/























































































































Автор: Карасик В.Е. Орлов В.М.
Теги: электротехника электроника физика математическая физика лазеры учебное пособие лазерные системы
Год: 2001
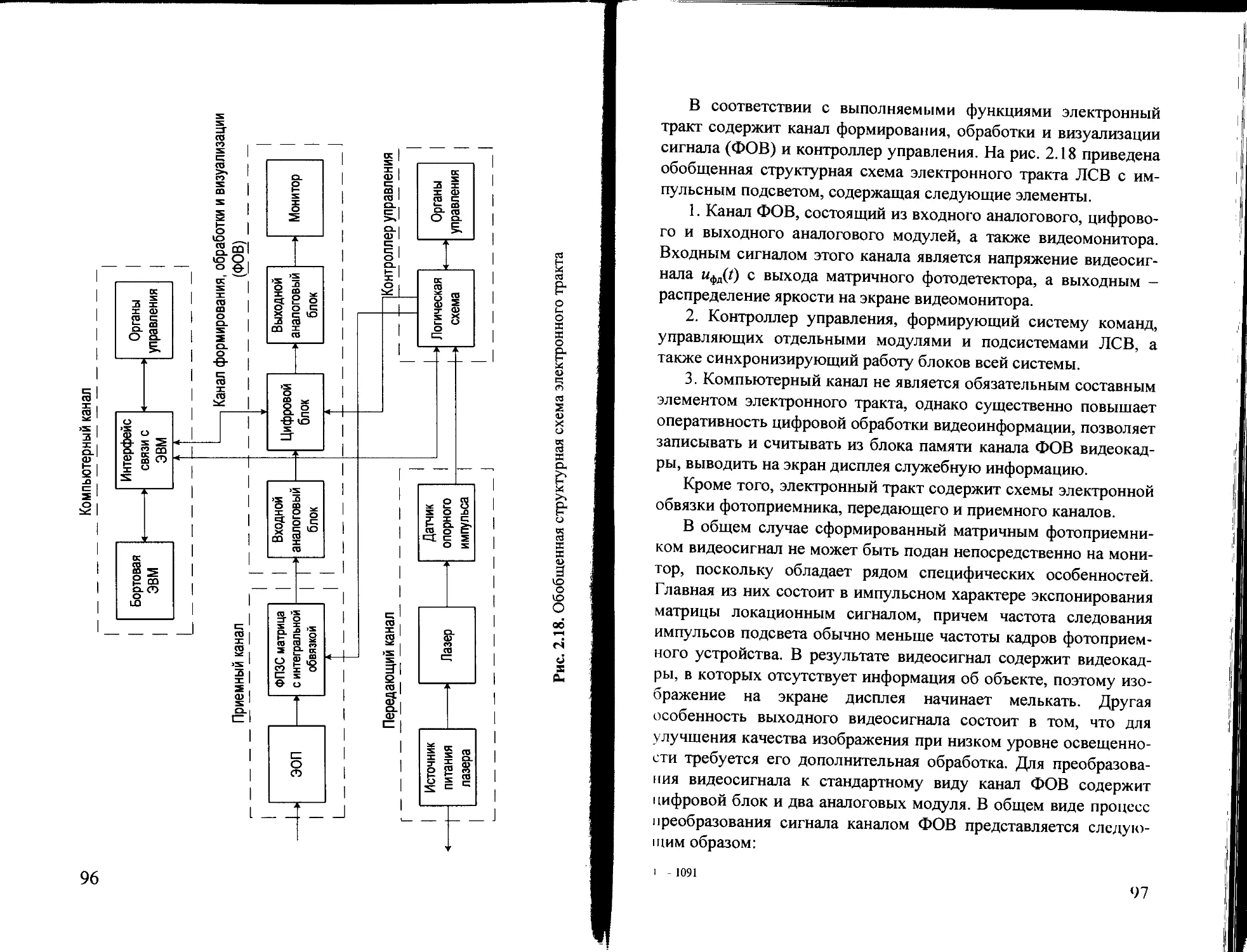
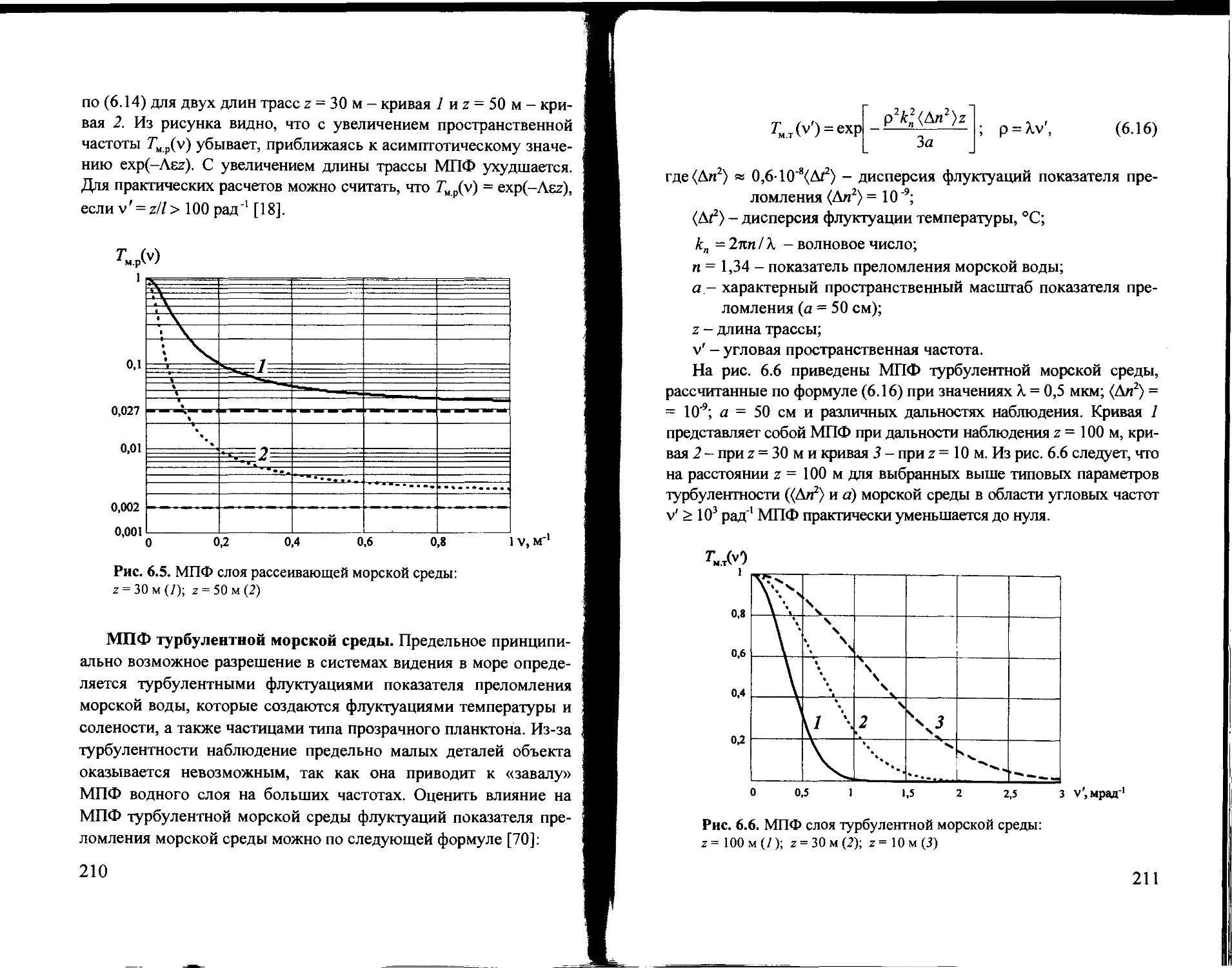
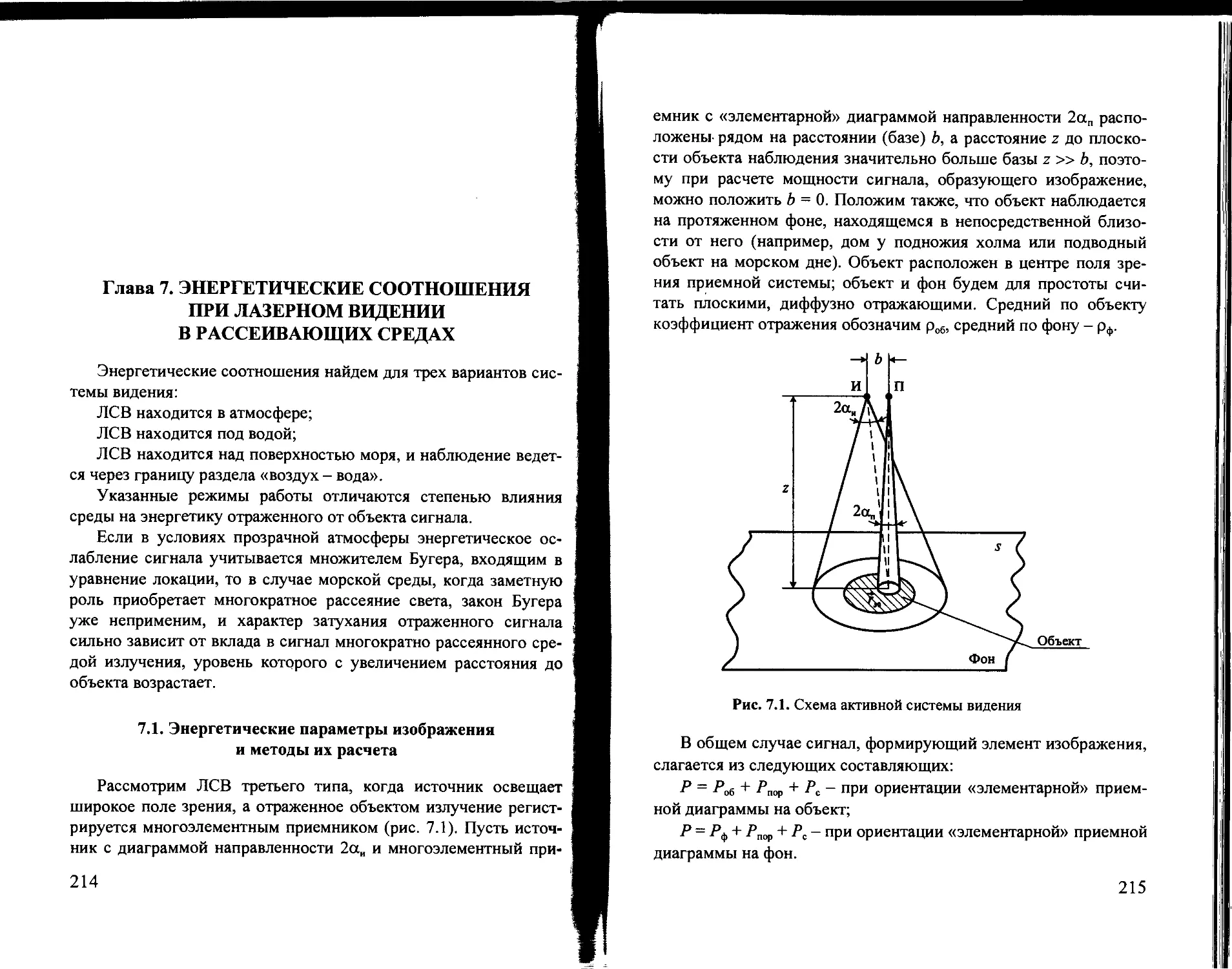
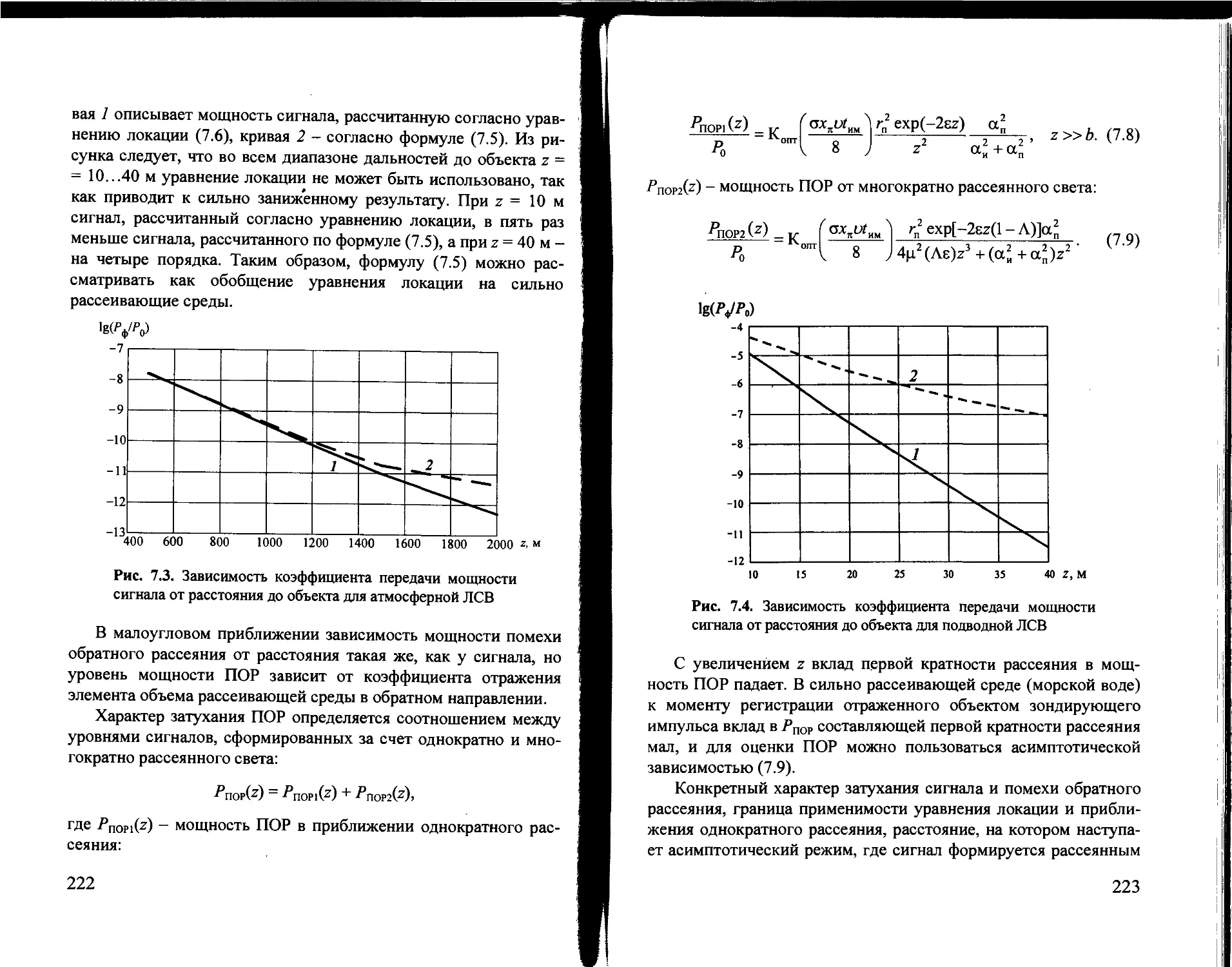
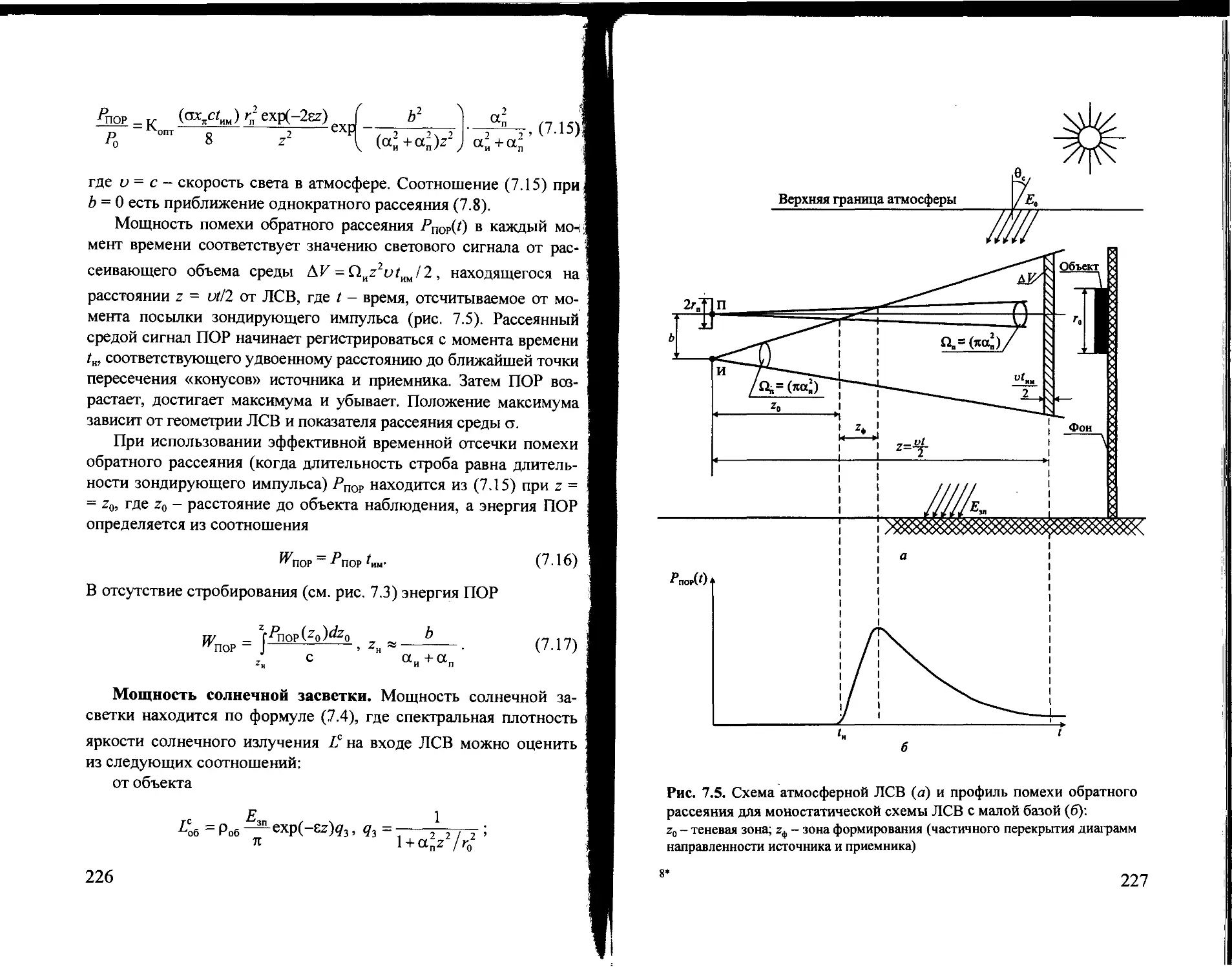
Текст
УДК 621.375(075.8)
ББК 32.85
К21
Рецензенты:
д-р техн, наук, проф. А.А. Романов, д-р техн, наук, проф. И IO loitomoe
Карасик В.Е., Орлов В.М.
К21 Лазерные системы видения: Учебное пособие. М.: Изд-во
МГТУ им. Н.Э. Баумана, 2001. — 352 с., ил.
ISBN 5-7038-1735-8
Изложены общая теория и технические пути построения изобра-
жающих оптико-электронных систем нового типа - лазерных систем
видения, предназначенных для наблюдения дистанционных объектов
при недостаточной естественной освещенности или ночью. Описаны
современные методы анализа процесса формирования изображения в
рассеивающих и случайно-неоднородных средах, основанные на син-
тезе теорий линейных систем и переноса излучения. Приведены ориги-
нальные методики расчета основных параметров систем активного
видения и характеристик воспроизводимого на экране дисплея
изображения, учитывающие специфические свойства зрительного
анализатора оператора. Описаны экспериментальные образцы систем
видения, обсуждены результаты экспериментальных исследований и
выработаны рекомендации по проектированию. Содержание учебного
пособия соответствует курсу лекций, который авторы читают в МГТУ
им. Н.Э. Баумана.
Для студентов технических университетов, обучающихся по нап-
равлению «Оптотехника», а также для научных и инженерно-техничес-
ких работников приборостроительного профиля.
Ил. 118. Табл. 29. Прил. 2. Библиогр. 71 назв.
УДК 621.375(075.8)
ББК 32.85
ISBN 5-7038-1735-8
© В.Е. Карасик, В.М. Орлов, 2001
© Издательство МГТУ им. Н.Э. Баумана, 2001
© МГТУ им. Н.Э. Баумана, 2001
ОГЛАВЛЕНИЕ
Предисловие..........................................6
Список основных сокращений..........................10
Список обозначений..................................11
Глава 1. Общие сведения о лазерных системах видения.26
1.1. Видение в рассеивающих средах..........26
1.2. Назначение и технические характеристики ЛСВ ...40
1.3. Обобщенная структурная схема ЛСВ.......46
1.4. Классификация и основные схемы
построения ЛСВ .............................49
Глава 2. Лазерная система видения как изображающая
система............................................54
2.1. Линейная изображающая система .........55
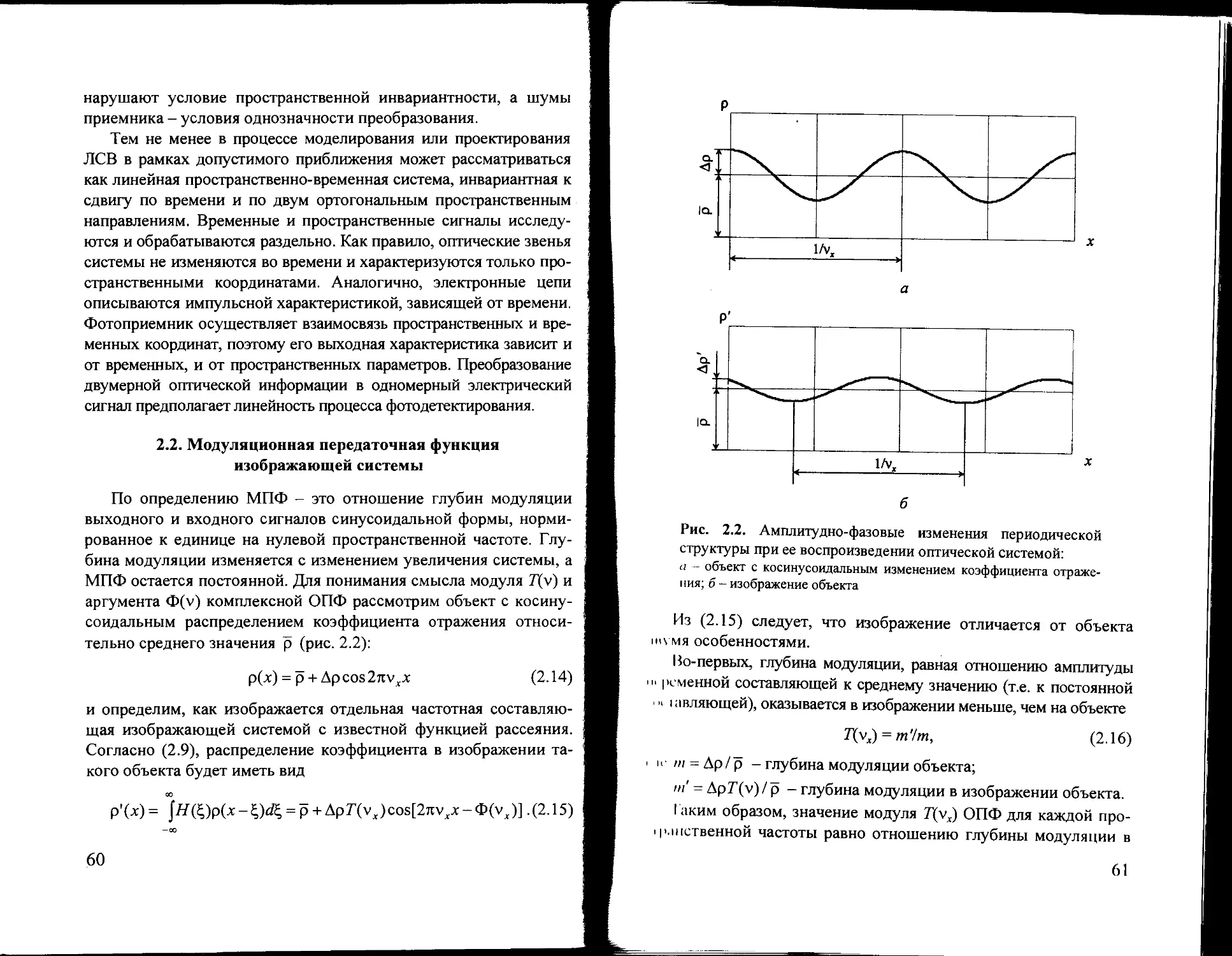
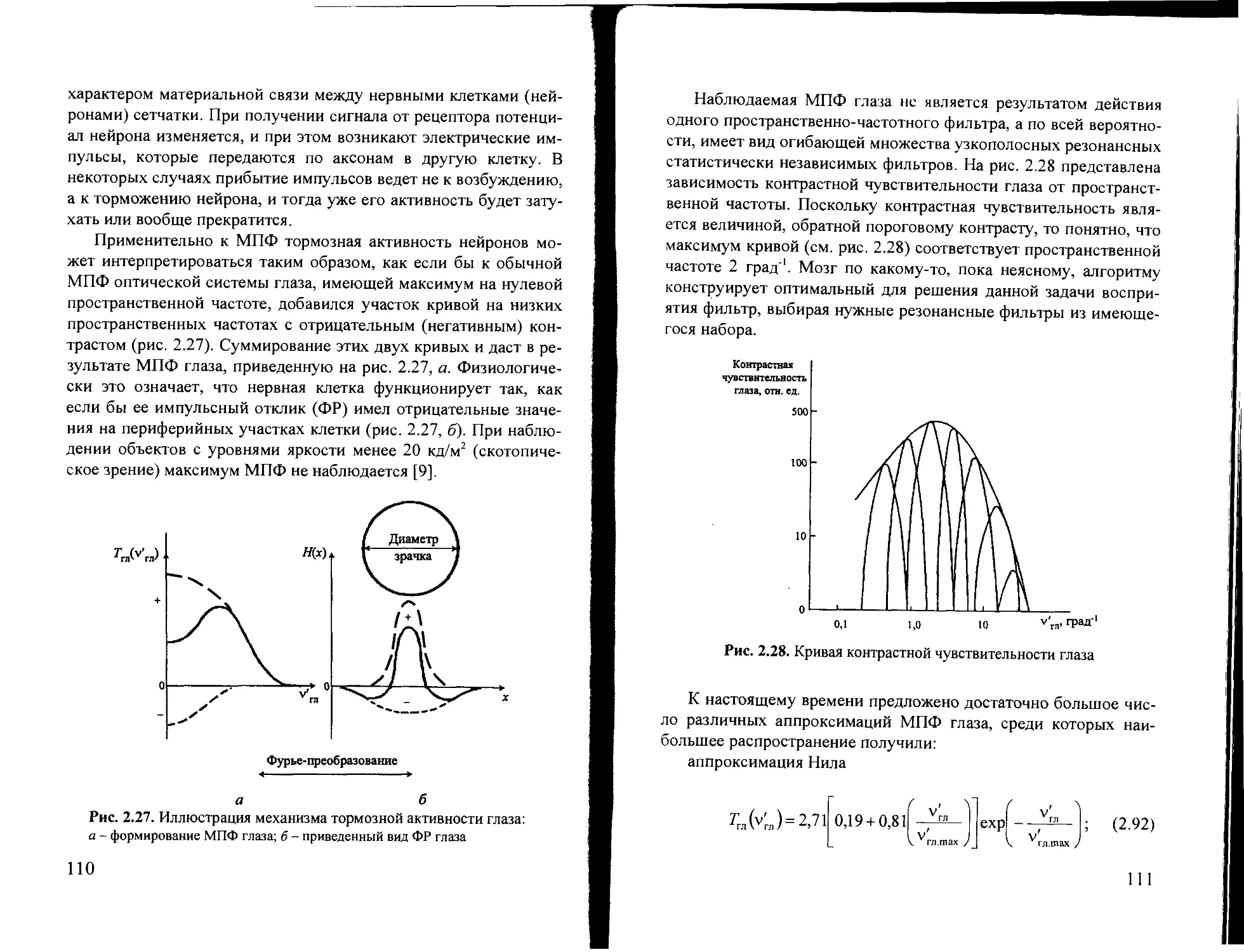
2.2. Модуляционная передаточная функция
изображающей системы .......................60
2.3. Глубина модуляции и контраст...........63
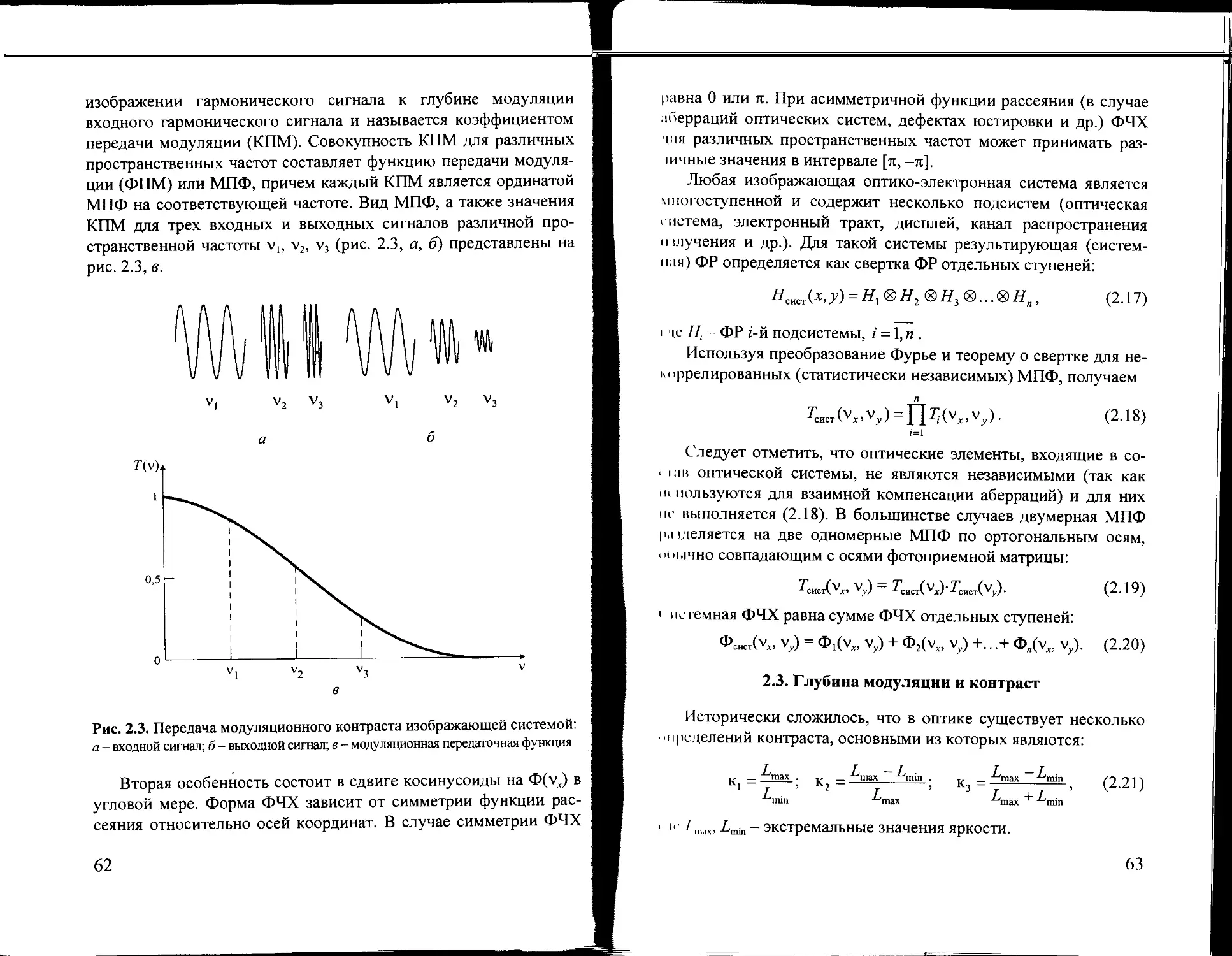
2.4. Контрастная передаточная функция
изображающей системы ........................65
2.5. Модуляционная передаточная функция
оптического канала...........................70
2.6. Модуляционная передаточная функция
матричного фотоприемника.....................75
2.7. Модуляционная передаточная функция
блока усилителя яркости .....................90
2.8. Анализ передаточной функции
электронного тракта..........................95
3
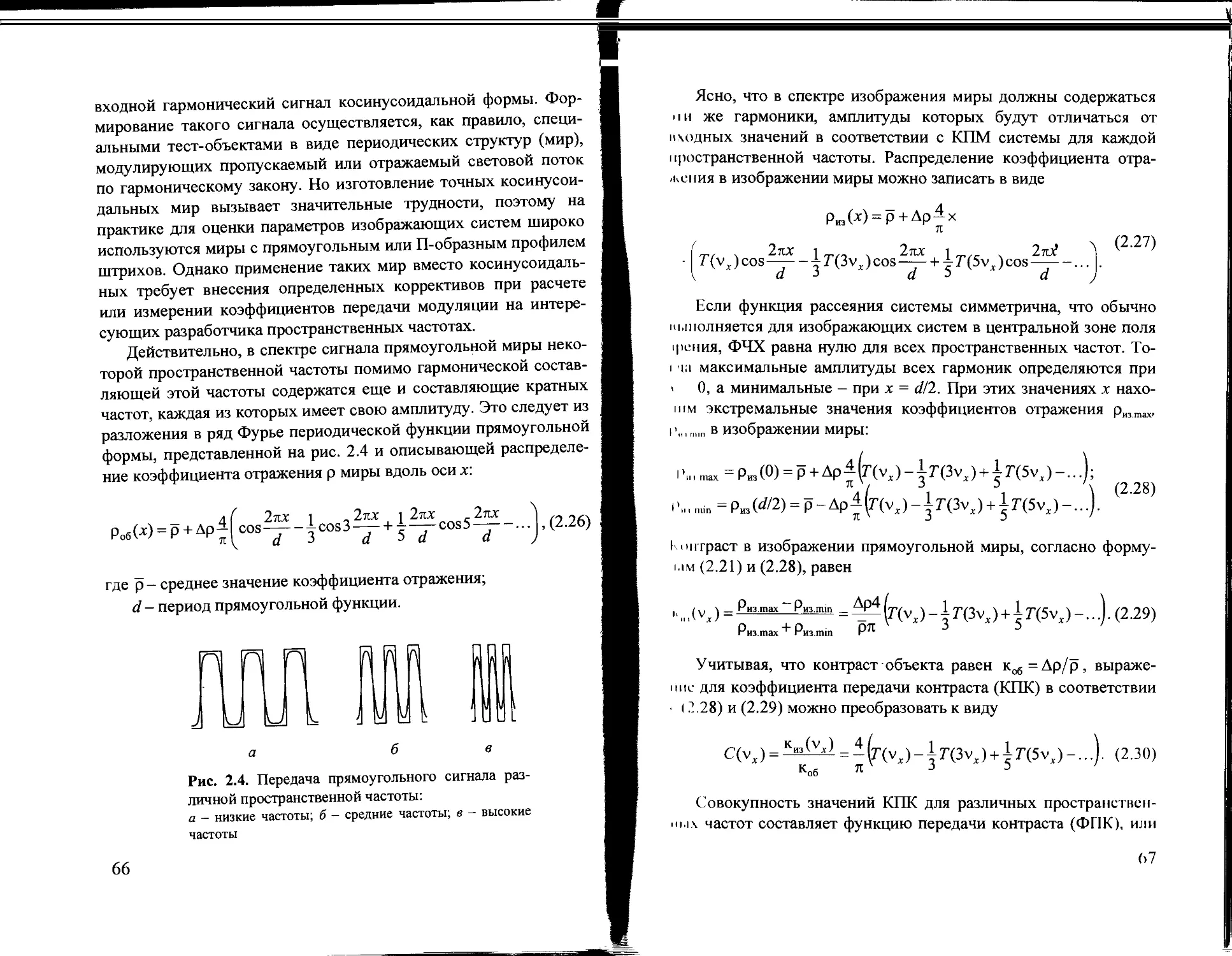
2.9. Модуляционная передаточная функция
видеомонитора...............................103
2.10. Модуляционная передаточная функция
зрительного анализатора.........................107
Глава 3. Перенос изображения в рассеивающей среде.....115
3.1. Характеристики поля излучения. Основные
фотометрические величины ....................116
3.2. Модели лазерного источника и приемного
устройства...................................121
3.3. Распространение лазерного излучения в
рассеивающей среде. Уравнение переноса
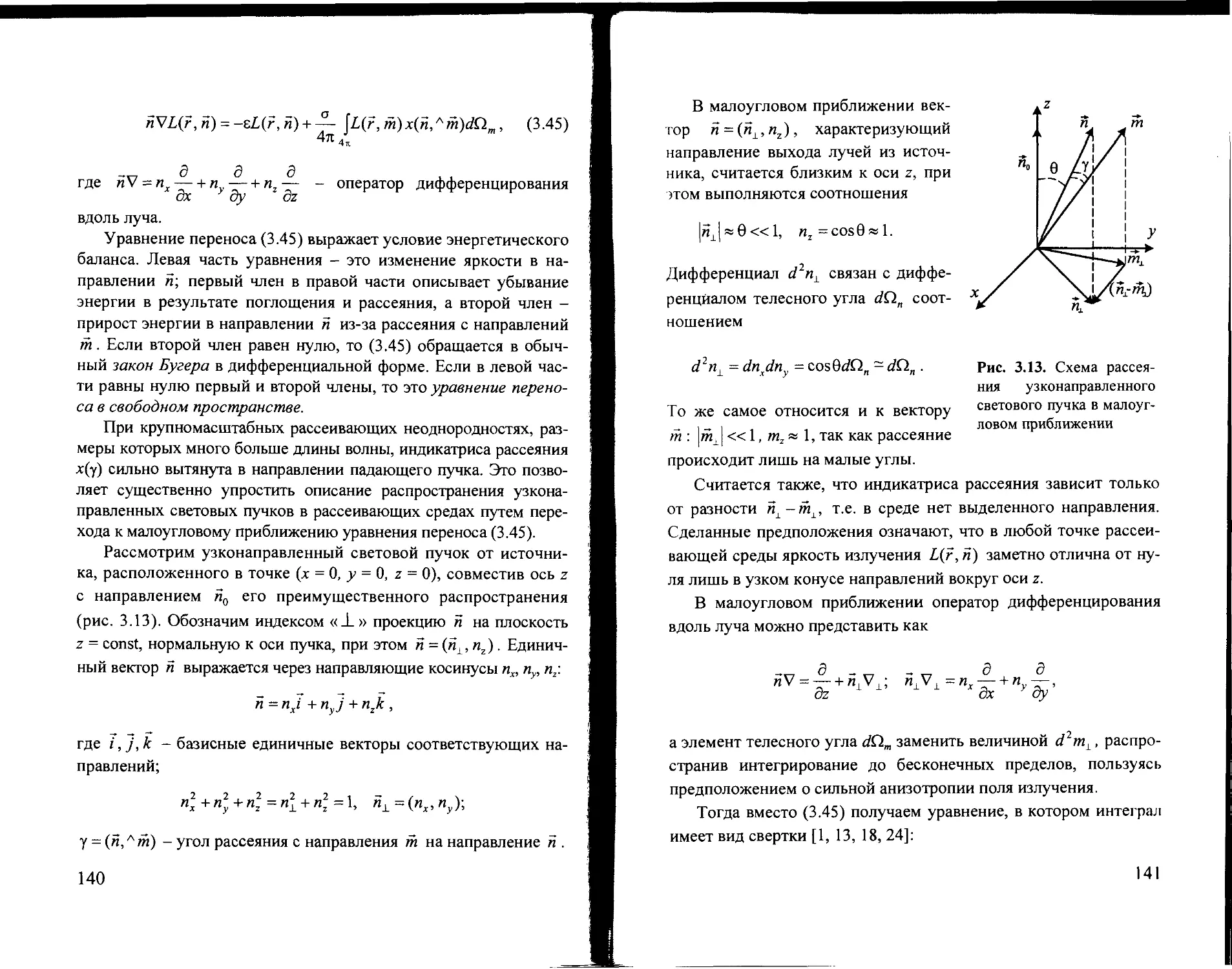
изображения. Малоугловое приближение.........135
3.4. Теорема взаимности. Уравнение переноса
изображения в рассеивающей среде.............143
Глава 4. Перенос изображения в случайно-неоднородной
среде ......................................153
4.1. Характеристики поля излучения и теория
когерентности................................154
4.2. Модели лазерного источника и приемного
устройства...................................161
4.3. Распространение лазерного излучения в
турбулентной атмосфере. Волновое уравнение,
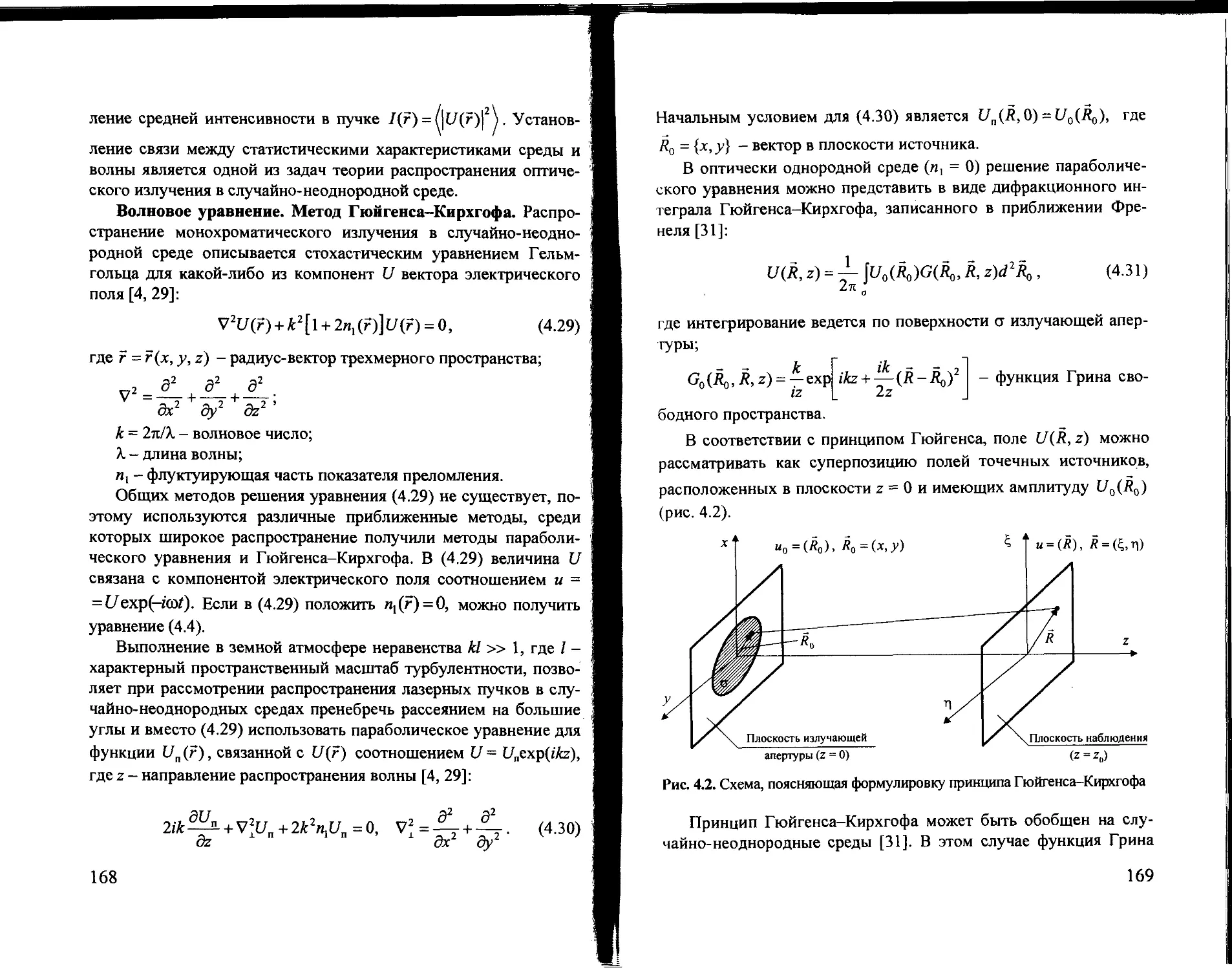
метод Гюйгенса-Кирхгофа ....................165
4.4. Теорема взаимности. Уравнение переноса
изображения в случайно-неоднородной среде....171
Глава 5. Оптические характеристики среды
распространения излучения...........................179
5.1. Оптические характеристики атмосферы......179
5.2. Оптические характеристики морской среды .190
Глава 6. Модуляционная передаточная функция среды
распространения излучения...........................194
6.1. Наблюдаемый контраст в изображении объекта .. 195
6.2. Модуляционная передаточная функция
атмосферы....................................203
6.3. Модуляционная передаточная функция
морской среды ...............................209
4
Глава 7. Энергетические соотношения при лазерном
видении в рассеивающих средах.......................214
7.1. Энергетические параметры изображения
и методы их расчета..........................214
7.2. Энергетические соотношения
при лазерном видении в атмосфере.............224
7.3. Энергетические соотношения
при лазерном видении в море ................228
7.4. Энергетические соотношения при лазерном
видении через границу раздела «воздух-вода» ....233
7.5. Особенности светоэнергетического расчета
фотоприемного устройства ЛСВ
с усилителем яркости.........................241
Глава 8. Минимальный разрешаемый контраст
и предельная дальность видения .............249
8.1. Минимальный разрешаемый контраст......249
8.2. Анализ шумов, влияющих на качество
изображения ЛСВ.........................252
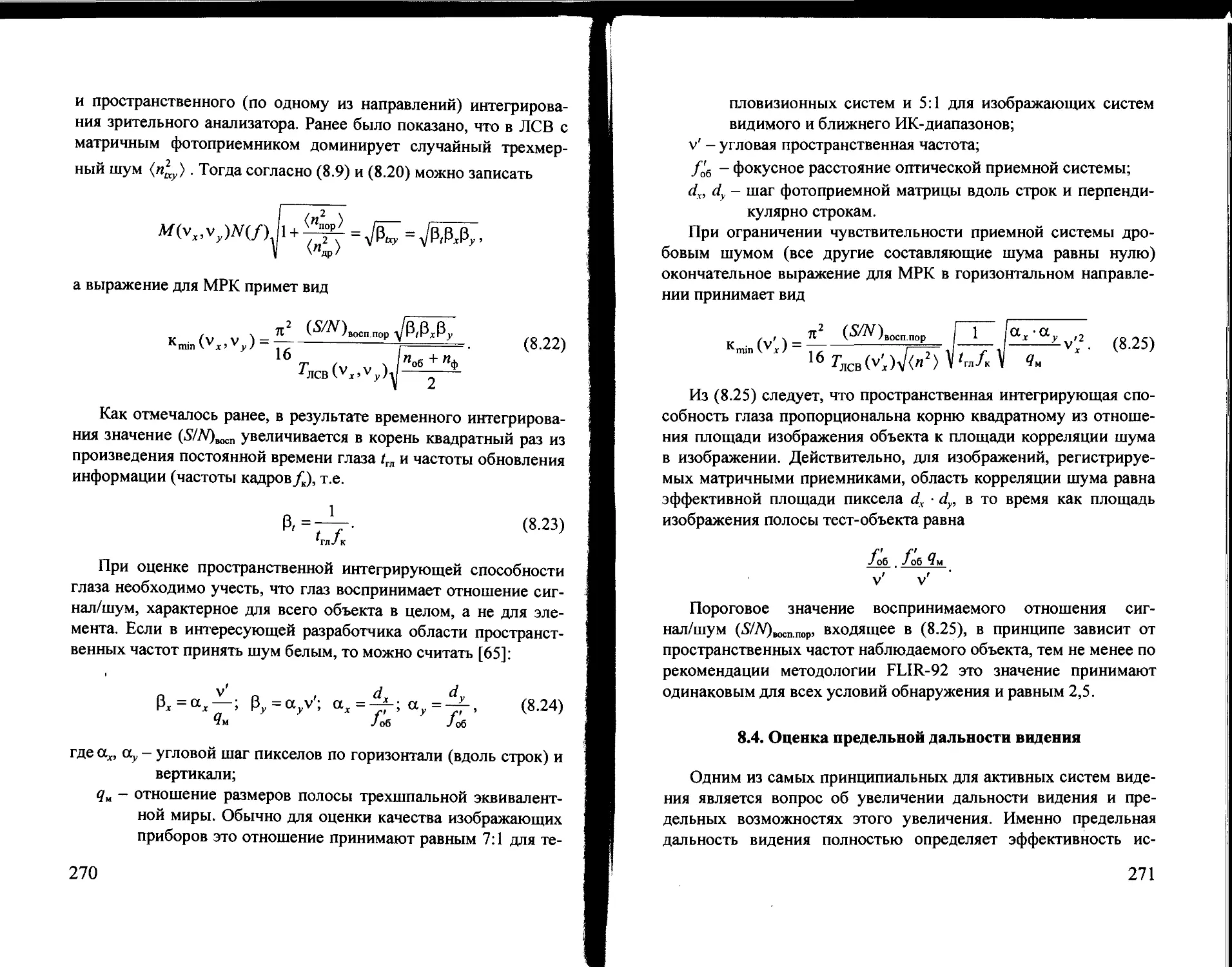
8.3. Модель трехмерного шума...............267
8.4. Оценка предельной дальности видения ..271
Глава 9. Методика расчета предельной дальности видения
при использовании ЛСВ с импульсным подсветом 280
9.1. Расчет предельной дальности видения при работе
ЛСВ в приземном слое атмосферы..........280
9.2. Расчет предельной дальности видения при работе
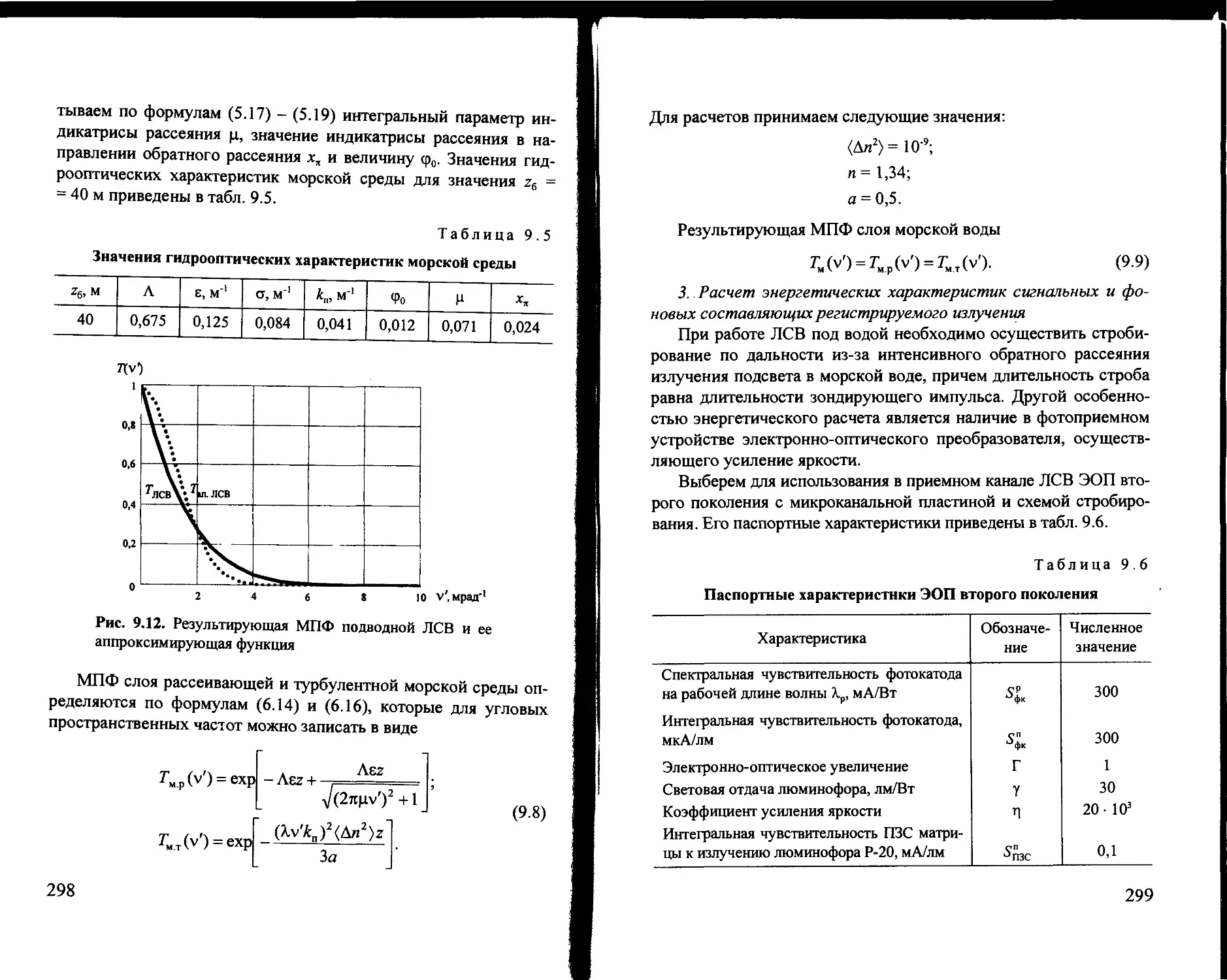
ЛСВ под водой...........................295
9.3. Расчет дальности видения объекта при работе
ЛСВ через границу раздела «воздух-вода»......303
Глава 10. Примеры практической реализации лазерных
систем видения......................................308
10.1. Двухчастотная лазерная система видения
с импульсным подсветом .....................310
10.2. ЛСВ с повышенной обнаружительной
способностью................................318
Приложение 1 ......................................335
Приложение! .......................................342
Список литературы..................................347
5
ПРЕДИСЛОВИЕ
Лазерные системы видения (ЛСВ) относятся к классу изо-
бражающих оптико-электронных систем и предназначены для
дистанционного наблюдения объектов в условиях недостаточной
естественной освещенности. За счет подсвета объекта лазерным
излучением ЛСВ могут работать как в ночное время в атмосфере,
так и в море на больших глубинах, куда не доходит солнечное
излучение. Несмотря на активное внедрение в последнее время
автоматических систем обработки изображений, следует при-
знать, что человек-оператор при наличии достаточного ресурса
времени на принятие решения справляется с задачей обнаруже-
ния и распознавания объектов значительно лучше автоматиче-
ских устройств. Поэтому задача разработки ЛСВ, у которых ко-
нечным звеном принятия решения является оператор,
представляется актуальной. Настоящая книга посвящается во-
просам анализа и проектирования таких ЛСВ.
Современный подход к анализу систем видения основан на
использовании методов теории переноса изображения, которая, в
свою очередь, базируется на теории линейных систем и теории
переноса излучения. Теория переноса оптического излучения по-
зволяет с единых позиций рассмотреть процесс переноса излуче-
ния от наблюдаемых объектов до плоскости регистрации изо-
бражения. Теория линейных систем дает возможность выделить
рассеивающую и случайно-неоднородную среду в виде отдельно-
го звена всей системы передачи изображения и определить его
передаточные характеристики, которые влияют на качество фор-
мируемого изображения. Эта возможность, однако, реализуется
6
только при выполнении в рассеивающей среде определенных ус-
ловий, анализ которых особенно принципиален для активных
систем видения. Действительно, при исследовании изображаю-
щих систем с искусственной подсветкой, функционирующих в
рассеивающих средах, возникают сложности, связанные с кор-
ректностью или принципиальной возможностью использования
аппарата линейных инвариантных систем.
Тем не менее, в рамках определенных допущений указанный
подход, основанный на синтезе теории переноса излучения и
теории линейных систем, позволил последовательно и с единых
позиций рассмотреть передаточные характеристики всех звеньев
лазерной системы видения, включая зрительный анализатор, и
оценить качество формируемого изображения.
В главе 1 приводятся общие сведения о лазерных системах
видения. Рассматриваются основные технические характеристи-
ки и обобщенная структурная схема ЛСВ. Дается классификация
основных типов ЛСВ и анализируется состояние элементной ба-
зы для их технической реализации.
В главе 2 лазерная система видения рассматривается как ли-
нейная изображающая оптико-электронная система. Анализиру-
ются передаточные функции и, в первую очередь, модуляцион-
ные передаточные функции (МПФ) всех звеньев ЛСВ с
импульсным подсветом, за исключением канала распростране-
ния, который является предметом исследования последующих
разделов. Приведенные расчетные соотношения позволяют опре-
делить результирующую системную МПФ.
В главах 3, 4 рассматриваются основы теории переноса опти-
ческого излучения в рассеивающих и случайно-неоднородных
средах. Приводятся основные величины теории фотометрии и
теории когерентности. С использованием оптической теоремы
взаимности выводятся уравнения переноса изображения в рассеи-
вающей и случайно-неоднородной средах. Эти уравнения связы-
вают мощность сигнала, образующего изображение, с распределе-
нием коэффициента отражения на поверхности наблюдаемого
объекта.
7
Глава 5 содержи! снедения об оптических характеристиках
атмосферы и морской среды.
Главы 6, 7 посвящены получению из уравнения переноса изо-
бражения в рассеивающей среде основных характеристик, опре-
деляющих качество изображения: модуляционной передаточной
функции (глава 6) и коэффициента передачи энергии «излуча-
тель-объект-приемник» (глава 7).
В главе 8 разрабатывается методика расчета важнейшей ха-
рактеристики ЛСВ - предельной дальности видения. Методика
использует понятие минимально разрешаемого контраста (МРК)
и учитывает особенности восприятия изображений зрительным
анализатором. Оценка воспринимаемого отношения сигнал/шум
проводится с привлечением модели трехмерного шума много-
элементных фотоприемных устройств, что существенно упроща-
ет определение среднеквадратического значения шума.
Глава 9 предназначена для практического освоения изучаемо-
го материала. Она содержит три примера расчета выходных ха-
рактеристик конкретных ЛСВ, предназначенных для работы в
атмосфере, под водой и через границу раздела «атмосфера-мо-
ре». Графическая иллюстрация получаемых возможных решений
в каждом примере способствует усвоению расчетных методик.
В заключительной главе 10 приводятся примеры практиче-
ской реализации конкретных типов ЛСВ. Анализ обнаружитель-
ных характеристик, полученных при их натурных испытаниях,
применяется для оценки предложенных в предшествующих раз-
делах расчетных соотношений.
При написании книги широко использованы элементы теории
передачи оптических сигналов и формирования изображений в
рассеивающих средах, изложенные в монографиях [7, 18, 65], а
также методы анализа линейных оптико-электронных систем,
изложенные в работах [11, 39, 47]. В большинстве из указанных
книг дается общее представление или обзор состояния дел в этой
области лазерной техники, определяются общие подходы к ис-
следованиям изображающих систем, в том числе систем дистан-
ционного наблюдения, развивается привлекаемый математиче-
ский аппарат.
8
Настоящая книга предназначена для изучения основных
принципов и технических путей построения лазерных систем
видения и является, по существу, общим введением в предмет,
написанным на уровне, соответствующем последнему году обу-
чения студентов технических университетов по направлению
«Оптотехника» и ряду смежных специальностей приборострои-
тельного и радиотехнического профиля. Именно поэтому авто-
ры рассматривают настоящую книгу как учебное пособие, тем
более что ряд параграфов написаны на основе курсов лекций,
читаемых авторами в МГТУ им. Н.Э. Баумана для студентов, изу-
чающих оптикоэлектронику и лазерную технику. Необходимо
подчеркнуть, что это учебное пособие не претендует на полный
обзор и анализ современных исследований в данной области, и по-
этому перечень литературных источников достаточно ограничен.
Авторы благодарят своих коллег за комментарии и предло-
жения, использованные в процессе написания книги. Особой бла-
годарности заслуживают В.Б. Немтинов и М.Л. Белов за терпе-
ние, труд и время, потраченные при чтении материала, В.Б. Бок-
шанский и М.А. Гусев за помощь при проведении эксперимен-
тальных исследований ЛСВ, и в особенности Е.Е. Мухина за тех-
ническое редактирование и компьютерную правку рукописи.
Предисловие, главы 1,2,8, 10 написаны В.Е. Карасиком, гла-
вы 4-7 и приложения - В.М. Орловым, главы 3, 9 - авторами со-
вместно.
СПИСОК ОСНОВНЫХ СОКРАЩЕНИЙ
КПК - коэффициент передачи контраста
КПМ - коэффициент передачи модуляции
КПФ - контрастная передаточная функция
ЛСВ - лазерная система видения
МДВ - метеорологическая дальность видимости
МКИ - модуляционный контраст изображения
МКО - модуляционный контраст объекта
МКП - микроканальная пластина
МОД - метеорологическая оптическая дальность
МПФ - модуляционная передаточная функция
МРК - минимальный разрешаемый контраст
ОПФ - оптическая передаточная функция
ПЧС - пространственно-частотный спектр
ФКЧ - функция контрастной чувствительности
ФПК - функция передачи контраста
ФПЗС (ПЗС) - фоточувствительный прибор с зарядовой связью
ФПУ - фотоприемное устройство
ФР - функция рассеяния
ФЧХ - фазочастотная характеристика
ФЭУ - фотоэлектронный умножитель
ЭОП - электронно-оптический преобразователь
СПИСОК ОБОЗНАЧЕНИЙ
А(г,п) - аппаратная функция приемника;
ах, ау - линейные размеры пиксела матричного фотопри-
емника в двух ортогональных направлениях хи у;
Яф - линейный размер площадки фотодетектора;
а - амплитуда волны;
b - лидарное отношение;
С - коэффициент передачи контраста;
с - скорость света в вакууме;
С2п - структурная характеристика (постоянная) пока-
зателя преломления среды;
dx, dy - межцентровый шаг ФПЗС-матрицы в двух ор-
тогональных направлениях х и у;
dz - среднеквадратическое отклонение показателя
ослабления атмосферных дымок;
£>,р - диаметр входного зрачка объектива;
D„ - диаметр выходного пучка лазерного излучателя;
dn - диаметр пятна на экране монитора;
Dn(r) - структурная функция;
£>ро - диаметр входного зрачка репродукционного
объектива;
d3„ - диаметр элемента изображения в плоскости фо-
токатода ЭОПа;
е - заряд электрона;
11
e(Fs) - Е(хи, уи) - Em(x',yr) - Em(yx,vy) ~ функция рассеяния среды; освещенность в плоскости изображения; освещенность в плоскости ФПЗС-матрицы; пространственно-частотный спектр на выходе ФПЗС-матрицы;
Езп - Eo - освещенность земной поверхности; освещенность солнечными лучами верхней гра- ницы атмосферы;
Еыа - Еып ~ Ефк ~ освещенность морского дна; освещенность морской поверхности; освещенность фотокатода; относительная спектральная плотность осве- щенности фотокатода ЭОПа;
^пзс(^) ~ относительная спектральная плотность осве- щенности ФПЗС-матрицы;
Ел ~ ^пор пороговая освещенность ФПЗС-матрицы для конкретного люминофора экрана ЭОПа;
Еп ~ ^пор паспортная пороговая освещенность матрично- го приемника излучения;
E„(rs)> Е„(г5) - распределение освещенности, создаваемое в плоскости объекта реальным и «фиктивным» источниками;
Еу - спектральная солнечная постоянная; электрическая частота;
А/ - ширина полосы пропускания видеотракта;
X - частота кадров;
fn частота следования импульсов накачки;
fo6 ~ /р'о ' фокусное расстояние объектива; фокусное расстояние репродукционного объектива;
/ер - максимальная частота пропускания видеотракта;
/дБ "" частота, на которой амплитуда выходного сиг- нала уменьшается на 3 дБ;
12
G
h
Н(х„-хт
У„-Уо)
Щ(хи-х0,
Уи-Уо)
Н(хи, уи,
хо, У о)
Нот
Нро
Нэл
^эоп
TJ
*-*мон
tf(vx,v7)
4tJVx,Vy)
AZ
Z(n)
Л«о)
об? -*ф
<о
7мкп
7фк
к
коэффициент умножения микроканальной пла-
стины;
постоянная Планка;
ФР пространственно-инвариантной изображаю-
щей системы;
ФР пространственно-инвариантной изображаю-
щей системы с линейным увеличением Р;
ФР изображающей системы;
ФР приемной оптической системы;
ФР репродукционного объектива;
функция пропускания элемента ФПЗС-матрицы;
функция рассеяния ЭОПа;
вертикальный размер экрана монитора;
оптическая передаточная функция (ОПФ);
передаточная функция ФПЗС;
дифференциальный сигнал на выходе фотоде-
тектора;
сила излучения в направлении п ;
осевая сила излучения;
интенсивность в центре пятна на экране мо-
нитора;
сигналы от объекта и фона на выходе фотоде-
тектора;
дисперсия темнового тока;
плотность тока на выходе микроканальной пла-
стины;
пространственная плотность тока фотокатода;
волновое число;
13
к„ приведенное волновое число;
д.' волновой вектор;
t приведенный волновой вектор;
п п
к„ показатель поглощения среды;
- среднее значение показателя поглощения;
у0),
уи) - яркость в плоскости объекта, изображения;
Lx ~ яркость неба у горизонта;
La - яркость атмосферной дымки;
LM - яркость излучения, выходящего из толщи моря;
Lun - яркость излучения, отраженного от морской
поверхности;
£ (г,и) - яркость излучения диффузного источника;
£ии(г,й) - яркость излучения изотропного источника;
£ми (г, й) - яркость излучения мононаправленного источника;
£ни (г, п) - яркость излучения направленного источника;
£о6, £ф - яркость объекта, фона;
Lo - внешний масштаб турбулентности;
/0 - внутренний масштаб турбулентности;
Lo6 н, £ф и - наблюдаемая яркость объекта, фона;
£мон - горизонтальный размер монитора;
Lc - яркость солнечного излучения на входе ЛСВ;
^пор - яркость солнечного излучения на входе ЛСВ
от объекта, фона, помехи обратного рассеяния;
L3K - яркость экрана ЭОПа, монитора;
£тах, ~ экстремальные значения яркости;
£х - спектральная яркость;
Z(v v ) “ пространственно-частотный спектр входного
у сигнала;
14
Lk(r,n) - спектральная поверхностно-угловая плотность
яркости;
т - глубина модуляции в плоскости объекта;
т' - глубина модуляции в плоскости изображения;
М(х, у) - светимость площадки;
тхп - число пикселов в фоточувствительной матрице;
M(v„ vy),
Mvr, v>) - функции, описывающие пространственные и
временные интегрирующие свойства зритель-
ного анализатора;
MN(k) ~ паспортное значение относительной спектраль-
ной плотности светимости источника излучения;
Мэ - светимость экрана ЭОПа;
п - показатель преломления среды;
п, т - единичные векторы направлений;
N50 - число периодов эквивалентной миры, разре-
шаемых при заданном уровне восприятия с
50%-ной вероятностью;
п0 - нормаль к площадке;
пОн, «Оп _ направление оси диаграммы направленности
источника, приемника излучения;
иобл, «ф л - число фотоэлектронов, обусловленных отражен-
ным от объекта и фона лазерным излучением;
п об с, «ф о _ число фотоэлектронов, обусловленных отражен-
ным от объекта и фона солнечным излучением;
ст ст - число фотоэлектронов, обусловленных отра-
"обс’ ‘ф.с _ ,
женным от объекта и фона солнечным излуче-
нием в режиме стробирования;
«пор л, «поре “ число фотоэлектронов, обусловленных лазерной
и солнечной помехами обратного рассеяния;
^ст пст - число фотоэлектронов, обусловленных лазер-
ной и солнечной помехами обратного рассея-
ния в режиме стробирования;
15
«о6> «ф
А«с=«об-«ф
<«вс>
<>О <«в2нш>
«>
<4>
<«п>
<«„2ор>
<«т2>
(Пфот)
<«s>
<А«С2ИСТ>1/2
<Аф1/2
Р(и, U)
^зр.и(О,
Др.п(О
P(rso)
Р«
Р0
Р<уЪ> Рф
среднее число фотоэлектронов, обусловленных
сигнальным и фоновым излучениями;
разность средних чисел фотоэлектронов, обу-
словленных сигнальным и фоновым излуче-
ниями;
среднее число темновых фотоэлектронов;
число телевизионных линий;
дисперсия шума восстановления;
дисперсия шума внутреннего, внешнего усили-
телей;
дисперсия дробового шума;
дисперсия шума квантования;
дисперсия шума подложки;
дисперсия порогового шума;
дисперсия шума темнового тока;
дисперсия фотонного шума;
дисперсия суммарного шума;
среднеквадратическое значение числа шумовых
фотоэлектронов, приведенное к одной ячейке;
среднеквадратическое значение пространст-
венно-временного шума;
функция зрачка оптической системы;
функция зрачка источника излучения, прием-
ного устройства;
мощность сигнала от объекта;
мощность сигнала от бесконечно протяженного
объекта;
мощность источника подсвета;
мощность сигнала, отраженного от объекта, фона;
16
JC pc
□6 > ''ПОР
^ПОР
P.
P P
2 o6hj 2 pacn
Лл
?(-^пр> Л'пр)
Я«*&', y')
ЯВыб(УХ,Уу)
ЯВы6(УХ^у)
Я*
r, R
Д11 А
К,
Л. А
*>А
мощность сигнала от объекта и мощность по-
мехи обратного рассеяния при солнечном ос-
вещении;
мощность помехи обратного рассеяния;
мощность солнечной засветки;
вероятность обнаружения (распознавания) объ-
екта;
плотность мощности электронного потока, па-
дающего на люминофор;
распределение электрических зарядов в плос-
кости ФПЗС-матрицы;
выборочное значение заряда в плоскости
ФПЗС-матрицы;
спектр выходного сигнала ФПЗС-матрицы;
спектр выходного сигнала ФПЗС-матрицы по-
сле НЧ-фильтрации;
коэффициент неоднородности чувствительной
матрицы;
радиус-вектор точки;
радиусы-векторы точек наблюдения;
радиусы-векторы точек в плоскости излучателя;
радиус-вектор точки расположения источника
излучения;
радиусы-векторы точек в плоскости приемника;
радиус-вектор точки расположения приемника;
радиус-вектор точки пересечения оси пучка
подсветки с поверхностью объекта;
радиус-вектор точки пересечения оси диаграм-
мы направленности приемника с поверхностью
объекта;
радиусы-векторы точек в плоскости наблю-
дения;
17
rK - Ги - - размер источника излучения; - радиус уширенного сечения пучка из-за влия- ния мелких вихрей;
D “МОН R. - - расстояние от наблюдателя до экрана монитора; - радиус кривизны волнового фронта в центре лазерного пучка;
r0 - rn - - эффективный размер объекта; - радиус входного зрачка приемной оптической системы;
Гс - - отклонение центра пучка от оси из-за прелом- ления на крупных вихрях;
ГФ - - эффективный размер чувствительной площад- ки фотоприемника;
<гэ2) S - *$из - среднеквадратический радиус пучка; - дальность видимости объекта; - площадь изображения на фоточувствительной поверхности;
V мкор 5М - £пзс(М ' - поверхностная область корреляции шума; - метеорологическая дальность видимости объекта; - относительная спектральная чувствительность ФПЗС-матрицы;
*^ПЗС - интегральная чувствительность ФПЗС-матри- цы по отношению к излучению реального лю- минофора экрана ЭОПа;
о max ° ПЗС - максимальная спектральная чувствительность ФПЗС-матрицы;
- относительная спектральная чувствительность фотокатода ЭОПа;
пП пР ^фк ’ ^фк - интегральная чувствительность фотокатода ЭОПа по отношению к эталонному и реально- му источникам;
- площадь пиксела;
18
S/N (S/N)Bia (S/N)^ - отношение сигнал/шум; - отношение сигнал/шум на выходе видеотракта; - воспринимаемое зрительным анализатором от- ношение сигнал/шум;
(S/N)nop (^/^Овосп .nop - пороговое отношение сигнал/шум; - пороговое воспринимаемое отношение сиг- нал/шум;
^а.ст 'гЛ tn - активное время строки; - время инерции глаза; - длительность зондирующего импульса; - время накопления заряда элементами ФПЗС- матрицы;
to - время начала регистрации помехи обратного рассеяния;
T(v„ vy) Лист(У„ Vy) ^(vx, Vy) 7™(vx, vy) ^n(Vx, Vy) /’ид4<vx, Vy) t Jiny(VX5 Vy) /j1Cb(Vx, Vy) /’moh(Vx, Vy) '/’onT(Vx, Vy) t \,m.a(V„ Vy) - модуляционная передаточная функция; - системная МПФ; - МПФ НЧ-фильтра Баттерворта; - МПФ зрительного анализатора; - МПФ лазерного источника; - МПФ идеального фильтра; - МПФ лазерного передающего устройства; - МПФ лазерной системы видения - МПФ видеомонитора; - МПФ приемопередающей оптической системы; - МПФ дифракционно ограниченной оптической системы;
/<>ny(vx, Vy) Tn(y„ Vy) /’pe3(Vx, Vy) '/’po(vx, Vy) Mvx, Vy) /фок(Ух, Vy) - МПФ оптического приемного устройства; - МПФ оптического приемника; - результирующая МПФ ЛСВ; - МПФ репродукционного объектива; - МПФ фотодетектора; - МПФ фокона;
19
^um(Vx, Vy) - ^n(V.„ Vy) - ^JOrt(Vo Vy) ' ^cp(Vt, Vy) - ^aT.p(Vr> Vy) T„/v„ Vy) - 7L.n(Vx, Vy) - K/V„ Vy) - T„T(y„vy) - Т’стр - Л4тр - и - - МПФ цифрового модуля ФОВ; - МПФ электронного тракта; - МПФ электронно-оптического преобразователя; - МПФ среды; - МПФ рассеивающей атмосферы; - МПФ турбулентной атмосферы; - МПФ взволнованной морской поверхности; - МПФ рассеивающей морской среды; - МПФ турбулентной морской среды; - период следования строб-импульсов; - длительность строба; - комплексная амплитуда монохроматической волны;
u0 - им - - амплитуда поля в центре лазерного пучка; - комплексная амплитуда плоской монохромати- ческой волны;
unn(Q, t) UM - - плоская волна; - комплексная амплитуда сферической моно- хроматической волны;
Исф(2,0 - Ифд(0 и - сферическая волна; - выходное напряжение ФПЗС-матрицы; - скорость света в среде;
Ч V(t) V*(X) vBmp(/), VBH1U(/), - скорость ветра; - видность интерференционной картины; - относительная спектральная видность глаза; спектральная плотность мощности шума внут- реннего, внешнего усилителей;
W(rs0) - энергия лазерного сигнала в изображении объекта;
wx - энергия сигнала от бесконечно протяженного объекта;
20
РГо6, ~ энергия сигнала от объекта, фона;
РР0 - среднее значение энергии сигнала;
И'пор _ энергия сигнала помехи обратного рассеяния;
2^мо„ - угловой размер экрана монитора;
2^сист - угол зрения ЛСВ;
Axmin - минимальный разрешаемый размер объекта;
Ax'min ~ минимальный разрешаемый размер в изобра-
жении;
хтук - координаты в плоскости изображения;
х0, Уо ~ координаты в плоскости объекта;
хпр, упр _ координаты центра пиксела приемной ФПЗС-
матрицы;
хэк, Уэк ~ координаты в плоскости экрана видеомонитора;
х(у) - индикатриса рассеяния;
- индикатриса рассеяния в обратном направлении;
z - дальность наблюдения;
z5 - прозрачность по белому диску;
znp - предельная дальность видения;
Кас - коэффициент асимметрии индикатрисы рассеяния;
к^ - минимальный разрешаемый контраст;
киз.восп - воспринимаемый контраст в изображении;
к'о6 - контраст объекта на фоне неба;
ко6, киз - модуляционный контраст объекта, изображения;
ко6и - наблюдаемый контраст объекта;
к об.и - наблюдаемый контраст объекта на фоне неба;
кпор ~ пороговый контраст объекта на фоне неба;
К01ГГ - коэффициент пропускания оптической системы;
Р - линейный оператор;
Ф(ух) - аргумент ОПФ;
Фи - световой поток, излучаемый точечным направ-
ленным источником;
21
Фо - световой поток на входе в рассеивающую среду;
Фп - поглощенный световой поток;
Фр - рассеянный световой поток;
Эфк - экспозиция фотокатода за время регистрации
импульса;
2аи - угловая расходимость излучения источника
подсвета;
2ап - угол зрения приемного канала;
ах> - угловой шаг пикселов по горизонтали и вертикали;
а0 - угловой размер объекта;
Р - линейное увеличение оптической системы;
Р, - весовой коэффициент г-й шумовой состав-
ляющей;
% - пространственное волновое число;
%п - показатель поглощения частицы вещества;
5 - относительная пространственная частота;
8ас - степень асимметрии индикатрисы рассеяния;
e(z) - показатель ослабления излучения в слое про-
тяженностью z;
e(S) - средний показатель ослабления на расстоянии,
равном дальности видимости;
s(z) - средний показатель ослабления на расстоянии z;
Г - видимое увеличение афокальной оптической
системы;
Г12(т) - функция взаимной когерентности;
Гэ - электронно-оптическое увеличение ЭОПа;
у - глубинный показатель затухания;
у12(т) - комплексная степень когерентности;
у2 - характерная ширина (дисперсия) индикатрисы
рассеяния;
уэк - светоотдача люминофора экрана ЭОПа;
22
Г|(А.) - квантовая эффективность фотонувствительного
слоя;
Г]Л - коэффициент усиления яркости ЭОПа;
фи - диаграмма направленности излучения источника;
срп - диаграмма направленности приемного устройства;
ф0 - доля света, рассеянного в заднюю полусферу;
Л - вероятность выживания фотона;
“к - длина волны излучения в вакууме;
- приведенная длина волны излучения (в среде);
ДХф - полоса пропускания фильтра;
ц - интегральный параметр, характеризующий фор-
му индикатрисы рассеяния;
vN - частота Найквиста;
v0 - средняя пространственная частота;
v„ - частота выборки (дискретизации) вдоль оси х;
v, - временная частота оптического излучения;
vt, vy - линейные пространственные частоты;
v'x, v'y - угловые пространственные частоты;
v'гл ~ угловая пространственная частота глаза че-
ловека;
v гл max ~ угловая пространственная частота глаза, на ко-
торой достигается максимальная контрастная
чувствительность;
vH3 _ пространственная частота в изображении;
vmax _ максимальная пространственная частота;
vH3max _ максимальная пространственная частота в изо-
бражении;
vM0H ~ пространственная частота монитора;
vcp - пространственная частота среза;
v 'Ср - угловая пространственная частота среза;
vonr.cp _ угловая пространственная частота среза опти-
ческой системы;
23
V фд.ср - угловая пространственная частота среза мат- ричного фотоприемника;
v' * ЭЛ.ср - угловая пространственная частота среза элек- тронного тракта;
vr v дне е - Ос - Ox, Oj, - - угловая пространственная частота дискретизации; - угол визирования; - зенитный угол Солнца; - угловой размер пикселов в двух ортогональных направлениях;
р - Риз - Риз.шах - коэффициент отражения (по интенсивности); - коэффициент отражения в изображении миры; - максимальное значение коэффициента отраже- ния в изображении миры;
Рк - Рм - Роб, Рф 4. Т - Рпв’ гпв - начальный радиус когерентности лазерного пучка; - коэффициент яркости моря; - коэффициент отражения объекта, фона; - коэффициент отражения поверхности моря при распространении света из воздуха в воду и из воды в воздух;
Рх р Sn - спектральный коэффициент отражения; - средний коэффициент отражения; - площадь входного зрачка приемной оптиче- ской системы;
с о 2 °сист ’ °сист - показатель рассеяния среды; - среднее значение показателя рассеяния; - дисперсия, среднеквадратическое значение системного шума;
°2, СТЭОП - дисперсия уклонов морской поверхности; - среднеквадратическое отклонение диаметра пятна рассеяния на экране ЭОПа;
t(z) То - оптическая толщина слоя среды; - оптическая толщина атмосферы;
24
Т - коэффициент пропускания морской поверхно-
^мп ’ ^мп
сти для падающего, выходящего излучения;
Q„ - телесный угол вокруг направления п ;
Q„ - эффективный телесный угол излучения источ-
ника;
Qn - эффективный телесный угол поля зрения при-
емника;
®пеР, ®пр - телесный угол диаграммы направленности пе-
редающего и приемного каналов ЛСВ.
Глава 1. ОБЩИЕ СВЕДЕНИЯ
О ЛАЗЕРНЫХ СИСТЕМАХ ВИДЕНИЯ
1.1. Видение в рассеивающих средах
Под видением в широком смысле понимают восприятие на-
блюдателем удаленных объектов. Если речь идет о возможности
непосредственного зрительного восприятия объектов, то пользу-
ются понятием «видимость». Например, видимость в атмосфере -
это возможность различать зрением удаленные объекты, отде-
ленные от наблюдателя слоем воздуха той или иной степени
мутности [30]. Если же для наблюдения используются техниче-
ские средства, формирующие изображение объекта, которое затем
анализируется оператором, то говорят о видении, а изображающие
средства, включая оператора, называют системами видения. Сис-
темы видения могут работать не только в видимом, но и в других,
недоступных для зрительного восприятия участках спектрального
диапазона, в соответствии с которыми они получили название сис-
тем радиовидения, тепловидения, телевидения и др.
Все системы видения можно подразделить на две большие
группы: пассивные и активные.
В пассивных системах видения изображение формируется
при естественном освещении или за счет собственного (теплово-
го) излучения объектов. К этим системам относятся, например,
тепловизионные системы, системы низкоуровнего телевидения,
большинство приборов ночного видения и др.
Активные системы видения используют для работы искусст-
венную подсветку, создаваемую специальными устройствами
26
различных типов - прожекторами, лампами-фарами, лазерными
источниками. Системы видения с лазерным подсветом получили
название лазерных систем видения (ЛСВ). Именно такие системы
рассматриваются в настоящей книге.
Поскольку оба термина «видимость» и «видение» характеризуют
один и тот же процесс восприятия удаленных объектов, но различ-
ными средствами, целесообразно определить характеристики ЛСВ,
используя аналогичные сложившиеся понятия теории видимости.
Пусть объект наблюдается в приземном слое атмосферы на
некотором фоне и регистрируется за счет различия яркостей объ-
екта £о6 и фона £ф, т.е. из-за наличия яркостного контраста. На
предельной дальности видения в рассеивающей атмосфере влия-
ние цветового контраста несущественно, так как под действием
атмосферной дымки цвет объектов становится неразличимым и
они выглядят бледно-серыми. Истинный (т.е. измеренный в
плоскости объекта) модуляционный контраст этого объекта на
данном фоне (при £о6 > £ф) равен
Коб =
Д>б ^ф
Д>б +
(1.1)
Модуляционный контраст может изменяться от 0 до 1, при-
чем термин «модуляционный» употребляется в пространствен-
ном смысле. Если пространственная модуляция яркости объекта
отсутствует, то его изображение представляется как равномерно
освещенное поле, которое не несет никакой информации. Напро-
тив, для формирования хорошего высококонтрастного изображе-
ния требуется модуляция высоких пространственных частот.
Введение понятия модуляционного контраста для описания
пространственных соотношений яркостей и фонов чрезвычайно
удобно, поскольку позволяет использовать хорошо развитый ма-
тематический аппарат теории линейной пространственно-частот-
ной фильтрации для объективной оценки качества работы любой
изображающей системы.
Действительно, широко применяемая при анализе качества
изображения модуляционная передаточная функция является от-
27
ношением модуляционных контрастов изображения киз и объекта
в виде функции пространственной частоты v:
Г(У) = Ь«И, (1.2)
Коб
где Т(у) - модуляционная передаточная функция изображающей
системы.
Способность обнаружения и опознавания удаленных объек-
тов зависит от способности системы наблюдения пропускать
спектр пространственных частот.
По мере удаления от объекта истинный контраст начинает
уменьшаться из-за изменения яркостей £о6 и £ф. Эти изменения
обусловлены двумя причинами:
- во-первых, яркости Lo6 и Ьф уменьшаются вследствие ослаб-
ления излучения при прохождении им замутненного слоя z от
объекта до ЛСВ;
- во-вторых, при работе ЛСВ в дневное время между объек-
том и аппаратурой наблюдения появляется слой дымки, яркость
которой Ьл увеличивается с расстоянием.
Наличие в атмосфере большого количества взвешенных
частиц (аэрозоль, минеральная и органическая пыль, дымовые
частицы и др.) приводит к интенсивному рассеянию света и
возникновению своеобразной световой пелены. Этот рассеян-
ный свет и создает атмосферную дымку, которая приводит к
уменьшению видимого контраста (т.е. контраста, наблюдаемого
на расстоянии z от объекта). Следовательно, результирующие
наблюдаемые яркости объекта и фона с расстояния z будут
иметь такой вид:
4б.н = Lo6exp(-ez) + Lfl(z);
Чн =Ьфехр(-Ё2) + £д(2),
где е - среднее значение показателя ослабления светового пото-
ка в пределах слоя z.
Тогда выражение для контраста, наблюдаемого на расстоянии
z от плоскости объекта, преобразуется к виду
28
к (£o6-^)exp(-sz) _ коб
06н (£о6 + £ф)ехр(-ёг) + 2£д(г) } + 2£д(г)ехр(Ёг)'
(А>б+ £ф)
Когда при зрительном восприятии наблюдаемый контраст
ко6 „ становится равным пороговому контрасту кпор, воспринимае-
мому глазом, то расстояние z, на котором ко6н = кпор, называют
дальностью видимости объекта 5. Тогда в соответствии с (1.4)
пороговый контраст глаза
к =_______________________ /1
пор 1+2£д(5)ехр[8(5)-5]’ ’ >
Д>6 +
где 8(5) - среднее значение показателя ослабления на расстоя-
нии, равном дальности видимости;
La(S) - яркость дымки в атмосферном слое протяженностью 5.
Из (1.5) следует
8(5)
Д>б + Aj)
I 2Ьд(5)
(1-6)
In -^б--1 +1п
< Кпор ,
Итак, дальность видимости несамосветящегося объекта
сложным образом зависит от показателя ослабления 8(5), ярко-
стей объекта и фона при данном освещении и яркости дымки.
В общем случае яркость слоя дымки по мере увеличения про-
1 яженности этого слоя сначала возрастает, но затем рост яркости
с увеличением расстояния z замедляется, и при z—>оо величина
/.n(z) стремится к некоторому предельному значению L„, которое
обычно отождествляется с яркостью неба у горизонта. Зависи-
мость L^z) называется световоздушным уравнением, которое с
некоторыми допущениями может быть представлено в виде [30]
Za(z) = ZJl-exp-^], (1.7)
। те оптическая толщина слоя x(z) равна
29
г
t(z) = je(z')Jz' = £z.
0
(18)
При сильной дымке ее яркость в горизонтальном направле-
нии достигает уровня насыщения уже на расстояниях нескольких
километров, а в туманах - на расстояниях сотен метров. С помо-
щью формулы (1.7) можно оценить дальность видимости несамо-
светящегося объекта при условии выполнения световоздушного
уравнения. Подставив (1.7) в (1.5), получим
Коб
^об + ^ф
Тогда дальность видимости определится соотношением
S =
1 jn коб | -^об + At>
Ё(5) ^Кпор J 2ТМ
+ 1
(1.9)
(1.Ю)
В практике атмосферного видения часто рассматривают си-
туацию, при которой объект наблюдается на фоне неба у гори-
зонта. В этом случае контраст объекта, наблюдаемого на фоне
неба яркостью с расстояния z, рассчитывается в отличие от
(1.1) по формуле [30]
' _ 1 _ Д>б.и
Коб.н 1 г
(1.11)
С учетом (1.3) контраст равен
, , Io6exp(-Ez) + LA(z)
Коб.н “ 1
L.
(1-12)
Если справедливо световоздушное уравнение (1.7), то выра-
жение (1.12) при условии порогового восприятия объекта зри-
тельным анализатором (к'об н = кпор )преобразуется к виду
кпоР = <6exp(-sz),
(1-13)
30
где Kg6 = 1 - —— - истинный контраст объекта.
Из (1.13) определим дальность видимости любого несамосве-
тящегося объекта на фоне неба у горизонта:
(1.14)
(1-15)
е(5) кпор
Особый интерес представляет определение дальности види-
мости абсолютно черных объектов на фоне неба, поскольку она
зависит только от прозрачности воздуха. Действительно, кон-
траст черного объекта к'об на фоне неба равен 1 и не зависит от
яркости неба. Поэтому можно считать, что дальность видимости
черных объектов на фоне неба определяется только показателем
ослабления и является интегральной характеристикой оптиче-
ских свойств атмосферы. Она называется метеорологической
дальностью видимости (МДВ) и для однородной атмосферы (s =
= const) находится из формулы (1.14):
Q — 1ПКПОР
е
Проблема видимости в атмосфере связана с вопросами обна-
ружения и распознавания удаленных объектов и, в первую оче-
редь, с определением расстояния, на котором объект обнаружи-
вается на пределе восприятия. В этом случае под пороговым
контрастом кпор понимают пороговый контраст обнаружения (по-
рог обнаружения). Многочисленные экспериментальные иссле-
дования показали, что пороговый контраст кпор не является де-
терминированной величиной, а флуктуирует относительно
некоторого среднего значения. Поэтому порог обнаружения сле-
дует рассматривать как уровень восприятия, при котором зри-
тельное ощущение возникает с некоторой заданной вероятно-
стью, например, равной 0,5.
Следует отметить, что в научно-технической литературе при
определении тех или иных оптических характеристик атмосферы
но визуальным оценкам МДВ практически однозначно использу-
31
ется значение кпор = 0,02 [9], и, соответственно, зависимость
(1.15) приобретает вид
3,91
(116)
Итак, дальность видимости S любого несамосветящегося
объекта на любом фоне определяется как расстояние, при кото-
ром наблюдаемый (видимый) модуляционный контраст объекта
на фоне ко6н становится равным пороговому модуляционному
контрасту зрительного анализатора. Поскольку атмосфера явля-
ется фильтром пространственных частот, то ко6н также зависит
от пропускаемой пространственной частоты. Понятие порого-
вого модуляционного контраста подробно обсуждается в § 2.10.
Здесь же отметим, что зависимость кпор от пространственной
частоты обусловлена специфическими процессами пространст-
венно-частотной фильтрации, присущими зрительному анали-
затору.
Согласно современным представлениям физиологии зри-
тельного восприятия, рецептивные поля зрительного анализа-
тора являются узкополосными пространственно-частотными
фильтрами, каждый из которых настроен на определенную
среднюю пространственную частоту. При восприятии изобра-
жения в высших отделах зрительного анализатора формируется
оптимальный для решения данной задачи фильтр путем выбора
соответствующих резонансных фильтров из имеющегося их на-
бора. Огибающая этого набора фильтров как раз и характеризу-
ет зависимость порогового модуляционного контраста от про-
странственной частоты.
Итак, еще раз подчеркнем, что при наблюдении объектов на
фоне неба у горизонта принято пользоваться определением кон-
траста к'об (1.13), отличным от определения контраста Коб, причем
оба значения связаны соотношениями
Коб =
К'об
2-к'об
Коб
2коб
1 + коб
(1-17)
32
В этом случае дальность видимости S определяется согласно
формуле (1.14), в которой ё(5) есть среднее на расстоянии S
значение показателя ослабления:
ё(5) = -Ме(2)<&.
о
Если же на фоне неба у горизонта наблюдается абсолютно чер-
ный объект с угловыми размерами более 0,3°, то его дальность
видимости трактуется как МДВ и рассчитывается в соответствии
с выражением (1.15).
Определение МДВ как предельной дальности видимости чер-
ного тела в светлое время суток основано на том, что пороговый
контраст при достаточном уровне яркости внешнего фона можно
считать постоянным.
В сумерках значение кпор резко возрастает, что в соответствии
с (1.15) вызывает уменьшение МДВ при той же прозрачности
атмосферы. Использование понятия МДВ в ночное время суток,
когда определение видимости по черным объектам невозможно,
вряд ли целесообразно, хотя в литературе приводятся многочис-
иенные расширительные определения этого понятия [30, 48].
()дин из путей решения проблемы связан с введением термина
«метеорологическая оптическая дальность» (МОД), которая оп-
ределяется как расстояние, на котором коллимированный пучок
света ослабляется до 0,05 относительно исходного уровня [30].
11онятие МОД является более четким и метеорологически обос-
нованным, поэтому именно оно (а не МДВ) принято в качестве
। icHOBHoro оперативного параметра при метеорологическом обес-
печении навигации.
Дальность видимости в воде ограничивается практически
полным ослаблением в поверхностном слое электромагнитного
излучения оптического диапазона. Только в узком спектральном
чиапазоне, соответствующем сине-зеленой области видимого
« пектра, излучение проникает до значительных глубин.
Ослабление светового потока при его распространении в при-
родных водах примерно на две трети вызвано рассеянием и на
1091
33
одну треть - поглощением. Ослабление приводит к уменьшению
освещенности объектов по мере их удаления от источников под-
света и к ослаблению водой их яркости.
Другим важным фактором, ограничивающим дальность ви-
димости в воде, является образование световой дымки, вызван-
ное обратным рассеянием воды и приводящее к снижению кон-
траста изображения.
Дальность видимости подводных объектов обычно оценива-
ют по значениям предельной безразмерной оптической глубины
тпр обнаружения
z0
Тпр= [£(z)dz^£ZQ,
О
(1.18)
которая в общем случае определяется не только оптическими
свойствами воды, но и направлением визирования. Когда объект
наблюдается глазом, может быть вычислена по формуле [13]
1 1п'К°б
l-ycosQ кпор’
(1-19)
где у - глубинный показатель затухания,
0 - угол визирования.
Вследствие того, что основным фактором, определяющим
дальность видимости в воде, является затухание света, дальность
слабо зависит от изменения интенсивности подсвета. Действитель-
но, для увеличения предельной оптической глубины тпр всего на
две единицы нужно увеличить мощность источника излучения в 10
раз [13]. В соответствии с расчетами и экспериментальными дан-
ными предельная дальность видимости в зависимости от парамет-
ров объекта и характеристик воды составляет 1^= 15.. .20 [70].
Изложенные выше основные положения теории видимости в
принципе могут быть привлечены и для анализа характеристик
систем видения. Отличие состоит лишь в том, что при использо-
вании систем видения оператор наблюдает не сам объект, а его
изображение на экране дисплея, причем характеристики изобра-
жения (яркость, контраст и др.) могут регулироваться электрон-
34
ным способом независимо от характеристик объекта. Приемное
устройство любой системы видения регистрирует дифференциаль-
ный сигнал - разность мощностей (энергий) оптического излуче-
ния, отраженного объектом и фоном, а также мощность помехи
(внешнее фоновое излучение, помеха обратного рассеяния и др.).
) (ифференциальный сигнал на выходе фотодетектора Д/ должен не
только превышать некоторое минимальное значение, соответст-
вующее порогу чувствительности фотоприемной системы, но и
превосходить среднеквадратическое значение системного шума
<\ист. Этот флуктуационный шум обусловлен различными причи-
нами, в том числе флуктуациями числа фотонов регистрируемого
< и । гического излучения, обусловленными квантовой природой све-
। а, флуктуациями оптических характеристик канала распростране-
ния излучения, внутренним шумом фотоэлектронного тракта и т.д.
< )бе величины Д/ и осист определяют важнейшие характеристики
изображения - контраст и отношение сигнал/шум, поэтому эффек-
iiiHHOCTb системы видения в общем случае может ограничиваться
нобой из них. Проведем последовательно анализ двух ситуаций, в
мнорых ограничение эффективности системы видения обусловле-
но указанными характеристиками. Сначала рассмотрим изобра-
жающую систему с ограничением по контрасту.
/. /. 1. Контрастно ограниченная изображающая система
Каждой изображающей системе присущ некоторый минималь-
ный контраст, определяемый на выходе системы (например, на
•ьранс дисплея) в соответствии с требованиями наблюдателя или
итого анализирующего устройства. Этот пороговый контраст
ыкисит от пространственной частоты v в плоскости анализа, что
наиболее отчетливо проявляется при наблюдении с помощью изо-
। сражающей системы штриховой миры в виде последовательности
'и пых и черных прямоугольных полос различной пространствен-
ней частоты.
< увеличением пространственной частоты в изображении ми-
ры с,,,, т.е. при уменьшении ширины изображаемой полосы, кон-
tpai । между черными и белыми полосами уменьшается. При вы-
35
соких пространственных частотах отдельные полосы уже не ка-
жутся белыми или черными, а воспринимаются сероватыми с
размытыми границами между ними. В итоге при какой-то высо-
кой пространственной частоте полосы перестают различаться.
Эта максимальная пространственная частота в изображении ми-
ры vH3max и характеризует предельное пространственное разреше-
ние. Спектр пространственных частот, пропускаемых данной
изображающей системой, лежит в диапазоне от 0 до vH3 max.
На рис. 1.1 приведен график, схематично поясняющий огра-
ничение пространственного разрешения типичной изображаю-
щей системы значением порогового контраста. Верхняя кривая
характеризует зависимость от пространственной частоты моду-
ляционного контраста изображения (МКИ), который на нулевой
пространственной частоте равен модуляционному контрасту объ-
екта (МКО), а нижняя - зависимость порогового контраста (ана-
логичная кривой для глаза). Пересечение кривых определяет зна-
чение vH3
Рис. 1.1. К определению максимальной разрешаемой
пространственной частоты
Еще раз подчеркнем, что обе кривые характеризуют зависи-
мости киз(уиз) и Knop(vH3) в плоскости изображения, т.е. качество
36
изображения определяется указанными контрастами именно в
и носкости изображения. Как видно из рис. 1.1, информация, со-
держащаяся в спектре частот, превышающих vH3max, пропускается
июбражающей системой. Однако контраст в изображении на
и их частотах так мал, что данная информация не воспринимает-
। я наблюдателем и практически бесполезна. Поэтому простран-
i । венная частота v„3inax является предельной частотой, ограничи-
н.нощей пространственное разрешение изображающей системы.
< мнественно, что в рассматриваемой ситуации отношение сиг-
। i.iп/шум на выходе системы предполагается достаточно высоким,
по ному ограничение пространственного разрешения целиком
опусловлено низким контрастом.
Изображающие системы, работающие в данной ситуации,
п.нывают ограниченными по контрасту, или контрастно огра-
ниченными (сравните с понятием дифракционно ограниченной
ш гемы). При работе с такой системой видения объект про-
। ранственно разрешается только в том случае, если его контраст
h i фоне превышает пороговое значение.
Для установления связи между vmmax и минимальным разре-
шаемым размером наблюдаемого объекта опять обратимся к экс-
перименту с наблюдаемой мирой.
11усть максимальная пространственная частота в изображе-
нии миры по направлению х, перпендикулярному длинной сто-
роне полос, при которой разрешается в изображении пара черно-
пах полос, равна vxmax, а ширина предельно разрешаемой ли-
пни равна Дх’ищ. Тогда, полагая справедливым соотношение
1 ’ '"mm) * =vx. max’ получаем выражение
Axmin=-(p.2vxmax)-’, (1.20)
। n \i,nin - минимально разрешаемый размер объекта в направле-
нии х;
Аг* .
р —п™. _ линейное увеличение изображающей системы,
^min
Если р < 0, то изображение - действительное и
перевернутое.
37
Из (1.20) следует, что величина Axmin обратно пропорциональ-
на ширине полосы спектра пространственных частот системы и
ее линейного увеличения. Однако существуют ограничения при
использовании этой формулы. При возрастании Р (по модулю)
все более мелкие детали объекта разрешаются, пока не достига-
ется предел разрешения, обусловленный собственным (внутрен-
ним) шумом изображающей системы и определяемый размером
кружка рассеяния (2vx max)-1. Следовательно, при малых увели-
чениях пространственное разрешение ограничивается самим уве-
личением и разрешаемый размер объекта Axmin уменьшается с
ростом увеличения. Именно такой режим характерен для дистан-
ционных систем наблюдения, в том числе и ЛСВ.
При больших увеличениях (режим проекционной системы)
качество изображения уже ограничивается шириной полосы про-
пускания пространственных частот, и возрастание Р приводит
лишь к увеличению кружка рассеяния и не вызывает повышения
разрешающей способности. В общем случае, чем больше ширина
полосы пропускания системой видения пространственных частот,
тем более мелкие детали объекта разрешаются. Кроме того, чем
больше размер изображения по сравнению с Ax'min, тем с большей
отчетливостью наблюдается объект.
1.1.2. Изображающая система с разрешением,
ограниченным шумом
Иная ситуация возникает при ограничении пространственной
разрешающей способности уровнем шума. Помехи, воздействуя
на сигнал изображения, вызывают флуктуации яркости в изобра-
жении, которые искажают его, а при высоком уровне помех де-
лают неразличимым. Особенно отчетливо флуктуационный шум
проявляется при работе системы видения на дальностях, близких
к предельной, когда регистрируются слабые сигналы. В этом
случае изображение объекта формируется на экране дисплея на
фоне случайного шумового поля яркости, проявляющегося в виде
«снега», и именно этот контраст, а не пороговый, ограничивает
пространственное разрешение. Таким образом, чем ниже отно-
38
шение сигнал/шум, тем меньше пространственное разрешение и
хуже качество воспроизводимого изображения.
Поскольку системная МПФ входит в выражение для опреде-
ления мощности сигнала изображения, то отношение сигнал/шум
(S/N) становится зависимым от пространственной частоты. Пере-
сечение кривой, характеризующей отношение (S/N)Btta на выходе
видеотракта, с требуемым для данного уровня восприятия поро-
говым значением (S/N) пор позволяет определить предельную про-
странственную частоту vH3max для системы, ограниченной шумом,
как показано на рис. 1.2. Пороговое значение (S/N)nOfl, как отмеча-
||ось выше, зависит от уровня видения и возрастает в несколько
раз при переходе от обнаружения объекта к его опознаванию.
(S/N)
Рис. 1.2. К определению максимальной пространственной
частоты в изображении для системы, ограниченной шумом
Для конкретной системы видения пространственные часто-
। ы v11>max, найденные в соответствии с графиками рис. 1.1 и рис.
I будут различными. Меньшая из них и будет ограничивать
пн контрасту или по шуму пространственную разрешающую
нпсобность в изображении. В общем случае «заснеженные»
и и сражения, как правило, ограничены шумом, в то время как
и к сражения хорошего качества являются контрастно ограни-
...1ЫМИ.
39
1.2. Назначение и технические характеристики ЛСВ
Лазерные системы видения относятся к классу локационных
оптико-электронных систем и предназначены для формирования
изображений удаленных объектов с целью их обнаружения и
распознавания в условиях недостаточной естественной освещен-
ности или ночью. Они позволяют осуществлять наблюдение объ-
ектов при крайне низких уровнях освещения и наличии помех
различного рода, т.е. в условиях, когда невозможно получить
удовлетворительное изображение с помощью прибора ночного
видения (ПНВ) или камеры низкоуровневого телевидения. При-
менение в качестве внешней подсветки традиционных ИК-
прожекторов неэффективно уже на дальностях, превышающих
700...800 м из-за слишком высоких уровней требуемой мощно-
сти. Кроме того, возникающая в канале распространения помеха
обратного рассеяния создает значительные сложности при прие-
ме слабого отраженного сигнала.
Ощутимого прогресса в развитии активных систем видения
удалось достигнуть в 60-х годах в связи с созданием лазеров, из-
лучение которых обладает высокими спектральной интенсивно-
стью, направленностью и монохроматичностью. Особый интерес
проявляется к ЛСВ, работающим в режиме стробирования по
дальности, когда объект наблюдения зондируется короткими
(10...50 нс) мощными световыми импульсами, длительность ко-
торых значительно меньше времени распространения импульса
до объекта и обратно. Приемная система снабжена быстродейст-
вующим затвором, открывающимся в такт с посылкой импульсов
подсвета на короткое время, через определенную временную за-
держку, которая соответствует дальности локации. При этом
оператор видит только сам объект и участок пространства, непо-
средственно его окружающий.
Широкое распространение ЛСВ получили в системах авиаци-
онной разведки наземных объектов, подвижных системах передне-
го обзора для получения изображения объектов ночью и в плохих
погодных условиях, в устройствах высокоскоростной фотографии
и аэрофотосъемки, а также в подводном видении.
40
Для ЛСВ важное значение имеет качество воспроизводимого
изображения, которое определяется субъективным впечатлением,
изменяющимся от крайне слабого до великолепного. Это вос-
принимаемая метрика, зависящая не только от оптимального
функционирования системы «глаз - мозг», но и от входных па-
раметров других сенсорных систем, эмоций, обученности, опыта
и др. Воспринимаемое качество одного и того же изображения
i ущественно разнится между наблюдателями, а также отличается
но времени для одного наблюдателя. Поэтому качество изобра-
жения не может оцениваться в абсолютных величинах, а визу-
аиьные психофизиологические исследования не позволяют коли-
чественно измерить все показатели изображающих систем.
< ci чествует множество формул для оценки качества изображе-
ния, каждая из которых получена для конкретных условий на-
ыподения эмпирическим путем. Все они в той или иной мере ис-
попьзуют две основные характеристики - пространственную и
>исргетическую разрешающую способность.
Пространственная разрешающая способность ЛСВ харак-
н ризует возможность системы различать минимальные простран-
• । псиные размеры объектов и их элементов. В общем случае она
и раничивается дифракцией и аберрациями оптической приемопе-
Р< чающей системы, размерами фотодетектора (пиксела) и шагом
м.нричной фотоприемной структуры, шириной полосы видеочас-
|> и электронного тракта, разрешением ТВ-монитора. Каждая из
подсистем ЛСВ обычно характеризуется собственной метрикой
1>а «решающей способности. Так, разрешение оптических систем
испивается критерием Рэлея или кружком размытия - изобра-
жением точечного источника, формируемого оптической систе-
мии. Разрешающая способность фотоприемного матричного уст-
роисгва определяется угловым размером чувствительного
< и мента (пиксела), телевизионного монитора - числом ТВ-
1ИИИЙ, а электронного тракта - частотой Найквиста.
( переменный подход к оценке разрешающей способности
1< Н основан на теории линейной пространственной фильтрации,
п рамках которой процесс видения рассматривается как про-
|р.|нственная фильтрация наблюдаемого объекта многозвенным
41
двумерным фильтром. При этом модуль передаточной функции
такого фильтра - модуляционная передаточная функция - харак-
теризует зависимость контраста мелких деталей изображения от
их размеров. Предельное разрешение определяется пространст-
венной частотой, на которой МПФ падает до определенного
уровня, например, до уровня 0,1.
Энергетическая разрешающая способность (контрастная
чувствительность) характеризует возможность различения сигна-
лов от крупноразмерных объектов на окружающем фоне за счет
существующего контраста. Она зависит от светоэнергетических
характеристик оптической системы, чувствительности фотоде-
тектора и системного шума и не зависит от пространственной
разрешающей способности.
Чувствительность определяется тем минимальным уровнем
сигнала, который может быть зарегистрирован приемной систе-
мой. Обычно это такой входной сигнал, который формирует на
выходе фотодетектора отношение сигнал/шум, равное 1. Вместе с
тем качество изображения, воспроизводимое ЛСВ и наблюдаемое
оператором на экране монитора, определяется воспринимаемым
отношением сигнал/шум которое может превышать
(5/У)вид на порядок за счет интегрирующих свойств зрительного
анализатора. Поэтому в перспективных ЛСВ формируется удовле-
творительное по качеству изображение на экране монитора даже
при значениях (/WV)B1U, существенно меньших 1, например 0,05.
Предельная дальность видения - максимальное расстояние,
на котором система видения реализует требуемый уровень вос-
приятия с заданной вероятностью (например, дальность обнару-
жения конкретных объектов с вероятностью 0,9). Предельная
дальность видения зависит одновременно от пространственного
разрешения и чувствительности.
Если эффективность системы ограничена пространственным
разрешением, то дальность видения z определяется только разме-
ром объекта г0 и предельным угловым разрешением а', т.е.
z = r0/<x' . В этом случае обобщенная системная характеристика,
выражающая взаимосвязь предельной дальности видения и уров-
ня сигнала (1.3), асимптотически стремится к некоторому пре-
42
зольному значению znp, обусловленному предельным разрешени-
ем. В свою очередь, предельное разрешение определяется сис-
। емной пространственной частотой среза и может ограничивать-
i я дифракционной разрешающей способностью оптической
• истемы, шагом структуры многоэлементного приемника, теле-
визионным разрешением видеомонитора и др.
В изображающих системах с выборкой обычно предельное
разрешение ограничивается частотой пространственной дискре-
шзации (или частотой Найквиста). Важно отметить, что при та-
iu>ii предельной оценке качества ЛСВ предполагается наличие
Bia сококонтрастного изображения, т.е. достаточно высокое от-
ношение сигнал/шум на выходе приемной системы.
13 другом предельном случае максимальная дальность видения
а раничивается чувствительностью ЛСВ или ее энергетической
р.нрешающей способностью. Эта ситуация возникает при наблю-
К11ИИ крупноразмерных малоконтрастных объектов. Для таких
ноем определяющей характеристикой является отношение сиг-
II.।и/шум, вычисляемое на нулевой пространственной частоте:
s/JV=exp(-eiM£j (121)
V ^сист
। и к средний показатель ослабления излучения в атмосфере
на расстоянии z;
\/ - дифференциальный сигнал (например, разность средних
значений сигнального и фонового фототоков на выходе
фотодетектора);
'Смет - дисперсия системного шума.
Данная аппроксимация применима только в тех условиях, когда
। зоной размер наблюдаемого объекта существенно превышает уг-
к hi\ ю пространственную разрешающую способность ЛСВ. Как сле-
i\i । из рис. 1.3, в этом случае предельная дальность видения неог-
раниченно возрастает с увеличением отношения сигнал/шум.
I аким образом, пространственная разрешающая способность
.... не определяет эффективность действия или качество
и ь'оражения, так как она не учитывает чувствительность систе-
43
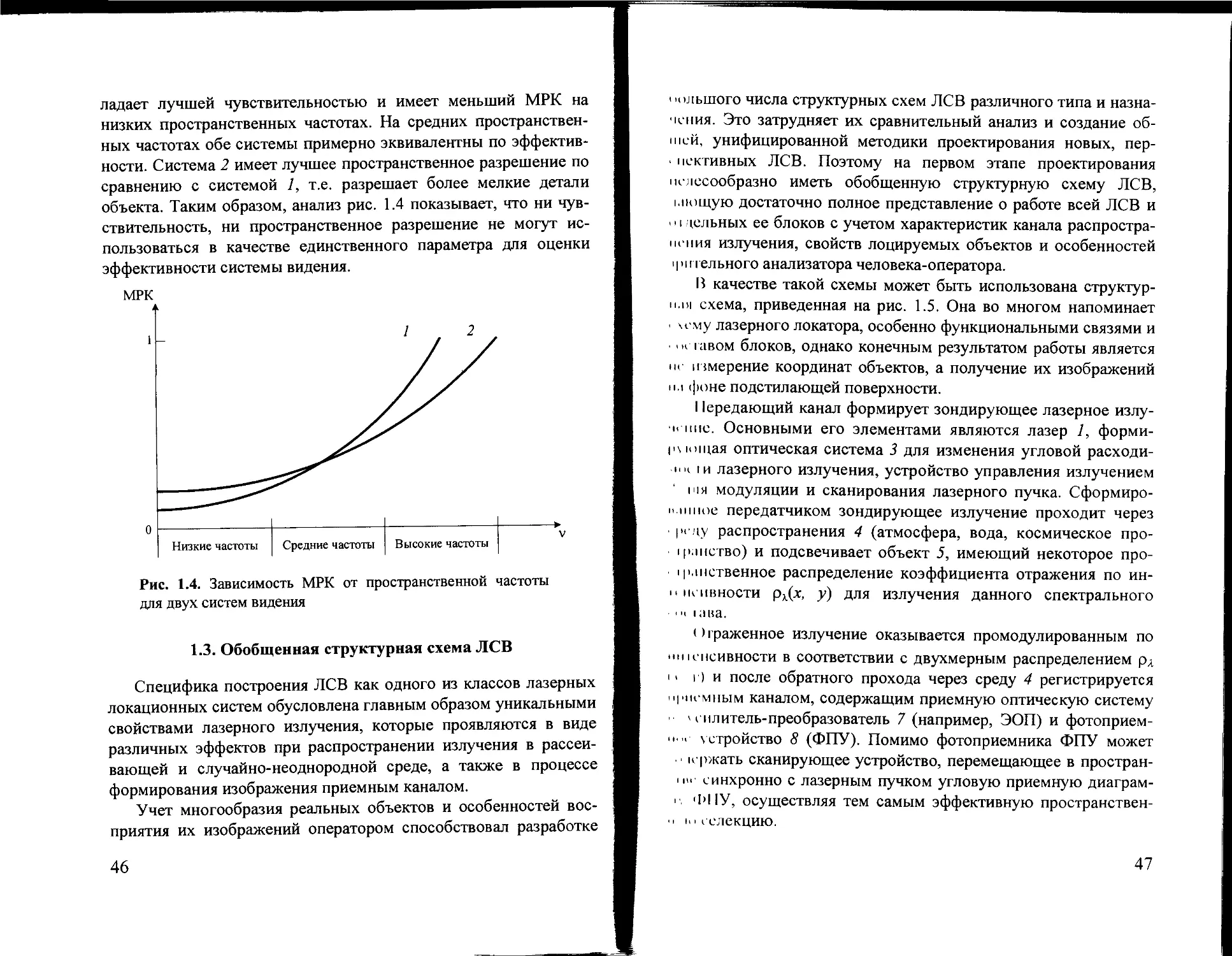
падает лучшей чувствительностью и имеет меньший МРК на
низких пространственных частотах. На средних пространствен-
ных частотах обе системы примерно эквивалентны по эффектив-
ности. Система 2 имеет лучшее пространственное разрешение по
сравнению с системой 1, т.е. разрешает более мелкие детали
объекта. Таким образом, анализ рис. 1.4 показывает, что ни чув-
ствительность, ни пространственное разрешение не могут ис-
пользоваться в качестве единственного параметра для оценки
эффективности системы видения.
Рис. 1.4. Зависимость МРК от пространственной частоты
для двух систем видения
1.3. Обобщенная структурная схема ЛСВ
Специфика построения ЛСВ как одного из классов лазерных
локационных систем обусловлена главным образом уникальными
свойствами лазерного излучения, которые проявляются в виде
различных эффектов при распространении излучения в рассеи-
вающей и случайно-неоднородной среде, а также в процессе
формирования изображения приемным каналом.
Учет многообразия реальных объектов и особенностей вос-
приятия их изображений оператором способствовал разработке
46
* юлыпого числа структурных схем ЛСВ различного типа и назна-
чения. Это затрудняет их сравнительный анализ и создание об-
шей, унифицированной методики проектирования новых, пер-
• иективных ЛСВ. Поэтому на первом этапе проектирования
целесообразно иметь обобщенную структурную схему ЛСВ,
ыющую достаточно полное представление о работе всей ЛСВ и
и । цельных ее блоков с учетом характеристик канала распростра-
нения излучения, свойств лоцируемых объектов и особенностей
"ригельного анализатора человека-оператора.
В качестве такой схемы может быть использована структур-
н.1я схема, приведенная на рис. 1.5. Она во многом напоминает
чему лазерного локатора, особенно функциональными связями и
ш гавом блоков, однако конечным результатом работы является
ш измерение координат объектов, а получение их изображений
ил фоне подстилающей поверхности.
I Предающий канал формирует зондирующее лазерное излу-
чение. Основными его элементами являются лазер 1, форми-
||\|ощая оптическая система 3 для изменения угловой расходи-
нч 1и лазерного излучения, устройство управления излучением
' । и я модуляции и сканирования лазерного пучка. Сформиро-
ванное передатчиком зондирующее излучение проходит через
руду распространения 4 (атмосфера, вода, космическое про-
||>.шство) и подсвечивает объект 5, имеющий некоторое про-
। ||.|нственное распределение коэффициента отражения по ин-
неивности рх(х, у) для излучения данного спектрального
ч шва.
<) граженное излучение оказывается промодулированным по
пн । снеивности в соответствии с двухмерным распределением рл
|| г) и после обратного прохода через среду 4 регистрируется
приемным каналом, содержащим приемную оптическую систему
' силитель-преобразователь 7 (например, ЭОП) и фотоприем-
н । устройство 8 (ФПУ). Помимо фотоприемника ФПУ может
' и-ржать сканирующее устройство, перемещающее в простран-
ц|г синхронно с лазерным пучком угловую приемную диаграм-
। <1»1 IV, осуществляя тем самым эффективную пространствен-
...селекцию.
47
Центральное устройство
Рис. 1.5. Обобщенная структурная схема ЛСВ
48
I leu тральное устройство управления содержит блок обра-
и и данных 9 и контроллер управления 10. Блок обработки
чип.lx предназначен для приема, цифрового преобразования и
г пинки входного сигнала с ФПУ, а также для формирования
.....того аналогового сигнала на входе монитора. Контроллер
"1> Н1иения осуществляет формирование синхронизирующих и
ч' <к ляющих импульсов, индикацию режимов работы ЛСВ,
ы инитение команд оператора.
11.п»едение ЛСВ на объект в условиях достаточной естествен-
и и освещенности проводится оператором с помощью визирного
. ||'оисгва 11, установленного на подвижной платформе 12 таким
"1'1 юм, что его оптическая ось соосна с оптической осью прием-
ч . к,шала. В этом режиме оператор 13 поворачивает платформу
в пимугу и углу места с помощью рукояток ручного привода.
Hi и р.кюте ночью или в автоматизированном режиме оператор
и-’... г участок освещаемой передатчиком местности на экране
I н монитора 14, а поворот платформы осуществляется электроме-
ЧН1П ( ними приводами 15 по командам контроллера управления.
I» ряде случаев наземные, подводные и бортовые ЛСВ сопря-
। 41 о и еще и с системой предварительного целеуказания, напри-
м< г Г!К \ акустическим или ИК-пеленгаторами. После контроля
Щ' “Hi и.пости проведенных операций предварительного нацелива-
||н-1 ’ in и ма переключается в режим активного видения.
। (мыкающим звеном в ЛСВ является оператор. Поэтому все
ин ин о 1с.хнические характеристики должны быть ориентирова-
ли и-1 оператора как на звено, принимающее решение о наличии
|11 "I। оксния и его качестве. Именно зрительный аппарат челове-
ка .in p.iiopa является исходным пунктом при проведении свето-
чи. |" । пшсского расчета ЛСВ.
I I К лассификация и основные схемы построения ЛСВ
I । и рпые системы видения, как и другие оптико-электронные
.. 1ы. отличаются большим разнообразием как по назначе-
Iiiii । и. и но функциональным схемам. По способам развертки и
г .и пн нию диаграмм направленности источника и приемника,
49
характеризуемых телесными углами ®пер и ®пр, различают три
варианта построения ЛСВ (рис. 1.6).
Рис. 1.6. Три варианта схем построения ЛСВ:
а - схема «узкий-широкий»; б - схема «узкий-узкий»;
в — схема «широкий-узкий»
50
1. В системе первого типа источник подсвета имеет узкую
шаграмму направленности, а оптический приемник - широкую,
1 е- ®пеР « ®пр. Изображение формируется в результате последо-
нагельного сканирования предметной области в пределах поля
обзора. Приемник регистрирует непрерывный сигнал, промоду-
шрованный по интенсивности в соответствии с пространствен-
ным распределением коэффициента отражения. Из этого сигнала
к дальнейшем формируется видеосигнал, следующий на ЭЛТ мо-
И11 гора. В качестве фотодетектора используется одноэлементный
фогоприемник (фотодиод, ФЭУ). Размер элементов разложения
'ирсделяется угловой расходимостью зондирующего излучения
’о„. а угол обзора определяется углом зрения приемной системы,
равным 2ап =2arctg
афд
2/о'б
, где ПфД - линейный размер площад-
। н фотодетектора; /о'б- фокусное расстояние объектива прием-
ной оптической системы (рис. 1.6, а).
2. В системе второго типа (рис. 1.6, б) обе диаграммы направ-
и нности - узкие и примерно равны, т.е. ®пер ® <впр, а приемная
। на грамма перемещается в пространстве синхронно с зондирую-
щим пучком. Частота сканирования по горизонтали и вертикали
him лучшего согласования с телевизионным стандартом должна
1 ч.11 в кратна телевизионной частоте.
1. В системе третьего типа (рис. 1.6, в) источник подсвета
ПМ1ТГ широкую диаграмму направленности, освещающую все
ннис обзора, а приемник - узкую, т.е. ®пер » ®пр. В этих лазер-
ных изображающих системах сканирование отсутствует, а в ка-
н 1 1не фотодетектора используется многоэлементный фотопри-
• минк (передающая ЭЛТ, ЭОП, ПЗС-матрица), который и
• ыцсствляет преобразование двухмерного оптического сигна-
ы в видеосигнал.
К достоинствам первой системы следует отнести простоту
.... Фукции и малую вероятность ложного обнаружения объек-
и । с даже в случае неравнояркого фона его значение на входе
• i|нн миика постоянно по полю растра из-за его интегрирования
и • пространству. Однако отношение сигнал/шум в таких систе-
51
мах, как правило, невелико из-за отсутствия пространственной
фильтрации.
Системы второго типа обладают достаточно большим отно-
шением сигнал/шум, слабым влиянием на чувствительность ЛСВ
эффектов, обусловленных когерентностью лазерного излучения
(спекл-шум). К недостаткам схемы следует отнести конструктив-
ную сложность узлов синхронного сканирования, а также угло-
вое рассогласование между диаграммами, возникающее при из-
менении расстояния наблюдения.
ЛСВ третьего типа весьма эффективны при использовании
метода стробирования по дальности. Для реализации этого мето-
да помимо мощного импульсного источника подсвета требуется
преобразователь изображения, оснащенный быстродействующим
затвором. Применение импульсной подсветки и стробирования
по дальности позволяет:
1) повысить контраст в изображении объекта за счет подавле-
ния или существенного уменьшения помехи обратного рассеяния
зондирующего излучения;
2) ослабить влияние рассеянного в атмосфере излучения, оп-
ределяемого уровнем естественной освещенности. Такое фоновое
излучение (световая дымка) в пассивных приборах наблюдения
резко снижает контраст в изображении, особенно при понижен-
ной прозрачности атмосферы;
3) наблюдать малоконтрастные объекты из-за очень малой
глубины просматриваемого пространства, когда фон за объектом
отсекается. В данном режиме обнаруживаются и опознаются
такие объекты, которые не видны ночью с помощью активных
оптико-электронных приборов, ни даже днем в оптические на-
блюдательные приборы. В [10], например, отмечается, что им-
пульсная ЛСВ позволяет отчетливо наблюдать людей в белых
халатах на фоне снежной целины и может эффективно использо-
ваться спасателями или для разведки природных ресурсов;
4) оценить дальность до объекта, так как изображение объек-
та наблюдается только при определенной временной задержке,
соответствующей дальности до объекта, причем погрешность
измерений не зависит от дальности до объекта, а определяется
52
юлько длительностями импульсов подсвета и строба. Обычно
на не превышает 10 м, но при необходимости может быть сни-
жена в несколько раз. Как и в современных лазерных дальноме-
рах, в импульсных ЛСВ за счет стробирования исключена воз-
можность ложного измерения при отражении излучения от
> ну чайных предметов на трассе (ветки деревьев, столбы, провода
и др.), сигнал от которых может быть достаточно мощным;
5) осуществить эффективную спектрально-временную селек-
цию фона. Действительно, влияние любой длительной световой
помехи ослабляется при работе ЛСВ в импульсном режиме со
> । робированием пропорционально скважности работы. Спек-
||>альная помехозащищенность достигается за счет установки в
приемном канале узкополосного интерференционного фильтра.
I’сальные значения степени подавления помех составляют
1<>s... 107 [2]. Этого достаточно для ведения наблюдения при воз-
и’йствии на ЛСВ прожектора с силой излучения 5- 10б кд, а также
при работе в дневных условиях при уровне естественной осве-
И1СИНОСТИ до 105 лк.
В зависимости от внешних условий и области применения
КВ третьего типа может работать в пассивном и активном ре-
симах. Недостатком активного режима является ограниченность
। чубины зоны обзора, определяемой длительностью строба и от-
носительно малым углом зрения, равным углу расходимости ла-
|| рного излучения подсвета. Из энергетических соображений
।< >г угол не может быть большим и обычно не превышает 1...3°.
)(ля уменьшения времени поиска объекта в зоне обзора в пер-
цептивных ЛСВ третьего типа обычно предусмотрена возмож-
ность попеременной работы в пассивном и активном режимах.
Поиск и обнаружение объектов при достаточном уровне естест-
| | иной освещенности осуществляется в пассивном режиме, а
но шавание объектов и определение их координат - в активном.
Глава 2. ЛАЗЕРНАЯ СИСТЕМА ВИДЕНИЯ
КАК ИЗОБРАЖАЮЩАЯ СИСТЕМА
ЛСВ относятся к широкому классу изображающих систем,
т.е. их основным назначением является получение качественного
изображения объекта в процессе обзора заданной области про-
странства. Многообразие задач, решаемых изображающими сис-
темами, порождает различия в требованиях, предъявляемых к
качеству изображения, которое они формируют. Но в любом слу-
чае качество изображающей системы считается тем выше, чем
меньше отличается изображение от объекта по распределению
световой интенсивности.
Любой двумерный объект можно характеризовать распреде-
лением яркости Цхъ у,), а изображение этого объекта - распре-
делением освещенности в плоскости анализа Е(х2, у2)- Поведение
изображающей системы описывается математическим операто-
ром Р, который показывает, как нужно воздействовать на функ-
цию Цхъ yt), чтобы на выходе системы получить функцию
£(х2, у2). Такое воздействие изображающей системы при выпол-
нении определенных требований (линейность, временная и про-
странственная инвариантность), можно описать с помощью пере-
даточных функций. Эти функции должны быть достаточно
универсальны, чтобы характеризовать не только подсистемы раз-
личной физической природы, входящие в состав изображающей
системы, но и оценивать степень влияния на качество изображе-
ния внешних факторов (оптических характеристик канала рас-
пространения, движение объекта и др.).
54
Другим важным требованием, предъявляемым к переда-
точным функциям изображающих систем, служит пригод-
ность их для оценки качества составных (многоступенных)
систем, в которых оптические системы являются лишь одной
ступенью. Иными словами, передаточные функции всех сту-
пеней изображающей системы должны хорошо согласовы-
ваться при оценке качества друг с другом и наиболее просто
позволять оценивать качество изображения всей многосту-
пенной системы.
2.1. Линейная изображающая система
Необходимой предпосылкой использования передаточных
функций является линейность изображающих систем.
Пусть (Р{ } - линейный оператор, преобразующий функцию
Дх) в другую функцию gig):
(2.1)
Обозначим функциями g,(£) и g2(Q реакции (отклики) системы
на соответствующие входные воздействия /,(х) и f2(x). Для ли-
нейной системы реакция на сумму входных воздействий равна
сумме реакций на отдельные входные воздействия, т.е.
^{fli/iW + aif2(x)} = a,g|(£) + а£2(£), (2.2)
Где а} и а2 - произвольные (в общем случае комплексные) посто-
янные.
Применительно к изображающей системе это означает, что
освещенность изображения, получаемая от суммарного воздейст-
Ия нескольких яркостных элементов объекта, равна сумме ос-
вещенностей, которые создаются каждым яркостным элементом
I отдельности.
Для линейной системы ее отклик на произвольный входной
вигнал можно выразить через отклик на определенные элемен-
тарные входные воздействия, на которые следует разложить
Входной сигнал. Такое разложение можно получить, используя
фильтрующее свойство 5-функции, которое позволяет предста-
55
вить входной сигнал L(x0, у0), характеризующий двумерное рас-
пределение яркости в плоскости объекта, в виде
00
Е(ХО,УО) = JJ^n)8(x0-^)8(y0-T]Wn- (2-3)
-00
Смысл выражения (2.3) состоит в том, что любую функцию
можно представить как бесконечную сумму взвешенных и сме-
щенных 8-функций. С оптико-физической точки зрения формулу
(2.3) можно рассматривать [44] как непрерывную двумерную
сумму точечных источников 8(х0 - 4) • 8(у0 - ц) с амплитудой
L(t, т|), локализованных в фиксированных точках (х0, _у0) плоско-
сти объекта (£,, т|).
Реакцию системы на входной сигнал L(x0, у0), т.е. распределе-
ние освещенности в плоскости изображения (хи, уи) получим,
подставив (2.3) в (2.1):
Е(хп,уй) = Р1
JJz,(^t])8(x0 -£)8(у0 -т|)^П ••
-оо
(2-4)
С учетом свойства линейности (2.4) можно записать в виде
Е(хя,уп) = - Wo • (2-5)
Обозначим реакцию (отклик) системы на входной типовой 8-
сигнал, т.е. на воздействие точечного источника излучения в виде
^{8(хо -ЪУо -п)} = н(х«>Уя’, х^У0)- (2-6)
Функция Я(хи,уи; х0,у0) характеризует дифракционно-аберра-
ционное изображение точечного источника, локализованного в
точке (х0, у0) предметной плоскости £г|, и называется функцией
рассеяния (ФР). Если изображающая система имеет линейное
увеличение |3, то ее ФР обозначается Яр(хи, у„; х0, у0). Выражение
(2.4) называется интегралом суперпозиции, так как выходной
сигнал Е(хи, уи) представляется в виде бесконечной суммы функ-
ций рассеяния, характеризующих реакцию системы на воздейст-
56
hi।я точечных источников, которые расположены в точках (х0, %)
предметной плоскости. В этой связи целесообразно переменные
интегрирования в (2.5) обозначать теперь через х0,у0, т.е.
00
Е{хи,уя)= \\b(xo,yo)H(xK,yu,xo,yo)dxodyo . (2.7)
-со
Геометрическая интерпретация интеграла суперпозиции
представлена на рис. 2.1. Распределение освещенности в плоско-
III изображения находят при разложении одномерного распре-
к иения яркости объекта на взвешенные 8-функции (рис. 2.1, а),
и меной каждой из них взвешенной функцией рассеяния и после-
।мошим суммированием (рис. 2.1, б).
г не. 2.1. Представление яркостного поля объекта и его изображения
» пиле последовательности 8-функций и ФР:
представление яркостного поля объекта и его изображения в виде последо-
...'и.пости 8-функций; б - формирование изображения в виде суперпозиции
। Н II.пых ФР
< )собый интерес представляют пространственно-инвариант-
|||.к- изображающие системы, у которых изображение точечного
in ।очника при перемещении его в предметной плоскости изме-
I н'| только свое пространственное положение, но не форму, т.е.
Н(хя,уя;х0,у0)=Н(хп-х0;уя -у0), (2.8)
57
причем разность координат рассматривается в плоскости изо-
бражения (хи, уи). Для пространственно-инвариантной изобра-
жающей системы интеграл суперпозиции (2.7) преобразуется в
интеграл свертки:
оо
Е(хя,Уя) = I fz<X > Уо - х0; уи - у0 )dxodyo .
-оо
Выражение (2.9) обычно записывается в символической форме:
E(xu,yu) = L®Н(хя,уя). (2.10)
Выполнив преобразование Фурье обоих частей соотношения
(2.10) и применив теорему свертки, получим выражение, связы-
вающее спектры входного L(yx,vy) и выходного E(yx,vy) сиг-
налов:
Ё(ух,уу) = Н(ух,уу)Ь(ух,уу), (2.11)
где vx,vy - пространственные частоты.
Фурье-образ нормированной ФР при некогерентном освеще-
нии называют оптической передаточной функцией изображаю-
щей системы (ОПФ):
оо
Wx,vy) = П#(*и,Уи)ехрН2л(уЛ +vyyn)]dxHdyn . (2.12)
В общем случае ОПФ представляет собой комплекснознач-
ную функцию
Я(уж,уу) = Т(ух,уу)ехр[7Ф(уж,уу)],
Т(ух, vy) = | Н(ух, vy) |, Ф(ух, vy) = arg[#(vx,vy)].
Модуль ОПФ Т(ух, уу) называется модуляционной передаточ-
ной функцией (МПФ) или функцией передачи модуляции
(ФПМ). Аргумент ОПФ Ф(у„ vy) называется фазочастотной ха-
рактеристикой (ФЧХ), или функцией передачи фазы.
58
ОПФ играет ключевую роль при расчете, проектировании и
оптимизации оптических систем. ОПФ идеальной оптической
системы при некогерентном освещении является действительной
неотрицательной функцией и совпадает с МПФ. При наличии
аберраций ОПФ может стать отрицательной или даже комплекс-
нозначной.
Важно, что электронный тракт и дисплей изображающей сис-
темы также описываются МПФ и ФЧХ, так что комбинация
МПФ различных подсистем образует системную МПФ, которая
показывает, насколько качественно, без искажений система вос-
производит изображение объекта. Наивысшая пространственная
частота vmax, воспроизводимая изображающей системой без ис-
кажения, называется максимальной частотой пропускания, или
частотой среза vcp.
Система может обнаруживать и регистрировать сигналы,
спектры которых содержат пространственные частоты, превы-
шающие частоту среза, но она не может воспроизвести их без
искажений. Так, штриховая мира с высокой пространственной
частотой изобразится в виде низкоконтрастного пятна. С позиций
разработчика МПФ системы должна быть «высокой» в области
lex пространственных частот, которые представляют наиболь-
ший интерес в соответствии со спецификой назначения и приме-
нения этой системы. Применение хорошо развитой теории ли-
нейной фильтрации к анализу изображающих систем, в том числе
К В, требует выполнения четырех условий:
некогерентности излучения;
линейности обработки сигнала;
пространственной инвариантности процесса воспроизведения
и юбражения;
однозначности преобразований, осуществляемых системой.
Все эти условия в изображающих системах с лазерным под-
четом обычно строго не выполняются. Частичная когерентность
торного излучения приводит к возникновению спекл-помехи в
и '.обряжении. Матрица чувствительных приемников осуществля-
। выборку, поэтому преобразование изображения не подчиняет-
ч закономерностям свертки. Аберрации оптической системы
59
нарушают условие пространственной инвариантности, а шумы
приемника - условия однозначности преобразования.
Тем не менее в процессе моделирования или проектирования
ЛСВ в рамках допустимого приближения может рассматриваться
как линейная пространственно-временная система, инвариантная к
сдвигу по времени и по двум ортогональным пространственным
направлениям. Временные и пространственные сигналы исследу-
ются и обрабатываются раздельно. Как правило, оптические звенья
системы не изменяются во времени и характеризуются только про-
странственными координатами. Аналогично, электронные цепи
описываются импульсной характеристикой, зависящей от времени.
Фотоприемник осуществляет взаимосвязь пространственных и вре-
менных координат, поэтому его выходная характеристика зависит и
от временных, и от пространственных параметров. Преобразование
двумерной оптической информации в одномерный электрический
сигнал предполагает линейность процесса фотодетектирования.
2.2. Модуляционная передаточная функция
изображающей системы
По определению МПФ - это отношение глубин модуляции
выходного и входного сигналов синусоидальной формы, норми-
рованное к единице на нулевой пространственной частоте. Глу-
бина модуляции изменяется с изменением увеличения системы, а
МПФ остается постоянной. Для понимания смысла модуля Т(у) и
аргумента Ф(у) комплексной ОПФ рассмотрим объект с косину-
соидальным распределением коэффициента отражения относи-
тельно среднего значения р (рис. 2.2):
р(х) = р + Арсо8 2лухх
(2-14)
и определим, как изображается отдельная частотная составляю-
щая изображающей системой с известной функцией рассеяния.
Согласно (2.9), распределение коэффициента в изображении та-
кого объекта будет иметь вид
со
р'(х) = JН(£)р(х - 0^ = Р + АрЛ>х) cos[2nvxx - Ф(ух)]. (2.15)
-оо
60
Рис. 2.2. Амплитудно-фазовые изменения периодической
структуры при ее воспроизведении оптической системой:
а - объект с косинусоидальным изменением коэффициента отраже-
ния; б - изображение объекта
Из (2.15) следует, что изображение отличается от объекта
шумя особенностями.
Во-первых, глубина модуляции, равная отношению амплитуды
и ременной составляющей к среднему значению (т.е. к постоянной
к । авляющей), оказывается в изображении меньше, чем на объекте
T(vx) = m7m, (2.16)
। н- т - Ар / р - глубина модуляции объекта;
tn' = Ap7(v)/р - глубина модуляции в изображении объекта.
Таким образом, значение модуля Т(ух) ОПФ для каждой про-
। ранственной частоты равно отношению глубины модуляции в
61
изображении гармонического сигнала к глубине модуляции
входного гармонического сигнала и называется коэффициентом
передачи модуляции (КПМ). Совокупность КПМ для различных
пространственных частот составляет функцию передачи модуля-
ции (ФПМ) или МПФ, причем каждый КПМ является ординатой
МПФ на соответствующей частоте. Вид МПФ, а также значения
КПМ для трех входных и выходных сигналов различной про-
странственной частоты v1; v2, v3 (рис. 2.3, а, б) представлены на
рис. 2.3, в.
Рис. 2.3. Передача модуляционного контраста изображающей системой:
а - входной сигнал; б - выходной сигнал; в - модуляционная передаточная функция
Вторая особенность состоит в сдвиге косинусоиды на Ф(у() в
угловой мере. Форма ФЧХ зависит от симметрии функции рас-
сеяния относительно осей координат. В случае симметрии ФЧХ
62
равна 0 или л. При асимметричной функции рассеяния (в случае
аберраций оптических систем, дефектах юстировки и др.) ФЧХ
для различных пространственных частот может принимать раз-
личные значения в интервале [л, -л].
Любая изображающая оптико-электронная система является
м 1 югоступенной и содержит несколько подсистем (оптическая
система, электронный тракт, дисплей, канал распространения
излучения и др.). Для такой системы результирующая (систем-
ная) ФР определяется как свертка ФР отдельных ступеней:
Ясист(х,у) = Н, ® Н2 8 Н. ®... 8 Нп, (2.17)
। те Ht - ФР /-й подсистемы, i = 1,п .
Используя преобразование Фурье и теорему о свертке для не-
коррелированных (статистически независимых) МПФ, получаем
иМ,)=1ВМ)- (2-18)
i=i
Следует отметить, что оптические элементы, входящие в со-
< । а в оптической системы, не являются независимыми (так как
hi пользуются для взаимной компенсации аберраций) и для них
не выполняется (2.18). В большинстве случаев двумерная МПФ
р.нделяется на две одномерные МПФ по ортогональным осям,
обычно совпадающим с осями фотоприемной матрицы:
Т’систСЧ, Vy) = 7Lhct(vx)-Тсип(уу). (2.19)
< не темная ФЧХ равна сумме ФЧХ отдельных ступеней:
Фсист(ух, V7) = Ф((ух, vy) + ф2(уг, УУ) +...+ ф„(у„ V0. (2.20)
2.3. Глубина модуляции и контраст
Исторически сложилось, что в оптике существует несколько
определений контраста, основными из которых являются:
К — ^тах . к = ^тах I'mm . _ Дтах ^min f 2 211
1 I ’ 2 I ’ 3 ~ Т + I ’ '
min max max 1 -^min
и I ,,ux, Lmin - экстремальные значения яркости.
63
Из трех формул только последняя дает значения контраста,
равные глубине модуляции. Действительно, в соответствии с
(2.21) и рис. 2.2 контраст объекта равен
_(r + AL)-(Z-AZ)_2AZ_AZ_Ap
Кпх — — ~ _ — — т, \2>.2,2Л
(Z+AZ) + (Z-AZ) 2L L р
а контраст изображения
к = ^max^'min 2Д1Т(у) Ш(у) _ APT(v) _
И3 ^'шах+^n 2Z L р
Тогда в полном соответствии с (2.16) МПФ имеет вид
T(v) = bn
Коб m
Заметим, что если для определения контраста использовать
формулу к2 = —^2-, то пропорциональность между контра-
ктах
стом изображения и объекта нарушается, отношение к^/к^ само
зависит от ко6, т.е. нельзя использовать понятие «коэффициент
передачи контраста», а следовательно, нельзя характеризовать
составные (многоступенные) изображающие системы в соответ-
ствии с формулами (2.18) - (2.21).
Таким образом, определение к3 в (2.22) следует признать наи-
более рациональным для изображающих систем. Однако при та-
кой оценке контраста его значение иногда не совпадает со значе-
нием воспринимаемого контраста. Наиболее отчетливо эти
расхождения проявляются в электронных изображающих систе-
мах, где изображение формируется на экране монитора и анали-
зируется оператором.
Пусть изображение содержит тхп элементов (пикселов), а
распределение яркости описывается двумерной дискретной
функцией Lmn(x, у), х = 0,т-1, у = 0,п-1. Средний уровень яр-
кости в изображении L равен
_ 1 л-1 т-1
—х YLmn(x,y}. (2.24)
Л1Л y=0 х=0
64
Воспринимаемый контраст в изображении кщ восп характеризу-
ется отклонением яркостного уровня элементов от среднего зна-
чения и по существу равен нормированному среднеквадратиче-
скому отклонению яркости:
Ji л-1 т-1 _
тп^о^о
В формулах (2.24) и (2.25) функция Lmn(x, у) и значение L
выражены в безразмерных величинах градаций яркости или
уровня серого, когда весь диапазон изменения яркости квантует-
ся по уровню, т.е. разбивается на определенное число (обычно 2")
> гупеней, например 256, так, что 0 соответствует уровню черно-
। о, а 255 - уровню белого. При такой дискретизации изображение
< минимальным уровнем серого 200 и максимальным уровнем
’ 10, является ярким, но низкоконтрастным.
Следует отметить, что значение контраста в изображении,
вычисляемое по формуле (2.21), в ряде случаев может отли-
ч.и вся от его значения, вычисляемого по (2.25). Для примера
оценим контраст изображения, содержащего тхп элементов, у
второго два элемента имеют экстремальные уровни яркости 0
и ?55, а все другие элементы - уровень 128. В соответствии с
выражением (2.21) модуляционный контраст равен 1. Однако
наблюдатель видит равномерно яркий фон нулевого контраста с
шумя шумовыми точками (пикселами). Вместе с тем, если изо-
бражение содержит много элементов с близкими к экстремаль-
ным уровнями яркости, контраст, измеренный в соответствии с
( ’ ? I), совпадает с воспринимаемым контрастом, вычисленным
н<> формуле (2.25).
2.4. Контрастная передаточная функция
изображающей системы
11ри использовании МПФ для оценки качества изображаю-
|||1 и системы необходимо определить реакцию этой системы на
входной гармонический сигнал косинусоидальной формы. Фор-
мирование такого сигнала осуществляется, как правило, специ-
альными тест-объектами в виде периодических структур (мир),
модулирующих пропускаемый или отражаемый световой поток
по гармоническому закону. Но изготовление точных косинусои-
дальных мир вызывает значительные трудности, поэтому на
практике для оценки параметров изображающих систем широко
используются миры с прямоугольным или П-образным профилем
штрихов. Однако применение таких мир вместо косинусоидаль-
ных требует внесения определенных коррективов при расчете
или измерении коэффициентов передачи модуляции на интере-
сующих разработчика пространственных частотах.
Действительно, в спектре сигнала прямоугольной миры неко-
торой пространственной частоты помимо гармонической состав-
ляющей этой частоты содержатся еще и составляющие кратных
частот, каждая из которых имеет свою амплитуду. Это следует из
разложения в ряд Фурье периодической функции прямоугольной
формы, представленной на рис. 2.4 и описывающей распределе-
ние коэффициента отражения р миры вдоль оси х:
/л - . 4 Г 1 2пх 1 2~х 2лх
РОб(*) = Р + АР~ cos—-|cos3-—+ ^——cos5 —-... ,(2.26)
л а -> а •> a a J
где р - среднее значение коэффициента отражения;
d - период прямоугольной функции.
Рис. 2.4. Передача прямоугольного сигнала раз-
личной пространственной частоты:
а — низкие частоты; б - средние частоты; в - высокие
частоты
66
(2.27)
Ясно, что в спектре изображения миры должны содержаться
> । и же гармоники, амплитуды которых будут отличаться от
входных значений в соответствии с КПМ системы для каждой
пространственной частоты. Распределение коэффициента отра-
жения в изображении миры можно записать в виде
proW = P + Ap-x
71
( 2лх 1 . 2пх , 1 2тгУ
Hvx)cos—-|T(3vx)cos—+ {T(5vx)cos—
Если функция рассеяния системы симметрична, что обычно
выполняется для изображающих систем в центральной зоне поля
<рения, ФЧХ равна нулю для всех пространственных частот. То-
। ia максимальные амплитуды всех гармоник определяются при
( 0, а минимальные - при х = d/2. При этих значениях х нахо-
1ИМ экстремальные значения коэффициентов отражения ризтах,
। в изображении миры:
।„ тах = риз (0) = р + Ар — (f(v х) -1 r(3vx) +1 T(5v)-...);
л( 3! 5! \ (2.28)
Р,„ ,nin = риз (d/2) = р - Ар 4 |T(vx) -1 T(3vx) +1 T(5vx)-...).
Контраст в изображении прямоугольной миры, согласно форму-
i.iM (2.21) и (2.28), равен
(V Л= 4^ (r(vx) -1 T(3vx) +1 T(5vx)-...). (2.29)
Риз.max + Риз.тш Р^
Учитывая, что контраст объекта равен коб=Ар/р, выраже-
ние для коэффициента передачи контраста (КПК) в соответствии
• 12.28) и (2.29) можно преобразовать к виду
C(vx) = M^ = A(nVx)_lr(3vx) + l7’(5vx)-...). (2.30)
Совокупность значений КПК для различных пространствен-
ных частот составляет функцию передачи контраста (ФПК), или
67
контрастную передаточную функцию (КПФ). КПФ характеризует
реакцию системы на входной сигнал прямоугольной формы. В
принципе КПФ не является передаточной функцией в том же
смысле как и МПФ и поэтому КПФ систем не каскадируются.
Измерив КПК C(vJ, C(3vJ, C(5vJ... по прямоугольной мире для
пространственных частот vx, 3vx, 5vx..., можно вычислить коэф-
фициенты передачи модуляции по косинусоидальной мире, ис-
пользуя формулу Колтмена [7]:
4vJ = 5(c(vj) + |C(3vJ-
-1 C(5vx) +1 C(7vx) - i С(1 Ч) +...),
(2-31)
или
4„=o п
где п принимает только нечетные значения: 1,3,5,...
Коэффициент Вп равен 1 или -1, в зависимости от п:
в = (-1)и(-1)2 >
-*-*и
О,
если г = пт,
если г <т,
(2.32)
где т - общее число простых сомножителей в и;
г - число различных простых сомножителей в п.
Теоретически для определения МПФ на частоте v, т.е. Т(у),
необходимо иметь бесконечно большое число значений КПК,
измеренных по прямоугольной мире на пространственных часто-
тах v, 3v, 5v, 7v, 1 lv и т.д. Однако на практике требуемое число
членов выражения (2.31) ограничивается частотой среза изобра-
жающей системы vcp, т.е. такой пространственной частотой, при
которой МПФ достигает нуля и остается нулевой на более высо-
ких частотах. Показано [66], что для мир с прямоугольными
штрихами, у которых пространственная частота v превышает ве-
личину vcp/3, изображающая система воспроизводит без искаже-
ний только основную гармонику периодической функции прямо-
угольной формы. Другими словами, прямоугольный профиль
68
миры воспроизводится в виде косинусоидального. На простран-
с гвенных частотах выше vcp/3 КПМ равен л/4 от значения КПК,
поэтому на этих частотах для измерения КПК и расчета КПМ
। ребуется только одна мира.
В результате исследований установлено, что результат измере-
ния МПФ перестает зависеть от числа п периодов миры уже при
и 7, а при п = 4 погрешность в определении МПФ не превышает
< % [65]. Для низких пространственных частот (см. рис. 2.4, а) вы-
ходной сигнал почти точно копирует входной (рис. 2.5, а). С уве-
шчением частоты (см. рис. 2.4, б) форма выходного сигнала
приближается к косинусоидальной (рис. 2.5, б) и при частотах
кьиие vcp/3 (см. рис. 2.4, в) прямоугольная мира воспроизводится
косинусоидальной (рис. 2.5, в), причем амплитуда МПФ меньше
амплитуды КПФ в л/4 раз.
Следует отметить, что взаимосвязь МПФ и КПФ определена
юлько для аналоговых систем. Для систем с выборкой математи-
ческие соотношения между МПФ и КПФ до настоящего времени
нс установлены. Тем не менее, приведенные выше соотношения
< 1 И)), (2.31) можно использовать для анализа изображающих
пс гем с матричными фотоприемниками при выполнении ряда
\ । новий, рассмотренных ниже.
11редставление ЛСВ в виде составной (многоступенной) изобра-
। .нощей системы позволяет определить МПФ всей системы (сис-
11 mi|ую МПФ) в виде произведения МПФ отдельных подсистем:
^hct(v„ vy) = TonT(v„ vy) тфд(ух, vy) T3„(vx, vy), (2.33)
1 11 /o.itCYw Vy)_ МПФ приемопередающей оптической системы;
/фд(у„ vj - МПФ фотодетектора;
I\„(yx, vy) - МПФ электронного тракта обработки сигнала.
( истемная МПФ характеризует качество воспроизводимого на
и I и не монитора изображения. Наблюдатель оценивает это изобра-
। нне, формируя результирующую воспринимаемую МПФ ЛСВ:
^ocn(vx, v,) = rc„CT(vx, Уу)Тти(ух, vy)Trjl(v„ vy), (2.34)
' 11 1 м.мХУ» v>.) - МПФ видеомонитора;
/; ,,(v„ v7) - МПФ зрительного анализатора.
69
Рис. 2.5. Передача сигнала прямоугольной формы оптиче-
ской системой
2.5. Модуляционная передаточная
функция оптического канала
Оптический канал включает в себя лазерное передающее уст-
ройство (ЛПУ), оптическое приемное устройство (ОПУ) и среду
распространения излучения (СР). МПФ указанных звеньев обо-
значим соответственно ТЛПу(у„ vy), Z’ony(v» v,), Тср(у„ vy).
70
Ниже будет показано, что нахождение МПФ оптического ка-
нала сводится к определению фурье-преобразования некоторой
функции, имеющей смысл ФР для всего оптического канала ЛСВ
и описывающей вклад потока, отраженного от точки г объекта в
мощность сигнала, регистрируемого фотоприемником, ось кото-
рого направлена в точку г - 0 с учетом рассеяния в среде на всей
трассе «источник - объект - приемник». МПФ среды распро-
странения излучения рассматривается далее в главе 6. Здесь же
отметим, что МПФ оптического канала зависит не только от рас-
сеивающих свойств среды, но и от соотношения диаграмм на-
правленности передающего и приемного каналов. В любом слу-
чае МПФ оптической приемопередающей системы однозначно
определяется МПФ звена с узкой диаграммой направленности.
11оэтому для ЛСВ с импульсной подсветкой (широкая диаграмма
источника) и фотоприемным устройством на основе ПЗС-
матрицы (узкая диаграмма приемника) необходимо определить
МПФ оптической приемной системы, т.е. функцию Тот(ух, vy).
МПФ дифракционно ограниченной (анаберрационной) опти-
ческой системы с круглым входным зрачком имеет вид [44]
Топт.д(5) = 1(агссо85-5л/Гб?), 5<1;
7ОПТД(5) = 0, 5>1,
i де 5 - относительная пространственная частота, равная отноше-
нию пространственной частоты v к ее предельному значению
v.... еще пропускаемому оптической системой. Эта максимальная
пространственная частота зависит от диаметра входного зрачка Dv
и фокусного расстояния/'об оптической системы: vonTCp=Z)3p/(?/o'6)
и обычно выражается числом периодов на единицу длины (на-
пример, в мм1). Дифракционно ограниченная оптическая система
юладает радиальной симметрией, следовательно, v2=v2+v2 и
• с МПФ в горизонтальном и вертикальном направлениях иден-
। ичны. Для угловых пространственных частот v' МПФ анаберра-
। тонной оптической системы имеет вид, аналогичный (2.35), а
l ie гота среза в этом случае равна v'onTCp a D /к .
71
График функции (2.35) в области низких частот имеет вид
почти прямой линии (рис. 2.6). Для ориентировочных расчетов
можно пользоваться более простой зависимостью
Г,„(5) = 1--(’1+Л78Г).
Л \ )
(2-36)
график которой представлен на рис. 2.7.
Рис. 2.7. Аппроксимация МПФ дифракционно ограниченной оп-
тической системы
72
Влияние аберраций оптической системы на ее МПФ можно
оценить с помощью зрачковой функции, которая описывает, как
под действием оптической системы изменяется поверхность вол-
нового фронта световой волны, исходящей из произвольной точ-
ки объекта М и приходящей во входной зрачок оптической сис-
темы (рис. 2.8). Эта световая волна является сферической,
поэтому сфера с центром в точке М, проходящая через центр
входного зрачка О системы, представляет собой волновую по-
верхность. На выходе оптической системы, имеющей аберрации,
эта волна не будет сферической (ее поверхность постоянной фа-
зы сложной формы показана на рис. 2.8 пунктиром).
Рис. 2.8. Формирование волнового фронта в выходном зрачке оп-
тической системы
Построим сферу сравнения с центром в точке М'(х), прохо-
дящую через центр О' выходного зрачка, и определим длины
отрезков вдоль лучей между реальной волновой поверхностью и
сферой сравнения. Текущие координаты на сфере сравнения обо-
значим через и и и, ось координат и перпендикулярна плоскости
рисунка. Тогда искомые отрезки, различные для различных точек
(w, и), образуют функцию w(u, и) волновой аберрации. Зрачковая
функция характеризует не только волновую аберрацию, но и ам-
плитудный коэффициент пропускания по зрачку у[х(и,и). В об-
щем случае зрачковая функция Р(и,и) представляется в виде
73
P{u,v) = yjx(u,u) exp
.2л . .
z — w(u,v)
Л
(2.37)
причем модуль y]x(u,u) учитывает уменьшение амплитуды про-
пускаемой световой волны, а аргумент определяет сдвиг фазы
волны, вызванный волновой аберрацией.
Если зрачковая функция оптической системы определена, то
ОПФ системы вычисляется с помощью автокорреляционной
функции
н(ух,уу)= ^P*(u,u)P(u + 'kf'vx,u+'kf'vy')dudu. (2.38)
Так как для нулевой пространственной частоты значение ОПФ
равно 1, то автокорреляционную функцию (2.38) нужно норми-
ровать на ее наибольшее значение:
j jP* (и, и)Р(и + X/' vx, u+'kf v у )dud и
H(vx,vy) = -^------------------------------. (2.39)
^P(u,v)\2 dudv
—со
Анализ аберрационных функций w(u, и), проведенный Клей-
ном [42], Стилом [63] и другими авторами, показывает, что даже
небольшие аберрации могут привести к значительному ухудше-
нию качества изображения. Важно отметить, что аберрации дос-
таточно сильно влияют на МПФ в области средних частот и не-
значительно в области малых (5 < 0,1) и высоких (5 > 0,9). На
рис. 2.9 представлены МПФ для дифракционно ограниченной
оптической системы и для систем с различными значениями
среднеквадратической волновой аберрации, выраженной в долях
длины волны X излучения подсвета. В соответствии с критерием
Марешаля оптическую систему можно считать хорошо скорреги-
рованной (достаточно хорошей), если среднеквадратическая вол-
новая аберрация не превышает величины Х/14. Как следует из
графика рис. 2.9, при выполнении этого критерия МПФ ухудша-
ется на 20 %.
74
мы (значения волновых аберраций указаны в долях длины волны):
/ - 0,05Х;2 - Х/16; 3 - М12;4 - АЛО; 5 - А/8
Для высококачественных изображающих систем рациональ-
нее всего КПМ или контраст оценивать на пространственной
i.ic готе v, лежащей в середине диапазона пространственных час-
। • > ।. Для определенности приняв v = 0,5vonTcp, получим
Т(у) > 0,8Toma(v), (2.40)
। е КПМ на частоте, равной половине предельной частоты при на-
шчии аберраций, не должен снижаться более чем на 20 % по срав-
нению с безаберрационной системой. Качество телевизионных
нс гем считается удовлетворительным, если Ду) > 0,5Топгя(у), и вы-
"ким, если Ду) > Q,75TonTa(v).
2.6. Модуляционная передаточная функция
матричного фотоприемника
()дним из наиболее важных элементов приемного канала
К Вс импульсным подсветом является матричный фоточувег-
75
вительный детектор оптического излучения на основе приборов
с зарядовой связью (ФПЗС-матрица). Входным оптическим
сигналом для ФПЗС-матрицы является непрерывное распреде-
ление освещенности на поверхности ее чувствительных элемен-
тов Ет(х', у', z'), сформированное предшествующими компонен-
тами оптической системы, а выходным - видеосигнал u(t).
Преобразование Ет(х', у', z') —> u(t) осуществляется путем
коммутации сигналов отдельных пикселов ФПЗС с установлен-
ными траекторией считывания изображения и скоростью. Как
дискретный датчик ФПЗС осуществляет двумерную пространст-
венную и одномерную временную выборку отсчетов. Из-за того,
что непрерывное распределение освещенности преобразуется в
дискретный сигнал распределения зарядов, изображающая сис-
тема с выборкой оказывается пространственно неинвариантной,
т.е. изображение точечного источника зависит от его положения
относительно двумерной решетки выборки (матрицы).
На рис. 2.10, а представлено упрощенное бинарное (т.е. двух-
уровневое) изображение, g(x, у), выборочная двумерная структура
в виде прямоугольной решетки и дискретные отсчеты gs(x, у) -
= 8(х, у) изображения после выборки. После смещения входного
изображения в направлении осей координат на и и и (рис. 2.10, б)
в случае пространственной инвариантности изображение после
выборки имело бы вид gs(x -и, у - и) = 8 (х -и, у - и).
Рис. 2.10. Выборка двумерного сигнала:
а - выборка в начальном положении; б - выборка при сдвиге изображения
б
76
Однако, как видно из рисунка, субпикселный сдвиг входного
изображения может вызвать значительные дискретные изменения
в выходном изображении после выборки. Следовательно, про-
цесс выборки не является пространственно инвариантным. Это
означает, что в общем случае изображающая система с выборкой
не имеет МПФ, однако при выполнении определенных требова-
ний фундаментальный подход к анализу изображающих систем,
основанный на теории линейной пространственной фильтрации и
использовании МПФ, может быть распространен и на изобра-
жающие системы с выборкой. На рис. 2.11 представлено схема-
тичное изображение растра ПЗС-матрицы в виде прямоугольных
элементов (пикселов) размерами ах. х ау. с расстояниями между
их центрами tZx. и dy. Функция пропускания одного элемента с
координатами центра х'пр, у'пр имеет вид
(2.41)
#эл(^УХр,Упр) = ГеС1
*'-<> У-Упр
’ а,.
Распределение
Рис. 2.11. Схема многоэлементного матричного фотоприемника
77
Геометрический растр ФПЗС состоит из двумерного набора
одинаковых элементов тхп, функция пропускания каждого из
которых аналогична (2.41). В зависимости от их пространствен-
ного положения (х^р,у„р) в результате фотодетектирования фор-
мируется пространственное распределение зарядовых пакетов
Процесс преобразования сигнала ФПЗС можно условно пред-
ставить в виде последовательного функционирования трех пре-
образующих звеньев: фотоэлектрического транспаранта, узла
сброса и усилителя (рис. 2.12). Геометрический растр ФПЗС в
виде транспаранта с окнами совместно с фотодетекторами мат-
рицы преобразует непрерывное распределение освещенности в
дискретные отсчеты зарядов путем усредняющей выборки, ПЧ-
фильтрации и фотодетектирования. При переносе зарядовых па-
кетов к выходному регистру и их преобразовании в соответст-
вующие отсчеты напряжения м,(0 формируется дискретный ви-
деосигнал, содержащий нелинейные искажения, обусловленные
выборкой. После прохождения через активный НЧ-фильтр по-
следовательные дискретные отсчеты напряжения видеосигнала
преобразуются в непрерывный (аналоговый) видеосигнал.
Рассмотрим процесс преобразования оптического сигнала
матричным ФПЗС. Представим двумерную структуру матрицы в
виде тонкого транспаранта, который выполняет две операции:
усредняющую выборку сигнала Ет(ху') с различным шагом
по двум ортогональным направлениям dx., dy\
преобразование усредненных каждым элементом ФПЗС ве-
личин освещенности в заряд.
В результате первой операции изображение представляется в
виде пространственно отфильтрованной выборочной совокупно-
сти средних значений освещенности изображения в пределах ка-
ждого окна структуры ФПЗС. В процессе второй операции осу-
ществляется фотодетектирование и формирование зарядовых
пакетов в узлах (ХпР,у„р) двумерной структуры окон.
Заряд ^(0, 0), формируемый центральным окном (х^р =0, j/p =0),
равен
78
<?(0,0) =
f fir / ’ X X У J ,, ,
----;----1 I 1£из(х..У )rect —dx'dy,
-L> a. a.
(2.42)
гдег](Х) - квантовая эффективность фоточувствительного слоя на
рабочей длине волны;
ё - заряд электрона;
hv - квант энергии;
t„ - время накопления матрицы;
Ею{х’,у") - распределение освещенности в изображении объекта.
Проведем выборку полученного значения с помощью дельта-
функции 3(х', у') в точке х' = 0, у' = 0. В результате получим вы-
борочное значение заряда, имеющее размерность поверхностной
плотности заряда:
<7Вь,б(°> °) =
hv
СО
-со
X
Л'
— dx'dy'
а„-
8(х',у'). (2.43)
Не изменяя значения интеграла в (2.42), заменим переменные х',
V на и и ix
hv
г с ч и и , ,
I 1диз(м,ь>)гес1 —;— dudu
\av ау’)
8(х',у'). (2.44)
Умножение на 8(х', у') оказывает выборочное действие на
->качение функции, заключенной в квадратных скобках, при х' =
0; у' = 0, поэтому можно заменить множитель rect — ; —
аг. а.
rect
и — х'
< «х ау. J
(2.44) запишется в виде
УвьЖУ) =
на
. С учетом свойств функции rect выражение
^et"- JJ^H3(M,u)rect
«v 4,
а
dudu 8(х',у').(2.45)
79
Фотоэлектрический транспарант
Усилитель
Усиление
и фильтрация
напряжения
Входное
распределение
освещенности
^'пр’/пр)
Дискретное
изображение
Фт^пр’/пр)
Дискретное
распределение
зарядовых пакетов
‘иЛ'пр’/пр)
Видеосигнал
Видеосигнал
с минимальными
искажениями
Рис. 2.12. Модельные представления процессов преобразования сигналов матричным фотоприемником:
а - схема процесса фотодетектирования
Рис. 2.12. Модельные представления процессов преобразования сигналов матричным фотоприемником:
6 - схематичное представление процесса выборки
Таким образом, выборочное значение заряда в точке х' = 0, у' = О
с точностью до постоянного множителя равно функции свертки
между £из(х',У) и rect —
а .
, умноженной на дельта-функцию
5(х',У):
?вы6 «У) =
hv
£H3(x',y')®rect
а,'
5(х',У) .(2.46)
Аналогичным образом находится выборочное значение заря-
да в точке Ур, у',р с координатами Ур = mdx.; у',р = ndy,. В ре-
зультате выборочная функция заряда двы6(х', у') определится как
сумма выборочных значений в каждой точке mdx., nd/
/, л т](Х)-ё/н
9выб^.у)= X --------------7----
7п,л=-оо hv
(и - mdx. - x) (/ - ndy, - y')
х JJ{£H3(u,b>)rect
ay
x 5(x' - md^, y' - ndv.).
dx'dy'}* (2.47)
С учетом вещественности и четности прямоугольной функ-
ции запишем (2.47) аналогично выражению (2.46):
. , т](Х) • et
?Bb,6(^y) = J4—”
hv
Ет(х, у')® rect —; —
а..
1 J Х'
х------comb —; —
dx'dy, dx, dy..;
(2.48)
где ~mdx^y'~ndy)
m,n=-<x>
1
dx'dy
comb —
82
Следует отметить, что в (2.48) коэффициент ------ безраз-
dx' dy
мерный, в то время как функция comb
имеет размер-
ность м 2.
Таким образом, усредняющая выборка, осуществляемая
ФПЗС-матрицей, с точностью до постоянного множителя эквива-
иентна свертке функций освещенности в изображении объекта с
распределением чувствительности по площадке элемента (пиксе-
ла) и последующей выборке в центре каждого элемента. Если
распределение чувствительности по площадке элемента (пропус-
кание окна транспаранта) является неравномерным и описывает-
ся функцией Нэл(х', у'), то выборочная функция двы6(х', у') прини-
мает вид
?выб(*',у') = П(А')'е/н [£нз(/,у') ® Нэп (/,у')]х
hv
1 hf х' у'
х-------comb —; —— .
dx,dy„ \^dx, dy..,
(2-49)
(’ учетом конечных размеров матрицы выражение (2.48) можно
ишисать как
. , т](Х)-еС
?ВыбО> у ) = , , ,
hvd,d.
Ет(х' ,y')®xeci —
а.
а .
X
(2.50)
X V
xcomb —rect
d. d„,
2_
Л- ’ L
Для анализа пространственно-частотного спектра выходного
сигнала найдем фурье-образ от (2.50). Получим:
83
tfsb.6 (VX > Vy ) = Л<7выб (*'. У)} = П(---~е?Н
hvd.d,.
x «У EK3 (%', yr) ® rect —
a,, a.
x
<8>УЬ comb — >®У- rect —> =
dr. d. I. I.
dr. d
h^d~y. L~B3V’x”/'“
x sine (ax,vx., ay.vy.)] ® dx.dy. comb(Jx.vx,, dy,vy.) ®
®/y,/y(sinc/x.Vy,/yVy).
(2-51)
Учитывая, что lx»dx; и lyf»dy/, ly.»ay., спектральными
компонентами, зависящими от конечных размеров матрицы,
можно пренебречь:
lim lx,ly. sine (vx./x., vy.ly,) 8(vx., у y.).
(2-52)
Тогда (2.51) принимает вид
~ т|(Х) • etKax.a,, г~
Я^(Ух' -vy) =------т------- £m(v/ >Vy )smc(ayvy ,a. v ,
hv
n(A) • etaa.,
® comb((/y vy ,dy. vy) =---------— v
hv
x l^H3(vy, Vy )sinc (ax.vx. ,ay.vy)]®
.гП(А-)'ё/н ax'ay „
hv dr,d,.
1
dx.dy
m
Sv
m n
n
dx.
d„.
m n
sme ay vy - —- tay v
dr. y d.
m
d,
(2.53)
84
После перегруппировки членов выражения (2.53), связанной с
выделением спектральных компонентов со значениями т = О,
п = 0, получим окончательное выражение для пространственно-
частотного спектра сигнала после усредняющей выборки и фото-
детектирования :
4выб<4' Ау) = ~~ —I— Риз (Vy > V у) sinefay vy, ау v.) +
d.d. hv y y
-I—- ' - "x
dx.d. hv
x
rri,n—
X Em
m,n*G
sine a.
(2-54)
Анализ выражения (2.54) показывает, что влияние усредняю-
щей выборки проявляется не только в фильтрации пространст-
венного спектра изображения фоточувствительным элементом
матрицы, но и в появлении побочных частотных полос с центра-
ми в точках mdx., ndy (псевдочастот). Первое слагаемое в (2.54)
представляет спектр входного сигнала, отфильтрованного sinc-
образным фильтром, а второе характеризует побочные спектры,
которые могут вызвать появление ложных изображений. Как
следует из (2.53) и (2.54), спектр выходного сигнала qvu&(yx,vy)
не может быть выражен произведением ПЧС входного сигнала
/'.„(v^v^,) и передаточной функции ФПЗС Н^(ух.у, по-
скольку зависимость (2.53) содержит свертку в частотной облас-
। и, а соотношение (2.54) содержит второе слагаемое. Таким обра-
<ом, в общем случае ФПЗС-матрица не имеет оптической
передаточной функции из-за пространственной дискретизации с
шагом dy, dy.
На рис. 2.13 представлен одномерный ПЧС выходного сигна-
|л, который имеет вид отфильтрованного спектра входного сиг-
нзла для двух ситуаций: ширина ПЧС входного сигнала больше
। рис. 2.13, а) и меньше (рис. 2.13, б) частоты Найквиста.
85
£(vx.,0)
Рис. 2.13. Формирование пространственно-частотного спектра выходно-
го сигнала многоэлементным фотоприемником:
а — ширина полосы входного сигнала выше частоты Найквиста;
б — ширина полосы входного сигнала равна частоте Найквиста
Для восстановления неискаженного исходного изображения по
совокупности передаваемых отсчетов видеосигнала, формируемых
при считывании зарядовых пакетов и следующих с интервалами
дискретизации dx. в продольном и в поперечном направлениях, в
86
соответствии с теоремой отсчетов необходимо выполнять два ус-
ловия. Во-первых, спектр передаваемых частот Еиз(ух,, vу) вдоль
осей дискретизации следует ограничить частотами
1 11 1 11
, < — v • =-----: v , < — v , ------
: 2 sx 2 dх. у 2 sy 2d/
(2.55)
где vsV, vs/ - частоты дискретизации по двум осям.
Так как значения 0,5v„., 0,5vs/ соответствуют частотам Найк-
виста vx. N, vy,N, (2.55) можно записать в виде
vx.<vx,w; vx.<vyN. (2.56)
Во-вторых, выходной сигнал необходимо пропустить через
идеальный двумерный фильтр низких частот с частотами среза
vr. № vy N и импульсной характеристикой вида
5(х',У) = sine
2L-JL
йЕ, ’ d,
(2-57)
В случае невыполнения условия теоремы отсчетов простран-
ственные частоты в спектре изображения превышают частоты
Найквиста, и возникает наложение компонентов частот побочных
спектров дискретизации на компоненты основного спектра.
Транспонирование компонентов побочных спектров в область
частот основного спектра вызывает появление псевдочастот и
проявляется в виде посторонних узоров (муаров) на изображе-
нии. Если же входной сигнал имеет финитный спектр, макси-
мальная частота которого vmax <vN, то НЧ-фильтр вида (2.57),
полоса которого Av = vmax, позволит полностью устранить нели-
нейные искажения и восстановить сигнал без потерь. Для этого
случая ПЧС выходного сигнала имеет вид
qL (V/ > vy) = <?вь.б <vx - vy )#ф (Vy, vy,) =
= <7вь.б (V/ > vy )rect
V/ , vy
2V/max 2Vymax ,
(2.58)
87
Подставляя (2.58) в (2.54), получаем
9 Ф (Vy, V .) = П--^ ’е/н £из (Vy, v .) sine {a,vx., a.vy ). (2.59)
выб dx,dy. hv
При указанных ограничениях можно определить передаточ-
ную функцию матричного фотоприемника нормировкой функ-
ции (2.59):
ГФд(уу ,vy) = sincGiyVy,^^,), (2.60)
или для угловых пространственных частот vx., vy:
^(v'/.v'y) = sine (ay v'x.,ay.v'y.) . (2.61)
Связь между линейными и угловыми пространственными часто-
тами в пплслт>янггве-излбпаже.ний оппепепяетс.я соотношением
Vyy^v',^, (2-62)
где /0'6 - фокусное расстояние приемного объектива.
Величина 0у у, = —представляет собой угловой размер
/об
пиксела матричного фотоприемника и определяет угловую про-
странственную частоту среза v^cp, т.е. такую пространствен-
ную частоту, при которой МПФ матричного фотоприемника
равна нулю:
уфд.Ср - мРад'• (2-63)
и
На рис. 2.14 представлена одномерная МПФ матричного фо-
топриемника для нормированных угловых пространственных
частот УфД/УфД Ср . МПФ равна нулю, когда Уфд = fc/A., где к - це-
лое число. Первый ноль (к = 1) определяет частоту среза v^cp,
так как любая более высокая пространственная частота не может
восприниматься без искажений и будет трансформирована в бо-
лее низкую псевдочастоту. Отрицательные значения МПФ харак- ,
88
теризуют обращение контраста, т.е. светлые полосы тест-объекта
соответствующих пространственных частот изображаются в виде
темных, и наоборот. На практике принято графически представ-
лять МПФ фотоприемника до первого нуля, как показано на рис.
2.15, но это, конечно, не означает, что она объективно не сущест-
вует для частот, превышающих у'фд ср.
Рис. 2.14. МПФ фотодетектора как функция нормированной уг-
ловой пространственной частоты v7 у'фд ср
Рис. 2.15. МПФ фотодетектора в диапазоне нормированных про-
странственных частот v7 у'фдср
В общем случае наивысшее значение пространственной час-
тоты, воспроизводимой оптическим каналом ЛСВ без искажений,
определяется с учетом пространственных частот среза фотопри-
емника и приемной оптической системы v'o . При ны-
Х9
полнении условия v'onT ср > Уфд ср системная МПФ ограничивается
фотоприемником (детекторно ограниченная ЛСВ), в то время как
при у'фД > v'oirr ср система будет оптически ограниченной. Следу-
ет иметь в виду, что мгновенное поле зрения приемной системы
апр определяется как размером кружка рассеяния приемного объ-
ектива, так и угловым размером пиксела Когда угловой раз-
мер кружка рассеяния меньше 0х.у, то апр = 9х.у.
В общем случае сигнал на выходе ФПЗС-матрицы зависит от
случайного пространственного смещения входного изображения
Е(х'-х'0,у'-у'о) относительно матрицы, определяемого значе-
ниями х'о, у'о, как показано на рис. 2.11. Однако указанный эф-
фект играет существенную роль лишь тогда, когда размеры дета-
лей изображения сравнимы с размерами одного элемента ФПЗС-
матрицы. В такой ситуации не выполняется условие теоремы от-
счетов, которая устанавливает предел ширины спектра входного
сигнала, передаваемого без нелинейных искажений.
2.7. Модуляционная передаточная функция
блока усилителя яркости
ЛСВ, формирующие изображение в условиях крайне низкой ос-
вещенности в плоскости входного зрачка приемного объектива, со-
держат, как правило, в приемном канале усилитель яркости на осно-
ве ЭОП. Усилитель яркости осуществляет не только усиление
сигнала, но выполняет также спектральное преобразование входного
излучения и стробирование входного канала. В современных ЛСВ
используются ЭОП второго и третьего поколений, отличающиеся
типом фотокатода. Составными компонентами таких ЭОП являются:
фотокатод, преобразующий фотоны входного излучения в фо-
тоэлектроны и характеризуемый спектральной квантовой эффек-
тивностью Г)фк(Л) и спектральной чувствительностью s(a), мА/Вт;
микроканальная пластина (МКЛ), усиливающая за счет вто-
ричной эмиссии поток фотоэлектронов. Коэффициент усиления
Смкп зависит от типа ЭОП и в перспективных образцах достигает
величины 1О4...1О5;
90
люминесцентный экран, формирующий видимое изображе-
ние и характеризуемый светоотдачей у,к.
В некоторых типах ЭОП имеется дополнительный кольцевой
электрод, выполняющий функции быстродействующего затвора.
Экран ЭОП оптически сопряжен с фоточувствительной площад-
кой ФПЗС-матрицы проекционной оптической системой или во-
локонно-оптическим элементом (пальцем).
Строго говоря, ЭОП является пространственно-неинвариант-
ным звеном из-за мозаичной структуры МКП. Однако при проек-
тировании ЛСВ математическая модель ЭОП представляется в
виде линейного пространственно-инвариантного звена с генера-
тором аддитивного дробового шума на входе. В связи с большим
разнообразием конструкций ЭОП различных производителей по-
лучить универсальную ФР ЭОП не представляется возможным.
Обычно для оценки пространственно-фильтрующих свойств ЭОП
используют нормированную ФР в гауссовом приближении [12]:
ЯЭОП<*эк^эк) = еХР
8(4+л2к)
2
аэоп
(2.64)
где Стэоп - диаметр пятна рассеяния на экране ЭОП по уровню 1 /е2;
хэк, Уэк ~ координаты в плоскости экрана.
При использовании ЭОП первого поколения аэоп определяет-
ся качеством фокусирующей системы, а для ЭОП с МКП - раз-
мером ячейки микроканальной пластины. Соответствующая нор-
мированная МПФ ЭОП имеет вид
^3on(vx>v0 = exp
к2стэоп(4+4)
8
(2.65)
Графики модуляционных передаточных функций в зависимо-
сти от угловых пространственных частот для ЭОП различных
поколений представлены на рис. 2.16. Анализ графиков позволя-
ет заключить, что наивысшим разрешением ~ 50...60 лин/мм об-
ладают однокаскадные ЭОП первого поколения, не содержащие
МКП. Тем не менее из-за малого усиления яркости применение
их в ЛСВ ограничено.
91
Рис. 2.16. МПФ электронно-оптического преобразователя:
1 - многокаскадные ЭОП первого поколения (ст-х,^ 210“2 мм); 2 - ЭОП
второго и третьего поколений (Оэоп = 1,5 'Ю2 мм); 3 - однокаскадные
ЭОП первого поколения (стэоп= 1 • Ю“2 мм)
Если система переноса изображения с экрана ЭОП на фото-
чувствительную площадку матричного фотоприемника содержит
репродукционный объектив, то распределение освещенности в
плоскости фотоприемника имеет вид
^пзс (x,y) = L3K(x,y)® #ро (Х> J2) >
где £эк(х,у) - распределение яркости на экране ЭОП;
Нро(х,у) - ФР репродукционного объектива, которая с дос-
таточной точностью аппроксимируется гауссовской функцией:
Нро(х,у) =
ехр
^(х2+у2)
(¥Р'о)2
(2.66)
Здесь Рро, Dpo, - увеличение, диаметр входного зрачка и
фокусное расстояние репродукционного объектива.
92
Нормированная МПФ репродукционного объектива опреде-
лится фурье-преобразованием (2.66):
^poC^^WxP
я2(Ур'0)2(у2+у2)
(2.67)
При использовании в качестве системы переноса изображе-
ния фоконного пальца следует иметь в виду, что фокон из-за со-
ставной структуры не является пространственно-инвариантным
звеном. Однако для диапазона пространственных частот Av =
= l/2dB, где dt - диаметр волокон на выходе фокона, его можно
считать пространственно-инвариантным с передаточной функцией
y) = bes^[^Byjv2x +v2yV (2.68)
Для практических расчетов удобно аппроксимировать МПФ фо-
кона гауссоидой:
7фок(Ух>У0 = еХР
(У2+У>2
0,85
(2.69)
На рис. 2.17 представлены графики передаточных функций
оптических систем переноса изображения - репродукционного
объектива с относительным отверстием 1:1 и волоконно-
оптического элемента на базе фокона с диаметром волокна на
выходе 10 мкм. Из графиков видно, что в принципе обе системы
обеспечивают примерно одинаковую разрешающую способность.
Однако на практике качество изображения, сформированного
фоконом, оказывается несколько худшим из-за дефектов фокона
в виде непрозрачных участков и геометрических искажений изо-
бражений вследствие неравномерной укладки волокон. Примене-
ние проекционных оптических систем переноса изображения по-
зволяет устранить отмеченные недостатки, но приводит к
увеличению габаритов и возрастанию энергетических потерь.
I [оэтому фоконные элементы рекомендуется использовать в изо-
бражающих системах, работающих при предельно низких уров-
93
нях сигнала. Характеристики некоторых оптических систем пе-
реноса изображения приведены в табл. 2.1 [28].
W)
Рис. 2.17. МПФ оптических систем переноса изображения:
I - волоконно-оптический элемент; 2 - репродукционный объектив с
относительным отверстием 1:3; 3 - репродукционный объектив с отно-
сительным отверстием 1:2; 4 - репродукционный объектив с относи-
тельным отверстием 1:1
Таблица 2.1
Основные параметры оптических систем переноса изображения
Характери- стика опта- ческой системы переноса Волоконно- оптические элементы Проекционные оптические системы
Посто- янного сечения Фокон Объектив ГОИ Объектив «Гранит- Н» Объектив СКВ ТНВ
Увеличение Iх 0,4х Iх 1-5х 0,5х
Угол охвата излучения 74° 24° 54° 54-11° 44°
Линейное поле зре- ния, мм 25 17,5 18 18 23
94
Окончание табл. 2.1
Характери- стика опти- ческой системы переноса Волоконно- оптические элементы Проекционные оптические системы
Посто- янного сечения Фокон Объектив ГОИ Объектив «Гранит- Н» Объектив СКБТНВ
Коэффици- ент пропус- кания 0,42 0,63 0,55 0,47 0,72
Коэффици- ент переда- чи модуля- ции на пространст- венной час- тоте, мм1: 5 0,98 0,92 0,98 0,95 0,96
12 0,96 0,72 0,96 0,80 0,75
25 0,90 0,38 0,90 0,70 0,63
50 0,75 0,05 0,80 0,65 0,48
Предельное разрешение, лин/мм 70 20 80 80 75
Длина, мм 8 20 ПО 220 115
2.8. Анализ передаточной функции электронного тракта
Электронный тракт ЛСВ является одним из наиболее ответст-
венных каналов в системе, поскольку он формирует выходное
телевизионное изображение и управляет работой всех подсистем
и блоков. В общем случае электронный тракт выполняет две ос-
новные функции:
формирование и обработку видеосигнала, несущего инфор-
мацию об объекте наблюдения;
реализацию алгоритма управления всеми каналами и подсис-
темами ЛСВ.
95
Компьютерный канал
Рис. 2.18. Обобщенная структурная схема электронного тракта
96
В соответствии с выполняемыми функциями электронный
тракт содержит канал формирования, обработки и визуализации
сигнала (ФОВ) и контроллер управления. На рис. 2.18 приведена
обобщенная структурная схема электронного тракта ЛСВ с им-
пульсным подсветом, содержащая следующие элементы.
1. Канал ФОВ, состоящий из входного аналогового, цифрово-
го и выходного аналогового модулей, а также видеомонитора.
Входным сигналом этого канала является напряжение видеосиг-
нала МфД(/) с выхода матричного фотодетектора, а выходным -
распределение яркости на экране видеомонитора.
2. Контроллер управления, формирующий систему команд,
управляющих отдельными модулями и подсистемами ЛСВ, а
также синхронизирующий работу блоков всей системы.
3. Компьютерный канал не является обязательным составным
элементом электронного тракта, однако существенно повышает
оперативность цифровой обработки видеоинформации, позволяет
записывать и считывать из блока памяти канала ФОВ видеокад-
ры, выводить на экран дисплея служебную информацию.
Кроме того, электронный тракт содержит схемы электронной
обвязки фотоприемника, передающего и приемного каналов.
В общем случае сформированный матричным фотоприемни-
ком видеосигнал не может быть подан непосредственно на мони-
тор, поскольку обладает рядом специфических особенностей.
Главная из них состоит в импульсном характере экспонирования
матрицы локационным сигналом, причем частота следования
импульсов подсвета обычно меньше частоты кадров фотоприем-
ного устройства. В результате видеосигнал содержит видеокад-
ры, в которых отсутствует информация об объекте, поэтому изо-
бражение на экране дисплея начинает мелькать. Другая
особенность выходного видеосигнала состоит в том, что для
улучшения качества изображения при низком уровне освещенно-
сти требуется его дополнительная обработка. Для преобразова-
ния видеосигнала к стандартному виду канал ФОВ содержит
цифровой блок и два аналоговых модуля. В общем виде процесс
преобразования сигнала каналом ФОВ представляется следую-
щим образом:
I - 1091
97
Лк(^У»0 = ^ФОв[Мфд(Г))’
(2.70)
где 7,эк (х, у, t) - распределение яркости на экране дисплея;
^фов ~ линейный преобразующий оператор;
КфД(0 - выходное напряжение ФПЗС-матрицы.
Рассмотрим поэтапное преобразование видеосигнала. Вход-
ной аналоговый модуль (см. рис. 2.18) осуществляет временную
фильтрацию выходного напряжения и по существу является низ-
кочастотным фильтром. Полоса пропускания такого фильтра
располагается на шкале частот от/= 0 до некоторой граничной
частоты /ср, а полоса непропускания (задержания) простирается
от этой частоты до бесконечно больших частот. Передаточная
функция такого идеального фильтра имеет вид
7ид.ф=гес1
(2.71)
VCP?
где f - электрическая видеочастота, Гц;
/ср - максимальная частота пропускания видеотракта (частота
среза).
Связь видеочастоты с линейной v и угловой v' пространст-
венными частотами выражается зависимостями
(2.72)
drm . ат
~^vx; f = -*—
^а.ст ^а.ст
где dx, ах - линейный и угловой размеры шага между пикселами
матричного фотоприемника;
т - число элементов (пикселов) в строке;
ZaCT - активное время строки;
vx и v x ~ линейная и угловая пространственные частоты в
горизонтальном направлении.
Если максимальная пространственная частота ограничена
частотой Найквиста vxN = 0,5Jt , то видеочастота среза/ср равна
/ср
2t
= V,
а. ст
, ОТ0Х
ср.х ~
*а.ст
(2.73)
т
98
Идеальный НЧ-фильтр пропускает ограниченный спектр по-
лезного сигнала без искажений и подавляет шум вне полосы про-
пускания, максимизируя тем самым отношение S/N.
Передаточная функция реального НЧ-фильтра существенно
отличается от идеального и обычно аппроксимируется полино-
мом. Наибольшее распространение получили НЧ-фильтры Бат-
терворта, обеспечивающие наиболее плоскую характеристику в
полосе пропускания. Передаточная функция такого фильтра опи-
сывается формулой
(2.74)
гДе Тздб - частота, на которой амплитуда выходного сигнала
уменьшается на 3 дБ или в д/2 раз;
п - степень полинома или порядок фильтра.
Чем выше порядок фильтра п, тем более плоским можно
сделать участок МПФ в полосе пропускания и увеличить кру-
тизну спада от полосы пропускания к полосе подавления (рис.
2.19). Когда видеочастота /3дБ соответствует частоте Найкви-
ста /н, теорема выборки удовлетворяется, однако прямоуголь-
ные полосы тест-объекта будут воспроизводиться как сину-
соидальные. Поэтому рекомендуется выбирать частоту /3дБ
существенно более высокой, т.е. использовать более широко-
полосные фильтры.
На рис. 2.20 приведены МПФ матричного фотоприемника с
угловым размером пиксела 10'4, а также МПФ идеального и двух
реальных НЧ-фильтров различного порядка и =1 и п = 2. Частота
среза обоих фильтров соответствует частоте Найквиста и при уг-
ловом шаге матрицы вдоль строк, равном угловому размеру пик-
села, составляет 5 мрад1. Из графиков видно, что с увеличением
порядка фильтра участок МПФ в полосе пропускания становится
более плоским, а кривизна спада от полосы пропускания к полосе
подавления увеличивается.
4*
9‘)
Рис. 2.19. МПФ низкочастотных фильтров Баттерворта
различных порядков
Рис. 2.20. МПФ матричного фотоприемника и НЧ-фильтров:
1 - МПФ матричного фотоприемника; 2 - МПФ идеального НЧ-
фильтра; 3 - МПФ реального НЧ-фильтра порядка п = 1; 4 - МПФ
реального НЧ-фильтра порядка п = 2
Вторым элементом канала ФОВ является цифровой модуль,
который преобразует аналоговый сигнал в цифровой двоичный
код, после чего осуществляет его запоминание и обратное преоб-
100
разование в аналоговый сигнал. 11ередаточная функция цифрово-
го модуля зависит от частоты дискретизации и для угловых про-
странственных частот аппроксимируется формулой [66]
7’цм«) = 81ПС
V
\ *дис у
(2.75)
где у'дис - угловая пространственная частота дискретизации.
Если угловые размеры пиксела и шага ПЗС-матрицы в гори-
зонтальном направлении равны, то v^,c =l/at и формула (2.75)
преобразуется к виду
7’цм«) = 81пс«-ах)- (2-76)
После цифро-аналогового преобразования сигнал имеет сту-
пенчатую форму, как показано на рис. 2.21. Выходной (восста-
навливающий) НЧ-фильтр осуществляет подавление побочных
спектральных составляющих, возникающих в результате усред-
няющей временной выборки и сглаживания формы сигнала. При
этом выходной сигнал несколько смещен относительно входного
(см. рис. 2.21). Для идеального восстанавливающего фильтра его
передаточная функция равна 1 на всех низких частотах вплоть до
частоты Найквиста. Передаточная функция реального выходного
фильтра имеет вид, аналогичный (2.74):
ГВых.ф(/)- /------------—
71 + (/ /здб)2"
(2.77)
где /3дБ - частота среза, определяемая по формуле (2.73).
Таким образом, результирующая передаточная функция элек-
тронного тракта, выраженная в угловых пространственных час-
тотах, представляется в виде
^(О = sinc(v'x -ax)—
(2.78)
Vx
у/
* х.эл.ср у
101
u„j&
Рис.2.21. Восстановление исходного сигнала выходным НЧ-фильтром:
1 - входной сигнал; 2 - сигнал после дискретизации; 3 - выходной сигнал
Графики функции Гэл(у'г) для различных частот среза v'x3JIcp фильт-
ров Баттерворта первого порядка (п = 1) представлены на рис. 2.22.
Рис. 2.22. МПФ электронного тракта ЛСВ при различных
угловых пространственных частотах среза;
1 - v'3,cP= 5 мрад'1; 2 - v'MCp= Ю мрад'1; 3 - у'элср = 15 мрад’;
4~ ^ЭЛ сР=20мрад-'
102
2.9. Модуляционная передаточная функция видеомонитора
Видеомонитор в ЛСВ, являясь устройством визуализации, не-
посредственно влияет на качество формируемого изображения. В
современных изображающих системах используются мониторы
двух типов: на основе ЭЛТ и жидкокристаллические матрицы.
Последние более компактны, имеют низкое энергопотребление,
но уступают мониторам с ЭЛТ по разрешающей способности и
существенно превосходят их в цене. Поэтому в настоящее время
наибольшее распространение в ЛСВ получили монохромные мо-
ниторы с ЭЛТ. Основной характеристикой такого монитора явля-
ется его разрешающая способность, оцениваемая числом ТВ-
линий Утв на высоте экрана монитора Ямон. Эта характеристика
зависит в первую очередь от размера электронного пятна. Если
профиль пятна радиально-симметричный и аппроксимируется
гауссовой функцией, то интенсивность светового пятна имеет
распределение
/(т) = /оехр —
2о„
(2.79)
где /0 - интенсивность в центре пятна;
оп - среднеквадратическое отклонение.
Диаметр пятна dn, определенный по уровню О,57о, равен
dn = 2,35оп,
(2.80)
а передаточная функция монитора, выраженная через линейную
пространственную частоту монитора vM0H, имеет вид
Гмон^мон) = ехр(-2л2ст2у2мон). (2.81)
Пространственная частота vM0H определяется числом ТВ-линий
(периодов) на экране, приходящихся на единицу длины (напри-
мер, 1 мм). Она связана с линейной пространственной частотой в
пространстве изображений vH3 соотношениями
V = V у • V = V V.
х.из х.мон I х ’ >>.из .у.мон I у ’
(2.82)
103
где ух -—Yv =—5!2!L - электронное увеличение, равное от-
mdx ndy
ношению размеров экрана монитора £мон, Нмои к соответствую-
щим размерам ПЗС-матрицы.
Как видно из рис. 2.23, связь между линейными v и угловы-
ми v' пространственными частотами в пространстве изображе-
ний характеризуется соотношением
(2-83)
/об
Подставив (2.82) в (2.80) и (2.83) в (2.81), получим МПФ монитора
в горизонтальном Тмон(у'х) и вертикальном TM0H(v'y) направлениях:
TM0H(v') = exp -l,89-^v'x ;
< мон/об )
, ( dnnd , Y
Т’мои(Ч) = exp -1,89-^v; .
\ МОН J об J
Обозначив через 0x, Qy угловой шаг элементов матрицы в соот-
ветствующих направлениях, окончательно получим
( /7 О Y
TM0H(v;) = eXp -1,89-^v' ;
мон ' (2.85)
, ( d„ney ,Y
rMOH(v;) = exp -1,89-^-iv; .
\ Лмон J
В том случае, если диаметр пятна d„ неизвестен, значение оп
можно оценивать параметром #тв, характеризующим число ТВ-
линий, укладывающихся на высоте экрана HMOW. В соответствии с
критерием разрешения, две соседние линии разделены расстоя-
нием 1,18 оп. Так как на одном пространственном периоде укла-
дываются две ТВ-линии, то линейный размер периода по высоте
равен 2,36оп. Если масштаб изображения составляет 4/3, то /мон =
= 2,35апЛ/тв4/3, а передаточная функция принимает вид
104
TMQH(Vx) = eXP -2л
2 3md.,
-----1—v
2,35 •4#тв
Ло.(^) = ехр^-2,?^Д-^
(2.86)
На рис. 2.24 представлены графики МПФ, построенные по
формуле (2.84) для различных значений параметра d„. Из анализа
графиков следует, что с увеличением диаметра пятна полоса
пропускания дисплея уменьшается, что может вызвать снижение
эффективности передачи изображения объекта. Эта эффектив-
ность связана с угловым увеличением ЛСВ
7W
Р — Z,ГГМОН
~ 2л;ист ’
(2.87)
где 2 РРМ0Н - угловой размер экрана монитора;
2И/СНСТ - угол зрения ЛСВ.
Рис. 2.23. К оценке соотношения между угловыми пространст-
венными частотами в пространстве объектов и изображений
105
Рис. 2.24. МПФ видеомонитора при различном числе раз-
решаемых ТВ-линий:
1 - <4 = 0,28 мм; .2 - <4 = 0,2 мм; 3-<4 = 0,16 мм
Как видно из рис. 2.23, монитор и зрительный анализатор на-
ходятся в одном пространстве, следовательно, их угловые про-
странственные частоты совпадают, т.е. v'rjI = v'M0H = vM0H 7?мои, где
7?мои _ расстояние от наблюдателя до экрана монитора. При этом
связь между угловыми пространственными частотами в про-
странстве объектов и пространстве наблюдения выражается че-
рез угловое увеличение:
L f
v7 = —----— V7
ЯМон mdx
, L МОН / ,
V =------—V
У R^"dy >
2(Й-^-ОИ у' =Г v'
VX.MOH X х.мон’
сист
2®у. МОН , р !
----------V — 1 V
~ v у.МОН у у.МОН
у. сист
(2.88)
Угловое увеличение системы видения рассчитывают таким
образом, чтобы частоты, представляющие наибольший интерес,
приходились на максимум МПФ глаза наблюдателя.
106
2.10. Модуляционная передаточная функция
зрительного анализатора
Конечным звеном лазерной системы видения является чело-
век-оператор, поэтому для нахождения воспринимаемой системы
МПФ необходимо учитывать МПФ зрительного анализатора, т.е.
Т’лсвСУх, Vy) = TCItCT(vx, vy)TM0K(vx, vy)Tr„(vx, vy). (2.89)
В свою очередь, воспринимаемая системная МПФ необходима
для расчета одной из определяющих характеристик ЛСВ - мини-
мального разрешаемого контраста (МРК).
В общем случае на МПФ глаза сильно влияют самые разнооб-
разные характеристики органа зрения, и главным образом, ди-
фракция на входном зрачке, аберрации хрусталика, конечные раз-
меры фоточувствительных рецепторов и др. Кроме того, работа
зрительного анализатора зависит от внешних условий наблюдения,
например, от средней яркости экрана монитора, продолжительно-
сти наблюдения, и т.д. Однако МПФ глаза не учитывает простран-
ственный шум, фоновую освещенность, положение оператора от-
носительно монитора и времени экспонирования. Тем не менее
каждый из этих параметров влияет на качество восприятия изо-
бражения, поэтому эмпирические зависимости, характеризующие
МПФ глаза, являются лишь аппроксимацией реальной МПФ.
МПФ глаза можно измерить пороговым методом по тест-
объекту с синусоидальным распределением яркости, определяя
зависимость контраста, при котором с заданной вероятностью
разрешается тест-объект, от пространственной частоты. Однако
непосредственно измерить амплитуду или контраст воспринятого
изображения синусоидальной картины не представляется воз-
можным, поэтому обычно измеряют функцию контрастной чув-
ствительности (ФКЧ). Контраст пространственной решетки, вос-
производимой на экране ТВ-монитора, без изменения среднею
значения яркости, уменьшается до порогового значения, т.е. до
тех пор, пока наблюдатель видит однородную картину. Измере-
ния повторяются на различных пространственных частотах, в
107
результате чего определяется кривая модуляционного порога гла-
за, вид которой представлен на рис. 2.25.
Величина, обратная пороговому уровню контраста, является
пороговой чувствительностью, а ее зависимость от пространст-
венной частоты есть ФКЧ. Измеренный пороговый контраст ис-
ходной картины [ФКЧ(у'гл)]‘1 при его изменении в соответствии с
МПФ зрительной системы должен быть равным фиксированному
значению кпор, при превышении которой картина считается види-
мой, т.е.
МПФ (v'J = кпор ФКЧ (v'rjI) (2.90)
и, следовательно, вблизи порога зрительного восприятия МПФ
пропорциональна ФКЧ.
Рис. 2.25. Кривая модуляционного порога глаза
Современное понимание надпорогового пространственно-
частотного зрения пока еще не полно. Тем не менее из результатов
измерения надпороговой МПФ следует, что ее форма отличается
от формы ФКЧ, особенно в области высоких пространственных
частот. Измерения МПФ основаны на сравнении экстремумов вос-
принимаемой синусоидальной волны с яркостью регулируемого
калиброванного источника. В отличие от наблюдения при порого-
вом контрасте, когда порог детектирования Кпор = const, при надпо-
108
роговом зрении уровень сравнения по воспринимаемой яркости
зависит от пространственной частоты, т.е.
МПФ (v'J = Knop(v'rJ ФКЧ (v'rjI).
(2.91)
Типичный вид МПФ глаза для фотопического зрения (при вы-
сокой освещенности сетчатки), измеренный в [67], представлен на
рис. 2.26. Видно, что МПФ глаза имеет максимум в области угло-
вых пространственных частот ~ 6 град-1 = 0,35 мрад1. Эти значения
согласуются с концепцией остроты человеческого зрения. Дейст-
вительно, нормальная острота зрения, равная 1, требует углового
разрешения 5' или 1,45 мрад (0,083°). Такое угловое разрешение
соответствует пространственной частоте V1 = 6 град1.
Рис. 2.26. Типичный вид МПФ глаза для фотопического зрения
В то же время известно [67], что пороговый контраст зритель-
ного анализатора находится в области угловых пространственных
частот v' = 2 град1, т.е. максимальная чувствительность глаза при
наблюдении малоконтрастных объектов сдвигается в сторону бо-
лее низких пространственных частот. Это означает, что при малом
контрасте легче всего обнаруживаются крупноразмерные объекты
(угловой размер более 0,25°), тогда как при большом контрасте
легче обнаруживаются объекты с угловым размером 0,083°.
Спад МПФ глаза на низких пространственных частотах для
фотопического зрения (см. рис. 2.26), по-видимому, обусловлен
109
характером материальной связи между нервными клетками (ней-
ронами) сетчатки. При получении сигнала от рецептора потенци-
ал нейрона изменяется, и при этом возникают электрические им-
пульсы, которые передаются по аксонам в другую клетку. В
некоторых случаях прибытие импульсов ведет не к возбуждению,
а к торможению нейрона, и тогда уже его активность будет зату-
хать или вообще прекратится.
Применительно к МПФ тормозная активность нейронов мо-
жет интерпретироваться таким образом, как если бы к обычной
МПФ оптической системы глаза, имеющей максимум на нулевой
пространственной частоте, добавился участок кривой на низких
пространственных частотах с отрицательным (негативным) кон-
трастом (рис. 2.27). Суммирование этих двух кривых и даст в ре-
зультате МПФ глаза, приведенную на рис. 2.27, а. Физиологиче-
ски это означает, что нервная клетка функционирует так, как
если бы ее импульсный отклик (ФР) имел отрицательные значе-
ния на периферийных участках клетки (рис. 2.27, б). При наблю-
дении объектов с уровнями яркости менее 20 кд/м2 (скотопиче-
ское зрение) максимум МПФ не наблюдается [9].
Рис. 2.27. Иллюстрация механизма тормозной активности глаза:
а - формирование МПФ глаза; 6 - приведенный вид ФР глаза
ПО
Наблюдаемая МПФ глаза не является результатом действия
одного пространственно-частотного фильтра, а по всей вероятно-
сти, имеет вид огибающей множества узкополосных резонансных
статистически независимых фильтров. На рис. 2.28 представлена
зависимость контрастной чувствительности глаза от пространст-
венной частоты. Поскольку контрастная чувствительность явля-
ется величиной, обратной пороговому контрасту, то понятно, что
максимум кривой (см. рис. 2.28) соответствует пространственной
частоте 2 град'1. Мозг по какому-то, пока неясному, алгоритму
конструирует оптимальный для решения данной задачи воспри-
ятия фильтр, выбирая нужные резонансные фильтры из имеюще-
гося набора.
К настоящему времени предложено достаточно большое чис-
ло различных аппроксимаций МПФ глаза, среди которых наи-
большее распространение получили:
аппроксимация Нила
7ГЛ^Л)=2,71 0,19 + 0,81
( t
Угл
у'
\ гл.шах
ехр -
Чл
у'
гл.max
(2.92)
111
аппроксимация Шульца
TrjI(v'rjI) = 2,71[exp(-0,llv'rjI)-exp(-0,325v'rjI)]; (2.93)
аппроксимация Кэмпбелла-Робсона
rra(v'ra) = 10 1
(2.94)
Во всех этих выражениях величина v'nmax обозначает угловую
пространственную частоту глаза, на которой достигается макси-
мальная контрастная чувствительность, т.е. v'rnmax«6 град1.
Однако современная методология оценки качества изобра-
жающих систем, предназначенных для обнаружения и опознава-
ния объектов, FLIR-92 ARG-25 рекомендует аппроксимацию
Корнфельда-Лоусона:
Uv'^exp^-Гр^, (2.95)
где Г = 1,444-0,344 lg(Z3K) + 0,0395 lg2 (Z3K) +...;
Z3K - яркость экрана монитора.
Следует отметить, что последняя аппроксимация не учитыва-
ет тормозной активности глаза на низких пространственных час-
тотах, однако очень хорошо согласуется с экспериментальными
данными на частотах, превышающих v'rjimax. Графически функ-
ции 7’4(v'rjl) представлены на рис. 2.29.
Пространственная частота v'rjI, регистрируемая зрительным
анализатором, зависит от размеров экрана монитора LK0HxHM0„ и
расстояния наблюдения 7?мон. Если v'rjI выражается в град1, а уг-
ловая пространственная частота тест-объекта v'r - в мрад'1, то
связь между ними имеет вид
1
ГЛ
2arctg
1
2-17,45vXHCT
Айон
D
лмон
(2.96)
где И;ист-угол зрения ЛСВ в горизонтальном направлении.
112
Рис. 2.29. График функций, аппроксимирующих МПФ глаза
Так как величина —— характеризует угловой размер наблю-
^мон
даемого изображения в горизонтальном направлении, то отноше-
ние М = —-— определяет увеличение системы видения. То-
^мон ^сист
гда для небольших углов наблюдения можно записать:
, 17,45 ,
v =---------v
гл М х
(2.97)
а формула (2.95) при нормальной яркости экрана монитора (Тэк «
® 85 кд/м2) преобразуется к виду
T„(v;) = expf-ilv'A (2.98)
Таким образом, модуляционная передаточная функция ЛСВ
может быть представлена в виде произведения МПФ отдельных
звеньев. На рис. 2.30 представлены передаточные функции ос-
новных подсистем ЛСВ: оптической системы - Топтд(у'х), ФПЗС-
матрицы - ТфД(у'х), электронного тракта - TM(v'x), монитора -
7M0H(v'x) и зрительного анализатора 7)л(у'х). Там же приведена ре-
зультирующая МПФ ЛСВ - 7’pe3(v'r). Как было отмечено выше,
реальная система не имеет передаточной функции, поскольку
содержит нелинейные преобразующие элементы, нарушающие
113
требования пространственной и временной инвариантности. По-
лученное выражение для МПФ ЛСВ является лишь линейным
приближением, позволяющим интегрально оценить эффектив-
ность ЛСВ и качество формируемого изображения.
Рис. 2.30. Результирующая МПФ ЛСВ и МПФ отдельных звеньев
На рис. 2.30 представлены компоненты МПФ, относящиеся к
ЛСВ с угловым разрешением порядка 0,1 мрад, причем МПФ
системы в целом имеет приблизительно гауссову форму. Это
обусловлено тем, что произведение п ограниченных по полосе
непрерывных МПФ стремится в соответствии с центральной пре-
дельной теоремой к гауссовой форме, когда п становится боль-
шим. Многие ЛСВ имеют как минимум шесть-семь компонент,
поэтому результирующая МПФ достаточно точно аппроксимиру-
ется гауссоидой.
Глава 3. ПЕРЕНОС ИЗОБРАЖЕНИЯ
В РАССЕИВАЮЩЕЙ СРЕДЕ
Реальные среды - атмосфера, море - это среды, в которых
всегда присутствуют дискретные рассеиватели (аэрозоли в атмо-
сфере, взвеси в морской воде), и где показатель преломления ис-
пытывает случайные и непрерывные изменения в пространстве и
во времени. Решение задачи переноса изображения в случайно-
неоднородной среде с дискретными рассеивателями является до-
вольно сложной теоретической проблемой, ее общее решение до
сих пор неизвестно. Поэтому на практике применяют подход, при
котором перенос оптического изображения в рассеивающей
(дисперсной) и случайно-неоднородной (турбулентной) средах
исследуют независимо, а модуляционную передаточную функ-
цию среды распространения излучения описывают произведени-
ем МПФ рассеивающей и турбулентной среды.
Основанием для такого подхода служит то обстоятельство,
что фильтрующие свойства турбулентной и рассеивающей среды
сказываются в существенно различных областях пространствен-
ных частот [20]. Что касается влияния турбулентности среды на
энергетические характеристики сигнала, то этим эффектом для
ЛСВ, имеющей узкие диаграммы направленности приемо-
передающих каналов, можно пренебречь.
Применительно к системам видения с активным подсветом
перенос оптического изображения в рассеивающей среде сопро-
вождается ухудшением его качества из-за эффектов многократ-
ного рассеяния излучения подсвета на трассе «источник - объект
наблюдения - приемник». Это проявляется в ослаблении энергии
115
сигнала, снижении контраста изображения, искажении его про-
странственной структуры, что в конечном итоге приводит к огра-
ничению дальности видения.
Количественное описание этих эффектов является главной за-
дачей теории видения в рассеивающих средах. Основу этой теории
составляет уравнение переноса изображения, связывающее мощ-
ность сигнала, регистрируемого фотоприемным устройством и
формирующего изображение, с распределением коэффициента
отражения на поверхности наблюдаемого объекта. Нахождение
уравнения переноса в рассеивающей среде для лазерных систем
видения связано с решением локационной задачи на трассе с отра-
жением от диффузно рассеивающей поверхности. Применение
теоремы взаимности позволяет свести локационную задачу к на-
хождению характеристик светового поля, создаваемого реальным
и «фиктивным» источниками на прямых трассах [13, 18].
Для более полного понимания указанной проблемы в настоя-
щей главе рассмотрены основные фотометрические характери-
стики поля излучения. Описаны модели источников и приемни-
ков излучения. Вводятся понятия точечных мононаправленного и
диффузного источников, имеющих смысл «элементарных» дву-
мерных 8-сигналов. Рассматриваются оптические характеристики
элементарного объема рассеивающей среды. Формулируется
уравнение переноса и его малоугловое приближение. Решение
этого уравнения широко используется в дальнейшем. Подробно
рассматривается теорема взаимности и ее следствия, описываю-
щие наиболее общие свойства световых полей; на их основе вы-
водится уравнение переноса изображения в рассеивающей среде.
3.1. Характеристики поля излучения.
Основные фотометрические величины
Определим параметры излучения, характеризующие распре-
деление лучистого потока на поверхности и в пространстве.
К источникам излучения будем относить как самосветящиеся из-
лучатели (первичные источники), так и несамосветящиеся по-
верхности, излучающие благодаря проходящему через них или
отраженному ими лучистому потоку (вторичные источники).
116
В последующем между этими случаями не будем делать никако-
го различия, т.е. вводимые определения применимы к обоим ти-
пам источников.
Пусть ds - элементарная площадка светящейся поверхности S
с нормалью к площадке п0 в точке r(x,y,z) (рис. 3.1). Для на-
правления, задаваемого единичным вектором п, элементарный
поток лучистой энергии, распространяющийся от светящегося
элемента поверхности ds в пределах телесного угла d£ln, равен
d^ = LK(r,n)cosQdsdQ„, (3.1)
где cos G = (п • п0), 9 - угол между единичными векторами п и п0.
Рис. 3.1. Фотометрическая схема излучающей площадки
Величина Zx(r,n) характеризует спектральную поверхност-
но-угловую плотность потока излучения и является функцией
направления п и координат точек г на поверхности источника.
Она определяет спектральную яркость элемента ds поверхности 5
в направлении оси пучка лучей п, составляющей угол G с норма-
лью п0 к площадке ds. Далее для краткости будем использован,
название «яркость излучения» и опускать индекс А, у всех спек-
тральных характеристик излучения.
117
Понятие яркости связано не только с источником, но и с пуч-
ком лучей, а точнее, со световой трубкой, внутри которой и про-
исходит перенос лучистой энергии. Другими словами, вместо
излучающей площадки можно рассматривать сечение ds световой
трубки (рис. 3.2) и определять для него элементарный поток ана-
логично (3.1), причем в этом случае L(f,n) характеризует яр-
кость пучка лучей в направлении оси световой трубки п и изме-
ряется лучистым потоком, проходящим через единицу площади,
нормальной к этому направлению, и заполняющим единицу те-
лесного угла d£ln.
Если в каждой точке г задано распределение яркости по на-
правлениям п , то говорят, что задано световое поле, или поле из-
лучения. Измерение яркости излучения в точке г в направлении
п можно осуществить следующим образом. Нужно взять прием-
ник с малой апертурой Дуп (рис. 3.3) и телесным углом зрения Дсо и
ориентировать его в направлении -п . Тогда яркость излучения
будет равна принятой мощности Ф, деленной на Дуп • Дсо, где Дуп и
Дсо выбирают предельно малыми.
Рис. 3.3. Схема измерения яркости
Измеритель
мощности
118
В свободном пространстве пучок лучей или световая трубка
являются носителями одной и той же яркости, так как в соответ-
ствии с законом сохранения энергии световой поток, проходящий
через любое сечение трубки, одинаков и равен величине, опреде-
ляемой согласно выражению (3.1). Постоянство лучевой яркости
означает, что производная от яркости вдоль траектории распро-
странения пучка равна нулю, т.е.
йУ£(г,й) = 0, (3.2)
где Цг,П) - яркость светового потока в точке r(x,y,z) в направ-
лении вектора n(nx,ny,nz);
_ д д д
пу =пх — + nv — + п7 —
дх Уду дг
- оператор дифференцирования
вдоль луча.
Яркость L(r,n) является дифференциальной характерис-
тикой светового поля. Через нее однозначно определяются все
интегральные характеристики светового поля.
Если точка наблюдения расположена вдали от излучающего
плоского элемента поверхности 5 на расстоянии, много большем
его размеров, то такой поверхностный источник можно трактовать
как точечный. Для его характеристики вводится понятие силы излу-
чения /(й), определяемое как поток лучистой энергии в единичном
телесном угле. Сила излучения 1(п) в направлении п выражается в
виде интеграла от яркости по поверхности источника:
/(й) = jcos9£(r, й) ds.
(3.3)
Поток излучения в элементарном телесном угле вокруг
направления й от точечного источника
4/Ф = /(Й)4/П„.
(3.4)
Для излучающей плоской площадки, яркость которой одина-
кова для всех направлений й, сила излучения пропорциональна
косинусу угла между этим направлением и нормалью к поверх-
ности:
119
I(n) = 7ocos0,
(3-5)
где Io = j£(r)dy, cos© = (n -n0).
s
Соотношение (3.5) называется законом Ламберта. Если за-
кон выполняется, то такой источник называют диффузным (по
аналогии с диффузно светящейся, равнояркой поверхностью),
или ламбертовым. У единичного диффузного источника, излу-
чающего световой поток мощностью 1 Вт, осевая сила излуче-
ния /0 = 7Т-1 Вт/ср .
Рассмотрим теперь падение излучения на площадку ds с нор-
малью п0 (рис. 3.4).
Рис. 3.4. Фотометрическая схема приемной площадки
Освещенность Е элементарной площадки ds определяется как
полный поток излучения, падающий на единицу поверхности
площадки со всех направлений со стороны нормали п0 (в телес-
ном угле 2л):
Е(7)= |Z,(r,-«)cos0JQ„; cos0 = (-«) «o. (3.6)
2 л
120
3.2. Модели лазерного источника и приемного устройства
3.2.1. Фотометрические модели источников излучения
В лазерных системах видения широко используют различные
фотометрические модели точечных и протяженных источников,
каждая из которых идентифицирует свой базисный типовой сиг-
нал, описывающий пространственно-угловое распределение яр-
кости L(r, Q) потока лучистой энергии.
Точечный источник. В оптике под точечным источником
понимают источник, размеры которого пренебрежительно малы
по сравнению с расстоянием до приемника излучения, так что
поверхность распространяющейся от него волны можно считать
сферической.
Для модельного физического представления точечного источ-
ника очень полезной оказывается двумерная 5-функция, которая
равна нулю во всех точках плоскости (х, у), кроме особой точки (х0,
у0), в которой она стремится к бесконечности. При этом интеграл
от этой функции, распространенный на сколь угодно малую об-
ласть, содержащую особую точку, равен 1. Математически это фи-
зическое определение сводится к двум соотношениям
5(х-х0,у-у0)
оо при х - х0, у = у0;
О во всех остальных
00
Jj5(x-x0,y-y0)JxJy =
— 00
случаях;
(3.7)
Уо +£2 хо +е1
= J |5(х-х0,у-у0)е&б/у = 1 Ve];e2 >0.
Уо-^2 х0“е1
Дополнительно по определению 5-функции
5(х - х0,у - у0) = 8(х - х0) • 5(у - у0) •
Так как площадь излучающей поверхности точечного источ-
ника стремится к нулю, то значение всех энергетических харак-
теристик излучателя, имеющих смысл поверхностной плотности
121
(светимость, яркость, лучистость и др.), стремятся к бесконечно-
сти. Именно поэтому точечные источники характеризуются угло-
вым пространственным распределением силы излучения 7(0).
Тем не менее для модельного представления и сравнительного
анализа характеристик излучения точечных источников различ-
ного типа (особенно в теории переноса излучения) широко поль-
зуются понятиями «яркость» и «светимость».
Чтобы понять оптико-физический смысл 5-функции, опреде-
ляющей точечный источник, по аналогии с [44] рассмотрим рав-
номерно излучающую площадку единичного (Ф = 1 Вт) источни-
ка, расположенную в начале координат (х0, у0) и ограниченную
прямоугольным отверстием размерами а*Ь в непрозрачном
транспаранте. Светимость площадки может быть записана в виде
М(х, у) = Мох(х, у) =—rectf — I • rectf —
ab {aJ I b
1
— при
ab
(3.8)
О в остальных случаях,
где т(х, у) - коэффициент пропускания отверстия;
1Вт
Мо --------исходная светимость площадки.
ab
Образуем последовательность STnect(x,y) значений функции с
rect-образными формами отверстия и исходной светимостью п2Мй\
2 ( \ \
S„rec'(x,у) = — rect -rect 8(х,у).
ab \ а/п J Ып
(3.9)
а/п
Легко увидеть, что (3.9) задает двумерную последовательность
прямоугольных параллелепипедов с уменьшающимся основанием
а b „ „ п1 . . с
размерами — х— и увеличивающейся высотой — (рис. э.э, а),
п п ab
122
a
б
Рис. 3.5. Фотометрические модели точечных излучателей:
а - представление светимости как двумерной последовательности парал-
лелепипедов; б - представление яркости как двумерной последовательно-
сти круговых конусов со сферическим основанием
При п —> оо площадь основания параллелепипеда (размеры излу-
чающей площадки) аЫ п2 -> 0, а высота (светимость) п2 / ah -> on.
Следовательно, в соответствии с определением 8-функции
123
limSnrect(x,y) = 8(x,y).
п—>00
Так как объем параллелепипеда равен единице (Ф = 1 Вт), то
справедлива и вторая часть определения 8-функции:
lim f \S™\x,y)dxdy = 1.
л—>х *' *'
-fi2 -Ej
Таким образом, при л —> оо прямоугольная излучающая пло-
щадка стягивается к точечной с бесконечно большой светимо-
стью, т.е. светимость точечного источника единичной мощности,
расположенного в точке (х0, у0) плоскости (х, у), равна
Л/(х,у) = 1 Вт-8(х-х0,у-у0).
Точечный направленный источник. Такой точечный ис-
точник характеризуется пространственно ограниченной в преде-
лах телесного угла Qno диаграммой направленности, представ-
ляющей собой отношение силы излучения 1(п) в направлении п
к осевой силе излучения Z(«0) = Z0 в направлении л0:
Фи(«/«о)=^М; Фи(0)=1. (з.ю)
Для единичных векторов п и п0 с полярными углами 9 и 90 и ази-
мутальными углами ф и ф0 величина (л,Лл0) обозначает косинус
угла между векторами, равный значению sin0sin0ocos(\|/-\|/o) +
+ cos0cos0o. Если же ось диаграммы направленности совмещена
с координатной осью OZ, то (л,Лл0) = cos0.
Световой поток Фи, излучаемый точечным направленным ис-
точником, равен
Фи - ^I(n)d£l= jl0(?K(n,*n0)d£l; dQ.- sinQdQdxy . (3.11a)
о о
Обычно лазерные источники подсвета имеют узкую (до
3...5°) осесимметричную диаграмму направленности фи(а), фор-
124
ма которой представлена на рис. 3.6, а. В этом случае (3.11а)
преобразуется в выражение
л/2
Фи=2л70 jcpH(a)sinou/a . (3.116)
Рис. 3.6. Модели точечных излучателей:
./ - точечный направленный источник; б - точечный мононаправленный источ-
ник; в - точечный изотропный источник; г - точечный диффузный источник
Заменим направленный точечный источник с диаграммой
Фи(а) эквивалентным по мощности изотропным источником с
одинаковой силой излучения, равной Zo, в пределах некоторого
। елесного угла , т.е.
125
л/2
Фи=2л70 j(pH(a)sinaJa = Zona^. (З.Пв)
о
Тогда фотометрическая модель точечного направленного ис-
точника единичной мощности может быть представлена в виде
1Вт
£ни(г,й) = —уфи(й,Лп0)8(г-г0). (3.12)
лаи
Точечный мононаправленный источник. В предельном
случае при последовательном уменьшении ширины диаграммы
направленности 2аи излучения точечного направленного источ-
ника его индикатриса Фи(й,лй0) вырождается в единственную
прямую (ось), указывающую направление, вдоль которого рас-
пространяется излучение. Точечный источник с такой вырожден-
ной индикатрисой называется мононаправленным (рис. 3.6, б).
Это понятие обычно используют в фотометрии и геометрической
оптике при описании гомоцентрического пучка лучей от беско-
нечно удаленной светящейся точки.
В качестве фотометрического модельного представления
точечного мононаправленного источника можно использовать
произведение двух 8-функций 8(г-г0) и 8(й-й0), которые ха-
рактеризуют плоскостную (осевую для круглой) симметрию из-
лучающей площадки и центральную симметрию индикатрисы
излучения. Действительно, для единичного точечного монона-
правленного источника, находящегося в точке (х0, у0) плоскости
(х, у) и излучающего в направлении, заданном единичным векто-
ром й0, можно записать
£ми </, й) = 1 Вт 8(г -г0) • 8(й - й0), (3.13)
где (Й-Йо) означает последовательное сканирование пространства
в полном телесном угле разностным вектором, выходящим из конца
единичного вектора й0. Тогда в сферической системе координат
8(й-й0) =
оо
10
при 0 = 0о,Ф = Фо;
в остальных случаях.
Выражение 8(й-й0) для единичных векторов означает
8(cos0-cos0o)8(4/-v|/o), причем ]8(й-й0)бК2 = 1, JQ = sin0J0J\|>.
4 л
Чтобы понять оптико-физический смысл функции 8(й-й0),
рассмотрим изотропный источник с силой излучения /0, одинако-
вой в пределах телесного угла Ои = , где аи - угол при вер-
шине конического сечения телесного угла меридиональной (про-
ходящей через ось диаграммы) плоскостью, отсчитываемый от
оси диаграммы направленности, совпадающей с ее осью симмет-
рии. Пусть эта ось имеет направление q0 и задана в сферической
системе координат (р, 0, Ф) единичным вектором й0(1, 0, Ф).
Будем последовательно сужать диаграмму направленности
излучения источника с помощью объемной диафрагмы (кониче-
ской бленды), коэффициент пропускания которой равен единице
внутри телесного угла Пи и нулю - вне его, при этом мощность
источника остается постоянной, равной 1 Вт (см. рис. 3.5, б). То-
гда сила излучения в некотором направлении й по аналогии с
(3.9) может быть представлена в виде последовательности:
1Вт
1т(п-п0) = ——тт(п-п0)—(3.14a)
£1и/т
Предполагается, что в (3.14a) функциятт(й-й0) представляет
собой канонический сигнал. Можно показать, что если объем
пространства, ограниченного конической блендой со сфериче-
ским основанием, равен единице, то справедлива вторая часть
определения 8-функции, т.е.
]8(й - й0 )d£2 = 1. (3.146)
4 л
Мононаправленному точечному источнику единичной мощно-
сти отводится особая роль в теории переноса излучения. Решение
уравнения переноса при освещении рассеивающей среды точеч-
ным мононаправленным источником называется фундаменталь-
ным решением уравнения переноса, или функцией Грина. Если
127
126
известна функция Грина, то решение уравнения переноса для про-
извольного источника можно найти с помощью интеграла супер-
позиции функции Грина и функции источника.
Точечный изотропный источник. У такого источника сила
излучения IQ не зависит от направления (рис. 3.6, в). Изотроп-
ный источник единичной мощности излучает с одинаковой
силой в полном телесном угле 4л ср, т.е. 1 Вт = 4л/0. Фотомет-
рическое модельное представление точечного изотропного ис-
точника имеет вид
4и(0=1ВТ jr~ro)- (3-15)
4л
Точечный диффузный источник. В лазерном видении объек-
том наблюдения, как правило, является шероховатая поверхность,
диффузно рассеивающая падающее на нее световое излучение.
Выделим элементарную площадку ds бесконечно малой площади с
нормалью к поверхности л0. Яркость излучения такого точечного
источника не зависит от направления, а сила излучения в направ-
лении, составляющем угол а с осью симметрии диаграммы, харак-
теризуется соотношением /(a) = /0 cos а, где 10 - осевая сила из-
лучения. Диффузные источники часто называют ламбертовыми.
Мощность точечного диффузного источника, определяемую в
пределах телесного угла Q„, находят из выражения
а«
Ф= j7dQ= |2л/0 cosasin аб/а = л/0 sm2aH. (3.16)
о. о
При телесном угле излучения = 2л ср мощность излуче-
ния равна л!0, следовательно, осевая сила излучения точечного
диффузного источника единичной мощности в четыре раза
меньше силы излучения единичного точечного изотропного ис-
точника. На рис. 3.6, в, г показаны диаграммы направленности
излучения двух поверхностных точечных источников равной
мощности Фи - изотропного и диффузного. Осевая сила излуче-
ния IQ диффузного источника, вычисленная в соответствии с
128
(3.16), равна 10 = Фи/л. Эквивалентный телесный угол Q„3KB, в ко-
торый излучает равномощный изотропный источник с силой излу-
чения То, определим из соотношения Оиэкв =ФИ/1О. Фотометриче-
ское модельное представление точечного диффузного источника
единичной мощности для этого случая запишется в виде
1 1
8(г-г0)= 5(г-г0). (3.17)
экв-----------------------------Я
Точечные мононаправленный и диффузный источники пред-
ставляют собой минимальный набор типовых базовых источни-
ков, используемых для расчета энергетических полей излучения
любых произвольных источников.
Пространственно ограниченный направленный источник.
Если направленный источник имеет излучающую площадку ко-
нечных размеров (рис. 3.7), то используется модельное представ-
ление пространственно ограниченного источника в виде
Ф
, л) = z—2V° 17 Рзр и (Нфи («,л «О ), (3-18)
(лг„)(лаи)
где лги2 и ла2 - эффективный размер и телесный угол излуче-
ния источника;
Рзри(г) - функция зрачка источника, характеризующая рас-
пределение светимости по излучающей площадке.
Рис. 3.7. Направленный пространственно
ограниченный источник
' 1091 129
Для описания функций Рзр„(г) и сри(и,Лп0) наиболее часто
используют гауссову аппроксимацию
Лр.и(?) = ехР ~Г— ; фи(«,Л«о) = ехр
К а„
(3.19)
При лги2 —> 0 и ла2 -> 0 реализуется предельный переход к то-
чечному мононаправленному источнику.
3.2.2. Фотометрические модели приемного устройства
Совместим начало системы координат (г = 0) с центром
апертуры приемного устройства и ориентируем ось z в направ-
лении оптической оси приемного устройства. Будем считать,
что на входном зрачке оптической приемной системы задано
пространственно-угловое распределение яркости Цг, - п). Что-
бы при измерениях учесть характеристики приемного устройст-
ва, введем «аппаратную функцию» приемника, представив ее в
виде произведения функции пропускания входного зрачка
Рзрп(г) и диаграммы направленности приемного устройства
Фп(«>Л«о):
Л(Р,й) = Рзрп(г)фп(й,ли0), (3.20)
где г - радиус-вектор точки в плоскости приемной апертуры;
и0 - единичный вектор в направлении оптической оси;
ап = (-й,Ли0) - угол прихода луча в приемное устройство.
Тогда мощность излучения, регистрируемая приемным устройст-
вом, может быть представлена в виде
Р = ^dr j£(r, - n)A(f, n)dun , (3.21а)
где интегрирование проводится по телесному углу и апертуре
приемного устройства.
130
Для описания функции пропускания входного зрачка наибо-
лее часто используют следующие аппроксимации:
1 при |г|<гп;
О при |Р|>гп;
1)ЛрП(0 =
2)ЛР.п(?) = ехр -
j ,(3.216)
п J
где гп - эффективный размер приемной апертуры.
Рис. 3.8. Фотометрическая модель приемного устройства
Физический смысл диаграммы направленности приемного
устройства срп(л,Л п0) можно пояснить с помощью рис. 3.8.
Рассмотрим приемное устройство, содержащее приемный объек-
тив с диаметром входного зрачка Do6 и фокусным расстоянием
/zo6, в фокальной плоскости которого помещен фотоприемник с
чувствительной площадкой диаметром с?ф. Пусть оптическая сис-
тема формирует изображение точечного изотропного (по ярко-
сти) источника в фокальной плоскости в виде кружка размытия
диаметром dK. Распределение освещенности в плоскости изобра-
жения точечного изотропного источника единичной мощности
будем описывать функцией рассеяния (ФР) Н(х,у), причем
j ^H(x,y)dxdy = 1. (3.22)
131
Введем функцию, характеризующую нормированное распре-
деление чувствительности фотоприемника g(x, у) по площадке,
такую, что
f\g(x,y)dxdy = nr^; g(0,0) = 1, (3.23)
где гф - эффективный размер чувствительной площадки фото-
приемника.
Определим нормированную диаграмму направленности при-
емного устройства фп(п,Лп0) = фп(ап) в виде зависимости мощ-
ности Р(ап) регистрируемого сигнала от угла между направлени-
ем оптической оси
изотропный источник:
п0 и направлением п на точечный
, л Л«п)
Ф„ (а) =--—
Р(0)
Тогда можно записать:
ffg(F)//(F-F0)JF
Фп(«п) = ^---------------
J Jg(r )#(F)dF
(3.24)
где г = {х,у}; |F0| = ап/0'6.
Заметим, что физический смысл диаграммы направленности
фп(ап) можно интерпретировать как долю мощности, регистри-
руемой фиксированным приемным устройством, расположенным
в центре сферы большого радиуса, по поверхности которой пе-
ремещается точечный изотропный источник, где осп - угол между
оптической осью приемника и направлением на источник.
Для гауссовых аппроксимаций функций
g(F)=exp
Г2 1
— ; Н(г) = — ехр
ГФ
1
где гф = £?ф/2, rK = djl, нормированная диаграмма направленности
имеет вид
132
Фп(ап) = ехр
к
«п
2 2
аф+ак
(3.25)
где сх.ф т'ф//' об, ак rjf об-
Видно, что диаграмма направленности зависит как от размера
чувствительной площадки фотоприемника гф, так и от размера
кружка размытия гк. Их влияние на диаграмму направленности
определяется соотношением между ними.
Если считать, что L(r, п) и А(г, п) как функции г практи-
чески постоянны, то вычисление мощности Р может быть сведе-
но к вычислению мощности излучения, воспринимаемой прием-
ником с «аппаратной функцией» вида
A(r, п) = пг* 8(гп)срп(л,Л п0 ),
(3.26)
где лгп2 - площадь входного зрачка оптической приемной системы.
Подставляя (3.25) в (3.18) получаем
Р = лгп2 ^(О,-й)фп(й,Лпо)б/®п, (3.27а)
2л
I де L(Q,-n) - яркость в центре входного зрачка приемного уст-
ройства.
Для фона постоянной яркости из (3.27а) следует
Р = £лгп2Яп-
(3.276)
Часто при анализе лазерных систем видения используется по-
нятие ракурсной инвариантности среды распространения, в соот-
ветствии с которым яркостное поле от диффузно светящегося
объекта, расположенного в плоскости z = zs, регистрируемое в
некоторой плоскости наблюдения z, удовлетворяет соотношению
(3.28)
L(r,z,n) = L г - —|(z — z5), z, и' .
nJ
На рис. 3.9 приведена схема наблюдения изображения, форми-
руемого путем регистрации яркости L в плоскости z как функции
1.33
координат точки пересечения линии визирования с плоскостью
источника zs. Здесь, как и в (3.28), п, п' - единичные векторы на-
правлений. Обозначим: п±,п[ и п:, п'г - проекции векторов
п и п' на плоскость z = const и ось z; Цг, z, п) - яркость излучения
_ _ (п | .
в точке В, в направлении п\ L г - — -(z - zs ),z,n - яркость
l«'z nJ
излучения в точке В2 в направлении п', создаваемая единичным
точечным диффузным источником излучения, расположенным в
точке О плоскости zs.
Рис. 3.9. К определению понятия ракурсной
инвариантности рассеивающей среды
Выполнение условия (3.28) для среды распространения излу-
чения означает, что яркость, регистрируемая в любой точке плос-
кости наблюдения, не зависит от ракурса наблюдения, а определя-
ется координатами точки диффузно светящейся поверхности. В
принципе, условие ракурсной инвариантности строго выполняется
лишь для свободного пространства. Однако, как показано в [18],
это условие остается справедливым и для рассеивающих сред в
рамках малоуглового приближения (см. § 3.3), когда можно пре-
небречь обратным рассеянием и зависимостью ФР от направления
134
падения излучения на среду. Количественно область выполнимо-
сти условия ракурсной инвариантности в рассеивающих средах
определяется соотношением [18]
|й±|, |и'|« 0o(z) = min-
-1/2
(ct + ^JzJ
3
У2стЛп273
>1/2'
>,(3.29)
2
где 0О - угол рассеяния;
ст, кп - средние значения показателей рассеяния и поглощения;
у2 - характерная ширина (дисперсия) индикатрисы рассеяния.
Из условия ракурсной инвариантности следует, что при ос-
вещении рассеивающей среды точечным мононаправленным ис-
точником единичной мощности, находящимся в плоскости z,
распределение освещенности E(rs) на выходе из среды в плоско-
сти z = zs не зависит от координаты г входа луча в среду и его
направления п, а полностью определяется координатами точки
(/, zs), в которую направлен луч.
В качестве другого следствия важно отметить, что яркость
всех лучей от диффузно светящейся поверхности, прошедших
через рассеивающую среду и направленных приемной оптиче-
ской системой в некоторую фиксированную точку ги в плоскости
изображения, одинакова. Таким образом, для расчета мощности
излучения, регистрируемой в элементе изображения радиусом г„,
достаточно знать яркость в центре входного зрачка оптической
системы, что и подтверждается выражением (3.26).
3.3. Распространение лазерного излучения
в рассеивающей среде. Уравнение переноса изображения.
Малоугловое приближение
Выделим в рассеивающей среде элементарный объем dV в
виде цилиндра высотой dl и площадью ds: dV = ds dl (рис. 3.10).
Пусть на элементарный объем dV в направлении л в беско-
нечно малом телесном угле d£ln падает пучок световых лучей
яркостью L. Рассматриваемый объем частично поглотит, а
135
Рис. 3.10. Схема процесса
переноса излучения
частично рассеет падающий на
него световой поток Фо, поэтому
поглощенный поток будет равен
б/Фп = knLd£lndV, а рассеянный -
</Фр = aLd£lndV.
Коэффициенты пропорциональ-
ности указанных дифференциаль-
ных приращений имеют смысл по-
казателей поглощения и рассеяния
о. Общее ослабление света элемен-
тарным объемом dV определяется
суммарным действием поглощения
и рассеяния. Соответственно показатель ослабления е определяется
суммой показателей поглощения и рассеяния:
е = А:п + о, (3.30)
а ослабленный поток - выражением
d<S> = d<S>n+d<bp=ELd£lndV. (3.31)
Изменение потока в результате уменьшения его яркости равно
d® = -dLdsdQ.n. (3.32)
Приравнивая (3.31) и (3.32), получаем закон Бугера в дифферен-
циальной форме:
dL = -tLdl. (3.33)
Проинтегрировав (3.33) для слоя толщины I, найдем:
L(l)=Loe^. (3.34)
Выражение (3.34) представляет собой закон Бугера в инте-
гральной форме. Из (3.34) следует, что показатель ослабления
можно рассматривать как величину, обратную расстоянию Г-1/е,
на котором пучок ослабляется в е = 2,718... раз из-за поглощения
136
и рассеяния. Соответственно, параметры кп, о, е имеют размер-
ность обратной длины.
Относительное угловое распределение силы света излучения,
рассеянного элементарным объемом, описывается индикатрисой
рассеяния.
Выделим некоторое направление т и элемент телесного угла
d£lm вокруг этого направления. Тогда для силы света dlf, рассеянного
в изотропной среде элементарным объемом в направлении т , со-
ставляющим угол у с направлением п падающего пучка, имеем
dL = — v(i)Ld£l„dV, (3.35)
4л
где о(у) - коэффициент пропорциональности, называемый пока-
зателем рассеяния в направлении у.
Очевидно, что световой поток, рассеянный по всем направле-
ниям, равен
</Фр = pZ/Qm = — Ld£lndV Jo(y)dQm =oZ<ZQ„cZK (3.36)
4л 4п
В (3.36) о = — Jo(y)cZQm - показатель рассеяния элементарного
4п
объема.
Относительное угловое распределение силы света излучения,
рассеянного элементарным объемом, удобно описывать функцией
х(у)=о(у)/о. (3.37)
Эта характеристика называется индикатрисой рассеяния и нор-
мируется условием
1 я
— jx(y)dQm=l или jx(y)sinyt/y = 2. (3.38)
471 4п О
Если сила света одинакова во всех направлениях (сферическая
индикатриса), то говорят, что имеет место изотропное рассеяние и
х(у)=1. (3.39)
137
В природных средах (атмосфере, океане) индикатриса рас-
сеяния вытянута вперед по направлению распространения па-
дающего пучка света (рис. 3.11). Степень асимметрии индикат-
рисы рассеяния (ее вытянутость в направлении п падающего
пучка лучей) характеризует интегральный параметр
Г1
jx(y) sin ydy
Sac = -----------100%,
(3.40)
показывающий процент энергии рассеянного вперед света в пре-
делах телесного угла СО], соответствующего линейному углу у, и
отсчитываемого от направления падения светового потока.
Направление
падения пучка
света _______».
Рис. 3.11. Вид индикатрисы рассеяния
Часто наряду с рассмотренными выше параметрами вводят
безразмерный параметр Л = <з1(кп + ст) - вероятность выживания
фотона, характеризующий долю рассеяния в общем ослаблении.
Если в среде рассеяние отсутствует, то Л = 0. Для чисто рассеи-
вающей среды Л = 1.
Уравнение переноса излучения. Малоугловое приближе-
ние. Рассмотрим изменение яркости луча L в направлении п .
Пусть на элементарный объем рассеивающей среды падает све-
товое излучение яркости Цг, п) в направлении п (рис. 3.12). На
участке dl яркость луча вследствие поглощения и рассеяния
уменьшится на величину
dLt (г, п) - -sL(r, n)dl.
(3-41)
138
dl
Рис. 3.12. К выводу уравнения переноса
В то же время яркость должна возрасти вследствие рассеяния
в направлении й части излучения яркостью L(r, in), падающего
на данный объем с направления in. Приращение яркости, обу-
словленное этим рассеянным излучением, равно
dL(r, ii,in) = —х(п,л m)L(r, m)d£l dl. (3.42)
4л
Так как на элементарный объем излучение падает со всех
сторон, полное приращение яркости в направлении й определя-
ется величиной
dL2(r, [х(п/т)Цё,in)dClm , (3.43)
471 4я
। де интегрирование ведется по направлениям вектора in в преде-
лах телесного угла 4л. Суммируя приращения dLx и dL2, получаем
уравнение переноса, связывающее изменение яркости L вдоль
пуча в направлении й:
Г’ п) = -гЦг, й) + — f£(F, йг)х(Й,Лй?)бК2 . (3.44)
Л 4л
Если вместо производной по направлению в левой части
(3.44) использовать оператор градиента, то уравнение переноси
иля яркости в рассеивающей среде имеет вид [1, 13, 18, 24]
139
nVL(r, n) - -гЦг, n) + — [£(г, т)х(п,лт)сК2т, (3.45)
47t4n
д д d . ,
где nv-n— + n — + nz — - оператор дифференцирования
ox dy oz
вдоль луча.
Уравнение переноса (3.45) выражает условие энергетического
баланса. Левая часть уравнения - это изменение яркости в на-
правлении п; первый член в правой части описывает убывание
энергии в результате поглощения и рассеяния, а второй член -
прирост энергии в направлении п из-за рассеяния с направлений
in. Если второй член равен нулю, то (3.45) обращается в обыч-
ный закон Бугера в дифференциальной форме. Если в левой час-
ти равны нулю первый и второй члены, то это уравнение перено-
са в свободном пространстве.
При крупномасштабных рассеивающих неоднородностях, раз-
меры которых много больше длины волны, индикатриса рассеяния
х(у) сильно вытянута в направлении падающего пучка. Это позво-
ляет существенно упростить описание распространения узкона-
правленных световых пучков в рассеивающих средах путем пере-
хода к малоугловому приближению уравнения переноса (3.45).
Рассмотрим узконаправленный световой пучок от источни-
ка, расположенного в точке (х = 0, у = 0, z = 0), совместив ось z
с направлением Яо его преимущественного распространения
(рис. 3.13). Обозначим индексом «_1_» проекцию п на плоскость
z = const, нормальную к оси пучка, при этом Я = (Я,, «2). Единич-
ный вектор Я выражается через направляющие косинусы п„ пу, пу
п - nxi + nyj + nzk ,
где i, j ,k - базисные единичные векторы соответствующих на-
правлений;
n2+n2 + n2=nl + n2 =1, Я±=(«Х,«У);
у = (Я,л in) - угол рассеяния с направления in на направление Я .
140
В малоугловом приближении век-
тор п = (и±, nz), характеризующий
направление выхода лучей из источ-
ника, считается близким к оси z, при
этом выполняются соотношения
|«±|»0« 1,
пт - cos 9 ® 1.
Дифференциал d2n± связан с диффе-
ренциалом телесного угла d£ln соот-
ношением
d2ny = dnxdny = cos9t/£2n — d£ln . Рис. 3.13. Схема рассея-
ния узконаправленного
То же самое относится и к вектору светового пучка в мал оу г-
. _ , ловом приближении
т : |«1, mz« 1, так как рассеяние
происходит лишь на малые углы.
Считается также, что индикатриса рассеяния зависит только
от разности п1-т1, т.е. в среде нет выделенного направления.
Сделанные предположения означают, что в любой точке рассеи-
вающей среды яркость излучения Цг, Я) заметно отлична от ну-
ля лишь в узком конусе направлений вокруг оси z.
В малоугловом приближении оператор дифференцирования
вдоль луча можно представить как
nV = — + п, V.;
dz 1
n±V±
д
— пг----vn
х дх -
д
ду’
а элемент телесного угла dClm заменить величиной d2mL, распро-
странив интегрирование до бесконечных пределов, пользуясь
предположением о сильной анизотропии поля излучения.
Тогда вместо (3.45) получаем уравнение, в котором интеграл
имеет вид свертки [1, 13, 18, 24]:
141
— + ”1У1 £(r±, z, n±) =-е£(г±, z, n±)+
dz J
о
4л
co
j JA(Fl, Z, 7Й1)х(П1 -WZ±)J2zn±
-CO
(3-46)
с граничным условием Lz=0 = Z0(r±, n±), где проекции
векторов г и п на плоскость z = const, нормальную к оси пучка;
r=(r±,z).
Уравнение (3.46) называют уравнением переноса в малоугло-
вом приближении. Это уравнение с успехом используется в зада-
чах, связанных с атмосферой и подводной видимостью [13, 18].
Решение уравнения (3.46) можно получить методом фурье-
преобразования по переменным rL,nL (см. приложение 1). Это
решение в фурье-образах имеет вид
(3-47)
где фурье-образ искомого распределения яркости
~ 1 “
L(v, z, -q) = — f f f , z, nL)exp(z v r±) exp(z f] )zZ2n1zZ2r1. (3.48)
4л
В (3.47) введены следующие обозначения:
Ро = [(Пх + vxz)2 + (П>, + v,z)2]1/2;
Lo - фурье-образ яркости на выходе излучателя (z = 0);
х(р)= |ух(у)эо(ру)г7у - преобразование Ганкеля от инди-
о катрисы рассеяния;
•То(РУ)_ функция Бесселя нулевого порядка первого рода.
Если среда освещается точечным мононаправленным источ-
ником: Z0(r, n) = 8(г) 8(п), то в (3.47) нужно положить Lo = 1.
Теперь можно найти освещенность в некоторой плоскости,
минуя сложный математический процесс определения яркости из
142
(3.48), положив в этой формуле ц = 0, тогда выражение (3.48)
преобразуется к виду
~ 1 00
Z.(v,z,0) = — ||е(^,г±)ехр(гЧг±)(/г±, (3.49)
4л _м
ос
где е(2,г±) = jjz.(r1,z,n1)t/2n1.
— СО
Обозначив L(y, z, 0) = e(v) и взяв обратное фурье-преобра-
зование от (3.49), окончательно получим
е(2,г±)= jji(v, z, 0)exp(-z vr±)J2v . (3.50)
-ос
Соотношение (3.50) является основным в теории переноса
изображения в рассеивающей среде, так как через распределение
освещенности записывается уравнение переноса изображения,
вывод которого дан в следующем параграфе.
3.4. Теорема взаимности. Уравнение переноса
изображения в рассеивающей среде
При решении задач видения в рассеивающих средах (атмо-
сфера, море) важную роль играет функция Грина, описывающая
в общем случае реакцию системы на входное воздействие в виде
5-функции.
В рамках модели рассеивающей среды, задаваемой уравнением
переноса излучения, функцией Грина называется решение этого
уравнения для точечного мононаправленного источника единич-
ной мощности. Функция Грина описывает нормированное распре-
деление яркости светового поля в рассеивающей среде, создавае-
мое точечным мононаправленным источником, и имеет
размерность ср'-м'2. Обозначим функцию Грина через
G(/j, п,; г2, п2), где первая часть аргументов относится к источнику
(его положению и направлению излучения пх), а вторая - к точ-
ке наблюдения (ее координате г2 и направлению наблюдения п2).
143
Оптическая теорема взаимности. Особую роль в теории
видения играет теорема оптической взаимности и ее следствия
[26]. Теорема оптической взаимности гласит, что
G(7-,n1;r2,n2) = G(r2,-«2;j-,-n1). (3.51)
Это означает, что яркость света, регистрируемая приемником в
некоторой точке г2 в направлении п2 от точечного мононаправ-
ленного источника, расположенного в точке и излучающего в
направлении (рис. 3.14, а), равна яркости света от источника,
расположенного в точке г2 и излучающего в направлении - п2,
при регистрации излучения приемником в точке в направлении
-п} (рис. 3.14, б). Иными словами, яркость света, регистрируе-
мая приемником, не изменится, если мононаправленные прием-
ник и источник поменять местами.
Рис. 3.14. К формулировке оптической теоремы взаимности
Оптическая теорема взаимности имеет два важных следствия.
Следствие 1
Умножим обе части равенства (3.51) на cos(«2,A-«0) и про-
интегрируем по dQ„2 в пределах телесного угла 2 л, где -
элемент телесного угла около направления п2, п0 - нормаль к
облучаемой площадке (рис. 3.15):
144
jC7(^,«1;r2,«2)cos(«2,A-«0)cZQ„2 =
2я
= , - П2; ?•, - Й,) соз(-й2,А п0 )(К1Пг,
2я
(3.52)
cos(«2, А-й0) = cos(-«2,л п0) = cos 0 .
Выясним физический смысл правой и левой частей тождества
(3.52). Пусть точечный мононаправленный источник единичной
мощности находится в точке i\ и излучает в направлении п}. То-
гда нормированная на мощность этого источника освещенность
е()\,п},г2) в точке г2 элементарной площадки ds с вектором
нормали п0, в соответствии с определением функции Грина и
выражением (3.52), равна
«(?!,«!, Г2)= jG(7-,«1;r2,«2)cos(«2,A-«0)jn„. (3.53)
2я
Таким образом, левая часть равенства (3.52) - это нормированная
освещенность в точке г2, создаваемая
точечным мононаправленным источни-
ком, расположенным в точке и излу-
чающим в направлении пг.
Теперь поместим в точку г2 площад-
ки ds точечный диффузный источник
единичной мощности, характеризую-
щийся эффективной силой излучения
/() в телесном угле я, равной л'1 Вт/ср
(см. § 3.2). Представим этот точечный ис-
точник как суперпозицию различным обра-
зом ориентированных мононаправленных
источников. Каждый элементарный све-
товой поток, распространяющийся внут-
ри элементарного телесного угла
вокруг некоторого направления излуче-
ния п2, представляется в виде
Рис. 3.15. Схема, по-
ясняющая следствие
оптической теоремы
взаимности
145
<5?Ф = /0соз(п2,л-п0)(/ОЛ2, где соз(п2,л-Я0) = соз6. (3.54)
Этот элементарный световой поток формирует световое поле,
яркость которого в точке гх и в направлении - пх представляется
функцией Грина следующим образом:
dL(rx,-пх) = G(r2, -п2,i\,-nx)d<b. (3.55)
Полную яркость светового пучка, проходящего через точку гх
в направлении -пх, найдем интегрированием (3.55) по телесному
углу 2л, в пределах которого излучает поверхностный точечный
диффузный источник:
g(^;^-«i)= -п2-,гх, -пх)10 cos e0Q„ =
! (3.56)
71 2n
Итак, правая часть равенства (3.52) представляет собой ум-
ноженную на л нормированную яркость светового поля в точке
г{ в направлении -пх, создаваемую точечным диффузным ис-
точником, расположенным в точке г2. В соответствии с теоремой
взаимности на основании (3.53) и (3.56) запишем
g(r2;/j,-«1) = -e(^,«1;r2). (3.57)
л
Из (3.57) следует, что нормированная яркость светового поля в
точке гх в направлении -пх, создаваемая точечным диффузным
источником, расположенным в точке г2, равна деленной на л
нормированной освещенности в точке г2, создаваемой точечным
мононаправленным источником единичной мощности, располо-
женным в точке гх и излучающим в направлении пх.
Представляет интерес иная нормировка функции Z(r2;/},-«]),
описывающей угловое распределение яркости в точке гх при ос-
вещении рассеивающей среды точечным диффузным источником
единичной мощности, находящимся в точке г2. Действительно,
146
если ее пронормировать на силу излучения источника, т.е. рас-
смотреть реакцию рассеивающей среды на излучение точечного
диффузного источника единичной силы излучения Io = 1 Вт/ср, то
выражение (3.57) примет вид
g*(r2;r1,-«1) = e(/-,«1;r2). (3.58)
Таким образом, из оптической теоремы взаимности следует,
что функция g*(-) тождественна функции е( ). Вместе с тем сле-
дует помнить, что это тождество обусловлено различной норми-
ровкой рассматриваемых функций. Поэтому несмотря на то, что
размерности обеих функций - [м“2], g*(-) характеризует угловое
распределение яркости в точке гх от диффузного точечного ис-
। очника с единичной эффективной силой излучения, находящего-
ся в точке г2, а е(-) - освещенность в точке г2, создаваемую моно-
направленным источником единичной мощности, помещенным в
। очке гх и излучающим в направлении п2. Нетрудно заметить, что
в этом случае мощность диффузного точечного источника равна л
Вт, т.е. в л раз больше мощности мононаправленного.
Следствие 2
Если рассеивающая среда обладает свойством пространст-
венной или ракурсной инвариантности, то распределение осве-
щенности £(гвых) в выходной плоскости z = zBbIX, создаваемое то-
чечным мононаправленным источником единичной мощности, не
'.ависит от координат гвх входа луча в среду и его направления
- п , а полностью определяется только координатами точки гвых,
в которую направлен луч. К анализу световых полей в такой сре-
ie применим принцип суперпозиции, т.е. угловое распределение
нормированной яркости в точке приема L(rn,-nn~) от плоской
шффузно рассеивающей поверхности можно выразить через уг-
ювое распределение яркости в этой точке g(rs; гп, - йп) от то-
чечного диффузного источника:
Дгп, - «п) =71 Ws '^n,-nn)dfs (3.59)
147
или через распределение нормированной освещенности е(гп, n„;rs),
создаваемой точечным мононаправленным источником единич-
ной мощности:
- «п) = Ws )е(гп, Йп; rs )drs. (3.60)
s
В обеих формулах интегрирование проводится по координатам
точки поверхности объекта с яркостью L(rs).
Уравнение переноса изображения в рассеивающей среде.
Рассмотрим применение оптической теоремы взаимности для
расчета мощности сигнала, попадающего в направленный при-
емник при освещении направленным источником диффузно
рассеивающей поверхности (рис. 3.16).
Рис. 3.16. Схема наблюдения объекта
в рассеивающей среде
Будем считать, что объектом наблюдения является поверх-
ность с коэффициентом отражения р(^). Отражающая поверх-
ность находится в плоскости z = zs. Система наблюдения включа-
ет в себя источник подсветки И и приемник П, расположенные в
плоскости z = 0 в точках ги и гп. Направление оси пучка под-
светки задается единичным вектором ЯОп, а точка пересечения
оси с поверхностью объекта - радиус-вектором г5и. Вектор ЯОп
определяет направление оси диаграммы направленности при-
емника, а радиус-вектор rsn - точку пересечения оси диаграммы
с плоскостью объекта. Вектор nOs задает направление нормали
148
к поверхности объекта, а вектор ns определяет направление лу-
ча в точке rs. Источник считаем точечным, что оправдано, когда
размер излучающей апертуры мал по сравнению с расстоянием
до объекта наблюдения.
Элементарный световой поток, идущий от источника в телес-
ном угле вокруг направления пи, равен
^ = (р0/аи)Фи(л0и,лли)^и, (3.61)
а его яркость в плоскости S
dL = G(rK,nK,ri,ns)dP. (3.62)
Проинтегрировав величину dL по телесному углу 2л, получа-
ем выражение для яркости в плоскости S:
= 1фи(«0и,Л«и)^и,«и;^,«5)^и- (3-63)
2л
В формулах (3.61) - (3.62) введены следующие обозначения:
Ро - мощность источника;
- эффективный телесный угол излучения источника;
Фи(”ои>Л”и) ~ нормированная диаграмма направленности ис-
точника;
G() - функция Грина.
Согласно формуле (3.6), распределение освещенности в плос-
кости S связано с яркостью L(fs, ns) соотношением
E(fs) = ^L(rs,ns)cos(ns,An0s)dCls, (3.64)
2л
где телесный угол d£ls образуется вокруг направления ns.
Подставляя (3.63) в (3.64), получим распределение освещен-
ности в плоскости объекта, создаваемое источником с нормиро-
ванной диаграммой направленности:
Е(.К) = ~ /Фи(«ои,л«и)^и,»и;^№> (3-65)
2п
149
где e(rH,n„;rs) = р(ги, пи, rs, ns) cos(«5,л nOs )t/Qs - распределе-
2л
ние освещенности в плоскости объекта при ее облучении точеч-
ным мононаправленным источником, излучающим из точки ги в
направлении пя.
Яркость рассеянного света на диффузно отражающей поверх-
ности объекта не зависит от направления рассеивания ns и пред-
ставляется через освещенность этой поверхности в виде
Z(rs) = ^Ws). (3.66)
Л
На основании оптической теоремы взаимности (следствие 2)
угловое распределение яркости в точке приема можно предста-
вить согласно (3.59), (3.60) в виде
L(rn, -п„) = ]Z(rs)g(rs; rn,-n„)drs = JZ(rs)e(rn, пп; rs)drs,
S s
где интегрирование проводится по координатам точки поверхно-
сти объекта. Тождественность функций g( ) и е( ) позволяет ре-
шить задачу нахождения углового распределения яркости на
входе приемника от точечного диффузного источника заменить
задачей нахождения распределения освещенности в плоскости
объекта от точечного мононаправленного источника, действую-
щего из точки приема гп в направлении п„.
Мощность сигнала, регистрируемая приемником с нормиро-
ванной диаграммой направленности, может быть найдена из вы-
ражения
P = Sn J<Pn('70n»A«n№’-«n)^n =
Г 2\ , (3.67)
= J£(rs)[ рРп(«Оп,л«п№,nn;rs)JQn]drs
s 2л
v- 2
где Ln = лгп - площадь входного зрачка оптической системы;
1фпГйоп,л«^п = ^п; фп(0)=1;
2л '
150
Qn - эффективный телесный угол поля зрения приемника (уг-
ловая ширина диаграммы направленности приемника);
<7Qn - элементарный телесный угол вокруг направления пп.
Подставляя (3.66) с учетом (3.65) в (3.67), для мощности све-
ншого сигнала, приходящего от объекта, окончательно получим
> иедующее выражение:
РУО
Р = Ж. Jp(7s)ЕК(rs, rSK)En{rs, rsn)drs, (3.68)
Л
। те
, rsa) = -J- Jq>„ («Ои,Л nK )e(r„, пи; rs)<?Q„;
““и 2л
>)п) = -J- J<pn (»0п > Л «М , Пп, rs)rfQn.
Функция £и(г5,г5И) - это нормированное распределение ос-
вещенности на поверхности объекта, создаваемое точечным ис-
। очником излучения единичной мощности и диаграммой направ-
ленности Фи(”ои’Л”и)> ПРИ ориентации оптической оси в
направлении пОи .
Функцию EB(fs,rsn) формально можно рассматривать как
аналогичное распределение для случая, когда источник располо-
жен в точке приема, имеет такую же, как приемник, диаграмму
направленности фп(пОп>Л”п) и его оптическая ось ориентирована
в направлении лОп.
Здесь, как и ранее, - координаты точек пересечения
। )еей диграмм направленности источника йОи и приемника лОп с
поверхностью S.
В случае радиально симметричной функции £(•) при неболь-
ших углах сканирования диаграмм направленности источника
(приемника) можно записать
E*rsl!) = E(rsa-rs), Еп (rs, rsn) = £(rjn - rs).
I [сложим F10 = rm - rsn. Тогда формула (3.68) примет следующий
вид [45]:
151
Dy Q I
Лг,о) = ^^/р(?,)£и(^о-г5)Еп(г,о-П)^, (3.69) 1
Л 5 I
где rj0 =Uo ~xs’ yso ~ys\ fco -rj =[(xj0 ~xs)2 +(ys0 -yj2]1/2. |
Формула (3.69) есть искомое уравнение переноса изображе- I
ния в рассеивающей среде для системы активного видения. Она I
устанавливает связь между коэффициентом отражения р(г5) и |
мощностью светового сигнала Р(г0), формирующего элемент
изображения, в виде функции координат г0 точки пересечения
оси диаграммы направленности излучателя (система первого ти- 1
па), приемника (система третьего типа) или обеих осей (система 1
второго типа) с поверхностью объекта наблюдения. Для систем |
первого и второго типов - это мощность сигнала, принимаемого |
от одноэлементного фотодетектора, для системы третьего типа - 1
мощность сигнала на одном элементе многоэлементного фотоде- 1
тектора (см. § 1.4). I
Непосредственно из (3.69) могут быть найдены характери- I
стики, определяющие качество изображения - модуляционная |
передаточная функция (см. главу 6) и коэффициент передачи 1
энергии «излучатель - объект - приемник» (см. главу 7). 1
Можно показать [15], что для пространственно ограниченных I
апертур источника и приемника мощность светового потока, ре- |
гистрируемого приемником, определяется выражением I
Р&о) = Jp<Z)E„Oio - rs)£n(rs0 - , (3.70) I
ЯЛ s I
где постоянный множитель L" [м'2 ср ‘] имеет смысл нормирован- I
ной яркости и введен в (3.70) для согласования размерности. 1
Величины £и,п(Гзо~Л) представляют собой нормированные I
освещенности на поверхности объекта, создаваемые пространст- I
венно ограниченными направленными реальным и «фиктивным»
источниками с яркостями соответственно Ц7, п) и Z* А(г, п), '
где координаты г задаются на апертурах источников. I
Глава 4. ПЕРЕНОС ИЗОБРАЖЕНИЯ
В СЛУЧАЙНО-НЕОДНОРОДНОЙ СРЕДЕ
При рассмотрении вопросов переноса изображения в атмо-
сфере и океане приходится учитывать амплитуд но-фазовые
флуктуации оптических волн, возникающие вследствие случай-
ного пространственно-временного распределения показателя
преломления. Искажения волнового фронта, обусловленные тур-
булентными флуктуациями показателя преломления, приводят к
ухудшению качества изображения, в результате чего наблюдение
малых деталей объекта оказывается невозможным. Среды, опти-
ческие характеристики которых случайно изменяются в про-
странстве и во времени, называются случайно-неоднородными, и
в них для описания распространения оптических волн использу-
ется статистический подход.
Задача о переносе изображения в случайно-неоднородной
среде, так же как и в рассеивающей среде, заключается в уста-
новлении связи между световым сигналом, образующим изобра-
жение, и распределением коэффициента отражения на поверхно-
сти наблюдаемого объекта. Выполнение теоремы взаимности
применительно к турбулентной атмосфере [69] позволяет свести
локационную задачу к нахождению характеристик светового по-
ля, создаваемого реальным и «фиктивным» источниками на пря-
мых трассах.
В настоящей главе рассматриваются характеристики поля оп-
тической волны, дается связь функции когерентности второго
порядка с яркостью, описываются модели источника и приемно-
го устройства, приводятся статистические характеристики поля
153
показателя преломления в атмосфере. Излагается метод Гюйген-
са-Кирхгофа, обобщенный на случайно-неоднородные среды.
Формулируется теорема взаимности и на ее основе с использова-
нием метода Гюйгенса-Кирхгофа выводится уравнение переноса
изображения в случайно-неоднородной среде.
4.1. Характеристики поля излучения
и теория когерентности
В рамках скалярной теории дифракции в любой точке Q(x, у ,z)
однородной среды в областях, свободных от источников излучения,
вещественная функция u(Q, t), описывающая световое излучение,
удовлетворяет скалярному однородному волновому уравнению
0.1)
и \0t J
2 д2х д2у d2z
где V = —- -I--у + —? - оператор Лапласа;
дх ду dz
с
и =---скорость света в среде.
п
Решение волнового уравнения (4.1) можно представить в виде
скалярной функции, определяющей вид монохроматической волны:
и(х, у, z, t) = a(Q) exp [2 л v/ - ф(0], (4.2)
где а - амплитуда;
2л V/ - ф((?) - полная фаза колебаний;
1 (О
v, = — =---временная частота оптического излучения.
Т 2л
Для упрощения расчетов, связанных с преобразованием гар-
монических сигналов, обычно используют комплексную экспо-
ненциальную гармонику. В результате комплексный пространст-
венно-временной гармонический сигнал преобразуется к виду
u(Q,t) = t/(0exp[-i2nv/], (4.3)
154
где комплексная функция координат U(Q) = a(0exp[-z<p(Q] на-
зывается комплексной амплитудой волны или комплексным оп-
тическим сигналом.
Подставив в (4.1) соотношение (4.3), получим известное
уравнение Гельмгольца (приведенное волновое уравнение) для
комплексной амплитуды поля:
, СО2
V2U + ^U = 0. (4.4)
и
Общее решение волнового уравнения имеет вид
«пл(&0 = 4(гё),Н,
где г(х, у, z) - радиус-вектор точки Q;
e(cosa, cosp, cosy) - единичный вектор нормали к плоскости
волнового фронта, который характери-
зует плоскую волну, распространяю-
щуюся в направлении вектора е со ско-
ростью и.
Комплексная амплитуда однородной (a(Q) = const) плоской
монохроматической волны представляется в виде
^пл (2) = a exp(ik„e -r) = a exp(ik„ г), (4.5а)
г 2л „
где кп -—е - волновой вектор, приведенная длина волны Л„
связана с длиной волны X в вакууме соотно-
шением X = п
п - показатель преломления среды.
В итоге комплексное выражение для электрического (магнит-
ного) поля однородной плоской монохроматической волны за-
пишется следующим образом:
«пл(2, О = Utm(Q)cos[-i2nv,t] = aexp(ik„r)exp(-iG)t). (4.56)
Сферической волной называют любое решение волнового
уравнения (4.1) вида исф(0 0 = s(r, t), где г = (х2 + у2 + z2)1'2.
155
Скалярное комплексное выражение для электрического поля
однородной сферической U(Q) - — монохроматической вол-
\ r)
ны, расходящейся от начала координат, получим из (4.3) заменой
г
/на t —:
и
«Сф(00 = -exp(z'V)exp(-zcoz). (4.6а)
г
Комплексная амплитуда этой волны равна
^сф(0 = -ехр(^пг). (4.66)
г
Здесь множитель — учитывает закон сохранения энергии при
г
распространении сферической волны постоянной интенсивности.
Следует подчеркнуть, что однородные плоские и сферические
монохроматические волны являются типовыми оптическими
сигналами слоя пространства, а их симметрия соответствует изо-
тропности слоя пространства.
Общее выражение для комплексной амплитуды может быть
представлено в виде
t/=a-e'e.
Для описания распространения волн в случайно-неоднородной
среде наряду с комплексной амплитудой используется комплекс-
ная фаза vy . Между амплитудой а, фазой 0 и комплексной фазой
vy имеется следующая связь:
U = ехр\у, где \y=lna + i0.
Случайное пространственно-временное распределение пока-
зателя преломления в среде распространения лазерного излуче-
ния приводит к тому, что изменения амплитуды и фазы оптиче-
ских сигналов носят случайный характер. Адекватное описание
поля возможно только при помощи осредненных характеристик в
рамках общей теории случайных процессов с использованием
функции взаимной когерентности.
156
Действительно, статистическая связность между пространст-
венно-временными оптическими сигналами U^Pi, Z) и U2(P2, / + т)
в некоторых двух точках Р{ и Р2 пространства будет обусловли-
вать статистическую связность между их образами cxUx и c2U2 в
точке Q плоскости наблюдения. Наличие такой статистической
связности влияет главным образом на интенсивность в точке Q,
которую можно получить усреднением во времени квадрата мо-
дуля результирующего возмущения (для стационарных эргодиче-
ских полей):
Лк (б)=|С1Ц(Л,/)+^2(Р2,/ + т)|2 = (4 7
= 71(0 + 72(0 + 2c1c2|ReF12(T)|,
гдес(, с2 - комплексные постоянные, зависящие от условий рас-
пространения волн от точек Ри Р2 к Q;
т - время задержки второй волны относительно первой;
Г12(т) - функция взаимной когерентности, которая определя-
ется по одной реализации как функция взаимной ко-
вариации стационарных эргодических полей.
Как следует из (4.6),
Г12 (т) = Ц(/>,/)-[72‘(Р2,/ + т). (4.8)
Здесь черта означает операцию усреднения во времени, а знак * -
операцию комплексного сопряжения.
Как правило, пользуются нормированной функцией Г12(т), ко-
торая называется комплексной степенью когерентности:
--------------- (4 9а)
[Г,, (0) • Г22 (0)]1/2 ’ 1 '
где Г11(О)-<|Ц(Р,ОГ> = /1(0|С1|‘2;
r22(O) = <|t72(72,Z + T)|2> = Z2(0|c2|“2.
В случае квазимонохроматического источника излучения, у ко-
торого относительная спектральная ширина полосы Av/ v, « 1,
комплексная степень когерентности представляется в виде
157
Y12(t) = | у12 (т)'|ехр{Яф12(т)]-27tvtT}, (4.96)
где ф12 (т) = 27tv,t + argy12 (?).
В результате можно получить известный закон интерференции:
Ак(0=м0+М0+
I---------, । г 1 (4.Ю)
+ 2^/1 (0Л (01 Ун (т)| cos[q>12 (т) - 2ttv,t].
Величину |у12(т)| называют степенью когерентности колеба-
ний в точках Р, и Р2. Именно она определяет видность интерфе-
ренционной картины
_ Anax ~ Anin _ З-у/А-А | Y12 (Т)| (4 11)
Anax + Anin А + А
Если интенсивности обеих волн равны (1Х = /2), то видность
равна степени когерентности V(t) = |y12(t)| . Так как 0 <|у12(т)| < 1,
то и видность изменяется в этом же диапазоне. Ситуация, при
которой |у12(т)| = 1, соответствует абсолютно когерентным вол-
нам, выходящим из точек Рх и Р2 с некоторой временной задерж-
кой т между ними. Если |у)2(т)| = 0, то излучение некогерентно и
никаких интерференционных эффектов нет.
Схема определения степени когерентности |у12| в дальней зоне
с помощью интерферометра Юнга показана на рис. 4.1. Пучок
излучения от лазера формируется с помощью линз JIj и Л2 и по-
падает на экран с двумя отверстиями. Интерференция волн, вы-
ходящих из отверстий, наблюдается в фокальной плоскости лин-
зы Л3. Определение степени когерентности |у12| в пучке сводится
к измерению видности интерференционных полос при различных
расстояниях d между отверстиями Рх и Р2.
На практике в большинстве случаев время т много меньше
времени когерентности, т.е. т«——. При этом условии
(p12(0) = argy12(0), а степень когерентности |у]2(0)| выражается
соотношением
158
у12(г) = = . (4.12)
Л/Г]1(О)Г22(О) ^Ji}-J22 4ЦГ2
Выражение (4.12) является одним из основных соотношений в
теории частичной когерентности. Величина
^2=^(0) = ^^,t)-u;(p2,t)) ,
где символ < ) означает статистическое усреднение (усреднение
по ансамблю) по флуктуациям поля, характеризует взаимную
ковариацию колебаний в точках Р, и Р2 волнового поля и называ-
ется взаимной интенсивностью. Она зависит только от положе-
ния этих точек, но не зависит от времени задержки т.
Рис. 4.1. Схема измерения степени когерентности с помощью интерфе-
рометра Юнга
Заметим, что функция Г12(0) характеризует только про-
странственную когерентность поля, поэтому она и называется
функцией пространственной когерентности. Именно на про-
странственную когерентность оказывает наибольшее влияние
турбулентная среда, в которой распространяется лазерное излу-
чение. Будем обозначать ее далее ,R2), где R\,R2 - радиу-
сы-векторы точек Р\ и Р2.
Определим связь между функцией пространственной коге-
рентности и яркостью. Пусть источник излучения с яркостью
L(R, п) расположен в плоскости z = 0. Тогда соотношение, свя-
159
зывающее яркость источника с функцией пространственной ко-
герентности, имеет следующий вид [57]:
V(R, р) = $L(R, п)exp(iknp)dQn, (4.13)
2л
где Rr (%!, у J), R2 (х2 ,у2) - радиусы-векторы точек наблюдения;
n(nx,ny,nz) - единичный вектор направления излучения ис-
точника;
Л = (Л1+Л2)/2, р = Я2-Я15 Г(Др) = ^яДр^Я-|р^,
dQ.„ - элемент телесного угла вокруг направления Я .
Из (4.13) следует, что яркость L является угловым спектром
функции когерентности Г. Через яркость можно выразить интен-
сивность поля I(R), положив р = 0:
I(R) = I\R,O) = $L(R,n)da„. (4.14)
2л
Таким образом, через яркость можно выразить основные ха-
рактеристики волнового поля: функцию когерентности и интен-
сивность. Воспользуемся соотношением (4.13) и установим связь
между функцией когерентности и яркостью излучения, отражен-
ного от диффузно рассеивающей поверхности. Для диффузно
рассеивающей поверхности яркость отраженного излучения не
зависит от направления, и интеграл (4.13) по полусфере можно
легко вычислить, поскольку (e^dQ = sm(^ ) [57]:
2J, kPs
Готр(^>р,) = 27[8Ш(^-^); р,=|р,|, (4.15)
kps
где ps) - функция когерентности отраженного излучения
на поверхности объекта наблюдения;
160
L(RS) - яркость излучения, отраженного от диффузно рас-
сеивающей поверхности; величина nL(Rs) имеет
смысл светимости поверхности.
Соотношение (4.15) будет использовано в дальнейшем при
выводе уравнения переноса изображения в случайно-неодно-
родной среде.
4.2. Модели лазерного источника и приемного устройства
Лазерный пучок, распространяющийся в турбулентной атмо-
сфере, испытывает флуктуации амплитуды и фазы вследствие
случайного пространственно-временного распределения показа-
теля преломления. Количественное описание этих эффектов
основано на методах теории когерентности, оперирующей поня-
тиями полей и их моментов (функций когерентности). Совер-
шенно ясно, что в рамках этих понятий должны быть построены
модели лазерного источника и приемного устройства.
Пространственная структура лазерного пучка формируется в оп-
тическом резонаторе, представляющем собой в простейшем случае
два зеркала (плоских или сферических), находящихся на общей оп-
тической оси. Именно конфигурация резонатора определяет основ-
ные свойства лазерного излучения. Гауссов пучок, формируемый
устойчивым резонатором, представляет собой волну, отличную как
от сферической, так и от плоской. Фазовая поверхность (волновой
фронт) представляет собой в данном случае параболоид вращения.
При малых поперечных размерах пучка ее обычно заменяют сфери-
ческой поверхностью с радиусом кривизны
R(z) = z + z2Jz,
где z — координата точки на оси резонатора, отсчитываемая от
перетяжки;
zK - конфокальный параметр пучка.
Волновой фронт является плоским при z —> оо и в сечении пе-
ретяжки. Поэтому лазерный пучок в устойчивом резонаторе не яв-
ляется гомоцентрическим даже в параксиальной области в отличие
1091
161
от пучка, излучаемого обычным точечным источником. При опре-
деленных условиях, например при z » zK, допустимо представле-
ние лазера с устойчивым резонатором в виде точечного источника
излучения, т.е. гауссов пучок в приближении геометрической оп-
тики может рассматриваться как сферическая волна.
Для плоского резонатора распределение поля для каждой мо-
ды остается практически постоянным в любом сечении, а волно-
вой фронт излучения - плоским. Неустойчивые резонаторы в
приближении геометрической оптики формируют гомоцентриче-
ский пучок (сферическую волну).
Для одномодового лазерного источника начальное распределе-
ние комплексной амплитуды поля на выходе передающей оптиче-
ской системы хорошо описывается следующей формулой [59]:
U(R) = Uoexp --у
R2 ikR1
2ЯК
(4.16а)
где Uo - амплитуда поля в центре пучка;
R - радиус-вектор точки в поперечном сечении пучка;
гк - эффективный начальный радиус пучка (радиус пучка в
перетяжке);
к - 2 л/Х - волновое число;
R* - радиус кривизны волнового фронта в центре пучка.
Мощность, излучаемая лазерным источником, равна
Р = 2 л J| U(R) |2 RdR = t/2 лги2. (4.166)
о
Реальные источники редко обладают идеальной когерентно-
стью, т.е. в разных точках источника сигнал может иметь различ-
ные и меняющиеся фазы ф( 7?):
U (R) = Uo ехр
R2
2ги2
ikR2
+ 1ф(/?)
(4.17)
Если фаза ф распределена по нормальному закону и флуктуа-
ции фазы однородны, то пространственную функцию
когерент
ности источника можно описать с помощью выражения [37]
162
Г(Др) = С/02ехр[-4-Л-^-^Д (4.18а)
I 4ги2 RK 4p2J
где рк - начальный радиус когерентности пучка, а переход к пол-
ностью когерентному пучку осуществляется при рк -» <х>:
— — т К
Г(Я,р) = С/2ехр - —
R2 р2 ikRp
г; 4r2 RK
(4.186)
Здесь, как и ранее, функция
r(fl,p) = /c/fl + |Vffl-1 П ха-
рактеризует статистическую связь полей в двух разных точках
7?! = 7? + —, R2 -R-— в один момент времени.
Функция когерентности второго порядка содержит информа-
цию о профиле средней интенсивности, который можно полу-
чить, полагая р = О,
/(Л) = Г(Лр = 0) = [/2ехр -
R^
2
(4.19)
Параметры источника ги, рк, X однозначно определяют угло-
вую ширину диаграммы направленности. В дальней зоне
(kr2 /z «1, где z - расстояние до плоскости наблюдения) шири-
на диаграммы направленности полностью когерентного расхо-
дящегося лазерного пучка
2аи
2 Г 1 к2г2]1/
(4.20а)
Для многомодового лазерного источника (слабокогерентного
источника) при рк « г„
2аи
2
*Рк
(4.206)
Простейшей и довольно распространенной приемной оптиче-
ской системой является объектив, вблизи фокальной плоскости
163
которого помещен фотодетектор. Для такой модели оптической |
приемной системы распределение поля (а значит, и все моменты
поля) в фокальной плоскости объектива можно найти, воспользо-
вавшись формулой Дебая. В параксиальном приближении она
имеет вид [63]
^('ф) = 777“ exP(“z%)х
V об
(4.21)
R2 '
2/об >
где R - вектор в плоскости входного зрачка; ]
Гф - вектор в плоскости фотоприемника, перпендикулярной
оптической оси объектива; |
Д - смещение плоскости наблюдения относительно фокаль- |
ной плоскости; |
- фокусное расстояние объектива; ]
и(Гф) - распределение поля в плоскости изображения. I
Интегрирование в (4.21) ведется по участку плоскости, ограни- |
ченному апертурной диафрагмой объектива. |
Из (4.21) следует, что профиль средней интенсивности 7(^) 1
за объективом определяется функцией когерентности второго |
порядка Г(Д,Л2). В параксиальном приближении имеем: |
1Л
2 /об
“Г /Бч J ik
х j w(7?)exp<—-
хехр-
ik
Д + ГфЯ -d2R,
- гф(А-Л2)-1—(Л,2-^2) \d2Rd2
(4.22)
R2,
где - векторы в плоскости входного зрачка приемного объек- |
тива(! = 1,2). |
Параметры приемного устройства определяют его угол зре- ]
ния 2ап, который в дальней зоне (кг2 / z »1, где z - расстояние 3
до плоскости наблюдения) равен ]
164
2ап — 2
£+_!_
f'2 k2r2
Job K rn
1/2
(4-23)
где Гф - эффективный размер фотоприемника;
гп - эффективный размер входного зрачка приемного объектива.
Интегрирование (4.22) по поверхности фотодетектора дает
общее выражение для мощности, регистрируемой приемником:
P=l^S(^d2r^-^x
-00 Wo6/
- - “i ik
/Г(ДД) Jg^exri —
Л2гф d2!^2^,
(4-24)
где g(^) характеризует чувствительность фотодетектора.
4.3. Распространение лазерного излучения
в турбулентной атмосфере. Волновое уравнение,
метод Гюйгенса-Кирхгофа
Случайные флуктуации температуры в земной атмосфере
приводят к флуктуациям показателя преломления, зависящим от
пространственной координаты г = (х, у, z) и времени /:
n(r,t) = 14-(г, Z), (4.25)
где - флуктуирующая часть показателя преломления относи-
тельно среднего значения (и) = 1. В рамках гипотезы «заморо-
женной турбулентности» можно положить, что п является лишь
функцией пространственных координат
И1(г,/)«И1(г).
Согласно этой гипотезе, все временные изменения nx(r,t)
связаны с переносом «замороженной» пространственной картины
165
случайного поля П](г)как целого со средней скоростью атмо-
сферного ветра: п} (г, t) = пу (г - йвг, t - т), где йв - средняя ско-
рость атмосферного ветра. Время «замороженности» атмосферы,
т.е. время, в течение которого распределение показателя прелом-
ления остается практически неизменным, по порядку величины
составляет 10'2..,10'3 с.
Турбулентное движение воздуха представляет собой сово-
купность вихрей различного размера, от самых больших,
имеющих характерный размер £0, до самых малых размеров /0.
Каскадный механизм передачи кинетической энергии от более
крупных вихрей к более мелким постоянно поддерживается в
атмосфере за счет внешних источников энергии, питающих об-
щий поток движения воздуха. При размерах вихрей порядка Zo
вся кинетическая энергия преобразуется в тепло, поэтому на
создание вихрей с размерами меньше /0 практически не остается
энергии.
Величина £0 определяется масштабом потока в целом и назы-
вается внешним масштабом турбулентности, величина /0 - внут-
ренним. Так, для приземного слоя масштаб Lo имеет порядок вы-
соты точки наблюдения. Масштаб 10 вблизи земной поверхности
составляет 1... 10 мм.
Более мелкие вихри, в отличие от крупных, статистически
однородны и изотропны. Это дает возможность описывать рас-
пределение показателя преломления по пространству статистиче-
скими характеристиками однородного изотропного случайного
поля и,(г), понимая под ним случайную функцию трех перемен-
ных (х, у, z), являющихся пространственными координатами. Для
такого поля математическое ожидание и дисперсия постоянны, а
смешанные начальный и центральный моменты второго порядка
(ковариационная и корреляционная функции) зависят только от
расстояния r = \r\ = ^j(x2-x})2 + (y2-yy)2 + (z2-z1)2 между точ-
ками наблюдения и не зависят от направления вектора г .
В рамках теории локально однородной изотропной турбулент-
ности корреляционные свойства флуктуирующей части показателя
преломления иДг) описываются структурной функцией [57]
166
D„(r) = {[nl(rl + P)-n^r)]2),
(4.26)
где r = |r| - расстояние между точками наблюдения.
Структурная функция D„(r) связана с корреляционной функ-
цией однородного поля В(г) = ( ^(г,+г)п,(?[)) соотношением
Dn(r) = 2[B(0)-B(r)].
(4-27)
( огласно (4.27), D„(r) при г -> оо имеет конечный предел £>я(оо) =
25(0) = 2стя, равный удвоенной дисперсии флуктуаций п}.
Важное свойство структурной функции, отличающее ее от кор-
реляционной, состоит в том, что на нее не влияют большие по
пространственной протяженности I» |г| масштабы. Структурная
функция может быть выражена через трехмерный пространст-
венный спектр [37]
D„(r) = ^j 1-
о \
sin/г
фп(х)хЧс,
(4-28)
। де % = 2л/1 - пространственное волновое число;
/ - размер неоднородности, г = |г |, х = |%|;
Фп( X) _ спектральная плотность распределения энергии
флуктуации показателя преломления по трехмер-
ному пространству.
С точки зрения теории особенностью задачи распростране-
ния световой волны через турбулентную атмосферу является
случайный характер поля показателя преломления. Поэтому в
теоретических построениях можно лишь установить связь меж-
ду статистическими характеристиками атмосферы и статисти-
ческими характеристиками световой волны. Если в качестве
случайной функции рассматривать поле U(г) лазерного пучка
света, то наибольший практический интерес для лазерного ви-
дения будет представлять функция когерентности второго по-
рядка F(ij, г2) = (и (rJU* (г2)^, которая характеризует распреде-
167
ление средней интенсивности в пучке /(f) = ^|[/(r)|2y. Установ-
ление связи между статистическими характеристиками среды и
волны является одной из задач теории распространения оптиче-
ского излучения в случайно-неоднородной среде.
Волновое уравнение. Метод Гюйгенса-Кирхгофа. Распро-
странение монохроматического излучения в случайно-неодно-
родной среде описывается стохастическим уравнением Гельм-
гольца для какой-либо из компонент U вектора электрического
поля [4, 29]:
V2[7(r) + к2 [ 1 + 2п} (г)] U (г) = 0, (4.29)
где г = г(х, у, z) - радиус-вектор трехмерного пространства;
V2 д2 д2 д2
v =—т+—т+—г;
дх2 ду dz2
к = 2л/Х - волновое число;
X - длина волны;
п1 - флуктуирующая часть показателя преломления.
Общих методов решения уравнения (4.29) не существует, по-
этому используются различные приближенные методы, среди
которых широкое распространение получили методы параболи-
ческого уравнения и Гюйгенса-Кирхгофа. В (4.29) величина U
связана с компонентой электрического поля соотношением и =
= (/ехр(—zco/). Если в (4.29) положить п1(г) = 0, можно получить
уравнение (4.4).
Выполнение в земной атмосфере неравенства kl » 1, где I -
характерный пространственный масштаб турбулентности, позво-
ляет при рассмотрении распространения лазерных пучков в слу-
чайно-неоднородных средах пренебречь рассеянием на большие
углы и вместо (4.29) использовать параболическое уравнение для
функции Un (г), связанной с U(г) соотношением U = Unexp(ikz),
где z - направление распространения волны [4, 29]:
2ik^ + V2Un+2k2niUn=0, + (4.30)
oz дх ду
168
Начальным условием для (4.30) является Un(R,G) = U0(R0), где
Ro = {х, у} - вектор в плоскости источника.
В оптически однородной среде (пх = 0) решение параболиче-
ского уравнения можно представить в виде дифракционного ин-
теграла Гюйгенса-Кирхгофа, записанного в приближении Фре-
неля [31]:
U(R, z) = ±- R, z)d2R(i , (4.31)
2л '
где интегрирование ведется по поверхности о излучающей апер-
гуры;
_ _ 1г fir _
G0(K0,7?,z) = -exp ikz + — (R-Rq)2
iz 2z
- функция Грина сво-
бодного пространства.
В соответствии с принципом Гюйгенса, поле U(R,z) можно
рассматривать как суперпозицию полей точечных источников,
расположенных в плоскости z = 0 и имеющих амплитуду Go(7?o)
(рис. 4.2).
Рис. 4.2. Схема, поясняющая формулировку принципа Гюйгенса-Кирхгофа
Принцип Гюйгенса-Кирхгофа может быть обобщен на слу-
чайно-неоднородные среды [31]. В этом случае функция Грина
169
будет зависеть от параметров случайной среды и во френелев-
ском приближении примет вид
1с
G(RQ, R,z) = — exp
iz
2z
(432)
Здесь \|/(7?о, R, z) - случайный набег комплексной фазы сфериче-
ской волны, распространяющейся в случайно-неоднородной сре-
де из точки (0, Rq) до точки (z, R), у = % + iQ, где %, 0 - лога-
рифм амплитуды и фаза сферической волны соответственно.
Сущность метода Гюйгенса-Кирхгофа в этом случае заклю-
чается в представлении поля в виде суперпозиции квазисфериче-
ских волн с флуктуирующими амплитудой и фазой.
Сопоставление рассмотренных выше методов, проведенное в
[31], показало, что метод параболического уравнения и метод
Гюйгенса-Кирхгофа строго эквивалентны в отношении первого и
второго моментов поля. Однако, поскольку метод Гюйгенса-
Кирхгофа позволяет упростить процедуру вычислений, он
широко используется при исследовании влияния турбулентности
атмосферы на характеристики светового поля.
Используя метод Гюйгенса-Кирхгофа, найдем функцию коге-
рентности и среднюю интенсивность поля оптической волны, па-
дающей в турбулентной атмосфере на отражающую поверхность
объекта наблюдения. Тогда, используя суммарно-разностные коор-
динаты (R, р), из (4.31) для функции когерентности находим [31]:
(4.33)
X
оО Г ‘1
ПГои(Л>Р„)ехр|-у(Л -Д,)(Р„ -Ps)-|^(PH,Ps)k2V2PH.
где ГОи(Д,, Ри) = +^о*(Х - у]
функция коге-
рентности, заданная на апертуре источника;
170
£>/ри,р5) = ([Ч/(Ли,Л1)-Ч/(ЛИ2,А2)]2) - структурная функ-
ция флуктуаций комплексной фазы двух сфери-
ческих волн, распространяющихся из точек 7?И1
и R* (плоскость излучения) в точки Rs и Д.;
(плоскость наблюдения) соответственно;
ри=Л, -R^, p=Rs -Rs , Ru=-^1----------Rs=—----------
“ И T1| T1J ' ~ J &2 7 n j J 5 ry
Теперь положим в (4.33) ps=0 и найдем распределение
средней интенсивности в плоскости отражающей поверхности:
(4.34)
к1
“(2k)2z2X
х ffroJ^,pJexp|-^(^-^)pH-iz>v(pH,O)p2V2P„-
Выражение (4.34) является основным в теории переноса
изображения в случайно-неоднородной среде, так как через
распределение средней интенсивности записывается уравне-
ние переноса изображения, вывод которого дан в следующем
параграфе.
4.4. Теорема взаимности. Уравнение переноса
изображения в случайно-неоднородной среде
В случае турбулентной среды под функцией Грина понимают
решение скалярного волнового (параболического) уравнения для
точечного источника, формирующего сферическую волну. Она
имеет смысл поля и описывает изменение комплексной амплиту-
ды поля сферической волны с единичной амплитудой, распро-
страняющейся в случайно-неоднородной среде.
Пусть G(^,r2) _ функция Грина. Это значит, что точечный
источник, помещенный в точке , создает в точке г2 поле
G(/j,r2). В турбулентной атмосфере для функции Грина выпол-
няется равенство
171
G(^,r2) = G(r2,/'). (4.35)
Оно выражает теорему взаимности', поле, создаваемое в точке
г2 точечным источником, расположенным в точке г,, эквива-
лентно полю, создаваемому в точке г, точечным источником,
расположенным в точке г2. То есть поле не изменяется, если
точку расположения источника и точку наблюдения поменять
местами.
Рассмотрим применение теоремы взаимности для расчета
мощности сигнала, регистрируемой приемником, при отраже-
нии лазерного излучения от диффузно рассеивающей поверх-
ности.
Схема наблюдения включает в себя объект наблюдения,
расположенный в плоскости z = z0, источник подсветки И и
приемник П, расположенный рядом в плоскости z = 0 (рис. 4.3).
Рис. 4.3. Схема наблюдения объекта в случайно-неоднородной среде
172
Векторы Rj описывают положение точек:
на отражающей поверхности (RJ;
на апертуре источника (Ли);
на апертуре приемника (Rn).
Пусть (70(Д,) - распределение поля на апертуре источника.
Тогда, применяя принцип Гюйгенса-Кирхгофа для прямой трас-
сы, можно представить поле на объекте наблюдения в виде
Unaa(Rs>) = ~ °°jU0(RK)G(R„,R,z)d2RH . (4.36)
2л -«
Для описания свойств отражающей поверхности объекта на-
блюдения будем использовать модель амплитудно-фазового экра-
на, т.е. будем считать, что поверхность плоская со случайным ко-
эффициентом отражения по полю. В этом случае можно записать
^ОТр(Л,) = Ра(Д,)^паД(Д,)> (4-37)
где ра(Д) - случайный амплитудный коэффициент отражения
поверхности в точке объекта наблюдения;
^пад(Л|) - поле, создаваемое источником в точке объекта
наблюдения;
{701р(Я5 ) - поле, отраженное в точке Rs> объекта наблюдения.
Теперь, применяя принцип Гюйгенса-Кирхгофа для обратной
трассы, найдем значение поля в точке 7?П1 плоскости приемника:
-
2л-“ (4.38)
= J[/o(^,) pa(/?Si) G)^, RSj, z)G(RS}, Rni, z)d2Rsd2R^.
(2") -о,
Далее, используя формулу Дебая (4.21) и принимая А = О, можно
последовательно найти:
173
распределение поля в плоскости фотодетектора
^(^) = T77-exp(-zV0'6) /ЩЯ^ехр — Мп, (4-39)
№
профиль средней интенсивности
I(fy = {U(RJU'(Rj) =
1
тг
<)exp -*-R^ -<) ЛуХ
(4.40)
мощность, регистрируемую приемником
Р=
-да Wo6/
X frXX) ]g(X)exp
(4-41)
где g(R$) - функция чувствительности фотодетектора.
Теперь найдем на основе (4.38) функцию когерентности
Г = (U(Rni)U,(RT,2)^ . В процессе вычислений предполагается вза-
имная некоррелированность флуктуаций полей источника, пря-
мой и обратной волн, а также флуктуаций амплитудного коэф-
фициента отражения поверхности объекта. Тогда для вторых
моментов случайных функций можно записать
{U0(RKi)U;(R№2)-G(RKi,RSi,z)Gt(RU2,RS2,z)x
х G(RSi, z)G\RS2, Д,2, zlp^R^Rjj =
= {u0(l)U;(Rn2)}-{G(Rlli,RSi,z)GXRn2,RS2,z))x
х(ед,Х,,^’(Д2^п2^)НРа(Д,)Ра(Д2))
174
и из (4.41) найти:
Р = ][(с/0(^)^(<)) R, z)G*(^2, RS2, z)\]X
(2л) 2 / \ 1 I 2 2 /J
X [(ра(Д,)Ра(Я2))]Х (4.42)
X [(ОД,, z)G\RS2, R„2, z))rOn(^, /q] X
xd2R!d2R,2d2Rud2RU2d2Rnd2RU2,
гДе Г0п(Д11,Д,2) =
функция, имеющая смысл функции когерентности, заданной на
апертуре «фиктивного» источника.
Воспользовавшись теоремой взаимности (4.35)
G(Rb,Rni,z) = G(R„i,RSi,z),
из (4.42) получим
Р = Л2ПГи(^,р,)Вр(^,р5)Гп(Л„р5>/2^2р„ (4.43)
где Л5±1р5 - векторы в плоскости отражающей поверхности,
определяющие положение точек, заданных век-
торами RSf и RS2 ;
- R +R - -
Rs=-^-±, ps=Rh-RSi.
В (4.43) приняты следующие обозначения:
Ги (RSi ,RS1) - функция когерентности излучения, падающего
на отражающую поверхность от действительного источника, на
апертуре которого задана функция когерентности ГОи(Д1, ЛИ2);
Г„ - —Ц- [ГОи(G(R„, Rs, z)G\R„ , Rs, z)\d2R„ d2R„ ;
(2 л)
И
175
Fn(7?Si, )- функция когерентности излучения, падающего
на поверхность от «фиктивного» источника с функцией коге-
рентности ГонСД,,, ЛП2);
5Р(Л1>А2) = (ра(Л1)Ра(^2)) ~ корреляционная функция коэф-
фициента отражения ра.
Воспользовавшись связью функции когерентности Готр(Л5,р5)
отраженного излучения с интенсивностью излучения 1И (Rs), па-
дающего на отраженную поверхность, для диффузно рассеиваю-
щей поверхности из (4.13) получим
гОф(Д,р,)=ги(Д,р,)вр(Д,р,)=р(Д)/и(Д)
2sm(fepJ
kps
, (4.44)
где 1И (Rs) - средняя нормированная на мощность источника Ро
интенсивность излучения, падающего на отражаю-
щую поверхность от источника;
p(Rs) - коэффициент отражения по мощности (альбедо).
Подставляя (4.44) в (4.43) и интегрируя по р5, получаем вы-
ражение, связывающее мощность сигнала, образующего изобра-
жение, с распределением коэффициента отражения на поверхно-
сти наблюдаемого объекта [64]:
Р = ]p(Rs)In(Rs)In(Rs)d2Rs, (4.45)
ni
где Г- размерный множитель, введенный для согласования раз-
_2
мерности, м ;
/П(Л,) - нормированная на мощность источника Ро интен-
сивность излучения, падающего на отражающую
поверхность от «фиктивного» источника.
176
Пусть 7?Jo - точка пересечения осей диаграмм направленно-
сти источника и приемника с поверхностью объекта наблюдения.
Тогда для пространственно инвариантной (изопланатичной) сис-
темы вместо формулы (4.45) имеем:
p(RSo)=^]р(Я)Ш-Л0)ШЧохХ. (4.46)
TtJ —со
Здесь интегрирование проводится в плоскости отражающей
поверхности, а интенсивности /и и 1П вычисляются методом Гюй-
генса-Кирхгофа, обобщенном на случайно-неоднородные среды,
для заданных соответственно на апертуре реального и «фиктив-
ного» источников функций когерентности: ГОи и Г < ГОп.
Формулы для /И(Л5) и In(Rs) (в плоскостях, нормальных к
оптическим осям реального и «фиктивного» источников) имеют
одну и ту же структуру (4.34) (см. приложение 2):
к1
I(R) = , ,х
(2л)2 z2
f /Г(Я',р')ехр -^(Л-ЛЭр'-^^^О) J2/?'J2p',
.гл Z Z
(4-47)
где Г(7?',р') - функция когерентности, заданная соответственно
на апертуре реального и «фиктивного» источников.
Следует отметить, что когда падающее и отраженное излуче-
ния проходят по разным неоднородностям среды, формула для
расчета мощности в случайно-неоднородной среде при отраже-
нии от диффузно рассеивающей поверхности (4.45) подобна ана-
логичной (3.70), полученной для рассеивающей среды. Этот факт
является следствием фундаментальной связи фотометрии с об-
щей теорией частично когерентных волновых полей [1, 57].
В феноменологической теории переноса излучения яркость
никак не связана с параметрами, описывающими волновое поле.
Такая связь может быть установлена при статистическо-волно-
вом подходе.
177
При определенных предположениях уравнение переноса
можно вывести из уравнения для функции когерентности, т.е., по
существу, непосредственно из стохастического волнового урав-
нения. При этом показатель ослабления (рассеяния среды) удает-
ся связать со спектральной плотностью флуктуаций показателя
преломления, а яркость L(R, п±) - с функцией когерентности
второго порядка Г(Л, р):
I 2 и
ОДи±) = -^у ffr(^,p)exp[-/jtw±p]d2p. (4.48)
4т1 -QQ
После подстановки (4.48) в уравнение переноса в малоугло-
вом приближении можно получить уравнение для функции коге-
рентности Г(7?, р), которое оказывается эквивалентным парабо-
лическому уравнению для волнового поля.
Таким образом, в малоугловом приближении уравнение пере-
носа эквивалентно параболическому уравнению для функции
когерентности. Иными словами, решить уравнение переноса в
приближении малых углов - это то же самое, что решить ди-
фракционное (параболическое) уравнение для функции коге-
рентности.
Детально вопрос о связи малоуглового приближения теории
переноса с параболическим уравнением для функции когерент-
ности рассмотрен в [1, 57].
Глава 5. ОПТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СРЕДЫ РАСПРОСТРАНЕНИЯ ИЗЛУЧЕНИЯ
5.1. Оптические характеристики атмосферы
Атмосфера Земли представляет собой среду, состоящую из
смеси газов и взвешенных в воздухе твердых и жидких частиц,
называемых аэрозолями. Общее ослабление лазерного излучения
в атмосфере обусловлено молекулярным и аэрозольным погло-
щением и рассеянием.
Молекулярное поглощение вызвано наличием в атмосфере
различных газов. Наиболее сильно излучение поглощается пара-
ми воды, углекислым газом и озоном. Молекулярное поглощение
имеет ярко выраженный селективный характер и проявляется в
виде полос поглощения, разделенных окнами пропускания, где
поглощение либо вообще отсутствует, либо является весьма ма-
лым. Такие участки спектра называют «окнами прозрачности»
атмосферы. Наибольшее значение для лазерной локации имеют
«окна прозрачности» в диапазонах 0,4...0,75; 0,95... 1,06;
1,2...1,3; 1,5...1,8; 2,1...2,4; 3,3...4,0; 8...9,3; 10...12,5 мкм [62].
Молекулярное (релеевское) рассеяние обусловлено флуктуа-
циями плотности атмосферы, а также рассеянием на малых час-
тицах, размер которых существенно меньше длины волны па-
дающего излучения. При релеевском рассеянии интенсивность
рассеянного света обратно пропорциональна четвертой степени
длины волны, а индикатриса рассеяния является симметричной
функцией. С точки зрения практики его учет имеет значение
лишь в прозрачной атмосфере в ультрафиолетовой части спектра.
179
Значения показателя молекулярного рассеяния для длин волн
0,53; 0,6493; 1,06 и 10,6 мкм приведены в табл. 5.1.
Таблица 5.1
Показатели молекулярного рассеяния
для различных длин воли
X, мкм стм, км’’
0,53 1,41- 10’2
0,6943 4,69- 103
1,06 8,54- 10“
10,6 8,47- 108
Оптические параметры атмосферы как рассеивающей и по-
глощающей среды за небольшими исключениями определяются
присутствием в ней аэрозоля - его концентрацией, распределени-
ем по размерам, химической природой и т.п. Общие закономер-
ности аэрозольного ослабления дает теория Ми. Согласно этой
теории, в качестве безразмерных характеристик частицы исполь-
зуются параметр дифракции р = 2лг/Х (г - радиус частицы, а -
длина волны излучения) и комплексный коэффициент преломле-
ния вещества частицы т = п - /%п (п - обычный показатель пре-
ломления, %п - показатель поглощения вещества частицы). Из
теории Ми следует, что при росте р индикатриса рассеяния ста-
новится все более вытянутой в направлении распространения па-
дающего излучения, спектральная избирательность рассеяния
уменьшается, поэтому для достаточно больших частиц (р > 30)
рассеяние не зависит от длины волны.
С достаточной для практики точностью процесс распростра-
нения лазерных пучков в аэрозольной атмосфере можно описы-
вать, располагая всего тремя оптическими характеристиками:
показателем ослабления е, показателем рассеяния ст и индикатри-
сой рассеяния х(у). Для оценки помехи обратного рассеяния наи-
более удобной характеристикой является лидарное отношение,
которое определяет в относительных единицах долю мощности
180
излучения рассеянного единицей объема среды в направлении
«назад». Для индикатрисы рассеяния, нормированной условием
с t/оэ х(л)
х(у) — = 1, лидарное отношение о = .
4л 4л
В приземном слое атмосферы выделяют несколько качественно
различных типов оптического состояния атмосферы: дымка, для ко-
торой типична метеорологическая дальность видимости SM > 3 км,
туманная дымка с характерными значениями 1 км < SM < 3 км, тума-
ны Su < 1 км.
Состояния дымки и туманной дымки, в которых приземный
слой находится приблизительно 90 % времени, являются наибо-
лее естественной ситуацией для применения лазерных устройств.
В континентальной зоне умеренных широт для дымки и туман-
ной дымки в диапазоне длин волн 0,55... 10 мкм расчет аэрозоль-
ного показателя ослабления (в «окнах прозрачности» атмосферы)
проводится по формуле [59]:
е(Х) = е(О,55)[ио ч-иД-"2]; (5.1)
e(0,55) = 3,91/Sm .
Эмпирические коэффициенты п0, пх, п2 для различных типов
дымок приведены в табл. 5.2.
Таблица 5.2
Энергетические коэффициенты к формуле (5.1)
Период Тип погоды «0 «1 «2
Летний Дымка радиационного происхождения (после сильного дождя) 0 0,4 1,88
Устойчивая дымка SM > 4 км 0,06 0,36 1,88
Весенне- Дымка 0,1 0,45 1,3
осенний Туманная дымка 0,01 0,8 0,5
Дымка с моросью 0,3 0,5 0,6
181
Окончание табл. 5.2
Период Тип погоды «0 «1 П2
Зимний «Ледяная» дымка 0,248 0,447 1,24
Зимняя дымка 0 0,58 1,24
Дымка со снегом 0,77 0,145 1,24
Наряду с выражением (5.1) спектральная зависимость показа-
теля ослабления дымок и туманных дымок часто аппроксимиру-
ется более грубой формулой [59]
Ф-) =
3,91 < 0,5 5 У’585
(5-2)
где 5М выражено в км, а А. - в мкм.
В табл. 5.3 приведены рассчитанные по (5.2) значения е, со-
ответствующие метеорологической дальности видимости 5М =
= 1, 5, 10 км.
Таблица 5.3
Показатели ослабления для различных значений
метеорологической дальности видения
А, мкм Е, КМ1
$м = 1 км 5М = 5 км Su = 10 км
0,53 3,99 8,12-Ю-1 4,ИЮ’1
0,6943 3,41 6,19-Ю'1 2,91-10-'
1,06 2,66 4,110-’ 1,71-10-’
10,6 6,9-10'1 4-10'2 9-Ю3
В табл. 5.4 приведены средние значения е и среднеквадрати-
ческие отклонения показателя ослабления dc реальных атмосфер-
ных дымок в «окнах прозрачности» диапазона 0,37...9 мкм. Дан-
ные получены в результате многолетних измерений на
горизонтальной трассе в средней полосе (Подмосковье) [48].
182
Таблица 5.4
Средние значения показателя ослабления и среднеквадратические
отклонения реальных атмосферных дымок в «окнах прозрачности»
для различных длин волн в средней полосе
к, мкм е(Х), км'1 de к, мкм е(Х.), км'1
0,37 0,41 0,30 3,16 0,20 0,09
0,42 0,37 0,28 3,7 0,09 0,06
0,50 0,30 0,23 3,9 0,10 0,05
0,63 0,24 0,15 8,33 0,22 0,08
1,03 0,17 0,11 8,63 0,20 0,07
1,2 0,15 0,09 8,85 0,17 0,07
1,6 0,12 0,07 8,96 0,18 0,08
2,2 0,10 0,06 9,12 0,15 0,07
В табл. 5.5 приведена повторяемость Р метеорологической
дальности 5М по отношению к году, составленная по результатам
многолетних наблюдений в средней полосе (Ленинградская об-
ласть) [58].
Таблица 5.5
Вероятность появления в году атмосферных дымок с разной 5М
в средней полосе
5М, км >10 9-10 8-9 7-8 6-7 5-6
Р, % 54 8,3 2,9 4,9 3,9 4,6
5М, км 4-5 3-4 2-3 1-2 0,5-1 <0,5
Р, % 5,4 5,3 4,7 3,8 1,2 0,9
Показатель поглощения аэрозоля кп -e-q в видимой облас-
ти спектра обычно мал, его отношение к показателю рассеяния о
для излучения с длиной волны а0 = 0,55 мкм равно
Р(Х0) = —®0,1...0,2.
о
183
Поглощение может вносить заметный вклад в ослабление в ин-
фракрасном диапазоне [48]:
р(Х) = (0,1...0,2)
\0,8
X
^0/
(5-3)
Для показателя рассеяния и показателя поглощения имеем:
s . к еР(М
1 + р(Х)’ п 1 + р(^)‘
(5-4)
Индикатриса рассеяния света атмосферным аэрозолем сильно
вытянута вперед; значительная доля рассеянной света сосредото-
чена в области малых углов рассеяния. При аппроксимации пе-
редней части индикатрисы рассеяния удобно использовать одно-
параметрическую функцию вида [59]
2 (у
х(у) = — ехр -2- ,
(5.5)
удовлетворяющую условию нормировки
оо
Jx(y)yrfy = 2,
о
где параметр ц характеризует вытянутость индикатрисы рассея-
ния. Чем больше вытянутость индикатрисы рассеяния вперед,
тем меньше значение ц.
Критерием при выборе параметра ц может служить инте-
гральный параметр 5ас, определяющий процент энергии, рассеян-
ной элементарным объемом, в пределах конуса с углом 2у, = 10°
относительно направления «вперед»:
5
ас
п
Jx(y)yrfy , \ \
-5-------= 1-К + 1 ехр|- —
2 J I Ну
(5.6)
184
В условиях атмосферной дымки параметр ц варьируется в
пределах от 0,1 до 0,6, наиболее вероятным является значение
0,3. Для крупнодисперсных туманных дымок ц может достигать
значений 0,16...0,18 [59]. В обратном направлении (у = 180°) ин-
дикатриса рассеяния х(у) принимает вид [59]
= О,ЗЗст-0’31, (5.7)
где о выражена в км-1.
В этом случае лидарное отношение
6 = —= 0,026о“°31. (5.8)
4л
При влажности, близкой к точке насыщения, происходит об-
разование туманов, которые из-за сильного рассеяния оптическо-
го сигнала в них значительно усложняют применение лазерных
систем. Туманы образованы из относительно крупных водных и
кристаллических частиц размерами 0,2... 100 мкм, вследствие
чего для индикатрис рассеяния туманов характерно наличие рез-
ко выраженного ореола в области малых углов рассеяния, где
сосредоточено более 60 % рассеянной энергии. Для туманов зна-
чения параметра ц в выражении (5.5) лежат в пределах
0,06...0,08, лидарного отношения Ь-в пределах 0,05...0,06 [59].
Спектральный ход показателя ослабления туманов является
практически нейтральным в видимой и ближней ИК-области
спектра, далее с ростом длины волны ослабление уменьшается.
Оптическая прозрачность туманов определяется метеорологиче-
ской дальностью видимости Su.
Связь 8М с показателем ослабления можно записать в виде [55]:
б = (59)
где q - коэффициент соответствия; е выражено в км1, 8М - в км.
Для лазерного излучения видимого и ближайшего ИК-
диапазона q = 3,9. Для лазеров на 10,6 мкм значение коэффици-
ента q изменяется от 1 до 2,2.
185
В табл. 5.6 дана вероятность Р появления в году туманов раз-
ной интенсивности для средней полосы (район Москвы) [5].
Таблица 5.6
Вероятность появления в году туманов разной интенсивности
в средней полосе
5„,м 50 50-200 200-500 500-1000
Р, % 0,03 0,20 0,75 1,22
Для туманов в видимой и ближней инфракрасной областях
спектра поглощения мало и ослабление определяется в основном
рассеянием (е = ст). В инфракрасной области спектра (10 мкм)
поглощение в зависимости от параметров микроструктуры тума-
на равно или превышает рассеяние.
В отличие от туманов, частицы в осадках имеют более круп-
ные размеры (100 мкм и более) и сильно вытянутую вперед ин-
дикатрису рассеяния. Ослабление видимого и инфракрасного из-
лучения в дожде от длины волны практически не зависит [5]. При
оценках эффектов рассеяния параметр индикатрисы рассеяния
может быть принят равным ц = 0,06, лидарное отношение b =
- 0,05, а показатель ослабления е = ст (вне полос поглощения
жидкой воды). Зависимость показателя ослабления от интенсив-
ности дождя имеет вид [55]
е = 0,21J0,74, (5.10)
где е выражена в км'1; J- в мм/ч.
Кроме дождя осадки могут выпадать в виде мороси, размер
капель которой имеет промежуточное значение между размера-
ми капель тумана и мелкого дождя (диаметр капель примерно
от 30 до 100 мкм). Максимальное ослабление в мороси не пре-
вышает 2,3 км для волны 10,6 мкм и 1,8 км ’’ для 0,63 мкм.
Ослабление в снеге на длинах волн 0,63 и 10,6 мкм описывается
соотношениями [5, 55]:
186
e0.63=2,5J0-53;
e10,6 = 3,48 J0’3',
(5-11)
где 8 выражено в км J- в мм/ч.
Ослабление излучения снегом намного больше, чем ослаб-
ление дождем при равной интенсивности осадков. Максималь-
ные значения показателей ослабления дождем и снегом в диапа-
зоне 0,63... 10,6 мкм составляют около 7 км-1, что меньше, чем в
туманах. Вероятность выпадения дождей в году для средней по-
лосы (Подмосковье) составляет примерно 2,1 %, снега - 6,9 %.
Вероятность выпадения дождей с интенсивностью J < 5 мм/ч
(SM >0,75 км) составляет 90 % от общей продолжительности до-
ждей. Средняя интенсивность снегопада J= 0,71 мм/ч [58].
Лазерный луч, распространяющийся в атмосфере, помимо по-
терь энергии, обусловленных явлениями поглощения и рассея-
ния, испытывает флуктуации амплитуды и фазы вследствие слу-
чайного пространственно-временного распределения показателя
преломления среды. В оптическом диапазоне длин волн флук-
туации показателя преломления вызываются главным образом
микропульсациями температуры.
Атмосфера Земли всегда находится в состоянии вихревого
движения, влекущем за собой хаотические изменения температу-
ры и, как следствие, флуктуации показателя преломления. Хотя
максимальное значение флуктуаций температуры имеет порядок
1°, вызываемые ими соответствующие изменения показателя
преломления оказывают существенное влияние на амплитуду и
фазу лазерного сигнала.
В рамках теории локально-однородной и изотропной турбу-
лентности структурная функция показателя преломления £>„(р)
подчиняется «закону 2/3» [57]
Dn (р) = ([л(г + р) - л(г)]2) = Ся2 р2'3, (5.12)
1о <-<- Р <-<- Д»
187
где n(r) - значение показателя преломления в точке г ;
| р | — расстояние между двумя точками, в которых определя-
ется п.
«Закону 2/3» соответствует спектр [57]
фл(Х) = о,оззс2г113, Хо«Х«Хи,
где С2 - структурная постоянная показателя преломления воздуха,
характеризующая степень его турбулентных пульсаций;
2л 2л
Хо г ’ Хт > ’
А) ‘о
Zo - внешний масштаб турбулентности;
/0 - внутренний масштаб турбулентности.
В приземном слое атмосферы (слой высотой 2 м от поверхно-
сти Земли): /0 имеет порядок 1... 10 мм; Lo = 0,4 h, где h - высота
точки наблюдения.
Структурная постоянная С2 входит во все соотношения, оп-
ределяющие взаимодействие оптического излучения с турбу-
лентной атмосферой. Значение С2 зависит от многих факторов:
характера трассы, времени года и суток, атмосферных условий и
т.д. Порядок изменения С2 в атмосфере - 10 ~13 м '2/3 (сильная
турбулентность) и 10 16 м273 (слабая турбулентность). В табл. 5.7
приведено распределение С2 по времени суток, где дан процент
попадания значений С2 в указанный интервал для каждого из
отрезков времени [4].
Поскольку искажающее влияние турбулентности на парамет-
ры световой волны накапливается по мере ее распространения в
атмосфере, то условия распространения света определяются не
только интенсивностью турбулентности на трассе С2, но и дли-
ной самой трассы. Значение турбулентных искажений зависит
также от длины волны распространяющегося излучения. Поэтому
турбулентные условия распространения принято характеризовать
комплексным параметром [4]
188
02 = l,23C2£76z116,
где к -----волновое число;
X
z - длина трассы.
Если этот параметр принимает значения, меньшие единицы
(Ро < 1), то говорят об условиях или области слабых флуктуаций
интенсивности; условия сильных флуктуаций реализуются в слу-
чае, когда параметр р^ превосходит единицу (Pjj >1).
Таблица 5.7
Распределение значений структурной постоянной С2 по времени
суток,%
Время суток С2,м-^3
5,ЗЮ16 5,3-1016- 5,3-10'5 5,3-10“15- 5,340 м 5,3-10-14- 5,ЗЮ13 5,3-10 13
День (Пч-15 ч) 0,2 0,8 12,2 83,5 3,4
Вечер (16 ч-19 ч) 8,4 16,8 48,8 26,0 —
Ночь (19 ч -24 ч) 1,0 10,5 69,6 19,0 -
На основании вышеизложенного рассмотрим теперь последо-
вательность определения оптических характеристик атмосфе-
ры, необходимых для оценки дальности действия ЛСВ в атмо-
сфере при различных ее состояниях.
Начнем с состояния аэрозольной атмосферы - дымки, > 1 км.
По заданной SM из формул (5.1) или (5.2) найдем показатель ос-
лабления s. Затем по формулам (5.3), (5.4) рассчитаем показатель
рассеяния а и показатель поглощения кП. Далее из (5.7) находим
значение индикатрисы рассеяния в обратном направлении хя.
Параметр индикатрисы рассеяния принимаем равным ц =
189
0,16...0,18 для туманных дымок (1 км < < 3 км) и ц = 0,3 для
дымок с SM > 10 км.
Для туманов порядок расчета следующий. Из (5.9) по извест-
ному значению Su находим е. Далее с учетом того, что е » о, на-
ходим р = 0,6...0,75 и ц = 0,06.
Для осадков задаем их интенсивность J и по (5.10) находим е.
Принимаем, что е ® о, находим хп = 0,6 и ц = 0,06.. .0,08.
Для турбулентной атмосферы структурная постоянная показа-
теля преломления С„ , характеризующая интенсивность атмосфер-
ной турбулентности, принимает следующие значения: при слабой
турбулентности - 5,2-10 16 м ‘2/3, при средней - 7,21 10 15 м-2/3, при
сильной - 10 13 м '2/3.
5.2. Оптические характеристики морской среды
Свет, распространяющийся в морской среде, испытывает
ослабление от двух независимых механизмов: рассеяния и по-
глощения. Рассеяние в основном обусловлено взвешенными в
воде частицами, его изменчивость целиком определяется ва-
риациями взвеси. Показатель рассеяния практически не зависит
от длины волны.
В поверхностных водах открытых океанов значение показа-
теля рассеяния о колеблется в пределах 0,1...0,2 м'' со средним
значением о = 0,15 м1, а в глубинных - 0,05...0,1 м’1 со средним
значением о = 0,075 м1. В прибрежных районах с высокой кон-
центрацией взвесей среднее значение о может повышаться до
2...3 м 1 [13].
Поглощение света в море зависит как от характеристик чистой
воды, так и от содержания в ней веществ, главным образом, пиг-
ментов фитопланктона и желтого вещества (растворимых в воде
органических веществ). Поскольку рассеяние в море практически
не зависит от длины волны, область наименьшего ослабления све-
та соответствует минимуму показателя поглощения &n min. Значение
^nmin в различных районах мирового океана приходятся на различ-
ные длины волн, однако во всех случаях Лп т1п находится в пределах
спектрального диапазона А = 470. ..570 нм [13].
190
Индикатриса рассеяния морской воды сильно вытянута впе-
ред, и для аппроксимации ее передней части удобно использо-
вать формулу (5.5). В направлении обратного рассеяния индикат-
риса имеет вид
2
х(п) =-------= 2(р0 , (5.13)
(1 + Кас)
где Кас = -—- коэффициент асимметрии индикатрисы рас-
Фо
сеяния, ф0 - доля света, рассеянного в заднюю полусферу:
1 "
Фо = т fx(y)sinyJy,
я/2
где индикатриса х(у) нормирована условием
1 п
- jx(y)sinytfy = 1.
о
(5.14)
(5.15)
Средние значения параметров индикатрисы рассеяния в поверх-
ностных и глубинных водах Тихого и Индийского океанов при-
ведены в табл. 5.8 [13].
Таблица 5.8
Средние значения параметров индикатрисы рассеяния
Район Слой, м С, М ’1 Фо
Открытый океан <100 0,15 42 0,023
>100 0,073 26 0,037
Прибрежные районы <100 0,25 65 0,015
Показатель ослабления е = о + кп измерить гораздо легче,
чем показатели поглощения и рассеяния раздельно. Наиболее
легко измеряемая гидрооптическая характеристика - это глуби-
на видимости белого стандартного 30-сантиметрового диска -
191
z6, данные по которой получены практически в любой точке
Мирового океана.
Данные о распределении площадей (частей) Атлантического,
Индийского и Тихого океанов с различными значениями z6 со-
держатся в табл. 5.9 [47].
Таблица 5.9
Прозрачность по белому диску в океанах
*6, М Площадь океанов, %
Атлантический Индийский Тихий
10 5 3 3
10-20 22 15 18
20-30 36 40 30
30-40 31 39 39
40 6 3 10
Сведения о значениях z6 в морях и заливах можно получить из
табл. 5.10. Наиболее мутные воды (z6 < 10 м) находятся в при-
брежных зонах материков и вблизи островов.
Таблица 5.10
Прозрачность по белому диску в морях и заливах
Район м
Черное море 5-28
Феодосийский залив 14
Балтийское море (Финский
и Ботнический залив) 6-12
Средиземное море:
центральная часть 20-50
прибрежные районы до 20
Баренцево море 6-24
Карское море 2-25
Панамский залив 10
Бенгальский залив 45
192
На основании вышеизложенного рассмотрим последователь-
ность определения оптических характеристик морской среды,
необходимых для оценки дальности действия ЛСВ в море.
Если известно значение прозрачности по белому диску z6, ко-
торое можно взять из табл. 5.9, 5.10, то из соотношения [21]
e = (4,7...5)/z6; А = 0,955-0,035/е (5.16)
можно найти показатель ослабления е, вероятность выживания
фотона А = ст/е.
Воспользовавшись соотношениями
Фо=Ю-3
' 0,4 +7,83s+ 3,65е2'
k 0,955s-0,03
Кас
1-Фо
Фо
(5-17)
можно найти коэффициент асимметрии индикатрисы рассеяния
Кае и рассчитать параметр индикатрисы рассеяния ц и ее значе-
ние в направлении обратного рассеяния в соответствии с фор-
мулами
Ц =
<у2> = 0,021 +
0,765 .
1 + К^’
2
1 + К/
(5.18)
(5-19)
Полученные таким образом гидрооптические характеристики
могут быть использованы для оценочных расчетов дальности
действия ЛСВ в море.
7 — 1091
Глава 6. МОДУЛЯЦИОННАЯ ПЕРЕДАТОЧНАЯ
ФУНКЦИЯ СРЕДЫ РАСПРОСТРАНЕНИЯ
ИЗЛУЧЕНИЯ
Перенос оптического изображения в рассеивающей среде
(атмосфере, море) при естественном (солнечном) освещении,
как известно, сопровождается ухудшением его качества. Дейст-
вительно, согласно пространственно-частотным представлени-
ям, основанным на математическом аппарате преобразований
Фурье, пространственное распределение яркости любого объек-
та всегда можно представить в виде некоторого набора (спек-
тра) пространственных частот, каждая составляющая которого
имеет определенную амплитуду и фазу. Слой рассеивающей
среды пропускает каждую из этих составляющих с некоторым
коэффициентом передачи, зависящим от пространственной час-
тоты. В результате первоначальный пространственно-частот-
ный спектр объекта искажается.
Степень искажений, вносимых рассеивающей средой в фу-
рье-спектр объекта, можно описать с помощью модуляционной
передаточной функции (МПФ) среды TCJI(yx, vy), которая пред-
ставляет собой отношение истинного и наблюдаемого контра-
стов, где под наблюдаемым контрастом понимают контраст в
плоскости входного зрачка приемной оптической системы в виде
функции пространственных частот. Зная степень падения контра-
ста тест-объекта с пространственным периодом I = Hv, где v -
пространственная частота, можно оценить качество видения де-
талей объекта, линейные размеры которых порядка I. При этом
194
результирующая МПФ пассивной системы видения может быть
представлена в виде произведения МПФ среды и МПФ изобра-
жающей системы (см. главу 2).
6.1. Наблюдаемый контраст в изображении объекта
Обобщим понятие МПФ на систему активного видения, рабо-
тающую в рассеивающей среде [13, 18].
Пусть rs0 - координата точки пересечения оси диаграммы на-
правленности источника rs0 = rSil (ЛСВ первого типа (см. § 1.4)),
приемника rj0-^n (ЛСВ третьего типа) или обеих осей
'<о = Кн = бп (ЛСВ второго типа) с поверхностью объекта (см.
рис. 3.16). Представим соотношение (3.69), описывающее про-
цесс формирования изображения в активной системе наблюде-
ния, также в виде интеграла свертки:
^(По) - Р. ]{р(П)#)(По -rs)drs, (6.1)
-00
где коэффициент пропорциональности выбран из условия
нормировки функции H{rs} \
fyd(rs)drs=\.
-00
EQ 00
Величина РХ=РО —~—- f рЧ,(б)£п(^)^ представляет собой
—00
мощность сигнала от бесконечно протяженного объекта с коэф-
фициентом отражения р = 1. Представим функцию H(rs) в виде
H(rs) - ; (6.2)
-00
где Ewn(rs) - распределение освещенности, создаваемое в плос-
кости объекта реальным и «фиктивным» источниками с диа-
7*
195
( rs - 1 <•
граммами направленности <ри J -—, оси которых совпадаю^,
’ < z
с направлениями пОи, пОп:
Ea(rs -ri0) = —L- J JcpfZL-Zko L(Z; ?s-r)dr.
^nZ -00 \ z J
(6.3)
Здесь r - переменная интегрирования;
e( ) - распределение освещенности в плоскости объекта от,
точечного мононаправленного источника единичной
мощности (ФР среды).
Назовем H(rs) нормированной функцией рассеяния (ФР) ак-
тивной системы наблюдения, по аналогии с соответствующей
характеристикой оптических систем, хотя в отличие от послед-
ней она учитывает влияние, которое оказывают на структуру
изображения все элементы, принимающие участие в формирова-
нии изображения: источник, приемник, рассеивающая среда.
Смысл H(rs) можно легко понять на примере ЛСВ, работающей
в свободном пространстве.
В свободном пространстве (в отсутствие рассеяния и по-
глощения) e(rs - г) = S(r5 - г) и функция H(rs) представляется в
виде произведения диаграмм направленности источника и при-
емника
Фи ~ Фи - I » / - X
Н(Ы = -------)!< ; J К J i = Ou„z2.(6.4a)
Пф. - Ф.Р-<₽,
J \ 7 I \ 7
-оо \ х / \ L /
Для ЛСВ с широким углом подсвета QH и малым телесным
углом приема Qn, т.е. когда » Qn, из (6.4а) следует
196
(6.46)
Воспользовавшись соотношением (3.22), описывающим связь
диаграммы направленности фп с ФР приемной оптической систе-
мы Нот, и приняв, что гф « гк, для ФР Hom(rs), редуцированной
в плоскость объекта, получим
ФпИ = яопт(ПХи2-
Подставляя это выражение в (6.46), находим
H(rs) = Hom(rs).
Таким образом, для ЛСВ третьего типа функция H(rs) имеет
смысл ФР приемной оптической системы.
Для ЛСВ с узким углом подсвета и широким телесным углом
приема, т.е. когда Q„« Qn, из (6.4а) следует
Фи[-
J ь
-ел Ч
(6.4в)
Влияние рассеивающей среды в выражениях (6.4а) - (6.4в)
эквивалентно расширению диаграмм направленности источника
и приемника, которые в этом случае можно назвать эффективны-
ми диаграммами направленности. Эти эффективные диаграммы
направленности могут быть найдены согласно (6.3) сверткой
функций: ФР среды е(-) и соответствующей невозмущенной диа-
граммы направленности ф„ п источника (приемника).
Рассеяние в среде приводит к искажению структуры изобра-
жения объекта, которое не может быть устранено даже в случае
197
использования мононаправленных источника и приемника. В
этом случае для ФР активной системы наблюдения
Я(П) = — (6.5)
JJe2(rs)^
-oo
Выразив через двумерное фурье-преобразование функции рас-
сеяния оптическую передаточную функцию системы видения и оп-
ределив ее модуль, найдем МПФ активной системы наблюдения.
Для систем первого и третьего типа ФР и МПФ определяются
согласно выражениям
^34rs) = -KEw’M ; (6.6)
JJ£H,n(?sX^
-со
ПД,.п<Л)ехр(гул;)^
Г(1'3) (v) = ----------------. (6.7)
Т(0)
Тогда в соответствии с (6.3) для ЛСВ первого и третьего ти-
пов, у которых источник подсвета имеет узкую диаграмму на-
правленности, а оптический приемник - широкую (фи « фп) или
наоборот (фи » фп) МПФ системы видения выражается через
произведение соответствующих передаточных функций лазерно-
го источника Ти(у) (оптического приемника Тп(у)) и рассеи-
вающей среды Tcp(v):
Tm(y) = TK(y)T^(y) - для системы первого типа;
T<3)(v) = Tn(v)Tcp(v) - для системы третьего типа.
Перемножение передаточных функций рассеивающей среды
и лазерного источника (оптического приемника) в ЛСВ первого и
третьего типов есть следствие теоремы о свертке двух функций:
диаграммы направленности источника (приемника) и освещенно-
сти от точечного мононаправленного излучателя.
198
Для МПФ системы активного наблюдения второго типа на
основании теорем о фурье-преобразовании произведения двух
функций (прямая теорема свертки) и их интегралов (обратная
теорема свертки) [49] получим
JfT(,)(v')T(3)(v-v')<Zv'
Т(2)(У) = , (6-8)
-00
где?*0 - МПФ системы первого типа (фп » фи) с параметром
Фи1)=Фи2);
7<3) - МПФ системы третьего типа (фп « фи) с параметром
ф(п2)=ф(Л
В формуле (6.6) T(1,3)(v) выражается в виде произведения
двух функций:
r(1)(v) = 7L(v)7;p(v); r(3)(v) = Tn(v)Tcp(v), (6.9)
первая из которых есть спектр Фурье от соответствующих диа-
грамм направленности источника (приемника), а вторая - МПФ
среды, которая характеризует степень искажений, вносимых рас-
сеивающей средой в пространственно-частотный спектр изобра-
жения наблюдаемого объекта.
Поскольку МПФ системы второго типа связана с функцией
Т(у) интегральным соотношением свертки (6.8), раздельное ис-
пользование понятий МПФ среды и прибора в этом случае ока-
зывается невозможным, поскольку, как отмечалось выше, на
структуру изображения оказывают влияние все элементы, при-
нимающие участие в формировании изображения: источник,
приемник, рассеивающая среда.
Из (6.8) следует, что в системе второго типа МПФ лучше, чем
в системах первого и третьего типов. Это легко увидеть на при-
мере гауссовых моделей диаграмм направленности источника
(приемника), имеющих гауссовы фурье-спектры. В соответствии
199
с теоремой о свертке свертка двух функций Гаусса также есть
функция Гаусса с дисперсией, равной сумме дисперсий исходных
функций. Таким образом, система с двумя узкими диаграммами
направленности способна пропускать более широкую полосу
пространственных частот по сравнению с системами видения
первого и третьего типов,
В дальнейшем ограничимся рассмотрением только ЛСВ
третьего типа как наиболее просто практически реализуемого.
Третий тип систем видения включает как активные, так и пас-
сивные системы, когда объект является самосветящимся или ос-
вещен излучением Солнца. Для таких систем рассеивающую сре-
ду можно рассматривать как один из элементов системы видения.
Найдем, как изменяется в рассеивающей среде наблюдаемый
контраст в изображении объекта при работе ЛСВ днем, когда
объект освещен как лазерным, так и солнечным излучением. Бу-
дем считать, что фотоприемник ЛСВ является накопительным
прибором и реагирует на энергию в заданный промежуток вре-
мени (время накопления).
Зададим распределение коэффициента отражения в плоскости
объекта в виде
Р<Л ) = Ро 0 + «обcos 2л ) = Re р0 {[1 + к^ exp(z 2nvrs)]}, (6.10)
Роб + Рф , ,
где р0 =----—- - среднее значение коэффициента отражения;
роб, рф - максимальное и минимальное значения p(rs), обо-
значаемые далее как коэффициенты отражения объ-
екта и фона;
v - пространственная частота;
Роб Рф W С 1
ко6 =------— - истинный контраст объекта на фоне.
Роб + Рф
С учетом введенных обозначений
Роб = Ро О + Коб), Рф = Ро (1 - к„б).
200
Подставив (6.10) в (6.1), получим следующее выражение для
энергии лазерного сигнала в изображении объекта:
W(ft0)=P(rs0)tm =
= П{Ро[1 + Кобехр(12лУг,)]}Я(г,0-г,)</г,= (6.11)
-оо
= ^0[1 + ko67’(v)coS2kvts0]; Wo = ^p0, W^P^,
где W* - энергия сигнала от бесконечно протяженного объекта с
коэффициентом отражения р = 1.
Из (6.11) следует, что контрасты изображения и объекта свя-
заны соотношением
W -W
(612)
"об+"ф
которое показывает, что МПФ среды /^(v) представляет собой
отношение наблюдаемого Ко6 и и истинного к^ контрастов в ви-
де функции пространственной частоты наблюдаемой структуры
объекта. В (6.12) 1Го6, Яф - энергия сигнала от объекта и фона;
JV +W
IVO - об —- среднее значение энергии сигнала, обуслов-
ленного лазерным подсветом; /им - длительность зондирующего
импульса.
Вместе с сигналом, несущим информацию об объекте наблю-
дения, на фотоприемник оптической системы поступает также
помеха обратного рассеяния (ПОР), вызванная обратным отра-
жением зондирующего лазерного импульса от толщи среды.
Энергия этой помехи Япор зависит от времени накопления tH и
определяется в соответствии с выражением
^пор ~ РпорО)0^’
где /’порО) - зависимость мощности ПОР от времени;
t0 - время начала регистрации ПОР.
201
Поскольку 1РПОР не зависит от rj0, то формулу (6.11) можно
записать в виде
^(г,о) = [1 + Ko6Tcp (v) cos 2 л vrs0 ] + 1РПОр =
1 + ^пор/^о
где величина
Ко6Гч>(У)
к —
обн 1 + IF IF
1 + "ПОР/ "0
(6.13а)
представляет собой наблюдаемый контраст изображения с уче-
том ПОР от лазерного источника.
Соотношение (6.13а) справедливо и для системы видения,
работающей при солнечном освещении, поскольку она отно-
сится к системам видения третьего типа: солнечный источник
равномерно освещает все поле обзора, а прием осуществляется
узкой диаграммой. При стационарном (солнечном) освещении
средние значения энергии сигнала и энергии ПОР соответст-
венно равны
ЙЛС _ pCf . rrrc ПС .
"о _ 'о ‘н ’ "ПОР 'пор'н >
где Pq,
ПС
•'ПОР
- средние значения мощности сигнала и мощности
ПОР при солнечном освещении;
+ ff*
---— - среднее значение энергии сигнала, обуслов-
Об
2
ленного солнечным излучением.
Таким образом, когда объект освещен как лазерным, так и
солнечным излучением, наблюдаемый контраст в соответствии с
(6.13а) описывается выражением
Ko6rcp(V)
06 Н 1+^пор+^пор
^о+^ос
(6.13i
202
Энергетические соотношения, необходимые для расчета на-
• > нодаемого контраста, приведены в главе 7.
6.2. Модуляционная передаточная функция атмосферы
Атмосфера является сложным фильтром пространственных
частот, так как представляет собой случайно-неоднородную сре-
iy, содержащую дискретные рассеиватели - аэрозоли. Однако,
поскольку фильтрующие свойства турбулентной и аэрозольной
а । мосферы сказываются в существенно различных областях про-
> । ранственных частот, МПФ для таких состояний атмосферы мо-
। у г быть определены и исследованы независимо [20].
МПФ аэрозольной атмосферы. Пусть точечный монона-
правленный источник света расположен на границе бесконечно
протяженного однородного слоя светорассеивающей среды. Из-
лучение направлено вдоль оси z перпендикулярно слою. МПФ
i лоя аэрозольной атмосферы Т„р определим согласно (6.9):
jj£(r)exp(zvr)dr
?LT,(v) = -^----------,
ffW
—со
। де E(r) - распределение освещенности, создаваемое в плоско-
с ги z = z0 точечным мононаправленным источником единичной
мощности.
Освещенность в рассеивающей среде определяется либо сум-
марным действием прямого и рассеянного излучения, если точка
находится в зоне пучка, либо действием только рассеянного из-
лучения, если точка наблюдения расположена вне зоны пучка.
11рямая составляющая освещенности подчиняется закону ослаб-
ления Бугера. Освещенность, создаваемую рассеянным излуче-
нием, можно представить в виде суммы освещенностей, обуслов-
ленных соответственно одно- и двукратным (многократным)
рассеянием (рис. 6.1).
203
Рис. 6.1. Схема распространения световых пучков в рассеивающей среде:
а - однократное рассеяние; б - многократное рассеяние
Освещенность за счет однократного рассеяния складывает-
ся из элементарных значений освещенности dEb создаваемых
излучением, которое рассеивается элементарным объемом среды
dV\, расположенным на оси зондирующего пучка. Освещенность
двукратного рассеяния Е2 складывается из элементарных осве-
щенностей dE2, которые возникают при последовательном взаи-
модействии излучения с парами элементарных объемов среды
dVi и dV2. При больших значениях показателя рассеяния среды
возникает необходимость учета многократного рассеяния.
204
В результате действия процессов рассеяния первоначально
коллимированный пучок расширяется, что эквивалентно ушире-
нию ФР и ухудшению МПФ.
МПФ для условий атмосферных дымок и туманов количест-
венно может быть определена в рамках малоуглового приближе-
ния /см. приложение I, формула (24)/
Гат.р(У) = ехР -Лт +
Ат
J(2npzv)2+1>
(6.14)
где Л = ст/в - вероятность выживания фотона;
ст - показатель рассеяния;
т = ez - оптическая толщина слоя среды;
v = 1/1 - пространственная частота, связанная с угловой час-
тотой v' = z/l соотношением v = v7z.
Общим свойством МПФ рассеивающей среды является то,
что она представляет собой монотонно убывающую функцию
пространственной частоты. При v —> оо МПФ определяется пото-
ком прямого нерассеянного излучения, прошедшего через слой, и
асимптотически стремится к предельному значению: p(v = со) =
= ехр(-Лт).
На рис. 6.2 приведены МПФ слоя аэрозольной атмосферы,
рассчитанные по (6.14) для X = 1,06 мкм и двух ситуаций:
1) Л,р(у) _ оптические параметры атмосферы: Л = 1, £ =
= 0,17 км'1 (SM= 10 км), ц = 0,3; длина трассы z = 5 км (кривая 7).
2) T”aTp(v) - оптические параметры атмосферы: Л = 1, е =
= 2,66 км'1 (5М= 1 км), ц = 0,17; длина трассы z = 1 км (кривая 2).
Атмосфера, оставляя неискаженными высокие пространст-
венные частоты (они передаются по закону Бугера), искажает
низкие пространственные частоты, соответствующие простран-
ственным масштабам I = 1/v > 600 м.
МПФ турбулентной атмосферы. При распространении кол-
лимированного пучка в случайно-неоднородной среде возникают
искажения волнового фронта, которые приводят к его уширению
и случайным смещениям. При взаимодействии светового пучка с
205
мелкими (по сравнению с размером пучка) турбулентными вих-
рями он уширяется, но практически не отклоняется, а при взаи-
модействии с турбулентными вихрями, размер которых больше
диаметра пучка, он отклоняется как целое.
Рис. 6.2. МПФ слоя аэрозольной атмосферы:
1 - F„p(v);2 - r'„.p(v)
В случайно-неоднородной среде мгновенная «картина» сече-
ния коллимированного пучка носит случайный характер и имеет
вид уширенного пятна (из-за влияния мелких вихрей радиусом
гм), центр которого отклонен от оси на расстояние гс из-за пре-
ломления на крупных вихрях (рис. 6.3, а). Поскольку турбулент-
ные вихри при своем движении пересекают световой пучок, он
будет непрерывно отклоняться в различных направлениях с ха-
рактерным временем А/ = Z>/|u|, где D - диаметр пучка, и - ско-
рость поперечного движения вихрей. Такое блуждание пучка по-
казано на рис. 6.3, б. Поскольку пятно перемещается из одного
места в другое за время порядка А/, то «усредненная» картина
пучка (длительное усреднение t » А/) будет иметь вид уширен-
ного пятна со среднеквадратичным радиусом пучка (гэ2) :
<^)=^2> + <Гс2>-
206
б
Рис. 6.3. Схема взаимодействия лазерного пучка с турбулент-
ными вихрями:
а - уширение и отклонение лазерного пучка; б - временные блу-
ждания лазерного пучка
207
Вследствие случайного характера искажений волнового фронта
МПФ турбулентной атмосферы T„.£v) также является случайной и
ее статистические характеристики зависят от времени осреднения.
При достаточно большом временном осреднении для МПФ турбу-
лентной среды имеем /приложение 2, формула (35)/:
TaTT(v) = exp[-0,55C2fc2z(p)573],
p = Xvz = vHV^=^v',
(6.15)
где С2 - структурная постоянная показателя преломления;
к = 2л/Х - волновое число;
z - длина трассы;
v = 1/1 - пространственная частота в плоскости объекта;
v„ = 1//и - пространственная частота в плоскости изображения;
v'-угловая пространственная частота;
/об - фокусное расстояние объектива.
Данная МПФ соответствует записи изображения с большим вре-
менем экспозиции, значительно превосходящим время «заморо-
женности» атмосферы. При короткой экспозиции в среднем фик-
сируется менее искаженное изображение, чем при большой
экспозиции. При этом меньшим искажениям подвержены мелкие
детали изображения, соответствующие большим пространствен-
ным частотам [24].
Из выражения (6.15) видно, что МПФ прямо зависит от интен-
сивности турбулентности на трассе. Большой диапазон наблюдае-
мых значений С2 в приземном слое атмосферы обусловливает
значительные вариации МПФ. На рис. 6.4 приведены МПФ турбу-
лентной атмосферы для сильной (С2 = 1013 м'2/3) - кривая 1, сред-
ней ( С2 = 1014 м’273) - кривая 2 и слабой (С2 = 1015 м'273) - кривая 3
турбулентностей на трассе z = 3000 м для Л, = 1,06 мкм. Как видно
из рис. 6.4, турбулентная атмосфера является фильтром низких
частот. Для средней турбулентности масштабы I = 1/v порядка
5 см и меньше не передаются через атмосферный канал.
208
Рис. 6.4. МПФ слоя турбулентной атмосферы:
1 - сильная турбулентность; 2 - средняя; 3 - слабая
6.3. Модуляционная передаточная функция морской среды
МПФ рассеивающей морской среды. Море по отношению к
оптическому излучению является рассеивающей и поглощающей
средой, в которой вероятность выживания фотона Л = о/е изме-
няется в широких пределах (Л = 0,3...0,9). Процессы рассеяния и
поглощения света в морской среде заметно влияют на качество
изображения даже при сравнительно небольших расстояниях
(1... 10 м) между объектами.
Для МПФ слоя морской среды также справедлива формула
(6.14), но здесь из-за сильной вытянутости индикатрисы рассея-
ния морской воды параметр ц принимает значения 0,06...0,08.
Вытянутость индикатрисы рассеяния определяет скорость спада-
ния МПФ до своего асимптотического значения Гмр(у = °о) =
- ехтр(-Л£г). Чем сильнее вытянута индикатриса рассеяния (чем
меньше параметр ц), тем больше значение МПФ на данной фик-
сированной пространственной частоте.
На рис. 6.5 приведены МПФ слоя морской среды с оптиче-
скими параметрами Л= 0,8; е= 0,15 м1; ц= 0,07, рассчитанные
209
по (6.14) для двух длин трасс z = 30 м - кривая 1 и z = 50 м - кри-
вая 2. Из рисунка видно, что с увеличением пространственной
частоты Тм p(v) убывает, приближаясь к асимптотическому значе-
нию exp(-A£z). С увеличением длины трассы МПФ ухудшается.
Для практических расчетов можно считать, что Тм p(v) = exp(-A£z),
если v' = z//> 100 рад-1 [18].
Рис. 6.5. МПФ слоя рассеивающей морской среды:
z = 30m(/); z = 50m(2)
МПФ турбулентной морской среды. Предельное принципи-
ально возможное разрешение в системах видения в море опреде-
ляется турбулентными флуктуациями показателя преломления
морской воды, которые создаются флуктуациями температуры и
солености, а также частицами типа прозрачного планктона. Из-за
турбулентности наблюдение предельно малых деталей объекта
оказывается невозможным, так как она приводит к «завалу»
МПФ водного слоя на больших частотах. Оценить влияние на
МПФ турбулентной морской среды флуктуаций показателя пре-
ломления морской среды можно по следующей формуле [70]:
210
TM.Av')=exP
р2к2(Дп2)г
За
P = Xv',
(6.16)
где (Ди2) « 0,6-10'8(Д^) - дисперсия флуктуаций показателя пре-
ломления (Ли2) = 10'9;
(At2) - дисперсия флуктуации температуры, °C;
кп =2mil'k - волновое число;
и = 1,34 - показатель преломления морской воды;
а - характерный пространственный масштаб показателя пре-
ломления (а = 50 см);
z - длина трассы;
v' - угловая пространственная частота.
На рис. 6.6 приведены МПФ турбулентной морской среды,
рассчитанные по формуле (6.16) при значениях X = 0,5 мкм; (Ал2) =
= 10'9; а = 50 см и различных дальностях наблюдения. Кривая 1
представляет собой МПФ при дальности наблюдения z = 100 м, кри-
вая 2 - при z - 30 м и кривая 3 - при z = 10 м. Из рис. 6.6 следует, что
на расстоянии z = 100 м для выбранных выше типовых параметров
турбулентности ((Ал2) и а) морской среды в области угловых частот
v' > 103 рад-1 МПФ практически уменьшается до нуля.
Рис. 6.6. МПФ слоя турбулентной морской среды:
z = 100 м(/); z=30m(2); z= 10м(3)
211
Теоретические и экспериментальные исследования показы- 1
вают, что предельной разрешающей способностью при наблюде- 1
нии в море можно считать величину v' = 103 рад'1 [47]. I
МПФ взволнованной морской поверхности. Когда подвод- 1
ные объекты наблюдают через поверхность моря, имеет место 1
дополнительное искажение изображения из-за случайного харак- 1
тера преломления света на взволнованной границе раздела «воз- ’
дух - вода». Это искажение достаточно просто может быть учте- }
но только для усредненного изображения. В этом случае МПФ i
системы наблюдения разбивается на произведения соответст-
вующих МПФ атмосферного канала, морской среды и взволно-
ванной морской поверхности. Для МПФ морской поверхности,
описывающей ухудшение среднего контраста за счет волнения, 1
имеем [18, 71]: |
4п(*') = ехр
0,5v'2o2
(6.17)
о2 = 0,003+ 0,00512ц,,
У 7 в 7
где v' = zll - угловая пространственная частота, рад'1;
z - глубина, на которой находится объект наблюдения;
ив - скорость ветра, м/с;
п - показатель преломления воды;
о2 - дисперсия уклонов морской поверхности.
МПФ взволнованной морской поверхности при большом
времени осреднения для различных скоростей ветра ий приведена
на рис. 6.7. Как видно из рисунка, с увеличением скорости ветра
угловая разрешающая способность падает и вследствие этого ос-
таются видимыми только крупные детали и тем крупнее, чем
глубже расположен объект наблюдения. Структура «мгновенно-
го» изображения может сильно отличаться от структуры усред-
ненного изображения. Оно дробится, в нем появляются разрывы,
форма деталей искажается. Качество «мгновенного» изображе-
ния сильно зависит от скорости ветра, времени осреднения, вы-
Z1Z
соты наблюдения и размеров элементов объекта, подлежащих
различению.
Рис. 6.7. МПФ взволнованной морской поверхности при
различных скоростях ветра
При работе ЛСВ через границу взволнованной морской по-
верхности результирующая МПФ морской воды находится пере-
множением величин
Глава 7. ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ
ПРИ ЛАЗЕРНОМ ВИДЕНИИ
В РАССЕИВАЮЩИХ СРЕДАХ
Энергетические соотношения найдем для трех вариантов сис-
темы видения:
ЛСВ находится в атмосфере;
ЛСВ находится под водой;
ЛСВ находится над поверхностью моря, и наблюдение ведет-
ся через границу раздела «воздух - вода».
Указанные режимы работы отличаются степенью влияния
среды на энергетику отраженного от объекта сигнала.
Если в условиях прозрачной атмосферы энергетическое ос-
лабление сигнала учитывается множителем Бугера, входящим в
уравнение локации, то в случае морской среды, когда заметную
роль приобретает многократное рассеяние света, закон Бугера
уже неприменим, и характер затухания отраженного сигнала
сильно зависит от вклада в сигнал многократно рассеянного сре-
дой излучения, уровень которого с увеличением расстояния до
объекта возрастает.
7.1. Энергетические параметры изображения
и методы их расчета
Рассмотрим ЛСВ третьего типа, когда источник освещает
широкое поле зрения, а отраженное объектом излучение регист-
рируется многоэлементным приемником (рис. 7.1). Пусть источ-
ник с диаграммой направленности 2аи и многоэлементный при-
214
емник с «элементарной» диаграммой направленности 2ап распо-
ложены рядом на расстоянии (базе) Ь, а расстояние z до плоско-
сти объекта наблюдения значительно больше базы z » b, поэто-
му при расчете мощности сигнала, образующего изображение,
можно положить b = 0. Положим также, что объект наблюдается
на протяженном фоне, находящемся в непосредственной близо-
сти от него (например, дом у подножия холма или подводный
объект на морском дне). Объект расположен в центре поля зре-
ния приемной системы; объект и фон будем для простоты счи-
тать плоскими, диффузно отражающими. Средний по объекту
коэффициент отражения обозначим ро6, средний по фону - рф.
Рис. 7.1. Схема активной системы видения
В общем случае сигнал, формирующий элемент изображения,
слагается из следующих составляющих:
Р = Ро6 + Pnaf + Рс - при ориентации «элементарной» прием-
ной диаграммы на объект;
Р = Рф + Рпор + Рс - при ориентации «элементарной» приемной
диаграммы на фон.
215
Здесь Pog - мощность сигнала, который формируется в элементе
изображения лазерным излучением, отраженным от
объекта;
Рф - мощность сигнала, отраженного от фона;
Рпор - мощность помехи обратного рассеяния (ПОР), вы-
званной обратным отражением зондирующего им-
пульса от толщи среды;
Рс = ^об + ^пор “ мощность солнечной засветки,
где Р'б - мощность солнечного излучения, отраженного от объ-
екта (фона);
Рпор _ мощность ПОР, возникающей в результате рассеяния
солнечного излучения в атмосфере (море).
На рис. 7.2 схематически показан профиль светового эхо-
сигнала Р, поступающего на приемник при импульсном освеще-
нии. На фоне плавно изменяющейся помехи обратного рассеяния
имеется «всплеск», соответствующий сигналу, пришедшему от
объекта. При этом максимум ПОР от импульсного источника ре-
гистрируется приемником раньше, чем сигнал, отраженный от
объекта.
Рис. 7.2. Профиль эхо-сигнала при импульсном
освещении объекта в рассеивающей среде
216
Применение импульсных лазерных источников в системах
видения позволяет осуществить отсечку большей части ПОР пу-
тем введения стробирования по дальности. При этом эффектив-
ная отсечка ПОР происходит при пространственном положении
строба в области обнаруживаемого объекта, когда длительность
строба А/С1р равна длительности зондирующего импульса ?им:
Л?С1р = /им. В этом случае фотоприемник принимает сигнал от объ-
екта и помеху обратного рассеяния с глубины пространства
А/ = utm/2 , где и- скорость света в среде. Использование одно-
временно импульсного стробирования и узкополосной спек-
тральной фильтрации позволяет значительно ослабить и уровень
помехи от солнечной засветки.
. Рассмотрим методику расчета составляющих сигнала, фор-
мирующего элемент изображения.
Мощность сигнала в изображении от объекта. Мощность
сигнала в изображении от объекта РаЪ при ориентации ЛСВ на
середину объекта согласно (3.69) описывается выражением
ру Q »
Ро5 (7.1)
-оо
где Еп = лгп2; Qn=7ta2; p(rs) - распределение коэффициента
отражения на объекте. Объект наблюдения считается плоским,
ограниченным, диффузно отражающим; Еи, Еп - освещенности в
плоскости объекта от действительного и «фиктивного» (с пара-
метрами приемника) источников.
Мощность сигнала в изображении от фона. Мощность сиг-
нала в изображении от фона Рф, представляющего собой плоскую
диффузно отражающую бесконечно протяженную поверхность,
описывается выражением
Рф = Р°£П°ПРФ fp?H(rJ£n(rJJrs, (7.2)
-оо
которое можно получить из (7.1), если считать фон однородным с
коэффициентом отражения рф.
217
Мощность помехи обратного рассеяния. В малоугловом
приближении выражение для мощности помехи обратного рас-
сеяния Рпор, когда источник и приемник расположены на базе Ь, а
оси их параллельны, имеет следующий вид [14]:
^ПОР Jj£„(r,)En(|r,-b\)drs. (7.3)
( <3XL)t
Здесь р = — имеет смысл коэффициента отражения слоя
\ ® /
- Ц.м с
среды толщиной —в обратном направлении;
и - скорость света в среде;
tm - длительность зондирующего импульса;
х* - значение индикатрисы рассеяния х(у) в обратном на-
правлении (у = л).
Мощность помехи от солнечной засветки. В дневное время
на входе ЛСВ появляется засветка от солнечного излучения, ко-
торая увеличивает мощность сигнала от объекта (фона) и приво-
дит к появлению дополнительной помехи обратного рассеяния,
обусловленной рассеянием солнечного света в атмосфере (море).
Мощность солнечной засветки определяется согласно формуле
Рс=ГК0ОТДХф(лгп2)Оп, (7.4)
где АХф - полоса пропускания фильтра;
Zc - спектральная плотность яркости солнечного излучения
на входе ЛСВ от объекта, фона или ПОР.
Нахождение Zc является задачей теории переноса бесконечно
широкого (солнечного) пучка в системе «атмосфера - Земля»
(для атмосферной ЛСВ) и «атмосфера - море» (для подводной и
надводной ЛСВ) [13, 49, 60].
Закономерности ослабления энергии лазерного сигнала,
отраженного от фона (объекта) и рассеивающей среды. По-
скольку структура формул для Р^, Рф, и РПОР одинакова, то ха-
218
рактер затухания сигнала от фона (объекта) и помехи обратного
рассеяния будет также одинаков.
В малоугловом приближении для гауссовых диаграмм на-
правленности источника, приемника и индикатрисы рассеяния
вида (5.5) из (7.2) имеем следующее выражение для мощности
сигнала, отраженного от бесконечно протяженного объекта (фо-
на) /приложение 1, формула (20)/:
= КоптРоб/ • а2п ехр[-2т(1 - Л)] х
(7.5)
Г>/(Лт)3 + ехр{-2тЛ[1 + Г>/(Лт)3 ]}
1 + Г>/(Лт)3
Л = -; t = e-z; Z> = —-(а£'2Гэ) ; гэ2 - (а2 + a2)z2; ги п « a z,
е 4ц
где Ро - мощность источника излучения;
Ро6,ф _ коэффициент отражения бесконечно протяженного
объекта, фона;
z - длина трассы;
2аи - угол расходимости излучения источника;
2ап - мгновенный угол зрения приемника;
2гп - диаметр входного зрачка объектива приемного устройства;
е, а, ц - показатели ослабления, рассеяния и параметр инди-
катрисы рассеяния;
- коэффициент пропускания оптической системы ЛСВ.
Соотношение (7.5) справедливо для сред с сильно вытянуты-
ми индикатрисами рассеяния. Оно обеспечивает получение дос-
таточно хороших результатов как в условиях атмосферной дым-
ки, так и морской среды. В общем виде (7.5) может быть
представлено следующим образом:
P(z) = P1(z) + P2(z),
гдеР|(г) - составляющая мощности отраженного сигнала, кото-
рая формируется прямым (нерассеянным) светом и
описывается уравнением локации;
219
P2(z) - составляющая мощности отраженного сигнала, обу-
словленная рассеянным светом.
Из сказанного следует, что отраженный объектом сигнал
формируется как прямым (нерассеянным), так и рассеянным
светом. Свет в оптически плотной среде претерпевает много-
кратное рассеяние, но, так как индикатриса рассеяния среды
сильно вытянута вперед, значительная часть рассеянной энер-
гии распространяется в том же направлении, что и прямая ра-
диация, улучшая тем самым энергетику зондирующего импуль-
са. В результате временные задержки прихода к объекту
рассеянных фотонов малы, и длительность отраженного сигна-
ла в первом приближении совпадает с длительностью зонди-
рующего импульса. Кроме того, характер затухания отраженно-
го сигнала сильно зависит от вклада в сигнал многократно
рассеянного средой излучения, уровень которого с увеличением
оптического расстояния т возрастает. Когда выполняются нера-
венства
D / П дх D
----?«ехр(-2тЛ), -----
(Ат)3 (Ат)3
смысл которых состоит в том, что в приемник не попадает мно-
гократно рассеянное средой излучение, ослабление сигнала в
среде происходит по закону Бугера, и формула (7.5) переходит в
уравнение локации:
P(z)_K
ОПТРоб,Фгп2 exp(-2ez) а3
()
На больших расстояниях, когда
£> z „
----7 » ехр(-2тЛ),
(Ат)3
сигнал формируется только рассеянным светом, и мощность сиг-
нала, как это следует из (7.5), равна
220
P{z) ^оптРоб,фГп г T /1 л
-Н =----------ехр[-2т(1 - Л)]
Pq z
£>/(Ат)3 а2
1 + Z>/(At)3 а2+а2
КогггРоб,фгп2 exp[-2sz(l - A)]a2
4p2(As)z3+(a2+a2)z2
(7-7)
В этой области уравнение локации неприменимо, так как значи-
тельно занижает уровень сигнала по сравнению с его действи-
тельным значением.
Проиллюстрируем вышеприведенные энергетические соот-
ношения на примерах наземной и подводной ЛСВ.
Параметры наземной ЛСВ: длина волны излучения А, = 1,06 мкм;
импульсная мощность источника излучения Ро = 107 Вт; длитель-
ность импульса и длительность строба Azcip = t„, = 10“7 с; диа-
грамма направленности источника 2аи = 0,0175 рад (1°); мгно-
венный угол поля зрения приемника 2ап = 10“* рад; диаметр
входного зрачка приемного объектива 2г„ = 0,06 м; коэффициент
пропускания оптической системы Копт = 0,7.
Оптические характеристики среды соответствуют туманной
дымке (SM = 1 км) с е = о = 2,66-10-3 м-1; ц = 0,16. Коэффициент
отражения объекта = 0,3. На рис. 7.3 приведена зависимость
мощности сигнала, отраженного от протяженного объекта (фо-
на), от расстояния z. Кривая 1 описывает мощность сигнала, рас-
считанную согласно уравнению локации (7.6), кривая 2 - соглас-
но формуле (7.5). Видно, что, начиная с некоторого расстояния
(z = 1000 м), уравнение локации дает заниженное значение мощ-
ности сигнала. При z = 2000 м сигнал, рассчитанный согласно
уравнению локации, на порядок меньше сигнала, рассчитанного в
соответствии с формулой (7.5).
Параметры подводной ЛСВ: 0,5 мкм; Ро = 108 Вт; Л?С1р =
= = IO”8 с; 2аи = 0,174 рад (10°); 2ап = 0,174/А(А= 6 • 102 чис-
ло элементов в кадре); 2гп = 0,12 м; Кот = 0,7.
Оптические параметры воды: Л = 0,8; е = 0,2 м'1; хп = 0,04;
ц = 0,077. Коэффициент отражения объекта = 0,1.
На рис. 7.4 приведена зависимость мощности сигнала, отра-
женного от протяженного объекта (фона), от расстояния z. Кри-
221
вая 1 описывает мощность сигнала, рассчитанную согласно урав-
нению локации (7.6), кривая 2 - согласно формуле (7.5). Из ри-
сунка следует, что во всем диапазоне дальностей до объекта z =
= 10...40 м уравнение локации не может быть использовано, так
как приводит к сильно заниженному результату. При z = 10 м
сигнал, рассчитанный согласно уравнению локации, в пять раз
меньше сигнала, рассчитанного по формуле (7.5), а при z = 40 м -
на четыре порядка. Таким образом, формулу (7.5) можно рас-
сматривать как обобщение уравнения локации на сильно
рассеивающие среды.
Рис. 7.3. Зависимость коэффициента передачи мощности
сигнала от расстояния до объекта для атмосферной ЛСВ
В малоугловом приближении зависимость мощности помехи
обратного рассеяния от расстояния такая же, как у сигнала, но
уровень мощности ПОР зависит от коэффициента отражения
элемента объема рассеивающей среды в обратном направлении.
Характер затухания ПОР определяется соотношением между
уровнями сигналов, сформированных за счет однократно и мно-
гократно рассеянного света:
Aiop(z) = Р nopi(z) + Т’порг^Х
где Pn0P1(z) - мощность ПОР в приближении однократного рас-
сеяния:
222
•^TIOPl (z)_ <ОХП^ИМ V exp(-2ez) a2
Po I 8 J z аи+ап
ЛгоггС2)_ мощность ПОР от многократно рассеянного света:
PnOP2(z) = к (гп2 exp[-2ez(l - Л)]а2
Ро Ч 8 J 4p.2(Ae)z3+(а2+a2)z2
Рис. 7.4. Зависимость коэффициента передачи мощности
сигнала от расстояния до объекта для подводной ЛСВ
С увеличением z вклад первой кратности рассеяния в мощ-
ность ПОР падает. В сильно рассеивающей среде (морской воде)
к моменту регистрации отраженного объектом зондирующего
импульса вклад в Рпор составляющей первой кратности рассеяния
мал, и для оценки ПОР можно пользоваться асимптотической
зависимостью (7.9).
Конкретный характер затухания сигнала и помехи обратного
рассеяния, граница применимости уравнения локации и прибли-
жения однократного рассеяния, расстояние, на котором наступа-
ет асимптотический режим, где сигнал формируется рассеянным
223
светом, зависят как от оптических характеристик среды е, а, ц, I
так и параметров ЛСВ - угловых апертур источника аи и прием-1
ника ап. I
Оценить границу применимости уравнения локации и при- ]
ближения однократного рассеяния можно из условия выполнения I
неравенства I
ZT^==^2T^<exP(-2Aez)- (71°) I
(Ат) 4ц Aez 1
Из (7.10) следует, что в условиях атмосферных дымок (.S’M = 1
= 1...10 км) и узких диаграмм направленности источника и при- 1
емника (аи < 1°, аи » ап) уравнения локации и приближения од- 1
некратного рассеяния могут быть использованы для расчета I
энергетических характеристик наземных ЛСВ во всем диапазоне I
дальностей, представляющих практический интерес z < SM. I
7.2. Энергетические соотношения при лазерном видении |
в атмосфере 1
Мощность сигнала в изображении от объекта. Для нахож- 1
дения мощности сигнала в изображении от ограниченного объек- 1
та Роб воспользуемся формулой (7.1). 1
Будем считать объект плоским, диффузно рассеивающим, с I
гауссовым распределением коэффициента отражения: |
Р(Гь) = Роб ехР[- г-!го ], (7.11) J
где г0 - эффективный размер объекта. 1
Для гауссовых моделей источника и приемника нормирован- 1
ные освещенности в плоскости объекта от действительного и 1
«фиктивного» источников определяются соотношениями |
exp[-r2/(a2z2)] |
£и ) =-----7 4? 2-----1 exp(-ez);
(”“-)Z (7.12)
г.(г.)=еХР17,г Чг2)1ехр(-И). !
(лап)г2 I
224
Подставляя (7.11) и (7.12) в (7.1), находим:
= Коптро6гп ехр( 2ez) ап (7л За)
Ро z аи + ап
1 Г0 -
। де qx =----z—г-----, а0 = — - угловой размер объекта.
1, аиап 2
(а2+а2)а2
Функция q} учитывает зависимость Ро6 от размера объекта. Из
(7.13а) следуют соотношения [41] для мощности сигнала, отра-
женного от протяженной диффузной цели (а0 > аи) и точечной
диффузной цели (а0 < аи) при условии ап > аи. Из (7.13а) имеем:
для протяженной диффузной цели
Роб = Коптро6 exp(-2sz) . (7 д зб)
^0 Z
для точечной диффузной цели
Роб _ Коптро6гп2 exp(-2ez)r02
X’ * ’
Мощность сигнала в изображении от фона. Мощность сиг-
нала в изображении от фона Рф можно найти из (7.13а) при р^ = рф
и <7i = 1 Оо -> °°):
Рф = КоптРфГп exp(-2ez) а*
Ро г2 а2+а2
Соотношение (7.14) представляет собой уравнение локации
(7.6) при отражении сигнала от бесконечно протяженной по-
верхности.
Мощность помехи обратного рассеяния. Для нахождения
мощности помехи обратного рассеяния РПор воспользуемся фор-
мулой (7.3). Используя выражения (7.12) для освещенности слоя
среды от действительного и «фиктивного» источников, из (7.3)
находим:
8 — 1091
225
fnop_v (стхЛм)гп exp(-2£z)_J b1 'j a2
D ^опт 0 2 CA₽ / 7 2\ 2 7 0
po 8 z (a„+an)z ) a; + a"
(7.15)
где и = с - скорость света в атмосфере. Соотношение (7.15) при
Ь = 0 есть приближение однократного рассеяния (7.8).
Мощность помехи обратного рассеяния РПор(0 в каждый мо-(
мент времени соответствует значению светового сигнала от рас-
сеивающего объема среды ДК = Оиг2ь>?им/2, находящегося на
расстоянии z = ut/2 от ЛСВ, где t - время, отсчитываемое от мо-
мента посылки зондирующего импульса (рис. 7.5). Рассеянный
средой сигнал ПОР начинает регистрироваться с момента времени
tK, соответствующего удвоенному расстоянию до ближайшей точки
пересечения «конусов» источника и приемника. Затем ПОР воз-
растает, достигает максимума и убывает. Положение максимума
зависит от геометрии ЛСВ и показателя рассеяния среды ст.
При использовании эффективной временной отсечки помехи
обратного рассеяния (когда длительность строба равна длитель-
ности зондирующего импульса) Рпор находится из (7.15) при z =
= z0, где z0 - расстояние до объекта наблюдения, а энергия ПОР
определяется из соотношения
^пор Т’пор /им.
(7.16)
В отсутствие стробирования (см. рис. 7.3) энергия ПОР
W - f7nop(zo)^zo
К*ПОР - J
Ъ
аи+ап
(7.17)
с
Мощность солнечной засветки. Мощность солнечной за-
светки находится по формуле (7.4), где спектральная плотность
яркости солнечного излучения £с на входе ЛСВ можно оценить
из следующих соотношений:
от объекта
Е 1
Т-об = РОб — exp(-£z)?3, q3 = ---;
л l + anz /г02
226
Рис. 7.5. Схема атмосферной ЛСВ (а) и профиль помехи обратного
рассеяния для моностатической схемы ЛСВ с малой базой (б):
z0 - теневая зона; гф - зона формирования (частичного перекрытия диаграмм
направленности источника и приемника)
8*
227
от фона
р
£Ф = РФ >
(7.18)
от помехи обратного рассеяния (световой дымки)
с = гг<**(у)
'"ор 0J 4л
^-(l-e’“);
4ле
E^ldl =
где z - расстояние между объектом и ЛСВ. Значение индикатри-
сы рассеяния х(у) = 1.
Освещенность земной поверхности Езп согласно [3] определя-
ется выражением
1 3 Н 3 I -то
1+2Цс+[1-2Цс]еХР
----------------
2 I 2
£зп = 2-----
4 + (3-х1)(1-рф)т0
(7-19)
где р.с = cos 0с - косинус зенитного угла Солнца;
т0 - оптическая толщина атмосферы, т0 = 0,2 (X = 1,06 мкм);
Рф - альбедо подстилающей поверхности, на которой нахо-
дится объект;
%! - первый член разложения индикатрисы рассеяния по по-
линомам Лежандра, Xj = 1,5;
Ео = £±цс - освещенность солнечными лучами верхней грани-
цы атмосферы;
Е± - спектральная солнечная постоянная /на X = 1,06 мкм
Ег = 0,67 Вт/(м2-нм)/.
7.3. Энергетические соотношения при лазерном видении
в море
Из-за сильного ослабления света в воде подводные ЛСВ име-
ют небольшие дальности действия - менее 100 м даже в чистых
океанских водах. Это обстоятельство приводит к необходимости
использовать в ЛСВ третьего типа источники с широкой диа-
граммой направленности, излучающие короткие импульсы. При
малых дальностях широкие диаграммы направленности 2аи > 5°
228
обеспечивают необходимый размер поля обзора, а короткие им-
пульсы порядка наносекунд - регистрацию помехи обратного
рассеяния только с небольшого участка пространства среды.
В море довольно быстро наступает световой режим, при кото-
ром в отраженном сигнале преобладает составляющая, обуслов-
ленная рассеянным светом. В этой области выполняется неравен-
ство D/(Ат)3 » ехр(-2тЛ), и мощность сигнала в изображении
при наблюдении бесконечно протяженной поверхности, как это
следует из (7.5), описывается асимптотической формулой (7.7).
Для подводной ЛСВ (рис. 7.6) энергетические соотношения в
области, где в отраженном сигнале преобладает составляющая,
обусловленная рассеянным светом, имеют следующий вид.
Мощность сигнала в изображении от объекта. Для нахожде-
ния мощности сигнала в изображении от пространственно ограни-
ченного объекта воспользуемся формулой (7.1). Из решения
уравнения переноса в малоугловом (диффузионном) приближении
для определения значений освещенности в плоскости объекта от
действительного и «фиктивного» источников имеем:
exp{-(l-A)ez} ( г*
~ 7t(2op2z3 +z2a3)eX\ 2op2z3 +z2a2 /
(7.20)
£ exp {-(1 - A)ez} Г________r,2
7t(2op.2z3+z2a2) \ 2op2z3+z2a2/
Подставляя соотношения (7.20) и функцию распределения ко-
эффициента отражения на объекте (7.11) в формулу (7.1), получаем:
Ле ь кОПтРобгп“п exp[-2sz(l - Л)]
Ро 4p2(Ae)z3+(a2+a2)z2 2’
=--------—2----’ гэ2и = 2Aep2z3 + a2z2; гэ2 = 2Aep2z3 + a2z2.
1 + —
О» + гэ2.>о2
Функция д2 учитывает зависимость Ро6 от размера объекта г0.
229
Верхняя граница атмосферы
Рис. 7.6. Схема подводной ЛСВ
230
Мощность сигнала в изображении от фона. Мощность сиг-
нала в изображении от фона Р$ можно найти из (7.21) при ро6 = рф
и = 1 (г0 -> оо):
РФ _КО1Прфгп2а^ехр[-2Е7(1-Л)]
Ро 4ц2 (Ae)z3 + (а2 + a2)z2]
Соотношение (7.22) представляет собой асимптотическое при-
ближение формулы (7.7) для мощности сигнала, отраженного от
бесконечно протяженной поверхности, в области, где сигнал
формируется только рассеянным светом.
Мощность помехи обратного рассеяния. В области, где в
ПОР преобладает составляющая, обусловленная многократно рас-
сеянным светом (z » b), в формуле (7.3) можно положить b = 0.
Тогда для расчета мощности помехи обратного рассеяния РПор
можно непосредственно воспользоваться формулой (7.22), поло-
жив в ней Рф =
ахяс^им
8л
где п - показатель преломления воды:
РПОР = к ( rn2a„exp[-2Ez(l-A)]
Ро “Ч 8л J[4p2(AE)z3 +(a2 +a2)z2]
(7.23a)
При использовании импульсного стробирования с длительностью
строба AZCTp = tm мощность РП0Р можно найти из (7.23a) при z = z0,
где z0 - расстояние до объекта наблюдения.
Следует отметить, что формулы для расчета мощности сигна-
ла в элементе изображения от объекта и фона справедливы для
ЛСВ как с импульсным подсветом, так и при непрерывном осве-
щении. Для импульсной ЛСВ Р^, Рф, Ро - импульсные мощности,
для непрерывной ЛСВ Ро6, Рф, Ро - средние мощности.
Значение помехи обратного рассеяния от непрерывного ис-
точника излучения можно найти, проинтегрировав соотношение
(7.23a) для нестационарной ПОР по времени и заменив
(^о=ЛиЧм)наРо[14]:
231
^ПОР
р0
= К0ПТ
гХ f
2иач
exp[-2ez0(l-A)]
4pЕ 2(Ae)z30 + (a2+a2)z2
dz0, (7.236)
Л^п
4
где пределы интегрирования [гнач; z] определяют протяженность
зоны действия ПОР;
b
7 =------- *
иач , >
z - расстояние до объекта наблюдения;
b - база.
Если известны мощности сигналов от объекта Р^, фона Р$ и
помехи обратного рассеивания /’пор, то соответствующие им осве-
щенности Erf, Еф, Епор в плоскости изображения определяются как
r _ Лб,ф, ПОР
^об.ф, ПОР — 2 Г! 2 ’
*ап/ об
где /о'б - фокусное расстояние приемного объектива;
ап ~ ---мгновенный угол поля зрения (</эл - размер элемен-
2/об
та изображения в плоскости фотокатода ЭОП).
Мощность солнечной засветки. Мощность солнечной за-
светки находится по формуле (7.4), где спектральная плотность
яркости солнечного излучения Е на входе ЛСВ для случая на-
блюдения в надир и высокого Солнца (цс «1) можно оценить из
следующих соотношений [13]:
от объекта
Е 1
Аэб — Роб ехр(—^nz)?4 ’ ?4 — ] iTT 2 3/2 ’
Л 1 + 2А£Ц Z / Го
от фона
£
£ф=Рф—ехр(-М); (7.24a)
л
232
от помехи обратного рассеяния (световой дымки)
4юр = Е(^ Ф4°Л [l-exp(-2yez)]; £(г1) = £мп^пехр(-уег1);
л 4у
£мд=£мп<пехр(-у8Й); (7.246)
у = 1-(1-Фо)Л;
Еып
3 ( 3 )
1 + -Цс+ 1--Цс ехР
Z \ Z. у
4 + (3-х1)т0
Ео,
(7.24в)
где Z£j0P - яркость рассеивающего слоя толщиной z, находящего-
ся непосредственно под ЛСВ;
E(z{) - освещенность на глубине z, под поверхностью моря;
Емд - освещенность морского дна;
Емп - освещенность морской поверхности. Формула (7.24в)
следует из (7.19) при альбедо морской поверхности
Рф = О, Емп рассчитывается при = 1,5, т0 = 0,3, Е± =
= 1,95 Вт/(м2 нм) (X = 0,53 мкм);
т^п - коэффициент пропускания морской поверхности для па-
дающего из атмосферы солнечного излучения; т^п - 0,98;
h - глубина;
кп, 8, Л, фо - оптические характеристики морской воды;
Рф - коэффициент отражения морского дна, на X = 0,53 мкм
Рф = 0,1...0,2 [68].
7.4. Энергетические соотношения при лазерном видении
через границу раздела «воздух - вода»
При расположении ЛСВ над поверхностью моря (рис. 7.7)
сигнал, формирующий элемент изображения, слагается из сле-
дующих составляющих:
Р ~ РОб + ^пор + Роб + Люр>
233
где Ро6, Р°6 - мощность лазерного сигнала и солнечной засветки,
отраженных от объекта наблюдения;
^пор _ мощность помехи обратного рассеяния, представляю-
щей собой сумму трех составляющих: атмосферной
дымки, солнечного излучения, отраженного от мор-
ской поверхности, и солнечного излучения, выходя-
щего из толщи моря;
Рпор _ мощность помехи обратного рассеяния, обусловленной
обратным отражением лазерного импульса от слоя ат-
мосферы (расположенного между ЛСВ и поверхностью
моря), от морской поверхности и толщи морской среды.
На рис. 7.8 изображен профиль эхо-сигнала P(t), поступающего
на приемник ЛСВ при дистанционном лазерном зондировании
подводного объекта через границу раздела «воздух - вода». Влия-
ние атмосферы и границы раздела проявляется в ограничении глу-
бины подводного зондирования. Процессы отражения и переотра-
жения границей раздела рассеянного атмосферой излучения
способствуют накоплению больших пробегов фотонов, вследствие
чего на приемное устройство ЛСВ одновременно с сигналом от
объекта приходит ПОР, сформированная атмосферой и границей
раздела.
Рис. 7.8. Профиль эхо-сигнала ЛСВ, расположенной над по-
верхностью моря:
1 - ПОР от слоя атмосферы; 2 - сигнал от морской поверхности; 3 -
ПОР от морской среды; 4 - сигнал от подводного объекта (дна)
235
На рис. 7.9 дан пример временной зависимости сигнала от во-
ды Рм и сигнала, сформированного атмосферой и границей раз-
дела Pt для углов 2а„ = 2-10'3 рад, 2ап = 0,35. Видно, что на глу-
бине h « 60 м уровень сигнала сравним с Рм, а сигнал с
глубины порядка 100 м практически не содержит составляющей
Рм и является фактически чисто атмосферным [33]. Для умень-
шения влияния ПОР, сформированной атмосферой и границей
раздела, на глубину подводного зондирования необходимо вво-
дить импульсное стробирование и использовать не слишком ши-
рокие диаграммы направленности приемника (источника). Для
авиалидаров (Н= 200 м) угол приема 2ап < 2°.
Рис. 7.9. Временная зависимость эхо-сигнала ЛСВ, располо- ’
женной над поверхностью моря: |
1 - Р„ для океанских вод; 2 - Ри для прибрежных вод; 3 - ПОР '
от атмосферы при о = 0,2 км'1 |
Пусть ЛСВ находится на высоте Н над поверхностью моря, а 1
диаграммы направленности источника излучения и приемника !
ориентированы по нормали к поверхности. Световое излучение j
проникает в воду через границу раздела «воздух - вода», отража- ]
ется от объекта наблюдения, снова возвращается в атмосферу и |
попадает в приемник ЛСВ. Если падающее излучение рассеива- I
ется объектом наблюдения диффузно, а граница раздела плоская, i
то для мощности излучения, попадающей в приемник, справед-
ливо соотношение, аналогичное (7.1). Изменение местоположе- 1
236
ния ЛСВ (подводного на надводное) не влияет на вид уравнений
переноса изображения, если под телесным углом диаграммы на-
правленности приемника в воде понимать телесный угол О.„/п2
[13]. Для этого случая
Роб=-Ро£п°п2— ffp(rs)£H(rJEn(FJ</rs, (7.25)
где и - показатель преломления воды;
p(rs) - коэффициент отражения объекта наблюдения;
Е„, Еп - освещенность в плоскости подводного объекта от
действительного и «фиктивного» (с параметрами
приемника) источников;
Рпв =(1-рЬ(1-Рпв); Р^Рпв - коэффициенты отражения
поверхности моря при распространении света из возду-
ха в воду и из воды в воздух (рпв - 0,96);
Та = ехр(-2е77) - коэффициент ослабления излучения в атмо-
сфере. При наблюдении с малых высот Г, = 1.
Основываясь на формуле (7.25), можно найти энергетические
соотношения для ЛСВ, работающей через границу раздела «воз-
дух - вода». При этом не требуется проводить специального ис-
следования: достаточно поставить новые граничные условия (пе-
ресчитать источники на границу раздела «воздух - вода») и затем
воспользоваться уже известными результатами для подводного
наблюдения в море. В этом случае для мощности сигнала, отра-
женного от бесконечно протяженного объекта (морского дна),
имеем:
р ( Y
— = р — а2ехр[-2т(1-А)]х
T’o I'd
Р/ (Ат)3 + ехр {-2тА[1 + Р/ (Ат)3 ]}
1 + £>/(Лт)3
(7.26)
где А = —; t = ez; = г2 == (а2+а2)(Яп +z)2.
е 4ц
237
При Н= 0 из (7.26) следует (7.5). Для ЛСВ, работающих через
границу раздела «воздух - вода», энергетические соотношения в
области, где в отраженном сигнале преобладает составляющая,
обусловленная рассеянным светом, имеют следующий вид.
Мощность сигнала в изображении от объекта. Мощность
сигнала в изображении от объекта Р& для гауссовой модели ог-
раниченного диффузно отражающего объекта размером г0 опи-
сывается выражением
Лб = КоптРпв^Робгп anexp[-2Ez(l - А)]
Ро 4p2Asz3 + (Нп + z)2 (a2 + a2) 5 ’
где
1
?5 ~ 2 2 ’
Г г
1 .___' эи'эп
(4 +г>02
4 = 2Ae|?z3 + (Ян + z)2 a2;
гэ2 = 2Aep2z3 + (Нп + z)2 a2.
Функция q5 учитывает зависимость от размера объекта г0.
Мощность сигнала в изображении от фона. При наблюде-
нии объекта на фоне морского дна мощность сигнала в изобра-
жении от фона /*ф можно найти из (7.27) при = рф и q5 = 1:
Рф = КоптРпв^аРф^п eXp[-2EZ(l - А)]
Ро 4p2Asz3 + (Нп + z)2 (a2 + a2)
Мощность помехи обратного рассеяния. Для расчета мощ-
ности помех обратного рассеяния Рпор от толщи морской среды
нужно в (7.28) положить рф =
рпор _ КоптрпвТастхяс/имгп2а2ехр[-2£г(1-А)]
Ро 8n[4p.2Asz3 + (Нп + z)2 (а2 + а2)]
8л
238
При Н = 0 из (7.27) - (7.29) получаются выражения (7.21) - (7.23),
соответствующие лазерному видению в море.
Мощность помехи от солнечной засветки. Мощность сол-
нечной засветки можно рассчитать по формуле (7.4), где спек-
тральную плотность яркости солнечного излучения L на входе
ЛСВ для случая наблюдения в надир и высокого Солнца (цс ® 1)
можно оценить из следующих соотношений:
от объекта
£ *
= Роб -^expt-V^L ехр(-т)?6,
_______________1____________
1 + (2Аец223 + {Нп + z)2 а2 )/г02 ’
от фона
Е ♦
= Рф ехР(-М)тмп ехр(-т), (7.30)
пп
где Емд - освещенность морского дна, рассчитываемая по форму-
ле (7.245);
от помехи обратного рассеяния (световой дымки)
^ПОР Ач + Аи ^мп ’
где £д - яркость атмосферной дымки (яркость света, рассеянного
нижележащим слоем атмосферы в пределах диаграммы
направленности приемника);
£м - яркость излучения, выходящего из толщи моря;
£мп ~ яркость излучения, отраженного от морской поверхности.
Яркости £д, £м, £мп находят по формулам
£Д = Л ехр(^-^)х
4л(1 + цс)
х ехр[-(т0 - т)(1+—)] - ехр[-т0 (1+—)] [;
Нс Нс J
Цс =COS0c,
(731)
239
4 = Я„пРм ехр(-т); (7.32)
п
Л<п =^ш-ехр(-т), (7.33)
п
где Емп - освещенность, создаваемая на поверхности моря светом
Солнца и неба, рассчитываемая по формуле (7.24а) при
=1,5; т0 = 0,3;
Е± = 1,95 Вт/(м2 нм) (X = 0,53 мкм);
4 - коэффициент пропускания морской поверхности для
падающего из атмосферы солнечного излучения,
4=0.98;
t
тмп - коэффициент пропускания морской поверхности для
солнечного излучения, выходящего из толщи моря,
4=0,98;
п - коэффициент преломления воды, учитывающий уменьше-
ние яркости света, выходящего из воды (яркость умень-
шается в 1/п2 раз); п = 1,34;
рм - коэффициент яркости моря, зависящий от типа морских
вод (для X = 0,53 мкм может быть принят равным
0,0097...0,0121);
гм - коэффициент яркости поверхности моря, зависящий от зе-
нитного угла Солнца 0С и скорости ветра и, (для 0С = 20° г„
= 0,033 при ц, = 2 м/с; гм = 0,077 при и„ = 5 м/с [13]);
т = гН- оптическая толщина слоя атмосферы от Н= 0 до Н.
При наблюдении подводных объектов с небольших высот Лд = 0,
ехр(-т) = 1 и
Е
пор
Ф т
Т т /•
МП VMn '•
2 ’ m
П П
Рм+Т Емп-
(7-34)
В заключение следует отметить два момента.
Когда параметры ЛСВ и оптические характеристики среды
таковы, что в интервале дальностей, представляющих практиче-
ский интерес, сигнал формируется как нерассеянным (ближняя
240
зона), так и только рассеянным (дальняя зона) светом, можно ис-
пользовать следующую методику оценки энергетических пара-
метров изображения. Мощность сигнала в изображении от фона
Рф и мощность помехи обратного рассеяния РПор рассчитывают
по формуле (7.5), которая справедлива как в ближней, так и в
дальней зонах. Мощность сигнала в изображении от объекта в
ближней зоне находят из уравнения локации (7.13), а в дальней
зоне - из асимптотической зависимости (7.21). В промежуточной
области Pog находят интерполяцией между указанными предель-
ными кривыми затухания сигнала.
Приведенная выше совокупность формул дает возможность
рассчитать коэффициенты передачи энергии от ограниченного
объекта, протяженного фона и помехи обратного рассеяния для
импульсных ЛСВ третьего типа, (а„ » ап) в атмосфере /(7.13) -
(7.15)/, морской воде /(7.21) - (7.23)/ и при работе через границу
раздела «воздух - вода» /(7.27) - (7.29)/. Специальных расчетов
соответствующих коэффициентов передачи ЛСВ первого типа
(ап » а„), у которых а<3) =а-1),а(п3) =а^!1), не требуется, так как
они могут быть найдены из соотношения
ri)
Т|(3)= —, (7.35)
1 N
где Лоб,ф,пор = ^об.ф.пор/^о > N = («‘.’’/«п’)2 - число элементов в
«кадре» изображения.
7.5. Особенности светоэнергетического расчета
фотоприемного устройства ЛСВ с усилителем яркости
В ряде случаев ЛСВ работают при предельно низких уровнях
входной освещенности (менее 10'4 лк). Это в первую очередь от-
носится к системам подводного видения, а также к дистанцион-
ным системам наблюдения космического базирования. В этих
условиях приемный канал ЛСВ выполняют, как правило, на ос-
нове фотоприемного устройства, содержащего усилитель яркости
изображения, которое представляет собой электронно-оптичес-
241
кий преобразователь (ЭОП), сопряженный с ПЗС-матрицей с по-
мощью репродукционного объектива.
Преобразование изображения в таком приемнике происхо-
дит в следующем порядке. Под воздействием падающего излу-
чения фотокатод ЭОПа генерирует фотоэлектроны - так возни-
кает электронное изображение. Эмиттированные электроны
проходят микроканальную пластину (если она есть), в результа-
те чего число электронов увеличивается в сотни раз. Далее
электроны разгоняются ускоряющим полем и бомбардируют
экран ЭОПа, покрытый люминофором, причем яркость свечения
пропорциональна мощности электронного пучка. Оптическое
изображение с экрана ЭОПа переносится репродукционным объ-
ективом на поверхность ПЗС-матрицы. Под воздействием па-
дающего излучения в ячейке матрицы генерируются фотоэлек-
троны, которые накапливаются в течение определенного
времени. Содержимое ячеек последовательно считывается - так
формируется электронный видеосигнал.
Пусть фотокатод ЭОПа засвечен равномерно и его освещен-
ность (или облученность) равна £фк. Под действием падающего
излучения фотокатод генерирует электроны, которые создают
ток с пространственной плотностью
7фк = ЗДк, (7-36)
где 5фк - интегральная чувствительность фотокатода по отноше-
нию к падающему излучению (A/Вт или А/лм). Когда падающее
излучение монохроматично, 5фк равна спектральной чувстви-
тельности фотокатода на рабочей длине волны. Если же падаю-
щее излучение имеет сложный спектральный состав, то величина
5фК может быть рассчитана следующим образом:
рф^)££(1)<а,/к n(vm£ Wk
С = < i, (7.37)
JV N (Х)< (k)dk р" (к)М " (k)dk
О о
242
где S^(X) - относительная спектральная чувствительность фо-
токатода;
Е^(Х) - относительная спектральная плотность облученно-
сти фотокатода ЭОПа;
Мп (X) - относительная спектральная плотность светимости
паспортного источника излучения;
Vy(X) - относительная спектральная видность глаза;
5фК - интегральная чувствительность фотокатода по отноше-
нию к паспортному источнику излучения (как правило, в
качестве такового применяется источник типа А), А/лм.
В микроканальной пластине происходит умножение потока
электронов, так что плотность тока на ее выходе
Умкп = = ^'фк^фк^> (7.38)
где G - коэффициент умножения микроканальной пластины.
Плотность мощности электронного потока, падающего на
люминофор, равна
р = (7.39)
1 э 1 э
где U- ускоряющее напряжение, В;
Гэ - электронно-оптическое увеличение ЭОПа.
Светимость экрана ЭОПа равна
«э=Л.,7=£-‘^-У. (7.40)
1 э
где у - световая отдача люминофора, лм/Вт.
Как правило, производитель ЭОПа не указывает такие пара-
метры, как ускоряющее напряжение, коэффициент умножения
микроканальной пластины и световая отдача люминофора, по-
этому формула (7.40) неудобна для практических расчетов. Для
энергетического расчета следует использовать коэффициент уси-
243
ления яркости ЭОПа т|£ , под которым понимают отношение све-
тимости на выходе ЭОПа к освещенности на входе [3]. Из [3]
следует, что
_ Мэ С S"GUy
Г12
Гфк дфк 1 Э
Таким образом, выражение для расчета светимости экрана ЭОПа
принимает следующий вид:
5Р
Л/Э=£фк11д-^. (7.42)
дфк
Коэффициент усиления яркости является паспортной харак-
теристикой ЭОП и обычно указывается производителем. В ряде
случаев вместо Т|£ приводят значение коэффициента преобразо-
вания потока излучения ЭОП т|, под которым понимают отноше-
ние светового потока на выходе электронно-оптического преоб-
разователя к потоку, падающему на вход [3]. Связь между двумя
этими параметрами ЭОПа проста:
Па =4- (7-43)
1 э
В табл. 7.1 приведены для примера некоторые типовые зна-
чения параметров ЭОПов с единичным увеличением и люмино-
фором КС-525 (зарубежный аналог Р20).
Таблица 7.1
Некоторые параметры электронно-оптических преобразователей
Наименование параметра Поколение ЭОП
Первое Второе Третье
Фотокатод Кислородно- цезиевый (S1) Мульти- щелочной (S20) Арсенид- галиевый (GaAs)
Паспортная интегральная чувствительность 30-40 мкА/л м 250-300 мкА/лм 1000-1200 мкА/лм
244
Окончание табл. 7.1
Наименование параметра Поколение ЭОП
Первое Второе Третье
Коэффициент умно- жения микроканаль- ной пластины 1 300-1000 200-500
Ускоряющее напряжение 10-12 кВ 5-10 кВ 5-6 кВ
Световая отдача люминофора 30 лм/Вт 30 лм/Вт 30 лм/Вт
Коэффициент усиле- ния яркости ЭОПа 10-15 15000-25000 20000-35000
Перейдем к расчету освещенности ПЗС-матрицы. Люмино-
фор ЭОПа имеет индикатрису силы излучения, близкую к лам-
бертовой, поэтому яркость экрана ЭОПа
(\2
— I
(7.44)
где — - относительное отверстие репродукционного объектива;
/ро
Рро - линейное увеличение репродукционного объектива;
т - коэффициент пропускания объектива.
Ток I, создаваемый падающим излучением в ячейке ПЗС-
матрицы, можно рассчитать по формуле
I ~ ^ПЗС^ПЗС»
(7.45)
где А - площадь пиксела, м2;
^пзс _ интегральная чувствительность ПЗС-матрицы для
спектра излучения люминофора, А/лм, которую
можно рассчитать согласно следующей зави-
симости:
245
Г. max 1^пзс(^)^пзс(^)^
*пзс = , (7-46)
683Вт iVV)Cc(^
где Sn3C(^) - относительная спектральная чувствительность
ПЗС-матрицы;
^пзс(^) ~ относительная спектральная плотность освещенно-
сти ПЗС-матрицы;
5^ - максимальная спектральная чувствительность ПЗС-мат-
рицы (для кремниевых ПЗС она равна 400.. .500 мА/Вт);
(X) - относительная спектральная видность глаза.
Интегральная чувствительность стандартной кремниевой
ПЗС-матрицы для излучения люминофора КС-525 (Р20) равна
0,1 мА/лм.
Число фотоэлектронов п, накопленных в ячейке ПЗС-камеры,
равно
г|Т,5фК х ^ПЗС^^н
е фк 5фК 4(1 + 1/Ppo)2l/Jpo е
(7.47)
где /н - длительность периода накопления заряда;
е - заряд электрона.
Разделив число накопленных фотоэлектронов на среднеквад-
ратическое отклонение шумовых электронов, можно рассчитать
отношение сигнал/помеха в ячейке ПЗС-матрицы для низкочас-
тотных составляющих изображения. Иногда бывает удобно на-
ходить отношение сигнал/помеха через отношение освещенности
ПЗС-матрицы к пороговой освещенности. При этом следует
иметь в виду, что пороговая освещенность определяется для пас-
портного источника излучения (источник типа А для отечествен-
ных матриц или, например, источник с цветовой температурой
3200 К для матриц фирмы Sony), а излучение люминофора имеет
иной спектральный состав. Поэтому необходим пересчет порого-
246
г
вой освещенности для излучения люминофора Е^ор, который
можно сделать по следующей формуле:
р"зс(АЖ (Х)<& Jv"(X)En"c(X)<a
£пЛор = С i-------------------------------> (7-48)
JV"(Wn (^М р"зс(Х)£"зс(Х)<а
о о
где Е„ор - пороговая освещенность МПИ по отношению к спек-
тру излучения паспортного источника.
Например, для ПЗС-матрицы ICX055 фирмы Sony пороговая
освещенность для излучения от паспортного источника составля-
ет примерно 0,06 люкс, а пороговая освещенность для излучения
люминофора КС-525 (Р20) - 0,13 лк. Для других матриц Е^ор
может превышать Е^ор в 5 - 7 раз.
Вышеприведенные соотношения позволяют рассчитать число
фотоэлектронов, накопленных в ячейке ПЗС-матрицы при непре-
рывном освещении фотокатода ЭОПа. При импульсном освеще-
нии ЭОПа все рассчитываемые параметры (яркость экрана ЭОПа,
освещенность ПЗС-камеры и др.) будут зависеть от времени. Для
расчета числа накопленных фотоэлектронов в этом случае можно
воспользоваться формулой
Лл^фк ____т___ ^пзс^
фк 5фК ^l + l/ppMrJpo е
где Эфк - экспозиция фотокатода за время регистрации импульса.
Если известно значение импульсной мощности Р, регистри-
руемой одной элементарной ячейкой (пикселом) матричного фо-
топриемника, то число фотоэлектронов, накопленных в ячейке
ПЗС-матрицы, равно
п = Рр2/им
Л/Лфк топ ( D $пЗС
£фПк 4(1 + 1/Рро)2 Шро е
= 5ФпЛ- (7.50)
247
Величина 5ФПУ имеет размерность [с'-Вт1] и характеризует
эффективность преобразования регистрируемого светового пото-
ка фотоприемным устройством.
Полученные в данной главе энергетические соотношения ле-
жат в основе методики расчета предельной дальности видения
при работе ЛСВ в приземном слое атмосферы, под водой и через
границу раздела «воздух-вода».
Глава 8. МИНИМАЛЬНЫЙ
РАЗРЕШАЕМЫЙ КОНТРАСТ
И ПРЕДЕЛЬНАЯ ДАЛЬНОСТЬ ВИДЕНИЯ
8.1. Минимальный разрешаемый контраст
Основным назначением любой активной изображающей сис-
темы, в том числе и ЛСВ, является обнаружение и распознавание
объектов на предельных дальностях, когда уровень полезного
сигнала соизмерим с уровнем шумов. В такой ситуации оператор
наблюдает на экране дисплея зашумленное, «заснеженное» изо-
бражение вследствие случайных временных и пространственных
флуктуаций освещенности. Даже высококонтрастные детали изо-
бражения могут оказаться неразличимыми при большом уровне
шума, а высокая системная МПФ не гарантирует в данных усло-
виях требуемых обнаружительных характеристик. Возможность
регулировки яркости и контраста изображения, воспроизводимо-
го на экране монитора, приводит к тому, что реальный контраст
на входе ЛСВ существенно отличается от контраста наблюдаемо-
го изображения. Поэтому для ЛСВ, разрешающая способность
которых ограничивается не контрастной чувствительностью, а
уровнем шумов, т.е. отношением сигнал/шум (S/N), целесообраз-
но пороговый уровень определять не через воспринимаемый кон-
траст, а через воспринимаемое отношение сигнал/шум (5/7V)BOCn.
Установив связь между контрастом тест-объекта в виде
шпальных мир и величиной можно найти такой мини-
мально разрешаемый контраст (МРК) черно-белых прямоуголь-
ных полос миры, при котором (5/7V)BOcn равно пороговому значе-
249
(8.i) :
нию (57Л0восп пор- Подчеркнем, что понятие МРК применимо толь- 1
ко для обнаружения объектов, имеющих форму чередующихся I
черно-белых полос различной пространственной частоты. Крите- |
рии Джонсона устанавливают эквивалентность этих эталонных 1
мир и реальных объектов с позиции вероятности их восприятия. 3
В результате понятие МРК распространяется на любые реальные
объекты, а связующим звеном является пространственная частота I
эквивалентной миры. Понятие МРК применимо исключительно к
монохромным оптико-электронным изображающим системам, |
причем предполагается, что контраст изображения на экране j
дисплея достаточно высок и не ограничивает разрешение и даль-
ность действия ЛСВ. j
Значение воспринимаемого оператором отношения сиг- j
нал/шум, пересчитанное к выходу фотоприемного устройства, I
определяется выражением
, v = АлсТсист(ух,у7) Тгя(ух,уу)Тиои(ух,уу) _ '
«т>1/2 М(ух,уу)К(Л
,г1*п ТгЛУх,уу}ТыоЛУх,уу)
=(SIN)-
где Дис = поб-Пф - разность средних чисел фотоэлектронов,
формируемых соседними элементарными ячейками
(пикселами) фотоприемного устройства под воздейст-
вием сигнального и фонового излучения за определен-
ный временной интервал;
(«снст)1/2_ среднеквадратическое значение числа шумовых
фотоэлектронов, приведенное к одной ячейке;
Тсист(у%, Vy) - МПФ изображающей системы на выходе элек-
тронного тракта;
^ra(vx, Yy), ТиоХу,, у,,) - МПФ зрительного анализатора и дисплея;
(S/N)mzx - аппаратное отношение сигнал/шум системы на вы-
ходе электронного блока;
М{ух, v^, N(f) - функции, описывающие пространственную и
временную интегрирующую способность
зрительного анализатора.
250
Принципиальная разница между аппаратным и воспринимае-
мым отношениями сигнал/шум состоит в том, что аппаратное
отношение (S/N)ctKT определяется в точке, т.е. для элемента изо-
бражения, площадь которого соответствует площади корреляции
шума.
При использовании фокальных матриц в качестве фотопри-
емных устройств область корреляции шума 5кор обычно прини-
мают равной размеру одного пиксела. С увеличением размера
объекта это отношение (S/N)ctKI существенно не изменяется, хотя
глазу становится легче различать протяженные объекты. Из этого
следует, что зрительный аппарат воспринимает отношение сиг-
нал/шум, характерное не для элемента изображения, а для всего
изображения в целом.
В результате экспериментальных исследований установлено
[39], что эффект пространственного интегрирования приводит к
улучшению отношения сигнал/шум в (5И]/8К0р) раз, где 5ИЗ - пло-
щадь изображения объекта на экране дисплея.
Эффект временного интегрирования связан с инерцией зре-
ния, т.е. способностью зрительного анализатора сохранять или
накапливать сигнал в течение определенного промежутка време-
ни. Многочисленные исследования подтвердили способность
глаза воспринимать не мгновенное значение случайного шума, а
его среднеквадратическое значение, усредненное за конечный
период. Это означает, что в системах с кадровой разверткой, при
условии некоррелированности шума в пространстве от кадра к
кадру, изображение, воспринимаемое в результате суммирования
нескольких кадров, имеет меньший уровень шумов, чем изобра-
жение одного кадра. При этом отношение сигнал/шум увеличи-
вается пропорционально величине fK trn , где fK - частота кад-
ров, a tn - время инерции глаза.
Таким образом, без учета селективных свойств глаза к воз-
действию различных видов шума при пространственно-
временном интегрировании воспринимаемое отношение сиг-
нал/шум (Жс„ связано с аппаратным (S/7V)C11CT формулой
251
T (v ,v }T (v v 1
(S/N)^ = (W)CHCT^-^ p M-O|A ;; y). (8.2)
I ^кор 1 I
C ft
\ *^из J к‘гл /
Эффекты пространственного и временного интегрирования,
проявляющиеся в процессе восприятия изображений зрительным
анализатором, приводят к существенному повышению воспри-
нимаемого отношения (SWV)»ocn относительно аппаратного значе-
ния (5/2У)сист. В рационально спроектированных ЛСВ оператор
уверенно обнаруживает изображения объектов при не
превышающем 0,05.
При расчете МРК используют линейные пространственные
частоты v (м1) или угловые v' (рад1), измеряемые в пространстве
объектов. Так как МПФ многих звеньев ЛСВ (см. главу 2) выраже-
ны через пространственные частоты в пространстве изображений
v„ или v'H, следует провести преобразование частот по формуле
v' = v;=v„/^,
где /о'б - фокусное расстояние объектива.
8.2. Анализ шумов, влияющих на качество изображения ЛСВ
Величина («сист)12’ входящая в формулу (8.1), характеризует
суммарный шум системы, приведенный к накопительной ячейке
ПЗС-матрицы. Суммарный шум проявляется в виде случайных
флуктуаций фотоэлектронов как от ячейки к ячейке фоточувст-
вительной матрицы, так и от кадра к кадру для некоторой фикси-
рованной ячейки. Шум, зависящий от времени, т.е. изменяющий-
ся от кадра к кадру, проявляется на экране в виде мерцания
отдельных линий и точек. Шум, зависящий только от простран-
ственных координат, проявляется на экране как случайное, но не
изменяющееся со временем распределение яркости.
Принимая все компоненты шума независимыми друг от дру-
га, можно записать в виде
✓ , vrtci *
252
<»СИСТ)1/2 = л/<П12) + <П2> + - + <»2),
(8.3)
где (и?) - дисперсия z-го шумового компонента.
Фотоприемный канал в силу своей сложной внутренней
структуры содержит наибольшее количество шумовых источни-
ков, схематично представленных на рис. 8.1 и показывающих, на
каком этапе и в каком локальном участке возникают отдельные
шумовые компоненты. В соответствии с рис. 8.1 рассмотрим ос-
новные виды шумов фотоприемного устройства и электронного
тракта.
Шум
Шум
Фотонный
дробовый шум
Дробовый шум
Рис. 8.1. Источники шумов фотоприемного канала
Дробовый шум входного излучения. Этот вид шума при-
сутствует всегда и обусловлен флуктуациями фотонов входного
оптического излучения относительно среднего значения за ин-
тервал наблюдения, поэтому он часто называется флуктуацион-
ным шумом. При работе системы видения в активном режиме со
стробированием по дальности входное оптическое излучение со-
держит две составляющие: сигнальную (лазерное и внешнее из-
лучения, отраженные объектом) и фоновую (излучения, отра-
женные подстилающей поверхностью).
Контраст в изображении возникает при регистрации обеих
составляющих раздельно соседними элементарными фоточувст-
вительными ячейками ПЗС-матрицы. То есть предполагается, что
некоторый фиксированный пиксел матричного фотоприемника
253
накапливает за определенный временной интервал среднее число
йоб сигнальных фотоэлектронов, а соседний пиксел в среднем
регистрирует фоновых фотоэлектронов. Разность между эти-
ми значениями Ди = по6 - иф и является в ЛСВ полезным сигна-
лом, несущим информацию об объекте наблюдения.
Реальные числа использованных фотонов по6 и иф флуктуиру-
ют относительно соответствующих средних значений из-за кван-
товой природы света и обусловленных ею дискретностью и не-
определенностью распределения фотонов. Эти флуктуации
проявляются в фоторегистрирующих устройствах в виде дробо-
вого шума. Если регистрируемая интенсивность входного опти-
ческого излучения невелика, что соответствует работе ЛСВ на
предельных дальностях, то распределение фотоэлектронов под-
чиняется статистике Пуассона с результирующей дисперсией фо-
тонного дробового шума [66]:
= (8.4)
и среднеквадратическим значением
(8-5)
Наличие помехи обратного рассеяния излучения подсвета и
внешняя фоновая засветка, обусловленная рассеянием солнечно-
го излучения толщей атмосферы, вызывает не только снижение
контраста (см. главу 6), но и уменьшение отношения сигнал/шум
за счет увеличения уровня дробового шума. Влияние этих помех
на эффективность работы ЛСВ особенно заметно в отсутствие
стробирования по дальности и подробнее рассмотрено в главе 9.
Даже в отсутствие входного излучения в накопительной
ячейке ПЗС образуется заряд, формируемый термогенерацией
трех видов:
а) термогенерацией и диффузией в нейтральном слое мате-
риала;
254
б) термогенерацией в обедненной области;
в) термогенерацией в приповерхностном слое.
В процессе генерации заряда накопительная ячейка, пред-
ставляющая собой конденсатор, заряжается темновым током,
плотность которого JT характеризует для данной матрицы ско-
рость термогенерации. Для кремниевых ПЗС в зависимости от
производителя плотность темнового тока JT лежит в пределах
0,1... 10 nA/см2 и может быть сильно уменьшена за счет охлажде-
ния. Среднее число (математическое ожидание) термогенериро-
ванных электронов в ячейке ПЗС определяется выражением
П, = Э-Д-,
е
где е - заряд электрона;
5Э - площадь одного элемента;
Т„ - время накопления.
Так, при S3 = 8 х 8 мкм2 и Тп = 16 мс среднее количество тем-
новых электронов пт будет равно примерно 670. Тогда средне-
квадратическое значение темновых шумовых электронов равно
27. Плотность темнового тока сильно зависит от температуры и,
в свою очередь, описывается выражением
где к - постоянная Больцмана;
Е - энергетическая ширина запрещенной зоны данного полу-
проводника;
Т - температура;
с - коэффициент, зависящий от типа полупроводника и изме-
няющийся от 1 до 2.
Электроны, эмиссия которых обусловлена термогенерацией,
также вносят свой вклад в дробовый шум матрицы. В соответст-
вии со статистикой Пуассона дисперсия дробового шума темно-
вого тока
<«т) = «т-
255
Тогда дисперсия и среднеквадратическое значение суммарного
дробового шума ПЗС-матрицы будут соответственно равны:
ЧУ2=
(8.6)
Таким образом, суммарный дробовый шум матрицы состоит
из трех компонентов: дробового шума сигнальных фотоэлектро-
нов, дробового шума фоновых фотоэлектронов и дробового шума
темнового тока.
Фиксированный шум подложки. Данный вид шума обу-
словлен неоднородностью чувствительных элементов ПЗС-
матрицы, которую составляют неоднородность термогенерации в
матрице (проявляется только в темноте), и неодинаковая чувст-
вительность элементов. Первая составляющая неоднородности не
зависит от уровня входного сигнала и в современных матрицах
является незначительной. Среднеквадратическое значение шума
из-за неодинаковой чувствительности элементов выражается че-
рез количество фотоэлектронов и коэффициент неоднородности
фоточувствительной матрицы q„:
<«п2>,/2и?м«фот-
Тогда для дисперсии фиксированного шума подложки можно
записать
<«п> = (?м«фот)2-
Для типовой матрицы qu - 2,5% и (и2)1/2 =0,025 . Это означа-
ет, что вклад фиксированного шума подложки при малом вход-
ном сигнале незначителен, и его можно не учитывать.
Шум восстановления. Этот шум связан с особенностями ра-
боты узла преобразования накопленного заряда в напряжение
видеосигнала и часто называется кТС-шумом. Поскольку данный
узел содержит резистор R в цепи разряда-заряда конденсатора С
256
сброса, на этом резисторе происходит термогенерация дополни-
тельных электронов, создающих шумовой ток. Дисперсия этого
тока в соответствии с формулой Джонсона
/•2 \ 4кТ .
К
Так как для узла сброса эквивалентная шумовая полоса А/ = RC/4,
то среднеквадратическое значение эквивалентных электронов на
ячейку ПЗС будет равно
, 2Л2^ТС
<«вс /
е
Как видно из приведенных формул, шум восстановления тоже
сильно зависит от температуры, и его можно сделать незначи-
тельным, применив охлаждение матрицы. Так при Т = 273 К и
С = 0,01 пФ (и2с)1/2 =40.
Шум внутреннего усилителя. Шум любого усилителя скла-
дывается из двух составляющих: шума типа 1// и белого шума.
Пусть fp - частота, на которой спектральная плотность белого
шума равна спектральной плотности шума \lf. Тогда выражение
для спектральной плотности мощности шума усилителя будет
иметь вид
V (Л = V 1 + ^Е-
внтр \j / *ус у*
где Vyc - спектральная плотность мощности белого шума усилителя.
Отметим, что шум типа \/f может быть минимизирован по-
средством двойной коррелированной выборки. Суммарный шум
усилителя зависит от ширины полосы электронного тракта. Мак-
симальная частота пропускания электронного тракта с точки зре-
ния минимизации шумов усилителя не должна превышать мак-
симальной частоты спектра полезного сигнала. Если время
опроса одного элемента ПЗС-матрицы равно тэ, то максимальная
частота видеосигнала а значит, и ширина полосы пропуска-
ния всех усилителей (включая внутренний) А/будет равна
9 — 1091
257
Утах -
2тэ
Тогда эквивалентное среднеквадратическое число электронов в
накопительной ячейке ПЗС, соответствующее шуму внутреннего
усилителя с учетом его рабочей полосы частот &f будет опреде-
ляться выражением
<«bV/2 =-^vBmp(/)V¥,
где к{ - коэффициент усиления внутреннего усилителя ПЗС.
Шум внешних усилителей. Под внешними усилителями
электронного блока ЛСВ понимают все аналоговые электронные
устройства, включая усилители блока обработки и видеоусили-
тель монитора. При этом не существует принципиальной разни-
цы в подходе оценки шумов между внутренним и внешним уси-
лителями. Для оценки среднеквадратического числа электронов,
приведенного к накопительной ячейке ПЗС и эквивалентного
шуму внешних усилителей, справедливо выражение
<«в2нш)1/2=Т^Чнш(/)Ж
кхк2е
где к2 - суммарный коэффициент усиления всех внешних усили-
телей: к2 = k2l-k22-...-k2l. При малых уровнях сигнала шумы усили-
телей также необходимо учитывать, так как значение (и2с)'2 =
= 7^"внш) + (явтр> может достигать уровня 50 - 100 фотоэлект-
ронов.
Шум квантования. Данный вид шума появляется только то-
гда, когда электронный блок содержит цифровые узлы обработки
сигнала. Поэтому для ЛСВ с импульсным подсветом (ИП) этот
вид шума является актуальным. Причиной его возникновения
являются вероятные ошибки квантования аналогового сигнала
АЦП - когда одному и тому же значению напряжения на входе в
разные моменты времени могут быть поставлены в соответствие
258
различные цифровые коды. Расчеты показывают, что для кор-
ректно работающей схемы АЦП среднеквадратическое значение
напряжения ошибки будет определяться выражением
(7 ) = _Д.
k кв? V12
где Емр - представляет собой минимальное напряжение, соответ-
ствующее шагу квантования, или разрешающую способность
АЦП. В общем случае Емр = где N - разрядность АЦП, а
^тах - максимальное напряжение на его входе. Тогда среднеквад-
ратическое значение числа электронов, приведенное к ячейке
ПЗС и эквивалентное шуму АЦП, найдем из соотношения
<W2
кук^е y[vi
Если вход АЦП согласован с динамическим диапазоном ПЗС,
последнее выражение можно переписать в виде
/ 2 \1 2
“ 2*712
где - максимальный заряд, который может накопить ячейка ПЗС.
В общем случае разрядность АЦП N выбирают таким обра-
зом, чтобы шум АЦП был примерно равен шумовому порогу
аналоговой части электронного тракта.
Определив дисперсии шумовых составляющих, найдем дис-
персию суммарного шума:
<«!> = <«ДР) + <«вс> + <<> + + <«п>> (8-7)
где (Идр) = (п^от) + (п^) - суммарный дробовый шум фотоприем-
ного устройства;
(нв2с) - дисперсия шума восстановления ПЗС;
- дисперсия шумов усилителей (или всего аналогового
тракта ЛСВ);
9*
259
(ивв) - дисперсия шума квантования;
(«„} - дисперсия шума подложки.
Необходимо отметить, что идеальной матрице присущ только
дробовый шум, причем та его часть, которая определяется вход-
ным излучением (т.е. фотонный шум):
где <п|оТ) - дисперсия дробовых шумов входного излучения. Ос-
тальные составляющие шума могут быть сведены к нулю за счет
высокого качества изготовления и применения специальных тех-
нических приемов, таких, как охлаждение матрицы.
Однако на практике подобная ситуация пока недостижима.
Поэтому в приемном канале ЛСВ всегда существует шумовой
порог, определяемый шумами аналогового и цифрового каналов,
шумом сброса ПЗС и т.д. Это приводит к тому, что даже в отсут-
ствие входного излучения в приемном канале всегда существуют
шумы, определяющие шумовой порог («„op) в соответствии с
выражением
<Ипор> = <Пт> + (<> + <«ус> +<«П> + <«»>• (8.8)
Шумовой порог не зависит от уровня входного излучения и
присутствует всегда. Его можно изменить только за счет оптими-
зации конструктивных параметров системы. Подставив (8.8) в
(8.7), получим среднеквадратическое значение числа шумовых
электронов в накопительной ячейке ПЗС:
<«Х>1/2 - <«сисТ>1/2 = >^> + <«пор>, (8-9)
, 2 ч «об+Йф
где <«фот) =--
Если в приемном канале ЛСВ используется ЭОП с коэффици-
ентом преобразования Кэоп, то дисперсия суммарного шума
260
определяется через дисперсию фотонного шума ПЗС-матрицы,
обусловленного входным излучением, и коэффициент преобразо-
вания Кэоп в соответствии с выражением [65]:
«об+«ф
2
(«ПОР)
(8.10)
1 + Кдол
В общем случае ЛСВ с ИП является многофункциональной
системой, способной работать в различных условиях: от полной
темноты и слабого входного сигнала до мощного сигнала и силь-
ного помехового фона. В связи с этим в различных ситуациях
применения ЛСВ отдельные шумовые компоненты по-разному
оказывают влияние на качество получаемого изображения. На
рис. 8.2 представлен график, на котором по оси ОХ отложено
число фотоэлектронов, обусловленных входным излучением
(сигнальным и фоновым), а по оси OY - среднеквадратическое
значение числа электронов суммарного шума. Как видно из гра-
фика, при слабом входном излучении суммарный шум ПЗС опре-
деляется шумовым порогом порядка 200 - 500 шумовых электро-
нов на ячейку. Эта ситуация характерна для случая, когда ЛСВ с
ИП работает в полной темноте (фон практически отсутствует) и
на предельной дальности от объекта.
Шумовые
электроны
ю 100 looo loooo looooo Фотоэлектроны,
ШТ.
Рис. 8.2. Фотонная передаточная характеристика
261
По мере увеличения интенсивности входного излучения шу-
мы также возрастают за счет роста дробовых шумов. При боль-
шом уровне сигнала, когда накопленный заряд приближается к
своему максимальному значению, происходит ограничение сиг-
нала за счет антиблюминговых каналов. Когда шумовые выбросы
заряда переполняют накопительную ячейку, избыточный шумо-
вой заряд перетекает в соседние ячейки, тем самым уменьшая
дисперсию шума.
Особый интерес представляет ситуация, когда система виде-
ния работает в режиме обнаружения слабого сигнала на предель-
ных дальностях при наличии подсветки либо в пассивном режи-
ме при недостаточной естественной освещенности. В этом случае
доминирующую роль играют дробовые шумы темнового тока
ПЗС и ЭОПа. На рис. 8.3 изображены графики составляющих
системного шума ЛСВ, из которых видно, что при малом числе
фотоэлектронов системный шум полностью определяется шумом
темнового тока, значение которого при отсутствии охлаждения
матрицы составляет 200 - 500 электронов на пиксел.
Рис. 8.3. Соотношение уровня шумов в фотоприемном устройстве при
различных режимах работы
262
В табл. 8.1 приведены среднеквадратические значения числа
шумовых электронов и величины порогового потока на одну
ячейку, а также уровни пороговой освещенности в зависимости
от заданной паспортной освещенности от источника с цветовой
температурой 3200 К. Из таблицы видно, что для самых лучших
бытовых матриц при комнатной температуре среднеквадратиче-
ское число шумовых электронов не ниже 20 на одну ячейку.
Таблица 8.1
Характеристики матричных фотоприемников
Паспортная минимальная освещен- ность, лк Пороговая освещенность ПЗС-матрицы, Вт/м2 Пороговый поток на одном элементе ПЗС 8x8 мкм, Вт Среднеквадра- тическое значе- ние числа шумовых элект- ронов
3 0,01 6,698-1013 5990
1 0,003 2,233-1013 1996
о,1 3,489-1 О'4 2,233-1014 200
0,05 1,744-1 О'4 1,116-1014 100
0,01 3,489-10’5 2,233-1015 20
В заключение отметим, что при анализе шумовых источников
фотоприемного канала следует учитывать различное время ин-
тегрирования отдельных шумовых составляющих. Так, внутрен-
ние шумы ПЗС, приведенные шумы усилителей и видеомонитора
суммируются за время накопления матрицы, в то время как фо-
тонный шум, обусловленный входным оптическим излучением,
интегрируется за время экспонирования. Поскольку выражение
(8.1) содержит системную МПФ, то в качестве входных сигналов
следует использовать гармонические двумерные сигналы. Одна-
ко на практике оценка выходных характеристик изображающих
систем проводится при использовании тест-объектов в виде пря-
моугольных мир. Тогда в соответствии с [65] выражение (8.1)
принимает вид
263
(Ж>30СП
8 7]lcB(Vx,V?)zVl(. 1
7Г2
(8.П)
Обозначим через (S/N)^ пор пороговое значение (S/N)^ и оп-
ределим минимальный дифференциальный сигнал Аптш, при ко-
тором осуществляется пороговое обнаружение объекта:
Д«т,п
Я2 (^зосп.порС^с^^^^.У.Ж/)
8 ^лсв(у x’V у)
Определив контраст объекта к^ соотношением
_ Роб Рф _ «об «ф
Коб — ~
Роб+Рф «Об + «ф
получим выражение для МРК:
(8.12)
(8.13)
(V,, V,) = V W). (8.14)
8 4св(Ух,У>)(«об+«ф)
Если дробовый шум характеризуется статистикой Пуассона,
то дисперсия этого шума равна его среднему значению, т.е.
<«др) = «др =
«об+«ф
2
(8.15)
Подставляя (8.15) в (8.14), получаем
Kmin(Vx,V?) =
п2 (^)восп пор(п2ист)1/2
16 ^Св(Ух>У0<«др)
M(yx,vy)N(f). (8.16)
Как показано в § 8.2, среднеквадратическое значение системного
шума при определенных допущениях выражается простым соот-
ношением
(<т>,2=ю12
«>
(«пор)
(8-17)
264
С учетом того, что
/2 ч 1/2 _ Поб +Яф
' др7 V 2
выражение (8.16) приобретает вид
2 (‘^Мвосп.пор
Kmin.(vx,v?) = ^-------------L ж/). (8.18)
16 " , ч Лоб+Пф
^JICb(Vx’V>)^ 2
Из (8.18) формально следует, что при стремлении Глсв(ух, vy) к
нулю значение МРК неограниченно возрастает, но в соответст-
вии с определением контраста (8.13) оно не может превышать 1.
Это кажущееся противоречие легко устраняется, если при-
нять во внимание, что произведение Kmin(vx, v?) • Глсв(ух, vy) пред-
ставляет собой воспринимаемый контраст изображения на пороге
обнаружения объекта и, (vr, v?), который, так же как МРК, из-
меняется в пределах от 0 до 1. При фиксированной интенсивно-
сти излучения подсвета увеличение пространственных частот vx,
Vy приводит к одновременному снижению уровня системной
МПФ и росту МРК. Максимальные значения vx, v?, при которых
значение МРК достигает 1 (без учета влияния канала распростра-
нения излучения), являются частотами среза ЛСВ и обозначаются
V V
*.т.ср> \y.cp*
На практике часто задают минимально допустимый уровень
МПФ системы Глсв(ух, vy) и по данному уровню (обычно 0,1) на-
ходят значения vxcp, vycp и максимально допустимого МРК. Если
в этом случае расчетное значение МРК превысит 1, то это озна-
чает, что контраст изображения недостаточен для порогового об-
наружения и, следовательно, необходимо повысить уровень
Тлсв(ух, vy) до требуемого значения.
На рис 8.4 представлено семейство кривых, характеризующих
зависимость МРК от интенсивности излучения подсвета. Из ана-
лиза графиков следует, что, хотя МРК однозначно связан с сис-
265
темной МПФ, воспринимаемая разрешающая способность зави-
сит от суммарного числа сигнальных и фоновых фотоэлектронов,
т.е. от уровня подсвета.
В подавляющем большинстве случаев значение дифференци-
ального сигнала Ап возрастает быстрее, чем соответствующий ему
уровень дробового шума. При заданном пороговом значении
(^/ЛОвосптор с ростом значения (S/N) наблюдатель воспринимает все
более мелкие детали изображения, т.е. воспринимаемое разреше-
ние увеличивается. Эта зависимость представлена на рис. 8.5 и
обусловлена исключительно спецификой зрительного анализатора,
в отличие от инструментальной разрешающей способности, кото-
рая определяется такой пространственной частотой, где значение
аппаратурной МПФ спадает до установленного уровня.
Рис. 8.5. Влияние значения отношения сигнал/шум на простран-
ственное разешение ЛСВ
266
8.3. Модель трехмерного шума
В начале 90-х годов в лаборатории электрооптики и ночного
видения (США) была разработана методология определения ми-
нимальной разрешающей разности температур (МРТ) примени-
тельно к тепловизионным системам. Она получила название
FLIR-92 и позднее была распространена на любые изображаю-
щие системы сканирующего типа, в том числе и с использовани-
ем матричных фотоприемных устройств, причем вместо МРТ в
них определялась МРК [65].
Центральное место в методологии FLIR-92 занимает трех-
мерная модель шума. В соответствие с ней системный шум изо-
бражающей системы («cHCT)1/2 представляется в виде семи со-
ставляющих, характеризующих пространственно-временной шум
в трехмерной координатной системе. Очевидным преимуществом
такого подхода является простая интерпретация сложных явле-
ний, связанная с возможностью представления интегральных
шумовых факторов в виде селективных структурных шумовых
компонентов.
На рис. 8.6 представлен трехмерный координатный базис, ось
Т которого соответствует временному направлению (по ней от-
кладывается последовательность видеокадров). Две другие орто-
гональные оси X и Y (горизонтальная и вертикальная) характери-
зуют пространственную информацию, причем индексы тип
указывают номер пиксела вдоль строк и в перпендикулярном на-
правлении. В табл. 8.2 приведены трехмерные шумовые компо-
ненты. Величина <n^)V2 характеризует среднеквадратическое
значение случайного пространственно-временного шума в мат-
ричном приемнике тхихДГ, где N - число кадров, (п^)1'2- сред-
неквадратическое значение пространственного шума после вре-
менного (по числу кадров N) усреднения.
267
Рис. 8.6. Координатный базис трехмерного шума
Таблица 8.2 Описание трехмерного шума
Состав- ляющая трехмерно- го шума Описание
К>1/2 «>1/2 Случайный трехмерный шум Пространственный шум, не изменяющийся от кадра к кадру
<«:>1/2 Среднеквадратическое значение флуктуаций по столбцам, изменяющееся от кадра к кадру («дождь»)
<«^>1/2 Среднеквадратическое значение флуктуаций по строкам, изменяющееся от кадра к кадру («полосы»)
<^>1/2 Независимое от времени среднеквадратиче- ское значение флуктуаций по столбцам (го- ризонтальные линии или «ленты»)
Независимое от времени среднеквадратиче- ское значение флуктуаций по строкам (вер- тикальные линии)
<«2>1/2 Флуктуации от кадра к кадру (фликкер-шум)
268
В зависимости от конструкции и режима работы системы
может доминировать любая из перечисленных в таблице состав-
ляющих шума. Источники шумовых составляющих имеют раз-
личную физическую природу, причем одновременно в изобра-
жающей системе могут присутствовать не все из них.
Фундаментальным положением рассматриваемой модели шума
является взаимная независимость шумовых составляющих. Тогда
среднеквадратическое значение системного шума (л2ист)1,2 выра-
жается формулой
<«сист >' 2 = > + <««> + > + <« v > + <«,2 > (819)
Оптимальная фильтрация, осуществляемая зрительным ана-
лизатором и характеризуемая в выражении для МРК (8.18) про-
изведением функций Л/(у„ Vy)-N(f), улучшает качество восприни-
маемого изображения за счет ослабления в различной степени
селективных шумовых составляющих. Это означает, что воспри-
нимаемый системный шум можно представить в виде
M(vt,V>.)W)«CT),/2 = Jp/л2) + Р2(л2) + ...+ Р„(и2), (8.20)
где Р, - весовой коэффициент ослабления z-й шумовой состав-
ляющей с дисперсией (л2) (0 < Р, < 1). Обозначим индексом i = 1
дробовый шум с дисперсией (л2) = (л2р) и перепишем выраже-
ние (8.20):
W^v,)W)«CT)1/2 =<п2р),/2. Рдр + Р2-^Й- + ... + Р„^Й-. (8.21)
V <«ДР> <«др>
В соответствии с моделью трехмерного шума каждая шумо-
вая составляющая (л2) соответствует одной из составляющих
трехмерного шума, представленных в табл. 8.2. В зависимости от
метрики шумовой составляющей его весовой коэффициент Р
представляется в виде соответствующего числа сомножителей Pv,
Ру, Р„ каждый из которых характеризует особенности временного
269
и пространственного (по одному из направлений) интегрирова-
ния зрительного анализатора. Ранее было показано, что в ЛСВ с
матричным фотоприемником доминирует случайный трехмер-
ный шум (и^). Тогда согласно (8.9) и (8.20) можно записать
а выражение для МРК примет вид
кт1П =
Л2 (^восппорУвРД
16 In , + п.
/пев (v х >v у)^ %
(8.22)
Как отмечалось ранее, в результате временного интегрирова-
ния значение увеличивается в корень квадратный раз из
произведения постоянной времени глаза /гл и частоты обновления
информации (частоты кадров/к), т.е.
Р,=
(8.23)
При оценке пространственной интегрирующей способности
глаза необходимо учесть, что глаз воспринимает отношение сиг-
нал/шум, характерное для всего объекта в целом, а не для эле-
мента. Если в интересующей разработчика области пространст-
венных частот принять шум белым, то можно считать [65]:
—; p =a v’; ах=^~; а =^~, (8.24)
/об /об
где а„ ау - угловой шаг пикселов по горизонтали (вдоль строк) и
вертикали;
qM - отношение размеров полосы трехшпальной эквивалент-
ной миры. Обычно для оценки качества изображающих
приборов это отношение принимают равным 7:1 для те-
270
пловизионных систем и 5:1 для изображающих систем
видимого и ближнего ИК-диапазонов;
v' - угловая пространственная частота;
/о'б - фокусное расстояние оптической приемной системы;
d„ dy - шаг фотоприемной матрицы вдоль строк и перпенди-
кулярно строкам.
При ограничении чувствительности приемной системы дро-
бовым шумом (все другие составляющие шума равны нулю)
окончательное выражение для МРК в горизонтальном направле-
нии принимает вид
Кт.п(<) = ^ (^)восП/пор_ |j_ (8.25)
16 TjICbCv'x)^"2) Vrn/к N
Из (8.25) следует, что пространственная интегрирующая спо-
собность глаза пропорциональна корню квадратному из отноше-
ния площади изображения объекта к площади корреляции шума
в изображении. Действительно, для изображений, регистрируе-
мых матричными приемниками, область корреляции шума равна
эффективной площади пиксела dx • dy, в то время как площадь
изображения полосы тест-объекта равна
/об . /об ?м
v' v'
Пороговое значение воспринимаемого отношения сиг-
нал/шум (S/N)m пор, входящее в (8.25), в принципе зависит от
пространственных частот наблюдаемого объекта, тем не менее по
рекомендации методологии FLIR-92 это значение принимают
одинаковым для всех условий обнаружения и равным 2,5.
8.4. Оценка предельной дальности видения
Одним из самых принципиальных для активных систем виде-
ния является вопрос об увеличении дальности видения и пре-
дельных возможностях этого увеличения. Именно предельная
дальность видения полностью определяет эффективность ис-
271
пользования ЛСВ конкретного типа в заданных условиях наблю-
дения.
Определение дальности видения при использовании ЛСВ свя-
зано с получением математического выражения, которое описы-
вает процесс восприятия и интерпретации изображения зритель-
ным анализатором. Реакция этого анализатора на входное S
воздействие не может быть непосредственно измерена, но может
быть найдена на основе достаточного объема психофизиологиче- !
ских экспериментальных исследований. Выделено несколько i
уровней восприятия, нижний из которых (обнаружение объекта)
соответствует выделению какого-то размытого пятна на фоне
помех, а высший уровень соответствует точной идентификации
объекта и определению его специфических особенностей. Между !
этими уровнями находится ряд различных уровней восприятия. В !
качестве параметра, характеризующего возможный уровень вое- '
приятия при работе с оптико-электронной системой видения,
предложено использовать разрешение штриховых мир, эквива- ]
лентных объекту. При этом предполагается, что объект характе-
ризуется неким минимальным размером Н^, существенным для
его восприятия.
Под эквивалентной штриховой мирой понимают миру прямо- i
угольной формы, ширина которой равна минимальному или кри- :
тическому (при двумерном восприятии) размеру объекта, а длина
соответствует размеру объекта в направлении, перпендикуляр-
ном критическому.
В соответствии с таким подходом, впервые развитым Джон-
соном [7], разрешение эквивалентной миры связывалось с каче- <
ством (уровнем) видения, которое определялось максимальной j
разрешаемой пространственной частотой миры, имеющей тот же i
контраст и наблюдаемой при тех же условиях, что и объект. На
примере военных транспортных средств Джонсон провел сравне- |
ние способности наблюдателя разрешать изображение миры с его
способностью воспринимать объект с различным качеством ви-
дения. В результате каждому уровню видения он поставил в со-
ответствие число некоторых разрешаемых периодов эквивалент-
ной миры, укладывающихся в пределах критического размера
272
объекта. Эти данные, называемые критериями Джонсона, приве-
дены в табл. 8.3, а на рис. 8.7 показан пример использования эк-
вивалентных штриховых мир для обнаружения и различения ре-
альных объектов.
Таблица 8.3
Критерии Джонсона
Уровень
видения
Обнаружение
Определение
ориентации
Различение
Идентификация
(опознавание)
Число разрешаемых периодов
штриховой миры на критическом
размере наблюдаемого объекта
1 ± 0,25
1,4 ± 0,35
4,0 ± 0,8
6,4 ± 1,5
Различение
Обнаружение
Рис. 8.7. Пример использования эквивалентных штриховых мир
для восприятия объектов (критерий Джонсона)
Из табл. 8.3 следует, что объект обнаруживается (т.е. уста-
навливается факт появления его в поле зрения), если на мини-
мальном размере объекта разрешается один период штриховой
миры. Различение объекта (т.е. классификация его, например, как
грузового автомобиля, трактора, танка) возможно, если на крити-
ческом размере разрешаются четыре периода штриховой миры.
Критерии Джонсона положены в основу современной методоло-
гии визуального восприятия объектов. На протяжении ряда лет
273
они уточнялись применительно к наблюдению изображений раз-
личного типа (растровых, безрастровых, тепловых и др.), воспри-
нимаемых на фоне неоднородной яркости в присутствии адди-
тивных и мультипликативных помех. Современные критерии
визуального восприятия, приведенные в табл. 8.4, несколько от-
личаются от значений табл. 8.3, но также называются критериями
Джонсона.
Таблица 8.4
Современные критерии визуального восприятия
Уровень видения Описание Мо
Обнаружение Выделение размытого пятна на фоне помех 1,0
Различение Объект выделяется с достаточной ясностью и дифференцируется по принадлежности к классу 4,0
Идентификация Объект дифференцируется по
(опознавание) принадлежности к типу внутри класса 8,0
Величина N50 в табл. 8.4 определяет количество периодов эк-
вивалентной миры, разрешаемых наблюдателем, для данного
уровня восприятия с 50%-ной вероятностью. В последнее время
предложена более детальная структура уровней восприятия в ви-
де графа, содержащая более десяти уровней и предназначенная
для создания алгоритмов работы автоматических устройств рас-
познавания и систем машинного видения.
Таким образом, критерии Джонсона позволяют связать каче-
ство визуального восприятия реальных объектов в данной систе-
ме видения с теоретически оцениваемыми характеристиками ка-
чества изображения прямоугольного тест-объекта, ширина
которого в два раза меньше критического размера реального объ-
екта, а контраст тест-объекта равен среднему контрасту реально-
го объекта на фоне подстилающей поверхности.
В отечественной научно-технической литературе, как прави-
ло, используются только два уровня восприятия - обнаружение и
274
распознавание, причем распознавание соответствует по критери-
ям Джонсона уровню идентификации.
Результаты фундаментальных исследований Джонсона по-
зволяют оценить по единому показателю (число пространствен-
ных периодов эквивалентной штриховой миры) 50%-ную вероят-
ность восприятия объекта с фиксированным качеством (уровнем)
восприятия. На основании более поздних экспериментальных
данных установлено, что вероятность восприятия подчиняется
логнормальному интегральному закону распределения [67]:
1 Igo
Ж) = ~г=-— Jexp
у/2п Igo- о
\2
50.^
IgCT J
IgW-lgM
2
</(lgW),
(8.26)
ruelg о = 0,198;
N - число периодов эквивалентной миры, разрешаемых при
заданном уровне восприятия с требуемой вероятностью;
^Vs0 - число периодов эквивалентной миры, разрешаемых при
заданном уровне восприятия с 50%-ной вероятностью.
Рис. 8.8. Зависимость вероятности восприятия
от числа периодов эквивалентной миры
Графики зависимости (8.26) для трех уровней восприятия
приведены на рис. 8.8. В технической литературе эти зависимо-
275
сти называются функциями передачи вероятности восприятия
цели. По аналогии с МПФ они характеризуют изменение веро-
ятности восприятия наблюдаемого объекта в зависимости от
пространственной частоты эквивалентной миры. С достаточной
точностью логнормальная функция распределения аппроксими-
руется соотношением
£ = 2,7+ 0,7---. (8.27) '
•^50
Используя формулы (8.27), по заданной вероятности воспри-
ятия P(N) и известному значению N50 для конкретного уровня ви- |
дения можно определить требуемое разрешаемое число периодов i
N эквивалентной миры. На основе вычислений по формулам |
(8.27) в табл. 8.5 приведены численные значения коэффициентов, *
на которые следует умножить величину Nso, чтобы найти требуе-
мое число N. Например, как видно из табл. 8.5, идентификация
объекта с вероятностью 95 % требует, чтобы на его критическом i
размере уложилось 8-2=16 периодов эквивалентной миры.
Таблица 8.5
Множитель для пересчета вероятности восприятия
Вероятность восприятия Множитель
1,00 з,о
0,95 2,0 .
0,80 1,5
0,50 1,0
0,30 0,75
0,10 0,50
0,02 0,25
0 0
276
При определении дальности действия ЛСВ предполагается,
что наблюдаемый объект характеризуется единственной про-
странственной частотой. В действительности реальный объект
содержит в своем пространственно-частотном спектре сложный
набор пространственных частот - от нулевой до очень высоких.
Системная МПФ ограничивает этот спектр частотами, воспроиз-
водимыми на экране монитора. Однако указанное допущение по-
зволяет использовать критерии Джонсона, устанавливающие
связь между угловыми размерами объекта и шкалой угловых
пространственных частот на графике МРК.
В соответствии с предлагаемым подходом будем считать, что
предельная дальность обнаружения объекта определяется не по-
роговым контрастом, как принято в работах [12, 16], но порого-
вым воспринимаемым отношением сигнал/шум. С одной сторо-
ны, при этом пороговом значении (5/7У)восп пор разрешается
минимально допустимый контраст на входе ЛСВ, т.е. МРК.
С другой стороны, величина этого входного контраста не долж-
на превышать уровень наблюдаемого контраста объекта, кото-
рый, как показано в главе 6, отличается от истинного контраста
объекта из-за характерных свойств канала распространения из-
лучения. Поскольку с увеличением дальности МРК возрастает,
а наблюдаемый контраст кобн уменьшается, то дальность дейст-
вия ЛСВ, на которой МРК равен кобн, и будет предельной даль-
ностью видения. Проще всего определить предельную даль-
ность графическим способом, построив зависимости Kmin(z),
коб H(z). Абсцисса точки пересечения этих кривых и соответству-
ет предельной дальности.
Согласно этой методике, на первом этапе согласно (8.25) на-
ходят KminCv'). Для этого сначала определяют системную воспри-
нимаемую МПФ (см. главу 2), а затем находят дисперсию сис-
темного дробового шума (Идр) (см. главу 7). На втором этапе
шкалу пространственных частот по оси абсцисс графика МРК =
= ДУ) преобразуют в шкалу дальностей с помощью обнаружи-
тельных характеристик. Действительно, число периодов эквива-
лентной миры N, укладывающихся на критическом размере
277
наблюдаемого объекта, связано с угловой пространственной час-
тотой v' соотношением
W = ^-v', (8.28)
z
где z - дальность видения.
Значение N выбирают в соответствии с заданным уровнем и
вероятностью восприятия. Тогда при известном критическом
размере объекта и выбранном N дальность действия и угловая
пространственная частот эквивалентного тест-объекта связаны
соотношением
Н
z = -^v' = Gv'. (8.29)
Если, например, требуется опознать объект, имеющий крити-
ческий размер 3 м с вероятностью 80 %, то по данным табл. 8.5 или
выражению (8.28) находим требуемое число периодов N = 8 • 1,5 =
= 12. Подставив найденное значение в формулу (8.29), получим
z = 0,25 v'.
Графики зависимостей Kmin=/j(v') и Kmin = /2(z) для этих
значений представлены на рис. 8.9 и 8.10. На заключительном этапе
по материалам главы 6 рассчитывают зависимость наблюдаемого
контраста от дальности ^„(z). При этом угловые пространственные
частоты v' выражают через дальность в соответствии с (8.29).
278
МРК
Рис. 8.10. Зависимость МРК от дальности наблюдения
На рис. 8.11 представлены кривые k^Jz) и ^„(z), характери-
зующие процесс видения на уровне опознавания объекта = 3 м
с 80%-ной вероятностью. Абсцисса точки пересечения кривых
соответствует предельной дальности znp.
Рис. 8.11. Схема определения предельной дальности видения
Следует отметить, что описанная методика основана на ряде
допущений, связанных с субъективным характером восприятия
и эвристической оценкой некоторых системных параметров
(например, системного шума). Поэтому она не может рассмат-
риваться в качестве точного инструмента, но является весьма
полезным универсальным средством интегральной оценки эф-
фективности систем видения.
279
Глава 9. МЕТОДИКА РАСЧЕТА ПРЕДЕЛЬНОЙ
ДАЛЬНОСТИ ВИДЕНИЯ ПРИ ИСПОЛЬЗОВАНИИ
ЛСВ С ИМПУЛЬСНЫМ ПОДСВЕТОМ
9.1. Расчет предельной дальности видения
при работе ЛСВ в приземном слое атмосферы
Постановка задачи
Определить предельную дальность обнаружения и распозна- \
вания объекта - транспортного средства на фоне однородной '
подстилающей поверхности - с помощью ЛСВ с импульсным !
подсветом излучением с длиной волны X = 1,06 мкм при задан- '
ных условиях наблюдения и параметрах системы (рис. 9.1). Оце- j
нить эффективность стробирования приемного канала по дально-
сти при работе ЛСВ в рассеивающей атмосфере. |
1. Условия наблюдения |
1.1. Вероятность обнаружения объекта
по его изображению на экране ТВ-монитора Ро6н = 0,9 |
1.2. Вероятность распознавания объекта Р^„ = 0,8 |
1.3. Время наблюдения: J
а) дневное, зенитный угол Солнца 9С = 20° I
Вт |!
б) сумерки, спектральная яркость фона LK= 10‘4 —х--- 1
м • ср- мкм j
1.4. Характеристики атмосферного канала: ’
Метеорологическая дальность видимости 5м=10км (
Интегральный параметр индикатрисы рассеяния ц = 0,3 !
280
Параметр индикатрисы рассеяния
(первый член полинома Лежандра) = 1,5
Структурная постоянная атмосферы С2 = IO'13 м-273
Спектральная солнечная постоянная
Вт
для излучения с длиной волны А, = 1,06 мкм Е± = 0,67 -
м нм
Оптическая толщина атмосферы т = 0,4
Рис. 9.1. Схема работы атмосферной ЛСВ
2. Объект наблюдения
Объектом наблюдения является неподвижное транспортное
средство типа грузового автомобиля.
2.1. Коэффициент отражения поверхности объекта
по интенсивности (альбедо) ро6 = 0,8
2.2. Коэффициент отражения подстилающей
поверхности по интенсивности рф = 0,3
281
2.3. Критический размер объекта = 3 м
3. Технические характеристики передающего канала (канала им-
пульсного подсвета)
Передающий канал содержит твердотельный импульсный
лазерный излучатель на АИГ : Nd3+ с модуляцией добротности
и оптическую систему (обратный телескоп), формирующую
требуемую угловую расходимость лазерного излучения.
3.1. Длина волны излучения подсвета
3.2. Импульсная мощность лазерного излучателя
3.3. Длительность импульса подсвета
3.4. Угловая расходимость лазерного излучения
на выходе формирующей оптической системы
4. Технические характеристики приемного канала
X = 1,06 мкм
Ро= 107Вт
tm - Ю 7 С
2ан= 1,5°
Приемный канал содержит дифракционно ограниченный
приемный объектив, в фокальной плоскости которого распо-
ложен фоточувствительный матричный приемник излучения.
4.1. Диаметр входного зрачка приемного объектива £>о6 = 60 мм
4.2. Фокусное расстояние приемного объектива /о'б = 100 мм
4.3. Коэффициент пропускания оптической системы Копт = 0,8
4.4. Число элементов (пикселов) матричного
приемника излучения (матрица 1/3") mxn = 512x512
4.5. Размер чувствительного элемента
(пиксела) аххау = 10 х 10 мкм
4.6. Шаг элементов матрицы dx = dy- 10 мкм
4.7. Квантовая эффективность фоточувствительного
слоя матричного приемника
на длине волны X = 1,06 мкм ц = 0,01
4.8. Линейный параллакс (база) между оптическими
осями приемного и передающего каналов Ь = 0,25 м
4.9. Ширина полосы пропускания
интерференционного фильтра ДХф = 5 нм
5. Параметры электронного тракта
Структурная схема электронного тракта соответствует схе-
ме рис. 2.18 и содержит входной и выходной аналоговые мо-
дули, а также цифровой блок обработки видеосигнала.
282
5.1. Частота среза электронного тракта
(видеочастота среза)
6. Технические характеристики видеомонитора
6.1. Формат воспроизводимого изображения
6.2. Размер диагонали экрана
6.3. Активное время строки
6.4. Число активных линий
/ср=10МГц
4:3
14"
t„ = 51,7 мкс
575
6.5. Частота кадров
7. Характеристики зрительного анализатора
7.1. Расстояние наблюдения
(от экрана до наблюдателя)
7.2. Яркость экрана монитора
7.3. Время инерции глаза
7.4. Пороговое воспринимаемое отношение
сигнал/шум
25 Гц
7?мон = 0,5 м
Д,к = 35 кд/м2
/гл = 0,2 с
(Ж)восп.пор = 2,5
Порядок расчета
1. Определение передаточной функции ЛСВ
На первом этапе, в соответствии со структурной схемой ана-
лизируемой ЛСВ, определяется ее модуляционная передаточная
функция Тлсв(ух, V0. Согласно заданным условиям, результиру-
ющую, воспринимаемую оператором МПФ системы видения,
можно записать аналогично (2.33) и (2.34) в виде
7)icb(v„ = Тот(ух, Vy) • Тфд(чх, Vy) • TM(vx, vy) • TM0H(vx, vy) • TJyx, vy).
Преобразовав формулы (2.35), (2.61), (2.78), (2.85), (2.98) для уг-
ловых пространственных частот и подставив в них исходные
данные, получим расчетные соотношения T^(v') для одномерной
пространственной частоты, которые сведем в табл. 9.1.
На рис. 9.2 представлены МПФ всех звеньев, а также резуль-
тирующая МПФ ЛСВ, полученная перемножением МПФ всех
составляющих звеньев системы. Там же приведена аппроксима-
ционная зависимость для результирующей МПФ, построенная по
формуле, указанной в табл. 9.1 при о = 0,075 мрад.
283
Таблица 9.1
Выражения для расчета МПФ отдельных звеньев
и результирующей МПФ ЛСВ
Звено ЛСВ
Оптический канал
Фотоприемное
устройство
Электронный
тракт
Дисплей (монитор)
Зрительный
анализатор
ЛСВ
Обозначе- ние МПФ Расчетная формула
T’onr(v') 2 ( v' A ( v' A L ( v' A — arccos — - — , 1- — л v 60 J 60 J у \ 60 J
^(V') sinc(0,lv')
Uv') sin c(0,l v') z- l + (0,lv')2
Z’moh(v') exp(- 0,068v'2)
exp(- 0,lv')
7jicb(v') exp(- 2n2c2v'2), о = 0,075 мрад
2
Рис. 9.2. Расчетные МПФ атмосферной ЛСВ и отдельных ее
звеньев
284
2. Определение оптических характеристик и МПФ атмо-
сферного канала
По заданному значению МДВ 5М = 10 км в соответствии с
формулой (5.2) находим показатель ослабления s излучения с
длиной волны А. = 1,06 мкм атмосферой, а затем согласно форму-
лам (5.3) и (5.4) определяем показатели поглощения к„ и рассея-
ния о, а также вероятность выживания фотона Л. Значение инди-
катрисы рассеяния в обратном направлении определяем в
соответствии с (5.7), а интегральный параметр индикатрисы ц в
условиях атмосферной дымки выбираем равным 0,3.
Интенсивность атмосферной турбулентности определяется
структурной характеристикой показателя преломления , кото-
рая для заданного состояния атмосферы соответствует уровню
сильных флуктуаций. Значения полученных оптических характе-
ристик атмосферы приведены в табл. 9.2.
Табл ица 9.2
Значения оптических характеристик атмосферы
А., мкм e, km 1 O, KM 1 kn, km'1 A
1,06 0,17 0,13 0,044 0,57 0,3 0,8 IO'13
МПФ для условий атмосферных дымок определяется в рам-
ках малоуглового приближения по формуле (6.14), а для турбу-
лентной атмосферы - по формуле (6.15). В зависимости от угло-
вых пространственных частот v' эти формулы приобретут вид
7’«r.P(v') = exp -Aez +
Aez
7(2npv')2 +1
^aTT(v') = exp
0,55C2f—
I A- J
z(v'A.)5/3
(9.1)
T„(y') = T„p(v')T„T(v').
285
3. Расчет энергетических характеристик сигнальных и фо- I
новых составляющих регистрируемого излучения ]
При работе ЛСВ в атмосфере днем и в сумерках в качестве со- |
ставляющих излучения, регистрируемых одним пикселом, рас- I
сматриваются лазерное излучение подсвета и солнечное освеще- |
ние, а при работе ночью - лазерное излучение и свет ночного неба. |
Интенсивность всех регистрируемых излучений будем оценивать 1
числом используемых фотонов, т.е. числом фотоэлектронов. 1
Числа фотоэлектронов, обусловленных отраженными от объ- |
екта и от подстилающей поверхности лазерным и солнечным из- ]
лучениями, равны
(9.2)
«об(*) = Лоб.л(Х) + Лоб.с(2)>
«ф(2) = Лф.л(2) = ЛФс(2)
и определяются в соответствии с формулами (7.13а), (7.14), (7.4), I
(7.18), пересчитанными в числах фотоэлектронов и выраженны- 1
Е 1
ми через спектральную яркость £зп = ——, где Ет - освещенность |
л 1
земной поверхности. ’
Для нахождения составляющих (лазерной и солнечной) поме-
хи обратного рассеяния nn0F(z) = ппор n(z) + ипор.с(Ю воспользуемся
формулами (7.15) и (7.18). Представим все найденные зависимо-
сти в виде сводки формул в табл. 9.3. Здесь и далее при вычисле-
нии чисел фотоэлектронов значения qt, i = 1,...,6 рассчитываем !
при размерах объекта r0 = Н^. j
Таблица 9.3
Выражения для расчета чисел фотоэлектронов
№ Число фото- электронов Расчетная формула
1 2 ^обл(^) "обсСО ЛКопг^РобЧ^п exp(-2Ez)f-уа" Jq. hvz Van+aJ ^зпРобКотДЛ.ф^нП(^„2)(ла^)ехр(-ег)93
Av
286
Окончание табл. 9.3
№ Число фото- электронов Расчетная формула
3 лфл(г) ^О^опт^имРф^! ''п / Г» ф ехр( 2ez) hvz ( 2 \ 2 2 lan+a2J
4 «фс(г) (лгп2 )(лап) exp(-ez) hv
5 ЯПОРл(2) Р0Копт^мП^ (exp(_2ez) х hvz2 \ 8 )
х ехр -b2 ar
.(«’ +a^)z2 l«2 + “2J
6 pTIOp(Zo) ^Z0> гнач b
ЛПОР лСО "нач
7 Игтгш Jz) - exp(-ez)]
4eAv
На рис. 9.3 и 9.4 приведены графические зависимости «,(z)>
характеризующие работу ЛСВ в дневных условиях в режиме
стробирования по дальности и без него. Заметим, что при расчете
энергии составляющих, обусловленных солнечным излучением
ио6 с(г), лф c(z), nnoP c(z), в режиме стробирования время накопления
1И матричного приемника приравнивается длительности строба,
которая соответствует длительности импульса подсвета tK = /нм.
В отсутствие стробирования tK для стандартных ФПЗС-матриц
равно 20 мс.
Как видно из графиков, в режиме стробирования интенсивно-
сти обеих помех обратного рассеяния лПор.л(г)> лпорс(2) сущест-
венно уступают лазерным составляющим no6„(z), «об.с(2)- В Ре"
зультате дробовый шум системы целиком определяется
энергетическими составляющими лазерного излучения, т.е.
/„2 \ ~ Иоб л + Яф л
' ДР / - -
287
Рис. 9.3. Зависимость числа фотоэлектронов от дальности в
режиме стробирования приемного канала при работе атмо-
сферной ЛСВ в дневных условиях:
~ "об 2 - "ф .V - "2>.с ’ 4 - П^с ; -5 - «ПОР л > ~ "пор с
Рис. 9.4. Зависимость числа фотоэлектронов от дальности
в отсутствие стробирования приемного канала при работе
атмосферной ЛСВ в дневных условиях:
"обл> 2 3 "ПОРл> "об.С’ "фС> "ПОРс
288
В отсутствие стробирования, как следует из графиков рис. 9.4,
составляющие солнечного излучения n^^z), n*e(z), «пор с(г) Доми-
нируют, в результате чего импульсная лазерная подсветка на-
блюдаемого объекта становится малоэффективной.
Рис. 9.5. Зависимость числа фотоэлектронов от дальности в
режиме стробирования приемного канала при работе атмо-
сферной ЛСВ в сумерках:
1 ~ п<л.ю 2 ~ яф л> 3 - «пор л ’ 4 ~ й, 5 - с, б - 71ПОР с
При расчете энергетических характеристик составляющих ре-
гистрируемого излучения в условиях сумеречного освещения
прежде всего отметим, что в режиме стробирования эффектив-
ность работы ЛСВ практически не зависит от уровня внешней
освещенности. Действительно, при работе ЛСВ как днем, так и в
сумерках контраст формируемого изображения полностью опре-
деляется компонентами импульсного лазерного излучения. Если
же ЛСВ работает в сумерках без стробирования, то дальность
видения зависит от соотношения энергетических составляющих
10—1091 пол
солнечного и лазерного излучений. В этом случае яркость сол-
нечного излучения на входе ЛСВ находим в соответствии с фор-
мулой (7.18) с учетом заданной спектральной яркости земной по-
верхности Lm = Езп /л:
от объекта Lco6 = po6Z3n exp(-sz)^3
от фона £ф = рф£зп exp(-sz) (9.3)
от помехи обратного рассеяния Z^OP = (ст / 4s) Дп [1 - exp(-sz)].
Графики энергетических составляющих n(z), рассчитанных
для сумеречных условий работы ЛСВ со стробированием и без
Рис. 9.6. Зависимость числа фотоэлектронов от дальности в
отсутствие стробирования приемного канала при работе ат-
мосферной ЛСВ в сумерках:
7 ^об л> 2 ^ф.л> $ ^ПОР.л» 4 ^обс’ $ ^ф.о б ^ПОР.с
4. Определение наблюдаемого контраста объекта
Наблюдаемый контраст объекта на фоне подстилающей по-
верхности Коб,,, измеренный в плоскости входного зрачка, отли-
290
чается от истинного контраста. Его можно вычислить в соответ-
ствии с формулой (6.13):
к —Коб^ат(У ) (д Д\
1 + 2пПор/(«об+«ф)
В общем случае величины иП0Р, п^ и лф, входящие в формулу
(9.4), представляются в виде суммы слагаемых:
«об — «об.л + «об.с5
«Ф = «Ф.л+«ф.с; (9-5)
«ПОР = «ПОР.л + «ПОР.С*
5. Определение минимально разрешаемого контраста
МРК находим по формуле (8.25) в предположении, что основ-
ной составляющей системного шума является дробовый фотонный
шум. Этот шум вызван флуктуациями фотоэлектронов, эмитиро-
ванных фотоприемником при регистрации составляющих:
лазерного излучения л, иф л;
солнечного излучения иобс, ифс;
помехи обратного рассеяния иПор.Л1 «пор.с-
Тогда выражение (8.25) трансформируется к виду
КтЖ) = ~------------(‘^ocn.nop ), (9.6)
16 7’лсв(''х)70>5<«об + «ф + «ПОР) V
где п^ + «об.с>
«ф «ф.л «ф.с>
«ПОР = «ПОР.л + «ПОР.с*
6. Определение предельной дальности видения ЛСВ
Как показано в главе 8, предельная дальность видения z^ оп-
ределяется абсциссой точки пересечения графиков МРК и на-
блюдаемого контраста. Предварительно указанные зависимости
должны быть выражены в виде функций дальности, т.е. k^z) и
k^h(z). Это можно сделать, связав угловые пространственные
частоты v' с дальностью z на основании критериев Джонсона:
ю»
291
\>' = Nz/HKf, (9.7)
где N - число периодов эквивалентной миры, укладывающихся на
критическом размере наблюдаемого объекта, при которых обеспе-
чиваются заданная вероятность определения уровня восприятия.
Для требуемых вероятностей обнаружения P^K - 0,9 и распо-
знавания Ррасп = 0,8 по данным табл. 8.5 и формуле (8.28) опреде-
лим Ао6н и Арасп:
#сбн=1,8; ^„=12.
При заданном критическом размере объекта = 3 м соот-
ношения (9.7) примут следующий вид:
для обнаружения объекта v' = 0,6z рад1;
для распознавания объекта v' = 4z рад1.
Аналогично проводим преобразование выражений (9.4) и
(9.6) для нахождения зависимостей 7лСВ(г) и 7aT(z). В результате
для каждого заданного уровня видения получаем две зависимо-
сти Kmin(z ) и k0^„(z). Определив точку пересечения этих кривых,
найдем предельную дальность видения.
На рис. 9.7 и 9.8 приведены графические зависимости Kmm(z) и
^„(z), характеризующие работу ЛСВ в дневных условиях в ре-
жиме обнаружения при стробировании приемного канала и без
него. Аналогичные зависимости, оценивающие работу ЛСВ в су-
мерках, приведены на рис. 9.9 и 9.10.
Предельная дальность распознавания при работе ЛСВ в днев-
ных условиях и сумерках определяется по графикам, представ-
ленным на рис. 9.7 - 9.10, и равна:
при работе в дневных условиях:
в режиме стробирования по дальности z^, = 5200 м,
^пр.расп 1500 М,
в отсутствие стробирования znp o6„ = 7800 м, znp pacn = 1700 м;
при работе в сумерках:
в режиме стробирования по дальности z^, = 5200 м,
^пр.расп 1500 М,
в отсутствие стробирования гпр о6н=4000 м, znp pacn= 1200 м.
292
Рис. 9.7. Определение предельной дальности обнару-
жения и распознавания объекта с помощью атмосфер-
ной ЛСВ в дневных условиях в режиме стробирования:
/ _ „обн . 2 _ обн . э _ расп . J _ расп
1 коб.н’ Kmin’J ко6.н ’ Kmin
Рис. 9.8. Определение предельной дальности обнаруже-
ния н распознавания объекта с помощью атмосферной
ЛСВ в дневных условиях в отсутствие стробирования:
1 _ „оби 2 - к-06" • 3 - к-Р*сп • 4 - к₽*сп
‘ ко6 н1 х Kmin > J ко6 н > Kmin
293
К об.н> ^min
Рис. 9.9. Определение предельной дальности обнаруже-
ния и распознавания объекта с помощью атмосферной
ЛСВ в сумерках при стробировании приемного канала:
/ _ и-обн 2 _ „обн . э _ расп . 4 _ расп
1 ко6 н > z Kmin ’ J ко6.н > * Kmin
Рис. 9.10. Определение предельной дальности обнару-
жения и распознавания объекта с помощью атмосфер-
ной ЛСВ в сумерках в отсутствие стробирования при-
емного канала:
/ _ й-06" 2 - V°®H • ? - vPacn • 4 - i^pacn
1 ко6.н > * Kmin > J ко6.н ’ * Kmin
294
9.2. Расчет предельной дальности видения
при работе ЛСВ под водой
Постановка задачи
Рассчитать дальность обнаружения объекта на фоне морского
дна для ЛСВ с импульсным подсветом при следующих заданных
условиях наблюдения и технических характеристиках каналов,
(рис. 9.11).
Рис. 9.11. Схема работы подводной ЛСВ
1. Условия наблюдения
1.1. Вероятность обнаружения и распознавания объекта по его
изображению на экране ТВ-монитора Ро6н = 0,9, Ррасп = 0,8
1.2. Прозрачность морской воды по белому диску z6 = 40 м
1.3. Критический размер объекта = 0,6 м
1.4. Коэффициент отражения объекта на рабочей
длине волны X = 0,53 мкм ро6 = 0,55
1.5. Коэффициент отражения подстилающей
поверхности по интенсивности рф = 0,15
1.6. Спектральная солнечная постоянная для излучения
Вт
с длиной волны X = 0,53 мкм -1,95 -----
м нм
1.7. Оптическая толщина атмосферы т = 0,5
295
А. = 0,53 мкм
Р0 = ЗЮ7 Вт
/им = Ю-8 С
2аи = 3°
/км =Ю Гц
2. Технические характеристики передающего канала
2.1. Длина волны излучения подсвета
2.2. Импульсная мощность лазерного излучателя
2.3. Длительность импульса подсвета
2.4. Угловая расходимость лазерного излучения
на выходе формирующей оптической системы
2.5. Частота следования импульсов
3. Технические характеристики приемного канала
Приемный канал содержит ЭОП, экран которого оптически
сопряжен с фоточувствительной площадкой матричного при-
емника репродукционным объективом.
В качестве приемного объектива используется объектив
«Рубинар-300» с диаметром входного зрачка!)^ = 60 мм и фо-
кусным расстоянием /о'6 = 300 мм.
В системе использован ЭОП второго поколения с МКП.
Остальные характеристики приемного канала, индикатора
такие же, как в системе, рассмотренной в § 9.1.
Порядок расчета
1. Определение модуляционной передаточной функции ЛСВ
Структурная схема ЛСВ в данном случае отличается от струк-
турной схемы ЛСВ, рассмотренной в § 9.1, наличием двух допол-
нительных звеньев - ЭОП и репродукционного объектива.
В качестве ЭОП использован ЭОП второго поколения с МКП,
диаметром экрана 18 мм и размером ячейки МКП, равным 30 мкм.
Репродукционный объектив = 20 мм, = 30 мм, р = 1/3)
обеспечивает оптическое сопряжение с увеличением 1/3 экрана
ЭОП и ФПЗС-матрицы. Таким образом, линейный размер эле-
ментарной приемной ячейки на фотокатоде ЭОП а„ = 30 мкм, а
следовательно, мгновенный угол поля зрения приемника, как и в
§9.1, равен 2ап = = 10~4.
/об
Воспользовавшись данными табл. 9.1 и вычислив МПФ ЭОП
и МПФ проекционного объектива по формулам (2.65) и (2.67),
296
найдем МПФ всех звеньев и результирующую МПФ системы
Тлсв(у'). Полученные зависимости представлены в табл. 9.4.
Таблица 9.4
Выражения для расчета МПФ отдельных звеньев
и результирующей МПФ ЛСВ
Звено ЛСВ Обозначе- ние МПФ Расчетная формула
Оптический канал ronT(v') 2 л Z .X / »\ I / ,\2 f v ) IV), IV) arccos — - — UI - — <6oJ V60Jv V6oJ
ЭОП 73on(v) ехр(-0,1 lv')2
Репродукционный объектив rpo(v') exp(-0,08v')2
Фотоприемное устройство W sinc(0,l v')
Электронный rjv')
тракт ’ l + (0,lv')2
Дисплей (монитор) r„0„(v') exp(-0,068v')2
Зрительный анализатор exp(-0,l v')
ЛСВ ТлсвС'О ехр(-2л2сг2у'2), a = 0,13 мрад
График МПФ ЛСВ, построенный на основании данных
табл. 9.4, а также график аппроксимирующей функции приве-
дены на рис. 9.12.
2. Определение гидрооптических характеристик и МПФ
морской среды
В соответствии с заданным значением прозрачности морской
воды по белому диску z6 согласно формуле (5.16) находим веро-
ятность выживания фотона Л, а затем определяем показатель ос-
лабления е, показатель рассеяния о и показатель поглощения кП.
Далее по найденному значению о по формуле (5.17) находим ко-
эффициент асимметрии Кас индикатрисы рассеяния х(у) и рассчи-
297
тываем по формулам (5.17) - (5.19) интегральный параметр ин-
дикатрисы рассеяния ц, значение индикатрисы рассеяния в на-
правлении обратного рассеяния и величину <р0. Значения гид-
рооптических характеристик морской среды для значения z6 =
= 40 м приведены в табл. 9.5.
Таблица 9.5
Значения гидрооптических характеристик морской среды
Z6, м A E, M 1 CT, M"1 *n, M-’ Фо
40 0,675 0,125 0,084 0,041 0,012 0,071 0,024
Рис. 9.12. Результирующая МПФ подводной ЛСВ и ее
аппроксимирующая функция
МПФ слоя рассеивающей и турбулентной морской среды оп-
ределяются по формулам (6.14) и (6.16), которые для угловых
пространственных частот можно записать в виде
^M.p(v') = exp
~Aez +
Aez
д/(2яцу')2 +1
^M.T(v') = exp
(XvV(An2)z
За
(9.8)
298
Для расчетов принимаем следующие значения:
<An2>= 10'9;
и =1,34;
а = 0,5.
Результирующая МПФ слоя морской воды
Tm(v') = Tmp(v') = Tmt(v'). (9.9)
3. Расчет энергетических характеристик сигнальных и фо-
новых составляющих регистрируемого излучения
При работе ЛСВ под водой необходимо осуществить строби-
рование по дальности из-за интенсивного обратного рассеяния
излучения подсвета в морской воде, причем длительность строба
равна длительности зондирующего импульса. Другой особенно-
стью энергетического расчета является наличие в фотоприемном
устройстве электронно-оптического преобразователя, осуществ-
ляющего усиление яркости.
Выберем для использования в приемном канале ЛСВ ЭОП вто-
рого поколения с микроканальной пластиной и схемой стробиро-
вания. Его паспортные характеристики приведены в табл. 9.6.
Таблица 9.6
Паспортные характеристики ЭОП второго поколения
Характеристика Обозначе- ние Численное значение
Спектральная чувствительность фотокатода на рабочей длине волны Хр, мА/Вт СР °фк 300
Интегральная чувствительность фотокатода, мкА/лм сп °фк 300
Электронно-оптическое увеличение г 1
Световая отдача люминофора, лм/Вт Y 30
Коэффициент усиления яркости П 20 • 103
Интегральная чувствительность ПЗС матри- цы к излучению люминофора Р-20, мА/лм сп ° ПЗС 0,1
299
Изображение, формируемое на экране ЭОП, сопрягается с
фоточувствительной поверхностью ПЗС матрицы репродукцион-
ным объективом с относительным отверстием (р/f') =1:3 и
линейным увеличением 0 = 1/3. Коэффициент оптической связи
Х = I?0- =0,2.
4(1 + 0)2
Подставив исходные данные в формулу (7.51), найдем эффек-
тивность преобразования регистрируемого излучения фотопри-
емным устройством 5ФПУ = 1,5 • 1019 Вт' с *.
Теперь определим числа фотоэлектронов, генерируемых в
одном пикселе регистрируемым излучением, от объекта, фона и
помех обратного рассеяния по формулам (7.21) - (7.23а), приве-
денным в табл. 9.7. В этой же таблице приведены формулы
(7.24а), (7.246) для вычисления чисел фотоэлектронов, форми-
руемых в результате солнечной засветки.
Таблица 9.7
Выражения для расчета чисел фотоэлектронов
№ Число фото- электронов Расчетная формула
1 ^об.л ЛЛм^ФпуКоптРобагЛ2 exp[-2£z(l - A)]g2
4p2Aez3 + (а2 + a2)z2
2 и. 7^им5ФпуКоптРФап''п2 exp[-2ez(l - А)]
'•ф.Л 4p2Aez3 +(а2 + a2)z2
з р, с и a2rn2 exp[-2ez(l - A)]
ЛПОР.л ^0*им°ФПУ14 опт o L 2* 3 /2 2\ 2 V 8л у 4p Aez +(a„+a„)z
4 „сг Лоб,с £ —^им^ФПуРоб^п^п ДЧ exp[-*nz]g4 7t
5 „ст ”фс £ -^^м^ФпуРф^а^г/АХф exp[-fcnz]
6 ст лПОР.с (1\ЛпуФ” *а2лг„2(1 exp[ 2ysz]) n 4y
300
Графически зависимости и,(2), характеризующие работу под-
водной ЛСВ в режиме стробирования по дальности, представле-
ны на рис. 9.13.
Рис. 9.13. Зависимость числа фотоэлектронов от
дальности при работе подводной ЛСВ со стробиро-
ванием приемного канала:
- поб л> ? ~ Пф л’ 3 - ИПОР л > ~ «об е ’ 5 ~ Иф с ’ " ИПОР.с
4. Определение наблюдаемого контраста объекта
Наблюдаемый контраст к^,, рассчитываем по формуле (6.13):
кебТм(у)
06" 1+жПОРж’
5. Определение минимально разрешаемого контраста
МРК вычисляем по формуле (9.6).
6. Определение предельной дальности видения
Для заданных вероятностей обнаружения и распознавания
Робн = 0,9, Р^п = 0,8, как и в рассмотренном выше примере, коли-
чество периодов эквивалентной миры
AU =1,8; ^асп=12.
301
При критическом размере объекта = 0,6 м связь между уг-
ловыми пространственными частотами v' и дальностью видения z
имеет следующий вид:
для обнаружения объекта v' = 3z рад1;
для распознавания объекта v' = 20z рад1.
Преобразовав выражения (9.8) и (9.6) на основе найденных
соотношений к виду TM(z) и коб H(z), определим искомую предель-
ную дальность видения (рис. 9.14):
^пр.обн 65 М, 2нррасп 48 М.
Рис. 9.14. Определение предельной дальности обнаруже-
ния и распознавания объекта с помощью подводной ЛСВ
при стробировании приемного канала:
/ _ vo6« • 7 _ „оби . 3 _ расп . > _ раса
1 коб.н ’ z Kmin ’ J ко6.н ’ Kmin
Заметим, что предельная дальность видения под водой в ос-
новном определяется затуханием света в воде и практически
обратно пропорциональна показателю ослабления. Поэтому ис-
пользование лазеров с перестраиваемой частотой может оказать-
ся перспективным для оптимального согласования частоты излу-
чения с максимумом спектральной прозрачности воды.
302
9.3. Расчет дальности видения объекта при работе ЛСВ
через границу раздела «воздух-вода»
Постановка задачи
Рассчитать дальность видения объекта на фоне морского дна
для ЛСВ, установленной на вертолете, совершающем облет за-
данного участка акватории (рис. 9.15).
Рис. 9.15. Схема работы ЛСВ через границу раздела
«воздух-вода»
1. Условия наблюдения
1.1. Высота полета над поверхностью моря Н = 100 м.
1.2. Скорость ветра и, = 2 м/с.
Остальные условия наблюдения, а также состав аппаратуры,
технические характеристики ЛСВ и параметры морской воды,
соответствуют данным, приведенным в § 9.2. Ослаблением излу-
303
нения в атмосфере пренебрегаем в связи с небольшой высотой 1
полета. I
Порядок расчета |
1. Определение МПФ ЛСВ
Так как состав аппаратуры и ее технические характеристики
идентичны рассмотренным выше в § 9.2, то МПФ системы, рас-
считанная по формулам табл. 9.4 и аппроксимированная гауссо-
вой кривой, может быть представлена в виде ।
Глсв(у') = ехр(-2л2а2у'2), о = 0,13мрад. (9.10)
2. Определение гидрооптических характеристик и МПФ i
морской воды (
Значения гидрооптических характеристик, приведенных в |
табл. 9.5, должны быть дополнены рядом оптических характери- |
стик, присущих морской поверхности (границе раздела). К ним 1
относятся: коэффициент пропускания морской поверхности для 1
падающего из атмосферы и выходящего из моря излучений - п |
и т£ п соответственно; рм - коэффициент яркости моря; гы - ко-
эффициент яркости поверхности моря. ;]
Значения дополнительных параметров морской поверхности I
определены в соответствии с данными § 7.3 и представлены в |
табл. 9.9. j
Таблица 9.9 ;
Значения дополнительных параметров морской поверхности
Параметр Рм гм
Значение 0,98 0,98 0,01 0,033
МПФ системы наблюдения в данном примере представляется !
произведением трех МПФ, две из которых характеризуют мор-
скую среду, а третья - взволнованную морскую поверхность: j
2’a-M(v') = 4p(v')7’H,(v')7’H.n(v'). (9.11)
С учетом формулы (6.17) выражение (9.11) запишется в виде
Aez
^а-м(У') = еХР "Л£г+ I----~2---
7(2лцу)2+1
(Xv'£n)2(An2)z
exp -------—--------
За
X
хехр -0,5у'2с2
(9.12)
3. Расчет энергетических характеристик сигнальных и фо-
новых составляющих
Как следует из результатов расчета, проведенного в § 9.2, при
работе ЛСВ в режиме стробирования интенсивностью всех со-
ставляющих, обусловленных внешней солнечной засветкой,
можно пренебречь из-за низких уровней. В этих условиях кон-
траст формируемого изображения зависит только от составляю-
щих лазерного излучения, отраженных объектом и фоном, и ла-
зерной ПОР. В табл. 9.10 приведены формулы (7.27) - (7.29) для
расчета этих составляющих.
Таблица 9.10
Выражения для расчета чисел фотоэлектронов
№ Число фото- электронов Расчетная формула
1 ^нмР„.5ФПУКоптро6а2гп:! exp[-2Ez(l - Л)]?5
^об.л 4p2Aez3 + (а2 + а\)(Нп + z)2
о ^нмРп.5ФПУКоптрфа2гп2 exp[-2sz(l - Л)]
л 4ц2 Aez3 + (а2 + а2)(Яи + z)2
3 (|
ИПОРл ^им5фПУРп.Копт ~“ х 8л J
х а2гп2 exp[-2Ez(l - Л)]
4p2AEz3 + (а2 + а2)(Яи + z)2
Графики зависимости n,(z) представлены на рис. 9.16.
304
305
Рис. 9.16. Зависимость числа фотоэлектронов от даль-
ности при работе ЛСВ через границу раздела «воздух-
вода» при стробировании приемного канала:
— ^об.л» 2 — Иф л, 3 ~~ »ПОР.Л
4. Определение наблюдаемого контраста объекта
Наблюдаемый контраст объекта коб „ рассчитываем по форму-
ле (6.13):
к КобГа-м(У')
°бН 1 + ^порЖ‘
(9.13)
5. Определение минимально разрешаемого контраста
МРК вычисляем по формуле (9.6).
6. Определение предельной дальности видения
Предельная дальность обнаружения гпробн и распознавания
определяется абсциссой точки пересечения кривых ko6h(z) и
Kmin(z) при учете соотношений v' = 3z (обнаружение) и v' = 20z
(распознавание). В результате анализа графиков рис. 9.17 на-
ходим:
^пр.обн 37 М, ^пр.расп ’ Ю М.
306
Рис. 9.17. Определение предельной дальности обнаруже-
ния и распознавания объекта при работе ЛСВ через грани-
цу раздела «воздух-вода» в режиме стробирования прием-
ного канала:
/ _ и-об" • 2 - к-06" • ? - vP10" • 4 - кР*0"
1 коб.н > z Kmin > J коб.н ’ 4 Kmin
Анализ графиков рис. 9.17 показывает, что предельная даль-
ность видения при наблюдении через взволнованную поверх-
ность существенно зависит от дисперсии флуктуаций изображе-
ния, а контраст изображения существенно ухудшается вследствие
волнения.
Глава 10. ПРИМЕРЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
ЛАЗЕРНЫХ СИСТЕМ ВИДЕНИЯ
К настоящему времени во всем мире, по-видимому, еще не
начат этап промышленного освоения ЛСВ, как, например, лазер-
ных дальномеров или приборов ночного видения с подсветом.
Сведения об экспериментальных разработках и созданных еди-
ничных образцах носят разрозненный характер, часто в виде рек-
ламных сообщений. Приводимые характеристики ЛСВ иногда
противоречивы и с трудом поддаются сравнительному анализу с
целью их систематизации, а также оценки уровня эффективности
и достигнутых технических показателей.
Поэтому в качестве примеров практической реализации
ЛСВ представляется целесообразным рассмотреть активные
системы видения, созданные в МГТУ им. Н.Э. Баумана при
участии авторов в течение 1993 - 1999 гг. Так как в основу про-
ектирования этих систем положены расчетные методики и тех-
нические пути построения, изложенные в предшествующих
главах настоящей книги, то появляется возможность достовер-
ной оценки разработанных теоретических положений и расчет-
ных соотношений.
Все рассматриваемые ниже образцы ЛСВ построены по схеме
«широкий - узкий», т.е. содержат лазерный канал подсвета, ко-
торый функционирует в импульсном режиме, обеспечивая одно-
моментную засветку всего заданного поля обзора, и приемный
узкопольный канал с фотоэлектронным сканированием (ЛСВ
третьего типа).
308
Рис. 10.1. Структурная схема двухчастотной ЛСВ
309
10.1. Двухчастотная лазерная система видения
с импульсным подсветом
Двухчастотная лазерная система видения с импульсным
подсветом (ЛСВ-4) осуществляет подсвет объектов лазерным
излучением в видимом и ближнем ИК-диапазонах спектра и
предназначена для наблюдения объектов в условиях низкой есте-
ственной освещенности или ночью на дальностях до 4 км. Струк-
турная схема ЛСВ-4 приведена на рис. 10.1 и включает в качестве
основных блоков:
передающий канал, содержащий многофункциональный ла-
зерный излучатель и формирующую оптическую систему;
приемный канал, представляющий собой телевизионный ви-
зир на основе приемного объектива-трансфокатора и фокальной
ФПЗС-матрицы с прогрессивной разверткой;
электронный блок управления, содержащий канал формиро-
вания и обработки видеосигнала, канал синхронизации и вычис-
лительный канал;
опорно-поворотное устройство для управления пространствен-
ным положением оптических осей приемопередающей системы.
Передающий канал обеспечивает формирование простран-
ственно-энергетических характеристик лазерного излучения под-
света на двух рабочих частотах. Существенной особенностью
лазера является его многофункциональность, т.е. возможность
работы в различных режимах генерации. Переключение режимов
генерации осуществляется по командам блока управления внут-
рирезонаторным модулятором добротности (затвором).
В качестве активной среды лазерного излучателя использова-
ны кристаллы ГГГ: Nd, обладающие наибольшей лучевой стой-
костью по сравнению с другими кристаллами, активированными
ионами Nd. Оптическая схема лазера, формирующего излучение
с основной длиной волны А,, = 1,06 мкм (рис. 10.2), включает за-
дающий генератор и усилитель. Такая схема позволяет в значи-
тельной степени разгрузить генератор по средней мощности на-
качки и уменьшить термооптические аберрации в активном
элементе.
310
Рис. 10.2. Оптическая схема лазерного излучателя аппаратуры ЛСВ-4:
1 - зеркало резонатора; 2 - оптический затвор НПВО; 3 - активный элемент
задающего генератора; 4 - плоскопараллельная пластина (поляризатор); 5 -
выходное зеркало резонатора; 6 - поляризатор; 7 - активный элемент усили-
теля; 8,9 - поворотные зеркала; 10 - телескоп; 11, 13 - удвоители частоты;
12 - кварцевый фазовращатель
Специально разработанный оптический затвор на основе на-
рушения полного внутреннего отражения (НПВО) позволяет реа-
лизовать два режима генерации: моноимпульсный и периодиче-
ской модуляции добротности (режим формирования пачки
импульсов). Для формирования поляризованного излучения в
резонаторе расположены плоскопараллельные пластины, уста-
новленные под углом Брюстера. Удвоитель частоты выполнен на
нелинейном кристалле КТР и предназначен для преобразования
ИК-излучения с основной длиной волны Aq = 1,062 мкм в види-
мое излучение с длиной волны Aq = 0,53 мкм. Для уменьшения
влияния деполяризации излучения накачки на КПД преобразова-
ния в оптическую схему введены последовательно расположен-
ный второй кристалл КТР и фазовый вращатель между ними.
Выходные характеристики лазерного излучателя приведены в
табл. 10.1, а временные диаграммы для указанных режимов гене-
рации представлены на рис. 10.3.
311
Рис. 10.3. Временные диаграммы режимов работы излучателя:
а — моноимпульсный режим генерации:
длительность импульса накачки тн = 200 мкс,
суммарная энергия импульса излучения AJ = 1,2 Дж,
энергия импульса излучения второй гармоники Е^) = 0,5 Дж,
длительность моноимпульса т„ = 15 нс,
частота следования импульсов накачки F = 5 Гц
Передающая оптическая система формирует три различных
диаграммы направленности:
широкую (20 = 1,5°), используемую в режиме поиска и обна-
ружения;
узкую в режиме пачки импульсов (20 < 10');
узкую в режиме моноимпульса (20 =1,5').
Две последние диаграммы используются в процессе работы ЛСВ
при различных уровнях восприятия (различение, идентификация).
Оптическая система (см. рис. 10.1) состоит из телескопа с
фиксированным видимым увеличением Г = 1 /4х, который форми-
рует обе узкие диаграммы направленности и вбрасываемый
оптический компонент (линза-коммутатор). Установка линзы-
коммутатора перед телескопом преобразует формирующую оп-
тическую систему в афокальную насадку, обеспечивающую ши-
рину диаграммы направленности излучения подсвета 20 = 1,5°.
312
б
Рис. 10.3. Временные диаграммы режимов работы излучателя:
б — режим генерации периодической последовательности импульсов (пачки):
длительность импульса накачки т„ = 150.. .400 мкс,
суммарная энергия импульса излучения = 5 Дж,
частота следования импульсов в пачке/и = 30... 150 кГц,
частота следования импульсов накачки F= 5 Гц
(/*„, Ри - мощности излучения накачки и моноимпульса, 17м - напряжение на
модуляторе)
Ввод и вывод линзы-коммутатора осуществляется электро-
двигателем с редуктором, а ее фиксация в рабочих положениях
обеспечивается за счет момента инерции ротора двигателя.
Управление вбрасываемым компонентом осуществляется коман-
дами, вырабатываемыми в блоке управления.
Приемный канал (ТВ-визир) - предназначен для формирова-
ния изображений заданного сектора обзора в пассивном и актив-
ном режимах работы и точного наведения приемной системы на
объект с целью определения его координат. Он выполнен на осно-
ве ПЗС-камеры ХС-8500 СЕ производства фирмы «SONY», сопря-
женной с трансфокатором фирмы «Computar» и экстендором
ЕХ2С. Сигналы с выхода ПЗС-камеры преобразуются в телевизи-
онный сигнал формата CCIR. На экране видеомонитора вместе с
313
изображением формируются координатная визирная сетка с пере-
крестием и служебные символы, информирующие оператора о те-
кущем состоянии всех подсистем аппаратуры ЛСВ-4.
Таблица 10.1
Выходные характеристики лазерного излучателя
№ Параметр выходного излучения Моноимпульс- ный режим генерации Режим генерации пачки импульсов
1 Длина волны излучения:
основной гармоники А.! = 1,06 мкм At = 1,06 мкм
второй гармоники А2 = 0,53 мкм А2 = 0,53 мкм
2 Энергия излучения
в одном импульсе £(А,) = 1,2 Дж £(А2) = 0,5 Дж ^(Aq, А2) = 50 мДж
в пачке импульсов - ^2) = 5,1 Дж
3 Длительность моноимпульса 15 нс
импульса в пачке — тип = 50 - 500 нс
пачки импульсов — тп < 1 мс
4 Частота следования импульсов в пачке — /ип = 30- 150 кГц
5 Угловая расходимость излучения (по уровню 0,5/т„) 2 мрад 20 < 10- 12 мрад
6 Диаметр выходного пучка Dn < 15 мм Пл < 15 мм
7 Частота повторений импульсов накачки Л-5 Гц Л 1 5 Гц
Технические характеристики приемного канала:
1. Диапазон изменения увеличения - Г.. ,40х.
2. Диапазон изменения углового поля зрения - 12°.. .0,3°.
3. Угловое разрешение при увеличении - 40х - 25".
4. Частота формирования кадров - 10 Гц, 5 Гц, 1 Гц.
314
Электронный блок управления выполняет две основные
функции:
формирование и обработку видеосигнала;
управление работой всех блоков и модулей ЛСВ.
Канал формирования и обработки видеосигнала (ФОВ)
(см. рис. 10.1) предназначен для формирования композитного
видеосигнала ФПЗС-матрицей с интегрированной электронной
обвязкой. Сформированный видеосигнал не может быть непо-
средственно подан на видеомонитор из-за импульсного харак-
тера экспонирования матрицы локационным сигналом. Так как
частота импульсов экспонирования меньше частоты формиро-
вания видеокадров ФПЗС-матрицей, то часть видеокадров не
содержит локационный сигнал. Это приводит к мельканию изо-
бражения на экране.
Для преобразования нестандартного видеосигнала с выхода
ФПЗС-матрицы в видеосигнал стандарта CCIR (в котором рабо-
тает видеомонитор) служит цифровой канал обработки. Это пре-
образование осуществляется с частотой подсвета 5 Гц, а считы-
вание - с частотой 50 Гц. Кроме того, цифровой модуль канала
ФОВ реализует электронное увеличение 2х или 4х за счет фраг-
ментации локального участка матрицы и последующего вывода
изображения на весь экран.
Канал синхронизации осуществляет временное согласование
работы лазерного излучателя и ФПЗС матрицы, а также выпол-
няет функции контроллера управления.
Лазерные импульсы подсвета, отраженные объектом и под-
стилающей поверхностью, должные попасть в определенный
временной интервал накопления рабочего цикла ФПЗС-матрицы.
Для синхронизации используется высокостабильный тактовый
генератор, импульсы которого одновременно инициируют гене-
рацию лазерного излучения и начало периода накопления ФПЗС-
матрицы.
Эти же импульсы запускают схему стробирования, которая
запирает матрицу на время эффективного воздействия на прием-
ный канал помехи обратного рассеяния. Кроме того, канал син-
хронизации осуществляет управление вводом-выводом линзы-
315
коммутатора в передающем канале для изменения угловой рас-
ходимости лазерного излучения.
Для формирования динамического изображения визирной
сетки и служебных символов на экране монитора, существенно
влияющих на точность наведения, блок управления содержит
вычислительный канал на основе однокристального микропро-
цессора. Положение визирных меток на экране видеомонитора
рассчитывается в соответствии с введенной программой, учиты-
вающей нелинейный характер изменения увеличения при пере-
мещении компонентов приемного объектива. На основе сигнала с
датчика линейного увеличения (см. рис. 10.1) микропроцессор
строит рамку визира на экране.
С помощью пульта управления осуществляют дистанцион-
ное управление линейным увеличением приемного объектива и
его фокусировкой, регулировку апертурной диафрагмы в соот-
ветствии с уровнем яркости фона, дискретное изменение элек-
тронного увеличения и частоты следования импульсов подсве-
та, а также переключение режимов работы.
Внешний вид аппаратуры
ЛСВ-4 представлен на рис. 10.4.
В процессе работы оператор
с помощью приводов опорно-
поворотного устройства направ-
ляет приемопередающую систе-
му в заданную пространствен-
ную область обзора и включает
канал подсвета. Осуществляется
режим поиска и обнаруже-
ния объекта, при котором фор-
мируется широкая (29 = 1,5°)
диаграмма направленности ла-
зерного излучения. При этом
лазерный излучатель генерирует
пачку импульсов длительностью
Рис. 10.4. Внешний вид аппа- 200.. .300 мкс и суммарной энер-
ратуры ЛСВ гией в пачке не менее 5 Дж.
316
В случае обнаружения объекта его изображение выводится
механизмами опорно-поворотного устройства в центральную зо-
ну визирной рамки, после чего линза-коммутатор удаляется из
оптической системы передающего канала и диаграмма направ-
ленности лазерного излучения «схлопывается» с 1,5° до 6'. В ре-
зультате освещенность в плоскости наблюдаемого объекта воз-
растает более чем в 200 раз, что приводит к существенному
увеличению отношения S/N, необходимому для достоверной
идентификации объекта.
Для более точного наведения аппаратуры на цель при опре-
делении ее координат, а также для более детального распознава-
ния на предельных дальностях предусмотрен еще один режим
работы, при котором лазерное излучение формируется в виде мо-
ноимпульса, а диаграмма направленности уменьшается до 2'.
На рис. 10.5 приведено изо-
бражение легковой машины,
полученное с помощью аппара-
туры в степном холмистом ре-
гионе на дальности 2,7 км. Изо-
бражение записано при работе
ЛСВ-4 в режиме «Распознава-
ние» при узкой диаграмме на-
правленности (20 = 8') и сум-
марной энергии излучения в рИс. 10.5. Изображение легкового
пачке импульсов на обеих дли- автомобиля на дальности 2,7 км
нах волн E(ki, Х2) = 4,8 Дж.
Дальность обнаружения указанного объекта ограничивалась дли-
ной трассы z = 4,2 км, на этой предельной дальности вероятность
обнаружения превышала 80 %. Сравнение полученных результа-
тов с расчетными данными (по методике главы 9) в общем свиде-
тельствует о достаточно удовлетворительном их совпадении. Так,
расчетная предельная дальность обнаружения объекта (с вероят-
ностью обнаружения 0,5) составила 4,8 км, а предельная даль-
ность распознавания (с вероятностью 0,8) - 2,4 км (см. рис. 10.5).
317
10.2. ЛСВ с повышенной обнаружительной способностью
Для повышения обнаружительных характеристик ЛСВ и рас-
ширения ее функциональных возможностей в приемном канале
устанавливают ЭОП, который усиливает входной оптический
сигнал и осуществляет стробирование по дальности с целью
уменьшения влияния помехи обратного рассеяния.
Ниже рассматриваются два образца таких систем ЛСВ-5А и
ЛСВ-5П, функционирующих в ближней ИК-области и отличаю-
щихся типом лазерного излучателя, используемого для подсвета.
Обобщенная структурная схема разработанных ЛСВ представле-
на на рис. 10.6.
Рис. 10.6. Структурно-функциональная схема макетного образца ЛСВ
Передающий канал, содержащий импульсный лазерный из-
лучатель и формирующую оптическую систему, осуществляет
318
подсветку объекта в заданном угловом поле обзора. Сформиро-
ванное приемным объективом изображение объекта на фоне
подстилающей поверхности регистрируется и усиливается по
яркости фотоприемным устройством на основе ЭОП. Репродук-
ционный объектив (РО) переносит изображение с люминесцент-
ного фотоприемника телевизионной ПЗС-матрицы. Видеосигнал
подвергается соответствующей обработке в электронном блоке и
далее следует на монитор. Для предварительной наводки систе-
мы на объект в условиях достаточной естественной освещенно-
сти применяется оптический визир, установленный соосно с пе-
редающим и приемным каналами на подвижной платформе,
которая может поворачиваться по азимуту и углу места.
В фотоприемном устройстве использован ЭОП третьего по-
коления, содержащий микроканальную пластину (МКП) и фото-
катод на основе арсенида галия (GaAs), обладающий наивысшей
(на данный момент) интегральной чувствительностью. Реализо-
вать в полной мере преимущества ЭОП третьего поколения воз-
можно только при условии защиты фотокатода от преждевре-
менной деградации (старения), возникающей из-за превышения
средним током фотокатода предельно допустимого значения (по-
рядка 10 б А). Этот эффект возникает при недопустимо высоких
уровнях освещенности фотокатода вследствие высокой интен-
сивности помехи обратного рассеяния или большой яркости
внешней фоновой засветки.
В разработанной ЛСВ эффективная защита фотокатода реа-
лизуется за счет стробирования по интервалу «фотокатод -
МКП» как в активном, так и в пассивном режимах работы.
Функциональная схема фотоприемного устройства и временные
диаграммы для указанных режимов приведены на рис. 10.7. При
отсутствии импульсов запуска выход формирователя высоко-
вольтных импульсов, соединенный с фотокатодом ЭОП, имеет
нулевой потенциал. При этом ускоряющее поле между фотокато-
дом и МКП отсутствует и ЭОП заперт. В активном режиме рабо-
ты на вход «Лазер» блока управления поступает сигнал запуска,
фронт которого соответствует импульсу подсвета.
319
режим работы ЛСВ
Рис. 10.7. Структурно-функциональная схема фотоприемного устройства:
АЛ - ангилогарифмагор; ФВИ - формирователь высоковольтных импульсов; ИП 1 - низковольтный источник питания; ИП 2 -
высоковольтный источник питания, М - мультиплексор; ПД - переключатель длительности; ПЗ - переключатель задержки;
ПНД - преобразователь «напряжение - длительность»; СС - схема согласования; ФД - формирователь длительности; ФЗ -
формирователь задержки
320
Последовательно соединенные формирователь задержки (ФЗ)
и формирователь длительности (ФД), управляемые соответст-
вующими переключателями задержки (ПЗ) и длительности (ПД),
преобразуют этот сигнал в прямоугольный строб-импульс. За-
держка строб-импульса относительно импульса запуска регули-
руется в диапазоне 2...26 мкс (что соответствует дальности до
объекта 0,3...3,9 км) с шагом 2 мкс. Длительность строб-импульса
изменяется в диапазоне 0,5...6 мкс (что соответствует глубине
изображаемого пространства 75...900 м) с шагом 0,5 мкс. Строб-
импульс передается мультиплексором (М) на вход схемы согла-
сования (СС), которая вырабатывает выходные сигналы в виде
команд управления формирователем высоковольтных импульсов
(ФВИ), следующих на затвор или МКП ЭОП.
В пассивном режиме работы длительность строб-импульсов
регулируется потенциометром «Длит» с линейной функциональ-
ной характеристикой. Напряжение, снимаемое с движка потен-
циометра, подается на вход антилогарифматора (АЛ) и далее на
вход линейного преобразователя напряжение-длительность
(ПНД). Запуск преобразователя осуществляется по заднему
фронту импульса, синхронизированному с кадровым гасящим
импульсом (КГИ), поступающим на вход блока управления. Та-
ким образом, период свечения экрана ЭОП попадает во времен-
ной интервал накопления ПЗС-матрицы. Длительность сформи-
рованных импульсов экспоненциально зависит от угла поворота
движка потенциометра; плавная регулировка длительности обес-
печена в диапазоне от 4 мкс до 18,4 мс. Сформированные им-
пульсы передаются мультиплексором на вход схемы согласова-
ния при условии, что тумблер режима работы блока управления
установлен в положение «ПАС» (на адресный вход А мультип-
лексора поступает напряжение логического нуля). Таким обра-
зом, изменяя длительность строб-импульса /стр, можно регулиро-
вать эффективный коэффициент усиления ЭОП г]^:
„ Сгр
Пэф=ПуЛ>
* стр
где 7стр - период повторения строб-импульсов.
11 — 1091
321
В отличие от традиционно применяемых схем регулировки
яркости экрана, в которых регулировка коэффициента усиления
происходит за счет изменения напряжения на МПК, разработан-
ная схема ограничивает средний ток фотокатода, предотвращая
его деградацию, что позволяет существенно продлить ресурс
ЭОП при высоких уровнях освещенности.
В приемном канале ЛСВ применены серийно выпускаемые
компоненты со следующими характеристиками:
1) электронно-оптический преобразователь третьего по-
коления:
интегральная чувствительность - 1200 мкА/лм,
спектральная чувствительность (X = 0,83 мкм) - 165 мА/Вт,
коэффициент усиления по световому потоку - 25000,
пространственное разрешение (к = 0,05) - 17 мм ',
яркость темнового фона - 3 -10‘3 кд/м2,
диаметр фотокатода - 17,5 мм,
электронно-оптическое увеличение - 1 *,
входное окно - стекло А-54, толщина 5,6 мм,
выходное окно - волоконно-оптический твистер,
люминофор - КС-527 (зеленый цвет свечения, зарубежный
аналог - Р20);
2) зеркально-линзовый фотографический объектив «Ру-
бинар-1000», используемый в качестве приемного:
фокусное расстояние - 1000 мм,
относительное отверстие - 1/10,
угловое поле - 2,5°,
разрешение - 100 мм1;
3) репродукционный объектив «Лептонар-Ш»:
фокусное расстояние - 13 мм,
увеличение - 1/3,
относительное отверстие - 1/1,6,
линейное поле в пространстве предметов - 18 мм,
пространственное разрешение в центре поля - 100 мм1;
4) ПЗС-камера на основе 1/3" матрицы ICX055 («Sony»):
число чувствительных элементов - 500x586,
322
период расположения элементов: по горизонтали - 9,8 мкм,
по вертикали - 6,3 мкм,
пороговая чувствительность к спектру люминофора -0,13 лк.
Конструктивно приемный канала ЛСВ выполнен в виде двух
блоков: низкоуровневой камеры и блока управления ЭОП. Низко-
уровневая камера представляет собой цилиндрический корпус,
внутри которого расположены ЭОП с высоковольтной частью
схемы управления, репродукционный объектив и ПЗС-камера.
Сверху корпуса установлен оптический прицел «Алина 6x46», ис-
пользуемый как визир для предварительной наводки на объект.
Внешний вид приемного канала показан на рис. 10.8.
Наличие в приемном канале ЛСВ высокочувствительного
ЭОП третьего поколения предполагает использование для под-
светки объектов лазерных излучателей с рабочей длиной волны в
ближней ИК-области спектра, поскольку максимум спектральной
чувствительности фотокатода лежит в диапазоне 0,78...0,8 мкм.
В аппаратуре ЛСВ-5А передающий канал содержит александри-
товый лазер с перестраиваемой длиной волны излучения в диапазоне
0,72...0,78 мкм. Функциональная схема передающего канала пред-
ставлена на рис. 10.9. Лазер работает в режиме генерации затянутого
моноимпульса, что позволяет достичь высокого КПД и энергии им-
пульсов выходного излучения при ограниченной лучевой стойкости
элементов резонатора. Режим генерации длинных импульсов был
реализован в схеме с излучательными потерями. Удлинение лазер-
ного импульса происходит из-за затягивания процесса генерации
при медленном включении модулятора на эффекте нарушения пол-
ного внутреннего отражения, так
что в каждый момент времени реа-
лизуется малое превышение ин-
версии над ее пороговым значени-
ем. При фиксированной накачке,
управляя временем переключе-
ния модулятора, можно изменять
Длительность генерируемых им-
пульсов в диапазоне 0,2... 1 мкс
без существенных потерь выход-
ной энергии.
Рис. 10.8. Внешний вид прием-
ного канала аппаратуры ЛСВ-5А
и»
323
Рис. 10.9. Структурно-функциональная схема передающего канала на основе александритового лазера:
1,5- зеркала резонатора; 2 - затвор НПВО; 3 - активный элемент; 4 - лампа накачки; 6 - оптико-волоконный жгут
324
Лазерный излучатель представляет собой жесткую конструк-
цию, в состав которой входят модифицированный квантрон
К-104, зеркала резонатора, модулятор добротности Н11ВО. В
кварцевом осветителе квантрона установлен активный элемент из
александрита диаметром 6 мм, длиной 75 мм и лампа накачки
типа ИНП-5/75. Лазерное излучение выходит под углом 60° к
продольной оси излучателя через оптическую систему формиро-
вания пучка. Изменяя расстояние между положительным и отри-
цательным компонентами этой системы можно изменять расхо-
димость выходного излучения в пределах 0,3... 1 °. На корпусе
излучателя установлены штуцеры для прокачки охлаждающей
жидкости и разъемы для подвода электропитания к лампе накач-
ки и управляющего напряжения к модулятору НПВО.
Из-за специфики работы кристаллов александрита, а именно
увеличения эффективности генерации при повышении темпера-
туры до 60...90 °C, в разработанном блоке охлаждения преду-
смотрена термостабилизация температуры охлаждающей жидко-
сти в районе 70 °C.
Селектор лазерных импульсов предназначен для формирова-
ния электрических импульсов, синхронизированных с импульса-
ми лазерного излучения и необходимых для работы фотоприем-
ного устройства приемного канала в активном режиме. Он
состоит из фотоприемника (фотодиод ФД-263, работающий в
фотодиодном режиме), компаратора, выделяющего лазерный им-
пульс на фоне излучения накачки, и одновибратора, формирую-
щего импульс с длительностью, необходимой для нормальной
работы фотоприемного устройства (30...40 мкс). Оптико-
волоконный жгут предназначен для удаления и гальванической
развязки селектора лазерных импульсов от лазерного излучателя,
с целью снижения уровня помех, возникающих при горении лам-
пы накачки, и обеспечения устойчивой работы селектора.
Параметры передающего канала на основе александрито-
вого лазера:
длина волны излучения - 0,72.. .0,76 мкм;
энергия импульса выходного излучения - до 10 мДж;
длительность импульса выходного излучения - 0,5... 1 мкс;
325
частота повторения импульсов - до 12,5 Гц;
угловая расходимость излучения - 0,3... 1 °.
Внешний вид аппаратуры ЛСВ-5А представлен на рис. 10.10.
В процессе полевых испытаний аппаратура ЛСВ-5А устанав-
ливалась на крыше трехэтажного здания, и высота приземной
трассы составляла 30 м. Тест-объект в виде набора штриховых мир
с контрастом к^ = 0,9 размещался на вышке, удаленной от ЛСВ на
800 м. Угловые пространственные частоты восьми различных мир
находятся в диапазоне от 1,5 до 10 мрад'1. На рис. 10.11 приведено
изображение тест-объекта. Видно, что при достаточно высоком
контрасте в изображении яркостное поле подсвета весьма нерав-
номерно и имеет характерную спекл-структуру, обусловленную
пространственно-временной когерентностью лазерного излуче-
ния. Предельная дальность видения объекта типа легкового ав-
томобиля при показателе рассеяния в атмосфере, соответствую-
щем МДВ =10 км, достигает 2 км, что согласуется с данными
расчета z^, по методике, изложенной в § 9.1.
Рис. 10.10. Внешний вид аппа-
ратуры ЛСВ-5А
Рис. 10.11. Изображение тест-
объекта, подсвеченного алексан-
дритовым лазером
326
Рис. 10.12. Структурно-функциональная схема передающего канала на основе полупроводникового лазера:
С - накопительный конденсатор; D - лазерный диод; G1 - задающий генератор; G2, G3 - одновибраторы; J -
стабилизатор тока; К - ключевой элемент; ВИП - вторичный источник питания
327
Рис. 10.13. Внешний
вид приемного канала
макетного образца ЛСВ
с полупроводниковым
лазером
Второй вариант передающего канала, реализованного в аппа-
ратуре ЛСВ-5П, предусматривал использование импульсного по-
лупроводникового лазерного излучателя IDLP-100M-810E.
Функциональная схема передающего канала приведена на
рис.10.12, а его внешний вид представлен на рис. 10.13. Тело
свечения лазерного излучателя представляет собой решетку из
элементарных излучающих р-м-переходов. Излучатель располо-
жен вблизи фокуса составного объектива так, что расфокусиро-
ванные изображения элементарных переходов на объекте
частично перекрываются, объект при этом оказывается засвечен-
ным практически равномерно. Предусмотрено изменение угло-
вой расходимости выходного излучения за счет подбора расстоя-
ний между компонентами объектива и излучателя. Накачка
лазерного излучателя осуществляется от оригинального источни-
ка питания, включающего в себя задающий генератор G1, фор-
мирователь импульсов заданной длительности G2 и ключ, через
который происходит разряд накопительного конденсатора С на
излучатель D током фиксированного значения. Одновибратор G3
формирует импульсы, синхронизированные с импульсами тока
через излучатель (а значит и с импульсами излучения), необхо-
димые для синхронизации работы фотоприемного устройства
приемного канала.
Параметры передающего канала:
длина волны излучения - 0,81 мкм;
импульсная мощность - до 70 Вт;
длительность импульса - до 200 нс;
328
частота повторения импульсов - до 2 кГц;
угловая расходимость излучения - от 0,6°х0,4° до 2°х1,4°.
Внешний вид макетного образца аппаратуры ЛСВ-5П с полу-
проводниковым лазером показан на рис. 10.14.
Рис. 10.14. Внешний вид
аппаратуры ЛСВ-5П
Экспериментальные исследования проводились на приземной
трассе длиной 250 м. В качестве тест-объекта использовался набор
штриховых прямоугольных мир различной пространственной час-
тоты. Измерив глубину модуляции в изображениях мир с различ-
ными пространственными частотами и поделив ее на контраст ми-
ры, можно найти значения МПФ на соответствующих частотах.
Для уменьшения влияния шума в изображении на результаты
измерений предварительно было зарегистрировано десять исходных
изображений миры, одно из которых представлено на рис. 10.15.
Каждое из этих изображений
преобразовывалось в двумерный
дискретный массив яркостей L
размерностью 790x580 элемен-
тов, а затем из десяти указанных
массивов формировался один ис-
ходный массив, характеризующий
усредненное распределение ярко-
сти в изображении. На втором
этапе для каждой миры формиро-
вался одномерный массив Р,
Рис. 10.15. Изображение тест-
объекта, подсвеченного полу-
проводниковым лазером
329
элементы которого соответствуют выборочным значениям гори-
зонтального профиля изображения. Восстановление горизон-
тального профиля V(x) по его выборочным значениям прово-
дилось в соответствии с теоремой Котельникова. В качестве
примера на рис. 10.16 приведен горизонтальный профиль
изображения миры № 7 с угловой пространственной частотой
2,9 мрад'1. Контраст в изображении миры оценивался по формуле
V -V
v — max 111111
1,3 v +К
' max ' min
гДе Knin - экстремальные значения сигналов.
(Ю.1)
Рис. 10.16. Горизонтальный профиль изображения
миры № 7:
• - выборочные значения профиля Р,.;
___ - восстановленный профиль V(x)
Контраст каждой миры ко6 принят равным 0,7, а значения
МПФ на фиксированных угловых пространственных частотах
определются соотношением
Г(у J =
Коб
(Ю.2)
330
В табл. 10.2 приведены рассчитанные значения МПФ для
пространственных частот каждой из мир и границы доверитель-
ного интервала (при 90% вероятности).
Таблица 10.2
Значения МПФ для набора мир
Параметр Номер миры
2 3 4 5 6 7 8
Частота миры, мрад1 9,2 7,2 5,8 4,6 3,6 2,9 2,3
Глубина моду- ляции изобра- жения миры, отн. ед. 0,10 0,18 0,24 0,34 0,57 0,75 0,77
Оценка МПФ на частоте миры, отн. ед. 0,11 0,20 0,27 0,39 0,66 0,85 0,91
Полуширина доверительного интервала для МПФ, отн. ед. 0,08 0,03 0,02 0,07 0,11 0,03 0,02
На рис. 10.17 приведены расчетные значения МПФ системы
ЛСВ-5П и отдельных ее блоков, а также экспериментально оп-
ределенные значения МПФ на фиксированных угловых про-
странственных частотах. Расчетные кривые построены в соот-
ветствии с аналитическими выражениями, приведенными в
главе 2.
Анализ графиков показывает, что МПФ аппаратуры ограни-
чивается в основном МПФ электронно-оптического преобразо-
вателя. Некоторое расхождение расчетных и измеренных зна-
чений в области пространственных частот 3...4 мрад1 можно
объяснить тем, что именно в этой области наблюдается наи-
большее отличие реальной МПФ ЭОП от аппроксимирующей
ее гауссоиды.
331
Рис. 10.17. Результаты измерения МПФ макетного образца
ЛСВ:
------ расчетные значения:
1 - МПФ атмосферы; 2 - МПФ приемного объектива; 3 - МПФ ЭОП;
4 - МПФ репродукционного объектива;
5 - МПФ матричного приемника излучения; 6 - МПФ ЛСВ;
• - оценки МПФ ЛСВ для изображений мир с соответствующими
номерами;
| - доверительные интервалы оценок МПФ
Изображения штриховых мир, сформированные ЛСВ, по-
зволяют оценить обнаружительную характеристику системы -
зависимость вероятности обнаружения штрихов миры от вос-
принимаемого отношения сигнал/шум. Для этого каждое из де-
сяти зафиксированных изображений предъявлялось наблюдате-
лям, которые принимали решение об обнаружении штрихов
мир. Для каждой миры проведено 50 испытаний (десять изо-
бражений предъявлены пятерым наблюдателям), найдены вы-
борочная частота обнаружения и доверительный интервал для
вероятности обнаружения (доверительная вероятность 90 %).
Результаты расчетов приведены на рис. 10.18. На этом же ри-
сунке сплошной кривой показана расчетная зависимость веро-
ятности обнаружения штрихов миры от воспринимаемого
отношения сигнал/шум.
332
Рис. 10.18. Зависимость вероятности обнаружения штрихов миры
от воспринимаемого отношения сигнал/шум:
___- расчетная кривая;
• - выборочные значения частоты разрешения мир с соответствую-
щими номерами;
I - доверительные интервалы вероятности разрешения
а б
Рис. 10.19. Изображения автомобиля при различных длительностях
стр об-им пульса:
а -2,5 мкс; б - 3 мкс
Предельная дальность видимости, определенная эксперимен-
тально как дальность обнаружения объекта типа «легковой автомо-
биль», составила 850 м. На рис. 10.19 приведены два изображения
333
этого объекта, полученные на дальности 420 м при различной дли-
тельности строба. Хорошо видно, что с увеличением длительности
строба «отодвигается» дальняя граница изображаемого пространст-
ва. Например куст, достаточно хорошо видимый на рис. 10.19, а,
становится практически неразличим на фоне забора (рис. 10.19, б).
ПРИЛОЖЕНИЕ 1
1. Уравнение переноса в малоугловом и диффузионном
приближениях
Малоугловое приближение
Q
+ V\ )Z(<L ’ Z> > Z> «L) +
oz
су 00
+ — f \L(r±,z,m±)x(n±-m^)d2mt,
4л _M
(1)
- V7 5 5
n, V- = n — + «„—
1 [ Хдх y dy
Малоугловое приближение описывает поле излучения, кото-
рое формируется в рассеивающей среде при прохождении через
нее узкого светового пучка [22].
Фурье-преобразованием по г± и й± уравнение (1) сводится к
следующему уравнению для функции L :
~-vV- |Z(v,z,fi) =
dz )
d
dx
ox(p)l~_ _
e + ~у- Цу,г,т[);
(2)
где
A ИИ£с
^rTt
• ,v —on
УГ1+Ппх)^2г±^2п
(3)
*(p) = MyWpyWyjy = I и± (4)
0
•^o(PY) ~ функция Бесселя нулевого порядка первого рода.
Если Z0(v,fj) - фурье-образ яркости L0(r±,nx) на выходе из-
лучателя, то решение уравнения (2) записывается в виде
335
L (v, z, fj) = Lo (v, rj + vz) exp
-ez + ^ jx(p0)dz
о
(5)
где
Po = [0L + vxz)2 + (T]y + vyz)2],/2.
Диффузионное приближение
Диффузионное уравнение выводится из уравнения (1) (путем
разложения функции L(f,z,m±) под знаком интеграла в ряд Тей-
лора по угловой переменной) и записывается следующим образом:
где (у2) - дисперсия угла отклонения луча при элементарном акте
рассеяния,
<т2> = | Jy34y)^-
о
(7)
Фурье-преобразованием по г± и уравнение (6) можно свести к
уравнению
^--vVjZ(v,z,fi) = - (е-о) + ^(у2)|ц|2 L(y,z,r\), (8)
dz ' J 4
из решения которого следует
Z(v,z,fj) = Z0(v,p + vz)exp- -[(e-o)z + ^<y2)J|p + vz1|2 </z,] -,(9)
о
где Z0(v,fj) - фурье-образ яркости £0(г,н±) на входе в среду.
Диффузионное приближение целесообразно использовать
только для нахождения рассеянной компоненты поля.
336
2. Мощность излучения, поступающего в приемник
от диффузно рассеивающей поверхности
Предположим, что приемник и источник расположены в
плоскости z = 0, а отражающая поверхность находится в плоско-
сти z = zs и представляет собой бесконечную плоскость. Диа-
граммы направленности приемника и источника узкие, излучение
и прием осуществляются в направлении оси z. Тогда для мощно-
сти, принимаемой приемником, имеет место следующее выраже-
ние [15]:
Р = ^ ^EH(rt)En(rJd2r±=4nps JJZH(v,z,O)2;(;,z,OX2v , (10)
-оо -00
где Ен, Еп - освещенности в плоскости объекта от действительно-
го - £0(г±,йх) и «фиктивного» (с параметрами при-
емника- Л(г±,л±)) источников;
ZH(v,z,0), Zn(v,z,0)- решение (5) для т| = О при заданных
параметрах источника 7,0(гх,й±) и прием-
ника А(гх,пх) соответственно;
р5 - коэффициент отражения диффузной поверхности.
Примем для яркости источника
2 2 Л
и а2 .
р
40!Л) = 2 2° 2~еХР -
л: гиа;
(11)
для аппаратной функции приемника
у
Л(гхЛ) = ехр
-2 а2>|
п ’"‘'л у
(12)
где Ро - мощность источника;
rw аи ~ эффективный радиус и угол расходимости светового
пучка в плоскости z = 0;
гп, ап - эффективный радиус приемной апертуры и угол поля
зрения.
337
Индикатрису рассеяния аппроксимируем показательной
функцией
< ч 2
4У) = —ехр
Ц
_У
(у2)-6ц2,
(13)
удовлетворяющей условиям нормировки:
со
/х(у)с?у = 2.
О
Найдем ZH(v,z,0) и Zn(v,z,0), для чего определим члены
уравнения (5):
1) для источника
Z0(v,vz) = — х
4л
Х СХР
exp exp{![vr± + (vz)n1]}d2rLd2n
r„J I abJ
= (14)
= -^exp -(v2+v2)
4?t !
4
2) для «фиктивного» источника
Z*(v,vz)
,2а2
й-ехр
4
(15)
? ]x(p0)dz = ™ ; р0 = [(Vxz)2 + (v?z)2]1/2 > (16)
2 о 7p2z2(v2+v2) + 1
2 1
где х(р0) = —т(Ро + ~г) 3 2 _ преобразование Ганкеля от показа-
Р Р
тельной функции (13).
После подстановки (14) - (16) в (5) получаем:
338
~ Р г2
A,(v,z,O) = ^-exp -v2( " --- "
A,(V,Z,O) =
>-2а2
^-^-exp -v
exp -ez +
oz
7(pzv)2+l
exp -sz +
az
J(pzv)2+1
, (17)
• (18)
Обращаясь к формуле (10) и используя (17), (18), находим:
2oz
Jexp -V2— exp -2ez+ .---------
о I 4 7 [_ 7(цгу)2+1
vc?v, (19a)
2 _ 2 .2 , _2_2 , _2_2
Интегрируя по частям, преобразуем (19а) к виду
p/ofon ехр[- 2(е - g)z]
,2
-v — d< exp
4 Г
2oz
J(pzv)2 +1
-2oz
Делая замену переменных
„ 2oz 2 4<?2
Р = —[...- = У v = ~Г“2
-J(|izv)2 +1 И Р
4о2 _
-у-т-, где то = 2oz,
И Ч
получаем [15]
Ps7J0rn2a2exp[-2(£-o)z]
2
2P2J
Т2
фк(19б)
2 8
о
п
4
,2 \
х
о
где А = 2о2гэ2/ц2.
339
Для нахождения данного интеграла разложим показатель у
экспоненты в ряд Тейлора
/(Р) - ЛМ = 1 + -41 •
1! 1! I I'd
Тогда получим выражение
РЛХ ехр[-2(е -o)z]
фк (19в)
интегрируя которое, найдем формулу для расчета мощности из-
лучения, поступающего в приемник от диффузно рассеивающей
поверхности [59, 64]:
р
•о
а2ехр[-2т(1-Л)]х
Р/ (Ат)3 + ехр[-2тЛ(1 + Р/ (Ат)3)]
1 + Т>/(Лт)3
(20)
тч A (8Г-) 2222222 ,
где Р = — э/ , гэ = ги + гп + z а2 + z а2, т = ez, Л = —.
4ц2 ’"I £
3. Модуляционная передаточная функция
рассеивающей среды
Пусть рассеивающая среда освещается точечным монона-
правленным источником единичной мощности с нормированной
яркостью излучения:
= • (21)
Если е(г±) - нормированное распределение освещенности от то-
чечного мононаправленного источника единичной мощности
(ФР), то фурье-образ L(y,z,O) = ?(v) есть ОПФ среды [18].
340
Положим fj = 0. Тогда из формулы (3) получим
L(v,z,0) = —f Jexp(jvrx)J2rx ffL(r1,z,n1)d2n1 =
4ТГ —ОО —да
= ”Т ff£;(rx)exp(jvrx)d2rx,
4Л _да
где £(v,z,0) находится из решения (5).
Так как для точечного источника Lo = 1, то из (5) для
катрисы рассеяния (13), согласно (16), найдем:
(22)
инди-
е (v) — L (v, z,0) = exp
— £Z +
О Г~/ \ л
-Jx(po)dz
о
(23)
= ехр -£Z +
QZ
что приводит к следующему выражению для МПФ:
7,cp.p(V) = eXP
-QZ +
QZ
-^(2npzv)2 + 1
v = l//.
(24)
ПРИЛОЖЕНИЕ 2
1. Уравнение для функции когерентности второго порядка
Метод параболического уравнения основан на выводе из сто-
хастического волнового уравнения для комплексной амплитуды
поля дифференциальных уравнений для статистических момен-
тов поля.
Уравнение для функции когерентности второго порядка
Г(7, R, р) = (17п (z, R + р/ 2) U*„ (z, R-pl 2))
в турбулентной среде имеет вид [31,37]:
<ЭГ i д2 _ nk2 n
^7^^Г + ~7“Я(2’Р)Г = 0- <25>
dz к dRdp 4
Функция H(z,p) характеризует статистические свойства флук-
туаций показателя преломления в атмосфере:
со
H(z,р) = 8 J]Ф„(z,х)[1 ~cos(xp)]d\,
где Фл(г,х) = Ф„(2;хЛ,Ху,0) - трехмерный спектр флуктуаций
показателя преломления.
Уравнение (25) эквивалентно малоугловому приближению
уравнения переноса излучения [29]. Решение уравнения (25) на-
ходится методом преобразования Фурье и для средней интенсив-
ности имеет следующий вид [64]:
к2
/(г,Я) = Г2(г,Я,О) = —-у^-х
(27Г) Z (26)
00 ik _ _ 1
X J/Гои(Л',р')ехр{-----p\R -R)--Dv (р,0)}d2R'd2p',
' z 2
где Г0И(Я',р') - функция когерентности, заданная на апертуре
источника;
342
z - длина трассы;
Z>v(p,O) = l,lC2£2z(p)5/3 - структурная функция комплексной
фазы сферической волны.
Результат (26) можно получить также методом Кирхгофа, так
как метод Кирхгофа и метод параболического уравнения приводят
к одинаковым результатам для двух первых моментов поля [31].
2. Мощность излучения, поступающего в приемник
от диффузно рассеивающей поверхности
Предположим, что источник и приемник расположены в
плоскости z = 0, а отражающая поверхность находится в плоско-
сти z = zs и представляет собой бесконечную плоскость. Диа-
граммы направленности источника и приемника узкие, излучение
и прием осуществляются в направлении оси z. Тогда для мощно-
сти, принимаемой приемником в турбулентной атмосфере, имеет
место выражение [64]:
р=^- /ри(Л)/пда2л,
л
(27)
где 7И(Л), 7П(7?) - средние интенсивности в плоскости рассеи-
вающей поверхности от реального и «фиктив-
ного» (с параметрами приемника) источников;
ps - коэффициент отражения диффузной поверхности.
Зададим функции когерентности.
На апертуре реального источника
( о2 2 •. _ 2 Л
Гои(Л,р) = С/2ехр
I Ч 4pJ
На апертуре «фиктивного» источника
_„2 (
т- /5-1 т*
Г п(2?,р) = / ----^v-exp -
ОП V 5 г/ г
v/Ту об ) V
г2 А-2 р2 г,2
гфЛ 2 Р
’•2 4г2
п п
(28)
(29)
4/об Р
343
где ги, г„ - эффективные размеры передающей и приемной
апертуры;
7?к - радиус кривизны волнового фронта на источнике;
рк - начальный радиус когерентности излучения источника;
Гф - эффективный размер фотодетектора;
/об _ фокусное расстояние приемного объектива;
7* - размерный множитель, введенный для согласования раз-
мерности.
Подставляя (28) и (29) в (26) и вычисляя интегралы (26) и
(27), получаем формулу для расчета мощности излучения, по-
ступающего в приемник от диффузно рассеивающей поверхно-
сти [64]:
р _ Р^п «п
Ро Ла,н+а,п)’
а^и = а* + 2,1( , j—, (30)
jn и ' 2 “ х z
где С* - структурная характеристика показателя преломления;
2а„ - угол расходимости излучения источника;
2ап - угол поля зрения приемника;
z - длина трассы;
к = 2л/Х - волновое число.
Как следует из (30), расширение лазерного пучка в турбу-
лентной атмосфере приводит к снижению уровня принимаемого
сигнала, которое можно интерпретировать как кажущееся пони-
жение прозрачности атмосферы, связанное с турбулентностью.
Влиянием турбулентности для ЛСВ, имеющих диаграммы на-
правленности излучателя и приемника, аи(ап)>Г можно пре-
небречь.
344
3. Модуляционная передаточная функция турбулентной среды
Пусть случайно-неоднородная среда освещается точечным
изотропным источником единичной мощности. Тогда МПФ
можно определить как модуль фурье-образа изображения точеч-
ного источника:
оо
|у)exp ivrdxdy
^(v) = ^,(vx, V0 = , (31)
f J/(x, y)dxdy
vj\q I(x,y) = (U(x,y)U*(x,y)) = {U(x,y)2') - распределение средней
интенсивности поля оптической волны в изображении точечного
источника.
При решении задач, связанных с переносом оптического изо-
бражения в случайно-неоднородной среде, более удобным явля-
ется определение МПФ через автокорреляционную функцию
комплексной амплитуды сферической волны в плоскости прием-
ной апертуры оптической системы [55]:
f п') + £, п' +
Wv,, V,) = ...-.. - .......—; (32)
fj№,T]')|2<W
где f - фокусное расстояние оптической системы.
Возможность такого определения МПФ следует из связи
комплексных амплитуд поля на входной апертуре оптической
системы U(^, т]) и в плоскости изображения U(x,y):
U(x,y) = A^ jt/(£,T|)exp| -~(£л + пу)
где А - комплексная постоянная, не зависящая от S, и т).
345
Фурье-преобразование в (31) квадрата функции рассеяния
(| U(x, у) |)2 на основании теоремы автокорреляции непосредст-
венно приводит к формуле (32).
Таким образом, для получения МПФ необходимо знать авто-
корреляционную функцию комплексной амплитуды сферической
волны в плоскости приемной апертуры:
щ,п)ч^пЖ(тп'+п)> =
= liml ffC7(^,n')C7‘ft’ + +
s J* s
которая в теории когерентности называется функцией когерент-
ности второго порядка.
Для локально-однородной и изотропной турбулентности нор-
мированная функция когерентности описывается выражением [55]:
ч ( i,lC2k2zp5/3}
Г(р) = ехр-----" . (33)
к 2 7
После подстановки в (33)
P = JV+n2 =¥V„=Xzv0=A,v' (34)
для МПФ турбулентной атмосферы получаем [55]:
W = exp(-0,55C>2zp5/3), (35)
где С2 - структурная характеристика показателя преломления;
к = 2л/Х - волновое число;
z - длина трассы;
v0 = 1//0 - пространственная частота в плоскости объекта;
v„ ~ 1/4 _ пространственная частота в плоскости изображения;
v’= г/10 - угловая пространственная частота.
СПИСОК ЛИТЕРАТУРЫ
1. Апресян Л.А., Кравцов Ю.А. Теория переноса излучения. М.: Наука,
1983.216 с.
2. Ахманов С.А., Никитин С.Ю. Физическая оптика. М.: Изд-во МГУ,
1998.656 с.
3. Бабенко В.С. Оптика телевизионных устройств. М.: Радио и связь,
1982.256 с.
4. Банах В.А., Миронов ВЛ. Локационное распространение лазерного
излучения в турбулентной атмосфере. Новосибирск: Наука, 1986.
170 с.
5. Бисярин В.П., Соколов А.П., Сухонин Е.В. Ослабление лазерного
излучения в гидрометеорах. М.: Наука, 1977. 176 с.
6. Борн М., Вольф Э. Основы оптики / Пер. с англ.; Под ред. Г.П. Мо-
тулевич. М.: Наука, 1970. 856 с.
7. Валентюк А.Н., Предка К.Г. Оптическое изображение при дистан-
ционном наблюдении. Минск: Наука и техника, 1991. 359 с.
8. Волосов Д.С., Цивкин М.В. Теория и расчет светооптических систем.
М.: Искусство, 1960. 526 с.
9. Грегори Р.Л. Глаз и мозг. М.: Прогресс, 1979. 269 с.
10. Грязин ГН. Оптико-электронные системы для обзора пространства.
Л.: Машиностроение, 1988. 224 с.
11. Гудмен Дж. Введение в фурье-оптику / Пер. с англ.; Под ред. Г.И.
Косоурова. М.: Мир, 1970. 364 с.
12. Гуревич С.Б. Эффективность и чувствительность телевизионных
систем. Л.: Энергия, 1964. 344 с.
13. Долин Л.С., Левин И.М. Справочник по теории подводного видения.
Л.: Гидрометеоиздат, 1991.229 с.
347
14. Долин Л.С., Савельев В А. О характеристиках сигнала обратного
рассеяния при импульсном облучении мутной среды направленным
световым пучком // Изв. АН СССР. Физика атмосферы и океана.
1971. Т. 7. №5. С. 505-510.
15. Ермаков Б.В., Ильинский ЮА. О характеристиках направленного при-
емника света в рассеивающей среде // Изв. высш, учебных заведений.
Радиофизика. 1968. Т. 11. № 4. С. 624 - 625.
16. Забелина ИА. Расчет видимости звезд и далеких огней. Л.’. Маши-
ностроение, 1978. 183 с.
17. Заказное Н.П., Кирюшин С.И., Кузичев В.И. Теория оптических сис-
тем. М.: Машиностроение, 1992. 448 с.
18. Зеге ЭЛ., Иванов АЛ., Кацев ИЛ. Перенос изображения в рассеи-
вающей среде. Минск: Наука и техника, 1985. 327 с.
19. Зуев В.Е. Распространение видимых и инфракрасных лучей в атмо-
сфере. М.: Сов. радио, 1970. 496 с.
20. Зуев В.Е., Кабанов М.В. Перенос оптических сигналов в земной атмо-
сфере (в условиях помех). М.: Сов. радио, 1977. 368 с.
21. Иванов АЛ. Импульсное светолоцирование слоев в океане.
Ч. 1. Освещение S-импульсом // Изв. РАН. Физика атмосферы и
океана. 1996. Т. 32. № 4. С. 505 - 513.
22. Измерение спектрально-частотных и корреляционных параметров и
характеристик лазерного излучения / Б.М. Аленцев, М.Я. Варшав-
ский, А.А. Вещиков и др.; Под. ред. А.Ф. Котюка, Б.Н. Степанова.
М.: Радио и связь, 1982. 272 с.
23. Имитационное моделирование в задачах дистанционного зондиро-
вания / Г.М. Креков, В.М. Орлов, М.Л. Белов и др.; Отв. ред. В.А.
Зуев. Новосибирск: Наука, 1988. 165 с.
24. Исимару А. Распространение и рассеяние волн в случайно-
неоднородных средах / Пер. с англ. Т. 1. М.: Мир, 1981. 280 с.
25. Ишанин ГТ. Источники и приемники излучения. СПб: Политехни-
ка,1991.240 с.
26. Кейз К, Цвайфель П. Линейная теория переноса / Пер. с англ.; Под
ред. М.В. Масленникова. М.: Мир, 1972. 384 с.
27. Климков Ю.М. Основы расчета оптико-электронных приборов с
лазерами. М.: Сов. радио, 1978.264 с.
28. Климков Ю.М. Прикладная лазерная оптика. М.: Машиностроение,
1985.248 с.
348
29. Кляцкин В.И., Татарский В.И. Статистическая теория распростра-
нения света в турбулентной среде (обзор) // Изв. высш, учебных за-
ведений. Радиофизика. 1972. Т. 15. № 10. С. 1433 - 1455.
30. Ковалев В.А. Видимость в атмосфере и ее определение. Л.: Гидро-
метеоиздат, 1988. 165 с.
31. Кравцов ЮЛ., Фейзулин З.И., Виноградов АТ. Прохождение радиоволн
через атмосферу Земли. М.: Радио и связь, 1983.224 с.
32. Красильников Н.Н. Теория передачи и восприятия изображений. М.:
Радио и связь, 1986. 248 с.
33. Креков Г.М., Крекова М.М., Шаманаев В.С. Численные оценки
влияния атмосферы на формирование сигнала при зондировании
морской воды // Оптика атмосферы и океана. 1992. Т. 5. № 11.
С. 1208-1212.
34. Крылов А.И., Прокопенко В.Т., Тарлыков В.А. Основы лазерной тех-
ники. Л.: Машиностроение, 1990. 316 с.
35. Курбатов Л.Н. Оптоэлектроника видимого и инфракрасного диапа-
зонов спектра. М.: Из-во МФТИ, 1999. 320 с.
36. Лазерная локация / И.Н. Матвеев, В.В. Протопопов, И.Н. Троицкий
и др.; Под. ред. Н.Д. Устинова. М.: Машиностроение, 1984. 272 с.
37. Лазерное излучение в турбулентной атмосфере. / А.С. Гурвич,
А.И. Кон, В.Л. Миронов и др.; Отв. ред. В.И. Татарский. М.: Нау-
ка, 1976. 277 с.
38. Лазарев Л.П. Оптико-электронные приборы наведения. М.: Маши-
ностроение, 1989. 512 с.
39. Ллойд Дж. Системы тепловидения / Пер. с англ.; Под ред. А.И. Го-
рячева. М.: Мир, 1978. 465 с.
40. Мак-Картни Э. Оптика атмосферы / Пер. с англ.; Под ред. К.С. Шиф-
рина. М.: Мир, 1979. 421 с.
41. Малашин М.С., Кашинский Р.П., Борисов Ю.Б. Основы проектиро-
вания лазерных локационных систем. М.: Высш, шк., 1983. 207 с.
42. Мирошников М.М. Теоретические основы оптико-электронных при-
боров. Л.: Машиностроение, 1983. 696 с.
43. Молебный В.В. Оптико-локационные системы. М.: Машинострое-
ние, 1981.
44. Мосягин Г.М., Немтинов В.Б., Лебедев Е.Н. Теория оптико-
электронных систем. М.: Машиностроение, 1990. 432 с.
349
45. Некоторые вопросы теории переноса изображения в рассеивающей
среде / Д.М. Браво-Животовский, Л.С. Долин, И.М. Левин и др. //
Вопросы радиоэлектроники. Сер. «Техника телевидения». 1972.
Вып. 3. С. 35-46.
46. Оптика океана. Т. 1. Физическая оптика океана / Под. ред. А.С. Мо-
нина. М.: Наука, 1983. 372 с.
47. Оптика океана. Т. 2. Прикладная оптика океана / Под. ред. А.С. Мо-
нина. М.: Наука, 1983. 236 с.
48. Оптические параметры атмосферного аэрозоля / Г.В. Розенберг,
Г.И. Горчаков, Ю.С. Георгиевский и др. // Физика атмосферы и
проблемы климата. М.: Наука, 1980. С. 216 - 252.
49. Орлов В.М., Самохвалов И.В., Белов МЛ. Дистанционный контроль
верхнего слоя океана. Новосибирск: Наука, 1991. 149 с.
50. Пахомов И.И., Рожков О.В., Рождествин В.Н. Оптико-электронные
квантовые приборы. М.: Радио и связь, 1982. 456 с.
51. Пахомов И.И., Цибуля А.Б. Расчет оптических систем лазерных
приборов. М.: Радио и связь, 1986. 152 с.
52. Порфирьев Л.Ф. Основы теории преобразования сигналов в оптико-
электронных системах. Л.: Машиностроение, 1989.387 с.
53. ПорфирьевЛ.Ф. Теория оптико-электронных приборов и систем. Л.:
Машиностроение, 1980. 272 с.
54. Протопопов В. В., Устинов Н. Д. Инфракрасные лазерные локаци-
онные системы. М.: Воениздат, 1987. 175 с.
55. Рапространение лазерного излучения в атмосфере Земли / Андреев
Г.А., Бисярин В.П., Соколов А.П. и др.; Научн. ред. Р.Г. Миринсон.
// Итоги науки и техники. Сер. «Радиотехника». М.: ВИНИТИ, 1977.
Т. 11. С. 5-148.
56. Роуз А. Зрение человека и электронное зрение / Пер. с англ. М.:
Мир, 1977. 240 с.
57. Рытое С.М, Кравцов Ю.А., Татарский В.И. Введение в статистиче-
скую радиофизику. Случайные поля. М.: Наука, 1978. 463 с.
58. Смирнов В.А. Введение в оптическую радиоэлектронику. М.: Сов.
радио, 1973. 208 с.
59. Сигналы и помехи в лазерной локации / В.М. Орлов, И.В. Самохва-
лов, Г.М. Креков и др.; Под. В.А. Зуева. М.: Радио и связь, 1985.264 с.
60. Соболев В.В. Рассеяние света в атмосфере планет. М.: Наука, 1972.
335 с.
350
61. Сокольский М.Н. Допуски и качество оптического изображения. Л.:
Машиностроение, 1989. 221 с.
62. Устинов Н.Д., Матвеев И.Н., Протопопов В.В. Методы обработки
оптических полей в лазерной локации. М.: Наука, 1983. 272 с.
63. Чернов. Л.А. Волны в случайно-неоднородных средах. М.: Наука,
1975. 169 с.
64. Элементы теории светорассеяния и оптическая локация / В. М. Ор-
лов, И.В. Самохвалов, Г.Г. Матвиенко и др.; Под. ред. В.М. Орлова.
Новосибирск: Наука, 1982. 224 с.
65. Holst Ger. CCD Arrays, Cameras, and Displays. JCD Publishing and
SPIE Optical Engineering Press. Bellingham, WA, 1996. 332 p.
66. Holst Ger. Electro-Optical Imaging System Performance JCD Publishing
and SPIE Optical Engineering Press. Bellingham, WA, 1995. 468 p.
67. Kopeika N.S. A system engineering approach to imaging. SPIE Optical
Engineering Press. Bellingham, WA, 1998. 679 c.
68. Lyzenga D.R. Passive remote sensing techniques for mapping water
depth and bottom features // Appl. Opt., 1978. V. 17. N 3. P. 379 - 383.
69. Shapiro J.H. Reciprocity of the turbulent atmosphere // J.Opt. Soc. Am.
1971. V. 6.N4. P. 492-495.
70. Viollier M., Tanre D., Deschamps P. Y. An algorithm for remote sensing
of water color from space // Boundary-Layer Meteorology. 1980. V. 18.
N3.P. 247-267
71. Yura H.T. Imaging in clear ocean water // Appl. Opt. 1973. V. 12. N 5.
P. 1061 -1066.