/







































































































































































































































































































































































































































































































































































































Автор: Феодосьев В.И.
Теги: механика деформируемых тел упругость деформация общетехнические дисциплины машиностроение сопротивление материалов учебник для вузов
ISBN: 5-7038-1340-9
Год: 1999



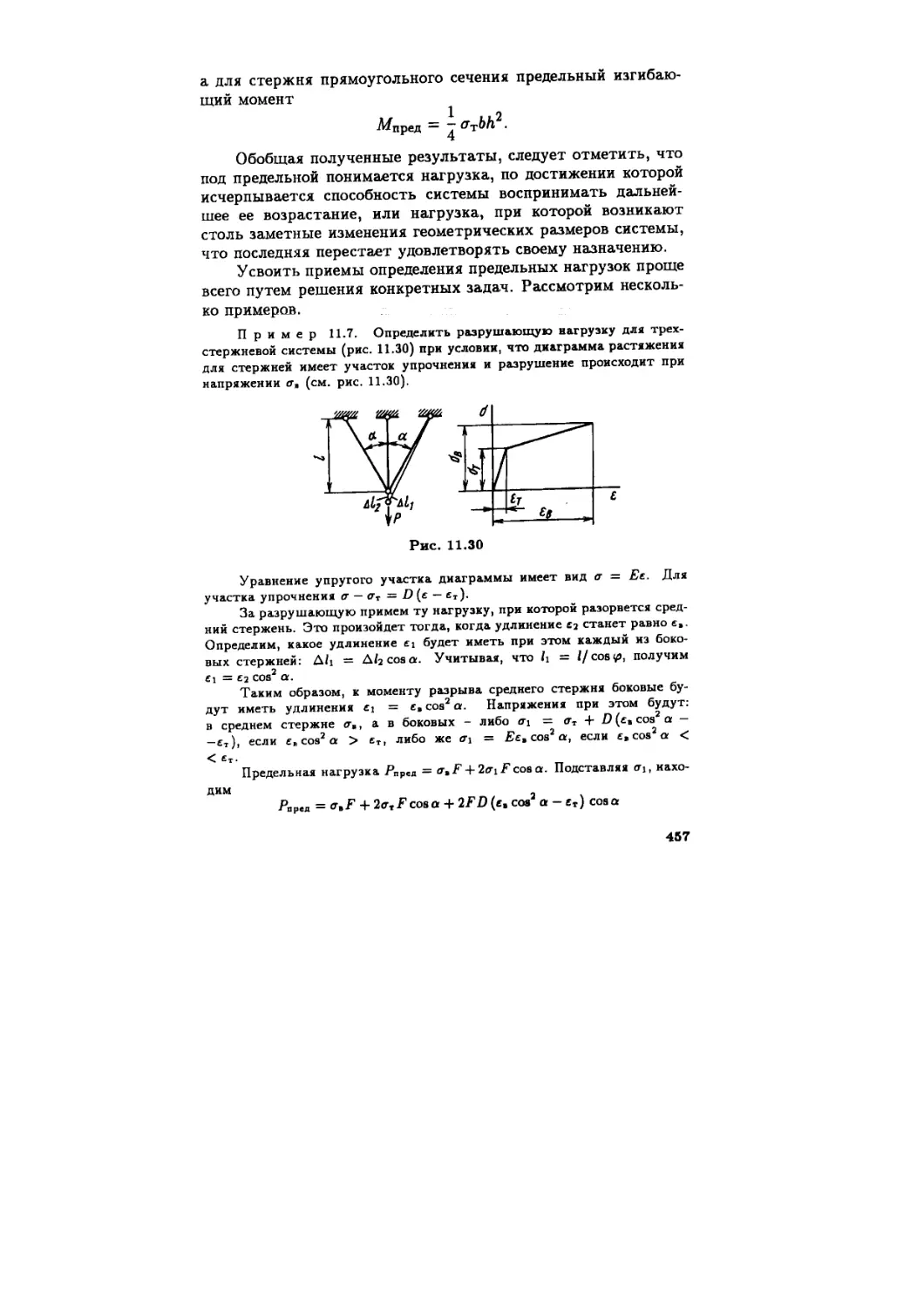
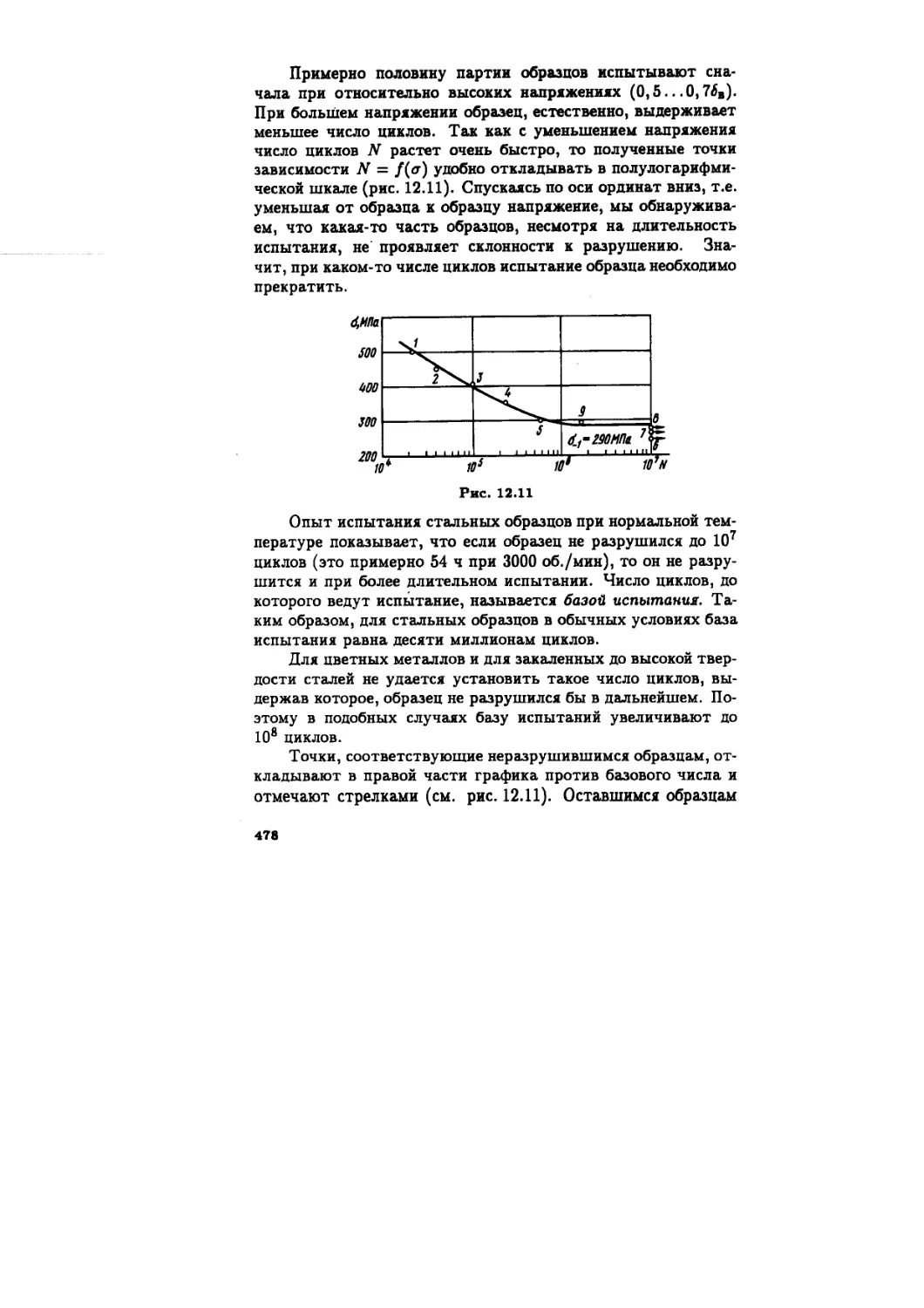
Текст
Сопротивление материалов
Проrрамма "Интеrрация"
"Механика в техническом университете"
Серия основана в 1999 rоду
в восьми томах
Том 2
Ответственный peaa'ICmop К. С. KOJ1.eCHU'lCoB
Редакционный совет:
к. С. к OJ1.eCHU'lCOB (nреасеаатеАЬ)'
Н.А. АJ1.футов
О. С. Нарай'ICUН
Д. Н. Попов
О.А. РJlховс'ICUЙ
В.А. Светлuц'ICUЙ
В.И. Усюх:ин
К.В. ФрОJ1.0в
И. С. Шумилов
Москва
Издательство MrTY им. н.э. Баумана
1999
" I J С' i 0//
:J ..JI.
'-" 1.
{Р )/0'0"
В.И. ФЕОПОСЬЕВ
СОПРОТИВЛЕНИЕ
МАТЕРИАЛОВ
Издание десятое, переработанное и дополненное
Реко,м,ендовано Министерство,м, обще20
и nрофессионаЛЬНО20 образованил Российской Федерации
в ка-честве учебника длл студентов
высших технических учебных заведений
МОСКВА
Издательство MrTY им. Н.Э. Баумана
1999
УПК 539.3/6(075.8)
ББК 30.121
Ф42
Рецензенты: а!l:аде..иU!I: РАН Н.Ф. Образцов,
д p тех". "aY!I:, профессор В.Л. ЧUр!l:ов (МЭН)
Ф42 Феодосьев В.И. Сопротивление материалов: Учеб. ДЛIiI вузов.
10 e изд., перераб. и доп. М.: Изд во MrTY им. Н.Э. Баумана,
1999. 592 с. (Сер. Механика в техническом университете; Т.2).
ISBN 5 70З8 IЗ40 9 (Т. 2)
ISBN 5 70З8 lЗ71 9
Изложены основные разделы курса сопротивлеНИIiI материалов: pa
стижение, кручение, изrиб, статически неопределимые системы, теории
наприженноrо состоинии, теории прочности, толстостенные трубы, пла
стины и оболочки, прочность при переменных наприжениих, расчеты
при пластических деформациих, устойчивость и методы испытаний.
Дли лучшеrо УС80ения теоретическоrо материала даны примеры С реше
НИIiIМИ. По сравнению с предыдущими изданиими опущены параrрафы
и rлавы, не получившие широкоrо практическоrо применении, внесены
дополнении и уточнении с учетом современных тенденций раЗ8ИТИIiI Me
ханики и прочности конструкций.
Содержание учебника соответствует проrрамме и курсу лекций,
читаемому в MrTY им. Н.Э. Баумана.
Дли студентов машиностроительных вузов и технических универ.-
ситетов. Может быть полезен аспирантам и преподаватеЛIiIМ, а также
специалистам, деlilтельность которых свизана с вопросами прочности,
жесткости, устойчивости и надежности элементов конструкций, машин
и приборов.
, . .1 н и..М . ... (,,:...1.. . 8.. . .3. . .. ... 8..'7 1
Бit(i.lflIОlе а yrHTY I
удк 539.3/6(075.8)
ББК 30.121
Нзда"uе осуществJ&ен.о nри Фu"а"совой nоддерЖ!l:е
ФедераJ&Ь"ОЙ цеАевой nрО2ра..и.м.ы "rосударств е "н.ал
nоддерЖ!l:а и"те2рации высше20 образова"UJ{ U
Фу"да..ие"таJ&Ь"ОЙ "aY!l:u "а 1997 2000 20ды"
() \g\Cj Cj
ISBN 5 70З8 IЗ40 9 (Т. 2)
ISBN 5 7038 1371 9
@ Центр "ИнтеrраЦИIiI",
1999
@ MrTY им. Н.Э. Баумана,
1999
Предисловие
Первое издание широко известноrо учебника "Сопротив
ление материалов" Всеволода Ивановича Феодосьева вышло в
1960 r. Данный учебник является переизданием девятоrо изда
ния, опубликованноrо в 1986 r. На этом учебнике воспитыва
лись и продолжают воспитываться мноrие поколения наших
инженеров. К сожалению, книrа переиздается коллеrами и
учениками В.И. Феодосьева без участия автора, который CKOH
чался в 1991 r. Некоторые rлавы учебника по сравнению с
последним (девятым) изданием методически переработаны, а
в параrрафы, посвященные стержневым элементам конструк-
ций, добавлены уравнения, позволяющие получать численные
решения более сложных задач. Вновь включена r лава о pac
чете пластин и оболочек, которая в девятом издании учеб
ника была изъята. Редакционная работа над учебником в
MfTY им. Н.Э. Баумана в целом была проведена Д pOM техн.
наук, профессором В.А. Светлицким (кафедра "Прикладная
механика") при активном участии докторов технических наук,
профессоров Н.А. Алфутова (кафедра "Космические аппараты
и ракеты-носители"), О.С. Нарайкина (кафедра "Прикладная
механика") и В.И. Усюкина (кафедра "Космические аппараты
и ракеты носители"). Большая работа по подrотовке учебни
ка к переизданию была проделана канд. техн. наук, доцентом
Н.А. Суховой (кафедра "Прикладная механика").
Недавно вышло пятое издание книrи В.И. Феодосьева
"Избранные задачи и вопросы по сопротивлению материалов"
(М., Наука, 1996). Эта книrа заканчивается кратким очерком
творческой и педаrоrической деятельности В.И. Феодосьева,
который написал ero друr профессор И.А. Бирrер (к сожа
JlеНИЮ 1 ныне тоже покойный). Считаем уместным частично
воспроизвести ero здесь.
5
ВСЕВОЛОД ИВАНОВИЧ ФЕОДОСЬЕВ
Научная, творческая и педаrоrическая деятельность
В.И. Феодосьева была связана с MfTY им. Н.Э. Баумана, rде
он учился и работал свыше 50 лет.
Ero выдающиеся способности, необычайные память и TPy
долюбие проявились весьма рано. Дипломная работа В.И. Фео
досьева была признана кандидатской диссертацией, а ДOKTOp
скую диссертацию "fибкие оболочки в машиностроении" он
защитил в возрасте 27 лет.
Читатель cMor уже оценить rлавные особенности научно
ro почерка В.И. Феодосьева: rлубокое проникновение в сущ
насть проблемы, четкость и изящность изложения, ориrиналь
ность и рациональность решения, несомненный литературный
талант.
Сотням тысяч инженеров известно имя В.И. Феодосьева
как автора учебника "Сопротивление материалов", выдержав
шеrо свыше десяти изданий у нас и за рубежом, YДOCToeH
HOrO rосударственной премии СССР. Это был новаторский
6
курс, отвечавший потребностям cOBpeMeHHoro машинострое
ния. За участие в создании капитальноrо TpexToMHoro труда
"Расчеты на прочность в машиностроении" В.И. Феодосьеву
была присуждена Леuинская премия. В этом труде, а также в
книrах В.И. Феодосьева "Упруrие элементы точноrо приборо
строения", "Прочность теплонапряженных узлов жидкостно
реактивноrо двиrателя", "Введение в ракетную технику" бы
ла заложена современная база обеспечения прочности и надеж
насти в авиационном и космическом машиностроении и дру-
rих областях техники. Большую известность среди молодых
специалистов, студентов, инженеров получила книrа "Лесять
лекций бесед по сопротивлению материалов", выдержавшая
два издания.
В 1977 r. В.И. Феодосьев был нзбран членом корреспон
дентом Академии наук СССР, в 1986 r. ему присваивается
высокое звание fероя Социалистнческоrо Труда.
Мноrие rоды В.И. Феодосьев возrлавлял кафедру ракетной
техники в MfTY им. П.З. Баумана.
В своей книrе "Основы техннки paKeTHoro полета" он пн-
сал в посвящении: "... Они творили ракетную технику соро-
ковых, пятидесятых и шестидесятых rодов, оставаясь добро
вольными пленниками cBoero долrа, своих обязанностей, своей
неизменной страсти. . ." и только несколько самых ярких имен
теперь известны каждому. По их было MHoro. .. Им ушед-
шим от нас, далеким и близким, друзьям и вовсе незнакомым
посвятил свою замечательную книrу В.И. Феодосьев.
Таким был и сам Всеволод Иванович Феодосьев талант
ливым, простым и сложным, безмерно одаренным и часто не-
счастливым, прекрасным друrом и товарищем.
И.А. Бир2ер
Введение
в 1. О дисциплине
"Сопротивление материалов"
СопротивАение .wamepиaJ1.OB это введение в науку о проч
насти, жесткости и надежности элементов, конструкций, при
боров и машин. Сопротивление материалов относится к фун
даментальным дисциплинам общеинженерной подrотовки спе
циалистов с высшим техническим образованием.
Это первая дисциплина, устанавливающая связь между
фундаментальными научными дисциплинами (физикой, BЫC
шей математикой и теоретической механикой) и прикладны
ми задачами и методами их решения, возникающими при про
ектировании машин, приборов и конструкций. Практически
все специальные дисциплины подrотовки инженеров по раз
ным специальностям содержат разделы курса сопротивления
метериалов, так как создание работоспособной новой техники
невозможно без анализа и оценки ее прочности, жесткости и
надежности.
Повышение эффективности и надежности машин при
уменьшении материалоемкости, создание новой техники, pac
считанной на эксплуатацию в экстремальных условиях при
больших наrрузках (статических и динамических, детерми
нированных и случайных), высоких температурах, импульс
ных и ударных воздействиях требует r лубоких знаний в обла
сти прочности. Без rлубокоrо понимания "физи'ки" поведения
элементов конструкций, наrруженных силами или находящих
си в силовых полях, рассчитать конструкцию с требуемыми
прочностью, жесткостью и надежностью невозможно.
8
Прочность И надежность проектируемых конструкций за
висит от учета всех особенностей реальных условий эксплуата
ции, так как чем точнее математическая модель объекта, тем
достовернее результаты численноrо решения уравнений "co
стояния" и точнее проrнозирование прочности и надежности
проектируемой новой техники.
Современная вычислительная техника позволяет решать
самые сложные задачи анализа прочности без упрощения их
математических моделей, что резко повышает достоверность
получаемых результатов и значимость курса сопротивления
материалов в подrотовке инженеров HOBoro поколения. Раз
витие HOBoro научноrо направления механотроники, объеди
няющей механику и электронику в единую систему (манипу
ляторы, роботы), стало возможным только блаrодаря появив
шейся ВО:lМожности проводить высокоточные расчеты механи
ческих элементов механотронных систем.
Сопротивление материалов это первая дисциплина, поз
воляющая студентам понять, что происходит внутри элемен
тов конструкции при наrружении. В этом основное качествен
ное отличие этой дисциплины от теоретической механики, KO
торая рассматривает объекты как абсолютно прочные и жест
кие. Поэтому считается, что при любых наrрузках они coxpa
няют свою форму И не разрушаются. Однако, к сожалению,
это далеко не так. Но без знания теоретической механики
нельзя решить ни одной задачи по сопротивлению материа
лов, поэтому курс теоретической механики должен обязатель
но предшествовать курсу сопротивления материалов. Так как
традиционно в сопротивлении материалов излаrаются в OCHOB
ном методы расчета элементов конструкций при статических
наrрузках, то студенты должны хорошо знать основные зако
ны статики.
Все твердые тела в той или иной мере обладают свойства
ми про'Ч1tостu и жестх:ости, Т.е. способны в определенных
пределах воспринимать воздействие внешних сил без разру
шения и существенноrо изменения rеометрических размеров.
Эти свойства привлекали внимание человека еще в те далекие
:времена, коrда он пробовал изrотовить первые примитивные
орудия труда и предметы хозяйственноrо обихода. Эти СВОЙ
ства волнуют специалистов и сейчас, например при создании
современных машин и rиrантских инженерных сооружений.
9
Прочность И жесткость требуют пристальноrо внимания,
качественных оценок и определенной количественной меры. Их
изучением занимается .наука, называемая .иеханu'lCОЙ твepao
20 аефор.иuруе.и020 теАа, а учебная дисциплина, вводящая
учащеrося в мир инженерных расчетов на прочность и жест
кость, носит название соnротивАение .иатерuаАов. К механи
ке TBepnoro деформируемоrо тела относятся и друrие дисци
плины, среди которых необходимо в первую очередь назвать
теорuю УnРУ20сти.
За последние десятилетия возникли и развились новые
разделы механики, занимающие промежуточное положение
между сопротивлением материалов и теорией упруrости, Ha
пример прикладная теория упруrости; возникли родственные
им дисциплины, такие как теорин nJ1.астuчностu, теорин
nОАзучесmu; созданы новые разделы науки о прочности, име
ющие конкретную практическую направленность, например
строительная механика сооружений, строительная механика
самолета, теория прочности сварных конструкций и т .д.
Сопротивление материалов подводит учащеrося к неиз
бежным и вечным вопросам, на которые порой труднее Bcero
ответить: будет ли конструкция нормально функционировать
под действием приложенной к ней наrрузки и как оценить ее
надежность.
При проведении инженерных расчетов методы сопроти
вления материалов следует применять творчески и помнить,
что успех практическоrо расчета лежит не столько в приме
нении сложноrо математическоrо аппарата, сколько в умении
найти наиболее удачные упрощающие предположения и ДOBe
сти расчет до окончательноrо числовоrо результата.
В2. Реальный объект и расчетная схема
в сопротивлении материалов, как и во всех естественных
науках, исследование реальноrо объекта следует начинать с
выбора расчетной схе.иы.
Приступая к расчету проектируемой конструкции, обосно
ванию ее расчетной схемы и соответствующей ей математиче
Сl(ОЙ модели, следует прежде Bcero установить, Что в данном
10
случае существенно и что несуществеННОj провести схемати
зацию объекта и отбросить все факторы, которые не MorYT
сколъко нибудъ заметным образом повлиять на суть задачи.
TaKoro рода упрощение задачи во всех случаях совершенно He
обходимо, так как решение с полным учетом всех свойств pe
альноrо объекта является принципиально невозможным вслед
ствие их очевидной неисчерпаемости.
Если, например, требуется провести расчет на прочность
троса подъемника (рис. Вl), то в первую очередь надо учесть
вес поднимаемоrо rруза, ускорение, с которым он движется, а
при большой высоте подъема, возможно, также и вес caMoro
троса. В то же время заведомо надо отбросить влияние таких
несущественных факторов, как аэродинамическое сопротивле
ние, возникающее при подъеме клети, изменение температуры
и баромеТРl!ческоrо давления с высотой и множество друrих.
Реa.JIЬНЫЙ объект, освобожденный от несущественных oco
беннастей, носит название расчетной схемы. Для одноrо и Toro
же объеI< та может быть предложено несколько расчетных схем
в зависимости от требуемой точ
ности и Toro, что интересует ис
следователя в данном конкретном
случае. Так, если в упомяну
том выше примере расчета нуж
но оценить только прочность TpO
са подъемника, то клеть и rруз дo
пустимо рассматривать как жест
кое целое и свести их действие на
трос к силе, приложенной к концу
троса (см. рис. Вl). Если же He
обходимо решить вопрос о проч
ности самой клети, то последнюю
уже нельзя считать абсолютно
твердым телом. Ее конструктив
ные особенности надо рассматри
вать отдельно и в соответствии с
ними выбирать для нее расчетную
схему.
'"
Рис. Вl
!Р
11
Как для одноro объекта может быть предложено несколь
ко расчетных схем, так и одной расчетной схеме MorYT COOT
ветствовать различные реальные объекты. Последнее обсто-
ятельство является весьма важным, так как, исследуя HeKO
торую схему, можно получить решение целоrо класса реаль
ных задач, сводящихся к данной схеме.
Построение расчетной схемы следует начинать со cxeMa
тизации структуры и свойств материала. Общепринято pac
сматривать все материалы как СПJ1.0ШНУЮ среау, независимо от
особенностей молекулярноrо строения вещества. Такое упро
щение совершенно естественно, поскольку размеры рассматри
ваемых в сопротивлении материалов объектов несопоставимо
больше характерных размеров межатомных расстояний. Cxe
ма сплошной среды позволяет использовать анализ бесконечно
малых величин. Она весьма универсальна, поэтому ее прини
мают в качестве основополаrающей не только в сопротивлении
материалов, но и в теории упруrости, пластичности, в rидро
и rазодинамике. Этот цикл дисциплин поэтому и носит обоб
щенное название .wezaHU'ICtl. СПАОШНОЙ среаы.
Схематизацию свойств материала проводят и дальше.
Среду предполаrают не только сплошной, но и оанороаной.
Металлы имеют поликристаллическую структуру, т .е. co
стоят из множества хаотически расположенных кристаллов.
И тем не менее мы рассматриваем их как однородные.
При выборе расчетной схемы сплошную среду наделяют
свойствами, отвечающими основным свойствам реальноrо Ma
териала. Например, под действием внешних сил реальное те-
ло меняет свои rеометрические размеры. После снятия внеш-
них сил rеометрические размеры тела полностью или частич
но восстанавливаются. Свойство тела восстанавливать свои
первоначальные размеры называется упру<!Остью. При реше-
нии большей части задач в сопротивлении материалов среду
считают совершенно УПРУ20Й. В действительности реальное
тело в какой то степени обнаруживает отступление от свойств
совершенной упруrости. При больших наrрузках это отступ-
ление становится настолько существенным, что в расчетной
схеме сплошную среду наделяют уже друrими свойствами, co
ответствующими новому характеру деформирования реально-
ro тела.
12
Обычно сплошную среду' принимают изоmропной, т .е.
предполаrают, что свойства образца, выделенноrо из сплош
ной среды, не зависят от ero исходной уrловой ориентации.
Отдельно взятый кристалл металла анизотропен. Но
если в объеме содержится весьма большое количество ха.отиче
ски расположенных кристалликов, то материал в целом можно
рассматривать как изотропный. Поэтому обычно предполаrа
ют, что металлы в той мере, в какой с ними ПРИХОДИТСЯ иметь
дело в инженерной практике, изотропны. Встречаются иани
зотропные материалы. Анизотропна, например, бумаrа: по
ласки, вырезанные из листа бумаrи в двух взаимно перпенди
кулярных направления, обладают различной прочностью. Су-
ществует анизотропия тел, связанная с их конструктивными
особенностями. Так, анизотропна фанера, анизотропны TKa
ни. В на.стоящее время широкое распространение получили
композипионные материалы.
При выборе и обосновании математической модели про
ектируемой конструкции очень часто элементы, из которых
она состоит, например упруrие элементы приборов, элементы
корпуса ракеты, самолета или корабля и Т.д., расматривают
как стержни, пластины и оболочки. Эти три элемента имеют
самое широкое распространение в инженерной практике при
проектировании новой техники практически во всех отраслях
промышленности. К тому же они являются наиболее просты
ми и Har лядными для иллюстрации понятий и методов новой
для студентов дисциплины, относящейся к механике сплошной
среды.
Самой простой математической моделью реальных KOH
струкций является стержень, поэтому, как правило, изло
жение курса сопротивления материалов начинают с изучения
основ механики стержней. Под стержнем понимается тело, oд
но из измерений KOToporo длина осевой линии, показанной
на рис. В2 штрихпунктирной линией, больше ДВУХ друrих,
характеризующих поперечное сечение стержня (на рис. В2 за
штриховано). Сечение стержня может быть как постоянным,
так и переменным.
На рнс. В3 показана модель BblcoTHoro здания, которое,
llапркм@р, при расчете па nt:ТрОnУЮ пйrрузку (и при опреде
лении частот и форм колебаний) можно рассматривать как
13
""
z
Рис. В2
z
......,
и
..............,
'1 z
'/
!/
Рис. Вз
Рис. В4
прямолинейный стержень переменноrо поперечноrо сечения.
Поток воздуха приводит к появлению аэродинамических сил,
действующих на стержень. На участках 1 и 111 возникают
распределенные аэродинамические силы qa, на участке 11, rде
имеется сосредоточенная масса А1, появляется сосредоточен
ная аэродинамическая сила Ра.
Кроме Toro, стержневая модель BblcoTHoro здания позво
ляет рассчитать (при v = О) конструкцию и на распределенные
(qz и др.), и на сосредоточенные (С и др.) наrрузки, Т.е. коли
чественно оценить работоспособность конструкции. В rл. 13
будет показано, что осевые (сжимающие) наrрузки MorYT при
вести к весьма неприятному явлению потере устойчивости.
На рис. В4 приведена спиральная пружина, широко ис
пользуеМaJI в различных приборах, которую при расчетах pac
14
!/
.т.
z
р
Рис. В5
Рис. В6
сматрива.ют как плоский криволинейный стержень. Спираль-
ная пружина наrружена сосредоточенным моментом 9Jt. На
рис. В5 изображено сверло (прямолинейный стержень), ко-
торое при сверлении наrружается сжимающими силами Р и
крутящим моментом 9Jt. Стержневая модель крыла само-
лета или лопатки двиrателя (рис. Вб) является упрощенной
моделью реальноrо крыла, однако позволяет определить кри-
тическую скорость полета, при превышении которой начина-
ются нарастающие поперечные колебания крыла флаттер
одно из самых опасных явлений, ставших причиной мноrих
катастроф.
На рис. В7 показан rибкий стержень (вал), находящийся в
жестком канале, осевая линия KOToporo, в общем случае, может
быть пространственно криволинейной. Вал предназначен для
передачи крутящеrо момента от точки О (вход) к точке К (BЫ
ход). Подобные стержневые элементы конструкции использу-
ют в роботах и манипуляторах в производстве, имеющем дело
с радиоактивными веществами.
Рис. В7
15
Очень широкое распространение в технике (системы
амортизации и виброзащиты) имеют различноro типа пру
жины, в том числе, цилиндрические (рис. Б8, а) и фасон
ные (рис. В8, 0), математической моделью которых является
пространственно криволинейный стержень.
р
.1л.
р
$л
о
tf
Рис. Б8
Различноrо типа трубопроводы и шланrи (рис. В9), пред
назначенные для транспортировки жидкостей, рассчитывают
с использованием модели стержня.
PD
о
IR
/
/
/
w, РА'
Рис. В9
Элементы конструкций, которые рассчитывают с исполь
зованием математических моделей пластин и оболочек, pac
смотрены в rл. 10.
Математическая модель включает силы, которые действу
ют на конструкцию; их особенности и характер поведения при
наrружении. Условно все на2рУЗ'ICи, действующие на реаль
ные конструкции, можно разделить на детерминированные, о
которых все известно, и случайные, поведение которых непред
ска.зуемо.
16
В курсе сопротивления материалов, также как и в курсе
теоретической механики, рассматривают детерминированные
наrрузки. Методы учета случайных наrрузок, действующих
на конструкции, изучают в курсах статистической механики и
теории надежности.
и
I I
1P2 I Р1
I I
Рис. В10
в качестве примера на рис. ВI0 показано действие случай-
ных сил на автомобиль, движущийся по дороrе с неровностями
(к сожалению, очень распространенный случай). В результате
возникают случайные колебания подвесок, что может приве
сти к усталостному разрушению (более подробно об этом см.
в rл. 12).
В3. Силы внешние и внутренние.
у равнения равновесия стержня
Силы подразделяют на внешние, приложенные к KOH
струкции, И внутренние, возникающие в элементах KOHCTPYK
ции. На рис. В2 показаны внешние силы, приложенные к
стержню.
Различают поверхностные, как на рис. В2, и объеА4ные
внешние силы. Поверхностные силы MorYT быть приложены к
малым участкам поверхности (это сосреаоточенные силы, на-
пример Рl и Р п на рис. В2) или к конечным участкам поверх-
ности (это расnреаеАенные силы, например q и qa. на рис. В2 и
Нз). Они характеризуют вза.имодействие конструкции с дpy
rими КОIfСТРУКЦИЯМИ или С внешней средой, например взаимо-
действие конструкций с потоком воздуха (см. рис. В3, В6) или
ИНВ. .м ........ Q I
.... .......... .... ...
f)"!r; '''.отека THTY ..,
17
жидкости (см. рис. В9). Объемные силы распределены по объ-
ему тела (например, Qz на рис. В3). Это силы тяжести, ми-
нитноrо притяжения, силы инерции при ускоренном движении
конструкции. К числу внеШНJ!:Х относят не только заданные
силы, которые часто трактуют как первопричину возможно
ro разрушения, но также и реаlЩИИ связей (например, сила R,
показанная на рис. В9).
Взаимодействие между час:тями рассматриваемоrо объек-
та характеризуют внутренние силы. Они возникают не толь-
КО между отдельными взаимодействующими узлами конструк-
ции, но также и между всеми смежными частицами объекта
при наrружении.
. Рассмотрим стержень, показанный на рис. Bll. BHYTpeH
ние силы в стержне можно наrлядно представить, если MЫ
сленно рассечь ero на две части. Такой прием выявления
внутренних сил в сопротивлении материалов носит название
метоаа сечений. Наиболее удобно рассматривать сечения,
ортоrональные осевой линии стержня.
l
Рис. В11
Метод сечений основан на следующем принципе: если кон-
струкция под действием внешних сил находится в равновесии,
то и любая ее часть находится в равновесии. Этот принцип
позволяет установить связь между внешними и внутренними
силами.
Так как связи между выделенными частями стержня
устранены, необходимо действие правой части на левую и ле
вой на правую заменить СИСТЕ!МОЙ сил в сечении, Т.е. вве-
сти систему внутренних сил 'QA и МА, rде QA вектор
18
внутренних силj МА вектор внутренних моментов в сече-
нии А стержня (см. рис. Вll). Таким образом, внутренние
силы определяют ВJаимодействие между частицами тела, рас-
положенными по разные стороны от мысленно проведенноrо
сечения.
В различных сечениях возникают, естественно, различ-
ные внутренние силы. Внутренние силы по принципу действия
и противодействия Bcerna взаимны. Правая часть действует
на левую точно так же, как левая на правую, и система сил,
возникающих в плоскости A(I)j обратна по знаку системе сил,
действующих в плоскости А (1 ). Внутренние силы распреде
ляются некоторым образом по поверхности проведенноrо сече-
ния, но во всех случаях они должны быть такими, чтобы yдo
влетворялись условия равновесия для правой и левой частей
стержня в отдельности.
Например, как следует из основных положений статики,
для правой части стержня (см. рис. Bl1 ) систему простран-
ственных сил и моментов можно привести к точке О' сечения
(центру тяжести сечения). В результате получим rлавный BeK
тор сил М и rлавный момент 9Jl. Опуская индекс "А", запишем
уравнения равновесия правой части стержня:
Q + Р = о;
м + 9Jl = о,
(В1)
(В2)
rде Q вектор внутренних сил, приведенных к точке О цен-
тру тяжести сечения; М вектор момента от внутренних сил
относительно точки О' (рис. В12). Каждое из векторных ypaB
нений (В1) и (В2) в проекциях на декартовы оси дает три
!/
о
.z
Рис. В12
19
скалярные уравнения, ПО3ВОЛЯЮIЦИе (если среди внешних сил
нет неизвестных реакций) определить три проекции вектора
внутренних сил Q и три проекции вектора момента М как на
оси Z, у, х, так и на связанные с сечением оси z', у', х'. Если,
например, для проекций вектора сил Q и проекций вектора
момента М в связанной системе z', у', х' ввести COOTBeTCTBeH
но обозначения QZI, Qy/, Qxl И Mzl, Myl, Мх" то векторы Q и
м для произвольноrо сечения можно представить так:
Q = Qz,el + Q y /e2 + Qх,еЗi (ВЗ)
М = Mzlel + M y /e2 + Мх,ез. (В4)
В сопротивлении материалов приняты следующие обозна
чения и определения для проекций векторов Q и М: Q Zl = N
осевая сила, направленная по касательной к осевой линии
стержня; Qy/, Qxl перерезывающие си.4Ь1; MZI = МХ x:pyтx
щий момент; Му' и Мх' изzибающие моменты. Уравнения
равновесия конечной части стержня позволяют наrлядно пред
ставить связь между внешними и возникающими при Harpy
жении внутренними силами. Если считать стержень (в более
общем случае конструкцию) абсолютно жестким и прочным,
как это принято в теоретической механике, то внутренние си
лы особоrо интереса не представляют. Считая конструкцию
абсолютно жесткой ( не деформируется) и абсолютно прочной
(не разрушается), предполаrают, что конструкция может BЫ
держать любые наrрузки.
Однако опыт показывает, что это, к сожалению, дале
ко не так. Реальные конструкции под действием внутренних
сил деформируются и при превышении определенных значений
внутренних сил становятся неработоспособными. Поэтому в
механике сплошной среды основное внимание уделяется aHa
лизу внутренних сил, что можно сделать, если рассматривать
равновесие не конечной части стержня, пластины или оболоч
ки, а бесконечно малоrо их элемента (это основной метод ис
следования в механике сплошной среды).
Недостатком уравнений равновесия (Вl), (В2) является,
как уже rоворилось выше, то, что использовать их можно толь
ко Torna, Korna все внешние силы, приложенные к отсеченной
20
части стержня, известны. Но если на стержень наложены ло
кальные связи (например, шарнирное закрепление, как пока
зано на рис. В9), тО эти уравнения мало. полезны. Кроме TOro,
получить из этих уравнений зависимость внутренних сил, на-
пример, от осевой координаты s (см. рис. Вll) практически
невозможно.
Поэтому рассмотрим общий метод, позволяющий иссле-
довать внутренние силы, возникающие в стержне при лю
бых внешних силах и условиях ero закрепления. Рассмотрим
элемент стержня бесконечно малой длины ds, показанный на
рис. В13. Элемент находится в равновесии, так как стержень
в целом находится в равновесии. Поэтому внешние наrрузки,
действующие на элемент стержня (распределенные сила q и
момент JL), и внутренние сила Q и момент М должны быть
уравновешены. Считается, что линии действия распределен-
ной силы q проходят через осевую линию стержня. Внутрен-
ние сила Q и момент М в общем случае изменяются по длине
стержня, поэтому в правом и левом сечении они отличаются
между собой на бесконечно малые приращения dQ и dM.
у
z
'1
о
tl
i,
.I
Рис. В13
Элемент стержня находится в равновесии, поэтому сумма
сил равна нулю:
(Q + dQ) Q + qds = О,
21
или
dQ
+ q == О.
ds
(В5)
Сумма моментов от распределенных и сосредоточенных
сил и моментов, например, относительно точки О (см.
рис. В13) центра тяжести левоrо сечения должна быть paB
на нулю, Т.е.
(М + dM) М + IL ds + ds [el Х (Q + dQ)] == О.
После преобразования, сохраняя только слаrаемые первоrо
порядка малости, получаем
dM
ds + IL + (el Х Q) == о,
(В6)
rде е} х Q векторное произведение единичноrо вектора el,
направленноrо по касательной к осевой линии стержня, и BeK
тора внутренних сил Q. Момент от распределенной силы q
ds
Mq == q ds "'2
не учитываем, так как он является величиной BToporo порядка
малости.
Векторные уравнения равновесия (В5) и (Б6) являют
ся инвариантными (независимыми) по отношению к систе
ме координат. Уравнения (В5) и (Б6) справедливы при
исследовании как прямолинейных (см. рис. В5, В6), так и
криволинейных плоских стержней (см. рис. В4, В9), а TaK
же пространственно криволинейных стержней (см. рис. В8).
В последующих rлавах учебника будут более подробно pac
смотрены частные случаи общих уравнений равновесия (В5),
(В6).
В качестве примера получим уравнения равновесия для
прямолинейноrо стержня, наrруженноrо произвольной по Ha
правлению распределенной силой q (рис. В14).
Вектор q в декартовых осях можно представить так:
q == qzi 1 + Qyi2 + Qxi3. (В7)
Аналоrично можно записать векторы Q и М:
Q == Qzi 1 + Qyi2 + Qx i 3;
М = Mzi 1 + Myi2 + Мжiз.
(Б8)
22
!I
i
6,
z
.I
Рис. В14
Из уравнения (В5) можно получить три скалярные уравнения
равновесия прямолинейноrо стержня, считая, что осевая ли
ния стержня мало отклоняется при наrружении от прямой (т.е.
ds dz):
dQz
+ qz = о;
dQy
+ qy = о;
dQx
+ qx = о.
(В9)
При малых отклонениях точек осевой линии от прямой
можно положить ej i j , поэтому векторное произведение
el Х Q = i 1 Х Q = [ il i б i J ] = Qxi2 + Qуi з . (ВI0)
Qz Qy Qx
Из BeKTopHoro уравнения (В6) получаем три скалярные ypaB
нения
dM z
+ J1.z = о;
dMy
Q х + J1.y = о;
dM x
+ Qy + J1.x = О.
(Вll)
Если на KaKOM TO участке стержня в поперечных сечениях
возникает нормальная сила Q z = N, а прочие внутренние си
ловые факторы обращаются в нуль, то на этом участке имеет
место растяжение или сжатие в зависимости от направле
ния силы N. Если в поперечном сечении возникает только
момент M z = М х , то в данном сечении стержень испытывает
х:ручен.ие. Наконеи, в случае, если внешние силы приложены
таким образом, что в поперечных сечениях возникает только
изrибающий момент Мх (или Му), имеет место чuстый U32uб
23
в плоскости zOy (или zОж). Обычно в поперечном сечении
наряду с изrибающим моментом (например, м ж ) действует и
поперечная сила Q,. Такой случай нa.rружения называется no
пере'4НЫ.м UЭ2ибо.м (в плоскости zOy). Возможны случаи Ha
rрузок, коrда стержень работает на кручение, изrиб и растя
жение (сжатие) одновременно.
В4. Напряжения
Чтобы характеризовать распределение внутренних сил по
сечению, необходимо ввести для них числовую меру. За такую
меру принимается наПРllжение.
Р п
Рис. В15
Рассмотрим сечение А HeKoToporo тела (рис. В15). В
окрестности точки К выделим элементарную площадку дР,
в пределах которой выявлена внутренняя сила LlQ. За среднее
напряжение на площадке др принимаем отношение LlQ / t::J..P =
= Рср. Будем уменьшать площадку t::J..P, стяrивая ее в точку
К. Поскольку среда непрерывна, возможен предельный пере
ход при t::J..P О. В пределе получаем
1 . t::J..Q
1т А Р = Р.
t:.F......O ti
Векторная величина Р представляет собой ПОАное напряжение
в точке К сечения А.
В Международной системе единиц (СИ) напряжение изме
ряется в паскалях (Па).
Полное напряжение р может быть разложено на три co
ставляющие: по нормали к плоскости сечени.ll и по двум осям
24
п
Рис. В16
в плоскости сечения (рис. В16). Составля щую вектора ПОk
Horo напряжения по нормали обозначают через (J и называют
нормальным наnряженuем. Составляющие в плоскости сече
ния называются 7CaCaтeJ1.bllbIMU наnряженuямu и обозначаются
через т. В зависимости от расположения и наименования осей
обозначения а и т снабжают системой индексов, порядок KOTO
рых будет установлен в дальнейшем.
Если через точку К в теле провести друrую секущую пло
щадку, напряжение р в той же точке будет, вообще rоворя,
друrим. Совокупность напряжений для Bcero множества пло
щадок, проходящих через точку, образует напряженное cocтo
я'Н.uе в точке.
Напряженное состояние, как мы узнаем в дальнейшем,
определяется шестью числовыми величинами и является в co
противлении материалов одним из наиболее важных понятий.
Оно будет подробно рассмотрено в rл. 7. Начало же курса свя
зано с рассмотрением наиболее ПРОСТЫХ и часто встречающих
ся частных случаев напряженноrо состояния.
В5. Перемещения и деформации
Ни один из существующих в природе материалов не явля
ется абсолютно твердым; под действием внешних сил все тела
в той или иной мере меняют свою форму (деформируются).
Изменение формы напряженноrо тела существенно влияет на
распределение В нем внутренних сил, хотя само по себе это
изменение формы является, как правило, незначительным и
обнаруживапся в большинстве СЛУЧiLеn только при ПОМОЩИ
чувствительных инструментов.
25
Под действием внешних сил точки тела меняют свое по
ложение в пространстве. Вектор, имеющий начало в точке
недеформированноrо тела, а конец в соответствующей точке
деформированноrо, называется нектором nОАиО20 nере.uещеUUll
точх:u. Ero проекции на оси координат носят название nepe
мещенuй по ОСНМ. ОНИ обозначаются через и, v и w COOTBeT
ственно осям х, у и z (рис. В17).
z
.z
!I
Рис. В17
Кроме линейноrо перемещения, введем понятие У2А0в020
nеремещеНUJ[. Если рассмотреть отрезок прямой между двумя
близкими точками до и после Юlменения формы тела, то леrко
установить, что этот отрезок поворачивается в пространстве
на некоторый уrол. Этот уrол поворота также характеризует
ся вектором, который может быть разложен по осям Х, у и z.
Если на систему наложены связи, достаточные для Toro,
чтобы исключить ее перемещение в пространстве как жестко
ro целоrо, то система называется 'lCuнематuчес'lCU неuзмеНJ[е
мой. Именно такие системы и рассматривают, как правило, в
сопротивлении материалов. В противном случае из перемеще
ний всех точек исключают слаr;а,ющую переноса тела как абсо
лютно жесткоrо и сохраняют ту часть, которая характеризует
только изменение формы. Тоrда для большинства рассматри
ваемых в сопротивлении материалов систем перемещения и, v
и w любой точки являются маJIЫМИ по сравнению с rеометри
ческими размерами тела.
На основе малости перемещений в сопротивлении матери
алов в методику анализа внутренних сил вводят упрощения,
26
носящие принципиальный характер. Одно из них носит назва
ние nринциnа начаJ1.ЬНЫХ раЗАСеров. Соrласно этому принци
пу, при составлении уравнений статики (уравнений paBHOBe
сия) тело рассматривают как недеформированное, имеющее те
же rеометрические размеры, какие оно имело до наrружения
внешними силами.
Так, если в точке А системы, показанной на рис. В18, а,
приложить некоторую силу Р, то канат АВ удлинится, CTep
жень АС несколько укоротится, да и вообще система изме
нится (рис. В18, 6). LIля определения внутренних сил в канате
и стержне надо воспользоваться методом сечений и составить
уравнения равновесия для отсеченноrо деформированноrо узла
А (рис. В18, в). Здесь, однако, возникает затруднение, связан
ное с тем, что новые rеометрические размеры системы OCTa
ются неизвестными, пока не определены внутренние силы, за
висящие, в свою очередь, от rеометрических размеров. При
малых перемещениях указанным обстоятельством можно пре
небречь, поскольку деформированная система мало отличается
от недеформированной. В этом случае в соответствии с прин
ципом начальных размеров уравнения равновесия составляют
для недеформированноrо узла (рис. В18, 2), и тоrда Nl = PV2;
N2 == P.
I Р
" '
450
А Н 2 Р
Ь Р l
Рис. В18
а
Понятно, что изложенный принцип нельзя применять в
случае больших перемещений. Кроме Toro, принцип началь
ных размеров может оказаться неприемлемым и при малых
перемещениях, если при этом форма системы меняется каче
ственно. Например, для двух шарнирно связанных стержней,
27
расположенных на одной .прямой, условия равновесия узла А
(рис. В19) следует составлять обязательно с учетом уrла Ha
клона 01, возникающеro вследствие удлинения стержней.
Рис. В19
Системы подобноrо рода называются .4С2новеННЫ.4Си .4Cexa
НUЗ.4Са.4СU. Это означает, что в какой то момент система явля
ется кинематически изменяемой, Т.е. допускает перемещения
элементов, не сопровождающиеся деформациями. В данном
случае кинематическая изменяемость имеет место в OKpeCTHO
сти исходноrо положения, в котором три шарнира находятся
на одной прямой. В отличие от MrHoBeHHoro обычный Mexa
низм обладает кинематической изменяемостью независимо от
взаимноrо расположения составляющих элементов.
Особый класс задач, rде, по существу, необходимо OT
ступить от принципа начальных размеров, образуют задачи
устойчивости, приведенные в rл. 13.
Для Toro чтобы характеризовать интенсивность измене
ния формы и размеров, рассмотрим точки А и В недеформи
pOBaHHoro тела, расположенные одна относительно друrой на
расстоянии 8 (рис. В20). Пусть в результате изменения формы
тела это расстояние увеличится на 6,8. Отношение прираще
НИК ДЛИНЫ отрезка Дs к ero начальной длине назовем средним
Рис. В20
28
удлинением на отрезке s: As/ s = Еср. Будем, далее, YMeHЬ
шать отрезок s, приближая точку В к точке А. В пределе
получим
lim Asjs = САВ;
э о
величина САВ называется Аинеинои аефор.wацuей (или просто
аеформацuей) в точке А по направлению АВ. В той же точке в
npyroM направлении деформация, вообще rоворя, будет друrой.
Если рассматривают деформации в направлении координат
ных осей х, у и Z, в обозначение Е вводятся соответствующие
индексы. Тоrда имеем Ех, су и cz.
Следует подчеркнуть, что слово "деформация" имеет ДBO
який смысл. В обиходном языке под деформацией понимает
ся вообще всякое изменение формы без количественной oцeH
ки. В сопротивлении материалов и в теории упруrости дe
формация имеет данное выше cTporoe определение и являет
ся количественной мерой изменения rеометрических размеров
в окрестности точки. IIеформация является безразмерной Be
личиной (ее измеряют также в процентах As по отношению
к s). Поскольку форма тела меняется незначительно, дефор
мации также имеют малую величину. IIля конструкционных
материалов, в частности, деформации лежат в пределах долей
процента.
Кроме линейной деформации введем понятие уи.овои ae
формации. Рассмотрим прямой уrол, образованный в недефор
мированном теле двумя отрезками OD и ОС (см. рис. В20).
После наrружения тела внешними силами этот уrол изменит
ся и станет равным с'о' D'. Будем уменьшать отрезки ОС и
О D, приближая точки С и D к точке О и оставляя при этом
уrол COD прямым. Предел разности уrлов COD и с'о' D'
'YcOD = lim ( СОЬ C'QlD' )
ОС..... О
OD.....O
называется уи.овой аеформацией, или уи.ом савш а в точке О
в плоскости COD. В координатных плоскостях уrлы сдвиrа
обозначают через 'Yyz, 'Yzx и 'Уху.
Совокупность линейных деформаций по различным на.пра.
влениям и уrловых деформаций в различных плоскостях для
29
одной точки образует аефОРАСuрованное состохние в точке. Ле
формированное состояние, так же как и напряженное СОСТОЯ
ние, определяется шестью числовыми величинами. Более по
дробно этот вопрос будет рассмотрен в rл. 7.
A
р
=:tB C
Рис. В21
Следует четко различать ПОНЯТИЯ деформации и переме
щения и не допускать довольно распространенной ошибки, KO
rда абсолютное удлинение стержня или осадку витой пружины
называют деформацией. Это не деформации, а перемещения.
Заметим также, что если какой"то участок стержня перемеща
ется, то это вовсе не значит, что он деформируется. Наrляд..
ный тому пример показан на рис. В21. Участок стержня ВС
получает перемещения вследствие деформации участка АВ, но
сам не деформируется.
В6. Закон rYICa и принцип
независимости действия сил
Мноrочисленные наблюдения за поведением твердых тел
показывают, что в большинстве случаев nереАСещенuz в onpe
аеАенных nреаеАах nроnорциОНI1АЬНЫ аействующuАС сиАаАС.
Эта закономерность была дана fYKOM в 1660 r. в формули
ровке "каково удлинение, такова сила", что по латыни звучало
"ut tensio sic vis". Но закон был опубликован только в 1676 r. в
виде aHarpaMMbl "ceiiinossstt u v". Так Bblr лядела приоритетная
заявка Toro времени.
Если рассмотреть перемещение произвольно взятой точки
А (см. рис. В17) по некотором:у направлению, например по
оси х, то
иА == охР,
(В12)
r де Р сила, под действием которой происходит перемещение
иА, а ОХ коэффициент пропорциональности между силой и
перемещением.
30
Очевидно, этот коэффициент зависит как от физических
СЕЮЙСТВ материала, так и от взаимноrо расположения точки
А и точки приложения силы и вообще от reометрических oco
БЕ!нностей системы. Таким образом, выражение (В12) следует
рассматривать как закон rYKa aJl.J1 систеАСЫ.
В современной трактовке заtcОН Fytca определяет линей
ную зависимость между напряжением и деформацией, а не
между силой и перемещением. При этом устанавливаются
линейные зависимости, свойственные состоянию материала в
т.ОЧ'lCе.
Коэффициенты пропорциональности в этом случае пред
ставляют собой физические константы материала и уже не свя
заны с rеометрическими особенностями системы в целом. За
кон, таким образом, выражает свойства caMoro материала. На
основе такой формулировки закона fYKa MorYT быть получе
ны линейные зависимости типа (В12) между перемещениями
и силами для конкретных систем. Физические константы Ma
териала будут введены в последующих rлавах при paCCMOTpe
нии частных случаев напряженноrо и деформированноrо COCTO
яний. В обобщенной трактовке закон fYKa будет сформулиро
ва.н в rл. 7. Пока же для выявления основных свойств напря
женных тел оrраничимся рассмотрением соотношения (В12),
типичноrо для подавляющеrо большинства систем.
Заметим сразу, что принятая линейная зависимость меж
ду перемещениями и силами сохраняется как при возраста
НИИ, так и при убывании сил и предопределяет, следовательно,
упруrие свойства системы. Это же подтверждается и опытом,
который показывает, что в случае указанной линейной зависи
мости твердое тело полностью восстанавливает свои первона
чальные размеры и форму после устранения внешних сил.
Системы, для которых соблюдается условие пропорцио
нальности между перемещениями и внешними силами, назы
ваются линейными и подчиняются принципу суnерnозиции,
или nринципу незавuсимостu aeucmBuJI сиА. В соответствии
с этим принципом перемещения и внутренние силы, возника
ющие в упруrом теле, считаются не зависящими от порядка
приложения внешних и.л: l! Л:И к системе приложено несколь-
ко сил, то можно определить внутренние силы, напряжения,
31
перемещения и деформации от каждой силы в отдельности, а
затем результат действия всех сил получить как сумму дей
ствий каждой силы.
Положим, что к некоторой системе приложена сила Рl.
Перемещение, которое вызовет эта сила в произвольной точке
А по направлению, например, оси х, будет, соrласно выраже
нию (В12), следующим:
иАl =CX1Pl. (В1З
Примем теперь, что сила Pl снята и внекоторой друrой
точке упруrоrо тела приложена сила Р2. Перемещение, KOTO
рое вызовет эта сила в точке А, будет таким:
иА2 = Сх2Р2. (В14)
Коэффициенты пропорциональности С Х1 и С Х2 будут различны
ми, поскольку силы Pl и Р2 приложены в разных точках тела.
Рассмотрим теперь совместное действие сил Pl и Р2. Прило
жим сначала силу Pl, а затем, не снимая ее, силу Р2. Тоrда
перемещение, которое получит точка А, можно представить
следующим выражением:
иА = С Х1 Pl + C 2P2' (В15)
Коэффициент С Х1 будет тем же, что и в формуле (ВIЗ),
поскольку силу Pl прикладывали к ненаrруженной системе.
Коэффициент же C 2' в отличие от формулы (В14), помечен
штрихом, так как силу Р2 прикладывали не к свободной си
стеме, а к системе, предварительно наrруженной силой Pl'
Если КОЗффИIIиенты 2 и X2 различны, то следует при
знать, что 6 2 зависит от силы Pl' Но это противоречит при
нятому предположению о линейной зависимости перемещений
от действующих сил. Следовательно, Б 2 от сил не зависит.
Выражение (В15) при P 1 = О должно переходить в выражение
(В14). Поэтому 6 2 = 6 х2 , И тоrда
иА = 6 Х1 Pl + 6х2Р2. (B16)
Таким образом, перемещение определяется как сумма pe
зультатов независимых действий сил Рl и Р2. Если изменить
32
порядок приложения сил, то можно путем ана.лоrичных paccy
ждений прийти к тому же выражению (В15). Следовательно,
результат действия сил не зависит от порядка их приложения.
Это положение леrко обобщается и на случай любоro числа
сил.
И так, в основе принципа независимости действия сил ле
жит предположение о линейной зависимости между перемеще
ниями и силами, а также связанное с ним предположение об
обратимости процессов наrрузки и разrрузки. Системы, не
подчиняющиеся изложенному в предыдущем параrрафе прин
ципу начальных размеров, обнаруживают нелинейные зависи
мости между силами и перемещениями, поэтому к таким систе
мам неприменим также и принцип независимости действия сил
(см., например, систему, представленную на рис. В19). Вместе
с тем не всякая система, подчиняющаяся принципу начальных
размеров, будет подчиняться и принципу независимости дей
ствия сил. Если при малых перемещениях сами свойства Ma
териала таковы, что перемещения зависят от сил нелинейно,
то такая система, подчиняясь первому принципу, не подчиня
ется второму. Принцип независимости действия сил является
основным при решении большинства линейных задач сопроти
В.'Iения материалов.
В7. Общие принципы расчета
элементов конструкции
В результате расчета нужно получить ответ на вопрос,
удовлетворяет или нет конструкция тем требованиям надеж
ности, которые к ней предъявляют. Для этоrо необходимо
прежде Bcero сформулировать те принципы, которые должны
быть положены в основу оценки условий достаточной надеж
ности. Без этоrо анализ конкретной конструкции сам по себе
не может иметь целевоrо назначения. Так, если в конструкции
определяются напряжения, надо предварительно четко пред
ставить себе, зачем это нужно и что с найденными напряже
ниями надлежит делать в дальнейшем. Точно так же, если
определяется форма деформированноrо тела, надо заранее Ha
метить путь дальнейшеrо использования полученноrо резуль
тата в оценке надежности конструкции. Все эти вопросы Ha
ходят свое решение в выборе общеrо .метода расчета.
2 В. И. Феодосьев
33
Наиболее распространенным методом расчета деталей Ma
шин и элементов сооружений на прочность является paCi4em
по наnр.нжени.н.и. В основу этоrо метода положено предполо
жение, что критерием надежности конструкции является Ha
пряжение нли, точнее rоворя, напряженное состояние в точке.
Последовательность расчета при этом выrлядит следуюIдИМ
образом.
На основании анализа конструкции выявляют ту точку
в теле, rде возникают наибольшие напряжения. Найденное
значение напряжений в этой точке сопоставляют с предель
ным значением для данноrо материала, полученным на основе
предварительных лабораторных испытаний. Из сопоставле
ния найденных расчетных и предельных напряжений делают
заключение о прочности конструкции.
Этот метод используется при решении большинства прак
тических задач. Вместе с тем не следует думать, что Ta
кой подход является единственно возможным. В ряде случа
ев быстрее приводят к цели друrие методы. Бывает и так,
что расчет по напряжениям оказывается попросту неприемле-
мым, например при проверке некоторых конструкций, находя
щихся под действием высоких перепадов температур (оболочка
жидкостноrо paKeTHoro двиrателя и др.).
В ряде случаев основная концепция изложенноrо метода,
по которой напряжения в одной точке можно рассматривать
как определяющий фактор в оценке надежности всей KOHCTPYK
ции, не всеrда оказывается правильной.
В качестве наиболее простоrо примера, иллюстрирующеrо
сказанное, рассмотрим стержень с выточкой, представленный
на рис. В22 ,а. Можно показать, что при растяжении TaKO
ro стержня напряжения в точках А, расположенных у верши
ны выточки, будут заметно больше, чем для rладкоrо стерж
ня, растянутоrо теми же силами (рис. В22, 6). Если исходить
из метода напряжений, то следует сделать вывод, что CTep
жень с выточкой менее прочен, Т.е. способен выдержать на-
rрузку меньшую, чем rладкий стержень. Однако это не Bce
rда так. Для некоторых материалов, таких как высокоуrле-
роди стая сталь, стекло, камень и друrие им подобные, CTep
жень, имеющий выточку, действительно оказывается менее
34
d
р
р
d
о
Рис. В22
прочным, чем rладкий. В случае, если оба стержня изrотов
лены из малоуrлеродистой стали, меди, бронзы или алюми
ния, стержень с выточкой, вопреки ожиданиям, выдерживает
не меньшую, а большую наrрузку. Таким образом, напряже
ния в точке не всеrда и не полностью характеризуют условия
разрушения конструкuии.
В связи со сказанным в некоторых случаях используют
метод расчета по разрушающuм наzруз?Сам. В этом методе
путем расчета определяют не напряжения, а находят предель
ную наrрузку, которую может выдержать конструкu ия , не раз-
рушаясь или не изменяя существенно свою форму. Предельную
(разрушающую) наrрузку сопоставляют с рабочей, и на осно-
вании этоrо делают выводы о степени прочности конструкции
в рабочих условиях. Этот метод обладает тем недостатком,
что расчетное определение разрушающей наrрузки возможно
только в наиболее простых конструктивных схемах.
Методы расчета выбирают в зависимости от условий pa
боты конструкции и требований, которые к ней предъявляют.
Если необходимо добиться наименьших изменений формы KOH
струкции, например при проектировании отражателя прожек
тора или системы зеркал астрономическоrо прибора, проводят
расчет по aOnYC'lCaeMbIM nеремещеНUJlМ, или, как rоворят, pac
'Чет на жест?Сость. Это не исключает, понятно, OДHOBpeMeH
ной проверки системы на прочность по напряжениям.
2.
36
Наряду с упоwвутыми существуют мноrие друrие MeTO
ды, связанные с качественно отличными явлениями, такими
как устойчивость, эффект повторных наrрузок, динамическое
воздействие и др.
Курс сопротивления материалов не претендует на то, что
бы точно указать, rде и коrда следует пользоваться тем или
иным из упомянутых методов расчета конкретных KOHCTPYK
ций. Сопротивление материалов дает В основном только изло
жение практически приемлемых средств для решения вопро
сов, связанных с определением напряжений, деформаций, пе
ремещений, разрушающих наrрузок и пр. в типичных элемен
тах конструкции. Вопрос о степени надежности конструкции
в конкретных условиях изучают в основном в курсах деталей
машин, прочности самолета, прочности корабля и т.Д.
Тем не менее, изучая сопротивление материалов, не сле
дует забывать, что определение напряжений и перемещений не
является самоцелью и что за определением этих величин стоит
неизбежный вопрос о возможности использования полученных
результатов в оценке надежности конструкции.
rлава 1
РАСТЯЖЕНИЕ И СЖАТИЕ
1.1. Внутренние силы и напряжения,
возникающие в поперечных сечениях стержня
при растяжении сжатии
Под растяжением понимается такой вид наrружения, при
котором в поперечных сечениях стержня возникают только
нормальные силы, а все прочие внутренние силовые факторы
(поперечные силы, крутящий и изrибающий моменты) равны
нулю.
Обычным является растяжение стержня силами, прило-
женными к ero концам. Передача усилий к стержню может
быть осуществлена различными способами, как это показано
на рис. 1.1, а в. Во всех случаях, однако, система внешних
сил образует равнодействующую Р, направленную вдоль оси
стержня. Поэтому независимо от условий крепления растя-
HYToro стержня расчетная схема в рассматриваемых случаях
оказывается единой. Она показана на рис. 1.1,2.
Если воспользоваться методом сечений, то становится оче-
видным, что во всех поперечных сечениях стержня возникают
нормальные силы N, равные силе Р (рис. 1.2):
N=P.
37
- t1 -
- -
I
- 6 -
р р
..
z
Рис. 1.1
р
..........
I
N N
.....
р
н-р
{c
р
р
.........
Рис. 1.2
Рис. 1.3
Сжатие отличается от растяжения формально только зна-
ком силы N. При растяжении нормальная сила N направлена
от сечения, а при сжатии к сечению. Таким образом, при ана-
лизе внутренних сил сохраняется единство подхода к вопросам
растяжения и сжатия. Вместе с тем между этими двумя типа-
ми наrружения MorYT обнаружиться и качественные различия,
например при изучении процессов разрушения материалов или
при исследовании поведения длинных и тонких стержней, для
которых сжатие сопровождается, как правило, изrибом.
Рассмотрим напряжения, возникающие в поперечном се-
чении растянутоrо стержня. Нормальная сила N является рав-
нодействующей внутренних сил в сечении (рис. 1.з). Естест-
венно предположить, что для однородноrо стержня внутренние
силы распределены по сечению равномерно. Тоrда нормальное
. напряжение для всех точек сечения будет одним и тем же:
N
(J = ,
F
rne F плошапь поперечноrо сечении.
(1.1)
38
Понятно, что высказанное предположение о равномерном
распределении внутренних сил в поперечном сечении справед
ливо лишь постольку, поскольку из рассмотрения исключают
ся особенности конкретно взятоro стержня в связи с условия
ми ero закрепления на концах. Здесь руководствуются прави
лом, которое принято называть nринциnо," CeH BeHaHa по име
ни известноrо французскоrо ученоro прошлоrо века. Принцип
CeH BeHaHa является общим, но применительно к стержням он
может быть сформулирован следующим образом: особенности
приложения внешних сил к растянутому стержню проявляют
ся, как правило, на расстояниях, не превышающих xapaKTep
ных размеров поперечноrо сечения стержня. Это значит, что
при изучении растянутоrо стержня достаточно принимать во
внимание только равнодействующую внешних сил Р, не инте
ресуясь особенностями приложения наrрузки. Для этоrо надо
исключить из рассмотрения часть стержня, расположенную в
зоне приложения внешних сил. На рис. 1.1 это как раз и пока
зано. Отбрасывая части стержня, примыкающие к ero концам,
получаем единую расчетную схему (см. рис. 1.1, а), независи
мо от способа при ложен ия внешних сил.
Приведенные рассуждения MorYT быть отнесены также и к
особым участкам стержня, содержa.IЦИМ резкое изменение reo
метрических форм. Например, для ступенчатоro бруса, пока
занноrо на рис. 1.4, следует исключить из рассмотрения зону
скачкообразноrо перехода от одноrо диаметра к друrому и зо
ны, примыкающие к отверстиям. Во всех остальных участках
напряжения в поперечных сечениях будут распределены paB
номерно и их можно определить по формуле (1.1).
Рис. 1.4
39
Для наrруженноrо по концам растянутоrо OnHoponHoro
стержня напряжения остаются постоянными как по сечению,
так и по длине, Т.е. сохраНЯЮТСJl неизменными для всех TO
чек объема, занимаемоro телом. Такое напряженное состояние
называется однородным. При однородном напряженном COCTO
янии все точки тела находятся в одинаковых условиях.
Понятие однородноrо напряженноrо состояния тесно свя
зано с понятием сплошной среды. Ясно, что распределение
внутренних сил в реальных условиях не может быть paBHO
мерным из за неоднородности кристаллических зерен металла
и молекулярноrо строения вещества. Поэтому, Korna rоворят о
равномерном распределении внутренних сил по сечению, име
ют в виду распределение без микроскопической детализации в
пределах площадок, существенно превышающих размеры се-
чений кристаллических зерен. Сделанная oroBopKa относится
не только к растяжению и сжатию, но и ко всем друrим видам
наrружения, которые будут рассмотрены в дальнейшем.
t P
p
d
Сuлы
тяжесm/L
J
Рис. 1.5
При растяжении, однако, не Bcerna возникает однородное
напряженное состояние. Например, у стержня с переменной
площадью поперечноrо сечения (рис. 1.5, а) напряжения меня-
ются по длине и напряженное состояние неоднородно. То же
самое имеет место и для стержня, наrруженноrо собственным
весом (рис. 1.5,6).
40
1.2. Удлинения стержня и закон rYKa.
У равнения равновесия
Размеры растянутоrо стержня меняются в зависимости от
величины приложенных сил. Если до наrружения стержня ero
длина была равна [, то после наrружения она станет равной
[ + д[ (рис. 1.6). Величину д[ называют абсо.tlютны,м yд.tlиHe
ние,м стержня.
" А 6Z В
tL
А 8 t
1J P
A I
..
Z
Рис. 1.6
Будем считать, что абсолютное удлинение и деформации
связаны только с напряжениями, возникающими в стержне. В
действительности имеются и друrие факторы, влияющие на
деформации. Так, деформации зависят от температуры и Bpe
мени действия наrрузки. Неупруrие деформации зависят от
"истории" наrружения, Т.е. от порядка возрастания и убыва
ния внешних сил. Пока, однако, этих вопросов мы касаться не
будем.
Если стержень наrружен только силой Р, то напряжен
ное состояние является однородным и все участки растянуто
ro стержня находятся в одинаковых условиях; деформация Е по
оси стержня остается одной и той же, равной своему среднему
значению по длине [:
д[
E
1 .
(1.2)
Эта величина называется относите.tlЬНЫ,м уд.tlинение,м стерж
НЕ.
Если стержень наrружен сосредоточенной силой Р и pac
пределенными силами Qz (наиболее общий случай), то относи
тельное удлинение € не будет постоянным по длине стержня.
Получим выражение для относительноrо удлинения стержня,
рассматривая элемент стержня между плоскостями АА и ВВ
41
до и после наrружении (см. рис. 1.6). Если обозначить переме
щение плоскости АА элемента стержня через и, то плоскость
ВВ будет иметь переыещение, равное u + du, rде du = д(ds)
дополнительное перемещение из за растяжении элемента dz
стержня. Тоrда относительное удлинение элемента будет paB
но
Е=
u + du u du
dz dz.
(1.3)
Заметим, что вследствие paBHoMepHoro распределения Ha
пряжений по сечению удлинения для всех элементарных от-
резков (см. рис. 1.6), взятых на участке dz, оказываются оди-
наковыми. Следовательно, если концы отрезков до наrруже
ния образуют плоскость, то и после наrружения стержня они
образуют плоскость, но смещенную вдоль оси стержня. Это
положение может быть взято в основу толкования механизма
растяжения и сжатия и трактуется как 2uпотеза nJ&oc'lCux ce
ченuй (rипотеза Бернулли). Если эту rипотезу принять как
основную, то тоrда из нее, уже как следствие, вытекает BЫ
сказанное ранее предположение о равномерности распределе
ния напряжений в поперечном сечении.
В пределах малых удлинений для подавляющеrо большин
ства материалов справедлив закон fYKa, который устанавли
вает прямую пропорциональность между напряжениями и дe
формациями:
(J = ЕЕ.
(1.4)
Величина Е представляет собой коэффициент пропорцио
нальности, называемый .м.одУАем. УПРУ2ости первО20 рода. Mo
дуль упруrости является физической константой материала и
определяется экспериментально. Величина Е измеряется в тех
же единицах, что и (J, т .е. в меrапаскалях. Вместе с тем, по
скольку модуль упруrости может иметь довольно большие чи
словые значения, ero предпочтительнее измерять не в Mera-, а
в rиrапаскалях: 1 rПа=1000 МПа.
Пля наиболее часто применяемых материалов модуль уп
руroсти Е имеет следующие значеНИJ:, rПа:
42
Сталь. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Медь.. .. . .... . ., .. . .......... ...
Латунь . . . . . . . . . . . . . . . . . . . . . . . . . . .
Алюминий и алюминиево--мarниевые сплавы .
Бериллий . . . . . . . . . . . . . . . . . . . . . . . . .
Вольфрам . . . . . . . . . . . . . . . . . . . . . . . . .
Молибден . . . . . . . . . . . . . . . . . . . . . . . . .
Титан . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Алмаз. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Дерево вдоль волокон . . . . . . . . . . . . . . . . .
Стекловолокно . . . . . . . . . . . . . . . . . . . . . .
Кварцевое волокно . . . . . . . . . . . . . . . . . . .
Бороволокно . . . . . . . . . . . . . . . . . . . . . . .
Карбидное волокно. . . . . . . . . . . . . . . . . . .
Промышленное уrлеродное волокно
высокомодульное . . . . . . . . . . . . . . . . . . . .
Промышленное уrлеродное волокно
высокопрочное . . . . . . . . . . . . . . . . . . . . . .
ЭПОlCсидные смолы . . . . . . . . . . . . . . . . . . .
Усы (нитевидные кристаллы):
rрафит. . . . . . . . . . . . . . . . . . . . . . . . .
Сапфир (А12 0 з) . . . . . . . . . . . . . . . . . . .
Асбест . . . . . . . . . . . . . . . . . . . . . . . . .
190 200
120
100 120
70 80
240
410
330
100
1050
8 12
70 85
70
430
430
310 345
220 250
2 3
< 690
< 530
170
Закон fYKa представляет собой простейшую и очевидную
аппроксимацию наблюдаемой в опытах зависимости удлине
ния от напряжения. Естественно, что точность этой аппрок
симации определяется в первую очередь тем, сколь широкий
диапазон изменения напряжения имеется в виду. Всеrда мож
но подобрать достаточно малый интервал напряжений, чтобы
в ero пределах функцию Е = f«(1) можно было бы с задан
ной точностью рассматривать как линейную. И конечно, для
разных материалов это выrлядит по разному. Лля некоторых
материалов, таких как, например, сталь, закон fYKa соблюда
ется с высокой степенью точности в широких пределах изме
нения напряжений. Лля отожженной меди, для чуrуна этот
интервал изменения напряжений существенно меньше. В тех
случаях, коrда закон rYKa явно не соблюдается, деформацию
задают в виде некоторой нелинейной функции от напряжения
Е = f( и) с таким расчетом, чтобы эта функция отвечала кри
вой, полученной при испытании материала.
43
Вернемся к выражению (1.4) и заменим в нем q на N / Р,
а Е. на dи/dz. Тоrда получим
или
Ndz
dи = ЕР '
dи N
dz ЕР = о.
(1.5)
в результате получаем систему, состоящую из двух ypaBHe
ний: первоrо уравнения системы (В9) (полаrая Qz = N) и
уравнения (1.5), которая позволяет определить напряженно
деформированное состояние прямолинейноrо стержня, Harpy
женноrо осевыми силами:
dN
dz + q(z) ::;:::: о;
dи N
dz ЕР ::;:::: О.
Из первоro уравнения системы (1.6) находим осевое усилие
N (z), а из BToporo 11.( z). Получаемые выражения для N и и
будут содержать две произвольные постоянные, определяемые
из двух краевых условий: при z ::;:::: О и z ::;:::: 1.
Абсолютное удлинение стержня переменноrо сечения на
длине l будет равно
(1.6)
1 1
дl::;:::: J dи::;:::: J z .
О О
В том случае, коrда стержень наrружен только по концам,
нормальная сила N = Р не зависит от z. Если, кроме Toro,
стержень имеет постоянные размеры поперечноrо сечения Р,
то из выражения (1.5) получаем
PI
Д::;:::: ЕР ' (1.7 а)
(1.7)
При решении мноrих практических задач возникает He
обходимость наряду с удлинениями, обусловленными напря
жением и, учитывать также удлинения, связанные с темпе
ратурным воздействием. В этом случае пользуются способом
44
наложения и деформацию Е рассматривают ках сумму силовой
и чисто температурной деформации:
(f
Е = + at,
Е
rде а коэффициент температурноro расширения материала.
Пля однородноrо стержня, нarруженноro по концам и рав-
номерно HarpeToro, получаем
Pl
дl = ЕР + lat.
Таким образом, силовая и температурная деформации paCCMa
триваются как независимые. Основанием этому служит экс
периментальна установленный факт, что модуль упруrости Е
при умеренном иаrреве слабо меняется с температурой, точно
так же как и а практически не зависит от и. Пля стали это
имеет место до температуры порядка 300 . . .400 ос. При более
высоких температурах необходимо учитывать зависимость Е
от t.
Рассмотрим примеры определения напряжений и переме
щений в некоторых простейших случаях растяжения и сжатия.
При м е р 1.1. Требуется ВЫЯВИТЬ за.хон изменения нормалЬ-
ных сил, напряжений и перемещений по длине ступенчатоro стержня, на-
rруженноrо на хонце силой Р (рис. 1.7, а), определить числовые значеНИII
наибольшеrо наПРllжения и наибольшеrо перемещеНИII, если Р == 50 хН,
F == 2 см 2 , 1 == 1 м. Материал сталь, Е == 200 rПа. Поскольку сила Р
велика, собственный вес стержня можно не учитывать.
l
р
r
f
.
I
Рис. 1.7
45
Из условий равновеси. любой отсечениой части стер.н. вытекает,
что нормальнlUI сила N в каждом сечекии стер.н. равна внешней силе
Р. Построим rрафик изменени. силы N вдоль оси стер.н.. rрафики
подобноrо рода называютс. в сопротивлении материалов эпюрами. Они
дают наrл.дное представление о законах изменеНИII различных исследу
емых величин. В данном случае эпюра нормальной силы пре.цставлена
на рис. 1.7, 6 ПРlIмоуrольником, поскольку N == Р == const. На рисунке
эпюра N заштрихована ЛИНИIIМИ, которые проведены параллельно откла
дываемым на rрафике значеНИIIМ N. В данном случае значение силы N
откладывают вверх, поэтому штриховка проведена вертикально.
Для тoro чтобы получить эпюру наПРII.ений t1', надо ординаты эпю-
ры N изменить обратно пропорционально величине F (рис. 1.7, 11). БОЛfr-
шее значение t1' равно t1'max == Р/ Ршin == 50 кН/2 см 2 == 250 МПа.
Определим перемещение u (см) каждоrо сечени. стерЖНII по иапра
ВJlению СИJlЫ Р. Перемещение z ro сече ни. равно удлинению отрезка
ДJlИНОЙ z. Следовательно, соrласно фОРМУJlе (1.6), u == Pz/(EF). Ta
ким образом, на участке изменеНИII z от НУJl. до 1 перемещение u про--
порционально z (рис. 1.7, 2). На втором участке стерЖНII перемещение
u == PI/(EF) + Pz 1 /(2EF). Зависимость u от ZI также будет линей
ной. На.ибольшее перемещение имеет торцевое сечение стеРЖНII: итах ==
== 3PI/(2EF) == 1,87 мм.
При м е р 1.2. Построить эпюры нормальных сил, наПРllжений
и перемещений для свободно подвешенноrо цилиндрическоrо стеРЖНlI, Ha
rруженноrо силами собственноrо веса (рис. 1.8, а). Длина стерЖНII 1, ПЛО--
щадь поперечноro сечения Р, плотность материала "(.
о
yFl II
о
8
ll 2
ZE z
Рис. 1.8
Нормальная сила в сечении z равна весу нижележащей части стерж
ня: N == "(Fz. Следовательно, нормальнаll сила пропорциональна z. Эпю
ру N в данном случае штрихуют rоризонтальиыми лиииями, поскольку
46
значени. N откладывают в roРИЗОНТaJIЬНОМ напраВ.IIеНJlИ (рис. 1.8, 6'). Н.....
пр.жение в сечении равно tr = -yz (см. рис. 1.8, в).
Перемещение U в сечении z равно удлинению BepXHero участка
стержн.. Соrл&сно формуле (1.5).
I
U = J F( d( = .l (е z2)
EF 2Е .
s
Таким образом, закон изменени. и изображаетс. квадратичной фуикци
ей z. Наибольшее перемещение Um." имеет нижнее торцевое сечеиие
(рис. 1.8, 2):
-y12
Um." = 2Е '
При м е р 1.3. Колонна (рис. 1.9, а) наrружеиа силой Р и силами
собственноrо веса. Требуетс. подобрать такой закон изменени. площади
поперечноrо сечени. F = F(z), чтобы напр.жени. во всех сечени.х были
одинаковы и равны Р / Fo. Построить эпюры НОРМLПьных сил, напр.жений
и перемещений.
N
о
Рис. 1.9
о
6
На раССТОIIНИИ z ОТ торца норма.пьнa.JI сжимающa.JI сила N равна
s
N = Р + -у J F d(.
о
47
По условию задачи
z
Р+'У] Р(
о
F
Р
== РО == const,
(1==
N
F
==
откуда
z
Р + 'у J F d( == Р.
о
ЛиффереИЦИРУJI обе части этоrо равенства. по Zt получим 'YF =
Р dF Р dF
= Fo 7[;' или dz = 'УРа Р. После иитеrрировании находим
z == : (ln F ln С), или F == Ce(-уFоz/Р).
'Y 'o
При z == О F == РО, следовательно, С == РО и тоrда искомый закон
изменения площади F принимает вид F == РО е -у Foz / Р .
Построение эпюр удобнее Bcero начинать с эпюры напряжения (1,
которое вдоль оси колонны по условию не меняется (рис. 1.9, 6). ПОСICОJIЬ
ку напряжение постоянно, то постоянным будет и относительное удлине
ние t:. Поэтому перемещение и возрастает пропорционально расстоянию
от основания колонны (рис 1.9, 6).
Нормальная сила в сечении z равна N == (1 F == Ре Fоz/ Р. Эпюра N
показана на рис. 1.9, 2.
Рассмотренная задача относится к числу часто встречающихся в
сопротивлении материалов задач на отыскание условий равнопрочности.
Если напряжение в некотором теле (в данном случае в колонне) будет
постоянно для всех точек объема, такую конструкцию называют равно--
прочной. В подобных конструкциях материал используется наиболее эф
фективно.
При м е р 1.4. Кронштейн АВС наrружен на конце силой Р
(рис. 1.10, а). Требуется подобрать поперечное сечение стержней АВ и
ВС с таким расчетом, чтобы возникающие в них напряжения имели оди
наковую заданную величину (1. При этом уrол Q должен быть выбран из
условия минимальноrо веса конструкции при заданном вылете кронштей
на 1.
Из условий равновесия узла В (рис. 1.10, 6) находим нормальные си
лы в стержнях: N j == Pctga, N 2 == P/sina.
Далее определяем площади поперечноrо сечения стержней по вели
чине заданноrо напряжения и:
N j Р
Р ! == == ctgaj
(f (f
N 2
Р2 ==
(1 Slna
48
L
/. С
8 НI 8
)7I
{Р А: !Р
5
d
Рис. 1.10
Вес конструкции кронштейна пропорционален объему: V = 11 Р 1 + 12 Р2.
ПодстаВЛJIII: длины и площади стержней, находим
Р' ( 1 )
V = ctg Q + . .
t1 SШQСОSQ
Величина. V имеет минимум при cos 2 Q = 1/3; Q = 550.
1.3. Потенциальная энерrия деформации
при растяжении сжатии стержня
Рассмотрим энерrетические процессы деформирования
упруrоrо тела.
Внешние силы, приложенные к упруrому телу, соверша
ют работу. Обозначим ее через А. В результате этой работы
накапливается потенциальная энерrия деформированноrо Te
ла U. Кроме Toro, работа идет на сообщение скорости массе
тела, Т.е. преобразуется в кинетическую энерrию К. Баланс
энерrий имеет вид А = и + К.
Если наrружение производится медленно, скорость пере
мещения масс тела будет весьма малой. Такой процесс Harpy
жения называется статичеС'ICи.м. Тело в любой момент BpeMe
ни находится в состоянии равновесия. В этом случае А = и, и
работа внешних сил целиком преобразуется в потенциальную
энерrию деформации.
При разrрузке тела за счет потенциальной энерrии произ
водится работа. Таким образом, упруrое тело является aKKY
мулятором энерrии. Это свойство упруrих тел широко исполь
зуется, на.пример, в за.водных пружинах часовых механизмах
49
и в различных упруrих амортизирующих элементах (рессоры,
пружины, торсионные валы и др.).
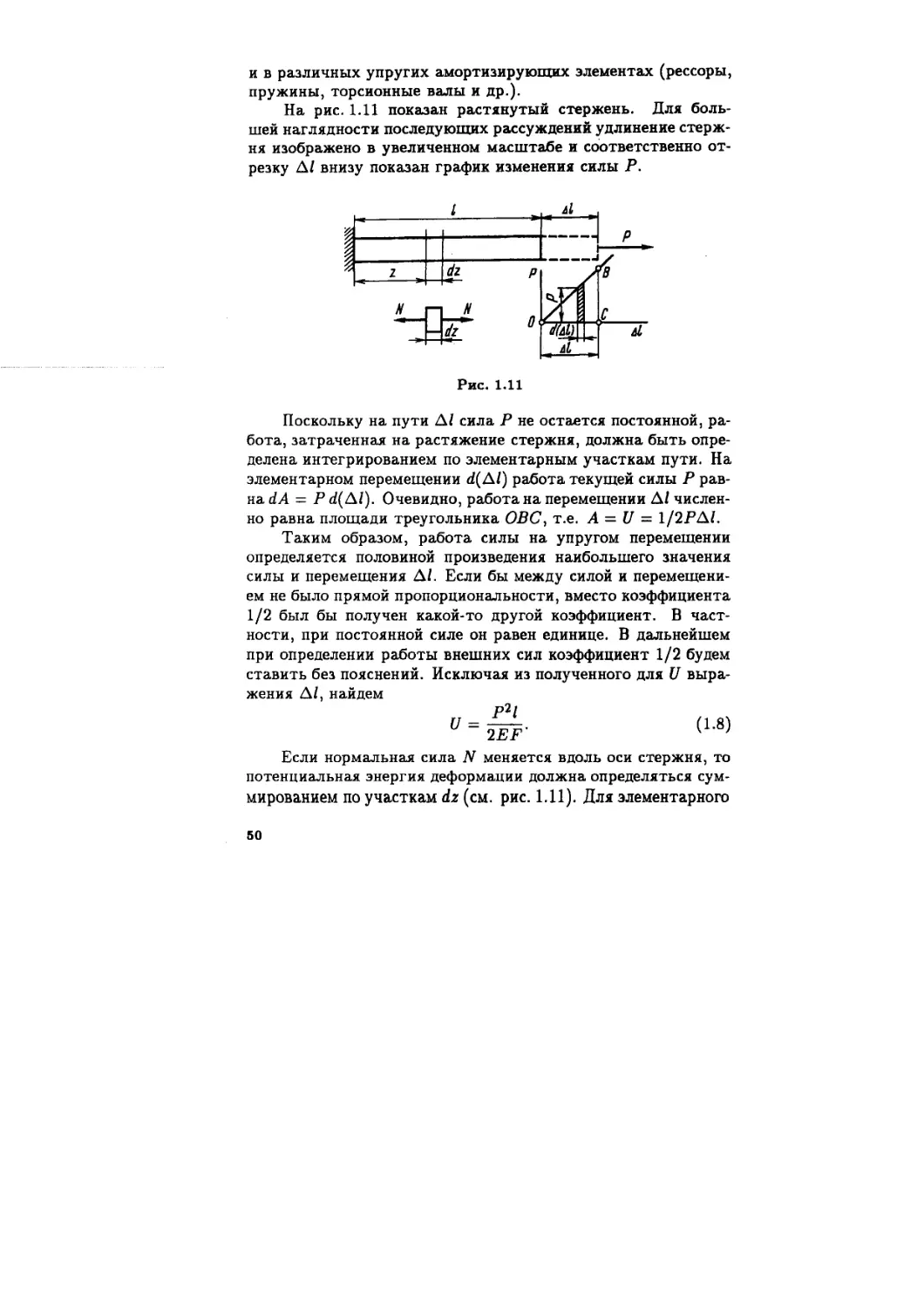
На рис. 1.11 показан растянутый стержень. Пля боль
шей наrлядности последующих рассуждений удлинение стерж
ня изображено в увеличенном масштабе и соответственно OT
резку дl внизу показан rрафик изменения силы Р.
t l
( . 1 1 р
.
I
...
Z Р 8
С
'! О 41,
Рис. 1.11
Поскольку на пути дl сила Р не остается постоянной, pa
бота, затраченная на растяжение стержня, должна быть опре
делена интеrрированием по элементарным участкам пути. На
элементарном перемещении d(Al) работа текущей силы Р paB
на dA = Р d( Al). Очевидно, работа на перемещении Al числен
но равна площади треуrольника ОВС, Т.е. А = и = 1/2PAl.
Таким образом, работа силы на упруrом перемещении
определяется половиной произведения наибольшеrо значения
силы и перемещения Al. Если бы между силой и перемещени-
ем не было прямой пропорциональности, вместо коэффициента
1/2 был бы получен какой-то друrой коэффициент. В част
насти, при постоянной силе он равен единице. В дальнейшем
при определении работы внешних сил коэффициент 1/2 будем
ставить без пояснений. Исключая из полученноrо для и Bыpa
жения Al, найдем
р2[
и = 2ЕР '
(1.8)
Если нормальная сила N меняется вдоль оси стержня, то
потенциальная энерrия деформации должна определяться CYM
мированием по участкам dz (см. рис. 1.11). ПЛЯ элементарноrо
50
N 2 dz
участка dU = 2ЕР ' а для Bcero стеРЖНJI
1
U = J N2 dz
2ЕР'
о
Энерrетические соотношения широко используются при
определении перемещения в сложных упруrих системах. Об
щие теоремы, относящиеся к этому вопросу, будут paCCMOTpe
ны в rл. 5.
(1.9)
1.4. Статически определимые и статически
неопределимые стержневые системы
Во всех рассмотренных до сих пор задачах нормальные
силы в поперечных сечениях стержня определяли при помо
щи метода сечений из условий равновесия отсеченной части.
Но такое нахождение нормальных сил, да и вообще BHYTpeH
них сил, далеко не всеrда возможно. На практике постоянно
встречаются системы, в которых имеется большое число нало
женных связей, и для определения внутренних сил уравнений
статики оказывается недостаточно. Такие системы называют
ся стати'ЧеС'lCи неопредеАимыми.
/. А / А /. А
p
Н, А Н, А
NJ ?tP NJ P
N t / '. "'/
Н2
а 5 I
Рис. 1.12
На рис. 1.12, а показан обычный кронштейн, состоящий из
двух стержней. Усилия в стержнях леrко определить из усло
вий равновесия узла А. Если конструкцию кронштейна услож
нить, добавив еще один стержень (рис. 1.12,6), то усилия в
51
стержнях прежним способом уже найдены быть не MorYT: для
узла А может быть по прежнему составлено только два ypaBHe
ния равновесия, а число неизвестных сил равно трем. В таких
случаях rоворят, что система один раз статически неопреде
лима. Усложняя конструкцию Дa.1lьше и вводя новые стержни,
можно получить два (рис. 1.12, в), три и Т.д. раза статически
неопределимые системы. На рис. 1.13 показано еще три систе
мы. Первая из них статически определимая, вторая и третья
соответственно один и два раза статически неопределимые.
А
8
р
6
Рис. 1.13
Для всех вариантов конструкций, показанных на рис. 1.13,
можно получить только два независимых уравнения paBHOBe
сия. Для варианта а этих уравнений достаточно, чтобы OДHO
значно определить силы в двух стержнях; для вариантов б и в
число сил в стержнях больше числа уравнений, поэтому опре
делить три (случай 6) или четыре (случай в) силы из двух
уравнений невозможно. В теоретической механике подобные
задачи определенноrо решения не имеют, в то время как это
наиболее распространненый случай в технике.
Если стержни, например в варианте в, прикрепить к ди
намометрам, то при наrружении силой Р они покажут, какие
силы в них возникли. Причем сколько бы раз стержни не Ha
rружали силой Р, возникающие в них силы будут одни и те
же. Определить их в так называемых статически неопредели
мых задачах можно только с учетом реальных свойств элемен
тов конструкций. В этом принципиальное отличие теоретиче
ской механики от сопротивления материалов. Учет реальных
свойств материалов позволяет рассчитывать любые KOHCTPYK
ции, коrда число связей в системе превышает число независи
МЫХ уравнений статики.
52
Можно сказать, что под n раз статически неопределимой
системой понимается такая, в которой число связей превышает
число независимых уравнений статики на n единиц. Определе
ние всех неизвестных сил, или, как rоворят, раскрытие стати
ческой неопределимости, возможно только путем составления
уравнений, дополняющих число уравнений статики до числа
неизвестных. Эти дополнительные уравнения отражают oco
беннасти rеометрических связей, наложенных на деформируе
мые системы, и условно называются уравненин.м.и nере.м.еще
ний. Лля стержневых систем, показанных на рис. 1.12, ypaBHe
ния перемещений должны выразить тот факт, что узел А дe
формированной системы должен быть общим для всех стерж
ней. В примере, показанном на рис. 1.13, уравнения перемеще
ний в случае, если брус АВ жесткий, должны показать, что
все нижние концы тяr после наrружения остаются на одной
прямой и т.п.
Рассмотрим принципы составления уравнений перемеще
ний на простейших примерах раскрытия статической неопре
делимости систем.
ПРИ м е Р 1.5. ПРJlМОЙ ОДНОРОДНЫЙ стержень (рис. 1.14) жестко
закреплен по концам и наrружен продольной силой Р, приложенной на
раССТОJlНИИ ОДНОЙ трети ДЛИНЫ от верхней заделки. ТребуеТСJl определить
наибольшие наПРJlжеНИJl, возникающие в стержне.
ЯА
А
....
......I
С
Р Р
-..а
"'-11....
F
8 /.
Я в
Рис. 1.14
53
Система, очевидно, один раз статически неопределима. посколыу
две реакции опор Я А и Я в не MorYT быть определены из одноro уравнеНИJl
равновеСИJl Я А + Я в = Р.
Уравнение перемещений должно выразить ТОТ ф&JI:Т. ЧТО общu дли-
на стеРЖНJI не меНJlеТСJl. На сколыо УДЛИНИТСJl верхн.... часть, на столыо
же сокраТИТСJl нижн"". Следовательно, 161 Ac l = 161 B cl. Выражu удли
неНИJl через силы, получим
1 2
Я А 1 Я в 1
EF EF '
или
Я А = 2Я в .
РешаJl это уравнение совместно с уравнением равновеси.., находим: Я А =
= 2/ЗР, Я в = I/ЗР. Наибольшее наПРllжение О'тах = 2P/(3F).
При м е р 1.6.
(рис. 1.15, а) наrружена
стеРЖНIIХ.
Система трех стержней одинаковых сечений
вертик&.IIЬНОЙ силой Р. Определить УСИЛИII в
1/
а
Рис. 1.15
При составлении уравнений равновеСИJl узла А (рис. 1.15, 6) восполь
зуеМСII принципом неизменности нач&.llЬНЫХ размеров. Поскольку под дей
ствием силы Р уrол а меНJlеТСII незначительно, будем считать ero неиз
менным. Тоrда имеем
N 1 = N з ; 2N 1 сова + N2 = Р.
Полученных уравнений недостаточно ДЛII определеНИII
всех сил. Необходимо составить дополнительно одно уравнение пере
мещений. ДЛJl этоrо сопоставим форму узла А до и после наrружеНИII
(рис. 1.15, 6). Отрезок АА' предстаВЛllет собой веРТИК&.IIьное перемещение
узла А. Оно равно, очевидно, удлинению среднеrо стеРЖНII: АА' = 612.
Из ТОЧКИ А проподим дуrу окружности АВ с центром в точке С. Отрезок
А' В предстаВЛJlет собой удлинение БОJ[овоrо стеРЖНJI: А' В = ll'
54
Вследствие малости перемещений дуrу АВ можно ПРИНJlТЬ за OT
резок, перпеНДИКУЛJlРНЫЙ прамой А/С, и тоrда, учитывu, что уrол а в
результате удлинений стержней менаетса незначительно, получим
д/! = Д/2 cosa.
Это и есть искомое уравнение перемещений. Выразнм удлинеНИJl через
N j / N 2 /
силы: д/! = EFcosa ' Д/2 = EF ; тоrда
N j = N 2 cos 2 а.
РешаJl это уравнение совместно с уравнением равновеСИJl, получим
N N Р сов 2 а .
j з 1 + 2 соs З а'
р
N 2 = .
1 + 2 соs З а
При м е р 1.7. Жесткa.JI невесомa.JI балка шарнирно закреплена
в точке О и СВJlзана с ДВУМJI одинаковыми упруrими таrами (рис. 1.16, а).
Определить УСИЛИJl, возникающие в Tarax, при HarpeBe ИХ на CltO.
"'-
.....
о
а
tNf t Nz
А В
......... f 1]
А ' ...... ..........[
6 о'....
Рис. 1.16
Разрезаем тяrи и вводим силы N j и N 2 (рис. 1.16, 6). Далее, прирав
ниваJl нулю сумму моментов сил относительно шарнира О, получим
N 1 a + 2N2a = О.
55
Положим, далее, что в результате вирева стержней жестхu бал
ка повернеТСJl н займет положение А' в' (см. рис.l.lб, 6). Из подоБИJl
треуrольников ОАА' и ОВВ' получаем Lll == 2Lll 1 или, соrл&сно формуле
(1.7),
N l ( Nll )
ЕР + lаLl' == 2 ЕР + lаLl' ,
откуда
N 2N 1 == EFaLlt.
N 1 == (2/5)EFa6ti N 2 == (1/5)EFaLlt.
Решая полученное уравнение совместно с уравнением равновеСИJl,
найдем
Знак минус перед N 1 указывает на то, что первый стержень не p&C
TJlHYT, как это предполаrа.лось ранее, а сжат.
При м е р 1.8. Прн сборке стержневой системы (рис. 1.17, а)
было обнаружено несоответствие длин стержней (см. узел А). Сборка
была произведена путем принудительноrо совмещеНИJl шарниров А и С.
Определить УСИЛИJl в стеРЖНJlХ после сборки.
ну
'1А
NJ
О
8
а
11 Нз
"4 1 Н !
'We/
6
Рис. 1.17
........ .....
...., А/С'
/' 1 r
z
'
\ 1,
/'l+ : 11,
о
Имеем ПJlТЬ стержней и, следовательно, ПJlТЬ искомых сил. Длх узлов
А и В может быть составлено четыре уравнених равновесих, по два на
каждый узел. Следовательно, система один раз статически неопределима.
Из условий равновеСИJl узлов А и В (рис. 1.17, б и в) получаем
N 1 == N == N э ; N 4 == N 5 i N з + 2N 4 cos 300 == о.
56
Положим, что после сборки шарнир А сместилсs вниз на величину
иА и занял положение А', а шарнир В сместилсs вверх на ив (рис. 1.17, 2
и д). Тоrда, очевидно,
l!.11 = иА sin 300 i l!.l. = иB со! 300.
Удлинение среднеrо стеРЖН.
l!.lз = l!. иА ив,
Исключая из этих выражений иА и ив, получим уравнение перемещений
2
l!.lз = l!. 2l!.11 + .;з l!.l..
Преобразуем это уравнение, выразив удлинени. через силы,
l!.
2N! 2N. + Nз = Т EF.
После COBMeCTHoro решения уравнени. перемещении с уравнениями paB
новесия получим
.;з l!.
N! = N2 = Nз = 2 + з.;з т EF;
1 l!.
N. = N 5 = .;з , EF.
2 + 3 3
Рассмотренные примеры уже дают достаточное предста
вление о принципиальной стороне приемав, используемых при
раскрытии статической неопределимости. Прочное овладение
этими приемами может быть достиrнуто при решении ДOCTa
точно большоrо числа задач.
Более общий метод раскрытия статической неопределимо
сти будет рассмотрен в r л. 6.
В заключение необходимо обратить внимание на два по
следних примера. В одном определялись температурные, а в
друrом монтажные усилия. И те и друrие MorYT возникать
только в статически неопределимых системах, и это достаточ
но очевидно. Температурные и монтажные деформации при
ни маются в расчет только при составлении уравнений дефор
маций. А для статически определимых систем в этих ypaBHe
ниях нет никакой надобности.
57
1.5. Напряженное и деформированное
состояния при растяжении сжатии
Рассмотрим более детально особенности напряженноrо co
стояния, возникающеrо в однородном растянутом стержне.
а
d
'
р А
I о
d
d
Рис. 1.18
Определим сначала напряжения в некоторой наклонной пло
щадке, составляющей уrол а с плоскостью нормальноrо ce
чения (рис. 1.18). Полное напряжение р на этой площадке,
cor ласно условию однородности напряженноrо состояния для
всех точек площадки, будет одним и тем же. Равнодействую
щая же внутренних сил в сечении должна быть направлена по
оси стержня и равна растяrивающей силе (1р, Т.е.
РРа = (1р,
rде Ра площадь Kocoro сечения, Ра = Р! cosa. Таким обра-
зом, полное напряжение на наклонной площадке
р = U cos а.
Раскладывая это напряжение по нормали и по касательной
к наклонной площадке (рис. 1.18,6), находим
а а = pcosa; Та = psina,
или
а а = (1 cos 2 а;
То: = 1/2(1sin2a.
(1.10)
(1.11)
58
Как видим, ДЛЯ одной и той же точки растянутоrо стерж
ня значения возникающих в сечении напряжений оказываются
различными в зависимости от ориентации секущей площадки.
Поэтому, в частности, неточным было бы утверждение, что
при растяжении возникают только нормальные напряжения.
Это верно только для площадок, нормальных к оси стержня.
Если положить а = О, ТО из выражений (1.10) и (1.11) мы
получим напряжения в поперечиом сечении стержня, т .е.
(1а = (1; Та = о.
При а = 900, Т.е. в продольных сечениях, (1а = Та = о.
Это значит, что продольные слои растянутоrо стержня не име
ют между собой силовоrо взаимодействия по боковым поверх
ностям. В этом смысле растяжение стержня можно уподобить
растяжению пучка не связанных между собой параллельных
нитей.
Касательное напряжение Та, обращаясь в нуль в продоль
ных И поперечных сечениях, имеет наибольшее значение на
площадках, наклоненных под уrлом 450 к оси растянутоrо
стержня:
Тmах = (1/2.
Если из растянутой полосы мы выделим прямоуrольник
(рис. 1.19, а), то на ero rранях АВ и С D следует приложить Ha
пряжения аа и Та, определяемые выражениями (1.10) и (1.11).
а
:
а
d
d
11
Рис. 1.19
59
На рис. 1.19, б эти напряжения отмечены сверху штрихом. На
rранях Ве и Ап напряжения вычисляют также по форму-
лам (1.10), (1.11), 8 каторых только уroл а заменяют уrлом
а + 1r /2. Эти напряжения отмечены двумя штрихами. Ta
ким образом, то напряженное состояние, которое показано на
рис. 1.19, б, представляет собой обыкновенное растяжение, но
изображенное в непривычном для нас ракурсе.
Существенно отметить, что переход от произвольной пло-
щадки а к площадке (а + 900) не сказывается на абсолютной
величине касательноrо напряжения Та. Действительно,
l qSin2al = l qSin2(a+900)1.
Следовательно, на двух взаимно перпендикулярных пло
щадках (если отвлечься пока от знаков) касательные напря-
жения должны быть равными. Это условие является общей
особенностью любоrо напряженноrо состояния и носит назва-
ние закона nарности 'lCaCameAbHbIX наnрJlжений.
Этому закону можно дать наrлядное толкование. Если
рассмотреть произвольно взятый элемент Аве D (см.
рис. 1.19, а), то леrко заметить, что, независимо от значений
нормальных напряжений а' и qll, касательные напряжения т'
и T II должны иметь такое значение и такое направление, чтобы
моменты их пар взаимно уравновешивались (см. рис. 1.19,6).
Для произвольно взятоrо элемента, имеющеrо толщину h, оче
видно, что
т' АВ h Ап = т" Ап h АВ.
Таким образом,
, "
т = т .
При этом, как видно на рис. 1.19,6, векторы касательных на-
пряжений в двух взаимно перпендикулярных площадках Ha
правлены либо оба к общему ребру (ребра А и С), либо от
общеrо ребра (В и п).
Закон парности касательных напряжений в самом общем
виде сложноrо напряженноrо состояния будет рассмотрен еще
раз в rл. 7.
Теперь обратимся к анализу деформированноrо состояния
растянутоrо стержня.
60
Наблюдения показывают, что удлинение стержня в oce
вом направлении сопровождается уменьшением ero попереч
ных размеров (рис. 1.20). Таким образом, при растяжении
возникает не только продольная, но и поперечная деформация
стержня:
l
С:прод == т'
a
С: попер == .
а
l ; =ll JJ
Рис. 1.20
Экспериментально установлено, что в пределах примени
мости закона fYKa поперечная деформация пропорциональна
продольной:
С: попер == J.LC: прод ,
(1.12)
rде J.L безразмерный коэффициент пропорциональности, назы
ваемый 'lCоэффициенто.м. Пуассона. Коэффициент J.L характери
зует свойства материала. Определяют ero экспериментальным
путем. lIЛЯ всех металлов числовые значения J.L лежат в пре
делах 0,25... О, 35. В дальнейшем, в rл. 7, будет показано, что
для изотропноrо материала значение J.L вообще не может пре
вышать 0,5.
Вернемся к рис. 1.19, а. Полоса удлиняется в продольном
направлении и сужается в поперечном. Стороны прямоуrоль
ника Аве п, начерченноrо на поверхности полосы, изменят
свою длину, а сам прямоуrольник перекосится и превратится
в параллелоrрамм. Уrлы А и С уменьшатся, а В и D увели
чатся. Это изменение прямоrо уrла для заданной ориентации
сторон, как нам уже известно, называется уrловой деформаци
ей или уrлом сдвиrа. Чтобы найти ero, мы определим сначала
уrлы, на которые повернутся отрезки АВ и Ап. Разность этих
yr лов и даст нам искомый уrол сдвиrа.
61
Начнем с отрезка АВ (рис. 1.21). Построим 'на нем, как на
диаrонали, вспомоrательный ПРJ:МОУroльник АХ BL, стороны
KOToporo Х В и AL ориентированы' по продольной оси стерж
ня. Вследствие продольноrо удлинеНИJ: точка В переместится
вправо и отрезок АВ повернется на уrол
ВВl ВК
АВ сов а == АВ Е прод сов а.
; , I
А L
Рис. 1.21
В результате поперечноrо сужения отрезок АВ получит допол
нительный уrол поворота
BIB2. АК .
АВ sш а == АВ Епопер sш а.
Сумма этих уrлов дает нам искомый уrол поворота отрезка
АВ:
WO/ == (С:прод + Епопер) sin а СОБ а,
или
WO/ == 2 (1 + J.L) sin 20.
Изменяя уrол о на 900, найдем положение отрезка АВ:
wO/+90o == 2 (1 + J.L) sin 20.
Уrловая деформация (уrол сдвиrа) определяется разно
стью yr лов поворота отрезков, и, следовательно,
10/ == WO/ WO/+90o == 2 (1 + J.L) sin 2а.
Сопоставляя это выражение с выражением (1.11), выведенным
для напряжения 7"0/, замечаем, что уrол сдвиrа между плоско-
стями АВ и АС независимо от а пропорциона.лен касательному
62
напряжению, Т.е.
2 (1 + )
'Уа = Е То..
ЭТО соотношение в случае изотропноrо материа.ла явля
ется единым для всех типов напряженных состоянИЙ и носит
название ЗйJCоНй rуJCЙ дм caeuza. Опуская индекс а, напишем
последнее выражение в виде
т
'У ( 1.13 )
С'
rде величина G называется м.оду.л.ем. caeuza, или 'м'оду.л.ем. ynpY
zocmu emopozo родй:
Е
G= .
2(I+JL)
(1.14)
Модуль G измеряется в тех же единицах, что и модуль Е.
Таким образом, если закон [ука для растяжения постули
руется при помощи соотношений (1.4) и (1.12), то для сдвиrа
он вытекает из них как следствие.
1.6. Испытание материалов
на растяжение сжатие
При решении простейших задач на растяжение и сжатие
мы уже встретились с необходимостью иметь некоторые ис
ходные экспериментальные данные, на основе которых можно
было бы построить теорию. К числу таких исходных экспе
риментальных данных относится в первую очередь уже знако
мый нам закон [ука. Основными характеристиками матери
алов при этом являются модуль упруrости Е и коэффициент
Пуассона JJ.. Понятно, что в зависимости от свойств материала
эти величины меняются. В первую очередь Е и JJ. зависят от
типа материала и в некоторой степени от условий термической
и механической обработки.
Пля решения практических задач необходимо иметь еще
числовые характеристики прочностных свойств материалов.
При изучении процессов rибки и штамповки нужны числовые
показатели, характеризующие способность материала пласти
чески деформироваться. В ряде случаев надо иметь данные о
63
способности материала противостоять действию высоких тeM
ператур, работать при переменных наrрузках и Т.д.
В связи С этим создано MHoro различных видов испыта
ний, но основными и наиболее распространенными являются
испытания на растяжение и сжатие. С их ПОМОIЦЪю удается
получить наиболее важные характеристики материала, Haxo
дящие прямое применение в расчетной практике.
Пля испытания на растяжение используют специально из
rотовленные образцы, которые большей частью вытачивают
из прутковых заrотовок или вырезают из листа. Основной oco
бенностью таких образцов является наличие усиленных мест
захвата и плавноrо перехода к сравнительно узкой ослаблен
ной рабочей части. На рис. 1.22 показано несколько типов Ta
ких образцов. Плину рабочей части lра.б выбирают обычно раз
в 15 большей диаметра d. При замерах деформаций исполь
зу ют только часть этой длины, не превышающую десяти диа
метров. Существуют, однако, и более короткие образцы, у
которых отношение lра.б/d 5. В случае прямоуrольноro по
перечноrо сечения в качестве характеристики, определяющей
рабочую длину [раб, принимает диаметр равновеликоrо KPy
ra d.
1
t=4э
t pA6
ak=н
fl
t pA6
Рис. 1.22
При испытании на сжатие используют короткие цилин
дрические образцы, высота которых превышает размеры по-
перечноrо сечения не более чем в два раза (рис. 1.23). При
64
11
.
01
Рис. 1.23
большой высоте сжатие образца сопровождается, как правило,
ero искривлением, искажающим результаты испытаний.
Абсолютные размеры образцов при испытаниях как на pa
стяжение, так и на сжатие зависят от располаrаемой мощно
сти 1 испытательных машин и от размеров заrотовки, из KOTO
рой изrотавливают образцы.
Испытания на растяжение и сжатие проводят на специ
альных машинах, rде усилие создают либо при помощи rруза,
действующеrо на образец через систему рычаrов, либо при по
мощи rидравлическоrо давления, передаваемоrо на поршень.
В первом случае машина называется рычажной, во втором
2идравJ1.ичес'ICОЙ.
На рис. 1.24 показана схема простейшей испытательной
машины рычажноrо типа. От червяка 1 вручную или посред
ством электропривода поворачивается червячное колесо 3, CMe
щающее вниз силовой винт 2. В образце 4 при этом возбужда
ется усилие, которое через рычаrи 5, 6, 7 уравновешивается
весом rруза Р на плече а. На рычаrе 7 имеется rрадуировка в
единицах силы, приходящейся на образец. Перемещение rруза
по рычаrу возможно не только вручную, но и автоматически.
На рис. 1.25 показана схема rидравлической испытатель
ной машины универсальноrо типа, Т.е. предназначенной для
испытаний на растяжение и сжатие. В рабочую полость ци
линдра 1 при помощи насоса 9 под давлением подается масло,
и плунжер 2 поднимается. На плунжере установлена рама 3,
1 Kor да rOBOpJlT О МОЩНОСТИ испытательной машины или пресса, име
ют в виду не работу, производимую в единицу времени, а те наибольшие
силы, которые способна создать машина.
3 В. И. Феодосьев
85
е
,
,
,
,
,
,
I
7/ \ I
I \ I J 2
;1$ 'II Kllk"KKK'H
"'РК$'К'''''''''К
Рис. 1.24
4
10
з
j
Рис. 1.25
66
в верхней части которой имеется захват для образца 5, ис-
пытываемоrо на растяжение. В случае испытания на сжатие
образец устанавливают на нижнюю часть рамы. На рис. 1.25
образец для испытания на сжатие отмечен цифрой 6. Рама
4 неподвижна, ее плоскость условно совмешена с плоскостью
рисунка и рамы 3. Усилие измеряется манометром 7, проrра
дуированным в единицах силы, приходяшейся на образец. По
окончании испытания масло под действием веса рамы 3 вытес-
няется через вентиль 8 обратно в масляную ванну 10.
Мощность испытательных машин колеблется в пределах
от нескольких rpaMMoB (для испытания волокон и нитей) до со-
тен тонн (для испытания крупных конструкций). Машины ма-
лой мощности (до тонны) выполняют обычно как рычажные.
llШI больших мощностей предпочтительным является rидрав-
лический принцип.
При испытании на растяжение образец закрепляют в
зажимах разрывной машины либо при помощи самозатяrи-
вающихся клиньев (рис. 1.26, а), либо в разъемных втулках
(рис. 1.26,6). Зажимы на машине проектируют таким обра-
зом, чтобы исключить перекос образца и создать по возможно-
сти центральную передачу усилий без дополнительноrо изrиба.
При испытании на сжатие цилиндрический образец свободно
устанавливают между пара.плельными плитами.
(J
lp
p
Рис. 1.26
Основной задачей испытания на растяжение (сжатие)
является построение диаrраммы растяжения (сжатия), Т.е. за-
3.
87
висимости между силой, действующей на образец, и ero удли
нением. Силу в рычажной машине определяют по положе
нию уравновешивающеrо rруза. В rидравлической машине
силу определяют по шкале соответствующим образом проrра
дуированноrо манометра. Для rрубоrо замера удлинений ис
пользуют простые приспособления (часто рычажноrо типа),
фиксирующие смещение зажимов машины один относительно
друrоrо. Это смещение при больших удлинениях можно pac
сматривать как удлинение образца.
Для точноrо замера малых удлинений используют специ
альные приборы, называемые тензо.wетра.ии. Установленный
непосредственно на образце такой прибор реrистрирует взаим
ные смещения двух сечений на рабочей части образца. У строй
ство И работа некоторых типов тензометров будут paCCMOTpe
на в rл. 14.
Современная испытательная машина обычно снабжена
прибором для автоматической записи диаrраммы растяже
ния сжатия. Это дает возможность сразу после испытаний
получить вычерченную в определенном масштабе кривую Р ==
== j(Дl).
1.7. Диаrрамма растяжения
Рассмотрим основные особенности диаrраммы растяже
ния.
На рис. 1.27 показана типичная для уrлеродистой стали
диаrрамма испытания образца в координатах Р, дl. Полу
ченная кривая условно может быть разделена на следующие
четыре зоны.
Зона ОА носит название зоны УnРУ2ости. Здесь материал
подчиняется закону rYKa и
Р[
д[ == ЕР '
Этот участок кривой на рис. 1.27 для большей наrлядности по
казан с отступлением от масштаба. Удлинения дl на участке
ОА очень малы, и прямая ОА, будучи вычерченной в масштабе
истинных удлинений, совпала бы в пределах толщины линии
с осью ординат.
68
р с р с
О
с
.ZJ
О t о l
Рис. 1.27 Рис. 1.28
Значение силы, до которой остается справедливым закон
fYKa, зависит от размеров образца и физических свойств Ma
териала.
Зона АВ называется зоной общей те'ICучести, а участок
АВ диаrраммы площадкой текучести. Здесь происходит cy
щественное изменение длины образца без заметноrо увеличе
ния наrрузки. Наличие площадки текучести АВ дЛЯ металлов
не является характерным. В большинстве случаев при испы
тании на растяжение и сжатие площадка АВ не обнаружи
вается, и диаrрамма растяжения образца имеет вид кривых,
показанных на рис. 1.28. Кривая 1 типична для алюминия и
отожженной меди, кривая 2 для высококачественных леrиро
ванных сталей.
Зона ВС (см. рис. 1.27) называется зоной уnрочнениll.
Здесь у длннение образца сопровождается возрастанием Ha
rрузки, но неизмеримо более медленным (в сотни раз), чем
на упруrом участке. В стадии упрочнения на образце HaMe
чается место будущеrо разрыва и начинает образовываться
так называемая шеЙ'ICа местное сужение образца (рис. 1.29).
Впрочем, место будущеrо разрыва намечается ранее при об
щей текучести. Обнаружить ero можно с помощью наклеенных
термопар, выявляющих место наиболее интенсивноrо повыше
ния температуры образца.
.
.
Рис. 1.29
69
По мере растяжения образца утонение шейки проrрессиру
ет. Коrда относительное уменьшение площади сечения срав-
няется с относительным возрастанием напряжения, сила Р до-
стиrнет максимума (точка C . В дальнейшем удлинение образ
ца происходит с уменьшением силы, хотя среднее напряжение
в поперечном сечении шейки и возрастает. Удлинение образ-
ца носит в этом случае местный характер, и поэтому участок
кривой С D называется зоной ..wесmной mеJC:у'Чесmи. Точка D
соответствует разрушению образца.
С
о
Рис. 1.30
Если испытуемый образец, не доводя до разрушения, раз-
rрузить (точка К на рис. 1.30), то в процессе разrрузки зави-
симость между силой Р и удлинением дl изобразится прямой
К L (см. рис. 1.30). Опыт показывает, что эта прямая парал
лельна прямой О А. При разrрузке удлинение полностью не
исчезает. Оно уменьшается на величину упруrой части удли-
нения (отрезок LM). Отрезок OL представляет собой OCTa
точное удлинение. Ero называют также nJtастu'ЧеС'ICи..w удАи-
нение.м., а соответствующую ему деформацию пластической
деформацией. Таким образом,
О М = 6,lупр = 6,lOCT'
Соответственно
С: = С:упр + С:ост'
Если образец был наrружен в пределах участка О А и за
тем разrружен, то удлинение будет чисто упруrим, и дlост =
= о.
70
При повторном нarружении образца диarраыма растяже-
ния принимает вид прямой LK и далее КрИВОЙ ксп (см.
рис. 1.30), как будто промежуточиой разrрузки и не было.
Положим теперь, что у нас имеются два одинаковых
образца, изrотовлениых из onHOro и тoro же материала. Один
из образцов до испытания наrружению не подверrается, а
друrой был предварительно наrружен силами, вызвавшими в
образце остаточные деформации.
Испытывая первый образец, мы получим диаrрамму pa
стяжения OABCD, показанную на рис. 1.31, а. При испыта-
нии BToporo образца отсчет удлинения будет производиться,
естественно, от ненаrруженноrо состояния и остаточное удли
нение OL учтено не будет. В результате получим укороченную
диаrрамму LKCD (рис. 1.31,6). Отрезок МК соответствует
силе предварительноrо наrружения. Таким образом, вид диа-
rpaMMbl для onHoro и Toro же материала зависит от степени
начальноrо наrружения (вытяжки), а само наrружение BЫCTY
пает теперь уже в роли некоторой предварительной техноло-
rической операции. Весьма существенным является то, что
отрезок LK (см. рис. 1.31, а) оказывается больше отрезка ОА.
Следовательно, в результате предварительной вытяжки мате-
риал приобретает способность воспринимать без остаточных
деформаций БОльшие наrрузки.
р
с
р
с
L М
f.l
о
о
о
Рис. 1.31
Явление повышения упруrих свойств материала в резуль
та те предварительноrо пластическоrо деформирования носит
название Ha'ICJ&ena, иАи HaeapmOe'ICU, и широко используется в
технике.
71
Например, ДЛЯ придания упруrих свойств листовую медь
или латунь в холодном состоянии прокатывают на валках. Цe
пи, тросы, ремни часто подверrают предварительной выт.8Ж
'lCf силами, превышающими рабочие, с тем, чтобы избежать
остаточных удлинений в дальнейшем. В некоторых случаях
явление наклепа оказывается нежелательным, как, например,
в процессе штамповки мноrих тонкостенных деталей. В этом
случае для Toro, чтобы избежать разрыва листа, вытяжку про
изводят в несколько ступеней. Перед очередной операцией BЫ
тяжки деталь подверrают отжиrу, в результате KOToporo Ha
клеп снимается.
1.8. Механизм образования деформации
ПО сих пор, rоворя об испытании образца на растяжение,
мы касались только внешней стороны явления, не затраrивая
внутренних процессов, происходящих на уровне молекулярноrо
строения. И это естественно, поскольку в основу подхода бы
ла положена схема сплошной среды, лишенной каких бы то ни
было структурных особенностей. Между тем процессы, проис
ходящие в материале при деформации и разрушении, опреде
ляются структурой вещества и принципиально не MorYT быть
объяснены средствами механики СПЛОШНОЙ среды. Поэтому их
изучение выпадает из класса задач, рассматриваемых в курсе
сопротивления материалов. Это уже вопросы физики TBepдo
ro тела, построенной на совершенно отличной от сопротивле
ния материалов основе. Тем не менее, изучая сопротивление
материалов, необходимо иметь хотя бы самое общее предста
вление о том, что происходит в материале при наrружении и
от чеrо зависят упруrость и пластичность.
Твердые тела разделяются, как известно, на аморфные и
кристаллические. Что касается первых, то диаrрамма растя
жения таких тел не носит стабильноrо характера; она суще
ственно зависит от времени действия сил, а сами материалы в
своем поведении обнаруживают качественное сходство с вязкой
жидкостью. Мы остановимся только на механизме деформиро
вания металлов. Все металлы в том виде, в каком они применя
ются в машиностроении, нмеют поликристаллическую CTPYK
туру, Т.е. состоят из множества мелких кристалликов, xao
тически расположенных в объеме. Внутри кристаллов атомы
72
металла располаrаются в определенном ПОрJlдке, образУJl пра
вильную пространственную решетку. Система расположения
атомов зависит от свойств атомов. Она меНJlется также в за
висимости от физических условий кристаллизации.
Между атомами кристаллической решетки существуют
силы взаимодействия. При большом раССТОJlНИИ между двумя
атомами имеет место сила взаимноrо ПРИТJlжения, при малом
ра.сстоянии отталкивания. Наличием этих сил и законами
их изменения по разным направлениям определяется система
кристаллизации, свойственная данному металлу. Пля свобод
Horo, ненаrруженноrо кристалла система указанных сил явля
ется такой же cTporo определенной, как и расположение саМИХ
атомов.
Под действием внешних сил атомы в решетке получают
юаимные смещения, и силы взаимодействия между ними Me
няются. Зависимость сил взаимодействия от смещений носит
сложный характер, однако в пределах малых перемещений ее
можно рассматривать как линейную. Возникающие в кристал
лической решетке смещения по разным направлениям ДЛЯ MHO
жества хаотически расположенных кристалликов интеrрально
порождают пропорциональную зависимость между смещения
ми точек тела и внешними силами, что и находит свое Bыpa
жение в законе rYKa.
По устранении внешних сил атомы снова занимают в кри
сталлической решетке свое cTporo определенное положение, и
rеометрические размеры тела полностью восстанавливаются.
Таким образом объясняется свойство упруrости.
Рассмотрим теперь процесс возникновения пластических
деформаций. Опыт показывает, что образование пластических
деформаций связано со сдвиrом в кристаллической решетке.
Наrлядное подтверждение этому дает, в частности, наблюде
ние за поверхностью полированноrо образца при испытании на
растяжение. В зоне общей текучести и упрочнения, т .е. при
возникновении заметных пластических деформаций, поверх
насть образца покрывается системой тонких линий или, как
их называют, nОА0С С1Со",ьжеНUJl (рис. 1.32). Эти линии имеют
преимущественное направление, сосТавляющее уrол, близкий
73
Рис. 1.32
Рис. 1.33
к 450, с осью стержни, и практически совпадают с плоскостями
максимальных касательных напряжений.
Механизм удлинения показан в упрощенном виде на
рис. 1.33. Пействительная картина явлиетси более сложной,
так как носит пространственный характер, и сдвиr происхо-
дит не только в одном семействе параллельных плоскостей, как
это показано на рисунке, а вообще во всех семействах плоско
стей, составляющих уrол, близкий к 450, с осью стержня.
А
Рис. 1.34
в пределах одноrо кристалла образование пластических
деформаций происходит в результате смещения части кри-
сталла по некоторой плоскости на целое число элементов ре-
шетки (плоскость АА рис. 1.34). Наименьшая пластическая
деформация соответствует смещению на один элемент. Это
cBoero рода квант пластической деформации. В результате
74
TaKoro смещения каждый предыдущий атом занимает место
последующеrо, и в итоrе все атомы оказываются на местах,
присущих данной кристаллической структуре. Следователь-
но, кристалл сохраняет свои свойства, меняя лишь внешнюю
конфиrурацию.
Предположим, что смещение атомов при сдвиre происхо
дит одновременно по всей плоскости АА (см. рис. 1.34), и оце-
ним порядок касательных напряжений, необходимых для обра-
зования в кристалле пластических деформаций. Постаточно
очевидно, что касательная составляющая сил взаимодействия
в плоскости АА при сдвиrе меняется в зависимости от взаимно-
ro смещения частей кристалла по некоторому периодическому
закону (рис. 1.35).
i
J
и
Рис. 1.35
Пока взаимное смещение u составляет меньше половины
расстояния между атомами « aj2), силы сцепления препят
ствуют сдвиrу. Однако если половина пути от исходной пози-
ции до соседней пройдена, силы взаимодействия способствуют
дальнейшему смещению решетки к новому устойчивому поло-
жению равновесия. Таким образом, при u = aj2 напряжение
т меняет знак. Примем, что т изменяется по закону синусо
. 27rU
иды Т = Тmах sш , rде Тmах напряжение, по достижении
а
KOToporo образуются пластические деформации.
. 27rU 27rU
При малыХ смещениях sш ::::: , и тоrда имеем
а а
прямую пропорциональность, соответствующую закону rYKa
27rU G
т = Tmax ,Houja = 'У,ат = G'Y. Следовательно, Тmах = 2 .
а 7r
При растяжении стержня наибольшие касательные напря-
жения возникают в площадках, наклоненных под уrлом 450
75
к оси образца, и равны q /2. Полаrая G = Е /2,6, получим
Е
О"тах = 2,611"
Таким образом, можно ожидать, что стержень при растя
жении способен без образования пластических деформаций BЫ
держивать напряжения порядка одной десятой от значения MO
дуля упруrости Е.
Конечно, такой способ расчета не может претендовать на
высокую точность; MHoroe зависит от ориентации кристалла,
ero строения, а также от типа связей между атомами в кри
сталлической решетке. Но любопытно, что множество ДOCTa
точно точных расчетов по оценке так называемой идеальной
(расчетной) прочности дают для всех материалов практиче
ски тот же результат. Напряжения необратимоrо скольжения,
а также и отрыва по основным кристаллоrрафическим плос
костям лежат для всех материалов в пределах 5.. .16 % от Е.
Прямая связь между идеальной прочностью и модулем ynpyro
сти очевидна. Они имеют общее происхождение и определяют
ся характером межатомноrо сцепления. И, наконец, есть еще
нечто общее, что сохраняется для всех материалов. Результа
ты теоретических расчетов по идеальной прочности находятся
в резком противоречии с тем, что мы получаем при испытании
образцов на растяжение. И возникновение общей текучести, и
последующий разрыв образца происходят при напряжениях, в
лучшем случае, в десятки, а то и в сотни раз меньших, чем те,
которые проrнозируются расчетом.
Основная поrрешность принятой расчетной схемы за
ключается в предположении, что смещение атомов при сдвиrе
происходит по всей плоскости одновременно. На самом деле
переход атомов в соседнее положение происходит с местными
искажениями структуры, которые называются дислокациями
и распространяются по плоскости во времени подобно волне.
На рис. 1.36 показана простейшая схема так называемой
краевой днслокации, которая характеризуется наличием лиш-
ней вертикальной атомной полуплоскости в верхней части кри-
сталла. После Toro как дислокация "пробежала" весь кристалл
слева направо (см. рнс. 1.36), форма кристалла изменнлась,
хотя структура осталась неизменной.
76
о о о о о о о о о о о о о
о о о о о о о о о о
о о о о о о о о о
о о о о о о о о о о
Рис. 1.36
Рис. 1.37
На рис. 1.37 показана пузырьковая модель атомной плоско
сти, содержащей дислокацию. Пля Toro чтобы ее лучше заме
тить, фотоrрафию следует рассматривать под малым уrлом,
повернув ее дополнительно на 300 влево или вправо!.
Перемещение дислокации через кристалл можно уподо
бить движению складки по ковру. Kor да складка прошла че
рез весь ковер, последний оказывается несколько сдвинутым.
Но сила, необходимая для перемещения складки, существенно
меньше той, которая нужна, чтобы сдвинуть весь ковер цели
ком.
Кстати, нечто похожее получается и при разрыве связи
между атомами. Попробуйте разорвать лист бумаrи, взяв ero
:Ja противоположные края. Ничеrо не получится. Поэтому мы
и рвем бумаrу хорошо всем известным и давно зарекомендо
вавшим себя способом.
1 К и т т е л ь Ч. Введение в физику твердоrо тела. М.: Наука,
1978.
77
Пвижение дислокаций сопровождается динамическими эф-
фектами. Атомы приобретают кинетическую энерrию и совер-
шают колебания около вновь приобретенноro положеНИJl равно-
весия. Следовательно, имеет место выделение теплоты; обра-
зец при пластических деформациях заметно ниреваеТСJl. Воз-
никают и акустические эффекты. Они MorYT быть обнаруже-
ны даже на самой ранней стадии возникновения пластических
деформаций с помощью специальной чувствительной аппара-
туры.
В металлах образование пластических деформаций начи-
нается уже при сравнительно небольших нarрузках. Среди
множества хаотически ориентированных кристалликов всеrда
находится некоторое количество неблarополучно расположен-
ных или даже имеющих внутренние дефекты, вследствие ко-
торых возможны остаточные изменения уже при сравнительно
небольших силах в пределах упруroй зоны диаrраммы растя-
жения. Число таких кристалликов, однако, невелико, и мест-
ные пластические деформации не сказываются заметным обра
зам на общей линейной зависимости между силой и перемеще-
нием, свойственной первой стадии наrружения образца.
При достаточно больших силах пластические деформации
в образце становятся преобладающими. Необратимые сдви-
rи происходят в большинстве кристаллов в их наиболее сла-
бых плоскостях, особенно если последние имеют направление,
близкое к плоскостям максимальных касательных напряжений
в образце. Это находит свое выражение в образовании полос
скольжения.
При растяжении образца соседние кристаллы взаимодей-
ствуют между собой, и возникшее в одном кристалле пласти-
ческое смещение не может возрастать неоrраниченно, так как
оказывается блокированным соседним, более удачно ориенти
рованным кристаллом. Этим обстоятельством и объясняеТСJl
возникновение зоны упрочнения и некоторое увеличение рас-
тяrивающей силы при наличии пластических деформаций.
Не следует, однако, думать, что с вытяжкой число дисло-
каций уменьшается. Напротив. Каждый кристаллик вза.имо-
действует с соседними, и возникают новые дислокации. Неко-
торые ТИПЫ дислокаций (МЫ показали на рис. 1.36 только один
78
тип, а их мното) способны к воспроизводству. Если дислока
ция не находит выхода и упирается в соседний кристаллик, то
к месту блокировки подходят следом новые и новые. Дисло
кации в этом месте накапливаются. Но несколько непосред
ственно соседствующих дислокаций это уже микротрещина,
которая по мере увеличения растяrивающих напряжений спо
собна начать расширяться. В структуре материала возможно
существование микротрещин и по условиям кристаллизации.
Получается, что процесс разрушения имеет в своей основе
два взаимообусловленных и взаимоконкурирующих механизма,
"борющихся" за право разрушить образец. Первый механизм
образование пластических деформаций путем сдвиrа по опре
деленным кристаллоrрафическим плоскостям. Второй обра
зование и развитие трещин с последующим pa.'JpblBOM. Иноrда
верх берет первый, иноrда второй. Об этих вопросах нам
предстоит поrоворить еще и в дальнейшем.
Возвращаясь к закону разrрузки, следует указать, что в
результате приложения к образцу внешних сил в кристаллах
возникают смещения атомов не только на целое число позиций,
но сохраняется также и некоторое искажение кристаллической
решетки. Следовательно, наряду с пластической деформацией
существует и упруrая. При разrрузке форма искаженной pe
шетки восстанавливается, Т.е. снимается упруrая деформация.
Пластическая же деформация, понятно, не восстанавливается.
Весьма существенно, что процесс снятия упруrой дe
формации происходит по тем же законам изменения внутри
кристаллических сил, что и в начальной стадии наrружения
образца. Поэтому прямая разrрузки К L (см. рис. 1.30) парал-
лельна прямой начальноrо наrружения О А.
Перейдем теперь к числовым механическим характеристи
кам, которые определяют при испытании материалов на растя
жение сжатие.
1.9. Основные механические характеристики
материала
Чтобы дать количественную оценку описанным выше
свойствам материала, перестроим диаrрамму растяжения р =
J(D.l) в координатах (J и Е. Пля этоrо уменьшим в F раз
79
ординаты и в 1 раз абсциссы, rде F и 1 соответственно пло
щадь поперечноro сечения и рабочая длина образца до Ha
rружения. Так как эти величины постоянны, то диarрамма
а = Л€.) (рис. 1.38) имеет тот же вид, что и диаrрамма pa
стяжения (см. рис. 1.30), и на.эыва.еТСJl УСАовной диаzраJ.CJ.CОЙ
раст.нжеНU11.
Отметим на диаrрамме характерные точки и дадим опре
деление соответствуюIIIИХ им числовых величин.
d
...
о
d
t
Рис. 1.38
Наибольшее напряжение, до KOToporo материал следует
закону fYKa, называется nредеА0,м nроnорционаАьности а пц .
Предел пропорциональности зависит от условно принятой CTe
пени приближения, с которой начальный участок диаrраммы
можно рассматривать как прямую. Степень отклонения кри
вой а = ЛЕ) от прямой а = ЕЕ определяют по величине уrла,
который составляет касательная к диаrрамме с осью а. В пре
делах закона fYKa TaHreHC этоrо yr ла определяется величиной
1/ Е. Обычно считают, что если отношение dE / da оказалось
на 50 % больше, чем 1/ Е, то предел пропорциональности дo
стиrнут.
Упруrие свойства материала сохраняются до напряжения,
называемоrо пределом упруrости. Под nреде""о,м ynpyzocmu ау
понимается такое наибольшее напряжение, до KOToporo MaTe
риал не получает остаточных деформаций.
Пля Toro чтобы найти предел упруrости, необходимо после
каждой дополнительной наrрузки разrружать образец и сле
дить, не образовалась ли остаточная деформация. Так как
80
пластические деформации в отдельных кристаллах появляют
ся уже на самой ранней стадии наrружения, JlCHO, что предел
упруrости, как и предел пропорциональности, зависит от тре-
бований точности, которые устанавливают на производимые
замеры. Обычно остаточную деформацию, соответствующую
пределу упруrости, принимают в пределах Еост = (1. .. 5) 10 5,
Т.е. 0,001... 0,005 %. Соответственно этому допуску предел
упруrости обозначают через 0'0,001 или 0'0,005'
Понятия предела пропорциональности и предела упруrо
сти довольно условны; они решающим образом зависят от
условно принятой нормы на уrол наклона касательной и на
остаточную деформацию. Поэтому значения О'пц И О'у В спра
вочные данные по свойствам материалов обычно не включают.
Следующей, более определенной характеристикой являет
ся предел текучести. Под предеА0А4 me'ICy"ecmv. О'т понимается
то напряжение, при котором происходит рост деформации без
заметноrо увеличения наrрузки. В тех случаях, Korna на диа
rpaMMe отсутствует явно выраженная площадка текучести, за
предел текучести условно принимают напряжение, при кото-
ром остаточная деформация Еост = 0,002, Т.е. 0,2 % (рис. 1.39).
В некоторых случаях устанавливают предел Еост = 0,005, или
С:ост = 0,5 %.
6
l
о
Рис. 1.39
у словный предел текучести обозначают через 0'0,2 и 0"0,5
в зависимости от принятой величины допуска на остаточную
81
деформацию. Индекс 0,2 обычно в обозначеНИJlХ предела теку-
чести опускают. Если необходимо ОТЛИЧИТЬ предел текучести
на растяжение от предела текучести на сжатие, то в обозна
чение вводится дополнительный индекс "р" или "с" соответ-
ственно растяжению или сжатию. Таким образом, для предела
текучести получаем обозначения О'т.р и О'т.С'
П редел текучести леrко поддается определению и являет-
ся одной ИЗ основных механических характеристик материма.
Только не следует думать, что для определени.l[ условноro пре-
дела текучести необходима последовательная наrрузка и раз
rрузка, пока остаточная деформация не достиrнет заданноrо
уровня. Все rораздо проще. Надо при прямом наrружении за-
писать диаrрамму испытания (см. рис. 1.39) и по оси абсцисс
отложить заданную деформацию 0,2 %. Затем из полученной
точки А провести прямую, параллельную начальному прямо-
му участку. Ордината точки пересечения этой прямой с диа
rраммой (точка В) как раз и даст искомое значение условноrо
предела текучести.
Отношение максимальной силы, которую способен Bыдep
жать образец, к ero начальной площади поперечноrо сечения
носит название предела nро'Чности, или времеННО20 соnроти-
влениll. Временное условное сопротивление при испытании на
растяжение обозначают через О'в.р, на сжатие через О'в.с'
Существенно заметить, что О'в.р не является напряжени
ем, при котором разрушается образец. Если относить растя
rивающую силу не к начальной площади сечения образца, а к
наименьшему сечению в данный момент, можно обнаружить,
что среднее напряжение, которое называется истинным наnРll
жением., в наиболее узком сечении образца перед разрывом cy
щественно больше, чем О'в.р.
Значения О'т.р и О'в.р для некоторых наиболее часто BCTpe
чающихся материалов приведены в табл. 1.1.
Для высокопрочных нитей и нитевидных кристаллов oc
иовной характеристикой наряду с модулем упруrости и плот
ностью является временное сопротивление (табл. 1.2). Именно
им в первую очередь и определяется прочность создаваемоrо
композита. Что же касается предела текучести, то ero для
82
Т/lБАUЦ/l 1.1. Мех.._ческ_е харuтер_стИIt- некоторых
материалов пр_ раст.жен_и и сжатии
Материал I1т.р trT.c 11..р tТ..C 6, %
МПа (10 == 5d)
Сталь малоуr леродистаА 250 250 390 42
Сталь 30 незакаленнlUI 330 330 530 28
Сталь 30 закаленнlUI 1030 900 1100 11
Сталь 45 незакаленнlUI 370 370 620 24
Сталь 45 закаленнlUI 1040 970 1080 13
Сталь У8 незакаленнlUI 250 430 630 25
Сталь У8 закаленнlUI 700 700 1100 16
Сталь зохrСА захаленнlUI 1400 1400 1620 10
Сталь 40ХНВ закаленнlUI 1720 2100 2050 10
Чуrун серый СЧ28 140 310 150 640 0,6
Титан техничесхий 520 520 600 23
Медь отожженнlUI 55 55 220 46
Медь прутковlUI 250 250 320 15
Латунь 330 330 450 17
Бронза 110 110 140 7,5
Алюминий 50 50 85 35
Дюраль 340 340 540 13
Т/lблuца 1.!l. 3начени. 11..р и 'у дл. высохопрочных
нитей и нитевиДНЫХ христаллов
Материал 17..р, МПа 'У, кr/м З
ВОJIьфрамовlUI ПрОВОJIока 4000 19300
Стекловолокно 3500 4600 2500
БОРОВОJIОКНО 3400 2200 2600
Карбидное волокно 3400 3000
ПРОМЫШJIенное уrJIеродное волокно:
высокомодульное 2400 1870
высокопрочное 3300 1760
83
ОlCончанuе mаб.ll. 1.!J
Материал и.. р , МПа -у, кr/м З
Усы (нитевидные кристаллы):
rрафит 20000 2200
сапфир (АI 2 Оз) 15000 4000
асбест 6000 3400
этих структурных элементов не определяют. Нити и ните
видные кристаллы лишены тех структурных свойств, KOTO
рые лежат в основе явления общей текучести и последующеrо
упрочнения.
При испытании на растяжение определяют еще одну xa
рактеристику материала так называемое удАинение при раз
рыв е h, представляющее собой среднюю остаточную деформа
цию на определенной стандартной длине образца к моменту
разрыва. Определяют h в процентах следующим образом.
Перед испытанием на поверхность образца наносят ряд
рисок, делящих рабочую часть образца на равные части. После
Toro как образец испытан и разорван, обе ero части составляют
по месту разрыва (рис. 1.40). Далее, по имеющимся на поверх
ности рискам от сечения разрыва вправо и влево откладывают
отрезки, имевшие до испытания длину 5d (см. рис. 1.40). Ta
ким образом определяется среднее удлинение на стандартной
длине [о == 10d. В некоторых случаях за [О принимают длину,
равную 5d (см. табл. 1.1).
""1::::s
Jd Jd
I I I I
lo+ !J.t g
Ежт
1%= (ср
Рис. 1.40
84
Удлинение при разрыве в процентах будет следующим:
6 = D.1o 100.
10
Возникающие деформации распределены по длине образ
ца неравномерно. Если произвести обмер отрезков, располо
женных между соседними рисками, можно построить эпюру
остаточных удлинен ий, показанную на рис. 1.40. Наибольшее
удлинение возникает в месте разрыва. Оно называется обычно
истштыJ.C yaJ1.UHeHueJ.C при разрыве.
Лиаrрамма растяжения, построенная с учетом уменьше
ния площади F и MecTHoro увеличения деформации, назы-
вается истинной диаzраJ.CJ.CОЙ раст.Jlженu.Jl (кривая ос'n' на
рис. 1.41).
tI
п'
t/ltT
t
о
Рис. 1.41
Построение истинной диаrраммы бывает необходимо при
теоретическом анализе операции r лубокой штамповки и вооб
ще при решении задач образования больших деформаций. Это
построение выполняют приближенными способами.
Один из них заключается в следующем. Сначала опре
деляют координаты О'ист И еист точки n' истинной точки
разрыва (рис. 1.41). Очевидно,
О'ист = P D / F ш ,
[де P D значение растяrивающей силы в момент разрыва в
точке п; F ш площадь поперечноrо сечении шей и после раз
рыва.
85
Значение Е ист леrко определить обмером разорванноro
образца из условия равенства объемов материала до и после ис
пытания. Вблизи места разрыва единица длины образца имеет
до испытания объем Р.l, а после разрыва F ш (1+Е ист ). Тоrда
F = F ш (1 + Еист), откуда
F
Еист = F ш 1.
Абсцисса точки п' будет равна
F аист
E D , = 1+ .
F ш Е
Далее, из найденной таким образом точки п' к кривой
О D проводят касательную п' С'. На участке ОС' обычная диа
rpaMMa совпадает с истинной, поскольку шейка на образце еще
не образовалась. При больших деформациях за истинную диа
rpaMMY принимают прямую С' п'. Вместо прямой С' п' можно
было бы с той же степенью приближения провести также плав
но изменяющуюся кривую, касательную к кривой оп.
1.10. Пластичность и хрупкость. Твердость
Способность материала без разрушения получать боль
шие остаточные деформации носит название nJ1.асти'Чности.
Свойство пластичности имеет решающее значение для таких
технолоrических операций, как штамповка, вытяжка, волоче
ние, rибка и др. Мерой пластичности является удлинение
при разрыве. Чем больше , тем более пластичным считается
материал. К числу весьма пластичных материалов относятся
отожженная медь, алюминий, латунь, малоуrлеродистая сталь
и др. Менее пластичными являются дюраль и бронза. К числу
слабо пластичных материалов относятся мноrие леrированные
стали.
Свойством, противоположным пластичности, является
xpYn'ICocmb, т. е. способность материала разрушаться без обра
зования заметных остаточных деформаций. Материалы, обла
дающие этим свойством, называются хруп 'lCUoМ. и. Для таких
материалов удлинение при разрыве не превышает 2...5 %, а
86
в ряде случаев измеряется долями процента. К хрупким MaTe
риалам относятся чуrун, высокоуrлеродистая инструменталь
ная сталь, стекло, кирпич, камни и др. Пиаrрамма растяже
ния хрупких материалов не имеет площадки текучести и зоны
упрочнения (рис. 1.42).
6
р
о
Рис. 1.42
l
о
1JL
Рис. 1.43
По-разному ведут себя пластичные и хрупкие материалы
и при испытании на сжатие. Как уже упоминалось, для испы-
тания на сжатие используют короткие цилиндрические образ
цы, располаrаемые между параллельными плитами. Пля ма-
лоуrлеродистой стали диаrрамма сжатия образца имеет вид
кривой, показанной на рис. 1.43. Здесь, как и у диаrраммы
растяжения, обнаруживается площадка текучести с последу-
ющим переходом к зоне упрочнения. В дальнейшем, однако,
наrрузка не падает, как при растяжении, а резко возраста-
ет. Происходит это в результате Toro, что площадь попе-
речноrо сечения сжатоrо образца увеличивается; сам образец
вследствие трения на торцах принимает бочкообразную форму
(рис. 1.44). Повести образец пластичноrо материала до разру-
шения практически не удается. Испытуемый цилиндр сжи-
мается в тонкий диск (см. рис. 1.44), и дальнейшее испыта-
ние оrраничивается возможностями машины. Поэтому пре-
дел прочности при сжатии для TaKoro рода материалов найден
быть не может (см. табл. 1.1).
Иначе ведут себя при испытании на сжатие хрупкие ма-
териалы. Пиаrрамма сжатия этих матери3JIОВ сохраняет каче-
ственные особенности диаrраммы растяжения (см. рис. 1.42).
87
р
Рис. 1.44
Рис. 1.45
Предел прочности хрупкоrо материала при сжатии определя
ется так же, как и при растяжении. Разрушение образца про
исходит с образованием трещин по наклонным или продоль
ным плоскостям (рис. 1.45).
Сопоставление предела прочности хрупких материалов
при растяжении О'в.р с пределом прочности при сжатии О'в.с
показывает, что эти материалы обладают, как правило, бо
лее высокими прочностными показателями при сжатии, неже
ли при растяжении. Отношение
и
k==
О'в.с
для чуrуна колеблется в пределах 0,2. . . О, 4; для керамических
материалов k = 0,1. . . О, 2.
88
У пластичных материалов прочностные характеристики
на растяжение и сжатие сопоставляют по пределу текучести.
Принято считать, что О'т.р О'т.с' Принято... Но так ли это
на самом деле сказать трудно. Справочная литература не
щедра на характеристики материалов при сжатии. Значения
предела текучести при сжатии, приведенные выше, определя
ли в свое время специально, чтобы заполнить второй столбец
табл. 1.11. Что же касается предела прочности при сжатии,
то здесь также MHoroe остается неясным. lIостаточно сказать,
что, в отличие от растяжения, результаты испытания оказы
ваются зависящими также и от формы поперечноrо сечения
образца. Испытывать на сжатие цилиндр или кубик не co
всем одно и то же.
Существуют материалы, способные воспринимать при pa
стяжении большие наrрузки, чем при сжатии. Это обычно
материалы, имеющие волокнистую структуру, дерево и He
которые композиты. Этим свойством обладают и некоторые
металлы, например маrний.
lIеление материалов на пластичные и хрупкие является
условным не только потому, что между теми и друrими не
существует резкоrо перехода в значениях б. В зависимости от
условий испытания мноrие хрупкие материалы способны вести
себя как пластичные, а пластичные как хрупкие.
Например, чуrунный образец при испытании на растяже
ние под большим давлением окружающей среды (р > 400 МПа)
разрывается с образованием шейки. Мноrие ropHble поро
ды, находящиеся под давлением вышележащих слоев, при
сдвиrах земной коры претерпевают пластические деформации.
Образец пластичноrо материала, имеющий кольцевую выточ
ку (рис. 1.46), при растяжении получает хрупкий разрыв в свя
зи С тем, что в ослабленном сечении затруднено образование
пластических деформаций сдвиrа по наклонным площадкам.
Рис. 1.46
1 Опыты ста.вил к.к. Лиха.рев.
89
Очень большое ВЛИJlние на проявление свойств пластич
ности и хрупкости оказывают скорость иаrружеиия и темпера
тура. При быстром наrружении более резко про является свой-
ство хрупкости, а при медленном свойство пластичности.
Например, хрупкое стекло способно при длительном воздей
ствии наrрузки при нормальной температуре получать оста-
точные деформации. Пластичные же материалы, такие как
малоуrлеродистая сталь, под воздействием резкой ударной Ha
rрузки проявляют хрупкие свойства.
Одной из основных технолоrических операций, ПОЗВОЛJl-
ЮЩИХ изменять в нужном направлении свойства материала,
является термообработка. Из данных, приведеииых в табл. 1.1,
видно, например, что закалка резко повышает прочностные ха-
рактеристики стали и одновременно снижает ее пластические
свойства. длJi большинства широко применяемых в машино-
строении материалов хорошо известны те режимы термообра-
ботки, которые обеспечивают получение необходимых механи
ческих характеристик материала.
Испытание образцов на растяжение----сжатие дает объек-
тивную оценку свойств материала. В производстве, однако,
для оперативноrо контроля за качеством изrотовляемых дета-
лей этот метод представляет в ряде случаев значительные не-
удобства. Например, при помощи испытания на растяжение
сжатие трудно контролировать правильность термообработки
rотовых изделий. Для TaKoro контроля нужно было бы для
каждой партии деталей изrотовлять несколько образцов, про
ходящих все стадии термообработки вместе с деталями, а за
тем подверrать эти образцы' испытанию на растяжение или
сжатие и таким образом определять механические характери-
стики для rотовой партии деталей. Такой прием сильно заrру
жал бы производство и снижал бы оперативность контроля.
На практике большей частью прибеrают поэтому к cpaB
ни тельной оценке свойств материала при помо[Ци пробы на
твердость.
Под твердостью понимается способность материала про
тиводействовать механическому проникновению в Hero посто
ронних тел. Понятно, что такое определение твердости повто-
ряет, по существу, определение прочности. В материале при
90
вдавливании в Hero постороннеrо тела возникают местные пла
стические деформации, сопровождающиеся при дальнейшем
увеличении сил местным разрушением. Поэтому показатель
твердости связан с показателями прочности и пластичности и
зависит от конкретных условий ведения испытания.
Наиболее широкое распространение получили методы из
мерения твердости по Бринелю и по Роквеллу. В первом слу
чае в поверхность исследуемой детали вдавливают стальной
шарик диаметром 10 мм, во втором алмазный острый HaKO
нечник. По обмеру полученноrо отпечатка судят о твердости
материала. Испытательная лаборатория обычно располаrает
составленной путем экспериментов переводной таблицей, при
помощи которой можно приближенно по показателю твердости
определить предел прочности материала. Таким образом, в
результате испытаний на твердость удается определить проч
ностные показатели материала, не разрушая деталь.
1.11. Влияние температуры и фактора времени
на механические характеристики материала
Все сказанное выше о свойствах материалов относилось
к испытаниям в так называемых нормальных условиях, Т.е.
при температуре 20 ос и при сравнительно небольших CKOpO
стях изменения наrрузок и удлинений, которые обеспечивают
ся обычными испытательными машинами. Нормальной CKOpO
стью деформации считается dc: / dt = О, 01 . . . 3 мин 1.
Диапазон температур, в пределах KOToporo реально рабо
тают конструкционные материалы, выходит далеко за рамки
указанных нормальных условий. Есть конструкции, rде MaTe
риал находится под действием чрезвычайно высоких темпера
тур, как, например, в стенках камер воздушно реактивных и
ракетных двиrателей. Имеются конструкции, rде, напротив,
рабочие температуры оказываются низкими. Это элементы
холодильных установок и резервуары, содержащие жидкие ra
зы.
В широких пределах изменяются также и скорости Harpy
жения, и время действия внешних сил. Есть наrрузки, дей
ствующие rодами, а есть такие, время действиЯ которых ис
числяется миллионными долями секунды.
91
Понятно, что в зависимости от указанных обстоятельств
механические свойства материалов будут проявляться по раз
ному.
Обобщающий анализ свойств материала с учетом темпе
ратуры и фактора времени оказывается очень сложным и не
укладывается в простые экспериментально полученные кри
вые, подобные диаrраммам растяжения. Функциональная за-
висимость между четырьмя параметрами 0', е, температурой
tO и временем t: J( 0', е, tO, t) == О, не является однозначной
и содержит дифференциальные И интеrральные соотношения
входящих в нее величин.
Так как в общем виде аналитическое или rрафическое опи-
сание указанной функции дать не удается, то влияние темпе
ратуры и фактора времени рассматривают в настоящее время
применительно к частным классам задач. Леление на классы
осуществляют в основном по типу действующих внешних сил.
Различают медленно, быстро и весьма быстро изменяющиеся
наrрузки.
Основными наrрузками, изучаемыми в сопротивлении ма-
териалов, являются медленно изменяющиеся, или статические.
Скорость изменения этих наrрузок во времени настолько мала,
что кинетическая энерrия, которую получают перемещающие-
ся частицы деформируемоrо тела, составляет ничтожно малую
долю от работы внешних сил. Иначе rоворя, работа внешних
сил преобразуется только в упруrую потенциальную энерrию,
а также в необратимую тепловую энерrию, связанную с пла-
стическими деформациями тела. Испытание материалов в так
называемых нормальных условиях происходит под действием
статических наrрузок.
Если вести испытания на растяжение при различных тeM
пературах образца, оставаясь в пределах нормальных CKOpO
стей деформации (de/dt == 0,01... 3 мин l), то можно в опре
деленном интервале получить зависимость механических ха-
рактеристик от температуры. Эта зависимость обусловлена
температурным изменением внутрикристаллических и меж-
кристаллических связей, а в некоторых случаях и структур-
ными изменениями материала.
92
Ь,мпо Е, rпo
800 220
700 180
500 140
500
400
JOO
200
100 2S
IJ
9 190 200 JOO 400 t, ОС
Рис. 1.47
На рис. 1.47 показана зависимость от температуры MOДY
ля упруrости Е, предела текучести ат.р, BpeMeHHoro сопроти
вления а в . р и удлинения при разрыве б для малоуrлеродистой
стали в интервале О. . .500 ос. Как видно из приведенных кри
вых, модуль упруrости в пределах О. . .300 ос практически не
меняется. Более существенные изменения претерпевают ав.р
и б, причем имеет место, как rоворят, "охрупчивание" стали
удлинение при разрыве уменьшается. При дальнейшем YBe
личении температуры пластические свойства стали BOCCTaHa
вливаются, а прочностные показатели быстро падают.
Явление "охрупчивания" при повышенных температурах
свойственно в основном малоуrлеродистой стали. Леrирован
ные стали и цветные сплавы при повышении температуры об
наруживают большей частью монотонное возрастание 6 и Ta
кое же монотонное снижение а т . р и а в . р . На рис. 1.48 показаны
соответствующие кривые для хромомарrанцевой стали марки
30XfCA.
Чем выше температура, тем труднее определить механи
ческие характеристики материала. Происходит это не только
потому, что возрастают сложности в технике эксперимента, но
также вследствие Toro, что сами характеристики становятся
93
tI, МПо
2000
1750
1500
,ио
1000
7JU
500
250
О
lOO 100 О
di.p r-.......
,
d{z .... \
, t! J
1\
\ \ ) /
f'3 v
.
1,%
100
80
60
40
20
О
100 200 100 400 ,ffJ() 500 700е, or
Рис. 1.48
менее определенными. При статическом наrружении, наЧИНaJI
с некоторых значений температур, резко сказывается фактор
времени. Для одних материалов это происходит при более низ
ких, для друrих при более высоких температурах. Влияние
фактора времени обнаруживается и при нормальных темпера
турах. Однако для металлов ero влиянием можно пренебречь.
Для некоторых же орrанических материалов даже при низких
температурах скорость наrружения существенно сказывается
на определяемых характеристиках.
Изменение во времени деформаций и напряжений, возни
кающих в наrруженной детали, носит название ПОJ1.зучестu.
Частным проявлением ползучести является рост необра
тимых деформаций при постоянном напряжении. Это явление
носит название последействи1l. Наrлядной иллюстрацией по
следействия может служить наблюдаемое увеличение разме
ров диска и лопаток rазовой турбины, нахОДЯЩИХСJ: под воз
действием больших центробежных сил и высоких температур.
Это увеличение размеров необратимо и проявляется обычно
после мноrих часов работы двиrателя.
Друrим частным проявлением свойств ползучести явля
ется реJ1.а'ICсаци1l самопроизвольное изменение во времени Ha
пряжений при неизменной деформации. Релаксацию можно
наблюдать, в частности, на примере ослабления затяжки БОJl
товых соединений, работающих в условиях высоких темпера-
тур.
94
Наиболее просто исследовать явление последействия. Ec
ли наrрузить образец постоянно действующей силой (рис. 1.49)
и следить за изменением ero длины в условиях фиксирован
ной температуры, можно получить диаrраммы последействия
(рис. 1.50), дающие зависимость деформации от времени при
различных значениях напряжения а.
Рис. 1.49
р
Е:
Р6.
/
/
/63
/
./ t).
./ а2
./
//
.;'
?
/61
..../
....
о
t
Рис. 1.50
Как видно из этих кривых, нарастание деформаций проис
ходит вначале очень быстро. Затем процесс стабилизируется
и деформации увеличиваются с постоянной скоростью. С Te
чением времени на образце, как и при обычном испытании,
появляется шейка. Незадолrо до разрыва имеет место быстрое
возрастание местных деформаций в результате уменьшения
площади сечения. При более высоких температурах измене
ние деформаций во времени происходит быстрее. Пля дaHHO
ro материала можно при помощи методов теории ползучести
перестроить диаrраммы последействия в диаrраммы релакса
ции. Последние, впрочем, можно получить и эксперименталь
но. Пля этоrо, правда, требуется более сложная аппаратура,
так как необходимо, сохраняя удлинение образца, замерять из
менения растя:rивающей силы.
95
Вид диаrрамм релаксации, дающих зависимость напряже-
ния от времени, представлен на рис. 1.51.
d
("
€1
&1
о
t
Рис. 1.51
Основными механическими характеристиками материала
в условиях ползучести являются предел длительной прочности
и предел ползучести.
ПредеJ1.ОМ дАитеАЬНОй nро'Чности называется отношение
наrрузки, при которой происходит разрушение растянутоrо
образца через заданный промежуток времени, к первоначаль-
ной площади сечения.
Таким образом, предел длительной прочности зависит от
заданноrо промежутка времени до момента разрушения. По-
следний выбирается равным сроку службы детали и изменя
ется в пределах от десятков часов до сотен тысяч часов. Со-
ответственно столь llIИРОКОМУ диапазону изменения времени
меняется и предел длительной прочности. С увеличением Bpe
мени он, естественно, падает.
ПредеJ1.0М nОJ1.зу'Чести называется напряжение, при кото-
ром пластическая деформация за заданный промежуток BpeMe
ни достиrает заданной величины.
Как видим, для определения предела ползучести необхо
дима задать интервал времени (который определяется сроком
службы детали) и интервал допустимых деформаций (который
определяется условиями эксплуатации детали).
Пределы длительной прочности и ползучести сильно за-
висят от температуры. С увеличением температуры они, оче-
видно, уменьшаются.
96
Среди различных типов статических нarрузок особое Me
сто занимают периодически изменяющиеСJI, или tfUI\:.lCuчеСJ(uе,
наrрузки. Вопросы прочности материа.пов в условиях таких
наrрузок составляют содержание специа.пьноro раздела сопро
тивления материалов и связываются с понятиями вЫHOC.ICивo
сти, или уста.ICости, материала. Эти вопросы будут paCCMO
трены подробно в rл. 12.
После статических рассмотрим класс быстро изменяю
щихся, или динамических, наrрузок.
В оценке этих наrрузок существуют два подхода. С одной
стороны, наrрузка считается быстро изменяющейся, если она
вызывает заметные скорости деформации частиц тела, причем
настолько большие, что суммарная кинетическая энерrия дви-
ЖУЩИХСJI масс составляет уже значительную долю от общей
работы внешних сил. С друrой стороны, скорость изменения
наrрузки может быть связана со скоростью протекания пла
стических деформаций. Наrрузку может рассматривать как
быстро изменяющуюся, если за время наrружения тела пла
стические деформации не успевают полностью реализоваться.
Это заметно сказывается на характере наблюдаемых зависи
мастей между деформациями и напряжениями.
Первый критерий в оценке быстро изменяющихся Harpy
зок используют в основном при анализе вопросов колебаний
упруrих тел, второй при изучении механических свойств Ma
териалов в связи с процессами быстроrо деформирования.
Поскольку при быстром наrружении пластические дефор
мации не успевают полностью реализоваться, материал с YBe
личением скорости деформации становится более хрупким и fJ
уменьшается. Так как скольжение частиц образца по наклон
ным площадкам затруднено, должна несколько увеличиться
разрушающая наrрузка. Сказанное можно проиллюстриро-
вать, сопоставив диаrраммы растяжения при медленно и бы
стро изменяющихся наrрузках (рис. 1.52).
Поскольку при быстром наrружении развитие пластиче
ских деформаций затруднено, rлавенствующим механизмом
разрушения оказывается развитие трещин. В этом случае Ma
териал очень чувствителен к местному повышению напряже
ния. Это позволяет создать специальный метод испытания
4 В. И. Феодосьев
97
i
о
&
Рис. 1.52
Рис. 1.53
материала на чувствительность к хрупкому разрушению так
называемое испытание на удаlJНУЮ вzз ость.
Под вязкостью понимается свойство структуры TBepnoro
тела задерживать, затруднять" противостоять развитию Tpe
щин.
Испытание на ударную вязкость заключается в следую
щем. На образце KBanpaTHoro сечения 10 х 10 делают надрез
rлубиной 2 мм. Образец укладывают на опоры (рис. 1.53) и
по нему со стороны, обратной надрезу, с помощью маятнико
Boro копра наносят удар. Разность высот маятника до и после
удара позволяет определить энерrию, затраченную на разру
шение образца. Эта энерrия Tf!M больше, чем больше вязкость
материала. Сравнительной мерой вязкости служит энерrия,
отнесенная к площади ослабленноrо сечения.
Важно отметить, что ударная вязкость с уменьшением
температуры падает, что кажется естественным. Но KOBap
ство заключается внеравномерности этоrо падения. ДЛЯ MHO
rих материалов существуют критические низкие температу
ры, при переходе через которые ударная вязкость скачком
уменьшается в несколько раз. Некоторые стали, например,
проявляют свойство хладолом:кости, на которое приходится
обращать особое внимание, в частности, при выборе матери-
алов для сооружений и транспортных средств, работающих в
арктических условиях.
Последним из трех рассматриваемых видов наrрузок явля
ются весьма быстро изменяющиеся во времени наrрузки. CKO
рость их изменения настолько велика, что работа внешних сил
98
почти полностью переходит в кинетическую энерrию движу
ЩИХСJl частиц тела, а энерrия упруrих и пластических дефор
маций оказывШ!тся сравнительно малой.
Весьма быстро измеНJlЮll!Иеся наrрузки возникают при
ударе тел, ДВИЖУЩИХСJl со скоростями В несколько сотен Me
трав в секунду и выше. С этими наrрузками приходится иметь
дело при изучении вопросов бронепробивШ!мости, при оценке
разрушающеrо действия взрывной волны, при исследовании
пробивной способности межпланетной пыли, встречающейся
на пути космическоro корабля.
Так как энерrия деформации материала в условиях весьма
больших скоростей наrружения оказывается сравнительно Ma
лай, то свойства материала как твердоrо тела имеют в данном
случае второстепенное значение. На первый план выступают
законы движения леrко деформируемой (почти жидкой) среды,
и особую роль приобретают вопросы физическоrо состояния и
физических свойств материала в новых условиях. Таким обра
зам, задачи, связанные с весьма большими скоростями Harpy
жения, выходят за рамки сопротивления материалов и оказы
ваются в сфере вопросов физики.
1.12. Коэффициент запаса
В результате испытаний на растяжение и сжатие мы по
лучаем основные данные о механических свойствах материала.
Теперь рассмотрим вопрос о том, как использовать получен
ные результаты испытаний в практических расчетах инженер
ных конструкций на прочность.
Как уже указывалось в В7, основным и наиболее распро
страненным является метод расчета по напряжениям. Соrлас
но этому методу, расчет на прочность ведут по наибольше
му напряжению О'тах, возникающему в некоторой точке Ha
rруженной конструкции. Напряжение О'тв.х называется макси-
мальным рабочим напряжением. Оно не должно превышать
определенноrо значения, свойственноrо данному материалу и
условиям работы конструкции.
Расчет по напряжениям ведут по формуле
О'тах = (JL/n,
4.
99
rде (1L .некоторое предельное ДЛЯ данноro материала напря
жениеj n число, большее единицы, называемое tt:оэффuцu
eHmOAt запаса или просто запасо.w. Обt.Iчно бывает так, что
размеры конструкции уже известны и назначены, например,
из эксплуатационных соображений или соображений техноло
rичности. Расчет на прочность является поверочным. В этом
случае подсчитывают (1mах И определяют фактический коэф
фициент запаса
n = (1L/(1max.
Если этот запас удовлетворяет конструктора, считается, что
поверочный расчет дал положительный результат.
Коrда конструкция находится в стадии проектирования
и некоторые характерные размеры должны быть назначены
непосредственно из требований прочности, значение n задают
заранее. Искомый размер получают из условия
(1mах [(1],
rде [(1] = (1L/n aonyc'lCaeJrtoe напряжение.
Остается решить вопрос, какое напряжение принимать за
предельное и как назначать n.
Пля Toro чтобы избежать в работающей конструкции
образования заметных остаточных деформаций, за величину
(1L дЛЯ пластичных материалов принимается обычно предел
текучести. Тоrда наибольшее рабочее напряжение составля
ет n ю долю от (1т.р (рис. 1.54). Коэффициент в этом случае
6
11
...
'"
6
&,
п
6 тl1 :E
11
...
!оо
"с)
t О t
Рис. 1.54
о
100
обозначается через Пт и называется 1I:0эффuцuенто.А.С запаса по
теll:учестtl. Для: хрупких, а в некоторых СЛУЧaJIХ и для YMepeH
но пластичных материалов за (fL принимают предел прочности
О"в.р. Тоrда получаем
пв == (Тв.р/итах,
rде П в 'lCоэффuциент запаса по предеАУ прочностu.
Как roворилось в В7, расчет по напряжениям не является
единственно возможным.
Если расчет ведут по предельной наrрузке, то аналоrично
может быть введено понятие запаса по предельной наrрузке
n == P L / Рраб,
rде P L и Рраб соответственно предеЛЬНaJI и раБОЧaJI наrрузки.
В случае расчета на жесткость
n == БL/Браб,
rде Б L и браб предельное и рабочее перемещения.
Значение n выбирают на основе ряда различных соображе
ний, выходящих в большинстве случаев за пределы вопросов,
рассматриваемых в курсе сопротивления материалов.
Прежде Bcero, коэффициент запаса не может быть назна
чен без учета конкретных условий работы рассчитываемой
конструкции. Коэффициент п, по существу, определяют ис
ходя из практическоrо опыта создания аналоrичных KOHCTPYK
ций за прошедшее время и уровня развития техники в данный
период. В каждой области техники уже сложились свои Tpa
диции, свои требования, свои методы и, наконец, своя специ
фика расчетов, в соответствии с которыми назначают коэффи
циент запаса. Так, при проектировании стационарных строи
тельных сооружений, рассчитанных на долrие сроки службы,
принимают довольно большие значения коэффициента запаса
(Пв == 2. ..5). В авиационной технике, rде на конструкцию Ha
кладывают серьезные оrраничения по массе, коэффициенты за
паса (или так называемые коэффициенты безопасности) уста.
навливают по пределу прочности в интервале 1,5...2. В связи
101
с ответственностью конструкции в этой области техники сло
жилась практика проведения обязате.пьных статических испы-
таний отдельных узлов и целых летате.пьных аппаратов для
прямоrо определения предельных наrрузок.
Выбор коэффициента запаса зависит от методов расчета
напряжений, степени точности этих методов и серьезности тех
последствий, которые повлечет за собой разрушение детали.
Значение коэффициента запаса зависит и от свойств Ma
териала. В случае пластичноrо материала запас по пределу
текучести может быть меньшим, чем в случае расчета детали
из хрупкоrо материала. Это достаточно очевидно, поскольку
хрупкий материал более чувствителен к различным случай
ным повреждениям и неожиданным дефектампроизводства.
Кроме Toro, случайное повышение напряжений в пластичном
материале может вызвать только небольшие остаточные дe
формации, в хрупком же материале последует прямое разру-
шение.
Изучение вопросов о конкретном выборе коэффициента за
паса входит как составная часть в такие дисциплины, как
прочность самолета, прочность конструкций и пр. Правиль-
ность выбора коэффициента запаса определяется в значитель-
ной мере опытом и искусством расчетчика и конструктора.
rлава 2
КРУЧЕНИЕ
2.1. Чистый сдвиr и ero особенности
На примере растяжения и сжатия были выявлены He
которые наиболее важные свойства напряженноrо состояния.
При растяжении в зависимости от ориентации секущих пло
щадок на rранях выделенноrо прямоуrольноrо элемента (см.
рис. 1.19) возникают как нормальные, так и касательные Ha
пряжения. Последние, независимо от значений нормальных
напряжений, подчиняются условию пар насти (см. 1.5).
Теперь положим, что имеется такое напряженное состоя
ние, Korna на rранях выделенноrо элемента возникают только
касательные напряжения..,. (рис. 2.1). Такое напряженное co
стояние называется 'Чистым сдви20м 1 .
Наиболее просто однородный чистый сдвиr может быть
осуществлен непосредственным наrружением пластины, за
хваченной в жесткие контурные шарнирно соединенные Ha
1 Более CTporoe определени@ чистоrо сдвиrа будет да.но в 7.2 по. О ПIr
ве общей теории иа.ПРJ[жеииоrо состоа:ииа:.
103
1
:<
. .
р
'(
t ''!
...............
! IDI! ....
'(
:<:
.
t p
t
Рис. 2.1 Рис. 2.2
кладки (рис. 2.2). Пля всех точек пластины касательные Ha
пряжения т будут, очевидно, следующими:
т = Рj(lб),
rде б. толщина пластины. Исключение составляет узкая Kpae
вая зона, rде пластина сопряrается с накладками. Здесь напря
жен ное состояние будет отличным от чистоrо сдвиrа. Однако
в соответствии с принципом Сен Бенана эти отклонения носят
чисто местный характер, и область их распространения мала
по сравнению с общими размерами напряженной пластины.
В качестве BToporo примера, иллюстрирующеrо состояние
однородноrо чистоrо сдвиrа, можно рассмотреть тонкостенную
цилиндрическую трубку, наrруженную моментами, приложен
ными в торцевых плоскостях (рис. 2.3). Здесь и далее внешний
момент в отличие от BHYTpeHHero обозначен через rot.
Напряжение т определяют из условий равенства момента
равномерно распределенных по поперечному сечению BHYTpeH
них сил моменту rot:
rot
т = 21rR26 ' (2.1)
rде R радиус труБКИj б ее толщина.
Посмотрим теперь, как при чистом сдвиrе изменяются
напряжения в зависимости от ориентации секущих площа
док. Лля зтоrо из пластины, нахОДJlщейся в состоянии чисто-
104
$ р
..
-(
,1 с 8 !' ;,
'(
01' ;.1 .,r't
JI
.!11! Р
Рис. 2.3 Рис. 2.4
ro сдвиrа, выделим элементарную трехrранную призму Аве
(рис. 2.4).
На rранях АВ и ВС по условию возникают только Kaca
тельные напряжения т. На rрани АС в зависимости от yr ла а
возможно возникновение как нормальноrо, так и касательноrо
напряжений. Обозначим их соответственно через ай" и Та'
Проектируем все силы, действующие на призму, на оси n
и t. У словия равновесия дают
аа АС = тАВ siпа + тВС cosa;
Та АС = TABcosa тВСsiпа.
Отрезки АВ и ВС связаны с АС очевидными соотношениями
АВ = АС cos а, ВС = АС sin а. Поэтому
aa=Tsin2aj Та = Tcos2a.
При а = О и а = 900 напряжения аа и Та принимают зна
чения, соответствующие исходным площадкам, Т.е. аа = О,
а Та = Т. При а = :1:450 Та = О, а аа = :1:т. Следователь
но, если из пластины выделить прямоуrольный элемент, rpa
ни KOToporo повернуты относительно исходных плоскостей на
уrол 450, то на секущих площадках будут обнаружены толь
ко нормальные напряжения, причем на одной паре rраней эти
напряжения являются растяrивающими, а на друrой сжима
ющими. Таким образом, чистый сдвиr может быть представ
105
t
1011
Рис. 2.5
",! /d-1
М
лен как одновременное растяжение и сжатие по двум взаимно
перпендикулярным направлениям (рис. 2.5).
Рассмотрим деформации при сдвиre. Касательное наПРJl
жение т связано с уrловой деформацией "У соотношением (1.13):
Е
r = С"У, rде, как мы уже знаем, G = 2(1 + JL) (см. 1.5).
I .т
о
'1
r ....
о
р
.1J2
Рис. 2.6
в результате возникающих уrловых деформаций пласти
на, показанная на рис. 2.2, перекашивается, а торцевые сече
ния трубки (рис. 2.6) получают взаимные уrловые смещения <1'.
Характер возникающих смещений показан на рис. 2.7, причем
<1' = "Yl/R.
dx
Рис. 2.7
106
(2.2)
't
r ...............
7Bi
1"
При чистом сдвиrе, как и при растяжении (да и вооб
ще при всяком напряженном состоянии), в деформируемом тe
ле накапливается упруrая потенциальная энерrия. Эту энер
rию леrко подсчитать, рассматривая изменение формы пря
моуrольноrо элемента с размерами dx, dy и толщиной 6 (см.
рис. 2.7).
Примем нижнюю rpaHb элемента условно за неподвиж
ную. Torna при смещении верхней rрани сила тdж6 совершит
работу на перемещении ,dy. Так как сила меняется пропорци
онально смещению, то ее работа равна половине произведения
Tdx6 . ,dy (см. 1.3). Следовательно, потенциальная энерrия
деформации, накопленная в элементе, равна dU = lj2т,dжdу6.
Если отнести энерrию к единице объема, получим
dU 1
ио = dV = "2 т,.
Выразим, через т по закону rYKa. Тоrда
т 2
ио = 2G '
(2.3)
Величина ио называется удеJ1.ЬНОЙ nотенциаАЬНОЙ энерzи
ей при caBuze и измеряется в Пжjм 3 .
Аналоrично испытанию на растяжение и сжатие можно
провести испытание материала в условиях чистоrо сдвиrа.
Пля этоrо удобнее Bcero воспользоваться испытанием TOHKO
стенной трубки (рис. 2.8). Если во время испытания произво
дить замер момента !.7л и взаимноrо yr ла поворота сечений <р на
длине [, можно построить для образца диаrрамму rot = /( <р).
в дальнейшем эту диаrрамму, соrласно выражениям (2.1) и
(2.2), можно леrко привести к переменным т и ,. Таким обра
зам может быть получена диаrрамма сдвиrа для материала
т = /(/).
Ej=:::::::::::=Q
Рис. 2.8
107
Сопоставление диarраммы сдвиrа с диаrра.ммой растиже
ния для одноrо и тoro же материала показывает их качествен
ное сходство. На диаrрамме сдвиrа также имеетси упруrая
зона, зоны текучести и упрочнения.
Аналоrичным образом для сдвиrа, как и для растижении,
можно было бы дополнительно ввести следующие характери-
стики: предел пропорциональности при сдвиre, предел упру
rости, предел текучести и Т.д. Прежде, коrда изучение Mexa
ники деформируемых тел находилось еще в начальной стадии,
так обычно и поступали. В дальнейшем, однако, было YCTaHO
влено, что характеристики сдвиrа свизаны с характеристика
ми растяжения. В настоящее время теории пластичности дa
ет возможность построить теоретически диarрамму сдвиrа по
диаrрамме растяжении, а также выразить все характеристики
сдвиrа через уже знакомые нам механические характеристики
растяжения. Точно так же допускаемые напряжения и коэф
фициенты запаса при чистом сдвиre MorYT быть связаны С СО-
ответствующими величинами для простоrо растяжения. Эти
вопросы будут подробно рассмотрены в rл. 10.
2.2. Кручение стержня с круrлым поперечным
сечением. Уравнения равновесия
Под кручением понимается такой вид наrружения, при ко-
тором в поперечных сечениих стержня возникает только KPy
тящий момент. Прочие силовые факторы (изrибающие момен-
ты, нормальная и поперечные силы) равны нулю. Дли крутя
щеro момента, независимо от формы сечения, принято следу
ющее правило знаков. Если наблюдатель смотрит на попереч
ное сечение со стороны внешней нормали и видит момент Мх
направленным против часовой стрелки, то момент считается
положительным. При противоположном направлении моменту
приписывается знак минус.
На рис. 2.9 показан стержень, наrруженный по концам MO
ментами !)J1. Если посмотреть на плоскость А со стороны
внешней нормали (со стороны точки С), то мы увидим, что
момент М" направлен по часовой стрелке. Следовательно, М"
108
} '
ИХ ИХ И К
Рис. 2.9
будет отрицательным. Тот же самый результат может быть
получен, если посмотреть из точки С на плоскость В.
Указанным правилом знаков руководствуются при постро
ении эпюр крутящих моментов. На рис. 2.10 показано не-
сколько примеров наrружения стержня сосредоточенными rot и
распределенными J.Lz (Н,м/м) внешними моментами. Для этих
моментов применено условное обозначение в виде двух круж
ков. Кружок С точкой обозначает силу, направленную на на-
блюдателя, а кружок с крестиком силу, направленную от
наблюдателя. На рис. 2.10 приведены соответствующие эпю-
ры крутящих моментов. Положительные моменты отложены
вверх.
н 4 ,Ir II
. . ..'
т
!Dl 11II11II1I1I11IUnnтnuz.т
а
о
1
2т 2 .m "'7 I',t
t i l r ,
ф.'
pl l'
пm11ПfIl Jiz lJ1 z t
.т 3
6 z
Рис. 2.10
109
При расчете стержня на кручение надо решить две OCHOB
ные задачи. Требуется определить напряжения и найти уrло
вые перемещения в зависимости от внешних моментов. Эти
задачи решают п разному, смотря по тому, какой вид имеет
поперечное сечение стержня. Наиболее просто можно полу-
чить решение в случае KpyroBoro сечения, а также для широ
Koro класса тонкостенных стержней.
Механизм деформирования стержня с круrлым попереч
ным сечением можно представить себе в следующем виде: бу
дем считать, что каждое поперечное сечение в результате дей
ствия внешних моментов поворачивается в своей плоскости на
некоторый уrол как жесткое целое. Этот уrол поворота для
различных сечений будет различным. Сказанное представля
ет собой zunотезу nJ1.0C'ICUX сечений предположение, оправды
ваемое общими правдоподобными соображениями о характере
возникающих перемещений.
Окончательным критерием приrодности любой rипоте
зы является опыт. Получив расчетную формулу, нужно пре
жде Bcero сопоставить результаты расчета с экспериментом,
и если между ними обнаруживается достаточно хорошее COOT
ветствие, rипотеза считается приемлемой.
Надо сказать, что задача о кручении стержня может быть
решена не только методами сопротивления материалов, но TaK
же и методами теории упруrости без принятия каких либо rи
потез, кроме предположения о непрерывности строения веще
ства. Решение, полученное этим путем, показывает, что Kpyr
лое поперечное сечение бруса действительно остается плоским
и поворачивается как жесткое целое. В поперечных сечениях
возникают только касательные напряжения.
Вернемся к стержню с KpyroBblM поперечным сечением,
наrруженному по торцам двумя моментами (см. рис. 2.9). В
поперечных сечениях стержня возникает постоянный крутя
щий момент
М" = 001.
Лвумя поперечными сечениями выделим из стержня эле
мент длиной dz, а из Hero в свою очередь двумя цилиндриче
скими поверхностями с радиусами р и р + dp элементарное
кольцо, показанное на рис. 2.11.
110
r#
ALJ
...."...1
8
Рис. 2.11
Правое торцевое сечение кольца поворачивается при KPy
чении относительно левоrо на уrол d'{J. Образующая цилиндра
АВ поворачивается при этом на уrол , и занимает положение
AB 1 . Отрезок ВВ 1 равен, с одной стороны, pd'{J, а с друrой
,dz. Следовательно,
d'{J
,=p .
dz
Уrол, представляет собой не что иное, как уrол сдвиrа цилин
дрической поверхности. Величину d'{J/dz обозначают обычно
через 8:
d'{J = 8,
dz
(2.4)
и называют относитеАЬНЫ..w YZJ1.O..w за'ICручиваниJl. Это уrол
взаимноrо поворота двух сечений, отнесенный к расстоянию
между ними. Величина 8 аналоrична относительному удлине
нию при растяжении /),,1/1. Вводя обозначение 8, получаем
, = р8.
По закону fYKa для сдвиrа
т = G8p,
(2.5)
rде т касательные напряжения, возникающие в поперечном
сечении бруса. Парные им напряжения образуются в продоль
ных плоскостях в осевых сечениях (см. рис. 2.11).
111
Рис. 2.12
Элементарные силы rdF (рис. 2.12) можно привести к
крутящему моменту МХ = J rpdF. Выполним интеrрирова-
F
ние для всей площади поперечноrо сечения Р. Подставив в
подынтеrральную функцию напряжение r из выражения (2.5),
получим МХ = С() J p 2 dF. Интеrрал J p 2 dF представляет со-
F F
бой чисто rеометрическую характеристику, измеряется в см 4
и носит название nОJ1.ярноzо .uo.ueHma инерции сечени.н:
J p 2 dF = J p .
F
Таким образом, получаем МХ = GJ p (), или
() = М Х . (2.7)
gJ p
Произведение GJ p называют жест1l:0стью стержня при 1I:py
'Чении. Если стержень имеет переменное сечение, то J p зависит
от z.
Через относительный уrол закручивания () леrко опреде-
лить и взаимный уrол поворота сечений <р. Соrласно выраже-
ниям (2.4) и (2.7),
(2.6)
d<p мх
dz GJ p '
(2.8)
112
Уравнение (2.8) и первое уравнение системы (Вll) при
J.L :f:. о дают систему nVYx 'уравнений равновеСИJ[ ПРJ[молиней
Horo стержня переменноrо сечения при кручении (J.Lz = М.:):
dM"
d + J.Lz = о;
z .
(2.9)
d'{J М" = О.
dz G J р
Система уравнений (2.9) позволяет определить внутренний
крутящий момент М" и уrол поворота сечения '{J для любых
J.LZ и rot z в зависимости от координаты z, например для случая
2 показанноrо на рис. 2.10.
Из уравнения. (2.8) получаем
1
J M"dz ( 2.10 )
'{J GJ'
о р
rде 1 расстояние между сечениями, для которых определяют
взаимный уrол поворота 'Р.
Если крутящий момент по длине стержня не изменяется,
М К = rot, а жесткость остается постоянной, то
rotl
'(J = GJ p '
Вернемся теперь к выражению (2.5).
получим
(2.11)
Исключив из Hero 8,
М"р
".
J p .
Таким образом, касательные напряжения в поперечном сече
нии распределены вдоль радиуса по линейному закону и име
ют наибольшее значение в точках, наиболее удаленных от оси
(рис. 2.13). При этом
(2.12)
МхРтах
"'тах = J
р
Величина
УХ!
Пр
Ртах
(2.13)
113
t тlz
JJ
Рис. 2.13
Рис. 2.14
называется ПОАllрНЫ.м. .м.о.м.енто.м. сопротив.1ени1l и измеряется
в см 3 . Окончательно имеем
М" )
Ттах = W . (2.14
11
Формулы (2.11) и (2.14) являются основными расчетными
формулами для кручения стержня с KpyroBblM поперечным ce
чением. Они справедливы как для сплошноrо, так и для полоrо
KpyroBoro сечения.
Определим теперь rеометрические характеристики сече
ния J p и W p . Пля этоrо подставим в выражение (2.6) вместо
dF площадь пояска 21rpdp (см. рис. 2.12). Если стержень имеет
сплошное KpyroBoe сечение, то
D/2
J p = 21t J p 3 dp,
о
r де D диаметр сечения, или
1rD4
J p = . (2.15)
32
Если же в стержне имеется внутренняя центральная полость
диаметром d (рис. 2.14), то
D/2
J p = 21r J p 3 dp,
d/2
114
или
7r п4 ( d4 )
J p = 32 1 п4 .
(2.16)
Соответственно этим выражениям определяем полярный MO
мент сопротивления W p (см. формулу (2.13)). Лля сплошноrо
сечения
'Кп 3
W p = 1"6"" О, 2п 3 ,
(2.17)
для кольцевоrо сечения (полый вал)
W p О, 2п 3 (1 : ). (2.18)
Таким образом, из выражений (2.11) и (2.15) видно, что
при заданном крутящем моменте уrловые перемещения вала
обратно пропорциональны четвертой степени диаметра. Что
же касается наибольшеrо напряжения, то оно, соrласно Bыpa
жениям (2.14) и (2.17), обратно пропорционально кубу диаме
тра п.
Касательные напряжения в поперечных сечениях стерж
ня направлены в каждой точке перпендикулярно текущему pa
диусу р. Из условия парности следует, что точно такие же
напряжения возникают и в продольных сечениях (рис. 2.15).
Наличие этих напряжений проявляется, например, при испы
тании на кручение деревянных образцов.
't
Рис. 2.15
Перево, как известно, обладает ярко выраженной анизо
тропией упруrих и прочностных свойств. llревесина имеет
сравнительно низкую прочность на скалывание вдоль волокон.
115
Поэтому разрушение дереВJIнноrо образца при кручении начи
нается с образования продольных трещин (рис. 2.16).
J»(
.. ........--;
.т
Рис. 2.16
Если двумя парами осевых и поперечных сечений Bыдe
лить из закрученноrо стержня элемент Аве п, показанный на
рис. 2.17, то на ero rранях будут обнаружены только касатель
ные напряжения. Следовательно, во всех точках стержня при
кручении возникает состояние чистоrо сдвиrа, как и при KPy
чении трубки. Здесь, однако, чистый сдвиr не будет OДHOpOД
ным, поскольку значение т изменяется по радиусу поперечноrо
сечения.
Из предыдущеrо параrрафа мы уже знаем, что если изме
нить ориентацию сечений, повернув их в плоскости сдвиrа на
450, то в новых площадках обнаруживаются только нормаль
ные напряжения, имеющие одинаковое с т значение. При этом
одно из них является растяrивающим, а второе сжимающим.
R.>1-r
d='t 1 d=1
A
Рис. 2.17
116
Соrласно сказанному, на rранях элемента A1B1C1Dl, BЫ
деленноrо из стержня при помощи винтовых сечений, прове
денных под уrлом 450 к образующим, возникают нормальные
напряжения, показанные на рис 2.17.
Наrлядной иллюстрацией этоrо может служить характер
разрушения хрупких образцов при кручении. Хрупкие MaTe
риалы разрушаются обычно по поверхности наибольших pac
тяrивающих напряжений. Если подверrнуть испытанию на
кручение образец из хрупкоrо материала, например чуrуна, то
разрушение произойдет по сложной винтовой поверхности, co
ответствующей максимальНЫМ растяrивающим напряжениям
(рис. 2.18).
Рис. 2.18
Наличие растяrивающих и сжимающих напряжений в Ha
клонных площадках при кручении можно наrлядно проиллю
стрировать и друrим способом. На поверхности цилиндра,
изrотовленноrо из пластичноrо материала (рис. 2.19), краской
было предварительно нанесено множество мелких кружочков.
При закручивании бруса кружки превратились в эллипсы с
rлавными осями, направленными под уrлом 450 к образующим.
По направлению больших осей эллипса произошло удлинение,
а вдоль малых осей сжатие.
<::S
&
%
Рис. 2.19
117
Рис. 2.20
Потенциальную энерrию деформации, накопленной стер-
жнем при кручении, можно определить аналоrично тому, как
это делали в случае растяжения. Рассмотрим участок закру-
ченнorо стержня длиной dz (рис. 2.20). Энерrия, накоплеННaJI
в этом элементе, равна работе моментов Мк, приложенных по
торцам:
1
dU = 2" MJl.d<p,
r де d<p взаимный уrол поворота сечений. Двойка, СТОЯЩaJI в
знаменателе, опять же является следствием Toro, что момент
М К меняется пропорционально d<p.
В полученное выражение подставляем d<p соrласно форму-
ле (2.8). Тоrда
d U = M;dz
2GJ .
р
Потенциальную энерrию во всем стержне определяем ин-
теrрированием выражения (2.19) по длине:
(2.19)
1 2
U = J MKdz
2GJ .
о р
Если момент М к по длине не меняется и жесткость постоянна,
то М к = !)J1 И
(2.20)
!)J12[
U = 2GJ .
р
Рассмотрим некоторые примеры.
118
При м е р 2.1. Bu переда.ет момент !Dt = 10000 Н'м. Tpe
буеТСJl подобрать размеры поперечноrо сечен.. BU& дл. двух случа.ев:
а) ДЛJl сплошноrо KpyroBoro сечени.; б) ДЛJl xpyroBoro сечеНИJl с отверсти
ем (d = 7D/8). Сравнить оба сечеНИJl по расходу метuла. Допускаемое
наПРJlжение [т] = 60 МПа.
Соrласно формуле (2.14), ДЛJl обоих сечений
W p = М" /[т] = 167 см 3 .
ДЛJl сплошноrо сечеНИJl, соrласно выражению (2.17),
D 3 = 167/0,2 = 835 см 3 ; D = 9,41 см.
ДЛJl полоrо сечеНИJl из выражеНИJl (2.18) получаем
D3 = 167 2 3
0,2 (1 7 /8 ) = 014 см ;
D = 12,6 см.
Расход металла пропорционален площади поперечноrо сечеНИJl. В первом
случае
F = 11' D 2 /4 = 69,6 см 2 ,
во втором
11' D 2 ( d2 ) 2
F = 4 1 D2 = 29,2 см .
Таким образом, полое сечение Jlвл.еТСJl более экономичным и в pac
сматриваемом случае (при d/ D = 7/8) дает более чем двукратное сниже
ние расхода металла.
о
Рис. 2.21
То, что полый вал JlВЛJlеТСJl более выrодным, чем вал сплошноrо ce
чеНИJl, JlСНО иэ рассмотреНИJl эпюры наПРJlжений в сечении вала (рис. 2.21).
В центральной части сплошноrо сечеНИJl материал наПРJlжен сравнитель
но мало и ero испольэование далеко не полно. ДЛJl сечеНИJl С отверстием
наПРJlжеНИJl распределены более равномерно (см. рис. 2.21) и степень ис
пользоваНИII материала повышаеТСII.
119
При м е р 2.2. Построить эпюры к:рутпцих моментов, напр..ений
и уrлов поворота дл. вала, пок&занноrо на рис. 2.22, а.
bJt.
.f!I
<::а
11
11
IJ
.тА
(JI(
Е
21
I
@ H)II
17 1.................
L1J1a II""""""'I' I
11 @ 8Лl 11.111.
z'/JIIt'r. ff ff ШJ
9 ЛI. 41 1I1I11II11111111I
170.201 1111111111111111 .l..1!L
17 1,501
l
11 ..!!f 10 J1Il .
f::\ 17 fiJp п ff !i .тl
tJ
Рис. 2.22
Система является один раз статически неопределимой. Поэтому CHa
чала раскрываем статическую неопределимость. Для этоrо отбрасываем
левую заделку и ее действие на вал заменяем моментом !тА (рис, 2.22, 6).
Этот момент определяется из условия, что поворот левоrо торцевоrо сече
ния относительно правоrо равен нулю.
Уrол поворота сечения А может быть выражен как алrебраичеСК8J(
сумма взаимных уrлов поворота торцевых сечений на участках АВ, ВС,
CD и DE.
Соrласно формуле (2.11), соответственно этим участкам получаем
!т,,2/ (!тА !т) 1 (!тА !т) 1 (!тА 5!т) 21 О
С} + С} + GJ' + GJ' ,
р р р р
120
rде GJ'P жесткость на участке с диаметром D, & GJ; жесткость на
участке с диаметром 2D. Очевидно,
GJ; = 16GJ'P'
УЧИТЫВёIJI :!то соотношение, находим
9
!Dt A = 17 !Dt.
Теперь леrко построить эпюру КРУТJlЩИХ моментов
(рис. 2.22, 6), а по формуле (2.14) определить rm&X во всех сечеИИJlХ ва-
ла (рис. 2.22, 2).
При рассмотрении построеиной эпюры наПРJlжений следует учиты
вать, что в зонах приложеНИJl внешних моментов имеет место отх.понение
действительноrо закона распреде.пеНИJl наПРJlжений в сечении от по.пучен-
Horo линейноrо. Однако, соr.пасно принципу Сен-Венаиа, эти отк.понеНИJl
НОСJlТ местный характер и практически не распростраНJlЮТСJl по оси за
пределы раССТОJlНИЙ ПОРJlдка диаметра сечеИИJl.
Находим уr.пы поворота сечений. На первом участке уrол поворота
сечеНИJl, расположенноrо на раССТОJlНИИ %1 от заде.llКИ,
!Dt A %1 9!Dt%1
V'z = GJ'P = 17GJ'P '
Эта зависимость изображаеТСJl ПрJlМОЙ, показанной на эпюре V'
(рис. 2.22, д). При %1/21 имеем
18!Dt1
V' = 17GJ'P .
На втором участке к этому уrлу прибаВЛJlем
(!Dt A !Dt) %2
GJ'P
rде %2 отсчитываем от .певоrо Kp&JI BToporo участха. Так по участкам
строим эпюру, показанную на рис. 2.22, д.
При м е р 2.3. ИмееТСJl система, показаНН&JI На рис. 2.23. Рычаrи
АВ и CD абсолютно жесткие. Между ними образован зазор 6.. Най
ти вертикальное перемещение точки приложеНИJl силы Р, если жесткости
валов 1 и II на кручение одинаковы и равны GJ'P'
При малой силе Р зазор 6. не перекрываеТСJl, и работает только вал
П. Искомое перемещение равно, очевидно, 6 = 'Ра, или, COr.llaCHO фОРМУ.llе
(2.11),
Ра 2 1
6 = GJ'P '
(2.21)
После тoro хак зазор закроеТСJl, система стаНОВИТСJl статически He
опреде.пимой. Пусть М. и М II хрутящие моменты, вознихающие в валах
121
t
C
r&:!
" }
t1i:
1
"
Рис. 2.23
Рис. 2.24
1 и П. Из условий равновеси.
М 1 + M I1 = Ра..
Уравнение пер мещений будет следующим:
a.CPI1 а.СРI = д,
или, соrласно формуле (2.11),
6
M I1 М 1 = 'а. GJ p .
ИС](ЛЮЧaJI Ml' находим
Ра. 6
M I1 = 2"" = 2la. GJ p .
Ис](омое перемещение
6 M l1 l PIa. 2 !
GJ а. 2GJ + 2'
р р
Выражение (2.21) применимо до значений 6, не превышающих д, Т.е.
(2.22)
при
Р < дGJ р
а.Ч .
Если сила превышает эту величину, перемещение следует опреде
ЛIIТЬ по формуле (2.22). На рис. 2.24 по](азана зависимость перемещеНИII
6 ОТ силЫ Р.
122
2.3. Кручение стерЖНJI
с HexpYI'JlblM поперечным сечением
Определение напряжений в стержне с некруrлым попереч
ным сечением представл.ет собой довольно сложнл о задачу,
которая не может быть решена методами сопротивления Ma
теРИaJIОВ. Причина заключается в том, что для некруrлоrо
сечения упрощающая rипотеза неизменности плоских сечений,
введенная ранее, оказывается неприемлемой. Сечения заметно
искривляются, В результате чеrо существенно меняется карти
на распределения по ним напряжений. На рис. 2.25 в качестве
примера показана форма закрученноrо стержня прямоуrольно
ro поперечноrо сечения. На поверхность предварительно была
нанесена мелкая. прямоуrольная сетка, которая деформирова
лась вместе с поверхностными частицами металла. Попереч
ные линии сетки заметно искривлены, следовательно, будут
искривлены и поперечные сечения.
1-..
Рис. 2.25
Таким образом, при определении уrлов сдвиrа необходимо
учитывать не только взаимный поворот сечений, но также и
местный перекос, связанный с их искривлением. Задача, KpO
ме Toro, резко усложняется тем, что для HeKpyr лоrо сечения
напряжения будут определяться в функции уже не одноrо He
зависимоrо переменноrо (р), а двух (х и у).
Выскажем общие соображения относительно законов pac
пределения напряжений в поперечных сечениях HeKpyr лой фор
мы, а затем приведем rOTOBble формулы, полученные методами
теории упруrости ПЛИ Ш!IШТОРЫХ, Н:iиоолее часто встре'lа,ю
щихся форм поперечных сечений.
123
Прежде Bcero, можно довольно просто установить, уто Ka
сательные напряжени. в поперечных сечениях для точек, pac
положенных йблизи контура, напра.влены по касательной к дy
re контура. Лействительно, положим, что в точке А (рис. 2.26)
касательное напряжение т вблизи контура направлено под He
которым уrлом к контуру. Разложим это напряжение на две
составляющие по касательной к контуру Tt И по нормали тn.
Рис. 2.26
Рис. 2.27
По условию парнасти на свободной поверхности стерж
ня должно возникнуть касательное напряжение T == Т n. Но
внеlllНЯЯ поверхность свободна от наrрузки и К ней никаких
внешних сил не приложено, кроме, разве что, сил атмосферно
ro давления. Таким образом, T == О. Следовательно, тn == О, И
касательное напряжение т вблизи контура направлено по Ka
сательной к контуру.
Совершенно аналоrично можно показать, что в случае,
если поперечное сечение имеет внешние уrлы, то в них Ka
сательные напряжения обращаются в нуль. Раскладывая Ha
пряжение т вблизи уrла (рис. 2.27) на две составляющие по
нормалям к сторонам yr ла, получаем напряжения Тl и Т2. Так
как парные им напряжения Tf и T равны нулю, то в нуль обра
щаются и напряжения Тl и Т2. Значит, вблизи внешнеrо yr ла
касательные напряжения в поперечном сечении отсутствуют.
124
h
Рис. 2.28
На рис. 2.28 пока.зана полученная методами теории упру-
rости эпюра касательных напряжений для бруса прямоуrоль-
Horo сечения. В уrлах, как видим, напряжения равны нулю,
а наибольшие напряжения возникают по серединам больших
сторон в точках А:
М К
ТА = Тmах = ь 2'
аа
(2.23)
в точках В
ТВ = 1/ Т mах,
(2.24)
rде а большая, а Ь малая сторона прямоуrольника.
Коэффициенты а и 1/ зависят от отношения сторон а/Ь
(табл. 2.1). Коэффициент fЗ также является функцией отноше-
ния а/Ь (см. табл. 2.1).
Таблuца 2.1. ЗначеНИJl коэффициентов 01, fJ и '1
а/Ь 01 fJ '1 а/Ь 01 fJ 'у
1 0,208 0,141 1,00 4 0,282 0,281 0,745
1,5 0,231 0,196 0,859 6 0,299 0,299 0,743
1,75 0,239 0,214 0,82 8 0,307 0,307 0,742
2 0,246 0,229 0,795 10 0,313 0,313 0,742
2,5 0,258 0,249 0,766 00 0,333 0,333 0,742
3 0,261 0,263 0,753
126
Уrловое перемещение
rotl
<р = G{3Ь З а'
Пля эллиптическоrо сечения (рис. 2.29) наибольшие Ha
пряжения возникают в точках А по концам малой оси:
2М к
ТА = Тmах = Ь 2;
1ra
(2.25)
в точках В
2М к
TB= Ь 2;
1r а
rде а и Ь полуоси эллипса.
А
Рис. 2.29
Уrловое перемещение для стержня эллиптическоrо сече
ния имеет следующее выражение:
rotl
1rа З Ь3
G
а 2 + ь2
Пля сечения, имеющеrо форму paBHocTopoHHero треуrоль
ника со сторонами а, наибольшие напряжения возникают по
серединам сторон и равны
Тmах = 20М к /а 3 .
<р=
Уrловое перемещение в этом случае
rotl
<р= vз 4'
G 80 а
126
Обобщая все эти формулы, можно отметить, что при KPy
чении
М"
Тта.х = w,, ;
rotl
ер= GJ,, '
(2.26)
(2.27)
а также
М" = GJ,,8. (2.28)
Потенциальная энерrии, накопленная закрученным брусом, co
rласно формуле (2.20), равна
1
и = J M"dz
2GJ" .
о
Здесь W" и J" rеометрические параметры, зависищие от фор
мы сечении. (табл.2.2). Пли круrлоro сечении W" и J" совпа
дают соответственно с W p и J p , Т.е. с полирным моментом
сопротивлении и полирным моментом инерции.
ТаБАuца 11.11. ВыражеИИJl ДЛJl вычислеВИJl reокетричесJCИХ
параметров W. в J.
(2.29)
Сечекие
W.
J.
1 3( d 4 ) D 4 ( )
О, 2D 1 d 4 32 1 D4
00:
:1:
=
:r
8
:11
=
8
2 =
u i
t:I pЬ a
OIЬ а
127
OICOH140HUe mоб..t. .2..2
Сечение W. J.
IJ
8 1I'03Ь 3
=- 1I'0Ь 2
i:!: 02 + 62
.. = 2
:s: :s:
5
=-
8
1,)
:21
:: =
8 8-
g S gj
= :s:
U 8 ::
а ,.Q vrз
1 03
2- 800
1 20
е
u
::
1 )
= 1 63
о: .!. 62"
3 "
:а 3
t
..
:s:
::
1,) ,.Q 11 ,
:r
8 t
u
:21
::
:: = .!. 63"
о: .!. 62"
Q
:: 3
3
::
Q 8
!--< U
,.Q
;j
t 4F*2
= J "
о:
2F* 6 m in
i:i
J
128
2.4. Краткие сведения
о пленочной (мембранной) аналоrии
в результате тoro, что аналитическое решение задачи о
кручении стержня с некруrлым поперечным сечением явли
етси достаточно сложным, возникла необходимость создании
косвенных методов исследовании этоrо вопроса. Среди таких
методов первое место занимает АСетод анаЛО2ий.
В задачах механики часто встречаютси случаи, коrда pe
шения совершенно различных по физической сущности задач
сводятся к одним и тем же дифференциальным уравнениим.
Тоrда между задачами может быть установлена аналоrия.
Можно, не решая уравнения, сказать, например, что между
переменными Хl, и Уl из одной задачи существует та же зави
симость, что и между переменными Х2 и У2 из друrой задачи.
Тоrда rоворят, что переменнаи Х2 ивляется аналоrом перемен
ной Хl, а У2 аналоrом переменной Уl' Часто бывает так, что
в первой задаче, не решая уравнений, трудно представить ce
бе связь между переменными Хl и Уl, а физическое содержание
второй задачи допускает простое и наrлядное толкование зави
симости Х2 от У2' В таком случае установленная аналоrии дает
возможность наrлядно представить себе закономерности, cy
ществующие в первой задаче. Так, в частности, обстоит дело
с задачей о кручении. Оказывается, что, независимо от формы
исследуемоrо сечения, задача о кручении стержня сводится к
тому же дифференциальному уравнению, что и задача о paB
новесии пленки, натянутой по контуру Toro же очертания и
наrруженной равномерно распределенным давлением. Анало-
rOM напряжения ивляется уrол, который составлиет касатель
ная к поверхности пленки с плоскостью контура, а аналоrом
крутищеrо момента объем, заключенный между ПЛОСКОСТЬЮ
контура и поверхностью пленки.
Характер деформации пленки под действием давлении
можно всеrда представить себе, если не точно, то, во всяком
случае, ориентировочно. Следовательно, всеrда имеется воз
можность представить и закон распределения напряжений при
кручении стержни с заданной формой сечении.
5 В. И. ФеодосЬеВ
129
Положим, например, что нужно установить закон распре
деления напряжений в сечении, показаином на рис. 2.30. Пред
ставим себе, что на заданный контур натянута пленка, KOТO
рая наrружена равномерно распределенным давлением. Изо
бразим несколько разрезов пленки. Соответственно уrлам Ha
клона пленки покажем ориентировочно распределение напРJ:-
жений по сечению (см. рис. 2.30).
Рис. 2.30
При помощи пленочной аНa.JIоrии можно получить не толь
ко качественные, но и количественные соотношеНИJ:. Пля это
ro используют специальный несложный приборl. Он состоит
из подвижноrо столика, на котором расположена плоская KO
робка с натянутой тонкой резиновой пленкой. Сверху пленка
вплотную накрыта крышкой с отверстием по форме исследу-
eMoro сечения. К нижней части коробки подведена трубка,
сообщающаяся со стеклянным манометром. Поднимая трубку,
повышают давление под резиновой пленкой, и последняя де-
формируется. Леrко провести обмер пленки посредством Bep
тикально установленноrо микрометра. Координаты точки на
пленке устанавливают продольным и поперечным перемеще
ниями столика. После Toro как определены перемещения, МО-
rYT быть найдены и уrлы наклона касательной к поверхности
пленки.
Если по форме исследуемоrо сечения изroтовить пробку
и плотно закрыть ею отверстие в верхней крышке, то пленка
1 Более подробно С конструкцией прибора можно ОЭНUОМИТЬСJ: В пре-
дыдущих иэдаНИJ:Х настоJ:щеrо учебвn:а.
130
распрямится и ЖИДКОСТЬ из объема под пленкой будет BЫтec
нена. По уровню жидкости в стеклянной трубке определяют
объем между проrнувшеiся пленкой и rоризонтa.JIЬНОЙ плос
костью. Этот объем, как уже roворилось, является aHa.JIoroM
крутящеrо момента.
В зависимости от ТОJIЩИны пленки и силы предваритель
Horo натяжения замеренные проrибы и объемы будут различ
ными. Чтобы ИСКЛЮЧИТЬ влияние жесткости пленки, OДHOBpe
мен но с исследуемым сечением на том же приборе производят
обмер пленки с KpyroBblM очертанием. Пля стержня KpyroBo
ro сечения жесткость и напряжения Mory'T быть определены
расчетным путем. Поэтому оказывается возможным, сопоста
вляя результаты замеров, найти требуемые характеристики
заданноrо сечения по характеристикам KpyroBoro сечения из
соображений пропорциональности.
Например, rеометрический параметр жесткости J x иссле
дуемоrо сечения (см. формулу (2.27)) можно определить из
соотношения
J x V
,
J p Vo
rде J p = 1r п 4 /32 полярный момент инерции Kpyra, п диа
метр KpyroBoro сечения; V, Vo объемы, оrраниченные плен
кой, для исследуемоrо и KpyroBoro сечений при одном и том же
давлении.
Аналоrично можно вычислить и reометрический пара
метр W x (см. формулу (2.26)):
W)( аОmв.х
W p аmв.х '
rne W p = 1r п 3 /16 полярный момент сопротивления KpyroBo
ro сечения; аmв.х, аОmв.х максимальные уrлы наклона Kaca
тельной к поверхности пленки ДЛЯ исследуемоrо и KpyroBoro
сечений, полученные замером при одинаковых объемах, orpa
ниченных пленкой.
Рассмотренная аналоrия не является единственной. Пля
задачи о кручении стержня MorYT быть предложены и друrие
аналоrии, связанные, например, с законами rидродинамики.
S.
131
в теории упруrости при решении некоторых з&д&ч используют
т&кже электрост&тические &на.лоrии, rде законы р&спределе
ния н&пряжений в ynpyroM теле устанавливают путем замер&
н&пряженности электрост&тическоro поля в ра.зличных точках
исследуемой обл&сти модели.
Современная техник& вообще широко использует ра.злич
ные а.на.лоrии. В тех случаях, коrд& в к&честве ана.лоr& исполь
зуют искусственно созда.нную схему, метод &на.лоrии на.зыв&
ют м.одеАирование.м.. Этим методом исследуют мноrие слож
ные инедоступные непосредственному на.блюдению процессы,
т&кие, к&к, н&пример, ста.билизция р&кеты в полете. Анало
r&ми yr лов поворот& р&кеты в простр&нстве являются в этом
случае электрические потенциа.лы в определенных узлах спе
циа.льно на.бр&нной электронной моделирующей уст&новки.
2.5. Кручение TOHKOCTeHHoro стержня
В пр&ктике м&шиностроения, и особенно с&молетострое
ния, часто возникает необходимость расчета на кручение так
называемых тонкостенных стержней. Типичные формы прока
танных, rHYTblX, тянутых и прессованных профилей показаны
на рис. 2.31. X&paKTepHO rеометрической особенностью ТOH
костенных стержней является то, что их толщина существенно
меньше прочих линейных размеров.
[
t
I
+
2
J
+
I
s
о
Рис. 2.31
7
132
Тонкие профили разделяются на замкнутые и открытые.
Так, первые четыре профиля, показанные на рис. 2.31, явля-
ются открытыми, а последние три замкнутыми.
Характер распределения напряжений в поперечном сече
нии TOHKocTeHHoro стержня проще Bcero установить при помо-
щи пленочной аналоrии. Представим себе вырезанное в плос
кой плите отверстие по форме профиля и натянутую на нем
пленку. Если приложить К пленке равномерно распределенную
наrрузку, то пленка деформируется, но по разному, в зависи
мости от Toro, замкнутым или открытым является профиль.
Это различие иллюстрирует рис. 2.32. В случае замкнутоrо
профиля область внутри контура не связана с внешней обла-
стью и под действием давления смещается (см. рис. 2.32,6).
Это и предопределяет качественное различие между формами
пленки для случаев замкнутоrо и OTKpblToro профилей.
"
t!
{J
ЛАенк(/ f]
НапряжеНUR
НапРllжеНUII
Пленка
(/
tf
Рис. 2.32
Пля OTKpblToro профиля: пленка имеет наибольшие yr лы
наклона по концам нормальноrо отрезка (см. рис. 2.32, а), при
чем примерно в середине толщины происходит смена знака
уrла наклона. С большой степенью точности можно принять,
что напряжения по толщине незамкнутоrо профиля распреде
лены линейно.
В случае замкнутоrо контура деформированная пленка
образует поверхность примерно постоянноrо уrла подъема
(см. рис. 2.32, 6), откуда следует, что распределение напря
жений по толщине профиля близко к равномерному.
lЗ3
Перейдем к составлению ра.счетных формул. Начнем с
OTKpblToro ПРОфИЛJl. Достаточно очевидно, что форма плен
ки (см. рис. 2.32, а), а следовательно, и наПРJlжеНИJl в стержне
сильно не изменятся, если профиль сечеНИJl ра.сПрJlМИТЬ. Ина
че roворя, напряжения в криволинейном открытом профиле бу-
дут примерно та.в:ими же, как и в ПрJlМОМ. Но В этом случае
MorYT быть использованы расчетные формулы, приведенные
выше для прямоуroльноrо сечеНИJl с большим отношением сто-
рон.
Обращаясь к формулам (2.23), (2.25) и табл. 2.1, при
а/Ь = 00 получаем
3Мж
1'mах = 2a ' (2.30)
30011
ер = G6 З s ' (2.31)
r де 6 толщина профиля (меньшая сторона прямоуrольника);
.s длина контура поперечноrо сечения (большая сторона пря
моуrольника) .
Полученные таким образом расчетные формулы являют
ся общими, Т.е. не зависят от формы профиля, если только
последний может быть развернут в прямоуrольник.
В случае, если тонкостенный незамкнутый профиль явля-
ется составным, как это, например, показано на рис. 2.33, и не
может быть развернут в вытянутый прямоуrольник, поступа
ют следующим образом: момент МЖ рассматривают K<fк сумму
моментов, возникающих в отдельных участках. Torna, соrлас
но формуле (2.31),
9л = МЖ = ( al + б S2 + ... + б s,,)
и
39Лl
ер = G ( 1>3 /;3 3 ) .
и181 + и2а2 + . . . + О"а"
(2.32)
При помощи пленочной аналоrии леrко установить, что
наибольшие напряжения возникают на участке с наибольшей
толщиной бmах. Пля этоrо отдельно B3J1Toro участка, которому
134
...
-.t'
Рис. 2.33
Рис. 2.34
мы припишем номер i, справедливы формулы (2.30) и (2.31):
3MJ(.i 3MJ(.i
'ri = 'rmax = --т-----; <.р = ,
6 i 3i G6 i 3i
rде MJ(.j ДОЛЯ крутящеrо момента, соответствующеrо i-MY
учаСТКуj <.р уrловое перемещение, единое для всех участков.
Исключая из этих выражений M"i, находим
6тах
'ri = 'rmax = <.pG 1""'
или, учитывая выражение (2.32), получаем
3MJ(.6 max
'Т"mах= ( з 3 3 ) .
6131 + 6232 + . . . + 6n s n
(2.зЗ)
Изложенный метод определения напряжений в незамкну-
том профиле является приближенным, поскольку не учитыва-
ются повышенные местные напряжения во внутренних yr лах
ломаноrо профиля. Чем меньше радиус закруrления во вну-
тренних уrлах, тем больше местные напряжения. Это наrляд
но можно проиллюстрировать при помощи пленочной аналоrии
(рис. 2.34). Местный уrол наклона а пленки в точке А больше,
чем в остальных точках BHYTpeHHero контура. Во избежание
местных перенапряжений внутренние уrлы в профилях выпол-
няют cKpyr ленными.
136
Рассмотрим теперь кручение стерЖНЯ, имеющеrо попе
речное сечение в форме замкнутоrо ТOHKocтeHHoro профиля
(рис. 2.35).
Рис. 2.35
Здесь, в отличие от OTKpblToro профиля, напряжения pac
пределены по толщине равномерно. Выделим из стержня эле
ментарную призму длиной dz. Размер призмы в направлении
дуrн контура, Т.е. расстояние между точками 1 и 2, является
произвольным. Пусть толщина контура в точке 1 будет б}, а в
точке 2 б2. Соответственно через т}, и Т2 обозначим напряже
ния в поперечном сечении. В продольных сечениях возникают
парные напряжения T = т} и T = Т2.
Составим для выделенноrо элемента уравнение paBHOBe
сня, спроектировав все силы на направление оси бруса. Оче
видно,
т}б}dz = T2b2dz.
Так как точки 1 и 2 взяты произвольно, то тб = const.
Таким образом, произведение тб по длине замкнутоrо KOH
тура не изменяется. На участках, имеющих меньшую толщи
ну, напряжения будут соответственно большими.
Выразим крутящий момент через напряжения т. Для
этоrо возьмем на контуре элементарный участок длиной ds
(рис. 2.36). Момент силы Tbds относительно произвольно взя
той точки О равен TbdslOAI. Тоrда
Мх = J /OA/ds.
136
't
А
BdsC
Рис. 2.36
Но произведение тб по длине дуrи контура не изменяется, по
этому
М К = тб J 10 Alds.
8
Произведение 10Alds представляет собой удвоенную площадь
треуrольника О ВС, а интеrрал от этоrо произведения по длине
замкнутоrо контура дает удвоенную площадь, оrраниченную
средней линией контура. Обозначим эту площадь через Р* в
отличие от Р. Таким образом,
М К = тб2F*.
Наибольшее напряжение
М К
Ттах == 2 P* . .
Vmш
(2.34)
Остается определить уrловое перемещение для TOHKO
CTeHHoro стержня замкнутоrо профиля поперечноrо сечения.
Сделаем это путем сопоставления потенциальноЙ энерrии, BЫ
раженной через напряжение т, с потенциальной энерrией, вы-
раженной через внешний момент rot. Обратимся к выражению
удельной потенциальноЙ энерrии при сдвиrе (2.з)
т 2
ио = 2G '
Энерrия, накопленная в элементарном объеме с размерами
ds, dz,б, равна
т 2
dU = 2G bdzds.
137
Это выражение ДОЛЖНО быть проинтеrрировано по длине
стержня 1 и по дуre замкнутоro контура. Если стержень явля
ется однородным по длине, то
и = J 2 d = lт 2 б 2 J ds
2С т v s 2С б .
s s
Последний интеrрал зависит от закона изменения толщи
ны по дуrе контура и является rеометрической характеристи
кой сечения. Учитывая, что
тб = МХ = rot
2Р* 2Р* '
получим
rot 2 1 J ds
и = 8ср*2 Т'
s
Однако энерrию и можно выразить как работу внешнеrо
момента rot на уrловом перемещении <р:
1
и = rot<p.
2
Приравнивая оба выражения для и, находим
rotl J ds
1{) = 4ср*2 Т'
s
Если толщина б по дуrе контура не меняется, то
rot ls
<р = 4ср*26'
(2.35)
r де s длина замкнутоrо контура.
Для различных сечений rеометрические параметры W x и
J x , входящие в формулы напряжений и уrлов поворота
МХ rotl
Ттах = W x ' <р= GJ x '
приведены в табл. 2.2.
138
При м е р 2.4. Оцределить напр..ение и уrловое перемещение
в тонкостенной трубе, 'Свернутой из листа, ДЛ. двух вариантов: а) краа
листа свободны (рис. 2.37, (1), б) краа листа склепаны (рис. 2.37, 6). Сопо-
ставить напр.жени. и уrлы поворота сечений.
J'Л
Рис. 2.37
В первом варианте профнль поперечноrо сечеНИII следует рассматри
вать как открытый. Пренебреru участком ПрОфИЛII в зоне соединеНИII
краев внахлестку, соrласно формулам (2.30) и (2.31), получаем
3!7Л
Та = 'A"D6'J ;
3 !7Лl
'{Ja = а'А"п6 3 '
Во втором варианте профиль IIВЛJlетеll замкнутым. Соrла.сно формулам
(2.34) и (2.35), имеем
Тб =
!7л
D 'J '
2 6
4
!7Лl'А" D
'{Jб = 'J
4а ( 'А" 'J ) 6
ДЛII более наrЛlIдноrо сопоставлени. рассмотрим отиошени. наПРllжении
и уrлов:
Та
зп
26:
'{Ja = 3 D'J
'{Jб 4 '
Тб
Таким образом, отношение наПРllжений имеет значение ПОрllдка п/6,
а отношение уrлов поворота ПОрllдка п 2 /62. Но, соrласно определению
тонкостенности, D MHoro больше, чем 6. Следовательно, замкнутый про
филь оказываете. существенно более прочным и в еще большей степени
жестким, чем такой же нез&МкнутыЙ.
139
Этот вывод Jlвл.еТСJl общим. Внешний момент, приложенный к
стержню С замкнутым контуром сечени., уравновешиваете. моментами
внутренних сил с длиной плеча ПОРJlдка поперечных размеров сечени., 11
для oTKpblтoro ПрОфНЛJl ПОрJlдка толщины. Отсюда следует, что ка.са.--
тельные наПРJlжеНИJl в открытом профиле будут во столько раз больше,
чем в замкнутом, во сколько поперечные размеры сечеННJI больше ero тол
щины.
При м е р 2.5. При заданном моменте !D1 и rеометрических размерах
трубы, рассмотренной в предыдущем примере, найти усилие, ПРИХОДJlще
еси на одну заклепку (см. рис. 2.37, 6).
ДВУМJI продольными сечеНИJlМИ выдеЛJlем из трубы клепаный узел
(рис. 2.38). Сила, деЙСТВУЮЩaJI на заклепки вдоль образующей, равна
Р = тБl, но
т=
!D1
п 2 '
2 б
4
следава тел ьно,
Р = 2!D11
1fD2 .
Если число заклепок равно ", то сила, ПРИХОДИЩaJIСИ на одну захлеп
ку, будет равна Р/п.
Рис. 2.38
Из силовой схемы, представленной на рис. 2.38, видно, что при OT
сутствии заклепок концы листа получили бы смещение вдоль образующей.
Поперечное сечение вышло бы при этом из своей начальной плоскости и
проиэошла бы, как rоворят, деП.llанацuнсечения. Оrраничение депланации
приводит к повышению жесткости И прочности стержни.
В тех случаях, коrда из эксплуатационных, монтажных или KOH
структивных соображений ПРИХОДИТСJl идти на применение незамкнутых
профилей, стараЮТСJl наложить MeC11lble оrраиичеНИJl на депланацию.
140
. -€
.9'л
Рис. 2.39
Рис. 2.40
Так, на рис. 2.39 показан стержень с тонкостенным незамкнутым профи
лем, в котором при помощи жесткой заделки и ДВУХ перемычек оrраничена
депланаЦИJl. Кручение в таких УСЛОВИJlХ носит на.звание стеснеННО20 к:py
ченшr.
При м е р 2.6. К тонкостенному стержню KopblTHoro ПрОфИЛJl
(рис. 2.40) приваривают стержень с уrловым профилем. Определить, во
сколько раз увеЛИЧИТСJl жесткость стеРЖНJI на кручение и во сколько раз
при том же моменте СНИЗJlТСJI наПРJlжеНИJl.
Дли KopblTHoro ПрОфИЛJl формула (2.32) дает
3 !1Jtl
'" = С,Р(2Ь + h)'
Дли COCTaBHoro ПрОфИЛJl по той же формуле получаем
3 !1Jtl
'" = G [зь,р + (26)3 h]'
Следовательно, жесткость после приварки уrолка увеЛИЧИТСJl в
(3Ь + 8h)/(2b + h) раз. Соrласно формуле (2.31), ДЛJl корытноrо профи
ли
3!1Jt
т= 6 2 (2b+h)'
а дли COCTaBHoro
3!1Jt . 26
т=
зМ2 + (26)3 h .
Следовательно, после приварки уrолка наПРJlжеНИJl уменьшаТСJI в 0,5 (3Ь+
Hh)/(2b + h) раз.
141
rлава з
rЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ПОПЕРЕЧНЫХ СЕЧЕНИЙ СТЕРЖНЯ
3.1. Статические моменты сечения
При решении задач, связанных с изrибом, возникает необ
ходимость оперировать некоторыми rеометрическими характе-
ристиками поперечных сечений стержня. Эти характеристики
применяются в основном при решении задач изrиба и в силу
CBoero узкоrо прикладноrо значения в общем курсе rеометрии
не изучаются. Их рассматривают обычно в курсе сопротивле-
ния материалов. Настоящая rлава и посвящена этому вопросу.
Возьмем некоторое поперечное сечение стержня (рис. 3.1).
Свяжем ero с системой координат х, у и рассмотрим два сле
дующих интеrрала:
S х = J ydF;
F
Sy = J xdF.
F
(з.1)
Каждый из этих интеrралов представляет собой сумму про-
изведений элементарных площадей dF на расстояние до соот-
ветствующей оси (х или у). Первый интеrрал называется cтa
mUЧfС7СUм. м.ом.енmоАС сеченu'н относительно оси х, а второй
142
!/
:::..
о
.r
Рис. 3.1
.r
х,
Xz
OOC::I
Рис. 3.2
статическим моментом сечения относительно оси У. Статичес
кий момент измеряют в см 3 или мм 3 .
При параллельном переносе осей статические моменты из
меняются. Рассмотрим две пары параллельных осей %1, Уl и
Х2, У2' Пусть а и Ь расстояния между осями :1:1 и %2, Уl и У2
соответственно (рис. з.2). Положим, что площадь сечения F
и статические моменты относительно осей :1:1 и Уl, Т.е. SX1 и
SYl' заданы. Требуется определить SX2 и SY2'
Очевидно, Х2 = %1 а, У2 = Уl Ь. Искомые статические
моменты будут равны
SX2 = J (У! Ь) dF;
F
или
SY2 = J (Хl а) dF,
F
SX2 = SX1 ЬР; SY2 = SY1 аР.
Таким образом, при параллельном переносе осей стати
ческий момент изменяется на величину, равную произведению
площади F на расстояние между осями.
Рассмотрим более детально, например, первое из получен
ных выражений:
SX2 == SX1 ЬР.
Величина Ь может быть любой: как положительной, так и OT
рицательной. Поэтому ее всеrда можно подобрать (причем
143
единственным образом) так, чтобы произведение ьр было paB
но SX1' Тоrда статический момент SX2' относительно оси Х2
обращается в нуль.
Ось, относительно которой статический момент равен HY
лю, называется центра.л.ьной. Среди семейства пара.л:лельных
осей она является единственной, и расстояние до этой ОСИ от
некоторой, произвольно взятой, оси Хl равно
Ь = УС = SX1 . (з.2)
F
Аналоrично для друrоrо семейства параллельных осей
SY2
а = Хс = Р'
(з.3)
Точка пересечения центральных осей называется центром
тяжести сечения. Путем поворота осей можно показать, что
статический момент относительно любой оси, проходящей че
рез центр тяжести, равен нулю.
Нетрудно установить тождественность данноrо определе
ния и обычноrо определения центра тяжести как точки прило
жения равнодействующих сил тяжести. Если уподобить pac
смотренное сечение однородной пластинке, то сила тяжести
пластинки во всех точках будет пропорциона.л:ьна элементар
ной площади dF, а момент сил тяжести относительно HeKOTO
рой оси статическому моменту. Этот момент относительно
оси, проходящей через центр тяжести, равен нулю. В нуль
обрашается, следовательно, и статический момент относитель
но центральной оси.
Выражения (з.2) и (з.3) дают возможность определить по
ложение центра тяжести, если найдены статические моменты,
или, наоборот, найти статические моменты, если известно по
ложение центра тяжести.
Рассмотрим простейшие примеры.
При м е р 3.1. Найти, на каком раССТОIIНИИ от основаНИII распо--
ложен центр Тllжести треуrольника (рис. з.з).
Сначала определим статический момент треуrольника относительно
оси Хl:
S:Z:l == J y 1 dF.
F
144
9/ !J
:5i ох
О .:Е/
Рис. З.З
Запишем выражение ДЛJl элементарной площади: dF = с dY1. Из подоБИJl
h У1
треуrольников получаем с = ь , rде Ь основание треуrольника; h
h
ero высота.
Таким обраэом,
h
SZ:I = J(h У1) Y1 d Y1.
о
После интеrРИРОВ&НИJl находим SZ:I = bh 2 /6. РаССТОJlние от основаНИJl
треуrольника до центра ТJlжести
(3.4)
SZ:I bh 2 /6 h
Ус = F = bh/2 = 3"
(см. рис. з.з).
При м е р 3.2. Определить положение центра ТJlжести сложноrо
COCTaBHOI'O сечеНИJl (рис. 3.4).
Разбиваем сечение на три простейшие фиrуры: треуrольник, ПрJl
моуrольник и полукруr. Выбираем произвольную систему осей 2:1, У1 И
опредеЛJlем координаты центров ТJlжести состаВЛJlЮЩИХ сечение фиrур.
у треуrольника центр ТJlжести С 1 наХОДИТСJl на раССТОJlНИИ 1/3 высоты
от основаНИJl. ПЛJl ПРJlмоуrольник& положение центра ТJlжести С2 опре
деЛJlеТСJl пересечением средних линий. У полукруrа центр ТJlжести С Э
расположен на оси симметрии н& р&ССТОJlНИИ 4R/(3?r) от вертикальноrо
диаметра (см. рис. 3.4).
Последнее выражение (тому, кто не забыл, чему равен объем ша
ра) удобнее Bcero получить на основании теоремы rюльдена. Bpa.tЦa.JI по
лукруr относительно диаметра, получаем тело врa.tЦеНЮI сферу, объем
которой равен произведению дуrи 2?rC на площадь ПОЛУКРУl'а:
4 3 11' R 2
з'Jl'R = 2'J1'CT'
откуда
4R
C= .
З'JI'
145
!Jf
50
10
Рис. 3.4
Определяем статический момент составной фиrуры хах сумму CTa
тических моментов составляющих фиrур:
B:r:l = Р1Уеl + Р 2 Уе, + FЗУез,
Таким образом, находим
1 202
Вх 1 = 60 . 30 . 10 + 30 . 60 . 30 + 1r 40 = 88100 мм З ,
2 2
1 202 ( 4 . 20 )
Ву 1 = 2" 30 . 60 . 20 + 30 . 60 . 15 + 1r""'2 30 + ---з;--- =
= 33200 мм З .
Площадь составной фиrуры равна
F = 60 . 30 + 30 . 60 + 1r . 202 = 3330 мм 2 .
2 2
Искомые координаты центра тяжести в системе осей 2:1, Уl имеют
следующие значения:
ХС = ВУl / F = 33200/3330 = 9,97 мм;
Уе = ВХl / F = 88100/3330 = 26,5 мм.
3.2. Моменты инерции сечения
В дополнение к статическим моментам рассмотрим еще
три следующих интеrрала:
J x == J y 2 dFj
F
J y == J x 2 dFj
F
J 2:У == J xydF,
F
(з.5)
146
rде по прежнему через х и у обозначены текушие координаты
элементарной площадки dF в произвольно взятой системе KO
ординат хОу (см. рис. з.1). Первые два интеrрала называются
осевы.uи .uo.ueHma.uu инерции се"ени... относительно осей х и у
соответственно. Третий интеrрал называется центробежны.u
.uo.ueHmo.u инерции се"ени... относительно осей х, у. Измеряют
моменты инерции в см 4 или мм 4 .
Осевые моменты инерции всеrда положительны, посколь-
ку положительной считается площадь dF. Центробежный MO
мент инерции может быть как положительным, так и отрица
тельным, в зависимости от расположения сечения относитель
но осей х, у.
Выведем формулы преобразования моментов инерции при
параллельном переносе осей. Для этоrо снова обратимся к
рис. 3.2. Будем считать, что нам заданы моменты инерции
и статические моменты относительно осей х 1, Уl. Требуется
определить моменты инерции относительно осей Х2, У2:
J X2 = J y dFj J Y2 = J x dFj J X2Y2 = J X2Y2 dF .
F F F
Подставляя сюда Х2 = Хl а и У2 = Уl Ь, находим
J X2 = J (Уl b)2dF; J Y2 = J (хl a)2dFj
F . F
J X2Y2 = J (Хl а)(Уl Ь) dF.
F
Раскрывая скобки, имеем, соrласно обозначениям (з.1) и (з.5),
J X2 = J X1 2ЬВ Х1 + ь 2 F;
J Y2 = J Y1 2аВ У1 + а 2 Р; (з.6)
J X2Y2 = J X1Y1 аВ Х1 ЬВ У1 + аЬР.
Если оси хl И Уl центральные, то В Х1 = В У1 = О, И
полученные выражения упрощаются:
J X2 = J X1 +ь 2 Р; J Y2 = J Y1 +а 2 Р; J X2Y2 = J X1Y1 +аЬР. (з.7)
147
Следовательно, при параллельном переносе осей (если одна из
осей централЬНaJI) осевые моменты инерции изменяются на
величину, равную произведению площади сечения на квадрат
расстояния между осями.
Из первых двух формул (3.7) следует, что в семействе
параллельных осей минимальный момент инерции получает
ся относительно центральной оси (а = О или Ь = о). Поэтому
леrко запомнить, что при переходе от центральных осей к He
центральным осевые моменты инерции увеличиваются, и Be
личины а 2 F и ь 2 F следует к моментам инерции прибавлять, а
при переходе от нецентральных осей к центральным вычи
тать.
1J1 !I,
I2
х,
Рис. 3.5
При определении центробежноrо момента инерции по по
след ней из формул (3.7) следует учитывать знак величин а и
Ь. Можно, однако, и сразу установить, как изменяется значе
ние J xy при параллельном переносе осей. Пля этоrо следует
иметь в виду, что сечения, находящиеся в 1 и 111 квадрантах
системы координат ХIСУl (рис. з.5), имеют положительные,
а сечения, находящиеся в 11 и IV квадрантах, отрицатель
ные значения центробежноrо момента. Поэтому при переносе
осей проще Bcero устанавливать знак слаrаемоrо аЬР в COOT
ветствии с тем, какие из четырех площадей увеличиваются, а
какие уменьшаются. Например, если от центральных осей
Xl, Уl (см. рис. 3.5) следует перейти к осям Х2, У2, то видно,
что в результате TaKoro переноса резко возрастает площадь
IV квадранта, следовательно, момент инерции уменьшается, и
произведение аЬР из момента J Ж17 /1 следует вычесть.
148
Приведем примеры определения моментов инерции про
стейших сечений относительно характерных осей.
При м е р 3.3. Найти момент инерции пр....оуrольника с OCHOBa
нием Ь и высотой h. относительно основаНИJ[ и относительно центральной
оси, параллельной основанию (рис. з.6).
-с:::
!/, !I
О
.I
О, h Х,
Рис. 3.6
Момент инерции относительно оси %1 равен
h
J:z:, = J y dF = J y bdY1'
F О
или
J:z:,
bh 3
=з"
Воспользовавшись формулой переноса (з.7), найдем момент инерции
относительно центральной оси:
J:z: = J:z:, ( YP,
bh 3
или J:z: = 12'
При м е р 3.4. Найти момент инерции paCCMOTpeHHoro ранее
треуrольника (см. рис. 3.3) относительно основаНИJ[ и относительно цeH
тральной оси, параллельной основанию.
Чтобы не ПОВТОРJ[ТЬ выкладок, вернемс.. к выражению (3.4) ДЛJ[ CTa
тическоrо момента треуrольника и заменим величину У1, СТОJ[ЩУЮ под
знаком интеrрала, на y . Тоrда
h
J ж \ == XJ(h Yl)Y dY11
О
bh 3
откуда J:Z: 1 12'
149
ИСПОЛЬЗУJl формулу переиос& (3.7), запишем момеит ииерции относительио
центральной оси % (см. рис. 3.3):
J% == J%l ( y Р,
Ь1&3
или J% == .
36
При м е р 3.5. Определить центробежный момент инерции ПрllМcr
уrольноrо треуrольник& относительно осей, совп&д&юIЦИХ с ero к&тет&ми
(рис. з.7).
!I, !I
:::;:;-
z
..с::
.,.,.
о,
х,
h
Рис. З.7
Выделим элемент площ&ди d%ldl/ 1 И, пол&ru величину 1/1 неизмен
ной, найдем центробежный момеит полоски АВ:
с
J с2
J%1111 (АВ) == IIl d l/l %ld%1 == 1/1dI/1'2'
о
Но
ь
c==h(1& l/l),
поэтому
ь 2 2
J%1111(AB) == 21&2 (1& 111) 1/ 1 d1/ 1 .
Проинтеrрируем это выражение по 1/1 от НУЛII до 1&:
h
ь 2 J 2
J%1111 == 21&2 (h 1/1) 1/ 1 dl/ 1
О
или
ь 2 h 2
J%1111 == .
150
Перейдем к центра.л:ьной системе координат жС, (см. рис. з.7), При
переходе к этим ОСIIМ увеличиваЮТСII площади во 11 и IV квадрантах, дa
ющне отрицательные значеНИII центробежноrо момеита. Следовательно,
соrласно формуле переноса (з.7), момент 1%1111 умеНЬШИТЬСII 'на произве
дение abF:
h Ь
J% II == J% 11 F
1 1 3 3 '
b 2 h 2
или J%II == 72'
llентробежный момент инерции относительно осей ж, JI оказа.л:СII, к&к ви
дим, отрицательным.
3.3. rлавные оси и rлавные моменты инерции
Посмотрим, как изменяются моменты инерции при пово
роте осей координат. Положим, даны моменты инерции HeKO
Toporo сечения относительно осей х, у (не обязательно цeH
тральных). Требуется определить J'U, J tJ и J'UtJ моменты
инерции относительно осей и, v, повернутых относительно пер
вой системы на уrол а (рис. 3.8).
()
Рис. 3.8
Так как проекция ломаной линии О Аве равна проекции
замыкающей, находим:
и = ysina + xcosaj
v = у cos а х sin а.
Исключим и и v в выражениях моментов ннерции:
J и = J v 2 dP;
F
J tJ = J tt 2 dP;
F
J'UtJ = J ttvdF.
F
151
Тоrда
J u = j(yCOSo. xsino.)2dFj
F
J v = J (у sin 0.+ х сов 0.)2dF;
F
J uv == J (у сов а х sin о.)(у sin 0.+ х сов o.)dF,
F
откуда
J u = J% cos 2 а J%y sin 20. + J y sin 2 о.;
J v = J% sin 2 0.+ J%y sin 20. + J y cos 2 о.; (з.8)
J% J y .
J uv = J%y cos 20. + 2 sш 20..
Рассмотрим два первых уравнения (з.8). Складывая их
почленно,ПОЛУЧИМ
J u + J v == J% + J y == j(y2 + x2)dF.
F
Таким образом, сумма осевых моментов инерции относительно
двух взаимно перпендикулярных осей не зависит от уrла а и
при повороте осей остается постоянной. Заметим при этом,
что
х2 + у2 = р2,
rде р расстояние от начала координат до элементарной пло
щадки (см. рис. з.8). Таким образом,
J% + J y == J p ,
rде J p уже знакомый нам полярный момент инерции:
J p == j p 2 dF,
F
значение KOToporo, естественно, не зависит от поворота осей
(з.9)
Х, у.
152
При помощи выражения (з.9), в частности, леrко опре
делить осевой момент инерции Kpyra относительно диаметра.
Так как в силу симметрии J x = J y , получаем J x = J y = Jp/2,
но, как известно, J p = 1r п 4 /32, следовательно, для Kpyra
1rD 4
J x = J y = м'
с изменением уrла поворота осей о значения моментов J'U
и J v меняются, но их сумма остается неизменной. Следова
тельно, существует такое о, при котором один из моментов
инерции достиrает cBoero максимальноrо значения, в то время
как друrой момент инерции принимает минимальное значение.
Пифференцируя второе выражение (з.8) по о и приравни
вая производную нулю, находим
2J xy
tg20 = J J ' (з.10)
у х
При этом уrле о один из осевых моментов будет наибольшим,
а друrой наименьшим. Одновременно центробежный момент
инерции J'Uv обращается в нуль, что можно леrко установить
из третьей формулы (з.8).
Оси, относительно которых центробежный момент инер
ции равен нулю, а осевые моменты принимают экстремальные
значения, называются 2J1авны.ми ося.ми. Если они к тому же
являются центральными, то тоrда они называются 2Аавны.ми
цеитраJ1.ьиы.ми о ся.м и. Осевые моменты инерции относитель
НО r лавных осей называются 2Аавны.ми .мо.мента.ми инерции.
Определим их. Пля этоrо первые две формулы (з.8) перепи
шем в виде
J u = Jz + J y
2
J v = J x + J y
2
J y J x
2
J y Jz
+ 2
cos 20 JZy sin 20;
cos 20 + J zy sin 20.
Учитывая, что
cos 20 =
1
J 1 + tg 2 20
и
sin 20 =
tg20
J l+tg 2 20'
153
исключаем при помощи выражеНИJ[ (з.10) уrол 0:. Тоrда
J mах = J х + J у ::1:
min 2
( J y Jx ) 2 J 2
2 + ху.
(з.11)
Верхний знак соответствует максимальному моменту инерции,
а нижний минимальному. После TOro как сечение вычерчено
в масштабе и на чертеже показано положение rлавных осей, He
трудно rлазомерной оценкой установить, которой из двух осей
соответствует максимальный, а которой минимальный MO
мент инерции.
Если сечение имеет ось симметрии, то эта ось, очевидно,
всеrда будет rлавной (рис. з.9). Центробежный момент инер
ции сечений, расположенных по одну сторону от оси, равен
моменту сечений, расположенных по друrую сторону оси, но
противоположен ему по знаку. Следовательно, J xy = О и оси х
и у являются r лавными.
..с::
!J
.х
Рис. 3.9
Рис. 3.10
Рассмотрим примеры определения rлавных осей и rлав
ных моментов инерции.
При м е р З.б. Определить положение rлавных центра.льных осей
и rлавных моментов для прямоуrольноrо треуrольниха, покаэанноrо на
рис. З.10.
Пля центральных осей, пара.ллельных катетам, имеем J ж = ЬЛ 3 /Зб,
J y = hЬ 3 /З6, J жу = ь2 л 2 /72. Соrласно формуле (з.10), находим tg 2а =
bh
= h 2 Ь 2 ' Если h = Ь. то а = 450, и rлавнu ось совпадает с осью
154
симметрии раШlобедренноro треуroльника. Из формулы (з.11) следует,
что
Jm.. == bh ( Ь 2 + h 2 ::1: -/ Ь 4 b 2 h 2 + h 4 ) .
тl. 72
При м е р 3.7. Определить положение rлавных центра.льных осей
и rлавных моментов ДЛJl COCTaBHoro сечеНИJl (рис. 3.11).
Рис. 3.11
Положение центра ТJlжести С ДЛJl этоrо сечеНИJl уже было найдено
выше (см. пример з.2). ДЛJl каждой иэ состаВЛJlЮЩИХ фиrур находим
моменты инерции относительно проиэвольно ВЭJlТЫХ осей Xl, Yl.
Для: треуrольника находим
60 . 303 4 4
J:r. == 12 == 135000 мм == 13,5 см i
30 . 603 4 4
J y . == 12 == 540000 мм == 54 см ;
302 . 602 4 4
J:r.y. == == 135000 мм == 13.5 см .
12
Для: ПРJlмоуrольника получаем
60 . 303 f f
== 12 == 2160000 мм == 216 см i
60 . 303 4 f
== == 540000 мм == 54 см .
12
J:r.
J y .
Центробежный момент инерции ПРJlмоуrольника определим путем перено
са осей:
J:r.'Y' == J:r2 Y ' + аЬР, или J:r.II. == О + 30.15.30.60 ==
== 810000 мм 4 == 81 см 4 .
lбб
ДЛJl полукруrа воспользуеМСJl снова методом переноса осей. СнаЧ8JIа
опредеЛJlем моменты инерции относительно цеИТР8JIЬНЫХ осей %2, !/2:
1 11' N' 'JI" . 40' , ,
J"'2 = 2" 54 = """"i28'" = 62800 мм = 6,28 см i
J = J' с 2 F = 'JI". 40'
1/2 1/2 128
( 4 . 20 ) 2 'JI" . 202
= 17560 мм' = 1.76 см';
J"' 1/2 = о.
ПереХОДJl к OCJlM %1, 1/1, получаем
'JI" 202
J"" = 62800 + 402 = 1068000 мм' = 107 см';
2
2 'JI" . 202 , ,
JI/ 1 = 17560 + (30 + с) = 948000 мм = 94,8 см j
'JI" . 202 , ,
J"'II/I = 0+ (30 + с)40 = 967000 мм = 96, 7см .
СУММНРУJl полученные значеНИJl моментов инерции ДЛJl состаВЛIIЮЩИХ фи
ryp, находим моменты инерции относительно осей %1,!/1 ДЛJl Bcero сечеНИJl:
J"'I = 336 см'; JI/ 1 = 203 см' j J"'IIII = 164 см'.
Переходим к OCJlM %, !/, ИСПОЛЬЗУJl найденные ранее координаты центра
Тllжести с:
J", = 336 2,652. 33, 3 = 103 см';
JI/ = 203 0,9972 . 33,3 = 170 см';
J"'I/ = 164 0.,997.2,65.33,3 = 76,3 см'.
Соrласно формуле (3.10),
2 2 . 76, 3
tg а =
170 103
= 2,28;
а = ЗЗ°10'.
На РНС. 3.11 отмечено положение rлавных центра.пьных осей. Соrласно
формуле (3.11), на.ходим
J m .. x = 220 см'; Jmin = 53, О см'.
Ось и, пока.заННaJ[ на рис. 3.11, соответствует минимальному, а ось 11
максима.пьному значеНИJlМ момента инерции.
156
rЛRва 4
изrИБ СТЕРЖНЕЙ
4.1. Внутренние силовые факторы, возникающие
в поперечных сечениях стержня при изrибе
Под tl.З2ибом понимается такой вид наrружения, при KO
тором В поперечных сечениях стержня возникают изrибающие
моменты (см. вз). Если изrибающий момент в сечении явля
ется единственным силовым фактором, а поперечные и HOp
мальная силы отсутствуют, изrиб называется 'Чистым. Боль
шей частью, однако, в поперечных сечениях наряду с изrи
бающими моментами возникают также поперечные силы. В
этом случае изrиб называют попере'Чным. Виды изrиба клас
сифицируют и по друrим признакам; некоторые из них будут
рассмотрены в дальнейшем.
Для Toro чтобы правильно ориентироваться в вопросах,
связанных с расчетом стержня на изrиб, необходимо, прежде
Bcero, научиться определять законы изменения внутренних си
ловых факторов, Т.е. строить эпюры изrибающих моментов и
поперечных сил. Рассмотрим некоторые характерные приме
ры и установим необходимые правила.
157
На рис. 4.1, а показан простейший двухопорный стержень,
наrруженный силой Р. Напомним еще раз, что показаннu си
стема, как и все, которые мы рассматривали до сих пор и будем
рассматривать в дальнейшем, получена ках результат опера-
ций, связанных с выбором расчетной схемы (см. В2). К ана-
лизу схемы двухопорноrо стержня сводится расчет очень MHO
rих машиностроительных конструкций, например балки мо-
CTOBoro крана, показанной на рис. 4.2.
А .r 8
o t о ь
t 1)= Р6 ( t Ро
0+/1 .( P,=i+l
tJ 1: 1
z
1Р.. н $ Н J 'р,
I D .1
o z
Рис. 4.1
О О CJ
Рис. 4.2
p
Анализ внутренних сил начинают обычно с определения
полной системы внешних сил. В данном случае необходимо
определить реакции опор. Из условий равновесия находим ре-
акции (см. рис. 4.1):
РЬ
Р л == ,
а+Ь
Ра
Р В == а + Ь .
158
На расстоянии Z от левой опоры проведем сечение С
(рис. 4.1, 6) и разделим стержень мысленно на две части. Пля
Toro чтобы каЖДaJI из частей находилась в равновесии, в сече-
нии С необходимо приложить силу Q и момент М. Эти сило-
вые факторы можно определить из условий равновесия одной
из частей стержня. В В3 было показано, что значение силы
Q не зависит от Toro, рассматриваем мы условия равновесия
правой или левой части стержня (рис. 4.1, в). В данном случае
удобнее рассматривать левую часть.
Если взять сумму моментов всех сил, действующих на ле
вую часть стержня относительно центральной поперечной оси
в сечении С, и приравнять эту сумму нулю, то получим
М = PAz.
Если бы слева от сечения С действовали не одна, а несколько
сил, изrибающий момент М в сечении определялся бы cy.м.
.м.ои моментов этих сил. Таким образом, изrибающий момент
в сечении можно рассматривать как сумму моментов относи-
тельно поперечной оси сечения всех сил, расположенных по
одну сторону от этоrо сечения. В дальнейшем, для тoro чтобы
избежать rромоздких рисунков, иллюстрирующих равновесие
отсеченных частей стержня, изrибающий момент будем опре
делять именно так.
!I
N
Ф}
(/ )и
н ",
о
Рис. 4.3
Знак изrибающеrо момента устанавливают по знаку кри
визны изоrнутоrо стержня (рис. 4.3) в зависимости от выбран-
Horo направления осей внешней неподвижной системы KOOp
динат zOy. Если ось у (см. рис. 4.3) направить в обратную
сторону, то знак кривизны, а следовательно и момента, изме-
НИТСЯ на обратный. Этим правилом знаков пользуются при
определении перемещений стержня и формы изоrнутой оси.
168
11 ри построении эпюр изrибающих моментов используют
друrое правило знаков (правило относительных знаков), при
котором знак момента не зависит от направления внешних
осей. Эпюру моментов строят на оси стержня и ординату MO
мента откладывают в сторону воrнутости упруroй линии, Т.е.
эпюру моментов строят, как rOBop.lT, на сжатом волокне. Это
му правилу можно дать и друrое толкование.
Если сумма моментов сил, действующих на левую часть
стержня, дает равнодействующий момент, направленный по
часовой стрелке, то ординату изrибающеrо момента в сечении
откладывают вверх. Если же равнодействующий внешний MO
мент слева от сечения направлен против часовой стрелки, то
ординату изrибающеrо момента откладывают вниз.
Пля сил, лежащих справа от сечения, имеет место обрат
ная зависимость: в случае равнодействующеrо момента, Ha
правленноrо по часовой стрелке, ординату изrибающеrо MO
мента откладывают вниз, а в случае равнодействующеrо MO
мента, направленноrо против часовой стрелки, вверх. CKa
занное иллюстрирует схема, представленная на рис. 4.4.
OpииHoтo 88epx )
o(
o, )
Рис. 4.4
Возвращаясь к рассматриваемому примеру двухопорноrо
стержня замечаем, что момент силы Р А , расположенной слева
от сечения С, направлен по часовой стрелке. Следовательно,
в сечении С ординату изrибающеrо момента нужно отклады
вать вверх.
В пределах изменения z от О до а изrибающий момент
РЬ
M= z.
а+Ь
Рассмотрим теперь правый участок, rде z изменяется от а
ДО а + Ь (см. рис. 4.1). Изrибающий момент в сечении С' удоб
нее рассматривать как сумму моментов внешних сил, лежащих
160
справа от сечения. Очевидно,
Ра
М = Рв(а + ь z) = Ь (а + Ь z).
а+
Ординату момента следует откладывать вверх, так как MO
мент внешней силы, лежащей спраВа от сечения С', направлен
против часовой стрелки.
В соответствии с полученными выражениями для изrиба
ющих моментов может быть построена эпюра, показанная на
рис. 4.5. Эпюра является кусочно линейной и на всей длине
стержня расположена сверху. Это значит, что ось изоrнутой
балки, называемая упруrой линией, всюду направлена BorHY
той стороной вверх, что в данном случае достаточно очевидно.
о
t
,ч
РЬ
о+Ь ""111111111111111111111111111111 illшшп:шIF Ро
0+0
Рис. 4.5
Определим поперечные силы Q. ИЗ условия равновесия
левой или правой части разрезанноrо в точке С (О < z < а)
стержня (рис. 4.1) следует, что
Q = Р А , или Q = Р Р В = Р А .
Во всех случаях поперечная сила для прямоrо стержня
равна сумме проекций на плоскость сечения всех внешних сил,
лежащих по одну сторону от сечения. Отсюда можно YCTaHO
вить правило знаков для поперечной силы. Если сумма внеш
них сил, лежащих по левую сторону от сечения, дает равнодей
ствующую, направленную вверх, то поперечная сила в сечении
считается положительной, а если вниз отрицательной. Пля
сил, расположенных справа от сечения, наоборот, если paBHO
действующая внешних сил направлена вверх, то поперечная
6 В. И. Феодосьсв
161
сила в сечении считается отрицательной, а если вниз поло
жительной. Это правило иллюстрирует схема, показанная на
рис. 4.6.
+ I +
о
I t
5
Рис. 4.6
в рассматриваемом случае двухопорной балки сила Р А ,
лежащая слева от сечения С, направлена вверх. Следователь
но,
РЬ
Q == Р А == .
а+Ь
Пля правоrо участка балки (а < z < а + Ь) сила Р в , pac
положенная справа от сечения С/, направлена вверх. Следова
теЛЬНD, на этом участке поперечная сила отрицательна:
Ра
Q == PB == .
а+Ь
Эпюра поперечных сил в рассматриваемом двухопорном
стержне изобразится двумя прямоуrольниками (см. рис. 4.5).
Рассмотрим еще несколько примеров построения эпюр из
rибающих моментов и поперечных сил.
Пвухопорный стержень длиной 1 наrружен равномерно
распределенными силами собственноrо веса стержня.
Определим реакции опор. Очевидно,
ql
Р А == Р В == .
2
На рис. 4.7 эти силы показаны условно на основном рисун-
ке. CTporo rоворя, их следовало бы изобразить на отдельном
рисунке стержня с отброшенными внешними связями, посколь-
ку эти силы заменяют действие связей. В предыдущем приме-
ре (см. рис. 4.1) именно так и было сделано. Однако обычно
162
f , fP,
A
J!.
2
Рис. /!L.7
ДЛЯ упрощения прибеrают к условному изображению реакций,
как это и показано в рассматриваемом примере.
Сумма моментов внешних сил, лежащих по одну сторону
от сечения, например по левую, равна
z
М = PAz qz 2'
rде PAz момент силы Р А направлен по часовой стрелке
(знак "+"); qz сила собственноrо веса на длине z. Ее paB
нодействующая проходит через середину отрезка z. Следова
тельно, плечо силы равно z/2, а момент этой силы, располо
женной слева от сечения С, направлен против часовой стрелки
(знак " "). Таким образом,
М = ql Z qz2
2 2 .
Эпюра изrибающеrо момента изображается параболой,
показанной на рис. 4.7. Наибольшее значение изrибающий MO
мент имеет в среднем сечении пролета при z = [/2:
q[2
М тах = 8.
Поперечная сила в сечении С равна сумме сил, лежащих по
одну сторону от сечения:
ql
Q = Р А qz = "2 qz.
Эпюра поперечной силы изображается прямой.
6*
163
На рис. 4.8 показано построение эпюр изrибающих MOMeH
тов и поперечных сил на примере стержня, защемленноrо oд
ним концом. TaKoro рода стержни называются 7СОНСОА.I'АСи. В
данном случае с правой стороны на стержень не наложены свя
зи, и изrибающие моменты и поперечные силы в любом сечении
MorYT быть найдены без предварительноrо определения peaK
ций.
Jл=; РII
1
f
J
-
11
11
O
PII
2 Q
р
Рис. 4.8
В среднем сечении консоли через крестовину передается
момент пары сил. В результате на эпюре изrибающих MOMeH
тов возникает скачок. При переходе через сечение С сумма
моментов сил, расположенных по правую или левую сторону
от сечения, изменяется на величину 9Л.
Рассматривая все построенные выше эпюры, нетрудно
установить определенную закономерную связь между эпюра
ми изrибающих моментов и эпюрами поперечных сил. Судя
по виду эпюр, поперечная сила Q представляет собой произ
водную от изrибающеrо момента М по координате z, напра
вленной по длине стержня. Докажем, что эта закономерность
действительно имеет место.
Пусть стержень закреплен произвольным образом и Ha
rружен распределенной наrрузкой q = J(z). Принятое направ
ление для q будем считать положительным (рис. 4.9).
Выделим из стержня элемент длиной dz и вправеденных
сечениях приложим моменты М и М + dM, а также попереч
ные силы Q и Q + dQ. Направления для этих силовых фак
164
торов приняты положительными в соответствии с обусловлен
ным выше правилом знаков. В пределах Ma.JIOrO отрезка dz
наrрузку q можно считать равномерно распределенной.
f=f(z)
A
rтT
fJ
н М+dИ
Рис. 4.9
Приравниваем нулю сумму проекций всех сил на верти
кальную ось и сумму моментов относительно поперечной оси
С (см. рис. 4.9):
Q + q dz Q dQ = о;
dz
М + q dz + q dz м dM = о.
2
После упрощения и отбрасывания величины высшеrо порядка
малости, получим
= q; d:: = Q. (4.1)
Уравнения равновесия (4.1) можно получить из уравнений
(В8) и (Bll), если принять: Qz = Qx = о, Qy = Q, qy = q,
M z = Му = о, f'z = f'y = f'x = о, Мх = М. Кроме Toro, так
как рассматриваемый стержень прямолинейный, то ds = dz.
Из соотношений (4.1) можно сделать некоторые общие BЫ
воды о характере эпюр изrибающих моментов и поперечных
сил для прямоrо стержня.
Если стержень наrружен только равномерно распределен
ной наrрузкой q = const, очевидно, функция Q будет линейной,
а М квадратичной. Это можно было наблюдать на примере
эпюр, показанных на рис. 4.7.
165
Если стержень наrружен только сосредоточенными сила
ми или моментами, то в промежутках между точками их при
ложения q == О. Следовательно, Q == const, а М является ли
нейной функцией z. В точках приложения сосредоточенных
сил эпюра Q претерпевает скачок на величину внешней силы,
а в эпюре М возникает соответствующий излом (разрыв про
изводной ).
4.2. Напряжения при чистом иэrибе
Рассмотрим наиболее простой случай изrиба, а именно,
чистый изrиб. Под чистым изrибом, как уже указывалось, по
нимается такой вид наrружения, при котором в поперечных
сечениях стержня возникают только изrибающие моменты, а
Q == О. Пля тех участков стержня, rде соблюдается это усло
вие, изrибающий момент, соrласно второму выражению (4.1),
остается постоянным (М == const). Условия чистоrо изrиба MO
rYT возникать при различных внешних наrрузках. Некоторые
характерные при меры показаны на рис. 4.10.
/ t- о
о
J7l
p
Ро
м
'1uсты;; О.12ио
Рис. 4.10
166
Отвлекаясь от особенностей приложени. внешних сил и
условий закрепления стержня в целом, рассмотрим только тот
ero участок, rде М = const и Q = О. На rраницах этоrо участка
действуют только моменты !)]1 (см. рис. 4.10, а).
Под действием моментов М стержень изоrнеТСJl. Так как
в любом сечении возникает один и тот же изrибающий момент,
то Б случае однородноrо стеРЖНJI изменение кривизны ДЛJl всех
участков будет одним и тем же. Следовательно, при чистом
изrибе ось однородноrо стеРЖНJI принимает форму дуrи окруж
ности.
Леrко обнаружить, что совокупность точек, расположен
ных до изrиба в плоскости поперечноrо сечения стеРЖНJI, по
сле изrиба также образует плоскость, но перемеСТИВШУЮСJl в
пространстве. Действительно, рассмотрим среднее попереч
ное сечение A A (рис. 4.11, а). Точки этоrо сечения по усло
виям симметрии не MorYT получить преимущественных CMe
щений ни вправо, ни влево, поскольку и та, и друrаJl стороны
полностью равноправны. Следовательно, это сечение остается
плоским.
o
6 )(H
'" '"
6 9f1{9
Рис. 4.11
Разрезая стержень на две равные части сечением A A,
получаем участки вдвое меньшие, наХОДJlщиеся точно в тех
же условиях, что и целый участок (рис. 4.11, 6). Для каждой
из полученных половин приведенные рассуждения MorYT быть
повторены (рис. 4.11, в). Следовательно, средние сечения этих
половин также остаЮТСJl плоскими.
167
Этот процесс деления можно продолжать дальше. Тем
самым будет доказано, что в неоrраниченной близости от лю
боrо наперед заданноro сечения есть сколь уrодно MHoro таких
сечений, для которых соблюдается высказанное условие плос
ких сечений. Фактически это есть доказательство Toro, что
все сечения однородноrо стержня при чистом изrибе не искри
вляются, а лишь поворачиваются.
Это утверждение, будучи точным для чистоrо изrиба, в
общем случае является приближенным и именуется zипотезой
nJ1.OC'ICUX сечений.
z t/z
Рис. 4.12
Образование деформаций при чистом изrибе можно pac
сматривать как результат поворота плоских поперечных ce
чений одно относительно друrоrо (рис. 4.12). Рассмотрим два
смежных сечения, расположенных между собой на расстоянии
dz (рис. 4.13). Примем левое сечение условно за неподвижное.
Тоrда в результате поворота правоrо сечения на уrол d(J Bepx
иие слои удлинятся, а нижние укоротятся. Очевидно, суще
ствует слой, в котором удлинения отсутствуют. Назовем ero
нейтрадьным слоем и отметим сп. в результате поворота
сечений изменение кривизны нейтральноrо слоя будет следую
щим:
1 d(J
р dz '
Произвольно взятый отрезок АВ = dz (см. рис. 4.13) полу
чит приращение длины А' в' АВ. Так как сечения остаются
плоскими,
А' В' АВ = (р + у) d() pdIJ = yd(),
168
СJl(оти
Рис. 4.13
rде у расстояние от рассматриваемоrо отрезка АВ дО ней
тральной сп. Положение этоrо отрезка пока неизвестно.
Относительное удлинение АВ равно
у dO у
E
dz р'
(4.2)
Cor ласно закону rYKa,
у
(J = ЕЕ = E .
р
(4.з)
Таким образом, при чистом изrибе напряжения в попереч
нам сечении изменяются по линейному закону. rеометрическое
место точек в сечении, удовлетворяющее условию (J = О, Ha
зывается нейтраJ1.ЬНОЙ Аинией сечения. Нейтральная линия,
очевидно, перпендикулярна к плоскости кривизны изоrнутоrо
стержня.
Свяжем теперь напряжение (J с внутренними силовыми
факторами, возникающимИ в поперечном сечении стержня при
чистом изrибе.
Сумма эЛ( ментарных СИJI иаЕ (рис. 4.14) дает нормаль
ную силу N в сечении. Но при чистом изrибе N = о. Поэтому
169
у
z
Рис. 4.14
N == J adF = О, или, соrласно выражению (4.з), : J ydF =
F F
== О, откуда
J у dF = о.
F
Этот интеrрал представляет собой знакомый нам из пре
дыдущей rлавы статический момент сечения относительно
нейтральной линии. Так как статический момент равен нулю,
нейтрадь'Н.ая J1.UНUЯ проходит через центр тяжести сечения.
Таким образом, координата у в выражениях (4.2) и (4.3) полу
чает определенность: она отсчитывается от центральной оси,
перпендикулярной плоскости кривизны. Точно так же получа
ет определенность и кривизна 1/ р, как кривизна нейтраДЬНО2О
сдоя, или как кривизна оси стержня.
Внесем некоторую определенность в систему осей х, у, z,
связанную с сечением (см. рис. 4.14). Начало координат О
совместим с центром тяжести сечения. Ось z направим по
нормали к сечению, а ось х по нейтральной линии. Ось у пер
пендикулярна оси х, следовательно, она лежит в плоскости из
менения кривизны. Это так называемая nодвuжнаJl cucme.ua
осей, положение которой меняется в пространстве при переходе
от одноrо сечения к друrому.
Изrибающий момент в поперечном сечении стержня, как
и нормальная сила, может быть выражен через напряжения а:
J axdF= Му;
F
J aydF = Мх.
F
170
Заметим, что в общем случае плоскость изrибающеrо MOMeH
та в сечении не совпадает с плоскостью yOz (см. рис. 4.14).
Иными словами, изменение кривизны стержня происходит не
обязательно в плоскости изrибающеrо момента. Этот общий
случай изrиба мы рассмотрим несколько позже, а пока orpa-
ничимся более простым частным случаем, при котором имеет
место совпадение плоскостей момента и кривизны.
При указанном условии момент элементарных сил (J dF
относительно оси у равен нулю, а относительно оси х полно
му изrибающему моменту М. Тоrда получаем
J ух dF = о; J у2 dF = М.
F F
Первое выражение приводится к виду
(4.4)
J xy = о.
Это значит, что изменение кривизны стержня происходит в
плоскости момента в том случае, если последняя проходит че
рез одну из 2Л(Z8НЫХ осей сечения. Такой изrиб называется
прямым. В отличие от прямоrо изrиба общий случай изrиба,
при котором плоскость изrибающеrо момента с r лавной осью
сечения не совпадает, называется 'lCOCbIM изrибом.
Из выражений (4.4) получаем зависимость кривизны
стержня от изrибающеrо момента:
1 М
,
р EJ x
(4.5)
rде J x момент инерции сечения относительно rлавной цeH
тральной оси, перп ндикулярной плоскости изrибающеrо MO
мента.
Величина Е J х называется жест1Состью стержня при из
rибе. Как и при кручении, она пропорциональна четвертой
степени линейных размеров сечения при пропорциональном их
изменении.
Возвращаясь к формуле (4.з) и исключая из нее кривизну
1/ р, получаем выражение для напряжения (J:
Му
{1
J ж .
(4.6)
171
\ # '
Рис. 4.15
Максимальное напряжение при изrибе возникает в точках,
наиболее удаленных от нейтральной линии (рис. 4.15):
М Утах
а тах =
J x
Отношение J х / Утах называется моментом conpoтивAe
ния сечения при изrибе и обозначается через W x (измеряется
в см З или мм З ):
J x
Wx= .
Утах
(4.7)
Таким образом,
м
а тах = W x .
Эта формула является основной в расчетах на прочность при
изrибе.
Для стержня прямоуrольноrо сечения со сторонами Ь и h
(4.8)
Ьh З h
J x = 12; Утах = 2";
Для стержня Kpyr лоrо сечения
7r п 4 п 7r п З з
J x = 64; Утах ="2; W x = з2 ::::: О, 1п . (4.10)
Таким образом, напряжения при изrибе обратно пропор
циональны третьей степени линейных размеров сечения.
Наиболее экономичными являются такие формы попереч
ных сечений, для которых с наименьшей затратой материа
ла получается наибольший момент сопротивления W x . Чтобы
форма сечения была рациональной, необходимо, очевидно, по
bh 2
Wx= .
6
( 4.9)
172
возможности распределять площадь сечения подальше от ней
тральной оси. Так возникли стандартные двутавровые и KO
рытные тонкостенные профили, показанные на рис. 4.16. При
изrибе в вертикальной плоскости такие профили дают суще
ственную выrоду по сравнению с прочими формами попереч
ных сечений.
Момент сопротивления W z стандартных проф лей вычис
лен для каждоrо размера заранее и задан в специальных Ta
блицах. Поэтому при расчете стержня на прочность отпадает
необходимость проводить rромоздкие вычисления по опреде
лению моментов инерции и моментов сопротивления. В при
ложении приведены таблицы стандартных профилей. Кроме
профилей, приведенных в этих таблицах, существуют и дpy
rие профили, например, применяемые в самолетостроении и
задаваемые специальнЫМИ стандартами.
tIZ
у
!/
с .I
с
.z
Рис. 4.16
Рис. 4.17
Энерrия упруrих деформаций стержня при изrибе опреде
ляется работой момента М на взаимном yr ловом перемещении
d8 двух сечений (рис. 4.17):
1
dU = м d8.
2
Но
dz М
d8= = dz,
р EJ x
173
поэтому
J м2 dz
и = 2ЕJ ж .
1
(4.11)
При выводе фармул для чистоrа изrиба прямаro стержня
не была сделано произвольных допущений и найденнае реше
ние в этом смысле можно. рассматривать как точное. Однако.
следует иметь в виду, что в рассматриваемой задаче не KOH
кретизираван характер распределения внешних сил. Считает
си только, что во. всех случаях эти силы свадятся к равнадей
ствующим моментам, приложенным к торцам стержня. Реше
ние будет точным талько для случая, если внешние силы на
!OE . Е,!-спреле.neньr по таму же линейнаму закану, что и во
всех паперечных сечениях. Практически это условие, понят
на, никоrда не соблюдается, и в акрестности торцевых сече
ний законы распределения напряжений далеки от тех, каторые
следуют из теории чистаrо изrиба. В саатветствии с принци
пам CeH BeHaHa имеется возможность, аднака, краевую зону
исключить, как это показано, например, на рис. 4.18. Таrда
для средней части стержня все выведенные выше формулы со-
храняют сваю силу и MorYT рассматриваться как точные.
.Pa
Рис. 4.18
Рассмотрим некоторые простейшие примеры, связанные с
определением напряжений в стержне при чистом изrибе.
При м е р 4.1. Определить, как выrоднее расположить стержень
С квадратным поперечным сечением при изrибе: а) так, чтобы плоскость
174
-t::
d
о
Рис. 4.19
момента была параллельна сторонам квадрата, или б) так, чтобы она
совпадала с ero диаrона.лью (рис. 4.19)?
Чтобы ответить на поставленный вопрос, необходимо подсчитать MO
мент сопротивления W% в первом и во втором СЛУЧaJIХ.
В случае а), соrласно выражению (4.9), W% = 11.3/6. В случае б)
J% = 11.4/12, Ута. = 11.../2/2, и тоrда W% = 11.3/(6../2).
Таким образом, случай а) является более выrодным. В этом случае
момент сопротивления W% оказывается примерно на 40 % выше.
При м е р 4.2. Определить, какой процент экономии меТaJIла
будет достиrнут, если при неизменных прочих условиях в конструкции,
работающей на изrиб, применить вместо сплошноrо круrлоrо сечения по
лое сечение с отношением диаметров d2/ п2 = 0,9 (рис. 4.20).
!J
ох
.о,
Рис. 4.20
Момент сопротивления сплошноrо круrлоrо сечения определяется
формулой (4.10):
W%l = О,1п:.
Для полоrо сечения величина W%, предстаВЛJlет собой разность моментов
инерции большоrо и MaJIOrO Kpyra, деленную на Ута., Т.е.
W 'lrD /64 'lrd /64 О l D З ( 1 d ) о lп 3 . О З4З
%2 п2/2 ,2 п , 2 , .
Из условия равнопрочности W%l = W%2, откуда пl/п2 = V'O,343 = 0,7.
175
Расход материа..па пропорционален площади сечения
Р ! = 1f'D .
4 1
Р2 = 1f'D ( 1 d ) = 1f'D О 19
4 п 4 1 .
Процент экономии материа..па определяется разностью площадей, OT
несенной к площади сплошиоrо xpyra:
Р! Р 2 100 си = ( 1 п о 19 ) 100 % ,
Р! О D '
или
Р! Р 2 100 % = 61 %.
Р!
При м е р 4.3. На рис. 4.21 показана консоль, наrруженнu: двумя
силами Р. Форма сечених ба..пки Т образнu:. Материа..п чуrун.
Спрашиваетсх, как рациональнее расположить сечение: полкой
вверх вариант 1, или вниз вариант П?
P l- о tp
m
r
P4
I
D
Рис. 4.21
Поскольку точка А отстоит от центра ТJlжести сечених да..пьше, Ha
прхжение в ней по абсолютной величине всеrда будет больше, чем в точках
В. При указанном направлении сил Р сжатые слои ба..пки располаrаются
внизу. Так как чуrун на сжатие работает лучше, нежели на растяжение,
точку А рациональнее поместить вниз. Следовательно, сечение должно
быть расположено полкой вверх, Т.е. следует предпочесть вариант 1.
При м е р 4.4. Для двухопорной ба..пки (рис. 4.22) подобрать
сечение в виде двутавровоrо профиля, обеспечив при этом двукратный
запас прочности при Р = 20 кН, а = 1 м и а т = 300 МПа.
p
p
Рис. 4.22
176
Наибольший изrибаюII1ИЙ момент возникает на участке чистоrо из
rиба и равен Ра. НаПРJlжение О'т.." не должно превышать половины О'т,
Ра 300 з
Следовательно, W Ж 2' откуда W ж 133 см .
По таблице стандартных профилей (см. приложение) выбираем ДBY
тавр N!!. 18, ДЛJl KOToporo W Ж = 143 см З .
При м е р 4.5. Проволака диаметром d HaMaTblBaeТCJl на барабан.
Диаметр барабана равен п. Определить наПРJlжение изrиба, возникающее
в поперечных сечеНИj[Х проволоки, если d п.
Кривизна изоrнутой проволоки задана: 1/ р = 2/ п. Поэтому, не
опредеЛJlJl изrибаюшеrо момента, соrласно формуле (4.з), сразу находим
2Уm.." d
О'm.." = Е = Е п '
Следовательно, при ПОСТОJlННОЙ кривизне наПРJlжение О'm.." возраста
ет пропорционально диаметру проволоки.
4.3. Напряжения при поперечном изrибе
Мы видели, что при чистом изrибе в поперечных сечени
ях стержня возникают только нормальные напряжения. COOT
ветствующие им внутренние силы приводятся к изrибающему
моменту в сечении. В случае поперечноrо изrиба в сечении
стержня возникает не только изrибающий момент, но и попе
речная сила Q. Эта сила представляет собой равнодействую
щую элементарных распределенных сил, лежa.IЦИХ в плоскости
сечения (рис. 4.23). Следовательно, в этом случае в попереч
ных сечениях возникают не только нормальные, но и касатель
ные напряжения.
z
Рис. 4.23
177
Возникновение касательных напряжений т сопровождает
ся появлением уrловых деформаций 'У. Поэтому, кроме OCHOB
ных смещений, свойственных чистому изrибу, каждая элемен
тарная площадка сечения dF получает еще некоторые допол
нительные yr ловые смещения, обусловленные сдвиrом. Kaca
тельные напряжения распределены по сечению неравномерно,
поэтому неравномерно будут распределены и уrловые смеще-
ния. Это значит, что при поперечном изrибе в отличие от
чистоrо изrиба поперечные сечения не остаются плоскими. На
рис. 4.24 показана типичная картина искривления поперечных
сечений.
А
8
!/
ЦВ'
h
Рис. 4.24
Рис. 4.25
Однако на значение нормальных напряжений искажение
плоскости поперечных сечений заметным образом не сказыва
ется. В частности, если поперечная сила Q не меняется по дли
не стержня, формулы (4.6) и (4.8), выведенные для случая чи
CToro изrиба, будут давать совершенно точные результаты и в
случае поперечноrо изrиба. Действительно, при Q = const ис
кривление всех сечений происходит одинаково (рис. 4.25). По
этому при взаимном повороте двух смежных сечений удлине
ние продольноrо волокна АВ будет одним и тем же, независимо
от Toro, осталось сечение плоским или нет (А' в' = А" В").
При поперечной силе, изменяющейся вдоль оси стержня,
формулы чистоrо изrиба дают для а некоторую поrрешность.
Путем несложноrо анализа можно показать, что эта поrреш
ность имеет порядок h/l по сравнению с единицей, rде h раз
мер поперечноrо сечения в плоскости изrиба; l длина стерж
ня. По определению, данному в В2, характерной особенно
стью стержня является то, что размеры ero поперечноrо сече
ния MHoro меньше длины. Следовательно, отношение h/l OTHO
сительна мало и соответственно малой оказывается указанная
поrрешность.
178
Все сказанное дает основание принять rипотезу плоских
сечений. Будем в да.л:ьиейшем считать, что совокупность TO
чек, образующих плоскость поперечноro сечения до изrиба,
образует и после изrиба плоскость, повернутую в простран
стве. Это предположение приемлемо в той мере, в какой yr ло
вые деформации 'у в сечении можно считать существенно MeHЬ
шими, чем уrловые перемещения, обусловленные изменением
кривизны.
Особенностью поперечноrо изrиба является также на.л:и
чие нормальных напряжений, возникающих в продольных ce
чениях бруса, Т.е. напряжений между слоями. Эти напряже
иия возникают только при переменной поперечной силе Q и
весьма малы l . .
Таким образом, в пределах указанных допущений форму
лы (4.6) и (4.8), выведенные для определения нормальных на-
пряжений, применимы не только при чистом изrибе, но и при
поперечном. В такой же мере применима. и формула (4.5), даю
щая зависимость кривизны стержня от изrибающеrо момента.
Теперь определим приближенно касательные напряжения
т при поперечном изrибе. Вычислить эти напряжения про
ще Bcero через парные им касательные напряжения, возни-
кающие в продольных сечениях стержня. Выделим из бруса
элемент длиной dz (рис. 4.26, а). При поперечном изrибе MO
менты, возникающие в левом и правом сечениях элемента, не
одинаковы и отличаются на dM. П родольным rоризонталь
ным сечением, проведенным на расстоянии у от нейтральноrо
слоя (рис. 4.26, 6), разделим элемент на две части и paCCMO
трим условия равновесия верхней части. Равнодействующая
нормальных сил a.dF в левом сечении в пределах заштрихо
ванной площади Р* равна, очевидно,
N*==jadP,
р.
или, соrласно формуле (4.6),
* М !
N == J ж У! dP,
р*
1 Особые области, в зоне которых приложены сосредоточенные силы,
не рассматриваЮТСJl.
179
J
н Н+dИ
о
II
Рис. 4.26
I
rде череЗУl обозначена в отличие от у текущая ордината пло
щадки dF (см. рис. 4.26,6). Полученный интеrрал представля
ет собой статический момент относительно оси х части пло
щади, расположенной выше продольноrо сечения (выше ypOB
ня у). Обозначим этот статический момент через В;. Тоrда
N* = МВ; .
J x
В правом сечении нормальная сила будет друrой:
N* + dN* = (М + dM)B;
J x
Разность этих сил
il.N* = dMB;
J x
должна уравновешиваться касательными силами, возникаю
щи ми в продольном сечении элемента (см. рис. 4.26, б и в).
В качестве первоrо приближения примем, что касатель
ные напряжения распределены по ширине сечения Ь paBHOMep
но. Тоrда
dMS; Ьd
T z,
J x
откуда
QS;
т JxЬ' (4.12)
Полученная формула носит название фор.м.УJ1.Ы ЖуравС'ICО2О, по
имени pyccKoro ученоrо прошлоro века, который впервые про
вел общее исследование касательных напряжений при попереч
ном изrибе.
180
Выражение (4.12) позволяет вычислить касательные Ha
пряжения, возникающие в продольных сечеНИJlХ стержня. Ha
пряжения, образующиеся в поперечных сечениях стержня paB
ны им, как парные. Зависимость т от у в сечении опредеЛJlется
через статический момент в;. При подходе к верхней кромке
сечения площадь ero заштрихованной части (см. рис. 4.26, б)
уменьшается до нуля. Здесь, следовательНО, в; = о. При под
ходе к нижней кромке заштрихованная часть охватывает все
сечение. Так как ось х центральная, то и здесь s; = о. По
этому касательные наПРJlжения, как это следует из формулы
(4.12), в верхних и нижних точках сечения равны нулю.
JQ 4 fJ. !J
7:ЛlfJZ"'z hIt 7:люz- J
-<::: ,- , -<:::
О О 6
Рис. 4.27
Для стержня прямоуroльноrо сечеНИJl со сторонами Ь и h
(рис. 4.27, а) имеем
s. = ( h2 2 ) .
ж 2 4 У I
Ьh3
J ж = ,Ь = Ь.
12
Следовательно,
т = : ( h: у2) ,
и эпюра касательных наПРJlжений по высоте сечения изобра
жается квадратной параболой. Наибольшее напряжение имеет
место при у = о:
3 Q
Ттах = 2" bh '
Для стеРЖНJI круrлоrо сечения (рис. 4.27, б) путем неслож
ной операции интеrрирования можно найти
s; = (я2 у2)З/2.
181
Кроме Toro,
1r п 4 1r я 4 . /
J% = 64 = 4; ь = 2у я 2 у2 ,
отхуда
4Q ( 2 2 )
Т= R Y
31r R4
и
4 Q
T m ax=3 1rR2 '
Для стержня, имеющеrо сечение в форме треуrольника с
основанием с и высотой h (рис. 4.27, в),
S = b( h Y) ( h+Y);
12Q ( 2 ) ( 1 )
T= h y h+y.
ch 3 3 3
сh З
J ж = 36 ;
Максимальное напряжение имеет место на расстоянии у = h/6
от нейтральной оси:
3Q
Тmах = .
в двух последних примерах наrлядно проявляется при
ближенный характер производимых операций. Это видно из
Toro, что в поперечном сечении касательные напряжения име
ют составляющие не только по оси У, но и по оси х. Дей-
ствительно, примем, как это делали выше, что для точек А,
расположенных у контура сечения (рис. 4.28), касательное Ha
пряжение Т направлено по оси у. Разложим вехтор Т на две
составляющие по нормали к контуру т" И по касательной
Tt. По условиям наrружения внешняя поверхность стержня
свободна от касательных сил. Поэтому напряжения, парные
Тn, отсутствуют. Следовательно, т" = О, а полное касатель
ное напряжение вблизи контура направлено по касательной к
контуру, и предположение о том, что Т направлено по оси У,
оказывается неверным. Тем самым обнаруживается наличие
составляющих Т по оси Х. ДЛЯ определения этих составляю
щих следует прибеrнуть к более сложным приемам, нежели
182
l'
р
t
l
Рис. 4.28
Рис. 4.29
рассмотренные ранее. Методами теории упруrости можно по
казать, что в большинстве случаев составляющие 7" по оси х
иrрают существенно меньшую роль, нежели по оси у.
Из рассмотренных выше примеров можно сделать общий
вывод, что зона максимальных касательных напряжений pac
положена приблизительно в средней части высоты сечения,
а 7" тах для нетонкостенных сечений имеет значение порядка
Q/F.
Можно сопоставить абсолютные величины максимальных
нормальных и максимальных касательных напряжений, воз
никающих в поперечных сечениях стержня. Например, для
консоли прямоуrольноrо сечения (рис. 4.29) имеем
м 6Pl
О'тах =
W x bh 2 ;
3 Р
7" тах = 2 bh '
откуда
7" тах h
о' тах = 41'
Это значит, что максимальные касательные напряжения в по
перечном сечении относятся к максимальным нормальным Ha
пряжениям примерно как высота сечения к длине стержня,
Т.е. касательные напряжения существенно меньше нормаль
ных. Указанная оценка, с немноrочисленными исключениями,
сохраняется для всех нетонкостенных стержней. Что же Kaca
ется тонкостенных стержней, то это вопрос особый.
183
в связи с малостью Тrnа.х расчет на прочность при попереч-
ном изrибе выполняют только по нормальным напряжениям,
как и при чистом изrибе. Касательные напряжения во внима
ние не принимают. Это тем более естественно, что в точках
сечения, наиболее удаленных от нейтральной линии, Т.е. в
наиболее опасных, касательные напряжения в поперечном се-
чении равны нулю.
Рассматривая качественную сторону явления, следует
иметь в виду, что касательные напряжения в поперечных сече
ниях и парные им напряжения в продольных сечениях, HeCMO
тря на свою малость, MorYT в некоторых случаях существенно
повлиять на оценку прочности стержня. Например, при попе
речном изrибе KopoTKoro деревянноrо бруса возможно разру-
шение не по поперечному сечению в заделке, а скалывание по
продольной плоскости, близкой к нейтральному слою, Т.е. там,
rде касательные напряжения максимальны (рис. 4.30).
р
Рис. 4.30
Касательные напряжения в продольных сечениях являют
ся выражением существующей связи между слоями стержня
при поперечном изrибе. Если эта связь в некоторых слоях
нарушена, характер изrиба стержня меняется. Например, в
стержне, составленном из листов (рис. 4.31, а), каждый лист
при отсутствии сил трения изrибается самостоятельно. Внеш
няя сила, приходящаяся на лист, равна Pjn, а наибольшее нор-
мальное напряжение в поперечном сечении листа равно
м (Pjn) 1 6Pl
О"rnа.х = W x = (bj6) (hjn)2 = bh 2 n.
Если листы плотно стянуть достаточно жесткими болта-
ми (рис. 4.31, 6), стержень будет изrиба.ться ка.к целый. В этом
184
случае наибольшее нормальное напряжение оказывается в n
раз меНЬШЕ!, т.е.
6Pl
О'rn&х = bh 2 .
Иными словами, связанный пакет листов способен в первом
приближении выдержать наrрузку в n раз большую, чем He
связанный.
t
1}
Р Iз '
p l'
а
d
Рис. 4.31
А
о
в поперечных сечениях болтов при изrибе стержня возни
кают поперечные силы. Наибольшая поперечная сила будет в
сечении, совпадающем с нейтральной плоскостью изоrнутоrо
стержня (сечение А А на рис. 4.31, 6). Эту силу в первом
приближении можно определить из простоrо равенства сумм
поперечных сил в сечениях болтов и продольной равнодейству
ющей касательных напряжений в случае целоrо стержня
rn&х 3 Р 3 Pl
mQболт& = Тrnах Ы = 2" bh Ы = 2" Т'
rде m число болтов.
Интересно сопоставить изменение кривизны стержня в за
делке в случае связанноrо и несвязанноrо пакетов. Соrласно
формуле (4.5), для связанноrо пакета
1 М 12Pl
Р = ЕJ ж = Ebh 3 '
185
Для несвязанноrо пакета
1 М (Pjn) 1 12Pl 2
Р ЕJ ж = Е (bj12) (hjn)3 = ЕМ3 n
Пропорционально изменениям кривизны меняются и проrибы.
Таким образом, по сравнению с целым стержнем набор
свободно сложенных листов оказывается в n 2 раз более rибким
и только в n раз менее прочным. Это различие в коэффициен
тах снижения жесткости и прочности при переходе к листовому
пакету используют на практике при создании rибких peccop
ных подвесок. Силы трения между листами повышают жест
кость пакета, так как частично восстанавливают касательные
силы между слоями стержня, устраненные при переходе к ли
стовому пакету. Рессоры нуждаются поэтому в смазке листов
и их следует обереrать от заrрязнения.
Заканчивая параrраф о поперечном изrибе, приведем при
мер, иллюстрирующий последовате.льность расчета стержня
на прочность при изrибе.
При м е р 4.6. Подобрать размер (1 Т образноro поперечноrо ce
чения, показанноrо на рис. 4.32, длJl двухопорноrо стеРЖНJI, наrруженноrо
равномерно распределенной наrруэlCОЙ интенсивностью q. Коэффициент
запаса по пределу текучести должен быть не менее чем ДВУlCратный. Дa
но: 1 == 1 м, q == 100 Н/см, О'т.р == О'т.с == 350 МПа.
о
29а
7т
.r
х,
Рис. 4.32
Определяем реакции опор и строим эпюру иэrибающих моментов (см.
рис. 4.32). Расчетный иэrибающий момент равен
8 2
Мт_к = iq1 .
186
8ql2 О'т.р
Соrласно условию прочности, 9W z 7' отхуда момент сопротивлеНИII
W z 50,7смЗ.
Рассматрив3.11 заданное сечение, опредеЛllем расСТОlIние от оси %1 ДО
29
центра Тllжести. Оно равно а. Момент инерции относительно оси %1
18
4 _ 707 4
равен J Z1 == 43/1 . Переход. х центральнои оси %, получаем Jz == а
мо".т ' JIOт.ш." W. = J. / (5. :: .) = ; .', откуда ..:...
аЗ > 50 , 7 122 СМ З или а > 2 ' Об см.
707
4.4. Касательные напряжения при поперечном
изrибе тонкостенных стержней
При поперечном изrибе TOHKocTeHHoro стержня в ero ce
чениях преобладающими остаются нормальные напряжения,
которые в основном и определяют прочность стержня. Однако
здесь, в отличие от стержня сплошноrо сечения, существенное
значение приобретают касательные напряжения и законы их
распределения.
d
d+dd
х
dz
Рис. 4.33
Касательные напряжения в поперечных сечениях TOHKO
cTeHHoro стержня определяются по тому же принципу, что И
для сплошноrо стержня. Разность нормальных сил для элемен
TapHoro участка, расположенноrо по одну сторону от продоль
Horo разреза (рис. 4.зз), уравновешивается касательными Ha
пряжениями Т. В отличие от стержня сплошноrо сечения про
IlОЛЬНЫЙ разрез ТОИКОСП!ННorо стер)l(Пj следует производить
не параллельной нейтральному слою плоскостью, а плоскостью
187
A A, нормальной к средней линии .контура (см. рис. 4.зз). Ta
кое сечение имеет наименьшую ширину, равную б, и в нем Ka
сательные напряжения, уравновешивающие разность нормаль
ных сил, будут больше, чем в друrих продольных сечениях.
Возвращаясь к выводу формулы Журавскоro, проделанно
му в 4.3, леrко обнаружить, что ДЛJl ТOHKoCTeHHoro стержня
в этом выводе ничеrо не меняется, кроме Toro, что обозначение
Ь заменяется на б. В итоrе имеем
QS;
T Jz6' (4.13)
В этой формуле, как и прежде, Q поперечная сила в сечении,
направленная перпендикулярно оси х, S; статический MO
мент заштрихованной части сечения относительно оси х (см.
рис. 4.33); Jz момент инерции Bcero сечения относительно
оси х.
Касательные напряжения т предполаrаются равномерно
распределенными по ширине сечения С. в поперечном сечении
стержня возникают напряжения, парные т. Они направлены
по касательной к линии контура (рис. 4.34). Если направление
't4 7:5
Рис. 4.34
поперечной силы Q не совпадает с rлавной осью сечения, то,
очевидно,
QyS; QzS;
т == Jzc + Jyc ' (4.14)
rде Qx и Qy составляющие поперечной силы по rлавным осям
х и у.
188
При м е р 4.7.
напряжений в корытнам
плоскости (рис. 4.35).
Определить закок распреде.пеНИII касательных
профиле при поперечном изrибе в вертик&.ЛЬНОЙ
у
t
6ОЬ
M(h+6b)
ь 1
2b+h
О
.%
..с::
d
ь
Рис. 4.35
h 2 6
При размерах, показанных на рисунке, J:z; = (h + 6Ь). ДЛЯ участ
12
ка полкн длиной 8 (см. рис. 4.35) имеем s; = !: 68. Таким образом, для
2
полки, соrласно формуле (4.13),
т=
6Q8
h6(h+6b)'
(4.15 )
и касательное напряжение оказывается пропорциональным 8. То же самое
имеет место и ДЛII нижней полки.
Если разрез сечения произвести на участке вертикальной стенки,
статический момент части сечеИИlI, расположенной выше ypOBHII у, будет
равен
. 6 ( h2 2 )
S:z; = 2" bh + 4 у ,
и тоrда
6Q (bh + у2 )
h 2 6 (h + 6Ь)
т=
Здесь касательное напряжение представляет собой квадратичную функ
дию у.
На рис. 4.35 показана эпюра распределения касательных наПРllжений
по контуру. Знак т вдоль контура, как видим, не менжетсж. Следователь
но, найденное касательное напряжение сохраиJ[ет ДJl.l всех точек сечеНИJ[
189
Рис. 4.36
ПОСТОJlнное направление, Т.е. либо от Kp8JI 1 К краю 1/, Jlибо же от Kp8JI 1/
к краю 1, в зависимости от знuа поперечной СИJlЫ (рис. 4.36).
При м е р 4.8. Найти закон распредеJlеНИJl касатеJlЬНЫХ напр.же
ний в KpyroBoM незамкнутом ПрОфИJlе при изrибе в ПJlОСКОСТИ, перпенди
КУЛJlрНОЙ оси симметрии (рис. 4.37).
J
2и
"(1пI.%" 1t'R4
r
Рис. 4.37
Момент инерции сечеНИJl относитеJlЬНО оси ж равен Jz: = 11' R 3 6.
Статический момент заштрихованной части сечеНИJl опредеЛJlеТСJl инте
'11'
rралом s; = 6 J R 2 sin Ф dф = R 2 6 (1 + сов I()). Соответственно зтому
'"
Q
т = 7rR6 (1 + cosl()), после чеrо может быть построена эпюра т (см.
рис. 4.31).
. 4.5. Центр И31'иба
Система сил, лежащих в плоскости сечения, как известно
из теоретической механики, может быть приведена к любой
точке плоскости в виде равнодействующей силы и момента.
Равнодействующая сила не зависит от точки приведения
и во всех случаях равна поперечной силе Q. в этом можно
190
убедиться хотя бы на примере рассмотрениоrо крутовото He
замкнутоrо профиля (см. рис. 4.37). Здесь равнодействующая
касательных сил по оси у определяется следующим интеrра
лом:
11'
J т СОБ <р dF = J (1 + СОБ <р) СОБ <р d<p,
F 11'
который, как леrко установить, равен Q. ТО же самое имеет
место и для рассмотренното выше примера KopblTHoro и вооб
ще для любоrо профиля.
jI
!J
J
!J
Q
:Е
f1
I
z
Рис. 4.38
Что касается равнодействующеrо момента в сечении, то
он зависит от положения точки приведения сил. Так, напри
мер, в том же случае KpyroBoro незамкнутоrо профиля момент
касательных сил относительно центра Kpyra (рис. 4.38) будет
11'
Мо = J т R dF = Q7r R J (1 + СОБ <р) d<p = 2QR.
F 1!'
При переходе от одной точки к друrой момент изменится,
очевидно, на величину Qa, тде а расстояние между этими
точками. Так, если привести силы к точке А (см. рис. 4.38, в),
то
М А = Мо QR = QR.
Существует такая точка, относительно которой момент
касательных сил в сечении при поперечном изrибе равен HY
лю. Эта точка называется центро-ц иЗ2иба. В рассмотренном
примере центр изrиба находится на расстоянии 2R от центра
крута (см. рис. 4.38, 2).
191
Лля KOpblTHOrO профиля (рис. 4.39) в точке А имеем
ь
М А == 2 J т6 ds.
о
Cor ласно выражению (4.15), после интеrрирования получим
зь 2
М А == Q h + 6Ь '
Отсюда следует, что центр изrиба находится на расстоянии
зЬ 2
h + 6Ь от средней линии стенки (см. рис. 4.39, в).
у у
IJ Jh t
11+10
2 А
A.L
:l \ (. о ох С О ох
11 А Jb Z
2" Q 'А = ((I1+6Ь Q
о 5 J
Рис. 4.39
Лля сечений, имеющих две оси симметрии, центр изrиба
совпадает, очевидно, с центром тяжести.
В некоторых простейших случаях положение центра из
rиба может быть указано без проведения каких бы то ни бы
ло вычислений. Например, у TaBpoBoro и yr ловоrо профилей
(рис. 4.40) центр изrиба находится в точке пересечения средних
1
I!" I !"
I
L(tHтp UJ2UOa
Рис. 4.40
192
линий стенки и полки. Момент касательных сил относительно
этой точки всеrда равен нулю.
Итак, если момент касательных сил в сечении относи
тельно центра изrиба равен нулю, то и момент внешних сил
относительно центра изrиба должен быть равен нулю, ина
че в стержне будут возникать деформации, свойственные не
только поперечному изrибу, но и кручению. В дальнейшем це-
лесообразно, очевидно, при определении внутренних силовых
факторов приводить касательные силы в сечении не к центру
тяжести, а к центру изrиба и под крутящим моментом пони-
мать соответственно внутренний момент относительно центра
изrиба. Так, рассматривая, например, стержень, показанный
на рис. 4.41, можно сказать, что поскольку линия действия си-
JIbl прохопит через ось z' (ось центров изrиба), то крутящий
момент в сечении равен нулю и стержень закручиваться не
бупет.
I
z'
Рис. 4.41
Рис. 4.42
Но, например, тот же самый стержень, защемленный oд
ним концом и нахопяuцийся поп пействием собственноrо веса
(рис. 4.42), будет закручиваться. Крутяuций момент в заделке
равен
Мх = Q. 2R = ql. 2R.
7 В. И. Фсодосьев
193
Рис. 4.43
Дополнительные касательные напряжения кручения pac
пределяются в сечении по законам для OTKpblToro профиля.
При этом
ЗМ х Зql
l' m ах = """""2"'"" = "'"""2
6 s 7r6
(см. формулу (2.28) 2.5). Аналоrичная картина имеет Me
сто И при изrибе TOHKOCTeHHoro стержня любоrо профиля, если
только равнодействующая внешних сил не проходит в сечении
через центр изrиба (рис. 4.43).
4.6. Дифференциальные уравнения равновесия
стержня. Перемещения при ИЗI'ибе
Форму изоrнутой оси стержня или, как rоворят, фор
му упруrой линии можно определить при помощи выражения
(4.5). В неподвижной системе координат yOz (рис. 4.44)
1 у"
Р (1 + yI2)3/2'
( 4.16)
Оrраничимся рассмотрением случая малых перемещений.
Тоrда TaHreHC уrла 8 между касательной к упруrой линии и
осью z (см. рис. 4.44) весьма мал. Поэтому квадратом вели-
чины у по сравнению с единицей можно пренебречь и принять
1 "
y,
р
откуда
" м
у ЕJ ж '
( 4.17)
194
z
z
L
Рис. 4.44
Сопоставляя выражение (4.17) с формулами (4.1), получа
ем очевидную цепочку дифференциальных соотношений:
() = у'; м = ЕJжу"; Q = (ЕJжу")'; qy = (ЕJжу")". (4.18)
Для стержня с постоянным сечением имеем
() = у' j м = ЕJжу"; Q = ЕJжу"'; qy = ЕJжуIV. (4.19)
Соотношения (4.18) можно представить как систему из че
тырех линейных уравнений первоrо порядка
dQ
dz qy(z) = о;
dM Q = о;
dz
d(} М
= о;
dz ЕJж(z)
du y () = о,
dz
( 4.20)
rде иу отклонение точек осевой линии стержня от ее положе
ния в недеформированном состоянии. При изrибе прямолиней-
ных стержней и у = у, но при изrибе криволинейных стержней
иу ::/: у. Уrол поворота сечения () = dUy/dz. Первые два ypaB
нения являются частным случаем уравнений (В9) и (Вll).1
1 Первые два уравнеНИJ[ (4.18) отличаЮТСJ[ от (В9) и (Вll) знаlCами
перед qJl и Q. КаlC правило, в сопротивлении материалов направление
силы Q, показанное на рис. 4.9, считаеТСJ[ положительным, тоrда lCаlC в
меха.НИkе, использующей при выводе уравнений равновеСИJl методы Mexa
ники сплошной среды, тахое направление считаеТСJl отрицательным.
7.
195
Систему уравнений (4.20) можно представить в более ком-
пактной форме записи:
dZ
dz +A(z)Z=b,
(4.21 )
rде Z = (Q, М, В, иу)т вектор, характеризующий напряжен
но деформированное состояние стержня; Ь = (qy,O,O,O?
Матрица A(z) равна
О
1
A(z) =
о
о
о
о
1
EJ z
О
о
о
о
о
о
о
1
о
Решение системы уравнений (4.20) или уравнения (4.21)
содержит четыре произвольные постоянные, определяемые из
rраничных условий. Например, для стержня, показанноrо на
рис. 4.44 имеем: 1) z = о, иу = (J = о, 2) z = 1, М = о,
Q = p. Для стержня с переменным сечением и переменной
по z распределенной наrрузкой q( z) определить напряженно
деформированное состояние (т.е. найти перерезывающую си
лу Q(z), изrибающий момент M(z), уrол (J(z) и перемещение
Uy(z)) проще Bcero численными методами решения систем диф
ференциальных уравнений [9].
Рассмотрим один из методов численноrо решения линей
ных дифференциальных уравнений метод начальных пара-
метров. Изложенный ниже метод справедлив не только для
стержня, наrруженноrо по всей длине распределенной наrруз
кой, но и для общеrо случая наrружения, коrда распределенная
наrрузка приложена к части стержня и, кроме Toro, действуют
сосредоточенные силы и моменты (см. рис. В.11)1
1 Эти сложные задачи статики стержней рассмотрены в моноrрафии
В.А. СвеТJIицкоrо "Механика стер. ией" ( М.: Высш. ШХ., 1987. Тl.).
196
В курсе высшей математики, в разделе, посвященном си
стемах линейных дифференциальных уравнений с переменны
ми и постоянными коэффициентами, показано, что общее pe
шение HeOHHopOHHoro уравнения (4.21) имеем вид
Z(z) == K(z)C + Zи(z),
rде K(z) фундаментальная матрица решений однородноrо
уравнения (4.18), С вектор произвольных постоянных, Zи
частное решение неоднородноrо уравнения (4.21). Матрицу
к( z) можно получить из однородноrо уравнения
dZO
+ AZO == О,
dz
решая ero четыре раза при следующих начальных условиях:
1).1 Ш; 2). Ш; з). Ш; 4).: Ш
Каждое из решений zJ(z) (j == 1,...,4), удовлетворяющее этим
начальным условиям, есть столбец матрицы K(z), поэтому
матрица K(z) при z == О является единичной. Частное решение
неоднородноrо уравнения (4.21) получаем, решая это ypaBHe
ние при нулевых начальных условиях. Компоненты вектора
С (Сl, С2, Сз, С4) находим из краевых условий (условий закреп
ления концов стержня). Найти все Cj из краевых условий при
z == О нельзя. В этом основная особенность задач статики (и
динамики) упруrих систем. В теоретической механике (в раз
деле динамика) все начальные условия задают в начальный
момент времени (задача Коши). Поэтому эти задачи часто
называют одноточечными краевыми, а задачи статики и ди
намики упруrих систем двухточечными краевыми.
Например, для случая, показанноrо на рис. 4.44, имеем при
z:::: О (Zи(О) == О)
( Q(O) ] ( 1
М(О) О
О О
О О
О
1
О
О
О
О
1
О
] Ш],
197
Т.е. С3 = С4 = О. Оставшиеся две произвольные постоянные Сl
и С2 находим из краевых условий при Z = 1
[ Q(l) ] [ kl1 (1)
М(I)
8(1)
и у (l) k41 (l)
k 1 2(1) klз(l)
k 14 (I) ] [ Сl ] [ ZHl(I) ]
С2 ZH2(1)
О + ZH3 (l) .
k44(1) О ZH4(1)
k42( 1) k4З( 1)
Так как при Z = 1 должны выполняться два условия:
Q(I) = P, M(I) = О, тО получаем систему из двух ypaBHe
ний для определения Сl и С2:
p = kll Сl + k12 C 2 + ZHl;
О = k21Cl + k22C2 + ZH2'
Определив Сl, С2, Са и С4, находим решение уравнения (4.21),
или системы (4.20). При использовании для исследования
ста тическоrо напряженно- деформированноrо СОСТОЯНИЯ прямо
линейноrо стержня системы из четырех уравнений первоrо
порядка отпадает необходимость делить задачи на статически
определимые и статически неопределимые, что приходится дe
лать при решении уравнений BToporo порядка.
Понятно, что написанные выше соотношения (4.18) и
(4.20) являются точными в той мере, в какой перемещения
можно считать малыми. Подавляющее большинство задач,
связанных с расчетами прямолинейных стержней на прочность
и жесткость при изrибе, решают в указанном предположении,
причем с весьма высокой степенью точности, поскольку вели-
чина y/2, отброшенная в выражении (4.16), действительно Ma
ла.
в некоторых случаях возникает необходимость решить за
дачу при больших упруrих перемещениях. TaKoro рода задачи
встречаются в основном при исследовании специальных пру-
жин приборов.
Если система способна при больших перемещениях coxpa
нять упруrие свойства, то она называется rибкой, независимо
от Toro, идет ли речь об изrибе, кручении или растяжении.
При изrибе предельные упруrие перемещения определяются не
198
только свойствами материала, но в равной мере отношени
ем ДЛИНЫ балки к размеру поперечноro сечения в плоскости
изrиба.
Наибольшее относительное удлинение при изrибе, соrлас
но формуле (4.2), равно
Утах
€тax = ,
р
а напряжение
Е Утах
атах = .
р
Значительные перемеrцения стержень сможет получить при
условии большоrо изменения кривизны 1/ р. Но при напряже
ниях, не превыающихx предел упруrости, это возможно толь-
ко при достаточно малом Ушах, Т.е. при малой высоте сечения.
fибкий стержень имеет поэтому обычно форму тонкой лен
ты или ТОНКОЙ проволоки и часто называется mOH'lCUAC 2uб'ICUАС
стержнеАС.
Дифференциальное уравнение упруrой линии rибкоrо
стержня имеет вид
м у"
EJ x = (1 + y/2)3/2'
Отличие этоrо уравнения от уравнения (4.17) заключает
ся не только в том, что здесь сохраняется нелинейный член
y/2 в знаменателе. Для rибкоrо стержня в выражении для М
нужно обязательно учитывать перемещения, возникающие в
стержне. Указанную особенность rибких стержней наrлядно
иллюстрирует при мер консоли (см. рис. 4.44). Видно, что с po
стом проrибов вертикальная сила Р получает rоризонтальное
смещение. В результате этоrо изrибающий момент в каждой
точке стержня изменяется на некоторую величину, зависящую
как от MecTHoro rоризонтальноrо смещения, так и от rоризон
тальноrо смещения точки приложения силы Р.
Общие методы изучения больших перемещений при изrи
бе объединяет так называемая теория 2иб'ICих стержней, KO
торая выходит за рамки сопротивления материалов и в насто-
ящем курсе не рассматривается.
Привепем некоторые примеры определения формы упру
rой линии изоrнутоrо стержня при малых перемещениях.
199
При м е р 4.9. Составить уравиеиие упруrой лииии консоли,
наrруженной на конце сосредоточенной си..оi Р (рис. 4.45).
I
:
z
I
t
t P
.I
Рис. 4.45
Поместим начало координат z, 71 в заделке. Изrибающий момент в
сечении, расположенном на расто.8НИИ z от заделки, равен М == Р(' z).
Подставив это выражение в (4.17) и дважды проинтеrрировав полученное
уравнение, найдем
Р ( z2 zз )
71 == Е J% 1 "2 б + Сl z + С 2 ,
rде C 1 , С 2 постоянные интеrрирования, определяемые из rраничных
условий. В данном случае при z == О имеем 71 == О и 71' == О, откуда С 1 == О
и С 2 == О. Тоrда
71 == :;r (1 2 3 ).
Наибольший проrиб имеет место в точке приложения силы Р, Т.е.
при z == 1, и равен
РI З
7Iт&х == 3EJ r '
При м е р 4.10. Двухопорный стержень длиной 1 наrружен силой
Р, расположенной на расстоянии а от левой опоры (рис. 4.46). Составить
уравнение упруrой линии и найти перемещеиие точки приложения силы.
У l :1l
Р:
z
р
z
о
/J
t
Рис. 4.46
Начало координат располаrаем на левой опоре. Запишем изrибаю--
щие моменты на первом и втором участках стержня:
ь
М 1 = Р 1 z;
ь
М 2 = Р 1 z Р (z а).
200
После подстановки этих вырв..:еиий в (4.17) и двукратиоrо интеrрирова
НИJ[ полученных уравиений нахОДИМ
р ( Ь %3 )
1/1 = EJ 1 б + С 1 % + С2 ;
Р ( Ь %3 %3 %2 )
1/2 = + а + С З % + С 4
EJ:z: I 6 6 2 .
Постоинные интеrрироваиии определием из условий закреплении
стержни и условий непрерывности при переходе с nepBoro участка на BТO
рой: при z = О 1/1 = о; при % = а 1/1 = 1/2 И 1/ = 1/ ; ПРИ z = I 1/2 = о. Из
_ а ( 2 2 ) а ( 2 2 )
ЭТИХ условии находим С 1 = 61 Заl 21 а I С2 = о, С З = 6i 2' + а I
аЗ
С 4 = . После преобразований получим
6
р ь [ З ]
1/1 = 6EJ:z: 1 % %а (21 а) ;
р а [ 3 2 ( 2 2 ) 2 ]
У2 = 6EJ:z: 1 z + З% I z 21 + а + а , .
Ра 2 ь 2
В точке приложении силы Р имеем 1/1 = 1/2 = ЗЕ J:z: , . Если сила прило--
Pl3
жена посередине пролета, то 1/1 = Утах = 48Е]х , .
Координата у точки приложении силы после изrиба стержня оказы
ваетси отрицательной. Стержень проrибаетси в сторону, противополож
ную положительному направлению оси 1/.
Из рассмотренных примеров видно, что для стержня, име
юшеrо несколько участков, определение формы упруrой линии
становится затруднительным. Уравнение каждоrо участка по
сле интеrрирования содержит две произвольные постоянные.
Если стержнь имеет п участков, необходимо совместно решить
2п уравнений для определения 2п постоянных интеrрирова
ния. Естественно, еще более rромоздкими будут выкладки для
стержня переменной жесткости.
В свое время на преодоление этих трудностей было затра
чено MHOI'O усилий. Но, как всеrда, с rодами поиска выраба
тывается что то наиболее простое и целесообразное. История
науки, изучающей сопротивление материалов, в этом смысле
достаточно поучительна. Существуют rрафические и rрафо
аналитические методы построения упруrой линии, изучение
201
которых еще до недавнеrо времени в курсах строите.льнойме
ханики считалось совершенно обязательным. Существует уни
версальное уравнение упруrой линии для стержня постоянноrо
сечения, rде при любом числе пролетов можно оrраничиться
определением Bcero двух постоянных интеrрирования. MorYT
быть предложены и друrие, родственные им приемы построе-
ния упруrой линии. Однако в настоящее время в связи с раз-
витием ЭВМ эти методы практически не используют.
4.7. Стержень на упруrом основании
Расчетная схема стержня на упруrом основании является
достаточно универсальной и позволяет предложить экономные
способы решения мноrих задач.
Представим себе прямой стержень, опирающийся на MHO
жество часто расположенных, не связанных между собою пру
жин или каких либо друrих упруrих элементов (рис. 4.47).
о
Рис. 4.47
Если к стержню приложены внешние силы, то со стороны
пружин возникают реакции, каждая из которых пропорцио
нальна местному проrибу. Так как расстояние между пружи
нами невелико, целесообразно представить реакции в виде pac
пределенных сил, интенсивность которых qy пропорциональна
проrибу:
q71 = ;ey,
( 4.22)
202
[де;:е коэффициент пропорционал:ьности, зависящий от жест
кости пружин и частоты их расстановки. Знак " " указывает
на то, что реакции направлены в сторону, противоположную
проrибу.
ПОДХОДЯ к аналоrичным системам с более общих позиций,
можно вообще представить пружинные опоры как некоторую
сплошную упруrую среду, обладающую тем свойством, что
возникающие с ее стороны реакции подчиняются соотношению
(4.22) независимо от физических и конструктивных особенно
стей основания. Стержень, расположенный на TaKoro рода
сплошной деформируемой среде, носит название стеРЖНJl на
УnРУ20.м. основании. Коэффициент;:е называется 'lCоэффциен
том УnРУ2О20 основанил.
В инженерной практике такая расчетная схема получила
широкое распространение и используется при анализе мноrих
конструкций. Правда, соотношение (4.22) не всеrда соблюда
ется, но часто ero можно рассматривать как приближенное.
Так, оно является почти точным в рассмотренном выше слу-
чае большоrо числа не связанных упруrих опор. Оно будет
также точным для плавающеrо стержня прямоуroльноrо сече
ния (рис. 4.48, а). Здесь реакция со стороны жидкости в каж
дом сечении пропорциональна rлубине поrружения стержня.
В то же время для шпалы (рис. 4.48, 6), лежащей на упруrом
rpYHTe, соотношение (4.22) следует рассматривать как при
ближенное, поскольку реакция в каждом сечении зависит не
только от MeCTHoro проrиба, но и от осадки [рунта в соседних
точках.
:J
.....:::=:::c- ==---==
tl
?;E,иu
i
Рис. 4.48
..=
==--=...=-==
203
Для стержня переменноrо сечении, лежащеrо на упруrом
основании (см. рис. 4.47, 6), в первое уравнение системы (4.20)
войдет еще одна распределенная наrрузка q,l = <еи у . С уче
том направления q и q,l имеем
dQ
dz + a:!'U,I = q.
Для численноrо решения уравнения (4.21) число ненуле
вых элементов в матрице А никакой роли не иrрает. Для слу
чая закрепления стержня, показанноro на рис. 4.4 7, а, компо
ненты вектора Z должны удовлетворять следующим краевым
условиям: z = о, и , = о, м = о; z = 1, и , = О, М = О.
Рассмотрим частный случай, коrда сечение стержня по
стоянно и постоянна изrибная жесткость EJ x . Конечно, и в
этом частном случае для решения можно воспользоваться чи
сленным методом, но можно получить и аналитическое реше
ние.
Последовательно
получаем уравнение
(и у = у):
исключая из системы (4.20) Q, М и (),
четвертоrо порядка относительно у
yIV + 4k4y = ; .
( 4.23)
rде 4k 4 = <ej(EJ x ).
В уравнении (4.23) использовано наиболее распространен
ное обозначение у вместо и , для проrибов прямолинейноrо
стержня, лежащеrо на упруrом основании.
Решение уравнения (4.23) можно записать в виде
у = e kz(Cl sinkz + С2 coskz)+
+еkz(сз sin kz + С4 cos kz) + у*, (4.24)
rne у* частное решение неоднородноrо уравнения (4.23).
Во мноrих случаях более предпочтительной оказывается
друrая форма записи, которая получается из (4.24) простой
переrруппировкой слаrаемых:
у == С 1 sin kz sh kz + С2 sin kz ch kz+
+СЗ cos kz sh kz + С4 cos kz ch kz + у*, (4.25)
rде sh kz и ch kz rиперболические синус и косинус.
204
Если ФУНКЦИЯ у определена, то, соrласно выражениям
(4.19), без труда можно определить изrибающие моменты и
поперечные силы.
При м е р 4.11. ДереВIIИИЫЙ стержеиь прt:моуrольиоrо поперечио--
ro сечеНИII (рис. 4.49) плавает иа воде. К стер_ию в середине приложена
сосредоточеннu: сила Р. Определить наибольший изrибающий момент в
предположении, что сила Р не очень велика и стер_ень ею не затаплива
eТCJl.
l
р
t
h
ос::
....="""....=---.....=--- ......=---- fr(тoz
..............................
...............................
Рис. 4.49
Если в KaKOM ТO сечении бa.JIка смеСТИТСII вниз на расСТОlIние 11, дa
вление со С1.'Ороны воды увеЛИЧИТСJl иа 'У1I, rде 11 плотность воды. Интен
сивность сил реакции будет qR == 'YЬy, rде Ь ширина ПРlIмоуrольноrо
сечеНИJl. Следовательно, се == 'УЬ, и, соrла.сно выражению (4.23),
k == v 'У Ь
4EJ'
(4.26)
Собственный вес стеРЖНJI уравновешиваеТСII реакцией жидкости, по
этому полаrаем в уравнении (4.23) q == О. Тоrда под величиной 11 следует
пони мать смещение, отсчитываемое от paBHoBecHoro положеНИJl стеРЖНJI,
которое тот занимает при Р == О.
Так как у. == О, получаем, соrласно (4.25),
у = С 1 sin kz sh kz + C sin kz ch kz + СЗ сов kz sh kz + С. сов kz ch kz.
Последовательно диффереНЦИРУII это выражение, находим
у' = (С 1 С З ) k sin kz sh kz + (С 1 С.) k sin kz ch kz+
+(С 1 + С.) k сов kz sh kz + (c + СЗ) k сов kz ch kz;
у" = 2С 1 е сов kz ch kz + 2C k сов kz sh kz
2Сзk sin kz ch kz 2с.е sin kz sh kz;
у'/1 = 2(C СЗ) k 3 сов kz ch kz + 2 (С 1 с.) k З сов kz sh kz
2 (С 1 + С.) е 8inkzch kz 2 (c + сз) е 8in kzsh kz.
Выберем начa.JIО отсчета. z в точке приложеНИII силы Р. При z = О ПО
условию симметрии 11' == О, а. поперечиаll сила справа от среднеrо сечеНИII
205
равна P/2. Следовательно. EJ,"'I...o = P/2 при z = 1, М = EJ," =
= О и Q = Е J 11'" = о. Тu:и.. образо.., ПО.lучае.. четыре уравнениа Д.llа
определениа: констаит С], С 2 . С З И С 4 :
р
С 2 + С 3 = о; С 2 С 3 = 4EJk 3 ;
С] сов kl сЬ kl + С2 сов kl вЬ kl С З sin kl ch kl С 4 sin kI сЬ kl = о;
С 1 (со! kl вЬ kl sin kl сЬ kl) + С2 (со! kl сЬ Icl sin kl вЬ kl)+
+С з ( сов kl сЬ kl sin kl вЬ kl)+
+С 4 ( COB k/sh kl sin klch kl) = о,
откуда
С] = вЬ 2 Icl + sin 2 Icl .
8EJk3 вЬ klсЬ Icl +sin /r;/cos1:l'
р р
С 2 == 8ЕJlc3 ; С з = 8ЕJlc3 i
С 4 = сь 2 Ic' + сов 2 kl
8Е J 1c 3 вЬ kl сЬ Icl + sin Icl сов kl'
И:и-иба.ющий момент в стержне опреде.llJlе.. через вторую производиую
функции У по формуле
м = EJII",
или
р ( вь2 kl + sin 2 kl
М == 4/r; sh kl сЬ kl + sin 1:1 сов kl сов kz сЬ kz сов kz вЬ /r;z
. сь 2 kl + cos 2 kl. )
sш kz сЬ kz + вЬ kl сЬ Icl + sin kl сов kl в]п kz вЬ /r;z .
Наибольший изrибающий момеит имеет место при z = о:
М Р sh 2 kl + sin 2 kl
m&х 4k вЬ 1:IсЬ kl + sin1:lcoskl'
С увеличением длины 1 изrибающий момент растет, но не беспредельно.
При очень большой длине Мm&х == P/4k, rде k опреде.llаем по формуле
(4.26). Вид эпюры изrибающих моментов MeHJleТCJl в зависимости от дли
ны 1.
При малой длине эпюра имеет внд крнвой, показанной на рис. 4.49.
Для более длинной балки эпюра изrнбающеrо момента менает знак и прн
ннмает вид крнвых, показанных на рис. 4.50.
j H r
Рис. 4.50
206
4.8. Косой иэrиб
Под косым изrибом, как нам уже известно, понимается Ta
кой случай изrиба, при котором плоскость изrибающеrо MOMeH
та не совпадает с rлавной осью сечения. Косой изrиб удобнее
Bcero рассматривать как одновременный изrиб в двух rлав
ных плоскостях zOx И zOy (рис. 4.51). Пля этоrо изrибающий
а
х
о
Рис. 4.51
момент М раскладывается на составляющие моменты относи
тельно осей х и у:
Мх = М sinaj Му = М cosa.
Нормальное напряжение в точке, имеющей координаты х
и У, определяется суммой напряжений, обусловленных MOMeH
тами Мх и Му, Т.е.
Мху МуХ
а = + ,
J x J y
( 4.27)
или
а = М ( J x sina + ;у cosa).
Следовательно, если в каждой точке сечения отложить по HOp
мали вектор а, то концы векторов, как и при простом изrибе,
образуют плоскость. Уравнение нейтральной линии в сечении
найдем, полаrая а = о:
J x
у = x ctga.
J y
( 4.28)
207
Леrко установить, что при косом изrибе нейтральная ли
ния не перпендикулярна к плоскости изrибающеrо момента.
Действительно, уrловой коэффициент k} следа плоскости MO
мента (см. рис. 4.51,6) представляет собой TaHreHC уrла а:
k} == tg а.
Уrловой же коэффициент нейтральной линии (см. формулу
(4.28)) равен
J x
k 2 == т ctg а.
у
Так как в общем случае J x :1 J y , то условие перпендику
лярности прямых, известное из аналитической rеометрии, не
соблюдается, поскольку k} :1 llk2' Стержень, образно Bыpa
жаясь, "предпочитает" изrибаться не в плоскости изrибающе
ro момента, а внекоторой друrой плоскости, rде жесткость на
изrиб будет меньше. Поэтому нейтральная линия не перпенди
кулярна плоскости момента, а несколько повернута в сторону
оси минимальноrо момента инерции (см. рис. 4.51, 6).
Так как эпюра нормальных напряжений в сечении линей
на, то максимальное напряжение возникает в точке, наиболее
удаленной от нейтральной линии. Пусть координаты этой точ
ки будут Х}, у}. Тоrда, соrласно выражению (4.27), получаем
МхУ} МуХ}
О'тах == + . (4.29)
Kor да сечение имеет простую форму (Kpyr, прямоуrоль
ник), наиболее опасная точка может быть определена сразу. В
случае сложной формы сечения удобно прибеrать к rрафиче
скому методу. Для этоrо сечение вычерчивают в масштабе и
проводят rлавные оси Х и у. Затем, соrласно формуле (4.28),
получаем уравнение и, строим нейтральную линию. При по
мощи линейки и уrольника (рис. 4.52) определяют точку, наи
более удаленную от нейтральной линии, а ее координаты Хl,
Уl определяют непосредственно с чертежа.
208
z
Рис. 4.52
Рис. 4.53
При м е р 4.12. Балка равнобокоrо уrолковоrо ПрОфИЛJl (рис. 4.53),
защемленная одним концом, находится под действием собственноrо веса.
Требуется определить наибольшее наПРJlжение в заделке. Длина балки
/ == 3 м, профиль N 10, толщина стенок ПрОфИЛJl 6 = 10 мм.
По таблицам стандартных профилей (см. приложение) опредеЛJlем
массу балки на единицу длины 15,1 Kr/M. Отсюда q == 1,48 Н/см. По
формуле М == q/2/2 находим наибольший изrибающий момент:
М == 66600 н'см. Плоскость этоrо момента параллельна стороне уrолка
и составляет с r лавными ОСJlМИ уrол cr = 450. Вычерчиваем в масштабе
поперечное сечение (рис. 4.54) и проводим rлавные центральные оси х и у.
Рис. 4.54
Из та.блиц сорта.мента находим J x = Jma.x = 284 см 4 , J II =
= Jmin = 74,1 см 4 . Соr.п&сно формуле (4.27), получаем уравнение
209
нейтральной линии
284 о
у = % 7 ctg45 = З,8З%.
4,1
Проводим эту ПРJlМУЮ, И опредеЛJlем наиболее удаленную от нее
точку А (см. рис. 4.54). Координаты этой точки будут %1 = з, 6 см,
../2
Уl == б,4 см; Мх == Ми == М = 47090 Н'см. По формуле (4.29) опре
2
деЛJlем
= 47090. 6,4 47090.3,6 = 33 5 МПа.
О'т&х 284 74 1 '
,
При м е р 4.13. ДВУХОПОРНaJI балка (рис. 4.55, а) наrружена си
лами Р и 2Р. Определить наибольшее наПРJlжение, если сечение балки
прямоуrольник со сторонами Ь и 2Ь (рис. 4.55, 6).
2Р
А
С
ь
о
.1..р
J
в данном случае внешние силы приложены по rлавным осям сечения
и удобнее Bcero рассмотреть раздельно зпюры изrибающих моментов от
одной и от друrой силы. Наиболее опасными будут точки, расположенные
на ребре АВ, rде суммируются наибольшие сжимающие напряжения, или
на ребре CD, rде суммируются наибольшие растяrивающие наПРJlжения.
Рассмотрим средний участок. На расстоянии Z от левой опоры
2Р Р
(рис. 4.55, 6) имеем Мх == 3 (31 z)j Ми = 3" z. Для точки ребра CD
2Р 31 z Р z
(Тт&х = + .
3 W z 3 W r
210
Так как W == Ь (2ь)2 /6 и W, == 2ЬЬ 2 /6, то дла ередиеrо участка D'm&x
оказываетеа ие зависащим от z и равиым ЗРllЬ З . На первом и третьем
участках иапражеииа будут меиьшими.
4.9. Внецентренное растяжение сжатие
При внецентренном растяжении равнодействующая внеш
них сил не совпадает с осью стержня, как при обычном растя
жении, а смещена относительно оси z и остается ей параллель
ной (рис. 4.56).
Пусть точка А приложения paB
нодействующей внешних сил име
ет в сечении координаты ХО и Уо
(см. рис. 4.56). Тоrда относитель
но r лавных осей равнодействуюшая
сила Р дает моменты
Мх == РУо и Му == Рхо.
Таким образом, внецентренное
растяжение сжатие оказывается
родственным косому изrибу. Б OT
личие от последнеrо, однако, при
внецентренном растяжении в попе
речном сечении стержня возникают
не только изrибающие моменты, но
и нормальная сила N == Р.
в произвольной точке В с KOOp
динатами х, у нормальное напряже
ние а определяется следующим BЫ
ражением:
Р Руоу Рхох
а== + +
F h '
( 4.30)
z
z
.z
Рис. 4.56
П ространственная эпюра напряжений образует плоскость.
Уравнение нейтральной линии получаем, приравнивая а HY
лю:
1 уоу хох
F + J x + J y = О.
(4.31 )
211
Наибольшие наПРJlжеНИJl, как и при косом изrибе, имеют Me
сто в точке с координатами хl, Уl, наиболее удаленной от ней
тральной линии:
( 1 УОУl ХОХl )
О"тах = р F + Т + J; .
При внецентренном растя
жении сжатии в отличие от
Kocoro изrиба нейтральная ли
ния не проходит через центр тя
жести сечения. При положи
тельных хо и Уо по крайней Me
ре одна из координат х, у, BXO
дящих В уравнение (4.31), долж
на быть отрицательной. Сле
довательно, если точка прило
жения силы Р находится в пер
вом квадранте, то нейтральная
линия проходит с противопо
ложной стороны центра тяже
сти через квадранты 2, а и 4
(рис. 4.57).
JI
Рис. 4.57
.r
Расстояние от начала координат до некоторой прямой,
уравнение которой
ау + Ьх + с = О,
как известно из курса аналитической rеометрии, равно
с
ос=
.J а 2 + ь2
в данном случае (см. рис. 4.57)
1/Р
V y /J: + x /J;
Следовательно, по мере Toro как точка приложения силы при
ближается к центру тяжести сечения, нейтральная линия yдa
ляется от Hero.
ос=
212
( 4.32)
В пределе при ха = Уа = О, коrда сила Р приложена в цeH
тре тяжести, нейтральная линия находится в бесконечности.
Напряжения в этом случае распределены по сечению paBHO
мерно. По мере Toro как точка приложения силы удаляется
от центра тяжести, отрезок ОС уменьшается и нейтральная
линия, следовательно, приближается к центру тяжести.
Из сказанноrо следует, что при внецентренном растяже
нии и сжатии нейтральная линия может как пересекать сече
ние, так и находиться за ero пределами. В первом случае в
сечении возникают и растяrивающие, и сжимающие напряже
ния. Во втором случае напряжения во всех точках сечения
будут одноrо знака.
Затронутый вопрос имеет значение, например, для расче
та сжатых кирпичных ко.донн. Кирпичная кладка плохо co
противляется растяжению. Поэтому желательно, чтобы Ha
пряжения при внецентренном сжатии были для Bcero сечения
сжимающими и чтобы нейтральная линия проходила за преде
лами сечения. lIЛЯ этоrо нужно внешнюю силу прикладывать
достаточно близко к центру тяжести.
В окрестности центра тяжести существует область, Ha
зываемая ядром сечения. Если след силы Р находится внутри
ядра сечения, напряжения во всех точках сечения будут oд
Horo знака. Если сила приложена за пределами ядра сечения,
нейтральная линия пересекает сечение, и напряжения в сече
нии будут как сжимающими, так и растяrивающими. Коrда
точка приложения силы находится на rранице ядра, нейтраль
ная линия касается контура сечения. Чтобы определить ядро
сечения, надо представить себе, что нейтральная линия обка
тывается BOKpyr сечения. Точка приложения силы вычертит
при этом контуры ядра.
Рассмотрим примеры.
При м е р 4.14. Установить, который из стержней, показанных па
рис. 4.58, способен выдержать большую наrрузICУ без признаICОВ пласти
ческих деформаций.
В случае а сила Р длJ( ослабленноrо сечеНИJ( J(ВЛJ(еТСJ( нецентраль
ной. Ее плечо относительно оси у равно а/4. Следовательно, наибольшее
растяrивающее напряжение
р БРа/4 4 Р
О'тах = аЗа/2 + а(За/2)2 = 3 а 2 '
213
t P
t P
JI
о
т
.р.
1
р.
1
.r
20
2fl
!Р tp
...ф
о О
Рис. 4.58
Рис. 4.59
в случае б сила Р является центральной и О'тах = Р/а.2.
Таким образом, в стержне, имеющем вырезы с двух сторон, напря
жение будет меньше.
При м е р 4.15. Определить размеры ядра сечения для стержня,
имеющеrо круrлое сечение радиусом R (рис. 4.59).
По условиям симметрии ядро сечения также должно иметь форму
Kpyra. Пусть точка приложения силы находится на оси у, а нейтралЬН&JI
линия касается контура сечения (см. рис. 4.59). Тоrда ОС = R, уа = r,
ХА = О.
УЧИТЫВ&JI, что F = 1fR 2 , а]:!: = 1fR /4, получим из формулы (4.31)
радиус ядра уа == r == R/4.
При м е р 4.16. Определить ядро сечения для стержня, имеющеrо
сечение в виде прямоуrольника со сторона.ми Ь и h (рис. 4.60).
Сначала по формуле (4.32) определяем ординату уа точки А пере
сечении контура ядра сечения с осью у. Коrда след нормальной силы
находится в точке А, нейтралЬН&JI линия совпадает с нижним основани
ем прямоуrольника, при этом ос = h/2, ха == О, F = bh, ]:!: = bh 3 /12.
Формула (4.32) да.ет уа == h/6.
Коrда. равнодеЙСТВУЮЩ&JI сил перемеСТИТСJl в точку В, расположен
ную на расстоянии Ь/6 от центра ТfЖести, иейтрал:ьиа.а: ЛИИИf совпадет с
214
правой стороной ПРJ:моуrольника. Симметрично точкам А и В распола
rаютса точки А' и в' (см. рис. 4.60).
Теперь остаетса решить ВО--
прос, по какой КРИВОЙ от точки А
к точке В будет переме[Цатьса точ
ка приложения силы Р, если ней
тральная линия поворачиваеТСJ: во--
Kpyr npaBoro нижнеrо уrла сечеНИJ:
(см. рис. 4.60). Формула (4.30) Bыpa
жает условие, при котором нормаль ООС::
ное наПРJ:жение в некоторой точке ce
чения равно нулю.
Потребуем, чтобы в нижнем
правом уrлу сечениа, Т.е. в точке с
координатами у = h/2 И Х = Ь/2,
напряжение равнялось нулю. Tor да,
соrласно уравнению (4.31), имеем
1 yah/2 х а Ь/2
bh = ЬhЗ /12 + hЬ З /12 = О,
или
1 6уо = 6хо = О.
h Ь
!I
JJ 11
:tО б
:с
Рис. 4.60
Если координаты точки приложеНИJ: силы Ха, уа удовлетворают это
му уравнению, то сила Р перемещается по прамой. В данном конкретном
случае эта ПРЯМaJI проходит через точкИ А и В. СоеДИНJ:J: точки А, В, А'
и В' прямыми, получаем адро сечеНИJ: в виде ромба.
4.10. Изrиб бруса большой кривизны
по сих пор мы рассматривали задачи, связанные с изrи
бом прямоrо бруса. Обратимся теперь к изrибу кривоrо бруса,
полаrая, что внешние силы приложены в плоскости ero кри
визны.
Принято различать брус малой и большой кривизны.
Основным признаком для TaKoro деления является отношение
высоты сечения h в плоскости кривизны к радиусу кривизны
оси бруса Ро. Если это отношение существенно меньше едини
цы (h / РО О, 2), считается, что брус имеет малую кривизну.
Пля бруса большой кривизны отношение h/ Ро соизмеримо с
единиuей. Таким образом, указанное деление является услов
ным и не имеет четкой rраницы.
215
Расчетные формулы, выведенные ранее для прямоrо бру
са, применимы также и к брусу малой кривизны. Очевидное
изменение претерпевает только формула (4.5), определяющая
кривизну наrруженноrо бруса. Взамен нее для бруса малой
кривизны имеем
11М
............ ...............,
р ро Е J х
( 4.33)
rде 1/ ро кривизна ненаrруженноrо бруса. Таким образом,
задачи, связанные с расчетом бруса малой кривизны на проч
ность, не содержат в себе специфических особенностей. Вопрос
о перемещениях будет рассмотрен особо в rл. 5.
Перейдем теперь к бру
су большой кривизны. К
схеме TaKoro бруса сводится,
например, задача расчета на
прочность крюка подъемни
ка или звеньев металличе
ской цепи (рис. 4.61).
Положим, имеется уча
сток бруса большой кривиз
ны постоянноrо сечения, Ha
rруженный по концам MO
ментами 9л (рис. 4.62). Так
же как и для прямоrо бру
са (см. 4.2), можно пока
р зать, что множество точек,
образующих до изrиба по
Рис. 4.61 перечное сечение бруса, по
сле изrиба также образует
плоское сечение, но повернутое в пространстве. Иными слова
ми, поперечные сечения бруса большой кривизны при чистом
изrибе остаются плоскими.
Выделим из кривоrо бруса двумя близкими нормальными
сечениями (см. рис. 4.62) элементарный участок. При изrи
бе смежные сечения повернутся одно относительно друrоrо на
уrол ll(d ), и в слоях бруса ВОЗНИКНУТ некоторые удлинения.
216
d,
A\HH 8
" 11
4+0'd,-
6
а
!
Рис. 4.62
Введем необходимые обозначения. Через РО (см.
рис. 4.62, а) обозначим радиус кривизны оси бруса (линии цeH
тров тяжести сечений), а через то радиус кривизны нейтраль
Horo слоя. Радиус то пока неизвестен. В дальнейшем мы уви
дим, что То всеrда меньше РО и нейтральная линия для бруса
большой кривизны смещена относительно центра тяжести в
сторону центра кривизны. Ординату у будем отсчитывать от
нейтральной линии.
Удлинение слоя АВ (см. рис. 4.62, б) равно
В в' уд( d<p)
€
АВ (то + у) d<p'
Здесь предполаrается, что в процессе изrиба бруса у не меняет
ся. Однако, cTporo rоворя, это не так. Если рассмотреть усло
вия равновесия элементарной полоски АВ (см. рис. 4.62, в),
станет очевидным, что между соседними волокнами должно
существовать взаимодействие в виде сил, направленных по pa
диусу, в результате чеrо форма поперечноrо сечения бруса Me
няется и размер у не остается прежним. Для сплошных сече
ний это изменение несущественно. Для TOHKocTeHHoro же бруса
радиальные перемещения волокон довольно велики и MorYT KO
ренным образом изменить картину распределения напряжений
в сечении.
Отношение д( d<p)/ d<p пропорционально изменению кри
визны бруса. Из рис. 4.62 видно, что с одной стороны С D =
= (d<p + д.( d<p)) т, r де r радиус кривизны нейтральноrо слоя
217
после деформации; с друrой стороны, С D = то dtp. Приравни
вая эти выражения, получаем
Ll(dtp) = ТО ( ) .
d<p т то
Таким образом, можно написать, что
с: = TO ( )
то + у т То
и, далее,
a=E TO ( ) '
то + у т ТО
(4.34)
в полученных выражениях Har лядно проявляется OCHOB
ная особенность бруса большой кривизны: размеры попереч
Horo сечения соизмеримы с радиусом ТО, поэтому величина у,
стоящая в знаменателе, имеет существенное значение и напря
жения по высоте сечения распределяются нелинейно. Для бру
самал6иi<ривизны размер у по сравнению с то мал и
а = Еу ( ) .
т то
При 1/то = О это выражение принимает вид уравнения (4.з)
для прямоrо бруса.
JI
.r
z
Рис. 4.63
Будем полаrать для простоты, что сечение бруса симме
трично относительно плоскости кривизны. Тоrда ось у в ce
чении является осью симметрии (рис. 4.63) и момент элемен
тарных сил (J dF относительно этой оси равен нулю. Напишем
218
теперь выражения для норма.л:ьной силы N и изrибающеrо MO
мента М:
N = J (J dF;
F
м = J (JydF.
F
После подстановки (J ИЗ (4.зз) получаем
N = Ето ( ) J у dF i М = Ето ( ) J у2 dF .
т То То + у т То То + у
F F
Так как нормальная сила равна нулю, то
J у dF = о.
То + у
F
Выражение для М преобразуем, разбивая ВХОДЯЩИЙ в Hero
интеrрал на два слаrаемых:
(4.35)
м = ETO ( 2. ) [J YdF То J ] .
т То то + у
F F
Первое слаrаемое представляет собой статический момент ce
чения относительно нейтральной линии и равно произведению
Ре, rде е расстояние от нейтральной линии до центра тяже
сти,
е = РО То
( 4.36)
Второе слаrаемое, соrласно выражению (4.35), равно нулю.
Таким образом,
м = ETO ( ) Pe.
т То
( 4.37)
Исключив при помощи полученноrо соотношения разность
1/ т 1/ То из выражения (4.34), получим следующую расчетную
формулу для определения нормальных напряжений:
м у
(J
Ре То + у'
( 4.38)
Напряжения, как видим, меняются по высоте сечения He
линейно. Эпюра напряжений представляет собой rипербо
лу, одна из асимптот которой совпадает с осью кривизны
219
(рис. 4.64). В зависимости от формы сечения наибольшие Ha
пряжения MorYT иметь место как в верхней, так и в нижней
точке сечения.
,
I
,
+
Асимптота О
Рис. 4.64
Рис. 4.65
Для Toro чтобы пользоваться формулой (4.38), необходимо
определить То. Для этоrо рассмотрим интеrрал (4.35). Введем
НОВУЮ переменную и = То + у (рис. 4.65). Тоrда выражение
(4.35) примет вид
J и То dF = О,
F
откуда
F
ТО = J dF .
, и
F
Интеrрал, стояrций в знаменателе, представляет собой
rеометрическую характеристику сечения, такую же, как, Ha
пример, статический момент или момент инерции. В частно
сти, для прямоуrольника (рис. 4.66, а) имеем
po+h/2
J dF = Ь J dи = Ып РО + h/2 ,
и и ро h/2
F po h/2
и, соrласно формуле (4.39),
( 4.39)
h
ТО = ln ро + h/2 .
ро h/2
220
у
-Ei:
... о ..с:::
.:r
.. '"
а
Рис. 4.66
!J
.%
о
б
Смещение нейтральной линии относительно центра тяже
сти
h
е = РО h/2 ' (4.40)
ln РО +
РО h/2
Аналоrичным образом для бруса круrлоrо поперечноrо ce
чения (рис. 4.66, 6) после выполнения операции интеrрирова
ния получим
е = (po V Рб R2). (4.41)
Вычисление е как разности между РО и То содержит в ce
бе значительные неудобства, особенно в случае сравнительно
небольшой кривизны бруса. Пело в том, что разность боль
ших радиусов РО и то очень мала, но должна быть вычислена
точно, поскольку от этоrо непосредственно зависит результат
расчета напряжения а по формуле (4.38). Поэтому значение То
приходится подсчитывать с большим числом знаков.
Пля подобных случаев выработан прием разложення BЫ
читаемых величин в ряды с последующим исключением пер
вых взаимно уничтожающихся членов. Например, в paCCMO
трен нам случае прямоуrольноrо сечения это выrлядит следу
ющим образом:
ln РО + h/2 = ln 1 + h/(2po) =
Ро h/2 1 h/(2po)
= 2 [ 2:0 + ( 2:,)' + ( 2:оУ +...] ,
221
откуда
1" РО h/2 = РО [1 C ,)'
РО h/2
4 ( h ) 4 44 ( h ) 6 ... ] .
45 2ро 945 2ро
Возвращаясь к выражению (4.40), видим, что радиусы РО вза
имно уничтожаются, а смещение е можно определить без по
тери точности при помощи следующеrо ряда:
1 ( h ) 2 [ 4 ( h ) 2 44 ( h ) 4 ]
e О 1+ + +
3 Р 2ро 15 2ро 315 2ро ....
При h/ Ро < 1/2 можно довольствоваться с достаточной точно
стью одним членом ряда:
е:::: po ( ) 2.
3 2ро
Аналоrично для выражения (4.41) имеем
v р2 R2 = Ро [ 1 ( R ) 2 ( R ) 4 ( R ) 6 .. . ] ;
о 2 ро 2 4 Ро 2 4 6 ро
R 2 [ 1 ( R ) 2 1 ( R ) 4 ]
е = 4ро 1 + 4" Ро + 8" Ро + . .. .
Все сказанное леrко может быть распространено и на слу
чай сечения произвольной формы. Выражение (4.35) перепи
шем в виде
J у dF = J у е + е dF = J Уl + е dF = О,
То + у ТО + е + у е Ро + Уl
F F F
rде Уl = У е расстояние от площадки dF до центральной
оси. Отсюда для е получаем следующее выражение:
222
е=
J Уl dF
Ро + Уl
F
J 1 dF'
РО + Уl
F
Воспользуемся разложением ( 1 + Уl ) 1 = 1 Уl + ( Уl ) 2
РО РО Ро
и оrраничимся двумя первыми членами ряда. Тоrда получим
J Уl (1 ) dF
е"" p
,... J ( 1 ) dF .
F
Так как Уl отсчитывается от центральной оси, то J Уl dF = О.
Тоrда, очевидно, F
J x
роР '
rде J x , как и при изrибе прямоrо бруса, момент инерции
сечения относительно центральной оси.
e
( 4.42)
При М е р 4.17. Найти наПРJl:жение в точке А крюка трапецеидаль
Horo сечеНИJl: (рис. 4.67) со следующими размерами: b 1 = 4 см, Ь 2 = 1 см,
Ul = 3 см, и2 = 10 см, h = 7 см. Сила Р = 20 кН.
Сначала определяем положение центра ТJlжести сечеНИJl:. Статиче
ский момент сечеНИJl относительно большеrо основаНИJl:
S = b 2 h 2 + b 1 Ь 2 h 2
2 б
Площадь сечеНИJl:
F b 1 + Ь 2 h 17 5 2
2 ,CM .
Разделив статический момент на площадь сечеНИJl:, находим расстояние
Уа от основаНИJl трапеции до центра ТJl:жести:
Ь 1 + 2Ь h
УО = b 1 + Ь з = 2, 8 см.
223
Рис. 4.67
Радиус ро == Уо + и! == 5,8 см. Момент
инерции сечеНИJl относительно OCHOBa
НИJl
J Ь2h З (Ь ! Ь 2 ) h З 200 1
+ , см.
2 12
!J
ПереХОДJl х центральной оси х, получа
ем J% == 62, 9 CM . ДОВОЛЬСТВУJlСЬ при
ближенным определением е, по формуле
(4.42) находим е == 0,620 см.
НаПРJlжение изrиба в точхе А опре
деЛJlем по формуле (4.38), XOТOp&JI при
нимает ДЛJl данноrо случаJl вид
РРо Уа е
(1' == Fe ==
== 20000.5,8 . 2,18 == 77 7 МП
17,5.0,620 3 ' а.
К этому наПРJlжению следует прибавить
наПРllжение раСТJlжеНИIl
(l'раст == Р/ F == 11,4 МПа.
Таким образом,
(l'А == 89,1 МПа.
ВЫЧИСЛJlJl значение е более точно, находим
F
е == ра ( Ь! Ь 2 )
Ь2+и2
и2 и!
(l'А == 92 МПа.
== О, 598 см,
и2
ln (Ь ! Ь 2 )
и!
rлава 5
ПЕРЕМЕЩЕНИЯ В СТЕРЖНЕВОЙ СИСТЕМЕ
ПРИ ПРОИЗВОЛЬНОЙ НАrРУЗКЕ
5.1. Потенциальная энерrия стержня
в общем случае наrружения
Выше определялись перемещения прямоrо стержня при
растяжении, кручении и изrибе. Рассмотрим теперь общий
случай наrружения, коrда в поперечных сечениях MorYT воз
никать нормальные и поперечные силы, изrибающие и крутя
щие моменты одновременно. Кроме Toro, расширим Kpyr pac
сматриваемых вопросов, полаrа.я:, что стержень может быть
не только прямым, но и криволинейным или состоять из ряда
участков, образующих плоскую или пространственную систе
му.
Решение поставленной задачи необходимо не только для
нахождения самих перемещений и оценки жесткости конструк-
ции. На основе определения перемещений созданы общие Me
тоды определения внутренних силовых факторов в статически
неопределимых системах, о чем будет сказано в следующей
rлаве.
8 В. И. ФеOllОСЬеВ
226
Наиболее просто перемещеНИJl можно найти при помощи
энерrетических соотношений на основе общеro выражения по
тенциальной энерrии наrруженноrо стержня.
Определению потенциа.льной энерrии предшествует aHa
лиз внутренних силовых факторов, возникающих в стержне.
Этот анализ проводят , как известно, при помощи метода сече
ний с построением эпюр изrибающих и крутящих моментов, а
в тех случаях, Korna это необходимо, также эпюр нормаль
ных и поперечных сил.
Во всех случаях эпюры внутренних силовых. факторов
строят на осевой линии стержня. Силовой фактор откладыва
ют по нормали к оси, как это показано, например, на рис. 5.1.
Для пространственноrо стеРЖНJI осевую линию вычерчивают
обычно в перспективе, а эпюры изrибающих моментов изобра
жают в соответствующих плоскостJIX изrиба (рис. 5.2). Эпю
ру крутящих моментов не связывают с какой либо определен
ной плоскостью и в отличие от эпюры изrибающих моментов
штрихуют винтовой линией.
PR
9.
l
Рис. 5.1
р
Рис. 5.2
226
Лля определения потенциальной энерrии выделим из
стержня элементарный участок длиной dz (рис. 5.з). Cтep
жень может быть не только прямым, но и иметь малую Ha
чальную кривизну. В каждом из поперечных сечений в общем
случае наrружения возникает шесть силовых факторов: три
момента и три силы. По отношению к выделенному элемен
тарному участку рассмотрим эти силовые факторы как внеш
ние и определим работу, которая совершаеТСJ: ими при дефор
мировании элемента. Эта работа переходит в потеНЦИaJIЬНУЮ
энерrию, накопленную в элементарном участке стержня.
Рис. 5.3
Левое сечение элемента (см. рис. 5.3) условно будем pac
сматривать как неподвижное, с тем чтобы работа всех сило
вых факторов, приложенных к левому торцу, была равна HY
лю. Точка приведения сил в правом сечении вследствие дe
формации элемента получает некоторые малые перемещения,
на которых совершается искомая работа. Очень важно, что
каждому из шести силовых факторов соответствуют такие пе
ремещения, на которых ни один из ОСТaJIЬНЫХ пяти работы
не совершает. Так, под действием момента Мх возникает уrол
поворота сечения относительно оси z. На этом уrловом переме
щении работа совершается только этим моментом Мх. Линей
ное перемещение вдоль оси у возникает вследствие действия
силы Q у, и только эта сила совершает работу на этом пере
мещении. Следовательно, потенциальную энерrию элемента
можно рассматривать как сумму незавuсu.uых работ каждо
ro из шести силовых факторов, Т.е., иначе I'OBOpJ:, как сумму
8.
227
энерrий кручения, изrиба, растяжения и сдвиrа:
dU = dU(M,,) + dU(М ж ) + dU(M,)+
+dU(N) + dU(Qж) + dU(Q,). (5.1)
Естественно, такое разделение работ возможно лишь при
определенном выборе осей. В частности, точка приведения сил
должна совпадать с центром тяжести сечения. Иначе HOpMMЬ
ная сила N вызовет поворот сечения, и изrибающие моменты
совершат работу на уrловом перемещении, вызванном этой си
лой. Оси х и у должны быть rЛа8НЫМR. В противном случае
момент М ж вызовет поворот сечения относительно оси у, и бу
дет произведена взаимнЗJI работа на уrловых перемещениях,
вызванных двумя изrибающими моментами.
Выражения для первых четырех слarаемых нам уже из
вестны:
dU ( M ) = М; dz .
х 2GJ" ,
M 2 dz
dU(M y ) = 2 } ;
у
Остается найти энерrию сдвиrа dU(Qж) и dU(Qy).
M 2 dz
dU(М ж ) = 2ЕJ ж j
N 2 dz
dU(N) = 2ЕР '
!I
z
Рис. 5.4
Для определения dU (Q у) рассмотрим элементарную приз
МУ с площадью основания dF и длиной dz (рис. 5.4). Энерrия,
заключенная в этом объеме, равна ио dF dz, rne ио удель
ная потенциальнa.I энерrия при сдвиre. COrJI&CHO выражению
228
1':2
(2.з), ио = 1'; j(2G). Таким образом, ио dF dz = 2 dF dz. Ин
теrрируя по площади Р, находим dU(Q,) = . : J 1': dF. Но,
F
Q s.
соrласно формуле Журавскоro (СМ. 4.3), 1'11 = ;%ь% ' Следо
вательна,
Q2 dz J S.2 dF
dU(Qy)= 2 J2 \2 '
% F
Q2 dz F J S.2dF
или dU(Q,)= 2 P J %Ь2 '
F
Обозначим
F J S.2dF
J2 %Ь 2 = ky.
% F
(5.2)
Тоrда
Q 2 dz
dU(Qy) = ky 2 F .
Аналоrично получим
dU (Q ) = k Q dz
% % 2G F .
Коэффициенты k% и k" пред
ставляют собой безразмерные ве-
личины, зависящие от reометри
ческой формы сечения. Напри
мер, для прямоуrольноrо сечения
с размерами Ь и h (рис. 5.5) стати
ческий момент S; заштрихован
ной площади относительно оси х
равен S; = ь ( 2 у2). Дa
лее, dF = bdy, F = bh, J% =
= bh 3 /12. Производя преобразова-
ния, по формуле (5.2) получаем k = k% = ky = 6/5. Для сплош-
Horo круrлоrо сечения k = 10/9. Для TOHKocтeHHoro KpyroBoro
профиля k = 2 и т .Д.
о
.r
-1::.
h
Рис. 5.5
229
Выражение (5.1) теперь принимает вид
м2ь м2ь М 2 Ь N 2 b Q2b Q 2 b
dU = 2G J ж. + 2EJ z + 2 J" + 2EF + k z 2GF + k" 2 F .
Чтобы получить потенциальную энерrию Bcero стеРЖIJЯ,
это выражение следует проинтеrрировать по длине:
J M2dz J M2dz J M2dz
dU = 2GJ K + 2EJ z + 2:J" +
1 1 1
J N2 dz J kzQ dz J k"Q dz
+ 2EF + 2GF + 2GF'
1 1 1
Если конструкция сложная и состоит из нескольких эле
ментов, имеющих форму стержня, то после интеrрирования в
пределах каждоrо стержня должно быть произведено сумми
рование энерrии по числу составляющих элементов.
В выражении (5.з) не всеrда все слаrаемые являются paB
ноценными. Для подавляющеrо большинства встречающих
ся на практике систем, rде составляющие элементы работают
на изrиб или кручение, три последних слаrаемых в выражении
(5.з) оказываются существенно меньшими трех первых. Иначе
rоворя, энерrия растяжения и сдвиrа, как правило, существен
но меньше энерrии изrиба и кручения.
(5.з)
. l
Рис. 5.6
Вместе с тем возможны такие случаи, в которых paCCMaT
риваемые слаrаемые оказываются величинами одноrо порядка.
Например, для нецентрально растянутоrо стержня, показанно
ro на рис. 5.6, энерrия растяжения и энерrия иэrиба являются
230
п,ноплост
Рис. 5.7
величинами onHoro порядка. При наrружении пластины, скле
енной из двух металлических листов с пенопластовым зanолни
телем (рис. 5.7), энерrия сдвиrа в заполнителе может оказаться
соизмеримой с энерrией изrиба.
5.2. Теорема Кастилиано
В основу определения перемещений стержня может быть
положена теорема Кастилиано: частнаz nроизводнаz от no
тенциаJ1.ЬНОЙ энер2ии систе.иы по сш&е равна nере.иещенuю
тО'Ч'lCи nриложениz сиАЫ по наnравJ1.ению этой силы.
Высказанная формулировка требует пояснения. у словим
ся под перемещением в заданном направлении понимать проек
цию полноrо перемещения на заданное направление. Поэтому
перемещение точки приложения силы по направлению силы
надо понимать как проекцию на направление силы полноrо пе
ремещения этой точки.
Р,
Рис. 5.8
Рассмотрим ynpyroe тело, наrруженное произвольной си
стемой сил и закрепленное тем или иным способом, но так,
чтобы были исключены ero смещения как жесткоrо целоrо
(рис. 5.8). Пусть потенциальная энерrия деформации, накоп
ленная в объеме тела в результате работы внешних сил, равна
231
U и выражена через силы. Одной из сил, например силе РП,
дадим приращение dPn. Torna потеНПИ&llЬНая энерrия U по
ди
лучит приращение дРп dPn и примет вид
ди
U + дРп dPn. (5.4)
Изменим теперь порядок приложения сил. Приложим CHa
чала к упруrому телу силу dPn. В точке приложения этой силы
возникнет соответственно малое перемещение, проекция KOTO
poro на направление силы dPn равна d6n. Тоrда работа силы
dPn оказывается равной dPnd6n/2. Теперь приложим всю си
стему внешних сил. При отсутствии силы dPn потенциальная
эttepf'ИЯ тeм ы сноваНРИН ll.ла&.lз-иа.чение и. Но теперь эта
энерrия изменитси на величину дополнительной работы dPn6n,
которую совершит сила dPn на перемещении 6п, вызванном
всей системой внешних сил. Величина 6п опить представли
ет собой проекцию полноrо перемещеНИJl на направление силы
РП. Перед произведением dPn6n множитель 1/2 отсутствует,
поскольку на пути 6п сила dPn остаеТСJl неизменной.
В итоrе при обратной последовательности приложения сил
выражение для потенциальной энерrии получаем в виде
1
U + dPn6n + dPnd6n.
2
(5.5)
Приравниваем это выражение выражению (5.4) и, отбрасывая
произведение dPnd6n/2 как величину высшеrо ПОРJlдка мало
сти, находим
ди
6п == дР п '
(5.6)
Следовательно, дифференцируя потенциальную энерrию по oд
ной из внешних сил (при прочих неизменных силах), находим
перемещение точки приложеНИJl этой силы по направлению
силы.
Если еще раз внимательно рассмотреть вывод, то леrко
установить, что в выражении (5.6) силу Рп можно трактовать
как обобщенную, Т.е. как некоторый силовой фактор. Тоrда
6п следует рассматривать как обобшенное перемещение, Т.е.
232
как такой rеометрический параметр, на котором обобщенная
сила Рn совершает работу. Например, если под Рn понимать
внешний момент rot (см. рис. 5.8), то 6n представляет собой
yr ловое перемещение в точке приложения момента по напра
влению момента. Если тело наrружено силами rидростати
ческоrо давления, то, дифференцируя потенциальнуЮ энерrию
по давлению, получаем изменение объема тела.
При доказательстве теоремы Кастилиано мы не наклады
вали оrраничений ни на форму тела, ни на систему внешних
сил. Мало Toro, мы не ставили даже вопрос о том, подчиня-
ется или нет материал закону rYKa. Однако в скрытой форме
эти оrраничения все же присутствуют.
Если зависимость между силами и перемещениями нели-
нейна, то работа, совершенная системой внешних сил, зависит
от Toro, приложена эта система до или после силы dPn. Иначе
rоворя, слаrаемые и в выражениях (5.4) и (5.5) различны, и
теорема Кастилиано становится несправедливой.
В подавляющем большинстве задач, с которыми прихо
дится сталкиваться на практике, зависимость между силами и
перемещениями является линейной, и к решению таких задач
теорема Кастилиано полностью применима. Исключение co
ставляют системы, к которым не может быть применен прин
цип неизменности начальных размеров и принцип независи
мости действия сил. Примеры таких систем были приведены
ранее (см. В6). При определении перемещений в таких си
стемах пользоваться теоремой Кастилиано в том виде, в каком
это делалось здесь, недопустимо.
В случае нелинейной зависимости между силами и пере
мещениями используют более общие энерrетические соотноше-
ния, выведенные на основе принципа возможных перемещений.
Более общую формулировку получает и теорема Кастилиано,
которая в этом случае трактуется как теорема о минимуме так
называемой дополнительной работы.
Рассмотрим простейшие примеры определения перемеще
ний при помощи теоремы Ка.стилиано.
233
При м е р 5.1. Определить при ПОМОЩИ теоремы Кастилиано уrол
поворота правоrо торца стержн. (рис. 5.9), нa.rруженноro моментом !IЛ.
t
Рис. 5.9
BHYTpeHHlI1I потенциальнa.JI энерrИII стеРЖНII при кручении, соrла.с
1
J М2 dz
но выражению (5.3), равна и == 2 J. . Так как М. == !IЛ, а жесткость
о
предполаrаеТСII неизменной, то и == 2 ;. ' Дифференциру. по !IЛ, нахо--
ди !IЛ1
дим", == д!IЛ == GJ. ' что совпадает с известным выражением дл. уrла
закручиваНИII.
При м е р 5.2. Определить проrиб консоли (рис. 5.10), наrруженной
на конце силой Р.
.
(j p
t
Рис. 5.10
1
U == J м;' dz
Потенциальнаll энерrИII стеРЖНII при изrибе 2EJz; . На pac
о
СТОIIНИИ z от конца Mz; == Pz. При посто.нной жесткости EJz; получаем
r w п
U == 6EJz; ' Перемещение точки приложеНИII силы Рб == дР == 3EJz; '
Это значение проrиба уже было получено ранее методом интеrрироваНИII
упруrой линии стеРЖНII.
При м е р 5.3. Определить вертикальное перемещение точки А ДЛII
конструкции, покаэанной на рис. 5.11. Жесткости стержней одинаковы и
равны EF.
Если не пользоватьс. теоремой Кастилиано, то такую задачу решить
было бы довольно трудно. Нужно было бы найти удлинеНИII всех стерж
ней, а затем путем rеометричесlCИХ преобр&Эоваиий устаиовить положение
234
узлов деформированной фермы. ТI,ICОЙ способ решен.. привел бы, несо-
мненно, х rромоздхим выхладхам. При помощи теоремы Кастилиано эта
задача решаете. несравненно проще.
Рис. 5.11
Сначала методом вырезаНИI: узлов находим ус или. в X8JICДOM стержне
и полученные значени. N сводим в таблицу
Номер Номер
Nj '; и; Nj '; и,
стержни стержн. I
1 Р 1 р 2 , 4 p 1 р 2 ,
2ЕР 2ЕР
2 Р../2 1../2 2P 2 1../2 5 Р../2 1../2 2P 2 1../2
2ЕР 2ЕР
3 Р 1 р 2 , б 2Р 1 4р 2 ,
2ЕР 2ЕР
Далее определ.ем значение потенциальной энерrии ДЛI: хаждоrо
N li
стержни и; = 2ЕР и заполн.ем последний столбец этой таблицы.
Суммируи, находим
р 2 ,
U = 2EF (1 + 4v'2}
Искомое перемещение ТОЧКИ А равио
ди Р' r.::
6 А = дР = ЕР (7+4у2).
5.3. Интеrрал Мора
Определение перемещений при помощи теоремы Кастили-
ано, как можно было убедиться на примерах, обладает тем
очевидным недостатком, что дает возможность найти пере-
мещения ТОЛЬКО точек приложения внешних СИЛ и только в
2З5
направлении этих сил. На практике же возникает необходи
мость определять перемешении любых точек системы в любом
наПравлении.
Выход из указаниOl'О затруднении оказывается довольно
простым. Если необходимо найти перемешение точки, к KO
торой приложены внешние силы, мы сами прикладываем в
этой точке внешнюю силу Ф в интересуюшем нас направлении.
Далее, составляем выражение потенциа.п:ьной энерrии системы
с учетом силы Ф. Лифференцируя ero по Ф, находим переме
щение рассматриваемой точки по направлению приложенной
силы Ф. Теперь остается вспомнить, что на самом деле силы
Ф нет, и положить ее равной нулю. Таким образом, можно
определить искомое перемещение.
Определим перемещение точки А в направлении оси :1:1
для стержневой системы, показанной на рис. 5.12.
IJ
AI
r:
Рис. 5.12
Приложим в точке А по направлеНИЮ:l:l силу Ф. BHYTpeH
ние силовые факторы в каждом поперечном сечении при этом,
вообще rоворя, изменятся на величины, зависяшие от силы Ф.
Например, крутящий момент в некотором поперечном сечении
будет иметь вид
М кр + М кф ,
rде первое слаrаемое представляет собой момент, который воз
никает под действием заданной системы внешних сил, а BТO
рое слаrаемое дополнительный момент, который появляет
ся в результате приложения силы Ф. Понятно, что и М кр , И
М КФ являются функциями Z, Т.е. изменяются по длине стерж
ня. Аналоrично появляются дополнительные слаrаемые и у
остальных внутренних силовых факторов: М Ж = М ЖР + М ЖФ '
Му = МУР + М УФ и Т.Д.
238
Совершенно очевидно, что дополнительные силовые фак
торы М"ф, М%ф, ... пропорциона.льны Ф. Если силу Ф, Ha
пример, удвоить, удвоятся соответственно и дополнительные
силовые факторы. Следовательно,
M"=M,,p+M" l Фj M%=M%p+M%l Фj M1/=M1/p+M1/1 Фj
N=Nр+NIФ; Q%=QхР+Q%lФj Q1/=Qур+Q1/1Ф,
(5.7)
rne MKl, M%l, ... некоторые коэффициенты пропорциональ
ности, зависящие от положения рассматриваемоrо сечения, Т.е.
переменные по длине стержня.
Если исключить систему внешних сил и заменить силу Ф
единичной силой, то М" = M"l, М% = M%l и Т. д. Следо
вательно, MKl, M%l, Myl, Nl, Q%l И Q1/1 суть не что иное,
как внутренние силовые факторы, возникающие в поперечном
сечении под действием единичной силы, приложенной в pac
сматриваемой точке в заданном направлении.
Вернемся к выражению энерrии (5.з) и заменим в нем BHY
тренние силовые факторы их значениями (5.7). Torna
U = J (МкР + MKl ф)2 dz J (М%р + М%lф)2 dz
2GJ K + 2EJ% +
I I
J (М1/Р + М1/ 1ф )2 dz J (Np + N 1 ф)2 dz
+ 2EJ1/ + 2ЕР +
I 1
J k%( Q%P + Q%l ф)2 dz J k1/( QyP + Q1/1 ф)2 dz
+ 2С F + 2С F .
1 1
Дифференцируя это выражение по Ф и полаrая после этоrо
Ф = О, находим перемещение точки А:
, ди I J M"pM"l dz J M%pM%l dz J MypM1/1 dz
ОА = = + + +
дФ ф==о GJ" EJ% EJ1/
1 1 1
J NpNl dz J k%Q%pQ%l dz J k1/Q1/PQyl dz ( 5.8 )
+ ЕР + СР + ар'
I I 1
Полученные интеrралы носят название uнтеzралов Мора.
237
Заметим, что интеrрa.J.[Ы Мора MorYT быть выведены и
без использоваНИJl теоремы Кастилиано из простых reометри
ческих соображении. Рассмотрим, например, консоль, пока
занную на рис. 5.13, и определим перемещение точки А по Ha
правлению Xl' Будем считать ДЛJl простоты, что искомое пе
ремещение является следствием только ИЗfиба.
Рвс. 6.13
На элементарном участке длиной dz произойдет изменение
кривизны, и правое сечение повернется относительно левоrо на
уrол
dO = ( ) dz,
Р РО
rде 1/ Р новая, а 1/ Ро старая кривизна.
Вследствие возникновения MecTHoro уrла поворота правая
часть повернется как жесткое целое, и точка А переместится
по направлению Х 1 на dб А = АА" = АА' sin Q = О А sin Q dO.
Но OAsinQ = ОВ. Следовательно, dБ А = OBdO. Отрезок ОВ
представляет собой не что иное, как момент относительно точ
ки О единичной силы, приложенной в точке А по направлению
Xl. Таким образом, dБ А = Ml dO, или
dБ А = ( ) Ml dz,
Р Ро
откуда
БА = J ( :0 ) M 1 dz.
1
238
Аналоrично можно составить выражеИИJl перемещений
для кручения, растяжеНИJl и сдвиrа. В общем случае
СА = J 8РМк1 dz+ J ( ) Мж1 dz+ J( ) М7I1 dz+
Р Ро жР Р РО 71 Р
I I I
+ J Ep N 1 dz + J 'УжрQж1 dz + J 'YypQy1 dz. (5.9)
I I I
Выражение (5.9) является более универсальным, чем BЫ
ражение (5.8), поскольку в нем не предполаrается линейной
зависимости 8, (1/ Р 1/ РО), Е И т. д. от внутренних силовых
факторов. Оно применимо, в частности, и для случая неупру
roro изrиба и кручения.
Если материал подчиняется закону rYKa, то
М к 11М N
8 = G J K j Р Ро = Е i е = Е F j
и тоrда выражение (5.9) переходит в (5.8).
kQ
'у = GF '
При м е р 5.4. Определить rориэонтв.льное перемещение точки А
консоли, покаэанной на рис. 5.14, а. Жесткость всех участков ПОСТОj[нна
и равна. EJ.
А
R
а
с
Ai
о
Рис. 5.14
в рассматриваемом стержне основную роль иrрают иэrибные пере--
мещеНИj[. ПеремещеНИj[ вследствие раСТj[жеНИJ: и сдвиrа так же мв.лы по
сравнению с перемещеКИJ:МИ изrиба, как и экерrИJ: расТJ:жеКИJ: и сдвиrа
239
по сравнению с энерrиеi иэrиба. Поэтому иэ шести интеrра.пов Мора (5.8)
берем один дл_ иэrнба
J МРМl dz
"А Е]
1
(иэrиб во второй плоскости и кручение отсутствуют).
Изrибающий момект силы Р на участке АВ равен нулю. На участке
ЕС М р == Pz, а на участке сп М р == PR(1 +sinep).
Момент от единичной силы на участке АС равен нулю, а на участке
CD М 1 == 1 . R (1 со. ер). Знак минус ПОСТaвJlек в св_зи С тем, что еди-
ничный иэrибающий момент направлен в сторону, противоположную М р .
Произведение М Р М 1 на участке АС оказываете_ равным нулю. По
этому интеrрирование ведем только на участке сп. ЗамеН_JI dz на R dlp,
получаем
"/2
PR 3 J
БА == Е] (1 + sin 'р) (1 COBIp) dlp,
О
откуда
11' 1 PR 3
БА == EJ '
Знак минус указывает на то, что rоризонталькое перемещение точки А
направлено не по единичной силе, а против нее, Т.е. влево (рис. 5.14, 6).
При м е р 5.5. Определить, насколько paCKpoeTCJI зазор в разре
эанном кольце (рис. 5.15) под действием сил Р. Жесткость кольца равна
EJ.
в точке В (см. РИС. 5.15) иэrибаю
щий момент М р от заданных сил Р равен
Р R (1 сов Ip), rде Ip центральный уrол.
Полаr&JI левый конец кольца закрепленным,
прикладываем к правому единичную силу,
с тем чтобы найти перемещение одноrо кон-
ца относительно друrоrо (рис. 5.16, а). Ре-
акЦИJl опоры будет равна единице, поэто-
му оба рисунка рис. 5.16, а и б, paBHoцeH
ны. Из сказанноrо, между прочим, следует,
что вообще, Kor да нужно найти flзаU.ICное
смещение двух точек, следует приклады
вать в этих точках равные, противополож-
но направленные единичные силы, действующие по пр_мой, соедИНJlЮ-
щей зтн точки. Момент от единичноЙ сивы Мl = R (1 СО8 ер). ИСJCомое
Рис. 5.15
240
о
Рис. 5.16
взаимное смещение
21<
J МрМ! dz РR З J( 2
Б А = Е} Е} 1 cos<p) d<p,
I о
РR З
или БА = 3,," EJ '
При м е р 5.6. Определить взаимное смещение точек А в таком
же кольце (см. предыдущий пример), но наrруженном силами, действую
щими перпеНДИКУЛJlРНО плоскости кольца (рис. 5.17, а).
р
а
Рис. 5.17
i
Рассмотрим кольцо в плане (рис. 5.17, 6). В сечении В возникает
не только изrибающий, но и КРУТJlЩИЙ момент. Первый равен моменту
силы Р относительно оси У, а второй моменту той же силы относительно
оси z (см. рис. 5.17, 6). Очевидно, М" = PRsin<p, Ма = PR(1 cos<p).
Прикладываем в точках А единичные силы взамен сил Р. Тоrда М,,! =
= Rsin <{J, Ма! = R (1 соа<р). ОбращаJlСЬ к выражению (5.8), остаВЛJlем в
нем два первых интеrра.ла и получаем
21< 21<
Р R з J( ) 2 Р R Э J . 2
БА = GJ a 1 cos<p d<p + Е} 8In I(J dl(J,
о о
241
или
3 ( 3 1 )
БА == 1rPR GJ. + Е] .
Здесь искомое перемещение опредеЛJlеТСJl жесткостью кольца как на кру-
чение, так и на иэrиб.
Из рассмотренных примеров видно, что при определении
перемещений для стержня, изоrнутоrо по дуre окружности,
приходится брать интеrралы от простейших триrонометриче-
ских функций в различных комбинациях. В табл. 5.1 даны
наиболее часто встречающиеся при решении подобных задач
интеrралы.
5.4. Способ Верещаrина
Основным недостатком определения перемещений при по-
МОIЦи интеrрала Мора является необходимость составления
аналитическоrо выражения подынтеrральных функций. Это
особенно неудобно при определении перемещений в стержне,
имеЮIЦем большое количество участков. Однако, если он co
стоит из прямых участков с постоянной в пределах каждоrо
участка жесткостью, операцию интеrрирования можно упро
стить. Это упрощение основано на том, что эпюры от единич
ных силовых факторов на прямолинейных участках оказыва-
ются линейными.
Положим, на участке длиной 1 нужно взять интеrрал от
произведения двух функцнй fI (z) . f2(Z):
1
J = J fI (z) . f2(Z) dz, (5.10)
о
при условии, что по крайней мере одна из этих функций ли
нейная. Пусть f2(Z) = Ь + kz. Тоrда выражение (5.10) примет
вид
1 1
J = Ь J fl(Z) dz + k J Zfl(Z) dz.
О о
242
><
:s;
101
I.J
CLI
11'
111
fo<
CLI
"
Q
111
;
fo<
><
111
а
'111
CLI
fo<
1:1
fo<
Q
:а
-111
III
'"' ct
101
111 111
=
-"s
.. .. с> 1< .. с> ..
с> с> N М I
.........o
-"s .... C'I Io!'
.......
.... .. I"" ....IC'I + + ....IC'I I
.... I м I о!' IN J:lo!'
'" ....
\;.........0 !
,.,
-"s
"IN ..IN Q .. IN N ..IN
C'I с> I
"'.......0
-"s .... C'I .. I о!'
.......
.. 1.". .. I о!' ....IN I 1 ....IN I
....... .... ....
..... "IN Io!' ....
'"
\;.........0
N
.S '" N
'" 1'1 .S
N N ....Io!' ';; '"
э.. .S .S ....Ie<i ....Io!'
-"s +
....... . '" '" '" .S 1 1
u 1'1 ....Ie<i ....!С"! .S '"
....... I .; I + '" I .S Ie<i
..... ....IN
90.......0 '" '" I
.... N О
............... ............... u
I I
....IN ....Ie<i .... .S
'"
MIC'I
'" 1'1 '"
'ii1 о
u
'" '" 9: 9:
9: о '"
u О О
.S '" '" .. u
.S '" u '" '"
о о I о о
'" u '" u .S I u u
.... .... I I
'" .......
.... ....
.......
..;
.,.,;
;:!'
::1
Е--.
243
Slf
z
l
z
Рис. 5.18
Первый из написанных интеrралов представляет собой пло
щадь, оrраниченную кривой fI(Z) (рис. 5.18), или, короче ro-
варя, площадь эпюры 11(Z):
1
J fI(z) dz = {}1.
О
Второй интеrрал характеризует статический момент этой пло
щади относительно оси ординат, Т.е.
1
J ZI1(Z)dz = {}I Z n.T,
О
rде Zn.T координата центра тяжести первой эпюры. Теперь
получаем
J = {}1(Ь + kz n . T ).
Но Ь + kz ц . т = 12(Zц.т), Следовательно,
J = {}112(Zn.T)'
Таким образом, по способу Верещаrина операция интеrри
рования заменяется перемножением площади первой эпюры на
ординату второй (линейной) эпюры под центром тяжести пер
вой.
В случае, если обе функции 11(Z) и 12(z) линейные, опе
рация перемножения обладает свойством коммутативности.
В этом случае безразлично, умножается ли площадь первой
244
эпюры на ординату второй или площадь второй эпюры на op
динату первой.
В каждый из интеrра.лов Мора (5.8) входит произведение
функций М хР М х l, М"РМ к l и Т.д. Способ Верешаrина приме-
ним к любому из шести интеrра.лов, и перемножение эпюр про
водится одинаково, независимо от тоro, построены эти эпюры
для изrибающих и круТЯIЦИX моментов и норма.льных и попе
речных сил. Разница заключается лишь в том, что результат
перемножения делится не на жесткость EJ, как при изrибе, а
на жесткость EJ", если речь идет о кручении, или на. ЕР или
G F при растяжении и сдвиre.
На первый взrляд может показаться, что способ Вереща
rина не дает существенных упрощений. Для ero применения
необходимо вычислять площадь эпюры моментов и положение
ее центра тяжести, что при сложных эпюрах все равно потре
бует интеrрирования, как и в методе Мора. Однако встречаю
щиеся на практике эпюры изrибающих моментов MorYT быть,
как правило, разбиты на простейшие фиrуры: прямоуrольник,
треуrольник и параболический треуrольник (рис. 5.19), для KO
торых площадь n и положение центра тяжести известны. При
кручении, растяжении и сдвиre эпюры оказываются еще более
простыми: они, как правило, линейные и состоят ИЗ прямо
уrольников и треуrольников в различных комбинациях.
52 - !J1 П;: Jlh
rm
Q=j&h
".... Лоро5одо Вершино
.т. ndpt1IoAbl
.....""
l
Рис. 5.19
При м е р 5.7. При помощи правила Верещаrина определить
перемещение точки А для стержня, показанноrо на рис. 5.20, а.
Строим эпюру изrибающих моментов от заданных сил Р
(рис. 5.20, 6). За.тем, полаru: внешние силы равными нулю, приклады
ва.ем в точке А единичную силу и также строим эпюру (рис. 5.20, в и е).
Далее проводим перемио.еиие эпюр.
245
d
р
1(.7.
J
I
Рис. 5.20
На участке ве площадь эпюры моментов заданных сил О = PI2/2.
Ордината единичной эпюры под центром ТJ(жести эпюры момеитов
заданных сил длJ( этоrо участка будет М 1 ..... = 1/6.
ПереМНОЖ8JI эти величины, находим ОМ1..... = PI3/6.
Участок BD неЛЬЗJ( рассматривать целиком, так K&IC на этом участке
эпюра моментов единичной силы J(ВЛJ(еТСJ( ломаной. Надо взять ПОJlОВИНУ
PI2 5 5PI 3
участка, Т.е. отрезок АВ. Здесь n = , М 1 ..... = 1, ОМ 1 .... =
2 8 . 16
СклаДЫВ8JI полученные выражеНИJ( длJ( ОМ!....., находим (ОМ 1 ..... )АС =
2ЗРI 3
48
Для участков, расположенных справа от точки А, получим по усл
виям симметрии тот же результат. Поэтому удваиваем найденное Bыpa
жение и, разделив ero на EJ, находим искомое перемещение
23PI 3
6 А = 24EJ '
При м е р 5.8. В системе, показанной на рис. 5.21, й, определить,
на какое раССТОJlние ра.зОЙДУТСJ( точки А под действием сил Р.
Строим зпюры моментов от заданных сил Р и ОТ единичных сил,
прил:оженных в ТОЧКаХ А (рис.5.21, б и в). Очевидно, реЗУЛЬТаТ перемн
246
А А
......
....:1 l
P1
.....
.....
р р р
(J
Рис. 15.21
1 А А 1
6
жеНИJl эпюр на вертикальиых участках будет равен нулю. ДЛJl rориэон
тальноrо участка получим n = P12. Mla. = 1. Следовательно,
РI З
6 А = EJ '
При м е р 5.9. Определить перемещение точки А консоли, Harpy-
женной равномерио распределенной наrрузкой q (рис. 5.22, а).
(1
f/ll
2
Рис. 5.22
Строим зпюры моментов от заданных сил и от единичной силы, при-
ложенной в точке А (рис. 5.22, б и в). Перемио_еиие эпюр до,пжио быть
247
проведено по участкам дл. правой и левой половин стер.н.. Но дл.
левой половины эпюра MOMeH B заД&JIНЫХ сил предСТ&ВJI.ет собой пара
болическую трапецию, площадь и поло.еиие центра т..ести которой нам
неизвестны. Поэтому проводим так называемое "расслаивание зпюры".
Вместо эпюры, показ&ниой на рис. 5.22, 6, строим отдельно зпюры от Ha
rрузки, расположенной справа, и отдельно от нarрузки, расположенной
слева. от точки А (рис. 5.22, 2). Теперь на левом участке взамен параболи
ческой трапеции имеем простые пр.моуrо.пьиик, треуrольиик и параболи
ческий треуrольник. Дл. всех этих фиrур площади и поло.еиие цеитров
т.жести известны.
Произведеиие эпюр дл. правоrо участка равно нулю.
участке соответственно дл. пр.моуrольника, треуroльника и
ческоrо треуrольника получаем следующие слarаемые:
На левом
параболи-
ql3 1
164'
ql3 1
163'
ql3 31
48 8'
откуда
17 ql4
БА == 384 EJ '
При м е р 5.10. Рассмотрим пример простраиственной системы.
Определим перемещение точки А в направлеиии k дл. простра.нственноrо
стеРЖНJI (рис. 5.23, а). Жесткость ДЛJl элементов при изrибе в одной и
друrой ПЛОСКОСТИ ра.вна EJ. Жесткость на кручение равна GJ..
Р/,
о
б
6
Рис. 5.23
Основными перемещеНИJlМИ в системе JlВЛ.ЮТСJl перемещеНИJl, CBJI
З8,нные с изrибом и кручением стержней. Строим эпюры изrибающих и
КРУТJlЩИХ моментов ОТ заданных сил и от единичной силы (рис. 5.23, 6
и 8). Перемножаем эпюры изrибающих моментов, причем только эпю--
ры, лежащие в одной плоскости. Это следует из выражеНИJl (5.8), rде под
интеrралами перемножают только моменты M:z: p M:Z: 1 и MJJ pMJJ 1 , но не
M:z: p MIJI и MIJPM:Z:I.
248
Приведем результат переМИОJКени. эпюр иэrибающих моментов, со--
ответствующих участкам АВ I ве I е D и D Е:
о.
,
Pl2 2
l'
23'
Pl2 1
Тз'
Pl2
,
2 .
T&II: K&II: жеСТJ(ОСТЬ на изrиб в обеих ПЛОСJ(ОСТ.Х дл. всех участков
одна и та же, все эти величииы следует СЛОJКить и разделить на EJ. Тоrда
получим
2 РI З
3 EJ '
Эпюры круТ&ЩИХ моментов перемиоJКаютс. только иа учасТJ(е eD.
Моменты имеют оБЩИЙ ЭН&II:. Поэтому получаем
Pl2
GJ" 1.
Искомое перемещение
З ( 2 1 )
6,4, = Р, 3EJ + GJ" .
дл& стер.н. круrлоrо сечеии&
Е
GJ,,= 2(1+1') 2J:::::O,77EJ,
и
РIЗ
6,4, ::::: 2 EJ '
5.5. Определение перемещений и напряжений
в . витых пружинах
Витые пружины принадлежат к числу наиболее распро
страненных упруrих элементов машиностроения. Их приме
няют в самых различных конструкциях в качестве аккумуля
торов упруrой энерrии амортизирующих, возвратно подающих
и мноrих друrих механических устройств.
Вопросы расчета и проектирования витых пружин OTHO
сятся К курсам деталей машин и приборов. Однако в силу
установившихся традиций основные расчетные формулы BЫ
водят обычно в курсе сопротивления материалов, поскольку
примеры расчета пружин дают наrлядную иллюстрацию Me
тодов определения переыешеиий.
249
Витую пружину можно рассматривать как простран
ственно изоrнутый стержень, осевая линия KOToporo в про
стейшем случае представляет собой винтовую линию. reoMe
трическая форма осевой линии определяется диаметром вит
ка D, числом витков n и уrлом подъема а (см. развертку на
рис. 5.24). Подъем витка можно характеризовать также шаrом
пр ужины s:
s == 1rDtga.
Пля всех встречающихся на практике пружин шаr S MHOro
меньше 1r D, и уroл а, следовательно, можно считать малым.
Обычно а < 50. Свойства пружин зависят также от формы
поперечноrо сечения витка. Как правило, пружины навивают
из круrлой проволоки. Обозначим диаметр сечения проволоки
через d (рис. 5.24).
])
tl.
Рис. 5.24
Рис. 5.25
в зависимости от вида воспринимаемых рабочих Harpy
зок витые пружины подразделяют на nружины растJlжениJl
(рис. 5.25, а), nружuны сжатUJl (рис. 5.25, 6) и nружuны 'lCpy
чеНUJl (рис. 5.25, в). В первых двух случаях пружина наrружа-
ется силами, равнодействующая которых направлена вдоль ее
оси. Пружина кручения наrружена двумя моментами в плос
кости, перпендикулярной оси пружины.
Конструктивной особенностью пружин перечисленных
типов является отделка концов. Концевые витки пружины ра-
стяжения и кручения отrибают с таким расчетом, чтобы моrло
250
быть осуществлено ее крепление к сыежным деТa.JIям. У пру
жины сжатия крайние витки поджиыают и сошлифовывают с
торцов, чем обеспечивается создание опорных плоскостей. При
определении перемещений и напряжений, однако, указанные
особенности пружин обычно не учитываются и концевые вит
ки из рассмотрения исключаются.
fI
Рис. 5.26
Определим зависимость изменения высоты пружины pa
стяжения сжатия от осевой силы Р. в любом поперечном
сечении витка пружины растяжения возникает результирую
щая внутренняя сила Р (рис. 5.26, а) и момент М = Р D /2.
Полная сила в сечении параллельна оси пружины, а плоскость
момента М совпадает с плоскостью пары сил Р. Нормаль
ное поперечное сечение витка повернуто по отношению к этой
плоскости на уrол а. Раскладывая момент и силу на составля
ющие относительно осей, связанных с сечением (рис. 5.26, 6),
находим
D
М К = P cosaj
2
Q = Pcosaj
м' = Р D sin а;
2
N = Psina.
(5.11)
Пля Toro чтобы определить осевое перемещение Л, при
кла.дыва.ем к концам пружины единичные силы и находим B03
никающие при этом внутренние силовые факторы. Последние,
251
очевидно, опредеЛJlЮТСJl выражеии-ми (5.11), уменьшенными
в Р раз:
М D М , п. Q N .
хl = "2 сова; 1 = "2 вшаj 1 = сова; 1 = вша.
Для определения перемещений в цилиндрической пружине
необходимо, следовательно, написать четыре интеrрала Мора
из шести (см. формулу (5.8)). Однако перемещения, обусло
вленные нормальной и поперечной силами, как и ДЛJl всякоrо
стержня, мa.nы, а вследствие малости уrла а мa.nым будет и
осевое перемещение, связанное с изrибом витков. Поэтому
л = J МхМхl dz
GJ x '
1
rде GJ'/J. жесткость витка на кручение. Полаrая сов а 1, по
рп2
лучим л = 4GJ'/J. 1, rде 1 полная длина рабочей части витков,
равная 1 1r пn. Таким образом,
л = P1rD3 n .
4GJ'/J.
(5.12)
При определении n для пружины растяжения отоrнутая
часть витков на ее концах-во внимание не принимается. Для
пружины сжатия из полноrо числа витков следует исключить
примерно по 3/4 витка с каждоrо торца, поскольку эти витки
поджаты при навивке к соседним и свободно деформироваться
не MorYT. Таким образом, предполаrается, что 1,5 витка в
работе не участвуют.
Если пружина навита из круrлой проволоки, то J'/J. = J p =
= 1rd 4 /32, и тоrда формула (5.12) принимает вид
\ 8Рп3 n
л Gd 4 .
(5.13)
Поскольку витки пружины растяжения сжатия работают в
основном на кручение, имеем
МК Рп
1'тах = = .
W'/J. 2W x
262
в случае KpyroBOro поперечиоro сечеИИJ[
М... 8PD
1"шах = W p = 1fd 3 '
ПерехОДJ[ к пружииам кручеНИJ[, заметим, что при их рас-
чете наибольший интерес представляет определение yr ловоro
перемещения одноro конца относительно друrоrо.
н
,.
I
Рис. 5.27
В поперечных сечениях витка пружины кручения возни-
кает полный момент М = !m (рис. 5.27). Раскладывая: ero по
осям, находим М' = !m cos aj М" = !m sin а. После приложе-
ния к концам пружины единИЧНЫХ моментов получим
М' = cos а; M"l = sin а.
Вследствие малости уrла а пренебреrа.ем перемещением, свя
занным с кручением витков, а cos а полаrаем равным единице.
Тоrда
J м' M dz !ml
ер ЕJ ж ЕJ ж '
1
или
!m 1f Dn
ер = ЕJ ж
Наибольшее напряжение изrиба
rot
О'т&х = W:r; .
253
Задачи, возникающие при расчете витых пружин, Дa.JIеко
не исчерпываются изложенным. В случае, коrда диаметр про
волоки d соизмерим с диаметром витка п, возникает необходи
мость введения поправок на большую кривизну. В некоторых
случаях бывает необходимо определить так называемые BТO
ричные перемещения, например изменения диаметра или чис
ла витков пружины растяжения. В ряде случаев представляет
интерес создание пружин с нелинейной зависимостью осадки л
от силы Р. Это достиrается тем, что часть витков в результа
те осадки пружины последовательно выключается из работы.
Встречаются задачи, связанные с расчетом нецилиндрических
пружин, и мноrие друrие. Все они, однако, выходят за рамки
курса сопротивления материа.лов и здесь не рассматриваются.
5.6. Теорема взаимности работ
Теорема взаимности работ, подобно теореме Кастилиано,
относится к числу общих теорем сопротивления материа.лов.
Она прямо вытекает из принципа независимости действия сил
и применима ко всем системам, для которых соблюдается этот
принцип.
Рис. 5.28
Рассмотрим упруrое тело, к которому приложены сила Рl
в точке А и сила Р2 в точке В (рис. 5.28). Полаrая, что к си
стеме может быть применен принцип независимости действия
сил, определим работу, которую совершат силы Рl и Р2 при
прямом и обратном порядке приложения.
Прикладываем сначала в точке А силу Pl' Эта сила co
1
вершит работу Pl Al' rде Al перемещение точки А по на-
2
правлению силы Pl, вызванное этой силой. Па.лее, в точке В
254
прикладыва.ем силу Р2. Эта сила совершит работу, которая
1
будет иметь аНa.JIоrичное выражение 2' Р2 6 в2 . Одновременно
совершит работу и сила Pl, поскольку при приложении силы
Р2 произойдет и пермещение точки А. Работа силы Pl будет
Р1 6 А2, rде 6 А2 перемещение точки А по направлению силы Рl
под действием силы Р2 приложенной в точке В.
В итоrе получим сумму работ при прямом порядке прило
жения сил:
1 1
2 P16Al + 2 Р2 6 В2 + Р1 6 А2'
Теперь приложим снаЧa.JIа силу Р2, а затем Pl' Тоrда,
очевидно, выражение работы будет CJIедующиы:
1 1
2 Р2 6 В2 + 2 P16Al + Р2 6 Вl'
Приравнивая работы, находим
Р6 А2 = Р2 6 Вl' (5.14)
Полученный результат может быть сформулирован сле
дующим образом: работа первой С1МЫ на nере.wещенuu тo"4
tcU ее nрuложеНU8 под действиеАС второй сuлы равна работе
второй сuлы на nере.wещенuu fflO"4tcU ее nрuложеНU8 под дей-
ствиеАС первой сuлы.
В этом и заключается теореАСа взаu.wностu работ.
Эта теорема приобрета.ет большую общность, если
учесть, что здесь, как и при выводе теоремы Кастилиано, под
Pl и Р2 можно понимать не просто силы, а обобщенные силы,
а под 6 А2 и 6 В1 обобщенные перемещения.
Иноrда в теорему взаимности работ вкладывают более уз
кое содержание, трактуя ее Как теореАСУ взаu.wно'стu "ереАСе-
щений. Если Pl = Р2, выражение (5.14) принимает вид
6 А2 = 6 в1 . (5.15)
Пере.wещенuе mo"4tctJ. А под действиеАС сиАЫ, приложенной
в mO"4tce В, равно nере.wещенuю fflO"4tcU В под действиеАС mа'ICОЙ
же силы, nрuложенной в mO"4tce А.
Сказа.нное может быть проиллюстрировано на примере
бa.JIКИ, нarружеиной СИJIоi Р ПOQчереllИО в ТОЧКах А и В
255
в
011
8
Рис. S.29
(рис. 5.29). Соrласно теореме взаимности перемещений, OTMe
ченные на рисунке отрезки .5 А2 и .581 равны.
Теоремы взаимности работ и перемещений оказываются
весьма полезными, так как позволяют в ряде случаев сильно
упростить решение мноrих задач сопротивления материалов.
Это мы увидим, в частности, в следующей rлаве, rде будут
рассмотрены общие вопросы раскрытия статической неопре
делимости систем.
В некоторых случаях теорема взаимности работ дает воз
можность весьма просто решать в общем виде такие задачи,
которые друrими методами MorYT быть решены только с боль
шим трудом.
При м е р 5.11. Определить изменение объема упруrоrо тела про
извольной формы, наrруженноrо ДВУМII равиыми, противоположно напра
вленными силами Р (рис. 5.30). РаССТОIIНИII между точка.ми приложеНИII
сил равно Н. Упруrие конста.нты материала зад8.ИЫ.
ПОНIIТНО, что найти решение задачи В столь общей постановке пред
стаВЛllеТСII весьма затруднительным. Однахо на помоIЦЬ приходит теоре--
ма взаимности работ. Одновременно с зад8.ИНОЙ наrрузкой будем pa.cCMa
тривать случай ниружеНИII тела равномерно ра.спределенным давлением
р, действующим по поверхности. Тосда имеем две обобщенные силы: си
стему двух сил Р, с одной стороны, и давление р, с друroй.
Соrласно теореме вз8.имности работ, можно сказать, что
РдН р == pt:J.V p ,
(5.16)
rде дН р взаимное смещение точек приложеНИII сил под действием дa
влеНИII р, а А V p искомое изменение объема тела под действием сил Р.
При наrружении тела равномерно ра.спределенным давлением в лю--
бой площадке тела возникает на.пРllжение а, равное давлению р. ДЛII эле
меита.риоrо объема., поltuа.иноrо на. рис. 5.31, откосительное CJКa.ткe в .lIJO-
2Se
Рис. 5.30
Рис. 5.31
бом направлении, соrласно закону rYKa, будет следующим:
(J (J (J р )
t; == Е IJ Е IJ Е == Е (1 21J .
ТОЧКИ приложения сил Р (см. рис. 5.30) сБЛИЗJlТСJl под действием давлеНИJl
р на
р
дН" == Е (1 21J) Н.
Тоrда, подставляя дН" в выражение (5.16), находим
РН
дV" == Е (1 21J).
При м е р 5.12. Замкнутu: нераСТJlЖИМU: рама, имеющu: форму
Kpyra, наrружена в своей плоскости произвольной системой сил (рис. 5.32).
Показать, что площадь, оrраниченнu: рамой, при ее изrибе не меНJlется.
:JЛ
J1l
Рис. 5.32
Рис. 5.33
Изменение площади рассматриваем как обобщенное перемещение.
Соответствующu: этому перемещению обобщеннu: сила представляет со--
бой распределенную наrрузку с ПОСТОJlННОЙ интенсивностью q. Поэтому
наРJlДУ с заданным случаем на.rружеНИJl рассмотрим на.rружение той же
ра.мы равномерно распределенной на.rрузкой q (рис. 5.33). Тоrда, соrл&сно
теореме взаимности ра.бот, ИМ/';/';М
qLiF; == 2:Pi6i"
(5.17)
9 В. И. Фсодосьсв
257
rде АР;' искомое изменение площади под действием произвольной си
стемы сил; L Pi6iq сумма работ этнх сил ка перемещениях, вызванных
распределеннымн силами q.
Под действием сил q перемещения в кольце возиикать не будут, по-
скольку кольцо нерастяжимое, и поэтому 6iq == О. Следовательно, правВJI
часть уравнения (5.17) обращается в нуль, и АР; == О, что и требовалось
доказать.
Понятно, что полученный результат ЯВЛ.lется пр&Вильным только
для малых перемещений, пока к системе может быть примеиен принцип
независимости действи.l сил.
rЛ8S8 в
РАСКРЫТИЕ СТАТИЧЕСКОЙ
НЕОПРЕДЕЛИМОСТИ СТЕРЖНЕВЫХ
СИСТЕМ МЕТОДОМ СИЛ
6.1. Связи, накладываемые на систему.
Степень статической неопреДeJIИМОСТИ
Выше (в rл. 1 и 2) был частично затронуты вопросы,
связанные с понятием статической неопределимости. Пли pe
шения большинства встречающихся на практике задач опи
санные приемы оказываются, однако, далеко не достаточны
ми. Поэтому необходимо остановитьси на более общих методах
раскрытии статической неопределимости стержневых систем.
Под стержневоt'J системоа в широком смысле слова по
нимаетси всякая конструкции, СОСТОJIЩaJI из элементов, име
ющих форму стержни. Если элементы конструкции работают
в основном на растяжение или
сжатие, то стержнеВaJI система
называетси фер.wоt'J (рис. 6.1).
Ферма состоит из прямых стерж
ней, образующих треуrольники.
Пли фермы характерно приложе
ние внешних сил в УЗЛах. Р.с. 8.1
9"
218
Если элементы стержневой системы работают в основном
на изrиб или кручение, то система называется pO.AiCod (рис. 6.2).
а
J
p
6
Рис. 6.2
Особую, наиболее простую для исследования rруппу стер-
жневых систем составляют nAOC'lCUe системы. У плоской рамы
или фермы оси всех составляющих элементов расположены в
одной плоскости, которая одновременно является rлавной плос
костью сечений. В этой же плоскости действуют все внешние
силы, включая и реакции опор (см. рис. 6.2, а).
Наряду с плоскими имеются так называемые nAOCKOnpo
странственные систеАСЫ. Лля TaKoro рода систем оси COCTa
вляющих элементов в недеформированном состоянии распола-
rаются, как и для плоских систем, в одной плоскости. Внешние
же силовые факторы действуют в плоскостях, перпендикуляр
ных этой плоскости (см. рис. 6.2, 6). Стержневые системы,
не относящиеся к двум указанным классам, называются npo
странствеННЫАСи (см. рис. 6.2, 6).
Рамы и фермы принято разделять на статически опреде-
лимые и статически неопределимые. Под статuчес'lCU оnре-
деАиАСОй понимается такая система, для которой все реакции
опор MorYT быть определены при помощи уравнений равнове-
сия, а затем при найденных опорных реакциях методом сече-
НИЙ MorYT быть найдены также и внутренние силовые факторы
в любом поперечном сечении. Под статическu неоnредеАи-
АСОй системой имеется в виду TaJ(aJI, ДЛЯ которой определение
260
внешних реакций и всех внутренних силовых факторов не MO
жет быть произведено при помоIЦИ метода сечений и ура.внений
равновесия.
Разность между числом неизвестных (реакций опор и BHY
тренних силовых факторов) и числом независимых ура.внений
статики, которые MorYT быть соста.влены для рассматрива
емой системы, носит назва.ние степени, или 14UC.ICa cтaти14e
С'ICОЙ HeOnpeae.ICu.wocmu. В за.висимости от этоro числа системы
разделяют на один, два, три, ..., n раз статически неопреде
лимые. Иноrда rоворят, что степень статической неопреде
лимости равна числу дополнительных связей, наложенных на
систему. Остановимся на этом вопросе подробнее.
Положение жесткоro тела в простра.нстве определяется
шестью независимыми координатами, иначе roворя, жесткий
стержень обладает шестью степен.ми свободы. На Hero MorYT
быть наложены связи, т .е. оrраничения, обусловливающие ero
определенное положение в пространстве. Наиболее простыми
связями являются такие, при которых полностью исключается
то или иное обобщенное перемещение для некоторых сечений.
Наложение одной связи снимает одну степень свободы. Сле
довательно, если на свободный жесткий стержень наложено
шесть связей, то положение ero в пространстве будет, за He
которыми исключениями, определено полностью, и система из
механизма, обладающеrо шестью степенями свободы, превра
щается в кинематически неизменяемую систему. То число свя
зей, при котором достиrается кинематическая неизменяемость,
носит название необходu.wоzо 14UC.ICa св.нзей. Всякую связь, Ha
ложенную сверх необходимых, называют aOnO.ICHUme.ICbHOU. Чи
сло дополнительных связей равно степени статической неопре
делимости системы.
Связи в рамах и стержневых системах делят обычно на
связи внешние и связи внутренние, или взаимные. Под внеш
ними связями понимаются условия, накладываемые на абсо
лютные перемещения некоторых точек системы. Если, напри
мер, на левый конец бруса (рис. 6.3, а) наложено условие, запре
щающее вертикальное перемещение, rоворят, что в этой точке
имеется одна внешняя связь. У словно ее изображают в виде
двух шарНИрОВ или катка. Если запрещено как вертикальное,
261
так и roРИЗОНТa.JIьное смещение, roВOpJ:T, что Нa.JIожены две
внешние связи (рис. 6.3, 6). ЗаДeJIка в плоской системе дает
=
= .:.
о .
6 а.
6 I
Рис. в.3
три внешние связи. ПространствеННaJI заделка COOTBeTCTBY
ет шести внешним СВЯЗJ:М (рис. 6.3, в). Внешние связи часто,
как уже упоминa.JIОСЬ, делят на необходимые и дополнитель
ные. Например, на рис. 6.4 показана ПЛОСКaJI рама, имеЮЩaJI
Вl:лучае 11 три, а в с.пучае 6 пять внешних связей. Для тoro
чтобы определить положение рамы в плоскости как жесткоro
IImIOI'O, .:иеООхсщико НaJIOжение трех св-зей. Следова.тельно, в
случае а рама имеет необходимые внешние связи, а случае 6,
кроме TOro, две дополнительные внешние связи.
. .
6
о
Рис. в.4
Под eHympeHHU.uu, или взаu.uны.uu, связями понимают
ся оrраничения, накладываемые на взаимные смещения эле
ментов рамы. Здесь также можно rоворить как о необходи
мых, так и о дополнительных связях. Например, плоская ра-
ма, показанная на рис. 6.5, а, имеет необходимое количество
как внешних, так и внутренних связей между элементами.
.П 8 .п а
о 6
Рис. 6.5
262
Это кинематически неизмеНJlеМaJI система. Если будут зада-
ны внешние силы, мы сможем при помощи уравнений статики
найти как реакции опор, так и внутренние силовые факторы
в любом поперечном сечении рамы. В той же раме, показан-
ной на рис. 6.5, б, кроме внешних наложены две дополнитель-
ные внутренние связи, запрещающие взаимное вертикальное
и rоризонтальиое смещеНИJl точек А и В. Система в данном
случае дважды статически неопределима (иноrда. доба.вJIJ:ЮТ:
внутренним образом).
АВ
Рис. в.в
в раме, показанной на рис. 6.4, а и б, также имеЮТСJl внут-
ренние дополнительные связи. Контур рамы полностью за-
мкнут. РазреЗaJI ero в любом сечении (рис. 6.6), мы, не нару-
шая кинематической неизменяемости, получаем возможность
при заданных силах найти виутренние силовые факторы в
каждом сечении рамы. Следовательно, разреЗaJI замкнутую
раму, мы снимаем дополнительные связи, Т.е. ПОЗВОЛJlем сече-
ниям А и В поворачиваться и смещаться в двух направлени-
ях одно относительно друrorо. ОбобЩaJI, можно сказать, что
замкнутый плоский контур имеет три дополнительные вза-
имные связи, Т.е. трижды статически неопределим. Таким
образом, рама, показаННaJI на рис. 6.4, а, трижды статически
неопределима, а рама, представлеННaJI на рис. 6.4, б, пять раз
статически неопределима (три раза внутренним образом и два
раза внешним).
Рассмотрим теперь несколько примеров определеНИJl сте-
пени статической неопределимости стержневых и рамных си-
стем. На рис. 6.7, a и показано несколько рам. Последователь
но рассмотрим их.
а. Рама имеет четыре дополнительные внешние связи и
три внутренние связи, Т.е. семь раз статически неопределима.
б. Полаrаем сиачала, что шарнир А отсутствует. Tor-
да имеются две внешние и три внутренние дополнительные
283
R
А
6
tJ
о Е!
1
и
?J, G)!. @
ж 1 /1
Рис. 6.7
связи. Система без шарнира А была бы пять раз статически
неопределимой.
Шарнир А принадлежит одновременно трем стержням.
Ero можно рассматривать как два совпавших шарнира
(рис. 6.8). Так как каждый шарнир снимает одну связь, Т.е.
разрешает поворот одноrо сечения относительно друrоrо, то
можно сказать, что шарнир А снимает две связи. Система
становится, таким образом, вместо пяти три раза статичес
ки неопределимой.
Рис. 6.8
Обобщая сказанное, можно сделать вывод, что шарнир
снимает число связей, на единицу меньшее числа сходящих
ся в нем стержней. В данном случае в шарнире А сходятся
три стержня, и шарнир снимает две связи.
264
8. ЕСJIИ бы шарнир А отсутствовал, система была бы CTa
тически неопределимой четыре раза внешним образом и три
раза внутренним образом, Т.е. Bcero семь раз. Шарнир А сни-
мает число связей, на единицу меньшее числа СХОДЯЩИХСJI в
нем стержней, Т.е. три связи. Рама четыре раза статически
неопределима.
2. Рама три раза статически неопределима.
д. Внешние связи не удовлетворяют условиям кинематиче
ской неизменяемости. Это механизм, точнее roворя, MfHoBeH-
ный механизм. Система имеет возможность поворачиваться
относительно верхней опоры как жесткое целое. Понятно, что
уrол поворота будет небольшим. Нижняя связь заклинится и
будет достиrнуто какое-то положение равновесия, но новое по
ложение связей будет зависеть от жесткости системы. К раме
неприменимы основные принципы сопротивления материалов:
принцип неизменности начальных размеров и принцип незави-
симости действия сил.
е. Рама пространственная. Имеется шесть дополнитель
ных внешних связей (лишняя заделка) и шесть дополнитель-
ных взаимных связей (замкнутый контур). Система 12 раз
статически неопределима.
ж. Система семь раз статически неопределима (один раз
внешним образом и шесть раз внутренним).
з. Здесь для плоской рамы не показaRЫ внешние связи, но
дана система внешних сил, удовлетворяющая условиям paBHO
весия. В таком случае условились считать, что дополнитель
ных внешних связей нет и положение рамы в пространстве
определено, поэтому рассматривают только внутренние связи.
Система три раза статически неопределима.
и. Здесь также рассматривают только внутренние связи,
поскольку система внешних сил удовлетворяет условиям paв
навесия. Нужно подсчитать, сколько сечений необходимо cдe
лать в раме, чтобы, с одной стороны, она не "рассыпалась" ,
а с друrой чтобы в ней не осталось ни одноrо замкнутоrо
контура.. Таких сечений следует сдела.ть пять (см. рис. 6.7, и).
Система 30 раз статически неопределима.
266
6.2. Метод сил. Выбор основной системы
Наиболее широко применяемым в машиностроении общим
методом раскрытия статической неопределимости стержневых
и рамных систем является .wemoa сиА. Он заключается в том,
что заданную ста тit:чески неопределимую систему освобожда
ют от дополнительных связей как внешних, так и взаимных,
а их действие заменяют силами и моментами. Значения этих
сил и моментов подбирают так, чтобы перемещения COOTBeT
ствовали тем оrраничениям, которые накладывают на систе
му отброшенные связи. Таким образом, при указанном способе
раскрытия статической неопределимости неизвестными оказы
ваются силы. Отсюда и название "метод сил". Такой прием
не является единственно возможным. В строительной механи
ке широко применяют и друrие методы, например метод пе
ремещений, в котором за неизвестные принимают не силовые
факторы, а перемещения в элементах стержневой системы.
Итак, раскрытие статической неопределимости любой pa
мы методом сил начинается с отбрасывания дополнительных
связей. Система, освобожденная от дополнительных связей,
становится статически определимой. Она носит название
основной cucme.wbI. Пля каждой статически неопределимой
стержневой системы можно подобрать, как правило, сколько
уrодно основных систем. Например, для рамы, показанной на
рис. 6.9, а, можно предложить основные системы б е, которые
получены путем отбрасывания семи дополнительных связей в
различных комбинациях. Вместе с тем нужно помнить, что не
всякая система с семью отброшенными связями может быть
принята как основная. На рис. 6.10 показано три примера для
той же рамы, в которой также отброшено семь связей, однако
сделано это неправильно, так как оставшиеся связи не обес
печивают кинематической неизменяемости системы, с одной
стороны, и статической определимости во всех узлах с дpy
rой.
После Toro как дополнительные связи отброшены и систе
ма превращена в статически определимую, необходимо, как
уже rоворилось, ввести вместо связей неизвестные силовые
факторы. В тех сечениях, rде запрещены линейные переме
щения, вводят силы. Там, rде зa.nрещены уrловые смещения,
288
R
а б 8
R
2 д е
Рис. 6.9
"
Рис. 6.10
вводят моменты. Как в том, так и в друrом случае неизвест
ные силовые факторы будем обозначать Xj, rде i номер He
известноrо. Наибольшее значение i равно степени статической
неопределимости системы. Заметим, что для внутренних свя
зей силы Xi являются взаимными. Если в каком либо сечении
рама разрезана, то равны и противоположные силы и моменты
прикладывают как к правой, так и к левой частям системы.
На рис. 6.11 показано пять возможных способов приложе
ния неизвестных сил, соответствующих задающей основной
системе. Принцип приложеНИJl неизвестных силовых факторов
становится понятным без дальнейших ПОJIснений.
267
х,
'Р
'"
JODOHHOR
сuстеио
Рис. 6.11
Теперь остается составить уравнения для определения He
известных.
6.3. Канонические уравнения метода сил
Обратимся к конкретному примеру. Рассмотрим систему,
представленную на рис. 6.12. Тем, что рассматривается кон-
кретная семь раз статически неопределимая система, общность
рассуждений не будет нарушена.
Перейдем теперь к составлению уравнений для определе
ния неизвестных силовых факторов. Условимся через бис обо
значать взаимное смещение точек системы. Первый индекс
при Ь соответствует направлению перемещения, а второй си
ле, вызвавшей это перемещение.
В рассматриваемой раме в точке А отброшена опора. Сле
довательно, rоризонтальное перемещение здесь равно нулю и
можно записать:
Dl(xl'x2..... P ) == О.
268
А
1, А
ас
p
JJ
1,
Х5
Х,
JJ
"
Рис. 6.12
Индекс 1 означает, что речь идет о перемещении по направле-
нию силы Хl, а индекс (Хl, Х2, ..., Р) показывает, что пере
мещение определяется суммой всех сил, как заданных, так и
неизвестных.
Аналоrично можно записать:
62(xj.x2,....P) = о; 63(х 1 .х2....,Р) = О И Т.д.
Так как под величиной бik понимается взаимное смеще-
ние точек, то 62 обозначает вертикальное смещение точки В
относительно С, 0з rоризонтальное взаимное смещение тех
же точек, .54 взаимное уrловое смещение сечений В и С.
Уrловым смещением в рассматриваемой системе будет также
.57(Хl,Х2,"',Р).
В точках А и D смещения 6ik являются абсолютными.
Но абсолютные смещения можно рассматривать как смещения,
взаимные с неподвижными отброшенными опорами. Поэтому
принятые обозначения приемлемы для всех сечений системы.
Пользуясь принципом независимости действия сил, рас-
кроем выражения для перемещений 6i(Xl.X2,....P):
.5
1(Xj'X2'''''P)
= .51Х ! + .5 1Х2 + 61Хз + 61Х" + 61ХБ + 61Хб + 61Х7 + бlР = о;
6 2 (Xj'X2'''''P) =
= 02Х 1 + 02Х2 + б2Хз + б2Х" + 62ХБ + D2Хб + б2Х7 + б2Р = о.
Аналоrичным образом запишем и остальные пять уравнений:
каждое из слаrаемых 6iXJ:' входящих В уравнение, обозначает
перемещение в направлении силы, указанной в первом индексе,
и под действием силы, стоящей во втором индексе. Поскольку
269
каждое перемещение ПРОПОРЦИОНaJIЬНО соответствующей силе,
бiх" можно записать в следующем виде:
6ix" = бiIcХ/с. (6.1)
Что касается перемещений бlР, б2Р и т. д., то под Р в индексе
будем понимать не просто внешнюю силу Р, а вообще систе
му внешних сил, которая может быть произвольной. Поэтому
величины бl Р , б2Р, ... в уравнениях оставим неизменными. Te
перь уравнения примут вид
б ll Х l + б 12 Х 2 + бlЗ Х З + б14 Х 4 + бlS Х S+
+б 1 б Х б + б17Х7 + б 1р = о;
б21 Х l + б22 Х 2 + б2ЗХЗ + б24 Х 4 + б2SХS+
+б2б Х б + б27Х7 + б2Р = о; (6.2)
б71 Х l + б72 Х 2 + D7ЗХЗ + б74 Х 4 + б7БХБ+
+D7Б Х Б + б77 Х 7 + б7Р = о.
Эти уравнения носят название анонuчес'ICUХ уравнении
.метода сиА. Число их равно степени статической неопредели
мости системы. Как увидим далее, в случаях, коrда имеется
возможность сразу указать значения некоторых неизвестных,
число совместно решаемых уравнений снижается. Остается
теперь выяснить, что представляют собой коэффициенты Di/c и
как следует их определять. Пля этоrо обратимся к выражению
(6.1). Если Х/С = 1, то
Dix" = бik.
Следовательно, коэффициент Dik есть перемещение по Ha
правлению i ro силовоrо фактора под действием единичноrо
фактора, заменяющеrо k й фактор. Например, коэффициент
DЗl уравнения (6.2) представляет собой взаимное rоризонталь
ное смещение точек В и С, которое возникло бы в раме, если бы
к ней вместо всех сил была приложена только единичная сила
в точке А (рис. 6.13). Если, например, вместо сил Х2 прило
жить единичные силы, а все прочие силы снять (рис. 6.14), то
270
1 А
А
D
Рис. 6.13
Рис. 6.14
уrол поворота в сечении D под действием этих сил будет 072,
rоризонтальное перемещение в точке А будет 012 и т .д.
Весьма существенно отметить, что в проделанном выводе
совершенно не обусловливается то, каким образом возникают
перемещения Oik' Хотя мы и рассматриваем раму, работаю
щую на изrиб, все сказанное с равным успехом может быть
отнесено вообще к любой системе, работающей на кручение,
растяжение н изrиб или на то, друrое и третье совместно.
Обратимся к интеrралам Мора (см. 5.з). Для тoro что
бы определить Dik, следует вместо внешних сил рассматривать
единичную силу, заменяющую k й фактор. Поэтому BHYTpeH
ние моменты и силы М хр , М хр , Мур, N p , QxP и QyP в Bыpa
женин (5.8) заменим на Mxk, Mxk, Myk, Nk, Qxk и Qyk, пони
мая под ними внутренние моменты и силы от единичноrо k-ro
фактора. В итоrе получим
D' J МжkМхi dz J MxkMxi dz J MykMyi dz
ak GJ x + EJ x + EJ y +
1 1 1
J NkNi dz J kxQxkQxi dz J kyQykQyi dz ( 6.3 )
+ EF + GF + GF'
1 1 1
rде Mxi, Mxi, ... внутренние моменты и силы, возникающие
под действием i ro единичноrо фактора. Таким образом, KO
эффиuиенты Dik можно получить как результат перемножения
i ro и k-ro внутренних единичных силовых факторов. Индек
сы i и k непосредственно указывают, какие факторы должны
быть перемножены под знаком интеrралов МОРА. Если рама.
состоит из прямых участков и можно пользоваться правилом
271
Верещаrина, то бik представляет собой результат перемноже-
ния i-x единичных эпюр на k-e единичные эпюры.
Очевидно, что бik = бki. Это следует, с одной стороны,
непосредственно из выражений (6.з), а с друrой из теоремы
взаимности перемещений (см. 5.6), поскольку перемещения
Dik, и Dki возникают под действием одной и той же силы, равной
единице.
Величины 6iP, входящие в канонические уравнения, пред-
ставляют собой перемещения в направлениях 1,2, ..., возника-
ющие под действием заданных внешних сил в основной систе-
ме. Они определяются перемножением эпюры заданных сил на
соответствующие единичные эпюры.
Еще раз напомним, что в подавляющем большинстве слу-
чаев перемещения, связанные с изrибом и кручением элемен-
тов рамы, значительно превышают перемещения растяжения
и сдвиrа. Поэтому в выражении (6.з) последними тремя инте
rралами, как правило, можно пренебречь (см. 5.1).
При м е р 6.1. Раскрыть статичесJCУЮ неопределимость и постро-
ить эпюру изrибающих моментов ДЛJl рамы, ПОJCазанной на рис. 6.15.
р
l l
Рис. 6.15
Рама три раза статически неопределима. Выбираем основную систе-
му, отбрасывu: левую заделку. Действие заделJCИ замеНJlем ДВУМJI силами
X 1 , X и моментом Х э (рис. 6.16). КаноничеСJCие уравнеНИJl (6.2) прини
мают ДЛJl рассматриваемой системы таJCОЙ вид:
бllХ 1 + бl Х + б1эХ э == бlР,
б lХl + б Х + б эХэ == б р,
БЗ1Х 1 + бз Х + бззХ з == бзр.
Основные перемещеНИJl в рассматриваемой раме опредеЛJlЮТСJl изrи-
бом. Поэтому, пренебреru: сдвиrом и сжатием стержней, строим эпюры
изrибающих моментов от заданной силы Р и от трех единичных силовых
фаICТОрОВ (см. рис. 6.16).
272
t
Х}
1,
lZ l
"""' "'''''''''''
(l)
"
ф
1
Рис. 6.16
ОпредеЛJlем коэффициенты уравнений, считa.JI, что жесткость на из
rиб всех участков рамы ПОСТОJlнна и равна EJ. Величину 611 опредеЛJl
ем перемножением первой единичной эпюры самой на сеБJl. ДЛJl каждоrо
участка берем, следовательно, площадь эпюры и умножаем на ординату
этой же эпюры, ПРОХОДJlЩУЮ через ее центр ТJlжести:
1 ( ' 2 ) 713
611 = . 1 + 2е . 1 =
Е} 2 3 зЕJ'
Заметим, что перемещеНИJl 6ik при i = k всеrда положительны, поскольку
площади эпюры и ординаты имеют общий знак.
ОпредеЛJlем, далее, и остальные коэффициенты уравнений, перемно
жаJl соответствующие эпюры:
21 З
6l = 6 ! = ;
Е]
21 31
б з = 6з = Е J j бзз = Е J i
РI З 5РI З
бlР = 2Е} i б р = 6EJ ;
51
б 1з = Б Зl = 2EJ i
81 З
б = 3EJ ;
Pl
6ЗР= 2ЕJ '
ПодстаВЛJlем найденные коэффициенты в канонические уравнеНИJl.
После сокращений получаем
7 5 Р'
IXl +21X + ХЗ = i
322
5 Р,
'Х, + 21X 2 + 3Х з == .
2 2
Решa.JI эти уравнеНИJl, на.ходи.. Х 1 = P/4, X = 7Р/16, Х з = Pl/12.
8 5Р'
21X 1 + IX + 2Х з = ;
3 6
273
Раскрытие статической неопределимости на этом заканчиваеТСJl.
Эпюра изrибающих моментов мо.ет быть получена наложением на
эпюру моментов заданных сил трех единичных эпюр, увеличенных COOT
ветственно в Х 1 , Х 2 Н Х з раза. CYMMapH&JI эпюра изrибающих моментов
представлена на рис. 6.17. Там же показана форма изоrнутой оси рамы.
о
Рис. 6.17
Рис. 6.18
При м е р 6.2. Определить УСИЛИJl в стеРЖНJlХ статически неопре
делимой фермы (рис. 6.18, а). Жесткости EF всех стержней одинu:овы.
Длины стержней равны 1 или 1../2 в соответствии с рисунком.
Ферма два раза статнчески неопределима: один раз внешним и один
раз внутренннм образом. Выбираем основную систему, замеНJIJI правую
шарнирную опору катком и разрезах стержень 5 (рнс. 6.18, 6). Канониче
скне уравненнх нмеют внд
6 11 X 1 + 6 12 Х 2 = 61P;
6 21 Х 1 + 6 22 Х 2 = 62P'
ОпредеЛJlем коэффициенты этих уравнений. Стержни работают на
растхженне и сжатие, поэтому перемещених 6нс будут опредеЛJlТЬСJl нор-
мальными снлами, возникающими в стеРЖНJlХ. Так как по длине каждоrо
стеРЖНJI норма.лЬН&JI сила не MeHJleТCJl, то построение эпюр стаНОВИТСJl
нзлишним, и МЫ просто составим табл. 6.1 ДЛJl усилий, возникающих в
стеРЖНJlХ от снл Р И от первой н второй единичных сил. Определение сил
проводим из условий равновеСИJl узлов. Далее, УЧИТЫВ&JI, что
1..
6. J NjNk dz Nj N k 1 n
.k EF EF '
о
r де In длина стерЖНJI с номером n, ВЫЧИСЛJlем значеНИJl ДЛJl произведе
ний NjN1c1n и результаты снова сводим: в табл. 6.1. Затем:, сум:м:иру. по
274
><
111
111
4)
f<
'"
111 :iI
'111 =-
111
»..
о
= =-
111 111
i
t:I
:iI о
111 m
:iI 111
f< 101
=
»'"
" aI
4) f<
Il. CJ
....
lCi
c:s
:1
:1
ts; ts; ts; ts;
N сч N ....... '""" LN C"'II
..... ..... ..... """'" + ....
++++ ..,+
I ....
ао ;::: .......Q........
I
.,;,
Q,
Q
:::
<:1
<:1
...:
....
<:1
.....
<:1
.,;,
<:1
Q
-::
ts;
I
IE"
""> ....
....
= .... C"I
Q
....
ts;1C"I ts;1C"I
Q" Q"
I
<:1 <:1
<:1
<:1 <:1
<:1
.... ....
....IC"I ....IC"I
<:1 <:1
<:1
IC"I ts;1C"I
I I
....
<:1
Q"
Q"
..,
<:1
Q"
I
ts;
ts;
.., +
....
....
Q"
Q
<:1
<:1
<:1
....
<:1
Q
11)
ts; ts; ts;
сч......NNts; N
+ Q,,""
:::ao I
Q"
I
....
....
Q"
Q
IC"I IN
Q" Q"
I I
<:1
<:1
<:1
ts;1C"I <:1
I
....IC"I ....IN
<:1
.... <:1
....
ts;1C"I ts;1C"I
I I
<:1
.... <:1
Q
Q" Q"
2
10
1'--
....
....
Q"
<:1
Q
<:1
<:1
<:1
<:1
Q
<:1
<:1
<:1
<:1
....
ts;
Q"
I
2
аа
ф
Q
....
275
столбцам таблицы, находим
10
1 '" 2 31
.511== EF LN 1 1 n== EF ;
n=1
10
.5 1 '" N2, (2+2 v 2)1 .
22 EF L 2 n EF '
n=1
1 10 3Рl
.5!р== ЕР L N p N 1 1 n == ЕР ;
n=!
1 10 ../21
.512==.521== EF ENIN21n== 2EF j
n=1
1 ../2Pl
.5 1р == ЕР L NpN21n== 2ЕР .
n=!
Канонические уравнеНИJl принимают вид
../2
3Х 1 Х2 == 3Pi
2
../2
2""" Х 1 + 2 (1 +../2) Х 2 == ../2Р,
откуда
Х 1 == 10 + 12../2 Р,
11 + 12../2
Х 2 == з../2 Р.
11 + 12../2
Теперь, чтобы найти УСИЛИJl N в каждом из стержней, надо х силе
N p добавить силы N 1 и N 2 , увеличенные соответственно в Х 1 и Х 2 раза.
Результаты этой операции приведены в последнем столбце табл. 6.1.
При м е р 6.3. Построить эпюру изrибающих моментов ДЛJl pa
мы (рис. 6.19, а). Точки А и В. рамы СВJlзаны между собой податливым
стержнем с жесткостью на раСТJlжение EoFo.
11
о
276
4
l
Рис. 6.19
Система один раз статически неопределима. РазреЗ&ll стер.ень АВ
в верхней точке, получаем освовнуlO систему (рис. 6.19, 6). Строим, да-
лее, эпюры моментов от заданной силы Р и от единичноi силы (рис. 6.19,8
И 2). Кроме тoro, на участке АВ, rдe необходимо учесть растJl.ение, стро-
им эпюру норма.пьной силы Н. ВЫЧИСЛJlем коэффициенты каноннческоrо
уравнеНИII
611 Х 1 + 61P == О,
ПРОВОДII перемножение не ТO.llblI:O эпюр изrибаюIЦIIХ моментов, но и pacTII
fивающей силы:
513 1
611 == 3Е] + EoFo j
Опреде.llllем X 1 :
5Pl3
61P == .
6Е]
Х 1 == 61P == 1
611 2 1 + 3Е J
5EoFoP
Как видим, УСИ.llие в стержне зависит от отношеНИII жесткости рамы
на ИЭfиб к жесткости стеРЖИJl АВ на расТllжение. Если жесткость стерж
HII АВ очень велика, то Х 1 == Р/2, и стержень воспринима.ет ПО.llОВИНУ
силы Р. Если стержень АВ очень податлив, то Хl О, И BCII сила Р
воспринимаеТСII рамой.
Рис. 6.20
На рис. 6.20 представлена эпюра ИЗfибающих моментов в раме и фор.-
ма ее ИЗОfНУТОЙ оси.
6.4. Использование свойств симметрии
при раскрытии статической неопределимости
Положим, имеется некоторая симметричная рама
(рис. 6.21, а). Ее правую часть можно рассматривать как
зеркальное отображение левой части относительно плоскости
277
симметрии. При расчете таких раы оказываеТСJl возможным
упростить решение задачи и снизить ЧИCJIо искомых силовых
факторов.
Q
5
6
Рис. 6.21
Рассмотрим случаи нarружеНИJl рамы симметричной и KO
М!dетр'и,:,!ной нarрузками. Под симметричной нarрузкой бу-
дем понимать такую, при которой все внешние силы, прило
женные к правой части рамы, JlВЛJlЮТСJl зеркальным отобра
жением сил, приложенных к ее левой части (рис. 6.21,6). Под
кососимметричной, или антисимметричной, нarрузкой будем
понимать такую, при которой силы, приложенные к правой по
лавине рамы, также являются зеркальным отображением сил,
приложенных к ее левой половине, но противоположны им по
знаку (рис. 6.21, в).
Аналоrично классифицируем и внутренние силовые фак
торы. Рассмотрим для этоrо некоторое произвольное сечение
рамы, в котором возникает шесть силовых факторов. В правой
и левой плоскостях произведенноrо сечения (рис. 6.22) силы и
моменты равны. Посмотрим, какие из шести силовых факто
ров образуют зеркальное отображение относительно плоскости
Рис. 6.22
278
сечения. Такими оказываются три: два изrибающих момента
и нормальная сила. Будем их называть сu.Ас.меmрuчныAcu вH1I
тренни.АСи факторами. Крутпций момент и обе поперечные
силы в ПРИНJlТОЙ терминолоrии должны быть названы tCOCO
СU.АС.меmрuчныoWU факторами. Каждый из них противоположен
по знаку зеркальному отображению вз&имноro фактора. He
трудно теперь доказать следующие положении.
у симметричной рамы в плоскости симметрии при сим
метричной внешней нarрузке обращаются в нуль кососимме
тричные силовые факторы, а при кососимметричной внешней
наrрузке симметричные силовые факторы.
Х,
х,
Рис. 6.23
Обратимся к симметричной раме, например к показанной
на рис. 6.21, и выберем основную систему, разрезая раму по
плоскости симметрии (рис. 6.23). Обозначим через Хl и Х2
кососимметричные, а через Хз, Х4, ХБ, Х6 симметричные
силовые факторы и выпишем систему канонических ypaBHe
ний. В данном случае их будет шесть:
15llX 1 + 1512Х2 + 61З Х З + 614 Х 4 + 61Б Х Б + 1516Х6 = 61Pi
1521Хl + 1522Х2 + 62ЗХЗ + 624Х4 + 62БХБ + 626Х6 = 62Pi
6ЗI Х l + 6З2Х2 + с5ззХз + с5З4Х4 + 6зsХs + 6З6Х6 = 6ЗРi
с541Хl + 642 Х 2 + с54ЗХЗ + 644Х4 + 64БХБ + с546Х6 = 64Pi
ББI Х l + 6Б2Х2:+- 6sзХз + 6Б4Х4 + с5ББХБ + 6Б6Х6 = 6БРi
б61 Х l + б62Х2 + 66ЗХЗ + 664Х4 + 66БХБ + 666Х6 = 66P'
Заметим теперь, что в этих уравнениях мноrие из коэффици
ентов обращаются в нуль. Это будут все коэффициенты, у KO
торых один индекс принадлежит симметричному, а друrой
278
кососимметричному фактору. Например, обращается в нуль
коэффициент 613' Индекс 1 принадлежит кососимметричному
фактору (Хl и Х2 кососимметричные факторы), а индекс
3 симметричному фактору (Х3, Х4, Xs и Хв симметрич
ные факторы). Обращаются также в нуль 614, 615, 616, 623,
б24 и Т.д.
Происходит это потому, что в симметричной раме не воз-
никает взаимных кососимметричных перемещений под дей-
c.тВ1leМ симметричных нarрузок. Точно так же не возника,...
ет симметричных перемещений под действием кососимметрич
ных факторов. Сказанное становится еще более очевидным,
если учесть, что в рассматриваемой системе эпюра изrибаю
щих моментов от кососимметричных факторов будет кососим
метричной (рис. 6.24, а), а от симметричных факторов сим-
метричной (рис. 6.24, 6). При перемножении таких эпюр, eCTe
ственно, получим нуль, в то время как перемножение кососим
метричной эпюры на кососимметричную и симметричной на
симметричную дает результат, отличный от нуля.
I
1
н
о
Рис. 6.24
Итак, вычеркивая из системы уравнений коэффициенты,
обращающиеся в нуль, получаем
6 11 X l + б12 Х 2 = 61Pj
621 X l + 622 Х 2 = б2Р;
Dзз Х з + DЗ4 Х 4 + DЗ5 Х 5 + DЗ6 Х 6 = Dзр;
6 43 Х з + 6 44 Х 4 + 6 45 Х 5 + 6 46 Х 6 = 64P;
D5З Х З + б54 Х 4 + б55 Х 5 + б56 Х в = б5Р;
D6ЗХЗ + Б64 Х 4 + Б65 Х 5 + БввХв = бвр.
Как видим, система уравнений расПaJIась на две независимые.
280
Теперь положим, что внешняя наrрузка является симме
тричной. Из высказанных выше соображений следует, что
бlР = б2Р = О. ПеРВaJl система уравнений становится OДHO
родной. Torna Хl = О, Х2 = О.
Следовательно, при симметричной наrрузке кососиммет
ричные силовые факторы в плоскости симметрии обращаются
в нуль.
При кососимметричной наrрузке бэр = б 4р = бs р = ббР =
= О. TorJta Хз = О, Х4 = О, ХБ = О, Хб = О. в этом слу
чае в плоскости симметрии обращаются в нуль симметричные
силовые факторы.
Все сказанное, понятно, сохраняет силу не только для
плоских, но и для пространственных рам при любой степени
статической неопределимости.
Если наrрузка, приложеННaJl к симметричной раме, не
обладает ни прямой, ни косой симметрией, всеrда имеется воз
можность разложить ее на кососимметричную и симметрич
ную, как это показано, например, на рис. 6.25. Задача, таким
образом, распадается на две. Рассматривают отдельно сим
метричную раму с кососимметричной наrрузкой и раму с сим
метричной наrрузкой. Внутренние силовые факторы в раме
определяют в дальнейшем наложением полученных решений.
!lIl
Z
р
2
+
р
2
:Ill
J'Л
2
р
и
Рис. 6.25
в случае, если рама rеометрически кососимметрична
(рис. 6.26), можно также путем сопоставления эпюр для двух
половин рамы получить упрощения в системе канонических
уравнений. Нетрудно, на.пример, таким способом уста.новить,
281
pl
k
т Х,
Ы
Р I "" х, Iр l
А
Рис. 6.26
что ДЛЯ рамы, показанной на рис. 6.26, при выбранной OCHOB
ной системе б 1 з = О, б2З = О, бlР = о, б 2р = О. Тоrда уравнения
принимают ВИД
бl1Хl + б12Х2 = о;
б21Хl + б22Х2 = о; бззХз + бзр = О.
Следовательно, в сечении А возникает только изrибаюIЦИЙ MO
мент, а нормальная и поперечная силы обращаются в нуль.
При м е р 6.4. Ра.скрыть статическую неопределимость и постро.-
нть эпюру иэrибающих моментов ДЛII рамы, покаэаиной на рис. 6.27, а.
р р
1 t 1;,
n
r:11 1 t
t
1
t t
Т '1
l
(/
J
т
6
т
Рис. 6.27
Рама симметрична. и HarpYJlCeHa кососимметрично ра.сПОЛОJlCенны
ми силами. Разреэаем ее по оси симметрии и в проиэведенном сеч
нии прикладываем силы Хl (рис. 6.27,6). Строим эпюры моментов
(рис. 6.27, в, 2). Симметричные силовые факторы, как мы уже знаем, paB
ны эдесь нулю.
Взамен трех уравнений получаем одно: 6 11 Х 1 + 61P == О, rде
713 PI3 З
611 == 12EJ ' 61P == 4Е) ' откуда Хl == '7 Р. Эпюра изrибающих мо-
ментов и форма иэоrнутои оси рамы представлены нв. рис. 6.28.
При м е р 6.5. Определить наибольший изrибающий момент в
кояьцевоА ра.ме, иarруж.еиной двум. СИ.llами Р (рис. 6.29).
282
А
Р
4
14 Pl
Рис. 6.28
8
Рис. 6.29
Рама три раза статически неопределима, ко услови. симметрии по-
зво./l.ют сократить чис./lо неизвестиых до одноrо. Разре.ем раму по вер.-
тикальному диаметру АВ (рис. 6.30, о), Т.е. по оси симметрии. В сечеии
IIХ А и В поперечные си./lы равны НУ./lю. Рама одновременно симметрична
отиосите./lЬИО ./Iинии деЙСТВИII СИ./l. Поэтому N А = N в = , М А = Мв.
Обозначим момент через Х 1.
В итоrе ПО./lучаем эквивалентную систему, предстаВ./Iенную на
рис. 6.30, б.
НА
Рис. 6.30
в сечении с уr./lОВОЙ координатой 1{) момент от заданных си./l Р будет
PR
М р = 2 (1 СО8 t,P). Момент единичноrо СИ./lовоrо фактора равен М 1 =
= 1.
Опреде./lllем коэффициенты к&ноническоrо уравнеНИII
1f/
611 = J Mf R dl{) = 1r R .
Е] 2EJ'
6 1р =
1f/
J MpM1Rdl{) = PR ( 1 )
Е] 2Е] 2 .
о
о
Тоrда
61Р ( 1 1 )
Xl= =PR .
611 2 '"
283
Изrибающий момеит в произво,Пьном сечеи-и равен а.пreБР&llческой CYM
ме момента М р от заданных сил и момента Мl, у&еличенноro в Хl раз.
В итоrе
М == М р Х 1 == PR (; iC08/P).
PR{j Jr)
I'
Рис. 6.31
Соr,Пасно этому выражению, на
рассматриваемой четверти окружно
сти может быть построена эпюра из
rибаюшеrо момента, которую затем
по УСЛОВИJlМ симметрии можно pac
пространить и на друrие участки
ОКРУЖНОСТИ (рис. 6.31). Н&IIбольший
изrибающий момент ВОЗНИКёLeТ в точ
ках приложеНИJl сил Р и равен Р R/'Ir.
При м е р 6.6. Раскрыть статическую неопределимость и постро--
ить эпюру моментов ДЛJl рамы, пок&3анной на рис. 6.32, а.
? -...
", А,
zXz
"" XJ
а J
Рис. 6.32
Рама rеометрически кососимметрична. РазреЗёLeМ ее в центре сим
метрии и приклаДЫВёLeМ в сечении три неизвесТIIЫХ силовых фактора
(рис. 6.32, 6). Строим все четыре эпюры моментов (одну от заданных
сил и три от единичных силовых факторов). СопостаВЛJlJl эти эпюры
(рис. 6.33), убеждаеМСJl, что 6 2р == 6 зр == 612 == 6 1з == о. Следовательно,
система трех канонических уравнений ПРИНИМёLeТ вид
6 11 Х 1 == 61P; 6 2 2Х 2 + 6 2э Х з == о; 6Э 2 Х2 + 6 зз Х э == о,
откуда Х 2 == Х З == о.
Да.пее, переМНОЖaJI эпюры, находим
81
611 = EJ ;
2qlЭ
61Р = 3EJ i Х 1 = q12 /12.
284
lf/l
t l
1
Рис. 6.33
Рис. 6.34
CYMMapHaJI эпюра иэrибающих моментов покаэана на рнс. 6.34.
Рассмотрим еще один пример, не ОТНОСЯЩИЙСJl к свой
ствам симметрии, но наrЛJlДНО иллюстрирующий значение
правильно выбранной основной системы при раскрытии CTa
тической неопределимости.
При м е р 6.7. Раскрыть статическую неопределимость стерЖНJI
ПОСТОJlнноrо сечеНИJl, расположенноrо на деСJlТИ раВНООТСТОJlЩИХ одна от
друrой опорах (рнс. 6.35, а).
В данном случа.е (и не только в данном, но и вообще ДЛЯ MHoronpo
,Jlетноrо стержня) удобно обр&Эовать основную систему, врез8.1 на опорах
285
N
hЛd
/f
И 11 Х , Х , Х , XJ XJ Х, х,
,{ )f 1f ;f J;[
о 1 2 J 6
.
J
H,
t , t
.
.
;
I
.
.
Рис. 6.35
шарниры и ввод. в JCачестве неизвестных T&JC называемые опорные MOMeH
ты (рис. 6.35, 6). ТаJCИХ момеитов будет восемь.
Построим эпюры от задаиноrо и от единичных моментов (рис. 6.35,
в a). Эпюры от единичных моментов представл.ют собой треуrОЛЬНИIИ,
расположенные лишь на смежных с опорой пролетах, а эпюра от внешних
сил изображаете. треуrольником на первом пролете.
Составим систему из восьми уравнений. В первом уравнении отлич
ными ОТ нул. будут следующие коэффициенты:
21
611 = 3EJ i
1
612 = 6EJ i
М'
6 1р = 6EJ '
Во втором уравнении Т&JCже обрат.те. в нуль все коэффициенты, кроме
трех:
1
621 = 6EJ i
21
622 = 3EJ i
1
623 = 6Е]
и Т.д. В итоrе после сокращений система уравнений примет вид
4Х 1 + Х2 + о ...
Х 1 + 4Х2 + ХЗ + о +...
о + Х2 +4Хз + Х4 + о +...
о + Х З + 4Х 4 + Ха + о +
= M,
о,
:; О.
=: 01
о +Х,+4Х,= О.
288
Мы получили систему ур&виеиий трехдхаroИLlЬНОЙ структуры.
Термин не требует раЗ'ЬJlснений, и roворит сам за сеБJl. Вообще, диаro-
нальные матрицы (таблицы) коэффициентов при раскрытии статической
неопределимости получаюТСJl ДЛJl систем, имеюIЦИХ однотипные, повторя
ющиеСJl элементы. Такими элементами в данном случае JlВЛJlЮТСJl проле
ты мноrоопорноrо стеРЖНJI, В более сложных задачах системы уравнений
MorYT ПОЛУЧИТЬСJl не только Tpex , но и ПJlТИ , семи или деВJlтидиаro-
нальными. Эти системы обладают относительной простотой и особенно
удобны (при большом числе неизвестных) ДЛJl машинноrо счета. Именно
пс,этому в последние rоды получили развитие приемы расчета, основанные
на предварительном разбиении сложных конструкций (типа оболочек с pe
брами) на множество ОДНОТИПНЫХ элементов, наделенных определенными
свойствами. УСЛОВИJl совместной деформации элемеитов записывают с Ta
K}IM расчетом, чтобы матрица обладuа диаrОНilJIЬНЫМИ свойствами. Это
ПClЗВОЛJlет получить на машине решение даже при числе неизвестных, из
меРJlемом ТЫСJlчами.
В рассматриваемом примере система ур&внений приобрел а диаro-
Н2LJIЬНУЮ структуру в результате раЦИОНilJIьноrо выбора основной систе
мы.
Понятно, что рассматриваемый пример особенно прост. Коэффи
Щlенты вдоль диаrоналей остаются неизменными, поскольку раССТОJlнне
МI ЖДУ опорами неизменно и жесткость пролетов одна и та же. Но основнв..
простота именно в диаrональной, или ленточной, структуре уравнений.
Это ПРИJlтное следствие TaKoro выбора расчетной схемы было подмече
НС. давно. Для мноrопролетноro стеРЖНJI уравнеНИJl можно обобщить на
случай раэличных длин пролетов и проиэвольной наrруэки. TaKoro ра-
да. уравнения наэываются уравнеНИJlМИ трех моментов и еще в недавнем
прошлом воэводились даже в paHr "теоремы о трех моментах". Лишь
относительно недавно, в свJlэи с развитием машинной техники, была oco
знана общность подхода, далеко ВЫХОДJlЩв.. эа рамки методов раСКРЫТИJl
статической неопределимости систем.
Но вернеМСJl к уравнеНИJlМ. Положим, что Х. == А/I', rде А и /1
неопределенные величины, не эаВИСJlIЦИе от индекса i.
Леrко заметить, что при т8.жом предположении будут удовлетворены
все уравнеНИJl, кроме nepBoro и последнеro, если толыо
1 + 4/1 + /I == о.
Определим корни этоrо уравнеНИJl: /11 == 2 + .../3, a == 2 .../3.
Теперь построим более общее выражение:
Х. == Aa + B .
ОПJlТЬ удовлетворены все промежуточные уравнеНИJl, Но теперь мы
располаrаем ДВУМJI константами А и В, которые можно подобрать так,
ч roбы были удовлетворены первое и последнее ур&ВнеНИJl.
287
Подставл.. в первое уравнение Х 1 и Х2. ПО.llучим
А + в = М.
Пусть крайн.. прав.. опора имеет индекс n. Перепишем последнее ypaB
нение нашей системы в виде
Xn 2 + 4Xn 1 + Х" Х" = О,
откуда
Aa + Ba = О.
РеШ8JI совместно оба уравнеНИ:l, получим
а"
A M 2 .
n " '
а 2 а 1
a
В = M n " '
а 2 а 1
Таким образом,
n i n i
Х' = м а2 аl аl а2
. n n
а 2 а 1
Но так как аl а2 = 1, то
n i n i
Х; = М а 2 а 1
a ar
Решение получено ДЛJl любоrо числа опор. В данном случае мы име
ем 10 опор и n = 9. ПодстаВЛJlJl значеНИJl аl и а2, леrко обнаружить, что
изrнбающие моменты на опорах с увеличением индекса i, Т.е. при счете
слева направо, имеют чередующиеС:l знаки и быстро убывают по абсолют
ной велнчине. Момент Х 1 примерно в четыре раза меньше момента М.
На предпоследней опоре он оказыва.еТС:l равным М/40545. Эпюра изrиба
ющих моментов ПОJl:аэана на рис. 6.36.
.....!:L..
40545
.
Рис. 6.36
288
в.5. Плоскопространствеиные и пространствеиные
системы
Рассмотрим основные особенности плоскопространствен
ных систем. Как уже указывалось выше, плоскопростран
ственными называются системы, плоские в reoметрическом OT
ношении, но наrруженные силовыми факторами, перпендику-
лярными плоскости рамы. Примеры плоскопространственных
систем представлены на рис. 6.37.
J
p
Рис. 6.37
Особенностью этих систем является то, что во всех по
перечных сечениях внутренние силовые факторы, леЖa.IЦИе в
плоскости рамы, равны нулю. Доказывается это так же, как и
при рассмотрении свойств с учетом прямой и косой симметрии.
Рис. 6.38
Положим, имеется некоторая плоскопространственная ра-
ма (рис. 6.38). Разрезаем эту раму в произвольном сечении,
превращая ее в статически определимую. Обозначим через Х 1,
Х2, ХЗ силовые факторы, плоскость действия которых перпен
дикуля:рна плоскости рамы. Это изrибающий и крутящий
моменты и вертика.лЬНaJI попереЧНaJI сила. Оста.льные три си-
;rювых фактора в сечении обозначим через Х", Xs, Х6. На
10 В. И. Феодосьев
288
рис. 6.38 эти силовые факторы, возникаюЩИ!l! в плоскости pa
мы, вынесены для ясности в стороиу.
Система канонических уравнений
61lXl + 612Х2 + 61ЗХЗ + 614Х4 + 6 1 БХБ + 61Б Х Б = 61P;
621Хl + 622Х2 + 62ЗХЗ + 624Х4 + с52БХБ + с52БХБ = 62Pi
6ЗIХl + 6З2Х2 + с5ззХз + 6З4Х4 + с5зsХs + 6ЗБХБ = с5ЗРi
641Хl + 642Х2 + 64ЗХЗ + 644Х4 + с5 4 БХБ + 646Хб = c54P;
65lXl + 6б2Х2 + 6sзХз + 654 Х 4 + 6ббХб + БS6 Х 6 = бsр;
6бlХI + 6б2Х2 + ббЗХЗ + 664 Х 4 + 66Б Х Б + б66 Х 6 = 66P
распадается здесь на две независимых системы, поскольку при
перемножении эпюр от первых трех факторов на эпюры от
трех последних получим всеrда нуль:
614 = с51б = с51б = 624 = . . . ,= о.
При этом, естественно, предполаrаем, что одна из rлавных
осей сечения расположена в плоскости рамы.
Таким образом, получаем
бl1Хl + 612Х2 + 61ЗХЗ = БIР;
с521ХI + с522Х2 + с52ЗХЗ = c52Pi
с5ЗIХl + с5З2Х2 + 6зз Х з = с5ЗРi
с544Х4 + с54БХБ + с546Хб = c54Pi
654Х4 + с5ббХб + 6SБХ6 = с5БР;
6б4Х4 + с5бsХs + с56БХ6 = с5БР'
Если внешние силы действуют в плоскости рамы, т .е. если
рама является плоской в обычном понимании , то обращаются
в нуль с51Р, 62Р и с5зр, и внутренние силовые факторы Хl, Х2,
ХЗ равны нулю. Это значит, что для плоской рамы возникают
только внутренние факторы, действующие в ее плоскости.
Если же внешняя наrрузка перпендикулярна плоскости
рамы, то равны нулю б4Р, 6 бр , и с5БР' Тоrда равны нулю и Х4,
Х б, Х б. В заданной для расчета раме, как видим, сохраняют
ся внутренние силовые факторы, плоскости действия которых
перпендикулярны к плоскости ра.ыы.
290
При смешанной нa.rрузке (рис. 6.39), действующей на пло
скую раму, Bcerna имееТСJ[ возможность разложить силы по
плоскостям и рассмотреть отдельно плоскую и плоскопро
странственную системы. Внутренние силовые факторы опре
деляют в дальнейшем как результат наложения полученных
решений.
1} !}
Рис. 6.З9
Перейдем к пространственным статически неопредели
мым системам. Исследование таких систем не содержит в ce
бе принципиальных трудностей. Понятно, что для простран
ственных систем задача раскрытия статической неопределимо
сти Bblr лядит, как правило, более rромоздкой, чем для плоских
систем. Однако канонические уравнения метода сил остаются
теми же, и их коэффициенты определяют при помощи тех же
приемав.
Особоrо внимания при раскрытии статической неопреде
J1(ИМОСТИ пространственных рам требует проверка основной си
стемы на кинематическую 'неизменяемость. Случается, что
пространственная система представляет собой механизм, но
обнаруживается это только при внимательном рассмотрении.
Например, системы с пространственными шарнирами, пока
занные на рис. 6.40, являются кинематически изменяемыми.
Рис. 6.40
10.
291
Пля каждой из них НaJIоженные свази не препатствуют Bpa
щению системы относительно осей, отмеченных на рис. 6.40
штриховыми линиами.
Проверку пространственной системы на кинематическую
неизменяемость проводят обычно при помощи проб, Т.е. пу
тем последовательных попыток мысленно сместить раму или
некоторые ее элементы относительно неподвижных осей.
В связи со сказанным следует в заключение отметить,
что требование кинематической неизменяемости, которое под
черкивалось выше, вообще rOBopa, не всеrда является обяза
тельным. В некоторых случаях кинематическая изменяемость
основной системы может быть допущена, но этот вопрос pe
шают обязательно в связи с особенностями приложенных к си
стеме сил. Так, в примере 6.5 кольцевая рама была рассечена
двумя сечениями (см. рис. 6.30). Части рамы получили при
этом возможность свободно перемеща ться одна относительно
друrой. Однако полученная кинематическая изменяемость не
оказалась существенной, поскольку и система заданных, и си
стема единичных сил были уравновешены независимо одна от
друrой.
При м е р 6.8. Раскрыть статическую неопределимость рамы,
показанной на рис. 6.41, а. Жесткость состаВЛJIЮЩИХ стержней на изrиб
равна EJ, а на. кручение GJ..
d
5
HX
-d @) : '
1 2 Z
1 6
Рис. 6.41
292
Ра.ма .вл.етс. ПЛОСJCопространственноi. поэто..у в любо.. ее по-
Jlеречном сечении силовые фпторы. ЛeJI&ПIВе в ПЛОСJl:OCТJI р....ы, равны
tIУЛЮ. Кроме тото, рама сИ....етрИчна. Следовате.п.ио, в поперечно"
сечении в плоскости симметР.И оБР&IЦuoтс. в нуль JCосос.....етрнчные
факторы крут.щиii мо..еит И BepтHKL1IbHLI попереЧНLI сила. Отлич
ным от нул. остаеТСII толыJ[o изrибuoщиii момент в веРТИIальной плос
I:ОСТИ. Разрезаем ра.му по ПЛОСIОСТИ симметрии и ПРИI.II&дывае.. ..о..еит
)(1 (рис. 6.41, 6'). Строим эпюру ..оментов от заданных сил И единичноrо
момеита (рнс. 6.41, а н е) и находим коэффициенты I&ион.чеСIОro уравне.-
НИIl
6 11 Х1 + 611> = о.
Получаем
21 21
611 = Е] + GJ. i
ql3 ql3
611> = 3Е] GJ. .
Tor да
Х ql2 1 + 3EJ/(GJ.)
1 6 1 + EJ/(GJ.) .
Бели рама состоит из стержней, имеющих Iруrлое поперечное сечение, то
Е]
GJ. == 1 + р 1, 3; Х 1 = О, 355q12.
CYMMapHiLJI эпюра иэrибающих моментов дана на рис. 6,42.
fl,14.f,t L
Рис. 6.42
При м е р 6.9. Раскрыть статическую неопределимость простран
ственной рамы, показанной на рис. 6,43, а. Жесткости на иэrиб Е] и на
кручение G J. ДЛII всех элементов рамы одинаковы.
Рама симметрична относительно вертикальных плоскостей АВ и
С D. РаэреЭiLJI раму по первой плоскости симметрии, получаем в сечеНИIlХ
только симметричные силовые факторы (рис. 6,43, 6'). Иэ условий равно-
веси. сразу видно, что нормальнlUI сила в этих сечеНИIlХ равна Р/2, а один
иэ моментов равен Pl/2. ОстаеТСIl толыо один неиэвестный момент X 1 ,
воэникающий в rориэоитальиой плоскости.
293
а
8
z
Рис. 6.43
D,JPl
Рис. 6.44
ДЛJl половины рамы строим эпюры моментов от заданных сил и от
едииичиоrо момента (рис. б.4З, в и 2). ПереМИОЖaJI эпюры, на.ходим
41 21
611 == Е} + GJ. j
PI2
61P ==
2EJ'
Тоrда
Р, 1
X 1 == 4" 2 + EJ/(GJ.) '
ДЛJl lCpyrJIOro сечеНИJl EJ/(GJ.) $:i:: 1, Зj Х 1 $:i:: о,07БРI. Сумма.рИaJI эпюра
моментов дана на рис. 6.44.
294
6.6. Определение перемещений
в статически неопределимых системах
Мы уже знаем, что в любой системе перемещение опреде
ляется как результат перемножения эпюры моментов от внеш
них сил на эпюру моментов от единичной силы, приложенной
в точке, перемещение которой надо найти. В статически He
определимых системах, очевидно, для построения эпюры MO
ментов от внешних сил нужно раскрыть статическую неопре-
делимость и построить суммарную эпюру так, как это уже
MHoroKpaTHo делалось в рассмотренных выше примерах. Kor
да к такой системе приложена единиЧНая сила, снова возника
ет вопрос о раскрытии статической неопределимости. Таким
образом, получается, что для определения перемещения в CTa
тически неопределимых системах нужно дважды раскрывать
статическую неопределимость.
Возникающие трудности, однако, леrко устраняются. По
JIOЖИМ, дана некоторая статически неопределимая система
и требуется определить перемещение, например, точки А
(рис. 6.45, а).
пf;П
{J J 6
Рис. 6.45
Рассмотрим некоторую основную систему и приложим к
ней заданные силы и неизвестные силовые факторы Х 1, Х 2,
ХЗ (рис. 6.45, 6). После Toro как статическая неопредели
масть раскрыта и неизвестные найдены, рама, показанная на
рис. 6.45, б, ничем не отличается от заданной. В частности,
и перемещения всех ее точек будут точно такими же, как и
у заданной. Поэтому можно рассматривать силы Хl, Х2, ХЗ
как заданные. Эпюра моментов от сил Р, Хl, Х2 и ХЗ пред
ставляет собой эпюру моментов в статически неопределимой
295
раме. Следовательно, сначала необходимо раскрыть статиче
скую неопределимость и построить суммарную эпюру MOMeH
тов. Вид этой эпюры, понятно, не зависит от выбора основной
системы. Далее, освобождаем систему от внешних сил, в том
числе и от сил Х 1, Х 2 и Х 3, и прикладываем единичную силу
к статически определимой раме (рис. 6.45, в).
Полученную единичную эпюру перемножаем с суммарной
эпюрой внешних заданных сил. На практике удобнее YMHO
жить единичную эпюру отдельно на эпюры от заданных сил
и от силовых факторов Хl, Х2, ХЗ, а затем полученные pe
зультаты алrебраически сложить. Таким образом определяет
ся искомое перемещение. Вторично раскрывать статическую
неопределимость, как видим, не нужно.
При м е р 6.10. Определить rОРИЗ0нтальное перемещение точки А
в раме, показанной на рис. 6.46, а. Эпюра изrибающих моментов ДЛJl этой
рамы уже была построена ранее (см. пример 6.4). Поэтому, считa.Jl, что
перваJl часть задачи рещена, разрезаем раму в любой точке и IC полученной
основной системе прикладываем в точке А единичную силу (рис. 6.46, 6).
17 Pl3
Перемножa.Jl эпюры, находим БА == 672 EJ '
4
/4 Pl
О
Рис. 6.46
[}
4
14. Pl
d
При м е р 6.11. Определить, насколько умеНЬШИТСJl диаметр
АВ кольцевой рамы (рис. 6.47, а) при наrружении ее силами Р. Стати
ческa.Jl неопределимость этой рамы также уже была раскрыта ранее (см.
пример 6.5). Изrибающий момент ДЛJl четверти рамы АС оказалСJl в сле
дующей зависимости от уrла 'Р:
м == PR (; coslp).
296
А
L(!);'
в
(J
Рис. 6.47
А
c
в
6
Разрезаем раму в произвольном сечении, IL в точках А и В прикла
дыва.ем противоположно направленные единичные силы (рис. 6.47, 6). В
сечении с текущим координатным уrлом I(J имеем Мl = Rsin I(J. Тоrда
1</2
Б АВ = 2 J MMIRdl(J = PR 3 ( )
Е} Е} '" 2'
о
6.7. О методе перемещений
Метод перемещений отличается от метода сил тем, что
при раскрытии статической неопределимости в качестве неиз
вестных принимают не силы, а перемещения.
Метод перемещений заслуживает столь же уважительно
['о к себе отношения, что и рассмотренный выше метод сил.
Нельзя сказать, который из них лучше. Они в основном paB
ноценны. Преимущества одноrо перед друrим определяются
особенностями статически неопределимой системы и в какой-
то мере привычками и традициями.
Особенно просто методом пе-
ремещений можно раскрыть CTa
тическую неопределимость систем
с малым числом уrлов. PaCCMO
трим пример, очень простой для
метода перемещений и вместе с
тем сложный для метода сил.
На рис. 6.48 показана систе
ма, состоящая из n стержней,
р
Рис. 6.48
297
связанных в единый шарнирный узел в точке А. Система 11. 2
раза статически неопределима, и определение усилий в стерж-
нях методом сил не сулит ничеrо panocTHoro, особенно, если
стержней MHoro и к тому же они имеют различные длины и
различные жесткости при растяжении. Метод перемещений
позволяет решать такие задачи неожиданно просто.
Обозначим rоризонтальное и вертикальное перемеrцения
узла А через и и v соответственно (см. рис. 6.48). Удлине-
ние i-ro стержня определяется суммой проекций и и v на ось
стержня, Т.е.
д'li == и sin l{Ji + V cos I{Jj.
Выражение для растяrивающей силы имеет вид
N EFi ( . )
i = Т и sш l{Ji + V cos l{Ji .
1
(6.4)
Напишем два уравнения равновесия для отсеченноrо уз
ла А:
n l
L NiCOSI{Ji = Р;
i==O
n l
L NiSinI{Ji == О.
i==O
Исключая силы Ni и переходя к перемещениям, получаем два
уравнения для вычисления и и v:
n l ЕР.- n l ЕР.-
и L т sinI{Jj cOSI{Ji + V L т cos 2 I{Jj = Р;
j==O 1 i==O 1
n l ЕР.- n l ЕР.-
'" 1.2 + "'1. О
и т sш l{Ji V т sш l{Ji cos l{Ji == .
i==O 1 i==O 1
После Toro как перемещения найдены, не представляет
труда с помощью выражения (6.4) определить усилие в любом
стержне.
Методом перемеrцений столь же просто можно pac
крыть статическую неопределимость системы, показанной на
рис. 6.49, при любом числе поддерживающих стержней. Реше-
ние очевидно. Надо ввести вертикальное и уrловое перемеще
ния жесткоrо стержня, выразить через них удлинения и силы,
а затем написать в перемещениях два уравнения равновесия.
298
ТlliПlц
Рис. 6.49
в то же время, если вернуться к примеру стержневой си
стемы, рассмотренной ранее (см. пример 6.2), то обнаружится,
что решение методом сил оказывается более предпочтитель
ным.
При большом числе узлов и конструктивных элементов
методы равноценны и, как один, так и друrой, MorYT быть
положены в основу создания машинных алrоритмов так назы
BaeMoro метода конечных элементов для анализа сложнейших
систем стержневоrо и оболочечноrо типов.
rлава 7
ОСНОВЫ ТЕОРИИ НАПРЯЖЕнноrо
И ДЕФОРМИРОВАнноrо СОСТОЯНИЙ
7.1. Напряженное состояние в точке
Уже на примерах растяжения и сдвиrа мы имели возмож
насть убедиться в том, что напряжения в площадке, прохо
дящей через заданную точку напряженноrо тела, зависят от
ее ориентации. С поворотом площадки меняются в определен
ной зависимости и напряжения. Совокупность напряжений,
возникающих во множестве площадок, проходящих через pac
сматриваемую точку, называется наПР1lженны.w состонниеАС в
точке. Напряженное состояние поддается анализу не только
в частных случаях растяжения и сдвиrа, но и в общем слу
чае наrружения тела. В настоящей rлаве этот вопрос и будет
рассмотрен. Заметим, что исследование законов изменения Ha
пряжений в точке не является чисто отвлеченным. Оно необ
ходимо для последующеrо решения более сложных задач и в
первую очередь для расчетов на прочность в общих случаях
наrружения.
Положим, имеется некоторое тело (не обязательно упру-
roe), наrруженное произвольной системой СИЛ (рис. 7.1). При
300
переходе от точки к точке напряженное СОСТОJ[ние MeHlIeTClI дo
статочно медленно и Bcerna имееТСll возможность выбрать в
окрестности произвольно ВЗllТОЙ точки А (см. рис. 7.1) такую
достаточно малую область, для которой вапр.женное состоя
ние можно было бы рассматривать как ОlЖнородное. ПОНJ[ТНО,
что такой подход возможен только в пределах принятой ранее
rипотезы сплошной среды, допускающей переход к предельно
малым объемам.
х
Рис. 7.1
Рис. 7.2
Чтобы охарактеризовать напряженное состояние в точке
А, представим себе, что через нее проведены три секущие пло
щадки И установлены возникающие в них напряжения. Затем
в окрестности исследуемой точки шестью сечениями выделим
элементарный объем в виде прямоуrольноrо параллелепипеда
(рис. 7.2). Если размеры параллелепипеда уменьшать, он бу
дет стяrиваться в эту точку. В пределе все rрани параллелепи
педа пройдут через точку А, и напряжения в соответствующих
секущих плоскостях можно рассматривать как напряжения в
исследуемой точке.
Полное напряжение, возникающее на секущей площадке,
может быть разложено на три составляющие: одну по HOp
мали к площадке и две в плоскости сечения. Нормальное Ha
пряжение будем обозначать по прежнему буквой и с индексом,
соответствующим осям х, у и z (см. рис. 7.2). Касательное
напряжение обозначим буквой". с двумя индексами: первый
с оотмтству ет ООИ, neрпеНJl:ИКУЛЯРНОЙ к площадке, а второй
301
оси, вдоль которой направлен вектор т. Ориентация самих
осей является произвольной.
Нормальные растяrивающие напряжения (1 будем считать
положительными, сжимающие отрицательными. Что каса-
ется знака напряжений т, то здесь обусловливать ero не будем,
поскольку в пределах рассматриваемых ниже задач знак т ро-
ли не иrрает.
Напряжения, возникающие на трех rранях элемента (на
трех взаимно перпендикулярных плоскостях, проходящих че-
рез точку) показаны на рис. 7.2. На невидимых rранях элемен-
та возникают соответственно такие же напряжения, но проти-
воположно направленные.
Система сил, приложенных к элементу, должна удовле
творять условиям равновесия. Поскольку на противополож-
ных rранях возникают противоположные по направлению си-
лы, то первые три условия равновесия удовлетворяются тожде
ственно, и суммы проекций всех сил на оси х, у и z равны нулю
независимо от значений возникающих напряжений. Остается
проверить, обращаются ли в нуль суммы моментов всех сил
относительно осей х, у и z. При составлении уравнений paB
новесия леrко обнаружить, что момент каждой силы уравнове-
шивается моментом противоположной силы, расположенной на
невидимой rрани. Исключение составляют касательные силы.
Например, для оси х условие равенства нулю суммы моментов
соблюдается в том случае, если момент силы T yz dx dz равен
моменту силы T zy dx dy, Т.е.
Tyz dx dz . dy == T zy dx dy. dz.
Аналоrично MorYT быть написаны еще два уравнения равнове-
сия. Тоrда получаем
T yz == Tzy; Tzx == T xz ; Тху == Тух'
(7.1)
Таким образом, на двух взаuмно перпендu'ICУJ1.ЯРНЫХ ПА0-
щад'ICах составJ1.яющие 'lCaCaтeJ1.bHbIX напряженuй, перпенди1СУ-
J1.ярные 'IC общему ребру, равны u направАены обе J1.uбо 'IC ребру,
лuбо от ребра. Это и есть закон парнасти касательных напря-
жений, сформулированный в общем виде (см. также 1.5). Он
справедлив для всех точек наrруженноrо тела независимо от
302
вида приложенных наrрузок и свойств материала. Следстви
ем из условия парности касательных напряжений является то,
что на rранях выделенноrо элемента (см. рис. 7.2) имеем не
девять, а только шесть независимых компонент напряжений,
поскольку касательные напряжения попарно равны.
Анализ напряженноrо состояния в точке начинают всеrда
с определения напряжений на rранях выделенноrо в OKpeCT
насти точки элемента. Через точку проводят три взаимно
перпендикулярные плоскости, ориентацию которых выбирают
произвольно, но так, чтобы напряжения в площадках моrли
бы быть определены наиболее простым путем.
При м е р 7.1. ВЫj[ВИТЬ наПРj[женное СОСТОj[ние в точках А и В
paCTj[HYToro и одновременно закрученноrо стерЖНj[ (рис. 7.3, а).
7л
р
p
'
01
В
Z
g
O
........ 1/=
А о
1
g '(==
6 0,2080
а
Рис. 7.3
В окрестности заданных точек секущими ПЛОСКОСТJlМИ выделяем эле
ментарный объем. Ориентацию плоскостей выбираем таким образом, что--
бы напряжения можно было определить наиболее простым способом. В
данном случае естественной j[ВЛj[еТСJ( ориентаЦИJ( плоскостей вдоль и по--
перек оси стеРЖНj[. На рис. 7.3, а секущие плоскости в окрестности точек
А и В показаны штриховыми линиJ(ми. Вынесем выделенные элементы
за пределы наrруженноrо тела и представим их в увеличенном масштабе
с сохранением ориентации плоскостей (рис. 7.3, б и в).
В результате деЙСТВИJ( силы Р в поперечных сечеНИJ(Х стерЖНj[ воз
никает нормальное наПРJ(жение U == Р /02. Векторы соответствующих Ha
ПРJ(жений вычерчиваем на rpaHJ(x элементов. В результате деЙСТВИj[ MO
мента !1л в поперечных и продольных сечениях возникают касательные Ha
ПРj[жеНИJ(. В точке А наПРj[жение Тт&х == fJЛ/(О, 20803), в точке В наПрj[же
ние т == О. Векторы Тт&х также вычерчиваем на rpaHJ(x элемента. В итоrе
имеем: в точке А аж == (111 == о, a == р/02, TII == о, Т ж == fJЛ/(о, 20803),
тжlI == о; в точке В иж == иlI == о, и == Р/а. 2 , TII == T :z: == T:Z:1I == О.
303
7.2. Определение напряжений
в проиэволъно ориентированной площадке
Если дано шесть компонент напРJlженноrо состояния: (1%,
(1у, (1%, Ту%, Т%% И Т%у В трех взаимно перпендикулярных пло
щадках, то можно определить напряжения в любой площадке,
проходящей через данную точку.
Из напряженноrо тела (см. рис. 7.1) еще раз выделим в
окрестности точки А элементарный объем, но уже не в виде
параллелепипеда, как было сделано ранее, а в виде четырех
rранника (рис. 7.4). Три rрани выделенноro элемента лежат
в координатных плоскостях системы Oxyz. Четвертая rpaHb
образована произвольной секущей плоскостью. Ее ориентацию
в пространстве будем определять направляющими косинусами
[, т, n нормали /1 к секущей плоскости.
z
х
.z
Рис. 7.4
Элементарный четырехrранник обладает теми же свой
ствами, что И рассмотренный выше параллелеципед. При
уменьшении размеров он стяrивается в точку А, и в пределе
все ero rрани проходят через эту точку. Поэтому напряжения
на rранях элемента рассматриваем как напряжения в иссле
дуемой точке на соответствующим образом ориентированных
площадках.
304
На рис. 7.4 штрихами показаны составляющие наПРJlже
ний на невидимых rpaHJlX. Вектор полноrо напРJlжеНИJl на пло
щадке ВС D спроецируем на оси :1:, У и z. Обозначим эти про
екции через Х, у и Z соответственно. Если эти три величины
найдены, то по ним, очевидно, MorYT быть найдены нормаль
ная и касательные состаВЛJlющие на произвольной площадке.
Площадь треуrольника ВС D обозначим через Р, площади
треуrольников осп, овп и ОВС соответственно через F ж ,
Ру, Fz. Очевидно,
РХ = Flj Ру = Рт; Fz = Рп,
(7.2)
rде l, m и n напраВЛJlющие косинусы нормали 11.
Проецируя все силы, действующие на элемент, последова
тельно на оси Х, у и Z, получим
Х F = ажFж + ТужFу + тzжFz;
у F = ТжуF ж + ауРу + TzyFzj
ZF = тхzFж + TyzFy + azFz,
или в соответствии с соотношениями (7.2)
Х = ажl + Тужm + тzж n ;
у = Txyl + аут + Tzynj
Z = тжzl + Tyzm + azn.
(7.з)
Таким образом, действительно для любой площадки, опре
деляемой направляюIЦИМИ косинусами 1, m и n, проекции Х, у
и Z можно выразить через шесть ис- 2
xoдHыx компонент ах, ау, a z , Tyz, Т zж
И Т жу' Иными словами, наnр.8жен
ное состО.8ние в тОЧ'ICе onpeдe.a.8eт
Сll шестью 'lCOMnOHeHmaMtI.
При помощи формул (7.з) леr-
ко определить вектор полноrо напря .r
жения на любой площадке, проходя
щей через рассматриваемую ТОЧI<У
(рис. 7.5). Рис. 7.6
306
НanРJlженное СОСТОJlние в точке предстаВЛJlет собой поня
тие, более сложное чем те, которыми мы оперировали ДО сих
пор.
Нам известно понятие числа и ПОНJlтие вектора как вели
чины, определяемой тремя числами. НanРJlженное состояние
определяется уже не тремя, а шестью числами и представляет
собой mенэор. Тензору в отличие от вектора не может быть
дано простое rеометрическое толкование, и ero обычно задают
матрицей (таблицей), написанной, например, в виде
( 500
200
100
200
50
43
100 )
43 "
720
rne каждое число представляет собой значение иж, Тиж и Т.д. в
соответствии с расположением коэффициентов в трех ypaBHe
ниях (7.з), Т.е. иж = 500, тж1I = 200 и Т.д.
Если взамен исходной системы Oxyz выбрать новую сис
тему, компоненты тензора изменятся, Т.е. значения иж, и и , ...
будут иными, однако сам тензор напряженноrо состояния OCTa
нется тем же. Сказанное можно леrко пояснить на примере
вектора, показанноrо на рис. 7.6.
z Z1
z
Рис. 7.6
Вектор может быть определен матрицей, членами которой
являются координаты конца вектора:
(400 300 о).
Если перейти к системе OXIYIZl (см. рис. 7.6), то для TO
ro же вектора получим
(500 О о).
306
Компоненты вектора, как видим, измеиились, но сам вектор
остался неизменным.
Остановимся более подробно на некоторых свойствах Ha
пряженноrо состояния в связи с преобразованием системы KO
ординат.
7.3. r лавные оси и rлавные напряжения
Выразим через Х, у и Z нормальное напряжение (J/I в
наклонной площадке. Очевидно, (J/I == XI + Ут + Zn, или,
соrласно выражениям (7.з),
(J/I == (Jжl2 + (Jyт 2 + (Jzn 2 + 2T yz mn + 2т zж nl + 2Т жу lт. (7.4)
Рассмотрим множество секущих площадок, проходящих
через исследуемую точку. По нормали к каждой площадке
отложим отрезок r == j((J/I) (рис. 7.7). Координаты концаэтоrо
вектора будут следующими:
х == rl, у == тт, Z == тn.
2
v
.r
Рис. 7.7
Исключая из выражения (J /1 направляющие косинусы l, m
и n, получим rеометрическое место точек концов вектора:
a/lr 2 == а х х 2 + а у у2 + a z z 2 + 2TyzyZ + 2TzxZX + 2т ху ху.
Теперь решим, в какой зависимости от a/l откладывать
абсолютную величину отрезка т. Обычно такой вопрос реша-
ют из условий наrлядности rеометрическоrо образа. В данном
307
же случае, не cTpeU:JlCb к наrЛJlДНОСТИ, а исключительно в цe
ЛЯХ простоты полученноro выражеНИJl примем формально, что
2 k
т = 10'111 '
rде k произвольная постоянная, отражающая масштаб по
строения. Torna
k = О'жх2 + О'уу2 + O'zz2 + 2TyzYZ + 2т zж zх + 2т жу ху.
Полученное соотношение мало что roворит о законах изме
нения напряжеиий в точке, зато оно дает уравнение централь
ной поверхности BТOporo порядка. А из курса аналитической
rеометрии известно, что путем поворота системы координат
это уравнение может быть преобразовано таким образом, что
в нем исчезнут попарные произведения координат, или, иначе
rоворя, обратятся в нуль коэффициенты при членах попарных
произведений. В данном случае это означает, что в 'lCаждой
тОЧ'ICе наnР.J1жеННО20 тела существует ma'ICa.J1 система Oxyz,
в 'lCоторой 'lCасательные наnР.J1жеНШl Tyz, Т zж и Т жу равны нулю.
Такие оси называются 2лавны..wи OC.J1..WU. Соответствующие им
взаимно перпендикулярные площадки называются 2лавны..wu
nJ1.0щад'ICа..wи, анормальные напряжения на них 2Аавными Ha
nР.J1жени.J1..wи. В порядке возрастания эти напряжения обозна
чают через О'з, 0'2 и 0'1.
Если в окрестности исследуемой точки элементарный объ
ем выделен rлавными площадками, то система сил, возникаю
щих на rранях элемента, упрощается (рис. 7.8). Существенно
упрощаются также выражения (7.3), они принимают вид
Х = 0'11; У == О'2т; Z == О'зn.
Так как
12 + т 2 + n 2 = 1,
то
х2 у2 Z2
2" + 2 + 2 == 1.
0'1 0'2 О'з
Этому соотношению можно дать не только простое, но на
этот раз и наrлядное толкование. Величины Х, У, Z мож
но рассматривать как координаты конца вектора полноrо Ha
ПРlжения р, возникающеrо на произвольно ориентированной
308
1
.z
11,
Рис. 7.8
площадке. Feo.uempU14eCJCoe .uecmo JCонцов веJCтора nО.ilНОС!О
наnР.Jlжени.Jl образует эмunсоuд, nO.ilyoc,6.uu JComopoC!o ,6вM
ютс.Jl ёмавные наnР.Jlженu,6 0'1, 0'2 u 0'3 (рис. 7.9). Полученный
эллипсоид носит название Э.il.ilunсоuда наnР,6женut2.
Из этоrо rеометрическоrо образа вытекает следствие, что
наибольшее из трех rлавных напряжений является OДHOBpe
менно наибольшим из возможных полных напряжений на MHO
жестве площадок, проходящих через исследуемую точку. Наи
меньшее же из rлавных напряжений будет наименьшим среди
множества возможных полных напряжений.
В случае равенства двух rлавных напряжений эллипсоид
принимает форму тела вращения. Тоrда каждая плоскость,
проходящая через ось вращения, становится rлавной. В слу
чае, коrда равны не два, а все три rлавных напряжения, эл
липсаид принимает форму сферы и в исследуемой точке все
плоскости являются r лавными.
Перейдем теперь к определению rлавных напряжений по
заданным шести компонентам напряженноrо состояния в про
извольной системе Oxyz. Возвращаясь к рис. 7.5 и соотноше
ниям (7.з), положим, что наклонная площадка является rлав
ной. Тоrда полное напряжение на этой площадке (оно же rлав-
ное) будет направлено по нормали 11. Обозначим ero через S:
Х = SI, У = Sm, Z = Sn.
Соотношения (7.з) примут теперь вид
51 = O'zl + тухт + Tzznj
Sm = Tzyl + (]ут + Tzynj
Sn = Txzl + Tyzffl + (]zn,
З08
или
(0'% 8) 1 + 1',1%т + 1'%%n = о;
1'%111 + (О'у 8) m + 1'%1In = о; (7.5)
1'%%1 + 1'у%т + (0'% 8) n = о.
Их можно рассматривать как систему уравнений относитель
но неизвестных 1, m и n, определяющих ориентацию rлавной
площадки в исходной системе Ozyz. ПолучеНН8JI система явля
ется однородной. Вместе с тем она должна давать для 1, m и n
ненулевое решение, так как направляющие косинусы не MorYT
быть все одновременно равны нулю, поскольку
12 + т 2 + n 2 = 1. (7.6)
Лля Toro чтобы система однородных уравнений (7.5) имела pe
шение, отличное от нулевоrо, необходимо, чтобы определитель
этой системы был равен нулю:
0'% 8 1'у% 1'%%
1'%11 0'11 8 1'.111 = о. (7.7)
1'%.1 1'yz 0'.1 8
Лостиrается это надлежa.IЦИМ выбором величины 8. Если
условие (7.7) выполнено, одно из трех уравнений (7.5) пред
ставляет собой линейную комбинацию двух друrих, которые
совместно с условием (7.6) образуют новую систему, дocтa
точную для нахождения 1, m и n, определяющих положение
rлавных площадок. Эту часть задачи мы оставим, однако, без
рассмотрения и перейдем к определению r лавных напряжений
8 из уравнения (7.7).
Раскрыв определитель и расположив ero члены по степе
ням 8, получим следующее кубическое уравнение:
83 8 2 J} + 8J2 Jз = о, (7.8)
в котором
J} = 0'% + 0'11 + 0'.1;
J2 = 0'110'.1 + 0'.10'% + 0'%0'11 1';.1 1';% 1';у;
0'% 1'у%
Jз = 1'%11 0'11
1"жz 1"yz
1'.1%
1'.111 = о.
(Jz
(7.9)
310
Можно показать, что все три корня уравнения (7.8) явля
ются вещественными. Они дают три значения rлавных напря
жений а1, а2 и аз.
Понятно, что rлавные напряжения, Т.е. корни уравнения
(7.8), определяются характером напряженноrо состояния и не
зависят от Toro, какая система осей была принята в качестве
исходной. Следовательно, при повороте системы осей Oxyz
коэффициенты J1, J2 и Jз уравнения (7.8) должны оставаться
неизменными. Они называются инвариантами наnР.JlжеННО20
CoCfflo.JlHU.Jl.
Б некоторых случаях инварианты MorYT принимать HY
левые значения. Например, если Jз = О, то один из корней
уравнения (7.8) также равен нулю. Б этом случае rоворят, что
напряженное состояние является двухосным, или nАОС7Сим. Б
частности, уже знакомое нам напряженное состояние чистоrо
сдвиrа представляет собой двухосное напряженное состояние,
для KOToporo а1 = аз и а2 = О.
Если одновременно равны нулю второй и третий инвари
анты, Т.е. J2 = Jз = О, тО уравнение (7.8) имеет два нулевых
корня и только одно из rлавных напряжений отлично от нуля.
Напряженное состояние в этом случае называется одноосным.
С ним мы уже встречались при изучении вопросов растяжения,
сжатия и чистоrо изrиба.
Рассмотрим некоторые примеры определения rлавных Ha
пряжений.
При м е р 7.2. Определить rлавные наПРJlжеНИJl в случае, если все
компоненты наПРJlженноrо СОСТОJlНИJl равны между собой (рис. 7.10, а).
о
Рис. 7.10
311
t
':i
I
I
I
I
I
I
I
I
I
I
)
"' rJ;'"
Рис. 7.11
Соrласно выражеНИJ:М (7.8) и (7.9), име
ем: J 1 :::: 30', J'J :::: J з :::: о; 0'1 :::: 30', O''J :::: 0'3 :::: о.
Следовательно, задаииое наПРJlженное СОСТОJl
ние предстаВЛJlет собой одноосное расТJlжение.
Полученному результату можно дать
простое оБЪJlснение, если учесть, что злемент
может быть выделен из paCTXHYToro стеРЖНJI
любым образом. Очевидно, если трн секущие
пло[Цадкн равнонаклонены к осн pacTJlHyтoro
стеРЖНJI, в rраиJ:Х элемента как раз и возни
кают равные составЛJlющие наПРJlженноrо со-.
СТОJlННJI (рнс. 7.11).
Поскольку при изменении ориентации ce
кущих площадок наПРllженное COCТOIIHHe не
MeHlleТCII, полученное решение может быть
представлено в виде символическоrо равенства
(см. рис. 7.10).
При м е р 7.3. Определить rлавные наПРllжеНИJl в случае наПРIl
женноrо СОСТОJlНИJl (рис. 7.12, а)
(; ).
:r
d i
Рис. 7.12
Соrласно выражеНИIIМ (7.9), получаем J 1 :::: о, J 2 :::: 3T2, J з :::: 2т 3 .
Тоrда S3 зт 2 S 2т 3 :::: О. Подбором опредеЛJlем один из корней. Это
будет S :::: T. Разделив левую часть уравнеНИJl на S + т, сводим ypaBHe
ние к квадратному и опредеЛllем остальные два КОрНJI. В итоrе получаем
0'1 :::: 2т; 0'2 :::: 0'3 Т. Следовательно, наПРllженное состохние JlВЛJlеТСII
трехосным (рис. 7.12, 6).
Итак, исследуя напряженное состояние, мы обнаружи
ли существование трех взаимно перпендикуля:рных площадок,
312
обладающих тем замечательным свойством, что касательные
напряжения в них равны нулю, и назвали эти площадки rла.в-
ными. Но существуют и друrие площадки, также обладающие
важными и интересными особенностями, знакомст:во с которы-
ми понадобится нам в дальнейшем.
о
Рис. 7.13
:r
Положим, что оси Х, у и z rлавные и аж = аl, а1/ = а2,
a z == аз (рис. 7.13). Тоrда выражения (1.з) примут вид
Х == аl1; у = а2т; Z = азn.
Найдем касательное напряжение 1"11 в этой площадке:
1"; = р2 a , (7.10)
rде р полное, а а ll нормальное напряжения в той же пло
щадке. Очевидно, что
р2 == х2 + у2 + z2 = a 12 + a т2 + a n2;
а ll = Хl + Ут + Zn = 0'112 + а2т2 + О'зn2.
Подставляя р2 и а ll в выражение (7.10) и учитывая, что 12 +
+т2 + n 2 == 1, получим
1"; == ( СТ 1 (2)21 2 т 2 +
+(аl аэ)21 2 n 2 + (а2 аэ)2 m 2 n 2. (7.11)
Как видим, 1'; величина существенно положительная и
на rлавных площадках, как и положено, обращаеТСJl в нуль.
313
Пействительно, если нормаль 11 совпадает с одной из rлацных
осей, то один из направляющих косинусов принимает значение,
равное единице, а два друrих равны нулю, и Torna 1': = о.
Пля дальнейшеrо нам потребуются выражения для напря
жений в так называемых окта.эдрических площадках, т .е. в
площадка.х i равнона.клоненных к r лавным. Пля таких площа
док [2 = т = n 2 = 1/3, и Torna мы получим
ТОК т = J (O'I 0'2)2 + (0'1 О'з)2 + (0'2 О'з)2 j (7.12)
1
О'охт =3 (0'1 + 0'2 + из). (7.13)
Таким образом, нормальное окта.эдрическое напряжение
равно среднему арифметическому трех r лавных напряжений.
Особый интерес представляют площадки, в которых воз
никают наибольшие касательные напряжения. Положение
этих площадок можно определить, отыскивая экстремум BЫ
ражения (7.11) при условии, что [2 + т 2 + n 2 = 1. Но этих
выкладок мы делать не будем, ибо о результате можно доrа
даться сразу. Заметим, что
0'1 из = (0'1 0'2) + (0'2 иЗ)
и, поскольку квадрат суммы не меньше суммы квадратов,
(0'1 0'2)2 (0'1 0'2)2 + (0'2 О'з)2 .
Значит, при равенстве [2 = т 2 = n 2 второе слаrаемое
в выражении (7.11) будет не меньше суммы двух остальных.
Если мы хотим, чтобы величина т; достиr ла наибольшеrо зна
чения, то, подбирая [2, т 2 и n 2 , мы должны, очевидно, макси
мально увеличить произведение [2 п 2 за счет т 2 . Но это будет
достиrнуто при т 2 = О, и тоrда произведение величин [2 и n 2
при условии, что их сумма равна единице, будет наибольшим,
если [2 = n 2 = 1/2. Таким образом,
1
ITmaxl = 2 (0'1 О'З),
(7.14)
Так как т = О, а [ = n = .../2/2, то максимальное Kaca
тельное напряжение возникает в площадка.х, равнонаклонен
ных к rлавным площадкам, на которых действуют максималь
ное и минимальное из rлавных напряжений.
314
7.4. KpyroBaJI диаrрамма наПРJlженноrо
СОСТОЯНИЯ
Как мы увидим в дальнейшем, определение rлавных Ha
пряжений является необходимым промежуточным этапом при
ведении расчетов на прочность в сложном напряженном COCTO
янии. Поэтому вычислять значения rлавных напряжений при
ходится довольно часто.
Однако это не значит, что всеrда необходимо решать KY
бическое уравнение (7.8). Пело в том, что в абсолютном боль
шинстве встречающихея на практике случаев положение одной
из r лавных площадок в исследуемой точке может быть указа
но заранее. Тоrда две друrие r лавные площадки можно опре
делить в семействе площадок, перпендикулярных первой, что
значительно упрощает задачу.
Рассмотрим условия равновесия треуrольной призмы, по
казанной на рис. 7.13. Эта призма образована путем сечения
элементарноrо параллелепипеда наклонной площадкой, KOTO
рая, независимо от уrла наклона а, остается параллельной oд
ной из rлавных осей. В данном случае такой осью является
r лавная ось у.
Проецируя все силы, действующие на отсеченную приз
му, на оси, параллельные'векторам (1 и r (см. рис. 7.1з,6),
получим
(1dy == (11 dydzcosa + (13 dydztgasina;
cosa
dz
r dy == (11 dy dz sin а (13 dy dz tg а cos а,
cosa
или
(1 == (11 cos 2 а + (13 sin 2 а; r == «(11 (13) sin а cos а.
Эти выражения можно переписать в виде
(11 + (13 (11 (13 2 (11 (13 .
(1 == 2 + 2 cos а; r == 2 sш 2а. (7.15)
Таким образом определяют напряжения в семействе пло
щадок, параллельных одной из rлавных осей. Выражениям
31S
(7.15) можно дать простое reoметрическое ТOJIкование. Пере
v 0'1 + О'з
несем полу сумму r лавных напр.жении 2 в левую часть
первоro уравнени.. Па.пее, ВОЗВОДJl в квадрат левые и правые
части уравнений, исключаем уrол 0:. Получим
( 0'1 + О'з ) 2 2 ( 0'1 О'з ) 2
O' 2 +т 2 .
в системе координат 0', Т это есть уравнение окружно
v +
сти, центр которои нахОДИТСJl на оси О' на раССТОJlНИИ 2
от начала координат. Радиус окружности равен полуразно
сти rлавных напряжений. Иначе roворя, окружность постро
ена на отрезке 0'1 О'З как на диаметре (рис. 7.14). Получен-
ный Kpyr называется 'lCРУ20.и Мора, или 'lCPY2oBoil диа2ра.и.иоil
наnряжеННО20 состояния. Что касается уравнений (7.15), то
их можно рассматривать как уравнение окружности, написан
ное в параметрическом виде. Роль параметра иrрает уrол 0:,
устанавливающий соответствие между точкой окружности и
секущей площадкой. Каждой секущей площадке COOTBeTCTBY
ет определенная точка на Kpyre Мора. В частности, если уrол
о: = О, секущая площадка совпадает с rлавной площадкой наи
большеrо напряжения 0'1 (точка В на рис. 7.14). Если о: = 900,
секущая площадка совпадает с друrой r лавной площадкой из
Toro же семейства (точка С на окружности).
oI (,
1. slпla
2
d
Рис. 7.14
Показанная на рис. 7.14 окружность построена для семей
ства площадок, параллельных вектору 0'2. Аналоrичным обра
30М можно построить круrи Мора и ДЛЯ семейств площадок,
316
параллельных векторам 0'1 и 0'3. В этих с.пуч8JIX круrи CTpoJlT
соответственно на отрезках 0'2 0'3 и 0'1 0'2 как на диамет-
рах. Таким образом может быть построено три Kpyra Мора.
Поскольку знак т не оroваривают, обычно оrраиичиваюТСJl по-
строением только верхней половины Kpyra (рис. 7.15):
r
11
для площадок, для площадок. 7: для ппощадок.
-т: параплспьных 't параппспьных параппст.ных
оси х оси )' оси z
О О (/ О d
Рис. 7.15
Каждой точке любой окружности соответствует опреде-
ленная секущая площадка в соответствующем семействе. По-
нятно, однако, что точки, расположенные на трех Kpyrax, не
исчерпывают всеzо множества секущих площадок. Площадки,
не параллельные ни одной из rлавных осей, не вписываются в
рассматриваемую схему.
Можно показать, что секущим площадкам соответству-
ют на плоскости и, т точки, лежащие внутри заштрихован-
Horo криволинейноrо треуrольника ВС п, образованноrо тре-
мя совмещенными круrами Мора (рис. 7.16). Имеются также
в
d
Рис. 7.16
317
и методы определения напряжений в соответствующих пло
щадках.
Поскольку ни одна из точек не выходит за пределы за
штрихованноrо криволинейноrо треуrольника, наибольшее Ka
сательное напряжение равно радиусу наибольшеro Kpyra
0'1 О'з
2
т шах =
Это напряжение возникает в площадке, равнонаклоненной к
rлавным площадкам, на которых действуют максимальное и
минимальное из rлавных напряжений, что уже было YCTaHO
влено ранее (см. выражение (7.14)).
KpyrOBaJI диаrрамма может быть построена не только, KO
rда заданы rлавные напряжения. Достаточно знать напряже
ния в двух любых площадках из рассматриваемоro семейства
площадок, параллельных rлавной оси. Положим, например,
задано напряженное состояние, показанное на рис. 7.17, а. Ось
у является rлавной. Среди семейства ей параллельных площа
док есть две, в которых напряжения известны. Это площад
ки 1 и п. Следовательно, на круrовой диаrрамме MorYT быть
f
1'.u
t1"
d
о
8
tf
Рис. 7.17
найдены две соответствующие им точки. Эти точки должны
располаrаться на противоположных концах одноro диаметра,
так как уrол между площадками равен 900, а на круrовой диа
rpaMMe он удваивается. Однако, поскольку знак напряжений
.,. не оrоваРИВaJIИ, ординаты обеих точек откладываем вверх.
На форме круrовой диаrраыыы это не скажется (рис. 7.17,6).
318
Из круrовой диаrраммы леrко определить rлавные нanря
жения:
,
(1 =
(1% + (1%
R;
2
" (1% + (1%
(1 = 2 + R,
rде R радиус Kpyra, R =
Таким образом,
( (1% (1х ) 2 2
2 +7' .
,
(1 =
(1х + (1:
2
J ( аж; аж )' + т';
( (1: (1х ) 2 2
+7' .
2
(7.16)
(1" = (1х + (1:
2 +
После Toro как напряжения (1' и (1" найдены, их сопоста
вляют с (1у, И все rлавные напряжения переименовывают на
(11, (12 и (13 в порядке убывания.
При м е р 7.4. Определить rлавные наПРJlжеНИJl ДЛJl наПРJlжен
Horo СОСТОJlНИJl, показанноrо на рис. 7.18. НаПРJlжеНИJl заданы в условных
единицах.
11'
о
10
40
Рис. 7.18
в предложенном примере одна из rлавных площадок и одно из rлав
ных наПРJlжений заданы. Следовательно, не прибеr&JI к решению куби
ческоrо уравнеНИJl (7.8), можно остальные rлавные наПРJlжеНИJl опреде
лить из Kpyra Мора ДЛJl семейства площадок, параллельных оси х (см.
рис. 7.18).
Наносим на диаrрамму точки, соответствующие площадкам 1 и II, и
строим круroвую диаrрамму:
(1" == 20 '1/202 + 302 == 16j
(1''' == 20 + '1/ 202 + 302 == 56.
Следовательно, а1 == 56, а == 50, аз == 16.
319
При определен.. rл&вных наир..ен.. мо.но бы.по бы польэоватьс.
также формулами (7.16). При этом неоБХОДКМО особое внимакие обращать
на то, чтобы не ошибатьс. в индекс&цик наир..ений по осаМ. Рассмотрим
еще один пример.
При м е р 7.5. Определить rла.вные наира.ениа в случае напражен-
Horo состо.ни., показанноro на рис. 7.19. Наира.ени. даны в условных
единицах.
.z
Наираженное состоание плоское.
Площадка А авлаетеа rл&вной. Две
друrие н&ходатса в семействе площа
док, перпендикуларных первой. С тем,
чтобы воспольэоватьса непосредствен-
но ФОРМУЛами (7.16), направим ось 11
перпендикуларно rла.вной площадке (см.
рис. 7.19). Тоrда (1'ж == 30, (1'. == 50,
r == 30. По формулам (7.16) находим
(1" == 40, (1''' == 60. ПереимеНОВЫВ8JI на-
пра.ениа в порадке убываниа, получаем
(1'1 == 60, (1'2 == О, (1'3 == 40.
JO
Рис. 7.19
7.5. Обзор различных типов
напряженных состояний
При исследовании вопросов прочности при сложном на-
пряженном состоянии существенное значение имеет вид на-
пряженноrо состояния. Большинство материалов по разному
разрушается в зависимости от Toro, являются ли напряжения
растяrивающими или сжимающими. Как показывает опыт,
все материалы без исключения способны воспринимать весь-
ма большие напряжения в условиях BcecTopoHHero сжатия, в то
время как при одноосном растяжении разрушение наступает
при сравнительно низких напряжениях. Имеются напряжен-
ные состояния, при которых разрушение происходит хрупко,
без образования пластических деформаций, а есть такие, при
которых тот же материал способен пластически деформиро
ваться.
В связи со сказанным очевидна необходимость более по-
дробно остановиться на типовых признаках напряженных со-
стояний и проследитъ, в каких условиJIX возникает то или иное
320
состояние. На основе TaROrO обзора в дальнейшем проще бу
дет ориентироваться в вопросах прочности и леrче дать oцeH
ку степени опасности напряженноrо состояния для материа
ла. Выше было произведено деление напряженных состояний
на трехосное, двухосное и одноосное. При решении вопросов
прочности, однако, TaKa.SI классификация не является достаточ
ной и принято делить напряженные состояния на три класса в
зависимости от знака rлавных напряжений.
't
d
Рис. 7.20
к первому классу относят трехосные растJlжеНUJl, Т.е.
такие напряженные состояния, в которых ни одно из rлав
ных напряжений не является сжимающим. KpyroBble диаrрам
мы для этоrо класса напряженных состояний располаrаются
в правой части плоскости аОт, (рис. 7.20). В частном слу
чае все три r лавных растяrивающих напряжения MorYT быть
равными; такое напряженное состояние называется чисты,м
трехосны,м растJlжение,м. Оно возникает, например, в цeH
тральной части сплошноrо шара, быстро HarpeBaeMoro извне
(рис. 7.21, а). Расширение внешних HarpeTblx слоев приводит
к тому, что внутренняя HeHarpeTa.SI область шара оказывается
под воздействием BcecTopoHHero "растяrивающеro давления".
KpyroBble диаrраммы при чистом трехосном растяжении BЫ
рождаются в точку (см. рис. 7.21, а). Трехосное растяжение,
при котором два rлавных напряжения равны, но отличны от
третьеrо, возникает в точках, лежaIЦИХ на оси растянутоrо
образца, имеющеrо кольцевую выточку (рис. 7.21, 6). Весьма
часто встречается напряженное состояние, в котором (J'З = О,
Т .е. двухосное растяжение, также относящееся к рассматрива
емому классу. Лвухосное растяжение, при котором 0'1 :f 0'2,
11 В. И. Феодосьев
321
о
Z d J
.z 11, '(
/ z
. 1.t;-4- ' '
Z d/-t/z
б /4 't
"j/ '.Р
d
6 * :&
z
't
.r d,_o
dt=d f .r о d,-
jI
2
i
. Z! '"
Р -1 р
t;:b
zELP
'.Р
Рис. 7.21
возникает, например, в быстроврarцаюDЦИХСЯ тонких дисках
постоянной толщины (рис. 7.21, в). Равное двухосное растяже
ние (0'1 = 0'2) возникает в точках, расположенных у внешней
поверхности сферическоrо сосуда, нarруженноro внутренним
давлением (рис. 7.21,2). К рассматриваемому классу наПрJl
женных СОСТОJlНИЙ относится, наконец, и простое одноосное
322
растяжение, возникающее в одиородиом стержне при ero pa
стяжении или чистом изrибе (рис. 7.21,0).
Второй распространенный класс СОСТ&В.1IJlЮТ такие иапРJl-
женные состояния, в которых ни одно из rлавных иапРJlжений
не является раСТJlrнвающим. Это так называемые mрежос-
ные сжаmu.f'. Для напряженных СОСТОJlНИЙ этоro класса KPY
rOBble диаrраммы располarаются в левой части плоскости (10т
(рис. 7.22).
t
J
If
Рвс. 7.22
Чистое трехосное сжатие возникает в любом теле, незави
сима от ero формы, при всестороннем rндростатнческом дaB
лении (рис. 7.23, а). Неравномерное трехосное сжатие xapaк
терна для точек, расположенных в окрестности контактирую
щих тел, таких как, например, ролики и обоЙМЫ подшипников,
втулки и валы (рис. 7.2з,6). Пример возникновеНИJl ДBYXOCHO
ro сжатии показан на рис. 7.23,8. Двухосное равное сжатие
(0'2 = аз) возникает при наrружении давлением вала, имею
щеrо свободные торцы (рис. 7.23,2). Одноосное сжатие также
относится к рассма'1;РИВа.емому классу напряженных СОСТОJl
ний и возникает, в частности, при чистом изrибе и сжатии
однородноrо стержни (рис. 7.23, д).
К третьему классу относятся так называемые смешаННblе
наnрJlжеННblе COCmOJlHUJl, в которых наибольшее и наименьшее
из rлавных напряжений имеют разные знаки. Напря:жение (12
может быть как положительным, так и отрицательным. Кру-
rOBble диаrраммы напряженных состоянии этоro класса распо
лаrа.ются в средней ча.сти плоскости (10т (рис. 7.24). Смешан
ное трехосное напРJ[жеииое состовие ВО3JIП&еТ, например,
11"
121
. WJ.
'у '1 8
dl
"
I /d z z
d
'Y
о
ь т,
y
I/1-I/1
oz
р
.r 3' z
z
g
Ш
Р" Jf M
jt d
Рис. 7.23
ffld
при наrружении толстостенноrо цилиндра внутренним давле
нием (рис. 7.25, а). Для изrибаемоrо и одновременно закру
чиваемоrо стержня характерно возникновение двухосноrо CMe
шанноrо наПРJlжеииоro СОСТОJlНИИ (рис. 7.25, 6). Чистый сдвиr
324
r
d
'jI
Рис. 7.24
Ij
d;
/1; z
'J
't'
(
11
Art ' ,
i
J1l J
У<О/
.у-, 7
JI
"
,
Рис. 7.25
также представляет собой смешанное двухосное напряженное
состояние (рнс. 7.25, в).
7.6.11еформированное состояние
Изменение формы тела связано с перемещениями ero TO
чек. Расстояние между положением некоторой точки А до и
после изменения формы тела (рис. 7.26) называется ее ПОАНЫАС
пере-w.ещение-w.. Составляющие вектора полноrо перемещения
по осям Х, у и z обозначаются соответственно через и, v и W.
325
z
Рис. 7.26
z
Ра.ссмотри),{ ЭJIе),{ентарный
отрезок АВ, направление которо-
ro совпадает с напра.в.ление),{ оси
ж (рис. 7.27, а). Ра.сСТОJl:ние ),{еж
ду точк8.),{И А и В обозначим че
.z рез dж. Соста.в.лJl:ющие вектора пе
ремещеНИJl: в точке В отличаюТСJl:
от соста.в.лJl:ЮЩИХ в точке А на ве.-
личины, соответствующие изме.-
нению координаты ж. Так, если
точка А перемещаеТСJl: вдоль оси
z на ш, то точка В перемещается
дш
на ш+ Oz dz и Т.д.
z 1J+ dz
IМ (/
{1
"
IU ю
А "
.z
6
:z
Рис. 7.27
ди
Приращение длины отрезка АВ составляет дж dж. Следо
вательно, относительное удлинение в точке А по оси ж будет
ди Ov дш
Е:ж = дж ' Аналоrично Е:у = ду i E::z = Oz '
Уrол поворота отрезка АВ в плоскости жОz равен OTHO
шению разности перемещений точек В и А вдоль оси z к длине
дш
отрезка dx, Т.е. /'1 = дж ' Уrол поворота отрезка АС в плос
ди
кости xOz (рис. 7.27,6) равен /'2 = Oz ' Сумма уrлов /'1 и /'2
представляет собой изменение прямоrо уrла ВАС, Т.е. уroл
дш ди
сдвиrа в плоскости xOz 'YZ% = дж + Oz ' Аналоrично MorYT
326
быть написаны выра.жеии.l: ДJ1JI yr лов сдвиrа в двух друrих
координатных ПЛОСltOст.I:X.
В итоre иыееы с.педующую св.l:зь ыежду переыemени.l:ЫИ и
деформаци.l:ЫИ в точке:
ди Bv дш
Еж = дж ' Е, = д1l ' Ez = Bz i
Bv дш дш ди ди Bv
"/,z = Bz + ду ' "/z,; = дж + Bz ' "/,;, = ду + дж '
Совокупность дефорыаций, возникаюIЦIIX по Р&3JIичныы
осям и В различных плоскост.I:X, проход.I:IЦИX через данную точ
ку, носит название дефОРА4UРОfJОННО20 состопси... fJ точке, а
Ех, Е1}' Ez, 'Y1}Z' 'Yzx и 'Ух, называюТС.l: КОА4nонентОА4и дефОРА4U
pOtJOHHOZO cocmO.J'HU.Il.
Возникает естественный вопрос, достаточно ли этих ше
сти компонент, чтобы определить дефорыированное СОСТО.l:ние,
Т.е. можно ли по этиы шести коыпонент8.Ы найти удлинение
по любой оси и уrлы сдвиrа в любых плоскост.I:X, проходпцих
через данную точку?
На этот вопрос ыожно ответить утвердительно. Paccыo
три м некоторую ось 11, ПрОХОД.l:щую через заданную точку
(рис. 7.28, о). НаправЛJlющие косинусы ПРJlЫОЙ 11 будут 1, т, n.
Выделим на этой ПРJlЫОЙ ыалый отрезок О А = dL и построиы
на нем, как на диаroнали, параллелепипед со СТОрОН8.Ыи dж, d1l,
dz (рис. 7.28, 6).
о
(L.""п)
z
J
.r
(J
Рис. 7.28
Если параллелепипед получает удлинение Еж, точка А сме-
щается вдоль оси ж на Е,; dж, а диaroналь ОА получает а.бсо-
лютное удлинение дdL = Е,;' dж. Относительное удлинение
диarОНaJIИ получим, разделив это ПРОИЗDeдeние на dL = dж/l.
327
в итоre обнаруживаем, что удлинение Еж вносит в удлинение
Еу слаrаемое Ежl2. Аналоrичные слarаемые дают удлинеНИJ:
Еу и Ez. Теперь положим, что НИЖНJ:J: rpaвb параллелепи
педа dx dy остаетс): на месте, а верХИJ:J: вследствие сдвиrа в
плоскости xOz получает вдоль оси х перемещение "Уzжdz. Это
удлиняет диаrональ dL на "У:&ж dz .lj делим это произведение на
dL = dz/n и видим, что сдвиr "Уzж приводит к увеличению Е"
на 1zжnl. Остальные слarаемые можно написать по а.налоrии.
Суммируя их, получаем
Е" = Е ж l 2 + Е у т 2 + Е:&n2 + "Yyzmn + "Уzжnl + "Ужуlт. (7.17)
Несколько сложнее определить уroл сдвиrа в плоскости,
определяемой двуми взаимно перпеНДИКУЛJ:РНЫМИ прямыми lJ
и J1. (см. рис. 7.28,6). Для этоro надо найти перемещение точ
ки А по направлению J1. и разделить ero на dL. Это дает уroл
поворота отрезка dL в плоскости 1IJ1.. Затем все то же самое
проделываем для отрезка, расположенноrо по оси J1.. Сумма
найденных уrлов дает искомый уroл сдвиrа в плоскости 1I0J1..
Но этих выкладок мы уже делать не будем. rлавное ясно. Дe
формированное состояние в точке определяется шестью компо
нентами.
Теперь вернемся к выражению (7.17) и сравним ero с най
денным ранее для напряжения и" выражением (7.4). Эти co
отношения имеют общую структуру, и все, что было получено
ранее из выражения (7.4), можно получить и из (7.17). ДOCTa
точно только во всех формулах заменить иж, иу, lrz на Еж, Еу,
Ez, а 2Tyz, 2т zж , 2т жу на "Yyz, "Уzж, "Ужу'
Таким образом, анализ деформированноro состояния пока
зывает, что оно обладает свойствами, совершенно аналоrич
ными свойствам напряженноrо состояния. Среди множества
осей, которые MorYT быть проведены через исследуемую ТОЧ
ку, существуют три взаимно перпендикулярные оси, в системе
которых уrловые деформации отсутствуют. Эти оси называ
ются .MaBHbI.wu OCZ.WU дефор.wироваННО2О COCтoZHUZ, а линей
ные деформации в этой системе 2J1.aBHbI.wu дефор.wацuz.wи.
r лавные деформации определяются из кубическоrо ypaв
нения
Е 3 JIE2 + J2E Jз = О,
328
коэффициентами KOToporo ЯВJIяются инварианты деформиро
BaHHoro СОСТОЯНИЯ:
Jl = Еж + Еу + Ez;
1 2 1 2 1 2
J2 = EyEz + ЕzЕж + ЕжЕу 4" 'Yyz 4" 'Уzж 4" 'Ужу;
Еж
1
2 'Ууж
1
'Уzж
2
1
'у z,
2
(7.18)
1
Jз = 'Ужу
2
1 1
2 'Ужz 2 'Y,z Ez
Из сопоставления этих выражений с соотношениями (7.8)
и (7.9) видно, что аналоroм нормальноrо напряжения здесь
является линейная деформация, а аналоrом касательноro Ha
пряжения половина уrла сдвиrа в соответствующей ПJIОСКО
сти. Продолжая эту аналоrию, можно, подобно KpyraM Мора в
напряжениях, построить круrи Мора в деформациях.
Анализ деформированноrо состояния основан на чисто
rеометрических соотношениях, и поэтому все сказанное OCTa
ется справедливым для любоro однородноro тела, независимо
от механических свойств материала.
Наряду с линейной и yr лавой деформациями в сопротивле
нии материалов приходится рассматривать иноrда объе.wную
дефор.м.ацию, Т.е. относительное изменение объема в точке.
Линейные размеры элементарноrо параллелепипеда dx, dy и
dz в результате деформации меняются и становятся равными
dx (1 + Еж), dy(1 + Е у ) и dz (1 + Ez). Абсолютное приращение
объема определяется, очевидно, разностью
Еу
дV = dxdydz(l +Е ж )(l +Е,)(1 +Ez) dxdydz.
Раскрывая скобки и пренебреrая произведениями линейных дe
формаций как величинами, малыми по сравнению с их первы
ми степенями, получаем
V = dx dy dz (Еж + Е" + Ez).
329
Относительное изменение объема обозначается буквой е и
равно сумме линейных деформаций по трем осям:
дV
е = = Е% + Ем + Ez. (7.19)
1J
С поворотом осей относительное изменение объема е в точ-
ке, очевидно, не меняется. Это один из инвариантов дефор
мированноrо состояния (см. формулу (7.18)).
7.7. Обобщенный закон I'YKa
и потенциальная энерrия деформации
в общем случае напряженноrо состояния
До сих пор напряженное и деформированное состояния
рассматривали независимо одно от друrоrо и не связывали со
свойствами материала. Однако между компонентами напря-
женноrо состояния, с одной стороны, и деформированноrо с
друrой, существует определенная зависимость. В пределах Ma
лых деформаций эта зависимость является линейной и носит
название обобщенноzо заJCона rYJCa. Наиболее простую форму
обобщенный закон fYKa принимает для изотропноrо тела. В
этом случае коэффициенты пропорциональности между компо-
нентами напряженноrо и деформированноro состояний не зави
сят от ориентации осей в точке.
Для тoro чтобы составить аналитическое выражение обоб-
щенноrо закона rYKa, воспользуемся принципом независимости
действия сил и рассмотрим раздельно силы, возникающие на
rранях элементарноrо параллелепипеда (рис. 7.29).
z
330
Рве. 7.29
в любой из коорJlииатIIых плоскостей, иапРJl)(ер 1/ 0Z ,
yr ловая деформация опреДeJIяется ТOJIЬKO соответствующим
касательным напряжением 17/% = T7/%/G. Две друrие пары Ka
сательных напряжений, а также нормальные напряжения не
будут влиять на 11/%' что является следствием свойств И30троп
Horo материала.
Сказанному можно дать следующее объяснение. Допу
стим, что на rраиях элемента возникают ТOJIЬKO касательные
напряжения Т Ж 7/ = Т7/Ж (рис. 7.30, о). Спрашивается, может
ли при этом появиться уrловая деформацИJl 17/Z в плоскости,
перпендикулярной плоскости действия касательных напряже-
w ?
нии 7'ЖУ.
z
Рис. 7.30
Если эта деформация возникает, то указать ее знак для
изотропноrо материала невозможно, поскольку "предпочти-
тельность" Toro или иноrо направления для ТЖJ/ не обнаружи-
вается, а в свойствах. материала она отсутствует. Положим,
например, что сдвиr происходит в направлении, указанном на
рис. 7.30, о. Torna, поворачивая элемент на 1800 относительно
оси z, получаем точно ту же систему сил ТЖ7/ и противополож
ный знак 1zy (рис. 7.30,6). Ясно, что указанное противоре-
чие устраняется только в том случае, если 1J/z = О. Следова
тельно, принимая принцип независимости действия сил, можно
сказать, что уrловая деформация 1J/z от ТЖJ/ не зависит. AHa
лоrичным образом доказывается, что она не зависит от всех
проч.их компонент нanРJlженноrо СОСТОJlНИJl, кроме 7'1/%' ДЛJl
анизотропноro материала приведенные соображеНИJl не имеют
аа1
силы. В итоre дл.: трех уrловых деформаций получаем
'у Т1/.. 'у Т%Ж. 'у ТЖ1/
,1/% а 1 ,%Ж G I ,Ж1/ G '
Из этих выражений видно, что ДJIJI И30тропноro тела 2.савные
оси наnрzжеННО20 u дефОРJAuроваННО20 cocmo..ncud совпадают,
поскольку одновременно с касательными напр.жени.ми обра
щаются в нуль и yr ловые деформации.
Подобно тому как yr ловые деформации не зависят от HOp
мальных напряжений, линейные деформации не зависят от
касательных напр.:жений. Это может быть довольно просто
показано при помощи приведенных выше рассуждений. Kpo
ме Toro, это следует также и из теоремы взаимности работ
(см. 5.6). Если нормальные напряжения не вызывают сдви
ra, на котором касательные силы моrли бы совершить работу,
то касательные напряжения не вызывают линейных смещений,
на которых моrли бы совершить работу нормальные силы.
Относительное удлинение в направлении оси х, обусло
вленное напряжением (1ж, равно (1ж/ Е. Напряжениям (17/ и (1.
соответствуют удлинения по оси х обратноro знака, равные
J.I.(17/ / Е и J.I.(1. / Е . Следовательно,
(1z (17/ (1.
Ez = Е J.l.E J.l. E '
(7.20)
Такие же выражения получ м по аналоrии и для Е7/ и Е..
В итоrе
1
Еж = Е [(1ж J.I.«(111 + (1.)];
1
Е7/ = Е [(17/ J.I. «(1. + (12:)]; (7.21)
1
Е. = Е [(1. J.I.«(1ж + (17/)]'
Сложив левые и правые части этих равенств, получим BЫ
ражение объемной деформации (7.19) в виде
1 2JL
е = Е «(1ж + (17/ + (1.). (7.22)
Полученные соотношения (7.20) (7.22) являются анали
тическим выражением обобщенноrо закона rYKa дли изотроп
HOrO тела..
332
Выражение объемной деформации (7.22) позвол.ет YCTa
новить предельное значение коэффициента Пуассона для лю-
боrо изотропноrо матерИaJIа. Оно справедливо для любо-
ro напряженноrо СОСТОJlНИЯ и применимо, в частности, при
аж = ау = а , = р. В этом случае
1 2JL
е = 3 Е р.
При положительном р изменение объема е должно быть
также положительным, а при отрицате.льном р отрицатель-
ным. Это возможно только в том случае, если JL 1/2. Сле
довательно, значение коэффициента Пуассона ДЛЯ изотропноro
материала не может превышать 0,5.
Полученный вывод, несмотря на ТО, что он вытекает из
частноrо случая напряженноrо СОСТОЯНИJl, ЯВЛJlетси оБIЦИм, по
скольку JL, является характеристикой АСатериа.ilа и в пределах
упруrих деформаций от напряженноro СОСТОЯНИЯ не зависит.
Перейдем к определению потеНЦИaJIЬНОЙ энерrии дефор
мации В общем случае напРJlженноro состоянии. Очевидно,
потенциальная энерrия, накопленная в элементарном объеме,
определяется суммой работ сил, распределенных по поверхно-
сти этоrо объема. НОРМaJlЬНая сила аж dydz (см. рис. 7.29) на
перемещении Еж dx совершает работу. Эта работа равна
1
аж dydz. E:z; dx,
2
rде t::z; относительное удлинение вдоль оси х, вызванное всеми
действующими силами.
Аналоrичные выражении работ дают и остальные HOp
мальные составляющие. Касательная сила Т у: dy dx на пере
мещении 'Уу: dz совершает работу
1
"2 Ту: dy dx . 'Уу: dz
(см. также 2.1). Выражения для остальных слаrаемых вну-
тренней энерrии получаем простой перестановкой индексов. В
итоrе имеем
1
dU = 2 dx dy dz (О'жЕх + О'уЕу + О',Е, + Ty,"'Iy, + 7", ж "'1, ж + 7"жу"'lжу).
ззз
Если энерrию отнести, :ка.к это обычно делают, J[ единице
объема и, :кроме тoro, по формулам (7.20) и (7.21) выразить
деформации через иаиРJ[жеНИJ[, то о:кончатeJIЬНО получим
1 2 2 2 ]
ио = 2Е [0'% + 0'" + O'z 2р.(0',,0'% + 0'%0'% + О'жО',,) +
1 2 2 2
+ 2G (r"z + r z % + т%,,), (7. З)
или в r лавных нa.nРJlжени1lX
ио = 2 [O' + O' + O'l 2р. (0'20'3 + 0'30'1 + 0'10'2)]. (7.24)
Пля TOro чтобы найти потенциальную энерrию во всем
объеме деформированноro тела, выра.жение ио следует YMHO
жить на элементарный объем и проинтеrрирова.ть по объему
тела:
U = J ио dV.
v
Выведем выра.жеНИJl для так называемых энер2UU иЗАСене
ни6 фОрАСЫ u энер2UU иЗАСенени6 об-ьеАСО. Эти выра.жения по
требуются в дальнейшем при изучении вопросов, связанных с
пластическими деформациями и предельными напряженными
состояниями.
Пеление внутренней потенциальной энерrии на две YKa
занные составляющие является условным; в ero основе лежит
следующий принцип.
Каждое из rлавных напряжений представляют в виде CYM
мы двух величин:
I I I ( )
0'1 = Р + 0'1' 0'2 = Р + 0'2' 0'3 = Р + О'з, 7.25
в результате чеro напряженное состояние разбивается на два.
Первое из них представляет собой всестороннее растяжение,
а второе является дополнительным к нему до заданноrо Ha
пряженноrо состояния (рис. 7.31). Напряжения р подбирают с
таким расчетом, чтобы изменение объема в дополнительном
напряженном состоянии отсутствовало, т .е.
O' + (1 + (1 = О.
334
' ф J
tJi=P Р+ 11/
/,q /Р dj
Р
Рис. 1.31
Складывая выражения (7.25), получают
1
р = з(0'1 + 0'2 + 0'з). (7.26)
При указанном условии система сил nepBoro нanряженноro
состояния (р) не производит работы на перемещениях, вызван
ных силами BTOpOro состояния. Точно так же и силы BToporo
напряженноrо состояния не производят работы на перемеще
ниях первоrо. Взаимные работы отсутствуют, поэтому BHY
треннюю энерrию разбивают на две части, соответствующие
двум напряженным состояниям:
ио = UОоб + Uоф,
rде UОоб энерrия изменения объема, а Uоф энерrия измене
ния формы, или энереUJl Фор.uоuз.uенеНUJl.
Подставляя в выражение (7.24) вместо всех rлавных Ha
пряжений величину р из (7.26), получают для nepBoro состоя
ния
1 2р. 2
UОоб = 6Е (0'1 + 0'2 + 0'3) .
(7.27)
Энерrию формоизменения можно найти, вычитая ио об из
U О. После несложных преобразований имеем
1+JL ( 2 2 2
Uоф = 3Е 0'1 + 0'2 + 0'3 0'20'3 0'30'1 0'10'2),
или
Uо ф = 1:: [(0'1 0'2)2 + (0'2 0'3)2 + (0'3 0'})2].
(7.28)
33&
Если это выражение написать ДЛ1l ПРОИЗВОJIЬНЫХ осей, то
в соответствии с (7.23)
1 + J.t [( 2 2 2
ио ф = 6Е q% q!/) + (q!/ qz) + (qz q%) ]+
122 2
+ 2G (T!/Z + TZ% + т%!/). (7.29)
В частном случае BcecTopoHHero paBHoMepHoro сжатия или
растяжения, Т.е. при ql = q2 = qз = q,
3 1 2J.t 2
ИО об = 2" Е q j ио ф = о.
При чистом сдвиrе, Т.е. если ql = q, q2 = О, qз = q, COCTa
вляющие потенциальной энерrии имеют вид
1+J.t 2
ИОоб = о; Ио ф = q .
Сравнивая выражение (7.27) с (7.12), а (7.28) с (7.11), леr
ко заметить любопытную особенность: энерrия изменения объ
ема и энерrия формоизменения соответственно пропорциональ
ны квадратам нормальноrо и касательноrо октаэдрических Ha
пряжений.
7.8. Анизотропия
Все сказанное по поводу обобщенноrо закона rYKa и BЫTe
кающих из Hero следствий относилось к изотропным средам.
Теперь остановимся на упруrих свойствах анизотропных Ma
териалов.
ПО недавнеrо времени в практических задачах инженерной
механики эти вопросы на передний край не выдвиrались. Это
не значит, что анизотропные материалы не находили примене
ния. С ними давно приходится иметь дело. Вспомним хотя бы
резинокордную конструкцию автомобильных и авиационных
шин, rде резиновая оболочка армирована стальными или ней
лановыми нитями, образующими косоуrольную сетку. Можно
вспомнить и фанерные анизотропные панели, применявшиеся
в прошлом для оклейки несущих плоскостей самолетов. Мож
но привести и друrие примеры, rде анизотропия фиrурирует
336
как важный фактор расчетной схемы. И все же, HeCMOTpJl на
несомненную важность и даже заслуженность подобных при
кладных задач, следует признать, что все они узконаправлен
ны и по своей общности существенно уступают тому боrатству
структурных схем, которое pacKpblBaeTCJl перед нами в связи
с применением композиuионных материалов. Сейчас немысли
мо представить авиаuионную и ракетно космическую технику
без применения композитов. Композиuионные материалы уже
охватили мноrие отрасли промышленности, в том числе про
изводство предметов домашнеrо обихода.
Композиuионные материалы MorYT иметь различную
структуру. Но во всех случаях, по самому определению, компо
зит состоит по крайней мере из двух компонентов наполните
ля и связующеrо. Последнее обычно называют матриuей. Если
наполнитель представляет собой уложенную в определенном
порядке систему нитей или нитевидных кристаллов, компози
ционный материал приобретает резко выраженные свойства
анизотропии, и модули упруrости в различных направлениях
MorYT различаться в несколько крат.
Не касаясь пока вопросов прочности, постараемся пред
ставить армированную структуру композита как сплошную и
однородную среду с соответствующими упруrими KOHCTaHTa
ми, позволяющими построить закон rYKa в традиuионной фор
ме линейных зависимостей между компонентами напряженно
ro и деформированноrо состояний. И обобщение в этом случае
достаточно очевидно: каждая компонента деформированноrо
состояния зависит от каждой из компонент напряженноrо co
стояния. В итоrе получаем следующие соотношеНИJl:
€x == Sll о"х + S120"y + SlЗО"z + S14Tyz + SlST z x + Slб'Т х у;
€y == S21 о"х + S220"y + S2ЗО"z + S24 T yz + S2ST zx + S2б'Тху;
€z == SЗl о"х + SЗ20"У + SззО"z + SЗ4 Tyz + Sзs'Тzх + SЗб'Тху;
(7.30)
/yz == S41 о"х + S420"y + S4ЗО"z + S44T yz + S4ST zx + S4б'Т ху ;
/zx == SSl о"х + SS20"y + ssзо"z + SS4Tyz + SssTzx + SSб'Т ху ;
/ху == Sбl о"х + Sб20"У + SБЗО"z + Sб4 T yz + SБS'Т zх + Sбб'Т ху ,
rде Sik коэффиuиенты податливости, которые определяются
свойствами материала, но не Jlвляются ero константами, по
скольку зависят еще и от ориентаuии выбранной системы осей
х, у, Z.
ЗЗ7
Как напряженное и деформированное СОСТОЯНИЯ являются
тензорами, так и система коэффициентов податливости обра
зует тензор, но более BblCOKOro ПОР1IДК& (paHra). Исследовать
ero свойства мы не будем, но отметим только, что этот тензор
симметричный, Т.е. 8i/c = 8/ci. Это вытекает из теоремы вза
имности работ (см. 5.6). Работа, например, силы (1, dydz на
перемещении 812(171 dx, вызванном силой (171 dx dz, равна работе
силы (1'71 dx dz на перемещении 821(1ж d1/:
(1'х dy dz. 812(171 dx == (1'71 dx dz. 821(1ж dy,
откуда следует, что 812 = 821.
Если оси х, у, z являют
ся r лавными осями напряженно
ro состояния, то T yz = T zx =
= Т жу = О. При этом уrловые
деформации "'Yyz, "'Уzж, "'УХ7/ В нуль
не обращаются. Следовательно,
в анизотропной среде r лавные оси
напряженноrо и деформированно
ro состояний, вообще rоворя, не
совпадают. Это иллюстрирует
простой пример , показанный на
рис. 7.32. Деревянный образец вы-
резан под yr лом к направлению
волокон. При растяжении вдоль
оси х образец получит не только
удлинение, но и перекос. В дaH
ном случае касательные напряже
ния ТХ71 равны нулю и, следова-
тельно, оси х и 1/ rлавные оси
напряженноrо состояния. Деформация же "'Уху в нуль не обра-
щается. Следовательно, для деформированноrо состояния оси
х и у не r лавные. Если бы образец был вырезан вдоль во-
локон, то при ero растяжении по оси х никаких перекосов не
возникало бы, и rлавные оси напряженноrо и деформирован
Horo состояний совпадали бы. А это означает, что HeKOТO
рые из коэффициентов податливости при таком выборе осей
обращаются в нуль. Значит, при определении коэффициентов
.I
td.c
I
I
dI
Рис. 7.32
338
!J
t[r
податливости в DeJI.lX простоты следует сообразовыватьс с
ос.lми анизотропии среды.
Наиболее простой вид матрица податливости приобрета
ет, естественно, в случае полной изотропии (см. (7.20) и (7.21)):
1 J.' J.' О О О
Е Е Е
J.' 1 J.' О О О
Е Е Е
J.' J.' 1 О О О
Е Е Е
О О О 1 О О
G
О О О О 1 О
G
О О О О О 1
.G
Несколько сложнее выrлядит матрица податливости в
случае АСонотроnии, или, как ее часто называют, тpaHcвep
саАЬНОй изотропии, которая свойственна композитам с OДHO
направленной укладкой нитевидноrо наполнителя (рис. 7.зз).
Рис. 7.33
Обратимся к первому выражению (7.21) и, сохраняя обо
значения для модуля и коэффициента Пуассона, снабдим их
соответствующими индексами. Пусть по оси х модуль будет
Е 1 , а по равноправным осям у и z Е2. Тоrда
1 J1.21 J1.21
Еж = El аж Е2 ау Е2 a z .
339
Обозначение коэффициента Пуассона снабжено ДВУМJI индек
сами. Первый соответствует оси, по :которой приложено Ha
пряжение, а второй ТОЙ оси, по которой происходит суже
ние. Для монотропной среды, естественно, JJ21 = JJЗl. Написав
аналоrичные выражения и для OCTaJ.[bHЫX компонент дефор
мированноrо СОСТОЯНИЯ, получаем матрицу податливости MO
нотропноrо материа.ла в следующем виде:
1 JJ21 JJ21 О О О
Еl Е2 Е2
JJ12 1 JJ32 О О О
Еl Е2 Е2
JJ12 JJ32 1 О О О
Еl Е2 Е2
О 1 О О
О О G2З'
О О 1 О
О О С12
О О О О О 1
С12
Здесь по свойству симметрии JJ21 JJ12 а кроме Toro, по
= ,
Е2 Еl скольку в плоскости уО z среда изотропна, для нее сохраняется
Е2 Таким обра
хорошо известн е соотношение G2v3 = 2 (1 + JJ32)' зам упруrие своиства монотропнои среды определяются пятью
независимыми константами.
И, наконец, еще один вид анизотропии, характерный для
композитов ортотропия, обладающая симметрией относи
тельно трех взаимно перпендикулярных плоскостей (рис. 7.34).
Здесь, в отличие от монотропии, оси У и z неравноправны. В
частности, ортотропной является древесина. Упруrие свой
ства ортотрапной среды описываются девятью независимыми
ПОСТОЯННЫМИ:
340
Рис. 7.34 Рис. 7.35
1 J.L21 J.LЗl О О О
Еl Е2 Ез
J.L12 1 J.LЗ2 О О О
Еl Е2 Ез
J.LIЗ J.LЗ2 1 О О О
Еl Е2 Ез
О О 1 О О
О G2З
О О О О 1 О
GЗl
1
О О О О О
С12
rде, конечно, по свойству симметрии
J.L21 J.L12 J.LЗl J.LIЗ J.LЗ2 J.L2З
Е2 Еl' Ез = Еl ' Ез Е2'
Упруrие постоянные Еl, Е2, ... ДЛЯ композита можно
определять не только путем испытания образцов. Если извест
ны модули нитей и связующеrо, можно с достаточной точно
стью рассчитать упруrие постоянные создаваемоrо композита.
В ча.стности, особенно просто опрепелить мопуль упруrости Еl
для монотропноrо композита (рис. 7.35). .постаточно очевидно,
341
что в случае длинных нитей
Еl = ЕиV и + ЕсУс,
rде Е к и Ес модули упруroсти нитей и СВJl:зующеroj У К и t'c
соответственно их объемные доли в композите. Если нanол
нитель состоит из коротких нитевидных кристаллов, формула
дает завышенные значения Еl' Возникает также поrрешность
вследствие различия коэффициентов Пуассона ДЛJl: нитей и Ma
трицы, но она незначительна. Формулы ДЛJl: определеНИJl: дpy
rих упруrих констант композита существенно сложнее только
что приведенной, но не настолько, чтобы это серьезно затруд
нило вычисления.
В практике расчетов и упруrих констант, и предела проч
насти композита широко используют понятие .wOHOCAOZ как
OCHOBHoro составляющеrо элемента слоистых структур. Mo
нослай это скорее двойной слой (см. рис. 7.35), содержащий
два семейства нитей, направленных соответственно под уrла
ми +<,0, <,o или 00, 900 к оси х.
Если <,о = 00, получается однонаправленный монослой.
Значения модулей упруrости и пределов прочности TaKoro MO
нослая даны в табл. 7.1. Приведенные данные заметно изме
НИЮТСЯ в зависимости от рецептуры связующеrо и от методов
изrотовления композита.
ТаБJllJца 7.1. Механические свойства однонаправленных
компознтов с ЭПОКСИДНОЙ матрицей
СтеJCЛО-- Уrле Орrаио-- Боро--
Характерксткха пласТКJc пласТИJc пластиJC пластиJC
(V. = 0,65) (V. = 0,7) (V. = 0,54 (V. = 0,5)
Е1, rПа 52,1 181,4 84,3 201,3
Е2, rПа 14,0 10,3 4,8 21,7
С 12 , rПа 6,3 6,9 2,9 5,4
/.112 0,056 0,016 0,018 0,018
/.121 0,21 0,28 0,32 0,17
Е 1 / Е2 3,7 17,6 17,6 9,3
E1/G 12 8,3 26,3 29,1 37,3
342
О"ончанuе mаБА. 7.1.
СтеКJlО- У r Jlе OpraHo- Боро-
Характеристика ПJlастик ПJlастик пластик ПJlастик
(У. = 0,65) (У. = 0,7) (У. = 0,54 (V. = 0,5)
пt, МПа 1108 1494 1186 1373
п , МПа 7,5 40,0 10,9 55,8
п , МПа 530 1702 289 1599
П;, МП& 78,0 246,1 64,8 123,4
пl , МПа 22,4 67,6 27,6 63,0
пt / п 148 37,3 108,8 24,6
Пt! П 1 49,5 22,1 43,0 21,8
П / п; 6,8 6,9 4,5 13,0
При М е ч а н И е. V. объеМН8JI дол. наполнитеЛJl. Через п+ I П
И Пl длJl наrЛJlДНОСТИ обозначены соответственно предеJlЫ прочности на
раСТJlжение, на сжатие И на сдвиr.
в табл. 7.2 даны значения модулей упруrости и пределов
прочности перекрестно армированных композитов.
Таблuца 7. . Механические свойства ортоrонально
армированных и перекрество армиро--
ванных композитов
X&p&Kтe Стеклопластик Уrлепластик Боропластик
ристика 00/900 ::1:450 00/900 ::1:450 00/900
Еl, rп& 22,6 17,0 68,8 8,2 84,3
E , rПа 22,6 17,0 70,2 7,6 83,4
#Jl 0,15 0,034 0,89 0,05
#J 1 0,15 0,035 0,87 0,05
Gl , rПа 9,4 12,5 3,1 20,0 4,4
Пt, МПа 407 530 291 68,6 422
П , МПа 407 284 63,7
П , МПа. 255 320 204 66,7 907
П'i I МПа 255 208 98,1
343
rлава 8
КРИТЕРИИ ПЛАСТИЧНОСТИ
И РАЗРУШЕНИЯ
8.1. Основные положения теории
пластичности и разрушения
Материал конструкции в зависимости от условий Harpy
жения может находиться в различных механических состояни-
ях. При небольших внешних силах возникают только упруrие
деформации, или, как rоворят, материал находится в УПРУ20АС
состО.8нии. При больших силах обнаруживаются заметные
остаточные деформации и материал находится в ПАастuчес
'lCOAC состО.8нии. При дальнейшем увеличении наrрузки про-
исходит образование местных трещин и наступает состО.8ние
разрушени.8.
Такая последовательность смены механических состояний
типична для пластичных материалов и с достаточной очевид-
ностью вытекает из испытаний образцов на растяжение и сжа-
тие. Возникают вопросы: способны ли эти испытания в полной
мере характеризовать механические свойства материала и что
будет I если испытания проводить в условиях не одноосноrо, а,
скажем, TpexocHOro напряженноro состоsния?
344
Наблюдения показывают, что это вопрос далеко не
праздный. Пействительно, мы уже знаем, что чуrун типич
ный хрупкий материал под действием большоrо BcecтopOH
Hero давления приобретает пластические свойства и разрыв
образца происходит с образованием шейки. Но ведь наложе
ние BcecTopoHHero давления Р означает переход от одноосноrо
напряженноrо состояния
0'1 = 0', 0'2 = 0'3 = О
к трехосному
0'1 = о' р, 0'2 = 0'3 = p,
и, следовательно, уже этот пример показывает нам, что в раз
личных напряженных состояниях свойства материалов про
являются пcr разному.
Образец с выточкой (см. рис. 1.46), изroтовленный из плar
стичноrо материала, обнаруживает при растяжении хрупкие
свойства. Конечно, это можно объяснить, как это уже делалось
ранее, тем, что образование пластических деформаций сдвиrа
в ослабленном сечении стеснено более жесткими участками,
расположенными вне выточки. Но ту же самую мысль можно
выразить и друrими словами. Напряженное состояние в зо
не выточки является неодноосным, и rлавные напряжения 0'2
и 0'3 в центральной части этой зоны будут положительными.
Поэтому материал частично утрачивает способность пласти
чески деформироваться.
Таким образом, механическое состояние материала в точ
ке зависит в первую очередь от напряженноrо состояния в этой
точке, хотя и не определяется им полностью. Например, при
наличии температурноrо воздействия на механическом COCTO
янии материала заметно сказывается фактор времени. При
малом времени наrружения состояние материала можно pac
сматривать как упруrое, а при большом как пластическое.
Но, пожалуй, более важным является то, что само понятие Me
ханическоrо состояния в точке не свободно от противоречий с
принятым ранее предположением о непрерывности среды. Это
обнаруживается в первую очередь при изучении вопросов раз
рушения, поскольку процесс образоваНИJl трещин в металлах
345
тесно связан с их молекулярной и кристаллической структу-
рой, а само разрушение опредеЛJlеТСJl не только напРJlженным
состоянием, но в ряде случаев характеризуется также и исто
рией наrружения, Т.е. зависит от Toro, в какой последователь-
ности прикладываются силы. В качестве примера достаточно
указать на разрушение при периодически изменяющихся Ha
rрузках. MHoroKpaTHoe наrружение и разrрузка MorYT приве
сти к разрушению, хотя возникающие напряжения остаются
существенно меньшими предела текучести.
Теоретическое обобщение этих вопросов относится к чи
слу наиболее острых и злободневных проблем современной Me
ханики сплошной среды, и ero обсуждение выходит далеко за
рамки задач сопротивления материалов. Но, не уrлубляясь в
тонкости вопроса, можно сказать одно: напряженное состояние
в точке является r лавной причиной изменения механическоrо
состояния материала, и задача заключается в том, чтобы уста-
новить меру напряженноrо состояния, по достижении которой
происходит переход от упруrоrо состояния к пластическому,
и условий, при которых начинается разрушение, Т.е. вырабо
тать 'lCритерий nJ1.астичности и 'lCритерий разрушеНШ1.
Между тем и друrим необходимо делать четкое разrрани
чение. Физические процессы, протекающие в этих переходных
состояниях, хотя и взаимосвязаны, но существенно различны,
и поэтому нет оснований в какой бы то ни было степени эти
критерии отождествлять.
Более разработанным, определенным и более простым
(если вообще понятие простоты применимо к этим вопросам)
является критерий пластичности. С Hero мы и начнем, а о
критерии разрушения поrоворим несколько позже.
Проводя испытания на растяжение, мы фиксируем свое
внимание на зависимости между напряжениями и деформа-
циями и замечаем, что по достижении предела текучести в
образце возникают ощутимые остаточные деформации. Та-
ким образом, условием перехода из упруrоrо состояния в пла-
стическое является равенство о = От.р. При сжатии получим
о = От.с' Аналоrичным образом можно поступить и в слу
чае чистоrо сдвиrа. Испытывая на кручение тонкостенную
трубку, нетрудно выявить напряжения в характерных точках
346
диarраммы сдвиrа и, назначив допускаемую пластическую дe
формацию, установить условие перехода в .пластическое cocтo
яние.
Если следовать по указанному пути, то в каждом напря
женном состоянии (0'1, 0'2, 0'3) нужно было бы для каждоrо
материала иметь соответствующие диаrраммы испытания с
числовыми характеристиками переходнОЙ точки. Понятно, oд
нако, что такой подход к решению вопроса является совершен
но неприемлемым прежде Bcero вследствие неисчерпаемости
возможных типов напряженных состояний, а затем в свя
зи С чисто техническими затруднениями, возникающими при
постановке испытаний материалов.
Техника эксперимента располаrает. в настоящее время
возможностями ведения испытаний лишь для некоторых типов
напряженных состояний (см. 14.2). Такие испытания требу-
ют в ряде случаев применения довольно сложной аппаратуры
и MorYT быть осуществлены только в сравнительно немноrих
исследовательских, но не производственных лабораториях. Из
сказанноrо вытекает, что критерий пластичности (как и кри
терий разрушения), обладая универсальностью по отношению
к различным напряженным состояниям, должен в то же время
базироваться па оrраниченном числе испытаний.
Практическое значение критерия пластичности также дo
статочно очевидно. Мы уже знаем, как, например, рассчиты
вают стержень на изrиб. Если нам заданы допускаемые каса-
тельные напряжения, то мы сумеем рассчитать стержень и на
кручение. Но если он одновременно изrибается и закручивает
ся, то о ero прочности пока ничеrо сказать нельзя, так как мы
не знаем, при каком соотношении между нормальными изrиб
ными напряжениями и касательными напряжениями кручения
возникают остаточные деформации. Ответ на этот и подобные
ему вопросы должен дать критерий пластичности.
Известны два подхода к формулировке критерия пластич
насти. Первый связан с принятием правдоподобных, обосно
ванных последующими экспериментами rипотез. Основные из
них будут рассмотрены в следующем параrрафе.
347
Вторым, более мноroобещающим, JlВЛJlеТСJl феноменолоrи
ческий ПОllXод, который основан на выборе наиболее простоro
и полноrо описаНИJl совокупности экспериментальных данных
при минимальных упрощающих предположеНИJlХ. Этот под
ход будет рассмотрен в 8.3.
Прежде чем перейти к рассмотрению существующих тe
арий, введем некоторые ПОНJIТИJl, которые понадоБJlТСЯ нам в
дальнейшем и которые широко используюте. на практике.
Обобщим ПОШlтие коэффиnиента запаса. Положим, зада
но напряженное состояние в точке. Если увеличивать про
порционально все компоненты этоro напряженноro состояния,
Т.е. изменять ero подобны.м. образо.м., то рано или поздно co
стояние материала изменится: либо возникнут пластические
деформации, либо начнется разрушение. Условимся под коэф
фициентом запаса в данном напряженном СО.СТОJlНИИ понимать
число, показывающее, во сколько раз следует увеличить все
компоненты напряженноrо состояния, чтобы изменилось Mexa
ническое состояние материала. Из данноrо определения как
частный случай вытекает уже знакомое нам определение KO
эффициента запаса при простом растяжении.
Если в двух напряженных состояниях коэффициенты за
паса равны, то такие напряженные состояния называются paв
ноопасны.ми.
Пля заданноrо матер'иала напряженные состояния мож
но сравнивать не по коэффициенту запаса, а по числовой ха-
рактеристике какоrо либо OnHOro напряженноrо состояния, BЫ
бираемоrо в качестве эталона. За такой эталон (эквивалент)
удобнее Bcero принять напряжение обычноrо растяжения так
называемое эквивалентное напряжение О'ЭICВ (рис. 8.1). ЭJCвuва
лент ное напряженuе это такое напряжение, которое следует
создать в растянутом образце, чтобы ero состояние было paB
ноопасно с заданным напряженным состоянием.
Широко используемое в практике понятие эквивалентноrо
напряжения содержит в своей основе замаскированное предпо
ложение, что для количественной оценки перехода материала
из одноrо состояния в друrое достаточно задать только одно
число. В действительности это не Bcerna так. Сравнивая два
348
dжl
Рис. 8.1
равноопасных напряженных состояния А и В, мы не учитыва
ем свойств материала, проявляющихся в разных напряженных
состояниях по разному. Может случиться, что в напряженном
состоянии А (см. рис. 8.1) при пропорциональном увеличении
всех составляющих напряжений произойдет хрупкое разруше
ние, а в состоянии В при увеличении О'экв начнется процесс
образования пластических деформаций. Тоrда напряженные
состояния оказываются несопоставимыми.
Таким образом, понятие О'экв следует рассматривать как
не всеrда безупречное, но в то же время весьма удобное cpeд
ство для ведения практических расчетов.
Вводя понятие эквивалентноrо напряжения, мы сводим
расчет на прочность в сложном напряженном состоянии к pac
чету на обычное растяжение. Пействительно, коэффициент за
паса при растяжении (состояние В на рис. 8.1) определяется,
как обычно, следующим образом:
О'т.р
n= .
о' экв
Такую же величину коэффициент запаса имеет и для случая
сложноrо напряженноrо состояния А. Весь вопрос заключает
ся только в том, как выразить о' э"в через 0'1, 0'2 и 0'3. Пля
этоrо рассмотрим некоторые уже сложившиеся и зарекомендо
вавшие себя rипотезы пластичности, или критерии появления
пластических деформаций.
349
8.2. rипотезы (критерии) появления
пластических деформаций
Итак, основной вопрос при формулировке критерия пла
стичности заключается в том, какaJI из компонент напряженно
ro состояния (или какaJI их комбинация) в общем случае опре-
деляет переход материала к пластическому состоянию.
Из множества предлаrавшихся в свое время rипотез пла
стичности лишь две сохранили к настоящему времени свое
значение.
Первая rипотеза связана с именами Треска и CeH BeHaHa.
Она основана на достаточно очевидной предпосылке: пласти
ческая деформация в металлах возникает в результате необра-
тимых сдвиrов в кристаллической решетке. Понятно, что
переход к пластическому состоянию не происходит внезапно.
Сначала пластичеСКaJI деформация возникает в отдельных, He
блаrоприятно ориентированных зернах. Возрастание наrруз-
ки вовлекает в пластическую деформацию новые микрообла
сти, и, коrда пластической деформацией охватывается пода-
вляющее множество зерен, мы можем rоворить о том, что
произошел переход к пластическому состоянию. Естественно
предположить, что мерой этоrо перехода является наибольшее
касательное напряжение в объеме, охватывающем достаточно
большое число произвольно ориентированных зерен, Т.е. то ca
мое касательное напряжение, которое мы определяли на основе
предпосылки сплошной изотропной среды.
Максимальное касательное напряжение возникает на пло-
щадках, равнонаклоненных к площадкам наибольшеrо и наи-
меньшеrо rлавных напряжений, и равно полуразности этих на-
пряжений (см. выражение (7.14)):
1
Тmах = 2 (0'1 0'2).
Таким образом, если Тmах достиrло HeKoToporo предельно
ro значения, свойственноrо данному материалу, то независиАСО
от вида наnР.8жен:н.О20 состо.8НtI..8 происходит переход к пла
стическому состоянию материала.
360
Экспериментальная проверка этой rипотезы показ8JIа, что
для пластичных матеРИ8JIОВ она приводит, в общем, к удо-
влетворительным результатам. Переход от упруrоrо состоя-
ния к пластическому действительно с достаточной точностью
определяется разностью между наибольшим и наименьшим из
r лавных напряжений и слабо зависит от промежуточноrо r лав
Horo напряжения (12. Наложение BcecTopoHHero давления на
любое напряженное состояние не меняет 1'rn&х и, следователь-
но, не оказывает влияния на возникновение пластических дe
формации. В частности, при всестороннем rидростатическом
давлении 1'rnа.х оБРa.IЦается в нуль. Это означает, что в таких
условиях в материале пластические деформации не возника
ют вовсе. Все опыты, проводившиеся при доступных для Tex
ники давлениях, подтверждают это. Сказанное нисколько не
противоречит описанному ранее поведению чуrуна в условиях
BblcoKoro давления. Наложение BcecTopOHHero давления вли-
яет не на условия nАастu'Чностu, а на условия разрушениЕ.
fраница разрушения отодвиrается, и материал приобретает
способность пластически деформироваться без разрушения. И
это характерно вообще для всех конструкционных материалов.
Если представить себе существование цивилизации на самых
больших r лубинах океана, то для этих воображаемых разум-
ных существ понятия хрупкости и пластичности материалов
были бы отличны от наших.
Придерживаясь сформулированноrо критерия пластично
сти, мы можем принять, что два напряженных состояния paB
ноопасны в том случае, если имеет место равенство наиболь
ших касательных напряжений. Лля напряженных состояний А
и В (см. рис. 8.1) имеем
1 1
2' ((11 (1З) = 2' (1ЭJ:В,
откуда
(1ЭJ:В = (11 (1З.
(8.1)
Это и есть то расчетное напряжение, которое по крите
рию маКСИМ8JIЬИЫХ касательных напряжений по,лжпо быть co
поставлено с пределом текучести при растяжении.
361
Казалось бы, что простота расчетных зависимостей, фи
зическая наrлядность критерия и, наконец, соответствие с ЭКС-
периментом должны были бы обеспечить rипотезе максималь
ных касательных напряжений полную монополию если не в
теоретическом аспекте, то по крайней мере при решении прак-
тических задач. Этоrо, однако, не произошло, и в своеобразном
естественном отборе, который происходил среди мноrих rипо
тез, предлаrавшихся в конце прошлоrо и начале настоящеrо
века, выжила и заняла место наравне с теорией Треска CeH
Венана также и rипотеза Хубера Мизеса. Она была сформу-
лирована Хубером в 1904 r. в виде исправленноrо варианта
критерия Бельтрами, соrласно которому переход к пластиче
скому состоянию связан с уровнем накопленной в единице объ
ема потенциальной энерrии деформации. Но принять в каче-
стве критерия пластичности всю энерrию деформации нельзя.
Это противоречило бы экспериментально установленному фак
ту, что при всестороннем давлении пластические деформации
не возникают, в то время как потенциальная энерrия Heorpa-
ниченно возрастает. В связи с этим Хубером было предложено
исключить из рассмотрения энерrию объема, а в качестве кри-
терия перехода из упруrоrо состояния в пластическое принять
энерrию формоизменения (7.28).
Для простоrо растяжения это выражение приобретает вид
1+р 2
Uо ф = fiE 20'э:кв,
Из условия равноопасности определяем О'Э:КВ' ДЛЯ этоrо
приравниваем дв а последних выражения и получаем
О'ЭICВ = v; } (0'1 0'2)2 + (0'2 0'3)2 + (0'1 0'з)2.
(8.2)
Но энерrия формоизменения, как мы уже знаем, пропорцио-
нальна квадрату октаэдрическоrо касательноrо напряжения
(см. 7.7). Поэтому то же самое выражение (8.2) дЛЯ О'ЭКВ
можно получить, если в качестве критерия пластичности при
нять не энерrию формоизменения, а касательное напряжение в
октаэдрических площадках. Лействительно,
2 1 2 2 2
Т окт = 9 [(ql q2) + (ql qз) + (q2 qз) ].
352
Для простоrо растяжения
2 2 2
Т ОКТ = 9" О'ЭКВ.
Приравнивая выражения Т;кт, приходим к уравнению (8.2).
Почему же rипотеза Хубера Мизеса, приводящая к более
сложному для О'ЭКВ выражению (8.2), чем теория максимальных
касательных напряжений, оказалась конкурентоспособной?
Оказывается, дело не только в том, что, по мнению MHO
rих авторитетов, она для основных конструкционных металлов
более точно отражает условия перехода в пластическое COCTO
яние. В процентнам отношении разница между выражениями
(8.1) и (8.2) не столь уж и заметна. Она достиrает максимума
при чиетом сдвиr-е, коrда 0'3 = 0'1, а 0'2 = О, и составляет при
мерно 13 %. Более важным является друrое обстоятельство.
Коrда конструкцию рассчитывают на прочность, мы, обраща
ясь к теории максимальных касательных напряжении, Т.е. к
выражению (8.1), должны обязательно продумать, которым из
трех rлавных напряжений присвоить индексы 1,2 и 3. Иноrда
это бывает не очень удобно, особенно если конструкция Haxo
дится под воздействием системы сил, меняющихся по различ
ным законам в зависимости от условий работы. Тоrда слож
ность перебора различных случаев в соотношении наrрузок
сводит на нет те преимущества, которые дает нам простота
выражения (8.1). Если же обратиться к теории Хубера Ми
зеса, то обнаруживается, что перестановка местами индексов
1,2 и 3 в выражении (8.2) не сказывается на О'ЭI<В, И это OCBO
бождает нас от необходимости думать о том, какое из rлавных
напряжений является наибольшим, а какое наименьшим.
Любопытно, что именно это обстоятельство заставило
Мизеса, не знакомоrо с работой Хубера, в 1913 т. в целях упро
щения предпринять поиск аналитическоrо выражения, близко
ro к тому, что дает теория максимальных касательных напря
жений, но не зависящеrо от перестановки индексов, что в даль
нейшем позволило с большим успехом использовать это Bыpa
жение при построении основ теории пластичности (см. rл. 11).
12 В. И. Феодосьсв
353
И так, мы рассмотрели два основных критерия пластич-
ности, базирующихся на правдоподобных rипотезах и соrла-
сующихся с опытом. Но к рассматриваемому вопросу мож-
но подойти и с несколько иных позиций с позиций упрощен-
ной систематизации экспериментальных данных. Этот подход
впервые был сформулирован Мором и в настоящее время носит
название теории Мора.
8.3. Теория Мора и ее применение
Допустим, что мы располаrаем испытательной машиной,
на которой образцу можно задавать любые напряженные со-
стояния с пропорциональным изменением всех компонент.
Выберем некоторое напряженное состояние и будем одно-
временно увеличивать все компоненты. Рано или поздно это
напряженное состояние станет предельным. Образец либо раз-
рушится, либо в нем появятся пластические деформации. Вы-
чертим для предельноrо состояния на плоскости иО", наиболь-
ший из трех KpyroB Мора (Kpyr 1, рис. 8.2). Будем в даль-
нейшем считать, что предельное состояние не зависит от и2.
Далее, на образце Toro же материала проводим испытание при
друrом напряженном состоянии. Снова путем пропорционалъ-
Horo увеличения компонент добиваемся Toro, что напряженное
состояние станет предельным. На диаrрамме (см. рис. 8.2)
вычерчиваем соответствующий Kpyr (Kpyr 2).
'(
Лр,4еnьная
ОШООЮll/ОR
о
d/ С d
Рис. 8.2
Поступая таким образом и дальше, получим семейство
KpyroB Мора для предельных напряженных состояний.
354
Вычерчиваем их общую оrиба.ющую. Примем, что эта o2u6a
юща,В' ,В'в.ll.,В'етс,В' единственно11, независимо от промежуточных
r лавных наПРJlжений 0'2. Это положение JlВЛJlется основным
допущением в излarа.емой теории.
Форма оrибающей предельных KpyroB Мора зависит от
свойств материала и ЯВJIJlеТСJl ero механическоi характеристи
кой, такой же, как, например, диarрамма расТJlжеНИJl. Если
оrибающu предельных KpyroB длJl материала дана, можно при
любом заданно напРJlженном состоянии определить коэффи
циент запаса. Для этоro надо по заданным напряжениям BЫ
чертить наибольший из трех KpyroB Мора, а затем, хотя бы
rрафически I установить, во сколько раз следует увеличить 0'1
и 0'3, чтобы увеличенный Kpyr касался предельной оrиба.ющей.
В изложенном подходе к вопросам предельных СОСТОJlНИЙ
не содержится, как видим, критериальных rипотез, и теория
Мора основана в первую очередь на лоrической систематиза
ции результатов необходимых экспериментов.
Теперь нужно решить вопрос о том, как построить оrи
бающую предельных KpyroB при оrраниченном числе испыта-
ний. Наиболее простыми являются испытания на растяже
ние и сжатие. Следовательно, два предельных Kpyra полу
чить просто (рис. 8.3). Можно получить еще один предельный
Kpyr путем испытания тонкостенной трубки на кручение. При
этом материал будет находиться в состоянии чистоrо сдви
ra и центр соответствующеrо Kpyra раСПОЛОЖИТСJl в начале
координат (рис. 8.4).. Однако этот Kpyr для определения фор
мы оrибающей мало что дает, поскольку расположен вблизи
двух первых KpyroB.
t
PDстЯЖIНU,
d
Рис. 8.3
12"
361
'(
d
Рис. 8.4
Для определения оrибающей чрезвычайно важно знать по
ложение точки С (см. рис. 8.2 и 8.з). Нормальное напряжение
в этой точке представляет собой напряжение отрыва при Bce
стороннем растяжении. До сих пор, однако, не существует
метода для проведения соответствующеrо испытания. Вообще
не удается осуществить испытание в условиях напряженноrо
состояния, коrда все три rлавных напряжения являются pac
тяrивающими (об этом подробнее см. в 14.2). Поэтому пока
нет возможности построить для материала предельный Kpyr,
расположенный правее предельноrо Kpyra растяжения.
В силу указанных обстоятельств наиболее простым и
естественным является решение аппроксимировать предель
ную оrибающую касательной к KpyraM растяжения и сжатия
(см. рис. 8.з). Понятно, что это не исключает возможности в
дальнейшем, коrда будут найдены новые методы испытания,
уточнить форму оrибающей и тем самым более полно OTpa
зить особенности поведения материала в условиях, близких к
всестороннему растяжению.
Выведем выражение для О"ЭICВ, полаrая, что оrибающая
является прямой. На рис. 8.4 эта оrибающая проведена по Kaca
тельной к предельным KpyraM растяжения и сжатия (точки D
и Р).
Построим Kpyr Мора для HeKoToporo напряженноrо COCTO
яния, заданноrо наибольшим и наименьшим rлавными напря
жениями 0"1 и о"з (см. рис. 8.4). Если все компоненты этоrо
напряженноrо состояния увеличить в n раз (rде n коэффици
ент запаса), то Kpyr станет предельным. Напряжения 0"1 и о"з
примут значения O"i и о"з:
qi = nQl, Qз = nQз. (8.з)
зsв
Этот увеличенный (предельный) Kpyr Мора касается предель
ной оrибающей в точке С'. Кроме тoro, соrласно условию
пропорциональноro увеличения компонент, он будет KacaTЬ
ся продолжения луча О А в точке В. Из точки с' проводим
rоризонтальную прямую с' EG и составляем пропорпорцию:
D Е FG w
С' Е = С' G ' Но отрезки D Е и FG представляют собои разно-
сти радиусов рассматриваемых KpyroB. Поэтому
* * * *
пЕ = qT.p ql qз . FG = qT.C ql qз
2 2' 2 2
Палее,
с' Е = q; + qз qT.P.
2 2'
Преобразовывая пропорцию, получаем
* qT.p *
qT.p = ql qз,
qT.C
q* + q* q
с' G = 1 3 + .....!:Е..
2 2
или, если учесть выражения (8.з),
qT.p
qT.p
ql qЗ
qT.C
n=
Пля эквива.лентноrо растяжения
n = qт.р/qэхв,
По условию эквивалентности коэффициенты запаса n в
этих напряженных состояниях равны. Поэтому
qэхв = ql kqз,
(8.4)
rде k отношение предела текучести при растяжении к пре
делу текучести при сжатии: k = QT.p/QT.C' В частном случае,
если материал имеет при растяжении и сжатии одинаковые
пределы текучести, k = 1. Тоrда формула (8.4) переходит в
полученную ранее формулу (8.1).
В настоящее время практические расчеты по допускае
мым напряжениям в сложном напряженном состоянии ведут,
как правило, на основе формулы (8.4). Вместе с тем, если ма-
териал обладает одинаковыми механическими характеристи-
ками при растяжении и сжатии, то расчеты можно вести по
357
формулам rипотезы энерrии формоизменения. Числовые pe
зультаты получаются вполне удовлетворительными.
Основное оrраничение, которое накладывается на 'приме-
нение теории Мора, связано с недостаточной точностью опре-
деления предельной оrибающей в области BcecтopoHHero- pa
стяжения. Это оrраничение, однако, не столь существенно,
поскольку напряженные состояния Taкoro рода при решении
практических задач встречаются редко. Недостаточно точно
известен также вид предельной оrибающей В области r лубоко
ro BcecTopoHHero сжатия. Здесь вследствие принятоrо упроще
ния также возможны поrрешности. Наилучшие результаты
выведенная расчетная формула дает для смешанных напря
женных состояний, Т.е. при 0'1 > О и О'з < О. Тоrда предель
ный Kpyr Мора располаrается В интервале между предельными
круrами растяжения и сжатия.
Подход Мора хорош тем, что позволяет в связи с особен-
ностями напряженноrо состояния доходчиво разъяснить отно-
сительную условность деления материалов на пластичные и
хрупкие.
Для одноrо и Toro же материала мы всеrда можем постро-
ить две оrибающие предельных KpyroB Мора. Первая оrиба
ющая характеризует переход от упруrоrо состояния матери-
ала к пластическому. Поскольку образование пластических
деформаций мы принимаем независимым от шаровоrо тензо
ра, эта оrибающая представляет собой прямую, параллельную
оси о' (рис. 8.5). Вторая оrибающая соответствует разрушению
образца (кривая 2).
'(
Lk
d
о
i
'....
d
(J
Рис. 8.5
Для материала пластичноrо (в общепринятом понима
нии этоrо термина) прямая 1 в правой части диarраммы (см.
358
рис. 8.5, а) ПРОХОДИТ ниже кривой 2. Это означает, что при
обычном испытании образца на раСТIжение Kpyr Мора 3, по
мере увеличеНИll раСТllrиваюшеrо наПРJlжеНИI и, сначала пе-
ресечет прямую 1. В образце возникнут пластические дефор-
мации. Затем Kpyr 3 коснется кривой 2. Образец разРУШИТСll.
Теперь рассмотрим взаимное расположение оrибаюIПИX
для хрупкоrо материала (см. рис. 8.5,6). Здесь ПрJlМая 1 в
правой части диarра.ммы расположена выше кривой 2. При
испытании образца на раСТJlжение Kpyr Мора 3, не касаясь
прямой 1, соприкаса.еТСJl с кривой 2. Разрушение происхо
дит без заметных остаточных деформаций, как и положено для
хрупких материалов. Предел текучести при этом, естествен-
но, не определяют. Но это еще не значит, что он не суше-
ствует. Представим себе, что мы испытываем тот же образец
на растяжение в условиях BblcOKoro rидростатическоrо давле-
ния. Тоrда Kpyr 3, как единое целое, сместится в левую часть
диаrраммы и при увеличении растяrиваюшей силы коснется
сначала прямой 1, но не кривой 2. Мы получаем и пласти-
ческие деформации для материала, считающеrося хрупким, и
находим даже ero предел текучести.
Все признаки хрупкоrо разрушения можно получить и у
пластичноrо материала, если ero испытывать в условии на-
ложенноrо BcecтopoHHero растяжения.
rлавное достоинство теории Мора заключаеТСJl в принци-
пе подхода к рассматриваемому вопросу. К сожалению, на это
далеко не всеrда обращают внимание, и часто теорию Мора
ставят в один ряд с общеизвестными rипотезами, а то обсто
ятельство, что в частных случаях расчетная формула Мора
совпадает с расчетной формулой rипотезы касательных напря-
жении, усиливает впечатление о равноценности этих подходов.
Между тем феноменолоrический подход Мора, Т.е. подход,
основанный на лоrическом описании явления, является наибо-
лее естественным и правильным. При обнаружении поrрешно
стей или несоответствий этот подход сохраняет за нами воз
можность внести в теорию дополиительные уточнения. Так,
если в дальнейшем удастся провести испытания образцов в
области положительных 0'1 и 0'3, можно будет аппроксимиро
вать предельную оrибающую Мора уже не Пр.lМОЙ, анекоторой
368
кривой. В расчетную формулу в этом случае войдут не толь
ко характеристики материала на расТJlжение и сжатие, но и
некоторые новые показатели, найденные в результате допол
нительных испытаний.
Особое значение приобретает феноменолоrический подход
в связи с широким применением в технике новых материалов.
Такие материалы, как стеклопластики, стеклоткани и вообще
материалы, имеющие волокнистую структуру, часто работа
ют в условия:х сложноrо наПРJlженноro СОСТОJlНИЯ:. При aHa
лизе подобных конструкций уже не приходится: рассчитывать
на апробированные теории. Надо создавать новую теорию, а
это не Bcer да леrко. Поэтому более целесообразным является
феноменолоrический подход.
Сказанное о предпочтительности феноменолоrическоrо
подхода к вопросам предельноrо СОСТОJlНИЯ не зачеркивает
практическоrо значения некоторых rипотез. Так, rипотеза
максимальных касательных напря:жений и rипотеза энерrии
формоизменения, прочно вошли в расчетную практику и обес
печивают большие удобства при решении конкретных задач,
а rипотеза энерrии формоизменения приобрела особое значе
ние в связи с созданием и развитием теории пластичности
(см. 11.2).
Рассмотрим примеры, иллюстрирующие применение тeo
рии предельных состояний.
При м е р 8.1. ОпредеJlИТЬ, какое из трех показанных на рис. 8.6
наПРJlженных СОСТОJlНИЙ JlBJlJleTCJl БОJlее опасным. ЧИСJlовые значеНИJl Ha
ПРJlжений заданы в МПа. МатериаJl на раСТJlжение и на сжатие работает
одинаково (k == 1).
М&
/10
о 5 8
Рис. 8.6
Подсчитываем з"виваяентное напряжение по формуле (8.4) для слу
чаев а, 6 и в:
380
а) 0',.. = 80 10 = 70 МПа; б) 0',.. = 60 ( 10) = 70 МПаj е) 0',,,. =
== 75 О == 75 МПа.
Наиболее опасным JlВЛJle'rCJI СОСТОJlние е. СОСТОJlНИJl а и б р&вноопас
ны.
При м е р 8.2. Прибор длJl исследованИJl морских rлубин опускают
под воду на rлубину Н (рис. 8.7). Вес прибора в воде равен Р. ПЛОnlость
воды "(, а матеРИa.JIа троса "(Т. Определить эквива.пеИnlые напРJl.еНИJl в
верхнем и нижнем сечеНИJlХ троса, если k = 1.
А Ь р+р,
'fd-
f
B
8 J!...'-YH
'=!!..
F
р
Рис. 8.7
в нижнем сечении имеет место трехосное наПРJlженное СОСТОJlние.
РаСТJlrивающее наПРJlжение создаеТСJl весом прибора, сжимающее дaB
лением жидкости на r лубине Н:
Р
0'1 = р; 0'2 = О'з = "(H;
Р
0'... == Р + "(Н.
в верхнем сечении имеет место толыо осевое расТJlжение, создава
емое весом прибора Р и весом троса в воде Р т = ("(т "() F Н . Таким
образом, в верхнем сечении
Р + Р т Р
0'... = = + ("(т "() Н.
F F
Если плотность троса более чем в два раза преВЫlUает плотность
воды, то наиболее опасным будет верхнее сечение троса. Это сечение He
обходимо также проверить на прочность в случае, Kor да прибор висит на
тросе в воздухе перед опусканием вводу.
При м е р 8.3. Через систему шестерен передаеТСJl момент !m
(рис. 8.8). В пределах вычерченноrо узла этот момент уравновеlUивает
СJl моментом fJЛ/i на нижней шестерне, rде i передаточное число от
Э61
первоrо вала )со второму. Подобрать диаметр первоrо вала, если дано:
!D1 == 2500 Н'М, R == 8 см, !I == 80 см, Ь == 10 см. Материал на раст.жение
и сжатие работает одииu:ово: (Тт.р == (Тт.с == 300 МПа. Требуете. обеспе
чить двухратный запас прочности (n == 2).
о
Jl!
t
tl
i
4
l
Рис. 8.8
%J
if
g
Из услови. равенства нулю суммы моментов относительно оси Ba
ла находим танrенциальную снлу на шестерне (рис. 8.8, б): Р == т/ R.
Между шестерн.ми вознихает не толыо танrенциальнu, но и радиальнu
сила Р я . Ее значение зависит от типа зацеплени.. Обычно принимают,
что Р я == О,4Р. Определ.. реахции опор, строим эпюры иэrибающих и
ICрут.щих моментов (рис. 8.8, в).
Результирующий наибольший изrибающий момент равен, очевидно,
М тах ==
( аЬ ) 2 ( аЬ ) 2
Р а + Ь + О,4Р а + Ь
аЬ
М тах == l,08Р Ь '
а+
Наиболее опасной будет периферийнu точка В в сечении, леж&щu в плос
ICОСТИ момента (рис. 8.8, а).
В ОlCрестности точlCИ выдел.ем элемент, показанный на рис. 8.8, д.
Напр.жение (J' определ.ете. изrибающим моментом, а r ХРУТ.ЩИМ:
М тах
(J'== О1d З ;
,
!D1
r == О, 2dЗ .
Дл. полученноrо напр.женноrо состо.ни. находим rлавные напр.
жеии.. ПОСICОJ1ыr:у одна из rJ1&ВИЫХ ПJ10щадоIC известка, ПОJIьзуемс. по-
382
строеиием Kpyra Мора (рис. 8.9), oТJtyдa ПОJlучаем
0'1 = + V 'J + r'J i 0'3 = v 'J + r'J ; O''J = О. (8.5)
Находим, да.пее, эквива.пеитиое иаир.жеиие по форму.пе (8.4). При k = 1
имеем
0'..... = 0'1 0'3 = V O''J + 4 r 'J ,
ИJlИ
( М ) 'J ( М.. ) 'J
0'.... = О, ld3 + 4 O,2d3
ПодстаВJI.. сюд& зи&чени. изrиб&ющеrо и крут-щеro моментов, ПОJlуч&ем
оконч&теJlЬНО
!Dt
0'... = O,ld 3
[ 1, 08аЬ r 1
R (а + Ь) + .
По з&д&нным ЧИСJlОВЫМ значени.м веJlИЧИН из услови. O''f.p/n = 0'... H&
ходим ди&метр d ::::1 64 мм.
dz=O
j
Рис. 8.9
Рассмотренное в последнем примере напряженное состоя
ние всеrда встречается при расчете вала на совместные круче
ние и изrиб (или растяжение). Поэтому имеет смысл для плос
Koro напряженноrо состояния (О', т), показанноro на рис. 8.9,
сразу выразить О'экв через две указанные компоненты с тем,
чтобы избежать промежуточноrо определения rлавных напря
жений.
Формула (8.4) после подстановки 0'1, 0'2 и О'з из выражений
(8.5) принимает вид
l k l+k y' 2 2
О'экв 2 о' + 2 о' + 41' .
(8.6)
383
При k = 1 приходим К тому же самому выражению, которое
было получено при решении р ассмотре нното примера:
О'ЭlCв = V 0'2 + 4т 2 . (8.7)
rипотеза энерrии формоизменеНИJl (см. формулу (8.2)) в
этом случае дает
qэlCВ = у и2 + зт 2 .
(8.8)
в практических расчетах этими формулами ПРИХОДИТСJl
пользоваться весьма часто, но при этом следует ПОСТОJlННО по
мнить, что они применимы то.l&ЫС:О к указанному наПРJlженно
му состоянию.
Различие коэффициентов при т 2 в двух последних выраже
ниях не должно вызывать удивление. Это следствие разли
чия rипотез. Наибольшее относительное расхождение между
числовыми значениями О'ЭlCв, найденными по формулам (8.7) и
(8.8), составляет примерно 13 %, что имеет место при q = о.
п р н м е р 8.4. Определить допустимую наrруэку ДЛIr ломаноrо
стеРЖНIr, пока.занноrо на рис. 8.10. Материал стеРЖНIr ковкий чуrун,
О'..р == 150 МПа, О'..с == 330 МПа. Сечение квадратное со стороной а ==
== 3 СМ; 1 == 30 см. Задан коэффициент запаса n == 3.
Jli.
пJ;ifPl 1
l' .
р
Рис. 8.10
Строим эпюру изrибающих и КРУТlrЩИХ моментов. Наиболее опасной
Irвля:еТСIr точка А в заделке,
6Pl
0'= ;
Pl
Т== О,208а З .
НаПРlrженное СОСТОlrние соответствует рассмотренному в предыдущем
примере. Поэтому можно пользоваТЬСIr формулой (8.6). ОпредеЛlrем:
k == 150/330 = 0,455. ПодстаВЛlr1r числовые значеНИIr величин в выраже
ние (8.6), находим 0'... == Р.I0, 94. УЧИТЫВaJI трехкратный запас, получим
р 450 Н.
364
При м е р 8.5. Сравнить эквивалентные напр..ени. в пр.моуrоль
ной призме в двух случа.х наrружени.: а) приэма сжимаете. свободно
(рис. 8.11, а), б) призма сжимаете. в жестком rнезде, не поэвол.ющем ей
раСШИРIIТЬСII в поперечном направлении (рис. 8.11, 6).
" "&
П LJ ,
а 6
Рис. 8.11
В случае а) 0'1 == О, 0'3 == O'. Следовательно, 0'3.. == kO'.
В случае б) необходимо сначала определить поперечные сжимающие
наПРllжеНИII 0" (см. рис. 8.11, 6).
По условию поперечнlUI деформаЦИll равна нулю, и в соответствии с
законом rYKa
t:поп.р == [О" IJ (О' + 0")] == О,
откуда поперечное сжимающее наПРllжение
, IJ
О' == O'.
1 IJ
Для полученноrо напряженноrо СОСТШIНИХ
IJ
0'1 == 0';
1 IJ
0'3 == О';
0'3.. ==
( } .....L ) 0'.
1 IJ
Величина 0',.. вследствие оrраничеНИII поперечных деформаций, как
видим, уменьшается.
Существенно отметить, что ДЛII наПРllженных СОСТОllНИЙ Bcec
pOHHero сжаТИII теОРИII Мора иноrда дает отрицательные значеНИII 0',...
В частности, это имеет место и в рассматриваемом примере в случае
k<
1 IJ
Такому результату формально можно дать следующее толкование.
Если при 0",.. == О наПРllженное СОСТОllние равноопасно ненаПРllженному,
то при о".кв < О напряженное СОСТОlIние менее опасно, чем ненаПРllженное.
Несмотря на парадоксальность TaKoro вывода, нет основании ero отвер--
raTb. Вместе с тем ero можно отнести также к поrрешностхм определеНИII
предельной оrибающей в области BcecтopoHHero сжаТИII.
В практических расчетах этот вопрос решаеТСII тем, что в оценке
прочности любой конструкции можно довольствоваТЬСll нулевым значени
ем 0"..., поскольку равноопасность наrруженной и ненаrруженной деталей
всеrда приемлема. Поэтому, если расчет дает 0'3.. < О, считают 0'3.. == О.
365
8.4. О хрупком раэрушении и ВJ[ЭКОСТИ
Мы с caMoro начала cTporo разrраничили два вопроса:
возникновение пластических деформаций и начало разРУllIе
ния. Все, о чем мы до сих пор roворили, относилось в OCHOB
нам к первой, относительно четко и определенно поставленной
задаче. Что же касается Bтoporo вопроса, то уже сам тepM H
"разрушение" такой четкостью не обладает и является более
сложным и менее определенным понятием.
Сначала надо, по видимому, условиться о разрушении че
ro идет речь разрушении конструкции или материала.
Под разрушением конструкции в широком смысле слова
следует понимать потерю функциональных свойств, Т.е. пе
реход в такое состояние, коrда конструкция по тем или иным
причинам перестает удовлетворять своему назначению. Это
может быть возникновение больших перемещеиий и необрати
мое изменение формы, износ или выработка посадочных по
верхнастей и, наконец, излом или разрыв oTBeTcTBeHHoro узла.
Однако образование видимой невооруженным rлазом трещи
ны, даже сравнительно большой, не всеrда следует рассматри
вать как разрушение. Словом, понятие разрушения KOHCTPYK
цИИ тесно смыкается с понятием ее надежности. Естественно,
что со столь широких позиций обсуждать вопросы разрушения
в курсе сопротивления материалов было бы неуместно.
Вопрос становится более определенным и конкретным, KO
rда мы рассматриваем разрушение как свойство .wатерuала.
Но и эта проблема настолько широка, что ее постановка TaK
же требует естественных оrраничений, поскольку разрушение
материала в различных условиях может проявляться в суще
ственно различных формах. Так, в частности, разрушение при
циклически изменяющихся напряжениях (усталостное разру
шение) целесообразно рассматривать как некоторое самостоя
тельное явление, хотя оно и является лишь частным проявле
нием общих свойств материала (к этому вопросу мы вернемся
в rл. 11). Большие затруднения обнаруживаются при попыт
ке сопоставить разрушение при различной последовательности
приложения сил. Эти вопросы также заслуживают особоrо
рассмотрения.
366
И еще вопрос. Мы rоворим о разрушении детали, о раз
рушении образца, но так ли уж правомерно roворить о разру
шении материала?
Если придерживаТЬСJl той точки зреНИJl, что за разруше
ние несет ответственность напРJlженное СОСТОJlние в точке, то
тоrда под разрушением caMoro материала следует понимать
образование первых микротрещин в окрестности рассматри
ваемой точки. Формально, вроде бы, ясно. Но верно ли? Ведь
предположительно в каждом материале и без тoro имеется Be
ликое множество затаивш хся трещин. Они ПРИХОДJlТВ дви
жение только под действием высоких наПРJlжеНИЙj причем не
напря:жений в точке, не местных напряжений, а тотальных
охватывающих значительные объемы на пути развития Tpe
ЩИН.
Как видим, вопросов можно поставить MHoro. Из таких
вопросов и возникающих сомнений и создается замысловатый
рисунок наших представлений о механизме разрушения.
Остановимся на модели fриффитса. Это модель разру
шения, построенная на энерrетической оценке развития
трещин.
Представим себе, что в Kpae
вой области плоскоrо растянутоrо
образца существует сквозная попе
речная трещина (рис. 8.12). Длина
трещины с MHoro меньше попереч
ных размеров стержня. Во всем объ
еме образца напряжения распределе
ны равномерно. Исключение COCTa
вляет область, непосредственно при
мыкающая к трещине, у края Tpe
щины возникает местный пик напря
жений, а сверху и снизу (в заштри
хованной области) напряжения будут
уменьшенными. У поверхности Tpe Рис. 8.12
щины они, естественно, равны нулю.
Длине трещины с сооБIЦИМ малое ПРИРa.IЦение c и про
следим за изменением энерrии системы. Увеличение дли
ны трещины приведет к увеличению заштрихованной обла
сти, Т.е. область пониженных напряжений расширится и
387
освободится часть упруrой энерrии образца. Это уменьше
ние энерrии будет пропорционально произведению Де на пло
щадь внешней поверхности заштрихованноrо объема, а та, в
свою очередь, пропорциональна е и тоmцине образца t. Учтем
также, что упруraJI энерrия пропорциональна 0'2/ Е. В итоrе
уменьшение энерrии вследствие небольшоrо удлинения трещи
ны составит:
0'2
А Е сtДс,
r де А некоторый безразмерный коэффициент, зависящий от
формы трещины и ее расположения (у крц, В середине, попе
рек или под уrлом к поперечному сечению).
Твердые тела, как и ЖИдкие, обладают поверхностным Ha
тяжением. Оно у конструкционных материалов раз в 10...20
больше, чем, например, у воды. Но поскольку твердые тела
обладают жесткостью, поверхностное натяжение не проявля
ет себя столь очевидным образом, как в жидкостях, и мы ero
не замечаем.
Поверхностное натяжение обладает энерrией. Чтобы
образовать свободную поверхность, надо произвести работу.
Пусть -у работа, пошеДШaJI на образование единицы свобод
ной поверхности материала. Если длина трещины увеличи
лась на Де, то своБОДНaJI поверхность увеличится на 2tДе.
"Лишняя" двойка появляется в связи с тем, что трещина име
ет две поверхности верхнюю и Нижнюю. Работа, пошеДШaJI
на удлинение трещины, составит -у . 2tДе.
ОБЩaJI энерrия системы стремится к минимуму. Поэтому
леrко сообразить, что трещина будет расширяться в случае,
если освоБОДИВШaJIСЯ упруraJI энерrия будет больше работы,
затраченной на образование свободной поверхности. Таким
образом, условие развития трещины принимает вид
А0'2
Е etde > 2-ytdc,
или
2-уЕ
с > А0'2 '
(8.9)
Коэффициент А в ряде случаев может быть вычис
лен. Пля поперечных трещин он изменяется незначительно
368
(в 1,5...2 раза). В частности, в рассматриваемом примере
плоскоrо напряженноrо состояния коэффициент А предполо-
жительно равен 1r.
Выражение (8.9) подкупает своей простотой и очевидно-
стью. Оно ясно показывает, что для каждоrо материала и
определенноrо уровня напряжений можно указать критический
размер трещины. Если размеры трещин меньше критических,
разрушения не происходит. Этим и объясняется то обстоя
тельство, что, несмотря на наличие микротрещин, материа.л
обладает свойством прочности.
Таким образом, модель rриффитса представляется каче
ственно правдоподобно:й:. Можно было бы пойти и Дa.JIьше и
попытаться дать количественную оценку коэффициента А для
различных напряженных состояний и различных форм возни-
кающих трещин. Это неоднократно делали, и результаты чи-
словых подсчетов, проведенных для хрупких материалов ти
па стекла, оказались вполне соответствующими реальности.
Вместе с тем, однако, оказалось, что механизм разрушения BЫ
rлядит значительно сложнее, чем в рассмотренной схеме.
В модели fриффитса трещине сообщали малое возмуще
ние и исследовали ее поведение в дальнейшем. При этом BЫ
сказывали достаточно разумное предположение, что при своем
развитии трещина ведет себя так же, как и в начале возмуще
ния. И, наверное, так и было бы, если бы структура материа-
ла была однородной. Но стронувшаяся с места трещина может
при своем движении оказаться тут же блокированной соседним
кристаллом или вкраплением, и для Toro чтобы принудить ее к
дальнейшему развитию, необходимо существенно поднять ypo
вень напряжений. И, наконец, при выводе соотношения (8.9)
было сделано неrласное предположение, что освобождающая-
ся упруrая энерrия полностью идет на образование свободной
поверхности, а роль пластических деформаций несущеетвенна.
Металловеды и инженеры механики часто по отношению
к металлам используют прилаrательное "вязкий" вязкий Me
талл, вязкая сталь. Вязкость это не просто пластичность,
это свойство структуры, ее способность блокировать развитие
трещин.
369
Рассмотрим простой пример. Стекольщик режет стекло,
нанося на ero поверхность острую риску. Затем по этой рис-
ке стекло ломается. Обычно это объясняют хрупкостью ма-
териала. И это правильно. Но важно и npyroe. Структура
материала не препятствует свободному развитию трещины.
Теперь возьмем стержень из стеклопластика или, для
конкретности, lUироко применяемое и весьма популярное у
рыболовов-спортсменов стеклопластиковое удилище. Оно из-
rотовлено из плотно уложенных в продольном направлении
тончайших стеклянных нитей, соединенных эпоксидным свя
зующим. Каждая нить обладает той же хрупкостью, что и
обычный стеклянный лист. Эпоксидная матрица также доста-
точно хрупкая. Композиция пластических свойств не приобре
тает. Если стеклопластиковый стержень подверrнуть испы
танию на растяжение, остаточные деформации при разрыве
будут ничтожными. И вот на такой композиционный матери
ал нанесем алмазом поперечную риску. При изrибе удилища
ничеrо похожеrо на поведение стеклянноrо листа мы не обнару-
жим. Развитие трещины блокируется поверхностями раздела
между стеклом и матрицей. Композиция, сохранив хрупкость,
приобрела вязкость.
В истории развития цивилизации можно найти массу по-
добных примеров, начиная с применявшеrося в незапамятные
времена замеса r лины с соломой и волосом для изrотовления
кирпича и кончая леrирующими добавками к сталям. И эти
примеры, конечно, не исключение. Сама природа в своей
длительной эволюции выработала множество рациональных
структур, обладающих свойствами вязкости: древесина, KO
сти и зубы животных, кожа и др.
За количественную меру вязкости удобно принять рабо-
ту, которая затрачивается на образование трещины. Конеч-
но, эту работу следует отнести к площади, охваченной Tpe
щиной. В случае совершенно хрупкоrо материала эта работа
была обозначена нами через 21'. Заменим обозначение на 1'р,
полаrая, что в 1'р входят все энерrетические затраты работа
на образование свободных поверхностей, а rлавное работа на
пластическое деформирование .материала на фронте развития
370
трещины. Следует заметить, что 1, ДЛJl миоrих материa.J,IОВ
может оказаться в ТЫСJlЧИ раз больше, чем 2-у.
Преобразуя выражение (8.9) и произвоДJI в нем замену 21
на 'Ур и А на 1С', получим
1р = 1С'си2 / Е = G c , (8.10)
rде G c как раз и есть критерий, характеризующий вязкость Ma
териала и выражающий работу на единицу площади (крити
ческая характеристика ВJlЗКОСТИ). Он указывает нижний пре
дел вязкости, которой должен обладать материал, чтобы при
напряжении q удержать от распространеНИJl трещину длиной
с, если она кра.евм, или 2с, если она расположена в середине
растяrиваемой полосы.
Вместо КС бывает удобнее пользоваться показателем вяз
кости К с, который определяют из соотношения
Кс = "'; КС Е,
(8.11)
или
Кс = qy1fC.
(8.12)
ПО'ICазате.аь в.нЗ'ICостu или, как еще ero называют, тpe
щиностОЙ'ICости, определяют экспериментально путем испы
. тания полосы с заранее сделанным острым надрезом. При Ha
rружении замечают напряжение, при котором от края надреза
начинает распространяться трещина. Затем по формуле (8.12)
определяют показатель Кс, имеющий не совсем обычную еди
ницу измерения МПа,м 1 / 2 .
Показатель вязкости, хотя и считается объективной энер
rетической характер стикой свойств материала, тем не Me
нее зависит от условий испытания и определяется с широким
разбросом. Поэтому, если обратиться к числовым значени
ям, следует привести только некоторые ориентировочные дaH
ные. Например, дюраль и мартенситнa.JI сталь относятся к
вязким материалам: К с = 110 МПа,м 1 / 2 , для меди и титана
Кс = 90 МПа,м 1 / 2 , а эпоксидная смола имеет низкую вязкость:
'" 2 МПа,м 1 / 2 .
Анизотропные композиционные материалы соответствен
но обладают и анизотропией вязкости. Уrлепластик обнару
живает вязкость вдоль и поперек волокон соответственно 2 и
371
105 МПа,м 1 / 2 . Причем попереЧНaJI в.зкость своим высоким
значением целиком обязана созданной структуре композита,
поскольку уrлерод (rра.фит), как самостоятельно ВЗJlТЫЙ MaTe
риал, имеет примерно столь же низкую вязкость, что и эпок
сидная смола.
Покаэатель вязкости }(с имеет значение не только как
сравнитеЛЬНaJI характеристика различных материалов, но в
некоторых СЛУЧaJIХ может окаэа ться полезным для оценки Me
ры опасности обнаруженных контролем трещин в уже выпол
неllНЫХ или создаваемых металлоемких сооружениях. Эта воз
можность вытекает из выражения (8.12), которое позволяет
при известном показателе }(с и по замеренной длине трещины
указать уровень допустимоro напряжения.
8.5. О новых материалах
Естественно, что при поиске новых материалов исследо
ватели обращают rлавное внимание на показатели прочности.
Вернемся к 1.8, rде был приведен упрощенный расчет пре
дельной, или идеальной прочности. Это прочность, определяе
мая силами молекулярноrо сцепления, свойственноrо данному
материалу, Korna все молекулярные связи воспринимают Ha
rрузку в максимальной степени.
Предельная прочность, выраженная в напряжениях, как
уже было выяснено, составляет, rрубо rоворя, одну десятую
от модуля упруrости (rде больше, rne меньше, в зависимости
от характера химических связей и структурных особенностей
материала).
В принципе о существовании предельной прочности Ma
териалов физикам было известно очень давно. Но только в
1920 r. инженер rриффитс сделал попытку причем успеш
ную практически приблизиться к предельной прочности. И
в качестве модельноrо материала он избрал стекло.
Надо сказать, что стекло в домашнем обиходе своей He
обычайной хрупкостью уже настолько себя скомпрометирова
ло, что только усилием воли можно заставить себя смотреть
на Hero как на полезный конструкционный материал да.же сей
час, Korna мы знаем, как MHoro высокопрочных конструкций
создано на базе стекловолокна.
372
Стекло при испытании на раст.жение показывает обычно
значение О'в.р 120.. .150 МПа. Но если выт.rивать из Hero
на rорелке все более и более тонкие образцы, то обнаружива
ется характерная зависимость: по мере уменьшения диаметра
образца временное сопротивление начинает возрастаТЬj снача
ла незаметно, а затем, по мере дa.n:ьнейшеro утончения уже не
прутка, а нити, все быстрее и быстрее. Так у rриффитса и
ПОЛУЧНJI()СЬ. У нитей диаметром 2,5 мкм О'в.р уже составl.IЛО
6000 МПа. Это если испытать нить сразу после изroтовле
ния. Если же повременить, то временное сопротивление сни
жается до 3500 МПа. Нити, более тонкие чем 2,5 мкм, rриф
фитс изrотовить не CMor. В то время нельзя было бы точ
но определить и ИХ диаметр. Но, экстраполируя зависимость
BpeMeHHoro сопротивления в область Ma.n:blX диаметров, rриф
фитс пришел к выводу, что, судя по ходу кривой, есть надежда
для очень ТОНКИХ нитей получить О'в.р около 11000 МПа, в то
время как расчетная предельная прочность стекла составляет
примерно 14000 МПа.
В основе хрупкоro разрушения, как мы уже знаем, лежит
соотношение между напряжением и размером трещины (см.
выражение (8.12)). В крупных образцах статистически преоб
ладают соответственно и более крупные трещины; в тонких
нитях им попросту нет места. Появись там такая трещина,
и не существует нити. Лаже просто выбирая из множества
образцов более тонкую нить, мы тем самым вместе с исключа
емыми более крупными образцами исключаем и более круп
ные трещины, и этой непреднамеренной селекцией обеспечи
ваем более тонким нитям более высокую прочность.
Хочется добавить, что употребленное выше слово "выби
рая" не следует понимать как "перебирая" и, тем более, "пе
реклацывая". Надо иметь в виду, что даже лишь прикасаясь
пальцами к заrотовленной нити, мы можем резко снизить ее
прочность. Невидимая острая пылинка минеральноrо проис
хождения, застрявшая в кожном покрове, способна нанести ей
роковые поверхностные повреждения. С помощью электрон
Horo микроскопа уже фотоrрафировали ветвистые царапины
TaKoro рода и возможность ИХ возникновения не подверrается
сомнениям.
373
Есть еще olIНa причина образОВ8JIJIJ[ ыикротрещин в cтe
клянных НИТJlХ. Стекло не имеет кристаллической структуры,
но некоторую склонность кристаллизоваТЬСJl в твердом coc
янии все же сохранJlет. И порой эта склонность может сеБJl
HeT HeT да и ПрОJlВИТЬ. Начало же ВСJ[КОЙ кристаллизации свя-
зано с местным изменением объема. Возникает микротреIЦИна,
что и проявляется в том, что выдержка нити снижает ее проч
ность так же, как и неизбежное соприкосновение с соседними
нитями или с окружаюIЦИМИ предметами.
За послеlIНИе деС.llтилеТИJ[ было выполнено MHoro работ в
попытках приБЛИЗИТЬСJl к предельной ПРОЧНОСТИj и не только
со стеклом, но и со мноrими друrими материалами, в том чи
сле и с металлами. Вытяrивали из расплава нити, ВЫРa.IЦИва
ли идеальные нитевидные кристаллы, были созданы приборы
для испытания на прочность микрообразцов длиной менее мил
лиметра. Возможность приближеНИJ[ к предельной прочности
подтверждалась, волновала и вселяла радужные надежды. Но
по мере накоплеНИJl знаний, как всеrда, НачИНали брать верх
реалистические соображения.
Наверное, нам нужна не только прочность, но И надеж
насть, которая находит свое выражение в достаточной вязко
сти материала, а может, и еще в каких то пока не названных
качествах.
И еще один вопрос. Если предельная прочность длJ[ OCHOB
ных конструкционных материалов количественно составляет
примерно десятую часть модуля упруrости, то это значит, что
в эксплуатационных условиях все конструкционные материа
лы будут иметь деформации, приближающиеСJl к 10 %. Как
видим, повышая максимально прочность, мы весьма заметно
теряем в жесткости. Сможет ли, например, леrкий и весьма
прочный коленчатый вал двиrатеЛJl нормально работать, если
возникающие в нем деформации измеряются несколькими про
центами.
Таким образом, ДЛJl практических целей важна не только
предельнаJl прочность. Есть еще ряд механических XapaKTe
ристик, как саМОСТОJlтельных, так и связанных с прочностью.
И их необходимо принимать во внимание.
374
Сейчас в практику машиностроении внедрено MHoro BЫ
сококачественных и прочных металлов и металлических спла
вов. Но все металлы без исключения обладают одной xapaк
терной и вместе с тем неприятной особенностью. С повышени
ем прочности их вязкость, как правило, падает. Оно и понятно.
Упрочняя материал путем леrирующих добавок или термооб
работкой, мы в той или иной мере оrраничиваем дислокацион
ные перемещения, а они то как раз и придают материалу вяз
кость, способствуют рассеинию энерrии на фронте трещины.
Значит, следует попытаТЬСJl найти или искусственно создать
еще какие то формы рассеяния энерrии, препитствующие pac
пространению трещин.
Находкой нашеrо века явилось создание микронеоднород
ных структур композитов, rде развитию трещин поставлен
заслон в виде высокопрочных волокон. Матрица прочно связа
на с нитями, и развивающаяся трещина не может их обойти и
не может продвинуться дальше, не разрушив их. Это все paB
но, что попробовать расколоть полено, предварительно вбив в
Hero поперек хотя бы несколько rвоздей. Таким образом, обна
руживается путь повышения вязкости при высокой прочности.
Но значение композитов не только в этом.
Чрезвычайно важно, что композиты заставили по новому
осмыслить наше отношение ко мноrим материалам, казавшим
ся прежде ни к чему не приrодными из за своей ХРУПКОСТИ. И
наrлядным примером тому является, прежде Bcero, то же самое
стекло, о котором мы ТОЛЬКО что rоворили. Следом за стеклом
пошли в дело и высокопрочные, но чрезвычайно хрупкие мине
ралы, лежащие буквально у нас под ноrами. Конечно, с ними
необходимо было поработать.
Чтобы представить потенциальные возможности различ
ных веществ, составляющих композиционные структуры, нет
необходимости вчитываться в подробнейшие справочные Ta
блицы, rne приводится множество механических характери
стик. Достаточно выделить rлавные. А rлавным в данном
случае для каждоrо вещества является ero модуль упруroсти.
От Hero зависит и жесткость, и предельная прочность. Необхо
димы еще такие характеристики, как температура плавления
и плотность. В то же время нет нужды особо фиксировать
375
свое внимание на реальном пределе прочности. Он изменяет
ся в широких пределах в зависимости от фазовоrо состава и
методов технолоrической обработки.
В табл. 8.1 приведены перечисленные характеристики для
трех rрупп конструкционных материалов. Первые две метал
лы и полимеры. Третью rруппу образуют неорrанические и
неметаллические вещества, для обобщения часто называемые
керамикой. С последней их роднит минеральное происхожде
ине и высокая T-eмnepaTypa обработки. В последнем столб-
це таблицы приведена относительная жесткость, Т.е. отноше
нне модуля упруrостн к плотности вещества. Для наrЛJ[ДНО
сти удельная жесткость каждоrо вещества отнесена к удельной
жесткости железа.
Относительная жесткость металлов, как видим, изменя
ется в достаточно узком интервале. Исключение составляет
ниобий. Он имеет очень низкую удельную жесткость. В обрат
ную сторону резко выделяется бериллий, и к нему в последнее
время приковано серьезное внимание в авиационной и paKeTHO
космической технике. Есть надежда, что прочность нитей бе
риллия можно будет поднять переводам в аморфное состояние.
И все было бы хорошо, но беда заключается в токсичности
бериллия, и это заставляет принимать специальные меры бе
зопасиости в цехах по ero обработки. Пока неизвестно, что
возьмет верх преимущества или недостатки.
Полимеры делят на две подrруппы: аморфные эпоксид
ные смолы и орrстекло, и не столь широко известные кристал
лические полимеры. Первые используются в качестве связую
щеrо. Кристаллические же полимеры имеют высокую удель
ную жесткость и прочность, что позволяет создавать на их
основе специальное орrановолокно.
И, наконец, третью rруппу образуют неорrанические и He
металлические вещества. Высокая удельная жесткость, жа-
ростойкость, неокисляемость оксидов (им больше некуда оки
сляться), твердость и дешевизна дают право надеяться на ши
рокое применение этих материалов. rромкие названия "сап
фир", "rpaHaT" не должны тревожить наше воображение. Это
очень распространенные па Земле минералы, недефицитные
376
ТаБJlUца 8.1. Характерные свойства конструкционных
материалов
Вещество t пл , "(, Е, О"..РI ( ) l
ос r / см 3 rПа МПа "( .., F.
Железо 1536 7,87 200 500 1500 1
Маrний 650 1,74 45 200 1500 1,02
Алюминий 660 2,70 71 300 600 1,03
Титан 1665 4,50 100 600 1200 0,87
Никель 1455 8,9 200 0,88
Молибден 2620 10,2 330 1,27
Вольфрам 3400 19,3 410 1200 2400 0,84
Бериллий 1287 1,85 240 300 600 5,70
Ниобий 2415 8,57 82 500 1000 0,38
Полимеры 0,02
аморфные "'" 1,5 0,5 5 10 100 O,1
Полимеры 100 2000
кристаллические "'" 1,5 120 зооо "'" 2,6
Сапфир А1 2 О з 2046 3,97 400 300' 3,96
rpa.HaT A15 УЗО12 1950 4,55 330 200 20000" 2,85
MgO 1870 3,65 290 500'; 1000" 3,13
Рутил Ti0 2 1870 4,24 290 100' 2,69
SiC 2600 3,2 450 "'" 3000" 5,53
В 4 С 2470 2,5 450 "'" 3000" 7,08
Si з N 4 1800 3,2 47 500 1000" 0,58
Бороволокно 2300 2,7 400 "'" 3000" 5,83
Уrлеволокно 1,7 2,2 зоо 2000 5 9
500 зооо"
'Поликристаллы. "Волокна.
377
и дешевые. Что же касается бороволокна и уrлеволокна, то
они уже давно внедрены в практику.
Теперь естественным будет вопрос, какие же пары (или
тройки) перечисленных веществ следует объединять в компо
зиты. Вопрос резонный, а rлавное, естественно вытекающий
из исторически сложившихся представлений о производствен
нам процессе. Но ответить на Hero непросто.
Композит это не совсем материал. Это часть KOHCTpYK
ции, выполняющая функции материала и отвечающая на BO
прос: "Из чеrо сделано?" Композит заставляет пересмотреть
наше отношение не только к веществам, но и к производствен
ному процессу в целом.
Из названных в табл. 8.1 веществ не представляет особо
ro труда изrотовить множество самых разнообразных образцов
композитов прутков, плоских моно слоев или трубок. Можно,
например, сделать образец молибдена с сапфировыми нитями,
хотя молибден и более туrоплавок, чем сапфир. Такие образцы
можно испытывать, определять их модули упруrости и предел
прочности. Существует специальная литература по вопросам
испытания композитных образцов, по приближенным и уточ
ненным способам расчетноrо определения прочности и жестко
сти композитов по характеристикам составляющих.
Но в TOM TO И дело, что создать образцы композита и из
rотовить из композита деталь машины далеко не одно и то
же. Композит нельзя изrотовить заранее. Ero rотовят вместе с
деталью и, создавая ero, образуют деталь. Поэтому на вопрос,
какие же комбинации из упомянутых веществ следует предпо
честь, ответ может быть только один: такие, которые позво
ляют изrотовить эту деталь и к тому же MorYT обеспечить ее
высокое качество. Вопрос слишком общий, чтобы можно было
дать на Hero определенный ответ. Все зависит от способа изrо
товления (если он существует), особенностей детали, условий
производства.
Композиты открывают перед инженером окно в новый
мир, rде нельзя быть только материаловедом или только Me
хаником. Для композитов нужен широкий круrозор механика,
материаловеда, физика и технолоrа.
378
rлава 9
ТОЛСТОСТЕННЫЕ ТРУБЫ
9.1. Основные уравнения для толстостенной
трубы
в технике для удержания BblcoKoro давления приходится
иметь дело с толстостенными сосудами. Обычно это ци
линдр, внешний диаметр KOToporo в несколько раз превышает
внутренний.
Задача определения напряжений в таком цилиндре за
метно сложнее, чем в тонкостенных сосудах, и одними толь
ко уравнениями раЩlOвесия обойтись не удается. Приходится
также рассматривать возникающие в цилиндре перемещения.
Эту задачу назыв ют задачей Ламе но имени французскоrо
ученоrо, работавшеrо в 20 x rодах прошлоrо столетия в Пе
тербурrской Академии наук.
Рассмотрим однородное тело цилиндрической формы
(рис. 9.1), наrруженное так, что внешняя наrрузка является
осесимметричной и вдоль оси цилиндра не меняется. Разме
ры цилиндра MorYT быть произвольными, и на соотношение
между внутренним и наружным радиусами цилиндра оrрани
чений накладывать не будем. Длину uилиндра пока также
319
будем считать произвольной. В
дальнейшем по этому поводу будут
сделаны некоторые оroворки. Каж
дм точка цилиндра при ero дефор
мации получит какие то перемеще
ния. По условиям симметрии эти
перемещеиия, очевидно, будут про
исходить в радиальных плоскостях.
Точка может перемещаться по на-
Рис. 9.1. правлению радиуса и вдоль COOTBeT
ствующей образующей.
Радиальное перемещение произвольно взятой точки обо
значим через и. Величина u является функцией текущеrо pa
диуса r и не изменяется по длине цилиндра. За положительное
направление для r примем направление от оси цилиндра (см.
рис. 9.1). Что касается перемещений вдоль оси, то будем счи
тать, что они возникают только как следствие общеrо удлине-
ния или укорочения цилиндра. Если осевые перемещения cy
ществуют, то они распределены так, что поперечные сечения
цилиндра остаются плоскими.
Обозначим через Er И Et относительные удлинения в ци
линдре в радиальном и окружном направлениях и выразим их
через перемещение и.
После
нarpужения
Рис. 9.2
Для этоrо рассмотрим элементарный отрезок АВ = dr,
выделенный в радиальном направлении (рис. 9.2), до и после
наrружения цилиндра. Точка А получает перемещение и, а
точка В перемещение и + dи. Леrко установить, что новая
380
длина элемента будет равна dr + du, а ero относительное удли
нение
du
Er = .
dr
(9.1)
Рассмотрим, да.лее, длину окружности, проведенной внутри
цилиндра до и после ero наrружеНИJl (рис. 9.з). Плина окруж
ности до наrружения цилиндра равна 211'r. После наrруже
ния радиус увеличится на и и длина окружности будет равна
2'1\"(Т + и). Относительное удлинение ее составит
2'1\" (т + и) 21!'Т
Et = ,
21!'Т
или
Et = и/т.
Исключая и из равенств (9.1) и (9.2), получаем
d
dr (Et r ) Er = О.
Обратимся теперь к уравнеНИJlМ равновесия.
(9.2)
(9.3)
До наrpужения
После
наrpужения
Рис. 9.3
Рис. 9.4
Выделим из цилиндра элемент в форме криволинейноrо
шестиrранника (рис. 9.4). Плины сторон этоrо элемента равны
dr, dz и r d<{).
В осевых сечениях цилиндра (плоскость Аве D элемен
та) по условиям осевой симметрии касательные напряжения
отсутствуют И сохраняются только нормальные напряжения
(1t, называемые О"РУЖНЫ.А4U. В поперечных сечениях цилиндра
381
(поверхность спЕР элемента) касательные напРJlжеНИJl так-
же предполarают равными нулю. Основанием этому служит
условие независимости перемещений u от координаты z. В по-
перечных сечениц MorYT существовать нормальные (осевые)
наПРJlжеНИJl а z, которые возникают как следствие нarружения
цилиндра силами вдоль оси. Эти напРJlжеНИJl предполaraioт
неизменными как по оси, так и по радиусу цилиндра.
Поскольку площадки Авсп и спЕР JlВЛJlЮТСJl rлавны-
ми, rлавной будет также и площадка ADEG. НапРJlжение на
этой площадке обозначим через а r. Оно называется радиаJlЬ-
ным напряжением. При переходе от радиуса r к радиусу r + dr
напряжение a r получит приращение da r .
В рассматриваемой постановке, как видим, задачу опре-
делеНИJl напряжений и перемещений в теле вращеНИJl можно
решить в функции только OnHOro независимоrо переменноro
радиуса т.
Проецируя силы, действующие на элемент, на направле-
ние радиуса, получаем следующее условие равновесия:
(a r + dar)(r + dr) dtpdz arr dtp dz at drdzdtp = О,
откуда
da r
a r + dr r at = О,
или
d
dr (arr) at = О. (9.4)
Остальные уравнения равновесия для элемента удовлетво
ряются тождественно.
Соrласно обобщенному закону fYKa, напряжения ar, at и
a z связаны судлинениями Er И Et следующими соотношеНИJlМИ:
1
€r = Е [ar J1. (at + az)]i
1
€t = Е [at J1. (at + a z )].
(9.5)
Будем считать, что напряжение a z нам известно из усло-
вий заrружения цилиндра осевыми силами по торцам.
Подставим €r И €t В выражение (9.з). Тоrда в дополнение
к уравнению равновесия получим
d
dr (O't r ) O'r = о.
(9.6)
382
Складывая и выЧИТaJI почленно уравнения (9.4) и (9.6), полу
чим два новых уравнения:
d
dr [(O't + O'r)r] (O't + O'r) = о;
d
dr [(O't O'r)r] + (O't O'r) = О.
Решая их, находим
2В
O't + O'r = 2А; O't O'r = 2'
r
rде А и В произвольные постоянные.
Палее определяем
в
O'r = А =f "'2
t r
(9.7)
(верхнему индексу соответствует верхний знак, нижнему
нижний) .
Перемещение u можно найти из выражения (9.2), если Et
определить предварительно по формулам (9.5):
и= [A(l JL)r+B(l+JL); JLO'zr]. (9.8)
9.2. Определение перемещений и напряжений
в толстостенном цилиндре
Рассмотрим цилиндр с внутренним радиусом а и внеш
ним Ь (рис. 9.5). Пля общности будем полаrать, что цилиндр
наrружен одновременно и BHYT
ренним давлением Ро. И внеш
ним РЬ. В Д8JIьнейшем, приНИ
мая Рь = О либо Ро. = о, можно
будет проанализировать отдельно
случаи действия только BHYTpeH
Hero и только внешнеrо давле
ния. При этом надо еще учесть,
что если цилиндр имеет днище
(рис. 9.6, а), то в нем возникает Рве. 0.6
383
а
Рис. 9.6
J
осевая растяrивающая сила, равная
2 Ь 2
P a 7ra Pb 7r .
Осевое напряжение {1 z будет следующим:
р а а 2 рьь 2
{1 z = Ь 2 2
a
Ллину цилиндра при этом предполаrают достаточно боль
шой для Toro, чтобы можно было считать, что напряжение U z
распределено по поперечному сечению равномерно и что yдep
живающее влияние днищ на радиальные перемещения цилин
дра ничтожно мало.
Кроме указанноrо, рассмотрим случай, коrда (1z = О, как,
например, для цилиндра, показанноrо на рис. 9.6, б.
Возвращаясь к формулам (9.7), определяем постоянные А
и В из следующих rраничных условий: а т = Pa при r = а;
и т = Pь при r = Ь, Т.е.
В
А 2 = Pa,
а
откуда
р а а 2 рьь 2
А = ь 2 2 '
a
384
(9.9)
в
А ь 2 = Pь,
а 2 ь 2
В = ь 2 а 2 (Ра РЬ).
в итоrе вместо (9.7) и (9.8) получаем
р а а 2 рьЬ2 а 2 ь 2 Ра РЬ
ат == =f . (9.10)
t Ь 2 а 2 т 2 Ь 2 а 2 '
1 J.L р а а 2 рь Ь2 1 + J.L а 2 ь 2 Ра РЬ !!:.. ( 9 11 )
и Е Ь2 а2 r + Е r Ь2 а2 Е (Jz. .
Наличие oceBoro напряжения (Jz сказывается только на pa
диальном перемещении и. В случае, если цилиндр наrружен
силами давления в осевом направлении, то, соrласно выраже
ниям (9.9) и (9.11), получаем
1 2J.L р а а 2 рьЬ2 1 + J.L а 2 ь 2 Ра Рь
и == Е Ь 2 а 2 r + 7 Ь2 а 2 ' (9.12)
Если осевая сила отсутствует, то
1 J.L Раа 2 рь Ь2 1 + J.L а 2 ь 2 Ра Рь
и == в-- Ь2 а2 т + в-- 7 Ь 2 а 2 .
(9.13)
Теперь рассмотрим два частных СЛУЧaJI.
Цилиндр наrружен внутренним
Д а в л е н и е м. В этом случае Ра == Р, Рь == О. Формула (9.10)
принимает вид
ат == ь/ а2 2 ( 1 =f b ) .
t а т
На рис. 9.7 показаны эпюры изменения радиальноrо и окруж-
Horo напряжений по толщине цилиндра при наrружении внут-
ренним давлением. Окружное напряжение, как и следовало
(9.14)
1/+/
Pol o1
202
p
/Jl ot Z J
h +O
р I/ Oz
Рис. 9.7
13 В. И. Феодосьев
386
ожидать, является растяrиваюIItИМ, а радиальное сжимаю
ЩИМ. У внутренней поверхности (1t достиrает наибольшеro
значения:
ь 2 + а 2
(1t(r=a) = р ь2 а 2 '
Радиальное напряжение при этом равно p.
Соrласно теории наибольших касательных напряжений (в
случае отсутствия осевой силы, Т.е. при (1% = О),
ь 2 + а 2
аэlCВ = а1 аз = р ь 2 2 ( p),
a
или
2 р 2
аэlCВ = Р Ь 2 2 .
a
(9.15)
Проследим, как изменяются напряжения (1т И (1t по мере
уменьшения толщины цилиндра. Примем Ь = а + 6, rne 6
толщина цилиндра. Тоrда
(а+6?+а 2
at(r=a) = р 6 (2а + 6) ;
При малом значении 6
а 2
(1t (т=а) = Р 6 (2а + 6) .
а
at (т=а) at (т=Ь) Р б'
Радиальное напряжение а т у внутренней поверхности равно
p, а у внешней нулю, независимо от толщины цилиндра.
Таким образом, мы видим, что для цилиндра с малой тол
щиной стенки окружные напряжения распределены по толщи
не почти равномерно, а радиальные малы по сравнению с
окружными в той же мере, в какой толщина 6 мала по cpaBHe
нию с радиусом.
Если толщина цилиндра увеличивается, то наибольшие
напряжения в нем при неизменном давлении уменьшаются, но
не беспредельно. Рассмотрим случай, Korna Ь 00, Т.е. коrда
цилиндр имеет бесконечно большую толщину. Torna выраже
ние (9.14) принимает вид
а 2
а т = =FP 2'
t r
386
Рис. 9.8
Это значит, что для цилиндра с бесконечно большой толщиной
стенки радиальное напряжение в любой точке равно окружно
му (рис. 9.8), и при отсутствии осевых напряжений все точки
находятся в состоянии чистоrо сдвиrа. Палее, напряжения, как
видим, находятся в обратно пропорциональной зависимости от
квадрата радиуса т. Если принять, например, r = 4а, то в
точках, расположенных на такоМ расстоянии от оси, напря
жения составляют Bcero 1/16 максимальныХ. Следовательно,
коrда можно довольствоваться точностью расчетов в пределах
5. . .6 % (практически большая точность и недостижима, xo
тя бы из за упруrих несовершенств материала), то цилиндр с
отношением Ь/а > 4 можно уже рассматривать как имеющий
бесконечно большую толщину стенки. Существенно, что при
этом мы совершенно не связаны с формой внешнеrо контура.
Если все точки внешнеrо контура удалены от оси BHYTpeHHero
отверстия более, чем на 4а, то форма внешнеrо контура оказы
вает влияния на распределение напряжений. Расчет упруrих
тел, таких, например, как на рис. 9.9, сводится, очевидно, к
схеме цилиндра с бесконечно большой толщиной стенки.
' I
Рис. 9.9
Эквивалентное напряжение, соrласно выражению (9.15),
при Ь 00 будет равно
О'ЭJ:В = 2р.
13.
387
Следовательно, еCJIИ, например, предел упруrости материала
равен 600 МПа, то при бесконечно большой толщине цилиндра
деформации будут упруrими при давлении, не превышающем
300 МПа. О том, какие возможности имеются для обеспечения
прочности при более высоких давлениях, мы скажем несколько
позже.
Ц и л и н Д р н а r р у ж е н в н е ш н и м Д а в л е н и е м.
В этом случае Ра = О, РЬ = р. Выражение (9.10) принимает вид
рь 2 ( а2 )
(Jr = ь 2 2 1 =t="2 .
j а r
Эпюры напряжений по толщине цилиндра для этоrо случая
наrружения представлены на рис. 9.10. Наибольшее эквива
лентное напряжение имеет место у внутренней поверхности
цилиндра. При отсутствии осевой силы
( 2Ь 2 )
(JЭJ:В = (Jl (J3 = О P ь 2 а 2 '
или
2ь 2
(J ЭJ:В = Р Ь 2 2 .
a
Это выражение совпадает с тем, которое было получено для
случая BHYTpeHHero давления.
jl+ ,/
Pb2 tI
Рис. 9.10
Если внутреннее отверстие отсутствует, Т.е. а = О, то
напряжения в цилиндре распределены равномерно:
(Jr = (Jt = p.
388
При м е р 9.1. Подобрать размер виешиеrо ДИUlетра 2Ь цилиидра,
предн&значенноrо ДЛII удержанИII BHYTpeHHero даuеИИII р = 50 МПа, при
условии двухратноro хоэффициента запаса. Предел тежучести материала
О'т.р = О'т.с = 500 МПа. Виутреиий диа.м:етр задан: 2(1 = 10 см.
Наиболее опаснымИ IIBJ1I1JOTCII точхи, расПОJ10жениые у внутренней
поверхности ЦИJ1индра. COrJ1acHo ФОРМУJ1ам (9.9) и (9.14), пОJ1учаем
ь 2 + (12 (12
O'r = p; (1, = р Ь 2 (12 ; 0". = Р Ь2 (12 .
2ь 2
Очевидно, 0'1 = (1t, (1з = O"r. Отсюда (1... = (11 (1З = Р Ь 2 2'
(I
подстановхи ЧИСJ10ВЫХ значений находим 2Ь = 2.;sтз (1 = 12,9 см.
ПОСJ1е
9.3. Определение напряжений в составных
трубах
Выше мы уже показали, что увеличение толщины не MO
жет во всех случаях обеспечить необходимой прочности трубы.
В пределе при бесконечно большой толщине О'эхв = 2р.
Если в толстостенном сосуде надо удержать высокое дa
вление, например в 1500 МПа, необходимо, чтобы предел TeKY
чести материала был бы по крайней мере в два раза большим,
Т.е. 3000 МПа. Следовательно, для сосудов BblcoKoro давления
необходимо искать какие то новые конструктивные решения.
Одним из таких решений является созпание составных, соеди
иеииыx с натяrом цилинпров. Этот прием используют как в
технике высоких павлений, так и в артиллерийской практике
для упрочнения стволов мощных орудий.
(i1
ь/+ с 1
I'к IJt с!
2,1
PKIJ1 ,!
,1+ dt
Рк ,J OI
ZC Z
РК ,1 иl
Рис. 9.11
Положим, мы имеем два цилиндра (рис. 9.11). BHYTpeH
ний радиус первоrо цилиндра обозначим через а, а внешний
через с. У BToporo цилиндра внутренний радиус на Д меньше
389
наружноro радиуса первоro цилиндра, Т.е. равен с А. Внеш
ний радиус BTOpOro цилиндра равен Ь. Если большой цилиндр
HarpeTb, то отверстие в нем увеЛИЧИТСJ[ и первый цилиндр MO
жет быть свободно вставлен во второй. При остывании между
цилиндрами возникает контактное давление fJж. Определим
ero.
При посадке внешний радиус BHYTpeHHero цилиндра co
кратится и точки цилиндра на контактной поверхности полу
чат ОТР.ilца'.l'ельное смещение 11.1. Внутренний радиус внешнеro
цилиндра увеличится. Здесь, следовательно, возникает поло
жительное смещение 11.2. Размер и2 + ( 1I.1) должен быть равен
натяrу :
11.2 11.1 = . (9.16)
Перемещение 11.1 можно определить по формуле (9.13), если по
ложить в ней Ра = О, Рь = Рк, а Ь и т заменить на с. Тоrда
получим
1 J.I. с 3 1 + J.I. а 2 с
11.1 = c2 a2P,, c2 a2P".
По той же формуле определяем и 11.2. Для этоrо полаrаем РЬ =
= О, Ра = Р", а = r = с. Тоrда
1 J.I. с 3 1 + J.I.
U2= Ь2 c2P,,+
ь 2 с
Ь 2 2 р".
c
Модуль упруrости Е и коэффициент Пуассона J.I. предполаrаем
для обоих цилиндров одинаковыми.
Соrласно выражению (9.16), находим
E (с 2 а 2 ) (ь 2 с 2 )
Р" = 2 3 ь 2 2 (9.17)
с a
Таким образом, в результате посадки внутренний ци
линдр оказывается под действием внешнеrо давления Р", а
внешний под действием точно TaKoro же BHYTpeHHero дa
вления. Картина распределения напряжений в сопряженных
цилиндрах показана на рис. 9.11.
Если теперь составной цилиндр наrрузить внутренним
давлением, то обе ero части будут работать как одно целое,
и В составном цилиндре возникнут напряжения, определяемые
390
формулой (9.14). Эти напРJ[жеНИJ[ должны быть а.лreбраически
просуммированы с предварительными иапРJ:жеИИJ[МИ натяrа
(рис. 9.12). Во внутренних, наиболее наПРI.Жениых точках pa
бочие напряжения и наПРJ[жении натиrа имеют разные знаки.
1/+// 1&1
tIe= P b2 o' PK C1 OI
{А}
}'J>\ dt,4
(8)
tV
Рис. 9.12
Поэтому суммарное наприжение здесь снижается и составной
цилиндр способен выдержать большее давление, нежели обыч-
ный. Нужно, однако, помнить, что вследствие натяrа увели-
чиваются напряжения в зоне контакта у внешнеrо цилиндра.
Поэтому натиr Д следует подбирать для заданноro рабочеrо
давления Р таким, чтобы была обеспечена прочность не толь
ко BHYTpeHHero, по и внешнеrо цилиндра. Леrко составить
условие равнопрочности цилиндров (см. рис. 9.12):
аэквА = аэквв,
Соrласно выражению (9.10), получим: в точке А
ь 2 + а 2 2с 2
аэхв = аl аз = Р ь 2 2 РХ 2 2 ( P)i
a с a
в точке В
(9.18)
аэхв = аl аз =
ра2 ( Ь2 ) ь2 + с 2 ра 2 ( Ь2 )
= ь 2 2 1 +"2 + РХ ь 2 2 ь 2 2 1 "2 ( PK)'
a с c a с
Приравняв эти выражении, находим
ь2 с2 а2 ( ь2 с 2 )
Р с 2 ь 2 а 2 = РХ ь2 с2 + с2 а2 .
(9.19)
391
Если подставить сюда рх из выражения (9.17), то найдем натяr
д, который обеспечивает условие равнопрочности при задан
.JlOM рабочем давлении р:
2р сь 2 ( с 2 а 2 )
д
Е ь 2 (с 2 а 2 ) + с 2 (Ь 2 с 2 )'
(9.20)
Если, наконец, исключить из выражения (9.18) контактное дa
вление РХ (9.17), то получим
2ь 2 [
О'ЭХВ == Р ь 2 а 2 1
ь' : с' ].
ь 2 с 2 с 2 а 2
Это напряжение имеет минимум при с == ..;аь:
min Ь
О'э.кВ == Р Ь .
a
(9.21 )
Полученные соотношения носят название УСАовий ТадОАина,
по имени pyccKoro ученоrо, впервые их получившеrо.
Сопоставляя выражения (9.21) и (9.15), видим, что посад
ка труб приводит к заметному снижению эквивалентноrо Ha
пряжения. Для сравнения рассмотрим отношение выражений
О'ЭХВ, полученных по этим формулам:
O' l: Ь + а
== 2Ь .
О' ЭХВ
Если внутренний радиус цилиндра а мал, то посадка труб
по соотношениям rадолина дает почти двукратное снижение
эквивалентноrо напряжения. Для тонкостенных труб, Т.е. при
а Ь, посадка труб не дает эффекта.
В технике высоких давлений, кроме посадки, применя
ют так называемое автофретирование, которое заключается
в предварительной наrрузке цилиндра внутренним давлени
ем, большим рабочеrо, с таким расчетом, чтобы во BHYTpeH
них слоях цилиндра возникали пластические деформации. По
еле снятия давления во внешних слоях цилиндра сохраняются
упруrие напряжения растяжения, а во внутренних слоях воз
никают напряжения сжатия (рис. 9.13).
392
В дальнейшем при наrрузке
цилиндра давлением остаточные
напряжения суммируются с рабо
чими так, что во внутренних сло
ях имеет место частичная раз
rрузка. Материал цилиндра не
получает пластических деформа
ций, если только рабочее давление
не превышает давления предвари
тельноrо обжатия.
Рис. 9.13
При м е р 9.2. Подобрать размеры диаметров 2с и 2Ь и HaTJ:r
l:!. ДЛJl двуслойноrо орудийноrо ствола, имеющеrо внутренний диаметр
2а == 100 мм. Максимальное давление в момент выстрела Ртах == 200 МПа.
Материал сталь, Е == 200 rПа, О'т.р == О'т.с == 600 МПа. Запа.с прочности
должен быть не менее чем двукратный.
По формуле (9.21) опредеЛJlем размер Ь:
600 == 200 ; Ь == 3а.
2 Ь а
Промежуточный радиус с предстаВЛJlет при этом среднее rеометрическое
между а и Ь: с == ..;;;ь == аЛ. Численные значеНИil диаметров таковы:
2а == 100 мм; 2Ь == 300 мм; 2с == 173 мм.
Выражение (9.20) после подстановки с == ..;;;ь принимает вид l:!. ==
== ..;;;ь. Отсюда натн
200
l:!. == 2. 105 у 50 . 150 == 0,0865 мм.
tp
При м е р 9.3. Стальной стержень установлен с HaTJ:rOM в сталь
ной плите (рис. 9.14). Какую силу следует приложить к стержню В осевом
Рис. 9.14
,
+
393
направлении, чтобы ВЫТIIНУТЬ ero из ПJlИты? Известны HaTJlT Д =
= 0,03 мм; диаметр стеРЖНII D = 60 мм, толщина плиты h = 100 мм,
коэффициент треНИJI между плитой и стержнем f = О, 25.
Пренебреrая особенностями, СВIlЗаииыми снеравномерным натяrом
по толщине плиты, примем, что искомu: сила представляет собой силу
трения
Р = !p.trDh.
Контактное давление р. определим по формуле (9.17), если примем а = О,
Ь = 00, с = D /2:
д 0,03
Р. = Е D = 200 = 100 МПа.
60
Искомая сила Р = 4,6 . 105 Н.
r л а в а 10
ПЛАСТИНЫ И ОБОЛОЧКИ
10.1. Основные особенности пластин и оболочек
Большинство элементов инженерных сооружений, подле
жащих расчету на прочность, может быть сведено к расчет
ным схемам стержня или оболочки. ПО сих пор в основном
рассматривались элементы конструкций, сводящиеся к схеме
стержня. Перейдем теперь к оболочкам.
Под оболо'Ч.?Сой понимается тело, одно из измерений KO
Toporo (толщина) значительно меньше двух друrих. feoMe
трическое место точек, равноотстоящих от обеих поверхно
стей оболочки, носит название срединной поверхности. Если
срединная поверхность оболочки является плоскостью, то Ta
кую оболочку называют nАастиной. В зависимости от формы
очертания внешнеrо контура пластины MorYT быть круrлы
ми, прямоуrольными, трапециевидными и пр. Если срединная
поверхность образует часть сферы, конуса или цилиндра, обо
лачку соответственно называют сферической, конической или
цилиндрической. rеометрия оболочки определяется не толь
ко формой срединной поверхности. Нужно знать также закон
395
изменения толщины оболочки. Однако все встречающиеся на
практике оболочки имеют, как правило, ПостоJ.нную толщину.
Осеси..w.uеmричны.wи, или просто си.w.wеmричны.uи, оболоч
ками называЮТСJl такие, срединна.я: поверхность которых пред
ставляет собой поверхность вра.щения. Будем полаrать в даль
нейшем, что наrрузка, действующа.я: на такую оболочку, также
обладает свойствами осевой симметрии. Пля таких оболочек
задача расчета значительно упроща.ется. Получа.еТСJl это по
тому, что все внутренние силы ДЛJl такой оболочки по дуrе
Kpyra не изменяются и заВИСJlТ только от текущеrо радиуса
или длины дуrи, измеренной вдоль образующей тела вра.ще
НИJl. Пли несимметричных оболочек распределение наприже
ний опредеЛJlТЬ значительно сложнее.
К схеме осесимметричной обо
лочки сводится расчет очень MHO
rих строительных сооружений,
котлов и баков, деталей машин и
приборов, начина.я: с таких мел
ких, как, например, упруrа.я: KO
робка вариометра. (рис. 10.1), име
юща.я: 40 мм в диаметре и 0,2 мм
толщины, и конча.я: такими coopy
Рис. 10.1 жениями, как купол планетария
(рис. 10.2). Со схемой пластины
приходится иметь дело при расчетах плоских днищ баков, сте-
нок различных резервуаров, плоских переrородок в самолетных
конструкциях и мноrих друrих.
Рис. 10.2
· Прибор дл. измерени. СIОросТИ подъема с....олета.
398
Понятно, что расчет стенки бака или rибкой коробки Ba
риометра не может быть произведен при помоmи тех приемав,
которые были изложены применительно к схеме стержня в пре
llЫllУЩИХ rлавах.
Задача о расчете оболочек вращения наиболее просто pe
шается В том случае, Korlla можно принять, что напряжения,
возникающие в оболочке, постоянны по ТОЛlцине и, следова
тельно, изrиб оболочки отсутствует. Теория оболочек, постро
енная в :нам предположении, называется беЗАСо.wентной тeo
рией оБОА.Q'Че?С.
. Если оболочка не имеет резких переходов и жестких за
щемлений и, кроме Toro, не наrружена сосредоточенными си
лами и моментами, то для ее расчета с успехом можно при
менять безмоментную теорию. При наличии же перечислен
ных особенностей в местах крепления оболочки и в местах
резких изменений формы возникают повышенные напряжения,
обусловленные изrибным эффектом. Решение подобных задач
более точными методами с учетом изrибающих моментов по
казывает, что зона повышенных изrибных напряжений OCTa
ется в большинстве случаев весьма оrраниченной, и поэтому
на достаточном удалении от перечисленных особых областей
определять напряжения можно по безмоментной теории. Ha
хождение же напряжени в указанных зонах требует особоrо
исследования. Следует, наконец, отметить, что чем меньше
толщина оболочки, тем ближе к истине предполаrаемый за
кон постоянства напряжений по толщине и тем более точные
результаты дает безмоментная теория.
Сказанное находит свое подтверждение в проведенном BЫ
ше расчете цилиндрическоrо сосуда (см. 9.2), rде было пока
зано, что в случае TOHKocTeHHoro цилиндра окружное напряже
ние можно считать равномерно распределенным по толщине.
Раllиальное напряжение при малой толщине оказалось прене
брежимо малым по сравнению с окружным.
Вопросы общей теории оболочек выходят далеко за paM
ки курса сопротивления материалов и представляют собой в
настоящее время самостоятельный раздел механики.
Сначала остановимся на простейших вопросах безмомент
ной теории. Рассмотрим задачи, связанные с определением
397
изrибных напряжений в простейших случаях наrружения пла
стин и TOHKocтeHHoro цилиндра.
10.2. Определение напряжений в симметричных
оболочках по безмоментной теории
Рассмотрим симметричную оболочку толщиной h
(рис. 10.з). Обозначим через Рт радиус кривизны дуrи мери-
диана ее срединной поверхности, а через Pt второй rлавный
радиус, Т.е. радиус кривизны норМaJIьноrо сечения, перпенди-
кулярноrо к дуrе меридиана. Этот радиус равен отрезку нор-
мали, заключенному между срединной поверхностью и осью
симметрии (см. рис. 10.3, а) Радиусы Рт и Pt являются в об-
щем случае функпией yr л:а 8 между НорМалью и осью симмет
рии.
11
!
Рис. 10.3
Двумя парами меридиональных и нормальных конических
сечений (см. рис. 10.3,6) выделим из оболочки элемент, пред
ставленный на рис. 10.4. Будем считать, что на rранях эле
мента возникают напряжения ат И (Jt. Первое будем называть
.м.еридионаАЬНЫМ напряжением. Вектор этоrо напряжения Ha
правлен по дуrе меридиана. Второе напряжение (Jt назовем
О'ICРУЖНЫМ. Напряжения ат И (Jt, умноженные на COOTBeTCTBY
ющие площади rраней элемента, дадут силы (Jmh dS2 и (Jth ds 1 ,
показанные на рис. 10.4. К этому же элементу приложена си-
ла нормальноro давления Р dS 1 dS2. Проектируя все силы на
нормаль, получим
Р dS 1 dS2 (Jm h dS 2 dO (Jth dS 1 d'{J = О.
398
Рис. 10.4
Так как
d(} == dS 1 ;
Рт
d<p == dS2
pt
то в итоrе имеем
а т Gt Р
+
Рт Pt h.
(10.1)
Это соотношение известно под названием уравнения ЛаПJ1.аса.
Для элемента, показанноrо на рис. 10.4, можно составить
еще одно уравнение, проектируя все силы на направление оси
оболочки. Удобнее это делать, oд
нако, не для элемента, а для части
оболочки, отсеченной коническим
нормальным сечением (рис. 10.5).
Обозначив через Р осевую
равнодействующую внешних сил,
получим
о'т '
d n
G m 27rrh sin () = Р.
(10.2)
Рис. 10.5
Отсюда леrко найти меридиональное напряжение а т . Таким
образом, соrласно безмоментной теории, напряжения а т И Gt
в оболочке можно определить из уравнений равновесия.
Третье r лавное напряжение напряжение надавливания
между слоями оболочки предполаrаем малым, и напряжен
ное состояние оболочки считаем двухосным. Действительно,
наибольшее значение радиальноrо напряжения по абсолютной
399
величине равно нормальному давлению р, в то время как (1т
И (1t, соrласно уравнению Лапласа, имеют значения порядка
PPm/h и PPt/h.
Прежде чем перейти к конкретным примерам расчета с
использованием безмоментной теории, докажем две следующие
теоремы.
Т е о р е м а 10.1. Если на какую либо поверхность дей
ствует равномерно распределенное давление, то, независимо от
формы поверхности, проекция равнодействующей сил давле
ния на заданную ось равна произведению давления Р на пло
щадь проекции поверхности на плоскость, перпендикулярную
к заданной оси.
F
о
Положим, задана поверх
насть F (рис. 10.6), на KO
торую действует paBHOMep
но распределенное давление
р. Требуется определить про
екцию на ось х равнодейству
ющей сил давления. Эта
проекция РХ будет, очевидно,
равна
РХ = J pcos<pdF,
F
r де <р уrол между нормалью
к поверхности и осью Х. Пло
щадь проекции элемента dF
на плоскость Х, перпендикулярную к оси х, равна dF' =
= dF сов <р. Следовательно,
Рис. 10.6
РХ = Р J dP' = рР'.
F
Таким образом, для Toro чтобы определить проекцию paB
нодействующей сил давления на ось Х, нужно предварительно
спроектировать поверхность на плоскость Х, а затем YMHO
жить давление на площадь этой проекции, что и требовалось
доказать.
400
Т е о р е м а 10.2. Если на какую либо поверхность дей
ствует давление жидкости (рис. 10.7), то вертикальная COCTaB
ляющая сил давления равна весу жидкости в объеме, располо
женном над поверхностью.
Рис. 10.7
Вертикальная составляющая сил давления для плошадки
dP, соrласно теореме 10.1, будет равна произведению давле
ния, действующеrо на эту площадку, на проекцию плошадки
на уровень жидкости, т.е. pdP'. Так как р = 'УХ, rде 'у
плотность жидкости, то вертикальная сила, действующая на
плошадку dP, будет 'УХ dP'.
Но Х dP' объем элементарной призмы, расположенной
над площадкой dP. Суммарная искомая сила будет, следова
тельно, равна весу жидкости в объеме, расположенном над по
верхностью Р.
Поясняя полученный результат, следует указать, что най
денная сила не зависит от формы сосуда, удерживающеrо жид
кость. Так, во всех трех случаях, представленных на рис. 10.8,
сила, приходящаяся на дно сосуда, будет одной и той же,
Рис. 10.8
401
равной весу жидкости в объеме вышерасположенноrо цилинд
ра Авсп.
Рассмотрим некоторые примеры определения напряжений
в тонкостенных сосудах.
При м е р 10.1. Сферическu: оболочка радиусом R и толщиной
h наХОДИТСJ[ под действием BHYTpeHHero Д&ВJlеНИJ[ р (рис. 10.9, а). Опреде-
лить наПРJ[жеНИJ[, возникающие в оболочке.
}id
tJ
о
Рис. 10.9
Для. сферической облочки Рт = Р! = R. Из УСЛОВИJ[ полной симмет-
рии следует О'т = 0'1. Соrласно формуле Лапласа (10.1), имеем
pR
О'т = 0'1 = и'
Напря.женное СОСТОJ[ние J[ВЛJ[еТСJ[ двухосным (рис. 10.9, 6), поэтому
pR
0'1 = 0'2 = 2h '
Наименьшее наПРJ[жение аЗ принимаем равным нулю. По теории Мора,
независимо от величины k,
pR
0'..8 = 0'1 kО'з = 2h '
(10.з)
При м е р 10.2. Цилиндрический сосуд (рис. 10.10, а) наХОДИТСJ[
ПОД действием BHYTpeHHero давлеНИJ[ р. Радиус цилиндра R, толщина h.
Определить напряжеНИJ[.
р
с>о::
d m
,..........
I
I
----+-.-
I
I
L,.........
! -
.........1
А D
I
f d t
8 С
....c::::J
AfD dт
6
а
Рис. 10.10
402
Отсекаем поперечным сечением часть цилиидра (рис. 10.10, б) и со--
ставлйем длй нее уравнение р&вновесий (10.2):
О'т 211' Rh == Р.
OCeB3JI соста.влйющ3JI сил давлений, независимо от формы днища,
соrласно теореме 10.1, будет равна Р == 1I'R 2 p. ТаJCИМ образом,
pR
О'т == 2h .
Для цилиндра Рт == 00, Pt == R. Поэтому из формулы Лапласа (10.1)
находим
pR
O't == Т'
Т.е. окружное напряжение оказывается вдвое большим меридиональноrо.
Элемент ABCD, выделенный из цилиндрической оболочки, находиТ
ся в двухосном напряженном состойнии (рис. 10.10, в):
0'1 == О'с; 0'2 == О'т i О'з == О.
Эквивалентное напряжение
pR
0',.. == 0'1 kО'з == Т'
ДЛИ цилиндра, как видим, эквивалентное напрйжение оказываетсй в
два раза большим, чем ДЛй сферической оболочки тoro же радиуса и ТОЙ
же толщины.
(10.4)
При м е р 10.3. Полусферический сосуд радиусом R и толщиной
h (рис. 10.11, а) заполнен жидкостью, плотность которой "'(. Определить
на.пряжение в сосуде и построить эпюры О'т, О'с И 0',...
d", dm
8 О
о
Рис. 10.11
Нормальным коническим сечением с уrлом 2", при вершине отсекаем
нижнюю часть сферической оболочки (рис. 10.11, , б) и соста.влйем длй нее
уравнение равновесия (10.2), [де Р равнодействующ3JI сила давлении
жидкости. Соrла.сно теореме 10.2, сила Р равна весу ЖИДJCости в объеме,
расположенном выше отсеченной части оболочки.
403
Введем вспомоrательиый уroл '" и определим объем ABCED (см.
рис. 10.11, 6'):
'р
v == J 21rR 3 8in '" С08 2 ?/1 tl?/1,
о
или
2 n3 3
V == 1r1t (1 С08 'Р)'
з
Таким образом, иаходим
2 3 3
Р == 3 1rR 'У(1 С08 'Р);
'YR 2 1 С08 3 'Р
а", ==
зл sin 2 'Р
Обращаемс. теперь к уравиению Лапласа (10.1):
Р", == Р! == R; р == 'Y RC08 '1'.
(10.5)
ПодстаВЛJl. (Тт, находим из зтоrо уравнени.
'YR2 [ 1 С08 З 'Р ]
и! == ---з-h з С08 'Р 8in 2 'P . (10.6)
Соrласно выражени.м (10.5) и (10.6), строим эпюры а", И Uj, пред
ставленные на рис. 10.12. Как видим, напр.жени. а", И и! в нижней
точке сферы равны. В верхней точке и! имеет отрицательное значение.
Там, rде ит и и! будут одноrо знака, имеем иl == ит, и2 == Uj, из == о,
ст... == иl kиз == ит. Там, rде ит и Ut имеют разные знаки, аl == ат,
и2 == О, из == Uj, иэ.. == а", kcrj. Эпюра эквивалентноrо напр.жени.
(см. рис. 10.12) имеет, таким образом, излом в точке, rде и! мен.ет знак.
Если "> 1/2, расчетное наПРJlжение дл. сосуда равно
т&х 'Y R2 ( 1 " )
и эх. == ---з-h + ,
rде по прежнему k = ит.р/и т . с .
Рис. 10.12
404
Наличие в верхней части сосуда наПРJ:жений сжаТИJ: 0'1 J:ВЛJ:ется в
данном случае вполне зuономерным.
МеРИДИОНaJIьное наПРJ:жение О'т В зоне закреплеНИJ: J:ВЛJ:еТСJ:, оче
вндно, расТJ:rиваюIЦИМ. Так как давление Р здесь м&.по, ТО равновесие BЫ
деленноrо элемента (рис. 10.13) возможно толыо при сжимающем окруж
ном напр_жении 0'1. Если бы сосуд был закреплен в нижней части, то ЭТО
явление не имело бы места, посколыу на верхней кромке О'т равнялось
бы нулю.
...........
1
,....... ................
( I dt
\ .......... t """
\ ..... ..
\.: ..........., ot
" 1 /,
'....... // d m
............... ...",..""-
d ЛJ
..,.......
Рис. 10.13
Рис. 10.14
Возникновение сжимаюIЦИХ напряжений 0'1 при внутреннем давле
нии свойственно не только сферическому сосуду. Например, в цилиндри
чес ком баке, заполненном ЖИДКQСТЬЮ (рис. 10.14), в зоне перехода от ци
линдрической части к дниIЦY также MorYT возникать при определенных
условиях сжимающие напряжения. Чтобы оболочка не терJlЛа. устойчи
вость, ее необходимо в этом месте укреПЛJlТЬ.
При мер
лоне, наrруженном
рис. 10.15, а.
Выделим сечеНИJlМИ, НОРМaJIЬНЫМИ к поверхности, часть торообраз
ной оболочки (рис. 10.15, 6). Составим для нее уравнение равновесия н
определим О'т:
10.4. Определить напряжеНИJ: в торообразном бал
внутренним давлением р. Размеры баллона даны на
O'm 2 1!'h (а + R sin ) sin == р1!' [(а + Rsin )2 а 2 ];
pR 2а + Rsin
О'т .
2h а + R sin
ОбращaJIСЬ к ура.внению Лапласа (10.1), получаем
а + R sin
рт == Rj РI ==
sIn
ПодстаВЛJlJ: Рт, РI И О'т В уравнение (10.1), находим 0'1 = pR/2h.
405
и
i +
Рис. 10.15
Наибольшее наПРJlжение О'т возникает во внутренних точках торо--
образной оболочки при i.p = 1r/2:
т&х
О'т
pR 20 R
2h о R .
Так как наПРJlжеНИJl О':&х и 0'1 имеют общий знак, то
т&х
из... == О'т
pR 20 R
2h о R .
(10.7)
8 частном случае, при о = О, тор обращаеТСJl в сферу и выражение
(10.7) совпадает с выражением (10.3), полученным ДЛJl сферы. При о = 00
тор обращаеТСJl в цилиндр. Тоrда выражение (10.7) совпадает с выраже
нием (10.4). При 0= R периметр BHYTpeHHero Kpyra обращаеТСJl в нуль и
из.. == 00.
10.3. Изrиб круrлых симметрично
наrруженных пластин
Выше было рассмотрено растяжение оболочки, не связан
ное с ее изrибом. Теперь рассмотрим случай изrиба, не свя
занноrо с растяжением. Удобнее Bcero это сделать на примере
изrиба пластин.
Теория изrиба пластин представляет собой детально раз
работанный раздел прикладной теории упруrости. Ниже мы
остановимся только на простейших задачах этоrо раздела.
406
Под действием внешних сил, перпеНДИКУЛJlРНЫХ к средин-
ной плоскости, пластина меняет свою кривизну. Это измене
ние кривизны происходит, как правило, одновременно в двух
плоскостях, в результате чеrо образуется некоторая слабо изо
rнутая поверхность двоякой кривизны, так называемая ynpy
2ал поверхность. Форма упруrой поверхности характеризует-
ся законом изменения проrибов пластины. При расчете пла-
стин считают, что nроrиб w существенно меньше ТОЛIЦИны
пластины h. Именно в этом предположении можно изrиб пла-
стины рассматривать независимо от растяжения. Пластины,
удовлетворяющие этому условию, называют иноrда тонкими
ПJ1.итами.
Пластины, проrибы которых соизмеримы с толщиной,
рассчитывают с учетом растяжения срединной поверхности.
Теория изrиба пластин и оболочек основана на некоторых
упрощающих предположениях. Первым из них является пред-
положение о неизменности нормали, или так называемая 2и
потеза КиРХ2офа. Принимается, что точки, расположенные
на некоторой прямой, нормальной к срединной поверхности до
деформации, после деформации снова образуют прямую, HOp
мальную к деформированной поверхности. Такое предположе-
ние, как и rипотеза плоских сечений стержня, выражает тот
факт, что yr ловыми деформациям оболочек можно пренебречь
по сравнению с уrловыми перемещениями. ЭТО приемлемо в
той мере, в какой толщина пластины мала по сравнению с дpy
rими ее размерами.
Будем, далее, считать, что нормальные напряжения в
сечениях, параллельных срединной плоскости, пренебрежимо
малы по сравнению с изrибными напряжениями, Т.е. нада-
вливание между слоями пластины отсутствует. Аналоrичное
допущение принимали ранее при выводе формул поперечноrо
изrиба стержня и при исследовании напряженноrо состояния
оболочек по безмоментной теории.
Перейдем теперь к определению напряжений в круrлых
пластинах. Рассмотрим пластину, имеющую постоянную тол
щину h, наrруженную силами, симметрично расположенными
407
-<:::
"
Рис. 10.16
Рис. 10.17
относительно оси пластины z (рис. 10.16). Деформации, пере
мещения и напряжения, возникающие в пластине, будут также
симметричны относительно оси z.
П роrиб пластины обозначим через w, а уrол поворота HOp
мали через fJ (рис. 10.17). Величины w и fJ являются функ
циями только радиуса r и связа.ны между собой очевидным
соотношением
fJ = dw .
dr
(10.8)
Знак минус берется в соответствии со схемой проrиба, по
казанной на рис. 10.17. С уменьшением проrиба w уrол fJ воз-
растает. Впрочем, этот знак не является принципиальным и
определяется только направлением проrиба.
На рис. 10.18 показано осевое сечение пластины. Точки,
расположенные на нормали AIBl, после изrиба пластины обра
зуют нормаль A B , повернутую на уrол fJ. Нормаль A B
повернется на уrол fJ + dfJ.
Отрезок сп, расположенный на расстоянии z от средин
ной поверхности и имеющий радиальное направление, получа
ет удлинение
z (fJ + dfJ) zfJ = z dfJ.
Относительное удлинение будет
dfJ
€r = Z dr ' (10.9)
Относительное удлинение в точке С в напра.влении, пер
пендикулярном к плоскости чертежа, может быть найдено из
408
.."
.D С
dr 81
- -
А!
r
Рис. 10.19
сравнения длины соответствующей окружности до и после дe
формации. До изrиба пластины длина окружности, проходя
щей через точку С, была равна 27rr, а после изrиба 27r (r+z19).
Следовательно, относительное окружное удлинение
19
C:t == z .
r
(10.10)
Двумя осевыми сечениями, проведенными под уrлом d<p
одно к друrому, и двумя цилиндрическими поверхностями с
радиусами r и r + dr (см. рис. 10.16) выделим из пластины
элементарную призму, показанную на рис. 10.19. Поскольку
в сечениях, параллельных срединной плоскости, нормальные
напряжения отсутствуют, связь между удлинениями и напря-
жениями определяется законом rYKa в следующем виде:
1 1
С: т == Е (О'т J.LO't); C:t == Е (O't J.LO'T)'
Если выразить напряжения через деформации, то получим
Е Е
О'т == 1 2 (С: т + J.LC:t); O't == 1 2 (C:t + J.LC: T ), (10.11)
J.L J.L
или, соrласно выражениям (10.9) и (10.10),
О'т == ( d19 + J.L ) i О'е == ( + J.L d19 ) . (10.12)
1 J.L2 dr r 1 J.L2 r dr
409
На rранях призмы (см. рис. 10.19) возможно возникнове
ние не только нормальных, но и касательных напряжений. Из
условий симметрии, очевидно, они MorYT возникать только на
площадках, перпендикулярных к радиусу r и только в верти
кальном направлении.
Рассмотрим теперь условия равновесия выделенной приз
мы. Для этоrо найдем сначала равнодействующие силы на
rранях элемента. На rрани AIBIA B (см. рис. 10.19) Ka
сательные напряжения дают равнодействующую поперечную
силу, направленную по оси Z. Силу, приходящуюся на еди
ницу дуrи r d<p, обозначим через Q. Поперечная сила на rpa
ни AIBIAiB будет Qrd<p, а на rрани A2B2A B; будет равна
(Q + dQ) (т + dr) d<p (рис. 10.20).
(Q+dl/J{r+t/J')df/
Рис. 10.20
Поскольку напряжения в верхних и нижних слоях одина
ковы, но различны по знаку (см. формулы (10.12)), нормаль
ные силы на rранях элемента отсутствуют. Нормальные Ha
пряжения (1т и (1t на соответствующих rранях приводятся к
равнодействующим моментам в вертикальных плоскостях.
Интенсивность моментов, возникающих на rранях
AIBIAiB и АIВIА2В2, Т.е. моменты, приходящиеся на еди
ницу длины сечения, обозначим соответственно через М Т и
Mt. Величины М Т и Mt в дальнейшем будем для сокрашения
называть просто моментами, а Q поперечной силой.
410
Зная напряжения (1, и (1t, опредеЛl:ем равнодействующие
моменты на rраиях:
+1&/2
М,Т d<p = r d<p J (1,Z dz;
h/2
Используя выражения (10.12), получим
+1&/2
Mt dr = dr J (1t Z dz.
h/2
1&/2
Е ( dfJ fJ ) J 2
М, = + J1. z dZj
1 J1.2 dr r
1&/2
+1&/2
Е ( fJ dfJ ) J 2
Mt = + J1. z dz.
1 J1.2 r dz
h/2
Но
+h/2
J z2 dz = h 3
12 '
h/2
следовательно,
( dfJ fJ )
М, = D dr + J1.; ;
( fJ dfJ )
Mt = D + J1. ,
r dr
(10.13)
rде
Eh 3
D = 12(1 J1.2)'
(10.14)
Эта величина называется цилиндрической жест'ICостью nAa
стины (или оболочки).
В число сил, приложенных к элементу (см. рис. 10.20),
включена также и внешняя сила рт dl{J dr. Проектируя все си
лы, действующие на элемент, на ось симметрии, получим
(Q + dQ)(r + dr) d<p Qrd<p prdl{Jdr = О,
откуда
d
рт= dr (Qr).
(10.15)
411
Возьмем сумму моментов всех сил относительно оси у, Ka
са тельной к дуre Kpyra радиусом r в срединной ПЛОСКОСТИ:
dr
(М т + dM T ) (т + dr) dcp MTrdcp pr drdcp 2
Mt drdcp + (Q + dQ) (т + dr) dcpdr == О.
Пренебреrая величинами высшеrо порядка и переходя к преде
лу, имеем
d
Mt dr (Мтт) == Qr.
(10.16)
Остальные уравнения равновесия удовлетворяются TO
ждественно вследствие условий симметрии.
Подставляя М Т и Mt из выражений (10.13) в уравнение
(10.16) и полаrая жесткость D постоянноЙ, получим
d 2 "э d"э"э Qr
r dr2 + dr ;: == п'
откуда
[ ("эr) ] == Q .
dr r dr D
(10.17)
Последнее преобразование леrко проверить простым диффе
ренцированием.
После двукратноrо интеrрирования выражения (10.17) Ha
ходим
"э == Clr+ 2 T /[/ Qdr] dr,
( 10.18)
rде С 1 и С2 произвольные постоянные интеrрирования, KO
торые определяют из rраничных условий в каждом конкретном
случае.
Поперечная сила Q может быть найдена из уравнения paB
новесия (10.15). Впрочем, поперечную силу rораздо удобнее
определять, рассматривая условия равновесия центральной ча-
сти пластины, выделяемой цилиндрическим сечением, радиус
KOToporo Т. Этот способ нахождения поперечной силы будет
показан ниже на конкретных примерах.
После Toro как функция 1J найдена, с помощью выраже
ний (10.13) определяют изrибающие моменты М Т и Mt, а по
формуле (10.8) проrиб w.
412
Зная изrибающие моменты, леrко найти и напряжения.
Сравнивая выражения (10.12) и (10.13), видим, что
Ez M r Ez Mt
Ur = 1 J.L2 D i Ut = 1 J.L2 N.
Подставляя выражение для D (10.14), находим
12M r 12 M t
Ur= Zi Ut= z.
Наибольшие напряжеНИJl имеют место при Z = :i:h/2. Поэтому
mах :i: 6Mr mах :i: 6Mt
U r = ; Ut = J;,2'
(10.19)
10.4. Определение напряжений и перемещений
в круrлых пластинах
Проследим на примерах последовательность применения
выведенных формул.
При м е р 10.5. Определить проrибы и иаПРJ:жеИИJ: в пластине,
наrруженной равномерно распределенной наrрузкой р, в двух случаJ:Х за-
креплеНИJ: пластины: а) при защемлении контура, б) при свободном опи-
рании пластины на контуре (рис. 10.21). Радиус пластины R, толщина h.
UПIfft/ 1r
I
I
Рис. 10.21
Решение задачи начинаем с определения поперечной силы Q. Для
центральной части пластины радиусом r (см. рис. 10.21), независимо от
способа. закрепления на внешнем контуре, уравнение ра.вновесия да.ет
Q . 21rr "" p1rr 2 ,
или
Q= pr .
2
413
Из выражеНИJl (10.18) ПОСJlе двукратноro кнтеrРКРОВ&НИJl нахОДИМ
02 ,r з
-8 == 01Т + .
r 16п
Как в первом, так и во втором случае уrол поворота 8 в центре пластины
(при r == О) должен быть равен НУJlЮ. Но ЭТО возможно ТОJlЫО при 02 == О.
Таким образом,
,r з
-8==01T .
16п
(10.20)
Теперь рассмотрим случаи закреплеНИJl раздеJlЬНО. В первом СJlучае
при r == R УТОJl 8 == О, откуда
,R 2
01 == 16D i
-8 == L (R 2 r rЗ).
16D
Соrласно выражеНИJlМ (10.13), получаем
M r == J!... (R 2 (1 + ) т 2 (з + )]i
16
М! == J!... (R 2 (1 + ) т 2 (1 + з )].
16
Далее, из выражеНИJl (10.8) находим
, ( 1 2 2 т 4 )
W == 16п Оз 2" R r + 4' '
(10.21)
rlIe С З nOCTOJlHH8..I, onpelIeJlJleM8..I из УСJlОВИJl w == О. Тотда
1 .
СЗ == 4" R ;
w == L (R 2 т 2 )2.
64D
(10.22)
Пластина, как видим, изrибаеТСJl по поверхности четвертоrо ПОрJlдка.
Во втором случае закреПJlеНИJl ПJlастины радиальные наПРJlжеНИJl (J'r
(или момент M r ) на контуре обращаЮТСJl в НУJlЬ. СледоватеJlЬНО, соrласно
первому выражению (10.13), при r == R
d-8 == iJ == О.
dr r
Из этоrо УСJlОВИJl опредеJlJlем ПОСТОJlННУЮ С 1 . Уравнение (10.20) дает
3pR 2 ( pR2 )
С 1 16d + С 1 16D == О,
откуда
с pR 2 3 + .
1 lБD 1 + #J I
8 == L ( 3 + R 2 З )
lБD 1 + #J r r .
414
Соrл&сно выражеНИj[" (10.13), опреде.а:j[е.. изrиб&Юш-е ..о..енты:
M r = :'6 (3 + р) (н 2 ,2);
Р ) ( 2 1 + 3,. 2 )
М, = 16 (3 + ,. R 3"'+'; , .
(10.23)
Выражение дл. перемещени. имеет вид
р ( 3 +,. R 2 ,2 ,. )
w= Сз +
16п 1 + ,. 2 4'
Посто.нную Сз снова подбираем из услови., чтобы на контуре перемеще--
иие w обра.щалось в нуль:
c R.5+"
3 4 1+,.'
следовательно,
w = ( .!. 5 + IJ R. .!. 3 +,. R2,2 + .!. ,. ) .
16п 4 1 + ,. 2 1 + IJ 4
(10.24)
Соrласно выражени.м (10.21) (10.23), строим эпюры изrибающих момен-
тов (рис. 10.22).
z
;2((11)
Рис. 10.22
В случае эа.щемленноrо контура наибольшие раст.rивающие напр.-
жени. возникают У верхней поверхности вблиэи контура. Соrла.сно фор-
мулам (10.19),
2pR 2 б 2IJpR2 6
0'1 = O'r = 16 1&2 ' 0'2 = 0', = 16 1&2 I 0'3 = О,
а эквивалентное напр.жение
3 pR 2
0'... = 0'1 kО'з = :4 V.
в случае свободно onepToro контура наиБОJIьшие ра.ст_rивuoщие напр_-
41&
жени. возникают в центре у НИJII:ней поверхности пласТИНЫ. Здесь
3 + IJ pR 2 6
а а 2 . а з == О' ,
1 --тб- h2'
3 pR 2
а... == аl /саз == 8" (3 + IJ) V'
Наибольшие проrибы, соrл&сно выражени.llМ (10.22) и (10.24), в пер--
вом и втором случа.llХ будут равны соответственно
ш мах == :: j
мах 5 + IJ pR f
W 1 + IJ 64п '
При м е р 10.6. Определить наПР.llжени.ll и проrибы в дисковой
пружине, показаниой на рис. 10.23, а.
p l
j
а
Рис. 10.23
За.дача, очевидно, СВОДИТС.ll к расчетной схеме пластины, нa.rружен-
ной по контурам распределенными силами интенсивности Р (рис. 10.23, 6).
Осадка пружины опредеЛ.llетс.ll проrибом одной пластины, увеличеииым в
n раз, r де n число пластин в пружине.
ОпредеЛJlем снача..ла поперечную силу Q. ИЗ условия равновесия цен-
тральной части пластины (рис. 10.23, в) имеем
Q . 2'11'r == Р;
Р
Q== .
2'11'r
Из уравнени. (10.18) находим
С 2 Р ( 1 )
{J == С 1 r + r ln r .
r 4'/rD 2
(10.25)
416
Заменив ПОСТОJlННУЮ Сl на Cf, перепишем это выр...еиие в спедующем
виде:
I С2 Р ,.
{J==Cl,.+ ,.ln . (10.26)
,. 411' n а
ПОСТОJlнные Cf и С2 подбираем из усповий, чтобы изrибающий радиаль
ный момент
( diJ {J )
M r == n d,. + ;:
обращапСJl в нупь при ,. == а и ,. == Ь Это дает два уравнеНИJl:
C (1 + ) С2 (1 ) == .
а 2 411'п'
C (1 + ) ;: (1 ) == 4: n [(1 + )ln + 1] ,
откуда
cf(1+ )== 4:n [ Ь2 a2 (1+ )ln +I];
р а 2 Ь 2 Ь
С2(1 ) == 4 N " Ь 2 2 (1 + )ln .
11' a а
Теперь подставив 8, C и С2 В выражеНИJl (10.13), попучим
р [ ь2 ( а2 ) Ь ,. ]
M r == (1 + ) 1 ln (1 + ) ln ;
411' Ь2 а 2 ,.2 а а
р [ ь2 ( а2 ) Ь ,. ]
М! == 411' Ь2 а 2 (1 + ) 1 + ,.2 ln ;; (1 + ) ln ;; + 1 .
Эпюры моментов представпены на рис.l0.24. Наибопьшее наПРJlжение
имеет место у BHYTpeHHero контура. Здесь
6 Mt m "&
(1',.. == (1'! == ,
rде
М т ,,& Р [ 2ь2 ( ) Ь ]
t == 1 + ln + 1 .
411' Ь2 а 2 а
р
w
Ж""""" """""
н{'аз:
Рис. 10.24
14 В. И. Фсодосьсв
417
ИнтеrРИРУJl уравнение (10.26), находим, соrла.сно выражению (10.8),
т 2 r рт 2 ( r 1 )
W == СЗ С: С2 ln + ln .
2 а 87rD а 2
ПОСТОJlННУЮ СЗ опредеЛJlем из УСЛОВИJl, чтобы при r == Ь перемещение W
обращалось в нуль. Тоrда
I 1 2 2 Ь Р ( 2 r 2 Ь ь 2 т 2 )
W == С ! (Ь т ) + C 2 1n + п т ln ь ln + 2 .
2 r 871' а а
ПолаrаJl т == а и подстаВЛJlJl С: и С 2 , находим проrиб одной пластины:
Wj == [ .!. 3 + 11- (ь2 а2) + 1 + 11- 2а 2 Ь 2 ln2 ] .
87rD 21+11- 1 l1-b2 a2 а
ДЛJl рассматриваемой пружины эту величину нужно увеличить в n раз.
При м е р 10.7. Определить проrиб и наибольшие наПРJlжеНИJl в
пластине, наrруженной сосредоточенной силой в центре (рис. 10.25).
Как и в предыдущем при
мере, Q == P/27rr. Поэто
му выражение (10.26) COXpaHJI
ет свою силу. Перепишем ero:
р
z
к
'"
I С 2 Р r
{J == С ! т + r ln .
r 471' D R
В центре (при r == О) уrол
{J == О. Следовательно, по
скольку lim r ln R r == О, посто
T O
JlHHaJI С 2 == О. ПОСТОJlННУЮ
С: подбираем так, чтобы функ
ЦИJl {J обращал ась в нуль при
r == R. Это дает С: == О. Ta
ким образом,
М! Н Т
р
J141f
р
41t
Рис. 10.25
Р R
{J == r ln .
47r D Т
Изrнбающие моменты, соrласно выражеНИJlМ (10.13), будут равны
М Т == [ (1 + 11-) ln 1 ] i
411" r
Ме == [ (1 + 11-) ln 11- ] .
411" Т
Эпюры, построенные по этим формулам, представлены на рис. 10.25.
Как видим, в центре изrибающие моменты обращаЮТСJl в бесконечность,
что JlВЛJlеТСJl следствием тoro, что здесь обращаеТСJl в бесконечность по-
перечнаJl сила Q. В центре, таким образом, имеет место, как rOBOpJlT,
неустраНИМaJI особенность. В реальных услови.х сосредоточенных в точ-
418
ке сил не существует это лишь схема.. Сила. действует на. небольшую
площадку (рис. 10.26) в за.висимости от р&3меров которой будут возникать
большие или меньшие нa.nр..ени..
Проrиб в центре пласти
ны при сосредоточенной силе
имеет конечную величину, и
схематизаЦИJ[ реа.льных уСЛ<r
вий приложеНИJ[ сил не вносит
здесь противоречий:
Pr 2 ( R 1 )
w = С З 1n + .
871'D r 2
I
н mtJЖ
ря 2
С З = 1671'D '
Так как при r = R проrиб w =
= О, то
Рис. 10.26
откуда
Р [ 1 2 2 2 Я ]
W = (Я r ) r 1n .
871'D 2 r
в центре
та. Р я 2
W = 1671'D '
При м е р 10.8. Построить эпюры изrибающих моментов длJ[
сплошной пластины, защемленной по контуру и на.rруженной силой Р,
распределенной по окружности радиусом а (рис. 10.27).
Пластину следует рассматрива.ть как СОСТОJ[ЩУЮ из двух участков.
На первом участке Q = о и, соrласно выражению (10.8), получаем
С2
{Jl=Clr+ ,
r
причем сразу можно сказать, что С 2 = О, поскольку в центре {Jl = О.
Таким образом,
{Jl == С 1 r.
(10.27)
На втором участке
Р
Q = 271'r '
Здесь, соrласно выражению (10.26),
I C'J Р r
{J'J == C 1 r+ r1n .
r 4'1t D 11
(10.28)
14.
418
!... ( 1 (/ I
46 01/
D [ Ь ,,' 1 ]
.L.. ( I+ JJ ) tп +
4К r (J 1 6' 1
Рис. 10.27
ПОСТОJlнные С 1 , С: и С2 опредеJlJlем из УСJlОВИЙ СОПРJlJlCеНИJl участков.
При r == а имеем {J1 == {J2 И M r1 == Mr2, Т.е. yrJlbl поворота и изrибающие
моменты на контуре СОПРJlжеНИJl участков ДОJlЖНЫ быть одинаковыми.
у СJlовие равенства моментов можно переписать в виде
( d{J1 +#' ) == ( d{J2 +#' {J2 ) .
dr r dr r
r=a r=a
Но так как "1 == "2, то
( d;1 ) r=a == ( d;2 ) r=a .
Третье УСJlовие будет, очевидно, СJlедующим: при r == Ь yroJl поворо--
та "2 == О. Таким образом, ПОJlучаем три уравнеНИJl:
I С 2
014 == 014 + ;
4
ИЗ которых находим
Oi == о; 02 .
а 2 41rD'
I 02 РЬ Ь
01 Ь + ln == о
ь 41r D а '
С 1 == ( ln ! + ! а 2 ! ) .
471' D а 2 Ь 2 2 I
С; == ( ln ! + ! а 2 )
471' D а 2 Ь2 I
Ра. 2
С 2 == 871' D .
На первом, центра.льном, участхе пластины изrибающие моменты, соrлас
но выражеииам (10.13) . (10.27), равны:
420
Р(1 + р) ( ь 1 111 1 )
M r == М! == 4", ln;; + 2" 2" == const.
На втором учаСТJ:е, учитыва. выра.ение ДJI. 81 (10.28), ПОJIУЧИМ
Р [ ( ь 1 111 ) а1 ]
M r == 4'1r (1 + р) ln; + 2" Ь 1 + 2r 1 (1 р) 1 i
Р [ ( ь 1 а 1 ) а1 ]
М ! == (1 + р) ln + (1 р) р .
4", r 2 Ь 1 2r 1
Эпюры изrибающих моментов ПОJ:азаны на рис. 10.27. Если радиус а
мал, то наибольший изrибающий момент возникает в центральной части
пластины. При больших значени.х а наибольший момент имеет место у
ее контура. По моментам леrJ:О подсчитать и наПРllжеНИII.
Таким образом, задача о расчете пластины, имеющей несколько
участков, не содержит в себе принципиальных трудностей. Однако здесь
приходится большей частью производить довольно rромоздкие выкладки.
10.5. Иэrиб прямоуrольных пластин
Задача о расчете пластин с прямоуrольным очертанием
контура оказывается значительно более сложной, чем симме
тричных круrлых пластин. Получается это, прежде Bcero, по
тому, что проrибы и напряжения несимметричной пластины
определяются в функции не .одноrо, а двух независимых пере
менных. Пля прямоуrольной пластины (рис. 10.28) в качестве
таких переменных берут обычно х
и у в прямоуrольной системе KOOp
динат. Пифференциальное ypaB
нение некруrлой пластины явля
ется уравнением в частных про
изводных и решается, как прави
ло, в рядах. Не останавливаясь
на этой задаче, приведем только
некоторые окончательные резуль
таты теории прямоуrольных пла
стин.
Если пластина свободно оперта по четырем сторонам
и находится под действием распределенноrо давления р, то
!J
О :r
о
..с::.
Рис. 10.28
421
наибольший проrиб имеет место при х = у = о (см. рис. 10.28)
4
ша.х ра
w = а Eh 3 '
rде о коэффициент, зависящий от отношения Ь/а; а MeHЬ
шая сторона пластины.
Наибольшие изrибающие моменты М ж и М", рассчитан
ные на единицу длины сечения, имеют место в той же точке и
равны
M ax = {Зра 2 , м::а.х = "(ра 2 .
Коэффициенты а, {З и "( для некоторых значений Ь/а при J.L =
= 0,3 приведены ниже:
ь
1,0
1,2
1,4
1,6
1,8
2
3
4
5
00
а
а..... 0,04330,06160,07700,09060,10170,11060,1336 0,14000,14160,1422
{J . . . .. 0,0479 0,0626 0,0753 0,0862 0,0948 0,1017 0,1189 0,1235 0,1246 0,1250
"У..... 0,0479 0,0501 0,05060,0493 0,0479 0,04640,0404 0,0384 0,0375 0,0375
Если пластина защемлена по четырем краям, то наиболь
ший проrиб имеет место по прежнему в центре пластины:
4
wша.х О ра
1 Eh 3 '
Наибольший изrибающий момент возникает по серединам
больших сторон, Т.е. при х = -3:.а/2 и у = о:
M a.x = {Зlра 2 .
Коэффициенты 01 И {Зl
J1. = 0,3 приведены ниже:
Ь
1,25
ДЛЯ некоторых значений Ь / а при
1,50 1,75 2 00
0,0240 0,0264 0,0277 0,0284
0,0757 0,0817 0,0829 0,0838
а
а.........
0,0138
0,0513
0,0199
0,0665
р.........
422
10.6. Иэrиб цилиндрической оболочки
при симметричном наrруж:ении
Выше были рассмотрены случаи расТJlжеНИJl оболочек без
изrиба (безмоментная теория) и изrиба пластин без растяже
ния. Теперь остановимся на более общем случае, Korna в
сечениях оболочки возникают и изrибающие моменты, и HOp
мальные силы.
Рассмотрим задачу об определении напряжений в симме
трично наrруженном тонкостенном цилиндре. Ее следует pe
шать при тех же допущеНИJIХ, что и задачу об изrибе пластин,
Т.е. принимать rипотезу неизменности нормали и предположе-
ние о ненадавливании слоев оболочки один на друrой.
Круrовой тонкостенный цилиндр радиусом R и постоян
ной толщиной h находится под действием некоторой осесим
метричной наrрузки (рис. 10.29). Пеформации и напряжения,
возникающие в оболочке, также обладают, очевидно, осевой
симметрией, и деформированный цилиндр представляет собой
некоторое тело вращения. Форма этоrо тела определяется фор
мой изоrнутой образующей цилиндра.
р
z
f)
z
.r
z
Рис. 10.29 Рис. 10.30
Обозначим через w радиальное перемещение, а через 1J
уrол наклона касательной к образующей срединной поверхнос
ти цилиндра (рис. 10.30). При этом
dw = 1J. (10.29)
dx
Перемещение w будем отсчитывать от оси цилиндра.
Относительное удлинение С: Х отрезка АВ (рис. 10.31), pac
положенноrо на расстоянии z от срединной поверхности, скла
дывается из двух составляющих: из удлинения С:О срединной
423
Рис. 10.31
поверхности и удлинеНИJl, обусло
вленноro искривлением образую
шей цилиндра. Последнее слarа
емое имеет вид z d11 / dz. Полное
удлинение СЛОJl АВ будет
d"
. Е% = Ео + Z d:c ' (10.30)
У длинение в ОКРУЖНОМ направле
нии
ЕJI = w/R.
(10.31)
Этим удлинениям соответствуют напряжения и% и иJI' связан
tпiIе с ними законом ryкa:
Е Е
и% = 1 2 (Е% +J.tEJI); иJI = 1 2 (Еу +J.tE%),
J.t J.t
или, соrласно выражениям (10.30) и (10.31),
Е ( w d" )
и% = 1 J.t2 ЕО + J.t R + Z d:c j
Е ( W d" )
иу = 1 J.t2 J.tEO + R + J.tz d:c .
( 10.32)
в сечениях цилиндра (как осевых, так и поперечных) воз
никают изrибающие моменты и нормальные силы. Их опре
деляют через напряжения (J % И (J у, аналоrично тому, как это
делали для круrлой пластины.
Рассмотрим элемент цилиндрической оболочки с размера
ми dx и dy (рис. 10.32). Нормальные силы в площадках h dy и
h dx, отнесенные к единице дуrи сечения, будут
+hJ2
N% = J и% dZj
hJ2
424
+hJ2
N y = J иу dz.
hJ2
pdztlJ
(lfz.+dHz)d!J
{Kz+tlNz}d!J
Рис. 10.32
Рис. 10.33
Определим в этих же сечениях изrибающие моменты
+11./2 +11./2
М ж = J (]ж z dZj Му = J (]1I Z dz.
h./2 h./2
Учитывая выражения (10.29) и (10.32), запишем силы N z и N y ,
моменты М ж и Му в зависимости от перемещения w:
N ж = 1 2 (e o + Jl } N y = 1 2 ( +Jle o ), (10.зз)
d 2 w d 2 w
М ж = D dx 2 ; Му = JlD dx 2 ' (10.34)
Eh 3
rде D = 12(1 Jl2) '
Теперь обратимся к уравнениям равновесия. Снова pac
смотрим элемент цилиндрической оболочки с размерами h, dx,
dy и к ero rраням приложим равнодействующие силы и MO
менты, которые равны произведению N ж , N y и М ж , Му на dy
и dx соответственно (рис. 10.33). Кроме четырех перечислен-
ных силовых факторов, прикладываем поперечную силу Q dy.
Внешние силы характеризуются давлением Р = р(х).
При переходе от rрани с координатой х к rрани с коорди-
натой х + dx силы получают прирашеИИJ:. В осевых сечениях
425
по свойствам симметрии силовые факторы остаются одинако
выми. Проектируя силы на ось цилиндра, получаем первое
уравнение равновесия
dN ж = О, N ж = const.
Это значит, что осеВaJI сила определяется условиями наrруже
ния цилиндра на торцах. В дальнейшем будем считать эти
условия заданными и силу N ж известной.
Проектируя силы на направление радиуса, получим BTO
рое уравнение равновесия
dy
Ny dx R dQ dy + pdx dy = О,
или
dQ N y
dx = Р Я' (10.35)
Наконец, третье уравнение равновесия составим, прирав
няв нулю сумму моментов всех сил относительно оси, Kaca
тельной к дуrе нормальноrо сечения (на рис. 10.33 это ось у):
Q dydx = dМ ж dy,
откуда
Q = dМ ж .
dx
( 10.36)
Остальные уравнения равновесия вследствие симметрии
удовлетворяются тождественно при любых значениях действу
ющих усилий.
Теперь преобразуем полученные уравнения. Из уравне-
ний (10.зз) исключаем с:о, а из (10.35) и (10.36) поперечную
силу Q. В результате получим
Eh
N y = lfW + р.N ж ;
d 2 М ж N y
dx 2 =Р Я'
Исключаем из этих уравнений N y :
d 2 М Ж Eh р.
dx 2 = Р я 2 W Я N ж.
(10.37)
426
Наконец, воспользовавшись первым выражением (10.34),
приходим к уравнению относительно одноro неизвестноrо пе
ремещения w:
d 4 w 4 Р J1.N ж
dx 4 + 4k w = D RD '
(10.38)
rде
4k 4 Eh 12(1 J1.2)
R2D R 2 h 2
(10.39)
Как видим, решение рассматриваемой задачи сводится к
дифференциальному уравнению (10.38), которое было полу
чено для изrиба стержня на упруrом основании (см. 4.7).
Родственность этих задач несомненна. Цилиндрическую обо
лачку можно рассматривать как совокупность совместно из
rибающихся полосок, связанных между собой упруrими сила
ми (рис. 10.34). При симметричном наrружении все полоски
изrибаются одинаково, и радиальная составляющая сил N y в
каждом сечении, как и для стержня на упруrом основании, про
порциональна местному проrибу w.
\
I
J
I
I
/
/
/
,/
/
Рис. 10.34
Если уравнение (10.38) решено и функция w найдена, то по
формулам (10.34) определяем моменты М ж и Му, из уравнения
(10.37) силу N y , а из (10.36) поперечную силу
dЗw
Q = D dж З ' (10.40)
427
Наибольшие напряжения находим по формулам (10.32)
при z == +h/2 или z == h/2:
(1:; == 1 ! 2 [(ЕО + ) : ];
(1у == 1 ! 2 [( EO + ) : ].
Исключив отсюда при помощи выражений (10,33J и (10.34)
величины (со + ш/ R), ( EO + ш/ R), а также d w/dx 2 и
d 2 w / dx 2, находим
N:; 6М:; N 1I 6M y
(1% == h };2; (1у == h };2' (10.41)
Таким образом, через перемещение w мы выразили внутренние
силы, а затем и напряжения.
Решение уравнения (10.38) имеет вид
w == e k%(Cl sin kx + С2 cos kx)+
+е+k%(сз sin kx + С4 СОБ kx) + ш.. (10.42)
r де ш. частное решение, которое находится в зависимости от
закона изменения р вдоль образующей.
ДЛЯ определения четырех постоянных необходимо задать
четыре rраничных условия и затем решить систему из четырех
уравнений. В большинстве случаев эта система оказывается,
как rоворят, слабо связанной и распадается на две системы
из двух уравнений. С достаточной степенью точности посто
янные Сl и С2 можно определить независимо от постоянных
СЗ и С 4 . Объясняется это тем, что слаrаемые, входящие в
функцию (10.42), имеют различный характер. Первое слаrае
мое представляет собой быстро затухающую функцию, второе
является функцией быстро возрастающей.
Если длина цилиндра 1 достаточно велика, и функция
e k%(Cl sin kx + С2 СОБ kx)
при значениях х, близких к l, принимает исчезающе малые зна
чения, то можно считать, что деформация цилиндра в OKpeCT
ности BToporo торца не зависит от условий в окрестности
428
первоrо. Таким образом, для достаточно длинноro цилиндра
имеется возможность проана.лизировать напряженное состоя
ние в области малоrо ж, пренебреraJI возрастающей функцией
е+kЖ(Сзsiпkж + С4соskж), Т.е. полaraJI С3 = С4 = О. Точно
так же, полаraJI Сl = С2 = О И сохраняя только возрастаю
щее слаrаемое, можно проанализировать напряженное СОСТОJl
ние цилиндра при значениях ж, близких к 1.
Применение выведенных формул рассмотрим на KOHKpeT
ном примере.
При м е р 10.9. Длиннu цилиндрическu труба, имеющa.JI на
конце жесткий фланец, натру.ена внутренним давлением Р (рис. 10.35).
ТребуеТСJl определить изrибные наПРJlжеНИJl в окрес'I1lОСТИ фланца.
CIC
Рис. 10.35
Будем считать, что oceBa.JI Р&СТJlrивающa.JI сила Nz: равна нулю. Так
как давление Р от х не зависит, чаС'I1l0е решение уравнеНИJl (10.38) имеет
вид
. Р
w = 4k i n .
Подставим w. в выражение (10.42):
w = e kZ:(Cl sin kx + С 2 соа kx) + e+ k z:(C 3 sin kx + C i соа kx) + 4 П '
При достаточно большом значении х перемещение w должно быть, оче
видно, величиной ПОСТОJlННОЙ. Этому условию JlВНО противоречит на..личие
слаrаемоrо
е+kz:(с э sin kx + C i соа kx),
которое неоrраниченно возрастает с ростом х. Из возникающеrо затруд
неНИJl леrко выйти, полаra.JI Сэ = Ci = о. Тоrда
w = е А:ж (С 1 sin kж + С2 сов kж) + 4 п '
429
Посто.нные С! и С 2 подберем так, чтобы в начале отсчета %, Т.е. в месте
сопр.жени. цилиндра с жестким фланцем, перемещение w к уrол поворота
dw/d:r: обращались бы в нуль. Тоrда получаем
С! =С 2 = 4k n ; ш= 4:'n [l е i:2:(siпk%+соskж)].
Так как 4k 4 = Eh/(R 2 D), то
w = Р:: [1 e i:2:(sin kж + сов kж)]. (10.43)
rрафик этой функции показан на рис. 10.36.
pR 1
ЕЬ
.r
Qc
Рис. 10.36
При достаточно большом х функци. w принимает вид
pR 2
ш= Eh '
(10.44)
Нетрудно установить, что это не что иное, как увеличение радиуса ци
линдра при свободном раСТJlжении в окружном направлении. В самом
деле, при наrружении внутренним давлением в цилиндре, как мы видели
в предыдущей rлаве, возникает окружное наПРJlжение O'j = pR/h. COOT
ветствующее удлинение ( = pR/(Eh).
Чтобы определить увеличение радиуса цилиндра, следует умножить
Е:( на R, в результате чеrо приходим к выражению (10.44).
На основании выражеНИJl (10.43) леrко проследить, сколь далеко
вдоль образующей распростраНJlеТСJl вли.ние защемлеНИJl у фланца. Если
довольствоваТЬСJl точностью в пределах 5 %, то можно сказать, что зо
на ВЛИJlНИJl простираетс. примерно до TaKoro значеНИJl х, при котором
e k%(sin kx + cos kx) < 0,05. Сумма sin kx + cos kx не может быть больше
V2. Следовательно, e k% < 0,035, откуда
kx > 3, 34,
430
или, соrласно выражению (10.39),
% > 3, 34.Ji[h 2, 7.Ji[h.
{/3 (1 p )
ТаJCИМ обраЗ0М, З0на ВЛИJlНИJl KpaeBoro 38.lЦемлеНИJl ра.спростраНJlет
СJI на участок цилиндра длиной 2,7.Ji[h. За пределами этой. эоиы можно
считать, что наПРJlжеНИJl с достаточной ДЛJl прuтических целей точнcr
стью соответствуют беэмоментной теории. Величина../lih обычно мала
по сравнению с длиной цилиндра, и поэтому изrибные наПРJlжеНИJl Hcr
CJlT JlBHO выраженный местный характер. Эта особенность распределеНИJl
наПРJlжений около контура JlВЛJlеТСJl общей ДЛJl оболочек вообще и носит
название ICрае60ео эффекта.
ПОЛЬЭУJlСЬ формулами (10.34) и (10.43), определим изrибающий Mcr
мент M z :
M z = 2п р:: Ir?e kz (c08k% 8ink%),
или
М pRh kz ( k . k )
z = е соs х 81n х .
2 V 3 (1 р2)
Эпюра M z изображена на рис. 10.36. Наибольшее значение изrибающий
момент имеет в заделке:
м тах pRh
z 2 V 3(1 р2)
Поскольку N z = О, меридиональное наПРJlжение az, соrласно форму
ле (10.41), принимает значение
тах
(fz
pR 3 pR
h V3(1 р2) 1,82 Т'
Иэrибное напряжение в меридиональном направлении оказываеТСJl в
1,82 раза больше расчетноrо наПРJlжеНИJl по безмоментной теории. Kpae
вой эффект, как видим, при водит к эаметному повышению максимальных
наПРJlжений. Еще более резкое повышение наПРJlжений имеет место в эоне
СОПРJlжеНИJl оболочек, например, цилиндра, соединенноrо со сферическим
днищем (рис. 10.37, а). Здесь, как покаэывают подсчеты, при одинаковой
толщине оболочек местное эквивалентное наПРJlжение
(fш = 1,05 р: Л.
ЭТО на.пряжение уже по ПОрJlДКУ величины больше тoro, что дает безмо
ментны теория. С тем, чтобы снизить краевой эффект, в зоне сопряжения
431
(J
I
Рис. 10.37
делают плавные переходы, к&к это показ&но, н&пример, н& рис. 10.37, б.
В этом случае Н&ПРllжение иэrиб& э&метно снижаеТСII. По подсчет&м
т&. О 145 pR R
аж , т р'
что не д&ет э&метноrо ОТЛИЧИII от Н&ПРllжекий, определеккых с испольэо
ванием беэмоментной теории.
Из BCerO сказанноrо не следует делать вывод о непримени
мости безмоментной теории в случаях, коrда в оболочке имеет
ся краевой эффект. Выше было указано, что, если в оболочке
отсутствуют резкие переходы или жесткие контурные защем
ления, определение напряжений с использованием безмомент-
ной теории оказывается достаточно точным для всех точек обо-
лочки. Коrда же имеются местные защемления, безмоментная
теория оказывается неприменимой лишь для областей, распо
ложенных в зоне KpaeBoro эффекта, и дает опять же вполне
приемлемые результаты для точек общеrо положения.
Не всеrда вычисленные выше изrибные напряжения сле
дует рассматривать как расчетные. Пело в том, что эти Ha
пряжения носят явно выраженный местный характер. Меж
ду тем известно, что для пластичных материалов резкие пе-
ренапряжения в узкой области при статическом наrружении
не сказываются существенным образом на несущей способно
сти системы. Так, в рассмотренной цилиндрической трубе в
зоне сопряжения с фланцем при увеличении давления произо
шло бы местное пластическое обмятие материала, а несущая
способность трубы не пострадала бы. Вместе с тем местные
напряжения имеют существенное значение для хрупких MaTe
риалов, а также в случае изменяющихся во времени наrрузок.
Этот вопрос специально будет рассмотрен в rл. 12.
432
rлава 11
ОСНОВЫ РАСЧЕТА ЭЛЕМЕНТОВ
КОНСТРУКЦИЙ, РАБОТАЮЩИХ
ЗА ПРЕДЕЛАМИ упруrости
11.1. Отличительные особенности расчета
и схематизация диаrраммы растяжения
Все рассмотренные до сих пор вопросы относились К pac
чету элементов конструкций в пределах упруrих деформаций.
Однако мноrообразие возникающих на практике задач дале
ко выходит за рамки, очерченные закОНОМ fYKa, и сплошь и
рядом приходится рассматривать вопросы, связанные с пла
стическими деформациями тел. Сюда относятся в основном
задачи исследования некоторых технолоrических операций, Ta
ких, например, как навивка пр ужин иди штамповка различных
изделий. С учетом пластических деформаций рассчитывают
сильно напряженные элементы конструкций типа оболочек pa
кетных двиrателей и мноrие друrие.
При решении подобноrо рода задач закон fYKa теряет
свою силу, и прямая пропорциональность между напряжения
ми и деформациями заменяется неI<О'I'ОрОЙ более сложной зави-
симостью, определяемой видом диаrраммы растяжения. Если
433
в обычных задачах деформации не превышают величины О А
(рис. 11.1), то при расчете с допуском пластических деформа
ций такое оrраничение снимается, и величина t: оказывается
существенно большей. Вместе с тем она остается по прежнему
пренебрежимо малой по cpaBHe
нию с единицей. В таком случае
rоворят, что расчет ведут в пре
делах малых пластических дефор
маций. Понятно, что можно TaK
же ставить вопрос и о расчетах
при больших пластических дефор
мациях. Такие задачи возникают,
например, при анализе кузнечно
прессовых и вытяжных техноло
rических операций. Этих вопро
сов, однако, мы касаться не будем.
В связи с малостью пластических деформаций к классу
задач, рассматриваемых в настоящей rлаве, полностью при
меним принцип неизменности начальных размеров, и при co
ставлении уравнений равновесия можно считать, что пласти
чески деформированная система мало отличается от недефор
мированной .
d
с
в
о А
r D
€
Рис. 11.1
t /1
pt + Р
pt
t
Рис. 11.2
Что же касается BToporo основополаrающеrо принципа,
Т.е. принципа независимости действия сил, то в данном слу
чае он оказывается неприменимым. Это хорошо иллюстриру
ет пример, представленный на рис. 11.2. Положим, что CTep
жень наrружен силами Рl и Р2, первая из которых вызывает
434
пластические деформации. При прямой и обратной последо
вательности приложения сил удлинения стержня, как видим,
оказываются различными.
Зависимости между напряжениями и деформациями при
наrрузке и разrрузке не совпадают. В соответствии с этим
принято различать активное и пассивное деформирование об
разца. При активном деформировании, или, как rоворят обыч
но, активной деформации, напряжение возрастает, при пас
сивной уменьшается. Таким образом, участок диаrраммы
ОБе (см. рис. 11.1) соответствует активной, а еР пас
сивной деформации. Деформацию, измеряемую отрезком О D
(см. рис. 11.1), можно рассматривать как сумму чисто пласти
ческой, необратимой деформации ОР и упруrой деформации
F п, которая восстанавливается после снятия наrрузки. Таким
образом, деформация образца не является ни чисто пластиче
ской, ни чисто упруrой.
При больших наrрузках в некоторых случаях можно пре-
небречь упруrими деформациями по сравнению с пластически
ми. Если пластические и упруrие деформации являются Be
личинами одноrо порядка, их называют упруrопластическими
деформациями. Этот же термин употребляют по отношению к
деформации различных тел, в которых имеются области упру
rих и области пластических деформаций.
В связи с возникновением в работающей конструкции пла
стических деформаций весьма существенным является вопрос
общих принципов ведения расчета. При пластических дефор
мациях нельзя, как правило, пользоваться методом расчета по
допускаемым напряжениям. В этом случае о приrодности кон-
струкции судят либо по возникающим перемещениям, либо по
предельной, или разрушающей наrрузке.
Пля Toro чтобы ввести в расчетные формулы зависимость
(J == J(c:), диаrрамму растяжения необходимо схематизировать.
При упруrих деформациях на участке ОА (см. рис. 11.1)
диаrрамма растяжения близка к прямой, и можно с весьма
большой степенью точности принять, что (J пропорциональ-
но с:.
Пальнейшую схематизацию участков диаrраммы прово
дят различными способами в зависимости от вида диаrраммы
и от предполаrаемоrо метода решения конкретной задачи.
435
В случае, если диаrрамма материала имеет площадку тe
кучести, как, например, для малоуrлеродистых сталей, мож
но приближенно представить диаrра.м:му в виде двух прямых
(рис. 11.3, а). ПО предела текучести имеет место оБЫЧНaJI ли-
неЙНaJI зависимость, а дальше, коrда напряжение U становится
равным пределу текучести (Т т . р , напряжение не зависит от дe
формации, т.е. U = (Т т . р .
d
d
Q.
10.;
Q.
-.!;;
Е7
[
[7
[
а
6
Рис. 11.3
Понятно, что при достаточно больших удлинениях эта за-
кономерность теряет свою силу точно так же, как теряет свою
силу и закон rYKa. Пиаrрамма, показаННaJI на рис. 11.3, а, HO
сит название диаrраммы идеальной пластичности.
Зависимость между U и Е можно также представить в ви
де двух прямых и для некоторых диаrрамм, rде отсутствует
площадка текучести (рис. 11.3,6). При Е < Е т имеем
U = ЕЕ,
при Е Е т
U (Т т . р = п(Е Е т ),
rде Е и D уrловые коэффициенты прямых. Значение D обыч
но существенно меньше Е. Подобные диаrраммы свойственны
большей частью леrнрованным сталям.
Пля некоторых материалов, как, например, для отожжен-
ной меди, диаrрамма не имеет явно выраженноrо упруrorо
участка (рис. 11.4). В этом случае КРИВaJI может быть пред
ставлена степенной зависимостью
А n
Е (J,
436
с
"'.....
d
о Е,
Е
о
t
Еl
Рис. 11.4
Рис. 11.5
rде А, n . постоянные, которые подбирают так, чтобы при
нятая зависимость на участке рабочеrо изменения Е возможно
ближе подходила к экспериментально снятой кривой.
CyrцecTBeHHo отметить, что схематизация KOHKpeTHoro
участка диаrраммы зависит еще и от тoro, сколь широ
ки пределы изменения деформаций в рассматриваемой зада
че. Так, если ожидаемые деформации лежат в пределах от
О < Е < Еl (рис. 11.5), диаrрамму следует схематизировать
прямыми ОА и АЬ. Если же необходимо исследовать пове
дение системы в пределах больших деформаций, например в
пределах О < Е < Е2, диаrрамма может быть схематизирована
прямыми О А и АС.
В ряде случаев упруrой дe
формацией по сравнению с плас
тической можно пренебречь. Tor
да диаrрамму растяжения схемати
зируют прямыми О А и АВ
(рис. 11.6). ПО напряжений, не
превышающих предела текучести,
тело рассматривают как жесткое,
при больших напряжениях ero считают пластическим. Ma
териал, наделенный такими свойствами, называется жестко
пластическим.
Так или иначе, но во всех случаях функцию, которой за
меняют диаrрамму растяжения, подбирают в первую очередь
В зависимости от формы кривой. Если в дальнейшем оказыва
ется, что выбранная функция при решении конкретной задачи
d
А
8
Q"
'"
'5
о
l
Рис. 11.6
437
приводит К rромоздким ВЫЧИСJrениям, выбирают новую функ
цию С таким расчетом, чтобы, с: ОДНОЙ стороны, она продолжа
ла служить достаточно точным приближением к диаrрамме
растяжения, а с друrой сложность вычислений не была чрез
мерной.
Во мноrих случаях вместо подобранной аналитической за-
висимости (J = J(c:) пользуются rрафическими, rрафоаналити
ческими или численными методами решения. С простейшими
из этих методов мы ознакомимся ниже.
11.2. Напряжения и перемещения
в простейших стержневых системах
при наличии пластических деформаций
Рассмотрим несколько задач, на примере которых можно
увидеть основные особенности поведения систем при пласти
чеСI<ИХ деформациях. Наиболее просто решаются эти вопросы
для стержневых систем.
При м е р 11.1. Определить абсолютное удлинение, возникающее
под действием собственноrо веса, свободно ВИС1lщей проволоки длиной 1 из
отожженной меди, диаrрамма раСТ1IжеНИ1l которой приведена на рис. 11.7.
Зависимость удлинения Е от наПРЯЖI НИЯ (1' может быть представлена cтe
пенной функцией Е = А(1'n. Константы А и n заданы.
d
/.
Е
......
I\j
Рис. 11.7
На расстоянии z от конца проволоки (1' = "(Z, rде "( плотность меди.
Деформация
Е = A"(nzn.
Искомое абсолютное удлинение определим путем интеrрироваиия этоrо
выражения по длине проволоки:
1
J ,n+1
61 = А-уn zn ,dz = A'Yn '
n+l
о
438
При м I Р 11.2. Определить УСИЛИJl в стеРЖИJlХ И перемещение
узла А (рис. 11.8, а) в зависИМОСТИ ОТ силы Р. Найти также остаточные
наПРJlжеНИJl, которые возник&IOТ в системе после ее наrружеНИJl силой Р
и последующеЙ разrрузки. Диаrрамма расТJlжеИИJl материала обладает
участком идеа. ьноЙ пластичности (рис. 11.8, 6).
iV
о l
Р 5
Q Рис. 11.8
При малых значеНИJlХ силы Р во всех стеРЖНJlХ системы возиикают
упруrие деформации. УСИЛИJl в стеРЖНJlХ опредеЛJlЮТСJl обычными Me
дами раскрытия статической неопределимости. Поскольку такую задачу
мы уже рассма.тривали ранее (см. пример 1.5), выпишем значеНИJl усилий
в стержнях бе:l вывода:
N 1 == Pcos 2 01 .
1 + 2 cos 3 01 '
Р
N 2 ==
1 + 2соа 3 01'
(11.1)
rде N 1 нормалЬНaJI сила в кра.йнем стержне; а N2 то же в среднем.
Перемещение точки А равно удлинению среднеrо стеРЖНJI, т.е.
б N2 1 Pl 1
А == ЕР == ЕР 1 + 2 cos 3 01'
Эти зависимости сохраНIIЮТСII до тех пор, пока в среднем стержне, в KOТO
ром нормаЛЬНilЯ сила больше, чем в крайних, не возникнут пластические
деформации. Это произойдет при
N 2 == (l'т.рР,
(11.2)
или при
р == (l'T.pF(1 + 2соа 3 01).
Далее напряжение в среднем стержне oCTaeTclI неизменным, равным
(l'т.р. Сила N 2 также не MeHJleТCII. И равна. (l'T.pF. УСИЛИJl в боковых стерж
них определиются в этом случае из УСJIОВИJl равновеСИJl узла (рис. 11.9).
Aj , fd7.PF /К,
($. Q'
А
Р
Рис. 11.9
439
Система, Т&JCИМ образом, из статически неопредеJlИМОЙ преВР&1ЦаеТСJl в
статически опредеJlИМУЮ:
Н 1 == Р aT.pF .
2соаа
Перемещение точки А (см. рис. 11.9) равно t:J.l 1 /cosa, или
6 N 1 1 (P aT.pF)1
А EFcos'J а 2EFcos 3 а .
ll&JIee и в боковых стержнях наПРJlжеНИJl стаиОВJlТСJl равными пре
делу текучести. Из выражеНИJl (11.3) следует, что это произойдет при
(11.з)
Р == aT.pF (1 + 2 соа а).
в этом случае система превращаеТСJl в механизм, посхолыу при Д&JIьней
шем возрастании силы условие равновеСИJl ДЛJl системы не соблюдаеТСJl.
В каждом из стержней HOpM&JIbHВJI сила, СУДJl по диаrрамме раСТJlжеНИJl,
не может быть больше, чем aT.pF, 11. веРТИХ&JIЬНВJI состаВЛJlЮЩВJI трех сил
равна O'T.pF(1 + 2 соа а) и остаетсж ПОСТОJ[ННОЙ.
Таким образом, к системе не может быть приложена сила, б6льшВJI
указанной. Эту силу длJ[ данной системы следует рассматривать K&JC пре-
деJlЬНУЮ. В некоторых случаJlХ ее именуют также разрушающей наrруз
кой. ПОНJ[ТНО, что название "разрушающВJI наrрузка" не отражает пол-
ностью существа JlвлеНИJl. Если действительнВJI диаrрамма расТJlжеНИJl
при увеличенных значеНИJ[Х t: имеет участо]( упрочнеНИJ[, то возможно,
что сила Р, б6ЛЬШaJI предельной, окажеТСJl в Д&JIьнейшем уравновешенной
внутренними силами. Однако это произойдет при весьма заметных пере
мещени.х и столь сильных изменени.х rеометрической формы системы,
что последнюю в этих УСЛОВИJlХ можно рассматривать как разрушившу
юс..
На рис. 11.10 показано изменение усилий N 1 и N'J. а также и переме
щени. 6", в зависимости от 'силы Р.
'т.,
,
.
d""t I
Т ёiN.
iJ;;F
Рис. 11.10
Теперь рассмотрим вопрос об остаточных наПРllжеНИIIХ, ВОЗНИIC&JO-.
щих В системе после раэrРУЗIИ. ПОНIТИО, что при этом имееТСI в ВИ.
ду наrружение системы тuими си.пами, пр. хоторых в среднем стержне
440
возникают 11.па.стические деформа.ции, иначе при чисто упруrих деформа
ЦИIIХ остаточных напРllжений не будет. Однпо нахрузка при этом до.пжна
оставаТЬСII меlllьше преде.пьной.
Процесс разrрузки эквива..пентен при.пожению внешней си.пы, равной
силе наrрузки, но обратной ей по знаку. Следовательно, остаточные Ha
ПРllжеНИII в системе можно р&Ссма.тривать как а..пrебраическую сумму Ha
ПРllжений, возникающих в результате последовательноrо приложеНИII сил
наrрузки и противоположных и равных им сил р&3rрузки.
Вследствие тoro что принцип независимости деЙСТВИII сил в данном
случае неприменим, приложение сил наrрузки и р&3rрузки должно быть
Т+
=w
р
Ht1l/YJXf1
PfJJZP!pXf1
Рис. 11.11
только в ПрllМОЙ последовательности (рис. 11.11). ДеформаЦИII при раз
rрузке происходит упруrо, и материа..п следует при этом закону rYKa. По
этому в процессе разrрузки в стеРЖНIIХ будут возникать УСИЛИII, опредеЛII
емые выражеНКIIМИ (11.1). При наrрузке же УСИЛИII опредеЛIIЮТСII выраже
НИIIМИ (11.2) и (11.3). Таким образом, остаточные УСИЛИII, возникающие в
стеРЖНIIХ, буд'у Т
N р (1'т.рР
! ОСТ 2 сов 0/
р сов 2 0/
1 + 2 сов 3 0/ '
р
N20CT = (1'т.рР з .
1 + 2 сов 0/
В этих выра.жеНИIIХ под Р понима.еТСII сила, до которой происходило Ha.
rружение. Ее значение наХОДИТСII в пределах, оrраниченных наrрузкой,
соответствующей нача..пу образоваНИII пластических деформаций, с одной
стороны, и значением предельной наrрузки с друrой:
(1'т.рР (1 + 2 сов 3 0/) Р (1'т.рР (1 + 2 сов 0/).
Остаточные наПРllжеНИII IIВЛIIЮТСII самоура.вновешенными, Т.е. узел
стержней (рис:. 11.12) при отсутствии внешних сил до.пжен наХОДИТЬСII в
равновесии:
2N! осТ сов 0/ + N'J ОСТ = О.
Подста.ВЛIIII сюда значеНИII Nl ост и N 20CT леrко убеДИТЬСII, что полученные
выра.жеНИII ДJl.1I сил удовлеТВОРIlЮТ этому условию.
441
Н, lJI.7 N.t «7 JV 2 1J1:Т
d7.P F dr.pF " . N
N,fJC7 "У 1ОСТ
}'+!
s;n 2 a
,+ 2 CDSJ(J.
СOSа
L
d7.P F
1 COSd. s;n 2 ct
1+.2cosJa
о
Рис. 11.12
На. рис. 11.12 пока.за.н rра.фик И:JменеНИJl оста.точных сил в за.висимо
сти от на.rружающей силы Р. В среднем стержне сила N 20CT JlВЛJlеТСJl
сжимающей. В боковых стеРЖНJlХ ос:та.точные силы ра.СТJlrивающие.
При повторном наrружении см:стема деформируеТСJl упруrо до тех
пор, пока сила вторичноrо наrружеНМIJI не станет равной силе первоначаль
Horo наrружеНИJl. Если систему наrружать дальше, в стеРЖНJlХ возникнут
пластические деформации, измеНJlЮJдиеСJl по установленным выше зако
нам первоначальноrо наrружеНИJl.
При м е р 11.3. Проанализ:кровать работу ступенчатоrо стерж
ня (рис. 11.13, а), у Koтoporo О'т.р = О'т.с = О'т, при наrружении ero силой Р.
о'
..... I
_ Ет t
О О
Рис. 11.13
Диаrрамма раСТJlжеНИJl схематизируеТСJl ДВУМJI ПрJlМЫМИ (рис. 11.13, 6),
уравнеНИJl которых следующие:
O'=Et: при О':$О'т;
(11.4)
O' O'T=D(t: t:T) при a aT'
Диз,rрз,ммз, сжз,ТИJl предполз,rз,еТСJl с;овпз,дз,ющей с диз,rрз,ммой рз,СТJlже
НИJl.
442
На первом этапе наrруJltеНИJl, коrда материал следует закону [ука,
усилия в нижнем и верхнем участках леrко определить обычными прие
мами раскрытия статической неопределимости. Так как
NAB=NAC=P,
а удлинения на участках АВ и АС одинаковы:
(11.5)
N Ac21
EF
NABl
= 2EF '
(11.6)
1 4
то N AC = 5 Р ' N AB = 5 Р '
Перемещение сечеНИJl А будет следующим:
6 N Ac 21 2Pl
А ЕР 5EF '
Эти соотношения будут справедливы до тех пор, пока наПРllжение на ниж
5
нем участке не достиrнет значения ит при Р = 2 (fTF.
На втором этапе наrружения нижний участок деформируеТСII пла
стически, а верхний ynpyro. Уравнен не (11.5) остаеТСII неизменным, а
уравнение (11.6) с учетом выражения (11.4) принимает вид
(f ит
E= +ET'
Тоrда взамен уравнения (11.6) получим
(11.7)
N Ac 21 [ 1 ( NAB ) ]
ЕР = 1 D 2Р ит + Е т .
Решая это уравнение совместно с (11.5), находим
N P 2(fTF(1 D/E) .
АС 1 + 4D / Е '
N AV = 4PD/E+ 2(fTF(1 D/E) (11.8)
1 + 4D/E
Перемещение сечения А
6 N Ac 21 P 2(fTF(1 D/E)
A EF EF 1+4D/E
Из nepBoro выражения (11.8) определяем силу, при которой наПРllжение в
верхнем участке достиrнет предела текучести,
Р = (fTF (3 + 2D/E).
На треп,ем этапе наrружеНИJl имеем 21t:AC = lt:AB, или, соrласно
выражению (11.7),
[ 1 ( NAC ) ] 1 ( NAB )
2 D F (т т +!т = D 2Р (тт + !Т'
443
Решаем это уравнение совместно с уравнением (11.5). ПО.llучаем
1 2 ( D )
НАС = '5 р + '5 tfTF 1 Е ;
N AB = !p tfTF ( 1 D ) .
5 5 Е
(11.9)
Перемешенне точкн А на третьем этапе наrружеННJI будет
6 А = 21 AC = .3!... [ Зtfт ( 1 п ) ]
5п F Е'
Завнсимость УСИJlИЙ N AB и N Ac И перемещеНИJl 6 А от СИJlЫ Р пред-
стаВJlена на рис. 11.14. На этом же rрафике показано и остаточное УСИJlие
Рост в стержне, ПОJlучающееСJl ПОСJlе раэrрузки. Оно будет одинаковым
ДJlJl обоих участков и опредеJlJlеТСJl путеМ вычитаНИJl из УСИJlИJl N Ac (см.
фОрМУJlЫ (11.8) ИJlИ (11.9)) УСИJlИJl "упруroй" раэrрузки, paBHoro Р/5.
Ни.
c.
,
РОСТ
Рис. 11.14
11.3. Упруrопластический иэrиб стержня
Рассмотрим случай чистоrо изrиба прямоrо стержня при
наличии пластических деформаций. Для простоты будем счи-
тать, что поперечное сечение обладает двумя осями симметрии
(рис. 11.15) и что диаrраммы растяжения и сжатия материала
одинаковы. При этих условиях, очевидно, нейтральная линия
совпадает с осью симметрии х (см. рис. 11.15). Ана.литичес
кн связь между напряжением (J и деформацией Е задавать не
444
J Ь
h d
Z
.z
h
Z
О €
Рис. 11.15 Рис. 11.18
будем и примем, что диаrрамма растяжения дана rрафически
(рис. 11.16).
Положим, что для стержня, как обычно, справедлива rи
потеза плоских сечений, Tor да получим
у
Е = , (11.10)
р
rne у расстояние от нейтральной линии; 1/р кривизна
стержня. Изrибающий момент в сечении стержня будет pa
вен
м =. J O'ybdy.
F
Теперь оказывается возможным rрафоаналитически опре
делить зависимость кривизны стержня 1/ р от момента М, а
затем при заданном моменте найти и напряжения, возникаю
щие в стержне. Проще Bcero сделать это следующим образом.
Задаемся кривизной 1/ р и по формуле (11.10) находим макси
мальное удлинение
(11.11)
h 1
Еmа.х = '2 р'
р ядом с чертежом поперечноrо сечения изображаем диаrрамму
растяжения (рис. 11.17) и отмечаем на ней точку А, COOTBeT
ствующую найденному значению Еmа.х. Это удлинение имеет
место в слоях, наиболее удаленных от нейтральной линии. По
этому против верхней точки сечения отмечаем отрезок о' А', а
445
затем и точку О". Так как удлинения распределены по высоте
по линейному закону, тачки о" и А' соединяем прямой. Она
представляет собой эпюру деформаций в сечении.
Далее строим эпюру напр.llжений. Для HeKoToporo значе
ния у по удлинению € (точка В") находим напряжение а (точка
в). Откладывая длину отрезка, ВС на эпюре, получаем справа
rрафик распределения наПРЯЖ1ений по высоте. Затем строим
rрафик произведения по высоте. Площадь полученной кри
вой дает, cor ласно выражению (11.11), изrибающий момент
М. Таким образом, в результате проведенных операций Ha
ходим одну точку зависимости 1/ р от момента М. Если за
даться новым значением кривизны, можно, повторяя все YKa
занные операции, найти новое значение момента и тем самым
определить следующую точку искомой зависимости 1/ Р от М.
Kor да искомая кривая построе
на (рис. 11.18), по заданному момен-
ту определим кривизну стержня. Да-
лее строим эпюру напряжений при
кривизне 1/ р, соответствующей за
данному моменту М.
Имея описанные построения,
можно леrко определить также и
остаточные напряжения, сохраняю
щиеСjJ[ в стержне после разrрузки.
Это возможно путем уже описанноrо
н
h
2
h
1
Рис. 11.17
о
Рис. 11.18
446
t
J
,
jJ
ранее способа суммирования воображаемых напряжений раз
rрузки и напряжений, возникающих при нa.rружении. В pac
сматриваемом случае напряжения разrрузки изменяются в ce
чении по линейному закону (f = My/Jz;. Накладывая эту ли
нейную эпюру на эпюру рабочих напряжений (рис. 11.19), на-
ходим эпюру остаточных напряжений. Важно отмети.ть, что
полученные напряжения являются само уравновешенными. В
сечении не возникает ни нормальной силы, ни изrибающеrо
момента.
Рис. 11.19
ЭЛЮptJ poJIPJJKи. ЭЛКJptJ
ОСIf1(J/RIJIfIIШ
NолрRJКtNuи
Описанная выше последовательность определения напря
жений в изоrнутом стержне выrлядит значительно проще В
случае, коrда ширина сечения Ь остается постоянной, Т.е. в
случае стержня прямоуrольноrо сечения, и особенно просто,
коrда диаrрамма растяжения к тому же обладает участком
идеальной пластичности.
Рассмотрим этот частный случай. Имеем прямоуrольное
сечение со сторонами Ь и h и диаrрамму растяжения, показан
ную на рис. 11.20. Леrко установить, что поперечное сечение
стержня делится на две зоны: упруrую и пластическую.
Величину Ут, определяющую rраницу этих зон, находим
из выражения (11.1 О)
УТ = C-ТР, (11.12)
По мере увеличения момента и, соответственно, кривизны УТ
уменьшается. Упруrая зона сокращается.
Изrибающий момент в сечении по прежнему определяется
выражением (11.11), которое в данном случае принимает вид
h/2
М = Ь f O'lI d ll'
h/2
447
(/
Рис. 11.20
Разбивая интеrра.л на два, получаем
h/2 h/2
М = 2Ь J (Jydy + 2b(JT J ydy.
о Ут
Так как на ynpyroM участке (J = Е , после интеrрирования
Р
находим
2 Е 3 ( h2 2 )
М = 3 ь р ут + Ьи т 4" ут .
Отсюда, имея в виду, что на основании выражения (11.12)
итр
Ут = Е:IР = ,
Е
получаем
bh 2 1 3 р2
М = 4 ит 3 b(JT Е2 '
(11.13)
откуда
f; 1 Ьа 3
т
1 зЕ2
= 1 .
Р 4"bh 2 (JT М
Кривизна стержня с увеличением момента М возрастает
и обращается в бесконечность при
(11.14)
1 2
М = bh (JT'
4
(11.15)
448
В этом случае р::: О И 'Ут обращается в нуль. Следовательно,
все сечение охватывается пластической деформацией, и эпю
ра напряжений в поперечном сечении стержня имеет вид двух
прямоуrольников (рис. 11.21). Несущая способность стержня
при этом исчерпывается, и большая наrрузка им воспринята
быть не может. Понятно, что в действительности кривизна
стержня не может обратиться в бесконечность, и указанный
случай следует рассматривать как предельный.
..с:::
Рис. 11.21
Применимость формулы (11.14) оrраничена значением MO
мента М не только сверху, но и снизу. При малых значениях
момента, Kor да пластическая зона отсутствует, кривизна опре
деляется по формулам, выведенным в предположении линейной
зависимости между (J и t::
1 М 12М
p EJ Eh 3 b '
Это соотношение будет правильным до тех пор, пока
(11.16)
м 6М
(J = w = bh 2 $ ат,
Т.е.
1 2
М < bh а Т '
6
Формулой (11.14) можно пользоваться при
1 2 1 2
bh а т < М < bh а Т '
6 4
15 В. И. Феодосьев
449
На рис. 11.22 изображена зависимость кривизны 1/ р от MOMeH
та М.
/
;о
1. и
4 bh1dт
1
jJ()(f
Рис. 11.22
Из выражений (11.14) и (11.16) сразу же можно найти
остаточную кривизну, которую сохраняет брус после разrруз
кн:
1
1 ЬО'З
т
3" Е2
1 2
bh О'т М
4
12М
ЕhЗЬ '
(11.17)
Рост
r де под М понимается величина момента при наrрузке.
Остаточная кривизна может быть найдена и по rрафику,
как это показано на рис. 11.22.
-<::
d,
Рис. 11.23
Эпюра остаточных напряжений представляет собой ло
маную линию (рис. 11.23). Она получается в результате BЫ
читания линейной эпюры разrрузки из эпюры наrружеНИJl.
450
Наибольшие остаточные напРJ[жеНИJ[ будут следующими:
, 6М
О'ост = О'т bh 2 j
" 12Мут
О'ост = О'т Ьh З
При м е р 11.4. ВИТ8JI пру_ина получа.еТСII путем холодной навив
ки проволоки Ila цилиндрическую оправку (рис. 11.24). ДЛII СЛУЧ8JI Прll
моуrольноrо сечеНИII проволоки подобрать диаметр опр&Вки D onp с таким
ра.счетом, чтобы после навивхи пру:аина ииела заданный средний диаметр
витка D np = 2fi мм. Высота сечеНИII проволоки h = 2,5 им; а.. = 500 МПа,
Е = 2.105 МПа.
d
t
Рис. 11.24
Полаra.JI, что уrол подъема витка мал, будем рассматривать виток
пружины как плоский. По условию остаТОЧН8JI кривизна витка
1 2 2 1
= = MM .
РОС" D np 25
ОбращаеМСIIК выражению (11.17). В нем нам неизвестен момент М.
Найдем ero. ДЛII зтоrо перепишем ур&внение (11.17) в виде
( 1М a.. ) ( 1 М ) 1 ( a.. )
j 'oCT + 12 bh aT Eh 4 bh 2 a T = 3 Eh '
или
( ) 2 ( )
2 М 3 1 М 1 8
25 + bh 2 a T 12.10 4 bh2a.. = 3 10 .
Величина М /(bh 2 а..) лежит в пределах от 1/6 до 1/4. Подбором опредеЛII
ем
= о 485 . lO
4 111&2(1.. I
15'
451
По формуле (11.14) находим раll.ИУС кривизны проволоки в Harpy.eH
ном СОСТОJlНИИ
м
4
Р = 2'
1 (т..
'i E 2 h 2
ОТkуда Р = 12,05 мм. ВЫЧИТiIJI из этоrо значеНИJl половину толщины
ПрОВОЛОkИ, находим размеры опраВI:И: Ропр = 12, 05 1,25 = 10,8 мм,
D onp = 21, б мм.
При м е р 11.5. Часовую пру.нну изroтовл.ют путем навив
kH стальной ленты на цилиндричес][нй сердечник (рис. 11.25, а). Осво--
божденна. лента прннимает в дальнейшем форму спнрали (рис. 11.25, 6).
Определить уравненне этой спиралн, если свойства матернала хараkтери
зуютс. диаrраммой идеальной пластичности.
Рис. 11.25
При наВИВkе лента изоrнута по спирали Архимеда
d
1
d h
т = 2" + 21r '1',
rде т и '1' ПОЛJ(рные координаты, d диаметр сердечника, h толщина
ленты (см. рис 11.25, а).
Tak kak толщина л нты h невеJllика и спираль, следовательно, имеет
небольшой шаr, можно считать, что :пол.рный радиус равен радиусу XpH
визны: р::::: т. Тоrда из уравнеНИJ( (11.13) получаем нзrибающий момент
при наВИВkе:
( ) 2
1 2 1 (т.. d h
М = bh (ту , + '1'
4 3 Е2 2 21r .
ПодстаВЛJ(J( далее М в уравнеЮlе (11.17), находим
+ 1 '1' 3 i + 4 ( J ( + 2 h 1r '1')2.
2 21r
Это выра.жение и npeдcTa.BJlJleT собоЙ искомое ура.внение спирали.
1
Росу т
452
с увеличением уrла Ip остаТОЧНaJI хривизна уменьшаеТСJl. При He
lCотором Ip она может окаэаТЬСJl равной нулю. Это значит. что в этом
сечении и на остальном внешнем участхе ленты пластические деформа
ции при наВИВКЕ! не обра.зУЮТСJl, и лента остаеТСJl ПрJlМОЙ.
11.4. Кручение стержня КРУI'ЛОI'О
поперечноI'О сечения при наличии
пластических деформаций
Для исследования деформации стержня в условиях упруrо
пластическоrо кручения необходимо располаrать диаrраммой
сдвиrа материала, Т.е. зависимо
стью yr ла сдвиrа 'У от напряжения r '(
(рис. 11.26). Будем считать, что Ta
кая диаrрамма у нас имеется. Она
может быть получена путем испыта
ния на кручение тонкостенных TPy
бок. В дальнейшем мы покажем, что
эта диаrрамма может быть определе О
на путем перестройки обычной диа
rpaMMbl растяжения а = j(E).
Принимая, как и при обычном кручении, rипотезу плоских
сечений, получим
r
Рис. 11.26
'У = р8
(11.18)
(см. формулу (2.5)). Крутящий момент в сечении равен
R
М" = 211" J тр2 dp.
о
Введем в это выражение взамен радиуса р переменное 'У co
rласно (11.18). Тоrда
1'тах
211" J
М" = (j3 'Т"'У 2 d'Y,
о
(11.19)
[де
'Ушах = R8.
(11.20)
453
'(
А
Интеrрал в выражении
(11.19) представляет собой не
что иное, как момент инер-
ции криволинейноrо треуrоль
ника ОАВ (рис. 11.27, а) OTHO
сительно оси т. Пля заданной
диаrраммы он может быть за-
ранее определен как функция
"Уmа.х (рис. 11.27,6).
Теперь леrко по точкам по-
строить зависимость удельноrо
уrла закручивания (J от момен-
таМх,
Задаваясь значением (J, определяем, соrласно выражению
(11.20), "Уmа.х, а затем с помощью rрафика значение интеrра-
'Утах
ла J Т"У 2 d"Y. Затем по формуле (11.19) находим МХ, Таким
о
образом, мы определили одну точку зависимости (J от М к . По-
вторяя эту операцию несколько раз, получаем полную кривую
() = ЛМ к ). При малых значениях момента, коrда кривую
'"
о
r
"1 8
r
{Y1W/Z
J"r'6r
о
а
JI ЛIIIZ
б
Рис. 11.27
'Утах
J т-у2 d-y = J( -Уmа.х)
О
нельзя построить точно, следует воспользоваться обычной ли
ней ной зависимостью в пределах закона rYKa
М К
() = С] . (11.21)
р
Все последующие операции по определению закона распре
деления напряжений в поперечном сечении стержня, а также по
нахождению остаточных напряжений и остаточных уrлов co
вершенно аналоrичны тем, которые были рассмотрены в пре
дыдущем параrрафе для изrиба стержня. Поэтому, здесь эти
операции повторять не будем, а проиллюстрируем их на кон-
кретном примере.
454
При и е р 11.6. Вит" ци.пиндрическu пру___ (рис. 11.28, а) с_и
MaeТCJl до ПОJlIIОЙ посадки витков (рис. 11.28, d). Требуете. опреде.пить
шаr ПРУЖИНЫlIос.пе ра.зrрузки, есJJИ до нarрузки он БЫJJ равен 11 10 ии.
Размеры пружины СJIедующие: D 20 им, d 4 ММ. Модуяь сдвиrа
G = 0,77. 10& МПа. Диаrра.м:ма сдвиrа иатериuа задuа кривой, пока-
занной на рис. 11.28, 11.
.7
J=m
IJ
,
А
о
0,0,0
6
8 )1
4110
уЛ/U-l,ll11
5
Рис. 11.28
D
Осадка пружины на один виток равна 'лl JJ d. Но 'лl 2" t/l, rAe
I длина витка, раВН&JI 1r D. Тахим образом,
1r 2
JJ d 2 D (J.
(11.22)
Отсюда определ.ем уrол з&хручиваНИJl е, который возникает в ПРОВОJlоке
при посадке витков: (J О, 00955 MM l.
d
Находим, да..лее, 'Умах 2" t/ = 0,0191. Откяадываем 'Умах на диа
rpaMMe сдвиr<L (см. рис. 11.28, в) и путем разбиеНИJl на площадки опреде
ляем момент инерции треуrольника ОАВ относительно оси т. В резуль
тате подсчетов получаем
"Уш...
J Т'У 2 d'Y = 0,455 . 10 3 МПа.
о
По формуле (11.19) находим КРУТJlЩИЙ момент
М = 2'11" . 0,455 . 10 3 = 3280 Н . .
х О 009553 ММ
,
По формуле (11.21) опредеЛllем yroJI закручивани. при упруrих дe
формаЦИIIХ
328 1
8 = 770011'.44/32 = 0,001070 мм .
455
Теперь, соrласно выра.жению (11.22), находим упруrую "отдачу"
пружины после разrрузхи
11' 2
80ет d = 20 . 0,00170 = 1,07 мм.
2
Исхомый шаr пружины 8 0ет = Jl, 07 + 4 = 5,07 мм.
ДЛJl полноты хартины определим захон распределеНИJl остаточных
наПРJlжений в поперечном сечении пружины (рис. 11.29, а). ДЛJl этоrо по
СТРОИМ сначала эпюру наПРJlжений при наrрузке. Соrласно выражению
(11.18), уrол сдвиrа на раССТОJlНИИ р от центра Kpyra равен 'у = О,ОО955р.
ЗадаВaJlСЬ несколькими значеНИJlМИ 1', по точхам опредеЛJlем наПРJlжение
т и строим эпюру, показанную на р]{с. 11.29, б. Из нее вычитаем наПРJl
жеНИII, определенные по формуле упруrой разrрузки, т = М р/ J p = 13, Ор.
о 80 1611 "'n(/ иn(/
g s
fl
о
6
Рис. 11.29
Разность между наПРJlжеНИIIМИ наrрузки и разrрузки дает значение
остаточных наПРJlжении (рис. 11.29, \5).
11.5. ОСНОВЫ расчета по предельным наrрузкам
При расчетах конструкций на прочность наиболее широко
распространенным является метод расчета по напряжениям.
Однако, как уже rоворилось, этот метод не является единствен
ным. В ряде случаев более предпочтительно ведение расчета
по разрушающим или предельным наrрузкам, от которых pa
бочие наrрузки составляют некоторую часть.
Отношение предельной наrрузки к рабочей называется KO
эффициентом запаса по предеЛI>НЫМ наrрузкам. Ero назнача
ют, как правило, в зависимости от особенностей проектируе
мой конструкции.
На примере рассмотренных в настоящей rлаве задач мы
уже имели возможность познакомиться с понятием предельной
наrрузки. Так, для системы, состоящей из трех стержней (см.
рис. 11.11), она оказалась равной
Р пред = О'тр (1 + 2 сова),
456
а для стержня прямоуrольноrо сечения предельный изrибаю-
щий момент
1 2
М пред = 4" (1Tbh .
Обобщая полученные результаты, следует отметить, что
под предельной пони мается нarрузка, по достижении которой
исчерпывается способность системы воспринимать дальней-
шее ее возрастание, или наrрузка, при которой возникают
столь заметные изменения rеометрических размеров системы,
что последняя перестает удовлетворять своему назначению.
у своить приемы определения предельных наrрузок проще
Bcero путем решения конкретных задач. Рассмотрим несколь-
ко примеров.
При м е р 11.7. Определить разруш&ющую в&rрузку для трех-
стержневой системы (рис. 11.30) при условии, что ди&rр&мм& Р&СТJlжеНИJl
ДЛJl стержней имеет участок упрочнеНИJl и разрушение происходит при
напряжении и. (см. рис. 11.30).
d
[.
t
Рис. 11.30
Уравнение упруrоrо участка диаrраммы имеет вид u = ЕЕ. Для
участка упрочнения u (1'т = D (Е f: T ).
За разрушающую примем ту наrрузку, при которой разорвется cpeд
ний стержень. Это произойдет тоrда, коrда удлинение f:] станет равно f:..
Определим, к&кое удлинение f:1 будет иметь при этом каждый из боко
вых стержней: А/1 = А/] сов а. Учитывa.1I, что /1 = 1/ сов I{J, получим
Еl = f:] сов] а.
Таким образом, к моменту разрыва среднеrо стеРЖНJI боковые бу-
дут иметь удлинеНИII Еl = Е. сов] а. НаПРJlжения при этом будут:
в среднем стержне (1'., а в боковых либо (1'1 = и т + D (Е. сов] cr
ET)' если Е. сов] cr > f: T , либо же (1'1 = ЕЕ. сов] а, если f:. сов] cr <
< f: T .
Предельная наrрузка Р ПРСII = (1'. F + 2(1'1 F сов а. ПодстаВЛIIJl и1, Haxo
дим
РП"СII = u.F + 2u..FcoBa + 2F D (!. coi а !..) сова
467
при Е. сов 2 а > Е т или
Рпр<" == а.Р + 2ЕЕ. соsЗ а
при Е. сов 2 а < Е т .
При м е р 11.8. Определить предельную наrрузку ДЛJl систе
мы, пока.занной на рис. 11.31, о. rоризонтальный стержень предполаrа
eТCJl жестким, а вертикальные имеют одинвовое поперечное сечение и
сделаны из OДHoro и тoro же материала, диаrрамма расТJlжеНИJl Koтoporo
дана на рис. 11.31, б.
I
*iic=
о t
I
А
tl
о
Рис. 11.31
Если постепенно увеличивать силу Р, то УСИЛИII В стеРЖНJlХ будут
увеличиваТЬСII. При некотором значении силы Р в стержне 1 или же в
стеРЖНIIХ !J и .4 наПРllжение станет равно ат, Однако эта сила еще не бу
дет предельной. Предельной IIВЛllеТСII та, при которой заметные пласти
ческие деформации возникнут и в стержне . Тоrда система превраТИТСII
в механизм и rориэонтальиый стержень ках жесткое целое повернеТСJl от-
носительно точки А или В (относительно кахой это будет BblJlCHeHO в
дальнейшем) .
Положим сначала, что предел текучести достиrнут в стеРЖНIIХ 1 и .
Тоrда, ВЗJlВ сумму моментов всех сил относительно точки В (рис. 11.32, о),
tO;F
drFt
А
11
(J
11
I
Рис. 11.32
опредеЛllем предельную наrрузку. В этом случае
2
атР . 20 + атРо == Р пр <" О,
3
458
откуда
9
Р ПР "1I = 2' и Р.
Допустим теперь, что предел текучести достиrнут в стеРЖИlIХ 2, 3
н 4. ОпредеЛllем сумму моментов относительно точки А (рис. 11.32, 6):
4
и P . 4а + и Pa = Р ПР "1I 3 а,
откуда
3
РПРО Il = (f F(l +4сова).
4
Из двух полученных значений Р ПР "1I выбираем меньшее. При любых уrлах
cr меньшим будет второе значение Р ПР "II'
При м е р 11.9. Определить предельную наrрузху ДЛII стеРЖНlI, по--
казанноrо на рис. 11.33. Поперечное сечение ПРlIмоуrольное. Диаrрамма
раСТllжеНИII имеет участок с идеа.льной пластичностью.
,
j" . '. ., ,
. ь
Рис. 11.33
ДЛII решеНИII задач TaKoro типа следует ввести ПОНlIтие пла.стичес
Koro шарнира.
Рассмотрим процесс распространеНИII зоны пластических деформа
ций в стержне при увеличении наrрузки. Пластические деформации по--
IIВIIТСII снача.ла в точках, расположенных у верхней и нижней поверхностей
в наиболее наПРllженных сечеНИIIХ. Зоны пластических деформаций (при
некотором значении силы Р) на рис. 11.34 заштрихованы. По мере роста
р
Рис. 11.34
наrрузки эти зоны раСШИРIIЮТСII. В качестве предельноrо можно paCCMaT
ривать случа.й, коrда в некотором сечении, rде имеет место наибольший
изrибающий момент, эти зоны сомкнутся, как это показано пунктиром на
рис. 11.34. ВСЕ: сечение будет охвачено тоrда пластической деформацией,
468
и изrибающий момеит в нем достиrнет предельиоrо значеНИJl М пр . Как
уже было установлено в S 11.3, ДЛJl ПРJlмоуrольноrо сечеНИJl
1 2
М пр == :4 tтTbh .
Изrибающий момент не может стать больше предельноrо. Сечение, в KO'l'O--
ром возник предельный момент, можно уподобить шарниру с ПОСТОJlННЫМ
моментом треНИJl. Такой шарнир носит название пл&стическоrо шарни
ра. Очевидно, если в стержне или раме возникнет несколько шарниров,
система может стать механизмом.
J;
Н nр
t l
H. rH.
Рnр
Нпр
Р лр
т
H J
ВозвращаJlСЬ к р&Ссматривае
мому стержню, обнаруживаем, что
ero предельное СОСТОJlние характери
зуеТСJl возникновением трех пласти
ческих шарниров (рис. 11.35). Из
УСЛОВИJl равновеСИJl половины стерж
HII находнм .
(11.23)
Рис. 11.35
р. 4М пр
пр ----т
или
bh 2
Рпр == tт T Т'
в дополнение к рассмотренному примеру на рис. 11.36 показано He
сколько статически неопределимых систем и соответствующих им шар
нирных механизмов.
.P Мпр
Н пр l""
t пр
p 6
460
р
l Р
П
н. IН
"пр
,""пР .М nр
1
рпр
(/
'1
z
Рис. 11.36
ДЛJl систс м, показанных на рис. 11.36, a 2, соответственно имеем
Р пр == 3Mnp/l;
Р пр == 4М пр /l;
Р пр == 2М пр /l;
2М пр 1 + а
qпр == 1 а '
РаССТОJlние а подбираем из УСЛОВИJl максимума изrибающеrо момента
в шарнирах А. ПолаraJI, что на раССТОJlНИИ а от опор попереЧНaJI сила Q
равна нулю, НlLХОДИМ
2М пр ( )
а == /(у2 1); qпр == у2 + 1 .
При ИЗМf:нении формы поперечноrо сечеНИJl в полученных выраже
ниих мениетси только Мпред.
При м е р 11.10.
поперечных сечений.
Определить Мпред ДЛJl круrлоrо и треуrольноrо
d
/J
Рис. 11.37
в обоих СЛУЧaJIХ зона пластичности охватывает все сечение
(рис. 11.37), и предельный момент представлиет собой момент сил, BЫ
ражающихси через постоинное наприжение (Т т ,
7I"d 2 2d uтd З
Дли Kpyra М ПР == 2и т с. Так как с == , то М пр
8 371" 6
Дли треуrольноrо сечении сначала необходимо найти положение оси
раздела, Т.е. высоту h 1 . Ее определиют из условии равенства нулю HOp
мальной силы в сечении или равенства площадей верхней растинутой и
нижней сжатой зон.
Предельный момент равен сумме моментов сил в обеих зонах:
1 2 (1 ../2 2 2 ) .
М пр == uTbh
3
11.6. ОСНОВЫ теории пластичности
До сих пор мы имели дело с простейшими видами напря
женных состояний. Мы рассматривали либо одноосное растя
жение или сжатие, либо чистый сдвиr. При этом характери
стика материала для соответствующеrо напряженноrо состоя
461
нии считаласъ заданной, и в ЭТИХ УСЛОВИJ[Х решение задачи не
встречало принципиалъных трудностей.
Если перейти к более сложным задачам, то прежде Bcero
возникает вопрос, как при друrих напряженных состояниях
связать аналитически напряжения и деформации, а rлавное,
как по результатам испытания образца на растяжение перейти
к зависимостям сложноrо наприженноrо состояния.
В пределах упруrих деформаций этот вопрос решить cpaB
нительно просто.
При растяжении справедлив закон rYKa в простейшей
форме:
(1 = ЕЕ.
Для сложноrо напряженноrо состояния имеем линейные
соотношения обобщенноrо закона rYKa:
1
€x = Е [(1х J1.((1y + (1z)],
1
€y = Е [(1у J1. ((1z + (1х)],
1
€z = Е [(1z J1. ((1х + (1у)],
1"yz
"Yyz = а;
1"zx
"Yzx = а;
1"ху
"Уху = а'
(11.24)
Условия перехода из упруrоro состояния в пластическое
MorYT быть определены по критерию пластичности. Как мы
уже знаем, в настоящее время имеется несколько критериев пе
рехода из упруrоrо состояния в пластическое. Наиболее при-
емлемыми являются: теория Мора, вытекающая из нее в част-
ном случае rипотеза максимальных касательных напряжений
и rипотеза энерrии формоизменения. Наиболее удобной для Ha
хождения соотношений пластичности является последняя. По
этой rипотезе переход из ynpyroro состояния в пластическое
происходит Torna, Korna величина
(1i =
V2 J =>
2 ((1у (1%)2 + ((1z (1х)2 + ((1х (1у)2+
=? 2 2 2
+6 (1"у% + 1"%% + 1"%у),
(11.25 )
называемая интенсивностью наПрJlжений, достнrает предела
текучести.
462
в упруrом состоянии интенсивность нв.пРJ:жений O'i может
быть выражена при помощи соотношений (11.24) через дефор-
мации. ТоrЩL после преобразований получаем
.J2
(1i = Е 2(1+Jl) x
X V(6y 6: :)2 + (€z €ж)2 + (€ж €y)2 + ('Y z + 'Y x + 'Y y).
Обозначим
о. = 2(;; ) V (o. о,), + (о, о.), + (о, o.J'+ ""
=>
3 ( 2 3 2 )
+'2 'Yyz + 'Yzx + 'Уху
(11.26)
и будем называть эту величину интенсивностью деформаций.
Пля упруrоrо состояния справедливо следующее COOTHO
шение:
O'i = E6i.
(11.27)
Это выражение можно рассматривать как одну из форм
обобщенноrо закона fYKa.
Теперь надо решить, как будет выражаться связь меж
пу компонентами напряжений и деформаций в пластическом
состоянии. Определение этих соотношений и решение на их
основе ряда ]адач механики сплошных сред составляют coдep
жание теории пластичности.
Зависимости между компонентами напряжений и дефор
маций в зоне пластичности должны быть, очевидно, построе
ны так, чтобы при упруrих деформациях искомые соотноше
ния переходили в соотношения (11.24). Но этоrо мало. Нужно,
чтобы из тех же выражений как следствие вытекал принятый
ранее критерий пластичности, Т.е. в данном случае критерий
энерrии формоизменения. Тоrпа искомые соотношения пла
стичности бупут представлять собой лоrическое расширение
установленных ранее закономерностей.
Пля законов пластичности удобно избрать ту же форму Ha
писания, что и для законов упруrости. Так, вместо Toro чтобы
463
писать (т = j(E), rne ЛЕ) есть функция, заданная rрафически
диаrраммой растяжения, можно написать
(т = Е'Е, (11.28)
rде Е' рассматривается как функция деформации Е. ИЗ диа
rpaMMbl растяжения (рис. 11.38) видно, что Е' = (Т/е. При
упруrих деформациях ер' = ер, Е' = Е (см. рис. 11.38).
о
t
&
Рис. 11.38
При переходе к сложному напряженному состоянию весьма
заманчиво Bblr лядит перспектива обобщить таким же образом
и соотношение (11.27), приняв
(fi = E'Ei,
(11.29)
rде Е' снова рассматривается как переменная величина, а co
отношение (11.29) сохраняется единым для всех видов напря
женноrо состояния.
При упруrих деформациях выражение (11.29) принимает
вид (11.27). Переход же ynpyroro состояния в пластическое
характеризуется равенством (fi = (тт'
Соrласно выражению (11.25), мы приходим, таким обра
зам, к rипотезе энерrии формоизменения. Мноrочисленные экс
перименты, поставленные для проверки высказанноrо предло
жения, показали, что оно является правильным для весьма ши
pOKoro класса задач.
Таким образом, было установлено, что вид функции
(11.29) определяется в основном свойствами материала и поч
ти не зависит от типа напряженноrо состояния. Это положе
ние является первым (исходным) положением теории пластич
НОСТИ.
464
Вторым положением теории пластичности является усло-
вие, что изменение объема
е = Ех + Еу + Ez
остается чисто упруrим. Это хорошо соrласуется с экспери-
ментами. При всех достижимых для современной техники дав-
лениях не удалось с помощью BcecTopoHHero сжатия вызвать в
материале пластические деформации.
При деформировании материала пластические деформа
ции, как правило, заметно больше упруrих. Так как е является
величиной Toro же порядка, что и упруrие удлинения, то обыч-
но принимают, что при пластическом деформировании объем
меняется НЕ значительно. Тоrда при выводе формул, связыва-
ющих компоненты напряжений и деформаций в пластической
зоне, принимают J-L = 1/2.
Теперь составим искомые соотношения. Прежде Bcero от-
метим, что при одноосном растяжении, коrда
ах := а, ау = a z = T yz = Tzx = Тжу = О,
f:x := f:, f:y = f:z = J-Lf:, 'Yyz = 'Yzx = 'Уху = О,
интенсивность напряжений ai и интенсивность деформаций
f:i обращаются соответственно в а и Е. Значит, выражение
(11.29) переходит в (11.28), а это есть аналитическое выра-
жение кривой обычной диаrраммы растяжения. Но, соrласно
первому положению теории пластичности, зависимость (11.29)
едина для всех напряженных состояний. Следовательно, она
ничем не отличается от обычной зависимости, задаваемой диа-
rраммой растяжения. Надо только откладывать по осям не а
и Е, а ai и f.i (рис. 11.39). Тоrда
Е , а i
,
Ej
Т.е. мы получаем величину переменноrо модуля.
dk:= l:
о [О II
Рис. 11.39
465
Теперь аналоrично выражениям (11.24) выписываем COOT
ношения пластичности:
€j [1 ] 3€.
€x = aj ах '2 (ау + a z ) , "Yyz = ..........!. .
T yZ !
а'
I
€. [1 ] 3€j (11.30)
€y ....!. ау (a z + аж) , "Уzж Тzж;
O'j 2 0"
I
€j [a z (ах + ау)], 3€j
€z "Ужу = Txy,
а' 0"
I I
Е
rде G = с учетом Toro, что J1. = 1/2, Т.е.
2(1 + J1.)
G' = Е' = aj
3 3€j'
Приведенные соотношения пластичности не являются co
вершенно точными и считаются верными по крайней мере для
тех видов наrружения, при которых внешние силы в процессе
наrружения возрастают пропорционально некоторому параме
тру, например времени. В этом случае, как можно показать,
r лавные оси напряженноrо состояния при изменении внешних
сил сохраняют свое направление. Такой вид деформации HO
сит название простой деформации, а наrружение nростО2О
на2ружения.
Рассмотрим прнмеры решення некоторых задач, дЛЯ KO
торых необходимо применение аппарата теории пластичности.
При м е р 11.11. Дана диаrрамма раСТJlжеНИJl (J' == f(t:). Построить
соответствующую ей диаrрамму сдвиrа r == f("().
Диаrрамму сдвиrа можно получить либо из ПРJlмоrо испытания на
кручение, либо же перестройкой диаrраммы растяжения при помощи co
отношений пластичности.
Обратимся к формулам (11.25) и (11.26). ДЛJl раСТJlжения 0'; == 0', а
t:; == t:. При сдвиrе, полаrая Jj == 1/2, находим 0'; == r../3, t:; == "(/../3. Но
зависимость 0'; == f(t:) едина для всех наПРJlженных СОСТОIIНИЙ. Поэтому
зависимости О' == f(t:) и r == л"(/../3) одинаковы. Перестройка диаrраммы
заключается, следовательно, в простой замене О' на r../3, а t: на "(/../3.
Чтобы получить диаrрамму сдвиrа, нужно в каждой точке диаrраммы
растяжения ординату уменьшить в ..;з раз, а абсциссу во столько же раз
увеличить (рис. 11.40).
466
о
,,= f ("{)
dj ,ИЛtl
JOO
250
200
150
100
JO
d,
't
Е,у
о
f
2 J E..tO J
о
Рис. 11.40
Рис. 11.41
При м е р 11.12. Определить увеличение диаметра цилиндриче
CKoro бака (ри<:. 11.41, а) в зависимости от давлеНИII р. Диаrрамма расти
жении материала задана (рис. 11.41, 6); D = 1800 мм, h = 10 мм.
МеРИДИaJlьное и окружное наПРllжеНИII в стенках цилиндра равны
pD
О'х = О'т = 4h'
pD
0'" = О'! = 2/;'
Соrласно формулам (11.30),
(; ( 1 )
(! = О'! О'т ,
О'; 2
или
3 (; pD
(t= .
8 О'; h
Увеличение диаметра
!:1D = D(t = (; pD 2 .
8 О'; h
(11.31)
По фОРМ:fле (11.25) находим
. I ../3 pD
О'; = V O' О'тО'! + O' 4 h
Построим теперь зависимость D от давлени. р. Задаваясь даВJIени
ем р, вычислим O'i, а по диarрамме испытанИ. И&ХОДИМ 1:(_ Затем из
487
AIJ,ии
4-
J
2
I
1,5 2,0 Р} НПа
Рис. 11.42
выражени. (11.31) определ.ем 6.D И
по точкам СТРОИМ ИСКОМУЮ зависимость
(рис. 11.42).
Полученное решение спрв.ведливо
в пределах небольших 6.D, пренебрежи-
мо малых по срв.внению с див.метром D.
В противном случае в выражеНИJlХ ДЛJl
q:z: и (Тl/ необходимо было бы учитывать
изменение диаметра.
о
П р н м е р 11.13. ДЛJl определеННJI СJj:ЛЫ ударной волны, воз
никающей прн взрыве, часто прнмеНJlЮТ тонкие свиицовые мембраны
(рис. 11.43). Под действнем давлеНИJl мембрана получает остаточиый про--
rиб, по величине Koтoporo и СУДJlТ о снле волны. ТребуеТСJl определить
зависимость проrиба такой мембраны от давлеНИJl.
Решим задачу приближенно, полаrая, что наПРJlжеНИJl распределе
ны по толщине мембраны равномерно и что форма изоrнутой мембраны
близка к сферической поверхности. Такое предположение, не сказываясь
сильно на количественных результатах, значительно упрощает решение.
......:::::::. ...... """",..."'"
............""":................................-----====.....---
А
Рис. 11.43
Рис. 11.44
Обозначим через р радиус кривизны сферической поверхности, а че
рез а половину центральноrо уrла cerMeHTa (рис. 11.44). Очевидно,
р = а/ sin а, или, вследствие малости а, р а/а, rде а радиус мем-
браны.
а аа
Проrиб мембраны f == а tl) 2" ::::: Т. Окружное и меридиоиа.IIhное
наПрJlжения в мембране
468
рр р02
(1'1 = (1'т = 2h = 4hf '
( 11.32)
Наконец, удлинеНИJl в мембране можно определить по разности длины дy
rи АС и хорды АВ:
ра psina
Е=
р sin а
а 2 2 Р
б 3' 42 .
(11.зз)
Теперь обраТИМСJl к соотношеНИJlМ пла.стичности (11.30). Примем
(1'z = О, (1'z = (1'т, (1'11 = (1'1. Тоrда
Ej ( 1 )
Ет = (1'т (1'1 i
(1'j 2
ЕI = :: ((1'1 i(1'm).
откуда
4 (1'j ( 1 )
(1'т = Ет + ЕI ;
3 Ej 2
4 (1', ( 1 )
(1'1 = ЕI + Ет .
3 Е, 2
ПодстаВЛJlJl (1'т, И (1'1 В третье выражение (11.30), находим Ez= (Em+
+EI),
ПодстаВЛJl ем Ez В выражен ие интенсивности деформаций (11.26). То--
rда Е, = .Jз V E + ЕтЕI + E . НО Ет = ЕI = Е, поэтому Е, = 2Е, или,
соrласно выражению (11.зз),
. 4 f2
E, .
3 02
(11.34)
Наконец, выражение (1', (11.25) с учетом тoro, что (1'z = О, а (1'т = (1't,
приводим к виду
р02
(1'j=(1'm= .
4hf
( 11.35)
ПОРJlДОК построеНИJl искомой зависимости выrЛJlДИТ следующим
образом. ЗадаеМСJl проrибом f. По формуле (11.34) находим Ej. Далее,
по диаrрамме раСТJlжеНИJl (1" = f(Ej) опредеЛJlем (1'j, а по формуле (11.35)
находим давление р, соответствующее ПрИНJlТОМУ проrибу. Так по точкам
строим искомую зависимость.
При м е р 11.14. Отожженную проволоку ПРОТJlrивают через
коническое сужающееСJl отверстие (фильеру). В результате диаметр про--
волоки меНJlеТСJl С размера D 2 на Dl (рис. 11.45). ПренебреraJI трением
н счнтаJl уrол конусности малым, определить, во сколько раз при YKa
занной схеме вытJlжки можно уменьшить диаметр проволоки. Материал
обладает свойством идеа.льиой пластичиости.
469
d,
::
])z
Рис. 11.45
Рис. 11.46
Обозначим через D текущий диаметр, а через р контактное давле
ние и составим уравнение равновесии дли элемента проволоки длиной dz
(рис. 11.46):
11" 11" п 2
(О' + dO') (п + 201 dZ)2 О' + p1l"Da dz = о,
4 4
rде а половина уrла при вершине конуса. После преобразований получим
dO' 401
dz + D (О' + р) = о.
Так как материал обладает идеальной пластичностью. то интенсивность
напряженноrо состояния O'i постоянна и равна (тт, Но в данном случае
0'. = 0', 0'% = 0'11 = p, Т%1I = Т1I" = Т,,% = О. Поэтому, соrласно выражению
(11.25), получаем О' + р О'т, а так как D == п 1 + 201Z, то уравнение
равновесия примет вид
dO' 4аО'т
dz п 1 + 2az'
Интеrрируя, получим
О' = 2О'т п(п1 + 201z) ln С].
Постоянную С подбираем из условия, что при входе в фильеру, Т.е.
при D = п2, напряжение О' = О. Тоrда получим
п 2
О' = 20'т ln П'
Напряжение на вытяrиваемом участке
п 2
0'1 = 20'т ln п 1 .
Но 0'1 не может быть больше О'т, иначе этот участок будет продолжать
удлиняться и сужаться, поэтому
п 2 r:
п 1 < уе = 1,65.
Естественно, что упрочнение материала и учет сил трения MorYT за
метно изменить эту оценку.
470
r JI а в а 12
ПРОЧНОСТЬ ПРИ ЦИКЛИЧЕСКИ
ИЗМЕНЯЮЩИХСЯ НАПРЯЖЕНИЯХ
12.1. Понятие об усталости материалов
Мноrие детали машин в процессе работы испытывают Ha
пряжения, циклически меняющиеся во времени. Например,
детали кривошипно-шатунноrо Mexa
низма двиrателя BHYTpeHHero cropa-
ния (рис. 12.1) находятся под дей-
ствием периодически меняюrцихся
СИЛ. Закон их изменения определяет
ся видом индикаторной диаrраммы и
кинематическими особенностями Me
ханизма.
Ось BaroHa, вращающаяся BMe
сте с колесами (рис. 12.2), также ис-
пытывает циклически изменяющие-
ся напряжения, хотя внешние си
лы остаются неизменными. П роис
ходит это в результате Toro, что
Рис. 12.1
471
частицы вращающейся оси оказываются попеременно то в pac
тянутой, то в сжатой зонах.
Рис. 12.2
Пля оси BaroHa на рис. 12.2 показана эпюра изrибающих
моментов. В точке А поперечноrо сечения (рис. 12.3, а) имеем
а =: М у / J х' Расстояние у от точки А до нейтральной оси
п.
меняется во времени по закону У=:"2 sш""t, rде "" уrловая
скорость вращения колеса. Следовательно,
() Рап.
а t =: sш ""t.
2J x
Таким образом, нормальное напряжение в сечениях оси
меняется по синусоиде с амплитудой (рис. 12.3, 6)
Рап
аа =: .
2J x
' Ь .
о \..../ t
5
Рис. 12.3
Опыт показывает, что при переменных напряжениях по
сле HeKoToporo числа циклов может наступить разрушение дe
тали, в то время как при том же неизменном во времени Ha
пряжении разрушения не происходит.
472
Число ЦИКЛОВ до момента разрушении зависит от аа И из
меняется в весьма ШИрОКИХ пределах. При больших напряже
ниях для разрушения бывает достаточно 5.. .10 циклов. Это
хорошо видно хотя бы на примере
MHoroKpaTHoro изrиба куска про
волоки (рис. 12.4). При меньших
напряжениих деталь выдерживает
миллионы и миллиарды циклов, а
при еще меньших способна рабо
тать неоrраниченно долrо.
После разрушения на поверхности излома детали обнару
живаются обычно две ярко выраженные зоны (рис. 12.5 и 12.6).
В одной зоне кристаллы можно различать невооруженным rла
зам с большим трудом. Микроповерхность излома сrлажена.
В друrой зоне явно выступают признаки свежеrо хрупкоrо раз
рушения, кристаллы имеют острую orpaHKY и блестящую чи
стую поверхность.
Рис. 12.4
Рис. 12.5
473
Рис. 12.6
в целом создается впечатление, что подобноrо рода разру
шение связано с изменением кристаллической структуры ме-
талла. Именно этим и объясняли в свое время разрушение при
циклических напряжениях.
В настоящее время установлено, что структура металла
при циклических наrрузках не меняется. Разрушению пред-
шествует MHoroKpaTHo сменяющаяся прямая и обратная пла-
стическая деформация в наиболее слабых плоскостях наиме-
нее удачно расположенных кристаллов. Это приводит к тому,
что кристаллическое зерно, сохраняя в основном свою форму
и связь с соседними зернами, постепенно разделяется на части
полуразрушенными разрыхленными прослойками, имеющими
определенную кристаллоrрафическую ориентацию.
Из рис. 12.5 видно, что разрушение вала произошло в ре-
зультате развития трещины, образовавшейся у края сечения.
Разрушение рельса (см. рис. 12.6) обусловлено развитием Tpe
щины, образовавшейся внутри сечения в зоне MeCTHoro порока.
По характеру излома можно судить о направле}JИИ развития
трещины. Обычно хорошо видны линии торможения ("OTДЫ
ха") трещины, связанные как с изменением режима работы
детали, так и с особенностями структуры материала в сече
нии.
474
В настоящее время, однако, физические основы теории
твердоrо тела не находятся еще на такой стадии развития,
чтобы на их базе можно было создать методы расчета на BЫ
носливость. Поэтому приходится, сохраняя все предпосылки
механики сплошной среды, идти по пути накопления экспе
риментальных фактов, из совокупности которых можно было
бы выбрать подходящие правила как руководство для расче
та. Объединение и систематика экспериментальных данных
и представляют собой в настоящее время содержание теории
сопротивления усталости.
12.2. Основные характеристики цикла
и предел выносливости
Рассмотрим вначале случай одноосноrо напряженноrо co
стояния.
d
о
Рис. 12.7
Закон изменения rлавноrо напряжения (J во времени пред
ставлен кривой, показанной на рис. 12.7. Наибольшее и
наименьшее напряжения цикла обозначим через (Jmах И (Jmin'
Их отношение называется 'lCоэффициентом. асим.м.етрии ЦU'ICда:
(Jmin R
(1"
(Jmах
(12.1)
в случае, Korna (Jmах = (Jmin, R(1' = 1, и цикл называ
ется сuм.м.етричным.. С таким циклом, в частности, мы уже
познакомились, рассматривая пример вращающейся оси Baro
на. Если (Jmin = О или же (Jmах = О, цикл называется nYДb
сационным. (рис. 12.8). Для пульсационноrо цикла R(1' = О или
R(1' = oo. Циклы, имеющие одинаковые показатели R(1', Ha
зываются: nодобны.wu.
4715
d
dлю.r
dbfu mtи:.o
t О t t
dтlл- О
CU/'fHtтpи'lHbIи
цик"
n""ьсоциОННЫI
цикль/
Рис. 12.8
Любой цикл может быть представлен как результат нало
жени я постоянноrо напряжения ит на напряжение, меняюще
еся по симметричному циклу с амплитудой ив (см. рис. 12.7)
Очевидно, при этом
иmах + frmin
2
иmах frmin
ив =
2
(12.2)
и т =
Процесс образования трещины при переменных напряже
ниях связан с накоплением пластических деформаций. Поэто
му следует ожидать, что усталостное разрушение определяет
ся только наибольшим и наименьшим напряжениями цикла и
не зависит от закона изменения напряжений внутри интерва
ла и mах frmin. Следовательно, циклы, показанные, например,
mr\l\f\, fN
о t
Рис. 12.9
на рис. 12.9, являются равноценными. Точно так же, как по
казывают опыты, несущественным является влияние частоты
изменения напряжений. Исключення представляют испытания
при высоких температурах, а также при воздействии коррози
анной среды. В этих условиях уменьшение частоты приводит
к некоторому снижению сопротивления усталости. В итоrе для
оценки усталостноrо разрушения в условиях заданноrо цикла
достаточно знать только иmах и frmin или (1т И (14'
476
Теперь, в дополнение к уже известным нам механическим
характеристикам материа.ла, введем некоторые новые, связан-
ные со спецификой циклическоrо наrружения. Естественно,
что эти характеристики MorYT быть определены только путем
специально поставленных экспериментов.
Наиболее распространенными являются испытания в ус-
ловиях симметричноrо цикла. При этом обычно используют
принцип чистоrо изrиба вращающеrося образца. На рис. 12.10
пока.зана схема машины ДЛЯ испытания образцов при чистом
изrибе. Образец 1 зажат во вращающихся uaHra.x 2и 3. Усилие
передается от rруза, подвешенноrо на cepьra.x .4 и 5. Счетчик 6
фиксирует число оборотов образца. Коrда образец ломается,
происходит автоматическое отключение двиrателя 7 от KOH
такта 8.
2
J
5
6
1
"/
Рис. 12.10
Пля проведения стандартных испытании на усталость He
обходимо иметь не менее десятка одинаковых образцов с тем,
чтобы можно было определить число циклов, которое выдер-
жит образец до разрушения, в зависимости от заданноrо Ha
пряжения.
Техника определения этой зависимости не содержит прин
ципиальных трудностей, но сам процесс оказывается доста-
точно длительным. Поэтому испытания ведут, КаК правило,
одновременно на нескольких машина.х.
477
Примерно половину партии образцов испытывают сна-
чала при ОТНОСИТeJIЬНО высоких напРJlжеНИJ[Х (0,5... 0,76.).
При болы.iIем наПРJ[жении образец, естественно, выдерживает
меньшее число циклов. Так как с уменьшением напРJ[жения
число циклов N растет очень быстро, то полученные точки
зависимости N = 1({1) удобно откладывать в полулоrарифми-
ческой шкале (рис. 12.11). СПУСКaJlСЬ по оси ординат вниз, Т.е.
умеНЬШaJI от образца к образцу наПРJ[жение, мы обнаружива-
ем, что какая-то часть образцов, несмотря на длительность
испытания, не' проявляет склонности к разрушению. Зна-
чит, при каком-то числе циклов испытание образца необходимо
прекратить.
d,ИЛо
500
400
5
100
10 S
Рис. 12.11
Опыт испытания стальных образцов при нормальной тем-
пературе показывает, что если образец не разрушился до 107
циклов (это примерно 54 ч при 3000 об./мин), то он не разру
шится и при более длительном испытании. Число циклов, до
KOToporo ведут испытание, называется базой испытаниЕ. Та-
ким образом, для стальных образцов в обычных условиях база
испытания равна десяти миллионам циклов.
Пля цветных металлов и для закаленных до высокой TBep
дости сталей не удается установить такое число циклов, вы-
держав которое, образец не разрушился бы в дальнейшем. По-
этому в подобных СЛУЧaJIХ базу испытаний увеличивают до
108 циклов.
Точки, соответствующие неразрушившимся образцам, от-
кладывают в правой части rрафика против базовоro числа и
отмечают стрелками (см. рис. 12.11). ОставШИМСJl образцам
100
10
478
испытуемой партии (образцы 7, 8, 9) последовате.п:ьно задают
напряжения, леЖa.II1Ие в интерва.ле между ыииима.льным раз-
рушающим напряжением и максима.льным неразрушающим
напряжением. В результате устанавливают то наибольшее
значение максимальноrо напряжения цикла, при котором обра-
зец не разрушается до базы испытания. Это напряжение на-
зывается предеАО'« вЫНОСАивости.
Предел выносливости обозначают через (1н, rne индекс
R соответствует коэффициенту асимметрии цикла. Так, для
симметричноrо цикла обозначение предела выносливости при
ни.мает вид (1 1, ДЛЯПУJIЪсационноro (10 И Т.д.
Пля расчета деталей, не предназначенных на длительный
срок службы, а также при некоторых специальных расчетах
вводят понятие 02ранu'ЧеННО20 предеАа БЫНОСJ&uвосmи (1нн, rne
под N понимают заданное число циклов, меньшее базовоrо.
Оrраниченный предел выносливости леrко определить по кри-
вой усталостноrо испытания (см. рис. 12.11). Пля naHHoro Ma
териала, например, при N = 105 получаем (11N = 400 МПа.
Пля испытаний на усталость характерен большой разброс
экспериментально полученных точек, и для достоверноrо опре-
деления предела выносливости требуется испытание большоrо
числа образцов с последующей статистической обработкой pe
зультатов, что является трудоемкой операцией. Поэтому был
сделан ряд попыток связать 9мпирическими формулами предел
выносливости с известными механическими характеристика
ми материала.
Как правило, для' сталей предел выносливости при изrибе
составляет половину от предела прочности:
(1 1 (0,4. . . О, 5) (1в.р,
причем для уrлеродистых сталей он ближе к нижней rранице,
для леrированных к верхней. Пля высокопрочных сталей
можно принять
1
(1 1 400 + 6" и в . р ,
Пля цветных металлов предел выносливости изменяется в бо
лее широких пределах:
(1 1 (0,25...0,5)(1в.р.
470
Ана.поrично испытанию на чистый изrиб можно вести ис-
пытание на кручение в условиях циклически измеНIЮIЦИХСЯ
напряжений. Пля обычных ста.пей в ЭТОМ случае
T 1 O,60' 1,
для хрупких материалов (высоколеrированная ста.пь, чуrун)
T 1 O,80' 1'
Композиционные материа.пы по отношению к циклически из-
меняющимся напряжениям естественно обладают той же ани-
зотропией, которая проявляется и при обычном наrружении.
В тех случаях, коrда усталостная трещина развивается по-
перек арматуры, композиты, как и следовало ожидать, про-
являют высокое сопротивление усталости. Так, например, для
уrлепластиков 0' 1 0,80'в.р. Но изучение усталостной выно-
сливости композитов еще впереди.
Приведенные выше соотношения и все им подобные следу-
ет применять с осмотрительностью, поскольку они получены
только для определенных материалов и в определенных усло-
виях испытания (при изrибе, при кручении). Предел выносли-
вости, например, полученный в условиях циклическоrо растя-
жения и сжатия, оказывается на 10...20 % ниже, чем предел
выносливости, полученный при изrибе, а предел выносливо
сти при кручении сплошных образцов отличается от предела
выносливости, полученноrо для полых образцов.
В табл. 12.1 приводятся данные по пределу выносливости
для некоторых материалов.
Таб.ilUца 12.1. Значение предела выносливости
при изrибе и кручении
Материал I а т . р , МПа а.. р , МПа U l, МП& T l, МПа
i
Сталь малоуrлеродистаJl I 180 320 420 lБО 220 80 120
Сталь 30 нез&халенн8.JI 280 480 БОО 200 270 110 140
Сталь 45 незахаленн8.JI I 340 БОО 750 250 340 150 200
Сталь зохrСА з&халенн8.JI I 1500 1700 700 400
480
OICOH..OHue то6А. 11l.1
Материал IТT.p, МПа 1Т..p, МПа lТ l, МПа r l, МПа
Чуrун серый 210 100 80
Алюминиевый сплав АМЦ
(термообработанный) 35 176 100 190 49 70
Орrаническое стекло 75 20 25
При м е ч & И И е. Имеющийс.: разброс д&кных об'ысн.:еТСI обыч-
ными отступлеИИIМИ техиолоrических режимов (плавки, прокатки, тepM
обработки) от номии&льных.
Мы рассмотрели испытания при симметричном цикле.
Образцы в условиях несимметричных циклов испытывают
обычно не на изrиб, а на растяжение сжатие или на кру-
чение специальнымИ машинами rидропульсаторами. Но не
исключено также и применение простейших приспособлений.
Так, можно на испытуемом образце установить пружину, co
здающую постоянное растяжение образца с напряжением (1т
(рис. 12.12). Во время испытания на это напряжение накла-
дывается напряжение изrиба, меняющееся по симметричному
циклу.
r
Рис. 12.12
Естественно, что введение дополнительноrо параметра
(показателя асимметрии цикла) делает задачу эксперимента-
тора более rромоздкой, а для испытаний необходимо распо
лаrать уже не одним, а несколькими десятками одинаковых
образцов. Образцы разбивают на rруппы, для каждой из KOTO
рых при испытании фиксируют значение среднеrо напряжения
цикла l1т, а предельную амплитуду l1а определяют по базовому
числу циклов, подобно тому как это делали для симметричноrо
16 В. И. Феодосьев
481
цикла. Кривая усталости (иа, 19 N) получается схожей с по
казанной на рис. 12.11, но, естественно, с друrими числовыми
значениями, зависяIЦИМИ от з щанноro ит.
В результате испытания rруппы образцов мы получаем
предельное значение и а , соответствующее выбранному значе-
нию ит. Это дает одну точку на плоскости ит, иа (рис. 12.13).
Проводя испытание следующей rруппы образцов, мы находим
вторую точку. Действуя под(),бным образом и далее, получа-
ем кривую предельных наПРJlжений при асимметричном ци-
кле (см. рис. 12.13). Она называется диаераАСАСОй nредеАЬНЫХ
а,м'nАитуд.
6а
6.., А
+
&/11
о
Рис. 12.13
Смысл ее очевиден. Положим, цикл характеризуется из-
вестными значениями ит И иа, которые можно рассматривать
как координаты рабочей точ](и. Нанося эту точку на диа-
rpaMMY (см. рис. 12.13), мы получаем возможность судить о
прочности образца. Если рабочая точка располаrается ниже
кривой, то образец способен выдержать неоrраниченное число
циклов ИЛИ, во всяком случае, сохранит прочность до базовоrо
числа. Если же точка расположена выше кривой, то это озна-
чает, что разрушение произойдет при KaKOM TO оrраниченном
числе циклов.
Так как построение диаrраммы предельных амплитуд
является достаточно трудоемким, то для целей расчета ее
целесообразно схематизировать. Точка А диаrраммы (см.
рис. 12.13) отражает результат испытания образцов при СИМ
метричном цикле. Точка В д;llя хрупких материалов оrрани
чивает условия работы образца по пределу прочности. Левая
часть диarраммы с более чем достаточной точностью может
482
быть аппроксимирована прямой, проходnцей через точку А и
имеющей уrловой коэффициент -Фи = tg а. Пля построения
этой прямой достаточно знать предел выносливости при сим
метричных циклах 0' 1 и располаrать либо еще одной точкой,
например пределом выносливости при пульсационном цикле
( о" т = о" а), либо самим yr ловым коэффициентом Фи. Значе
ния последнеrо, как показала систематизация мноrочисленных
опытов, лежат в пределах 0,1... О, 2 для уrлеродистых сталей
и 0,2... О, 3 для леrированных. Испытание образцов на круче
ние дает заметно меньшие значения yr ловоro коэффициента -ф.,.
для тех же сталей: 0,05... О, 1 и 0,1. . . О, 15 соответственно.
Правая часть диаrраммы аппроксимируется прямой, про
ходящей через точку В и составляющей уrол 450 с координат
ными осями О'т И О'а, Т.е.
О"т + а а = О'в.р.
Смысл этой прямой очевиден. Максимальное напряжение цик
ла а т + О"а не может превышать ав.р, Следовательно, при cxe
матизации диаrрамма предельных амплитуд заменяется двумя
прямыми АС и ВС (см. рис. 12.13).
Итак, построив диаrрамму предельных амплитуд при
асимметричных циклах, мы получили, казалось бы, основные
данные для Toro, чтобы проводить расчеты на прочность лю
бой детали, работающей в условиях циклически изменяющихся
напряжений. Но это только так кажется. rлавное впере
ди. Циклическая прочность деталей, в отличие от прочности
образцов, содержит в себе ряд специфических особенностей, к
рассмотрению которых мы сейчас и перейдем.
12.3. Влияние концентрации напряжений
на прочность при циклическом наrружении
Одним из основных факторов, которые необходимо учиты
вать при практических расчетах на циклическую прочность,
является концентрация напряжений.
Мноrочисленные теоретические и экспериментальные ис
следования показывают, что в области резких изменений фор
мы ynpyroro тела (внутренние уrлы, отверстия, выточки), а
16.
483
А
!JЛf:'
А
А
а
JJL
Рис. 12.14
6
также в зоне контакта деталей возникают повышенные напря
жения. Например, при растяжении полосы с небольшим OT
верстием (рис. 12.14, а) закон paBHoMepHoro распределения Ha
nряжений вблизи отверстия нарушается. Напряженное COCTO
яние становится двухосным, а у края отверстия появляется
пик oceBoro напряжения. Аналоrично при изrибе ступенчато
ro стержня (рис. 12.14,6) в зоне BHYTpeHHero уrла возникает
повышенное напряжение, которое зависит в первую очередь
от радиуса закруrления т. При прессовой посадке втулки на
вал (рис. 12.14, в) у концов втулки и вала также возникают
местные напряжения. Подобных примеров можно привести
очень MHoro. Описанная особенность распределения напря
жений получила название 'lCонцентрации наnрz енuй. Зона
распространения повышенных напряжений оrраничена узкой
областью, расположенной в окрестности очаrа концентрации,
и в связи с локальным характером распространения эти напря
жения называются АСестНЫАСи.
Степень влияния местных напряжений на прочность дeTa
ли существенным образом зависит от характера наrружения.
Проводя расчет конструкции, работающей в условиях
обычноrо, нециклическоrо наrружения, мы местными напря
жениями, как правило, пренебреrаем. И к этому имеются
основания. Паже незначительные проявления пластических
свойств материала приводят к тому, что в зоне концентрации
484
напряжений возникают необратимые деформации, не приводя
щие к образованию TpeIЦJIHЫ, и даже если она и образуется,
то конструкция в целом сохраняет свою несущую способность.
Так, в частности для стержня, показанноrо на рис. 12.14, а, Ha
личие отверстия не сказывается сколь либо заметным образом
на силе, при которой наступает разрыв.
Иначе обстоит дело при циклически изменяющихся напря-
жениях. MHOrOI<paTHOe изменение напряжений в зоне очаrа
концентрации приводит к образованию и дальнейшему разви
тию трещины с последующим усталостным разрушением дe
тали. Поэтому при циклическом наrружении явление KOHцeH
трации требует особоrо внимания, что находит свое выраже
ние прежде Bcero в тех мерах, которые применяются на прак-
тике при проектировании машин. Для деталей, работающих в
условиях циклических напряжений, внешние обводы стремят-
ся сделать возможно более плавными, радиусы закруrления во
внутренних yr лах увеличивают, необходимые отверстия рас-
полаrают в зоне пониженных напряжений и т .д.
..
о о
Рис. 12.15
а
Рис. 12.16
На рис. 12.15, а показана конструкция rалтели с rлубоким
поднутрением, уменьшающим местные напряжения. Для уве-
личения радиуса rалтели можно применять также проставоч-
ные кольца, как это показано на рис. 12.15, б. Для снижения
местных напряжений иноrда практикуется введение разrру
зочных канавок (рис. 12.16, а), наличие которых блаrотворно
о
485
сказывается на уста.лостной прочности ва.ла. TaKoro же рода
разrрузочные канавки можно примеНJ[ТЬ и в местах посадки
(рис. 12.16,6).
Однако подобноrо рода приемы, используемые при проек
тировании ответственных деталей, MorYT только снизить Bpeд
ное влияние местных напряжений, но не освобождают от Hero
полностью. Поэтому, очевидно, необходимо выработать спосо
бы количественной оценки этоrо фактора с тем, чтобы иметь
возможность учесть ero при расчетах.
Местные напряжения в зависимости от rеометрической
формы детали определяют обычно при помощи методов Teo
рии упруrости. Часто при определении местных напряжений
используют также испытание моделей. Обычно здесь приме
няют поляризационный метод (см. 14.4;).
Основными показателями местных напряжений являют
ся теоретu'ЧеС'lCuе 'lCоэффuциенты 'lCонцентрации напряжений:
для нормальных напряжений
О'mах
О'иом
а для касательных напряжений (кручение вала)
аа =
(12.з)
7"mах
aT= 1
7"иом
rne О'mах И 7"mах наибольшие местные напряжения, О'иом И 7"иом
так называемые но.минаАьные напряжения, которые опреде
ляются по простым формулам сопротивления материалов без
учета эффекта концентрации. Обычно подсчет О'иом ведут по
наиболее ослабленному сечению детали, например по сечению
А А (см. рис. 12.14). В частности, для полосы с отверстием
(см. рис. 12.14, а)
р
о' иом =
PA A '
для случая изrиба ступенчатоrо стержня (см. рис. 12.14, 6)
9'J1
О'иом = W .
A A
486
rде W p полярный момент сопротивления неослабленноrо ce
чения.
Так или иначе, номи
нальное напряжение выби
рают в первую очередь из
соображений, связанных с Iot
простотой расчета. Teope J
тический коэффициент KOH
центрации определяют для
основных встречающихся
на практике типовых KpH
струкционных элементов.
Значения аи даны в виде
таблиц и rрафиков в спра
вочной литературе по Ma
шиностроению. Так, на
рис. 12.18, а, 6 показана за
висимость теоретическоrо
коэффициента KOHцeHTpa
ции от отношения rеометри
ческих размеров для полосы
с отверстием и для вала с
выточкой соответственно.
Теоретический коэффи
циент концентрации не опи
сывает полностью xapaK
тер изменения местных
Однако если при подобных
подсчетах возникают трудности,
за номинальное следует прини
мать напряжение внеослабленном
сечении. Например, при кручении
вала, имеющеrо поперечное OTBep
стие (рис. 12.17), имеем
М"
r НОМ == W '
р
JЛ JЛ
t . 1
Рис. 12.17
N
(1.6
3,0
2,5
1,0
',5
,,о
()
0,2
а
0,4
0,6 d/b
N
J,O
а6
2,2
D r d
1- P
2,5
1,8
1,1,
1,0 о
0,15
О
Рис. 12.18
о,и r/d
0,06
487
напряжений, а характеризует только относительное увеличе
ние одной компоненты напряженноro состояния. Поэтому вли
яние местных напряжений на сопротивление УСТ8JIОСТИ при oд
нам и том же теоретическом коэффициенте концентрации, но
при разЛИЧНЫХ типах очаrов концентрации оказывается раз
личным. Но еще большую роль иrрают свойства caMOro Ma
териала, или, как rоворят, ero чувствительность к местным
напряжениям.
В связи с этим в отличие от теоретических коэффициен
тов концентрации вводят понятия эффен:тивных 'lCоэффициен
тов 'lCонцентрации К и и КТ' В условиях симметричноrо ци
кла (при R = 1) эффективные коэффициенты концентрации
определяются отношениями
К и = (1 1 и КТ = 1" 1 , (12.4)
(1 11( 1" 11(
rlle (1 1 и 1" 1 пределы выносливости rладкоrо образца; (1 11(
и 1" 1 к пределы выносливости, подсчитанные по номиналь
ным напряжениям для образцов, имеющих концентрацию Ha
пряжений, но такие же размеры поперечноrо сечения, как и у
r ладкоrо образца.
Эффективный коэффициент концентрации зависит уже не
только от rеометрической формы и способа наrружения, но
и от механических свойств материала. При несимметричных
циклах, как показывает опыт, диаrрамму предельных ампли
туд для образцов с концентрацией напряжений можно полу
чить из соответствующей диаrраммы r ладких образцов (см.
рис. 12.13) путем деления всех ординат на К и .
Наиболее достоверные числовые значения эффективно
ro коэффициента концентрации, естественно, получаются на
основе усталостноrо испытания образцов. В настоящее Bpe
мя в этом направлении накоплен достаточно большой экспери
ментальный материал. Для типовых и наиболее часто BCTpe
чающихся видов концентрации напряжений и основных KOH
струкционных материалов созданы таблицы и rрафики, KOTO
рые приводятся в справочной литературе. На рис. 12.19 пока
заны в качестве примера типичные rрафики для определения
эффективноrо коэффициента концентрации.
488
J(d
I<t
t
i=;:rл I I I :I:.m
:;
R
1,0 О
о,os
D,10
41}
8,20 d
1,8
1,6
1,4
2,5
1,2
Рис. 12.19
Первый rрафик дает значения K(f дЛЯ стальноrо ступен
чатоrо стержня при растяжении и сжатии. Кривые 1, 2 и 3
даны для сталей с О'в.р, равном 400, 800 и 1200 МПа. Второй
rрафик дает К т для кручения вала с кольцевой выточкой для
уrлеродистой стали с О'в.р == 500 МПа.
В тех случаях, коrда прямые экспериментальные данные
по определению эффективноrо коэффициента концентрации OT
сутствуют, прибеrают к различным приближенным оценкам.
В частности, сопоставление результатов мноrочисленных ис
пытаний позволяет внекоторой оrраниченной мере установить
соотношение между эффективным и теоретическим коэффици
ентами концентрации в виде
к (f == 1 + q (Q:(f 1),
rде q коэффициент чувствительности материала к местным
напряжениям.
Значение q зависит в основном от свойств материала. Ha
пример, можно считать, что для высокопрочных леrированных
сталей значение q близко к единице, для конструкционных CTa
лей в среднем q == 0,6... О, 8, причем более прочным сталям co
ответствуют большие значения q. Для ceporo чуrуна значение
q близко к нулю. Иначе rоворя, серый чуrун нечувствителен
к местным напряжениям. Объясняется это тем, что крупные
зерна rрафита, содержащиеся в структуре чуrуна, уже сами
по себе являются такими очаrами концентрации, по cpaBHe
нию с которыми rеометрические особенности детали теряют
свое значение.
489
Описанный способ определени эффективноro коэффици-
ента концентрации является довольно rрубым. Коэффициент
чувствительности заметно меняется в зависимости от reOMe-
трических особенностей как самой детали, так и очаrа KOH
центрации напряжений. Наблюдается некоторое снижение q в
случае больших коэффициентов К (f и некоторое возрастание
при увеличении абсолютных размеров детали. Поэтому во-
прос определения эффективноrо коэффициента концентрации
смыкается с так называемым масштабным эффектом, к рас-
смотрению KOToporo мы сейчас и перейдем.
12.4. Масштабный эффект
Если из одноrо и Toro же материала изrотовить несколько
отличающихся по диаметру партий образцов, то после испы
тания на усталость обнаруживается, что предел выносливо
сти с увеличением диаметра уменьшается. Эта зависимость
носит асимптотический характер. По виду кривой можно за-
ключить, что для очень больших образцов, которые мы уже
ни изrотовить, ни испытать не можем, снижение предела вы-
носливости с увеличением диаметра прекращается.
Снижение предела выносливости с увеличением размеров
детали получило название .«асштаБНО20 эффе'ICта. Этот эф-
фект следует рассматривать как очевидное следствие Toro, что
максимальное напряжение в образце, а тем более в детали, не
характеризует полностью процесс усталостноrо разрушения, а
предел выносливости, как уже указывалось, не выражает в чи
стом виде свойств материала. Статистический характер воз-
никновения микротрещин тесно связан снеоднородностью на-
пряженноrо состояния в пределах малых объемов, и reометри-
ческое подобие, как критерий для оценки усталостноrо разру
шения, потребовало бы rеометрическоrо подобия всех кристал
лов в структуре и даже rеометрическоrо подобия их строения.
Но эти условия при переходе от малоrо образца к большому не
соблюдаются. Естественно поэтому, что не сохраняя полноrо
rеометрическоrо подобия, мы не получаем и силовоrо подобия.
Вопрос состоит в том, как учесть этот эффект количе
ственно. Понятно, что единствеННaJI возможность сделать это
490
заключается в накоплении, систематизации и осм:ысливании
экспериментальных данных, ибо получить какие либо обна
деживающие результаты из теоретическоrо a.Rализа явлений,
протекающих в поликристаллической структуре металла, мы
пока не можем.
Прежде Bcero введем 'lCоэффuцuенmы ..wасшmа6НО20 фа'IC
тора
К lТ ld
drr '
lТ l
К т ld
dr= '
T l
(12.5)
Т.е. безразмерные величины, которые показывают, на какое
число следует умножить предел выносливости lТ 1 или т 1
CTaHnapTHoro образца диаметром 7,5 мм, чтобы получить пре
дел выносливости lТ ld или т ld образца диаметром d.
При несимметричных циклах поправка Kdrr, так же как и
Ки, входит только в амплитудную составляющую цикла. Ибо,
опять же, как показывает опыт, при увеличении абсолютных
размеров образцов диаrрамма предельных амплитуд претер
певает изменения только в значениях ординат, каждое из KO
торых, С учетом описанной ранее концентрации напряжений,
становится равным lТaK и / Kd(f'
В расчетных выкладках, как мы увидим в дальнейшем,
множитель Ки/ Kd(f используется как единое целое. Числи
тель зависит от концентрации напряжений, а знаменатель
от размеров детали.
Таким образом, разделение факторов носит условный xa
рактер. Поэтому естественной является попытка связать Mac
штабный эффект и концентрацию напряжений в единый KOM
плекс не только по форме, но и по существу. А существо со-
стоит в тех представлениях о статистическом характере воз
никновения и накопления структурных повреждений, о KOTO
рых rоворилось выше. Этот вопрос частично поддается коли
чественной оценке при помощи аппарата теории вероятности,
но доведение задачи до числа нуждается, конечно, в принятии
некоторых правдоподобных rипотез и систематизации опыт
ных данных. Остановимся на основных предпосылках и рас-
481
смотрим окончательную полуэмпирическую зависимость, по
лученную в результате TaKoro подхода l .
Мы уже видели, что значение О'mах вблизи очarа KOHцeH
трации, выраженное через теоретический коэффициент KOH
центрации йи, еще не характеризует полностью роль MeCT
ных напряжений в уста.лостном разрушении. Было замечено,
что большое значение имеет также и скорость убывания этих
напряжений, т.е. их rрадиент. Это тоже CBoero рода Mac
штабный эффект. Если местные напряжения убывают Meд
ленно, то в относительно широкой зоне местных напряжений
оказывается большое число кристаллитов, и вероятность ин
дивиnуальной неблаrоrtриятности их состояния и расположе
ния возрастает. Если rрадиент большой и напряжения по мере
удаления от очаrа концентрации быстро падают, то в среднем
статистическом опасность зарождения трещины снижается.
Скорость убывания местных напряжений определяется их
rрадиентом G, т .е. производной от напряжения по некоторой
характерной координате. Например, для стержня, показанноrо
на рис. 12.20,
G dO' I
dr r=d/2'
Под относитеАЬНЫм, zpaaueHmOM понимается величина
dO' 1
c
dr О'm&х'
Увеличение относительноrо rрадиента снижает чувствитель
насть материала к местным напряжениям.
Обратное влияние оказывает линейная протяженность L
очаrа концентрации. Чем больше L, тем большее число кри
сталлитов находится в зоне повышенных напряжений и Bepo
ятность образования усталостной трещины возрастает. Ha
пример, для стержня, показанноrо на рис. 12.20, L == 7rd, а
1 Здесь мы опир&еМСJl н& исслеДОВ&НИJl, результ&ты которых изложены
в книrе В.П. KOr&eB& "Р&счеты н& прочность при Н&ПРJlжеНИJlХ, перемен
ных во времени" (М.: Машиностроение, 1977).
492
t P
P
Рис. 12.20
Рис. 12.21
ДЛЯ стержня прямоуrольноrо сечения, имеющеrо две канавки
(рис. 12.21), L = 2t.
Таким образом, площадь поперечноrо сечения, охваченная
зоной повышенных напряжений, характеризуется отношением
L j G и чувствительность детали к местным напряжениям и
масштабному эффекту определяется именно этой величиной.
Эксперименты в достаточной мере подтверждают эту мысль.
В результате была предложена дробно степенная зависимость
Ки! Kd(J' от Lj G . Лля сталей, алюминиевых и маrниевых спла
вов, а также для чуrуна с шаровидным rрафитом она имеет
ВИД
К и
Kdи =
ИЛИ при кручении
2аи
( С ) lIа
1 + 88,3 L
( 12.6)
2ат
( С ) II'" '
1 + 88,3 L
rде 88,3 коэффициент, мм 2 (поэтому 1j G и L следует под
ставлять в миллиметрах); 1I(J', II T показатели степени, по
стоянные для данноrо материала (при определенной темпера
туре и частоте испытания). Пля уrлеродистых сталей lIи =
КТ
KdT
=
(12.7)
493
= 0,1... 0,14; для алюминиевых сплавов 11(1' = 0,08... О, 09;
ДЛЯ чуrуна с шаровидным rрафитом 11(1' = О,15; ДЛЯ леrиро
ванных сталей, как правило, 11(1' = 0,04... О, 08. Значения IIТ
определены с меньшей достоверностью и для меньшеrо числа
материалов. При отсутствии информации можно ориентиро
ва тъся на простое соотношение
IIТ (1,5...2)11(1"
В выражениях (12.6) и (12.7) еще не определено значе
ние С . Подобно теоретическому коэффициенту концентрации,
оно зависит от формы тела и условий наrружения и определя
ется законом изменения напряжений в окрестности очаrа KOH
центрации. Это второй (кроме 0.(1') параметр, характери
зующий особенности местных напряжений. Введение в расчет
rрадиента не требует специальноrо решения каких либо новых
задач. Ero определяют в каждом конкретном случае OДHOBpe
менно с теоретическим коэффициентом концентрации.
Надо, однако, сказать, что в справочной литературе orpa
ничиваются в основном систематизацией данных по коэффи
циентам концентрации, хотя rрадиенты во всех случаях из
вестны. На них стали обращать внимание лишь в последние
rоды.
Возвращаясь к рассмотренным ранее примерам KOHцeH
трации напряжений, приведем данные по rрадиентам.
Для полосы с отверстием (см. рис. 12.19, а)
G = 4,6/d.
Для вала с выт очк ой (см. рис. 12.19, , если D/d > 1,5, то
при растяжении G = 2/т, а при изrибе G = 2/T+2/d. Если же
D / d < 1, 5, то соответственно имеем
G = 2 (1 + !t')
т
и
G = 2 (1 + !t') + ,
т d
rде
1
!t'=
4у + 2
При кручении, независимо от D/d, G = l/r + 2/d.
( 12.8)
494
Пля вала с rалтелью (см. рис. 12.19) при D/d > 1,5 для
растяжения и изrиба G = 2,3/т И G = 2,3/Т + 2/d, а при
D/d 15 G 2,3(1+ ) G 2,3(1+ ) +
<, и d ' rде
т т
по прежнему определяется выражением (12.8). Пля кручения,
также независимо от D / d,
G = 1,15 + .
т d
(12.9)
в последнем примере Har лядно проявляются преимуще-
ства изложенноrо подхода. Каждая кривая, показанная на
рис. 12.19, приrодна лишь для определенноrо материала и при
определенном отношении D/d. Выражение (12.9) обладает не-
сравненно большей универсальностью.
12.5. Влияние качества обработки поверхности
в большинстве деталей усталостное разрушение начина-
ется с поверхности. Поэтому состояние поверхности cyrцe-
ственным образом влияет на предел выносливости и в еще
большей степени сказывается на долrовечности детали.
Особенности, связанные с обработкой поверхности, учи-
тывают при расчетах на усталостную прочность введением
'lCоэффицuента JCачества' поверхности
(1'
К 1
p= ,
(1 1
(12.10)
rде (1 1 предел выносливости для серии образцов, имеющих
шероховатость, измеряемую в микрометрах по fOCT 2789 73;
(1 1 предел выносливости тщательно полированных образ-
цов. Шероховатость 12 мкм примерно соответствует тонкой
обточке образца на токарном станке.
На рис. 12.22 приведены ориентировочные значения коэф
фициентов качества поверхности различных сталей в зависи
мости от BpeMeHHoro сопротивления. Коэффициент К F для
полированных образцов можно считать равным единице.
Токарная обточка алюминиевых образuов дает К F =
= 0,8... О, 9, маrниевых K F = 0,7... О, 8. Очень чувстви-
тельны к качеству обработки поверхности титановые сплавы.
495
K F
1,0
Ш'р4хol4тоетj,NКJI
<1
/,6
0,9
0,8
K F
8,8
ll1tH"
0,7
0,6
0,6
IdllHtи
0,4
'Q(J IlHti
o,s
Joo 400500 700 тои 1500 1000
0,1 'О
40,
6f)(J 800
1000 12OO6 u ,ilRo
Рис. 12.22
Рис. 12.23
Снижение предела выносливости титановых точеных образцов
по сравнению со шлифованными составляет при нормальной
температуре примерно 33 %.
Большое влияние на предел выносливости оказывает KOp
розия. На рис. 12.23 показано снижение коэффициента K F в
зависимости от BpeMeHHoro сопротивления стали при различ
ной выдержке в условиях коррозии до испытания на усталость.
Все это примеры неrативноrо влияния поверхностной об
работки по сравнению с полировкой. Теперь следует поrово
рить о специальной обработке, повышающей предел выносли
вости.
В промышленности уже давно и весьма широко применя
ют методы поверхностноrо упрочнения деталей, работающих
в условиях циклических напряжений (рессоры и полуоси aB
томашин, зубья шестерен, винтовые клапанные пружины и
пр.). Эта специальная поверхностная обработка не преследу
ет целей общеrо изменения прочностных показателей металла.
Речь идет именно об усталостном упрочнении, часто в соче
тании с требованиями износостойкости. К числу таких MeTO
дов, применяемых в различных сочетаниях, относятся химико
термические (азотирование, цементация), поверхностная за
калка токами высокой частоты и наклеп поверхностноrо слоя
обкаткой роликами или обдувом дробью.
496
ПовеРХНОСТНaJI обработка создает ДВОJlКИЙ эффект. Во--
первых, повышается прочность поверхностиоro сло., но coxpa
няется вязкость нижележa.IЦИX слоеВ, а BO BТOpЫX, в поверх
ностнам слое создаются остаточные сжимающие напряжения,
препятствующие образованию трещины. В результа1'е обра
ботки предел выносливости в оптимальных СЛУЧaJIХ может YBe
личиться в несколько раз, а долroвечность детали В десят
ки Р().3. Цричем наибольший эффект повеРХНОСТНaJI обработка
дает для деталей, имеющих заметную концентрацию иаПРJlже
ний.
В табл. 12.2 приведены ориентировочные данные для уrле
родистых и леrированных конструкционных сталей, xapaKтe
ризующие эффект поверхностноrо упрочения. Он характери
зуется коэффициентом Kv.
ТаБАuца ни!. Значение Kv ДЛJl уrлеродистых
и леrированных сталей
Тип обработки Диаметр, Kv
мм без концентрации с концентрацией
Закалка токами 7 20 1,3 1,6 1,6 2, 8
высокой частоты 30 40 1,2 1,5 1, 5 2, 5
Азотирование на rлу 8 15 1, 15 1,25 l,9 3,0
бину О, 1 0,4 мм 30 40 1,10 1,15 1, 3 2, О
ЦементаЦИJl на r лу 8 15 1, 2 2, 1 1, 5 2, 5
бину о, 2 о, б мм 30 40 1, 1 1,5 1, 2 2, О
Обработка 7 20 1,2 1,4 1,5 2,2
роликами 30 40 1, 1 1,25 1, 3 1,8
Обдув дробью 7 20 l,l l,З 1,4 2,5
ЗО 40 1, 1 1,2 1,1 1,5
12.6. Коэффициент запаса при циклическом
наrружении и ero определение
Теперь, коrда мы познакомились с основными факторами,
влияющими на сопротивление усталости, мы можем вернуться
к диаrрамме (Тт, (Та, полученной при испытании образцов (см.
497
рис. 12.13). Эта диаrрамма для упрощения была представлена
наклонной прямой
ио. = и l -Ф(1т,
а рабочая область справа оrраничена условием, что макси-
мальное напряжение цикла, равное ит +(10., не превышает ит.р
или ив.р,
Но все это для образцов. Если перейти к детали, то вли
яние местных напряжений, масштабноrо фактора и качества
обработки поверхности приводит к тому, что предельные ам-
плитуды циклов ио. для рассматриваемой детали уменьшатся
в Ku/(KduKF) раз и уравнение предельной прямой (рис. 12.24)
примет вид
1
ио. = К (и l -фит),
(12.11)
rде
К= Ка'
К duK F
представляет собой результирующее влияние трех факторов
на циклическую прочность детали. По результатам экспери
ментальных работ рекомендуется влияние качества обработки
поверхности учитывать иным способом, а именно принимать
(12.12)
К = ( Ки + 1 ) . (12.13)
Kdrr K F Kv
Оrраничение по пределу прочности или по пределу TeKY
чести сохраняется для деталей таким же, как и для образца.
d"
6.1
о с D
Рис. 12.24
в результате получаем диаrрамму предельных амплитуд для
детали (см. рис. 12.24).
498
Номинальные напРlIжеНИlI Umиом И Uаиом цикла, в усло
виях KOToporo работает деталь, примем за координа ты рабо
чей точки А. Если эта точка расположена ниже предельной
прямой, то деталь обладает некоторым запасом циклической
прочности. При пропорциональном увеличении составляющих
цикла приходим к предельному состоянию (точка В).
Условимся под коэффициентом запаса циклической проч
ности понимать отношение отрезка ОВ к отрезку ОА:
ОВ
nR = ОА '
Это отношение характеризует степень близости рабочих усло
вий к предельным. Из выражения (12.11) получаем для точ-
ки В
1
иаВ = К (и 1 ФUmВ),
Но
Uаиом
иаВ = итВ .
U mиом
Приравнивая эти выражения, находим
и 1
итВ = Uтиом'
К U аиом + фU тном
Однако
о в о D итВ
ОА ОС Uтиом
Таким образом, коэффициент запаса циклической прочно-
сти
и 1
nR =
Ки а + ФUт
(12.14)
(здесь индекс "нам" при обозначении номинальных напряже-
ний ит И и а опущен).
Выражение (12.14) дает нам значение коэффициента за
паса циклической прочности по верхней прямой диаrраммы
предельных амплитуд (см. рис. 12.24). Казалось бы, теперь
необходимо установить условие для определения коэффициен-
та запаса на случай, если предельная точка В окажется не на
верхней, а на правой оrраничивающей прямой. Практически,
499
однако, в этом нет никакой необходимости, ибо правая прямая
дает условие, по которому максимальное напряжение цикла не
может превышать временное сопротивление, Т.е.
О'mах = О'т + 0'0 < О'в.р'
Но конструктор, назначая размеры детали, начинает, eCTe
ственно, с выполнения обычных условий по пределу текучести
или временному сопротивлению, обеспечивая необходимый за
пас
О'в.р
nь= или
О'mах
О'т
nT= '
О'mах
и только затем (если это нужно) вычисляет nR (12.14).
Если деталь работает в условиях циклическоrо изменения
касательных напряжений, то структура выражения (12.14) для
коэффициента запаса сохраняется; меняются лишь обозначе
ния:
T l
nR =
Кто + 'ФтТт .
Известны мноrие попытки создания rипотез усталостноrо
разрушения в сложном напряженном состоянии. Все они CBO
дятся В основном К обобщению известных rипотез прочности и
пластичности на случай циклических напряжений. Для наибо
лее часто встречающеrося на практике расчета при двухосном
напряженном состоянии (О', т) общепринятой в настоящее вре-
мя является эмпирическая формула rафа и Полларда
(12.15)
1 1 1
n2 = n 2 + n 2 ' (12.16)
R (1' r
rде nR искомый коэффициент запаса; Па коэффициент запа
са в предположении, что касательные напряжения т OTCYTCTBY
ют; N Т запас по касательным напряжениям, установленный
в предположении, что О' = О.
Формула (12.16) применима не только в случае синфазноrо
изменения О' и т, но и при таких циклах, коrда максимумы О'
и т достиrаются не одновременно.
Рассмотрим некоторые примеры расчетов в условиях ци
клических напряжений.
500
При м ер 12.1. Стаяьиой шлифованиый вая с rаятелью (рис. 12.25)
работает на кручение по несимметричиому ЦИlCлу. Наибольшее зиачение
момента !D1 == 800 Н,м, наименьшее значение !D1 == 200 Н'м. Механиче
ские харахтеРИСТИI(И материа.па т == 190 МПа, а.. р == 600 МПа. Опреде
лить коэффициент запаса.
+
Рис. 12.25
Подсчитываем номинальные хараlCтеристики цикла:
т m && П
Т m && == O,2d 3 == 62, 5 М а,
!D1 m in МП
Tmin == d З == 15,6 а,
0,2
откуда Та == 23,5 МПа, Тт == 39, О МПа.
ОпредеЛJlем теоретический ко--
эффициент концентрации. Дли: этоrо
воспользуемси: справочными дaHHЫ
ми]. На рис. 12.26 показаны rрафи
чески значении: теоретическоrо lCоэф--
фициента дли: ва.па с rа.птелью, pa
ботающеrо на кручение. При D/d ==
50/40 1,25 и r/d == 2/40 0,05
получаем о: 1,6. rрадиент MeCT
ных наПРJlжений ДЛJl этоrо СЛУЧaJI
определи:ем нз выражении: (12.9): G ==
О, 602 MM ].
Длина очаrа концентрации L ==
1rd 126 мм. Так l(aK пока
затель IJT нам неизвестен, то при-
мем IJT l,7Та. Значение же lJa
дли: стали равно 0,1. Поэтому IJT ==
0,17. Теперь по формуле (12.7)
опредеЛJlем КТ / к dT == 1,72. ДЛII
шлнфовки с Rz == 6,3 мкм И а..р ==
600 МПа из rрафика, похазанноrо
на рис. 12.22, находим К F 0,92.
tLt
2,5
2,0
щ
;о
7-2
I,JJ
1,09
1,0 О
405 0.1 о,!
rjtl
Рис. 12.26
] [ОСТ 25.504 82. Расчеты и испытаНИJl на прочность. Методы pac
чета характеристик сопротивлеНИJl уста.пости.
501
Итоrовый поправочный коэффициент д.ll. деТ&JIИ, cor.ll&CHO формуле
(12.13), К = 1,81.
Коэффициент 1/1.,. дл. уrлеродистых СТ&JIей лежит в пределах 0,05.. .
... 0,1. Принимаем 1/1.,. = 0,075 и по формуле (12.15) находим коэффициент
запаса nR = 2,63.
При м е р 11.2. Требуете. определить коэффициент запаса цикли
чесхой прочности дл. В&JIа 1 (рис. 12.27).
Момент !D1 = 1000 Н'м, диаметр В&JIа d = 5 см, а = 20 см, Ь = 8 см,
радиус напрессованной шестерни R ::;; 8 см. МатеРИ&JI уrлеРОДИСТaJI
СТ&JIЬ: О'т.р = 400 МПа, О'..р = 800 МПа, 0' 1 = 350 МПа. Обработка В&JIа
ТOHXaJI обточка.
Под действием посто.нноrо момента !D1 в поперечных сечени.х В&JIа
возникают неизменные во времени касательные напр.жени. т. OДHOBpe
менно с кручением имеет место иэrиб В&JIа под действием силы Р силы
взаимодействи. между шестерЮIМИ (рис. 12.28).
h
Р,
J1l
р
р
Рис. 12.27
Рис. 12.28
И з теории зубчатых зацеплен ий известио, что P'l О, 4Н. Поэтому
Р = J Р? + Р; 1,08Р 1 . Но из условии равновеси. В&JIа 1 Р 1 = !D1/ R,
Р = 1, 08!D1/ R. В зоне посадки шестерни в поперечных сечени.х В&JIа
возникают НОРМ&JIьные напр.жени.. Вследствие ВР&lЦени. В&JIа они будут
меняться по симметричному циклу.
Таким образом, напряженное состояние В&JIа является двухосным, и
для определения коэффициента запаса НаДО обратиться к эмпирической
формуле rафа и Полларда (12.16). СнаЧ&JIа определим отдельно условные
502
запасы прочности по t1' И r:
М !JЛ аЬ 1
итах == иа == O,1d 3 == 1, 08 R Х tJ + Ь О, ld3 '
откуда итах == иа == 61,6 МПа, ит == О. Цикл симметричиый. Поэтому,
соrласно формуле (12.14), Па == t1' l/Kt1'a.
Для определения К необходимо иметь значение Ка / к da, COOTBeT
ствующее условиям посадки шестерни на Ba.JI. На рис. 12.29 дан необхо.-
димый ДЛII этоrо rрафик, взятый из rOCT 25.504 82. По приведенным
кривым для данноrо диаметра можио определить величину Ка / к da при
изrибе Ba.JIa. Кривa.JI 1 соответствует рассматрива.емому случаю, lCоrда
через напрессованную детa.JIЬ переда.еТСJl сила или момент. Кривa.JI .2 дает
значени 11 Ка / к da при отсутствии сил и моментов.
(Kd/Ktid)O
1
20 30 40 50
100 150200 JООd,ни
Рис. 12.29
rрафик построен ДЛJl давлеНИJl напрессовlCИ Р > 30 МПа и ДЛJl
и.. р == 500 МПа. Если давление нa.nрессовки меньше указанноrо, а и.. р
больше, то в найденное по rрафику значение (Ka/Kda)O следует ввести
поправочные коэффициенты.
Будем считать, что в нашем
случае Р > 30 МПа и поправка на
давление не требуеТСII. А вот на и..р
необходима поправка. Поправочный
коэффициент задаеТСJl rрафиком, по.-
казанным на рис. 12.30. Из rрафи
ка находим при и..р == 800 МПа ко.-
эффициент , == 1, 4. Умножаем'
на (Ka/Kda)O == 2,9 (см. рис. 12.29,
кривая 1 при d == 50 мм). Таким
образом, Ka/Kda == 2,9.1,4 == 4,06.
ДЛJI тонкой обточки (12,5 мкм) при
1,75
500 700 800 900
Рис. 12.30
d}МЛа
Ц0
'}25
1
500
503
и..р 800 МПа с помощью диarраммы, приведенной на рис. 12.22, опреде--
л.ем значение FF 0,85. Поло_им, что ВLII проходит оБJ[аТJ[У ролихами,
и в соответствии с табл. 12.2 K tJ 1,3. В итоre, соrласио формуле (12.13),
получаем К 3,26. Следовательно, п., = 1,74.
Далее, имеем То О, Тт fJЛ./(О,211 3 ) = 40 МПа. Посхольху то
О, коэффициент за.паса следует определ.ть по пределу техучести: п,. =
U т . р /U з .. = 5.
По формуле (12.16) вычисл.ем Пll:
п.,п.,.
Пll = 1,64.
...; n + n
r л а в а 13
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ
ДЕФОРМИРУЕМЫХ СИСТЕМ
13.1. Понятие об устойчивости
в предыдущих rлавах мы считали, что при статическом
наrружении упруrих элементов конструкций их состояние paB
новесия является единственным при любых наrрузках (имеют
ся в виду наrрузки, при которых возникающие напряжения и
деформации подчиняются закону rYKa).
Например, в rл. 1, rде были рассмотрены стержни, Harpy
женные осевыми силами, предполаrалось, что состояние paB
новесия стержня и при растяrивающей, и при сжимающей силе
одно и то же. Однако в общем случае может быть несколько
состояний равновесия стержня. Поэтому при расчетах необ
ходимо выяснить какие из возможных состояний равновесия
являются устойчивыми, а какие неустойчивыми.
Под устойчивостью мы интуитивно понимаем свойство
системы сохранять свое состояние при внешних воздействиях.
Если система таким свойством не обладает, она называется He
устойчивой. В равной мере можно сказать} что неустойчивым
является ее состояние.
605
В реальных условиях всеrда существуют какие то причи
ны, по которым может произойти отклонение от исходноrо paB
HOBecHoro состояния. Следовательно, возможность перехода к
новому состоянию в неустойчивой системе всеrда реализуется.
В этом случае roворят, что произошла потеря устойчивости.
Система при потере устойчивости может вести себя по
разному. Обычно происходит переход к некоторому новому
положению равновесия, что в большинстве случаев сопрово
ждается большими перемещениями, возникновением пласти
ческих деформаций или полным разрушением. В некоторых
случаях при потере устойчивости IЮнструкция продолжает pa
ботать и выполняет по прежнему свои основные функции, как,
например, тонкостенная обшивка в самолетных конструкци
ях. Возможны, наконец, и такие случаи, коrда потерявшая
устойчивость система, не обладая устойчивыми положениями
равновесия, пе еходит в режим незатухающих колебаний.
Явление пфтери устойчивости для упруrих тел можно Ha
блюдать на целом ряде примеров.
Наиболее простым случаем является потеря устойчивости
центрально сжатоrо стержня (рис. 13.1). При некоторой силе
р прямолинейная форма становится неустойчивой и стержень
переходит в новое устойчивое состояние равновесия, показан
ное на рис. 13.1 штриховыми линиями.
р р
,
I
I
I
I
I
"
Рис. 13.1
Рис. 13.2
Тонкостенная труба (рис. 1з.2), наrруженная внешним
давлением, способна потерять устойчивость. При этом Kpyro
вая форма сечения переходит в эллиптическую, а затем труба
506
полностью сплющивается, хотя напря:жения I( моменту потери
устойчивости далеко не достиrают предела текучести.
Та же труба может потерять устойчивость и при осевом
сжатии (рис. 13.з). Аналоrичное явление имеет место и при
закручивании трубы (рис. 13.4).
Рис. 13.3
Рис. 13.4
Подобных примеров можно привести очень MHoro. Обоб
щая сказанное, следует отметить, что наиболее ярко явление
потери устойчивости проявляется в JIеrких тонкостенных KOH
струкциях: в сжатых стержнях, оБОJIочках и тонких стенках.
Поэтому при проектировании подобных конструкций OДHOBpe
менно с расчетом на прочность проводят и расчет на устойчи
вость как отдельных УЗJIОВ, так и системы в целом.
Одной из мер повышения запаса устойчивости системы
ЯВJIяется увеJIичение ее жесткости. Так, в практике caMoдe
тостроения тонкостенные переrородки подкрепляют специаль
ными профилями. Такая подкрепленная стенка имеет высокую
степень устойчивости при сравнительно малом весе.
Пля анализа устойчивости необходимо выбрать расчет
ную схему и соответствующую ей математичеСКУ1 модель.
507
Основной, ставшей уже классической, является следующая.
Система предполarа.ется идеальной, Т.е. если речь идет о сжа
том стержне, ось ero CTpOro прямолинейна, силы приложены
центрально. Если рассматривают цилиндрическую оболочку,
то также считают, что она имеет совершенную форму и Ha
rрузка не отступает от предписанных законов распределения.
Идеальной системе сообщают отклонение от положения
равновесия. При этом рассматривают отклонения, которые не
только являются малыми, но и MorYT быть меньше любой напе
ред заданной малой величины. Если после устранения причин,
вызвавших отклонение, система возвращается в исходное co
стояние равновесия, то последнее считается устойчивым, если
же нет, то положение равновесия считается неустойчивым. Си
лы инерции, возникающие при деформациях системы не учи
тывают.
Такая расчетная схема позволяет рассчитывать систему
на устойчивость и определять условия перехода от устойчи
Boro состояния к неустойчивому. Параметры, характеризую
щие такой переход, называются 'lCрuтuчеСII:UАСU. В частности,
обобщенная сила, превышение которой приводит к переходу от
устойчивоrо равновесия к неустойчивому, называется 'lCpUfflU
чес'ICОЙ сиАОй.
При расчете на устойчивость рабочую наrрузку назнача
ют как n ю долю критической. При этом под n понимают 'lCo
эффuцuен.т запаса устойчuвостu, значение KOToporo, как и
при расчетах на прочность, назначают в зависимости от KOH
кретных обстоятельств, связанных со спецификой технолоrии,
с условиями эксплуатации, а также со степенью OTBeTCTBeHHO
сти конструкции. Естественно, что расчет на устойчивость по
коэффициенту запаса не исключает, а даже предполаrает необ
ходимость одновременной проверки конструкции по условиям
прочности.
13.2. Определение критических наrрузок
Чтобы более наrлядно показать особенности подхода, KO
торый обычно используют при анализе устойчивости упруrих
систем, рассмотрим для начала простейшую механическую MO
дель.
508
На конце жесткоrо стержня (перевернутоro М8J[тника, по
казанноrо на рис. 13.5) укреплен
имеет шарнир и удерживается в
вертикальном положении упруrой
пружиной, имеющей линейную xa
рактеристику. Это значит, что
при повороте стержня на уrол ер
в шарнире возникает момент, paB
ный сер, rne с жесткость пружи
ны.
Эта модель, обладая предель
ной простотой, сохраняет в себе
все основные свойства, xapaKTep
ные для более сложных задач, KO
торые будут рассмотрены в даль
нейшем.
Можно предположить, что при достаточно большой силе
Р или достаточно большой высоте расположения rруза положе
ние равновесия обращенноrо маятника станет неУСТОЙЧИВЫМj
при малом отклонении стержня от вертикали пружнна не CMO
жет восстановить исходное состояние равновесия.
В основе анализа устойчивости упруrих систем лежит
определение условий существования соседних форм paBHOBe
сия. Сообщим системе возмущение, Т.е. примем, что маятннк
отклонился от вертикали на некоторый уrол ср (рис. 1з.5,6).
По какой причине это произошло, не имеет никакоro значения.
Приравняв момент силы Р шарнирному моменту, полу
чим
rруз Р. Внизу стержень
р
..."
%
а
Рис. 13.5
Pl sin ер == сер. (13.1)
Построим rрафик зависимости Pl/c J(cp) (рис. 13.6).
Прежде Bcero мы видим, что при ер == о уравнение (1з.1) спра
ведливо при любых значениях силы Р. Значит, ось ордннат
принадлежит исследуемому rрафику. Остальные ветви кривой
определяются выражением
Pl =
. ,
с ВIn ср
609
которое будет верным, пока пружина сохраняет линейность
характеристики. При значениях 'Р, кратных 11', rрафик тep
пит разрыв, и происходит смена знака Р через бесконечность.
Оно и понятно. Korna уrол поворота маятника приближает
ся к 11" плечо силы уменьшается до нуля, а сама сила должна
неоrраниченно возрастать (рис. 1з.7). Если маятник протолк
нуть через мертвую точку, то для Toro чтобы удержать ero в
новом положении равновесия, следует приложить силу обрат
Horo знака.
pt
8 Т С
8
б
.....
1t О Jt lJt 'р/'
2
4
б
Рис. 13.6 Рис. 13.7
Теперь обратимся к вопросу, какие точки на построечных
кривых отражают устойчивые и какие неустойчивые поло
жения равновесия.
Основным критерием устойчивости, как известно из Mexa
ники твердоrо тела, является условие минимума полной потен
циальной энерrии системы. Например, для шарика, лежащеrо
на дне лунки и занимающеrо устойчивое положение paBHOBe
сия, потенциальная энерrия будет наименьшей по сравнению
со всеми соседними положениями. Если шарик расположен на
510
вершине выпуклости или на седловине (рис. 1з.8), ero положе
ние равновесия будет неустойчивЫМ. Этот критерий приме
ним, естественно, и к упруrим системам, конечно, с учетом
потенциальной энерrии деформации.
Рис. 13.8
в нашем случае полная потенциальная энерrия системы Э
состоит из двух слаrаемых: из потенциальной энерrии rруза
Pl(1 cos <р) (см. рис. 13.5) и потенциальной энерrии деформа
1
ции пружины с<р2. Таким образом,
2
1
Э = с<р2 Pl(1 cos <р).
2
Дифференцируя это выражение по <р, получим
dЭ Pl .
d<p = V<p sш <р.
Если приравнять производную нулю, то мы придем к
уравнению равновесия (1з.1), на основе KOToporo построены
кривые, показанные a рис. 13.6. Значит, положение paBHOBe
сия определяется экстремумом потенuиальной энерrии. OCTa
ется только решить, какие точки на построенных кривых co
ответствуют максимуму, а какие минимуму потенциальной
энерrии.
После BToporo дифференцирования получаем условие ми
нимума (условие устойчивости) в виде следующеrо HepaBeH
ства:
с Pl cos <р > О.
( 13.2)
Сначала рассмотрим вертикальное положение маятника
(<р = о). Условие устойчивости выполняется при Р < cJl. При
511
силе, большей cjl, вертикальное положение маятника оказы
вается неустойчивым. Таким образом, все точки оси ординат,
расположенные ниже точки бифуркации А, отражают устой
чивое положение равновесия, а выше неустойчивое.
При t.p :/: о условие устойчивости (1з.2) удобно преобразо
вать с учетом уравнения равновесия (13.1). Исключив силу Р,
получим
sin t.p
> cos<p.
t.p
Леrко установить, что на участке от 1r до +1r это условие
выполняется. Следовательно, ветвь кривой ВАС, расположен
ная внутри этоrо интервала, отражает устойчивые положения
равновесия, и по достижении силой критическоrо значения про
исходит переход из неустойчивоrо вертикальноrо положения к
новому, устойчивому положению с отклоненной от вертикали
осью. Друrие ветви, показанные на рис. 13.6, в свою очередь
также имеют участки как устойчивоrо, так и неустойчивоrо
положения равновесия.
Вернемся к уравнению (13.1). Если уrол t.p считать Ma
лым, то sin t.p <р, и тоrда мы приходим к линеаризованному
уравнению
(Pl c)t.p = О.
(13.з)
Очевидно, это уравнение всеrда имеет тривиальное решение
t.p = О, означающее, что при вертикальном положении маят
ника условие равновесия выполняется при любом значении Р.
Имеется и второе решение: если t.p :/: о, то Р = cjl. Сле
довательно, линеаризованное уравнение (13.з) дает ту же ca
мую точку бифуркации А, которую мы нашли из нелинейноrо
уравнения (1з.1). Но важно подчеркнуть, что линеаризован
ное уравнение не содержит никакой информации о конечных
перемещениях системы при Р > Р КР '
Если задачу решать в малых перемещениях, а это, как
мы увидим в дальнейшем, существенно упрощает дело, то мы
можем определить критическую силу, но не сами величины
перемещения.
Для исследования закритическоrо поведения системы He
обходимо применять нелинейные соотношения.
512
13.3. Задача Эйлера
Теперь мы можем перейти непосредственно к некоторым
задачам об устойчивости упруrих систем. Начнем с простей
шей задачи о равновесии прямолинейноrо стержня, сжатоrо
силой Р, линия действия которой совпадает с осевой линией
стержня (рис. 13.9, а). Впервые эта задача была поставлена
и решена великим математиком Л. Эйлером в середине XVIII
века. Поэтому часто, коrда rоворят об устойчивости сжато
ro стержня, употребляют выражения: "задача Эйлера" или
"устойчивость стержня по Эйлеру".
'
а
Pt:1
о
z
Рис. 13.9
Положим, что по какой то причине сжатый стержень He
сколько изоrнулся. Рассмотрим условия, при которых возмож
но равновесие стержня с изоrнутой осью. На рис. 13.9, б пока
зана часть стержня и действующие на нее силы. Отсеченная
часть стержня находится в равновесии, поэтому сумма MOMeH
тов относительно точки О равна нулю:
м + Ру = О,
(13.4)
или
EJy" + Ру = О.
(1з.5)
Изrиб стержня при потери устойчивости происходит в плос
кости минимальной жесткости, и поэтому под J здесь следует
понимать минимальный момент инерции сечения.
Обозначим
Р 2
EJ = k .
(13.6 )
17 В. И. Феодосьев
613
Torna уравнение (1з.5) примет вид
11" + k 2 11 = О,
(1з.7)
откуда
11 = Cl sin kz + С2 СОБ kz.
(13.8 )
Постоянные Cl и С2 находим из rраничных условий (z = О
и z = 1). в рассматриваемом случае имеем при z = О 11 = о;
при z = 1 11 = О.
в результате получаем систему однородных алrебраических
уравнений
Cl . о + С2 . 1 = о;
Cl sinkl + С2 coskl.
Как известно из линейной алreбры, чтобы система однородных
линейных уравнений имела нетривиальное решение, необходи
мо, чrобы ее определитель был равен нулю, Т.е.
D = det [ . О 1 ] = о.
S1П kl СОБ kl
Раскрывая определитель, находим
sin kl ,= О.
(1з.9)
в данном простом примере уравнение (1з.9) можно полу
чить и без выписывания определителя. Из условия при z = О
У = О следует, что С2 = о; а из условия при z = 1 у = О по
лучаем Сl sin kl = О. Произвольная постоянная Cl i- О. При
Сl = С2 = О получаем тривиальное 11 == о, которое нас не
интересует, так как при новой форме равновесия стержня ero
осевая линия не прямолинейна. Поэтому sin kl = О. Но в более
сложных задачах, требующих использования вычислительной
техники, для определения критических сил определитель необ
ходим.
Из уравнения (1з.9) следует, что kl = 1\"n, rде n произ
вольное целое число. Учитывая выражение (1з.6), получаем
р = 7r 2 n 2 EJj12. Это означает, что для Toro чтобы стержень
сохранял криволинейную форму, необходимо, чтобы сила Р
514
принимала определенное значение. Наименьшая сила Р, OT
личная от нуля, будет при n = 1:
1I'2EJ
Р кр = (1з.10)
Эта сила носит название ЭЙАеровой или Jl:рuтuчес'ICОЙ сиАЫ.
При n = 1 имеем kl = 11', и уравнение упруroй линии (1з.8)
принимает вид
С . 1I'Z
У = lSШ ,
1
Стержень изrибается по полу волне синусоиды с макси
мальным проrибом Cl-
При любом целочисленном значении n
С . 1I'nz
у = 1 sш т'
И упруrая линия стержня изображается кривой в виде n полу
волн (рис. 1з.10).
л..,
p<
л-J ?
Рис. 13.10
Линеаризованное уравнение (1з.5), как и уравнение (1з.2),
является приближенным и верно лишь при сколь уrодно малых
проrиба.х. С ero помощью мы определили Р кр и форму изоrну
той оси стержня при потере устойчивости. Но при этом KOH
станта Сl в выражении для упруrой линии осталась неопре
деленной. Перемещения найдены, как rоворят, с точностью до
постоянноrо множителя.
llля описания закритическоrо поведения стержня при
болыцих проrибах следует использовать полное нелинейное
уравнение равновесия. Поскольку при больших проrибах М =
= Е] / р, rде р радиус кривизны изоrнутой оси стержня, то
из уравнения (13.4) находим
Е J у"
2 + Ру = О.
(1 + у' )3/2
17.
515
При силе Р, большей критической, перемещения столь Be
лики, что пренебреrать величиной yl2 в знаменателе нельзя.
Наконец, из paccMOTpeHHoro примера видно, что у сжатоrо
стержня существуют высшие формы равновесия (n = 2, 3,.. .),
которым соответствуют и большие значения сил. Эти формы
в чистом виде не реализуются. Они неустойчивы. Но если
стержень снабдить промежуточными равноотстоящими одна
от друrой опорами, то соответственно числу пролетав n можно
определить и критическую силу.
13.4. Зависимость критической силы
от условий закрепления стержня
в пределах малых перемещений для стержня, шарнирно
закрепленноrо по концам, изrиб при потере устойчивости про
исходит по полуволне синусоиды, и критическая сила
n 2 EJ
Р"р = 12
Используя особенности упруrой линии, мы можем доволь
но просто распространить полученное решение и на друrие
случаи закрепления стержня. Так, если стержень на одном
конце жестко защемлен, а на друrом свободен (рис. 1з.11),
то упруrую линию стержня путем зеркальноrо отображения
относительно заделки леrко привести к упруrой линии шар
нирно закрепленноrо стержня. Очевидно, критическая сила
для защемленноrо одним концом стержня длиной 1 будет равна
критической силе шарнирно закрепленноrо стержня, имеюще
ro длину 2/. Таким образом, в рассматриваемом случае
'К 2 EJ
Р"р = (2/)2 .
. ----1
Рис. 13.11
516
L
t f:4
Рис. 13.12
Шарнирно закрепленный стержень, имеюший посреди
не опору (рис. 1з.12), при потере устойчивости изоrнется по
двум полувалнам. Следовательно, каждая ero половина теря
ет устойчивость как шарнирно опертый стержень, имеющий
длину 1/2. Поэтому
71'2 Еl
Р хр = (1/2)2 '
Обобщая полученные формулы, можно написать общее
выражение критической силы для сжатоrо стержня в виде
71'2EJ
Р хр = (рl)2 '
(1з.11)
rде J-L так называемый 'lCоэффuцuенm nрuведеНШl дАины,
J-L = 1/n; n число полуволн.
Коэффициент J-L это число, показывающее, во сколько раз
следует увеличить длину шарнирно опертоrо стержня, чтобы
критическая сила для Hero равнялась критической силе стерж
ня длиной 1 в рассматриваемых условиях закрепления. lIля
стержня, защемленноrо на одном конце и свободноrо на дpy
rOM, J-L = 2; для стержня, приведенноrо на рис. 13.12, J-L = 1/2.
На рис.13.13 показано несколько видов закрепления
стержня и указаны соответствующие значения коэффициента
приведения длины р. Во всех случаях значение J-L определя
ют путем простоrо сопоставления упруrой линии изоrнутоrо
стержня с длиной полуволны синусоиды при шарнирном за
креплении.
517
p
'Р Р IP
, ', ,
р-2 ;=2
JI 1
Z
,
J';:-} р=1 )'=! ;=0,7
Рис. 13.13
Рассмотрим несколько примеров на определение критиче
ской силы.
При м е р 13.1. Определить критическую силу длJl стеРЖНJI С
ДВУМJI уч&стк&ми (рис. 13.14), если жесткость OДHoro уч&стк& в четыре
раз& больше жесткости друroro.
р р
"-1 !I
Ф
.....
уЫ
<IO
'l.
Рис. 13.14 Z
Соответственно ДЛJl nepBoro и Bтoporo участков ПОЛУЧil.ем УРil.внеИИJl
EJy ' + Ру! = о; 4EJy + РУ2 = о.
р 2
ОБОЗНil.Чil.ем 4Е] = k . Тоrдil.
,,;' + 4k 2 "1 = о; ,, + k 2 Y2 == о,
ОТКУДil.
Уl == С 1 Bin 2kz + С 2 сов 2kz;
112 = С З Bin kz + С 4 сов kz.
Из УСЛОВИJl, что при z = О проrиб Уl = о, получ&ем С 2 = о.
518
Далее. имеем еще три условиа: при % == 1/2 перемещеииа 1/1 == I/
и !I == !I I при % == 1 проrиб !I == О. Соответственно записываем три
уравнениа:
С . kl С . kl С kl
1 Sln == З 8ln 2 + 4 cos 2;
kl . kl
2Сl cos kl == Сз cos 2 048ln 2;
с з sin kl + С 4 coskl = О.
Приравниваем нулю определитель этой системы
sin '"
. kl
вln 2
'"
COB2
sin kl
kl
coa 2
. '" == О
Sln "2
сов kl
D = 2 cos '"
О
. '" kl
и получаем два уравнении: Sln == о и tg == 2. Наименьшнй отлич
2 2
ный ОТ нуля корень находим из условиа tg '" = .../2. kl/2 = 0.955. Тоrда
2
р, 14.6Е}
кp Р
При м е р 13.2. Определить критическую силу дла шариир
но закрепленноrо стержна, наrруженноrо продольной силой посередине
(рис. 1з.15).
t:I...
Рис. 13.15
Здесь дла первоrо и Bтoporo участков имеем
EJI/ ' == pf %;
Е J Y = Р f z + р (f Y:l)'
519
или
y ' == k f Zj y +k y == k f (1 -Т).
откуда
k f zз
Уl == т "6 + С 1 Z + С 2 j
y == С З sinkz + С 4 coskz + f (1 -i).
При z == О проrиб Уl == О. Следовательно, C == О. При z == 1/2 перемещеНИll
Уl == f, У2 == f и y == y , а при z == 1 проrиб У2 == О. Тu:им образом,
получаем следующие четыре уравнених:
k 2 f I з 1
+ С 1 == f'
1 48 2 '
. kl kl 1
С З 81П + С 4 cos + 2 f == fj
2 2
k 2 fI kl. kl f
+ С 1 == С з kСО8 C 4 k81n .
8 2 2 1 '
СЗ sin kI + С 4 со& kI == О.
Приравниваем нулю определитель этой системы, рассмаТРИВ8JI С 1 ,
Сз, C и f как неизвестные:
1 О k /
О 1
2 48
kl kl 1
п== о sin coa 2
2 2 == О.
kl Ic . kI 1 k 2 ,
k соа sln I 8
2 2
О &in kl соа kl О
Тоrда
kl 31c1/2
tg"2 == (kl/2)2 9 '
Наименьший корень этоrо уравнеНИJl k1/2 == 2, 16. Тоrда
n 18,7Е)
"Р 12
При м е р 13.3. Определить критическую силу ДЛJl защемленноrо
стрежнх, к свободному концу KOToporo передаеТСll через жесткий шатун
ДЛИНОЙ а сила Р (рис. 1з.16).
520
t (/
J- -r - р
Е! :1
J'=: r
Рис. 13.16
Отбрасываем жеСТJ:ИЙ шатун И ПРИJ:ладываем J: упруrому стержню
продольную силу р' :::: Р И поперечную силу Р f / 4. Tor да
EJy" р (J у) + р L (1 %),
4
или
" 2 2 ( 1 Z )
у +/cy /c! 1+;; ;; ,
откуда
у С ! sin /с% + С 2 cos /с% + f (1 + ;. ) .
Далее, имеем rраничные условия: при z О У О и у' о, а при
% 1 у f.
Таким образом, получаем три уравнения:
С 2 + f (1 + ) о;
1
С ! /с f о;
а
С! sin /cl + С 2 cos /cl о.
ПрираВНИВaJI нулю определитель ЭТОЙ системы, приходим К следую-
щему трансцендентному уравнению:
tg /cl /сl (1 + т ) ,
из Koтoporo находим критическую силу в зависимости от отношения a/I.
Последний пример заслуживает дополнительноrо обсуж-
дения.
Упруrий стержень наrружен сжимающей силой, но она пе-
редается через жесткий шатун и при отклонении стержня ме-
няет направление линии cBoero действия. Поэтому критичес-
кая сила зависит от длины шатуна. Выясняется, что устойчи-
вость определяется не только условиями закрепления стержня,
и самой силой, но и ее п,?ведением при малых возмущениях.
621
Если никаких orOBopOK о ][[оведении силы не делают, то
считают, что при отклонении стержня сила Р (рис. 13.17, а) co
храняет направление вертикa.JI}[. Но, вообще roворя, об устой
чивости стержня, показанноrо на рис. 13.17, а, ничеrо сказать
нельзя, пока не задан характер поведения приложенных сил. А
возможностей здесь MHoro. В частности, на рис. 13.17, б 2 по
казаны примеры одинаково, казалось бы, наrруженных стерж
ней, имеющих, однако, различные значения критических сил.
p
1
р
о
l'
z
i
Рис. ]l3.17
При решении примеров 13.1 13.3 использовали уравнения
BToporo порядка. Это традиционный алrоритм решения за
дач устойчивости прямолинейных стержней. Однако этот ал
rоритм не всеrда эффективен при решении задач с более слож
ными rраничными условиями, чем шарнирное закрепление
(см. например, последний случай, показанный на рис. 1з.13).
Для этоrо случая из рассмотрения формы осевой линии стерж
ня после потери устойчивости был определен коэффициент
1
приведения длины J1. = = 0,1566... 0,7. Значение J1. 0,7
1,5
получено не из решения уравнений равновесия стержня, а из
rеометрических особенностей предполаrаемой формы осевой
линии после потери устойчивости, поэтому ero следует pac
сматривать как приближенное.
Рассмотрим общий метод определения критических Ha
rрузок для прямолинейноrо стержня. В В3 были получены
векторные уравнения равновесия: стержня (В5) и (В6). При Ma
лых отклонениях пря:молинейноrо стержня, полаrая dS = dz и
522
J1. = о, имеем
dQ
+ q = о;
dz
dM
dz + (е Х Q) = О.
(1з.12)
(1з.13)
Оrраничемся случаем, коrда после потери устойчивости
осевая линия стержня есть плоская кривая l . Это имеет место
только тоrда, коrда при потере устойчивости не возникают
крутящие моменты.
В рассматриваемом частном случае входящие в уравнения
равновесия векторы в декартовых осях равны
Q = Qzil + Qyi2; q = qzil + qyi2; М = Mx i 3;
е = (elil)il + (eli2)i2 = cos8il + sin8i2:::::: 1. il + 8i2.
При потере устойчивости возможно появление распреде
ленных сил qy, зависящих от проrибов стержня. Например,
после потери устойчивости сжатоrо стержня, связанноrо с
упруrим основанием (см. рис. 4.47), при двухсторонней свя
эи стержня с упруrим основанием возникнут распределенные
силы qy = ;;ey (см. 4.7).
Из уравнений равновесия в проекциях на декартовые оси
получаем
dQz
+ Qz = о;
dz
dQy
d:; qy = О,
dM
Q Q z8 = О.
dz
(13.14)
1 Более общие уравнеНИJl равновеСИJl стеРЖНJI, наrруженноrо осевыми
силами и КРУТJlЩИМИ моментами, lCоrда после потери устойчивости осеваи
ЛИНИJl стеРЖНJI стаНОВИТСJl пространственной хривой, приведены в учеб
нике В.А. Светлицкоrо "Механика стержней" (М., Высш. ШК. 1987).
523
К полученным выражениям следует добавить еще два
уравнения (см. 4.6)
d8 М
dz Е J z; = О i
dy 8 = О,
dz
rде EJ x наименьшая изrибная жесткость, которая в общем
случае зависит от z.
Из первоrо уравнения системы (13.14) находим осевую си
лу
z
Qz = J qzdz + С,
о
rде С произвольная постоянная, определяемая из KOHKpeT
ных условий наrружения. Например, если стержень сжимает
ся только силой Р (qz = О) (см. рис. 1з.1), то Qz = с = P.
Если учитывать собственный вес стержня (qz = q) и силу Р,
то осевая сила
Q z = qz + с.
При z == 1 qz == P, поэтому
Qz== P q(l z).
в результате систему уравнений, из которых можно опре
делить критическое значение сосредоточенной силы Р и pac
пределенной силы q для общеrо случая, коrда при потере
устойчивости появляются силы qy:
dQ
dz qy = о;
dM
dz Q + N (z) 8 = о;
d8 М
dz EJ:z; = о;
dy
8 == О,
dz
rде N(z) = Р + q(l z).
(1з.15)
524
Пля стержня, лежащеrо на упруrом основании с линей-
ной характеристикой q71 = y. Систему уравнений можно
привести к одному уравнению относительно перемещения у,
последовательно исключая Q, М и 8:
(EJxY")" + (N(z) у')' + rey = о.
(1з.16)
Полученное уравнение позволяет определять критические Ha
rрузки (сосредоточенные и распределенные) для наиболее об
щеrо случая, Kor да изrибная жесткость стержня переменна по
ero длине. При изrибе прямолинейноrо стержня в плоскости
(см. систему уравнений (13.15)) при малых отклонениях TO
ЧеК осевой линии стержни всеrда имеются четыре rраничных
условия (по два на каждом конце стержня). Поэтому реше-
ние уравнения равновесия стержня должно содержать четыре
произвольные постоянные.
Рассмотрим частный случай уравнения (1з.16), коrда
жесткость стержня постоянна и он наrружен сосредоточенной
сжимающей силой Р (упруrоrо основания нет, Т.е. re = о).
Из (1з.16) получаем
yIV + k 2 y" = О (k 2 = Р/ EJ). (1з.17)
Интеrрируя два раза это уравнение, находим
у" + k 2 y = C1Z + С2.
Общее решение уравнения (1з.17) имеет вид
. С1 С2
У = Сз cos kz + С4 sш kz + k 2 z + k2'
(1з.18)
(1з.19)
Чтобы получить уравнение для определения критической си
лы, входящей в коэффициент k, это решение должно удо-
влетворять четырем однородным rраничным условиям. Рас-
смотрим несколько примеров на определение критической си
лы с использованием решения (1з.19) уравнения (1з.17).
При м е р 13.4. Определить критическую силу дли шестоrо СЛУЧaJI
закреплении КОНЦОВ стержни, показанноrо на рис. 13.13. rраничные усло
ВИi имеют следующий вид: при z = О 71 = 71' = о; при z = 1 71 = у" = О
(EJy/ll = Q).
525
Из rраничных условий при z == О и z == 1 имеем
k 2 с з + С 2 == о;
еС 4 + С 1 == о;
Озk Bin kl + 04k сов kl + == о;
Озk З Bin kl 04 k З сов kl == О.
(1з.20)
Получаем систему однородных алrебраичесJCИХ уравнений относительно
Cj (j == 1,...,4). Для существования нетривиальноrо решения этой си
стемы необходимо, чтобы ее определитель D был равен нулю, Т.е.
k 2
о
k З
k сов kl
kЗ СО8 kl
о
1
1jk 2
О
о
о
о
== О.
(1з.21)
D==
о
k 8in kl
k 3 8in kl
Раскрыв определитель, получаем
8in kl == О.
(13.22)
Наименьший отличный ОТ нуля корень этоrо уравнения
kl == 7r.
Так как (kl? == Pl2 j(EJ), то критическое значение силы
7r 2 Е J
Р. р == 12'
что соответствует значению коэффициента 11 == 1, Т.е. приближенное зна
чение 11 и точное в данном примере совпали.
При м е р 13.5. Определить критическую силу для последнеrо слу
чая закрепления стержня, показанноrо на рис. 13.13. rраничные условия
имеют вид: при z == О У == у' == о; при z == 1 у == у" == О.
Из rраничных условий при z == О и z == 1 получаем
k 2 0 з + 02 == о;
k З С 4 + С 1 == о;
. 01 02
С з соз kl + С 4 SlП kl + kf 1 + kf == о;
С з k 2 сов k/ + С 4 k 2 Bin k/ == О.
(13.23)
526
Приравнив определитель системы уравнений (13.23) нулю:
1:2 О О 1
D==
о
cosl:/
е сов k/
1:3
sin 1:/
k 2 sin k/
1
//1:2
О
о
1/1:2
О
== О,
(1з.24)
после преобразований получаем уравнение дли вычислении критической
силы:
tg k/ == k/.
(13.25)
Численное решение полученноrо уравнении дает наименьший корень
(k/)min == 4,49. Так как k 2 == Р/ EJ, то после преобразований находим
уточненное значение коэффициента /.1 == 0,699, что незначительно отлича
еТСJI от приближенноrо значеНИJl, paBHoro 0,666.
Если стержень имеет переменную изrибную жесткость
или наrружен распределенной осевой наrрузкой, то получить
аналитическое решение для системы (1з.16) нельзя. В этом
случае для определения критической силы используют числен
ные методы.
Представим систему уравнений (1з.15) при qy = <EY В
виде BeKTopHoro уравнения, введя вектор состояния системы Z:
dZ (1з.26)
dz + AZ = О,
rде
Z = (Q, М, (), у)т;
О О О <Е
1 О N О
А= 1 О
О EJ x О
О О 1 О
Воспользовавшись методом начальных параметров (см.
4.6), получаем фундаментальную матрицу решений (задав
шись числовым значением Рl при известном q) и находим pe
шение
Z = K(z, Рl) с (К(О) = Е).
(1з.27)
Например, для TpeTbero случая закрепления, показанноrо на
рис. 13.13, компоненты вектора Z должны удовлетворять сле
дующим rраничнЫМ УСЛОВИЯМ: ПРИ z = О М = О, У = о; при
527
z = l Q = о, (J = О. Поэтому С2 = С... = о, а для определения
Сl и Сз получаем два однородных а.лreбраических уравнения
k ll (l, Рl)Сl + klз(l, Рl)СЗ = о;
kЗl(l, Рl)Сl +kзз(l, Рl)Сз = О.
(1з.28)
Для существования нетривиальноro решения необходимо
D = det [ kll
kЗl
k 1з ] = О.
kзз
(1з.29)
Конечно, при первом приближении Рl определитель в нуль не
обращается, поэтому решения проводят для ряда Pj. Наимень
шее значение Р кр , при котором D = о, является критическим
значением сжимающей силы Р.
в настоящее время при широком распростронении вычи
слительной техники и внедрении ее в учебный процесс изло
женный вариант численноrо определения критической силы
является наиболее эффективным.
13.5. Устойчивость плоской формы изrиба
прямолинейноrо стержня
Хорошо известно, что в некоторых случаях плоская форма
изrиба стержня становится; неустойчивой и при потере устой
чивости происходит изrиб в плоскости yOz и одновременно
возникает кручение. Это наблюдается у стержней, имеющих
большую жесткость в плоскости действt{я внешних сил и Ma
лую жесткость в плоскости уО z.
Рассмотрим стержень (рис. 1з.18), наrруженный на KOH
цах моментами, действующими в вертикальной плоскости.
у словия закрепления на концах будем считать допускающи
ми свободный поворот сечения при изrибе как в одной, так
и в друrой плоскости и в то же время запрещающими пово
рот при кручении. Жесткость в плоскости заданных внешних
моментов предполаrаем достаточно большой. Это позволяет
считать, что до потери устойчивости стержень сохраняет в
основном прямолинейную форму.
Представим себе, что стержень изоrнулся в плоскости,
перпендикулярной плоскости моментов , и одновременно
528
закрутился. На рис. 13.18 форма изоrнутоrо стержня показана
так, что перемещение у и ero перВaJI и ВТОрaJI производные по
ложительны. Это исключает ошибку в знаках при составлении
уравнений.
Рис. 13.18
в произвольнам сечении, расположенном на расстоянии z
от левоrо конца, изrибной момент относительно оси Хl (см.
рис. 13.18) равен
м = !т <.р,
rде <.р уrол поворота рассматриваемоrо сечения относитель
но продольной оси. Знак минус поставлен в связи с тем, что
изrибной момент направлен в сторону уменьшения кривизны.
Крутящий момент в том же сечении равен
МХ = !)лО,
rде !)Л О составляющая момента !)Л относительно оси Zl (см.
рис. 13.18); о = у' уrол поворота сечения относительно Bep
тикальной оси.
Пользуясь известными соотношениями
EJO' = М; GJx'l" = М х ,
получаем следующие дифференциальные уравнения:
EJ(J' = !)Л<.рj GJx<.p' = !тО. (1з.30)
Здесь под Е J понимается жесткость стержня на изrиб в
направлении, перпеНДИКУЛJlРНОМ плоскости действия внешних
18 В. И. Феодосьев
529
моментов rot. Величина GJ.. предстаВЛJ[ет собой жесткость на
кручение. Исключив из уравнений (1з.30) 8, получим
" k 2 О
<р + <р= ,
rде
2 !JJt 2
k = GJfl. EJ '
(1з.31)
отсюда
<р = Сl sin kz + С2 cos kz.
( 13.32)
Функция <р должна обращаться в нуль при z = О и z = 1.
Значит, С2 = О и Сl sin kl = О.
Как и для шарнирно защемленноrо стержня, С2 = О,
sin kl = О. Наименьшее, отличное от нуля значение крити
ческоrо момента определяется из условия kl = 11".
Соrласно выражению (1з.31), находим
9Л кр = 'I v GJfl.EJ.
Выражение (1з.32) принимает вид (рис. 13.19, а):
С . 1I"Z
<р = 1 slП Т'
Рис. 13.19
Воспользовавшись методом при ведения длины, как это де-
лали для сжатых стержней, можно установить, что в случае
защемленных концов (рис. 13.19,6)
211"
rot Kp = Т ..; EJGJ...
530
Задачи об устойчивости ПJIОСКОЙ формы изrибв. при нмру-
жении стержня поперечными силв.ми оказываются существен
но более сложными, чем paccMoTpeHHa.JI выше, поскольку изrи-
бающий момент в ПJIОСКОСТИ нa.rружения меНJlется вдоль оси.
13.6. Энерrетический метод определения
критических наrруэок
Рассмотрим ПОJIНУЮ потенциальную энерrию KOHcepBa
тивной системы
Э = и + п = и А, (13.зз)
rде и потенциалЬНaJI энерrИJl упруroй диформв.ции стержня;
П потенциал внешних СИJI; А работа внешних сил (П= А).
ПотенциалЬНaJI энерrия стержня при изrибе в плоскости уО z
(частный случай выражения (5.з)) равна
1 2 1
и = J M E 1 z = J EJ y "2 dz (J = Jmin)'
о о
Работа силы Р = р. при потере устой Z
чивости (стержень считается нера.стя:жи- р
мым) равна (рис. 13.20)
А = >.р.. (1з.35)
При малых отклонениях точек осевой ли
нии стержня от оси z вертикальное пере-
мещение точки ПРИJIожения СИJIЫ р. равно
(см. рис. 13.20)
1 1 1 2
л = J dл = J (dz dz сов 8) = J dz,
о о о
dy
или, так как 8 = dz '
1
1 J ,2
>. = 2 у dz.
о
18"
(1з.34)
dz
!/
Рис. 13.20
( 13.36)
&31
В результате получаем
1 1
Э 1 1 EJ ,,2 d Р. 1 ,2 d
= у z у z.
2 2
о о
В соответствии с принципом Лаrранжа, состояние paBHO
весия консервативной системы устойчиво тоrда и только TO
rда, коrда ее полная потенциа.льная энерrия в этом состоя
нии минима.льна. Сформулированный принцип часто называ
ют теоре.м.ой Ла2ранжа Л'UрUХ.ll.е. Необходимое условие мини
мальности полной энерrии заключается в том, что ее первая
вариация равна нулю, т.е.
(1з.37)
БЭ = о.
(13.38)
Первая вариация это аналоr первой производной при иссле-
довании функции на экстремум. Об устойчивости состояния
равновесия, rде выполняется условие (13.38), можно судить по
знаку второй вариации 6 2 э. Если 6 2 э > О, то данное состояние
равновесия устойчиво, если 6 2 э < о, то состояние равновесия
неустойчиво; и, наконец, при 6 2 э = О имеет место безразлич
ное состояние равновесия.
Рассмотрим вначале простейший случай, коrда прибли
женное выражение для проrиба у имеет вид
у = .81 V l(Z),
r де .81 произвольный постоянный множитеЛЬj Vl (z) функ
ция, удовлетворяющая rраничным условиям задачи. Подста
вив у в выражение (1з.37), получим
2 1 1
Э .81 J ,,2 d Р 2 J ' 2
= 2 Е J Vl Z "2.81 Vl dz.
о о
Первая вариация Э, равна
1 1
6Э = 6.81(1 EJv 2dz P 1 v 2dZ).
о о
532
Приняв БЗ, = о, получаем
, ,
б{Зl (! EJv 2 dz Р ! v 2 dz) = о. (1з.39)
о о
Так как вариация параметра {Зl :f о, то из уравнения (13.39)
следует
(/ ' ,,2 / ' , 2 )
EJvl dz Р vl dz = о,
о о
или
,
/ EJv 2 dz
О
(13.40)
,
! v 2 dz
о
Например, для шарнир но закрепленноrо стержня (см.
рис. 13.9, а), полаrая у = (Зl sin '1r z Z , из уравнения (1з.39) по
лучаем уже известное выражение для критической силы:
Р"р =
'1r 2 EJ
Р"р = [2
Следует подчеркнуть, что выражение (13.40) получено для
стержня с переменным сечением. Приближенное значение кри
тической силы (13.40) можно уточнить, взяв двучленное при
ближение ДЛЯ проrиба у:
у = {ЗI V l + {З2 V 2,
r де ФУНКЦИЯ V2, так же как и функция vl, должна удовле
творять rраничным условиям. В этом случае
аз аз
б3 = а{Зl б{Зl + а{З2 б{З2 = О.
в результате имеем
б,вlАl + б,в2А2 = о.
БЗЗ
Так как вариации б/3j независимы, то линейное соотношение
может выполняться только тоrда, коrда
А1 = о, А2 = О.
(13.41)
Здесь
1
А1 = J [EJ (fЗ1 v 2 + fJ2v v ) Р (fЗ1 v 2 + fJ2v v )] dz;
о
I
А2 = J [EJ (/31 v v + /32v 2) Р (fЗ1 v v + /32V 2)] dz.
о
Из условий (13.41) получаем систему, состоящую из двух ал
rебраических однородных уравнений относительно /31 и /32:
(а11 Ь 11 Р) /31 + (а12 Ь 12 Р) /32 = о;
(а21 Ь21 Р ) /31 + (а22 Ь22 Р ) /32 = о;
(13.42)
r де а 11
1
J ,,2 d
= EJv1 Zj
О
Ь11
1
J ,2
Vl dz;
О
а12 =
1
J EJv vf dz;
о
1
Ь 1 2 = J v v dZj а21
О
1
= а12; Ь 21 = Ь 1 2; а22 = J EJv 2 dz; Ь 2 2 =
О
1
J ,2
= v2 dz.
о
Приравняв определитель системы (13.42) к нулю (чтобы полу
чить нетривиальное решение), получим уравнение относитель
НО Р. Наименьший корень Р1 этоrо квадратноrо уравнения
есть уточненное значение критической силы.
Можно получить и более точное решение, представив в
виде ряда
n
у = L /3jVj'
j=1
(13.43)
534
В этом случае
n дЭ
63 = L 6{3j = О.
. j==1 a{3j
(13.44 )
Из соотношения (13.44) получаем n однородных алreбраиче
ских уравнений относительно {3j, аНaJIоrичных системе (13.42),
а из условия равенства нулю определителя находим Pj (j =
= 1,2,..., n). Наименьший корень Р1 есть критическая сила,
Т.е. Р"р = Рl.
Определим энерrетическим методом критическую силу
для случая, paccMoTpeHHoro в примере 13.2. Поскольку сила
приложена посередине длины стержня (c . рис. 1з.15), ин
теrрирование в знаменателе формулы (13.40) следует вести от
[/2 до [, Т.е.
1
J EJy"2 dz
О
Р"р = 1
J yl2 dz
1/2
Примем, что у == {31 sin '1r[Z . Тоrда после интеrрирования Haxo
21r 2 EJ 18,7 EJ
дим Р кр == [2 Точное решение равно Р"р == [2
Рассмотренные примеры убеждают нас в том, что при
ближенным методом можно без особоrо труда получить ДOCTa
точно точное значение критической силы.
Рассмотрим в заключение еще один пример.
При м е р 13.6. Определить критическую силу ДЛJl защемленноrо
стерЖНJI, наХОДJlщеrОСJl под действием собственноrо веса q (рис. 1з.21).
ЗадаеМСJl уравнением упруrой линии изоrиутоrо стерЖНJI в виде
у == с ( 1 сов ; ).
Леrко убеДИТЬСJl в том, что это выражение удовлеТВОРJlет rраиичиым
условиям.
635
z
ОпредеЛJlем энерrию иэrиба:
1 J ' 1/2 1 2 1 ( 'JI' ) 4
и... == 2' EJy dz == 4" EJC 2i'
о
"-1
ДЛJl тото чтобы нaiти работу сил q при пе
реходе от ПрJlмолииеiiной формы к криволиней
ной, подсчитаем, соrласно выражению (1з.36), .
(рис. 13.21):
......
,..
!J
l J "2 1 2 ( 'JI' ) 2 ( 1. 'JI' z )
a == 2 11 dz == 4" С 2i z ;: 5Ш Т .
о
Рис. 13.21
Работа сил q будет следующей:
1 , 1 2 ( 'JI' ) 2 ( /2 2/2 )
q z dz == 4" qC 2i 2" ;2 .
о
ПриравнИlЩ. эту работу энерrии иэrиба, находим
Е} 'JI'4 8,29Е}
qap == 2р 'JI'2 4 ::::: р i
точное решение дает
7,83Е}
qap == р
Характерной особенностью энерrетическоrо метода явля
ется то, что ошибка в определении критических наrрузок Bcer
да имеет один знак. Приближенное значение критической си
лы оказывается завышенным по сравнению с точным. Объ
ясняется это тем, что, задаваясь приближенно формой упру
rой линии, мы как бы накладываем на систему лишние связи,
заставляем ее деформироваться несвойственным ей образом и
тем самым увеличиваем в среднем ее жесткость.
13.7. Продольно поперечный ИЗl'иб
Рассмотрим наrружение прямоrо шарнирно закрепленно
[о стержня (рис. 13.22) продольной силой и системой попереч
536
У! ql . ,t
P.
Рис. 13.22
ных сил. Такой вид наrружеНИJl принято называть продольно
поперечным изrибом.
При составлении дифференциальноrо уравнения упруrой
линии изrибающий момент можно рассматривать как сумму
момента поперечных сил М п и момента продольной силы Ру.
При этом, поскольку проrибы считаются малыми, момент М П
зависит в явном виде только от z и не зависит ни от у, ни от
ПРО1IOльной силы Р: .
EJy" = Py + МИ'
(13.45)
Дифференциальное уравнение упруrой линии имеет вид
" k 2 Ми ( 3 6)
у + у = EJ ' 1 .4
откуда
у = Сl sin kz + С2 cos kz + у. ,
rде у* частное решение уравнения (13.46), зависящее от
функции Ми, т. е. от вида поперечной наrрузки. Напри
мер, для двухопорноrо равномерно заrруженноrо стержня (см.
рис. 13.22) имеем
" ql qz2
EJ у = z Ру.
2 2
Torna
" k 2 q ( 1 2 )
У + у = 2EJ z Z j
* q ( 2 1 2 )
У = 2Е J k2 k2 + Z z
и, следовательно,
у = Сl sin kz + С2 cos kz + 2E k2 ( :2 + lz z2).
637
Постоянные Сl и С2 подбирают с таким расчетом, чтобы про
rиб у при z = О и z = 1 обращался в нуль.
В итоrе
q [ sin kz k 2 2 ]
у= EJk 4 (l coskl) sinkl +1 coskZ+2(lz z).
Изrибающий момент
" q [ ) sin kz ]
М = EJy = k 2 (1 coskl sinkl + coskz 1 .
Наибольший изrибающий момент имеет место при z = 1/2:
q 1 cos(kl/2)
М mах = k 2 cos(kl/2) . (13.47)
При малых значениях сжимающей силы Р (при малом k)
это выражение после раскрытия неопределенности, как и сле
давало ожидать, принимает вид М mах = q12/8, Т.е. макси
мальный момент совпадает с тем, который дает поперечная
распределенная сила q. По мере роста силы Р максимальный
изrибающий момент резко возрастает.
При более сложных видах поперечной наrрузки, например
при нескольких поперечных силах, определение изrибающих
моментов описанным выше способом становится затрудни-
тельным, поскольку изrибающий момент на различных участ-
ках описывается различными функциями. В таких случаях
удобнее применять приближенные, менее точные, но более про
стые приемы расчета. Один из таких весьма распространен-
ных способов мы сейчас и рассмотрим.
Обратимся к выражению (13.45)
EJy" = М п Ру.
При отсутствии продqльной силы оно принимает вид
EJy = М п ,
rде индекс "п" соответствует наrружению стержня только по
перечными силами. Исключая М п , получаем
EJy" = EJy Ру.
(13.48)
538
Теперь примем, что форма упруrой линии как при нали
чии продольных сил, так и без них близка к синусоиде:
f . 1f'Z f . 1f'Z
У == Slfi Т; Уп == п Slfi Т'
Подставляем У и Уп в уравнение (13.48). Тоrда
71'2 71'2
EJf [f == ЕJfП[f + Pf,
откуда
f = fп
1 Р/ Р хр
(13.49)
в случае друrих способов закрепления стержня часто пользу
ются той же формулой (1з.39), но подставляют друrое значение
критической силы.
П редполаr ая изrибающие моменты пропорциональными
проrибам, можно написать
М= М п
l P/PKp
Проверим полученную формулу на примере paCCMOTpeH
Horo выше стержня с равномерно распределенной наrрузкой q.
Пусть Р = Р кр /2. Тоrда, соrласно формуле (1з.50), М =
= 2М п . Но поперечная наrрузка дает изrибающий момент
М п = qI2/8. Таким образом, в этом случае имеем М mаХ =
= О, 25q12.
Теперь посмотрим, что дает точная формула (13.47). Bы
ражение для k, входящеrо в эту формулу, принимает при за
данном значении Р следующий вид:
(1з.50)
k = J :J = J ;;j = l '
Тоrда, соrласно выражению (13.47),
71'
212 1 cos . tn
М mах = ; У 2 О, 252q12.
71' COB
2V2
539
Сопоставляя полученные значения М мах , видим, что они прак
тически совпадают.
Хуже обстоит дело при явно несимметричных видах pac
пределения поперечных сил. Но в подобных случаях основное
внимание следует уделять не уточнению расчетных формул,
а поиску средств, с помощью которых можно было бы вообще
избавиться от подобных видов наrружения.
r л а в а 14
МЕТОДЫ ЭКСПЕРИМЕНТАльноrо
ИССЛЕДОВАНИЯДЕФОРМИРОВАнноrо
и НАПРЯЖЕнноrо СОСТОЯНИЙ
14.1. Испытание материалов и конструкций
fоворя об экспериментальных методах замера деформа
ций и напряжений, необходимо делать различие между механи
ческими испытаниями материалов и испытаниями KOHCTPYK
ций.
Испытания материалов проводят с целью определения Me
ханических характеристик, таких, как предел текучести, Bpe
менное сопротивление, модуль упруrости и т.д. Кроме Toro,
их можно проводить В исследовательских целях, например для
изучения условий прочности в сложных напряженных состоя
ниях или выявления механических свойств материала.
Для испытания материалов используют образцы, разме
ры и форму которых варьируют в зависимости от имеющейся
измерительной аппаратуры и самих условий испытания.
Для получения объективных характеристик материала
необходимо соблюдать условие однородности наnрнжеННО20
541
состоннин, Т.е. необходимо обеспечить постоянство напря-
женноrо состояния для всех точек испытуемоrо образца. Это
условие соблюдается, например, при растяжении, частично
при сжатии KopoTKoro образца и при кручении тонкостенной
трубки. Изменение свойств материала в этих испытаНИJlХ про-
исходит одновременно во всем объеме образца и леrко подда-
ется количественной оценке. При кручении сплошных образ-
цов, а также и при изrибе напряженное состояние J1ВЛJlется
неоднородным. Качественные изменения свойств материала в
отдельных точках не влекут за собой заметных изменений в
характеристиках образца.
Требование однородности напряженноrо состояния накла-
дывает серьезные оrраничения на результаты мноrих видов
испытаний. В частности, до сих пор не удается провести объ-
ективные испытания в условиях однородноrо BcecTopoHHero ра-
стяжения. Это напряженное состояние можно создать пока
только в отдельных точках образца, например в центре сплош-
Horo шара, быстро HarpeBaeMoro извне.
Одним из видов механических испытаний являются тex
'Н.ОJlО2uчес?Сuе пробы, дающие не объективные, а только срав-
нительные характеристики свойств материала при cTporo pe
r ламентированных условиях испытания. Сюда относятся ис
пытания на твердость, на ударную вязкость и некоторые дру-
rие. В не которой мере к технолоrическим пробам MorYT быть
отнесены также испытания на усталостную прочность.
Коrда rоворят об испытании конструкции, то имеется в
виду испытание на прочность целой машины, ее отдельных
узлов или их моделей. Такое испытание имеет целью, с од-
ной стороны, проверку точности проведенных расчетов, а с
друrой проверку правильнасти выбранных технолоrических
процессов изrотовления узлов и ведения сборки, поскольку при
недостаточно правильных технолоrических приемах возможно
местное ослабление конструкции. Наиболее широко развито
испытание конструкции в таких отраслях техники, как само-
летостроение и ракетостроение, r де в силу необходимой эко-
номии веса вопросы прочности являются наиболее ответствен-
ными. При создании новой машины отдельные ее узлы, уже
выполненные в металле, подверrают статическим испытаниям
542
до полиоro разрушеНИJl с целью опреде.пеНИJl так называемой
разрушающей наrрузки. Эту нarрузку СоПОСТaвJIяют затем с
расчетной. Характер приложения сил ПрИ статических испы
таниях устанавливают таким, чтобы имитировались рабочие
наrрузки для определенноro, выбранноrо заранее расчетноrо
СЛУЧaJI, например: ДЛJl шасси самолета случай посадки, для
крыльев выход из пике и т.д.
Кроме статических испытаний часто возникает необхо
димость проведения и динамических испытаний. Например,
весьма распространены испытания приборов, работающих в
условиях вибраций. Эти испытания проводят на специальных
вибрационных столах при различных значениях частот и aM
плитуд. При таких испытаниях деформации и напряжения в
вибрирующих деталях прибора обычно не замеряют. О проч
насти отдельных узлов судят только в случае их разрушения.
В ряде случаев динамические испытания ведут с осциллоrра
фированием (записью) быстро изменяющихся деформаций, воз
никающих в наиболее опасных узлах.
Существующие в настоящее время способы эксперимен
тальноrо исследовании напряженных конструкций сводятся,
так или иначе, к прямому определению деформаций, возникаю
щих в испытуемом объекте. Напряжения определяют косвенно
через деформации на основе закона fYKa. В случае пласти
ческих деформаций напряжении при испытаниях конструкций
обычно не определяют, а устанавливают только разрушаю
щую наrрузку или то значение силы, при котором наблюда
ются признаки возникновения пластических деформаций.
Для замера деформаций применяют различные методы.
Ниже мы остановимся на определении деформаций при помо-
щи приборов (тензометров) с механическим и электрическим
принципами замера; рассмотрим оптический и рентrеноrрафи
чес кий методы, метод муаровых полос и метод лаковых покры
тий.
14.2. Определение деформаций
при помощи механических тензометров
Принцип работы механическоrо тензометра основан на за
мере расстояния между какими-либо двумя точками образца до
li43
и после наrружеНИJl. Первоначальное расстояние между двумя
точками носит название базы тензометра 1. Отношение при
ращения базы LlI к 1 дает значение среднеrо удлинения по Ha
правлению установки тензометра. Если деформированное co
стояние однородно, то в результате замера определяют точное
значение искомой деформации, как это имеет место, например,
при растяжении стержня (рис. 14.1, а). В случае, если дефор
мация вдоль базы изменяется, то замеренное среднее значение
ее будет тем ближе к местному истинному, чем меньше база
тензометра (см. случай изrиба бруса на рис. 14.1,0).
t
t
р
о
о
Рис. 14.1
При испытании материалов на растяжение, коrда OДHO
роднасть деформации обеспечена, база оrраничивается разме
рами образца. Обычно в этом случае база 1 имеет значения 50,
100, 150 и 200 мм.
При испытании конструкций увеличение базы оrраниче
но поrрешностью, связанной с неоднородностью деформаций,
а ее уменьшение определяется потерей точности вследствие ин
струментальных поrрешностей. Как правило, база механиче
ских тензометров, применяемых при испытании конструкций,
лежит в пределах 2.. .20 мм.
Для точных замеров упруrих удлинений при определении
модуля упруrости материала широко используется тензометр
Мартенса с оптическим рычаrом (рис. 14.2).
544
' Р
1
.....
.q
-с:
6
7
Рис. 14.2
Тензометр состоит из жесткой планки 2, прижимаемой к
образцу при помощи струбцины 9. Верхний нож 1 планки непо
движен. В качестве BToporo ножа используется каленая приз-
ма 4, имеющая ромбовидное сечение. Плина диаrонали призмы
равна а. С призмой жестко связано зеркальце 5. На рассто-
янии L от зеркальца неподвижно установлена шкала 6. При
удлинении образца зеркальце поворачивается, и наблюдатель
через трубу 7производит отсчет по отраженной шкале. Увели-
чение, даваемое прибором, определяется отношением разности
показаний по шкале в миллиметрах к значению .6.1, измерен
ному также в миллиметрах.
Уrол поворота зеркальца а = .6.1/a. Разность отсчетов по
шкале до и после наrружения В силу малости а равна h = L.2a.
Исключая уrол а, находим коэффициент увеличения прибора
. h 2L
t = .6.1 = .
Обычно у тензометра Мартенса шкалу (размер L) выбира
ют так, что i::::: 500.
Пля исключения поrрешностей, связанных с внецентрен-
ным растяжением образца и возможным ero изrибом, прак-
тикуют установку сразу двух тензометров, как это показано
545
р
на рис. 14.3. Осреднение показаний
двух приборов исключает влияние
изrиба.
Сдвоенный тензометр Мартен-
са неудобен тем, что требует срав-
нительно кропотливой работы при
установке. Менее точными, но бо
лее удобными в употреблении явля-
ются хорошо зарекомендовавшие се-
бя большебазные тензометры МИЛ и
Бояршинова, показанные на рис. 14.4
и 14.5.
р
Рис. 14.3
Рис. 14.4
Тензометр МИЛ (см. рис. 14.4) имеет базу 100 мм и явля
ется шарнирно-рычажным. Это сдвоенный тензометр, YCTa
навливаемый на образце при помощи пружинноrо зажима.
Нижняя опора 1 является неподвижной, верхняя же предста
вляет ОДНО целое с рычаrом 4. Перемещение нижнеrо конца
546
этоrо рычиа передаеТСJl ПЛ8.Нхе 9, а от нее стрелке 5. При по-
мощи винта имееТСJl возможность приводить стрелку перед
экспериментом в нулевое положение. ЕCJIИ деформации образ
ца велики настолько, что стрелка выходит за пределы шкалы,
тем же винтом можно вернуть ее в исходное положение и во
время опыта. Увеличение тензометра МИЛ равно 500.
9
9
Рис. 14.5
в тензометре Бояршинова (см. рис. 14.5) вместо Mexa
нических шарниров применен упруrий шарнир, состоящий из
двух плоских пружин И 3. Алюминиевые детали 5 и 6 пово
рачиваются при растяжении образца относительно точки пе
ресечения пружин. Упруrий шарнир обладает тем преиму
ществом, что не имеет зоны застоя, которая характерна для
обычных механических шарниров вследствие наличия cyxoro
трения. Тензометр имеет два стальных каленых ножа 11 7,
которыми он прижимается к образцу при помощи винтов 9.
647
В момент установки прибор арретируеТСJl (запирается) при по
мощи штифта , соеДИНJlющеrо наrлухо детали 5, 6. Отсчет
деформаций ведеТСJl при помощи индикаторов 8.
Тензометром БОJlршинова можно производитъ отсчеты без
перестановки шкалы в пределах деформаций, достиrающих
4 %. Таким широким диапазоном измерения друrие тензо
метры не обладают. База тензометра 1 == 50 мм, увеличение
около 500.
1
J
Pt
2
4
R
2
pJ
Рис. 14.6
При замере деформации образцов, испытываемых на pa
стяжение и сжатие, отлично зарекомендовал себя тензометр
Лихарева с "rидравлическим рычаrом" (рис. 14.6). OCHOBHЫ
ми частями этоrо тензометра являются металлические rофри
рованные коробки (сильфоны 4), образующие замкнутую по
548
лость, сообщающуюся с капилляром 1. Полость между силь
фанами заполнена жидкостью. При удлинении образца объем
полости увеличивается и уровень жидкости в капилляре пони
жается на h.
Из условия неизменности объема жидкости, очевидно,
(11' я 2 1I'r 2 ) fll = hF,
rде R, r средний радиус большоrо и малоro сильфона, COOT
ветственно; F площадь сечения капилляра. Таким образом,
R 2 т 2
увеличение тензометра равно 11' F и зависит от размеров
выбранных сильфонов и капилляра. Обычно коэффициент YBe
личения прибора около 2000.
Тензометр на образце устанавливают с помощью винтов 2.
Пля изменения уровня жидкости в капилляре и для установки
прибора на нуль служит винт 9. Наименьшая база прибора
около 20 мм.
Среди механических тензоме
трав, применяемых не только при
механических испытаниях MaTe
риалов, но и при испытаниях KOH
струкций, имеющих сравнитель
но малую базу, наиболее широ
кое распространение в лабора TOp
ной практике получил шарнирно
рычажный тензометр fуrенберrе
ра (рис. 14.7) с базой 20 мм и YBe
личением около 1000.
Механические тензометры с
меньшей базой не имеют широ
Koro распространения и являют
ся уникальными. Попытки OT
дельных исследователей внедрить
такие тензометры в лаборатор
ную практику успеха не имели,
поскольку при испытании MaTe
риалов более предпочтительными
являются тензометры с большой Рис. 14.7
549
базой, а при испытании КОНСТРУКЦИЙ тензометры заменяют
проволочными датчиками сопротивления.
14.3. Применение датчиков сопротивления
В технике испытания конструкций за последние десятиле
тия широкое распространение получили проволочные датчики
сопротивления.
Проволочный датчик представляет собой наклеенную на
полоску бумаrи тонкую зиrзаrообразно уложенную проволочку
(рис. 14.8) толщиной 0,015.. . о, 030 мм. К концам проволачки
сваркой либо пайкой присоединяются провода.
Лро60h
х
Рис. 14.8
Датчик наклеивают на поверхность исследуемой детали
так, чтобы размер базы 1 совпадал с направлением, в котором
желательно замерить деформацию. При деформации объекта
проволочка удлиняется (укорачивается) и ее омическое сопро
тивление изменяется.
Опыт показывает, что относительное изменение омическо
ro сопротивления проволоки ДRj R пропорционально ее удли
нению, !:1Rj R = 'УоЕ, rде 'Уо коэффициент тензочувстви
тельности безразмерная величина, зависящая от физических
свойств материала. Для материалов, применяемых в датчи
ках сопротивления, значение 'Уо колеблется в пределах 2. . .3,5.
Для константана, например, 'Уо = 2, 0...2,1, для нихрома
2,1. . .2,3, для элинвара 3,2. . .3,5.
У проволочноrо датчика вследствие закруrлений на кон-
цах петель обнаруживается чувствительность не только к про
дольным, но и к поперечным деформациям, и
!:1R
R = 'Уf: ж + &1J,
550
rne Еж И Еу удлинеИИJl в направлении осей х и .у (см.
рис. 14.8), 'у и !J коэффициенты продольной и поперечной TeH
зочувствительности датчика, определяемые путем тарировки.
Значение 'у вследствие наличиЯ закруr лений на концах пе
тель оказывается несколько меньше коэффициента тензочуВ
ствительности проволоки 'УО, ПО мере увеличения базы 1 раз
ница между 'у и 'Уа уменьшается и для обычно применяемых
датчиков с базой 1 = 20 мм оказывается ничтожно малой. Toro
же порядка малую величину представляет собой и коэффици
ент !J. Для датчиков, имеющих малую базу (1 < 5 мм), значе
ние !J соизмеримо с 'У, и при подсчете напряжений коэффициент
поперечной тензочувствительности следует принимать во вни
мание.
!I
аи
fJ+ ds
81 8'
1
v + аи ds
iJ.r
о
х
Рис. 14.9
Рис. 14.10
При исследовании напряженноrо состояния в элементах
сложной КОНСТРУКЦИИ часто возникает необходимость опреде
лить не только значение, но и направление rлавных напря-
жений. В таком случае практикуют установку в исследуемой
области сразу Tp датчиков в направлениях, составляющих
уrлы 450 (рис. 14.9), так называемой розетки датчиков. По
трем замеренным удлинениям MorYT быть без труда определе
ны rлавные удлинения и уrол, определяющий положение rлав-
ных осей. Делают это следующим образом: положим, заданы
деформации по rлавным осям х и у (рис. 14.10). Из рис. 14.10
нетрудно установить, что разность отрезков А' В' и АВ, Т.е.
абсолютное приращение длины АВ, равно
ди av.
дэ ds сов <р + дэ ds вш <р,
r де и и v перемешеНИJl по OCJlM х И у.
riS1
Относительное удлинение вдоль оси 1 составляет
ди Ov .
е, = сов'Р + Вtn <р,
д8 д8
или
ди 2 Ov 2
Е, = дх cos 'f' + ду sin <р,
откуда
2 . 2
Е, = Еж cos 'f' + Еу Stn <р.
Для трех осей, совпадающих с осями датчиков в розетке
(рис. 14.11), IIолучаем соответственно
2 . 2
Е, = Еж cos 'f' + Еу sш <р;
еп = Еж cos 2 ( 'f' + 450) + Еу sin 2 ( 'f' + 450);
Еш = Еж cos 2 ( 'f' + 900) + Еу sin 2 ( 'f' + 900),
откуда после несложных преобразований находим
2 EI 2Еп + Еш
tg 'f' = j
€I Еш
EI + Еш 1 . I 2 2
Еж = 2 + 2 У (EI Еш) + (EI 2Еп + Еш) ;
EI Еш 1 . I 2 2
Еу= 2 +2V(ЕI ЕШ) +(ЕI 2Еп+Еш).
Таким образом, в общем случае по-
лучены выражения для определения
значения и направления rлавных де-
формаций.
r лавные деформации с равным
успехом MorYT быть найдены и при
помощи трех механических тензоме-
тров. В некоторых случаях практи
.z куется определение r лавных осей при
помощи лаковых покрытий (см. да-
лее) с последующей установкой тен-
зометров по rлавным направлениям.
л
1
Рис. 14.11
5/)2
В современной технике эксперимента датчики сопротивле
ния используют не только для замера деформаций. Во мноrих
силоизмерительных устройствах их используют как чувстви
тельные элементы, реаrирующие на изменение внешних Ha
rрузок. Пля замера усилий датчики сопротивления наклеива
ют на деформируемый упруrий элемент (стержень, вал), и по
изменению сопротивления датчика судят о действующем уси
лии. Такой способ удобен тем, что позволяет весьма просто
осуществить дистанционный замер, без введения сложных дo
полнительных устройств.
При стапrчеС1<ИХ испыта.ниях
датчик, наклеенный на поверхность
исследуемой детали, включают в из
мерительный прибор по мостовой
схеме (рис 14.12) с отсчетом пока
заний по rальванометру. Одно из
четырех сопротивлений моста, Ha
пример Rl, представляет собой co
противление датчика. Остальные & 1 1 1 1
сопротивления подбирают так, что
бы при отсутствии удлинений дe Рис. 14.12
тали (до начала опыта) мост был
сбалансирован и сила тока в rальванометре i r равнялась бы
нулю. Лля этоrо необходимо, как известно, соблюдение COOT
ношения
Rl R2
R4 = R3
(14.1)
Обычно в качестве сопротивления R4 берут второй дaT
чик, точно такой же, как и первый, а сопротивления R2 и R3
выбирают равными. Таким образом,
Rl = R4 = R д , R2 = R3 = R
и условие (14.1) соблюдается.
Составляя уравнения Кирхrофа для цепей, представлен
ных на рис. 14.12, нетрудно определить, что в случае несба
лансированноrо моста ток, проходящий через rальванометр,
равен
i r = & RIR3 R2 R 4
R2R3R4 + RIR3R4 + RIR2R4 + RIR2 R 3
(14.2)
553
При этом предполarаеТСJl, что внутреннее сопротивление ис
точника тока и rальванометра MHoro меньше Rl, R2, R3 и R4.
При работе датчика сопротивление Rl изменяеТСJl на l1R JS, и
Rl = R JS, + ДЛ д ; Л2 = Лз = Л; Л4 = Л д .
Выражение (14.2) принимает при этом вид
. & ДЛ д
'r= .
2(Л + Л д ) Л д
Таким образом, ток, протекающий через rальванометр,
пропорционален изменению сопротивления датчика и, следо
вательна, замериемой деформации.
Основной поrрешностью датчиков сопротивления явля
ется температурная поrрешность. При изменении темпера
туры сопротивление датчика меняется весьма заметно. Ha
пример, для KOHcTaHTaHoBoro датчика, наклеенноrо на поверх
ность стальной детали, при изменении температуры на 10 оми
ческое сопротивление меняется так же, как при изменении Ha
пряжения в стальном образце, на 0,7 МПа. С тем чтобы KOM
пенсировать температурную поrрешность, датчик R4 в MOCТO
вой схеме помещают без приклейки на датчике Rl и закрыва
ют сверху теплоизолирующим материалом, например тонкой
фетровой полоской. Температура обоих датчиков оказывает
ся при этом одинаковой. Torna одинаковым будет и темпера
турное изменение сопротивлений Лl и Л4' Балансировка MO
ста, следовательно, меняться не будет, поскольку соотношение
(14.1) сохраняется.
Коrда ведется исследование напряженноrо состояния
сложной конструкции, имеется большое количество датчиков,
с которых необходимо снять показания. rальванометр и co
противления Л2 и Rз остаются при этом общими, а пары co
противлений Лl, Л4 дЛЯ каждой исследуемой точки включают
в схему поочередно для снятия показаний. Чтобы избежать
поrрешностей из за изменения напряжения питания & непо
средственно перед каждым отсчетом проводить балансировку
моста при помощи nepeMeHHoro сопротивления r (рис. 14.13).
554
Описанный способ замера
приrоден, понятно, только при
статическом изменении наrрузки.
При быстро протекающих про
цессах вводят специальную реrи
стрирующую аппаратуру. Пля
записи деформаций применяют
осциллоrрафы, а в схему включа
ют усилитель.
g 11\1
Рис. 14.13
14.4. Оптический метод определения напряжений
при помощи проэрачных моделей
ОптичеСI{ИИ метод исследования напряжений заключается
в том, что прозрачную модель из оптически активноrо MaTe
риала (обычно из специальноrо орrаническоrо стекла) в Harpy
женнам состоянии просвечивают в поляризованном свете. Изо
бражение модели на экране оказывается при этом покрытым
системой полос, форма и расположение которых определяются
напряженным состоянием модели. Путем анализа полученной
картины имеется возможность найти возникающие напряже
ния.
Наиболее просто при помощи оптическоrо метода анали
зируют плоское напряженное состояние в моделях постоянной
толщины. Вместе с тем существуют приемы исследования и
объемноrо напряженноrо состояния. Эта задача, однако, OKa
зывается значительно более сложной как по технике экспери
мента, так и по обработке полученных результатов.
Остановимся на случае просвечивания плоской модели в
монохроматическом свете.
Схема установки представлена на рис. 14.14. В этой YCTa
новке S источник света, 1 конденсор, 2 светофильтр,
б объектив, 7 экран. Модель 4 помещают между двумя
поляризующими элементами 3 и 5. Первый из них называется
поляризатором, второй анализатором. Оптические оси по
ляриза.тора. и ана.лиза.тора составляют между собой уrол 900.
555
Рис. 14.14
При этом пучок света, прошедший через поляризатор 3, по
ляризуется в rоризонтальной плоскости (вектор поляризации
располаrается rоризонтально, а световые колебания происхо
дят в вертикальной плоскости). Поляризованный пучок CBe
та через анализатор при указанном расположении оптических
осей не пройдет и экран освещен не будет. Поляризатор и aHa
лизатор, как rоворят, "установлены на темноту". При наrруз
ке модель приобретает свойство поворачивать в зависимости
от величины напряжений плоскость поляризации проходящеrо
через нее света. Тоrда свет с повернутой плоскостью поляри
зации частично проходит через анализатор, давая на экране
изображение исследуемой модели, покрытое системой светлых
и темных полос.
Рассмотрим этот вопрос более подробно. Аналоrом поля
ризованноrо света являются механические плоские поперечные
колебания, для которых перемещение и изменяется по rapMo
ническому закону:
и = а sinwt,
rде а амплитуда колебаний, соответствующая яркости CBeTO
Boro пучка; w частота поперечных колебаний, равная частоте
световой волны.
Пусть поляризованный в rоризонтальной плоскости пучок
(рис. 14.15) проходит через прозрачную напряженную модель.
Смещения в вертикальной плоскости О А разложим по r лав
ным осям х И у. Тоrда
их = asinasinwt;
и, = а cos а sin wt.
556
Оптически активный
материал при наличии Ha
пряжений становится анизо
тропным, и скорость света
С при прохождении в напра-
влении осей х и у оказы
вается различной. Поэтому
различными будут и проме
жутки времени, за которые
свет пройдет через пластин
ку толщиной h:
h h
t x == , t y == .
с х Су
Уравнения волн в Ha
правлении осей х и у по
сле выхода из пластинки бу
дут соответственно следую-
щими:
Рис. 14.15
их == asinasinw(t tx)i
и у == а cos а sin w (t t y ).
(14.з)
Таким образом, колебания оказываются сдвинутыми по фазе.
Сдвиr фаз равен w(t y t x ).
Через анализатор, "установленный на темноту", пройдут
только колебания, происходящие в rоризонтальной плоскости,
Т.е.
и' == ОБ2 ОБ! == ОА2 cosa ОА! sina,
или, соrласно выражениям (14.з),
и' == а sin а cos а [sin w (t t x ) sin w (t t y )].
После простых преобразований окончательно получим
, t y t x ( tx + t y )
и = а sin 2а . sin w 2 . cos w t 2 .
557
Как видно, амплитуда волны, прошедшей через образец и ана-
лизатор, оказывается равной
, . . t, t ж
а = аsш2аsшw 2 (14.4)
Следовательно, интенсивность света, падающеrо на эк
ран, зависит от сдвиrа фаз w (t, tж) и от уrла а.
В случае, если плоскость поляризации совпадает с напра
влением одной из rлавных осей, sin 2а = о. Тоrда экран в COOT
ветствующих точках будет затемнен. Кроме тoro, экран будет
затемнен соответственно в тех точках изображения модели, rде
разность фаз w (t, t ж )/2 принимает значения, кратные 11":
t, t ж
w 2 = 1I"n. (14.5)
Под n здесь понимается любое целое число.
Таким образом, на экране получаются темные полосы ДBO
якоrо происхождения. Прежде Bcero, имеется одна или не-
сколько темных полос, в которых направление rлавных осей
совпадает с плоскостями поляризации. Такие линии носят Ha
звание UЗО1СJ1.UН (линия постоянноrо наклона rлавных напряже
ний). Вторая система темных полос соответствует значениям
w (t y t ж )/2, равным о, 11",211", ....
Опыт показывает, что разность фаз (разность промежут-
ков времени прохождения света в направлении осей у их) про-
порцианальна разности напряжений иу и (Jж, т.е.
h h
t y t:z; = = kh((Jy иx),
Су сж
rne k коэффициент пропорциональности, зависящий от опти
ческой активности материала.
Следовательно, для каждой полосы BToporo рода разность
напряжений (Jу (Jж, соrласно выражению (14.5), есть величина
постоянная, равная
211" 211" 211"
о; ; wkh ; 2 wkh j 3 wkh j . . . ;
Число n называется порядком полосы.
Оптическую постоянную k леrко определить путем пред
варительноrо испытания образца при простом растяжении.
211"
n wkh '
558
Если растяrивать в поляризованном светепризматический
стержень из Toro же материала, из KOToporo сделана модель,
то изображение образца на экране будет последовательно тeM
неть, коrда напряжение в нем будет проходить через значения
27r 27r
I.I.Jkh i 2 1.1.Jkh i и Т.д.
Отсчитывая изменения наrрузки между двумя последую
ЩИМИ потемнениями, определяем
27r
(1=
I.I.Jkh
и для данноrо значения I.I.J (для взятоrо цвета) находим значе
ние k.
Темные полосы на модели, соответствующие постоянным
значениям (1у (1х, леrко отличаются от изоклин. Если поля-
ризатор и анализатор одновременно поворачивать в их плоско
сти, Т.е. изменять уrол а, изоклины будут менять свою форму.
Полосы же (1у (1х = const, Т.е. остаются постоянными. При
исследовании напряженноrо состояния в плоской модели этим
. приемом обычно и пользуются. Поворачивая плоскость поля
ризации (обычно с интервалом в 50), строят семейства изо
клин с соответствующими указаниями уrлов. По изоклинам
без труда MorYT быть затеМ построены и траектории rлавных
напряжений в модели.
Если менять наrрузку на модель при неизменном положе
нии поляризатора и анализатора, можно наблюдать возникно
вение и перемещение полос на изображении модели. Например,
при изrибе призматическоrо бруса имеем систему полос, пока
занную на рис. 14.16. В средней части модели, rде имеет место
чистый изrиб, наблюдается равномерное распределение полос.
Это значит, что напряжения по высоте сечения распределены
Рис. 14.16
б59
по линейному закону. По мере возрастания нarрузки у верх-
Hero и ннжнеrо краев бруса будут возникать новые полосы,
перемещающиеся по направлению к нейтральной линии. При
этом полосы будут сrущаться, но распределение их сохранит-
ся равномерным. Производя на,rружение от нуля, очень леrко
определить порядок каждой по,лосы и точно указать соответ-
ствующую разность их им,
Оптический метод не дает возможности определить их и
им отдельно. Для этоro используют побочные приемы. Одним
из способов является замер при помощи специальноrо тензоме
тра изменения толщины модеЛlI в различных точках. Так как
дh пропорционально сумме напряжений:
6.h р.
h = Е (их + им),
то, зная сумму и разность напряжений, леrко подсчитать и
сами напряжения. Однако б"лее предпочтительным методом
является применение общих уравнений теории упруrости с по-
следующим интеrрированием внутренних сил в соответствии
с полученными направлениями r лавных напряжений. Более
детальное описание этоrо способа, однако, выходит за рамки
курса сопротивления материалов.
Описанным выше приемом просвечивания плоской Moдe
ли в монохроматическом свете не исчерпываются возможно
сти оптическоrо метода. Часто модели просвечивают в белом
свете. На экране в этом случае вместо темных и светлых по
лас получаются цветные полосы с непрерывными переходами
через цвета спектра.
Существуют способы просвечивания моделей с поrашени
ем изоклин. Известны приемы исследования напряженноrо со-
стояния в пространственных моделях путем их "заморажива-
ния" с последующим разрезанием на плоские образцы.
560
=
:= =
:а
о = а......
:а t:I N
:s: '" 1:) t--
са:а I
р.. :.1 IQ Ф
t:::: 1:) '11 С
а. а. If.)
t:I аа
.а =
U
",С:: О
u'"'
».......
ts::
t=:
<
E-t
О
.ts::
О
=:
E-t
<
о
t::
E-t
=:
::Е
<
E-t
О
(.) ti
-.:;
19 В. И. Феодосьев
:Е 6 ....
. g. ...
.d .. а> &1) "" <Q ....
:а <10 ..... ..... ..... ""
(J t; 6 ...;-
'J = ..... ..... .....
rd :с :с
... t; -&
.. t:(
.; :2 а .... <") <о а
<о <о t--. t-- <10
.. U а 6 а а а
; . .. ..... CI> t-- ..... а
I :2 <10 а. &1). ...... C'I
U а ..... ..... C'I C'I
;
,::
'е :2 ф <10 Ф 00 &1)
,;О: <") <") .... .... '"
4J о U а а 6 а а
u о
О ;:о, '"
I ...
ос
t;
t:( ,::
4J '15 .. t-- C'I .... .... ао
:а ::I! ...... ...... <"). ..... .....
= " u а а а а а
= ..;-
'"
t:(
4J
:а &1) <") &1) <") t--
= S ::I! t--. t--. Ф Ф. а
:>' о u 6
о н о а а а .....
: I .
'"
= о
{,) Н ><.
'" .. <") 00 cn C'I ....
S ::s "'. t-- C'I. "'. <10.
о U с> с> ..... ..... .....
.:; ::I! ф 00 &1) .... &1)
aq, &1). t-- t-- со
Н ... u с> с> 6 6 6
I
н .. с> с> ..... <") '"
::I! .... &1) со а .....
u 6 6 6 ..... .....
tW:> 'lIинаьа:> <") '" <") '" C'I
'1'1t1lП1ОI/'Il ..... ..... .... СО. '"
....... ..... ..... ..... .....
C'I N <")
.. ....... ....... .......
&1) &1) а
::I! ...; ...; ..;
::I!
<") .... <") .... <")
а &1) аа
N N C'I
IIlfифоdи
dawoH &1) 00.
N N N
561
..,
::s
z
..,
"=
о
о
::Е 6 ...
а.
= :.:
'" .,., '" .,., '" t-- "" М t-- '" .,., t--
'" :<! ос т "' ..... "" т C t-- М М C t--
U о:: c'i
u = ..... '" '" N N м N м м
'" :s: :s:
::Е о:: -&
t:(
,; " т т т м t-- .... '" Q М "" N.
"" т т C C N N M м- м- .,.
.. u Q Q Q .....
н '" т .,. '" м м .,. Q Q .,. Q Q
I .." N М '" "' м '" t-- Q М '" т
м .... .,. '" '" 00 Q Ф c'i .-) N CD Q
W U .... N
=
'ё ::Е м N .... Q т 00 т т т 00 Q т 00
':0: '" '" t-- t-- t-- t-- t-- "" "" "" C т т
.., u а а
u о Q Q Q О О О О О О О О
О "" .:-
.. I
о:: о
t:( "" =
.., 'ё . .,. '" '" r-- о о N .,. м '" о м
:з ::Е t-- т О. м- т м .... 1'- м т 00 "'.
= Q U Q Q .... .... .... c'i c'i c'i ..; c'i ..;
= ......'"
'"
t:(
..,
:з '" м .... т 00 '" м .,. '" .,. N '" .,. N
= S ::Е '" "'. M м- "'.. "'.. "'. t--. t--. t--. Cn. Cn. т.
:r о u
о н Q .... .... .... .... .... .... .... .... .... .... .... ....
111 .
'" I
а.
= о
О н ><
01 Q 00 '" м '" '" м Q О Q Q Q
13 . 00 "'. Q '" '" N t-- .... '" r-- м-. '" 00
::Е . r: 00 00 а c'i . r:
а U N М '" '" ....
.... .... .... .... ....
::Е r-- '" о т м N О т "" r-- '" .,. м
. т т O N. N. N. М М М "'. "'. "'.
н u Q а .... .... .... .... .... .... .... .... .... .... ....
I
н . r-- '" '" cn '" 00 м м м м .... .... о
::Е r-- N '" N '" '" '" .... <о O .... N N
U .... N N М М . .-) .-) CD "" r: ф ....
....
tW::I 'IrИИ<lhOJ::I '" м Q '" '" 00 cn '" 00 N <о т о
'IIt1lП10ItIl 00. .,.. .... r--. м- О. r--. "'. .,. . т. "" "".
.... N N N N М М N ...; N ..; .,.
.. "' "' t-- r--. OO
.... .... .... .... ....
1---------
R:: '" '" о о '"
::Е ..; . '" .-) '"
1--------- ::Е
.", м .,. м .,. м .,. '" м ..,. '" м ..,. '"
..а N '" Q '" О
М м ..,. .,. '"
I"tифоdu
dOJWOH N '" IC
м м ..,. ..; IC
562
..,
::1
:
..,
!ii
00::
О
О
:Е 6 ....
..... = :>01 О
ti . 1/) о .... C"I 1"- CXI '" '" 1"- а '" '" N ....
II! :а . C"I "' CXI 1"- CXI М М М М ос> ос> а> а r=i
u tj ф
:= м . м . 1/) . 1/) '" r:-- CXI 1/) '" r:--
:о: :о: .....
::Е о::: -&
t:!
,; :Е C"I r:-- а> . ос> ос> а . а> C"I C"I '" а 1/) ос>
1/) "'.. "' r:-- r:-- OC> a> Cn Cn a а. а. ..... ..... .....
.. u ..... ..... ..... ..... ..... ..... ..... ..... ..... N N N N N N
. м а а а а a r:-- . ..... Cn. "'. а>. М. а а
C"I ....... 1/). а. <-i
I ..!: :Е м а> м ..... а ..... '" CIO r=i ..... а> м ос> ..... C"I
U C"I C"I М . 1/) 1/) 1/) '" CIO cn '" CIO cn ..... .....
н
а:=
'13 ::s ..... а 1/) 1/) cn cn CIO 1'-- 1'-- cn CIO CIO 1'-- '"
':0: ...... ..... C"I C"I C"I. М. ""- ""- М. М. . . . .
.., u .....
u с) о ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... .....
о ;:., .:'
.. I
о::: с) =-
t:! ;:.,
.., '8 . ..... о> ..... C"I а а. C"I. 1/). CIO а . м ..... CIO 1/)
. 1/) CIO 1/) C"I.
:а ::s иi cti ф C"I М 1/) 1'-- а '" cn N -i"
:= о u .... .... .... ..... .... C"I ..... ..... C"I C"I C"I
:= ...;- ....
01
t:!
..,
:а CIO '" 1/) м N N .... cn CIO .... а о> 1'-- '"
:= 8 ::s .... .... . . . I'-- I'-- I'-- "' '" cn о> 00 00 00
::r' с) U N ci' ci' N N N N N
о н о N N N N N N C"I
:i I .
= с)
с) н
. а а а а а а. 1'-- "'. C"I . '" о> '" '" а
8 CIO о> '" '" иi
::s ф cti ci' '" а о> CIO '" N М -i" -i"
о u а 1/) . 1/) 1/) '" 1'-- '" 1'-- CIO о> а
..!: N C"I C"I М .....
::s м C"I '" м '" '" '" м ..... а cn CIO 1'--
. 1'--. 1'--. 0>. 0>. 0>. .... .... .... .... .... м м N N N
Н U .... .... .... .... .... C"I N N N N N ci' N ci' ci'
I
н . а а о о о а 0>. "' О. N 1/) '" м CXI .....
.... О. 0>. ..... ....
..!: ::s <-i '" CIO М 1'-- о> .... 1'-- М 00 Ф cti М. 0>. ",.
U ..... ..... ..... N N N М М . М 1/) 1/) '"
t":I 'IIИН:lh:l:l CIO .... '" М CIO О '" '" C"I а о> CIO а а а
М. .. 0>. .... C"I N. CIO ..... . 1'--. М 1'-- ..... 1/) CIO
'1D'1IПЮI/'II 1/) '" r:-- '" cti CIO cn а 00 r=i .... ci'
..... ..... .... ....
О. М 1'-- а
...
C"I N N М
ес: ::s O а. CIO о>
'" 1'--
::s
'" 1/) '" 1/) '" '" 00 1/) '" 1'-- CXI '"
1'--
"'" '" М а '"
If.) '" 1'-- r:--
IIlI'ифоdu
da"oH '" М 1/)
иi '" 1'--
19"
:i63
Q,)
;s
:1:
Q,)
"с
о
о
,; 6 ....
а.
... = I0Il CIO <о ... >1:> со) . с с с с с с с с с с с
01 :.1 IIC .... со) >1:> <о со) <о ф N ... CIO N ... Ф. <О. ..... Ф. >1:>.
U t: <О. ..... "о ф "о ф с N с. со N .r) .... с со) ... со)
:а = 11: ... ..... ... ... ... ... ... N N ... .....
11:
:::е t: -&
t:t
:1 .... ф м .... м .... ... >1:> 00 ..... >1:> со) ..... т CD CD Q
..... ..... N. N. .. . >1:> >1:> <O t-:. .... CIO Ф. т. О. т о
u N N N N N N N N N N N N N N со) N СО).
101 . . N О О О О О О Q Q О. О. Q О. О О. О. О.
м ..; ..... ..; ф ..;
I :1 N ф '" ф ..... >1:> со) N N N CIO '"
U т о ..... со) . <О Ф ..... ..... '" CD '" О .... . о >1:>
..... ..... ..... ..... ..... ..... N N N N со) . "" '" '" '"
101
'ё :1 а> 00 00 .... а> 00 .... .... а> CIO CIO CD >1:> "" "" а> CIO
'11: '" "'. '" "'. .... .... .... .... а> а>. а> а> а> т. а>. ..... .....
cu u N
u о " ..... ..... ..... ..... ..... ..... ..... ... ... ..... ..... ..... ..... ..... ..... N
О ;о, '"
I ..
IIC
t: о =-
t:t ;о,
cu 'Е! . 00 '" о '" о т 00 <О ..... N а> ... а> '" О. .... 00.
:а :1 ..... ..; со "". CIO со) "о о ..; со ..; CD а> N N ...
= " u N N N '" '" '" "" "" '" '" <о .... 00 а> ..... .... 00
= ..;- ...
nI
t:t
cu
:а ..... ..... а> CIO о ф 00 <о 00 00 .... "" ..... 00 "" а> 00
= s :1 ..... ..... О. О. '" "" "" "" 00 CIO 00 CIO 00 .... ..... N N
о U '" ..; '" '" ..; ..; ..; ..; ..; ..; '" '" .., ..; .., "". ..;
101 "
:1 I .
а. о
1::
с) 101 :i
со "" о Q Q О О. Q О. Q О Q О. Q О Q Q
S . ..; ё ..; OD о. 0- со. ..... ..; ..; ",. 0Ji ф .r)
:1 00 .., .....
" u 00 ф Q ..... .., '" со 00 а> Q м 00 м .... ..... .... .....
..... ..... ..... ..... ..... ..... ..... N N N м м "" N '"
:1 .... .... '" "" 00 .... со '" а> 00 .... '" м о 00 о а>
. "" ""- "" "" .... .... .... .... Q О О О О Q а> "" м
м u N N N- N. N N. N. N ..; ..; ..; ..; ..; ..; N ..; ..;
I
м . ..... о "'- "" ..... м о Q О о. О о о о о о о
:1 N '" М. N- ..; 0Ji "о N ..... ф ф ..; OD "о
u '" '" <о .... 00 а> о .... N М "" .... о '" <О .... а>
..... ..... .... ..... ..... ..... N N N ..... .....
r:И:> '.IIН:!";!:> М 00 О О Q Q О Q Q Q Q Q Q Q О Q Q
<О. М 00 '" <О М а> <О 00 00 <О N 00. "'. ..... N N_
'IJttnюIl'П 00 ai c:i N со N ..; .r) N М '" а> <О а> u) ....
..... ..... .... ..... ..... ..... ..... ..... ..... ..... N N ..... .....
... о '" о Q
..; '" ..; ..;
c:z:: т о N N
:& ... ... ...
:1
-.s '" <о .... 00 <о .... CIO Ф '" .... с N "" <о .... 00
.r) 0Ji 00 ... ..... ..... .....
о о с с
... Q .....
00 ф ..... .....
Оllфodв
d;!ион о .....
00 а> ..... .....
58
..
:1
Z
..
!ii
"1:
()
()
, 6 ....
р,
..... = iIII
.п.. м ..... t-- с"4 <C -п -п t-- с e -п e
01 :а trII -п а> N <ti а> а> ..... -п а> Q() м
\J t:I
\J :.: ..... ..... ..... N N N ..... N N N N N М М
01 :о: :о:
::s t:I .g.
r:::(
.; , <Q С -п м ..... Q() Q() N С С -п а> t-- -п м с
-п <Q <Q t-- Q() а> м м M -п "' t--
.. \J М М ... М М м м м м ..; ..; ..;
н ... <Q N а> N <Q ..... Q() ..... t-- <Q М ..... ..... N <Q
I , ..... Q() Q() ..... -п ..... ..... а> -п а> м ..... а> t-- -п
-п -п <Q t-- а> с Q() а> с м <Q а> ..... t--
\J ..... ..... ..... ..... ..... ..... N N N
!iI
=
'6 ::IJ а> Q() t-- <D -п а> Q() <D Ф Q() t-- <D М N
':0: t-- t-- t-- ..... ..... ..... ..... ..... ..... .....
.. \J N N N ..; ..;
\J " Q N N N N N N М М ... М ...
О ;о, .
trII I
t:I "
r:::( ;о, =
.. '6 ... N Ф с N ..... Q() ф Q() <D ..... t-- Ф
:а ::I! N ... t-- С C'I Ф ..... ..... t-- М Q() ... Q()
:.: Q \J ..... ..... ..... ..... C'I C'I ..... C'I C'I ... ... м -п
:.:
01
t:(
.. ..;
:а 01 t-- <D C'I 00 t-- <D М м с t-- М с
:о: S ::I! Q() "" 00 "" t-- t-- C'I C'I C'I C'I ..... ..... .....
g " \J ..; ..; ..; ..; ..; ..; .n .n <ti <ti <Q <ti <ri <ri <ri
!iI <>
::1 I .
р,
= "
о !iI ..;
01 ... t-- С ..... С М Ф t-- Ф ..... с N <D ..... ""
8 ::I! <Q N t-- t-- <D м ..... -п N <Q <D <Q
<D t-- 00 t-- "" Ф N М <Q 00 С C'I
<> \J ..... ..... ..... ..... ..... N N
W ::I! t-- <D C'I С 00 м ..... <D C'I Ф t--
"". 00. 00. OO 00 t-- М м м ф ф ф ф 00 00 00
!iI . .. \J ... М М ... ..; ..; ..; ..; ..; ..; ..; ..; ..; ..; ..; ..;
I
!iI ... t-- С C'I C'I а> <Q C'I N ... <D а> а>
::I! ф N <Q C'I 00 М <D ..... С t-- ..... t-- Ф .....
N М М -п <D t-- "" Ф с ..... N
\J ..... ..... ..... .....
ЕI'iI:> 'ИКИ;!Ь:l:> t-- С. М Ф 00 t-- "'.. -по M ..... 00
'1пmorrп ф N ..; 00 ..; ..; t-- N ..... ..; t-- М Ф ..; ё
..... C'I N C'I М М N C'I м ... м ... <D
<D <O ...
..
J.........
<D
, ..... ..... .....
,
"1:! 00 Ф с C"I <D Ф С C"I С ..... N <D "" С
..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... C'I
с с
..о C"I :!: tO
..... .....
иrrкфodu .п..
dal'il°H N <D
..... ..... .....
565
'"
%
'"
:t
%
О
IC
а
" <-о
р.
t:: :01 u) с> "' 00 t-- с> <D '<t' 00 "'.. '" '" с> u) '<t'
<d :а .. с "' t-- '" N 00 c> '<t' t-- t-- М CIO CD '" '<t' '<t'
U t:;I .., м '" .., '<t' '<t' <D t-- CIO '<t' u) <D <D t-- CIO а> с>
u = :о: .....
<d :о:
:::.s о; -е-
"t
со u) '" N <D '<t' с> '" '" N u) М ..... с> М .....
CIO OO М. '<t'. '<1' U) 1'-- CIO O а> о 1'-- 00 a> о ..... C'I со')
.. u '<t' '<t' u) u) u) u) u) u) <D l1'i CD <D <D <D I'-- r: r: r:
r; :: . CIO '<t' N N N '<t' u) .., о <D N ..... '<t' '<t' '<t' ..,
N N CIO u) N <D u) .., .., '<t' <D CIO '<t' О <D <D 1'-- u)
I ..... .., ..... '<t' 1'-- N .., ..... а> <D N '" '<t' '<t' О <D 1'--
N N '" .., '" '<t' u) <D CIO '<t' '" CIO а> о ..... '" '<t' '"
..... ..... ..... ..... .....
!oi
'ё ;!; '" CIO '" 00 1'-- <D '" ..... а> CIO <D CIO <D '<t' .., ..... '" а>
':0: '" u) а> а> а> а> а> а>. CIO со') со') a> а>. а> а> а> 00 00
CL> U .; .;
u о " .., .., .., .., .., .., .., .., .., '<t' '<t' '<t' '<t' '<t' '<t' '<t'
О ;:., .,!'
.. I
о; о =-
"t ;:.,
CL> "ё . о о а> '" ..... о N CIO CIO а> <D N 00 О а> 1'-- о а>
:а о '<1' '<t' О <D 1'-- CIO '" CIO '" О '<t' '" 1'-- 1'-- 00 а> DO
'" '" 1'-- CIO CIO а> ..... '<t' <D ..... '" а> ..... '" '" 00 ..... .....
= " u ..... ..... ..... ..... ..... ..... N N N N .., ..,
:r:: ....'"
<d
o:r
CL>
:а <d <D '<t' '<t' '" ..... 00 N М '" О DO 00 u) N а> '<t' а> <о
:r:: е ;!; о о OO 00 OO 1'-- 1'-- <о u) <о u) 1'-- 1'-- 1'-- <о <о u) u)
о U r: 1'--. r: r: r: r: аО аО ф ф ф ф ф ф ф
!oi " 1'-- 1'--
IQ .
<d I
р.
= о
О !oi
<d '" ..... <D <D '" '" о '<t' ..... О u) N 1'-- О ..... u) ... u)
е . .., cn cn ..... '" u) <о а> u) 1'-- '<t' а> м <о <о N ... <о
::!! а> о CIO ..... '" 1'-- u) ... ..... ... о ... ..... ..... а> ..... C'J а>
" u ..... N N .., .., .., "'<t' '" <D '<t' u) 1'-- CIO cn а> ..... N C'J
..... ..... .....
. ::!! о а> N ..... О 1'-- N <о О .., ..... <D .., ..... cn u) ..... cn
. <О. U). N. "". N ..... ..... о О. 00 00 1'--. 1'-- 1'--. <о <о <о u)
!oi u u) u) <о <о <о CD CD CD <о CD CD 1'-- r: 1'-- r: 1'--. 1'--. t--.
I
!oi . . <о 1'-- со') ..... 1'-- .., ..... <о о ... u) 1'-- 1'-- u) О <D t-- t--
::!! ..... ..... N <D а> <D 1'-- <о C'J ..... 1'-- ..... "'<t' <о 1'-- о ..... t--
N ..... 00 а> О '" 00 ... о 00 ..... t-- C'J 1'-- C'J О t-- .....
u ..... ..... ..... ..... N N N .., "'<t' N .., ... '" u) <о 1'-- t-- 00
z:W:> 'lI'инаhа:> CIO N t-- '" <D О '" ..... "'. "'<t' <D ... 1'-- О ..... t--. ..... О.
аО N ..... С .; N CD .; ..... с аО аО r: r: <D cn .., N
'1П'1!mОU'1l .., "'<t' "'<t' '" u) <D t-- а> ..... <D <D 1'-- CIO а> о ..... ..... "'<t'
..... ..... ..... ..... .....
.. .., О. О О.
'" <о r: CIO
ct:: <D 00 ..... "'<t'
..... ..... N N
r-------- ::!!
..... N N .., '<t' <о о u) о ... <о <о 00 о N '" 00 о
..... ..... ..... ..... ..... ..... N N ..... ..... ..... ..... ..... N N N N .....
f-------
О О О О
..Q 00 О N '"
..... N N N
lI'U'ифоdu
dawoH DO о N u)
..... N N N
566
=
:1:
::r
с
t;
с
= S ----
= = N
'" 111
са са CI
Wc:l.....
с Q,I >1)
c:l.:I: (1)
=E-4
(J
'" t; о
(J b
..;-
'fi
Р
...
'"
,;;
со! :а :1: ...
u ::Ii = -& .. ..... 1'-- "" CIO .;-
U a> ..... "' .;- a>
со! ..... :s: О .;
::Е с; р.. е ..... ..... ..... .....
t:1 t:: с;
с; ::.: со! :s: "" "" .;- '" .....
о :с а> CIO 1'-- CIO CIO
... со! О u 00 м м м м м
» :с с; о ... е а а а а
" .;- м м ..,. ..,.
'Е м ..,. ..,. '" 1/')
u
;:! : а а а а а
I
;:! " м CIO 1/') <D .....
ё .
..... "" м 1/') 1'--
U a а а а а
':о:: .; "" а> м а> м
..,. ..,. 1/') 1/') Ф
4J 14 U
u .;, а а а а а
О
.. I
с; "
t:t .;, 'Е . '" "" "" CIO 1/')
..,. CIO ..... 1/') .....
4J U а а ..... ..... coi
:а ....,'"
:с
:z: <D
'" .; ао N N 1'--
t:t ао a ..... м м
14 ;:., u
4J а ..... ..... ..... .....
:а I
:z: . <D <D ао t-- м
,. 14 1/') N М М 1/')
О u ..... м <D ао
111
со!
р.. :!! "" 1/') ..,. CI 01
= .:0 "" 1/') 1/') 1'--. '"
О ;:., u а ci с> с> ci
I
;:., ::Ii "" <D 1'-- М ао
...;" "" ..,. 1/') а> .....
u а а а ci .....
:!! ао ..... а 1'-- <D
.:: 1'-- C> C> N N
14 u а ..... ..... ..... .....
I
14 а N м '" м
:!! 1'-- 1/') a> а_ 01.
u ci ..... ..... м м
6 ,.Q , ,; <D 01 "" 01 1'--
t:t 4J ....
с; со! ,. :о:: :!! ..... ..,. . 01 ao ""
1:::: 3' 4J :z: u ...... ..... ..... ..... N
U
.. N "" м..
..... ..... .....
er:: '" '" а
..; м ..,.-
:!!
"I:! :!! м м ..,. м ..,.
..а <D а 1/')
..... N N
C:Q '" N а
N '" ..,.
р.. "'.
QJ .. ..... N 1/')
2 6 t; ........ ........ N
О р.. :о:: 1/') N ........
::ж:: = .е- N м ..,.
567
.,
=
z
.,
ос
с\
с\
oj :а * ....
u ::!i 0& >01 00 С С Ф '" t-- М М Ф Ф Ф м
U ;: "' C'I Ф ... 00 ... ф '" с м t-- "' ...
oj о ,,; N м
::Е Q. C'I C'I М М ... '" ... ... v,) t--
1:( t::
w oj C'I Ф М '" ... t-- '" М '" '" '" v,) с
О :z: s 00 t-- С С С С Ф Ф Ф 00 CI М М М
.... oj о u tID М М ... ... ... ... М. М М. M "'. ... ... ...-
» :z: о .... <::> с с <::> с> с с <::> с с <::> с> с <::>
с .... <::> с cn 00 00 t-- '" '" v,) 00 cn 00 t--
'е ::s "'. "'- t-- "'. "". ""_ 00. ао.. 00 00_ Cn е. е_ e
u
;s :1 С О О С О О С О С С С .... ....
..
I
;:1 с .. cn N 00 N Ф '" t-- C'I '" 00 ... ... 00 о
'ё "". e .... OI') .... O "" М. 01') М N_ ... cn
:I! N ar) ё
u о .... .... .... N М М ... 01') t-- 00
....
.
о :I! ... 00 C'I '" ... 00 .... 01') cn t-- v,) t-- .... cn
'" "'. t-- t-- 00 00 ф cn ф С. С. .... N C'I.
.s н u ё ё ё ё ё ....
.. .;: с <::> о о .... .... .... ....
u
О I
ос с <::> 00 '" м 01') .... .... <::> с о с <::> о с
о; .;: 'ё .. М. Ф N ... N Ф. 01') 00 .... ф N 00 N N
1:( :I! N N м ..,. '" t-- 00 С М r: v,) с 01') ...
u
.. ....'" .... .... .... .... м N М
:21
== t-- .... С 01') М '" М 00 М С 00 cn ... м
н ::в "'. 01'). 00 00. 00. С. С .... М М М ... 01')
t:( u .... .... ..... ..... ..... ..... N N N N N N N N
.. I N С С С С С С С С О С С С N
:21 . ..
С. ..... ... '" N N. С ...- cn cn t-- t-- cn .....
== н ::в N N иi м ф CD
,. u cn cn "" ..... '" cn м .....
о ..... ..... ..... N N М ... ... '" 01') '" 00
:1 cn 00 ..... о N ..... М N .... cn t-- м N С
Q. ;;. ::в t-- t-- cn cn_ С. 0_ ..... ..... ...... С_ М. .... "'. ....
= .. u ё ё
О ;о, с о ..... ..... ..... ..... ..... ..... ..... ..... ..... .....
I N cn cn '" с 00 '" '" 00 01') 01') с с с
;о, .. "" . Ф. Cn. "" ... ..... N N ..... С. V,) '" u')
....'" ::в ..,. r: ..,. ай
u ..... ..... .... N М v,) '" cn cn м
..... ..... ....
21 м N С cn 00 t-- ..... С '" Ф м '" 00 u')
.!} ...- .... Ф. 1t). t-- t-- С. О '" "'- N М М ""
Н U ..... ..... ..... ..... ..... ..... N N ..... .... N N М N
I ..... 00 t-- 00 О с> С С с> с> О с> с> С
Н .. ... ф ..... '" "'. 00 м '" м- ф 00 00 "'- ...
::s ..,. ar) CD r-: ф ",. r-: ..,. N
u ..... м ф м с>
..... ..... ..... ..... N N N М ... 01')
о ,.Q , .; ... <::> N t-- 00 ..... ... 00 с> 00 '" .... u') t--
t:( .. '"
liI 01 ,. :11 :11 ..... ао.. ... .... 01'). ... С о'> 0'>. ID 01') ..... N. ....
1::: S .. == u N N N М М ..; ..; ..; 1t) t-- u') CD t-- '"
u
.. "". 00. С М 1t). t--
.... .... N N N N
С 1t) С С u') С
ar) ar) '" ""- t-- 00
::s
.,., ::s м ... м ... ... 1t) ... 1t) со 00 v,) 01') '" 00
ос> 00 N '" С 1t) С
N М М ... ... 1t)
1:1:1 01') с '" м с v,)
... 01') 1t) '" t-- t--
Q. 00 '" с>
.. ос N М М . 01') 01')
:11 8- о; ....... м ....... ....... ... .......
о :с 01') '" "" 01')
::I:: 0& ..; ....... CD ....... r:
= 01') 1t) t--
568
..
:1
Qj
Н
'о::
<:)
't)
<:)
'" :а :1: .. а> N r-- с> r-- м с> r-- с> 00 с::> с с с> Q Q с::>
U
u :!J = -& 111 а> a> ... r-- r--. >q, r-- 00 ... 0'1 0'1 Q. \r.I \r.I м ... '"
'" ... :1: О .. '" u) u) 00 1'--- tIO ф N tIO о ... N .r) tIO
:::Е о: со ... ... ... ... ... ... ... ...
1:1 с: о::
о:: м '" /:! t-- u) .,. ...,. с::> м N ... t-- ('011 Q t-- u) ...,. с::> ... а>
о = :1: 00 00 00 00 00 0'1 0'1 0'1 00 Q Q Q Q Q Q ... О
.. '" о u tID M м М м м м м м М. "" "". "" "" "" "". "". ""
» = о: о .. Q Q Q Q r::i r::i о о Q О С О о о с Q О
с 0'1 00 N ('011 ... 00 t-- <о '" м N <о '" "" N 00 <о
'ё :11 с С. N. N. N. М. М М. ..... >q, "'. t-- t--. t--. t-- a> 0'1
u ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
;s ':
I
;s с ... 00 00
'ё "'. 00. 00. t-- ..... C"I. 00 "" м 0'1 М "It' 00 М '" М '"
:11 о ..; tIO CD N ..; tIO ф ф о .r)
u t-- 00 ... N <о 00
... ... ... ... ('011 C"I ('011 C"I .., "" "" '" <о to- ао
.; :11 м t-- <о 00 <о ('011 u) с::> 00 CIO "It' Q "" N с::> М C"I
... ... C"I. C"I М. "". "" '" '" '" <о. ао ао Ф. Q О ...
101 u N N N
':1: ;;. ... ... ... ... ... ... ... ... ... ... ... ... ... ...
&1
:3 I " Q Q
'ё "':11 CIO N ('011. N 00 0'1 t-- <о CIO м N. Q Q Q. с::> Q. Q
111 ;;. О .r) r.: tIO .r) о .r)
о:: N '" 0'1 N 0'1 t-- М ""
U C"I C"I .., М "It' "It' '" <о CIO t-- 0'1 ... м to- ... 0'1 ""
1:( ...;" ... ... ... N ... ('011
QJ
:21 .; :11 с '" ('011 '" "" м CIO C"I с::> '" ... ... '" "" N 0'1 ао
= <О <О. 0'1. 0'1. с::> C"I. C"I М. "" '" <о с::> с::> ... C"I "" '"
= ;:о, u N N C"I C"I ..; м ..; м ..; ..; ..; ..; "" "". ..; ..;
101
1:( I Q О
QJ . ... <О Q
:21 :11 N
101 ...!: C"I '" "" CIO C"I <о м <о м C"I CIO 0'1 ... t-- ...
= u 00 Q м "" 0'1 0'1 .., <О м ао '" '" ... "" CIO C"I ...
Ь ... ... ... ... ... N C"I м ('011 .., "" '" <о t-- t-- 0'1
:i :11 ... Q CIO CIO <О 0'1 ао t-- '" Q CIO 0'1 CIO <о "" IID <О
. "". "". "'. "'. '" t--. t--. t--. "'. CI 0'1. <"1 N C"I ('011 '" '"
со u N N N N N N N
r:I ;:о, ... ... ... ... ... ... ... ... ... ...
с) I Q Q
;:о, ... t-- IID t--. C"I. ... <о CI <"1 ... <О. <о to- Q Q Q Q Q
...;" :11 N ..; 0'1 ... о .r) ф '" ..; ..; ..; о r: о CD
u ... ... ... ('011 N М со') со') "" "" '" t-- 00 Q ... N ""
... ... ... ...
N :11 <о '" CIO CIO '" Q 0'1 CIO '" ..., ... ... Q CIO '" 0'1 t--
'" '" CIO CIO CIO <"1 ... ... ... '" 10 Q О 0'1 0'1 "" ""
... u N N N N N ..; ..; со') ..; ..; ..; ..; ..; ..;
101
I О О
101 ...!: ... <о. CI. ..... <O 0'1 ..., QO О О CI О О Q. CI CI CI
:11 ... 0'1 10 О О CIO ..;r: N N CD <"1 .r)
u "" "" <о t-- 0'1 0'1 ... ('011 '" "" t-- <"1 '" ... <О <о ""
... ... ... ... ... <"1 <"1 ..., ..., ..., ""
,Q dI .. <О 10 <о "" CIO 0'1 CI О О О Q Q Q О О О CI
1:( ... ..., '" ао '" ... '" ...<0 "'. ""0'1 ... О t-- "" CI <"1
'" :r \11 :11 ф r: r: tIO ai ci ...; CD ai ...; tIO N
t::: S QJ = U ... at)
u ... ... ... ... ... ... ... ... ... N ... <"1
.. t-- CI ..., "'.. t-- Q
N ..; ..; м ..;
ct: Q. Q. С Q ... N
CIO 0'1 ... ... ... ...
:11 "'. Q. Q Q с::> Q Q '" Q. Q Q. Q. Q Q Q
-.:s at) <о tIO CD t--. tIO о CD N tIO о
:11 '" <о CIO CIO Q
... ... ... ...
... Q <о ..., Q с::> Q
at) at) <о to- CIO а>
Q Q с::> О '" Q
ао а> с::> ... <"1 ""
... ... ... ...
.., ао
QJ 111 <о CD t-- ....... 0'1
8- о:: at) '" ....... ....... '" .......
\11 ....... ....... Q ... <"1 ""
::r:: с: -& 00 0'1 ... ... ... ...
689
..
r
C:I
;t
r
о
It
а
<d :а '= .... с> с> с> с> с> с>
u ::Е :<: -& :>о: с> 00 '" м N . . .... а> а> 00 .....
u
"' :о: о ",. 00 а> м .... N '" .... а> а> .... а> '" ....
::Е е: N N N N N N М М М '" '"
t::( =: е:
е: , "' с> 00 '" u) N N с> 00 с> 00 .... u)
о :>о: :<: = а> а> 00 00 .... .... а> а> а> 00 с> с> с>
.... "' о u "" "" "" "" "" "" "" м "" м . . .
» :<: е: о с> с> О О с> с> с> с> с> О с> с> <=> с>
= <=> а> 00 '" N О '" м N О а> 00
'Е ::Е N .... .... .... .... .... u) '" . .
u N N N
: N N N N N N N М М "" М
I .
;! = о О. о о о о
'Е ..
:=; о N N u) u) .... .... '" ф
..; u .... N '" '" ф '" ею N '" О ао '"
.... .... .... .... .... .... N N М "" '" .... ею ф
с :=; "" ею '" "" N а> м о' М Ф .... u)
N N М u) .... ею о' о' u) '" .... ею
':о: !OI u N N N N N N N N N N М М М М
cu ;;;
u I .
о = о с> с> с> с> с>
ос ;;; 'Е .. о '" '" ,,: ,,: ею '" N о .... '"
е: :=; о м о .... м .... ею N '" М О ао ....
t::( ......'" u м м '" .... .... о' с> '" N ....
.... N N N
cu
:а с о' м N О 00 .... с> N .... .... м ....
= :=; .... N М - ею о' "'- '" "'. ..... о' .... N. М
= "" u .r) ,,: 00
"' н '" '" '" '" '" '" '" '" '" 00 00
t::( I .... о' с> "" с> о' '" N ею 00 о
cu . . N '" М .... М N N 00 N '" .... о '" ....
:а :1; N М '" о' о' "" о' .... .... N N "" ""
u .... .... .... .... .... N N М "" '" ею о' о
= ....
:>'
О u) N О N О ею .... N N ею '" ""
11'1 .;:0 :=; ею ею ею ею .... .... u) u) u) u) '" u) u) u)
'" u N ..-) ..-) ..-)
"" N N N М М М
= I
U о с> о о о с:>
"" - . ф а> N ф '" N .... .... N М u) М
........ :=; ею о м .... .... N ею u) .... м "" .... ....
u .... N N N N М u) '" о м <о
.... .... .... ....
:=; '" м .... ею о .... '" м .... ею .... N Ф ....
.!1 .... .... .... о ею .... - - м О. О. о' о'
U .r) oti ,,: ,,:
н u) '" '" '" '" '" '" '" ею ею
I о о о о 0_ о
н .:=; '" ....- - ,,: N ..-) Ф ею .... '" .... .... '" ....
о '" ею о' '" N '" о N о' ею
u '" '" .... ею о' .... '" ею о .... о '" о'
.... .... .... .... N м
6 ..Q , ,; о о о о с> о о
t::t cu '" о' М О .... "" .... о' о' о' ею м '" .... '"
"= '" :>' :о: :=; N oti ё 00 ..-) 00
t::: !3' cu = u .... м о' ею м ....
u N N М М N м м м '" .... ....
"'t .... ..... с:>
.. '"
c:r::: "" ею
.... .... .... ....
о о с:> с:> с:> О.
"tI :=; о' О N с:> N .... N '" N '" ао о
;:; .... .... .... .... .... .... .... .... .... .... .... .... N
с> с> u) с:>
...,. о ..... N '"
..... ..... ..... .....
о с> с:> о
'" ао о '"
..... ..... N N
'"
cu ос о ..... N '"
:=; 6 о; .... .... .... ....
...... ...... ...... ......
о :о: '" ао с> '"
::I:: = -& .... .... N N
570
= Qi
:а
'" ! """"
<11 Q, N
:WI 111 t--
Qi <11 I
tr' '" ф
ас >. м
Q,III
8t:1:
,QIIIE-4
= U O
'" aj
u E:-
)1 "" ао '" с ао ""
. "" ...., "'. r-- ao .....
u ..... ..... ..... ..... ..... ""
;., '" а> "" с с а а
:., "<t' r-- "' '" "<t' ао
':о: I )1 <о ао ..... ..; ао ""
u
си ;., ..... ..... ..... ""
u
О
.. . а> а> a> <O <O О
с: "')1 r-:
t::( ...;- r-- ..... ао "" "<t'
U ..... "" '" ао .....
си .....
:а
=
= . .., о t-- 00 М 00
0\ ... )1
t::( CI'J м м <о N ..... а>
u "" м <о ао ас
си
:;\
= . )1 <о ас м t-- N .....
.:: а ас r-- '" . '"
u ..;
111 Н '" <о r-- r--
0\
р., I
r:: н . r-- . 1'--. С О О.
с) '"
)1 а> ас ..... о> м а>
u м '" ао а '"
..... ..... .....
"')1 ас о "" м о а
о> '" r-- r-- а> М
..... М '" ас ""
u ..... .....
0\ ... <о с
u :WI о с а о
:а '" r-- о> "<t'. а>
i а> ..... м .ё 00 а>
..... ..... ..... ..... ..... .....
6 ,.Q 41 oi о r-- . N
t::( '"
с: 0\ :r :s: ::I! N ..; 1'-- 6 м- .ё
t::: 8' си = u ..... ..... ..... N N N
U
... '" с с '" '" "'.
N м- м м м м
c:z:: о '" о "'. а. о.
r-: 1'--. аО ас о> а>
N м '" ас ...... М.
r-: r-: r-:
1'-- ао ас
::I!
::I! '" 00 а> а ..... ......
'" ..; ..; ..;
'" '" '"
'" "<t' М ..... а с
OQ '" <.о r-- ас о> с
.....
с с с с с с
с "" <о 00 00
..... ..... ..... ..... ..... .....
Q, :s:
Qi
)1 :о:
о 0\
с N "<t' <о 00 00
\о ..... ..... ..... ..... ..... .....
571
..
;:1
:z:
с:!
:z:
()
II!
а
::s r-- N r-- <::> r-- м ... <::> а> Lt) а> а> м а> м а> ...
.:- <::> м "' Lt) М <O "' ao <о а> r-- ао <::> <::> ('O м "'
u N N N N N N N N N N N N М М М М М
<::> <::> Q <::> Q <::> <::> Q <::> <::> <::> Q <::> <::> <::> <::> <::>
;о, .., ..... N <о м- "' <O "'.. Q a> ..... a> ..... ..... Q Q Q Q
I м ао ао ... ... ..... ..... Q '" ci '" ..... <о ..... м ..... N
N N N М М ... ... '" ... <о '" r-- ао <::> N '" ао
,;о; ;о, ..... ..... ..... .....
..
u
О <::> Q <::> <::> Q Q Q Q Q Q <::> <::> <::> <::> o o o
.. . Lt) Lt) r: <о rЮ <=> <=> r: r: <li а> <о r: ао м <о Lt)
"1 .....'" ::s ..... Lt) "" Q а> <о <о м м м ..... ..... <о о ... u') N
t:( U ..... ..... ..... N ..... N N М М ... ... it) <о ао Q м r--
..... ..... .....
..
:iI Q О Q О Q О Q Q Q Q Q О О О О o o
=
= olj .., ... ..;- ..... м м ао <=> cn rЮ N cn м ui rЮ cn ..... .....
.s CtJ :2 о ..... м ... <о r-- ..... N <о а> со:> N ... О ..... ао а>
t:( u ..... ..... ..... ..... ..... ..... N N N N М ... '" r-- а> ..... .....
.. ..... .....
:iI
= ао r-- м N r-- о о о о о Q О О Q Q Q О
Ъ .:: ::s N м ..... N а> ..... "". М М '" '" r-- N ..... '" ао. <O
u rЮ rЮ cn cn а> <=> ..... ..... N N М ..;- <о rЮ cn ..... м
IQ Н ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... N N
.s
1:1. I
= н Q О О Q. О Q o Q O О. Q Q О Q Q О О
О . .., i,i N cn r: r: r: ui <=>
... ..... N ао м м ..... а>
::s со:> "" ао ..... r-- Q r-- ..... '" ... Lt) со:> ао со:> <о
u ..... N N N N со:> "" ... ... Lt) '" r-- а> N '" О ""
..... ..... N N
О Q Q Q Q)Q Q Q Q Q Q о N <о t-- N <о
. ... со:> "" а> <о о ..... Q ао ао ... ао <о '" N <о Q
..!: :2 ао Q "" r-- ... ао Q "" Q t-- ао со:> Q <о t-- '" ао
u ..... N N N со:> со:> Lt) "" t-- r-- '" со:> '" r-- а> "" <о
..... ..... N со:> "" r--
.s '" Q Q О О Q О Q Q Q Q О О О О О Q О
U О. t-- Q ао "" ... Lt) Cn. Lt) N N <O О. Lt). Lt). <O О
:;i i ..... N ..;- ui r: cn ..... со:> <li ai N ао r-- <о ао N «f
N N N N N N со:> со:> со:> со:> ... ..,. Lt) <о t-- '" Q
..... .....
,.Q , .. ао '" <о ао ао. Lt) N N "" '" ао "'. <о t-- о Q. Q
t:( .. ... <li «f ci N t--" о ..; CD cn ..; . о «f
.s 11' ;о; ::в ..,. ..... N ао
t:: а .. = u N N со:> со:> со:> со:> ... ... ... ..,. Lt) <о t-- ао о ..... со:>
u ..... ..... .....
о о Q О Q Q "" Lt) о о Q О Q Q О Q О.
.. ..." . . ..;- ..;- . . . .,; .,; .,; <о <li r.: r.: r: ао
Lt) Lt) Q Q Lt). Lt) Q. Q Q Q Q Q. Q Q Q Q. Q
cn о'> Q Q Q о" ..... ..... N N со:> ..,. Lt) <о t-- ао ci
..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... ..... N
... <о t-- а> Lt). ао. ао N ""' t--. N со:> Q N N Lt) ao
... ао ао ао ао а> ф cn Q Q Q ..... N со:> ... u') <li r--
::s ..... ..... ..... ..... ..... ..... ..... .... .... .....
::в
"". N ... ... <O <O О Q. Lt) "". О Lt) со:> Q Q о. o
., Lt) .,; .,; .,; Lt) "" <li со <li <о r.: r.: «f cn Q .... N
.... .... ....
Q Q О Q Lt) Lt) "" Lt) Lt) Lt) Q Lt) Lt) Q Q Q Q
ос> О .... .... N .... N N со:> со:> ... ... ... Lt) <о r-- ао а>
.... ..... .... ..... ..... .... .... ..... .... .... .... ..... .... .... ..... ..... ....
Q Q Q Q О Q Q Q Q О Q Q О Q О О О
-с! О О N N ..... ..... ..... r-- Q Q "" <о Q Lt) О Lt) О
N N N N N N N N со:> со:> со:> со:> ... ... Lt) Lt) r.D
Q, :s:
..
:1
.s .s .s '" .s
о о Q N N ..,. ..,. t-- t-- О Q со:> r.D Q Lt) Q Lt) Q
::r: 10 N N N N N N N N со:> со:> "" со:> ... ..,. Lt) Lt) со
572
lIj
= ::в 1:1
са о,.
. cu
= N
lIj >. с. to-
Qj r.. I
11' \J >< Q
.. .'"
c.:ilcaN
е са CICI
,Q5cu
Qjc.u
111 o
'"' !:I 1111;."
U;;;llll......
<..
::.,
.:;;
:11 ос . ..... . . "'" "'"
....... N "" . 11:) <D OO
<J ..... ..... ..... ..... ..... ..... .....
. Q Q Q Q Q Q
::I! 11:) 00 cn "'" "" Q .
.:' <J Cn C ....... "" Ll) "'" ""
Q ..... ..... ..... ..... ..... ...
;., ;. "'5 11:) 00 11:) <D N Q Q
'11: I "'" <D "'" . 11:) C> ""
IIJ N м <zi "" ..... ""
<J ;., ..... .....
о
с> Q Q
о:: .- ..... Q Q Q
t:t <D "'" OC . N . 11:)
,.;- ::I! u) ,zj е
IIJ <J N ..... 11:) "'"
:а ..... N "" . 11:)
:.:
:.: cn с> с> с> с> с> с>
"' '" 11:) Q "" . <D ос .......
t:t ёА' ::I! u) т- е
<J "" cn Q Ll)
IIJ ..... N N . .
:JI .
:.: .
б ::I! N <D cn ос с> <D
.!} cn 10 ..... а> "'" <D <D
IZI Н <J ..... N "" "" . 11:) 10
"'
р., I
= н '" ..... Q . ос <D N ос
с,) т- u) N е е
..... N "" 11:) "'" "'"
.- OC <D . Q Q ....... Q
:11 N ос а> ..... u)
<J N . ос "'" Q cn .
..... "" . 11:)
"'
<J . Q 10 а> Q Q с>
:;1 ос cn Q 10 . "" ""
i u) r: ,zj Q N м
..... ..... ..... .....
ь ,.Q dI .; <D ..... ос с> с> Q с>
t:t ... ..... 1/'). a> a> "" <D Q
о:: "' ;r :о: ::в u)
t::: s: IIJ :.: <J N "'" ос с> ""
<J ..... ..... ..... .....
... 1/') 10 10 О. C> С. C>
N N N "" "" "" ""
CI:: с> Q 10 Q 10 с> Q
чi чi .Q ,zj ,zj
... с> N . <D ос ..... "'"
"'" r: ,zj ,zj
::I!
::I! . . 10 I/') OC cn а>
.,
. .
N <о Q <D N ос N
OQ "" "" . . 1/') 1/') <D
Q 11:) Q Q Q Q с>
..с: Ll) <о "" с::> N . ""
..... ..... ..... ....
а. 11:
IIJ
::I! iIII 10
"'
о Ll) .D ос с> N . .
tI: IQ .... .... ..... ....
::1;:;
57!
..
:s
z
t:!
':1
Z
о
а
о о ... м 1'- "" .... <о N 1'- 1'- N 0'1 "" 11:)
с; ::1 о. 0'1. .... О. N N ... ... <о .... 11:). 11:) <О. 1'-.
... U .... N .... N. N N N N' N. N N N N N N
О О О О О О О О О О О О О О О
. ::1 1'- .... ... "" о 11:) 1'- 11:) О "" М ... 1'- О М
. U "". о о .... N М М 11:) <о 1'- 1'- "" 0'1 .... N
.... N N N N N N N N N N. N N м- М
;:., ;. "' о о о о о о о о о о о о о о о
"". .... О. О, 11:). N. .... О. <О. N. М. <О. "". 1'-. ...
I м <о 1'- о О ... 11:). о .... 1'- 1'- м .... .... м
':S: ;:., .... .... .... N N N N М М М М ... 11:) '" 1'-
..
о о о о о о о о о о о о о о о
";:е м "". О. о о о О. О. О. О О. О. О. О. О.
'" ...,;0,
о;: М "" <о 11:) м 0'1 .... t-- "" ... N t-- о м N
t:! u '" 1'- "" О .... М 11:) "" о 11:) <о N .... .... ...
.... .... .... .... .... N N N М ... 11:) '"
..
:Q о о о о о о о о о о о о о о о
= , '" .... ... "" .... "" 0'1 О О. О О. О О. О. О О
= <" ::1 ...' а> CD 1'-'
., CI) 0'1 11:) О .... 0'1 .... "" ... .... о ...
t:! u 11:) 11:) '" 1'- "" 0'1 .... N М 1/) 1'- N "" 1/) ...
.... .... .... .... .... N N М ...
..
:Q N 0'1 ... N 1'- 1/) 0'1 0'1 М ... О О О О О
= . ::1 .... .... N М О .... "" 0'1 1'-. "" 0'1 О .... N 1'-
g . u <о <о r: r: "" "" "" "" 0'1 0'1 О N м- ... 1/)
!'I .... .... .... .... ....
., I
а. ... о О, о о о о о о о о о о О, О.
== . '"
о !'I :; м м .... N N 1'- N N N 11:) "" 1'- ... .... ....
u 0'1 О N М 11:) <о 0'1 .... ... '" о "" "" о '"
.... .... .... .... .... .... N N N М М ... <о 1'-
о О о о о о о о о о о о о о о
, .. 1'- М О О О О О О О О О О О О О
... N 0'1 0'1 N 1'- .... М О "" <о .... "" N N
U 1'- "" О .... 11:) <о .... м 0'1 .... .... "" 0'1 "" N
.... .... .... .... N N N '" ... 11:) 1'- О 11:)
.... ....
., .... о о о о о о о о о
u 111 о о о о о о
N М М ... ... "" О, <о о "" 1'- "" 11:) 0'1 М
'i .... 1/) <о r: ею а> .... N .... 11:) r: .... <о .... ею
::Е .... .... .... .... .... .... N N N N N '" М ... ...
....
6 ,.Q , ",. о о о о о о о о о о о о о о о
t:! .. '" .... 11:) 1'-. "'. .... N 1'- ею <о 0'1 N 11:) 11:) .... 11:).
о;: ., :>' = ф
t::: S <IJ = U 0'1 О N М 11:) <о ею о N 11:) О <о м ....
u .... .... N N N '" N N '" '" м ... ... 1/) '"
11:) 11:) 11:) 11:). О О О О О О 1/). О О. О О
.. .... ....
м '" м '" ... ... ... ... ... 1/) 11:) <о <о
1/). 1/) О О 11:) 11:). О. О 1/) 11:) о о о о о
R:: "" "" 0'1 0'1 0'1 0'1 О О О О .... N '" .... 11:)
.... .... .... .... .... .... .... .... ....
... о 1'- '" О 1'- 11:) N О 1'- 11:) О. 1'- <о 11:)
... "" 0'1 "" а> 0'1 0'1 0'1 О О О О .... .... N М
::1 .... .... .... .... .... .... .... ....
::1
., о о .... .... N N ... ... <о <о о 1/) о 1/) о
11:) 1/) .ё .ё 11:) 11:) 11:) 1/) 1/) 11:) '" <о 1'- 1'- ""
... "" о ... <о о N 1'- О 11:) 1/) о 1/) о 1/)
..Q <о <о 1'- 1'- 1'- "" "" "" 0'1 0'1 0'1 О О .... ....
.... .... .... ....
о о о о о о о о о о о о о о о
'" '" "" "" о о N N ... ... 1'- О '" <о о
.... .... .... .... N N N N N N N м м м ...
а. :s:
Q)
;:е :.:
., ., ., ., .,
о <о <о "" "" о о N N ... ... t-- о '" <о о
::r:: \о .... .... .... .... N N N N N N N м м м ...
574
:с
:1
:а
:11
,Q
=
C:I. ......
w 1\1 W N
Q,I 1:1 е
'" а CI
C:I. :а 1:1
g-III CID
t
CiI 111 О
"'!:jc:l.
Uo;;ll-i.......
с...!,.
1 L l. -ос:!.
::.,
""" !
11-.1
ч
'
41
..
t;
о::(
4.1
:а
=
=
.s
о::(
4.1
:а
:=
:r'
о
<Q
.s
р"
=
о
<>
...
.
:>J
I :t.,
:>J
.5
.,
'н '!
CtJ u
:I!
. u
н
I
н
.
5
.s
u
::Е
'"'
:01
:I!
u
..... о') ао м со N
N... N М... Lr.:I.. со QO..
...... ..... ..... ...... ....... ......
'!
.....
6
t;
I=i
.Q
о::(
.s
S
с> с>
"t' "t'
C'I "t'
с> с>
'" .....
<l> CXI
<":1 с>
CXI C'I
... :- ...... ..... ...... ......
cn CD 1"""""1 t'-- CI
a> с> <":1 <":1 CXI а>
C'I"t'L/)l'--aiN
.....
L/) L/) С> С> С> С>
о') м cn со ф u')
U')ai N."""
1""""'1 N u')
..... N С С С С
"" С> <":1 L/) 1'-- a>
",ai<":lcaic
...... N N
N U') CD cn cn ......
Ф... U') '""" m r--- со
N M";
.,.
'!
u
...,. с с С> С> с:>
:66
...... N с"') u') r---
CXI 00 00 с с с
N rIO cn u') ... м
N ...,. 00 1'-- С а>
..... <":1 ...,.
...,. с '" а> с с
00 а> С> '" ...,. <":1
...,.",t-.""OOON
..... .....
:r'
4.1
U
.. N
5 t-.""
ао CI с=> CI
о') Cn... с"') со
ао CI ('f"]'" u')
..... ..... .....
"' '" L/) C> '" "'
'" <":1 ..; <":1 ...,. ...,.
ez:: с с L/) с:> '" с:>
<.D t-."" t-."" 00
с:> C'I ...,. <.D 00 .....
t-."" t-."" 1'-- 1'-- t-."" ai
'!
'! ...,. ...,. '" '" 00 '"
'" ..; ...,. ...,.
C'I <l> с:> <l> N ""
"'" <":1 <":1 ...,. ...,. L/) L/)
с:> L/) с с с:> с
..с:: '" <l> 00 с:> N ...,.
.... ..... .....
а. :о:
4.1
'! :01 '"
О L/) 00 с:> N ...,.
::I: \Q ..... ..... .....
575
'"
::1
Z
с3
':1
Z
О
С
576
.s:
'"
u
О
..
о;
r:::(
'"
:а
=
=
1\1
r:::(
'"
:а
=
!:I.
1::
О
о
о;
-с!
"
..
.:0
;;''''
;:.,
.:I!
u
..,
.... :I!
ct) u
.
н
I
н ..,
.
1\1 ....
u iIOI
:ii :i
::Е ....
,.Q
r:::(
1\1
g
h
,.
tI
U
...
..
ос>
а. \SI
V iIII
:I:: \о
::Е
u
... '" CI'I ... <.о
с '" '" 11:)
'" 11:). "":. '"
N N N N
N .... 00 '" с CI'I 11:)
"'. C "'. 00. CI'I. CI'I. С.
N '" N N N N '"
Q Q Q Q Q С Q Q С Q С Q Q
Q Q Ф м ф N
;:;
Q Q Q
'" ос> .....
N '" 11:)
м м'" м
о о о Q О О О О а а а о а о а
"' ... <.o <.o СЧ. '" С. a 11:). '" "" "'. CI'I.
ф а ф ф ф
N N N N
о о о а Q а а а а а а с о а о а
N oo. c.a.c.c С Q Q С> С С Q Q С>
N а а '" ... N 00 а N '" ..... .... о
<.о '" CI'I С N '" <.о '" N ... а .... CI'I CI'I .... '"
N N М
с Q С С С С> С С Q Q а а с Q а Q
сч. '" с '" с сч. с. С. С. а. а. с а. а. Q
(7) ci<liaic.o 1""""11""""1 ф N ао 1""""1 а ar'3--
... 11:) '" '" 00 CI'I ..... N '" '" N 00 ...
1""""1 1""""1 1""""1 N N М
00 ... .... '" ... 00 '" Q
:-:-:- ::
1""""1 U') с.а с а
Q '" 00 CI'I С
ФCl'lCl'lОN
.... .....
с С> Q
.... '" 00
'" oti
.... ..... ....
Q Q Q Q Q С Q Q Q С Q а а Q а Q
N 00 Q Q q Q Q Q Q Q Q С Q Q С Q
00 '" '" .... '" '" 00 '" N '" '" Q CI'I '" М М
Ф а N ф 1""""1 о с.а
1""""1 1""""1 1""""1 1""""1 N N N М М с.о
. ci- ::-- ci- ci- ci- ci- . ci- . . . . ci- . ci-
... N CI'I Q М 00 N ... .... Q 00 '" .... ф
'" 00 Q N Ф .... м CI'I N .... 00 Q 00 N
1""""1 1""""1 1""""1 1""""1 N N а
.... ....
с Q С Q Q Q Q Q а Q а Q Q
М сч. "'''' 00 с.<.о Q 00 '" 00
"",,,, Фr: Ф""N otir:....
1""""1 1""""1 1""""1 1""""1 1""""1 1""""1 N N N N N М
Q Q Q
:-:--:-
м ... ...
....
\SI :I!
:о: u
Q Q Q Q С> Q С> Q а Q а а Q а а а
::-- :- ;} :;. . :;. :. . . . :- :3-
.... .... .... N N N N N N М М М ... ... ф
Q Q с> а Q Q Q Q 11:) Q Q
", cD",ФcDcDr:r: Ф
::-- d-d-ci-ci-5-
1""""11""""11""""11""""11""""1 1""""1 1""""1 1""""1 1""""1
:I!
:I!
'" "":. q '" м Q '" N Q '" Q '" <.о
00 00 CI'I ос) CI'I CI'I CI'I CI'I Q Q Q Q .... .... N ..,..
f"""'I ...... ..... """"" ...... 1""""1 ...... ,....
CI'I q Q .... .... N N ... "":. '" ф Q Q Q
oti oti oti oti oti oti '" '" r: r: 00.
N ... 00 а ... ф а N '" Q 11:) Q Q
с.о с.а с.о ос) ф ф ф а а 1""""1 1""""1
...... 1""""1 1""""1 ,....
Q Q О Q Q С Q С Q С С С С О О С
... '" '" ос) 00 а а N N ... ... '" с м '" с
,.... ,.... ,.... ..... 1""""1 N N N N N N N М М
1\1 1\1 1\1 1\1
... Ф Ф 00 00 с Q N
1""""1 ...... 1""""1 ...... 1""""1 N N N
1\1
N ...
N N
'"
"",,"'аМфQ
N N М М М ...
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автофретирование 392
Аналоrия пленочная 129
Анизотропия 13,336
Асимметрия цикла 475
База тензометра 544
Бернулли rипотеза 42
Бринеля проба 91
Верещаrина способ 242
Взаимность перемещений
254, 255
работ 254, 255
Временное сопротив
ление 82
Выносливость 97
Вытяжка 72
Вязкость удаРНaJI 98
rадолина условия 392
rафа и Полларда формула
500
fипотеза Бернулли 42
максимальных касатель
ных напряжений 350
плоских сечений 42, 110,
168
Треска CeH BeHaHa 350
Хубера Мизеса 352, 353
энерrии формоизменения
352,462
fрадиент напряжений 492
относительный 492
fриффитса модель разру
шения 367
fYKa закон 30, 31
для сдвиrа 63
обобщенный 330,463
677
Депланация 140
Деформация 25
активная 435
r лавная 328
линейная 29
объемная 329
пассивная 435
пластическая 63
простая 466
температурная 45
Деформация yr ловая 29
Диаrрамма напряженноrо
состояния круrовая 316
предельных амплитуд
482
растяжения 68, 80
истинная 85
Дислокация 76, 77
краевая 76
Жесткость 9
при изrибе 171
при кручении 112
Журавскоrо формула 180
Задача Ламе 379
Эйлера 513
Закон fYKa 30
для сдвиrа 63
обобщенный 330,462
парнасти касательных
напряжений 60,302
578
Запас 100,348
по пределу прочности
101
по предельным наrруэ
кам 456
по текучести 1 О 1
устойчивости 508
циклической прочности
499
Зона текучести местной 70
общей 69
упрочнения 69
упруrости 68
Изrиб 157
косой 171, 207
поперечный 24, 157
продолъно поперечный
537
прямой 171
чистый 23, 157
Изотропия 13
трансверсальная 339
Инварианты деформиро
BaHHoro состояния 329
напряженноrо состояния
311
Интеrрал Мора 237
Интенсивность деформа
ций 463
напряжений 462
Кастилиано теорема 321
Композит 337
Консоль 164
Концентрация напряже
ний 484
Коэффициент асимметрии
цикла 475
безопасности
101
запаса 100, 348
по пределу прочности
101
по предельным наrруз
кам 456
по текучести 101
устойчивости 508
циклической прочности
499
качества поверхности
495
концентрации напря
жений теоретический
486
эффектиВНЫЙ 488
масштабноrо фактора
. 491
податливости 338
приведения длины 517
Пуассона 61, 333
упруrоrо основания 203
чувствительиости К
местным иапРJ(жеИИJ[М
489
К ритерий пластичности
346
Треска Сеи Венана
350
Хубера Мизеса
352,353
разрушения 346
Kpyr Мора 316
Кручеиие 23, 108
стесненное 141
Ламе задача 379
Лапласа уравнение 399
Линия нейтральная 169
Материал жестко пласти
ческий 437
композиционный 13,337
хрупкий 86
Матрица податли-
вости 286
Металл 72
Метод аналоrий 129
начальныХ параметров
527
перемещений 297
579
расчета по допускаемым
переыещеНИJ:Ы 35
по напРJ:жеНИJ:Ы 34
по разрушающим
наrрузкам 35
сечений 18
сил 266
Механизм MrHOBeH
ный 28
Механика сплошной
среды 12
твердоrо тела 10
Моделирование 132
Модель разрушениж rриф
фитса 367
Модуль сдвиrа 63
упруrости BTOpOro
рода 63
первоrо рода 42
Момент изrибающий 20
инерции rлавный 153
осевой 147
полярный 112
центробежный 147
Момент крутящий 20,
108
сопротивления ПОЛЯРНЫЙ
114
при изrибе 172
статический 142
Монослой 342
Монотропия 339
580
Мора интеrрал 237
Kpyr 316
теоРИJ: пластичности 354
Ниартовка 71
Нarружение простое 466
статическое 49
Нarрузка 16
антисиыыеТРИЧН8JI 278
быстро меНЖЮЩ8JIСЯ 97
весьыа быстро меняю
Щ8JIСЖ 98
динаыичеСК8JI 97
кососимыеТРИЧН8JI 278
преде.лЬН8JI 456
симыеТРИЧН8JI 278
статичеСК8JI 92
цикличеСК8JI 97
Наклеп 71
Наполнитель 337
Напряжение 24
r лавное 308
допускаемое 100
касательное 25, 301
меридиональное 398
местное 484
номинальное 486
нормальное 25,301
окружное 381, 398
полное 24, 301, 305
радиальное 381, 382
эквивалентное 348
Оболочка 16,395
симметричная 396
Ортотропия 340
Оси rлавные деформиро
BaHHoro состояния 328
инерции 153
центральные 153
напряженноrо состоя
ния 308
"Охрупчивание" стали 93
Паскаль 24
Перемещение по оси 26
полное 26, 325
yr ловое 26
Пластичность 86
Площадка r лавная 308
октаэдрическая 314
текучести 69
Поверхность срединная
оболочки 395
Ползучесть 94
Полосы скольжения 73
Последействие 94
Потеря устойчивости 506
Предел выносли
вости 479
длительной прочности 96
ползучести 96
пропорциональности 80
прочности 82
текучести 81
условный 81
упруrости 80
П ринцип начальнЫХ раз
меров 27
независимости действия
сил 31
CeH Венана 39
суперпозиции 31
Проба Бринеля 91
Роквелла 91
технолоrическая 542
П рочность 9
Пружина кручения 250
растяжения 250
сжатия 250
Пуассона коэффициент 61,
333
Рама 260
Равновесие неустойчивое
511
устойчивое 510
Разрушение 344, 366
Растяжение 23, 37, 38
двухосное 321
одноосное 322
трехосное 321
чистое 321
Расчет на жесткость 35
по допускаемым переме
шеНИJ[М 35
681
по напряжениям 34
по разрушающим Har-
рузкам 35
Релаксация 94
Роквелла проба 91
Связующее 337
Связь взаимная 262
внутренняя 262
дополнительная 261
необходимая 261
Сдвиr чистый 103
Сен-Венана принцип 39
Сжатие 23, 38
двухосное 323
одноосное 323
трехосное 323
чистое 323
Сила внешняя 17
внутренняя 17
критическая 508, 515, 517
осевая 20
объемная 17, 18
поверхностная 17
перерезывающая (попе
речная) 20
распределенная 17
сосредоточенная 17
эйлерова 515
Система кинематически
неизменяемая 26
582
неустойчивая 506
основная 266
плоская 260
плоскопространственная
260,289
пространственная 260
статически неопреде-
лимая 51, 260
определимая 51, 260
стержневая 13,259
устойчивая 505
Слой нейтральный 168
Сопротивление времен-
ное 82
материалов 8
Состояние деформирован
ное 30, 327
напряженное 25, 300,
305
двухосное 311
одноосное 311
однородное 40
плоское 311
смешанное 323, 324
неустойчивое 506, 508
пластическое 344
упруrое 344
устойчивое 506, 508
Состояния напряженные
равноопасные 348
Способ Берещarина 242
Среда анизотропная 13
изотропная 13
однородная 12
сплошная 12
упруrая 12
Степень статической
неопрепелимости 261
Стержень 13
тонкий rибкий 199
Схема расчетная 10
Твердость 90
Текучесть 69, 70
Тело аморфное 72
кристаллическое 72
Тензометр 68, 544
Бояршинова 546
fуrенберrера 549
Лихарева 548
Мартенса 546
МИЛ 546
Тензор 306
напряженноrо состояния
306
Теорема взаимнос.ти пере
мещений 254,255
работ 254, 255
Кастилиано 231
Теория rибких стержней
199
максимальных каса тель
ных напряжений 351
Мора 354
оболочек безмоментная
397
пластичности 1 О, 461
ползучести 1 О
предельных состояний
354
упруrости 10
энерrии формоизменения
462,352
Треска CeH BeHaHa
теОРИJl 350
Трещиностойкость 371
у rол закручивания
относительный 111
СД8иrа 29
Удлинение абсолютное 41
относительное 41
пластическое 70
при разрыве 85
истинное 85
Упрочнение 69
У пруrость 12
У равнение Лапласа 399
У равнения метода сил
канонические 270
перемещений 53
Условия fадолина 392
Усталость 97
Устойчивость 505
стеРЖНJI по Эйлеру 513
б83
Фактор силовой
кососимметричный 279
симметричный 27'J
Ферма 259
Физика твердоro тела 72
Формула rафа и Полларда
500
Журавскоrо 180
Хрупкость 86
Хубера Мизеса теория
352,353
Центр изrиба 191
тижести сечении 144
Цикл пульсационный 475
симметричный 475
Циклы подобные 476
Число статической
неопределим:ости 261
Шарнир пластический 460
Шейка 69
Эйлера задача 505
Эллипсоид напряжений
309
Энерrия изменения
объема 334
формы 334
потенциальная деформи
pOBaHHoro тела 49, 333
удельная при сдвиrе 107
Эффект масштабный 490
Ядро сечении 213
оrЛАВЛЕНИЕ
Предисловие. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Вl. О дисциплине "Сопротивление материалов" .
В2. Реальный объект и расчетная схема. . . . . . . . . . . .
В3. Силы внешние и внутренние. Уравнения равновесия
стержня . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
В4. Напряжения. . . . . . . . . . . . . . . . . . . . . . . . . . .
В5. Перемещения и деформации. . . . . . . . . . . . . . . .
В6. Закон rYKa и принцип независимости действия сил
И7. Общие принципы расчета элементов конструкции.
rЛАВА 1. Раст.жение и сжатие. . . . . . . . . . . . . . . . . .
1.1. Внутренние силы и напряжения, возникающие в попереч
ных сечениях стержня при растяжении сжатии. . . . . .
1.2. Удлинения стержня и закон fYKa. Уравнения равновесия
1.3. Потенциальная энерrия деформации при растяжении сжа
'1 (1.4') ::::::::Яо е л'и 'и' T e o д e' .
стержневые системы . . . . . . . . . . . . . . . . . . . . . . . . .
1.5. Напряженное и деформированное состояния при растяже
нии сжатии . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6. Испытание материалов на растяжени сжатие
1.7. Диаrрамма растяжения . . . . . . . . . . . . . . . . . . . . . . .
1.8. Механизм образования деформации. . . . . . . . . . . . . . .
1.9. Основные механические характеристики материала. . . .
1.10. Пластичность и хрупкость. Твердость. . . . . . . . . . . .
1.11. Влияние температуры и фактора времени на механи
ческие характеристики материалов . . . . . . . . . . . . . .
1.12. Коэффициент запаса. . . . . . . . . . . . . . . . . . . . . . . .
5
8
8
10
17
24
25
30
33
37
37
41
49
51
58
63
68
72
79
86
91
99
586
rЛАВА 2. Кручевие . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1. Чистый сдвиr и ero особенности. . . . . . . . . . . . . . .
2.2. Кручение стержня с круrлым: поперечным сечением.
Уравнения равновесия. . . . . . . . . . . . . . . . . . . . . . . .
2.3. Кручение стержня с некруrлым поперечным сечением.
2.4. Краткие сведения о пленочной (мембранной) ана..п:оrии . .
2.5. Кручение ТOHKocтeHHoro стержня. . . . . . . . . . . . . . . .
rЛАВА 3. rеометрические характеристики поперечных
сечений стержн. . . . . . . . . . . . . . . . . . . . . . .
3.1. Статические моменты сечения. . . . . . . . . . . . . . . . . .
3.2. Моменты инерции сечения. . . . . . . . . . . . . . . . . . . . .
3.3. rлавные оси и rлавные моменты инерции. . . . . . . . . . .
rЛАВА 4. Изrиб стержней. . . . . . . . . . . . . . . . . . . . . . .
4.1. Внутренние СИJIOвые факторы, возникающие в поперечных
сечениях стержня при изrибе . . . . . . . . . . . . . . . . . . .
4.2. Напряжения при чистом изrибе. . . . . . . . . . . . . . . . . .
4.3. Напряжения при поперечном изrибе. . . . . . . . . . . . . . .
4.4. Касательные напряжения при поперечном изrибе ТOHKO
стенных стержней. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5. Центр изrиба . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6. Дифференциальные уравнеНl!lЯ равновесия стержня. Пере
мещения при изrибе . . . . . . . . . . . . . . . . . . . . . . . . .
4:7. Стержень на ynpyroM основании. . .
(4.8) Косой изrиб . . . . . . . . . . . . . . . . . . . .
/4.9! Внецентренное растяжение сжатие . . . .
I о ' ([ _б>. Изrиб бруса большой кривизны . . . . . . . . . . . . .
rЛАВА 5. Перемещени. в стержневой системе при про-
/ извольной наrрузв:е . . . . . . . . . . . . . . . . . . . .
-(9 Потенциальная энерrия стержня в общем случае Harpy
( ';:J жения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1., 5#. Теорема Кастилиано . . . . . . . . . . . . . . . . . . . . . . . . .
:5'.3) Интеrрал Мора. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5:41 Способ Верещаrина . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5. Определение перемещений и напряжений в витых пружи
.. нах. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-1 -..{ .з) Теорема взаимности работ. . . . . . . . . . . . . . .
./
)
586
103
103
108
123
129
132
142
142
146
151
157
157
166
177
187
190
194
202
207
211
215
225
225
231
235
242
249
254
rЛАВА б. Раскрытие статической неопределимости
стержневых систем методом сил. . . . . . . .
L,р.@Связи, накладываемые на систему. Степень статической
неопределимости. . . . . . . . . . . . . . . . . . . . . . . . . . . .
G/ Метод сил. Выбор основной системы. . . . . . . . . . . . . .
__@ Канонические уравнения метода сил . . . . . . . . . . . . . .
6.4. Использование свойств симметрии при раскрытии стати
ческой неопределимости. . . . . . . . . . . . . . . . . . . . . . .
б.5. Плоскопространственные и пространственные системы.
б.б. Определение перемещений в статически неопределимых
системах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7. О методе перемещений . . . . . . . . . . . . . . . . . . . . . . . .
rЛАВА 7. Основы теории напр.женноrо и деформиро-
BaHHoro состо.ний . . . . . . . . . . . . . . . . . . . . .
7.1. Напряженное состояние в точке. . . . . . . . . . . . . . . . .
7.2. Определение напряжений в произвольно ориентированной
площадке. . . . . . . . . . . . . . . . . . . . . . . . . .
7.3. rлавные оси и rлавные напряжения. . . . . . . . . . . . . . .
7.4. Круrовая диаrрамма напряженноrо состояния. . .
7.5. Обзор различных типов напряженных состояний. . . . . .
7.6. Деформированное состояние. . . . . . . . . . . . . . . . . . . .
7.7. Обобщенный закон rYKa и потенциальная энерrия
деформации в общем случае напряженноrо состояния
7.8. Анизотропия. . . . . . . . . . . . . . . . . . . . . . . . . . . .
rЛАВА 8. Критерии пластичности и разруmени. . . . . .
8.1. Основные положения теории пластичности и разрушения
8.2. rипотезы (критерии) появления пластических дефор
маций . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3. Теория Мора и ее применение . . . . . . . . . . . . . . . . . . .
8.4. О хрупком разрущении и вязкости . . . . . . . . . . . . . . .
8.5. О новых материалах. . . . . . . . . . . . . . . . . . . . . . . . .
rЛАВА 9. Толстостенные трубы . . . . . . . . . . . . . . . . . .
9.1. Основные уравнения для толстостенной трубы. . . . . . .
9.2. Определение перемещений и напряжений в толстостенном
цилиндре . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3. Определение напряжений в составных трубах. . . . . . . .
259
259
2б6
268
277
289
295
297
300
300
304
307
315
320
325
330
33б
344
344
350
354
366
372
379
379
383
389
581
/
rЛАВА 10. Пласт ивы и оболоЧJCИ. . . . . . . . . . . . . . . . .. 395
10.1. Основные особенности пластин и оболочек. . . . . . . .. 395
/rб"1 \ Определение напряжений в симметричных оболочках по
безмоментной теории . . . . . . . . . . . . . . . . . . . . . . 398
10.3. Изrиб круrлых симметрично наrруженных пластин. .. 406
10.4. Определение напряжений и перемещений в круrлых
пластинах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413
10.5. Изrиб прямоуrольных пластин. . . . . . . . . . . . . . . 421
10.6. Изrиб цилиндрической оболочки при симметричном
наrружении . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423
rЛАВА 11. Основы расчета элементов конструкций,
работаIOIЦИХ за пределами упруroсти . . . .
11.1. Отличительные особенности расчета и схематизация
диаrраммы растяжения . . . . . . . . . . . . . . . . . . . . .
11.2. Напряжения и перемещения в простейших стержневых
системах при наличии пластических деформаций . . . .
11.3. Упруrопластический изrиб стержня. . . . . . . . . . . . . .
11.4. Кручение стержня круrлоro поперечноro сечения при
наличии пластических деформаций . . . . . . . . . . . . . .
11.5. Основы расчета по предельным наrрузкам
11.6. Основы теории пластичности. . . . . . . . . . . . . . . . . .
rЛАВА 12. Прочность при циклически измен.IOIЦИХС.
напр.жеви.х . . . . . . . . . . . . . . . . . . . . . . . .
12.1. Понятие об усталости материалов. . . . . . . . . . . . . . .
12.2. Основные характеристики цикла и предел выносливости
12.3. Влияние концентрации напряжений на прочность при
циклическом наrружении . . . . . . . . . . . . . . .
12.4. Масштабный эффект. . . . . . . . . . . . . . . . . . . . . . . .
12.5. Влияние качества обработки поверхности. . . . . . . . . .
12.6. Коэффициент запаса при циклическом наrружении и ero
определение . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
rЛАВА 13. Устойчивость равновеси- деформируемых
систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gз.l.'ПонятиеОбустойчивости.................... .
,/ ./
1 ; . 1 .:..2. Определение критических наrрузок . . . . . . . . . . . . . .
. ,r1' .
\ 13. . Задача Эйлера. . . . . . . . . . . . . . . . . . . . . . . . . . . .
:JЗ 4) Зависимость критической силы от условий закрепления
стержня. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
688
433
433
438
444
453
456
461
471
471
475
483
490
495
497
505
505
508
513
516
13.5. Устойчивость плоской формы изrиба прямолинейноro
стержня . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 528
13.6. Энерreтический метод определения критических
наrрузок . . . . . . . . . . . . . . . . . . 531
13.7. Продольно-поперечный изrиб . . . . . . . . . . . . . . 536
rЛАВА 14. Методы экспериментальноro исследоваии.
деформироваиноro и напр..еввоro
состо.ний. .. . . . . .. . .. . . . . .. . .. . ., ., 541
14.1. Испытание материалов и конструкций. . . . . . . . . . .. 541
14.2. Определение деформаций при помощи механических
тензометров . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 543
14.3. Применение датчиков сопротивления. . . . . . . . . . . .. 550
14.4. Оптический метод определения напряжений при помощи
прозрачных моделей . . . . . . . . . . . . . . . . . . . . . . .. 555
Приложение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 561
Предметный указатель . . . . . . . . . . . . . . . . . . . . . . . . . .. 577
КОНЦЕПЦИЯ
создания серии учебников под общим названием
"Механика в техническом университете"
в связи с повышением энерrовооруженности и быстро
ходнасти, уменьшением удельной материалоемкости машин,
насыщением их rидро и пневмомеханизмами возникла Ha
сущная необходимость повышения качества расчетных MeTO
дав прикладной механики при разработке конструкций машин.
В связи с этим целесообразно расширить и yr лубить обще
инженерную фундаментальную подrотовку студентов машино
строительных специальностей, что позволит повысить научно
методический уровень учебных курсов по каждой специально
сти и сделать их более компактными.
В первую серию входят учебники по предметам, которые
имеются или в ближайшее время должны появиться в учебных
планах большинства технических университетов машиностро
ительноrо профиля:
"Курс теоретической механики"
"Сопротивление материалов"
"Теория колебаний"
"Устойчивость движения и равновесия"
"rидромеханика"
"Теория механизмов и механика машин"
"Механика rидропневмоприводов"
"Детали машин"
Учебник должен быть фундаментальным, Т.е. содержать
ясную физическую трактовку явлений и лоrичные выводы,
590
задачи в четкой постановке; изложение должно опираться
на строrий, но, по возможности, простой математический
аппарат и строиться на основе сведений, полученных CTyдeH
тами при изучении естественнонаучных дисциплин (высшая
математика, физика, теоретическая механика).
Издание осуществляется Издательством MfTY
им. Н.Э. Баумана по доrовору и при поддержке Центра "Ин
теrрация" .
После завершения издания первой серии предполаrается
выпуск второй серии, которая будет состоять из учебников по
отдельным специальностям или посвященных рассмотрению
более сложных вопросов.
Ответственный редак;тор
К. С. КОАесник;ов
У",ебное изда.ние
Всеволод Иванович Феодосьев
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Редактор Е.Н. СmаБUЦICаJl'
Художник С. С. Водчuц
Корректор О.В. КЙJlаШНUICОба
Компьютерна.а: верстка В.А. ТОбсmоноаа
Ориrинал
макет подrотовлен в Издательстве
MrTY им. Н.Э. Баумана
Изд. лиц. N!!.020523 от 25.04.97.
Сдано в набор 10.07.98. Подписано в печать 01.05.99.
Формат 60х90/16. Печать офсетна.а:. Бумаrа офсетна.а: N!!.l.
Усл. печ. л. 37. Уч.
изд. л. 36,88.
Тираж 3000 экз. Изд N!!.109. Заказ N!!. 845
Издательство MrTY им. Н.Э. Баумана. 107005, Москва, 2
я Бауманска.а:, 5.
Orпечатано с ориrинал
макета в ППП «Тнпоrpафия ..Наука»
121099. Москва. Шубинекий пер.. 6
590