида (9)). Теорема доказана.
§ 9. Движение твердого тела с одной неподвижной
точкой
1. Рассмотрим в трехмерном евклидовом пространстве
движение твердого тела с одной закрепленной точкой О.
Примем точку О за начало координат с ортонормированным
базисом ei, е$, е3.
Пусть произвольная точка тела в начальный момент вре-
мени занимала положение М, а за время t переместилась
в точку A1t. Положим
ОМ = х, OMt=y
и обозначим через 1(f) преобразование, которое вектору х
ставит в соответствие вектор у:
у— 1(f) х.
Твердое тело понимается как абсолютно недеформируе-
мое. Геометрически это означает, что каждый прямолинейный
отрезок, образованный точками тела, в процессе движения
переходит в прямолинейный отрезок такой же длины.
Поэтому можно построить переменный ортонормированный
базис eit, е-ц, e3t, движущийся вместе с телом, в котором
координаты вектора ONlt сохраняют постоянные числовые
значения.
Переход от базиса еь eit е3 к базису еи, е^, е31 при каж-
дом фиксированном t задается некоторой ортогональной
матрицей. Из сказанного следует, что преобразование 1(f)
линейно и изометрично при каждом t. В базисе elt е.ь е3 это
преобразование запишется так:
Предположим, что определяющие числа /Аа (f) являются
дифференцируемыми функциями времени t.
376
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ IX
Найдем распределение линейных скоростей v точек тела
в произвольный момент времени t. Иначе говоря, мы хотим
найти v для каждой точки Mt, т. е. v как функцию от у.
Для каждой точки имеем
। । dy
V = Vi et -}- v2 е3 -ф- v3 е3 = .
Таким образом,
Символически это можно записать так:
v=l'tx,
где l't — линейное преобразование, матрица которого полу-
чается дифференцированием элементов матрицы I по аргу-
менту t. Заметив, что
х — I 1у = 1у,
получим искомую функцию в виде линейного преобразования
I . *
•v= 1(1 у.
2. Преобразование A = ItI исследуем более внимательно.
*
Найдем сопряженное ему преобразование А. Воспользуемся
тем, что в ортонормированном базисе для перехода к сопря-
женному преобразованию достаточно транспонировать мат-
рицу, а транспонирование произведения двух матриц осу-
ществляется по известной формуле: (4 /*)* = (/*)* (It)*.
Двукратное транспонирование приводит к исходной матрице,
а дифференцирование элементов матрицы по t, очевидно,
перестановочно с операцией транспонирования. Поэтому
имеем матричные равенства
а*=(/;/*)*=/(/*)/. (О
*
С другой стороны, имеем равенство I(t). I(t) = Е для
преобразований и вместе с тем равенство
I(t)-I*(t) = E (2)
для их матриц, которые соблюдаются тождественно по t.
Можно доказать, что произведение матриц дифференциру-
§ 10]
КРИВИЗНА И КРУЧЕНИЕ КРИВОЙ
377
ется по такому же правилу, как и произведение функций,
поэтому из (2) имеем:
+ =E’t=0. (3)
Из (1) и (3) следует, что
*
л4-л = о.
Тем самым мы установили, что линейное преобразование
v= Ay
А
является кососопряженным (Л — — Л).
В § 6 было показано, что постоянное кососопряженное
преобразование дает мгновенное распределение скоростей
тела, вращающегося с постоянной угловой скоростью вокруг
некоторой неподвижной оси, и может быть представлено
формулой
v=[a X Л
В рассматриваемом случае преобразование Л и вектор а
зависят от времени.
Вывод. Когда твердое тело движется, имея одну
закрепленную точку О, то в каждый момент времени поле
мгновенных линейных скоростей его точек такое же, как
если бы тело вращалось вокруг некоторой оси с постоянной
угловой скоростью, но эта ось и угловая скорость зависят
от выбора момента времени.
В связи с этим вместо слов «движение тела с неподвиж-
ной точкой» в механике часто употребляется термин «враще-
ние тела вокруг неподвижной точки».
Вектор a = a(f) называется угловой скоростью мгновен-
ного вращения тела. Прямая, проходящая через точку О в
направлении вектора a(f), называется осью мгновенного вра-
щения тела.
Изменение оси мгновенного вращения со временем можно
наглядно проследить, наблюдая за вертящимся волчком.
§ 10. Кривизна и кручение пространственной кривой
1. Пусть в трехмерном евклидовом пространстве дана
кривая 5. Для наглядности будем считать, что 5—траектория
точки 7И, которая движется с единичной скоростью, то есть
за единицу времени проходит по 5 дугу, длина которой
378
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
равна единице. При таком условии потраченное время числен-
но совпадает с длиной пройденного пути. Эту длину мы обоз-
начим через s и будем рассматривать как независимый
аргумент.
Вектор мгновенной скорости точки М обозначим через t.
Он направлен по касательной к кривой 5 в сторону движе-
ния и является единичным, то есть
(U)=t (1)
Если линия не прямая, то вектор t меняет свое направ-
ление в пространстве. Поэтому точка Л1 испытывает ускоре-
ние, равное производной от вектора скорости, т. е. равное t's.
Можно доказать, что скалярное произведение векторов
дифференцируется по такому же правилу, как произведение
функций. Дифференцируя равенство
(1) по 8, находим, что ускорение
ортогонально скорости:
(/, = Q=0.
Положим k (s) = | t's | и, считая,
что k (s) ф 0, введем единичный век-
тор п, по направлению совпадающий
с t's (рис. 63). Тогда
t's — kn. (2)
Величина k носит название кри-
визны кривой в данной точке Л1.
По определению /гДаО. Вектор п называется вектором глав-
ной нормали, а плоскость, проходящая через точку Л1 парал-
лельно векторам t и п, называется соприкасающейся пло-
скостью кривой 5 в точке М.
Построим единичный вектор b = \t X п]. Он перпендику-
лярен к соприкасающейся плоскости и носит название вектора
бинормали в точке М (рис. 63).
Тройка единичных векторов t, п, b при каждом значении
аргумента s образует ортонормированный базис, естественным
образом связанный с геометрическими свойствами кривой в
окрестности точки М. Базис t, п, b называется триэдром
Френе.
2. Векторы триэдра Френе будем откладывать в прост-
ранстве от фиксированной точки О. Тогда при изменении
§ Ю]
КРИВИЗНА И КРУЧЕНИЕ КРИВОЙ
379
аргумента s триэдр Френе вращается вокруг точки О как
твердое тело.
Вектор скорости мгновенного вращения триэдра Френе
называется вектором Дарбу. Обозначим его через d = d(s).
Для произвольного вектора а, твердо связанного с триэдром
Френе, согласно результатам предыдущего параграфа имеем
(3)
В частности,
t’s=[dXi]. (4)
Посмотрим, как расположен вектор Дарбу по отношению
к триэдру Френе. Введем обозначение а = (d, f), и из формулы
(4) найдем проекции вектора d на направления п и Ь.
Для этого в равенство (4) под-
ставим разложение
d — at -j- Хи 4- <ib
с неопределенными коэффициентами
X, р.. Учитывая, что t's=^kn, полу-
чаем
Ад = а[/ХЛ + Ч«Х<] +
откуда Х = 0, р = А. Итак,
d — at kb (5)
(рис. 64).
Функция c = c(s) называется кручением кривой S. Под-
ставив выражение (5) в равенство (3), получим
4 = с [t X «] + k \b X и]. (6)
Формула (6) показывает, что мгновенное вращение три-
эдра Френе раскладывается на сумму двух вращательных
движений — вокруг касательной и вокруг бинормали. Первая
из этих компонент вращения имеет угловую скорость, равную
кручению кривой, а вторая —угловую скорость, равную кри-
визне кривой. Угловая скорость суммарного вращения триэдра
равна | d | = |/ /гу а2.
3. Подставляя в формулу (6) вместо и векторы п и Ь,
найдем разложения их производных по базису t, п, Ь. Вместе
Рис. 64.
380 ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ IX
с соотношением (2) эти разложения образуют так называемые
формулы Френе
t's — kn,
n's = — kt -ф- ab,
b's= — an,
имеющие важное значение в теории кривых.
§11. Разложение произвольного линейного
преобразования в произведение самосопряженного
и изометричного преобразований
1. Цель этого параграфа — любое линейное преобразова-
ние в евклидовом пространстве представить в виде супер-
позиции самосопряженного преобразования и изометричного
преобразования.
2. Определение. Самосопряженное преобразование А
называется неотрицательным, если (Ах, х)^0 при любом х.
Лемма 1. Если самосопряженное преобразование не-
отрицательно, то все корни его характеристического мно-
гочлена неотрицательны.
Замечание. То, что преобразование самосопряженное,
здесь очень существенно: в этом случае мы заведомо знаем,
что все характеристические корни действительны.
Доказательство леммы 1. Пусть X — характери-
стический корень, х—соответствующий ему собственный
вектор. Тогда Ax=kx и
(Ах, х) = X (х, х) == X || х ]|2 2s 0>
так как (Ах, х) 5г 0. Отсюда X 0.
Лемма 2. Если А — неотрицательное самосопряженное
преобразование, то найдется неотрицательное самосо-
пряженное преобразование В такое, что А = ВВ.
Замечание. Преобразование В называют квадратным
корнем из преобразования А.
Доказательство леммы 2. Вследствие самосопря-
женности преобразования А найдется ортонормированный
базис, в котором матрица А имеет диагональный вид:
§ 11]
РАЗЛОЖЕНИЕ ЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ
381
По лемме 1 все 0, поэтому — действительные
неотрицательные числа.
В том же базисе определим преобразование В матрицей
о
J/Xi
О
Базис ортонормированный, матрица В диагональная, по-
*
этому преобразование В самосопряженное (£? = /?). Из фор-
мулы для В ясно, что для матриц имеем соотношение ВВ — А,
поэтому такое же соотношение справедливо и для преобра-
зований. Запишем у = Вх в координатах:
Уг — хъ
. Уп-- ХП‘
Отсюда
(Вх, х)=(у, х) = xtyt ... - j- хпуп =
= xt 4- • -|- хп ‘ о,
так что преобразование Вх неотрицательно. Лемма 2 дока-
зана.
Замечание. Рассмотрим скалярное произведение (Ах, х).
Если эта квадратичная форма положительно определенная,
то преобразование А называется положительно определенным
или положительным. В этом случае А невырожденно, и все
его характеристические корни положительны. Из доказа-
тельства леммы 2 видно, что квадратный корень из поло-
жительного преобразования также является положительным
преобразованием.
3. В этом параграфе для обозначения сопряженного пре-
образования мы будем ставить звездочку не сверху, а сбоку,
как при обозначении транспонирования матрицы, то есть
обозначать символом А* преобразование, сопряженное А.
Такая символика будет удобнее для выкладок, но при этом
нужно помнить, что если той же буквой А обозначена мат-
рица преобразования А, то транспонированная матрица А*
будет матрицей сопряженного преобразования А*, вообще
говоря, лишь в ортонормированием базисе.
382
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
Ниже вам понадобятся тождества, справедливые как для
матриц, так и для преобразований:
1) (АВ)* — В*А*,
2) (А*)* = А,
3) (АВ)-' = В~'А-\
4) (А*)'1 = (А-1)*.
Сначала нужно проверить справедливость этих формул
для матриц (см. §§ 2, 3 гл. 11), а затем рассмотреть преобра-
зования в ортонормированном базисе. В таком базисе пере-
численные формулы для преобразований сразу следуют из
матричных равенств.
4. Теорема. В п-.мерном евклидовом пространстве Еп
для любого невырожденного линейного преобразования А
существует самосопряженное преобразование В и изомет-
ричное преобразование 1 такие, что
A —IB. (1)
Замечание. Аналогично существуют самосопряженное
преобразование Bt и изометричное Ц такие, что A — BJi.
Доказательство теоремы. Рассмотрим преобразо-
вание А*А. Оно является самосопряженным:
(А* А)* = А* (А*)* = А*А.
Оно является невырожденным, так как А по условию невы-
рожденное. Кроме того, преобразование А*А является поло-
жительно определенным:
(А* Ах, х) = (Ах, Ах) = || Ах ||22> О,
если х ф 6. По лемме 2 можно извлечь квадратный корень
из преобразования А*А:
V~AFA=B, А*А = ВВ,
где В — положительно определенное самосопряженное пре-
образование. Поэтому
A = (A*)-1BS.
Положив
7=(А*у1В,
получаем для А следующее представление:
Л = 1В.
§ 12]
ТЕНЗОР ДЕФОРМАЦИЙ И ТЕНЗОР НАПРЯЖЕНИЙ
383
Остается доказать, что 7—изометричное преобразование. Для
этого вычислим 7*, используя самосопряженность В:
I* = В* ((А*)”1)* = ВАЛ
Далее имеем
7*7== В А1 (А*)-1 В = В (А*А)~1В.
По построению преобразования В
(А*А)'=(ВВ) * = В 1В1,
так что
1*1=ВВ~1В'1В = Е,
откуда и вытекает изометричность .преобразования 1. Теорема
доказана.
5. Самосопряженное преобразование В в разложении (1)
будем называть существенной частью преобразования А.
§ 12. Приложения к теории упругости.
Тензор деформаций и тензор напряжений
1. Рассмотрим сплошную упругую среду. Зафиксируем
в ней точку О и выделим некоторый объем, содержащий
эту точку. Предположим, что в отсутствие внешних сил этот
объем представляет собой шар U с центром О, а под воз-
действием внешних сил он деформируется и смещается. Однако,
отвлекаясь от параллельного перемещения в пространстве,
мы можем считать, что точка О остается неподвижной. Про-
извольная точка М в шаре U характеризуется - вектором
х = 0Л1. Пусть в результате деформации точка Л1 переходит
в положение Мг. Положим ОМ’ =у. Эксперименты показы-
вают, что
у = С2х-\-г{х\ (1)
где С — линейное невырожденное преобразование с положи-
тельным определителем, а вектор г = г(х) при малом х пред-
ставляет собой бесконечно малую высшего порядка, то есть
Пт = (2)
Если шар U мал, то вектором г можно пренебречь,
и тогда вместо преобразования (1) можно рассматривать
384
ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА
[ГЛ. IX
линейное преобразование
у = Сх.
(3)
Замечание. Если соблюдается условие (2), то линей-
ное преобразование (3) называется дифференциалом нелиней-
ного преобразования (1).
Линейное преобразование С при данной деформации
упругой среды зависит, вообще говоря, от выбора точки О.
2. По теореме, доказанной в предыдущем параграфе,
линейное преобразование С можно разложить на два сомно-
жителя:
С = /С,
где С—самосопряженное преобразование (существенная
часть С), 1—изометричное преобразование, причем
Det/= -j- 1.
Преобразование С характеризует деформацию упругой
среды вблизи точки О. Оно представляет собой сжатие по
Рис. 65.
Рис. 66.
трем взаимно перпендикулярным направлениям и потому пе-
реводит шар U в некоторый эллипсоид V (рис. 65).
Преобразование I характеризует поворот эллипсоида V
как твердого тела вокруг точки О (рис. 66).
В большинстве реально встречающихся случаев эллип-
соид V мало отличается от шара U. Так, например, в металлах
при нагрузках, не выводящих за пределы упругих дефор-
маций, полуоси эллипсоида V отличаются от'радиуса шара U
обычно только на доли процента. Поэтому преобразование С
близко к единичному преобразованию Е, и его пред-
§ 12) ТЕНЗОР ДЕФОРМАЦИЙ И ТЕНЗОР НАПРЯЖЕНИЙ 385
ставляют в виде суммы
С = Е-\-В.
Здесь В (как нетрудно доказать) — тоже самосопряженное
преобразование.
Пусть et, е8, еа — ортонормированный базис. Запишем
в нем матрицу В = \\Ь^ ||.
Дважды ковариантный тензор btj называется тензором
деформаций.
з
Величина 0= У Ьц (след оператора В) называется ко-
i=l
эффициентом изменения объема. Это название связано с тем,
что собственные значения оператора В малы и отношение
объема эллипсоида V7 к объему шара U приближенно равно
1 -j- 0 (с точностью до величины порядка квадрата собствен-
ных значений оператора В).
3. При деформации упругого тела в нем возникают на-
пряжения. Проведем через точку О плоскость, ориентирован-
ную единичной нормалью и, и рассмотрим малые части
упругой среды, примыкающие к этой плоскости вблизи точ-
ки О. Фактическое взаимодействие этих частей заменим при-
ложенными к ним силами.
Сила воздействия одной части упругого тела на другую,
отнесенная к единице площади сечения, называется напряже-
нием в данной точке О при данной ориентации п и обозна-
чается р (рис. 67). Зависимость напряжения р от направления
п в данной точке О с высокой точностью выражается фор-
мулой вида
p = F(n),
386 ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВА ПРОСТРАНСТВА [ГЛ. IX
где — некоторое линейное преобразование, зави-
сящее, вообще говоря, от выбора точки О.
Тензор ftj называется тензором напряжений.
4. Если упругое тело однородно и изотропно, то есть
имеет одинаковые механические свойства во всех точках
и по всем направлениям, а деформации достаточно малы, то
связь между тензором деформаций и тензором напряжений
дается законом Гука
или в координатах
fik — + 2p&,-fe.
Здесь X и р — константы, характеризующие механические
свойства упругой среды, 6 — коэффициент изменения объема
(см. выше, п. 2).
\ГЛАВ А X. ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
§ 1. Альтернация
1. Пусть а, Ь, с,... — произвольные векторы данного линей-
ного пространства L. Мы будем рассматривать произведения
векторов из L, понимая эти произведения как контравари-
антные тензоры, то есть как элементы линейных пространств
Т*, Т% и т. д.; само L при этом есть Г* (см. главу V).
Таким образом, например, а £ , ab £ Т30, abc £ Г’ и т. д.
Назовем альтернацией произведения векторов действие,
которое, будучи обозначено квадратной скобкой, определя-
ется следующими равенствами:
(а] = а,
[ab] — i (ab — ba),
[abc] — л (abc -|- bca cab — bac — acb — cba).
Для любого числа произвольных векторов аь а^,...
...,am £ L полагаем
[“fii ... ат] — ~ (Ус^а-,... ат — ^ata3... amV
\ 1 2 /
где У] означает сумму всех произведений, которые получа-
1
ются из произведения . ат при четных перестановках
индексов 1, 2,..., т; У1, имеет аналогичный смысл соответ-
2
ственно нечетным перестановкам. Иначе можно написать
. ат]=а)
где сумма справа берется по всем индексам jb fa,..., jm,
каждый из которых независимо от остальных пробегает все
значения от 1 до т; =-]-1, если /j есть
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
четная перестановка набора чисел 1, 2,..., пт, B'i7s =
=—1, если ji есть нечетная перестановка набора
1, 2,..., /я; 87;7» " 7™ = 0, если среди значений /ь /2,
имеется пара одинаковых.
2. Альтернация произведений векторов обладает следую-
щими свойствами:
1) Линейность по любому сомножителю; например
(по первому сомножителю),
[(aaj ра,) а2... ат] = а [aja2... ат] -j- р [а^а2... ат].
2) Косая симметрия по любой паре сомножителей;
например (по первой паре),
[aia2a3... ат] = — [ала,... ат].
Эти свойства легко усматриваются из определения аль-
тернации; доказывать их мы не будем.
3. Если среди векторов at, а2,...., ат имеется пара оди-
наковых, то [atO2... ат] = 0; символом 0 здесь обозна-
чен нулевой тензор пространства Г™. Утверждение ясно, так
как при обмене местами одинаковых векторов альтернация
[aia2... ат] не меняется, но в то же время меняет знак.
4. Если векторы ai, с2,..., ат линейно зависимы, то
| ata2... am] = 0. В самом деле, предполагая для простоты,
что ai,..., ak является максимальной независимой подсисте-
мой системы векторов аь..., ат, имеем аь _|. i = -ф-...
akak. Но отсюда по свойству линейности и вследствие
п. 3 получаем
| fij... ат\ = aj [ai... akai... am] -f-...-[- aft [aj... akak ...am] =
= ai 0-{-... -|-ай • 0 = 0.
5. Будем далее предполагать, что данное пространство L
является «-мерным.
6. Тогда, если т^> п, то [ata3... am] = 0 (утверждение
непосредственно следует из п. 4).
7. Пусть х — произвольный тензор из 7*. Согласно опре-
делению Г* тензор х представляет собой сумму произведе-
ний некоторых векторов пространства L, содержащую k век-
торных сомножителей в каждом своем слагаемом. Напишем
соответственно
х — ... а*1’ Э-a(/V)a‘A’>.. ,а'л', С2)
1-2 k I 1 1 i ft \л)
§ I] АЛЬТЕРНАЦИЯ 389
где а</> £ L- Назовем альтернацией тензора х (х £ Г*) тен-
зор той же валентности, который, будучи обозначен через
[х] ([х] £ Г*), определяется равенством
[х] = [а<Пай>... аи>] +... + [oWaW... <>]. (3)
8. Альтернация тензора не зависит от способа его запи-
си в виде (2). Иначе говоря, если х'=х, то [х,] = [х].
В самом деле, пусть
х' — . .&(?> 4-...4- (4)
12 «I '12 ™
тогда по нашему определению
[x'l = [&(Df,(i)... +... + [&W&W... (5)
Допустим, что х' — х. Это означает, что сумма (2) сво-
дится к сумме (4) с помощью допустимых замен (см. гл. V).
Но вследствие линейного свойства альтернации, каждой до-
пустимой замене в сумме (2) отвечает точно такая же допус-
тимая замена в сумме (3). Поэтому сумма (3) сведется к
сумме (5) с помощью таких же допустимых замен, какие
приводят сумму (2) к сумме (4). Таким образом, [x'j^fx].
9. Имеет место тождество
[[ «1«а ... am]] = [. ат], (6)
то есть повторная альтернация произведения векторов совпа-
дает с первоначальной.
Убедимся в справедливости тождества (6) сначала в двух
простейших случаях лг=1 и т = 2. Здесь это тождество
очевидно:
[[а^П = 2Г — =
= 2f ^2j- («1^2 — a«ai) — =
= 2f — a««i) = [aiad
В общем случае имеем, согласно (1) и (3),
Но легко видеть, что в сумме, написанной здесь справа, все
слагаемые одинаковы и каждое из них равно [вЩц... ат].
390 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ (ГЛ. X
В самом деле, ввиду косой симметрии по любой паре верх-
них индексов величины 87| и ввиду косой симметрии
по любой паре индексов альтернации [ад...ау ] мы можем
в каждом слагаемом суммы (7) обменять местами любую па-
ру индексов в наборе слагаемое при этом не изме-
нится. Значит, во всех слагаемых, не меняя их, можно при-
вести индексы к натуральному расположению. Так как
то каждое слагаемое сведется к [а1а2...а,л|.
Поскольку число всех слагаемых в сумме (7) равно т\, то
из (7) вытекает (6).
Замечание. Теперь ясно, почему при определении
альтернаций выгодно брать не просто алгебраическую сумму
произведений векторов, а эту сумму, деленную на т\.
10. Вследствие тождества (6) имеем для любого тензора
* € П
[[*]] = [х].
11. Если k п, то для любого х £ имеем [л-] == 0
(см. п. 6).
12. Пусть еъ е2,..., еп —базис в L. Тогда, как мы зна-
ем, всевозможные произведения eiei^...eik составляют базис
I в и для любого тензора х имеет место разложение
х=^хЛ'" ,keieis...eik.
Отсюда получаем выражение альтернации тензора х в
данном (произвольном) базисе
И = 2Х‘*‘2 " -••%]• (8)
13. Мы будем дальше употреблять символ 8<* ... по"
нимая его следующим образом. Будем считать, что индексы
Zj,..., ik, jbjk принимают любые значения из набора
1, 2,..., п (где п—размерность пространства L); число всех
нижних индексов (или верхних), то есть число k может быть
любым. Если все численные значения z\,..., lk различны, то
1 в том случае, когда есть четная пе-
рестановка набора чисел 1Ь ik; 8f‘ ’’’ = — 1, если j\.../й
есть нечетная перестановка набора Zj. ...,z\; во всех осгаль-
§ I]
АЛЬТЕРНАЦИЯ
391
ных случаях &{* /* = 0. Таким образом, ... {* = 0, если
среди численных значений 1Ь (или Jb.. .,jk) имеется пара
одинаковых или если среди численных значений j\,... ,/Т есть
такое, какого нет среди z'i,..., ik (и наоборот). В частности,
/* = 0 в случае
Согласно высказанному определению множество чисел
8? • • • обладает косой симметрией как по верхним, так
и ••• ih
индексам. Иначе говоря, при обмене местами
и по нижним
двух верхних
индексов или двух нижних индексов 8/1
4
4
меняет знак.
14. Легко убедиться, что из формулы (1) следует равен-
ство
[efl ... eik} = 12 % eh eJb> (9)
где индексы ib ..., ik фиксированы, а сумма справа берется
по всем значениям индексов из набора 1, 2, ..., и.
Тем самым правая часть (9) есть разложение тензора
[e/j ... eik] по базису в пространстве 7*; числа 7*
(при фиксированных 1Ь ..., ik) являются координатами этого
тензора.
15. Перепишем формулу (8) с помощью формулы (9):
и=2 й 2 1 ’ ’ ’S• • •ej>-
Введем обозначение
Х[А ••• 4] = JL V ... jkxh ••• >k (10)
k\ ч • • • lk к '
Иначе говоря, мы полагаем
х^ = х1,
х\ч\=^(х'’ — x7i),
х'4*1 — X (x,,k x’ki -L- х*г/ — x^,k — xik/ — xk/‘) и T. Д.
Согласно (10) получаем
[x] = 2 xl71 • • • 7*k71 ... e]k. (11)
392 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ X
Операция, которая определена равенством (10), называется
альтернацией координат тензора х, ее называют также альтер-
нацией индексов/1, ..., jk. С ней мы уже встречались в гл. V.
Сравнивая (8) и (11), мы видим, что для получения альтер-
нации тензора х можно поступить любым из двух способов:
1) либо в разложении тензора х заменить все произведе-
ния базисных векторов ... е-,к их альтернациями [е(1 ... е,А],
оставив прежние коэффициенты х'1 •••
2) либо коэффициенты xil 'k заменить соответствую-
щими альтернациями х^1 ‘ ’ ’*1, оставив без изменений произ-
ведения базисных векторов efl ... eik. Равносильность этих
двух операций мы покажем ради наглядности еще раз в част-
ном случае k = 2. Если х = У, хг/егеу-, то
w=2 ^е‘е^=Z i ~=
— 21 2 Х 'е‘е^ 21 2 х’'е)е‘ ~
=i 2 xile^ ~ i. 2xlietej=2*liyle/‘>
16. Равенство (И) является разложением тензора [х] по
базису в 7*. Следовательно, альтернации xlA ' '' коорди-
нат тензора х суть координаты его альтернации [х].
17. Из (10) следует, что альтернации xl71 коорди-
нат произвольного тензора х С 7* обладают косой симмет-
рией по любой паре индексов.
18. Определение. Тензор х (х С ?„) назовем косым,
если fx] — x.
Из этого определения и из п. 16 следует, что для коор-
динат косого тевзора имеют место равенства
л/1 ••• 4 = х1А ”•-Ч (12)
Таким образом, координаты косого тензора обладают косой
симметрией по любой паре индексов. Обратно, если коорди-
наты х'1 ” '* какого-нибудь тензора х£ 7* обладают косой
симметрией, то из (10) получим (12) (точно такими же рас-
суждениями, какими было доказано тождество (6) в п. 9);
отсюда |xj = x.
§ 2] ПОЛИВЕКТОРЫ. ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ 393
Таким образом, определение косого тензора х посредством
условия [jcJ = х равносильно определению по свойству косой
симметрии его координат (см. гл. V, § 8).
Замечание. Так как для любого тензора х из TJ имеет
место равенство [jc] = х, то все одновалентные тензоры сле-
дует относить к числу косых.
§ 2. Поливекторы. Внешнее произведение
1. Рассмотрим Множество •£, элементами которого являются
все контравариантные косые тензоры всевозможных валент-
ностей (в том числе одновалентные), заданные над и-мерным
линейным пространством L.
Определение. Внешним (или альтернированным) про-
изведением косых тензоров х, у, х £ 7*, у £ 7J, называют
тензор пространства 7* +1, который обозначается симво-
лом х /\у и выражается формулой
хЛз'=-^Г7г[-^1- (П
Квадратными скобками обозначена альтернация обычного
произведения тензоров ху.
В частном случае двух произвольных контравариантных
векторов х, у £ L имеем
х /\ у = ху —ух.
2. Альтернация всегда дает косой тензор, поэтому внешнее
умножение не выводит из множества S. Нетрудно проверить, что
совокупность косых тензоров данной валентности т образует
подпространство в Т%, которое мы обозначим О'”; таким обра-
зом, сложение тензоров и умножение их на числа также не выво-
дят за пределы множества S.
Ненулевые тензоры, входящие в S, считаются равными
элементами этого множества тогда и только тогда, когда они
принадлежат одному пространству Т™ и равны как элементы
7™. Кроме того, в S входят нулевые элементы пространств
7'" при всех натуральных ni. Нулевые тензоры всех валент-
ностей считаются равными элементами множества S\ будем
обозначать их символом 0.
Очевидно, что
х /\ 0 = 0
394 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ. X
для любого х £ S. Согласно п. 6 § 1 имеем х /\у~0, если
Т*, у С Т{, k-\-l>n.
3. Множество & с указанным выше равенством элементов
и определенными в нем операциями внешнего умножения,
умножения на число, а также сложения тензоров одинаковых ва-
лентностей будем называть алгеброй Грассмана над простран-
ством L,).
Контравариантные А-валентные косые тензоры, рассматри-
ваемые как элементы алгебры Грассмана, называются контра-
вариантными А-векторами или контравариантными поливек-
торами. Число k называют порядком поливектора. Элемент О
называется нулевым поливектором. Порядку нулевого поли-
вектора можно приписать любое натуральное значение. Все
поливекторы порядка к^>п равны нулевому. Таким образом,
все ненулевые поливекторы принадлежат пространствам
71 уз -Тп
4. Простейшие свойства внешнего умноже-
ния.
1) (ах) /\у = х /\(ау) = а(х /\у) для любого числа а и
любых х, у £ S, поскольку числовой множитель можно выно-
сить как за знак обычного умножения тензоров, так и за знак
альтернации.
*) Высказанное здесь определение алгебры Грассмана недоста-
точно. Дело в том, что в множествах, называемых алгебрами, операция
сложения определена для любых элементов. Поэтому в рассматри-
ваемом множестве g?, помимо указанных нами операций, следовало бы
определить сложение тензоров разных валентностей.
Это делается путем построения формальных сумм элементов из
разных пространств Т™. Кроме того, в & обычно включают тен-
зоры нулевой валентности, то есть скаляры (инварианты). В резуль-
тате 3? становится линейным пространством размерности 2", изо-
морфным прямой сумме подпространств Gm:
$ = G°®Gl® ... ®Gn,
где через G° обозначена совокупность тензоров нулевой валент-
ности. Мы не проводим подробно эту конструкцию, поскольку нам
не придется пользоваться сложением тензоров разных валентностей.
Отметим еще, что множество & часто называют алгеброй Грассмана
над пространством £*, сопряженным данному пространству L,
в связи с тем, что элементы множества У можно отождествить
с полилинейными формами, аргументами которых являются векторы
пространства £*. Общее определение алгебры Грассмана читатель
может найти в книге: Р. Бишоп и Р. Криттенден, Геомет-
рия многообразий, «Мир», 1967.
§ 2]
ПОЛИВЕКТОРЫ. ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ
395
2) (х~\~у) /\z = х /\г -\-у f\z, так как и обычное умно-
жение и альтернация произведения тензоров распределительны
относительно сложения.
3) Внешнее умножение косокоммутативно. Именно
х/\у = (—^)ыу/\х, (2)
если х С Г‘, у е Т1„.
Доказательство. В координатной записи имеем
••• eik,
У=^У}' " % ••• eh'
откуда
х /\У=S х‘* ' ‘ У'1 ’' ’h [e‘i • • • <3)
Аналогично
-J/Ax=^fer7r2yi 'kyii 7/[еЛ "• •" (4)
Здесь еь , еп—базис в L, индексы ilt ... , ik, jit ... , jt
меняются от 1 до п независимо друг от друга, суммирование
ведется по всем этим индексам, квадратные скобки, как и выше,
обозначают альтернацию. Для того чтобы перевести переста-
новку индексов (z’j, ... , ik, ji, , ji) в перестановку
(Ji , • •• , ji, h, • • • , ik), нужно совершить kl транспозиций
соседних индексов. Поэтому и в силу определения альтерна-
ции каждое слагаемое суммы (4) отличается от соответствую-
щего слагаемого суммы (3) множителем (— 1)ы, откуда сле-
дует (2).
Следствие. Если х — поливектор нечетного порядка,
то х/\х=0.
4) Внешнее произведение ассоциативно, т. е. для любых
поливекторов х, у, z £ Э:
(X /\у) /\г=х /\(у f\z).
Для доказательства этого тождества нам придется сделать
ряд предварительных заключений.
Б. Рассмотрим два произвольных набора базисных векто-
ров: eiv ... , eik и ... , Возьмем их альтернации; мы
396
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
получаем два поливектора
1еЛ • • • eh\ — 7Г 2 84 — Ле₽1 '' ’ e₽z‘
Перемножим их согласно обычному правилу перемноже-
ния тензоров и проальтерпируем полученное произведение:
[P*i ••• eik] p/i ••• e/z]] =
-- i—•** °7? В'Т € € Z? I (5)
— fel/lZ '•> 4 4 - 4* °* ak h ₽J 1 ’
Допустим сначала, что среди индексов ib ... , ik, а также
среди индексов Д, .... jt нет одинаковых. Тогда в сумме (5)
достаточно рассмотреть лишь те слагаемые, где ... ак
есть перестановка набора индексов ib ... , ik, a pi ... pt
есть перестановка (остальные слагаемые равны
нулю). Но очевидно, что все такие слагаемые одинаковы,
причем для любого из них имеем
::: \А ч 1еч ••• ечеч •••
=к ••• ••• еч\-
Очевидно также, что общее число этих слагаемых равно
А!/!. Следовательно,
[Но • • • eik] [ел ... e/z]] = . eiteh ... ]. (6)
Теперь ясно, что равенство (6) справедливо вообще, так
как при наличии одинаковых индексов среди z’i, • • • > 4 или
среди /1, ... , /7 обе его части равны нулевому поливектору.
6. Из (§) сразу следует свойство ассоциативности для
внешнего произведения базисных векторов. Именно, мы имеем
qA<7=2! ieieA-
Далее,
(ei A ej) A ek — А ег = 3! =
= 3! [<?,•<?/?*].
Аналогично
A A A ek) = 3! 1е< l^edl = 3! к-е7е/(].
§ 2) ПОЛИВЕКТОРЫ. ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ 397
Таким образом, (ef Д еу) Д ek — et /\ (ej /\ ек). Тем самым
определяется ег Д Д ек = (ег Д еу) Д ek = г,- Д (е7 Д ek).
Отсюда и по индукции (с использованием (6)) получаем
Oi л А • • • A = ml ... eim]. (7)
Написанное здесь слева внешнее произведение многих базис-
ных векторов может быть определено, как обычно в таких
случаях, путем любого последовательного сочетания сомно-
жителей. Из (6), (7) и (1) следует также, что
(О1А % А • • • A A (e/i А А • • • А е/г)—
~ e‘i /\е1%/\ ••• А е‘п /\ eh /\eji/\ • • • A eii‘ (8)
7. Пусть x — произвольный поливектор из 7*:
= " '*^1 ••• %- (9)
Согласно определению поливектора мы имеем х = |х] и, сле-
довательно, можем написать
Х=^х1^ - ... %].
Отсюда и вследствие (7)
•*=112 х’1 “ ^О.АОаА ••• А%- (Ю)
Здесь суммирование идет по всем индексам, и каждый из них,
независимо от других, принимает значения 1, 2,..., п. Те
слагаемые этой суммы, где имеется хотя бы одна пара оди-
наковых индексов, равны нулю. Рассмотрим все слагаемые,
отвечающие всевозможным перестановкам какого-нибудь од-
ного набора различных индексов. Таких слагаемых для дан-
ного набора индексов имеется kl, и все они равны друг
другу. Поэтому вместо (10) можно написать
г*^1А ••• Aeife’ (И)
где сигма со звездочкой впереди есть знак суммирования по
всем наборам индексов ..., z* при условии /i <j8 4-
8. Как мы знаем, все поливекторы данного порядка k
образуют в пространстве 7* подпространство, обозначенное
выше через Gk. Из выражения (11) вытекает важный вывод:
внешние произведения е1г/\ •••/\eik базисных векторов
пространства L, отвечающие всевозможным наборам индексов
z‘i z2< ... *\ 4, составляют базис в подпространстве Gk.
398
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
В самом деле, согласно (11) каждый поливектор х £ Gk
разлагается по внешним произведениям еГ1 /\ ... /\ eib
(/j <С • • • < lk)- С другой стороны, легко убедиться, что
эти внешние произведения линейно независимы в Gh. Именно,
допустим, что существуют числа х'1 ‘*,где ••• <^А>
для которых формула (И) дает х = 0. Определим х'1
для любых порядков расположения индексов А, ..., ik по усло-
вию косой симметрии; иначе говоря, мы положим х2 1 3 ••• * =
=— х1 23 k и т. д. Тогда вместо разложения (И) можно
написать эквивалентное ему разложение (9), где суммирование
идет по всем индексам, а коэффициенты х‘1 1,1 являются
координатами тензора х. Мы имеем х = 0; следовательно,
х'1 —о как координаты нулевого тензора. Тем самым
линейная независимость внешних произведений
/\ eii /\ • • • /\ eik (А G <Z. • • А)
доказана.
9. Следствие. Размерность подпространства Gk
равна Ся.
В самом деле, число всех внешних произведений
в;, Л е Д Л • • • Л eik< А < < • • • < 'ь, равно числу сочета-
ний из п элементов по 1г, что и есть Сь
10. Вернемся к вопросу об ассоциативном свойстве внеш-
него произведения любых поливекторов. Доказательство этого
свойства вытекает из тождества (8). Чтобы упростить запись
доказательства, введем обозначение
Д = ^1Ло2Л ••• ЛеД-
Тогда тождество (8) примет вид
Ч ••• дЛеА 11—е\ ДА А’
Рассмотрим любые поливекторы х С Т*> У € Т2. Мы можем
написать их в виде
х=^2у’’”--Д’ У=*£у^ ” ileil - */г.
Отсюда и вследствие (12)
" ‘кУ11 " - ДА ••• 1с <13>
Здесь сигма со звездочкой впереди есть знак суммирова-
ния по всем наборам индексов 4, ...,/* и /ь ..., у) при условии
§ 3]
БИВЕКТОРЫ
399
0<О'а<С • и /1<СЛ<С -•• <О/> однако в общем наборе
Л> • • •, 4> 71> • •., ji эти индексы могут и не быть располо-
женными в порядке возрастания.
Пусть z £ — еще один поливектор:
z = — w (14)
4 1 ш
Из (13) и (14), снова применяя (12), находим
{x/\y)/\z=^^-lkyh ~hzsi-smeii _h/\es^Sr==
= * S X'' " ikyJl " JlzS' " Sm <\ - ikJ\ - J'l \ - W 0 5)
С другой стороны,
x ACv A 2)=* S xlikyJi "h z*' "Sm e‘. - lk Ae/. - 4 4 - sm=
= (16)
В формулах (15) и (16) символ * У употребляется в таком
же смысле, как в формуле (13). Сравнивая (15) и (16),
получаем: (х /\у) /\ z—x /\(у /\ z), и ассоциативное свой-
ство доказано.
11. Теперь обычным образом определяется внешнее про-
изведение любого числа любых контравариантных поливекто-
ров: х/\у /\z /\.../\w, Например,
х /\у /\z /\у) /\z) f\t=
=(^Лз')Л(2'Л0 =х АО7 Л(2 АО)-
§ 3. Бивекторы
1. Бивектором пространства L называется поливектор
второго порядка. Здесь, как и раньше, речь идет о контра-
вариантных поливекторах. Таким образом, говоря сейчас
о бивекторах, мы имеем в виду поливекторы из 71.
2. Бивектор р называется простым, если он равен внеш-
нему произведению двух векторов:
р=ах/\а3, (1)
где alt а3 £ L. Если сц, а3 линейно зависимы, то р=0.
Если «1, а3 независимы, то р 0. В самом деле, в случае
независимости векторов ait а3 их можно дополнить до базиса
at, а3, а3, ап. Но тогда внешние произведения at/\aj,
1<ZJ, составляют базис в подпространстве бивекторов над L
400 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ X
(см. п. 8 § 2). Следовательно, ни одно из этих внешних
произведений, в том числе ai/\a<t, не может быть нулевым
бивектором.
Таким образом, простой бивектор (1) равен нулю тогда
и только тогда, когда векторы аь а* линейно зависимы.
3. Допустим, что р 0 и, следовательно, аь незави-
симы. При этом условии векторы ai, «2 определяют в про-
странстве L двумерное подпространство L2, представляющее
собой их линейную оболочку: L2 = L(<Zj, й2). Пусть bi, bt —
любые два вектора из Lg. Вследствие независимости а1г й2
мы имеем
bi = ацй1 —|
Ь% = а21й1 —J- J
где а,-.-—числовые коэффициенты. Рассмотрим бивектор
q = b}/\bi. (3)
Из (2) и (3) получаем по правилам внешнего умножения
Я^^Ьу /\ bi — (atJai -}~а12а2) A(a2iQi /\ a22a2) =
= alla22 (al /\ an) 4“ a12«21 (°2 /\ й1) = (аца22 «12^21) (al /\ ai)-
Таким образом,
q = Dp, “’®|, (4)
J Г I a21 a22 I ' '
т. e. бивектор q пропорционален бивектору p, и множитель
пропорциональности D — Det || a,-у || .
Обратно, допустим, что q = ЬХ /\bi-~bp, где X — некото-
рое число (X ф 0). В таком случае bi, b% £ L8, т. е. имеют
место равенства (2); при этом \ = D из (4).
Докажем это утверждение.
Для доказательства рассмотрим три произвольных вектора
О. <2> О- Если они зависимы, то
бАА\сз = 0 (а)
(см. п. 4 § 1 и равенство (7) § 2). Если cit с2, с3 независимы,
то Ci А О А О # 0- В самом деле, независимые векторы сь
с3 можно дополнить до базиса сь с2, с3....сп. Но тогда
все внешние произведения вида с,-, А с«а А с,’з>
§ 3]
БИВЕКТОРЫ
401
составят базис в О3. Следовательно, все они отличны от нуля.
Таким образом, равенство (а) необходимо и достаточно для
зависимости векторов Ci, с2, с3. Пусть теперь
Л —Л й«)>
где X 0, ai /\ 0. Умножим обе части этого равенства
внешним образом на Ьь Мы получим слева /\ bi /\ bi = 0;
следовательно,
biAaiAas = 0-
Отсюда, согласно сказанному выше о произвольных векто-
рах с1( с2, с3, заключаем, что blt ait а% зависимы. Значит,
С Га = L (аъ ai). Аналогично £ Г2 = Г(йь й2). После
этого ясно, что X = D.
4. Итак, если ai /\ ai ф 0, то
bi /\Ьч — Х(й1Лй2)> ^7^0, (5)
в том и только в том случае, когда bi, bi независимы и
Ьь bi £ L« = L (ab й2). При этом X = Det || aiy-||, где || а,-у1|
есть матрица, составленная из
координат векторов Ьь Ь2 по
базису йь а*.
5. В частности,
bi/\bi=й1Аа«
в том и только в том случае,
когда Ьь Ьг g Li—L (ait ai) и
Det || а,71|=1.
6. Подпространство Lo —
— L (ab а2) называется подпро-
странством бивектора й! А За-
говорят, что бивектор a\/\ai
лежит в подпространстве Г2. Говорят также, что ai/\ai
есть направляющий бивектор этого подпространства (подобно
тому как обычный вектор, лежащий на прямой, называют
направляющим вектором этой прямой).
7. Предположим, что линейное пространство L снабжено
евклидовой метрикой. Ради наглядности будем представлять
себе ненулевой бивектор Ьх /\ bi в виде ориентированного
параллелограмма, построенного на упорядоченной паре век-
торов bb bi (рис. 68). Площадь этого параллелограмма будем
402
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
называть площадью бивектора bt /\ Ь». Бивектор, площадь
которого равна единице, назовем единичным.
Пусть теперь сц /\ а2 — единичный бивектор. Тогда
Det || а,-у || = ±о, где с — площадь бивектора Ь1ДЬ2, и соот-
ношение (5) принимает вид
bi Д h — ± о (aj Д я8). (6)
Знаки ± здесь соответствуют случаям, когда бивектор bi /\ Ьг
ориентирован в L2 одинаково с бивектором ai Д а2 или
противоположно ему.
Если считать, что само подпространство Т2 ориентиро-
вано упорядоченной парой векторов аь а2, то вместо (6)
можно написать
bi Д Ь.2 = S (ai Д а2), (7)
где S=Det || а(-у-|| есть ориентированная площадь бивектора
bi Д bs.
8. Итак, простые бивекторы, лежащие в L2, изображаются
в виде ориентированных параллелограммов подпространства L2.
Согласно (6) (или (7)) параллелограммы равной площади и
одинаково ориентированные в 12 изображают один и тот же
бивектор (рис. 69).
Рис. 69.
9. Считая L евклидовым пространством, возьмем в L
ортонормированный базис et, ..., еп. Рассмотрим произволь-
ные векторы bi, Ьг £ L. Имеем
bi = x^ei —|— XiCi —|—... —х"е п,
Ьг — х!>е} -|- х|е2 Д... + х"еп.
Выберем какую-нибудь пару различных базисных векторов
eit Sj, предполагая i<^J. Они определяют некоторую дву-
мерную координатную плоскость; обозначим ее через Е,у-
(точнее следовало бы говорить, что 7Д есть двумерное под-
§ 3]
БИВЕКТОРЫ
403
пространство, именно L(et, еу-))_ Будем считать, что плоскость
ориентирована бивектором егД<?у-, 1<ZJ. Назовем проекцией
бивектора ^i/\&2 на Б,у бивектор
(х\е{ 4- х{е^ Д (х Д Д х Д) = 8‘'е; Д ejt
где 8^ = х\х{— х{х[ есть ориентированная площадь парал-
лелограмма, построенного в ЕД на векторах х^-^-х^е,- и
Рис. 70.
x‘2ei~j-x{ej-, то есть на проекциях векторов Ъ\ и Вместе
с тем по правилам внешнего умножения находим
^ДЕ2=* и^ЧДеу, (8)
где, как и раньше, звездочка означает суммирование при
условии I <^j.
Из (8) заключаем, что в ортонормированном базисе коор-
динатами простого бивектора Ьх /\ Ь.2 являются ориентирован-
ные площади S" его проекций на двумерные координатные
плоскости Eij, l<Zj (см. рис. 70, где n—’i).
404
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
10. В трехмерном случае базис состоит из трех векторов
еъ еъ ез и сумма (8) также имеет три слагаемых:
Ьг /\ b2 = S1* /\ et) Д S13 (е, /\ е3) Д S23 (е2 Д е3).
Поэтому с каждым бивектором Ьг/\Ь% трехмерного евкли-
дова пространства L можно сопоставить вектор с из того же
пространства L, приняв
— ^ДД^Д
Вектор с определен бивектором Ьг/\Ь^ инвариантно
относительно переходов к другим ортонормированным бази-
сам с той же ориентацией, какую имеет базис et, е2, е3.
Легко понять, что вектор с
er~s’3e^ s'ee3 есть векторное произведение Ь{
\ на (рис. 71):
\ С = {Ь"Х h]'
\ п- Обратимся к произволь-
ным бивекторам (необязательно
4 простым) в «-мерном линейном
Рис. 71. пространстве L; наличия евкли-
довой метрики в L мы пока
предполагать не будем. Пусть еь еп — какой-нибудь ба-
зис в L. Тогда ei/\ei, ... , e„j/\en составляют базис в
пространстве бивекторов над L. Для любого бивектора и
имеем разложение
и=*2«"егД«;=
= u^ei Д <?2 Д п13О Д е3 Д... Д utnet Д еп Д
Д н23е2 Д е3 Д... Д н2"е2 Д еп Д...
...Дп-’^А^. (9)
Таким образом, любой бивектор разлагается в сумму
простых бивекторов.
12. Вследствие соотношений е£-Д равен-
ство (9) можно заменить разложением и по базису в Д:
и = £иг'д =
= 0 • Д к*Де8 Д... Д иХпехеп Д
Д u2le2ei Д 0 е2е2 —j-... Д и2пе^еп Д
+............................+
Д Д. • • Д 1 пеплеп Д 0 • епеп. (10)
БИВЕКТОРЫ
405
§ 3]
Здесь при положено и'7 =— tth\ на диагонали рас-
положены нулевые компоненты (с коэффициентами
«“ = 0).
13. Ранг матрицы ||и,/1|, составленной из коэффициентов
разложения (10), т. е. из координат бивектора и по базису
e,ej, называется рангом бивектора и. Мы будем обозначать
ранг через г (г = Rang [| м'71|).
14. Ранг бивектора и является также рангом билинейной
формы п($, щ) — У с ковариантными аргументами
E = Gi, ..., $„), — .... -»]„), $, ц С L*. Эта форма, буду-
чи полной сверткой, есть инвариант и потому ее ранг инва-
риантен. Отсюда следует инвариантность ранга бивек-
тора, т. е. независимость ранга от выбора базиса еь ...
• • • > еп € Ь.
15. Рассмотрим линейный оператор U, который произволь-
ному вектору £ из L* ставит в соответствие его правую
свертку с бивектором и:
х=1Л = (и, $)С L.
Запишем преобразование U в координатах:
= (И)
где х'— координаты вектора х по любому базису ех......еп
пространства L, — координаты $ по взаимному базису е1,... ,еп
пространства L*. Матрица преобразования U совпадает с
матрицей |[ и1’ || бивектора и. Поэтому ранг преобразования U
(определяемый как ранг его матрицы) совпадает с рангом
бивектора и (Rang U = г).
Пусть Lr= U(L*) — образ всего пространства L*. Сог-
ласно § 3 гл. VII Lr является подпространством размерности
г в пространстве L. Подпространство Lr будем называть
ранговым подпространством бивектора-и.
Предположим, что базисные векторы еь..., ег выбраны в
Lr. Тогда они образуют базис в Lr и каждый вектор х=£Д
раскладывается по векторам е1,...,ег. Иначе говоря, в этом
случае имеем
хг+1 = ... = хп = 0. (12)
Равенства (12) соблюдаются при любом ££ L*, поэтому из
(11) и (12) имеем и'' — 0, если 1'^г. Отсюда и1’— Q, если
J г, поскольку и1' = — и'\ Итак, если базис eh ..., еп
406
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
таков, что еь er^_ Lr, то матрица координат бивектора
и по базису £ 1'1 (то есть матрица коэффициентов раз-
ложения (10)) имеет вид
где через Дг обозначена квадратная клетка г X г> остальные
места матрицы (*).заняты нулями.Очевидно, что Dr = Det Дг Ф 0,
иначе ранг бивектора и был бы меньше г.
16. Пусть Z.* —нулевое подпространство билинейной
формы и (с, -ф (размерность L* равна п — г). Из п. 15 сле-
дует, что если х С Lr, $ С то
(х, Е) = 0; (**)
если (**) соблюдается для любого £ £ L%, то х £ Lr; если
(**) соблюдается для любого х £ Lr, то £ £ L%. Таким об-
разом, если свертку рассматривать как аналог скалярного
произведения, то Lr и L* аналогичны подпространству и его
ортогональному дополнению. (Конечно, нужно иметь в виду,
что Lr и Др находятся в разных пространствах.)
Чтобы убедиться в справедливости сказанного, достаточно
заметить, что Lfi есть ядро преобразования U, и что если
векторы еь ...,ег выбраны в Lr, то векторы ег11,..., еп взаим-
ного базиса окажутся в L* (см. (11) с учетом (*)) и составят
в нем базис.
17. Теорема 1. Ранг любого бивектора есть четное
число.
Доказательство. Если бы число г было нечетным,
то мы имели бы Dr=0, так как всякий кососимметричный
определитель нечетного порядка равен нулю. (Чтобы убедиться
в справедливости последнего утверждения, достаточно умно-
жить на (— 1) каждую строку кососимметричного определи-
теля, а затем его транспонировать.)
18. Теорема 2. В трехмерном пространстве всякий
бивектор простой.
Доказательство. Если L трехмерно, то, согласно
предыдущей теореме, для любого бивектора и над L возможны
лишь два случая: г = 0 и г — 2. В первом случае и—нулевой
бивектор, и, следовательно, можно написать и = а/\а, где
а—любой вектор из L. Во втором случае ранговое под-
БИВЕКТОРЫ
407
§ 3]
пространство Lr бивектора и двумерно. Поэтому, если мы
возьмем в L базис еь ег, е3 при условии еь £ Lr, то раз-
ложение (10) примет вид
и = ti^Gf /\ ег.
Теорема доказана.
19. Теорема 3. В пространстве любой размерности
каждый ненулевой бивектор и может быть представлен
в виде суммы простых бивекторов, число которых равно
половине ранга г бивектора и:
«==Р1Д^1 + ---+РлД^, 2k —г, (13)
причем векторы рь qb ..pk, qk линейно независимы.
Доказательство. Прежде всего заметим, что если
разложение вида (13) имеет место, то независимость векторов
Рь Чъ • •, Рю Яь обязательна. В самом деле, допустим, что эти
векторы зависимы. Тогда их линейная оболочка L имеет
размерность s<4 и векторы рь qb ..., pk, qk могут быть
разложены по базису еи ..., es £ L. Подставляя их разложе-
ния в (13), мы получим для и разложение вида (10) по ба-
зису etj в То над L, т. е. при I, j= 1, 2,..., s<^r. Но в
таком случае ранг и окажется меньше г, вопреки условию.
Заметим еще, что в силу аналогичных соображений число
простых бивекторов в сумме вида (13) меньше у г быть не
может.
Возможность разложения (13) докажем по индукции. Ясно,
что для любого бивектора и ранга = 2 разложение вида (13)
существует; именно и=р/\q, где р, q — некоторые незави-
симые векторы, лежащие в двумерном ранговом подпрост-
ранстве. Предположим, что возможность разложения (13)
установлена для всех бивекторов ранга 2, 4. г — 2; тогда
покажем, что такое разложение возможно и для бивектора
ранга г. Тем самым доказательство будет завершено.
Пусть базис еь ..., еп в L выбран при условии еь ...,erQ L„
соответственно имеем
и = икег /\ е2 -j- п13<?1 Д е3 Д-... 4- Д ег -|-
Д е3 -|-... 4- Д ег Д-...
...Д-д^^Де,.
408
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ X
Положим Ci — pi, и13е2 -j- zzla<?:< . -|- ulrer — qx. Отсюда и
из предыдущего разложения находим, что ранг бивектора
и—/’iA'Zi не больше числа векторов в наборе е%, е3,...,еп
т. е. не больше г — 1. Но ранг любого бивектора — четное
число. Следовательно, ранг бивектора «—Pi/\qi не больше
г — 2. Поэтому и по предположению индукции существуют
векторы р2, q% ..., pk, qk, где 2kг (т. е. число пар pt, qi
не больше половины числа г — 2), такие, что и — рх /\qx —
— Рч /\ + • - • + Pk /\ Чъ- Отсюда получаем разложение (13).
При этом 2k — г, так как в действительности 2k г невоз-
можно вследствие замечания, сделанного в начале доказа-
тельства. Теорема доказана.
20. Если в линейном «-мерном пространстве L задана
евклидова метрика, то можно считать, что L* совпадает с L;
при этом под сверткой (х, ?) двух элементов х, £ из L сле-
дует понимать их скалярное произведение. Отсюда и на
основании рассуждений п. 16 заключаем: для бивектора в
евклидовом пространстве L как ранговое подпространство
Lr, так и нулевое подпространство Lo определены в самом L
(по понятным соображениям мы пишем теперь Lo без звездочки).
Подпространства Lo и Lr являются ортогональными дополне-
ниями друг друга.
21. Пусть у —Ах— линейное преобразование, заданное
в евклидовом «-мерном пространстве L. В координатной
записи имеем у{ = У Aisxs, где Xs — контравариантные ко-
ординаты вектора х, у,— ковариантные координаты вектора
у; при этом Ais суть ковариантные координаты тензора данного
линейного преобразования. Этот тензор мы будем обозначать
также через А, а само преобразование напишем в виде у =
=(Д, х). Круглые скобки здесь обозначают правую свертку
тензора А с вектором х. Мы называем линейное преобразо-
вание косым, если Ais = — Asi (см. гл. IX).
Определения и теоремы, изложенные выше для контра-
вариантных бивекторов, непосредственно переносятся на ко-
вариантные бивекторы (косые двухвалентные ковариантные
тензоры). В случае косого преобразования тензор А есть
ковариантный бивектор, ранг которого равен рангу этого
преобразования. Отсюда и согласно п. 19 имеем предло-
жение:
Пусть у— Ах— косое линейное преобразование в евкли-
довом пространстве L; если ранг его равен г, то в прост-
БИВЕКТОРЫ
409
§ 3]
ранстве L найдутся независимые векторы Ръ Цъ > Pk> Qk>
где k — -^-r, такие, что данное преобразование представится
в виде
+ + х).
Здесь (pt/\qi, х)—правая свертка бивектора Pi/\qt с век-
тором х:
(р, л Чь х)=Pi (ffi, х) — qt (Pi, x);
(qh x) и (рг, x) — скалярные произведения.
22. В частности, если L — трехмерное евклидово прост-
ранство, у = Ах — произвольное косое преобразование не-
нулевого ранга, заданное в L, то найдутся независимые век-
торы р, q такие, что у = (р /\ q, х). Полагая а — — [р X q\,
получим у = [а X х]. В- самом деле, [а X •*] — [-^Х[рХ9]1 —
= p(q, х) — q (р, х) = (р /\ q, х). Таким образом, в трехмер-
ном евклидовом пространстве всякое косое преобразование
представляется в виде векторного произведения (в том числе
преобразование нулевого ранга — при а = 0). Этот результат
уже был установлен раньше в гл. IX.
23. В заключение параграфа мы приведем еще одно пред-
ложение, известное под названием леммы Картана:
Пусть в линейном пространстве L даны две системы
векторов: рь . ..,pk и qb ..., qk, причем система pir. ..,Pk
линейно независима. Пусть
Pi Л^1+ • • -APk/\Чь = ®- (14)
Тогда векторы qir ... , qk линейно выражаются через
pt,Pk соотношениями
4i = ^aisPs (15)
с симметричной k\ k-матрицей || ais ||, то есть ais = asi.
Обратно, если имеют место равенства (15) и матрица
|| a;s || симметрична, то имеет место также (14).
Дока за т е л ь с тв о. 1) Сначала докажем второе (обратное)
утверждение. Пусть соотношения (15) даны и aZs = asi. Тогда
k k
^Pi/\4i = У здЛй=*Е(а'’-а"')йЛй=0>
i == 1 i, s —I
то есть (14) соблюдено.
|410 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ. X
2) Пусть теперь дано (14). Дополним систему векторов
Pi, ...,Pk ДО базиса рь ...,рь, Pk+i, •••> Рп в Ь- Тогда можно
.написать разложения
k
4'1— aisPs ai k+lPk+l ~Ь • • Ч~ ainPn- (16)
S = 1
.Отсюда и вследствие (14)
k k
IX Pi Л<11=* У (“is “ “si) Pl A Ps +
1 = 1 i, s==I
k
+ У {°-ik^Pi /\Pk^l-\- ‘'•-\-°-inPi /\Р1^ — ^- (17)
i = l
Но внешние произведения Pi/\ps, l<^s, образуют базис в
подпространстве бивекторов над /..Поэтому и вследствие(17)
\ais = asi, если i, s— 1, 2, кроме того, ais — 0 при
s^>k. Таким образом, соотношения (16) сводятся к соотно-
шениям вида (15) и матрица ais симметрична. Все доказано.
§ 4. Простые поливекторы
1. Простым контравариантным поливектором в простран-
стве L называется внешнее произведение нескольких векторов,
взятых в L:
p — al/\ai/\.../\ak.
Число k называется порядком поливектора р. Говорят
также, что р есть Л-вектор в L.
2. Мы сообщим сейчас ряд предложений о простых поли-
векторах любого порядка, которые естественным образом
обобщают предложения о простых бивекторах, изложенные
в пп. 2—9 § 3. Доказательства этих предложений, подробно
изложенные нами для частного случая Л = 2, тривиально
переносятся на общий случай.
1) /2 = 0 тогда и только тогда, когда векторы аь...,
линейно зависимы.
2) Пусть аь... ,ак независимы; соответственно р ф 0.
Тогда векторы ах, ..., ak определяют Л-мерное линейное под-
пространство L* в L, именно свою линейную оболочку: L* =
— L(ab ..., ак). Говорят, что L* есть линейное подпростраи-
§ 4]
ПРОСТЫЕ ПОЛИВЕКТОРЫ
411
ство поливектора р или что поливектор р лежит в Lk. Говорят
также, что р есть направляющий поливектор подпростран-
ства Lk.
Возьмем в Lk произвольные векторы Ьь...,Ьк. Имеем
а1как,
Ьк----ак1а1 Ч- • • • °-ккак>
(1)
где а,-у — числовые коэффициенты. Пользуясь распределитель-
ным свойством внешнего умножения и его косой симметрией,
легко доказать, что
4 = bi/\bi/\.../\bk = 'C>et\\u.iJ\\(ai/\ai/\.../\ak'). (2)
В самом деле, при почленном перемножении правых частей
(1) нужно учитывать только те слагаемые aIZi... Д ...
.../\alk, где индексы ib...,ik все разные (остальные сла-
гаемые равны нулю). Но для написанного (произвольного)
слагаемого имеем
«If х • akikail /\.../\a!k = . ,/ft aIfi... Д... Д ak.
Поэтому
^Д...Д^=(28ч..Л“ui---a-kik) at/\.../\ak =
= Det || atj || a, Д... Д ak.
В последнем равенстве мы воспользовались формулой (1) из
§ 3 гл. II (строго говоря, упомянутая формула дает опреде-
литель транспонированной, матрицы || а,-у-||, поскольку здесь
ведется суммирование по вторым индексам элементов а,-у, а
не по первым, как в § 3 гл. II).
Подчеркнем еще раз, что множитель Det || агу-1| получается
вследствие линейности произведения по каждому аргументу
и косой симметрии произведения по каждой паре аргументов.
В дальнейшем мы будем неоднократно проводить аналогичные
вычисления, не останавливаясь так подробно на деталях.
Таким образом, q = Dp, т. е. поливектор q пропорциона-
лен поливектору р, и множитель пропорциональности D —
= Det || aiy ||.
Обратно, если q = bx /\Ь<^/\... /\Ьк — \р, где X — неко-
торое число, X О, то Ьъ ... ,Ьк независимы и принадлежат
412
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ: X
\bk, т. е. имеют место равенства (1); при этом Х = О =
Det||a/y||.
3) В частности,
bt/\b2/\.../\bk — ai/\a2/\.../\ak
в том и только в том случае, когда blt..., bk £ L* =
— L (fli,.... и Det || azy || — 1.
3. Предположим, что линейное пространство L снабжено
евклидовой метрикой. Пусть Ьь ... ,Ьк С Lk = L(аь ..., ak).
Будем представлять себе ненулевой поливектор bt /\Ъ^/\...
• в ориентированного Л-мерного параллелепипеда
в Ьк, построенного на упорядоченном наборе векторов bit
ibt,, bk. Объем (Л-мерный) этого параллелепипеда будем
Рис. 72.
называть объемом поливектора bi /\Ьг /\... /\bk. Поливектор,
объем которого равен единице, назовем единичным. Объем
произвольного простого поливектора вычисляется согласно
п. 6 § 13 гл. VIII.
Допустим, что исходный поливектор /\а2 /\... /\ak
единичный и что подпространство Lk = L (аь ..., ak) ориен-
тировано упорядоченным набором векторов at, ...,ак. Тогда
Det || a-ij || = V, где V — ориентированный Л-мерный объем
поливектора by /\Ьа А- •• /\Ьь- Равенство (2) теперь может
быть написано в виде
bt /\bi/\.../\bk = V-al/\at/\.../\ak. (3)
4. Итак, простые поливекторы порядка k, лежащие в Lk,
изображаются в виде ориентированных параллелепипедов под-
пространства Lk. Согласно (3) параллелепипеды равного объема
и одинаково ориентированные в L* изображают один и тот же
поливектор (при Л = 3 см. рис. 72).
5. Возьмем в L ортонормированный базис еь...,еп. Рас-
смотрим набор произвольных векторов Ьь ..., bk С L. Имеем
bi = У, x\ei, .... bk—'Zi x‘^i- (4)
§ 4]
ПРОСТЫЕ ПОЛИВЕКТОРЫ
413
Выберем какие-нибудь базисные векторы tj,eik, считая
z’i Д i3 . Д 1к. Они определяют A-мерную координатную
плоскость; обозначим ее через Et (точнее следует сказать,
что есть линейная оболочка векторов е^,..., eifc).
Будем считать, что плоскость Et... ik ориентирована поли-
вектором Д ei& /\... Д ef. Рассмотрим любой вектор bj
из набора Ьь ...,Ьк; обозначим через bj проекцию вектора
Ь; на плоскость Е;
J Ч lk
bj — x'/eii 4-xlj-eh +... + -Vjkeik.
Назовем проекцией поливектора bi Д b^/\... Д bk на А-мер-
ную плоскость Et поливектор bi Д Ь^ Д... Д Ьк. Со-
гласно (3)
^Д^Д.-.Д fcfc = Vi^-l»eii/\eii/\...eii.
Здесь уйй...«й— ориентированный Л-мерный объем паралле-
лепипеда, построенного в Eiti,,„i на векторах bt, ..., Ьк,
т. е. на проекциях векторов bi,_ ,bк. Вместе с тем для самого
поливектора bt /\Ь$/\ ... /\Ьк по правилам внешнего умно-
жения находим
*1Л^Л ••• = Де4Д ... Д% (5)
где, как обычно, звездочка означает суммирование при усло-
вии z’i <СД <С • • •
Из (5) заключаем, что в ортонормированном базисе коор-
динатами простого поливектора Ъ[ /\Ь9/\ ... Д Ьк являются
ориентированные Л-мерные объемы уйй...«* его проекций
на Л-мерные координатные плоскости ;fc;
х‘‘ л’« ... X‘k
х'« ... Х'к
(6)
хй х^ ... х‘к
6. В предыдущем пункте речь шла о проекциях и
объемах. Однако алгебраические выкладки, приводящие к
414 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ. X
формулам (5) — (6), от метрики не зависят. Поэтому, если
в линейном пространстве L в каком-либо базисе еьеп
заданы векторы (4), то для поливектора bt /\ ... /\bk спра-
ведлива формула (5) с коэффициентами (6).
§ 5. Векторное произведение
1. С помощью простых поливекторов можно естественно
распространить понятие векторного произведения на случай
любого числа k векторных сомножителей в евклидовом про-
странстве Еп любой размерности n{n^>k).
Сначала вспомним, что в Е3 координаты векторного произ-
ведения z = [xXj] в произвольном базисе выражаются так:
х=2 S е;₽'>У-
Здесь g'' — контравариантный метрический тензор, е—кова-
риантный дискриминантный тензор, е"У — смешанные коорди-
наты дискриминантного тензора, получающиеся путем подъема
последнего индекса (см. §§ 9 и 13 гл. VIII).
Пусть теперь хь .xk — какие-нибудь векторы в Еп,
заданные в числе k<^n, {х/}—-координаты вектора х, в про-
извольном базисе е1г ..., еп пространства Еп. Построим тен-
зор z согласно следующей формуле:
* = a.'!'"'«-*Xi‘ ... хк>< =
1 k
••• ... x{k. (1)
Здесь, как обычно, — дискриминантный тензор, g‘7 —
метрический тензор пространства Еп. Дискриминантный тензор
является осевым и обладает косой симметрией по всем индек-
сам. Поэтому z — аксиальный поливектор, то есть осевой
кососимметричный тензор (валентности п — k). Согласно общим
правилам (см. § 9 гл. VIII) мы можем записать его в кова-
риантных координатах. Получим более простую формулу
z‘*--'n_fe==Ses*-"En,'i---/n_feXi‘ xkk-
Поливектор z порядка п — k, определяемый формулой (2),
назовем векторным произведением векторов хь ..., xk,
взятых в данном порядке, и будем обозначать символом
kiX X**]-
§ 5] ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ 415
Иначе говоря,
2’ = [х,Х ... X**] = ... ein k. (3)
Покажем, что по своим свойствам поливектор z предста-
вляет собой многомерный аналог обычного векторного про-
изведения.
2. Свойства векторного произведения (их доказательство
см. ниже, п. 3).
1) Векторное произведение линейно по каждому своему
сомножителю. Например, для первого сомножителя имеем
[(ал-jрх[) X *2 X ••• X-*fe] =
= a[xJX-*2X X + ₽ ki X X ••• X^il
2) Векторное произведение кососимметрично по любой
паре сомножителей. Например, для первой пары сомножите-
лей имеем
X-^2 X • X*d— [-^2 X Xi X • •• Х*4
3) [xj X • • • X = 0 тогда и только тогда, когда
сомножители линейно зависимы.
4) Векторное произведение есть простой, поливектор.
Точнее, существуют векторы yt, ..., yn_k С Еп такие, что
[xiX^X ... X^1=J'iAT2A ••• /\Уп-ь-
5) Если векторы хь ..., хк линейно независимы, то век-
торы yIfуп ь тоже линейно независимы; тем самым вполне
определены подпространства Lk=L(xt, ..., xk) и Ln~k =
= L(уь уп_ь). Эти подпространства Lk и Ln_k являются
ортогональными дополнениями друг друга.
6) Если векторы хь ....х* линейно независимы, то ориен-
тации X],..., xk в Lk и yi, ...,yn^k в Ln_k таковы, что объеди-
ненная система векторов Xj, ..., хк, У\, .уп_к одинаково
ориентирована с базисом et, ..., е„ (т. е. с тем базисом в Еп,
по которому даны координаты в исходных равенствах (1)).
7)(п—Л)-мерный объем поливектора z = yt/\Уа/\... /\уП-ь
численно равен A-мерному объему параллелепипеда, построен-
ного на векторах х,, ..., хЛ.
3. Доказательство. Свойства 1) и 2) непосредст-
венно вытекают из равенства (2). Докажем теперь свойство 3).
Из свойств 1) и 2) следует, что z = 0, если X), ..., xtl
линейно зависимы.
416 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ. X
Пусть теперь хь ..., xk линейно независимы. В линей-
ной оболочке Lk — L(xb .... xk) выберем какой-нибудь ортс-
нормированный базис ait ..., ak, одинаково ориентирован-
ный с системой векторов xlt хк, и дополним его до
ортонормированного базиса at, ..., аь, ..., ап во всем про-
странстве Еп, ориентированного так же, как исходный базис
еь ..., еп. Имеем разложения вида
х, — ••• -\-a-ikak>
причем Det ||afy[|= V, где И>0 есть A-мерный объем парал-
лелепипеда, построенного в Lk на векторах х1г ..., хк. Вслед-
ствие линейности и косой симметрии векторного произведе-
ния получаем
[xiX-^X ••• X*k] — Det |] aiy Ц [a, X «а X ••• Хй*1 =
= V[atX^X •- X^L
Отсюда и из (1)
—= V^^... g‘n->?n-k ..?nka^ ... aakk, (4)
Тензорное равенство (4) справедливо в любом базисе,
ориентированном так же, как et, ..., еп. В частности, в орто-
нормированном базисе at, .... ап имеем g’-3 = 8‘p, а* — ^
так что в этом базисе
г‘‘ Vej ki .
* ... ... *n-k
Отсюда следует, что поливектор z имеет при it <\.. in_k
единственную ненулевую координату, именно
(5)
Из (5) видно, что в случае линейно независимых сомножи-
телей [Xf X • • • X xk] #= 0. Тем самым свойство 3) доказано.
Докажем теперь свойства 4)—7). Заметим, что может
существовать не более одного простого поливектора, обла-
дающего свойствами 5)—7) из п. 2 (так как эти свойства
задают подпространство, объем и ориентацию поливектора).
Построим простой поливектор и, равный векторному произ-
ведению z и обладающий свойствами 5) — 7). Положим
й = (ИаА,+1)Д a*+sA ••• Аа«-
По формуле (5) § 4 находим, что
и^...п= v (6)
§ 5]
ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
417
и что остальные координаты
G<C7a<C ••• равны нулю,
лучаем
ti—z.
и'1 • • 'я-ь при услови и
Сравнивая (5) и (6), по-
Поэтому, полагая
У1 —У$ — ak+& • • • > Уп-k —•
мы увидим, что все свойства 4)—7) п. 2 соблюдаются.
4. Понятие векторного произведения помогает в произ-
вольном (в частности, косоугольном) базисе решать следую-
щие геометрические задачи:
а) В евклидовом (векторном) пространстве Еп дано под-
пространство Lk. Найти его ортогональное дополнение Ln k.
б) В евклидовом (точечном) пространстве Еп дана точка А
и Л-мерная. плоскость Щ, не проходящая через А. Провести
через точку А плоскость Пи k размерности п — k, ортого-
нальную nfc.
в) В условиях задачи б) опустить из точки А перпен-
дикуляр на Щ (то есть найти прямую, ортогональную Щ,
проходящую через точку А и пересекающую Щ).
г) В условиях задачи' б) найти кратчайшее расстояние
от точки А до плоскости Щ.
д) В пространстве Еп даны скрещивающиеся плоскости
П* и Hz. Построить их общий перпендикуляр.
е) В условиях задачи д) найти кратчайшее расстояние
между Щ и П;.
Не останавливаясь на деталях, рассмотрим схемы решения
перечисленных задач.
Для решения задачи а) достаточно взять какой-нибудь
базис Xj, ..., хь в Lk и построить подпространство Ln_k
поливектора [xt X ••• XО вычислениях, которые для
этого нужно проделать, см. ниже, пп. 5—Д
Задача б), очевидно, сводится к задаче а).
Пусть П„_й — плоскость, полученная в результате реше-
ния задачи б). Нетрудно установить (например, с помощью
теоремы 5 § 7 гл. III), что П„_л пересекается с Щ, и доказать,
что точка их пересечения единственна. Обозначим эту точку
через В. Тогда прямая АВ будет искомым перпендикуляром
в задаче в); а длина отрезка АВ — искомым расстоянием
в задаче г).
418
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
Решение задачи д) представляет собой многомерное обоб-
щение построения общего перпендикуляра к двум скрещи-
вающимся прямым в Еъ.
Именно, рассмотрим направляющие подпространства Lk
и Li плоскостей Щ и П/ соответственно. Построим их сум-
му L' = Lk-\- Li и ее ортогональное дополнение L. Нахож-
дение последнего сводится к решению задачи а). Пусть пе-
ресечение Lk Lt имеет размерность т. Тогда размерность
L равна р=п — — tn).
Через произвольную точку Л-1 плоскости Щ проведем
плоскость П в направлении подпространства L = Lk © L
(рис. 73). Размерность П равна — I. В силу
построения L пересечение L [) Lz совпадает с пересечением
Lk f] Li и потому имеет размерность tn. Применяя теорему 5
§ 7 гл. III, находим, что плоскость П пересекается с пло-
скостью Пл Пусть С — какая-нибудь точка их пересечения.
Можно показать, что при tn 1 точка С не единственна
в отличие от хорошо известного трехмерного случая.
Проведем через точку С плоскость П в направлении под-
пространства L. Отметим, что П зависит от выбора точки
С в плоскости ЩрЙ (см. рис. 74, где л = 4, ~Rk — Lk~
— L (ер е2), IIZ проходит в направлении L (е2, е3), П одномер-
на). Рассматривая Щ и П как плоскости в (А -}-^)-мерном аф-
ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
419
§ 5]
финном пространстве П и еще раз применяя теорему 5 из
§ 7 гл. Ш, установим, что Ufe и П пересекаются в некото-
рой точке D (рис. 73 — 74). Прямая CD пересекает Щ и
Hz. Она содержится в П, так что ее направляющий век-
тор принадлежит L и потому ортогонален всем векторам
из Lk и L/. Таким образом, прямая CD является искомым об-
щим перпендикуляром к Щ и П; (вообще говоря, не един-
ственным). Предоставляем читателю доказать, что длина от-
резка CD является кратчайшим расстоянием между Пй и
Hz, так что попутно получается решение задачи е).
Обратим внимание на то, что отыскание подпространств,
плоскостей и точек, о которых выше шла речь, сводится
к решению некоторых систем линейных уравнений.
5. Вернемся к задаче а). Предположим, что L* задано
как линейная оболочка независимых векторов хь ..., xk, раз-
ложенных-по некоторому базису et, ..., е,г:
Х1 = ^х{е].
Согласно пп. 1—2 имеем
= ... X -Хд] = _У1/\ •‘•/\Уп-Ь==:
= ^-*n-keit ... %
где zilопределяются формулой (1), векторы уь ...,yn-k
образуют базис в искомом подпространстве Ln_k. Запишем
разложения векторов уь ..., уп_ь по базису elt ..., <?„:
У 1 = ^1
с неизвестными нам коэффициентами {_у/}, и составим матрицу
••• У"
у= (7)
; у1 , ... У"-J : J П—k fl—k -Уп-k
Аналогично п. 5 § 4 можно доказать, что каждая из коор-
динат zli'"ln~k поливектора z равна определителю порядка
п — k, образованному столбцами матрицы У с номерами
Л. ••• in-k- Поэтому, хотя мы и не знаем числовых значений
элементов матрицы У, но нам известны числовые значения
всех ее миноров порядка (п — k). Для простоты дальнейших
420 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ (ГЛ X
обозначений предположим, что левый (отмеченный) минор
матрицы (7) является базисным, то есть, что
A==zi...«-ft_40
Вектор и — У, п'е(- принадлежит Ln_h тогда и только тогда,
когда
Rang
и1 ... ип k ... ип
Я ... у»
V1 ... Vя-?; ... Vя
J n-k 'n-k. 'n-k
(8)
Составим минор порядка (п— А-]- 1) матрицы (8), образован-
ный столбцами с номерами 1,..., п — k, I, где п — k<^l^n.
Такой минор заведомо равен нулю. Разложив его по первой
строке, мы получим для координат вектора и линейное урав-
нение; полагая 1=п — k-\-1, ..., л, получим однородную
систему уравнений
Ли = 0, (9)
имеющую k X я-матрицу вида
Важно, что все ненулевые элементы матрицы А суть некото-
рые из координат поливектора z. Любой вектор
и С bn-fe удовлетворяет системе (9). Но Rang А = k, поэтому
векторы из L„_fc образуют всю совокупность решений систе-
мы (9). Итак, система (9) определяет искомое подпростран-
ство и дает тем самым решение задачи а).
Разумеется, задачи а) — е) можно решать по-другому,
например, используя § 4 гл. VIII.
6. Пусть теперь et, ..., еп — ортонормированный базис
в Еп. Тогда имеют место следующие равенства:
кХ«,Х... Х%1=«лЛелА-А^ (10)
§ 6] ВНЕШНИЕ ФОРМЫ И ДЕЙСТВИЯ НАД НИМИ 421
где объединенный набор индексов (1ь 1Ь, /ь ...,
является четной перестановкой натурального набора (1, 2,..п).
Чтобы убедиться в справедливости равенств (10), достаточно
заметить, что простой поливектор ejt/\ejt/\ • •• /\ejn_kno
отношению к векторному произведению [etl X • •• X %]
обладает свойствами 4)—7) п. 2. Но такими свойствами
может обладать только один поливектор.
Формулы (10) дают таблицу умножения базисных векто-
ров е1г .еп и позволяют вычислить векторное произведение
любых векторов путем почленного перемножения их разло-
жений по базису elt ..., еп. С их помощью можно в неко-
торых случаях находить сомножители yt......yn-k> входящие
в выражение z =J'iД ... /\уП-Ь непосредственно, минуя
решение системы (9). Вместе с тем получается другой путь
решения задачи а).
Пример. В четырехмерном евклидовом пространстве
в ортонормированном базисе elt е2, е3, даны векторы
xt — 2et -]- е3, Хч = ех-\- ец. Найти направляющий бивек-
тор ортогонального дополнения линейной оболочки L(xi, х2).
Решение. В качестве искомого бивектора можно взять
векторное произведение [х4 X х«]- Перемножая векторы х4, х%
почленно и пользуясь формулами (10), найдем
[xj X -*4 — [(2^1 4“ + ез) X (ei + =
— [es X 4~ [ез X 4“ 2 [tfj X е4 -f- [^2 X ег] “Ь 1ез X ei] —
= e4 Д e3 4-Д e4 4-2ea Д e3e3 Д + ei Д =
= Д e2 —2е3Д —e4 Д e2 —
— ei Д e3 4- 2e3 Д e3 4~ e4 Д e3 = (et — 2e3 — e4) Д (et — e3).
Таким образом, ортогональным дополнением для L(xi, х2)
является L (_уь _у2)> где _yi = <?i — 2<?3 — <?4, у3 = <?2 — е3.
§ 6. Внешние формы и действия над ними
1. Пусть L — линейное /г-мерное пространство, хь ..., хк—
набор произвольных векторов из L, w(xj, ..., х^)— поли-
линейная форма с векторными аргументами х4, ..., х*.
Назовем альтернацией формы w(xi......Х/г) полилинейную
форму, которую будем обозначать через (а)(х4, ...» хА)) и
422
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
определять равенством
<«> (х1;..., xfc)>=12 V1/2:: Lk ш (хл> -ч> • • • > xJk) , О)
где суммирование по каждому из индексов j\, .jk идет
от 1 до k. В частности, для линейной формы ы(х) имеем
<<о(х)> = ю(х); (2)
для билинейной формы ю(х, у)
<«) (х, j)> = ~ (и> (х, у) — о) (у, х));
для формы трех аргументов
<ю(х, у, г)> = зу((о(х, у, z)4-w(js z, х)-|-
4~ w (г, х, _у) — w (у, х, z) — w (х, z, у) — w (z, у, х)).
Из формулы (1) ясно, что
1) <«)> действительно является полилинейной формой, то
есть обладает свойством линейности по каждому аргументу;
например, по первому аргументу
(ю (a.xj х2, .... xft)) =
= a (to (xj, х2, ..., xfc)) 4- р (u> (xi, х2, ..., х*)).
2) (w (хь ..., xfc)) обладает косой симметрией по любой
паре своих аргументов; например, по первой паре
<(0(Xi, хй х3, ..., х*)> — — <ю(х2, хь х3, ..., xfc)>.
2. Форму <о будем называть косой, если (o)) = w.
Согласно равенству (2) каждая линейная форма, то есть
форма одного аргумента, должна быть отнесена к числу
косых.
Из определения альтернации следует, что косая форма
обладает косой симметрией по любой паре своих аргументов.
Обратно, если полилинейная форма <о обладает косой
симметрией по любой паре своих аргументов, то она является
косой в смысле данного выше определения, то есть =
Доказательство предоставляем читателю.
3. Пусть <o(xi, .... X*) — косая форма. Если векторы
Хь ..., х* линейно зависимы, то соответствующее им значе-
ние формы w равно нулю.
§ 6]
ВНЕШНИЕ ФОРМЫ И ДЕЙСТВИЯ НАД НИМИ
423
Утверждение следует из свойств линейности по каждому
аргументу и косой симметрии по каждой паре аргументов.
4. Если число аргументов косой формы w превышает
размерность пространства (/г^>д), то w тождественно равна
нулю.
Утверждение является следствием п. 3.
5. Важно понять, что косая форма w(xit хк) является
функцией простого поливектора р = хг /\... /\ хк. Иначе
говоря, значение w не изменится, если векторы х1у ..., хк
мы заменим другими векторами ..., ук при условии
У1/\---/\Ук = Х1/\.../\хк.
Докажем это утверждение. Вследствие пп. 3, 4 достаточно
рассмотреть случай, когда Х\, ..., хк независимы. Тогда
равенство J’i /\... /\ук = хк /\... /\ хк равносильно тому,
что имеют место разложения
J’i — aItX! а1кхк,
(3)
У к aklxi + • • • + a-kkxk<
где Det || а<71| = 1 (см. п. 2 § 4). Из равенств (3), а также
из свойств линейности и косой симметрии формы w имеем
w(ji> Jft) = Det||a,7||a>(Xi......хк) = ч>{хъ ..., xft).
Этим наше утверждение доказано.
6. Согласно п. 5 областью определения косой формы
w(xi, ..., xft)=w(p) является множество всех простых
поливекторов порядка k.
Определение. Косая форма как функция поливектора
называется внешней формой. Порядок k аргумента р условно
называется степенью внешней формы w(^).
Говорят также, что w(p) есть A-форма. Для обозначения
/г-формы часто употребляется символ <»*(/?).
7. Внешние формы данной степени k образуют линейное
подпространство в пространстве всех полилинейных форм
с аргументами xlt ..., хк.
В самом деле, внешние формы одной и той же степени
можно складывать и умножать на числа, и в результате
будут получаться внешние формы той же степени (поскольку
линейная комбинация косых форм от хь ..., хк есть косая
форма от этих же аргументов, что очевидно).
424
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
8. Определим внешнее произведение двух внешних форм
любых степеней.
Внешним произведением формы со*(р), р — хх/\.../\ xk,
на форму и>1 (q), q = (x/(j /\... /\ xllJrl) называется внешняя
форма степени которая обозначается w* (?) Д coz (?) и
определяется следующим равенством:
(Р) А (?)=(*м7Г ‘(х*+ъ • • • ’ х*+/^’
где (w*(Xi, xk)со'(x*+i, xfc+z)) есть альтернация
полилинейной формы степени k1, получаемой обычным
умножением на «А
Докажем, что со* (?) Д со'(?) есть внешняя форма сте-
пени А 1 от поливектора р Д ?:
W* (р) Д со' (9) = со* J (р /\ q).
Доказательство. То, что со*(р)Дсо'(?) есть косая
форма степени непосредственно следует из определения
альтернации. Далее имеем
<о* (?) А(?) = U)fe+I (*i> • •. xk+i) = (Xi Д... Д xk+l).
Но согласно пп. 10, 11 § 2
х, Д... Д xk /\ xk+i Д... Д xkJil =
=(х, Д... Д х*) Д (х*+1 А... A xft+z)=p/\q,
что и требуется.
9. Ниже мы докажем, что внешнее произведение внешних
форм обладает следующими свойствами:
1) (аш*) Д со' — со* /\ (ам1) = а (ш* Д со') для любого числа а
и любых внешних форм wh и wl.
2) (*°? + ш*) А «/ = 4 Д чД со* Д со' для любых внешних
форм со*, и>%, и>.
3) Внешнее умножение внешних форм косокоммутативно,
именно
w* Д wz = (— l)fcZ wz Д 40*
для любых w*, <oz. Отсюда следует, в частности, что
при <oz = io* будет (о*Д(о* = 0 при любом нечетном k.
4) Внешнее умножение внешних форм ассоциативно;
(40* Д 40Z) А 40т = 40* Д (со' Д 40я1)
для любых со*, со', со"'.
§ 7] ВНЕШНИЕ ФОРМЫ И КОВАРИАНТНЫЕ ПОЛИВЕКТОРЫ 425
10. Таким образом, для внешних форм получается полный
аналог с алгеброй Грассмана ’), которая была определена
нами по отношению к контравариантным поливекторам, то
есть поливекторам в L.
Однако мы покажем в следующем параграфе, что здесь
имеется не только аналогия, а в точности алгебра Грассмана,
но только ковариантных поливекторов, то есть поливекторов
в пространстве L*, сопряженном данному пространству L.
Тем самым будут доказаны свойства, перечисленные в п. 9.
§ 7. Внешние формы и ковариантные поливекторы
1. Пусть дана полилинейная форма
“С*!.....= ••• х'ь> (9
где х^ — координаты вектора х^ по какому-нибудь базису
£ь • • • > еп в L. Мы знаем, что с каждой такой формой
инвариантно и взаимно однозначно сопоставляется ее тензор:
«>= У г/’1 ••• А (2)
где е\ ..., еп — базис в L*, взаимный с базисом ..., еп
в L (см. § 7 гл. V).
Численное значение полилинейной формы (1) на конкретно
взятых векторах ..., xk есть полная свертка тензора (2)
с этими векторами, причем вектор Xi свертывается с
вектор свертывается с elt и т. д.
Вспомним теперь, что каждый вектор сопряженного про-
странства L* является линейной формой от векторного
аргумента из L. Кроме того, значение этой линейной формы
па данном векторе х из L и есть как раз свертка вектора х
с тем вектором из L*, который изображает эту форму.
В данном случае для вектора = -ф-.. .-\-х"еп
вследствие взаимности базисов е1} еп и е\ ..., е" имеем
el (*•) = x}ei (ei) + • • • + х1/ (<?,) + • • • + х"^ (<?„) = xir (3)
Теперь вместо (1) мы можем написать
w (хъ ..., хк) = >7 ... »/’* (Xi) ... е\ xk). (4)
*) См. подстрочное примечание на стр. 394.
426
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ X
Формула (4) показывает, что произвольная полилинейная
форма ш{х1, хк) разлагается в сумму произведений
независимых форм е1(х), ..., еп{х) совершенно так же, как
тензор w этой формы разлагается в сумму произведений
одновалентных тензоров е\ ..., еп. Этим выражается уже
давно известный нам изоморфизм между полилинейными
формами и их тензорами, благодаря которому все, что
говорилось о поливекторах, можно непосредственно перенести
на внешние формы.
При этом, однако, нужно иметь в виду два обстоятельства:
1) В §§ 1—4 мы имели дело с контравариаитными поли-
векторами. Сейчас мы имеем дело с полилинейными формами,
которым отвечают ковариантные тензоры. Таким образом,
мы прежде всего должны определить ковариантные поливек-
торы. Это определение следует сделать по абсолютной ана-
логии с определением контравариантных поливекторов, то есть
ковариантным поливектором называть косой ковариантный
тензор, а косой тензор определить как совпадающий со своей
альтернацией.
2) Альтернация форм определена нами без непосредствен-
ной аналогии с альтернацией тензоров, почему в § 5 и был
введен символ ( ) вместо [ ]. Поэтому нам нужно доказать
следующее утверждение.
Если ш(л'1, ..., х/;) — произвольная полилинейная форма
(1), <и — ее тензор (2), то тензор альтернации этой
формы равен альтернации ее тензора {то есть форма
(<о (хь ..., x^j) имеет тензор [ю]).
Докажем это. Альтернация формы определена в § 5
с помощью перестановок аргументов х^......... xk, именно
<“ (Xi, ..., xft)> = 2 (А'Л’ • • • ’
Отсюда и из (4) имеем
<w(xb .... = •” <5>
В равенстве (5) индексы it, ..., 1к принимают всевозможные
значения от 1 до п, индексы j\, ..., jtl образуют всевозмож-
ные перестановки чисел 1, ..., k.
С другой стороны, по определению альтернации тензора
и вследствие формул (8) и (9) § 1 имеем
м=2<%.-л^* ••• •••
§ 7] ВНЕШНИЕ ФОРМЫ И КОВАРИАНТНЫЕ ПОЛИВЕКТОРЫ 427
В последней сумме все индексы i\, lk, а.х, ak неза-
висимо друг от друга пробегают значения 1, ..., п.
Нужно доказать, что формула (6) дает тензор полилиней-
ной формы (5). Мы знаем, что (6) является тензором поли-
линейной формы
F 2 Wii - г?“1 V"*(Х1) • (7)
Поэтому нужно установить совпадение полилинейных форм
(5) и (7). Очевидно, для этого достаточно проверить равенство
•••
при любых фиксированных значениях индексов /ъ ..., ik,
считая, что они все различны (иначе (8) дает 0 — 0).
В правой части (8) отличны от нуля лишь те слагаемые,
для которых индексы а1( ..., a.k образуют какую-нибудь
перестановку номеров 1Ь ..., 1к. Поэтому в правой и левой
частях (8) одинаковое количество k\ ненулевых слагаемых.
Между ними имеется естественное взаимно однозначное соот-
ветствие.
Именно, пусть j\ ... — какая-нибудь произвольно вы-
бранная перестановка номеров 1, ..., k. Тогда, переставляя
в соответствующем слагаемом левой части (8) формы е*1(х}1),...
..., е'* (Xj^, получим новый порядок их расположения:
«W ... etk(xjk)=eai(x1) ... A(xft). (9)
Ему соответствует вполне определенное слагаемое правой
части (8). Это соответствие взаимно однозначно, поскольку
разные перестановки (j\ ... jk) дадут в (9) разные переста-
новки (a-i ... ак).
Остается только заметить, что коэффициенты при соот-
ветствующих слагаемых слева и справа в (8) равны между
собой. Но действительно, переходя от левой части тожде-
ства (9) к его правой части, мы переставляем сомножители
е'1 (хУ1), ..., elk (XjJ так, чтобы они расположились в порядке
возрастания номеров их аргументов; эта же перестановка
сомножителей переводит индексы (iIt ..., ib) в индексы
(аь ..., а*). Значит,
со)
428 ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ [ГЛ. X
так как, согласно сказанному, подстановки, которые стоят
в (10) слева и справа, имеют одну и ту же четность. Таким
образом, установлена справедливость равенства (8), откуда
следует, что [ш] является тензором формы (u>(xi, ..., х*)).
2. Теперь больше нет смысла сохранять символ ( ),
и в дальнейшем альтернацию полилинейной формы мы будем
обозначать квадратными скобками, так же как и альтерна-
цию тензора, то есть считать, что
[co(xb..., xft)] = < w(xb..., xft)>. (11)
3. После изложенного мы можем непосредственно пере-
нести на формы основные результаты и соотношения, уста-
новленные в §§ 1 — 4 для поливекторов.
1) Пусть имеются линейные формы (каждая от одного
аргумента) щ (хД и2 (х2),..., ик (xk). Альтернацию их произ-
ведения можно записать в виде
[и, (xj ih (-v2) • • • uk (**)] = - ** ‘ Uik <12)
Обратим внимание читателя на то, что в формуле (12)
аргументы хь..., х* во всех слагаемых расположены в на-
туральном порядке.
В частности, для базисных форм е1.....еп, взятых в лю-
бом числе k и при любом их расположении, имеем
[е'* (х,)... е'* (х*)] = ~(**) U 3)
2) Если w(Xi,..., хк) — любая форма, записанная в ви-
де (4), то
[w(хь .... xft)] = 2*% ... Ui) • • • е‘к=
В связи с этим см. п. 15 § 1.
3) Косые формы могут быть охарактеризованы условием
то есть условием косой симметрии их коэффициентов по
любой паре индексов (см. § 1, н. 18).
4) Внешнее произведение нескольких базисных форм
е*(х),..., е"(х), взятых в любом числе и в любом порядке,
§ 7]
ВНЕШНИЕ ФОРМЫ И КОВАРИАНТНЫЕ ПОЛИВЕКТОРЫ
429
может быть выражено формулой
e'*(Xi) Д е** (х2) Д ... Д е» (хк) =
= k\ [A (Xi) А (х2) ...ek (xft)]. (14)
Формула (14) доказывается аналогично формуле (7) § 2,
поскольку мы можем понимать альтернацию в смысле фор-
мулы (13) (которая имеет такое же строение, как и (9) из § 1).
4. Из формул (14), (13) и (3) получаем
е 1 (Xi) /\ е(х8) А • • • A е'к (•**)=
=28л •” ilkkx['---xk= <15)
Здесь
x\l xkk
— минор порядка k матрицы
составленной из координат векторов хь ..., х^. Индексы
z1(..., указывают номера столбцов матрицы X, участвую-
щих в миноре V‘i 'k. Следует оговориться, что слово
«минор» мы здесь употребляем в условном смысле, посколь-
ку не предполагается, что индексы z\ идут в порядке
возрастания.
Формула (15) дает численные значения одночленных
внешних форм, представляющих собой внешние произведе-
ния базисных форм е1 (х),..., еп (х). Эти одночленные фор-
мы, как всякие внешние формы, являются функциями просто-
го поливектора, в данном случае поливектора р = Х\/\
/\х^/\... /\xk. Числа VS ••• *k совпадают с координатами
простого поливектора р (см. § 4, пп. 5, 6). Если в простран-
стве L введена евклидова метрика и базис еь..., еп орто-
нормированный, то V‘i •••'* при zi<zs<...<zft суть ори-
ентированные объемы проекций поливектора р на координат-
ные плоскости (см. § 4, п. 5).
430
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ X
5. Произвольная внешняя форма юк(р), p — Xi/\х<>/\...
... /\хк, может быть выражена следующим образом через
базисные формы (аналогично п. 7 § 2):
^(р)=*2л - (*0 Л ••• А ***(**)• <16>
Напомним, что звездочка означает суммирование при условии
h
Из (15) и (16) имеем
(р)= *^Dti ... lk v‘‘ ” (16а)
6. Поскольку значение линейной формы е1 на произволь-
ном векторе x=xlei~\-х"еп равно координате x“, то
символом х1 обозначают линейную форму е‘(х) = х‘ и вмес-
то (16) пишут
“fc(P)=*2‘»i1... tkxl /\хг‘ /\.../\xtk. (17)
7. Для внешней формы второй степени (или, как иногда
говорят, внешней квадратичной формы) разложение (16) в
трехмерном пространстве имеет вид
Ю = OJ) Д (Xj) Д е9- (х2) 4- <о3^ (Л'1) Д еч (хД -f-
+ w13e,(-vI)A^(x2). (18)
Наряду с этим, учитывая п. 6, можно писать также
о> = w^x1 А х2 WjbX2 А х3 -j- ы13х’ А х3. (19)
Записи (18) и (19) выражают одно и то же в разных
способах обозначения. Запись вида (17) или (19) условная
и может вызвать недоразумения. Поэтому, употребляя ее,
нужно помнить, что х1, х2,... не являются координатами
векторов, а обозначают линейные формы; например:
х1 Д х2 = е1 (xi) А (*s) =
e’(xi) fs(x,)
<?’(х2) е2(ха)
xj
х|
Для исчерпывающего разъяснения возьмем числовые дан-
ные. Пусть
Xi =х}₽а 4~ xfeg-j- х|сз = 2^14~ 4~
Хц— x^i 4- х%е$ 4- х&— — 1^14* 4~-’ь*Хь
S 7]
ВНЕШНИЕ ФОРМЫ И КОВАРИАНТНЫЕ ПОЛИВЕКТОРЫ
431
Тогда
2 3
— 1 5
х* Дх’ =
= 13.
Здесь найдено числовое значение формы х1Дх® =
= е1 /\ е* на конкретной паре векторов. Но нужно, конечно,
помнить, что сама форма е1 /\ е* как элемент алгебры Грас-
смана не есть число.
8. В интегральном исчислении и в теории дифференци-
альных уравнений используются внешние формы, аргумента-
ми которых являются дифференциалы переменных. Тогда в
выражениях вида (17), (19) вместо х1,..., х" пишут соот-
ветственно dx\..., dxn. Так, например, часто встречается
внешняя форм_а вида (19) в записи
w = Р dx1 Д dx® 4- Q dx® Д dx3 -|- R dx? Д dx\
где коэффициенты P = wI2, Q = u>23, ——w13 сами явля-
ются функциями аргументов х1, х®, х3.
9. Запись внешней формы в виде (17) удобна в тех
случаях, когда приходится переходить к новому базису
и даны выражения старых координат через новые:
xJ = Д-х1’Д... +Д^хД
хп=Р" х1' -4-... -4- Р" хп'.
(20)
Тогда имеет место следующее равенство:
х‘\ Дх<. Д... Д х'л = *241 xh А Л • • • А (2О
г ... к
где D., —минор
7| 7ь
Д-... Д-
• • • • •
рп рп
1' ••• л'
матрицы
стоящий на пе-
ресечении строк с номерами .... ik и столбцов с номерами
Л. • • > 7* (71 <С7а • • • <С7*).
Доказательство формулы (21) проводится путем почлен-
, ih
ного перемножения линейных форм х ,..., х, которые
432
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
(ГЛ X
следует рассматривать как линейные комбинации форм
х7*,..., х,п согласно равенствам (20). При этом получаем
*' А *'' Л • Л >=(24 ? Л • • • Л (24 **)=
=♦2.(2.. 4
Л • • • Zfe ч • • •
= «24:4ИА-ЛА
Замечание. Формула (21) может быть написана сразу
же на основании пп. 5, 6 § 4. Достаточно в формуле (5)
указанного параграфа в качестве векторов Ьь..., bk взять
формы х\... ,х'*> а в качестве векторов еь..., еп взять
формы х1, хп.
10. В заключение параграфа сформулируем три важные
теоремы о внешних формах, которые получаются из определе-
ний и результатов § 3 заменой L на L*.
Теорема 1. Ранг г всякой внешней формы второй
степени есть четное число, не превышающее размерно-
сти пространства (г = 2т^п).
Теорема 2. Если о2(х/\у) — внешняя форма второй
степени ранга г=2т, то найдется система независимых
линейных форм рь..., рт, qi,-.., Чт такая, что
ws (х Л.у)=aW Л ч 1 Су)4-• • •4-Рт (х) /\ qm о).
Теорема 3 (Лемма Картана для внешних форм). Пусть
pi (х),..., ps (х), 4i (х),qs (х) — линейные формы, причем
Pi (s),.... ps (х) независимы. Для того чтобы
Pi (х) /\ qi (у) 4-...+ps(x) Л qs О)=о.
необходимо и достаточно, чтобы существовали разложе-
ния вида
4i (X) — altpi(x) +... 4- aisps (х),
где a.ij = a.ji (atj — числовые коэффициенты).
§ 81 СЛУЧАИ ТРЕХМЕРНОГО ПРОСТРАНСТВА 433
§ 8. Внешние формы в трехмерном евклидовом
пространстве
1. В качестве геометрической иллюстрации материала
двух предыдущих параграфов рассмотрим внешние формы
в трехмерном евклидовом пространстве Е3 и покажем, что
они тесно связаны с известными операциями элементарной
векторной алгебры. Будем считать, что е3, е3 — ортонорми-
рованный базис, a, b, р, q — зафиксированные векторы,
х, у, z — переменные векторы, пробегающие все Е3. Коор-
динаты векторов будем обозначать нижними индексами, так
как расположение индексов не имеет значения в силу орто-
нормированности базиса (в таком базисе контравариантные
координаты векторов равны ковариантным, см. гл. VIII).
Согласно п. 4 § 6 нам нужно рассмотреть Л-формы
лишь при А=1, 2, 3.
2. Напомним (см. гл. VIII), что всякая линейная форма
в евклидовом пространстве может быть представлена в виде
скалярного произведения постоянного вектора а на перемен-
ный вектор х, и каждый вектор а £ Е3 определяет линей-
ную форму (а, х), которую мы сейчас обозначим <оЦх):
<Оа(х) = (а, х) = а.\Х\ а^х^-j- а3х3. (1)
Формула (1) устанавливает линейный изоморфизм между про-
странством £3, рассматриваемым как множество векторов а,
и пространством линейных форм.
Полагая а = еь мы получим базисные линейные формы
<Д, которые будем сокращенно обозначать
ы) (х) =(еь х) = хь /=1,2,3. (2)
Формулу (1) можно рассматривать как разложение формы
(Од по базису (2) и переписать в виде
= fll40} "I- a2w2 “4“ а3°/3- (3)
3. Рассмотрим смешанное произведение (а, х, у), в котором
первый сомножитель зафиксирован, а два других меняются.
Оно линейно по каждому из аргументов и кососимметрично
по х и у ((а, у, х) = — (а, х, yj), так что представляет собой
2-форму, которую мы обозначим <и„(х/\_у). Из элемен-
тарного курса аналитической геометрии известно, что числовое
значение Ид(х Ду/) равно произведению площади 5 бивектора
434
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
[ГЛ. X
х /\у на длину | а | вектора а и на косинус угла а между за-
данным вектором а и стандартно ориентированной нор-
малью бивектора х /\у (рис. 75). Таким образом,
Рис. 75.
(х /\у) = (а, х, у) =
— S | а | cos а. (4)
Обозначим через X мат-
рицу, составленную из коор-
динат векторов х, у.
и положим
X; X:
Vij= J,
У. У]
I, j=l, 2, 3, (5)
Тогда по известной формуле для смешанного произведе-
ния имеем
ио(ХЛУ) = ^23 Ч- Ч- «3^12. (6)
Мы знаем (см. § 7, формулы (16) — (19)), что произволь-
ная 2-форма и2 (хДу/) в Е3 имеет вид
(х /\у)= Via ~Ь “1зП13Д “23V23. (7)
Возьмем вектор а с координатами
= <«аз, ач == — ш1з, Оз= ш12- (8)
Тогда правые части формул (7) и (6) совпадут.
Вывод. Любая внешняя форма второй степени в трех-
мерном евклидовом пространстве может быть представлена
в виде смешанного произведения (а, х, у) при надлежащем
выборе зафиксированного вектора а, который однозначно
определяется формулами (8).
4. Полагая a = eit получим 2-форму <о|;, которую сокра-
щенно обозначим <о,? (г — 1, 2, 3). Используя формулы (2), (5),
(6) и учитывая пп. 5—7 § 7, можем написать:
“1 {х Л У) = V23 = — V3S — (х) /\ (у),
«8 (* Д j) = V31 = — V13 = <о| (X) Д О)} (у),
(* Л У) = V12 = — V81 = <«1 (X) Д в>| (у).
(9)
§ 8]
СЛУЧАИ ТРЕХМЕРНОГО ПРОСТРАНСТВА
435
Численное значение каждой из 2-форм (9) равно площади
проекции бивектора х /\у на соответствующую из коорди-
натных плоскостей. Геометрически ясно, что должно быть
именно так. Например, произведение площади бивектора
х /\у на косинус угла у между базисным вектором е3 и
нормалью бивектора х/\у равно площади проекции би-
вектора х/\у на координатную плоскость натянутую
на векторы et и (см. рис. 76). Длина вектора, участвую-
щая в формуле (4), в данном случае равна единице (а — е3).
Рис. 76.
Используя (9), разложение (6) можно переписать так:
о)д — atwj <73о>з =
= G1W* А “з + Л “1+ Л W2- (1 °)
Формула (10) устанавливает линейный
множеством векторов а и пространством
тами из £3. Именно, сложению форм ы2а
сложение векторов
Ч- ШЬ == ша+г»
изоморфизм между
2-форм с аргумен-
и w* соответствует
умножению формы на число отвечает умножение вектора на
число
5. Смешанное произведение трех переменных векторов
(х, у, z) представляет собой внешнюю форму третьей степени,
436
ПОЛИВЕКТОРЫ И ВНЕШНИЕ ФОРМЫ
(ГЛ. X
которую мы обозначим оф
“К* А-У А *) = (*> 4
Ее значение на поливекторе х /\у /\z равно ориентирован-
ному объему V этого поливектора. Поскольку пространство
внешних форм третьей степени одномерно (k = n, см. в связи
с этим гл. V, § 8), то мы имеем
io3(x, у, z) — №l(x/\y/\z)~'k(x,y, z),
то есть произвольная внешняя форма третьей степени про-
порциональна смешанному произведению ее аргументов и
однозначно определяется числовым множителем X.
6. Покажем, что внешнему умножению линейных форм
соответствует векторное умножение векторов. Именно, спра-
ведлива следующая формула:
= О1)
где [л X ^1> как обычно, обозначает векторное произведение.
Доказательство. Пользуясь свойствами внешнего ум-
ножения, перечисленными в п. 9 § 6, находим
< А + а2“2 + «з“|) A (MJ + Ма + ^8шз) =
as as
bi b3
a8
b3
#1 Gs
bl bi
(12)
Сравнивая (12) и (10), получаем (11).
Обратим внимание на то, что выкладка (12) с алгебраи-
ческой точки зрения совпадает с выводом формулы вектор-
ного произведения через координаты сомножителей, хорошо
известным из элементарного курса аналитической геометрии.
7. Формула (11) позволяет дать другое доказательство
того, что произвольная 2-форма о)2 (х A _V) в £'3 представляется
в виде смешанного произведения (а, х, _у).
Именно, по теореме 2 из п. 10 § 7 найдутся две линейные
формы, которые, согласно п. 2 этого параграфа, можно за-
писать в виде <0р и оф, такие, что
‘°2(^А-1/) = ‘0р(х)Л‘йИЛ (13)
Полагая a — \py^q], из (13), (11) и (4) получаем
/\у) — ч^(х/\у) = (а, х,у).
§ 8]
СЛУЧАИ ТРЕХМЕРНОГО ПРОСТРАНСТВА
437
8. Внешнему умножению линейной формы на 2-форму
соответствует скалярное умножение векторов, именно
‘°«WAw»O/A^)=(a> /\у /\z)=
— (a,b)(x,y,z). (14)
В самом деле, согласно (3) и (10) имеем разложения
ма = Я110} -|- а30)з> 1
4 = fcjlOg Д ^2^3 А “1 + ^з0)1 A 4 J
Перемножаем почленно выражения (15) и, используя свойства
внешнего умножения, находим
4 Д 4 — + «А + «зМ (4 А “а А “з)- (16)
Аналогично формуле (15) § 7 можно показать, что значение
3-формы <о}Д<о|Д<о| на поливекторе х/\у /\г равно опре-
делителю, составленному из координат векторов х, у,- г,
то есть
<4 А “2 А “3=4 (17)
Из (16) и (17) следует (14).
ГЛАВА XL ГИПЕРПОВЕРХНОСТИ ВТОРОГО
ПОРЯДКА
§ 1. Общее уравнение гиперповерхности второго порядка
1. Пусть дано действительное «-мерное аффинное прост-
ранство и в нем система аффинных координат с началом
О и базисом еь...,еп.
Гиперповерхностью второго порядка в называется
геометрическое место точек 7Й £ ?(„, у которых радиус-вектор
х=ОМ удовлетворяет уравнению
а (х, х) -ф- 2b (х) -j- с = 0, (1)
где а(х, х) — квадратичная форма, Ъ(х) — линейная форма,
с—постоянная. Формы а(х, х) и &(х) предполагаются ин-
вариантными относительно изменения базиса.
2. Если положить х — ОМ = x^i -]-... -ф- хпеп, то урав-
нение (1) получит координатную запись:
S aikxixk 4~ biXi -ф- с = 0. (2)
Здесь Xi, ...,х„ — координаты точки М. Их называют теку-
щими координатами, считая М любой точкой. Квадратичная
форма а(х, х) = ^ й,-7х,-Ху называется группой старших чле-
нов уравнения (1) или (2). Линейная форма
2b(x)=2^ibixi
Называется группой членов первой степени. Постоянная с назы-
вается свободным членом уравнения.
Замечание. Всюду в пределах этой главы мы будем
помечать координаты нижними индексами, так как пользо-
ваться тензорной алгеброй не придется.
3. Может случиться, что в действительном ?(„ для неко-
торого уравнения вида (2) нет ни одной удовлетворяющей
ему точки. Все-таки и про такое уравнение говорят, что оно
есть уравнение гиперповерхности второго порядка. Иногда
при этом гиперповерхность называют мнимой (или нулевой).
§ 2] ПЕРЕНОС НАЧАЛА КООРДИНАТ 439
Например, говорят, что уравнение хй-р_у2-|-.г2-|_ 1 =0 есть
уравнение мнимой сферы (в евклидовом пространстве с си-
стемой декартовых прямоугольных координат х, у, z). Разуме-
ется, за такими словами не содержится определенного гео-
метрического смысла, пока мы остаемся в действительном
пространстве. Но единообразие терминологии удобно по
формально-алгебраическим соображениям. Дело в том, что
предметом теории, которой посвящена эта глава, по существу
являются не столько гиперповерхности, сколько сами урав-
нения. Б теории этих уравнений невыгодно какие-либо случаи
исключать из рассмотрения, во-первых, потому, что заранее
не ясно, определяет ли уравнение какое-нибудь непустое мно-
жество точек или нет; во-вторых, даже в том случае, когда
оно определяет пустое множество, его левая часть может
иметь какой-либо механический или физический смысл.
4. Можно доказать, что в комплексном аффинном прост-
ранстве всякое уравнение вида (2) определяет непустое мно-
жество точек. Однако мы ограничиваемся действительным Шя.
Лишь в некоторых случаях мы будем говорить о комплекс-
ных точках (например, если совместное решение уравнений
прямой и гиперповерхности приводит к комплексным значе-
ниям искомых координат).
5. Уравнение (2) с буквенными коэффициентами называется
общим уравнением гиперповерхности второго порядка. Оно
содержит 4-(лi)(«-{-2) членов. Число это при сколько-
нибудь значительных п весьма велико. Поэтому непосредст-
венное исследование гиперповерхности по ее уравнению, на-
писанному в произвольной системе координат, оказывается
затруднительным.
Далее будут указаны приемы, которые позволяют общее
уравнение (2) привести к некоторым специальным видам, когда
уравнение является неполным и называется каноническим.
§ 2. Изменение левой части уравнения при переносе
начала координат
1. Всю левую часть уравнения гиперповерхности второго
порядка обозначим символом 2F, рассматривая F как функ-
цию текущих координат:
2F (*1,..., х„) = S aikXiXk 4-2 2 b^Xj -ф- с.
440 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ XI
Согласно § 2 гл. III при переносе начала координаты
меняются по формуле х, = xt -j-х°, где (хг)—старые коор-
динаты произвольной точки, (х,)— ее новые координаты,
(х$)— координаты нового начала в старой системе координат.
Подставим эти выражения в функцию F и перегруппируем
слагаемые, собрав члены со вторыми и с первыми степенями
новых координат. При этом существенно используем сим-
метричность матрицы квадратичной формы (ailt = aki):
2F (х1; ..., xn)=2 aik (х,- х?) (xft4-x*)-j-2 5} bt(x;-|-x’)4-<7=
— У\аН&хк 4~ 2 2 aikxk 4~ xi 4~
4“ (S aikxixk 4- 2 2 ^iXi 4" 0-
Если функцию F в новых координатах запишем по ста-
рому стандарту:
2F = 2 aikXiXk 4-2 2 bixt 4* с,
то
a.k = aik, (I)
(И)
c—2fl«x?xft4-22Mi +<?- (Ш)
2. Величина ? представляет собой левую часть первона-
чального уравнения, в которую вместо координат текущей
точки подставлены координаты нового начала:
c = 2F(xJ, ...,xj).
Обратим внимание на то, что формулу (II) можно записать
иначе:
&, = ^F(x;,...,x“).
Здесь частная производная функции F по аргументу х,-
подсчитана по координатам нового начала (xj,..., x'h).
3. Для более компактной записи формул (I) —(III) введем
матрицы
। «и • • • Д1„ bi
Оц ... Д1л
А- •••••> В= ......................ь •
л || ant • • • апп Ьп
uni ... апп
bi ... Ьп с
§ 2]
ПЕРЕНОС НАЧАЛА КООРДИНАТ
441
Матрицу В и другие матрицы порядка «Ц-1 будем вы-
делять специальным шрифтом.
Соотношение (I) в матричной форме запишется так:
А —А. (1а)
Функцию F с помощью искусственного приема удобно
записать в виде квадратичной формы. Для этой цели введем
дополнительную координату хп+1, употребляя ее как условный
символ и всюду считая, что _хП1д=1.
Кроме того, будем считать, что Ь,- = а,- n+i — a„+i /, с =
— °л+1 Л+1- 0
Тогда формулы xh = xlt-]-xlt можно записать в виде
следующих соотношений:
= 4--^?Л+1>
Л'4= Xa-f-
---- Хп —j— Хп Xn_ytt
•*7141 --- •*•«+!•
Последнее равенство показывает, что xn+i=l, так же
как xn+t.
За счет введения дополнительной координаты все формулы
преобразования координат становятся однородными (без сво-
бодных членов). Кроме того, сама левая часть уравнения (2)
§ 1 становится однородной. Именно, в новых обозначениях,
можно написать
п
2F = У
п
л+1
Получилась квадратичная форма с матрицей В.
Матрица преобразования (1) выражает старые координаты
через новые и согласно стандарту должна обозначаться Р*:
442
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
Рассматривая функцию F как квадратичную форму аргу-
ментов х1г xn+i, мы можем применить известную формулу
для преобразования матрицы квадратичной формы. В резуль-
тате получим матричное равенство
В^РВР* (2)
которое охватывает все формулы (I) — (III).
Матричная формула (2) позволяет сформулировать важную
теорему.
Теорема 1. Определитель матрицы В и ее ранг
являются инвариантами относительно переноса начала
координат, то есть
Det В = Det В, Rang В = Rang В.
Доказательство. Непосредственно видно, что
DetP* = DetP = l, поэтому теорема вытекает из формулы (2).
Замечание. Что касается матрицы А, то при переносе
начала координат она сама является инвариантом, то есть все ее
элементы сохраняются.
§ 3. Изменение левой части уравнения при изменении
ортонормированного базиса
1. Чтобы не усложнять вычислений, будем в дальнейшем
считать, что мы находимся в евклидовом пространстве (точеч-
ном) и пользуемся ортонормированными базисами.
Допустим, что мы делаем переход от одного ортонорми-
рованного базиса к другому:
Ci — Illel ~t~ •••
вп--- IlnPl “I- • • * “Ь ^ппеп-.
Ортогональная матрица / = || 11}-1| записана так, что воз-
растание первого индекса идет по строке.
Координаты точек преобразуются по формулам
Х1 = /цХ, linXn,
(1)
хп — ‘Юх1 • ~Г 'ппхп-
§ 3] ИЗМЕНЕНИЕ ОРТОНОРМИРОВАННОГО БАЗИСА 443
Матрица
hi hn
/* =
4ii • • 41л
также является ортогональной.
Формулы (1)—-однородные (не содержат свободных чле-
нов), так как начало координат сохраняется на месте.
2. Перейдем в левой части уравнения (2) § 1 к новым
координатам по формулам (1). Имеем
2F(xb ..., = +
где штрихами обозначены новые коэффициенты. Вследствие
однородности формул (1) группы членов разных степеней
преобразуются автономно. В частности, свободный член сохра-
няется без изменения:
с' = с.
Аналогично
ClikXiXk-а^Х^Х^.
Отсюда в матричной записи получим
А’ = 1А1*.
Вследствие ортогональности матрицы I ее транспониро-
ванная матрица равна обратной: 1* = Г1; поэтому
A' — IAFh
Из этого матричного равенства аналогично п. 4 § 2 гл. VII
получается
Теорема 1. При переходе от одного ортонормирован-
ного базиса к другому левая часть уравнения имеет ин-
варианты Det A, Rang А и характеристический многочлен
р(б) матрицы А.
Замечание 1. Многочлен р(Х) содержит Det А в каче-
стве одного из коэффициентов, поэтому инвариантность Det А
вытекает из инвариантности р(с).
Замечание 2. Если напишем р(к) подробно
то увидим, что pt, ръ рп инвариантны; то есть при пере-
ходе к новому ортонормированному базису сохраняются суммы
444
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
главных миноров первого порядка матрицы А, суммы главных
миноров второго порядка и т. д. Таким образом,
Rang А' = Rang А,
p'i=Pi.....Рп-i—Рп-ъ Det А' = Det А.
3. Найдем закон преобразования матрицы В. Снова вве-
дем обозначения t>1 = ain+1, c = an+in+i. Тогда
п+1
2f--- У,
i. k = \
где jcn+i=l. Припишем к формулам (1) еще одно равен-
ство и полученные формулы сокращенно запишем так:
(_2’ , | (2)
*^*П-|1 --^n+1- J
Матрица формул преобразования (2) имеет вид
Ai • •• An 0
|*= ini ’ Znn 0 •
0 .. 0 1
Нетрудно сообразить, что
1* = Г.
Действительно, последнее из соотношений (2) обращается
тривиально: нужно только поменять местами левую и правую
части. Что касается формул (1), то их обращению соответ-
ствует транспонирование матрицы 1*.
Таким образом искомая формула преобразования матрицы
В квадратичной формы 2Д имеет вид:
В'=1В1* или В'=1В1-1. (3)
Из формулы (3) получается
Теорема 2. При переходе от одного ортонормирован-
ного базиса к другому определитель и ранг матрицы В
инвариантны:
Det В' = Det В, Rang В' — Rang В.
§ 4]
ЦЕНТР ГИПЕРПОВЕРХНОСТИ
445
4. Из формулы (1а) § 2, теоремы 1 § 2 и теорем 1—2
§ 3 вытекает
Следствие. При общем преобразовании координат,
состоящем из переноса начала и перехода от старого
ортонормированного базиса к новому ортонормированному
базису, инвариантами являются
Det В, Rang В, Det A, Rang А
и характеристический многочлен pQ) матрицы А.
§ 4. Центр гиперповерхности второго порядка
расположены симметрично
быть точки, которые целе-
1. Центром гиперповерхности второго порядка обычно
называют такую точку пространства %п, относительно кото-
рой все точки гиперповерхности
парами. Таким образом, когда
говорят о центре, то подра-
зумевают центр симметрии
(рис. 77).
К сожалению, в действи- с
тельном пространстве это
определение теряет силу в тех
случаях, когда для уравнения
гиперповерхности нет ни одной
удовлетворяющей ему точки.
Однако и в таких случаях могут
сообразно считать центрами по алгебраическим соображениям.
Например, центром мнимой сферы -j—г2 —1 О
является начало координат. Поэтому мы предпочтем опреде-
лить понятие центра гиперповерхности второго порядка иным
способом.
2. Рассмотрим неполное уравнение
“Н С--О* О)
Если точка (хь ..., хп) лежит на гиперповерхности (1),
то и симметричная ей точка (—хь ..., —х„) тоже лежит на
гиперповерхности (1).
Следовательно, если существуют точки, удовлетворяющие
уравнению (1), то начало координат является центром сим-
метрии гиперповерхности (1).
446
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. ХГ
Исходя из этого, мы дадим следующее формально-алгеб-
раическое определение центра.
Центром произвольной гиперповерхности второго порядка
будем называть такую точку, что если поместить в нее начало
координат, то уравнение гиперповерхности примет неполный
вид (1). Таким образом, мы объявляем центром всякую
точку, относительно которой левая часть уравнения облада-
ет центральной симметрией (не меняется при замене х1,..., хп
на —... , — х„).
3. Пусть дано общее уравнение второй степени:
S aikxixk _1~ Я2 b^Xi с = 0.
Мы хотим выяснить, существует ли центр, и найти его.
Перенесем начало координат в точку O(xJ, ..., х„); получим
уравнение
S aik xixk b^i с = 0.
Новое начало будет центром в том и только в том случае,
когда
Ь{ = 0, Z=l, п. (2)
Равенства (2) с учетом равенств (II) § 2 дают так называе-
мые уравнения центра (уравнения, определяющие центр)
S аН/Х°г == О-
В подробной записи уравнения центра выглядят так:
апх1 -j- ... ainXn — — bi, (3)
anlxi 4“ ••• аппхп — — Ьп.
Матрица системы (3) совпадает с матрицей А.
Если Det А ф 0, то система (3) имеет единственное реше-
ние. Тогда гиперповерхность имеет единственный центр.
Такая гиперповерхность называется центральной.
Если Det А — 0, то система (3) либо несовместна, и тогда
центра нет (как, например, у параболы), либо совместна,
и тогда центров бесконечно много (как у круглого цилиндра
или пары параллельных плоскостей).
S 51
КАНОНИЧЕСКИЙ ВИД УРАВНЕНИЯ
447
4. Само определение центра подсказывает первый шаг
упрощения уравнения: нужно перенести начало координат
в центр.
б. Введем два символа:
8 = Det А, А = Det В.
Признаком центральной поверхности является неравенство
8^0.
§ 5. Приведение к каноническому виду общего
уравнения гиперповерхности второго порядка
в евклидовом пространстве
1. Гиперповерхности второго порядка распределяются
на несколько классов, для которых получаются разные про-
стейшие, как говорят, канонические формы уравнений.
2. В теоретическом изложении мы не будем стремиться
к экономии операций и начнем с поворота системы коорди-
нат. При практических вычислениях, если поверхность цен-
тральная, то лучше в качестве первого этапа перенести начало
координат в центр.
3. Будем рассматривать гиперповерхность в евклидовом
пространстве и пользоваться только ортонормированными
базисами. Пусть дано общее уравнение 2F(xb ..., хп)—0.
Прежде всего рассмотрим самосопряженное преобразование с
матрицей А, которая является матрицей квадратичной формы —
группы старших членов. Все корни Хь ..., характеристи-
ческого многочлена этого преобразования действительны,
и существует ортонормированный базис из собственных век-
торов е\, ... , е'п, причем вектору e'k соответствует собствен-
ное значение Л—1, ..., и (см. гл. IX, § 3).
Перейдем к этому базису, сохраняя пока прежнее начало
координат. Тогда группа старших членов примет каноничес-
кий вид
---^1 (-^1) "ф* ••• ' । (Xn) ,
а левая часть уравнения гиперповерхности упростится так:
2F=Xj(Xj)2... -J-Xn(xn)2-J-2Z»jXi-|- ... -ф- 2bnxn-j~ с.
Коэффициенты членов первой степени изменились; поэтому
они помечены штрихами. Свободный член с остался без изме-
нений.
,448
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
4. Дальше нужно рассмотреть несколько случаев.
1) Все характеристические корни отличны от нуля:
X, ф 0, ..., Хя ф 0.
Тогда нужно выделить полные квадраты:
X* {Xkf -J- 'ZbbXk = Xfe I x’k -f- -у—)-т—.
Затем сделаем перенос начала координат по формулам
b'k
Xk — Xk \ .
Kk
После этого членов первой степени не будет, поэтому
новое начало координат является центром поверхности. По-
лучим
Xi-x|-]~ ... -}-Хпл^=:/7, (I)
где Н = — с -J-
Уравнение (I) относится к числу канонических.
2) Xj 0, ..., Хг ф 0, Хг+1 = ... = Х„ = 0; г — ранг ква-
дратичной формы старших членов; г^п — 1.
Здесь обстановка несколько усложняется, и чтобы избе-
жать слишком больших вычислений преобразование формы
старших членов нужно провести с некоторым расчетом.
Прежде всего найдем собственные векторы, отвечающие
Хъ ..., Хг. Как нам известно, их можно выбрать так, чтобы
они образовали ортонормированную систему ej, .е'г (см. § 3
гл. IX). Остальные базисные векторы определим позже.
Пусть мы имеем первоначальное уравнение в исходных
координатах
S aikxixk biXi -j- с = 0.
Его линейная часть однозначно определяется заданием
вектора
b = {bbbit .... bn}.
Разложим вектор b на две составляющие^ одна из кото-
рых лежит в линейной оболочке е[, ..., е’„ а другая орто-
гональна к указанной линейной оболочке:
ь—... 4“ —р-
§ 5] КАНОНИЧЕСКИЙ ВИД УРАВНЕНИЯ 449
Для этого нужно положить
pi = (Mi),..., Рг — (Ь,е'г), р = — 2М-
i = 1
Так построенный вектор р ортогонален подпространству
L(e'i, е'г).
Если р ф 9, то е'п мы направим по вектору р. Тогда
Р — Н^л,
где р. — числовой коэффициент.
Вектор еп берется единичным. Его можно направить так,
что будет р = или так, что будет р = —|р|.
Векторы e'r+i, ..., е'н_л возьмем таким образом, чтобы они
образовали вместе с ранее построенными векторами ортонор-
мированную систему: е{, ei, е'г, е'ГлЬ e'n_it е'п.
В остальном выбор векторов e^+i, •••» Mi произволен.
Если /? = б, то векторы Мн е'п возьмем как угодно,
лишь бы система е{...е'п была ортонормированной. Заметим,
что и в этом случае соблюдается равенство
р = ре'п,
но только р = |/?| = 0.
Итак,
^=М+---+М—Кд- (!)
Группы членов второй степени, первой степени и нулевой
при переходе к новому базису преобразуются автономно.
Группа старших членов в новом базисе примет вид
2 а ikxixk = (-^l)2 ~Ь • • • ~Ь (-^г)2.
Группу членов первой степени естественно записать в виде
скалярного произведения
^bkxk — (b, х).
Вследствие равенства (1)
(Ь, X) — (₽!«?{ + . . • + РЛ — р.е„, Х) = Mi 4-... -J- Mr — РХл.
так как в ортонормированном базисе скалярное произведение
любого вектора на базисный равно соответствующей коор-
450 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ. XI
динате: (ei, x)=x'i. Таким образом, после перехода к новому
базису получается
2F=X1(xi)2-|-... + Xr(x;)s +
2[irxr — 2р.хп -J- с = 0.
Свободный член с остался прежним.
Далее выделяем полные квадраты при k—1, г.
*-k {xkf 2PfeXfe — ^k —у pi-
\ 'kJ r'k
Затем делаем перенос начала (только в направлении коор-
динатных осей с номерами 1, г}.
После этого уравнение принимает вид
Xi-xj + • • • 4~ — 2рх„ = Н.
Если, р = 0, то получим уравнение
(*)
которое относится к числу канонических. Если р # 0, то
напишем
2рх„ -J- Т/ = 2р. [хп .
Сделаем дополнительный перенос начала координат по
направлению оси хп на величину —Обозначений коор-
динат менять не будем, чтобы не осложнять запись.
Уравнение примет вид
^1X1— 2рхп=0. (**)
И это уравнение является каноническим.
Никаких других случаев, кроме рассмотренных выше, быть
не может. Остается только навести порядок: составить ката-
лог и расклассифицировать гиперповерхности второго порядка.
КЛАССИФИКАЦИЯ В ЕВКЛИДОВОМ ПРОСТРАНСТВЕ
451
§ 6]
§ 6. Классификация гиперповерхностей второго порядка
в евклидовом пространстве
1. На основании упрощения уравнений, проведенного
выше, естественно выделяются следующие классы гиперпо-
верхностей:
1) 8 = Det А т'-0. Эго значит, что ни одно X,- не равно
нулю. Сюда попадают все случаи, помеченные номером (I),
и только они. Имеем каноническое уравнение
Xi-xf -}-•••• -}- Хпх„=И. (I)
Здесь и в дальнейшем мы пишем текущие координаты без
дополнительных пометок.
II) 8 = Det А — 0, [г ф 0, г — Rang А — п—1. Имеем
соответствующее каноническое уравнение
XiXi — 2[ix„ = 0 (II)
(оно получается из (**) § 5 при г — п—1).
Г) 8 = 0, |х = 0. (Так как 8 = 0, то г <^.п.) В этот класс
входят поверхности с каноническими уравнениями вида (*)
§ 5, то есть
= (Г)
где 1 r C/z— 1.
If) 8 = 0, [1 ф 0, г <^п — 1. Сюда попадают поверхности
с каноническими уравнениями вида (**) § 5 при г<^п—1,
то есть
XjJCi Хрсг — 2[ixn = 0. (If)
Здесь 1 ; г п — 2.
Указанные классы исчерпывают все возможности. Случаи,
когда уравнение имеет вид (I) или (II), являются основными.
Случаи (К) и (If) повторяют основные случаи, но только
в подпространстве меньшей размерности.
2. Запишем матрицы А и В для основных случаев.
Случай I.
452
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
Случай II.
ч о
0Х- о_и-
— |* о
Определение. Гиперповерхность второго порядка
называется невырожденной, если невырождена матрица В,
то есть если
A = DetB фО.
Очевидно, невырожденными являются поверхности (I) при
условии, что Н^-0, а также все поверхности (II).
3. Согласно п. 4 § 3, величины 8 = Det A, A = DetBf
г = Rang A, Rang В и характеристический многочлен д(Х)
1 матрицы А являются инвариантами левой части уравнения
в классе ортонормированных координатных систем. Все эти
величины могут быть найдены по левой части общего урав-
нения гиперповерхности, заданной в любых ортонормирован-
ных координатах. Кроме того, мы знаем уравнения центра
в любых координатах.
Поэтому, не переходя к каноническому уравнению, мы
можем определить, является гиперповерхность центральной
или нет, является она вырожденной или нет, найти множество
всех центров и вычислить все корни Ху характеристического
многочлена матрицы А.
Кроме того, для гиперповерхности типа (1) можно опреде-
лить Н. В самом деле, из п. 2 имеем
— /Л, ... Х„ = Д.
При этом Xi ... Х„ — 8 ф 0. Отсюда
Для гиперповерхности типа (II) имеем
— p2Xj ... Хя j = Д.
Но произведение Xt ... Х„ ъ взятое со знаком минус,
равно в случае \п—0 коэффициенту рп_л характеристиче-
ского многочлена р(Х). При этом следует считать, что харак-
§ 6] КЛАССИФИКАЦИЯ В ЕВКЛИДОВОМ ПРОСТРАНСТВЕ 453
герпетический многочлен написан так, как указано в замеча-
нии 2 п. 2 § 3. Отсюда находим
Г Рп-1
Подкоренное выражение в формуле (1) положительно, по-
скольку существование и действительность р. установлены
предыдущими исследованиями.
4. Для невырожденных гиперповерхностей случая I имеем
Rang А = п, Rang В = л 4" 1- (2)
Из первого равенства (2) и теоремы Кронекера — Капелли,
примененной к системе уравнений центра, заключаем, что все
они являются центральными.
Рассмотрим их подробнее.
5. Если Хь ..., Хл и Н — числа одного знака, то гипер-
поверхность (I) называется (// — \)-мерным эллипсоидом. Его
уравнение можно переписать так:
Величины at называются полуосями эллипсоида (af^>0).
Нетрудно проверить, что эллипсоид расположен в паралле-
лепипеде, определяемом
неравенствами | х{ | ai,
1=1,..., п. (При п = 3
см. рис. 78, при п = 2
см. рис. 79.) Обратим внимание на то, что /г-мерный эллип-
соид при А—1 представляет собой эллипс (рис. 79), при
k — 0 — пару точек Xj = ± at (рис. 80).
454
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
Трудно наглядно изобразить на рисунке эллипсоид (3)
ври л >3. Однако сопоставление рис. 80, 79 и 78 поможет
читателю представить себе, как усложняется Л-мерный эллип-
соид с ростом его размерности k.
Если at —... — ап = R, то эллипсоид (3) называют (п — 1)-
мерной сферой радиуса R.
6. Если Хь ..., Х„ одного знака, Н — другого знака,
то поверхность (1) называется мнимым эллипсоидом. В дейст-
вительном пространстве он
не имеет точек.
7. Если Х1; ..., Х„ раз-
ных знаков и Н 0, то
поверхность (I) называется
гиперболоидом. В этом слу-
уравнения
-а,
а,
Рис. 80.
чае, разделив обе части
вести его к виду
(I) на /7, можно при-
.2
1-2
лй.|4
7^=1.
Ьп-к
0)
объектов в простран-
Величины аь ..., ak называются действительными полуосями,
bi, ..., Ьп_к — мнимыми полуосями гиперболоида (4) (а,-^>0,
bj 0). В зависимости от сиг-
натуры левой части уравнения
(4) гиперболоиды имеют раз-
ное геометрическое строение.
В элементарном курсе аналити-
ческой геометрии для иссле-
дования формы поверхностей
рассматривают их сечения раз-
личными плоскостями (см., на-
пример, рис. 82, 83). Сейчас мы
применим такой же прием для
того, чтобы составить пред-
ставление о строении разных
гиперболоидов. Рассмотрим ча-
стные случаи, начиная со знакомых
ствах малых размерностей:
А'2 А'2
1) При тг — 2 уравнение (4) принимает вид — р~1
и задает гиперболу (рис. 81).
$ 6] КЛАССИФИКАЦИЯ В ЕВКЛИДОВОМ ПРОСТРАНСТВЕ 455
2) При п = 3 имеются две возможности: двуполостный
гиперболоид (рис. 82):
О? b't bl~l
и однополостный гиперболоид (рис. 83):
<г-2 *-2
—1 I —2 - 1
al bf~ ‘
3) п = 4. Здесь нужно рассмотреть три случая:
а) Двуполостный гиперболоид
у2 v-2 »-2 <-2
Л1 •л 2 Л g Л 2J _____ 1
«г- ь*~ ~bT~W=
(5)
(6)
аналогично гиперболе и гиперболоиду (5) состоит из двух
отдельных частей, расположенных в полупространствах xt 2гaj
Рис. 82.
Рис. 83.
и xt — ар С гиперплоскостями вида xt = const при | Хх 12> at
он пересекается по эллипсоидам, полуоси которых увеличи-
ваются с ростом | хг (. С остальными гиперплоскостями вида
X; = const (/ = 2, 3, 4) гиперболоид (6) пересекается по дву-
полостным гиперболоидам вида (5).
456 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА (ГЛ. XI
б) Уравнение
bl bl~l
задает новый вид гиперболоида, который характеризуется
тем, что с каждой из гиперплоскостей вида х,— const он
пересекается либо по некоторому гиперболоиду (однополост-
ному или двуполостному) либо по некоторому конусу. (Поня-
тие конуса введено в § 12 гл. IV; подробнее о конусах
второго порядка см. ниже, п. 9.) Нужно иметь в виду, что
типичным сечением здесь является гиперболоид. Конусы по-
являются лишь в отдельных гиперплоскостях (| xt | = аь
| х^ | = сг); их можно рассматривать как вырожденные гипер-
болоиды. В трехмерном пространстве нет аналогичной по-
верхности, а для пространств более высокой размерности
это наиболее типичный случай.
в) Гиперболоид, аналогичный однополостному:
Г2 г2 г3 г2
А1 [ л 2 | -^3 __ 4 - 1
Ь*~
Со всеми гиперплоскостями х4 —const он пересекается по
двумерным эллипсоидам, полуоси которых увеличиваются с
ростом | х4 |; с остальными гиперплоскостями xt = const он
пересекается по гиперболоидам (однополостным или двуполо-
стным), которые вырождаются в конусы, если x, = zta;.
Наглядно изобразить на чертеже гиперболоиды в четырех-
мерном пространстве затруднительно. Однако можно предста-
вить их себе по аналогии со случаями меньших размерностей,
показанными на рис. 81—83. При этом нужно учесть,
что сечения гиперплоскостями имеют вид поверхностей,
изображенных на рис. 78, 82, 83 и 25 (см. также
рис. 77 и 88).
В общем случае имеем такие возможности:
а) п2, k—\—двуполостный гиперболоид, состоящий
из двух частей, расположенных в полупространствах xt^aj
и Xi — at. Гиперплоскости xt = const (| xt | oj) пересекают
его по (л — 2)-мерным эллипсоидам, остальные гиперплоско-
сти Xi — const (/— 2, ..., л)— по двуполостным гипербо-
лоидам.
б) л ^4, число положительных, а также число отрица-
тельных членов в левой части уравнения (5) не меньше двух.
§ 6] КЛАССИФИКАЦИЯ В ЕВКЛИДОВОМ ПРОСТРАНСТВЕ 457
Такой гиперболоид с каждой из гиперплоскостей х, = const
пересекается по некоторому гиперболоиду меньшей размер-
ности (быть может, вырождающемуся в конус).
в) k — n—1 — гиперболоид, аналогичный одно-
полостному. Все гиперплоскости х„ = const пересекают его
по (п — 2)-мерным эллипсоидам, остальные гиперплоскости
xt = const (I— 1.....п—1)—по гиперболоидам или ко-
нусам.
Нетрудно доказать (например, индукцией по размерно-
сти пространства), что все гиперболоиды, за исключением
двуполостных, содержат прямолинейные образующие.
Обратим еще внимание на то, что каждая /г-мерная плос-
кость вида x*+i = ck+t, ..., хп = с„ (с, — const) пересекает
гиперболоид (4) по (k—1)-мерному эллипсоиду, а среди
(я—Л)-мерных плоскостей вида xt — Ci.......... xk—ck
(Ci = const) имеются такие, которые пересекают гиперболоид
(4) по (я—k—1)-мерным эллипсоидам. .Можно доказать,
что на гиперболоиде (4) имеются r-мерные эллипсоиды все-
возможных размерностей г шах (k—1, п — k—1) и нет
эллипсоидов более высокой размерности. При я = 2, 3 это
видно из сопоставления рис. 79—83. Рассматривать общий
случай мы не будем.
Если в пространстве, кроме данной евклидовой метрики,
ввести другую квадратичную метрику со знакопеременной
квадратичной формой, то роль сфер в ней будут выполнять
гиперболоиды. В связи с этим двуполостный гиперболоид
в четыррхмерном пространстве имеет важное значение в теории
относительности.
8. Все поверхности с каноническими уравнениями вида (II)
являются невырожденными и называются параболоидами.
Любой из параболоидов не имеет ни одного центра: по
теореме Кронекера — Капелли система уравнений центра в слу-
чае параболоидов несовместна, так как ранг основной матрицы А
равен п—1, а ранг расширенной матрицы равен л (см. мат-
рицы А и В, подробно написанные в п. 2).
Различных видов параболоидов много из-за разных соче-
таний знаков Хг. Их можно исследовать по образцу преды-
дущего пункта.
9. Рассмотрим теперь вырожденные поверхности, то есть
те, для которых Д = Det В = 0.
Их удобно разбить на три группы.
458 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ. XI
1) Случай (I) при условии, что Н— 0. Тогда Rang А =
= Rang В — п, и гиперповерхность является центральной.
Уравнение имеет вид
...+>.,Х = 0. (7)
Мы знаем, что однородное уравнение второй степени за-
дает конус (см. § 12 гл. IV). Если все X, одного знака, то
конус называется мнимым. (Следует иметь в виду, что у
него есть одна действительная точка — его центр.)
Если Х; разных знаков, то конус называют действи-
тельным в том смысле, что у него есть действительные точки,
помимо центра. Изменением нумерации координат и сменой
знака левой части уравнения (7) можно добиться, чтобы было
X, 2> О, Х„<^0, и число отрицательных членов не превышало
числа положительных. Тогда уравнение (7) приведется к виду
b'n-k
О,
(8)
где Гиперплоскость = const 0 пересекает ко-
нус (8) по (п — 2)-мерному эллипсоиду, если k — n—1, или
по гиперболоиду, если k<^ji—1 (последнее возможно лишь
ври п 5;4). Нетрудно проверить, что конус (8) состоит из
всевозможных прямых, проходящих через начало координат
и через точки поверхности, по которой он пересекается
с гиперплоскостью хп — const ф 0.
2) Рассмотрим уравнение (Г). Пусть Е* — подпространство
размерности г, натянутое на базисные векторы еь ..., ег.
В этом подпространстве уравнение (Г) определяет гиперпо-
верхность типа (1), которую мы обозначим 5.
В случае любой размерности уравнение (Г) определяет
гиперповерхность, которую называют цилиндром. Объясним
положение дел подробнее.
Обозначим Е** ортогональное дополнение подпростран-
ства Е* (E** — L(er+i, еп)). Возьмем произвольный век-
тор а из Е** и сдвинем гиперповерхность (Г) на вектор а.
Тогда у каждой ее точки изменятся лишь те координаты,
которые не входят в уравнение (Г), то есть х„+ъ ..., хп.
Поэтому точки, получающиеся при любом таком смещении,
тоже удовлетворяют уравнению (Г). Таким образом, гиперпо-
верхность (Г) получается путем параллельного перенесения
§ Л
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
459
гиперповерхности 5 по всевозможным направлениям в под-
пространстве Е**. Эта конструкция есть многомерное обоб-
щение того, как цилиндр х2 -]-_у2 = 1 в Е3 получается в ре-
зультате параллельного переноса окружности вдоль оси Z
(рис. 84). Роль прямолинейных образующих на цилиндре (Г)
выполняют (п — г)-мер-
ные плоскости, парал-
лельные Е**.
Все цилиндры (Г)
имеют бесконечно мно-
го центров. Нетрудно
проверить, что сово-
купность всех центров
совпадает с подпро-
странством Е**.
3) Уравнения вида
(If) определяют поверх-
ности, называемые па-
раболическими ци-
линдрами. Обозначим
(г 1)-мерное подпро-
странство, натянутое
на векторы еь.;., ег,еп,
через Е', его ортогональное дополнение — через Е". В под-
пространстве Е' уравнение (If) определяет параболоид, кото-
рый мы аналогично предыдущему обозначим через <$. Гипер-
поверхность (1Г) образована путем параллельного перенесе-
ния параболоида <$ на всевозможные векторы подпростран-
ства £". Параболические цилиндры не имеют центров.
§ 7. Аффинные преобразования
1. Допустим, что в аффинном пространстве введена не-
которая система аффинных координат и рассматривается пре-
образование произвольной точки М (Xi, ..., хп) в точку
ЛГ(Хр ...» х„), заданное следующими формулами:
Xj — 0цХ1 а\пхп -|- Ь\,
О)
хп — «лЛ "Н • • • 4“ аппхп 4~ ьп.
460 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ. XI
Будем предполагать, что п X n-матрица А = ||«z/|| невырож-
дена, то есть Det А ф 0.
Такое преобразование пространства ?!„ называется аф-
финным.
Вследствие невырожденности матрицы А аффинное пре-
образование является взаимно однозначным.
Легко проверить, что если две формулы вида (1) отли-
чаются хотя бы одним коэффициентом, то аффинные преоб-
разования, которые они задают в какой-либо системе аффин-
ных координат, различны (в смысле п. 1 § 2 гл. VI).
2. Определение класса аффинных преобразований инва-
риантно относительно выбора аффинных координат.
В самом деле, если мы перейдем к другим аффинным
координатам, то старые координаты точки М и ее образа ЛГ
выразятся через новые координаты формулами первой сте-
пени, а все соотношения, с которыми придется иметь дело,
однозначно обратимы. Поэтому при переходе к другим аф-
финным координатам мы не выйдем из класса однозначно
обратимых формул вида (1).
3. Пусть в аффинном пространстве имеется геометриче-
ская фигура еХ, задаваемая некоторым уравнением вида
F(x) = 0, (2)
где символом х обозначены координаты текущей точки. Пусть
задано аффинное преобразование, которое мы символически
обозначим
а/ = ?(х). (3)
Найдем уравнение образа фигуры Из (3) находим,
что х = *(а/). Подставив это выражение в (2), получим
уравнение
F(?-‘(V)) = 0, (4)
которому удовлетворяют все точки фигуры е^'. Ввиду взаим-
ной однозначности преобразавания (3) никаких лишних точек
не получится (точки не принадлежащие уравнению (4)
не удовлетворяют).
Систему координат в пространстве мы не меняем, по-
этому для координат текущей точки удобно сохранить преж-
ний символ х (а не а/, как в (4)). Окончательно для по-
лучаем уравнение
F(? 1(х))^0.
§ 7] АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 461
Замечание. Фактически использована лишь взаимная
однозначность преобразования (3). Поэтому мы воспользуемся
результатами этого пункта в гл. ХП при рассмотрении пре-
образований более общих, чем аффинные.
4. Аффинные преобразования сохраняют степень алгебраи-
ческого уравнения; именно, если координаты точки М удов-
летворяют алгебраическому уравнению Л-й степени, то коор-
динаты точки М' удовлетворяют уравнению такой же степени.
Доказательство. Так как формулы (1) первой сте-
пени, то ни один член уравнения не может повысить свою
степень в результате преобразования. Понизиться степень
тоже не может, так так в противном случае произошло бы
повышение степени при обратном преобразовании.
Следствие. При аффинном преобразовании гиперпло-
скость преобразуется в гиперплоскость.
5. Теорема 1. При аффинном преобразовании всякая
плоскость размерности k переходит в плоскость той же
размерности.
Доказательство. Пусть Л-мерная плоскость П* за-
дается линейной системой ранга п — k, содержащей я — k
уравнений. Запишем эту систему в матричной форме
Sx = s,
где S есть (я — k) X «-матрица, s обозначает матрицу-стол-
бец свободных членов. Аффинное преобразование (1) также
вапишем в матричной форме:
а/ = Ах -j- Ь.
Используя п. 2, находим матричное уравнение образа Щ пло-
скости ПЛ:
•STT’x = s, (5)
где s = s-j-SA^b— новый столбец свободных членов. Си-
стема (5) тоже содержит л — k уравнений относительно
координат текущей точки х. Согласно п. 3 § 4 гл. II и вслед-
ствие невырожденности А имеем
Rang SA-1 - Rang S=n — k.
Значит, система (5) совместна и определяет плоскость той
же размерности k, что и требовалось установить.
462
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. XI
6. Очевидно, что аффинные преобразования сохраняют
параллельность гиперплоскостей. В самом деле, если до пре-
образования две гиперплоскости не имели пересечения, то
и их образы не будут пересекаться вследствие взаимной
однозначности преобразования; отсюда следует параллель-
ность их образов (см. § 6 гл. III).
7. Справедливо более общее утверждение:
Аффинное преобразование сохраняет параллельность пло-
скостей любых размерностей.
Доказательство предоставляем читателю.
8. Т е о р е м а 2. Аффинное преобразование в п-мерном
аффинном пространстве ?(„ определяется однозначно, если
в качестве прообразов задана произвольная упорядоченная
система точек Afo, АД ..., Мп в числе n—1, находя-
щихся в общем положении, а в качестве их образов —-
произвольная аналогичная система No, Aj, ..., Nn.
Доказательство. Введем в аффинную систему
координат, приняв А1(, за начало, векторы ЛфАА...АДЛД
за базис. (Эти векторы независимы, поскольку точки
АД,Mi, ..., Мп находятся в общем положении; см. п. 5 § 3
гл. III.) Искомое аффинное преобразование задается в этих
координатах формулами вида (1), в которых столбец свобод-
ных членов состоит из координат точки Ао, а столбец
коэффициентов при х,- состоит из координат вектора А0А;.
Условие Det А ф 0 выполняется вследствие того, что точки
Nj находятся в общем положении. Таким образом, иско-
мое преобразование существует и единственно.
9. Рассмотрим два преобразования:
1) Линейное преобразование
х) — aiixt -j- ... -j- ajnxn,
(6)
•X л--|~ • • • ~H ann-^n-
2) Параллельный перенос
xj = Xi -j- bb
(7)
Xn----Xn -j- bn.
При параллельном переносе все точки одновременно сдви-
гаются на один и тот же вектор {Ьъ ..., Ьп].
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
463
§ 71
Всякое преобразование вида (1) есть суперпозиция пре-
образований (6) и (7) и обратно.
Поэтому всякое аффинное преобразование есть суперпо-
зиция линейного преобразования (6) при условии его невы-
рожденности и параллельного переноса (7).
10. Пусть теперь рассматривается евклидово простран-
ство. Вследствие предыдущего пункта и § 11 гл. IX всякое
аффинное преобразование представляется как суперпозиция
самосопряженного преобразования, изометрического преоб-
разования и параллельного переноса.
Об изометрическом преобразовании (коротко — об изо-
метрии) можно говорить в несколько более широком плане,
чем в гл. IX. Именно, рассматривать его не как линейное
преобразование, а как преобразование вида (1), сохраняющее
расстояние между точками. Тогда и линейное изометрическое
преобразование, и параллельный перенос являются изомет-
риями, и их суперпозиция является изометрией. Поэтому
аффинное преобразование представляет собой произведение
сжатий по п ортогональным направлениям и некоторой изо-
метрии.
11. Важно отметить, что всевозможные аффинные пре-
образования пространства ?(„ образуют группу. Ее называют
аффинной группой пространства <*(„.
Согласно § 2 гл. VI для доказательства этого достаточно
проверить, что:
1) аффинное преобразование обратимо и обратное к нему
преобразование тоже является аффинным;
2) произведение двух аффинных преобразований снова
является аффинным преобразованием.
Оба свойства с очевидностью следуют из п. 1.
12. Определение. Две фигуры аЛ и в аффинном
пространстве называются аффинно эквивалентными, если
одна из них является образом другой при некотором аффин-
ном преобразовании.
Так как аффинные преобразования составляют группу, то
имеют место следующие свойства аффинной эквивалентности
фигур:
1) если эквивалентна &£', то эквивалентна
2) если эквивалентна е^', эквивалентна е//", то
эквивалентна
3) каждая фигура эквивалентна сама себе.
464 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ ХГ
Пример. На двумерной евклидовой плоскости каждый
эллипс аффинно эквивалентен единичной окружности.
Предоставляем читателю самостоятельно доказать, что
в пространстве любые две плоскости одинаковой размер-
ности k (l^k^n—1) аффинно эквивалентны.
§ 8. Аффинная классификация гиперповерхностей
второго порядка
1. Мы установим, что в аффинном пространстве все
гиперповерхности второго порядка распределяются в конеч-
ное число классов, так что в каждом классе все поверхности
аффинно эквивалентны друг другу. Такое распределение на
классы называется аффинной классификацией гиперповерх-
ностей второго порядка. (Говорят также, что это есть клас-
сификация относительно аффинной группы.)
2. Возьмем произвольную гиперповерхность второго по-
рядка. Приведем ее уравнение к каноническому виду. Алгеб-
раически это значит, что мы преобразуем левую часть урав-
нения по некоторым формулам вида (1) § 7. Если эти фор-
мулы мы рассматриваем не как формулы преобразования
координат, а как аффинное преобразование, то полученное
каноническое уравнение дает некоторую гиперповерхность,
аффинно эквивалентную исходной. Если дополнительно сде-
лать еще одно аффинное преобразование, заключающееся
в сжатии по направлениям координатных осей, то все не
равные нулю коэффициенты в каком бы то ни было кано-'
ническом уравнении можно свести к -ф-1 или — 1.
Поэтому в случаях (I) и (Г) § 6 при Н ф 0 мы получим
±х]±х%± ... ±х%—1 (!^г^л); (1)
в случаях (I) и (Г) § 6 при Н = 0 получим
±xf±xl± ... ±Хг — 0 (l^rsgn); (2)
в случаях (11) и (1Г) получим
± x'i t ... ±x2r — Чхп = 0 (I sS г л — 1). (3)
Поверхности, задаваемые различными уравнениями вида(1),
(2) и (3), нельзя перевести друг в друга аффинным преобра-
зованием вследствие закона инерции квадратичных форм.
Различными здесь следует считать уравнения, которые нельзя
§9.]
ПЕРЕСЕЧЕНИЕ ПРЯМОЙ С ГИПЕРПОВЕРХНОСТЬЮ
465
перевести друг в друга умножением на (—1) и изменением
нумерации координат.
Таким образом, мы получили искомые классы аффинно
эквивалентных гиперповерхностей, каждый из которых имеет
своего представителя среди уравнений (IX (2), (3).
§ 9. Пересечение прямой с гиперповерхностью второго
порядка. Асимптотические направления
1. Пусть даны: гиперповерхность
2F = S aiI;XiXk + 2 2 bkxk -|- с — О (1)
и произвольная точка Л10 с координатами (xj, ..., х„). Через
точку 7И0 в направлении некоторого вектора /={/ъ ..., 1п\
проведем прямую.
Будем искать точки пересечения прямой и гиперповерх-
ности (1).
Координаты текущей точки М на указанной прямой
даются уравнениями
Хд.------Xft xl/g,
(2)
Лля нахождения точек пересечения нужно решить сов-
местно уравнения (1) и (2). Подставляя (2) в (1), получим
т2 2 aihlilk + 2т (5 aiftx?/fc + 2 bklk} + 2F (xj,..., х») = 0. (3)
Нужно исследовать уравнение (3).
2. Если У Ф 0, то уравнение (3) является квадрат-
ным. В этом случае имеются две точки пересечения,
причем это могут быть две разные действительные точки,
две разные комплексно сопряженные точки, и, наконец, они
могут быть слившимися. В последнем случае говорят, что
прямая имеет с поверхностью кратную точку пересечения.
П р и м е р. На евклидовой плоскости окружность х24~_у2=1
и прямая х = —2 не имеют действительных точек пересе-
чения (рис. 85). Несложный подсчет дает координаты комп-
лексно сопряженных точек их пересечения (—2, ztZj/sQ.
Для того чтобы увидеть эти точки, рассмотрим окруж-
ность х24~.У8— 1 иа двумерной комплексной плоскости.
Возьмем в качестве модели двумерной комплексной пло-
466
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
[ГЛ. ХГ
скости четырехмерное действительное пространство (см. § 11
гл. I). Положим
х = и + iz, y~v -f- (4)
Подставив эти выражения в уравнение окружности и выде-
лив действительную и мнимую части, получим
-|- тп) = 0.
(5)
Система (5) показывает, что окружность рзс-
сматоиваемая на двумерной комплексной плоскости (4), изо-
бражается в четырехмерном про-
странстве переменных (и, v, Е, ц)
в виде пересечения гиперболоида
и конуса.
Прямая х = —2 изображается
в пространстве переменных
(и, v, Е, т]) в виде двумерной пло-
скости
и = — 2, Е = 0. (6)
Рассмотрим в четырехмерном
Рис. 85. пространстве трехмерное подпро-
странство Е = 0. Плоскость (6)
целиком содержится в нем, а окружность (5) пересекается
с этим подпространством по фигуре
--Т)®= 1, |
Tjti — 0, J
(7)
состоящей из обычной окружности
П2 Ц2 = 1, 7) = 0
(именно ее мы и видим на действительной евклидовой пло-
скости) и гиперболы
№ — Tj2=l, v — 0
(рис. 86). Плоскость (6) и фигура (7) пересекаются в тех
самых точках и —— 2, —± |z 3, о которых шла
речь выше.
3. Если
У, aiklilk = 0,
(8)
§ 91
ПЕРЕСЕЧЕНИЕ ПРЯМОЙ С ГИПЕРПОВЕРХНОСТЬЮ
467
то в качестве (3) мы будем иметь либо уравнение первой
степени, либо противоречивое равенство, либо тождество.
В первом из этих трех
случаев говорят, что пря-
мая пересекает гиперпо-
верхность один раз в ко-
нечной точке и другой
раз на бесконечности. Во
втором случае говорят,
что прямая имеет с гипер-
поверхностью двукратное
пересечение на беско-
нечности. В третьем слу-
чае прямая целиком ле-
жит на гиперповерхно-
сти. Во всех трех слу-
Рис. 86.
чаях говорят, что прямая
имеет асимптотическое на-
правление относительно данной гиперповерхности. Асимптоти-
ческое направление дается вектором /—{4......1п} при усло-
вии (8).
Рис. 87.
Все прямые, имеющие асимптотические направления и
проходящие через одну точку, образуют конус (рис. 87).
Из (8) и (2) получаем уравнение конуса асимптотических
468
ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА [ГЛ XI
направлений, вершина которого находится в точке 7И0:
У, aik (xt — х?) (х* — x*k) = 0.
Из уравнений центра следует, что если точка /Ио нахо-
дится в центре гиперповерхности, а вектор I имеет асимпто-
пусы гиперболоидов в трехмерном
асимптоты гиперболы при и = 2.
тическое направление, то
уравнение (3) принимает
вид
O.t«-]-O.t-4-2F(xJ, ...
...»х’)=о.
Тогда, если F(xJ, ...
•. •> х°п) 0, то прямые, об-
разующие этот конус, не
встречают гиперповерх-
ность ни в одной конеч-
ной точке. Такие прямые
можно назвать асимптота-
ми, а конус— асимптоти-
ческим.
Примерами могут слу-
жить асимптотические ко-
пространстве (рис. 88) и
§ 10. Сопряженные направления
1. Предположим, что вектор I имеет неасимптотическое
направление. Тогда любая прямая, проходящая в направлении
вектора I, пересекает гиперповерхность в двух точках и Mt.
Пусть — середина хорды /И1/И2- Определение середины
отрезка в случае действительного аффинного пространства
см. в п. 3 § 8 гл. III. Если Мь 7Иг — комплексно сопряженные
точки, то середину Мо хорды /И1ТИ2 следует понимать как
точку, координаты которой являются средними арифметиче-
скими координат концов. Точка 7И0 является действительной
также и в этом случае.
Рассмотрим все прямые, параллельные вектору Z, и на
каждой из них найдем середину хорды Л11/И2. Оказывается,
§ 10] СОПРЯЖЕННЫЕ НАПРАВЛЕНИЯ 469
что геометрическое место этих середин является гипер-
плоскостью.
Докажем это. Имеем
7ИоА11 = 7Ио/И2 = т2/, (1)
где т2 =—тр Если 7И1 и Л12— действительные точки, то
равенство т2 = —'q усматривается с геометрической очевид-
ностью. Если 7И1, ТИ2 — комплексно сопряженные точки, то
вместо каждого из векторных равенств (1) можно написать п
координатных равенств. Из них легко последует, что и в этом
случае т2 = —Tt.
Таким образом,
Т1 4~ т2 — 0- (2)
Вернемся к уравнению (3) §9. Так как прямая имеет не-
асимптотическое направление, коэффициент при квадрате не-
известной отличен от нуля. По теореме Виета , и вследствие
(2) коэффициент при первой степени неизвестной в урав-
нении (3) § 9 должен обратиться в нуль. Поэтому
= (3)
Для того чтобы получить уравнение для всех середин,
нужно считать, что Мп— любая середина, и рассматривать
ее координаты как текущие координаты (Xi ,..., х„). Тогда
из (3) имеем
+ = (4)
Положим
М =
Тогда соотношение (4) примет вид
N\X\-\-. ..-\-Nnxn-\- D = Q. (5)
Легко доказать, что среди чисел N, есть отличные от нуля.
В самом деле, допустим, что
М=2>Л=° <6)
при всех i—l, ..., п. Умножая равенства (6) на lt и
470 ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 1ГЛ. XI
складывая, получим
У, auJJk —
вопреки предположению, сделанному в начале параграфа.
Поскольку среди чисел Nt, Nn есть отличные от
нуля, соотношение (5) является уравнением гиперплоскости.
2. Гиперплоскость (5) называется диаметральной гипер-
плоскостью, сопряженной направлению I относительно
данной гиперповерхности.
Она делит пополам каждую хорду, параллельную I.
3. Числа Nt ,..., Nn образуют координаты некоторого
вектора N={NX, ..., Nn}.
Будем считать, что координаты в пространстве ортонор-
мированные. Тогда вектор N ортогонален к диаметральной
Рис. 89.
гиперплоскости (5), то есть является ее нормальным век-
тором.
Соотношения
М = У, aiklk (I = 1, .... п)
можно рассматривать как линейное преобразование
N=Al,
переводящее вектор I в вектор N (рис. 89).
Это как раз и есть то самосопряженное линейное преоб-
разование, которым мы занимались, когда исследовали общее
уравнение гиперповерхности второго порядка.
4. Мы знаем, что в процессе приведения уравнения гипер-
поверхности к каноническому виду нужно направить коорди-
натные оси по собственным векторам преобразования А.
§ 10] СОПРЯЖЕННЫЕ НАПРАВЛЕНИЯ 471
Теперь легко понять по геометрическим соображениям,
почему именно эти направления выгодны для упрощения
уравнения гиперповерхности.
Допустим для простоты, что мы рассматриваем собственное
направление, которое не является асимптотическим. Тогда
сопряженная ему диаметральная гиперплоскость существует
и перпендикулярна этому направлению. Поэтому она является
плоскостью симметрии данной гиперповерхности.
Отсюда, по крайней мере в случае невырожденной цент-
ральной гиперповерхности, ясно, что, приводя ее к канони-
ческому виду, мы принимаем в качестве координатных плоско-
стей ортогональную систему ее плоскостей симметрии.
ГЛАВА ХП. ПРОЕКТИВНОЕ ПРОСТРАНСТВО
§ 1. Однородные координаты в аффинном пространстве.
Бесконечно удаленные точки
1. Рассмотрим /7-мерное аффинное пространство ?(я. Пусть
в нем задана .система аффинных координат с началом О и
базисом eit еп, и пусть xt, Хц — координаты про-
извольной точки М.
Мы введем сейчас в §|л так называемые однородные коор-
динаты.
Будем говорить, что Еь En, £я+1 (?я+1 7^ 0) являются од-
нородными координатами точки М(xt, хп), если
Xi, " Хп- (1)
Wl+1---------------------------------------*/1+1
Ясно, что точка Л/ числами (Еь ..., Ея, En+i) определена. Будем
писать М(Еь ..., Е„+1). Ясно также, что со своей стороны
точка М не вполне определяет свои однородные коорди-
наты. В самом деле, если мы умножим все однородные коор-
динаты на одно и то же не равное нулю число, то при этом
точка не изменится. Иначе говоря, набор чисел (Еь ..., E„,i)
и набор чисел (ЛЕ1; ..., 1 Е„т)) при X ф 0 определяют одну и
ту же точку.
2. Согласно предыдущему однородные координаты про-
извольно взятой точки зависят от выбора аффинной системы
координат, то есть от выбора начала О и базиса elt е„.
Перейдем к новому началу и к новому базису. Тогда аффин-
ные (неоднородные) координаты изменятся по формулам вида
xt — Qu Xi -ф- ... -ф- Qin хп -ф- Qi n+i,
(2)
Хп--- QntXt ф- ... -ф- Qnnxn Qn п+Ь
где свободные члены Qin+i> •••> Q««+j являются новыми
координатами старого начала О; матрица ||Qij|| (г,/=1, ...
..., п) известным нам образом определяется по старому и
§ 1] БЕСКОНЕЧНО УДАЛЕННЫЕ ТОЧКИ 473
новому базису (см. § 5 гл. 11). Формулы (2), как мы видим,
вообще говоря, не однородны.
Из (1) и (2) получим соответствующие формулы преоб-
разования однородных координат:
Si = Qii^i Qin^n 4~ Qi л+1£л+1>
£л = Qnih 4- • • • 4~ Qn£n 4~ Qn л+1^л+1>
^л+1 == ^л-11>
где последнее равенство — ^л-п принято по нашему
желанию. С равным успехом можно было бы написать
= Qii^i 4~ • - 4- С?1л£л 4- Qi
Х£а — Q„4i 4- • • 4- Qnn^n -|- Qn л+1£л+1> (
^л-pl---
где X — любое число, не равное нулю.
Мы видим, что формулы преобразования однородных ко-
ординат сами являются однородными, то есть не имеют сво-
бодных членов.
3. Рассмотрим произвольную гиперплоскость в 31п:
AiXi 4-... 4" ^пхп 4- ^л+1 = 0.
Переходя к однородным координатам, получаем уравнение
4" ••• 4" ^л^л 4“ ^л+1^л+1 = 0- (5)
Таким образом, в однородных координатах гиперплоскость
определяется однородным уравнением первой степени. Соот-
ветственно плоскость любой размерности k определяется си-
стемой линейных однородных уравнений ранга г = п— k.
4. Рассмотрим в 31п произвольную гиперповерхность вто-
рого порядка:
У, AiJxixj 4- Ai n+lxi 4- ^л+1 п+1 0.
i, J=l 1 = 1
Переходя к однородным координатам, получим
2 / 4~ 2 Aj л+1^Лл+14~ А»+1 n+i^n+i=о (6)
1,7=1 i=l
474
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
ИЛИ
п 1
а, ₽=1
Мы опять получили однородное уравнение. Уже здесь
видно удобство употребления однородных координат, по-
скольку уравнение гиперповерхности второго порядка запи-
салось более компактно, так что его левая часть стала квад-
ратичной формой. По существу, мы уже употребляли одно-
родные координаты в § 2 предыдущей главы и получили
от них некоторую помощь.
5. Пополним аффинное пространство $(„ новыми элемен-
тами, которые будем называть бесконечно удаленными точ-
ками. Мы не будем давать им никаких наглядных описаний,
а будем только считать, что бесконечно удаленная точка
есть объект, определяемый однородными координатами ...
.... £n+i) при условии, что
Ui = 0, (7)
а среди чисел (£ъ ..., £„) хотя бы одно отлично от нуля.
При этом будем считать, что наборы (Х;1( ..., Ц„, 0) при
всех X 0 задают одну и ту же бесконечно удаленную точку;
непропорциональные наборы определяют разные точки.
Будем говорить, что некоторая бесконечно удаленная
точка принадлежит данной гиперплоскости или данной гипер-
поверхности второго порядка и т. д., если ее координаты удов-
летворяют соответственно уравнению этой гиперплоскости
или этой гиперповерхности и т. д. При изменении исходной
аффинной системы координат будем считать, что координаты
произвольно выбранной бесконечно удаленной точки изме-
няются по формулам (3) или (4), где последняя строчка есть
тождество 0 = 0.
6. Мы будем считать, что каждое однородное линейное
уравнение в координатах ..., B„+i, то есть каждое урав-
нение вида (5), определяет некоторую гиперплоскость. К числу
таких уравнений относится и уравнение (7). Соответственно
этому считается, что все бесконечно удаленные точки состав-
ляют гиперплоскость. Ее называют бесконечно удаленной.
7. Возьмем в 91„ две параллельные гиперплоскости
Д141 . 4* А£п -ф- — 0
? 1]
БЕСКОНЕЧНО УДАЛЕННЫЕ ТОЧКИ
475
Ai^i.-f- А^.п-\- Лп+i^n+i —0.
Пересечение каждой из них с бесконечно удаленной ги-
перплоскостью дается одной и той же системой уравнений
^, = 0.} <8)
Отсюда следует, что параллельные гиперплоскости имеют общие
бесконечно удаленные точки. Поскольку система (8) имеет
ранг г = 2, то множество всех бесконечно удаленных точек,
общих для двух параллельных гиперплоскостей, следует счи-
тать (бесконечно удаленной) плоскостью размерности п—2.
(См. рис. 90; здесь и в дальнейшем мы будем пользоваться
условным изображением бесконечно удаленных элементов и
пересечения геометрических фигур в бесконечно удаленных
точках.)
8. Считая, что каждая однородная система линейных урав-
нений ранга г — п — k задает в однородных координатах
некоторую плоскость размерности k, можно установить ана-
логично предыдущему пункту, что две параллельные пло-
скости одинаковой размерности k пересекаются на бесконеч-
ности по бесконечно удаленной плоскости размерности k— 1.
В частности, любые две параллельные прямые пересекаются
в одной бесконечно удаленной точке (рис. 91).
9. Аффинное пространство 3(„, указанным способом попол-
ненное бесконечно удаленными элементами, называется «-мер-
ным проективным пространством. Однако точнее следовало
бы говорить, что это одна из конкретных моделей «-мер-
ного проективного пространства, общее понятие которого
излагается в следующем параграфе.
476 ПРОЕКТИВНОЕ ПРОСТРАНСТВО [ГЛ. ХП
§ 2. Понятие проективного пространства
1. Рассмотрим множество каких-либо объектов, природа
или внешний вид которых для нас безразличны. Мы будем
только предполагать, что каждый из этих объектов одно-
значно задается упорядоченной системой чисел (£ь ..., £„+1).
Эти объекты будем называть точками и обозначать обычным
образом, например А1 (5Ь ..., S„+i).
Множество будем называть /z-мерным проективным про-
странством и обозначать через Рп, если соблюдены следую-
щие два условия:
А) Любой упорядоченный набор чисел (q, ..., опре-
деляет некоторую точку /И ......S„+i), если хотя бы одно
из чисел $!, ..., S„4i не равно нулю. Набор, состоящий из
одних нулей, никакой точки не определяет.
Б) Если X — любое число, не равное нулю (X ф 0), то
два пропорциональных набора ($ь ..., £„+i) и (А$ь ..., м„+))
определяют в Рп одну и ту же точку. Непропорциональные
наборы определяют различные точки в Рп.
Числа Si, ..., называют однородными координатам!
точки М в Рп.
Важное замечание. Мы рассматриваем сказанное
сейчас как определение /z-мерпого проективного простран-
ства. Однако обычно в определение проективного простран-
ства включают описание некоторых специальных подмно-
жеств, называемых A-мерными плоскостями (А = 0,1, ..., д)
с соблюдением у системы этих подмножеств определенных
свойств. Эти свойства выражаются аксиомами проективного
пространства. В одном и том же множестве точек подмноже-
ства такого рода (плоскости) можно назначить по-разному,
или, как- принято говорить, на одном и том же множе-
стве можно задавать разные проективные структуры. Мы
позволяем себе ограничить определение проективного про-
странства всего лишь двумя аксиомами А) и Б), потому что
в дальнейшем мы введем системы подмножеств, называемых
плоскостями, по одному совершенно определенному стан-
дарту (с помощью систем линейных уравнений), от которого
никогда не будем отступать.
Замечание. Аксиомы проективного пространства мы
не приводим. Аксиоматическое определение проективного
пространства гораздо сложнее, чем знакомое нашему чита-
§ 2]
ПОНЯТИЕ ПРОЕКТИВНОГО ПРОСТРАНСТВА
477
телю аксиоматическое определение линейного пространства,
данное в § 1 гл. I.
2. Сразу же обратим внимание читателя на то, что про-
ективное пространство не является векторным, поскольку
в нем не будут определены линейные операции.
3. Проективное пространство называется действительным,
если для его точек М (Ej, ..., E„+i) допускаются только дей-
ствительные значения координат (Ei, ..., En+i). Если же в ка-
честве Е* берутся также и комплексные числа, то проектив-
ное пространство называется комплексным.
4. Пусть даны соотношения
Qn^i • • • + Qi n+i5n+i,
--Qn+1 1^1 । • • ] Qn+l
(о
при условии, что (и-|- 1)Х(Л-Ь 1)-матрица Q = ||Q/7|| невы-
рождена и X ф 0.
Тогда по произвольно заданному набору чисел (Еъ ...
. •., E„+i) определяется новый набор чисел (XEJ, ..., Х^+1). При
этом, если среди чисел есть хотя бы одно, отличное от
нуля, то и среди чисел Е* также найдется отличное от нуля
вследствие невырожденности матрицы Q.
Будем считать, что числа (Ei, ..., ЕЙ+1) являются новыми
координатами точки, которая раньше была определена коор-
динатами (Ei, ..., En+i). При этом по отношению к новым
наборам чисел k' требования А) и Б) соблюдены, в чем легко
убедиться. Формулы (1) при любом задании матрицы Q будем
рассматривать как формулы преобразования координат. О гео-
метрическом смысле этих преобразований пока задумываться
не будем (он будет рассмотрен ниже, в следующем пара-
графе).
Таким образом, наряду с исходными координатами Ец ...
• • •, E„+i мы вводим множество других координатных систем.
Мы будем называть их проективными системами коор-
динат в Рп. Каждая новая система определяется заданием
матрицы Q.
Исходные координаты Ei, ..., En+i не имеют никакого
преимущественного положения среди других координатных
систем, вводимых формулами (1). В самом деле, формулы (1)
можно обратить, и тогда старые координаты будут выражены
478 ПРОЕКТИВНОЕ ПРОСТРАНСТВО [ГЛ. XII
через новые формулами такого же вида. Кроме того, если
мы по формулам вида (1) с матрицей Q перейдем от коор-
динат 5Х, £„+1 к координатам £„+1, а затем по ана-
логичным формулам с матрицей Q перейдем от координат
•••> £л+1 К координатам £„+1, то Е„+1 будут
выражаться через St, £n4t по формулам вида (1) с мат-
рицей QQ. Коротко говоря, равноправие всех указанных
координатных систем является следствием того обстоятель-
ства, что преобразования вида (1) составляют группу
(известную нам группу линейных преобразований пере-
менных).
5. Формулы вида (1) можно рассматривать с иной точки
зрения. Можно считать, что система координат не изменяется,
а сама точка Mfa, En+i) преобразуется в точку ...
..., 5л+1). Формулы(1), рассматриваемые с этой точки зре-
ния, задают некоторое взаимно однозначное преобразование
проективного пространства. Всякое преобразование такого
вида в пространстве Рп называется проективным преобразо-
ванием. Все проективные преобразования пространства Рп
(то есть отвечающие всевозможным невырожденным матри-
цам Q) составляют группу. Ее называют проективной груп-
пой пространства Рп.
6. Ошибочно было бы думать, что проективная группа
пространства Рп изоморфна группе невырожденных (n-j-l)X
X (n4" 1)-матриц. Дело в том, что формулы вида (1) с мат-
рицами Q и aQ (а — любое число, не равное нулю) опре-
деляют одно и то же проективное преобразование. В част-
ности, при Q = лЕ, а ф 0, независимо от а получаем тож-
дественное проективное преобразование, которое оставляет
все точки на своих местах.
7. Предметом проективной геометрии, т. е. теории про-
ективных пространств, являются объекты, свойства и вели-
чины, инвариантные относительно проективной группы. Рас-
смотрим некоторые инварианты проективной группы.
8. Назовем гиперплоскостью в проективном простран-
стве Рп любое множество точек, которое определяется в не-
которой заданной системе координат каким-либо однородным
уравнением первой степени
4" • • • 4" ^n^n+i — 0.
(2)
§ 2] ПОНЯТИЕ ПРОЕКТИВНОГО ПРОСТРАНСТВА 479
Преобразуем уравнение (2) соответственно проективному
преобразованию (1) (см. п. 5). Обращая (1), найдем
(3)
/=1
Подставляя это выражение в (2), получим
•^1^1Лп+1£п+1 = 0, (4)
где через (Ej, ..., Е„+1) обозначены текущие координаты точки
в той же самой координатной системе, в которой задана ги-
перплоскость (2), а коэффициенты Д* выражаются формулой
л 4-1
А'к = '- 2 PkiAi. (5)
z=i
Поскольку среди А/ есть отличные от нуля, 1^0 и мат-
рица Р невырождена, то и среди Л* есть отличные от нуля.
Поэтому (4) не тождество. Следовательно, (4) есть уравне-
ние первой степени. Обратно, если в уравнение (4) подста-
вим (1), то, учитывая (5), получим уравнение (2). Мы видим,
что точки, удовлетворяющие уравнению (2), переходят в точки,
удовлетворяющие уравнению (4), и обратно. Поэтому образы
точек гиперплоскости (2) заполняют всю гиперплоскость (4).
Вывод. При проективном преобразовании любая гипер-
плоскость переходит в гиперплоскость.
Таким образом, множество всех гиперплоскостей в Рп
есть объект, инвариантный относительно проективной группы.
Поэтому гиперплоскости относятся к предмету проективной
геометрии.
Замечание. Переход от уравнения (2) к уравнению (4)
можно рассматривать с иной точки зрения, именно как пере-
ход к уравнению той же самой гиперплоскости в другой
системе проективных координат. Отсюда видно, что уравне-
ние гиперплоскости вО всех проективных системах коорди-
нат является линейным и однородным. Легко понять, что
вообще проективная инвариантность класса объектов равно-
сильна инвариантности класса уравнений этих объектов отно-
сительно перехода от одной проективной системы координат
к другой.
9. Назовем A-мерной (проективной) плоскостью в Рп лю-
бое множество точек, которое определяется в некоторой
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
(ГЛ. ХП
заданной системе координат какой-либо однородной линей-
ной системой уравнений ранга г — п — k:
#11^1 • • • + л+1’л+1 — О,
Ori’i 4~ • • • Ч~ аг л+1^л+1 — 0.
(6)
Обозначим прямоугольную матрицу системы (6) через А.
Преобразуя систему (6) по формулам (3), получим систему
^114 ~Т~ • • “I ^1 Л41^л+1 -0>
Пг л+1^л+1----0-
(7)
Пусть А' — матрица системы (7). Аналогично п. 9 § 5 гл. III
имеем из (6) и (3)
А' = 1АР*. (8)
Из (8) следует, что Rang А! = Rang А, поэтому система (7)
задает плоскость той же размерности А.
Из этих выкладок видно, что при проективном преоб-
разовании Л-мерная плоскость переходит в A-мерную пло-
скость. Таким образом, множество всех A-мерных плоскостей
в Рп есть" объект, инвариантный относительно проективной
группы. Поэтому A-мерные плоскости относятся к предмету
проективной геометрии.
10. .Две плоскости в проективном пространстве назы-
ваются скрещивающимися, если они не имеют общих точек.
Рассмотрим в Рп плоскости IIfc и Пг размерностей k и I,
заданные системами однородных линейных уравнений; объе-
диним все их уравнения в одну систему. Если объединенная
система имеет только тривиальное решение, то Щ и Пг
скрещиваются, так как набор (0,..., 0) не определяет ника-
кой точки. В противном случае плоскости пересекаются.
Отсюда нетрудно подсчитать, что две плоскости в Рп могут
скрещиваться лишь при условии, что сумма их размерностей
меньше размерности пространства:
k -j-1 п.
Из п. 9 и из взаимной однозначности проективных пре-
образований следует, что при проективных преобразованиях
§ 21 ПОНЯТИЕ ПРОЕКТИВНОГО ПРОСТРАНСТВА
481
пересекающиеся плоскости переходят в пересекающиеся, а
скрещивающиеся переходят в скрещивающиеся.
Замечание. При пополнении аффинного простран-
ства бесконечно удаленными точками не исключено, что
плоскости, скрещивающиеся в 21„, могут превратиться в пере-
секающиеся плоскости пополненного пространства (о скре-
щивающихся плоскостях в ?(„ см. выше, § 7 гл. 111).
11. Назовем гиперповерхностью второго порядка в проек-
тивном пространстве Рп любое множество точек, которое
определяется в некоторой проективной системе координат
каким-либо однородным уравнением второй степени
п+1
У, 0,^=0.
I,
Аналогично предыдущему можно показать, что множество
всех гиперповерхностей второго порядка в Рп есть объект,
инвариантный относительно проективной группы. Поэтому
гиперповерхности второго порядка относятся к предмету
проективной геометрии.
12. Проективная геометрия изучает такие свойства гипер-
плоскостей, A-мерных плоскостей, гиперповерхностей второго
порядка и т. п., которые инвариантны при любых проектив-
ных преобразованиях. К числу таких свойств относится, на-
пример, размерность плоскости.
13. Одномерная проективная плоскость называется проек-
тивной прямой.
Рассмотрим произвольную прямую в Рп. Она определя-
ется линейной однородной системой уравнений ранга п — 1
относительно п 1 переменных. Следовательно, в данном
случае фундаментальная система решений состоит из двух
независимых решений. Обозначим их (iii,..., u„+i), (t»i,..., г»л+1).
Им отвечают две точки U, V на прямой. Пусть М (Еъ...
..., $„+i) — произвольная точка этой прямой. Поскольку любое
решение линейно выражается через фундаментальное, то
имеем
5г = -h i — 1.............п + 1, (9)
где р., э — некоторые числа (не равные одновременно нулю).
Формула (9) выражает тот геометрический факт, что пря-
мая однозначно определяется любыми двумя своими точками
482
Проективное пространство
[ГЛ хп
и что через две произвольные точки U, V С Рп можно про-
вести прямую.
Числа р, к можно рассматривать как однородные коор-
динаты точки М на данной прямой. Вместе с тем заключаем,
что прямая в проективном пространстве сама является одно-
мерным проективным пространством.
Ограничиваясь случаем действительного пространства Рп,
положим
с = ----, p.c = cosa, мс — sin а.
Тогда из (9) имеем
cl, = ut cos a -j- Vi sin а,
(Ю)
где cl, — координаты той же самой точки М. Изменяя а
в пределах от —со до -|-оо, мы получим всевозможные
точки на данной прямой. При -этом ввиду периодичности
Рис. 92.
синуса и косинуса каждая точка М повторится бесконечно
много раз. Формула (10) показывает, что наглядной моделью
действительной проективной прямой может служить простая
замкнутая кривая, например обычная окружность. В самом
деле, при изменении а от 0 до it точка М один раз пробе-
гает всю проективную прямую и возвращается в исходное
положение. Отметим, что при пополнении аффинного прост-
ранства бесконечно удаленными точками каждая прямая
пополняется одной точкой, которая и делает ее замкнутой
линией (рис. 92).
Аналогичное представление действительной двумерной
проективной плоскости в виде сферы оказывается ошибочным.
В связи с этим см. п. 13 следующего параграфа.
14. В случае A-мерной проективной плоскости вместо
формулы (9) получаем
S-=М” + нХ-2’ + • • +
(П)
§ 2]
ПОНЯТИЕ ПРОЕКТИВНОГО ПРОСТРАНСТВА
483
где {«;'*}, ..., {?/(*+')}— фундаментальная система реше-
ний линейной системы уравнений вида (6), —
числа, среди которых есть отличные от нуля. Их можно
рассматривать в качестве однородных координат точки /г-мер-
ной плоскости.
Отсюда ясно, что /г-мерная плоскость в Рп сама является
A-мерным проективным пространствам (действительным или
комплексным в зависимости от того, действительно или ком-
плексно Рп).
15. Вернемся к рассмотрению произвольной прямой (9)
в проективном пространстве Рп. Вместе с точками U, V рас-
смотрим еще две точки на этой же прямой: точку Л4 с коор-
динатами
—+ (12)
и точку N с координатами
»li = R« + wi, (13)
считая, что они отличны от точек U, V. Число
называется сложным или двойным отношением, в котором
упорядоченная пара точек М, N делит упорядоченную пару
точек U, V.
Для обозначения g употребляется символ (UVAIN). Таким
образом,
(UVA4N)— — (14)
Iх [X
Заметим, что каждое из простых отношений — и 4- не
Iх р-
определяется точками U, V, Л4 и U, V, N. Это ясно, посколь-
ку однородные координаты любой из этих точек можно
умножить на произвольное не равное нулю число.
Однако двойное отношение имеет вполне определенное
численное значение, зависящее только от задания на прямой
упорядоченных пар точек U, V и М, N.
В самом деле, если координаты точек U, V7, М, N умно-
жим соответственно на четыре любых множителя ф 0, то
484
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ XII
дроби м/р и v/p умножатся на один и тот же множитель,
который в выражении (14) сократится.
Более того, двойное отношение не меняется при переходе
к любой новой системе проективных координат пространства.
Это утверждение равносильно тому, что двойное отношение
инвариантно относительно любых проективных преобразова-
ний; доказательство см. в п. 1'6.
Рассмотрим подробнее геометрический смысл двойного
отношения. Возьмем на обычной прямой четыре различные
точки U, V, Л4, N. Будем считать, что на этой прямой вве-
дена аффинная координата х, принимающая в указанных
точках соответственно значения xt, ха, х3, (рис. 93).
N х, М &g
У
Рис. 93.
Перейдем к однородным координатам (£, ц) по формуле х —
= V73> ''J 0. Полагая ij=l, будем иметь следующие одно-
родные координаты рассматриваемых точек:
U(xb 1), V(xa, 1), М(х3, 1), N(xit 1).
Тогда формулы (12) и (13) примут вид
Хз — Р>‘1 4* VX2, | Х4 — |ТХ1 4- vx4, 1
, < ( I (15)
1 — р т ) 1 = р 4- v. J
Из систем (15) найдем р, v, р, v и, подставив их в (14),
получим
(UVMN)=Xs ~Xt- :X1-. (16)
Xg —- Xg Xg х$
Из элементарной аналитической геометрии известно, что
дроби в правой части формулы (16) суть отношения X и X,
в которых точки М и N соответственно делят отрезок UV:
,__UM_____хя — Xj j-____UN____xt — xt , ~
/VH7 xs — x:l ' NV хг— Xi' '
§ 2]
ПОНЯТИЕ ПРОЕКТИВНОГО ПРОСТРАНСТВА
485
Таким образом,
(UVMN) = l:l
_UM .UN
~ MV'NV
для любых четырех различных точек на аффинной прямой.
16. Двойное отношение двух пар точек является величи-
ной, инвариантной относительно проективной группы.
Для доказательства рассмотрим произвольное проективное
преобразование. По формулам (3) имеем
= (18)
Вследствие невырожденности матрицы из (18)
и (12) получаем
то;, (19)
где it'i, v'i, суть координаты точек U\ V и Л-Г, которые
являются образами точек U, V и М соответственно. Анало-
гично получаем координаты образа N' точки N
= + (20)
Из (19) и (20) находим
(U'V'M'N') = - : 4 =(UVMN),
И (Л
что и требовалось установить.
17. В конце предыдущего параграфа мы указывали, что
пополненное бесконечно удаленными элементами аффинное
пространство $(„ является моделью общего понятия «-мер-
ного проективного пространства. Нужно заметить при этом,
что если мы рассматриваем пополненное аффинное простран-
ство как проективное и допускаем в нем любые преобразо-
вания вида (1) § 2, то мы должны не обращать внимания
на особое положение бесконечно удаленных элементов и счи-
тать, что они равноправны с обычными, поскольку с помощью
проективного преобразования любую бесконечно удаленную
точку можно перевести в обычную. К тому же в определении
проективного пространства не делается выделения каких-либо
объектов в качестве бесконечно удаленных.
Поэтому множество бесконечно удаленных точек в попол-
ненном аффинном пространстве не является объектом, инва-
риантным относительно проективной группы. Следовательно,
486
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. ХП
понятие о бесконечно удаленных точках не относится к пред-
мету проективной геометрии.
18. С помощью преобразования координат в Рп можно
добиться того, чтобы любая наперед заданная гиперплоскость
получила уравнение £„+i = 0, и можно условиться считать ее
бесконечно удаленной. Указание того, какая именно гипер-
плоскость принята в качестве бесконечно удаленной, можно
рассматривать как возвращение от проективного простран-
ства к аффинному.
19. Если в аффинном пространстве введены однородные
координаты, то, как нетрудно проверить, любое аффинное
преобразование задается формулами вида (4) § 1 и любое
преобразование вида (4) § 1 с невырожденной матрицей
коэффициентов является аффинным. Если сравнить формулы
(4) § 1 с формулами (1) настоящего параграфа, то будет
ясно, что аффинные преобразования пространства можно
считать частным случаем проективных преобразований в
пополненном аффинном пространстве, то есть в Рп. Именно,
аффинными можно считать все преобразования вида (1), кото-
рые сохраняют бесконечно удаленные точки в качестве бес-
конечно удаленных.
В самом деле, если из условия |n+i = 0 обязательно полу-
чается £'„+1 = 0, то проективное преобразование должно
иметь вид (3) § 1. Если мы интересуемся лишь точками
самого пространства ?(„, то £П1д ^0, и из (3) § 1 получаем
формулы (2) § 1, выражающие аффинное преобразование.
Важное следствие. Группа всех аффинных преобра-
зований в является подгруппой в проективной группе
пространства Рп.
Замечание. Для этой формулировки весьма сущест-
венно, что мы условились аффинными считать некоторые
специальные проективные преобразования. Таким образом, мы
включили аффинные преобразования в число проективных.
Из-за того, что запас проективных преобразований богаче
запаса аффинных преобразований, проективная группа имеет
меньше инвариантов, чем аффинная: каждый инвариант про-
ективной группы является инвариантом аффинной группы, но
обратное неверно. Например, каждое из отношений (17) явля-
ется аффинным инвариантом, но не является инвариантом
проективным (последнее без всяких вычислений вытекает из
П. 3 § 5).
СВЯЗКА ПЛОСКОСТЕЙ
487
§ 3)
С другой стороны, проективная геометрия по сравнению
с геометрией аффинной (и тем более с метрической) изу-
чает свойства геометрических фигур, более устойчивые в том
смысле, что они сохраняются при любых преобразованиях
более обширной группы.
20. Все изложенное в пп. 8 — 19 служит иллюстрацией
нашей краткой формулировки п. 7.
§ 3. Связка плоскостей в аффинном пространстве
1. Рассмотрим в (п-|~ 1)-мерном аффинном пространстве
§(„+1 множество всех плоскостей всех размерностей (в том
числе прямых), проходящих через зафиксированную точку О.
Это множество называется связкой с центром О. Дальше
мы связку и ее центр будем обозначать одной и той же
буквой О.
Примем точку О в качестве начала аффинной системы
координат с произвольно выбранным базисом еь..., е„+1. Начало
координат мы менять не будем, поэтому будем отождеств-
лять 91n+i и соответствующее ему линейное пространство
^-л+1-
Каждая прямая связки однозначно определяется заданием
какой-нибудь своей точки М, отличной от точки О. Пусть
(£ь..., £„+1) — координаты точки М в базисе eit..., e„+i.
Тогда точка (Х£ь..., Х£„+1) при любом X ф 0 определяет ту
же самую прямую ОМ
Прямую, рассматриваемую как элемент связки, назовем
точкой, числа (?1;..., £„+i) — ее однородными координатами.
Тогда ясно, что множество таких точек (то есть прямых
связки О) представляет собой п-мерное проективное про-
странство Рп. Ясно также, что каждая (А -L- 1)-мерная пло-
скость связки О является A-мерной проективной плоскостью
в Рп, поскольку она проходит через начало координат,
и, следовательно, определяется системой однородных линейных
уравнений ранга г — (п -j-1) — (А-|-1) = п — k.
Таким образом, мы получили еще одну геометрическую
модель проективного пространства Рп — в виде связки в аф-
финном пространстве размерности n-l- 1. В отличие от § 1,
здесь не требуется какого-либо пополнения новыми точками;
все элементы рассматриваемого множества (прямые связки)
геометрически равноправны.
488
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ XII
2. Рассмотрим совместно обе известные нам модели
«-мерного проективного пространства. Это поможет выяснить
геометрический смысл преобразований координат и проек-
тивных преобразований в Рп, которые были определены
алгебраически в § 2.
В качестве «-мерного аффинного пространства возь-
мем какую-нибудь гиперплоскость в пространстве ЭД„+1, не
проходящую через центр связки О. Пополним 8(„+i беско-
нечно удаленными элементами согласно пп. 5—8 § 1. Тогда
?I„+i превратится в проектив-
ное пространство Рп+1,.а ги"
перплоскость §(„ превратится
в проективное пространство
размерности п, которое мы
будем обозначать
Каждая прямая а связки О
(пополненная бесконечно уда-
ленной точкой) пересекает ?(„
в некоторой точке А (рис. 94).
Будем говорить, что точка А
соответствует прямой а. Это
соответствие является взаимно однозначным благодаря про-
веденному пополнению 9(„+1; именно, если прямая в аффин-
ном пространстве параллельна гиперплоскости §(„, то точка
А является бесконечно удаленной (рис. 55).
Пусть ОМ — какой-нибудь направляющий вектор прямой а,
ОМ — -ф-...-ф-^„+1е„+1. Числа ()ЛЬ..., Х|„+1) (X ф 0), про-
порциональные координатам вектора ОМ, примем за одно-
родные координаты точки А в соответствующей прямой а
§ 3]
СВЯЗКА ПЛОСКОСТЕЙ
489
(рис. 96). Они совпадают с однородными координатами этой
прямой, определенными согласно п. 1.
Ясно, что выбором базиса еь..., e„+i в полностью
определяются проективные координаты в связке О и в гипер-
плоскости Эта система проективных координат сохра-
няется при подобном преобразовании базиса et (т. е. при пере-
ходе к базису вида аеь..., аеп+1, а ф 0).
Обратим внимание на частный случай, когда векторы
..., еп параллельны ?(„. В этом случае обозначим через О'
точку пересечения ги-
перплоскости с той
прямой связки О, на-
правляющим вектором
которой служит еп+1.
Введем в аффинные
координаты с нача-
лом О' и базисом
еь..., еп (рис. 97).
Тогда аффинные коор-
динаты (хьхп)
Рис. 97.
произвольной точки А £ и ее однородные координаты
(Sb • • • > S„+i) будут связаны формулами (1) § 1, то есть xt =
/=1,..., п, S„+i#:0.
3. Вернемся к рассмотрению общего случая. Пусть е\, ...
е'п^1 — новый базис в Тогда
п+1
= 7=1,+1. (1)
/= i
Если ОМ — произвольный ненулевой вектор на прямой а,
имеющий в старом базисе координаты Si,..., S„+i, а в новом
координаты Si,..., S„+i, то
n+I
= i=l’’ «+1- (2)
7=1
Но числа (Si,...-, S„+i) являются старыми однородными коор-
динатами точки А, а числа (Si,..., S«;i) — ее новыми одно-
родными координатами в 'Л„. Поэтому формулы (2) можно
рассматривать как преобразование однородных координат
точек ц пополненной гиперплоскости (а вместе с тем
490 ПРОЕКТИВНОЕ ПРОСТРАНСТВО [ГЛ. ХП
и в связке О) при только что описанном изменении коор-
динатной системы пространства ?1л+1- Вместо (2) можно напи-
сать формулы (1) § 2, поскольку однородные координаты
определяются с точностью до множителя пропорциональности.
4. Пусть теперь в п-мерном проективном пространстве Рп
задано формулами (1) § 2 какое-нибудь преобразование
проективных координат. Отождествляя Рп со связкой О
в 3(„+1 и положив в формулах (1) § 2 Х=1, получим фор-
мулы (2). Их можно рассматривать как формулы такого пре-
образования координат в 3(л+), при котором начало коорди-
нат остается на месте, а базис преобразуется по форму-
лам (1).
5. Подводя итог, можно сказать, что проективные коор-
динаты в Рп определяются заданием базиса еь..., е„+1 в 5ЙЛ+Ь
а формулы (1) § 2 выражают переход к новой проективной
системе координат в Рп, задаваемой новым базисом е\,...
.. •, ел+]В 'Лл+1. При этом безразлично, какую из двух моделей Рп
рассматривать: связку О или гиперплоскость ?(л.
6. Аналогичным образом можно истолковать формулы (1)
§ 2, если считать, что они задают проективное преобразо-
вание в Рп. Для этого нужно рассмотреть в ?|л+1 аффинное
преобразование, которое оставляет на месте точку О и за-
дается формулами (2). При этом произвольная точка М £ ?1л+1
с координатами (5ц..., 5„+i) переходит в точку Af(5i, ...
..., £npi)- Если нас не интересует сама по себе точка АГ, а ин-
тересует только прямая ОАГ, в которую переходит пря-
мая ОМ, то мы можем в соотношениях (2) числа 5ц..., £„+1
или числа Bi,..., 5л+1 умножить на любое число X 0. Если
мы поставим множитель X в левых частях формул (2), то
получим формулы (1) § 2.
Таким образом, можно сказать, что любое проективное
преобразование в пополненной гиперплоскости 31л индуци-
руется некоторым аффинным преобразованием в §1л+1, остав-
ляющим на месте точку О (или, что то же самое, невырож-
денным линейным преобразованием в L„+1).
Если же в качестве модели проективного пространства Рп
взять связку О, то можно сказать, что проективные пре-
образования в Рп есть просто аффинные преобразования в
?(л+1, сохраняющие точку О, не забывая при этом, что точ-
ками Рп являются прямые связки Q,
СВЯЗКА ПЛОСКОСТЕЙ
491
§ 3]
7. Чтобы придать полную наглядность всему сказанному о
модели проективного пространства в виде связки О в §(„+1 и о
проективных преобразованиях на этой модели мы порекомен-
дуем читателю вообразить себе, что он наблюдает пространство
§(„+i из центра связки О. Тогда все точки этого пространства,
лежащие на каком-нибудь луче его зрения, он увидит как
одну точку. Поэтому если читатель будет следить из точки О
за перемещением точек при каком-нибудь невырожденном
линейном преобразовании в L„+i —5й„+1, то на самом
деле он увидит проективное преобразование в связке или
в какой угодно гиперплоскости, не проходящей через
точку О.
Отметим, что разные линейные преобразования Ах и рЛх
([1 — любое число ф 0) в §(„+1 являются одним и тем же про-
ективным преобразованием л связке О.
8. В качестве приложения рассмотренных выше конструк-
ций выясним условия, однозначно определяющие проективное
преобразование в Рп. Введем важное для дальнейшего опре-
деление.
Определение. Система г -I- 1 точек в Рп находится в
общем положении, если они не принадлежат одной (г—1)-
мерной (проективной) плоскости.
Очевидно, что общее число точек такой системы не
может быть больше л/—1.
Замечание. Если в качестве Рп рассматривается связка
О в то точки ..., ат£ Рп находятся в общем поло-
жении в пространстве Рп тогда и только тогда, когда направ-
ляющие векторы прямых аь..., ат£ 9(„+i линейно незави-
симы в Л„+1- Чтобы убедиться в этом, достаточно вспомнить,
что в такой модели A-мерные (проективные) плоскости
пространства Рп суть (k 1)- мерные плоскости связки О.
Пусть в Рп произвольно задана система точек аь ...
..., Сл а„+8 в числе /г-|-2 такая, что любые и-1-1 из этих
точек находятся в общем положении. Пусть далее в Рп про-
извольно задана другая аналогичная система точек а/, ...
..., a'n+i, а'п+2. Докажем, что справедлива
Теорема 1 . Существует и притом единственное
проективное преобразование пространства Рп, которое
переводит at в а{ для всех номеров п-1-2.
Доказательство. В качестве модели проективного
пространства Рп снова возьмем связку О в ?(„+i. Пусть в
492
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ XII
связке О прямые alt..., a„+i> йп+2 заданы в качестве точек-про-
1образов, а прямые а/,..., ай-н> «п+2 — в качестве точек-обра-
зов. Возьмем какой-нибудь направляющий (ненулевой) вектор
^п+2 прямой а„+2; возьмем любые направляющие (ненулевые)
|векторы ё,- прямых аг (Z=l,..., л-j-l). По условию пря-
мые ai,a„+i как точки Рп находятся в общем положе-
нии; значит, векторы ё, (Z=l,..., п-|-1) составляют
базис в §1л+1. Поэтому существует разложение
ел+2 = Х„+1 ёп+ь
Докажем, что ни одно из чисел Хг не равно нулю:
Хг^0, г=1,..., «4-1. (3)
Предположим противное. Пусть, например, Х1 = 0. Тогда
линейно выражается через векторы eit...,en+1, по-
этому система еъ..., еА-н> еп + з линейно зависима, что
противоречит условию, поскольку точки аз,..., an^.t,
£ Рп находятся в общем положении. Итак, Х^О. Ана-
логично устанавливаются остальные неравенства (3).
Положим е1 = 'К1еь 1=1,..., п-\- 1. Тогда
^n+2~ei~i~--‘~ben + i. (4)
Из независимости векторов еь..., еп и неравенств (3)
следует, что векторы еь..., en + i тоже независимы. Анало-
гично доказывается, что найдутся векторы e’t, лежащие соот-
ветственно из прямых a'i, такие, что
en + i = el~\~ •-\~еп + ъ (5)
причем е'р..., + , линейно независимы в ?(„ + ]. Отсюда
и из п. 6 § 3 гл. VII следует, что в + l = L„ + 1 суще-
ствует; невырожденное линейное преобразование = Ах, для
которого e'i = Aeb 1=1 «-{-1. Используя (5), находим,
что
— ei 4- • • -Ч- en+i — 4- • • •+^en+i =
= А (б! 4-... 4- е„+4 = Аеп-+ 2.
Тем самым ei = Aet для всех /=!,..., «4-1, то
есть линейное преобразование х'=Ах в переводит
данные прямые at,..., а„+2 в данные прямые а„^3
и, следовательно, индуцирует искомое проективное преобра-
зование в связке О, которое мы обозначим через /.
§ 3] СВЯЗКА ПЛОСКОСТЕЙ 493
Докажем единственность. Пусть имеется еще одно проек-
тивное преобразование <р в связке О, для которого <р(а,-) =
\=a'i, n-j-2. Согласно и. 8 оно индуцируется не-
которым невырожденным линейным преобразованием В про-
странства 91л-|-1, которое также переводит прямые а, в
a'i (1 = 1,..., п 4- 2). В таком случае
e[—Bei = ^.iel, (6)
где [л, — какие-то числа; I — 1,..., п -|- 2. При этом вслед-
ствие (4) и (6) имеем
^«4-2 — ^я + 2 — Ве\ -(“••• 4” Веп + 1 —
= №1Н- • • • 4~ Hn+i^+i- (7)
С другой стороны, используя (5) и (6), находим, что
en + i == Ня -)-2^яЦ-2 == Ия + 2^1 4- • • • Ня-|-2ел+ 1- (8)
Из (7) и (8) следует
Нл + 2 = Н = Н2 = --- = 1хя+1. (9)
поскольку векторы е[,..., е'п + 1 независимы. Полагая
|л„_|_2 = |х, получим
Bei = y.e'i = p.Aei, п-\- 1.
Но тогда Вх = }>.Ах для любого вектора х из ?1я+1, а это
и значит, что <р=/. Тем самым теорема 1 доказана.
9. Выше было указано, что координаты в Рп опреде-
ляются заданием базиса в Однако базис в яв-
ляется объектом, внешним по отношению к пространству Рп.
Желательно иметь другой способ задания проективных коор-
динат, опирающийся лишь на рассмотрение объектов самого
проективного пространства.
Пусть в Рп произвольно выбрана и зафиксирована систе-
ма точек в числе n-j-2
Аь А,..., Ап + 1, В (10)
такая, что любые п -ф-1 из этих точек находятся в общем
положении.
Теорема 2. В п-мерном проективном простран-
стве Рп найдется единственная система проективных
494
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. ХП
координат, в которой точки (10) имеют следующие од-
нородные координаты:
Л (1, 0,
А (0, 1......0),
.................................. (П)
А + 1(0, 0, ..., 1),
в (1, 1, .... 1).
Доказательство. В качестве модели Рп рассмотрим
связку О в Ши+1. Так же, как в доказательстве теоремы 1,
найдем направляющие векторы eltепуь еп'г2 прямых
Др..., Дя + р В связки О такие, что:
а) _|_2 = ej р
б) еь..., е„ + 1 линейно независимы в 91n-|-i-
Примем векторы е1г..., e„ + i за базис в ?(«4-i. Тогда,
согласно п. 1, в Рп определятся однородные координаты
точек, причем условия (11) будут- выполнены (последнее
из них — вследствие а)).
Докажем единственность. Пусть некоторая проективная
система координат в Рп задана другим базисом ед,-.., A+i
пространства и пусть условия (11) снова соблюдены.
Тогда в силу (11) векторы ёь..., еп+1 необходимо яв-
ляются направляющими для прямых Д1; ..., Длр! связки О, то
есть ?I- = a/ei (а,- 0, /=1,..., п-]-1); кроме того,
»+1
У ~ег = а„ + ^„ + 2, а„ + 2^:0, поскольку вектор щ-)----
1 = 1
е„л должен быть направляющим для прямой В £ О.
Далее аналогично выкладкам (7) — (9) устанавливается, что
оц =... = a„+i. Отсюда следует, что однородные координаты
01,..., 5n+i) точки X, задаваемые с помощью базиса ё\, ...
• • , А+ь пропорциональны ее кординатам 0Ь..., £„+i), получен-
ным, исходя из базиса eit..., enJti. Теорема 2 доказана.
10. Замечание. Для иллюстрации геометрического
смысла теоремы 2 рассмотрим в качестве модели Рп попол-
ненное аффинное пространство считая, что однородные
координаты 01,..., £„+i) вводятся, согласно пп. 1 — 5 § 1,
исходя из некоторой аффинной системы координат (ад, ...
..., х„) в 2(„. Тогда точки, имеющие координаты (11), выполня-
ют следующие роли:
§ 3]
СВЯЗКА ПЛОСКОСТЕЙ
495
A„+i(0.... О, 1) служит началом аффинной системы ко-
ординат в ?1„;
Ai, Ай..., Ап являются бесконечно удаленными точками
координатных осей хь хъ..., хп соответственно; их выбор
определяет направление координатных осей;
точка 5(1,..., 1, 1), называемая точкой единиц, опреде-
ляет собой выбор базисных векторов на каждой из осей
хъ..., хп (рис. 98).
11. В заключение параграфа укажем еще одну весьма
популярную геометрическую модель для действительного
проективного пространства Рп. Будем считать, что в
Рис. 98.
Рис. 99.
введена евклидова метрика, и наряду со связкой О рассмот-
рим «-мерную сферу X с центром О (определение «-мерной
сферы см. в п. 5 § 6 гл. XI). Каждая прямая связки пересе-
кает сферу в двух диаметрально противоположных точках
(при п — 1 см. рис. 99). Отождествим такие точки, то есть
каждую пару диаметрально противоположных точек сферы X
будем рассматривать как одну точку нового множества. Так
полученное множество по построению взаимно однозначно
соответствует связке О и, следовательно, может рассматри-
ваться в качестве Р„. Каждая A-мерная проективная плоскость
изображается в этой модели в виде Л-мерной сферы с ото-
ждествленными диаметрально противоположными точками,
поскольку каждая (/г — 1)-мерная плоскость связки О пере-
секает сферу X по некоторой сфере размерности k (см.
рис. 100, где я —2, /г= 1).
Заметим, что в частном случае я=1 (и только в этом
случае) можно изобразить Рп в виде одномерной сферы, то
496
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
есть в виде окружности, не отождествляя диаметрально про-
тивоположных точек. Именно, рассмотрим на двумерной
плоскости связку О (иначе говоря, пучок прямых, проходя-
щих через точку О) и окружность S, проходящую через эту
же точку (рис. 101). Точке О на окружности S поставим в
соответствие прямую о, касающуюся окружности в этой точ-
ке. Любой другой точке А £ S поставим в соответствие
прямую ОА. Мы получим взаимно однозначное соответствие
между прямыми связки О и точками окружности S, позволя-
ющее рассматривать окружность как модель проективной
прямой (см. в связи с этим п. 13 § 2).
§ 4. Центральное проектирование
1. Выше мы рассматривали проективные преобразования
в данном пространстве Рп. Это понятие можно обобщить
и рассматривать проективное отображение одного «-мерного
проективного пространства Рп на другое «-мерное проективное
пространство Р’п, считая, что это отображение дается формула-
ми (1) § 2 при условии, что 01,..., ^i) — координаты прообра-
за в пространстве Рп, 0J,.... 5„+i) — координаты образа в про-
странстве Р'п. В этом параграфе мы рассмотрим важный
частный случай: так называемое центральное проектирование.
2. Из п. 10 § 2 следует, что в Рп любая прямая и лю-
бая гиперплоскость пересекаются.
Нетрудно проверить, что если прямая а не лежит цели-
ком в гиперплоскости П, то у них имеется единственная
§ 4]
ЦЕНТРАЛЬНОЕ ПРОЕКТИРОВАНИЕ
497
общая точка. Для доказательства добавим уравнение гипер-
плоскости П к системе уравнений ранга п—1, определяю-
щих прямую а. Если а и П имеют две разные общие точки,
то объединенная система уравнений имеет два независимых
нетривиальных решения, так что ее ранг г^п—1. Но это
возможно лишь тогда, когда уравнение гиперплоскости П
является следствием уравнений прямой а, то есть когда
a cz П.
писать также М'
3. Пусть теперь в Рп выбраны какие-нибудь две различ-
ные гиперплоскости П и II' и зафиксирована произвольная
точка О, не принадлежащая ни
одной из этих гиперплоскостей.
Через произвольную точку М
гиперплоскости П и через точку О
проведем прямую ОМ. Вследствие
п. 2 прямая ОМ пересекает П' в
единственной точке М', и для каж-
дой точки М' £ П' найдется един-
ственная точка М £ П такая, что
М, О и М' лежат на одной пря-
мой (рис. 102).
Точку М' будем называть
проекцией точки М из центра
О на гиперплоскость П'. Будем
Взаимно однозначное отображение — гиперплоско-
сти П на гиперплоскость IT называется центральным про-
ектированием гиперплоскости П на гиперплоскость IT из
центра О.
4. Вместо гиперплоскостей П, П' можно рассматривать
две плоскости Щ, Щ произвольной одинаковой размерно-
сти k и определить центральное проектирование одной из
них на другую, но при этом требуется специальное взаимное
расположение плоскостей Пй, П* и точки О.
Именно, предположим, что П*, Щ и О принадлежат ка-
кой-нибудь одной (ЛЦ- 1)-мерной проективной плоскости Щ+1
в пространстве Рп. Кроме того, будем считать, что плоско-
сти Щ и И* не совпадают, и точка О им не принадлежит.
Тогда полностью применимы рассуждения и построения пп. 2,
3, поскольку П* и П* можно рассматривать как гиперпло-
скости в (/г-|- 1)-мерном проективном пространстве, которым
является плоскость Щ+1 (см. рис. 103, на кодером А—1).
498
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
5. Теорема. Центральное проектирование плоско-
сти П* на плоскостьП'ь (X^k^n — 1) есть проективное
отображение.
Доказательство. Мы знаем, что IIft и Щ можно рас-
сматривать как проективные пространства (§ 2, п. 14) и что
центральное проектирование 7И'==/(7И) является взаимно
однозначным отображением П* на Щ (при k^n — 2 вслед-
ствие специального взаимного
расположения плоскостей). По-
этому нам достаточно выяс-
нить вид формул, задающих это
отображение.
Выберем в Рп систему коор-
динат так, чтобы точка О имела
координаты 5} —... - = О,
Ф 0. Согласно формуле (11) из § 2 произвольная точка
М £ Щ имеет координаты
где пД — некоторые числа. Аналогично произвольная точка
АГ £ Щ имеет координаты
+ • • • +
При этом ([!•!,..., |a*+i) можно считать однородными коорди-
натами Д4 внутри nfc, а (н,..., Р-ачл)—однородными коор-
динатами М! внутри П*. Если точки О, Л1, М' лежат на
одной прямой, то
= + /= 1,..., л-|-1. (1)
Здесь и Р #= 0, так как ни одна из точек М(В,) и
ЛГ(ф не совпадает с точкой О(^). При Z=l,..., п полу-
чаем аЕг-|-р^ —0, но Д-рВ„+1 7^ 0. Обратно, если равен-
ства (1) обеспечены для некоторых чисел а 0, Р #= 0 при
i = l,..., п и если оЛ„+1 -j-р^Лч_1 0, то точки М(Ef) и ЛГ (Ei)
лежат на одной прямой с точкой О. Таким образом, если мы
хотим найти проекцию М' по данной точке М, то должны
решить систему уравнений
н®?’-+-•••++1)=х (И1м?’+• • • 4*
/=1,2,..., л, (2)
§ 4]
ЦЕНТРАЛЬНОЕ ПРОЕКТИРОВАНИЕ
499
считая pt,..., |a*+i, vU} и к ф 0 данными, а р',..., р^+1_
искомыми. Тогда в качестве а 0 и Р ф 0 можно будет
взять любые числа при условии
должны иметь
Кроме того, мь
А+ 1 + • • • +ф}’ Х i + • • • + ф}’)• (3)
Мы заведомо знаем, что точка 714' существует и един-
ственна. Поэтому система (2) однозначно разрешима,
а неравенство (3) соблюдается. Кроме того, матрица,
составленная из столбцов т!»,..., г>(*+1), где i=l, 2,..., п,
имеет ранг Л-[-1 (см. и. 14 § 2). Поэтому у нее есть ба-
зисный минор D порядка k-1-1. Предположим для просто-
ты изложения, что минор D составлен первыми
строчками. Тогда мы возьмем в системе (2) первые ЛЦ-1
уравнений, а остальные отбросим. Решая полученную систе-
му по правилу Крамера, получим
Н = х Pi + • • • + )<
.............................................. (4)
P*+i = >-
[Dk+ii । । Djt+l fe+i \
ТГ" К + ---Н------7)—V-k+i),
где Djt есть определитель, полученный из D заменой столб-
ца с номером j столбцом «Р (i=l,..., /г-f-l). Мы видим,
что pi,..., p*+i выражаются (с точностью до множителя К)
.динейными и однородными формулами через ръ..., pfc+i.
Коэффициенты этих формул, т. е. -g составляют невы-
рожденную матрицу, так как в противном случае можно по-
добрать не все равные нулю числа рь..., p*4i> для которых
будет pi=... = p*+1 = 0. Но это означает, что некоторая
точка Л!С II* не имеет проекции на Щ, вопреки условию. Таким
образом, мы установили, что центральное проектирование Щ
на Щ из центра О задается линейными однородными фор-
мулами (4) с невырожденной матрицей коэффициентов. Теоре-
|ма доказана.
Итак, центральное проектирование является частным слу-
чаем проективного отображения. Отсюда, по-видимому, проис-
ходит название проективных отображений.
5С0
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
(TJJ ХП
6. В качестве упражнения рекомендуем читателю дока-
зать, что если возможно (взаимно однозначное) центральное
проектирование плоскости Щ на плоскость Щ из центра О,
то IIft, Щ и О содержатся в некоторой (k -]- 1)-мерной плос-
кости пространства Рп.
7. Результаты, установленные в § 2 о проективных пре-
образованиях, автоматически переносятся на случай проек-
тивных отображений. Поэтому из доказанной в п. 5 теоремы
вытекает следующее предложение.
Рис. 104.
Пусть дана прямая а в плоскости Щ. и прямая й'С Щ,
которая является образом а при проектировании П* на Щ из
некоторого центра О. Пусть далее U, V, М, N—четыре
точки на прямой a', N' — их проекции на а' (рис. 104).
Тогда
(U'V'M'N') — (UVMN),
то есть двойное отношение является инвариантом относитель-
но центральных проектирований.
§ 5. Проективная эквивалентность фигур
1. Две фигуры в проективном пространстве Рп (то есть
два множества, состоящие из точек, прямых и Л-мерных пло-
скостей) называются проективно эквивалентными, если одна
из них переводится в другую с помощью некоторого проек-
тивного преобразования.
Так как все проективные преобразования образуют группу,
то имеют место следующие предложения:
1) Если фигура проективно эквивалентна фигуре
то orf' эквивалентна
§ 51
ПРОЕКТИВНАЯ ЭКВИВАЛЕНТНОСТЬ ФИГУР
501
2) Если фигура эквивалентна и фигура orf'
эквивалентна а^", то еЛ эквивалентна
3) Каждая фигура эквивалентна самой себе.
В проективной геометрии проективно эквивалентные фи-
гуры не различаются, подобно тому как в метрической гео-
метрии не различаются конгруэнтные фигуры.
2. Теорема 1.В п-мерном проективном пространстве
любые две плоскости одинаковой размерности проективно
эквивалентны.
Доказательство. Пусть произвольная Л-мерная пло-
скость Щ задана системой уравнений
filial ~|~ •••-]- п+1 ^п+1 — 0>
-ф-... -ф- аг „+1 — 0,
(1)
ранг которой равен числу уравнений (г = д — k). Рассмот-
рим проективное преобразование
£1 — а11^1 -ф-... -ф- G1 п+1^л+1>
Ъ + ar n+i£n+i>
£г+1 = G/-+1 1^1 + • • • + ar+l п+1^п+1>
(2)
£л+1 — ап+11^1 + • • • + «п+1п+1£п+1>
где коэффициенты выражений ^+ь • • •, £n+i взяты как угодно,
лишь бы матрица преобразования (2) была невырожденной
(такой выбор возможен, поскольку система (1) имеет ранг
г— п — k). Плоскость Щ преобразованием (2) переводится
во вполне определенную плоскость ^ = 0,..., £+ = 0, кото-
рую мы обозначим через Щ. Аналогично предыдущему уста-
навливается, что любая другая Л-мерная проективная пло-
скость Пй проективно эквивалентна плоскости Щ. Отсюда
следует, что П* и Щ эквивалентны между собой.
3. Рассмотрим проективную прямую. На ней всевозможные
упорядоченные тройки различных точек проективно эквива-
лентны между собой вследствие теоремы 1 § 3; выясним, при
каких условиях проективно эквивалентны четверки точек.
Докажем, что справедлива
502
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ XII
Теорема 2. Для того чтобы упорядоченные четверки
различных точек U, V, М, N и U', V, М', N' на одной
прямой были проективно эквивалентны, необходимо и до-
статочно равенство их двойных отношений
(UVMN)==(U’V'M'N'). (3)
Доказательство. Необходимость равенства (3) сле-
дует из проективной инвариантности двойного отношения.
Докажем достаточность. Пусть равенство (3) соблюдается.
По теореме 1 § 3 существует проективное преобразование /
такое, что
U'=f(U),
Положим f(N) = N". Тогда ((/' V' AT N")=(UVMN) =
вследствие проективной инвариантности двой-
ного отношения и условия (3). Но если заданы различные
точки U', V, М и двойное отношение (V'VMN')=g, то
точка N' определяется однозначно, так как ее однородные
координаты однозначно (с точностью до множителя) выра-
жаются из формул п. 15 § 2 через g и координаты U', V'
и М'. Поэтому N"=N'. Теорема доказана.
4. Говорят, что упорядоченная пара точек MN гармони-
чески разделяет упорядоченную пару точек UV (расположен-
ных на прямой MN}, если
(UVMN)= (4)
В этом случае говорят также, что четверка точек U, V,M,N
является гармонической и что точка N—четвертая гар-
моническая для (упорядоченной) тройки точек U, V, Л1.
Гармоничность четверки точек не нарушится, если:
1) поменять местами пары точек М, N и U, V;
2) поменять местами точки внутри любой из этих пар.
Эти свойства сразу следуют из формулы (4) и формул
п. 15 § 2.
5. Пусть аффинная прямая пополнена бесконечно удален-
ной точкой N. Рассмотрим на этой прямой отрезок АД; обо-
значим через М его середину.
Теорема 3. Пара точек MN гармонически разделяет
пару точек АВ.
Иначе говоря, середина отрезка АВ является четвертой
гармонической для А, В, N, где N— бесконечно удаленная
точка.
§ 5]
ПРОЕКТИВНАЯ ЭКВИВАЛЕНТНОСТЬ ФИГУР
503
Доказательствотеоремы. Введем на прямой аффин-
ную координату х так, чтобы х = 0 в точке А и х = 1 в
точке В. Тогда х — 1^ в точке М (рис. 105). Введем, кроме
того, однородные координаты (Е, tq), полагая х = уч.
получим следующие однородные координаты рассматриваемых
точек: Д(0, 1), 7И(1, 2), В(1, 1), )V(1, 0). Отсюда с помощью
формул (12) — (14) § 2 находим
(ABMN)— — 1.
6. Перейдем к рассмотрению некоторых фигур на двумер-
ной проективной плоскости.
4 / \2
/ 7 \
~2~М~ в\4
Рис. 105.
Рис. 106.
Трехеершинником называется совокупность трех точек, не
лежащих на одной прямой, и трех прямых, попарно соеди-
няющих эти точки (рис. 106).
Поскольку при проективном преобразовании прямая пере-
ходит в прямую, из теоремы 1 § 3 вытекает проективная
эквивалентность любых двух трехвершинников на проектив-
ной плоскости.
7. Понятие трехвершинника помогает наглядно проиллю-
стрировать некоторые геометрические свойства действитель-
ной проективной плоскости. Перечислим эти свойства, не
останавливаясь на доказательствах.
Один трехвершинник разбивает всю действительную
проективную плоскость на четыре треугольника, которые на
рис. 106 и 107 помечены цифрами 1, 2, 3, 4 (на рис. 107
проективная плоскость изображена в виде сферы с отожде-
ствлением диаметрально противоположных точек).
Если на аффинной плоскости какой-нибудь многоугольник
разбит на треугольники, то можно так выбрать направление
обхода каждого из этих треугольников, чтобы обходам любых
двух соседних треугольников соответствовали противополож-
504
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
(ГЛ. XII
ные направления движения по их общей стороне (рис. 108).
Такой выбор обхода треугольников можно сделать двумя
разными способами, что соответствует двум различным ориен-
тациям аффинной плоскости.
На проективной плоскости, разбитой на треугольники,
такого согласованного обхода всех треугольников выбрать
невозможно. Например, если мы согласуем обходы первого
и второго треугольников (рис. 107), а затем второго и треть-
его, то обходы первого и третьего треугольников оказываются
Рис. 107.
не согласованными между
собой.
Г оворят поэтому, что
действительная проективная
плоскость не ориентируема.
Замечание. На аффинной плоскости нельзя разместить
не только четыре, но даже и три треугольника с таким взаим-
ным прилеганием сторон, какое наблюдается в трехвершин-
нике. Однако в трехмерном аффинном пространстве можно
построить модель взаимного расположения любых трех тре-
угольников трехвершинника с помощью так называемого листа
Мёбиуса (т. е. поверхности, склеенной из изогнутого прямо-
угольника, как показано на рис. 109). К краю листа Мёбиуса
можно подклеить и четвертый треугольник трехвершинника
и получить модель всей проективной плоскости в виде по-
верхности, если допускать деформацию склеиваемых треуголь-
ников и самопересечение поверхности. Это самопересечение
можно ликвидировать за счет выхода в четырехмерное прост-
ранство.
8. Фигура на проективной плоскости, составленная че-
тырьмя точками, из которых никакие три не лежат на одной
§ 5]
ПРОЕКТИВНАЯ ЭКВИВАЛЕНТНОСТЬ ФИГУР 505
прямой, и шестью прямыми, соединяющими попарно эти точ-
ки, называется полным четырехвершинником.
Указанные точки называют вершинами, прямые, которые
попарно их соединяют,— сторонами четырехвершинника.
На рис. ПО изображен четырехвершинник ABCD. Стороны,
Рис. 109.
не имеющие общей вершины, называются противоположны-
ми. Так, четырехвершинник ABCD обладает тремя парами
противоположных сторон: АВ и CD, АС и BD, ВС и AD.
Точки пересечения противоположных сторон называют диа-
гональными точками четырехвершинника. На рис. ПО диаго-
нальные точки суть Р, Q, R.
Из теоремы 1 § 3 следует, что любые два четырехвер-
шинника проективно эквивалентны (тогда как системы
из пяти точек на проективной плоскости, вообще говоря,
не эквивалентны между собой).
506
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
Обратим внимание на то, что все три диагональные точ-
ки четырехвершинника равноправны между собой: любую
из них можно перевести в любую другую таким проективным
преобразованием, которое переводит четырехвершинник в себя.
Например, если мы хотим
перевести точку Р в точ-
ку Q (см. рис. ПО), то
нам достаточно взять та-
кое проективное преоб-
разование /, при котором
f(A) = A, f(B) = C,
Тогда прамая АВ перей-
дет в прямую АС, прямая
CD — в прямую BD так,
что точки Р и Q поме-
няются местами, а четырехвершинник ABCD преобразуется
в этот же четырехвершинник.
9. Пусть дан четырехвершинник ABCD. Через две его
диагональные точки Р
и Q проведем прямую
и обозначим через Е
и F точки ее пересе-
чения с теми двумя
сторонами четырехвер-
шинника, которые про-
ходят через третью
диагональную точку R
(рис. 111).
Теорема 4. Если
выполнено указанное
построение, то следующие четверки точек являются гар-
моническими
Рис. 111.
Р, Q, Е, F; A, D, Е, R; В, С, F, R.
Доказательство. Будем считать, что проективная
плоскость получена в результате пополнения аффинной пло-
скости бесконечно удаленными точками. Сделаем проектив-
ное преобразование, переводящее точки А, В, С и D
§ 6]
КЛАССИФИКАЦИЯ ГИПЕРПОВЕРХНОСТЕЙ
507
соответственно в вершины A', Br, С' и D’ некоторого
параллелограмма. Тогда точка Р перейдет в центр Р'
параллелограмма A'B’C'D’ (рис. 112), точки Q и R перейдут
в бесконечно удаленные точки Q' и R' прямых А'В' и A’D’
соответственно. Прямая PQ перейдет в прямую, параллель-
ную А'В’, точки Е и F — в середины Е' и F' противополож-
ных сторон A'D' и В'С,
а точка Р’ окажется середи-
ной отрезка E'F'. Поэтому
с учетом теоремы 3 п. 5 и
проективной инвариантности
двойного отношения имеем
(PQEF)=(P'Q'E'F’) = — 1,
(AD ER) = (A'D'E'R') - — 1,
(BCFR) = (B'C'F'R') = — 1,
что и требовалось доказать.
10. Покажем, как гео-
метрически построить чет-
вертую гармоническую точ-
ку N для трех заданных то-
чек U, V, М на евклидовой
плоскости (U, V, М — три
различные точки на одной
прямой).
Через точку U проведем
прямую, перпендикулярную
UV, и отложим на ней отрезки AU— UD (рис. 113). Обозначим
через В и С точки пересечения прямых DM и АЛ1 с пер-
пендикуляром к прямой (/V, проходящим через точку V.
Тогда прямые DC и АВ, очевидно, пересекают UV в одной
точке, которая является искомой вследствие теоремы 4.
§ 6. Проективная классификация гиперповерхностей
второго порядка
I. Теорема. Для того чтобы две гиперповерхности
второго порядка в действительном Рп были проективно
эквивалентны, необходимо и достаточно, чтобы левые
части их уравнений имели одинаковые ранги и равные
\по абсолютной величине сигнатуры.
508
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
Доказательство. Пусть даны гиперповерхности
а(Е, Е)=0, Е)=0, (1)
где а(Е, Е) и &(Е, Е)— квадратичные формы относительно
однородных координат (Ei.... E„+i) — Е.
Геометрический смысл каждого из уравнений (1) не изме-
нится, если обе части уравнения умножить на—1. Поэтому
можно предполагать, что канонический вид каждой из квад-
ратичных форм содержит отрицательных членов не больше,
чем положительных. Тогда сигнатура положительна и равен-
ство рангов и сигнатур двух квадратичных форм равносильно
равенству их рангов и положительных индексов. Учитывая
это соображение, докажем сначала достаточность, затем необ-
ходимость.
1) Пусть квадратичные формы а(Е, Е) и />(Е, Е) имеют
один и тот же ранг г и один и тот же положительный индекс k.
Рассмотрим квадратичную форму
с(Е, Е) = Е|-{-...-{-Е* — ЕХ+1— — У
(2)
и вместе с ней третью гиперповерхность с(Е, Е) = 0.
Мы знаем, что существует невырожденное линейное пре-
образование переменных, которое форму а(Е, Е) переводит
в форму вида (2). Это значит, что существует проективное
преобразование, которое переводит гиперповерхность а(Е, Е) =
= 0 в гиперповерхность с(Е, Е) = 0, то есть указанные
гиперповерхности проективно эквивалентны. Точно так же
гиперповерхность &(Е, Е) = 0 проективно эквивалентна гипер-
поверхности с(Е, Е) = 0. Следовательно, гиперповерхности (1)
проективно эквивалентны между собой.
2) Пусть а(Е, Е) = 0 и &(Е, Е) = 0 проективно эквива-
лентны. Это значит, что существует линейное преобразова-
ние переменных Е в переменные ц, которое переводит форму
а(Е, Е) в квадратичную форму &(ц, ц). Но тогда ранги
и положительные индексы квадратичных форм а (Е, Е) и b (Е, Е)
одинаковы. Теорема доказана.
Замечание. В n-мерном комплексном проективном
пространстве гиперповерхности а(Е, Е) = 0 и &(Е, Е) = 0
проективно эквивалентны тогда и только тогда, когда квад-
ратичные формы а(Е, Е) и &(Е, Е) имеют одинаковый ранг г.
Доказательство аналогично предыдущему.
§ 6]
КЛАССИФИКАЦИЯ ГИПЕРПОВЕРХНОСТЕЙ
509
2. Определение. Гиперповерхность второго порядка
а(£, £) = 0 в n-мерном проективном пространстве называет-
ся невырожденной, если невырождена квадратичная форма
aft, I), то есть если ее ранг г =
Замечание. Сформулированное определение согласует-
ся с терминологией предыдущей главы.
3. В действительном Рп всякая невырожденная гипер-
поверхность проективно эквивалентна одной из гиперповерх-
ностей вида
где иk^n-y-1. Поэтому при четном п в простран-
стве Рп имеется ^ 4^1 проективно различных невырожден-
ных гиперповерхностей второго порядка, а при нечетном п
число их равно -^(«Ц-З).
4. В двумерном проективном пространстве, которое
называется проективной плоскостью, имеются (в действитель-
ном случае) две проективно различные невырожденные ги-
перповерхности второго порядка, которые, впрочем, в этом слу-
чае гораздо естественнее называть кривыми (что все и делаю!)
Именно:
1) кривая
^ + 51 + 51 = 0,
которая на действительной плоскости совсем не имеет точек
и потому называется нулевой;
2) кривая
(3)
которая имеет действительные точки и носит название
овальной.
5. Будем считать, что проективная плоскость получена
из обычной плоскости добавлением бесконечно удаленной
прямой £3 = 0. Прямая —0 не пересекает кривую (3),
и мы можем в уравнении (3) перейти к неоднородным
с р
координатам х— у—*-. Получаем эллипс
510
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
(ГЛ. XII
6. Предположим теперь, что бесконечно удаленной яв-
ляется прямая £а = 0. Она пересекает кривую (3) в двух
различных действительных точках (±Х, 0, X). Исключая их
из рассмотрения, перейдем к неоднородным координатам
с с
_х==''!, _у = А Получим гиперболу
<Э Q 1
х~—у — 1-
7. Теперь сделаем на проективной плоскости следующее
преобразование однородных координат:
•>11 = Еь
Tj-2 = ---|- £з,
Ei + Es-.
Тогда уравнение (3) примет вид
— WB = 0. (За)
Будем считать, что бесконечно удаленной является прямая
тй = 0. Эта прямая пересекает кривую (За) в двукратной точке
(0,1,0). Исключая ее из рассмотрения, положим х — =
= —. Получим параболу у = х*.
8. Таким образом, аффинно различные эллипс, гипербола
и парабола получаются из одной и той же овальной кривой
в зависимости от того, как она расположена по отношению
к той прямой, которая является (или считается) бесконечно
удаленной.
В тех моделях проективной плоскости, где не выделена
бесконечно удаленная прямая, такого различия нет. Так, напри-
мер, если в качестве взята связка О в ?(3, то овальная
кривая представляет собой обычный конус. Переходя от связки
к плоскости ?(2 согласно п. 2 § 3, мы получим эллипс,
гиперболу или параболу в зависимости от расположения
плоскости по отношению к рассматриваемому конусу
(см. рис. 114, 115, 116).
9. Согласно п. 3 в трехмерном действительном проективном
пространстве имеются три различные невырожденные поверх-
ности второго порядка. Перечислим их.
1) Е? + + «| + ^ = 0 — нулевая поверхность (мнимый
эллипсоид), у нее нет действительных точек.
§ 6]
КЛАССИФИКАЦИЯ ГИПЕРПОВЕРХНОСТЕЙ
511
2) £2 -{- Ц -{- = 0 — овальная поверхность. Этот
тип включает эллипсоид, эллиптический параболоид и двуполост-
ный гиперболоид. Здесь полная
аналогия с овальной кривой, рас-
смотренной выше.
3) % %*1=0—
кольцевидная поверхность. Над-
лежащим подсчетом нетрудно
проверить, что при переходе
Рис. 115.
Рис. 114.
к аффинному пространству кольцевидная поверхность пре-
вращается либо в однополостный гиперболоид, либо в гипер-
болический параболоид. Разница состоит в том, что однопо-
лостный гиперболоид пересекает бесконечно удаленную пло-
скость по овальной кривой, а гиперболический параболоид
512
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
пересекает бесконечно удаленную плоскость по двум прямо-
линейным образующим. Наглядной моделью кольцевидной по-
верхности может служить тор. Не останавливаясь на доказа-
тельстве, ограничимся лишь рис. 117, на котором параллелям
тора а, р, у, 8 соответствуют прямолинейные образующие
кольцевидной поверхности, помеченные теми же буквами;
меридианам тора /, 11, III,
IV, V соответствуют овальные
кривые на кольцевидной по-
верхности, помеченные теми
же цифрами. Одному мериди-
ану ABCD, взятому на торе,
Рис. 117.
соответствует бесконечно удаленная овальная кривая кольце-
видной поверхности. Она условно изображена в двух экзем-
плярах; нужно представить себе, что точки на ней, помечен-
ные одинаковыми буквами, отождествляются.
Выше, в п. 9 § 6 гл. XI, мы отмечали, что в четырех-
мерном аффинном пространстве существуют два различных
вида действительных конусов второго порядка. Один из этих
конусов изображает овальную поверхность, а другой — кольце-
видную, если в качестве модели Р3 рассматривается связ-
ка в 8(4.
10. Заметим еще, что при рассмотрении вырожденных
поверхностей нужно иметь в виду, что в проективном прост-
ранстве исчезает разница между цилиндрами и конусами.
Прямолинейные образующие цилиндра, параллельные с аффин-
§ 6]
КЛАССИФИКАЦИЯ ГИПЕРПОВЕРХНОСТЕЙ
513
ной точки зрения, пересекаются в одной бесконечно удален-
ной точке. Так, например, уравнение (3) в трехмерном дей-
ствительном проективном пространстве задает действитель-
ный конус. При переходе к аффинному пространству этот
конус в зависимости от положения бесконечно удаленной
Рис. 118.
плоскости превращается в одну из следующих четырех поверх-
ностей, различных в аффинной классификации: конус хя-ф-
— z2 = 0, эллиптический цилиндр, параболический
цилиндр или гиперболический цилиндр.
11. Вернемся к двумерному случаю. Нетрудно заметить,
что при переходе от аффинной плоскости к проективной
Рис. 119.
кривая второго порядка пополняется бесконечно удаленными
точками тех и только тех прямых, которые имеют асимп-
тотические направления относительно рассматриваемой кри-
вой (рис. 118, 119). На рис. 119 (как и на рис. 116) пока-
зана парабола и модель овальной кривой в виде конуса а
в связке О. Параболе соответствует конус а, за исключением
одной прямолинейной образующей а. Ось параболы и все
514
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
параллельные ей прямые плоскости 312 имеют общую бесконечно
удаленную точку А, которой в связке О соответствует пря-
мая а. Точка А является бесконечно удаленной точкой рас-
сматриваемой параболы.
12. Утверждение, сформулированное в п. 11, мы докажем
сразу для п-мерного случая.
Если мы считаем точки £п+1 = 0 бесконечно удаленными,
то для нахождения всех бесконечно удаленных точек, лежа-
щих на гиперповерхности второго порядка, достаточно
в ее уравнении положить ?п.л = 0. Вернемся к уравнению
(6) § 1. При ?п+1 = 0 получим
п
2 А^=0.
г. j = I
(4)
Уравнение (4) с точностью до обозначений совпадает
с уравнением (8) § 9 гл. XI, которое определяет координаты
векторов, имеющих асимптотические направления относитель-
но рассматриваемой гиперповерхности. Отсюда следует,
что прямые асимптотических направлений и есть те прямые,
на которых находятся бесконечно удаленные точки данной
гиперповерхности.
§ 7. Пересечение гиперповерхности второго порядка
и прямой. Поляры
1. Пусть в и-мерном проективном пространстве Рп дана
гиперповерхность второго порядка
».;=1
и прямая
Е,-= рн,-(Z 1), (1)
проходящая через какие-нибудь две точки U(иь ..., w„+i),
V(yi, ..., un+i) пространства Рп. Для нахождения точек пере-
сечения прямой (1) с гиперповерхностью (а) нужно подставить
выражения (1) в уравнение (а). Мы получим уравнение вида
(2)
§ 7]
ПОЛЯРЫ
515
где
п -}— 1 zi-|—I zi-J—1
Л= 2 В— atjtiiVj, С— 2 atjViVj. (3)
«,/=1 «,у=1 i.J=\
Уравнение (2) определяет искомые точки пересечения.
Исследуем уравнение (2). Решение р = v = 0 дает
. = £„+1 = 0, так что ему не соответствует никакая точ-
ка в Рп. Нужно искать лишь те решения, для которых р и v
не обращаются в нуль одновременно. В зависимости от коэф-
фициентов А, В, С возможны следующие три случая:
1) АС—В-фО. Покажем, что в этом случае имеются
две различные точки пересечения.
Предположим сначала, что А 0. Тогда, если v = 0, то
р = 0. Поэтому будем считать, что v ф 0 и, разделив (2) на
v8, получим квадратное уравнение для отношения [л/v, кото-
рое имеет два разных корня. Обозначим их и л2. В ре-
зультате получим два семейства решений уравнения (2)
Р=М, (4)
где v — свободное неизвестное. При v Ф 0 из (4) и (1) нахо-
дим однородные координаты двух разных точек пересечения
гиперповерхности (а) и прямой (1).
Если при этом а{]-, щ, Vi действительны, но АС—В*<^0,
то для {£,} получаются комплексно сопряженные значения.
Тогда, даже если рассматривается действительное простран-
ство Рп, говорят, что прямая (1) пересекает гиперповерхность
(а) в двух комплексно сопряженных точках.
Пусть теперь Л —0. Геометрически это означает, что
точка U находится на гиперповерхности (а) (см. первое из
равенств (3)). Точке U соответствует семейство решений (р, 0)
уравнения (2). Из условия АС—В3 =—В’=/: 0 следует, что
В ф 0, поэтому, кроме точки U, есть еще одна точка пере-
сечения, координаты которой определяются из (1) при усло-
вии 2Вр -ф- Cn — 0.
2) АС — В' = 0, но среди коэффициентов А, В, С по
крайней мере один отличен от нуля. Рассуждая аналогично
предыдущему, нетрудно проверить, что уравнение (2) имеет
два семейства решений, слившихся в одно семейство реше-
ний либо вида v = Ap, к ф 0, либо вида р —Av, л ф 0; оно
дает единственную точку, принадлежащую прямой (1) и ги-
перповерхности (а).
516
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XI!
В этом случае говорят, однако, что имеется двойная точ-
ка пересечения. Если такая точка не является особой точкой
гиперповерхности (как, например, вершина конуса), то в этой
точке прямая (1) касается гиперповерхности.
3) Л = В = С=0. Уравнение (2) обращается в тождество.
Это значит, что прямая (1) целиком принадлежит гиперпо-
верхности (а), то есть является ее прямолинейной образующей.
Замечание. В проективном пространстве, в отличие от
аффинного, любая гиперповерхность второго порядка пересе-
кается с любой прямой, и понятие асимптотического направ-
ления не имеет смысла.
2. Заменим квадратичную форму в левой части уравнения
полярной билинейной формой
п+1
2 а/уН^=0, (5)
«.7=1
считая, что («1, ..., ц„+1) — координаты произвольно выбран-
ной зафиксированной точки U£ Рп, (Et.......5„+1) — текущие
координаты.
Уравнение (5) определяет гиперплоскость, за исключением
особого случая, когда обращаются в нуль коэффициенты при
всех Е,-, то есть когда
ОцИ14“ • • • 4“ ап+1 1нп+1 = 0, 1
...................................... (6)
а1 п+11г1 Ч~ • • • Ч~ ап+1 п-Лнп+1 — 0- J
Но однородные координаты un+i) не обращаются в
нуль одновременно, поэтому из (6) имеем
Det || а,71| = 0. (7)
Далее, умножив уравнения (6) на иь ..., h„+j соответственно
и затем сложив, получим
п + 1
2 я,7я,-иу = 0. (8)
i,J=l
Соотношения (7) и (8) показывают, что (5) может обра-
титься в тождество лишь тогда, когда гиперповерхность (а)
вырождена, а точка U принадлежит (а).
Более того, для точки U не просто соблюдается уравне-
ние (8), а соблюдаются по отдельности все уравнения (6);
S 7]
ПОЛЯРЫ
517
такая точка U называется особой точкой гиперповерхности
(а). Особыми точками обладают вырожденные гиперповерхнос-
ти и только они. Типичный пример особой точки — вершина
конуса. Итак, (5) обращается в тождество тогда, когда гипер-
поверхность (а) вырождена, а точка U принадлежит ей и яв-
ляется ее особой точкой. Во.всех остальных случаях равенство
(5) определяет некоторую гиперплоскость.
Определение. Гиперплоскость (5) называется полярой
точки U относительно гиперповерхности (а).
Непосредственно из определения следует, что если точка
U расположена на гиперповерхности (а) и имеет поляру, то
эта поляра проходит через точку U; если же U не принад-
лежит (а), то поляра точки U не проходит через эту точку.
Если гиперплоскость П является полярой точки U, то
точка U называется полюсом гиперплоскости П (относи-
тельно рассматриваемой гиперповерхности (а)). Легко пока-
зать, что произвольная гиперплоскость П имеет единствен-
ный полюс относительно любой невырожденной гиперповерх-
ности второго порядка.
В самом деле, пусть дана гиперплоскость
Ч- • • • Ч- ^n+i^n+i — 0.
Для отыскания полюса этой гиперплоскости получаем из
уравнения (5) систему
o-uUi a„+i 1Я„+1 — Ait
(9)
а1 п+1и1 “Ь • • • 4“ ап+1 n+ltln+l-----А„+1.
Вследствие невырожденности данной гиперповерхности вто-
рого порядка имеем Det || а;у1| ф 0. При этом условии си-
стема уравнений (9) имеет и притом единственное решение
(tii, ип+1), что и требовалось.
3. Высказанное выше определение поляры как гиперплос-
кости, которая дана для точки U (щ, ..., ип+1) уравнением
(5), связано с некоторой системой проективных координат.
Нужно показать, что это определение имеет инвариантный
(геометрический) смысл, т. е. что поляра данной точки U
относительно данной гиперповерхности второго порядка не
зависит от выбора системы проективных координат.
Допустим, что мы переходим от старых координат Е,- к
новым координатам по формулам вида (1) п. 4 § 2; без
518
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
потери общности можем считать в этих формулах X = 1.
По терминологии тензорной алгебры формулы такого вида
определяют контравариантный закон преобразования. По та-
ким формулам, в частности, преобразуются старые коорди-
наты iii точки U в новые координаты щ той же самой точки.
Преобразуя левую часть уравнения данной гиперплоскости
второго порядка, мы получим тождество
п+1 П-Н
вследствие которого новые коэффициенты ац выражаются
через старые а1}- по ковариантному закону. Но в таком случае
п + 1 п+1
У, aijUil'j= У aijiifcj, (10)
»./=! «,/=1
поскольку полная свертка двухвалентного ковариантного тен-
вора с двумя контравариантными тензорами есть инвариант.
п+1
Из равенства (10) видно, что уравнения У dijii£j= 0 и
«•7=1
п+1
У, агуиДу=0 соблюдаются одновременно и, следовательно,
определяют одну и ту же плоскость. Тем самым инвариантность
определения поляры, т. е. независимость поляры от выбора
проективных координат, доказана. Заметим теперь, что фор-
мулы вида (1) п. 4 § 2 можно рассматривать с другой точки
зрения, а именно как формулы проективного преобразования.
Поэтому нами доказана также следующая теорема.
Теорема 1 (проективная инвариантность поляры). Если
при проективном преобразовании гиперповерхность (я) пере-
ходит в некоторую гиперповерхность (а'), а точка U —
в точку U', то поляра точки U относительно (а) пере-
ходит в поляру точки U относительно (а').
4. Выше, в § 5 были определены гармонические четверки
точек. Для дальнейшего нужно распространить это понятие
на случай, когда точки одной из двух гармонически разде-
ленных пар сливаются.
Временно будем считать, что проективная прямая с чет-
веркой точек М, N, U, V получена в результате пополнения
поляры
519
§ 71
аффинной прямой бесконечно удаленной точкой U. Тогда
(MNUV)=— 1, если V является серединой отрезка 7VW
(см. § 5, п. 5). Пусть теперь точка N стремится к М а
точка V остается четвертой гармонической для упорядоченной
тройки 7И, N, U. Тогда V тоже стремится к М.
Исходя из этого, будем вообще считать, что если M = N,
то четвертая гармоническая точка V для упорядоченной трой-
ки М, N, U совпадает с и Л; и будем писать в этом случае
(MNUV)=(UVMN)=—1.
5. Пусть точка U не принадлежит гиперповерхности (а),
и пусть прямая а проходит через U.
Согласно п. 1 прямая а пересекает гиперповерхность в
двух точках М, N (различных, совпадающих или комплексно
сопряженных).
Определение. Точки U и V па прямой а располо-
жены гармонически относительно гиперповерхности (а), если
(UVMN) = — 1.
Замечание. Этим определением можно пользоваться и
тогда, когда пространство действительно, а точки М, N ком-
плексно сопряженные (здесь мы используем терминологию,
принятую нами в п. 1 § 7). С помощью формул п. 15 § 2
можно доказать, что в этом случае, если точка U является
действительной, то и точка V действительна.
6. Теорема 2. Если точка U не принадлежит гипер-
поверхности (а), то поляра точки U есть геометрическое
место всех таких точек V, что пары. UV расположены,
гармонически относительно (а).
Доказательство. Пусть V — четвертая гармоническая
для точек М, N, U. Координаты произвольной точки на пря-
мой а, отличной от U, можно представить в виде
= (п)
(см. (1) при v^O, X = p/v). Точки М и N определяются из
(11) при X = Xi, Х = Х2, где Х1; — корни квадратного урав-
нения
n-f*i л4-1 «4-1
2 a/y4^-b2X У У aiJuiiij = Q, (12)
i.j=\ i.j=\ i.j=l
которое получается при подстановке (11) в (а).
520
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. XII
Предположим, что Xj ф Тогда точки Л1 и 7V различны,
и в силу выбора точки V имеем
(MNUV)==(UVMN) =Ь = — 1. (13)
Значит, X1-j-X2 = 0, и по теореме Виета
п + 1
У, aijUiVj^O. (14)
i. j = 1
Равенство (14) показывает, что точка V принадлежит поляре
точки U.
Если Xt = X2, то M = N, а согласно п. 4 V = М = N, и
из (11) находим, что ^=>.2=0 (эти же равенства можно
получить и из (12), учитывая, что точка V находится на
гиперповерхности (а). Таким образом, снова имеем
Xi-|-X2 = 0, (15)
откуда, как и выше, получаем (14).
Пусть теперь точка V принадлежит поляре, то есть соб-
людается (14). Из (14), (12) и теоремы Виета следует (15).
Дальше имеются две возможности:
либо Х1 = Х2 = 0, тогда V=M = N вследствие (11), и
(UVMN) = — 1 согласно п. 4;
либо и тогда применима формула (13).
Теорема 2 доказана.
7. Теорема 1 является геометрически очевидным следст-
вием теоремы 2. Чтобы пояснить это, рассмотрим случай,
когда точка U не принадлежит гиперповерхности (а). Тогда
для построения поляры точки U достаточно найти п точек
Vi, ..., У„, находящихся в общем положении и таких, что
все пары UVt расположены гармонически относительно (а).
Гиперплоскость, проходящая через точки Vt, ¥& ..., Vn, и
будет полярой точки U. При проективном преобразовании
она перейдет в поляру образа точки U относительно об-
раза гиперповерхности (а) вследствие проективной инвари-
антности двойного отношения.
8. Пусть точка U не принадлежит гиперповерхности (а)
и расположена на некоторой гиперплоскости, принимаемой
за бесконечно удаленную. Тогда из теоремы 2 и п. 5 § 5
(с учетом § 10 гл. XI) следует, что поляра П точки U пред-
ставляет собой диаметральную гиперплоскость, сопряженную
§ 7]
ПОЛЯРЫ
521
направлению тех параллельных прямых, которые пересека-
ются в точке U (рис. 120).
9. Рассмотрим частный случай, когда гиперповерхность
имеет уравнение вида
с^ + ... + Сп+1^+1 = 0, (16)
где с,- ф 0 для всех 1—1, ..., п-1- 1, а в качестве точки U
берется точка Aj с координатами
Еу=1, = 0 при i^j (17)
(J — некоторый фиксированный номер, 1 j п -1- 1).
Согласно формуле (5) полярой точки Aj является гипер-
плоскость = 0.
Напомним, что выбор точек с координатами вида (17) и
точки единиц В(1, ..., 1)
координат в Рп (§ 3,
п. 9). В данном случае си-
стема точек Д1, ..., А„г1
обладает следующим
свойством, характеризую-
щим специальноерасполо-
жение этих точек относи-
тельно гиперповерхности
(16).
Каждая из точек Aj
является полюсом ги-
перплоскости, проходящей через остальные точки Tit, ...
..., Aj_\, A..., АП1,.
Такая система точек называется автополярной.
Можно доказать, что указанное свойство не только не-
обходимо, но и достаточно для того, чтобы уравнение невы-
рожденной гиперповерхности второго порядка приняло вид
(16), а за счет выбора точки единиц можно добиться, что-
бы I Ci | — 1 при 1—1, ..., п -ф- 1.
10. Рассмотрим еще некоторые свойства поляр.
Теорема 3 (принцип взаимности в теории поляр). Если
точка V расположена на поляре точки U, то поляра
точки V проходит через точку U.
Доказательство. Теорема 3 следует из определения
поляры и симметричности матрицы коэффициентов урав-
нения (а).
522
ПРОЕКТИВНОЕ ПРОСТРАНСТВО
[ГЛ. ХП
Теорема 4. Если точка U лежит на гиперповерх-
ности (я) и имеет поляру П, то каждая прямая в поляре П,
проходящая через точку U, касается этой гиперповерх-
ности в точке U, являясь, быть может, ее прямоли-
нейной образующей (рис. 121).
Доказательс тво. Если
прямая вида (1) не имеет с
гиперповерхностью (я) других
общих точек, кроме точки U,
то она является касательной
согласно пп. 1, 2. Поэтому
достаточно доказать, что если
на прямой (1), кроме U, есть
еще точка V, принадлежащая
и гиперповерхности (я) и ее
поляре (5), то прямая (1) цели-
ком принадлежит гиперповерх-
ности. Пусть точки U, V при-
надлежат гиперповерхности (я)
п + 1
У, а,/гги7=0,
«4-1
У, aiJvi'Uj = Q, (18)
I, >=1
и пусть, кроме того, точка V находится на поляре точки U
У atjUiVj ^O. (19)
<•. 7 = 1
Используя (18), (19), (1) и (я), находим, что
П-|-1
У aij^j— у а,7(ря,4-то1)(ри7+те7) =
г./=1 «./=1
«4-1 n-J-i «4-1
= р2 У aijitiUj-\- 2pv У atjUiVj-}-^ У а(7^7=0,
I. J = \ i, у = 1 i, /=1
при любых р, v, то есть прямая UV является прямолинейной
образующей гиперповерхности (я). Теорема 4 доказана.
§ 71
ПОЛЯРЫ
523
Следствие. Если точка на проективной плоскости
принадлежит овальной кривой, то поляра этой точки
является касательной к
овальной кривой.
И. В качестве приложе-
ния изложенных выше ре-
зультатов рассмотрим сле-
дующую задачу.
Пусть на двумерной ев-
клидовой плоскости дан
эллипс и точка U вне его.
Требуется построить каса-
тельные к эллипсу, прохо-
дящие через точку U.
Построение. Через
точку U проведем какие-
нибудь две прямые, каж-
дая из которых пересекает
ствительных) точках А, В и
Рис. 122.
эллипс в двух различных (лей-
c. D соответственно (рис. 122).
Пусть Q — точка пересечения прямых АО и ВС; Р — точка
пересечения прямых АС и ВО; К и L — точки пересечения
эллипса с прямой PQ. Тогда прямые UK и UL являются иско-
мыми касательными.
Доказательство легко проводится с помощью
теоремы 4 из п. 9 § 5, теорем 2—3 этого параграфа и
следствия, сформулированного в предыдущем пункте.
ПРИЛОЖЕНИЕ
ДОКАЗАТЕЛЬСТВО ТЕОРЕМЫ
О КЛАССИФИКАЦИИ ЛИНЕЙНЫХ ВЕЛИЧИН
1. У тверждение, которое мы высказали в главе VI в конце §2
и в п. 8 § 3 и оставили там без доказательства, может быть сформули-
ровано в виде следующей теоремы.
Теорема. Пусть Gn — группа всех действительных невырож-
денных п X п-матриц, f (Р) — действительная числовая функция,
заданная на Gn. Пусть и = f (Р) — гомоморфизм группы Gn в
группу (по умножению) всех действительных чисел без нуля, т. е.
f(PP')=f(P)f(P') (1)
для любых Р, Р’ £ Gn- Тогда
либо f(P) = \Vc\P\°, а = const, (2)
либо f(P) = ±\ Det Р |а, (3)
где знак плюс отвечает случаю Det Р > 0, знак минус — слу-
чаю Det Р < 0.
Замечание 1. Обе функции (2), (3) удовлетворяют усло-
вию (1) вследствие хорошо известного свойства определителя про-
изведения матриц. Поэтому сущность теоремы заключается в гаран-
тии, что, кроме (2) и (3), нет других функций, удовлетворяющих
условию (1).
Замечание 2. В приведенной выше формулировке теоремы
упущены теоретико-функциональные условия. Мы докажем теорему,
предполагая, что функция f(P) непрерывна на G„.
Замечание 3. Дальше мы можем забыть, что u=f (Р) есть
гомоморфизм Gn в группу по умножению действительных чисел
без нуля, а требовать только соблюдения (1). Дело в том, что
если исключить неинтересный случай тождественного равенства
f (Р) = 0, то из условия (1) само собой следует, что f(P)z£0 для
всех Р £ Gn-
В самом деле, допустим, что есть хотя бы одна матрица Р0СО„,
для которой /(Рс) = 0. Тогда для любой P£Gn имеем f(P)=:
=f(PP^l)f(Po) = 0-
Отсюда находим важное следствие условия (1):
f(E) = l, (4)
где Е — единичная матрица. Равенство (4) вытекает из соотноше-
ния f (Р) — f (РЕ) =f(P)f (Е), поскольку f (Р) ф 0.
ПРИЛОЖЕНИЕ
525
Из (4) получаем
7Г) = {7(Р)Г, (5)
поскольку f (Р~') f (P)=f(E) = \.
2. Доказательство теоремы проведем сначала для слу-
чая п=1. При п= 1 имеем
f(xy)=f(x)f(y), (6)
где x,y^R. Через R обозначена числовая ось, из которой выбро-
шен нуль.
Отметим несколько простых следствий равенства (6):
1) Если х>0, то /(х)>0. В самом деле, легко видеть, что
f (х) =7 (/х) t (/ х) = {/(Кх) }’ > 0.
2) Если есть число хо<0, для которого/(хс)<0, то /(х) <0
для-любого х <0 (х £ 7?). В самом деле, если х <0, то /(х) /(х0) =
= 7(ххо)>0.
При этом же предположении при х < 0 имеем /(х) = — f (| х|).
В самом деле, вследствие (5) находим {/(j х |)}-1 =/(| х | -1); от-
сюда /(х):/(|Х|)=/( —1)= — 1 (поскольку /( —1)/( —1) =
= /(!)=! и/(—1)<0).
3) Если есть число х0 <0, для которого /(хс) > 0, то /(х) > 0
для всех х £ R, причем всегда /(х)=/(|х|).
Вследствие свойств 1), 2), 3) дело сводится к рассмотрению
полуоси х > 0.
4) Для любого рационального числа г>0и для любого х>0
7(хЭ = {/(х)Г (7)
В самом деле, если Г—п (п—натуральное), то вследствие (6)
f (хл) =/(хх... х) =7(х) /(х) .../(х) = (7(х))« (8)
Если r=l/m (т — натуральное), то вследствие (8) (7(х,''”)},л ==
—7(х); отсюда
7(x1/m) = {7(x)}1/'”. (9)
Из (8) и (9) получаем
f(xn,m) = {f(x)}n/m.
Тем самым (7) доказано.
Возьмем теперь какое-нибудь фиксированное число а, в>0,
ауЫ. Положим при наших условиях 6>0. Мы можем
написать: b = e°, а = const. Пусть х — любое положительное число.
Мы также можем написать х = ак и считать, что k есть предел
некоторой последовательности рациональных чисел гп:
k — lim r„.
п —-f-ос.
Согласно (7)
7(вГя) = {7(«)}Гп-
Б26
ПРИЛОЖЕНИЕ
Отсюда и вследствие непрерывности функции f(x) имеем
f (х) —f (ak) = f (lim an) = lim f (a") = lim {/ («)}г" — {f («)}* =
= bk = <fk — (ak')a = x°.
Тем самым при n=l теорема доказана. Именно, либо /(х) = | х | a
при любом х £ R, либо f(x)=± | х | а, где знаки плюс и минус
отвечают случаям х>0 их<0(х£ Л).
3. Обратимся к группе Gn при любом п. Допустим, что суще-
ствует числовая функция f(P), Р £ Gn, удовлетворяющая усло-
вию (1).
Заметим прежде всего, что на эквивалентных матрицах рассмат-
риваемая функция принимает одно и то же значение. В самом
деле, если
Р2 = АРУА~1,
то вследствие (1) и (5)
/(Р2)=/(Л)/(Р1)/(Л~|)=/(Р1).
Поэтому мы можем считать, что рассматриваемая функция f(P)
определена на множестве всех невырожденных линейных преобра-
зований некоторого «-мерного действительного линейного простран-
ства Ln. Символ Р при этом будем понимать по своему усмотре-
нию либо как обозначение линейного преобразования, либо как
обозначение его матрицы (безразлично, в каком базисе).
Введем в пространстве Ln евклидову метрику. Тогда для любо-
го Р имеем
P = JB, (10)
где J — некоторое изометричное линейное преобразование,
В — самосопряженное преобразование (см. гл. IX). Мы можем счи-
тать, что DetJ>0 (следовательно, DetJ= -{-1).
Рассмотрим подгруппу /(/) группы Gn, составленную матрица-
ми вида
(й)
(Л) =
cos t — sin t
sin t cos t
, (H)
считая, что клетка (ft) занимает на диагонали какое-нибудь фикси-
рованное место. Убедимся, что/(/(<)) = 1 при любом t. В самом
целе, функция u=f(j(t)) отображает сегмент на неко-
торый сегмент esgizsgft, [a, b]czR, причем, так как f(J (0)) =
=/(Р) — I, то (здесь следует учесть замечание
п. 1). Отсюда, если есть значение t, для которого/(/(/)) ^ 1, то
з < Ъ. Кроме того, так как j (t) — подгруппа, то вместе с каждым
:воим элементом она содержит обратный ему. Поэтому из равен-
ПРИЛОЖЕНИЕ
527
ства (5) следует, что а < 1 < Ь. Пусть j есть такой элемент j (t),
что f(j) = b. Мы имеем f (у2) = ba > b, что невозможно, посколь-
ку /2 принадлежит j (t) и b есть наибольшее значение
Остальную часть доказательства мы разделим на два пункта.
1) Согласно гл. IX (с учетом, что Det J= -J- 1) матрица J пред-
ставляется в виде J — jt-.-jst гДе Л, •••, А — матрицы вида (11)
при разных расположениях клетки (й). Отсюда и на основании
предыдущего
2) Положим f(/)-/(A)-/(Js) = l. (12)
1 . 0
bk (х) =
(13)
О
где х занимает на диагонали й-е место. При данном х и при раз-
ных k выражение (13) дает эквивалентные матрицы. Следователь-
но, функция
Ч> (х) =f(bk (х))
не зависит от k. Заметим далее, что bt (х) bt (у) = Ьг (ху). Отсюда и
из основного равенства (1) находим (ху) = (х) у (у), х, у £ R.
Поэтому и на основании п. 2 имеем: либо <р (х) = | х |°, а = const,
либо <р (х) = ± | х где знаки плюс и минус соответствуют слу-
чаям х>0 и х<0.
Согласно гл. IX линейное преобразование В в некотором базисе
представляется диагональной матрицей; пусть Хь..., Х„ —числа,
стоящие на диагонали этой матрицы.
Тогда имеем: В = bt (X/)... bn (Х„). Отсюда либо
либо
/(В) = <р(Х1)...т1Х„) = ]Х1...Х„ I’,
/(В) = Т(Х1)...т(Х„) = ±|Х1...Хх I’.
(14)
(15)
Равенство (15) получается, если (х)= ± |х|°. Тогда в (15) знак
минус возникает в случае, если среди чисел Хп..., Х„ имеется не-
четное число отрицательных, т. е. если X1...Xrt<0. Но Х1...Х„ =
= Det В = Det Р. Отсюда и из равенств (10), (12), (14), (15) полу-
чаем утверждение теоремы.
ИТЕРАТУРA
1, А л е к с а н д р о в П. С., Лекции по аналитической геомет-
рии, пополненные необходимыми сведениями из алгебры с
приложением собрания задач, снабженных решениями, со-
ставленного А. С. Пархоменко, «Наука», 1968.
2. Бурбаки Н., Алгебра (Алгебраические структуры, ли-
нейная и полилинейная алгебра), Физматгиз, 1962.
3. Б у р б а к и Н., Алгебра (Модули, кольца, формы), «Наука»,
1966.
4. Г а н т м а х е р Ф. Р., Теория матриц, «Наука», 1967.
5. Гельфанд И. М., Лекции по линейной алгебре, «Наука»,
1966.
6. Ефимов Н. В., Высшая геометрия, Физматгиз, 1961.
7. Курош А. Г., Курс высшей алгебры, «Наука», 1968.
8. Ленг С., Алгебра, «Мир», 1968.
9. Мальцев А. И., Основы линейной алгебры, «Наука», 1970.
10. Проскуряков И. В., Сборник задач по линейной алгеб-
ре, «Наука», 1967.
11. Рашевский П. К., Риманова геометрия и тензорный
анализ, Гостехиздат, 1953.
12. Р о з е н ф е л ь д Б. А., Многомерные пространства, «Наука»,
1966.
13. Спивак М., Математический анализ на многообразиях,
«Мир», 1968.
И. Тышкевич Р. И. и Феденко А. С., Линейная алгеб-
ра и аналитическая геометрия, Минск, «Выш. шк.», 1968.
15. Фаддеев Д. К., С о м и н с к и й И. С., Сборник задач по
высшей алгебре, изд. 9-е, «Наука», 1968.
16. Фаддеев Д. К. и Фаддеева В. Н., Вычислительные
методы линейной алгебры, Физматгиз, 1963.
17. Шилов Г. Е., Введение в теорию линейных пространств,
Гостехиздат, 1956.
18. Шило® Г. Е., Математический анализ. Конечномерные
линейные пространства, «Наука», 1969.
19. Ш р е й е р О. и Ш п е р н е р Е., Введение в линейную ал-
гебру в геометрическом изложении, ОНТИ, 1934.
20. Юдин Д. Б. и Гольштейн Е. Г., Линейное программи-
рование (Теория, методы и приложения), «Наука», 1969.
21, Manning Н. Р., Geometry of four dimensions, New York,
1955.
22. ReichardtH., Vorlesungentiber Vektor-und Tensorrechnung,
Berlin, 1968.
23. S о m m e r v i 11 e D. M. Y, An introduction to the geometry,
' of A dimensions, New York, 1958.