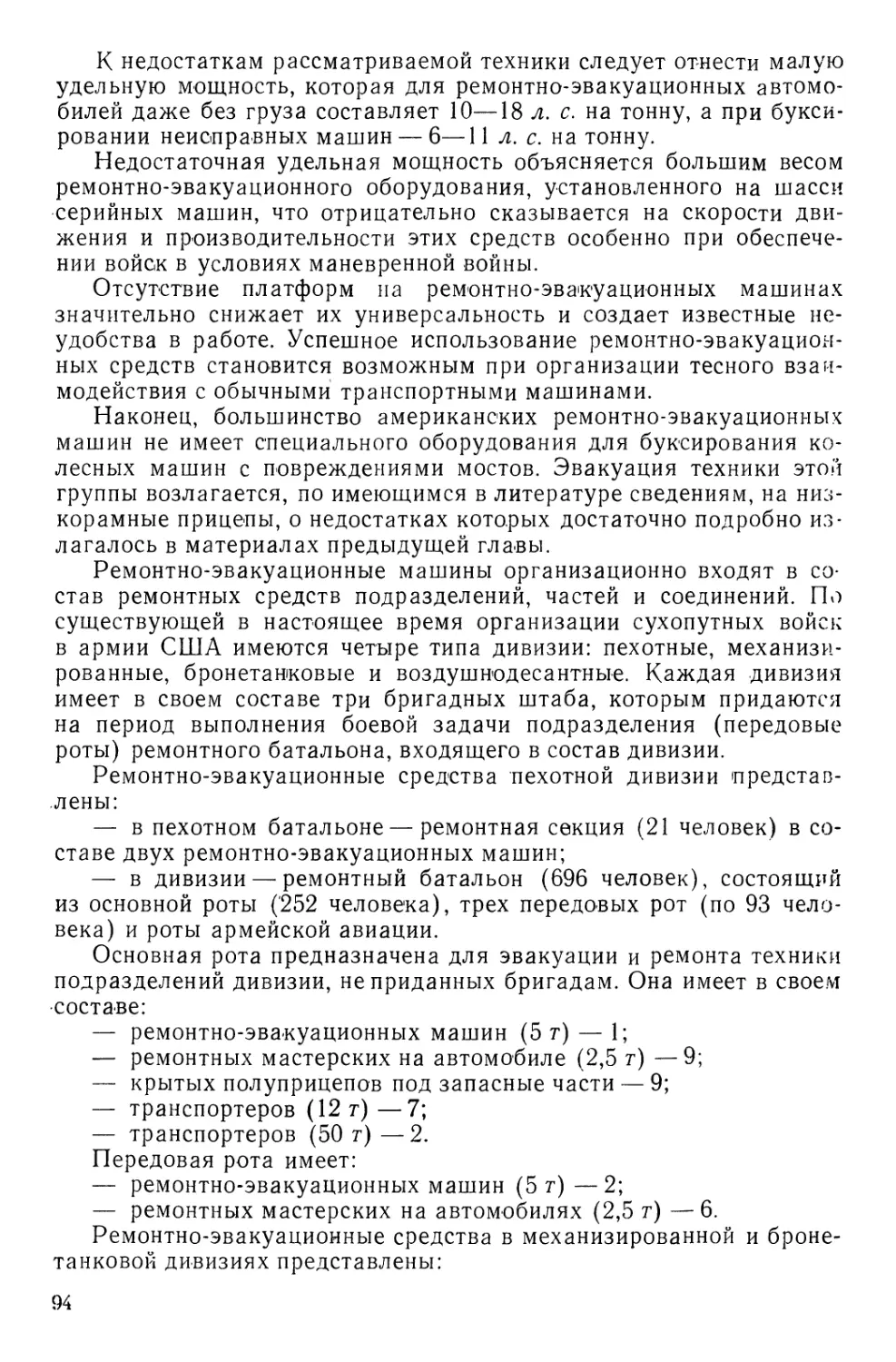
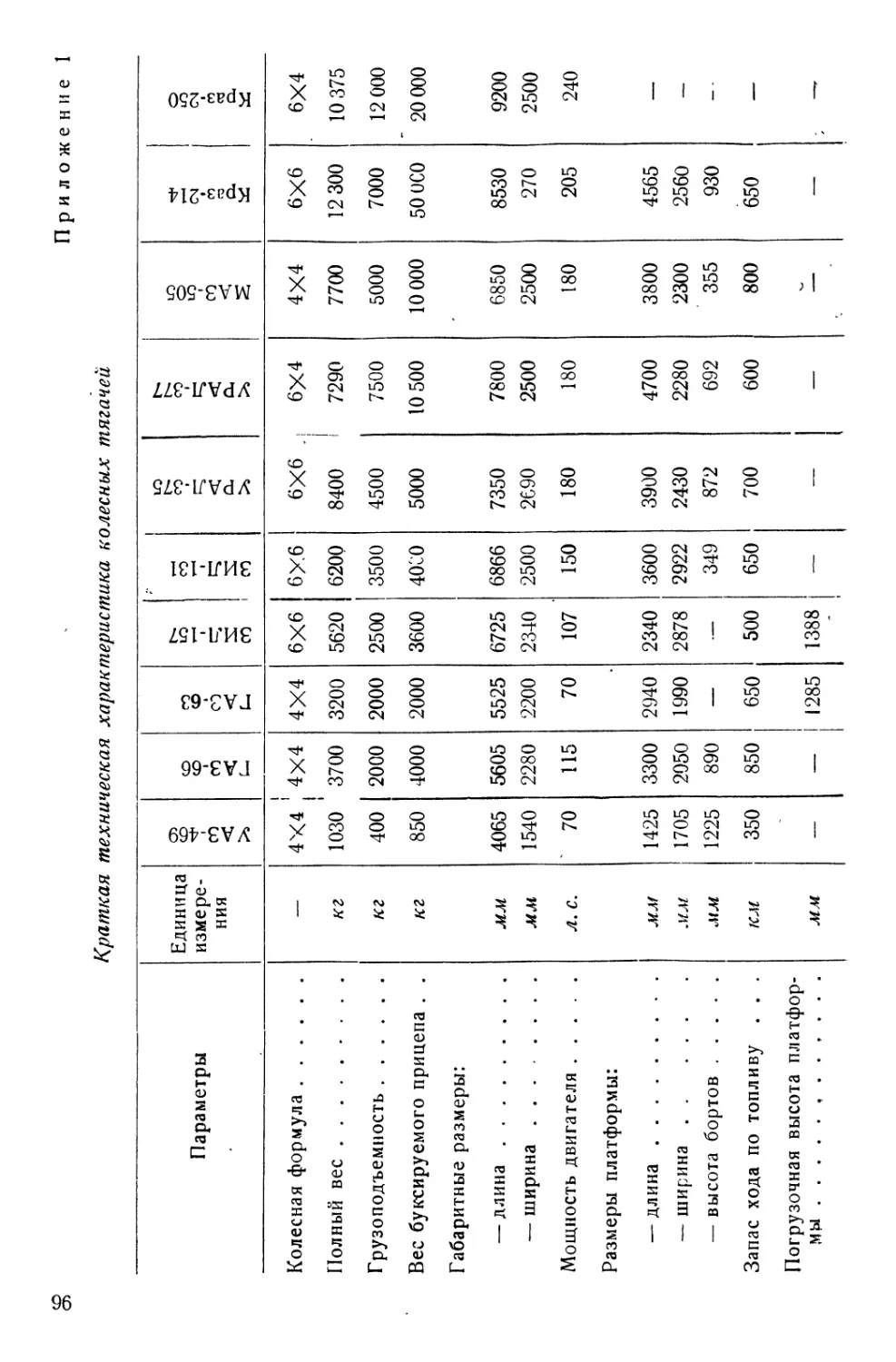
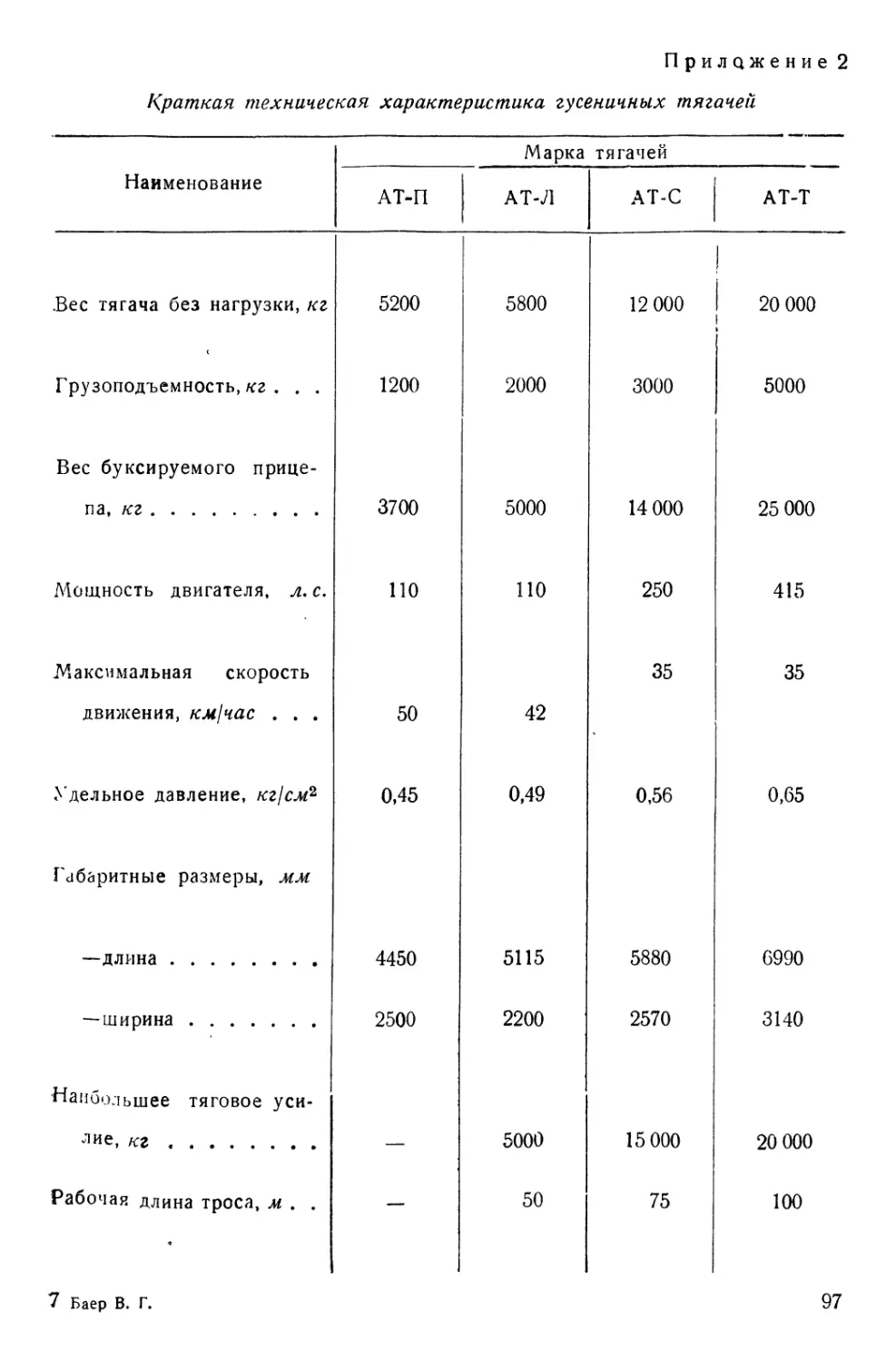
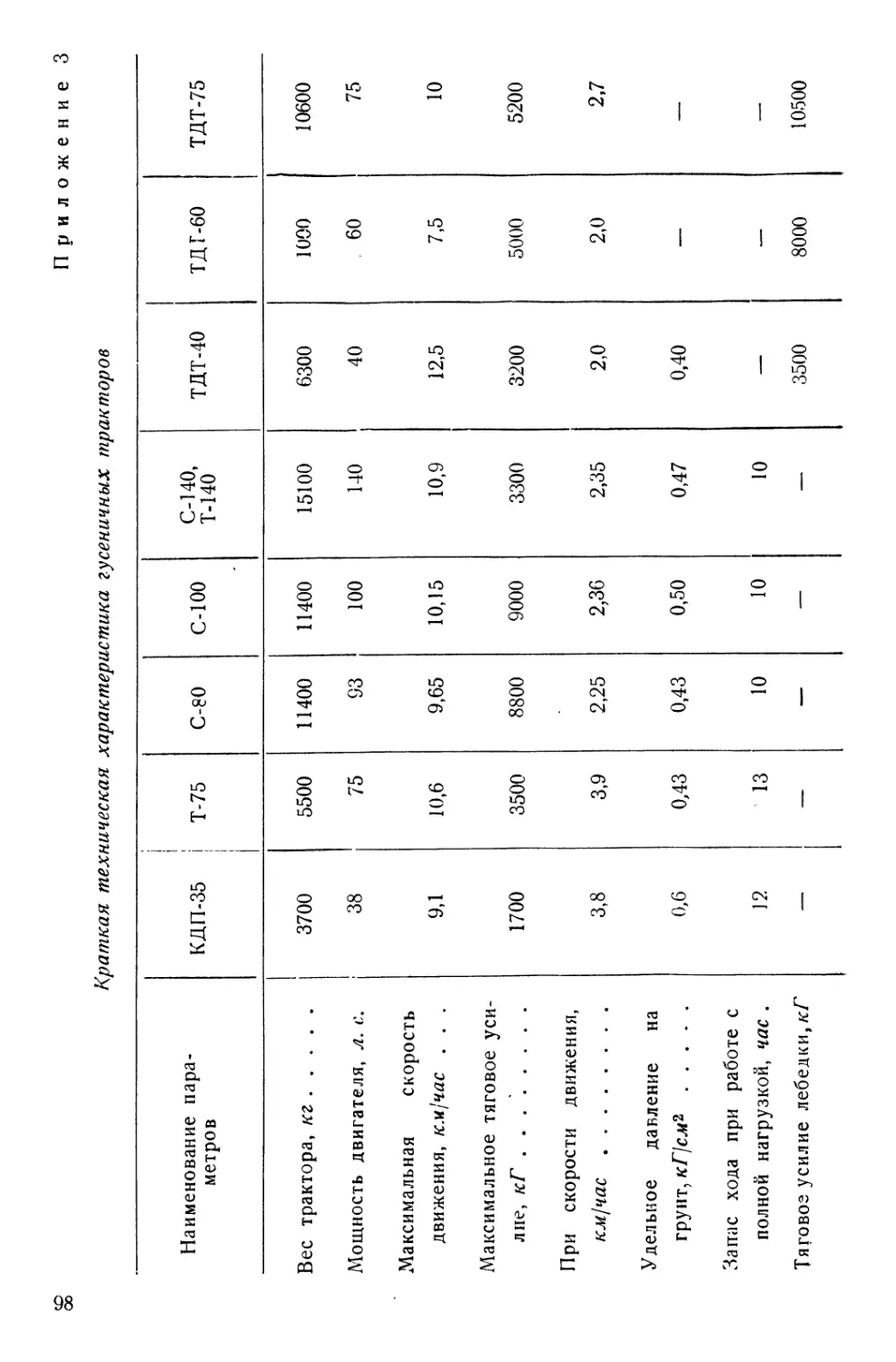
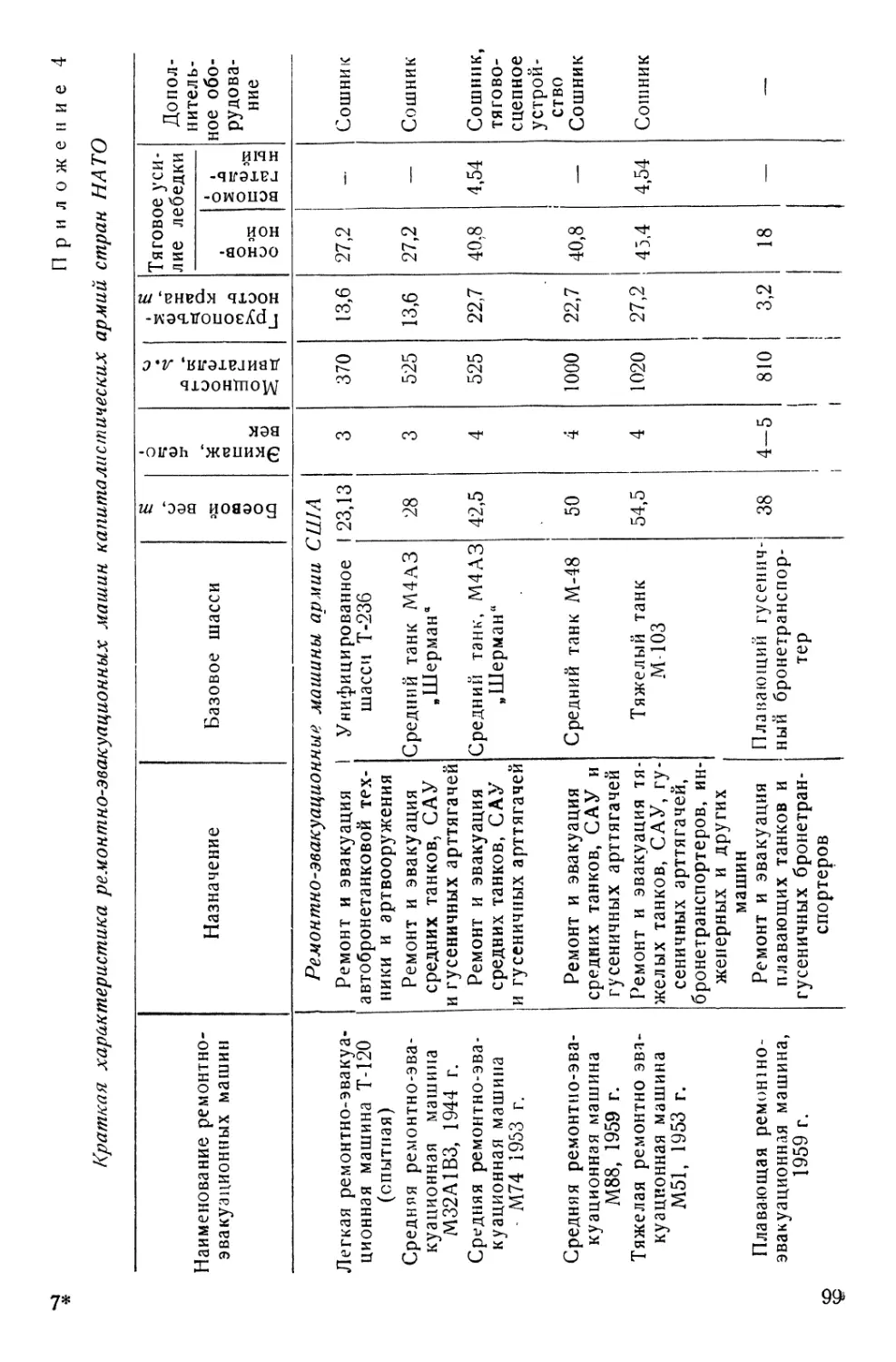
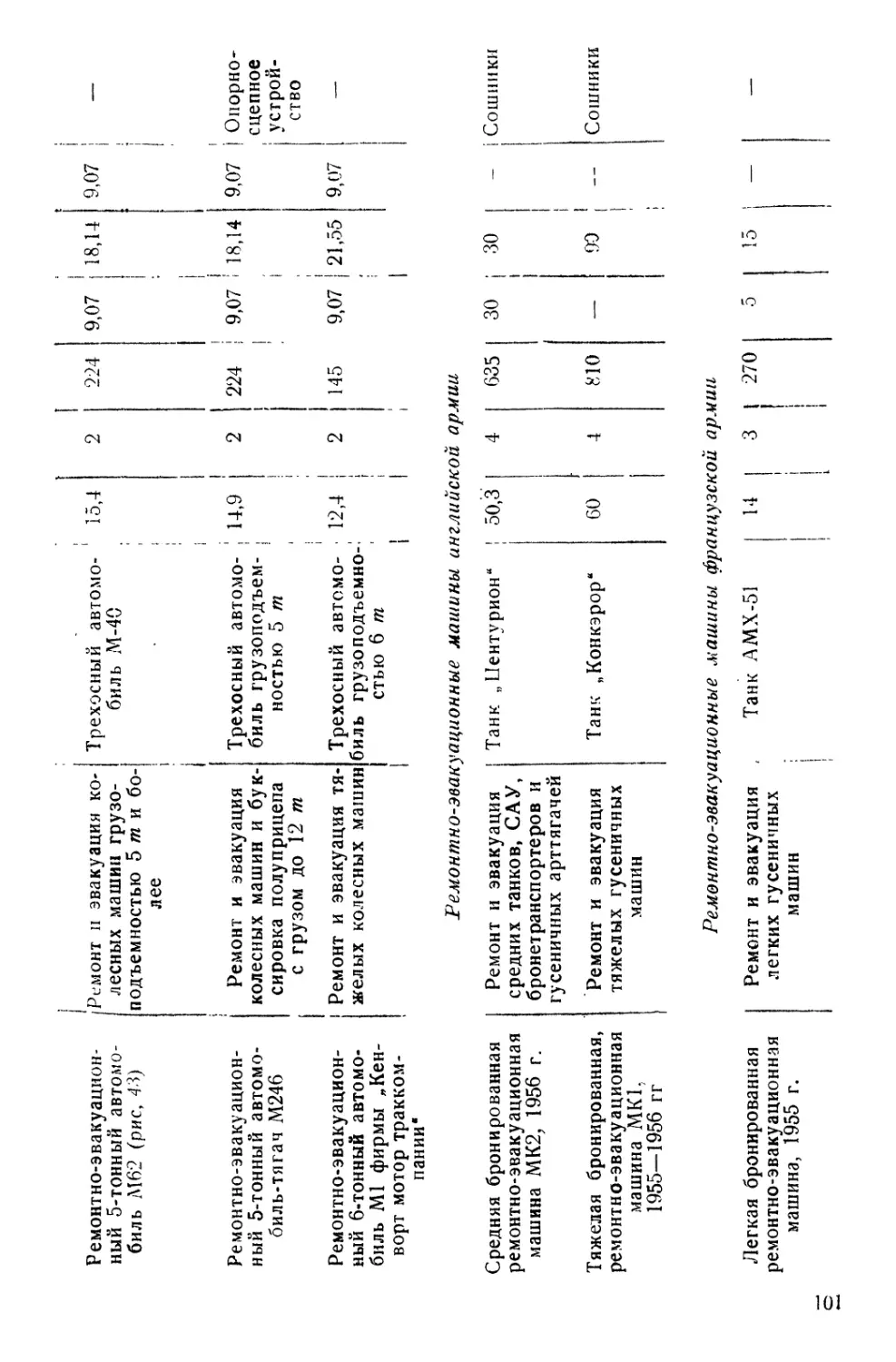
/














Теги: военное оборудование военная техника военное дело
Год: 1966




Текст
Военная академия тыла и транспорта
Энз. Ms —19
Способы
эвакуации
автотракторной
техники
«
Учебное пособие
Ленинград —1966
ВОЕННАЯ АКАДЕМИЯ ТЫЛА И ТРАНСПОРТА
Экз. №_____
СПОСОБЫ ЭВАКУАЦИИ
АВТОТРАКТОРНОЙ ТЕХНИКИ
УЧЕБНОЕ ПОСОБИЕ
Ленинград
1966
Настоящее учебное пособие предназначается для изучения техники
и способов эвакуации поврежденных автомобилей и гусеничных машин слу-
шателями автотракторной специальности Военной академии тыла и транс-
порта, а также может быть использовано офицерами автотракторной
службы в войсках и для обучения курсантов автотракторных училищ.
В этом пособии рассмотрены: т
— основы организации работ в эвакочастях и подразделениях;
— оборудование и способы эвакуации автотракторной техники с уче-
том: опыта Великой Отечественной войны, послевоенных учений и работ,
выполненных на кафедре ремонта боевых колесных и гусеничных машин
и в НИИ-21;
— назначение, краткая характеристика и особенности использования
специализированных эвакотягачей;
— некоторые материалы по эвакуационной технике армий стран НАТО.
Учебное пособие написал доцент, кандидат технических наук инженер-
полковник Баер В. Г.
Пособие утвердил 5 марта 1965 года начальник академии профессор',
генерал-полковник Мидовский М. П.
ГЛАВА I
ОСНОВЫ ОРГАНИЗАЦИИ ЭВАКУАЦИИ ПОВРЕЖДЕННЫХ
МАШИН
Эвакуация автотракторной техники, поврежденной различными
видами оружия, является частью единого процесса восстановления
неисправных машин в условиях ведения боевых действий.
Если в мирное время воинские части самостоятельно сдают на
ремонтные заводы неисправную технику, то в современной войне
осуществить принятый порядок сдачи в ремонт не всегда предста-
вится возможным. При массовом выходе техники из строя в усло-
виях маневренной войны войска своими силами не смогут
обеспечить сбор поврежденных машин, разбросанных на громадной
площади. Потребуются специальные формирования, которые
возьмут на себя выполнение работ по доставке этих машин на сбор-
ные пункты и отправке их в районы размещения ремонтных средств.
Эвакуация автотракторной техники примет широкие размеры.
РАБОТЫ, ВЫПОЛНЯЕМЫЕ ПРИ ЭВАКУАЦИИ АВТОТРАКТОРНОЙ
ТЕХНИКИ
Опыт Великой Отечественной войны и результаты работ, выпол-
ненных в послевоенный период, показывают, что трудоемкость эва-
куационных работ, приемы и способы их выполнения зависят, с од-
ной стороны, от характера боевых повреждений машин, состояния
маршрутов и некоторых других факторов, а с другой стороны, от
уровня механизации эвакуационных работ.
Автомобили и гусеничные тягачи, подлежащие эвакуации, могут
иметь весьма разнообразные повреждения и занимать различные
положения на местности, возможные сочетания которых определя-
ют, в конечном счете, трудоемкость и последовательность выполне-
ния эвакуационных работ. Так, в ряде случаев, прежде чем букси-
ровать поврежденный автомобиль на СППМ, потребуется поставить
его на колеса, вывезти с трудного участка местности и произвести
подготовительные работы для создания возможности и безопасности
3
последующей перевозки. В общем случае под эвакуацией
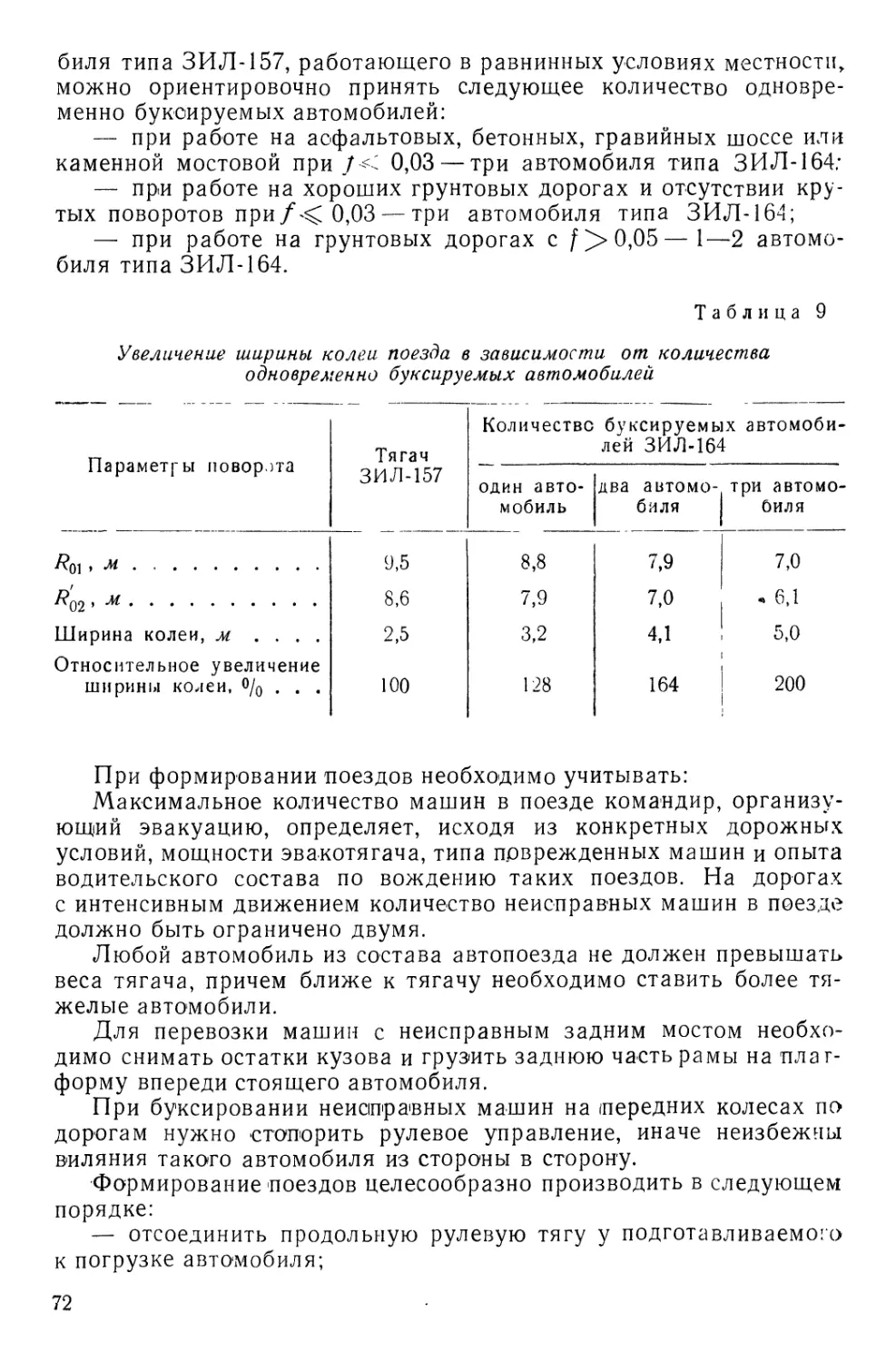
поврежденной автотрактор ной тех ни (к и понимают
комплекс работ, выполняемых с целью вывода
машин из аварийных положений, доставки их на
СППМ или к ремонтным частям, охрану и оборону
собранной техники.
При эвакуации поврежденной техники не следует причинять ма-
шинам дополнительных повреждений, которые могут увеличить тру-
доемкость их последующего восстановления в ремонтных частях.
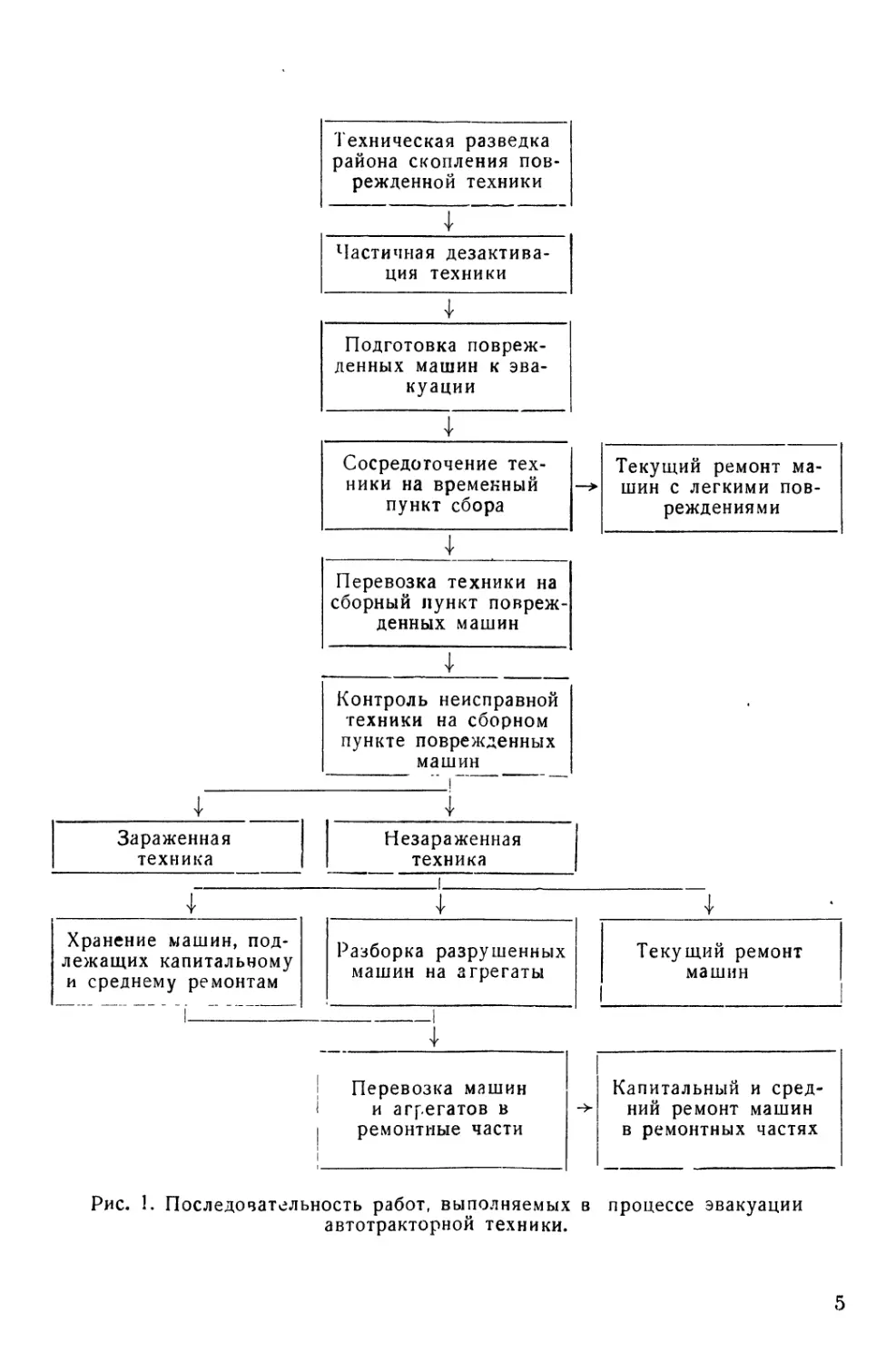
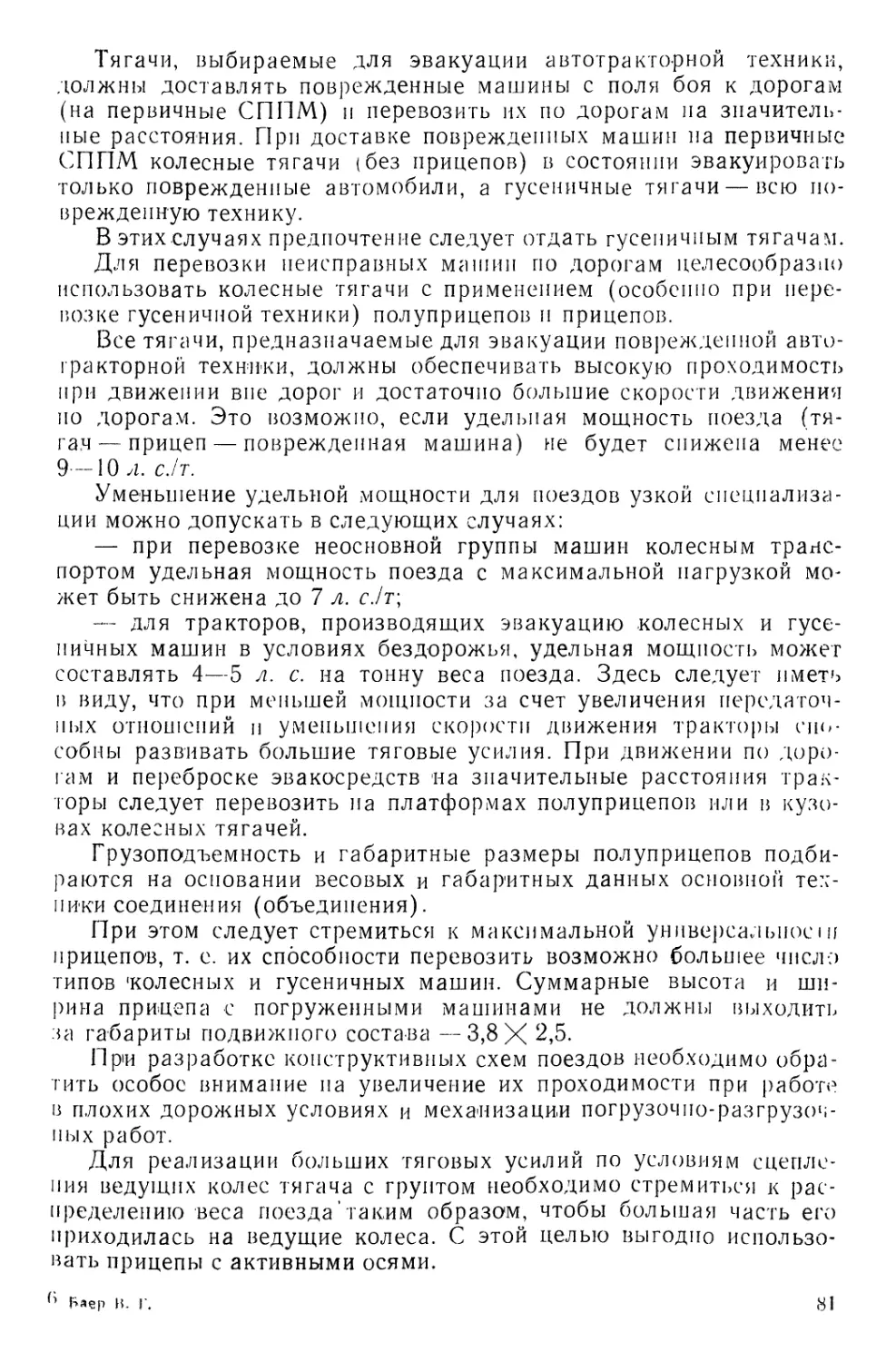
Все работы, выполняемые в'процессе эвакуации автотракторной
техники, производятся в определенной последовательности, указан-
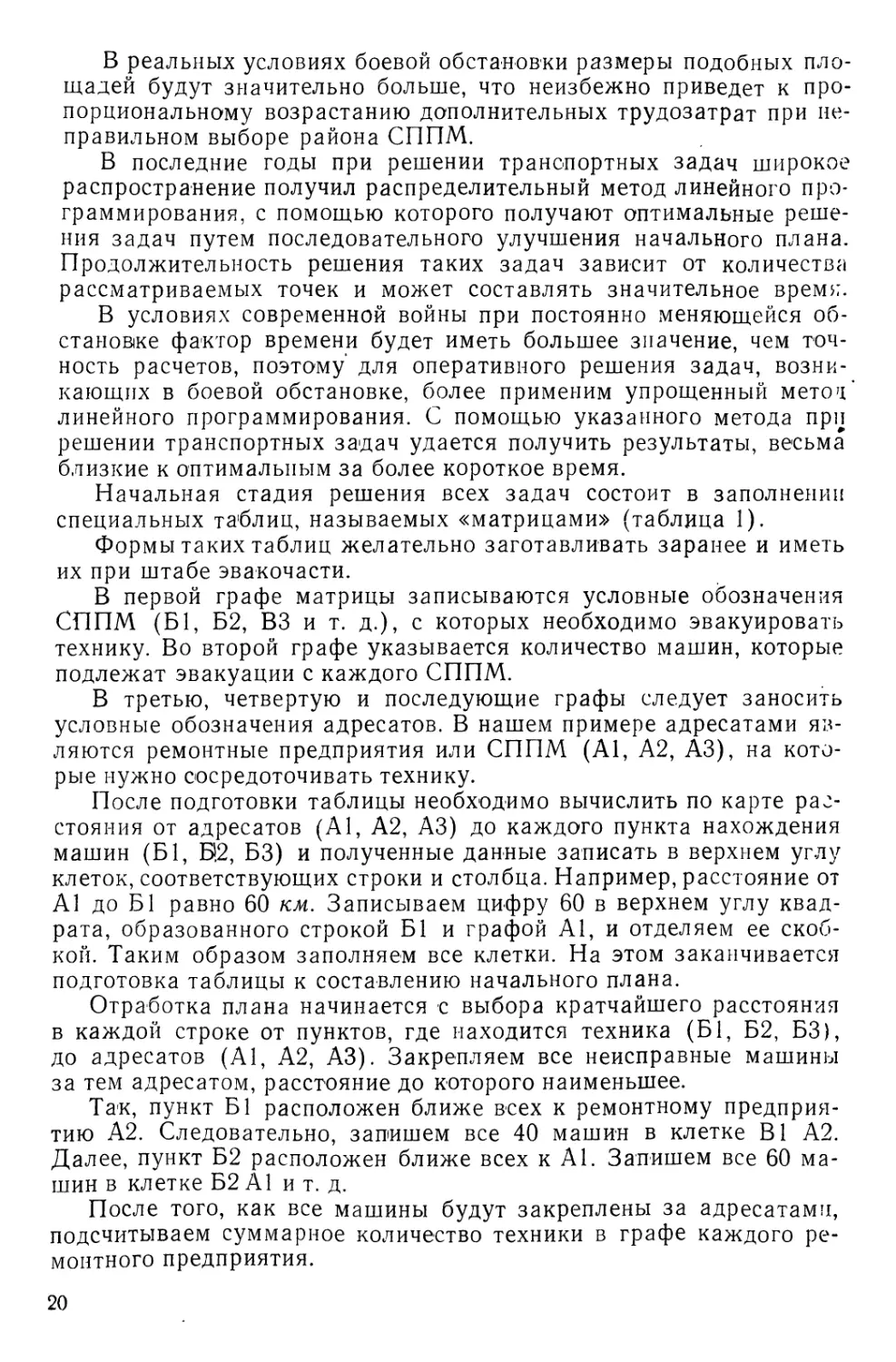
ной на рис. 1.
Техническая разведка организуется эвакуационной частью (под-
разделением) и производится непрерывно с целью получения дан-
ных о районах скопления неисправных машин в полосе работы эва-
куационных средств. Для разведки конкретного района выхода ма-
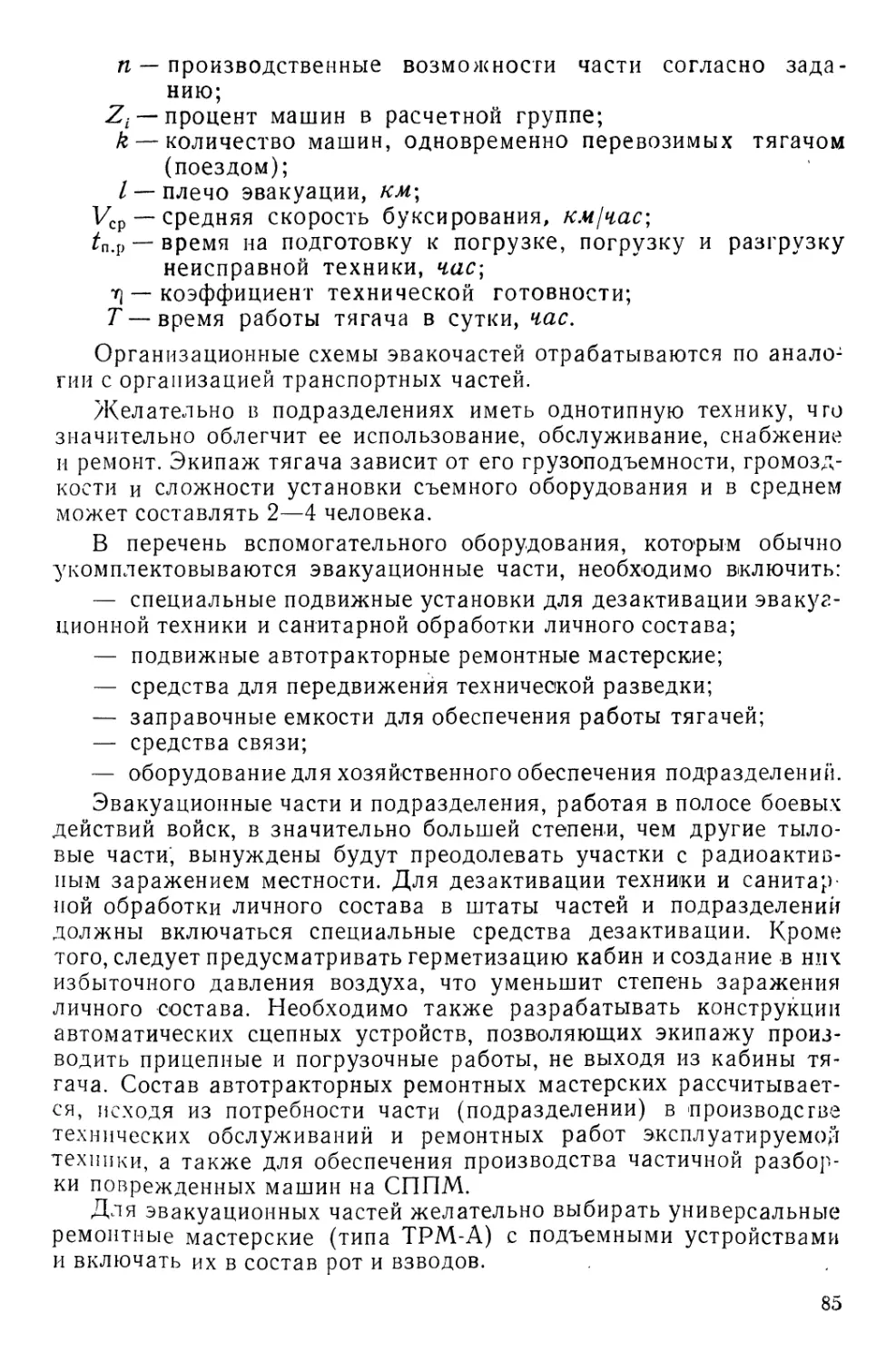
шин из строя от эвакуационной части (подразделения) высылается
на автомобиле специально подготовленная группа из 2—4 человек,
в состав которой могут входить: командир и автомеханик, химик-
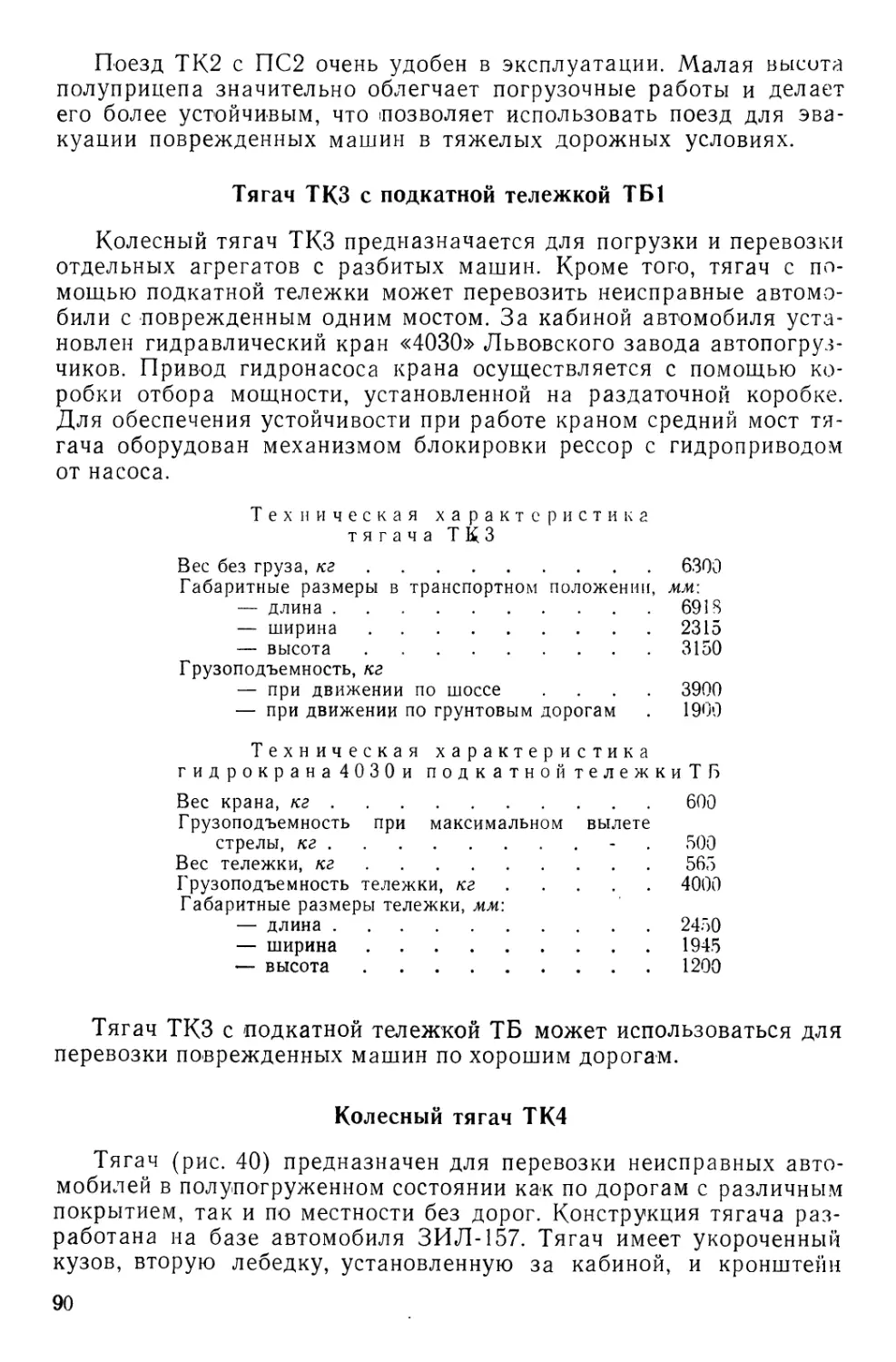
дозиметрист и сапер.
Разведка, прибыв в район скопления поврежденных машин,
должна объехать по периметру (если позволяют уровни радиа-
ции) и пересечь в двух-трех диаметральных направлениях. Во вре-
мя движения и на остановках работает весь состав разведки.
Автомеханик определяет участки, на которых сосредоточена не-
исправная техника, и наносит их на карту (схему), уточняет виды
аварийных повреждений машин, пути и способы их эвакуации.
Химик-дозиметрист уточняет и обозначает границы зон с пре-
дельно-допустимыми уровнями химического и радиоактивного за-
ражения местности и техники, находящейся на ней.
Сапер определяет возможные районы минирования противником
дорог и местности, на которой планируется сосредоточивать тех-
нику. Особенно тщательно проверяются пути эвакуации. На осно-
вании собранного материала выбирается район сосредоточения не-
исправной техники — временный пункт сбора (ВПС), который ор-
ганизуется эваковзводом (отделением).
ВПС — место для сосредоточения поврежденной техники около
дорог с целью погрузки и последующей отправки неисправных
машин автомобильным транспортом на СППМ или в ремонтные
части. Поврежденные машины, расположенные на трудных участках
местности, могут доставляться на ВПС (к дорогам) гусеничными
тягачами и тракторами.
Для перевозки собранной техники по дорогам целесообразно ис-
пользовать тягачи эвакочастей и автомобили автотранспортных ча-
стей, движущиеся в направлении тыловых баз. С этой целью на
ВПС подготавливаются площадки для производства погрузочных
работ и подготовки поврежденных машин к буксированию грузо-
выми автомобилями.
4
Контроль неисправной
техники на сборном
пункте поврежденных
машин
Рис. 1. Последовательность работ, выполняемых в процессе эвакуации
автотракторной техники.
5
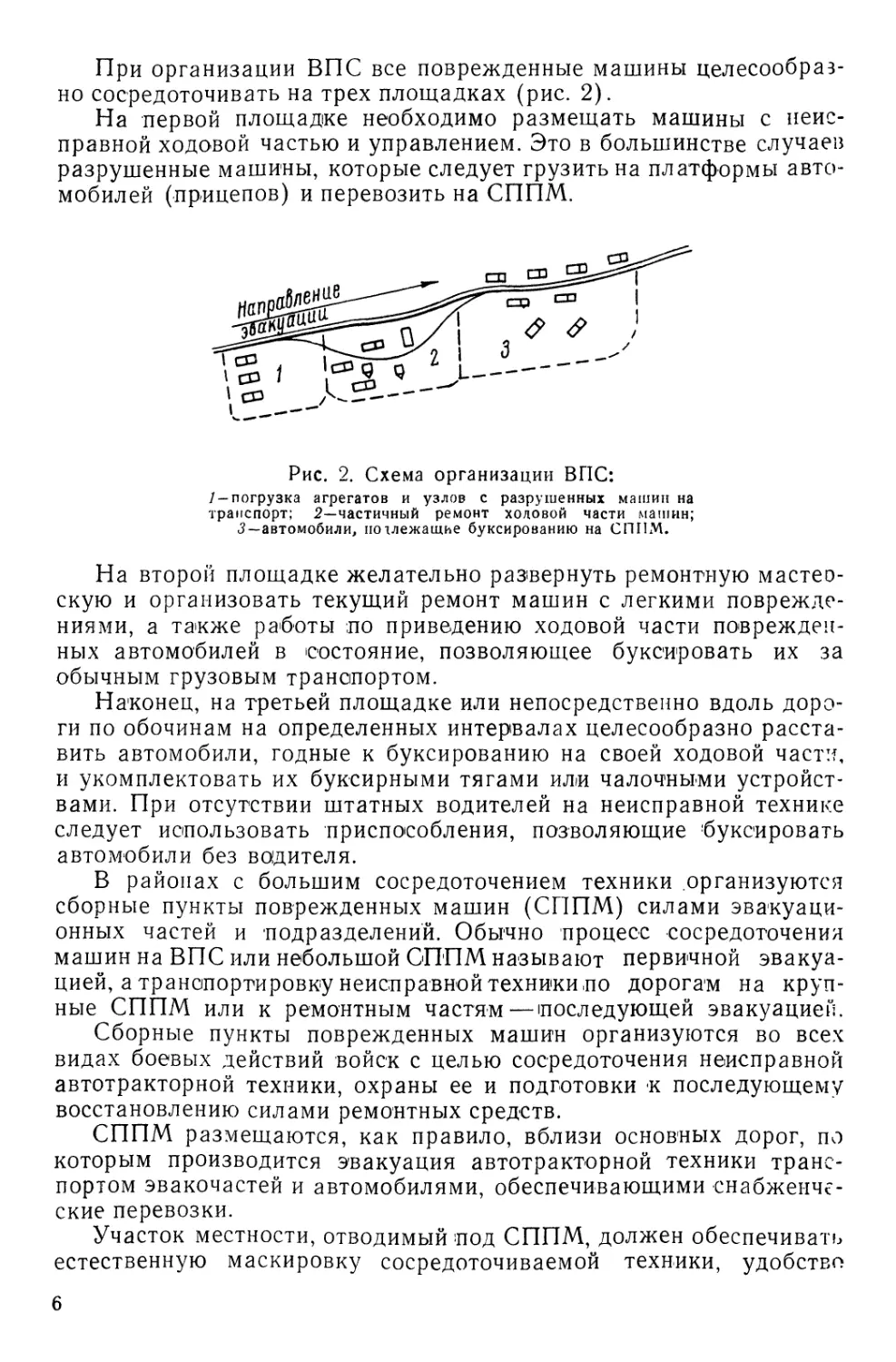
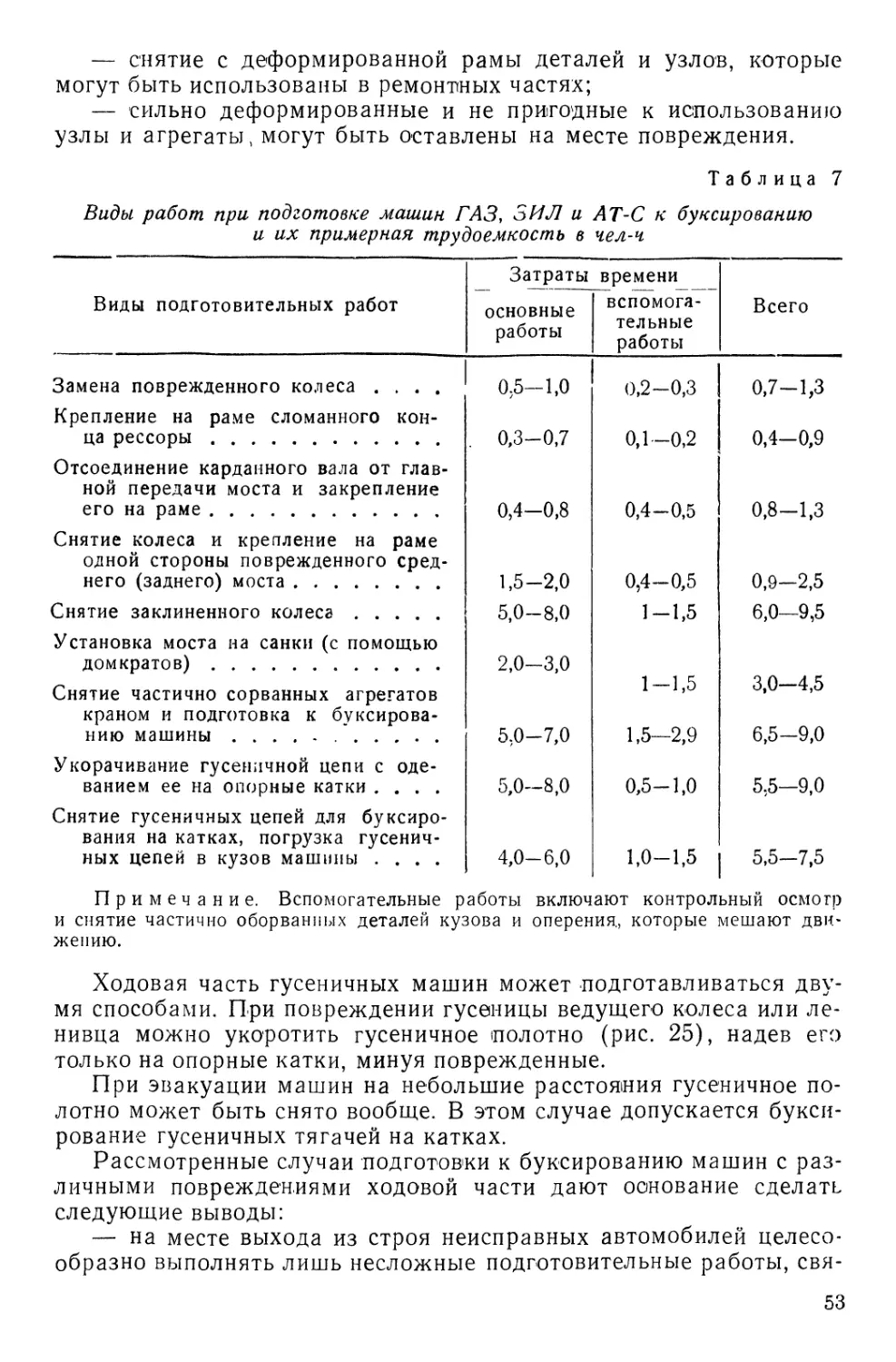
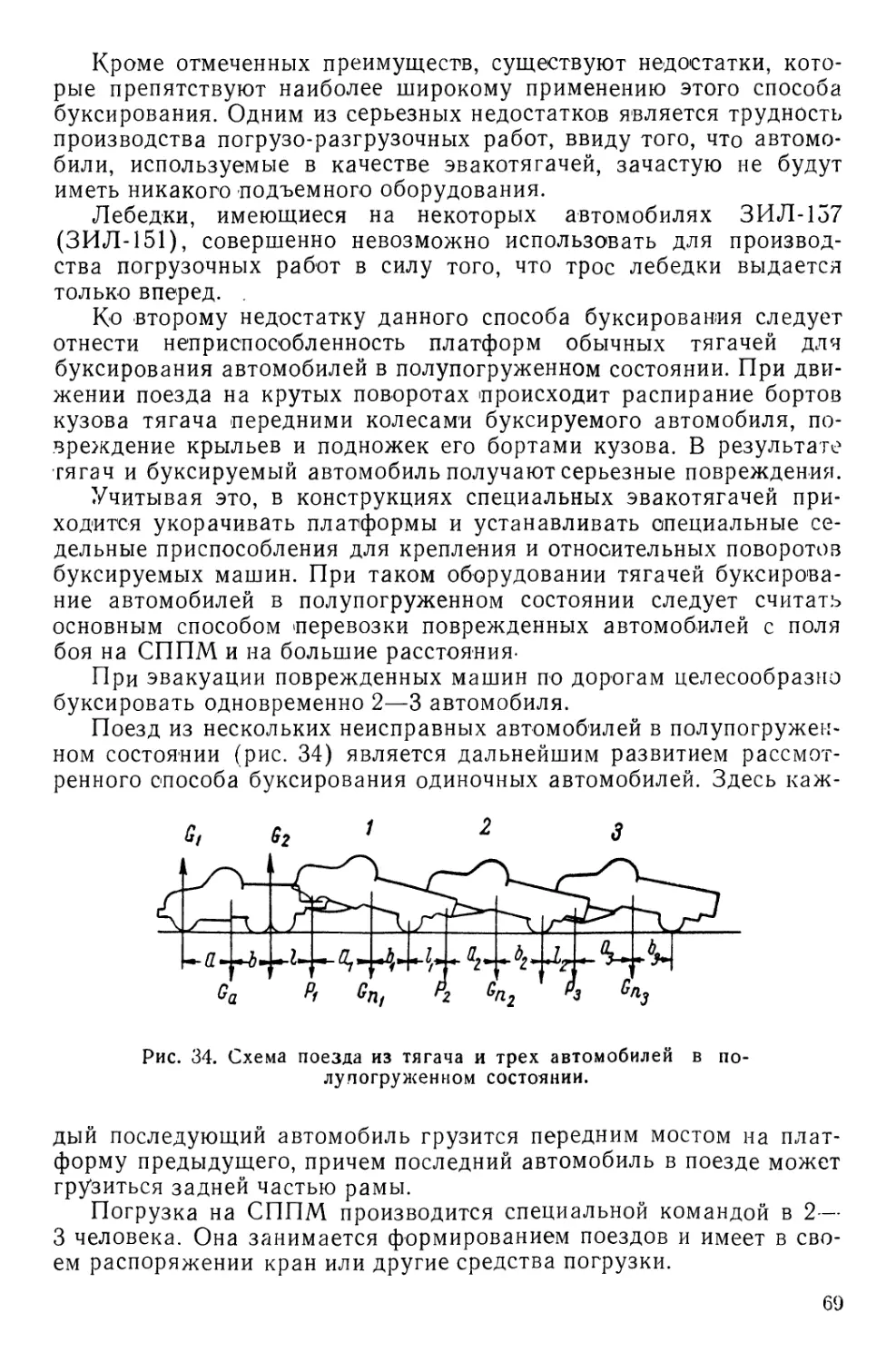
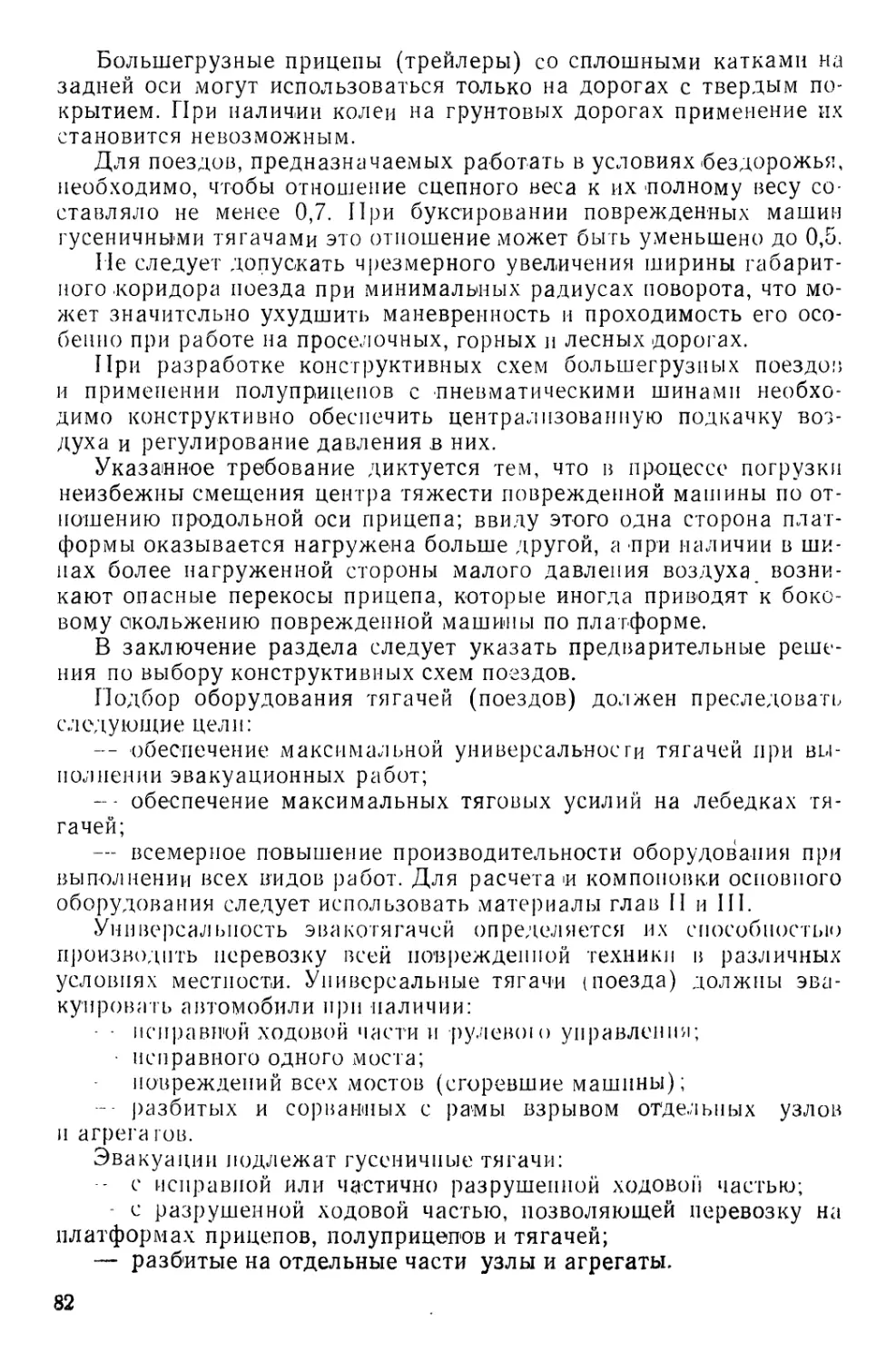
При организации ВПС все поврежденные машины целесообраз-
но сосредоточивать на трех площадках (рис. 2).
На первой площадке необходимо размещать машины с неис-
правной ходовой частью и управлением. Это в большинстве случаев
разрушенные машины, которые следует грузить на платформы авто-
мобилей (прицепов) и перевозить на СППМ.
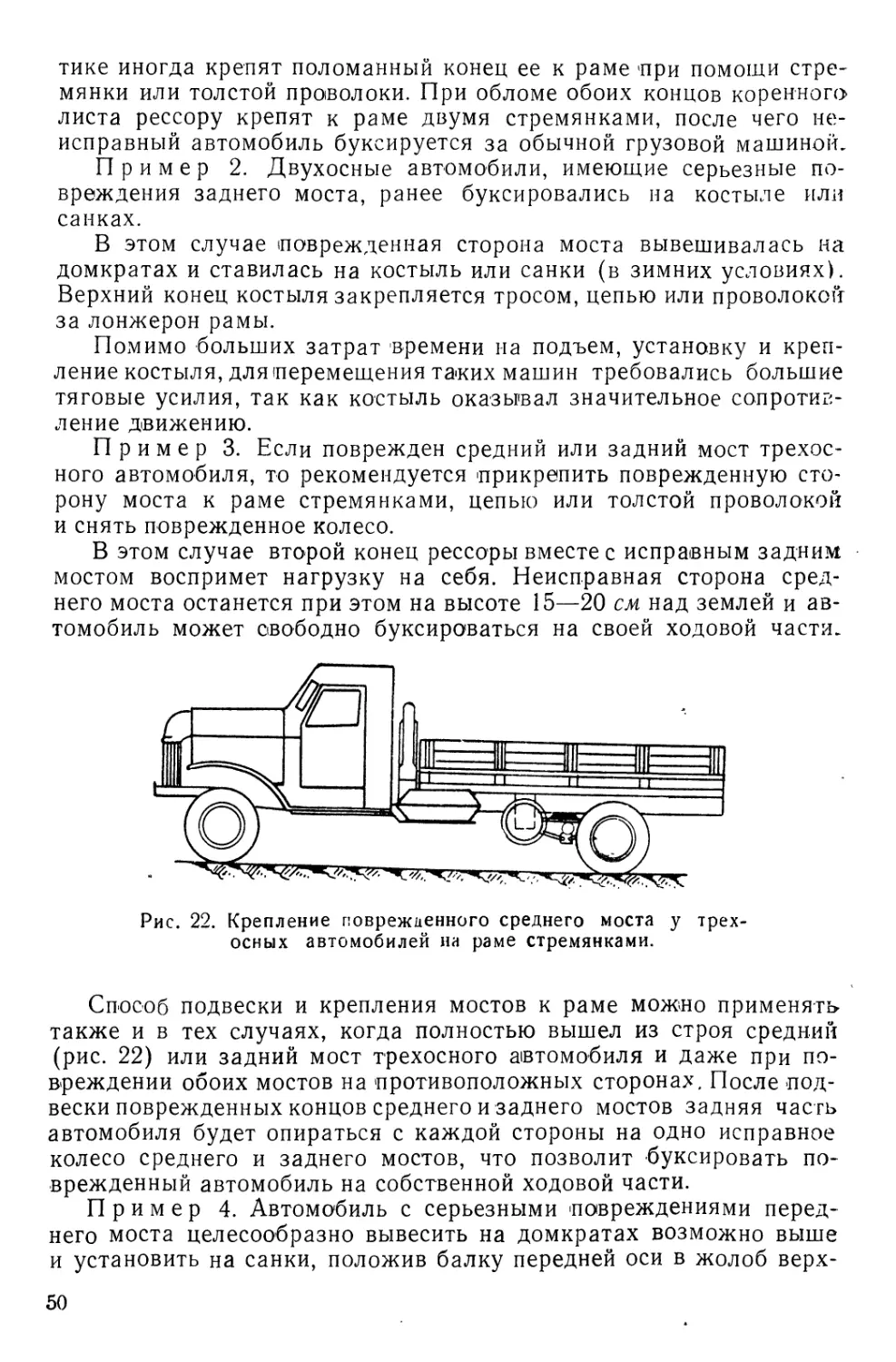
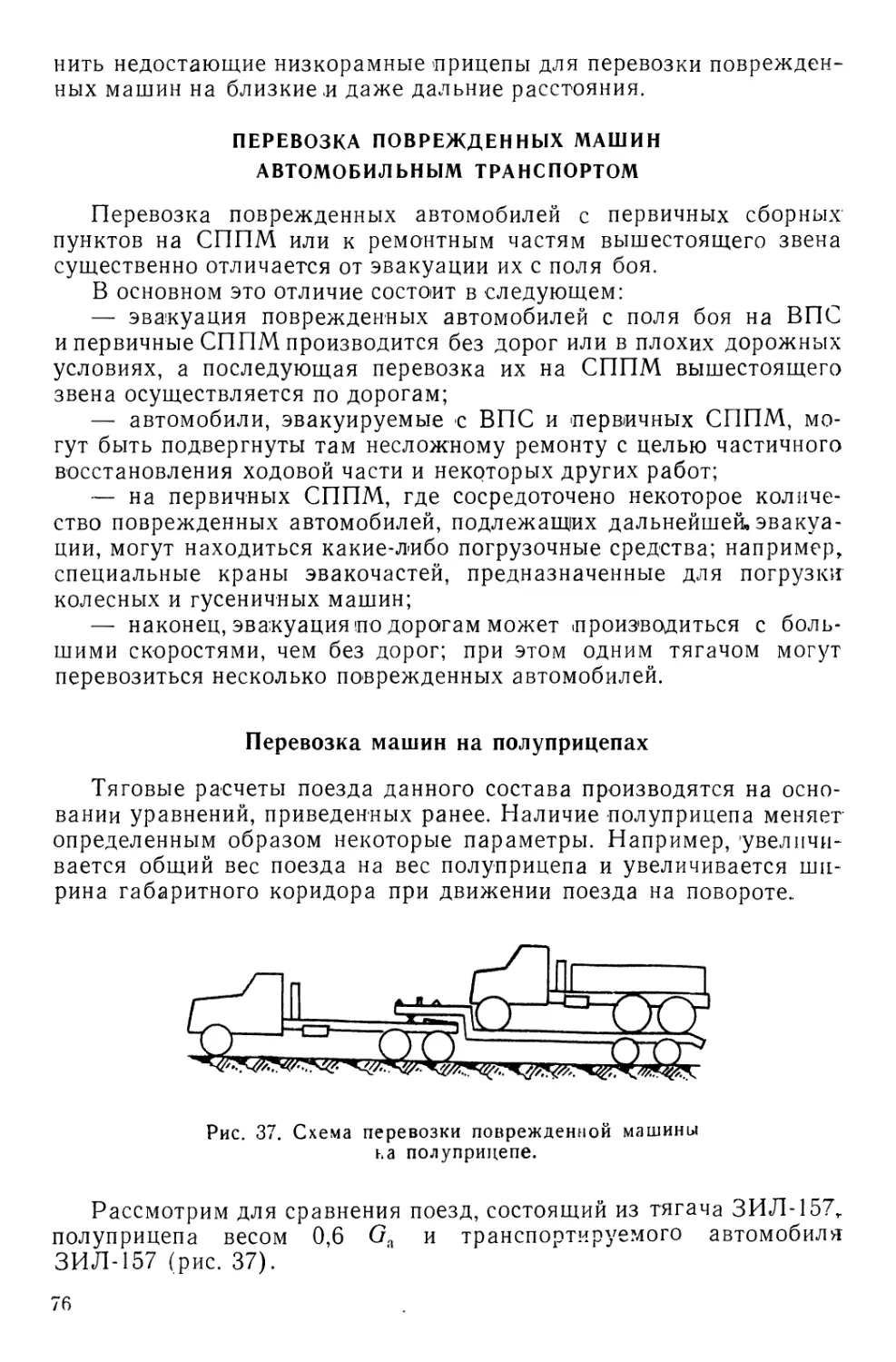
Рис. 2. Схема организации ВПС:
/ — погрузка агрегатов и узлов с разрушенных машин на
транспорт; 2—частичный ремонт ходовой части машин;
3—автомобили, подлежащие буксированию на СППМ.
На второй площадке желательно развернуть ремонтную мастео-
скую и организовать текущий ремонт машин с легкими поврежде-
ниями, а также работы по приведению ходовой части поврежден-
ных автомобилей в состояние, позволяющее буксировать их за
обычным грузовым транспортом.
Наконец, на третьей площадке или непосредственно вдоль доро-
ги по обочинам на определенных интервалах целесообразно расста-
вить автомобили, годные к буксированию на своей ходовой части,
и укомплектовать их буксирными тягами или палочными устройст-
вами. При отсутствии штатных водителей на неисправной технике
следует использовать приспособления, позволяющие буксировать
автомобили без водителя.
В районах с большим сосредоточением техники организуются
сборные пункты поврежденных машин (СППМ) силами эвакуаци-
онных частей и подразделений. Обычно процесс сосредоточения
машин на ВПС или небольшой СППМ называют первичной эвакуа-
цией, а транспортировку неисправной техники во дорогам на круп-
ные СППМ или к ремонтным частям—последующей эвакуацией.
Сборные пункты поврежденных машин организуются во всех
видах боевых действий войск с целью сосредоточения неисправной
автотракторной техники, охраны ее и подготовки к последующему
восстановлению силами ремонтных средств.
СППМ размещаются, как правило, вблизи основных дорог, по
которым производится эвакуация автотракторной техники транс-
портом эвакочастей и автомобилями, обеспечивающими снабженче-
ские перевозки.
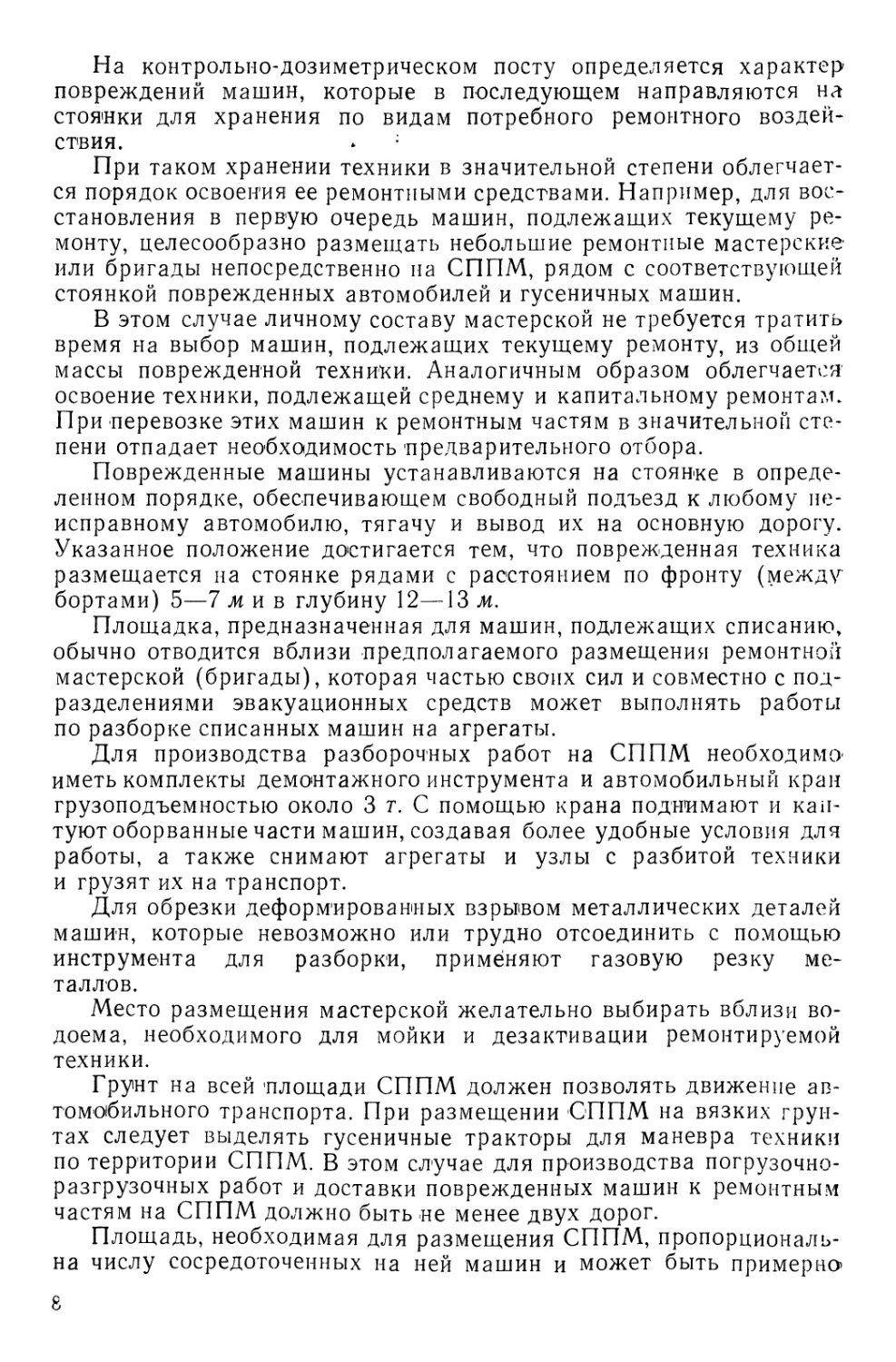
Участок местности, отводимый под СППМ, должен обеспечивать
естественную маскировку сосредоточиваемой техники, удобство
6
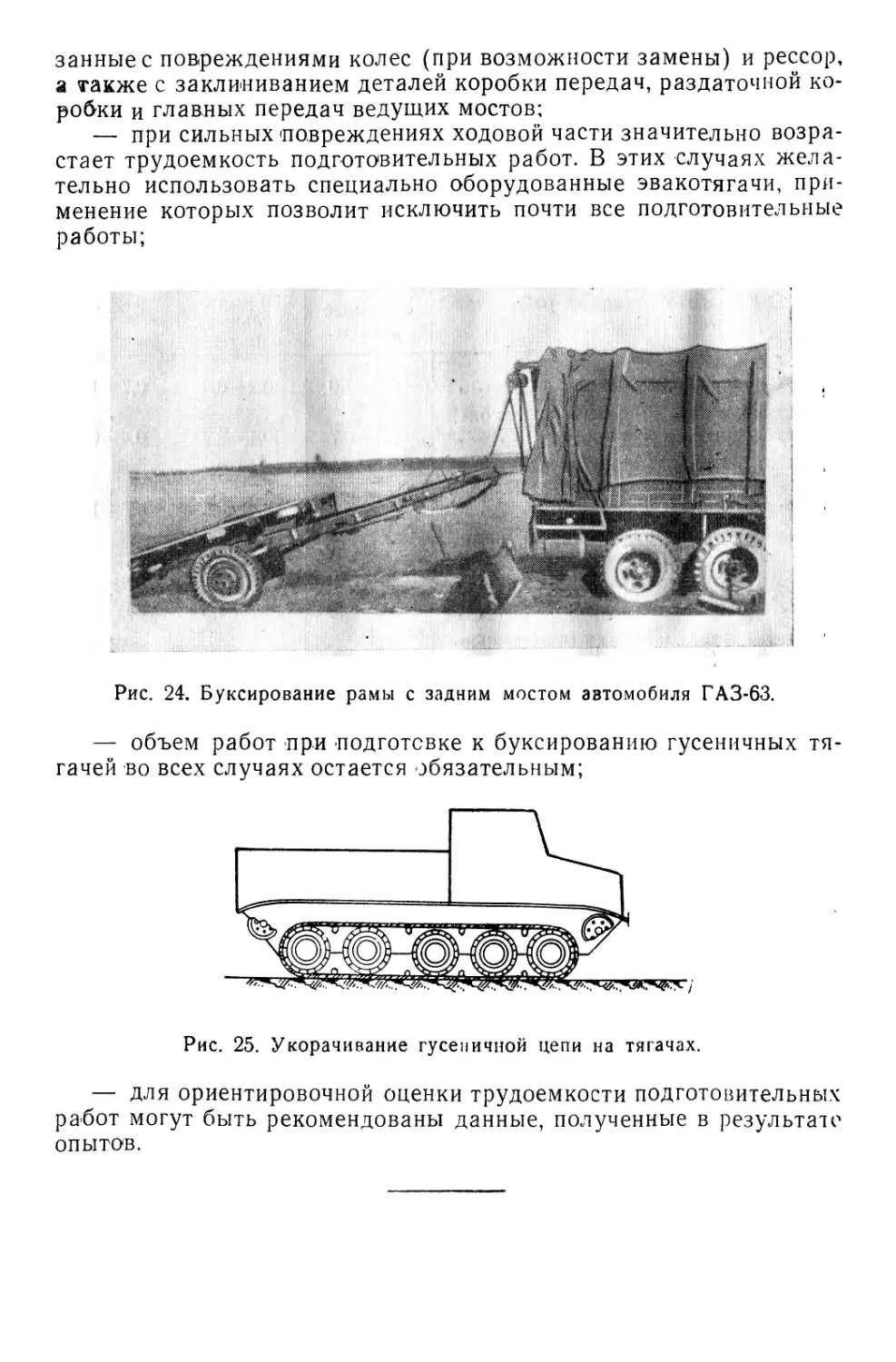
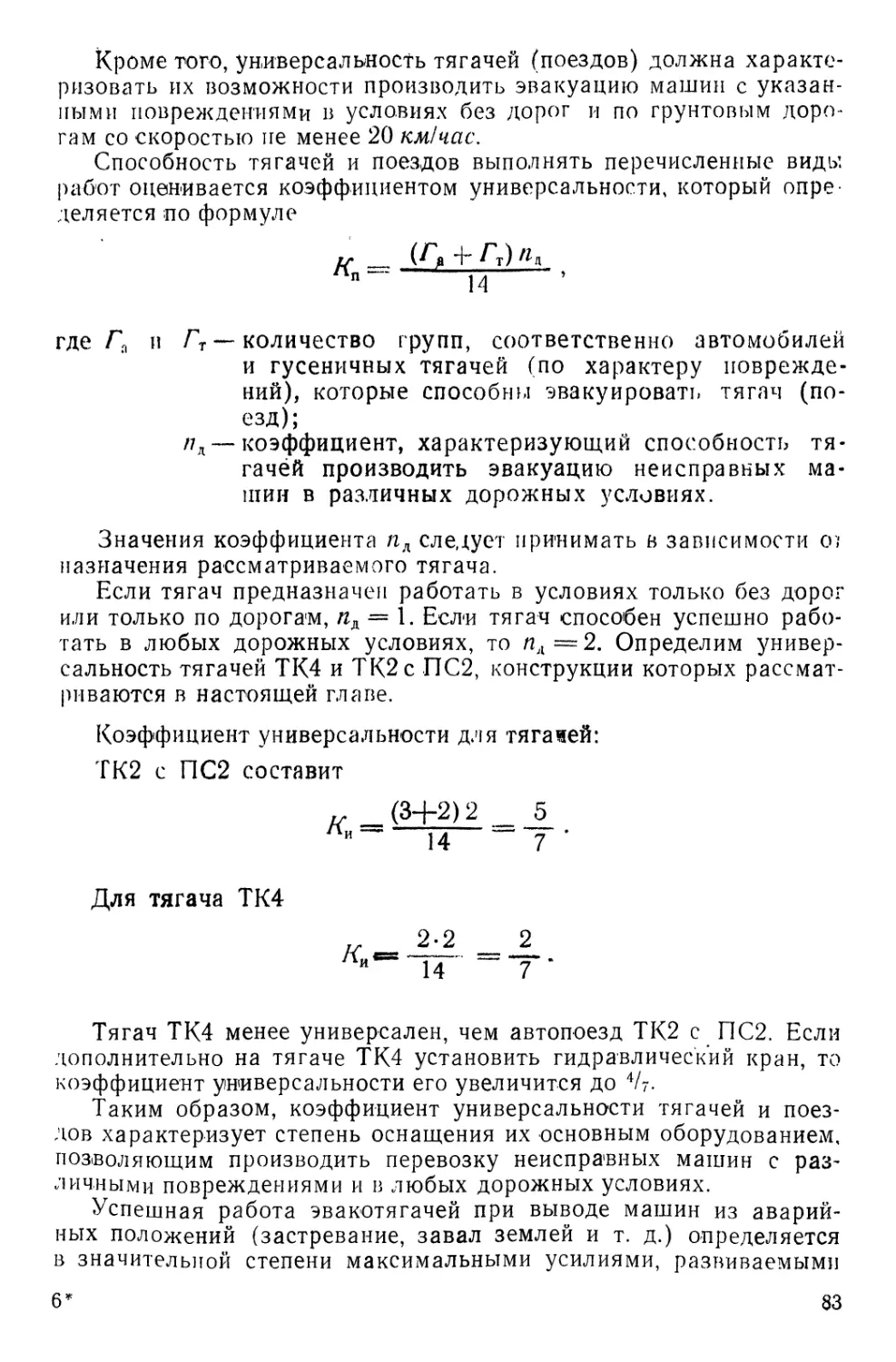
размещения и охрану. Отдельные элементы сборных -пунктов по-
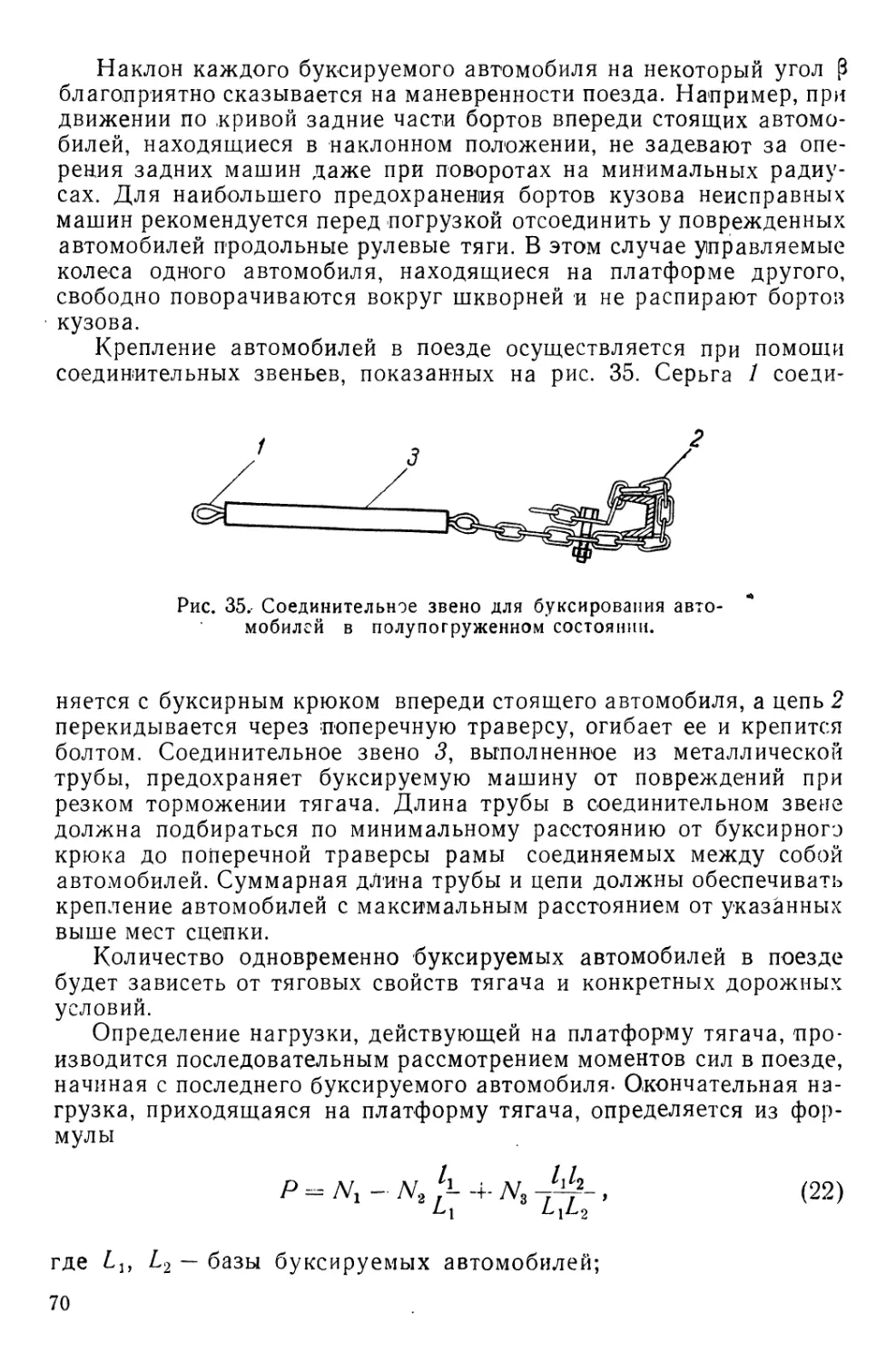
врежденных машин показаны на рис. 3.
Неисправная техника, поступающая на территорию СППМ, про-
ходит через контрольно-дозиметрический пост, пде проверяются на-
личие и уровни химического и радиоактивного заражения, а также
техническое состояние автомобилей и гусеничных тягачей. Машины,
имеющие уровни радиации выше допустимых, направляются на
площадку I.
Рис. 3. Схема размещения СППМ:
I—плотачка для зараженной техники; II- площадка для пезараженной
техники; /--машины, подлежащие капитальному ремонту; 2—машины, под-
лежащие среднему ремонту; 5-машины, подлежащие текущему ремонту;
4 — площадка для разрушенных машин; 5 — ремонтная мастерская.
Дегазация и дезактивация зараженной техники на СППМ, как
правило, не производится, ибо к моменту поступления машин в ре-
монтную часть проходит значительный промежуток времени, за ко-
торый произойдет естественное снижение уровня заражения или,
наоборот, в течение этого времени собранная техника может под-
вергнуться повторному воздействию поражающих средств против-
ника. В этих условиях полная дегазация и дезактивация автотрак-
торной техники становятся целесообразными лишь непосредственно
в ремонтных частях.
7
На контрольно-дозиметрическом посту определяется характер
повреждений машин, которые в последующем направляются на
стоянки для хранения по видам потребного ремонтного воздей-
ствия. * :
При таком хранении техники в значительной степени облегчает-
ся порядок освоения ее ремонтными средствами. Например, для вос-
становления в первую очередь машин, подлежащих текущему ре-
монту, целесообразно размещать небольшие ремонтные мастерские
или бригады непосредственно на СППМ, рядом с соответствующей
стоянкой поврежденных автомобилей и гусеничных машин.
В этом случае личному составу мастерской не требуется тратить
время на выбор машин, подлежащих текущему ремонту, из общей
массы поврежденной техники. Аналогичным образом облегчается
освоение техники, подлежащей среднему и капитальному ремонтам.
При перевозке этих машин к ремонтным частям в значительной сте-
пени отпадает необходимость предварительного отбора.
Поврежденные машины устанавливаются на стоянке в опреде-
ленном порядке, обеспечивающем свободный подъезд к любому не-
исправному автомобилю, тягачу и вывод их на основную дорогу.
Указанное положение достигается тем, что поврежденная техника
размещается на стоянке рядами с расстоянием по фронту (между
бортами) 5—7 жив глубину 12—13 м.
Площадка, предназначенная для машин, подлежащих списанию,
обычно отводится вблизи предполагаемого размещения ремонтной
мастерской (бригады), которая частью своих сил и совместно с под-
разделениями эвакуационных средств может выполнять работы
по разборке списанных машин на агрегаты.
Для производства разборочных работ на СППМ необходимо'
иметь комплекты демонтажного инструмента и автомобильный кран
грузоподъемностью около 3 т. С помощью крана поднимают и кан-
туют оборванные части машин, создавая более удобные условия для
работы, а также снимают агрегаты и узлы с разбитой техники
и грузят их на транспорт.
Для обрезки деформированных взрьивом металлических деталей
машин, которые невозможно или трудно отсоединить с помощью
инструмента для разборки, применяют газовую резку ме-
таллов.
Место размещения мастерской желательно выбирать вблизи во-
доема, необходимого для мойки и дезактивации ремонтируемой
техники.
Грунт на всей площади СППМ должен позволять движение ав-
томобильного транспорта. При размещении СППМ на вязких грун-
тах следует выделять гусеничные тракторы для маневра техники
по территории СППМ. В этом случае для производства погрузочно-
разгрузочных работ и доставки поврежденных машин к ремонтным
частям на СППМ должно быть не менее двух дорог.
Площадь, необходимая для размещения СППМ, пропорциональ-
на числу сосредоточенных на ней машин и может быть примерно’
8
подсчитана по удельной площади, необходимой для размещения
одного автомобиля, трактора, гусеничного тягача.
F = (150 н- 200) п£м*] (1)
где 150 -4- 200 — удельная площадь в л/2, приходящаяся в сред-
нем на одну машину;
п —число машин, находящихся на СППМ.
Неисправные машины, поступающие на СППМ, заносятся
в книгу учета неисправной техники, где необходимо указать: номер
и принадлежность машины (по опознавательным знакам), техни-
ческое состояние, комплектность и необходимый вид ремонтного-
воздействия.
При передаче или направлении неисправных машин в ремонт-
ные части в книге учета должны также делаться соответствующие
отметки.
Начальник сборного пункта обязан ежедневно подавать по
команде сведения о собранной на СППМ и отправленной в ремонт-
ные части технике.
Сборные пункты поврежденных машин, переданные ремонтным
частям, продолжают функционировать до тех пор, пока на них на-
ходится неисправная техника. В это время все работы по эвакуа-
ции поврежденных машин и их восстановлению возлагаются на по-
движные ремонтные части, которые для успешного выполнения
стоящих перед ними задач должны всемерно осваивать местную
промышленную базу.
ПАРАМЕТРЫ, ОПРЕДЕЛЯЮЩИЕ ПРОИЗВОДИТЕЛЬНОСТЬ
ЭВАКОТЯГАЧЕИ
При эвакуации поврежденной автотракторной техники работа
эва.котягачей обычно оценивается количеством неисправных машин,
эвакуируемых за период времени, и определяется по зависимости
М Drtl /Г)\
N т ’^к.и.р.в. ’ ^к.тг., (2)'
4- + *о.р.
V ср
где N— количество эвакуированных машин;
D — продолжительность расчетного периода в днях;
г — продолжительность рабочего дня в часах;
п — списочное количество эвакотягачей;
L --среднее плечо эвакуации в км,\
Кр—средняя скорость движения тягачей порожняком и с эва-
куируемой машиной в км!час\
— время погрузки и разгрузки эвакуируемой машины
в часах;
т]к.и.р.в. — коэффициент использования рабочего времени в часах;
он учитывает непроизводительные затраты времени на
$
болезни, наряды, перерывы в работе, связанные с непос-
редственным воздействием противника на район работ;
ориентировочно следует принимать т)к,и.р.в. = 0,7—0,8;
т]к.т.г. — коэффициент технической готовности тягачей.
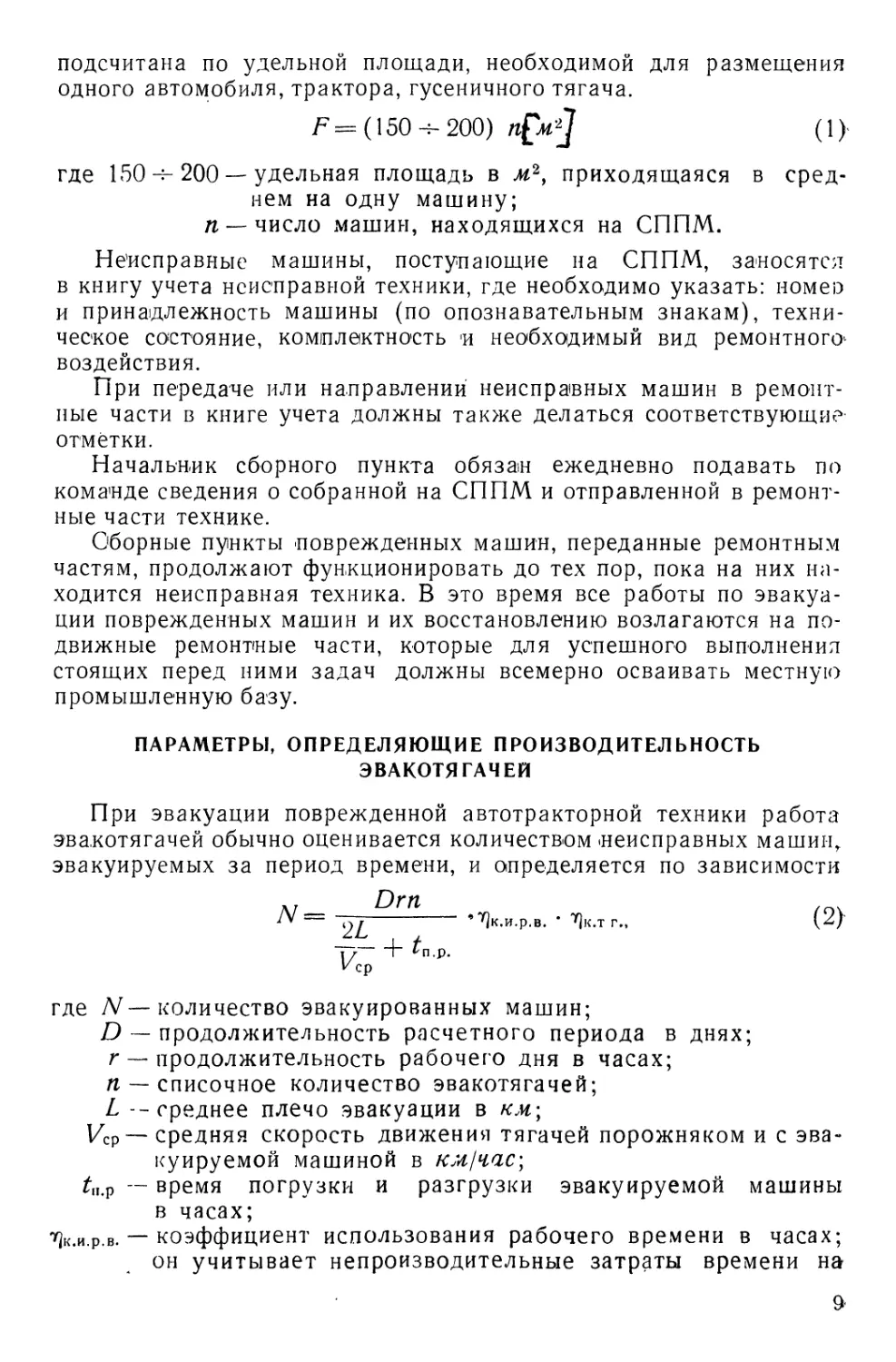
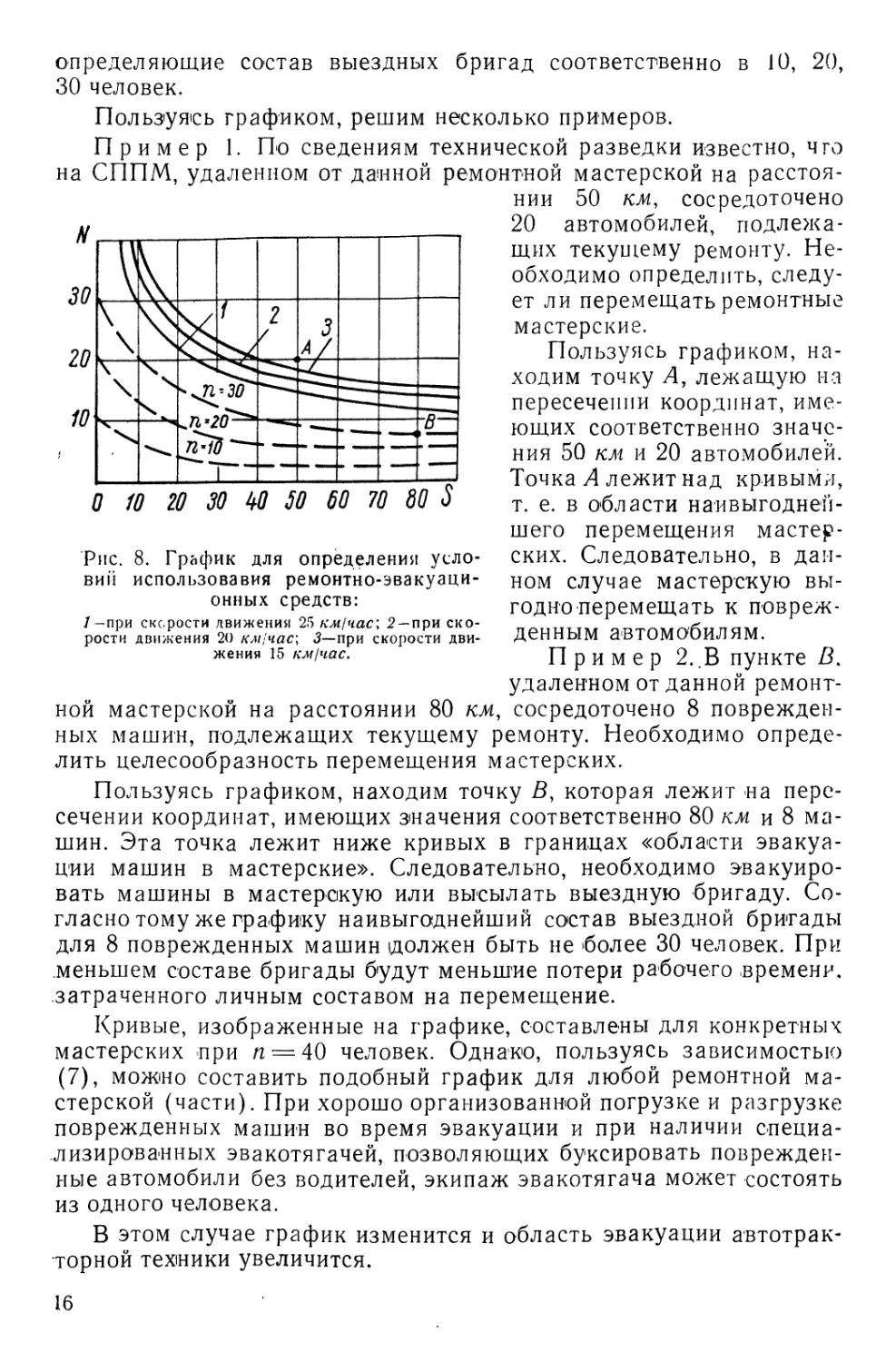
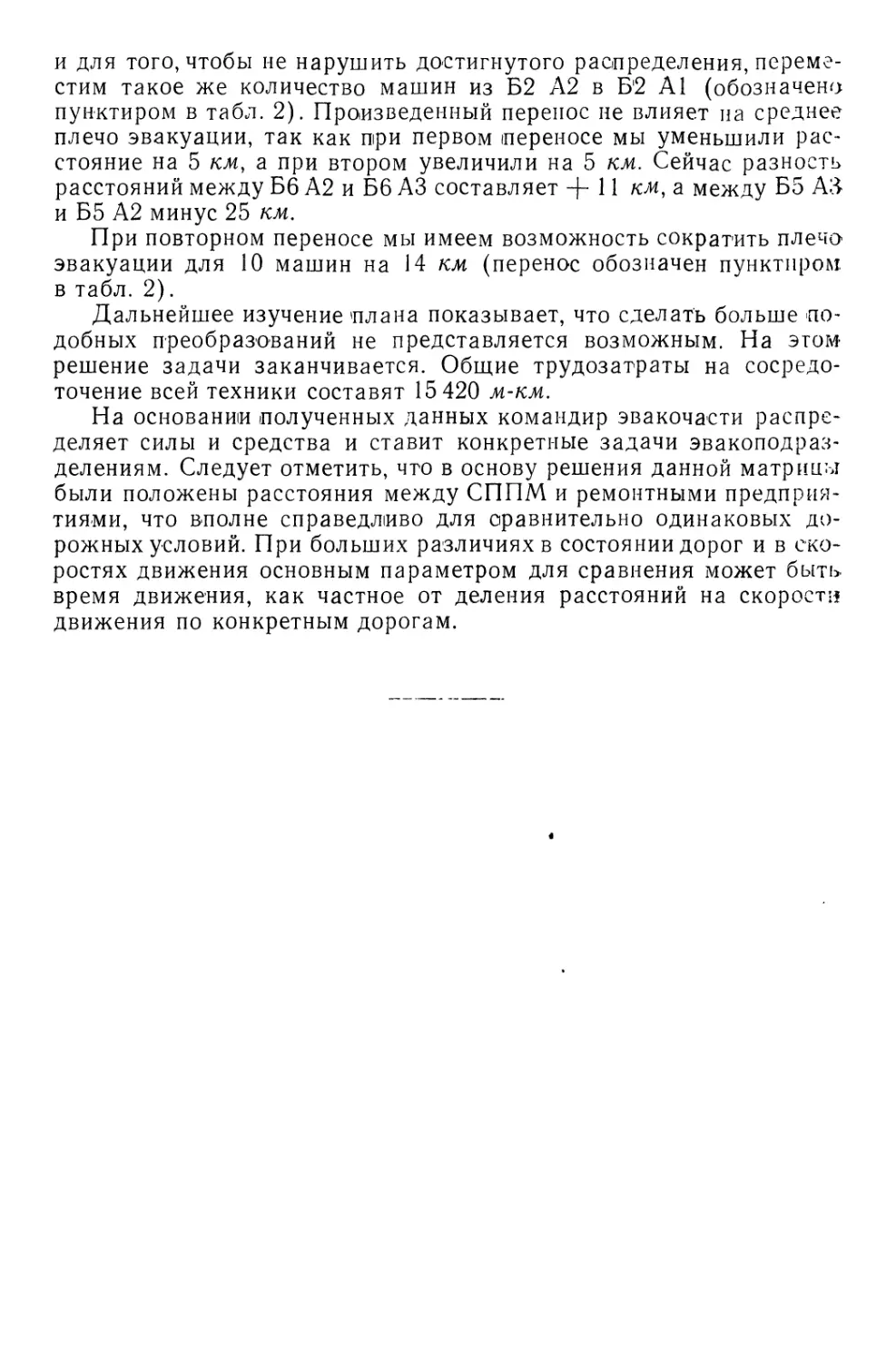
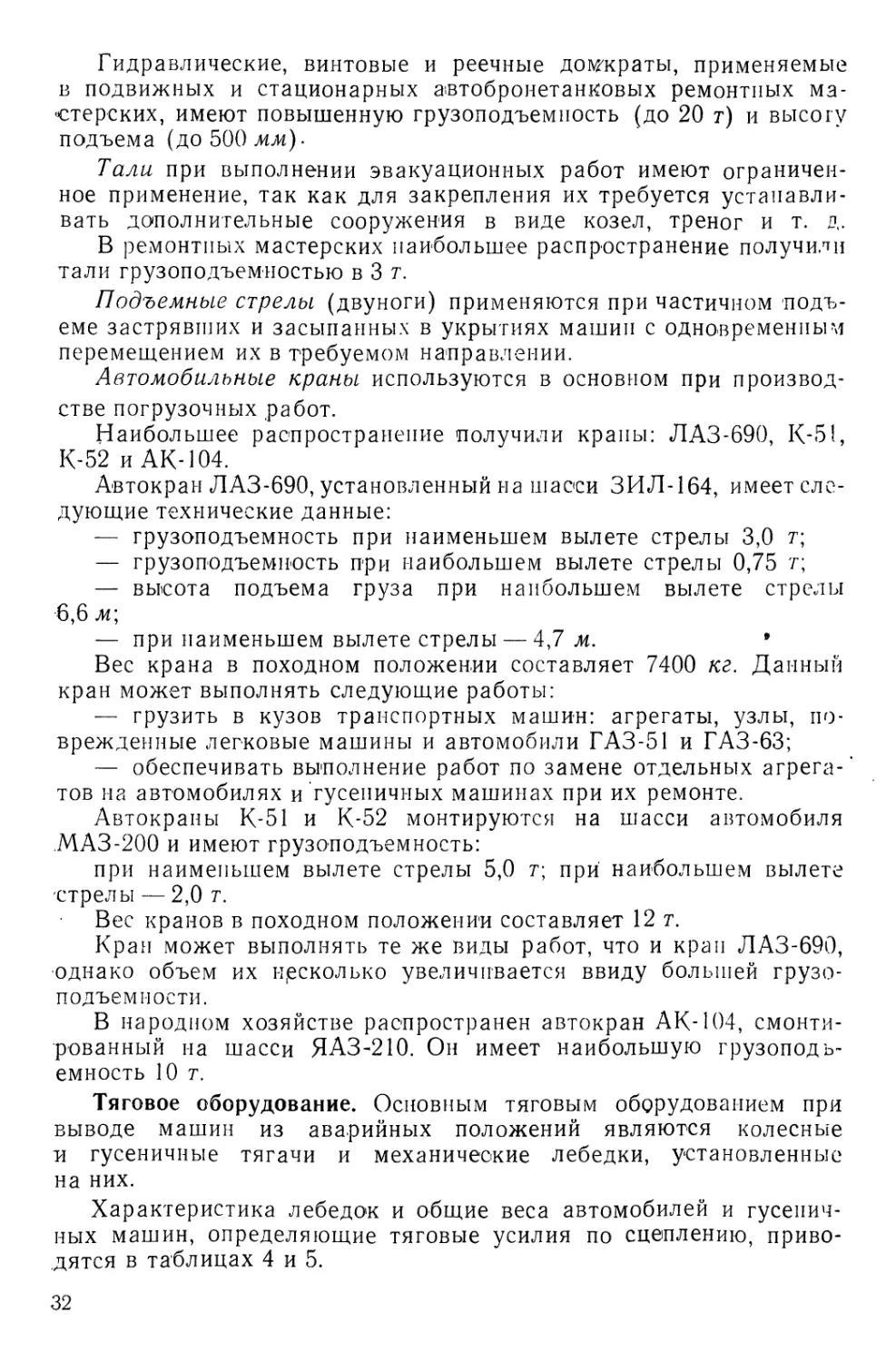
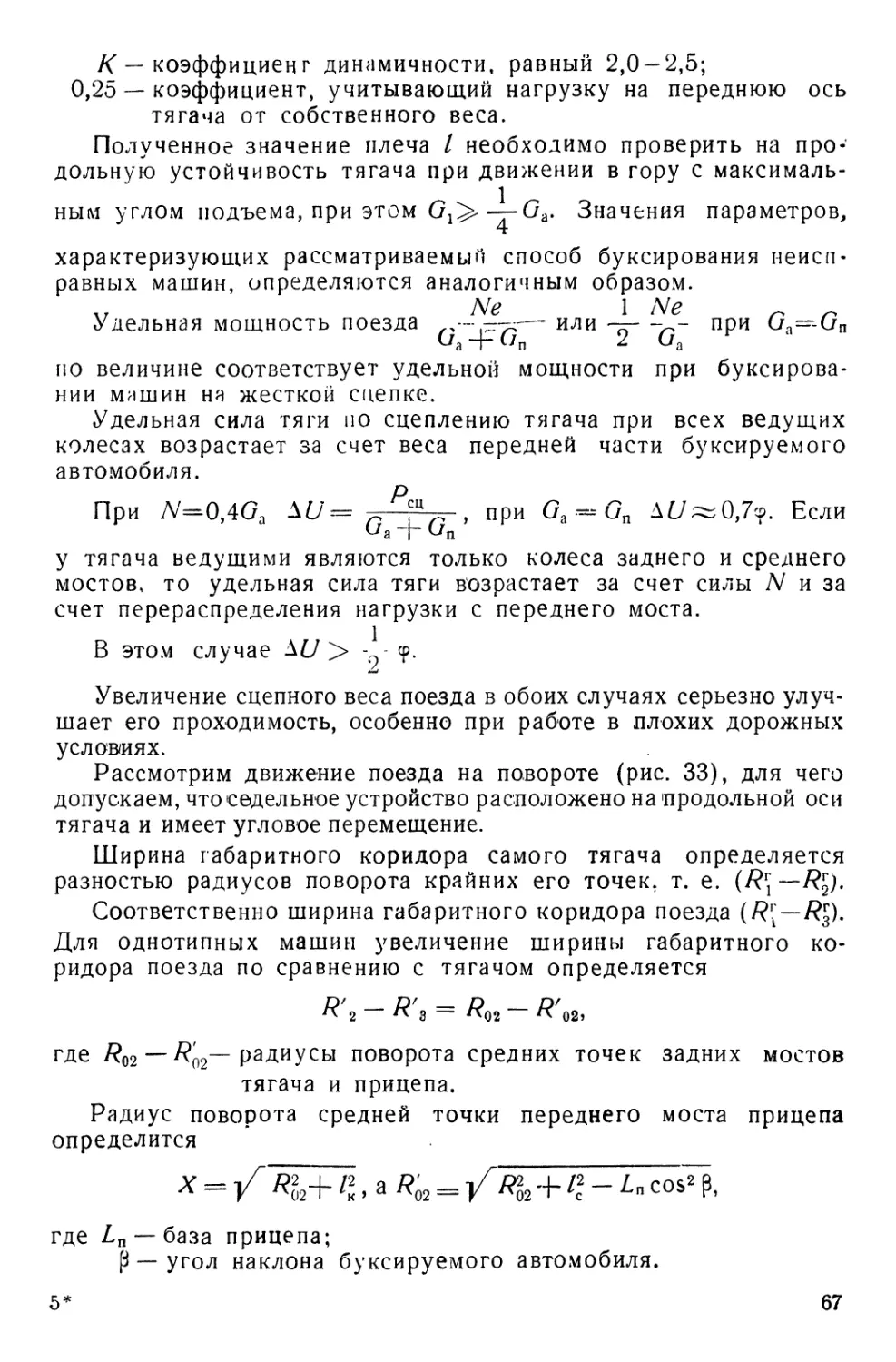
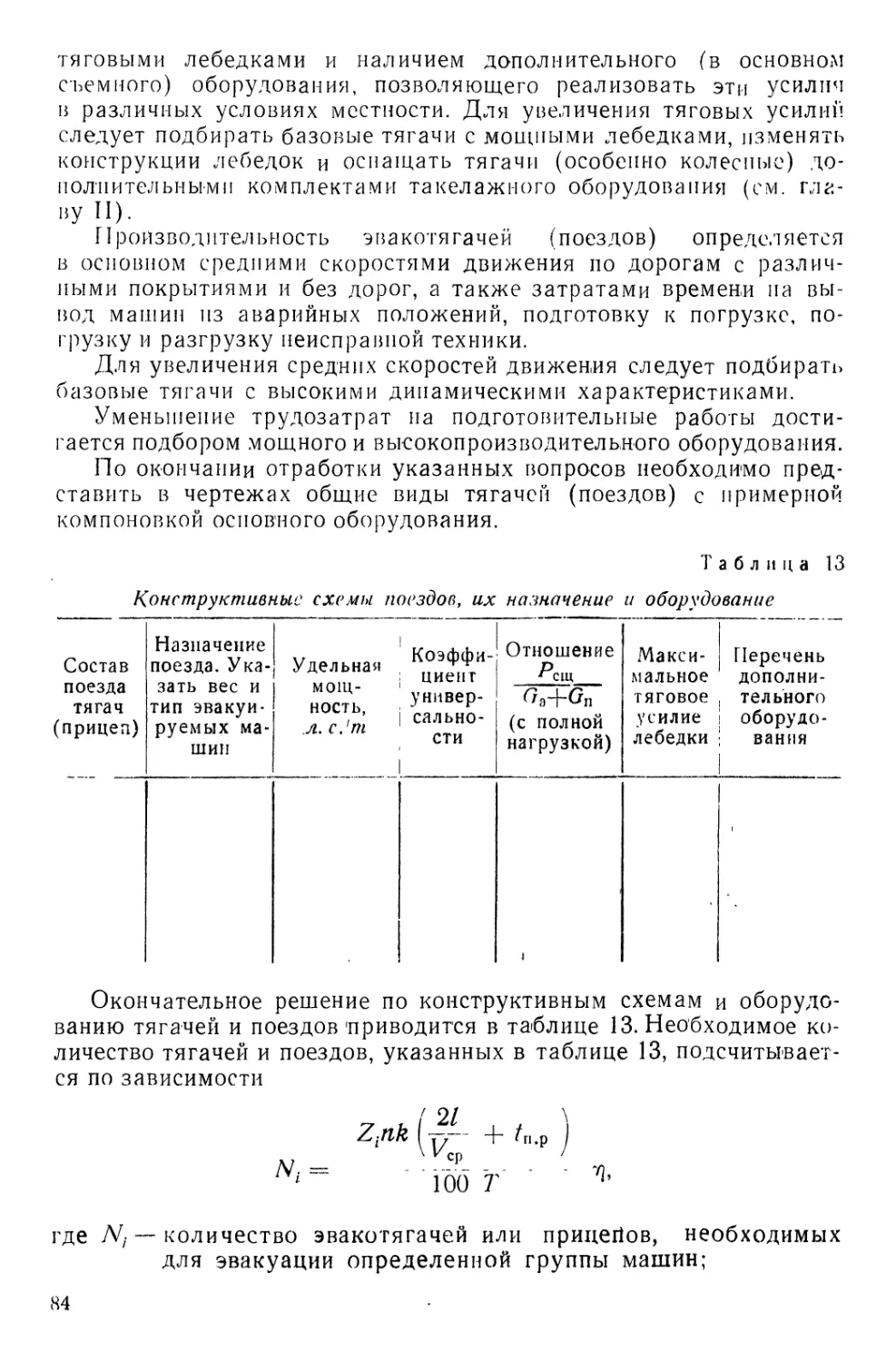
Рис. 4. Графическая зависимость
количества эвакуированных ма-
шин от плеча эвакуации.
Работа тягачей по перевозке неисправной техники может оце-
ниваться также произведением количества эвакуированных машин
на среднее плечо эвакуации. Этот параметр, измеряемый в машино-
километрах (ж-кж), дает полное
представление о выполненной рабо-
те. Однако величина его также не-
постоянна. Так, с уменьшением пле-
ча эвакуации возрастает количество
эвакуированных машин, но не про-
порционально, так как увеличивают-
ся потери времени на погрузочно-
разгрузочные работы и уменьшается
количество машинокилометров.
Это наглядно представлено гра-
фической зависимостью между пара
метрами N и L в виде кривой (рис. 4),
напоминающей равнобочную гипер-
болу, отнесенную к асимптотам и
смещенную в сторону оси ON. Дан-
ная зависимость рассчитана по фор-
муле (2) для одного тягача при
Жи.р.в. — 0,75 и 1/ср = 20 км!ч,ас.
14з положения кривой на графике
выводы:
— плечи эвакуации, размещенные
на ось ОЛ, являются наиболее выгодными для работы тягачей, так
как в этом случае значительно возрастает количество эвакуиро-
ванных машин;
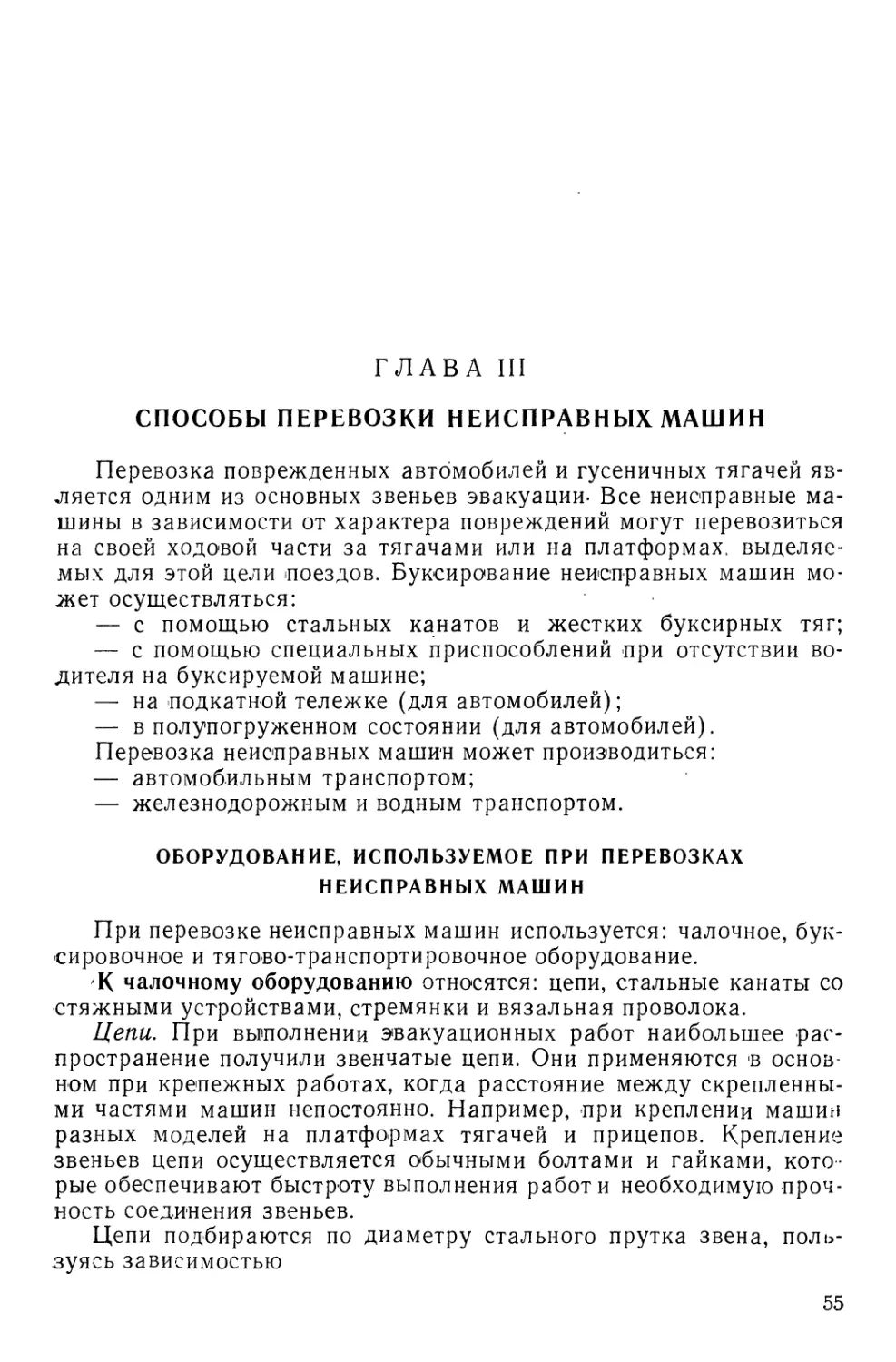
г =12 час., 4.р~0,5 часа,
можно сделать следующие
влево от проекции точки .4
— всемерное сокращение плеч эвакуации в реальных условиях
способствует прогрессивному увеличению числа эвакуированных
машин, особенно при переходе к небольшим плечам эвакуации, по-
этому увеличение £Ср > 25 км следует считать нецелесообразным.
Перевозку поврежденных машин на значительно большие расстоя-
ния следует производить подвижным составом транспортных частей
и автомобильными поездами, позволяющими одновременно грузить
несколько поврежденных машин.
Среднее плечо эвакуации при работе тягачей на реальной мест-
ности может быть подсчитано по формуле
i^K
Лср = .... ZT_°________________ км,
i-~ к
Z--0
(3)
40
где /Vz — количество машин, расположенных в определенном
пункте на местности;
Li — расстояния, на которые следует перевозить указанные
машины;
k — общее количество машин или групп машин на местности.
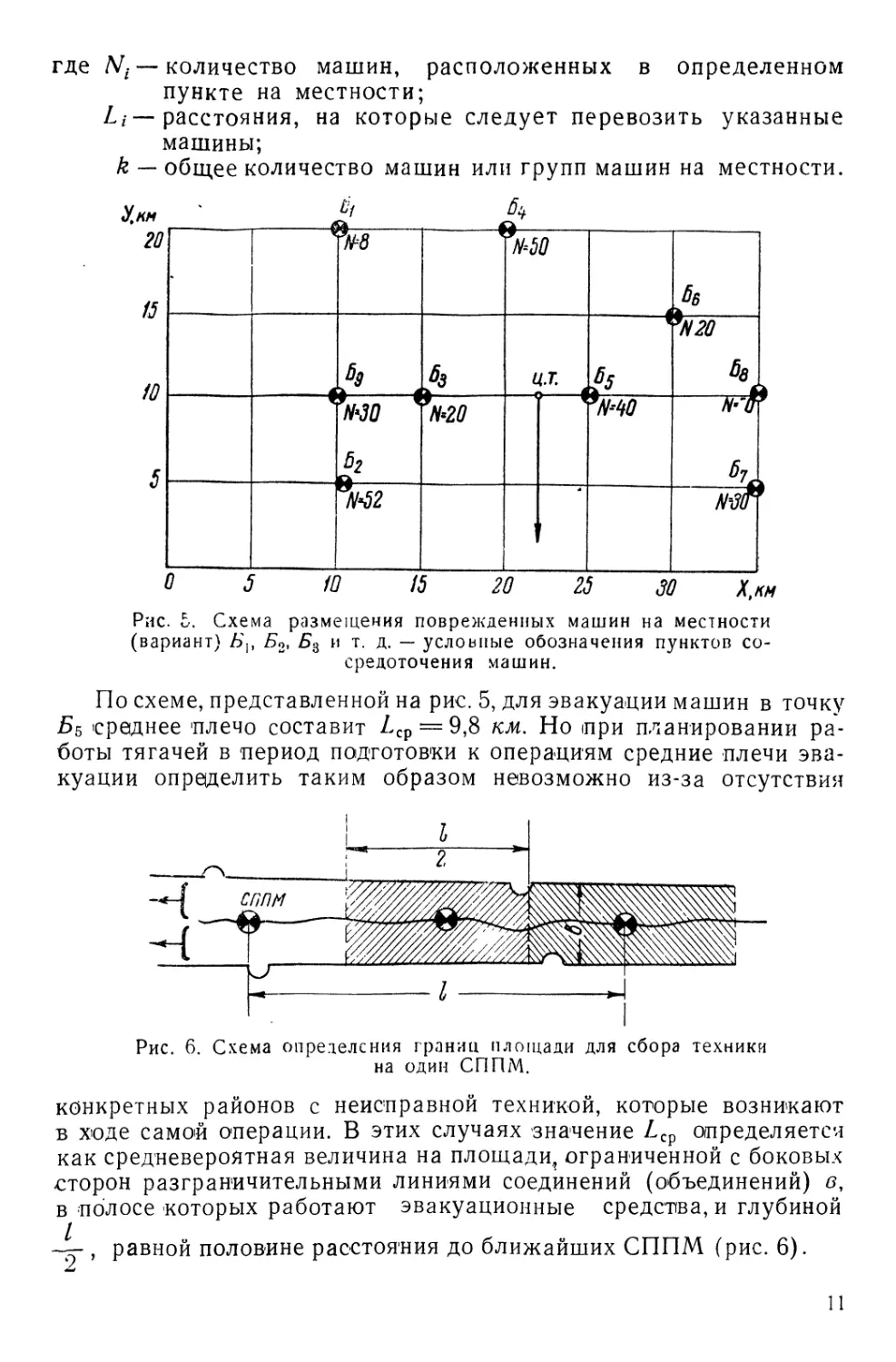
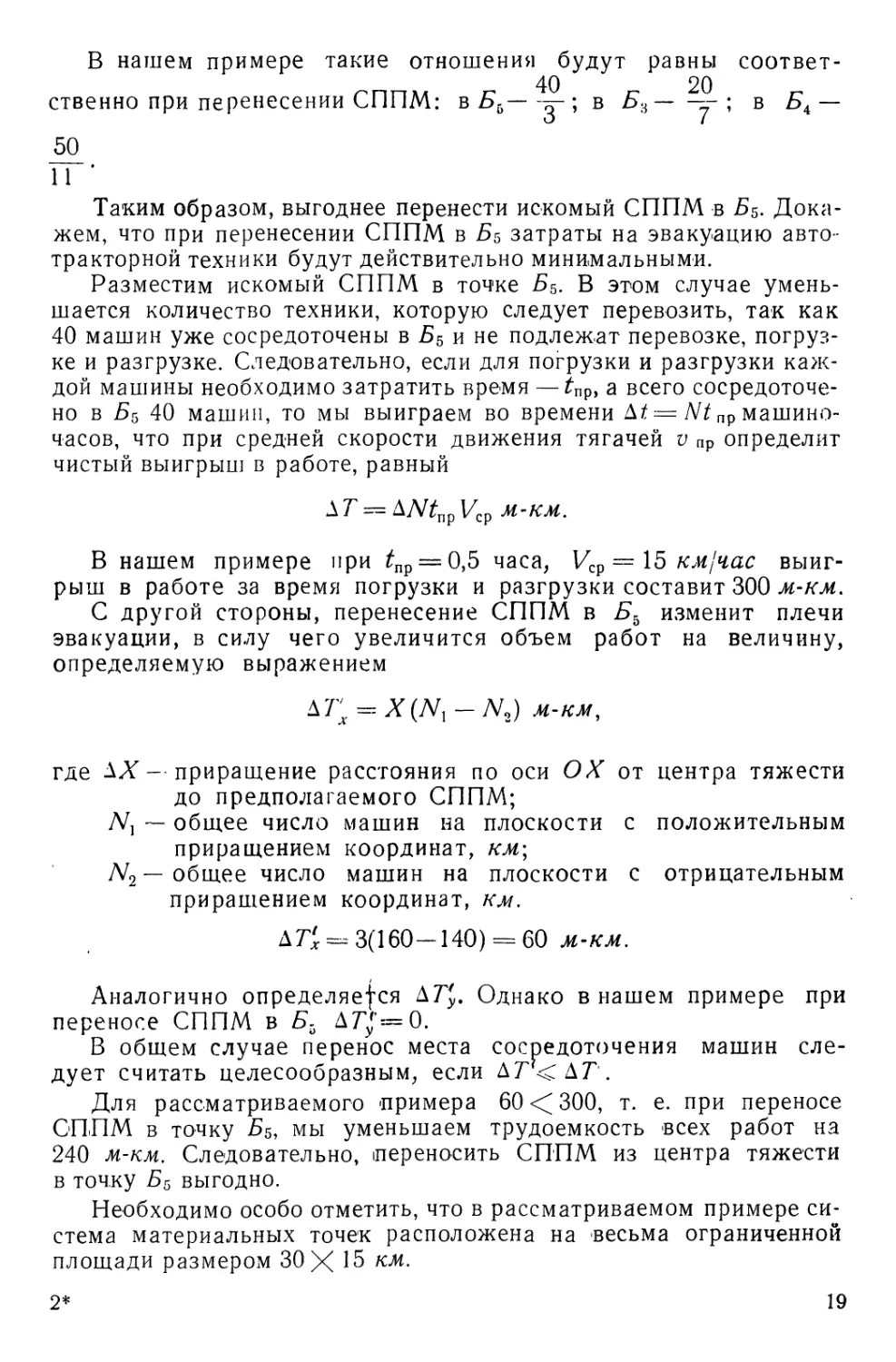
* *№8 ( э MO А 6s ъ
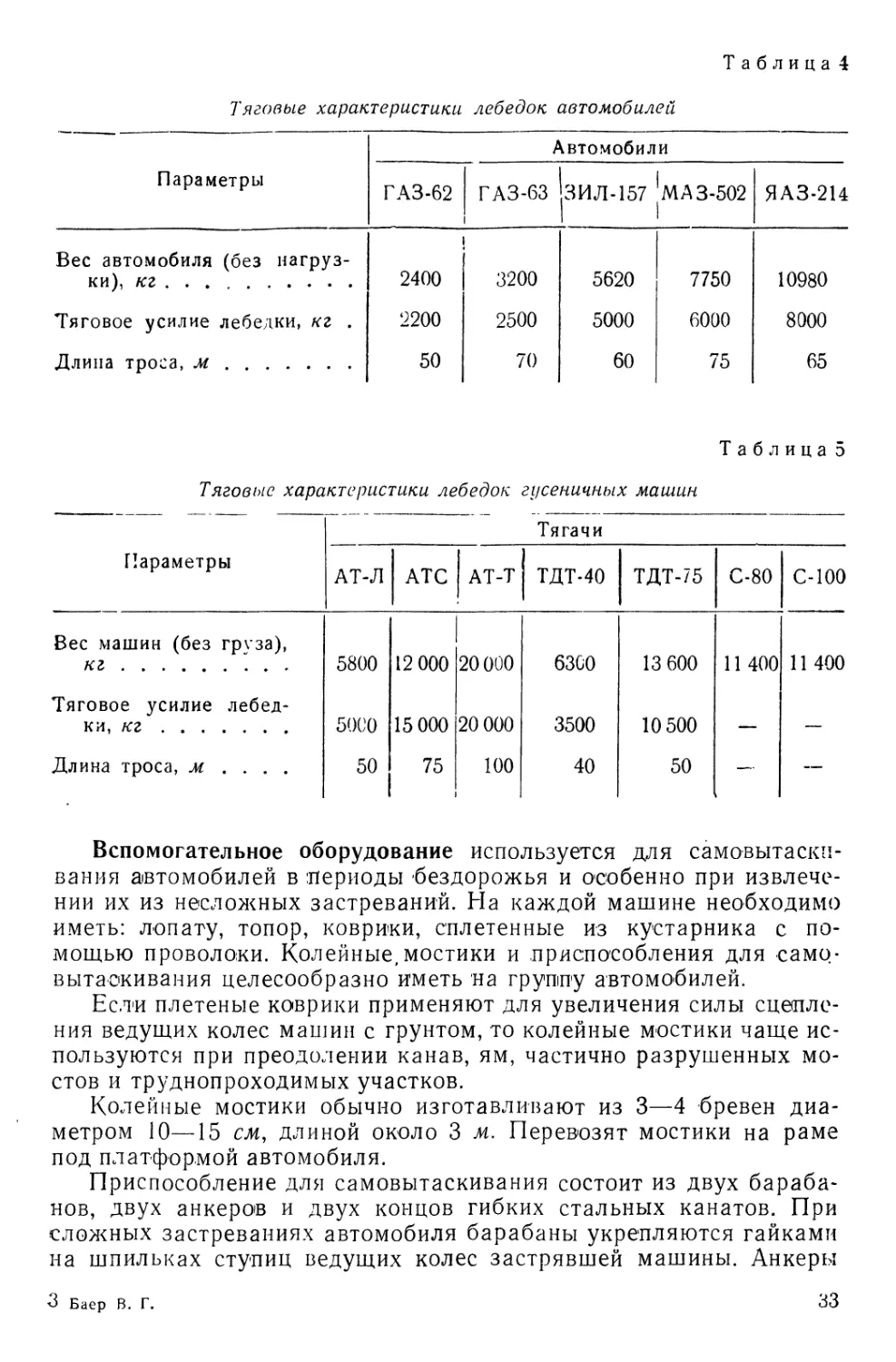
л а.т. л 1 бв
— й N‘20 9N-W 67
^•52 мят
О 5 10 15 20 25 30 Х,км
Рис. 5. Схема размещения поврежденных машин на местности
(вариант) Б}, Б2, 53 и т. д. — условные обозначения пунктов со-
средоточения машин.
По схеме, представленной на рис. 5, для эвакуации машин в точку
Б5 среднее плечо составит Z,cp = 9,8 км, Но при планировании ра-
боты тягачей в период подготовки к операциям средние плечи эва-
куации определить таким образом невозможно из-за отсутствия
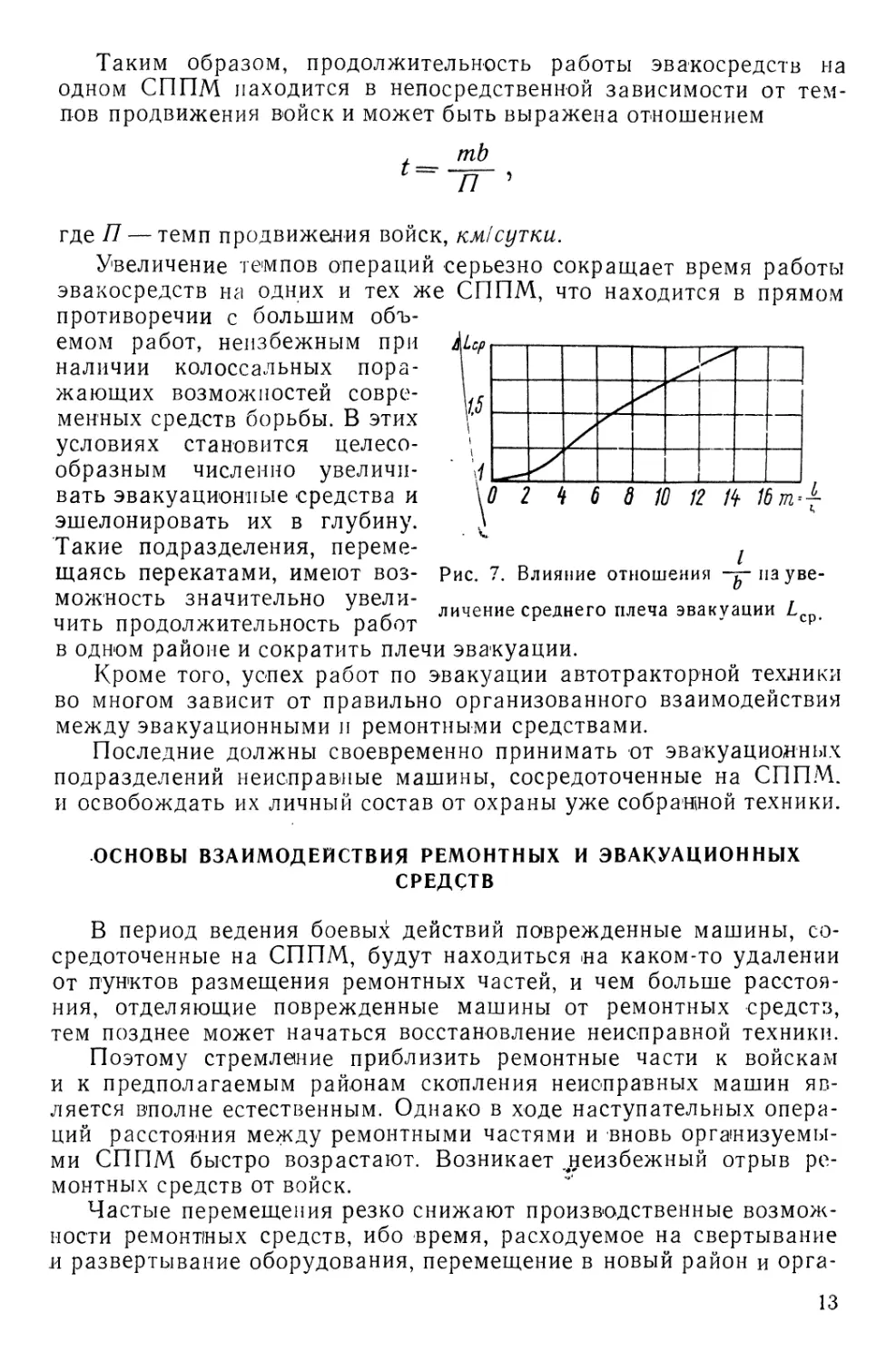
Рис. 6. Схема определения границ площади для сбора техники
на один СППМ.
конкретных районов с неисправной техникой, которые возникают
в ходе самой операции. В этих случаях значение Лср определяется
как средневероятная величина на площади, ограниченной с боковых
сторон разграничительными линиями соединений (объединений) в,
в полосе которых работают эвакуационные средства, и глубиной
, равной половине расстояния до ближайших СППМ (рис. 6).
11
Среднее плечо эвакуации определится как
А Ср & км.
Для случая, рассмотренного на рис. 5, величина Лср = 10 км.
Значение среднего плеча эвакуации, определенного ранее с уче-
том реального размещения техники (Аср = 9,8 км), и значение
Z/cp, определенного по площади как средневероятная величина
(Z/cp=10 км), весьма близки по значению, поэтому для прак-
тических расчетов можно принять
^Ср ' ' ср’
При обеспечении боевых действий войск эвакуационные части
(подразделения) принято направлять за конкретными соединения-
ми и объединениями. Поэтому ширина полосы эвакуации в опреде-
ляется расстоянием между разграничительными линиями соответст-
вующих соединений и объединений, а расстояния между смежными
СППМ выбираются, исходя из целесообразных плеч эвакуации
и времени, необходимого для сосредоточения поврежденной техни-
ТЛ rk 1 ' lf b I у
ки. Из формулы L ср = ——если-g-= 7 , видно, что при увели-
чении Г быстро возрастают плечи эвакуации и снижаются произ-
водственные возможности эвакотягачей.
Для определения оптимального значения суммы (Z'-f-ft) про-
изведем сравнение равновеликих площадей квадрата площадью
а2 и прямоугольника со сторонами I' и Ь.
Обозначим 4- — т, b = и Sr—> = S ] = а2 = Z'2—— *
b т т
тогда
ААср = , (3'>
у т
где ДЛСр “ относительное приращение среднего плеча эвакуации.
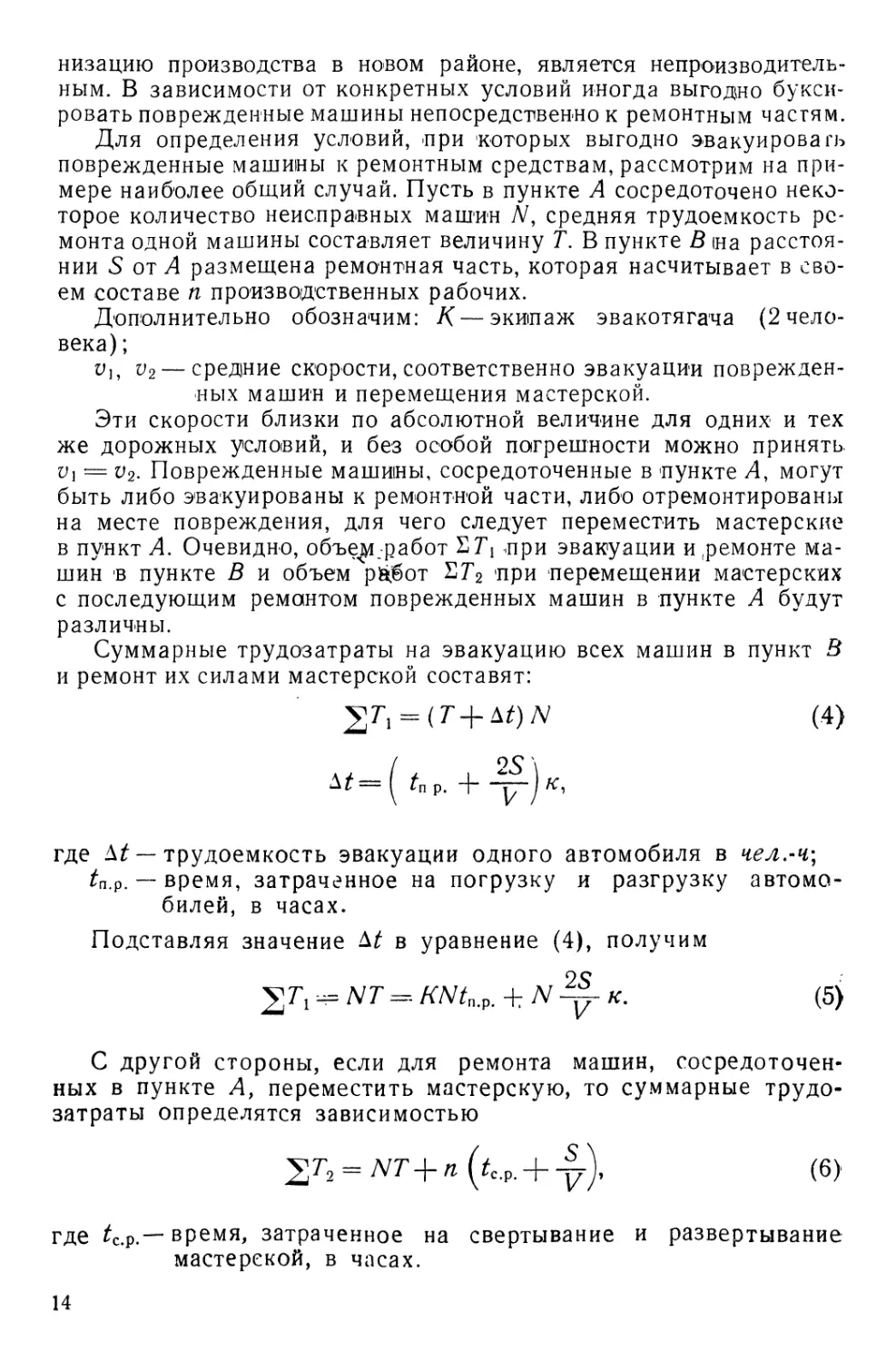
В уравнении (3х), давая, различные значения т, построим гра-
фик (рис. 7), из которого видно, что увеличение отношения силь-
но влияет на среднее плечо эвакуации. Минимальное значение Лср
будет в случае, если/'но выдержать это условие при обеспече-
нии наступательной операции не всегда возможно, поэтому перио-
дические возрастания величины т = 2—3 следует считать неизбеж-
ными и вполне допустимыми. При дальнейшем увеличении т ста-
новится целесообразным организовать новый СППМ.
Г2
Таким образом, продолжительность работы эвакосредств на
одном СППМ находится в непосредственной зависимости от тем-
пов продвижения войск и может быть выражена отношением
._ mb
~ТГ '
где П — темп продвижения войск, км!сутки.
Увеличение темпов операций серьезно сокращает время работы
эвакосредств на одних и тех же СППМ, что находится в прямом
противоречии с большим объ-
емом работ, неизбежным при
наличии колоссальных пора-
жающих возможностей совре-
менных средств борьбы. В этих
условиях становится целесо-
образным численно увеличи-
вать эвакуационные средства и
эшелонировать их в глубину.
Такие подразделения, переме-
щаясь перекатами, имеют воз-
можность значительно увели-
чить продолжительность работ
Рис. 7. Влияние отношения -у- на уве-
личение среднего плеча эвакуации Аср<
в одном районе и сократить плечи эвакуации.
Кроме того, успех работ по эвакуации автотракторной техники
во многом зависит от правильно организованного взаимодействия
между эвакуационными и ремонтными средствами.
Последние должны своевременно принимать от эвакуационных
подразделений неисправные машины, сосредоточенные на СППМ.
и освобождать их личный состав от охраны уже собранной техники.
ОСНОВЫ ВЗАИМОДЕЙСТВИЯ РЕМОНТНЫХ И ЭВАКУАЦИОННЫХ
СРЕДСТВ
В период ведения боевых действий поврежденные машины, со-
средоточенные на СППМ, будут находиться на каком-то удалении
от пунктов размещения ремонтных частей, и чем больше расстоя-
ния, отделяющие поврежденные машины от ремонтных средств,
тем позднее может начаться восстановление неисправной техники.
Поэтому стремление приблизить ремонтные части к войскам
и к предполагаемым районам скопления неисправных машин яв-
ляется вполне естественным. Однако в ходе наступательных опера-
ций расстояния между ремонтными частями и вновь организуемы-
ми СППМ быстро возрастают. Возникает ^неизбежный отрыв ре-
монтных средств от войск.
Частые перемещения резко снижают производственные возмож-
ности ремонтных средств, ибо время, расходуемое на свертывание
и развертывание оборудования, перемещение в новый район и орга-
13
низацию производства в новом районе, является непроизводитель-
ным. В зависимости от конкретных условий иногда выгодно букси-
ровать поврежденные машины непосредственно к ремонтным частям.
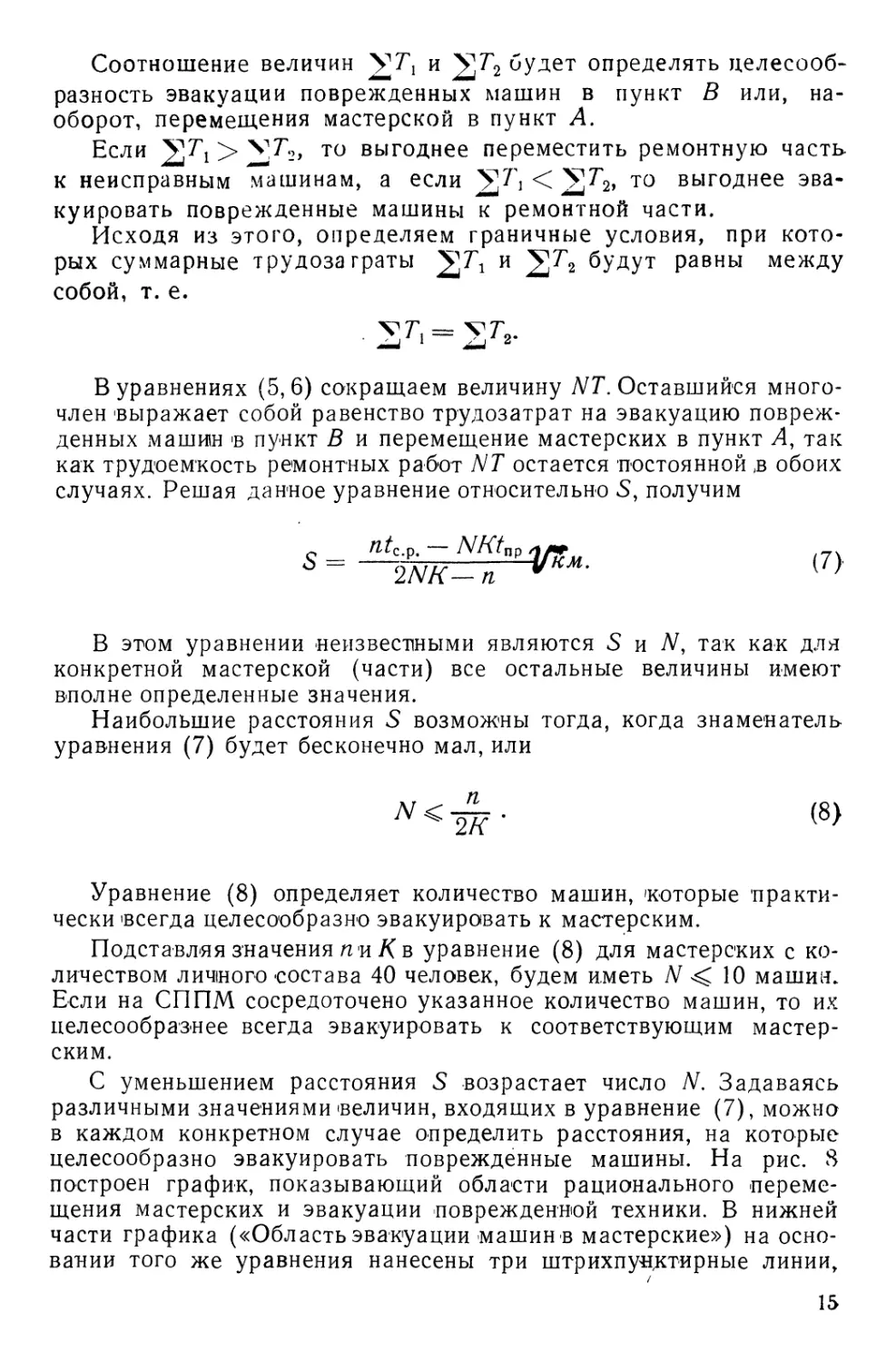
Для определения условий, при которых выгодно эвакуировать
поврежденные машины к ремонтным средствам, рассмотрим на при-
мере наиболее общий случай. Пусть в пункте А сосредоточено неко-
торое количество неисправных машин N, средняя трудоемкость ре-
монта одной машины составляет величину Т. В пункте Виа расстоя-
нии S от А размещена ремонтная часть, которая насчитывает в сво-
ем составе п производственных рабочих.
Дополнительно обозначим: К — экипаж эвакотягача (2 чело-
века) ;
У], v2— средние скорости, соответственно эвакуации поврежден-
ных машин и перемещения мастерской.
Эти скорости близки по абсолютной величине для одних и тех
же дорожных усло<вий, и без особой погрешности можно принять
Vi = v2. Поврежденные машины, сосредоточенные в пункте А, могут
быть либо эвакуированы к ремонтной части, либо отремонтированы
на месте повреждения, для чего следует переместить мастерские
в пункт А. Очевидно, объщд.работ при эвакуации и ремонте ма-
шин в пункте В и объем р^бот ^Т2 при перемещении мастерских
с последующим ремонтом поврежденных машин в пункте А будут
различны.
Суммарные трудозатраты на эвакуацию всех машин в пункт В
и ремонт их силами мастерской составят:
27'1 = (7'+Д0Л/ (4)
(\Р. 4- -у-)^
где Nt — трудоемкость эвакуации одного автомобиля в чел.-%
tn.p. — время, затраченное на погрузку и разгрузку автомо-
билей, в часах.
Подставляя значение kt в уравнение (4), получим
ос
2Л - NT - KNtn.p. + N~K. (5)
С другой стороны, если для ремонта машин, сосредоточен-
ных в пункте А, переместить мастерскую, то суммарные трудо-
затраты определятся зависимостью
2^ = ^+«(^.р. + 4)’ (в)
где Л:.р.— время, затраченное на свертывание и развертывание
мастерской, в часах.
14
Соотношение величин и будет определять целесооб-
разность эвакуации поврежденных машин в пункт В или, на-
оборот, перемещения мастерской в пункт А.
Если то выгоднее переместить ремонтную часть
к неисправным машинам, а если <2^2» то выгоднее эва-
куировать поврежденные машины к ремонтной части.
Исходя из этого, определяем граничные условия, при кото-
рых суммарные трудозатраты и 2Л будут равны между
собой, т. е.
. V72.
В уравнениях (5, 6) сокращаем величину NT. Оставшийся много-
член выражает собой равенство трудозатрат на эвакуацию повреж-
денных машин в пункт В и перемещение мастерских в пункт А, так
как трудоемкость ремонтных работ NT остается постоянной в обоих
случаях. Решая данное уравнение относительно 3, получим
3 = (7)
В этом уравнении неизвестными являются 3 и N, так как для
конкретной мастерской (части) все остальные величины имеют
вполне определенные значения.
Наибольшие расстояния 3 возможны тогда, когда знаменатель
уравнения (7) будет бесконечно мал, или
(8)
Уравнение (8) определяет количество машин, которые практи-
чески всегда целесообразно эвакуировать к мастерским.
Подставляя значения п и К в уравнение (8) для мастерских с ко-
личеством личного -состава 40 человек, будем иметь N < 10 машин.
Если на СППМ сосредоточено указанное количество машин, то их
целесообразнее всегда эвакуировать к соответствующим мастер-
ским.
С уменьшением расстояния 3 возрастает число N. Задаваясь
различными значениями величин, входящих в уравнение (7), можно
в каждом конкретном случае определить расстояния, на которые
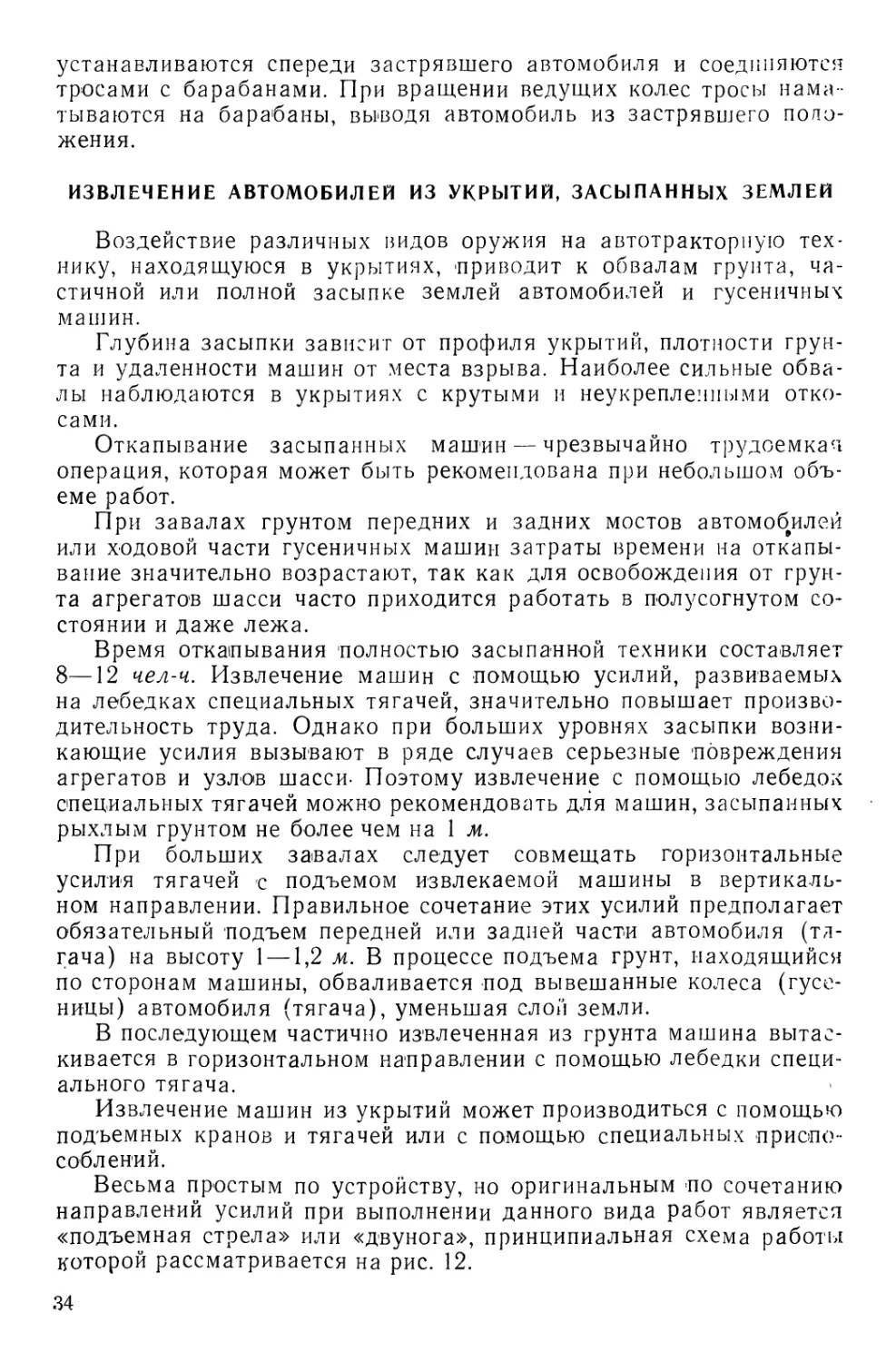
целесообразно эвакуировать поврежденные машины. На рис. 8
построен график, показывающий области рационального переме-
щения мастерских и эвакуации поврежденной техники. В нижней
части графика («Область эвакуации машин в мастерские») на осно-
вании того же уравнения нанесены три штрихпун,ктирные линии,
определяющие состав выездных бригад соответственно в 10, 20,
30 человек.
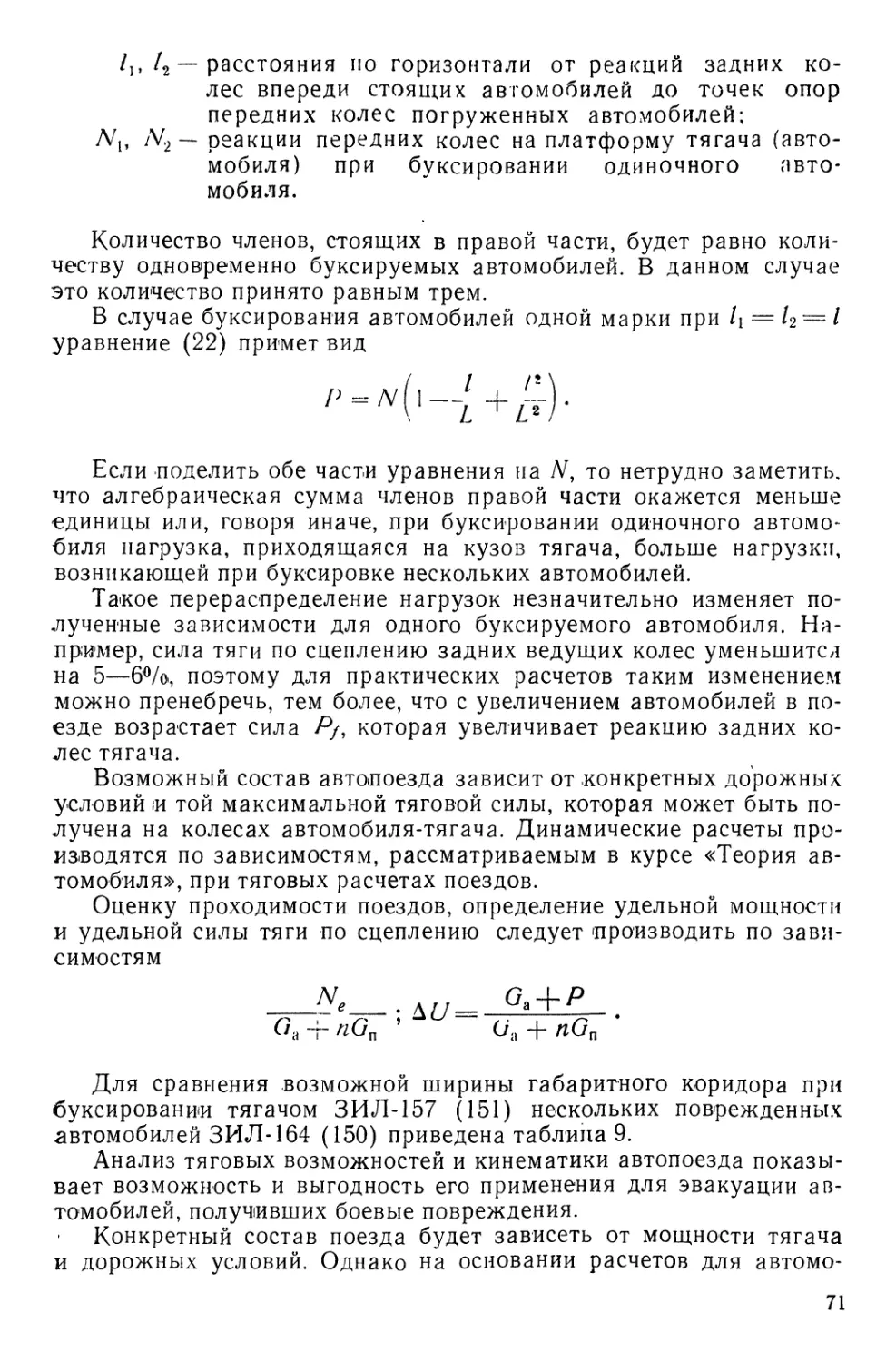
Пользуясь графиком, решим несколько примеров.
Пример 1. По сведениям технической разведки известно, чго
на СППМ, удаленном от данной ремонтной мастерской на расстоя-
нии 50 км, сосредоточено
20 автомобилей, подлежа-
щих текущему ремонту. Не-
обходимо определить, следу-
ет ли перемещать ремонтные
мастерские.
Пользуясь графиком, на-
ходим точку А, лежащую на
пересечении координат, име-
ющих соответственно значе-
ния 50 км и 20 автомобилей.
Точка Л лежит над кривыми,
т. е. в области наивыгодней-
Рис. 8. График для определения усло-
вии использовавия ремонтно-эвакуаци-
онных средств:
/—при скорости движения 25 км/час; 2 —при ско-
рости движения 20 км/час; 3—при скорости дви-
жения 15 км/час.
ной мастерской на расстоянии 80 к.
ных машин, подлежащих текущему
шего перемещения мастер-
ских. Следовательно, в дан-
ном случае мастерскую вы-
годно перемещать к повреж-
денным автомобилям.
Пример 2. .В пункте В.
удаленном от данной ремонт-
', сосредоточено 8 поврежден-
ремонту. Необходимо опреде-
лить целесообразность перемещения мастерских.
Пользуясь графиком, находим точку В, которая лежит на пере-
сечении координат, имеющих значения соответственно 80 км и 8 ма-
шин. Эта точка лежит ниже кривых в границах «области эвакуа-
ции машин в мастерские». Следовательно, необходимо эвакуиро-
вать машины в мастерскую или высылать выездную бригаду. Со-
гласно тому же графику наивыгоднейший состав выездной бригады
для 8 поврежденных машин должен быть не более 30 человек. При
меньшем составе бригады будут меньшие потери рабочего времени,
.затраченного личным составом на перемещение.
Кривые, изображенные на графике, составлены для конкретных
мастерских при п ==40 человек. Однако, пользуясь зависимостью
(7), можно составить подобный график для любой ремонтной ма-
стерской (части). При хорошо организованной погрузке и разгрузке
поврежденных машин во время эвакуации и при наличии специа-
лизированных эвакотягачей, позволяющих буксировать поврежден-
ные автомобили без водителей, экипаж эвакотягача может состоять
из одного человека.
В этом случае график изменится и область эвакуации автотрак-
торной техники увеличится.
16
МАТЕМАТИЧЕСКИЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
ПО СОСРЕДОТОЧЕНИЮ АВТОТРАКТОРНОЙ ТЕХНИКИ
Успех организации эвакуации поврежденных машин в войско-
вом и оперативном тылу во многом зависит от быстрого выбора
оптимального решения, обеспечивающего выполнение поставленных
задач в кратчайшие сроки и с наименьшими трудозатратами.
При большом количестве поврежденных машин, рассредоточен-
ных на множестве мелких СППМ, выбор такого решения весьма
затруднен, а применение обычных методов решения не позволяет
учесть всех возможных вариантов и принять оптимальный из них.
В этих случаях существенную помощь могут оказать математиче-
ские методы линейного программирования, с помощью которых мо-
гут решаться следующие задачи:
— выбор рационального места размещения СППМ (ВПС) при
эвакуации автотракторной техники из района (площади) или с пер-
вичных СППМ;
— определение минимальных трудозатрат при сосредоточении
автотракторной техники в несколько адресатов;
— выбор оптимального варианта при распределении автотрак-
торной техники в заданном отношении.
Выбор места размещения СППМ должен производиться исходя
из детального анализа обстановки с учетом минимальных затрат
сил и средств па сосредоточение неисправной техники.
В реальных условиях организация первичных СППМ по месту
и времени часто будет носить случайный характер, ибо трудно пред-
видеть заранее, где и когда противник нанесет прицельный удар.
Очевидно, первичные СППМ будут организовываться в районах
с наибольшим скоплением поврежденных машин, так как в этом
случае следует ожидать меньших трудозатрат на сосредоточение не-
исправной техники.
Эвакуационные части, работая в оперативном тылу, будут встре-
чать большое число уже организованных небольших СППМ, а так-
же очаги атомных взрывов, из которых техника не была эвакуиро-
вана из-за высокой радиоактивности, недостатка средств и т. д.
В такой обстановке эвакуационные части должны так выбрать
районы размещения СППМ, чтобы трудозатраты на сосредоточение
всей неисправной техники с заданных площадей были минималь-
ными.
Область применения электронно-вычислительных машин для ре-
шения вопросов эвакуации весьма ограничена, так как решение
таких задач практически будет производиться в батальоне и роте,
где электронно-вычислитильная техника, конечно, будет отсутство-
вать. Очевидно, в этом звене наибольшее применение могут найти
математические методы, позволяющие решать различные оператив-
ные задачи в сравнительно короткий срок.
Для выбора места размещения СППМ может быть предложен
метод нахождения центпа тяжести системы материальных точек,
•2 Баер В. Г. 17
расположенных в одной плоскости с последующим уточнением ко-
ординат центра тяжести, исходя из конкретной обстановки.
При организации эвакуации на местности с широкой сетью авто-
мобильных дорог совокупность СППМ целесообразно рассматри-
вать как систему материальных точек на плоскости. При наличии
всего 1—3 дорог в полосе работы эвакосредств все СППМ могу г
рассматриваться, как линейная система материальных точек. В этом
случае исходные СППМ проектируются на одну ось с точным со-
блюдением расстояний и определяется центр тяжести линейной
системы.
Рассмотрим наиболее общий случай, т. е. систему материальных
точек на плоскости (при наличии развитой сети дорог). На схеме
(рис. 5) или рабочей карте обычно обозначаются районы сосредо-
точения неисправной техники с указанием количества находящихся
на них машин.
Такие данные командир эвакочасти получает в штабе вышестоя-
щего начальника или в результате технической разведки, органи-
зуемой с указанной целью. После получения и нанесения данны.’Г
на карту следует провести оси координат по границам района эва-
куации и определить координаты центра тяжести материальных то-
чек по зависимостям:
/=-1 /=1
В приведенных формулах знаменатели определяют сумму
всех поврежденных машин, сосредоточенных на рассматриваемой
1==к 1—к
территории, а выражения V NtXi \ V YiNi являются статическими
/=1 /-==1
моментами плоской материальной системы соответственно отно-
сительно осей OY и ОХ.
Для рассматриваемой схемы (рис. 5) координаты центра тя-
жести материальных точек будут равны X с = 22 км\ Ус= 10 км.
Расчетные координаты центра тяжести, как правило, не совпадают
ни с одним СППМ, поэтому трудоемкость работ по сосредоточению
всей техники в центр тяжести может не быть минимальна.
В решении мы не учли время на погрузку и разгрузку техники,
поэтому .перейдем ко второму этапу решения, сущность которого
заключается в том, что размещаем искомый СППМ на одном из су-
ществующих и расположенных вблизи центра тяжести. Таких
СППМ может быть 2—4, из которых нужно выбрать один.
Для этого следует найти максимальное отношение количества
неисправных машин, сосредоточенных на СППМ, на расстояние до
центра тяжести материальных точек.
18
В нашем примере такие отношения будут равны соответ-
40 20
ственно при перенесении СППМ: в Бь—; в 2>3-------; в Б± —
о /
50
11 '
Таким образом, выгоднее перенести искомый СППМ в Б^. Дока-
жем, что при перенесении СППМ в £5 затраты на эвакуацию авто-
тракторной техники будут действительно минимальными.
Разместим искомый СППМ в точке Бь. В этом случае умень-
шается количество техники, которую следует перевозить, так как
40 машин уже сосредоточены в Б5 и не подлежат перевозке, погруз-
ке и разгрузке. Следовательно, если для погрузки и разгрузки каж-
дой машины необходимо затратить время —£Пр, а всего сосредоточе-
но в Б5 40 машин, то мы выиграем во времени М — Nt пр машино-
часов, что при средней скорости движения тягачей v пр определит
чистый выигрыш в работе, равный
АГ = ДМирУср м-км.
В нашем примере при £пр = 0,5 часа, 1/ср = 15 KM^ac выиг-
рыш в работе за время погрузки и разгрузки составит 300 м-км.
С другой стороны, перенесение СППМ в Бъ изменит плечи
эвакуации, в силу чего увеличится объем работ на величину,
определяемую выражением
\Гх — Х(Nx — N2) м-км,
где АХ - приращение расстояния по оси ОХ от центра тяжести
до предполагаемого СППМ;
N} ~ общее число машин на плоскости с положительным
приращением координат, км-,
общее число машин на плоскости с отрицательным
приращением координат, км.
471 = 3(160-140) = 60 м-км.
Аналогично определяемая 47^. Однако в нашем примере при
переносе СППМ в Б-с 471=0.
В общем случае перенос места сосредоточения машин сле-
дует считать целесообразным, если 4Г?<4Г.
Для рассматриваемого примера 60 X 300, т. е. при переносе
СППМ в точку £>5, мы уменьшаем трудоемкость всех работ на
240 м-км. Следовательно, переносить СППМ из центра тяжести
в точку Т>5 выгодно.
Необходимо особо отметить, что в рассматриваемом примере си-
стема материальных точек расположена на весьма ограниченной
площади размером 30 X 15 км.
2*
19
В реальных условиях боевой обстановки размеры подобных пло-
щадей будут значительно больше, что неизбежно приведет к про-
порциональному возрастанию дополнительных трудозатрат при не-
правильном выборе района СППМ.
В последние годы при решении транспортных задач широкое
распространение получил распределительный метод линейного про-
граммирования, с помощью которого получают оптимальные реше-
ния задач путем последовательного улучшения начального плана.
Продолжительность решения таких задач зависит от количества
рассматриваемых точек и может составлять значительное время.
В условиях современной войны при постоянно меняющейся об-
становке фактор времени будет иметь большее значение, чем точ-
ность расчетов, поэтому’ для оперативного решения задач, возни-
кающих в боевой обстановке, более применим упрощенный метон'
линейного программирования. С помощью указанного метода при
решении транспортных задач удается получить результаты, весьма
близкие к оптимальным за более короткое время.
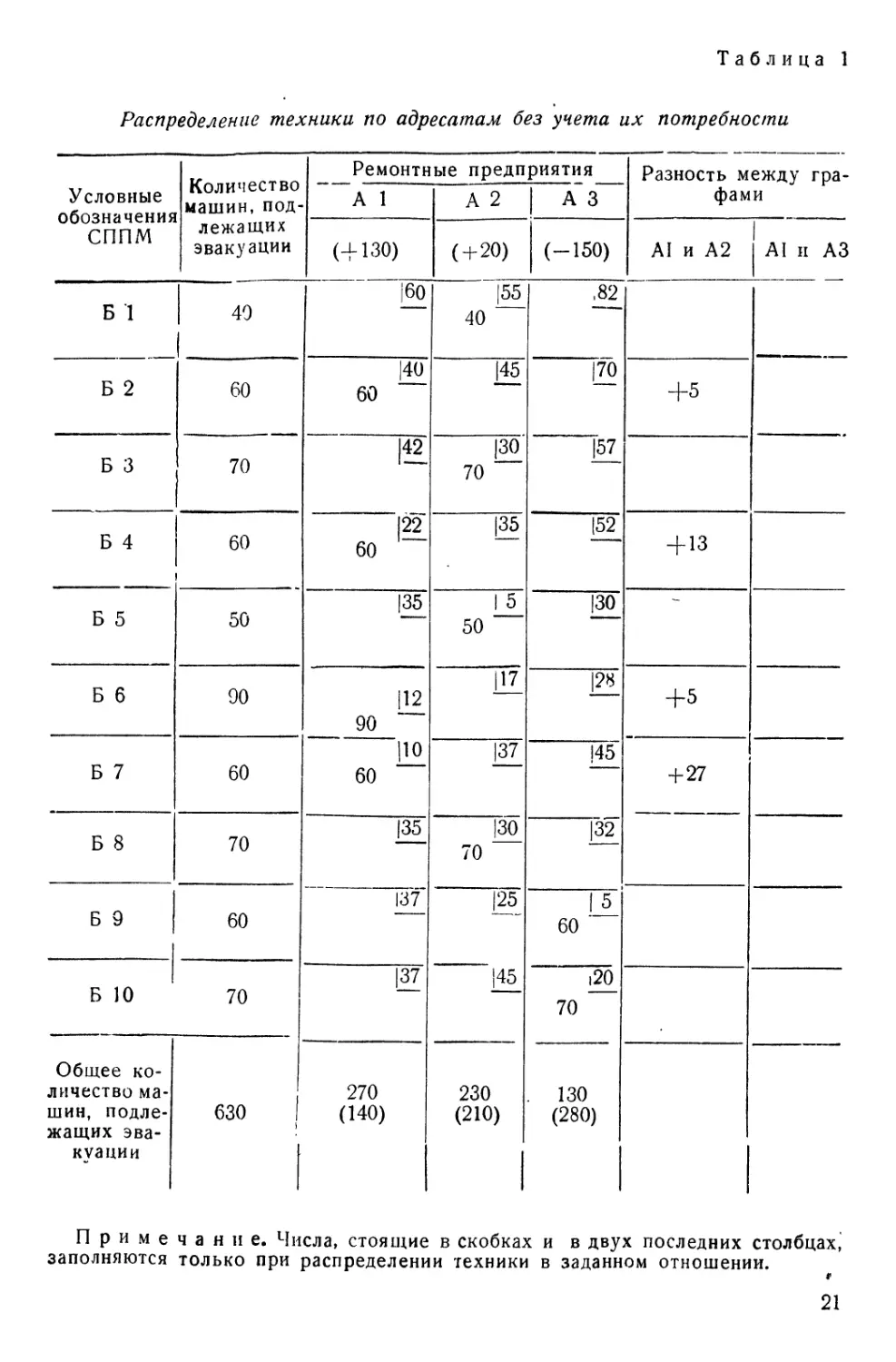
Начальная стадия решения всех задач состоит в заполнении
специальных таблиц, называемых «матрицами» (таблица 1).
Формы таких таблиц желательно заготавливать заранее и иметь
их при штабе эвакочасти.
В первой графе матрицы записываются условные обозначения
СППМ (Б1, Б2, ВЗ и т. д.), с которых необходимо эвакуировать
технику. Во второй графе указывается количество машин, которые
подлежат эвакуации с каждого СППМ.
В третью, четвертую и последующие графы следует заносить
условные обозначения адресатов. В нашем примере адресатами яв-
ляются ремонтные предприятия или СППМ (Al, А2, АЗ), на кото-
рые нужно сосредоточивать технику.
После подготовки таблицы необходимо вычислить по карте рас-
стояния от адресатов (Al, А2, АЗ) до каждого пункта нахождения
машин (Б1, 02, БЗ) и полученные данные записать в верхнем углу
клеток, соответствующих строки и столбца. Например, расстояние от
А1 до Б1 равно 60 км. Записываем цифру 60 в верхнем углу квад-
рата, образованного строкой Б1 и графой А1, и отделяем ее скоб-
кой. Таким образом заполняем все клетки. На этом заканчивается
подготовка таблицы к составлению начального плана.
Отработка плана начинается с выбора кратчайшего расстояния
в каждой строке от пунктов, где находится техника (Б1, Б2, БЗ),
до адресатов (Al, А2, АЗ). Закрепляем все неисправные машины
за тем адресатом, расстояние до которого наименьшее.
Так, пункт Б1 расположен ближе всех к ремонтному предприя-
тию А2. Следовательно, запишем все 40 машин в клетке Bl А2.
Далее, пункт Б2 расположен ближе всех к А1. Запишем все 60 ма-
шин в клетке Б2 А1 и т. д.
После того, как все машины будут закреплены за адресатами,
подсчитываем суммарное количество техники в графе каждого ре-
монтного предприятия.
20
Таблица 1
Распределение техники по адресатам без учета их потребности
Условные обозначения СППМ Количество машин, под- лежащих эвакуации Ремонтные предприятия Разность между гра- фами
А 1 А 2 А 3
(4-130) ( + 20) (-150) AI и А2 AI и АЗ
Б 1 49 |6О |55 40 ,82
Б 2 60 (40 60 (45 |70 +5
Б 3 70 |42 |30 70 157
Б 4 60 122 60 |35 |52 + 13
Б 5 50 |35 1 5 50 |30
Б 6 90 112 90 1<7 |28 +5
Б 7 60 ПО 60 |37 145 +27
Б 8 70 |35 |30 70 |32
Б 9 | 60 I37 |25 1 5 60 '
Б 10 । 70 [37 (45 ,20 70
Общее ко- личество ма- шин, подле- жащих эва- куации 630 1 1 270 (140) 230 (2Ю) . 130 (280)
Примечание. Числа, стоящие в скобках
заполняются только при распределении техники
и в двух последних столбцах^
в заданном отношении.
21
Полученный план является оптимальным решением 'поставлен-
ной задачи. Он обеспечивает минимальные трудозатраты на сосре-
доточение неисправной техники в три адресата без учета их потреб-
ностей. В нашем примере общие трудозатраты на эвакуацию всех
машин составят 13 550 м-км.
Для распределения техники в заданном отношении необходимо
перенести избыточное количество машин из 1перегруженных граф
Таблица 2
Распределение техники с учетом потребностей адресатов
Условные обозначения СППМ Количество машин, под- лежащих эвакуации Ремонтные предприятия Разность между графами
А 1 _ + 130 0 А 2 А 3
+20 0 —150 0 AI и А2 AI и АЗ
Б 1 40 60 |60 |55 40 .82 [70 57 1 I52 1 +27
Б 2 Oi ND О О 1 t- । 45 40 >60 4-5 +25
Б 3 70 l4r. |30 70 +27
Б 4 60 |22 60 [35 + 13
Б 5 50 |35 1 | 5 50 1-30 >10 1 4-25
Б 6 90 H2I 10 |17| “1 I ~ 90 > 70 20 >20 |28_ —>70 -->80 +5 +11
Б 7 60 |Ю 60 |37 |45
Б 8 70 |35 |30 70 |32 —70 ! — +2
Б 9 60 |37 • |25 15 60
Б 10 /0 137 |45 |20 70 1
Общее ко- личество машин, под- лежащих эвакуации 630 140 210 280 1 1
22
в недогруженные, для чего в последней строке таблицы необхо-
димо указать количество техники, потребное для каждого адресата
(140, 210 и 280).
Вначале следует определить разности между суммарными ко-
личествами машин, закрепленных за каждым ремонтным предприя-
тием, и их потребностями. Полученные результаты заносят по гра-
фам в верхние клетки, расположенные под условным обозначением
адресатов. Избыточное количество закрепленных машин дает по-
ложительную разность, а недостаток — отрицательную.
Алгебраическая сумма цифр в клетках разности должна быть
равна нулю. В нашем примере адресат А1 оказался наиболее пере-
груженным (+130), а адресат АЗ — недогруженным (—150).
Далее рассматриваем только те строки, загрузка которых нахо-
дится в наиболее перегруженной графе А1. Определяем разность
расстояний в строках в начале между клетками граф А1 и А2. Ре-
зультаты вычислений записываем в предпоследний столбец Al, А2.
После определения разности расстояний для всех загруженных
клеток графы А1 подбираем минимальные приращения расстояний,
помещенных в столбце (1—2). Такими величинами будут +5
в строках Б2 и Б6. Перенесем 60 машин из клетки Б2 А1 в клетку
Б2 А2. После указанной операции из графы А1 необходимо еще
убрать 70 машин. Эти машины перемещаем из квадрата Б6 А1
в квадрат Б6 А2. В процессе обоих переносов мы увеличили для
перенесенной техники расстояние эвакуации на 5 км.
В графе А1 осталось точно заданное количество машин. Пере-
нос избыточного количества машин от адресата А2 к соседнему
адресату АЗ и т. д. производится с соблюдением описанной выше
поеледовательности.
Распределение техники по' адресатам в заданном отношении
означает окончание 1-го этапа решения матрицы. Представленный
план близок к оптимальному и в ряде случаев может быть принят
окончательным. Трудоемкость работ по сосредоточению всей тех-
ники составляет 15 500 м-км.
Дальнейшее уменьшение трудозатрат определяется вторым эта-
пом решения, сущность которого заключается в том, что в состав-
ленном плане отыскиваем потенциальные загруженные клетки, име-
ющие максимальное отрицательное приращение расстояний
в сравнении с незагруженными клетками строки. Такой клеткой
в нашем плане является Б5 АЗ (—25). Перенос машин из клетки
Б5 АЗ в Б5 А2 может сократить плечо эвакуации до 25 км. Для
того, чтобы осуществить указанное сокращение, необходимо пере-
нести такое же количество машин из А2 в АЗ. Только тогда сохра-
нится заданное распределение. Однако разность расстояния между
загруженными клетками А2 с соседними по строке клетками АЗ
равна или больше 25 км. В таких случаях производят двойной пе-
ренос, т. е. находят минимальную разность расстояний в строках
между загруженными клетками графы А1 и клетками АЗ. Такой
строкой является Б6. Переместим загрузку клетки Б6 А1 в Б6 А2
23
и для того, чтобы не нарушить достигнутого распределения, переме-
стим такое же количество машин из Б2 А2 в Б2 А1 (обозначено
пунктиром в табл. 2). Произведенный перенос не влияет на среднее
плечо эвакуации, так как три первом переносе мы уменьшили рас-
стояние на 5 км, а при втором увеличили на 5 км. Сейчас разность
расстояний между Б6 А2 и Б6 АЗ составляет + 11 км, а между Б5 АЗ
и Б5 А2 минус 25 км.
При повторном переносе мы имеем возможность сократить плечо
эвакуации для 10 машин на 14 км (перенос обозначен пунктиром,
в табл. 2).
Дальнейшее изучение плана показывает, что сделать больше по-
добных преобразований не представляется возможным. На этом
решение задачи заканчивается. Общие трудозатраты на сосредо-
точение всей техники составят 15 420 м-км.
На основании полученных данных командир эвакочасти распре-
деляет силы и средства и ставит конкретные задачи эвакоподраз-
делениям. Следует отметить, что в основу решения данной матрицы
были положены расстояния между СППМ и ремонтными предприя-
тиями, что вполне справедливо для сравнительно одинаковых до-
рожных условий. При больших различиях в состоянии дорог и в ско-
ростях движения основным параметром для сравнения может быть,
время движения, как частное от деления расстояний на скорости
движения по конкретным дорогам.
ГЛАВА II
ВЫВОД МАШИН ИЗ АВАРИЙНЫХ ПОЛОЖЕНИЙ
В ходе боевых действий автотракторная техника может выйти:
из строя, находясь в самых различных условиях местности. Весьма
часто для размещения автомобилей и тягачей будут использоваться
овраги, рвы, воронки, лес и другие естественные и искусственные
укрытия. Кроме того, ударной волной может сбросить машину с до-
роги на труднодоступный участок местности (болото, реку, овраг)
а использование боевых и строевых машин вне дорог дает вполне
достаточно оснований предполагать, что поврежденная техника мо-
жет находиться на самых трудных участках местности и в различ-
ных положениях.
К наиболее характерным и часто встречающимся аварийным
случаям следует отнести:
— завалы землей автомобилей и гусеничных тягачей, находя-
щихся в укрытиях;
— тяжелые застревания машин на местности, особенно в перио-
ды бездорожья;
— опрокидывание машин;
— серьезные повреждения ходовой части автотракторной тех-
ники;
— попадание машин в глубокие водоемы.
Вывод а1'втомобилей и гусеничных тягачей из перечисленных
аварийных положений характеризуется своеобразием приемов, спо-
собов выполнения работ и применяемым оборудованием.
ОБОРУДОВАНИЕ, ПРИМЕНЯЕМОЕ ПРИ ВЫВОДЕ МАШИН
ИЗ АВАРИЙНЫХ ПОЛОЖЕНИЙ
К основному оборудованию, которое часто применяется при вы-
воде машин из аварийных положений, следует отнести: такелажное,
подъемное, тяговое и оборудование для самовытаскивания.
Такелажное оборудование применяется для передачи тяговых уси-
лий на расстояние, а также для изменения направления и величины
2S
этих усилий, передаваемых от тягача к объекту эвакуации. К этой
группе оборудования относятся: стальные канаты (тросы), блоки
и полиспасты, анкеры и другое подобное оборудование.
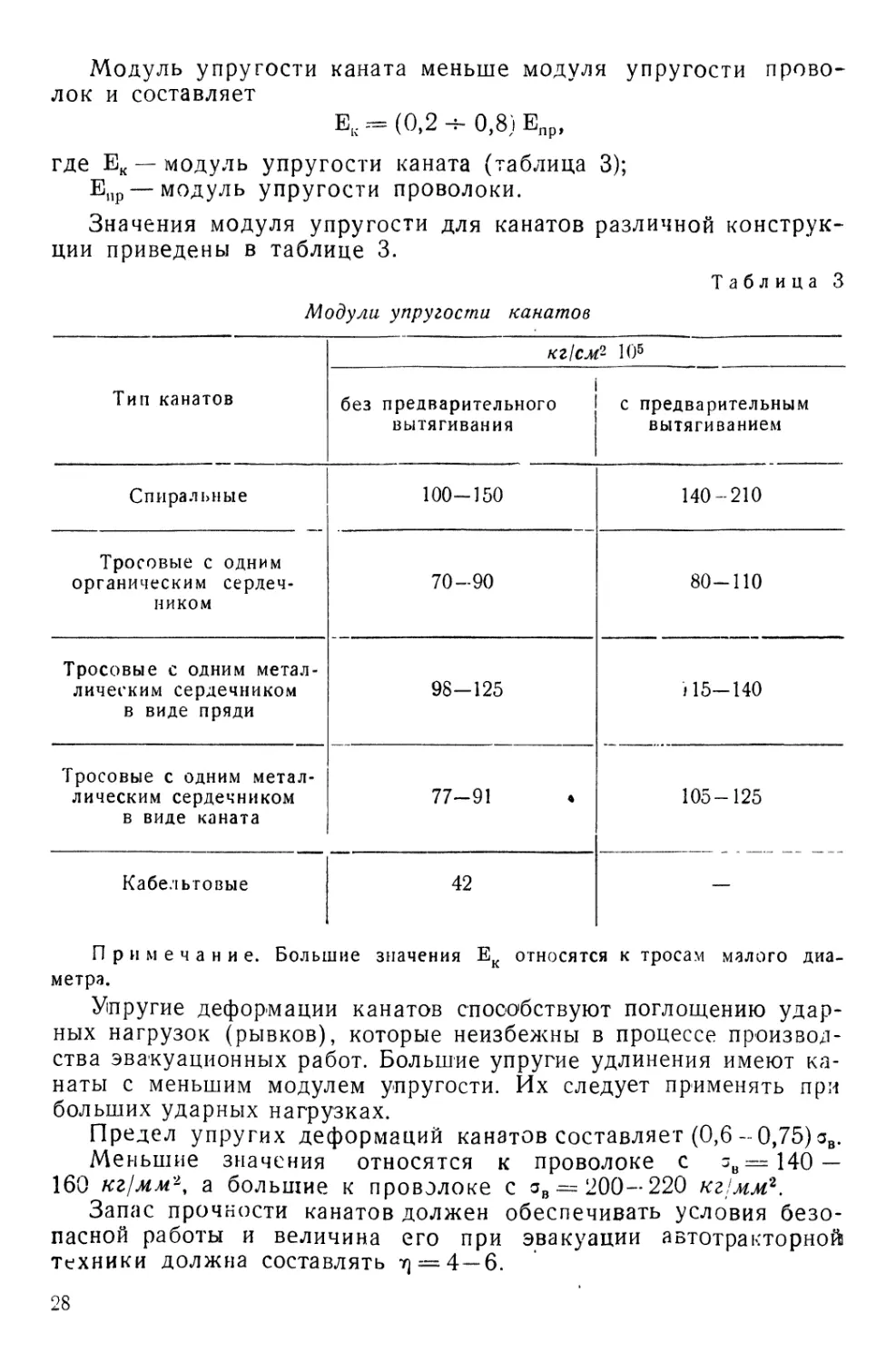
Стальные канаты нашли широкое применение при производстве
всех видов эвакуационных работ.
Основу канатов составляют свитые определенным образом сталь-
ные проволоки, расчетный предел прочности каждой из которых со-
ставляет 130—240 кг/мм2.
В зависимости от назначения и условий эксплуатации промыш-
ленность выпускает канаты различной конструкции. Наиболее часто
встречаются следующие виды канатов:
— спиральные канаты е
одинарным скручиванием про-
волок (рис. 9, а);
— канаты тросовой конст-
рукции с двойным скручивани-
нием проволок; вначале прово-
локи скручиваются в пряди, за-
тем пряди скручиваются в ка-
наты (рис. 9, б);
— канаты кабельтовой кон-
струкции с тройным скручива-
нием проволок; вначале прово-
локи скручиваются в пряди, за-
тем пряди — в стренги, и, нако-
нец,стренги~в канатьцрис 9,в\
В зависимости от способа
свивки проволок в пряди сталь-
ные канаты делят на следую-
щие типы:
— с точечным касанием
проволок в прядях (ТК);
— с линейным касанием проволок в прядях (ЛК);
— с комбинированным касанием проволок в прядях (ТЛК
и ЛТК).
Канаты с точечным касанием проволок получают под нагрузкой
повышенные местные напряжения, поэтому их выносливость мень-
ше, чем канатов ЛК.
Для различия особенностей конструкции канатов действующими
ГОСТами приняты следующие обозначения.
Спиральные канаты — ТК1х37 = 37,
где ТК — тип свивки (точечное касание);
I — число прядей;
37 — число проволок в канате.
Канаты тросовой конструкции из круглых прядей —
ЛК-О7х7 = 49 или 7х(6 + 1) м.с.,
где ЛК-0 — тип свивки (линейное касание с одинаковым
диаметром проволок в слое);
Рис. 9. Вилы стальных канатов (по
способу свивки):
а-спиральный канат (одинарной свивки);
б— тросовый канат ( чвойной свинки); в — ка-
бельтовый канат (тройной свивки).
26
7 — число прядей, включая центральную;
7 или (6+1)—число проволок в пряди;
м. с. — металлический сердечник.
Канаты тросовой конструкции с органическим сердеч-
ником— ЛК-Рбх19 = 144 или 6x19 + 1 о.с.,
где ЛК-Р — тип свивки (линейное касание с различными чередую-
щимися диаметрами проволок в верхнем слое пряди);
6 — число прядей в канате;
19 — число проволок в пряди;
144 — число проволок в канате;
о. с. — органический сердечник.
Канаты кабельтовой конструкции с двумя органиче-
скими сердечниками — ТК6 X 7 X 19 = 798 или 6 X 7 X 19 2 о. с.,
где ТК — тип свивки;
6 — число стренг;
7 — число прядей в стренге, включая центральную;
19 — число проволок в пряди;
2 о. с. — два органических сердечника.
Существующими ГОСТами определяются также разрывные уси-
лия канатов, которые слагаются из разрывных усилий основных
проволок.
В расчет не принимаются проволоки, изготовленные из низко-
углеродистой стали и используемые в качестве сердечника каната.
Обычно разрывное усилие канатов (агрегатная прочность) на 10—
20% меньше суммарной прочности входящих в него проволок. Эти
потери являются следствием неравномерного распределения растя-
гивающих и изгибающих напряжений по отдельным проволокам
и зависят в значительной степени от конструкции каната. Обычно,
чем больше концентрических слоев проволок в прядях, тем больше
потери.
Весьма важным параметром стальных канатов является их спо-
собность под нагрузкой давать упругие удлинения.
В процессе эксплуатации канаты подвергаются воздействию
растягивающих усилий. Очень важно, чтобы по прекращению дей-
ствия этих усилий канат возвращался в исходное положение, т. е.
работал в пределах упругих деформаций, которые характеризуются
отношением
• где Р — растягивающее усилие, кг;
/ — длина испытуемого каната, см;
F — площадь поперечного сечения каната, см2;
Д/удлинение каната при растяжении, см.
Величина упругих удлинений каната зависит от его конструк-
тивных особенностей и свойств отдельных проволок.
27
Модуль упругости каната меньше модуля упругости прово-
лок и составляет
Ек - (0,2 + 0,8) Епр,
где Ек —модуль упругости каната (таблица 3);
Епр— модуль упругости проволоки.
Значения модуля упругости для канатов различной конструк-
ции приведены в таблице 3.
Таблица 3
Модула упругости канатов
Тип канатов кг 1см2 105
i без предварительного 1 вытягивания с предварительным вытягиванием
Спиральные 100—150 140-210
Тросовые с одним органическим сердеч- ником 70-90 80-110
Тросовые с одним метал- лическим сердечником в виде пряди 98-125 /15—140
Тросовые с одним метал- лическим сердечником в виде каната 77—91 105-125
Кабельтовые 42 —
Примечание. Большие значения Ек относятся к тросам малого диа-
метра.
Упругие деформации канатов способствуют поглощению удар-
ных нагрузок (рывков), которые неизбежны в процессе производ-
ства эвакуационных работ. Большие упругие удлинения имеют ка-
наты с меньшим модулем упругости. Их следует применять при
больших ударных нагрузках.
Предел упругих деформаций канатов составляет (0,6-0,75) <зв.
Меньшие значения относятся к проволоке с зв=140 —
160 кг]мм\ а большие к проволоке с ов —200--220 кг!мм2.
Запас прочности канатов должен обеспечивать условия безо-
пасной работы и величина его при эвакуации автотракторной
техники должна составлять т] — 4—6.
28
Выбор канатов следует производить по утвержденным ГОСТам,
при этом агрегатное разрывное усилие, уменьшенное на запас проч-
ности, не должно превышать максимального усилия, развиваемого
тяговыми устройствами.
При выборе конструкции каната следует учитывать возмож-
ности поглощения возникающих .при работах динамических на-
грузок и принимать канаты с малым модулем упругости.
В практике выполнения эвакуационных работ передки случаи
использования канатов, бывших в эксплуатации и взятых с других
тяговых устройств. Часто не представляется возможным опреде-
лить маркировку и агрегатное разрывное усилие. В таких случаях
для ориентировочного определения допустимей нагрузки для кана-
тов тросовой конструкции может быть рекомендована зависимость
p=^—^~°BKuKf кг,
где Д — диаметр троса, мм\
зв— предел прочности на разрыв проволоки, из которой
изготовлен трос (^= 130—240 кг/мм2)}
Ла — коэффициент, показывающий уменьшение агрегатного
разрывного усилия каната по отношению к суммарно-
му разрывному усилию всех проволок, Л а = 0,8—0,9;
А} — коэффициент использования площади поперечного се-
чения, для канатов тросовой конструкции = —
0,65;
т] —запас прочности каната
Подставив числовые значения величин, входящих в привезен-
ное уравнение, получим окончательно
Р=10Д2/сг. (10)
При выборе тросов желательно также учитывать их гибкость,
которая зависит в основном от диаметра составляющих проволок.
Стальные канаты, выполненные из тонкой проволоки, более гибки,
чем канаты из толстой проволоки, но быстрее изнашиваются от
истирания. Канаты из толстой проволоки более жестки. Они плохо
навиваются на барабаны лебедок, плохо обходят блоки и неудобны
в работе. Канаты типа «Компаунд», имеющие в каждой пряди на-
ружные толстые проволоки, а внутренние — тонкие, обладают по-
вышенной гибкостью и хорошо противостоят износу от истирания.
При подборе канатов к лебедкам следует учитывать условие
" d6
15-^20 ’
где Д — диаметр стального каната, мм\
d6 — диаметр барабана лебедки, мм.
29
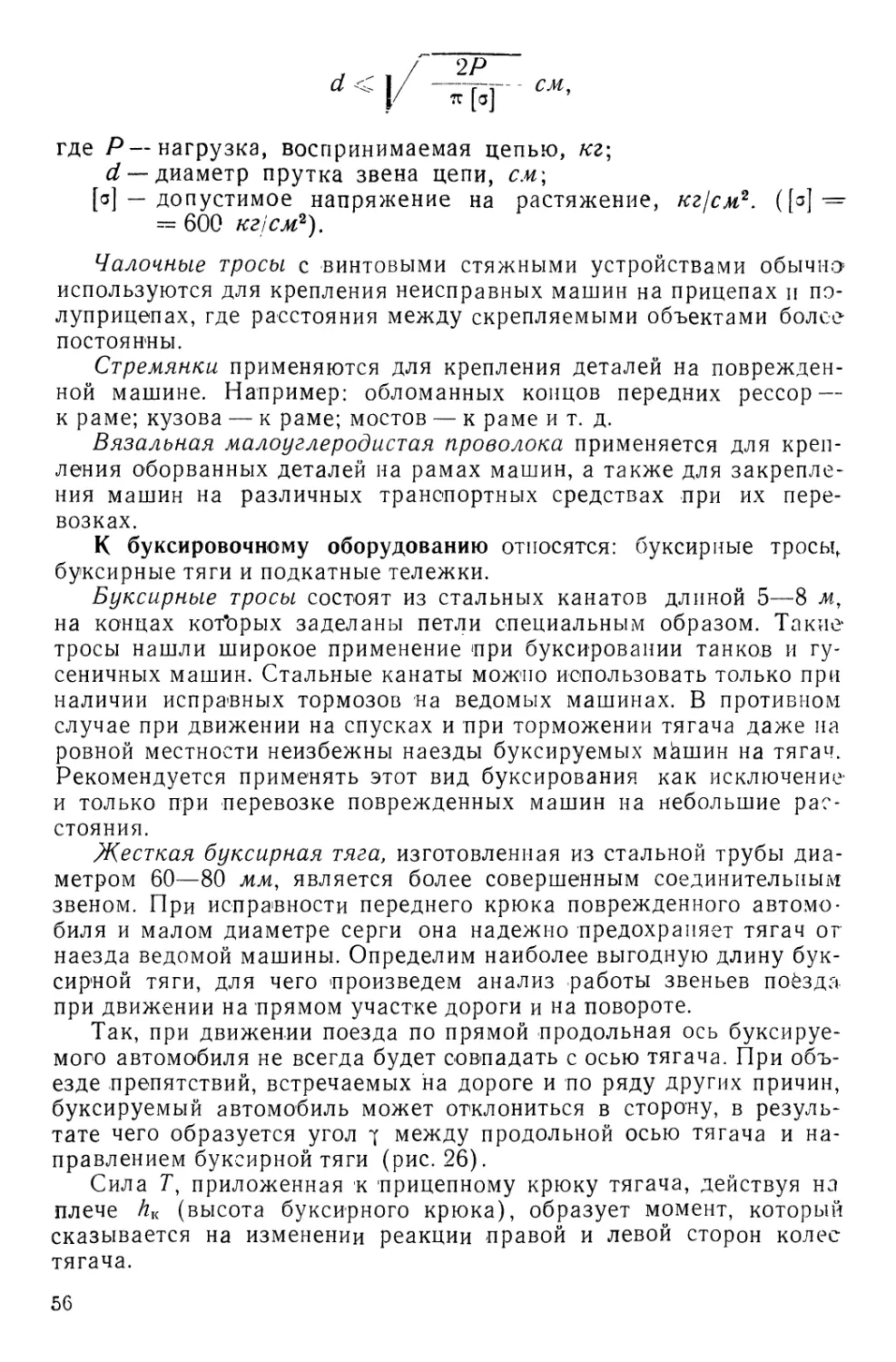
Блоки применяются для изменения направления усилий, если
направление извлечения застрявшей машины не совпадает с поло-
жением лебедки или тягача.
В этих случаях блок крепится крючком за неподвижный пред-
мет, а трос от лебедки пропускается через ролик блока. При извле-
чении застрявших машин с помощью подвижного блока можно по-
лучить выигрыш в силе в 2 раза (без учета потерь на трение в ро-
лике). В этом случае следует закрепить блок за крюки застрявшей
машины и пропустить трос от лебедки тягача через ролик блока.
Свободный конец троса можно закрепить за тягач или неподвиж-
ный анкер.
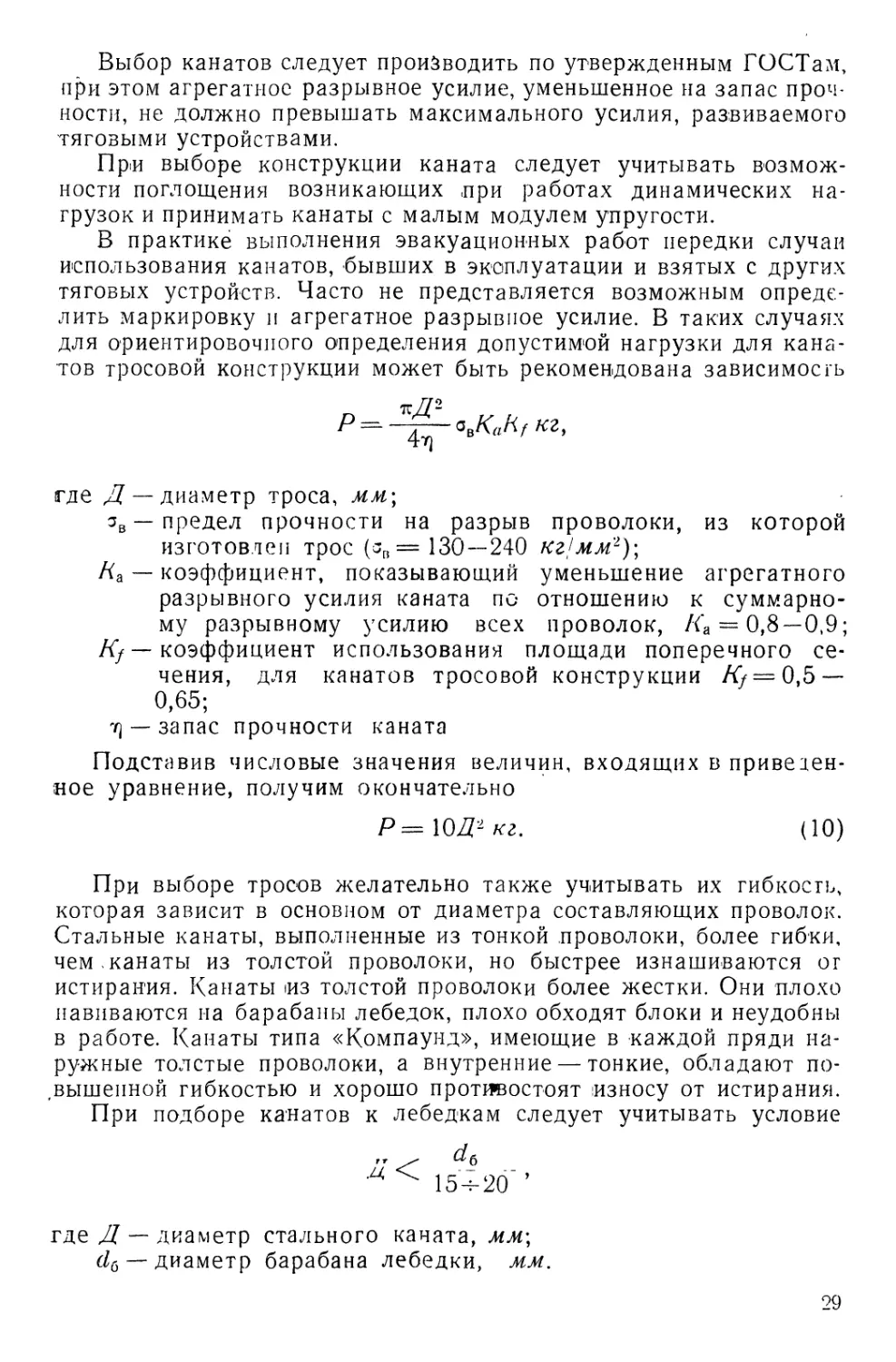
Полиспастом называется простейший механизм, состоящий из
блоков, тросов и опор, определенное сочетание которых позволяет
увеличить тяговое усилие лебедки (тягача) при одновременном
и пропорциональном уменьшении расстояния, на которое переме-
щается аварийная машина.
Отношение реализуемого усилия к подводимому носит название
передаточное отношение полиспаста
Рис. 10. Использование полиспасЯэв
при выводе застрявших машин:
«--крепление свободного конца за подвижной
блок; б-крепление свободного конца за не-
подвижной блок.
где / — передаточное отношение полиспаста;
Q — реализуемое тяговое усилие;
Р— подводимое тяговое усилие от лебедки (тягача);
^ — коэффициент полезного действия полиспаста.
Передаточное отношение поли-
спаста зависит от количества по-
движных и неподвижных блоков
в системе и от закрепления анкер-
ного конца каната. В практике
применения полиспастов возмож-
ны два случая крепления анкер-
ного конца.
Первый случай. Стальной
канат последовательно проходит
через все блоки и свободный конец
его крепится за аварийную ма-
шину или подвижный блок, за-
крепленный на ней. Передаточное
отношение полиспаста / — п+1
(п— число подвижных и непо-
движных блоков, рис. 10, а).
Таким образом, при наличии
даже одного подвижного блока,
т. е. при п= 1, можно получить выигрыш в силе почти в 2 раза.
Второй случай. Свободный конец троса закреплен непо-
движно, т. е. за неподвижный блок, тягач или анкер. Передаточное
30
отношение полиспаста i = n, так как в этом случае один из блоков
только изменяет направление усилия (рис. 10,6).
В полиспасте могут использоваться блоки с одним роликом
и с несколькими роликами, установленными на одной оси.
Во время Великой Отечественной войны полиспасты широко
применялись при эвакуации танков.
При выводе из аварийных положений автотракторной техники
полиспасты могут применяться для тяжелых и средних гусеничных
тягачей, достаточно прочный корпус которых в состоянии выдер-
жать большие нагрузки.
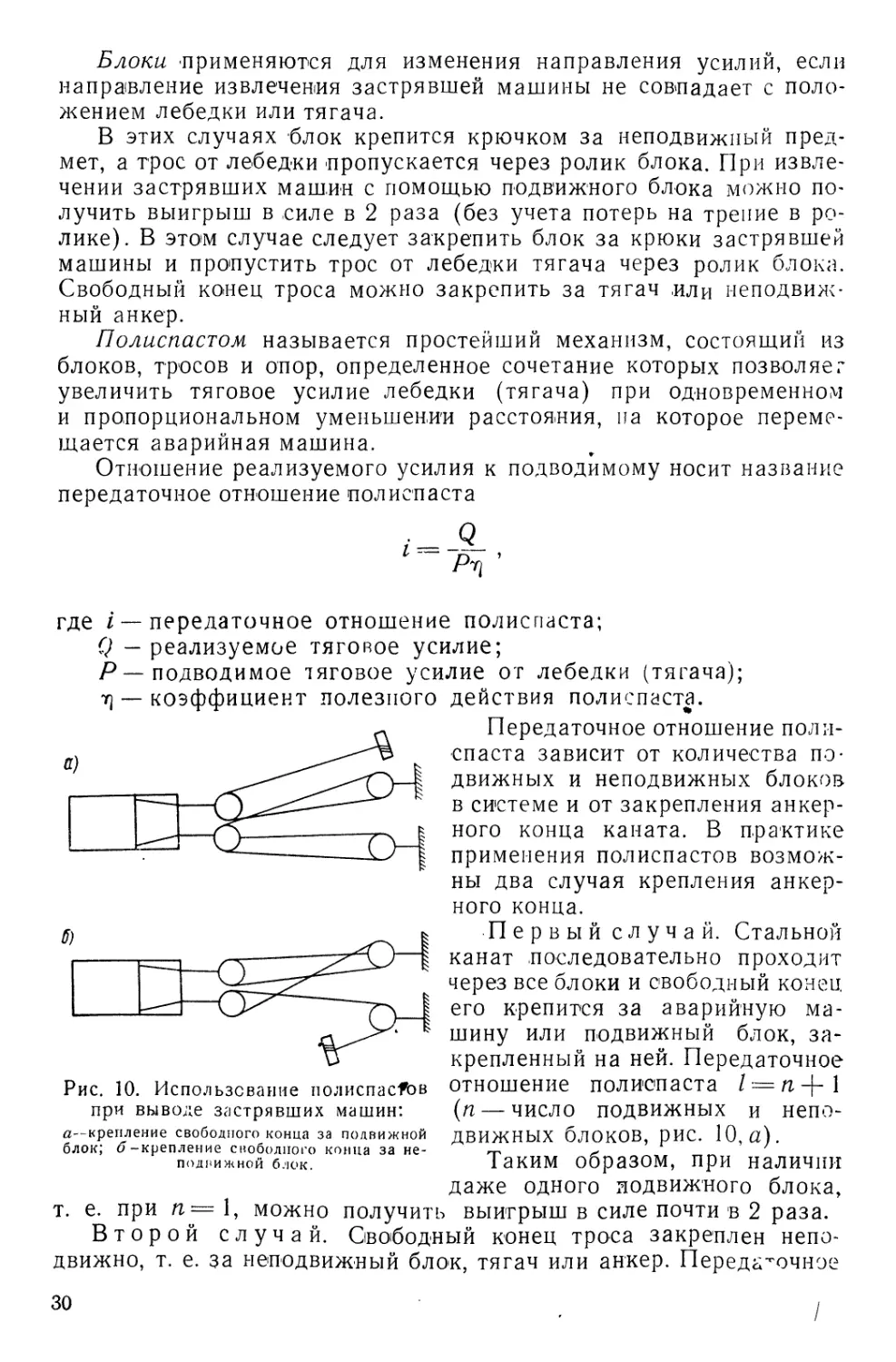
Анкеры. Под анкерами понимают неподвижные опоры, находя-
щиеся на местности или искусственно устанавливаемые неподвиж-
ные устройства для крепления тягачей и блоков при производстве
эвакуационных работ.
В качестве анкеров могут использоваться: деревья, пни, части
зданий, различных сооружений, а при отсутствии таковых — ис-
кусственно устанавливаемые анкеры.
На рис. И показан один из способов установки анкера. В отры-
тую траншею глубиной около 1 м укладывается бревно. Трос, за-
крепленный на середине бревна, выхо-
дит на поверхность земли по наклон-
ной аппарели. За конец троса закреп-
ляется тягач или блок.
Для установки такого анкера тре-
буется выполнить значительные земля-
ные работы, поэтому в последнее вре-
мя на эвакотягачах нашли применение
металлические штыревые анкеры.
Эти анкеры состоят из металличе-
ских звеньев (полос), закрепляемых
на поверхности земли металличе-
скими штырями длиной 50—70 см. От-
дельные звенья металлических анкеров
длиной около 1 м могут соединяться
между собой последовательно и парал-
лельно, что дает возможности создать на
опору, способную воспринимать большие усилия (до 20 и более тонн).
Подъемное оборудование используется для частичного или пол-
ного подъема автомобилей и гусеничных тягачей. К этой группе
необходимо отнести: домкраты, тали, стрелы, подъемники и краны.
Домкраты могут применяться для частичного подъема машин
с последующим подведением под застрявшие колеса подручного ма-
териала. а также при производстве ремонтных работ.
По конструктивным признакам домкраты делятся на: реечные,
винтовые и гидравлические. Последние получили наибольшее рас-
пространение и входят в комплекты водительского инструмента на
всех армейских машинах. Грузоподъемность таких домкратов 3---
7 т. Высота подъема — 100—300 мм.
Рис. 11. Установка искусст-
венного анкера.
местности неподвижную
31
Гидравлические, винтовые и реечные домкраты, применяемые
в подвижных и стационарных автобронетанковых ремонтных ма-
стерских, имеют повышенную грузоподъемность (до 20 т) и высоту
подъема (до 500 мм).
Тали при выполнении эвакуационных работ имеют ограничен-
ное применение, так как для закрепления их требуется устанавли-
вать дополнительные сооружения в виде козел, треног и т. д.
В ремонтных мастерских наибольшее распространение получили
тали грузоподъемностью в 3 т.
Подъемные стрелы (двуноги) применяются при частичном подъ-
еме застрявших и засыпанных в укрытиях машин с одновременным
перемещением их в требуемом направлении.
Автомобильные краны используются в основном при производ-
стве погрузочных работ.
Наибольшее распространение получили краны: ЛАЗ-690, К-5!,
К-52 и АК-Ю4.
Автокран ЛАЗ-690, установленный на шасси ЗИЛ-164, имеет сле-
дующие технические данные:
— грузоподъемность при наименьшем вылете стрелы 3,0 т;
— грузоподъемность при наибольшем вылете стрелы 0,75 т;
— высота подъема груза при наибольшем вылете стрелы
6,6 м\
— при наименьшем вылете стрелы — 4,7 м. 9
Вес крана в походном положении составляет 7400 кг. Данный
кран может выполнять следующие работы:
— грузить в кузов транспортных машин: агрегаты, узлы, по-
врежденные легковые машины и автомобили ГАЗ-51 и ГАЗ-63;
— обеспечивать выполнение работ по замене отдельных агрега-’
тов на автомобилях и гусеничных машинах при их ремонте.
Автокраны К-51 и К-52 монтируются на шасси автомобиля
.МАЗ-200 и имеют грузоподъемность:
при наименьшем вылете стрелы 5,0 т; при наибольшем вылете
стрелы — 2,0 т.
Вес кранов в походном положении составляет 12 т.
Кран может выполнять те же виды работ, что и кран ЛАЗ-690,
•однако объем их нисколько увеличивается ввиду большей грузо-
подъемности.
В народном хозяйстве распространен автокран АК-104, смонти-
рованный на шасси ЯАЗ-210. Он имеет наибольшую грузоподъ-
емность 10 т.
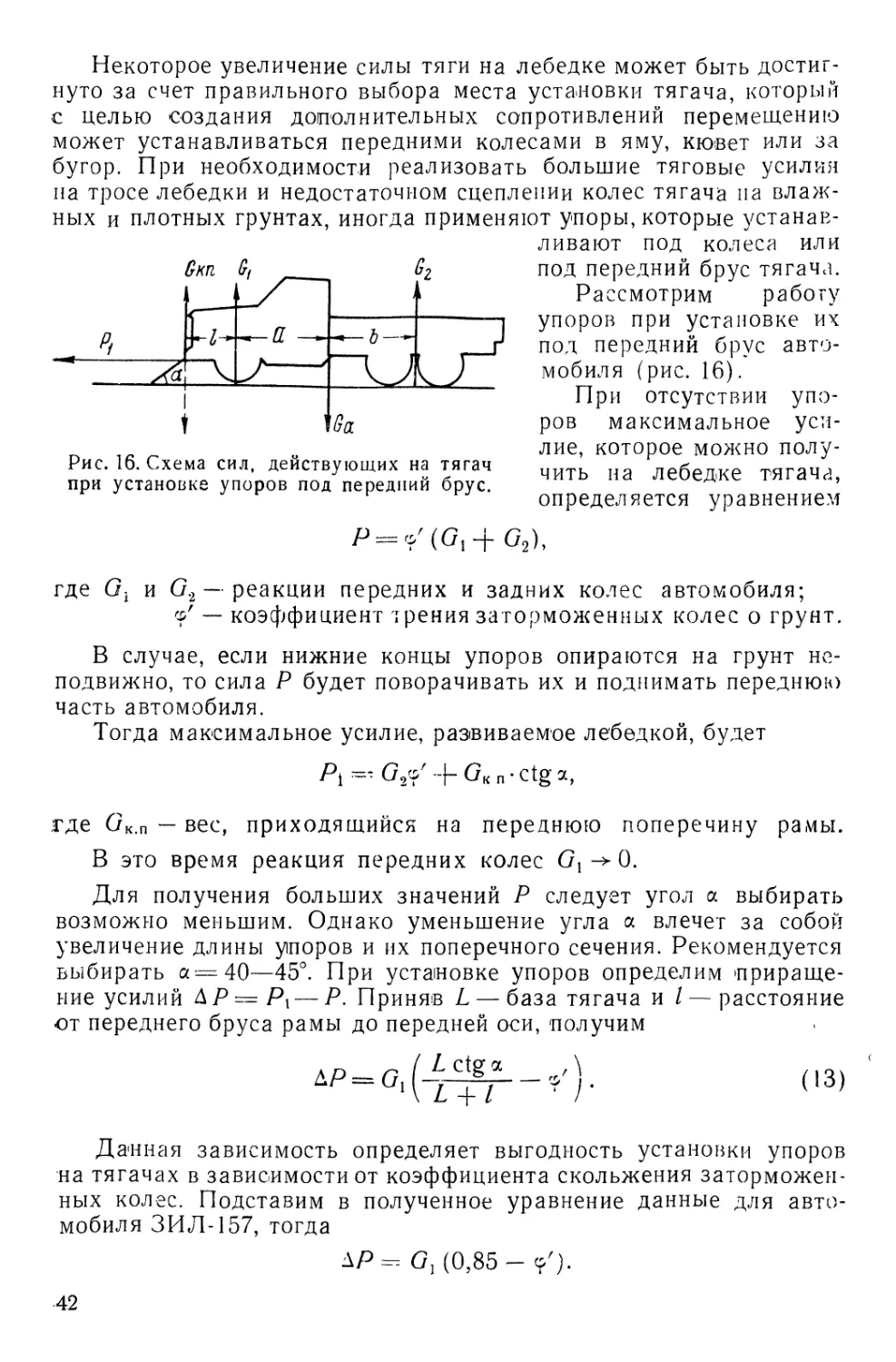
Тяговое оборудование. Основным тяговым оборудованием при
выводе машин из аварийных положений являются колесные
и гусеничные тягачи и механические лебедки, установленные
на них.
Характеристика лебедой и общие веса автомобилей и гусенич-
ных машин, определяющие тяговые усилия по сцеплению, приво-
дятся в таблицах 4 и 5.
32
Таблица 4
Тяговые характеристики лебедок автомобилей
Параметры Автомобили
ГАЗ-62 ГАЗ-63 ^ЗИЛ-157 'мАз-бог 1 ЯАЗ-214
Вес автомобиля (без нагруз- ки), кг 1 2400 1 3200 5620 7750 10980
Тяговое усилие лебедки, кг . 2200 2500 5000 6000 8000
Длина троса, м 50 70 60 75 65
Таблица 5
Тяговые характеристики лебедок гусеничных машин
Параметры Тягачи
АТ-Л АТС | АТ-Т ТДТ-40 ТДТ-75 С-80 С-100
Вес машин (без груза), кг 5800 12 000 20 000 6300 13 600 11 400 11 400
Тяговое усилие лебед- ки, кг 5000 15 000 20 000 3500 10 500 — —
Длина троса, м . . . . 50 75 100 40 50 —•
Вспомогательное оборудование используется для самовытаски-
вания автомобилей в периоды бездорожья и особенно при извлече-
нии их из несложных застреваний. На каждой машине необходимо
иметь: лопату, топор, коврики, сплетенные из кустарника с по-
мощью проволоки. Колейные,мостики и приспособления для само-
вытаскивания целесообразно иметь на группу автомобилей.
Если плетеные коврики применяют для увеличения силы сцепле-
ния ведущих колес машин с грунтом, то колейные мостики чаще ис-
пользуются при преодолении канав, ям, частично разрушенных мо-
стов и труднопроходимых участков.
Колейные мостики обычно изготавливают из 3—4 бревен диа-
метром 10—15 см, длиной около 3 м. Перевозят мостики на раме
под платформой автомобиля.
Приспособление для самовытаскивания состоит из двух бараба-
нов, двух анкеров и двух концов гибких стальных канатов. При
сложных застреваниях автомобиля барабаны укрепляются гайками
на шпильках ступиц ведущих колес застрявшей машины. Анкеры
3 Баер В. Г.
33
устанавливаются спереди застрявшего автомобиля и соединяются
тросами с барабанами. При вращении ведущих колес тросы нама-
тываются на барабаны, выводя автомобиль из застрявшего поло-
жения.
ИЗВЛЕЧЕНИЕ АВТОМОБИЛЕЙ ИЗ УКРЫТИЙ, ЗАСЫПАННЫХ ЗЕМЛЕЙ
Воздействие различных видов оружия на автотракторную тех-
нику, находящуюся в укрытиях, приводит к обвалам грунта, ча-
стичной или полной засыпке землей автомобилей и гусеничных
машин.
Глубина засыпки зависит от профиля укрытий, плотности грун-
та и удаленности машин от места взрыва. Наиболее сильные обва-
лы наблюдаются в укрытиях с крутыми и неукрепленными отко-
сами.
Откапывание засыпанных машин — чрезвычайно трудоемкая
операция, которая может быть рекомендована при небольшом объ-
еме работ.
При завалах грунтом передних и задних мостов автомобилей
или ходовой части гусеничных машин затраты времени на откапы-
вание значительно возрастают, так как для освобождения от грун-
та агрегатов шасси часто приходится работать в полусогнутом со-
стоянии и даже лежа.
Время откатывания полностью засыпанной техники составляет
8—12 чел-ч. Извлечение машин с помощью усилий, развиваемых
на лебедках специальных тягачей, значительно повышает произво-
дительность труда. Однако при больших уровнях засыпки возни-
кающие усилия вызывают в ряде случаев серьезные повреждения
агрегатов и узлов шасси- Поэтому извлечение с помощью лебедок
специальных тягачей можно рекомендовать для машин, засыпанных
рыхлым грунтом не более чем на 1 м.
При больших завалах следует совмещать горизонтальные
усилия тягачей с подъемом извлекаемой машины в вертикаль-
ном направлении. Правильное сочетание этих усилий предполагает
обязательный подъем передней или задней части автомобиля (тя-
гача) на высоту 1 —1,2 м. В процессе подъема грунт, находящийся
по сторонам машины, обваливается под вывешанные колеса (гусе-
ницы) автомобиля (тягача), уменьшая слой земли.
В последующем частично извлеченная из грунта машина вытас-
кивается в горизонтальном направлении с помощью лебедки специ-
ального тягача.
Извлечение машин из укрытий может производиться с помощью
подъемных кранов и тягачей или с помощью специальных приспо-
соблений.
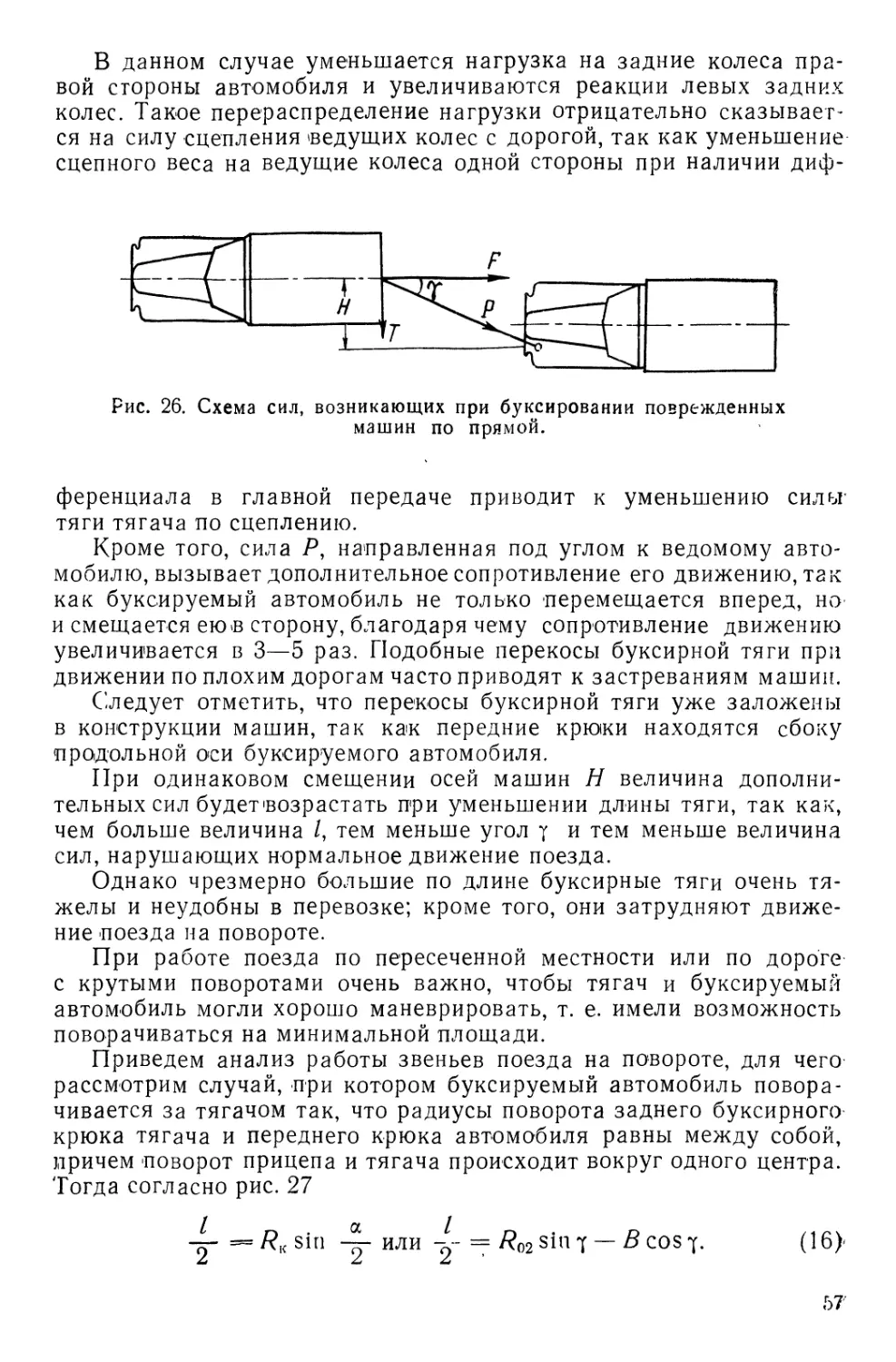
Весьма простым по устройству, но оригинальным по сочетанию
направлений усилий при выполнении данного вида работ является
«подъемная стрела» или «двунога», принципиальная схема работы
которой рассматривается на рис. 12.
34
Подъемная стрела изготовляется из металлических труб или
двух бревен, диаметр которых подбирается в зависимости от воз-
никающих нагрузок. На верхнем конце стрелы закрепляются два
троса, один из которых идет к лебедке тягача, а другой крепится
за буксирный крюк автомобиля.
Рис. 12. Схема работы подъемной стрелы.
Высота двуноги обычно составляет 3,5—4 м. Установленная на
грунт подъемная стрела в процессе работы поворачивается тросом
тягача вокруг шарнирных оснований (точка а).
Рассмотрим работу стрелы, для чего обозначим:
Р— усилие на тросе, приложенное от стрелы к вытаскиваемо-
му автомобилю;
Ри Т— горизонтальная и вертикальная составляющие этого уси-
лия;
S — сила, приложенная от лебедки тягача к стреле;
/--длина подъемной стрелы;
а — угол наклона стрелы;
8--угол между тросом, идущим к вытаскиваемому автомо-
билю, и горизонталью;
8 — угол приложения тягового усилия от тягача к стреле.
Рассматривая равновесие стрелы в вертикальной плоскости, со-
ставим сумму моментов сил, действующих относительно точек опор
двуноги (точка а)
Tl sin а 4- Fl cos & — SI sin а cos 8.
В левой части данного уравнения находятся моменты сил, обра-
зованные сопротивлением грунта и весом машины, а в правой —
момент силы, приложенной к подъемной стреле от лебедки тягача.
Для того, чтобы уменьшить усилие тягача S при любом значе-
нии угла а, следует уменьшить угол 8, т. е. необходимо тягач с ле-
бедкой на относительно ровной местности ставить дальше от подъ-
емной стрелы. Практически это расстояние может составлять 20—
40 м. Из схемы, представленной на рисунке, видим, что
3*
35
F=P-sin3 и 7=-P-cos₽,
причем, если сила F поднимает автомобиль вертикально и удер-
живает его в этом положении, то сила Т представляет собой сум-
марное сопротивление горизонтальному перемещению вытаскивае-
мой машины.
Подставив приведенные значения сил в уравнение моментов, по-
лучим
Z = (ID
S sin(a-j-P) 7
_ Р
Отношение сил — есть не что иное, как передаточное отно-
О
шение стрелы i.
• В начальный момент работы желательно получить максималь-
ное вертикальное усилие, которое возможно при —90°, так как
сила 7 = 0. Следовательно,подъемную стрелу необходимо устанав-
ливать так, чтобы трос, идущий к буксирному крюку извлекаемой
машины, был расположен вертикально.
о Р .
В этом случае= tg а =г.
Передаточное отношение стрелы зависит только от угла а. Зада-
ваясь значением Z, можно получить различные положения стрелы,
из которых видно, что с увеличением угла а возрастает выигрыш
в силе, но проигрывается в высоте подъема.
Для выбора параметров начального положения двуноги при-
нимаем /=1, тогда a = 45°, 7 = 0, P=S = F, т. е. горизонталь-
ное усилие от лебедки тягача полностью преобразуется в вер-
тикальное. По мере увеличения угла а начинает действовать
сила 7, так как обвалившийся грунт удерживает автомобиль от
перемещения в горизонтальном направлении.
Влияние силы F на сопротивление повороту стрелы посте-
пенно уменьшается и при a = 90° сила F будет направлена по
оси стрелы. В этом случае при<£->0 отношение сил опреде-
ляется равенством 7=S, т. е. все усилие лебедки затрачива-
ется на перемещение в горизонтальном направлении частично
поднятого автомобиля. Сила F действует, так как автомобиль
находится в приподнятом положении, но не оказывает влияния
на поворот стрелы, ибо плечо ее при a = 90° равно нулю.
Работа стрелы во второй четверти, т. е. при a > 90°, харак-,
теризуется зависимостью
S + Fctga= 7.
Сила 7, удерживающая автомобиль в приподнятом состоянии,
обеспечивает перемещение его в сторону наклона стрелы. По мере
увеличения угла а^>90° действие ее будет сказываться все сильнее.
36
И,наконец, стрела займет такое положение, при котором сила 5,
уменьшаясь, становится равной нулю и будет справедливо равенство
/^ctga = Т.
Начиная с этого момента, перемещение в горизонтальном на-
правлении происходит только за счет собственного веса автомо-
биля, находящегося в приподнятом состоянии. Передаточное отно-
шение стрелы возрастает практически до бесконечности.
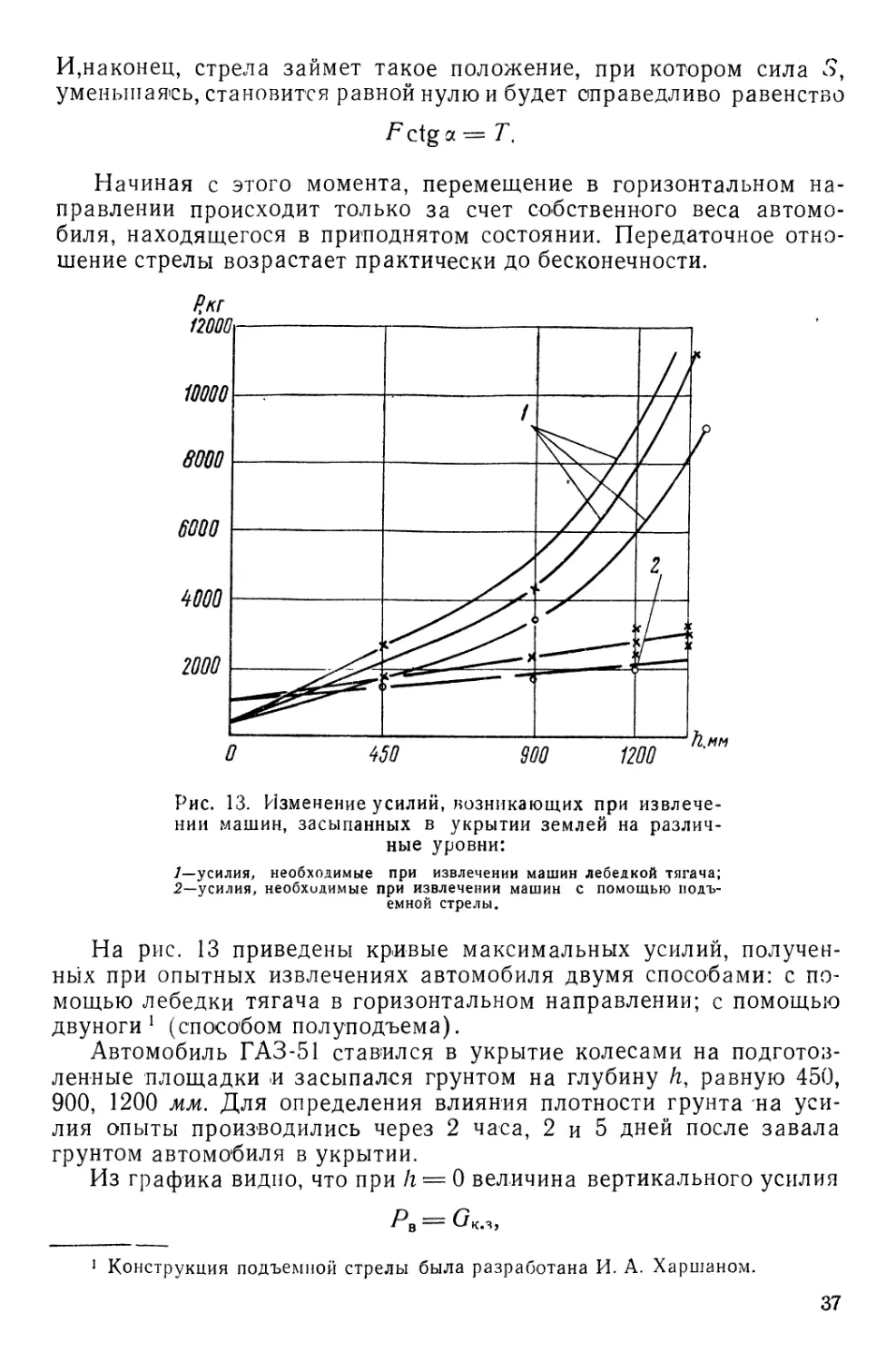
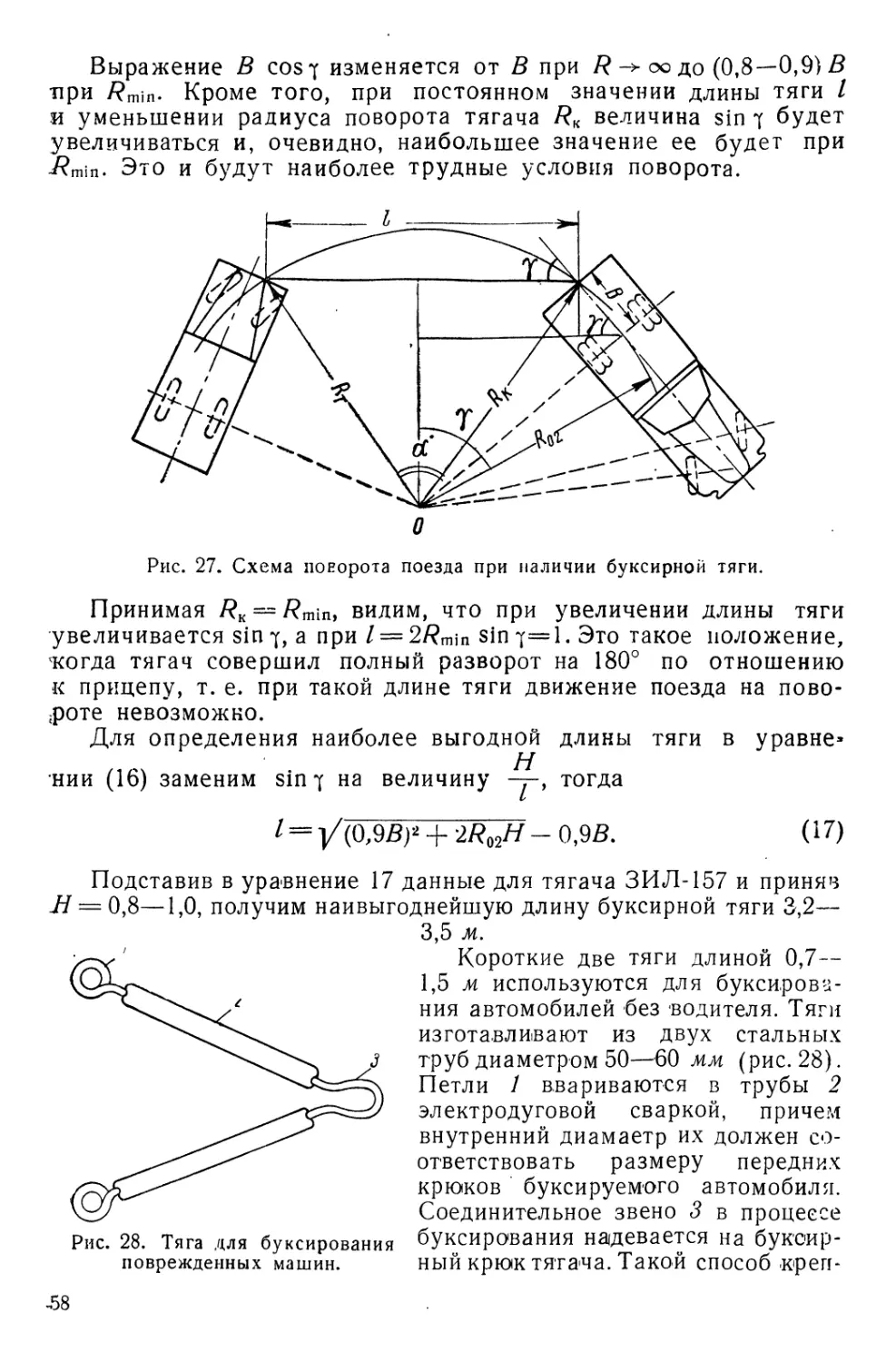
Рис. 13. Изменение усилий, возникающих при извлече-
нии машин, засыпанных в укрытии землей на различ-
ные уровни:
7—усилия, необходимые при извлечении машин лебедкой тягача;
2—усилия, необходимые при извлечении машин с помощью подъ-
емной стрелы.
На рис. 13 приведены кривые максимальных усилий, получен-
ных при опытных извлечениях автомобиля двумя способами: с по-
мощью лебедки тягача в горизонтальном направлении; с помощью
двуноги1 (способом полуподъема).
Автомобиль ГАЗ-51 ставился в укрытие колесами на подготов-
ленные площадки и засыпался грунтом на глубину Л, равную 450,
900, 1200 мм. Для определения влияния плотности грунта на уси-
лия опыты производились через 2 часа, 2 и 5 дней после завала
грунтом автомобиля в укрытии.
Из графика видно, что при h — 0 величина вертикального усилия
Рв — Ок.з,
1 Конструкция подъемной стрелы была разработана И. А. Харшаном.
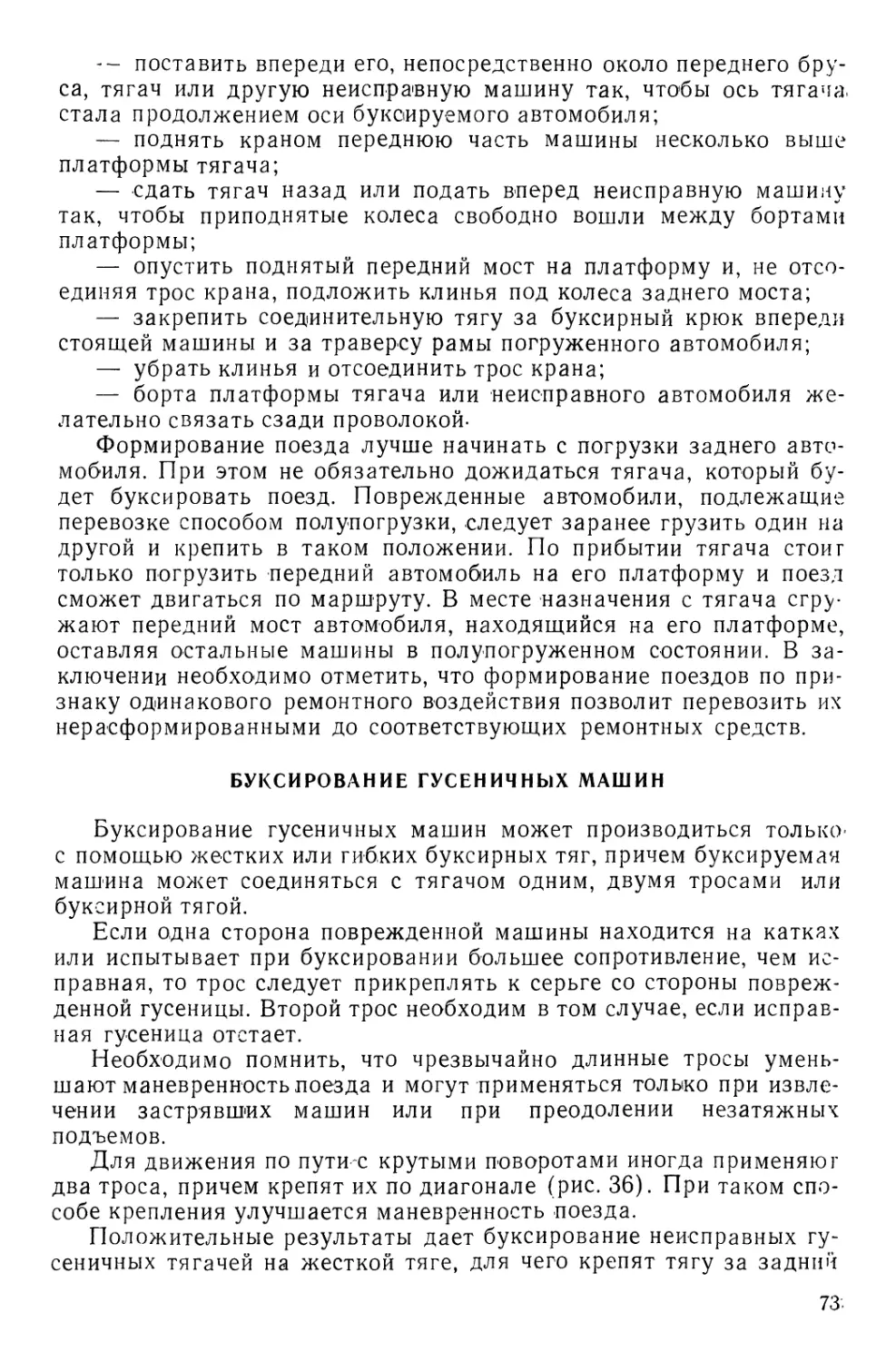
37
а горизонтального усилия
Рг == (/C0S I + Sin 7),
где GK.3 — вес, приходящийся на задний буксирный крюк ав-
мобиля в процессе подъема;
Gd — вес автомобиля;
7 —угол наклона площадки.
С увеличением уровня засыпки грунтом возрастают силы сопро-
тивления горизонтальному перемещению, причем горизонтальное
усилие на лебедке тягача возрастает значительно больше и при
максимальной засыпке грунтом превышает усилие с применением
двуноги более чем в 4 раза.
Извлечение автомобиля лебедкой тягача вызывает в таких слу-
чаях повреждения деталей и узлов шасси.
Силы, возникающие с применением двуноги, нарастают про-
порционально увеличению /г, и для определения их в практических
целях может быть рекомендована следующая зависимость:
P = GK.3±Kh кг. (12)
где h — высота грунта, мм\
К— коэффициент плотности и влажности грунта, равный
1 — 1,3 кг/мм.
Вес, приходящийся на передний конец рамы или задний бук-
сирный крюк извлекаемых машин, определяется из условий равно-
весия автомобиля в вертикальной плоскости, и для различных ма-
шин приводится в таблице 6.
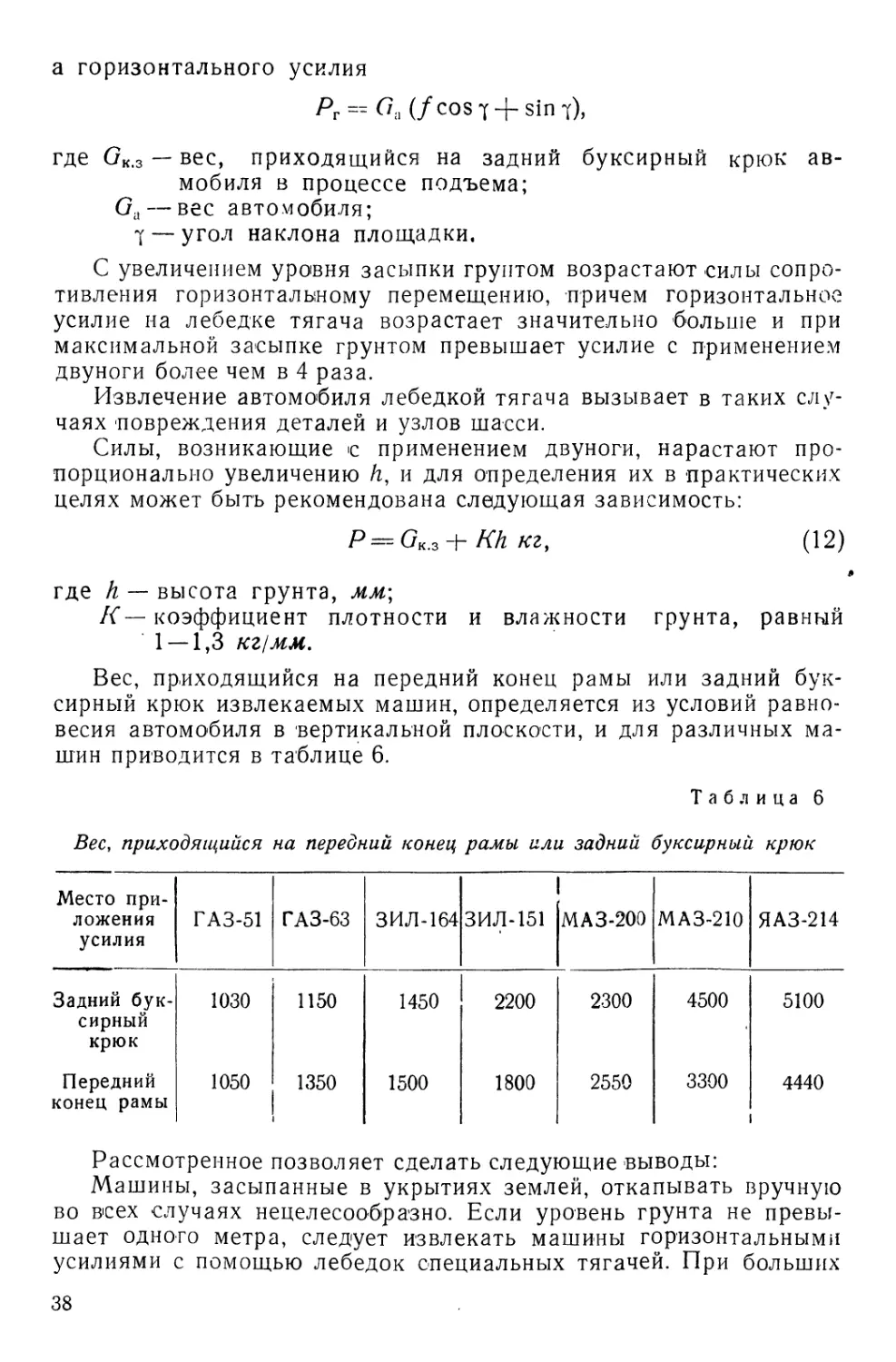
Таблица 6
Вес, приходящийся на передний конец рамы или задний буксирный крюк
Место при- ложения усилия ГАЗ-51 ГАЗ-63 ЗИЛ-164 ЗИЛ-151 МАЗ-200 МАЗ-210 ЯАЗ-214
Задний бук- сирный крюк 1030 1150 1450 2200 2300 4500 5100
Передний конец рамы 1050 1350 1500 1800 2550 3300 । 4440 ।
Рассмотренное позволяет сделать следующие выводы:
Машины, засыпанные в укрытиях землей, откапывать вручную
во всех случаях нецелесообразно. Если уровень грунта не превы-
шает одного метра, следует извлекать машины горизонтальными
усилиями с помощью лебедок специальных тягачей. При больших
38
уровнях грунта необходимо сочетать вертикальные и горизонталь-
ные усилия.
При извлечении засыпанных машин с помощью подъемной стре-
лы, необходимо устанавливать ее при а-=40—45°. Место установки
опор стрелы от буксирного крюка автомобиля должно находиться
на расстоянии 0,7 /, где / — длина подъемной стрелы.
При извлечении автомобилей и гусеничных машин из ям, воро-
нок и траншей подъемная стрела может устанавливаться на боль-
шем расстоянии. В этом случае .передаточное отношение и верти-
кальная составляющая сил уменьшаются. Например, при установке
стрелы на расстоянии 2/передаточное отношение изменяется от 0,75
до 2,6. Однако в данном случае нет необходимости поднимать пе-
реднюю или заднюю части автомобиля, нужно только несколько
облегчить их. Такое положение стрелы характерно для вытаскива-
ния застрявших машин.
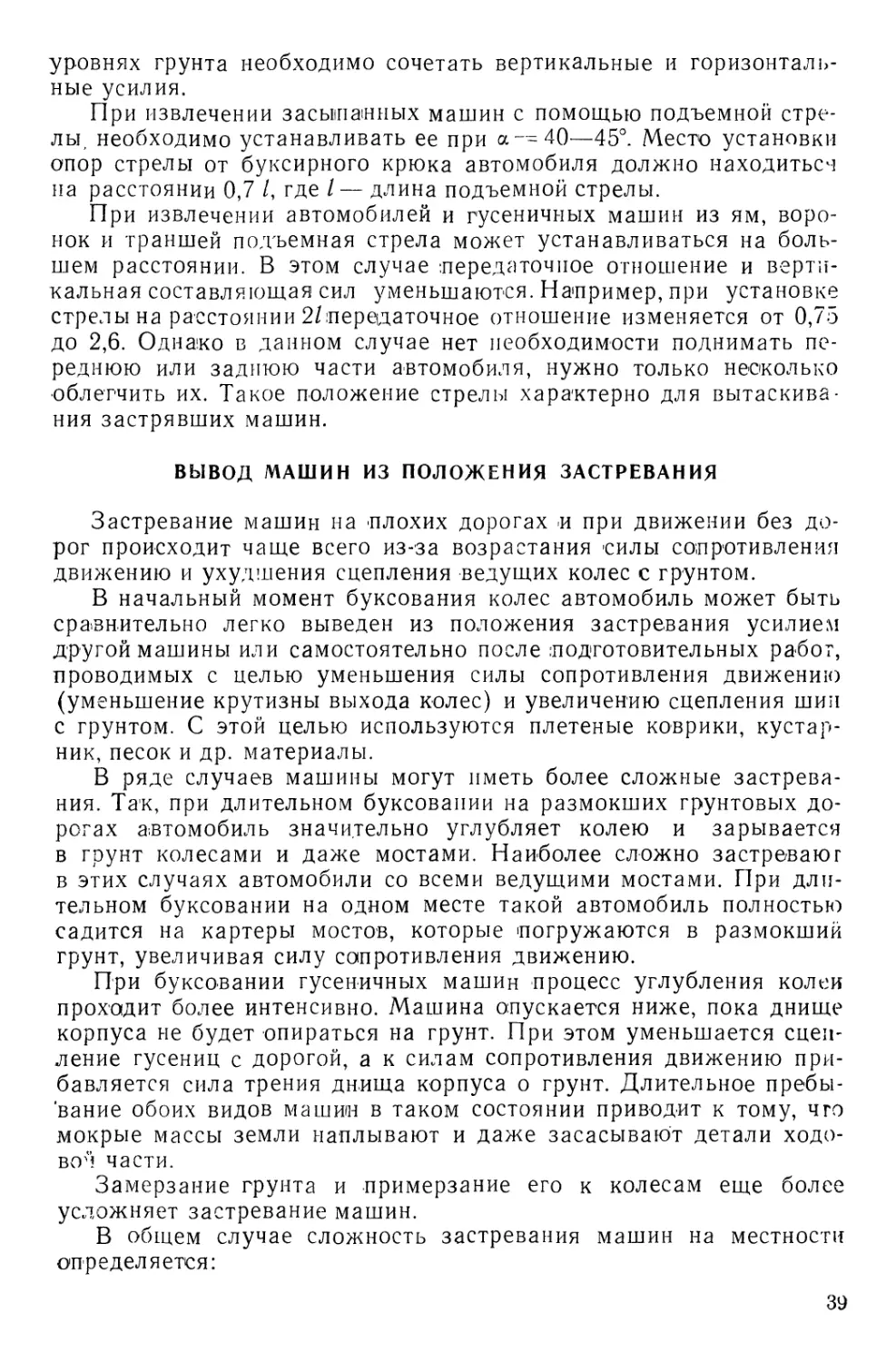
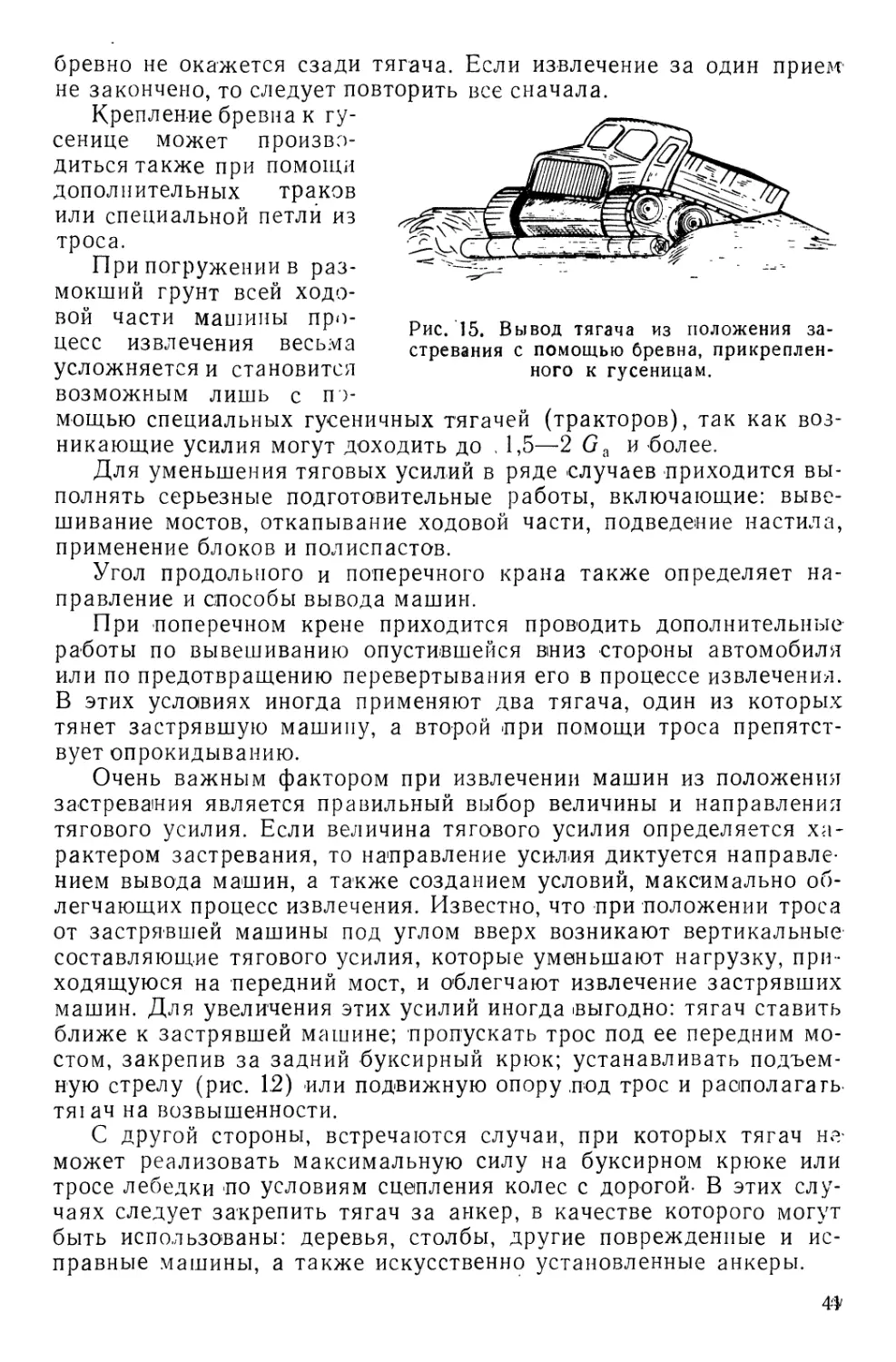
ВЫВОД МАШИН ИЗ ПОЛОЖЕНИЯ ЗАСТРЕВАНИЯ
Застревание машин на плохих дорогах и при движении без до-
рог происходит чаще всего из-за возрастания силы сопротивления
движению и ухудшения сцепления ведущих колес с грунтом.
В начальный момент буксования колес автомобиль может быть
сравнительно легко выведен из положения застревания усилием
другой машины или самостоятельно после подготовительных работ,
проводимых с целью уменьшения силы сопротивления движению
(уменьшение крутизны выхода колес) и увеличению сцепления шип
с грунтом. С этой целью используются плетеные коврики, кустар-
ник, песок и др. материалы.
В ряде случаев машины могут иметь более сложные застрева-
ния. Так, при длительном буксовании на размокших грунтовых до-
рогах автомобиль значительно углубляет колею и зарывается
в грунт колесами и даже мостами. Наиболее сложно застревают
в этих случаях автомобили со всеми ведущими мостами. При дли-
тельном буксовании на одном месте такой автомобиль полностью
садится на картеры мостов, которые погружаются в размокший
грунт, увеличивая силу сопротивления движению.
При буксовании гусеничных машин процесс углубления колеи
проходит более интенсивно. Машина опускается ниже, пока днище
корпуса не будет опираться на грунт. При этом уменьшается сцеп-
ление гусениц с дорогой, а к силам сопротивления движению при-
бавляется сила трения днища корпуса о грунт. Длительное пребы-
вание обоих видов машин в таком состоянии приводит к тому, чго
мокрые массы земли наплывают и даже засасывают детали ходо-
вой части.
Замерзание грунта и примерзание его к колесам еще более
усложняет застревание машин.
В общем случае сложность застревания машин на местности
определяется:
39
— глубиной погружения колес и гусениц в грунт;
— плотностью и влажностью грунта;
— углом продольного и поперечного крена застрявшей техники;
— наличием условий, при которых тягач может реализовать уси-
лия, необходимые для извлечения застрявших машин.
Глубина погружения колес (гусениц) в грунт уже в значитель-
ной степени определяет необходимые усилия и способы вывода за-
стрявших машин.
При частичном погружении колес автомобиля в грунт (на
Мз часть) усилия, развиваемые тягачом, как правило, не превыша-
ют половины веса застрявшей машины Ga. Извлечение из поло-
жения застревания следует производить вперед или назад, причем,
трос от тягача может быть закреплен за один передний или задний
крюк автомобиля.
Если у застрявшей машины погрузились в грунт катки, баланси-
ры (тягачей) или передние или задние мосты (автомобилей), то
тяговые усилия значительно возрастают и иногда превышают вес
застрявших машин Ga. В этих случаях необходимо уменьшить кру-
Рис. 14. Крепление троса при извлечении
сильно застрявших хмашин:
а--правильное, d-неправильное.
тизну выхода всех колес,,
а трос от тягача следует
крепить за оба передних
крюка, как показно на
рис. 14, а. Такое крепле-
ние троса уменьшает поч-
ти вдвое нагрузку, прихо-
дящуюся на каждый бук-
сирный крюк, и понижает
вероятность появления
местных перенапряжений
в раме машины.
Крепление троса последовательно за оба крюка, показанное на
рис. 14, б, недопустимо. Такое крепление вызывает деформацию крю-
ков и верхних полок лонжеронов рамы, даже при сравнительно не-
больших нагрузках, так как силы Fi и Г2 действуют в направлении^
перпендикулярном оси автомобиля, на которое крюки не рассчи-
таны. В отличие от автомобилей на гусеничных машинах силу сцеп-
ления тягача с грунтом можно увеличить прикреплением бревна
к обоим гусеницам. Бревно крепится перпендикулярно к продоль-
ной оси тягача со стороны предполагаемого выхода (рис. 15). Впе-
реди непосредственно у гусениц подготавливается место для уста-
новки бревна, так, чтобы оно лежало на земле полностью, после-
чего. бревно прикрепляют к гусеницам при помощи специальных
кусков троса так, чтобы концы его выступали по сторонам тягача
одинаково на 0,5—1 м.
Желательно диаметр бревна выбирать для АТ-Т — 25; АТ-С -
22; АТ-П — 17 ель
После проведения подготовительных работ следует включить,
низшую передачу и начать медленное движение до тех пор, пока
40
бревно не окажется сзади тягача. Если извлечение за один прием'
не закончено, то следует повторить все сначала.
Крепление бревна к гу-
сенице может произво-
диться также при помощи
дополнительных траков
или специальной петлй из
троса.
При погружении в раз-
мокший грунт всей ходо-
вой части машины про-
цесс извлечения весьма
усложняется и становится
Рис. 15. Вывод тягача из положения за-
стревания с помощью бревна, прикреплен-
ного к гусеницам.
возможным ЛИШЬ с по-
мощью специальных гусеничных тягачей (тракторов), так как воз-
никающие усилия могут доходить до . 1,5—2 Ga и более.
Для уменьшения тяговых усилий в ряде случаев приходится вы-
полнять серьезные подготовительные работы, включающие: выве-
шивание мостов, откапывание ходовой части, подведение настила,
применение блоков и полиспастов.
Угол продольного и поперечного крана также определяет на-
правление и способы вывода машин.
При поперечном крене приходится проводить дополнительные
работы по вывешиванию опустившейся вниз стороны автомобиля
или по предотвращению перевертывания его в процессе извлечения.
В этих условиях иногда применяют два тягача, один из которых
тянет застрявшую машину, а второй при помощи троса препятст-
вует опрокидыванию.
Очень важным фактором при извлечении машин из положения
застревания является правильный выбор величины и направления
тягового усилия. Если величина тягового усилия определяется ха-
рактером застревания, то направление усилия диктуется направле-
нием вывода машин, а также созданием условий, максимально об-
легчающих процесс извлечения. Известно, что при положении троса
от застрявшей машины под углом вверх возникают вертикальные
составляющие тягового усилия, которые уменьшают нагрузку, при-
ходящуюся на передний мост, и облегчают извлечение застрявших
машин. Для увеличения этих усилий иногда 1выгодно: тягач ставить
ближе к застрявшей машине; пропускать трос под ее передним мо-
стом, закрепив за задний буксирный крюк; устанавливать подъем-
ную стрелу (рис. 12) или подвижную опору .под трос и располагать
тя!ач на возвышенности.
С другой стороны, встречаются случаи, при которых тягач не'
может реализовать максимальную силу на буксирном крюке или
тросе лебедки по условиям сцепления колес с дорогой- В этих слу-
чаях следует закрепить тягач за анкер, в качестве которого могут
быть использованы: деревья, столбы, другие поврежденные и ис-
правные машины, а также искусственно установленные анкеры.
4^
Некоторое увеличение силы тяги на лебедке может быть достиг-
нуто за счет правильного выбора места установки тягача, который
с целью создания дополнительных сопротивлений перемещению
может устанавливаться передними колесами в яму, кювет или за
бугор. При необходимости реализовать большие тяговые усилия
на тросе лебедки и недостаточном сцеплении колес тягача на влаж-
ных и плотных грунтах, иногда применяют упоры, которые устанав-
Рис. 16. Схема сил, действующих на тягач
при установке упоров под передний брус.
ливают под колеса или
под передний брус тягача.
Рассмотрим работу
упоров при установке их
под передний брус авто-
мобиля (рис. 16).
При отсутствии упо-
ров максимальное уси-
лие, которое можно полу-
чить на лебедке тягача,
определяется уравнением
О2),
где Gj и G2 — реакции передних и задних колес автомобиля;
ъ' — коэффициент трения заторможенных колес о грунт.
В случае, если нижние концы упоров опираются на грунт не-
подвижно, то сила Р будет поворачивать их и поднимать переднюю
часть автомобиля.
Тогда максимальное усилие, развиваемое лебедкой, будет
Л -J- GKn-ctga,
где GK.n — вес, приходящийся на переднюю поперечину рамы.
В это время реакция передних колес Gx -> 0.
Для получения больших значений Р следует угол а выбирать
возможно меньшим. Однако уменьшение угла а влечет за собой
увеличение длины упоров и их поперечного сечения. Рекомендуется
выбирать а = 40—45°. При установке упоров определим прираще-
ние усилий ДР=РХ — Р. Приняв L — база тягача и I — расстояние
ют переднего бруса рамы до передней оси, получим
(13)
Данная зависимость определяет выгодность установки упоров
на тягачах в зависимости от коэффициента скольжения заторможен-
ных колес. Подставим в полученное уравнение данные для авто-
мобиля ЗИЛ-157, тогда
ДР- G} (0,85 - </).
42
раз превышают максимальные
Упоры, установленные под углом a(i =45° на автомобиль ЗИЛ-157,
дают выигрыш в силе только при значениях ?'</0,85. При/>0,85.
применение упоров бессмысленно.
Таким образом, упоры под передний брус тягача целесообразно
устанавливать при малых значениях /, характерных для гололеда
и размокших грунтовых дорог.
Однако, чтобы получить максимальное приращение тяговой си-
лы, определяемой уравнением (13), необходимо сделать упоры не-
подвижными в нижней части, что представляет некоторые затруд-
нения, особенно при установке их на мягких и рыхлых грунтах.
С конструктивной точки зрения упоры для тягачей целесообразно
делать съемными и перевозить в кузове тягача.
Для извлечения застрявших машин иногда достаточно прило-
жить большое усилие от тягача на сравнительно малом участке
пути, или осуществить трогание с места застрявшей машины.
Известно, что при трогании с места даже исправных автомоби-
лей и гусеничных машин на хорошей дороге требуются значительно
большие усилия, чем при дальнейшем движении- Объясняется это
положение необходимостью преодоления инерционных сил покоя,
а при извлечении застрявших машин, кроме того, дополнительных
сопротивлений, которые во много
усилия, возникающие при обыч-
ном трогании с места. При из-
влечении застрявших машин з
практике иногда применяют
способ трогания с места «рын-
ком», который осуществляется
за счет резкого включения сцеп-
ления или предварительного
разгона тягача в пределах дли-
ны буксирного троса. В конце
пути разгона происходит на-
тяжение троса и рывок, благо-
даря чему скорость тягача па-
дает от v2 до какого-то значе-
ния щ. Уменьшение скорости
движения тягача на малом рас-
стоянии освобождает большую
кинетическую энергию, а воз-
никающие при этом усилия» в
ряде случаев оказываются чрезмерными и вызывают серьезные по-
вреждения машин (рис. 17).
Рассмотрим случай, при котором щ = 0, т. е. застрявшая маши-
на не была извлечена.
Тогда величина силы рывка определится из формулы
2 AS ’
Рис. 17. Повреждения автомобиля
ЗИЛ-150, получен! ые при выводе
из положения застревания.
43
где 7К — момент инерции вращающегося тела;
М — масса тягача;
су. — углогая скорость вращения тела;
AS — путь торможения тягача;
Ц и 1/2— скорости тягача ‘соответственно в начале и в конце
торможения.
Сила F зависит от разности (v22— ) и расстояния A S, на про-
тяжении которого происходит снижение скорости движения тягача.
Очевидно, большие расстояния AS соответствуют уменьшению силы
рывка по величине и увеличивают действие ее по времени.
Для существующих конструкций машин величина A S будет сла-
гаться из суммы упругих деформаций:
— пружины сцепного устройства тягача;
— подвесок тягача и аварийной машины;
— стальных канатов (тросов).
Величина упругих деформаций пружин автомобилей ЗИЛ-161
(157) и ГАЗ-51 А (63) составляет 40 мм, а автомобилей МАЗ-200
и Я АЗ — 28 (мм.
Упругие изменения, возникающие за счет подвесок тягача и за-
стрявшей машины вследствие деформаций рессор и пневматических
шин, различны и зависят в основном от конструктивных особенно-
стей автомобилей. В общем случае величина их может быть равна
20—40 мм для одного автомобиля. Большие значения относятся
к двухосным автомобилям, а меньшие — к трехосным, которые име-
ют повышенную жесткость подвески, благодаря наличию балансир-
ных тяг.
Упругие деформации стальных канатов, как было сказано ра-
нее, и основном подчиняются закону Гука и определяются
QEK
где Р — растягивающее усилие;
Q — площадь поперечного сечения каната-
Упругие удлинения канатов возрастают с уменьшением модуля
упругости £к и площади поперечного сечения каната Q. Величина'
силы рывка Р зависит от темпа торможения тягача, т. е. от абсо-
лютной разности квадратов скоростей (у22 — ^2i).
Очевидно, наибольшие усилия возможны в случаях, когда в ре-
зультате рывка застрявшая машина не будет извлечена и тягач
остановится, т. е. = 0.
На рис. 18 изображена кривая нарастания силы рывка для авто-
мобиля ЗИЛ-157 в зависимости от v2. при Uj = O. Из положения
кривой на графике следует, что рабочий ход буксирных устройств
тягачей не обеспечивает необходимое уменьшение (гашение) усилии,
возникающих при извлечении застрявших машин рывком-
44
Для существующих автомобилей даже с учетом упругих дефор-
маций подвесок машин использование рывка возможно лишь при
v2 > 5 км/час.
Увеличение тормозного пути
AS может быть достигнуто введе-
нием дополнительных звеньев,
имеющих большие упругие удли-
нения.
Например, применение капро-
новых, пеньковых и джутовых ка-
натов длиной 20—30 м позволит
получить упругие удлинения до
1,5—2 м. В этих случаях для по-
лучения инерционной силы F —
= 5000 кг тягач в конце пути раз-
гона может иметь скорости
v2 = 10—12 км/час.
Однако введение упругих
звеньев не предохранит полностью
Рис. 18. Изменение силы рывка в за-
висимости от скорости движения тя-
гача.
тягач и извлекаемую машину огвозможных перегрузок, т. е. сила
натяжения каната Fo6ui слагается из силы тяги по условиям сцепле-
ния ведущих колес тягача с грунтом Рс(1 и инерционной силы F.
Параметры, определяющие ве-
личины этих двух сил, изменя-
ются в широких пределах, по-
этому суммарная сила натяже-
ния канатов при одной и той
же скорости движения тягача
может принимать различные
значения.
Надежное предохранение
тягача и извлекаемой машины
от перегрузок может быть до-
стигнуто с помощью специаль-
Рис. 19. Схема тормозного устройства ных устройств, устанавливае-
ма тягача; 2 —крепление* тормозной муфты МЫХ Н* ТЯГЗЧаХ (РИС. 19). КОН-
на раме; 3—тормозная муфта; 4-барабан лебед- СТрукТИВНЫе ЭЛеМСНТЫ ТЗКИХ
ки; .7—стальной, канат. устройств ДОЛЖНЫ ВКЛЮЧИТЬ:
барабаны лебедок 4, привод лебедки от коробки передач или раз-
даточной коробки и тарированные тормозные узлы 3.
В качестве таких узлов могут использоваться фрикционные
и гидростатические муфты, которые должны обеспечивать выдачу
троса барабаном лебедки при возрастании усилия натяжения троса
до установленной величины.
Величина силы, при которой будет происходить выдача троса,
должна ограничиваться, исходя из конструктивных соображений
и обеспечения прочности деталей тягача.
45
При извлечении застрявших машин трос от лебедки тягача (трос
должен выдаваться лебедкой назад) закрепляется за-передние крю-
ки застрявшего автомобиля. В процессе разгона происходит натя-
жение троса и при возрастании силы натяжения его до заданной
величины начинается работа муфты и выдача троса с барабана
лебедки. При этом увеличивается путь замедления движения тя-
гача-AS, оставляя силу натяжения троса F постоянной.
Применение описанного способа увеличения тяговых усилий ко-
лесных и гусеничных тягачей обеспечивает:
— реализацию максимально допустимых тяговых усилий неза-
висимо от состояния дорог, т. е. условий сцепления ведущих колес
(гусениц) с грунтом и скорости движения тягача в конце пути
разгона;
— надежное предохранение тягача и извлекаемой машины от
перегрузок, так как тормозная муфта приводится в работу силой
натяжения троса, которая является результирующей силой тяги на
ведущих колесах тягача и инерционной силы.
Оборудование тягачей по предлагаемому способу исключит
в значительной степени необходимость установки: анкеров, блоков,
полиспастов, используемых при необходимости реализовать боль-
шие тяговые усилия.
Для проверки предлагаемого способа увеличения тяговых уси-
лий тягачей автором были проведены испытания модели автомоби-
ля с фрикционной тормозной муфтой.
В процессе испытаний производилась запись на ленту осцилло-
графа силы натяжения троса, а также изменение скорости движе-
Рис. 20. Осцилограммы:
7 —сила рывка; 2— сила на тросе лебедки.
лебедка выдала трос длиной Д S
Полученные осциллограммы
и необходимости использования
застрявших машин.
ния модели во времени.
На рис. 20 представлена ос-
циллограмма изменения силы
рывка 1 при наличии жесткой
связи между моделями тягача
и извлекаемой машины (без
предлагаемого устройства).
Вес модели тягача—3350 г.
При испытании упругие
удлинения Д S составляли
20,8 мм, v2 =0,7 м/сек, F
= 10 кг.
Вторая осцилограмма была
получена на этой же модели,
но с лебедкой и фрикционной
муфтой, отрегулированной ла
выдачу троса при усилии в
3,2 кг. При этом ^2 = 0,7 м/сек,
68 мм.
свидетельствуют о возможности
инерционных сил для извлечения
46
Некоторые колебания инерционного усилия, наблюдаемые на
2>-й кривой, следует отнести за счет неточности регулировки фрик-
циона и недостаточной приработанности трущихся поверхностей.
Применение гидростатических муфт с плавным нарастанием тор-
мозного усилия позволит их полностью исключить.
Иногда для увеличения тяговых усилий применяют несколько
тягачей, соединенных с извлекаемой машиной последовательно или
параллельно. Применение таких поездов вызывается, с одной сто-
роны, необходимостью реализовать большие тяговые усилия, а с дру-
гой,— отсутствием тягачей, способных в данных условиях развито
потребные усилия.
Таким образом, применение нескольких тягачей для извлечения
одной машины вызывается необходимостью и не может рассматри-
ваться, как правило.
Тягачи могут быть соединены последовательно. Этот способ ча-
ще всего применяется при извлечении застрявших машин на доро-
гах. Максимальное тяговое усилие получается при полной согласо-
ванной работе тягачей.
При параллельном способе сцепки тягачи могут располагаться
в ряд или со смещением один к другому в зависимости от условий
местности. Для увеличения тяговой силы следует тягачи ставить
возможно ближе друг к другу.
ПОСТАНОВКА НА КОЛЕСА ОПРОКИНУТЫХ МАШИН
Опрокидывание автотракторной техники происходит в резуль-
тате воздействия избыточного давления воздушных масс, возника-
ющего при взрывах ядерных боеприпасов, на боковые поверхности
машин. Это одно из наиболее распространенных аварийных поло-
жений. Даже при эксплуатации машин в условиях мирного времени
бывают случаи нарушения поперечной устойчивости автомобилей,
вследствие конструктивных недостатков (автомобиль ГАЗ-63) и на-
рушения правил эксплуатации, особенно при движении на крутых
поворотах дорог и косогорах.
Изучение возможных способов вывода машин из опрокинутых
положений и экспериментальные исследования, выполненные
в ВАТТ и НИИ-21, позволяют рекомендовать для практического
применения способ установки опрокинутых машин в положение
на колеса с помощью лебедок тягачей.
Рассмотрим действие сил, возникающих при выводе автомобиля
из опрокинутого положения (рис. 21), для чего обозначим:
Р—усилие на тросе лебедки тягача;
Н — плечо приложения усилий;
а—угол наклона машины;
|В — угол между вертикалью и линией, соединяющей точку при-
ложения усилия и точку опоры;
Ад — высота центра тяжести автомобиля.
47
Величина силы Р, приложенной к опрокинутому автомобиля^
выразится зависимостью
cos a cos 8
//cos (р — а)
(14)
Максимальное значение силы Р следует ожидать при а = 0, т. е.
в момент отрыва платформы автомобиля от земли. В этом случае
Р —
И ~ '
Если подставить в приведенную зависимость значения величин
для автомобиля ГАЗ-63, то Р = 0,53 Ga, т. е. Ga. В действи-
тельности, при установке автомобиля на колеса по мере увеличения
Рис. 21. Схема сил при выводе авто-
мобиля из опрокинутого положения.
вить (Л д — кВ),
угла а точки опоры находятся не
на протекторах шин, как указано
на рис. 21, а на ободах колес. Ши-
ны, лежащие на земле, отжима-
ются весом автомобиля, благода-
ря чему величина Л д уменьшается
на ширину покрышки, уменьшая
плечо реактивного момента. Кро-
ме того, наблюдается сжатие верх-
них рессор, вызывающее некото-
рый наклон мостов в сторону при-
ложения усилия, в силу чего центр
тяжести автомобиля еще больше
приближается к точкам опор.
Описанные явления могут быть
учтены, для чего в приведенных
выше зависимостях вместо табличных значений hA необходимо ста-
где В — ширина покрышки, на которую уменьшается величина Лд;
k — коэффициент, учитывающий деформации рессор.
Окончательно, максимальное усилие при установке на колеса
юпрокинутого на бок автомобиля, определится по формуле
о G.(h,-kB}
Р ==. —1—------
(15)
Н
Значения коэффициента k,полученные в результате опытов, для
автомобилей типа ГАЗ-51 (63) и ЗИЛ-150 (157) равны 1,1 —1,3.
В случаях установки на колеса машин, находящихся на косогоре,
составляющая сил веса G.a будет направлена в сторону уклона.
48
В этом же направлении рекомендуется поворачивать опрокинутый
автомобиль.
При положении машины вверх колесами усилия, необходимые
для перевертывания в положение на бок, остаются по величине при-
мерно такими же.
В общем случае при установке на колеса опрокинутых машин не-
обходимо выполнить следующий перечень работ:
— поставить тягач перпендикулярно к оси опрокинутого авто-
мобиля; прикрепление троса не за кабиной перевернутого авто-
мобиля (тягача) или установка его не перпендикулярно к оси
опрокинутой машины может серьезно повредить кабину и кузов,
так как опрокинутый автомобиль начинает скользить по земле;
— 1 закрепить трос от лебедки за раму сзади кабины. Если авто-
мобилыперевернуть вверх колесами, то трос закрепляют за дальний
от тягача лонжерон рамы;
— усилие от лебедки должно прикладываться плавно без
рывков;
— время на вывод из опрокинутого положения автомобиля со-
ставляет не более 10—15 мин.
ПОДГОТОВКА к БУКСИРОВАНИЮ МАШИН С НЕИСПРАВНОЙ
ХОДОВОЙ ЧАСТЬЮ
Процесс подготовки к буксированию машин с повреждениями
деталей ходовой части имеет цель придать неисправным автомо-
билям (тракторам) такое состояние, которое позволит буксировать
их за тягачами общего назначения.
Следовательно, рассматриваемые виды работ характерны для
эвакуации поврежденных машин тягачами общего назначения,
а при наличии специализированных средств эвакуации (см. гла-
ву IV) необходимость в них отпадает.
В зависимости от характера повреждений деталей ходовой части,
имеющегося оборудования и приспособлений восстановление по-
движности машин может достигаться:
— применением простых приспособлений и дополнительных де-
талей, устанавливаемых на неисправную ходовую часть;
— проведением демонтажных и других видов работ.
Восстановление подвижности ходовой части поврежденных машин
с помощью приспособлений
Личный состав, занимаясь подготовкой ходовой части машин
на месте выхода их из строя, часто вынужден вводить дополнитель-
ные крепления, простые приспособления, которые облегчают про-
цесс буксирования машин.
Рассмотрим несколько примеров.
Пример 1. Если поврежденный автомобиль в числе других
неисправностей имеет поломанную переднюю рессору, то в прак-
4 Баер В. Г.
49
тике иногда крепят поломанный конец ее к раме 'При помощи стре-
мянки или толстой про1волоки. При обломе обоих концов коренного
листа рессору крепят к раме двумя стремянками, после чего не-
исправный автомобиль буксируется за обычной грузовой машиной.
Пример 2. Двухосные автомобили, имеющие серьезные по-
вреждения заднего моста, ранее буксировались на костыле или
санках.
В этом случае поврежденная сторона моста вывешивалась на
домкратах и ставилась на костыль или санки (в зимних условиях).
Верхний конец костыля закрепляется тросом, цепью или проволокой
за лонжерон рамы.
Помимо больших затрат времени на подъем, установку и креп-
ление костыля, для перемещения таких машин требовались большие
тяговые усилия, так как костыль оказывал значительное сопротив-
ление движению.
Пример 3. Если поврежден средний или задний мост трехос-
ного автомобиля, то рекомендуется прикрепить поврежденную сто-
рону моста к раме стремянками, цепью или толстой проволокой
и снять поврежденное колесо.
В этом случае второй конец рессоры вместе с исправным задним
мостом воспримет нагрузку на себя. Неисправная сторона сред-
него моста останется при этом на высоте 15—20 см над землей и ав-
томобиль может свободно буксироваться на своей ходовой части.
Рис. 22. Крепление поврежденного среднего моста у трех-
осных автомобилей на раме стремянками.
Способ подвески и крепления мостов к раме можно применять
также и в тех случаях, когда полностью вышел из строя средний
(рис. 22) или задний мост трехосного автомобиля и даже при по-
вреждении обоих мостов на противоположных сторонах. После под-
вески поврежденных концов среднего и заднего мостов задняя часть
автомобиля будет опираться с каждой стороны на одно исправное
колесо среднего и заднего мостов, что позволит буксировать по-
врежденный автомобиль на собственной ходовой части.
Пример 4. Автомобиль с серьезными повреждениями перед-
него моста целесообразно вывесить на домкратах возможно выше
и установить на санки, положив балку передней оси в жолоб верх-
50
него бревна и закрепив ее цепями. Санки с поврежденным автомо-
билем могут буксироваться за тягачом на жесткой буксирной тяге.
Скорость буксирования должна быть 10—15 км/час. В случаях уво-
да санок в сторону во время движения следует притормозить бук-
сируемый автомобиль. В этом случае направление движения санок
изменится. Такой способ буксирования можно применять на доро-
гах, где нет движения встречного транспорта.
Приведенные примеры показывают, что отсутствие специализи-
рованных эвакосредств, предназначенных для эвакуации автомоби-
лей с поврежденной ходовой частью, вызывает трудоемкие дополни-
тельные работы, которые снижают производительность эвакосредств.
Выполнение демонтажно-монтажных работ
Исходя из конкретного характера боевых повреждений, иногда
выгоднее при подготовке машин к эвакуации производить только
разборочно-сборочные работы. Безусловно, что произвести полный
ремонт автомобиля в этих условиях не всегда возможно, поэтому
при подготовке машин к буксированию следует выполнять работы,
связанные с приданием подвижности узлам ходовой части.
Возможности производства такого рода работ на месте выхода
машин из строя рассмотрим на примерах.
Пример 1. Если автомобиль имеет повреждения колес, кото-
рые можно заменить исправными, то эту операцию целесообразнее
произвести на месте выхода машины из строя. Замена поврежден-
ных колес производится обычно без особых трудностей, однако на
болотистых и размокших грунтах иногда требуется произвести
двух-, трехкратный подъем одной стороны моста, так как домкрат
сильно погружается в грунт.
Пример 2. При повреждении коробки передач или главной
передачи часто происходит заклинивание некоторых деталей, в ре-
зультате чего задние колеса автомобиля теряют способность прово-
рачиваться.
Для буксирования такого автомобиля на собственной ходовой
части следует отсоединить конец карданного вала от главной пере-
дачи и прикрепить его к раме с помощью проволоки или цепи. Если
повреждена (заклинена) главная передача, то следует вынуть по-
луоси, закрыть образовавшиеся окна жестью или листовой сталью
и доставить поврежденный автомобиль на СППМ.
Пример 3. Иногда повреждения колес автомобиля сопровож-
даются деформацией деталей, которые усложняют выполнение де-
монтажно-монтажных работ.
Так, на рис. 23 разорвавшийся обод колеса автомобиля ЗИЛ-150
загнулся за тормозной диск, в результате чего колесо потеряло вся-
кую способность проворачиваться, а снять его нельзя до тех пор»
пока не будет обрезана или обрублена загнувшаяся часть обода.
Если подобные повреждения имеет переднее колесо, то иногда вы-
годно отсоединить поперечную рулевую тягу, выбить шкворень
4*
51
и снять колесо вместе с поворотной цапфой. На место старых де-
талей поставить новые. При повреждении задних колес необходимо
прежде всего обрезать газовым пламенем загнувшиеся части обода
колеса, тормозного диска и установить новое колесо, предваритель-
но вывесив мост на домкратах. Иногда выгоднее установить вна-
чале повое наружное колесо,
как показано на рисунке, после чего
обрезать загнувшиеся части обода.
Полная подготовка к эвакуа-
ции таких машин при отсутствии
оборудования для газовой резки
металлов занимает 6—10 чел.-ч.
Пример 4. Для подготовки
автомобилей, имеющих частично
сорванные с места крепления аг-
регаты и один исправный мост,
крайне необходимо применять тя-
гачи, имеющие на себе подъемно-
погрузочное оборудование. На-
пример, тягачи ЗИЛ-157 с бирель-
сом и талью или гидравлическим
краном 4030. Наличие бирельса
или крана делает их более
приспособленными для выполне-
ния таких работ, чем обычные
грузовые машины.
Подготовка к эвакуации авто-
мобилей, имеющих отмеченные
Рис. 23. Заклинивание обо-
да колеса за тормозной диск
у автомобиля ЗИЛ-150.
выше Повреждения, будет включать следующие работы:
— пользуясь краном или талью автомобиля ЗИЛ-157 и монтаж-
ным инструментом, отсоединить агрегаты, частично сорванные
с опор, и погрузить в кузов тягача двигатель, коробку передач, ра-
диатор, (передний или задний мост;
— проверить ходовую часть, убрать обломки, мешающие дви-
жению;
— погрузить переднюю или заднюю часть рамы в кузов тягача
талью и закрепить ее. На выполнение указанных работ потребуется
5—7 чел.-час. (таблица 7).
После снятия агрегатов автомобиля вес, приходящийся на сво-
бодный конец рамы, не будет превышать 0,5 т; следовательно, его
можно погрузить в кузов тягача с помощью крана и буксировать
оставшуюся часть автомобиля в полупогруженном состоянии
(рис. 24).
Пример 5. Эвакуация автомобилей, имеющих оборванные
и разбросанные взрывом агрегаты, сильную деформацию рамы
и подлежащих списанию, включает:
— сбор и погрузку в кузов тягача оборванных взрывом узлов
и агрегатов;
52
— снятие с деформированной рамы деталей и узлов, которые
могут быть использованы в ремонтных частях;
— сильно деформированные и не пригодные к использованию
узлы и агрегаты, могут быть оставлены на месте повреждения.
Таблица 7
Виды работ при подготовке машин ГАЗ, ЗИЛ и АТ-С к буксированию
и их примерная трудоемкость в чел-ч
Виды подготовительных работ Затраты времени Всего
основные работы вспомога- тельные работы
Замена поврежденного колеса .... 0,5-1,0 0,2-0,3 0,7-1,3
Крепление на раме сломанного кон- ца рессоры 0,3-0,7 0,1—0,2 0,4-0,9
Отсоединение карданного вала от глав- ной передачи моста и закрепление его на раме 0,4—0,8 0,4-0,5 0,8-1,3
Снятие колеса и крепление на раме одной стороны поврежденного сред- него (заднего) моста 1,5-2,0 0,4-0,5 0,9-2,5
Снятие заклиненного колеса 5,0-8,0 1-1,5 6,0—9,5
Установка моста на санки (с помощью домкратов) Снятие частично сорванных агрегатов 2,0-3,0 1-1,5 3,0-4,5
краном и подготовка к буксирова- нию машины 5,0-7,0 1,5—2,9 6,5-9,0
Укорачивание гусеничной цепи с оде- ванием ее на опорные катки .... 5,0-8,0 0,5-1,0 5,5—9,0
Снятие гусеничных цепей для буксиро- вания на катках, погрузка гусенич- ных цепей в кузов машины .... 4,0-6,0 1,0-1,5 5,5-7,5
Пр и м е ч а н и е. Вспомогательные работы включают контрольный осмотр
и снятие частично оборванных деталей кузова и оперения., которые мешают дви-
жению.
Ходовая часть гусеничных машин может подготавливаться дву-
мя способами. При повреждении гусеницы ведущего колеса или ле-
нивца можно укоротить гусеничное полотно (рис. 25), надев его
только на опорные катки, минуя поврежденные.
При эвакуации машин на небольшие расстояния гусеничное по-
лотно может быть снято вообще. В этом случае допускается букси-
рование гусеничных тягачей на катках.
Рассмотренные случаи подготовки к буксированию машин с раз-
личными повреждениями ходовой части дают основание сделать
следующие выводы:
— на месте выхода из строя неисправных автомобилей целесо-
образно выполнять лишь несложные подготовительные работы, свя-
53
занныес повреждениями колес (при возможности замены) и рессор,
а также с заклиниванием деталей коробки передач, раздаточной ко-
робки и главных передач ведущих мостов;
— при сильных повреждениях ходовой части значительно возра-
стает трудоемкость подготовительных работ. В этих случаях жела-
тельно использовать специально оборудованные эвакотягачи, при-
менение которых позволит исключить почти все подготовительные
работы;
Рис. 24. Буксирование рамы с задним мостом автомобиля ГАЗ-63.
— объем работ при подготовке к буксированию гусеничных тя-
гачей во всех случаях остается обязательным;
Рис. 25. Укорачивание гусеничной цепи на тягачах.
— для ориентировочной оценки трудоемкости подготовительных
работ могут быть рекомендованы данные, полученные в результате
опытов.
ГЛАВА III
СПОСОБЫ ПЕРЕВОЗКИ НЕИСПРАВНЫХ МАШИН
Перевозка поврежденных автомобилей и гусеничных тягачей яв-
ляется одним из основных звеньев эвакуации- Все неисправные ма-
шины в зависимости от характера повреждений могут перевозиться
на своей ходовой части за тягачами или на платформах, выделяе-
мых для этой цели поездов. Буксирование неисправных машин мо-
жет осуществляться:
— с помощью стальных канатов и жестких буксирных тяг;
— с помощью специальных приспособлений при отсутствии во-
дителя на буксируемой машине;
— на подкатной тележке (для автомобилей);
— в полупогруженном состоянии (для автомобилей).
Перевозка неисправных машин может производиться:
— автомобильным транспортом;
— железнодорожным и водным транспортом.
ОБОРУДОВАНИЕ, ИСПОЛЬЗУЕМОЕ ПРИ ПЕРЕВОЗКАХ
НЕИСПРАВНЫХ МАШИН
При перевозке неисправных машин используется: чалочное, бук-
сировочное и тягово-транспортировочное оборудование.
К чалочному оборудованию относятся: цепи, стальные канаты со
стяжными устройствами, стремянки и вязальная проволока.
Цепи. При выполнении эвакуационных работ наибольшее рас-
пространение получили звенчатые цепи. Они применяются в основ-
ном при крепежных работах, когда расстояние между скрепленны-
ми частями машин непостоянно. Например, при креплении машин
разных моделей на платформах тягачей и прицепов. Крепление
звеньев цепи осуществляется обычными болтами и гайками, кото-
рые обеспечивают быстроту выполнения работ и необходимую проч-
ность соединения звеньев.
Цепи подбираются по диаметру стального прутка звена, поль-
зуясь зависимостью
55
где Р—нагрузка, воспринимаемая цепью, кг\
d —-диаметр прутка звена цепи, см\
[о] — допустимое напряжение на растяжение, кг)см2. ([а]-=
— 600 kzicm2).
Чалочные тросы с винтовыми стяжными устройствами обычно
используются для крепления неисправных машин на прицепах и по-
луприцепах, где расстояния между скрепляемыми объектами более
постоянны.
Стремянки применяются для крепления деталей на поврежден-
ной машине. Например: обломанных концов передних рессор —
к раме; кузова — к раме; мостов — к раме и т. д.
Вязальная малоуглеродистая проволока применяется для креп-
ления оборванных деталей на рамах машин, а также для закрепле-
ния машин на различных транспортных средствах при их пере-
возках.
К буксировочному оборудованию относятся: буксирные тросы,
буксирные тяги и подкатные тележки.
Буксирные тросы состоят из стальных канатов длиной 5—8 м,
на концах котЪрых заделаны петли специальным образом. Такие
тросы нашли широкое применение при буксировании танков и гу-
сеничных машин. Стальные канаты можно использовать только при
наличии исправных тормозов на ведомых машинах. В противном
случае при движении на спусках и при торможении тягача даже на
ровной местности неизбежны наезды буксируемых мЬшин на тягач.
Рекомендуется применять этот вид буксирования как исключение-
и только при перевозке поврежденных машин на небольшие рас-
стояния.
Жесткая буксирная тяга, изготовленная из стальной трубы диа-
метром 60—80 мм, является более совершенным соединительным
звеном. При исправности переднего крюка поврежденного автомо-
биля и малом диаметре серги она надежно предохраняет тягач от
наезда ведомой машины. Определим наиболее выгодную длину бук-
сирной тяги, для чего произведем анализ работы звеньев поёзда
при движении на прямом участке дороги и на повороте.
Так, при движении поезда по прямой продольная ось буксируе-
мого автомобиля не всегда будет совпадать с осью тягача. При объ-
езде препятствий, встречаемых на дороге и по ряду других причин,
буксируемый автомобиль может отклониться в сторону, в резуль-
тате чего образуется угол 7 между продольной осью тягача и на-
правлением буксирной тяги (рис. 26).
Сила Г, приложенная к прицепному крюку тягача, действуя на
плече hK (высота буксирного крюка), образует момент, который
сказывается на изменении реакции правой и левой сторон колес
тягача.
56
В данном случае уменьшается нагрузка на задние колеса пра-
вой стороны автомобиля и увеличиваются реакции левых задних
колес. Такое перераспределение нагрузки отрицательно сказывает-
ся на силу сцепления ведущих колес с дорогой, так как уменьшение
сцепного веса на ведущие колеса одной стороны при наличии диф-
Рис. 26. Схема сил, возникающих при буксировании поврежденных
машин по прямой.
ференциала в главной передаче приводит к уменьшению силы
тяги тягача по сцеплению.
Кроме того, сила Р, направленная под углом к ведомому авто-
мобилю, вызывает дополнительное сопротивление его движению,так
как буксируемый автомобиль не только перемещается вперед, но
и смещается ею»в сторону, благодаря чему сопротивление движению
увеличивается в 3—5 раз. Подобные перекосы буксирной тяги при
движении по плохим дорогам часто приводят к застреваниям машин.
Следует отметить, что перекосы буксирной тяги уже заложены
в конструкции машин, так как передние крюки находятся сбоку
продольной оси буксируемого автомобиля.
При одинаковом смещении осей машин Н величина дополни-
тельных сил будет возрастать при уменьшении длины тяги, так как,
чем больше величина /, тем меньше угол у и тем меньше величина
сил, нарушающих нормальное движение поезда.
Однако чрезмерно большие по длине буксирные тяги очень тя-
желы и неудобны в перевозке; кроме того, они затрудняют движе-
ние поезда на повороте.
При работе поезда по пересеченной местности или по дороге
с крутыми поворотами очень важно, чтобы тягач и буксируемый
автомобиль могли хорошо маневрировать, т. е. имели возможность
поворачиваться на минимальной площади.
Приведем анализ работы звеньев поезда на повороте, для чего
рассмотрим случай, при котором буксируемый автомобиль повора-
чивается за тягачом так, что радиусы поворота заднего буксирного
крюка тягача и переднего крюка автомобиля равны между собой,
причем поворот прицепа и тягача происходит вокруг одного центра.
Тогда согласно рис. 27
= /?к sin или у = /?02sinT — cos у. (16>
57
Выражение В cos 7 изменяется от В при R -> ос до (0,8—0,9) В
при /?пт1П. Кроме того, при постоянном значении длины тяги /
и уменьшении радиуса поворота тягача величина sin 7 будет
увеличиваться и, очевидно, наибольшее значение ее будет при
-7?min. Это и будут наиболее трудные условия поворота.
Рис. 27. Схема поворота поезда при наличии буксирной тяги.
Принимая /?к = видим, что при увеличении длины тяги
увеличивается sin 7, а при Z = 2/?min sin 7=1. Это такое положение,
когда тягач совершил полный разворот на 180° по отношению
к прицепу, т. е. при такой длине тяги движение поезда на пово-
роте невозможно.
Для определения наиболее выгодной длины тяги в уравне»
нии (16) заменим sin 7 на величину -у, тогда
I = }/(0,9В)2 + 2RmH - 0,9В.
(17)
Подставив в уравнение 17 данные для тягача ЗИЛ-157 и приняв
77 = 0,8—1,0, получим наивыгоднейшую длину буксирной тяги 3,2—
3,5 м.
Рис. 28. Тяга для буксирования
поврежденных машин.
Короткие две тяги длиной 0,7—
1,5 м используются для буксирова-
ния автомобилей без водителя. Тяги
изготавливают из двух стальных
труб диаметром 50—60 мм (рис. 28).
Петли 1 ввариваются в трубы 2
электродуговой сваркой, причем
внутренний диамаетр их должен со-
ответствовать размеру передних
крюков буксируемого автомобиля.
Соединительное звено 3 в процессе
буксирования надевается на буксир-
ный крюк тягача. Такой способ .креп-
.58
ления машин обеспечивает буксирование автомобилей без води-
теля по хорошим дорогам. Поворот управляемых колес на
ведомом автомобиле обеспечивается конструктивным наклоном
шкворней '.передней оси назад и вбок на угол около 2°. Поэтому на
ровной местности передние колеса буксируемого автомобиля сле-
дуют в требуемом направлении. Однако при переезде через неров-
ности (вороги, ямы) точка опоры колес перемещается вперед и про-
исходит явление дестабилизации, т. е. такого поворота управляе-
мых колес, после которого они не возвращаются самостоятельно
в исходное положение. В силу отмеченного недостатка этот способ
буксирования применяется ограниченно.
Подкатные (буксирные) тележки применяются для перевозки
автомобилей с поврежденным передним или задним мостом за ко-
лесными или гусеничными тягачами (рис. 29).
Тележка состоит из тяги 1 длиной около 2 м, катков 2 и опор-
ного устройства 3, на которое грузится поврежденный мост авто-
мобиля с помощью крана или домкратов. Погрузка машин может
Рис. 29. Подкатная тепежка.
осуществляться также за счет разности плеч тележки. С этой целью
перед началом погрузки следует поднять буксирную тягу вверх,
наклонить и подвести опорное устройство тележки под неисправ-
ный мост, затем, затормозив неисправный автомобиль, повернуть
тягу тележки усилием лебедки тягача в горизонтальное исходное
положение и, соблюдая особую осторожность, прицепить буксирную
тягу за крюк тягача. В ряде случаев взамен тележки могут исполь-
зоваться обычные роспуски.
К тягово-транспортировочному оборудованию относятся: колес-
ные и гусеничные тягачи, полуприцепы и прицепы, краткие харак-
теристики которых приводятся в приложениях 1, 2, 3.
Колесные тягачи без специального оборудования могут букси-
ровать поврежденные автомобили при наличии исправной ходовой
части и рулевого управления.
Для перевозки машин с разрушенной ходовой частью могут ис-
пользоваться: подкатные тележки, роспуски, полуприцепы и при-
цепы, особенно низкорамные, после соответствующего дооборудова-
ния, вызванного характером повреждения машин.
59
Погрузка неисправного автомобиля на прицеп может произво-
диться по аппарелям с помощью лебедки, поэтому тягач должен
выдавать трос назад через платформу прицепа. Кроме того, при по-
грузке автомобилей без переднего моста детали, расположенные
ниже рамы (кронштейны рессор, поперечины рамы, картер двига-
теля, картер маховика, коробка передач и под*ножки) могут заде-
вать за край платформы прицепа, что затруднит погрузку и может
вызвать дополнительные повреждения у объекта погрузки и плат-
формы. Следовательно, конструкция аппарелей прицепов должна
учитывать эти особенности.
При разгрузке поврежденных машин возникает необходимость,
приложить усилие в противоположном направлении. В этих слу-
чаях иногда целесообразно на задней части платформы полупри-
цепа закрепить блок, через который пропускать трос от лебедки.
Свободный конец троса следует 'крепить за переднюю часть по-
врежденного автомобиля.
Таким образом, успешное применение полуприцепов и прицепов,
используемых в народном хозяйстве, возможно лишь после дообо-
рудования их специальными устройствами, позволяющими быстро
и без серьезных затруднений производить погрузку, перевозку
и разгрузку машин, имеющих самый различный характер повреж-
дений.
Наличие кранов достаточной грузоподъемности в местах погруз-
ки и разгрузки не дает оснований пренебрегать данным оборудова-
нием, так как в условиях ведения боевых действий выход из строя
даже одного крана неизбежно вызовет ранее отмеченные затрудне-
ния и резко понизит производительность эвакосредств.
Из гусеничных машин, используемых в народном хозяйстве, наи-
больший интерес представляют трелевочные тракторы (ТДТ-40,
ТДТ-60 и ТДТ-75). Эти тракторы используются на вывозке леса.
Имея на задней части рамы лебедку и откидной металлический щи г,
они в состоянии быстро грузить и перевозить автомобили с различ-
ными повреждениями (рис. 30). Время погрузки автомобиля перед-
ним или задним мостом на щит трактора составляет 15—30 секунд.
Небольшие скорости движения этих машин несколько ограничи-
вают ихприменение, особенно при перевозке на большие расстояния.
При работе на небольших плечах трелевочные тракторы могут
с успехом использоваться для эвакуации автомобилей и гусеничных
машин с различными повреждениями.
Сельскохозяйственные тракторы могут также использоваться
для эвакуации гусеничных машин и автомобилей, получивших раз-
личные повреждения, при условии дооборудования навесной си-
стемы тракторов палочными устройствами.
Следует отметить, что гидравлические навесные системы трак-
торов Т-75 и С-100 имеют грузоподъемность соответственно 3000
и 3500 кг при высоте подъема более 1 м, благодаря чему они в со-
стоянии поднять поврежденную переднюю или заднюю часть авто-
мобиля и буксировать его в таком состоянии на СППМ.
60
Гусеничные тягачи АТ-С и АТ-Т (приложение 2) используются
в основном для эвакуации тяжелых гусеничных машин, а также для
выполнения работ по расчистке путей эвакуации и при извлечении
тяжело застрявших машин.
Рис. 30. Буксирование поврежденных машин трелевочным
трактором.
СРАВНИТЕЛЬНАЯ ОЦЕНКА СПОСОБОВ БУКСИРОВАНИЯ
ПОВРЕЖДЕННЫХ АВТОМОБИЛЕЙ
Перевозка неисправных машин колесным транспортом часто за-
трудняется из-за недостаточной проходимости тягачей, поэтому
оценку указанных выше способов буксирования произведем: по
удельной мощности, удельной силе тяги по сцеплению ведущих ко-
лес тягача с грунтом и по ширине габаритного коридора при дви-
жении поезда на поворотах с минимальным радиусом.
Удельная мощность измеряется в лошадиных силах на тонну
и определяется отношением максимальной мощности двигателя
к суммарному весу поезда, т. е. к весу тягача, прицепа и повреж-
денной машины.
Удельная сила тяги по сцеплению — величина отвлеченная
и определяется отношением сцепного веса поезда к его общему весу.
Ширина габаритного коридора измеряется в метрах и опреде-
ляется габаритным расстоянием, которое занимает поезд на пово-
роте с минимальным радиусом. Очевидно, поезда с большими зна-
чениями удельной мощности, удельной силы тяги по сцеплению
и соответственно с малой шириной габаритного коридора обладают
большей проходимостью и могут использоваться для эвакуации по-
врежденных машин в трудных дорожных условиях. Наоборот, по-
езда с меньшим'И значениями удельных мощности и силы тяги
ио сцеплению целесообразно использовать только на дорогах.
61
Буксирование машины с помощью стальных канатов
и жестких буксирных тяг
Для определения указанных выше параметров необходимо вы-
яснить, как изменяются реакции колес тягача при буксировании
неисправных машин.
При движении поезда по плохим дорогам буксирная тяга будет
занимать различные положения и оказывать влияние на изменение
реакции колес. Если по условиям местности буксирный крюк тя-
гача расположен ниже переднего крюка буксируемого автомобиля,
то реакция задних колес тягача будет уменьшаться и наоборот.
Таким образом, отклонения буксирной тяги от горизонтального
положения вызывают уменьшение или увеличение реакции задних
колес. Это положение ясно и без доказательств, поэтому остается
выяснить влияние буксирной тяги на реакцию задних колес при дви-
жении по ровной дороге.
Если тягач буксирует за собой неисправный автомобиль (рис. 31),
•Рис. 31. Схема сил, действующих на поезд при движении на подъем.
то, пренебрегая сопротивлением воздуха ввиду относительно не-
большой скорости движения, рассмотрим равновесие тягача в вер-
тикальной плоскости, для чего возьмем сумму моментов сил, дей-
ствующих относительно его центра тяжести. Тогда для случая
равномерного движения можно написать
Rxa + Т/1Л — GJ cos а — Опр (Лд — Ак) sin а —
- Опр (^д — Ак) fcos а — R2b = О,
где Т — сила тяги на ведущих колесах;
Опр — полный вес буксируемого автомобиля;
62
R} — нормальная реакция на передних колесах тягача;
Ад — высота центра тяжести тягача;
Ga — полный вес тягача;
Ак — высота сцепного устройства.
В приведенной зависимости
/?i - Ga-cos а — /?2;
/?£ (а 4- А) = R2L и Т —
Произведя соответствующие замены указанных значений, по-
лучим нормальную реакцию задних колес тягача R.,
D_ Gaa cos а — Gnp (Ад — Ак) (/cos а — sin а)
А-ф-Ад • (,8>
Из приведенной формулы видим, что увеличение реакции
задних колес тягача при буксировании неисправного автомобиля
следует ожидать тогда, когда Ак > Ад и, наоборот, при АК<АД
реакция задних колес будет уменьшаться.
У существующих автомобилей разница Ад — Ак мала по аб-
солютной величине, а будучи умноженной на f становится еще
меньше. Поэтому при движении поезда реакция задних колес
изменяется незначительно и для практических расчетов может
не приниматься во внимание.
Значения параметров, характеризующих проходимость поезда
при рассматриваемом способе буксирования, определятся:
— удельная мощность поезда при буксировании однотипных
Ne Ne
машин составит г г—; при Оа = Gnp „„ ;
“г ^пр
Р
— удельная сила тяги по сцеплению = ~q-, при.
р ₽
Ga = Gnp ДА7 = 9^- и для тягача со всеми ведущими колесами
Основные параметры, характеризующие буксирование автомо-
билей на жесткой или гибкой сцепке, справедливы и для буксиро-
вания автомобилей на подкатной тележке. Однако в этом случае
увеличится суммарный вес прицепа на величину .веса тележки, ко-
торый примерно составит 0,2 Ga, тогда
______и \rj_______________Рщ
l,3Ga + Gnp J,2Ga + Gnp-
63
При движении поезда на повороте подкатная тележка занимает
более определенное положение. При этом увеличивается значитель-
но ширина колеи поезда, ухудшая проходимость его на кривых по
сравнению с буксированием на жесткой сцепке или тросе. В общем
случае проходимость поезда ухудшается. К преимуществам тележ-
ки следует отнести возможность буксирования поврежденных авто-
мобилей без водителей за гусеничными машинами, что весьма вы-
годно, особенно в условиях бездорожья.
Буксирование неисправных автомобилей в полупогруженном
состоянии
При данном способе буксирования поврежденная часть автомо-
биля грузится на платформу тягача, в силу чего меняются вес тя-
гача и распределение нагрузок по осям.
Нагрузки, воспринимаемые дорогой от колес автомобиля-тягача
и прицепа, стоящих неподвижно на горизонтальной площадке
(рис. 32), или равные им по абсолютной величине нормальные ре-
Рис. 32. Схема сил, действующих на поезд и статическом состоянии.
акции дороги на колеса определятся из условий равновесия автомо-
биля в вертикальной плоскости.
Для определения силы Af, действующей на платформу тягача,
рассмотрим вначале равновесие буксируемого автомобиля. Возь-
мем сумму моментов сил относительно его задней оси
NLi cos р — Gnp [Bj cos p — (Ад — r) sin₽] = О,
откуда
7V-'= ~~ tg (19)
где LA — база буксируемого автомобиля.
Нагрузка, приходящаяся на передние колеса буксируемого авто-
мобиля, изменяется в зависимости от высоты подъема (tgвперед-
‘64
ней оси, сравнительно мало. Так, для того, чтобы уменьшить на-
грузку на 10%, необходимо поднять переднюю ось на Я = 2,0—2,5 л/.
В действительности, высота подъема передней части буксируемых
автомобилей определяется высотой платформ тягачей (табл. 8).
Таблица 8
Погрузочная высота платформ автомобильных тягачей
Высота платформы Марка автомобиля
ГАЗ-63 ЗИЛ-157 ЗИЛ-151 ЯАЗ-214 | ЯАЗ-210
Н, мм 1180 1100 1140 1650 1495
Кроме того, при подъеме передней части автомобиля происходит
уменьшение расстояния С между буксирным крюком и полотном
дороги, в силу чего уменьшается угол заднего съезда поезда. В слу-
чае буксирования трехосных автомобилей типа ЗИЛ-157 предель-
ная высота подъема ограничивается также гарантийным зазором
между протекторами задних колес и полом погрузочной платфор-
мы. При значительном подъеме происходит касание протекторов
шин о пол платформы буксируемого автомобиля.
Таким образом, при разработке конструкций тягачей для бук-
сирования автомобилей в полупогруженном состоянии тягово-сцеп-
ное устройство следует располагать ниже.
Реакции передних и задних колес тягача (рис. 32) определим
также из уравнения моментов, взятых относительно центра тя-
жести тягача, и после несложных преобразований будем иметь:
G2 = Z2 + W-4-.y-,
(20)
0) (21)
где Z{ и Z2— нормальные реакции на колеса тягача без груза;
G1 и G2 — нормальные реакции на колеса тягача с погру-
женной передней частью автомобиля.
В приведенных уравнениях замечаем одинаковый по абсолютной
А7
величине член -j--, который определяет собой перераспределенную
нагрузку с передней оси автомобиля-тягача на заднюю. Это пере-
распределение возникло благодаря тому, что точка приложения
силы N находится сзади оси балансира тягача. Если взять авто-
5 Баер В. Г.
65
поезд, состоящий из тягача ЗИЛ-157 и буксируемого автомобиля
ЗИЛ-164, то в зависимости от плеча I перераспределение нагрузки
с передних колес на задние может увеличиться от 0 при / — О до-
600 кг, при 1= 1,5 м. Такое перераспределение нагрузки на осп тя-
гача в известных пределах допустимо. При этом разгружаются
колеса передней оси автомобиля.
Обычно большие нагрузки на переднюю ось вызывают при дви-
жении по бездорожью значительное продавливание мягкого грунта
передними колесами, что часто приводит к застреванию автомобиля.
Некоторая разгрузка передней оси, вызываемая силой AZ, умень-
шает коэффициент сопротивления движению поезда и сказывается
благоприятно на его проходимости.
Однако при больших значениях I реакция на переднюю ось тягача
уменьшается настолько, что начинает отрицательно влиять на
управляемость тягача. Это обстоятельство следует иметь в виду
и не допускать уменьшения реакции на переднюю ось тягача менее
0,25 Ga.
Распределение нагрузки на колеса автопоезда при его движении
Уже статическое перераспределение нагрузок вызывает измене-
ние координат центра тяжести. При движении поезда реакция зад-
них колес тягача будет еще более возрастать.
Согласно уравнению (18) второй многочлен числителя стано-
вится положительным. Для рассматриваемого способа буксирова-
ния возможно йк>Лд. Таким образом, приращение реакций зад-
них колес происходит пропорционально увеличению разности
(hK /7Д)
При движении в гору реакция задних колес тягача возрастает
за счет уменьшения нагрузки на передний мост и при значительной
разгрузке колес передней оси тягач может потерять управление.
При движении по неровной проселочной дороге вес передней
части буксируемого автомобиля, находящегося на платформе тя-
гача, будет создавать дополнительную динамическую (ударную)
нагрузку, величина которой может превысить силу N в 2 и более
раза. Возникающие при этом дополнительные нагрузки на задний
конец рамы тягача могут вызывать временные' разгрузки передней
оси и потерю управляемости.
На основании изложенного, при размещении сцепного устрой-
ства и проектировании тягачей для буксирования автомобилей
в полупогруженном состоянии величину плеча I следует выбирать,
пользуясь зависимостью
, Ga(b — 0,257/1
1 К L
где Ь — расстояние от центра тяжести до оси задних колес по-
рожнего тягача;
66
/(—коэффициент динамичности, равный 2,0 —2,5;
0,25 — коэффициент, учитывающий нагрузку на переднюю ось
тягача от собственного веса.
Полученное значение плеча I необходимо проверить на про-
дольную устойчивость тягача при движении в гору с максималь-
ным углом подъема, при этом Значения параметров,
характеризующих рассматриваемый способ буксирования неисп-
равных машин, определяются аналогичным образом.
Ne 1 Ne
Удельная мощность поезда или ——при Ga--Gn
Ga + Gn 2 Ga
по величине соответствует удельной мощности при буксирова-
нии машин на жесткой сцепке.
Удельная сила тяги по сцеплению тягача при всех ведущих
колесах возрастает за счет веса передней части буксируемого
автомобиля.
При A/=0,4Ga AG — г > ПРИ — Оп AG^0,7?. Если
~Г Gn
у тягача ведущими являются только колеса заднего и среднего
мостов, то удельная сила тяги возрастает за счет силы N и за
счет перераспределения нагрузки с переднего моста.
В этом случае AG > - - ср.
Увеличение сцепного веса поезда в обоих случаях серьезно улуч-
шает его проходимость, особенно при работе в плохих дорожных
условиях.
Рассмотрим движение поезда на повороте (рис. 33), для чего
допускаем, что седельное устройство расположено на продольной оси
тягача и имеет угловое перемещение.
Ширина габаритного коридора самого тягача определяется
разностью радиусов поворота крайних его точек, т. е. (R\ — /?2).
Соответственно ширина габаритного коридора поезда (А?^—/?р.
Для однотипных машин увеличение ширины габаритного ко-
ридора поезда по сравнению с тягачом определяется
R 2 R 3 = Rq2 R 02»
где /?02 —/?р2—радиусы поворота средних точек задних мостов
тягача и прицепа.
Радиус поворота средней точки переднего моста прицепа
определится
* = М = +
где Ln— база прицепа;
Р— угол наклона буксируемого автомобиля.
5
67
Из приведенной зависимости следует сделать вывод, что
полное совпадение колеи задних мостов тягача и буксируемого
автомобиля возможно в случае, если l = cos (3; тогда, подста-
вив это выражение в приведенную выше зависимость, будем
иметь /?0'2 =/?02.
Полученное условие выполнить практически весьма сложно, так
как при возрастании величины I уменьшается нагрузка на перед-
нюю ось тягача со всеми вытекающими последствиями.
Рис. 33. Схема поворота автопоезда из тягача и автомо-
биля, находящегося в полупогруженном состоянии.
Очевидно, при буксировании неисправных автомобилей уве-
личение ширины габаритного коридора поезда по сравнению с тяга-
чом является неизбежным.
Исходя из рациональности конструкции тягача, относительное
увеличение габаритного коридора для автомобилей ЗИЛ может со-
ставить 30—40%.
Следует отметить, что буксирование поврежденных автомоби-
лей в полупогруженном состоянии выгодно отличается от ранее рас-
смотренных способов, так как в этом случае:
— увеличивается сила тяги тягача по сцеплению;
— не требуется водителя на буксируемый автомобиль, что очень
важно, так как в условиях современных войн не всегда с повреж-
денным автомобилем будет находиться водитель;
— уменьшается длина автопоезда в 1,5—2 раза, благодаря чему
улучшается его маневренность;
— повышается скорость движения автопоезда, так как отсутст-
вует возможность наезда буксируемого автомобиля на тягач при
торможении последним.
68
Кроме отмеченных преимуществ, существуют недостатки, кото-
рые препятствуют наиболее широкому применению этого способа
буксирования. Одним из серьезных недостатков является трудность
производства погрузо-разгрузочных работ, ввиду того, что автомо-
били, используемые в качестве эвакотягачей, зачастую не будут
иметь никакого подъемного оборудования.
Лебедки, имеющиеся на некоторых автомобилях ЗИЛ-157
(ЗИЛ-151), совершенно невозможно использовать для производ-
ства погрузочных работ в силу того, что трос лебедки выдается
только вперед. .
Ко второму недостатку данного способа буксирования следует
отнести неприспособленность платформ обычных тягачей для
буксирования автомобилей в полупогруженном состоянии. При дви-
жении поезда на крутых поворотах происходит распирание бортов
кузова тягача передними колесами буксируемого автомобиля, по-
вреждение крыльев и подножек его бортами кузова. В результате
тягач и буксируемый автомобиль получают серьезные повреждения.
Учитывая это, в конструкциях специальных эвакотягачей при-
ходится укорачивать платформы и устанавливать специальные се-
дельные приспособления для крепления и относительных поворотов
буксируемых машин. При таком оборудовании тягачей буксирова-
ние автомобилей в полупогруженном состоянии следует считать
основным способом перевозки поврежденных автомобилей с поля
боя на СППМ и на большие расстояния-
При эвакуации поврежденных машин по дорогам целесообразно
буксировать одновременно 2—3 автомобиля.
Поезд из нескольких неисправных автомобилей в полупогружен-
ном состоянии (рис. 34) является дальнейшим развитием рассмот-
ренного способа буксирования одиночных автомобилей. Здесь каж-
Рис. 34. Схема поезда из тягача и трех автомобилей в по-
лулогруженном состоянии.
дый последующий автомобиль грузится передним мостом на плат-
форму предыдущего, причем последний автомобиль в поезде может
грузиться задней частью рамы.
Погрузка на СППМ производится специальной командой в 2—
3 человека. Она занимается формированием поездов и имеет в сво-
ем распоряжении кран или другие средства погрузки.
69
Наклон каждого буксируемого автомобиля на некоторый угол р
благоприятно сказывается на маневренности поезда. Например, при
движении по .кривой задние части бортов впереди стоящих автомо-
билей, находящиеся в наклонном положении, не задевают за опе-
рения задних машин даже при поворотах на минимальных радиу-
сах. Для наибольшего предохранения бортов кузова неисправных
машин рекомендуется перед погрузкой отсоединить у поврежденных
автомобилей продольные рулевые тяги. В этом случае управляемые
колеса одного автомобиля, находящиеся на платформе другого,
свободно поворачиваются вокруг шкворней и не распирают бортов
кузова.
Крепление автомобилей в поезде осуществляется при помощи
соединительных звеньев, показанных на рис. 35. Серьга 1 соеди-
Рис. 35. Соединительное звено для буксирования авто-
мобилей в полупогруженном состоянии.
няется с буксирным крюком впереди стоящего автомобиля, а цепь 2
перекидывается через поперечную траверсу, огибает ее и крепится
болтом. Соединительное звено 3, выполненное из металлической
трубы, предохраняет буксируемую машину от повреждений при
резком торможении тягача. Длина трубы в соединительном звене
должна подбираться по минимальному расстоянию от буксирного
крюка до поперечной траверсы рамы соединяемых между собой
автомобилей. Суммарная длина трубы и цепи должны обеспечивать
крепление автомобилей с максимальным расстоянием от указанных
выше мест сцепки.
Количество одновременно буксируемых автомобилей в поезде
будет зависеть от тяговых свойств тягача и конкретных дорожных
условий.
Определение нагрузки, действующей на платформу тягача, про*
изводится последовательным рассмотрением моментов сил в поезде,
начиная с последнего буксируемого автомобиля- Окончательная на-
грузка, приходящаяся на платформу тягача, определяется из фор-
мулы
р = М - М Д 4- М 7Z42- , (22)
где L2 — базы буксируемых автомобилей;
70
/], 4 ~ расстояния по горизонтали от реакций задних ко-
лес впереди стоящих автомобилей до точек опор
передних колес погруженных автомобилей;
7Vb N2~ реакции передних колес на платформу тягача (авто-
мобиля) при буксировании одиночного авто-
мобиля.
Количество членов, стоящих в правой части, будет равно коли-
честву одновременно буксируемых автомобилей. В данном случае
это количество принято равным трем.
В случае буксирования автомобилей одной марки при 1{ = 12 = 1
уравнение (22) примет вид
''-44+/Я-
Если поделить обе части уравнения на Af, то нетрудно заметить,
что алгебраическая сумма членов правой части окажется меньше
единицы или, говоря иначе, при буксировании одиночного автомо-
биля нагрузка, приходящаяся на кузов тягача, больше нагрузки,
возникающей при буксировке нескольких автомобилей.
Такое перераспределение нагрузок незначительно изменяет по-
лученные зависимости для одного буксируемого автомобиля. На-
пример, сила тяги по сцеплению задних ведущих колес уменьшится
на 5—6%, поэтому для практических расчетов таким изменением
можно пренебречь, тем более, что с увеличением автомобилей в по-
езде возрастает сила Р/, которая увеличивает реакцию задних ко-
лес тягача.
Возможный состав автопоезда зависит от конкретных дорожных
условий и той максимальной тяговой силы, которая может быть по-
лучена на колесах автомобиля-тягача. Динамические расчеты про-
изводятся по зависимостям, рассматриваемым в курсе «Теория ав-
томобиля», при тяговых расчетах поездов.
Оценку проходимости поездов, определение удельной мощности
и удельной силы тяги по сцеплению следует производить по зави-
симостям
____= Ga Ц- Р 9
С1а -г nGn ’ и.л + nGn
Для сравнения возможной ширины габаритного коридора при
буксировании тягачом ЗИЛ-157 (151) нескольких поврежденных
автомобилей ЗИЛ-164 (150) приведена таблица 9.
Анализ тяговых возможностей и кинематики автопоезда показы-
вает возможность и выгодность его применения для эвакуации ав-
томобилей, получивших боевые повреждения.
Конкретный состав поезда будет зависеть от мощности тягача
и дорожных условий. Однако на основании расчетов для автомо-
71
биля типа ЗИЛ-157, работающего в равнинных условиях местности,
можно ориентировочно принять следующее количество одновре-
менно буксируемых автомобилей:
— при работе на асфальтовых, бетонных, гравийных шоссе или
каменной мостовой при 7 < 0,03 — три автомобиля типа ЗИЛ-164:
— при работе на хороших грунтовых дорогах и отсутствии кру-
тых поворотов при/'С 0,03 — три автомобиля типа ЗИЛ-164;
— при работе на грунтовых дорогах с f > 0,05—1—2 автомо-
биля типа ЗИЛ-164.
Таблица 9
Увеличение ширины колеи поезда в зависимости от количества
одновременно буксируемых автомобилей
Параметры поворота Тягач ЗИЛ-157 Количестве буксируемых автомоби- лей ЗИЛ-164
один авто- мобиль два автомо- биля три автомо- биля
#01 » м • 9,5 8,8 7,9 7,0
#02 ’ М 8,6 7,9 7,0 . 6,1
Ширина колеи, м . . . . 2,5 3,2 4,1 5,0
Относительное увеличение ширины колеи, % . . . 100 Г28 164 1 200 1
При формировании поездов необходимо учитывать:
Максимальное количество машин в поезде командир, организу-
ющий эвакуацию, определяет, исходя из конкретных дорожных
условий, мощности эвакотягача, типа поврежденных машин и опыта
водительского состава по вождению таких поездов. На дорогах
с интенсивным движением количество неисправных машин в поезде
должно быть ограничено двумя.
Любой автомобиль из состава автопоезда не должен превышать
веса тягача, причем ближе к тягачу необходимо ставить более тя-
желые автомобили.
Для перевозки машин с неисправным задним мостом необхо-
димо снимать остатки кузова и грузить заднюю часть рамы на плат-
форму впереди стоящего автомобиля.
При буксировании неисправных машин на передних колесах по
дорогам нужно стопорить рулевое управление, иначе неизбежны
виляния такого автомобиля из стороны в сторону.
Формирование поездов целесообразно производить в следующем
порядке:
— отсоединить продольную рулевую тягу у подготавливаемого
к погрузке автомобиля;
72
- - поставить впереди его, непосредственно около переднего бру-
са, тягач или другую неисправную машину так, чтобы ось тягача,
стала продолжением оси буксируемого автомобиля;
— поднять краном переднюю часть машины несколько выше
платформы тягача;
— сдать тягач назад или подать вперед неисправную машину
так, чтобы приподнятые колеса свободно вошли между бортами
платформы;
— опустить поднятый передний мост на платформу и, не отсо-
единяя трос крана, подложить клинья под колеса заднего моста;
— закрепить соединительную тягу за буксирный крюк впереди
стоящей машины и за траверсу рамы погруженного автомобиля;
— убрать клинья и отсоединить трос крана;
— борта платформы тягача или неисправного автомобиля же-
лательно связать сзади проволокой-
Формирование поезда лучше начинать с погрузки заднего авто-
мобиля. При этом не обязательно дожидаться тягача, который бу-
дет буксировать поезд. Поврежденные автомобили, подлежащие
перевозке способом полупогрузки, следует заранее грузить один на
другой и крепить в таком положении. По прибытии тягача стоит
только погрузить передний автомобиль на его платформу и поезд
сможет двигаться по маршруту. В месте назначения с тягача сгру-
жают передний мост автомобиля, находящийся на его платформе,
оставляя остальные машины в полупогруженном состоянии. В за-
ключении необходимо отметить, что формирование поездов по при-
знаку одинакового ремонтного воздействия позволит перевозить их
нера-сформированными до соответствующих ремонтных средств.
БУКСИРОВАНИЕ ГУСЕНИЧНЫХ МАШИН
Буксирование гусеничных машин может производиться только-
с помощью жестких или гибких буксирных тяг, причем буксируемая
машина может соединяться с тягачом одним, двумя тросами или
буксирной тягой.
Если одна сторона поврежденной машины находится на катка.х
или испытывает при буксировании большее сопротивление, чем ис-
правная, то трос следует прикреплять к серьге со стороны повреж-
денной гусеницы. Второй трос необходим в том случае, если исправ-
ная гусеница отстает.
Необходимо помнить, что чрезвычайно длинные тросы умень-
шают маневренность поезда и могут применяться только при извле-
чении застрявших машин или при преодолении незатяжных
подъемов.
Для движения по пути-с крутыми поворотами иногда применяют
два троса, причем крепят их по диагонале (рис. 36). При таком спо-
собе крепления улучшается маневренность поезда.
Положительные результаты дает буксирование неисправных гу-
сеничных тягачей на жесткой тяге, для чего крепят тягу за задний
73-
крюк неисправной машины и буксируют ее за эвакотягачом в та-
ком положении. Жесткая тяга обеспечивает безопасность движения
даже на крутых спусках.
Поврежденная машина с исправной ходовой частью буксирует-
Рис. 36. Схема крепления стальных канатов при бук-
сировании гусеничных машин.
ся за обычным гусеничным тягачом. Коэффициенты сопротивления
движению для гусеничных машин приводятся в таблице 10.
Таблица 10
Коэффициенты сопротивления движению
для гусеничных машин
Дорожные условия
Коэффициент со-
противления дви-
жению
При повреждении ле-
нивца, ведущего колеса
или части гусеничного по-
лотна на болотистых грун-
тах следует укоротить гу-
сеницу и соединить ее,
Асфальтированное шоссе
Булыжная мостовая . . .
Гравийная дорога ....
Пашня..................
Луг со скошенной травой
Грязная грунтовая дорога
Свежая пахота..........
Влажный песок . .
Сухое болото ..........
CblpOj 6ОЛОТО..........
Сухой песок ...........
Снежная укатанная доро-
га ....................
•Снежный покров h—20 см
0,03-0,04
0,05 -0,06
0,06 — 0,07
0,08
0,08
0,1-015
0,1-0,15
0,1
0,1
0,15-0,25
0,15-0,18
0,15—0,18
0,20
минуя поврежденные или
заклиненные детали.
Укорачивание гусени-
цы при буксировании ма-
шин по твердым грунтам
и дорогам не имеет смыс-
ла, так как подобные опе-
рации связаны со значи-
тельными затратами вре-
мени и, кроме того, дви-
жение гусеничных машин
на опорных катках в этих
условиях оказывается
вполне возможным.
Данное обстоятельство существенно отличает эвакуацию гусе-
ничных машин от эвакуации танков. Так, например, перемещение
танков на катках имеет ограниченное применение ввиду значитель-
ного увеличения сопротивления движению по причине большого
веса танков и чрезмерного давления катков на грунт. При буксиро-
74
вании же гусеничных тягачей на катках сопротивление движению
в ряде случаев даже уменьшается по сравнению с гусеницами. Так,
при движении на катках легких тягачей по сухому лугу сила со-
противления движению уменьшается примерно в 1,5 раза. Только
на сырых, размокших грунтах и труднопроходимых участках силы
сопротивления движению значительно возрастают.
При коэффициенте сопротивления движению для гусениц f = 0,!,
соответствующему дорожным условиям, указанным в табл. 10, ко-
эффициент сопротивления качению катков увеличивается не более
чем в 2 раза.
Несмотря на относительно небольшой вес гусеничных машин
по сравнению с танками буксирование их с заклиненными гусени-
цами не рекомендуется, так как при этом тяговые усилия возра-
стают в 7—10 и более раз по сравнению с усилиями, возникающими
при движении с исправным движителем. Поврежденные машины,
имеющие серьезные разрушения и не подлежащие буксированию
ни одним из перечисленных выше способов, следует грузить на
трейлеры или в кузова колесных тягачей.
Эвакуацию гусеничных машин по хорошим дорогам необходимо
производить только колесным транспортом. В зимний период вре-
мени для перевозки гусеничных машин с неисправной ходовой
частью можно применять деревянные или металлические лыжи, на
которые устанавливать эвакуируемый тягач. При движении на лы-
жах необходимые тяговые усилия определяются по следующей за-
висимости:
Gy*/<-cos а 4 Gasina,
где а —угол наклона дороги;
К— коэффициент трения лыж о грунт, значения его при-
водятся в таблице. II.
Таблица 11
Примерные значения коэффициента трения
Соприкасающиеся поверхности Влажность, °/о 1 1 Значения к
Сталь по глинистому песку . . Сталь по глинисто-песчаной поч- 11 0,357
ве 14 0,5
Сталь по известковой почве . . 6,4 0,78
Сталь по уплотненному снегу . . — 0,02
Сталь по рыхлому снегу .... - - 0,45
Дерево по сухому грунту .... — 0,36
Дерево по снегу — 0,3-0,)
Из анализа коэффициента трения k видно, что буксирование по-
врежденных гусеничных машин на лыжах выгодно по снегу, льду
и снежным дорогам. В зимний период времени лыжи могут заме-
75
нить недостающие низкорамные ’прицепы для перевозки поврежден-
ных машин на близкие -и даже дальние расстояния.
ПЕРЕВОЗКА ПОВРЕЖДЕННЫХ МАШИН
АВТОМОБИЛЬНЫМ ТРАНСПОРТОМ
Перевозка поврежденных автомобилей с первичных сборных
пунктов на СППМ или к ремонтным частям вышестоящего звена
существенно отличается от эвакуации их с поля боя.
В основном это отличие состоит в следующем:
— эвакуация поврежденных автомобилей с поля боя на ВПС
и первичные СППМ производится без дорог или в плохих дорожных
условиях, а последующая перевозка их на СППМ вышестоящего
звена осуществляется по дорогам;
— автомобили, эвакуируемые с ВПС и 'первичных СППМ, мо-
гут быть подвергнуты там несложному ремонту с целью частичного
восстановления ходовой части и некоторых других работ;
— на первичных СППМ, где сосредоточено некоторое количе-
ство поврежденных автомобилей, подлежащих дальнейшей, эвакуа-
ции, могут находиться какие-либо погрузочные средства; например,
специальные краны эвакочастей, предназначенные для погрузки
колесных и гусеничных машин;
— наконец, эвакуация то дорогам может производиться с боль-
шими скоростями, чем без дорог; при этом одним тягачом могут
перевозиться несколько поврежденных автомобилей.
Перевозка машин на полуприцепах
Тяговые расчеты поезда данного состава производятся на осно-
вании уравнений, приведенных ранее. Наличие полуприцепа меняет
определенным образом некоторые параметры. Например, увеличи-
вается общий вес поезда на вес полуприцепа и увеличивается ши-
рина габаритного коридора при движении поезда на повороте..
Рис. 37. Схема перевозки поврежденной машины
на полуприцепе.
Рассмотрим для сравнения поезд, состоящий из тягача ЗИЛ-157Г
полуприцепа весом 0,6 Gn и транспортируемого автомобиля
ЗИЛ-157 (рис. 37).
76
Очевидно, удельная мощность поезда составит
2,6Оа
0,38
л;
Оа
Для определения удельной силы тяги по сцеплению необходимо
узнать величину силы Р, с которой передняя часть полуприцепа да-
вит на платформу тягача. В конструкциях большинства полупри-
цепов
Р =(0,3-0,4)03 4- О,,),
где Оп — вес полуприцепа,
Оа — вес перевозимой машины.
Тогда
Д(7^0,57
Ширина габаритного коридора поезда при повороте на кривой
^?ш;п рассчитывается по зависимости, приведенной для буксирова-
ния автомобилей в полупогруженном состоянии.
При данном способе перевозки точка опоры полуприцепа на
седло тягача располагается по оси задних колес (оси балансира)
или впереди ее. В этом случае ширина габаритного коридора уве-
личивается по сравнению с буксированием в полупогруженном со-
стоянии.
Таким образом, перевозка автомобилей и гусеничных машин на
полуприцепе обеспечивает несколько лучшие условия проходи-
мости по сцеплению ведущих колес с грунтом, чем буксирование
автомобилей на жесткой сцепке или тросе. При этом удельная мощ-
ность понижается и увеличивается ширина габаритного коридора
поезда.
Для эвакуации поврежденных колесных и гусеничных машин
может использоваться также поезд, состоящий из тягача и прицепа.
Приведенный анализ движения автомобиля ЗИЛ-157 с полупри-
цепом показал уменьшение удельной мощности, поэтому для дан-
ного поезда следует подбирать тягач возможно большей мощности.
Кроме того, размеры платформы самого тягача должны позволять
перевозить поврежденные машины или агрегаты. Увеличение веса
прицепа вызывает снижение удельной мощности, поэтому даже при
наличии груза в кузове тягача этот поезд может применяться только
для эвакуации поврежденных машин по хорошим дорогам. В таб-
лице 12 приводятся некоторые сравнительные данные, характери-
зующие проходимость поездов при различных способах транспор-
тировки машин.
В выгодную сторону отличается буксирование автомобилей в по-
лупогруженном состоянии, так как в этом случае тягач с повреж-
денной машиной имеет максимальную удельную мощность и силу
тяги по сцеплению.
77
При буксировании машин на жесткой сцепке значительно ухуд-
шается удельная сила тяги по сцеплению, правда, несколько умень-
шается суммарная ширина колеи при движении на повороте с ми-
нимальным радиусом.
Таблица 12
Некоторые параметры проходимости поездов при различных
способах транспортировки поврежденных машин
Тягач и неисправная машина Удельная мощность, л. с. Отношение веса поезда к об- . щему весу Ширина ко- леи поезда в м при ^min Отношение ширины ко- леи поезда к колее тягача
ЗИЛ-157—ЗИЛ-157 на бук- сире 9 0,5 2,5 ! 1 ! !
ЗИЛ-157—ЗИЛ-157 в полу- погруженном состоянии 9 0,7 3,2 1 1,3
ЗИЛ-157-2 автомобиля ЗИЛ-157 в полупогру- женном состоянии . . . 6 0,5 4,2 1,65
ЗИЛ-157—ЗИЛ-157 на полу- прицепе 7 0,57 4,0 1,56
ЗИЛ-157—ЗИЛ-157 на под- катной тележке . . . 8 0,45 — —
ЯА^-214 с полуприцепом МАЗ-5203 и полезной нагрузкой 20 т . 6 0,57 5,0 1,6
ЯАЗ-214 с прицепом МАЗ- 5203Б и полезной нагруз- кой 7-|-20 т 4 0,39 5,0 1,6
Введение в состав поезда дополнительных звеньев (подкатных
тележек, прицепов) значительно ухудшает указанные параметры
проходимости и является крайне нежелательным. При перевозке
поврежденных машин на полуприцепах с учетом известных конст-
руктивных особенностей можно получить высокие значения удель-
ной силы тяги по сцеплению, а при наличии на тягаче мощного дви-
гателя этот способ обеспечивает достаточно хорошие условия про-
ходимости и может быть рекомендован для эвакуации колесных
и гусеничных машин даже в плохих дорожных условиях.
ГЛАВА IV
СРЕДСТВА ЭВАКУАЦИИ
Материал, рассмотренный в предыдущих главах, дает основание
заключить, что успешное сосредоточение поврежденных автомоби-
лей и гусеничных тягачей к ремонтным частям и на СППМ возможно
лишь при наличии специализированных средств эвакуации. Тягачи
общего назначения, серийно выпускаемые промышленностью, в со-
стоянии эвакуировать только поврежденную технику с исправной
ходовой частью. Оснащение этих тягачей дополнительным оборудо-
ванием позволит расширить их производственные возможности, осо-
бенно при эвакуации со средними и тяжелыми повреждениями.
ОСНОВНЫЕ ПОЛОЖЕНИЯ ПО ПРОЕКТИРОВАНИЮ
ЭВАКУАЦИОННЫХ СРЕДСТВ
При разработке проекта тягачей для эвакуационных подразде-
лений и частей следует стремиться, чтобы проектируемые средства
были в состоянии выполнить весь комплекс эвакуационных работ
при всемерном сокращении в подразделениях типажа эвакотягачей.
Для выполнения этих важных условий необходимо:
— всемерно расширять производственные возможности тягачей,,
добиваясь их универсальности;
— применять на тягачах более совершенное оборудование, обес-
печивающее высокую производительность при выполнении всех ви-
дов работ;
— обеспечить высокую проходимость тягачей и большие сред-
ние скорости перемещения подразделений при движении в различ-
ных дорожных условиях.
Проектирование эвакуационных подразделений и частей произ-
водится в соответствии с существующими положениями для проек-
тирования промышленных объектов. На подразделение (часть) раз-
рабатываются проектное задание и рабочие чертежи на оборудо-
вание отдельных эвакотягачей.
79
Проектное задание составляется•на основании утвержденного
начальником задания на проектирование, в котором указывается:
— назначение эвакуационной части (подразделения);
— штатная принадлежность;
— производственные возможности части (подразделения);
— характеристика районов, для которых проектируется эвакуа-
ционная часть (крайний север, пустынные районы и т. д.);
— дополнительные сведения о темпах перемещения, делимости
части (подразделения), универсальности тягачей и возможных за-
тратах средств на их изготовление.
Проектное задание содержит пояснительную записку и схемы
оборудования эвакотягачей.
В пояснительной записке на основе глубокого анализа техники,
обслуживаемых соединений (объединений), изучения литературных
данных по способам эвакуации и выполнения необходимых экспе-
риментальных работ определяются оптимальные конструктивные
варианты тягачей. Разрабатываются организационные схемы части,
подразделений и их оснащение основным и вспомогательным обо-
рудованием. Выполняются также сравнительные экономические рас-
четы, причем под основным оборудованием понимаются различные
устройства, приспособления на тягачах, используемые непосредст-
венно в процессе эвакуации машин. С помощью вспомогательного
оборудования (заправочные емкости, дезактивационное оборудова-
ние, кухни и т. д.) обеспечивается нормальная работа тягачей
и личного состава.
Рабочие чертежи по оборудованию эвакотягачей окончательно
разрабатываются конструкторскими бюро на основании проектного
задания. При курсовом проектировании разрабатываются: поясни-
тельная записка, схема организации эвакочасти на листе А-1, общий
вид одного тягача с приспособлениями на листе А-1, деталировка
приспособления на листе А-1.
Разработка проектного задания начинается с определения воен-
но-технических требований, которые составляются в соответствии
с заданием на проектирование.
Анализ состава техники, обслуживаемых соединений, объедине-
ний производится с целью определения количественного соотноше-
ния отдельных групп машин по их маркам, габаритам, весам и ти-
пам движителя. Результаты анализа заносятся в таблицы.
Для специальной техники дополнительно указываются конструк-
тивные особенности, которые могут вызвать осложнения и затруд-
нения при выполнении эвакуационных работ.
Типы базовых машин подбираются по весу и габаритам обслу-
живаемой техники, причем вес основного типа тягача не должен
быть меньше или значительно превышать вес основной группы ма-
шин, находящихся на вооружении в соединении (объединении). Для
эвакуации техники остальных групп целесообразно дополнительно
подбирать 2—3 базовые модели.
80
Тягачи, выбираемые для эвакуации автотракторной техники,
должны доставлять поврежденные машины с поля боя к дорогам
(на первичные СППМ) и перевозить их по дорогам на значитель-
ные расстояния. При доставке поврежденных машин па первичные
СППМ колесные тягачи (без прицепов) в состоянии эвакуировать
только поврежденные автомобили, а гусеничные тягачи — всю по-
врежденную технику.
В этих случаях предпочтение следует отдать гусеничным тягачам.
Для перевозки неисправных машин по дорогам целесообразно
использовать колесные тягачи с применением (особенно при пере-
возке гусеничной техники) полуприцепов и прицепов.
Все тягачи, предназначаемые для эвакуации поврежденной авто-
тракторной техники, должны обеспечивать высокую проходимость
при движении вне дорог и достаточно большие скорости движения
ио дорогам. Это возможно, если удельная мощность поезда (тя-
гач— прицеп — поврежденная машина) не будет снижена менее
9--10 л. с./т.
Уменьшение удельной мощности для поездов узкой специализа-
ции можно допускать в следующих случаях:
— при перевозке неосновной группы машин колесным транс-
портом удельная мощность поезда с максимальной нагрузкой мо-
жет быть снижена до 7 л. с.!т\
— для тракторов, производящих эвакуацию колесных и гусе-
ничных машин в условиях бездорожья, удельная мощность может
составлять 4—5 л. с. на тонну веса поезда. Здесь следует иметь
в виду, что при меньшей мощности за счет увеличения передаточ-
ных отношений п уменьшения скорости движения тракторы спо-
собны развивать большие тяговые усилия. При движении по доро-
гам и переброске эвакосредств на значительные расстояния трак-
торы следует перевозить на платформах полуприцепов или в кузо-
вах колесных тягачей.
Грузоподъемность и габаритные размеры полуприцепов подби-
раются на основании весовых и габаритных данных основной тех-
ники соединения (объединения).
При этом следует стремиться к максимальной универсальноеiп
прицепов, т. е. их способности перевозить возможно большее число
типов 'колесных и гусеничных машин. Суммарные высота и ши-
рина прицепа с погруженными машинами не должны выходить
за габариты подвижного состава — 3,8 X 2,5.
При разработке конструктивных схем поездов необходимо обра-
тить особое внимание на увеличение их проходимости при работе
в плохих дорожных условиях и механизации погрузочно-разгрузоч-
ных работ.
Для реализации больших тяговых усилий по условиям сцепле-
ния ведущих колес тягача с грунтом необходимо стремиться к рас-
пределению веса поезда'таким образом, чтобы большая часть его
приходилась на ведущие колеса. С этой целью выгодно использо-
вать прицепы с активными осями.
Ваер В. Г. 81
Большегрузные прицепы (трейлеры) со сплошными катками на
задней оси могут использоваться только на дорогах с твердым по-
крытием. При наличии колеи на грунтовых дорогах применение их
становится невозможным.
Для поездов, предназначаемых работать в условиях -бездорожья,
необходимо, чтобы отношение сцепного веса к их полному весу со-
ставляло не менее 0,7. При буксировании поврежденных машин
гусеничными тягачами это отношение может быть уменьшено до 0,5.
Пе следует допускать чрезмерного увеличения ширины габарит-
ного коридора поезда при минимальных радиусах поворота, что мо-
жет значительно ухудшить маневренность и проходимость его осо-
бенно при работе на проселочных, горных и лесных дорогах.
При разработке конструктивных схем большегрузных поездов
и применении полуприцепов с пневматическими шинами необхо-
димо конструктивно обеспечить централизованную подкачку воз-
духа и регулирование давления в них.
Указанное требование диктуется тем, что в процессе погрузки
неизбежны смещения центра тяжести поврежденной машины по от-
ношению продольной оси прицепа; ввиду этого одна сторона плат-
формы оказывается нагружена больше другой, а при наличии в ши-
нах более нагруженной стороны малого давления воздуха, возни-
кают опасные перекосы прицепа, которые иногда приводят к боко-
вому скольжению поврежденной машины по платформе.
В заключение раздела следует указать предварительные реше-
ния по выбору конструктивных схем поездов.
Подбор оборудования тягачей (поездов) должен преследовать
следующие цели:
— обеспечение максимальной универсальноеги тягачей при вы-
полнении эвакуационных работ;
- -- обеспечение максимальных тяговых усилий на лебедках тя-
гачей;
— всемерное повышение производительности оборудования при
выполнении всех видов работ. Для расчета и компоновки основного
оборудования следует использовать материалы глав II и III.
Универсальность эвакотягачей определяется их способностью
производить перевозку всей поврежденной техники в различных
условиях местности. Универсальные тягачи (поезда) должны эва-
куировать автомобили при наличии:
исправной ходовой части и •рулевою управления;
- исправного одного моста;
повреждений всех мостов (сгоревшие машины);
- разбитых и сорванных с рамы взрывом отдельных узлов
и агрегатов.
Эвакуации подлежат гусеничные тягачи:
- с исправной или частично разрушенной ходовой частью;
- с разрушенной ходовой частью, позволяющей перевозку на
платформах прицепов, полуприцепов и тягачей;
— разбитые на отдельные части узлы и агрегаты.
82
Кроме того, универсальность тягачей (поездов) должна характе-
ризовать их возможности производить эвакуацию машин с указан-
ными повреждениями в условиях без дорог и по грунтовым доро-
гам со скоростью не менее 20 км/час.
Способность тягачей и поездов выполнять перечисленные виды
работ оценивается коэффициентом универсальности, который опре-
деляется по формуле
zz _ (^а Н" Гт)
п 14
где Л, и Гт — количество групп, соответственно автомобилей
и гусеничных тягачей (по характеру поврежде-
ний), которые способны эвакуировать тягач (по-
езд);
/7д — коэффициент, характеризующий способность тя-
гачей производить эвакуацию неисправных ма-
шин в различных дорожных условиях.
Значения коэффициента /гЛ следует принимать в зависимости о?
назначения рассматриваемого тягача.
Если тягач предназначен работать в условиях только без дорог
или только по дорогам, = 1. Если тягач способен успешно рабо-
тать в любых дорожных условиях, то пл =2. Определим универ-
сальность тягачей ТК4 и ТК2с ПС2, конструкции которых рассмат-
риваются в настоящей главе.
Коэффициент универсальности для тягачей:
ТК2 с ПС2 составит
_ (3+2)2 __
и~ 14 7 ’
Для тягача ТК4
/< «= JL’A = —
14 7 ’
Тягач ТК4 менее универсален, чем автопоезд ТК2 с ПС2. Если
дополнительно на тягаче ТК4 установить гидравлический кран, то
коэффициент универсальности его увеличится до 4/?.
Таким образом, коэффициент универсальности тягачей и поез-
дов характеризует степень оснащения их основным оборудованием,
позволяющим производить перевозку неисправных машин с раз-
личными повреждениями и в любых дорожных условиях.
Успешная работа эвакотягачей при выводе машин из аварий-
ных положений (застревание, завал землей и т. д.) определяется
в значительной степени максимальными усилиями, развиваемыми
6
83
тяговыми лебедками и наличием дополнительного (в основном
съемного) оборудования, позволяющего реализовать эти усилия
в различных условиях местности. Для увеличения тяговых усилий
следует подбирать базовые тягачи с мощными лебедками, изменять
конструкции лебедок и оснащать тягачи (особенно колесные) до-
полнительными комплектами такелажного оборудования (см. гла-
ву II).
Производительность эвакотягачей (поездов) определяется
в основном средними скоростями движения по дорогам с различ-
ными покрытиями и без дорог, а также затратами времени на вы-
вод машин из аварийных положений, подготовку к погрузке, по-
грузку и разгрузку неисправной техники.
Для увеличения средних скоростей движения следует подбирать
базовые тягачи с высокими динамическими характеристиками.
Уменьшение трудозатрат на подготовительные работы дости-
гается подбором мощного и высокопроизводительного оборудования.
По окончании отработки указанных вопросов необходимо пред-
ставить в чертежах общие виды тягачей (поездов) с примерной
компоновкой основного оборудования.
Таблица 13
Конструктивные схемы поездов, их назначение и оборудование
Состав
поезда
тягач
(прицеп)
Назначение
поезда. Ука-|
зать вес и
тип эвакуи-
руемых ма-
шин
Удельная
мощ-
ность,
,л. с.’т
Коэффи-
: циент
универ-
j сально-
сти
Отношение
Рсщ
(с ПОЛНОЙ
нагрузкой)
Макси-
мальное
тяговое
усилие
лебедки
Перечень
дополни-
тельного
оборудо-
вания
Окончательное решение по конструктивным схемам и оборудо-
ванию тягачей и поездов'приводится в таблице 13. Необходимое ко-
личество тягачей и поездов, указанных в таблице 13, подсчитывает-
ся по зависимости
где N, — количество эвакотягачей или прицейов, необходимых
для эвакуации определенной группы машин;
84
п — производственные возможности части согласно зада-
нию;
—процент машин в расчетной группе;
k — количество машин, одновременно перевозимых тягачом
(поездом);
Z —плечо эвакуации, км;
1/ср — средняя скорость буксирования, км)час;
/п.р —время на подготовку к погрузке, погрузку и разгрузку
неисправной техники, час;
^ — коэффициент технической готовности;
Т — время работы тягача в сутки, час.
Организационные схемы эвакочастей отрабатываются по анало-
гии с организацией транспортных частей.
Желательно в подразделениях иметь однотипную технику, чго
значительно облегчит ее использование, обслуживание, снабжение
и ремонт. Экипаж тягача зависит от его грузоподъемности, громозд-
кости и сложности установки съемного оборудования и в среднем
может составлять 2—4 человека.
В перечень вспомогательного оборудования, которым обычно
укомплектовываются эвакуационные части, необходимо включить:
— специальные подвижные установки для дезактивации эвакуа-
ционной техники и санитарной обработки личного состава;
— подвижные автотракторные ремонтные мастерские;
— средства для передвижения технической разведки;
— заправочные емкости для обеспечения работы тягачей;
— средства связи;
— оборудование для хозяйственного обеспечения подразделений.
Эвакуационные части и подразделения, работая в полосе боевых
действий войск, в значительно большей степени, чем другие тыло-
вые части', вынуждены будут преодолевать участки с радиоактив-
ным заражением местности. Для дезактивации техники и санитар-
ной обработки личного состава в штаты частей и подразделений
должны включаться специальные средства дезактивации. Кроме
того, следует предусматривать герметизацию кабин и создание в них
избыточного давления воздуха, что уменьшит степень заражения
личного состава. Необходимо также разрабатывать конструкции
автоматических сцепных устройств, позволяющих экипажу произ-
водить прицепные и погрузочные работы, не выходя из кабины тя-
гача. Состав автотракторных ремонтных мастерских рассчитывает-
ся, исходя из потребности части (подразделении) в производстве
технических обслуживании и ремонтных работ эксплуатируемой
техники, а также для обеспечения производства частичной разбор-
ки поврежденных машин на СППМ.
Для эвакуационных частей желательно выбирать универсальные
ремонтные мастерские (типа ТРМ-А) с подъемными устройствами
и включать их в состав рот и взводов.
85
Расчеты подвижных мастерских, средств связи, заправочных ем-
костей и хозяйственного оборудования производятся на основе тща-
тельного анализа условий работы части (подразделения) по зави-
симостям, рассматриваемым в соответствующих курсах.
При необходимости выполняются экономические расчеты по за-
тратам средств на дооборудование эвакотягачей с учетом стоимости
устанавливаемого оборудования.
Окончательная схема организации эвакуационной части /под-
разделения) составляется с включением подразделений обслужива-
ния основного и вспомогательного оборудования. Схема выполняет-
ся на листе А-1.
В заключение приводятся сводные военно-технические показа-
тели проектируемой части (подразделения):
— количество эвакотягачей в части (подразделении);
— . количество прицепов к эвакотягачам;
— количество моделей базовых тягачей эвакочасти (подразде-
ления);
— количество моделей прицепов к эвакотягачам;
— средний коэффициент универсальности тягачей;
— количество эвакотягачей на одну ремонтную мастерскую.
Количество личного состава части, из них:
— непосредственно занятых на эвакуации машин;
— в ремонтных мастерских;
— в подразделениях обслуживания.
Производственные возможности эвакочасти:
— среднее плечо эвакуации (расчетное);
— количество эвакуируемых за сутки машин.
ЭВАКУАЦИОННЫЕ СРЕДСТВА СОВЕТСКОЙ АРМИИ
В Советской Армии созданы специальные средства, предназна-
ченные для эвакуации только автомобилей и гусеничных машин.
Указанное обстоятельство накладывает свои особенности на ор-
ганизацию эвакуации, назначение и характер оборудования тяга-
чей. Так для эвакуации танков применяются мощные и хорошо
оснащенные танковые тягачи, которые организационно входят
в штаты ремонтных мастерских соединений, частей и подразделений.
Автотракторные эвакуационные средства войскового звена орга-
низационно представлены в ремонтных мастерских частей и со-
единений.
В качестве основного вида этой техники используются выпускае-
мые промышленностью автомобили высокой проходимости и гусе-
ничные тягачи, укомплектованные дополнительным оборудованием.
Для обора автотракторной техники за наступающими войсками
созданы специализированные средства эвакуации, которыми пред-
полагается комплектовать эвакуационные части и подразделения.
При разработке оборудования этих средств учитывались предпола-
гаемые условия работы и состав техники, имеющейся на вооружении,
86
поэтому в рассматриваемом комплекте представлены: колесные
и гусеничные тягачи; поезда, состоящие из колесных тягачей и по-
луприцепов, а также подъемные краны и другое эвакуационное
оборудование.
Автопоезд в составе колесного тягача ТК1 и полуприцепа ПС1
Автопоезд (рис. 38) предназначается для перевозки поврежден-
ных колесных и гусеничных машин по шоссейным и хорошим грун-
товым дорогам.
Колесный тягач, разработанный на базе автомобиля ЯАЗ-214,
имеет по сравнению с серийными образцами раму, укороченную
сзади на 575 мм, и другую конструкцию роликов для выдачи троса
лебедки назад.
. Рис. 38. Автопоезд из тягача ТК1 и полуприцепа ПС1.
Дополнительно на тягаче установлено седельное устройство для
полуприцепа и багажный ящик, в котором размещаются такелажное
оборудование и чалочные приспособления. Такелажное оборудова-
ние состоит из комплекта деталей, предназначенных для установки
искусственных анкеров. В комплект чалочных приспособлений вхо-
дят: цепи, тросы с крюками и петлями, с помощью которых неисправ-
ная техника крепится на платформе полуприцепа. Тягач укомплекто-
ван демонтажно-монтажным инструментом, который может исполь-
зоваться для снятия с поврежденных машин деталей и узлов, ме-
тающих погрузке.
Полуприцеп ПО разработан на базе выпускаемого промышлен-
ностью полуприцепа МАЗ-5203, предназначенного для работы с се-
дельным тягачом МАЗ-210А.
Замена базового тягача вызвала необходимость некоторых кон-
структивных изменений полуприцепа, а именно было увеличено
возвышение передней опорной части над платформой полуприцепа
на 800 мм и уменьшен угол заднего скоса до 18°.
87
Погрузка неисправной техники производится с помощью лебед-
ки тягача, трос которой проходит через опорные ролики полупри-
цепа. Поврежденные машины усилием лебедки поднимаются на
платформу по аппарелям, которые после погрузки укладываются
на полуприцеп и закрепляются болтами. Разгрузка неисправной
техники производится также с помощью лебедки, трос которой про-
пускается через съемный ролик, устанавливаемый в задней части
платформы. Установка аппарелей при разгрузке не обязательна.
Техпическаяхарактеристикатягача Т К 1
Мощность двигателя, л. с..................205
Собственный вес тягача, кг.....................11730
Габаритные размеры, мм:
— длина............................... 7865
— ширина................................ 2700
— высота................................ 2880
Максимальный вес буксируемого полуприцепа, кг 29 000
Тяговое, усилие лебедки, кг............... 12 000
Техническая характеристика
полуприцепа ПС1
Вес без груза, кг.............................. 9900
Грузоподъемность, кг...................... 20 000
Габаритные размеры, мм:
— длина................................ 10 730
— ширина.............................. 3 000
— высота.............................. 2 400
Размеры платформы, мм:
— длина...................................... 6 559
— ширина.............................. 3 000
— высота погрузочная...............1285
При эксплуатации данного поезда следует контролировать и под-
держивать одинаковое давление во всех шинах, а в процессе по-
грузки не допускать значительных перегрузок одной стороны полу-
прицепа по отношению к другой. В противном случае возникают
сильные деформации шин перегруженной стороны и опасные пере-
косы поезда, высота которого в процессе перевозки АТ-Т и больше-
грузных машин иногда превышает 4 м. При перевозке легких гусе-
ничных тягачей (АТ-П) или автомобилей типа ГАЗ-63 и ЗИЛ-164
следует грузить на платформу одновременно по 2—3 машины. Авто-
мобили следует размещать на полуприцепе в полупогруженном со-
стоянии. В этих случаях выгодность использования большегрузных
полуприцепов очевидна.
Средние скорости движения поезда по дорогам с твердым по-
крытием составляют 15—30 км/час, а по грунтовым дорогам 5—
15 км/час.
Автопоезд в составе колесного тягача ТК2 и полуприцепа ПС2
Автотоезд (рис. 39) предназначен для эвакуации поврежденной
автотракторной техники весом до 7 т как по дорогам с твердым по-
крытием, так и в условиях работы без дорог.
88.
Тягач ТК2 разработан на базе автомобиля ЗИЛ-157В и отли-
чается от него наличием второй лебедки, установленной за кабиной
тягача. Привод к лебедке осуществляется от раздаточной коробки
с помощью карданного вала.
Рис. 39. Автопоезд из тягача ТК2 и полуприцепа ПС2.
Полуприцеп ПС2 — низкорамный, имеет раму сварной конструк-
ции, которая сверху закрыта стальным листом, образующим погру-
зочную платформу. В передней части полуприцепа имеется выдвиж-
ное опорное устройство, позволяющее свободно откатить тягач или
поставить его под полуприцеп, который сохраняет при этом гори-
зонтальное положение.
Погрузка и разгрузка неисправных машин производится второй
лебедкой тягача аналогичным образом (смотри ТК1 и ПС1) с по-
мощью металлических аппарелей. Крепление перевозимых машин
осуи;ествляется с помощью цепей с винтовыми стяжными устрой-
ствами и крюками.
Техническаяхарактеристика тягача Т К 2
Мощность двигателя, л. с.............106
Вес без груза, кг.................... 6000
Габаритные размеры, мм:
— длина . •................... . 6960
— ширина ......... 2340
Наибольшее тяговое усилие лебедок, кг . 5000
Техническая характеристика
полуприцепа П С 2
Вес без груза, кг . . *.............. 3000
Грузоподъемность, кг................. 7000
Габаритные размеры, мм:
— длина....................... . 9’000
— ширина........................ 2400
— погрузочная высота ........... 1000
Средние скорости движения поезда с грузом по дорогам с твер-
дым покрытием составляют 20—35 км/час, а по грунтовым доро-
гам — 10—20 км/час.
8'9
Поезд ТК2 с ПС2 очень удобен в эксплуатации. Малая высота
полуприцепа значительно облегчает погрузочные работы и делает
его более устойчивым, что позволяет использовать поезд для эва-
куации поврежденных машин в тяжелых дорожных условиях.
Тягач ТКЗ с подкатной тележкой ТБ1
Колесный тягач ТКЗ предназначается для погрузки и перевозки
отдельных агрегатов с разбитых машин. Кроме того, тягач с по-
мощью подкатной тележки может перевозить неисправные автомо-
били с поврежденным одним мостом. За кабиной автомобиля уста-
новлен гидравлический кран «4030» Львовского завода автопогруз-
чиков. Привод гидронасоса крана осуществляется с помощью ко-
робки отбора мощности, установленной на раздаточной коробке.
Для обеспечения устойчивости при работе краном средний мост тя-
гача оборудован механизмом блокировки рессор с гидроприводом
от насоса.
Техническая характеристика
тягача ТКЗ
Вес без груза, кг..................... 6300
Габаритные размеры в транспортном положении, мм-.
— длина...........................6918
— ширина..........................2315
— высота..........................3150
Грузоподъемность, кг
— при движении по шоссе .... 3900
— при движении по грунтовым дорогам . 1900
Техническая характеристика
гидрокрана4030и подкатной тележкиТБ
Вес крана, кг................................600
Грузоподъемность при максимальном вылете
стрелы, кг...........................- 500
Вес тележки, кг..........................565
Грузоподъемность тележки, кг.............. 4000
Габаритные размеры тележки, мм:
— длина.............................. 2450
— ширина..............................1945
— высота...............................1200
Тягач ТКЗ с подкатной тележкой ТБ может использоваться для
перевозки поврежденных машин по хорошим дорогам.
Колесный тягач ТК4
Тягач (рис. 40) предназначен для перевозки неисправных авто-
мобилей в полупогруженном состоянии как по дорогам с различным
покрытием, так и по местности без дорог. Конструкция тягача раз-
работана на базе автомобиля ЗИЛ-157. Тягач имеет укороченный
кузов, вторую лебедку, установленную за кабиной, и кронштейн
90
с блоком и опорным устройством, установленными на задней части
рамы. Подъем и погрузка передней (задней) части неисправного
автомобиля производится с помощью второй лебедки, трос который
перекидывается через блок кронштейна. Неисправные автомобили
грузятся на опорное устройство передней или задней частью рамы
и крепятся с помощью цепей со стяжными винтовыми устройствами.
Верхний щит опорного устройства закреплен на шаровой пяте, что
Рис. 40. Тягач ТК4.
обеспечивает необходимую свободу колебаний буксируемого авто-
мобиля по отношению к тягачу. Наличие двух лебедок позволяет
успешно использовать тягач при выводе машин из аварийных поло-
жений.
Т с х и и ч ес к а я характеристика тягача
Вес тягача, кг................................ 6700
Грузоподъемность сцепного устройства, кг . . 2500
Максимальный угол складывания тягача с букси-
руемым автомобилем, град....................50
На тягаче имеется комплект такелажного оборудования и де-
монтажно-монтажный инструмент. Для разгрузки рессор, при из-
влечении застрявших машин или засыпанных в укрытиях землей
’С помощью дополнительной лебедки, тягач оборудован откидными
винтовыми опорами.
Т1\4 является универсальным средством эвакуации автомобилей,
обеспечивающим сравнительно высокую производительность. Сред-
ние скорости движения тягача с буксируемым автомобилем по до-
рогам с твердым покрытием составляют 25—30 км/час, а по грун-
товым дорогам — 15—25 км/час.
91
Гусеничный тягач ТГ1
Тягач разработан на базе тяжелого артиллерийского тягача,,
предназначается для эвакуации гусеничных и большегрузных ко-
лесных машин к дорогам, для последующей погрузки на платформы
полуприцепов.
На эвакуационном тягаче ТГ1 несколько изменена конструкция
лебедки, благодаря чему увеличена длина троса до 150—200 м.
Тягач оборудован упорным сошником и такелажным комплек-
том (полиспасты, анкеры), сочетание которых дает возможность
получить тяговые усилия на лебедке: 18, 35, 50, 65, 80 и НО т, при-
чем анкеры используются только при необходимости получить мак-
симальные тяговые усилия (110т).
В комплект тягача, кроме того, входят: демонтажное оборудо-
вание, керосинорез и буксирные приспособления.
Гусеничный тягач ТГ2
Тягач предназначен для эвакуации гусеничных и большегруз-
ных колесных машин к дорогам, а также для расчистки и прокладки
на местности путей эвакуации и отрывки укрытий. Данный тягач
разработан на базе путепрокладчика БАТ, в отличие от которого*
имеет лебедку измененной конструкции (длина троса 200 м), комп-
лект такелажного оборудования (полиспасты, анкеры), позволяю-
щий развивать тяговые усилия до 150 т, и комплект демонтажно-
монтажного инструмента для производства несложных ремонтных
работ.
СРЕДСТВА ЭВАКУАЦИИ АВТОБРОНЕТАНКОВОИ ТЕХНИКИ
В АРМИЯХ КАПИТАЛИСТИЧЕСКИХ СТРАН
Правящие круги стран НАТО уделяют большое внимание раз-
витию транспортных средств. За последние годы в основных капи-
талистических странах проведены большие работы по унификации,
основных видов боевой техники, механизации и автоматизации си-
стемы учета и снабжения автобронетапковым имуществом. Соз-
даны образцы современных средств ремонта и эвакуации неисправ-
ных машин.
С целью облегчения работ по техническому обслуживанию, ре-
монту и эвакуации и упрощению организации снабжения запас-
ными частями в основных капиталистических странах ведутся ра-
боты по сокращению количества типов и марок грузовых армейских
колесных машин.
Так, в США намечено создать четыре основных типа автомоби-
лей: легких (0,25—1,0 т); промежуточных (1,0—2,5 т); средних
(2,5—5,0 т) и тяжелых (5,0—10,0 т). Автомобили каждой группы
предполагается изготовлять с колесными формулами: 4X4; 6X8;
8\8, причем с увеличением числа осей будет возрастать грузо-
92
подъемность машин в указанных интервалах. Во вновь создавае-
мых моделях предполагается максимальная стандартизация узлов
и деталей как внутри групп, так и между ними. Уделяется большое
внимание удобству ремонта и обслуживания.
Для поддержания бронетанковой техники в исправном состоя-
нии, своевременного ремонта и эвакуации машин в ходе боевых,
действий в американской армии создаются и непрерывно совер-
шенствуются средства эвакуации и ремонта.
Большое внимание уделяется созданию достаточно мощных и хо-
рошо оснащенных войсковых ремонтных и эвакуационных средств,
основу которых составляют ремонтно-эвакуационные машины ши-
рокой специализации. Такие машины предназначаются для выпол-
нения эвакуационных работ, войскового (текущего) и полевого»
(среднего) ремонта всей автобронетанковой техники и вооружения.
В зависимости от назначения и предполагаемых условий работы
ремонтно-эвакуационные машины выпускаются:
— бронированными, предназначенными для эвакуации автобро-
нетанковой техники и вооружения непосредственно с переднего края
и последующего ремонта их за боевыми порядками войск;
— небронированными, на базе гусеничных артиллерийских тя-
гачей, для эвакуации и войскового ремонта автобронетанковой те.х-
ники в зоне непосредственного обеспечения;
— на шасси автомобилей высокой проходимости — для эвакуа-
ции и войскового ремонта колесных машин в зоне непосредствен-
ного обеспечения.
В американской армии имеются также плавающие ремонтно-
эвакуационные машины, предназначенные для эвакуации и ремонта
плавающих и затонувших в водоемах машин и вооружения.
Указанная ремонтно-эвакуационная техника создается на базе
серийно выпускаемых промышленностью: танков, гусеничных тяга-
чей и автомобилей различного веса и грузоподъемности (прило-
жение 4).
К характерным конструктивным особенностям этих машин сле-
дует отнести:
— наличие подъемных кранов с механическим или гидравли-
ческим приводами и короткой стрелой, что позволяет реализовывать
большие вертикальные усилия, необходимые при выводе застряв-
ших, засыпанных землей машин, а также при производстве ремонт-
ных работ;
— установку мощных тяговых лебедок максимальные усилия,
которых в ряде случаев превышают собственный вес машин;
— оборудование машин специальными устройствами (сошни-
ками, упорами), с помощью которых реализуются большие тяговые
усилия на лебедках в различных условиях местности;
— наличие газосварочного, демонтажно-монтажного и другого-
ремонтного оборудования, которое может частично использоваться
при производстве эвакуационных работ.
93-
К недостаткам рассматриваемой техники следует отнести малую
удельную мощность, которая для ремонтно-эвакуационных автомо-
билей даже без груза составляет 10—18 л. с. на тонну, а при букси-
ровании неисправных машин — 6—11 л. с. на тонну.
Недостаточная удельная мощность объясняется большим весом
ремонтно-эвакуационного оборудования, установленного на шасси
серийных машин, что отрицательно сказывается на скорости дви-
жения и производительности этих средств особенно при обеспече-
нии войск в условиях маневренной войны.
Отсутствие платформ на ремонтно-эвакуационных машинах
значительно снижает их универсальность и создает известные не-
удобства в работе. Успешное использование ремонтно-эвакуацион-
ных средств становится возможным при организации тесного взаи-
модействия с обычными транспортными машинами.
Наконец, большинство американских ремонтно-эвакуационных
машин не имеет специального оборудования для буксирования ко-
лесных машин с повреждениями мостов. Эвакуация техники этой
группы возлагается, по имеющимся в литературе сведениям, на низ-
корамные прицепы, о недостатках которых достаточно подробно из-
лагалось в материалах предыдущей главы.
Ремонтно-эвакуационные машины организационно входят в со-
став ремонтных средств подразделений, частей и соединений. По
существующей в настоящее время организации сухопутных войск
в армии США имеются четыре типа дивизии: пехотные, механизи-
рованные, бронетанковые и воздушнодесантные. Каждая дивизия
имеет в своем составе три бригадных штаба, которым придаются
на период выполнения боевой задачи подразделения (передовые
роты) ремонтного батальона, входящего в состав дивизии.
Ремонтно-эвакуационные средства пехотной дивизии представ-
лены:
— в пехотном батальоне — ремонтная секция (21 человек) в со-
ставе двух ремонтно-эвакуационных машин;
— в дивизии — ремонтный батальон (696 человек), состоящий
из основной роты ('252 человека), трех передовых рот (по 93 чело-
века) и роты армейской авиации.
Основная рота предназначена для эвакуации и ремонта техники
подразделений дивизии, не приданных бригадам. Она имеет в своем
составе:
— ремонтно-эвакуационных машин (5 т) — 1;
— ремонтных мастерских на автомобиле (2,5 т) —9;
— крытых полуприцепов под запасные части — 9;
— транспортеров (12 т) —7;
— транспортеров (50 т)—2.
Передовая рота имеет:
— ремонтно-эвакуационных машин (5 т) —2;
— ремонтных мастерских на автомобилях (2,5 т) —6.
Ремонтно-эвакуационные средства в механизированной и броне-
танковой дивизиях представлены:
94
— в танковой роте — ремонтная секция (11 человек) в составе
одной 5-тонной ремонтно-эвакуационной машины;
— в танковом батальоне — ремонтный взвод (26 человек) в со-
ставе двух ремонтно-эвакуационных машин;
— в механизированном батальоне — ремонтная секция (30 че-
ловек) в составе трех ремонтно-эвакуационных машин и двух ма-
стерских;
— в механизированной (бронетанковой) дивизии ремонтный
батальон численностью 823 (862) человека.
Основные роты батальонов имеют 329 (363) чел. и следующую
материальную часть:
— ремонтно-эвакуационных машин — 4,
— ремонтных мастерских—18,
— крытых полуприцепов (под запасные части) —9,
— транспортеров (50 т) —6.
Передовые роты батальонов численностью 118 (120) человек
имеют по три ремонтно-эвакуационные машины и по семь ремонт-
ных мастерских.
Эвакуация всей неисправной техники и вооружения в полевой
армии возлагается на артиллерийско-технические роты сбора и де-
фектовки поврежденной техники, которые предназначены для сосре-
доточения машин и вооружения из войск на пункт сбора, последую-
щего ремонта силами частей общего технического обеспечения или
подготовки к последующей эвакуации на ремонтные заводы адми-
нистративной зоны или на континент.
Ремонтные,средства пехотной дивизии английской армии пред-
ставлены ремонтно-восстановительными ротами пехотных бригад,
предназначенными для войскового ремонта артиллерийского во-
оружения, автомобилей и имущества связи. Силами этих же рот
производится эвакуация автомобилей и вооружения.
Основным видом техники, предназначенной для производства
эвакуационных работ, являются также ремонтно-эвакуационные ма-
шины.
Приложение 1
Краткая техническая характеристика колесных тягачей
Параметры Единица измере- ния УАЗ-469 ГАЗ-66 ГО <£> ЗИЛ-157 ЗИЛ-131 У РАЛ-375 УРАЛ-377 МАЗ-505 Краз-214 Краз-250
Колесная формула — 4X4 4X4 4X4 6X6 6X6 : 6X6 , ; 6X4 4X4 6X6 6X4
Полный вес кг 1030 3700 3200 5620 6200 8400 । ! 7290 7700 12 300 10 375
Грузоподъемность кг 400 2000 2000 2500 3500 4500 7500 5000 7000 12 000
Вес буксируемого прицепа . . Габаритные размеры: кг 850 4000 2000 3600 4000 5000 10 500 10 000 50 0С0 20 000
— длина мм 4065 5605 5525 6725 6866 7350 7800 6850 8530 9200
— ширина мм 1540 2280 2200 2340 2500 2690 2500 2500 270 2500
Мощность двигателя л. с. 70 115 70 107 150 180 180 180 205 240
Размеры платформы:
— длина мм 1425 3300 2940 2340 3600 3900 4700 3800 4565 —
— ширина мм 1705 2050 1990 2878 2922 2430 2280 2300 2560 —
— высота бортов мм 1225 890 — — 349 872 692 355 930 --
Запас хода по топливу . . . км 350 850 650 500 650 700 600 800 650 —
Погрузочная высота платфор- мы мм — — 1285 1388 — — — — — —г
Прилцжение2
Краткая техническая характеристика гусеничных тягачей
Наименование Марка тягачей
АТ-П АТ-Л АТ-С АТ-Т
.Вес тягача без нагрузки, кг 5200 5800 12 000 1 20 000 ।
Грузоподъемность, кг . . . 1200 2000 3000 5000
Вес буксируемого прице-
па, кг 3700 5000 14 000 25 000
Мощность двигателя, л. с. ПО 110 250 415
Максимальная скорость 35 35
движения, км/час . . . 50 42
Удельное давление, кг/см2 0,45 0,49 0,56 0,65
Габаритные размеры, мм
—длина 4450 5115 5880 6990
— ширина 2500 2200 2570 3140
Наибольшее тяговое уси-
лие, кг — 5000 15 000 20 000
Рабочая длина троса, м . . — 50 75 100
97
7 Баер В. Г.
Приложение 3
Краткая техническая характеристика гусеничных тракторов
Наименование пара- метров КДП-35 Т-75 С-80 С-100 С-140, Т-140 ТДТ-40 ТДГ-60 ТДТ-75
Вес трактора, кг 3700 5500 11400 11400 15100 6300 1000 10600
Мощность двигателя, л. с. 38 75 93 100 140 40 . 60 75
Максимальная скорость движения, км/час . . . 9,1 10,6 9,65 10,15 10,9 12,5 7,5 10
Максимальное тяговое уси- лие, кГ . . 1700 3500 8800 9000 3300 3200 5000 5200
При скорости движения, км/час 3,8 3,9 2,25 2,36 2,35 2,0 2,0 2,7
Удельное давление на грунт, кГ/см2 0,6 0,43 0,43 0,50 0,47 0,40 — —
Запас хода при работе с полной нагрузкой, час . 12 13 10 10 10 — — —
Тяговое усилие лебедки,кГ — — — — — 3500 8000 10500
*
Приложение 4
Краткая характеристика ремонтно-эвакуационных машин капиталистических армий стран НАТО
Наименование ремонтно- эвакуационных машин Назначение Базовое шасси Боевой вес, т Экипаж, чело- век Мощность двигателя, л. с Грузоподъем- ность крана, т Тяговое уси- лие лебедки Допол- нитель- ное обо- рудова- ние
основ- ной вспомо- гатель- ный
Легкая ремонтно-эвакуа- Ремонтно-эвакуационные машины армии США Ремонт и эвакуация 1 Унифицированное 1 23,13 3 370 13,6 27,2 Сошник
ционная машина Т-120 (опытная) Средняя ремонтно-эва- автобронетанковой тех- ники и артвооружения Ремонт и эвакуация шасси Т-236 Средний танк М4АЗ 28 3 525 13,6 27,2 Сошник
куационная машина M32A1B3, 1944 г. Средняя ремонтно-эва- средних танков, САУ и гусеничных арттягачей Ремонт и эвакуация „Шерман* Средний танк, М4АЗ 42,5 4 525 22,7 40,8 4,54 Сошник
куационная машина - М74 1953 г. Средняя ремонтно-эва- средних танков, САУ и гусеничных арттягачей Ремонт и эвакуация „Шерман" Средний танк М-48 50 4 1000 22,7 40,8 тягово- сцепное устрой- ство Сошник
куационная машина М88, 1959 г. Тяжелая ремонтно эва- средних танков, САУ и гусеничных арттягачей Ремонт и эвакуация тя- Тяжелый танк 54,5 4 1020 27,2 45,4 4,54 Сошник
куационная машина М51, 1953 г. Плавающая ремонто- желых танков, САУ, гу- сеничных арттягачей, бронетранспортеров, ин- женерных и других машин Ремонт и эвакуация М 103 Плавающий гусенич- 38 4-5 810 3,2 18
эвакуационная машина, 1959 г. ю плавающих танков и гусеничных бронетран- спортеров ный бронетранспор- тер । 1
Наименование ремонтно- эвакуационных машин Назначение
Ремонтно-эвакуацион-
ная машина Т4Е1
Ремонтно-эвакуацион-
ная машина Т5Е1,
1952 г.
Ремонтно-эвакуационная
машина Т6Е1, 1953 г.
Легкая ремонтно-эва-
куационная машина
Т119 (опытная)
Легкая ремонтно-эва-
куационная машина
М8Е1 (опытная)
Ремонтно эвакуацион-
ный 2,5 т автомобиль
М60
Ре монт но- эва к у а цион-
ный 4-тонный автомо-
биль „Даймонд Т*
Ремонт и эвакуация
автобронетанковой тех-
ники н артвооружения
Ремонт и эвакуация aei-
кой бронетанковой тех-
ники и артвооружения
Ремонт и эвакуация
бронетанковой текники
и артвооружения
Ремо! т и эвакуация
автобронетанковой тех-
ники и артвооружения
Ремонт и эвакуация
легких танков, САУ, гу-
сеничных тягачей и
транспортеров
Ремонт и эвакуация
легких колесных машин
Ремонт и эвакуация ко-
лесных машин грузо-
подъемностью до 5 т
Окончание приложения 4
Базовое шасси Боевой вес, т Экипаж, че- ловек Мощность двигателя, л. с. Грузоподъем- ность крана, т Тяговое уси- лие лебедки Дополни- тельное оборудо- вание
основ- ной вспомо- гатель- ный
Артиллерийский тя- гач М8Е2 29 4 — 13,6 8,6 8,6 —
Артиллерийский тягач Т43Е2 16,3 4 — 9 5,4 5,4 —
Артиллерийский тя- гач Т44Е, с 1955 г. на базе арттягача Т86 46,3 4 — 20 — — Земле- ройный ковш 0,32 л/З
У инфицированное шасси Т236 19,5 3 । 370 13,6 27,2 — Сошник
Артиллерийский тягач 8МА2 25 4 500 Два крана по 14 т каждый 20,4 — Бульдо- зер
Трехосный автомо- биль грузоподъем- ностью 2,5 т Трехосный автомо- биль „Даймонд" грузоподъемностью 4 т с двигателем „Геркулес" ВХС 10,75 9,84 2 106 4,54 3,6 6,8 1 — —
Ремонтно-эвакуацион- ный 5-тонный автомо- биль М62 (рис, 43) 1 Ремонт п эвакуация ко- лесных машин грузо- подъемностью 5 т и бо- лее Трехосный автомо- биль М-40 15,4 2 224 9,07 j i i 18,14 1 9,07 j —
Ремонтно-эвакуацион- ный 5-тонный автомо- биль-тягач М246 Ремонт и эвакуация колесных машин и бук- сировка полуприцепа с грузом до 12 т Трехосный автомо- . биль грузоподъем- • ностью 5 т 14,9 1 2 J । ! 224 s I । i ‘ 9,07 ; 18,14 9,07 j Опорно- сцепное устрой- ство
Ремонтно-эвакуацион- ный 6-тонный автомо- биль Ml фирмы „Кен- ворт мотор тракком- пании* Ремонт и эвакуация тя- желых колесных машин Трехосный автомо- биль грузоподъемно-^ стью 6 т । 1 12,4 i 2 145 9,07 | 21,55 9,07 —
Ремонтно-эвакуационные машины английской армии
Средняя бронированная ремонтно-эвакуационная машина МК2, 1956 г. Ремонт и эвакуация средних танков, САУ, бронетранспортеров и гусеничных арттягачей Танк „ Центурион* ! 50,3 4 635 30 j i 1 30 I ! - i Сошники
Тяжелая бронированная, ремонтно-эвакуационная машина МК1. 1955—1956 гг Ремонт и эвакуация тяжелых гусеничных машин Танк „Конкэрор" 60 4 810 — 90 I i Сошники
Ремонтно-эвакуационные машины французской армии
Легкая бронированная ремонтно-эвакуационная машина, 1955 г. Ремонт и эвакуация легких гусеничных машин Танк АМХ-51 14 1 3 i L I 270 1 5 15 — —
ЛИТЕРАТУРА
1. Е. А. Ч у да к о в. Теория автомобилей. Машгиз, 1950.
2. В. А. Илларионов и др. Теория автомобиля. Автотрапсиздат, 1960.
3. А. С. Озерский и др. Гусеничные тракторы. Издательство сельскохо-
зяйственной литературы,. 1961.
4. М. М. Щукин. Сцепные устройства автомобилей и тягачей. ВАТТ, 1960
5. М. А. Бук штейн. Производство стальных канатов. Государственное
научно-техническое издательство литературы но черной и цветной металлу;»
гин, 1963.
6. Материалы ио проектированию ОЭР. НИ11-21, 1957—60 гг.
7. И. И. Михайлов и др. Эвакуационные средства армий стран НАТО.
Бюллетень технической информации № 15, 1962. НИИ-21 МО.
8. В. Я. Розенберг и др. Теория массового обслуживания, изд. «Совет-
ское радио», 1962.
ОГЛАВЛЕНИЕ
Глава I. Основы организации эвакуации поврежденных
машин................................................... 3
Работы; выполняемые при эвакуации автотракторной
техники........................................... 3
Параметры, определяющие производительность эвако-
тягачей ................................................ 9
Основы взаимодействия ремонтных и эвакуационных
средств.................................................13
Математические методы решения задач по сосредото-
чению автотракторной техники .......................... 17
Глава Ik Вывод машин из аварийных положений . 25
Оборудование, применяемое при выводе машин из ава-
рийных положений....................................25
Извлечение автомобилей из укрытий, засыпанных
землей..............................................34
Вывод машин из положения застревания .... 39
Постановка на колеса опрокинутых машин . . . 47
Подготовка к буксированию машин с неисправной хо-
довой частью........................................49
Глава III. Способы перевозки неисправных машин 55
Оборудование, используемое при перевозках неисправ-
ных машин...............................................55
Сравнительная оценка способов буксирования повреж-
денных автомобилей......................................61
Буксирование гусеничных машин.......................73
Перевозка поврежденных машин автомобильным
ipancnop'roM.........................................7 С»
Глава IV. Средства эвакуации..........................79
Основные положения но проектированию эвакуацион-
ных средств..........................................79
Эвакуационные средства Советской Армии ... 80
Средства эвакуации автобронетанковой техники в ар-
миях капиталистических стран........................
Приложения.............................................9(1
Редактор Евстигнеев А. К.
Технический редактор Потапова 3. Т. Корректор Усвятцева Е. М.
Сдано в набор 6. 10. 65 г. Подписано к печати 22. 10. 65 г.
Формат бумаги бОХОО1/^ Объем б1^ п. л. Заказ 709
Г-798100
Тип. ВАТТ