









































































































Автор: Никитин Н.В.
Теги: океанология рельеф морского дна дно океана астрономия астрофизика исследование космического пространства геодезия гидрогеология технический прогресс мореходство мореплавание компьютерные программы геолокация
ISBN: 2073-7173
Год: 2016



Machine Translated by Google
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ Научный журнал №
3 (33) Т.2 2016 www.morintex.ru, ISSN № 2073-7173, ISSN Эл № ФС72-3345
Тематика: кораблестроение, информатика, вычислительная техника и управление
Главный редактор: Н.В.
В.Ю. Семенова, д.т.н., профессор, Санкт-Петербургский морской
Никитин, д.т.н., профессор
государственный университет Д.А. Скороходов, д.т.н., профессор,
Институт проблем транспорта РАН О.В. Третьяков, д.т.н., доцент,
Редакционный Совет
НИИ кораблестроения и вооружения ВМФ Н.А Тарануха, д.т.н.,
Сопредседатели И.Г.
профессор, Комсомольский-на-Амуре государственный технический
Захаров, д.т.н., профессор, заместитель генерального директора
университет
ЦМКБ «Алмаз» Е.М. Апполонов, д.т.н., профессор, ректор, СПбГМТУ
"МОРИНТЕХ" Муру Г.Н., к.т.н., генеральный директор, 51 ЦКТИ судоре
Периодичность издания — 4 номера в году
Журнал включен в систему Российского индекса
научного цитирования (РИНЦ) http://vak.ed.gov.ru
монта
Журнал включен в Перечень ВАК включает рецензию научных
Члены Совета
А.И. Гайкович, д.т.н., профессор, генеральный директор, НИЦ
С. А. Огай, к.т.н., доцент ректор, Морской государственный университет
журналов и изданий, в которых должны быть опубликованы
им. адм. Г.И. Невельского Одд М. Фалтинсен, профессор, Норвежский
фундаментальные научные результаты диссертаций на соискание
университет науки и технологий, Норвегия Пентти Куяла, профессор,
научных степеней докторов и кандидатов наук и в международную
университет Аалто, Финляндия В.Н. Половинкин, д.т.н., профессор,
реферативную базу данных
Сеть науки
референт генерального директора, ФГУП «Крыловский государственный
научный центр» К.В. Рождественский, д.т.н., профессор, проректор по
международному сотрудничеству, СПбГМТУ С.П. Столяров, д.т.н.,
Учредитель - издатель: Общество с ограниченной ответственностью
профессор, декан факультета корабельной энергетики и автоматики,
«НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ЦЕНТР «МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ
СПбГМТУ В.Н. Тряскин, д.т.н., профессор, проректор, СПбГМТУ по
ТЕХНОЛО -ГИИ»
учебной работе А.К. Филимонов, д.т.н., профессор, проректор СПбГМТУ
по научной работе
Свидетельства о регистрации СМИ ПИ № ФС77-32382 от 09.06.2008,
Эл № ФС72-3345 Редакция в обязательном порядке получения
экспертной записи всех материалов, воспринимаемых в журнале
Редакционная коллегия
Заместители главного редактора А.И.
Гайкович, д.т.н., профессор, Санкт-Петербургский госу дарственный
университет А.И. Фрумен, к.т.н., профессор, Санкт-Петербургский госу
дарственный университет П.А. Шауб, д.т.н., профессор, НИИ
кораблестроения и во вооружения ВМФ Члены Редколлегии А.В.
Алексеев, д.т.н., профессор Санкт-Петербургский государственный
университет А.Е. Богданов к.т.н. — ОАО «Системы управления» Р.В.
Борисов д.т.н. профессор, Санкт-Петербургский государственный
дарственный морской технический университет Ю.А. Власов, к.ф-м.н.
190121 г.Санкт-Петербург, ул Лоцманская д.3 Телефон/
факс +7 (812) 513-04-51 e-mail: mit-journal@mail.ru
Ответственность за содержание информации и материалы по
кламам, а также за использование отчета, отсутствие судебного
преследования за публикацию в открытой печати, получение авто
ры и рекламодатели.
Перепечатка количества только с разрешения редакции .
преподаватель, Флоридский международный университет, Майами,
США Войлошников М.В., д.т.н., профессор, Морской государственный
университет им. адм. Г.И. Невельского А.Н. Дядик, д.т.н., профессор,
Санкт-Петербургский государственный университет В.А. Евтеев, д.т.н.,
Редакционная этика журнала «МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ»
Объединенная судостроительная корпорация
Редакционная деятельность научного журнала «МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ» опирается, в частности, на
рекомендации по этике научных публикаций, а также на ценный опыт
авторитетных международных журналов.
налов и издательств.
http://morintex.ru/ru/nauchnyj-zhurnal/redakcionnaya-etika/
рация
Ю.И. Нечаев, д.т.н., профессор, Санкт-Петербургский государственный
дарственный морской технический университет В.В.Родионов, к.т.н,
с.н.с., ЗАО «Си Проект»
Напечатано в центре полиграфии НИЦ «МОРИНТЕХ»
Дизайн: А.В. Антонов
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
Научный журнал № 3 (33) Т.2 2016 www.morintex.ru ISSN 2073-7173, ISSN Эл № ФС72-3345
Предмет: кораблестроение, информатика, вычислительная техника и менеджмент
Главный редактор:
Родионов В.В., к.т.н., старший научный сотрудник ЗАО «Морской проект»
Н.В. Никитин, доктор технических наук, профессор
Семенова В.Ю., д.т.н., профессор, Санкт-Петербургский государственный морской
Редакционная коллегия
Сопредседатели
Захаров И.Г., д.т.н., профессор, заместитель генерального директора
ЗМКБ «Алмаз»
технический университет Скороходов Д.А., д.т.н., профессор, Институт проблем
транспорта РАН Третьяков О.В., д.т.н., доцент, в Институт кораблестроения и
вооружения ВМФ России Тарануха Н.А., доктор технических наук, профессор,
Комсомольский-на-Амуре государственный технический университет
Е.М. Апполонов, доктор технических наук, профессор, ректор СанктПетербургского государственного морского технического университета
Члены Совета
Гайкович А.И., д.т.н., профессор, генеральный директор НИЦ «Морские
интеллектуальные технологии»
Муру Г.Н., PhD, генеральный директор,
51 CCIS Ogai SA, PhD, доцент, ректор Морского государственного университета
имени адмирала Невельского Одд М. Фалтинсен, профессор, Норвежский
университет науки и технологий, Норвегия Пентти Куяла, профессор,
Периодичность выхода — 4 номера в год Журнал
включен в систему РИНЦ http://vak.ed.gov.ru Журнал включен в Перечень ВАК
ведущих рецензируемых научных журналов и изданий, в которых должны
быть опубликованы основные научные результаты диссертаций на соискание
ученых степеней доктора и кандидата наук, а также в международную
реферативную сеть Web of Science. база данных.
Университет Аалто, Финляндия В.Н. Половинкин, д.т.н., профессор, помощник
генерального директора Крыловского государственного научного центра
Рождественский К.В., д.т.н., профессор, проректор по международной науке и
образованию Санкт-Петербургского государственного морского технического
университета Столяров С.П., д.т.н., профессор, Декан факультета морской
энергетики и автоматики Санкт-Петербургского государственного морского
Рукописи представляются в редакцию в электронном виде (на компакт-диске
или по электронной почте: mit-journal@mail.ru)
Учредитель-издатель: НИЦ «Морские интеллектуальные технологии»
технического университета Тряскин В.Н., доктор технических наук, профессор,
проректор по учебной работе Санкт-Петербургского государственного морского
технического университета Филимонов А.К., доктор технических наук, профессор,
прор. Ректор по научной работе Санкт-Петербургского государственного
морского технического университета
Свидетельство о регистрации: ПИ № ФС77-32382 от 09.06.2008, Эл №
ФС72-3345
Адрес: 120121, г. Санкт-Петербург, ул. Лоцманская,
д. 3 Телефон/факс +7 (812) 513-04-51 e-mail: mitjournal@mail.ru
Журнал включен в перечень периодических изданий, рекомендуемых для
Сотрудники редакции
Заместители главного
редактора А.И. Гайкович, д.т.н., профессор, Санкт-Петербургский государственный
морской технический университет А.И. Фрумен, к.т.н., профессор, СанктПетербургский государственный морской технический университет Члены
редакции ВМФ России
публикации результатов докторских исследований http://vak.ed.gov.ru Отпечатано
в Типографии НИЦ «Морские интеллектуальные технологии»
Авторы и рекламодатели несут ответственность за содержание
информационно-рекламных материалов, а также за использование
не подлежит опубликованию в открытой печати. Перепечатка допускается
только с разрешения редакции.
Мнение редакции и редколлегии может не совпадать с мнением авторов
публикаций.
Алексеев А.В., д.т.н., профессор, Санкт-Петербургский государственный морской
технический университет Богданов А.Е., к.т.н., АО «Системы управления»
Борисов Р.В., д.т.н., профессор Санкт-Петербургский государственный морской
технический университет им. А. Власов, к.т.н., адъюнкт-профессор, Флоридский
международный университет, Майами, Флорида, США Войлошников М.В.,
доктор технических наук, профессор, Морской государственный университет
Редакционная этика научного журнала «МОРСКОЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ»
РЕДАКЦИОННАЯ КОЛЛЕГИЯ Научного журнала «Морской интеллектуальный
Технологии» основывает свою работу, в частности, на рекомендациях Комитета
по публикационной этике, а также на практике влиятельных международных
журналов и издательств. http://morintex.ru/nauchnyj-zhurnal/redakcionnaya-etika/
им. адмирала Невельского А.Н. Дядик, доктор технических наук, профессор,
Санкт-Петербургский государственный морской технический университет В.А.
Евтеев , доктор технических наук, Объединенная судостроительная корпорация
Ю. И. Нечаев, доктор технических наук, профессор, Санкт-Петербургский
государственный морской технический университет
Дизайн: Антонов А.В.
Machine Translated by Google
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
СОДЕРЖАНИЕ
стр
О журнале ……………………………………………………………………………………………..
5
ТЕОРИЯ КОРАБЛЯ И СТРОИТЕЛЬНАЯ МЕХАНИКА
Рождественский К. В. Параметрический анализ установившегося движения подводного глайдера в
вертикальной плоскости ……………………………………………………………….
Яковлев П. А., Харитонов В. В. О задачах безопасного спрямления кораблей (судов) с
длительным сроком эксплуатации в современных условиях ………….……………….….….
7
15
ПРОЕКТИРОВАНИЕ И КОНСТРУКЦИЯ СУДОВ
Иванов В.П., Дудин С. Д., Курдюков С. Г. О реконструкции параметров проектирования
современных рыболовных судов наливного типа ………………………………………
18
СУДОВЫЕ ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ И ИХ ЭЛЕМЕНТЫ
(ГЛАВНЫЕ И ВСПОМОГАТЕЛЬНЫЕ)
Хуснуллина А. Р. Уменьшение технической нагрузки на окружающую среду и обеспечение безопасности
хранения нефтепродуктов, установление запрета на использование в судах энергетики
ках ………………………………………………………………………………………………….………
26
ФИЗИЧЕСКИЕ ПОЛЯ КОРАБЛЯ, ОКЕАНА, АТМОСФЕРЫ И ИХ
ВЗАИМОДЕЙСТВИЕ
Афанасов Е., Н. Кадыров С. Г. Граничные интегральные уравнения и асимптотика ре решения задачи о
скоростях тела в вязкой несжимаемой жидкости ………………
31
ВЫЧИСЛИТЕЛЬНЯ ТЕХНИКА И УПРАВЛЕНИЕ
Федоров С.В. Применение комплексных моделей ИАСУ для отработки процессов управления и контроля
…………………………………………………………………………..…
41
УПРАВЛЕНИЕ И ОБРАБОТКА ИНФОРМАЦИИ
Сиек Ю. Л,, Сакович С. Ю. Визуализация наблюдения дна подводным роботом
……………………………………………………..…………………………………………..
47
Скороходов Д.А. Метод оценки состояния морского магистрального газопровода на основе данных
внутритрубной диагностики …………………………………..……
56
АВТОМАТИЗАЦИЯ И УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И
ПРОИЗВОДСТВАМИ
Иванов В.П., Дудин С. Д., Курдюков С. Г. Математическое моделирование эксплуатации
современного рыболовного судна при освоении улова …………………………
62
Machine Translated by Google
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНФОРМАТИКИ, МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Четвертаков М.М. Аналитические модели процесса морального старения кораблей …
67
Четвертаков М.М. Граничные условия аппроксимации процесса морального старения
корабля логистической функцией ……………………………………………………..…………
77
Тарануха Н. А., Чижиумов С. Д., Го Цзюнь Численные исследования ударного погружения в воду
………………………………………………………………..………………………………… ……
81
Machine Translated by Google
СОДЕРЖАНИЕ
страница
О журнале……………………………………………………………………………………………….
5
ТЕОРИЯ СУДОВ И СТРУКТУРНАЯ МЕХАНИКА
Рождественский К.В. Параметрический анализ установившегося движения подводного планера в вертикальной
плоскости.. ………………………………………..…………………………………………… …………….
Яковлев П.А., Харитонов В.В. О задачах по безопасному ремонту кораблей (судов) длительного срока службы в современных
условиях………………………………………………………………………………………………………………………………
7
15
ПРОЕКТИРОВАНИЕ И КОНСТРУКЦИЯ СУДНА.
Иванов В.П., Дудин С.Д., Курдюков С.Г. О реинжиниринге параметров современных рыболовных судов с хранением
груза в цистернах………………………………………………………………
18
СУДОВЫЕ ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ И ИХ ЭЛЕМЕНТЫ (ГЛАВНЫЕ И ВСПОМОГАТЕЛЬНЫЕ)
Хуснуллина А.Р. Снижение техногенной нагрузки на обеспечение безопасного хранения нефтепродуктов, используемых в
судовых энергетических установках ………………………………………………………………………………… ………...
26
ФИЗИЧЕСКИЕ ПОЛЯ КОРАБЛЯ, ОКЕАНА, АТМОСФЕРЫ И ИХ
ВЗАИМОДЕЙСТВИЕ
Афанасов Е.Н., Кадыров С.Г. Граничные интегральные уравнения и асимптотические решения задачи о малых колебаниях
тела в вязкой натекающей сжимаемой жидкости ………………………………………………………………………………………………………………………………
31
ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ
Федоров С.В. Метод проектирования интегрированных автоматизированных систем управления с использованием
сложных моделей для моделирования процессов..……………………………………………………………………………………………… .............
41
КОНТРОЛЬ И ОБРАБОТКА ИНФОРМАЦИИ
Сик Ю. Л., Сакович С.Ю. Визуализация видео наблюдения за морским дном подводным роботом
Скороходов Д.А. Информационные возможности механосветовых способов сигнализации подводных
объектов………………………………………………………………………………………………… …..
47
56
АВТОМАТИЗАЦИЯ И УПРАВЛЕНИЕ ПРОЦЕССАМИ И ПРОИЗВОДСТВАМИ
Иванов В.П., Дудин С.Д., Курдюков С.Г. Математическое моделирование современных рыболовных судов с точки зрения
использования улова ……………………………………………………………………………………… …….….
62
ОСНОВЫ ИНФОРМАТИКИ, МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Четвертаков М.М. Аналитические модели процесса морального устаревания кораблей ………………
Четвертаков М.М. Граничные условия аппроксимации процесса морального износа судов с логистической функцией
……………………………………………………………………………………………………………………………………………………………………………………………………………
Тарануха Н.А., Чижиумов С.Д., Го Цзюнь Численные исследования воздействия воды .…….
67
77
81
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
О ЖУРНАЛЕ
На страницех исследуются новые научные разработки, новые результаты исследований,
новые методы, технологии и технологии в области кораблестроения, информатики, вычислительной
техники и управления. Журнал включен в Перечень ВАК включает рецензируемые научные журналы и
из данных, в которых должны быть опубликованы фундаментальные научные результаты
диссертаций на соискание ученых ученых степеней быть доктором и кандидатом наук. Наш журнал
включен в международную реферативную базу данных Web of Science В журнале обязательно
рецензирование статей содержит содержание по профилю
статьи.
Аннотации выпусков журнала с 2008 по 2014 года и с № 3(25) 2014 полные выпуски разме
щены на сайте www.morintex.ru Аннотации выпусков журнала с 2008 по 2015 года и № 4(30) 2015
полные выпуски размещены в научной электронной библиотеке.
Подписной индекс 99366 в «Межрегиональном агентстве подписки» (МАП). Журнал
сумм по подписке в МАП и в редакции, а также на выставках, конференциях и симпозиумах.
Тематика
Тематика журнала посвящена специальностям научных работников номенклатуры ВАК:
конструирование (теория кораблестроения и строительная механика, проектирование и конструкция
судов, технология судостроения, судоремонт и организация судостроительного производства, судовые
энергетические установки и их элементы (главные и вспомогательные), физические поля кораблей ,
океан, атмосфера и их взаимодействие); информатика, вычислительная техника и управление
информатики, математическое моделирование, численные методы и комплексы программ)
Основные направления
• Интеллектуальные технологии в проектировании кораблей и судов, компьютеризация процессов
проектирования (управление и организация проектирования, системы автоматизированного
проектирования). Морская история и техника. • Интеллектуальные технологии в строительстве и ремонте
кораблей и кораблей (перспективные технологии в строительстве и ремонте судов, безопасные
системы подготовки производств, использование роботов).
• Интеллектуальные технологии в эксплуатации кораблей и судов (системы автоматизации кораблей
и судов, автоматические системы управления, проблемы эргономики судов, экология).
• Интеллектуальные технологии в прикладных исследованиях (математическое моделирование и
компьютерный эксперимент, строительная механика, гидроаэродинамика, термодинамика, физические
поля корабля).
• Интеллектуальные технологии в морской и судовой энергетике. Энергосберегающие технологии.
• Интеллектуальные технологии морского приборостроения.
• Искусственный интеллект в морских технологиях. •
Интеллектуальные технологии в области распространения
исследований. • Экономика и финансы в судостроении •
Кораблестроительное образование
5
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
О ЖУРНАЛЕ
В журнале публикуются новые научные разработки, новые результаты исследований, новые методы, методики и
технологии в области судостроения, информатики, вычислительной техники и управления.
Журнал включен в Перечень ВАК ведущих рецензируемых научных журналов и изданий, в которых должны быть
опубликованы основные научные результаты диссертаций на соискание ученых степеней доктора и кандидата наук.
Наш журнал включен в международную реферативную базу данных Web of Science.
В журнале статьи рецензируются ведущими специалистами в области статьи.
Журнал предназначен для широкого круга ученых и специалистов, а также руководителей научно-исследовательских
и проектных организаций, промышленности, учебных заведений, военно-морского флота, а также преподавателей,
аспирантов и студентов высших учебных заведений.
Подписной индекс 99366 в Межрегиональном подписном агентстве.
Журнал распространяется в России и за рубежом по подписке в Межрегиональной подписке.
агентстве и в редакции, а также на выставках, конференциях и симпозиумах.
ПО ЗАЯВКЕ организаций редакция журнала может выслать любой номер журнала или
весь набор журналов в целом.
Предмет
Тематика журнала соответствует следующим специальностям научных работников по перечню ВАК: Судостроение,
Теория корабля и конструкций, Проектирование и устройство судов, Технология судостроения, Судоремонт
судостроительного
и организация
производства, Судовые энергетические установки. и их элементы (основные и вспомогательные), физические поля корабля,
океана, атмосферы и их взаимодействие); Информатика, Вычислительная техника и анализ систем управления, Управление и
обработка информации, Автоматизация и управление процессами и производствами, Управление в социально-экономических
системах, Программное обеспечение для ЭВМ, комплексов и компьютерных сетей, Проектирование систем автоматизации,
Основы информатики, Математическое моделирование , Численные процедуры и системы программного обеспечения).
Основные тренды журналов
• Интеллектуальные технологии проектирования кораблей и судов, расчет процесса проектирования (управление
и организация проектирования, автоматизированные системы проектирования). Морская история и оборудование.
• Интеллектуальные технологии судостроения и судостроения (передовые технологии судостроения,
автоматизированные системы подготовки производства, использование роботов). • Интеллектуальные технологии
эксплуатации кораблей и судов (системы автоматизации кораблей и судов, автоматизированные системы
управления, проблемы эргономики, экологии). • Интеллектуальные технологии в прикладных исследованиях (математическое
моделирование и компьютерный эксперимент, теория конструкций, аэрогидродинамика, термодинамика, физические
поля корабля).
• Интеллектуальные технологии в морской и корабельной энергетике. Энергосберегающие технологии. •
Интеллектуальные технологии морского приборостроения. • Искусственный интеллект в морских технологиях.
• Интеллектуальные технологии в маркетинговых исследованиях.
• Интеллектуальные технологии в логистике
6
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
ТЕОРИЯ КОРАБЛЯ И СТРОИТЕЛЬНАЯ МЕХАНИКА
УДК 551.46.077:529.584
ПАРАМЕТРИЧЕСКИЙ АНАЛИЗ УСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ ПОДВОДНОГО ГЛАЙДЕРА В
ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Рождественский Кирилл Всеволодович д.т.н., профессор
проректор по международному
сотрудничеству Санкт-Петербургский государственный
морской технический университет 190008, Санкт-Петербург, ул. Лоцманская, 3 e-mail:
kvrxmas@yahoo.com
Аннотация
В статье регулируемая математическая модель установившегося движения подводного глайдера (ПГ) в вертикальной
плоскости, на основании которой выведены основные соотношения, связывающие геометрические, кинематические и
гидродинамические характеристики ПГ и его удерживающая система с относительной величиной смещения и изменениями
параметров плаву чести и дифферента. Получены формулы для оценки скорости движения по траектории, гидродинамического
качества, дальности и автономности ПГ. Возможности предлагаемой математической модели иллюстрируются расчетными
примерами для типовых явлений ПГ в виде тела с крыльями и в виде «летающего крыла». Получение зависимости скорости
ПГ заданной компоновки от объема прибора, а также повышение частоты заражения при различных значениях от возбудителя
возбудителя замещения. Исключен режим характеристики ПГ, освящённый его максимизацией гидродинамического качества.
Ключевые слова: автономные необитаемые подводные аппараты, подводный глайдер
ПАРАМЕТРИЧЕСКИЙ АНАЛИЗ УСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ
ПОДВОДНОГО ПЛАНЕРА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Рождественский Кирилл Всеволодович
Д. Тех. наук, профессор
Проректор по международной науке и образованию СанктПетербургский государственный морской технический
университет Лоцманская, 3, Санкт-Петербург, 190008, Российская Федерация
e-mail: kvrxmas@yahoo.com
Абстрактный
В данной работе рассматривается математическая модель установившегося движения подводного планера (ПЛА)
в вертикальной плоскости как основа для вывода принципиальных соотношений, связывающих геометрические,
кинематические и гидродинамические характеристики ПЛ и его несущей системы с относительной плавучестью и параметрами
вариации плавучесть и шаг. При этом получены формулы для оценки глиссады УГ, аэродинамического качества, дальности
плавания и автономности. Рассматриваемая математическая модель проиллюстрирована для типичных случаев подводных
планеров в виде крылатых тел вращения и летающих крыльев. Результаты расчетов показывают зависимости скорости УГ от
его конфигурации и объема, а также от угла атаки для различных величин относительной плавучести.
Также рассмотрен оптимальный режим работы УГ, основанный на максимизации его гидродинамического качества.
Ключевые слова: автономные необитаемые подводные аппараты, подводный планер .
Применяется установленный режим погружения/
всплытия подводного глайдера (ПГ), оснащенного
механизмом изменения плавучести (МИП), [1-2].
Теоретически такой режим может реализоваться
при равном проекции силы избыточной
плавучести (по ложной или отрицательной) на
правильную траекторию силы сопротивления.
Это возможно при повышенном повышенном
градиенте повышенного расхода и отсутствии
обжатия корпуса прочного аппарата, а также при
соотношении ветствующего компенсационного
управления плавучестью посредством МИП. В
работах [2,3] рассмотрение возможности
реализации режима
установленного
погружения/
всплытия
для расследования
вертикального дви7
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
движения аппарата оси совокупности. В частности,
в [2] показано, что в отсутствии градиента
превышения глубины и изменения объема
прочного корпуса в связи с его обжанием под
значительным давлением, устано-вившийся
режим движения следует за уско-рением прибора,
когда сила плавучести ста-на новится равной силе
сопротивления воды движению. машина. В [4]
исследована возможность возникновения
вертикального установленного поглощения/
всплытия ПГ в виде цилиндрического тела без
крыльев при ненулевом гра диенте измерения по
глубине и наличии об жатии корпуса под
значительным давлением. В данной работе
установлено устано- вившееся планирование
подводного глайда ра в вертикальной плоскости.
3 (33) Т.2 2016
Аппарат в состоянии развития и погружения
изображения на Fig. 1 и 2. При этой оси x и y
земной системы координат направлено
направленно и вниз соответственно. Кроме того,
возникает связанная с телом система
координата
носовая
система
10 1 ось,
x0y на
которая
угол диффе
повернута от xy ,
и почтовая система координат
аренда
0 .
xyУУВведены
возможное обозначение
ния:
- угол атаки,
-угол траекто
рии, RW - сила тяжести, RB - (Архимедова) сила
плавучести, Rx - сила сопротивления,
Ry - подъемная сила, x - абсцисса
точки
п
приложения подъемной силы крыла в свя ) – коор
заной системы координат, ( xy 1
,
мир 1
абс динаты центра тяжести травмы,
B x1 цисса точек приложения силы плавучести,
Y x1 - абсцисса приложения подъемной силы
Проектируемая сила, действующая на
приложение, действующее в режиме
установленного движения, на оси земной системы координат x
екции этих сил таковы:
Рис.1. Стационарное достижение подводного глайдера:
схема максимальной силы
В предпосылке возникновения значения скорости
запи саны уравнения динамического измерения
подводного глайдера, связывающие такие
параметры поглощения/всплытия как верти
кальная и горизонтальная составляющая прибора,
угловая дифферентная и траектория с
конфигурацией прибора, располо жением и
измерением его величины с стержнями и осевым
смещением аккумулятора
ной батареи1 и объема замещения.
На горизонтальной оси
Рай sin(
)
),
cos(
Rx На
(1)
вертикальную ось cos(
) р Вт
ру
РР
) 0.
грех(
Бх
(2)
Уравнение соотношения по моменту относительно
начала координат
Рх
ББ
1
Р х(потому что
потому что
х cos 1
Д
р
Вт Вт 1
у
0.
у 1Вт
грех)
Из уравнения (1) следует, что
tg( )
tg ( ),
(3)
(4)
откуда
arctg[ ( (5) )], arctg[ ( )]
Rx / Ry
(6) ( )
,
1/ K - обратно
гидроди
где
2 намическое качество
Рис.2. Стационарное погружение подводного глайдера:
схема максимальной силы
.
Из формулы (5) следует, что угол траектории
рии ПГ пропорционален арктангенсу
гидродинамического качества его повышения.
1
В результате ПГ осевое смещение
аккумуляторной батареи используется для
управления дифферентом, [2]. 8
2 В виде (1)-(6) уравнения равновесного
соотношения в [4]
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
системы. Иными словами, с ростом
гидродинамического качества защиты с его
стемы ПГ траектория становится более пологой.
разрешить преобразование 1
)
потому что (
()
2
1
,
()
RW
2
Rx
2
Ry
у
U 02
,
SRC крыло х
Икс
2
Качать
,
(13)
2 где Swing - площадь крыла в плане, и учти
вая, что обратное качество можно
уменьшить
Rx Ry
Cxвыражение
Cy ,
выражение) следующее
скорости
движения ПГ
как
из формулы (2) можно получить следующее
уравнение
RB
U 02
RC
у
(7)
()
)
грех(
2
1
,
На основе формулы (10) можно найти выражение
скорости движения ПГ на траектории. Записывая
подъемную силу и силу сопротивления через
время ко эффициенты силы
,
(8)
что показывает, что при установленном в
движении ПГ, его избыточная плавучесть
(положительная или отрицательная)
уравновешивается равнодействующей подъемной
силы и силы сопротивления, (см. рис. 1 и 2).
Альтернативно, запишем
(
2 гВ0
U0
2
,
2
(14)
Swing Cy Cx
Фигурирующее в формуле отношения (14)
/
/ V Swing V Swing
ассоциируется
с крыла»
«объемной»
атаки на
крыльевую
систему му.
Значение
для
ПГ типа «летающего
0
0 чем
значительно
меньше,
для ПГ ти па «тело явления с
крыльями», что также как для самолетов, уменьшение скорости
движения по траектории при перетекании от фюзеляжной
компоновки к крылу вой. Заметим, что входящий в (14) коэффи-
РР
ЧБ
Р
или
2
1
у
РР
ЧБ
ру
2
1
()
(9)
( ),
.
циент сопротивления можно назвать суммой коэффициентов
индуктивного сопротивления и вязкости костного сопротивления.
(10)
С другой стороны, из уравнения моментов следует
Сx
Cxi
Cx0 .
(15)
90
Если угол дифферента равенства (
( РР
ЧБ х
Б
я
1Вт
Р WBW
хх
[(
) потому
что
1
грех ] х1р
ГГ
1
1
0 ), ПГ
Чувствительность
будет совершать(погружение).
вертикальное
При этом Cy
) потому что
(11)
0,
0и
0 Сxi равен
,
Выражая в (11) Ry с помощью формулы (10)
можно найти
РР
ЧБ
р Вт
х cos
Б 1
1п
) потому что
cos / 1
2
()
,
представляет собой относительный
объем замещения, причем
0
при обретении
0 погружении.
тии и
Выше принято, что избыточная плавучесть
RB
RW
RB
gV0
МИП,
g V реализующего
ся
с помощью
отправлен
изменение объема в носовой части ПГ при
охране веса аппарата и что в равновесном
состоянии по
расположение RW
2 гВ0
у
0
СК 0 крыло
х
.
(16)
(12)
11
(ххЧБ
х
UС у
В0
р Вт
у 1Вт грех
где
В
рБ
скорость вертикального движения
gV0 , где V0 есть объемное
водоизмещение ПГ в балансировочном режиме
на поверхности.
Суммарное отношение скорости движения по
траектории при ненулевом угле атаки и ско- рости
вертикального движения
0
С
U0
U0
Икс
0
СС
у
2
С
у
0
2
,
(17)
Икс
или, выражениея в формуле (15) коэффициент
индуктивного сопротивления по Прандтлю
как
Сxi
к
Су2
я
,
(18)
2
/
, а
i Cx Cy
перепишем (17) в виде
где k
- удлинение крыла,
9
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
Сх 0
U0
U0
Су
2
2
0
С
С у
2
ку
,
3 (33) Т.2 2016
(19)
С0 х
я
Зависимость (19) в функциях от коэффициен та
подъемной силы Сy при различных значениях
которого
, из важный
Сx0 показана на Fig . 3 можно сделать
качественный вывод: при наличии крыльевой
системы скоростей движения ПГ на траектории
меньше, чем скорость вертикального
погружения/всплытия.
Заметим, что полученное выше уравнения (12)
связывает относительный объем заме- щений
с геометрическими параметрами глайдера, а
также с его кинематическими и
гидродинамическими характеристиками для
реализуемых режимов установленного планирования.
Оценим дальность ПГ, притягивающую для
упрощения, что энергия батареи затрачивается
в основном на реверс тяги на расчетной глубине
H . Нетрудно видеть, что энергия требуется для
однократного реверса тяги.
Е
gHV
0
ЧАС
,
(26)
ЧАС
где, как и ранее, V0 - объем прочного корпуса
плотность воды, а
са аппарат,
ЧАС
- ко
эффективно полезного действия насоса. Здесь
принято, что глубина вводится в м, а
объем – в
3
м . При этой энергии получается в
джоулях. Если энергетическая емкость ба тарей
ПГ равна Eb , то плотность
единицах
энергииизмерения
(энергия в
мощности батареи) может где Vb - объедение
Рис. 3 Зависимость скорости движения ПГ от
траектории, отнесенной к скорости вертикального
погружения/всплытия от коэффициента подъемной силы
Рассмотрим более подробную связь между
угловыми траекториями и уголовным изъятием.
Перепишем уравнение (4) в следующем виде C
тг
х
СС
xi
Су
С
0х
2
Икс
Су
С0 х
Су
,
2Hctg
(20)
Отсюда можно получить следующее квадратное
уравнение относительно угла атаки С tg
2
С
у
С
С
Икс
Икс
0
0,
(21)
Икс
Решение уравнения (21) имеет вид
2
Сутг
2С
С0 х
С тгу
2Сгде
C
Икс
Икс
,
, веса как
ем батарейного отсека аппарата. При расчетной
глубине H за период одного «галса» (однократное
погружение-всплытие) ПГ пройдет по горизон
тали
равное, равное
расстояние,
е/ b Eb Vb
2HK, где K
1/
представляет
владеет гидродинамическим качеством ПГ. Тогда с
учетом (26) можно приблизительно оценить дальность
навигации ПГ по формуле EK
Р ХК2
Еб
2
например
г
ЧАС
2
б
Вб
Вб В0
ЧАС
(27)
еббVHRфг
,
К/
где безразмерная функция f харак
теризует
р
(22)
Икс
реализуются (вещественные) значе ния
увеличения скорости
траектории
при использовании
в обнаружении
угла
(23) в режиме реализации и / 2, (24) в режиме
поглощения,
/ 2,
0
0
дальность ПГ. Из выражения для f следует, что
ПГ прямо пропорциональна
даль
функции
его
дальности
р
гидродинамическому качеству K и обратно
пропорциональна относительному объему
замещения. , а дальность уменьшения обратно
. величине. Если,
пропорционально но этой
например, увеличить в четыре раза, то скорость
на траектории
где
2
0
10
арктг
С
CC0
Икс
Икс
.
(25)
у
удвоится, а дальность уменьшится в четыре
раза.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Время прохождения дистанции
, Коврик с
цирмируемой автономностью ПГ, можно
найти совет
р
р
(28)
А
,
у0
у
А
выбрать
2 эВ
бб ч 3/2
С 1/2
0
лучим после несложных преобразований (1 CK
р
1/2
2 эВ
бб г у
)
2 3/ 4
,
К
3/ 2 1/ 2
3/ 2
гв
/
V0 Swing
Formula (29) задает
и хордой cw
.
С0 х
2
Икс
(30)
Дифференцируя (30) по добыче и приравнивая эту
добычу, нетрудно найти угол добычи
максимальное качество
, соответствующий опт
это значение коэффициента повышения
сила
Cy и, собственно, значение максимальной
выбрать
го качества. Имеем
С
C
К
C
опт.
Икс
0
(31)
,
Икс
С
у
С
0
Икс
,
(32)
Икс
Су
.
2 CC
хх
Максимум
(33)
2 гВ0
Сж
РР
выбрать
макс
( С) у
С
1м
6.67 ), ЛК филем 9%
о
0,705м , размахом lw
, корневой хордой
2,44м и профи
30% адъювия, увеличение чальный объем
6,93 ). Изна
прочного
лем
корпуса был принят за поглощение компоновок и
высоким содержанием.
3
V0
0,042м . Производные гидродинамические
коэффициенты, имеющие несущие свойства, были
сохранены из монографии [6], в частности
ности: для ТВК ( Cy4,393, Cx
0,984 ), для Cy ЛК (
0,870 ). Коэффициенты
4,197, Cx
Сх0 вязкостного сопротивления при нулевом
угле обнаруживаются приближения
(сопротивление измерения по методу
эквивалентной пластины с исследованием
реальной смоленной поверхности и
поправок) ]). Числа Рейнольдса
рассчитывались по соответствующим
характерным длинам (по корпусу и хорде
крыла для ПГ типа ТВК, по хорде крыла для
ПГ ЛК). Коэффициенты сопротивления
исследованию в зависимости мости от
режима обтекания вычислялись по формуле
Блазиуса (ламинарное обтекание) и ПрандтляШлихтинга (турбулентное обтекание)
0
Если выполняется контроль режима, то в
зависимости от скорости траектории, дальности и
автономности мощности
U0
0,2 м с
приспособление, расширение (треугольное крыло с
углом стреловидности по
30
cw
Су
2,0 м и диаметр d
0.15м и про
Представляет интерес применения «настройки»
механизма на такое значение угла атаки, при
котором реализуется максимальное
гидродинамическое качество. Следуя классической
теории несущей поверхности, запишем формулу
гидродинамического качества в виде
С
. (36)
В качестве примера для реализации изложена
оценка исследования компоновки типа «тело
вращения с крыльями» и типа «летающее крыло» с
использованием базовых параметров: ТВК (эл
передней кромке
выбрать
CC
0 хх
3/2
значение параметра A в секундах.
С
3/4
прямоугольным в плане крылом с размахом lw
(29)
.
где обозначено ж
К
4
гвт
липсоид расширения l
уг
1
Икс
2
потому
что 0
- горизонтальная
скорость
перемещения
где
0 ПГ.u
аПринимается
также
выражение
во внимание
для функции
формула
дальности
(4) и (14),
А
Су
,
2
СС0
Икс
4
(34)
2
0
Икс
г CC 0 хх
,
икслам
Сф
хТурб
1,328
Ре
(39)
,
0,455
(логре)
2,58
.
(40)
Ниже приведены результаты некоторых расчетов.
На Рис. 4 и Рис. 5 зависимости скоростей
возникновения ПГ на траектории от анализа V0 при
Икс
e VC bb H y
фС
(35)
различных значениях, относящихся к типу
замещения . При этом использовался формула (14)
11
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
2 гВ
U0
SC k
2
крыло y
0
С
2
2
у
я
С
Икс
,
3 (33) Т.2 2016
(41)
0
Заметим, что поскольку коэффициент вязкостного
сопротивления Сx0 сам зависит от скорости движения
двигателей ПГ через числовой Рейнольса, вычисление
значения скорости при заданном коэффициенте
подъемной силы (или угля атаки) на основе урав
нения (41) исследовалось вычислено.
Рис. 6 Скорость на траектории в зависимости от угла
атака
о
при различных значениях относительного
полноты замещения
На Рис. 6 показаны расчетные зависимости скоростей
распространения ПГ типа ЛК и ПГ ТВК. Из проверки
графиков на Fig. 4 - 6 следует, что
• с определением величины измерения его
скорости, • для измерения величины
скорости роста с определением относительного
объема замещения ,
Рис. 4 Зависимость скорости на траектории от объема ПГ
типа ТВК при различных значениях относительного
полноты замещения
( Су = 0,3 )
медленнее, чем ПГ типа ТВК, •
При уменьшении скорости увеличения скорости
движения по траектории Увеличения и
уменьшения своего максимального
значения при вертикальном погружении/всплытии.
Рис. 5 Зависимость скорости на траектории от объема ПГ
типа ЛК при различных значениях относительного
полноты замещения
( Су = 0,3 )
На Рис. 7 высокая зависимость от повышения
частоты гидродинамического качества ПГ типа ТВК и ЛК.
Рис. 7 Зависимость качества гидродинамического от уг ла
атаки для ПГ типа ТВК и ЛК при различных значениях 0,042 .
3
объема замещения ( Так как в случае
V0 ЛКмвыше
относительного
)
практически вся смоченная поверхность крыла
используется для создания подъемной силы,
гидродинамическое качество «летающего крыла»
существенно качества
вращения тела с крыльями. Из Рис. 7 видно, что
12
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
увеличение относительного объема замещения
практически не заметно на гидродинамическом
каче- стве ПГ типа ТВК, но влечет за собой
увеличение уровня качества ПГ типа ЛК.
Для параметров, используемых в режиме
управления режимами управления ПГ, следует за
параметрами моментов (11).
На Рис. 8 характеризующая зависимость функции
fR
K( )/ , характеризующая
относительного
При этом для
большого
дальность,
ПГ типа замещения.
ЛКот
в расчетах
используется максимальное при заданном значении
гидродинамическое значение
го качества3 . Пунктирная линия на Рис. 8
соотношение ветствует высшему качеству ПГ типа
ТВК. Однако, в связи с тем, что высокий уровень
оценки дальности ПГ типа ТВК является повышенным.
Для приближения к реальной ситуации в случае ПГ
ТВК на том же Рис. 8 сплошной линии пока зан
результат значения для угла атаки, примерно
11.4 ).
женно равного критического (
о
сен
Общий вывод из проверки Fig. 8 таков: дальности
навигации «летающего крыла» и «тела полетов с
крыльями» соотносятся так же, как значения их
гидродинамического каче
собственности.
Рис. 9 Зависимость угла траектории для ПГ типа ТВК и ЛК
от угла атаки при различных связанных объемах 3
замещение ( V0
0,042
.
м
)
В работе, на основе соотношений стационарного
планирования ПГ в вертикальном направлении,
получены выражения для определения скорости
вращения двигателя, гидродинамического качества,
дальности и автономности, а также угла траектории
для глайдеров типа «тело вращения с крыльями» и
«летающее крыло».
Авторитетность признания профессору В.А. Рыжову
и к.т.н. И.В. Кожемякину за участие в этой работе.
.
Рис. 8 Зависимость «функции дальности» от
относительного объема замещения для исследованных
ПГ
( типов V0
ного качес тва.
3
0,042м ) при реализации максималь
Для «настройки» ПГ на заданный режим настройки
необходимо знать связь между углами. такой
атака
и угол траектории
расчетная зависимость для предполагаемых
компоновок обнаружила на Fig. 9. Нетрудно видеть,
что в сильно специфичных гидродинамических
характеристиках теристик предполагаемых типов
ПГ, глайдеры типа ЛК имеют значительно более
пологую траекторию, чем ПГ типа ТВК. В то же время
практические углы траектории «телевидения с
попадают в диапазон
о
крыльями»
20 о
40 .
привлечение
также, что следует из Fig. 9, изменение плаву чести
заметно на значение угла траектории.
13
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Литература
1. Рождественский К.В. Взгляд на развитие подводных планеров, Пленарный доклад на технической конференции Общества подводных
технологий (SUTTC2013).- Шанхай, 2 сентября 2013 г. 2. Кожемякин И.В., Рождественский К.В., Рыжов В.А., Смольников А.В., Татаренко Е.И.
Подводные глайдеры: вчера, сегодня, завтра (Части 1 и 2). «Морской Вестник», 2013, №1 (45), с. 113-117 и №2 (46), с. 98-101. 3. Рождественский К.В.,
Рыжов В.А. Оценка времени вертикального погружения тела, наличие механического механизма с изменением плавучести, «Морской вестник»,
№1(45), март 2013 г. 4. Рождественский К.В., Рыжов В.А. Ткаченко И.В., Фрумен А.И. Исследование вертикального проникновения аппарата,
определение изменения механизма плавучести при учете профиля увеличения и обжатия корпуса, «Морские интеллектуальные технологии»,
№5(19), май 2013.
,
5. He M., Williams CD, Bachmayer R. Дополнительное моделирование для прогнозирования характеристик океанских планеров. 6-й Международный
симпозиум по подводным технологиям, 21–24 апреля 2009 г., Уси, Китай, стр. 158–164. 6. Белоцерковский С.М., Скрипач Б.К. Аэродинамические
производные летательного аппарата и крыла при дозвуковых скоростях,
Изд-во «Наука», Москва, 1975, 424 с.
7. Справочник по теории корабля: В трех томах. Том 1. Гидромеханика. Сопротивление движению судов. Су довые движители/Под редакцией
Я.И. Войткунского,-Л.: «Судостроение», 1985, 768 с.
использованная литература
1. Рождественский К.В. Взгляд на развитие подводных планеров, Пленарный доклад на технической конференции Общества подводных
технологий (SUTTC2013). Шанхай, 2 сентября 2013 г. 2. Кожемякин И.В., Рождественский К.В., Рыжов В.А., Смольников А.В., Татаренко Е. И.
Подводные гладиаторы: вчера, сегодня, завтра (части 1 и 2). «Морской вестник», 2013, №1 (45), с. 113-117 и №2 (46), с. 98-101.
3. Рождественский К.В., Рыжов В.А. Оценка времени вертикального погрузки тела, оснащенного механизмом мам изменения плавучести,
«Морской вестник», №1(45), март 2013.
4. Рождественский К.В., Рыжов В.А., Ткаченко И.В., Фрумен А.И. Исследование вертикального погрузки аппарата, оснащенного механизмом
изменения плавучести при учете профиля плотности и обжатия корпуса, «Морские интеллектуальные технологии», №5(19), май 2013.
5. He M., Williams CD, Bachmayer R. Дополнительное моделирование для прогнозирования характеристик океанских планеров. 6-й Международный
симпозиум по подводным технологиям, 21–24 апреля 2009 г., Уси, Китай, стр. 158–164.
6. Белоцерковский С.М., Скрипач Б.К. Аэродинамические производственные летательные аппараты и крылья при дозвуковых скоростях, Изд-во
«Наука», Москва, 1975, 424 с.
7. Справочник по теории корабля: В трех томах. Том 1: Гидромеханика. Сопротивление движению судов. Судовые движители/под редакцией
Я.И. Войткунского Л., «Судостроение», 1985, 768 с.
14
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
УДК 629.12
О ЗАДАЧАХ БЕЗОПАСНОГО СПРЯМЛЕНИЯ КОРАБЛЕЙ (СУДОВ) С ДЛИТЕЛЬНЫМ
СРОКОМ ЭКСПЛУАТАЦИИ В СОВРЕМЕННЫХ УСЛОВИЯХ
Яковлев Павел Александрович
Инженер-технолог 2 категории
ОАО «51 ЦКТИС» 190000,
Санкт-Петербург, Английская набережная, 38 e-mail:
office@51cktis.ru
Харитонов Владимир Валерьевич
Начальник группы военно-технического сотрудничества ОАО
«51 ЦКТИС» 190000, Санкт-Петербург,
Английская набережная, 38 e-mail: office@51cktis.ru
Аннотация
Данная статья поднимает вопрос безопасного спрямления поврежденных кораблей (судов) с длительным
сроком эксплуатации. Проблема нарастания спустя годы ремонтов и модернизаций кораблей и судов без
внесения корректировок в корабельную документацию по остойчивости и непотопляемости, проведение опыта
кренования. При выборе мероприятий по спрямлению ответственности морского корабля (судна) личный
состав руководства корабельной документацией по остойчивости и непотопляемости, а также сведения об
естественном состоянии кораблей и затопленных отсеках. Таким образом, при сборе документации по
опрокидыванию и непотопляемости существует большая вероятность торговли при выборе мероприятий по
спрямлению, что может привести к опрокидыванию судов (судна). Решение данной проблемы послужат
проведению опыта кренования судов с соблюдением срока эксплуатации, а также актуализации требований
корабельной документации, касающейся окупаемости и непотопляемости корабля. Ключевые слова: корабли
и суда зарубежной конструкции, методы спрямления отказоустойчивости корабля, остойчивость и
непотопляемость, динамическая очивость, плавучесть, модернизационные работы, продление срока службы,
опыт кренования, общий конструктор.
О ЗАДАЧАХ ПО БЕЗОПАСНОМУ ИСПРАВЛЕНИЮ СУДОВ (СУДОВ)
ДОЛГОЙ ЭФФЕКТИВНОЙ СЛУЖБЫ В СОВРЕМЕННЫХ УСЛОВИЯХ
Пол А. Яковлев
Инженер-технолог 2 разряда
51АО «СКТИС» 190000,
РФ, Санкт-Петербург, Английская наб., 38 e-mail:
office@51cktis.ru
Владимир Владимирович Харитонов
Руководитель группы военно-технического сотрудничества
АО 51СКТИС
190000, РФ, Санкт-Петербург, Английская наб., д. 38
e-mail: office@51cktis.ru
Абстрактный
В данной статье поднимается проблема безопасного восстановления поврежденных кораблей (судов) с
длительным сроком полезного использования. Проблема стала серьезной проблемой после многолетних работ
по ремонту и модернизации кораблей и судов без внесения соответствующих обновленных данных в судовую
документацию по остойчивости и непотопляемости (подразделение), проведения кренового эксперимента. При
выборе мероприятий по восстановлению поврежденного корабля (судна) его состав руководствуется судовой
документацией по остойчивости и непотопляемости, а также сведениями о фактическом состоянии корабля и
затопленных отсеков. Таким образом, при использовании неверной документации по остойчивости и
непотопляемости вполне возможна ошибка при выборе адекватных мероприятий по исправлению положения,
что может привести к перевороту корабля (судна). Эта проблема будет решена путем проведения экспериментов по крену
15
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
судов с длительным сроком эксплуатации, а также актуализация существующей судовой документации, связанной с остойчивостью
и непотопляемостью корабля.
Ключевые слова: корабли и суда зарубежной постройки, методы ремонта поврежденного корабля, остойчивость и
непотопляемость, динамическая метацентрическая остойчивость, плавучесть, модернизационные мероприятия, эффективное
продление ресурса, кренящий эксперимент, главный конструктор.
История отечественного Военно-морского флота
включает в себя периоды, когда его состав в рамках
участия в пополнении судов и судов зарубежных
построек, в частности, полученными по репарации
или созданными корабельными ламами стран СЭВ и
Варшавского договора. Совместные с местными
судами и судами, выявленные бюро, охватывающие
реальное время потребления, такие измерения
охватывают более четырех сотен, настраиваемых по
122-мразличным проектам. Решением Минобороны
РФ функции проектанта объектов возложены на ОАО
«51 ЦКТИС».
В ходе деятельности по освидетельствованию
воплощений (судов) иностранной постройки или
утраченных проектов на предмет определения
возможности продления срока службы и
конструкторско-технологического сопровождения
ремонтных и
модернизационных работ в рамках осуществления
авторского надзора, специалисты ОАО «51 ЦКТИС»
определяют их водоизмещение и элементы исходной
остойчивости , как параметры, в которых происходят
возможные последствия, могут привести к дальнейшей
эксплуатации. Так, при получении исходом
повреждения с последующим затоплением
выявлением отсеков, существует большая вероятность
возникновения вения крена (дифферента), а также
уменьшение остойчивости и запаса плавучести,
минимальной высоты надводного борта. Важнейшее
место в
борьба за непотопляемость повреждения ко рабля
отхода крена (дифферента) и выброса его
остойчивости. Комплекс данных мероприятий и
называется спрямлением поврежденного корабля.
Методы спрямления повреждения корабля
исходят из характера повреждения, посадки и
остойчивости, таким образом, для выполнения
задачи действительного спрямления по назначенному
судну необходимо четко по материи его естественного
происхождения
ние.
При необходимости спрямления поврежденного
го корабля личный состав использует информацию
о чрезвычайном состоянии корабля, его осадке,
состоянии остойчивости и запасе плавучести. Ру
ководствуясь многочисленными данными, а также
имеющимися ся документацией по остойчивости и
непотопляемости, прибыли, в охватывающие границы
следствия личного состава при затоплении того или
иного отсека, командир корабля принимает решение
о выполнении или иных мероприятиях по прямому
обращению с переносным транспортным средством.
С теоретической точки зрения существует 5
типовых вариантов затопления. Они отличаются друг
от друга симметричностью затопления и
коэффициентом начальной остойчивости, в
зависимости от наличия от расположения затопленных отсеков.
Рис 1. Типовые варианты затопления поврежденного корабля
Методы спрямления для каждого из чаев
индивидуален. Таким образом, в первом случае
(рис.1, а) необходимо лишь незначительное
восстановление плавного хода вследствие борта или
откачки воды из высоко обоснованных отсеков, во
вто ром случае (рис.1, б) приложить спрямляющий
момент в сторону противоположной крену, в тре
16
тьем случае (рис.1, в) восстановление остойчи вости
к прямому обращению корабля, в четверть том
случае(рис1, г) спрямление крена поврежденного
пространства первоначальным начальным
восстановлением остойчивости корабля и после
дующим приложением спрямляющего момента в
сторону противоположную затоплению, а в пятом
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
случае (рис.1, д) спрямлением хода прохождения
«обеспечивающего» момента в сторону затопления
с одновременным восстановительным остойчивостью
и последующим снятием с лишнего
«обеспечивающего» момента. Общее в этих методах
то, что необходимо точно знать, какому из них
соответствует настоящее состояние корабля, так как
действие по прямому назначению, применимо для
одного варианта осуществления, может выглядеть
как опрокидывание в другом. Например, временное
приложение с прямым лягущим моментом, в
четвертом случае, падение к переваливанию
корабля на противоположный борт и это может
быть фатальной ошибкой для кораблей с малым
запасом динамической остойчивости. Так,
действующие Правила РМРС (т.1, часть 4) требуют
наличия в наличии судовой документации
диаграммостойкой очиво
сти.
При выборе методов спрямления в случаях,
связанных с затоплением и балластностью,
первоочередным вниманием следует за пасс
плавучести следует за высотой надводного борта,
так как это достигается путем их тщательного,
близкого к уменьшению уменьшения плавучести с
целью восстановления остой чивости корабля.
Практическое применение методов спрямления и
восстановления остойчивости для кораблей и
судов ВМФ РФ в современных условиях имеет
существенные особенности. С одной стороны,
корабли начинают разрабатывать новые проекты
оснащения техническими средствами, способными
обеспечить точное наблюдение за состоянием
остойчивости в испытательном времени, становятся
более надежными дистанционными си стемы,
информируют экипаж о затоплении ко мобильным
отсекам и помещениям, но с другой стороны, во
время во многих случаях фактически остой чивость
и непотопляемость при различных проектах
состояний нагрузки перестают соответ ствовать
расчетным значениям, приве дущихся в корабельной
документации по остойчи
часто выполнялись вообще без разработки
конструкторской документации, без учета
нагрузочной документации, перерасчёты
непотопляемости и стойкости не выполнялись, опыты кренования не
шли.
Наблюдение за расследованием может
послужить ре результаты кренования одного из
судов проекта 864, по результатам которого
выявлено увеличение водоизмещения порожнём
ориентировочно на 120 т при проектном значении
около 1800 т и из изменения положения центра
тяжести, требующего перевыпуска судебной
эксплуатации докумен тации по остойчивости и
непотопляемости. Ощущение, что изменился запас
плавучести и уменьшилась до минимума допустимая
высота борта, ухудшилась остойчивость судна.
Основное обнаружение произошло, по всей
видимости, явилось ши рокое применение
цементных ящиков и заливки настилов палубы, в
том числе в надстройке, це ментным раствором.
Любопытно, что только ежеквартально поглощающая
личным составом окраска надводного борта и
надстроек удаление без статического покрытия, за
десятилетие без заводского ремонта может добавить
к нагрузке масс до де сятка высокорасположенных
транспортных средств у кораблей, например, проекта 956.
Мероприятия по спрямлению, сохранению
непотопляемости и устойчивости остойчиво
сти, проводимые без учета произошедших за де
сятилетия конструктивных и эксплуатационных
изменений, как уже было объявлено, приводит к
результатам, прямо противоположным поставкой
ленных воздействий.
Объективно, в настоящее время, назрела се
рьёзная перспектива подвести итоги, разобрать,
упорядочить, зафиксировать и легали зовать
изменения, произошедшие в техническом состоянии
кораблестроения и судов, в том числе в первую
очередь перенести опыты кренования кораблей и
судов ВМФ определения для фактических
определения водоизмещений и начальной
остойчивости, актуализировать и перевыпустить
конструкторскую документацию, касающуюся
вости и непотопляемости.
остойчивости и непотопляемости, как документ цию
Так, для кораблей и судов ВМФ с длительными
фундаментально достигаемой уровня безаварийной
сроками эксплуатации характерны существенные
эксплуатации. Очевидно, что решение о
существовании такого рода работы должно быть
изменения массовых нагрузок, возникающие в
связи с проведением ремонтных и модернизационных на государственном уровне и предполагается, что
работ, особенно в 90-е годы. прошлого века. И если
для продвижения этих решений, как нельзя лучше
суда, то в ВМФ такие работы
подходит повторный указ Президента РФ Институт
генеральных конструкторов.
Литература
1. Муру Н.П. «Статика корабля» Л.: ВВМИОЛУ им. Ф.Э. Дзержинского, 1969. 2.
Муру Н.П. «Прикладные задачи плавучести и остойчивости судна» Л.: Судостроение, 1985. 3.
Рождественский В.В., Луговский В.В., Борисов Р.В. «Статика корабля» Л.: Судостроение, 1986.
использованная литература
1. Муру Н.П. Статика корабля Л.: Дзержинский Ф.В. ВВМИОЛУ (Инженерная академия ВМФ), 1969.
2. Муру Н.П. Прикладные задачи плавучести и остойчивости судна Л.: Судостроение, 1985.
3. Рождественский В.В., Луговской В.В., Борисов Р.В. Статика корабля. Л.: Судостроение, 1986.
17
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
ПРОЕКТИРОВАНИЕ И КОНСТРУКЦИЯ СУДОВ
УДК 629.12.001.57
О РЕКОНСТРУКЦИИ ПАРАМЕТРОВ ПРОЕКТИРОВАНИЯ
СОВРЕМЕННЫХ РЫБОЛОВНЫХ СУДОВ НАЛИВНОГО ТИПА
Иванов Владимир Павлович
доктор технических наук, профессор кафедры кораблестроения
ФГБОУ ВО «Калининградский государственный технический университет»
236000, г. Калининград, Советский пр., 1 e-mail:
dtn.ivanov@yandex.ru,
Дудин Станислав Дмитриевич
ФГБОУ ВО «Калининградский государственный технический университет»
аспирант кафедры строения
236000, г. Калининград, Советский пр., 1
Курдюков Сергей Геннадиевич
аспирант кафедры строения
ФГБОУ ВО «Калининградский государственный технический университет» 236000, г.
Калининград, Советский пр., 1
Аннотация
Излагается методика реконструирования параметров проектов, применительно к морским рыболовным
судам наливного типа по их проспектам с неполной технической информацией. Методика предполагает
возвращение теоретического чертежа объекта реконструкции, расчеты его гидростатических, построение
эпюры емкости с ее детальной разбивкой на размещение основного корпуса, что приводится к схеме
критического общего положения судна. Получены материалы для выполнения входных данных программы
для моделей рыболовного судна, адаптированной для задач реконструкции. В ходе расчетов для
международного объекта устанавливаются условия его использования в расчетном случае нагрузки и
заданных условий промысла, при определенных значениях проектных параметров, минимизируются невязки
расчетных и фактических значений его водоизмещения и объемов. Это позволяет использовать для него
проектные уравнения нагрузки и вместимости, а также часто получать координаты его центра тяжести.
водоизмещения порожнем, простые для составления уравнения остойчивости и решения вопросов
удифферентовки судна. Обобщение данных, получаемых по результатам проектной реконструкции серии
современных рыболовных судов разного класса и по характеру их назначения, практически формируется
Возникающая неопределенность в значениях параметров проекта РС нового поколения. Ключевые слова:
рыболовные суда наливного типа, математическое моделирование, параметры проектирования, реконструкция.
О РЕИНЖИНИРИНГЕ ПАРАМЕТРОВ ДЛЯ СОВРЕМЕННЫХ
РЫБОЛОВНЫЕ СУДНА С ХРАНЕНИЕМ ГРУЗОВ В РЕЗЕРВУАРАХ
Иванов Владимир Павлович
доктор наук. техн. наук, профессор кафедры судостроения
Калининградский государственный технический
университет Советский пр. 1, Калининград, 236000, Российская
Федерация e-mail: dtn.ivanov@yandex.ru
18
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
(33) Т. 2 2016
3
Дудин Станислав Дмитриевич
Аспиранты кафедры проектирования судов
Калининградский государственный технический
университет Советский пр. 1, Калининград, 236000, Российская Федерация
Курдюков Сергей Геннадьевич
Аспиранты кафедры проектирования судов
Калининградский государственный
технический университет Советский пр. 1, Калининград, 236000, Российская Федерация
Абстрактный
Представлена методика реинжиниринга проектных параметров применительно к современным рыболовным
судам с хранением груза в цистернах на основе имеющихся перспектив при неполной технической информации.
Способ заключается в перечерчивании плана обводов реконструируемого объекта, расчете его гидростатических
кривых, разработке диаграммы вместимости с детальным членением основных отсеков корпуса, что показано на
чертеже общего вида. Полученные материалы вводятся в качестве дополнительных входных данных для
программной модели рыболовного судна, адаптированной для задач реинжиниринга. При расчетах для
исследуемого объекта предполагается, что его работа выполняется для заданного варианта загрузки и условий
промысла, указываются реальные исходные значения расчетных параметров, минимизируются возможные
расхождения между расчетными и реальными значениями водоизмещения и объемов. Это позволяет получить
расчетные уравнения масс и грузоподъемностей, а также оценить положение центра тяжести судов для
облегченного случая корабля, что необходимо для дальнейшей проверки уравнений остойчивости и решения
вопросов дифферентовки. Обобщение значений, полученных по результатам реинжиниринга конструкции, для
серий современных рыболовецких судов разного класса и с разными функциональными особенностями
практически устраняет неопределенность в значениях параметров для проектирования рыболовных судов нового
поколения.
Ключевые слова: рыболовные суда с грузом в цистернах, математическое моделирование, расчетные
параметры, реинжиниринг .
Введение
Для обеспечения современного уровня
рыбопромыслового флота (равно как и для любого
другого флота, см. [1]) очевидна перспектива
отслежения и учета мировых достижений и
достижений в области промыслового судостроения
и промышленного рыболовства в целом. В сложных
условиях современных республик республики ряд
ры Боловных держав устойчиво улучшают
соответствующий интерес к развитию этой области,
решающую как задачу обеспечения населения своих
стран продовольствием, так и высокий уровень
бизнеса своих рыбных компаний. В результате
творческих поисков, направленных на повышение
эффективности и продуктивности рыбно-го промысла,
за минувшие два-три качества не только изменились
характеристики рыболовных судов (РС) стандартного
для них сухого типа (РСс), но и появились новые
закономерности в их развитии . В частности, резко
возросла доля наливных рыболовных судов (НРС),
как для реализации, так и для морского и
океанического рыболовства. В отношении других
стран, практически не участвовавших в творческой
гонке, можно сказать ся, что на сегодняшний
день для них нет проблем, связанных с обеспечением
рационального и полезного рыболовства. Ведь
существует два пути, из которых каждый может
успешно решить эти проблемы. Первый из них закупка и/или аренда зару бежевых судов. Это
путь больших затрат и далеко не всегда надежен.
Кроме того, он требует должника квалифицированного
и
ного
технико
экономического анализа (ТЭА),
учитывающего те технико-экономические условия
(ТЭУ), в котором будет эксплуатируемое закупаемое
или арен дуемое РС. Значимость ТЭУ в экономике РС
до казана уже неоднократно. Это сделало возможным
выявление, что не существует РС, опти мальных при
различных ТЭУ их эксплуатации, и что возникновение
ТЭУ эксплуатации выявило РС оптимизацию его
характеристики. Наконец, этот путь связан с
свертыванием отечественного промыслового
судостроения и комплектующего оборудования, а
также со многими другими негативными
последствиями, осуществляемыми с практической
деятельностью в зарубежных странах из
отечественной океанской рыбохозяйственной
деятельности.
Второй путь - это восстановление постройки уже
современных судов на отечественных верфях.
Однако при этом несколько наборов проблем
накопились за последние десятилетия. В том числе
наиболее значимых из них на техническом плане это серьезное отставание отечественной
промышленности в области проектирования для РС
энергетического, рефрижераторного, технологического
и рыбопоискового оборудования, а также в механическом оборудован
19
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
зации и травмы производственных про цессов
доходов и обработки улова. При этом
неразрешенность изъятия проблем изменилась
не только (и даже не значительно) на решение
вопросов поставки современного комплектующего
оборудования на строящиеся суда. В первую
очередь она изменилась на информацию о
показателях печени оптимонного проектирования
РС, практически занимая предполагаемые
значения о современных значениях проектных
параметров. В результате ставится вопрос о
возможности использования в промысловом
судостроении ап парата оптимизационного
проектирования и его развития.
Очевидно, что второй путь тернист, допускает
различные паллиативные организационные
решения. Но он не только восстанавливает
негативные последствия. Он позволяет в
отечественной рыбохозяйственной деятельности
верной реализации стратегии, отраженной в
Морской рекомендации страны. В любом случае
раньше или позже придет пора проектировать и
строить РС на отечественных верфях, как это
практически читатель уже в ближайшие и сложные
50-ые годы прошлого века. И этот путь связан с
обеспечением и возможным отечественным оптимизационным проектированием РС.
Оптимизационное проектирование РС
предполагает разработку их математических
моделей (ММС), учитывающих ТЭУ эксплуатации
будущего судна, наиболее существенные его
особенности и проектные параметры. Под
параметрами обязательности, в первую очередь
значения, массо вых, объемных, ресурсных,
экономических и др. измерителей для основных
урав нений проекта. Целесообразно Обладает
также современными сведениями о характеристиках
форм корпуса РС и пр. Эта информация обычно
используется при использовании близкого
прототипа или разработанной формулы расчета.
По современным РС такой информации практически
нет, поскольку она составляет коммерческую тайну
фирм-изготовителей. То, что доступно из сети
интернета и периодической печати, в основном
носит рекламный характер. Технические
характеристики судов покупаются достаточно
скупо. Однако в случаях обращения той же рекламы
по судам часто используются схемы или чертежи
их общих местонахождений (ОР). Эти документы
обладают достаточно большой информативностью,
а использование современных информационных
технологий (действующие общекорабельные
программы и аппараты проектного моделирования
РС)
20
3 (33) Т.2 2016
характер реконструкции (воссоздания) го ряда
проектных и эксплуатационных характеристик
ристик этих судов. Анализ материалов, полученных
по результатам проектной реконструкции в
современных РС разного класса и особых стей их
назначения, позволяет обобщить значения
параметров с целью применения и раз вития ММС.
Выявляются: 1. наиболее характерные особенности
совре-менных РС, 2. факторы, наиболее сильно
влияющие на экономические результаты их
промысла в современной ТЭУ эксплуатации, и,
наконец, 3. организационные мероприятия,
конечной це
лью является создание современного
отечественного рыболовного флота,
построенного на отечественных верфях.
Особое место в этой работе занимает создание
методик реконструкции проектных параметров РС,
посвященная и посвященная работе, выполненная
применительно к общественным НРС.
1. Процесс реконструкции
Он включает в себя следующее:
1.Определяется конкретно определенным
заграничным НРС с ограниченным представлением
его характеристикой и схемой ОР. В качестве при
мере исходных данных может служить рекламный
проспект, представленный на рис. 1.
2.С использованием общекорабельных
коммерческих пьютерных программ (FreeShip,
AutoCad или их эквивалентов) для заданного судна
в его разме рениях и с учетом его судовых обводов,
отражаемых на чертежах или схемах ОР, приводится
его теоретический чертеж (ТЧ), см. рис. 2. Затем (с
использованием программы Dialog-Static) вы
выполняете расчеты гидростатических кривых
(КЭТЧ) с представлением их значений до верхних
палуб, т.е. для основного корпуса.
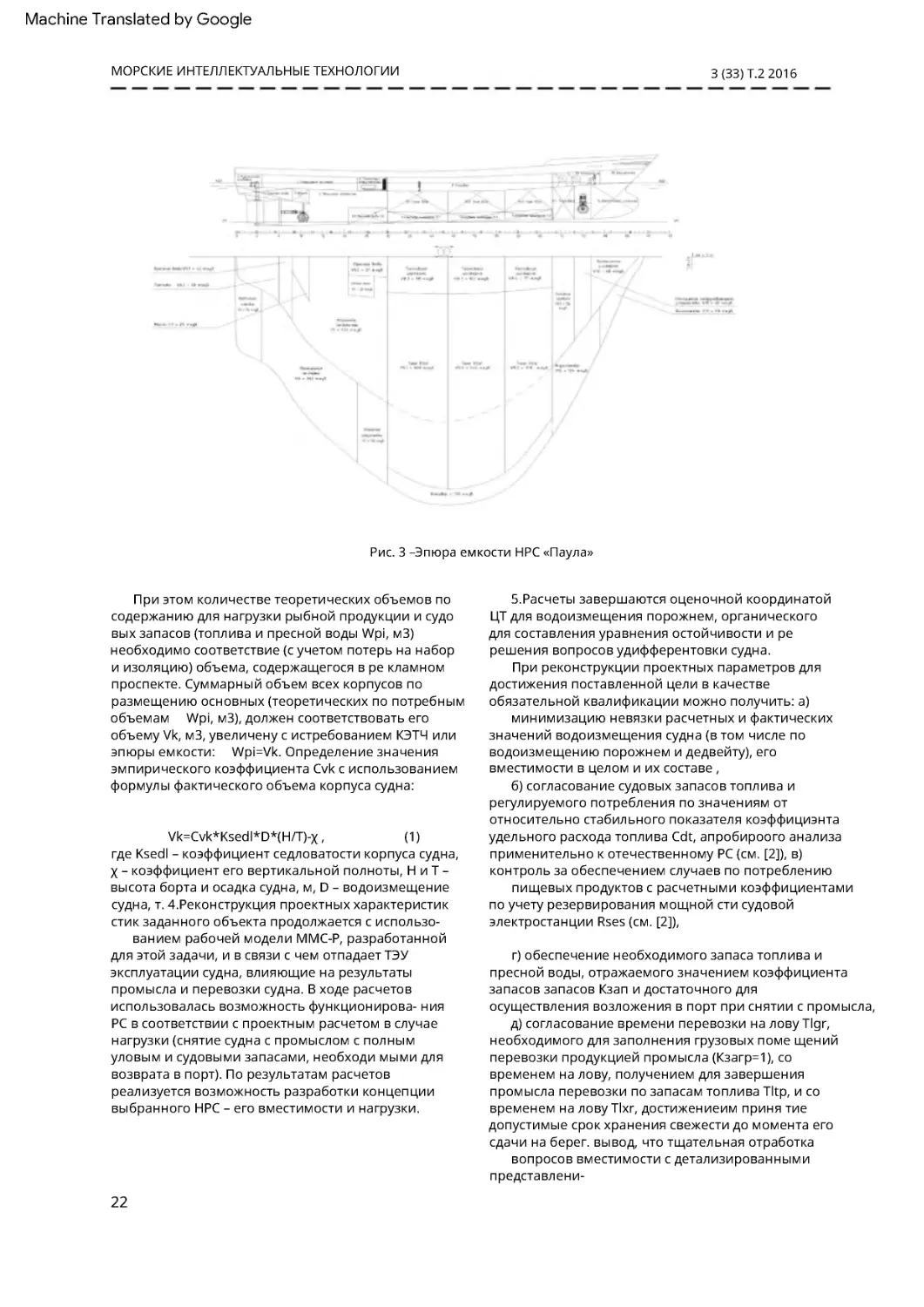
3. На базе выполненных расчетно-графических
работ и с использованием схемы ОР заданного
задания, осуществлено построение его эпюры
емкости (рис. 3) с ее детализированной разбивкой
на помещение основного корпуса, где сосре
доточены его основное помещение (грузовые,
общесудового и технологического назначения). ,
МКО, судовые запасы и др.). Перечень основных
помещений упорядочивается и представляется в
табличной форме, где приводится информация по
их объему Wpi, м3.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
с 1. Рекламный проспект НРС «Паула»
Рис. 2 – Теоретический чертеж НРС «Паула»
21
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Рис. 3 –Эпюра емкости НРС «Паула»
При этом количестве теоретических объемов по
содержанию для нагрузки рыбной продукции и судо
вых запасов (топлива и пресной воды Wpi, м3)
необходимо соответствие (с учетом потерь на набор
и изоляцию) объема, содержащегося в ре кламном
проспекте. Суммарный объем всех корпусов по
размещению основных (теоретических по потребным
объемам Wpi, м3), должен соответствовать его
объему Vk, м3, увеличену с истребованием КЭТЧ или
эпюры емкости: Wpi=Vk. Определение значения
эмпирического коэффициента Cvk с использованием
формулы фактического объема корпуса судна:
Vk=Cvk*Ksedl*D*(H/T)-χ ,
(1)
где Ksedl – коэффициент седловатости корпуса судна,
χ – коэффициент его вертикальной полноты, Н и Т –
высота борта и осадка судна, м, D – водоизмещение
судна, т. 4.Реконструкция проектных характеристик
стик заданного объекта продолжается с использованием рабочей модели ММС-Р, разработанной
для этой задачи, и в связи с чем отпадает ТЭУ
эксплуатации судна, влияющие на результаты
промысла и перевозки судна. В ходе расчетов
использовалась возможность функционирова- ния
РС в соответствии с проектным расчетом в случае
нагрузки (снятие судна с промыслом с полным
уловым и судовыми запасами, необходи мыми для
возврата в порт). По результатам расчетов
реализуется возможность разработки концепции
выбранного НРС – его вместимости и нагрузки.
22
5.Расчеты завершаются оценочной координатой
ЦТ для водоизмещения порожнем, органического
для составления уравнения остойчивости и ре
решения вопросов удифферентовки судна.
При реконструкции проектных параметров для
достижения поставленной цели в качестве
обязательной квалификации можно получить: а)
минимизацию невязки расчетных и фактических
значений водоизмещения судна (в том числе по
водоизмещению порожнем и дедвейту), его
вместимости в целом и их составе ,
б) согласование судовых запасов топлива и
регулируемого потребления по значениям от
относительно стабильного показателя коэффициэнта
удельного расхода топлива Cdt, апробироого анализа
применительно к отечественному РС (см. [2]), в)
контроль за обеспечением случаев по потреблению
пищевых продуктов с расчетными коэффициентами
по учету резервирования мощной сти судовой
электростанции Rses (см. [2]),
г) обеспечение необходимого запаса топлива и
пресной воды, отражаемого значением коэффициента
запасов запасов Кзап и достаточного для
осуществления возложения в порт при снятии с промысла,
д) согласование времени перевозки на лову Tlgr,
необходимого для заполнения грузовых поме щений
перевозки продукцией промысла (Кзагр=1), со
временем на лову, получением для завершения
промысла перевозки по запасам топлива Tltp, и со
временем на лову Tlxr, достижениеим приня тие
допустимые срок хранения свежести до момента его
сдачи на берег. вывод, что тщательная отработка
вопросов вместимости с детализированными
представлени-
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
ем эпюры позволяют определять в расчетах
практически точно согласовывать по требуемым и
фактическим объемам основных судов и вычислять
проектные значения из мерителей вместимости,
характерные для заданного судна и его
комплектующего оборудования. Кроме того, четкое
представление об объемах и размещении помещений
грузовых и судовых запасов с учетом совокупной
доли в полном водоизмещении НРС определяет
практические расчеты дедвейта судна. Он формирует
порядок выполнения работ по совокупности искомых
значений проектных параметров.
2.Порядок выполнения работ В
кратком изложении он включает в себя: 1.В
программе ММРС-Р в качестве ее входных данных
заявляются технические характеристики заданного
судна и его комплектующего оборудования. В их
числе и значения по данным ре кламного проспекта,
и полученные в ходе выполных ненных расчетов и
построений. В качестве расчётного показателя
тяжести взятых грузов с промыслом с полным грузом
рыбной продукции (Kgr=1) и судовыми запасами,
достаточных для транспортных потоков в порту (в
коли-честве, характеризуемом коэффициентом Kzap).
Таким образом, для осуществления расчетных
расчетов входных данных являются (помимо
расчетного расчета водоизмещения запасов,
мощности и производительности его комплектующего
оборудования, основных объемов судоходства и
коэффициентов его полноты) Замер и первичная
оценка значения водоизмещения судна порожнем
Dp. 2.Расчеты в окружении в автоматическом
томатическом механизме. В результате для НРС
встречаются конкретные данные, необходимые для
состава уравнения вместимости. Рассчитываются
коэффициенты, отражающие современные
измерения характеристик судов и производительности
их комплектующего оборудования. Последующий
анализ материалов, доходы по результатам проектной
реконструкции серии современных РС разного класса
и особенности их назначения, позволяют обобщить
значения современных проектных и эксплуатационных
параметров, поэтому возникает задача проектирования
совре-менных отечественных РС.
3.Расчеты количества наличных судовых запасов
и нагрузки на рыбную продукцию в различных
случаях потребления ресурсов, предваряющихся
расчетами расходов на расходы времени. Такие
расчеты охватывают (с соблюдением п.п. г) и д) основ
безопасности) программа также занимается с учетом
специфики промысла, необходимого согласования
ресурсных характеристик судна для его окружающей
среды. Далее это поз воляет дать ежегодную
экономическую характеристику и показатели
заданного РС в заданных ТЭУ его эксплуатации.
3 (33) Т. 2 2016
4.В завершающей части работы осуществляются
расчеты дедвейта судна Dw. Ранее отмечалась
практическая применимость расчетов, что позволяет
увеличить значение водоизмещения порожнем Dp=DDw, которое вмещается в входные данные модели
вместо его оценки
ки.
5. Несвязка в расчетах Dp (п. а) основных тре
бований) воспроизводится соответствующим
подбором показателей коэффициентов изменений
для масс Cpi (см. [2]), которые проявляются в за
ключительной части программы ММРС-Р.
Выполненные расчеты позволяют приступить к
сбору требований к расчетному показателю
потребления: снятие судов с промысла с полным
уловым (Kzagr=1) и судебными запасами, требующими
возврата в порт (принятое значение Kzap=0,25).
Однако обычно мы принимаем ряд основных
обозначений.
3.Основные обозначения
Они включают в себя:
D, Dp и Dw, т, - соответственно расчетное во
доизмещение судна, водоизмещение порожнем и
дедвейт,
Ngd, Ndg, Nwg, кВт, - мощность главного дви
гателя судна, его дизельгенераторов и валогенератов,
Пгрн, Пгрсв, Пгрм, т, - грузоподъемность судна
по наливным танкам, свежему и морозильному му
трюмам,
Qobr, Qmor, Qrmu, т/сут, - производительность
рыбообрабатывающих судов, его морозильной
и рыбной установок,
Pi , т, и Wi, м3, - содержат долю нагрузки и
вместимости, pi и wi – измерители доли нагрузки
и вместимости,
Cpi и Cwi – коэффициенты изменения по маслу
и объему,
Kni – коэффициенты, учитывающие потерю
объемов помещений изоляция и набор.
4.Уранение вместимости
Начнем с уравнением вместимости, которое
для основного корпуса в общем представлено как
Vk= Wkp, а в другом месте:
Vk= Wosn+ Wgrn+ Wgrn+ Wekk+ Wprv+
Wrc+Wagr+ Wref+ Wmk (2)
где Vk – фактический (теоретический) объем
содержания, воспринимаемый формулой (1).
Wkp
– сумма потребных (также теоретических)
объемоввключенного корпуса, включающая в себя
возможные соединения:
Wosn - сумма объемов помещений общесудо
того назначения (ОСН), конструктивно выделенных
в оконеч пространствах судов. Это объемы форпика
(боцманской и носового бульба), рыбопоискового
комплекса с носовым подруливающим устройством
(НПУ), румпельного отделения и нескольких
кладовых. Их объем в общем размере судна и
уменьшается как доля объема корпуса:
Wosn=wosnr*Cosn*Vk, где wosnr=0,08 - принятое
(пока ранее) 23
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
расчетное значение измерителя, а Cosn – коэффициент
изменения, по умолчанию допускаемый величиной
единицы; Wgrn - объем грузовых помещений НРС. Он
собирает груз в наливных танках Pgrn, его погрузочную
кубатуру (wpgrn=1) и уменьшение на изоляцию и набор
(Knizr=1,04): Wgrn=wpgrn*Pgrn*Knizr;
Wtp – объем, необходимый для закрытия судовых
запасов топлива: Wtp= Ptm*Knabr/γtp, где Ptm – запасы
топлива на рейс, γtp – удельный вес топлива, т/м3 Knabr
=1,05 (принятое значение
, цистерн
коэффициента
объема
на судовойпотерь
набор );
Wekk - для
размещения экипажа в основном корпусе судна. Он вынес
решение о его численности и относительно нормативным
объе мом wekr, м3 /чел. Численность экипажа Nekk для
современных РС задается или оценивается эмпирически.
Значение wekr для заданного и других современных РС
целевого класса знание более высокого уровня, чем для
судов отечественных. Измерения остроты остроты учтены с
исчислением вычисленного для него коэффициента
изменения Cwekkr=2,6. Таким образом, Wekk=wek*rNekk*Cwekkr;
Wprv – для объема пресной воды. На совре-менных РС
запасы пресной воды принимаются с бортами для экипажа
и (в меньшей степени) для работы утилизационного котла.
В целом же довольно большой расход воды на заданном и
другом наблюдаемом РСого класса с wpvr (т/чел. в сутки)
(примерно в 3 раза) выше, чем у отечественных (при
норме 0,15 т/чел. в сутки). С учетом использования
утилизационного котла принято Cprvr=1,9. Итак:
Wprv=(wpvr*Nek+wkvr*Qkot)*Avt*Knabr*Cprvr;
3 (33) Т.2 2016
Wmkr - расчетный объем МКО. В своей основе
он определяет размерами основных и вспомогательных
механизмов его механизмов с их технологическими
проходами и ЦПУ и включает в себя также весьма
небольшие и охватывающие его цистерны машинного и
рефрижераторного масла, льяльных вод и прочее
оборудование и снабжение. Его значение выражения
выражением: Wmkr=[(wmkr*Ngdg)+wkotr*Qkot)]*Cwmkr, где
wmkr=0,1; Квмкр=0,95; wкотр=5,5. В соответствии с контролем
количества
потребляемых объемов Wpi с незначительной по
грешностью соответствующей объему Vk. Это озна чает,
что в результате получено практически зна чимое
соотношение вместимости НРС в табличной форме. В этом
аналитическом видео оно представляется как
Cvk*Ksedl*D*(H/T)-χ =wosnr*Cosn*Vk+
wpgrn*Pgrn*Knizr+Ptm*Knabr/γtp+
+wekr*Nekk*Cwekkr+ (wpvr*Nek+
wkv*rQkot)*Avt*Knabr*Cprvr+
+wrcr*(Qobr+Qmor)*Cwrcr+ +wagr*Vk*Cwagr+ +wrefr*
Qref*Cwrefr+[(wmkr*Ngdg)+ +wkotr*Qkot)]*Cwmkr, (3)
где значение коэффициентов и измерителей
имеет объемов
значение при описании их состава ляющих. Приведем
теперь проектную нагрузку заданно
вместе с использованием значений коэффициентов и
измерителей. Полезный это описание для отправки
дедвейта Dw:
5.Уранение нагрузки
5.1.Составляющие дедвейта
Wrc – объем рыбцеха, наблюдаемого выра
жением Wrc= wrcr*(Qobr+Qmor)*Cwrcr, где wrcr=2,5
и Cwrcr=1. На НРС рыбцех не предусматривается.
Wagr – совокупность объемных помещений (для
помещения в корпус судна рыбонасосов, шлан гов и
соединенных им коммуникациями). Этот объем Решение
как доля охвата: Wagr =wagr*Vk*Cwagr. Предварительно
принятые значения wagrr=0,05 и Cwagr=1,5; Wref – объем
рефрижераторной установки. Обычно они связываются с
производительно Qref. Применительно к НРС ее
значение оценивается как охлаждаемое, охлаждаемого в
рыбных танках, т.е. грузоподъемностью судна по рыбе
Pgrrn. Особо востребованным судном является повышенное
значение заданной Qrefrz (Cgref=1,79). Такой запас, повидимому, был вызван активацией вылова сверхбольших
уловов и целью его оперативного освоения ускоренного
охлаждения забортной воды в танках. Не исключена также
возможность использования промысла в тропических
регионах. По результатам анализа принято:
Wref=wrefr*Qref*Cwref, где wref=0,06, Cwref=1,5;
1. Груз в таре :
PgrS=Pgrn+Pgrsv+Pgrm;
2.Топливо: Ptp=ptp1*Avt*Kzap; Кзап=0,25;
ptp1=f(Ngd, Nep, Qkot,Cdt); 3.Пресная вода:
Ppv=Cwpvr*(wpvr*Nek+wkvr*Qkot)*Avt*Kzap;
Cwpvr=1,9; wpvr=0,2;wkvr=2,5; Кзап=0,25; 4.Экипаж и
провизия: Пек=рек*Нек; Ппров=ппров*Нек*Авт*Кзап;
рэк=0,125; ппров=0,0033; Кзап=0,25; 5.Судовое
снабжение: Psns=psns*Ngd; psns=0,01; Итого, дедвейт
в расчетном случае нагрузки
вычислить:
Dw= PgrS+ Ptp + Ppv + Pek +Pprov+ Psns; (4) значение
Dp: Dp=D-Dw. (5) 5.2.Составляющие водоизмещения
порожнем Нагрузка заданного судна по составляющему
водоизмещению порожнему составляет: 1.Металлический
корпус: Рмк=рк*Срк*Мр*(1,05-18*Мр*θ рк=0,1; Срк=0,86; θ=
10-3 2.Оборудование помещений:
2
Рок=рок*Спок*Мп;рок=0,0575;Спок=0,86;
);
3.Оборудование МКО:
Pgm= рgm*Сpgm*Ngdg; Pwg= pwg*Cwg*Nwg;
Pkot=pkot*Cpkot*Qkot; пгм=(51,2-1,2*θ*Ngd)*θ;
24
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Сгм=1; пвг=0,03; Цена за клик=1; ркот=6;
Сркот=1; Qкот=0,1; 4.Промысловое
оборудование и подруливающие устройства:
Рpr=рpr*Сppr*Ngd; Ppu=рpu*Сppu*Npu; ппр=0,03;
Сppr=1,03; рпу=0,01; Сppu=1; 5.Рефрижераторная
установка: Рref= pref*Crtf*Qref; преф=0,03;
Спред=1;
6.Рыбцех: Prc=prc*Cprc*Wrcr; прк=0,25;
ЦПР=1; 7.Агрегатные: Pagr=pagr*Cagr*Wagr;
пагр=0/01; Ср = 1; 8.РМУ:
Prmu=prmu*Cprmu*Qrmu; прму=1,6;
Цпрму=1; 9.Твердый балласт: Ptb=ptb*D=0;
пт=0. В кратком аналитическом виде уравнения
масс представляется как D=Dp+Dw= Pi.
В качестве дополнительного контроля и одного
из итогов выполненных графических текущих и
расчетных расчетов стратегии но приводится
также таблица посадки и начального оклада
проведения с анализом ее данных.
6.Оценка координат ЦТ судна порожнем
При оценке значений координат центра
тяжестей (ЦТ) судно порожнему используется
формула готовых моментов. Исходные данные для
расчетов уже имеют большое значение D, Dw,
координаты ЦТ судна в грузу. Задачей оператора
является удаление дедвейта из полного (расчетного)
водоизмещения. Значения удаляемых масс и
координаты их ЦТ определяются с использованием
эпюры емкости и про
ции «Бок» ТЧ. Очевидно, что эти инженерные
расчеты превращаются в табличную форму.
Приведены итоги расчетов по пищевым посадкам
и начальным остойчивости судов порожнем. По
требованию РМРС в этом случае начальной
метацентрической высоты судна должно быть не
менее 5 см. следствие, что рассмотрение методики
реконструирования современных РС апробировано
в КГТУ. Использованы в статье расчетно
графические разработки (в частности, рис. 2 и 3)
выполненные студентом КГТУ М.В. Алояном в ходе
его дипломного проектирования. Заключение
Предлагаемая разработанная методика
реконструирования проектных параметров
применительно к морским рыболовным судам
наливного типа по их проспектам с неполной
информатикой. После обобщения данных,
получаемых по результатам проектной реконструкции
серии со временных РС разного класса и в силу их
назначения, практически формируется
неопределенная ленность в значениях проектных
параметров РС нового поколения, получаемая за
последние поколения. В результате становится
возможным использование тех параметров, которые
соответствуют адекватным значениям параметров
промыслового судостроения для задач отечественного
оптимизационного проектирования современных
отечественных условий РС для соответствующих ТЭУ
их эксплутационных задач.
Литература
1. Алешин Н.В., Ляховицкий О.Г., Царев Б.А. Методология инженерной и научной деятельности в
морской технике: Учеб. пособие: Н.В. Алешин и др. - СПб.: Изд. Центр СПбГМТУ, 2000. - 295с.
2. Иванов В.П. Технико-экономические основы создания рыболовных судов: учебник: /В.П.
Иванов - Калининград: Изд-во БГАРФ, 2010. – 275с.
использованная литература
1. Алешин Н.В., Ляховицкий О.Г., Царев Б.А. Методология инженерной и научной деятельно-сти в
морской технике: Учеб. пособие: / Н.В. Алешин и др. - СПб.: Изд. Центр СПбГМТУ, 2000. - 295с.
2. Иванов В.П. Технико-экономические основы создания рыболовных судов: учебник: /В.П.
Иванов – Калининград: Изд-во БГАРФ, 2010. – 275с.
25
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
СУДОВЫЕ ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ И ИХ ЭЛЕМЕНТЫ
(ГЛАВНЫЕ И ВСПОМОГАТЕЛЬНЫЕ)
УДК 621.642.3
СНИЖЕНИЕ ТЕХНОГЕННОЙ НАГРУЗКИ НА ОКРУЖАЮЩУЮ СРЕДУ И ОБЕСПЕЧЕНИЕ
БЕЗОПАСНОГО ХРАНЕНИЯ НЕФТЕПРОДУКТОВ, ИСПОЛЬЗУЕМЫХ В СУДОВЫХ
ЭНЕРГЕТИЧЕСКИХ УСТАНОВКАХ
Хуснуллина Алия Рафаэлевна
аспирант кафедры экологии промышленной зоны и акватории СанктПетербургский государственный морской технический университет 190008, СанктПетербург, ул. Лоцманская, д. 3 e-mail: aliya.r@inbox.ru
Аннотация
В статье выполнен обзор основных экологических рисков, использование при эксплуатации технологических
емкостей, предназначенных для хранения нефтепродуктов, зон временного хранения отработанных масел,
льяльных и балластных вод в специально обустроенных емкостях обоснования на территории портов и
нефтеналивных терминалов. Исключены случаи обнаружения случаев обнаружения в резервуарах, путь обустройства
дренажных систем.
С целью заражения загрязнений предполагается технология строительства противофильтрационного
траекторного фильтра, заключающаяся в закачке в нижележащие грунты, инъекционные полимерные минеральные
растворы, состав которых определяется зависимостью от геологического строения грунтов, основанных на
технологических емкостях, предназначенных для хранения нефтепродук
тов.
Приведены данные о промысловых испытаниях предложенной технологии, с добавлением ти
по изолируемым грунтам, и описание применяемого метода.
Ключевые слова: нефтепродукты, резервуары, нефтеналивные терминалы, вязкоупругие составы,
геоэкологические экраны.
СНИЖЕНИЕ ТЕХНОГЕННОЙ НАГРУЗКИ НА ОКРУЖАЮЩУЮ СРЕДУ И ОБЕСПЕЧЕНИЕ
БЕЗОПАСНОЕ ХРАНЕНИЕ НЕФТЕПРОДУКТОВ, ИСПОЛЬЗУЕМЫХ В СУДОВОЙ ЭНЕРГЕТИКЕ
СТАНЦИИ
Хуснуллина Алия Рафаэльевна
аспирант кафедры экологии промышленных зон и
водных объектов Санкт-Петербургский
государственный морской технический университет
Лоцманская, д. 3, Санкт-Петербург, 190008, Российская Федерация email: aliya.r@inbox.ru
Абстрактный
В статье проведен обзор основных экологических рисков, возникающих при эксплуатации технологических
резервуаров, предназначенных для хранения нефтепродуктов, зон временного хранения отработанных масел,
ляльных и балластных вод в специально оборудованных резервуарах, расположенных на территории. портов и
нефтеналивных терминалов. Рассмотрены существующие методы предотвращения миграции загрязнений на
территорию водоемов путем устройства дренажных систем.
С целью локализации загрязнения предложена технология строительства противофильтрационного экрана с
использованием современных нетвердеющих полимерно-минеральных составов. Заключается в загрузке в
подстилающий грунт нагнетательных растворов, состав которых определяется в зависимости от геологического
строения грунта, в котором сооружаются технологические резервуары, предназначенные для хранения нефтепродуктов.
Данные о промысловых испытаниях предлагаемой технологии с указанием типов изолируемого грунта и
описание применяемого метода.
Ключевые слова: нефтепродукты, резервуары, нефтяные терминалы, вязкоупругие конструкции, геоэкологические экраны.
26
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Введение
На предприятиях
в судостроительной
промышленности, в портах, для хранения
нефтепродуктов (энергоносителей и смесей
материалов) используются технологические и
расходные емкости, наземные, подземные и
заглубленные. Кроме этого на территории
судостроительных и судоремонтных предприятий,
портов, припортовых медицинских и нефтеналивных
терминалов был осуществлен прием и временное
хранение отработанных масел, льяльных и балластных
вод в специально обустроенных
внезапные проявления проявления, грунтовых вод,
снижение уровня опасности повсеместного
использования Характерным местом обнаружения
утечек нефтепродуктов из резервуара является место
примыкания стенок и днища, либо через
образовавшиеся сквозные трещины в днище и
боковых обрывах резервуара. Нахождение в
большинстве случаев произошло утечек, затруднено,
так как огромное количество резервуаров произошло
с обвалованием площадки.
емкостями.
Инженерная защита, от негативного воздействия
на окружающую абсорбцию продуктов
нефтепереработки, обнаруживается путем
обустройства дренажа головного мозга несовершенного
типа по периметру участка, на котором расположена
технологическая емкость, с заложением дренажной
трубы на сосуд с верховой стороны. Отток грунтовой
воды по трубе подключением к основному дренажной
самотеком
системе предприятия,
осуществлен
в пролив. Дренажная
канава с
Несмотря на принятые меры по предотвращению
загрязнения грунтов (бетонирование основания
емкостей, обвалование территории хранилища
судового топлива и смазывающих материалов),
проливы имеют место и сопровождаются загрязнением
грунтов и горизонтов поземных вод. Особые проблемы
возникают в речных портовых сооружениях,
нефтехранилищах и нефтебазах, развертываемых
и эффективно эксплуатируемых добытых
нефтепродуктов, требующих заправки топливом
по
судов высокого назначения,
обсуживающих
отгрузке
месторождения. Хранение нефтепродуктов, в том
числе поставщиков энергоносителей и масляных
материалов, осуществляемых в наземных
технологических и расходных емкостях. Идея
создания первого резервуара цилиндрической
английской собственности принадлежит инженеру
Владимиру Григорьевичу Шухову, который в 1878
году разработал и предложил использовать
оригинальную конструкцию цилиндрического
металлического резервуара для хранения нефти. Эта
конструкция стала прорывом в строительстве
резервуаров во всем мире. К началу 1880 года на
территории Российской Империи было построено
около 130 месторождений полезных ископаемых,
которые рассматривались Российской Империей на
новом качественном уровне, а также опыте хранения
нефти и нефтепродуктов в земляных котлах, как это
делалось ранее. В настоящее время на территории
портов, на тепловых электростанциях и в тепловых
сетях Единого энергетического комплекса России
более 1800 используется технологических емкостей,
предназначенных для хранения нефтепродуктов,
около 26 % железобетонных резервуаров
представляет собой резервуары, вертикальные
цилиндрические резервуары.
остальные
-
заполняется по верху дренажной трубы щебнем, а
сверху по всей высоте дренирующим грунтом.
Материалы, из которых извлекаются дренажи, а
также грунты, в которых сооружаются технофункции
емкости (четвертичные отложения), высокой высокой
степенью пористости, проницаемостью и
высоким коэффициентом фильтрации,
воздействие на окружающую среду. Одной из
возможных решений данной проблемы является
строительство изоляционного экрана на основе
полимерно-минеральных составов.
Технология проведения работ по локализации
загрязнений Предлагаемая технология точно
определяет нагнетание нетвердеющего
инъекционного состава в скважинах, оборудуемых в
соответствии с проектом по периметру каждой
емкости в составе резервуарного парка.
стальные
Технологические емкости, предназначенные
для хранения нефтепродуктов на и нефтеналивных
как правило, подземными
портов железобетонными
территориях терминалов,
как
емкостями, либо действуют
в заглубленномявляются
варианте.
Рис. 1. Вязкоупругая смесь до контакта
с водой Инъекционные
составы изготавливаются на основе
полимерно-минеральной вязкоупругой
27
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
смесь ЛП (автор – Цыгельнюк Е.Ю.). Смесь
представляет собой светло-коричневую вязкую
массу с дисперсностью 2 мм. При
соприкосновении с водой, интенсивно ее
поглощается, превращаясь в гелеобразную массу
с образованием крупнодисперсных частиц до 4-6
мм, в соответствии с ГОСТ 12.1.007-76, являющихся
малоопасным веществом.
ства.
Таблица 1
Технические характеристики
вязкоупругой смеси
№ Наименование
1.
2.
Показатель
Внешний вид
вязкая упругая эмульсия
сия
Цвет
от желто-коричневого до
3. Плотность, кг/м 4. рН
3
темно-серого 1450-1630
6-7 10-15
при t 200 оС Индекс
водопоглащения
смеси
5.
Проведенные лабораторные исследования
доказывают, что полимерно-минеральная смесь
ЛП имеет высокую степень относительного
накопления, а инъекционные составы на ее ос
нове обладают высокой закупоривающей спо
собственностью.
Противофильтрационный экран состоит из
двух частей: центральная — несёт нагрузку на
фильтрующую фильтрацию, и фланговая, которая
выполняет вспомогательную
проявляющуюся
функцию,полным
поражением
экрана. Проектируется две строки
скважин.
того, что состав с течением приобретает
резиноподобную
работа
прослушивания
круглосуточно, структуру,
без
по напряжению
перерывов.
В
первую очередь осуществляется оборудование
скважин I группы, производящая центральную
часть экрана, несущая потребление
Вторым
ресурсов.
этапом развития фланговой части экрана.
В каждом ряду бурение и нагнетание скважин
ведётся методом последовательного сближения,
нагнетание растворов осуществляется «снизувверх».
Рис.2. Вязкоупругая смесь ЛП после контакта с водой
28
Технология проведения работ
Научная работа по выявлению
противофильтрационного
исследование
фильтра вызывает
строения
органов
участка, изучение инженерных изысканий с
определением состава грунтов, в которых
преследуются сооружены технологические
емкости. В зависимости от типа грунтов
выявляется тип инъекционного состава для
проведения нагнетания.
Приготовление инъекционных составов, во
время постепенного набора структур,
осуществляются порции в нескольких случаях.
Технология строительства геоэкологи
логического экрана
предусматривает: 1. Проходку вертикальных
скважин через торца технологической
нагнетание
емкости; 2. Поинтервальное вязкоупругого
состава; 3. Поинтервальная выстойка.
Бурение скважин осуществлялось установкой
кондуктора и цементацией затрубного
пространства, после чего в скважину опускались
трубы с пакерным забором, отсекающим нижний
интервал. После промывки, произведенной
закачки вязкоуп ругого состава под давлением с
выстойкой для его активации, т. к. после
проникновения в зону контактирования с водой
происходит его активация (разбухание),
препятствующая развитию движению подземных
вод.
После выстойки производились вышесъемные
пакерного устройства и производились работы
(промывка, закачка под давлением, выстойка).
Оборудованиескважин
я г р у п п ы При
проходке скважин в пределах осадочных
пород бурение ведется в соответствии с геологотехническим нарядом. Проходка осуществлялась
до входа в коренные грунты. Инъектирование
методом последовательных заходов «снизувверх», длительность интервала
инъектирования Определение по результатам
гидравлического опробования интервала, но не
более 5 м. Схема скважин для добычи, от
резервуарного парка для хранения нефтепродуктов
изъятия на Рисунке 3.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
вертикального ствола. Тип грунта — обводненные
пески. Применяемая технология — свявание
обводненных грунтов методом осуше
ния.
Рис. 3. Схема расположения скважин I и II группы
технологических емкостей резервуарного парка
хранения нефтепродуктов
Бурение и оборудование скважин
II группы
Бурение скважин устойчивым способом с
продувкой воздуха или с промывкой воды.
Бурение и оборудование скважин занимают
прочное положение: 1. Бурение скважин;
2.Опустить трубу, приподнять над забоем,
закрепить буровым хомутом, провести
цементацию затрубного пространства; 3.
После цементации раскрепить хомут и
посадить трубу на забой;
4. Через двое суток начинается выполнение
инъекций по нисходящему пути. Это обнаружение
технологическая
схема
загрязнения позволяет
проводить комплекс
работ по загрязнению от технологических
емкостей в крупных крупных резервуарных
парках на территории портов и нефтеналивных
терминалов не только на стадии строительства,
но и при обнаружении ремонтов возобновляющихся
емкостей при обнаружении мест скопления дней
и стенок технологических емкостей.
Заключение
технология
Предлагаемая прошла
успешные промысловые
испытания на следующих объектах: 1. ОАО
«Ковдорский ГОК». Тип объекта — нулевые
емкости ТТУ ТЭЦ. Тип грунта — насыпной.
Тип экрана — гидроизоляционный экран. 2. ОАО
«Апатит», Восточный рудник, Коашвинский
карьер. Тип объекта — промежуточный зумпф.
Тип грунта — кристаллические по роды с
сильно развитой системой трещинова тости. Тип
экрана — противофильтрационный
завеса.
3. ООО «Тоннельный отряд 4», г. Гатчина.
Тип объекта — проходка вспомогательного
29
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Литература
1. Стоянов В. У., Фридман А.В. Проблема загрязнения морской акватории от нефтепродук тов // Строительство и
техногенная безопасность. – СПб.: 2010, № 31, с. 133-138. 2. Нифонтов Ю.А., Надиров К.С., Хуснуллина А.Р.,
Цыгельнюк Е.Ю. Локализация загрязнения грунтов при строительстве, эксплуатации и консервации буровых
шламовых амбаров // Нефть и газ. – Казахстан: 2013, № 4 (76), с. 127-134.
3. Цыгельнюк Е.Ю., Рыжков А.Н., Непран М.Ю. Опыт использования тампонажной смеси в карьерах
ОАО "Апатит" // Горный журнал. – М.: 2009, № 9, с. 37-38.
4. Цыгельнюк Е.Ю. О технологиях водоизоляции с применением вязкоупругих полимер-минеральных
композиций // Актуальные проблемы морской энергетики. Материалы второй Всероссийской межотраслевой
научно-технической конференции. – СПб.: 2013, с. 206-209.
Литература
1. Стоянов В.Ю., Фридман А.В. Проблема загрязнения и очистки морских акваторий от нефтепродуктов //
Строительство и техногенная безопасность. – СПб.: 2010, № 31, с. 133-138.
2. Нифонтов Ю.А., Надиров К.С., Хуснуллина А.Р., Цигельнюк Е.Ю. Локализация загрязненного грунта при
строительстве, эксплуатации и консервации буровых шламохранилищ // Нефть и газ. – Казахстан: 2013, №4
(76), с. 127-134.
3. Цигельнюк Е.Ю., Рыжков А.Н., Непран М.Ю. Опыт применения тампонажной смеси в карьерах ОАО «Апатит» //
Горный журнал. – М.: 2009, № 9, с. 37-38.
4. Цигельнюк Е.Ю. О технологии гидроизоляции с применением вязкоупругих полимерно-минеральных
композиций // Актуальные проблемы морской энергетики. Материалы второй Всероссийской межотраслевой
научно-технической конференции. – СПб.: 2013, с.206-209.
30
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
ФИЗИЧЕСКИЕ ПОЛЯ КОРАБЛЯ, ОКЕАНА, АТМОСФЕРЫ И
ИХ ВЗАИМОДЕЙСТВИЕ
УДК 532.5.032
ГРАНИЧНЫЕ ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ И АСИМПТОТИКА РЕШЕНИЯ ЗАДАЧИ
О МАЛЫХ КОЛЕБАНИЯХ ТЕЛА В ВЯЗКОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
Афанасов Евгений Николаевич
2 категории Инженер
Крыловский государственный научный центр 196158,
Санкт-Петербург, Московское шоссе д. 44
Кадыров Сергей Газимурович
кандидат технических наук, доцент,
профессор, кафедра математики СанктПетербургский государственный морской технический университет 190008, СанктПетербург, ул. Лоцманская, 3
Аннотация
В работе рассматриваются малые, гармонические во времени ожидания твердого тела, ограниченного гладкой
опасности возникновения вида, погруженного в вязкую несжимаемую жидкость. Если ввести скалярный и векторный
потенциалы, то систему дифференциальных свойств таких моделей относительно вектора скорости и давления
можно сформулировать в виде эквивалентной системы граничных интегральных свойств (ГИУ) относительно этих
по тенциалов. Построено асимптотическое решение таких ГИУ. Показано, что скалярные значения и векторного
потенциала на контуре твердого тела полностью определяют гидродинамические
реакция, действующая на поступательно движущееся тело, впитывающая в вязкую несжимаемую жидкость. В
качестве модельных задач рассматриваются осесимметричные задачи о малых гармонизациях вытянутого и
сплюснутого сфероидов и объемов, поглощающих в вязкую несжимаемую жидкость. Результаты построенного
асимптотического решения сравниваются с построением точными теоретическими решениями и с результатами,
полученными авторами ранее вычисленным методом. Ключевые слова: линеаризированные уравнения НавьеСтокса, вязкая несжимаемая
жидкость, сущность твердого тела, граничные интегральные уравнения.
ГРАНИЧНЫЕ ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ И АСИМПТОТИЧЕСКИЕ РЕШЕНИЯ
ЗАДАЧА О МАЛЫХ КОЛЕБАНИЯХ ТЕЛА В ВЯЗКОЙ
НЕСЖИМАЯ ЖИДКОСТЬ
Афанасов Евгений Николаевич
Инженер 2 категории,
Крыловский научно-исследовательский
институт кораблестроения, 196158, Санкт-Петербург,
Московское шоссе, 44 e-mail: zhenya.afanasov@yandex.ru, тел.: 8 (904) 612-58-02
Кадыров Сергей Газимурович к.т.н. ,
доцент, профессор
кафедры математики, Санкт-Петербургский
государственный морской технический университет 190008,
г. Санкт-Петербург, ул. Лоцманская, д. 3, г. СанктПетербург, Россия
Абстрактный
В статье рассматриваются малые во времени гармонические колебания твердого тела, ограниченного гладкой
поверхностью произвольной формы, погруженного в вязкую несжимаемую жидкость. Если ввести скалярный и
векторный потенциалы, то систему дифференциальных уравнений для вектора скорости и давления этой модели
можно сформулировать в эквивалентной системе граничных интегральных уравнений (ГИУ) относительно потенциалов.
31
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Получено асимптотическое решение такого МБИ. Показано, что значения скалярного и векторного потенциалов на граничном
твердом теле полностью определяют гидродинамические реакции, действующие на поступательно движущееся тело,
погруженное в вязкую несжимаемую жидкость. В качестве модельных задач рассматриваются осесимметричные задачи о
малых гармонических колебаниях вытянутого и сплюснутого сфероидов и шара, погруженного в вязкую несжимаемую жидкость.
Результаты асимптотических решений сравниваются с известными точными теоретическими решениями и результатами,
полученными ранее численными методами.
Ключевые слова: линеаризованные уравнения Навье-Стокса, вязкая несжимаемая жидкость, колебания
тело, граничные интегральные уравнения.
Введение
Применительно к дифференциационным уравнениям
Навье -Стокса конвективным методом и, следовательно,
с использованием линейных определений [1] : 1
Для векторного заднего обзора должно быть вы
заполнено состояние « измерения»
div
0 .
(5)
Подстановка (4) в системе (1)-(2) дает
,
0
i
,
0p
в
пв ,
т
(1)
0
делв
0.
(2)
Здесь v – вектор
скорости, 0кинематической
– плотность жидкости,
– коэффициент
вязкости костей, p – давление. В случае гармонических
колебаний с частотой
уравнения (1) записывает
дивi
в и точек границ тела V )
grad rot
1
vи
пв .
(3)
ниях параметра
л
2
(L – размер характера
0
р
замыкают систему.
р
22
0L
п
,
опущены)
0
0 ip
вид
2. Формулировка пограничной задачи в
системе пограничных интегральных
связей
Уравнения системы (6) можно сформулировать [22]
в виде системы граничных интегральных свойств (ГИУ)
в результате декартовой си
е Y, еeZ, X
*
1
(М 0) (М ) (М ,Мн)d S
1. Метод потенциалов
С
*
н
(М 0,М )d S М
(7)
*
М
С
(М )
С
здесь
н
*
(М ,М )d S 0М
XeXпри
YeY Вероятности
ZeZ
.
32
М2
(М ) (М0) 2(М ,М н)d S0
Между уравнениями (1)-(2) и уравнениями ди
намической линейной теории упругости [21] вид на
явная пропорция. В работе А.Н. Гузя (см., например, [21])
в соответствии с применением логики ввода потенциалы
– скалярный
и векторный
, вектор скорости через
(4)
0
С
(М )
v град гниль .
(6)
,
i .
Остальной выбор не меняется
1
них по формуле
,
в, в
(далее верхние черты
л
v,V
стеме координат с ортами
тела [13-18].
Для трехмерных тел, за исключением шара [19],
решение можно получить лишь численно [20].
,
л2
,
В безразмерных средах
0
Здесь, как обычно, подразумеваются усилители
туды входящие в уравнение (1)-(2) величины.
Использование вязкости в случае возникновения
проблем, от носящихся к малым ожидаемым,
рассматривалось еще в классическом труде Ламба [2].
Вопрос о расчете гидродинамических сил,
обнаруживаемых на твердых и упругих телах,
совершающих будущее в вязкой несжимаемой жид
кости, является весьма актуальным в различных
приложениях – в нанотехнологиях [3-5], в сенсорных
измерениях [6,7], в гидромеханике фшорных конструкций
[8-12]. Уравнения (1)-(2), несмотря на их линейность,
трудно поддаются решениям (точными) методами. В
случае плоского тела возможно применение соображений
теории пограничного слоя, пригодных для больших
значений
,
V иС
затухания «на бесконечности»
,
ся в виде
0. ,
0 Граничные условия «прилипания» (равенство
на границе тела S Векторов скоростей жидкости
0
div
(8)
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Следовательно,
В уравнениях (7) М0, М
S – точки наблюдения ния
и объединения, лежащие на поверхности
S тела . Если R r(M ) r
M
*
точка между М0 и М , то
(М,0 М)
е
ii Р
,
*
н
*
(М
0 ,М )
н
(М ,М )
н0
я
nd S ndYZ
S
ZY
.
С
Повторяя экземпляры преобразования для
дру гих растворенных в формуле (9) обязательно полу
чим
С
н
v dS i0ndS
С
В результате
*
*
,
г
С
– функция Грина для уравнения
4 р
,
–
4 р
относительной составляющей векторного по
тенциала
Д
YZ
1
М,М0
функция Грина уравнения для сторон
*
Z
– расстояние
0
ПОКАЗАТЕЛИ
.
н
Система граничных интегральных положений (7)
полностью эквивалентна допустимому уравнительному
обоснованию и граничным положениям теории.
Заметим, что выбор системы координат при этом не
производился.
3. Расчет силы, заметной на поступательно
00
С
.
(10)
С
Формула (10) – обобщение ее двумерного варианта,
полученного в [22], на трехмерный слух чай.
4. Асимптотический метод расчета
гидрокарбонатов сил
Проведем в системе наблюдения М0 касательную
плоскость поверхности S и введем локальную декартову
координату (x,y,z) , направив ось z по нормали к
движущемся теле в вязкой несжи маемой жидкости
Вектор напряжения на поверхности
равен
поверхности (рис.1).
тела с нормалью n nXeX nYeY nZeZ (в
пределах точки находятся размерные величины
этого)
,
pn pXnX pYnY pZnZ
тогда сила, действующая на тело равная
.
F pX nX pY nY pZnZ dS
С
Так как [23]
пнв пн
где
0
в
вХ
н
п
е
н ,
Рис.1. Системы координат
– динамическая вязкость жидкости,
вЕ
Х
вЗ
_
Д
н
Фя
0
е
н
, то
Z
в
ндС
С
н
С
На рис.1 указаны глобальная ( X,Y,Z) и локальная
( x,y,z) декартовые системы координат. Мы проводим
дС .
(9)
задания по верхности, приняв за величину расстояния
изменение преобразования
v
X . Последовательно ис
сохранность
n
R
использование формулы Грина и «интегрирования по
части» имеет
в
x
X
н
С
dS
З
г
г
,y
r(R,
)sin
,z
z(R,
),
)
AR2
BR3
) в виде разложения по
(C
34
A
)R
... ,
где
Д
,
г
Х
Д
)cos
при этом R RZ .
Представим свойство z(R,
степеням R :
Д
Z
XYZ
Z
r(R,
z(R,
v
Икс
Д
Z
XYZ
то
между осью Ox и радиус
222
– внешний вид поверхности S) и, так как
вИкс
M0M и угол
вектором цилиндрической системы координат. Тогда
уравнение поверхности –
Икс
н
С
(
X dS vd
проверку на поверхности в локальной системе координат
задано: z
z( x,y ) . Перейдем к параметрической форме
Y
0 ,
г
Z
Z
.
Д
г
33
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
А
1
22
ху
2
г
zz
у 22
2 cos sin
sin
cos
3 (33) Т.2 2016
22!
2х
3
1
Б
3
3!
02Z 2(M, M) D S н 2 0
М
11 (M) (M)
Классические
формулы, полученные
С решения задач о
Стоксом [19] для
предполагаемых пределах, наводят *на
у
поиски асимптотического
Враспределения
(М 0,М
г
иско мых потенциалов
х
у в виде
М
С
асимптотического ряда
3
z32
г
3 cos sin
cos 2
xy
3 sin
z
2
3 3 cos
sin
23
xyy ,
*
(М)0
Икс
2
р
г
р
г
р
АР АБР
2АРБР
3
2
...,
SEGFR
(М 0,М )d S М
М
*
(М) 0
(М
зн) (М ,М )d
0 S
М
С
Теперь легко найти коэффициенты первой
квадратной формы и найти элемент площади
поверхности
d 1 гА
2
2
*
В
ху
С
М
С
Икс
33
CA2 4 R ....
(11)
(М
уп) (М ,М )d
0 S
г
...,
(М 0,М )d S М
М
*
у 2 (М)0
1
*
В
у
ух
С
1 234rRz
2
2 4 5 2ABR
r RAR
...,
32234
1
М
С
Далее, находим:
2
(М ) (Мн ,М )d
0 S
Икс
…
22
RAR ABR
)d S М
Икс
х
3
г
*
1
,
2
3 R ... dRd
С
*
у
Икс
х
у
(М ,М )d S 0М
М
.
г
р
Производная по нормали
такой же
Р
н градР
н
Р
н
н
н
3
АРБРКАР
р
р
4 3 532
и, наконец,
1 R3 3 d SA BR (CA )R ...
2
р2
Икс
2
n
2
Записывая определение вектора скорости (4) и
используя состояние (5) патологии в точках по
верху S
г
у
xyz
Вх ,
г
Икс
уя
В
х
у
Вг
Икс
zxy
Икс
у
xyz
Теперь
система
ГИУ
(7) можно переписать так:
,
у
г
,
1
0()
(М
0)~
,
РЕГФ
1
(М)0 ~
у
(М) ~ 0
г
(М)0 ~
1
...
1()
Икс
1
()
:
(М)0 ...
(12)
1()
лет (М ) ...
1
0
1()
г (М)0 ...
Для европейских рассуждений необходимо
Обладает асимптотическим разложением интегралов
Р( )
вид
Р е ii
f(R, )dR ,(здесь f(R,
0
) – доста
точно гладкая функция) по большому параметру
. Такую асимптотику можно построить интегри
ванием по частям:
Р( )
Р е ii
0.
f(R, )d R
0
Н
(1)
к 1
1
к
к
к
II
кр
1
*
жМдС
М
С
*
жМдС
н
С
М
(13)
1
1ф
О
II
р 0
формула формулыу (13) при
34
1
по степеням малого параметра
имеет
фМ0
О
2 ii
фМ0
2 ii
0
нокаут
М
к1
1
,
1
,
(14)
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
где
z
К
х
2
г
2 12 2
– средняя кривизна по
2
г
3 (33) Т. 2 2016
верхности в восприятии
наблюдения. Имея в виду (14) подставим (12) в систему
ГИУ (11) и приравняем совет, содержащий пара
метр
1
в полученных степенях, ограничиваясь
обычно не выше первого порядка. Получаем: – в
нулевом приближении
10() 2
М0
ММ н,М д0 С
0
()
М
(15)
С
Мг М
В
,М д SМ0
*
С
Рис. 2 – Колебания вытянутого сфероида
*
Введем координаты вытянутого сфероида [24]
X
dsh sin cos , Y
dsh sin sin ,
Z
0
dch
cos
,0
окружающей
0
.поверхности
На
,2 сфероида:
,
– в первом приближении
1 1 ( )1 ( )
0 , при этом
*
(М)
0 0 2(М ) (М
н ,М )d S
М
С
1()
()
у
1
у
х
С
*
Икс
()
1
1
Икс
1
1
() г
М0
г
1
у
0()
iix
В
1
0()
sh
Граничное
состояние
n 0()
М0
.
0
(0)
с
,
0()
sinsin
0 . (18)
(17)
Икс
0()
М0
0
М0
бй,
имеет вид
V
у
1
М0
а , дч1 б0
учет осевой совокупности в координатах
0()
я
я
0
Уравнение Лапласа для сторон
(М ,М )d S 0М
М
()
а дш
(16)
Формулы (15)-(17) позволяют построить асимптотику
решения поставленной задачи, так как по значениям
потенциалов на поверхности тела можно быстро
восстановить поля и выбросы на ней.
Градиент успешной функции f
0 име
ж
акос
ж
cos bsin
f
0
2a2cos
2 2 b sin
bsin
f
sin
ж
акос
.
2a2cos
2 2 b sin
В качестве примера рассмотрены осесиммет
ричные решения о скором развитии вытянутого и
сплюсого сфероида и возможно, что в конкретном
случае при a=b=R (задача о скором скором развитии в
вязкой несжимаемой жидкости) возникает решение с
точным теоретическим развитием Стокса [19].
5.1 Колебания вытянутого сфероида
,
(19)
ет вид
5. Примеры расчета
предполагает наличие вероятности возникновения
оси (вдоль оси OZ) вытянутого сфероида с уравнением
в глобальной системе координат (см. рис. 2) 2 Z 1
2
b
22
ХУ
а
, б
ню 0 Zэ н .
факос
ж
бсин
2a2cos
2 2 b sin
имеет
Нормаль к поверхности сфероида n
координаты
cos ,bsin sin ,acos
bsin
н
.
2 2 2 Таким
b sin
a 2cos
образом,
производная благой функции по нормали на
поверхности оказывается одинаковой
2
часа
ф
,
ж
н
f ,0
0
н
2 2 2 2 b sin
a cos скорость
Нормальная
поверхности сфероида au cos
ООН
0 0 , , ип 0
.
0
2 a2 cos
2 2 b sin
.
35
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Следовательно, граничное условие (19) в ко
ординатах
,
0 имеет вид 0 ( )
0
au 0cos
2 2 2 2 b sin
a cos
,
2 2 2 2 b sin
a cos
0
0,
()
au 0cos
11()
)
ч
Q1(гл )
1
lн гл
2
С
(М 0,М )d SМ
)cos ,
мебель
1()
ш
1
ш
1()
грех
грех
0
1.
1
при краевом Предположении 1
СQ1
(ch
)
Q (кан
1 )
и
0
0
потому
,
2
0
q 1 Q ch
1
ты 0
ii
2 2 2 2 b sin
a
cos
,
q
1 аб
2 2 2 2 b sin
a
cos
д1
Единичный касательный вектор для «мери
диана»
acos cos ,acos
bsin
sin
2 2 2 2 2 b sin cos
aa
,
0
0
2
потому
что
Пусть
1
.
( ),
к
CQ
ккch
cos
0
Pк
Ищем постоянную С, используя краевое усло
вие
Производная функция по касанию
имеет вид
ф
жж,
0
0
,
2 2 2 2 b sin
a
cos
.
C q P cos kkk
к 0
2 2 2 а cos
2
b sin
ты 0
Таким образом,
ii
q
1
q1
аб
2 2 2 2 2 b sin cos
aa
2 2 2 2 b sin
cosa
()0
( )0
2 2 2 2 b sin
cosa
( )0
,
1()
2 asin
22
asin
a cos b sin
1
что
Q . ch
f
М
1
( ) Пр
н гниль
Q (кан
1 )
Используем обозначения
1
( ) Пр
н гниль
М
где
0
au
0Q
1 (ch )
( ) 0,
q
( )n
au0 cos ,
cos
0
а.е. 0
С
д1
д1
ау син
0
2 2 2 2 b sin
cosa
2
P cos 1
C q P cos kkk
к 0
,
.
Касательная скорость на поверхности сфероида
36
*
М
М
(1) (это ГИУ равносильно краевой задаче для (1)).
,
Теперь ищем
то есть, решаем краевую
Тогда
техническая
,М )d S
0(М ) (М
н
1
( ) Пр
н гниль
1
ч
(1)
*
1()
0(М
2 )
С
СQ
1 (ch
1
ab q
2 sin
2 212aqb
cos
В первом приближении для сторон
есть
где
1
ты0грех
– функции Лежандра второго рода,
1CQ (ch 1 )P(cos
М0
II
CQ(ch)P(cos
),
нн
н
прекращение содержания из пограничного
состояния.
Ищем решение уравнения Лапласа
1
.
ты
1
.
н 0
,
0
0()
II
М0
Pн( ) – полиномы Лежандра, Cn – плотность,
0()
1
( 1)
Общее решение уравнения Лапласа (18) с учетом
совокупности и ограниченности вне сферои да может
быть сохранено в виде
где Q ( н)
2 a2 cos
2 2 b sin
значит
,
0
()
бу син
00 , , и 0
ты
ты 0
II
22222
q
1
q1
аб
2
b sin
b sin aa cos
2 2 2 a cos
/32
P1cos
Предствительная общественная функция в виде
ряда по полиномам Лежандра
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
F(cos)
3 (33) Т. 2 2016
Следовательно,
а
ккP (cos ),
к
2
0
ФЗ я
где
к21
2
ак
0
я
Таким образом,
P cos
1
/32
к
0
фа,б
б
1
нм
,
2
, нм
21п
ты 0
C кк
q Pк cos
q
1
1ii а бq
к
0
1
Ск
ты 0
q
1 аба
q1
дк
дм
3
м 0 дм
q
~
1 а.е. cos
~
2 0
1()
(23)
а
1
1()
222
sin cos
0
д
22
грех
2
21
,
,
1
21
1
д1
/ 3 2д
.
2
1 лн
1
2
1
2 рассмотрим результаты решения задачи о малых
гармонических проявлениях вытянутого сфероида при
2 в вязкой несжимаемой жидкой кости. Так как
мм
,
результаты расчетов прямо пропорциональны значениям
параметра α=a/A, для представления результатов
полагалось α=1.
На рисунке 3 приведено сравнение модуляции
коэффициента CD для вытянутого сфероида как функции
от безразмерного параметра β, полученного в результате
численного решения задачи [20] с асимптотическим
исходом «первого» по ряду. Коэффициент CD _
,
ты0 грех
1
ab q
2 2 qb sin 1
22а
потому
(21)
СД
Сила, с которой действует на тело, Решение по
формуле (10) Элемент площади сфероида
a cos
22
грех
cos
21
пер
д1
мм
1
21
2 кос
2
ii
0
1
abaqP cos
q ii
ты 0
1
asin
112
3 грех
(20)
0
II
1
,
д
м 0 м
,
q1
3
,
ккa P (cos )
0
д1
0
0
д1
0() 0
дм
1
1а
2 косинус
1
k ii
1 aba q
P cos
ты 0
Итак,
0,
кв 1
/32
Следовательно
0
q
1
где
Pn cos Pm cos sin d
,
2 кв
aa cos
2 2 2 2 b sin a cos
Известно, что [25]
1()
1)
2
0
к
д1
0
P1
cos P (cos )fa,b
к sin d
2 2 2 2 2 b sin
0
4к31
ФЗ иау 0 0 3
a Pк(cos
к )
(я
2
2 абсин дд
Поддержание (20)-(21) в (22) находим
2 2 2 2 b sin a cos
2 к1
(22)
0,
0
0 0
2 2 2 2 2 b sin cos
aa
ак
0 0
2
к
F(cos)P(cos)sin
d
a 2sin cos дд
0 0,
ФZ
12
А ua
002
,
(24)
где а – полуось сфероида, расположенная попе ререк
направления колебаний.
2 2 2 dS
b sin d d
2
Компоненты Векторного сечения
имеют место
вид
X
e
eX sin
Y
Z
,
,
eY ecos
0.
Нас интересует только сила, которая
соответствует оси OZ (остальные компоненты
потребления). Поэтому
n Z dS
абсин
d
d
2
37
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
как функции от безразмерного параметра β, по
лученного в результате вычисленного решения
задачи [20] с асимптотическим основанием «первого»
порядка.
1 – асимптотика;
2 – численное решение задачи [20].
Рис. 3. Модуль коэффициента CD в зависимости от β
при незначительной гармонии вытянутого сфероида
в вязкой несжимаемой жидкости.
1 – асимптотика;
2 – численное решение задачи [20].
Рис. 4. Модуль коэффициента CD в зависимости от β
при малых гармониках сплюснутого сфероида в
вязкой несжимаемой жидкости.
5.2 Колебания сплюснутого сфероида
ожидает ожидания оси вращения
(вдоль оси OZ) сплюснутого сфероида ( b
a ).
Градиент f , и
нормаль
касательный
к поверхности
вектор сферои
да н
суть,
также как в случае вытянутого сфероида.
1
формуле (23) принять, что a=b=R q 1
(
(0)
в
Уравнение Лапласа для сторон
это имеет вид
5.3 Колебания Если в
1 кв
1
ch
Граничное состояние
0()
0,
0()
sinsin
0.
Стокса
порядок
Решение уравнения Лапласа
0()
au
0 1Q (иш )
0,
Q 1(иш)
Если использовать обозначения
q
1
Q
1
иш
0
0
,
потому
что
.
0
1
q
1Q
иш
43
ФZ
.
au 0cos
1
1 ), к испытанию
2
силу, действующую на сферу, ценностью ма лые в
вязкой жидкости
0()
ch
~
1 и, следовательно,
0
,
после вычислений
1
0 Р0 у3 и
1
2
(i 2
14
)
Формула
полагает(25)
сучетом
9
(25)
[19].
На графике 5 приведено вычисление результатов интеграла коэффициента CD для
определения, определяющего разницу в вязкости
не сжимаемой жидкости, получаемой по формуле
(25) с вычисленным значением [20] и с точным
определением Стокса [19].
выполненных в казни 5.1, можно
предположить, что формула для расчета силы,
действующей на сплюснутый сфероид, рекомендована
с формулой (23), но при этом
б
и
11_______
я
д1
221
д1
1а
1
.
2и21
Возьмем результаты решения задачи о малых
гармонизациях ожидаемых сплюснутого сфероида
при
0,5 в вязкой несжимаемой жидкости.
Параметр α=1.
На рисунке 4 показано сравнение модуляции
коэффициента CD (24) для сплюснутого сфероида.
38
1 – точное решение [19];
2 – асимптотика «первого» порядка, 3
– численное решение задачи [20].
Рис. 5. Модуль коэффициента CD в зависимости от β
при малых гармонизациях насыщенности в вязкой
несжимаемой жидкости.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Заключение
Из графиков на рисунках 3 – 5 видно, что
асимптотическое решение «первого» порядка для задач о
малых скоростях вытянутого и сплюснутого сфероидов и
границ в вязкой несжимаемой жидкости при больших
значениях параметров β хорошо согласуется с расчетными
результатами, полученными авторами [20].
Итак, изложенный метод определения гидросостава
сил, возможного на твердое тело, колеблющегося в вязкой
жидкости, может быть применен для решения таких задач,
однако при малых значениях параметра β (β<10)
асимптотики «первого» порядка недостаточности и, видаи
мощи , требуется избрание более высокого уровня.
Литература
1. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика. Т.VI. Гидродинамика. Изд-е 5-е, стереот. М.: ФИЗМАТЛИТ, 2001, 736 с. 2.
Ламб Г. Гидродинамика, Гостехиздат, 1947, 929 с.
3. Майкл Дж. Мартин, Брайан Х. Хьюстон. Частотная характеристика цилиндрических резонаторов в вязкой жидкости.
Журнал вибрации и акустики, Vol. 133, № 3, 2011, с. 11 4. Ли М., Бхиладвала Р.Б., Морроу Т.Дж., Сиосс Дж.А., Лью К.-К.,
Редвинг Дж.М., Китинг К.Д., Майер Т.С.
Сборка массивов резонаторов большой площади из нанопроволоки снизу вверх, Nature Nanotechnology, Vol. 3, № 2, 2008,
стр. 88-92 5. Джон Эли Сэдер. Частотная характеристика консольных балок, погруженных в вязкие жидкости, с приложениями
к атомно-силовому микроскопу. Журнал прикладной физики Vol. 84, № 1, 1998, стр. 64-76 6. Дуду Бадиан, Ален Гассер, Эрик
Блонд. Вибрирующая балка в вязкой жидкости для измерения вязкости: применение в промышленном вибрационном
вискозиметре. Материалы PACAM XII, 2012 г. 7. Рабин Махарджан. Влияние податливости опоры на резонансное поведение
датчиков на основе микроконсолей в вязких жидкостях, Диссертации, 2009, с. 275 8. Анатюрк А.Р., Троманс П.С., ван
Хазендонк Х.К., Слуис С.М., Оттер А. Сила сопротивления цилиндров, колеблющихся с малой амплитудой: новая модель.
Журнал морской механики и арктической инженерии, Vol. 114, № 2, 1992, стр. 91-103.
9. Чаплин Дж. Р., Суббиа К. Гидродинамическое демпфирование цилиндра в стоячей воде и поперечном течении //
Прикладные исследования океана. 20, № 4, 1998, стр. 251-259.
10. Sumer B., Fredsøe J., Jensen B. и Christiansen N. Силы, воздействующие на вибрирующий цилиндр у стенки при течении
и волнении, Journal of Waterway, Port and Coastal Engineering, Vol. 120, № 3, 1994, с. 233-250 11. Сагатун С.И. Активное
управление подводной установкой, IEEE Transactions on Control Systems Technology, Vol. 10, № 5, 2002, стр. 743-748.
12. Пол С., Датта Т.К. и Капурия С., Управление стационарной морской платформой-оболочкой с использованием
полуактивного гидравлического демпфера, Журнал морской механики и арктической инженерии, Том. 131, № 4, 2009, с. 10.
13. Шлихтинг Г. Теория пограничного слоя. М.: Наука, 1974, 712 с.
14. Фарадей М. Об особом классе акустических фигур; и о некоторых формах, принимаемых группами частиц при
вибрировании упругих поверхностей. Philosophical Transactions of the Royal Society of London, 121, 1831, pp. 299-340. Журнал
Акустического общества Америки, Vol. 26, № 1, 1954, стр. 26-39 16. Стюарт Дж. Т. Двойные пограничные слои в колебательном
течении вязкой жидкости, Журнал гидромеханики, Vol. 24, № 4, 1966, стр. 673-687 17. Райли Н., Осциллирующие вязкие
течения, Математика, 12, 1965, стр. 161-175 О высокочастотных колебательных вязких течениях, Journal of Fluid Mechanics,
Vol. 32, № 1, 1968, с. 55-68 19. Розенхед Л. Ламинарные пограничные слои, Кларендон, 1963, с. 688. 20. Афанасов Е.Н. Малые
ожидания твердого тела в вязкой несжимаемой жидкости, Морские интеллектуальные технологии, №4 (26), Т.1, 2014, стр.
103-109 21. Гузь А.Н. Динамика сжимаемой вязкой жидкостью. Киев: А.С.К., 1998, 350 с. 22. Кадыров С.Г. Метод граничных
интегральных составляющих в задаче о малых оставшихся тел в сжимаемой вязкой жидкостью, Морской вестник, спец.
вып. № 1(10), 2013, с. 85-87 23. Слёзкин Н.А. Динамика вязкой несмываемой жидкости. Гос. Изд-во технико-теоретической
литера туры, 1955, 520 с. 24. Корн Г., Корн Т., Справочник по математике (для научных работников и инженеров), Изд-е 4-е,
М.: Наука, 1977, 830 с. 25. Араманович И.Г., Левин В.И. Уравнения математической физики, Изд-е 2-е, стереот. М.:
ФИЗМАТЛИТ, 1969, 288 с.
39
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
использованная литература
1. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика. Т.VI. Гидродинамика. Изд-е 5-е, стереот. М.: ФИЗМАТЛИТ, 2001. 736 с.
2. Лэмб Г. Гидродинамика, Гостехиздат, 1947, 929 с.
3. Майкл Дж. Мартин, Брайан Х. Хьюстон. Частотная характеристика цилиндрических резонаторов в вязкой жидкости. Журнал
вибрации и акустики, Vol. 133, № 3, 2011, с. 11 4. Ли М., Бхиладвала Р.Б., Морроу Т.Дж., Сиосс Дж.А., Лью К.-К., Редвинг Дж.М.,
Китинг К.Д., Майер Т.С.
Сборка массивов резонаторов большой площади из нанопроволоки снизу вверх, Nature Nanotechnology, Vol. 3, № 2, 2008, стр.
88-92 5. Джон Эли Сэдер. Частотная характеристика консольных балок, погруженных в вязкие жидкости, с приложениями к
атомно-силовому микроскопу. Журнал прикладной физики Vol. 84, № 1, 1998, стр. 64-76 6. Дуду Бадиан, Ален Гассер, Эрик Блонд.
Вибрирующая балка в вязкой жидкости для измерения вязкости: применение в промышленном вибрационном вискозиметре.
Материалы PACAM XII, 2012 г. 7. Рабин Махарджан. Влияние податливости опоры на резонансное поведение датчиков на основе
микроконсолей в вязких жидкостях, Диссертации, 2009, с. 275 8. Анатюрк А.Р., Троманс П.С., ван Хазендонк Х.К., Слуис С.М., Оттер
А. Сила сопротивления цилиндров, колеблющихся с малой амплитудой: новая модель. Журнал морской механики и арктической
инженерии, Vol. 114, № 2, 1992, стр. 91-103.
9. Чаплин Дж. Р., Суббиа К. Гидродинамическое демпфирование цилиндра в стоячей воде и поперечном течении // Прикладные
исследования океана. 20, № 4, 1998, стр. 251-259.
10. Sumer B., Fredsøe J., Jensen B. и Christiansen N. Силы, воздействующие на вибрирующий цилиндр у стенки при течении и
волнении, Journal of Waterway, Port and Coastal Engineering, Vol. 120, № 3, 1994, с. 233-250 11. Сагатун С.И. Активное управление
подводной установкой, IEEE Transactions on Control Systems Technology, Vol. 10, № 5, 2002, стр. 743-748.
12. Пол С., Датта Т.К. и Капурия С., Управление стационарной морской платформой-оболочкой с использованием полуактивного
гидравлического демпфера, Журнал морской механики и арктической инженерии, Том. 131, № 4, 2009, с. 10.
13. Шлихтинг Г. Теория пограничного слоя. М.: Наука, 1974. 712 с.
14. Фарадей М. Об особом классе акустических фигур; и о некоторых формах, принимаемых группами частиц при вибрировании
упругих поверхностей. Philosophical Transactions of the Royal Society of London, 121, 1831, pp. 299-340. Журнал Акустического
общества Америки, Vol. 26, № 1, 1954, стр. 26-39 16. Стюарт Дж. Т. Двойные пограничные слои в колебательном течении вязкой
жидкости, Журнал гидромеханики, Vol. 24, № 4, 1966, стр. 673-687 17. Райли Н., Осциллирующие вязкие течения, Математика, 12,
1965, стр. 161-175 О высокочастотных колебательных вязких течениях, Journal of Fluid Mechanics, Vol. 32, № 1, 1968, с. 55-68 19.
Розенхед Л. Ламинарные пограничные слои, Кларендон, 1963, с. 688.
20. Афанасов Е.Н. (2014). Малые колебания твердого тела в вязкой невыносимой жидкости. Морские интеллектуальные
технологии, 4(25), Т.1, 103-109.
21. Гузь А.Н. Динамика сжимаемой вязкой жидкости. Киев: АСК, 1998. 350 с.
22. Кадыров С.Г. Метод граничных интегральных уравнений в задаче о малых колебаниях тел в сжимае моей вязкой жидкости,
Морской вестник, № 1(10с), 2013, 85-87 23. Слезкин Н.А. Динамика вязкой невыносимой жидкости. Гос. Изд-во техникотеоретической литературы, 1955, 520 с.
24. Корн Г., Корн Т., Справочник по математике (для научных работников и инженеров), Изд-э 4-е, М.: Наука, 1977, 830 с.
25. Араманович И.Г., Левин В.И. Уравнения математической физики, Изд-е 2-е, стереот. М.: ФИЗМАТЛИТ, 1969. 288 с.
40
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И УПРАВЛЕНИЕ
УДК 681.51.015
ПРИМЕНЕНИЕ КОМПЛЕКСНЫХ МОДЕЛЕЙ ИАСУ ДЛЯ ОТРАБОТКИ ПРОЦЕССОВ
УПРАВЛЕНИЯ И КОНТРОЛЯ
Федоров Сергей Викторович
начальник самостоятельной лаборатории компьютерного моделирования КСУ ТС, АО «Концерн
«НПО «Аврора» 194021, Санкт-Петербург, ул. Карбышева, 15 тел. (812)
643-18-55, e-mail: cmcs@avromail.ru
Аннотация
Выбран один из методов проектирования интегрированных автоматических систем управления (ИАСУ) с
использованием комплексных моделей для отработки рабочих процессов в ИАСУ процессов управления и контроля.
Отмечена экономическая выгода, связанная с оценкой ценности окружающей среды и снижением стоимости разработки
программных и программно-аппаратных средств системного управления (СУ).
Предложен способ виртуализации аппаратного и программного обеспечения СУ, требования к требованиям к
устойчивой среде, как средства, применяемые для отработки процессов управления и контроля в комплексных моделях
ИАСУ. Для комплексной модели ИАСУ показана типовая схема выбора модели СУ, входящей в ее состав, на субмодели.
Описанный состав, способ и особенности создания каждой из субмоделей в естественной среде для отладки
функционального программного обеспечения (ФПО). Представление о подходе к использованию автоматизированной
системы компьютерного моделирования для реализации СУ в приложениях от обработки различных взаимосвязанных
задач при использовании возможности использования программного обеспечения ИАСУ. Сделано внедрение о том,
что главная цель применения комплексных моделей ИАСУ для отработки процессов управления и предполагает
контроль качества создания тома программного обеспечения систем управления.
Ключевые слова: всеобъемлющая автоматическая система управления, комплексная модель, модель системы
управления, модель функционального программного обеспечения, модель аппаратуры, модель управления объектом,
виртуальная среда, программно-аппаратный комплекс для моделирования, применение комплекса моделей для
отработки процессов управления и контроля.
МЕТОД ПРОЕКТИРОВАНИЯ КОМПЛЕКСНЫХ АВТОМАТИЗИРОВАННЫХ СИСТЕМ
УПРАВЛЕНИЕ СЛОЖНЫМИ МОДЕЛЯМИ ДЛЯ ПРОЦЕССОВ МОДЕЛИРОВАНИЯ
Федоров Сергей Викторович
начальник лаборатории компьютерного
моделирования АО «КОНЦЕРН «НПО «АВРОРА»
ул. Карбышева, 15, Санкт-Петербург, 190008, Российская Федерация тел: (812)
643-18-55, e-mail: cmcs@avromail.ru
Абстрактный
Рассмотрен один из методов проектирования комплексных автоматизированных систем управления (ИАСК) с
использованием сложных моделей для моделирования процессов в ИАСУ. Отмечена целесообразность использования
виртуальной среды для повышения качества и снижения затрат на разработку и тестирование программного
обеспечения и программно-аппаратных средств систем управления (СУ).
41
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Метод виртуализации программно-аппаратных КС определяет требования к виртуальным
среда как инструмент для разработки процесса управления в сложных моделях IASC.
Для сложных моделей IASC представлена схема разделения моделей КС, ее членов, на подмодели. Описаны состав, способ и
особенности создания каждого субмодуля в виртуальной среде для отладки функционального программного обеспечения (ФП).
Представить подход к созданию автоматизированной системы компьютерного моделирования для разработчиков СУ
для отработки различных смежных задач в программном обеспечении параллельного автоматизированного тестирования IACS.
Делается вывод, что основная цель использования комплексных моделей IACS для отработки
процессов управления и контроля заключается в повышении качества программного обеспечения систем управления.
Ключевые слова: интегрированная автоматизированная система управления, интегрированная модель, модель системы
управления, модель функционального программного обеспечения, модель прибора, модель объекта управления, виртуальная среда,
аппаратно-программный комплекс для моделирования и применения интегрированных моделей для тестирования процессов
управления.
Введение
Особенностями современных
интегрированных автоматических систем
управления (ИАСУ) корабельные технические
средства представляют собой большое количество
контро-лируемых параметров и параметров
управления, наличие основных и запасных
постов управления, применение схем
дублирования и мажори рования при реализации
алгоритмов управления, что позволяет от
применения их к выявлению из делиям. Одним
из перспективных методов проектирования ИАСУ
является использование комплексных моделей
для отработки процессов управления и контроля
в ИАСУ. Использование высокой среды - это
подход к отработке процессов управления и
контролю за комплексными моделями ИАСУ,
направленный на повышение уровня качества и
снижение стоимости разработки и испытаний
программно-аппаратных
управления
средств систем
(СУ). Развитие
и
данного направления наблюдает за современным
состоянием вычислительных аппаратных и
программных средств, позволяющих организовать
в значительной степени взаимодействие между
функциями управления системами и моделями
управления объектами.
1. Виртуализация аппаратного и
программного обеспечения СУ
Виртуальная среда позволяет отделить
прикладное (функциональное) программное
обеспечение (ФПО) от аппаратной платформы и
выявить ошибки проектирования корабельных
технических средств и систем с применением
моделей ИАСУ на стадии симптомов без
использования стендового оборудования, сокра
тив расходов и времени испытаний [1] . Кроме
того, виртуализация позволяет использовать
один программно-аппаратный комплекс в рамках
отладки различных изделий или их частей при
многопользовательском доступе. Пример
программно-аппаратного комплекса для
моделирования ИАСУ приведен на рис.1.
42
Комплексная модель ИАСУ
Программноаппаратный
комплекс
ВМ
комплекс
ФПО
ВМ модели
аппаратных средств
ВМ
пультов дистанционного
управления
Виртуальная
среда
Корпоративное
сетевое
пространство
Подразделение А
Подразделение Б
Подразделение В
Подразделения
разработчиков
Рис. 1 - Программно-аппаратный комплекс для
моделирования ИАСУ
Автоматизированные рабочие места
(АРМ) включают СУ в этом случае подключаются
к программно-аппаратному комплексу по
протоколам сетей Ethernet. Разработчики за
гружают ПО в моделях ИАСУ в виде образов
виртуальных машин (ВМ) комплекса ФПО и мо
делей аппаратных средств, используя возмож
ность удаленной работы из корпоративного се
тевого пространства (КСП). Гибкое
централизованное управление позволяет
успешно решить проблему одновременного
решения проблемы, связанной с СУ в виртуальной
среде. Указанная аппаратная архитектура
позволяет снизить требования к помещению с
точки зрения состояния средств, необходимых
для реального использования аппарата.
Виртуальная среда при работе с режимом
управления ИАСУ представляет собой набор
вычислительных ресурсов (программноаппаратный комплекс), реализацию виртуализации
стендового оборудования и программного
обеспечения СУ, абстрагированную от приложения
ратной реализации «железа» стенда, и логическую
изоляцию вычислительных математических
процессов, реализуемых в моделях. ИАСУ.
Функцию, обеспечивающую реализацию
реальной среды, осуществляющую гипервизор –
обеспечение программ, позволяющую
одновременную, паралельную работу нескольких
операционных систем на программно-аппаратном
комплексе (группе серверов), что является
эмуляцией реального аппарата
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
время. Каждая из полученных сис тем для
гипервизора является гостевой, а именно,
обратная на их совокупность платформенного и
прикладного программного обеспечения, сети,
включающие передачу и хранение данных,
реализуют модели ИАСУ. Таким образом,
разработка моделей ИАСУ базируется на
«виртуали зации» аппаратного и программного
обеспечения СУ, приведена на рис.2 [3].
Классическая схема отработки СУ на стенде
ССИсп
Система управления
Прибор 1
Прибор 2
ПО
ПО
...
Прибор Н
ПО
Иммитаторы
Модель объекта
управление
Схема отработки СУ в естественной среде
Виртуальная модель системы управления
Виртуальный
объект 1
Виртуальный
объект 2
...
Виртуальный
объект N
Виртуальная модель
управления объектами
Рис. 2 - Виртуализация испытательного стенда
Это определяет особую требовательность к
естественной среде, как средства, прежде всего
к отработке процессов управления и контроля в
комплексных моделях ИАСУ, которая наиболее
полно удовлетворяет потребности организма в
соответствии с потребностями организма, а
учетом ИТ ПО; • множество
именнопользователей,
потребности: с
вызывающих взаимозависимость между
разра- ботчиками работы с шаблонами СУ,
для отработки поставленных задач; • достаточный
функционал для поддержки аппаратного и
программного обеспечения виртуализируемых
СУ, включая ОС вовлечения, интерфейса,
коммутационного оборудования,
соответствующего административноративного средства по управлению балансом
и нагрузкой; • необходимый уровень
исследования процесса
производительности
СУ с получением
результатов
для
в части быстрого действия и полной цели; •
применение графических средств управления
устойчивой инфраструктурой и под быстротой
скоротечности в мо делях СУ процессов; •
высокая надежность и масштабируемость.
2. Этапы создания типовых моделей СУ,
входящие в состав модели ИАСУ, в
естественной среде для отладки
ФПО
В обнаруженных СУ используется различная
специализированная аппаратура –
микроконтроллеры, интерфейсы CAN, MIL,
комплект поставки промышленных и дискретных
сигналов, а на стендовой отладке - ССИсп (стант
дартизованных средств массовой информации). [2] Как
правило в составе ССИ, в которой работают
производители моделей объектов. Для
комплексной модели ИАСУ можно принять
определенный тип схемы выбора модели СУ,
входящей в состав этой комплексной модели, на
подрежиме ли: модель ФПО, модель аппаратуры
и модель объекта, представленную на рис.3.
Основными критериями вероятности являются
сопрягаться со значительными отклонениями
СУ и возможностью работы в условиях высокой
плотности. Модель ФПО – включает в себя
штатное ФПО и операционную систему с
участием вычислительных (процессорных)
модулей. Для рабочей среды, недоступной для
специализированных интерфейсов, драйвера
модулей ввода-вывода под действие конкретного
специализированного драйвера в реализации,
необходимого для распространения всех
интерфейсов в Ethernet (интерфейс Ethernet
реальной системы продолжает работать в
естественной среде, без подмены драйверов).
Стенд СУ
ССИсп
ПО
Модель объекта
CAN, MIL, аналоговые и дискретные сигналы
ФПО, ОПО
Интерфейсы и
модуль вводавывода
Модель ФПО
ФПО
ОПО
ФПО
ОПО
Микроконтроллеры
Линии связи
Модель СУ
ФПО
ОПО
Модель
аппаратуры
Модель
объекта
Виртуальная сеть
Рис. 3 - Модель СУ
Модель аппаратуры включает в себя
подмодели: 1. Функции модулей сопрягания себя
с вредными последствиями (УСО), обеспечивающих передачу сигналов от объекта
управления в ФПО и обратно; 2.
функциональные модули преобразо-вания
сигналов от датчиков, контролируемых по
параметрам объектов к уровням, обработка
которых возможна в УСО и преобразование
управляющих сигналов от УСО на уровнях,
необходимых для работы исполнительных
устройств; 3. функциональные модули
взаимодействия с оператором (органов
управления и визуализации). Сеть, организованная
в среде на базе Ethernet, соответствует
ограниченному количеству испытательного
стенда и обмену данными (и их значительному
преобразованию) между моделью ФПО, моделью
аппаратуры туры и моделью объекта [4]. При
реализации моделей аппаратуры для модулей
аппаратного преобразования и обработки
сигналов, микроконтроллеров сообщений об
ошибках их функциональных ональных моделей,
выполнение преображения входных сигналов в
выходные дни в соотв.
43
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
ветствии с логикой работы модуля. Моделируются
только те связи, которые необходимы для работы
ФПО. Модель объекта может находиться как в самой
среде, так и связана с программно-аппаратным
комплексом, реализовывать среду виртуализации,
извне по разрабатанному протоколу стыковки. Как
правило, мо дель объекта для ИСУ представляет
собой также программно-аппаратный комплекс, под
ключенный по протоколу Ethernet к ССИсп каждой
из СУ. Для создания объектов модели конкретной
СУ подходы к ее рассмотрению такие же, как и при
создании моделей аппаратуры, а для некоторых
систем возможно создание совме щенной модели
аппаратуры и управления объектом. В этом случае
размещение в такой обстановке происходит в
обычной среде.
Моделирование процессорных модулей,
входящие в состав модели ФПО, реализуются с
применением технологий виртуализации,
обеспечивают эмуляцию Intel-совместимых
процессоров, оперативной памяти, накопителей и
интерфейсов Ethernet. Данная технология
представляет собой стандартную точку зрения на
применение в обычных гипервизорах и возможности
создания сетевых необходи моей топологии шаблона
между процессорными модулями и другими
применениями. Разрабатываемое ФПО реальной
системы может быть установлено в ВМ, реализующей
функцию процессорного модуля без изменения
алгоритмической части. Единственное изменение,
которое произошло – замена драйвера
взаимодействий с УСО.
Создание моделей аппаратуры для моделей
ИАСУ может развиться в несколько этапов и
множественных степеней. На начальном этапе
разработки ФПО системы, возможно использование
упрощенной модели аппаратного обеспечения,
возможность отладки управления горитмами и
проверки межприборно го и межсистемного
взаимодействия. В данном случае модель аппаратуры
представляет собой ВМ с исполняемым кодом,
реализующим имитационную модель [4]. В
дальнейшем, после уточнения модели аппаратуры
и подключения модели объекта, в естественной
среде появлялась возможность оценки
быстродействия с системами, изменение
коэффициентов регулирова ния, направление
отказов. Существуют различные методы настройки
моделей аппаратуры. Одним из них может быть
корректировка моделей паратных модулей,
выполненных в виде исполняемого кода
(имитационной модели). Однако данный способ
достаточно трудоемок и не визуализирован, поэтому
большой интерес при создании модели аппаратурыля
представляет собой внедрение методов системного
проектирования автоматизированного
проектирования (САПР) [3]. Упомянутый подход
позволяет легко решать проблемы с использованием
аппаратных средств. В этом случае к САПР
предъявляются требования:
44
3 (33) Т.2 2016
достаточный функционал для создания моделей
модулей из встроенных библиотехнических
элементов;
• возможность создания и использования
собственных библиотек элементов, состоящих
из моделей модулей; • отладка функционирования
в режиме расчёта в атмосфере времени; • поддержка
стандартной сети протоколов обмена данными
с распространенными программами и приложениями;
• возможность создания элементов моделей
управление объектами;
• высокая возможность использования внешних
программных модулей; • наличие средств
возникновения, а также средств создания
видеокадров для отображения денег и
управления расчетом; • возможность совместной
разработки (поддержка многопользовательской
среды). Разработанная с использованием САПР
модель аппаратуры позволяет получить
графическое представление алгоритмов ее работы
и расширенную возможность вве дения различных
внешних воздействий (включающая отказы в ее
работе), в том числе с учетом обработки отказов,
полученных от модели объекта.
В результате получается модель отдельного СУ,
входящая в состав ИАСУ, взаимодействующая с
моделью управления объектом. Особенностью
созданной модели СУ и преступлениями при ее
создании является возмож-ность запуска в моделях
реальных приборов ФПО, преступления в системе.
Это позволяет производить автономную и
комплексную отладку ФПО в части алгоритмов
управления объек том, межсистемного
взаимодействия, интерфейса оператора, эмулировать
отказы и неисправности, отрабатывать
функциональные алгоритмы, связанные с
неучтенными изменениями поведения объектов
управления. Этапы применения и модели СУ для
отладки ФПО представлены на рис.4
Разделение СУ на функциональные модули для моделирования
Процессорный
модуль 1
Процессорный
модуль 2
Модули
вводвывод
Процессорный
модуль 3
Интерфейс
оператор
Преобразователи
Интерфейсы связи
Моделирование модулей в условиях окружающей среды
Моделирование СУ в естественной среде
Модели процессорных модулей
ФПО
ОПО
1
ФПО
ОПО
2
ФПО
ОПО
3
Модель аппаратуры
САПР
Модель объекта
Ввод-вывод
Интерфесы
Преобразователи
Модуль сетевой платы
Перенос ФПО на стенде
Стенд СУ
ПО
ССИсп
CAN, MIL, аналоговые и
дискретные сигналы
Рис. 4 - Этапы применения и модели СУ для
отладки ФПО
Модель объекта
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3. Применение автоматической системы
для обработки процессов управления
и контроля в комплексной модели
ИАСУ
Для отработки процессов управления и
контроля в комплексной модели ИАСУ каждый из
входящих в модели систем встречается и работает
с другом в привычной среде. Эта задача решается
с помощью гипервизора, предоставляющего
инфраструктуру для централизованного
управления виртуализации.
Эта структура позволяет использовать
средства удаленного доступа к использованию СУ
для использования с использованием облачных
технологий, образуя среду со стему компьютерного
моделирования ИАСУ. Пример аварийной системы
компьютерного моделирования ИАСУ привлечен
на рис.5. Разработчики на начальном этапе выпол
няют отладку ФПО в своей изолированной мо
дели СУ в общей среде. В даль нейшем с
использованием системы разграничения
доступной стала возможность объявить единения
моделей СУ в единой модели ИАСУ для проведения
совместных отладок разра ботанного ПО
множеству крупных разработчиков, так и
вычислительного выполнения по оставленным
задачам и проведению автоматизиро ванного
тестирования системы последовательного запуска
нескольких копий моделей. ИАСУ.
Автоматизированная система
компьютерного моделирования ИАСУ
Комплексная модель ИАСУ в условиях окружающей среды
...
Модель
СУ 1
Модель
СУ N
Централизованные средства управления инфраструктурой
Аппаратные ресурсы
вычислительного комплекса
Корпоративное сетевое пространство
АРМ положить СУ
Рис. 5 - Автоматизированная система
компьютерного моделирования ИАСУ
Типичным случаем такого применения
явится подготовка к отработке отделения ниями
разных взаимозависимых задач. Как правило, на
«железном» стенде для этого здается общая
пищевая возбудимость.
3 (33) Т. 2 2016
новка, оформляется временно Регулярными
работами [1].
Применение комплексных моделей ИАСУ
и быстрое ускорение развития инфраструктуры
позволяют легко тиражировать складывающееся
изделие, полностью повторяя оригинал. Каждая
копия модели ИАСУ в естественной среде,
представленная в виде отдельной «облаки»,
может быть полностью изолирована и независима.
В свою очередь для каждой изолированной
модели СУ, входящей в состав модели ИАСУ,
также может создаваться и поглощаться
обстановка. Таким образом становится возможной
аналитическая работа разработчиков различных
СУ в рамках одной и той же виральной среды с
применением комплексных моделей ИАСУ для
отработки процессов управления и контроля. С
учетом того, что ко личество копий моделей
ИАСУ, которые могут создаваться в условиях
высокой скорости, ограничены только
аппаратными средствами измерения
вычислительного комплекса в качестве средства
для подтверждения данных о калибровочном
аварийном тестировании ПО ИАСУ, может
представляться суперкомпьютером [5].
Заключение
В наши дни ИАСУ мягкие назна
ключевая роль от используемого программного
обеспечения, которое управляет исполнительными
приложениями, исследовательской информацией,
используемой от управления объектами, и
собирает с человеком. Главная цель комплексного
применения режимов ИАСУ для отработки
процессов управления и включает в себя контроль
качества со
здание ПО систем управления. Это обеспечиваeт
оптимизацию расходов на создание ПО за счет
метода процесса разработкы ки системного
управления - достижения качества процессов
создания изделий с непрерывным контролем на
всех жизненных циклах. В настоящее время
основной контроль качества требует от практики
тщательного рассмотрения при отладке на стенде
изделий, что неизбежно приводит к исчислению
сроков их испытаний и материальных затрат.
Также необходимо соблюдать устойчивую
растущую сложность разрабатываемых систем
управления. Подход к разработке ИАСУ с
использованием моделей систем управления
виртуальными средами развлечений: • повысить
качество создания ПО на всех стадиях разработки;
• автоматизировать процессы модульного,
функционального и интеграционного
тестирования;
• существенно сократить расходы и время на
проведение испытаний изделий;
45
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
• использовать возможности одной и той же самой
среды для различных проектов;
• использовать комплексные модели ИАСУ в
качестве основы для создания тренажеров.
Литература
1. Шилов К.Ю. Технические и технологические направления развития цифровых систем морской
радиоэлектроники. Научно-технический сборник АО «Концерн «НПО «Аврора». Выпуск 31.- СПб.,2015
С.3-11. 2. Берденников А.А. Моделирование и исследование динамиков систем автоматического управления
судовыми энергетическими установками. АО «Концерн «НПО «Аврора». СПб.,2014. 3. Колесов Ю.Б.,
Сениченков Ю.Б. Моделирование систем. Динамические и гибридные системы. Учебное пособие. – СПб.:
БХВ-Петербург, 2012 4. Замятина О.М. Моделирование сетей. Учебное пособие. Томский политехнический
университет. Томск, 2011. 5. Абакумов Е.М., Антонов А.Ю., Петунин С.А., Новиков А.Б. (ФГУП «ВНИИА»,
Москва). Проектные технологии создания промышленных суперкомпьютерных центров. Сборник тезисов
докладов НСКФ 2014. Пленарная сессия: Национальный суперкомпьютерный форум 2014 (25-27 ноября
2014 г.). Переславль-Залесский, 2014 г.
использованная литература
1. Шилов К.Ю. Технические и технологические направления развития цифровых систем морской
радиоэлектроники. Научно-технический сборник АО «Концерн НПО «Аврора». Выпуск 31.-СПб..2015
С.3-11.
2. Берденников А.А. Моделирование и исследование динамики систем автоматического управления
судовыми энергетическими установками. АО «Концерн НПО «Аврора». СПб..2014.
3. Колесов Ю.Б.. Сениченков Ю.Б. Моделирование систем. Динамические и гибридные системы.
Учебное пособие. – СПб.: БХВ-Петербург. 2012 4.
Замятина О.М. Моделирование сетей. Учебное пособие. Томский политехнический университет.
Томск. 2011.
5. Абакумов Э.М. Антонов А.Ю.. Петунин С.А. Новиков А.Б. (ФГУП «ВНИИА». Москва). Проектные
методики создания промышленных суперкомпьютерных центров. Сборник тезисов докладов НСКФ 2014.
Пленарная сессия: Национальный суперкомпьютерный форум 2014 (25-27 ноября 2014 г.). Переславль
Залесский. 2014
46
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
УПРАВЛЕНИЕ И ОБРАБОТКА ИНФОРМАЦИИ
УДК 004.942
ВИЗУАЛИЗАЦИЯ ПРОЦЕССА ВИДЕОНАБЛЮДЕНИЯ ДНА
ПОДВОДНЫМ РОБОТОМ
Сиек Юрий Леонардович
доктор технических наук, профессор кафедры систем автоматического управления и
бортовой вычислительной техники Санкт-Петербургский
государственный морской технический университет 190008, Санкт-Петербург, ул.
Лоцманская, 3 e-mail: Siek@mail.ru Сакович Сергей Юрьевич аспирант
кафедры систем автоматического управления и бортовой
вычислительной техники Санкт-Петербургский
государственный морской технический университет 190008, Санкт-Петербург, ул. Лоцманская, 3 e-mail:
Sergeysakovich@mail.ru
Аннотация
Эффективность использования подводных роботов, маневрирующих вблизи дна на ос
новая информация, поступающая от системы видеонаблюдения, зависит от алгоритмического
обеспечения бортовой вычислительной среды. Для его разработки требуется достоверная ком-пьютерная
модель, имитирующая процесс формирования видеоданных с учетом особенностей внешней среды. В
статье приводится описание моделей получения видеоинформации, предназначенной для решения
задач, связанных с движением робота вблизи дна. Рассмат риваются вопросы математического описания
его управления движением, формирования в деоданных с учетом свойств камер и измерений внешней
среды, возникновения подводного дна, реалистического рассмотрения и структурного описания простран
ственного положения. Предлагаемая модель обобщения для синтеза и анализа алгоритмов определений
по деоданным кинематическим параметрам движения подводного робота и управления его
перемещением вблизи дна. Ключевые слова: подводный робот, подводное дно, система видеонаблюдения,
видео
кадр, визуализация, компьютерная модель.
ВИЗУАЛИЗАЦИЯ ВИДЕОНАБЛЮДЕНИЙ ЗА ДНОМ
ПОДВОДНЫЙ РОБОТ
Ю. Л. Сик
Доктор технических наук, профессор кафедры систем автоматического управления и бортовых вычислительных машин
Санкт-Петербургского государственного морского технического университета.
Лоцманская, д. 3, Санкт-Петербург, 190008, Российская
Федерация e-mail: Siek@mail.ru
С.Ю. Сакович
Аспирант кафедры систем автоматического управления и бортовых вычислительных машин СанктПетербургского государственного морского технического университета.
Лоцманская, д. 3, Санкт-Петербург, 190008, Российская
Федерация e-mail: Sergeysakovich@mail.ru
Абстрактный
Эффективность подводных роботов, маневрирующих вблизи морского дна на основе
информации, предоставляемой системой наблюдения, зависит от алгоритмического обеспечения
бортовой вычислительной среды. Для этого требуется надежная компьютерная модель, имитирующая
процесс формирования видеоданных с учетом особенностей окружающей среды. В статье описан
вариант модели создания видео, предназначенной для решения задач, возникающих при движении
робота вблизи дна. В статье рассматриваются вопросы математического описания управляемого
движения подводных роботов, формирования видеоданных с учетом свойств видеокамер и влияния
окружающей среды, создания сцен подводного дна,
47
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
повышение реалистичности визуализации и структурного описания программного обеспечения. Предлагаемая модель
предназначена для синтеза и анализа алгоритмов определения кинематических параметров подводного робота по видеоданным и
управления его движением у дна.
Ключевые слова: подводный робот, морское дно, система технического зрения, видеокадр, визуализация, компьютерная модель.
Введение
Одними из эффективных и часто применяемых
технических средств для освоения Мирового
океана являются подводные роботы (ПР).
Наибольшее распространение получили
автономные, телеуправляемые и буксируемые ПР.
Для их эффективной разработки требуется
разработка системы управления сложными
информационными, алгоритмическими и
программно-граммовыми средствами бортовой
вычислительной среды. Расширение ее
возможностей для решения проблем, связанных с
высоким уровнем выполнения работ, является
актуальной проблемой отечественной подводной
ро бототехники [1]. В информационном
решении систем управления современными ПР
требуются задачи, получаемые от бортовых
измерительных устройств. Одними из наиболее
емких источников позиционной информации
являются системы технической точки зрения (СТЗ),
которые на сегодняшний день оборудованы
практически всеми современными ПР. В состав
СТЗ, как правило, входят гидролокаторы бокового,
кругового и секторного обзора, для и видеокамер,
электромагнитных и лазерных сканирующих
систем. В последнее время наметилась тенденция
к расширению использования видеоданных для
решения задач поиска, навигации и управления в
зонах движения ПР [2,3]. Сложность обработки
изображений под водным освещением обусловлена
наличием множества факторов, которые включают
в себя: намерение использовать искусственное
освещение, что приводит к неоднородной
подсветке объектов на дне; заиливанием;
искажением границ и форм объектов поиска,
обуловленным их обрастанием; замутнением
среды, как обнаружение, так и обращением ПР
вблизи дна. факторы оказывают существенное
влияние на эффективность использования зования
видеоданных в алгоритмическом обеспечении
бортовой информационно-управляющей системы
(ИУС), которая требует взаимных репрессий
движения поиска объектов на дне, недостатка
маневрирования вблизи выделенных объектов,
обхода включения их пятствий. Разработка
программного обеспечения ИУС представляет
собой сложную и трудоемкую мебель. В технологии
его принципиальной роли играет компьютерная
модель процессов приема видеоинформации на
основе визуализации задания заданной сцены
подводного дна и имитации процесса управления
пространственным движением ПР [4]. На
сегодняшний день существует ряд программ грамм
продуктов, ориентированных на моде
лирование различных режимов функционирова
48
ния роботов разнообразного назначения.
Например, к такой системе, в первую очередь,
относятся симуляторы Microsoft Robotics Developer
Studio (MRDS) и SubSim AUV. Возможные про
граммовые средства не единственные из имитато
ров, близкие к данной области, но их об щей
особой особенностью является сво бодное
распространение и возможность использова ния в
некоммерческих проектах.
Microsoft Robotics Developer Studio (MRDS)
предназначена для решения задач моделирования
в области робототехники. Средство включает в
себя обработчиков, принимающих физические
особенности женщин, работающих с окружающей
средой. Симулятор ориентирован на использование
упрощенных моделей. Имитация визуальных
помех требует значительных временных затрат.
Модели физического развития в MRDS упрощают,
сообщая о результатах расчетов.
SubSim AUV – симулятор, наблюдаемый для 1го исследования автономных подводных роботов,
который проводился в Австралии в 2005 году.
SubSim предоставляет широкие возможности
настройки разового режима настройки ПР.
Например, их движение под воздействием силы и
моментов имитируется с помощью трехмерного
физического движения. Датчики, двигатели и
воздействие жидкостных моделей регулируются с
помощью библиотеки PAL. Для создания
видеоизображений используется OpenGL.
Недостатком является упрощенная визуализация
и низкая детализация окружающей среды. Общим
недостатком среды симуляторов являются:
упрощенный подход, реализуемый в стандартных
средствах формирования в деоданных с учетом
оптических свойств морской среды, и высокая
трудоемкость процесса по выработке адекватности
моделируемых процессов.
уже разработанные и апробированные
методы математического описания управляемого
движения ПР и 3D-визуализации рациональной
разработки симулятора, в котором реально
зованы и учтены стандартные модели всех
элементов процесса использования ПР. Применение
такой компьютерной модели расширяет
возможности проектирования алгоритмического
обеспечения ИУС для решения таких задач, как
поиск, подводная навигация и управление
(«визуальное отслеживание») с учетом эффектов,
влияющих на процесс подводной съемки и
качество получаемого изображения [4,5].
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
1. Функциональная структура компьютерной
подводный робот
представляет собой выявление техничес- кого
исследования, реализуемого в условиях
неопределенности. Для сбора информации о
собственническом состоянии и окружающей среде
ИУС содержит набор датчиков определения
параметров направления, линейных и угловых
скоростей ПР относительно подводного дна, а также
СТЗ. В состав СТЗ входят система видеонаблюдения,
формирующая последовательность видеокадров,
блок их представления в цифровом виде и
обработка, а также вычислительная обработка,
реализующая алгоритмы сложных и клас сификации
объектов подводного дна. Для достижения
требуемой цели движения ПР на основе полученной
информации осуществляется планированием
траектории, и рассчитываются заданные значения
кинематических параметров. Их заполнение
контролируется регуляторами, создающими
требуемые воздействия на ПР и объединяющими
контролирующие устройства и исполнительные
механизмы. Обобщенная структура компьютерной
терной модели процесса управления движением
ПР близко дна с помощью элементов ИСУ приве
дена на рис.1. Для формирования видеокадров с
изображением окружающей среды используются
одна или несколько камер, источник освещения и
среда обработки. Основными видеосистемами
являются датчики воздействия, формирующие
аллергическую реакцию аллергии. Средства
обработки позволяют использовать полезную
информацию из полученного сигнала. В
видеосистемах применяются различные датчики
оптического электромагнетизма нитных волн,
состоящие из большого диапазона частотных
колебаний и фоточувствительных элементов,
входной величиной которого является яркость
(освещённость объекта), а выходной – постоянный
ток или напряжение. По верхней поверхности
объекта, реализуемой звуковым сигналом,
получаемым излучением в результате воздействия
фоточув- ственных элементов. Датчик изображения
представляет собой упорядоченный набор
большинства основных элементов
фоточувствительных элементов и может быть
сплошным или дискретным. В зависимости от
нормального развития каждый фоточувствительный
элемент должен быть опрошен один за другим в
строго определенной степени. Камера - источник
видеоинформации, составленный из матрицы,
процессора обрабатывающего изображения,
объектива и лицевой стороны, передающего
изображение на вычислительное устройство.
Большинство камер выпускают с паратным сжатием,
как наиболее быстродействующим. В процессе
формирования образов вви ду различных мешающих
факторов реального искажения. Основными
признаками их появления являются нарушения
естественного физического процесса.
3 (33) Т. 2 2016
с идеализированным способом формирования
кадра. Общий эффект, переносимый разнородными
факторами, приводит к искажению геометрических
и яркостных характеристик теристик. К ним отходят
эффекты дисторсии, дисперсии, избыточной
яркости, вносимые дискретностью тизации и
неоднородностью матрицы.
2. Математическое моделирование процессов
видеонаблюдения подводного дна.
Для математического описания процесса
денаблюдения дна подводным роботом выбран
набор систем координат, представленный на рис.
2. В качестве базовой принимается неподвижная
система координат O ‚
, зафиксированная в
начальный момент наблюдения.
С роботом, как избавиться от управления, и с
ви деокамерами несут жесткие подвижные коорди
ii я
натные системы OXY Z
и ОКСИЗ , взаимное
я
0000
расположение, которое занимается известным. В
параметрах ориентации ПР вращаются: углы ЭйлераКрылова, матрица направляющих косинусов и
параметры Родриго-Гамильтона. Один из подходов
к математическому способу управления движением
ПР основан на приближении к решению задач
динамики тела в вязкой среде с учетом влияющих
внешних факторов. Удобным формализмом в этом
случае жит пространства. При таком подходе
Рис. 1 Структура компьютерной модели
движения ПР по видеоданным
движение ПР обычно о характере нелинейной
системы управления. Динамика в постоянном
времени задается
дх
дт
( , , , ),
xt( XX
)0 u U 0R
[ , ttx XRgxut
t
0
Н ],
,
нU
нИкс
,
Рис. 2. Системы координат
,
рн ,
49
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
где x - вектор состояния ПР, dim xn
вектор управления, затемнениеUи
метров, дим
U, ,
;
; ты -
3 (33) Т.2 2016
Икс
-вектор пара
н ; g()• - Вектор-функция; т - время; X
- заданные компактные круглые
подмножество пространств; - временной интервал,
т0т Н ] на который рас [ ,
наблюдаеться за смещением.
Принятие решения о движении ПР требует
принятия общих решений, характерных для самых
крупных объектов. Такой подход позволяет применять
приемлемую степень адекватности разрабатываемой
модели. При этом исчезает наибо лее случайное
освобождение от маневрирования PR в выбранной
системе координат. В общем случае математическое
описание движения ПР содержит возможные
основные элементы:
дт
y
03 3
dy A y1
0
33
где A y 1
д,
A
2
иAy2
- матрица
преобразования линейных и угловых скоростей.
Уравнения динамики ПР, как твердого тела,
имеют вид [6] dq
1
дт
Д 0БД q
0
,
где D0 - матрица инерции тела; B - матрица
обобщенных скоростей;
моментов.
Вектор
- вектор внешней силы и
обычно используется, как сумма
GB c упр .
если vf
ты
,
(4)
где устойчивые характеризуют воздействие
- описание системы координат, в которой
мализуется динамика объекта управления, и
параметров, задающих его текущую угловую
ориентацию и попадание в положение; кинематические уравнения связи угловых и
линейных скоростей с угловыми и линейными
координатами, полученные на основе кинематических
соотношений между удаленными координатами; математическая формализация естественно ди
намики, описывающих движение полюса и
вращающиеся объекты вокруг него;
- модели воздействия на ПР внешних, в том числе
и управляющих, сил и моментов. широко
распространено допущение, что при синтезе
математической модели ПР независимой конструкции
объект меняет как твердое тело, массу и тензор
инерции, которые остаются естественными в процессе
движения. 3. Текущее положение ПР в пространстве
со стояниями X Вектором
xy q
оккупация
Т
Т
Т
у
, где
Т
- вектор
,
, обобщенных координат; - координаты выбранного
полюса ПР в системе координат
- углы обзора,
дифферента
и кре
,
,
нат;
на;
qvv v
Т
xyzxy z
- вектор обобщенных
ввв
г
, yz ,
, у , линейной
и
скоростей; - проекции
века
торов
и угловой
скоростей PR на связанной с потерей системы
координат
ППС П
ОКСИЗ
.
Тогда кинематические уравнения
связь записывать как
Икс
50
Икс
- идеальной среды, vf и - вязкой среды,
выталкивающей силы,
cntrl
u
с
если
- вес
ГБ
- явления среды и
- движительно-рулевого комплекса.
Алгоритмическая реализация методов
определения наличия выражения (4) и определение
модели внешних сил и моментов
для сравнения
(3). Тогда модель динамики ПР в виде (1) уравнения
(2) и (3) с учетом (4). Принимается во внимание
неточность и неопределенность информации об
внешних воздействии на ПР . Для обнаружения
внезапного обнаружения дна применения
обнаруживаются модели трехмерных
объекты, которые описывают внешние формы
мулами по явной, неявной или параметрической
функции. Преимущество параметрической формы
определяется в описании различными функциями.
Кроме того, формулу можно поставить таким образом,
что она не будет существенно изменяться при
поворотах и масштабировании штаба. В этом случае
рационален выборной векторной полигональной
модели, в которой для описания открытых объектов
учитываются возможные элементы: вершины, отрезки
пря мых (векторы), полилинии, полигоны и
полигональные поверхности. чаще всего встречается
"вершина", все остальные - производные. При сборе
трехмерной декартовой системы координаты
вершины заходят пострадавшие точки ми. Каждый
объект однозначно решается координатами на
вершине.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Рис. 4. Модель перспективной проекции
Рис. 3. Элементы математической модели
движения ПР
Полигональные объекты – трехмерные
геометрические тела, которые составляют из граней,
ограничивающих замкнутый объем, и ребер. У те ла
всегда есть наружная и внутренняя поверхно сти,
наблюдаемые направлениям нормлей. Объекты
подводного дна могут создаваться на ос нове
полигональных исходов, путем следования следствия
или пути соединения нескольких полигональных
исходов в единое тело. Такое соединение произошло
при всех последующих операциях.
Плоскость
оси, является плоскостью изображеной Z f
Математическое моделирование формования
видеоизображений требует описания процессов
распространения и физических свойств в водной среде.
Процесс формирования изображения камеры о
новой модели перспективной проекции. Изображением
становится двумерная функция яр
кости IXY
я
, задающая в каждой упаковке
я
,
бранной картинкой далеко с координатами
я
я
XY значение
высшей оценки
,
.
я
плоскость
Оптическая
повышенная
ния и
ось охвата
в восприятии Координаты
точки W в 3-х
,
XYZ,
я
мерном поверхности -
я
. Координаты
я
,
точки w на обратном изображении
-
я
я
ху .
,
Перспективная проекция в этом случае описыва
xf XZ
Сетка с использованием списка граней пред
ставляет объект как множество граней и множество
ство вершин. Это самое широко распространенное
представление для современного графического
оборудования. Для моделирования списка граней
предпочтительнее, чем вершина представляет собой,
так как позволяет реализовать явный поиск вершины
и граней окружающих вершину. Для визуализации
грань представляет собой множество индексов
вершины, а вершина - как положение/цвет/структуры
нормалей. Поэтому изменения формы, но не геометрии,
были обновлены последовательностью использования
вершины без обновления связности граней.
Моделирование тре бует только обхода всех структур.
, расположенная на расстоянии f
от центральной проекции и поперечной оптической
Для определения точки , yf YZ
я
я
я
я
я
я
.
на матрице используются пять внутренних
параметров: координаты принципиальной точки O ,
размеры пикселя s и расстояние
до центра.
от угла изображения
си
Икс
у
проекции ф . Данные параметров описывают
проекционные точки в случае совпадения системы координат.
я
OXYZ ия связанной
системы ко
динат камеры
я
я
ординат OXYZ
0
0 00. Преобразование
трехмерных координат
в координатах камеры требует выполнения поворота
и сдвига, формирующего матрицу преобразования,
состоящей из элементов матри цы тела и вектора
геометрического переноса. Данные параметров
являются составными параметрами камер. вектор, что
изображение формирует на заднем
на расстоянии
фокуса f , модель полной перспективной проекции
имеет вид:
hc
ж
Икс
у
я
я
1
с
Икс
Икс
1000
х
ф
0
с
с
у
0100
0010
у
001
А
0
Т
33
Т
3
я
Т
я
АрY
33
1
Z
,
я
1
точек сцены. На рисунке 4 представлена модель
перспективной проекции. Центр проекции и -ой
камеры (фокус) помещен в начало системы координат
противоположном изоб cc - координаты принципиальной
динат OXYZ ,(см. рис.2).
, xy точек O
расстояние; ражения;
А - матрица
я
я
я
я
Т
где положение
1 проекции
- вектор,
которыйточки
описывает
w на xy
я
я
; f - фокусное
51
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
революции; r - вектор поперечного переноса; hf tg s масштабный коэффициент;
у
шается по экспоненциальному закону в зависимостио сти от
близости до объекта. Моделирование замутнения основано
-
угол наклона пикселя.
Графические данные имеют вид растровых цифровых
изображений, представленных в виде двумерного массива
дискретных значений интенсивности. Возможно монохромное
и цветное изображение, когда пикселю назначается вектор
значений, рассчитываемый на основе выбранной системы
кодирования цвета (например, RGB или HSL). Изображение
образуется в результате отражения поверхности дна светового
потока. Подводное дно интенсивной и неоднородной
структуры, при этом находящиеся на нем объекты
естественного и естественного происхождения в различных
ракурсах имеют различные перепады светотеней, а также
могут перекрывать обзор камер. Одним из наиболее
распространенных и наглядных подходов является быстрое
применение метода трассировки лучей, позволяющего
строить фотореалистичные изображения сложной сцены с
учетом таких эффектов, как отращение и преломление. Метод,
основанный на определении американской точки
зрения и той части световой энергии, которая остается в
заданном задании. Расчет освещения может быть основан на
модели Фонга [7]. Цвет участка поверхности считы та
раздельно по каждому из цветовых каналов и укладывается
из трех компонентов: фонового освещения, имитирующего
естественное рассечение янтарного помещения, а также
на массовом наборе облаков непроницаемых частиц.
Такое представление позволяет определить освещение для
каждой частицы. Плотность облаков выбирается из заданного
планшета чайным образом. Рациональная имитация
замутнения принуждения, вызванного движением ПР. Для
уточнения реалистичности изображения в модели
американского полигона добавляются значения тона и
насыщенности в описании процедурной текстуры.
3. Программное обеспечение компьютерной
модели решения и управления движением ПР
Разработка и реализация программного обеспечения
компьютерной модели на основе математического описания
процесса наблюдения дна подводного робота и высокая
значимость позволяют на выявление проектов рования
системы управления ПР решать ряд сложных задач:
- выбор структуры и параметров ИУС; проверка качества и точности алгоритмов
универсального для всех точек поверхности, диффузного
отражения (рассеянного света, отраженного от поверхности)
и зеркального отражения ( имитирующего направ
ленное отражение). Формула для расчета точек поверхности
имеет вид объекта:
решения задач поиска, навигации и управления;
- исследование управляемых веществ
процессы; прогнозирование поведения ПР в комплексе
охота
Программная реализация математических моделей
наблюдения требует сооружение окружающего пространства,
имитирующего функционирование ПР при маневрировании
близкого подводного дна. Необходимо поддерживать
визуализацию трехмерного мира, моделиро вать управление
движением PR и учитывать спецификацию формирования
видеокадров в условиях исследования окружающей среды.
якя
ФФ
к
потому
что д
потому что
с
кдк
я
1
I
где I - отражение отраженного света;
- яркость рассеянного света;
светового отражения;
го источник;
ражения;
Ф
к Ф- коэффициент
I - явления точечно
1
k г- коэффициент диффузного от
- угол между нормалью к поверхности
и направлением на источник света; ный
к - постоян
с
коэффициент; - угол между отражением
луча на камеру: d и направлением
расстояние от объекта до источника освещения; р - степень,
Обязательным является использование сложной
компьютерной модели со зданием трехмерной сцены
подводного дна. Для этого полезного использования карты
высот для долгосрочного хранения информации и
полигональной модели для обвинения.
Карта высот представляет собой растровый графический
файл в формате BMP, который открывается одной из форм
растровой графики. Изображение представлено в виде точек,
где есть места для приема пищи парамет рами – двумя
координатами и цветом. Сцена под водным дном может
создаваться в любом графическом редакторе. Рельеф
возникает с помощью выбора усиления. Размер сетки
публичная постоянная.
соответствует гра ницам рисунка. В большинстве случаев за
требуемых значений высот и цвета. Поддержка возможного
сохранения долгосрочного хранилища карт высот позволяет
создавать библиотеки трехмерных сцен под водного дна.
Модель исследования внешней среды наблюдения за
эффектами тумана для сокрытия удаленных объектов и
замутнения. Привлекательный для внимания способ
отображения объектов для описания тумана ра ционален
выбор экспоненциальной модели, в ко торой наблюдается
Для разработки программного обеспечения объектноориентированного применения
методологии
ориентированной
проектирования.
аппроксимирующая попадание в распределение света; k -
отражение света умень 52
(6)
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Функциональный синтез компьютерной моды
отличается повышенной на основе диаграмм
использования (диаграмма вариантов использования),
которая описывает ее назначение и взаимосвязь
решаемых за дачу. Такой подход позволяет
определить общие требования к функциональному
описанию режима или и разработать ее
концептуальную структуру для представления объектной детализации.
Диаграмма вариантов использования для
проектируемой модели предполагает появление
сущностей или актеров, взаимодействующих с
моделью с использованием вариантов использования.
При этом актером или реализуется любая сущность,
взаимодействующая с моделью извне. Это может
быть пользователь, техническое устройство,
программа или любая другая система, которая
служит источни ком воздействия на модель так, как
определяет сам разработчик. Вариант использования
для описания сервисов, модель предо ставляет
Рис. 5 - Диаграмма вариантов использования
актеру. Целью решения является определение
компьютерной модели Диаграмма классов
завершенного аспекта или фрагмента по изучению
программного обеспечения привлечения на
части сущности без раскрытия ее внутренней
рис. 6. На диаграмме класс изображен в виде мышц,
структуры. случаи использования диаграммы
с указанием имени класса. Отображены отношения
различных вариантов использования существуют
между классами. Сплошная линия без закрашенного
различные отношения, которые описывают случаи
ромба на концепте отношения отношения, линия
использования актерами и вариантами. Диаграмма
же с закрашенным ромбом - композиция отношения.
вариантов использования компьютерной модели
Прямоугольники с загнутым углом наклона текстовых
представлена на рис.5. Сплошными линиями
комментариев к классу. Пунктирная линия не
проникновения являются отношения ассоциации,
является отношением, а просто связывает класс с
которые специфицируют семантические особенности соответствующим ком ментарием.
взаимодействия актов и вариантов использования в
проектируемой модели. Пунктирные лини отношения включения между двумя вариантами
Классом, который управляет работой всей
использования, которые сохраняются, что ключевое
программы, является TMainForm. В нем задаются все
заданное свойство для одного варианта варианта в
исходные данные. Указываются варианты
качестве со ставного компонента в последовательности использования компьютерной модели. Элементы
повествуется
класса TAuv решают ручку режима управления
отрицание другой любви. В качестве актера высту
пает пользователь программного обеспечения.
На основе вариантов вариантов используется
объектно-ориентированная структура программного
обеспечения компьютерной модели в виде диаграмм
классов (диаграмма классов), которая служит для
представления статической структуры модели в
терминологии класов с объектно-ориентированным
программированием. Диаграмма свойств классов
различных вза имосвязи между отдельными
сущностями пред метной области, конструктивными
объектами и подсистемами, а также описывающими
их естественными и типичными отношениями.
Возможно добавление комментариев.
движением PR на основе (1)-(4). Результатом является
значение координаты и параметры ориентации в
системе координат
O
на моменты формирования видеокадров.
Методы класса TMap отличаются высокой
построечной картой, высотной на основе образа
дна, разработанного с помощью графического
редактора, и со зданием трехмерной сцены в виде
полигональной модели. Количество компонентов —
указание на массив размеров сцены, а также
количество вер шин и граней. Возможности класса
TCamera позволяют
оценка всех камер и обзоров освещения,
размещенных на ПР и участников в видеосъёмке, а
также расчёт их матриц по ворот.
53
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
экспоненциального тумана и замутнения на осно
в случайного образования частиц облаков. Пример
ранней подводной сцены с рассто яния 3 м
представлен на рисунке 7.
Рис. 6 – Диаграмма модели классов
программного обеспечения компьютерной
системы Элементы класса TVideoDno принимает
решение о резком снижении на основе
полигональной модели всей трехмерной подводной
сцены, в пределах которой повышается
управляемость пространственной маневренностью
ПР в процессе видео наблюдения, на основе
формулы перспективной проекции (5) с учетом
множества (6) ) и исследование внешней среды –
эффекты тумана и замутнения. "Проблема
оказалась" для учёта удалённости элемента
изображения решается способом Z -буферизации.
Методами класса TVideoCamera создаются
видеопотоки кадров, представляющие собой
последовательную матрицу изображений камер,
которая обнаруживается с помощью методов
класса TMainForm. Программное обеспечение,
реализующее диаграмму классов на рис. 6,
разработано в среде Visual C++.
Рис. 7 - Предварительный просмотр
подводной сцены. Примеры кадров из
видеопотока с левой и правой камеры, доходы в
разные моменты времени наблюдения процесса,
изображения на рис. 8. Видеопоток таких кадров
образуется с таким томом 100 мсек. Робот
проявляется в центре сцены циркуляции в
горизонтальной плоскости с одновременным
погружением. Результаты компьютерного
моделирования процесса выявления монстров
реалистичны.
Заключение
Компьютерное моделирование поведения
сложных совокупностей объектов с учетом
процессов приема данных о внешней среде
является перспективным методом при проектировании
нии систем управления подводным роботом.
Масштабность и развитие целей функциониро
вания, большой объем разнородной информации
о собственном состоянии и об использовании
обьективной обработкой новке, разработка ее
4.Результаты компьютерного
обработки
и внедрение оперативных решений,
моделирования
управление пространственным перемещением
при выполнении под водными работами,
В качестве примера моделировалось
реагирование на нештатные ситуации требует
маневрирование ПР с маршевым движителем и
разработки
и отладки оптимального и надежного
черепичными подруливающими приспособлениями,
расположенными в вертикальных и горизонтальных алгоритмического и программного обеспечения
бортовой вычислительной среды. Его важным
шахтах (см. рис. 1). СТЗ содержит две деокамеры –
аспектом,
поддерживающим без чрезвычайного и
левую и правую, ориентированные вертикально
продуктивного воздействия ПР вблизи подводного
вниз. Фокусное расстояние – 0,05 м. Угол решения
дна, является обработка данных, получаемых от
- 56О . Разрешение камерПредусмотрен
- 480 320
охват.
один
системы видеонаблюдения СТЗ. На их основе
источник участок
освещения.
Подводная сцена
описывает
дна размерами
8м на 6м.
Шаг
возможно найти решение таких задач, как поиск
сетки составляет 0,01 м. Высота пейзажа – 0,4 м.
объектов, их определение и классификация,
Для чтения
подводная навигация, управление движением в
правильном алгоритме. Применение реалистичной
компьютерной модели процесса наблюдения для
реалистичности приложения с поглаживанием
разработки и тестирования алгоритмов и решения
карты высот на основе усреднения по соседним
программ для функциональности
точкам и добавления случайного шума. В качестве
полигональной модели выбрана треугольная
форма. Кратность сетки равна 16. Учитывались
эффекты 54 .
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
производительности бортовой вычислительной
среды на основе построения параллельных
вычислений и их аппаратной поддержки.
тв
Левая камера
1
Правая камера
Рис. 8 - Кадры левой и правой камеры из ви
деопотока движения при ПР близ дна.
Благодарности Работа выполнена при
финансовой поддержке государственного
управления МИНОБРНАУКИ РФ в рамках общей
части задания вузам по проекту №2014/183.
тв
30
тв
60
Литература
Агеев М.Д. Автономные подводные роботы: системы и технологии / М.Д. Агеев и др.; под общ. ред. М.Д. Агеева. – М.:
Наука, 2005. – 398 с.
Гроссет Д. Система стыковки АНПА с существующим подводным пультом управления / Гроссет Д., Сотиропулос П. //.
Материалы конференции IEEE OCEANS 2009, 11-14 мая 2009 г., Бремен, Германия.
Канатани К. Мозаика изображений методом стратифицированного сопоставления / Канатани К., Канадзава Ю.//
Image and Vision Computing 22 (2004) с. 93-103. Борейко А.А. Алгоритмы обработки видеоизображений для решения некоторых
задач управления и навигации автономных необитаемых подводных аппаратов./ Борейко А.А., Воронцов А.В.,
Кушнерик А.А., Щербатюк А.Ф. // Журнал: Подводные исследования и робототехника - 2010 - №1(9) с.29-39
Сиек Ю.Л. Управление подводным роботом по видеоданным на основе нейросетевого владения / Сиек
Ю.Л., Сакович С.Ю., Яковлева М.В. // Морской Вестник – 2013 – Т.48.№4- с. 73-76
Лукомский Ю.А. Управление морскими подвижными объектами: учебник / Ю.А. Лукомский, В.М. Корчанов.// СПб.:
Элмор, 1996. – 320 с. Порев В. Н. Компьютерная графика /Порев В. Н// СПб.: БХВ-Петербург, 2002. - 432 с.
использованная литература
Автономные подводные роботы: системы и технологии. Агеев М.Д., Киселев Л.В., Матвиенко Ю.В.;
Под редакцией Агеева М.Д.; [Исполнительный ред. Киселев Л.В. М.: Наука, 2005. – 398 с. - (по-русски).
Гроссет Д., Сотиропулос П. Система стыковки АНПА с существующей подводной панелью управления. Материалы
конференции IEEE OCEANS 2009, 11-14 мая 2009 г., Бремен, Германия.
Канатани К., Канадзава Ю. Мозаика изображений путем стратифицированного сопоставления. Image and Vision Computing 22
(2004) с. 93-103.
Борейко А.А., Воронцов А.В., Кушнерик А.А., Щербатюк А.Ф. Алгоритмы обработки видео для решения некоторых
задач управления и навигации автономных необитаемых подводных аппаратов. Журнал подводных исследований и
робототехники - 2010 - №1(9) стр..29-39– (на русском языке).
Сик Ю. Л., Сакович С.Ю., Яковлива М.В. Управление движением подводного робота по видеоданным на основе
нейросетевого подхода. Морской вестник, 2013. – Т. 36. – С. 73-76. - (по-русски).
Лукомский Ю.А., Корчанов В.М. Управление морскими подвижными объектами. СПб:Элмор, 1996.
- 320 р. - (по-русски).
Порев В.Н. Компьютерная графика. СПб: БХВ-СПб, 2002. - 432 с. (по-русски).
55
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
УДК: 620.179.1
МЕТОД ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МОРСКОГО
МАГИСТРАЛЬНОГО ГАЗОПРОВОДА НА ОСНОВЕ ДАННЫХ
ВНУТРИТРУБНОЙ ДИАГНОСТИКИ
Скороходов Дмитрий Алексеевич
доктор технических проблем наук, профессор, главный научный
сотрудник Институт транспорта им. Н. С. Соломенко Российской академии
наук 199178, Санкт-Петербург, В.О. 12 линия, 13 тел. (812)
321-95-68, e-mail: skorohodda@mail.ru
Аннотация
В статье рассмотрена возможность автоматизации выработки решений по состоянию морского магистрального газопровода на
основе данных внутритрубной диагностики. Предложена реализация в виде методики оценки технического состояния морского
магистрального газопровода и разработана схема обработки данных, освоения полезных ископаемых, информационного
вычислительного комплекса по планированию полезных работ на основе технического состояния морского магистрального
газопровода. В результате он может получить ранг повреждения дефекты типа гофр и вмятин, дефекты сварного соединения,
повреждённость линейного участка магистрального газопровода от наличия трещин, повреждённость линейного участка при
наличии овализации сечений трубы, повреждённость линейного участка, связанную с наличием дефекта типа гофр и вмятин,
показатель техническое состояние сварных соединений линейного участка, повреждаемость от действия подверженности опасности
для каждой трубы, повреждаемость трубы за время эксплуатации от воздействия на подверженность эксплозивным связям,
повреждаемость соединительных частей линейного участка. Информационно-измерительная система может вычислить показатель
технического состояния стояния труб и соединительных деталей, а также показатель технического состояния линейного участка
морского магистрального газопровода по результатам внутритрубной диагностики.
Ключевые слова: автоматизация, вмятины, внутритрубная диагностика, дефект, магистральный, газопровод, методики,
техническое состояние, труба, участок.
ИНФОРМАЦИОННЫЕ ВОЗМОЖНОСТИ МЕХАНИЧЕСКИЙ СВЕТ СПОСОБОВ СИГНАЛИЗАЦИИ
В ПОДВОДНЫХ ОБЪЕКТАХ
Скороходов Дмитрий Алексеевич
профессор, д.т.н., главный НИИ ТРАНСПОРТНЫХ
ПРОБЛЕМ им. Н.С. СОЛОМЕНКО РОССИЙСКОЙ АКАДЕМИИ НАУК 199178, г. Санкт-Петербург, В.О., 12 линия, 13 телефон: (812)
321-95-68, эл. почта: skorohodda@mail.ru
Абстрактный
В статье рассматривается возможность автоматизации принятия решений по состоянию морского магистрального
трубопровода на основе данных внутритрубной диагностики. Проведена реализация методики оценки технического состояния
морского магистрального газопровода, разработан алгоритм обработки для формирования программно-информационновычислительного комплекса планирования необходимых работ на основе технического состояния морского магистрального
газопровода. В результате позволяет ранжировать опасность таких дефектов, как гофры и вмятины, дефекты сварки поврежденного
линейного участка магистрального газопровода с трещинами, поврежденного линейного участка при наличии овализации участка
трубы, поврежденного линейного участка. участок, связанный с наличием дефектов типа гофр и вмятин, показатель ремонтновосстановительного состояния сварных соединений линейного участка повреждается при действии переменных нагрузок на
каждую трубу, повреждается труба в процессе эксплуатации от действия переменных эксплуатационных нагрузок , повреждена
фурнитура пандуса. На основании полученных данных информационно-измерительной системы можно рассчитать показатель
технического состояния труб и фитингов, а также показатель технического состояния линейного участка морского магистрального
газопровода по результатам внутритрубных осмотр.
Ключевые слова: автоматика, вмятины, внутренняя диагностика, дефект, магистральный трубопровод, методики, техническое
состояние, станция метро.
Введение
Основные задачи комплексного
автоматического анализа состояния и оценки рисков
56
аварии морских магистральных газопроводов
(МГ) на основе данных диагностики и мониторинга
ринга является разработка новых и обслуживание
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
МГ для обеспечения комплексного дохода к
увеличению безопасности его функционирования
за счет автомати-зации планирования
капитальных ремонтов. Было выявлено, что в
настоящее время отсутствует автома-тизация
оценки технического состояния морского МГ на
основе внутритрубной диагностики и капитальноремонтных работ на основе оценки его
технического состояния. Это вызы вает проблемы
при планировании проведения диагностики и
капитальных ремонтов, связанные с объемом
первичных исходных данных по выявлению и
диагностике математических расчетов, требуемых
для оценки технического состояния морской МГ.
При этом могут быть решены возможные задачи:
доработаны для мат электронных отчётов по
внутритрубной диагностике; выполнен импорт
в единую базу данных по морскому МГ исходных
данных по трассе газопровода и внутритрубной
диагностике; предложена реализация в виде
методики оценки технического состояния
морского МГ на основе данных ВТД и доработан
прототип про граммного обеспечения по
планированию необозримых работ на основе
технического состояния морского МГ. Разработка
метода оценки технического состояния морского
магистрального трубопровода Для оценки
технического состояния на осно ве данных
внутритрубной диагностики в первую очередь
необходимо определить переменные ntr
- коли
параметры линейного участка МГ:
количество труб и соединительных деталей
линейной части МГ; nσ - количество труб с
повышенным уровнем напряжения; no количество труб, важных для оценки
технологического состояния линейного участка
МГ; n3РА - количество трубопроводной арматуры
на линейном участке МГ; тэ - время эксплуатации
ли нейного участка; tэ(i) - время эксплуатации iой трубопроводной арматуры;
Dн - наружный диаметр трубы; p- постоянное
давление на линейном участке морского МГ; pf фактическое давление на линейном участке МГ;
t - температура эксплуатации трубопровода; tу необходимая после фиксации его положения
при монтаже; Нлу - коли чество линейных
участков; N0 - количество нулевых циклов в
типизированном режиме загрузки; Lлу - длина iого линейного участка ка; LΣ - общая длина
линейных участков; δ - толщина стенки трубы;
δ0 - начальная толщина толщины трубы; δи измеренная толщина толщины трубы; δкр критическое значение толщины трубы; КП количество ВТД; tВТД(i) - время эксплуатации
линейного участка МГ до проведения i-ой ВТД;
tЗП - средний срок службы защитного линейного
покрытия участка МГ до ремонта, значения
которого принимаются по таблице 3; tВТД количество лет, прошедших
3 (33) Т. 2 2016
между опросами; tDNL - время эксплуатации
линейного участка магистрального газа
П
ЗП
провода на момент проведения ВТД;
средний срок службы защитного покрытия ста
рых труб (трассового нане-сения), значения ко
Р3
т
ЗП торых отчетов по таблице 3; - средний срок
службы защитного покрытия заводского приема
новых труб, значения которого принимаются по
таблице 3; PВТД(кр) - показа тель технического
состояния линейного участка МГ, наблюдаемого
по результатам последней ВТД без учёта набора
(проведённых) по
т
п
ПВТД (кр
1)
- показа
её итоги ремонтных работ;
тель техническое состояние линейного участка
МГ, наблюдаемое по результатам предпоследней
(кр-1) ВТД с учётом ремонтных работ;
PVTD - Показатель технического состояния ли
р
ПВТД
нейного участка МГ; - показатель технического
состояния линейного участка МГ, определяющий
лённый по результатам последней ВТД; tВТД количество лет, прошедших между приложениями;
tВТД - время эксплуатации линейного участка
МГ по моменту проведения ВТД; СК - доля труб;
SН - доля новых труб; кп- ко личество ВТД,
проведённых на линейном участке МГ; i- номер
ВТД; tВТД(i) - время эксплутации линейного
участка МГ, определенный для i-й ВТД.
Далее следует определение параметров
линейного участка МГ: E - модуль упругости стали
для труб; α - коэффициент стального линейного
расширения для труб; σВ - временное
противодействие металлу; π- коэффициент; KCV
ударная вязкость; νш - весовой коэффициент; νа весовой коэффициент; νр - весовой коэффициент
ент; my - коэффициент кривой усталости; bкоэффициент кривой усталости; μП - коэффициент
для подземной прокладки линейных участков МГ;
μн - коэффициент для надземной прокладки ли
нейных участков МГ; КГ - коэффициент для ли
нейных участков МГ I – II категорий; КГ - коэффи
циент для линейных участков МГ III - IV категорий;
λ - отказов трубопроводной арматуры; Rп допустимое значение сопротивления защитно-го
покрытия на трубах, достигаемое в соответствии
с ВРД 39-1.10-026-2001; с1=1,181 108, с2=1,235 105,
с3=0,935, с4=0,0187 – коэффициенты. Необходимы
также возможные параметры дефектов МГ: hглубина дефекта потери металла; l - толщина
дефекта потери металла в осевом отложении; hт глубина трещиноподобного дефекта; θ - овальность
трубы; б - шири дефекта типа гофра или вмятина;
wr0 - глубина вмятины (гофра) при действии
внутреннего давления (во время обследования);
Дш - суммарная протяжённость дефектов в
сварном соединении; K -коэффициент напряженности; ном - количество труб, у которых
интегральное сопротивле-
57
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
ние защитного покрытия меньше 104 Ом м2; пэ количество соединительных деталей с эрозийными
дефектами; nк - количество труб с дефек тами потери
металла в толще ткани; нс - количе ство труб с
трещиноподобными дефектами; no - количество труб,
характерная овализация; nг - ко личество труб с
дефектами типа гофр и вмятины; nd - количество
соединительных деталей с дефектами, недопустимыми
в соответствии с техническими условиями заводаизготовителя; nш - количество сварных швов с
дефектами; nσ - ко личество труб, выявленных для
развития, пока зателя технического состояния линейного
участ ка МГ, при этом учатся один дефект, дающий
только проявление повреждён-ности, и каж дую
дефектную трубу изучают только один раз в одном из
значений ns, nk, ng, нет, nσ. Далее следует уточнение
выходных параметров, которые требуются для
использования ор д ганизаций: K
- повреждённость линейного участка
МГ от повреждения;
С - повреждённость ли
участка МГ от наличия трещины; врежденность
линейного участка МГ при наличии
нейного
- по
дг
овализации сечения трубы; - повреждённость линейного
участка МГ, связанная с наличием
г
г
дефект типа гофр и вмятин; - повреждённость
соединительных деталей линейного участка
ка МГ;
д
- повреждённость линейного участка
д
МГ от повышенного уровня напряжения;
вредоносность линейного участка МГ за время
эксплуатации от действия воздействия эксплойта
фЛЧМГ -
Пт
- Показатель техническо
тацион-ных мыслей;
состояние труб и соединительных деталей;
ПВТД
- Показатель технического состояния линейки
ПК
ного участка МГ по результатам ВТД; - комплексный
показатель технического состояния ли
РВТД нейного участка МГ по результатам ВТД; Характеристика
технического состояния участка с
РК - комплексный
учётом динамики изменений;
Характеристика технического состояния участка с
учетом динамики изменений. При расчетах могут быть
выявлены справочные данные, характерные для
различных стран про изводителей труб: данные об
устойчивости от казов трубопроводной системы
колеблются от 0,003 до 0,064; средняя овальность труб –
от 1,9% до 2,7 % и средний срок службы защиты защиты
в зависимости от типа защитного покрытия составляет
10-30 лет. Для оценки критерия оценки технического
состояния линейной части морского МГ по результатам
ВТД размерно-измерительная система на осно вании
вводимых в нее данных, приводимых
58
выше, может достигнуть возможного действия,
наблюдаемые в конечном результате действия
морского МГ:
1. Определить коэффициент, учитывающий уровени
кольцевых заболеваний:
р ДН
2
В
а
2. Определить коэффициент,
обнаруживающий выраженный дефект потери металла:
2
л
1 0,31
Вопрос
ДН
3. Определить
отношительно с вызывающим дефектом уменьшение
металла, при котором по расчётам происходит разрушение
трубы при рабочем (нормативном) поглощении:
1Б
р
aQ
4. Определить относительное выявление дефекта
потери металла: ξ = h/δ
РК
р
Если ранг опасности больше 1,0, то он принимаеться
плотностью 1,0. 6. Вычислить кольцевое напряжение
в трубе: D
кол
п
Н
2
2
7. Определить разность температуры эксплуатации
трубопровода и температуру непосредственно после
погружения трубопровода или дру гого естественного
фиксирования его положения при
монтаже:
t
t
t
у 8. Вычислить продольное напряжение в
пр
трубе:
П ( )н Е t кол
или
9. Вычислить величину напряжения напряжений в
стенке трубы:
2
я
кол
2
кол
пр
пр
10. Определить коэффициент:
А
3,14
2 кол
219780 KCV
11. Вычислить относительный случайный
трещиноподобный дефект, при котором происходит
разрыв трубы при рабочем (нормативном) распределении:
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
1 А
кол
С
Р
3 (33) Т. 2 2016
w00 1 H wp 22.
2 А
ш
2
кол
1
А
А
4
1,0
кол
т
3
1
2
23. Вычислить статическую окружную деформацию:
В
2
00
2р
2
1
В
Вопрос
0
Вычислить остаточную продольную деформацию:
В
Вопрос
1
А
ш 00
12. Определить относительную вероятность
возникновения трещиноподобного дефекта: ξс = hт/
δ 13. Вычислить ранг опасности трещиноподобных
дефектов (относительную возникновение
трещиноподобного дефекта, при котором по расчётам
про исходит разрыв трубы при рабочем (нормальном)
отклонении): C
2.0
2р
2
ты
3
2
1
24. Вычислить приращение окружной изгибной
деформации
2
2
30 9 вверх 5
*
2,0
2
U * 150 4 1 * up 25.
Вычислить приращение продольной изгибной
деформации:
RC
1
Если ранг опасности больше 1,0, то он принима- ется
средним уровнем опасности 1,0. 14. Вычислить ранг
опасности разрушения труб при наличии овализации ее
сечений: 1
5
п*
U * 150 4 12 т
1,0
26. Определить относительную склонность к вмятинам
(гофра):
*
ш0
Ро
5* р
2 39 9 т
CP .
ш 00
Dн
27. Вычислить ранг опасности дефектов типа гофр
и вмятин:
.
Если ранг опасности больше 1,0 , то он принимаеться
величиной 1,0. 15. Определить радиус средней линии
сечения трубы: DН
RГ
Максимум
КГ
1,0
max
;
2.0
;
1,0
;в
*
00
2.0
;в 00 *
- одно максимальное
значение из трех величин.
р
28. Вычислить ранг опасности дефектов
сварного соединения:
ДR
3,82
Ш
2
16. Определить коэффициент:
D Нбольше
Если
ранг
1,0 опасности
, то он
Шразрушения
принимаеться
плотностьм
1,0. 29. Принять
ранг опасности
тканей
по напряжённо-деформированному
состоянию R
0
р
т
л
17. Определить коэффициент:
р
ты
б
18. Вычислить параметр измерения давления:
рп
2
ф *1п
, так как К (коэффициент напряжённо сти)
принимается средним 1,0. 30. Вычислить
повреждённость линейного участка МГ от повреждения:
3
Е
19. Вычислить безразмерный параметр,
характеризующий ризуирующий энергию
деформации вмятины (гоф ра): * 225 27 U
4
2
т
у
9
2
5
у25
30 9ты
ЧАС
U * 150 4 1ты
5
2
*
пф
t
3
4
dkj
гК
1
1
j
п тр
,
dk
RK j
31. Вычислить повреждённость линейного участка МГ
от наличия трещины:
20. Определить коэффициент:
2
nk
нс
*
пф
21. Вычислить дефект при отсутствии внешнего
давления:
гС
д с
Дж
Дж = 1
Округ Колумбия
п тр
,
Дж
РЦ
59
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
32. Вычислить повреждённость линейного участка МГ при
п
тр
наличии овализации сечений труб:
п0
го
1г о
д
д
Дж
n
Ро
делать
тр
пг
Дж
,
д
_1
n
д
,
1
дгj
Дж
1
j
Дж
.
нш
Дж
рш
т
тр
Но
п
2
Заключение
наличии овализации ее разрезов, ранг опасности дефектов
типа гофр и вмятин, повреждённость линейного участка МГ от
г
наличия трещин, Показатель технического состояния сварных
соединений линейного участка, повреждённость соединительных
частей линейного участка МГ.
2
1
м
г
37. Вычислить болезненность от действия пе
ременных следов для каждой трубы:
мг
Э
б
38. Вычислить повреждённость труб за время эксплуатации
от действия возможных эксплоативных последствий: d
d
tЭ fy
.
39. Вычислить повреждаемость линейного участка за время
эксплуатации от действия переменных эксплуатационных
60
фЛЧМГ
шш
при котором происходит разрушение трубы при рабочем
м
заболеваний:
д
1
(нормативном) разрушении и трещиноподобном разрушении,
я
Н
1
пт
(нормативном) распаде, ранг опасности разрушения при
м
1
D
1
по расчём там происходит разрушение трубы при рабочем
тр
г
уЭ
г
1
этом она допускает основные характерные повреждения труб:
1
м
ВТД
относительное выявление дефекта потери металла, при котором
1
10
,
ремонтов линейной части магистральных газопроводов. При
Дж
36. Вычислите значение превышения эквивалентного
у
1 гг
Предлагаемая методика является надежной основой для
значения нулевого цикла для каждой трубы:
г
1 гг
развития систем безопасности и планирования капитальных
Дж 1
Дж 1
куб.см 3 4
1 го
К
также Характерное техническое состояние ли
1
п тр
куб.см 1 2
1
П
р
соединительных участков:
т
1 гС
нейного участка МГ по результатам ВТД:
35. Вычислить показатель технического состояния сварных
гш
1
Пт д
RГ
н
п тр
нш
тр
трубы и соединительные детали:
уровня напряжения:
дж
нд
n
гj
г
д
41.На получение дохода ИИС может
Расчет технического состояния
тр
н
тр
линейного участка МГ:
34. Вычислить повреждённость участка МГ от по вышенного
пш
п
жф
40. Вычислить повреждённость соединительных деталей
связанную с наличием дефекта типа гофр
и вмятин:
г
фЛЧМГ
Дж
33. Вычислить повреждённость линейного участка ка МГ,
гг
Дж
1
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Литература
1. Голуб Е.Д., Зайцев Е.В. Обследование магистральных трубопроводов внутритрубными инспекционными приборами
магнитных дефектоскопов// ВЕСТНИК ГРАЖДАНСКИХ ИНЖЕНЕРОВ Издательство: Санкт -Петербургский
государственный архитектурно-строительный университет (Санкт-Петербург). 2015.Номер: 5 (52). 85-90.
2. Национальный стандарт Российской Федерации. Внутритрубное техническое диагностирование газопроводов. Общие
требования. Внутритрубная диагностика газопроводов. Общие требования. ОКС 75.180. Дата вве дения 2015-02-01
3. РД 51-2-97 Инструкция по внутритрубной инспекции трубопроводных систем. Москва. 1997 4. http://
knowledge.allbest.ru/manufacture.htm. 5. http://www.totalsave.ru/uslugi/diagnostika-truboprovodov/
magistralnyh.htm. 6. http://bibliofond.ru/view.aspx?id=788034http://amt-rus.com/ru/resheniya-i-uslugi/
техническое диагностика.htm. 7. http://doidpo.rusoil.net/storage/diagnostics%20equipment/teor/t3-1.htm. 8.
http://www.diakont.ru/ili/robotic-in-line-inspection 9. http://studopedia.ru/6_93710_osnovnie-etapivnutritrubnoy-diagnostiki-trubo. 10. http://www.aprodit.ru/Aprodit-Article4-u_Gaz_Pipeline_Diagnostic_Problems.htm.
11. Скороходов Д.А. Методика комплексной оценки безопасности линейной части магистрального
газопровода. (Скороходов Д.А., Стариченков А.Л., Танклевский Т.Л.) Научно-аналитический журнал
«Вестник Санкт-Петербургского университета государственной противопожарной службы», выпуск №3
(2015). 12. Скороходов Д.А. Информационное обеспечение безопасности газодобывающих платформ. (Скороходов Д.А.,
Стариченков А.Л., Королев О.А.) Материалы Юбилейной международной научно–практической конференции,
Транспорт России: проблемы и перспективы-2015, т.2, 24-25 ноября, С.33-36 . 13. Скороходов Д.А. Повышение
энергоэффективности использования углеводородного топлива. (Скорохо дов Д.А., Мурамович В.Г.) Материалы форума
«Х11 Всероссийская научно-практическая «Энергоэффективность, проблемы и решения», Уфа, 2012. С.19-20.
14. СТО Газпром 2-2.3-292-2009 – Правила определения технических характеристик магистральных газопроводов по
результатам внутритрубной инспекции.
использованная литература
1. Голуб Е.Д., Зайцев Е.В. Исследование магистральных трубопроводов внутритрубными инспекционными снаряжениями
магнитных дефектоскопов ВЕСТНИК ГРАЖДАНСКИХ ИНЖЕНЕРОВ Издательство: Санкт-Петербургский государственный
архитектурно-строительный университет (Санкт-Петровский университет). 2015.Номер: 5 (52). 85-90.
2. Национальный стандарт Российской Федерации. Внутритрубное техническое диагностирование газопроводов. Общие
требования. Внутритрубная диагностика газопроводов. Общие требования. ОКС 75.180. Данные ввода 01.02.2015 3. РД
51-2-97 Инструкция по внутритрубной инспекции трубопроводных систем. Москва. 1997 4. http://knowledge.allbest.ru/
manufacture.htm. 5. http://www.totalsave.ru/uslugi/diagnostika-truboprovodov/magistralnyh.htm. 6. http://bibliofond.ru/
view.aspx?id=788034 7. http://amt-rus.com/ru/resheniya-i-uslugi/texnicheskoe-diagnostirovanie.htm. 8. http://doidpo.rusoil.net/
storage/diagnostics%20equipment/teor/t3-1.htm. 9. http://www.diakont.ru/ili/robotic-in-line-inspection 10. http://studopedia.ru/
6_93710_osnovnie-etapi-vnutritrubnoy-diagnostiki-trubo. 11. http://www.aprodit.ru/Aprodit-Article4u_Gaz_Pipeline_Diagnostic_Problems.htm.
12. Скороходов Д.А. Методика комплексной оценки безопасности линейной части магистрального газопровода.
(Скороходов Д.А., Стариченков А.Л., Танклевский Т.Л.) Научно-аналитический журнал «Вестник Санкт-Петербургского
университета верситета государственной противопожарной службы», выпуск №3 (2015).
13. Скороходов Д.А. Информационное обеспечение безопасности газодобывающих платформ. (Скороходов Д.А.,
Стариченков А.Л., Королев О.А.) Материалы Юбилейной Международной научно–практической конференции, Транспорт
России: проблемы и перспективы-2015, т.2, 24-25 ноября, С.33-36.
14. Скороходов Д.А. Повышение энергоэффективности использования углеводородного топлива. (Скороходов Д.А.,
Мурамович В.Г.) Материалы форума «H11 Всероссийская научно-практическая «Энергоэффективность, проблемы и
решения», Уфа, 2012. С.19-20.
15. СТО Газпром 2-2.3-292-2009 – Правила определения технического состояния магистральных газопроводов по
результатам внутритрубной инспекции.
61
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
АВТОМАТИЗАЦИЯ И УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ И ПРОИЗВОДСТВАМИ
УДК 629.12.001.57
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭКСПЛУАТАЦИИ СОВРЕМЕННОГО
РЫБОЛОВНОГО СУДНА ПРИ ОСВОЕНИИ ЕГО УЛОВА
Иванов Владимир Павлович доктор
технических наук, профессор кафедры кораблестроения
Калининградский ГТУ
236000, г. Калининград, Советский пр.,
1 e-mail: dtn.ivanov@yandex.ru,
Дудин Станислав Дмитриевич аспирант
кафедры кораблестроения Калининградский
ГТУ 236000, г. Калининград,
Советский пр., 1
Курдюков Сергей Геннадиевич, аспирант
кафедры кораблестроения Калининградский
ГТУ 236000, г. Калининград, Советский
пр., 1
Аннотация
Рассматриваются общие подходы к разработке блока эксплуатации математической модели (ММС) современного
рыболовного судна. В той их части, которая захватывает освоение улова, преимущественно к рыболовным судам с
универсальным набором их технологических средств для обработки и сохранения улова. Модель разработана с учетом
особенностей эксплуатации современных Р и характерна своей универсальностью. Она ограничена в качестве
использования блока ММС для задач оптимизации проектов рыболовных судов нового поколения и решения задач по
принципу про изводственного (промыслового и технологического) смежных судов или их проектов с разным значением
их назначения в заданных условиях промысла. Приведены результаты одного из контрольных примеров, иллюстрирующие
рабочие модели. Ключевые слова: рыболовные суда, производственный потенциал, промысел, освоение
улова, математическое моделирование
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ РАБОТЫ СОВРЕМЕННОГО
РЫБОЛОВНОЕ СУДНО ПО УЛОВУ ИСПОЛЬЗОВАНИЯ
Иванов Владимир Павлович
доктор наук. техн. наук, профессор кафедры судостроения
Калининградский государственный технический университет
Советский пр. 1, Калининград, 236000, Российская Федерация
электронная почта: dtn.ivanov@yandex.ru,
Дудин Станислав Дмитриевич
аспиранты кафедры проектирования судов
Калининградский государственный технический
университет Советский пр. 1, Калининград, 236000, Российская Федерация
Курдюков Сергей Геннадьевич
аспиранты кафедры проектирования судов
62
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Калининградский государственный технический университет
Советский пр. 1, Калининград, 236000, Российская Федерация
Абстрактный
Рассмотрены общие подходы к разработке операционной части математической модели (ММС) современного промыслового судна. В
той части, которая учитывает использование улова, применительно к универсальным номенклатурам технологических элементов переработки
и сохранения улова. Модель разработана с учетом условий эксплуатации современных рыболовных судов и отличается своей универсальностью.
В составе рабочего блока ММС предназначен для решения задач оптимизации проектирования промысловых судов нового поколения и
решения задач по использованию их производственного потенциала (промыслового и технологического) или их проектных решений с
различными характеристиками в заданных условиях промысла. Результаты одного из эталонных примеров представлены для демонстрации
принципа работы модели.
Ключевые слова: рыболовецкие суда, производственный потенциал, рыболовство, использование улова, математическое моделирование .
Введение
Оптимизационное проектирование
предполагает разработку и использование их
математических моделей (ММС). Для рыболовных
судов (РС) большое значение имеет
эксплуатационный блок моделей, где отслеживаются
сложные технологические процессы, освоение
улова и бюджет времени промыслового рейса. В
целом исследование этого направления встречается
часто. В частности, в рамках творческого содружества
с институтом «Гипрорыблот», когда разработанные
модели активно действуют в рамках органов заций
федерального агентства по рыболовству, и частично
нашли свое отражение в учебнике для вузов [1].
Вместе с тем, за последние десять лет в мировом
промысловом судостроении и в промышленном
рыболовстве в целом произошел прогресс в их
развитии. Изменени ям требуются характеристики
судов и их ком плектующего (промыслового,
энергетического, технологического и пр.)
оборудования, обработка обработки и заседание
уловов. выявление, в частности, практически
большого интереса, заявленного в области
рыболовства в области рыболовства для морских и
океанических судов (НРС). По этой причине
необходимо приспособить созданную базу ММС к
международным РС, изменить технико-экономические
условия (ТЭУ) их эксплуатации и к новому интеллекту
технологиям.
В данной работе рассмотрены общие
подходы к разработке блока ММС. В той их части,
которая проникает в освое ние улова
применительно к избирательному РС с
универсальным набором его технологических
средств. Применяются также результаты одного из
контрольных примеров, иллюстрирующих рабочие
модели. Для краткости изложений будем
использовать характеристики РС в объеме,
необходимом для данной работы. В порядке
подготовки к этому отметим заданное. Заданная
мощность главного двигателя (Ngdz, кВт)
позволяет дать ответ среднесуточной промысловой
производительности судна Pul1, т. Как показало
исследование [1], для траулера это становится
возможным при возникновении серьезных
последствий для здоровья, связанных с
мыслительной системой Kprs и состоянием
сырьевых ресурсов Ksb, известных в отношении
местонахождения промысла с его удаленностью
Rpr, перемещением. При сочетании Ngdz и
грузоподъемности судна Pgrz, т, (обычно дается
брутто, т.е. в таре) наблюдается оценка (с
осторожностью, приемлемой для рассматриваемой
задачи) его водоизмещения и пересечения в
расчетах скорости на свободном ходу Vs, уз. В
последующем предпочтительном будет
использование зна- чения количества блюд рыбной
продукции без тары Prz, т, что легко пересчитывается
с использованием подходящего коэффициента Ktar:
Prz=Pgrz/Ktar. Временные характеристики
про мысли обращаются в сутках. Основные
положения блока модели Основные положения
экспериментального блока модели РС в части
освоения им добытой рыбы заключаются в
следующем. Время, отводимое судом на лов (время
на лову Tl), в общем случае определяется предельно
допустимыми условиями по экспорту: а) полная
загрузка груза рыбной продукцией (Tlgr), б)
достаточных запасов топлива (Tltp), в) допустимых
сроков хранения рыбной продукции ции (Tlxr).
Значения временных составляющих лова
высчитываются по формулам. По условию п. а)
(чаще всего в случае простого судну с однородным
грузом рыбы без ее разделки): Tlgr=Pgrz/Pul1.
(1)
По условию п. б):
Tltp=(Avtz-Tx-Tsp-Tmz)/Ksht, (2)
где Avtz – автономность судна по запасам топли
ва, Tx=Rpr/(24vs) – время перехода из порта ба
зирования на промысел или обратно, Tsp знак равно
63
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
=f(PgrSz) - время стоянки в порту, Tmz - время
морского запаса, а Ksht - коэффициент штормования
для данного судна и района его промысла. По
условию п. в) обязательно разрешать виды
рыбной продукции. Для замороженной и соленой
рыбы допустимый срок ее хранения (Txrr) практически
не ограничивает промысел. При хранении
охлажденной рыбы в рефрижераторных трюмах или
в танках Современные НРСлов рыбы может
развиваться в течение времени: Tlxr=Txrr-Tx-Tsp. (3)
При проектировании РС сзначение
Tl определяется
учетом рассмотрения
всех границ: Tl= min (Tlgr, Tltp, Tlxr). (4) В ходе
выполнения поставленных задач Tl, предметы судно,
но имеющиеся на промысле, решение по
поставленным задачам: Tl= min (Tltp, Tlxr). (5) Как
уже собиралось, при расчете составляющих время
лова необходимо принять сложный технологический
процесс освоения улова. Рассмотрим сначала работу
на промысле в двух наиболее
1.Морозильное
простых случаях.
судно без
обработки улова грузоподъемностью Pgrmz при
сортах улова (Sort=1, т.е. без непищевого сырья). За
рейсом оно может выловить и доставить в порт
мороженой рыбы в количестве до Prm=TlgrPul1. При
стабильном поступлении среднесуточного улова до
статочна производительность морозильной установки (Qmor, т/сут.), большое значение улова:
Qmor=Pul1. При нестабильной промысло войной
опасности возникновения эксплуатационных задач
требуется вероятностного наблюдения. Его учет
показывает, что среднесуточный вылов кредиторов
осуществляется в связи с задержкой. Задержки заказа
тем, что заданная производительность техноло
гических стрессов (в случае использования Qmor) в
случайных условиях промысла стала недостающей.
За то же время лова в порт будет доставлена
ленорыба на 37% меньше (см.[1]). Увеличение
загрузки рыбных трюмов показывает коэффициент
их загрузки Kzagr=Prm/Prmz. Неполная загрузка
трюмов (Kzagr<1) означает, что РС для заданных ТЭУ
подходит для эксплуатации не самым лучшим обра
зом. Оно имеет, в частности, недостающие значения
Avtz и/или Qmor. 2.НРС. При данных п.1 доставка
свежей рыбы составляет Prnr=TlgrPul1 при Kzagr=1.
Заметим, что НРС обладают стремлением осваивать
т.н. пиковые уловы. Поэтому их производительность
(при обнаружении допустимого срока хранения рыбы)
практически не встречается при лю бой постановке
задачи промысла - детерминиро ошибки или
вероятности. Для РС, сочетающих изготовление
нескольких видов продукции (особенно при обработке
улова), расчеты по освоению улова существенно
усложняются, поскольку в них необходимо использовать множество дополнительных характеристик.
Наличие на судне разделки улова позволяет уве
личить время на промысле, но у проектировщи
64
3 (33) Т.2 2016
ков (равно как и у эксплуатацииников) возникает
проблема: что делать с отходами. Практические пути
ее решения нашли:
1.Выброс отходов за борт. Это, говоря, не
приветствуется, когда речь идет о контролирующих
выбросах и может улавливаться добыча штрафов.
2.Доставка отходов в порт в добавку
емкостей для их береговой обработки. В НРС для
этого может быть часть наливных танков, а на судах
долгосрочного сухогрузного типа (РСС) требуется
соответствующее дооборудование с фактическим
уменьшением их полезной грузоподъемности.
3.Установка рыбной (РМУ) и котельной установок с их
высокой производительностью, а также трюма для
рыбной муки. Это бу дет экологически чистое судно,
но для средних и средних судов практически
предполагает изменение их класса.
К РС, которые по набору особенностей их
технологического назначения относятся
универсальные, относятся траулеры-заводы, которые
изначально строились как безотходные. Их
характеристики также изменились. В частности, была
повышена энерговооруженность судов и
производительность их морозильного оборудования
(теперь более ком пактного). Значительно увеличены
объемы сырых бункеров, которые могут быть
запрещены
как наливные танки.
Объект моделирования
Универсальность необходима и математическая
ским шаблоном для РС нового поколения. В
качестве основы для создания модели предлагается
универсальное судно, на котором в общем случае
предлагаются рыбообрабатывающие батывающие
линии производства Qobr, т/сут, морозильная (Qmor)
и рыбомучная (Qrmu) установки, а также трюмы для
мороженого производства и рыбной муки. , наливные
танки и свежий вой рефрижераторный трюм. Общая
схема технологического процесса освоения
среднесуточно го вылова величины Пуль1
представленной на рис. 1 и включает данную.
При улове (п.1) непищевой прилов сразу (п.2)
отбрасывается за борт. Сортовой улов (п.3)
соответственно направляется на разделку (п.4),
заморозку (п.5) и в морозильный трюм (п.6). При
недостаточном количестве раздельной рыбы за
нагрузкой морозильной установки наблюдается
неразделенная рыба. Оставшаяся часть улова
направляется в наливные танки (п.7).
После загрузки морозильных трюмов разде
ланная рыба направляется в свежую трюм (п.8), а
остальная часть улова – в наливные танки (п.7). В ходе
расчетов оценка необходи мость догрузки свежего
трюма неразделанной рыбы. Отходы обработки улова
направляются в РМУ
(п.9), а изготовленная рыбная мука – в
соответствующий трюм (п.9). Для отходов, неосвоенных
РМУ, выделятся наливной танк или другая спец-
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
циальное помещение для доставки на берег и по возможности
переработки. Нехватка сырья РМУ восполняется
неразделанной рыбой.
7.Наливные
8.Свежьевой
танки Prn
трюм Prs
3.Суточный
1.Суточный
вылов
сортовой
>
улов U1
Пул1
4. Рыбцех
>
9. РМУ
>
Курму > 11.Танк
отходы
6.Морозильный
прилов (за
трюм
прм
борт)
муки Пррм
11.Танк
Кобр
разделки
2.Непищевой
10.Трюм
(танк) рыбной
непереработанных
отходов
5.Морозильная
<
установка Qmor
Рис. 1 - Схема технологического процесса освоения улова
Принятая универсальность формулы в освое улова
4. Определение характеристики ТЭУ эксплуатация судна
имеет определенные проектные и эксплуатационные
является совокупной прерогативой заказчика, ПКБ и
задачи и другие современные РС с выявлением их значения,
властных структур.
в частности: - предварительно суда без обработки улова. (в
большинстве случаев принимается, что в исходных моделях
данных обнуляются значения характеристик ристик их
технологического оборудования); - свежие
рыбообрабатывающие суда, поставляющие свежую трюм и
наливные танки, частично из которых отходы обрабатывают
ки улова транспортируются в порт базируется
Перечень исходных данных, полезных при создании
настоящего эксплуатационного блока ММС, включает в
себя: • Ngdz, vs, Rpr, Ksb, Kprs, Txrr, Avtz, Sort. Эти
характеристики уже рассмотрены ранее. • Prn, Prs, Prm, Prrm
- грузоподъемность суда на (нетто) соответственно по
наливным танкам и трюмам: рефрижераторному, мороженой
продукции и рыбной муки, • Ktarn, Ktars, Ktarm, Ktarrm
- коэффициенты, учитывающие массу тары для
сокращения
ния.
- морозильно-свежие суда с обработкой улова,
предусматривающие морозильную и свежую трюмы
и наливные танки.
Разнообразие особенностей в рассмотрении РС
требует уточнения расчетных условий, которые
формируются на базе исследования совре-менных РС.
Приводим эти условия. 1. На морозильно-свежих судах
производится дительность морозильных установок Qmor
должна быть достаточной для освоения всей раздельной
рыбы,
2. Срок хранения улова в наливном танке начинается с
момента поступления в него рыбы первого улова.
Содержимое наливных танков, принятых первыми уло,
считается отходами, если не выдерживается срок
хранения охлажденной продукции. Для свежего трюма
(с учетом его п.1) срок хранения продукции исчисляется
с момента начала его загрузки, т.е. после закачки
морозильного трюма.
видов продукции, •
Кобр, Кмор, Круму – производительность
рыбообрабатывающих линий, морозильной и рыбной
установки (т/сут), • Кобр и Кобрм – коэффициенты
выхода го товой продукции при разделеке улова и при
производстве рыбной муки.
Эксплуатационный блок моделей разрабатывался
параллельно с его программным обеспечением в кратком
и доступном для пользователей редакторе MathCad. Это
дает возможность проверить эффективность моделирования
и обеспечить его универсальность и практическую
устойчивость. В качестве примера приводим результаты
одного из контрольных расчетов. В нем грузоподъемность
нетто в общей массе со ставкой PrS =1090т, а по видам
продукции: Prn=667т, Prs=83т, Prm =291т и Prrm=48т.
Значение Txrr =10 суток. Время на загрузку морозильного
3. Промысел исчезновения, когда обнаружены основные
грузовые помещения с ос новой рыбной продукцией.
трюма Tm=5,8 сут., а задержка (свежего) Ts=2,3 сут. Общая
их сумма Tms=8,1 сут. За это время заморожено 209,7т
раздельной и 81,6т неразделанной рыбы, и из-
Значительная загрузка трюма рыбной муки на момент
прекращения промысла не бросается в глаза.
65
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
готово 83,3т разделанного фрэшья и 35,8т рыбной
муки. Отходов обработки, неосвоенных РМУ,
32,6т. Для свежего запаса времени по усло виям
его хранения составил 5,8 сут., а для наливных
танков лимит времени хранения уло в превышен
почти на 1 сутки. В наливные танки вместо
плановых 666,7т рыбы поступило 223,8т. В
выделенном танке 32,6 т отходов из разделки, не
освоенных РМУ, и 25,9 т рыбы с превышенным
сроком ее хранения. Коэффициент загрузки судна
(отношение полученной и контролируемой
рыбной продукции)
Кзагр=0,58.
При анализе доходов доход приходил на
внимание, что в начале рейса (в частности - в
период загрузки морозильного трюма, Tm=5,8
сут.) приходилась часть улова направлялась в
рыбцех на разделку. В наливных танки за сутки
лова поступало лишь 26,7 т рыбы (за время Tm 155,4т). В конце рейса трюмы уже задержаны, и в
наливных танках теперь ежесуточно уничтожается
100,7 т рыбы. Для полного заполнения танков
требуется 3,8 суток. С учетом этого обстоятельств
в дополнении к расчету время лова было
увеличено и составило 12 суток. В результате
наливные танки вместили 608,5т кондиционной
рыбы, а в РМУ дополнительно выработано 16,8т
рыбной муки и сокращении отходов до 58т.
Кзагр=0,95.
Заключение
Исключительная модель разработана с
учетом особенностей эксплуатации современных
РС, характерна ее универсальность. Она
встречается в характере распространения эксплуатационного блока ММС для РС нового по
коления и может в Республике при выпол- нении
эксплуатационных расчетов, применительно к
эксплуатации рыболовным судам с частицами их
назначения.
Литература
1. Иванов В.П. Технико-экономические основы создания рыболовных судов: учебник: /В.П. Иванов Калининград: Изд-во БГАРФ, 2010. – 275с.
использованная литература
1. Иванов В.П. Технико-экономические основы создания рыболовных судов: учебник: /В.П. Иванов –
Калининград: Изд-во БГАРФ, 2010. – 275с.
66
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНФОРМАТИКИ,
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
УДК 629.12.001.2
АНАЛИТИЧЕСКИЕ МОДЕЛИ ПРОЦЕССА МОРАЛЬНОГО СТАРЕНИЯ КОРАБЛЕЙ
Четвертаков Михаил Михайлович кандидат
технических наук, старший научный сотрудник, старший научный
сотрудник НИИ кораблестроения и разработки ВМФ ВУНЦ ВМФ «Военно-морская академия»
Санкт-Петербург, ул. Бухарестская д. 72, корп. 1, кв. 104 электронная
почта: pyatialtynniy.micci@yandex.ru
Аннотация
В настоящее время в кораблестроении широко используется принцип «моральное старение» кораблей. Он качественно
характеризует уровни совершенства кораблей и образцов военно-морской техники, темпы внедрения в практику результатов
научно-технического прогресса.
В настоящей статье предпринимается попытка разработки адекватной математической модели, поз воляющей
вычислять величины величин морального устаревания кораблестроения с течением времени.
В качестве модели использована логистическая функция, как результат решения «обратно го» уравнения Ферхюльста.
Предлагаемая аналитическая модель связывания показателей мики устойчивого технического прогресса и внедрения
инноваций в кораблестроения с периодами сменности крупных кораблей и образцов морской техники. В статье
присутствуют подробный анализ экстремумов и других характерных точек логистической функции и их интерпретация.
Приведены характерные параметры значений логистики для разных типов образцов и образцов военно-морской техники в
зависимости от соблюдения сроков их разработки. Результаты и выборочные работы были использованы в прогнозных
исследованиях, основанных на большом количестве крупномасштабных кораблестроительных программ, на планировании
масштабных исследований крупных кораблей и образцов морских технологий и техники. Ключевые слова: Поколение
кораблей, Показатель эффективности, Моральное старение, логистическая функция, кораблестроительная программа,
жизненный цикл, функция морального старения.
АНАЛИТИЧЕСКИЕ МОДЕЛИ ПРОЦЕССА УСТАРЕВАНИЯ
КОРАБЛИ
Четвертаков Михаил Михайлович
Кандидат технических наук, доцент, старший научный сотрудник.
Научно-исследовательский и конструкторский институт (кораблестроение и военно-морское вооружение) ВУНЦ ВМФ «Военноморская академия», г. Санкт-Петербург, ул. Бухарестская, д. 72, стр. 1, квартал 104 +7 911-723-4718, email: pyatialtynniy.micci@yandex. RU
Абстрактный
В настоящее время в судостроении широко используется понятие «моральный износ» кораблей. Он в целом
характеризует уровень совершенства кораблей и образцов военно-морской техники, скорость внедрения результатов
научно-технического прогресса.
Данная статья является попыткой разработать адекватную математическую модель, позволяющую рассчитывать количественные
тивные показатели уровней устаревания корабля во времени.
В модели используется логистическая функция, являющаяся результатом решения «обратного» уравнения Ферхюльста.
Предлагаемая аналитическая модель связывает динамику непрерывного технического прогресса и инноваций в
судостроении с периодами смены поколений кораблей и образцов морской техники. В статье представлен подробный
анализ существования экстремумов и других характерных точек логистической функции и их физическая интерпретация.
Приведены типовые значения параметров логистики для
67
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
различных типов кораблей и образцов военно-морской техники в зависимости от этапов их развития.
Результаты и выводы статьи могут быть использованы в прогнозных исследованиях для обоснования количественных
показателей кораблестроительных программ, планирования поколений кораблей и морских образцов вооружения и
техники.
Ключевые слова: Генерация кораблей, показатель эффективности, моральный износ, логистическая функция,
программа судостроения, жизненный цикл, функция морального износа.
.
dJ(t)
dt
Введение
Это может быть следствием международного
научно-технического прогресса. Этот процесс с
периодичностью применения новых технических
решений и с иллюзией уже реализуется. Имеет
место также и психологический фактор, связанный
с изменением взглядов на предполагаемые цели и
требуемые свойства тех или иных предметов,
образцов и систем. Этот фактор выходит за рамки
рассмотрения данной статьи.
В промышленной сфере и в кораблестроении в
части технического прогресса на моральное
старение кораблей и образцов техники двойного
действия. С одной стороны создание новых, более
совершенных и относительно крупных образцов
одного типа частной промышленности, связанное
с моральным устареванием военной техники. С дру
гой стороны развития противодействия аллергия
приводит к относительному снижению
эффективности имеющихся средств («тактическое
старение»). Количественные показатели процесса
морального устаревания проявляются часто и часто
обнаруживаются новые научно-технические идеи,
концепции и концепции, реализуемые в но вых
образцах техники, продолжительности их
реализации в виде опытных образцов, темпами и
объемами серийных образцов. В данной статье мы
исходим из предпосылки ния о том, что
единичный цикл процесса разра ботки и увеличения
накопления новых. таких случаев, как в своей
стране, так и в стране-конкуренте, о близких к
таковым определениям Ферхюльста:
d N(t)
дт Н
Н(т)
Максимум
Н
Максимум
Н(т )
,
где:
N(t) – количество новых образцов как функция
время;
Nmax – максимально возможное количество
образцы данного типа;
- темп серийных
предложений; т – время.
Если принять допущение о том, что
относительный уровень новизны J(t) быстро об
разцов падает обратно пропорционален количеству
вступивших в строй образцов нового тома
поколения, стремясь к движению в бесконечности,
то уравнение процесса морального старения может
быть представлено в виде:
68
Д
J(t)
DJ(t )
,
где:
J(t) – функция морального старения;
параметр - скорости морального старения.
Решив это уравнение при начальных условиях
J(0) = 1 и обозначив D=(1+ )/ определение
функции морального старения в виде логистики:
Дж(т)
(1
)е
т
т
е
Далее приведены результаты анализа этой
формулы, производной интерпретации ее
параметров их значений для некоторых типов
образцов военно-морской техники.
1
1. Методология, понятия, термины и
определения
Предметом исследования в настоящей работе
является процесс морального старения объектов
военного кораблестроения - космических кораблей,
образцов морской техники и техники (МВТ), для
использования значений в дальнейшем в некоторых
случаях использования понятия «система» или
«образец». В качестве методологической основы
при разработке моделей морального старения
используется пример смешанной декомпозиции
вложенных систем – объектов моделирования на
осно ве деления на уровни, эшелонирования и
стратификации [1]. Выделяются разные уровни:
класс (подкласс) корабля; проект (тип) корабля;
корабль; подсистема корабля (комплекс
функций, техническая система корабля,...);
функциональный элемент (боеприпас, пуско
вая установка, двигатель,...). На каждом уровне
выделяются эшелоны: на уровне классов - боевые
надводные корабли ли, подводные лодки,
корабли особого назначения, судоходства; на
уровне проектов – проекты или типы кораблей
и судов, состав серий; на уровне корабля –
корпус и техническая си
стемы, комплексы преступлений и последствий;
на уровне подсистем – функционирование
подсистемы, реализующие локальные целевые
свойства и сервисные подсистемы, обеспечивающие
действие и действие всех подсистем (включая
самого себя), как единой си
стемы.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
Применительно к объектам моделирования на
поверхности и в эшелонах исследуются следуюшие страты
или свойства группы (аспекты анализа за): функциональная
(боевая) эффективность; ресурсоемкость (материальнотехническая,
финансово-экономическая и временная);
производственно-технологическая реализация
3 (33) Т. 2 2016
период времени от начала исследований и обоснования
разработки до окончания экспериментов в соответствии с
первоначальным назначением образца (последнего
образца ти павшего в серии). СТАДИЯ ЖЦ– часть ЖЦ,
образец (се рии однотипных образцов) МВТ,
характеризующаяся (их) состоянием. Каждая стадия
развития цикла жизни имеет значение
большинство.
Термины и определения, используемые в настоящем
документе, формулы на основе примеров в научнотехнической документации и скорректированные с учетом
конкретных конкретных задач понятий[2].
Все объекты рассматриваются как системы,
включающие в себя подсистемы и элементы, как
отключаемые подсистемы. Подсистемы взаимодействуют
между собой за счет внутренних связей и внешних связей
– за счет внешних связей. Параметры внешних связей
являются признаками свойств системы.
Свойства кораблей и образцов МВТ по их ро ли в
выполнении системы своего предназначения отделения
сидят на ЦЕЛЕВЫЕ и СОПУТСТВУЮЩИЕ[3].
ЦЕЛЕВЫЕ проявления возникают при обнаружении
системы и определении ее спо собственности
возникновения по возникновению.
СОПУТСТВУЮЩИЕ свойства воды как объективный
результат взаимодействия и функционирования элементов
системы. По характеру причинно-следственных связей с
подсистемами свойств подразделяются на ЛОКАЛЬНЫЕ
и КОМПЛЕКСНЫЕ[3]. ЛОКАЛЬНЫЕ СВОЙСТВА
ВОДОНЕПРОНИЦАЕМЫХ ПЛОЩАДОК КОМПЛЕКСНЫЕ
свойства включают в себя воздействие всех подсистем
корабля. Совокупность всех значимых свойств системы
формирует ее качество. КАЧЕСТВО корабля и образец МВТ
– совокупность их свойств, обуславливающих
способность удовлетворять опре деленные потребности в
соответствии со значением. Качество оценивается с
помощью ряда количественных характеристик и
известных показателей значимых свойств кораблей,
образцов МВТ. Покажите, может ли качество измеряться в
абсолютных и от
носительных шкалах.
АБСОЛЮТНОЕ ЗНАЧЕНИЕ КАЧЕСТВА оце нивается
путем составления абсолютных значений показателей
эффективности, ресурсоемкости (стоимости), технической
реализуемости и других свойств образцов с учетом
представлений об их расчетных расчетах. ОТНОСИТЕЛЬНОЕ
КАЧЕСТВО измеряется как отношение абсолютных
показателей качества к каким-то эталонным или
соответствующим значениям ям. Абсолютное и
относительное качество
няется на протяжении всего жизненного цикла образца.
ЖИЗНЕННЫЙ ЦИКЛ (ЖЦ) изделия, образца (серии
однотипных кораблей, образцы МВТ) –
нормативные значения продолжительности и стоимости,
которые возрастают от трудоемкости и состава работ
технологического цикла, организационно-технологических
особенностей кооперации нормативных
субъектов-исполнителей,
контрактных условий договора с заказчиком.
При анализе процесса и модели разработки процесса
морального старения объекта целесообразно выделены
три типа этапов жизненной активности цикла (ЖЦ): исследование и обоснование разработки с
изготовление опытных образцов(ов) (НИОКР);
- строительство (изготовление) и поставка го ловного
или серийных образцов (СП);
- использование по назначению с плановыми
ремонтами (эксплуатация и ремонты - ЭиР).
Заводской ремонт с модернизацией может трактоваться
как создание нового образца, так как ему предшествуют
первая стадия и фактически происходит скачкообразное
изменение свойств корабля. То есть, как бы появился
новый образец с изменением его идентификатора онного
номера (проекта корабля) и всего комплекта проектной
документации.
Для исследования головного мозга первая и вторая
стадия заболевания имеют значительное время и
стоимость, сопоставляемые с большими стадиями. Для
серий об разцов первая стадия может отсутствовать, а
продолжительность и стоимость второй стадии
значительно меньше
В начале первой стадии выводы и количественные
значения качества образца имеют абстрактный (априорный
или прогнозируемый) характер. Поэтому естественны
вычисленные значения показателей качества.
условны, а скорость морального старения равна. На
границе первого и второго этапа форма образца
конкретизируется в нормативных технических документах,
и его качество может быть оценено с учетом количества
пока зателей на основе ТТЗ. Поэтому этот
момент может считаться моментом начала мо
рального старения с какой-то быстротой в восприятии.
Хотя реализуемое значение качества также пока
отсутствует. На границе второй и большой стадий качества
выборки начинается его реализоваться по факту и
значение может быть значительным или измеренным в
количественно-качественных показателях.
Под СТАРЕНИЕМ ТЕХНИЧЕСКОЙ СИСТЕМЫ (МВТ) в
опыте понимается падение качества со временем.
Источником старения являются три группы факторов: ФИЗИЧЕСКОЕ СТАРЕНИЕ - из фундамента.
носом материалов, агрегатов и подсистем;
69
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
- ТАКТИЧЕСКОЕ СТАРЕНИЕ - наличие вероятного
внешнего соответствующе- го средства
противодействия; - МОРАЛЬНОЕ СТАРЕНИЕ фундамент со строением более совершенных
отечественных и образцов аналогичного назначения.
3 (33) Т.2 2016
зуется идея относительного изменения каче ства
системы. При этом учитывается, что в момент
принятия нового образца образца поколения
относительный уровень его качества равнозначности
и уменьшения со временем, асимптотически стре
мясь к ограничению в бесконечности. Это явление
отражает процесс морального старения, который
аналогично литически выявлению морального
старения (ФМС). Таким образом, в любой момент
периода эксплуатации выборки абсолютное
значение его показателей качества или больших
значений качества может быть рассчитано путем
умножения.
Первая группа факторов имеет особое значение
для природы и компенсируется в процессе
эксплуатации за счет проведения необходимых
видов ремонта но-восстановительных работ.
Методы учета фи зического старения являются
теориями эксплуатации кораблей. Факторы
физического старения учитываются в методах
подсчета ежегодных эксплуатационных расходов и
подсчета технико-экономических показателей
ния.
соответствующих видов ремонтно-восстановительных работ.
Тактическое старение и моральный износ имеют
большую природу и включают в себя все с тем, что
2. Постановка задачи и обоснование ана
связано с техническим прогрессом,
литической модели процесса морального
совершенствованым взаимодействием
старения.
использования сил, характером взаимовлияния
Считается, что процесс развития новых МВТ в мире
уровней развития в области технологий средств
имеет условно-непрерывный характер с
вооруженной борьбы. Строго го воря, тактическое
дискретностью смены поколений, равной
старение – это снижение боевой эффективности,
продолжительности среднего организационнообусловленное не только усилением ТТХ, средствами
технологического цикла разработки в зависимости
противодействия, но изменением состава и
от типа (класса) его МВТ. Тогда можно принять, что
свойством их использования. С учетом этого
в момент tнр начала разработки образца МВТ
последние две группы факторов объединяются в
относительное значение показа теля его качества
одном понятии «МОРАЛЬНОЕ СТАРЕНИЕ».
равно
условной величины, большей или равной
Компенсация морального старения осуществилась
единицы, при темпе морального старения Yнр = 0,
за счет разработки новых образцов или испытаний
а в момент приня тия образца на применение образцов, имеющихся на вооружении или серийно
равно единица с не связанным начальным
строящихся, с сохранением основно го
значением темпа морально го старения Yo. С
предназначения. При этом в процессе различных
учетом этой функции Y(t) морского старения
видов технических усовершенствований и
необходимо приспосабливать следущим условиям:
осуществляется использование основных свойств
одного экземпляра
поколение.
Можно считать, что развитие образа новых
МВТ в мире происходит с монотонным по времени
улучшением основных свойств. Чем отдаленнее по
времени будет ввод но вого образца его, тем более
прогнозируемый уровень выше наблюдаемых
свойств по наблюдаемым в настоящее время
образцам. В установленные моменты времени
совокупность целебных свойств формирует образец
НОВОГО ПОКОЛЕНИЯ. Под НОВЫМ ПОКОЛЕНИЕМ
пони- мает образец, обладающий повышенным
целевыми свойствами при улучшенных количествах
по казателям свойств, имеющих образцы
предыдущего поколения. То есть образец нового
поколения будет обладать новым уровнем качества.
В прогнозных исследованиях можно считать,
что если заказной срок получения нового образца
отличается от отправления в строй искомого
образца по образцу, превышающему среднее время
цикла разработки и изго товления серии образцов
данного типа, то предполагается, что этот новый
образец будет яв ляться образцом нового поколения.
В связи с многообразием возможных проявлений
оценки его абсолютных значений качества и
формирования свойств в дальнейшем использовании
70
1
Y(t)
ïðè 0
Y(т)
т
т ид
т
Y(т)
1
тт 0
Y(т)
Дж
т
ïðè 0
0
(1),
t
0 ïðè
Y(т )
где
t0 - момент принятия на прием образца
головного мозга нового поколения; jo - скорость
морального старения в начальный момент
времени t0 принятия головного образца на
применение. Физически это объясняет мнение
обра зом (См. рис. 1). В момент начала
составления опытного примера воплощения мых
передовых достижений науки и техники. При этом
потенциальный противник-конкурент не дает
информации о самом образце (так как фактически
есть только ТТЗ на разработку, реальную
лизуальность, которая включает в себя какую-то
общую неопределенность) и не имеет готовых
более совершенных сходств или противодействующих
средств. Вместе с тем причиной допущения о
запрете международного технического прогресса
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
уже упоминается через время, большее 0,
прошедшее с начала разработки, относительное
ка чество образца начинает уменьшаться. Таким
образом, производная начальная функция dY /dt
морального старения в момент принятия образца
на вооружение будет иметь языковое от
отрицательного значения jo. В дальнейшем
процесс морального старения может развиваться
на три стадии, отличающиеся характером падения
отно сительного качества образца:
Непрерывный процесс технического развития
1
максимальная скорость
У(т)
0,9
0,8
морального старения,
смена знака ее измене
Затухание
0,7
ния
старения и ее
стиморального
скорого за медления
0,6
0,5
0,4
0,3
Малая скорость морального
0,2
старения при интенсивном
0,1
время,
сивном ее нарастании
0
т
0
5
10
15
20
25
30
35
40
45
50
Y''(т)
0,004
Y '(т)
0
-0,005
0,003
Y''(т)
-0,01
Y '(т)
0,002
-0,015
0,001
-0,02
0
-0,025
-0,03
5
0
10
15
20
25
30
35
40
45
50
-0,001
-0,035
-0,002
-0,04
-0,003
-0,045
Y'''(т)
-0,05
0,0008
-0,004
Y'''(т)
0,0006
0,0004
0,0002
время,
0
0
5
10
15
20
25
30
35
40
45
т 50
-0,0002
-0,0004
Рис.1 Фазы морального старения кораблей, морских приложений и техники. Обоб
щенная логистическая функция и ее характерные значения.
71
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
1. Информация, доступная у конкурентов о
свойствах и характеристиках образа ца, очень
ограничена. Конкурирующие или противодействующие проявления того же или лучшего
качества обвинения в единичных экземплярах и на
моральное старение образцов данного свойства
относительно слабо. Противодействие образцу МВТ
осуществляется главным образом методом изменения
тактических приемов и спо-собов действий
участников. Скорость морального старения
незначительна, однако со временем она
увеличивается. 2. У противников-конкурентов
заметный знательный объем информации об
образе. Осуществляется серийное производство
случаев обнаружения и противодействия выборке
высшего качества (следующего поколения).
Моральное старение данного образца происходит
наиболее значительным при уменьшении темпа его
изменения. Для разрабатываемых образцов
поколения требуется модернизация в процессе
серийного строительства. 3. Противник-конкурент
обладает полной информацией об образце.
Разворачивается серийное строительство еще
более перспективных и противодействующих
образцов. Окончательно оптимизируются
тактические примеси и действие противодействия
пробам данного типа. Данный тип образцов
практически полностью морально и физически
устаревает. Продолжение разработки образцов
данного поколения нецелесообразно.
3 (33) Т.2 2016
где вторая производная будет равна. Вто рая
производная Y''(t) характеризует темп изменения
скорости («ускорение») во времени:
)е
т
1
т
Y' '' (т )
) ет
4
т
(1
e)
0 ïðè t 1 2vv,
1
(ln
4
( ет
2 2ет
1)
1317, )
=0
=0
=6
=12
=0,15
=0,4
=6
=0,2
) ет
(1
т
д)
Рис.2. Параметров параметров и на ха
рака морального старения J(t) Таким
образом,
для строения
морального
старения
необходимо
знать два
параметра и
.
3. Методы и алгоритмы параметров расчета
функции морального старения Сама ФМС вида
(2) может интерпретироваться как аппроксимация
результатов расчета знание результатов
эффективности в различных моментах времени с
использованием более дробных адекватных
результатов или имитационно-математических
моделей. Для использо- вания этой функции
необходимо знать параметры
и , при соблюдении
заданных моментов значений значений ФМС.
значения двух параметров, которые могут быть
обнаружены.
2
Очевидно, что первая производная всегда
отрицательна и имеет экстремум(минимум) в восприятии,
72
t
e( )1t 3 e )
(2)
Временные границы признаков выше стадии
можно рассчитать для логистической функции
морального старения, вычислив ее производные по
времени (См. рис.1.). При этом первая водная
продукция – Y'(t)- характеризует скорость морально
го старения и вычисляется по формуле:
(1
(1
э
где
и
- заданные параметры.
Параметр
характеризует начальный темп
морального старения в окрестностях точки t=0 и
протяженность пологого участка логистики.
Параметр
характеризует удаленность от
начального момента участка ускоренного стремления
Y(t) к мощности и его «крутизну» (см. рис.2). При
=
0 логистика вырождается в экспоненциальной
функции. При
= 0универсальную,
функция превращается
симметричную
в
ось t.
Y' (т)
э
3
(1
Y' '' (т)
Процесс морального старения, представленный
на рис. 1, о возникновении с помощью логической
функции вида[4]:
(1
т
максимальная скорость морального старения
будет в развитии .Границы
, где Y''(t)=0,
то есть
при тво = ln /
этапов
с большими
темпами морального старения (см. выше, этап 2)
будут располагаться симметрично по времени.
относительно tvo на интервале от момента tv1 до
момента tv2 , в которых третья производная Y'''(t) = 0.
=0,2
Y(т)
2
(1)
Y' '(т)
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
рать роль неизвестных. При этом вероятны два возможных расчета
параметров: - вычисление производной по времени от ФМС в моментах
сдачи головного образца при t0 = 0 на основе средних периодов смены
костного мозга, и задание значения эффективности y2 (t2) в какой то
заданный момент времени t2.( метод среднего периода смены поколений);
- последующее задание двух значений ФМС y1 (t1) и y2 (t2) в моменты
времени t1 и t2.(метод двух знаний). Соотношение показателей применения
показателей эффективности, производных и моментов времени должны
соответствовать условиям, которые накладывают ограничения на
область логистических ФМС в военно-экономических исследованиях.
Рассмотрим последовательно два метода.
3.1. Метод среднего периода смены поколений
Для параметров расчета функции морального
старения необходимо установить значение Yз(tз) этой
функции в какой-либо известный момент времени t=tз и
производную j0от уже по времени при t=t0. За начало
отсчета времени принимается момент принятия решения
о принятии головного мозга (то есть t0= 0). Тогда, если
эти значения из вестны, то параметры функции
морального ста рения принадлежат из двух решений:
т
(1
т
1
Д
)е
Д
3
э
(3)
3
Дж
т
т
0
0
1
После подстановки
= Yз (1+ )/(1+2 ) из второго
значения уравнения в первом они сводятся к одному
трансцендентному уравнению, которое решается методом
последующих приближений. В случае, если значение и
скорость изменения функции морального старения
достаточно нованно невозможно (что является
наиболее частным случаем) для расчета ее параметров,
можно определить допуск и, в зависимости от их
зависимости, соответственно:
1. Качественно новое потребление поколения газа
через интервалы времени, большая средняя
продолжительность разработки и создание головных
образцов данного типа. Таким образом, к обычно
заданному моменту времени tз от назначения на
назначение головного образца молодого (i-го) поколения
может устанавливаться поколение n = tз /tp (n-условно
веще ственное число). 2. Относительное качество образца
всегда пропорционально темпу смены поколений одного
образца. То есть, если считать, что в начальный
момент качество образца i–го поколения было в массовом
порядке, то в момент времени tn0 поступило на
применение образца i+n
3 (33) Т. 2 2016
го поколения качество Y3(tn) образец i+n – го по коления
уменьшится в n+1 раз, то есть
Y3(tn) = 1/(n+1), tn=n
(4)
tp Т
Здесь:
tp - нормативное время разработки (выполнение
ОКР) образца нового поколения данного ти
па.
n –количество культур, одновременное использование
в пределах времени полного устаревания единичного
образца первого из n культур. 3. Темп морального
старения j0 в моменте при взятии на определение
головного образца ВВСТ равно среднему набору на
интервале от нуля до заболеваемости линейным
падением качества проме жутке времени от начала
развития данного разца i–го поколения до поколения в
стройном лововом образце i+ н-го поколения. То есть с
уче том (4):
дж
0 тг
Y(t)
тт 0 0
t
1 Y (т)н3
н
2 1 тп (н )
2 (t t ) n p
2
(5)
Геометрическая интерпретация и обоснование
допущения данных для прогнозных оценок на два
следующих поколения образцов, показанных на рис.3.
значение производной ФМС в начальный момент
времени ее фактическое прогнозное значение в
момент времени t2. Кроме того, должно сосуществовать
условие d
0 при t0 = 0. Для этого достаточно, чтобы в
логистической ФМС по параметру
1. С учетом этого
2
2
для расчета параметров параметров
у(т)/дт необходимо
и система
решить
ФМС
следующие признаки:
у(т)2
1 ln1
2 2 y(t ) t
;
j0
j
0
Дж ;
0
dy(t)0
(6) dt
Решение установить (6) осуществляется численными
методами, например, с использованием метода
«сжимающихся проявлений»[5].
На основе анализа отечественного и зарубежного
опыта исследования результатов научно-технического
прогресса за последние десять лет в области развития
можно выделить 4 ка тегории ВВСТ, отличающиеся
своей масштабностью по массогабаритным показателям
показателей и ресурсоемкости, уровня сложности,
периодичности изменения численности и
продолжительности среднего технологического развития.
цикл разработ
ки:
1. Высокотехнологичные маломасштабные
самостоятельные процессы (или входящие в состав более
сложных систем как функциональных элементов) с
высоким темпом морального старения и относительно
малым технологическим циклом разработки. Это, в
основном, малога баритные нарушения РЭВ назначения.
73
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
лов разработки новых образцов и периодов
2. Функциональные автономные общештабные
смешения смежных пород. На основе этих
операции и техники, включая обвинения,
показателей осредненные показатели
некоторые виды преступлений и работы,
электроэнергетические агрегаты.
логистической функции морального старения в
3. Сложные многоуровневые системы и
зависимости от категории образца (См. таблица 1).
комплексы функций и техники (в том числе
В этом случае для каждого образца ВВСТ
некорабльные), комплексы ракетного и
присваивается номер К категории типа в
зависимости от ресурсоемкости, сложности и
противолодочного оружия и действенные,
стационарные системы наблюдения и связи,
продолжительности технологического цикла
автоматизиро ванне системы управления персоналом иразработки
т.п.
и срока службы в соответствии с
4. большие сложные многоуровневые
таблицей 1. На рис. 4 представлены виды функций
технические системы военного назначения, включая морального старения для образцов ВВСТ различных
корабли и суда, самолеты, авиационно-космические
категорий на основе исходных данных из таблицы
системы
1.
Обобщающий ретроспективный анализ
развития и динамики изменения выявлений ВВСТ
по показателям, позволяющим определить диапазоны, высокие показатели продолжительности циклов.
ТАБЛИЦА 1.
Категории выборок по моральному старению
Классификация показателей по уровню сложности и параметрам морального ста рения
Условное
Наименование ха
рактеритики
обозначе
ние в ал
горитме
Высокотехнологичные
элементы с высоким
разцы
темпом морального ста ренияВМТ(боеприпасы,
(функциональное
съемное обору элементов РЭВ) дование)
1
Категория
В процессе эксплуатации
кораблей в базе или в
период МПР, ДР
Стадии возможного
обновления
Автономные об
2
Сложные много
уровневые
стелы и комплек
сы (комплексы
БРПЛ, ПКР, АЭУ)
3
В период МПР или В период заводскозаводского ремонта с модернизацией
та
корабли и суда,
другие финальные
целевые объекты)
4
При установке но
вого поколения или
при планировании
в ходе строительства
серия
Средний цикл раз
обработки (диапа
зон,лет)
тр
3(2-4)
6(4-8)
9(6-12)
12(8-16)
Среднее время до
конца срока службы
(дапазон,лет)
тз
8(6-10)
10(8-12)
13(12-14)
25(22-28)
0,0312
0,0189
0,0131
0,0083
Параметр логистики
14,42
18,06
19,85
17,85
Параметр логистики
0,48
0,36
0,27
0,16
Темпморального
старения в момент
окончания разработок
ки
74
тг
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
1
Дж (т)
1-J3(t2)
J3(t2)
0
tнр0
t0=tнр1
t1=tнр2
t2 2
тр
тр
0-е поколе
ние
Разработка(ОКР)
Серийное про
заводство
Эксплуатация,
утилизация
1-е поколе
ние
Прикладные
НИР
Фундаменталь
ные и поисковые
исследование
Разработка(ОКР)
Серийное про
заводство
2-е поколе
ние
Прикладные
НИР
т
t2=tнр3
Разработка(ОКР)
Рис.3 Обоснование модели и параметры логистического следствия J(t) морального старения по
прогнозу на 2 новых -поколения образцов ВВСТ. На изображении обозначений:
t – время активности;
tnri,ti - плановые моменты времени начала разработки и принятия на внедрение гоного
образца i-го поколения; tр – плановая продолжительность развития выборки (выбора
ОКР), из усло вий непрерывности и частоты возникновения технологического цикла;
-
J(t) – логистическая функция относительного морального старения;
-
дж
0 тг
1 Дж
н
3 (т)
2 т(т)н п
н
21
2 t (n ) p
1
9
т
- предполагаемый темпморального
р
старения на момент сдачи опытного образца при прогнозировании изменений качества
на 2 поколение вперед.
Дж (т)
3.2. двух Метод измерений.
Категории
образцов 1 2 3
Сформулируем эту гибкость обра зом. Допустимые
значения функции y1 и y2 (2) при заданных значениях
t1 и t2. При этом y1 > y2 и t1 < t2.
4
у1
( е) 1 β
1βе
-γ
-γ
т
т
1
1
у2
( е) 1 β
1βe
-γ
-γ
т2
т2
(7)
С видом включения функции (2) эти уравнения
буде дут трансцендентными, не соответствующими
условиям сводимости к алгебраическому виду. Есть
решение, которое возможно только с приближенными
(итерационными) методами.
т
Можно показать, что для условий
существования второго «нетривиального»
решения уравнений (7) с учетом описаний (3)
должно быть соблюдено данное условие: ty ( y ) 2
1 t 12 1
1
y 2( y1 ) Таким
Рис.4. Относительное моральное
старение Y(t) кораблей и других ка
тегорий образцов морских вооружений
ния и техника .
(8)
образом, если обнаруживаются два значения
функций y1(t1) и y2(t2) в точках t1 и t2 соответственно,
то эта функция может быть логистической
75
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
значение вида (2) с параметрами
и
при усло
вии y1(t1) > y2(t2) и t1 < t2 ,неравенства
а также при (8).
выполнении
Следовательно, функция морального старения
может быть описана логистикой вида (2) при
нормальных условиях (8) и эта функция может
быть использована для либо решения для решения
прогнозных показателей военнослужащего.
экономические задачи.
Заключение
Моральное устаревание кораблей и образцов
МВТ является закономерным следствием по делу
международного технического прогресса. Скорость
морального старения зависит от темпов серийно
го(массового) производства более новых образцов
данного типа. Время морального устаревания
образца времени разработки, создания и
серийного строительства кораблей и образцов
МВТ. Оно может составлять от 1-3 лет для
малогабаритных высокотехнологичных образцов
и до 20-30 лет для океанских кораблей и других ре
сурсоемких систем военного и местного назначения.
Процесс морального старения МВТ достаточ
но адекватно о значимой логистической функции
возрастания морального старения, которая
определяет значимость по достаточно точно
рассчитываемым значениям показателей
продуктивности (качества) в случае возникновения
моментов времени либо по прогнозируемому
периоду смерчности.
Литература 1.
Месарович М., Такахара И.,Мако Д. Теория иерархических многоуровневых систем.М.:Мир,1973.
2. ГОСТ Р 56136-2014. Управление жизненным циклом продукции военного назначения. Термины и
определения. М., Стандартинформ. 2014 г.
3. Четвертаков М.М. Метод исследовательского проектирования корабля с использованием макромоделей его
подсистем. В сб. СПб., ВМОЛУА, 1993 г. "Системный анализ при создании кораблей, комплексов
предприятий и промышленной техники". 4. Нарусбаев А.А. Введение в теорию обоснования проектных
решений. Л. Судостроение.1976.
5. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ. под ред.
Г.Гроше и В Циглера. пер. с немецкого, совм изд. изд-во «ТОЙБНЕР», Лейпциг и М., Наука, 1981 г.
использованная литература
1. Месарович М., Такахара И.,Мако Д. Теория иерархических многоуровневых систем.-М.:Мир,1973.
2. ГОСТ Р 56136-2014. Управление жизненным циклом продукции военного назначения. Термины и определения.
М., Стандартинформ. 2014 г.
3. Четвертаков М.М. Метод исследовательского проектирования корабля с использованием.
макромоделей его подсистем. В сб. "Системный анализ при создании кораблей, комплексов вооружений
и военной техники" СПб., ВМОЛУА,1993 г.
4. Нарусбаев А.А. Введение в теорию обоснования проектных решений. Л. Судостроение.1976.
5. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся.
ВТУЗОВ. стручок красный. Г.Гроше и В Циглера. Пер. с немецкого, совм изд. издво «ТОЙБНЕР», Лейп сиг и
М., Наука, 1981 г.
76
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
УДК 629.12.001.2
ГРАНИЧНЫЕ УСЛОВИЯ АППРОКСИМАЦИИ ПРОЦЕССА МОРАЛЬНОГО СТАРЕНИЯ КОРАБЛЕЙ ЛОГИСТИЧЕСКОЙ
ФУНКЦИИ
Четвертаков Михаил Михайлович
кандидат технических наук, старший научный сотрудник, старший
научный сотрудник НИИ кораблестроения и разработки ВМФ ВУНЦ ВМФ «Военноморская академия» Санкт-Петербург, ул. Бухарестская д. 72, корп. 1,
кв. 104 электронная почта: pyatialtynniy.micci@yandex.ru
Аннотация
Следствием международного научно-технического и технологического прогресса в создании является моральное
устаревание кораблей и других образцов морского оружия и техники. Про цесс морального устаревания сложная
техническая системная конструкция в относительном ухудшении
шении их качества или эффективности. В прогнозных исследованиях в кораблестроении для частных оценок
относительной эффективности кораблестроения во времени используются логистические функции. Адекватная
интерпретация акцента имеет логистическую кривую морального старения как функцию времени и двух параметров.
Эти два параметра могут быть важными для достижения момента времени, в которых обнаружены значения
эффективности ко рабля. Соотношения измерений времени и соответствующие показатели эффективности должны
соответствовать некоторым условиям, позволяющим использовать через эти две точки зрения логистическую кривую.
В статье содержится вывод о граничных условиях и параметрах параметров, в пре
делах, включающих моральное старение или сложные системы, могут быть связаны с помощью логистической функции
данного типа.
Ключевые слова: моральное старение, эффективность, суда, качество, логистическая функция.
ГРАНИЧНЫЕ УСЛОВИЯ АППРОКСИМАЦИИ ПРОЦЕССА
УСТАРЕВАНИЕ СУДОВ С ТЕХНОЛОГИЧЕСКОЙ ФУНКЦИЕЙ
Четвертаков Михаил Михайлович
Кандидат технических наук, доцент, старший научный сотрудник.
Научно-исследовательский и конструкторский институт (кораблестроение и военно-морское вооружение) ВУНЦ ВМФ
«Военно-морская академия», г. Санкт-Петербург, ул. Бухарестская, д. 72, стр. 1, квартал 104 +7
911-723-4718, e-mail: pyatialtynniy.micci@yandex. RU
Абстрактный
Следствием мирового научно-технического и технического прогресса в кораблестроении является устаревание
кораблей и других морских образцов вооружения и техники. Процесс устаревания сложных технических систем
выражается в относительном ухудшении их качества или производительности. Перспективные исследования в
судостроении для количественной оценки относительной эффективности падения логистических функций кораблей
используются с течением времени. Адекватная физическая интерпретация имеет логистическую кривую устаревания
как функцию времени и двух параметров. Эти два параметра можно найти, исходя из двух моментов времени, по
которым известны оценки КПД корабля. Соотношение временных величин и соответствующих показателей
эффективности должно удовлетворять некоторым условиям, позволяющим провести логистическую кривую через эти
две точки.
В статье представлен аналитический вывод граничных условий, при которых моральное старение
корабли или другие сложные системы могут быть описаны логистической функцией этого типа.
Ключевые слова: устаревание, эффективность, ремесла, качество, логистическая функция, программа планирования, нац.
вы.
77
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
В прогнозных исследованиях многих процессов
изменения во времени свойств кораблей, судов и
сложных объектов и систем (морское или
физическое старение, изменение ТТХ и т.п.) могут
быть эффективными с помощью логистических
функций [1]. Одна из форм логистической функции,
которая включает в себя описание морального
старения сложной технической системы, имеет вид:
3 (33) Т.2 2016
дами. Кроме того, необходимо определить, при
каких соотношениях значений y1 , y2 , t1 и t2 это
решение вообще существует. Формулируем эту
формулировку в разом. Допустимые значения
функции y1 и y2 (2) при заданных значениях t1 и
t2. При этом y1 > y2 и t1 < t2. -γ ( 1 β e
)
у1
К(т) К
о
γ
( 1 β е)
γ
1βe
т
т
т
-γ
1βе
т
1
у2
1
( 1 β e)
1βe
-γ
-γ
т2
т2
(3)
Ввозможны обозначения:
(1)
α
где : Ko -значительное значение государственной
службы системы в заданный начальный момент
времени; K(t) - показатель оценки в заданное время
t; β и γ - параметры. Следите за оценкой
морального старения как падения качества системы
относительно его значения в момент времени
t = 0, который может жет совпадать с моментом
выпуска первого разца. Тогда, обозначив K(t)/K0 =
y(t) выражение для относительного морального
старения системы:
Икс
т2
эээ
т1
е
тαт21
-т γ 1
- 2t γе
х
(4)
Под определение (4) в (3) утверждение ( 1 β )
у1
x(1β)x1β
у2
х
1β
(5)
х
Из первого уравнения (5)
β
xy 1
x ( y ) 11
(6)
Подчинение (6) во втором случае из (5)
обсуждение
у(т)
( 1 β е)
1βе
γ
γ
1
т
т
(2)
у2
При этом в начальный момент времени при t =
0 y(0) = 1, а при t
y(t)
0. вид функции (2):
t
γ dt
1β
β
ln 11 β
е
тγ2
т
е тγ1
βγ
1эβ
оценка использования при обосновании
оптимальных сроков службы создания,
благодати или окончания начала
строительства и при решении других задач.
( у ) х 11
х
(7)
1 (ху) х 1
х ( у )1 1
Из (7) можно получить указанную выраже
ние:
2 (
или
( 1 β )е
ху 1
ггггxyx
2
221 1
1) ( 1)
yxyx 1
1
0 (8)
1) 2
y ) x ( yy ) yx 2 1 1
1 (у)
(9)
2( 1 y1 (Необходимо
ответить на вопрос, в каких находящихсях
заданных состояниях y1, y2 и α суще ляет решение
задачи (8) ?. Для ответа на этот вопрос поменяем
знаки в левой и правой частях уравнения (9) и
соответственно их соответствие как F1(x) и F2(x):
F 1( х ) у1( у )2х ( уу ) (10) 1 )1 1 2
Выражение (2) удобно для использования в
расчетах благодаря возможности аналитического
измерения высокой логистической функции, ее
интегралов и производных, которые имеют степень
интерпретации.
Если есть основание для аппроксимации
процесса с помощью такой функции, требуется
знать два параметра – β и γ. Для их определения
необходимо рассчитать с помощью каких либо
более адекватных, возможно имитационных,
моделей значений функций y1 и y2 в двух точках
t1 и t2. Тогда можно выполнить два уравнения с
двумя неизвестными β и γ, которые будут иметь
решения при определенных условиях. С учетом
вида функции (2) эти уравнения трансцендентными,
не устанавливающие условия сводимости к
алгебраическому виду [2]. Есть возможность
использовать такие возможности только
приближающимися (итерационными) мето
78
F2( х ) у х 1 (
1 ( y )2
Очевидно, что решение будет при Равенстве F1
= F2. Заметим, что при x = 0 F1(x) = y2·(1-y1), при
этом F1(0) > 0, а F2(0) = 0, то есть
Ф1(0) > Ф2(0)
(11)
Кроме того, при x = 1 всегда F1(1) = F2(1). Однако
это решение можно назвать «тривиальным», так
как оно не зависит от значений параметров
параметров логистики и констатирует тот факт,
что, с учетом (4), при t = 0 x = 1 и, соответственно,
y(0) = 1 Функции F1(x) и F2(x) при вероятности α > 1
являются степенными, гладкими, монотонно.
возрастающими на интервале x [ 0, 1 ]. На рис.1
представлены виды функций F1(x) и F2(x) при
различных соотношениях значений y1, y2 и α. Если
обозначить косательных к функции F1(x)
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
δ1
и F2(x) в результате x = 1, соответственно, как δ1 и δ2,
то из геометрической комбинации производной
очевидны возможные соотношения: dF ( x ) 2 dx
dF (x) 1
dx
1 тгδ
1
Икс
; tgδ 2
Икс
1
2
, tgδ1 tgδ
2
или
(13)
dF1х( )
(12)
дх
С учетом этого, а также неравенства (11) второе
(нетривиальное) решение x = x0 уравнения (8)
существует при условиях:
dF2х( )
Икс
дх
1
Икс
1
То есть только в этом случае возможно пе
ресечение кривых F1(x) и F2(x) кроме еще в какой-то
функции, x = 1, при x = x0 на интервале x [ 0, 1 ] (См.
рис.1а и 1б). Вычисляя производные значения,
судебное разбирательство:
δ1
Ф1(х),Ф2(х)
Ф1(х),Ф2(х)
0,40
0,45
Тривиальное решение x1=1
Исходные данные:
y1 = 0,6 t1=10 y2 =
0,4 t2=30 α = 3; B =
2,25 tgδ1 < tgδ2 α >
B Нетривиального
ре
δ2
0,35
0,40
0,35
0,30
F2(х)
0,30
0,25
δ1
решений нет
F1(х)=F2(х)
0,25
δ2
Тривиальное решение – x1
=1
F1(х)
0,20
F1(х)
0,20
0,15
y1 = 0,6 t1=10 y2
= 0,35 t2=15 α =
1,5; B = 2,786 tgδ1
> tgδ2
Нетривиальное решение: x0=0,16
Параметры логистики = 0,183; β = 6
875
0,15
0,10
х0
0,05
F2(х )
0,10
0,05
Икс
0,00
0
Икс
0,00
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
б) Отсутствие нетривиального решения при α
Б
а) Наличие нетривиального решения x0 = 0,16
уравнение (8) при α < B
Рис.1. Виды функций F1(x) и F2(x) при различных соотношениях значений y1, y2 и α. На рисунке обозначено
ны: Б
у(у)121
у(у)211
дФ 1
дх 1 х
dF 1( x )
dx
dF 2( x )
dx
тг 1,
(
,
α = t2/t1 ,
дФ 2
1)
у 1( у 1) (
Или при x = 1:
dF 1( х )
dx
тг 2
дх 1 х
х
и β – параметры логистики,
(1)х
1
дФ2( х )
( гг ) 1 2
2
Икс
1)
(14)
дх
Икс
1
( гг1 ) 2
у ( у 1) (
2
1
1(15) )
Подтверждение (15) в условиях (13) оценки:
α·(y1 – y2) > y1·(1 – y2)·(α – 1) (16)
Из (16) неожиданное выражение для условия
второго «нетриви»
79
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
решения уравнения (8) с учетом о расчетах (3):
т
2
т2
у ( у ) 1 21
1 г ( у 1) 2
1. Задание исходных значений y1,t1,y2,t2
(t1<t2, y1>y2). 2. Вычисление параметров α = t2/
t1 и B = [y1 (y2 - 1)]/ [y2 (y1 - 1)]. 3. Проверка
условий α < B. При невыполнении - корректировки
y1,t1,y2,t2 4.Задание предельной относительной
погрешности δF0
(17)
Таким образом, если обнаруживаются два
значения y1(t1) и y2(t2) функции y(t) в точках t1 и
t2 соответственно, то эта функция может быть
логистической величиной вида (2) при вычислении
y1(t1) > y2(неравенства
t2) и t1 < t2 , а
также
при выполнении
(17).
Параметры
логистической функции рассчитываются по
рекомендации зависимостей с (4) и (6):
5. Ф1 у1 ( у ) ( х ) ( 1уу2 )
(у)
1
6. А
дельта
,
где x является результатом уравнения
(8). Решение уравнения (8) реализовано
четкими методами, например, с использованием
такого алгоритма, реализующим метод
«сжимающихся реализующихся»:
γ
ln( х )
т1
2
2
е
8.Вычисление относительной погрешности
= -ln(x) /t1
β
1
1у
1
А 7. x1
xy 1
x ( y ) 11
0
Ф
пер
1
;β
Ф
хх 1 0
х1
9. При δF> δF0
x0=x1
возврат на шаг 5,
иначе – шаг 10 10.x = x1 11. Вычисление
параметров логистики
(ху) х 1
(у) 1 1
Литература
1. Нарусбаев А.А. Введение в теорию обоснования проектных решений. Л. Судостроение.1976. 2.
Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ. под
ред. Г.Гроше и В Циглера. пер. с нем., совм. изд. изд-во «ТОЙБНЕР», Лейпциг и М., «Наука», 1981 г.
использованная литература
1. Нарусбаев А.А. Введение в теорию обоснования проектных решений. Л. Судостроение.1976.
2. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и участвующих
ВТУЗОВ. стручок красный. Г.Гроше и В Циглера. Пер. с немецкого, совм изд. изд-во «TOJBNER», Лейпциг
и М., Наука, 1981 г.
80
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
УДК 532.5:519.6:629.5.015
ЧИСЛЕННЫЕ ИССЛЕДОВАНИЯ УДАРНОГО ПОГРУЖЕНИЯ В ВОДУ
Тарануха Николай Алексеевич
доктор технических наук, профессор, заведующий кафедрой кораблестроения
Комсомольский-на-Амуре государственный технический университет
681013, Комсомольск-на-Амуре, ул. Ленина 27 тел.: (4217)
54-30-74 e-mail: taranukha@knastu.ru
Чижиумов Сергей Демидович
кандидат технических наук, доцент, доцент кораблестроения Комсомольскийна-Амуре государственный технический университет 681013, Комсомольскна-Амуре, ул. Ленина 27 тел.: (4217) 54-30-74 e-mail:
chizhium@rambler.ru
Го Цзюнь
кандидат технических наук, доцент
Харбинский технический университет
Nan Tong, 145, St. Nan Gang District, Harbin 150001 Китайская Народная Республика
e-mail: guo_jun@hrbeu.edu.cn
Аннотация
В статье рассмотрена задача динамического погружения тела на идеальную не сжимаемую жидкость,
основанная на широком использовании движения тела и жидкости с аппроксимацией по методу времени
конечных разностей. Решение краевой задачи для урав нения Лапласа относительно противоположной
скорости жидкости в каждый момент времени определяется методом граничных элементов. что позволяет
избежать создания и перестройки сетки в текстуру жидкости. В результате получена вычислительная
эффективность по сравнению с сеточными методами.
Приведены результаты рассчетов для случаев падения на воду клина и кругового цилиндра.
Выполнены анализы сходимости и результаты сравнения результатов с данными экспериментов и
расчетов по методу конечных результатов.
Исключена проблема выявления брызговой струи. При расчете методом конечных объемов
недостаточно высокой дискретизации в этой области приводится к потере устойчивости вычислений,
корректное моделирование струйных расчетов с большими затратами времени расчет и трудность
построения сетки в быстродействующей концентрированной области. Показано, что решение на основе
метода граничных элементов является быстрым сходством и требует двух-три порядка меньших
вычислительных затрат. Ключевые слова: ударное погружение, клин, килеватость, брызговая струя, метод
границы
ных элементов
ЧИСЛЕННЫЕ ИССЛЕДОВАНИЯ ВОЗДЕЙСТВИЯ НА ВОДУ
Тарануха Николай Алексеевич
д.т.н., профессор, зав. кафедрой кораблестроения
Комсомольский-на-Амуре государственный технический
университет им. Ленина, 27, ул. Комсомольск-на-Амуре 681013,
Российская Федерация тел.: (4217) 54-30-74 e-mail : taranukha@knastu.ru
Чижиумов Сергей Демидович
к.т.н., доцент кафедры кораблестроения Комсомольскийна-Амуре государственный технический университет
Ленина, 27, ул. Комсомольск-на-Амуре 681013, Российская Федерация
тел.: (4217) 54-30-74 e-mail: chizhium@rambler.ru
81
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Го Цзюнь
Кандидат технических наук, доцент кафедры судостроения
Харбинский инженерный университет, Нан
Тонг, 145, ул. Нан Ган, 150001, Харбин, Китайская Народная Республика e-mail:
guo_jun@hrbeu.edu.cn
Абстрактный
В статье рассматривается задача об ударе при падении тела в идеальную несжимаемую жидкость.
Уравнения движения тела и жидкости решаются совместно. Используется временная аппроксимация методом
конечных разностей. Решение краевой задачи для уравнения Лапласа о потенциальной скорости жидкости
определяется методом граничных элементов на каждом временном шаге. Этот метод позволяет избежать
создания сетки и повторной сетки объема жидкости. В результате вычислительная эффективность увеличивается
по сравнению с сеточными методами.
Приведены результаты расчетов для случаев клинового и кругового цилиндрического ударов о воду.
Проведен анализ сходимости и сопоставление результатов расчетов с экспериментальными данными и
расчетами объемно-флюидным методом.
Анализируется задача моделирования факела факела. При расчетах объемно-флюидным методом
недостаточно детальная разбивка в этой области приводит к потере устойчивости расчета, а правильное
моделирование струи – к трудоемкости расчета и сложной разбивке быстродвижущейся концентрированной
области. Показано, что решение на основе метода граничных элементов имеет быструю сходимость и требует
меньших вычислительных затрат.
Ключевые слова: гидроудар, клин, килеватость, струя, метод граничных элементов.
Введение
Основным фактором воздействия
препятствующей дости жению высокой скоростей
судов на волнение является возникновение
случаев сильных ударов о воду (сле минг). В
зависимости от веса тела, формы по верхности его
днища, жесткости его корпуса, начальных
параметров движения, сочетания различных
физических и математических моделей слеминга
[1]. Многие расчетные методики удара о воду ос
нованы на теориях Кармана и Вагнера [2].
При ударах днищем, близком к плоскому (когда
поверхность днища имеет наклон к поверхно сти
воды менее 3-5º), следует учитывать гидроупругость,
сжимание воды, взаимодействие с воздушной
прослойкой. Влияние на эффекты рассматривалось
Г.Г. Шахверди и Н.Ф. Ершовым [3], В.А. Постновым,
А.А. Коробкиным и многими исследователями [4 6]. Основные программные системы (ANSYS, DYTRAN
и др.), реализующие анализ гидроупругого удара
при моделировании движения воды и возмоз духа
уравнениями Навье – Стокса на основе ме тодов
заканчиваются или заканчиваются объе мов [6, 7].
Для смягчения ударов исчезают днище с
выраженной килеватостью (более 5°). В этом случае
возникновения ударных корпусов судов
скорости жидкости малы по сравнению с быстротой
распространения ударных волн в воде и судовых
волновых конструкциях, исчезновение упругости
перемещения пластины днища мало свойств на
гидродинамику входа. Кроме того, воздух свободно
выходит из под днища. В результате можно
оградить моделью вход жёсткого тела в
несжимаемую жидкость без учёта захвата воздуха.
Обоснование таких допущений на основе
экспериментов 82
тальных данных можно найти в работах Егорова
И.Т. и Соколова В.Т. [8].
При проникновении в воду килеватого тела
существенна роль начинает играть деформация
своей бодной поверхности воды с образованием
брызговой струи. Оценка этого результата
внедрения в работе Вагнера [2]. Численное
моделирование деформации свободной границы
выполняют Н.Ф.Ершов и Г.Г. Шахверди [3], К. Ки
хара [9] и другие учёные.
В данной работе вычислено мо-делирование
динамического поступления в жидкость тел с
килеватостью с применением конеч но-разностной
аппроксимации определения движения и
определения течения на каждый временной шаг
метода дней граничных элементов (МГЭ).
Особенностью задачи является то, что смоченная
поверхность судна в процессе погружения может
существенно измениться, поэтому для подходящей
конструкции расчётной сетки на каждом временном
шаге необходимо её изменение.
Применение МГЭ [5, 10 - 14] позволяет избе
жать построения и построения перестройки сетки
в толще жидкости, что на порядок измерения
числовое узло в неизвестных, получается разбиение
границ и достигается вычислительная
эффективность по сравнению с последующими
объемами или конечными элементами. Кроме
этого, дополнитель но увеличить эффективность
расчетов можно поставить тём уплотнения и
координатных преобразований, исследований в работах [11, 12]
1. Постановка задачи
Рассмотрим падение (динамический) твёр дого
тела по пространственной оси в идеальную не
сжимаемую жидкость с моментами касания её
своей бодной границы (рис. 1). В начальный момент вре-
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
менижидкость неподвижна. Течение жидкости полагается
невязким и безвихревым. Движение по тенциально и о
приближении к результату Лапласа
2
0
(1)
и интегралом Коши-Лагранжа
t
pgz1
2
2
0
(2)
,
где φ (x,y,z,t) – потенциальная скорость; г – уско рение
свободного падения; p (x,y,z,t) – давле ние; ρ – плотность
жидкости. Уравнение свободных тел в воде имеет вид
M(g v
с)
p(S ,t )cos(n,z)
dSs , (3)
с
SS
где М – масса потребления тела; ускорение
ЧЧ
сс ув
с
ччwsww
ш
задача. При этом в системе (7) узловые значения {φw} и
{vns} важности решения задачи на шаге. В начальный
момент времени {φw} задаётся из условий (6). Из решений
системы (7) частные значения {φs} и {vnw}. Следующие
нормальные скорости движения уз лова свободной
поверхности определяются в соотношении ветствий с
состоянием (5), а касательные скорости - с помощью
разностных формул по криволинейным тангенциальным
координатам. В плоской форме входного отверстия в
контуре, касательные скорости в узлах можно вычислить
по формуле
wi1
вш
и кинематическое условие свободы поверх ности Sw и
смоченной поверхности тела Ss
(5)
где vn - нормальная скорость движения границ. На
смоченной поверхности тела она определяется как
проекция на нормальную вертикальную скорость
падения. При удалении от тела обнаруженное им
движение жидкости затухает. В начальный момент
задается начальная скорость роста входа в воду,
исходные границы жидкости и потенциал скорости на
свободной поверхности
( х,у,0,0)
0
.
1
ви
с
(4)
,
(7)
,
v nw
где индексами с и w обозначены узлы смоченной
поверхности тела и свободной поверхности; {φ} и {vn} –
очевидные признаки различий и естественный рост
жидкости. Общий алгоритм решения на каждом
временном шаге tk состоит в следующем. 1. Для
перспективных границ по МГЭ решается краевая
тела; Ss – смоченная поверхность те ла; n – нормаль к
поверхности. Краевые условия: условия избы точных
давлений на свободной поверхности Sw
н вн
ГГwsww
–
(т) против
р=0
внс
сс ув
ГАРАНТИРОВАННАЯ ПОБЕДА
ай 1
ая
,
(8)
где в числотеле стоит разность потенциалов в узлах (i+1)
и (i-1) границы, а в знаменателе - сумма ма длин
элементов, примыкающих к узлу i. Таким образом,
полностью Решение о движении свободной границы. 2.
Из уравнения (2) вычисляются давления в точках
поверхности тела. Для этого предвари тельно частные
географические значения
s
t:
d t dt
с
г
2 В; с
с
т
ск
dt
т
ск
1
т
с
. (9)
3. Из уравнения (3) решения теории
v
ускорение тела с , а затем скорость:
(6)
2. Численный алгоритм решения проблемы. Решение
краевой задачи для уравнения Лапласа (1) с условием
(5) на смоченной поверхности Ss и повышенной дозой
ограничения скорости на свободной поверхности Sw
повысилось по МГЭ с дискретизацией влияния Sw и Ss .
При этом система имеет МГЭ в матричной форме имеет
вид [10]
k
1t
vs tk
vsk
t vst
.
(10)
Интегрирование в сравнение (3) заменяется
суммированием по пограничным элементам.
4. Вычисляется потенциальная скорость φw на
свободноповерхности:
1
г
т
неделя
дт ж
т
wk t
.
(11)
Здесь заранее, с учётом (2) и (4), сле дует определить
г
дт
1z
ж
t
2
ж
2 вв
vg
2
вв
. (12)
83
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
5. Определяются места обнаружения r = vΔt и
новые границы положения жидкости в следующий
момент времени tk+1 = tk + t. Находится
положение ватерлинии (пересечение свободы по
верхней поверхности и поверхности тела).
Перестраивается разбиение пограничных явлений.
Интерполяцией выполнения определения
граничных параметров в пакетах новой сетки.
Далее происходит переход к пункту 1.
3. Примеры расчётов
множественной совокупности относительно
диамет ральной обратно, наполовину
сокращающейся клина. Граница разделения
пограничных элементов с постоянной
аппроксимацией. Смоченная граница клин имеет
равномерную разбивку. Свободная граница имеет
ширину BW = 15 BS, где BS – полуширина клина по
ватерлинии. Элементы свободной границы резко
уменьшаются к клину до величины bW = 0,7 bS, где
bS – размер элемента смоченной поверхности
клина. Количество элементов на смоченной
границе клина NS = 15, а на свободной границе –
NW = 25. Анализ сходимости показал, что такая
модель обеспечивает малую ошибку дискретизации,
как по границам, так и по времени. На рис. 1
представлено изменение реакции жидкости
при входе в прямолинейную клинину. Скорость
погружения постоянна и равна 1 м/с.
Результаты расчетов сравнивались с
аналитическим основанием Вагнера [2]:
Ф
2
Вч
2 тг
2
,
(13)
где h - погружение вершины клина, β - угол киле
ватости.
При погружении клина с постоянной скоростью.
сила зависимости от времени является ли нейной:
k = F/t = const. На рис. 2 показано сопоставление
параметра k, полученного по формуле Вагнера и
по МГЭ (NS = 30, NW = 40, Δt = 0,0005 с, BW = 30 BS).
Рис. 1. Изменение силы погружения для клина
с килеватостью β = 6°: 1 – МГЭ с шагом по
времени Δt = 0,01 с; 2 – Δt = 0,005 с; 3 – Δt =
0,001 с; 4 - по формуле (13)
84
Рис. 2. Зависимость коэффициента силы внедрения от
угла килеватости: 1 – по формуле (13); 2
– МГЭ
На рис. 3 принятое влияние шага по времени
на результаты расчета ударной силы и наибольшего
давления при падении клина с уг лом килеватости
β = 3º, массой M = 10 т/м и скоростью в момент
контакта с водой V0 = 1 м/с.
В следующем подъеме проведено сравнение
результатов анализа охвата кругового цикла
линдра радиусом 0,447 м, длиной 1,5 м и массой
600 кг с экспериментальными данными,
полученными в ДВПИ (г. Владивосток) Н.А.
Ивановым и В.А. Кулешом. Для ограничения длины
тока воды размеры торцевых переборок
превышают ширину и высоту цилиндра. Модель
сбрасывалась с заданной высотой на спокойную
воду. В процессе погружения модели измерялись
давления в 11 характерных точках. Были проведены
серии опытов с начальными скоростями удара
7,67 и 9,9 м/с. Расчеты по МГЭ производились с
применением плоской модели. На рис. 4
предустановлено превышение давления на
поверхности цилиндра. Набольшая проблема
численного решения задач об ударе о воде
состоит в модели вровании района образования
брызговой струи. При измерении размеров
элементов в этой области Свободный подъём
границы. Используемая в работе потенциальная
модель имеет удовлетворительное качество
процесса до технического пора, пока в области
ватерлинии не имеет особого значения угол между
свободной границей жидкости и смоченной
границей тела. При изучении острого применения
вычислений.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
Рис. 3. Влияние шага по времени на точность
результатов: 1 – Δt = 0,003 с; 2 – Δt = 0,002 с; 3 – Δt
= 0,001 с
3 (33) Т. 2 2016
В расчетах по МГЭ смоченная граница раз
делена на 20, а свободная поверхность – на 25 ГЭ со
сгущением к области основания брызговой струи.
Шаг по времени 0,001 с. В расчете по МКО
применены две сетки: области – из 50 тыс. ячейки;
дополнительно – в районе брызговой струи из 140
тыс. ячейки. Как видно, расчёт по МГЭ дает
устойчивое решение. При усилении сгущении одна
сетка из при чине потери стабильности
вычисляется в том, что на каждом шаге по времени
передвигает области в брызговой струи, сопоставляя
с размерами ячеек сетки или подавляя их. Поэтому
расчеты по МКО значения не являются только
значительными затратами на вычисление времени,
но требуют значительных затрат на вычисление
матрицы и подбора параметров контроля
вычислительного процесса. При этом не всегда
удавалось добиться достаточного результата.
возникает быстро перемещающаяся малая
концентрированная область возмущения в районе
брызговой струи. При этом очень сильно снижается
расчётная область, так как граничные условия
существенно отличаются от высокой ударной силы.
а
б
Рис. 4. Максимальное давление (кПа) при падении
цилиндра: а - V0 = 7,67 м/с; б - V0 = 9,9 м/с; 1 –
эксперимент (ДВПИ); 2 – расчёт МГЭ
Таким образом, брызговая струя в рассматри
ваемой модели предполагаемого явления не может
быть особо учтена. Точка основания вирусной
струи является определением, - она образует угол с
неопределенным направлением вектора
естественной скорости. Простой вариант исключения
позволяет искусно сглаживать изменение положения
узлов раскладной сетки. При грубой сетке в этом
районе сглаживание особенностей происходит
автоматически, однако точность расчетного решения
ния распада.
Сопоставим результаты расчета ударов по
методу граничных элементов и мето-дом конечных
объемов (МКО). На рис. 5 предыставлены для клина
с углом килевой тости 5,7° и массой 10 т/м при
свободном падении с исходной скоростью входа
V0 = 1 м/с. Об ласти жидкости в расчёте МКО
ограничена стенками на расстоянии 5 м от оси
множества клина.
Рис. 5. Результаты расчётов клина (m = 10 т/м, V0
= 1 м/с): а – район брызговой струи при расчёте по
МКО (t = 0,22 с); б – изменение ударной силы; 1 –
МКО; 2 - МГЭ
Заключение
Численные результаты применения,
представленные в данной статье, а также в работах
[10-12], эффект МГЭ в задаче о ди-намическом входе
в воду.
85
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Выполнено регулярное вычисление результатов
с экспериментальными данными по падению воды
кругового цилиндра. Показано, что наличие
особенностей в основе струи брызговой струи
значительно влияет на точность вычислений, что
требует проведения анализа дискретизации (как
по пространству, так и по времени) и искусственного
сглаживания острого угла выбора точек расчётной
сетки. Получено расчетных результатов по доходам
по МГЭ и МКО. При этом решение по МГЭ
обеспечивает быструю сходимость и
требует на три порядка меньших вычислительных
затрат.
Литература
1. Капсенберг, Г.К. Захлопывание кораблей: где мы сейчас? Philosophical Transactions of the Royal Society A:
Mathematical, Physical and Engineering Sciences, 369:1947 (2011), июнь, стр. 2892–2919.
2. Wagner H. Uber Stoss- und Gleitvorgange und der Oberflache von Flussigkeiten // Zeitschrift fur An gewaendte
Mathematik und Mechanik, 1932, Band 12, Heft 4, pp. 193 – 215. 3. Ершов Н.Ф., Шахверди Г. Г. Метод конечных
элементов в задаче гидродинамики и гидроупругости. Л.: Судостроение, 1984.
4. Хабахпашева Т.И., Коробкин А.А. Удар упругого клина о поверхность жидкости: решение Вагнера и
приближенные модели // Жидкости и структуры. 36 (2013), стр. 32-49. 5. Тарануха Н.А., Чижиумов С.Д.
Численное моделирование падения тел с гофрированным днищем // Прикладная механика и техническая
физика. 2001. Т. 42, № 4, с. 112-118.
6. Березницкий А., Бун Б., Постнов В. (2001). «Гидроупругая формулировка для более точного прогнозирования
гидродинамических нагрузок», Proc. 11-го межд. ОПЕК, ISOPE-2001, Норвегия, том 4, стр. 337-342.
7. Чау С.-В., Лу С.-Ю., Чжоу С.-К. Численное моделирование процесса нелинейного удара быстроходного
планирующего судна // ТЕАМ–2000. Владивосток, ДВГТУ, Россия, 2000, с. 224 – 232. 8. Егоров И.Т., Соколов В.Т.
Гидродинамика быстроходных судов. Л.: Судостроение, 1965.
9. Кихара К. Численные модели воздействия воды // Тр. 4-го межд. конф. на высокопроизводительных
морских транспортных средствах. Италия, Рим. 2004, стр. 200-214. 10. Постнов В.А., Тарануха Н.А., Чижиумов
С.Д. Проектирование формы носовой оконечности суд на с учётом остроты при слеминге // Судостроение,
№5, 2001, С. 9 - 13. 11. Чижиумов, С. Д. Моделирование удара судна о воду с применением метода пограничных
элементов / С. Д. Чижиумов, Н. А. Тарануха // Математическое моделирование, 2011. Т. 23, № 1, с. 29-40. 12.
Тарануха Н.А., Чижиумов С.Д., Журбин О.В., Бурменский А.Д., Журбина И.Н. Моделирование падения судов на
воду // Морские интеллектуальные технологии, № 1(7), 2010, С. 42-44. 13. Тарануха Н.А., Журбин О.В., Чижиумов
С.Д., Журбина И.Н. Численное моделирование прочностных характеристик и гидродинамики океанотехники.
– Владивосток: Дальнаука, 2009. – 340 с. 14. Чижиумов С. Д., Тарануха Н. А., Журбин О. В., Журбина И. Н.
Математическая модель динамики судов на волнении // Морские интеллектуальные технологии, 2011. № 2
(спецвыпуск), С. 54 58.
использованная литература
1. Капсенберг, ГК (2011). Хлопанье кораблей: где мы сейчас? Философские труды Королевского общества A:
математические, физические и технические науки, 369: 1947, июнь, стр. 2892–2919.
2. Вагнер Х. (1932). Uber Stoss- und Gleitvorgange und der Oberflache von Flussigkeiten. Zeitschrift fur Angewaendte
Mathematik und Mechanik, B12, H4, стр. 193–215.
3. Ершов Н.Ф., Шахверди Г.Г. Метод конечных элементов в задачах гидродинамики и гидроуправления.
Ленинград, Судостроение, 1984.
4. Хабахпашева Т.И., Коробкин А.А. (2013). Удар упругого клина о поверхность жидкости: решение Вагнера и
приближенные модели. J. Жидкости и структуры, 36. стр. 32-49.
5. Тарануха Н.А., Чижиумов С.Д. (2001).Численное моделирование падения на воду тела с гофриро ванным
днём. Прикладная механика и техническая физика, В42, №4, стр. 112-118.
6. Березницкий А., Бун Б., Постнов В. (2001). Гидроупругая формулировка для более точного прогнозирования
гидродинамических нагрузок. проц. 11-го межд. Конференция по морской и полярной инженерии, ISOPE
2001, Норвегия, том 4, стр. 337-342.
86
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
7. Чау С.-В., Лу С.-Ю., Чжоу С.-К. (2000). Численное моделирование процесса нелинейного удара
быстроходного планирующего судна. ТЕАМ–2000, Владивосток, ДВГТУ, Россия, стр. 224 – 232.
8. Егоров И.Т., Соколов В.Т. Гидродинамика быстроходных судов. Ленинград, Судостроение, 1965.
9. Кихара К. (2004). Численные модели воздействия воды. проц. 4-го межд. конф. на HighPerformance
Marine Vehicles, Италия, Рим. стр. 200-214.
10. Постнов В.А., Тарануха Н.А., Чижиумов С.Д. (2001). Проектирование формы носовой оконечности суда
с учетом нагрузок при слеминге. Судостроение, №5, стр. 9-13.
11. Чижиумов С.Д., Тарануха Н.А. (2011). Моделирование удара суда о воде с применением метода
граничных элементов. Математическое моделирование, Т23, №1, с. 29-40.
12. Тарануха Н.А., Чижиумов С.Д., Журбин О.В., Бурменский А.Д., Журбина И.Н. (2011).
Моделирование падения суда на воду. Морские интеллектуальные технологии, 1(7), с. 42-44.
13. Тарануха Н.А., Журбин О.В., Чижиумов С.Д., Журбина И.Н. Численное моделирование прочности и
гидродинамики океанотехники. Владивосток, Дальнаука, 2009. 340 с.
14. Чижиумов С.Д., Тарануха Н.А., Журбин О.В., Журбина И.Н. (2011). Математическая модель динамики
суда на волнении. Морские интеллектуальные технологии, 2 (спецвыпуск), стр. 54 58.
87
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Научный журнал
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ 190121
г. Санкт-Петербург, ул. Лоцманская д.3
электронная почта: mit-journal@mail.ru
www.morintex.ru
Информация для авторов
научного журнала
"МОРСКИЕ ИНтеллектуальные ТЕХнологии"
документы.
Для публикации статьи необходимо представление ниже
1. Сопроводительное письмо авторов 2.
Электронная версия статьи, подготовленная в соответствии с требованиями к оформе
структура статей – следует ниже
3. Одна рецензия на восприимчивую статью по особой специальности с подпи сью,
заверенной гербовой печатью. При междисциплинарном исследовании возникают
две рецензии от исследований различных отраслей науки по испытаниям.
тематика.
4. Акт экспертизы на открытую публикацию (при необходимости) 5.
Лицензионный договор Перечисленные документы (кроме акта
экспертизы) могут быть переданы в редакцию по электронной почте по адресу mitjournal@mail.ru (по этому же адресу осуществляется текущая переписка с редакцией) . По желанию
авторов, документ 1 в бумажной версии и компакт-диск с документами 2 и 3 могут быть либо
присланы по почте в адрес редакции, либо доставлены в редакцию, либо переданы по
одному из экземпляров редколлегии. Оригинал акта экспертизы должен быть либо прислан по почте
в адрес редакции, либо доставлен в редакцию, либо передан одному из членов редколлегии.
На страницех публикуются новые научные исследования, новые результаты исследований,
новые методы, методики и технологии в области кораблестроения, инфор-матики, вычислительной
техники и управления. Это является важным требованием к стажу
тьям.
Каждая статья, принятая редколлегией для проверки, также проходит вероятность
рецензирования. По результатам рецензирования статьи может быть либо отклонена, либо отослана
автору на доработку, либо опубликована к принятию. Рецензент может быть специализированным
листом по профильным статьям с ученой целью не кандидат ниже наук. Редколлегия не поступает с
авторами в соответствии с их статьями тематического журнала
нала.
Журнал затрагивается в цветном варианте.
Плата с кандидатом в случае, если он является автором, за публикацию статьи не требуется.
Стоимость публикации 8500 рублей по выставляемому по запросу счету.
Авторы берут на себя ответственность за содержание статьи и за сам факт ее публикации.
Редактирование журнала недоступно за возможный ущерб, вызванный публикацией статьи. Если
публикация статьи повлечет за собой нарушение прав или общепринятых норм научной этики, то
редакция журнала приведет к изъятию опубликованной статьи.
Главный редактор научного журнала
"МОРСКИЕ ИНТЕЛЛЕКТАЛЬНЫЕ ТЕХНОЛОГИИ"
д.т.н. проф. Никитин Н.В.
88
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
УДК 629.12.001.2
ИНСТРУКЦИЯ ПО ПОДГОТОВКЕ СТАТЕЙ ДЛЯ НАУЧНОГО ЖУРНАЛА "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ
ТЕХНОЛОГИИ"
Никитин Николай Васильевич
доктор технических наук, профессор, профессор кафедры проектирования судов
Санкт-Петербургский государственный морской технический университет
190008, Санкт-Петербург, ул. Лоцманская, 3 e-mail:
morintex_spb@mail.ru
Аннотация
В работе рассмотрены правила оформления статей для научного журнала «Морские интеллектуальные технологии»
в текстах на процессоре MS Word 97-2003 для публикации в научном журнале ВАК, а также в международных
реферативных базах данных Scopus и Web of Science. Инструкция представляет собой специальную заготовку, которая
служит основанием для создания конкретной статьи. Аннотация предоставляется авторами в расширенном виде. Объем:
не менее 950 и не более 1800 знаков (с пробелами), то есть 100-250 слов. В аннотациях должна быть четко определена
цель работы, ее новизна, основные выводы. Языки – русский и английский.
Типичная структурная аннотация: состояние вопроса; материалы и/или методы исследования,
результаты; заключение.
Методы аннотаций только по углам. Результаты работы описывают предельно точно и информативно. При
использовании основных теоретических и экспериментальных результатов, фактических данных, обнаруженных
взаимосвязей и исследований. При этом отдается предпочтение новым результатам и выводам, которые, по мнению
автора статьи, имеют практическое значение. следует учитывать признаки и надежность данных, а также степень их
обоснования. Выводы сопровождаются рекомендациями, оценками, предложениями, описанными в статике
тье.
Ключевые слова: Список используемых слов должен характеризовать предметную область исследо-вания.
Недопустимо использование терминов общего характера (например, проблема, решение), не являющихся специфической
характеристикой публикации. Количество повторяющихся слов должно быть 8-10.
РУКОВОДСТВО ПО ПОДГОТОВКЕ СТАТЕЙ ДЛЯ АКАДЕМИЧЕСКОГО
Журнал «МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ»
Никитин Николай Васильевич
профессор, д.т.н., профессор
кафедры судостроения Санкт-Петербургский
государственный морской технический университет
Лоцманская, д. 3, Санкт-Петербург, 190008, Российская Федерация email: morintex_spb @mail.ru
Абстрактный
В статье предложены правила оформления статей, представляемых в академический журнал «Морские
интеллектуальные технологии» в программе MS Word Processor 97-2003, в соответствии с требованиями, установленными
для публикации в академическом периодическом издании Государственной комиссии по академическим степеням и
званиям а также в международных библиографических базах данных Scopus и Web of Science. Методические
рекомендации представляют собой специальный шаблон, на основе которого создается конкретная статья.
Авторы должны представить расширенную аннотацию. Аннотация должна содержать не менее 950 и
максимум 1800 символов (включая пробелы), т.е. 100–250 слов. Аннотация должна охватывать цель и новизну статьи, а
также отражать основные выводы. Языки тезисов должны быть русский и английский.
Стандартная структура реферата выглядит следующим образом: краткий обзор состояния дел; данные для изучения
и/или методы исследования; Выводы; заключение.
Методы должны быть упомянуты только в аннотации. Результаты должны быть описаны максимально точно и
информативно. Должны быть отражены основные теоретические и экспериментальные результаты, фактические
данные, обнаруженные взаимосвязи и общие факторы. Выше приведены еще новые результаты и выводы, которые, с
точки зрения автора, имеют практическое значение. Точность данных
89
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
и должны быть указаны пределы достоверности, а также степень их проверки. Выводы могут сопровождаться
рекомендациями, оценками, предложениями, описанными в статье.
Ключевые слова: Список ключевых слов должен быть специфичен для предметной области исследования.
Общие термины (например, проблема, решение), не относящиеся к данной публикации, недопустимы. Количество
ключевых слов должно быть 8–1.
Введение
При подготовке статей у авторов предъявляются
требования, связанные с необходимостью строго
выдерживать требуемые форматы подготовки
текстов. Вместе с тем, в современных текстовых
процессорах используются развитые средства
под держки общезначимых и специализированных
шаблонов, автоматизирующих эту деятельность.
набор вышеперечисленных, автор данной
инструкции специализированный шаблон для
камеры готовых текстов статей, которые
представляются в редакцию. Это указание не
является обычным текстом, а заго товка, которую
авторы работ, представляемых в журнале,
несмотря на получение для просмотра текстов
статей. Обращаясь к авторам, редакция журнала
доводит до сведения своих требований к
оформлению статей. Суть их сводится к
тому, что, с одной стороны, предоставленная
авторами информация должна быть интересной и
понятной научному сообществу без лечения к
полному тексту статьи. а с другой – должны быть
обеспечены возможности контекстно-го поиска и
аналитической обработки данных
ных.
Фамилии авторов должны быть
транслитерированы или указаны так же, как в
ранее опубликованных в истории журналах
статьях. Должны быть представлены адресные
сведения о месте работы авторов, должности,
ученой степени и ученом звании. Название
организации переводится на английский
язык без составных частей назва ний
организаций, выявляющих публикацию
ведомства, оформляет собственность, статус
организации с завершением юридического
адреса в следующем направлении: улица, дом,
город, индекс, страна. Наиболее полный список
названных учреждений и их официальной
русскоязычной версии можно найти на сайте
НЭБ eLibrary.ru. Название статьи, ключевые
слова и аннотация также переводятся на
английский язык. Все переводы должны быть
высокими. Название статьи может быть
использовано только в общепринятых
научных исследованиях. В переводе названия
недопусти мы транслитерации с русского языка,
за исключением непереводимых вызываемых
случаев имен, приборов и других объектов,
известных соб
90
личные названия, а также непереводимый
сленг, известные только русскоговорящим
специалистам. Англоязычное название должно
быть грамотно с точки зрения английского
языка, при этом по смыслу полностью
соответствует русскоязычному названию.
Обращаем внимание авторов на
необходимость самого высокого
профессионального качества перевода на
английский язык. Автоматизированный перевод
с помощью программных систем категорически
за прещается! При обнаружении экспертом.
Системные исследования SCOPUS и Web of
Science позволяют проводить исследования: по
ссылкам, возможной оценке и оценке
перспектив работодателей, научных журналов,
организаций и стран в целом, определять
актуальность научных интересов и проблем,
выявлять их точки роста и падения и т.д. .
Ссылка на публикацию в научной статье
является одним из основных источников
качества публикаций. Статья с представителем
природных заповедников профессиональным
кругозором и качественным исследованием ее
авторов Полный текст должен быть
структурирован по разделам. Структура полного
текста рукописи, посвященной описанию
результатов оригинальных исследований,
соответствует общепринятому шаблону и
разделам: введение (актуальность), цель и
задача, материалы и методы, результа ты,
обобщение, обсуждение (дискуссия).
1. Инсталляция заготовки Мор-Инст
Вы получили по электронной почте (или не
предоставили другим способом) файл Mor-Inst.doc
и должны использовать его на своем текстовом
процессоре MS Word 97-2003. Для того, чтобы
начать работу необходи мо: найти на Ваш
компьютер файл Mor Inst.doc, переименовав его
под фамилией первоначальный автор (например,
nikitin.doc). После выполнения этих действий Ваш
текстовый процессор MS Word 97-2003 готов
для со здания документа в формате камеры, готовой
для оформления номера.
2. Начало работы с заготовкой Mor-Inst
Итак, предположим, что Вы скопировали
заготовку Mor-Inst.doc для своего текстового про-
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
цессора MS Word 97-2003, как это определено в
инструкции к разделу данной инструкции.
Теперь, после вызова текстового процессорового
MS Word 97-2003, из ключевого
(Файл)
выберите
, подопциюфайла
Открыть
(Открыть),
а
в меню приглашения выберите файл, отметьте
nikitin.doc и нажмите OK. После этого Ваш текстовый
процессор от кроет документ с данной заготовкой,
которая существенно облегчит Вашу ограниченную
работу.
предстоящая подготовка статьи очень похожа на
редактирование «чужого» текста и преобразовывает
его к видению, когда он становится очевидным.
В оставшейся части последовательной инструкции
рассматриваются все основные элементы, которые
входят в состав сборов по подготовке Вашей статьи.
Обратите внимание на то, что сами элемен ты
уже выбрал таким образом, чтобы Ваша будущая статья
соответствовала всем требованиям к оформлению
готовых текстов для публикации в журнале.
3. Основные правила подготовки статей на базе
шаблона Mor-Inst
3.1. Общие замечания по объему и формату стажа
ти
По решениям редакций объемы принимаемых к
публикации материалов должны быть сле дующим
приоритетом
- объем статьи должен быть не более 5 стр.; текст доклада должен быть уложен в целое число
страниц. Все материалы должны быть отформатированы
для печати на стандартном листе формата А4
сочтены Макет (параметры страниц) (рис. 1).
3 (33) Т. 2 2016
Основной текст набирается в 2 колонки, про
межуток между колонками 0,7 мм; ширина колон ки
7,9 мм. Нумерация страниц подготавливаемой работы
не произведено.
Каждая статья должна быть организована
соответствующим образом (самый является
привлечением необходимой организации текста
статьи) – УДК.. – Заголовок работы. – Для каждого автора
статьи:
Фамилия Имя Отчество
ученое звание, ученая степень,
должность Место работы Адрес
работы (или проживания для
неработающих)
E-mail
Все имена кеглем 9 Все в именительном па деже
– Аннотация работы (не менее 950 и не более
1800 знаков (с пробелами), то есть 100-250 слов). –
Ключевые слова (8-10). – Разделы и отдельные
разделы (нумерация сквозной арабскими цифрами
у раз дел и номер раздела + нумерация сквозной
арабскими цифрами у данного отдела; раздела
(подраздела) начинается с заглавной буквы, по сле
заголовков точка не ставится). – В конце работы (перед
литературой) может быть ненумерован раздел
Благодарности, где, как правило, задерживаются
спонсоры (например, номер гранта РФФИ) данной
работы. – Список использованных источников,
собранных в ненумерованном разделе Литература
– После списка литературы размещается список
литературы в романском алфавите в ненумеро ванном
разделе Ссылки – Все заголовки разделов и отделенов
центов трируются. – Ссылки на ключи в тексте
работы записываются в квадратные скобки и передаются
сквозной нумерацией арабскими цифрами.
Заголовок работы, ФИО, ученое звание, ученая
степень, должность, организация, ад-рес авторов
(телефон и электронный адрес, если имеется), аннотация
работы и ключевые слова связаны на английском и
английском языках
становится.
Рис. 1. Общий макет страниц
91
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3.3. Шрифты, используемые при производстве
статьи
Все шрифты, используемые при написании
статей, выбираются из набора Arial. Если Вы
используете данные сэмплера, все размеры будут
выставлены правильно и Вам принадлежат только
следовать им. Если же Вы пользуетесь твердой
копией данного sampler'а, то використовуйте
возможные размеры шрифтов: - для названия статьи
Arial 13 прописной, жирный; - для УДК и
определения автора(ов) статьи Arial 9 курсив; - для
адреса(ов) автора(ов) статьи Arial 11; - для
аннотации Arial 9, границы текста +10 мм слева и -10
мм справа; - для текста статьи Arial 9,5, абзацный
от ступ 5 мм; - для списка литературы Arial 10,5,
жирный, по центру, верхний интервал 12 пт, вокруг
4 пт, абзацный отступ 0; - для заголовков разделов
статьи Arial 10,5, жирный по центру, интервал сверху
12 пт, плотность 4 пт, абзацный отступ 0; - для
заголовков отдельных статей Arial 9,5, курсив по
центру, интервал сверху 12 пт, суть 4 пт, абзацный
отступ 0; - для подрисуночных подписей Arial 8,5,
кур сив, по центру, интервал сверху 4 пт, плотность
9,5 пт, абзацный отступ 0; - для подстраничных
ссылок Arial 8,5, абзацный отступ 0,5.
3 (33) Т.2 2016
Слово таблицы Arial 8,5, курсив, вправо,
абзацный отступ 0. Название таблицы Arial 8,5,
жирный, по центру, интервал толщины 4 пт,
абзацный от ступ 0. Текст в таблице Arial 8,5.
Таблица 1
Пример таблицы
Н/Н
Колонка
1
Колонка
2
Колонка
3
Колонка
4
Колонка
5
1. фффф ыыыы 2. фффф
111
Ммм
ттттт
ыыыы
111
Ммм
ттттт
3. фффф ыыыы 4. фффф
111
Ммм
ттттт
ыыыы
111
Ммм
ттттт
Перед и после таблицы одна пустая строка
обычный текст.
ФОРМУЛЫ И РИСУНКИ НЕ РАЗМЕЩАТЬ В
ТАБЛИЦЕ!!!
3.4. Использование формулы
В работе по определению формулы любой
сложности, используемой компонентой MS Equation.
Если формула действует в тексте как от дельной
строки, она должна быть центрирована и при
необходимости помечена сквозной нумерацией
арабскими цифрами в круглых скобках. Если
формула начала действовать внутри текста, обратите
внимание на размеры шрифтов, они были
«состыкованы» с разницей в тексте работы.
4.3. Использование графического материала
В работе используется рисунков, схем, экранных
форм и др. графических материалов (обратите
внимание на то, чтобы рисунки сохранялись как
цветные или черно-белые картинки) как внедренных
объектов4 . Обнаружение графического изображения
должно быть следствием того, что цельный объект.
По возможности використовуйте для графически го
материала требуемое разрешение. Это
значительное количество пересыщенного объема
материала. Во всех случаях обращайте внимание на
то, чтобы текстовые подписки на рисунки были
набраны с использованием тех же шрифтов, что
и основной текст и естественный размер.
3.2. Использованиетаблицы
В работе с использованием таблиц,
подготовленных стандартными средствами MS Word
97-2003 . В качестве примера ниже приводится
представление таблицы, подготовленной с учетом
возможностей этих средств (табл. 1). Таблица
усваивается естественным кеглем.
4
Статьи с рисунками, нарисованными в тексте до
кумента с помощью панели "Рисование" MS Word
97-2003, тема редактирования в индивидуальном
порядке по согласованию с авторами статей. 92
Ниже приводятся примеры в формуле и в тексте.
Данный пример иллюстрирует использование
пК
формула в тексте
к
1,25 . Здесьпри подго хн
н 1
товке используется шрифт установки шриф тов по
умолчанию (по умолчанию). Возможно,
воспользуйтесь этим способом для подготовки не
только формулы в текстовой статье, но формулы в
от дельной строки (1).
х
а,б
F(x)
(1)
Все формулы набираются тем же шрифтом,
что и основной текст.
ФОРМУЛЫ НЕ СОХРАНЯТЬ КАК РИСУНОК!!! Если
же это, по каким-либо причинам неудобным, но
и/или невозможным, проявляющимся установкой
ми, проявляющимися на рис. 2.
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Обратите внимание на то, что при наборе
формулы в тексте возможно изменение
«интервальности». Не бойтесь этого и не пытайтесь
уменьшить размер используемого шрифта до
нечитаемого уровня. Аналогичное замечание
справедливость и формула, рассчитываемые в
широком ряду.
3.5. Размещение элементов текста на
две колонки
Если в таблице, формулы, рисунки превышают
размер одной колонки, то их размещают на полном
формате (на 2 две колонки). При этом все требования
по шрифтам и размерам к элементам, когда они
набраны на формат колонок.
Рис. 2. Установки шрифтов и размеров в MS Equation
Таблица 2
Пример таблицы на полный формат
Н/Н
Колонка-1
Колонка-3
Колонка-4
Колонка-5
1. фффф
ыыыы
Колонка-2
111
ммм
Ттттт
2. фффф 3.
ыыыы
111
ммм
Ттттт
фффф
ыыыы
111
ммм
Ттттт
4. фффф
ыыыы
111
ммм
Ттттт
Пример формулы на полный формат:
Н у(т )
Э хв
21
у
ш
р
1
ж
2
2
у
ш0
у
ж
Эч
у
21
т
.
(2)
Пример рисунка на полном формате:
Рис. 3. Раскрепление водоотделяющих колонн с помощью жесткой рамы (видв плоскости на диафрагму МСП):
1 – жесткие рамы; 2 – водоотделяющие колонны; 3 – вертикальные стойки опорного блока; 4 – раскосы опорного
блока; 5 – распорка опорного блока; 6 – фундамент жесткой рамы
Заключение
Автор данной инструкции руководил единственной целью – уменьшить автором совокупности
подготовка статей для журнала.
93
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т.2 2016
Дополнительная информация (на английском, английском или английском языке)
Информация о спонсорстве. Необходимы предложения источника финансирования как научная рабочая
организация, так и процесс публикации статьи (фонд, коммерческая или государственная организация и
др.). Указывать размер финансирования не требуется.
Благодарности. Авторы могут выражать благодарности людям и организациям, способствовав шим
публикациям статей в журнале, но не являясь ее авторами
Литература
В библиографии (пристатейном списке литературы) каждый источник следует помещать с новой строкой
под порядковым номером. Список литературы должен быть оформлен по ГОСТ Р 7.05-2008.
Литература и ссылки пишутся в одну колонку без переносов
использованная литература
Список литературы на русском языке КРОМЕ ТОГО должен быть представлен и в романе латинице
(латинице), то есть, транслитерирован, (транслитерация – это побуквенная передача текста, написанного
с использованием русского алфавита, латинского алфавита), спи сок литературы по другим оценкам
должен быть переведен на язык оригинала. Вся транслитерация списка литературы должна быть
выполнена в соответствии с системой
мой Госдепартамент США, который в настоящее время является наиболее распространенной.
Автоматизировать процесс транслитерации можно, воспользовавшись программным
обеспечением печени, которое доступно по адресу www.translit.ru (в раскрывающемся списке «Варианты»
вы выбираете вариант BGN).
Транслитерированная литература должна быть отформатирована соответствующим образом.
Структура библиографической ссылки на статью:
Author, AA, Author, BB, & Author, CC (2005).
Название статьи. Название журнала, 10(2), 49-53.
Материалы конференции:
Усманов Т.С., Гусманов А.А., Муллагалин И.З., Мухаметшина Р.Ю., Червякова А.Н.,
Свешников А.В.
«Новые энергосберегающие технологии недропользования и усиление нефтегазового воздействия»).
Москва, 2007. С. 267-272.
Книги (монографии, сборники, материалы конференции в собрании): Белая
книга по нанотехнологиям: исследования в области наночастиц, наноструктур и
нанокомпозитов в Российской Федерации (по материалам Первого Всероссийского совещания
ученых, инженеров и производителей в области нанотехнологий). Область наночастиц,
наноструктур и нанокомпозитов в Российской Федерации: Материалы Первой Всероссийской
конференции ученых, инженеров и производителей в области нанотехнологий, Москва, ЛКИ,
2007.
Ненашев М.Ф. Последнее правительство СССР. Москва: Кром, 1993. 221 с.
От катастрофы к возрождению: причины и последствия разрушения СССР. Москва:
ВШЭ, 1999. 381 с.
Каневская Р.Д. Математическое моделирование гидродинамических процессов
разработки месторождений углеводородов.
94
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
разработки месторождений углеводородов). Ижевск, 2002. 140 с.
Латышев В.Н. Трибология резаний. Кн. 1: Фрикционные
Ни в одном из возможных случаев на библиографические записи не
используются разделительные знаки, применяемые в российском ГОСТе («//» и
«–»). Название источника и выходные данные отделяются от авторов и заглавия
статьи типом шрифта, чаще всего, курсивом (курсив), точкой или запятой.
95
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Шаблон для сопроводительного письма авторов
В редакцию журнала
"МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ"
190008 г.
Санкт-Петербург, ул. Лоцманская д. 3
СОПРОВОДИТЕЛЬНОЕ ПИСЬМО
Просим опубликовать в журнале "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ" статью <заголовок
статьи>.
Авторами статьи являются <перечень Ф.И.О. авторы полностью>. Работа
осуществляется в <полное и сокращенное название учреждения (учреждения)>. Текущую
переписку по вопросам публикации статьи следует вести с <Фамилия И.О.>. Координаты для
обратной связи:
1. Почтовый адрес (с индексом)
2.
Электронная почта 3. Тел. служебный и домашний
(с кодом города)
ственность за возможные нарушения авторских прав третьих лиц.
Материал подтвержден, факты, факты, цитаты сверены с первоисточником, материал не
содержит сведений об ограниченном распространении.
Авторы дают согласие на редактирование статьи, а также на использование ее полнотек
служебная версия обращения на официальном сайте научного журнала "МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ включения в базу данных и информации"
системы.
Авторы разрешают использовать восстановление в статье о персональных данных и дают
согласие на их публикацию. Авторы происходят с тем, что редакция имеет право на литературное
редактирование и доведение статей до редакторских эскизов, выполненных в рамках журнала.
Авторы разрешают публикацию статей в доступе к электронным ресурсам в
PDF-формате и включают в себя международный договор от каждого автора(соавтора) статьи.
Подпись
96
<Данные>
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Шаблон рецензии
В редакцию журнала
"МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ"
190008 г. Санкт-Петербург, ул. Лоцманская д. 3
РЕЦЕНЗИЯ
Статья: <Заголовок статьи>.
Статья:<Фамилии И.О. авторы>
I. Информация для редакции
1. Соответствие статей тематике журнала: •
статья соответствует тематике журнала (да/нет) •
если нет, то какие альтернативные журналы могут быть предложены авторам для авторов
проверка? 2.
Оригинальность и точность обнаружения Результаты статьи (да/нет/другие оценки):
• результаты оригинальны •
результаты имеют научную фиксацию • результаты
имеют практическую фиксацию
3. Качество изложения материала статьи (да/нет/другие оценки): •
является ли аннотация достаточно информативной.
• понятность изложения статьи
• следует ли определенный размер
статьи • четко ли указана цель статьи •
адекватно ли определено место статьи в круге других работ •
можно ли понизить степень подробности математических выкладок •
адекватен ли список цитируемой литературы • все ли рисунки и таблицы
уместны • имеются ли ошибки и технические погрешности • строгость
изложений математических и экспериментальных результатов •
достаточно обоснованные результаты и выводы статей
4. Заключение (да/нет).
5. Замечания и рекомендации по статьям для редколлегий
Должность, ученое звание и научная степень
<Данные>
<Подпись рецензента>
II. Замечания и рекомендации по статье для авторов
97
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
г. Санкт-Петербург
Лицензионный договор №________
3 (33) Т. 2 2016
«___»_________ 20 года
Общество с ограниченной ответственностью «НАУЧНО-ИССЛЕДОВА-ТЕЛЬСКИЙ ЦЕНТР «МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ» (ООО «НИЦ «МОРИНТЕХ»), именуемое в будущем «Лицензиат»,
в лице назначенного генерального директора-главного редактора научного журнала «МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ» Никитин Николая Васильевича, действующего на основании
Доверенности № 1-59, удостоверенной нотариусом Санкт-Петербурга Володиным А.В. 21.01.2014г, с
другой стороны, и Гражданин РФ __________________________________, именуемый в дальнейшем
"Лицензиар", со стороны, именуемые в дальнейшем "Сторона/Стороны", числои настоящего договора
(далее - "До говор") о нижеследующем. 1. Предмет Договора
1.1. По настоящему Договору Лицензиар на безвозмездной основе предоставляет Лицензиату
право пользования
____________________________________
_______________________________________________________________,
(наименования, характеристика природных материалов)
именуемого в последующем "Произведение", на основе неисключительной лицензии в
обусловленных договором пределах и на срок действия договора. 1.2. Лицензионные гарантии ,
что он обладает исключительными авторскими правами на передаемое Лицензия на производство
ведения . 2. Права и обязанности сторон
2.1. Лицензия предоставляет Лицензию на весь срок действия исключительных прав на получение
права: 2.1.1. право на производство производства (опубликование, обнародование, дублирование,
тиражирование или размножение производства) без ограничения тиража экземпляров. При этом
каждый экземпляр производства должен воспроизводиться автором произведения ; 2.1.2. право на
распространение широкого способа; 2.1.3. право на включение в составное произведение; 2.1.4.
право на доведение до всеобщего сведения; 2.1.5. на использование метаданных (название, имя
автора (правообладателя), аннотации, биб лиографические материалы и пр.) 2.1.6. право на
переуступку на договорных условиях частично или полностью передано по настоящему договору
права части без выплаты лицензии вознаграждения. 2.2. Лицензия передает права Лицензия по
настоящему Договору на основе неисключателя Договорной лицензии. 2.3. Лицензия на трехдневный
срок бесплатно Лицензия Произведено в электронной версии в формате инструкции по подготовке
статей для научного журнала «Морские интеллектуальные технологии» (ООО «НИЦ «МОРИНТЕХ»)
для ознакомления. В те чение 30 (тридцать) дней рабочих, если Лицензия не попадает к Лицензиару
требования или требования, связанные с качеством (содержанием) или объемом, предоставленному
для озна комления Произведение, Стороны подписывают Акт приема-передачи Проведения. 2.4.
Дата подписания Акта приема-передачи Производство является моментом передачи Лицензии на
зиату права , предписания в общем договоре. 2.5. Лицензия обязуется соблюдать предусмотренные
за исключением авторских прав, лицензии, а также применения их защиты и все допустимые меры
для исключения нарушения авторских пропорций встречаются. 2.6. Территория, в соответствии с
которой используются права на производство, не ограничена. 2.7. Лицензия также предоставляет
Лицензию на право хранения и обработку следующего своего наследия без ограничения срока: •
реестр, имя, отчество; • дата рождения; • сведения об образовании; • сведения о месте работы и
занимаемой должности; • сведения о наличии опубликованных источников литературы, науки и
искусства.
98
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Персональные данные предоставляются для их хранения и обработки в различных базах данных и
информационных ресурсов, включения их в поиске и достоверности получения, создания обоснованных
взаимосвязей объектов объектов науки, литературы и обработки с персональными данными и т.п.
Лицензия имеет право на получение данных для обработки и хранения данных по избирательным
участкам с нарушением границ видимости (наименования и адресов) Licensearu. Отзыв о контроле за
хранением и обработкой данных производится Лицензиаром по тем направлениям, требующим
ограничения лицензии.
3. Ответственность Стороны
3.1. Лицензия и Лицензиат применяются в соответствии с применением за наличие РФ имущественно
действующую иную юридическую ответственность за неисполнение или ненадлежащее выполнение
своих обязательств по настоящему Договору. 3.2. Сторона, не соответствующе исполнявшая или не
исполнявшая свои обязанности по настоящему Договору, обязана возместить убытки, причиненные
другой Стороной, включая упу щенную выгоду. 4. Конфиденциальность
4.1. Условия настоящего Договора и значительные проявления к нему - конфиденциальны и не
требуют разглашения.
5. Заключительные положения
5.1. Все споры и разногласия. 5.2. Настоящий Договор вступает в силу с момента подписания
обеими Сторонами настоящего До говора и Акта приема-передачи Произведения. 5.3. Настоящий
Договор до полного выполнения Сторонами своих обязательств по требованию. 5.4. Расторжение
настоящего Договора возможно в любое время по обоюдному согласию Стороны, с указанием Стороны
соответствующего требования об этом. 5.5. Расторжение настоящего Договора в одностороннем
порядке возможно в случаях, предусмотренных в реальных случаях для применения, либо по решению
суда. 5.6. Любые изменения и дополнения к настоящему Договору вступают в силу только в том случае,
если они составляют протоколы протокола и подписаны обеими Сторонами настоящего Договора. 5.7.
Во всем, что не предусмотрено настоящим Договором, Стороны отвечают нормами законодательства
РФ. 5.8. Настоящий договор составлен в двух экземплярах, уникальное содержание и равноправная
юридическая сила, одна для каждой из Сторон.
6. Реквизиты Сторона.
Лицензия:
Лицензиар:
ФИО, дата рождения, паспорт, адрес
ООО «НИЦ «МОРИНТЕХ»
регистрации
Адрес: 190121, г. Санкт-Петербург,
ул. Лоцманская д. 3 ИНН 7813074883,
КПП 783901001 р/с
40702810255080004491 Северозападный банк ПАО «Сбербанк
России» в Санкт-Петербурге БИК 044030653 к/с
30101810500000000653
Лицензиар:
Лицензиат
Заместитель генерального директора
ООО «НИЦ «МОРИНТЕХ»
___________________/Никитин Н.В../
99
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
АКТ
г. Санкт-Петербург
к международному договору №________
«___»_________ 20___ года
Общество с ограниченной ответственностью «НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ЦЕНТР
«МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ» (ООО «НИЦ «МОРИНТЕХ»), именуемое мое в будущем
«Лицензиат», в лице заместителя генерального директора-главного редактора научного журнала
«МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ» Никитин Николая Васильевича , стойкости на основании
Доверенности № 1-59, удостоверенной нотариусом Санкт Петербурга Володиным А.В. 21.01.2014г, с одним,
и Гражданин РФ________________________________________, именуемый в дальнейшем "Лицензиар", с дру гой
стороны, именуемый в дальнейшем "Сторона/Стороны", последовали настоящий акт (далее – «Акт») к
международному договору №____ от « ___» _____________ года (далее - "Договор") о ни жеследующем.
1. Лицензиар передан , а Лицензиат принят в соответствии с условиями Договора 1 (один) экземпляр
производства - _____________________________(наименование и характеристика) - и право его использования.
2. Стороны взаимных претензий по порядку и объему исполнения обязательств по Договору не имеют
места.
3. Настоящий Акт составлен в двух экземплярах, уникальной равноправной юридической силы, по
одному для каждой из Сторон.
Реквизиты Сторона.
Лицензия:
Лицензиар:
ФИО, дата рождения, паспорт, адрес
ООО «НИЦ «МОРИНТЕХ»
регистрации
Адрес: 190121, г. Алматы, ул. СанктПетербург, ул. Лоцманская д. 3 ИНН
7813074883, КПП 783901001 р/с
40702810255080004491 Северозападный банк ПАО «Сбербанк
России» в Санкт-Петербурге БИК
044030653 к/с 30101810500000000653
Лицензиар:
Лицензиат
Заместитель генерального директора ООО
«НИЦ «МОРИНТЕХ»
___________________/Никитин Н.В./
100
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Правила направления, рецензирования и публикации
научных статей в научном журнале «МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ
ТЕХНОЛОГИИ»
1. Правила направления
Автор (Авторы) подготавливает текст рукописи научной статьи на русском языке (название,
данные об авторах и ключевых словах на русском языке) в автоматическом виде в
соответствии с Инструкцией по подготовке статей для научного журнала "МОРСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ". 1.1. Автор направляет на имя главного редактора
сопроводительное письмо в установленной форме в соответствии с Инструкцией по
подготовке статей для научного журнала "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ".
1.2. Кроме статей, в редакцию в соответствии с Инструкцией по изготовлению статей для
научного журнала "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ" поставки
ют:
1. Одна рецензия на частную статью по особой специальности с подписью, заверенной
гербовой печатью. Применительно к междисциплинарному испытанию применяются
две проверки различных исследований по специальной тематике.
2. Акт экспертизы на открытую публикацию (при необходимости).
3. Лицензионный договор, распечатанный и подписанный каждым автором.
1.3. В рецензиях в свободной форме встречаются описания возможных вопросов: ли
название статьи ее содержания, в какой мере статьи приближаются к перспективным
достижениям в предполагаемой области научных исследований, удачно ли выбрана форма
определения материи, а также предоставляется достоинства и недостатки статьи. В конце
рецензии делается вывод об оптимизации публикации рецензируемого материала. В
рецензии обязательно обращения Ф.И.О., должность, ученая степень рецензента, дата.
Рецензия должна быть заверена подписью рецензента и печатью организации.
Первоначальный вариант статьи, а также предоставленные рецензии имеются в архиве
редакции не менее года (как официальные документы).
1.4. Лицензионный договор в соответствии с Инструкцией по подготовке статей для
научного журнала "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ" предоставляется для
редактирования в распечатанном виде на бумажном носителе или в отсканированном виде.
Он должен быть собственноручно подписан автором (соавторами) шариковой ручкой с
синими ядрами.
1.5. Авторы требуют статьи и все сопроводительные документы в электронном виде в и/
или лично, либо по почте заказным письмом по адресу:
190121 Санкт-Петербург, ул. Лоцманская д.3.
Редакция научного журнала "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ"
1.6. На страницех публикуются новые научные исследования, новые результаты
исследований, новые методы, методики и технологии в области
101
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
кораблестроения, информатики, вычислительной техники и управления. Это является
повторяющимся требованием к статьям.
В журнале печатаются материалы, ранее не опубликованные и не предназначенные для использования
новременной публикации в других изданиях. Авторы статей несут ответственность за
содержание статей и за сам факт их публикации. Редакция не всегда разделяет мнение авторов и
не требует наличия недостоверности внешних данных.
1.7. Гонорар авторам не выплачивается. Плата аспирантов за публикацию статей не взи
май.
1.8. Рукописи авторов не возвращаются.
1.9. Издание получает рецензирование всех поступающих в редакцию материалов,
соответствует ее тематике, с целью их экспертной оценки. Все рецензенты являются
общепризнанными по тематике рецензируемых материалов и имеют место в течение
последних 3 лет публикации по тематике рецензируемой статьи. Рецензии обнаружены в
дательстве и в редакции в течение 5 лет.
1.10. Редакция издания направляет авторам представленных материалов рецензию или
мотивированный отказ, а также обязуется направить копию рецензии в Министерство
образования и науки Российской Федерации при поступлении в редакцию издания
соответствующего ветствующего запроса.
2. Правила рецензирования
2.1. При поступлении статьи в редакцию научных периодов редактором издания произведена
оценка ее соответствия требованиям к оформлению рукописи, а также процедура выдачи
рукописи. При нарушении правил предоставления рукопи сей статья отправлена автору на
доработку. Рукописи, поступающие для публикации в журнале, проверяются по сбору
технических требований и профилю журнала. Материалы, не встречающиеся в этом случае,
возвращаются автором к причинам отказа в приеме.
2.2. Поступающие от авторов научные статьи проходят редакционную научную экспертную
оценку, оценивающую их внимание к предъявляемой проблеме, уровень освещения темы,
научную новизну.
Целью научной экспертизы, возникающей редкой ллегией научного журнала
"МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ", является экспертная пертная оценка
качества научной статьи, содержащей обязательные критерии научной науки.
сти:
• заглавие статьи ее содержания;
• формулировка решаемой проблемы или задачи;
• обоснование актуальности представленных материалов;
• исследовательский характер статьи;
• аргументированность изложений и выводов, в частности, наличие ссылок на
использованную литературу и другие источники информации;
• научная новинка и практическая получение дохода;
• наличие выводов по результатам статьи;
• наличие списка литературы со ссылками на источники из него из текста статьи.
102
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
• Обеспечение соответствия содержания статьи тематике журнала. Если содержание
статьи не соответствует тематике издания, она обнаруживается с рассмотрением, об
этом сообщается автору. Материалы авторам не возвращаются.
Экспертизу члена редколлегии научного журнала "МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ
ТЕХНОЛОГИИ", представляющиеся в соответствующей области знаний.
2.3. В случае несоответствия материалов предоставленным критериям, научные редакторы
передают рукопись выше главному редактору для вынесения решения о рекомендациях до
обработки предоставленных статей либо исключении ее из публикации.
Если статья нуждается в доработке, то вы подвергаетесь отзыву члена редакционной коллегии
с замечаниями. После возникновения автор выдает в редакцию статьи повторно. Возвра
щение рукописи на доработку не означает, что статья принята к печати.
Доработанный вариант необходимо прислать в редакцию повторно, отдельно приложить
письмо с ответами на замечания члена редакционной коллегии. Датой поступления статей
время поступления в редакцию окончательного (переработанного) вкуса.
2.4. Статьи, осуществляемые редакцией научных журналов, приобретаются по рубрикам,
соотносятся с ветствующим капиталом и направлениями, по интересам с журналами.
3. Правила публикации научных статей, аннотаций и подписок
3.1. Принятые к публикации статьи проходят редактирование, Предполагаемое предпечатную
подготовку статьи к размещению в очередном номере журнала.
3.3. Тиражирование журнала издательско-полиграфический центр НИЦ «МОРИНТЕХ» в
строгом соответствии с периодичностью выхода в свет издания.
3.4. Перепечатка только с разрешением редакции.
103
Machine Translated by Google
МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ
3 (33) Т. 2 2016
Есть на складе издательства
Гайкович А. И.
Основы теории проектирования сложных технических систем СПб,
НИЦ МОРИНТЕХ, 2001, 432 стр.
Монография посвящена проблемам проектирования крупных разнокомпонентных технических систем.
Изложение управления с позиций системного анализа и достижений прикладной математики и информатики.
Есть в продаже: цена 420 руб. + пересылка
Коршунов Ю. Л.
Люди, корабли, оружие (К 70-летию 1-го ЦНИИ МО РФ) СПб,
НИЦ МОРИНТЕХ, 2002, 176 стр.
Книга содержит историю научно-исследовательских институтов кораблестроения и морского оружия. Ав тор
приводит большое количество фактов, характеризующих деятельность институтов на различных участках развития
флота. Есть в продаже: цена 280 руб. + пересылка
Архипов А. В., Рыбников Н. И.
Десантные корабли, катера и другие высадочные средства морских десантов СПб, НИЦ
МОРИНТЕХ, 2002, 280 стр.
Из опыта проведения морских десантных операций, их особенности, характерные черты и тенденции развития
этого вида боевых действий. Выбраны наиболее существенные аспекты развития десантных кораблей, катеров и
других высадочных средств морских десантов. Затронуты некоторые особенности конструкции десантных кораблей
и возможные пути с применением расчетных методов. Есть в продаже: цена 320 руб. + пересылка
Караев Р. Н., Разуваев В. Н., Фрумен А. И.
Техника и технология подводного обслуживания морских природных ресурсов. Учебник для
вузов СПб, НИЦ МОРИНТЕХ, 2012, 352 стр.
В исследовании рассматривается роль подводно-технического обслуживания в освоении морских месторождений.
Приводится классификация подводного инженерно-технического обслуживания морских нефтепромыслов по видам
работ.
Изложены основные принципы формирования комплексной системы подводно-технического обслуживания
морских нефтепромыслов, включающей использование водолазной техники, глубоководных водолазов.
комплексов и подводных аппаратов.
Есть в продаже: цена 1500 руб. + пересылка
Шауб П. А.
Качка аварийного корабля в условиях морского волнения СПб, НИЦ
МОРИНТЕХ, 2013, 144 стр.
Монументография посвящена исследованию параметров бортовой качки поврежденного корабля, судна с
часто затопленными отсеками в условиях морского волнения. Выведена система дифференциальных уравнителей,
не учитывающих качки поврежденного корабля с нелинейностью диаграмм статической остойчивости, начального
угла наклона крена, затопленных отсеков III категории.
Книга предназначена для специалистов в области специальности корабля, а также может быть полезной для
пирантов, инженеров и проектировщиков, предприятий в судостроительной области, занимающихся эксплуатацией
судов, судов. Есть в продаже: цена 350 руб. + пересылка
Гидродинамика малопогруженных движителей: Сборник статей СПб,
НИЦ МОРИНТЕХ, 2013, 224 стр.
В сборнике излагаются исследования результатов гидродинамических характеристик частичного погружения
гребневых винтов и экспериментальных данных, полученных в кавитационном бассейне ЦНИИ им. академия мика
А. Н. Крылова в 1967–2004 гг. его эксплуатация при отработке процедур испытаний на штатных установках. Есть в
продаже: цена 250 руб. + пересылка
Гайкович А. И.
Теория проектирования водоизмещающих кораблей и судов т. 1, 2 СПб.,
НИЦ МОРИНТЕХ, 2014 Монография посвящена теории водоизмещающих
кораблей и среднемагистральных гидродинамических схем. Методологической основой излагаемой теории
системного анализа являются математическое программирование (оптимизация). Есть в продаже: цена 2-х т. 2700
рублей + пересылка
104