/















































































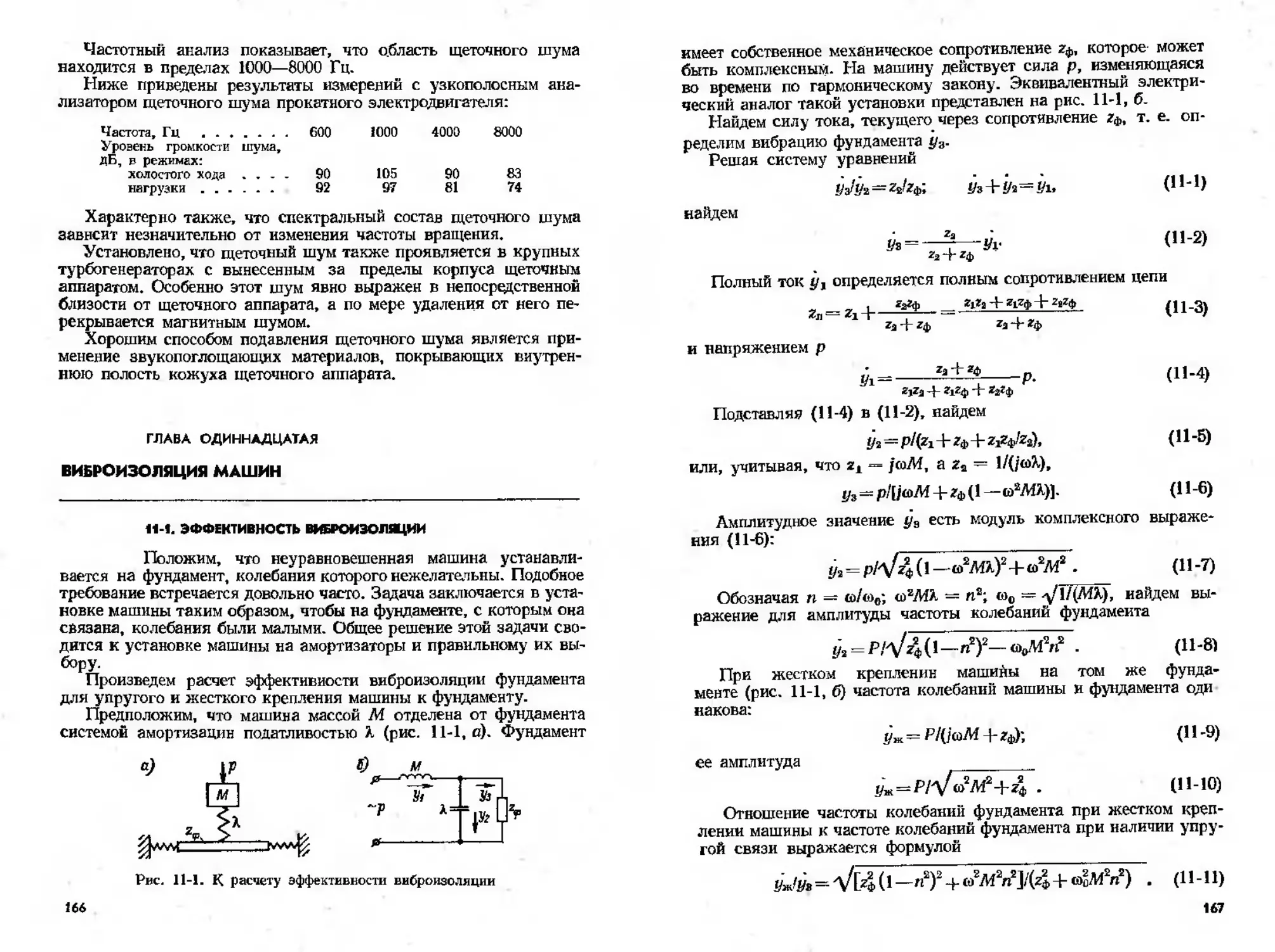

























Текст
л/. J/5
ббк si.гб
Щ8В)
УДК 621.313:634.835.46
Рецензент Э. Л. Мышинский
Содержание
Обложка
Шубов И. Г.
Ш95 Шум и вибрация электрических машин, -2-е изд., пе*
рераб. и доп.— Л.: Эиергоатомиздат. Ленингр. отд-ние,
1986.— 208 с.: ил.
В книге рассматривается возбуждение вибрации и шума в электрический
машинах источниками магнитного, механического и аэродинамического происхож-
дения. Второе издание отличается от первого (1974 г.) тем, что в и ем значительно
расширены и уточнены методы расчета магнитного шума; обновлены разделы,
касающиеся аэродинамического шума и вибрации, возбуждаемый подшипниками
мчення; дополнено разделом магнитострикции.
Книга предназначена инженерно-техническим работникам, занятым проек-
тированием, исследованием и эксплуатацией электрических машин.
... 2302030000-110
Ш 051(01)—86 14в—80
ББК 31.20
© Эиергоатомиздат, 1986
ПРЕДИСЛОВИЕ
Со времени выхода первого издания книги прошло более 10 лет.
Книга используется в конструкторских бюро как руководство при
проектировании электрических машин, а также в некоторых ву-
зах как учебное пособие.
Низкие уровни шума и малая виброактивность стали в послед-
ние годы основными показателями качества и надежности электри-
ческих машин. В связи с этим «Энергетическая программа» преду-
сматривает обеспечение народного хозяйства страны электриче-
скими машинами с улучшенными виброакустическими характери-
стиками.
Во втором издании книги сделан ряд дополнений, касающихся
в основном магнитной вибрации. Рассмотрены вопросы влияния
качества электроэнергии, магнитострикции электротехнической
стали и технологии изготовления на шум и вибрацию крупных
электрических машин. Приводятся рекомендации по расчету па-
раметров малошумных машин, а также методы анализа измерений
и нормирования их шума и вибраций. Некоторые разделы допол-
нены новейшими данными из отечественной и зарубежной прак-
тики.
Так же как в первом издании, автор стремился основные поло-
жения иллюстрировать конкретными примерами расчета. Однако
их не следует рассматривать как расчетную методику, которая
в настоящее время в большинстве случаев значительно усложнена
и связана с применением ЭВМ.
Автор с благодарностью отмечает помощь М. Б. Ройтгарца,
Е. И. Лисака и Т. Г. Станкевич, оказанную ими при внесении
поправок и дополнений.
Замечания и пожелания по книге следует направлять в Ленин-
градское отделение Энергоатомиздата по адресу: 191065, Ленин-
град, Марсово поле, 1.
Автор
ГЛАВА ПЕРВАЯ
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ АКУСТИКИ
1-1. КОЛЕБАНИЯ И ЗВУК
Любая механическая колебательная система является
источником звуковых волн. Звук при достаточной силе восприни-
мается ухом в диапазоне частот 16—16 000 Гц. Наш слух обладает
способностью одинаково реагировать не на абсолютный прирост
частоты, а на относительное ее изменение.
Увеличение любой частоты вдвое всегда приводит к ощущению
повышения тона на определенную величину, которая называется
октавой. Так, например, изменение частоты от 50 до 100 Гц или
от 1000 до 2000 Гц воспринимается на слух как одинаковое изме-
нение высоты звука — на одну октаву. Диапазон доступных слуху
звуков равен примерно 10 октавам.
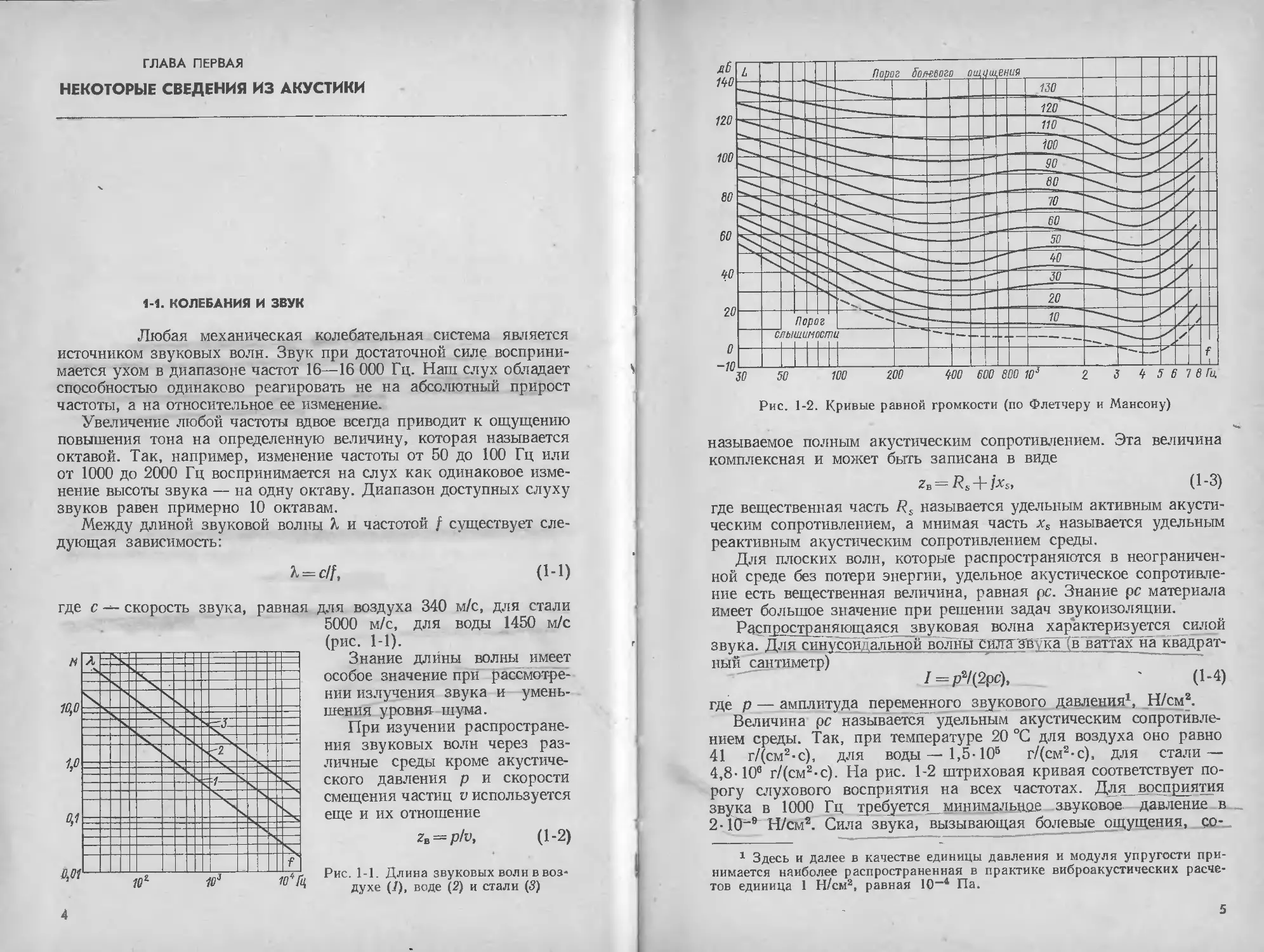
Между длиной звуковой волны Z и частотой f существует сле-
дующая зависимость:
Х = с//, (1-1)
где с скорость звука, равная
для воздуха 340 м/с, для стали
5000 м/с, для воды 1450 м/с
(рис. 1-1).
Знание длины волны имеет
особое значение при рассмотре-
нии излучения звука и умень-
шения уровня шума.
При изучении распростране-
ния звуковых волн через раз-
личные среды кроме акустиче-
ского давления р и скорости
смещения частиц v используется
еще и их отношение
zB = plv, (1-2)
Рис. 1-1. Длина звуковых волн в воз-
духе (/), воде (2) и стали (3)
4
называемое полным акустическим сопротивлением. Эта величина
комплексная и может быть записана в виде
zB = Rs + jxs, (1-3)
где вещественная часть Д называется удельным активным акусти-
ческим сопротивлением, а мнимая часть xs называется удельным
реактивным акустическим сопротивлением среды.
Для плоских волн, которые распространяются в неограничен-
ной среде без потери энергии, удельное акустическое сопротивле-
ние есть вещественная величина, равная рс. Знание рс материала
имеет большое значение при решении задач звукоизоляции.
Распространяющаяся звуковая волна характеризуется силой
звука. Для синусои альной волны сила'з'в ка ДГваттахна квадрат-
ный сантиметр)
1=р2/(2рс), ' (1-4)
где р — амплитуда переменного звукового давления1, Н/см2.
Величина рс называется удельным акустическим сопротивле-
нием среды. Так, при температуре 20 °C для воздуха оно равно
41 г/(см2-с), для воды — 1,5-10Б г/(см2-с), для стали —
4,8-10® г/(см2-с). На рис. 1-2 штриховая кривая соответствует по-
рогу слухового восприятия на всех частотах. Для восприятия
звука в 1000 Гц требуется минимальное звуковое давление в _
2-10-9 Н/см2. Сила звука, вызывающая болевые ощущения, со-
1 Здесь и далее в качестве единицы давления и модуля упругости при-
нимается наиболее распространенная в практике виброакустических расче-
тов единица 1 Н/см2, равная 1()~4 Па
5
ответствует верхней кривой и равна примерно 2-10 3 Н/см2. Пло-
щадь, ограниченная нижней и верхней кривой, называется областью
слышимости.
Аналогично кривой порога слышимости, характеризующей на
всем своем протяжении одинаковые слуховые ощущения, можно
провести и другие кривые одинакового ощущения громкости звука,
полученные сравнительными испытаниями. Из рис. 1-2 видно, что
ухо не так чувствительно к низким тонам, как к высоким.
В основе построения шкалы уровней громкости L принят закон
Вебера—Фехнера, по которому чувствительность уха пропорцио-
нальна логарифму силы звука I.
1-2. ЕДИНИЦЫ ШУМА И ВИБРАЦИИ ;
Единицей’ уровня громкости звука является фон. Шкала
уровней громкости-была установлена следующим о( разом. Уро-
вень громкости основного тона в 1000 Гц, отнесенный к пороговому
звуковому давлению 2-Ю-8 Н/см2 или пороговой силе звука
10-1в Вт/см2,
Г = 201g------= 101g—— . . (1-5)
2 10-9 10-16 4
Чтобы определить уровень громкости звука любого тона, его
сравнивают с уровнем тона частотой 1000 Гц. На рис. 1-2 кривые
равной громкости расположены с интервалом в 10 фон. В прило-
жении 1 приведены уровни громкости различных источников шума.
Для уровней громкости более 60 фон на участке, где кривые
равной громкости идут почти параллельно, уровень громкости
шума нескольких источников, звуковое давление которых рх,
р2, р3, . . . , а сила звука IL, 12, /3, . . . , может быть вычислен
по формулам:
о-в)
2-10—9
ИЛИ
L = 101g
Д Ч- Д 4~ Д
Ю-16
(1-7)
Результат суммирова-
ния уровней представлен
на рис. 1-3.
Если суммируются два
уровня громкости, то вы-
деляется всегда источник
Рис. 1-3. Суммирование уров-
ней громкости
Рис. 1-4. Осциллограмма (а)
и спектрограмма (б) сложного звука
звука, уровень громкости которого больше; при условии,
что громкость звуковых источников одинакова, к уровню громко-
сти любого из них прибавится 3 фон. Суммирование нескольких
уровней громкости производится постепенно.
В практике измерений пользуются единицей шума — децибел,
которая не учитывает восприимчивость слуха. Децибельная шкала
также построена на сопоставлении двух измеряемых уровней зву-
ковых давлений или мощностей.
Измерения, произведенные в фонах и децибелах, совпадают
только при частоте 1000 Гц. На остальных частотах два источника
шума с одинаковыми уровнями громкости шума в децибелах вос-
принимаются слухом неодинаково.
На практике приходится иметь дело со сложными звуками,
представляющими собой смесь многих простых колебаний различ-
ной интенсивности и частоты. Сложный звук может быть представ-
лен в виде осциллограммы (рис. 1-4, а) либо спектрограммы
(рис. 1-4, б). В акустике запись колебательных процессов чаще
производится при помощи спектрограмм.
Пример 1. Требуется определить общий уровень громкости шума в ма-
шинном отделении, в котором установлены три машины с уровнями гром-
кости 85, 85 и 82 дБ.
Решение. Суммируя уровни громкости двух источников 85 и 85 дБ,
находим по рис. 1-3 поправку 3 дБ, т. е. их общий уровень громкости соста-
вит 88 дБ. Для суммы 88 и 82 дБ поправка составляет-1 дБ, откуда суммар-
ный уровень громкости шума в машинном отделении составляет 89 дБ.
Соотношение между колебательным давлением р (в ньютонах
на квадратный сантиметр) и скоростью колебаний вибрирующей
поверхности у (в сантиметрах в секунду) при частоте f (в герцах)
имеет вид
р = рст/, (1-8)
тогда сила звука из (1-4) (в ваттах на квадратный сантиметр)
I=-Lpy.lQ->. (Ь9)
Здесь скорость колебаний у является действующим значением, т. е.
амплитуда вибрации есть величина -у/2 у.
Поскольку колебательное давление, принимаемое за нуль, со-
ставляет 2-Ю-8 Н/см2, То колебательная скорость по формуле
7
(1-8) будет 5- IO-8 см/с. Аналогично пороговые значения могут быть
установлены для смещения у и ускорения у. При исследованиях
вибраций по смещению, скорости или ускорению их интенсивность
оценивают в относительных единицах, применяя шкалу децибелов
аналогично формуле (1-5).
Между амплитудными значениями гармонического смещения у,
скорости у и ускорения у одной и той же точки, колеблющейся
с угловой частотой w, существуют соотношения:
t/ = <o2//. (1-10)
При измерениях уровней ускорения и колебательного смеще-
ния звуковой вибрации получил распространение такой выбор
нулевых уровней, при котором для частоты 1000 Гц получается
одинаковое значение уровня вибрации в децибелах (по скорости,
ускорению и смещению). При этом действующие значения ускоре-
ния у и смещения у звуковой вибрации, отвечающие нулевым уров-
ням ускорения и скорости, должны быть соответственно: у0 =
= 2л-1000 'у = 3-10-2 см/с2; у0 = 5- 10-®/(2л-1000) = 8- IO”10 см.
Если L-у — уровень скорости, имеющий частоту f (в герцах),
то уровни их ускорения L» и смещения Ly будут:
L- = L- +201g—L- £ £ 201g—L. (MJ)
У V 1000 ' V у 6 1000 v
Пример 2. На сколько отличается измеренный в децибелах по скорости
уровень звуковой вибрации от ее уровня по ускорению при частотах 200
и 2000 Гц?
Решение. По формулам (1-11) находим поправку, которая должна
быть прибавлена к уровню гармонической вибрации, оцениваемому по ско-
рости, чтобы получить уровень по ускорению:
£•-£• =20 lg (f/1000);
для частоты 200 Гц L..— L. = 20 1g 0,2 = — 14 дБ; для частоты 2000 Гц
L..—L. = 20 1g 2 = 6 дБ.
У V
1-3. ИЗЛУЧЕНИЕ ШУМА
При исследованиях шума, возбуждаемого электриче-
скими Тмашинами, обычно сталкиваются с двумя видами шума,
которые различают по характеру возникновения: а) шум, вызван-
ный вибрацией поверхности корпуса машины и контактирующих
с ним элементов фундамента, и б) шум, возникающий вследствие
движения воздуха, вентилирующего активное ядро машины; ~
Первый вид шума обычно преобладает в закрытых машинах_1.._к.
которым относятсямаПШны с водяным охлаждением и замкнутой
вентиляцией. В этом случае_звукообразойаниЕ~5ависит не только
от интенсивности/вйбращиЗкорлуса, но и от отношения размеров
источника звука и длины передаваемой: волны, а также распреде-
ления узловых линий на излучаемой поверхности. Если длина
волны велика по сравнению с размерами источника шума, то сила
8
излучаемого звука повышается с увеличением размеров излуча-
теля. Поэтому при малом размере машины создаются условия для
излучения шума преимущественно высбких._звуковых_частот.
Если длина звуковой волны мала по сравнению с размерами
корпуса, то сила излучаемого звука мало зависит от частоты. Так,
например, крупные турбогенераторы излучают низкие и высокие
частоты.
Колеблющаяся поверхность, все точки которой имеют одина-
ковую фазу и амплитуду колебаний, является излучателем нуле-
вого вида. Идеальным излучателем нулевого вида является пуль-
сирующий шар. Излучателями высшего порядка являются поверх-
ности, имеющие узлы и пучности колебаний. Корпуса электриче-
ских машин относятся к источникам колебаний как нулевого,
так и высшего порядка. Излучатели высшего порядка при равных
амплитудах излучают меньше энергии, чем излучатель нулевого
порядка. Объясняется это тем, что звуковые давления, возникаю-
щие на поверхности двух смежных участков, имеющих различную
фазу колебаний, вызывают ослабление звука в точке, отстоящей
на каком-то расстоянии от корпуса. Это ослабление звуковой энер-
гии проявляется тем в большей степени, чем больше длина излу-
чаемой волны по сравнению с размерами машины. В связи с этим
в закрытых электрических машинах при прочих равных условиях
вибрации высших порядков дают меньшую силу звука, чем вибра-
ции нулевого и низших порядков.
Помимо шума, излучаемого вибрирующими поверхностями ма-
шин, возникает шум, исходящий от металлических конструкций,
контактирующих-с машиной. Сюда прежде всего относятся метал-
лические фундаменты и судовые сварные конструкции, уменьшение
шума которых производится при помощи амортизаторов, устанав-
ливаемых под лапы вибрирующей машины.
Второй вид шума имеет место преимущественно в вентилируе-
мых по разомкнутому циклу машинах. Здесь шум обусловлен дви-
жущимися потоками воздуха, вызванными вращением ротор а и
вентилятора-.---
1-4. РАСПРОСТРАНЕНИЕ ШУМА
В открытом пространстве звуковые волны распростра-
няются от источника равномерно во все стороны. Если этот источ-
ник достаточно мал по сравнению с длиной волны, звуковое давле-
ние уменьшается обратно пропорционально расстоянию г, а сила
звука — обратно пропорционально квадрату расстояния 1/г2. Зная
силу звука на расстоянии 1 м от источника, можно ее определить
на некотором расстоянии г, отняв от исходного величину 10 1g (1/г2)
или 20 1g (1/г). Следовательно, при удвоении расстояния от источ-
ника звука его уровень снижается на 6 дБ. Этот закон ослабления
действителен для частот, не превышающих 1000 Гц. Если распро-
странение звука не является одинаковым во всех направлениях,
ТО говорят о направленности его распространения. Свойства на-
9
правленности появляются тогда, когда размеры машины больше
длины волны и на высоких частотах.
В закрытых помещениях на уменьшение силы звука оказывают
влияние, кроме расстояния, стены, потолок, пол и наличие в этих
помещениях оборудования. Чем больше поглощение звука на гра-
ницах помещения, тем больше заметно уменьшение силы звука.
Сила и частотная характеристика отраженного звука зависят как
от поглощающих свойств поверхностей, так и от размеров помеще-
ния. Одной из мер эффективного снижения шума в помещениях
является покрытие стен -н- гютолка-чвукопбглощающими материа-
лами. Возможность экранирования звука внутри помещения за-
висит от отношения длины волны к линейным размерам экрана.
Благоприятные результаты могут быть получены при больших
экранах"и коротких звуковых волнах. Экран должен быть по мень-
шей мере вдвое больше длины звуковой волны/ кроме того, источ-
ник звука (Годной стороны экрана и место обслуживания с другой
его стороны должны находиться на расстоянии не менее длины
одной волны от экрана. Если звуковая волна падает на границу,
разделяющую две среды, то часть звука передается в другую среду
(поглощается), другая же часть отражается. Отношение силы по-
глощенного звука к силе падающего звука называется коэффици-
ентом поглощения, отношение силы отраженного звука к падаю-
щему — коэффициентом отражения. Коэффициент поглощения твер-
дыми телами на средних частотах может достигать 3 %.
В практике имеют место случаи, когда полностью закрытая
машишГ~(напрймерг-е-водяным охлажденйём)~имеет из-за наличия
в корпусе малых отверстий (например, для выводов или уплотне-
ний вй.чаКповышс1Тт>1Й^уровень—йтума. Объясняется это тем, что
звуковые волны легко проходят через малые отверстия. Увеличе-
ние уровня шума (в децибелах) может быть в этом случае рассчи-
тано по формуле:
AL= lOlgp + (1-12)
где L — подавление шума корпусом машины, дБ; F — поверхность
корпуса; f — площадь отверстий; k — коэффициент, равный 1 для
круглых и квадратных отверстий и возрастающий до 10 для прямо-
угольных отверстий с отношением их длины к ширине, равным
1000. Эта формула неприемлема для отверстий с большими попереч-
ными сечениями.
Пример 3. В машине с водяным охлаждением в корпусе имеется прямо-
угольное отверстие для токоподвода площадью 0,02 м2. При k = 3 и L =
= 30 дБ
ДБ = 10 1g ^1 + 3 °’q2 1Озо/10 j = 8,5 дБ.
Поэтому снижение шума в машинах закрытого исполнения может
быть также легко достигнуто за счет уплотнения отверстий, имею-
щихся в их корпусе.
Ю
1-5. ВЛИЯНИЕ ШУМА И ВИБРАЦИИ
НА ЧЕЛОВЕЧЕСКИЙ ОРГАНИЗМ
Воздействие шума повышенного уровня громкости на
человеческий организм может отрицательно сказываться на нерв-
ной системе человека в целом, а также может повредить слуховой
аппарат.
Многочисленные наблюдения показывают, что работа, и осо-
бенно отдых, при повышенных уровнях громкости шума приводит
к повышению кровяного давления и раздражительности. Общее
самочувствие ухудшается, а трудоспособность, особенно при ум-
ственном труде, понижается.
Человеческий организм в общем случае подвергается воздействию
смешанных нагрузок — шума и вибрации. Сильная кратковременная
вибрация оказывает физическое и фи-
зиологическое воздействие на челове-
ка. При длительном воздействии и ме-
нее сильные вибрации приводят к фи-
зиологическим эффектам, подобным
Рис. 1-5. Влияние вертикальной и гори-
зонтальной вибраций на самочувствие че-
ловека.
А — область неудовлетворительного са-
мочувствия; В и В' — переходная об-
ласть при вертикальной и горизонтальной
вибрации соответственно; С — область
нормального самочувствия
эффектам, вызванным шумом. Так же как и при шуме, восприимчи-
вость человека к вибрации имеет нижний и верхний порог чувст-
вительности.
Проведенные исследования на судах [27] показали, что вос-
приимчивость человека к вертикальной и горизонтальной вибра-
ции неодинакова. Так, например, неприятное* ощущение от гори-
зонтальной вибрации наступает при ускорении, большем 0,015 g,
в то время как вертикальная вибрация приводит к неприятным ощу-
щениям лишь при ускорении, большем 0,03 g.
В настоящее время санитарные нормы на допустимые значения
амплитуд вертикальной и горизонтальной вибрации действуют во
многих странах. На рис. 1-5 приведены данные, характеризующие
связь между уровнем вибрации и самочувствием человека при раз-
ных значениях частот. Как видно, уровень допустимой вибрации
при вертикальных колебаниях оказывается примерно в два раза
выше.
ГЛАВА ВТОРАЯ
ИСТОЧНИКИ ШУМА И ВИБРАЦИИ
ЭЛЕКТРИЧЕСКИХ МАШИН
2-1. ХАРАКТЕРИСТИКА ИСТОЧНИКОВ
а. Электромагнитные силы. Эти силы действуют в воз-
душном зазоре между статором и ротором и имеют характер вра-
щающихся или пульсирующих силовых волн. Их величина зави-
сит от электромагнитных загрузок и некоторых конструктивных
и расчетных параметров активного ядра машины. Вызываемая элек-
тромагнитными силами вибрация во многом зависит от характери-
стик статора как колебательной системы. В большинстве типов
электрических машин значение магнитной вибрации лежит в диа-
пазоне частот 100—4000 Гц.
В задачу проектирования электрических машин обычно входит
выбор таких расчетных и конструктивных параметров, которые
обеспечили бы максимальное ослабление электромагнитных сил
и вибрации, передаваемой на корпус машины.
б. Подшипники качения. Интенсивность звука этого источника
зависит от следующих факторов:
от качества изготовления самих подшипников; имеется в виду
такое изготовление, которое обеспечило бы минимальные вибра-
ции наружного кольца подшипника при его вращении в специаль-
ной испытательной установке вне машины;
от точности обработки мест под посадку подшипников и замков
в щитах для их фиксации относительно корпуса машины; указан-
ные операции должны обеспечить максимальную соосность под-
шипниковых узлов и отсутствие искажений геометрических форм
дорожек качения при посадке подшипников на вал;
от свойств подшипниковых щитов, которые при неудачных
конструктивных формах могут быть интенсивными излучателями
шума, возбуждаемого подшипниками.
в. Аэродинамически есилы. Интенсивность звука вентиляторов
и вентиляционных каналов электрической машины зависит от того,
насколько хорошо с точки зрения аэродинамики и акустики они
сконструированы. Здесь имеется также в виду удачный выбор кон-
структивных форм и геометрических размеров отдельных элемен-
тов вентиляционных путей, по которым проходит охлаждающий
воздух, и допустимые скорости воздуха на отдельных участках
вентиляционной цепи.
Особое внимание здесь уделяется также конструированию тон-
костенных воздуховодов, которые могут явиться интенсивными
излучателями шума. Хорошо выполненная в аэродинамическом
отношении электрическая машина не содержит в спектре шума ди-
скретных составляющих.
12
Таблица 2-1
Частота вращения Тип машины Тип подшипника Источник
вибрации шума
До 1000 об/мин (рис. 2-1, а) Крупные электро- двигатели по- стоянного и пере- менного тока Скольже- ния Магнитные силы Посторон- ний венти- лятор; ще- точный аппарат
1500 об^мин (рис. 2-1, б) Электрические ма- шины постоян- ного и перемен- ного тока средней и малой мощности Скольже- ния (1) Магнитные силы; небаланс Встроен- ный вентилятор
Качения (2) Подшипни- ки; магнит- ные силы; небаланс
3000 об/мин (рис. 2-1, в) Электрические ма- шины постоян- ного и перемен- ного тока средней и малой мощности Скольже- ния (1) Небаланс; магнитные силы Встроен- ный венти- лятор
Качения (2) Подшипни- ки; неба- ланс; маг- нитные силы
3000 об/мин (рис. 2-1, г) Крупные турбоге- нераторы 100— 500 мВт Скольже- ния Небаланс; магнитные силы • Магнитные силы; встроенные вентиля- торы; щетки
1500— 3000 об/мин (рис. 2-1, й) Высокочастотные ин- дукторные генера- торы Скольже- ния; качения Магнитные силы
г. Механическая несбалансированность роторов. Ротор возбуж-
дает ощутимые вибрации особенно в быстроходных машинах с ча-
стотами вращения 3000 об/мин и выше.
Уменьшение небаланса ротора достигается динамическим урав-
новешиванием ротора на балансировочном станке или, в особых
случаях, в собранной машине. Чрезвычайно важным является
процесс изготовления ротора, при котором была бы достигнута
максимальная монолитность вращающихся обмоток. Особое зна-
13
чение при проектировании машины имеет расчет критических ча-
стот вращения ротора, который определяет геометрию ступеней
вала, обеспечивающую достаточное удаление рабочей частоты от
критической.
д. Трение щеток о коллектор или контактные кольца. Возбуж-
даемый трением шум является преимущественно высокочастотным,
особенно проявляется в крупных машинах постоянного тока с боль-
шим щеточным аппаратом.
Источники шума и вибраций различных электрических машин
приведены в табл. 2-1; в ней показано, в какой очередности по сте-
пени интенсивности проявляются те или иные источники в воздуш-
ном шуме и вибрации, а на рис. 2-1 показаны типовые спектры виб-
рации корпуса этих машин. Как видно, по мере увеличения частоты
вращения возрастают вибрации, возбуждаемые небалансом.
По производимому электрическими машинами общему уровню
шума на расстоянии 1 м от корпуса их можно разделить следующим
образом:
Крупные электродвигатели постоянного и переменного тока с при-
нудительной вентиляцией ...................................... 90—105 дБ
Крупные двухполюсные турбогенераторы с водородным охлажде-
нием ......................................................... 90—95 дБ
Электрические машины постоянного и переменного тока (двига-
тели, генераторы, преобразователи мощностью до 1000 кВт) . . . 70—95 дБ
Гидрогенераторы .............................................. 85—95 дБ
2-2. РАЗДЕЛЕНИЕ ИСТОЧНИКОВ ШУМА И ВИБРАЦИИ
При экспериментальном исследовании шума и вибрации,
создаваемых различными источниками, возникает задача их раз-
деления. Для этого поочередно исключают или максимально ос-
лабляют интенсивность звука всех основных источников шума
машины, кроме одного исследуемого.
Производится это следующим образом:
а) исключается интенсивность звука, возбуждаемого магнит-
ными полями, максимально возможным снижением потока возбуж-
дения либо полным отключением тока возбуждения;
б) исключается вибрация, возбуждаемая подшипниками ка-
чения, нри испытании машины на подшипниках скольжения, когда
магнитный поток в машине полностью снимается либо уменьшается
до такого значения, при котором уровень вибрации, возбуждаемой
подшипниками скольжения, будет выше вибрации, вызванной маг-
нитными силами;
в) исключается аэродинамический шум, возбуждаемый венти-
лятором, отключением вентилятора в машинах с посторонней вен-
тиляцией либо снятием вентилятора с вала в машинах с самовен-
тиляцией; шум, производимый самим ротором, может быть умень-
шен закрытием окон, через которые подводится и отводится охлаж-
дающий воздух;
г) исследуется вибрация, создаваемая небалансом ротора, на
частоте вращения ротора; в машинах переменного тока эта частота
иногда может иметь также магнитную составляющую, поэтому не-
обходимо путем регулирования потока возбуждения убедиться,
что в этой вибрации нет магнитной составляющей; при исследова-
нии небаланса ротора чрезвычайно важно установить возможность
возникновения теплового небаланса, что определяется нагревом
ротора до рабочих температур;
д) полностью исключается щеточный шум поднятием щеток,
однако такое испытание осуществить чрезвычайно сложно, так как
через щетки подводится питание к электрической машине. Поэ-
тому возможно частично исключить щеточный шум, оставив мини-
мальное число щеток, необходимое для питания машины на холо-
стом ходу.
Для разделения источников шума в электрической машине на-
ряду с методом последовательного исключения источников приме-
няется метод спектрального анализа шума, который основан на
том, что некоторые частотные составляющие спектра шума могут
быть связаны с теми или иными источниками, характеризующимися
определенными частотами. Наиболее четко выражены магнитные
составляющие шума, частоты которых хорошо известны. Что ка-
сается механических и аэродинамических составляющих, то лишь
некоторые из них легко определяются. Наряду с ними существует
ряд других частот, расчет которых затруднителен. Поэтому метод
спектрального анализа сам по себе не всегда позволяет выявить
и количественно оценить уровень звукового давления всех источ-
ников шума.
15
Наиболее четкую картину можно получить сочетанием обоих
методов.
Самое эффективное снижение шума и вибрации электрических
машин может быть достигнуто при их подавлении в источнике.
В связи с этим малошумность электрической машины должна обес-
печиваться на стадии ее проектирования и изготовления. Что ка-
сается машин с повышенной интенсивностью звука, которые на-
ходятся в эксплуатации, то в большинстве случаев трудно какими-
либо мерами ее снизить, в крайних случаях можно лишь в какой-то
мере локализовать при помощи экранов.
Во вновь проектируемых машинах должен быть намечен ком-
плекс конструктивных и технологических мер, обеспечивающих
снижение шума и вибрации. При этом надо иметь в виду, что в
связи с отсутствием надежных методов расчета нет уверенности,
что осуществление всех намеченных мер приведет к желаемому
результату. В ряде случаев эта задача остается еще трудноосущест-
вимой.
Поэтому требования, предъявляемые к электрооборудованию,
по снижению шума и вибрации должны быть строго аргументиро-
ваны, в противном случае затраты на создание оборудования бу-
дут неоправданны. Так, например, надо иметь в виду, что неразумно
малошумную машину устанавливать в шумном помещении.
Существующие допустимые уровни громкости шума оборудо-
вания в основном продиктованы техническими возможностями соз-
дания этого оборудования.
ГЛАВА ТРЕТЬЯ
РАСЧЕТ ВИБРАЦИИ И ИЗЛУЧАЕМОГО ШУМА
3-1. ВВЕДЕНИЕ
1. Методика расчета вибрации электрической машины во
многом зависит от характера сил и мест их приложения. От того,
возбуждается ли вибрация небалансом ротора, электромагнитными
силами или подшипниками качения, зависит физическая модель
машины как колебательной системы. Кроме того, для каждого
источника вибрации можно указать свой диапазон частот и харак-
терные методы борьбы с вибрацией в источнике и на путях ее рас-
пространения.
Так, например, причинами низкочастотной вибрации (от 1 до
100 Гц) в машинах с частотой вращения до 3000 об/мин, являются:
небаланс ротора; несоосность приводов отдельных агрегатов; нару-
шение геометрии цапф; двойная жесткость ротора.
И
Рис. 3-1. Колебательная модель —i—
статора электрической машины 7^\ \ Ъ-Аи/тИ /
(I Р \ \ '
Динамическая модель ма- I |р
шины для исследования ко- \ \ I
лебаний этого диапазона ча- \ 'Ч / / \_/
стот состоит обычно ИЗ 2— ---'Д/ >>4
3 сосредоточенных масс, свя- •—^777777
занных между собой упругими
безынерционными элемен-
тами. Силы в этих моделях носят обычно сосредоточенный харак-
тер. Вся машина рассматривается как единая упругая система,
исследование свойств которой производится обычно методами при-
кладной теории колебаний. Следует отметить, что колебания, воз-
буждаемые этими силами, определяют динамическую прочность
элементов конструкции машины и несут с собой подавляющую
долю колебательной энергии; они хорошо распространяются на
большие расстояния из-за слабого демпфирования. Все это делает
данный диапазон наиболее важным. В диапазоне средних и высо-
ких частот вибрация возбуждается электромагнитными силами
и подшипниками качения.
Динамическая модель машины при возбуждении электромагнит-
ными силами может быть представлена в виде совокупности ради-
альных каналов, по которым колебания распространяются от то-
чек приложения сил к выбранным точкам наблюдения. Конкрет-
ный анализ динамического состояния машины производится рас-
сечением системы статора на ряд независимых подсистем.
На рис. 3-1 показан пример построения такой модели для ста-
тора электрической машины. Как видно, цилиндрическая оболочка,
возбуждаемая системой сил, распределенной по ее внутренней
поверхности, приводится к одномассовой колебательной си-
стеме.
Описание свойств подсистем в точках их сочленения со смеж-
ными элементами системы производится обобщенными динамиче-
скими характеристиками типа динамической податливости или
полного сопротивления.
Наибольшую интенсивность имеет вибрация, возбуждаемая ос-
новной волной вращающегося магнитного поля. Частота этой виб-
рации равна удвоенной частоте питающей сети.
Колебания, возбуждаемые подшипниками качения в диапазоне
средних и высоких частот, представляют собой упругие волны,
распространяющиеся по элементам конструкции. Их расчет сле-
дует, по-видимому, вести акустическими методами, как для слож-
ных по геометрии и структуре сред. Такие расчеты являются чрез-
вычайно сложными и производить их из-за низкой точности неце-
лесообразно. Кроме того, эти колебания несут небольшую часть
колебательной энергии всего спектра и при распространении хо-
рошо демпфируются,
17
Рис. 3-2. Элементы
электрических цепей
и механических си-
стем
2. Вибрация отдельных элементов конструкции электрической
машины может быть рассчитана методом электромеханической ана-
логии.
Сущность этого метода заключается в том, что любые механи-
ческие колебательные системы могут быть заменены эквивалент-
ными электрическими цепями.
В качестве основы для построения аналогии между механическими
и электрическими системами используются дифференциальные урав-
нения, которые описывают колебательные процессы, происходящие
в указанных системах.
Основными элементами, из которых состоят электрические и ме-
ханические колебательные системы (рис. 3-2), являются:
для электрической цепи — электрическое сопротивление гЕ,
индуктивность L и емкость С;
для механических систем: поступательной — механическое со-
противление (трение) гм, масса т и податливость Хм поступатель-
ного упругого элемента (пружины); крутильной — механическое
сопротивление (трение) ге, момент инерции J вращающейся
массы, податливость Хе вращательного упругого элемента.
Из решения дифференциальных уравнений, описывающих ме-
ханические и электрические системы, следует, что подобно тому,
как масса, податливость и трение в механической системе опреде-
ляют движение тел, так индуктивность, емкость и сопротивление
определяют ток в электрической цепи.
Способ соединения элементов механической системы определяет
характер распределения сил и перемещений в системе. Из много-
образия возможных типов соединения элементов механических
систем можно выделить три:
параллельное соединение элементов, при котором скорость каж-
дого элемента равна скорости всей системы, а сила, действующая
на всю систему, равна сумме сил, приложенных к каждому элементу;
последовательное соединение элементов, при котором скорость
системы равна сумме скоростей отдельных элементов, а сила, при-
ложенная ко всей системе, равна силе, приложенной к каждому
из них;
18
смешанное соединение включает в себя последовательное и па-
раллельное соединение элементов.
Способ соединения элементов в электрических цепях определяет
характер распределения в них напряжений и токов. Здесь также
возможны три типа соединений:
последовательное соединение элементов, при котором ток в каж-
дом элементе равен току всей цепи, а напряжение, приложенное
ко всей цепи, равно сумме напряжений, приложенных к каждому
элементу;
параллельное соединение элементов, при котором ток цепи ра-
вен сумме токов в отдельных элементах, а напряжение, приложен-
ное ко всей цепи, равно напряжению, приложенному к каждому
элементу;
смешанное соединение включает в себя последовательное и па-
раллельное соединение элементов.
Сравнение механических систем и электрических цепей при-
водит к заключению, что если придерживаться аналогии сила —
электрическое напряжение, то параллельному соединению меха-
нических элементов соответствует последовательное соединение
элементов электрической цепи, а последовательному соединению
механических элементов — параллельное соединение электрических
элементов.
3. Расчет магнитной вибрации не может ограничиваться только
определением спектра возмущающих сил, а должен завершаться
определением спектра вибрации. Вызвано это тем, что электромаг-
нитные силы, действующие в воздушном зазоре электрической ма-
шины, обычно представляются в виде силовых волн синусоидаль-
ной формы, каждая из которых имеет свою частоту и амплитуду.
Если такая система сил возбуждает вибрации электрической
машины, то в ней возможен так называемый избирательный резо-
нанс. Это значит, что закон колебаний системы может совершенно
отличаться от закона изменения возбуждающих сил.
Поскольку спектр возбуждающих сил в электрической машине
насыщен множеством гармоник, то спектр ее вибрации оказывается
чрезвычайно сложным из-за наличия в системе большого количе-
ства резонансов. Для их подавления существует два различных
метода: один из них состоит в «отстройке» системы путем изменения
жесткости или массы ее элементов, другой — в специальном уве-
личении демпфирования системы, т. е. применении демпфирующих
материалов. Из этих двух методов обычно наиболее эффективен
первый, хотя его не всегда удается осуществить, так как «отстройка»
на одной частоте во многих случаях приводит к появлению резо-
нансов на смежных частотах.
3-2. ОДНбМАССОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА
Одномассовые поступательная и крутильная механиче-
ские системы и их электрический аналог показаны на рис. 3-3.
К колебаниям поступательной системы (рис. 3-3, а) могут быть
приведены:
вибрация амортизированной электрической машины на фунда-
менте бесконечной массы и жесткости, возбуждаемая остаточным
небалансом ротора;
вибрация сердечника статора, возбуждаемая электромагнит-
ными силами.
К колебаниям крутильной системы (рис. 3-3, б) приводятся
крутильные колебания ротора электрической машины, сочленен-
ного с ротором, имеющим бесконечный момент инерции. Крутиль-
ные колебания возбуждаются при внезапном коротком замыкании
статорной обмотки.
В электрической цепи э. д. с. е действует на соединенные после-
довательно индуктивности L, г£ и С. В механической поступатель-
ной системе движущая сила Рм действует на массу т, прикреплен-
ную к упругому элементу А™, с потерями на трение гм, пропорцио-
нальными скорости. В механической крутильной системе движу-
щий крутящий момент /ле действует на маховик с моментом инер-
ции J, соединенный с вращательным упругим элементом ^е, с по-
терями на трение ге, пропорциональными скорости.
Уравнения равновесия сил, моментов и э. д. с. для всех трех
систем могут быть записаны в следующем виде:
для электрической цепи (рис. 3-3, в),
Ь^-+ге1 + ^- = Е^ (3-1)
at с
Рис. 3-3. Поступательная (а), крутильная (б) колебательные системы и элек-
трический аналог (в)
20
— ^rE —— падение напряжения на электрическом сопротив-
dt
лении; — qlC — э. д. с. электрической емкости; Ee>wt — э. д. с.,
приложенная к цепи;
для механической поступательной системы (рис. 3-3, а)
т + гм = Pjat, (3-3)
dP м d Хм м 4 ’
d-у dy
где—т——сила инерции; —гм—сила трения;
сила упругости; PMe‘wi — приложенная к системе сила;
для механической крутильной системы (рис. 3-2, б)
— у!К
J + ге =M^at, (3-4)
dP ° dt %е
Т d2<p
где—J—-— момент
di2
dtp
__Гп —-— момент сил
6 dt
сил инерции вращающегося
трения; — cp/Ze—момент сил
маховика;
упругости;
Meeiwt — внешний момент, приложенный к системе.
Решения уравнений (3-2) — (3-4) имеют вид:
q=i
Ee’at
е
rE + jcoL — j/(v>C) zE
(3-5)
— для электрической цепи;
. Р e’at Р
у =-------------------———
гм + jam — j/(coXM) zM
— для механической поступательной системы;
. Л46е/И/ тв
<р =------------------=------
ге + /со/ — /7(соХе) ze
— для механической крутильной системы.
Полные комплексные сопротивления равны:
гЕ — гь + JcoL—
zM = rM + jam—/7(оЖм);
ze = re + jaJ—j/(ak)e.
(3-6)
(3-7)
(3-8)
(3-9)
(3-10)
Единица сопротивления для механической поступательной си-
стемы — ньютон-секунда на сантиметр, а для механической кру-
тильной системы — ньютон-сантиметр-секунда на радиан
При ча< тоте со = со„ мнимые составляющие комплексных со-
противлений обращаются в нуль. Такая частота называется резо-
нансной. При этой частоте ток в электрической цепи i и скорости
поступательных у или вращательных tp перемещений в механиче-
ских системах имеют максимальное значение. Кроме того, ток и на-
21
Рис. 3-4. Колебательные системы: амортизированная машина на вибрирую-
щем фундаменте (а), крутильные колебания ротора, возбуждаемые дизелем
(б), и электрический аналог (в)
пряжение, скорость и сила, угловая скорость и крутящий момент
совпадают по фазам.
Резонансная частота в указанных случаях:
/0 = 1/(2л д/ZZT) (3-11)
— для электрической цепи;
/о = 1/(2л Vm2iM ) (3-12)
— для механической поступательной системы;
f0=l/(2nV7V) (3-13)
— для механической вращательной системы.
На рис. 3-4 показан другой пример одномассовых колебатель-
ных систем и их электрического аналога. Указанные схемы соот-
ветствуют амортизированной машине, установленной на вибри-
рующем фундаменте (рис. 3-4, а), и ротору генератора, приводи-
мого во вращение двигателем дизеля (рис. 3-4, б). В этом случае
токи i и скорости перемещений у равны:
для электрической цепи:
is = el(rE j <oL) (3-14)
— ток, проходящий через индуктивность L и сопротивление гЕ,
= е [л£ + /coL + 1/(/соС)] .
1 (r£ + /WL)l/(jWC) ( ’ 7
— суммарный ток;
1*2 = — 1з — е] (ОС (3-16)
— ток, проходящий через конденсатор С;
для механической поступательной системы:
Уз = Ры/(гм+ jam) (3-17)
— линейная скорость массы т;
• = Рм км + /сот + 1/(/соХм)]
1 (Гм + /сот) 1/(/соАм)
— линейная скорость в точке приложения силы рм;
Уз = Уг—Уз = Рм/<о^м (3-19)
22
— скорость у2, т. е. разность между линейными скоростями двух
концов пружины;
для механической крутильной системы:
(ps = me/(re + j(oJ)
— угловая скорость маховика с моментом инерции J;
• = тв [ге + /со/ + 1/(/toXe)]
1 (ге + /со/)/(/соАе)
— суммарная угловая скорость в точке приложения момента;
Ф2 = <Pi—Фз = mejake (3-22)
— угловая скорость ср2, т- е- разность угловых скоростей на двух
концах пружины Ае.
(3-20)
(3-21)
3-3. ДВУХМАССОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА
На рис. 3-5 — 3-7 показаны двухмассовые колебатель-
ные системы и их электрические аналоги, к которым приводятся:
машина массой т1У установленная на двойной каскад аморти-
заторов, из которых первый имеет податливость Aj и второй — А2,
с промежуточной массой т2 (рис. 3-5); машина возбуждается си-
лами р0;
Рис. 3-5. Машина, установленная на двойной каскад амортизаторов, и ее
электрический аналог
машина массой mlt установленная на амортизаторы податли-
востью А с динамическим поглотителем колебаний (т2, А2) (рис. 3-6);
машина возбуждается силами р0;
Рис, 3-6, Амортизированная машина с динамическим поглотителем колеба-
ний и электрический аналог
23
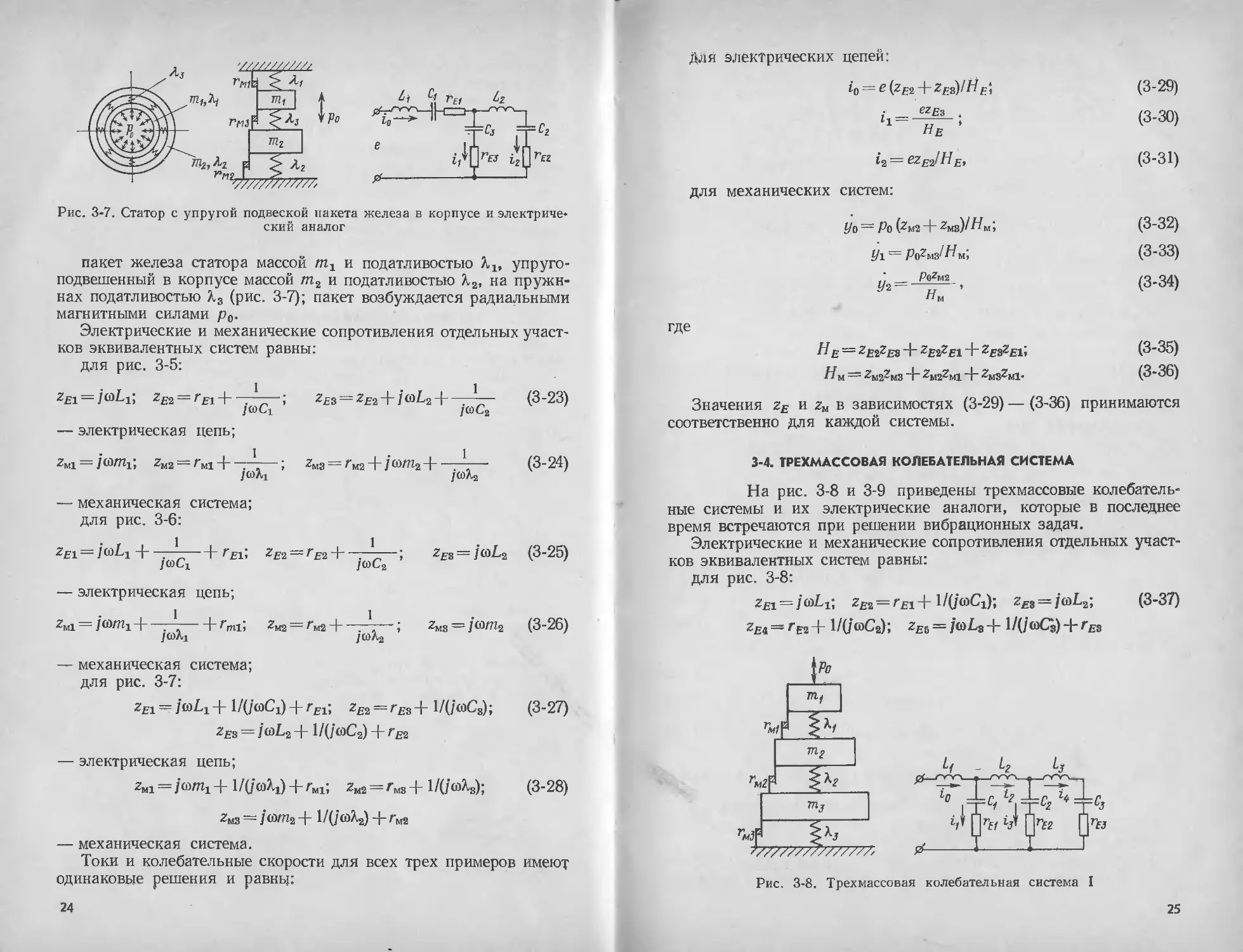
Рис. 3-7. Статор с упругой подвеской пакета
ский аналог
железа в корпусе и электриче-
пакет железа статора массой и податливостью %х, упруго-
подвешенный в корпусе массой т2 и податливостью Z2, на пружи-
нах податливостью А,3 (рис. 3-7); пакет возбуждается радиальными
магнитными силами р0.
Электрические и механические сопротивления отдельных участ-
ков эквивалентных систем равны:
для рис. 3-5:
z£i = /®^i> z£2 = r£1-|—. ; 2£3 = z£2 + j(oL2 Н—. (3-23)
/«Ci /соС2
— электрическая цепь;
Да = 2М2 = Гм1Н г-;;—; 2м3 = rM2 -|- j com2 -|--— (3-24)
/coXi /соХ2
— механическая система;
для рис. 3-6:
zei = -| ; — |- г£1; z£2 — г Е2 -|—;———; z£8 = jaL2 (3-25)
/coCi /соС2
— электрическая цепь;
Да= -| ; - |- гтХ; zM2 = гМ2 4 : ; Д^з= /ы/т?2 (3-26)
/СОА1 /С0Л2
— механическая система;
для рис. 3-7:
zei — + 1/(/®Сх) + г £1; zE2 — rES + 1/(/<оС3); (3-27)
zes = /®L2 + 1/(/<оС2) + гЕ2
— электрическая цепь;
zM1 = jam.! + l/OcoZi) + rM1; zM2 = rM3 + 1/(/®М; (3-28)
2мЗ = /<0/T?2 +1/(/<В72) -|- Гм2
— механическая система.
Токи и колебательные скорости для всех трех примеров имеют
одинаковые решения и равны:
24
Для электрических цепей:
t'o = е (z£2 + Zfs)/Н Е‘, (3-29)
11==_^_; (3-30)
— (3-31)
для механических систем:
Уо~ Ро (zm2 2м:{)///м; (3-32)
У1 ~ PoWЯм; (3 - 33)
y2 = J^, (3.34)
где
Не — ZE22E3 + Z£2Z£1 + Z£3ZEb (3-35)
Нм — zm22m3 4“ zm2zm14- zm3zm1- (3* 36)
Значения zE и zM в зависимостях (3-29) — (3-36) принимаются
соответственно для каждой системы.
3-4. ТРЕХМАССОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА
На рис. 3-8 и 3-9 приведены трехмассовые колебатель-
ные системы и их электрические аналоги, которые в последнее
время встречаются при решении вибрационных задач.
Электрические и механические сопротивления отдельных участ-
ков эквивалентных систем равны:
для рис. 3-8:
Z£i = j(oLi; Х£2 = Г£1+1/(/'®С1); z£3 = /<oL2; (3-37)
гЕЛ~ГЕз + 1/(/и6?2); Z£6 = /a»L3 j- 1 l(j(oCg) + ГЕЗ
Рис. 3-8. Трехмассовая колебательная система I
25
77lj
77777777?777777/
колебательная система II
Рис. 3-9. Трехмассовая
— электрическая цепь;
zM2 = rffll+l/G’co^); zMS = jcom2; (3-38)
гад = rM2 + zM8 = j(i>tns + 1/(/сЖ8) + rMS
— механическая система;
для рис. 3-9:
zE1 — j(£>Li, zE2 = r£i+ zEg — rES-\- ja>Ls-\- l/(/<oC3); (3-39)
Z£4 = rE2 + l/(j<oC2); zE6 = ]<лЬ2
— электрическая цепь;
zM1 = jamr, zM2=rM1+l/(/coX1); zH8 = rH8 +jcoms+l/(/coX3); (3-40)
zM4 = rM2 + l/( ; zM6 = jam2
— механическая система.
Токи и колебательные скорости для приведенных примеров
имеют одинаковые решения и равны:
для электрических цепей:
io — с [ze2-\- гЕЭ-\- zEizE6/(zEi-\- гЕЪ)]1 Н е\ (3-41)
ii = ez£2///£; (3-42)
i2 = е [z^z^tiz^ 4- zE^]/HE, (3-43)
для механических систем:
Уо — Ро 1^м2 ~Ь ^мз 4* zMnZM^/(zM^ 4* 2М8)]/ЯМ, (3-44)
У1 = Ро^Ны\ (3-45)
У^ ~ Ро [^-m2^m4^(Zm4 + м> (3-46)
где
Не = z£izF2 4~ Ze2Zes + ZeiZES + zEizEJ(zEi 4- zE^) (zEi 4- Z£2); (3-47)
Нм —ZmiZm2 4- ZM2Zm3 4~ ZMiZMg-|-ZM4ZM5/(zM4 4~ ZMg) (zmi4_zm2).
Значения zE и zM в зависимостях (3-37) — (3-40) принимаются
соответственно для каждой системы.
Рассмотренные колебательные системы охватывают наиболее
часто встречающиеся случаи расчета вибрации элементов конструк-
26
ции электрических машин. В дальнейшем вышеприведенные фор-
мулы будут использованы при расчетах вибрации вдали от резо-
нансных частот, что позволяет потерями на трение гы пренебречь.
3-5. РАСЧЕТ ВИБРОПОГЛОЩЕНИЯ
В конструкциях электрических машин имеются эле-
менты, которые возбуждаются силами, имеющими широкий частот-
ный спектр; тонкостенные воздуховоды, подшипниковые щнты,
улитки вентиляторов, лапы и др. Эти элементы имеют повышенные
вибрации и излучают повышенный шум именно на их резонансных
частотах.
Уменьшение вибраций этих элементов могло бы быть достиг-
нуто применением конструкционных материалов с большими внут-
ренними механическими потерями гм. Однако материалы, приме-
няемые в электромашиностроении, как правило, имеют малые по-
тери. Поэтому уменьшить вибрации резонирующих элементов
можно путем нанесения на них покрытия из материала с большими
механическими потерями. Элемент конструкции, облицованный
таким покрытием, будет вести себя в отношении вибрации и рас-
пространения шума как однородный материал с большими внутрен-
ними потерями.
Сумма сил упругости и трения может быть представлена в виде
у/К + г,.у = (1/А.+jcorM) у = (г//Х) (14- р]), (3-48)
где т] = <вгмХ. Как видно, наличие в системе трения можно учесть
введением комплексной жесткости (1/Х)/(1 4- /ц), что приводится
к комплексному модулю упругости Е (1 + /ц). Такое представле-
ние о потерях указывает на наличие фазового сдвига между напря-
жениями в материале и его деформациями. Тангенс угла фазового
сдвига или потерь равен ц. Действительная часть комплексного
модуля упругости является его упругой компонентой, а мнимая
часть — вязкой компонентой, которая характеризует потери в ма-
териале. Если система совершает свободное колебание, то лога-
рифмический декремент колебаний
& = л;т]. (3-49)
Вибрации тонкостенной пластины можно представить в виде
системы с одной степенью свободы, для которой амплитуда коле-
бательной скорости
У =
1
(0/71---------
соХ
I2 । 2
+ гм .
(3-50)
При резонансе, т. е. при com = 1/со X (со — соо),
У — Рк1гы Pm(ooVt]. (3-51)
Так как при нанесении на пластину вибропоглощающего по-
крытия ее податливость заметно не меняется, то уменьшение ам-
27
плитуды колебаний облицованной пластины на резонансных ча-
стотах соответствует равенству
—УобЛ =Т]необл/'Побл- (3-52)
Упеобл
При колебаниях на частоте, удаленной от резонансной, покры-
тие мало изменяет амплитуду колебаний пластины. Толщина по-
крытия обычно принимается равной не более (2—-2,5)-кратной тол-
щине покрываемого элемента конструкции машины. Для умень-
шения вибрации тонкостенных элементов кроме резины могут быть
применены вибродемпфирующие мастики.
Тангенс угла потерь некоторых из них равен 0,4—0,45, а мо-
дуль упругости (3-=-5)-105 Н/см2.
На рис. 3-10 показано сопоставление спектров шума электри-
ческой машины с замкнутой самовентиляцией, у которой тонкие
стенки корпуса в целях снижения шума были облицованы резиной
(кривая 1 —до обклейки, кривая 2 — после обклейки).
Для выяснения влияния демпфирования в колебательной си-
стеме на форму резонансных кривых рассмотрим зависимость
yly0 = F (<о/<оо), (3-53)
где соо = М'у/т'к .
Введем следующие обозначения: гкр = со/по = 1/(сооХ) — кри-
тическое сопротивление системы; <о/<оо = 0; rmlrKV = d; am =
= гкр0; 1/(соА,) = Гкр/0. Тогда выражение для механического со-
противления системы можно привести к виду
z= д/[(от— 1/(<оА)]2-[- Гт —(0—1/0)2. (3-54)
Используя отношение rmlz, имеем
уГу0 = d/7d2+ (0- 1/0)2 = 1/71-H(0-1/0W- (3-55)
Из последнего выражения следует, что форма резонансной кри-
вой у!у0 =? F (со/соо) зависит только от величины демпфирования d
цепи. Резонансные кривые для цепей с различными значениями
демпфирования приведены на рис. 3-11. Покажем, что, имея ре-
зонансную кривую, можно очень просто определить демпфировав
ние цепи.
28
Рис. 3-11. Влияние затухания на
форму резонансных кривых
Проведем на высоте у!уй =
= 1/д/2^ прямую, параллельную
оси абсцисс, и вычислим длину
отрезка этой прямой между
точками пересечения ее с резо-
нансной кривой. Для точек пе-
ресечения имеем:
! + [(₽—l/p)/d]2 = 2, (3-56)
откуда для положительных корней этого уравнения найдем
₽! = — d/2 + 7^/4+ 1; ₽2 = + rf/2 + уЖфТ. (3-57)
Следовательно, искомая длина указанного отрезка, равная 02—
будет равна демпфированию d. Поэтому чем больше демпфирова-
ние, тем шире и тупее резонансная кривая.
Таким образом, имея частотную характеристику вибрирующего
тела, можно определить демпфирование d.
3-6. ВИБРАЦИЯ СТАТОРОВ,
ВОЗБУЖДАЕМАЯ ЭЛЕКТРОМАГНИТНЫМИ СИЛАМИ
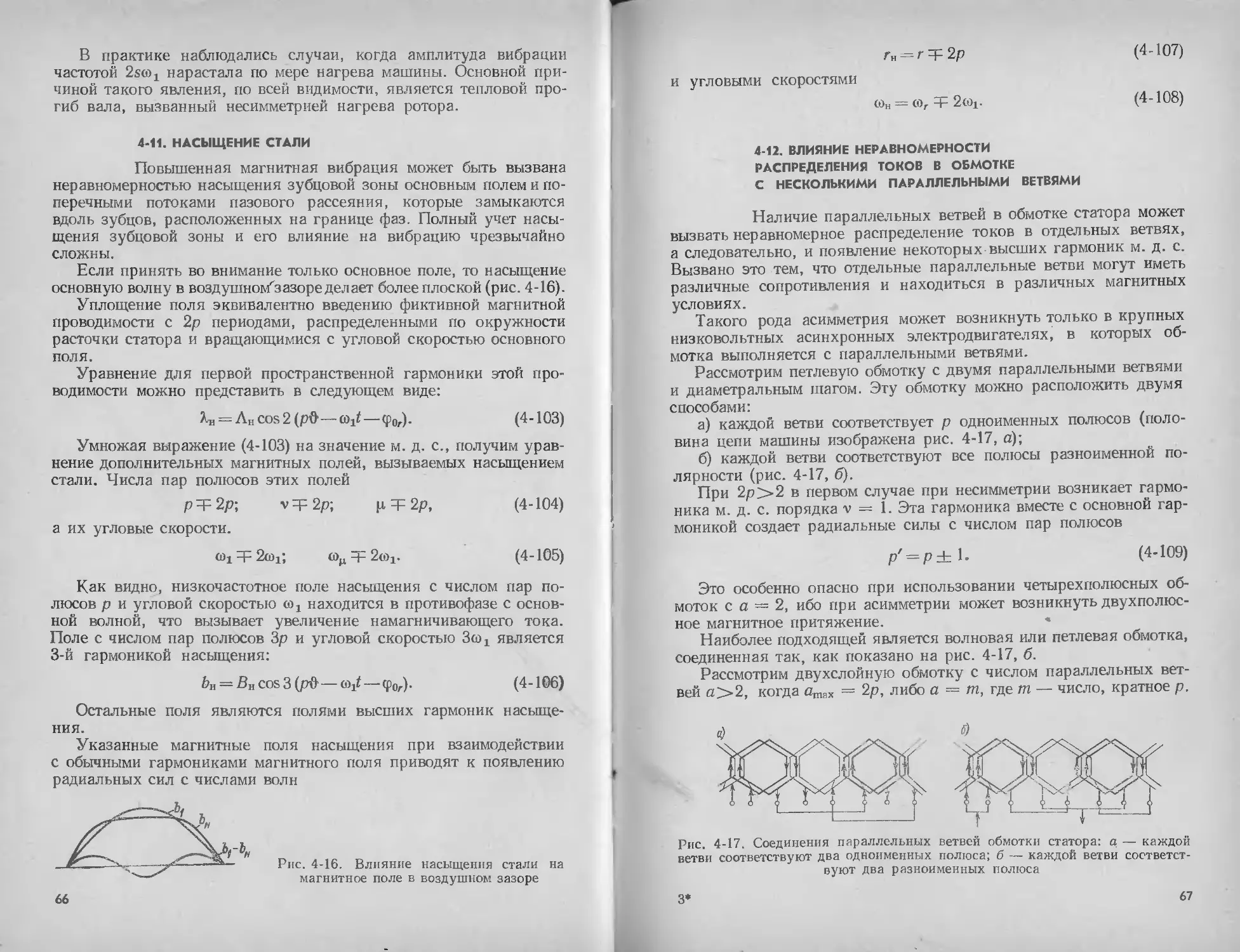
Как показали исследования, основным источником маг-
нитного шума являются не колебания зубцов или полюсов, не-
посредственно к которым приложены электромагнитные силы, а ко-
лебания ярма статора.
Простым расчетом можно показать, что под воздействием элек-
тромагнитных сил амплитуда вибраций зубцов в десятки и сотни
раз меньше вибраций ярма. Поэтому исследования магнитного
шума электрической машины в основном сводятся к исследованиям
колебаний его ярма.
При расчетах ярмо машины представляется в виде цилиндри-
ческой оболочки, на которую воздействует система с г числом волн,
периодически изменяющихся во времени и симметрично распреде-
ленных по окружности радиальных и тангенциальных сил.
При изучении вибрации статоров, возбуждаемой магнитными
силами, различают следующие пространственные формы колеба-
ний, которые присущи всем типам электрических машин перемен-
ного и постоянного тока (рис. 3-12):
при г = 0 (рис. 3-12, а) статор вибрирует, как пульсирующий
цилиндр (растяжение — сжатие). Частота собственных колеба-
ний кольца статора при этом виде колебаний
соо = V EhKtnRi); (3-58)
при г — 1 (рис. 3-12, б) все силы, возбуждающие этот вид ко-
лебаний, приводятся к одной вращающейся результирующей силе,
29
Рис. 3-12. Формы колебаний статора электрических машин
приложенной в центре тяжести машины. В этом случае статор при
установке машины на амортизаторы вибрирует относительно своего
центра тяжести без изменения формы колебаний. Частота собст-
венных колебаний машины на амортизаторах рассчитывается по
формуле (3-12).
При жестком креплении машины к фундаменту статор можно
рассматривать как часть кольца с углом а, заделанную обоими
концами. Основная форма колебаний подобного кольца в его пло-
скости будет иметь вид кривой на рис. 3-13, а частота собственных
колебаний
“о = f Eh3/( Y2.mR§. (3-59)
Значения коэффициента f (а) для углов а, от 180° (половина
кольца) до 360° (кольцо заделано в одной точке), даны на рис. 3-13.
При г > 2 — рис. 3-12, в (этот вид колебаний наиболее часто
встречается в практике) частота собственных колебаний ярма ста-
тора машин переменного тока может быть рассчитана по формулам
г (г2 — 1) / Eh3 rh . _ ,„т.
—-------' - д /-------- при ------<1,0; (3-60)
д/г2 + 1 V 12т7?с Ес
“° EhS при /-й/7?с>1,о,
д/г2 + 1 V +3г2х)
. где х = /г2/(127?с)- (3-61)
В формулах (3-58) — (3-61) т — масса, приходящаяся на 1 см2
средней цилиндрической поверхности ярма, кг (зубцовая зона
с обмоткой в машинах переменного тока и полюсы с обмотками воз-
тока считаются присоединенной
массой); h — высота спинки ста-
тора, см; Rc — средний радиус
ярма, см; Е — модуль упруго-
сти, равный для магнитопрово-
дов машин постоянного тока и
Рис. 3-13. Колебания статора, жест-
ко закрепленного в двух точках на
фундаменте
30
Таблица S-i
Лс. см Частота собственных колебаний статора, Гц, при г, равном
0 2 3 4 5
10,0 7250 1400 3960 7600 12 400
20,0 5140 695 1980 3800 6 100
30,0 4200 747 1320 2500 4 100
пакетов динамной стали из целых дисков 2,1 • 107 Н/см2, а для
пакетов, набранных из сегментов,—1,2-107 Н/см2.
Из формул (3-58) — (3-61) следует, что с ростом радиуса ярма
падает частота собственных колебаний. Это означает, что ампли-
туда колебаний, а следовательно, и уровень магнитного шума при
равных возбуждающих силах и равных частотах будет выше у ма-
шинб1, имеющей большие геометрические размеры.
В табл. 3-1 приведены значения частот собственных колебаний
статоров асинхронных двигателей при h/Rc = 0,25 с учетом того,
что m==h. Из таблицы следует, что эллиптическая форма дефор-
мации наиболее опасна, так как в этом виде колебаний частоты
собственных колебаний самые низкие, а следовательно, вибрация
и шум значительно выше, чем при г = 0 или г>2.
Учитывая, что магнитный шум машины обусловлен в основном
радиальными колебаниями ярма, расчет вибрации корпуса машины
как свободного кольца можно привести к расчету простейшей ко-
лебательной системы (рис. 3-3). При этом в целях упрощения, как
уже указывалось, расчеты будут производиться без учета демпфи-
рования вибрации.
Параметры колебательной системы, эквивалентной статору:
колеблющаяся масса (в килограммах)
тс = Mcl(2nRcl()t
(3-62)
гДе /Ис — полная масса пакета железа статора с обмоткой или ста-
нины с полюсами; lt — активная длина ярма;
приведенная податливость статора равна:
для колебаний при г = 0 (рис. 3-12, а)
2ic = Pc/(£/i); (3-63)
для колебаний при г > 2 (рис. 3-12, в)
12/?с Ze 12^с Е ( Re \8 г2 + 1 rh . , „ го слх —! при 1,0; (3-64) < h ) г2(г2-И2 7?с ( Т) С+З^пр, £ >1.0 (3-65)
(колебания при г = 1 дополнительно рассматриваются в гл. 4).
31
Полное механическое сопротивление статора при частоте со
Возбуждающих сил
zc = atnc— 1/(<оХс). (3-66)
Зная амплитудное значение удельной возбуждающей силы р0,
приведенной к средней окружности ярма, получим скорость ко-
лебаний на поверхности сердечника статора
y=pjzc. (3-67)
Здесь
Ро — PoiRJ Re (3-68)
где р01 — удельная сила, действующая в воздушном зазоре, Н/см2;
Ro — радиус расточки статора, см.
При жестком креплении машины к фундаменту пространствен-
ные формы колебаний статора искажаются. В этом случае вибро-
акустические характеристики машины во многом зависят также
от свойств фундамента.
Поэтому при исследованиях виброакустических характеристик
машин принята методика, при которой машина устанавливается
на амортизаторы, чем исключается влияние фундаментов. Это по-
зволяет производить расчеты колебаний статоров как свободных
колец.
В машинах переменного тока пакет железа статора преимущест-
венно жестко крепится в корпусе. Поэтому при расчетах вибрации
кроме полного механического сопротивления zc пакета статора
необходимо учесть сопротивление корпуса
zk — amk — 1 /(со 7vft). (3-69)
При этом колебательная скорость на поверхности корпуса
Уя — Pol (Zc + z*). (3-70)
Величины mK и ZK рассчитываются аналогично расчету тс и кс,
так как корпус при жестком креплении в нем сердечника приобре-
тает пространственные формы колебаний последнего. При неплот-
ной посадке сердечника статора в корпус (это возможно в крупных
машинах переменного тока) форма колебаний корпуса может от-
личаться от формы колебаний сердечника. В этом случае расчет
вибраций по формуле (3-70) недопустим.
Произведенные экспериментальные исследования крупных элек-
трических машин переменного тока, в которых имело место плохое
сопряжение пакета с корпусом, показали следующее: корпус и па-
кет железа статора в вибрационном отношении могут вести себя
как обособленные колебательные системы, при этом вибрационное
состояние статора может быть существенно улучшено, если закли-
нить сердечник в корпусе.
Пакет железа и корпус могут колебаться с фазовым сдвигом,
доходящим до 180°, и различными порядковыми числами волн.
Надо отметить, что корпус крупной электрической машины,
32
как правило, несимметричен. Механическая несимметрия кон-
струкции корпуса приводит к расслоению спектра собственных
частот, искажению пространственных форм колебаний и сказы-
вается на амплитудно-частотных характеристиках. Поэтому во
многом справедливо утверждение, что машина, проектируемая как
малошумная, должна быть по возможности симметричной. Вместе
- с тем влияние механической несимметрии конструкции корпуса
нельзя переоценивать, так как это может дезориентировать кон-
структора. Корпус должен прежде всего удовлетворять требова-
ниям прочности и надежности работы машины, а также эффектив-
ного охлаждения активного ядра и удобства обслуживания.
Попытки объяснить имеющиеся расхождения расчетных и фак-
тических уровней вибрации механической несимметрией недоста-
точно обоснованы.
Опыт показывает, что увеличение точности расчета собственных
частот колебаний корпуса, например методом конечных элемен-
тов, не приводит к повышению точности расчета виброактивности
машины в целом. Объясняется это следующими причинами:
колебательная энергия, излучаемая электрической машиной
в фундамент, обусловливается колебаниями корпуса как симмет-
ричного кольца; колебания отдельных элементов корпуса, особенно
в зоне низких частот, вносят малую поправку в общий баланс
излучаемой энергии;
в зоне средних и высоких частот доля излучаемой энергии мала
в связи с эффективным ее затуханием в амортизаторах и фунда-
менте; вибрация машины в этом диапазоне частот особенно сильно
зависит от технологических факторов.
3-7. ИЗЛУЧЕНИЕ МАГНИТНОГО ШУМА КОРПУСОМ МАШИНЫ
Излучаемая корпусом машины звуковая энергия за-
висит от размеров машины и пространственных форм ее колебаний.
Вычисление звукового давления и силы звука по формулам (1-6)
и (1-7) допустимо лишь при условии, если размеры, корпуса машины
велики по отношению к длине излучаемой волны X, т. е. корпус
подобен плоскому излучателю. Так, например, если плоский из-
лучатель колеблется с амплитудой у — 10~® см и частотой
/=1000 Гц, то у = 2л-1000-10-® = 6,28-10-8 см/с;
р = 42 • 6,28-10-3 • 10-® = 0,264-10"6 Н/см2;
1 = 0,5-0,264-6,28-10-3 10~’ = 0,83-10~10 Вт/см2.
Тогда относительно порога 10~18 Вт/см2 уровень громкости шума
на поверхности излучателя
£=1018 °-83'1°^С59 дБ.
& ю-м
Однако условие, при котором длина звуковых волн мала по
сравнению с размерами излучателя, не выполняется для машин
2 Заказ № 2109
33
средней и большой мощности. Так, например, звуковые частоты
магнитного происхождения в электрических машинах находятся
в диапазоне 100—4000 Гц, т. е. в диапазоне волн от 343 до 8,6 см,
что соизмеримо с габаритами машин.
Для того чтобы произвести в этом случае расчет шума на по-
верхности машины, обычно заменяют корпус машины сферическим
излучателем звуковых волн, радиус которого равен наружному
радиусу корпуса машины. Акустические свойства корпуса в этом
случае зависят от пространственной формы колебаний и числа
волн деформаций г. При колебаниях г — 0 все элементы сферы
колеблются синфазно, т. е. имеем пульсирующий шар.
Вибрациям при г = 1 соответствует сферический излучатель
первого порядка.
При деформациях г = 2 имеем вибрирующий эллипсоид и т. д.
Вследствие фазового сдвига сила звука при одинаковой ампли-
туде у сферического излучателя меньше, чем у плоского. Отноше-
ние силы звука сферического и плоского излучателей при одинако-
вой амплитуде называют относительной мощностью излучения
Д/отн. Она зависит от отношения периметра излучателя nD к длине
волны X и от порядкового числа г излучателя (рис. 3-14).
При относительно малых значениях nDfk мощность воз-
растает пропорционально (2г -ф 2)-й степени и при лБГ/. 1,0 не-
зависимо от числа г приближается к 1,0, т. е. сферические излуча-
тели, периметр которых намного больше длины волны, создают
у поверхности такую же силу звука, как плоский излучатель.
Максимальная сила звука у поверхности сферического излуча-
теля r-го порядка
-- /()МотН-
Вся излучаемая звуковая мощность
(3-71)
для излучателя r-го порядка
Мг = —/о F, (3-72)
2г+ 1
где F — поверхность из-
лучателя.
Пример 1. Требуется вычи-
слить уровень громкости маг-
нитного шума асинхронного
электродвигателя у поверх-
ности на частоте 835 Гц, имею-
щего наружный диаметр кор-
пуса £>=35 см, амплитуду виб-
раций на указанной частоте
5-10-® см при г — 2:
у = 2л-835-5- 10-8 =
=26,3-10-8 см/с;
Рис. 3.14. Зависимость отно-
сительной мощности излуче-
ния WOTH корпусов электриче-
ских машин от
р = 42-26,3-10-8= 1,1-10-6 Н/см2;
X = 340-102/835 = 40,5 см;
лО/Х = л • 35/40,5 = 2,72; Л’отн = 0,9;
/о = 0,5-1,1-26,3-10~3-10~7 = 14,5-10—10 Вт/см2;
1Г = 14,5-10-10-0,9 = 13-10-1° Вт/см2;
13.10 ю
L = 101g —-------- =71 дБ.
10-18
Пример 2. Требуется вычислить уровень громкости магнитного шума
у поверхности турбогенератора 200 мВт на частоте 100 Гц, имеющего наруж-
ный корпус D = 350 см, амплитуду вибрации корпуса у = 1-10~8 см при
г = 2:
у = 2л-100-10—8 — 0,628 см/с;
р = 42-0,628-10-6 = 26,3-10—а Н/см2;
/0 = -26,3-0,628-10-’= 8,2-10“’ Вт/см2;
2
X = 340-102/100 = 340 см;
лО/Х = л • 350/340 = 3,25; = 1,0;
/г = /0 = 8,2-10-’ Вт/см2;
L = 10 1g 8,2'10~г = 99 дБ.
Ю-1в
Пример 3. Требуется вычислить уровень громкости магнитного шума
у поверхности асинхронного электродвигателя, имеющего размер корпуса
10 см при тех параметрах вибрации, что и в примере 1:
л£)/Х = л-10/40,5 = 0,775; N0TH = 0,0026;
1Г = 14,5-10-1°-0,0026 = 3,8-10—12 Вт/см2;
3 8-10—12
L = 10 1g -^-Д—— = 46 дБ.
[0-м
•
Из сопоставления примеров 1 и 3 видно, что размеры машины
существенно влияют на уровень громкости шума. Характеристики
крупных машин приближаются к характеристикам плоских излу-
чателей, поэтому их уровень громкости, как правило, выше, чем
малых. Кроме того, надо иметь в виду, что вибрации возрастают
с увеличением размеров. Так, например, при увеличении диаметра
корпуса в 3 раза при одинаковых возбуждающих магнитных си-
лах уровень громкости магнитного шума увеличивается прибли-
зительно на 10 дБ.
Таким образом, свойства корпуса электрической машины как
колебательной системы и акустического излучателя имеют во мно-
гом решающее значение при шумообразовании. Однако из формул
(3-68) и (3-70) видим, что уровень вибрации корпуса зависит от
возбуждающей электромагнитной силы. Для ее определения не-
обходимо знать структуру поля в воздушном зазоре.
2*
35
Ниже рассмотрим физическую картину возникновения возбуж-
дающих магнитных сил в машинах различных типов. При расчете
этих сил надо иметь в виду, что большой точности в определении
их значений не требуется. Так, например, погрешность в опреде-
лении силы в 25 % дает отклонение приблизительно на 2 дБ, что
находится в пределах точности измерений.
ГЛАВА ЧЕТВЕРТАЯ
МАГНИТНЫЙ ШУМ
АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
4-1. ОСНОВНЫЕ УРАВНЕНИЯ
Наиболее наглядное и подробное представление о по-
лях, возбуждающих магнитный шум, может быть получено при
изучении м. д. с., создаваемых токами в обмотках статора и ротора,
и магнитной проводимости воздушного зазора.
Как известно, в общем виде магнитная индукция в воздушном
зазоре в точке с координатой & в момент времени t, если пренебречь
магнитным сопротивлением стали,
b($, = f) A (&, t), (4-1)
где f (О, 0 и A (О, t) — мгновенные значения результирующей
м. д. с. обмоток статора и ротора и магнитной проводимости зазора.
Значение и распределение радиальных магнитных сил (в ньюто-
нах на квадратный сантиметр) в воздушном зазоре определится
уравнением
pr = 40fe2(0, t). (4-2)
Значение и распределение тангенциальных сил (в ньютонах
на квадратный сантиметр)
рх = а(®, t)b(®, 0-10-®, (4-2а)
где а (&, 0— линейная токовая нагрузка статора или ротора, А/см.
4-2. МАГНИТОДВИЖУЩИЕ СИЛЫ
ОБМОТОК СТАТОРА И РОТОРА
Магнитодвижущая сила при ее разложении в ряд Фурье
имеет вид
v=oo Ц—00
/(О, 0+ X 0+ S Ш 0. (4-3)
v=i Ц=1
где f0 (О, t) — результирующая м. д. с. основной волны; fv (Ф, t) —
36
Рис. 4-1. Векторная диаграмма асинхрон-
ного электродвигателя
м. д. с. v-й гармоники обмотки стато-
ра; fu С&, О — м- Д- с- R-й гармоники
ротора.
В уравнении (4-3)
/о(&> t) = F0cos(p&—Ojt—<por);
(4-4)
fv C&. О = Fv cos (vf)—co if—qjj);
(4-5)
fv 0 = Fy. cos (p/&— coMf—<p2).
(4-6)
Амплитуды м. д. с. для трехфазных обмоток равны:
F0=l,35^^/0r; р (4-7)
Fv= 1,35-^-^ Л; V (4-8)
Fu=l,35 Wlkwl 12- (4-9)
В формулах (4-4) — (4-9) р, v, р — числа пар полюсов основ-
ного поля, гармоник м. д. с. обмотки статора и короткозамкнутого
ротора; со х, соц — угловые скорости основной волны и ц-й гармо-
ники ротора относительно статора; w1 — число витков фазы об-
мотки статора; kwl, kwv — обмоточные коэффициенты для основ-
ной волны и v-й гармоники обмотки статора: iOr, llt /2, срОг, <рт,
ср2 — токи и фазовые сдвиги из векторной диаграммы рис. 4-1.
Число v для обмотки с целым числом пазов на полюс и фазу q
•V = (6<7Z-|-1) р при </ = ±1; ±2; ±3. (4-10)
Особое внимание при расчете магнитного шума следует обра-
тить на пазовые гармоники, для которых
q' — i q\ -+- 2^; -+- 3q . . . (4-11)
При проектировании малошумных асинхронных двигателей
всегда следует воздерживаться от применения обмоток с дробным
числом q.
Положительным значениям q' соответствуют гармоники, вра-
щающиеся в направлении главного поля (v — 7р, 13р, 19р, . . .),
а отрицательным — против вращения главного поля (у = — 5р,
37
— Пр, — 17р, . . .). Угловая скорость v-й гармоники относительно
обмотки статора
co^^W+1). (4-12)
Число ц для короткозамкнутого ротора
p = <7"Za + p; ±2; ±3;. . (4-13)
где Z2 — число пазов ротора.
Угловая скорость
(o(I = o1[l+<?"(Z2/p)(l- s)], (4-14)
где s — скольжение.
4-3. МАГНИТНАЯ ПРОВОДИМОСТЬ ВОЗДУШНОГО ЗАЗОРА
При двусторонней зубчатости проводимость может быть
представлена в виде:
Л(о, о=л0+£хт1+ 5>т2+ .... (4-15)
т,
где Ло — постоянная составляющая магнитной проводимости;
Zml — гармоника проводимости, обусловленная зубчатостью ста-
тора при гладком роторе; 7т2 — гармоника проводимости, обус-
ловленная зубчатостью ротора при гладком статоре.
Кроме указанных проводимостей будут иметь место комбина-
ционные гармоники проводимости, обусловленные зубчатостью
статора и ротора. Однако по своей величине они будут значительно
меньше основных. Поэтому в практических расчетах обычно огра-
ничиваются рассмотрением основных гармоник.
В выражении (4-15) постоянная составляющая
Л0=1/(б/гс), (4-16)
где б — воздушный зазор; kc — коэффициент Картера, учитываю-
щий зубчатость статора kcl и ротора kC2.
Гармоники, обусловленные зубчатостью статора, не изменяются
во времени:
— Лт1 cosпри Л,= 1, 2, 3, . . . (4-17)
Гармоники, обусловленные зубчатостью ротора при его вра-
щении, будут зависеть от времени:
^ms = Am2COs/?2Z2[O—(<о,/р)(1—s)H при /г2—1. 2, 3, . . .
(4-18)
Амплитудные значения Лт1 и ЛП12 по Иордану [44]
AW1 = -Ло(~О*'(fee-1) ~ =Л0§,; (4-19)
hi [(*ci — 1)/*с11/л
= -Ао (-ф(feci-1) si”fe^c3~; ‘;);v± = (4-20)
kt t(*cs — l)/*ca] n
38
Рис. 4-2. Функции и g2
где значения функций и Е2
в зависимости от коэффициентов
kcl или kcs и порядка гармо-
ники kx или k 2 могут быть
определены из графика 4-2.
4-4. МАГНИТНОЕ ПОЛЕ
В ВОЗДУШНОМ
ЗАЗОРЕ
Подставив все состав-
ляющие разложения для м. д. с.
и проводимостей в уравнение
(4-1) и произведя соответствую-
щие вычисления, получим ре-
зультирующее поле в воздуш-
ном зазоре машины.
Для дальнейшего анализа пренебрежем несущественными по
своему значению полями, оставив следующие:
а. Основное поле
b1 = B1cos(p'&—coii—фог) (4-21)
с амплитудой
В1 = №Л0«Вв, (4-22)
где kR — коэффициент насыщения магнитной цепи, равный отно-
шению общей м. д. с. обмоток к м. д. с. воздушного зазора для
основного поля.
б. Гармоники обмотки статора имеют фазу рабочего тока ста-
тора, число пар полюсов и частоту гармоник м. д. с. статора
fcv = /vA0 = Bvcos(vi7—оц/—(pj, (4-23
где амплитуда
Bv = FVAO = -Р- J&- kn А- К (4-24)
т kwl Ior
Наиболее сильными из них являются гармоники Bvz, имеющие
порядок зубчатости статора, т. е.
v2 = (6w' + l)p = <7/Z1 + p при </ = ±1; ±2; ±3;. . .
(4-25)
Для удобства пользования формулой (4-24) значения произве-
дения (p/v) (kwyr/kwl) для различных обмоток сведены в приложе-
ние 8. Ослабить поле bv можно путем подбора соответствующего
сокращения шага обмотки р, от которого зависит значение указан-
ного произведения.
в. Зубцовые гармоники статора
bzl = В21 cos (уг®—ajt—<рОг), (4-26)
39
Рис. 4-3. Геометрическое сум-
мирование гармоник порядка
зубчатости
где
BZ1 = (F 0/kH) Лт1 =
= (№)л0^=в6^.
(4-27)
Эти гармоники возни-
кают из-за зубчатости ста-
тора. Результирующее зна-
чение гармоник порядка
зубчатости статора может
быть^получено геометрическим сложением полей bvz, обусловлен-
ных распределением обмотки и зубчастостью Ьг1 (рис. 4-3). На век-
торной диаграмме гармоники обмотки статора находятся в фазе
с током — для полей прямого вращения и в противофазе — для
полей обратного вращения.
г. Гармоники обмотки короткозамкнутого ротора имеют фазу,
число пар полюсов и частоту гармоник м. д. с. ротора
^ = fuAo = BuCOs(H&—<р2), (4-28)
где
= ГЦЛО = -Р- -±- A kRBe. <4-29)
[X «Г01 * 1
Наиболее сильными из них являются гармоники, имеющие по-
рядок зубчатости ротора, т. е.
iiz = q"Z2 + p при </" = ±1; ±2; ±3;. . . (4-30)
д. Зубцовые гармоники ротора
&z2 = (folkn) Кп2 = Вг2 COS — Фог), (4‘31)
где
B22 = (WAm2 = BeU (4-32)
Результирующее значение гармоник порядка зубчатости ро-
тора может быть получено геометрическим сложением полей,
Ьрл и Ьг2.
Надо иметь в виду, что э. д. с., индуцированные гармониками
bv и вызывают демпферные токи, которые стремятся ослабить
гармоники поля статора и ротора. Однако, как показали иссле-
дования, при практических расчетах без особой погрешности демп-
фирующим действием обмоток ротора и особенно статора можно
пренебречь.
Важная группа гармоник поля ротора обусловлена высшими
гармониками поля статора (т = ц). Каждая такая пара гармоник
ротора и статора аналогична системе основных полей обмоток
40
ротора и статора асинхронной машины. В результате их взаимо-
действия возникает вращающий момент, который по своей при-
роде и свойствам аналогичен вращающему моменту основной волны
(поэтому он называется асинхронным). Этот момент противодейст-
вует основному моменту и вызывает добавочные потери. Особенно
опасны при пуске двигателя высшие гармоники, вращающиеся
в ту же сторону, что и ротор. При прохождении ротора в этом слу-
чае через синхронную скорость v-й гармоники ускоряющий момент
меняет свой знак на противоположный, вследствие чего возникает
тормозной асинхронный момент. Эти моменты возникают при лю-
бом соотношении чисел пазов статора и ротора и могут достигнуть
больших значений.
Синхронные моменты возникают лишь при некотором опреде-
ленном соотношении чисел пазов статора и ротора. При взаимо-
действии полей с одинаковым числом полюсов в этом случае (при
определенной скорости ротора) возникает синхронизирующий мо-
мент, который стремится затормозить ротор.
При выборе числа пазов ротора необходимо исключить числа,
при которых возможно возникновение особенно сильных синхрон-
ных моментов.
Результирующее магнитное поле в зазоре
Ь = Ь1+ Efcv+ Е Ьц==В1СОз(ра—a^t—<рОг) +
V ц
+ 2 Bvcos(v&—(0^—qv) + 2 Bucos(pfl—<рц,-).(4-33)
V ц
4-5. РАДИАЛЬНЫЕ СИЛЫ,
СОЗДАВАЕМЫЕ МАГНИТНЫМИ ПОЛЯМИ
Подставляя в уравнение (4-2) величину результирую-
щего магнитного поля (4-33), получим выражение с большим чис-
лом взаимодействующих волн, среди которых с точки зрения соз-
дания звуковой вибрации могут быть приняты во внимание сле-
дующие:
а. Силовые волны, создаваемые основным полем,
Pi = /’icos(2p'&—2(0^—2<рОг), (4-34)
вызывают вибрации с порядком г — 2р, частотой 2(1^ и амплиту-
дой (в ньютонах на квадратный сантиметр)
Р1 = 20Вб. (4-35)
Особенно эти вибрации проявляются в крупных асинхронных
электродвигателях с числом полюсов 2р = 2.
б. Силовые волны, создаваемые взаимодействием любой пары
высших гармонических полей статора и ротора,
Pvtl = COS [(V ± р) •& — (®ц ± (0!) t — (фцг ± <pvr)] (4-36)
с амплитудой (в ньютонах на квадратный сантиметр)
P^ = 4OBVB„, (4-37)
41
Рис. 4-4. Взаимодействие двух полей
41 образование силовой волны индук-
ции (а), результирующей силовой
волны (6) и разложение силовой
волны (в)
Рис. 4-5. Распределение радиальных
сил в воздушном зазоре двухполюс-
ной машины и вызываемые ими де-
формации статора
порядком г = р. v, фазой <рг = <рцг + <pvr и угловой скоростью
(0г=©ц— ю1 = (^Р) (1—s) при r = p—-v; (4-38)
ojr = co|i + fi)1==a»1[^/(Z2/p)(l—s) + 2] при r = p + v (4-39)
вызывают наиболее интенсивную вибрацию и шум особенно при
низких порядках, т. е. г = 0, 1, 2, 3, 4. Так как порядок колебаний
г зависит от соотношения чисел пазов статора и ротора Z2, не-
обходимо стремиться подбирать их такими, чтобы получить более
высокое значение г.
На рис. 4-4 показан пример взаимодействия двух полей и об-
разования силовых волн.
В асинхронных двигателях следует избегать обмоток с дробным
числом пазов на полюс и фазу, так как у них особенно велика ве-
роятность низких чисел волн. При более высоких порядках г ди-
намические прогибы ярма становятся малыми, так как они убы-
вают приблизительно пропорционально 4-й степени числа г.
Здесь надо также иметь в виду, что вибрация в значительной
степени зависит от полного сопротивления колебательной системы
zM, которое характеризует близость ее к резонансу. Разумеется,
что при резонансе вибрация и шум могут быть большими даже
При малых возбуждающих силах.
Максимальная амплитуда силовых волн согласно (4-37) соз-
дается парой первых пазовых гармоник статора (д' — ± д) и ро-
42
тора (</'= ± 1). Поэтому при расчетах необходимо в первую
очередь учесть влияние этих гармоник на уровень вибрации и гром-
кости шума.
В общем виде радиальные силовые волны могут быть представ-
лены следующим образом:
р, = Р,. cos (пЭ—со/—q>r). (4-40)
Различное направление усилий в этом выражении (к центру
и от центра) объясняется тем, что при возведении в квадрат выра-
жения (4-2) результирующая сила слагается из постоянной и пере-
менной составляющей. Так, например, для основной волны
b1 — Bjcos^f) — —срт) (4-41)
имеем радиальную силу
== = (В|/2) [ 1 + cos 2 (рО— a>jt—дэт)] = р0 р Р1. (4-42)
Постоянная составляющая в этом выражении указывает на то,
что к Статору приложена система равномерно распределенных сил,
вызывающих напряжения сжатия. Переменная составляющая пред-
ставляет собой бегущую силовую волну, меняющую один раз свой
знак в пределах каждого полюсного деления.
На рис. 4-5 показано распределение сил для двухполюсной ма-
шины. Здесь синусоидальное распределение сил в бегущей волне
заменено сосредоточенными силами Pt.
Амплитудное значение силовой волны (в ньютонах на квадрат-
ный сантиметр), создаваемой первыми пазовыми гармоническими
статора и ротора, можно определить по приближенной формуле
P = (l/^)(/i//0r)2Blfe2H. (4-43)
Если принять во внимание, что высокой точности от расчета
возбуждающих сил не требуется, то формулу (4-43) можно еще бо-
более упростить. Приняв в среднем В6 = 0,8 Тл; kH = 1,25;
IJIor = 3,0 и подставив эти значения в формулу (4-43), получим
(в ньютонах на квадратный сантиметр)
Р « 1О/<72. (4-44)
Как видно из (4-44), при обычных числах пазов на полюс и
фазу, колеблющихся в пределах 3—5, амплитуда силовых волн,
возбуждаемых первыми пазовыми гармониками, находится в пре-
делах 0,5—1,0 (в ньютонах на квадратный сантиметр). Зависимость
(4-44) также показывает, что значение возбуждающих магнитных
сил значительно уменьшается с ростом числа пазов статора.
Ниже приводятся примеры расчета вибрации асинхронных дви-
гателей, возбуждаемых радиальными силами. В целях упрощения
расчеты выполняются без учета элементов крепления корпуса.
Для удобства рекомендуется составить расчетную таблицу
(табл. 4-1).
43
Таблица 4-1
777 *> tx++ 1 + m4 zt=i , 1 IIII
X (1 при г при г
E +
£ 1 —
r = V ±p,
+4
1
+3
CO 1
+2
СЧ 1
+ Jk
7
иГ e-
Х'\ d + X. + SZ^ = n (l + ,"9) X X d = л 't' *-y +1 <N СЧ + . . . c 1 +
Z1
44
4-6. ТАНГЕНЦИАЛЬНЫЕ СИЛЫ
При работе асинхронного электродвигателя под нагруз-
кой кроме радиальных сил (4-40) возникают тангенциальные силы,
переменная составляющая которых также вызывает вибрацию.
Для наглядности рассмотрим взаимодействие основной волны
индукции Ьх (&, /) с основной волной линейной токовой нагрузки
(О', 0 — Рис- 4-6, а.
Учитывая синусоидальный характер распределения линейной
нагрузки и индукции by (аналогично радиальным силам), можно
сделать вывод, что на каждую элементарную площадку статора
действует постоянно направленная тангенциальная сила рт0 и пе-
ременная тангенциальная сила рг1, имеющая синусоидальное с
удвоенным числом волн распределение по окружности расточки
статора (рис. 4-6, б).
Рис. 4-6. Распределение тангенциальных сил в воздушном зазоре (а) и вы-
зываемые ими деформации статора (б)
Интегрирование элементарных сил рг0 по всей окружности
статора дает значение полного усилия, скручивающего 1 см длины
статора.
Для переменной составляющей рх1 полное усилие, действую-
щее по всей окружности статора, равно нулю. Эти силы вызывают
вибрацию с порядком г =± 2р, частотой 2 сох и амплитудой (в ньюто-
нах на квадратный сантиметр) рт[ = Zj6rlCh2.
Аналогичные вибрации возбуждаются тангенциальными си-
лами высших порядков.
Различают следующие случаи:
при г = v ± р = 0 имеют место крутильные колебания ста-
тора с большой амплитудой, особенно при несимметричном пита-
нии фаз на частоте 2 fp,
при г — v ± р = 1 возникает вращающаяся в одном направ-
лении тангенциальная сила, это происходит при неравномерном
зазоре между статором и ротором;
при г == v ± р > 2 наблюдаются изгибные формы колебаний
статора.
Сумма тангенциальных сил по окружности статора в этом слу
чае равна нулю.
45
Рис. 4-7. Векторная Диаграмма сил и
моментов в двухполюсном двигателе
На рис. 4-7 приведена про-
странственная ориентация ампли-
туд радиальных и тангенциаль-
ных сил рг и для двухпо-
люсного асинхронного электродви-
гателя.
Как видно, при работе асин-
хронного электродвигателя под на-
грузкой возникают два сдвинутых
относительно друг друга эллипса
Р деформаций. Угол сдвига меж-
ду осями деформаций составляет
почти л/2 рад. Расчетами и экспериментальными исследованиями
установлено, что динамические прогибы статора, вызванные тан-
генциальными силами, значительно меньше прогибов от радиаль-
ных сил. Это дает основание пренебречь действием тангенциальных
сил, вызывающих изгибные формы колебаний (г > 2).
Пример 1. Произведем подробный расчет магнитной вибрации трехфаз-
ного короткозамкнутого асинхронного электродвигателя мощностью 6 кВт
на напряжение 220 В, частоту 50 Гц и число полюсов 2р = 6, имеющего
следующие данные:
число пазов = 36, Z2 = 44; ток = 17,5 А, /0 = 10,6 A, l'2 = 15 А;
фазовый угол = 37°, фог=9О°; коэффициент Картера kci = 1,15,
kC2 = 1,02; индукция в воздушном зазоре Be = 0,76 Тл; коэффициент на-
сыщения магнитной цепи kH — 1,5; номинальное скольжение s = 0,05;
сокращение шага обмотки статора р = 2/3; обмоточный коэффициент kwl =
= 0,92; средний радиус спинки статора 7?с = 11,2 см, радиус расточки
статора Ri — 6,2 см; толщина спинки статора h = 2,2 см; активная длина
статора It — 20 см; масса статора, приведенная к 1 см2 средней цилиндри-
ческой поверхности спинки, тс = 3,5-10~2 кг.
1. Число пар полюсов магнитных полей обмотки статора (включая ос-
новную волну) v = (6g' + 1) р = + 3, — 15, + 21, (— 33, + 39), — 51,
4- 57, (— 69, + 75), — 87, + 93, ... В скобки взяты числа пар полюсов
зубцового порядка.
2. Число пар полюсов магнитных полей обмотки ротора (включая ос-
новную волну) pi — q"Z2 + р = + 3, — 41, + 47, — 85, + 91, — 129,
+ 135, . . .
3. Порядок колебаний г = v ± р (табл. 4-2). В этой таблице отмечены
только порядки колебаний с числом волн менее 10.
Наиболее сильный шум из всех указанных в таблице порядков колеба-
ний будет возникать при числе волн г — — 2. Такой низкий порядок коле-
баний на зубцовой частоте свидетельствует о том, что число пазов ротора
в этом электродвигателе подобрано неудачно
Произведем подробный расчет вибрации, возбуждаемой пазовыми гар-
мониками (v = + 39; р = — 41) и высшими гармониками обмоток статора
и ротора (v = — 87, р = — 85).
А. Вибрация, возбуждаемая пазовыми гармониками.
1. Частота возбуждающих сил согласно (4-38) и (4-39)
f = 50 [ — 1 (44/3) (1 — 0,05) + 2J = 595 Гц; = 2п-595 = 3740 с“Ч
2. Амплитуда первой пазовой гармоники статора:
46
Таблица 4-2
ч" Ч' 0 -1 +• —2 +2 —3 +3 —4 +4 —5 +5
V +3 4? —15 9 +21 4-39 26 Г51 +57 —69 +75 60 —87 +93
0 +3+2
—1 -41’^ +8 1-21 О
+ 1 +47^0 51
—2 -85 G (-2)
+2 +91^ 2 +4 +2
от распределения обмотки в соответствии с (4-24)
Bvz = 0,077 (17,5/10,6)-1,5-0,76 = 0,145 Тл;
от зубчатости статора для первой пазовой гармоники статора имеем со-
гласно (4-27) В21 = 0,146-0,76 — 0,111 Тл, где = 0,146 — для йс1 = 1,15
и k = 1 (рис. 4-2);
результирующее значение пазовых гармоник статора равно геометри-
ческой сумме В21 и BV2, Т- е. Bv — 0,215 Тл.
3. Амплитуда гармоник полей ротора:
от распределения обмотки ротора в соответствии с выражением (4-29)
Вцг = (3/ — 41) (1/0.92/)-1,5 (15,0/10,6) 0,76 = —0,129 Тл;
от зубчатости ротора согласно (4-32) Вг2 = 0,02-0,76 = 0,0152 Тл, где
£2 = 0,02 для kc2 = 1,02 и k = 1 (рис. 4-2);
результирующее значение пазовых гармоник ротора равно геометри-
ческой сумме Вцг и Вг2, т. е. Вц = 0,13 Тл.
4 Амплитуда удельной радиальной силы, приведенная к среднему ра-
диусу спинки статора, в соответствии с (4-37)
pILV = 40-0,215-0,13 (6,2/11,2) = 0,62 Н/см2.
5. Полное механическое сопротивление статора при значениях массы
щ=3,5-10-2 кг и податливости Х= [12-11,24/(2,4-1О’-2,23)] ((22 +1)/
/]22 (22—I)2]} = 11,8-10-^ см/Н
г = 3740-3,5-10~4 —[1/(3740-11,8-10~6)] = —0,95 Н-с/см.
6. Уровень вибрации
0,62 3740-0,46 „
ц = ----—— =0,46 см/с; Z, = 201g------------------- =95 дБ.
V— 3-10—2
2 °
Б. Вибрация, возбуждаемая высшими обмоточными гармониками:
v - — 87, р = — 85.
1. Частота возбуждающих сил для гармоник ротора с числом пар по-
люсов р = — 85, порядковое число q" = — 2. Следовательно, частота
f = 50 [ — 2 (44/3) (1 — 0,05)] = 1390 Гц; <о = 2л-1390 = 8730 с~Ч
2. Амплитуда гармоники обмотки статора
Bv = 0,0093 (17,5/10,6) 1,5-0,76 = 0,0175 Тл.
3. Амплитуда гармоники обмотки ротора
Вц = (3/85) (1/0,92)-1,5 (15/10.6)-0,76 = 0,062 Тл.
47
4. Амплитуда удельной радиальной силы
Pvu = 40-0,0175-0,062 (6,2/11,2) = 0,024 Н/см2.
5. Полное механическое сопротивление при г = — 2
гы = —0,95 Н-с/см.
6. Уровень вибрации
0,024 , о. . 8730-0,017
у = ----------- = 0,017 см/с; А = 20 1g - --------!--- = 74 дБ-
0.95-V2 3-10—а
Пример 2. Произведем расчет уровня магнитной вибрации асинхрон-
ного электродвигателя мощностью 500 кВт на напряжение 6000 В, частоту
50 Гц и число полюсов 2р = 4, в котором выбрано благоприятное соотноше-
ние чисел пазов статора и ротора.
Число пазов Zj = 60, Z2 = 50; ток /г = 57,5 A, Zo = 15,3 А, /2 =
= 51,5 А; угол фазового сдвига <рх = 27°, <рог = 90°; коэффициент Картера
АС1 = 1,45, kC2 = 1,1; индукция в воздушном зазоре Be = 0,8075 Тл; ко-
эффициент насыщения магнитной цепи kH — 1,28; номинальное скольжение
s= 0,012; сокращение шага обмотки статора Р = 11/15; обмоточный коэф-
фициент kwl = 0,873; средний радиус спинки статора Rc = 38,3 см, радиус
расточки статора Ri = 25,5 см; толщина спинки статора h = 8,5 см; актив-
ная длина статора lt = 34 см; масса статора, приведенная к 1 см2 средней
поверхности спинки статора, тс = 12-10-2 кг.
1. Число пар полюсов магнитных полей обмоток статора и ротора: v =
= (6/ + 1) р = + 2, — 10, + 14, — 22, + 26, — 34, + 38, — 46, + 50,
(— 58, + 62), . . . ; р = q"Z2 + р = + 2, — 48, + 52, — 98, + 102, . . .
2. Порядок колебаний г = v ± р (табл. 4-3).
Как видно из таблицы, пазовые гармоники не могут вызвать большие
вибрации, так как порядок колебаний, возбуждаемый ими, равен — 6, + 10.
Поэтому произведем расчет вибраций, возбуждаемых обмоточными гармо-
никами, с числом волн г = 2 и основным полем г = 4.
1. Частота возбуждающих сил:
для гармоник v = — 46 и р = — 48:
f = 50 [ — 1 (50/2) (1 — 0,012)] = 1230 Гц; со = 2л 1230 = 7720 с-1;
для основной волны v = 2; р = 2; г = 4;
/ = 2-50= 100 Гц; со = 2л-100 = 628 с-
2. Амплитуда магнитных полей:
Таблица 4-3
<Г 0 -> 1 +1 —2 +2 —3 +3 —4 +4 -5 +5
Q" \ V и \ +2 -10 +14 —22 +26 —34 +38 —46 +50 —58 +62
0 +2 (4)
—1 —48 НМ +2
+1 +52 +6 —2 —6 +10
—2 —98
+2 + 102
48
гармоник обмоток статора и ротора:
Bv= —0,0728 (57,5/15,3)-1,28-0,8075 = —0,284 Тл;
В^=(2/ — 48)(1/0,873) 1,28(57,5/15,3) 0,8075= —0,167 Тл;
основной волны Bj = 0,8075 Тл.
3. Амплитуда удельной радиальной силы:
для гармоник v — — 46 и jt - — 48 л
Pvy. = 40-0,284-0,167 (25,5/38,3) = 1,26 Н/см2;
для основной волны
Pi = 20-0.80752 (25,5/38,3) = 8,7 Н/см2.
4. Полное механическое сопротивление статора:
для колебаний при г = 2;
X = (12-38,3*)/(2,1 10’-8,5s) {(22 + 1)/[22 (22 — I)2]} =2,8-10-* см/Н;
zc = 7720-12-10—* —[1/(7720-2,8-10-*)] = 8,84 Н-с/см;
для колебаний при г = 4:
Х = (12-38,3*)/(2,1 • 1О’-8,53) ((42 + 1)/[42(42 — I)2]} = 0,95-10~6 см/Н;
zc = 628-12-10-* —[1/(628-0,95-10-®)]= —168 Н-с/см;
5. Уровень вибрации:
на частоте 1230 Гц:
у =-------------- = 10-1 см/с; L = 201g - 10-~1'7720 = 88 дБ,
д/2-8,84 310 2
на частоте 100 Гц:
у= ------------ = 0,036 см/с; L = 20 lg О28'0-^6. =57дб.
V2-168 3-10 2
4-7. ВЛИЯНИЕ РЕЖИМА РАБОТЫ
НА УРОВЕНЬ ГРОМКОСТИ МАГНИТНОГО ШУМА
На стадии проектирования часто возникает необходи-
мость в расчетной оценке уровней громкости магнитного шума при
работе машины как под нагрузкой, так и в режиме холостого хода.
Вызвано это тем, что в большинстве случаев существующая мето-
дика оценки виброакустических характеристик предусматривает
испытания машины только в режиме холостого хода. Испытание
машины под нагрузкой требует сочленения валов испытуемой ма-
шины с нагрузочным устройством, что связано с созданием специ-
ального виброакустического стенда, обеспечивающего полное от-
сутствие помех, вносимых нагрузочным устройством и элементами
сочленения.
Так как такие испытания не всегда желательны и возможны,
то произведем расчетную оценку снижения магнитной вибрации
при переходе от режима нагрузки к режиму холостого хода.
Расчет радиальных сил в режиме холостого хода может быть
произведен по формулам (4-35) и (4-37). Из них видно следующее:
1) основная волна магнитного поля при переходе от нагрузки
к режиму холостого хода практически не меняет свою величину;
49
имеющиеся случаи изменения уровня вибрации, возбуждаемой
основной волной, при обмотках с целым числом q, можно объяснить
плохим креплением пакета железа в корпусе;
2) высшие гармоники обмотки статора Bv и ротора Bt, меняют
свою величину пропорционально IiUor и ГДйг соответственно.
Поэтому уровень вибрации, возбуждаемой этими гармониками
поля, при переходе от нагрузки к режиму холостого хода должен
низиться на значение
AZ. = 201g = 20 ’б А”' <4'45)
(В-^Вц)0 /2
Гармоники зубцового порядка, как видно из формул, имеют
две составляющие. Одна из этих составляющих — обмоточная —
зависит от тока нагрузки, так же как и гармоники (п. 2); вторая
составляющая обусловлена зубчатостью и практически не меняет
своего значения от тока нагрузки.
При работе машины под нагрузкой обе составляющие имеют
различные фазы, поэтому складываются геометрически. В режиме
холостого хода обе составляющие имеют фазу тока холостого хода,
поэтому их результирующая равна алгебраической сумме.
Ниже на примере показано, как изменяется магнитная вибра-
ция при переходе от нагрузки к режиму холостого хода.
Пример 3. Определить вибрацию в режиме холостого хода электродви-
гателя мощностью 6 кВт на напряжение 220 В, с числом полюсов 2р = 6,
уровни вибрации которого при работе под нагрузкой рассчитаны в § 4-6.
1. Для пазовых гармоник:
статора
flVz0 = Bvz н (IJh) = 0,145 (10,6/17,5) = 0,088 Тл;
S2io = S2ih= 0,111 Тл;
Bv = Bzl0 + Bvz о = 0,111 + 0,088 = 0,199 Тл;
ротора
= Вцг н (/0//2) = 0,129 (10,6/15,0) = 0,091 Тл;
В?2| = Вг 2н ~ 0,0152 Тл;
Вц = Вц№ + Вг20 = 0,091 + 0,0152 = 0,1062 Тл;
снижение вибрации
AL = 20 1g
0,215
0,199
0,13
0,1062
= 3 дБ.
2. Для обмоточных гармоник по формуле (4-45) снижение вибрации
АВ = 20 1g -17,5'15 = 7,5 дБ.
10,62
4-8. ВЫБОР ЧИСЛА ПАЗОВ
КОРОТКОЗАМКНУТОГО РОТОРА
Благоприятное соотношение чисел пазов статора и ро-
тора оказывает решающее влияние на снижение магнитного шума
электродвигателя. Однако надо иметь в виду, что от выбора тех
50
или иных соотношений чисел пазов зависит не только малошум-
ность, но пусковые, двигательные и тормозные свойства асинхрон-
ных двигателей. Поэтому при выборе чисел пазов необходимо учесть
все указанные факторы.
Рассмотрим основные условия, которыми необходимо руководст-
воваться при выборе чисел пазов короткозамкнутого ротора, имея
в виду, что число пазов статора выбирается из условий применения
обмотки с наибольшим целым q.
1. Для уменьшения асинхронных моментов, вызванных зубцо-
выми гармониками проводимости воздушного зазора, гармониками
м. д. с. обмоток статора и ротора, добавочными потерями, а также
для улучшения условий работы рекомендуется:
при открытых пазах в статоре соблюдать отношение
0,8Zi<Z2< l,25Zi; (4-46)
при закрытых и полузакрытых пазах пределы (4-46) могут
быть несколько раздвинуты;
при тяжелых условиях пуска число пазов в роторе должно
быть меньше, чем в статоре, т. е.
Z2<Zr; (4-47)
при нормальных и облегченных условиях работы число пазов
в роторе в целях снижения шума должно быть больше, чем в ста-
торе, т. е.
Z2>ZX. (4-48)
2. Для того чтобы подавить или ослабить действие синхрон-
ных моментов, при выборе числа пазов короткозамкнутого ротора
необходимо руководствоваться табл. 4-4, где приведены пары выс-
ших гармонических, создающие синхронизирующий момент.
3. Соотношением чисел пазов статора и ротора определяется
число пар высших гармоник v и р, а тем самым порядковое число
силовых волн г. Самыми опасными являются числа г = 0, 1, 2,
3, 4. При этом г = 0 у большинства машин малой и средней мощ-
ности менее опасно, чем r= 1, 2, 3 (см. табл. 3-1). Для выбора
соотношения чисел пазов Zj и Z2 достаточно ограничиться рассмот-
рением первой пазовой гармоники статора и ротора, т. е. воспре-
пятствовать тому, чтобы первая пазовая гармоника статора дала
с первой пазовой гармоникой ротора силовую волну, имеющую
порядковое число г — 0, ± 1, ±2, ± 3, ± 4. Амплитуда коле-
баний при г = ± 5 и выше для машин малой и средней мощности
уже мала.
Так как число пар полюсов первой пазовой гармоники статора
v = ±Z1 + p, (4-49)
а число пар полюсов первой пазовой гармоники ротора
p = ±Za4-p, (4-50)
То создаваемые ими силовые волны имеют порядок
г— (± Z2 + р) ± (± Zj-j-p). (4-51)
51
Таблица 4-4
Zz Число пар полюсов высших гармонических, Вызывающих провал в кривой момента вращения
Р 2р 3Р Sp 6р 7Р 8Р 9р Юр //р 12р 13р
zf +Wp О о о О 0 0 о
zt + 9p © © © ©
zt + Bp О о о 0 0 О о
Z, + 7p 0 о
z,+6p © © © © ©
Z; + 5p 0 о
Zi + 4p о о 0 о О о о
Z,+3p © © © ©
Zt+2p 0 0 о о о о о
zf + p о о
Zi © © © ©
z,- p о о
z,-2p 0 о о о о о о
Zj-3p © © © ©
z,~4p о 0 0 о о о о
z,-5p 0 о
Zf-ep © © © © ©
Zf-7p 0 о
z,~8p о О о 0 0 о о
Zr9p © © ©
ZrlOp о о о О О 0 о
© - Пробили при неподвижном роторе;
О~ провалы в режиме двигателя;-
Q— провалы в тормозном режиме,
особо сильные провалы соответственно
' ’ при неподвижном роторе, режиме двига-
теля и тормозном режиме
Примечание. 1. Числа пазов ротора, при
которых возникают синхронные моменты при непод-
вижном роторе, соответствуют отсутствию скоса
пазов.
2. Провал моментов уменьшается по мере возра-
стания числа пар полюсов высших гармонических.
Учитывая требование по ограничению числа г, условие умень-
шения шума может быть записано в виде:
21—2а =/=
О, ± 1; +2; ±3; -+- 4;
2р, 2р тЬ 1; 2р +- 2; 2р ± 3; 2р -+- 4.
(4-52)
52
Чтобы избежать нулевых колебаний (г = 0)
( 0;
Zx—Z2=/=| (4-53)
Колебания с числом волн г = ± 1 не возникают при
21-^2=# { ±2р±1. (4-54)
Изгибные колебания с числом волн г = ± 1 не возникают при
[ ±2;
Zx—Za#={2p±2 (4-55)
Изгибные колебания с тремя волнами деформаций по окруж-
ности не возникают при
( ±3;
Zx-Z2^ (4-56)
I &р 3= о
И т. д.
Выполнение условий (4-54) и (4-56) равносильно исключению
нечетных чисел пазов ротора.
Приведенные соотношения являются достаточными для исклю-
чения того или иного вида колебаний. Однако при этом надо иметь
в виду, что для ограничения шума не существует универсального
правила выбора числа пазов, одинаково пригодных для машин
как малых, так и больших мощностей. Объясняется это тем, что
резонансные свойства пакетов железа различны у малых и боль-
ших машин.
Хорошим примером сказанного является опыт, проведенный
Иорданом [45]. Был сконструирован целый ряд четырехполюсных
асинхронных двигателей с пазами Zx = 36, Z2 = 30, с одинаковой
индукцией в зазоре В6 и одинаковой линейной токовой загрузкой
А на 5, 10, 15, 30, 100 и 200 кВт.
Выяснилось, что несмотря на совершенно одинаковые магнит-
ные силы электродвигатели на 5, 10, 100 и 200 кВт оказались ма-
лошумными, на 15 кВт — с повышенным шумом, на 30 кВт — осо-
бенно шумными.
На рис. 4-8 изображены зависимости основной частоты возбуж-
дающих магнитных сил и собственной частоты статорного кольца
для колебаний при г = 0, 2, 3, 4
53
деформация почти совершенно не влияет на шум машины мощностью
500 кВт. Деформация с числом волн г = 4 очень опасна для машины
мощностью более 1500 кВт, но совершенно не влияет на шум ма-
шин меньшей мощности.
Приведенный пример указывает на то. что правильный выбор
пазов не дает еще гарантии малошумной работы электродвигателя.
Окончательный ответ может быть получен только после тщатель-
ного виброакустического расчета, учитывающего вибрационные
свойства статора как колебательной системы. Поэтому при выборе
числа пазов ротора для бесшумной работы необходимо рассмат-
ривать отдельно машины малых, средних и больших мощностей.
Допустимое число силовых волн г должно быть тем больше,
чем крупнее машина.
4. Для машин больших мощностей, имеющих а параллельных
ветвей в обмотке статора, рекомендуется выполнять следующие
условия:
Zx—Z2=# I pio- ± P ± 11 — при нечетном a;
Zx—Z2 Ф12p/a ± p ± 11—при четном a. (4-57)
5. Для двухслойной обмотки с укороченным шагом, имеющей
две параллельные ветви {а = 2), необходимо, чтобы
Zi—Zj—Z2^=p±l- (4-58)
Ниже на примерах показано, как должен производиться выбор
чисел пазов ротора для малошумного электродвигателя.
Пример 4. Необходимо выбрать число пазов для ротора четырехполюс-
ного асинхронного электродвигателя, имеющего 36 пазов в статоре и диаметр
корпуса 300 мм, при нормальных условиях работы.
Решение. Учитывая условия (4-48), (4-54) и (4-56), ограничим ко-
личество пазов ротора числами 36, 38, 40, 42, 44, 46.
б. Чтобы первые пазовые гармоники не вызывали вибрации с числом
волн г, равным 0 и 2, следует из указанных чисел для г = 0 исключить 36,
40, для г = 2—38, 42.
в. Из оставшихся чисел 44 и 46 следует исключить число 44, так как
при нем возникает сильный провал момента в режиме двигателя (табл. 4-4).
Пример 5. Необходимо выбрать число пазов для ротора крупного высо-
ковольтного асинхронного электродвигателя с числом полюсов 2р = 4, имею-
щего 60 пазов в статоре и диаметр корпуса 1000 мм при тяжелых условиях
пуска.
Решение. Учитывая условия (4-47), (4-54) и (4-56), рассматриваем
числа 48, 50, 52, 54, 56, 58, 60.
б. Чтобы первые пазовые гармоники не вызывали вибрации с числом г,
равным 0, 2 и 4, следует из указанных чисел для г = 0 исключить 56, 60;
для г — 2—54, 58, а для г = 4—52, 56, 60.
в. Из оставшихся чисел 48 и 50 следует исключить число 48 из-за про-
вала момента при пуске (табл. 4-4).
Провалом момента для числа пазов 50 от гармонических с числом
волн 5р пренебрегаем.
Пример 6. Необходимо выбрать число пазов для ротора двухскорост-
ного электродвигателя с числом полюсов 2р = 8 и 2р = 12, имеющего 72
паза в статоре и диаметр корпуса 800 мм при нормальных условиях работы.
Решение, а. Учитывая условия (4-48), (4-54) и (4-56), рассматри-
ваем четные числа пазов от 72 до 90.
б. Чтобы первые пазовые гармоники не вызывали вибрации с числом
волн г, равным 0,2 и 4, следует из оставшихся чисел для г = 0 при числе
54
полюсов 2р = 8 исключить 72, 80; при 2р = 12—72, 84; для г = 2 при числе
полюсов 2р — 8 исключить 74, 82, 78; при 2р = 12—74, 86, 82; для г = 4
при числе полюсов 2р = 8 исключить 76, 84; при 2р “ 12—76, 88, 80.
Остается одно число 90, которое неприемлемо из-за провала момента
при 2р = 12 при пуске. Таким образом, ни одно число не удовлетворяет
вышеприведенным условиям.
В связи с этим включаем в рассмотрение еще одно число — 92. Указан-
ное число пазов полностью удовлетворяет условиям малошумности, а воз-
никающий незначительный провал момента от гармонических с числом по-
люсов 5р в тормозном режиме (табл. 4-4) вполне приемлем.
Пример 7. Необходимо выбрать число пазов для ротора крупного асинх-
ронного электродвигателя с числом полюсов 2р = 30, имеющего 189 пазов
в статоре и диаметр корпуса 2500 мм при тяжелых условиях пуска.
Решеви е. а. Учитывая условия (4-47), (4-54) и (4-56), рассматриваем
четные числа пазов от 144 до 180.
б. Чтобы число силовых волн г было наибольшим, из указанных чисел
выбираем число 162 (г = 18).
в. При числах пазов Zt = 180 в Z2 = 162 синхронные моменты не воз-
никают.
4-9. ВЛИЯНИЕ СКОСА ПАЗОВ НА ВИБРАЦИЮ И ШУМ
Взаимодействие полей высших гармоник статора и ро-
тора при скосе пазов приводит к появлению нового вида колебаний
(рис. 4-9).
Как показывают многочисленные опыты и расчеты, вибрация,
возбуждаемая первой пазовой гармоникой, при скосе пазов
на пазовое деление значительно ниже, чем при прямых пазах. Это
особенно откосится к двигателям, в которых соотношение чисел
Z± и Z2 является неблагоприятным.
Магнитное поле в зазоре при прямых пазах в статоре и скошен-
ных пазах в роторе можно представить в следующем виде:
гармоники поля статора
bv = Bv cos (vf)——<pv<), (4-59)
т. e. без изменения по Зависимости (4-23);
гармоники поля ротора <
Ь.,= В,, cos
[и —Ts '
(4-60)
В отличие от уравнения (4-28) в уравнении (4-60) учитывается
дополнительный фазовый сдивг \^yszllt, вызываемый скосом пазов.
В уравнении (4-60) ys = 2bJDv — центральный угол скоса
пазов; bs — дуга скоса пазов ротора; £)р — диаметр ротора; lt —
длина пакета ротора.
Обе эти волны полей по урав-
нениям (4-59) и (4-60) создают ра-
диальные силовые волны
рг — Pr cos (гО-— о/—<рл—p.ysz!lt),
(4-61)
Рис. 4-9. Форма колебаний статора при
скосе пазов
55
где
Рг = 40В^-, (4-62)
r=p±v; (Or = ± <01! «Pr = «Pw±4W-
При изучении влияния скоса пазов на уровень вибрации ста-
тора можно наглядно представить знакопеременную радиальную
Рис. 4-10. Пространственное распределение сил при отсутствии и наличии
скоса пазов
JXTs=ftt;
с = 1,0
силу, приложенную к каждой элементарной площадке, в виде
вращающегося вектора (рис. 4-10), проекция которого на радиус
дает значение возбуждающей силы во времени.
При нескошенных пазах элементарные площадки, взятые вдоль
образующей расточки статора, будут возбуждаться магнитными
силами, имеющими одинаковые значение и фазу (рис. 4-10, а).
56
Суммарная сила, действующая на полоску шириной 1 см, будет
равна алгебраической сумме всех элементарных сил.
Полный цикл изменения этой силы произойдет за время, в те-
чение которого ротор повернется на одно деление, равное длине
волны р. или v, в зависимости от того, где осуществлен скос — в ро-
торе или в статоре.
/"При наличии скоса пазов фаза векторов сил будет изменяться
[линейно от одного края статора к другому. Если — центральный
угол скоса пазов на длине статора, то силы на противоположных
концах статора будут сдвинуты по фазе на pys, а фаза сил на ка-
кой-нибудь произвольной полоске, расположенной на расстоянии z
от середины статора, равна [iysz/lt.
На рис. 4-10, б—г показано пространственное распределение
сил при скосе паза на 0,25, 0,5 и 1 длины волны ротора р. Конец
векторов сил описывает цилиндрическую спираль, которая пово-
рачивается на 90, 180 и 360° вдоль длины статора. Результирующая
сила всех векторов элементарных сил, совмещенных в одной пло-
скости, равна геометрической сумме сил.
Как видно из рис. 4-10, по мере увеличения скоса модуль ре-
зультирующего вектора уменьшается и становится равным нулю
при pys = 2л.
При дальнейшем увеличении скоса паза происходит очередной
цикл нарастания и спадания радиальных сил, которые становятся
равными нулю при pys = 4л и т. д.
Колебания статора (рис. 4-9) происходят относительно линии
х—х, перпендикулярной оси машины.
Учитывая неравномерное распределение радиальных сил вдоль
длины машины, при расчете деформаций изгиба пакета активной
стали статора пользуются только средним значением удельного
усилия, т. е.
+lt12
Рп=-^~ f Prdz = Pr sin(^/2). cos (гй-—со/—фД (4-63)
k -lt!2 pys/2
где выражение
sin (hYs/2)
. HTs/2
(4-64)
— k
-- «8Д
является обмоточным коэффициентом скоса для р-й гармоники ро-
тора.
/Таким образом, радиальные силы, воздействующие на статор
при скосе пазов, должны уменьшиться пропорционально коэффи-
циенту скоса.
х^-'Для определения скручивающего момента необходимо проин-
тегрировать моменты элементарных сил pr dz по всей длине пакета:
+г,/2
mT = f przdz.
-ttl2
(4-65)
57
(4-66)
Амплитуда скручивающего момента
м =р cos(HTs/2)-fesp
T 2 |iys/2
(4-67)
На рис. 4-11 приведена зависимость ksll и qSfl от pys/2.
Все приведенные рассуждения справедливы также и при рас-
чете вибрации при скосе пазов статора с той только разницей, что
в выражении коэффициентов kSil и q^ индекс р следует заменить
индексом V.
Влияние скоса пазов статора или ротора на уровень вибрации
можно рассчитать по уравнению равновесия моментов, приложен-
ных к элементу массы сердечника статора, представленного
на рис. 4-12 в виде кольца прямоугольного сечения с 'размерами
спинки статора. Влияние массы пазов и обмотки статора можно
учитывать посредством увеличения массы спинки.
Дифференциальное уравнение движения элемента массы имеет
следующий вид:
Нс Н
(4-68)
Здесь дифференцирование <р — по времени, <р” — по пространст-
венной координате; Jp = т (/? -ф /г2)/12 — полярный момент инер-
ции элемента массы ста-
тора; 7ж=/г///12 — момент
инерции поперечного сече-
ния статора относительно
оси х—х; Jx — r\lths —
-7.
Рис. 4-12. Силы, приложенные
к элементу сердечника стато-
ра при скосе пазов
58
момент инерции поперечного сечения статора при кручении, где
t] (по Сен-Венану) выбирается из значений:
1,/h . . 1 1,5 2 3 4 6 8 10 оо
ц . 0,14 0 196 0,229 0,263 0,281 0,299 0,307 0,313 0,333
Модуль сдвига G — 0,8-10’ Н/см2 (для стали).
В уравнении (4-68) крутящий момент Мх, создаваемый радиаль-
ными силами, уравновешивается моментом сил инерции JpRc<p и мо-
ментами, обусловленными силами упругости при кручении——
7?с
« Е->х
и изгибе ------- я>.
Rc
Из решения однородного дифференциального уравнения может
быть получена частота собственных крутильных колебаний статора
(для г = 0, 2, 3, 4 . . .)
<4-Ю)
где податливость статора при кручении
Akc=^/(EA4-GJ/). (4-70)
Расчет при г = 1 не представляет интереса и поэтому не рас-
сматривается.
Из решения дифференциального уравнения (4-68) для ампли-
туды угловой скорости колебаний получим
Ф = Mxl[<aJp— 1/(со1кг)] = A4.c/zKp, (4-71)
где 2кР — механическое сопротивление статора при кручении.
Учитывая, что акустическая мощность пропорциональна квад-
рату скорости колебаний, действующая радиальная амплитуда
скорости колебаний
/ +J/2
УКР=А \ (гф)2&=ф—(4-72)
V 1‘ ~‘‘IZ 2Л/з
или
f А *7 ОХ
£/«₽ =--—--------------(4-73)
2 <3 [wZp — 1 /(<Лкр)]
Результирующая амплитуда вибрации с учетом изгибных и кру-
тильных колебаний
где вибрация изгиба
V- 2 . "2
4/и4-г/Кр,
с учетом скоса пазов
У
и ат — 1 /(оАи)
(4-74)
(4-75)
59
Приведенная выше физическая картина возникновения вибра-
ции при скошенных пазах и расчетные формулы применимы также
при расчетах магнитного шума синхронных машин и машин по-
стоянного тока.
Пример 8. Рассчитать уровень магнитной вибрации, возбуждаемой гар-
мониками (v = + 39, р. = — 41, <о = 3740 с-?, г = 2), при скосе пазов
в роторе на одно пазовое деление для электродвигателя 6 кВт (§ 4-6).
1. Моменты инерции:
2 9.203
Л = ---- = 1,46- 10s см4; Jx = 0,31 -2,28-20 = 66 см4;
12
Jp = 70-10~2-(202 + 2,г2)/! 2 = 23,6 кг-см2.
2. Податливость статора при кручении в соответствии с формулой (4-70)
Хкр= 11,22/(2,1 • 107-1,46-10» Ч- 0,8-107-66-22) = 3,85-10-» см/Н.
3. Полное механическое сопротивление статора при кручении
zKp = 3740-23,6-10—а—1/(3740-3,85-10—») = —69500 Н-с/см.
4. Коэффициенты (рис. 4-9)
ksp = 0,2; qsll = - 0,4 (-ф- = л) -
5. Крутящий момент
/Ит= — 0,4-0,62-202/2 = —50 Н-см.
6. Вибрация согласно выражениям (4-73) и (4-75):
от радиальных сил
у„ = °.’2'9.'62 = 0,092 см/с;
0,95-д/2
от крутящих моментов
г/кр = -50'20----- =0,41-10-2 см/с;
2д/з - 69500
результирующая вибрация от радиальных сил и крутящих моментов
Ур = ^!(9,2-10-2)2 4- (0,41 • Ю-2)2 = 9,2-10~2 см/с;
, 3740-9,2-10—2 с, _
Д = 20 1g-------------- = 81 дБ,
3-10—2
следовательно, снижение магнитной вибрации на частоте w = 3740 с~1
вследствие применения скоса пазов АД = 95—81 = 14 дБ.
4-10. ВЛИЯНИЕ ЭКСЦЕНТРИСИТЕТА ВОЗДУШНОГО ЗАЗОРА
НА МАГНИТНЫЙ ШУМ
У некоторых машин переменного тока иногда наблю-
даются повышенные уровни шума на отдельных составляющих
спектра из-за эксцентрического положения ротора в расточке ста-
тора (неподвижный эксцентриситет) либо эксцентрического распо-
ложения пакета ротора относительно оси вала (вращающийся экс-
центриситет).
60
Неподвижный эксцентриситет, как
правило, возникает в результате неточ-
ной сборки машины, вращающийся эксцен-
трисистет—в результате плохой проточки
полностью собранного пакета ротора на
валу.
Величину воздушного зазора при на-
личии эксцентриситета (рис. 4-13) как
неподвижного, так и вращающегося, можно
выразить равенством
6 = 60—6Е cos (О' — ©8/), (4-76)
где б0 — равномерный воздушный зазор;
6е — эксцентриситет; О — угловая координата; соЕ — угловая
скорость.
Угловая скорость о>8 равна нулю при неподвижном эксцентри-
ситете и равна угловой скорости ротора при вращающемся эксцен-
триситете:
йЕ = (©1/р)(1— s).
(4-77)
Магнитная проводимость зазора при эксцентриситете
% (#, Л = —!— _----------!---------, (4-78)
6 (&, 0 1 — е' cos (& — <ае0
где относительный эксцентриситет
а' = 6Е/ (6о&с) = e./ka. (4-79)
Разлагая множитель в уравнении (4-78) в ряд Фурье и ограни-
чившись в этом разложении только первым членом, получим для
проводимости
% (^’ ° = iphy11+<5/ cos
(4-80)
Самая сильная гармоника поля может быть получена при ум-
ножении м. д. с. (4-4) на проводимость (4-80):
bl = Bl-^-COS[(p± I)® — (<Щ ± ®е) (4-81)
аналогично для высших гармонических
bv = Bv -|- cos [(v ± 1) О'—(wj ± (о6)Л; (4-82)
Ьц=Вц~|-СО8[(р,± l)^—(®i± ®Ц)П.
Как видно из уравнений (4-81) и (4-82), при наличии эксцен-
триситета, кроме магнитных полей, имеющих место при нормаль-
ном исполнении машины, возникают дополнительные магнитные
поля с числами пар полюсов
Р± 1; v ± 1; р ± 1; (4-83)
61
угловыми скоростями
®i ± <оЕ; ®i ± <оц (4-84)
и амплитудами, пропорциональными половине относительного экс-
центриситета е'. Надо иметь в виду, что магнитные поля порядка
г — р ±1, вызываемые основной волной м. д. с., могут демпфиро-
ваться обмоткой статора при наличии в ней параллельных ветвей
и короткозамкнутым ротором. Поскольку демпферное действие
обмоток и их влияние на вибрацию слабо изучены, то в практике
расчетов принято определять усилия, действующие при эксцентри-
ситете, без их учета. При таком допущении амплитуды результи-
рующих полей равны:
5p±1=v-Bb (4-85)
(4-86)
Su±.= -f-Bn- (4-87)
Низкочастотные радиальные силы первого порядка могут воз-
никнуть при взаимодействии полей с числом пар полюсов р ± 1
с основным полем р:
г=р±1— р=±1; (4-88)
угловая скорость этих сил
в/ = ± (0е— (1Ц = ± (Dg,
т. е. равна угловой скорости ротора при вращающемся эксцентри-
ситете и нулю — при неподвижном.
Амплитуда радиальных сил первого порядка
Р! = 20В?е'. (4-89)
Особенно эти силы проявляются в крупных четырехполюсных
асинхронных двигателях.
Амплитуды высокочастотных сил 1-го порядка
p;v = 40BvBu+1; (4-90)
Pvu — 40Вц+1Вц (4-91)
при
= 1 ± v = r± 1 (4-92)
И угловой скорости ©' = С0г ± ®е-
Как видно, высокочастотные силы 1-го порядка при г ±1 воз-
никают при эксцентриситете у тех машин, у которых при его от-
сутствии имеют место силы нулевого (г — 0) и 2-го (г = 2) поряд-
ков. Поэтому средством подавления высокочастотного шума, соз-
62
б)
Рис. 4-14. К расчету вибрации при вращающемся эксцентриситете
даваемого эксцентриситетом, является устранение при проектиро-
вании машины колебаний нулевого и 2-го порядков.
Полная односторонняя радиальная сила (в ньютонах), дейст-
вующая на ротор и статор при г — ± 1,
(4-93)
На рис. 4-14, а показана схема приложения сил Рг при вра-
щающемся эксцентриситете для амортизированного электродвига-
теля, а на рис. 4-14, бив эквивалентная механическая система
и ее электрический аналог. Расчетные схемы построены в предпо-
ложении, что центры тяжести статора и ротора и центр приложе-
ния сил Рг лежат на одной оси.
Вибрация на корпусе электродвигателя по эквивалентной элек-
трической схеме может быть определена из решения следующей
системы уравнений:
У1='Уг+Уг, у^т—Уг—^— =Рг,
<олв
у^т +у3а>М—у3 —— = 0.
(1)Ла
Откуда
Уз= Ру/ Г( 1 + —- )zp-coml, (4-94)
1Д т / J
где М, т — массы статора и ротора; Хв. Л.а — податливости вала
при изгибе и амортизаторов на сжатие; zp = com — 1/(соХ,в) — пол-
ное сопротивление ротора.
Пример 9. Произведем расчет вертикальной магнитной вибрации частоты
вращения для электродвигателя мощностью 500 кВт с числом полюсов 2р =4
из примера § 4-6 при наличии вращающегося эксцентриситета значением
е=0,1.
Исходные данные: со8 = 156 с-1; т = 1000 кг, М = 1600 кг; Кв =
= 1,1-10—8 см/Н, Ха = 3,2-10-в См/Н.
1. Возбуждающая сила в соответствии с формулой (4-93)
Р1 = 20л-51-34-0,782-0,1 =6600 Н-.
63
Рис. 4-15. Электромагнитные силы при враща-
ющемся эксцентриситете
2. Вертикальная вибрация статора соглас-
но выражению (4-94)
Уз = 6600 X
X ГГ1 + -----------!---------\—4300)—
L\ 1000 156s-10-3,2-10-0 )
q1
— 156-10 | =0,9 см/с;
гр=156-10------------------ —4300 Н-с/см;
156-1,1-Ю-о
. ... 156-0,9 _
L = 20 1е------ =73 дБ.
3-10—3
Следует иметь в виду, что кроме радиальных сил (4-90), (4-91)
в случае вращающегося эксцентриситета при работе машины под
нагрузкой возникают тангенциальные силы (рис. 4-15) [12].
Здесь составляющая результирующей силы, действующей на
единицу длины машины по оси х, проходящей через центр тяжести
ротора,
2л 2Л
рх = f prR cos (МО— f pxR sin (МФ; (4-95)
о о
по оси у
py= f prR sin Ф^Ф + f pxR cos ФйФ. (4-96)
о о
Если результирующая сила создается v-й гармоникой статора
и р-й гармоникой ротора, то согласно выражению (4-95) для со-
ставляющей силы по оси х при R = 1 будет справедливо выражение
2л 2л
рх =----f ^(Ф, ()В„(Ф, t) cosФс1Ф— f Вг,(Ф, /)Л„(Ф, /)8шФб/Ф.
Цо о о
(4-97)
Если в формулу (4-97) подставить выражения для соответст-
вующих гармоник
bv (Ф, t) = Bv cos (v© — сог/—<Pi);
Ьц (&. О = 5Ц cos (р-Ф— —(рц); (4-98)
М*- Лц8ш(|гФ—<0ц/~фц),
то составляющие результирующей силы будут:
R Г Z R 2Я
cosK>-W-q>i)X
2 (\ Ро /о
64
2л
XCosKn+l)'»—со^—cpjdfi’+f—cos(v&—(ovi — epi) x
\ |4i / о
X cos )(p — 1) & — (o^i—фр] (/О]; (4-99)
pu= ---COS(V& — ovi— фх)Х
2 (\ Po /0
X sin[(p+ !)&—6),,/—фр]йй —f-—+ ^nY( cos (v&—(ovi—фх) X
X P-0 / 0
Xsin[(p—!)&—®ui—фр]^}. (4-100)
Интегралы в выражениях (4-99) и (4-100) имеют значения, от-
личные от нуля, только при v = р ±1, т. е. при г — 1. Следова-
тельно, составляющие тангенциальных сил по осям х и у равны:
рх = ± Ар) cos [(®v— ®р) i—Фр]; (4-101)
2 \ go 7
py= T^sin[((0v-(0p)i-^p]. (4-101а)
2 \ Ро 7
Таким образом возникает односторонняя результирующая сила,
воздействующая на статор и ротор, которая вращается с угловой
СКОРОСТЬЮ (0v —(Ор.
Радиальные силы с числом волн г = 1, рассчитанные по форму-
лам (4-101) и (4-101 а), усиливаются тангенциальными силами,
если порядок гармоники статора меньше, чем порядок гармоники
ротора (v = р,—1). В противном случае (v = р + 1) тангенциаль-
ные силы будут уменьшать амплитуду радиальных сил.
Надо иметь в виду, что в двухполюсном трехфазном асинхрон-
ном двигателе могут возникнуть силы, частота колебаний которых
равна двойной частоте скольжения. Причиной возникновения та-
ких сил является униполярный магнитный поток, замыкающийся
через вал, подшипники, подшипниковые щиты, корпус и пакеты
электротехнической стали статора и ротора. Ранее*предполагалось,
что униполярный магнитный поток ослабляется реакцией вихре-
вых токов в массивных частях, однако, как выяснилось, при ча-
стоте скольжения влияние вихревых токов незначительно.
Униполярная индукция в этом случае
Ьу== Вг cos (®х—(o8)i= Вх cossohi, (4-102)
а знакопеременная радиальная сила, воздействующая на статор,
вызовет вибрацию с частотой 2 s(ov В выражении (4-102) — от-
носительный эксцентриситет для униполярного потока.
Для ослабления униполярного потока, замыкающегося через
вал, необходимо один из элементов магнитной цепи, по которому
замыкается этот поток, выполнить из немагнитного материала (на-
пример, вал или подшипниковые щиты машины).
3 Заказ Ks 2109
65
В практике наблюдались случаи, когда амплитуда вибрации
частотой 2s® х нарастала по мере нагрева машины. Основной при-
чиной такого явления, по всей видимости, является тепловой про-
гиб вала, вызванный несимметрией нагрева ротора.
4-11. НАСЫЩЕНИЕ СТАЛИ
Повышенная магнитная вибрация может быть вызвана
неравномерностью насыщения зубцовой зоны основным полем и по-
перечными потоками пазового рассеяния, которые замыкаются
вдоль зубцов, расположенных на границе фаз. Полный учет насы-
щения зубцовой зоны и его влияние на вибрацию чрезвычайно
сложны.
Если принять во внимание только основное поле, то насыщение
основную волну в воздушном' зазоре делает более плоской (рис. 4-16).
Уплощение поля эквивалентно введению фиктивной магнитной
проводимости с 2р периодами, распределенными по окружности
расточки статора и вращающимися с угловой скоростью основного
поля.
Уравнение для первой пространственной гармоники этой про-
водимости можно представить в следующем виде:
XH = AIIcos2(p6’—®xi—(for)- (4-103)
Умножая выражение (4-103) на значение м. д. с., получим урав-
нение дополнительных магнитных полей, вызываемых насыщением
стали. Числа пар полюсов этих полей
р=Р2р; v=F2p; р Т 2р, (4-104)
а их угловые скорости.
o)1=F2(o1; (Оц + 20)!. (4-105)
Как видно, низкочастотное поле насыщения с числом пар по-
люсов р и угловой скоростью со, находится в противофазе с основ-
ной волной, что вызывает увеличение намагничивающего тока.
Поле с числом пар полюсов Зр и угловой скоростью 3&4 является
3-й гармоникой насыщения:
b„ = B„ cos 3 (р&—(Oji—<ро,)-
(4-106)
Остальные поля являются полями высших гармоник насыще-
ния.
Указанные магнитные поля насыщения при взаимодействии
с обычными гармониками магнитного поля приводят к появлению
радиальных сил с числами волн
Рис. 4-16. Влияние насыщения стали на
магнитное поле в воздушном зазоре
r„ = r^2p (4-107)
и угловыми скоростями
<0н = ®гТ2<01- (4-108)
4-12. ВЛИЯНИЕ НЕРАВНОМЕРНОСТИ
РАСПРЕДЕЛЕНИЯ ТОКОВ В ОБМОТКЕ
С НЕСКОЛЬКИМИ ПАРАЛЛЕЛЬНЫМИ ВЕТВЯМИ
Наличие параллельных ветвей в обмотке статора может
вызвать неравномерное распределение токов в отдельных ветвях,
а следовательно, и появление некоторых высших гармоник м. д. с.
Вызвано это тем, что отдельные параллельные ветви могут иметь
различные сопротивления и находиться в различных магнитных
условиях.
Такого рода асимметрия может возникнуть только в крупных
низковольтных асинхронных электродвигателях, в которых об-
мотка выполняется с параллельными ветвями.
Рассмотрим петлевую обмотку с двумя параллельными ветвями
и диаметральным шагом. Эту обмотку можно расположить двумя
способами:
а) каждой ветви соответствует р одноименных полюсов (поло-
вина цепи машины изображена рис. 4-17, а);
б) каждой ветви соответствуют все полюсы разноименной по-
лярности (рис. 4-17, б).
При 2р>2 в первом случае при несимметрии возникает гармо-
ника м. д. с. порядка v = 1. Эта гармоника вместе с основной гар-
моникой создает радиальные силы с числом пар полюсов
р' = р±1. (4-109)
Это особенно опасно при использовании четырехполюсных об-
моток с а = 2, ибо при асимметрии может возникнуть двухполюс-
ное магнитное притяжение. <
Наиболее подходящей является волновая или петлевая обмотка,
соединенная так, как показано на рис. 4-17, б.
Рассмотрим двухслойную обмотку с числом параллельных вет-
вей а>2, когда атях — 2р, либо а — т, где т — число, кратное р.
Рис. 4-17. Соединения параллельных ветвей обмотки статора: а — каждой
ветви соответствуют два одноименных полюса; б — каждой ветви соответст-
вуют два разноименных полюса
67
Рис. 4-18. Распределение м. д. с.
при несимметрии параллельных вет-
вей
Рис. 4-19. Влияние несимметрии па-
раллельных ветвей на шум при двух-
слойной обмотке с укороченным
шагом
2. При а = 2р на каждую параллельную ветвь приходится
один полюс.
Самая большая несимметрии наступит тогда, когда ток в одной
ветви будет отличаться на А/ от тока I в остальных ветвях. При
этом м. д. с. будет содержать все четные и нечетные гармоники, на-
чиная от основной: v = 1 (рис. 4-18).
2. При а = р целесообразно включение последовательно двух
полюсов одинаковой полярности. При несимметрии одной ветви
машины с числом пар полюсов р>2 такое соединение обмоток
можно привести к четырехполюсной машине, м. д. с. которой со-
держат добавочные гармоники порядка v = 2 k, где k = 1, 2, 3, . . .
3. При а = т при симметричном расположении всех ветвей
и отклонений по току одной ветви на значение А/ относительно
остальных возникает добавочная м. д. с. порядка
V— —— k,
а
где а — любое целое нечетное число.
При этом наиболее ярко выраженными будут гармоники по-
рядка p/а (при k = 1). Эти гармоники наводят в роторе токи, зуб-
цовые гармоники м. д. с. которого имеют порядок
р = Z2 ± (р/а). (4-1Ю)
При интерференции этих гармоник с зубцовыми гармониками
м. д. с. статора порядка v = Zr ± р может возникнуть вибрация
порядка
Л±Р—Zi±pla = r (4-110а)
или
± р—Z2 ± 2р/а = г.
Самыми опасными являются односторонние силы (г — 1). Поэ-
тому при выборе числа пазов рекомендуется удовлетворять усло-
виям (5-47).
68
Предыдущие рассуждения справедливы для обмотки с диамет-
ральным шагом. Для обмоток с укороченным шагом при несиммет-
рии параллельных ветвей могут возникнуть другие гармоники.
В двухслойных обмотках укорочение шага ведет к смещению
нижних слоев обмотки относительно верхних. Слой обмотки каж-
дой фазы на каждом полюсном делении имеет ширину т/3. Если
у обмотки с двумя параллельными ветвями по одной ветви прохо-
дит ток I 4* АД а по другой ветви I — М, то уравнительные токи,
проходя по ветвям, вызывают дополнительные составляющие в
кривой линейной нагрузки. Результирующая линейная нагрузка
представлена на рис. 4-19, а и б. Слой этих добавочных токов имеет
ширину
s = t(1-₽). (4-111)
Следовательно, добавочные токи при диаметральном шаге р = 1
исчезают. Соответствующее этому случаю распределение м. д. с.
показано на рис. 4-19, в. Основные гармоники этого распределения
м. д. с. имеют 2р пар полюсов и вызывают в воздушном зазоре маг-
нитное поле такого же порядка. Если это поле действует на ротор
с Z2 стержнями, то появляются роторные зубцовые гармоники
м. д. с. порядка Z2 ± 2р. При интерференции этих гармоник с зуб-
цовыми гармониками м. д. с. статора порядка ZT ± р возникнут
возбуждающие силы
r = (Z1±p)-(Z2±2p). (4-112)
Самыми опасными будут односторонние силы при г = 1, поэтому
при конструировании таких машин выбор числа пазов рекомен-
дуется делать согласно условию (4-58).
4-13. ВЛИЯНИЕ НЕСИНУСОИДАЛЬНОСТИ
НАПРЯЖЕНИЯ И ТОКА ПИТАНИЯ НА МАГНИТНЫЕ ВИБРАЦИИ
Выполненный анализ пространственцо-временных гар-
моник магнитного поля в воздушном зазоре асинхронного электро-
двигателя при его питании несинусоидальным напряжением от ти-
ристорного преобразователя частоты показал, что даже незначи-
тельные искажения кривой питающего напряжения и тока яв-
ляются источником возникновения значительной вибрации. Осо-
бенно сильное возрастание вибрации наблюдается в асинхронных
электродвигателях, питаемых от тиристорных преобразователей,
в которых не предусмотрены специальные схемные решения для
сглаживания кривой питающего тока. Частотный спектр вибрации
в этих случаях становится особенно насыщенным не только в об-
ласти высоких, но и низких частот.
Рассмотрим вибрации электродвигателя при его питании пе-
риодическим несинусоидальным током
i (О — X h cos (kat—<рА). (4-113)
69
При этом возникнет множество пространственно-временных
гармоник поля и тока, наиболее сильными из которых являются
длинные волны линейной токовой нагрузки вида
а($, t)= £/1J5.cos(p$—kat—<p1S) (4-114)
k
и волны индукции вида
t)= S Be*cos(pf>—koi—<p0*), (4-115)
k
где Л1K — амплитуда линейной плотности fe-й гармоники тока ста-
тора; В6К — амплитуда индукции fe-й гармоники результирующего
поля в воздушном зазоре (fe>0 — для волн прямого вращения,
/г<0 — для волн обратного вращения).
Наиболее сильные вибрации возникнут в результате взаимо-
действия первой и высших гармоник поля и тока:
радиальная вибрация будет возбуждаться силой
Pr = b6b6k/p0 = (Vpo) B6cos (p$—at—q01)B6k cos (pft—kat—<poft);
(4-116)
тангенциальная —- силой
Pr = alkb6 4- ax&efe = A lk cos (p&—kart—<p1S) B6 cos (p-ft—at—<p01) 4-
4~24xcos(pft — at—фх) B6kcos(p&—kart—фоА). (4-117)
Выражения (4-116) и (4-117) могут быть представлены в следую-
щем виде:
Рг = [В6ВСА/(2р0)] (cos [(со/ (1 — fe)—(ф0 ft—ф01)] +
+ cos [2pft—at (1 4- fe) — (ф014- ф0 ft)]; (4-118)
Рт = ИиВб/2) {cos [<о/ (1—k)—(фи—фи)] +
4- cos [2рФ—at (1 4- k)—(фох 4- фi*)]} + (Л iBcfe/2) X
X {cos [<о/ (1—ty 4-(<Pi—Фо*)] 4-cos [2pft— at (1 4-Ф—(фх4-фо*)]}-
(4-119)
Из полученных выражений видно, что радиальные силы воз-
буждают колебания с частотами аг = ®(1 4- k) и пространствен-
ным порядком г = 0 и г = 2р, а тангенциальные силы возбуждают
крутильные колебания г = 0, со, = со(1—k) и колебания с про-
странственным порядком г = 2р и частотой со, = со(1 4- k).
Выражение (4-119) для тангенциальных сил можно упростить,
если принять во внимание, что изгибные колебания статора при
г = 2р значительно меньше изгибных колебаний с таким же чис-
лом волн, возбуждаемых радиальными силами.
Объединив два гармонических процесса, происходящих с оди-
наковой частотой, получим
Pt = Pxm sin [со/ (1—й)4-0], (4-120)
где Рхт и 6 — амплитуда и фаза тангенциальных сил.
70
Амплитуды радиальных и тангенциальных сил равны
Ргт = [В2в/(2но)] (/о (4-121)
Ptm = (ABe/2)(/lft/71)y, (4-122)
где Z01, Iok, Ilt I lk — первая и k-я гармоника намагничивающего
тока и тока статора.
Тангенциальные силы создают крутильный момент
MKP = nR2ltA1B6(IlkII1)y. (4-123)
Для асинхронных электродвигателей общепромышленного при-
менения коэффициент у колеблется в пределах 1—1,5.
4-14. ВЛИЯНИЕ НЕСИММЕТРИИ ТОКОВ
В ФАЗАХ ОБМОТКИ СТАТОРА
НА МАГНИТНЫЕ ВИБРАЦИИ
Несимметричный режим нагрузки асинхронного двига-
теля обусловлен как несимметрией токов питающей сети, так и раз-
личием сопротивлений отдельных фаз обмотки статора. Как пока-
зывает опыт, даже незначительная несимметрия фазных токов
(в пределах 2—3 %) приводит к значительному возрастанию танген-
циальной вибрации на частоте 2m х под воздействием пульсирую-
щего крутильного момента.
Рассмотрим механизм возникновения таких моментов и вычис-
лим их значение. Ток линейной нагрузки статора и индукция ре-
зультирующего магнитного поля в воздушном зазоре могут быть
представлены в следующем виде:
а (&, /) = A j cos (р$—<£>!<—фА х) + А 2 cos (р<) + <о# — срА 2);
(4-124)
6 (&, f) = Br cos —а-ft—<pB1) B2 cos (p/l-J- <01/—<pB2),
(4-125)
где Alt A 2, Bx, B2 — линейные токовые нагрузки статора и индук-
ции результирующего магнитного поля в воздушном зазоре пря-
мого и обратного следования фаз.
Крутильные колебания статора (г = 0) возникают под воздейст-
вием тангенциальных сил
рх = 0,5 A iB2 cos (2<ох/—<рл14- <рВ2) + 0,5А 2Br cos (2(ох/ + фвх—флг) •
(4-126)
Принимая во внимание, что фВ2—флг ~ Фвх—Фла> а обратное
поле В 2 мало, имеем
Рх=== 0,54 2ВХ cos (2m 1/ Ц- фвх—фЛ2)* (4-12/)
Действующее значение крутильного момента в долях номиналь-
ного составит
Мкр = [А.В^А^] nR^A^. (4-128)
71
При малых несимметриях нагрузки (Вт « Вв) имеем
Мкр « (7а//н) nR^A^, (4-129)
где /2 —ток обратной последовательности.
Следует отметить, что крутильным колебаниям особенно под-
вержены асинхронные двигатели в режиме холостого хода. При их
сочленении с приводным механизмом во многих случаях наблю-
дается резкое уменьшение вибрации из-за возрастания механиче-
ского сопротивления крутильной системы.
4-15. МАГНИТОСТРИКЦИЯ
1. Магнитострикция—это деформация тел при изме-
нении их магнитного состояния. Известно, что магнитострикцион-
ные силы являются основной причиной магнитного шума трансфор-
маторов.
Результаты экспериментальных исследований крупных машин
переменного тока указывают, что в ряде случаев магнитострикция
электротехнической стали статора также является причиной их
повышенной вибрации и шума, однако ее количественная характе-
ристика в литературе отсутствует.
Имеются значительные трудности, связанные как с эксперимен-
тальным определением магнитострикции электротехнических ста-
лей в переменных магнитных полях, так и с разработкой соответст-
вующего метода расчета. Вызвано это в значительной мере тем, что
магнитострикция является нестабильной характеристикой мате-
риала. Так, например, установлено, что коэффициент магнитострик-
ции для одной марки стали в зависимости от номера плавки может
различаться в 5 и более раз. Влияет на нее также способ обработки
стали. Известно, что наиболее нестабильные характеристики имеют
холоднокатаные стали, однако их магнитострикция в направлении
проката меньше, чем у обычных марок горячекатаной стали. В го-
рячекатаной стали путем повышения содержания в ней кремния
можно почти полностью исключить явление магнитострикции, од-
нако такая сталь становится очень хрупкой.
2. В сердечниках статоров электрических машин магнитострик-
ционная деформация распределена неравномерно по сечению и по
окружности ярма. Связано это с тем, что магнитострикция зави-
сит не только от индукции, которая распределена по ярму неравно-
мерно, но и от угла между направлением прокатки и магнитного
потока.
На рис. 4-20 приведена область значений коэффициента магни-
тострикции <хм для горячекатаных сталей марок 1412, 1413, 1512,
1513, 1514 и 1521. Измерения магнитострикции на указанных ста-
лях проводились вдоль различных направлений, составляющих
углы 0, 20, 40, 55, 75 и 90° с направлением прокатки и при различ-
ных индукциях.
Как видно, интервал значений магнитострикции в насыщенном
состоянии (1,5—1,6 Тл) в среднем для всех марок и всех углов ко-
72
Рис. 4-20. Область значений
коэффициентов магнитострик-
ции различных марок элек-
тротехнической (стали в зави-
симости от индукции в сер-
дечнике статора
Рис. 4-21. Кольцевое (а) и многополюс-
ное (б) намагничивание сердечника статора
леблется в пределах 6-10~6 до 12-Ю-6. В слабых полях (менее,
0,5—0,8 Тл) имеется полная изотропность магнитострикции, ко-
торая в среднем составляет 3- 10-в. Следует иметь в виду, что при
насыщенной магнитной цепи вибрация, возбуждаемая магнито-
стрикцией, содержит много гармоник.
3. Для выяснения влияния магнитострикции на магнитную
вибрацию сердечников статоров, набранных из различных марок
горячекатаной стали, были выполнены экспериментальные иссле-
дования.
Средний радиус спинок статоров составлял 0,1; 0,14; 0,2 и
0,45 м. В сердечниках статоров создавался многополюсный маг-
нитный поток в одном случае (рис. 4-21, б) и кольцевой — в другом
(рис. 4-21, а). Многополюсный поток создавался катушками, ко-
торые были намотаны через аксиальные каналы статора. При этом
имелось в виду, что направление намагниченности 0 и 180° не влияет
на магнитострикцию. Индукция в сердечниках изменялась в пре-
делах от 0 до 1,5 Тл при частоте питающей сети 50 Гц. Вибрация
измерялась в нескольких точках по окружности амортизирован-
ного сердечника статора.
Зависимости вибрации от значения индукции в спинке статора
при многополюсном и кольцевом намагничивании, как показали
исследования, мало различаются.
Установлено, что амплитуда магнитной вибрации зависит от
выбора точки измерений, особенно при больших индукциях в спинке
статора. Это указывает на анизотропию стали в сильных полях.
При экспериментальных исследованиях выяснилось влияние ка-
чества сборки сердечника на вибрацию. Установлено, что плохая
прессовка пакета приводит к усилению его вибрации в осевом на-
правлении. Усиление запрессовки пакета, как правило, приводит
к уменьшению осевой вибрации, а незначительная неравномер-
ность запрессовки —- к ее возрастанию.
4. При проектировании малошумных электрических машин
большой мощности следует иметь в виду следующее:
73
а) вибрация, возбуждаемая магнитострикцией, может быть су-
щественно снижена путем уменьшения индукции в спинке статора.
Опыт показал [24], что для уменьшения на 10 дБ уровня шума
трансформатора, выполненного из горячекатаной стали, требуется
уменьшить индукцию в стержнях от 13,5 до 0,95 Тл. Такой же
эффект может быть достигнут при уменьшении индукции в спинке
статора в том случае, если магнитный шум обусловлен магнито-
стрикцией электротехнической стали. При этом увеличение массы,
габаритов и стоимости машины в сопоставлении с достигаемым эф-
фектом снижения шума должно быть строго оценено и согласовано
с заказчиком электрооборудования;
б) в статорах, набранных из сегментов, магнитострикцию можно
ослабить, если направление прокатки совместить с направлением
намагничивания; для этого необходимо, чтобы штамповка сегмен-
тов стали производилась с учетом направления прокатки;
в) необходимо, чтобы листовая сталь имела одинаковую тол-
щину по всей поверхности, чтобы не было волнистости или других
деформаций. Особое внимание должно быть уделено качеству сборки
и запрессовке пакета стали. Наилучшие результаты достигаются
для сердечников, в которых отдельные листы стали склеены между
собой. Уменьшение вибрации корпуса машины, возбуждаемой маг-
нитострикционными силами, достигается упругой подвеской сердеч-
ника статора в корпусе.
4-16. ВЛИЯНИЕ ТЕХНОЛОГИЧЕСКИХ
И КОНСТРУКТИВНЫХ ФАКТОРОВ НА МАГНИТНЫЙ ШУМ
1. Магнитная вибрация асинхронного электродвигателя
в значительной мере зависит от степени несимметрии магнитной
цепи, вызванной в основном наличием эксцентриситета воздушного
зазора. Такая несимметрия, как правило, возникает из-за несоос-
ности ротора и статора и тепловых прогибов вала. В малошумных
машинах эксцентриситет зазора должен быть снижен до минимума.
Опыт показывает, что устранение эксцентриситета в некоторых
двигателях приводит к снижению магнитной вибрации на 10—12 дБ
на частоте 100 Гц.
Влияние теплового прогиба ротора на вибрацию будет тем
меньше, чем жестче ротор. Показателем жесткости ротора является
отношение его первой критической частоты к номинальной. Обычно
жестким считается ротор, у которого это отношение > 1,7.
2. Обмотка статора должна быть симметричной. Нарушение
этого условия приводит к возбуждению изгибных колебаний ста-
тора низких порядков и крутильных колебаний всей машины в це-
лом. Беличья клетка ротора должна быть тщательно изготовлена,
особенно пайки стержней с короткозамыкающими кольцами. Ре-
зультаты экспериментальных исследований указывают на влияние
дефектов изготовления короткозамыкающих клеток на магнитный
шум. Так, например, при полном разрыве только одного стержня
74
уровень магнитного шума электродвигателя возрастает на 10—
18 дБ. Это явление получило теоретическое обоснование.
3. Существенное влияние на вибрацию электродвигателя ока-
зывает механическая несимметрия конструкции его корпуса (на-
личие в корпусе окон, ребер жесткости, опорных лап, коробки
выводов). Такая конструкция корпуса приводит к расслоению
спектра его собственных частот колебаний, что влияет на вибра-
цию при резонансе. В практике наблюдались случаи, когда вибра-
ция лап и отдельных элементов корпуса электродвигателя превы-
шала вибрацию статора на 10 дБ.
Указанная неравномерность распределения вибрации сглажи-
вается, если корпус электродвигателя выполнить более жестким.
4. Для уменьшения осевой вибрации необходимо, чтобы актив-
ная длина пакета железа статора, измеренная в нескольких пло-
скостях по внутренней расточке статора, была бы одинаковой. Осо-
бенно это относится к крупным электродвигателям с большой дли-
ной пакета статора, в которых различие длин наблюдается наиболее
часто.
Длина активной стали ротора должна быть несколько больше
длины статора. «Веер» активной стали в зубцовой зоне статора и ро-
тора должен отсутствовать. Уменьшение осевой магнитной вибра-
ции во многих случаях достигается также склейкой листов актив-
ной стали статора или вакуумной пропиткой статора и ротора.
5. В малошумных машинах должен быть обеспечен гарантиро-
ванный натяг пакета статора в корпус и пакета ротора на вал. При
отсутствии натяга или его потере в период эксплуатации электро-
двигателя возможно возрастание его вибрации.
4-17. ШУМ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
С ФАЗНЫМ РОТОРОМ
В машинах, имеющих трехфазную обмотку на роторе,
порядок высших гармоник поля в воздушном зазоре отличается
от порядка гармоник поля машин с короткозамкнутым ротором.
Машины с фазным ротором, имеющие целое число пазов на полюс
и фазу, как правило, имеют меньший уровень шума.
Порядок силовых волн
r = p(6ci± 1)±р(6с2± 1), (4-130)
где Cj и с2 — произвольные целые числа, включая 0.
Уравнение (4-130) имеет следующие решения при минимальных
порядках сил:
r = 2p[3(c1—с2) ± 1] ;
r = 6p(Ci—с2). (4-131)
Анализируя эти уравнения, можно показать, что в двигателях
с фазным ротором, имеющих обмотки с целым числом на полюс
и фазу, возникают силы, имеющие порядок г — 2 ср. Радиальные
75
силы зависят от значений соответствующих обмоточных коэффи-
циентов.
Двигателям с фазным ротором менее присуще образование шума,
чем двигателям с короткозамкнутым ротором. Специфической осо-
бенностью двигателей с фазным ротором, и особенно гибким валом,
является более высокая чувствительность машины к наличию экс-
центриситета.
4-18. МАГНИТНАЯ ВИБРАЦИЯ
АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
С ЗАЩИТНЫМИ ГИЛЬЗАМИ
Электродвигатели с защитными гильзами используются
в качестве привода центробежных герметичных насосов для работы
в агрессивных средах. Статор в таких электродвигателях обычно
экранируют тонкостенной немагнитной металлической гильзой.
В таких случаях возникает вопрос: не экранируются ли высшие
гармонические полей статора и ротора защитными гильзами и не
уменьшается ли в этих случаях магнитный шум?
Определение влияния гильзы на магнитное поле в воздушном
зазоре сводится к расчету коэффициентов экранирования конкрет-
ных пространственно-временных гармоник. Здесь под коэффици-
ентом экранирования понимается отношение индукции магнитного
поля в зазоре при наличии гильзы к индукции без гильзы. При этом
предполагается, что внутренняя полость электродвигателя запол-
нена жидкостью, удельной электрической проводимостью которой,
по сравнению с удельной электрической проводимостью материала
защитной гильзы, можно пренебречь, а ее магнитная проницаемость
практически равна магнитной проницаемости воздуха.
Коэффициент экранирования гильзы
/г9= 1/V1 + (4-132)
где е = р.0уАт5®/(2л) — магнитное число Рейнольдса; р,0 =
= 4л-10-7 Гн/м; у — удельная электрическая проводимость ма-
териала гильзы, (Ом-м)-1; со = 2л/ (/— частота поля, Гц); А —
толщина гильзы, м; т — полюсное деление для данной пространст-
венной гармоники, м; s — скольжение.
Анализ выражения (4-132) показывает, что применяемые в асин-
хронных электродвигателях защитные немагнитные гильзы слабо
влияют на высшие пространственно-временные гармоники магнит-
ных полей в зазоре (в том числе зубцового порядка).
Так, например, гильза из немагнитной стали или титана с удель-
ной электрической проводимостью у = 2-10® (Ом-м)-1, толщиной
А = ю-3 м при 1000 Гц и s = 1 в двигателе с зубцовым делением
т те 10-2 м практически не экранирует зубцовое поле, так как
в == 0,025.
Аналогичный результат получается с гильзами других немаг-
нитных материалов.
76
4-19. ВИБРАЦИЯ КРУПНЫХ МНОГОПОЛЮСНЫХ
АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Результаты экспериментальных исследований крупных
многополюсных электродвигателей с короткозамкнутым ротором
показывают, что они являются мощными источниками магнитной
вибрации.
Вызвано это в основном тем, что в таких машинах трудно вы-
держать равномерным воздушный зазор между статором и рото-
ром. К несимметрии магнитной цепи добавляется также электри-
ческая несимметрия обмотки статора, имеющая большое число па-
раллельных ветвей. В связи с этим возникает опасность возбужде-
ния вибрации низких порядков (г = 1, 2), имеющих большую ам-
плитуду особенно на частоте 100 Гц. Высокочастотная часть спектра
вибрации оказывается также насыщенной и весьма интенсивной
из-за малого, а иногда и дробного q. В крупных электродвигателях
особое значение приобретает магнитострикция динамной стали
статора, которая сильно проявляется при плохо запрессованных
сердечниках, набранных из сегментов.
В крупных электродвигателях трудно осуществить скос паза
из-за сегментировки железа статора, в связи с чем магнитная виб-
рация зубцового порядка значительно выше, чем в малых машинах.
Радиальные каналы в пакете статора являются источником не
только воздушного шума, но и причиной сильных осевых магнит-
ных вибраций.
Надо также отметить, что чем крупнее электродвигатель, тем
сложнее его корпус и спектр его собственных частот. Поэтому
борьба с резонансами корпуса в таких машинах является чрезвы-
чайно сложной задачей.
Все сказанное в равной степени относится к тихоходным син-
хронным электродвигателям.
М
«
ГЛАВА ПЯТАЯ
МАГНИТНЫЙ ШУМ СИНХРОННЫХ МАШИН
5-1. ОБЩИЕ СВЕДЕНИЯ
Расчет магнитной вибрации синхронных машин произ-
водится аналогично расчету магнитной вибрации асинхронных элек-
тродвигателей, т. е. рассчитываются:
вибрация, возбуждаемая основной волной результирующего
поля статора и ротора, равная двойной частоте тока сети 2<в и выз-
ванная силовыми волнами порядка г = 2р. Ее амплитуда пропор-
циональна квадрату индукции в воздушном зазоре; в многополюс-
77
ных машинах, имеющих дробные обмотки (гидрогенераторы), воз-
можна вибрация частотой 2со и порядком колебаний г<2р;
вибрация более высоких частот, возникающая в результате
взаимодействия любой пары вращающихся волн индукции Bv и
Вц, одна из которых создается м. д. с. статора, а другая — м. д. с.
ротора. Особенно интенсивными из них являются волны зубцового
порядка.
При определении взаимодействующих полей Bv и необхо-
димо принимать во внимание только те поля, которые создают наи-
более длинную волну, т. е. наименьший порядок колебаний г.
Кроме того, для полей Bfl необходимо учитывать специфику кон-
струкции ротора синхронной машины, а именно, является ли ро-
тор явно- или неявнополюсным.
5-2. ВИБРАЦИЯ ДВОЙНОЙ ЧАСТОТЫ ТОКА СЕТИ
В последнее время в связи с ростом мощностей турбо-
и гидрогенераторов борьба с магнитной вибрацией двойной частоты
тока сети является одной из важнейших задач; снижение этой виб-
рации преследует цель не только подавления шума, но и увеличе-
ния надежности работы машины.
Что касается синхронных машин обычного промышленного
применения с числом полюсов 2р > 4, имеющих обмотки с целым
числом пазов на полюс и фазу, то здесь не возникала потребность
снижения шума и вибрации двойной частоты. Поэтому ниже рас-
смотрена вибрация крупных турбо- и гидрогенераторов, так как
выводы и расчеты этого раздела могут быть применены также для
машин с любым числом полюсов.
А. Вибрация статора двухполюсного турбогенератора. Ради-
альные усилия, возбуждающие вибрацию двойной частоты 2ю при
холостом ходе турбогенератора, могут быть рассчитаны по фор-
муле (4-35).
При работе турбогенератора под нагрузкой кроме радиальных
сил (рис. 4-5) возникают тангенциальные силы (рис. 4-6), перемен-
ная составляющая которых также вызывает вибрацию двойной
частоты.
Расчетом можно легко установить, что динамический прогиб,
вызванный тангенциальными силами, значительно меньше прогиба
от радиальных сил. Это дает основание в турбогенераторах пре-
небречь действием тангенциальных сил. Тем не менее опытом уста-
новлено, что несмотря на то, что значение возбуждающих магнит-
ных сил при переходе от режима холостого хода к нагрузке в це-
лом увеличивается, уровень же вибрации двойной частоты в боль-
шинстве турбогенераторов уменьшается. Это объясняется дейст-
вием вращающего момента, создающего более жесткое сочленение
между сердечником статора и корпусом.
Надо также отметить, что в некоторых случаях в эксплуатации
наблюдались внезапно возникающие вибрации сердечника турбо-
генератора с двойной частотой тока сети. Неожиданный рост ам-
7В
a)
Рис. 5-1. Конструкции упругих подвесок статоров турбогенераторов
плитуды вибрации связан с постепенным изменением собственной
частоты колебаний статора во время работы. Вызвано это чаще всего
нарушением крепления пакета статора в корпусе на упругой под-
веске, которое возникает при повышенной вибрации генератора на
частоте вращения ротора. Такое явление, если оно не обнаружи-
вается своевременно, может привести к повреждению обмотки
статора.
Для уменьшения вибрации, передаваемой с сердечника статора
на корпус, в турбогенераторах применяется упругая подвеска
пакета статора. На рис. 5-1 приведены различные варианты кон-
струкции упругой подвески, запатентованные различными фир-
мами. Применение того или иного варианта упругой подвески
во многом связано с требованиями надежности, трудоемкостью
изготовления, наличием на заводе-изготовителе технологической
оснастки и др. В каждом из приведенных вариа'нтов конструкции
достигается эффективное подавление вибрации, передаваемой на
корпус.
Формулы для расчета упругой подвески статора приведены
в гл. 3, но при расчетах вдали от резонанса их можно упростить,
если пренебречь затуханием гм.
Колебательная скорость на поверхности корпуса в этом случае
Уз = Ро К^м — Zc)/(zMZK)] - (5-1)
Здесь
zM = zc—[!/(<oAJ] zK/[zK — 1 /(®Xy)J (5-2)
— полное механическое сопротивление колебательной системы;
'К.у — податливость упругой подвески пакета статора, приведенная
к 1 см2 посадочной поверхности.
79
Кратность снижения вибрации при упругой подвеске по срав-
нению с жесткой посадкой сердечника статора в корпусе
c = W*/3== [l/(Zc + zK)l [zK/(l—zc/zM)]. (5-3)
Необходимая податливость упругой подвески Ху, обеспечиваю-
щая снижение вибрации частотой ® в с раз,
Ху = (1 —с)/<о (l/zK 4- l/zc). (5-4)
Приведение X к податливости упругих элементов Ху, установ-
ленных между статором и корпусом, производится по формуле
X = Xyfe/(f/), (5-5)
где t — шаг между отдельными рядами упругих элементов по ок-
ружности статора; I — полная длина по оси машины одного ряда
упругих элементов; k — число упругих элементов в одном ряду.
Пример 1. Определить вибрацию корпуса крупного двухполюсного тур-
богенератора на частоте 100 Гц при жестком.и упругом креплении пакета
статора в корпусе. Упругая подвеска выполнена в соответствии с рис. 5-1, а.
Влияние фундамента не учитывается.
Исходные данные: масса, приходящаяся на 1 см2 средней цилиндриче-
ской поверхности статора, тс = 0,4 кг; масса, приходящаяся на 1 см2 сред-
ней цилиндрической поверхности корпуса, тк = 0,1 кг; высота спинки
статора h = 43,7 см; средний радиус спинки Rc = 113 см, радиус расточки
сердечника Ri = 65,8 см; число упругих элементов в одном ребре k = 5;
податливость одного упругого элемента Ху= 0,2-10“4 см/Н; расстояние
между смежными ребрами t = 31,4 см; индукция в воздушном зазоре Bg =
= 0,87 Тл.
Расчет. 1. Податливость сердечника и корпуса:
Хс
12 ИЗ4
22+ 1
1,2-107-43,7s 22(22—I)2
= 2,72-10“4 см/Н
(г = 2р 2);
Хк = 21,8-10“4 см/Н
(по ориентировочным расчетам).
2. Механические сопротивления сердечника и корпуса при со = 2л-100=
= 628 с-1:
гс = 628-4-10—3— 1/(628-2,72-10“4) = —3,8 Н-с/см;
гк = 628-10“3 — 1/(628-21,8-10“4) = —0,23 Н-с/см.
3. Удельная возбуждающая сила
р = 20-0,872 —-8 = 8,8 Н/см2.
Г- 1 1 Q
4. Вибрация на поверхности корпуса при жесткой посадке сердечника
в корпус:
У =
8,8
— 3,8 — 0,23
= 2,2 см/с;
L = 20 1g
628-2,2
3-10“2
= 93 дБ.
5. Вибрации на поверхности корпуса при упругой подвеске сердеч-
ника в корпусе:
податливость упругой подвески, приведенная к 1 см2 посадочной поверх-
ности,
Ху = 0,2-10“4-31,4-630/5 = 0,08 см/Н;
80
эффективность упругой подвески
„ 1 —с / 1 1 \
0,08 =-----|--------------— I при с = 12;
628 к —3,8 0,23 )
уровень вибрации на корпусе
L = 93 — 20 1g 12 = 72 дБ.
Применение упругой подвески сердечника статора приводит к сниже-
нию вибраций, передаваемых на корпус, на 21 дБ.
Б. Вибрация статора гидрогенератора. Повышенные уровни
вибрации статоров гидрогенераторов во многих случаях возникают
в результате взаимодействия основной волны поля возбуждения
с дробными гармоническими полей реакции якоря, обусловлен-
ными дробным числом пазов на полюс и фазу. Эта вибрация воз-
растает с увеличением тока статора.
Число пар полюсов гармонических для двухслойных обмоток
с дробным числом пазов на полюс и фазу
v = (6&/d 4-1) р при fe=±l; ±2; +3; ... (5-6)
где d — знаменатель несократимой дроби числа q = b ф- c/d. Для
однослойных обмоток с дробным q числом пар полюсов гармониче-
ских
v = (3&/cf ф-1) р при fe==±l; ±2; ±3; ...
Так, например, двухслойная обмотка гидрогенератора с q =
о 4
= 2— имеет следующие порядки гармоник:
5
обратного вращения (/г = — 1; — 2; — 3; . . .)
v' = v/p=l/5; 7/5; 13/5; 19/5; 25/5 = 5; 31/5; . . .;
прямого вращения (k = ф- 1; ф- 2; ф- 3; . . .)
v' = —= 11/5; 17/5; 23/5; 29/5; 35/5 = 7; 41/5; . . .
Р
Дробные гармоники, числа пар полюсов которых меньше числа
пар полюсов главного поля, носят название низших гармоник
или субгармоник.
Наиболее длинная силовая волна наименьшего порядка соз-
дается гармоникой, ближайшей по порядку к основной.
Порядок колебаний статора, имеющего трехфазную двухслой-
ную обмотку с дробным числом пазов на полюс и фазу, при взаимо-
действии основного поля возбуждения с дробной гармонической
поля реакции якоря
r = v—р = (6£/Фф-1) р—p = 6kp/d, (5-7)
где k = 1, 2, 3, . . .
Как видно, порядок колебаний при дробной обмотке может
быть меньше 2р. Это значит, что вибрация, возбуждаемая субгар-
моникой, может быть значительно выше вибрации, возбуждаемой
основной волной поля, при которой порядок колебаний г = 2р.
81
Модуль упругости шихтованных сердечников статоров по дан-
ным экспериментальных исследований лежит в пределах
(1,3 ч- 1,5) • 107 Н/см2. Нижний предел следует принимать для разъем-
ных статоров, верхний — для'неразъемных.
В практике эксплуатации и исследования гидрогенераторов на-
блюдались случаи повышенной вибрации статора на различных
оборотах при выбеге генератора с возбуждением. Это явление за-
мечено в гидрогенераторах, имеющих сосредоточенное расположе-
ние параллельных ветвей, а также в гидрогенераторах с одной
параллельной ветвью, но при выбеге с малой нагрузкой.
При сосредоточенных параллельных ветвях обмотка статора
обтекается уравнительными токами как в нагрузочных режимах,
так и в режиме холостого хода, так как у машин большого диаметра
всегда имеют место колебания воздушного зазора. При этом урав-
нительные токи в параллельных ветвях различаются как по зна-
чению, так и по знаку. В результате число силовых волн может
быть существенно меньше 2р.
Надо отметить, что в гидрогенераторах на частоте 100 Гц часто
наблюдается большой магнитострикционный шум. Уровень его во
многом зависит от того, насколько хорошо запрессован пакет ди-
намкой стали статора и насколько плотно посажен он в корпус.
Расчеты показывают, что уровень магнитной вибрации, вызванной
одной лишь магнитострикцией, может в несколько раз превышать
вибрацию, вызванную магнитными силами в воздушном зазоре.
Чрезвычайно важное значение имеет жесткость корпуса. Наличие
плохо затянутых стыков между «шестерками» статора в значитель-
ной мере сказывается на магнитной вибрации гидрогенератора.
В связи с этим при проектировании и изготовлении генератора
должно быть уделено особое внимание конструкции статора и от-
дельных его элементов, а также качеству его изготовления и сборке
генератора на месте его эксплуатации.
В практике имели место случаи резонанса колебаний статора
и элементов фундамента, на котором он установлен, на частоте
100 Гц. В таких случаях требовалась отстройка от резонанса пу-
тем изменения жесткости резонирующих элементов.
Пример 2. Рассчитаем вибрацию частотой 100 Гц сердечника статора
гидрогенератора, имеющего следующие параметры: 2р = 88;
о = 1—
4 11
Rc = 550 см; /гс = 13 см, Ri = 529 см; Во = 0,74 Тл; тс = 0,25 кг; Е —
= 1,3-10’ Н/см2.
Принимаем в расчет дробные гармоники м. д. с. порядка V = 5/11 с ам-
плитудным значением индукции В6/ц = 0,025 Тл.
а. Вибрация, возбуждаемая основной волной поля возбуждения и дроб-
ными гармониками м. д. с. статора:
1. Число волн колебаний
г5/п =6-1-44/11 =24.
2. Податливость статора
12-5504
1,3-10’-133
242 -|- 1
242(242— 1)в
11,7- 10~?См/Н.
82
3. Механическое сопротивление статора при ш = 628 с-1
zc = 628-0,25-10~2 - 1/(628-11,7 10~5)=12 Н-с/см.
4. Удельная возбуждающая сила.
рг = 40-0,025-0,74 = 0,74 Н/см8.
5. Вибрация
у = 0,74/(1/2-12) = 4,4-10“2 см/с.
б. Вибрация, возбуждаемая результирующим полем основной волны;
1. Число волн колебаний г = 2р = 88.
2. Податливость статора
12-5504 882+ 1
?.с =-------------------1-------= 6,5-10-7 см/Н.
1,3-107-133 882(882—I)2
3. Полное механическое сопротивление статора
гс = 628-0,25- 10~2- ’ = -2450 Н-с/см.
Ь2о-о,о-1и '
4. Удельная возбуждающая сила
Рх = 20-0.742 = 11 Н/см2.
5. Вибрация
у = 11/2450 = 0,45-10—2 см/с.
Как видно из расчета, вибрация, возбуждаемая основной волной,
значительно меньше вибрации, возбуждаемой дробными гармониками по-
рядка 5/11.
5-3. ВИБРАЦИЯ,
ВОЗБУЖДАЕМАЯ ВЫСШИМИ ГАРМОНИКАМИ
ПОЛЕЙ СТАТОРА И РОТОРА
Амплитуда v-й гармоники поля статора в синхронных
машинах
Bv = l(p/v) XadBft, (5-8)
где xad — реактивность обмотки статора от полей реакции якоря
по продольной оси; значения (p/v)(fe£t)V/kwl) указаны в приложе-
нии 8.
При расчете амплитуд полей зубцового порядка геометрически
суммируются гармоники обмотки статора порядка зубчатости Bvz
с зубцовыми гармониками проводимости Вг1. При этом поля Bvz
находятся в фазе с током статора /х, а поля Вг1 — в фазе с пото-
ком возбуждения. Поля BZ1 рассчитываются по формуле (4-27).
Число пар полюсов полей статора
V = (6</+ 1) р при q' = 0; ± 1; ±2; ...
Здесь имеется в виду, что в синхронных генераторах общепро-
мышленного применения с числом полюсов 2р = 4 и 2р = 6, а
также в синхронных двигателях обычно принимается целое число
пазов на полюс и фазу.
83
Амплитуды роторных полей Д, в явнополюсных машинах без
демпферной клетки на роторе зависят от наличия эксцентриситета
воздушного зазора 6max/6min и отношения ширины полюсной дуги
к ширине полюсного деления аг:
B,t = — - В А---------------os p<p-d<p---------. (5-9)
ц л J 1 + (6max/6min - 1) [2<Р/(ОДЛ)Р
о
Для упрощения расчетов обычно исходят из условия пря-
моугольной формы ПОЛЯ возбуждения (6max/6min — 1,0). При этом
ц-я гармоника может быть выражена через основное поле:
(5-10)
g — Р sin [ц (счл/2)] в
11 р. sin [р (ащ/2) 6
Для турбогенераторов с массивными роторами гармоники поля
ротора без учета насыщения определяются по следующей формуле:
sin рл [e/(2Z2)] sin рл [Z2/(2Z2y]
Z2 sin2 [рл (2Z2)]
sin рл [(1 — e)/(2Z2)l Z9 1
------ -------7 COS [1Л —M,
sin [pn/^SZg)] 2Z2 ]
Ви = — В6
рэт
(5-11)
где Z2/^2 — отношение числа пазов ротора с обмоткой к полному
числу пазовых делений; в = (Да/Д) (Дг и /2 — ширина зубца
ротора и ширина пазового деления).
Число пар полюсов полей ротора
H = p(2q" +1) при /' = 0, 1, 2, 3, ... (5-12)
Порядок колебаний для машин с q, равным целому числу,
[1 1 — сумма;
(<7"±3<7') + ~ (5-13)
0 J — разность. ' '
Как видно, порядковые числа силовых волн могут или рав-
няться нулю или быть кратными числу полюсов.
Для машин с дробным числом обмоток г может быть меньше
и не кратно 2р.
Частота вибрации
[1 1—сумма;
’" + о]-разяость.
Высокочастотная вибрация в турбогенераторах проявляется
в значительно меньшей степени, чем в явнополюсных синхронных
машинах. Ее уменьшение происходит из-за большого воздушного
зазора и демпфирования магнитных полей массивным ротором.
Для удобства расчета магнитного шума рекомендуется ана-
логично расчету асинхронных двигателей составить таблицу по-
рядковых чисел силовых волн (табл. 5-1).
84
Таблица 5-1
= Р <69' + 0 и=р(2е"+о^~-~--^ Bv f — 2fjy х х k+o)
Q' +1 —1 +2 —2 +3 —3
ч" \ V Ц- \
1
2
3
4
5
6
7
8 >
Пример 3. Произведем расчет высокочастотной вибрации трехфазного
синхронного генератора с явно выраженными полюсами (650 кВА, 400 В,
50 Гц, 2р = 4), имеющего следующие данные: число пазов статора Zj = 60;
коэффициент Картера kc= 1,4; фазовые сдвиги тока статора и потока воз-
буждения; <р! = л/5; <р0 = л/2; индукция в воздушном зазоре Ва = 0,66 Тл;
сокращение шага обмотки статора Р= 11/15; средний радиус спинки ста-
тора Rc = 38 см, радиус расточки статора Rt = 28,7 см; высота спинки
статора ha = 9,15 см; масса статора, отнесенная к 1 см2 средней цилиндри-
ческой поверхности спинки статора, тс= 0,11 кг; реактивность Хдд = 2,08.
Ротор не имеет демпферной клетки. Пазы в статоре прямые. Скрепляю-
щее действие корпуса не учитывается.
Решение. Составляем табл. 5-2. В приведенной расчетной таблице
отмечены только наименьшие порядки волн, т. е. 0 и 4. Расчет магнитной
вибрации во всем звуковом диапазоне частот обычно выполняется на ЭВМ.
Ниже производится расчет наиболее интенсивной вибрации, возбуждае-
мой гармониками зубцового порядка.
В расчетной таблице значения зубцовых гармоник первого порядка
взяты в скобки. Для вибрации, возбуждаемой волнами, v = — 58, р =
= + 54, г = — 4.
1. Частота возбуждающих сил f = 2-50(13 + 1) = 1400 Гц, ы =
= 2л-1400 = 8800 с-1.
2. Амплитуда гармоники статора;
от распределения обмотки
ВХ2 = 0,0345-2,08-0,66 = 0,047 Тл;
от зубчатости статора (k = 1)
Вг1 = 0,32-0,66 = 0,21 Тл,
85
Таблица 5-2
86
где g = 0,32 для kc — 1,4 из рис. 4-2;
результирующее значение
Bv =
= 0,25 Тл.
I
0,047е 5 + 0,21е 2
3. Амплитуда гармоники ротора
_ 2 sin 54 (0,62л/2) . . _
Вц =-------------—----—- 0,66 = 0,0195 Тл.
и 54 sin 2 (0,62л/2)
4. Удельная радиальная сила
28,7
р=40-0,25-0,0195 -----’— =0,15 Н/см®.
38
5. Полное механическое сопротивление статора
^ = 8800-1,1.10-3 - = -5,82 Н-с/см,
где
. 12-384 42+1
Хс =----------------------Г-----= 7,34-10-3 см/Н.
2,1 • 1О’-9,153 42 (42—I)2
6. Уровень вибрации
0,15 , 8800-0,018
у = —т=--------=0,018 см/с; £ = 20 1g--------------=74 дБ.
/2-5,82 3-Ю-2
Аналогичный расчет производится для всех гармоник.
5-4. МАГНИТНЫЙ ШУМ ИНДУКТОРНЫХ ГЕНЕРАТОРОВ
ПОВЫШЕННОЙ ЧАСТОТЫ
Рис. 5-2. Пазовая зона статора
индукторного генератора
К индукторным генераторам относят машины, у кото-
рых индуцирование э. д. с. в рабочей обмотке происходит вследст-
вие колебания магнитной проводимости воздушного зазора. Поэ-
тому эти машины имеют сильно выраженный магнитный шум.
Наиболее широкое промышленное применение имеют переменно-
полюсные индукторные генераторы.
Ротор индукторной машины представляет собой зубчатое ко-
лесо, набранное из электротехнической стали. В статоре имеются
системы больших и малых пазов (рис. 5-2), водной из которых за-
ложена обмотка возбуждения (2), в другой — рабочая обмотка (7) для
тока повышенной частоты.
Частота наиболее интенсивной
вибрации в этих машинах равна
частоте индуцированной э. д .с.,
т. е. f = Z2n/60 (Z2 — число зуб-
цов ротора).
Распределение поля в воздуш-
ном зазоре в индукторных гене-
раторах (без учета зубчатости ста-
тора) аналогично распределению
поля в машинах постоянного то-
ка. Число силовых волн колебаний
87
статора в связи с тем, что Z2/(2p) в этих машинах — целое число,
имеет значения г = 0 или 2р.
Кроме вибрации основной частоты Z2n/60, в индукторных ге-
нераторах следует учитывать вибрацию двойной зубцовой частоты
Z2n/30.
Возбуждающие магнитные силы при холостом ходе опреде-
ляются по формулам, приведенным в гл. 6. Эти силы не могут быть
подавлены применением скоса пазов ротора, так как при этом на-
ряду с уменьшением вибрации уменьшилась бы индуцированная
э. д. с. в рабочей обмотке статора.
Поэтому для индукторных машин не существует проблемы ра-
ционального выбора числа пазов для снижения магнитного шума,
поскольку оно осуществляется применением закрытого жесткого
корпуса с упруго подвешенным в нем сердечником статора. Охлаж-
дение машины выполняется по замкнутому циклу, с воздухоохла-
дителями. При разомкнутом цикле вентиляции кроме упругой
подвески пакета статора должны применяться глушители шума,
пристраиваемые к входу и выходу воздуха.
5-5. РЕЗУЛЬТАТЫ ИЗМЕРЕНИЯ ШУМА И ВИБРАЦИИ
СИНХРОННЫХ МАШИН
1. На рис. 5-3 дана спектрограмма шума турбогенера-
тора 300 МВт, 3000 об/мин (кривая /). Как видно, в спектре пре-
валирует составляющая 100 Гц, которая обусловлена вращаю-
щимся магнитным полем. В турбогенераторе выполнена упругая
подвеска пакета железа в корпусе, которая существенно снижает
вибрации, передаваемые на корпус. Опыт показал, что отсутствие
натяга между пакетом железа и корпусом существенно снижает
Рис. 5-3. Спектрограмма шума турбогенератора 300 МВт (кривая 1) и гидро-
генератора 500 МВт (кривая 2)
88
Рис. 5-4. Спектрограмма вибрации (У) и шума (2) синхронного генератора
мощностью 750 кВ-A при частоте вращения 1500 об/мин
эффективность упругой подвески, особенно в области высоких ча-
стот. Так, например, устранение зазоров между отдельными реб-
рами в верхней половине корпуса и пакетом железа в турбогенера-
торе 300 МВт привело к снижению высокочастотной вибрации
примерно на 30 дБ.
Спектрограмма воздушного шума является усредненной по шести
точкам, отстоящим от корпуса на расстояние 1 м. Нагрузка турбо-
генератора существенно не сказывается на уровнях воздушного
шума, однако приводит к некоторому снижению вибрации на ча-
стоте 100 Гц.
Средний уровень воздушного шума турбогенераторов мощностью
от 200 до 500 МВт на расстоянии 1 м от корпуса колеблется в пре-
делах 93—95 дБ.
2. На рис. 5-3 приведен также усредненный спектр воздушного
шума гидрогенератора мощностью 500 МВт Красноярской ГЭС
(кривая 2). Высокий уровень воздушного шума этих машин обус-
ловлен вращением ротора. Поэтому спектр при переходе от холо-
стого хода к нагрузке практически не меняется.
Влияние различных факторов на уровень вибрации было иссле-
довано на гидрогенераторе мощностью 50 МВт. Вибрация корпуса
этого гидрогенератора на частоте 100 Гц при переходе от холо-
стого хода к нагрузке возрастала на 10—12 дБ, что объясняется
дробностью обмотки статора и наличием в ней сосредоточенных
параллельных ветвей.
3. Уровни вибрации корпуса синхронного генератора 750 кВ-А,
1500 об/мин, 50 Гц (рис. 5-4, кривая /) в основном определяются
магнитными составляющими на частотах 100 и 1120 Гц: первая воз-
буждается основным полем, вторая — зубцовыми пульсациями.
Для снижения вибрации зубцовой частоты в статоре генератора
осуществлен скос паза на одно зубцовое деление.
89
0 WOO 8000 la,
й) дб1к
Рис. 5-5. Спектрограммы шума индукторного генератора частотой 400 Гц:
а — в режиме холостого хода; б — под нагрузкой
Указанные частоты не влияют на уровень воздушного шума
(кривая 2), так как шум в основном обусловлен аэродинамическими
силами от вентиляции.
4. На рис. 5-5 показаны спектрограммы воздушного шума пере-
менно-полюсного индукторного генератора частотой 4000 Гц (Z2 =
= 80; 2р = 4) при холостом ходе (а) и нагрузке (б). На спектро-
граммах видны две дискретные частоты.
5-6. ВИБРАЦИЯ СТАТОРНЫХ ОБМОТОК
В крупных турбо- и гидрогенераторах часто возникает
проблема ограничения вибрации статорных обмоток в пазовой и
особенно лобовой зонах.
Вибрация обмотки в пазовой зоне происходит при наличии за-
зоров между стенками паза и секциями обмотки статора. Такие
зазоры часто возникают в период изготовления машины и в про-
цессе эксплуатации.
Обмотка в пазовой зоне в таких случаях вибрирует в двух вза-
имно перпендикулярных направлениях. Под воздействием сил
p1 — IBsin2at, (5-15)
где I — амплитуда тока в проводнике; В — амплитуда индукции
продольного магнитного поля в пазу; <о — частота тока, провод-
ник вибрирует в тангенциальном направлении поперек паза.
90
Под воздействием сил
Pi = - sin 2mt, (5-16)
2fen
где ba — ширина паза, проводник вибрирует вдоль паза, попере-
менно воздействуя на клин и дно паза.
Расчеты показывают, что эти силы значительно меньше знако-
переменных радиальных и тангенциальных сил, действующих на
сердечник статора со стороны воздушного зазора. Поэтому они не
могут повлиять на вибрацию сердечника статора и всей машины
в целом, однако могут существенно повлиять на надежность пазо-
вой изоляции, особенно при резонансе.
Для уменьшения вибрации, вызываемой этими силами, некото-
рые фирмы предлагают устанавливать между стержнем обмотки
и клином демпфирующую прокладку из упругой гофрированной
полосы или стекловолокна, пропитанного синтетическими смолами.
Предлагали также сменные пружины и упругие оболочки, напол-
ненные газом или жидкостью.
Оценка сил, воздействующих на лобовые части обмотки статора,
является весьма приближенной, что обусловлено сложностью формы
и положения лобовых частей как относительно друг друга, так и от-
носительно ферромагнитных масс. Поэтому чтобы сделать расчет
возможным, приходится вводить многочисленные упрощения.
Амплитудные значения вибрационных сил частотой 2со в ста-
торных обмотках турбо- и гидрогенераторов могут быть рассчи-
таны по формулам Вебера:
а. Силы (в ньютонах) в прямолинейных частях проводов при
выходе из пазов:
тангенциальные
Р, = 2(т/100)(А1/100)2£1(а?, 2р), (5-17)
где функция F^q, 2р) — рис. 5-6; т — полюсное деление, см;
— линейная токовая нагрузка статора, А/см;
радиальные
Рг = 2(т/100) (А/100)2F2(2q, 2р), * (5-18)
где функция F2 (2q, 2р) — рис. 5-6.
б. Сила (в ньютонах) взаимодействия обмотки статора с обмот-
кой ротора в лобовых частях:
для явнополюсных машин
Pt = (т/100)2 (Л 1/100) (Л2/100) (1/с) (1/т); (5-19)
для турбогенераторов >
Pi = (т/ ЮО)2 (Лi/100) (1/£) (1/т)а, (5-20)
где Л 2 — линейная токовая нагрузка ротора; с, Е — расстояния ме-
жду лобовыми частями (рис. 5-7); т — число фаз обмотки статора.
Удельные вибрационные усилия в двухполюсных турбогенера-
торах различной мощности, рассчитанные по формулам (5-18),
(5-20), приведены на рис. 5-8.
91
Рис. 5-6. Графики функций Fj и F,
Рис. 5-7. Силы, действующие в лобо-
вых частях обмотки статора
Вибрационное состояние лобовых частей зависит от системы
их крепления. В большинстве случаев бандажное крепление вклю-
чает в себя бандажные кольца, закрепленные на нажимных плитах
сердечника статора при помощи кронштейнов, и бандажные шну-
ровые вязки, связывающие стержни между собой и с бандажными
кольцами.
Вся эта система крепления совместно с лобовыми частями пред-
ставляет собой круговую арку «корзиночного» типа.
При вибрационных расчетах следует иметь в виду, что жесткость
на изгиб стержней обмотки статора уменьшается с ростом темпера-
туры изоляции. Так, например, экспериментальными исследова-
ниями установлено, что в крупных турбо- и гидрогенераторах же-
сткость стержней обмотки с ростом температуры падает почти в
1,5 раза.
Особенно опасными с точки зрения надежности изоляции и
прочности лобовых соединений являются колебания с числом волн
г — 2. Поэтому при расчетах крепления бандажа необходимо стре-
миться, чтобы частота собственных колебаний крепления по этой
форме была по мере возможности удалена от частоты возбуждаю-
щих сил.
Опыт экспериментальных исследований крупных турбогенера-
торов показывает, что амплитуда вибрации лобовых частей на ча-
стоте 100 Гц колеблется в преде-
лах 35—60 мкм.
Более полный расчет сил,
возбуждающих вибрации лобовых
частей обмотки статора, может быть
произведен по формулам, приве-
денным в работах [39, 41].
Рис. 5-8. Вибрационные усилия в двух-
полюсных турбогенераторах различной
мощности
92
ГЛАВА ШЕСТАЯ
МАГНИТНЫЙ ШУМ МАШИН ПОСТОЯННОГО ТОКА
6-1. ПРИНЯТЫЕ ДОПУЩЕНИЯ
Многочисленные экспериментальные исследования по-
казали, что магнитная вибрация машин постоянного тока в основ-
ном обусловлена магнитными силами зубцовой частоты (в секундах
в минус первой степени):
о = 2nZn/60, (6-1)
где Z — число зубцов якоря.
В связи с этим производимые ниже
расчеты относятся только к вибрации
указанной частоты.
В целях упрощения расчетов рассма-
тривается режим холостого хода. При
этом сделаны следующие допущения:
а) магнитное поле в воздушном зазоре на
краях полюсных башмаков спадает до ну-
Рис. 6-1. Магнитное поле под полюсом при
равномерном зазоре
ля (рис. 6-1); б) главный полюс является абсолютно жестким телом,
жестко прикрепленным к ярму; в) добавочные полюсы являются
присоединенной к ярму массой и магнитные силы на них не дейст-
вуют.
Рассмотрим действие на главные полюсы машины магнитных
сил, вызванных зубчатостью якоря, для случаев, наиболее часто
встречающихся в практике.
6-2. ПРЯМОЙ ПАЗ ПО ДЛИНЕ ЯКОРЯ,
РАВНОМЕРНЫЙ ВОЗДУШНЫЙ ЗАЗОР ПОД ПОЛЮСОМ
Индукция в воздушном зазоре в любой точке (рис. 6-1),
отстоящей на расстояние х от оси полюса,
5x==jB6 + B/Cos^-y^-x—со/). (6-2)
Принимая, что Bt!B& — kc— 1 = е (fec— коэффициент Кар-
тера), а = bplty — количество пазов в полюсной дуге, получим
Вх = В6 £ 1 + е cos ( -?а х—со/)] .
Сила, действующая на единичную площадку полюса,
рг = 40В* = 40В1 р + е cos х— at . (6-3)
93
Рис. 6-2. Формы колебаний
станин в зависимости от значе
ний Z/(2p) и fcp/Zj
Пренебрегая в этом вы-
ражении членом, содержа-
щим в2, и выделяя посто-
янные составляющие,
после интегрирования по-
лучим выражение для зна-
копеременной радиальной
силы, действующей на по-
люс длиной 4:
+V2
Рг == 4 prdx =
-6р/2
+м
= 80Вб4е { cos(—„
J \ Ьр х
-Ьр/2
— dx = 80В%Ь lte 51п-яю- cos at. (6-4)
/ ла
Амплитудное значение радиальной силы, действующей на еди-
ничную площадку, равную 1 см2, полюса (в ньютонах),
„ оло2 sin ла
рг = 80В №------
ла
(6-5)
При расчете радиальных сил рг следует иметь в виду соотно-
шения, от которых зависит форма колебаний станины (рис. 6-2):
если а ~ q' -ф 1/2, a Z/(2p) = q (q', q — целые числа), тогда
в каждый момент времени под всеми полюсами будет находиться
целое число пазовых делений, радиальные силы Рг под каждым
полюсом будут совпадать по фазе, а поэтому они вызовут колеба-
ния растяжения — сжатия при г = 0 (рис. 6-2, а);
если а — q' -|- 1/2, a Z/(2p) = q ф- 1/2, то в каждый момент
времени число пазов в полюсной дуге а под соседними полюсами
будет отличаться на единицу;
радиальные силы Рг соседних полюсов будут находиться в про-
тивофазе, а поэтому вызовут колебания изгиба (рис. 6-2, б) с чис-
лом волн по окружности г = р.
Кроме радиальных сил Рг при известных условиях возникают
знакопеременные изгибающие моменты Мг, величина которых мо-
жет быть рассчитана интегрированием выражения
+6р/2
Mr = 4 J prxdx.
-6р/2
(6-6)
94
Пренебрегая при интегрировании величинами второго порядка
малости, имеем
Mr = 4QBleb2plt [sin ла/(л2а2)—cos ла/(ла)] sin cot (6-7)
Амплитудное значение момента, действующего на единичную
площадку, равную 1 см2, полюса,
тг = 40Blebp [sin ла/(л2а2) — cos ла/(ла)]. (6-8)
Изгибающие моменты Мг возникают при следующих условиях:
если ZH2p) = q, а а = ЬрИ± = q', то изгибающие моменты,
действующие на соседние полюсы, находятся в фазе и число волн
деформаций по окружности станины г = 2р (рис. 6-2, в);
если ZHpp) = <7 + 1/2, а а = bpltr = q’, то изгибающие мо-
менты, действующие на соседние полюсы, находятся в противо-
фазе и число волн деформаций по окружности станины равно р
(рис. 6-2, г)..
Формулы для расчета радиальных сил рг и изгибающих момен-
тов тг могут быть представлены в виде:
p, = 80BWp(a); (6-9)
mr=40BlebpfM(a). (6-10)
На рис. 6-3 абсолютные значения функции fp (а) и fM (а) по-
строены для обычно встречающихся в практике значений а.
Условия возникновения радиальных сил и изгибающих момен-
тов при холостом ходе машины сведены в табл. 6-1.
Если ZHp.p') = q и q + 1/2 =/-= Z/(2p), то порядок колебаний
определяется из зависимости
r — 2pq—Z>0. (6-1Р
При этом в расчет вводятся только те числа q, при которых г
получается минимальным.
95
Таблица 6 I
Число зубцов на полюсном делении и полюсной дуге Возбуждающая сила Колебания соседних полюсов Число волн деформации по окружно- сти станины
г Ьр , 2р б Изгибающий момент В фазе г = 2р
г Ьр , 1 — = ?;а = -^ = <7 4 2р h 2 Радиальная сила г = 0
г 1 Ьр . 2р 2 ti Изгибающий момент В проти- вофазе < = Р
г 1 bp 1 2р 2 <i 2 Радиальная сила
Примечание, q, q — целые числа.
При bpltx Ф q' и q' + 1/2 главные полюсы возбуждаются как
радиальными силами рг, так и изгибающими моментами тг.
При изгибных колебаниях деформации, вызванные радиаль-
ными силами бр и изгибающими моментами бм, сдвинуты относи-
тельно друг друга на п/2, поэтому результирующая деформация
равна геометрической сумме отдельных составляющих, т. е.
б = д/б2Р + б^ . (6-12)
Для упрощения расчета вибрации, вызванной изгибающими
моментами, имеет смысл заменить их эквивалентными (по равенству
вызванных ими деформаций) радиальными силами.
Так, изгибающий момент Мг, приложенный к полюсу, может
быть заменен эквивалентной силой РЭк с местом приложения ее
между полюсами:
Рвк = (ЛШс)[(г2-1)/г]- (6-13)
При выборе числа пазов якоря Z предпочтение должно быть
отдано большим значениям Z/(2p), так как в этом случае умень-
шаются продольные пульсации магнитного потока, что вызывает
уменьшение колебаний напряжения на зажимах машины и умень-
шение магнитной вибрации. Однако надо помнить, что чрезмерное
увеличение числа пазов увеличивает расход пазовой изоляции,
вследствие чего увеличивается стоимость машины. Кроме того, из-
за относительного увеличения толщины изоляции в пазу может
увеличиваться длина машины.
96
Рис. 6-4. Остроконечное (а) и закру-
гленное (б) выполнение полюсных
наконечников
При выборе числа пазов
якоря должны быть соблюдены
следующие требования.
1. Число пазов на полюс 27(2р)
на основании данных практики
должно соответствовать значениям, указанным ниже:
Диаметр якоря, мм <500 <1000 >1000
Z/(2p).................... 7-10 10-16 12—22
Здесь большие значения Zl{2p) соответствуют меньшим числам
полюсов для данного диаметра якоря
2. Число пазов якоря должно удовлетворять условиям симмет-
рии обмотки.
3. При якорях с диаметром больше 1000 мм, сердечники кото-
рых собираются из сегментов, число пазов должно быть выбрано
с учетом того, чтобы размеры сегментов и число пазов в каждом
сегменте позволяли произвести сборку сердечника. Кроме того,
число сегментов по окружности якоря должно быть таким, при ко-
тором снижается возможность возникновения токов в подшипни-
ках.
Значение а = bp!t1 на расчет не влияет, так как может изме-
ниться при работе машины под нагрузкой. Объясняется это тем,
что поле реакции якоря может вызвать насыщение зубцов и краев
полюсного башмака (рис. 6-4, а). Для того чтобы уменьшить ве-
роятность насыщения краев полюсных башмаков, следует делать
их закругленными, как показано на рис. 6-4, б.
6-3. СОБСТВЕННЫЕ КОЛЕБАНИЯ ЯРМА
У машины постоянного тока частоты собственных ко-
лебаний ярма будут ниже, чем у статора синхронной или асин-
хронной машины при равных высотах спинки статора и ярма. Объяс-
няется это тем, что главные полюсы являются сосредоточенными
массами, прикрепленными к ярму.
Детальное исследование частот собственных колебаний машин
постоянного тока показывает, что понижение частоты, рассчитанной
по формулам (3-60), (3-61), происходит за счет поправки на массу,
принятую в расчете. При этом формула податливости остается
без изменения. Значение этой массы зависит от отношения числа
пазов в якоре Z к числу пар полюсов р. Здесь надо различать два
случая:
Z не является числом, кратным р (Z =Z= q"p), а следовательно,
порядок колебаний г отличается от числа, кратного р;
Z является числом, кратным р (Z = q"p), и порядок колебаний
г также кратен р.
4 Заказ № 2109
97
Значение колеблющейся массы т, приведенной к 1 см2 средней
цилиндрической поверхности ярма, для указанных случаев при-
ведено в табл. 6-2.
Таблица 6-2
Колебания Z г q"f> z = e"p
От радиальных сил tTlj fflp mj + 2mp
От изгибающих момен- тов mj + kmp mj -f~ 2kmp
Примеча н и е. Индекс / у массы ярма; р—у
полюса
Коэффициент k определяется из следующей зависимости:
fe = (^ + 4A^)/(/? + /i;2), (6-14)
где hp — радиальная высота полюса; й/ — высота ярма; 1р — ак-
сиальная длина полюса; I, —- аксиальная длина ярма
Пример 1. Произведем расчет магнитной вибрации двигателя постоян-
ного тока мощностью 20 кВт (1600 об/мин, 2р = 4), имеющего следующие
данные: индукция в воздушном зазоре Be = 0,57 Тл; количество пазов в
якоре Z = 42; ширина пазового деления = 1,72 см; ширина полюсного
башмака Ьр = 12,9 см; коэффициент Картера kc = 1,23; длина полюса
по оси машины If = 14,5 см; длина ярма по оси машины /у = 22 см; средний
радиус ярма Rj = 20 см; радиус якоря Ra = 11,5 см; толщина ярма h/ =
= 2 см; удельная масса: ярма т/ = 3,5-10“2 кг, полюсов тр = 410“2 кг.
Решение. 1. Частота возбуждающих магнитных сил
= 42-1600 = и -2л-1120 = 7030 с“1.
' 60
2. Число зубцов на полюсном делении и полюсной дуге
Z/(2p) = 42/4 = 10,5; а = 12,9/1,72 = 7,5.
При таких соотношениях от радиальных сил возникают колебания с
числом волн по окружности ярма г = 2 (см. табл. 6 1).
3. Удельная радиальная сила, приведенная к среднему радиусу ярма
по формуле (6-9),
11 5
рг = 80 0,572(1,23— 1)-4,1-10“2 - = 1,4 10—1 Н/см2;
fp (а) = 4,1 10-2 (рис. 6-3).
4. Полное механическое сопротивление ярма при г = 2, г = q''p
(табл. 6-2)Ху = [ 12-204/(2,1 107-28)](5/36) = 1,610“3 см/Н и ш=3,5-10“2 4-
+ 2-4-10“2= 11,5 10“2 кг
_ 7030-11,0-10- - 7ю(,^'бТо— -Л9 Н• с/см.
98
5. Уровень вибрации
1,4- 10-* , , 7030-1,26-10-2 „ г
у = —у=-------=-. 1,26-10~2 см/с; L = 20 1g--------------=69 дБ.
7 1/2 -7,9 З Ю-2
Пример 2. Определим уровень магнитной вибрации двигателя из при-
мера 1 при а = 7,0 и 7,3.
I. При а = 7,0 возникают колебания с числом волн г = 2 от изгибаю-
щих моментов, а при а = 7,3 колебания с теми же числами волн возбуждаются
радиальными силами и изгибающими моментами.
2. Удельные возбуждающие силы:
а) при а = 7,0 согласно рис. 6-3 и формуле (6-10)
тг = 40-0,572-0,23-12,9 4,З Ю-2 = 1,67 Н ем;
эквивалентная радиальная сила по (6-13)
рэк = (1,67/20)/[(22 — 1)/2] = 12,5-10—2 Н/см2;
б) при а = 7,3, согласно рис. 6-3 и формуле (6-10), изгибающий момент
тг = 40-0,572 0,23 12,9-2,2 Ю-2 = 0,85 Н-см;
эквивалентная радиальная сила
рэк = (0,85/20) [(22 — 1 )/2] = 6,4 • 10~2 Н/см2;
радиальная сила в соответствии с (6-9)
11 5
рг= 80-0,572-0,23-3,5-10~2 = 12-Ю-2 Н/см2.
3. Полное механическое сопротивление при действии радиальных сил
zp = 7,9 Н-с/см, при действии изгибающих моментов т = 3,5-10_2 +
2-0,9-410—2 = 10,7-10—2 кг и k = 0,9, согласно формуле (6-14),
zM = 7030-10,7- Ю-4 — 1/(7030-2- Ю'3) = 6,9 Н-с/см.
4. Уровень вибрации:
при а = 7,0 от изгибающих моментов
уы = 12,5-10-2/(б,9-УГ)= 1,28-10_2 см/с;
при а = 7,3 от изгибающих моментов
рм = 6,4-Ю-2/(б,9-УГ)= 0,66-Ю-2 см/с;
от радиальных сил
i/p = 1210-2/(7,9-УГ) = 1,07-Ю-2 ом/с.
Результирующая вибрация
у = УУЗЗ^Ю-2)2 + (1,07 1 б-2)2 = 1,3-10-2 см/с.
Как видно из примера, величина а здесь практически ие влияет на уро-
вень вибрации.
6-4. ПРЯМОЙ паз по длине якоря,
ЭКСЦЕНТРИЧЕСКИЙ ВОЗДУШНЫЙ ЗАЗОР под полюсом
Эксцентрический воздушный зазор или зазор, увеличи-
вающийся'начиная от середины полюса к его краям, создается спе-
циальным профилем полюсного башмака. Такой профиль обычно
характеризуется условным эксцентриситетом, представляющим со-
бой отношение максимального зазора 6тах под краем башмака к ми-
нимальному зазору бт1п под его серединой (рис. 6-5).
4*
99
Рис. 6-5. Магнитное поле под полюсом при
зазоре с эксцентриситетом
Эксцентрический воздушный зазор
в машинах постоянного тока создается
для ослабления действия знакопере-
менных сил, вызывающих вибрацию
и шум, и ослабления поля реакции
якоря. При этом основным условием
расчета машины должно быть равенство
проводимостей такого воздушного зазора
и оптимального для данной машины
равномерного воздушного зазора.
В противном случае уменьшение маг-
нитного шума было бы достигнуто за
счет использования активных материа-
лов машины. Эффективность снижения шума при эксцентриче-
ском зазоре увеличивается по мере увеличения отношения bpltr.
При проектировании малошумных электрических машин обычно
принимается эксцентриситет воздушного зазора 1 : 2 и 1:3. Экс-
центриситет более чем 1 : '3 значительно увеличивает индукцию
в зазоре под серединой полюса, что может привести к увеличению
напряжения между смежными коллекторными пластинами.
На рис. 6-5 показан характер распределения индукции под
полюсом при эксцентрическом воздушном зазоре.
Из условия равенства суммарных магнитных проводимостей
равномерного и эксцентрического воздушных зазоров вытекает,
что при эксцентриситете 1 : 2 зазор под серединой полюса 6m[n =
= (0,75 ч- 0,8)6, а при эксцентриситете 1 : 3 6min & 0,66.
Произведенные расчеты, а также экспериментальные исследо-
вания показывают, что эксцентрические зазоры по сравнению с рав-
номерным зазором приводят к ослаблению возбуждающих магнит-
ных сил почти в два раза.
6-5. СКОШЕННЫЙ ПАЗ ПО ДЛИНЕ ЯКОРЯ,
РАВНОМЕРНЫЙ ВОЗДУШНЫЙ ЗАЗОР ПОД ПОЛЮСОМ
Существенное снижение магнитного шума достигается
при скосе пазов в якоре на одно пазовое деление. Скосы более чем
на одно пазовое деление в практике не применяются, так как при
этом добавочными полюсами труднее создать поле для компенса-
ции реактивной э. д. с. в короткозамкнутой секции. В некоторых
напряженных в коммутационном отношении машинах даже скос
паза на одно пазовое деление ухудшает коммутацию.
Особенно это относится к машинам с одноходовыми петлевыми
обмотками и малым числом пазовых делений, приходящихся на
междуполюсное окно. В этом случае (рис. 6-6) стороны коммути-
рующей секции ab и cd частично приближаются к главным полюсам,
100
Рис. 6-6. Коммутируемая сек-
ция при скосе пазов
Рис. 6-7. Полюс с «шеврон-
ным» наконечником
что при сильном поле возбуждения и больших индукциях поля
реакции якоря может вызвать нарушение коммутации.
Физическая картина возникновения возбуждающих сил при
скошенных пазах в якоре аналогична картине в машинах перемен-
ного тока. Расчет магнитных сил и возбуждаемой ими вибрации
при скосе пазов производится по формулам гл. 4. Так как скос
пазов в машинах постоянного тока обычно принимается в долях
пазового деления якоря с, то на рис. 4-11 на оси абсцисс даны
также значения с.
Эффективным средством подавления магнитного шума является
комбинирование скоса пазов с эксцентриситетом воздушного за-
зора. Значительное снижение магнитного шума может быть также
достигнуто выполнением «шевронных» полюсных башмаков,
(рис. 6-7). Однако такая форма полюсов значительно удорожает
конструкцию машины, кроме того, при этом значительно труднее
добавочными полюсами скомпенсировать реактивную э. д. с. в ко-
роткозамкнутой секции.
Пример 3. Вычислим, на сколько уменьшится уровень вибрации двига-
теля из примера 1 при скосе пазов в якоре на одно пазовое деление. Ради-
альная сила при прямых пазах рг — 1,4-10—1 Н/см®.
1. Крутящий момент по формуле (4-67)
Л4Т = 1,4-iO-1-14,54 — 0,38)/2= —5,6 Н-см.
2. Моменты инерции:
= 2-223/12 = 1750 см4; Л = 0,32-23-22 = 56 см4 при т) = 0,32;
Jp= 1,7 -(222 Ц-22)/12 = 69 кг-см2,
где тс = 14,5-11,5-10~2 = 1,7 кг.
3. Податливость ярма при кручении по формуле (4-70)
Хкр = 22Е/(2,1 10-7 1750 + 0,8-107-56-22) = 0,1 10-’ 1/(Н -см).
4. Полное механическое сопротивление ярма при кручении
гкр = 7030-69-10-3— 1/(7030-0,1-10-’)= —9250 Н-с/см.
5. Уровень вибрации согласно формуле (4-78)
_ —5,6 14,5— _ смус _
2Д/3 - 9250
6. Снижение вибрации при скосе пазов
7030-2,5-Ю-з
20 lg~= 56ДБ-
ДЬ = 69 — 56= 13 дБ.
101
6-6. ВЛИЯНИЕ НАГРУЗКИ НА МАГНИТНЫЙ ШУМ
Некомпенсированные машины. Реакция якоря приводит
к искажению магнитного поля в воздушном зазоре, вследствие
чего индукция с одной стороны полюсного башмака становится
больше, чем с другой.
Пазовые гармоники обмотки якоря сдвинуты на 90° относи-
тельно пазовых гармоник поля возбуждения. В связи с этим виб-
рацию ярма при нагрузке можно представить в виде двух одина-
ковых волн деформаций, сдвинутых относительно друг друга на
угол 90°, одна из которых создана полем возбуждения, а другая —
полем реакции якоря.
Электромагнитные возбуждающие силы в машинах постоянного
тока при их работе под нагрузкой в самом простом случае (при
нескошенных пазах в якоре, без учета насыщения железа и сту-
пенчатости кривой поля реакции якоря) могут быть рассчитаны
по следующим формулам [371:
радиальная сила
рг = 80Вее Vfp (а) + xf« (а) ; (6-15)
изгибающий момент
Мг = 40В&Ьр у/fl (а) + xfp (а) , (6-16)
где % = А Ър- 10“4/(1,66В6), Л — линейная токовая нагрузка
якоря, А/см.
Кроме того, возникают тангенциальные силы, под воздейст-
вием которых станина подвергается изгибным и крутильным ко-
лебаниям. Наиболее сильные тангенциальные волны имеют вид
рх = BgAecos^ 2^” х—(of). (6-17)
Полная знакопеременная тангенциальная сила, действующая
на полюс,
+ЬР12
Px=lt С pxdx = B6Abplfi sinna cos со/. (6-18)
-bpt2 ™
Амплитудное значение силы (в ньютонах), действующей на 1 см2
поверхности полюса,
ртт = ВвЛе^^-10-2. (6-19)
па
Эти силы на плече, равном высоте полюса h, создают изгибаю-
щие моменты (в пьютон-сантиметрах)
тх = B6Aha -sir . ю~\ (6-20)
ла
под воздействием которых станина колеблется с числом волн г =
= 2р при Z/{2p) = q и г = р при Zl(2p) = q 4- 1/2.
102
Опыт расчетов и экспериментальных исследований показывает,
что эти колебания по амплитуде значительно меньше колебаний,
возбуждаемых радиальными силами.
Кроме изгибных колебаний станина при Zl(2p) = q под воз-
действием полного крутильного момента
Мх = 2pl„b, - А Rae siri . 10-г (6-21)
па
совершает крутильные колебания относительно оси машины с ча-
стотой w (Ra — радиус якоря).
В долях номинального момента Л4НОМ это выражение будет
__= е -s.in . (6-22)
М ном ла
Если ZR2p) не равно q и q + 1/2, то, так же как и в режиме
холостого хода, возникают колебания порядка г — 2 pq — Z>0.
Имеющийся опыт показывает, что вибрация частоты под нагруз-
кой мало отличается от вибрации в режиме холостого хода. Однако
в некоторых случаях наблюдалось резкое возрастание магнитной
вибрации при переходе от режима холостого хода к работе под на-
грузкой. Опыт экспериментальных исследований показывает, что
причиной повышенной вибрации могут быть:
возбуждение нового вида колебаний, при которых ярмо машины
при ее работе под нагрузкой втягивается в резонанс (это особенно
часто встречается в крупных машинах);
возбуждение колебаний добавочными полюсами, которые по
интенсивности могут быть соизмеримы, а иногда больше колебаний,
возбуждаемых главными полюсами (это возможно, когда число
пазовых делений, коммутируемых добавочным полюсом, является
нецелым числом).
Компенсированные машины. В таких машинах из-за наличия
двусторонней зубчатости спектр вибрации становится более насы-
щенным высшими гармониками. Под воздействием радиальных сил
станина колеблется с числом волн
г — 2pq -|- Z Z 0, (6 -23
где Z' — число пазов компенсационной обмотки.
При Z±Z' = 2pq возбуждаются колебания порядка г — 0.
Надо отметить, что компенсированные машины более чувстви-
тельны к наличию эксцентриситета воздушного зазора.
6-7. ВИБРАЦИЯ МАШИН ПОСТОЯННОГО ТОКА
ПРИ ИХ ПИТАНИИ ОТ СТАТИЧЕСКИХ ВЫПРЯМИТЕЛЕЙ
При питании якоря и обмотки возбуждения от стати-
ческого выпрямителя магнитный поток главных полюсов и ток
якоря изменяются во времени с частотой пульсации выпрямлен-
ного напряжения. Магнитное поле полюсов b (t) и линейную то-
юз
ковую нагрузку якоря а (/) в этом случае можно представить в виде
разложения Фурье:
b (0 = Be +Е В6к cos ((йц!—<р*в);
(6-24)
a (t)=А 4 £ Ak cos (to*#~<pw),
где о* — частота k-к гармоники выпрямленного тока или напря-
жения.
Эта система полей и токов порождает радиальные силы
pr = b\t)t^ (6-25)
и тангенциальные силы
pT=b(t)a(t). (6-26)
Наиболее сильно будут проявлять себя силы рх, радиальные
силы рг будут значительно ослаблены из-за демпфирования маг-
нитных полей массивными частями магнитопровода.
Поскольку поперечное поле реакции якоря замыкается в ос-
новном в полюсных наконечниках, то его демпфирование практи-
чески проявляться не будет.
В связи с этим при расчете вибрации следует учитывать в пер-
вую очередь силы
₽, = ВврЛ8со8(и,|—фм), (6-27)
которые вызывают крутильные колебания корпуса вокруг оси ма-
шины. —
Крутильный момент, вызванный ft-й гармоникой выпрямлен-
ного тока,
Л4кр=ЪрЬ^ЯаВъАь cos (e>kt—<р*л), (6-28)
или
(6-29)
где Ra — радиус якоря; Л4Ио« — номинальный момент машины;
ЦП кои — отношение тока Л-й гармоники к номинальному току
якоря.
6-8. ВЛИЯНИЕ НЕКОТОРЫХ
ТЕХНОЛОГИЧЕСКИХ ОТКЛОНЕНИЯ
f Анализ результатов виброакустических измерений одно-
типных машин постоянного тока показал, что, несмотря на их вы-
полнение по одним и тем же чертежам и предполагаемое различие
только в пределах технологических допусков, все же имеется зна-
чительный разброс значений шума на зубцовой частоте машин.
104
полюсов
причин
иссле-
Рис, 6-8. Прилегание
к станине
Для выяснения
такого разброса было
довано влияние следующих С---------------Э
факторов:
различие зазоров под отдельными главными полюсами в пре-
делах ±10 % расчетного значения зазора;
условия прилегания полюсов к ярму.
Неравномерность воздушного зазора под полюсами не вызывает
существенного изменения возбуждающих сил, однако при этом
возможно изменение числа силовых волн на ±1, что может при-
вести к значительному уменьшению механического сопротивления
ярма и в некоторых случаях к появлению резонанса. Например,
если в машине с равномерными зазорами образуются колебания
с числом волн, равным 2, то при наличии неравномерности зазоров
к этим колебаниям добавляются колебания с числом волн 1 и 3
и вызывающие в определенных случаях увеличенные вибрации и
шум. Это следует учитывать при выборе числа пазов якоря.
Возможные случаи прилегания полюсов к ярму показаны на
рис. 6-6. Прилегание полюсов, изображенное на рис. 6-8, а, недо-
пустимо. Как показал опыт, полюса в этом случае совершают ма-
ятниковые колебания, величина которых зависит от затяга болтов
крепления. Такое прилегание возникает часто из-за вводимых (не
предусмотренных чертежом) прокладок между полюсом и ярмом.
В подобных случаях изменение уровня вибрации на корпусе’в зави-
симости от усилия затяга доходило до 10 дБ.
Прилегание полюсов, изображенное на рис. 6-8, б, давало ста-
бильные результаты измерений, мало зависящие от затяга.
ГЛАВА СЕДЬМАЯ
АЭРОДИНАМИЧЕСКИЙ ШУМ
7-1. ОБЩИЕ ЗАМЕЧАНИЯ
Стремление улучшить использование активных мате-
риалов с целью уменьшения габаритов и массы электрических ма-
шин находится в прямом противоречии с требованиями снижения
аэродинамического шума. Объясняется это тем, что с улучшением
использования активных материалов электрической машины уве-
личивается количество охлаждающего воздуха, необходимого для
отвода выделяемой теплоты, что влечет за собой возрастание аэро-
динамического шума.
105
В современных вентилируемых машинах, особенно открытого
и защищенного исполнения, шум, создаваемый потоками воздуха,
превалирует над всеми другими источниками шума. Поэтому воз-
никающие трудности на пути создания малошумной электриче-
ской машины, как правило, связаны не столько с выбором наибо-
лее рациональных в акустическом отношении конструктивных форм,
сколько с проектированием оптимальной системы ее вентиляции.
7-1. ОБРАЗОВАНИЕ АЭРОДИНАМИЧЕСКОГО ШУМА
Основными причинами возникновения аэродинамиче-
ского шума являются:
' шум вентилятора, обусловленный срывающимися вихрями от
. рассечения воздушной струи кромками лопаток и диском венти-
лятора;
шум вращения ротора, обусловленный срывом вихрей с его
поверхности от рассечения воздушной струи головками обмоток
ротора или выступающими концами стержней беличьей клетки
короткозамкнутых роторов;
шум воздушных потоков, вызываемый срывом вихрей с непод-
вижных препятствий в вентиляционных путях, например на ре-
шетках входных и выходных окон, с ребер статора, лобовых ча-
стей обмоток статора и Др-;
‘ звуки, вызываемые тем, что воздушный поток на выходе с вен-
тиляторного колеса встречает на своем пути препятствия в виде
ребер, проходных шпилек и других деталей;
тональные звуки дискретной частоты, вызванные периодиче-
скими колебаниями давления на отдельных участках аэродинами-
ческой цепи, например, при пульсациях потока воздуха, выходя-
щего из радиальных вентиляционных каналов ротора и входящего
в радиальные вентиляционные каналы статора.
7-3. ШУМ ВЕНТИЛЯТОРА
Основную часть аэродинамического шума в машинах
как с самовентиляцией, так и с независимой вентиляцией создает
вентилятор.
В машинах с самовентиляцией невозможно по ряду конструк-
тивных соображений выполнить вентилятор и корпус, в который
он встроен, по всем правилам аэродинамики
Размеры встроенного вентилятора зависят от конструктивных
особенностей машины, однако не всегда удается сконструировать
вентилятор с оптимальными размерами, обеспечивающими макси-
мальный к. п. д. и минимальный шум.
Многочисленные исследования показали, что шум центробеж-
ного вентилятора состоит из шума, обусловленного в основном ча-
стотой вращения и размерами вентилятора, и составляющей, опре-
деляемой только его производительностью и напором.
106
Гюбнер подробно исследовал вентилятор с отношением диамет-
ров dy'da — 0,7 и с числом лопаток 19. Он установил, что измене-
ние шума центробежного вентилятора при его производительности
V —О-е-Гцои и постоянной частоте вращения п составлял при-
близительно 7 дБ. На рис. 7-1 показана зависимость снижения об-
щего уровня громкости шума от коэффициента дросселирования
£=ЛД‘/(Рр), (7-1)
где h — статический напор, у 10-8 Па; р— плотность воздуха,
кг/м8; V — производительность, м8/с; D — диаметр засасывающего
отверстия, м.
Такой характер снижения уровня шума наблюдается почти у
всех машин независимо от их конструктивного исполнения.
Проведенные исследования показали, что составляющая шума,
определяемая частотой вращения, оказывает значительно меньшее
влияние на общий уровень шума центробежного вентилятора, чем
развиваемый напор и производительность. Это значит, что кон-
струкция вентилятора имеет второстепенное значение в образова-
нии аэродинамического шума.
Для выяснения влияния этих факторов на шум машины мощ-
ностью 30 кВт при 3000 об/мин были испытаны четыре различные
конструкции центробежного вентилятора.
1. Литой силуминовый двухрядный вентилятор с наклонными
лопатками: лопатки внутреннего ряда выполнены удлиненными,
наружного — укороченными. Общее число лопаток 24; диаметр
вентилятора 344 мм.
2. Литой силуминовый однорядный вентилятор с 13 радиаль-
ными лопатками. Лопатки удлиненные с возрастанием ширины
в направлении к периферии. Диаметр вентилятора 344 мм.
Рис. 7-1 Зависимость снижения шума от
коэффициента дросселирования
Рис. 7-2. Вариант выполне-
ния встроенного вентиля-
тора
107
Таблица 7-1
108
Продолжение табл 7-1
3. Литой силуминовый однорядный вентилятор с 18 наклон-
ными лопатками. Этот вентилятор имеет два исполнения, разли-
чающиеся диаметрами (346 и 300 мм).
4. Литой силуминовый однорядный вентилятор с переменным
шагом лопаток. Число лопаток 18. Этот вентилятор имеет три ис-
полнения (в том числе двухструйный), различающиеся диаметрами:
346, 300 и 280 мм. Конструкции и результаты испытаний этих вен-
тиляторов приведены в табл. 7-1.
Как видно из табл. 7-1, общий уровень воздушного шума ма-
шины с вентиляторами различной конструкции при 3000 об/мин
колеблется в пределах 92—94 дБ. При уменьшении диаметра вен-
тиляторов уровень шума резко снижается. В спектрах частот ис-
следованных вентиляторов не содержится резко выраженных со-
ставляющих, что дает основание для сопоставления конструкций
вентиляторов. Таким образом, приведенные исследования показы-
вают, что совершенствованием конструкции встроенных вентиля-
10?
торов, очевидно, может быть достигнуто лишь незначительное сни-
жение аэродинамического шума (примерно на 2 дБ).
Основное внимание при конструировании должно быть уделено
выполнению щита, образующего полость для вентилятора. Эта
полость на внутренней поверхности не должна иметь ребер жест-
кости и проходных шпилек, а кромки окон, через которые выходит
воздух, должны иметь закругления. Окна для подвода и отвода
охлаждающего воздуха по возможности не должны иметь выхода
в зону обслуживания’.
Если вблизи вентилятора имеются препятствия, то возникает
звук частотой
/zbi®, (7-2)
где k — число лопаток вентилятора.
Уровень этого шума можно снизить увеличением зазора между
вентилятором и неподвижным препятствием.
Зазор 6 (рис. 7-2) между вентилятором и щитом или неподвиж-
ным препятствием должен быть не меньше 15 % от наружного диа-
метра вентилятора ds. Если конструктивным путем невозможно
увеличить зазор б, то шум вентилятора можно подавить примене-
нием неравномерного шага лопаток в рабочем колесе или скосом
кромки окна а на один шаг лопаток вентилятора.
При проектировании встроенных вентиляторов не рекомен-
дуется создавать больших запасов их производительности, так как
от этого зависит уровень шума машины.
Ширина лопаток центробежного вентилятора b при выбранном
диаметре вентилятора d2 (рис. 7-2) может быть ориентировочно
определена по формуле
(7-3)
где Z — аэродинамическое сопротивление машины.
Ориентировочные значения величины Z (в метрах в минус чет-
вертой степени) в зависимости от Phi (в киловаттах на обороты
в минуту) приведены ниже:
Р/л . 0,003 0,006 0,010 0,015 0,03 0,06 0,1 0.2
Z . . - 3000 2000 1000 800 500 200 150 100
Так, например, для машины мощностью 45 кВт, в которой диа-
метр вентилятора равен 0,48 м, частота вращения 1500 об/мин,
Pin = о.ОЗ (45/1500), a Z = 500,
6 ~ 0,3/(0,48 \/ЯЙ"! = 0,03 м
С целью уменьшения потерь в вентиляторе желательно, чтобы
площздь входа ndtb была меньше площади осевого сечения входа
на колесо (л/4) (di— do), где d0 — диаметр втулки вентилятора.
Отношение djdr принимается в пределах 1,2—1,5.
110
дб
80
SO 10 100 НО 200 280 WO 560 800 1120 1600 22403200 4480 6400 Гц
Рис. 7-3. Спектр шума асинхронного электродвигателя со снятым (/) и на-
саженным (2) вентилятором (область подавления шума заштрихована)
Для ориентировочного выбора числа лопаток можно рекомен-
довать следующую зависимость:
т-(б4-10)—(7-4)
d2 —d>
Для того чтобы исключить рециркуляцию воздуха, необходимо
устанавливать воздухонаправляющие щитки (с) с зазором около
2 мм (рис. 7-2).
7-4. ШУМ, ВОЗНИКАЮЩИЙ ОТ ВРАЩЕНИЯ РОТОРА
В крупных машинах для лучшего отвода тепла ротора
в пакете стали предусматриваются радивльные каналы. Располо-
женные в этих каналах распорки и выступающие стержни коротко-
замкнутых клеток по шумообразованию ведут себя так же, как
лопатки центробежного вентилятора. В асинхронных электродви-
гателях и машинах постоянного тока средней и малой мощности
диаметр вентилятора обычно значительно больше диаметра пакета
стали ротора, поэтому вызываемый ротором шум не может сущест-
венно повысить общий уровень аэродинамического шума.
На рис. 7-3 показан спектр шума асинхронного электродвига-
теля (мощность 1000 кВт, 1480 об/мин, отношение диаметра вен-
тилятора к диаметру ротора 1,6). Кривая 1 соответствует уровню
шума машины со снятым вентилятором, кривая 2 — с насажен-
ным вентилятором. Повышение общего уровня шума машины с вен-
тилятором составляет примерно 6 дБ.
Для того чтобы снизить вентиляционный шум, в крупных двух-
и четырехполюсных машинах с обеих сторон ротора целесообразно
уствнавливать по одному вентилятору и охлаждающий воздух
направлять двумя раздельными потоками. Ввиду того что наруж-
ный диаметр каждого из обоих вентиляторов может быть в -\/2
раза меньше диаметра одного вентилятора, необходимого для про-
тяжной вентиляции при тон же производительности, при такой
системе вентиляции обеспечивается снижение уровня шума на
5-7 дБ.
111
В этом случае диаметры вентиляторов равны диаметру ротора
и поэтому производимый ими шум соизмерим с шумом ротора ма-
шины.
В крупных явнополюсных синхронных машинах применяется
двухструйная аксиальная вентиляция ротора с выходом воздуха
в радиальные каналы статора при помощи пропеллерных вентиля-
торов, расположенных по обеим сторонам ротора. Уровень шума
пропеллерных вентиляторов соизмерим с шумом ротора.
В быстроходных машинах более предпочтительна аксиальная
вентиляция, чем радивльная.
Для машин с самовентиляцией, работающих по разомкнутому
циклу, без применения специальных шумозаглушающих устройств,
существует естественный предел уровня шума, снизить который
невозможно из-за специфики конструкции.
Так, например, для машины мощностью 1000 кВт и частоте
вращения 1500 об/мин при самовентиляции этот предел составляет
около 95 дБ.
В крупных асинхронных машинах радиальная вентиляция пре-
дусматривается как в статоре, так и в роторе. Вентиляционные
каналы ротора, действуя как центробежные вентиляторы, направ-
ляют воздушный поток в радиальные каналы статора, откуда он
выходит через спинку статора. Давление воздушного потока под-
вержено периодическим колебаниям с частотой, обусловленной
частотой вращения вентилятора и числом пазов ротора. Этот шум
можно подавить изменениями конструкции: смещением радиаль-
В)
0,020,050,1 0.2 0,5 1 2 5 10 кГц
Рис. 7-5. Влияние акустического эк-
рана на гауы электродвигателя: а —
конструкция; б — спектр шума без
экрана (/) и с экраном (2)
(12
ных каналов статора и ротора относительно друг друга; уве-
личением расстояния между распорками статора и ротора; уве-
личением воздушного зазора машины (рис. 7-4).
Если эти изменения не дают полного подавления дискретного
шума, то его дальнейшее снижение может быть достигнуто установ-
кой цилиндрического звукопоглощающего экрана, оклеенного из-
нутри войлоком (рис. 74>, а).
Расстояние между экраном и спинкой статора принимается
равным приблизительно четверти длины волны заглушаемого шума.
Спектры шума асинхронного двигателя (мощность 2800 кВт,
1490 об/мин) показаны на рис, 7-5, б.
1-5. ПРИМЕНЕНИЕ ГЛУШИТЕЛЕЙ ШУМА
Внутренние части электрической машины обладают очень
малой звукопоглощающей способностью, поэтому возникающий
внутри машины шум от вращения ротора и вентилятора почти бес-
препятственно передается наружу. Это особенно касается машин
брызгозащищенного исполнения.
В непосредственной близости от поверхности машины уровень
шума зависит не только от расстояния до поверхности, но и от места
измерения, особенно вблизи отверстий, через которые всасывается
и выдувается охлаждающий воздух. Как правило, эти отверстия
являются местом максимального излучения аэродинамического
шума. В машинах с независимой вентиляцией максимальное из-
лучение шума наблюдается у всасывающего отверстия вентиля-
тора.
Как показала практика, наиболее простым и эффективным спо-
собом подавления шума машин как с самовентиляцией, так и с при-
нудительной вентиляцией является установка глушителей в ме-
стах максимального излучения шума.
Глушитель является компактным (не выходящим далеко за
габариты машины) воздуховодом, стенки которого покрыты звуко-
поглощающим материалом. Как праввло, в таком воздуховоде
должен быть предусмотрен поворот струи воздуха. В некоторых
случаях из-за этого поворота увеличивается аэродинамическое со-
противление системы, уменьшается расход охлаждающего воздуха.
Глушитель для электровентилятора показан на рис. 7-6, а для
машин с самовентиляцией — па рис. 7-7.
г Эффективность снижения шума, обусловленного установкой
глушителей, зависит от поглощения шума, которое возрастает
с увеличением поверхности, по-
крытой эвукопоглотителем, и от
поглощения низких частот, кото-
рое повышается с ростом толщины
Рис. 7-6. Глушитель шума для элсктро-
вектилятора
113
Рис. 7-7. Варианты исполнения глушителей для машин с самовентнляцией
звукопоглощающего слоя и его коэффициента звукопоглощения
(толщина слоя звукопоглотителя определяется по нижней границе
спектра заглушаемого шума). Кроме того, в случае применения
волокнистых звукопоглотителей поглощение возрастает с повы-
шением частоты шума. Таким образом, оптимальным выбором ма-
териала поглотителя, определяющего коэффициент звукопоглоще-
ния площади покрытия, и толщины его можно достигнуть эффек-
тивного поглощения шума.
114
На рис. 7-8 и 7-9 приведены спектрограммы шума электровен-
тилятора производительностью 10 000 м3/ч и напором 1500 Па
и машины мощностью 40 кВт при 3000 об/мин с глушителем и без
глушителя.
В четырехполюсных короткозамкнутых асинхронных электро-
двигателях мощностью 400—10 000 кВт фирма ВВС рекомендует
устанавливать на прямоугольный корпус мощные акустические
глушители. Глушитель состоит из двух камер, через одну из ко-
торых проходит засасываемый в машину воздух, а через вторую —
выбрасываемый нагретый. Снижение уровня аэродинамического
шума достигается за счет многократного изменения направления
воздуха в камерах и поглощения шума звукопоглощающим покры-
тием внутренних вертикальных стенок камер.
Применение глушителя, по данным фирмы, позволило снизить
шум двигателя мощностью 1400 кВт с частотой вращения
1490 об/мин с 91 до 76 дБ (А) на расстоянии 1 м от его поверхности.
Простейшим способом глушения аэродинамического шума дви-
гателя является помещение его в жесткий кожух. При этом если
применяются для кожуха одинарные стенки, то степень глушения
не зависит от материала стенки, а зависнт от ее толщины.
Для определения коэффициента звукоизоляции (в децибелах)
стальных листов толщиной 25 мм справедлива приближенная фор-
мула
AL=13,31gAl. (7-5)
где М — масса 1 № стенки, кг.
Так, стальные листы толщиной 1 мм имеют коэффициент звуко-
изоляции примерно 20 дБ, толщиной 5 мм — 35 дБ, толщиной
25 мм — 44 дБ. Внутреннюю поверхность кожуха целесообразно
покрыть звукоизоляцией. Наличие проходных валов в кожухе,
соединительных шин, а также вентиляционных каналов значи-
тельно снижает звукоизолирующее действие кожуха. Если сум-
марная площадь отверстий достигает 10 %, общей площади поверх-
ности кожуха, то его звукоизолирующая способность практически
сводится к нулю.
115
В крупных электрических машинах эффективное подавление
шума может быть достигнуто звуковой изоляцией внутренних или
наружных поверхностей кожуха, которые наиболее интенсивно
излучают шум. Такими излучателями шума особенно являются
тонкостенные воздуховоды.
7-6. АЭРОДИНАМИЧЕСКИЙ ШУМ МАШИН
РАЗЛИЧНОГО ИСПОЛНЕНИЯ
В последние годы предприняты попытки связать излу-
чаемый машиной шум с размерами встроенного вентилятора, кон-
струкцией подшипникового щита со стороны вентилятора, геомет-
рией якоря и поверхностью его охлаждения. Все эти попытки от-
ражают стремление конструкторов электрических машин как можно
более точно предопределить уровень шума машины на стадии ее
проектирования.
Однако анализ измерений шума однотипных машин показал,
что существует значительное различие между ними как в общем
уровне громкости, так в его отдельных спектральных составляю-
щих. Это свидетельствует о влиянии различных отклонений (даже
в пределах существующих допусков) на уровень громкости шума
машины и, следовательно, о необходимости сужения допусков на
сопрягаемые детали и ужесточения требований к сборке малошум-
ных машин.
Из-за большого разброса опытных данных невозможно уста-
новить строгие зависимости, связывающие шум машины с ее кон-
струкцией. Поэтому представляется целесообразным дать эмпи-
рические зависимости, позволяющие определить уровень громкости
шума проектируемой машины, имея для этого только основные
номинальные данные.
Этими зависимостями можно пользоваться лишь при условии,
что шум машины в основном обусловлен аэродинамическими ис-
точниками, т. е. уровни шумов, вызванные магнитными силами,
щетками и др., конструктивно ограничены. Указанные зависимости
не могут быть применены при использовании специальных мер
подавления шума, особенно глушителями.
Общие уровни громкости шума (в децибелах) электрических
машин на расстоянии 0,5 м от корпуса в точке с максимальным
уровнем могут быть рассчитаны по следующим приближенным
формулам:
машины защищенного исполнения с самовентиляцией:
L= 101g Р + 201g n+5, (7-6)
где Р — мощность машины, кВт; п — частота вращения, об/мин;
машины с замкнутой самовентиляцией:
L=101gP + 201gn; (7-7)
машины закрытые с водяным охлаждением:
116
L = 101g P+201g n—10; (7-8)
машины с независимой вентиляцией, шум которых определяется
шумом вентилятора:
L=141gP+80. (7-9)
где Р — мощность вентилятора, кВт.
Сопоставление измеренных уровней громкости шума машин
различного исполнения с вычисленными по формулам дает откло-
нение ±3 дБ.
При проектировании малошумных машин надо иметь в виду
следующее:
1. В крупных машинах с самовентиляцией, в которых воздух
засасывается из атмосферы и выдувается в атмосферу, шум может
быть снижен на 6—9 дБ, если заменить самовентиляпию незави-
симой вентиляцией.
Доля шума, вносимого независимым вентилятором, может быть
снижена, если его разместить под машиной, в фундаменте, а воз-
духоводы выполнить толстостенными и покрыть звукоизоляцией.
Значительное снижение шума может быть достигнуто установкой
глушителей к отверстию входа и выхода воздуха.
2. Одним из возможных способов уменьшения аэродинамиче-
ского шума является уменьшение .наружного диаметра вентиля^,
тора в том случае, если двигатель недоиспользуется ^"мощности.
Так, например, уменьшение диаметра вентилятора на 10 ?о, осо-
бенно в быстроходных машинах, обеспечивает снижение уровня
шума на 2—3 дБ.
3. При малых аэродинамических сопротивлениях машин акси-
альный вентилятор является более предпочтительным, чем ради-
альный. Так, например, по данным фирмы ВВС, в диапазоне ча-
стот от 31,5 до 16 000 Гц для четырехполюсного двигателя мощ-
ностью 210 кВт уменьшение общего уровня шума при использова-
нии аксивльного вентилятора вместо радиального соствнило 7 дБ.
4. Одним из путей уменыпения^шума двигателя .может служить,
увеличение -числа^ябпатоХгТ'^ёГ сдвиг частоты вентилятора в об-
ласть более высоких частот.
5. У машин с наружным обдувом уровень громкости шума оп-
ределяется только шумом вентилятора. На рис. 7-10 показаны
кривые шума асинхронного электродвигателя мощностью 45 кВт
при частоте вращения 2945 об/мин с наружным обдувом (кривая /)
и двигателя закрытого исполнения (кривая 3), обеспечивающего
ту же мощность. Уменьшение шума машины составляет 26 дБ. Та-
кой вариант установки может быть рекомендован для двигате-
лей мощностью до 50 кВт при малошумной работе.
6. У машин с замкнутой самовентиляцией степень уменьшения
шума зависит оттолщины и массы стенок воздуховодов. В крупных
машинах тонкостенные щиты должны быть покрыты с внутренней
стороны звукопоглотителем.
На рис. 7-10 показаны кривые шума асинхронного электродви-
гателя мощностью 2000 кВт при частоте вращения 1490 об/мин
117
с протяжной самовентиляцией (кривая 2} и вентиляцией по замк-
нутому контуру с воздухоохладителем (кривая 4). Толшина стенок
корпуса и щитов колеблется от 5 до 20 мм.
ГЛАВА ВОСЬМАЯ
КОЛЕБАНИЯ РОТОРОВ
8-1. КОЛЕБАНИЯ ВАЛА
С ОДНОЙ СОСРЕДОТОЧЕННОЙ МАССОЙ
Рассмотрим вертикальный вал (рис. 8-1) с диском мас-
сой т, вращающийся с угловой скоростью <о.
После удара по диску вал под действием центробежной силы
начнет вращаться в изогнутом состоянии, которое не меняется,
если неизменна угловая скорость Условие равновесия сил в этом
случае имеет вяд
тчРу—ky или (тс/—(8-1)
где k — жесткость вала при изгибе.
Условие (8-1) выполнимо, если у произвольно, а ю имеет зна-
чение
• (8'2)
Это выражение дает критическую угловую скорость вала.
'•Для ввла длиной I с моментом инерции поперечного сечения
при изгибе J, с диском, посаженным в середине вала,
Икр = yj^>EJI(rnlv} (8-3)
Чтобы определить, как изменяется прогиб вала при приближе-
нии угловой скорости к критической, допустим, что центр тяжести
118
Рис. 8-2. Зависимость прогиба вала от
степени приближения к резонансу
Рис. 8-1. Верти-
кальный вал с дис-
диска смещен от оси вала на величину е. Пренебрегая демпфиро-
ванием колебаний, условие равновесия сил примет вид
т(у+е)с£? = ку-
прогиб
<>* с (<д/<окр)а_______________
klm—<£>* 1 — (<о/<окр)«
(8-4)
(8-5)
График этой зависимости показан на рис. 8-2. Из этого графика
видно, что с возрастанием со величина прогиба растет от нуля и при-
обретает неограниченное значение при со = ®кр. При со оо ве-
личина прогиба стремится к е, так что центр тяжести приближается
к оси вращения. Часть кривой выше критической угловой скорости
принято изображать без учета знака.
На рис. 8-3 показано расположение точек В, S и G при равно-
весии сил уравнения (8-4). На этом рисунке В — ось подшипни-
ков, S — ось вала, G — центр тяжести диска.
При частотах, меньших критической, точка G лежит от центра
В дальше, чем точка S, тогда как при частотах, больших критиче-
ской, точка S лежит дальше, чем точка G. Точки S и G при всех
частотах лежат по одну и ту же сторону от точ-
ки В.
Для упругих подшипников рассмотренная
физическая картина остается той же, однако
несколько понижается критическая угло-
Рис. 8-3. Расположение точек В, S к G
119
вая скорость ротора. Обычно жесткость подшипников по верти-
кальной и горизонтальной оси различна. В связи с этим наблю-
даются две критические угловые скорости, соответствующие двум
указанным жесткостям подшипников.
Формулу (8-2) можно записать в виде
юкр = -y/klm = ^Jglyc , (8-6)
где g — ускорение силы тяжести, или для критической частоты
вращения (в оборотах в минуту)
п„ = 300/-^, (8-7)
где ус — максимальный прогиб, см.
8-2. ОПРЕДЕЛЕНИЕ КРИТИЧЕСКИХ ЧАСТОТ
ВРАЩЕНИЯ РОТОРА
Вал на двух опорах. При изучении поперечных колеба-
ний вала электрической машины основное внимание уделяют рас-
чету его критических частот вращения. Правильно сконструиро-
ванный вал должен иметь критические частоты вращения, доста-
точно удаленные от рабочих.
Принятый в электромашиностроении графический метод рас-
чета критических частот обеспечивает достаточную точность, но
трудоемок.
Ниже излагается метод [34], позволяющий определять крити-
ческие частоты вращения аналитическим путем, в связи с чем он
легко поддается расчету иа счетно-решающей машине.
При изучении изгибных колебаний вал электрической машины
на двух подшипниках рассматривается как балка на двух опорах
(рис. 8-4). Задача о статическом изгибе такой балки сводится, как
известно, к интегрированию следующих дифференциальных урав-
dx» EJ (х) ' 1
при граничных условиях у (0) = у (1} = 0; М (0) = М (/) *= 0,
где у (х) —Гпрогиб; М (х) — изгибающий момент; q (х) — масса
единицы длины; ЕJ (х) — жесткость балки при изгибе.
Ось х направленаТпо’оси вала. Уравнения (8-8) могут быть не-
колебаний вала, если в на-
грузку включить силы инер-
ции вала, интенсивность кото-
рых представляется выраже-
нием
пользованы для изучения изгибных
Рис 8-4. К расчету поперечных
колебаний аала
120
Уравнения колебаний вала относительно положения покоя мо-
гут быть при этом записаны в следующем виде:
&М . д'у _ &у _________________М (х. о ,g „
to? 41 ’ дР ’ to» EJ (х) ’ ' 7
где у (х, t) — динамический прогиб вала; М (х, /) — динамиче
ский изгибающий момент; у (х, t) и М (х, t) являются гармониче-
скими функциями времени и их можно представить в виде
у(х, t)=y(x)sinkl; М(х, t) — М (х) sin kt, (8-10)
где у (х) и М (х) — форма колебаний и форма изгибающего мо-
мента. Подставляя эти выражения в (8-9) и сокращая на sin kt,
получим однородную систему дифференциальных уравнений:
_^L=_^(x)j,(x);
(8-И)
(Ру __ М(х)
dx* ' EJ (х)
с граничными условиями у (0) — у (I) = 0; М (0) == М (I) = 0.
Решение системы уравнений (8-11) относительно формы коле-
баний у (х) и формы момента М (х) возможно только при опреде-
ленных значениях к = kk (k — 1, 2 . . .)• Физически это означает,
что вал с заданным распределением массы и жесткости, с заданной
длиной имеет строго определенные частоты свободных колебаний.
Каждой частоте кк соответствует своя форма колебаний ук (х) и
своя форма изгибающего момента Мк (х).
Сущность приводимого ниже метода заключается в том, что
здесь задается форма колебаний и форма изгибающего момента,
тем самым исключается двойное интегрирование и двойное диффе-
ренцирование.
Форму колебаний и форму изгибающего момента можно пред-
ставить в виде рядов:
»(«)= j?OiSln-!S-; Л1(х)=У t,sln-” , (8-12)
где sin (tnxll) — функция, удовлетворяющая краевым условиям;
di и bi — неопределенные коэффициенты.
Представляя форму колебаний и форму изгибающего момента
в виде рядов'(8-12), тем самым сводим задачу об определении не-
известных функций у (х) и М (х) к задаче о нахождении бесконеч-
ного числа коэффициентов at и bi (t = 1, 2, . . . , оо), для опреде-
ления которых из (8-12) получается бесконечная система однород-
ных алгебраических уравнений. Эта система алгебраических урав-
нений допускает решение только при определенных значениях
к — kk, соответствующих частотам свободных изгибных колеба-
ний вала.
121
Для электрических машин интересно знать первую, иногда пер-
вые две частоты свободных изгибных колебаний.
Приближенную формулу низших частот можно получить, по-
ложив
у(х) — a*sin—; Al(x) = fcjjSin—при Л=1, 2,
(8-13)
т. е. оставив в разложении (8-12) только один член с индексом k.
Решение уравнений дает следующую формулу для определения
критических частот вращения вала:
здесь
nKP=(30M!)V^*g'/9* •
у Ас.
J* k jL Ji ’
(8-14)
Ji —• момент инерции i-ro участка (Д< = Ф (£f) — Ф (Ь-i); =
= Ф (£г) = Zi — stn 2л|//(2л); значения функции Ф (t<) для
различных значений приведено в приложении 9);
1 т
«•=т,§Дй<-
(?t— масса i-ro участка); Е — модуль упругости материала вала.
Для стального вала (Е = 2.1-107 Н/смг)
Максимальный прогиб (в сантиметрах) от массы вала может
быть оценен по формуле
6=9-ЮХ>-
(8-146)
Для проведения расчета критической частоты вращения вала
составим табл. 8-1.
Пример. Эскиз вала приведен па рис. 8-4. Масса железа якоря с обмот-
кой 1185 кг, масса коллектора 200 кг; q*~ 16,4; l/j*= 0,1164:
«кр - 4,3-10e/(154,6’)V103/(16,4 0,1164) =4100 об/мин.
Статический прогиб
ёст = (300/4100)» = 0,0054 см.
Следует, однако, иметь в виду, что не для каждого вала должен
производиться такой расчет. Так, например, для тихоходных ва-
лов достаточно произвести приближенную оценку критической
частоты вращения.
Формула для приближенной оценки первой критической ча-
стоты получается исходя из следующих упрощений; вал машины
заменяется эквивалентным валом равного диаметра dsx; для ма-
шины постоянного тока этим диаметром может быть принята сту-
1-22
Таблица 8-i
Исходные данные Расчет нервов теоретической частоты вращения при ft = 1 |
II "-I- 1 1 д^ — Ф(М ГФ(Ь)~ Н®(Vi) * Jl
1 0,745 0.72 2,5 0,0162 0,000027 0,000027 0,0000201 0,000037
2 0,965 1,2 10,7 0,0692 0.00226 0,002223 0,00215 0,00186
3 1Л 1,88 26.2 0,1695 0,0305 0,02824 0,034 0,015)
4 17,5 17,8 102,8 0.665 0,802 0,7715 13,5 0,044
5 24,0 10,5 117,8 0,76 0,9188 0,1168 2,8 0,0111
6 1,21 1,88 142.2 0,92 0,99663 0,07783 0.0942 0,0413
7 0,965 1.2 14/,9 0,955 0,99944 0,00281 0,00271 0,00234
8 0,82 0,859 149.9 0,97 0,999823 0.000383 0,000314 0.000445
9 0,62 0,491 154,6 1.0 1,0 0,000177 0,00011 0.00036
1.0000 16,4 0,1164
пень вала под коллектором, а асинхронной и синхронной машин
(кроме турбогенераторов) — ступень вала в месте посадки венти-
ляторов; масса ротора т принимается равномерно распределенной
по длине I между опорами; эта формула (в оборотах в минуту)
Лк, = 8,45 ЮХ/. (8-15)
где Л™ и / — в сантиметрах; т — в килограммах.
Если величина пхр, рассчитанная по формуле (8-15), будет выше
рабочей частоты вращения ротора не меньше чем на 80—100 %,
то более точного расчета не требуется.
Так, по приближенной формуле критическая частота ротора,
рассчитанного в примере,
пкр = 8,45- 10s • 21,5“/^' 1600 154.6s =4 5050 об/мин.
Если рабочая частота вращения этого ротора равна 1500 об/мин,
то точного расчета критической частоты не требуется.
Вал на двух опорах с консолью. У вала на двух опорах с нагру-
женной консолью, как известно, имеются две основные' критиче-
ские частоты вращения. Первая из них — низшая критическая
частота, при которой инерционные силы, действующие в пролете
между опорами и на консоли, направлены в противоположные
стороны.
В этом случае упрутая линия имеет вцд, показанный на
рис. 8-5, а. При второй критической частоте (высшей) инерционные
силы направлены согласно рис. 8-5, б.
Обычно для электрических машин практическое значение имеет
только первая критическая частота вращения.
123
Рис. 8-5. Колебания вала с консолью
Аналитически произвести упрощенный расчет критической ча-
стоты вращения вала с консолью, используя при этом результаты
приведенного расчета критической частоты в пролете, можно сле-
дующим образом:
1) определить критическую частоту лкр.к для вала одинако-
вого диаметра, в пролете между опорами которого действует на-
грузка, равная массе якоря, а на консоли — массе маховика;
2) определить критическую частоту лкр вала без консоли оди-
накового сечения с нагрузкой в пролете, равной массе якоря;
3) установить коэффициент влияния консоли kK на величину
критической частоты вращения, взяв отношение критических ча-
стот Лкр. к/Лкр.
Формула для расчета коэффициента kK может быть получена
из частотных уравнений деформаций вала, исходя из того, что цен-
тробежные силы вращающихся масс при критической частоте вра-
щения должны быть уравновешены упругими силами:
у2 = 4- т~(дау2112;
(8-16)
где т1э — массы якоря и маховика; Хц и Х12 — податливости,
характеризующие деформацию в точке от единичной силы, прило-
женной в той же точке; Х12, Х21 — взаимные податливости.
По теореме взаимности Х14 = Х21, так как груз, приложенный
в точке 1, вызывает прогиб в точке 2, равный прогибу в точке /,
вызванному такой же нагрузкой в точке 2.
Податливости равны:
J 1 & . ) J 1 + С)С* /С 17'
Лп 77 ’ ,,а “---------------------ЗЁ7~- (8‘17)
Уравнения (8-16) могут дать для у2 и у2 отличные от нуля ре-
шения только в том случае, когда определитель, составленный
из коэффициентов при у2 и у2, равен нулю, т. е.
I 1
I mi<o8A„
m2waX12 |
nt2<02AM—1 [
(8-18)
после вычисления получим
(XjjXm—-Ха2)—о (/п^фл^^т1 =0. (8-19)
124
Рис. 8-6. Кривые коэффициентов вли-
яния консоли ftK
Это биквадратное уравнение
позволяет найти две критические
частоты вращения, из которых
низшая
_ Г (mjX.i-1-m^»)
сОкр. к — I--1-----------------
V("«Ли + '"Ла)2 - 4rnim2 (Х11Х22 - 4)
(^11^22 ^12)
(8-20)
Критическая частота вращения вала одинакового сечения без
консоли
wKp = V l/fmAi). (8-21
Коэффициент алияния консоли
= ®кр. х/Икр = f (рч!т2, сП) (8-22)
Эта зависимость для различных значений т21тг и с/l приве-
дена на рис. 8-6.
Определим первую критическую частоту вращения вала
на двух опорах с нагруженной консолью.
Длина консоли / = 120 мм; масса маховика т2 ~ 1300 кг; масса
якоря /пх — 1400 кг; отношение т,/т2 - 1400/1300 = 1,08; с/1 =
= 120/1546 = 0,078; из рис. 8-6 определяем = 0,92. Следова-
тельно, НкР,к == 0,92-4100 = 3780 об/мин.
Вал на трех опорах. У вала на трех опорах, так же как у вала
на двух опорах с консолью, имеются две основные критические
угловые скорости, которым соответствуют две пространственные
формы колебаний вала (рис. 8-7). Обычно практическое значение
имеет критическая частота для колебаний, приведенных на
рис. 8-7, а.
Уравнения деформаций вала аналогичны уравнениям (8-16).
Поэтому расчет критической частоты вращения может произво-
Рис. 8-7. Колебания трекопорного вала
125
диться по формуле (8-20), приняв в ней [311:
Ч = пи^ЕЛ U2-4-cDJ;
Ли = ' [ZllltCjCz (/*—^—4) —
iZlijCJl
— <?)(/''—if—4)]- (8-23)
Меняя местами в формуле Лп. Zg и 1г и св и сх, получим подат-
ливость Хва.
8-3. ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ
НА КРИТИЧЕСКУЮ ЧАСТОТУ ВРАЩЕНИЯ
На критическую частоту вращения влияет целый ряд
факторов. К самым существенным из них относятся магнитное
притяжение, податливость опор вала, гироскопическое действие
масс и влияние насаженных на вал деталей (пакетов железа и вту-
лок).
Магнитное притяжение. Сила одностороннего магнитного при-
тяжения при некотором эксцентриситете ротора приводит к увели-
чению прогиба вала, т. е. к дополнительному эксцентриситету,
который, в свою очередь, вызывает дополнительное увеличение
прогиба и т. д. Когда упругая реакция изогнутого вала становится
равной силе одностороннего магнитного притяжения, смещение
вала прекращается.
Установившийся прогиб вала от одностороннего магнитного
притяжения
«м = М* -*) J * = (8-24)
где б0 — пропорциональный прогиб; е0 — начальный эксцентри-
ситет.
Суммарный прогиб вала
6 = 6„ + fiM. (8-25)
Первая критическая частота вращения с учетом односторон-
него магнитного притяжения
n.r.B«300V(l—*)/6е, =nKPV>—(8-26)
Введенная здесь поправка k, учитывающая алияние односто-
роннего магнитного притяжения, действительна для вала, несу-
щего только одну нагрузку в зоне активного железа якоря. При
наличии коллектора и других дополнительных нагрузок эта по-
правка яаляется приближенной.
Надо иметь в виду, что в машинах постоянного тока, снабжен-
ных уравнительными соединениями, одностороннее магнитное при-
тяжение снижается за счет появления уравнительных токов.
Для приведенного в этом параграфе примера расчета при экс-
центриситете, равном 0,04 см, и магнитном притяжении 5500 Н,
126
имеем: пропорциональный прогиб б0 = (5500/14 000)0,0054 —
— 0,0021 см; коэффициент k = 0,0021/0,04 = 0,052; критическая
частота вращения
Лкр. м = 4100V1 —0,052 — 3980 об/мин.
Податливость опор. В большинстве случаев расчет критической
частоты вращения производят в предположении, что опоры яв-
ляются абсолютно жесткими. Однако в крупных быстроходных
машинах упругость опор может заметно снизить особенно вторую
критическую частоту вала. Кроме того, в последнее время появ-
ляются конструкции машин, в которых по условиям эксплуатации
требуется установка упругих опор. В этих случаях учет упругости
опор при расчете критической частоты вращения яаляется обяза-
тельным.
Критическая частота вращения осесимметричного ротора с уче-
том податливости опор
<»« - V^/m(l. + S3, (8-27)
где — податливость вала между опорами при изгибе; Хо — по-
датливость опоры; т — масса ротора.
При жестких опорах
= 1/д/. (8-28)
Отношение критических частот вращения на жестких и упругих
опорах выражается зависимостью
(<и/<»„)!=1 + 2ХА,. (8-29)
Это показывает, что введение упругих опор приводит всегда
к снижению критической частоты вращения.
Амплитуда сил, передаваемых на фундамент через жесткие
опоры,
(8-30)
а через упругие опоры —
Ry- (е/[(со0<со)в— 1]) [1/(Х,+2М|. (8-31)
Таким образом, применение упругих опор позволяет уменьшить
реакции, передаваемые на фундамент:
RJR, = |[(<»/®)!-1]/[(4/<») —1])I(1+2V4' (8-32)
При проектировании следует иметь в виду следующее:
1. В машинах постоянного тока и асинхронных электродвига-
телях следует воздерживаться от применения упругих опор: они
могут привести к повышенному износу щеточного аппарата и ухуд-
шению коммутации машины. В асинхронных электродвигателях
из-за малого воздушного зазора между статором и ротором они мо-
гут привести к нарушению равномерности воздушного звзора и на-
сыщению спектра магнитной вибрации дополнительными гармо-
никами.
127
Рис. 8-8. Действие гироскопического момента иа упругую линию вала
2. В синхронных турбогенераторах для подавления вибрации,
возбуждаемой небалансом ротора и овальностью цапф, примене-
ние упругих опор в ряде случаев оправдано. Однако нельзя чрез-
мерно увеличивать податливость опор. Опыт показывает, что при
большой податливости опор происходят нарушения равномерности
воздушного зазора вследствие «увода» ротора под воздействием
односторонних магнитных сил.
3. В крупных машинах, выполненных на подшипниках каче-
ния, факторами, ограничивающими применение упругих опор, яв-
ляется прочность упругих элементов, встраиваемых в опору, и на-
дежность работы подшипников при перекосах опор под воздейст-
вием реакций приводимых механизмов. Особенно чувствительны
к перекосам подшипники высокого класса точности.
Влияние гироскопического аффекта вращающихся масс. На кри-
тическую частоту вращения может оказывать влияние гироскопи-
ческое действие вращающегося маховика большого диаметра, осо-
бенно если маховик насажен на такое место вала, где его упругая
линия имеет большой наклон
Гироскопическое действие проваляется в большинстве случаев
в сопротивлении угловым перемещениям вала. Возможны также
случаи, когда гироскопическое действие увеличивает прогиб.
Уменьшение или увеличение прогиба (рис. 8-8) вращающегося
маховика будет зависеть от того, имеет ли место прямая или обрат-
ная прецессия, т. е. вращается ли плоскость упругой линии вала
согласно с направлением вращения маховика вокруг своей оси
или встречно. На практике обычно наблюдается прямая прецессия,
т. е. гироскопический момент стремится уменьшить прогиб, а сле-
довательно, повысить критическую частоту вращения вала.
Гироскопический момент, действующий в месте расположения
маховика,
Mr=(J—(8-33)
где J — момент инерции маховика относительно осн; — момент
инерции маховика относительно диаметра.
Для маховиков, выполненных в виде тонких дисков, прк пря-
мой прецессии
J—J,- - JJ2. ' (8-34)
Рассмотрим наиболее часто встречающийся в практике случай
насадки маховика на свободный конец вала.
Частотные уравнения деформаций вала составляются анало-
гично уравнениям (8-16). Кроме инерционных сил вращающихся
128
масс мйХовйка и якоря, на свободном Конце возникает гироскопи-
ческий момент Л4Г, который зависит от угла поворота р маховика.
Уравнения деформаций для прямой прецессии вала:
у=nuifiyku 4- %у =-- /na>2{Ai8+- (8-35)
Преобразовав выражения, получим:
у (тсЛ„— 1) 4- — 0; у (пиАп-1)4- хЛ<А^>(/ — 0.
(8-36)
Здесь у' — угол наклона упругой линии под диском; —
податливость от силы; Х21 — податливость от момента; 112 — уг-
ловая податливость от силы; Х22 — угловая податливость от мо-
мента; х = — 1.
Когда у и у' отличны от нуля, определитель, составленный из
коэффициентов при неизвестных, равен нулю:
I mco’Xja—1
| шй24
—Хю%2м ]
2, < 1= О»
—ХюАаам—1 [
(8-37)
после вычисления получим
w® Х^a ^12)—со2 (тХц 4- X J 1^ая) 4-1 = 0. (8-38)
Это биквадратное уравнение позволяет найти критические ча-
стоты вращения
, Г «Хц 4-,
®i, г,», * ± I ------“— ±
[ 2%/2 (1] ]\2 — Х|2)
, Л^(т^н + ХА*22)2~4ХЛ(>'||*22 —1 zoom
±-------------------------—----------- I (О-ОУ)
2х/2 (Xj ,^22 — XI8) J
Упругие линии вала изображены на рис. 8-8.
Для обратной прецессии в формуле для гироскопического мо-
мента Мг момент инерции маховика должен быть
J—Jx = (3/2) т. е. х=3. (8-40)
Взяв отношение критической частоты вращения с учетом гиро-
скопического действия маховика к критической частоте без учета
этого действия, при соответствующей форме колебаний можно уста-
новить коэффициент влияния гироскопического эффекта на крити-
ческую частоту.
Влияние насаженных на вал деталей. Влияние втулок, наса-
женных на вал, сказывается тем больше, чем они длиннее и чем
жестче запрессованы на вал. При запрессованных длинных втул-
ках момент инерции сечения нужно находить как сумму моментов
инерции вала и втулки на длине, равной длине втулки за вычетом
диаметра вала. Влиянием коротких втулок (/ = d-~ 1,5 d) на жест-
кость можно пренебречь.
5 Заказ м 2109
12»
Влияньем насаженного пакета Мали на жесткость вала следует
также пренебречь, так как, во-первых, в нем возможны наруше-
ния сплошности насадки, обусловленные шихтовкой стали, а во-
вторых, ступень вала под пакетом, как правило, мало влияет на
жесткость вала.
Е-Д. КРИТИЧЕСКИЕ ЧАСТОТЫ ВРАЩЕНИЯ ВТОРОГО РОДА
Кроме обычной критической частоты вращения, которая
возбуждается небалансом ротора, в горизонтальных валах возни-
кает повышенная вибрация при частоте вращения, равной поло-
вине критической.
В вертикальных машинах эта вибрация отсутствует. Это явле-
ние известно под названием критической частоты вращения вто-
рого рода. Возбуждаются эти вибрации массой ротора совместно
с двойной жесткостью.
На рис. 8-9 видно, что двойная жесткость двухполюсного ро-
тора обусловлена наличием больших зубцов в пазовой зоне бочки
и двух пазов для токоподвода в зоне хвостовины.
В машинах постоянного тока и асинхронных двигателях двой-
ная жесткость ротора вызвана шпоночными канавками, выполняе-
мыми для фиксации на валу от проворачивания железа якоря, кол-
лектора и вентилятора.
Наличие двойной жесткости в роторе приводит к тому, что даже
при отсутствии в роторе небаланса на опоры действует возбуждаю-
щая сила, которая в течение одаого оборота два раза меняет свое
значение.
Если среднее значение жесткости вала принять равным k, то
при вращении его с частотой со жесткость вала изменяется по за-
кону
fe0 = ft4-Aftsin2cof, (8-41)
где k = (fa + fee)/2; Aft = (kd—kq)/2 — жесткость вала по
продолькой оси ротора; kd — жесткость вала по поперечной оси
ротора).
Амплитуда возмущающей силы двойной частоты, действующей
на опоры,
₽««=Kfa l (8-42>
где т — масса ротора.
Если вал вращается с частотой, в два раза меньшей критиче-
ской, то импульсы этой силы имеют частоту, равную частоте собст-
венных колебаний, вследствие чего возникает повышенная вибра-
ция.
Можно показать, что этот вид колебаний возможен и при более
высоких частотах вращения, соответствующих половинам нечет-
ных форм колебаний, т. е. при о>0/2, 105/2 и т. д., ио не может быть
при частотах вращения, соответствующих половинам четных форм.
130
Рис. 8-9. Двойная жесткость ро-
тора
Рис. 8-10. Частотная характеристи-
ка вибраций подшипника турбоге-
нератора
На рис. 8-10 приведена частотная характеристика вибрации под-
шипника турбогенератора мощностью 300 МВт. снятая для состав-
ляющих вибрации основной (кривая /) и двойной частоты враще-
ния (кривая 2). Видны следующие резонансные пики: =
= 1000 об/мин и п2 = 2600 об/мин — первая и вторая критиче-
ские частоты вращения ротора; лт/2 = 500 об/мин и п^2 =
= 2650 об/мин — резонансы по двойной гармонике вследствие
двойной жесткости ротора (расчетное значение л8 = 5600 об/мин).
Вибрация двойной частоты вращения не меняется при установке
на ротор корректирующих грузов и может быть снижена путем
выравнивания жесткости kd и kq.
Устранение двойной жесткости в роторах малошумных машин
должно производиться при отношении
(kd-k^Hkd+kq) > 0,03. (8-43)
В роторах турбогенераторов в зоне бочки двойная жесткость
устраняется созданием дополнительных канавок в больших зуб-
цах. В зоне хвосговин вместо двух пазов для токоподводов выпол-
няется четыре пвза, из которых два не заполнены.
Когда двойная жесткость бочки ротора и хвостовины (каждая
в отдельности) допустима по условиям вибрации, ротор и хвосто-
вина должны обязательно находиться в двух взаимно перпенди-
кулярных плоскостях.
Двойная жесткость валов со шпоночными канавками в меньшей
степени влияет на вибрацию. Поэтому устранять шпоночные
канавки следует только в тех случаях, когда расчеты жест-
кости по двум осям дают явно неудовлетворительный результат.
В этих случаях шпоночные
соединения железа якоря, коллек-
тора и вентилятора следует заме-
нять горячей посадкой или вместо
одной шпонки применять три,
расположенные относительно друг
друга под углом 120° (рис. 8-11).
Рис. 8-11. Расположение шпоночных
пазов в валу
131
Шпоночные соединения отдельных деталей не должны распола-
гаться на валу в одной плоскости. Они должны быть смещены от-
носительно друг друга.
Пример 1. Рассчитаем ориентировочно, какие уровни вертикальной
вибрации возбуждаются двойной жесткостью ротора, если машина аморти-
зирована.
Исходные данные: частота вращения ротора п — 3000 об/мин: со —
= 314 с-1; жесткость ротора по продольной оси kj — 25-IO6 Н/см, по попе-
речной оси fy = 22-105 Н/см; масса ротора т= 2000 кг, масса машины
М — 7000 иг; податливость амортизации по вертикальной оси Х.а ==
= Ю-» см/Н.
1. Возбуждающая сила
<25 -22)- ЮТ
(25+ 22)-IO1
•2000g =1300 Н
2. Механическое сопротивление пашины
г„ = 2-314-70 — 2 = 42400 Н-с/см.
3. Вибрация машины
8-5. УРАВНОВЕШИВАНИЕ РОТОРОВ
Одной из основных причин вибрации вращающегося ро-
тора и всей машины в целом является неуравновешенность ротора
(небаланс). Рассматривая наиболее часто встречающуюся в прак-
тике конструкцию жесткого ротора [17], можно указать на три
возможных случая его небаланса (рис. 8-12).
Статический небаланс (рис. 8-12, а) — центробежная сила не-
баланса вызывает на опорах одинаковые по значению и совпадаю-
щие по фазе вибрации: Ах = Аа.
Динамический небаланс (рис. 8-12, б) — пара центробежных сил
небаланса вызывает на опорах одинаковые по значению и противо-
положные по фазе вибрации: Ах = — Аг.
Смешанный небаланс (рис. 8-12, в)—остаточный небаланс
ротора приводится к паре сил (рис. 8-12, б) и к радивльной силе,
приложенной в центре тяжести ротора (рис. 8-12, с); вибрации опор
здесь различаются как по значению, так и по фазе: Ах =#= А2.
Наиболее распространенным в практике является смешанный
небаланс.
Эти виды небаланса могут быть устранены путем установки до-
бавочных грузов, которые бы привели к компенсации. Обычно
грузы устанавливаются в двух плоскостях ротора, в специвльных
круговых канавках с радиусом г.
Так, например, при статическом небалансе масса /пнеОб приво-
дится к радиусу г следующим образом:
тиеб=(е/г)/И, (8-44)
где М — масса ротора; е — смещение центра тяжести ротора.
132
Рис. 8-12. Примеры небаланса ротора
Рис. 8-13. Векторное решение уравне-
ния (8-9)
При динамическом небалансе компенсирующие массы опреде-
ляются для каждой половины отдельно. Ротор считается уравно-
вешенным, если он не передает на свои опоры центробежных сил
или если эти силы не превышают установленных допусков. Ниже
рассмотрим встречающийся в практике случай балансировки же-
сткого ротора в собственных подшипниках. Балансировка произ-
водится в режиме холостого хода.при рабочей частоте вращения
или при большом небалансе при пониженной частоте, которая
выбирается такой, чтобы вибрация опор не превосходила установ-
ленной нормы более чем в 3—4 раза.
При чисто статическом небалансе скорость колебаний опор
у = Л4со8е/?и, ’ (8-45)
амплитуда вибрации
At = М (£te!z„ — Шиеб (юг/Zm) — (8-46)
где zM — механическое сопротивление машины.
Величина сог/2м == k характеризует балансировочную чувстви-
тельность машины. В уравнении (8-46) тиеб и к — неизвестные
векторные величины, которые связаны с вращающейся совместно
с ротором системой координат. Вектор А! получаем, измерив ам-
плитуду и фазу вибрации опор при исходном пуске.
Для определения щиес необходимо иметь второе уравнение,
которое получим по результатам второго пуска ротора с пробным
грузом тяр:
A 2 — k (ГПцеб + тПр). (8-47)
Из уравнений (8-46) и (8-47) имеем
nw = пър (Ai/(A2—Ах)]. (8-48)
133
Так как myp = — nw» то
niyp — ninp (—Aj/(A2-—АД). (8-49)
На рис. 8-13 дано векторное решение уравнения (8-49). Из
векторной диаграммы видно, что если вектор приращения вибрации
пробного груза Аг—Ах окажется равным и противоположно на-
правленным к вектору исходной вибрации Аг, то ротор будет урав-
новешен, поскольку вибрация А2 окажется равной нулю.
Решая уравнения (8-46) и (8-47) относительно k, получим
к = (Аа—А^/Шпр. (8-50)
Чувствительность для ротора данного типа и применяемой
аппаратуры определяют по результатам балансировки, после чего
уравновешивай ке однотипного ротора можно проводить с исполь-
зованием известной величины k.
Используя выражение (8-49), имеем
тур~—А,/к, (8-51)
откуда видно, что уже после первого пуска вибрация может быть
значительно снижена.
Ниже для удобства запись векторных величин будем произво-
дить в полярных координатах, имея при этом в виду, что все опе-
рации на векторах должны производиться принятым в математике
способом.
Так, например, если даа вектора в полярных координатах Ах =
= 25 40° и А2 = 10 / 10°, то их отношение
Ai/Aa = 25 2.40710 2.10° = 2,5 Z.30°.
Рассмотрим пример компенсации статического небаланса при одно-
плоскостной балансировке.
При исходном пуске вибрация каждой из опор Aj = 60 мкм / 20°.
При пуске с пробным грузом тпр = 1,2 кг 2. 70° вибрации опор оказались
Аг = 75 / 80°. Строим на диаграмме (рис. 8-13) А, и А, и находим, что
A2-Aj = 69 2. 130°.
Уравновешивающий груз
шуР —
Р Л5- Aj 692.130°
= 1,22.70е-0,872.70° = 1,042.140е,
т. е. пробный груз надо умножить на 0.87 и повернуть на угол <р = 70° по
направлению вращения.
Балансировочная чувствительность
A2-At
П>пр
_ 692.130° мкм
= 1,22.70“ кг
2.60°.
Если перед началом балансировки была бы принята система разметки
ротора против его вращения, а неподвижной шкалы отсчета фазы — по на-
правлению вращения, то измеренные векторы вибрации оказались бы рав-
ными своим зеркальным отражениям относительно оси 0—180°: Л] =
= 60 2. 340°, As = 75 2. 280е.
Весь расчетный треугольник оказался бы в четвертом квадранте. Проб-
ный груз был бы И1пр = 1,2 / 290°.
134
Надо иметь в ваду, что весь цикл уравновешивания в связи
с неизбежными погрешностями при измерениях вибрации, уста-
новке грузов, а также наличии в некоторых случаях нелинейных
соотношений между небалансом и вибрацией требует нескольких
пусков.
Рассмотрим случай двухплоскостной балансировки при сме-
шанном небалансе.
Вибрации опор I и II
A, = А' + A"; A, j = А'—А", (8-52)
где А' — вибрация от статического небаланса; А" — вибрация от
пинамического небаланса.
Решаем уравнение (8-52) на векторной диаграмме (рис. 8-14):
A'=(Aj + Аи)/2; А"-(А,—А„)/2. (8-53)
Вибрации А' и А" в практике называют симметричными и ко-
сосимметричными составляющими вибрации опор.
Статическая и динамическая составляющие небаланса уравно-
вешиваются раздельно: первая — по симметричным, вторая — по
кососимметричным составляющим вибрации опор.
Расчет уравновешивающих систем
Рис. 8-14. Векторное решение уравнения (8-52)
135
Рис. 8-15. Векторное определение остаточной неуравновешенности ротора
для статической составляющей небаланса
к' — балансировочная чувствительность к статической составляю-
щей небаланса; тяр — вектор пробного груза, входящего в дина-
мическую систему:
А, = (Ах j — Ах 10/2; А, = (А2,—Л2 п)/2, (8-55)
к" — балансировочная чувствительность к динамической состав-
ляющей небаланса.
Для обоих случаев Ац — вектор вибрации опоры I при первом
пуске; Ащ — то же для опоры II; A2i — вектор вибрации опоры
при втором пуске с пробным грузом; А2 п — то же для опоры II.
Рассмотрим динамическую двухплоскостную балансировку ротора син-
хронного генератора мощностью 800 кВт при частоте вращения 1500 об/мин.
Балансировку будем производить по вертикальным вибрациям: для
опоры IA,i — 80 / 110°; для опоры //Ац]=20 / 170°. По диаграмме
рис. 8-15 находим полусумму А1 ~ 46 2 122° и полуразность Ai = 36 / 96°.
Балансировку начинаем с уравновешивания статического небаланса.
Устанавливаем в каждой из плоскостей исправления по одному грузу
одинаковой массы и под одним и тем же углом к нулевому радиусу. Масса
и угол установки пробной системы грузов выбраны произвольно — по 1 кг
на угол 200°.
При втором пуске вертикальные вибрации оказались следующими:
А2 i =. 762.70°; А2 и = 342.0.
Выделяем симметричную составляющую вибрации Аа и определяем по
диаграмме вектор ДА, j = As—Ai — 53 2 357°.
Определяем уравновешивающие грузы:
шУр = шпр • Г**, = 1.02.20СГ 46-^122 + 180 = 0,872.145°.
Aj-Aj '532.357
Уравновешивающий груз меньше пробного, так как приращение ДА]
больше исходной вибрации А,, и повернут на угол q> — — 55°, т. е. против
вращения ротора.
136
Рис. 8-16. Векторное определение остаточной неуравновешенности ротора
для динамической составляющей небаланса
Сняв пробную систему грузов и установив расчетную уравновешиваю
щую, производим третий пуск машины. Измеренные вибрации:
Аа 1 = 3OZ.9O0; Аз ц = 44Z-2803.
Полусумма атих вибраций будет составлять всего 7 мкм (Аэ = 7 Z. 303е).
Балансировочная чувствительность ротора ft по результатам трех пусков
составит в среднем 56 / 160°.
Следовательно, остаточный статический небаланс невелик и можно пе-
реходить к уравновешиванию динамической составляющей небаланса.
Вибрации опор при третьем пуске являются исходными для уравнове-
шивания динамической составляющей небаланса:
Л!/—30Z.900 и At//= 44Z.2800.
Определяем полуразность этих векторов Ai = 37 / 96° (рис. 8-16).
Устанавливаем на ротор пробную динамическую систему грузов, углы
установки которых различаются па 160°:
шпр i = 2.5Z-350”; шпр // 2.5ZJ70 .
При пуске с этими грузами измерены вибрации;
Аа J = 66Z.1550; Аа н = 75Z.3490.
Определяем их полуразность Аа и приращение Аа—Аа = 65 193°.
Рассчитываем уравновешивающую пару грузов:
аля плоскости /
37Z.96P 4-130°
тур 7 = 2,5Д350°---.Ъ,----------= 1.42Z.830;
137
для плоскости II
тур п = I.42Z.2639.
При пуске ротора с рассчитанной парой грузов, поставленной после
снятия пробной, вибрация опор значительно снизилась.
Балансировочная чувствительность ротора к составляет в среднем
23 / 198е.
Небаланс, оставшийся в роторе после балансировки, называется
остаточным.
8-6. ТЕПЛОВОЙ НЕБАЛАНС
Тепловой небаланс роторов вызывается неравномерным
нагревом или охлаждением активной зоны ротора и встречается
в турбогенераторах с воздушным и непосредственным водяным
охлаждением. Тепловая несимметрия ротора, возникающая осо-
бенно при работе машины под нагрузкой, приводит к тепловому
изгибу вала, в результате чего значительно увеличивается неба-
ланс ротора.
Несимметричный нагрев роторов турбогенератора может воз-
никнуть из-за виткового замыкания в обмотке ротора; при неравно-
мерной толщине пазовой изоляции обмотки ротора, вследствие
чего перепады температур в пазах будут различаться; из-за нерав-
номерного распределения охлаждающей воды по отдельным па-
раллельным ветвям ротора при водяном охлаждении.
Допустим, что одна из указанных причин может вызвать тепло-
вую несимметрию бочки ротора турбогенератора, в результате
которой одна сторона бочки ротора будет иметь температуру выше,
чем противоположная, на значение АТ.
Рис. 8-18. Перемещение пакете
железа ротора при освобожден-
ной его посадке на валу
138
Для простоты представим ротор состоящим из бочки круглого
сечения диаметром D длиной L и хвостовин длиной I и
диаметром d (рис. 8-17),
Если поле температур в бочке описывается функцией Т (х, у),
то на иее действует «температурный изгибающий момент»
М т = аЕ f Т(х, у) yds, (8-56)
где а — коэффициент линейного расширения материала бочки;
Е — модуль упругости; s — площадь сечения бочки.
Для круглого сечения удобнее воспользоваться полярными ко-
ординатами гиб, тогда формула примет следующий вид:
2л DI2
Мт-аЕ J .1 Т(г, 8)г’cosOdn№. (8-57)
Допустим, что отклонения температуры от среднего значения
линейно измениются по высоте сечения, т. е.
(8-58)
где — разность температур в диаметрально противоположных
точках бочки.
Тогда по формуле (8-57) имеем
MT=2^S1. J’cosHlr’tiraOs-i-raf.D’AZ. (8-69)
Под действием приложенного момента Мт бочка изогнется
(рис. 8-17).
Угол поворота концевых сечений от изгиба определяется по
формуле
₽ = AM(EJ). (8-60)
Подставив сюда выражение для Мт и J, получим
₽==М (8-61)
тогда смещение центра тяжести бочки составит
в = L₽ = aLlbttD. (8-62)
Если ограничить 6 для роторов массой более 1 т значением не
более 2 мкм, то допустимая тепловая несимметрия составит менее
0,2 К.
Многочисленные исследования показали, что тепловой изгиб,
особенно в- крупных турбогенераторах, возможен также при со-
вершенно равномерном нагреве ротора. Существует мнение, что
этот изгиб вызван наличием внутренних остаточных напряжений
в бочке ротора от термомеханической обработки поковки,- из ко-
торой изготовлен ротор.
В крупных быстроходных машинах е шихтованными роторами
несимметричный нагрев вала может возникнуть вследствие разъе-
139
динения посадки железа ротора на вал. Такое разъединение воз-
можно особенно при работе машины под нагрузкой, когда расши-
рение пакета железа ротора происходит не только от центробеж-
ных сил, но и от выделяемых потерь в роторе.
Разъединение посадки в некоторых случаях может вызвать также
нестабильность вибраций машины во времени вследствие непре-
рывного перемещения пакета железа на валу.
Физическая картина изменения вибрации во времени в этом
случае представляется следующим образом.
Ослабление поса^гки железа ротора под действием центробаж-
ных сил и тепловой) расширения пакета при его ориентации отно-
сительно вала (рис. 8-18) приводит к тому, что вал изгибается в на-
правлении, указанном стрелкой. Такой изгиб обусловлен тем, что
участок вала, контактирующий с пакетом, имеет более высокую
температуру, чем его противоположная сторона.
Нарастание теплового прогиба сопровождается увеличением
вибрации до тех пор, пока центробежные силы, рвзвиваемые па-
кетом на радиусе теплового прогиба, не переместят его на полную
величину зазора, образовавшегося в результате освобождения по-
садки. После перемещения пакета произойдет выравнивание про-
гиба, а затем его нарастание в противоположную сторону; в ре-
зультате произойдет временное уменьшение вибрации и ее после-
дующее нарастанке до максимального значения.
На рис. 8-19 показан график изменения вибрации во времени
крупной быстроходной машины постоянного тока, у которой на-
блюдалось освобождение посадки железа якоря. Периодичность
изменения вибрации на этой машине составляла 6 ч.
Устранение тепловой несимметрии роторов, вызывающей уве-
личение небаланса при работе машины под нагрузкой, может быть
достигнуто прежде всего устранением причин, вызывающих ее.
Одиако в их числе кроме причин технологического характера есть
причины, которые могут возникнуть в процессе эксплуатации (вит-
ковые замыкания, неравномерное распределение охлаждающей
воды по отдельным параллельным ветвям ротора).
Рис. в-19. Изменение вибраций машины во времени при освобожденной по-
садке железа я нор я
140
Задачей конструирования малошумных машин является ослаб-
ление действия факторов, вызывающих небаланс. В таких случаях
необходимо по возможности выполнять ротор более жестким.
В быстроходных машинах постоянного тока и асинхронных элек-
тродвигателях следует применять горячие посадки железа на вал.
В крупных турбогенераторах причиной тепловой несимметрии
ротора чаще всего являются нарушения нормальной проходимости
газа по каналам в пазу ротора. Так как устранение неравномерного
охлаждения ротора требует сложной и трудоемкой работы по де-
монтажу машины и разборки ротора, то для снижения вибраций,
вызываемых термической нестабильностью ротора, часто прибе-
гают к так называемой тепловой балансировке, т. е. к созданию
искусственной температурной несимметрии, обратной имеющейся
в роторе, например, с помощью частичного перекрытия вентиля-
ционных квиалов, вызывающего равный встречный вследствие
нагрева изгиб ротора. Разборка машины для устранения причин
тепловой несимметрии производится только при значительных теп-
ловых приращениях вибрации. Возможно также компенсировать
термическую нестабильность ротора путем установки корректи-
рующих масс. Это хотя и приводит к возрастанию вибрации машины
при холодном роторе, однако позволяет добиться удовлетворитель-
ного вибрационного состояния машины при работе под нагрузкой.
8-7. ВИБРАЦИЯ ОТ НЕКРУГЛОСТИ ЦАПФ РОТОРА
При гидродинамических расчетах подшипников сколь-
жения машины и механизмов обычно принимается, что цапфа имеет
правильную цилиндрическую форму. В действительности же ре-
альная форма цапф имеет отклонения от цилиндрической как в про-
дольном сечении — конусность, корсетность, так и в поперечном—
некруглость.
Опыт экспериментальных исследований и эксплуатации элек-
трических машин показывает, что только некруглость цапф яв-
ляется причиной вначительных вибраций подшипников. Рассмот-
рим ее влияние на динамические нагрузки, действующие в подшип-
никах скольжения. В самом общем случае профиль поперечного
сечения цапфы имеет произвольную форму (рис. 8-20).
В полярной системе координат положение произвольной точки
М контура поперечного сечения цапфы будет определиться поляр-
ным радиусом г и полярным углом <р. Эта зависимость может быть
записана в виде [19]
r(<p) = r<,+^r»sin(ftip + a,), (8-63)
где г0 — радиус средней окружности; гк — амплитуда k-R гармо-
ники; а* — фаза я-й гармоники.
Для фиксированного аначения k из выражения (8-63) получаем
уравнение контура поперечного сечения цапфы, имеющей элемен-
тарный вад некруглости:
г»(<р) ='•+'* sin (ftqp+qj) при k=2, 3, . ... т. (8-64)
141
Рис. 8-20. Поперечное Рис. 8-21. Виды некруглости цапфы
сечение некруглой цап-
фы /
Так при k = 2 слагаемое правой части выражает овальность
(рис. 8-21, а), при k — 3 — 6-узловой профиль (рис. 8-21, в), при
k — 4—8-узловой профиль (рис. 8-21, б) и т. д.
Задача о движении масляного слоя между вращающейся с по-
стоянной угловой скоростью частотой <о некруглой цапфой, несу-
щей статическую нагрузку Q, и цилиндрическим вкладышем дли-
ной I и диаметром D при известных допущениях сводится к реше-
нию системы дифференциальных уравнений Рейнольдса. Количест-
венная оценка динамических сил, действующих в цилиндрическом
подшипнике с относительной длиной 1/D ~ 0,5; 1,0; 2,0; со, для
овальной цапфы (k = 2) произведена в [19]. Значения коэффици-
ента нагруженности | в зависимости от относительного эксцентри-
ситета цапфы х = — эксцентриситет, 6 — радиальный за-
зор в подшипнике) приведены на рис. 8-22.
На рис. 8-23 построены зависимости динамической нагрузки Р~,
отнесенной к статической нагрузке Q и параметру относительной
овальности цапфы е, от относительной длины IID и эксцентриситета.
Относительная овальность цапфы
е=(Dmax-Dmm)/(46) - Д/«.
Результаты выполненных расчетов показывают, что динамиче-
ские нагрузки на подшипник, вызванные оввльностью цапфы, ра-
стут с уменьшением эксценгриситета х и уменьшением относитель-
Рис. 8-23. Динамические на-
грузки на подшипник сколь-
жения, вызванные овально-
стью цапфы
Рис. 8-22. Коэффициент
нагруженности подшип-
ника скольжения
142
ной длины UD. Амплитуда динамической силы преимущественно
ориентирована в направлении статической нагрузки Q.
Для снижения динамической силы Р~ относительный эксцен-
триситет х полезно увеличивать за счет увеличения относительного
зазора яр — 2S/P, так как при этом одновременно уменьшается
относительная овальность цапфы 8.
Полученные значения амплитуды динамической силы с учетом
влияния масляного слоя в подшипнике полезно сопоставить со зна-
чением динамической силы без его учета.
Амплитудные значения ускорения центра тяжести ротора и ди-
намической силы в этом случае
£=2®Е8; Р~ = 2asmA;
(8-65)
ЛЛ> = 2шЕД/£,
где т — масса ротора.
На конкретном примере произведем оценку влияния депмфи-
рующего действия’масляной пленки на значение динамической
силы, действующей на опоры электрической машины.
Пример I. Пусть подшипник имеет D — 180 мм; 1 = 160 мм; 1/0 = 0,89;
угловая скорость ротора (О = 157 с*"1; ф=2,2-10“s; 6 = 2,2-16“®-90 ==
= 0,2 мм; у. = 0,6. Из рис. 8-22 находим £ = 1,2. Разница между макси-
мальным и минимальным значениями диаметра цапфы примем Dmax—Omln=
= 0,005 мм.
Относительная некруглость цапфы
е = 0,005/(4-0,2) = 0,006.
Из графика рис. 8-23 находим P~!Q = 0,006-2,8 = 0,017 или 1,7 %
статической нагрузки.
При отсутствии масляной пленки динамическая сила P~IQ = 2-1572Х
Х0.005/10* = 0,025 или 2,5 % статической нагрузки.
Таким образом, масляная пленка уменьшает динамическую силу в 1,4
раза. Это показывает, что при упрощенных расчетах во многих случаях при
оценке динамических нагрузок, действующих на подшипниковые узлы,
можно пользоваться зависимостью (8-65),
Пример 2. Произведем оценку уровня вибрации амортизированной ма-
шины, возбуждаемой овальностью цапфы, имеющей следующие данные:
масса машины М = 10* кг, масса ротора т— 3-10® кг; угловая скорость
ротора ©= 314 с-1; овальность цапф Л = 2-10-8 м; податливость аморти-
зации, установленной под лапами машины, ?<а = 7-10“® м/Н.
Динамическая сила
Р~ = 2-3142-3-103-2-10“s = 1200 Н.
Вибрация
у =-----------—---------------= 2-10-* м/с;
628-10« — 1/(628-7-10-®)
£ = 20 1g
628-2-10-*
3-10—*
= 52 дБ.
Это значение примерно соответствует результатам экспериментальных
исследований.
143
Надо отметить, что овальность цапф -особенно влияет на вели-
чину вибрации в крупных быстроходных электрических машинах.
Ниже для машин, выполненных на подшипниках качения, об-
работанных по различным классам точности, приведены допуски
на овальность цапф:
Диаметр цапфы, мм ...............
Допуск на овальность цапфы, мкм, для
подшипников качения класса точности
Н, П и В ....................
АиС . . Z....................
35
8
3
45 65 90 100 120
8 10 12 12 12
3 3 4 4 4
Ослабить влияние овальности на вибрацию можно только умень-
шением ее величины, т. е. более тщательной обработкой.
Для малошумных машин следует обрабатывать цапфы по клас-
сам точности АиС. При этом допуск на овальность не
должен превышать 1/4 значения поля допусков на обработку.
8-8. ВИБРАЦИЯ МАШИН, ВОЗБУЖДАЕМАЯ НЕБАЛАНСОМ
Роторы различных типов электрических машин имеют
свои конструктивные особенности и поэтому поддаются уравнове-
шиванию с различной степенью точности.
Самая высокая точность уравновешивания может быть достиг-
нута в асинхронных двигателях с короткозамкнутыми роторами,
у которых первая критическая частота вращения выше обычкой.
Роторы этих машин термически стабильны во времени и практически
не меняют свой небаланс в эксплуатации.
Якоря машин постоянного тока и явяополюсные роторы син-
хронных машин имеют более высокий остаточный небаланс, прихо-
дящийся на единицу массы ротора. Стабильность вибрации указан-
ных машин достигается особой технологией формовки и запечки
коллекторов и обмоток роторов.
Самые высокие вибрации наблюдаются в машинах с гибкими
роторами, у которых рабочая частота вращения выше первой и вто-
рой критической. Роторы этих машин особенно чувствительны
к тепловой несимметрии и требуют дополнительной балансировки
ротора в собранной машине.
При разработке норм на допустимый остаточный небаланс ро-
торов электрических машин и вызываемые им вибрации исходят
из необходимости выполнения следующих требований:
1) обеспечить отсутствие усталостных разрушений в течение
установленного срока службы машины;
2) уровень вибраций электрических машин не должен отра-
жаться на качестве технологических процессов;
вибрация машин при их эксплуатации не должна оказывать
вредного физиологического воздействия на человека.
ГОСТ 22061—76 устанавливает нормы на допустимый небаланс
жестких роторов и учитывает требования международного стан-
дарта ИСО 1940—73 «Точность балансировки вращающихся тел».
144
«Электросила»
Точность балансировки характеризуется произведением удельного
небаланса на максимальную эксплуатационную угловую скорость
мм-ст1. Роторы всех вращающихся машин в занисимости
от требований к точности балансировки разделены на 11 классов:
наибольшая точность характеризуется первым классом, наимень-
шая — одиннадцатым. Роторы электрических машин по этой клас-
сификации попадают в классы с первого по четвертый: к первому
классу относятся роторы электродвигателей прецизионных шли-
фоввльных станков, ко второму — роторы малых машин со спе-
циальными требованиями, к третьему — без специальных требо-
ваний и к четвертому — роторы электрических машин общего на-
значения. Для каждого класса устанавливаются интервалы значе-
ний произведения естсои или соответствующие интервалы значения
эксцентриситета в зависимости от частоты вращения ротора
(рис. 8-24). Тем самым допуски на балансировку вращающихся
дета лей становятся аналогичными допускам на ихобработку. Нормы
на вибрации электрических машин массой 0,5 — 2000 кг устанавли-
вает ГОСТ 16921—83. В качестве нормируемого параметра вибра-
ций принимается эффективное значение вибрационной скорости.
В зависимости от размеров и требований к исполнению машины
ее относят к одному из классов вибраций, которые обозначаются
индексами, соответствующими максимально допустимой для дан-
ного класса вибрационной скорости Оэф.шм (в миллиметрах в се-
кунду): 0,28; 0,45; 0,71; 1,12; 1,8; 2,8; 4,5; 7,1. Стандарт не дает
рекомендаций, какие машины следует относить к тому или иному
классу. Для этого целесообразно воспользоваться рекомендациями
международного стандарта ИСО 2372—74, по которому электро-
двигатели общепромышленного исполнения мощностью до 15 кВт,
встраиваемые в основной механизм, следует относить к классу
145
вибрации 1,8. Электрические машины до 75 кВт без специальных
фундаментов относят к классу 2,8; большие машины на тяжелых
фундаментах можно относить к классу 4,5, но на них
ГОСТ 16921—83 уже не распространяется. Для таких машин до-
пустимые уровни вибраций устанавливаются обычно . внутриза-
водскими нормалями. Турбогенераторы всех типов относятся по
ГОСТ 533—76 к классу 4,5. На рис. 8-25 приведены принятые
в ЛПЭО «Электросила» нормы допустимых вибраций электрических
машин на стендах завода.
Следует отметить, что в технически обоснованных случаях по
согласованию между заказчиком и предприятием-изготовителем
допускается предъявление более жестких требоввний. чем для
класса 0,28.
Вибрация машины, возбуждаемая небвлансом, практически не
поддается расчету из-за невозможности предопределить распреде-
ление остаточной неуравновешенности во всем объеме ротора.
В самом простом случае, когда в роторе имеется чисто статический
небаланс, центр тяжести машины совпадает с центром жесткости
амортизирующего крепления и жесткость ротора при изгибе зна-
чительно выше жесткости амортизирующего крепления, расчет
вибрации можно производить как для одномассовой системы, в ко-
торой расчетными элементами являются масса машины и жесткость
амортизации.
При гибком роторе, жесткость которого соизмерима с жест-
костью амортизации, расчет следует производить как для двухмас-
совой системы, в которой расчетными элементами яаляются массы
статора и ротора, а также жесткость ротора при изгибе и жесткость
амортизации. Вибрация машины в децибелах, измеренная по уско-
рению, будет тем выше, чем быстроходнее машина. Имеющийся
опыт показывает, что при возрастании частоты вращения в два раза
уровень вибрации, возбуждаемой небалансом, повышается при-
мерно на 6 дБ.
8-9. ЦЕНТРОВКА ЛИНИИ ВАЛА
При работе электрических машин в агрегате уровень
вибрации во многом зависит от правильного сопряжения роторов
машин и механизмов, входящих в состав агрегата, т. е. от их цен-
тровки.
Эта операция состоит в такой выверке опор и сопрягаемых флан-
цев, при которой обеспечивается отсутствие смещения и излома
линии вала.
Правильное сопряжение роторов (рис. 8-26, б) обеспечивается
выполнением следующих требований:
перед соединением роторы должны быть расположены так,
чтобы их упругие линии яалялись продолжением друг друга без
смещения и излома в плоскости сопряжения;
при соединении фланцев должна быть строго соблюдена их па-
раллельность.
146
Рис. 8-26. Центровка линии вала
Невыполнение хотя бы одного из указанных требоввний
(рис. 8-26, а) вызывает повышенную вибрацию агрегата на частоте
вращения.
Влияние несоблюдения центровки на уровень вибрации может
быть уменьшено путем применения упругих муфт, но надо иметь
в виду, 'что они могут сами быть источником вибрации вследствие
своей неуравновешенности.
Кроме того, при использовании зубчатых муфт или муфт с паль-
цами вращающий момент может передаваться не всем элементам
сцепления. В результате этого на каждую из полумуфт действует
радиальная неуравновешенная сила, вращающаяся вместе с муф-
той. В предельном случае, когда вращающий момент передается
одним зубом или одним пальцем, неуравновешенная сила дости-
гает наибольшего значения и вибрация агрегата будет максималь-
ной.
Упругие муфты при правильном их монтаже обеспечивают нор-
мальную работу агрегатов при несоблюдении центровки, достигаю-
щей 0,2—0,3 мм.
Допуски на несоосность валов устанавливаются в зависимости
от типа соединительной муфты. Ниже приведены примерные зна-
чения допустимых отклонений при центровке валов в турбогене-
раторах:
Тип муфты .......................
Смещение осей, мм ................
Излом на 1 м диаметра, муфты, мм
Жесткая Полужесткая Зубчатая
0,02 0,03 0.04
0,05 0,06 0,08
8-10. ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ
Эффективным] средством подавления вибрации, возбуж-
даемой небалансом ротора, в машинах со строго фиксированной
частотой вращения может в некоторых случаях оказаться приме-
нение поглотителей колебаний.
Подробное их описание и расчет приведены в [9]. Здесь при-
ведем лишь основные элементы расчета поглотителей, воспользо-
вавшись приведенной на рис. 3-5 схемой. Следует отметить, что
поглотитель колебаний рекомендуется применять лишь в крайних
случаях, когда машина работает вблизи резонанса и нет возможно-
сти иными способами удалиться от него.
Поглотитель колебаний без затухания. В этом случае сопротив-
ление гм2 должно быть принято равным нулю. Собственная ча-
стота поглотителя ©п = 1/-ул1а^8 подбирается так, чтобы она была
равна частоте возбуждающей силы <о. Масса поглотителя /пв может
147
быть мала по сравнению с массой машины тг. Амплитуда вибрации
машины в этом случае
' ___________poltoma —1/(<оМ_____________
° m»/!» — [<wnx — iZfoiXx) J [ci)zna — 1/(йЖа)]
= Рогп/(тЛа—z«zn), (8-66)
где zM и zn — полные сопротивления машины и поглотителя.
Амплитуда вибрации самого поглотителя
«/в = Ро1/(и%а)/(ягЛ—г„гп). (8-67)
Как видно, при настройке поглотителя (гЫ2 = 0) у0 =?= 0.
Экспериментальные исследования показывают, что поглотитель
без затухания эффективен только тогда, когда частота возбуждаю-
щей силы постоянна. В машинах, работающих при переменном ско-
ростном режиме, применение поглотителей без затухания беспо-
лезно.
Поглотитель колебаний с затуханием. Для поглотителя с за-
туханием, в соответствии с (3-32), если ги1 = 0, а гив =/= 0, имеем
ЙО —------------ , 10-00 )
[Г« + 1 /</«оХа)1 /“^2 — гмг„
где zn = гиа -Ь l/(jo>?v2) 4-/<ол1г; = J<wnt Wj&KJ-,
rui = ^/(лсоЛа) (8-69)
(ft — логарифмический декремент затухания упругого элемента по-
глотителя). Оптимальное значение ft для поглотителя с наилучшей
настройкой и ианлучшим затуханием может быть выбрано из [9].
Выражение (8-68) приводится к веду
У о—Ро (Ai + /В,)- (8-70)
Складывая геометрически векторы Aj и В1г находим
й-РоД/^+В? (8-71)
Введя в выражение (8-71) обозначения
и /=<йл/Ои, (8-72)
приходим к следующему результату:
f=l/(l + p). (8-73)
Полученная формула дает значение настройки для любого по
величине поглотителя с затуханием.
Так, например, в очень малых поглотителях настройка опреде-
ляется значением f ~ 1,0, т. е. собственная частота поглотителя соп
должна быть такая же, как собственная частота машины а>„. При
массе поглотителя, составляющей одну пятую часть массы машины:
f = 5/6, поглотитель должен иметь собственную частоту на 17 %
меньше массы машины.
При проектировании поглотителей надо иметь в виду следующее:
148
конструкция поглотителя должна допускать плавную его на-
стройку;
не следует применять много поглотителей на одной машине,
так как их настройка в этом случае значительно усложняется;
кроме того, установлено, что эффективность каждого из них па-
дает; максимальный эффект достигается при одном поглотителе;
в случае применения нескольких поглотителей равнодействующая
упрурих реакций всех поглотителей по возможности должна быть
приложена ближе к оси, проходящей через центр тяжести машины;
механические напряжения в упругом элементе поглотителя
не должны быть выше допустимых;
особое внимание должно быть уделено условиям крепления
упругого элемента к корпусу машины, конструкция должна исклю-
чать возможность ослабления крепления упругого элемента к кор-
пусу;
поглотители должны вписываться. в габаритные размеры ма-
шины.
8-11. КРУТИЛЬНЫЕ КОЛЕБАНИЯ
Простейшим, наиболее распространенным случаем си-
стемы с крутильными колебаниями вала является агрегат, состоя-
щий из генератора и дизеля.
Для снижения напряжений от крутильных колебаний в валу
и элементах ротора сочленение дизеля с генератором часто произ-
водится при помощи эластичной муфты.
Для уменьшения неравномерности хода дизеля и более устой-
чивой работы генератора на венец ведущей полумуфты или при-
водной конец вала дизеля насаживается маховик.
Расчет крутильных колебаний такой установки приводится
к колебаниям вала с угловой податливостью на концах кото-
рого насажены две массы: с одной стороны — маховик с моментом
инерции J.2, а с другой — ротор с моментом инерции Jlt масса ко-
торого сосредоточена в центре тяжести (рис. 8-27, а). Участок вала
считается безынерционным, а масса его входит в массы на концах.
На рис. 8-27, б приведен электрический аналог этой системы. Пол-
ное механическое сопротивление этой системы
ze = 1/j ]/(©/,)—еДе1-|-соА. (8-74)
Приравнивая это выражение нулю, получим формулу для кри-
тической частоты вращения колеблющихся масс:
<о (8-75)
откуда
(8-76)
Здесь податливость ?.о равна сумме податливостей эластичной
муфты и всех ступеней вала между массами.
149
Рис. 8-27. Крутильные колебания двухмассоной (а, б) и трехмассовой си
стем (в, г)
Податливость цилиндрического участка вала длиной I и диа-
метром d
Лв=432/(лС)]Ш4, (8-77)
где G — модуль упругости при сдвиге (для стали G = 8,1 х
к ю8 h/cms).
Момент инерции
J = (T/g)(jt/32)Zd4, (8-78)
где у — плотность.
Для системы с тремя массами (рис. 8-27, в) возможны две формы
колебаний. Первая форма — меньшая частота вращения, когда
две соседние массы вращаются в колебательном движении в одну
сторону, а третья (крайняя) — в противоположную. При этом на
валу оказывается один узел колебаний. Вторая форма — большая
частота вращения, когда две крайние массы вращаются в колеба-
тельном даижении в одну сторону, а третья (средняя масса) — в про-
тивоположную. При этом на валу получается два узла колебаний
Критические частоты вращения этих двух форм колебаний мо-
гут быть определены, если приравнять полное сопротивление
рис.( 8-27, а) нулю:
2ш?2 = + -уЛ 4- (у—I- -L-) ±
Al \ Ji Jt s Аа \ Jj Jb /
(8-79)
V Система, имеющая Z масс на упругом валу, имеет I—1 частот
собственных крутильных колебаний, причем каждой частоте со-
ответствует своя вполне определенная форма колебаний.
Опасными получаются те колебания, которые резонируют
с какой-либо из гармонических пульсирующих момента первич-
ного двигателя.
150
Вращающийся момент дизеля колеблется в определенных пре-
делах около своего среднего значения, равного приложенному
моменту сопротивления. Основная частота пульсаций, налагаю-
щихся на средний момент,
/ = лЛ/60, (8-60)
где п — частота вращения, об/мин; h — число импульсов возму-
щающей силы за один оборот вала, которое зависит от числа ци-
линдров двигателя, числа тактов работы, порядка вспышек и др.
Значения величин h и k для различных дизелей приведены ниже:
Число цилиндров . . .
Значение h для дизелей-
двухтактных . . .
четырехтактных . .
Значение k для дизелей-
двухтактных ....
четырехтактных
1 2 3 4 5 6
1 2 3 4 5 6
0,5 1 1,5 2 2,5 3
1,3 0,4 0,19 0,11 0,075 0,055
— 1,4 0,45 0.2 0,14 0,1
При определении момента инерции ротора J для устойчивой
работы дизель-генератора необходимо, чтобы выбранный момент
инерции обеспечивал:
правильную работу регулятора скорости дизеля при сбросе
нагрузки;
заданную степень неравномерности хода дизеля;
маховой момент должен гарантировать достаточное удаление
от резонанса, т. е. находиться между собственными и вынужден-
ными колебаниями.
Так как момент инерции самого ротора генератора в некоторых
случаях, особенно при импульсной нагрузке, не обеспечивает вы-
полнения вышеуказанных условий, то требуется уствновка махо-
вика.
Суммарный момент инерции якоря и маховика, обеспечивающего
заданный коэффициент неравномерности хода 6, различен для раз-
ного типа дизелей и должен определяться заводом — поставщиком
дизелей
При отсутствии подобных данных можно с некоторым прибли-
жением вычислить величину J (в ньютон-метрах-секундах в квад-
рате),. отвечающую определенному значению коэффициента нерав-
номерности 6:
J=5,5PHO1M(n/100)’6], (8-81)
где Рном — номинальная мощность, кВт; k — коэффициент, за-
висящий от характеристики дизеля (см. выше).
Коэффициент неравномерности 6 может быть принят равным
1/100-=-1/250 и менее. Верхний предел принимается в случаях,
когда высокая точность поддержания напряжения не имеет сущест-
венного значения.
1$t
ГЛАВА ДЕВЯТАЯ
ВИБРАЦИЯ, ВОЗБУЖДАЕМАЯ ПОДШИПНИКАМИ
ОБЩИЕ СВЕДЕНИЯ О ПОДШИПНИКАХ КАЧЕНИЯ
В электрических машинах наибольшее применение на-
ходят радиальные шарикоподшипники (рис. 9-1, о), радиально-
упорные шарикоподшипники (рис. 9-1,6) и роликоподшипники
с короткими цилиндрическими роликами (рис. 9-1, в).
«)
о_
Рис. 9-1. Типы подшипников: а — радиальный, б — радиально-упорный,
в — роликовый с короткими цилиндрическими роликами
Шарико- и роликоподшипники изготавливаются различных
классов точности: Н — нормального; П — повышенного; В — вы-
сокого; А — особо высокого и С — сверхвысокого. Класс точности
определяет точность изготовления подшипника, но не связан с ве-
личиной радиального зазора, который для любого класса может
быть как нормальным, так и увеличенным.
Практика показывает,'что подшипники качения являются Наи-
более интенсивным источником вибрации во многих типах машин
и особенно быстроходных. На рис. 9-2 приведен спектр вибрации
шарикоподшипника диаметром 100 мм при частоте вращения
1500 об/мин, измеренных на наружном кольце свободно установ-
ленного подшипника. Как видно из спектрограммы, подшипник
возбуждает вибрации в широком диапазоне частот.
152
Рис. 9-3. Спектрограмма вибрации электродвигателя постоянного тока
Для суждения о влиянии подшипников качения на уровень
вибраций машины на рис. 9-3 дано сопоставление спектров вибра-
ций машины мощностью 45 кВт при частоте вращения 3000 об/мин
с подшипниками качения (/) и скольжения (2). Как видно, весь
спектр частот, кроме магнитных (1200 Гц) и небаланса (50 Гц),
обусловлен шумом подшипников качения.
Схема установки подшипников качения на валу электрической
машины должна обеспечивать: наименьший возможный для при-
нятого класса точности производства относительный перекос под-
шипников, установленных по концам вала; исключение возмож-
ности возникновения в результате нагрева вала при работе машины
добавочных осевых усилий, действующих на подшипники; исклю-
чение влияния на подшипники монтажных деформаций вала.
Типичными схемами установки подшипников качения в круп-
ных электрических машинах являются:
1. Два радиальных шарикоподшипника; подшипник на сто-
роне, обратной приводу, фиксирован; тепловые деформации вала
компенсируются осевыми перемещениями подшипника на стороне
привода.
2. Цилиндрический роликоподшипник на стороне привода; ра-
диальный шарикоподшипник на стороне, обратной приводу; теп-
ловые деформации ввла компенсируются перемещением роликов
подшипника относительно дорожек качения его колец.
3. Цилиндрический роликоподшипник на стороне привода; два
радиально-упорных шарикоподшипника на стороне, обратной при-
воду. Тепловые деформации ввла компенсируются перемещенными
роликов роликоподшипника (п. 2).
4. Роликоподшипники на обоих концах вала; осевые нагрузки
воспринимаются радиальным шарикоподшипником, освобожден-
ным в радиальном направлении; сторона установки этого подшип-
ника — любая.
5. Вертикальные машины; верхний несущий подшипник — ра-
диальный шариковый; нижний подшипник на стороне приводного
конца вала — радиальный шариковый, освобожденный в осевом
направлении.
153
6. Вертикальные машины; верхний несущий поДшйПИИК -
сдвоенный — из двух радиально-упорных шариковых подшипни-
ков; нижний подшипник на стороне приводного конца вала — ра-
диальный шариковый, освобожденный в осевом направлении.
7. Вертикальные машины; нерхний несущий подшипник —
строённый. Нижний подшипник на стороне приводного конца
вала — радиальный шариковый с увеличенным радиальным за-
зором.
Каждая из перечисленных схем установки подшипников ха-
рактеризуется своим спектром шума и вибрации, который прак-
тически ие поддается расчету.
Приступая к проектированию малошумной машины, чтобы обес-
печить малошумную работу подшипников, необходимо знать ве-
личину дополнительных нагрузок, воспринимаемых машиной и ее
подшипниками, так как от этого во многом зависит конструкция
подшипниковых узлов и их малошумность.
9-2. ТРЕБОВАНИЯ К КОНСТРУКЦИИ И ПРОИЗВОДСТВУ
Выбор типоразмера подшипника. Чем меньше диаметр
подшипника, тем меньше возбуждаемые’им вибрации и шум.
Исследованиями установлено, что с увеличением внутреннего
диаметра подшипника на каждые 5 мм уровень вибрации возрас-
тает примерно на 1—2 дБ. Установлено также, что уровни гром-
кости шума подшипников увеличиваются по мере увеличения диа-
метров шариков. Так, например, при равных внутренних диамет-
рах подшипников серий № 300 и № 200 последние имеют меньший
уровень шума на 3—5 дБ. Учитывая, что переменные усилия, дейст-
вующие на подшипниковые узлы машины, воспринимаются наруж-
ными кольцами подшипников и передаются ими на подшипниковые
щиты, существенное значение имеют демпфирующие свойства щи-
тов и промежуточных капсюлей.
Некоторое влияние на уровень громкости шума подшипников
оказывает конструкция и материал сепараторов. Хорошие вибро-
акустические характеристики получены у подшипников со штам-
пованными сепараторами. Развал гнезд массивных сепараторов
повышал уровень вибрации подшипника в основном в высокоча-
стотной части спектра.
Размер подшипника со стороны привода обычно подбирается
по приводному концу вала, посредством которого осуществляется
передача вращающего момента. Иногда этот подшипник имеет
больший диаметр, чем требуется по действующим нагрузкам и
сроку службы. Чтобы не. создавать больших запасов по долговеч-
ности подшипников, необходимо в таких случаях вал выполнять
йз высокопрочной стали. При конструировании самого ротора сле-
дует иметь в ваду, что гибкий ротор с критической угловой ско-
ростью ниже рабочей оказывает неблагоприятное воздействие на
работу подшипников.
Рис. 9-4. Самоустанавливающиеся подшипниковые узлы, скомплектованные
по системе «дуплекс» (с) и «триплекс» (б)
При выборе типа подшипников следует отдавать предпочтение
шарикоподшипникам, так как роликоподшипники имеют повышен-
ный уровень шума.
Требования к соосности. При изготовлении машины должна быть
как конструктивно, так и технологически обеспечена соосность
посадочных мест на валу и в корпусе. Подшипниковая промышлен-
ность рекомендует в зависимости от типа подшипников допустимый
перекос линии вала устанавливать равным не более 40 мкм на метр
длины пролета между подшипниками. Наилучшую соосность под-
шипниковых гнезд-обеспечивает совместная их расточка.
Особенно чувствительны к йесоосности радиально-упорные под-
шипники, скомплектованные по системе «дуплекс» (рис. 9-4, о)
и «триплекс» (рис. 9-4, б), так как .они ограничивают угловую под-
вижность опор ротора. Для уменьшения шума этих подшипников
применяют конструкцию самоустаиавливающихся опор с проме-
жуточным капсюлем и шаровым поясом.
Соосность нарушается также в случае погнутости вала или
прогиба его вследствие недостаточной жесткости под действием
сил статического и динамического небаланса.
Требование к обработке посадочных мест. Допуски на отклоне-
ние от правильных геометрических форм посадочных мест (цапфы
вала и гнезда в подшипниковых щитах), а также чистота обработки
их поверхностей должны строго соответствовать требованиям ГОСТ
для выбранного класса точности подшипников. Если подшипники
качения туго насаживаются на неточно обработанный вал, То по-
грешности вала могут передаться дорожке качения внутреннего
кольца и проявляться там в виде повышенной волнистости. Грязь
и прочие инородные тела в подшипнике и в смазке могут вдавли-.
ваться в дорожку качения и привести к увеличению шума.
-Выбор посадок. Правильный выбор посадок должен обеспечи-
вать фиксацию внутреннего и наружного кольца от проворачива-
ния л сохранение необходимых радиальных зазоров.
t55
Учитывая, что окончательная величина рабочего радиального
зазора зависит от посвдки внутреннего кольца на вал и наружного
в щит, а также от установившейся разности температур внутрен-
него и наружного кольца в рабочем режиме машины, выбор началь-
ных зазоров в подшипнике имеет важное'значение.
Некоторые фирмы рекомендуют для уменьшения подшипни-
кового шума ограничить рабочий радиальный зазор пределами
3—9 мкм. Известно, что чрезмерно большой радиальный зазор
приводит к увеличению шума в области низких частот,
а уменьшенный — вызывает увеличение шума в области высоких
частот.
Тип посадки наружных колец в щиты влияет на передачу виб-
рации. Плотные посадки усиливают эту передачу и, следовательно,
способствуют увеличению шума. Менее плотные посадки более
благоприятны, так как допускают демпфирование колебаний на-
ружных колец масляными пленками в местах контакта подшип-
ника со щитом. Однако чрезмерно слабые посадки наружных ко-
лец могут вызвать дребезжание. Наиболее благоприятными посад-
ками являются: плотная — на вал, скользящая — для на-
ружного кольца в подшипниковый щит.
Для прецизионных радиальных и рвднально-упорных шарико-
подшипников классов точности АиС посадки должны выполняться
по первому классу точности. Рекомендуется монтировать внутрен-
ние кольца на вал посадкой П1а и наружные в корпус — С1П. Ро-
ликоподшипники с короткими цилиндрическими роликами менее
чувствительны к повышенным посадочным натягам, так как ра-
диальные зазоры в них в 1,5—2 раза больше, чем у шарикоподши-
ников.
Следует указать, что подшипники качения высокого класса
точности могут стать источником интенсивного шума, если будут
неправильно смонтированы. Уровень производства должен быть
в таких случаях очень высокий.
Предварительный осевой натяг. Исследованиями установлено,
что устранение внутренних зазоров в шарикоподшипниках при
помощи пружинного осевого натяга приводит к улучшению внбро-
акустических характеристик машины. На рис. 9-5 приведен спектр
вибрации машины мощностью 30 кВт при частоте вращения
3000 об/мин с осевым натягом подшипника (2) и без него (1), в ко-
тором в качестве упругого элемента применяется волновая пру-
жина.
Некоторые фирмы предлагают осевую нагрузку Т (в ньютонах)
определять по эмпирической формуле Т = (4-^6) d, где d — внут-
ренний диаметр подшипника, мм.
Приведенная формула является ориентировочной и поэтому
она пригодна для определения только необходимой жесткости
пружин. Окончательная нагрузка должна устанавливаться экспе-
риментально, для чего конструкция осевого натяга должна допу-
скать регулировку натяга пружины. Основным требованием»
предъявляемым н конструкции осевого натяга, является равно-
154
мерное распределение нагрузки по окружности наружного кольца
подшипника.
Следует, однако, отметить, что указанный способ снижения
уровня громкости шума и вибрации подшипников при помощи
осевого натяга не является обязательным для всех машин. Опыт
показывает, что в ряде случаев осевой иатяг не приводил к замет-
ному улучшению внброакустнческих характеристик. Поэтому окон-
чательное решение о необходимости применения осевог^ натяга,
особенно во вновь проектируемой машине, должен решаться экс-
периментальным путем.
Выбор смазки. При выборе типа смазки руководствуются экс-
плуатационными данными смазок. Однако в последнее время уста-
новлено, что смазка может влиять на виброакустические характе-
ристики машины. Поэтому при выборе типа смазки для малошум-
ных машин надо руководствоваться следующим:
1) не рекомендуется применять слишком густую смазку, так
как она плохо депмфирует вибрации тел качения; гидродинами-
ческая смазка должна препятствовать износу н заеданию, которые
возможны между телами качения, сепаратором и дорожками ка-
чения; сухое трение приводит к увеличению шума, особенно это воз-
можно при низких температурах;
2) не следует закладывать слишком большое или недостаточ-
ное количество смазки в масляную камеру; камера должна быть
заполнена на 50 %;
3) не должно быть шлака на дорожках качения обойм подшип-
ников, накопившегося вследствие окисления смазки, либо дли-
тельной эксплуатации; это возможно, когда температура колец
выше температуры смазки, поэтому важно, чтобы конструкция'
подшипника позволяла производить замену смазки с тщателы-
ной промывкой подшгахника от следов старой отработанной смазки;
1ST
особенно это важно для судовых машин, где такую замену жела-
тельно производить без разборки подшипникового узла.
Перерождение смазки и ее затвердевание наблюдалось в маши-
нах с подшипниковыми токами.
Смазка должна обеспечивать стабильность своих свойств при
консервации и хранении машины до ввода ее в эксплуатацию.
От этого будет зависеть сохранение виброакустических характе-
ристик подшипников.
Консистентная смазка после длительного хранения, машины
в неблагоприятных условиях может распасться на составляющие.
Выделяющийся 'в результате окисления смазки лаковый осадок
вызывает шероховатость дорожек качения, сиять которую можно
только тщательной промывкой подшипников.
Требования к уплотнениям подшипников. Тип и конструкция
уплотнения зависят от требований, предъявляемых к машине в це-
лом, по защите от окружающей среды (пыль, влага, пары кислот).
Правильно сконструированное уплотнение должно удовлет-
ворять следующим требованиям:
не допускать проникновения пыли, влаги и паров кислот в по-
лость подшипника;
ие допускать вытекания жидкой фракции смазки из полости
подшипника;
- обеспечивать при щелевом уплотнении отсутствие задевания
уплотнения за вал; при трущемся уплотнении — отсутствие су-
хого трения и больших потерь в уплотнении.
Неудовлетворительная работа уплотнений сказывается на
спектре вибрации. Обычно задевание щелевого уплотнения вызы-
вает повышение вибрации и уровня громкости шума на нйзких
частотах. При трущемся уплотнении большой натяг и отсутствие
смазки в некоторых машинах вызывает повышение вибрации в
средней полосе частот 300—1000 Гц. Интенсивность этой вибрации
падает по мере приработии уплотнений.
Подшипниковые щиты. Подшипниковые щиты могут являться
интенсивным источником вибрации и шума, возбуждаемого под-
шипниками качения. Поэтому при конструировании машины не-
обходимо производить проверку щита на возбуждение в нем из-
гибных колебаний. При расчетах подшипниковый щит чаще всего
можно представить в виде диска постоянной толщины, -защемлен-
ного по наружному контуру. Расчет частот собственных, изгибных
колебаний для такого щита производится по формуле приложения 6.
Если подшипниковый щит является сварным и содержит ребра
жесткости; особое внимание при его изготовлении следует обра-
тить на полноценный отжиг щита после сварки. Опыт показал,
,что плохой отжиг приводит к деформации посадочных мест при
переходе от холодного к горячему состоянию машины.
В таких случаях, как правило, наблюдалось изменение спектра
вибраций и шума подшипников.
Следует указать, что некоторые фирмы для ’ослабления вибра-
ций подшипниковых щитов рекомендуют применение упругого
15В
Крейлёнйя поДШйпнйков. Конструкций fartofo крёИЛеййя СОСТОИТ
из набора стальных упругих элементов, встраиваемых между под-
шипником и щитом. Такие конструкции трудно поддаются расчету
и поэтому в ряде случаев требуется экспериментальная их доводка.
Особенно осторожно следует подходить к применению упругих,
опор в машинах с тяжелыми условиями работы.
Транспортировка и хранение. Малошумные машины требуют
осторожного обращения при транспортировке и хранении.
В настоящее время встречаются случаи ухудшения виброаку-
стических характеристик машин после их трвнспортировки к месту
эксплуатации. Установлено, что при перевозке машин по желез-
ной дороге, особенно на далекие расстояния, возможен наклеп
дорожек качения шарико- и роликоподшипников. Наклеп подшип-
ников может также возникнуть в результате длительного воздейст-
вия вибрации фундамента на незращающуюся машину. Одним из
возможных способов устранения наклепа подшипников является
установка машины на амортизаторы.’
9-3. ИСТОЧНИКИ ВИБРАЦИЙ ПОДШИПНИКОВ КАЧЕНИЯ
При изготоалении деталей подшипников имеют место
отклонения геометрических форм и размеров в пределах допусков,
нормированных соответствующими ГОСТ. Этими отклонениями
в значительной мере обусловлены вибрация и шум подшипников.
Наиболее существенными из них являются;_ радиальный и осе-
войбой-колец^овальность, гранность и конусность колец; разно-
ргазмерность шариков; овальность и гранность шариков; допуски
в гнездах сепараторов; волнистость и шероховатость дорожек ка-
чения.
Рассмотрим более подробно указанные источники вибрации.
1. Радиальный бой внутреннего кольца подшипника вызывает
вибрации, подобные остаточному небалансу ротора. Радиальный
бой наружных колец нарушает соосность в подшипниковых узлах.
Боковое биение торцов внутренних' и наружных колец вызвано
их непараллельностью, которая приводит к перекосу внутреннего
кольца относительно наружного при установке подшипника в ма-
шину. Величина указанного боя тем меньше, чем выше прецизион-
ность подшипника. Так, например, по существующим ГОСТ, в под-
шипниках класса точности С указанный бой в 5 раз меньше, чем
в подшипниках класса Н.
2. Овальность и конусность колец допускается в пределах 0,5
допуска на диаметр для подшипников класса Н и 0,25 допуска иа
диаметр для подшипников класса точности С. Овальность колец
является причиной вибрации с двойной частотой
/==2н/50. (9-1)
3. Вибрация, возбуждаемая разноразмерностью шариков, за-
висит .от угловой скорости сепаратора и конкретного распределе-
ния разноразмерных шариков в подшипнике.
15?
При равномерном чередовании в подшипнике шариков боль-
шого и малого размера
(9-2)
где гj и г£ — радиусы дорожек качения внутреннего и наружного
колец; z — число тел качения.
4. Овальность и гранность тел качения зависит от класса точ-
ности подшипников. Для класса точности С она в 5 раз меньше,
чем для подшипников класса Н. Частота вибрации, вызванная гран-
ностью тел качения,
(9-3)
где Do — диаметр центров тел качения; dm — диаметр тел каче-
ния; k — число граней.
Точный расчет частоты по этой формуле затруднен в связи со
случайным расположением граней на телах качения.
5. Зазоры в гнездах сепараторов являются существенным ис-
точником вибрации подшипников. Чрезмерно большие зазоры при-
водят к смещению сепаратора на величину зазора и появлению
вибрации частотой
(9-4)
Такую же частоту имеет неуравновешенность сепаратора. Ма-
лые зазоры могут быть причиной залегания шариков и нарушения
кинематики вращения подшипника, что также вызывает повышен-
ный шум.
6. Возникающие в подшипниковых узлах динамические им-
пульсы от волнистости не имеют периодического характера. Спектр
вибраций, обусловленный этими причинами, нестабален. Состав-
ляющие этой вибрации лежат преимущественно в области высоких
частот. Некоторые фирмы рекомендуют применительно к дорожкам
качения шариковых подшипников волнистостью считать углуб-
ления, превышающие 0,1 мкм с длиной волны, соизмеримой с ра-
диусом шариков.
Частота, обусловленная волнистостью,
/
(9-5)
где т — число волнистостей по окружности дорожки качения
внутреннего или наружного кольца.
Шероховатость поверхностей качения имеет меньшее значение
в шумообразовании подшипников из-за мвлого расстояния между
отдельными выступами по сравнению с радиусами шариков.
Кроме указанных причин, возможны локальные дефекты на
дорожках качения. К числу таких дефектов можно отнести местный
160
наклеп дорожек качения при транспортировке машин по железной
дороге.
Частота этой вибрации
где — число дефектов на дорожках качения. Знак «—» прини-
мается при наличии дефектов на внутреннем кольце, а знак «+»
на наружном.
Вибрация подшипников возбуждается также периодическими
изменениями жесткости подшипника при перекатывании тел ка-
чения.
Частота этой вибрации
(9-7)
* х Do / чи
На уровень вибрации кроме жесткости колец влияют радиаль-
ный зазор и нагрузка на подшипник.
Причины вибрации подшипников, вызванные различными ис-
точниками, трудно обнаруживаются при анализе спектра вибрации
машины.
Произведенные измерения вибрации наружных колец подшип-
ников при их обособленной работе вне машины показывают, что
между отдельными подшипниками одного и того же типа и размера
существует большое различие спектров. Это указывает на то, что
существующее оборудование не позволяет изготовить подшипники,
не отличающиеся друг от друга геометрией поверхностей дорожек
и тел качения. Большой разброс, доходящий до 15—20 дБ, на-
блюдается в зоне высоких частот, где особенно проявляется зави-
симость частоты вибрации от размера подшипника. Этим частично
и объясняется, что в одинаковых машинах, выполненных по одним
и тем же чертежам, нельзя гарантировать одинаковые виброаку-
стические характеристики.
О расчете вибрации подшипников качения. В настоящее время
предпринимаются попытки определять расчетным путем вибрацию
и шум, возбуждаемые подшипниками качения [6]. Это отражает
стремление конструкторов на стадии проектирования машины при-
нять эффективные меры, направленные на подавление вибрации
подшипников. Однако надо признать, что выполняемые расчеты
нельзя признать достаточно убедительными. Объясняется это не
только невозможностью учесть все факторы, влияющие на вибра-
цию подшипников, но и существующим различием спектров вибра-
ции подшипников одного класса и типоразмера.
В связи с этим внимание конструкторов электрической машины
должно быть сконцентрировано не столько на расчетах вибрации,
возбуждаемой самим подшипником, сколько на разработке средств
подавления вибрации на путях ее распространения.
Заказ JA 2109
161
9-4. ВЛИЯНИЕ ТОКОВ И МАГНИТНЫХ ПОЛЕЙ
НА ВИБРАЦИЮ ПОДШИПНИКОВ КАЧЕНИЯ
Опыт испытаний и эксплуатации некоторых типов элек-
трических машин показал, что магнитные поля и токи, пронизы-
вающие подшипниковый узел, приводят к повышенному его на-
греву, быстрому старению консистентной смазки и повышенной
вибрации подшипников. К таким машинам прежде всего относятся
синхронные машины с половинным числом катушек возбуждения
на полюсах ротора, синхронные машины с когтеобразными рото-
рами и индукторные одноименно-полюсные машины. У последних
двух типов машин корпус, вал и подшипниковые щиты являются
магнктопроводами. Опыт виброакустических испытаний таких ма-
шин показал, что их вибрация сильно зависит от тока возбуждения
машины и поэтому часто трудно расчленить источники вибрации:
создаются ли они высшими гармоническими обмоток ротора и ста-
тора или вызваны повышенной вибрацией подшипников качения,
работающих в магнитном поле.
Особенно сильно сказывается влияние магнитного поля на ра-
боту подшипников в быстроходных машинах, где повышенная виб-
рация сопровождается коксованием смазки и точечной коррозией
поверхностей тел и дорожек качения. Установлено, что это сни-
жает долговечность работы подшипников.
Для того чтобы свести к минимуму влияние магнитных полей
и токов на вибрацию и надежность подшипников, необходимо при
проектировании машин принять следующие меры:
устранить или скомпенсировать все круговые или частичные
контуры токов, охватывающие вал машины;
применять подшипниковые щиты из немагнитных материалов.
При этом надо иметь в виду, что при агрегатировании таких машин
с другими механизмами магнитные поля могут по линии ввла по-
пасть в соседние под±ипниковые узлы и нарушить их нормальную
работу.
9-5. ВИБРАЦИЯ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
Проблема проектирования подшипников скольжения
с малыми вибрациями состоит в решении двух основных групп за-
дач: первая — заключается в определении границ устойчивости
движения ротора, оценке опасности самовозбуждающихся колеба-
ний и изыскания конструктивных средств смещения границы устой-
чивости или ослабления автоколебаний; вторая — состоит в оценке
влияния упругих и демпфирующих сил масляного слоя на смеще-
ние критических частот вращения, на формы колебаний ротора
и характер свл, передаваемых через подшипники на опоры, а также
на условия уравновешивания ротора.
Проблеме устойчивости движения ротора, вращающегося в под-
шипниках скольжения, посвящено много работ, среди них наибо-
лее полное изложение приведено в 126]. Основная сущность этих
162
Рис. 9-6. Конструктивные схемы
вкладышей подшипников повы-
шенной виброустойчввости
t)
работ заключается в том, что при определенных частотах вращения
роторов возникают интенсивные самовозбуждающиеся колебания
ротора, происходящие либо с частотой, равной примерно половине
частоты вращения, либо с собственной частотой ротора.
Колебания с половинной частотой возникают при достижении
некоторой скорости, зависящей от статической нагрузки подшип-
ников. Наиболее вероятно возникновение таких колебаний в слабо-
нагруженных подшипниках скольжения.
Самовозбуждающиеся колебания на основной собственной ча-
стоте ротора могут возникнуть при частоте вращения, в два раза
превышающей эту частоту. Интенсивность таких колебаний на-
растает с ростом частоты.
Основными методами борьбы с автоколебаниями являются при-
менение подпружиненных вкладышей или применение специальных
конструкций виброустойчивых подшипников (рис. 9-6). К ним от-
носятся цилиндрические подшипники с масляными карманами (с)
и кольцевой камерой (б), эллиптические с карманом (в) и без кар-
мана (г), клиновой подшипник (д) с самоустанавливающимися сег-
ментами (е).
Общая особенность проектирования таких подшипников со-
стоит в необходагмости их экспериментальной доводки.
При решении задач второй группы подшипник выступает в роли
пассивного элемента, обладающего упругими и демпфирующими
свойствами. Наличие масляной пленки приводит к снижению кри-
тических частот ротора, к более сложной форме колебаний и вно-
сит затруднения в методику уравновешивания ротора.
ГЛАВА ДЕСЯТАЯ
ШУМ ЩЕТОЧНОГО АППАРАТА
10-1. ПРИЧИНЫ ШУМА
Шум щеток вызывается в основном следующими причи-
нами 148]:
а) плохим состоянием поверхности коллектора (выступание от-
дельных пластин и прокладок, биение коллектора и др.);
б) большими зазорами между щеткой и щеткодержателем; не-
достаточным давлением на щетку; перекосом щетки вследствие
неправильного приложения нагрузки на щетку; недостаточно жест-
кой конструкцией щеткодержателя, щеточных бракетов и траверсы;
в) процессами, происходящими в самом скользящем контакте.
Причины, указанные впп. «а» и «б», носят чисто конструктивный
и технологический характер. Устранение этих причин должно про-
изводиться на стадии проектирования и изготовления электриче-
ской машины.
Что касается п. «в», то этот шум требует особого рассмотрения.
10-2. ШУМ СКОЛЬЗЯЩЕГО КОНТАКТА
При идеальном изготовлении коллектора и щеточного
аппарата шум щеток проявляется как «шелест», легко отличимый от
шума магнитного и аэродинамического происхождения. Этот ше-
лест меняет свою интенсивность при переходе от режима холостого
хода к нагрузке.
Отмечая состояние щеточного контакта, необходимо указать,
что при эксплуатации машины коллектор или кольца постепенно
теряют свой первоначальный цвет. Вызвано это образованием
пленки, состоящей из слоя окиси меди (Cu2O, СиО) и слоя мелких
прилипших к поверхности частиц углерода, который образуется
в результате износа щеток, количество его увеличивается с увели-
чением токовой нагрузки и мало в режиме холостого хода. Обра-
зование этого слоя связано также с разнополярностью щеток. Об-
разовавшаяся на коллекторе или кольцах пленка оказывает влия-
ние на коммутацию и шум. Чем больше нагрузка, тем больше из-
нос щеток и тем лучше поверхность коллектора или колец «смазы-
вается» щеточной пылью. В режиме холостого хода происходит
срабатывание контактной поверхности и сухое трение щеток. Ко-
эффициент трения при этом примерно в 5 раз выше, чем под нагруз-
кой. Поэтому незначительная шероховатость коллектора даже по-
лезна, так как она способствует прилипанию частиц углерода
и уменьшению шума щеток.
Изучая процессы образования пленки на коллекторе, необхо-
димо их связывать не только с шумом, но и с коммутацией, так
как стремление уменьшить уровень громкости шума в ущерб ка-
честву коммутации совершенно неприемлемо.
164
Образованию пленки на коллекторе во многом способствует
характер нагрузки, температура и влажность окружающего воз-
духа, присутствие нежелательных газов и пыли в окружающем
и охлаждающем воздухе.
Так, например, в результате экспериментальных исследований
установлено следующее:
1. Самый большой уровень шума имеют прокатные электро-
двигатели, у которых режим холостого хода составляет 60 % об-
щего времени. Объясняется это тем, что шум щеток при холостом
ходе на 6—10 дБ выше, чем под нагрузкой. При этом наблюдается,
что при переходе от режима холостого хода к нагрузке шум сни-
жается скачкообразно, что, по всей видимости, объясняется вне-
запным появлением «смазываемой» пленки на коллекторе. При пе-
реходе же от нагрузки к режиму холостого хода шум нарастает
постепенно, так как «смазка» с коллектора снимается медленно.
Поэтому шум машины более утомляет в тех случаях, когда соотно-
шение между периодом режима холостого хода и периодом нагрузки
велико.
2. От марки щеток также зависит уровень громкости шума, но
при ее выборе необходимо руководствоваться прежде всего сте-
пенью надежности коммутации. Поэтому требования малошумно-
сти здесь, как правило, отступают на второй план. Однако вполне
вероятно, что существуют щетки, которые наряду с высокими ком-
мутационными качествами, низким пылеобразованием обладают
низкими уровнями громкости шума.
3. Было установлено, что незначительная смазка коллектора
парафином снижает щеточный шум на несколько недель. Шлифовка
коллектора пемзой уменьшает шум на несколько месяцев. Состоя-
ние пленки коллектора постоянно влияет на уровень шума.
4. Влажность воздуха в пределах, оговоренных ГОСТ, на шум
щеток не влияет.
5. Установлено, что температура скользящего контакта влияет
на уровень громкости шума щеток: при низкой температуре шум
больше, с увеличением температуры он вначале снижается, а затем
снова увеличивается (минимальный шум наблюдается приблизи-
тельно при 50—70 °C).
6. С увеличением угловой скорости шум щеток увеличивается
незначительно.
Проведенные опыты по ограничению уровня громкости шума
щеток при помощи демпфирующих элементов, заложенных между
щеткодержателем и щеткой, изменения наклона щеток к поверх-
ности коллектора к существенным снижениям шума не при-
вели.
7. Произведенные измерения показали, что шум щеток особенно
проявляется в режиме холостого хода в крупных тихоходных (до
350 об/мин) машинах постоянного тока.
В машинах с частотой вращения более 1000 об/мин этот шум
перекрывается шумами магнитного и аэродинамического проис-
хождения.
165
Частотный анализ показывает, что о.бласть щеточного шума
находится в пределах 1000—8000 Гц.
Ниже приведены результаты измерений с узкополосным ана-
лизатором щеточного шума прокатного электродвигателя:
Частота, Гц ............. 600 1000 4000 8000
Уровень громкости шума,
дБ, в режимах:
холостого хода .... 90 105 90 83
нагрузки.......... 92 97 81 74
Характерно также, что спектральный состав щеточного шума
зависит незначительно от изменения частоты вращения.
Установлено, что щеточный шум также проявляется в крупных
турбогенераторах с вынесенным за пределы корпуса щеточным
аппаратом. Особенно этот шум явно выражен в непосредственной
близости от щеточного аппарата, а по мере удаления от него пе-
рекрывается магнитным шумом.
Хорошим способом подавления щеточного шума является при-
менение звукопоглощающих материалов, покрывающих внутрен-
нюю полость кожуха щеточного аппарата.
ГЛАВА ОДИННАДЦАТАЯ
ВИБРОИЗОЛЯЦИЯ МАШИН
11-1. ЭФФЕКТИВНОСТЬ ВДООИЗОЛЯЦИИ
Положим, что неуравновешенная машина устанавли-
вается на фундамент, колебания которого нежелательны. Подобное
требование встречается довольно часто. Задача заключается в уста-
новке машины таким образом, чтобы на фундаменте, с которым она
связана, колебания были малыми. Общее решение этой задачи сво-
дится к установке машины на амортизаторы и правильному их вы-
бору.
Произведем расчет эффективности виброизоляции фундамента
для упругого и жесткого крепления машины к фундаменту.
Предположим, что машина массой М отделена от фундамента
системой амортизации податливостью к (рис. 11-1, с). Фундамент
Рве. 11-1. К расчету эффективности внброизоляции
166
имеет собственное механическое сопротивление Хф, которое может
быть комплексным. На машину действует сила р, изменяющаяся
во времени по гармоническому закону. Эквивалентный электри-
ческий аналог такой установки представлен на рис. 11-1, б.
Найдем силу тока, текущего через сопротивление Хф, т. е. оп-
ределим вибрацию фундамента у3.
Решая систему уравнений
У^Уа = 2й1Хф-, Уз + Уа=У1, (П-1)
найдем
»='TV—Л-
2а + гФ
(11-2)
Полный ток У1 определяется полным сопротивлением цепи
(11-3)
и напряжением р
у,------------------------—р.
Подставляя (11-4) в (11-2), найдем
У а=p/(Zi+Хф+Z^Z-j),
или, учитывая, что z, =- jcuM, a z2 — 1/(/<оХ),
Уз—pIlfaM+2ф (1 — ю*Ж)].
(Н-4)
(И-5)
(11-6)
Амплитудное значение у3 есть модуль комплексного выраже-
ния (11-6):
Л = р/л/4(>— ш“ЛО.)2+<о*Л1! . (11-7)
Обозначая п — <о/е>о; <ozAfX = п2; <оо = -^/1/(Л1Л), найдем вы-
ражение для амплитуды частоты колебаний фундамента
"')2— (11-81
При жестком креплении машийы на том же фунда-
менте (рис. 11-1, б) частота колебаний машины и фундамента ода
какова:
Уж—P/(iaM + Хф)',
(Н-9)
ее амплитуда _________
p«=p/V<»2ai2+4 . (11-Ю)
Отношение частоты колебаний фундамента при жестком креп-
лении машины к частоте колебаний фундамента при наличии упру-
гой связи выражается формулой
ЙЛ. = V[4 (1 —«‘У + <ЛИа'>’]/(г» + . (11-11)
167
Эффективность виброизоляции (в децибелах)
ди=201е-^-= 101g (11-12)
03' % + к$М2л2
Из этой формулы можно сделать выводы о роли амортизаторов
в вибрации фундаментов:
при низких частотах вращения (п = ю/й>0 1) виброизоляция
амортизаторов равна нулю;
на резонансной частоте ВИ отрицательна и определяется фор-
мулой
ВИ„-1 ю lOlgfogM’/K+mgM’)]: (11-13)
это значит, что на резонансной частоте вибрация фундамента при
упругом креплении машины больше, чем при жестком;
на высоких частотах, т. е. при выполнении условия л > 1, виб-
роизоляция ВИ определяется формулой
ВИ =-101g K4n! + + айи V)! (11-14)
В частности, если полное сопротивление фундамента во много
раз больше полного сопротивления виброизолируемого механизма,
т. е. выполняется условие (OoM2nsl^ •< 1,0, то виброизоляция,
вносимая упругостью, может быть вычислена по формуле
Btf«20Ign=201g(co/<i»0). (Н-15)
Как видно, для получения большой эффективности ВИ аморти-
зацию необходимо подобрать таким образом, чтобы частота собст-
венных колебаний машины была очень мала в сравнении с частотой
возмущающей силы, т. е. чтобы пружины были максимально мяг-
кими.
Здесь надо иметь в виду, что передаваемая на фундамент сила
зависит не только от силы упругости пружины, но и от сил трения.
Затухание здесь выгодно лишь в области, где со/«м0 <д/2”, в об-
ласти же низких частот более эффективными оказываются обычные
пружины. В этом случае для более эффективной защиты фундамента
машину -следует устанавливать не на резинометаллические амор-
тизаторы, а да витые пружины.
11-1 ЧАСТОТА СВОБОДНЫХ КОЛЕБАНИЙ
АМОРТИЗИРОВАННЫХ МАШИН
Амортизированная машина в самом общем случае имеет
шесть степеней свободы, из которых три степени свободы соответст-
вуют поступательным колебаниям машины в направлении трех ко-
ординатных осей и три — поворотным колебаниям вокруг этих
осей.
Следует различать три практически важных случая располо-
жения амортизаторов и расчета частот свободных колебаний амор-
тизированной машины 1211.
168
Рис. 11-2. Установка машин на амортизаторы
В первом случае центр жесткости упругого основания О' бла
годаря высокому расположению лап машины совпадает с центром
-его инерции О, а главные оси инерции — с главными осями жест-
кости (рис. 11-2, а). К этому случаю всегда следует стремиться.
Все шесть частот свободных колебаний определяются здесь на-
следующих зависимостей:
п-1в
где fz, fK, fv — частоты поступательных колебаний по осям, ука-
занным индексами; fbx , fbx, fby — частоты колебаний относительно
тех же осей; Jx, Jv, Jz — моменты инерции массы машины относи-
тельно соответствующих осей.
Жесткости амортизации при поступательных колебаниях по
трем осям:
(11-17)
где с2ц — жесткости отдельных амортизвторов, ап — число
амортизвторов
Если все амортизвторы одинаковы, то
Ct=nc2t‘, Сх=псхг, Ca=ncyt. (11-18}
165»
Жесткости амортизации из п амортизаторов относительно глав-
ных осей (рис. 11-2, б):
Кг — 22 + 22( Кх — ,22 а сгГ, Ку — 22 ^Цг/, (11-19)
где ai и It —- плечи отдельных амортизаторов во осям х и у.
При этом виде амортизации выражения всех шести частот сво-
бодных колебаний не связаны меяеду собой; это значит, что случай-
ный резонанс одного какого-либо вида колебаний не вызовет ре-
зонансных колебаний другого вида. Это обстоятельство, а также
значительная устойчивость амортизированной машины обусловли-
вают преимущества данного типа крепления перед другими.
Однако наиболее часто встречается амортизирующее крепле-
ние (рис. 11-2, б), при котором центр жесткости упругого основа-
ния находится на одной вертикали с центром инерции машины.
В этом случае частоты колебаний сдвига и поворота в плоскостях
zOy и zOx попарно связаны (так называемые двухсвязные колеба-
ния), а частоты свободных вертикальных колебаний и колебаний
•относительно вертикальной оси определяются из независимых ре-
шений. Выражения частот имеют внд:
: <“-20>
Cr)-^V И м'- Ут( ;
____________________________________(И-21)
(М=_1_Л /ца. ал т л/1(а . а_т+
Xfx ) 2л \/ 2 \ М Jy J V 4 V м lv ) MJy'
(11-22)
где h0 — превышение центра инерции машины над плоскостью
амортизации.
Если выражения для поступательных колебаний жесткостей
Сх, Су, Сг и колебаний относительно вертикальной осн жесткости
Кя в этом виде амортизирующего крепления не отличаются от при-
веденных выше выражений соответствующих жесткостей при амор-
тизирующем креплении с совмещенными центрами инерции машины
и жесткости упругого основания, то выражения для колебаний
жесткостей относительно осей хну (К* а Ку) отличаются от ранее
приведенных выражений. В этом случае появляются дополнитель-
ные плечи по отношению к жесткостям амортизаторов Сх и Су.
Выражения для колебаний жесткостей Кх и Ку при этом виде
крепления имеют внд:
(11-23)
170
Так, например, выражения колебаний жесткостей для крепле-
ния, состоящего из четырех одинаковых амортизаторов с поступа-
тельными жесткостями сх, св и сг, расположенными по углам ос-
нования (размеры основания 2а и 21), будут:
Kz = 4 (с?сх+ PcJ)-, 7G=4 (с2^Ку « 4 (о%
(11-24)
то же при восьми симметрично расположенных одинаковых амор-
тизаторах:
К1 = 8а’с,+4(1?+©с; К„=8(Лг + /&);
(11-25)
расположение плеч и lt видно из рис. 11-2, б.
При третьем виде амортизации проекция центра инерции на
плоскость амортизирующего крепления попадает в центр его же-
сткости, но лежит на одной из гланных осей жесткости (рис. 11 -2, в).
Тогда выражения частот свободных колебаний связаны по три
Методы расчета частот в этом случае даны Н. Г. Беликовским 13]
и другими авторами.
При определении свободных колебаний следует стремиться в це-
лях упрощения расчетов сложные системы приводить к более про-
стым. Так, например, если смещение центра жесткости от центра
тяжести по оси не превышает 10—15 % расстояния между край-
ними амортизвторами, то эти оси следует совместить.
Пример. Произведем расчет свободных колебаний электродвигателя,
установленного на четырех амортизаторех типа AKCC-400II. Установочные
размеры приведены на рис. 11-3. Скорость вращения электродвигателя равна
1000 об/мин.
Исходные данные: масса электродвигателя М = 900 кг; моменты инер-
ции массы электродвигателя относительно оси х ]х = 2900 Н-см-са, отно-
сительно осей у и z Jy= Jg — 7300 Н-см-с2; положение центра жесткости
амортизирующего крепления х* = 7,55 см; у* = 0; 2* — 5,5 см.
Вибрационные жесткости при поступательных колебаниях одного амор-
тизатора АКСС—400 по оси х сХ{~ 3700 Н/см, по оси ycyi= 13000 Н/см,
по оси z с2{ = 53000 Н/см.
Рис. 11-3. К примеру расчета свободных колебаний электродвигателя
171
Решение. I. В целях упрощения расчета вертикальную ось жест-
кости совмещаем с осью г, так как отношение смещения к расстоянию
Между крайними амортизаторами составляет 6 %.
2. Жесткости амортизирующего крепления при колебаниях:
а) поступательных
Сж —See —4-37000= 148000 Н/см;
су = Хc₽i = 4-13000 = 52000 Н/см;
ед = 4 -53 000 = 212 000 Н/см;
б) относительно вертикальной оси
К* = 4-1^. 10*-5,5« 4-4-5.3-10*-15» = 4,9-10’ Н-см/рад;
Ки=2-5,3-10*(55^2-4- 70,6s) 4- 4-3,7-10*-5,5я = 95,4-10’ Н-см/рад;
К, = 4-3,7-IO*-15»+2-1.3-10* (55.51 + 70,6я) — 26,6-10» Н-см/рад.
3. Частоты свободных колебаний:
а) вдоль оси 2
, 1 / 212 000
fl~ 2л V 900-1О-® -24’8Г«5
б) вокруг оси 2
„ 1 _ / 26,6-10’ „ ,
~8МГщ
в) двухсвязных в плоскости хОу
fM 1 Г 1 ( 14 800 . 95,4-10» \
Vi-/ 2я L 2 1э00-10-» + 7300 / +
/1/ 14 800 95,4-10’ у 148 000’-5,5* lW_20J Гц;
’’’ V 4 \ 900-10~а 7300 ) +900-10-*-7300 J 57,6 Гц.
г) двухсвязных в плоскости уОх
(fbu\ - 1 Г 1 f 62000 1 4,9-10’ \
Vx ) 2л [ 2 у. 900-10-® + 2900 ) Т
_. / 1 / 52 000 4,9-10’у ; 52000’-5,5» 1№_»2 Гщ
’’’ V 4 I 900-10—® 2900 ) 900-10~*-2900 J —20,8 Гц.
11-3. КОНСТРУКЦИЯ И ВЫБОР АМОРТИЗАТОРОВ
Наиболее часто для электрических машин применяются
Сварные резин^металлические амортизаторы следующих типов:
двухпластилчатые (рнс. 11-4), пластинчатые с промежуточной мас-
сой (рис. 11.-5), амортизаторы типа АКСС (рис. 11-6), пневматиче-
ские типа АПС (рис. 11-7).
. Всё указанные амортизаторы присоединяются к маппще и фун-
даменту металлическими частями, между которыми находится слой
вулканизированной резины.
Двухпластинчатые амортизаторы могут быть с обычным, на-
клонным и елочным расположением резинового слоя. Виброизоли-
рующие свойства амортизаторов (рнс. 11-4, б и в) выше, чем обыч-
173
Рис. 11-4. Двухпластмнчатые амортизато-
ры с обычным (а), наклонным (б) и угло-
вым (в) расположением резинового слоя
Рис. 11-5. Пластин-
чатый амортизатор
с промежуточной
массой
ных (рис. 11-4, а); грузоподъемность колеблется от нескольких
десятков килограмм до нескольких тонн.
Амортизаторы с промежуточной массой типа АПМ более эффек-
тивны, чем двухпластинчатые амортизаторы. Самым большим амор-
тизатором этого типа является АПМ-1700 грузоподъемностью
1700 кг. Недостатком пластинчатых амортизаторов является боль-
шая разница жесткостей по различным осям. Кроме того, при от-
слоении резины от металлической арматуры машина может сор-
ваться с места крепления.
Указанных недостатков лишен амортизатор типа АКСС — амор-
тизатор корабельный сварной, «со страховкой». Устройство метал-
лической арматуры здесь таково, что повреждение места соедине-
ния резины с металлом не приводит к разрушению амортизатора.
Амортизаторы типа АКСС встречаются двух разновидностей —
АКСС-М и АКСС-И, которые различаются сортом резины. Аморти-
заторы АКСС-И более эффективны, чем амортизаторы АКСС-М.
Амортизаторы АКСС-М делятся на типоразмеры по номинальной
нагрузке от 10 до 400 кг, а АКСС-И — от 25 до 400 кг.
Частота свободных вертикальных колебаний машин на аморти-
заторах АКСС-И при номинальной нагрузке колеблется в преде-
лах 10—15 Гц; деформация равна 1—1.5 мм.
Рис. 11-6. Амортизатор типа AKGC Рис. 11-7. Пневматический аморти-
аатор типа АПС
173
Амортизатор пневматический типа АПС в отличие от амортиза-
торов типа АКСС имеет замкнутую воздушную полость, в которую
воздух подается под давлением через специальный штуцер.
По своей эффективности амортизатор АПС превосходит все пе-
речисленные амортизаторы: его грузоподъемность находится в пре-
делах 200—700 кг.
При выборе амортизирующего крепления необходимо руковод ст-
воваться следующим:
1. Крупные майнины с малой опорной поверхностью лап уста-
навливаются преимущественно на пластинчатые амортизаторы.
В остальных* случаях применяются амортизаторы типа АКСС.
При особо жестких требованиях к виброизоляции машины приме-
няются амортизвторы типа АПС.
2. Количество опорных амортизаторов определяют из условия
обеспечения номинальной нагрузки на каждый амортизатор и
устойчивости установки машины.
Возможно некоторое отступление от номинальной нагрузки
в пределах допуслаемых отклонений для выбранного типа амор-
тизаторов; при этом нужно иметь в виду, что при перегрузках
сокращается срок службы амортизаторов. При недогрузках уве-
личивается число амортизаторов, а следовательно, н жесткость
амортизирующего крепления, что ухудшает его виброизолирую-
щую способность.
При определении количества амортизаторов необходимо также
учитывать количество и расположение отверстий в опорных лапах
машины.
- 3. Для снижения вибрации, возбуждаемой небалансом, необ-
ходимо опорные лапы машины располагать таким образом, чтобы
центр жесткости амортизирующего крепления был по возможности
ближе к центру тяжести машины.
4. При выборе схемы расположения амортизаторов следует
учитывать удобство монтажа и замены амортизаторов.
ГЛАВА ДВЕНАДЦАТАЯ
ИЗМЕРЕНИЕ ШУМА ЭЛЕКТРИЧЕСКИХ МАШИН
12-1. УСЛОВИЯ И МЕТОДЫ ИЗМВ>Е№М
Результаты измерений шума в значительной мере за-
висят от акустических свойств -помещения, выбора точек измере-
ния, способа установки машины и режима ее работы, используемой
измерительной аппаратуры и условий ее применения. Могут кон-
тролироваться различные параметры, характеризующие машину
174
ка.к источник шума: общие уровни звукового давления, спектры
уровней звукового давления, звуковая мощность, характеристика
направленности излучения и др.
Для получения надежных и сопоставимых данных контроль и
нормирование шума необходимо производить на базе единой ме-
тодики измерений. Измерения должны производиться на специ-
альных стендах (или в камерах), обеспечивающих выполнение сле-
дующих условий: достаточно низкий уровень шумовых и вибра-
ционных помех, определенный характер распространения звука
внутри помещения, в котором производятся измерения.
Выполнение первого условия обеспечивает отсутствие искаже-
ний, вносимых в измерения источником помех. Что касается ха-
рактера распространения звука в помещении, то выполнение этого
условия во мвогом зависит от свойств помещения.
Излучаемый испытуемой машиной шум может отражаться от
пола, стен, потолка помещения, а также от различных предметов,
расположенных в помещении. В этом -случае при измерениях будет
фиксироваться суммарный шум прямой и отраженной звуковой
волны.
При неопределенном характере звукоотражения могут быть
получены случайные результаты измерения, не характеризующие
шум данной машины.
Этих искажений можно избежать, если измерения производить
в условиях, близких к свободному звуковому тюлю, т. е. в усло-
виях, когда практически отсутствует звукоотражение.
Есть и другая возможность избежать случайных результатов
измерений — обеспечить, наоборот, очень большое звукоотраже-
ние в помещении.
уЕсли излучаемая машиной звуковая энергия будет практи-
чески полностью отражаться, то в этом случае (т. е. в диффузном
поле) шумомер зафиксирует суммарное звуковое давление прямой
и отраженной звуковых волн. Эго позволит определить уровень
громкости шума испытуемой машины, внеся в результаты изме-
рений соответствующую поправку-
В последнее время находит применение метод, позволяющий
учесть влияние звукоотражения^ Этот метод основан на примене-
нии образцового источника шума н позволяет производить испы-
тания в помещениях, где ие обеспечиваются ни условия свобод-
ного поля, ни условия диффузвого поля.
Зная истинные шумовые характеристики образцового источ-
ника (предварительно снятые в условиях свободного поля) и фак-
тические характеристики того же образцового источника, изме-
ренные в данном помещении, можно судить о том, насколько эти
характеристики отличаются (за счет отклонений акустических
свойств испытательного помещении) от условий свободного поля.
' Затем, сопоставляя результаты испытаний машины с результатами
испытаний образцового источника в тех же условййх, можно оп-
ределить шумовые характеристики машины с учетом поправок на
свойства данного помещения.
175
Наконец, существует метод измерения шумовых характеристик
в условиях, близких к свободному полю, но отличающихся тем,
что точки измерения выбираются на стандартном (I м) расстоянии
от машины независимо от ее размсрон!/Этот метод по сравнению
с методом свободного поля менее точен для определения звуковой
мощности крупных машин так как возможны погрешности из-за
эффекта «ближнего звукового поля», но проще и удобнее.
Исходя из изложенного, предусматривается возможность из-
мерения шумовые характеристик любым из четырех методов:
в свободном звуковом поле;
в отраженном звуковом поле;
прн помощи образцового источника;
на расстоянии 1 м от наружного контура машины.
Каждый из указанных методов имеет свои преимущества и не-
достатки.
Метод измерения в свободном звуковом поле можно считать
наиболее точным^ Он позволяет определять все шумовые характе-
ристики машин, включая характеристики направленности излу-
чения, во всем контролируемом диапазоне частот. Недостатком
метода является необходимость иметь заглушенную камеру с хо-
рошими звукопоглощающими свойствами, причем для больших
машин требуется кзмера значительных размеров.
Метод измерения в отраженном звуковом поле требует ревербе-
рационной камеры, т. е. помещения с хорошим звукоотражением.
Такая камера по сравнению с заглушенной может иметь несколько
меньшие размеры (особенно при испытании крупных машин), ее
конструкция проще, дешевле и удобнее в эксплуатации. Но в ре-
верберационной камере чрезвычайно трудно обеспечить требуемое
звукоотраженне на низких частотах, поэтому измерения в ней
возможны тольно в диапазоне частот не ниже 124 Гц. Машины, об-
ладающие шумом со значительными низкочастотными составляю-
щими, испытывать в реверберационной камере не рекомен-
дуется.
Рассматриваемый метод обладает еще и тем неудобством, что не
позволяет непосредственно измерять уровни громкости звука
(в децибелах), хотя' именно эта величина является основной прн
контрольных испытаниях. Приходится измерять спектр уровней
звукового давления, а затем уже пересчетом определять уровень
громкости звука.
Недостатком метода измерения в отраженном поле является
также невозможность определения характеристики направленно-
сти излучения, так как во всех точках диффузного поля уровни
громкости Шума одинаковы. Это свойство диффузного поля обус-
’ ловливает и преимущество данного метода: отпадает необходимость
соблюдения точного расстояния от точек измерения шума до испы-
туемой машины (необходимо лишь, чтобы они лежали в зоне диф-
фузного поля).
В настоящее время нет достаточного опыта измерения шу-
мовых характеристик машин в отраженном поле, а также опыта
176
проектирования и строительства реверберационных камер для этйх
целей?
Еще меньше опыта в применении метода образцового источника.
В качестве основного метода измерения шумовых характеристик
электрических машин установлен метод измерения на расстоя-
нии 1 м от наружного контура машины.
Для машин размером до 0,75 м этот метод обеспечивает практи-
чески такую же точность определения всех шумовых характери-
стик, что и метод измерения в свободном поле. Для более крупных
машин расстояние I м не гарантирует выхода за границы «ближ-
него звукового поля» источника, это обеспечивается лишь при из-
мерительном расстояния ие менее двойного размера машины, как
предусмотрено методом измерения в свободном поле. За счет этого
возможна погрешность в расчёте звуковой мощности. Однако учи-
тывая, что в качестве нормы шума электрических машин опреде-
лена не звуковая мощность, а уровень громкости звука на расстоя-
нии 1 м, указанный недостаток можно считать несущественным.
Вместе с тем метод измерения на расстоянии 1 м позволяет не-
посредственно определять нормируемую характеристику шума.
Кроме того, он упрощает выбор точек измерения. Для крупных
машин этот метод позволяет иметь меньшие размеры заглушенной
камеры. Это и определило выбор данного метода в качестве основ-
ного для контроля шума электрических машин.
Для измерения шумовых характеристик электрических машин
на расстоянии 1 м от наружного контура необходимы специальные
заглушенные камеры, обеспечивающие достаточную звукоизоля-
цию и виброизоляцию от внешних помех, а также минимальное
отражение шума, излучаемого испытуемой машиной, от стен и
потолка. Пол такой камеры может быть звукопоглощающим (тогда
звуковое поле является сферическим, так как звуковые волны от
испытуемой машины распространяются во всех направлениях
практически без отражения) либо звукоотражающим, что соответст-
вует полусферическому полю. В обоих случаях должно обеспечи-
ваться одно из следующих условий:
средний уровень звукового давления должен увеличиваться ие
менее чем на 5 дБ при уменьшении вдвое расстояния от центра
источника до точек измерения шума;
средний уровень звукового давления должен уменьшаться не
менее чем на 4 дБ прн удвоении указанного расстояния от центра
источника до точек измерения шума машины.
Практические рекомендации по устройству таких камер содер-
жатся в специальной литературе.
12-2. ИЗМЕРИТЕЛЬНАЯ АППАРАТУРА
Непосредственным измерением могут быть определены
следующие шумовые характеристики:
уровень громкости звука;
общий уровень звукового давления;
Заказ № 2109
177
спектр уровней звукового давления.
Для измерения этих характеристик применяются .шумомеры
и анализвторы (либо спектрометры, полосовые фильтры) различ-
ных типов.
Измерение уровней громкости звука производится по шкале А
приборов.
Измерение общих уровней звукового давления производится
по линейной шкале либо по шкале С, которая мало отличается от
линейной.
При измерении частотных спектров шума также используется
линейная шкала! или шкала С. Для этих измерений к выходу шу-
момера или усилителя подключается анализвтор.
Иногда результаты измерения шумовых характеристик реги-
стрируются не по показаниям стрелочного индикатора, а путем
записи на специальную бумажную ленту при помощи самописца.
Большинство фирм, производящих аппаратуру для акустиче-
ских измерений, предусматривает возможность измерения вибра-
ций путем замены микрофона датчиком вибраций. Анализ вибра-
ций производится теми же анализаторами, которыми пользуются
при анализе шума. Среди датчиков, нашедших широкое примене-
ние, можно назвать пьезоэлектрические, в которых генерируемая
э. д. с. пропорциональна ускорению. Самы® распространенные дат-
чики изготовляются из керамического пьезоэлектрического мате-
риала — титаната циркония или бария. Характеристики этих дат-
чиков ие зависят от температуры в интервале от 10 до 100 °C, а
частотная характеристика линейна в интервале от 5 до 10 000 Гц.
При измерении вибраций, так же как и при измерении шума,
необходимы самописцы, магнитофоны, осциллографы и т. д. Хо-
рошо зарекомендовали себя приборы,' производимые [фирмой
«Брюль и Къер».
12-3. УСТАНОВКА И РЕЖИМ РАБОТЫ
ИСПЫТУЕМОЙ МАШИНЫ
Способ установки машины при акустических испытаниях
может оказать влияние на результаты измерений.
При жестком креплении машины к фундаменту возможны иска-
жения по трем причинам:
в результате передачи посторонних вибраций к испытуемой
машине ее шум может возрасти;
вибрация машины, передаваясь на фундаментную плиту, мо-
жет прекратить последнюю в источник шума и помех;
масса фундамента, присоединенная к массе корпуса машины,
может существенно изменить характер колебаний корпуса и тем
самым исказить спектр и уровень громкости шума, излучаемого
машиной.
Поэтому испытуемая машина изолируется от фундамента по-
средством амортизвторов либо упруго подвешивается. Исключе-
ние допустимо только в тех случаях, когда проверной установлено,
178
что для машин данного типа иная установка не искажает резуль-
татов измерения шумовых характеристик.
Амортизвторы или упругую подвеску необходимо выбирать из
условия, чтобы частота собственных колебаний машины была ниже
частоты возбуждающих сил не менее чем в 2 раза.
Шум, создаваемый электрической машиной, в известной мере
зависит от режима ее работы, поэтому измерение шума желательно
производить в номинальном режиме. Однако в тех случаях, когда
испытуемую машину для создания номинального режима работы
приходится сочленять со вспомогательной нагрузочной или при-
водной машиной, возникают серьезные трудности, связанные с не-
обходимостью устранения искажений, вносимых этой машиной
в результаты измерений шума. Такие искажения (за счет шумовых
и вибрационных помех, звукоотражения, влияния присоединенной
массы и т. д.) могут быть настолько значительными, что пренебре-
гать ими нельзя, а учесть и внести соответствующие поправки в
большинстве случаев невозможно.
Вместе с тем известно, что из всех параметров, определяющих
рабочий режим машины, наибольшее влияние на шумовые характе-
ристики имеет обычно угловая скорость. От нее сильно зависят
вентиляционные и механические составляющие шума. Поэтому
угловая скорость при акустических испытаниях машин должна
быть номинальной. Что касается нагрузки, то она влияет практи-
чески лишь на магнитный шум. В большинстве случаев это влия-
ние не превышает 2—4 дБ, искажения же за счет влияния нагру-
зочной машины могут быть значительнее. Поэтому рекомендуется
производить измерение шума в режиме номинальной нагрузки
для электромашинных преобразователей, а также других машин,
нагрузка которых может быть создана без механического соедине-
ния их со вспомогательной машиной или механизмом (тормозом,
вентилятором и т. д.). В синхронных машинах электрическую на-
грузку можно имитировать в режиме компенсатора (перевозбуж-
денного двигателя). Для асинхронных электродвигателей, и дви-
гателей постоянного тока избавиться от помех, создаваемых на-
грузочным устройством, чрезвычайно трудно. Если этого и удается
иногда достичь применением малошумных нагрузочных устройств
(размещаемых за пределами испытательного помещения и соеди-
няемых е машиной посредством специального валопровода сложной
конструкции) и особо тщательным сочленением, то для контроль-
ных испытаний, такая методика неприемлема. Ею можно пользо-
ваться лишь для некоторых исследовательских работ н. быть мо-
жет, в отдельных случаях для типовых испытаний.
12-4. НОРМИРОВАНИЕ ВИБРАЦИИ МАШИН
С целью ограничения вибрации в различных областях
техники существуют требования и нормы по ее регламентации.
Разнообразие подходов к ограничению вибрации, обусловленных
различными требованиями, сильно затрудняет разработку единых
7* 179
норм. В большинстве случаев нормы устанавливаются с учетом
всех наиболее важных условий работы машины. Так как сниже-
ние вибрации ниже определенного уровня отражается на стоимости,
сроках изготовления, массо-габаритных характеристиках, уровни
вибрации каждой машины должны находиться в определенном со-
четании с другими ее параметрами.
Здесь следует конкретизировать два понятия, которые часто
смешивают,— требования и нормы по ограничению вибрации.
Под требованиями принято подразумевать те предельно допу-
стимые уровни вибрации, которые необходимы для полного удов-
летворения определенных частных условий, без учета возможности
их выполнения в данный момент.
Под нормами обычно понимаются установленные с помощью
статистических методов реально достижимые минимальные уровни
вибрации, выполнение которых является обязательным.
К разрвду требований относится большинство действующих
санитарно-гигиенических нормативов по ограничению вибраций, а
также ряд специальных ведомственных технических требований,
обусловленных назначением машин.
Оценка виброактивности должйа учитывать следующее:
1. Установление частотного диапазона, в котором должен про-
изводиться контроль вибрации. До настоящего времени в крупном
машиностроении широко используется способ контроля и норми-
рования вибрации по максимальному смещению на одной из частот
колебательного процесса; недостаток этого способа — отсутствие
информации о гармонических составляющих вибрационного про-
цесса, необходимой как для более полного контроля технического
состояния машин, так и для оценки вибрации с позиции санитарно-
гигиенических требований.
Практика показывает, что достаточно надежное наблюдение
за техническим состоянием машин может быть обеспечено только
при контроле вибрации в диапазоне частот 5 Гц—10 кГц. При этом
оптимальная ширина полосы частотного анализа соответствует
третьоктавной или полуоктавной полосе частот. При необходимости
детвльиой расшифровки спектра применяется узкополосный ана-
лиз вибрации.
2. Контроль и нормирование низкочастотной вибрации в со-
ответствии с большинством действующих в настоящее время как
технических, так и медицинских требований осуществляется по
максимальным значениям вибрационного смещения. При нормиро-
вании вибрации в диапазоне частот 5 Гц — 10 кГц в качестве нор-
мируемого параметра принято вибрационное ускорение. Вызвано
это тем, что наиболее чувствительные и малогабаритные вибродат-
чики реагируют непосредственно на ускорение.
Вибрационная частота используется в некоторых медицинских
требованиях и нормах как фактор, непосредственно влияющий на
физиологическое состояние людей. При оценке вибрации в расчет
вводятся максимальные значения измеренных величин. Эти вибра-
ции имеют наибольший практический интерес. Для контроля и
180
нормирования вибрации в полосах частот наиболее целесообраз-
ной является оценка среднего квадратического ее значения.
3. Важным является выбор места и направления измерений.
Колебания, возникающие в различных машинах, по-разному про-
являются на отдельных ее участках. Сравнение спектрограмм,
снятых в различных точках одной и той же машины при неизмен-
ном режиме работы, свидетельствует о существенном их различии.
То же относится к направлению измерений в выбранной точке
(вертикальное, горизонтальное, осевое). Поэтому возникает не-
обходимость строгой регламентации места и направления измере-
ния вибрации при ее нормировании и контроле. Большинство
нормативных документов, ограничивающих вибрации машин, пре-
дусматривает ее контроль на крышках подшипников в трех взаимно
перпендикулярных напраалениях. Для решения задач, связанных
с распространением вибрации, первоочередной интерес представ-
ляет информация о вибрации, передаваемой в несущие конструк-
ции (фундаменты, полы, опоры). В этих случаях нормирование
и контроль вибрации осуществляются в опорных узлах машин
(лапах, фланцах и т. п.).
В практике машиностроения неоднократно отмечались случаи,
когда режим работы машины, нормвльно работающей на одном
фундаменте, становился аварийным при перестановке ее на другое
основание. Возрастание вибрации происходило главным образом
вследствие наступления резонанса системы машина — фундамент.
Поскольку истинные вибрационные характеристики этой системы
могут быть получены только при испытаниях в эксплуатационных
условиях, требования ограничения уровней вибрации турбо- и гид-
рогенераторов предусматривают контроль их вибрационных ха-
рактеристик в нормальных рабочих условиях.
Такой подход к отдельным машинам индивидуального изготов-
ления можно считать оправданным. Однако он неприемлем при
крупносерийном производстве, когда контроль вибрационных ха-
рактеристик машин надо осуществлять на заводских стендах.
В этих случаях наиболее правильными являются измерения виб-
рации при установке машины на амортизаторы, при которой обес-
печивалась бы такая развязка машины и фундамента, которая
позволяла бы выявить вибрационные свойства самой машины.
В большинстве действующих нормативов выдвигаются требо-
вания к частотной расстройке, при которой частота свободных
колебаний машины, установленной на амортизаторы, была бы
в 2—4 раза ниже частоты, возбуждаемой небалансом ротора.
12-S. ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ
И ОБРАБОТКА РЕЗУЛЬТАТОВ
При снятии шумовых характеристик на расстоянии 1 м
от наружного контура измеряются только уроани громкости звука
в выбранных точках. Полученные данные обрабатываются в сле-
дующем порядке:
181
1. Если разность между уровнем громкости звука, измеренным
при работающей машине, и уровнем громкости помех составляет
6—9 дБ, то поправка, учитывающая влияние помех, будет 1 дБ,
если эта разность составляет 4—5 дБ, то поправка будет 2 дБ.
Эта поправка вычитается из уровня громкости звука, измерен-
ного при работающей матине. При разности более 9 дБ поправка
не вносится.
2. Производится усреднение уровней громкости звука, изме-
ренных в нескольких точках вокруг машины. Если усредняемые
уровни отличаются Друг от друга менее чем на 5 дБ, то за средний
уровень принимается их среднее арифметическое значение. Если
они различаются более чем на 5 дБ, усреднение производится по
формуле
- iole(x IO01'*' j— lOIgn, (12-1)
где Lai — уровень громкости шума в i-й точке измерения на рас-
стоянии 1 м от корпуса; я — число точек измерения.
При типовых испытаниях дополнительно измеряются уровни
звукового давления в точке с максимальным уровнем звука.
Обработка результатов измерений производится в следующем
порядке:
вносятся поправки, учитывающие влияние помех;
определяются уровни звуковой мощности в каждой полосе;
определяются показатели направленности излучения для каж-
дой точки измерения.
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1
Средний уровень громкости наиболее часто встречающихся
звуков и шумов
Наименование источников шума и места их измерения Уровень громкости шума, дБ
Порог болевого ощущения Авиационный мотор на расстоянии 5 м Шум ъ поезде метро во время движения Автобус на расстоянии 5 м Трамвай на расстоянии 10—20 м Троллейбус на расстоянии 5 м Улица с интенсивным движением и трамваем Тихая улича (без транспорта) Удары молота по стали* клепальная машина на расстоянии 2—4 м Цехи электромеханические, автомобильные Библиотеки Тиканье часов на расстоянии 0,5 м 130 116—120 85—90 85—88 80—85 77 75—80 30—35 110—113 90—92 25—30 30
ПРИЛОЖЕНИЕ 2
Соотношений между уровнями вибраций и звуковых давлений,
выраженных в децибелах, и значениями этих величин,
выраженных в абсолютных единицах
дБ Звуковое давление, Н/сы’ Скорость. Ускоре- ние. см/с1 ДБ Звуковое давление, Н/см" Скорость. Ускоре- ние, см/с1
0 1 2 3 4 5 6 8 9 10 11 12 2,00-10—» 2,24-10° 2,52-10-® 2,83-10-® 3,17-10“® 3,56-10-® 3,99-10-8 5,02- IO-8 502-10-» 5,64-10-® 6,32-IO-’ 7,10-10—8 7,96- IO-® 5,00-10-8 5,61 -10-е 6,30-10-8 7,07- 10-е 7,93-10-8 8,89-10-8 9,98-10-8 1,12-10-* 1,26-10-8 1,41-10-8 1,58-10-» 1,77-10-* 1.99-10-8 3,00-10-е 3,37-10-е 3,78- 10-е 4,24-10-® 4,76-10-8 5,33- IO-8 5.98-10-8 6,72-10-8 7,54-10-е 8,45-10—* 9,49. IO-2 1,06-10~1 1.19-10—1 13 14 15 16 17 18 19 20 21 22 23 24 25 8,93-10-® 1,00-10-8 1,12-10-в 1,26-10-« 1,42-10-8 1,59-10-8 1,78- IO-® 2,00- 10-е 2,24-10-8 2,52-10-в 2,83-10-е 3,17-10-8 3,56-Ю-в 2,23-IO"8 2,51-10“» 2,81-10-» 3,16-10-8 3,54-10—8 3,96-10-» 4,46-10-8 5,00- IO-* 5,61-10-» 6,30-10-5 7,07.10-» 7,93-10-» 8,89- IO-® 1,34-10-» 1,60-10—8 1,69-10“» 1,89-10-» 2,12-10-» 2,38-10-» 2,67-10-Х 3,00-10-х 3,37-10-х 3,78-10-» 4,24-10-» 4,76-10-х 5,33-10~1
183
Продолжение приложи 2
ДБ Звуковое давление. Н/см* Скорость, У ск пре- ние, сы/с2 ДБ Звуковое давление; Н/см5 Скорость, Ускоре- ние, см/с9
26 3,99-10-“ 9,98-10—® 5,98-10“1 76 1,26-10“» 3,16-10“8 1,89-10’
27 4,48-10-® 1,12-10“* 6,72-10-1 77 1,42-10—5 3,54-10“2 2,12-10’
28 5,02-10-в 1,26-10“* 7,54-10—1 78 1,59-10—5 3,97-10- 2 2,38-10’
29 5,64-10-» 1,41-10 4 8,45-10—1 79 1,78-!0“» 4,46-10—2 2,67-10®
30 6,32-10-» 1,58-10-* 9,49-10-* 80 2,00-10-® 5,00-10-2 3,00-10’
31 7,10-10-е 1,77,-10-* 1,06 81 2,24-10“ » 5,61-10-а 3.37-10’
32 7,96-10-« 1.99-10—* 1,19 82 2,52-10-6 6,30-10-8 3,78-10’
33 8,93-10-8 2,23- !0~* 1,34 83 2,83-10 = 7,07-10-8 4,24-10’
34 1,00-10-8 2,51-10-« 1,50 84 3,17-10-» 7,93- IO-’ 4,76-10’
35 1,12-10-8 2,81-10-3 1,69 85 3,56-10-» 8.89- IO-’ 5,33-10’
36 1,26-10-8 3,16-10—4 1,89 86 3,99-10-» 9.98-10-8 5,98-10”
37 1.42-10-8 3,54-10—4 2,12 87 4,18-10'» 1,12-10-* 6,72-10®
38 1,59- IO-® 3,97-10-* 2,38 88 5,02-10-» 1.26-10-* 7,54-10’
39 1,78-10—8 4,46-10-* 2,67 89 5,64-10-» 1,41-10—1 8,45-10’
40 2,00-10-8 5,00 10 “* 3,00 90 6,32-10—» 1,58-10—1 9,49-10’
41 2,24-10-’ 5,61-10“* 3,37 91 7,10-10-» 1,77- IO—1 1,06-10’
42 2,52-10-’ 6,30-ю-4 3,78 92 7,96- 10“» 1,99-10-1 1,19-10’
43 2,83-10-’ 7,07-10—4 4,24 93 8,93- 10“в 2,23- Ю“1 1,34-10»
44 3,17-10-’ 7,93-10-* 4,76 94 1,00-10-* 2,51-10-* 1,50-10s
45 3,56-10-’ 8,89-10—4 5,33 95 1,12-10-* 2,81-10—* 1,69-10’
46 3,99-10-’ 9,98-10“* 5,98 96 1,26-10-* 3,16-10-» 1,89-10’
47 4,48-10-’ 1.12-10-8 6,72 97 1,42-10—* 3,54-10-* 2,12-10’
48 5,02-10-’ 1,26-10-3 7,54 98 1,59-10-* 3,97-10-1 2,38-10’
49 5,64-10-’ 1,41-10—8 8,45 99 1,78-10-* 4,46-10—1 2,67-10’
50 6,32-10-’ 1,58-10-8 9,49 100 2,00-10-* 5,00-10-1 3,00-10’
51 7,10-10-’ 1,77-10-а 1,06-10 101 2,24-10-* 5,61-10—1 3,37-10’
52 7,96-10-’ 1,99-10-8 1,19-10 102 2,52-10* 6,30-10-* 3,78-10’
6.3 8,93-10-’ 2,23-10-8 1,34-10 103 2,83-10-* 7,07-10—1 4,24-10’
54 1,00-10-® 2,51-10“® 1,50-10 104 3,17-10“* 7.93-10—1 4,76-10’
55 1,12-10-в 2,81-10—8 1,69-10 105 3,56-10“* 8,89-10—* 5,33-103
56 1,26-10-8 3,16- ю—3 1,89-10 106 3,99-10—4 9,98- IO-» 5,98- №
57 1,42-10—с 3,54-10-8 2,12-10 107 4,48-10—* 1.12 6,72-10’
58 1,59-10-8 3,97-10-8 2,38-10 108 5,02-10-* 1,26 7,54-10’
59 1,78-10-« 4,46-10-8 2,67-10 109 5,64-10-* 1,41 8,45-10’
60 2,00-10-« 5,00-10-8 3,00-10 ПО 6,32-10-* 1,58 9,49-10s
61 2,24-10-8 5,61-10-® 3,37-10 111 7,10-10—* 1,77 1,06-10*
62 2,52-10-в 6,30- io-8 3,78-10 112 7,96-10“* 1,99 1,19-10"
63 2,83-10-с 7,07- Ю-’ 4,24-10 113 8,93-10-* 2,23 1,34-10"
64 3,17-10-« 7,93-10-8 4,76-10 114 1,00-10—8 2,51 1,50-10»
55 3,56-10-® 8,89-10-8 5,33-10 115 1,12-10—» 2,81 1,69-10*
66 3,99-10-в 9,98-10-® 5,98-10 116 1.26-1О-» 3,16 1,89-19*
67 4,48-10-» 1,12-10-8 6,72-10 117 1,42-10—® 3,54 2,12-10"
68 5,02.10-« 1,26-10-8 7,54-10 118 1,59-10—3 3,97 2,38-10"
69 5,64-10-8 1,41-Ю-з 8,45-10 119 1,78-10-8 4,46 2,67-10’
70 6,32-10-в 1.58-10-3 9,49-10 120 2,00-10—3 5,00 3,00-10*
71 7,10-10-в 1,77-10-8 1,06-10’ 121 2,24-10“® 5,61 3,37-10"
72 7,96-10-« 1,99-10-з 1 19-10’ 122 2,52-10“® 6,30 3,78-10*
,73 8,93-10-8 2,23-10-« 1,34-10’ 123 2,83-10“® 7,07 4,24-10*
'74 1,00-10-5 2,51-Ю-2 1,50-10’ 124 3,17-10“® 7,93 4,76-10’
75 1,12-10—е 2,81-10-2 1,69-10’ 125 3,56-10-® 8,89 5,33-10»
184
Продолжение прилож. 2
«Б Звуковое давление. Н/см' Скорость. Ускоре- ние, см/с5 дБ Звуковое давление, Н/см5 Скорость, Ускоре- ние. см/с’
126 127 128 129 130 131 132 133 134 135 136 137 138 3,99-10“3 4,48- IO-® 5,02-Ю-з 5,64-10-3 6,32-Ю-з 7,10-Ю-з 7,96-10-а 8,93-Ю-з 1,00-10-® 1,12-Ю-з 1,26-Ю-з 1,42-Ю-з 1,59-Ю-з 9,98 1,12-10 1,26-10 1.41-10 1,58-10 1,77-10 1,99-10 2,23-10 2,51-10 2,81-10 3,16-10 3,54-10 3,97-10 5,98-10* 6,72-10* 7,54-10* 8,45-10* 9,49-10* 1,06-106 1,19-10» 1,34-106 1,50-10’ 1,69-10» 1,89-10» 2,12-106 2,38-106 139 140 141 142 143 144 145 146 147 148 149 150 1,78-Ю-з 2,00-Ю-з 2,24-Ю-з 2,52-10“® 2,83-10-® 3,17-10—2 3,56-10-з 3,99-10-« 4,48- IO*2 5,02-Ю-з 5,64-Ю-з 6,32-Ю-з 4,46-10 5,00-10 5,61-10 6,30-10 7,07-10 7,93-10 8,89-10 9,98-10 1,12-10* 1,26-10’ 1,41-10’ 1,58-10’ 2,67-106 3,00-103 3,37-103 3,78-10» 4,24-106 4,76-106 5,33-106 5,98-10s 6,72-10» 7,54-106 8,45-Юз 9,49-10»
ПРИЛОЖЕНИЕ 3
Зависимость резонансной частоты fB для простой колебательной системы,
состоящей из массы, подвешенной на пружине, от статической деформации
пружины б (в сантиметрах).
Зависимость определяется формулой/о — 5~[/1/5 .
ПРИЛОЖЕНИЕ 4
Зависимость интенсивности силы звука / (в микроваттах на квадратный
сантиметр) в плоской или сферической волне в воздухе или в воде от звуко-
вого давления р (в ньютонах на квадратный сантиметр).
Зависимость определяется формулой / = р®/(10 рс).
Рис. П-2
ПРИЛОЖЕНИЕ 5
Зависимость колебательной скорости у в плоской или сферической волне
в воздухе и в воде от давления р (в ньютонах на квадратный сантиметр).
Зависимость определяется формулой у = р/(рс)
Пример 1. Найти колебательную скорость в воздухе и в воде при дав-
лении 3-10—8 (в ньютонах на квадратный сантиметр). Из графика находим:
для воды (справа) у = 2-10~6 см/с; для воздуха (слева) у = 0,07 см/с.
ПРИЛОЖЕНИЕ 6
Зависимость основной резонансной частоты fe (в герцах) круглого, за-
щемленного во периметру, алюминиевого или стального диска от его тол-
щины ft (в сантиметрах) и диаметра d (в сантиметрах), являющегося пара-
метром семейства прямых (рис. П-4).
186
Предполагается, что диск колеблется в вакууме. Влияние окружающей
диск среды может быть учтено с помощью рис П-5.
Зависимость определяется формулой
Для определения резонансной частоты сложного колебания полученные
из 1 рафика значения частоты необходимо умножить па коэффициенты, при-
веденные в таблице.
Примечание. 1. Окружность, по которой
защемлен диск, считается первой узловой окружно-
стью. 2 При dlk 1000 резонансная частота при ко-
лебаниях диска в воздухе и вакууме практически оди-
накова .
Пример 2. Найти резонансную частоту при двух узловых окружностях
для круглого стального подшипникового щита электрической машины,
имеющего толщину 1 см и диаметр 60 см.
Восстанавливая абсциссу (рис. П-4) из точки на оси ординат, соответст-
вующей значению толщины диска 1 см, до пересечения с наклонной прямой
для диаметра 60 см, отсчитываем на оси абсцисс значение резонансной ча-
стоты, равное 260 Гц. Искомое значение равно 3,88 260 = 1010 Гц.
При колебаниях стального диска в воде резонансная частота, получен-
ная с помощью рис. 11 4, должна быть умножена на значения частотного
коэффициента а, взятого из рис. П-5.
Зависимость для а определяется по формуле а = 1/р^ 1 0,0425rf/ft.
Пример 3. Найти резонансную частоту подшипникового щита из при-
мера 2, колеблющегося в воде. Из рис. П-5 для dih -= 60/1 = 60 находим
а — 0,5. Следовательно, резонансная частота в водеД, = 1010-0,5 = 505 Гц.
ПРИЛОЖЕНИЕ 7
Зависимость отношения f0'P (/0 — резонансная частота прямоугольной
стальной или алюминиевой пластины, Гц; р — частотный коэффициент,
определяющий форму пластины и способ ее закрепления) от толщины пла-
стины h (в сантиметрах) и наибольшего линейного размера а (в сантимет-
рах), служащего параметром семейства прямых.
Из рис. П-6 можно определить резонансную частоту опертой и закреп-
ленной по периметру прямоугольной пластины, задаваясь ее геометриче-
Преднолагается, что колебания происходят в вакууме или в воздухе.
При колебаниях в воде резонансную частоту стальной пластины можно при-
ближенно подсчитать, пользуясь формулой и графиком приложения 6, имея
в виду, что d = 1,131/л, Ь, где с и Ъ —длина и ширина пластины.
Зависимость определяется формулой
f0/p~2,45 —рис. П-6.
Для опертой пластины
Р ^9,87(1 — а2/й2) — рис. П-7, кривая А,
для закрепленной по периметру пластины
VG2 , с4
14-0.606 — + —
рис. П-7, кривая В.
V Пример 4. Найти резонансную частоту стальной защемленной прямо-
угольной пластины размером 30 "< 50 см2 и толщиной 0,2 см, являющейся
влемеитом корпуса электрической машины.
Из рис. П-6 для h = 0,2 см и наибольшей стороны а = 50 см находим
ftl/p =1,3.
Из рис. П-7 по кривой В имеем р = 80. Следовательно, f0 — 1,3-80 =
= 104 Гц.
188
189
Продолжение прилож. 8
i а 4
₽ v/р 7/9 2/3 1 11/12 5/6 44 2/3
+ 1 + 1 + 1 +1 .1-1 -1-1 + 1
—0,008378 —0,045337 +0,042883 +0.034315 +0,011490 —0.017763 —0,042883
т7 -0.0215206 -0,0263987 + 0.0235034 +0,0144313 —0,006298 —0.02350 —0,023503
—11 -0,013695 +0,016799 + 0,011968 -1 0,00158 -0,011969 -0,00496 +0,01197
— 13 —0,003222 +0,01744 + 0,010127 —0,001333 -0.010127 -1-0,00419 +0,01013
—17 +0,05882 —0,05882 +0,009678 -0,005943 —0,002593 +0,00968 —0,009678
т!9 —0,052631 +0,052631 +0,011285 —0.00903 + 0,003024 +0,004674 —0.01128
—23 +0.001Я22 -0,009856 +0,04348 - 0,04348 4-0,04348 -0,04348 -1-0,04348
+ 25 +0,00003 —0,00739 —0,04000 +0,04000 —0,04000 1-0,04000 —0,04000
—29 +0,005195 + 0,00637 —0.00739 +0,00592 —0,00196 0,00306 +0,00739
+31 + 0,00135 +0,00731 —0,00531 +0,00826 +0,00142 -0,00531 +0,00531
—35 - 0,028'57 —0,02857 -0,00376 4-0,000495 + 0,003762 —0,001558 —0,003762
+37 -s-0,02703 + 0.02703 —0,003558 —0,000469 4-0,00356 +0.00147 —0,00356
—41 —0.00102 —0,00553 —0.00401 —0,00246 + 0.00107 +0,00401 +0,00401
+43 —0.00350 -0,004297 —0,00499 —0,00399 —0,001336 +0,00207 +0,004986
-47 0,003205 ч 0,00393 —0,02128 -0,02128 -0,02128 —0,02128 —0,02128
+49 —0,000855 -г0,00463 +0.02041 + 0,02041 •НО,02041 +0,02041 + 0,02041
-53 +0,018568 —0,018868 +0,00405 -1-0,00324 п-0,001084 —0,001676 —0,004046
+55 —0,018182 +0,018181 г0,002991 + 0,001837 -0,000802 —0,00299 —0,00299
-59 + 0,000710 -0,00384 +0.00223 + 0,000294 —0,00223 -0,000924 +0,00223
+ 61 +0,002469 -0,00303 +0,00216 —0.0002Л4 —0,002158 +0.000894 +0,002158
Продолжение прилож, 8
Q 5 6
v/p 1 14/15 13/15 4/5 11/15 2/3 1
+1 + 1 +1 + 1 + 1 + 1 + 1 -1
+0,041812 +0,03641 +0,021373 —0,0000002 -0,0228844 -0,0418117 - -0,0412
+7 +0,022316 +0,016676 + 0,0023846 —0,013792 -0,023895 -0,0223163 - -0,0217
—11 +0,010402 + 0,004254 —0,00712 -0,01040 —0,00119 +0,010402 - 0,00967
+ 13 +0,00822 +0,00172 —0,00768 —0,00508 +0,00602 +0,00822 -0,0074
—17 +0,000286 —0,001314 —0,00587 +0,003885 +0,00460 —0,006286 - -0,00515
+ 19 +0,00602 —0,002463 —0,004119 -0,00602 —0,000689 —0,00602 -0,0046
-23 +0,006792 —0,005075 + 0,000726 +0,004198 —0,00727 +0,00679 -0,00418
+25 +0,00836 —0.007282 +0,00427 —0,00000 —0,00458 + 0,00836 -0,00426
—29 + 0,03448 —0,03448 +0,03448 —0,03448 +0,03448 —0,03448 - -0,00524
+31 —0.03226 +0,03226 —0,03226 +0,03226 —0,03226 +0,03226 -0,00665
—35 —0,00597 +0,0052 —0,00305 —0.00000 +0,00327 —0,00597 гО,02857
+37 —0,00422 +0,00315 —0,000451 —0,00261 +0,00452 —0,00422 -0,027
41 —0,00279 +0,00114 +0,00191 0,00279 +0,000319 —0,00279 -0,00503
+43 -0,002485 + 0,000519 +0,00232 -0,001536 —0,00182 +0,00248 -0,00353
. 47 —0,00227 —0,000475 +0,00212 1-0,00141 -0,00167 —0,00227 -0.00226
+ 49 —0,00234 —0,000955 +0,001597 + 0,00234 +0,000267 —0,00233 -0,00196
-53 —0,002948 —0,002203 —0,000315 +0,00182 +0,003156 +0,00295 -0,00165
+ 55 •0,0038 —0,00331 —0,00194 —0.0000002 +0.00208 +0,00380 -0,00159
-59 —0,01695 -0,01695 —0,01695 -0,01695 —0,01695 -0,01695 -0,00163
+61 +0,016394 +0,016394 +0,016393 +0,016393 + 0,016393 +0,016393 -0,00174
Продолжение прилож. 8
Q 6 7
V/P 17/18 8/9 5/6 7/9 13/18 5/а 1
+ 1 + 1 +1 + 1 +1 + 1 + 1 + 1
—5 +0,0375 +0,0269 +0,0111 —0,00762 —0,0261 -0,0412 +0,0409
+7 +0,0178 +0,00754 -0,00582 -0,0177 —0,0239 -0,0217 +0,0214
-11 +-0,00557 —0.00386 —0,00967 —0,00788 +0,00093 +0.00967 +0,00927
+ 13 +0,00314 —0,00483 -0,0074 —0.00137 +0,00669 + 0,0074 + 0,00690
—17 +0,00045 —0,00615 —0,00138 +0,00515 + 0,0024 -0,00515 +0,0046
+ 19 - 0,000403 —0,00460 +0,00123 +0,00460 -0,00215 -0,00460 +0,00398
—23 —0,00177 —0,00273 +0,00418 —0,000773 —0,00378 +0,00418 +0,00329
+25 -0,00245 —0,00148 +0,00426 —0,00347 -0.000409 +0,00426 +0,00313
—29 —0,00431 +0,00182 + 0,00140 —0,00427 +0,00576 -0,00524 +0,00312
+31 —0,00605 +0,00434 —0,00178 —0.001229 +0,00421 —0,00665 +0,00329
-35 —0X12857 +0,02857 -0,02857 +0,02857 —0,02857 +0,02857 +0,00427
+37 +0,027 -0,027 + 0,027 -0,027 +0,027 -0,027 +0,00553
—41 +0,00458 —0,00328 + 0,00135 -[•0,00093 —0,00318 +0,00503 +0,0244
+43 +0,0029 —0,00123 -0,000947 +0,00288 —0,00388 +0,00353 —0,02325
—47 +0,0013 +0,000786 -0,00226 +0,00164 +0,000'218 -0,00226 —0,00435
+49 +0,00083 +0,00128 -0,00196 +0,000362 +0,00177 —0,00195 —0,00305
—53 +0,000144 +0,00165 -0,00044 —0,00165 +0,00077 +0,00165 —0,00192
+55 —0,000139 + 0,00159 + 0,000426 —0,00159 —0,00074 +0,00159 —0.00164
-59 —0,000692 +0,00106 +0,00163 -г 0,000301 -0,00147 —0,00163 —0,00133
+61 —0,00100 +0.000606 +0.00174 +0,00142 —0,000168 —0,00174 —0,00124
Прод олжение прилож. 8
« 7
v/p'\ 20/2) 19/21 6/7 17/21 16/21 6/7 2/3
1-1 J.! +1 ..'•1 + 1 +1 + 1 _|_j
-5 +0,0382 +0,0303 +0.0182 +0,0032 —0,0129 —0,0283 —0,0409
+7 +0,0185 +0,0108 —0.000000 -0,01117 —0,0198 -0,0237 —0,0216
-11 -[+,00632 -0,0007 -0,00743 —0,00959 —0,0056 + 0,00229 + 0,00927
+ 13 +0,00393 —0,00257 -0,00696 —0,00534 +0,00111 +0,00696 + 0,00696
-17 +0.00136 —0,00384 —0,00369 +0,00176 +0,00493 +0,00114 —0,0046
+ 19 +0,00059 -0,00384 -0,00177 +0,00344 +0,00291 —0,00275 —0,00398
-23 —0,00049 —0,00317 +0,00146 +0,00284 -0,0024 —0.00227 +0,00329
+25 —0,000925 —0,00261 +0,002509 +0,001196 -0,00335 +0,000773 +0,00313
—29 —0,00176 —0,00115 +0,00312 -0,00239 —0.000499 +0,00312 —0,00312
+31 —0,00224 —0.000248 +0,00264 —0,0034 +0,00199 +0,000812 —0,00329
-35 —0,00371 +0.00216 —0,000000 —0,00223 +0,00397 —0,00474 +0,00427
+37 -0,00516 +0,0041 -0,00246 +0,000433 +0,00175 -0,00382 +0,00553
—41 —0.0244 +0,0244 —0,0244 +0,0244 —0,0244 +0,0244 -0,0244
+43 +0,02335 -0,02325 +0,02325 —0,02325 +0,02325 —0,02325 +0,02325
—47 +0,00406 -0,00323 +0,00194 —0,00034 —0,00138 +0,00301 —0,00435
+49 -• +0,00265 —0,00154 -0,000000 +0.00159 —0.00284 +0,00338 —0,00305
-53 +0,00131 +0,000145 -0,00154 +0.00199 —0,00116 -0,000475 +0,00192
+55 +0.000929 + 0.000608 -0.00164 +0,00126 +0,000263 —0,00164 +0,00164
—50 +0,000392 +0,00111 —0,00106 —0,000507 +0,00142 -0,000327 —0,00133
+61 + 0,000185 +0,0012 -0,00055 —0,00107 +0,000905 +0,000857 -0,00124
Предо гжение прилож. 8
а 8
V/Р 1 23/24 11/12 7/8 5/6 19/24 3/4
+ 1 1-1 + 1 + 1 + 1 + 1 + 1 + 1
—□ -0,0407 +0,0386 + 0,0326 +-0,0231 +0,0109 —0,0028 —0,0169
+ 7 0.0211 +0,019 +0,01297 +0,0042 —0,00566 -0,0147 —0,02] 1
•—11 -0,009 +0,00879 +0.00119 -0,0051 —0,009 —0,00854 —0,00374
+ 13 -0,00669 +0,00442 —0,00088 —0,00567 —0,00669 —0,00313 +0,00277
--17 -0,00429 +0,0019 —0,00263 —0,00429 —0,00115 -1-0,0034 +0,00429
+ 19 0,00364 +0,00117 —0,0029 -0,00308 +0,00097 +0,00383 +0,0015
-23 0,00285 +0,000187 —0,00285 —0,000567 +0,00285 +0,000967 —0,00285
+25 0.00262 —0,000172 —0.00262 +0,00052 +0,00252 -0,00089 —0,00262
—29 -0,00238 —0,000767 —0,0019 +0,00202 +0,000638 -0,0025 +0,000987
+31 0,00235 —0,00104 —0.00144 +0,00235 —0,00063 -0,00187 +0,002.35
—35 - -0,00249 —0,00164 —0,000327 т0,00211 —0,00248 +0,00116 +0,00103
+ 37 -0,00268 —0,00202 +0,000353 + 0.00152 -0,00268 +0,00254 -0,00111
,—41 -0,0036 —0,00324 +0,00221 —0,000718 —0,000966 +0,00251 —0,0036
+43 - -0,00473 —0,00449 +0,00379 —0,00268 +0,00127 +0,000326 —0.00196
—47 - -0,02127 —0,02127 +0,02127 —0,02127 +0,02127 -0,02127 +0,02127
+49 -0,0204 +0,0204 —0,0204 +0,0204 —0,0204 +0,0204 —0,0204
-53 -0,00384 +0,00364 —0,00307 +0,00217 —0,00103 —0,000265 +0,00159
+55 -0,00268 +0,00241 —0,00165 +0,000535 + 0,000721 —0,00187 +0,00269 +0,000696
-59 0,00168 +0,00127 -0,000221 —0,000952 +0,00168 —0,00159
+61 -0,00143 +0,000942 -1-0,000188 —0,00121 +0,00143 —0,000666 —0,000591
Продолжение прилож. 8
4 8 9
V/P 17/1’4 B/J • 28/27 25/27 8/9 25/27
+1 + 1 + 1 + 1 + 1 _|_ 1 + 1 + 1
—0,0299 —0,0407 +0.0405 +0,0389 +0,0341 4-0.0365 +0,0165 -1-0,00491
+ 7 -0,0235 -0,0211 +0,02097 +0,0193 -гО.О1449 +0.00Т28 -0,00125 —0.00982
-11 +0.00323 +0,009 -0.00885 4-0,00711 +0,00256 —0,00307 —0,00760 —0.00922
+ 13 +0,00707 +0,00669 +0,00652 + 0,00475 -t-0,000381 —0,00425 —0,00665 —0,00646
—17 +0,000313 +0,00429 +0,00409 +0.00225 —0,00163 —0,00409 —0,00289 +0,00008b
-49 —0,00305 —0,00364 4 0,00342 +0.00154 —0,00206 --0,00342 —0,00101 + 0.0026
—23 —0,0014 +0,00285 +0,0026 +0,00060 —0,00234 —0,00169 4-0,00169 + 0.00249
+ 25 +0,00129 -1-0,00262 +0,00234 -1-0,000272 —0.00229 —0,000813 + 0.00215 +0,00134
-29 -1-0,00199 —0,00238 +0,00202 —0,00023 —0,00198 •. 0.000701 + 0,00185 —0,00116
+ 31 -0,000172 —0,00235 + 0,00193 —0,000445 —0,00173 +0,001258 +0,001183 —0,00185
-35 —0,00252 —0,00248 -г 0,00186 —0,000836 —0,0011176 +0,00186 -0,000548 —0,00141
+37 —0,00096 +0,00268 +0,00188 -0,001035 —0,00075 4-0,00188 —0,00133 —0,000453
41 +0,00401 -0,0036 тО,00207 -0,00151 +0,000121 + 0,00135 -0,00211 т0,00173
+43 +0,00348 —0,00473 +0,00226 —0,00182 +0,000654 + 0,000786 —0,00194 +0,0023b
-0,02127 +0,02127 4-0,00312 —0,00287 +0,00216 —0,00108 —0,000186 + 0,00146
+49 +0.0204 —0,0204 4-0,00414 —0,00397 +0,00348 —0,00270 +0,00168 —0,00050
-53 —0.00282 +0,00384 4-0,01887 —0,01887 + 0,01887 —0,01887 +0,01887 —0,01887
+55 —0,00299 +0,00269 —0,01818 +0,01818 —0.01818 -1-0,01818 —0,01818 —0,01818
—59 ТО,000603 -0,00168 —0,00344 4-0,003297 —0,00289 -0.00224 —0,001398 т 0,000416
+ 61 +0,00151 —0.00143 —0.00241 +0,00221 —0.00156 -,-0,000835 -‘-0,000144 —0,00112
Продолжение прилож. 8
а 9 10
*/л\ 7/9 20/27 19/27 2/3 1 29/30 14/15 9/10
4-1 + 1 + 1 + 1 + 1 + 1 + 1 + 1 + 1
-5 —0,00749 -0,01982 —0,03114 -0,0405 +0.0404 +0,0391 + 0ДО32 +0,02895
+7 —0,0171 —0,02188 -0,0233 —0,02097 +0,02086 +0,0196 -0,01550 +0.00959
—И —0,00721 —0,0022'2 +0,00392 +0,00885 +0,00874 +0,00734 +0,00357 —0,00138
+ 13 —0,00120 +0,00390 +0,0071 + 0,00852 -1-0,0064 —0.00498 +0,00134 —0,00294
-17 +0,00409 +0,00358 -0,000266 —0.00409 —0.00396 +0,0025 -0,000828 -0,00357
+ 19 +0,00342 +0,000433 —0,0032 —0,00342 +0,00328 -1-0,00179 -0,00134 —0.00328
—23 —0,00048 —0,00282 —0,000834 +0,0026 +0,00244 4-0,000875 —0,00182 —0,002199
+26 —0,00191 —0,00185 +0.00136 +0,00234 +0,00217 4-0,00056 -0,00189 —0,00155
—29 —0,00165 +0,0016 + 0,00135 —0.00202 +0,00181 4-0,000095 —0,00181 —0,000286
+31 —0,000356 +0,00209 —0,00062 —0,00193 +0,00169 -0,00009 —0.00169 +0,000268
-35 +0,00186 —0.000235 -0,00174 +0,00166 +0,00155 —0,000401 —0,00135 +0,00111
+37 +0,00188 —0,00164 —0,000122 +0,00188 + 0,00151 —0,000544 —0,00113 +0,00137
41 —0,000382 -0,00124 +0.00225 —0,00207 +0,00152 —0,00083 —0,000622 +0.00152
+43 -0,00185 + 0,000569 +0,001003 —0,00226 +0,00157 —0,000987 —0,000327 +0,00141
—47 -0,00255 +0,00326 —0,00347 +0,00312 + 0,00177 -0.00138 + 0,00037 +0,000813
+49 —0,000764 +0,00202 —0,00318 +0,00414 +0,00196 —0,00165 +0,00080 +0,00031
-53 +0,01887 -0,01887 +0,01887 —0,01887 + 0,00275 -0,00257 ! 0,00206 —0,00127
+ 65 —0,01818 +0,01818 —0,01818 +0,01818 +0,00368 -0.00356 т 0.00320 —0,00253
—59 +0,000635 —0,00168 +0,00264 —0,00344 +0,01695 -0.01695 —0.01695 —0,01695
+61 +0,00196 —0,00251 +0.00267 —0,00241 -0,01639 +0,01639 -0,01639 +0,01639
Продолжение прилож. 8
Q 10
VlP 13/15 5/6 4/5 23/30 11/16 7/10 2/3
+1 + 1 + 1 "И + 1 + 1 + 1 + 1
—5 +0,0207 +0,0108 —0,00000 -0,0112 —0,0221 -0,0321 —0,0404
+7 +0,00223 -0,00559 —0,01289 —0,01874 —0,0223 -0.0231 -0.0209
—11 -0,00598 —0,00874 —0,00874 -0.00889 —0.000999 +0.00445 +0,00874
+ 13 —0,00597 -0,0064 -0,00395 +0.00359 +0,00469 +0.00709 +0,0064
—17 —0,0037 —0,00106 +0,00245 +0.00424 + 0.00290 —0.000696 —0,00396
+ 19 —0,00225 4-0,00088 +0.00328 + 0,00273 —0,000376 —0,00328 —0,00328
—23 +0,00026 +0,00244 +0,00151 —0,00142 —0,00261 —0,00043 +0,00244
+25 +0,00111 + 0,00217 —0,000000 —0,00224 —0,00119 +0.00172 +0,00217
—29 +0,00181 +0,00048 —0,00181 -0,00069 +0,00181 +0,00092 -0,00181
+31 +0,00169 -0,00045 -0,00169 +0,000649 +0,00159 -0,000861 -0,00169
—35 +0,000791 -0,00155 +0,000000 + 0,0016 -0,00085 —0.00123 +-0,00165
+37 +0,000162 —0,00151 +0,000936 +0,000884 —0,00162 +0,000266 +0,00151
41 -0,00104 —0,000408 +0,00152 —0,00127 —0,000174 +0,00152 —0,00152
+43 -0,00146 +0,00042 +0,900968 —0,00167 +0,00115 +0,000275 -0,00157
-47 —0,00165 +0,00177 -0.00109 —0.000099 +0,001296 0,00196 +0,00177
+49 —0,00134 +0,00198 -0,00196 +0,00132 —0,00022 — 0,000999 +0,00196
—53 +0,000295 +0,000738 —0,00170 +0,00247 -0,00295 +0,00305 -0,00275
+55 +0,00168 —0,00098 +0,000000 + 0.00102 —0,00201 +0,00292 -0.00368
—59 +0,01695 —0,01695 +0,01695 —0,01595 +0,01695 —0,01695 +0,01695
+61 —0,01639 +0,01639 -0,01639 +0,01639 —0,01639 +0,01639 —0,01639
ПРИЛОЖЕНИЕ 9
о * « z,, - Sin-Z.lt
Значение функций (5) — g-----------—
2л
5 Ф® Е (Е) Е ® <61
0,000 0,0000000 0,100 0,00657 0,340 0,206
0.002 0,0000000 0,100 0,01)66 0,345 0,213
0,004 0,0000004 0,105 0,0075 0,350 0,221
0,006 0,0000014 0,110 0,0086 0,355 0.229
0,008 0,0000034 0,115 0,0098 0,360 0,237
0,010 0,0000066 0,120 0,0110 0,365 0,246
0,012 0,000011 ’ 0,125 0,0125 0,370 0,254
0,014 0,000018 0,130 0,0140 0,375 0,262
0,016 0,000027 0,135 0,0156 0,380 0,271
0,018 0,000038 0,140 0,0174 0,385 0,280
0,020 0,000053 0,145 0,0192 0,390 0,289
0,022 0,000070 0,150 0,0212 0,395 0,297
0,024 0,000091 0,155 0,0234 0,400 0,306
0,026 0,000115 0,160 0,0256 0,405 0,316
0,028 0,000144 0,165 0,0280 0,410 0,325
0.030 0,000177 0,170 0,0305 0,415 0,334
0,032 0,000215 0,175 0,0332 0,420 0,343
0,034 0,0002,’Я 0,180 0,0360 0,425 0,353
0,036 0,000306 0,185 0,0390 0,430 0,362
0,038 0,000360 0,190 0,0420 0,435 0,372
0,040 0,000420 0,195 0,0453 0,440 0,381
0,042 0,000487 0,200 0,0486 0.445 0,391
0,044 0,000560 0,205 0.0522 0,450 0.401
0,046 0,000640 0,210 0,0560 0,455 0,411
0,048 0,000725 0,215 0,0597 0,460 0,420
0,050 0,000820 0,220 0,0637 0,465 0,430
0,052 O.OOU92 0,225 0,0678 0,470 0,440
0,054 0,00103 0,230 0,0721 0,475 0,450
0,056 0,00115 0,235 0,0766 0,480 0,460
0,058 0,00128 0,240 0,0812 0,485 0.470
0,060 0,00142 0,245 0,0859 0,490 0,480
0,062 0,00157 0,250 0,0908 0,495 0,490
0,064 0,00172 0,255 0,0959 0,500 0,500
0,066 0,00188 0,260 0,1012 0,500 0,500
0,068 O.OC’W 0,265 0,1066 0,505 0,510 1
0,070 0,00226 0,270 0,1121 0,510 0,520
0,072 0,00245 0,275 0.1178 0,515 0,530
0,074 0,00266 0,280 0,1237 0,520 0,540
0,076 0,00289 0,285 0,1297 0,525 0,550
0,078 0,00312 0,290 0,1360 0,530 0,560
0,080 0,00337 0,295 0.1422 0,535 0,570
0,082 0,00362 0,300 0,1486 0,540 0,580
0,084 0,00389 0,300 0,149 0,545 0,589
0,086 0,00418 0,305 0,155 0,550 0,599
'v0,088 0,00448 0,310 0,162 0,555 0,609
0,090 0,00479 0,315 0,170 0,560 0,619
0,092 0,00512 0,320 0.176 0,565 0,628
0,094 0.00545 0,325 0,183 0,570 0,638
0,096 0,00581 0,330 0,191 0,575 0,647
0,098 0,00619 0,335 0,198 0,580 0,657
198
Продолжение прилож. 9
£ ® (§» Е Ф(Е> Е
0.585 0,666 0,775 0,9322 0,926 0,99734
0,590 0,675 0,780 0,9363 0,928 0,99755
0,595 0,684 0,785 0,9403 0,930 0,99774
0,600 0,694 0,790 0,9441 0,932 0,99796
0,605 0,703 0,795 0,9478 0,934 0.99812
0,610 0,711 0,800 0,9514 0,936 0,99828
0,615 0,720 0,805 0,9547 0.938 0,99843
0,620 0,729 0,810 0,9580 0,940 •0,99858
0,625 0,738 0,815 0,9611 0,942 0,99872
0,630 0,746 0,820 0,9640 0,944 0,99885
0,635 0,754 0,825 0,9668 0,946 0,99897
0,640 0,763 0,830 0.9695 0,948 0,99908
0,645 0,771 0,835 0,9720 0,950 0,999180
0,650 0,779 0,840 0.9744 0,952 0,999275
0,65.1 0,787 0,845 0,9766 0,954 0,999360
0,660 0,794 0,850 0,9788 0,956 0,999440
0,665 0.802 0,855 0.9808 0,958 0,999513
0,670 0,809 0,860 0,9826 0,960 0,999580
0,675 0,817 0,865 0,9844 0,962 0,999640
0,680 0,824 0,870 0,9860 0,964 0,999694
0,685 0,831 0,875 0,9875 0,966 0,999742
0,690 0,838 0,880 0,9890 0,968 0,999785
0,695 0,845 0.885 0,9902 0,970 0,999823
0,700 0,851 0,890 0,9915 0,972 0,999856
0,700 0,8514 0,895 0,9926 0,974 0,999885
0,705 0,8578 0,900 0,9934 0,976 0,999909
0,710 0,8641 0.900 0,99343 0,978 0,999930
0,715 0,8703 0,902 0,99381 0,980 0,999947
0,720 0,8763 0,904 0,99419 0 982 0,999962
0,725 0,8822 0,906 0,99455 0,984 0,999973
0,730 0,8879 0,908 0,99488 0,986 0,999982
0,735 0,8935 0,910 0,99521 0,988 0,999989
0,740 0,8988 0,912 0,99552 0,990 0,9999934
0,745 0,9041 0,914 0,99582 0,992 0,9999966
0,750 0,9092 0,916 0.99611 0,994 0,9999936
0,755 0,9141 0,918 0,99638 0,996 0,9999996
0,760 0,9188 0,920 0,99663 0,998 1,0000000
0,765 0,770 0,9234 0,9279 0,922 0,924 0,99688 0,99711 1.0000000
Примечание. При расчете критических угловых скоростей £ округлять
до значений, указанных в таблице.
199
ПРИЛОЖЕНИЕ 10
Среднее значение звукоизоляции
для некоторых материалов и конструкций (опытные данные)
Наименование материалов или конструкций Толщина, СМ Масса 1 м’, Уровень громкости шума, дБ
Картон в несколько слоев 2,0 12 20
Фанера трехслойная , 0,32 2,54 19
0,64 3,56 21
Железо листовое Стекло: 0,2 15,6 33
зеркальное 0,63 17,5 30
двойное (промежуток 3,8 см) 0,63 40
из железобетона 10 240 49
из кирпичной кладки в 1 кирпич 25 425 53
Перегородка одинарная из досок толщиной 2 см, оштукатуренная с обеих сторон, с оклейкой обоями Перегородка двойная из фанерных листов толщиной 3 мм: 6 70 37
с промежутком 2,5 см, заполнен- ная шлаковой ватой 3 8 26
с промежутком 8,5 см Окно, плотно закрытое: 7 14 34
двойное .—- — 25
одинарное Дверь: — 8,5
тяжьлая дубовая — — 25
металлическая (герметичная) — — 30
Примечание. Приводимые значения уровня звукового давления пред-
ставляют собой средние значения для частот 128—2048 Гц и мо1ут отклоняться
в ту вли иную сторону на 2—3 дБ.
ПРИЛОЖЕНИЕ 11
Статические н динамические (вибрационные) жесткости
амортизаторов АКСС-М
аморти- ватора Неывнвльнав ста- тическая касса в направлении осей, кг Динамическая жесткость, соответствующая дефор- мациям в направлении осей, Н/см
соответствующая деформациям в капрвл- леиии осей, Н/см
Z X Y г „ | V Z X | у
АКСС-10 10 10 5 1 250 I 700 1000 5 500 8 000 3 000
АКСС-15 15 15 10 1 500 2 500 1300 6 500 11 500 4 500
АКСС-25 25 25 10 2 200 5000 2100 11 000 12 000 6 500
АКСС-40 40 40 15 4 000 6000 3500 16 500 17 000 10 000
А КОС-60 60 60 25 6 400 8 000 6000 22 000 17 000 9 000
АКСС-85 85 85 35 8500 9 000 6200 31 000 19 000 10 000
АКСС-120 120 по 50 11 500 12 000 6500 35000 21 000 13 000
АКСС-160 160 150 70 28 000 16 000 7000 76 000 23000 16 000
АКСС-220 220 190 80 47 000 25 000 7500 100 000 30 000 28 000
АКСС-300 300 210 90 52 000 32 000 8000 110 000 42 000 20 000
АКСС-400 400 260 100 72 000 40 000 9000 145 000 56 000 26 000
Приложение <2
Статические и динамические (вибрационные) жесткости
амортизаторов тина АКСС-И
амортиаатора Номинальные статические массы в направ- лении осей, кг Статические жестко- сти, соответствующие деформациям в на- правлении осей, Н/см Динамические жестко- сти, соответствующие деформациям и направ- ленна осей, Н/сы
Z X 1 г Z X У Z X | V
АКСС-25И АКСС-40И АКСС-60И АКСС-85И АКСС-120И АКСС-160И АКСС-220И АКСС-300И АКСС 400И 25 40 60 85 120 160 220 300 400 25 40 60 85 110 150 190 210 260 10 15 25 35 50 70 80 90 100 2 500 4 000 6500 8 000 7 500 15 000 23 000 28 000 29 000 5 500 7000 10 000 12 000 10000 9500 18 000 19000 27000 2000 3000 3500 3500 3000 3500 5500 8000 8500 5 000 6 500 10 000 13 500 12 000 26 000 40000 39 500 53 000 7 000 9 000 12 000 17 000 15 000 15 500 27 000 27 000 37 000 3 000 4 000 5000 5500 5000 6 000 9500 11 000 13 000
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И. И„ Генкин М. Д., Сергеев В. И. Акустическая
динамика машин.- Вестник АН СССР, 1968, № 11, с. 50—59.
2. Астахов Н. В., Юргенсен Т. С. Электромагнитные возмущающие
усилия синхронных машин.— Труды МЭИ, вып. 217, 1975, с. 134—137.
3. Беликовский Н. Г. Конструктивная амортизация механизмов, при-
боров и аппаратуры на судах.— Л.: Судостроение, 1965.— 520 с.
4. Бкдерман В. Л. Прикладная теория механических колебаний.—
М.: Машиностроение, 1972.— 320 с.
5. Борьба с шумом на судах/Под ред. Н. Р. Четыркина.— Л.: Судо-
строение, 1970.— 162 с.
6. Вибрация и шум электрических машин малой мотцности/Л. К- Вол-
ков, Р. Н. Ковалев, Г. И. Никифорова и др___Л-: Энергия, 1979.— 205 с.
7. Вибрация энергетических машин: Справочное пособие/Под ред.
Н. В. Григорьева.—Л-: Машиностроение, 1974.— 464 с.
8. Вольдек А. И. Электрические машины.— Л.: Энергия. 1974.—
9. Гартог Д. П. Механические колебания.— М-: Физматгиз, 1960.—
579 с.
10. Генкин М. Д„ Яблонский В. В. Поток энергии колебаний как кри-
терий ввброактивности механизма.— Машиностроение, 1965, № 5, с. 56—58.
11. Городецкий Э. А., Муркес Н. И. Некоторые средства уменьшения
вентиляционного шума электрических машин.— Труды ВНИИЭМ, 1965,
т. 20, с. 132—136.
12. Геллер Б., Гамата В. Высшие гармоники в асинхронных машинах.—
М.: Энергия, 1981___350 с.
13. Гена В. Я. Колебания статоров машин постоянного тока в поле за-
данных электромагнитных сил.— Труды ВНИИЭМ, 1980, т. 65, с. 79—83.
14. Гена В. Я., Позняк Э. Л. Влияние эксцентрического положения ро-
тора и несимметрии токов фаз на магнитные вибрации сердечника статора.—
Электротехника, 1981, № 4, с. 24—26.
15. Иоффе В. К, Янпольский А. А. Расчетные графики и таблицы по
электроакустике.— М.: Госонергоиздат, 1964.— 511 с.
16. Ипатов П. М., Дукштау А. А. Вибрация гидрогенераторов.— Элек-
тричество, 1967, № 11, с. 23—26.
17. Исакович М. М„ Клейман Л. И., Перчанок Б. X, Устранение вибра-
ции электрических машин.— Л.: Энергия, 1969.— 214 с.
18. Каплин А. И., Ковалев В. Б., Белкин А. Е. О вибрациях статора
синхронных двигателей, вызванных магнитными силами, при несимметрии
магнитной системы.— Труды ВНИИЭМ, 1976, вып. 46, с. 35—42.
19. Кельзон А. С., Журавлев Ю. Н., Январей Н. В. Расчет и конструи-
рование роторных машин. - Л.: Машиностроение, 1977.— 287 с.
20. Кельзон А. С., Зобнин А. П. О влиянии неоднородности упругого
поля опор на динамику жесткого ротора.— Вибротехника, 1973, № 3 (20).—
Каунас, с. 341—349.
21. Клюкин И. И. Борьба с шумом и звуковой вибрацией на судах,—
Л.: Судостроение, 1981.— 415 с.
202
22. Кожешник Я. Механика вращающихся электрических машин.—
М.: Госэпергоиздат, 1962.— 247 с.
23- Костенко М. П., Пиотровский Л. М. Электрические машины. Т. 2.—
М________Л ’ Госэпергоиздат, 1957 — 651 с.
24. Л азарону Д. Ф.. Бикир Я. Шум электрических машин и трансфор-
маторов.— М.- Энергия, 1973.— 269 с
25. Паиовко Я. Г. Основы прикладной теории упругих колебаний,—
М.: Машгиз- 1957.— 336 с.
26. Позняк 3. Л. Влияние масляного слоя в подшипниках скольжения
на устойчивость и критические скорости высокоскор остпых роторов. —
В кн.: Колебания валов на масляной пленке.— М.: Наука, 1968, с. 10—38.
27. Постнов В. А., Калинин В. С., Ростовцев Д. М. Вибрация корабля.—
Л.: Судостроение, 1983.— 248 с.
28. Рабинович И. Н., Шубой И. Г. Проектирование машин постоянного
тока.— Л.: Энергия, 1967. 498 с.
29. Скуридин А. А., Михеев Е. М. Борьба с шумом и вибрацией судо-
вых ДВС.— Л.: Судостроение, 1970.— 223 с.
30. Слита В. Й., Шубов И. Г. Аэродинамический шум электрических
машин.— Сб. «Электросила».— Л : Энергия, 1965, № 24, с. 41—4о.
31. Тимошенко С. П. Колебания в инженерном деле.— М.: Физматгиз,
1959.— 439 с.
32. Тондл А. Динамика роторов турбогенераторов.— Л.: Энергия,
1971— 387 с.
33. Турбо генераторы-'В. В. Титов. Г. М Хуторецкий, Г А. Загородная
и др.—Л.: Энергия, 1967.— 894 с.
34- Фридман В. М. Аналитический метод расчета критических скоро-
стей вращения валов.— Сб. «Электросила».— Л.: Энергия, 1955, № 13,
с. 41—49.
35. Цырлин А. Л. Динамика роторов двоякой жесткости.— В ки.:
Динамика гибких роторов.— М.: Наука, 1972, с. 27—44.
36. Шубов И. Г. О магнитном шуме машип постоянного тока.— Сб.
«Электросила».— Л : Энергия, 1965. № 24, 45—49 с.
37. Шубов И. Г. Расчет магнитного шума машин постоянного тока ме-
тодом электромеханической аналогии.— Электричество, 1958, № 4, с. 32—34.
38. Шумилов Ю. А. Анализ пространственной картипы вибраций ста-
тора синхронной машины методом конечных элементов — Проблемы техни-
ческой электродинамики, 1976, вып 58.— Киев: Изд-во АН УССР, с. 89—94.
39. Шуйский В. А. Расчет электрических машин_Л.: Э чергия, 1970.—
730 с.
40. Юдин Е. Я- Борьба с шумом.— М.: Стройиздат, 1964— 687 с.
41. Юдов М. Ф. Вибрация и деформация обмоток статоров синхронных
машин— М.: Энергия, 1968.— 160 с.
42. Юргенсом Т. С. К расчету соотношений радиальной и дзнгенциаль-
ной составляющих электромагнитной силы, вызывающей вибрации и шум
синхронной машины.— Труды МЭИ, № 220, 1975, с. 103—106.
43- Alger L. L. The magnetic noise of polyphase induction motors.—
TAEE, 1954, p. 75—82.
44. Jordan H Geraiischarme Elektromotor.— Essen, 1952.— 82 S.
45. Jordan H., Miilier-Tornfelde H. Akustische Wirkting der Schragung
bei Drehstromasynchronmaschinen mit Kafiglaufern— ETZ-A, Bd. 82, 1961,
S. 82—93.
46- Jordan H.T Nowack S, Weis M. Uber der magnetische Larm von Sinch-
ronmaschinen.— E. und M-, Bd. 84, 1967, S. 62—69.
47. Jordan Н.» Staiger A. Uber den magnetische Larm von Sinchronmaschi-
nen mil Einzelpolen—AEG-Mitt., 1962, Bd. 52, № I—2, S. 44—48.
48. Putz W- Uber das magnetische Gerausch Sinlironer Einzelpoimaschi-
nen.— Z. fiir EL, 1948. S. 127—132.
49. Rentzsh H. Luftslromungsgerausche in elektrische Maschinen.—
ETZ-A, 1961, Bd. 82, № 24. S. 76—82.
203
ОГЛАВЛЕНИЕ
Предисловие . . . ... .... 3
ГЛАВА ПЕРВАЯ. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ АКУСТИКИ.....................4
' 1-1. Колебания и звук . . ..................—
1-2. Единицы шума и вибрации . - - 6
1-3. Излучение шума...................................... 8
1-4. Распространение шума................................ 9
1-5. Влияние шума и вибрации на человеческий организм . . 11
ГЛАВА ВТОРАЯ. ИСТОЧНИКИ ШУМА И ВИБРАЦИИ ЭЛЕКТРИЧЕСКИХ
МАШИН...........................................................12
2-1. Характеристика источников............................—
2-2. Разделение источников шума н вибрации .... .15
ГЛАВА ТРЕТЬЯ. РАСЧЕТ ВИБРАЦИИ И ИЗЛУЧАЕМОГО ШУМА . . .16
3-1. Введение................................. ... . —
3-2. Одномассовая колебательная система . 20
- 3-3. Двухмассовая колебательная система . ... 23
3-4. Трехмассовая колебательная система................. 25
3-5. Расчет вибропоглощення..............................27
i 3-6. Вибрация статоров, возбуждаемая электромагнитными силами 29
3-7. Излучение магнитного шума корпусом машины . 33
ГЛАВА ЧЕТВЕРТАЯ. МАГНИТНЫЙ ШУМ АСИНХРОННЫХ ЭЛЕКТРОДВИ-
ГАТЕЛЕЙ ................................................... 36
4.-1. Основные уравнения..........................
4-2. Магнитодвижущие силы обмоток статора и ротора .
4-3. Магнитная проводимость воздушного зазора . . .
4-4. Магнитное поле в воздушном зазоре............
4-5. Радиальные силы, создаваемые магнитными полями . . 4]
4-6. Тангенциальные склы ................................45
4-7. Влияние режима работы на уровень громкости магнитного
шума ...........................*................... ... 49
4-8. Выбор числа пазов короткозамкнутого ротора...........50
' 4-9. Влияние скоса пазов на вибрацию и шум..............55
74-10. Влияние эксцентриситета воздушного зазора на магнитный
шум ...................................................60
V 4-11. Насыщение стали.....................................66
4-12. Влияние неравномерности распределения токов в обмотке с
несколькими параллельными ветвями.............67
4-13. Влияние несинусоидальности напряжения и тока питания
на магнитные вибрации.................................69
4-14. Влияние несимметрии токов в фазах обмотки статора на маг-
нитные вибрации.......................................71
:8g I I
204
4-15 Магнитострикция .................................... 72
4-16 Влияние технологических и конструктивных факторов на
магнитный шум........................................ 74
4-17. Шум асинхронных двигателей с фазным ротором . . .76
4-18. Магнитная вибрация асинхронных электродвигателей с ко-
роткозамкнутым ротором с защитными гильзами...........76
4-16. Вибрация крупных многополюсиых асинхронных электро-
двигателей .......................................... 77
ГЛАВА ПЯТАЯ. МАГНИТНЫЙ ШУМ СИНХРОННЫХ МАШИН 77
5-1. Общие сведения —
5-2 Вибрация двойной частоты тока сети ............... 78
5-3. Вибрация, возбуждаемая высшими гармониками полей ста
тора и ротора...................................... 83
5-4. Магнитный шум индукторных генераторов повышенной ча-
стоты ................................................ 65
5-5. Результаты измерения шума и вибрации синхронных машин . 87
5-6. Вибрация статорных обмоток......................... 90
ГЛАВА ШЕСТАЯ. МАГНИТНЫЙ ШУМ МАШИН ПОСТОЯННОГО ТОКА 93
6-1. Принятые допущения................................. —
6-2. Прямой паз по длине якоря, равномерный воздушный зазор
под полюсом..............................................—
6-3. Собственные колебания ярма . . . ........97
6-4. Прямой лаз по длине якоря, эксцентрический воздушный за-
зор под полюсом.........................................99
6-5. Скошенный паз по длине якоря, равномерный воздушный за-
зор под полюсом........................................100
6-6. Влияние нагрузки на магнитный шум..................102
6-7. Вибрация машин постоянного тока при их питании от стати-
ческих выпрямителей....................................103
6-8. Влияние некоторых технологических отклонений . 104
ГЛАВА СЕДЬМАЯ. АЭРОДИНАМИЧЕСКИЙ ШУМ . 105
7-1. Общие замечания ... ......... —
7-2. Образование аэродинамического шума . 106
7-3. Шум вентилятора............................. ... . —
“7-4. Шум, возникающий от вращения ротора . ... .111
г1"1 । 7-5. Применение глушителей шума...................... 113
7-6. Аэродинамический шум машин различного исполнения . . 115
ГЛАВА ВОСЬМАЯ. КОЛЕБАНИЯ РОТОРОВ ............................118
8-1. Колебания вала с одной сосредоточенной массой . —
v8-2. Определение критических частот вращения ротора . . . 120-
8-3. Влияние различных факторов на критическую частоту враще-
ния .......................................... . . . 126
v 8-4. Критические частоты вращения второго рода . . 130
8-5. Уравновешиэлние роторов . . ... 132
8-6. Тепловой небаланс................................ . 138
8-7. Вибрация от некруглости цапф ротора ... .141
8-8. Вибрация машин, возбуждаемая небалансом . 144
8-9. Центровка линии вала . . 146
8-10. Поглотитель колебаний . . 147
8-11. Крутильные колебания . . 149
ГЛАВА ДЕВЯТАЯ. ВИБРАЦИЯ, ВОЗБУЖДАЕМАЯ ПОДШИПНИКАМИ . . 152
9-1. Общие сведения с подшипниках качения.................—
9-2. Требования к конструкции и производству............154
9-3. Источники вибраций подшипников качения............ 159
205
9-4. Влияние токов и магнитных полей на вибрацию подшипников
качения ................... ..........................
9-5. Вибрация подшипников скольжения
162
ГЛАВА ДЕСЯТАЯ. ШУМ ЩЕТОЧНОГО АППАРАТА ............... .164
10-1. Причины шума.............. ... —
10-2. Шум скользящего контакта ... —
ГЛАВА ОДИННАДЦАТАЯ. ВИБРОИЗОЛЯЦИЯ МАШИН . 166
11-1. Эффективность виброизоляции........................ —
11-2. Частота свободных колебаний амортизированных машин . 168
11-3. Конструкция и выбор амортизаторов.................172
ГЛАВА ДВЕНАДЦАТАЯ. ИЗМЕРЕНИЕ ШУМА ЭЛЕКТРИЧЕСКИХ МАШИН 174
12-1. Условия и методы измерений . ...................—
12-2. Измерительная аппаратура........................ .177
12-3. Установка и режим работы испытуемой машины 178
12-4. Нормирование вибрации машин...................... 179
12-5. Проведение измерений и обработка результатов . . 181
Приложения....................................................183
Список литературы . 202
ИСАК ГРИГОРЬЕВИЧ ШУБОВ
ШУМ И ВИБРАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
Редактор В. Н. Миханкова
Художественный редактор Д. Р. Стеванович
Технический редактор А. Г. Рябкина
Корректор И. В. Кучерова
Переплет художника Г. В. Смирнова
ИБ № 1335
Сдано в набор 25.10.85. Подписано в печать 19.02.88.
М-32774. Формат 60 X 90 '/|0. Бумага типографская ТА 2.
Гараитура лнтературиае. Высокая печать Уел. печ. л. 13.
Усл. кр.-отт. 13. Уч.-вад л. (4,69. Тираж 9000 эка.
Заказ 2109. Цена I р. 10 к.
Ленинградское отделение Энергоатомпвдата
(91065, Ленинград, Марсово поле, 1.
Ленинградская типография № 4 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Еигевив Соколо-
вой Союзполиграфпрома при Государственном комитете СССР по делам
издательств, полиграфии и книжной торговли. 191126. Ленинград. Социа-
ЭНЕРГО АТОМИЗДАТ
ЛЕНИНГРАДСКИЙ КНИЖНЫЙ МАГАЗИН «ЭНЕРГИЯ» —
ОПОРНЫЙ ПУНКТ ЭНЕРГОАТОМИЗДАТА —
ПРЕДЛАГАЕТ ВНИМАНИЮ СПЕЦИАЛИСТОВ КНИГИ,
ИМЕЮЩИЕСЯ В НАЛИЧИИ:
Синягин Н. Н. и др. Система планово-предупредительного ремонта обору
доввния и сетей промышленной энергетики; Одобрено Глав. гос. инспекцией
по надзору Минэнерго СССР/ Н. Н. Синягин, Н. А. Афанасьев, С. А. Нови-
ков.— 3-е изд., перераб. и дол, 1984.— 448 с. 1 р. 60 к.
Содержит основные показатели и нормативы для планирования ремонтов
и технического обслуживания оборудования л сетей промышленной энерге-
тики. В настоящем издании учтены новые директивные материалы.
Для инженерно-технических и руководящих работников, связанных с экс-
плуатацией энергетического оборудования и сетей, может быть полезна сту-
дентам вузов.
Сборник директивных материалов Главтехуправления Минэнерго СССР
(электротехническая часть)/Мниэнерго СССР—3-е изд, перераб. и доп.,
1985.— 304 с. 1 р. 30 к.
Включены действующие директивные (обязательные) материалы: решения,
прогивоаварийпые и эксплуатационные циркуляры Главтехуправления Мин-
энерго СССР Второе издание сборника под названием «Сборник директив-
ных материалов по эксплуатации энергосистем» вышло в 1981 г. Третье изда-
ние переработано и дополнено решениями и циркулярами, выпущенными до 3)
декабря 1982 Г.
Для инженерно-технических работников и рабочего персонала, занимаю-
щихся проектированием, монтажом, наладкой, эксплуатацией и ремонтом
энергетического оборудования.
Электротехнический справочник: В 3-х т. Т 1/ Под общей ред. яроф. МЭИ
В. Г. Герасимова, П. Г. Грудннского и др.— 7-е изд., перераб. и доп., 1985.—
3 р. 70 к.
Приведены сведения по теоретическим основам электротехники, электро-
физике проводников, полупроводников, диэлектриков и ферромагнетиков, об-
щим вопросам электрооборудоввиия, технике безопасности, измерениям элек-
трических и магнитных величин, применению вычислительной техники и мо-
делированию в электротехнике и электроэнергетике. Даны основные правила
оформления конструкторской документации и способы контроля качества
электротехнических материалов и изделий. Шестое издание вышло в I960 г.
Рассчитан на широкий круг инженеров-электриков
АДРЕС МАГАЗИНА «ЭНЕРГИЯ»: 196066, ЛЕНИНГРАД,
МОСКОВСКИЙ ПР.. 189.
ПОЛЬЗУЙТЕСЬ УСЛУГАМИ МАГАЗИНА — ОПОРНОГО ПУНКТА
ЭН Е РГ О А Т О М И 3 Д АТА!
ИВИБРДЦИЯ
ЭЛШТРИЧЕСКИХ
И. Г. ШУБОВ
ШУМ
И ВИБРАЦИЯ
ЭЛЕКТРИЧЕСКИХ
МАШИН
Издание второе,
переработанное
и дополненное
1g
Ленинград
ЭНЕРГОАТОМИЗДАТ
Ленинградское отделение
1986