


















































































































































Автор: Кун С. Госселин К.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика механика инженерия проектирование монография инженерное дело
ISBN: 978-5-9221-1396-0
Год: 2012



Xianwen Kong and Clement Gosselin
Type Synthesis of Parallel
Mechanisms
Сяньвэнь Кун
Клемент Госселин
Структурный синтез
параллельных
механизмов
Перевод с английского
д. т. н. J1. А. Рыбак, к. т. н. А. В. Чичварина
под редакцией д. т. н. А. В. Синева
МОСКВА
ФИЗМАТЛИТ®
2012
УДК 681.5
ББК 22.2, 34
К91
#
Издание осуществлено при поддержке
и Российского фонда фундаментальных
исследований по проекту 10-08-07012
Кун С., Госселин К. Структурный синтез параллельных механиз¬
мов / Пер. с англ. д.т.н. JI.A. Рыбак, к.т.н. А.В. Чичварина под ред. д.т.н.
А.В. Синева. - М.: ФИЗМАТЛИТ, 2012. - 276 с. - ISBN 978-5-9221-1396-0.
Монография посвящена структурному синтезу параллельных механизмов
(ПМ), являющемуся одной из важнейших задач при разработке и проектиро¬
вании разнообразных инновационных устройств, основанных на применении
параллельных механизмов: параллельных манипуляторов, станков с парал¬
лельной кинематикой, подвижных симуляторов, тактильных устройств, микро-
и наноманипуляторов. Структурный синтез параллельных механизмов состоит
в отыскании всех структур ПМ, реализующих требуемое движение. В книге
проведена классификация ПМ, приведены эффективный метод структурного
синтеза ПМ и большое количество пригодных для практического применения
параллельных механизмов. Подход к синтезу основан на концепции виртуаль¬
ных цепей и применении элементарной нотации теории винтов. При использо¬
вании данного подхода семейства параллельных механизмов конструируются
из набора композиционных единиц. Такой подход концептуально прост и удо¬
бен. Кроме того, для упрощения понимания архитектуры любого параллельного
механизма в книге приведена обобщенная процедура анализа подвижности
ПМ. Для чтения данной книги необходимы лишь начальные знания линейной
алгебры и кинематики.
Книга предназначена исследователям, разработчикам, инженерам и аспи¬
рантам, интересующимся робототехникой, проектированием машин и механиз¬
мов и теорией винтов.
ISBN 978-5-9221-1396-0 (русск.) © ФИЗМАТЛИТ, 2012
ISBN 978-3-540-71989-2 (англ.) © Springer-Verlag Berlin Heidelberg, 2007
ОГЛАВЛЕНИЕ
Предисловие редактора английского издания 13
Предисловие 14
I. Подход к синтезу
Глава 1. Введение 18
1.1. Параллельные механизмы и их применение 18
1.1.1. Параллельные механизмы (18). 1.1.2. Характеристики
и применение (18).
1.2. Структурный синтез параллельных механизмов 20
1.3. Обозначение параллельных механизмов 20
1.3.1. Обозначение кинематических пар (21). 1.3.2. Обозначение
опор (23). 1.3.3. Обозначения ПМ (23).
1.4. Современное состояние проблемы 24
1.4.1. Структурный синтез многоконтурных пространственных ме¬
ханизмов (25). 1.4.2. Структурный синтез ПМ с заданным числом
степеней свободы (27). 1.4.3. Структурный синтез ПМ с заданной
траекторией движения (27).
1.5. Цели и структура книги 29
Глава 2. Структурный анализ 31
2.1. Теория винтов 31
2.1.1. Винты (31). 2.1.2. Группы винтов (31). 2.1.3. Операции
над группами винтов (33). 2.1.4. Группа кинематических винтов
и группа силовых винтов кинематической цепи (37).
2.2. Анализ мгновенной подвижности кинематических цепей 45
2.2.1. Последовательные кинематические цепи (46). 2.2.2. Одно¬
контурные кинематические цепи (46). 2.2.3. Параллельные кине¬
матические цепи (48).
2.3. Условие правильности выбора приводных кинематических пар в па¬
раллельных механизмах 52
6
Оглавление
2.3.1. Приводные силовые винты (52). 2.3.2. Условие правильности
выбора приводных кинематических пар (53).
2.4. Резюме 54
Глава 3. Структурный синтез одноконтурных кинематических
цепей 55
3.1. Введение 55
3.2. Процедура структурного синтеза 55
3.3. Структуры одноконтурных кинематических цепей с с-£-членной
группой 61
3.4. Резюме 65
Глава 4. Классификация параллельных механизмов 67
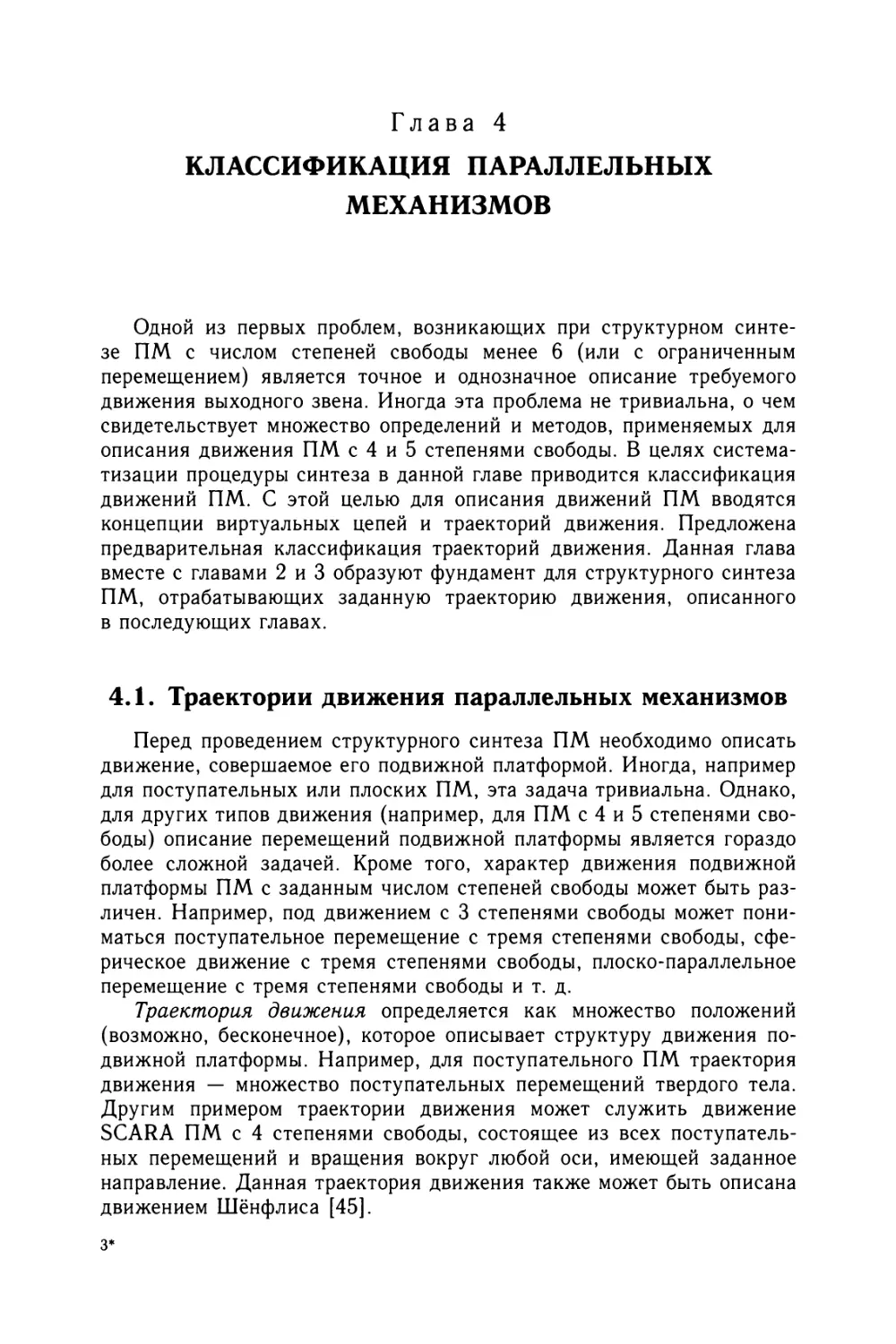
4.1. Траектории движения параллельных механизмов 67
4.2. Концепция виртуальных цепей 68
4.3. Предварительная классификация траекторий движения и соответ¬
ствующих параллельных механизмов 69
4.4. Резюме 74
Глава 5. Подход к структурному синтезу параллельных механиз¬
мов, основанный на виртуальных цепях 75
5.1. Введение 75
5.2. Условие, при котором параллельная кинематическая цепь является
V= параллельной кинематической цепью 76
5.3. Методика структурного синтеза V= паралельных механизмов. ... 76
5.4. Шаг 1: Декомпозиция группы силовых винтов параллельной кине¬
матической цепи 78
5.4.1. Определение групп силовых винтов опор (78). 5.4.2. Опре¬
деление комбинаций групп силовых винтов опор (79).
5.5. Шаг 2: Структурный синтез опор 88
5.5.1. Шаг 2а: структурный синтез ^-подвижной одноконтурной
кинематической цепи, содержащей виртуальную цепь и имеющей
указанную группу силовых винтов (88). 5.5.2. Шаг 2Ь: получение
структуры опор (90).
5.6. Шаг 3: Соединение опор 91
5.7. Шаг 4: Выбор приводных кинематических пар 92
5.8. Резюме 96
Оглавление
7
II. Конкретные примеры
Глава 6. 3-подвижный РРР= параллельный механизм 98
6.1. Введение 98
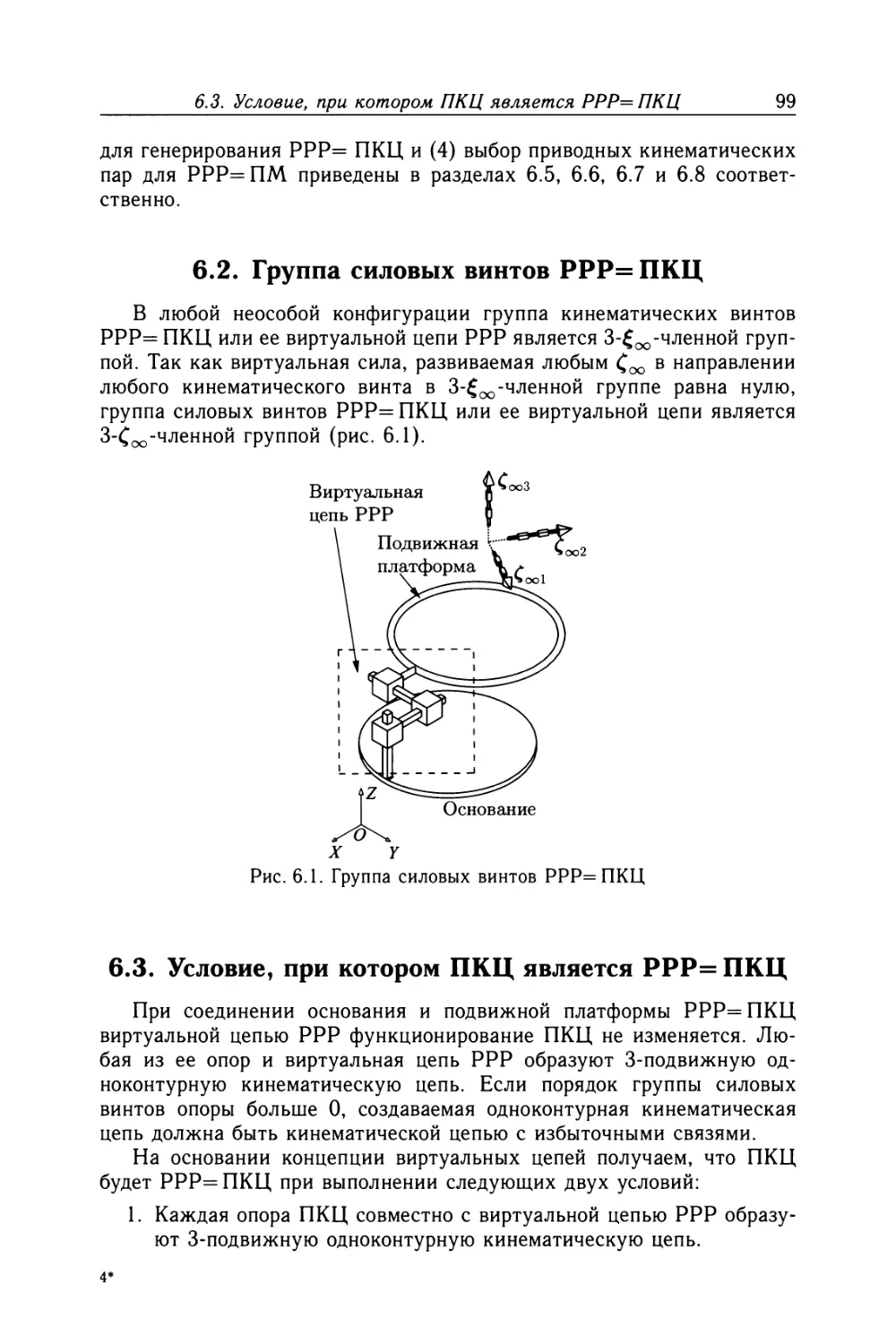
6.2. Группа силовых винтов РРР=ПКЦ 99
6.3. Условие, при котором ПКЦ является РРР= ПКЦ 99
6.4. Методика структурного синтеза РРР=ПМ 100
6.5. Шаг 1: Декомпозиция группы силовых винтов 3-подвижной
РРР=ПКЦ 100
6.5.1. Определение групп силовых винтов опор (100). 6.5.2. Опре¬
деление комбинаций групп силовых винтов опор (101).
6.6. Шаг 2: Структурный синтез опор 101
6.6.1. Шаг 2а: Структурный синтез 3-подвижных кинематических
цепей, включающих виртуальную цепь и имеющих заданную груп¬
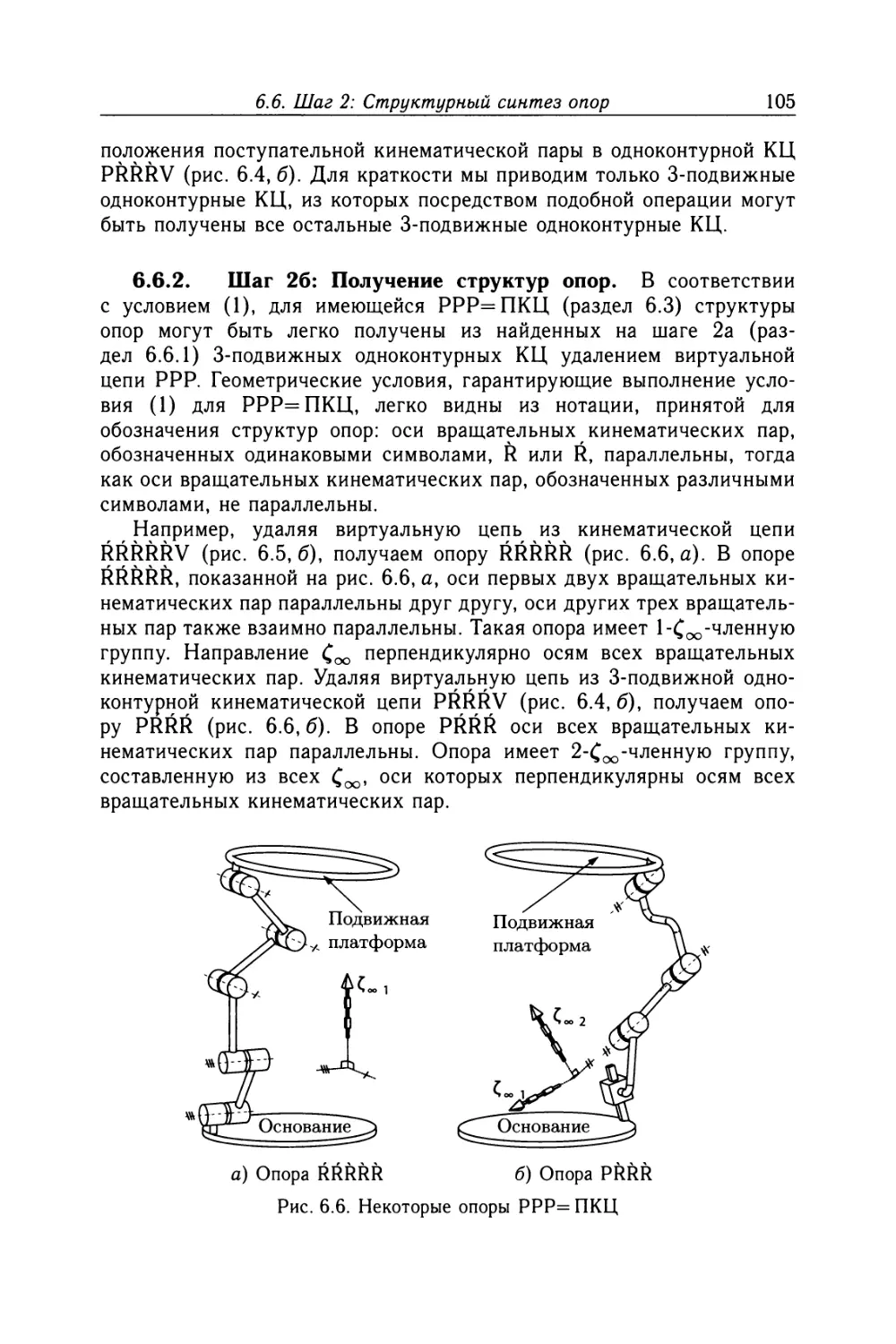
пу силовых винтов опоры (101). 6.6.2. Шаг 26: Получение струк¬
тур опор (105).
6.7. Шаг 3: Сборка опор 107
6.8. Шаг 4: Выбор приводных кинематических пар 109
6.8.1. t-компоненты приводных силовых винтов (109). 6.8.2. Про¬
цедура проверки правильности выбора приводных кинематических
пар (111).
6.9. Резюме 116
Глава 7. 3-подвижный S= параллельный механизм 117
7.1. Введение 117
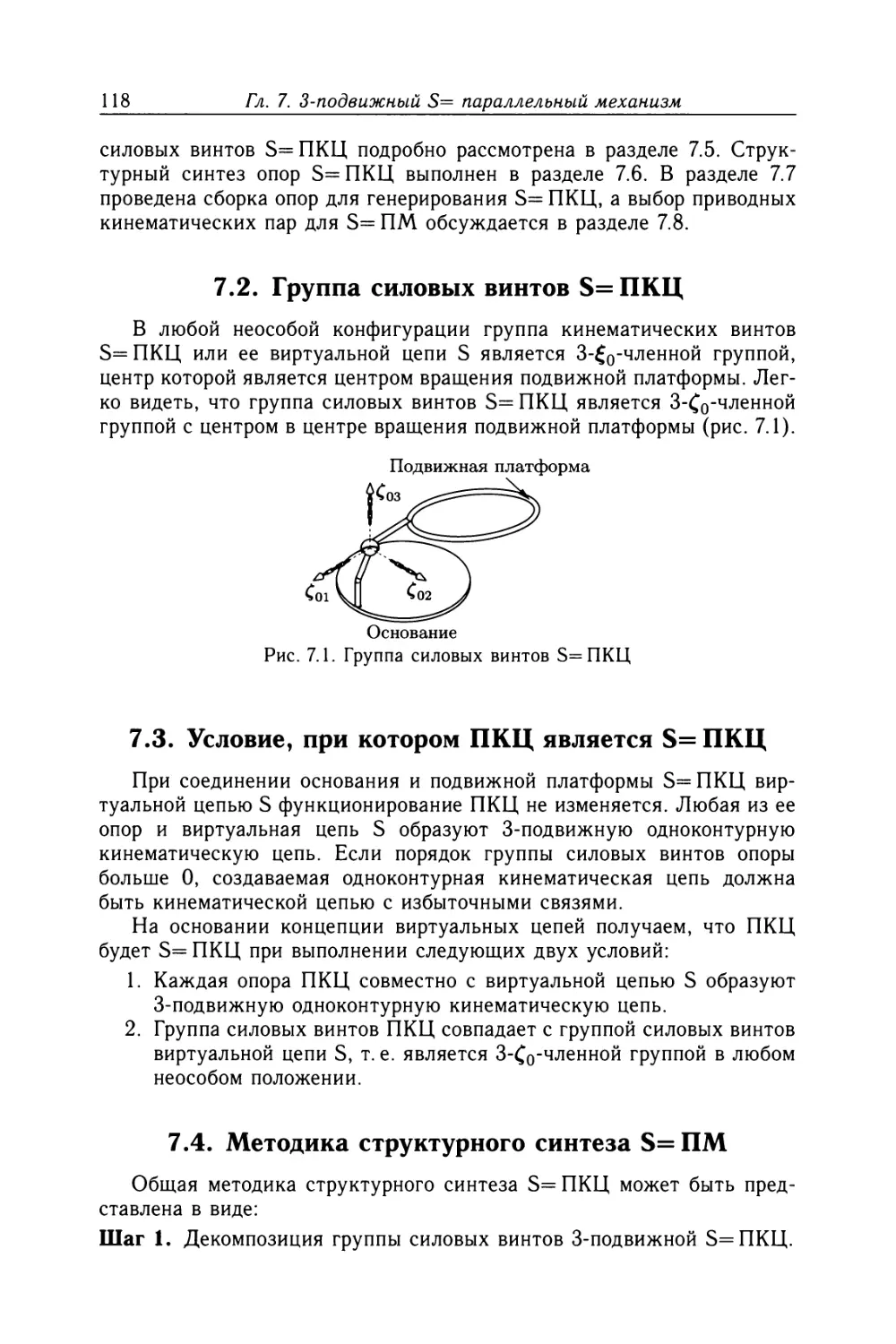
7.2. Группа силовых винтов Б=ПКЦ 118
7.3. Условие, при котором ПКЦ является Б=ПКЦ 118
7.4. Методика структурного синтеза Б=ПМ 118
7.5. Шаг 1: Декомпозиция группы силовых винтов Б=ПКЦ 119
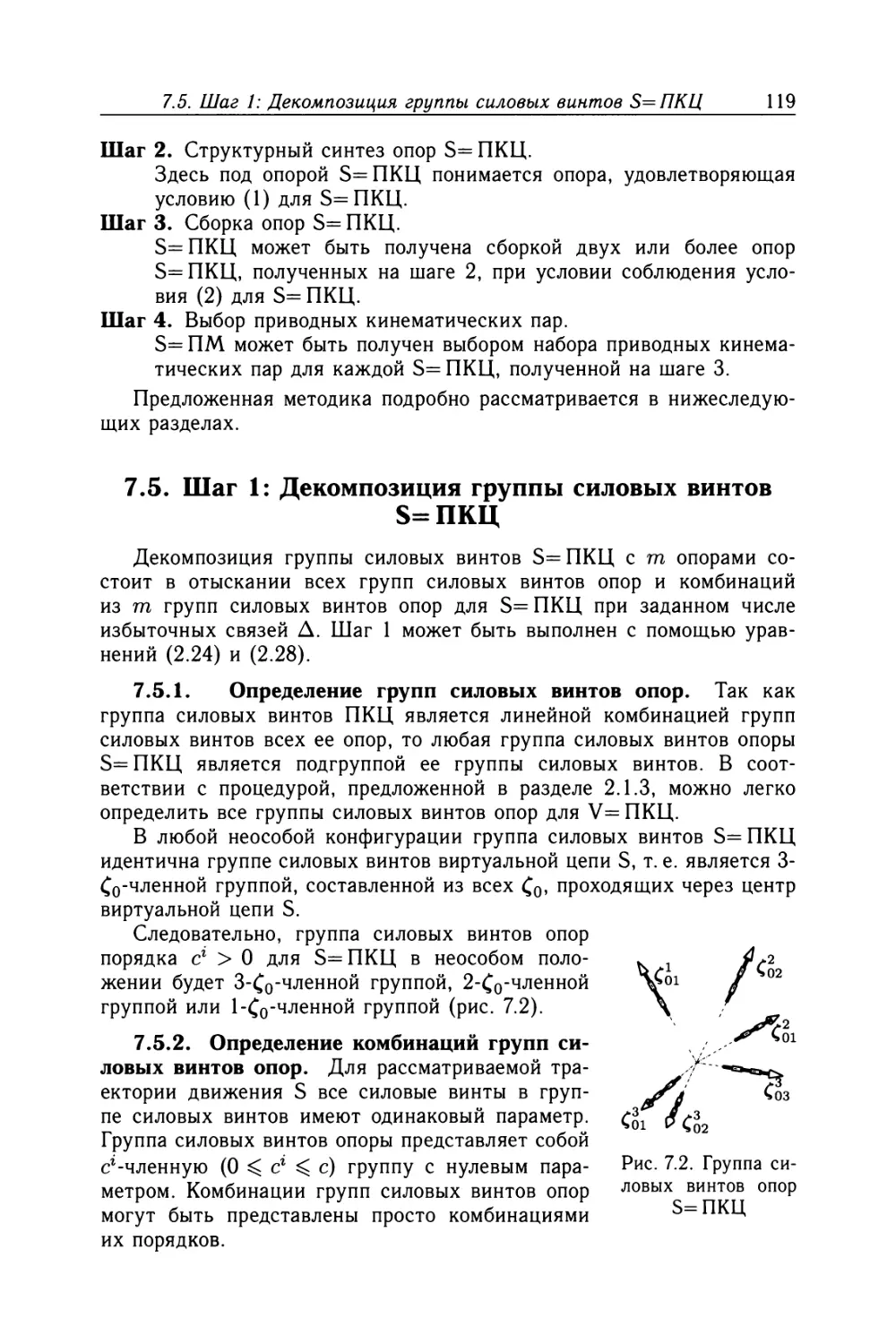
7.5.1. Определение групп силовых винтов опор (119). 7.5.2. Опре¬
деление комбинаций групп силовых винтов опор (119).
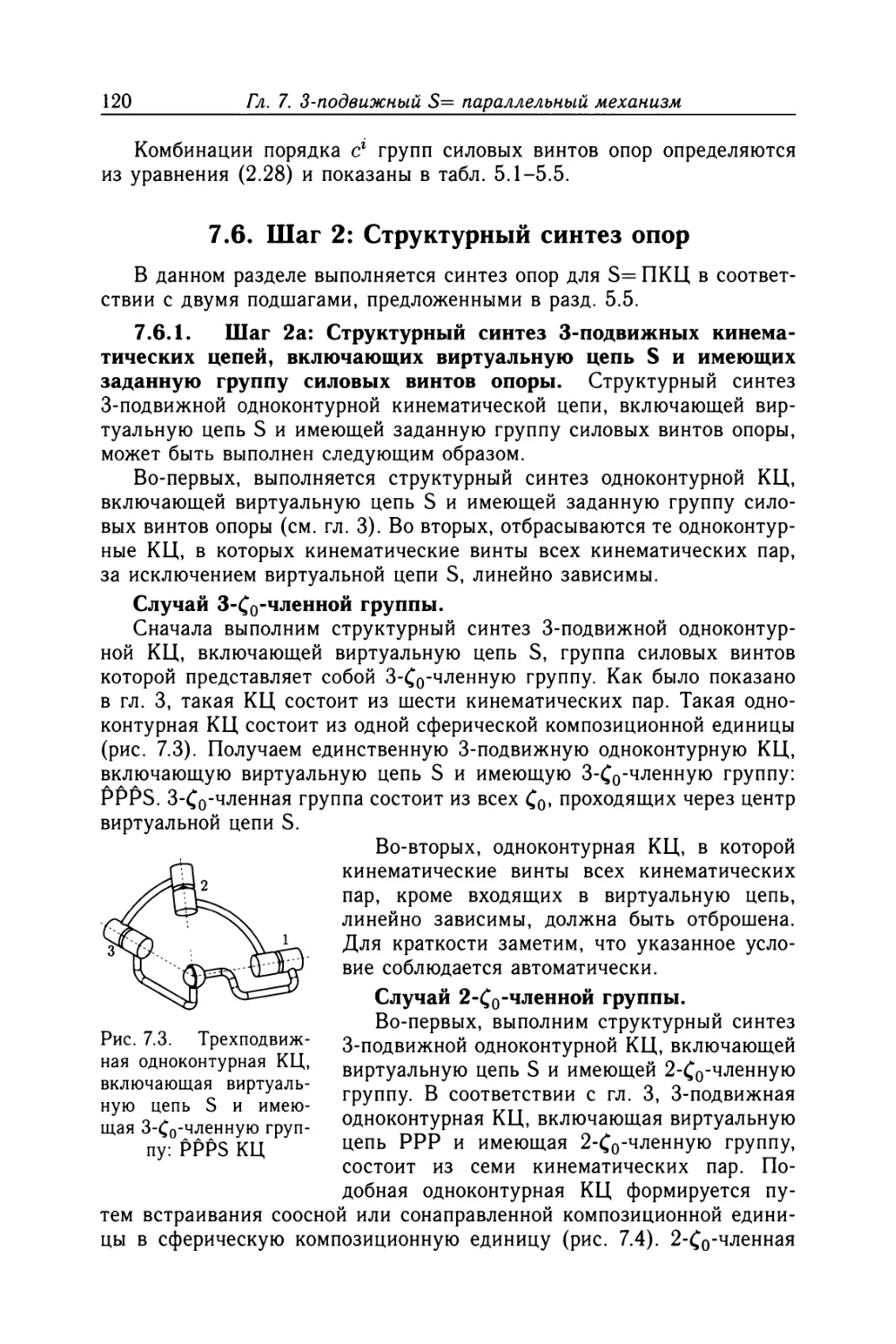
7.6. Шаг 2: Структурный синтез опор 120
7.6.1. Шаг 2а: Структурный синтез 3-подвижных кинематических
цепей, включающих виртуальную цепь S и имеющих заданную
группу силовых винтов опоры (120). 7.6.2. Шаг 26: Получение
структур опор (123).
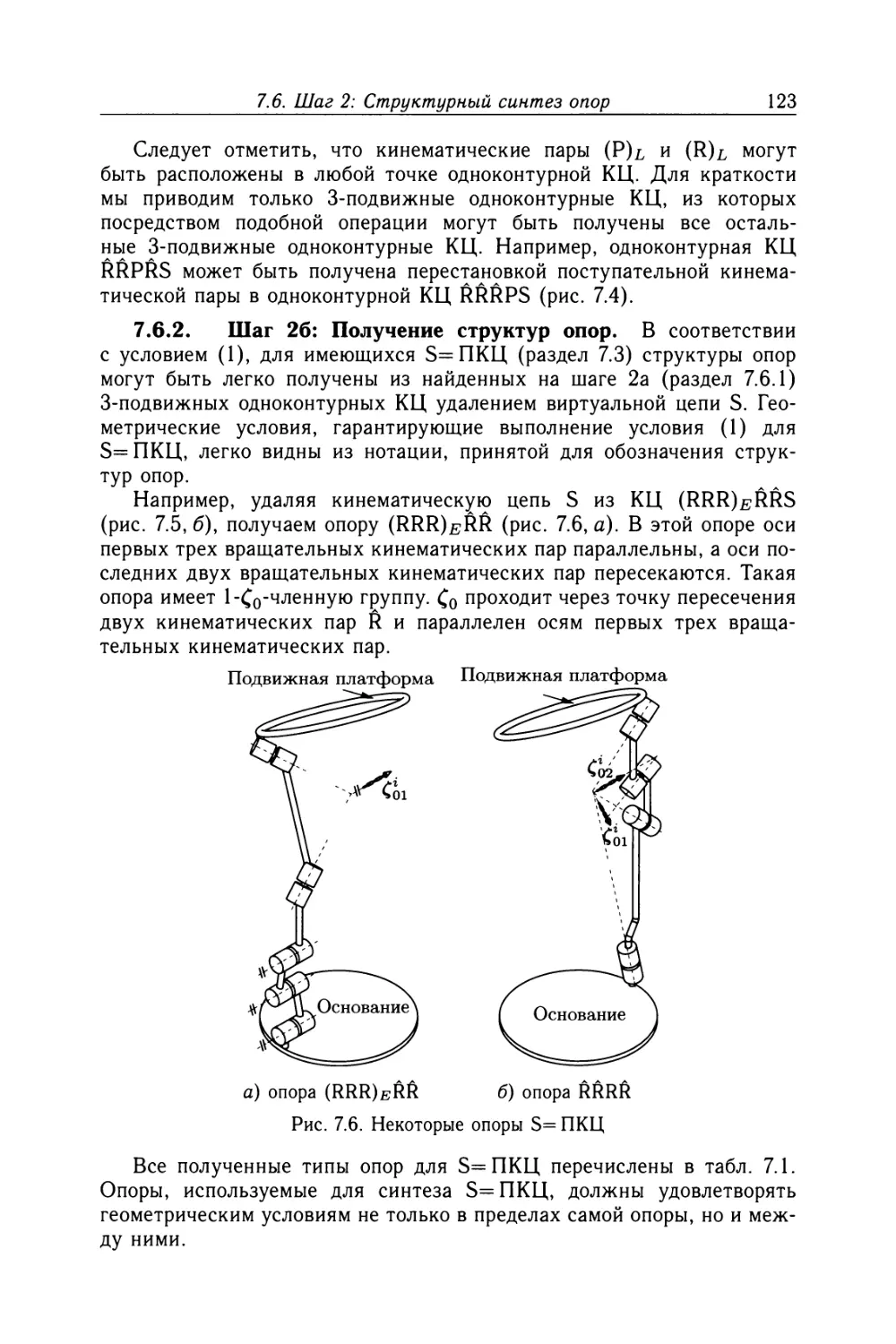
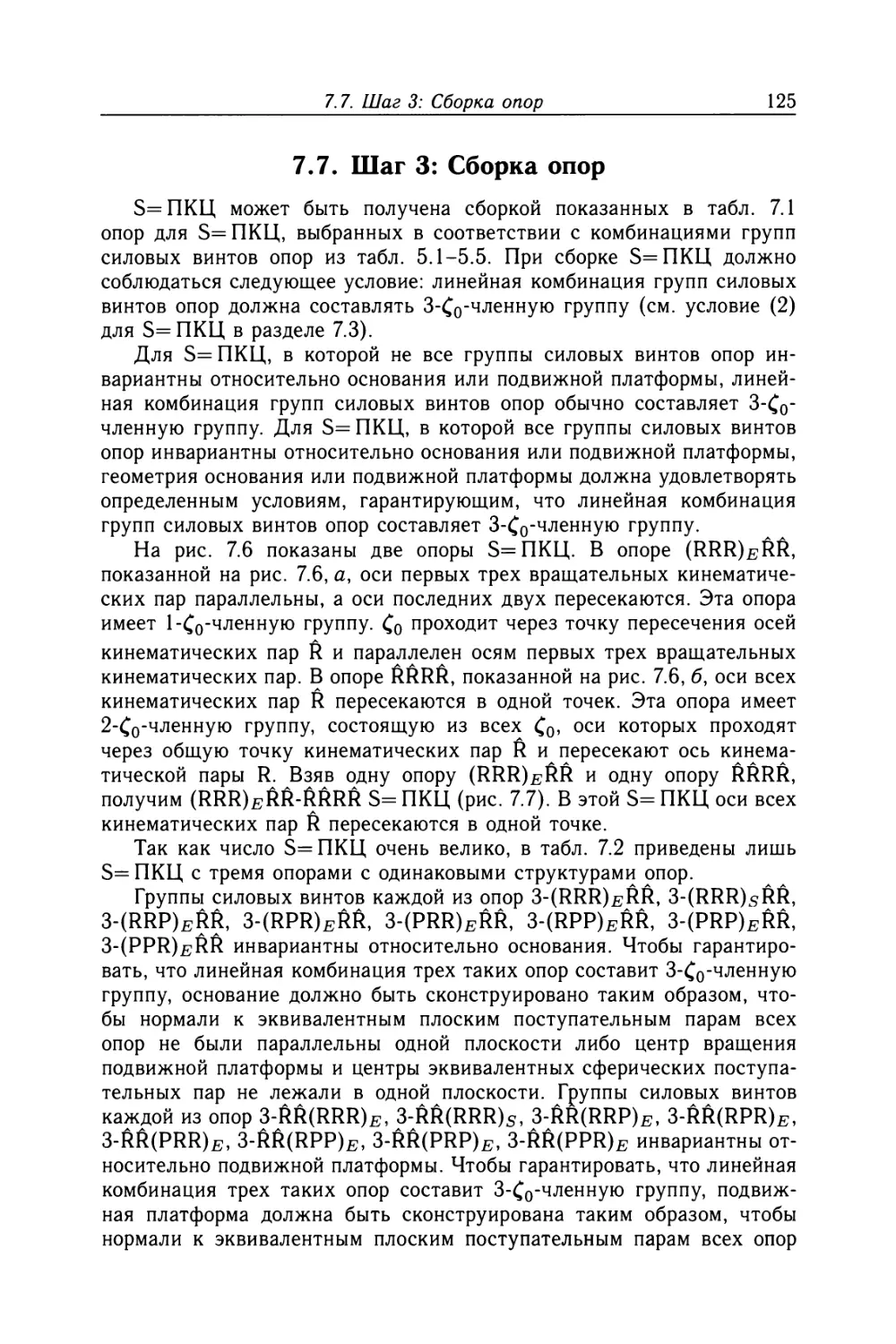
7.7. Шаг 3: Сборка опор 125
7.8. Шаг 4: Выбор приводных кинематических пар 127
7.8.1. t-компоненты приводных силовых винтов (127). 7.8.2. Про¬
цедура проверки правильности выбора приводных кинематических
пар (129).
7.9. Резюме 130
8
Оглавление
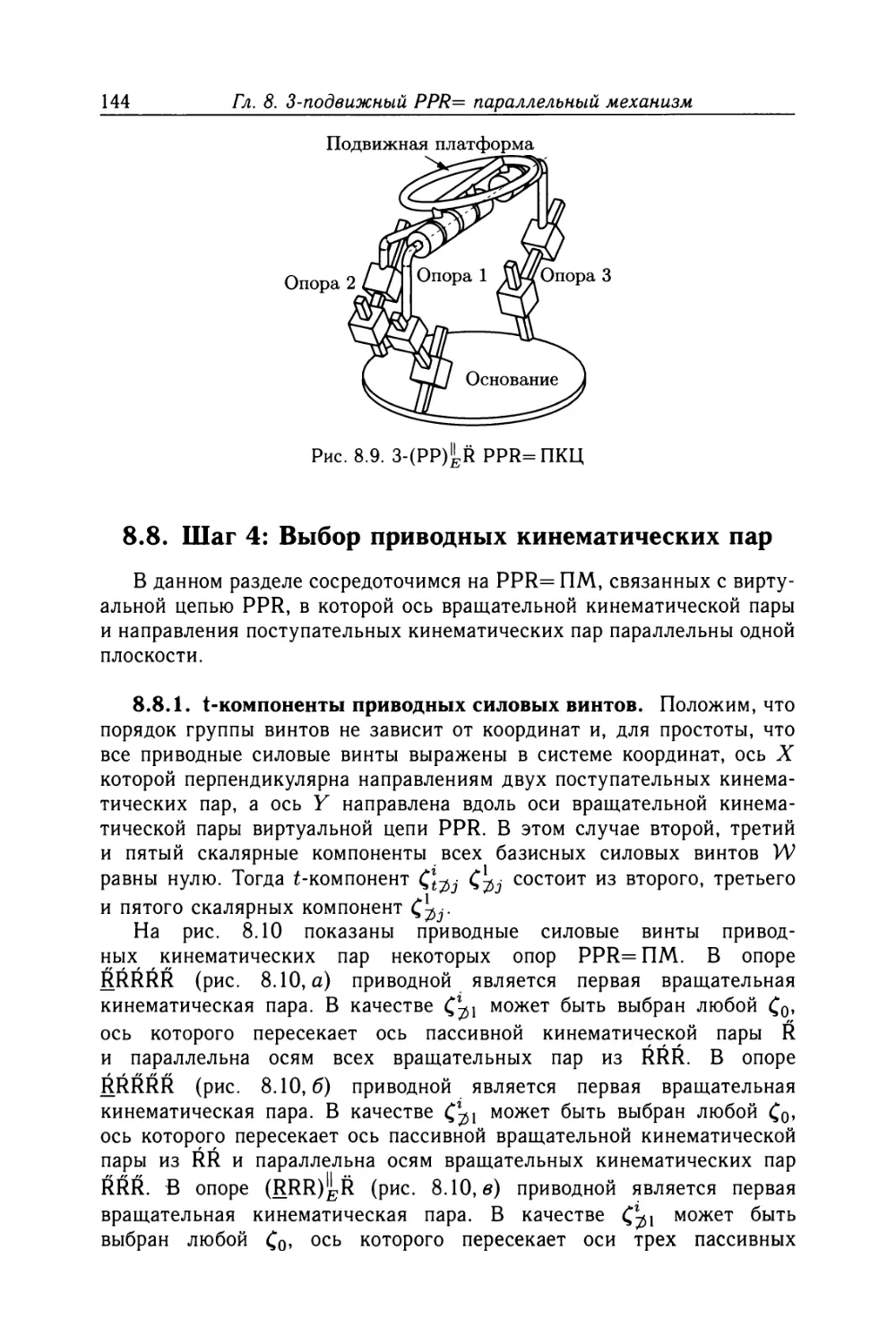
Глава 8. 3-подвижный PPR= параллельный механизм 133
8.1. Введение 133
8.2. Группа силовых винтов PPR= ПКЦ 134
8.3. Условие, при котором ПКЦ является РРИ=ПКЦ 134
8.4. Методика структурного синтеза PPR= ПМ 135
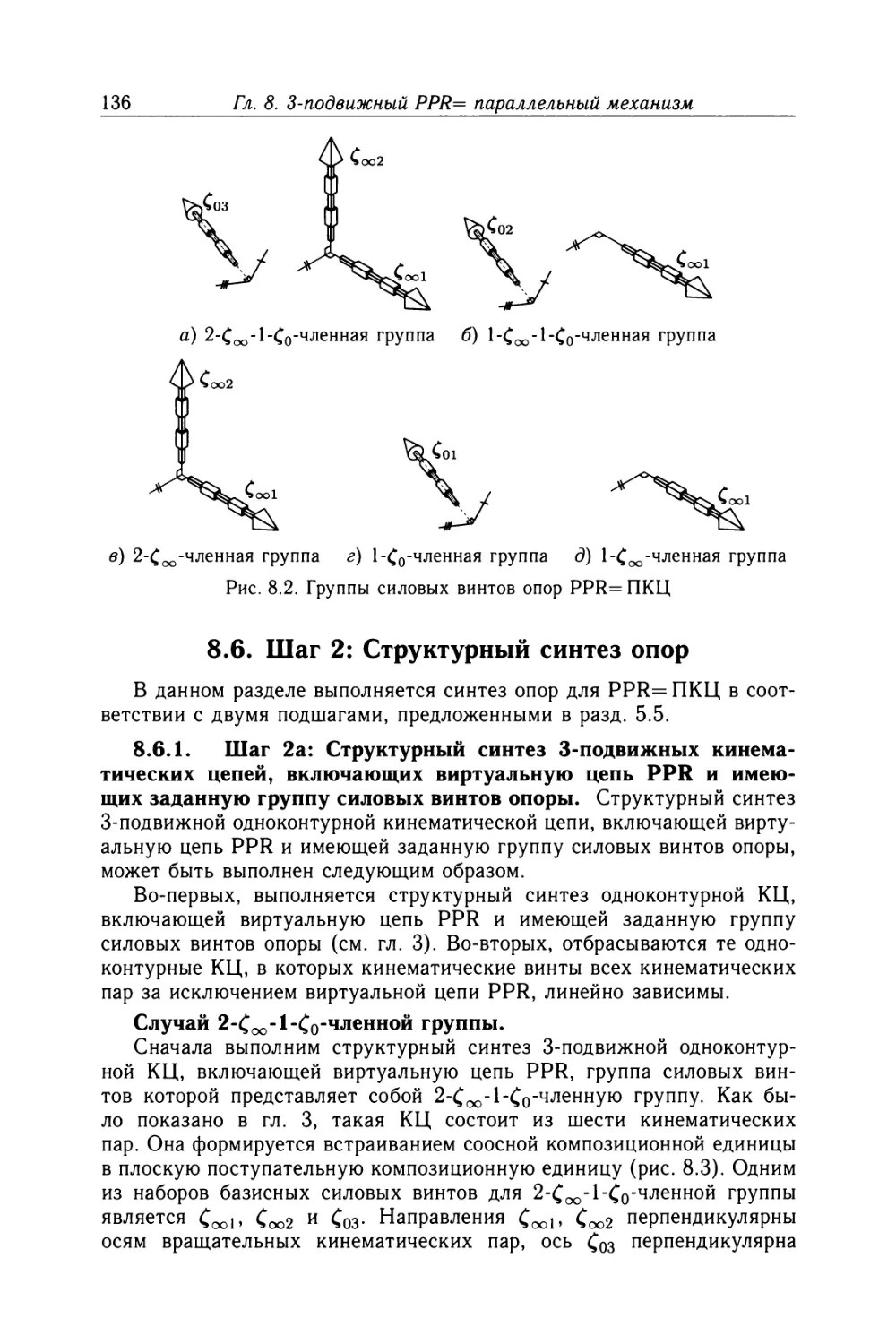
8.5. Шаг 1: Декомпозиция группы силовых винтов РРИ=ПКЦ 135
8.5.1. Определение групп силовых винтов опор (135). 8.5.2. Опре¬
деление комбинаций групп силовых винтов опор (135).
8.6. Шаг 2: Структурный синтез опор 136
8.6.1. Шаг 2а: Структурный синтез 3-подвижных кинематических
цепей, включающих виртуальную цепь PPR и имеющих заданную
группу силовых винтов опоры (136). 8.6.2. Шаг 26: Получение
структур опор (140).
8.7. Шаг 3: Сборка опор 141
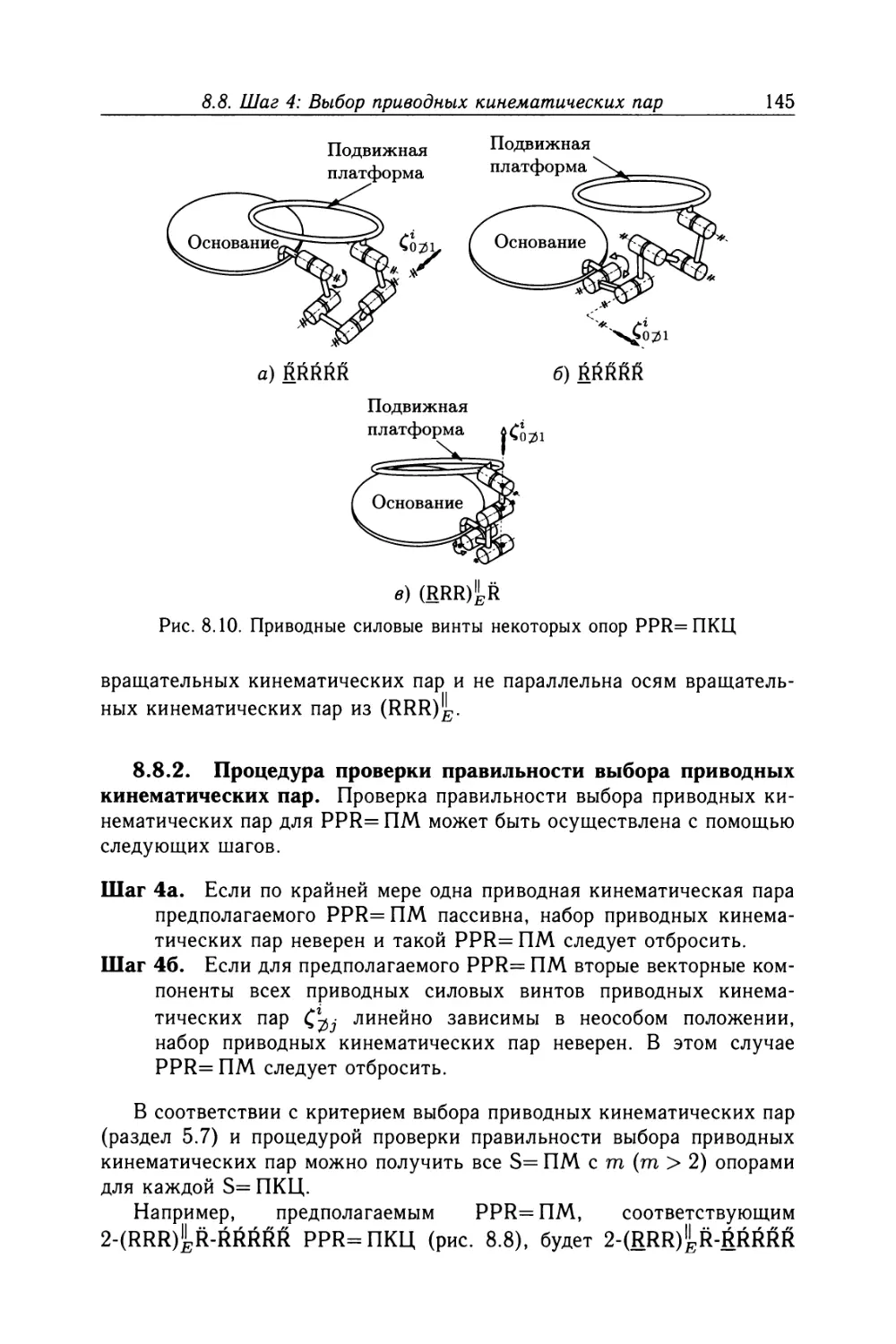
8.8. Шаг 4: Выбор приводных кинематических пар 144
8.8.1. t-компоненты приводных силовых винтов (144). 8.8.2. Про¬
цедура проверки правильности выбора приводных кинематических
пар (145).
8.9. Резюме 148
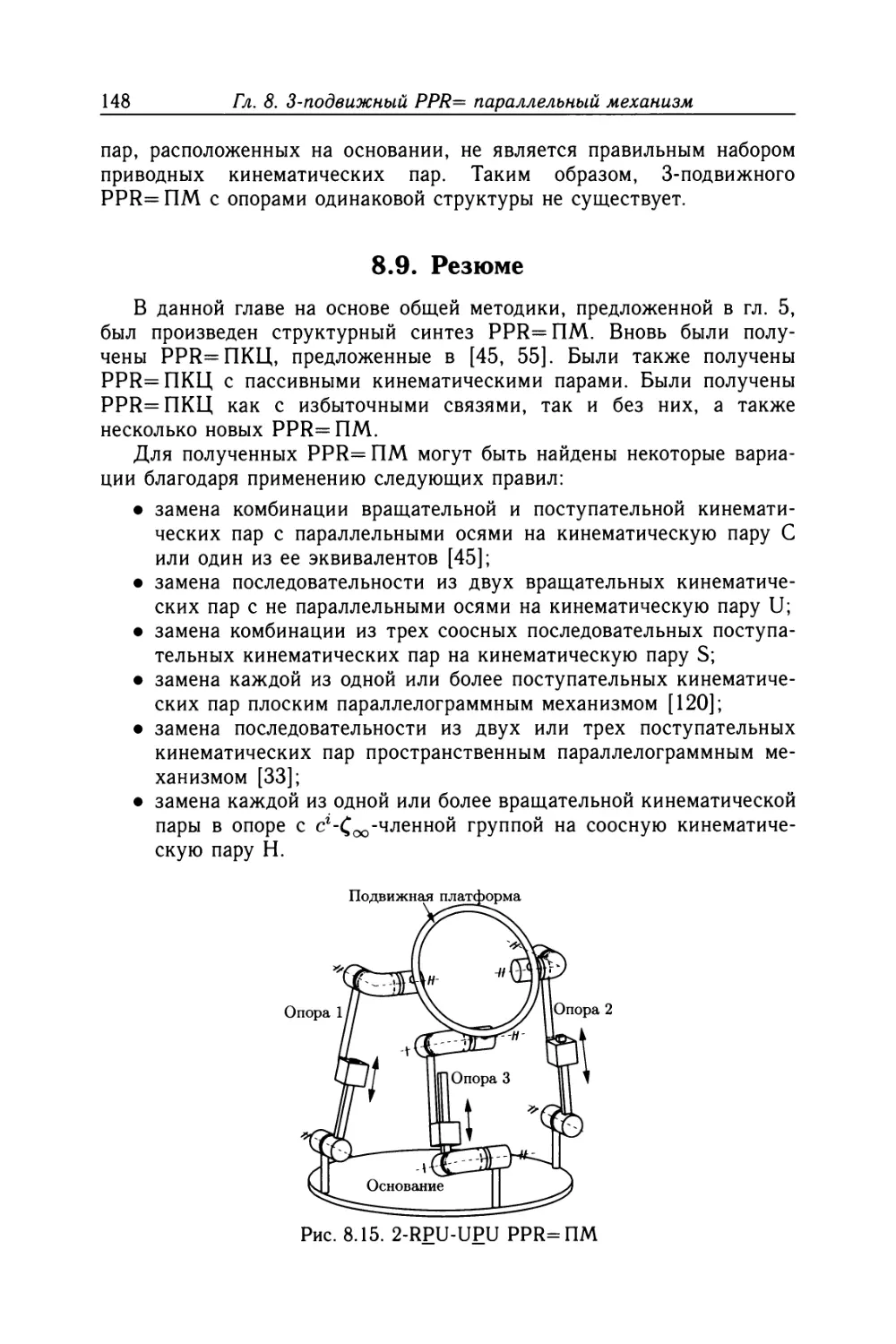
Глава 9. 4-подвижный PPPR= параллельный механизм 150
9.1. Введение 150
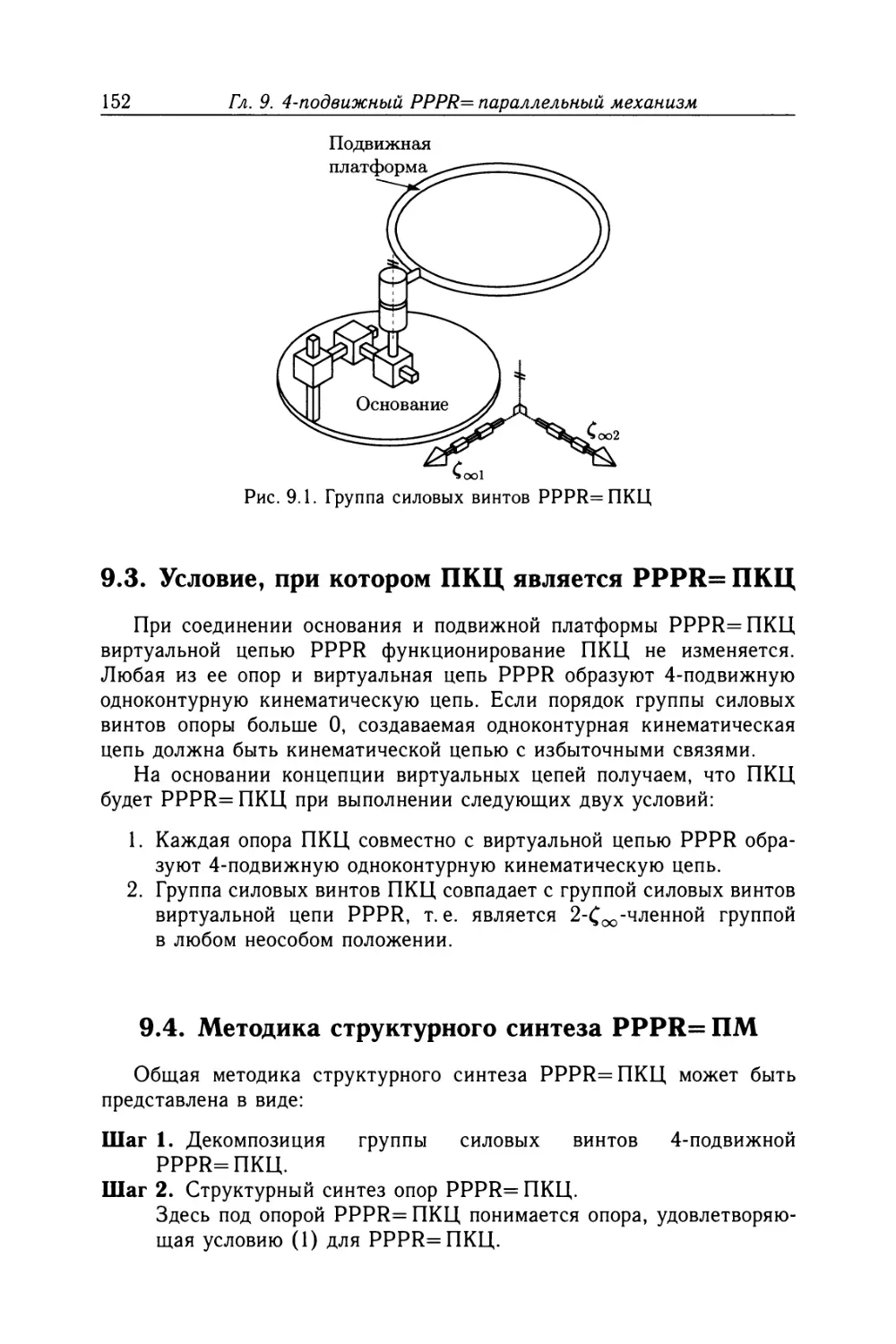
9.2. Группа силовых винтов РРРИ=ПКЦ 151
9.3. Условие, при котором ПКЦ является РРРИ=ПКЦ 152
9.4. Методика структурного синтеза РРРИ=ПМ 152
9.5. Шаг 1: Декомпозиция группы силовых винтов РРРИ=ПКЦ 153
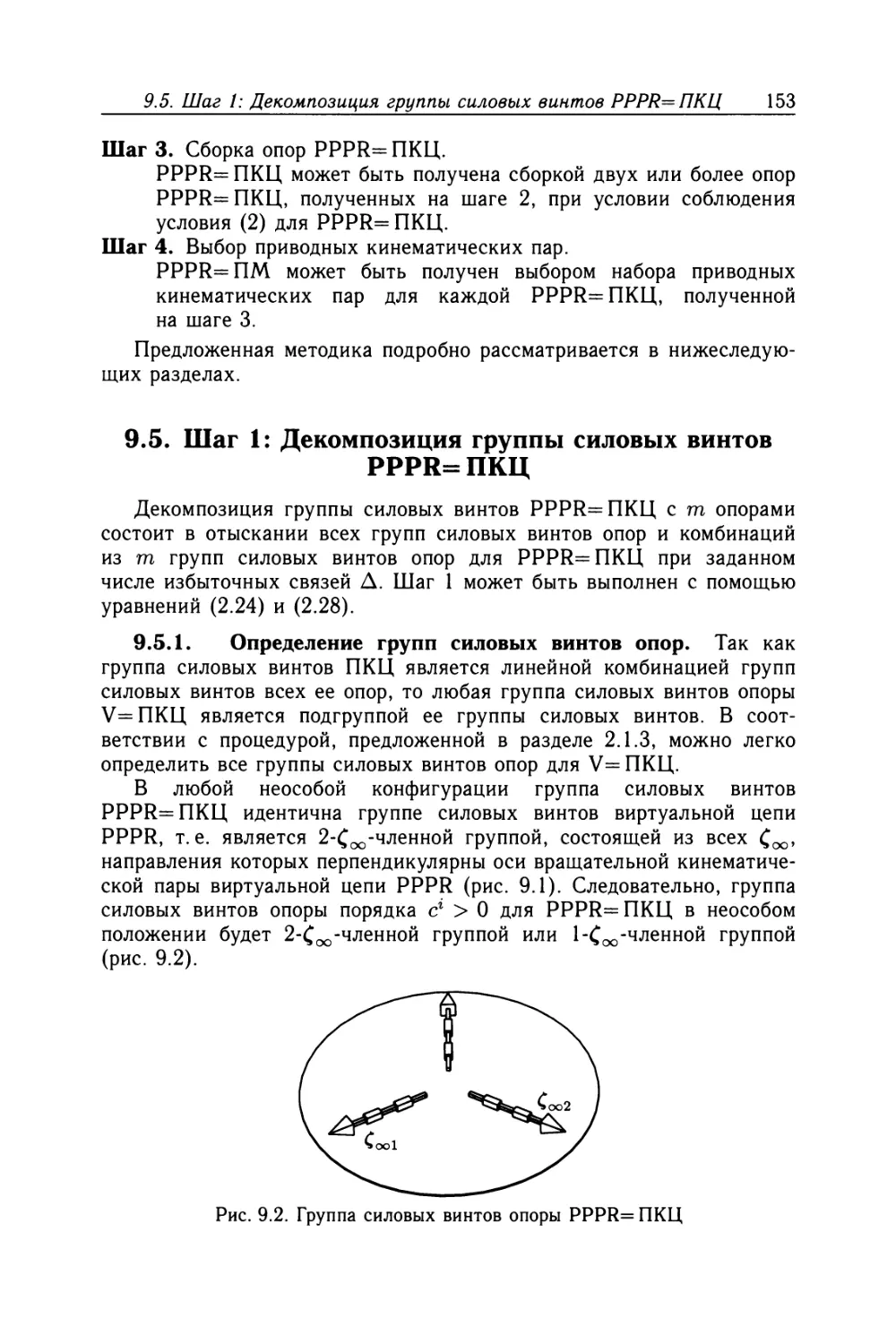
9.5.1. Определение групп силовых винтов опор (153). 9.5.2. Опре¬
деление комбинаций групп силовых винтов опор (154).
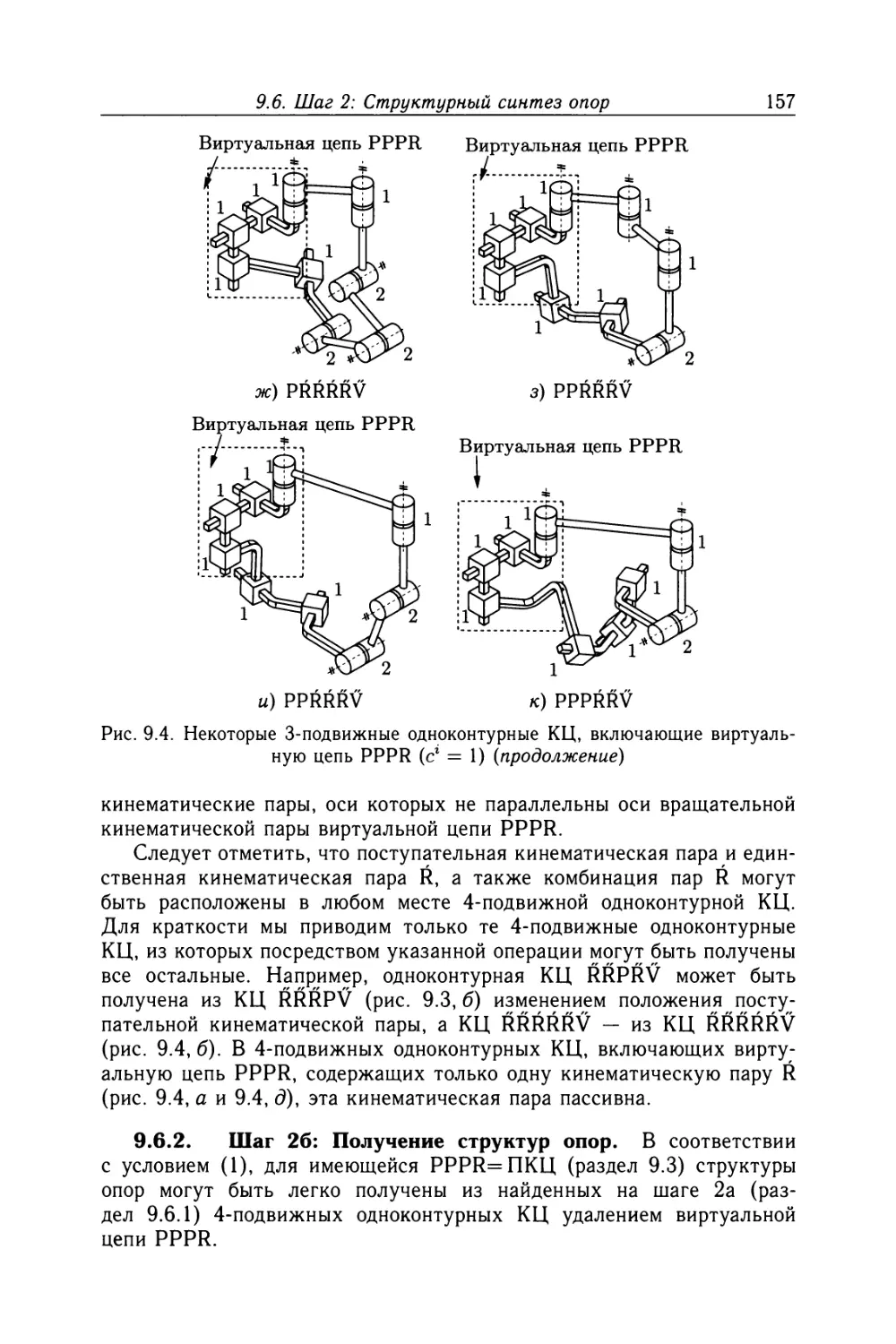
9.6. Шаг 2: Структурный синтез опор 154
9.6.1. Шаг 2а: Структурный синтез 4-подвижных кинематических
цепей, включающих виртуальную цепь PPPR и имеющих заданную
группу силовых винтов опоры (154). 9.6.2. Шаг 26: Получение
структур опор (157).
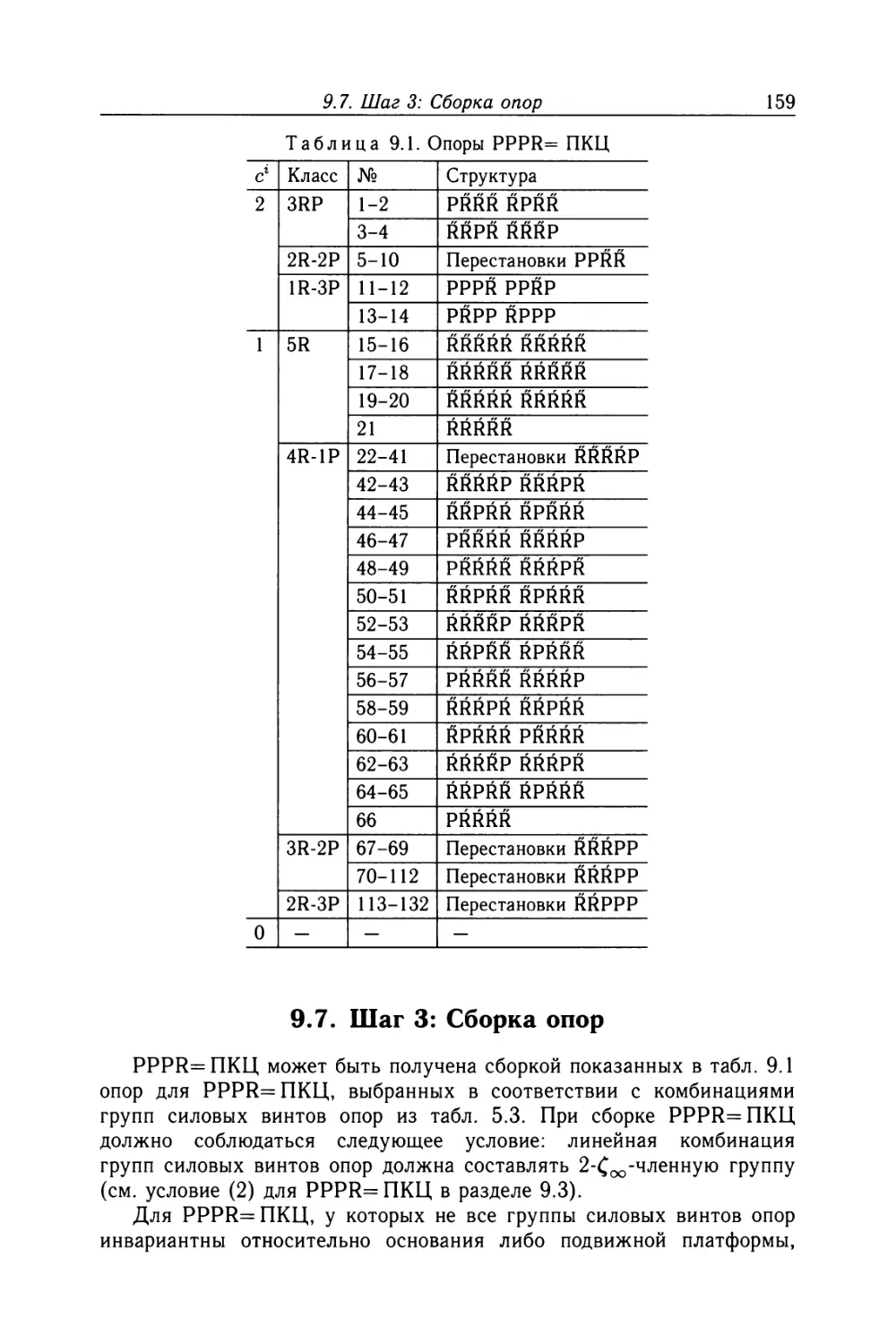
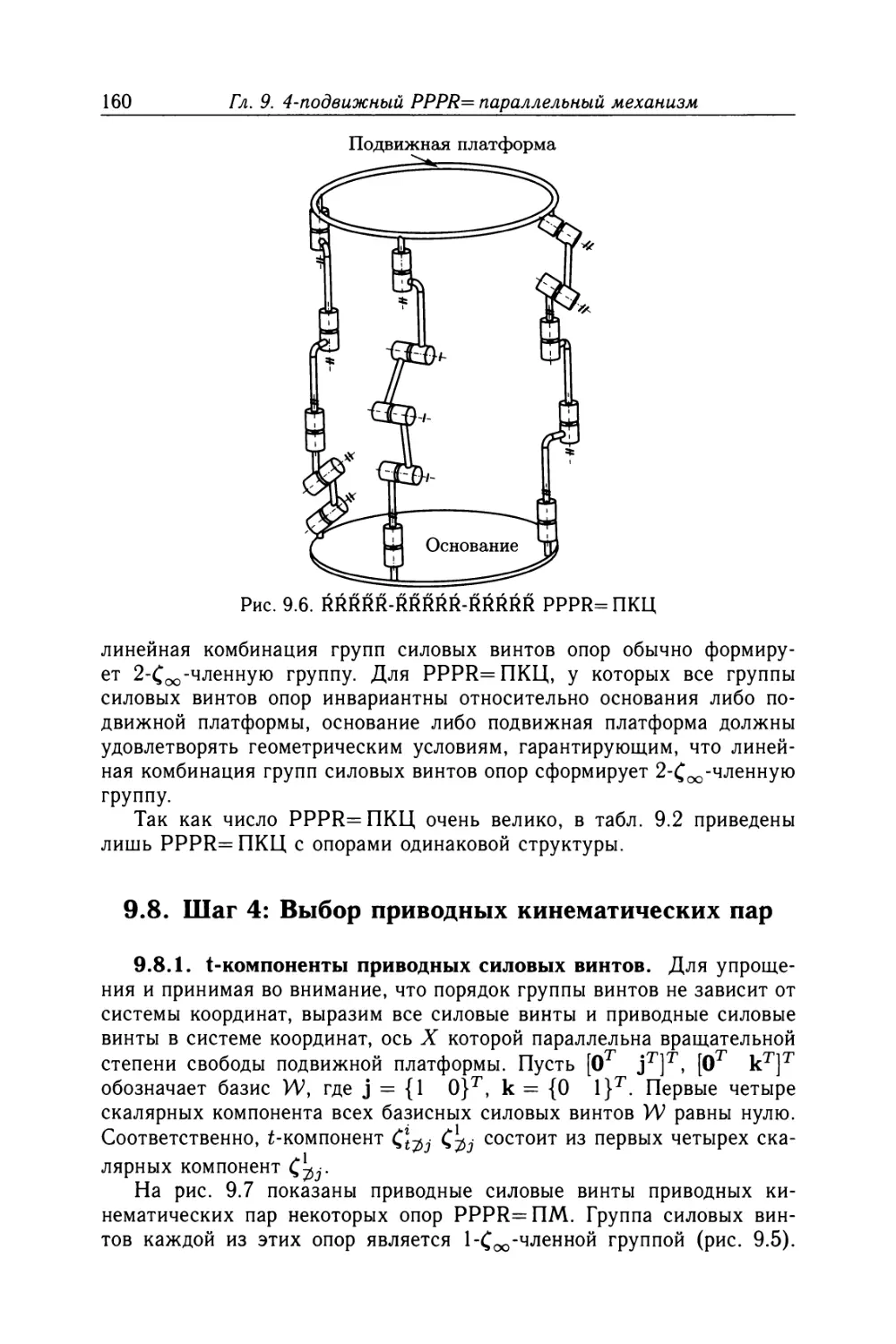
9.7. Шаг 3: Сборка опор 159
9.8. Шаг 4: Выбор приводных кинематических пар 160
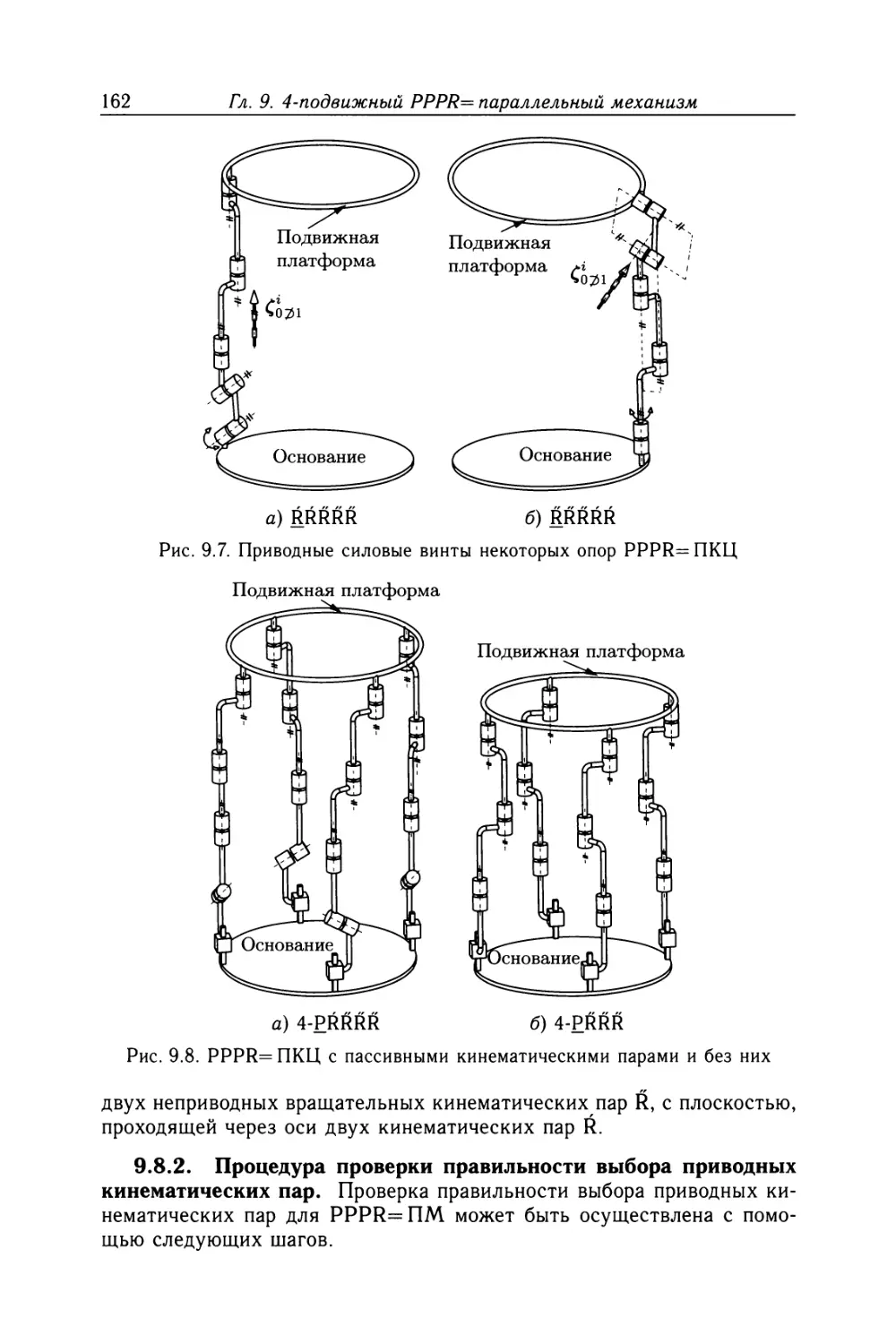
9.8.1. t-компоненты приводных силовых винтов (160). 9.8.2. Про¬
цедура проверки правильности выбора приводных кинематических
пар (162).
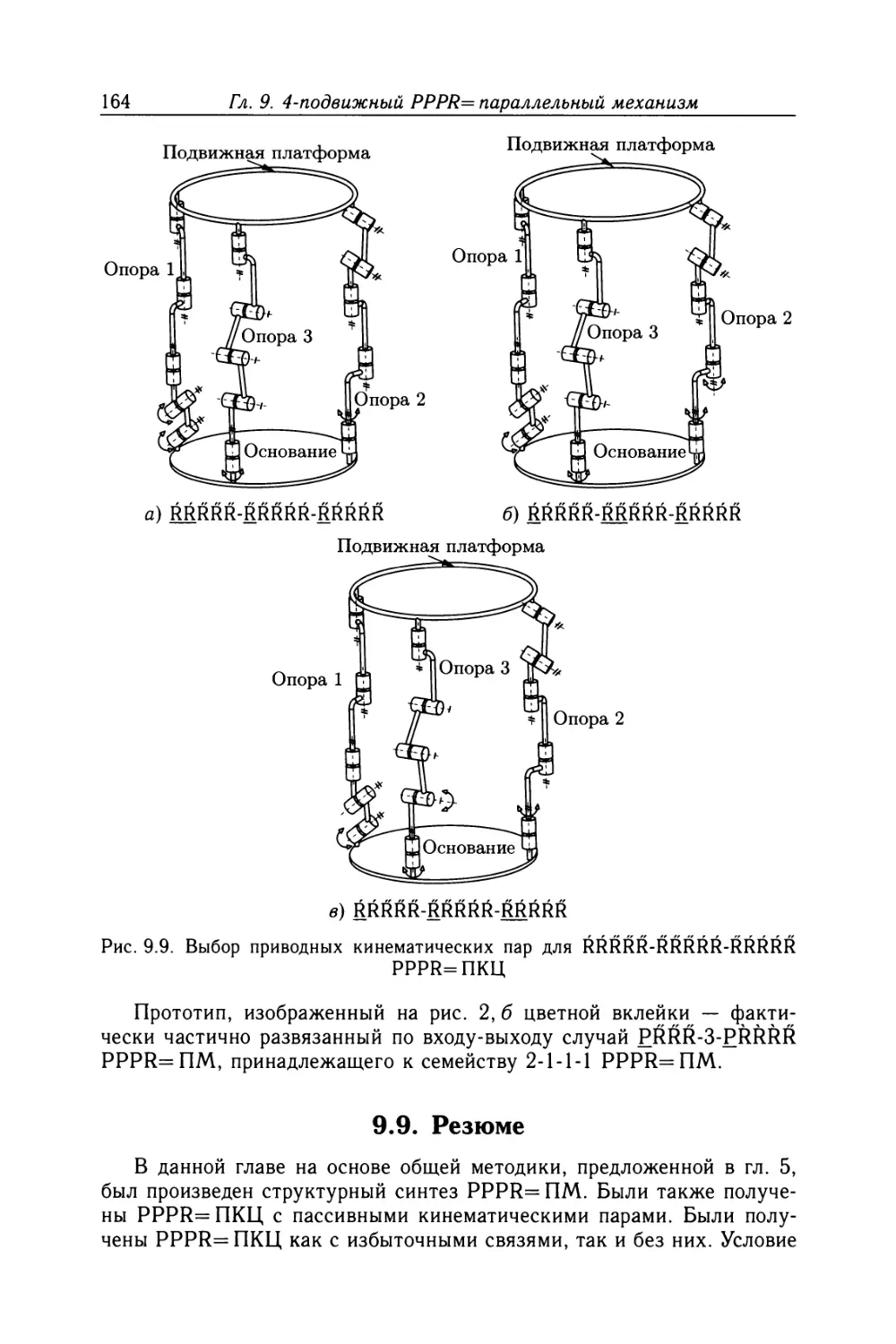
9.9. Резюме 164
Оглавление
9
Глава 10. 4-подвижный SP= параллельный механизм 168
10.1. Введение 168
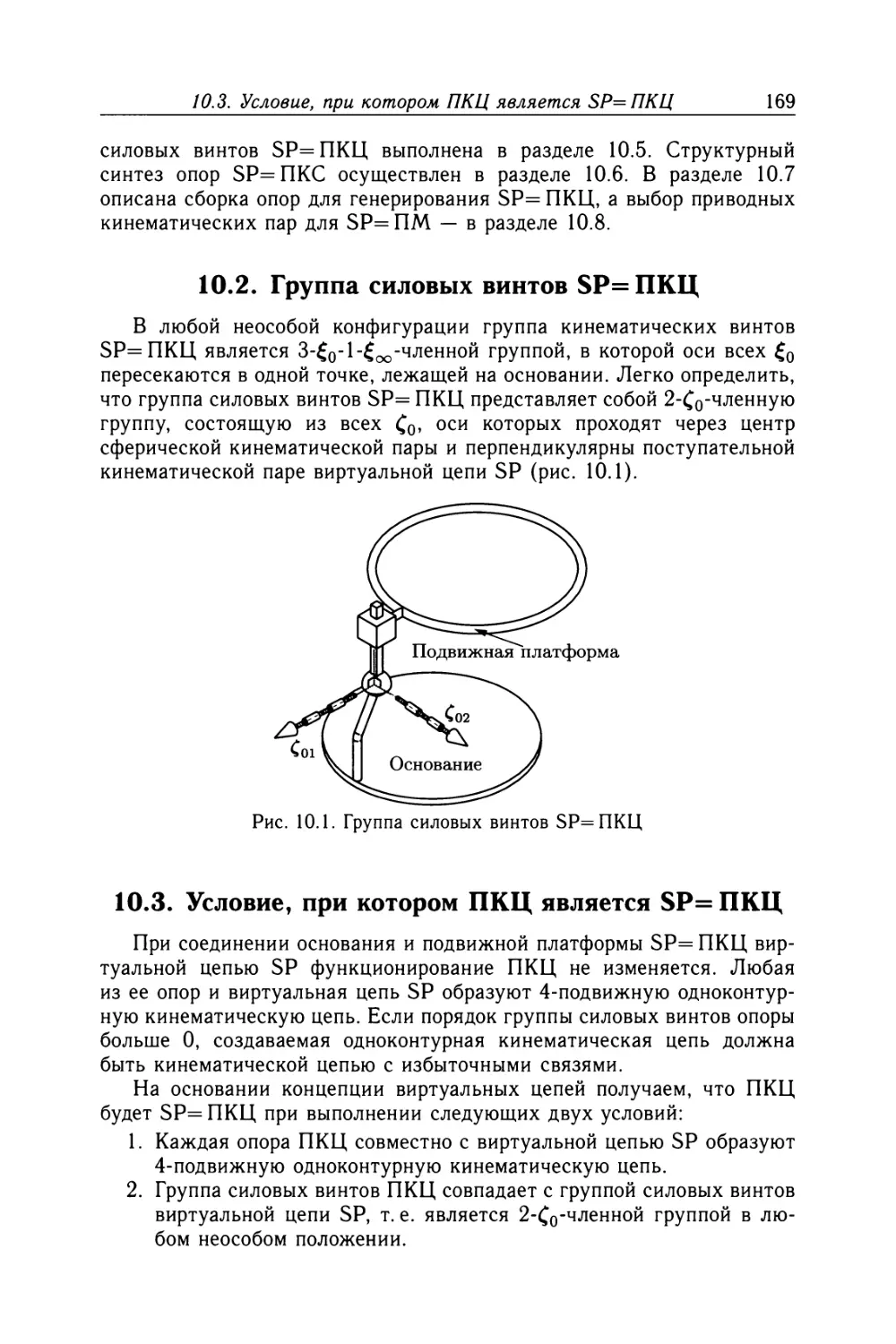
10.2. Группа силовых винтов 5Р=ПКЦ 169
10.3. Условие, при котором ПКЦ является БР=ПКЦ 169
10.4. Методика структурного синтеза БР=ПМ 170
10.5. Шаг 1: Декомпозиция группы силовых винтов БР=ПКЦ 170
10.5.1. Определение групп силовых винтов опор (170).
10.5.2. Определение комбинаций групп силовых винтов опор (170).
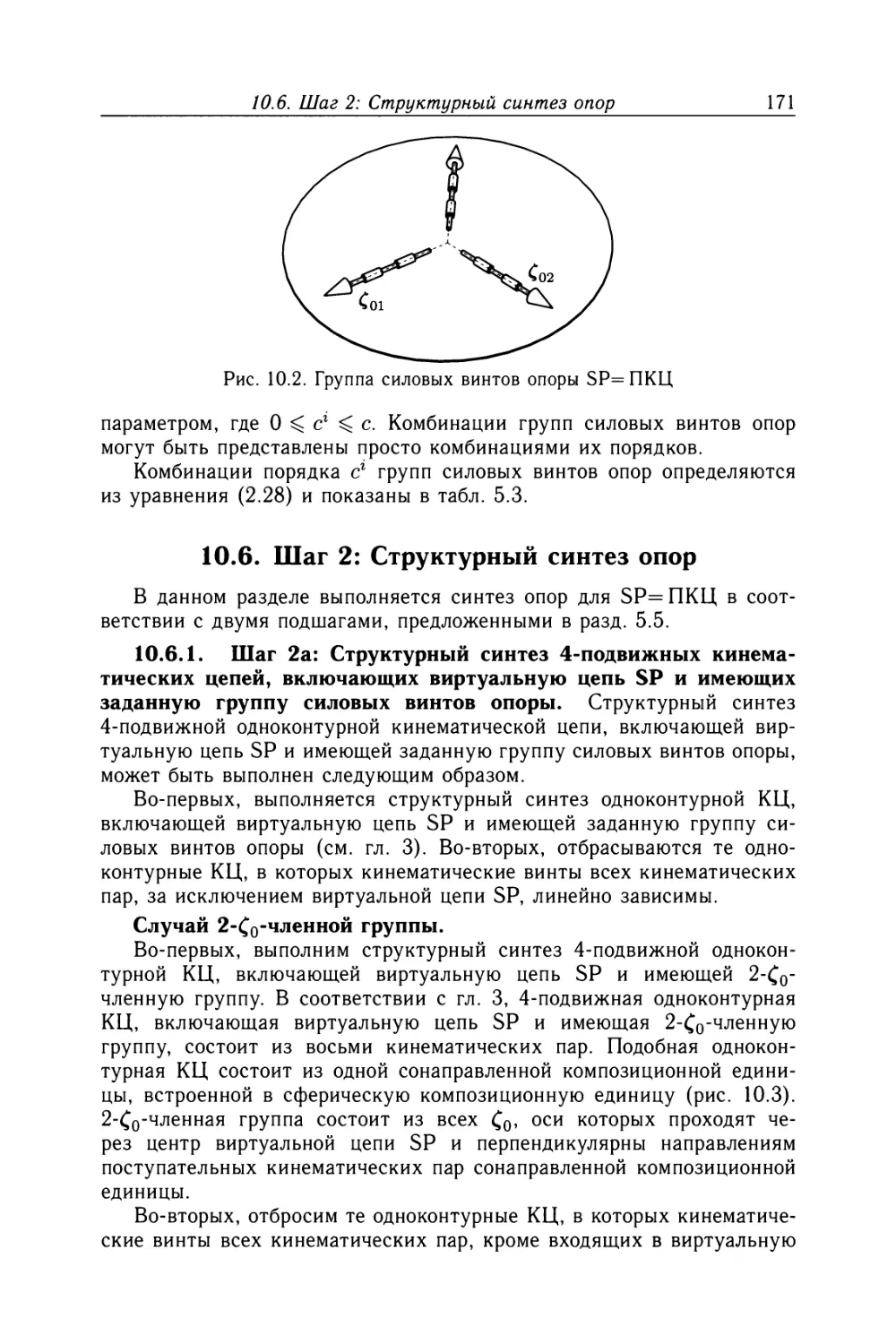
10.6. Шаг 2: Структурный синтез опор 171
10.6.1. Шаг 2а: Структурный синтез 4-подвижных кинематических
цепей, включающих виртуальную цепь SP и имеющих заданную
группу силовых винтов опоры (171). 10.6.2. Шаг 26: Получение
структур опор (174).
10.7. Шаг 3: Сборка опор 174
10.8. Шаг 4: Выбор приводных кинематических пар 176
10.8.1. t-компоненты приводных силовых винтов (176).
10.8.2. Процедура проверки правильности выбора приводных
кинематических пар (177).
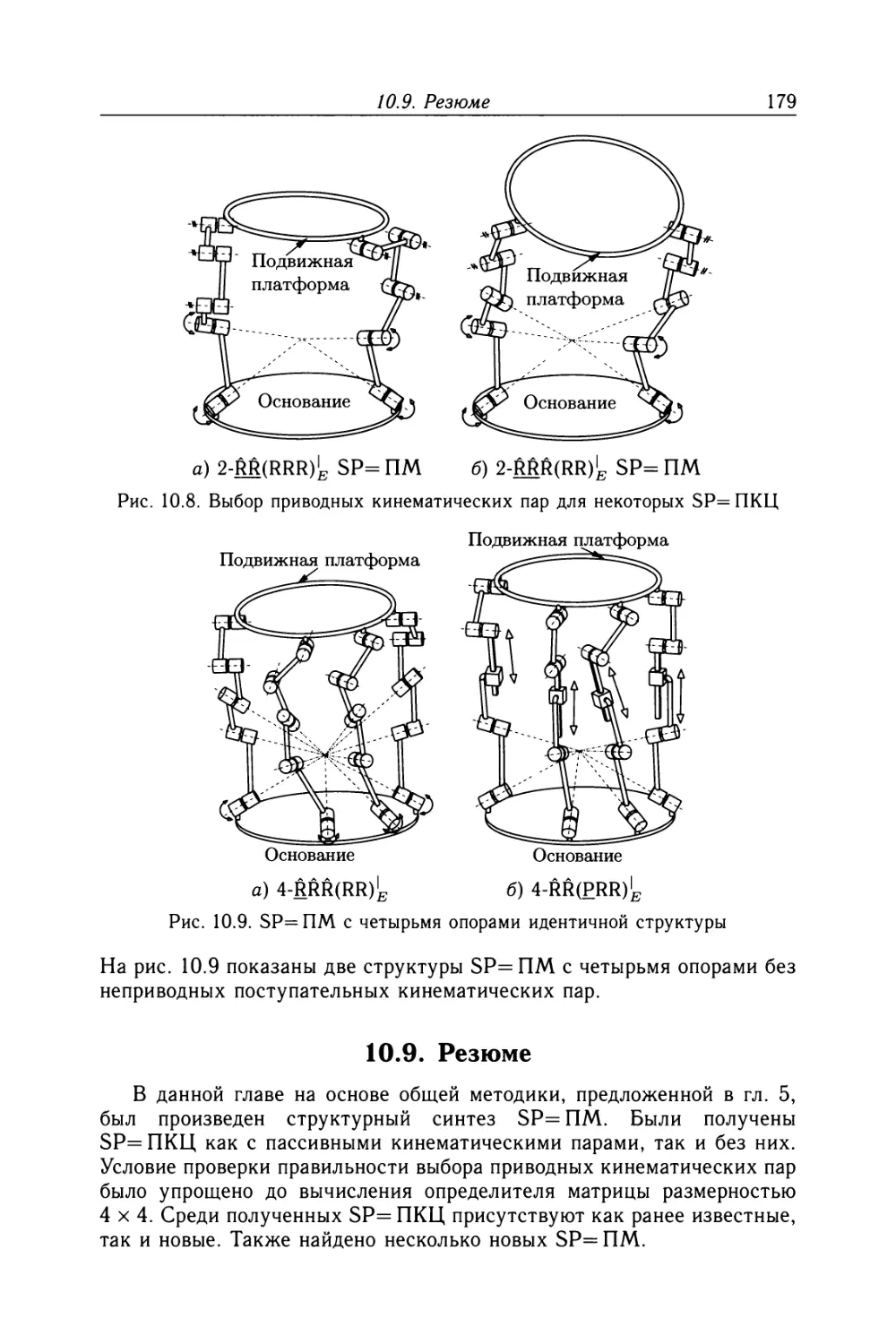
10.9. Резюме 179
Глава 11. 5-подвижный US= параллельный механизм 181
11.1. Введение 181
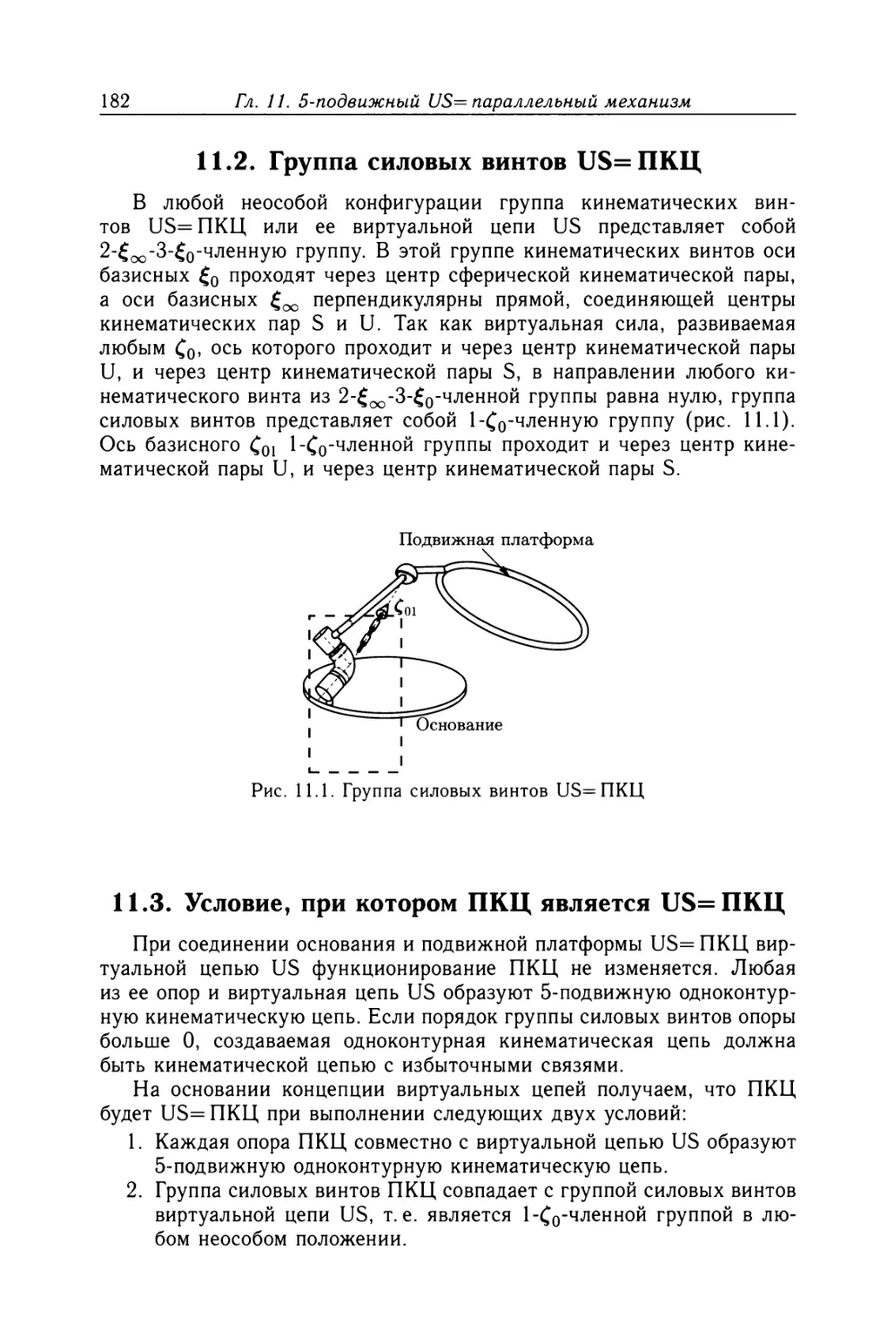
11.2. Группа силовых винтов US= ПКЦ 182
11.3. Условие, при котором ПКЦ является иБ=ПКЦ 182
11.4. Методика структурного синтеза US=nM 183
11.5. Шаг 1: Декомпозиция группы силовых винтов Ш=ПКЦ 183
11.5.1. Определение групп силовых винтов опор (183).
11.5.2. Определение комбинаций групп силовых винтов опор (183).
11.6. Шаг 2: Структурный синтез опор 184
11.6.1. Шаг 2а: Структурный синтез 5-подвижных кинематических
цепей, включающих виртуальную цепь US и имеющих заданную
группу силовых винтов опоры (184). 11.6.2. Шаг 26: Получение
структур опор (185).
11.7. Шаг 3: Сборка опор 187
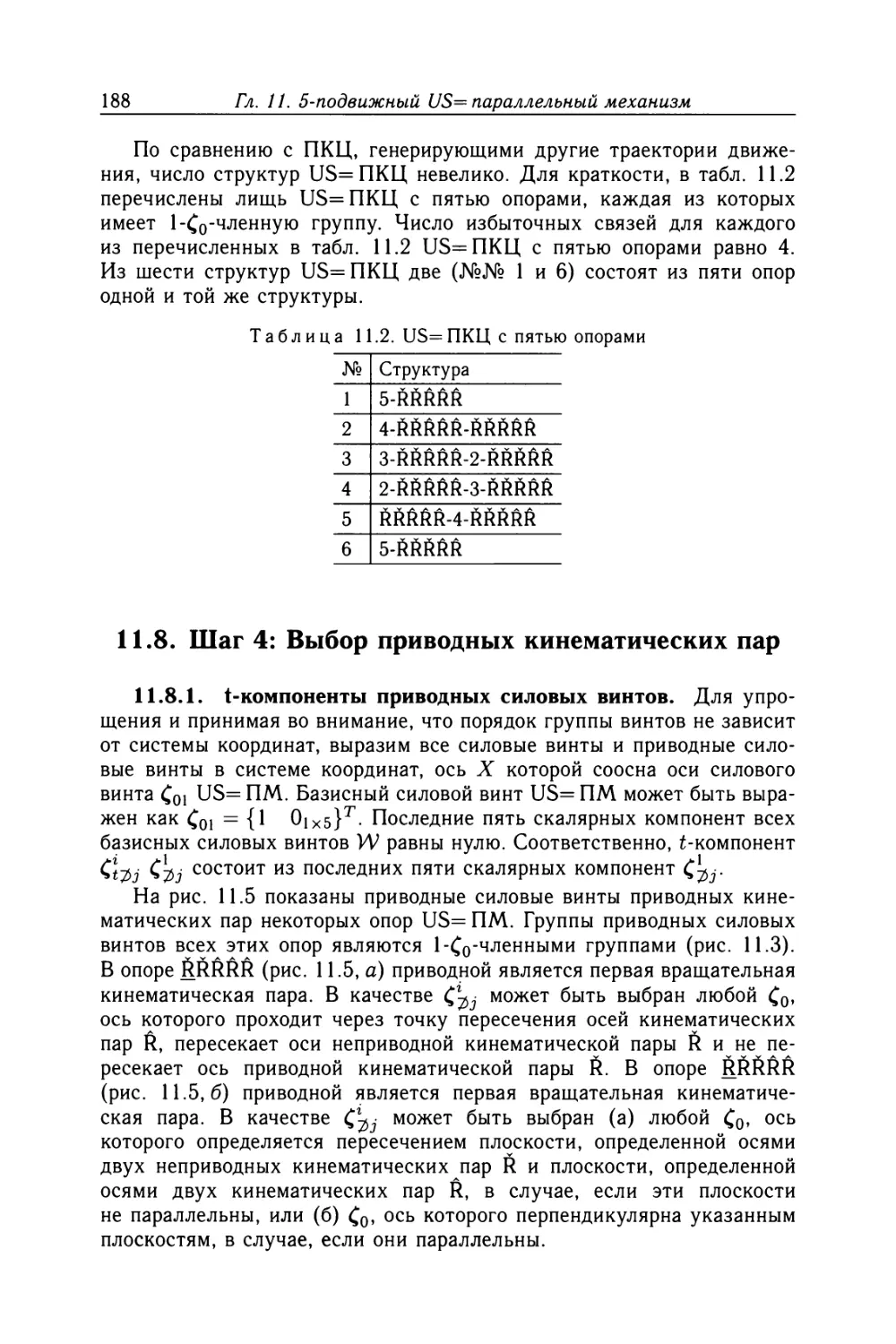
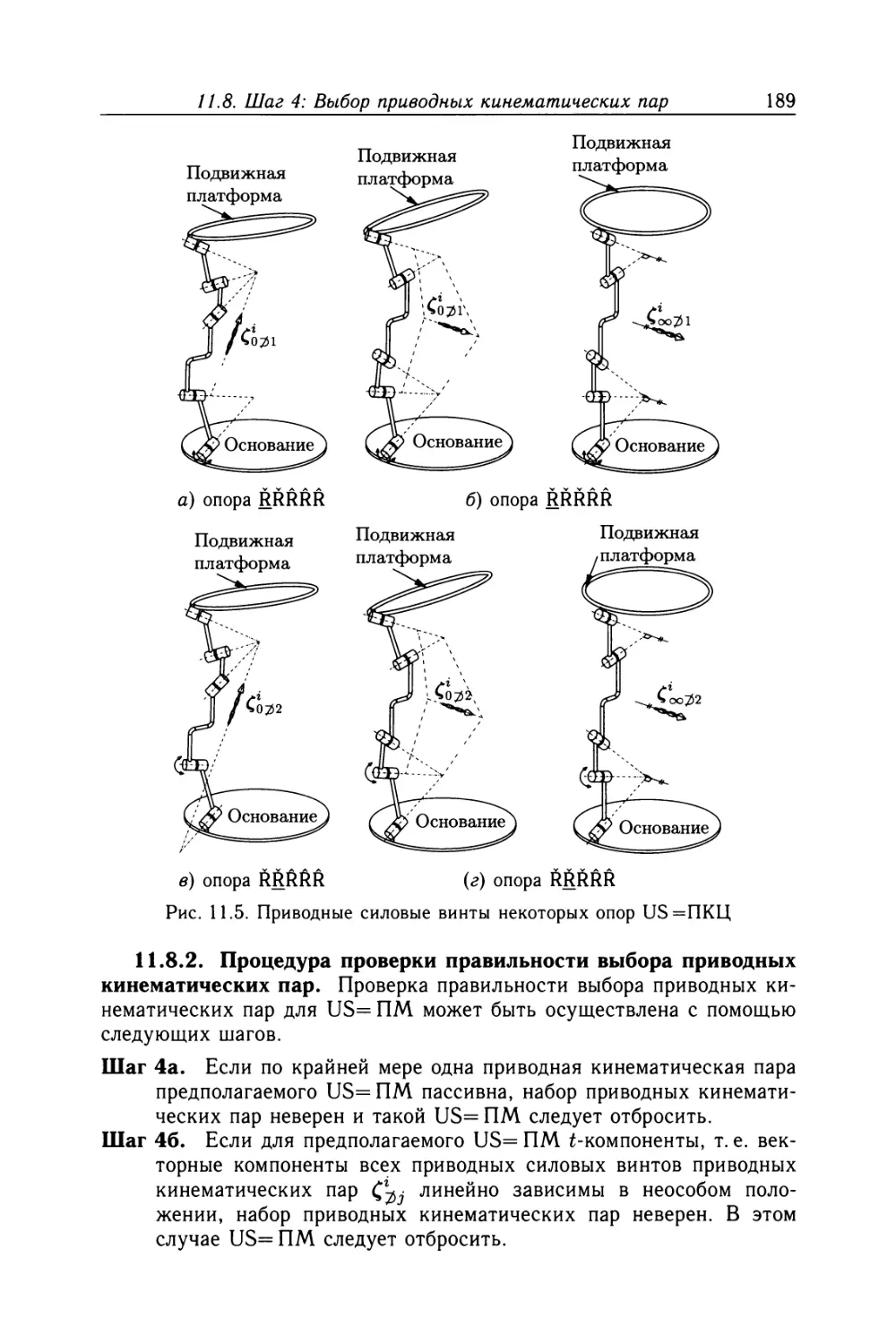
11.8. Шаг 4: Выбор приводных кинематических пар 188
11.8.1. t-компоненты приводных силовых винтов (188).
11.8.2. Процедура проверки правильности выбора приводных
кинематических пар (189).
11.9. Резюме 191
10
Оглавление
Глава 12. 5-подвижный PPPU= параллельный механизм 192
12.1. Введение 192
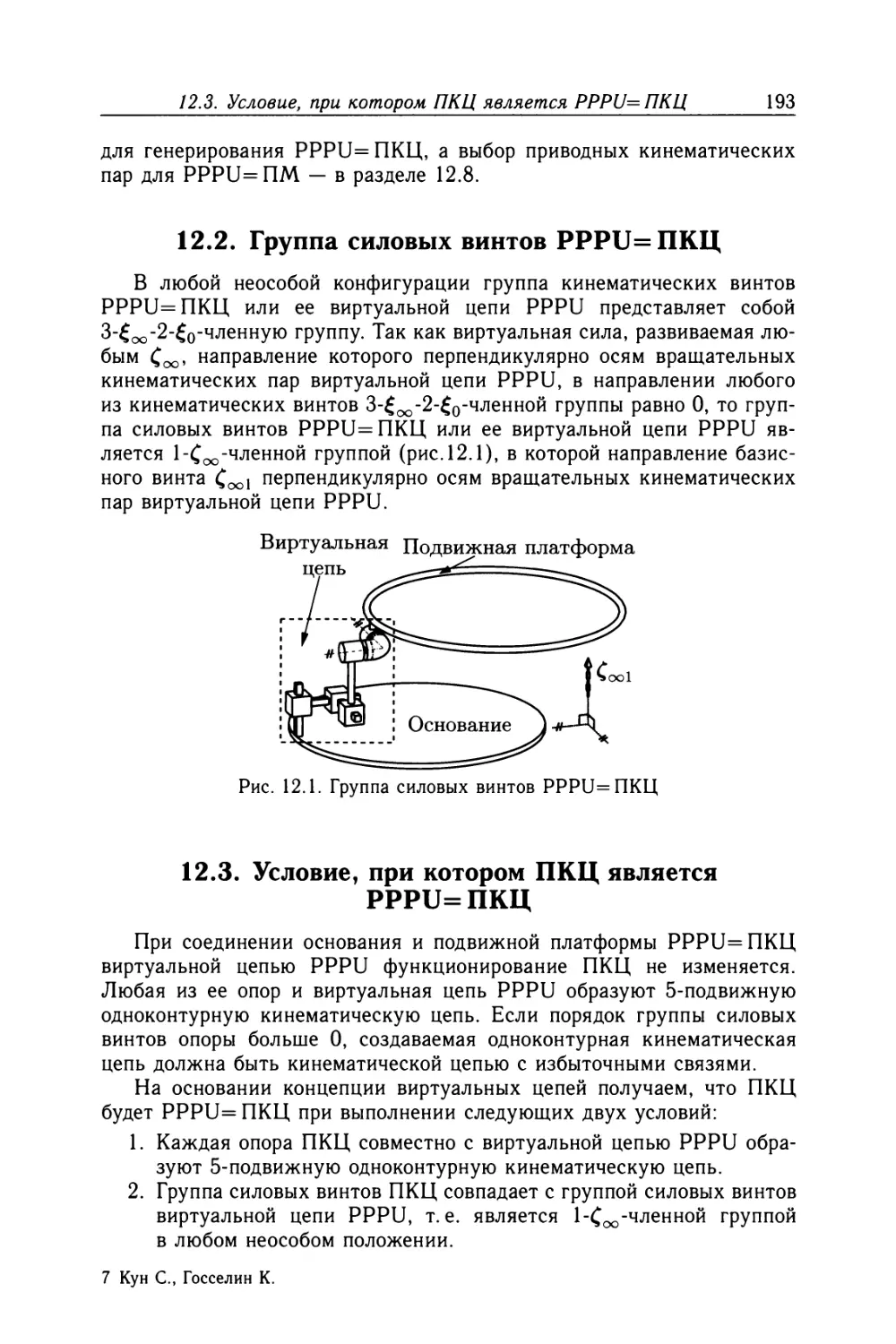
12.2. Группа силовых винтов PPPU= ПКЦ 193
12.3. Условие, при котором ПКЦ является РРР11=ПКЦ 193
12.4. Методика структурного синтеза РРР11=ПМ 194
12.5. Шаг 1: Декомпозиция группы силовых винтов РРР11=ПКЦ 194
12.5.1. Определение групп силовых винтов опор (194).
12.5.2. Определение комбинаций групп силовых винтов опор (195).
12.6. Шаг 2: Структурный синтез опор 195
12.6.1. Шаг 2а: Структурный синтез 5-подвижных кинематических
цепей, включающих виртуальную цепь PPPU и имеющих заданную
группу силовых винтов опоры (195). 12.6.2. Шаг 26: Получение
структур опор (198).
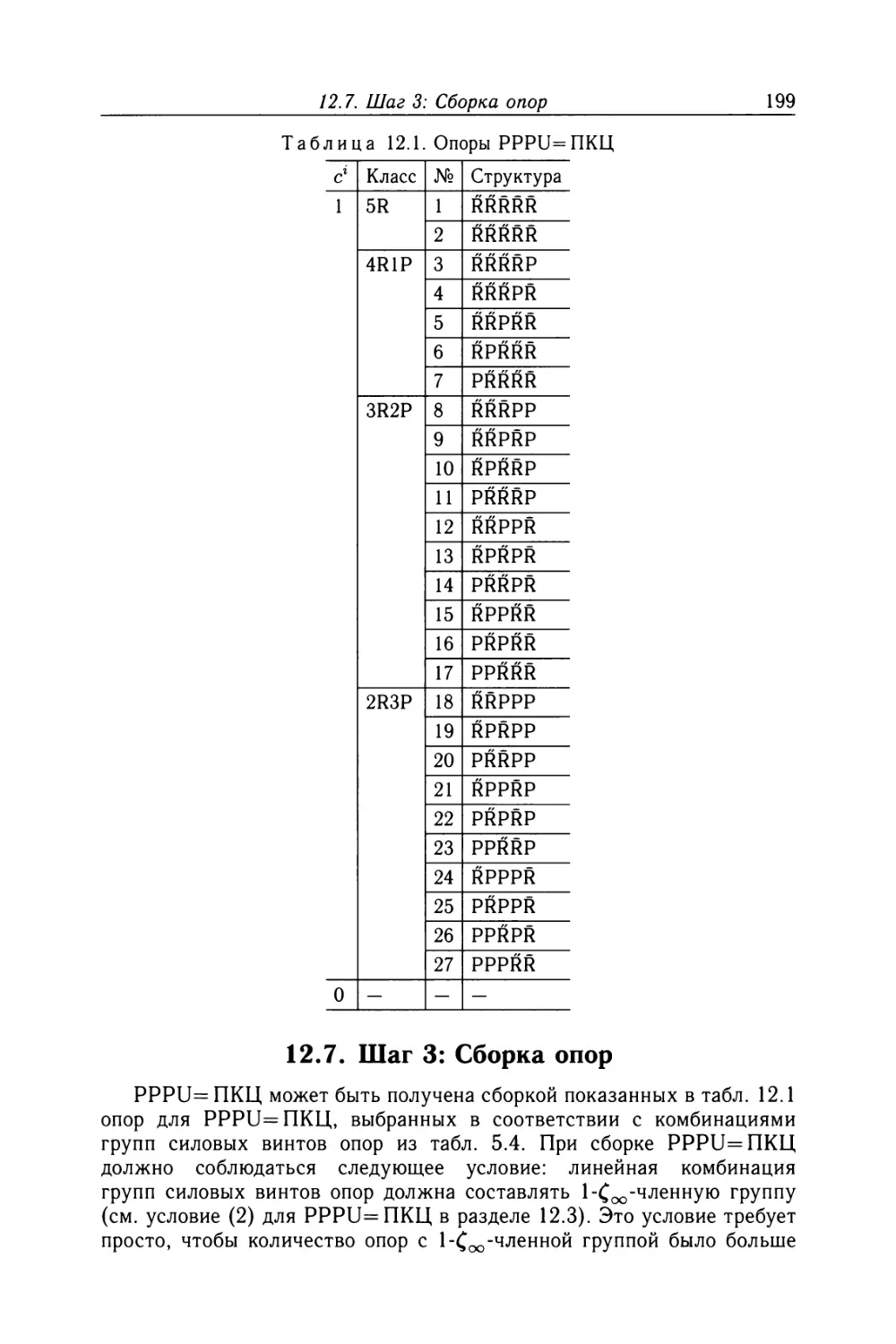
12.7. Шаг 3: Сборка опор 199
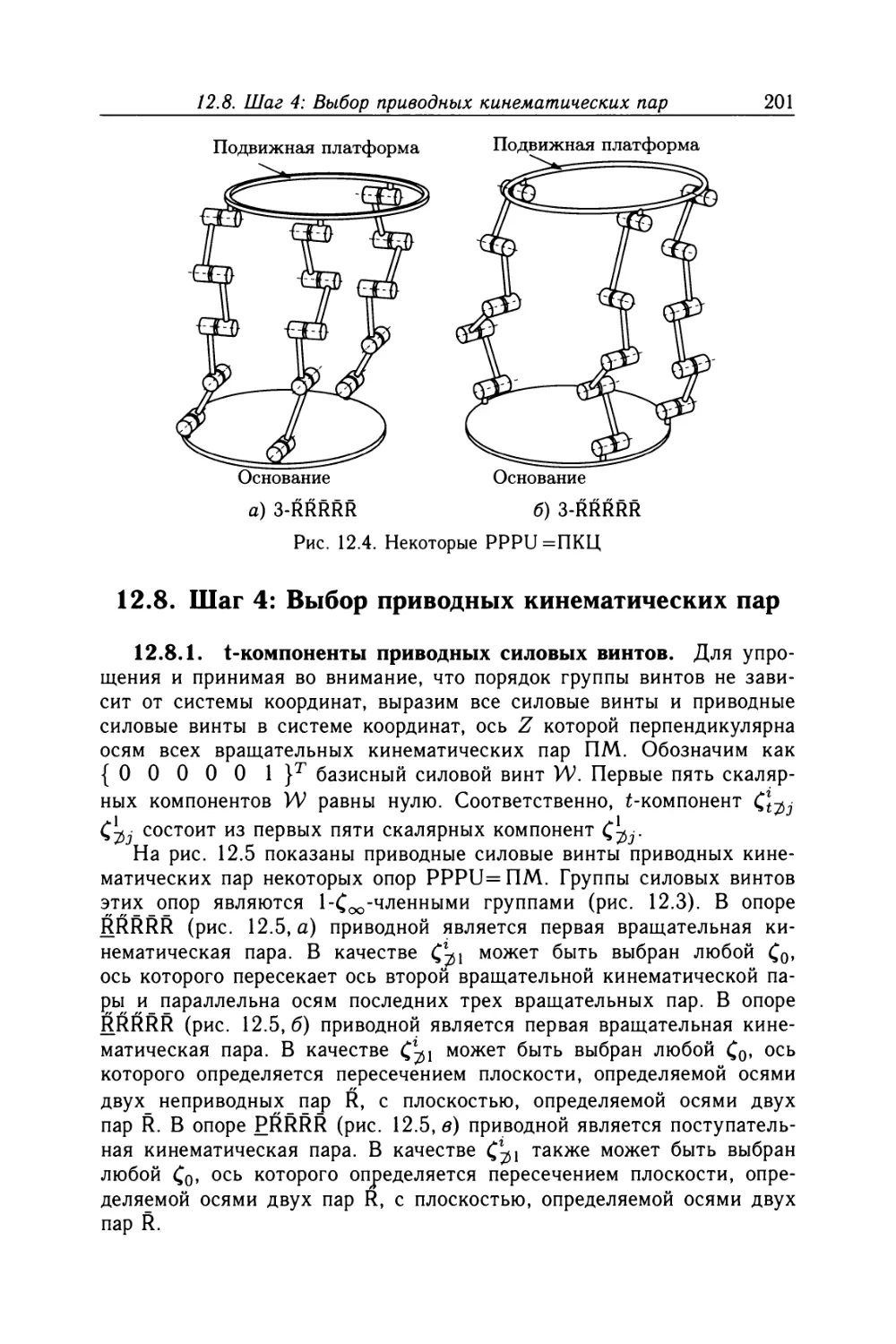
12.8. Шаг 4: Выбор приводных кинематических пар 201
12.8.1. t-компоненты приводных силовых винтов (201).
12.8.2. Процедура проверки правильности выбора приводных
кинематических пар (201).
12.9. Резюме 205
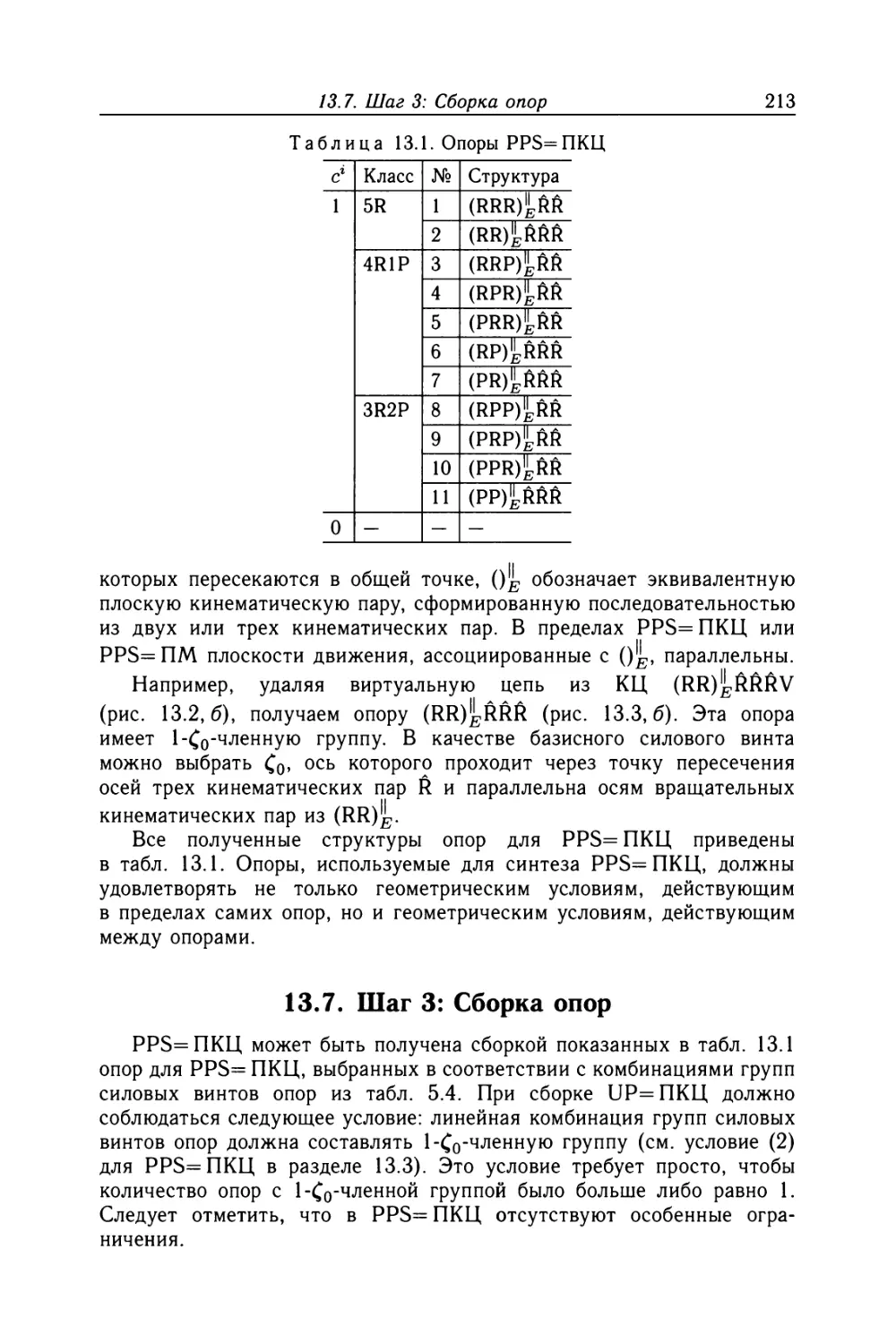
Глава 13. 5-подвижный PPS= параллельный механизм 207
13.1. Введение 207
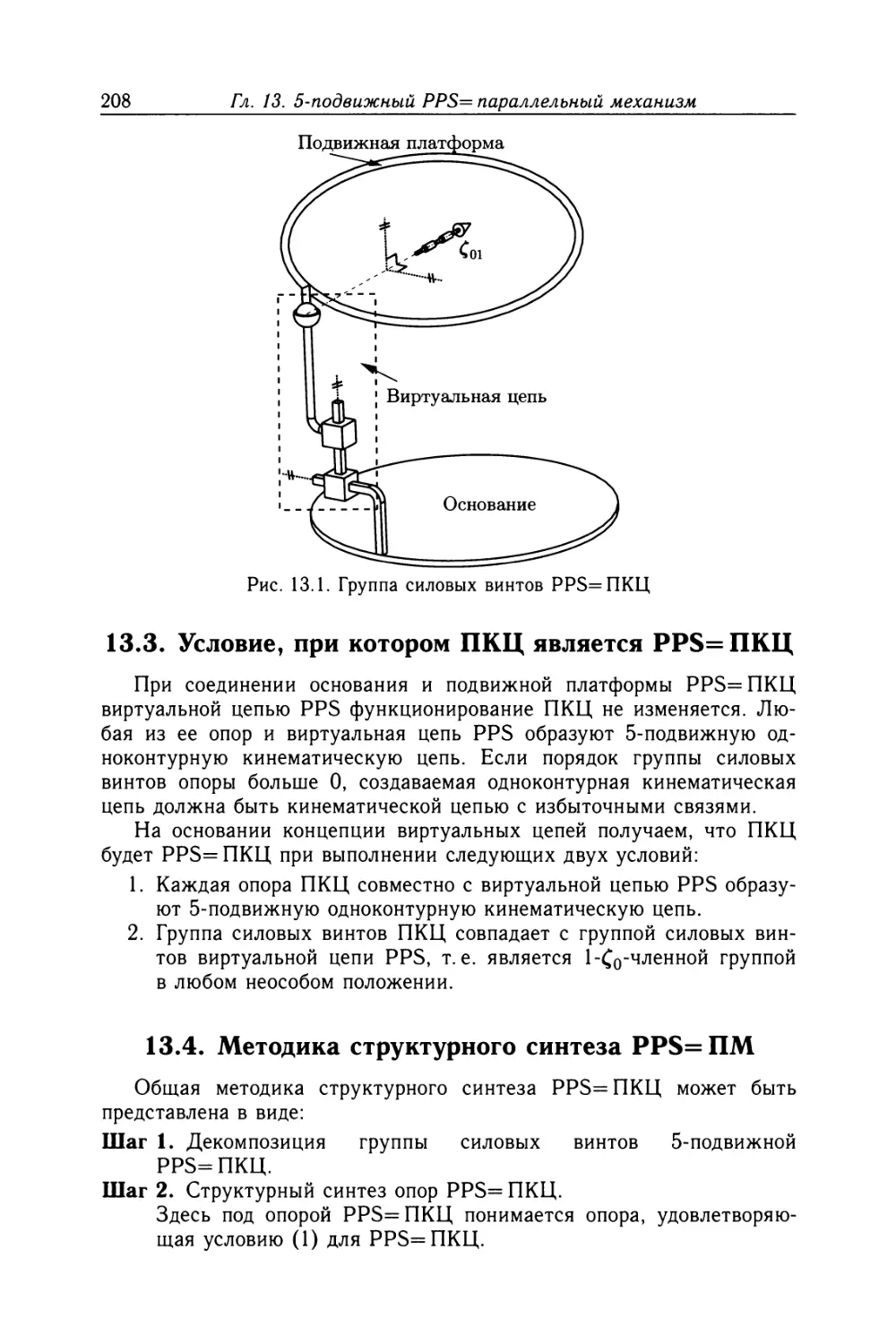
13.2. Группа силовых винтов РРБ=ПКЦ 207
13.3. Условие, при котором ПКЦ является РРБ=ПКЦ 208
13.4. Методика структурного синтеза РРБ=ПМ 208
13.5. Шаг 1: Декомпозиция группы силовых винтов РРБ=ПКЦ 209
13.5.1. Определение групп силовых винтов опор (209).
13.5.2. Определение комбинаций групп силовых винтов опор (209).
13.6. Шаг 2: Структурный синтез опор 210
13.6.1. Шаг 2а: Структурный синтез 5-подвижных кинематических
цепей, включающих виртуальную цепь PPS и имеющих заданную
группу силовых винтов опоры (210). 13.6.2. Шаг 26: Получение
структур опор (212).
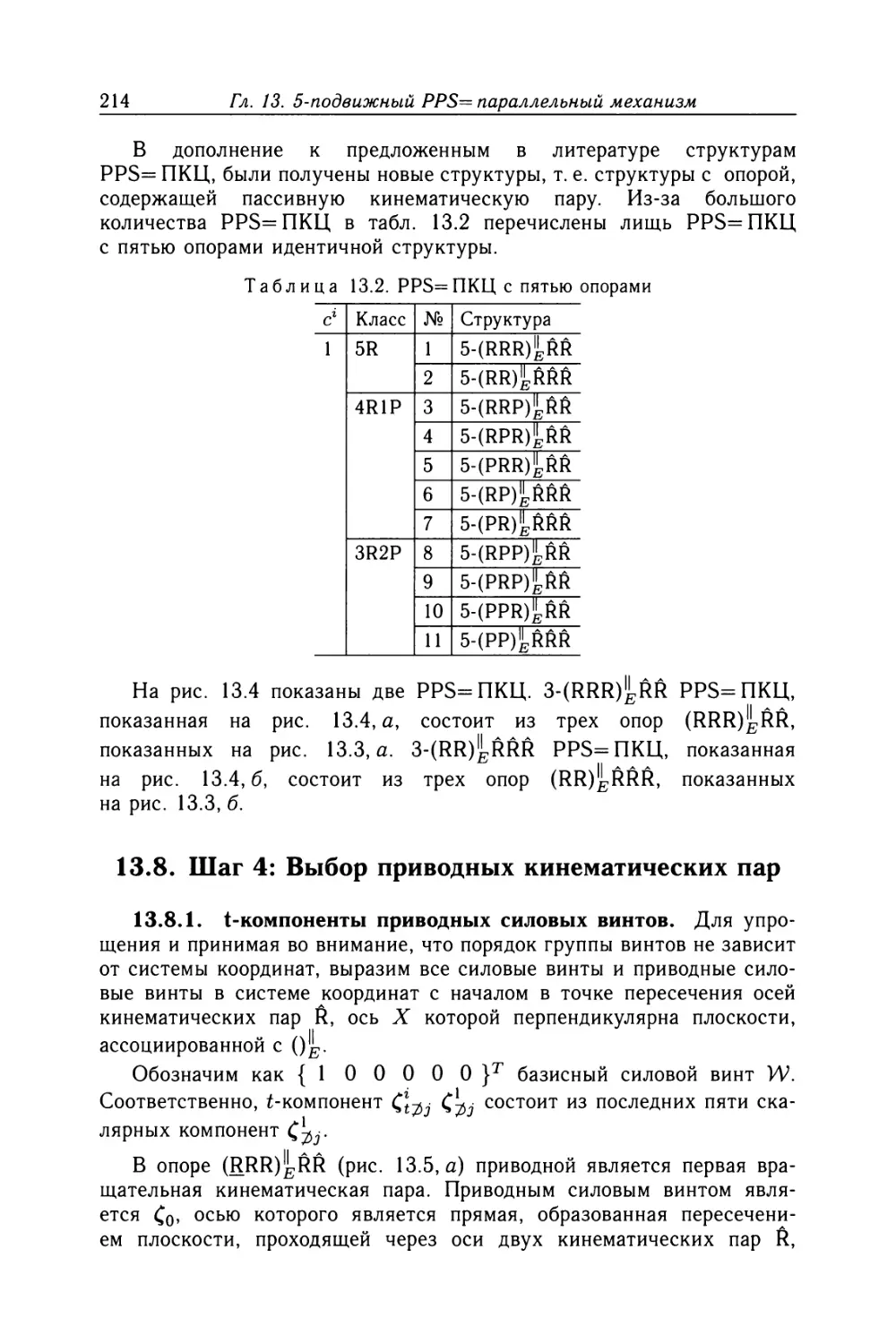
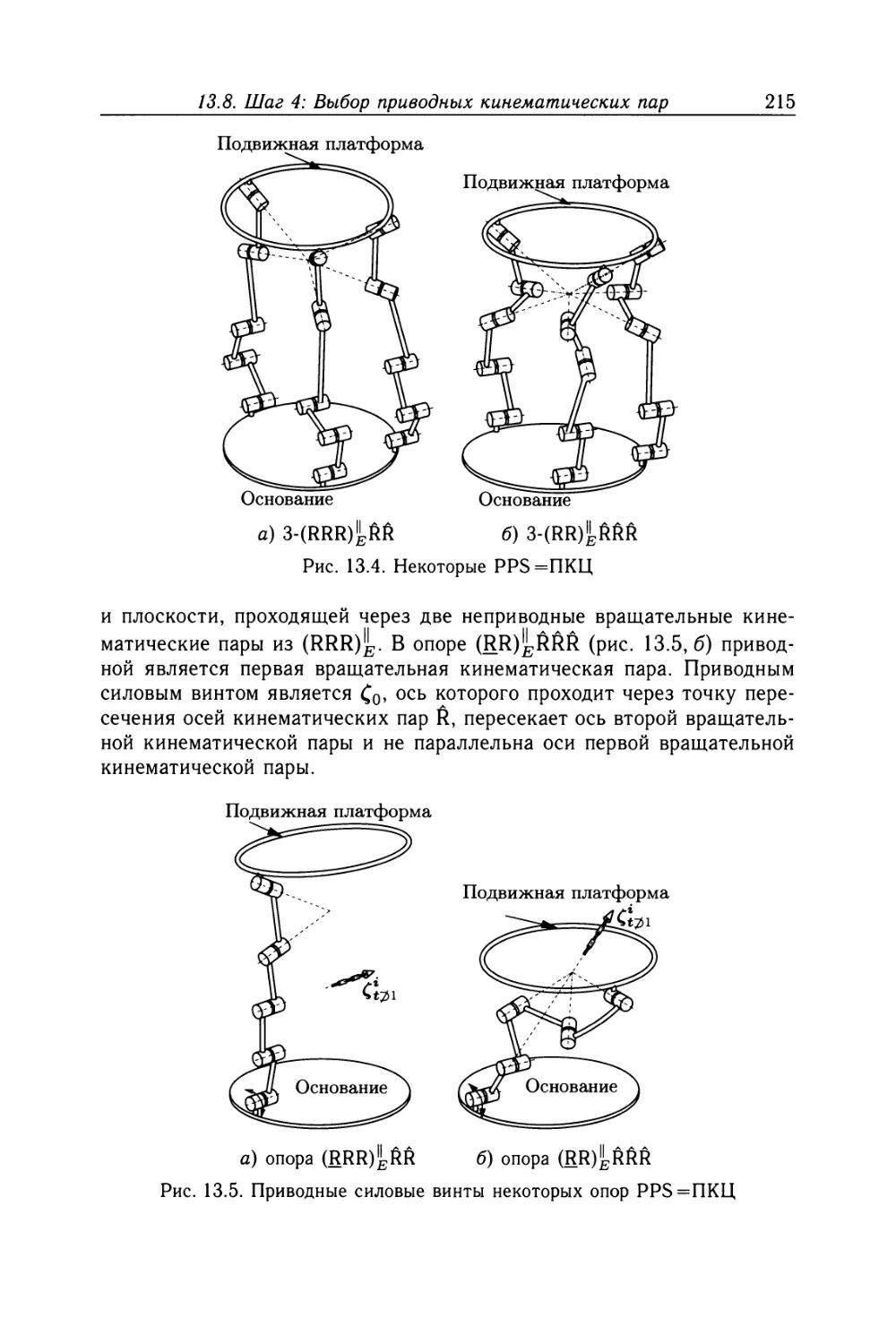
13.7. Шаг 3: Сборка опор 213
13.8. Шаг 4: Выбор приводных кинематических пар 214
13.8.1. t-компоненты приводных силовых винтов (214).
13.8.2. Процедура проверки правильности выбора приводных
кинематических пар (215).
13.9. Резюме 217
Оглавление
11
Глава 14. Параллельные механизмы с параллельными виртуаль¬
ными цепями 219
14.1. Введение 219
14.2. Процедура структурного синтеза параллельных механизмов 219
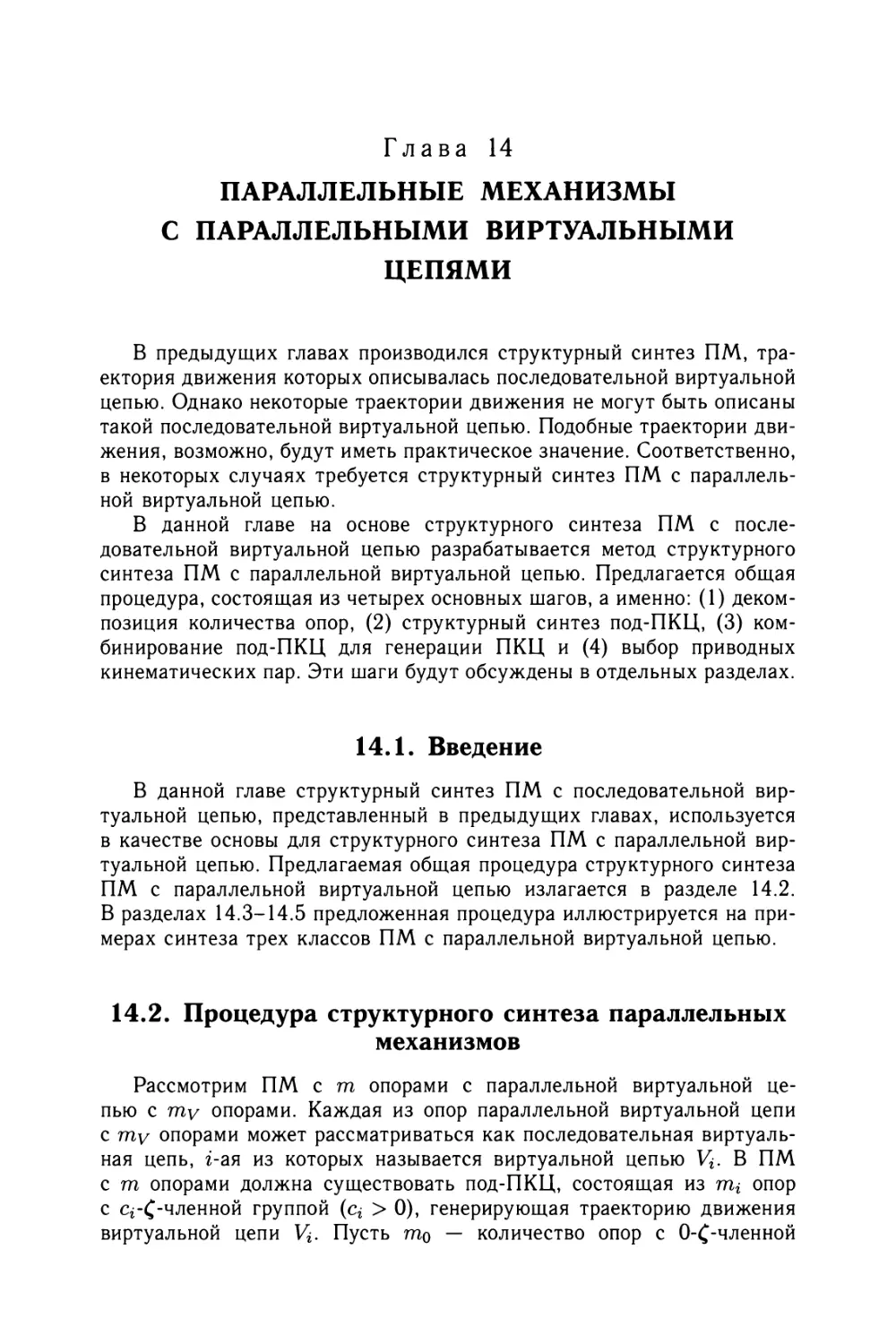
14.3. Структурный синтез 3-РРБ=ПМ 221
14.3.1. Декомпозиция количества опор (221). 14.3.2. Структурный
синтез под-ПКЦ (221). 14.3.3. Комбинирование под-ПКЦ (221).
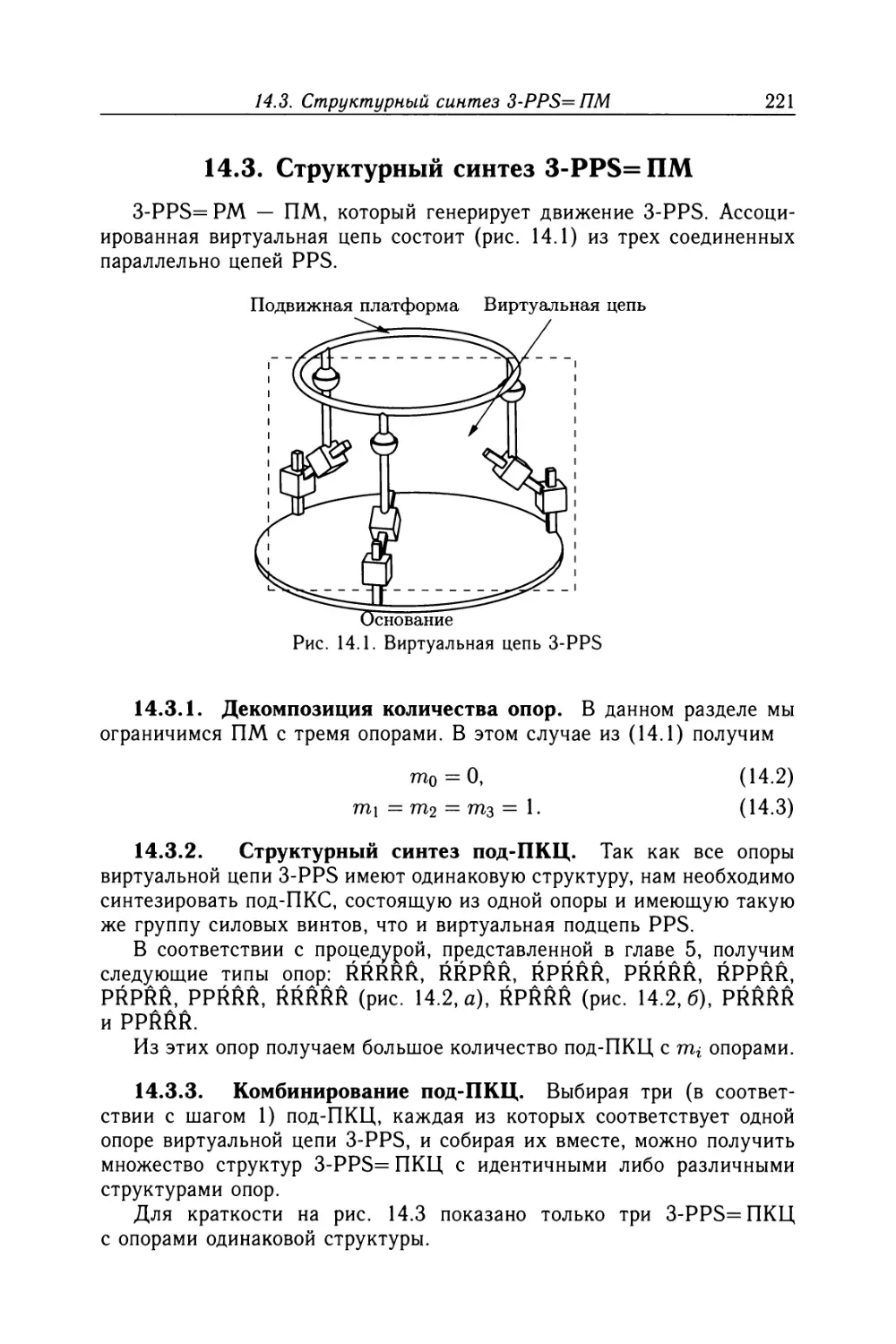
14.3.4. Выбор приводных кинематических пар (223).
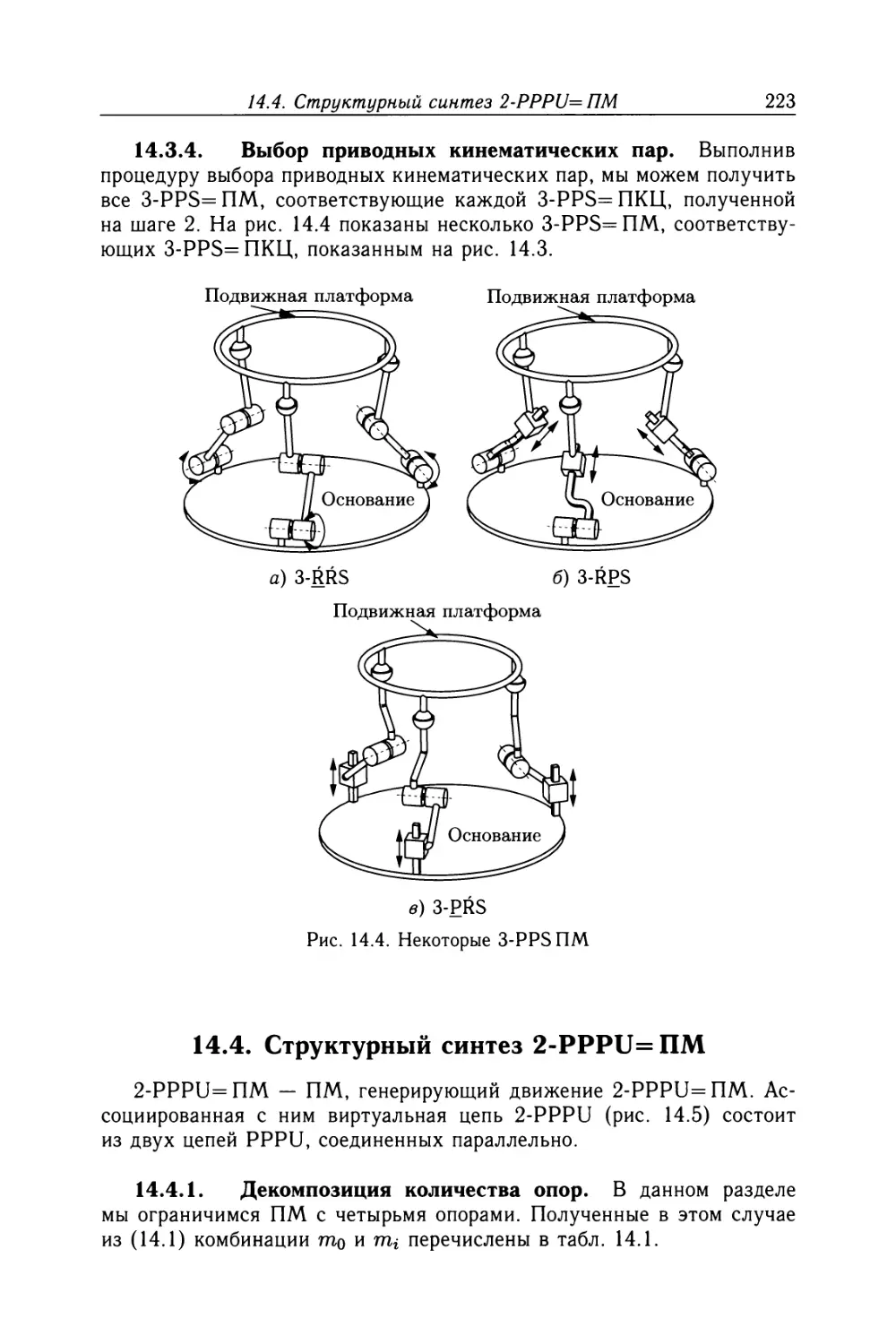
14.4. Структурный синтез 2-PPPU= ПМ 223
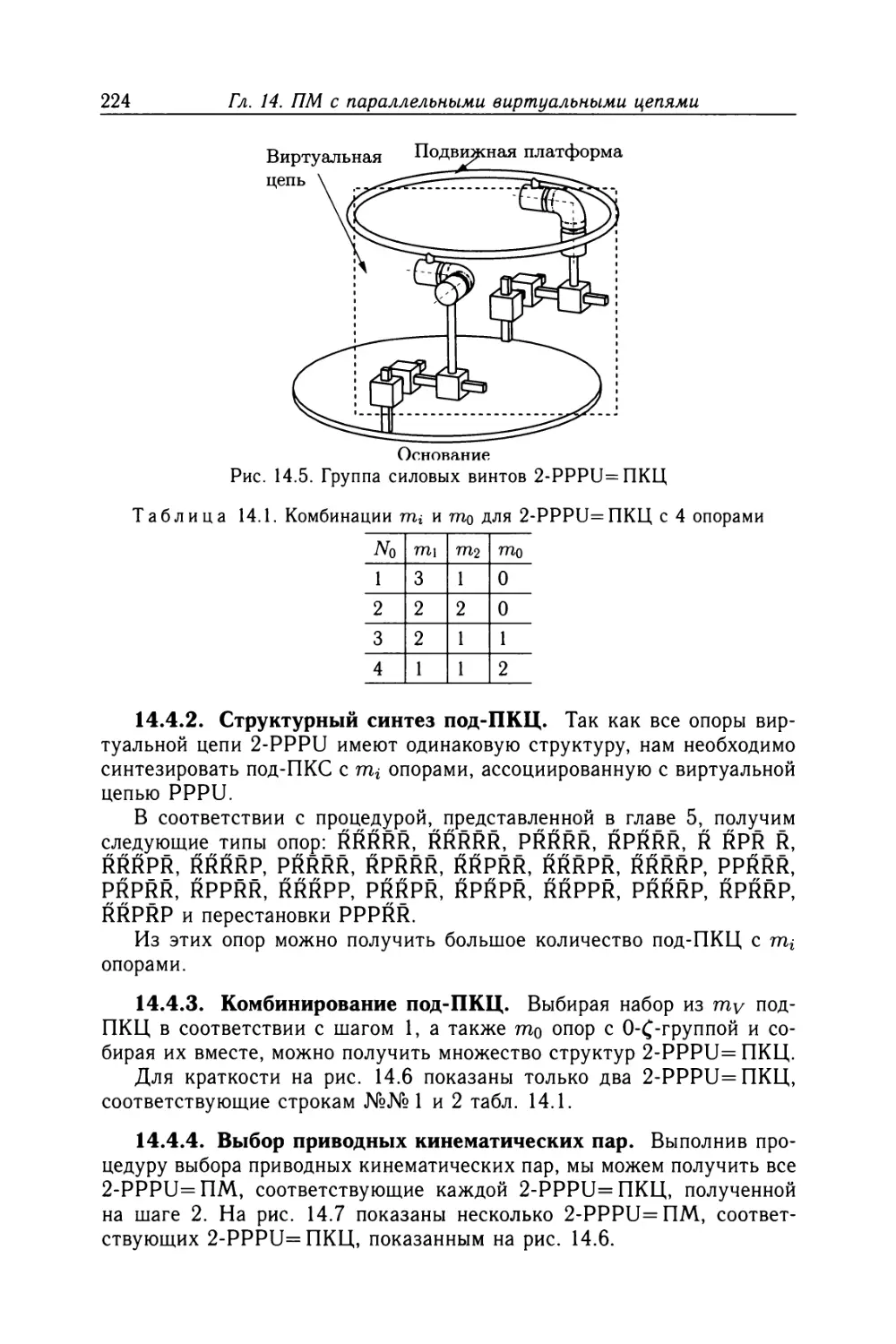
14.4.1. Декомпозиция количества опор (223). 14.4.2. Структурный
синтез под-ПКЦ (224). 14.4.3. Комбинирование под-ПКЦ (224).
14.4.4. Выбор приводных кинематических пар (224).
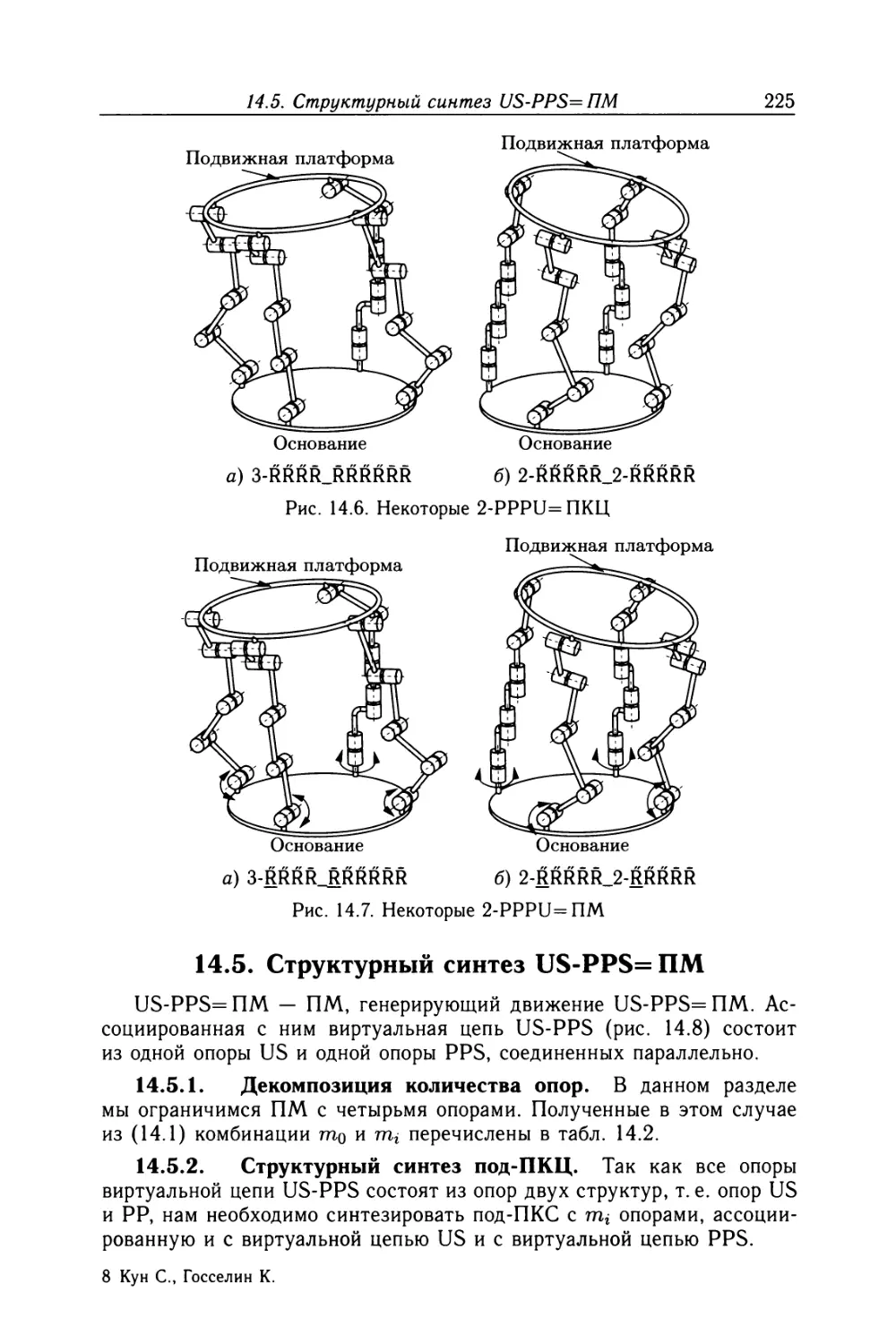
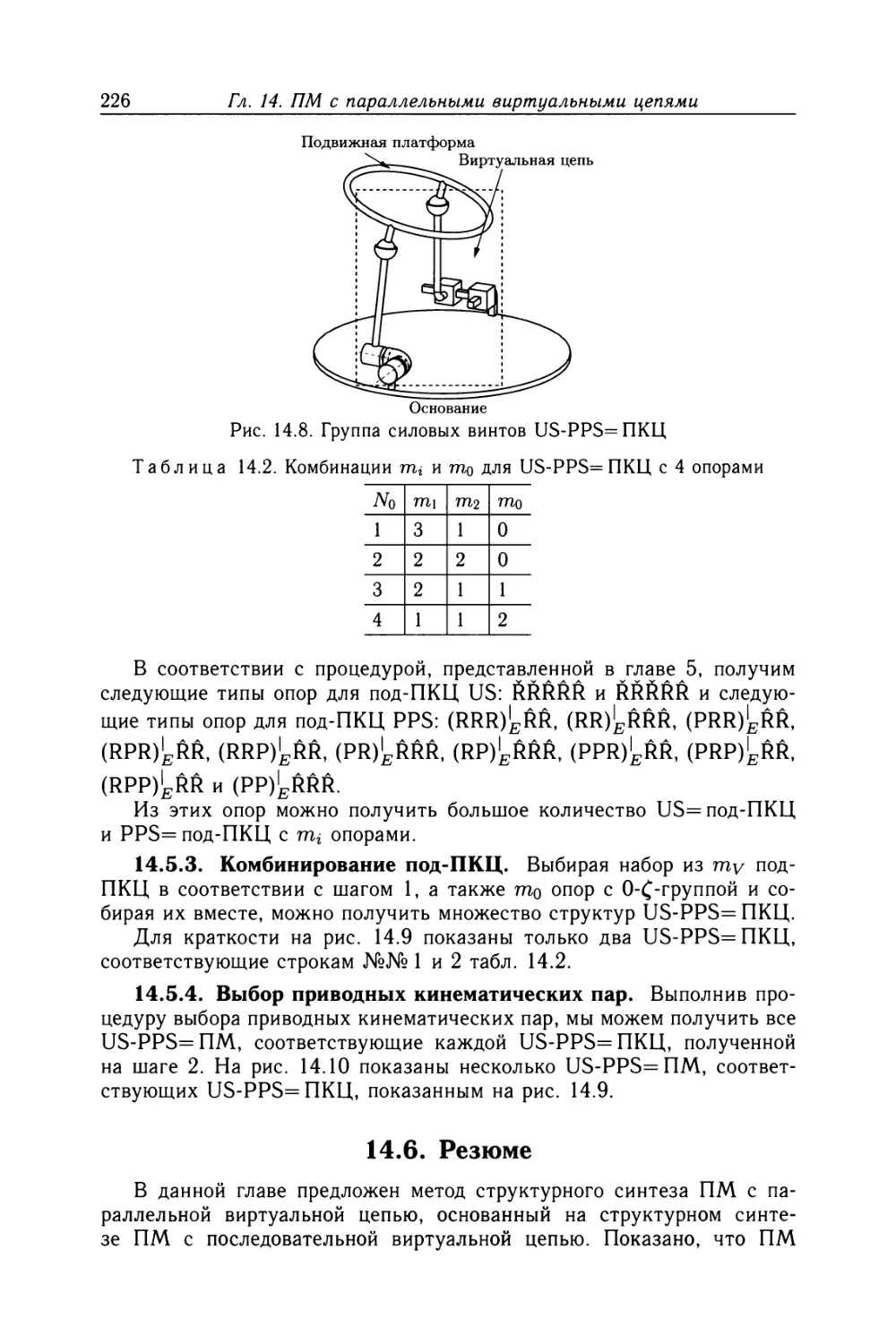
14.5. Структурный синтез US-PPS=nM 225
14.5.1. Декомпозиция количества опор (225). 14.5.2. Структурный
синтез под-ПКЦ (225). 14.5.3. Комбинирование под-ПКЦ (226).
14.5.4. Выбор приводных кинематических пар (226).
14.6. Резюме 226
Глава 15. Заключение 228
15.1. Основные результаты 228
15.2. Направления дальнейших исследований 229
Приложение А. Проектирование устройств, основанных на парал¬
лельных механизмах 231
А.1. Общие задачи 231
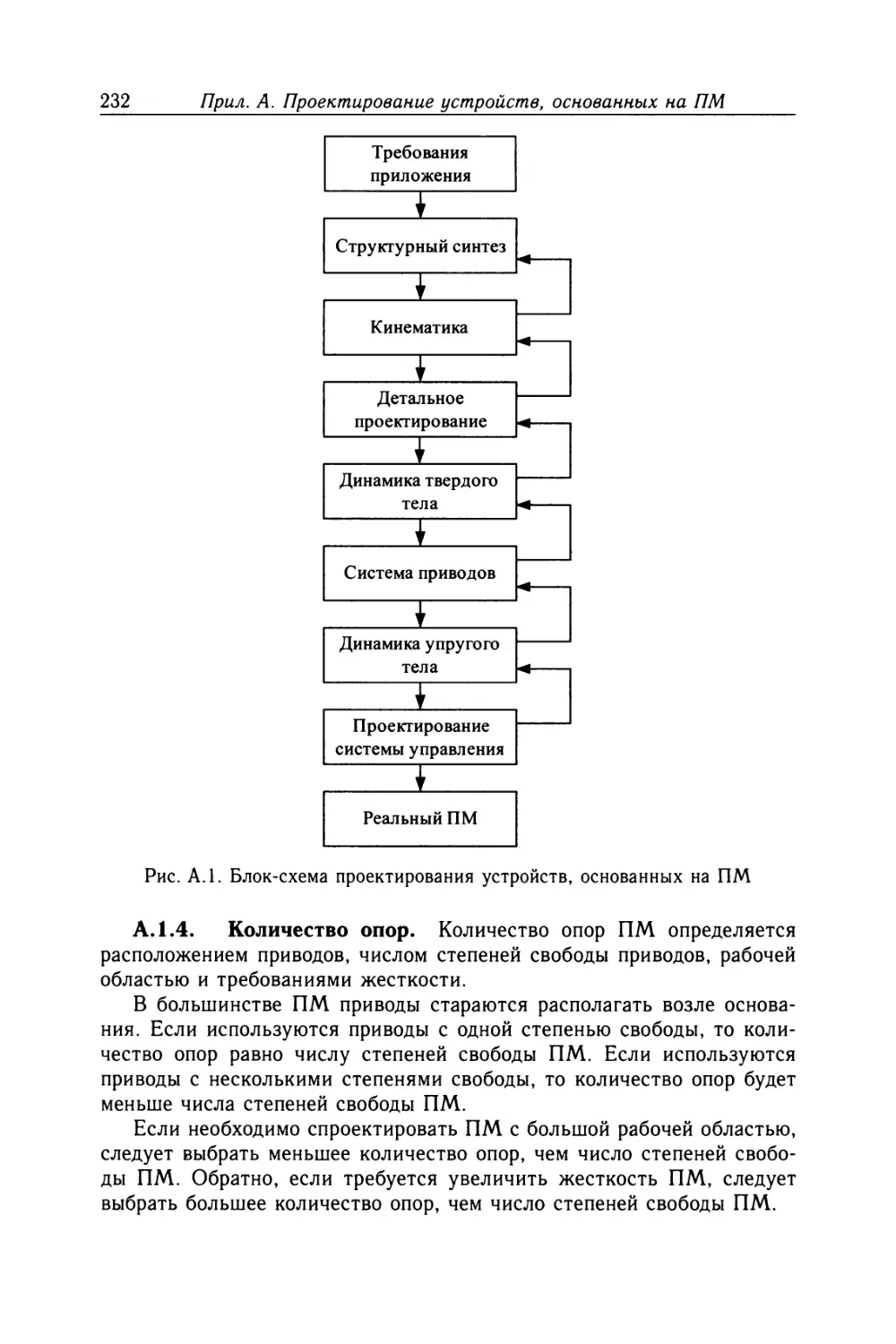
А. 1.1. Обзор процесса проектирования (231). А. 1.2. Выбор режи¬
ма работы (231). А. 1.3. Избыточность для данной задачи (231).
А. 1.4. Количество опор (232). А. 1.5. Выбор структур опор (232).
А.2. Специфические задачи 233
А.2.1. Параллельные манипуляторы (233). А.2.2. Тактильные
устройства (234). А.2.3. Медицинские роботы (235). А.2.4. На¬
номанипуляторы (235). А.2.5. Микроманипуляторы (236).
А.З. Резюме 238
Приложение Б. Анализ подвижности параллельных механизмов. . . 239
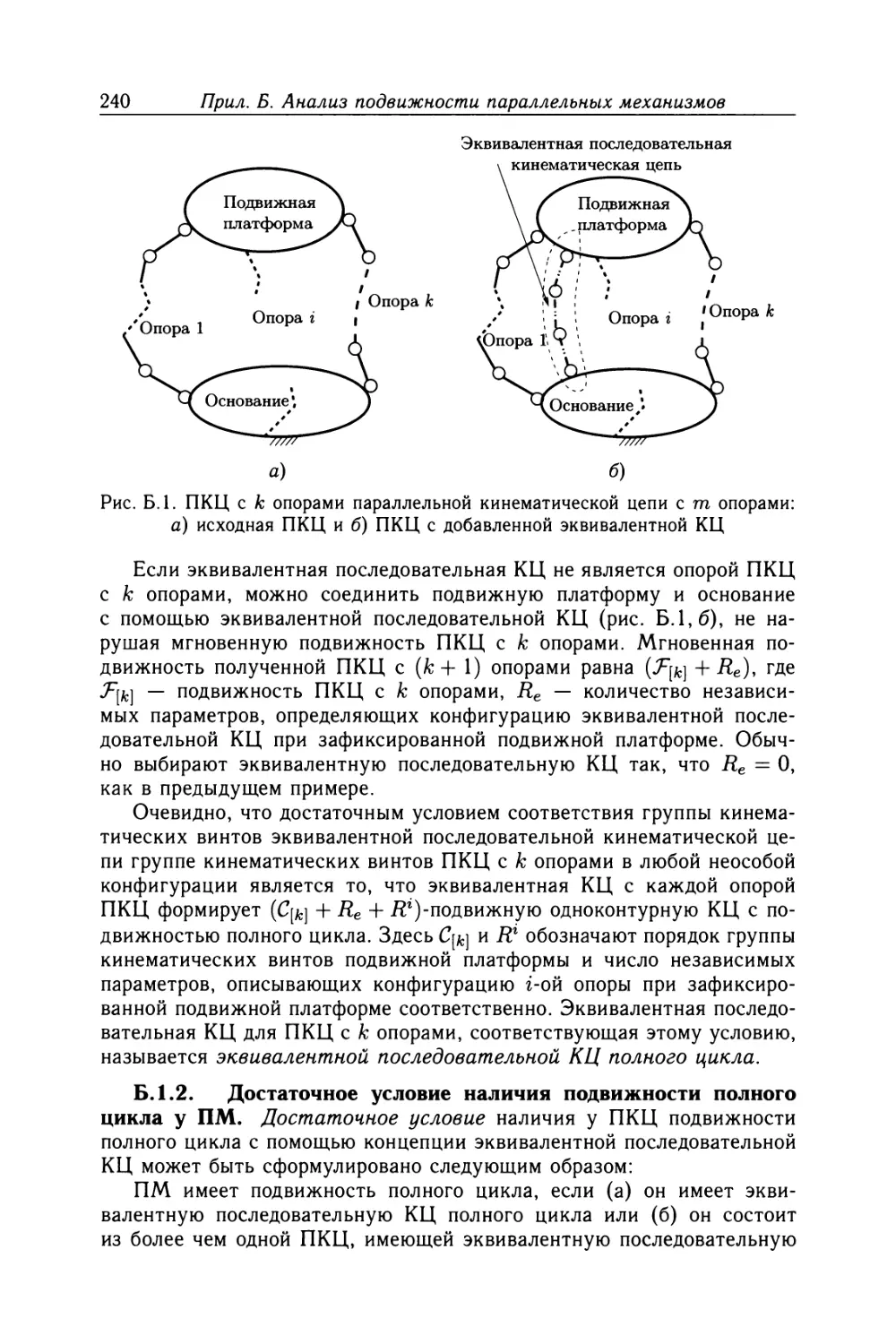
Б. 1. Принципы проверки подвижности полного цикла 239
Б. 1.1. Эквивалентные последовательные кинематические це¬
пи (239). Б. 1.2. Достаточное условие наличия подвижности
полного цикла у ПМ (240).
Б.2. Процедура анализа подвижности 241
Б.2.1. Анализ мгновенной подвижности (241). Б.2.2. Проверка по¬
движности полного цикла (242).
Б.З. Примеры 243
Б.4. Резюме 250
12
Оглавление
Приложение В. Метод, основанный на теории групп движений ... 251
В.1. Группы движений и их генераторы 251
В.2. Операции над подгруппами движений 253
В.З. Кинематическая связь 256
В.4. Последовательность структурного синтеза параллельных кинемати¬
ческих цепей 256
Список литературы 259
Предметный указатель 269
Предисловие редактора английского издания
На заре нового тысячелетия существенно изменяются область
и масштаб применения робототехники. Из доминировавшей области
промышленных применений, робототехника стремительно расширяется
в область задач гибкой неструктурированной среды. Взаимодейству¬
ющие, помогающие и обслуживающие роботы все больше и больше
изменяют людей и их жизнь.
Целью новой серии Springer Tracts in Advanced Robotics (STAR)
является своевременное освещение наиболее значимых и актуальных
достижений и разработок робототехники. Мы надеемся, что более ши¬
рокое распространение перспективных разработок будет стимулировать
расширение научного сотрудничества и способствовать дальнейшему
развитию этой быстро развивающейся области знания.
Монография, написанная Сяньвэнь Куном и Клементом Госсели-
ном, является результатом их десятилетней работы по исследованию
параллельных механизмов. Исследования в этой области имеют огром¬
ный практический потенциал, во все большем количестве проектов,
от симуляторов движения до тактильных устройств, от параллель¬
ных манипуляторов до микро- и наноманипуляторов, используются
подобные кинематические структуры. Значимость книги заключается
в систематическом подходе к структурному синтезу параллельных ме¬
ханизмов, который затем демонстрируется на нескольких конкретных
примерах механизмов, имеющих от трех до пяти степеней свободы.
Результатом является строгое исследование сути предмета с некоторым
проникновением в творческий процесс проектирования механизмов.
В качестве первого тома STAR, посвященного параллельным меха¬
низмам, эта книга является прекрасным введением ко всей серии.
Неаполь, Италия
Февраль 2007
Бруно Сицилиано
Редактор STAR
Хао Ма, Цинмяо Кун и Мэри Кун.
Анетте Швердтфегер,
Мари-Жоэлл Госселин
и Александрине Госселин.
Предисловие
Напрасно обучение без мысли,
опасна мысль без обучения.
Конфуций (551-479 до н.э.)
Параллельные механизмы (ПМ) использовались и используются
в широком спектре приложений, таких, как подвижные симуляторы
и параллельные манипуляторы и даже наноманипуляторы и микро¬
манипуляторы. От широко известной платформы Гауфа-Стюарта до
Дельта-робота и робота «Живой глаз» и многих других проектов, ПМ
в основном синтезировались интуитивно. В противоположность после¬
довательным кинематическим цепям, число кинематических конфигу¬
раций (структур) которых ограничено, заданную траекторию движения
может отрабатывать очень большое количество кинематических конфи¬
гураций ПМ. В связи с этим для более качественного проектирования
необходим систематический подход к определению всех структур ПМ.
Данной фундаментальной задаче, называемой структурным синтезом,
и посвящена эта книга.
Данная книга суммирует и расширяет работу авторов по струк¬
турному синтезу ПМ на протяжении последних десяти лет 0. Она
состоит из двух частей, в первой из которых (главы 2-5) представлен
систематический подход к структурному синтезу ПМ, основанный на
виртуальных цепях, а во второй (главы 6-14) — применение подхода
к различным траекториям движения. Понятие траектории движения
было выбрано потому, что оно в наибольшей степени соответствует
задачам робототехники и включает, кроме всего прочего, перемещения
в декартовых координатах и движение SCARA. В приложениях изло¬
жены дополнительные вопросы, а именно применение предложенного
в книге метода к практическим вопросам проектирования, определение
числа степеней свободы ПМ и структурный синтез ПМ с применением
теории групп движений.
0 Подробнее о публикациях авторов и разработанных ими прототи¬
пах см. на веб-сайте лаборатории робототехники университета Лаваль
(www. robot. gmc. ulaval. ca).
Предисловие
15
Хотя книга адресована в первую очередь исследователям и разра¬
ботчикам параллельных манипуляторов, машин с параллельной кине¬
матикой и тактильных устройств, мы надеемся, что она будет инте¬
ресна более широкому кругу читателей: (а) студентам и аспирантам,
работающим в указанных областях науки, так как предложенный метод
основан на линейной алгебре и основах кинематики, с которыми они
знакомы; (б) исследователям и аспирантам в области нанотехнологий
и микроэлектромеханических систем (МЭМС), так как эта книга мо¬
жет служить хорошей отправной точкой для проектирования микрома¬
нипуляторов и наноманипуляторов; (в) исследователям и аспирантам
в области проектирования механизмов, так как данная книга представ¬
ляет собой пример проектирования механизмов; и (г) исследователям
в области теории винтов, так как эта книга является примером успеш¬
ного применения теории винтов.
Данная книга была бы невозможна без участия и помощи многих
людей. В частности, мы хотим поблагодарить г-на Пьера-Люка Ришара
(Pierre-Luc Richard) и г-на Матьё Гуле (Mathieu Goulet) за создание
множества CAD-моделей, Тьери Лалиберте (Thierry Laliberte) за созда¬
ние нескольких пластиковых моделей и Симона Фуко (Simon Foucault)
за проектирование Триптерона, ставшего одним из практических при¬
менений полученных в книге результатов. Мы также благодарим неко¬
торых бывших сотрудников лаборатории робототехники университета
Лаваль, особенно г-на Жонатана Левеска (Jonathan Levesque), за боль¬
шинство помещенных в книге рисунков. Также благодарим г-на Бориса
Мейер-Ст-Онджа (Boris Mayer-St-Onge) за помощь в использовании
ВТЕХ’а. Последними по порядку, но не по важности, мы должны побла¬
годарить Natural Sciences and Engineering Research Council of Canada
(NSERC) и Canada Research Chairs Program за финансовую поддержку.
Квебек, Канада
Февраль 2007
Сянъвэнъ Кун
Клемент Госселин
Часть I
ПОДХОД К СИНТЕЗУ
Глава 1
ВВЕДЕНИЕ
На протяжении двух последних десятилетний параллельные ме¬
ханизмы (ПМ) прошли путь от более чем примитивных машин до
широко распространенной механической архитектуры. В настоящее
время ПМ применяются в подвижных симуляторах, промышленных
роботах, наноманипуляторах и микроманипуляторах и т. д. Однако,
существующие архитектуры ПМ в большинстве своем синтезировались
интуитивно. В противоположность последовательным кинематическим
цепям (КЦ), число кинематических конфигураций (структур) которых
ограничено, очень большое количество кинематических конфигураций
ПМ может отрабатывать заданную траекторию движения. В связи
с этим для более качественного проектирования необходим система¬
тический подход к определению всех структур ПМ. Данная книга
посвящена фундаментальной задаче структурного синтеза. В данной
главе приводятся предпосылки структурного синтеза ПМ. Кроме то¬
го, рассмотрено современное состояние исследований в этой области
и описана общая структура книги.
1.1. Параллельные механизмы и их применение
1.1.1. Параллельные механизмы. Хотя существует несколько
определений ПМ (см. например [96]), в контексте структурного синте¬
за важно принять определение, ограничивающее структуру проектиру¬
емых КЦ.
В данной книге используется следующее определение: параллель¬
ный механизм — многоподвижный механизм, состоящий из подвижной
платформы и основания, соединенных как минимум двумя запарал-
леленными последовательными КЦ (рис. 1.1). Эти последовательные
КЦ называют опорами (или ногами). ПМ с опорами, содержащими
замкнутые КЦ, в данной книге не рассматриваются. Отметим, что
приводные кинематические пары ПМ обычно располагаются ближе
к основанию.
1.1.2. Характеристики и применение. По сравнению с после¬
довательными механизмами, правильно спроектированный ПМ имеет
большую жесткость и точность, но обычно меньшую рабочую область.
1.1. Параллельные механизмы и их применение
19
Область применения ПМ постоянно расширяется [5, 6, 95, 106, 114].
Всеобъемлющие обновляемые списки ПМ см. в [7, 96]. Впервые ПМ
с шестью опорами был применен в конце 1950-х гг. в машине для
тестирования шин, разработанной Гауфом (рис. 1,а цветной вклей¬
ки [106]). В 1970-х гг. получили распространение авиационные си¬
муляторы (рис. 1,6 цветной вклейки) на основе ПМ. С 1980-х гг.
параллельные манипуляторы оказываются в сфере научных интересов
многих исследователей и используются в нескольких крупных иссле¬
довательских проектах. Только параллельные манипуляторы находят
широкое применение при сборке, контроле качества изделий и т. д.
Некоторые типы параллельных манипуляторов, например платформа
Гауфа-Стюарта и Дельта-робот (рис. 1, в цветной вклейки), широко
применяются в коммерческих разработках. На протяжении последнего
десятилетия ПМ применяются в станках, называемых станками с па¬
раллельной кинематикой (рис. 1, г-1,(3 цветной вклейки), устройствах
ориентации камер (рис. 1, е цветной вклейки [36]), тактильных устрой¬
ствах (рис. 1 ,ж цветной вклейки [5]), медицинских роботах (рис. 1 , з
цветной вклейки [114]), устройствах позиционирования (рис. 1, и цвет¬
ной вклейки [114]), координатно-измерительных машинах и датчи¬
ках силы.
Для удовлетворения потребности в развитии нанотехнологий и мик¬
росистем или микроэлектромеханических систем, недавно были разра¬
ботаны наноманипуляторы [84, 90, 100, 117, 125] и микроманипулято¬
ры [57] на основе ПМ. На рис. 2, а цветной вклейки показан немагнит¬
ный гексапод, разработанный PI (Physik Instrumente). На рис. 2, б
цветной вклейки показан параллельный наноманипулятор [100], разра¬
ботанный группой проф. И-Минь Чена в Наньянском технологическом
20
Гл. 1. Введение
университете. В этом параллельном манипуляторе используются гиб¬
кие кинематические пары. В дополнение к высокой точности, в данном
манипуляторе можно выбирать приводные кинематические пары, что
обеспечивает простоту управления. На рис. 2, в цветной вклейки по¬
казан параллельный микроманипулятор, разработанный группой проф.
Лари Л. Хауэлла в университете Бригхам Янг. Такой микроманипуля¬
тор может использоваться для перемещения микрокомпонентов, напри¬
мер, зеркал, линз и дифракционных решеток, по трем направлениям
при помощи трех независимых линейных входов. Проект данного мик¬
романипулятора основан на поступательном параллельном механизме,
предложенном в [112].
1.2. Структурный синтез параллельных механизмов
Характер движения подвижной платформы заданного ПМ с Т сте¬
пенями свободы может быть различен. Например, под движением
с 3 степенями свободы может пониматься поступательное перемещение
с тремя степенями свободы, сферическое движение с тремя степенями
свободы, плоскопараллельное перемещение с тремя степенями свободы
и т. д. Каждый тип движения подвижной платформы называется тра¬
екторией движения. Подобная классификация траекторий движения
дана в главе 4. Ясно, что задания числа степеней свободы недостаточно
для определения траектории движения.
Структурный синтез ПМ состоит в отыскании всех возможных
структур ПМ, отрабатывающих заданную траекторию движения по¬
движной платформы. В большинстве предыдущих работ структур¬
ный синтез ПМ определялся как определение всех возможных струк¬
тур ПМ, отрабатывающих движение платформы с заданным числом
степеней свободы. В данной книге используется приведенное выше
определение структурного синтеза, как максимально соответствующее
практическим потребностям. Действительно, задание траектории дви¬
жения — естественная стартовая точка для структурного синтеза.
Структурный синтез — важная фундаментальная задача в исследо¬
вании ПМ. Он также является первым логическим шагом в разработке
новых подвижных симуляторов, параллельных манипуляторов и дру¬
гих устройств, основанных на ПМ. Полный процесс проектирования
устройств, основанных на ПМ, читатели найдут в приложении А.
1.3. Обозначение параллельных механизмов
Обычно ПМ должен удовлетворять некоторым геометрическим
ограничениям, действующим в пределах опоры и/или между раз¬
личными опорами. В ПМ опоры, которые должны удовлетворять
геометрическим ограничениям, могут быть разделены на отдельные
опоры (главы 6-13) либо группы опор (глава 14). Группа опор
1.3. Обозначение параллельных механизмов
21
определяется как максимальное количество опор, в котором как каж¬
дая опора в отдельности, так и все они вместе удовлетворяют опреде¬
ленным геометрическим ограничениям.
1.3.1. Обозначение кинематических пар. В ПМ используют¬
ся следующие кинематические пары (рис. 1.2): а) вращательная (R),
б) поступательная (Р), в) винтовая (Н), г) универсальная (U), д) ци¬
линдрическая (С), е) сферическая (S) и ж) плоскопараллельная (Е).
а) Пара R
б) Пара Р
ж) Пара Е
Рис. 1.2. Кинематические пары
Так как универсальная и сферическая пары могут быть представ¬
лены в виде комбинации двух вращательных пар с пересекающимися
и ортогональными осями и комбинации трех вращательных пар с пе¬
ресекающимися осями, при структурном синтезе ПМ мы ограничимся
в основном ПМ, составленными только из вращательных и поступа¬
тельных пар.
Для более компактного описания геометрических соотношений
между осями кинематических пар вводятся обозначения, приведенные
в табл. 1.1. Кроме того, R и Р будем использовать для изображения
приводной кинематической пары, соответственно вращательной и по¬
ступательной.
22
Гл. 1. Введение
Таблица 1.1. Обозначения кинематических пар
С
Цилиндрическая кинематическая пара
н
Винтовая кинематическая пара
р
Поступательная кинематическая пара
R
Вращательная кинематическая пара
R
Вращательные пары, оси которых параллельны в пределах некоторой
опоры
R
Вращательные пары, оси которых параллельны в пределах некоторой
опоры
R
Вращательные пары, оси которых пересекаются в пределах некоторой
опоры
R
Вращательные пары, оси которых перпендикулярны в пределах группы
опор
R
Вращательные пары, оси которых перпендикулярны в пределах группы
опор
R
Соосные вращательные пары, оси которых пересекаются с осями
пар R, при их наличии, в пределах группы опор
R
Вращательные кинематические пары с параллельными осями, парал¬
лельные осям кинематических пар R или прямой, проходящей через
как минимум два пересечения осей кинематических пар R при их на¬
личии, в пределах группы опор
R
Вращательные пары, оси которых параллельны в пределах группы
опор
S
Сферическая кинематическая пара
и
Универсальная кинематическая пара
Ол
Последовательность кинематических пар, содержащая как минимум
одну вращательную кинематическую пару и одну поступательную ки¬
нематическую пару, расположенные таким образом, что оси всех вра¬
щательных кинематических пар параллельны и направления движения
не всех поступательных кинематических пар перпендикулярны осям
вращательных кинематических пар
Ол
Последовательность кинематических пар, содержащая как минимум
одну вращательную кинематическую пару и одну поступательную ки¬
нематическую пару, расположенные таким образом, что оси всех вра¬
щательных кинематических пар параллельны и направления движения
не всех поступательных кинематических пар перпендикулярны осям
вращательных кинематических пар. Оси каждой вращательной кине¬
матической пары в пределах ()д параллельны осям кинематических
пар R и R либо линии, проходящей как минимум через два пересече¬
ния осей кинематических пар R в пределах группы опор
1.3. Обозначение параллельных механизмов
23
Продолжение табл. 1.1
()в
Последовательность кинематических пар, содержащая как минимум
одну вращательную кинематическую пару, расположенные таким об¬
разом, что оси всех вращательных кинематических пар параллельны
Ов
Последовательность кинематических пар, содержащая как минимум
одну вращательную кинематическую пару, расположенные таким об¬
разом, что оси всех вращательных кинематических пар параллельны.
Оси каждой вращательной кинематической пары в пределах ()д па¬
раллельны осям кинематических пар R и R либо линии, проходящей
как минимум через два пересечения осей кинематических пар R в пре¬
делах группы опор
()е
Последовательность кинематических пар в пределах одной опоры, все
звенья в которой перемещаются в параллельных плоскостях
()L
Каждая из ()е в пределах группы опор, все связанные с которой плос¬
кости движения параллельны одной прямой
о!
Каждая из ()е в пределах группы опор, все связанные с которой плос¬
кости движения параллельны
(U
Как минимум одна соосная вращательная кинематическая пара или
как минимум одна сонаправленная поступательная кинематическая
пара
Os
Последовательность кинематических пар, составленная таким обра¬
зом, что все звенья перемещаются по соответствующей сферической
поверхности
()т
Последовательность поступательных кинематических пар в пределах
опоры, составленная таким образом, что все звенья перемещаются
в параллельных плоскостях
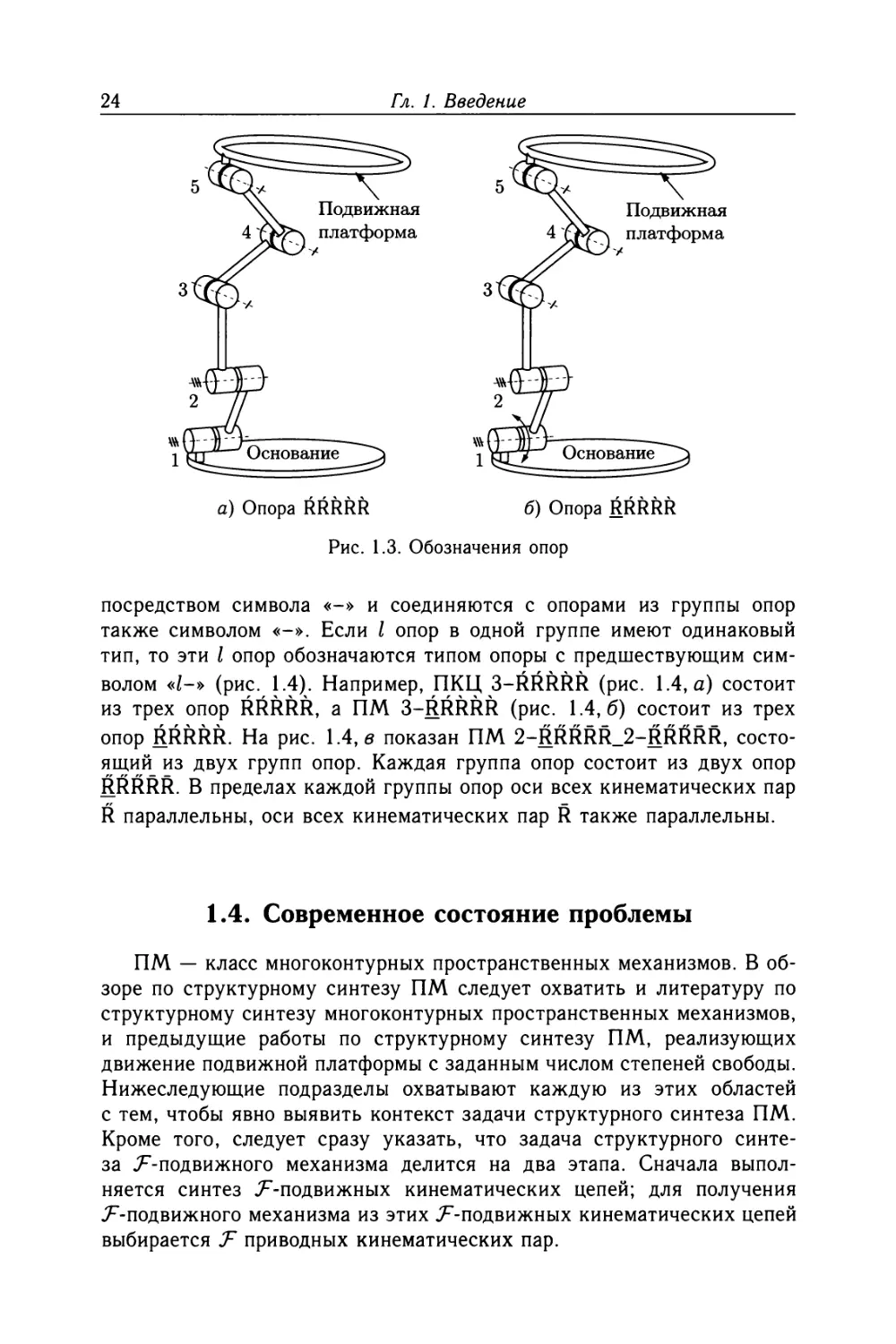
1.3.2. Обозначение опор. Опора ПМ обозначается последова¬
тельностью символов, обозначающих типы кинематических пар в на¬
правлении от основания к подвижной платформе (рис. 1.3). Например,
опора RRRRR (рис. 1.3, а) состоит из пяти вращательных пар. Оси пер¬
вых двух вращательных пар параллельны друг другу и оси последую¬
щих трех пар также взаимно параллельны. Аналогично, опора RRRRR
(рис. 1.3, б) состоит из пяти вращательных кинематических пар, первая
из которых является приводной. Оси первых двух вращательных пар
параллельны друг другу и оси последующих трех пар также взаимно
параллельны.
1.3.3. Обозначения ПМ. Параллельная кинематическая цепь
(ПКЦ) или ПМ обозначаются структурами их опор, соединенными
символами «-» и «_». Типы опор в пределах одной группы опор
соединяются символом «-». Типы опор либо различных групп опор
соединяются символом «_». Опоры, на которые не наложены ника¬
кие геометрические ограничения, также соединяются друг с другом
24
Гл. 1. Введение
Подвижная
платформа
а) Опора RRRRR б) Опора RRRRR
Рис. 1.3. Обозначения опор
посредством символа «-» и соединяются с опорами из группы опор
также символом «-». Если I опор в одной группе имеют одинаковый
тип, то эти I опор обозначаются типом опоры с предшествующим сим¬
волом «/-» (рис. 1.4). Например, ПКЦ 3-RRRRR (рис. 1.4, а) состоит
из трех опор RRRRR, а ПМ 3-RRRRR (рис. 1.4,6) состоит из трех
опор RRRRR. На рис. 1.4, в показан ПМ 2-RRRRR_2-RRRRR, состо¬
ящий из двух групп опор. Каждая группа опор состоит из двух опор
RRRRR. В пределах каждой группы опор оси всех кинематических пар
R параллельны, оси всех кинематических пар R также параллельны.
1.4. Современное состояние проблемы
ПМ — класс многоконтурных пространственных механизмов. В об¬
зоре по структурному синтезу ПМ следует охватить и литературу по
структурному синтезу многоконтурных пространственных механизмов,
и предыдущие работы по структурному синтезу ПМ, реализующих
движение подвижной платформы с заданным числом степеней свободы.
Нижеследующие подразделы охватывают каждую из этих областей
с тем, чтобы явно выявить контекст задачи структурного синтеза ПМ.
Кроме того, следует сразу указать, что задача структурного синте¬
за ^-подвижного механизма делится на два этапа. Сначала выпол¬
няется синтез ^-подвижных кинематических цепей; для получения
^-подвижного механизма из этих ^-подвижных кинематических цепей
выбирается Т приводных кинематических пар.
1.4. Современное состояние проблемы
25
Подвижная платформа Подвижная платформа
а) ПКЦ 3-RRRRR
б) ПМ 3-RRRRR
Рис. 1.4. Обозначения ПКЦ и ПМ
1.4.1. Структурный синтез многоконтурных пространственных
механизмов. Задача структурного синтеза многоконтурных простран¬
ственных механизмов состоит в поиске всех структур (архитектур)
многоконтурных пространственных механизмов для заданного чис¬
ла степеней свободы. Задача структурного синтеза многоконтурных
пространственных механизмов возникла в конце 1960-х гг. и была,
наверное, наименее востребованной областью исследований в меха¬
нике на протяжении нескольких десятилетий [28]. Однако в начале
1990-х гг. в этой области наметился некоторый прогресс. Структурный
синтез многоконтурных пространственных механизмов обычно основан
на критерии подвижности механизмов, имеющем одну из следующих
26
Гл. 1. Введение
форм [27, 56, 111, 119]:
g
T = d{n-g- 1) + £л, (1.1)
3 =1
где Т — подвижность или относительное число степеней свободы КЦ,
п — количество звеньев, включая основание, g — количество кинема¬
тических пар, fj — число степеней свободы j-ой кинематической пары,
d — число независимых уравнений связи в пределах контура, или
g
?=Y/fi~dv’ о-2)
j=\
где v — количество независимых контуров в механизме, или
g V
f =^fj-тт^2<и, (1.3)
j=1 i= 1
где di — количество независимых уравнений связи в г-ом кон-
тУРе> Y?i= \di — сумма di в наборе из v независимых контуров,
minY?i=\di — минимум по всем наборам из v независимых
контуров.
Уравнение (1.1) обычно называют критерием Чебышева или основ¬
ным критерием подвижности.
Структурный синтез многоконтурных пространственных механиз¬
мов, в которых все контуры имеют одинаковое количество уравне¬
ний связи, рассматриваемый некоторыми авторами (например, [122]),
основан на применении критерия подвижности (1.2). В 1994 г. был
выполнен [65, 82] структурный синтез пространственных механизмов,
содержащих призматические и вращательные кинематические пары,
в которых все контуры имели 6 независимых условий связи. Были
синтезированы пространственные механизмы с пассивными призмати¬
ческими кинематическими парами. В 1998 г. в [93] на основе уравнения
(1.3) был выполнен структурный синтез пространственных механизмов
с различным числом уравнений связи для различных контуров.
Как уже упоминалось, следующим шагом структурного синтеза ПМ
является выбор приводных кинематических пар. Однако эта задача
в течение долгого времени не рассматривалась. Одна из причин этого
заключается в том, что большинство авторов занимались синтезом
пространственных механизмов, состоящих из КЦ с одной степенью
свободы. Для таких КЦ приводной может быть любая кинематическая
пара. Другой причиной является то, что условие проверки правиль¬
ности выбора приводных кинематических пар было сформулировано
(см., например, [119]) следующим образом:
1.4. Современное состояние проблемы
27
«Для ^-подвижного механизма набор из Т приводных кинематиче¬
ских пар верен, если при блокировании всех приводных кинематиче¬
ских пар число степеней свободы полученной КЦ равно О».
Однако, при выборе приводных кинематических пар с помощью
данного условия возникает очень сложная задача определения числа
степеней свободы механизма. Как было указано в [75], наборы при¬
водных кинематических пар для двух ПМ, предложенные в [125],
не работоспособны.
В 1999 г. в [64] для пространственных механизмов, содержащих
поступательные и вращательные кинематические пары, в которых каж¬
дый контур имеет шесть независимых уравнений связи, был предложен
новый критерий проверки правильности выбора приводных кинемати¬
ческих пар.
В настоящее время проблемы как структурного синтеза ПМ, так
и выбора приводных кинематических пар для пространственных КЦ
полностью еще не решены.
1.4.2. Структурный синтез ПМ с заданным числом степеней
свободы. В то время как в большинстве опубликованных работ
новые ПМ синтезировались от случая к случаю, некоторые иссле¬
дователи [27, 45, 56] разрабатывали систематизированные подходы
к структурному синтезу ПМ с заданным числом степеней свободы.
Структурный синтез ПМ с заданным числом степеней свободы
осуществляется на основании критериев подвижности (1.1) и (1.3).
В [56] был выполнен структурный синтез для d = 2, 3, 4 и 6. Были
получены ПМ, совершающие 2-подвижное плоскопараллельное переме¬
щение, 3-подвижное пространственное перемещение, поступательное
движение, сферическое движение и движение 3T1R (три поступатель¬
ных и одна вращательная степень свободы). В [27, 111] выполнен
структурный синтез ПМ для d = 6. Данный подход наилучшим обра¬
зом применим к структурному синтезу ПМ с полным числом степеней
свободы (6 для пространственных ПМ и 3 для сферических и плос¬
костных ПМ). ПМ, показанные на рис. 1 цветной вклейки, были полу¬
чены с применением такого подхода. Однако ПМ, не удовлетворяющие
обобщенному критерию подвижности (например, показанные на рис. 3
цветной вклейки), не могут быть синтезированы таким образом. ПМ,
показанные на рис. 3, а цветной вклейки [37, 68, 69] и 3, б цветной
вклейки [75], принадлежат к классам ПМ, подробно описанным в гла¬
вах 6 и 9 соответственно.
1.4.3. Структурный синтез ПМ с заданной траекторией дви¬
жения. Вследствие большого количества разнообразных применений
ПМ, траектория требуемых от них движений может существенно раз¬
личаться. Существует насущная необходимость в поиске новых струк¬
тур ПМ [9, 97], отрабатывающих заданную траекторию движения.
Кроме того, новые структуры ПМ необходимы в связи с развитием
28
Гл. 1. Введение
станков с гибридной кинематикой, в которых два ПМ работают сов¬
местно.
Так как траектория движения подвижной платформы содержит
больше информации, чем число ее степеней свободы, и из-за потреб¬
ности в ПМ с числом степеней свободы меньшим 6, структурному
синтезу ПМ с заданной траекторией движения начиная с 1990-х гг.
уделяется все большее внимание [3, И, 31, 40, 43, 45, 50, 59, 67,
72, 123, 131]. Существует мнение, что ПМ с 6 степенями свободы
применимы во всех случаях, и, соответственно, подвергается сомнению
необходимость структурного синтеза ПМ с числом степеней свободы,
меньшим 6. Одной из основных причин структурного синтеза ПМ
с числом степеней свободы, меньшим 6, является уменьшение стоимо¬
сти их изготовления. Другая причина заключается в том, что, в общем
случае, уменьшение числа степеней свободы увеличивает диапазон
допустимых перемещений по оставшимся степеням свободы.
Следует заметить, что к проблеме структурного синтеза ПМ с за¬
данной траекторией движения обращался еще Хантер [55] в 1973 г.
В [55] ПМ использовались в качестве передаточных цепей, со¬
храняющих скорости перемещений. К сожалению, данная работа
осталась практически незамеченной широкому кругу исследователей-
робототехников, т. к. Хантер не упомянул ее в своей пионерской
работе по структурному синтезу ПМ [56]. Позднее несколько авто¬
ров независимо друг от друга работали над структурным синтезом
плоско-параллельного ПМ с 5 опорами [И, 31, 67] и некоторые ре¬
зультаты были получены повторно. Вклад [И, 31, 67] заключается
в алгебраическом доказательстве условий подвижности полного цикла,
данных в [55] без доказательств. Таким образом, было неявно дока¬
зано, что не существует других опор с 5 степенями свободы, кроме
описанных в [55], состоящих только из вращательных и поступатель¬
ных кинематических пар и применимых для построения параллельной
кинематической цепи, совершающей плоскопараллельное перемещение.
Подходы к структурному синтезу ПМ с заданной траекторией дви¬
жения можно разделить на 4 класса: (1) подход, основанный на теории
винтов (см., например, [И, 31, 51, 55, 67]), (2) подход, основанный на
теории групп движений (см., например, [3, 40, 43, 45, 61]), (3) под¬
ход, основанный на открытых цепях с жестко закрепленным концом
(см., например, [59, 123]) и (4) подход, основанный на виртуальных
цепях (см., например [72, 73, 75, 77]).
Каждый из этих подходов имеет свои особенности. Один из спосо¬
бов оценки достоинств и недостатков каждого из них состоит в сравне¬
нии процедур структурного синтеза структуры одного и того же ПМ,
осуществленных с применением различных методов. В [77] выполнен
структурный синтез ПМ с применением подхода, основанного на вир¬
туальных цепях и теории винтов, и приведено его сравнение с другими
подходами, описанными в литературе. Отмечается, что:
1.5. Цели и структура книги
29
• подход, основанный на виртуальных цепях, требует меньшего
количества вычислений, чем подходы, предложенные в [11, 31,
62, 76];
• подход, основанный на виртуальных цепях, концептуально более
прост и, следовательно, более легок для понимания, чем подход,
предложенный в [55].
• подход, основанный на виртуальных цепях, является более об¬
щим, чем подходы, предложенные в [45, 118]. При применении
этих подходов не могут быть получены некоторые структуры ПМ
с 5 опорами, имеющие 3 и 4 степени свободы.
В большей части литературы, посвященной структурному синтезу
ПМ, уделяется очень мало внимания выбору приводных кинематиче¬
ских пар. В противоположность этому, в подходе, основанном на вир¬
туальных цепях, выбор приводных кинематических пар считается важ¬
ным шагом структурного синтеза ПМ. Дефицит литературы по выбору
приводных кинематических пар для ПМ может быть объяснен тем, что
для большинства предложенных ранее ^-подвижных ПМ любой набор
из Т кинематических пар может использоваться в качестве приводного.
В [1] предложено условие проверки правильности выбора приводных
кинематических пар на основе теории винтов и подробно обсужден
выбор приводных кинематических пар для 2-подвижного плоскопарал¬
лельного ПМ. В [53] предложено альтернативное условие проверки
правильности выбора приводных кинематических пар на основе теории
винтов и подробно обсужден выбор приводных кинематических пар для
ПМ с 3 и 4 степенями свободы. Определение правильности выбора
приводных кинематических пар для 6-подвижного ПМ при приме¬
нении вышеупомянутых подходов требует вычисления определителя
матрицы размерностью 6x6. Фактически определение правильности
выбора приводных кинематических пар для ^-подвижного ПМ требует
вычисления определителя матрицы размерностью Т х Т [72, 73, 75,
77]. Следует отметить, что пассивные кинематические пары в ПМ
не влияют на траекторию движения подвижной платформы. Этим
объясняется то, что в предыдущих работах по структурному синтезу
ПМ [31, 40, 67] не рассматривались ПМ с пассивными кинематически¬
ми парами. В данной книге такие ПМ рассматриваются, так как ПМ
с пассивными кинематическими парами и соответствующие им ПМ без
пассивных кинематических пар имеют разное количество избыточных
связей и различные реакции в опорах.
1.5. Цели и структура книги
Главная цель данной книги — представление систематического под¬
хода, основанного на виртуальных цепях, к структурному синтезу ПМ.
Кроме того, выполнен структурный синтез ПМ, отрабатывающих за¬
данные траектории движения. В качестве дополнительного результата
представлен новый подход к анализу подвижности ПМ. Эта проблема
30
Гл. 1. Введение
является классической в теории механизмов, однако все еще не имеет
удовлетворительного решения.
Книга состоит из двух основных частей. В части I, включающей
гл. 2-5, представлен систематический подход к структурному синтезу
ПМ, основанный на виртуальных цепях. Гл. 2 посвящена анализу
структуры ПМ на основе теории винтов. Структурный синтез однокон¬
турных КЦ с избыточными связями освещен в гл. 3. В гл. 4, в кото¬
рой вводится концепция виртуальных цепей для описания траектории
движения подвижной платформы, обсуждается классификация ПМ.
В гл. 5 предлагается методика структурного синтеза ПМ, основанная
на концепции виртуальных цепей и теории винтов. Часть II, состоя¬
щая из девяти глав, посвящена применению подхода, основанного на
виртуальных цепях, к синтезу ПМ. В них обсуждается структурный
синтез ПМ, отрабатывающих заданные траектории движения, предпо¬
ложительно имеющие наибольшую потенциальную практическую зна¬
чимость. В частности, описывается синтез ПМ, траектория движения
которых соответствует траектории движения линейных параллельных
роботов, работающих в декартовых и цилиндрических координатах.
В последней главе сделаны выводы о проделанной работе и намечены
направления дальнейших исследований. Кроме того, в книгу включены
три приложения. В приложении А проиллюстрировано применение
изложенных результатов к разработке новых параллельных манипуля¬
торов, предназначенных для использования, например, в медицинских
роботах, нано- и микроманипуляторах. В приложении Б предложен
новый подход к анализу подвижности ПМ, призванный помочь чита¬
телю в исследовании механизмов, не представленных в данной книге.
Эту процедуру структурного анализа ПМ можно рассматривать как
обратную к процедуре структурного синтеза, основанной на концепции
виртуальных цепей. В приложении В кратко изложена методика струк¬
турного синтеза ПМ, основанная на теории групп движений. Данное
приложение было включено в книгу по двум причинам: (а) этот метод
эффективен для синтеза ПМ с простыми кинематическими характери¬
стиками [41, 78] и (б) метод нуждается в систематическом развитии.
Глава 2
СТРУКТУРНЫЙ АНАЛИЗ
При синтезе структуры ПМ необходимо учитывать ограничении,
накладываемые кинематическими парами и КЦ. Теория винтов пред,мл
гает эффективные методы решения этой проблемы и, соответстпеннп,
будет использоваться на протяжении всей книги. В этой главе снач;иш
дается обзор важнейших положений теории винтов, например, прим
ципа взаимности винтов. Затем излагается метод анализа и критерий
мгновенной подвижности для ПМ, отличный от известных ранее, оО
легчающий синтез структуры ПКЦ. В заключение предложено усломие
проверки правильности выбора приводных кинематических пар ПКЦ,
что позволяет производить синтез действующих ПМ.
2.1. Теория винтов
В данном разделе приведены некоторые результаты теории мим
тов [54, 112], необходимые для дальнейшего изложения.
2.1.1. Винты. (Нормализованный) винт (см. рис. 2.1) определи
ется как
S =
s х г + hs
, если h конечен,
если h —> оо,
(2.1)
где s — единичный вектор, направленный вдоль оси винта S, г
вектор, направленный из некоторой точки на оси винта к началу
координат OXYZ, h — так называемый параметр. Отметим, что
для представления винта, как видно из определения, необходимо дмп
векторных либо шесть скалярных компонентов.
Для краткости, So и Sqo используются для обозначения винта с ну¬
левым и бесконечным параметром соответственно. Для изображения
различных типов винтов на диаграммах будем использовать различные
наконечники стрелок, как показано на рис. 2.2.
2.1.2. Группы винтов. Группа винтов порядка п (0 < п < (>)
представляет собой совокупность всех винтов, линейно зависящих от //
данных линейно независимых винтов. Примеры групп винтов порядком
1, 2, 3 и 4 приведены на рис. 2.3-2.6 соответственно. Группу винтом
32
Гл. 2. Структурный анализ
Рис. 2.1. Винт
Sqo S0 S h
Рис. 2.2. Обозна¬
чения винтов
порядка п называют также n-членной группой. Любой набор из п неза¬
висимых винтов, входящих в n-членную группу, образует базис этой
группы. Обычно базис n-членной группы может быть выбран различ¬
ными способами. На рис. 2.7 показаны два базиса 1-Sqo-1-So-членной
группы: а — Sooi и S0i и б — Sooi и S02-
Существует множество типов групп винтов (см. например [54]).
Далее приведем лишь те группы, которые применяются при анализе
и синтезе ПКЦ. Эти группы винтов показаны на рис. 2.3-2.6. Для по¬
нимания нижеследующих разделов и глав опишем их подробнее.
• 1-членные группы
- l-Soo-членная группа состоит из всех Sqo, имеющих одно
и тоже направление (рис. 2.3, а).
- 1-So-членная группа состоит из всех So, расположенных на
одной прямой (рис. 2.3, б).
а) l-Soo-членная группа б) 1-So-членная группа
Рис. 2.3. Некоторые 1-членные группы
2-членные группы
- 2-8оо-членная группа состоит из всех Sqo, направления ко¬
торых параллельны некоторой плоскости (рис. 2.4, а).
- 1-Sqo-1-So-членная группа состоит из всех So, оси которых
компланарны и параллельны, а также из всех Sqo, направле¬
ния которых перпендикулярны осям So (рис. 2.4, б).
- 2-во-членная группа состоит из всех So, оси которых пе¬
ресекаются в общей точке и компланарны (рис. 2.4, в).
Эта общая точка называется центром 2-во-членной группы.
2.1. Теория винтов
33
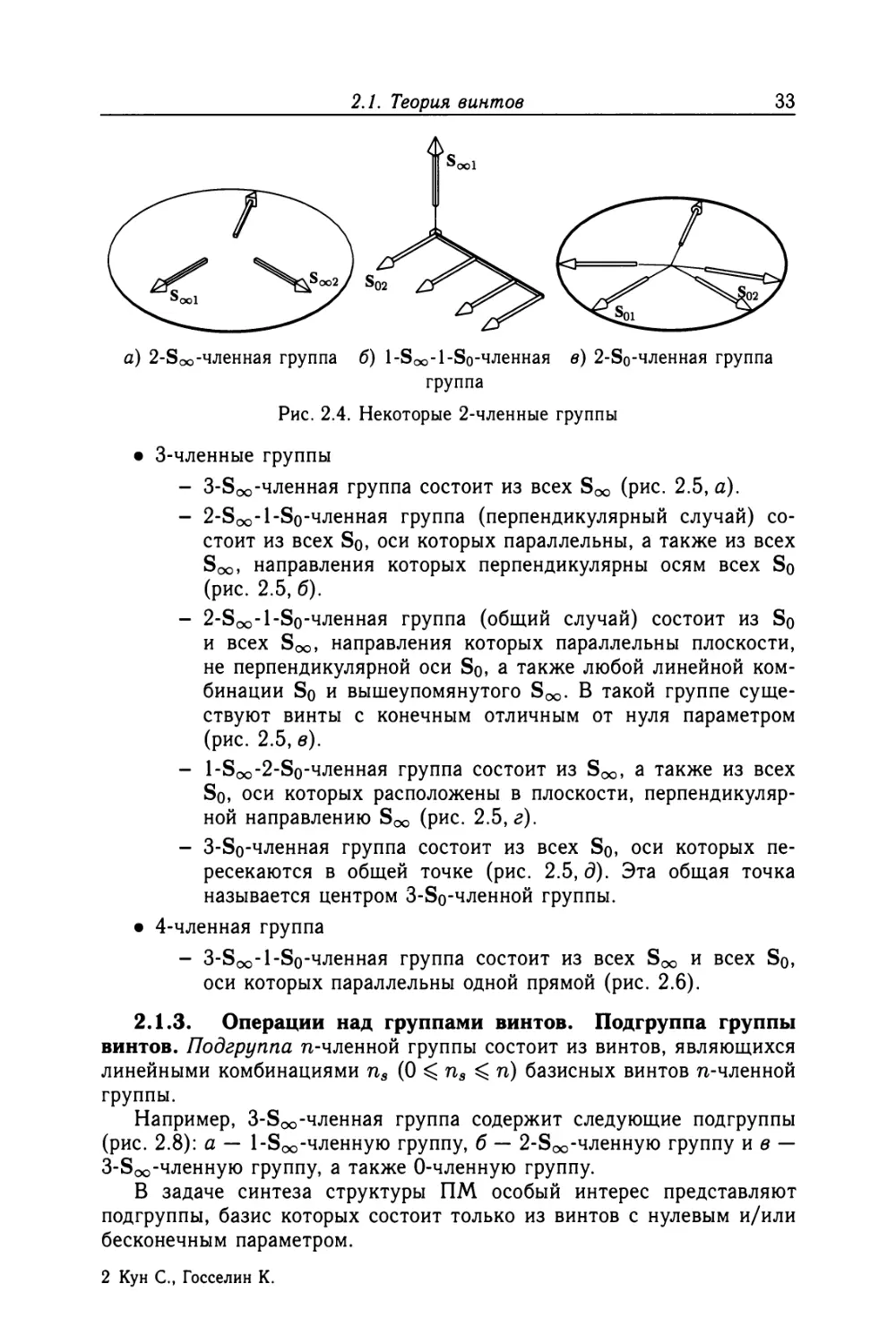
a) 2-Soo-членная группа б) 1-Soo-l-So-членная в) 2-8о-членная группа
группа
Рис. 2.4. Некоторые 2-членные группы
• 3-членные группы
- З-Эос-членная группа состоит из всех (рис. 2.5, а).
- 2-Sqo- 1 -So-членная группа (перпендикулярный случай) со¬
стоит из всех So, оси которых параллельны, а также из всех
Sqo, направления которых перпендикулярны осям всех So
(рис. 2.5, б).
- 2-Sqo- 1 -So-членная группа (общий случай) состоит из So
и всех Soc, направления которых параллельны плоскости,
не перпендикулярной оси So, а также любой линейной ком¬
бинации So и вышеупомянутого Sqo. В такой группе суще¬
ствуют винты с конечным отличным от нуля параметром
(рис. 2.5, в).
- 1-8оо-2-8о-членная группа состоит из Sqo, а также из всех
So, оси которых расположены в плоскости, перпендикуляр¬
ной направлению Sqo (рис. 2.5, г).
- З-Эо-членная группа состоит из всех So, оси которых пе¬
ресекаются в общей точке (рис. 2.5, д). Эта общая точка
называется центром З-Эо-членной группы.
• 4-членная группа
- 3-Sqo-I-So-членная группа состоит из всех Sqo и всех So,
оси которых параллельны одной прямой (рис. 2.6).
2.1.3. Операции над группами винтов. Подгруппа группы
винтов. Подгруппа n-членной группы состоит из винтов, являющихся
линейными комбинациями п3 (0 ^ п3 ^ п) базисных винтов п-членной
группы.
Например, З-Sqo-членная группа содержит следующие подгруппы
(рис. 2.8): а — l-Soo-членную группу, б — 2-Зоо-членную группу и в —
З-Эоо-членную группу, а также 0-членную группу.
В задаче синтеза структуры ПМ особый интерес представляют
подгруппы, базис которых состоит только из винтов с нулевым и/или
бесконечным параметром.
2 Кун С., Госселин К.
34
Гл. 2. Структурный анализ
Soo3
а) 3-8оо-членная б) 2-Soo-l-So-членная группа в) 2-8оо-1-8о-членная
группа (перпендикулярный случай) группа (общий случай)
г) 1-8оо-2-8о-членная группа д) 3-8о-членная группа
Рис. 2.5. Некоторые 2-членные группы
С> Soi
—О
Sqo2
Рис. 2.6. 4-членная группа:
3-8оо-1-8о-членная группа
Рис. 2.7. Два базиса 1-
Soo-l-So-членной группы
Линейная комбинация групп винтов. Линейная комбинация
двух групп винтов состоит из всех линейных комбинаций всех базис¬
ных винтов двух этих групп винтов. Порядок этой новой групп винтов
меньше или равен сумме порядков двух исходных групп винтов.
Например, линейной комбинацией l-Soo-членной группы и 2-Sqo-
членной группы может быть (а) 2-8оо-членная группа, если направ¬
ление Soo в l-Soo-членной группе параллельно плоскости, параллель-
2.1. Теория винтов
35
оо 1
а) l-Soo-членная
группа
&
Sqo3
Sooi
в) 3-8оо-членная группа
Рис. 2.8. Подгруппы 3-8оо-членной группы
ной направлениям всех S^ в 2-800-членной группе (рис. 2.9, а), или
(б) З-воо-членная группа, если направление Soo в l-Soo-членной груп¬
пе не параллельно плоскости, параллельной направлениям всех
в 2-8оо-членной группе (рис. 2.9,6).
ос 2
+
ool^'
ool
Г
оо 1
6S
оо2
*7
эоо1
а) Случай (а)
Sooi
б) Случай (б)
Рис. 2.9. Линейная комбинация l-Soo-членной группы и 2-8оо-членной группы
Взаимные винты и взаимные группы винтов.
Взаимные винты. Два винта Si и S2 называют взаимными, если
они удовлетворяют следующим условиям:
SioS2 = [nS1]rS2 = 0,
где
П
О 13
13 О
(2.2)
(2.3)
1з — единичная матрица размерности 3x3, 0 — нулевая матрица
размерности 3x3. Оператор о обозначает скалярное произведение двух
винтов.
2'
36
Гл. 2. Структурный анализ
Условие взаимности может быть представлено в виде (рис. 2.10)
{без ограничений, если и h\ и /12 равны оо,
cos А = 0, если h\ или /12 равен оо, (2.4)
(h\ + /12) cos А — т 12 sin А = 0, если и h\ и /12 конечны,
где г 12 — длина перпендикуляра, опущенного из винта Si на винт S2,
А — угол между осями Si и S2, измеренный по направлению перпенди¬
куляра от Si к S2 в соответствии с правилом правой руки, как показано
на рис. 2.10.
Из (2.4) можно заключить, что
1. Два Sqo всегда взаимны друг другу.
2. Soo взаимен So тогда и только тогда, когда их оси взаимно
перпендикулярны.
3. Два So взаимны тогда и только тогда, когда их оси компланарны.
Взаимная группа винтов. Для данной n-членной группы су¬
ществует единственная взаимная группа винтов порядка (6 - п),
состоящая из всех винтов, взаимных винтам исходной группы. Введем
обозначения Т и Т1- для группы винтов и ее взаимной группы соот¬
ветственно. Тогда имеем , ,
Т={Т±)±, (2.5)
где ()х обозначает взаимную группу для группы винтов в скобках.
Взаимная к данной группа винтов может быть получена с помощью
условий взаимности винтов, приведенных выше. Например, взаимная
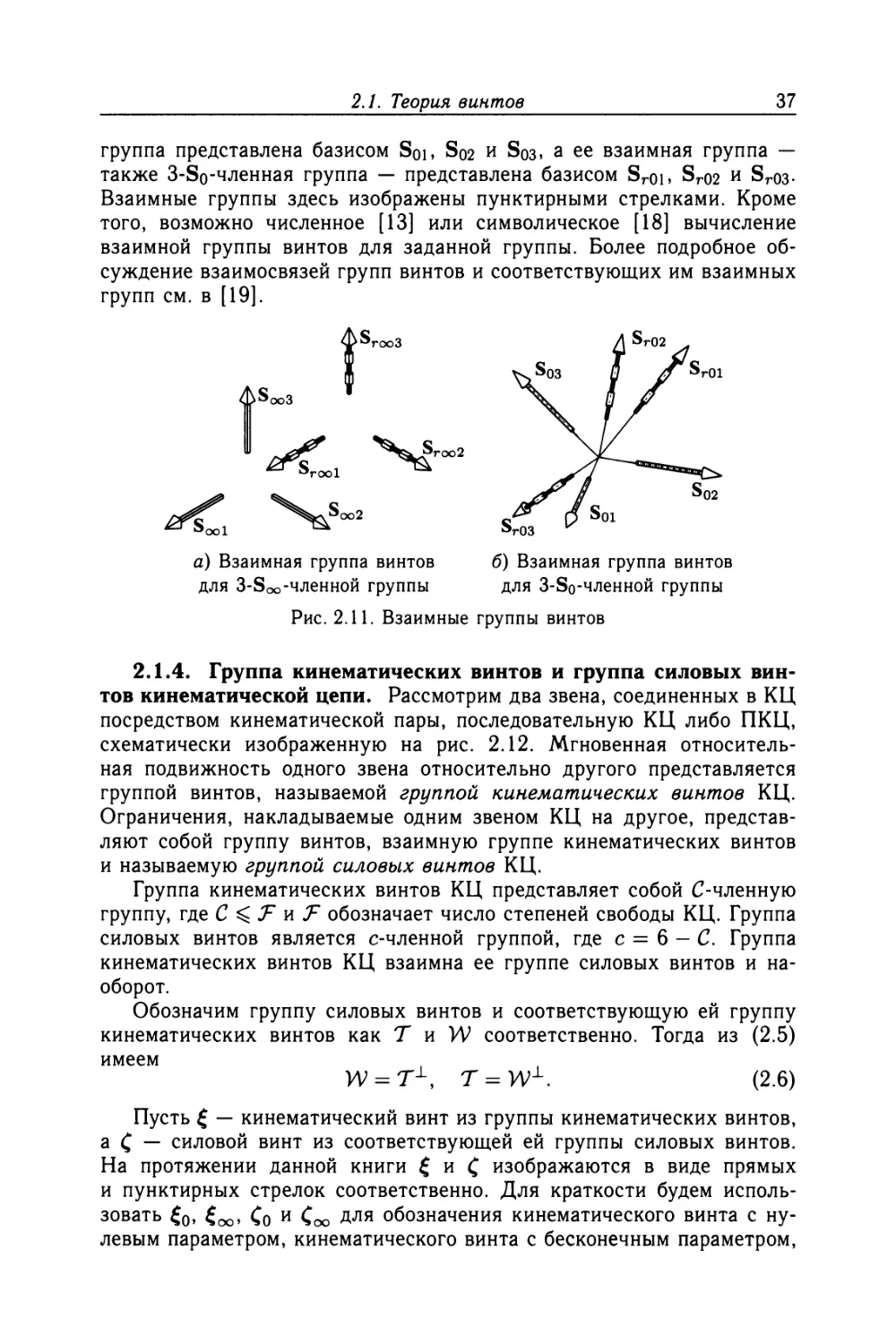
группа винтов для З-Sqo-членной группы также будет З-Sqo-членной
группой. Это показано на рис. 2.11, а, где З-воо-членная группа пред¬
ставлена базисом Sod, Soo2 и Soo3, а ее взаимная группа — также
З-воо-членная группа — представлена базисом Srooi, SroC2 и Sroo3. Ана¬
логично, взаимная группа винтов для З-во-членной группы также будет
З-во-членной группой. Это показано на рис. 2.11,6, где З-во-членная
Рис. 2.10. Взаимные винты
2.1. Теория винтов
37
группа представлена базисом Soi, S02 и S03, а ее взаимная группа —
также З-Эо-членная группа — представлена базисом Sroi, Sro2 и Sro3-
Взаимные группы здесь изображены пунктирными стрелками. Кроме
того, возможно численное [13] или символическое [18] вычисление
взаимной группы винтов для заданной группы. Более подробное об¬
суждение взаимосвязей групп винтов и соответствующих им взаимных
групп см. в [19].
2.1.4. Группа кинематических винтов и группа силовых вин¬
тов кинематической цепи. Рассмотрим два звена, соединенных в КЦ
посредством кинематической пары, последовательную КЦ либо ПКЦ,
схематически изображенную на рис. 2.12. Мгновенная относитель¬
ная подвижность одного звена относительно другого представляется
группой винтов, называемой группой кинематических винтов КЦ.
Ограничения, накладываемые одним звеном КЦ на другое, представ¬
ляют собой группу винтов, взаимную группе кинематических винтов
и называемую группой силовых винтов КЦ.
Группа кинематических винтов КЦ представляет собой С-членную
группу, где С ^ Т и Т обозначает число степеней свободы КЦ. Группа
силовых винтов является с-членной группой, где с = 6 — С. Группа
кинематических винтов КЦ взаимна ее группе силовых винтов и на¬
оборот.
Обозначим группу силовых винтов и соответствующую ей группу
кинематических винтов как Т и W соответственно. Тогда из (2.5)
имеем
W = TL, Т — W . (2.6)
Пусть £ — кинематический винт из группы кинематических винтов,
а С — силовой винт из соответствующей ей группы силовых винтов.
На протяжении данной книги £ и £ изображаются в виде прямых
и пунктирных стрелок соответственно. Для краткости будем исполь¬
зовать £0> £оо> Со и Соо Для обозначения кинематического винта с ну¬
левым параметром, кинематического винта с бесконечным параметром,
а) Взаимная группа винтов б) Взаимная группа винтов
для 3-8оо-членной группы для Э-Эо-членной группы
Рис. 2.11. Взаимные группы винтов
38
Гл. 2. Структурный анализ
Рис. 2.12. Два звена, соединенных посредством кинематической пары, после¬
довательной КЦ либо ПКЦ
силового винта с нулевым параметром и силового винта с бесконечным
параметром соответственно. На основании условия взаимности винтов
можно получить следующие геометрические соотношения между груп¬
пами кинематических и силовых винтов:
1. Ось £0 компланарна оси любого Со-
2. Направление ^ перпендикулярно оси любого Со-
S. Ось £0 перпендикулярна направлению любого Сое-
Взаимосвязь между группой кинематических винтов и соответству¬
ющей ей группой силовых винтов может быть выражена в следующем
виде: виртуальная сила, развиваемая любым С в направлении любого £,
равна нулю.
С помощью соотношения между группой кинематических винтов
и соответствующей ей группой силовых винтов можно определить
группу силовых винтов по известной группе кинематических винтов,
создаваемой ПКЦ.
Кинематические пары. Наиболее широкое распространение по¬
лучили вращательные, поступательные, цилиндрические, универсаль¬
ные (карданные) и сферические кинематические пары. Легко показать,
что все эти кинематические пары могут быть легко представлены
в виде кинематических цепей, содержащих только вращательные и по¬
ступательные кинематические пары. Соответственно, ниже приводятся
2.1. Теория винтов
39
группы кинематических и силовых винтов, связанные с вращательны¬
ми и поступательными кинематическими парами (рис. 2.13)
а) Вращательная кинематическая б) Поступательная кинематическая
Рис. 2.13. Группа кинематических винтов и группа силовых винтов для враща¬
тельной и поступательной кинематических пар
• Вращательная кинематическая пара
Группа кинематических винтов вращательной пары представляет
собой 1-членную группу. Кинематический винт в этой 1-членной
группе — £0> направленный вдоль оси пары. Группа силовых вин¬
тов представляет собой 5-членную группу, состоящую из всех £0,
оси которых пересекают ось пары, и Соо» оси которых перпенди¬
кулярны оси пары, и всех линейных комбинаций этих силовых
винтов.
• Поступательная кинематическая пара
Группа кинематических винтов поступательной пары представ¬
ляет собой 1-членную группу. Кинематический винт в этой
1-членной группе — направленный вдоль оси пары. Группа
силовых винтов представляет собой 5-членную группу, состо¬
ящую из всех Со» оси которых перпендикулярны направлению
движения пары, всех £оо и всех линейных комбинаций этих
силовых винтов.
Последовательные кинематические цепи. Для простоты и без
потери общности предположим, что последовательная КЦ состоит
из одноподвижных кинематических пар, т. к. Z-подвижную кинематиче¬
скую пару можно представить в виде последовательной КЦ, состоящей
из I одноподвижных пар. Последовательная КЦ схематически изобра¬
жена на рис. 2.14.
пара
пара
40
Гл. 2. Структурный анализ
Подвижная
Рис. 2.14. Последовательная кинематическая цепь
Выходной кинематический винт подвижной платформы (или рабо¬
чего органа) последовательной КЦ определяется как
j=о
где и 6j — соответственно кинематический винт и скорость j-той
кинематической пары. Переменные / и р обозначают соответственно
число степеней свободы последовательной КЦ и амплитуду выходного
кинематического винта.
Из (2.7) можно заключить, что группа кинематических винтов Т
последовательной КЦ является линейной комбинацией групп кине¬
матических винтов Tj всех кинематических пар в последователь¬
ной КЦ, т. е.
T=J2Tj> (2-8)
j=i
где индекс j обозначает j-ую кинематическую пару. Из (2.8) и (2.6)
получим
W= f| Щ. (2.9)
3 = 1
Выражение (2.9) показывает, что группа силовых винтов W последо¬
вательной кинематической цепи является пересечением групп силовых
винтов Wj всех ее кинематических пар.
2.1. Теория винтов
41
Рассмотрим КЦ PR, изображенную на рис. 2.15. Группа кинемати¬
ческих винтов последовательной КЦ PR представляет собой линейную
комбинацию групп кинематических винтов вращательных и поступа¬
тельных пар и является 2-членной группой. Базис этой группы состоит
из векторов £0 вдоль оси вращательной пары и вдоль направления
движения поступательной пары. Группа силовых винтов последова¬
тельной КЦ PR представляет собой пересечение групп силовых винтов
вращательной и поступательной пар. Это 4-членная группа, включаю¬
щая в себя все Соо» оси которых перпендикулярны оси вращательной
пары, все Со» оси которых перпендикулярны оси поступательной пары
и пересекают ось вращательной пары, и линейные комбинации этих
силовых винтов.
Рис. 2.15. Группа кинематических винтов и группа силовых винтов последова¬
тельной КЦ PR
Существует несколько классов последовательных КЦ со следующей
специфической кинематической характеристикой: при любом положе¬
нии таких КЦ их группа силовых винтов всегда включает указан¬
ное число силовых винтов с нулевым либо бесконечным параметром.
Такие кинематические цепи с заданной группой силовых винтов будем
называть композиционными единицами и использовать в дальнейшем
для синтеза одноконтурных КЦ (глава 3) и параллельных КЦ (гла¬
вы 4, 5).
Основные типы композиционных единиц изображены на рис. 2.16
и описаны ниже:
• Класс 1 (Параллельноосевая композиционная единица). После¬
довательная КЦ, состоящая как минимум из одной вращатель¬
ной пары и как минимум из одной поступательной пары, в ко¬
торой оси всех вращательных пар параллельны и направления
движения не всех поступательных пар перпендикулярны осям
вращательных пар. Композиционная единица данного класса ха¬
рактеризуется тем, что оси всех вращательных пар в ней всегда
параллельны. Группа силовых винтов данной композиционной
единицы всегда включает 2-Соо-членную группу. 2-Соо-членная
Звено а
42
Гл. 2. Структурный анализ
группа состоит из всех (^00, направления которых перпендикуляр¬
ны осям всех вращательных пар (рис. 2.16, а). Параллельноосе¬
вая композиционная единица обозначается ()д.
• Класс 2 (Пространственная поступательная композиционная еди¬
ница). Последовательная КЦ, состоящая из трех или более по¬
ступательных пар, направления которых не параллельны некото¬
рой плоскости. Группа силовых винтов композиционной единицы
данного класса всегда представляет собой 3-С^-членную группу
(рис. 2.16,6). Пространственная поступательная композиционная
единица обозначается как ()т-
• Класс 3 (Плоская композиционная единица). Последовательная
КЦ, состоящая из по меньшей мере двух вращательных и/или
поступательных кинематических пар, содержащая как минимум
одну вращательную пару и в которой все звенья перемещаются
в параллельных плоскостях. В композиционной единице данного
класса оси всех вращательных пар параллельны, а направле¬
ния движения всех поступательных пар перпендикулярны осям
всех вращательных пар. Группа силовых винтов такой компо¬
зиционной единицы всегда содержит 2-£оо-1-£0-членную группу.
2<оо-Ксгчленная группа состоит из всех Со» оси которых па¬
раллельны осям всех вращательных пар, а также из всех Соо>
направления которых перпендикулярны осям всех вращательных
пар (рис. 2.16, в). Плоская композиционная единица обозначается
как ()я.
• Класс 4 (Плоская поступательная композиционная единица). По¬
следовательная КЦ, состоящая из двух или более поступатель¬
ных пар, направления движения которых параллельны некоторой
плоскости. Композиционная единица данного класса характе¬
ризуется тем, что направления движения всех поступательных
пар в ней всегда параллельны некоторой плоскости. Группа си¬
ловых винтов такой композиционной единицы всегда содержит
3~Соо~1~Со~членнУю группу. 3-Соо~1~Со~членная группа состоит
из всех Соо» а также из £0, оси которых перпендикулярны
направлению движения всех поступательных пар (рис. 2.16, г).
Плоская поступательная композиционная единица является осо¬
бой разновидностью плоской композиционной единицы и поэтому
обозначается как ()^.
• Класс 5 (Сферическая композиционная единица). Последователь¬
ная КЦ, состоящая из двух или более кинематических враща¬
тельных пар, оси которых пересекаются. Композиционная едини¬
ца данного класса характеризуется тем, что оси всех вращатель¬
ных пар в ней всегда пересекаются. Группа силовых винтов такой
композиционной единицы всегда является 3-£0-членной группой
с центром, совпадающим с точкой пересечения осей вращатель¬
ных пар (рис. 2.16, д). Сферическая композиционная единица
обозначается как ()s.
2.1. Теория винтов
43
• Класс 6 (Соосная композиционная единица). Последовательная
КЦ, состоящая из одной или более соосных вращательных пар.
Композиционная единица данного класса характеризуется тем,
что оси всех вращательных пар в ней всегда совпадают. Группа
силовых винтов такой композиционной единицы всегда являет¬
ся 2-Соо-З-Со-членной группой (рис. 2.16, в), которая включает
все £0, оси которых пересекают оси вращательных пар, все £оо>
оси которых перпендикулярны осям вращательных пар, и все
линейные комбинации этих силовых винтов. Соосная композици¬
онная единица обозначается как ()^.
• Класс 7 (Сонаправленная композиционная единица). Последо¬
вательная КЦ, состоящая из одной или более поступательных
пар, направленных параллельно. Композиционная единица дан¬
ного класса характеризуется тем, что направления движения
всех поступательных пар в ней всегда параллельны. Группа си¬
ловых винтов такой композиционной единицы всегда является
З-Соо-2-Со-членной группой (рис. 2.16, ж), состоящей из всех Со»
оси которых перпендикулярны направлению движения поступа¬
тельных пар, всех и всех линейных комбинаций этих силовых
винтов. Сонаправленная композиционная единица обозначается
как ()L.
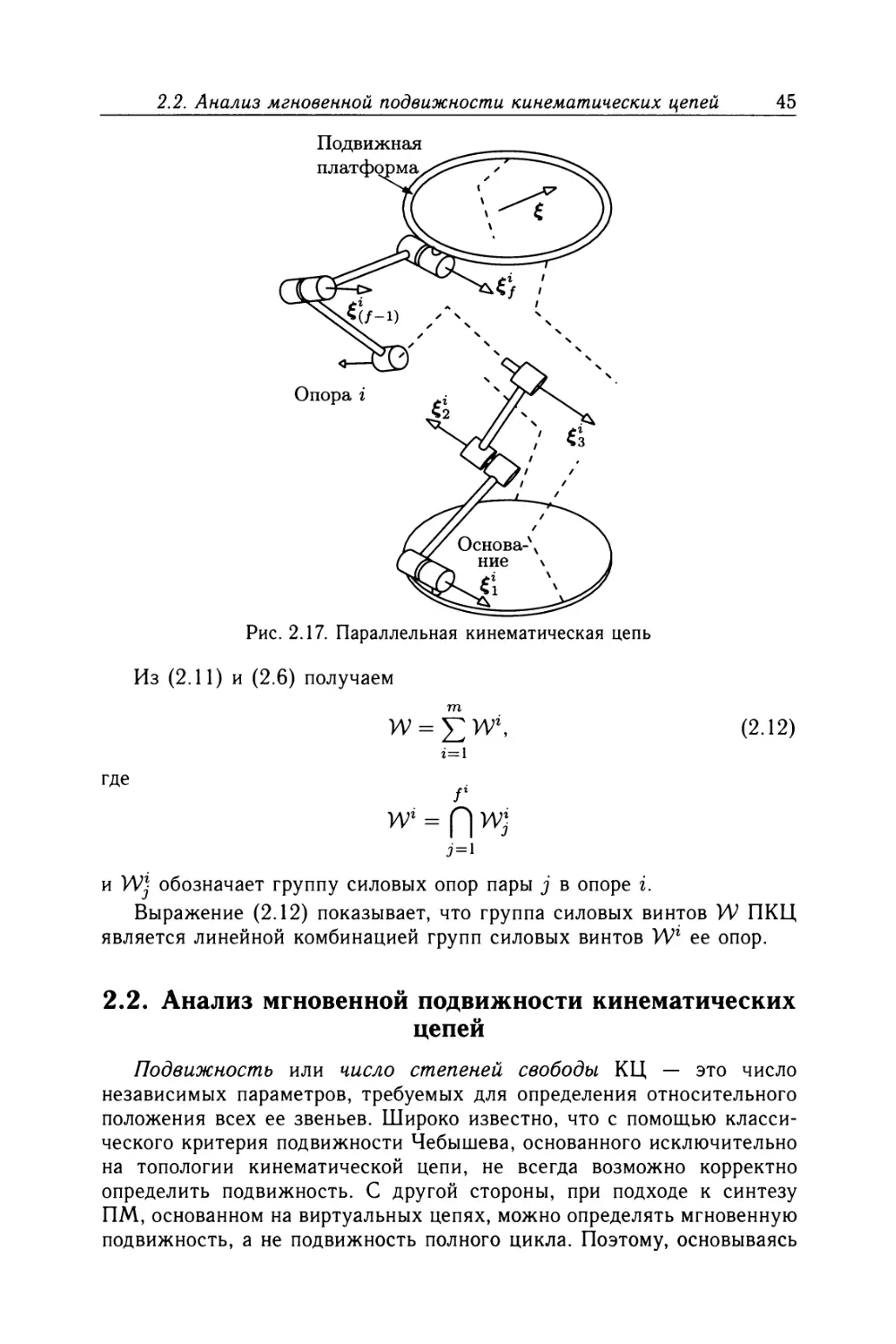
Параллельные кинематические цепи [85]. ПКЦ схематически
изображена на рис. 2.17. Она состоит из т последовательных КЦ,
соединенных с общим основанием и общей подвижной платформой.
Выходной кинематический винт подвижной платформы может быть
записан как
г = 1,2,..., т, (2.10)
з=о
где верхний г и нижний j индексы обозначают j-тую кинематическую
пару г-той опоры, а т и /г обозначают соответственно количество опор
и ПКЦ и число степеней свободы г-той опоры.
Из (2.10) можно заключить, что группа кинематических винтов Т
ПКЦ является пересечением групп кинематических винтов % всех ее
опор, т. е.
771
Т=р)Т\ (2.11)
i— 1
где
^ = Е V
3 = 1
и Tj' обозначает группу кинематических винтов пары j в опоре г.
44
Гл. 2. Структурный анализ
Звено b
а) Параллельноосевая единица
(PRRR)a
Звено b 1
б) Пространственная поступательная
единица (РРР)т
в) Плоская единица (RRR)# г) Плоская поступательная единица (РР)я
д) Сферическая единица (RRR)s
ж) Сонаправленная единица (PP)l
Рис. 2.16. Композиционные единицы
2.2. Анализ мгновенной подвижности кинематических цепей
45
Из (2.11) и (2.6) получаем
771
W = £W\ (2.12)
i= 1
где Г
w = Р) щ
J=1
и Wj обозначает группу силовых опор пары j в опоре г.
Выражение (2.12) показывает, что группа силовых винтов W ПКЦ
является линейной комбинацией групп силовых винтов W2 ее опор.
2.2. Анализ мгновенной подвижности кинематических
цепей
Подвижность или число степеней свободы КЦ — это число
независимых параметров, требуемых для определения относительного
положения всех ее звеньев. Широко известно, что с помощью класси¬
ческого критерия подвижности Чебышева, основанного исключительно
на топологии кинематической цепи, не всегда возможно корректно
определить подвижность. С другой стороны, при подходе к синтезу
ПМ, основанном на виртуальных цепях, можно определять мгновенную
подвижность, а не подвижность полного цикла. Поэтому, основываясь
46
Гл. 2. Структурный анализ
на проведенном выше геометрическом анализе, предлагается альтерна¬
тивный критерий мгновенной подвижности. Как показано в [71] или
в приложении Б, применение анализа подвижности полного цикла ПМ
возможно лишь при полном изменении предлагаемого здесь процесса
синтеза ПМ. Читателей, интересующихся анализом подвижности пол¬
ного цикла ПМ, отсылаем к [71] или приложению Б.
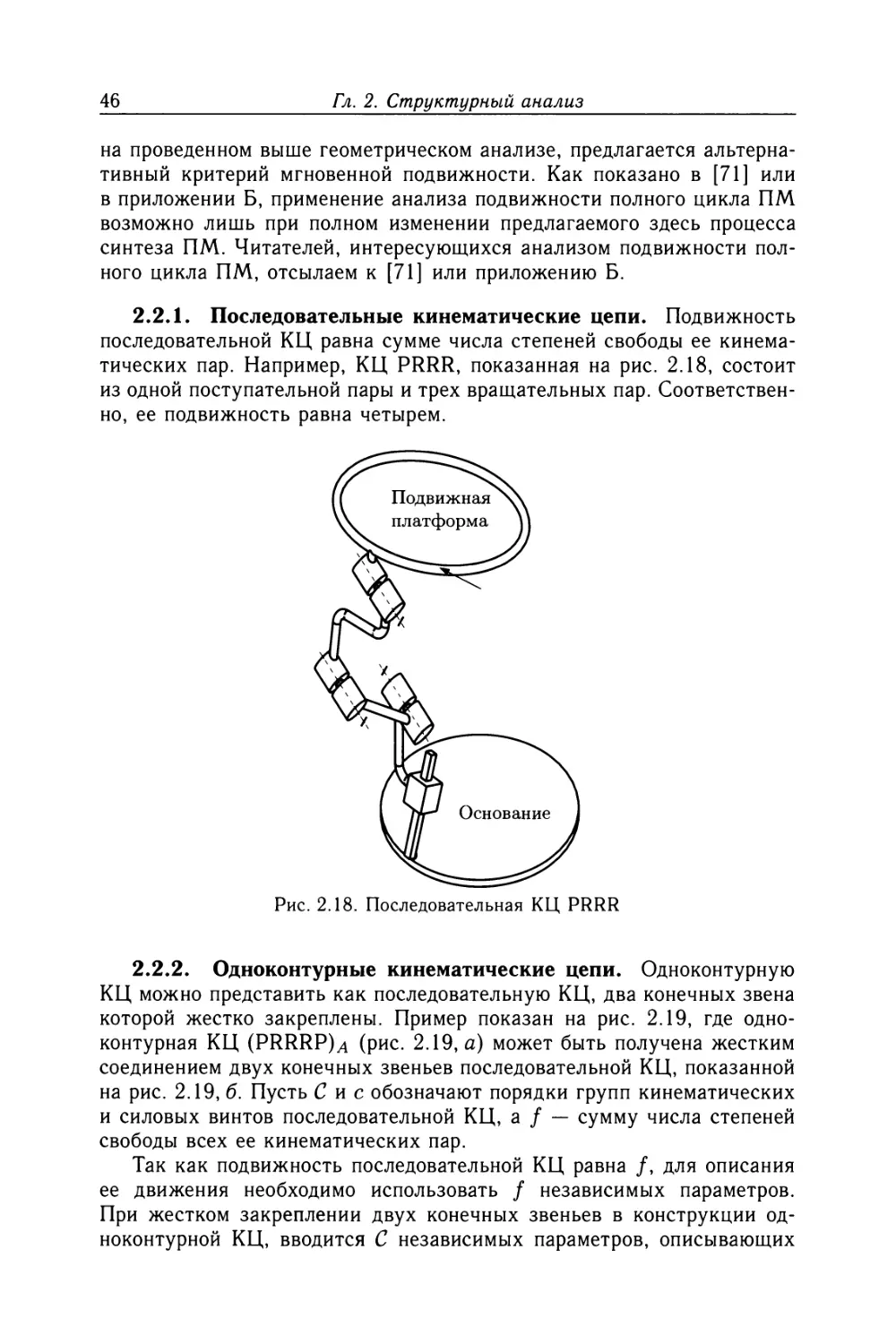
2.2.1. Последовательные кинематические цепи. Подвижность
последовательной КЦ равна сумме числа степеней свободы ее кинема¬
тических пар. Например, КЦ PRRR, показанная на рис. 2.18, состоит
из одной поступательной пары и трех вращательных пар. Соответствен¬
но, ее подвижность равна четырем.
2.2.2. Одноконтурные кинематические цепи. Одноконтурную
КЦ можно представить как последовательную КЦ, два конечных звена
которой жестко закреплены. Пример показан на рис. 2.19, где одно¬
контурная КЦ (PRRRP)^ (рис. 2.19, а) может быть получена жестким
соединением двух конечных звеньев последовательной КЦ, показанной
на рис. 2.19, б. Пусть С и с обозначают порядки групп кинематических
и силовых винтов последовательной КЦ, а / — сумму числа степеней
свободы всех ее кинематических пар.
Так как подвижность последовательной КЦ равна /, для описания
ее движения необходимо использовать / независимых параметров.
При жестком закреплении двух конечных звеньев в конструкции од¬
ноконтурной КЦ, вводится С независимых параметров, описывающих
2.2. Анализ мгновенной подвижности кинематических цепей
47
Рис. 2.19. а) Одноконтурная КЦ (PRRRP)a и б) одна из соответствующих ей
последовательных КЦ
относительные перемещения между двумя конечными звеньями. Таким
образом, подвижность Т одноконтурной КЦ равна
F=f -С. (2.13)
Так как
с = 6-С, (2.14)
выражение (2.13) может быть переписано в следующем виде:
•F = /- C = /-(6-c) = /- 6 + c. (2.15)
Например, одноконтурная КЦ (PRRRP)^, изображенная на
рис. 2.19, а, сформирована жестким соединением двух конечных
звеньев параллельноосевой КЦ (рис. 2.16, а). Группа силовых винтов
параллельноосевой последовательной КЦ является 2-С^-членной груп¬
пой, состоящей из всех направления которых перпендикулярны
осям вращательных кинематических пар этой цепи. Имеем с = 2.
С помощью (2.15) вычисляем подвижность одноконтурной КЦ как
Т = f - 6 + с = 5 —6 + 2= 1.
Следует отметить, что в КЦ могут иметься пассивные пары. Пас¬
сивная пара — пара в КЦ, которая не способна совершать перемеще¬
ния из-за ограничений, наложенных на нее другими парами этой КЦ.
При удалении (блокировке) пассивной кинематической пары из КЦ
относительные перемещения в пределах КЦ не изменяются.
Пассивная кинематическая пара в одноконтурной КЦ может быть
выявлена следующим образом 0. Кинематическая пара в КЦ пассивна
тогда и только тогда, когда
С'=С-1 (2.16)
!) Это условие непосредственно вытекает из (2.13) и (2.14). Оставляем
доказательство читателю.
48
Гл. 2. Структурный анализ
или
с' = с + 1,
(2.17)
где С и с обозначают соответственно порядки групп кинематических
и силовых винтов последовательной КЦ, соответствующей одноконтур¬
ной КЦ, а С' и с' обозначают соответственно порядки групп кинема¬
тических и силовых винтов последовательной КЦ, соответствующей
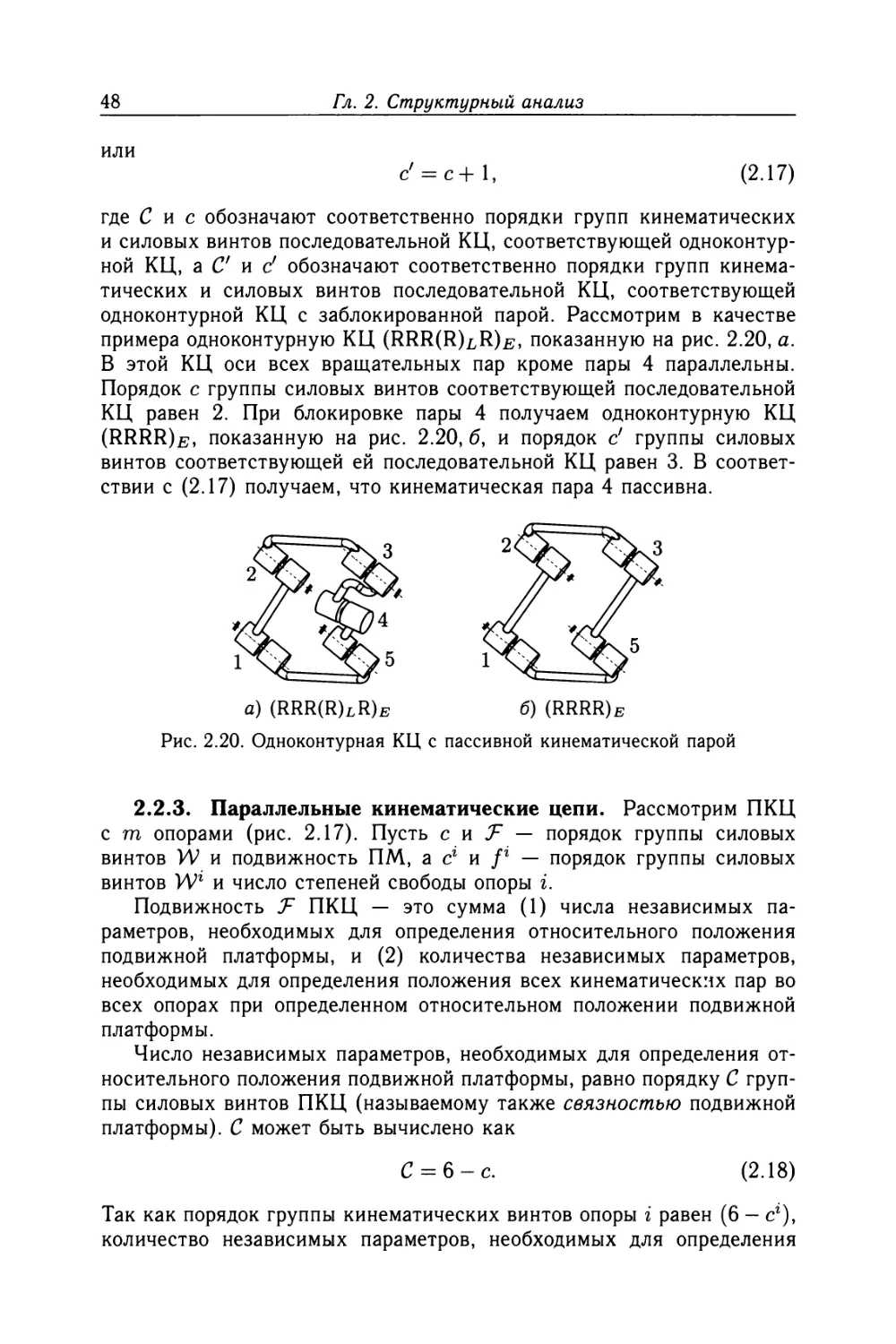
одноконтурной КЦ с заблокированной парой. Рассмотрим в качестве
примера одноконтурную КЦ (RRR(R)lR)^;, показанную на рис. 2.20, а.
В этой КЦ оси всех вращательных пар кроме пары 4 параллельны.
Порядок с группы силовых винтов соответствующей последовательной
КЦ равен 2. При блокировке пары 4 получаем одноконтурную КЦ
(RRRR)#, показанную на рис. 2.20,6, и порядок с' группы силовых
винтов соответствующей ей последовательной КЦ равен 3. В соответ¬
ствии с (2.17) получаем, что кинематическая пара 4 пассивна.
Рис. 2.20. Одноконтурная КЦ с пассивной кинематической парой
2.2.3. Параллельные кинематические цепи. Рассмотрим ПКЦ
с т опорами (рис. 2.17). Пусть с и Т — порядок группы силовых
винтов W и подвижность ПМ, а сг и р — порядок группы силовых
винтов Wz и число степеней свободы опоры г.
Подвижность Т ПКЦ — это сумма (1) числа независимых па¬
раметров, необходимых для определения относительного положения
подвижной платформы, и (2) количества независимых параметров,
необходимых для определения положения всех кинематических пар во
всех опорах при определенном относительном положении подвижной
платформы.
Число независимых параметров, необходимых для определения от¬
носительного положения подвижной платформы, равно порядку С груп¬
пы силовых винтов ПКЦ (называемому также связностью подвижной
платформы). С может быть вычислено как
a) (RRR(R)LR)s
б) (RRRR)s
С = 6-с.
(2.18)
Так как порядок группы кинематических винтов опоры г равен (6 — сг),
количество независимых параметров, необходимых для определения
2.2. Анализ мгновенной подвижности кинематических цепей
49
положения всех кинематических пар в опоре i при определенном отно¬
сительном положении подвижной платформы можно определить как
д* = Р - (6 - С4) = р - 6 + с4, (2.19)
где R1 называют числом избыточных степеней свободы опоры г.
Количество независимых параметров, необходимых для определе¬
ния положения всех звеньев во всех опорах при определенном относи¬
тельном положении подвижной платформы, определяется как
771
R = '£Ri, (2.20)
i= 1
где R — число избыточных степеней свободы ПМ. Тогда подвиж¬
ность (или число степеней свободы) Т ПКЦ определяется как
771
f = C + R = 6-c + '£Ri. (2.21)
i= 1
Подвижность, получаемая из (2.21), обычно мгновенна. Если с, сг
и R1 не изменяются в различных положениях платформы, получаем
подвижность полного цикла.
В дополнение к подвижности другой важной характеристикой ПКЦ
является величина ш
Д = - с, (2.22)
г=1
где Д — количество сверхсвязей (называемых также пассивными свя¬
зями или избыточными связями), если Д > 0.
Продемонстрируем приведенную выше процедуру анализа подвиж¬
ности ПКЦ на двух примерах.
Пример 2.1. Рассмотрим ПКЦ 3-(PRRRR)a, показанную на рис. 2.21.
В этой ПКЦ оси всех вращательных пар в пределах одной опоры парал¬
лельны. Направления движения поступательных пар в пределах одной
опоры не перпендикулярны осям вращательных пар этой опоры. Груп¬
па силовых винтов каждой опоры представляет собой 2-^оо-членную
группу. Группа силовых винтов ПКЦ — З-^оо-членная группа. Имеем
сг = 2, с = 3, R1 = 5 — (6 — 2) = 1. Тогда
С = 6 — с = 3
и 3
= С + £ Д* = 6.
i—\
Отметим, что оси последовательности вращательных пар остаются па¬
раллельными при любых произвольных перемещениях. Следовательно,
с, сг и R1 не изменяются при небольших перемещениях платформы
относительно главного положения и, соответственно, мы получили
50
Гл. 2. Структурный анализ
Подвижная платформа
Рис. 2.21. ПКЦ 3-(PRRRR)a
подвижность полного цикла. Количество избыточных связей такой
ПКЦ равно
з
Д = £с* — с = 6 — 3 = 3.
г= 1
Пример 2.2. Рассмотрим ПКЦ 3-(PRRR)a, показанную на рис. 2.22.
В этой ПКЦ оси всех вращательных пар в пределах одной опоры
параллельны. Направления движения поступательных пар в пределах
одной опоры не перпендикулярны осям вращательных пар этой опоры.
Оси вращательных кинематических пар, прилегающих к подвижной
платформе, не все параллельны. Группа силовых винтов каждой опо¬
ры представляет собой 2-С^-членную группу. Группа силовых винтов
ПКЦ — З-Соо-членная группа. Имеем сг = 2, с = 3, К1 = 4 - (6 - 2) = 0.
Тогда
С = 6 - с = 3
и
з
Т = С + £ R1 = 3.
i— 1
Как и в предыдущем примере, отметим, что оси последовательности
вращательных пар остаются параллельными при любых произвольных
перемещениях. Следовательно, с, сг и К1 не изменяются при небольших
перемещениях платформы относительно главного положения и, со¬
ответственно, мы получили подвижность полного цикла. Количество
2.2. Анализ мгновенной подвижности кинематических цепей
51
Подвижная платформа
избыточных связей такой ПКЦ равно
з
Д = ]Гс<-с = 6- 3 = 3.
г= 1
Для облегчения синтеза ПМ можно подставить (2.22) в (2.21)
и получить
тп
£с< = 6-С + Д = 6-.Г + Д + Я. (2.23)
г= 1
Выражения (2.12), (2.20) и (2.19) могут быть переписаны в виде
т
W = W, (2.24)
2=1
т
£ Я* = Д, (2.25)
i— 1
/* = 6 + й*-с\ (2.26)
Выражения (2.23)-(2.26) будем использовать для структурного син¬
теза ПМ. В данной книге рассматриваются ПМ без избыточных связей
(см., например, рис. 2.22), для которых
й = = 0, г = 1,2,...,ш. (2.27)
В этом случае (2.23) и (2.26) могут быть сокращены до
т
£с* = 6-С + Д = 6-;Г + Д (2.28)
2=1
52
Гл. 2. Структурный анализ
и
f =6-с\ (2.29)
Таким образом, для структурного синтеза ПМ в данной книге будут
использоваться три уравнения: (2.28), (2.24) и (2.29). Общая методо¬
логия, основанная на этих уравнения, разрабатывается и применяется
в главах 5—13.
2.3. Условие правильности выбора приводных
кинематических пар в параллельных механизмах
Для механизма с Т степенями свободы необходимо выбрать Т при¬
водных кинематических пар. Существует большое количество способов
выбора приводных кинематических пар механизма. Выбор приводных
пар должен производиться таким образом, чтобы гарантировать нуле¬
вую степень свободы механизму в неособом положении при блокиро¬
вании Т приводных кинематических пар.
Проверка правильности выбора приводных кинематических пар для
обычных ПМ может быть выполнена на основании критерия подвиж¬
ности, рассмотренного в разделе 2.2. Как было указано выше, в данной
работе исследуются ПМ без избыточных связей. Соответственно, все
ниже изложенное относится именно к таким ПМ.
2.3.1. Приводные силовые винты. Пусть = с*)-
множество всех силовых винтов, не взаимных кинематическим винтам
пары j и взаимных всем остальным кинематическим винтам в пределах
опоры г. Физически, — множество силовых винтов, влияющих
на подвижную платформу в том случае, если кинематическая пара j
в опоре г будет приводной. Это множество силовых винтов уже вводи¬
лось некоторыми авторами (см. например [2, 10]).
Пусть Cj ~ базис группы силовых винтов W1 опоры г, а — про¬
извольный силовой винт, принадлежащий Тогда любой силовой
винт из может быть выражен как
С%=аС*у + £ <*^0. (2.30)
k= 1
Для простоты назовем C$j приводным силовым винтом кинематиче¬
ской пары j опоры г.
Например, в каждой опоре (PRRR)a, представленной на
рис. 2.23, б, ПМ 3-(PRRR)a (рис. 2.23, а), первая поступательная пара
является приводной. Тогда приводной силовой винт поступательной
пары — любой Со» ось которого параллельна осям трех вращательных
пар в пределах этой опоры.
2.3. Выбор приводных кинематических пар
53
а) ПМ 3-(PRRR)^
б) Приводной силовой винт
опоры (PRRR)^
Рис. 2.23. Проверка правильности выбора приводных кинематических пар ПМ
3-(PRRR)^
2.3.2. Условие правильности выбора приводных кинематиче¬
ских пар. Для ПМ с Т степенями свободы без избыточных связей
заданный набор приводных кинематических пар верен тогда и только
тогда, когда Т' — 0, где Т' — подвижность ПМ при блокировании всех
приводных пар. Из (2.21) имеем
где с' — порядок группы силовых винтов ПМ с заблокированными
приводными кинематическими парами.
Фактически, группа силовых винтов ПМ с Т степенями свободы
без избыточных связей при блокировании Т приводных кинематиче¬
ских пар является линейной комбинацией группы силовых винтов W
ПКЦ и приводных силовых винтов C^j всех Т приводных пар. Тогда
условие правильности выбора приводных кинематических пар для ПМ
может быть сформулировано следующим образом:
Для ПМ с Т степенями свободы, в неособом положении которого
все кинематические винты в пределах каждой опоры линейно неза¬
висимы, набор из Т приводных кинематических пар верен тогда
и только тогда, когда в неособом положении приводные силовые
винты всех Т приводных пар вместе с набором базисных
винтов группы силовых винтов ПКЦ W образуют шести-членную
группу.
с' = 6 - Т’ = 6,
(2.31)
54
Гл. 2. Структурный анализ
Пример 2.3. Определим теперь, правильно ли определен набор при¬
водных кинематических пар для ПМ 3-(PRRR),4, приведенного на
рис. 2.23, а [37, 68, 69]. В этом ПМ предполагается, что оси враща¬
тельных пар на подвижной платформе не параллельны одной плоско¬
сти. Пусть [0 iT]T, [0 jT]T, [0 кт]т обозначают базис W, и пусть
[Cf^ ftwF представляют Здесь i, j и к — единичные векторы
вдоль осей X, Y и Z соответственно. Условие правильности выбора
приводных кинематических пар для ПМ может быть выражено в виде
Cfjj Cfjj Cfjj ООО
£s?)j * J k
— I 1 J k I | Cf^ Cf^ Cf^ | Ф 0» (2.32)
где 0 — нулевой вектор размерности три. Так как | i j k | = 1, то
(2.32) может быть приведено к виду
I &7>Э t3FJ>j I ^ (2-33)
Так как оси вращательных пар на подвижной платформе не парал¬
лельны одной плоскости, то (2.33) удовлетворяется. Соответственно,
набор приводных кинематических пар для ПМ 3-(PRRR),4, показанного
на рис. 2.23, а, верен.
2.4. Резюме
В данной главе рассмотрены основные концепции теории винтов,
а именно, рассмотрены группы винтов и операции над ними. Введена
полезная концепция взаимности. С ее помощью из группы кинемати¬
ческих винтов КЦ может быть получена ее группа силовых винтов
и наоборот. Далее, дана классификация КЦ, группа силовых винтов
которых всегда содержит заданную группу винтов с нулевым либо
бесконечным параметром. Эти классы КЦ названы композиционными
единицами в соответствии с их назначением в процессе синтеза струк¬
туры ПМ. Кроме того, в данной главе выполнен анализ мгновенной
подвижности КЦ. Установлены фундаментальные соотношения, кото¬
рые в дальнейшем будут использоваться при структурном синтезе ПМ.
И, наконец, дано условие правильности выбора приводных кинемати¬
ческих пар для ПМ.
Глава 3
СТРУКТУРНЫЙ СИНТЕЗ ОДНОКОНТУРНЫХ
КИНЕМАТИЧЕСКИХ ЦЕПЕЙ
Данная глава посвящена структурному синтезу многоподвижных
(с подвижностью полного цикла) одноконтурных КЦ с заданной
с-£-членной группой. Обращение к данной проблеме объясняется тем,
что она является одной из основ синтеза ПМ. Результаты, полученные
в главе 2 (особенно взаимные группы винтов и композиционные едини¬
цы с заданными ограничениями), позволяют легко конструировать мно¬
гоподвижные одноконтурные КЦ с заданной с-£-членной группой. Хотя
результаты данной главы не имеют непосредственного практического
значения, они будут использоваться при синтезе ПМ в последующих
главах. Фактически, как будет показано далее, предложенный здесь
подход к синтезу одноконтурных кинематических цепей является клю¬
чевым компонентом предлагаемой в книге методологии структурного
синтеза ПМ. Однако, данная глава посвящена исключительно струк¬
турному синтезу одноконтурных кинематических цепей.
3.1. Введение
Предыдущие исследования структурного синтеза одноконтурных
КЦ с избыточными связями были посвящены одноподвижным одно¬
контурным КЦ [115, 124]. Хотя в [115] и исследовались несколько
многоподвижных одноконтурных КЦ с избыточными связями, система¬
тического исследования многоподвижных одноконтурных КЦ с избы¬
точными связями до сих пор не проводилось. В данной главе обсуж¬
дается структурный синтез одноконтурных КЦ с заданной с-£-членной
группой.
3.2. Процедура структурного синтеза
На основании результатов, полученных в главе 2, можно разра¬
ботать систематическую процедуру синтеза. Структурный синтез од¬
ноконтурных КЦ с с-£-членной группой может быть выполнен в три
приведенных ниже шага:
Шаг 1. Определение числа кинематических пар.
Из критерия подвижности одноконтурной КЦ (2.15) получаем
/ = jr+(6-c),
(3.1)
56
Гл. 3. Структурный синтез одноконтурных КЦ
где / назовем числом одноподвижных кинематических пар, Т —
подвижность одноконтурной КЦ, с — порядок группы силовых
винтов последовательной КЦ, соответствующей данной однокон¬
турной КЦ.
Шаг 2. Определение геометрических ограничений на оси кинемати¬
ческих пар на основе соотношения кинематических и силовых
винтов.
На основе условия взаимности винтов (см. раздел 2.1.3) имеем
(al) Ось вращательной кинематической пары компланарна оси
любого Со из с-£-членной группы.
(а2) Направление движения поступательной кинематической па¬
ры перпендикулярно оси любого £0 из с-£-членной группы.
(аЗ) Ось вращательной кинематической пары перпендикулярна
оси любого Сое из с-£-членной группы.
Теперь геометрические ограничения на оси кинематических пар
для одноконтурных КЦ с с-£-членной группой в неособом поло¬
жении определяются без усложнений.
Шаг 3. Определение структуры одноконтурной КЦ с с-С,-членной
группой. На основе конкретных геометрических ограничений на
оси кинематических пар, полученных на шаге 2, из одной или
двух композиционных единиц со специфическими характеристи¬
ками, исключая соосную и сонаправленную композиционные еди¬
ницы, может быть сконструировано несколько структур однокон¬
турных КЦ с с-£-членной группой.
Кроме того, одноконтурная КЦ с с-£-членной группой может быть
получена из одноконтурной КЦ с (с + р)-£-членной группы путем
добавления р соосных и/или сонаправленных композиционных
единиц. Число степеней свободы Т* и количество кинематиче¬
ских пар /' одноконтурной КЦ с (с + р)-£-членной группой равны
соответственно
F = F-{fP-p), (3.2)
где /р — общее количество одноподвижных кинематических пар
в р соосных или сонаправленных композиционных единицах, и
/' = / - /Р. (3.3)
Пример 3.1. Рассмотрим структурный синтез одноконтурной КЦ
с 3-Соо-членн°й группой. Предложенная выше процедура может быть
применена следующим образом:
Шаг 1. Определение числа кинематических пар. Так как группа
кинематических винтов является 3-£-членной группой, имеем
с = 3. Следовательно, из (3.1) число кинематических пар / равно
(^ + 3).
Шаг 2. Определение геометрических ограничений на оси кинемати¬
ческих пар на основе соотношения кинематических и силовых
винтов.
3.2. Процедура структурного синтеза
57
В качестве базиса З-С^-членной группы можно выбрать три Соо>
не параллельных одной плоскости (рис. 2.5, а). Следовательно,
на основе соотношения кинематических и силовых винтов, по¬
лучаем геометрические ограничения на оси кинематических пар
одноконтурной КЦ с З-Соо-членной группой: число вращательных
пар равно нулю, так как не существует вращательных пар, оси
которых были бы перпендикулярны трем прямым, не параллель¬
ным одной плоскости.
Шаг 3. Определение структуры одноконтурной КЦ с Ъ-Соо-членной
группой. Подходящей структурой является одноконтурная КЦ,
составленная из пространственной композиционной единицы, со¬
стоящей из / = (J7 + 3) поступательных кинематических пар.
3_Соо"членная группа состоит из всех £ос- Например, если же¬
лаемая подвижность равна 3, имеем Т = 3 и, соответствен¬
но, / = 6. Результирующая одноконтурная КЦ с З-С^-членной
группой, имеющая 3 степени свободы, схематически изображена
на рис. 3.1.
Рис. 3.1. Одноконтурная КЦ с 3 степенями свободы (РРРРРР)т с 3-С^-
членной группой
Пример 3.2. Рассмотрим структурный синтез одноконтурной КЦ с 2-
(^-членной группой.
Шаг 1. Определение числа кинематических пар. Так как группа
кинематических винтов является 2-£-членной группой, имеем
с — 2. Следовательно, из (3.1) число кинематических пар / равно
(JT + 4).
Шаг 2. Определение геометрических ограничений на оси кинемати¬
ческих пар на основе соотношения кинематических и силовых
винтов.
58 Гл. 3. Структурный синтез одноконтурных КЦ
В 2-^-членной группе (рис. 2.5, а) все всегда параллельны
одной плоскости. Следовательно, на основе соотношения кинема¬
тических и силовых винтов получаем, что оси всех вращатель¬
ных пар должны быть параллельны прямой, перпендикулярной
направлениям из 2-С^-членной группы.
Шаг 3. Определение структуры одноконтурной КЦ с 2-^-членной
группой.
Так как оси всех вращательных пар должны быть параллельны,
следовательно, все одноконтурные КЦ с 2-^^-членной группой
конструируются из одной параллельноосевой композиционной
единицы. 2-С^-членная группа состоит из всех оси которых
перпендикулярны осям всех вращательных пар. Несколько одно¬
контурных КЦ с 2-С^-членной группой приведены на рис. 3.2.
Пример 3.3. Рассмотрим структурный синтез одноконтурной КЦ с 3-
Со-членной группой.
Шаг 1. Определение числа кинематических пар. Так как группа
кинематических винтов является 3-£-членной группой, имеем
с — 3. Следовательно, из (3.1) число кинематических пар / равно
[Т + 3).
Шаг 2. Определение геометрических ограничений на оси кинемати¬
ческих пар на основе соотношения кинематических и силовых
винтов.
В качестве базиса 3-£0"Членной группы (рис. 2.5, д) могут быть
выбраны любые три некомпланарные Со» пересекающиеся в общей
точке. Следовательно, на основе соотношения кинематических
и силовых винтов получаем следующие геометрические ограниче¬
ния на оси кинематических пар одноконтурной КЦ с 3-£0-членной
группой: (а) оси всех вращательных пар проходят через центр
3-Со"Членной группы и (б) количество поступательных пар равно
нулю, так как не существует ни одной поступательной пары,
направление движения которой было бы перпендикулярно осям
трех С0, не перпендикулярных одной плоскости.
Шаг 3. Определение структуры одноконтурной КЦ с 3-£0"Членной
группой.
Так как оси всех вращательных пар должны пересекаться в од¬
ной точке, то одноконтурная КЦ с 3-£0-членной группой кон¬
струируется из сферической композиционной единицы, состоящей
из / = {Т + 3) вращательных пар. 3-£0"Членная группа состоит
из всех С0, оси которых проходят через центр сферической ком¬
позиционной единицы. Такая одноконтурная КЦ с 3-£0-членной
группой с 3 степенями свободы показана на рис. 3.3.
3.2. Процедура структурного синтеза
59
a) (RRRRRRU
д) (PPRPRPPb
е) (PPRPPPPU
Рис. 3.2. Одноконтурные КЦ с 3 степенями свободы с 2-С^-членной группой
Пример 3.4. Рассмотрим структурный синтез одноконтурной КЦ с 2-
£0-членной группой.
Шаг 1. Определение числа кинематических пар. Так как в этом
случае с — 2, число кинематических пар в соответствии с (3.1)
равно Т + 4.
Шаг 2. Определение геометрических ограничений на оси кинемати¬
ческих пар на основе соотношения кинематических и силовых
винтов.
60
Гл. 3. Структурный синтез одноконтурных КЦ
Рис. 3.3. Одноконтурная КЦ с 3 степенями свободы (RRRRRR)s с 3-С0-членной
группой
Рис. 3.4. Одноконтурные КЦ с 3 степенями свободы с 2-£0-членной группой
В качестве базиса 2-£0-членной группы (рис. 2.4, в) могут
быть выбраны два пересекающихся Со» определяющих плоскость
и центр 2-£0-членной группы. На основе соотношения кинемати¬
ческих и силовых винтов получаем, что (а) оси всех вращатель¬
ных пар проходят через центр 2-£0-членной группы либо располо¬
жены в ее плоскости и (б) все поступательные пары направлены
перпендикулярно плоскости 2-£0-членной группы.
Шаг 3. Определение структуры одноконтурной КЦ с 2-£0-членной
группой.
Из полученных геометрических ограничений получаем, что од¬
ноконтурная КЦ с 2-£0-членной группой может быть получе¬
на путем (а) встраивания соосной композиционной единицы
в одноконтурную КЦ с 3-£0-членной группой или (б) встраи¬
вания сонаправленной композиционной единицы в одноконтур¬
ную КЦ с 3-£0-членной группой. 2-£0-членная группа состоит
из всех Со, оси которых проходят через центр сферической компо¬
зиционной единицы и перпендикулярны осям всех поступатель¬
ных пар, входящих в сонаправленную композиционную единицу
4
a) (RRR(R)lRRR)s
б) (RRR(P)lRRR)s
3.3. Структуры одноконтурных КЦ с с-^-членной группой
61
и пересекающих оси всех вращательных пар соосной композици¬
онной единицы. На рис. 3.4 схематично приведены два примера
одноконтурных КЦ с 2-£0-членной группой, имеющих 3 степени
свободы.
3.3. Структуры одноконтурных кинематических цепей
с с-£-членной группой
Примеры из предыдущего раздела иллюстрируют применение мето¬
дологии синтеза к проектированию структуры одноконтурных КЦ с за¬
данной группой силовых винтов. Эта процедура синтеза для классов
КЦ, приведенных на рис. 2.16, является систематической и достаточно
ясной. Такая процедура может систематически применяться к струк¬
турному синтезу одноконтурных КЦ с с-£-членной группой, позволяя
получить множество таких КЦ. Полученные в соответствии с группой
силовых винтов одноконтурные КЦ приведены в таблицах 3.1-3.4.
Таблица 3.1. Структуры одноконтурных КЦ с 2-£-членной группой
Группа силовых
винтов
Геометрические ограничения
на оси кинематических пар
Структура
з-Со-Ко-
членная группа
Количество вращательных пар
равно нулю, так как не суще¬
ствует вращательной пары, ось
которой была бы перпендикуляр¬
на трем прямым, не параллель¬
ным одной плоскости. Направ¬
ления движения поступательных
пар параллельны плоскости, пер¬
пендикулярной осям Со-
Плоская посту¬
пательная компо¬
зиционная еди¬
ница (рис. 3.5).
Рис. 3.5. Одноконтурная КЦ (РРРР)я с 3-С00-1-Со"членн°й группой
62
Гл. 3. Структурный синтез одноконтурных КЦ
Таблица 3.2. Структуры одноконтурных КЦ с З-С-членной группой
Группа силовых
винтов
Геометрические ограничения
на оси кинематических пар
Структура
3-Соо-членная
группа
Количество вращательных
пар равно нулю, так как
не существует вращательной
пары, ось которой была бы
перпендикулярна трем пря¬
мым, не параллельным одной
плоскости.
Пространственная посту¬
пательная композиционная
единица (рис. 3.6, а).
2-Сос-Ко-
членная группа
(перпендику¬
лярный случай)
Оси всех вращательных пар
параллельны осям Со- На¬
правления движения всех по¬
ступательных пар параллель¬
ны плоскости, перпендику¬
лярной оси Со-
Плоская композиционная
единица (рис. 3.6, б).
2-Coo-l-Co-
членная группа
(общий случай)
Оси всех вращательных пар
перпендикулярны направле¬
ниям Соо и компланарны
осям Со- Направления дви¬
жения всех поступательных
пар параллельны плоскости,
перпендикулярной оси Со-
Плоская поступательная
композиционная единица
+ соосная композиционная
единица (рис. 3.6, в).
З-Со-членная
группа
Оси всех вращательных пар
проходят через центр 3-
Со-членной группы, число
поступательных пар равно
нулю, т. к. не существует по¬
ступательной пары, направ¬
ление движения которой бы¬
ло бы перпендикулярно осям
трех Со» не параллельных од¬
ной плоскости.
Сферическая композицион¬
ная единица (рис. 3.6, г).
Таблица 3.3. Структуры одноконтурных КЦ с 2-С-членной группой
Группа силовых
винтов
Геометрические ограничения
на оси кинематических пар
Структура
2-Соо-членная
группа
Оси всех вращательных пар
параллельны прямой, пер¬
пендикулярной направле-
ИИЮ Соо-
Параллельноосевая ком¬
позиционная единица
(рис. 3.7, а).
3.3. Структуры одноконтурных КЦ с с~С~членной группой
63
Продолжение табл. 3.3
Группа силовых
винтов
Геометрические ограничения
на оси кинематических пар
Структура
Коо-Ко-
членная группа
Оси всех вращательных пар
компланарны осям Со и па'
раллельны плоскости, пер¬
пендикулярной направле¬
нию Соо- Направления дви¬
жения поступательных пар
параллельны плоскости, пер¬
пендикулярной оси Со-
Встраивание соосной компо¬
зиционной единицы в одно¬
контурную КЦ, образован¬
ную из параллельноосевой
композиционной единицы
(рис. 3.7, б).
2-С0-членная
группа
Оси всех вращательных
пар проходят через центр
2-С0-членной группы или
расположены в плоско¬
сти 2-С0-членной группы.
Направления движения всех
поступательных пар пер¬
пендикулярны плоскости
2-С0-членной группы.
(а) Встраивание соосной
композиционной единицы
в одноконтурную КЦ, об¬
разованную из сферической
композиционной единицы
(рис. 3.7, в), или (б) встраи¬
вание сонаправленной ком¬
позиционной единицы в од¬
ноконтурную КЦ, обра¬
зованную из сферической
композиционной единицы
(рис. 3.7, г).
Cool
б) (RRRRR)e
Рис. 3.6. Некоторые одноконтурные КЦ с 2 степенями свободы с 3-£-членной
группой: а) КЦ с З-Соо-членной группой, б) КЦ с 2-С00-1-Со'членн°й группой
(перпендикулярный случай), в) КЦ с 2-С00-1-Со"членн°й группой (общий слу¬
чай) и г) КЦ с З-Со-членной группой
64
Гл. 3. Структурный синтез одноконтурных КЦ
Таблица 3.4. Структуры одноконтурных КЦ с 1-£-членной группой
Группа силовых
винтов
Геометрические ограничения
на оси кинематических пар
Структура
1-Соо-членная
группа
Оси всех вращательных пар
параллельны плоскости, пер¬
пендикулярной направле-
НИЮ Соо-
(а) Две параллельноосе¬
вые композиционные едини¬
цы или плоская композици¬
онная единица (рис. 3.8, а),
или (б) встраивание соос¬
ной композиционной едини¬
цы в одноконтурную КЦ,
образованную параллельно¬
осевой композиционной еди¬
ницей.
1-£0-членная
группа
Оси всех вращательных пар
компланарны оси £0. На¬
правления движения посту¬
пательных пар параллель¬
ны плоскости, перпендику¬
лярной оси £0.
(а) Плоская композицион¬
ная единица + сфериче¬
ская композиционная еди¬
ница (рис. 3.8, б), (б) две
сферические композицион¬
ные единицы с различны¬
ми центрами (рис. 3.8, в),
(в) встраивание соосной
композиционной единицы
в одноконтурную КЦ, об¬
разованную плоской ком¬
позиционной единицей
(рис. 3.8, г), (г) встраива¬
ние двух соосных компози¬
ционных единиц в однокон¬
турную КЦ, образованную
сферической композицион¬
ной единицей (рис. 3.8, д),
(д) встраивание соосной
и сонаправленной компози¬
ционных единиц в однокон¬
турную КЦ, образованную
сферической композицион¬
ной единицей (рис. 3.8, е),
или (е) встраивание двух
сонаправленных композици¬
онных единиц в однокон¬
турную КЦ, образованную
сферической композицион¬
ной единицей (рис. 3.8, ж).
Как будет показано в главе 5 и последующих главах, однокон¬
турные КЦ, приведенные в таблицах 3.1-3.4, составляют набор мо¬
дулей, которые будут использоваться при структурном синтезе ПМ.
3.4. Резюме
65
в) (RRRRR(R)l)s г) (RRRRR(P)l)s
Рис. 3.7. Некоторые одноконтурные КЦ с 2 степенями свободы с 2-£-членной
группой: а) КЦ с 2-С^-членной группой, б) КЦ с 1 -Соо"^-Со_членн°й группой
и в)-г) КЦ с 2-Со-членной группой
Соответственно, перед дальнейшим чтением рекомендуется вниматель¬
но изучить эти таблицы с соответствующими рисунками.
Отметим в заключение, что список, приведенный в таблицах 3.1-
3.4, не является исчерпывающим и могут существовать другие струк¬
туры многоподвижных одноконтурных КЦ с заданной с-£-членной
группой. Однако эти другие структуры одноконтурных КЦ, некоторые
из которых применяются в части ПМ, предложенных в [81], наклады¬
вают дополнительные геометрические ограничения на кинематические
пары (габариты звеньев). Следовательно, ПМ, построенные с при¬
менением таких одноконтурных КЦ, вряд ли получат практическое
применение и в данной книге не рассматриваются.
3.4. Резюме
В данной главе вводится систематическая методология струк¬
турного синтеза многоподвижных одноконтурных КЦ с заданной
с-£-членной группой. С помощью предложенного подхода на осно¬
ве композиционных единиц, введенных в главе 2, построены струк¬
туры одноконтурных КЦ с заданной с-£-членной группой. Данные
3 Кун С., Госселин К.
66
Гл. 3. Структурный синтез одноконтурных КЦ
1 Cool
a) (RRRPU(RPRb
ж) (RRRR(P)lR(R)l)5
Рис. 3.8. Некоторые одноконтурные КЦ с 2 степенями свободы с 1-£-членной
группой: а) КЦ с l-Coo-членной группой и б)-ж) КЦ с 1-£о-членной группой
одноконтурные КЦ будут использоваться при конструировании струк¬
туры ПМ в главах 6-14 и при анализе подвижности полного цикла
ПМ в приложении Б.
Глава 4
КЛАССИФИКАЦИЯ ПАРАЛЛЕЛЬНЫХ
МЕХАНИЗМОВ
Одной из первых проблем, возникающих при структурном синте¬
зе ПМ с числом степеней свободы менее 6 (или с ограниченным
перемещением) является точное и однозначное описание требуемого
движения выходного звена. Иногда эта проблема не тривиальна, о чем
свидетельствует множество определений и методов, применяемых для
описания движения ПМ с 4 и 5 степенями свободы. В целях система¬
тизации процедуры синтеза в данной главе приводится классификация
движений ПМ. С этой целью для описания движений ПМ вводятся
концепции виртуальных цепей и траекторий движения. Предложена
предварительная классификация траекторий движения. Данная глава
вместе с главами 2 и 3 образуют фундамент для структурного синтеза
ПМ, отрабатывающих заданную траекторию движения, описанного
в последующих главах.
4.1. Траектории движения параллельных механизмов
Перед проведением структурного синтеза ПМ необходимо описать
движение, совершаемое его подвижной платформой. Иногда, например
для поступательных или плоских ПМ, эта задача тривиальна. Однако,
для других типов движения (например, для ПМ с 4 и 5 степенями сво¬
боды) описание перемещений подвижной платформы является гораздо
более сложной задачей. Кроме того, характер движения подвижной
платформы ПМ с заданным числом степеней свободы может быть раз¬
личен. Например, под движением с 3 степенями свободы может пони¬
маться поступательное перемещение с тремя степенями свободы, сфе¬
рическое движение с тремя степенями свободы, плоско-параллельное
перемещение с тремя степенями свободы и т. д.
Траектория движения определяется как множество положений
(возможно, бесконечное), которое описывает структуру движения по¬
движной платформы. Например, для поступательного ПМ траектория
движения — множество поступательных перемещений твердого тела.
Другим примером траектории движения может служить движение
SCARA ПМ с 4 степенями свободы, состоящее из всех поступатель¬
ных перемещений и вращения вокруг любой оси, имеющей заданное
направление. Данная траектория движения также может быть описана
движением Шёнфлиса [45].
з-
68
Гл. 4. Классификация параллельных механизмов
Следует заметить, что траектория движения не всегда может быть
описана группой движений. Фактически, концепция траекторий движе¬
ния может найти широкое применение, так как она имеет более общий
характер по сравнению с концепцией групп движений.
4.2. Концепция виртуальных цепей
Так как существующие методы описания траектории движения
подвижной платформы в большинстве случаев неудобны, в данном
разделе для описания траектории движения подвижной платформы
вводится концепция виртуальных цепей.
Виртуальная цепь, связанная с данной траекторией движения, —
последовательная или параллельная КЦ, подвижная платформа кото¬
рой осуществляет эту траекторию движения. Ясно, что для заданной
траектории движения может существовать не единственная вирту¬
альная цепь. Вообще, для данной траектории движения виртуальная
цепь выбирается при всестороннем анализе группы силовых винтов
последовательных и параллельных цепей с учетом изменения групп
силовых винтов при изменении их положения. Кроме того, как правило
выбирается простейшая виртуальная цепь.
Например, группа силовых винтов последовательных цепей
(PPPR)^, (PPRR )л, (PRPR)a и (PRRR)^ представляет собой
2~Соо~членнУю ГРУППУ> направления всех Соо в которой перпендику¬
лярны осям вращательных кинематических пар. Любая из этих КЦ
может использоваться для представления одной и той же траектории
движения. Однако, в качестве виртуальной цепи выбирается
последовательная КЦ (PPPR)^, так как она интуитивно наиболее
соответствует представляемой траектории движения.
Виртуальные цепи, являющиеся последовательными КЦ, называют
последовательными виртуальными цепями. Примеры последователь¬
ных виртуальных цепей приведены на рис. 4.1-4.3. Аналогично, вирту¬
альные цепи, являющиеся параллельными КЦ, называют параллельны¬
ми виртуальными цепями. Примеры параллельных виртуальных цепей
приведены на рис. 4.4.
Последовательные виртуальные цепи представляются последова¬
тельностью символов, обозначающих кинематические пары вирту¬
альной цепи в направлении от основания к подвижной платфор¬
ме. Например, виртуальная цепь РРР (рис. 4.1, а) состоит из трех
поступательных кинематических пар, соединенных последовательно.
Кроме виртуальной цепи РРР практический либо теоретический ин¬
терес представляют виртуальные цепи Е (рис. 4.1,6), S (рис. 4.1, в),
PPR (рис. 4.1, г), PPPR (рис. 4.2, a), PS (рис. 4.2,6), SP (рис. 4.2, в),
PPPU (рис. 4.3, а), PPS (рис. 4.3, б), US (рис. 4.3, в) и UE (рис. 4.3, г).
Параллельные виртуальные цепи обозначаются структурами их
опор, соединенными символом «-». Например, виртуальная цепь 3-PPS
(рис. 4.4, а) состоит из трех опор PPS, а виртуальная цепь 2-PPPU
4.3. Предварительная классификация траекторий движения
69
Подвижная
Подвижная
платформа
в) S
^03 Подвижная
^ платформа
iCool,
г) PPR
Рис. 4.1. Последовательные виртуальные цепи с 3 степенями свободы
(рис. 4.4, б) состоит из двух опор PPPU. Классификация параллельных
виртуальных цепей является открытой проблемой.
Рис. 4.1-4.4 позволяют заключить, что концепция виртуальных
цепей — очень удобный и интуитивно-понятный метод представления
траекторий движения, лишенный неопределенности. В главе 5 будет
показано, что концепция виртуальных цепей является эффективным
инструментом структурного синтеза ПМ.
4.3. Предварительная классификация траекторий
движения и соответствующих параллельных
механизмов
Траекторию движения, соответствующую виртуальной цепи, на¬
зывают V-движением. ПМ, совершающий V-движение, называется
V= ПМ, что означает ПМ эквивалентен V.
Чтобы систематизировать процесс синтеза и максимизировать прак¬
тическую пригодность результатов, произведена предварительная клас¬
сификация траекторий движения и отрабатывающих их ПМ. Траек¬
тории движения, потенциально наиболее применимые на практике,
приведены ниже:
70
Гл. 4. Классификация параллельных механизмов
Подвижная
Рис. 4.2. Последовательные виртуальные цепи с 4 степенями свободы
• Движение РРР: при данной траектории движения (рис. 4.1, а)
подвижная платформа может совершать поступательные переме¬
щения относительно неподвижного основания. Соответствующий
класс ПМ в литературе называют поступательными ПМ. Од¬
нако далее мы будем называть его РРР= ПМ, чтобы показать
соответствующую этому движению виртуальную цепь. Группа
силовых винтов РРР= ПМ представляет собой Э-С^-членную
группу.
• Движение Е: при данной траектории движения (рис. 4.1,6) по¬
движная платформа может совершать относительно основания
движения в плоскости. Соответствующий класс ПМ в литерату¬
ре называется плоскими ПМ. Далее он будет обозначаться как
Е= ПМ. Группа силовых винтов Е= ПМ представляет собой
2"Соо"1"Со"членнУю ГРУППУ> состоящую из всех направления
которых параллельны плоскости кинематической пары Е, и всех
£0, оси которых перпендикулярны плоскости пары Е.
• Движение S: при данной траектории движения (рис. 4.1, в) су¬
ществует неподвижная общая точка между подвижной платфор¬
мой и основанием, и подвижная платформа осуществляет вра¬
щательные движения относительно этой точки при неподвижном
4.3. Предварительная классификация траекторий движения
71
Подвижная
платформа^^**^ \
Подвижная
Основание
a) PPPU
Подвижная
в) US
г) UE
Рис. 4.3. Последовательные виртуальные цепи с 5 степенями свободы
основании. Соответствующий класс ПМ называют сферическими
ПМ, ориентационными ПМ или вращательными ПМ. Далее он
будет обозначаться как S= ПМ. Группа силовых винтов S= ПМ
представляет собой 3£0-членную группу, состоящую из всех £0,
оси которых проходят через центр пары S.
Движение PPR: при данной траектории движения (рис. 4.1, г)
подвижная платформа может совершать вращение относительно
оси, которая может перемещаться в плоскости. Соответствующий
класс ПМ называют цилиндрическими ПМ. Далее он будет обо¬
значаться как PPR= ПМ. Группа силовых винтов PPR= ПМ
представляет собой 2-Соо-1-£0-членную группу (общий случай),
состоящую из (а) всех Соо^ °си которых перпендикулярны оси
вращательной кинематической пары, (б) всех £0, оси которых
перпендикулярны направлениям движения поступательных кине¬
матических пар и компланарны оси вращательной пары, и (в) дру¬
гих £, являющихся линейными комбинациями вышеуказанных
Соо И Со-
72
Гл. 4. Классификация параллельных механизмов
Подвижная
платформа
С02
Подвижная
платформа
Основание иснование
а) 3-PPS б) 2-PPPU
Рис. 4.4. Параллельные виртуальные цепи
• Движение PPPR: при данной траектории движения (рис. 4.2, а)
подвижная платформа может вращаться относительно оси, кото¬
рая может совершать поступательные перемещения в простран¬
стве. Движение PPPR называют также движением 3T1R, дви¬
жением SCARA, или движением Шёнфлиса. Соответствующий
класс ПМ называют ПМ 3T1R. Далее он будет обозначаться как
PPPR= ПМ. Группа силовых винтов PPPR= ПМ представляет
собой 2-^-членную группу, состоящую из всех (^00, направле¬
ния которых перпендикулярны оси вращательной кинематической
пары виртуальной цепи PPPR.
• Движение PS: при данной траектории движения (рис. 4.2, б) по¬
движная платформа может вращаться относительно точки, совер¬
шающей поступательное перемещение. Соответствующий класс
ПМ называют PS= ПМ. Группа силовых винтов PS= ПМ пред¬
ставляет собой 2-С0-членную группу, состоящую из всех £0, оси
которых проходят через центр сферической кинематической пары
и перпендикулярны направлению движения поступательной ки¬
нематической пары виртуальной цепи PS.
• Движение SP: при данной траектории движения (рис. 4.2, в) по¬
движная платформа совершает цилиндрическое перемещение от¬
носительно прямой, вращающейся вокруг универсальной кинема¬
тической пары. Соответствующий класс ПМ называют SP= ПМ.
Группа силовых винтов SP= ПМ представляет собой 2-£0-
членную группу, состоящую из всех оси которых проходят
через центр сферической кинематической пары и перпендикуляр¬
ны направлению движения поступательной кинематической пары
виртуальной цепи SP.
4.3. Предварительная классификация траекторий движения 73
• Движение PPPU: при данной траектории движения (рис. 4.3, а)
подвижная платформа может вращаться вокруг универсальной
кинематической пары, центр которой может произвольно посту¬
пательно перемещаться. Соответствующий класс ПМ называется
ПМ 3T2R [29, 33, 50, 59]. Далее он будет обозначаться как
PPPU= ПМ. Группа силовых винтов PPPU= ПМ представляет
собой 1-Соо-членную группу, направление £оо в которой перпен¬
дикулярно осям универсальной кинематической пары виртуаль¬
ной цепи PPPU.
• Движение PPS: при данной траектории движения (рис. 4.3, б)
подвижная платформа может вращаться относительно точки, пе¬
ремещающейся в плоскости. Соответствующий класс ПМ назы¬
вается ПМ 2T3R [29, 39, 49, 50]. Далее он будет обозначаться как
PPS= ПМ. Группа силовых винтов PPS= ПМ представляет собой
1-£0-членную группу, ось Со которой проходит через центр сфе¬
рической кинематической пары перпендикулярно направлениям
движения двух поступательных кинематических пар виртуальной
цепи PPS.
• Движение US: при данной траектории движения (рис. 4.3, в)
подвижная платформа может совершать произвольные враще¬
ния вокруг центра сферической кинематической пары, который
движется по сферической поверхности с центром, совпадающим
с центром универсальной кинематической пары. Соответствую¬
щий класс ПМ называется US= ПМ. Группа силовых винтов
US= ПМ представляет собой 1-£0-членную группу, ось Со кото¬
рой проходит через центры универсальной и сферической кине¬
матических пар.
• Движение UE: при данной траектории движения (рис. 4.3, г)
подвижная платформа совершает плоско-параллельное движе¬
ние в плоскости, вращающейся относительно универсальной
кинематической пары. Соответствующий класс ПМ называет¬
ся UE= ПМ. Группа силовых винтов UE= ПМ является 1 -Со“
членной группой, ось Со которой проходит через центр универ¬
сальной кинематической пары перпендикулярно плоскости пло¬
скопараллельной кинематической пары.
• Движение З-PPS: данный тип траектории движения (рис. 4.4, а)
описать достаточно сложно. Соответствующий класс ПМ называ¬
ется ПМ без кручений (zero-torsion РМ) [8]. Далее он будет обо¬
значаться как 3-PPS= ПМ. Группа силовых винтов 3-PPS= ПМ
представляет собой особый вариант 3-£-членной группы, являю¬
щийся линейной комбинаций трех 1-£0-членных групп опор PPS
виртуальной цепи 3-PPS.
• Движение 2-PPPU: как и движение З-PPS, данный тип тра¬
ектории движения (рис. 4.4, б) достаточно сложно описать.
Соответствующий класс ПМ называется 2-PPPU= ПМ. Впер¬
вые подобный ПМ был предложен в [29]. Группа силовых
74
Гл. 4. Классификация параллельных механизмов
винтов 2-PPPU= ПМ является линейной комбинаций двух
1-Соо-членных групп опор PPPU виртуальной цепи 2-PPPU.
Очевидно, что вышеприведенная классификация траекторий движе¬
ния не полна. Однако предложенные здесь классы охватывают наибо¬
лее интересные с точки зрения практической применимости случаи.
Кроме того, классификация, основанная на виртуальных цепях, умень¬
шает любую потенциальную неопределенность в описании траекторий
движения и групп силовых винтов.
4.4. Резюме
Для строгого описания движения, совершаемого ПМ, в данной
главе введена концепция виртуальных цепей. Для целей структурного
синтеза ПМ с помощью этой нотации введены виртуальные цепи, про¬
сто и не двусмысленно описывающие траектории движения. Как будет
показано в следующих главах, концепция виртуальных цепей является
ядром подхода к структурному синтезу, предлагаемому в книге.
Глава 5
ПОДХОД К СТРУКТУРНОМУ СИНТЕЗУ
ПАРАЛЛЕЛЬНЫХ МЕХАНИЗМОВ,
ОСНОВАННЫЙ НА ВИРТУАЛЬНЫХ ЦЕПЯХ
В данной главе разработан метод структурного синтеза параллель¬
ных механизмов с заданной траекторией движения, представленной
последовательной виртуальной цепью, основанный на теории винтов
и концепции виртуальных цепей (гл. 2-4). Предлагаемая общая мето¬
дика состоит из четырех шагов, а именно: (1) декомпозиция группы
силовых винтов параллельной кинематической цепи, ассоциированной
с виртуальной цепью V (V= ПКЦ); (2) структурный синтез опор;
(3) сборка опор с целью создания V= ПКЦ; (4) выбор приводных ки¬
нематических пар. Эти шаги последовательно объясняются в нижесле¬
дующих разделах. Использование предложенной здесь методики к син¬
тезу нескольких классов ПМ подробно рассматривается в гл. 6-13.
Результаты, представленные в данной главе, составляют основу для
структурного синтеза ПМ с параллельными виртуальными цепями
(гл. 14).
5.1. Введение
В большинстве выполненных к настоящему времени работ, по¬
священных структурному синтезу ПМ, в качестве отправной точки
используется число степеней свободы ПМ. Траектория движения ис¬
пользуется для таких целей крайне редко. Подход к структурному
синтезу, излагаемый в данной книге, основан на указании траектории
движения и числа избыточных (пассивных) связей, обозначаемого Д.
Как было указано в главе 4, есть две предпосылки обоснованности
такого подхода: (1) для многих приложений необходимы ПМ, отраба¬
тывающие заданную траекторию движения, которая содержит в себе
больше информации, чем число степеней свободы, и (2) число избы¬
точных связей Д — важная величина, характеризующая механические
свойства ПМ. Так, сложность, стоимость и производительность ПМ,
отрабатывающего заданную траекторию движения, меняются в очень
широких пределах при изменении Д. Для структурного синтеза ПМ,
отрабатывающих заданную траекторию движения, будем использовать
уравнения (2.28), (2.24) и (2.29) главы 2. Кроме того, ради полноты
результатов, приведенных в главах 6-13, на протяжении структурного
синтеза ПМ Д может принимать только одно из возможных значений,
что приводит к чрезвычайно обобщенному подходу.
76
Гл. 5. Подход, основанный на виртуальных цепях
5.2. Условие, при котором параллельная
кинематическая цепь является V= параллельной
кинематической цепью
Рассмотрим ^-подвижную V= ПКЦ (в качестве примера
см. рис. 5.1, где Т = 3). При соединении подвижной платформы
с основанием такой ПКЦ с помощью виртуальной цепи (рис. 5.1,6),
соответствующей траектории движения ПКЦ, функции ПКЦ
не нарушаются. Любая из ее опор образует с виртуальной цепью
одноконтурную ^-подвижную КЦ (рис. 5.1, в). При этом группа
силовых винтов исходной ПКЦ (рис. 5.1, а) должна быть тождественна
группе силовых винтов виртуальной цепи в любом неособом
положении. С другой стороны, число степеней свободы подвижной
платформы будет больше числа степеней свободы виртуальной
цепи. Для ясности мы обычно будем окружать виртуальную цепь
пунктирным прямоугольником.
С помощью концепции виртуальных цепей получаем, что ПКЦ
является V= ПКЦ при выполнении двух нижеследующих условий:
1. Любая из опор ПКЦ образует с виртуальной цепью одноконтур¬
ную ^-подвижную КЦ.
2. Группа силовых винтов ПКЦ тождественна группе силовых вин¬
тов виртуальной цепи в любом неособом положении.
Условие (1) обеспечивает выполнение подвижной платформой V-
движения, а условие (2) обеспечивает также равенство числа степеней
свободы подвижной платформы и виртуальной цепи. Следует отметить,
что если порядки и группы силовых винтов опоры и группы силовых
винтов виртуальной цепи больше нуля, образованная ими однокон¬
турная КЦ может быть КЦ с избыточными связями. Это происходит
потому, что виртуальная цепь ограничивает перемещение платформы
с целью отработки траектории движения и, соответственно, уже содер¬
жит все необходимые ограничивающие силовые винты.
5.3. Методика структурного синтеза V= паралельных
механизмов
На основании вышеприведенных условий и результатов предыду¬
щих глав может быть предложена общая методика структурного син¬
теза V= ПМ. Предлагаемая методика может быть разделена на четыре
основных шага, а именно:
Шаг 1. Декомпозиция группы силовых винтов V= ПКЦ.
Шаг 2. Структурный синтез опор V= ПКЦ.
Здесь под опорой V= ПКЦ понимается опора, которая имеет
указанную группу силовых винтов и которая, совместно с вир¬
туальной цепью, может образовать ^-подвижную одноконтурную
5.3. Методика структурного синтеза V— ПМ
77
Подвижная
а) РРР= ПКЦ с 3 опорами
Подвижная
Виртуальная ^ ^°°3
цепь РРР
Подвижная I-
Основание
б) виртуальная цепь РРР
в) РРР= ПКЦ с 3 опорами с добавленной виртуальной цепью РРР
Рис. 5.1. РРР= ПКЦ
78
Гл. 5. Подход, основанный на виртуальных цепях
КЦ. Для достижения указанных условий предлагается выполнить
два подшага:
Шаг 2а. Структурный синтез ^-подвижной одноконтурной КЦ,
содержащей виртуальную цепь и имеющей указанную груп¬
пу силовых винтов.
Шаг 26. Получение структуры опор V= ПКЦ посредством уда¬
ления виртуальной цепи из ^-подвижных одноконтурных
КЦ, полученных на шаге 2а.
Шаг 3. Соединение опор в V= ПКЦ.
V= ПКЦ может быть получена соединением т опор V= ПКЦ,
полученных на шаге 2, так, что (1) каждая опора вместе с вирту¬
альной цепью может образовывать ^-подвижную одноконтурную
КЦ и (2) линейная комбинация групп силовых винтов опор экви¬
валентна группе силовых винтов виртуальной цепи (условие (2)
для V= ПКЦ). Выполнение этих условий легко проверяется.
Шаг 4. Выбор приводных кинематических пар.
V= ПМ образуется посредством выбора приводных кинематиче¬
ских пар для каждой V= ПКЦ, полученной на шаге 3.
Данная методика подробно рассматривается в нижеследующих раз¬
делах.
5.4. Шаг 1: Декомпозиция группы силовых винтов
параллельной кинематической цепи
Декомпозиция группы силовых винтов V= ПКЦ с т опорами со¬
стоит в отыскании всех групп силовых винтов опор и всех комбинаций
из т групп силовых винтов опор для заданной V= ПКЦ и заданного
числа избыточных связей Д. Шаг 1 может быть выполнен с использо¬
ванием уравнений (2.24) и (2.28).
5.4.1. Определение групп силовых винтов опор. Так как группа
силовых винтов ПКЦ представляет собой линейную комбинацию групп
силовых винтов ее опор в неособом положении, то группа силовых
винтов любой опоры является подгруппой группы силовых винтов
V= ПКЦ. С помощью процедуры, предложенной в разделе 2.1.3, можно
легко идентифицировать все группы силовых винтов опор V= ПКЦ.
Следует отметить, что при структуром синтезе ПМ нас интересуют
лишь группы силовых винтов, базис которых состоит только из сило¬
вых винтов с нулевым и/или бесконечным параметром 0.
!) Для некоторых ПМ, например для PPR= ПМ (см. гл. 8), имеющих
группу силовых винтов с различными параметрами, существуют группы си¬
ловых винтов опор с ненулевым конечным параметром. Однако для ясности
подобные группы силовых винтов опор в данной книге не рассматриваются.
Соответствующие им структуры опор также могут быть получены с помощью
5.4. Шаг 1: Декомпозиция группы силовых винтов ПКЦ
79
Пример 5.1. Определение группы силовых винтов опор РРР= ПКЦ.
В любом неособом положении группа силовых винтов РРР= ПКЦ
эквивалентна группе силовых винтов виртуальной цепи РРР, т. е. яв¬
ляется З-Соо-членной группой, состоящей из всех Соо*
Из этого следует, что любая группа силовых винтов порядка сг > О
опоры РРР= ПКЦ в неособом положении является либо З-С^-членной
группой, либо 2-Соо-членной группой, либо ЬС^-членной группой
(рис. 5.2).
а) З-Соо-членная группа б) 2-С^-членная группа в) 1-С^-членная
группа
Рис. 5.2. Группы силовых винтов опор РРР= ПКЦ
Пример 5.2. Определение группы силовых винтов опор PPR= ПКЦ.
В любом неособом положении группа силовых винтов PPR= ПКЦ
эквивалентна группе силовых винтов виртуальной цепи PPR
(рис. 4.1, г), т.е. является 2-Соо-1-Со‘членн°й группой, состоящей
из (а) всех ^ООУ оси которых перпендикулярны оси кинематической
пары R, и (б) всех £0, оси которых перпендикулярны направлению
кинематических пар Р и компланарны оси кинематической пары R,
и (в) других £, являющихся линейными комбинациями вышепере¬
численных Соо и Со- Одним из базисов 2-С00-1-Со_членной группы
ЯВЛЯЮТСЯ Coi. <002 И СооЗ-
Из этого следует, что любая группа силовых винтов порядка
сг > О опоры PPR= ПКЦ в неособом положении является либо
2-Соо-Ко-членн°Й группой, либо 1-Соо-1-Со‘членн°Й группой, либо
2-Соо“членн°й группой, либо 1-Со-членной группой, либо 1-Соо-членной
группой (рис. 5.3).
5.4.2. Определение комбинаций групп силовых винтов опор.
Группы силовых винтов, состоящие из силовых винтов с одинако¬
вым параметром.
Для большинства широко используемых траекторий движения все
силовые винты в группе имеют одинаковый параметр. Группы си¬
ловых винтов опор являются сг-членными группами с одинаковым
предложенной в книге методики. Каждая из таких опор содержит одну или
более пассивных кинематических пар в отличие от опор, рассматриваемых
в данной книге.
80
Гл. 5. Подход, основанный на виртуальных цепях
а) 2-£00-1-Со"членная группа б) l-C^-l-Co-членная группа
Cool
в) 2-Соо-членная группа г) 1-£0-членная группа (д) 1-С^-членная группа
Рис. 5.3. Группы силовых винтов опор PPR= ПКЦ
параметром, где 0 ^ сг ^ с. В этом случае комбинации групп силовы>
винтов опор могут быть представлены просто комбинациями их поряд¬
ков сг. Комбинации порядков сг групп силовых винтов опор могут быть
определены из уравнения (2.28), приведенного здесь для удобства:
771
ХУ = 6 + ^ + Д.
г= 1
В таблицах 5.1-5.5 приведены наборы сг для V= ПКЦ с т
(2 ^ га ^ (.Т7 + 1)) опорами. В таблицах 5.1-5.5 для полноты приведены
наборы значений с\ соответствующие всем возможным значениям Д.
Для ^-подвижной V= ПКЦ с га опорами Д может принимать значения
от 0 до (m - 1)(6 - J7).
Таблица 5.1. Комбинации сг для 2-подвижной ПКЦ с га опорами
(2 ^ га ^ 3)
га
с
Д
с1
с2
с3
2
4
4
4
4
3
4
3
2
4
2
3
3
1
4
1
3
2
0
4
0
3
1
2
2
г)
ж)
Рис. 1. Применение ПМ: а) оригинальная машина для испытания шин Гауфа
(Proceedings of the IMechE), б) летный симулятор CAE (CAE), в) Дельта-робот
(Demaurex SA), г) ПМ-гексапод Р 3000 (Parallel Robotic Systems Corporation),
(?) TriceptRobot (ABB Ltd), e) «Живой глаз» университета Лаваль, ж) так¬
тильное устройство университета Лаваль, з) медицинский робот (PI (Physik
Instrumente)) и и) устройство позиционирования (PI)
в)
Рис. 2. Параллельные наноманипуляторы и микроманипулятор: а) параллель¬
ный наноманипулятор с пьезоэлектрическими линейными двигателями (PI
(Physik Instrumente), www.pi.ws), (б) параллельный наноманипулятор (Ху
Хоан Фам и проф. И-Минь Чен, Наньянский технологический университет),
(в) параллельный микроманипулятор (проф. Лари Л. Хауэлл, университет
Бригхам Янг)
а) Робот «Триптерон» б) Робот «Квадруптерон»
Рис. 3. Два прототипа ПМ, разработанные в университете Лаваль
а) 3-PRRR (случай 1)
б) 3-PRRR (случай 2)
в) 3-PRRRR (случай 2)
Рис. 4. Пластиковые модели развязанных по входу-выходу РРР= ПМ (с линей¬
ными приводами)
Рис. 5. 4-RRR(RR)|e; SP=fIM (©2005 IEEE, перепечатано из [132] с разреше¬
нием)
л
Рис. 6. 3-PRRR РРР=ПМ
5.4. Шаг 1: Декомпозиция группы силовых винтов ПКЦ
81
Продолжение табл. 5.1
га
с
А
с1
с2
с3
3
4
8
4
4
4
7
4
4
3
6
4
4
2
4
3
3
5
4
4
1
4
3
2
3
3
3
4
4
4
0
4
3
1
4
2
2
3
3
2
3
4
3
0
4
2
1
3
3
1
3
2
2
2
4
2
0
4
1
1
3
3
0
3
2
1
2
2
2
4
3
1
1
4
1
0
3
2
0
3
1
1
2
2
1
0
4
0
0
3
1
0
2
2
0
2
1
1
Таблица 5.2. Комбинации сг для 3-подвижной ПКЦ с га опорами
(2 ^ га ^ 4)
га
с
А
с1
с2
с3
с4
2
3
3
3
3
2
3
2
1
3
2
1
2
0
3
2
0
1
3
3
6
3
3
3
5
3
3
2
82
Гл. 5. Подход, основанный на виртуальных цепях
Продолжение табл. 5.2
771
С
А
с1
с2
с3
с4
4
3
3
1
3
2
2
3
3
3
0
3
2
1
2
2
2
2
3
2
0
3
1
1
2
2
1
1
3
1
0
2
2
0
2
1
1
0
3
0
0
2
1
0
1
1
1
4
3
9
3
3
3
3
8
3
3
3
2
7
3
3
3
1
3
3
2
2
6
3
3
3
0
3
3
2
1
3
2
2
2
5
3
3
2
0
3
3
1
1
3
2
2
1
2
2
2
2
4
3
3
1
0
3
2
2
0
3
2
1
1
2
2
2
1
3
3
3
0
0
3
2
1
0
3
1
1
1
2
2
2
0
2
2
1
1
2
3
2
0
0
3
1
1
0
2
2
1
0
2
1
1
1
1
3
1
0
0
2
2
0
0
2
1
1
0
1
1
1
1
5.4. Шаг 1: Декомпозиция группы силовых винтов ПКЦ
83
Продолжение табл. 5.2
т
с
Д
с1
с2
с3
с4
0
3
0
0
0
2
1
0
0
1
1
1
0
Таблица 5.3. Комбинации сг для 4-подвижной ПКЦ с т опорами
(2 ^ т ^ 5)
т
с
Д
с1
с2
с3
с4
с5
2
2
2
2
2
1
2
1
0
2
0
3
2
4
2
2
2
3
2
2
1
2
2
2
0
2
1
1
1
2
1
0
1
1
1
0
2
0
0
1
1
0
4
2
6
2
2
2
2
5
2
2
2
1
4
2
2
2
0
2
2
1
1
3
2
2
1
0
2
1
1
1
2
2
2
0
0
2
1
1
0
1
1
1
1
1
2
1
0
0
1
1
1
0
0
1
1
0
0
5
2
8
2
2
2
2
2
7
2
2
2
2
1
6
2
2
2
2
0
2
2
2
1
1
5
2
2
2
1
0
2
2
1
1
1
4
2
2
2
0
2
2
1
1
0
2
1
1
1
1
3
2
2
1
0
2
1
1
1
0
1
1
1
1
1
84
Гл. 5. Подход, основанный на виртуальных цепях
Продолжение табл. 5.3
т
с
А
с1
с2
с3
с4
с5
2
2
2
0
0
0
2
1
1
0
0
1
1
1
1
0
1
2
1
0
0
0
1
1
1
0
0
0
2
0
0
0
0
1
1
0
0
0
Таблица 5.4. Комбинации сг для 5-подвижной ПКЦ с т опорами
(2 ^ т ^ 6)
т
с
А
с1
с2
с3
с4
с5
с6
2
1
1
1
1
0
1
0
3
1
2
1
1
1
1
1
1
0
0
1
0
4
1
3
1
1
1
1
2
1
1
1
0
1
1
1
0
0
0
1
0
0
5
1
4
1
1
1
1
1
3
1
1
1
1
0
2
1
1
1
0
0
1
1
1
0
0
0
0
1
0
0
0
6
1
5
1
1
1
1
1
1
4
1
1
1
1
1
0
3
1
1
1
1
0
0
2
1
1
1
0
0
0
1
1
1
0
0
0
0
0
1
0
0
0
0
0
Таблица 5.5. Комбинации сг для 6-подвижной ПКЦ с т опорами
(2 ^ т ^ 7)
т
с
А
с1
с2
с3
с4
с5
с6
с7
2
0
0
0
0
3
0
0
0
0
0
4
0
0
0
0
0
0
5
0
0
0
0
0
0
0
6
0
0
0
0
0
0
0
0
7
0
0
0
0
0
0
0
0
0
5.4. Шаг 1: Декомпозиция группы силовых винтов ПКЦ
85
Группы силовых винтов, состоящие из силовых винтов с раз¬
личными параметрами.
Для траекторий движения, не все силовые винты которых имеют
одинаковый параметр, комбинации групп силовых винтов опор не могут
быть представлены просто комбинациями их порядков с\ В таких
комбинациях следует также указывать типы групп силовых винтов
опор, входящих в них.
Декомпозиция групп силовых винтов, состоящих из силовых винтов
с различными параметрами, может быть осуществлена в два шага,
а именно:
Шаг а. Определение комбинаций порядков сг групп силовых винтов
опор из решения уравнения (2.28). Этот шаг аналогичен случаю
групп силовых винтов, состоящих из винтов с одинаковым пара¬
метром.
Шаг б. Для каждой комбинации порядков сг группы силовых винтов
опор из уравнения (2.24) определяются комбинации типов групп
силовых винтов опор.
Пример 5.3. Определение комбинаций групп силовых винтов опор
для PPR= ПКЦ с га опорами (2 ^ га ^ 4).
Шаг а. Определение комбинаций порядков сг групп силовых винтов
опор из решения уравнения (2.28). Результаты показаны в табли¬
цах 5.1-5.5.
Шаг б. Для каждой комбинации порядков сг группы силовых винтов
опор из уравнения (2.24) определяем комбинации типов групп
силовых винтов опор. Комбинации типов групп силовых винтов
опор 2-£00-1-Со"членной группы получены из решения уравнения
(2.24) и приведены в таблицах 5.6-5.8.
Таблица 5.6. Комбинации групп силовых винтов опор для PPR= ПКЦ
с 2 опорами
д
2-Сос-Ко
Коо-Ко
2-Соо
Ко
2-Соо
0-членная группа
3
2
0
0
0
0
0
2
1
1
0
0
0
0
1
0
1
0
0
0
1
1
0
0
1
0
0
1
0
0
0
1
0
0
2
0
0
0
0
0
1
1
0
0
0
0
0
2
0
0
0
0
1
0
0
0
0
1
0
1
0
1
0
0
0
1
0
0
1
0
0
0
1
1
0
0
86
Гл. 5. Подход, основанный на виртуальных цепях
Таблица 5.7. Комбинации групп силовых винтов опор для PPR= ПКЦ
с 3 опорами
А
2-Сос-Ко
Коо-Ко
2-Соо
Ко
Кос
0-членная группа
6
3
0
0
0
0
0
5
2
1
0
0
0
0
2
0
1
0
0
0
4
2
0
0
1
0
0
2
0
0
0
1
0
1
2
0
0
0
0
1
1
1
0
0
0
1
0
2
0
0
0
3
2
0
0
0
0
1
1
1
0
1
0
0
1
1
0
0
1
0
1
0
1
0
0
0
1
0
1
0
0
0
0
2
1
0
0
0
0
1
2
0
0
0
2
1
1
0
0
0
1
1
0
1
0
0
1
1
0
0
2
0
0
1
0
0
1
1
0
1
0
0
0
2
0
0
2
0
1
0
0
0
2
0
0
1
0
0
1
1
1
0
0
0
1
1
0
1
0
0
0
2
1
0
0
0
0
2
0
1
0
1
1
0
0
1
0
1
1
0
0
0
1
1
0
2
0
0
0
1
0
1
1
0
0
1
0
0
2
0
0
1
0
1
0
2
0
0
0
1
0
1
1
0
0
1
0
0
2
0
0
1
0
0
0
0
2
0
1
0
1
0
1
0
1
0
0
1
1
0
0
1
1
0
1
0
0
1
0
1
1
0
0
0
1
2
0
0
0
0
2
1
0
5.4. Шаг 1: Декомпозиция группы силовых винтов ПКЦ
87
Таблица 5.8. Комбинации групп силовых винтов опор для PPR= ПКЦ
с 4 опорами
д
2-Сос-Ко
Коо-Ко
Кос
Ко
2-Соо
0-членная группа
9
4
0
0
0
0
0
8
3
1
0
0
0
0
3
0
1
0
0
0
7
3
0
0
1
0
0
3
0
0
0
1
0
6
3
0
0
0
0
1
2
1
0
1
0
0
2
1
0
0
1
0
2
0
1
1
0
0
2
0
1
0
1
0
1
3
0
0
0
0
1
2
1
0
0
0
1
1
2
0
0
0
1
0
3
0
0
0
5
2
1
0
0
0
1
2
0
1
0
0
1
2
0
0
2
0
0
2
0
0
1
1
0
2
0
0
0
2
0
1
2
0
1
0
0
1
2
0
0
1
0
1
0
2
1
0
0
1
0
2
0
1
0
4
0
0
1
0
1
0
0
0
1
1
1
2
0
0
0
1
1
1
1
0
0
1
1
0
2
0
0
1
1
1
0
2
0
0
1
1
0
0
2
0
1
1
0
1
1
0
1
0
1
2
0
0
1
0
1
0
2
0
1
0
1
1
1
0
3
0
0
0
0
2
1
1
0
1
0
1
1
1
0
0
1
1
1
0
1
1
0
1
1
0
1
0
1
1
0
2
0
2
0
0
0
2
0
1
1
0
0
2
0
0
2
0
88
Гл. 5. Подход, основанный на виртуальных цепях
Продолжение табл. 5.8
А
2-Сос-Ко
Кос-Ко
2-Сос
Ко
2-Сос
0-членная группа
0
0
2
2
0
0
0
0
2
1
1
0
0
1
2
0
0
0
2
1
1
0
0
0
2
1
0
1
0
0
2
1
0
0
2
0
1
1
0
0
1
1
1
1
0
0
0
2
1
0
2
0
1
0
1
0
2
0
0
1
1
0
1
1
1
0
1
0
1
1
0
1
1
0
0
2
1
0
1
1
1
0
0
1
0
2
1
0
0
0
1
2
0
2
0
0
0
2
0
1
1
0
0
2
0
1
0
2
0
1
0
1
0
1
1
1
0
1
0
0
2
1
0
0
1
2
0
1
0
0
1
1
1
1
0
0
0
2
2
0
0
1
0
0
0
0
3
0
1
0
1
0
2
0
1
0
0
1
2
0
0
1
1
0
2
0
0
0
1
2
1
0
0
0
2
1
1
5.5. Шаг 2: Структурный синтез опор
После определения различных комбинаций групп силовых винтов
опор следует определить кинематические цепи, реализующие данные
группы. Эта операция выполняется в два шага.
5.5.1. Шаг 2а: структурный синтез ^-подвижной одноконтур¬
ной кинематической цепи, содержащей виртуальную цепь и име¬
ющей указанную группу силовых винтов. Структурный синтез
^-подвижной одноконтурной кинематической цепи, содержащей вир¬
туальную цепь и имеющей указанную группу силовых винтов, про¬
изводится следующем образом. Во-первых, выполняется структурный
синтез ^-подвижной одноконтурной кинематической цепи, содержа¬
щей виртуальную цепь и имеющей указанную группу силовых винтов
5.5. Шаг 2: Структурный синтез опор
89
(см. главу 3). Во-вторых, удаляются линейно зависимые. Эта операция
должна быть выполнена для каждой группы силовых винтов опор,
полученной на шаге 1.
Для примера рассмотрим структурный синтез 3-подвижной од¬
ноконтурной КЦ, содержащей виртуальную цепь РРР и имеющей
2-Соо"членнУю ГРУППУ- Во-первых, в соответствии с результатами,
полученным в гл. 3, 3-подвижная одноконтурная КЦ, содержащая
виртуальную цепь РРР и имеющая 2-^^-членную группу, состоит
из 7 кинематических пар. Такая 3-подвижная одноконтурная КЦ со¬
стоит из одной пространственной параллельноосевой композиционной
единицы (рис. 5.4). Подчеркнем, что кинематическая пара Р может
быть расположена в любом месте в пределах одноконтурной КЦ.
Для краткости, перечислим лишь те 3-подвижные одноконтурные КЦ,
из которых перестановкой кинематических пар могут быть получены
все остальные. Например, одноконтурная КЦ (RRPRV)^ может быть
получена из одноконтурной КЦ (PRRRV)^, показанной на рис. 5.4,6,
перемещением кинематической пары Р. 2-^^-членная группа состоит
из всех направления которых перпендикулярны осям всех кинема¬
тических пар R.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинемати¬
ческие винты всех кинематических пар, не входящих в виртуальную
цепь, линейно зависимы. КЦ (RRRRV)^ (рис. 5.4, а) должна быть
отброшена, так как кинематические цепи всех четырех ее кинематиче¬
ских пар линейно зависимы. Для всех остальных КЦ, изображенных
на рис. 5.4, КЦ, составленные из всех кинематических пар за ис¬
ключением виртуальной цепи, представляют собой пространственную
параллельноосевую композиционную единицу.
Вообще говоря, кинематические винты кинематических пар в преде¬
лах одной опоры довольно часто линейно зависимы. К счастью, условия
линейной независимости кинематических винтов кинематических пар
в пределах одной опоры при структурном синтезе ПМ не сложны.
Это проистекает из характеристик композиционных единиц, используе¬
мых при конструировании ПМ и из того, что мы рассматриваем синтез
ПМ без избыточных связей. Для краткости эти условия приводятся
ниже без пояснений:
(а) Отсутствие соосных кинематических пар R.
(б) Отсутствие кинематических пар Р, направления осей которых сов¬
падают.
(в) Направление самое большее одной кинематической пары Р парал¬
лельно осям кинематических пар R.
(г) Оси как максимум 3 кинематических пар R параллельны.
(Д) Оси как максимум 3 кинематических пар R проходят через одну
точку.
(е) Направления самое большее двух кинематических пар Р парал¬
лельны одной плоскости.
90
Гл. 5. Подход, основанный на виртуальных цепях
в) (PPRRV)a г) (PPPRVb
Рис. 5.4. 3-подвижные одноконтурные КЦ, содержащие виртуальную цепь РРР
и имеющие 2-С^-членную группу
(ж) Сумма числа кинематических пар R, оси которых параллельны,
и числа кинематических пар Р не более четырех.
(з) Если направления пр кинематических пар Р перпендикуляр¬
ны осям пц кинематических пар R с параллельными осями,
то пр + riR ^ 3.
5.5.2. Шаг 2Ь: получение структуры опор. После получения
структур ^-подвижных одноконтурных КЦ, содержащих виртуальную
цепь и имеющих заданную группу силовых винтов опор, становится
возможным получение структуры опор V= ПМ удалением виртуальных
цепей из ^-подвижных одноконтурных КЦ. При удалении виртуаль¬
ных цепей для гарантии выполнения условия (1) для V= ПКЦ —
т. е. образования каждой опорой с соответствующей виртуальной це¬
пью ^-подвижной одноконтурной кинематической цепи — должны вы¬
полняться специальные геометрические условия. Эти геометрические
условия обозначаются с помощью нотации, введенной в разделе 1.3
для обозначения типов опор.
Например, на рис. 5.5 показана опора (PRRR)^ РРР= ПКЦ, полу¬
ченная из 3-подвижной одноконтурной КЦ (PRRRV)a, изображенной
на рис. 5.4. Группа силовых винтов этой опоры представляет собой
2_Со0‘членнУю группу, состоящую из всех направления которых
перпендикулярны осям всех вращательных кинематических пар.
5.6. Шаг 3: Соединение опор
91
Подвижная платформа
Рис. 5.5. Опора (PRRR)a РРР= ПКЦ
Для некоторых опор с сг > 0, как например для опоры (PRRR)^,
показанной на рис. 5.5, геометрические условия должны удовлетво¬
ряться только для самой опоры и могут, соответственно, получаться
непосредственно из ассоциированной одноконтурной кинематической
цепи. Для других опор с сг > 0, кроме геометрических ограничений,
в пределах самой опоры должны соблюдаться геометрические ограни¬
чения, накладываемые другими опорами. Такие условия объясняются
в следующем разделе и в нижеследующих главах при синтезе несколь¬
ких семейств ПМ.
5.6. Шаг 3: Соединение опор
Структурный синтез ПКЦ состоит в получении структуры ПКЦ
с помощью соединения опор, полученных на шаге 2, в соответствии
с комбинациями т групп силовых винтов опор, полученных на шаге 1.
Для ПКЦ с инвариантными группами силовых винтов опор, т. е.
ПКЦ, группы силовых винтов опор которых инвариантны относительно
основания и/или подвижной платформы, условие, гарантирующее, что
линейная комбинация всех групп силовых винтов опор составляет
группу силовых винтов виртуальной цепи (условие (2) для V= ПКЦ),
уже пояснено.
Для ПКЦ с различными группами силовых винтов опор делается
предположение, что линейная комбинация групп силовых винтов всех
опор составляет требуемую группу силовых винтов.
92
Гл. 5. Подход, основанный на виртуальных цепях
Например, РРР= ПКЦ 3-(PRRR)a (рис. 5.6) — ПКЦ с инвари¬
антными группами силовых винтов опор. Налагая условие, что оси
не всех вращательных пар на подвижной платформе параллельны,
мы гарантируем, что линейная комбинация трех 2-С^-членных групп
образует З-С^-членную группу.
Подвижная
Подвижная 0
Виртуальная
платформа цепь ррр
Опора
Опора
б)
Рис. 5.6. а) РРР= ПКЦ 3-(PRRR)a и б) РРР= ПКЦ 3-(PRRR)a с добавленной
виртуальной цепью РРР
Однако часто группа силовых винтов ПКЦ различна в различных
положениях. Вырождение группы силовых винтов ПКЦ в [25, 130]
называют особенными ограничениями (constraint singularity) ПМ.
Так как анализ особенных ограничений ПМ не зависит от выходных
воздействий, более аккуратным было бы говорить об анализе осо¬
бенных ограничений ПКЦ. Поверхность особенных ограничений ПКЦ
образует открытую границу рабочей области ПМ, соответствующе¬
го ПКЦ.
5.7. Шаг 4: Выбор приводных кинематических пар
Выбор приводных кинематических пар для V= ПМ заключается
в отыскании всех возможных V= ПМ для заданных V= ПКЦ и уда¬
лении тех случаев, для которых не выполняется набор критериев:
1. Приводные пары должны быть расположены на всех опорах на¬
столько равномерно, насколько это возможно.
5.7. Шаг 4: Выбор приводных кинематических пар
93
2. Приводные пары желательно располагать на основании или как
можно ближе к нему.
3. Не должно быть пассивных поступательных кинематических пар.
Первые два критерия предназначены для оптимизации произво¬
дительности за счет минимизации перемещающейся массы и инер¬
ции. Третий критерий возникает из практических соображений. Дей¬
ствительно, пассивные поступательные кинематические пары имеют
тенденцию к некачественному функционированию, не считая случая
использования дорогостоящих управляющих систем.
Так как поиск всех возможных V= ПМ для данной V= ПКЦ
тривиален, основной задачей при выборе приводных кинематических
пар для возможного V= ПМ становится проверка правильности их
выбора.
Выбор приводных кинематических пар для ^-подвижного ПМ дол¬
жен удовлетворять условию правильности выбора приводных кинема¬
тических пар в ПМ, предложенному в разделе 2.3. Проверка пра¬
вильности выбора приводных кинематических пар требует вычисления
определителя размерностью 6x6. Фактически проверка правильности
для ^-степенного V= ПМ для большинства рассматриваемых в книге
ПМ может быть сведена к вычислению определителя размерностью
Т х Т при надлежащем выборе системы координат.
Далее кратко опишем процедуру проверки правильности выбора
приводных кинематических пар, которая будет использоваться в гла¬
вах 6-13.
Из условия правильности выбора приводных кинематических пар
для ПМ (раздел 2.3) известно, что набор из Т приводных ки¬
нематических пар для ^-подвижного ПМ правилен тогда и толь¬
ко тогда, когда в неособом положении приводные силовые винты
(i = 1,2,..., J7) всех Т приводных пар вместе с набором базисных
винтов Ck (А; = 1,2,..., с) группы силовых винтов ПКЦ W образуют
шести-членную группу. Имеем
14, С2ъ ... <&• Cl с2 ... Cl^o. (5.1)
Так как линейная зависимость винтов не зависит от выбора системы
координат, мы можем выбрать систему координат для представления
группы силовых винтов W таким образом, что (6 — с) из шести
скалярных компонентов в некотором положении будут равны нулю
для каждого базисного силового винта группы силовых винтов W.
Пусть Ctjj — вектор, состоящий из (6 — с) скалярных компонентов
приводного силового винта Cjj- В соответствующем положении эти
(6 — с) скалярных компонентов базисного силового винта группы си¬
ловых винтов W стремятся к нулю. C\^j называют t-компоненпгом
приводного силового винта ^j* а вектор состоящий из других
компонентов называют w-компоненпгом Для удобства сдела¬
ем предположение, что первые (6 — с) из шести скалярных компонентов
94
Гл. 5. Подход, основанный на виртуальных цепях
равны нулю для каждого базисного силового винта группы силовых
винтов VV. Уравнение (5.1) может быть представлено в виде
Так как | Cw\ CW2 ••• Cwc I Ф 0, (5.1) может быть упрощено до
Тогда линейная зависимость всех приводных силовых винтов
и группы силовых винтов эквивалентна линейной зависимости Т
(= 6 — с) ^-компонентов приводных силовых винтов. Таким образом,
проверка правильности выбора приводных кинематических пар
сводится к вычислению определителя матрицы размерностью Т х Т’,
каждый столбец которой составлен из ^-компонентов приводных
силовых винтов.
Процедура проверки правильности выбора приводных кинематиче¬
ских пар осуществляется следующим образом:
Шаг 4а. Если одна или более приводных кинематических пар пред¬
полагаемого ПМ пассивна, то набор приводных кинематических
пар неверен и такой ПМ должен быть отброшен.
Для ПКЦ, полученных с помощью предлагаемого в данной книге
подхода, основанного на виртуальных цепях, пассивные кине¬
матические пары выявляются в процессе структурного синтеза.
Для ПКЦ, полученных с помощью других подходов, пассивные
кинематические пары могут быть неизвестны. Их можно легко
выявить, поскольку приводной силовой винт пассивной кинемати¬
ческой пары принадлежит группе силовых винтов ПКЦ. Это один
из способов определения пассивных кинематических пар в ПКЦ.
Как указывалось ранее, для ПКЦ с пассивными кинематическими
парами и кинематически эквивалентной ей ПКЦ без пассивных
кинематических пар, число избыточных связей и реакции в парах
различны, хотя пассивные кинематические пары и не влияют
на перемещения подвижной платформы.
Шаг 46. Если детерминант матрицы Т х Т, составленной
из ^-компонентов всех приводных силовых винтов приводных
кинематических пар, всегда равен нулю, то ПКЦ с таким набором
приводных кинематических пар неработоспособна. В этом случае
соответствующий ей ПМ должен быть отброшен. Аналогично,
если элементы матрицы Т х Т постоянны и ее детерминант
зависит только от параметров опор (рис. 5.7), ее детерминант
будет равен нулю, и, следовательно, соответствующий ей ПМ
также должен быть отброшен. ПМ, для которого элементы
матрицы Т х Т постоянны и ее детерминант не равен нулю,
не имеет особенных ограничений. Следует отметить, что в случае
(5.2)
(5.3)
5.7. Шаг 4: Выбор приводных кинематических пар
95
отсутствия пассивных кинематических пар в наборе приводных
кинематических пар, мы делаем предположение, что этот набор
верен при условии, что элементы матрицы Т х Т зависят
от конфигурации.
Рис. 5.7. Выбор приводных кинематических пар 3-(PRRR)a РРР= ПМ
Пример 5.4. Выбор приводных кинематических пар 3-(PRRR)a
РРР= РКС из раздела 5.6.
На основании критериев выбора приводных кинематических пар,
из 3-(PRRR)^ РРР= ПКЦ получаем предполагаемый 3-(PRRR)^ РРР=
ПМ (рис. 5.7, а).
Выполним теперь проверку правильности выбора приводных кине¬
матических пар.
Шаг 4а. В 3-(PRRR)yi РРР= ПКЦ отсутствуют пассивные кинемати¬
ческие пары. Переходим к шагу 46.
Шаг 46. В каждой опоре (PRRR)^ (рис. 5.7, б) предполагаемого
3-(PRRR)A РРР= ПМ (рис. 5.7, а), первая поступательная кине¬
матическая пара является приводной. Каждый приводной силовой
винт — Со» ось которого параллельна осям трех вращательных
кинематических пар в пределах опоры (рис. 5.7, б). Для опре¬
деления базиса W воспользуемся некоторой системой координат
[О iT]T, [0 jT]T, [0 кт]т. Здесь i, j и к — единичные
векторы, направленные вдоль осей X, Y и Z соответственно.
Следовательно, первые три скалярных компонента всех базисных
приводных силовых винтов в W равны нулю. Соответственно,
Подвижная Подвижная
платформа платформа
a) 3-(PRRR)a РРР= РМ б) Приводные силовые винты
опоры (PRRR)a
96
Гл. 5. Подход, основанный на виртуальных цепях
t-компонент Ct^j из С-pj состоит из первых трех скалярных ком¬
понентов Cbj»т-е-
= (5-4)
где Cf^j ~ единичный вектор, параллельный осям вращательных
кинематических пар опоры г.
Условие правильности выбора приводных кинематических пар
РРР= ПМ может быть выражено в виде
I СF2j СF?j | Ф (5-5)
Элементы матрицы 3x3 для 3-(PRRR)a РРР= ПМ постоянны
и ее детерминант зависит только от параметров опор. Следова¬
тельно, для того чтобы набор приводных кинематических пар
был правильным, РРР= ПМ должен быть собран таким образом,
чтобы оси вращательных кинематических пар у подвижной плат¬
формы не были бы параллельны одной плоскости.
5.8. Резюме
На основании результатов, полученных в главах 2-4, в данной главе
предлагается общая методика структурного синтеза ПМ. С использо¬
ванием концепции виртуальных цепей дано два простых условия про¬
верки предлагаемых ПКЦ. Далее, предложена методика структурного
синтеза ПМ, состоящая из четырех шагов. Предложенная методика
является общей и простой в использовании. Она будет применена
для синтеза нескольких семейств ПМ во второй части книги.
Часть II
КОНКРЕТНЫЕ ПРИМЕРЫ
4 Кун С., Госселин К.
Глава 6
3-ПОДВИЖНЫЙ РРР= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Как было показано в главе 4, существует большое количество
траекторий движения, для которых могут быть синтезированы ПМ.
Одна из простейших и, в тоже время, наиболее распространенных тра¬
екторий движения связана с параллельными перемещениями. В данной
главе рассматривается структурный синтез 3-х степенного РРР= ПМ
(называемого в литературе поступательным ПМ) с применением обще¬
го подхода, изложенного в главе 5. РРР=ПМ — параллельный аналог
последовательного робота, работающего в декартовой системе коорди¬
нат, отрабатывающий поступательное перемещение по трем степеням
свободы. Он широко распространен. Далее подробно рассмотрены че¬
тыре шага структурного синтеза РРР=ПМ.
6.1. Введение
РРР= ПМ (поступательный параллельный механизм) — ПМ, отра¬
батывающий поступательные перемещения по трем степеням свободы.
РРР=ПМ широко применяется, в частности, при сборке и металлооб¬
работке. Предложено несколько типов РРР=ПМ [4, 11, 14, 26, 43, 45,
58, 67, 111, 112, 128]. Систематический подход к созданию РРР=ПМ,
основанный на теории групп движений, предложен в [43, 45]. Система¬
тическое изучение создания 3-подвижных РРР= ПМ с помощью алгеб¬
ры винтов и теории винтов предпринято в [31] и [67] соответственно.
Фактически, в большинстве современных работ, посвященных си¬
стематическому структурному синтезу РРР=ПМ [11, 31, 45, 67],
рассматривается в основном структурный синтез поступательных па¬
раллельных кинематических цепей (РРР=ПКЦ). Ради исторической
точности следует отметить, что результаты по РРР= ПКЦ с 5-
подвижными опорами, представленные в [11, 31, 45, 67], фактически
были опубликованы в [55] в 1973 г. Работа Ханта [55] посвяще¬
на другой проблеме (передаточные муфты с постоянной скоростью),
сложна для чтения, и, соответственно, была в значительной степени
проигнорирована на протяжении многих лет. Выбор приводных кине¬
матических пар для РРР= ПМ систематически рассматривается в [67].
Данная глава посвящена структурному синтезу РРР= ПМ с приме¬
нением общей методики, изложенной в гл. 5. Четыре шага структур¬
ного синтеза РРР=ПМ, т. е. (1) декомпозиция группы силовых винтов
РРР= ПКЦ, (2) структурный синтез опор РРР= ПКС, (3) сборка опор
6.3. Условие, при котором ПКЦ является РРР= ПКЦ
99
для генерирования РРР= ПКЦ и (4) выбор приводных кинематических
пар для РРР=ПМ приведены в разделах 6.5, 6.6, 6.7 и 6.8 соответ¬
ственно.
6.2. Группа силовых винтов РРР= ПКЦ
В любой неособой конфигурации группа кинематических винтов
РРР= ПКЦ или ее виртуальной цепи РРР является 3-^-членной груп¬
пой. Так как виртуальная сила, развиваемая любым £оо в направлении
любого кинематического винта в 3-^-членной группе равна нулю,
группа силовых винтов РРР= ПКЦ или ее виртуальной цепи является
3"Соо"членн°й группой (рис. 6.1).
Рис. 6.1. Группа силовых винтов РРР= ПКЦ
6.3. Условие, при котором ПКЦ является РРР= ПКЦ
При соединении основания и подвижной платформы РРР=ПКЦ
виртуальной цепью РРР функционирование ПКЦ не изменяется. Лю¬
бая из ее опор и виртуальная цепь РРР образуют 3-подвижную од¬
ноконтурную кинематическую цепь. Если порядок группы силовых
винтов опоры больше 0, создаваемая одноконтурная кинематическая
цепь должна быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет РРР=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью РРР образу¬
ют 3-подвижную одноконтурную кинематическую цепь.
4*
100
Гл. 6. 3-подвижный РРР= параллельный механизм
2. Группа силовых винтов ПКЦ совпадает с группой силовых вин¬
тов виртуальной цепи РРР, т. е. является З-С^-членной группой
в любом неособом положении.
6.4. Методика структурного синтеза РРР= ПМ
Общая методика структурного синтеза РРР=ПКЦ может быть
представлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 3-подвижной
РРР=ПКЦ.
Шаг 2. Структурный синтез опор РРР= ПКЦ.
Здесь под опорой РРР=ПКЦ понимается опора, удовлетворяю¬
щая условию (1) для РРР=ПКЦ.
Шаг 3. Сборка опор РРР= ПКЦ.
РРР=ПКЦ может быть получена сборкой двух или более опор
РРР= ПКЦ, полученных на шаге 2, при условии соблюдения
условия (2) для РРР= ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
РРР= ПМ может быть получен выбором набора приводных кине¬
матических пар для каждой РРР= ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
6.5. Шаг 1: Декомпозиция группы силовых винтов
3-подвижной РРР= ПКЦ
Декомпозиция группы силовых винтов РРР=ПКЦ с га опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из га групп силовых винтов опор для РРР= ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
6.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
У=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для У=ПКЦ.
В любой неособой конфигурации группа силовых винтов
РРР= ПКЦ идентична группе силовых винтов виртуальной цепи
РРР, т. е. является З-С^-членной группой, составленной из всех £оо
(рис. 6.1).
Следовательно, группа силовых винтов опор порядка сг > 0 для
РРР=ПКЦ в неособом положении будет З-С^-членной группой, 2-С^-
членной группой или 1-^-членной группой (рис. 6.2).
6.6. Шаг 2: Структурный синтез опор
101
I*-
^^^Соо2
а) З-Соо-членная группа б) 2-С^-членная группа в) 1-С^-членная
группа
Рис. 6.2. Группы силовых винтов опор РРР= ПКЦ
6.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения РРР все силовые винты
в группе силовых винтов имеют одинаковый параметр. Группа силовых
винтов опоры представляет собой сг-членную группу с бесконечным
параметром (0 ^ сг ^ с). Комбинации групп силовых винтов опор могут
быть представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.1-5.5.
6.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для РРР= ПКЦ в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
6.6.1. Шаг 2а: Структурный синтез 3-подвижных кинематиче¬
ских цепей, включающих виртуальную цепь и имеющих заданную
группу силовых винтов опоры. Структурный синтез 3-подвижной
одноконтурной кинематической цепи, включающей виртуальную цепь
РРР и имеющей заданную группу силовых винтов опоры, может быть
выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь РРР и имеющей заданную группу
силовых винтов опоры (см. гл. 3). Во вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар за исключением виртуальной цепи РРР линейно зависимы.
Случай З-Coo-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь РРР, группа силовых вин¬
тов которой представляет собой З-С^-членную группу. Как было по¬
казано в гл. 3, такая КЦ состоит из шести кинематических пар.
Эта одноконтурная КЦ состоит из одной пространственной посту¬
пательной композиционной единицы (рис. 6.3). Получаем единствен¬
ную 3-подвижную одноконтурную КЦ, включающую виртуальную цепь
РРР и имеющую З-Соо-членную группу: PPPV. З-С^-членная группа
состоит из всех Соо-
102
Гл. 6. 3-подвижный РРР= параллельный механизм
Рис. 6.3. Трехподвижная одноконтурная КЦ, включающая виртуальную цепь
РРР (с* = 3): PPPV КЦ
Одноконтурная КЦ, в которой кинематические винты всех кинема¬
тических пар, кроме входящих в виртуальную цепь, линейно зависимы,
должна быть отброшена. Для PPPV КЦ, приведенной на рис. 6.3,
КЦ, состоящая из всех кинематических пар, кроме входящих в вир¬
туальную цепь, представляет собой пространственную поступательную
композиционную единицу. Другими словами, направления трех по¬
ступательных кинематических пар не параллельны одной плоскости,
т. е. указанное геометрическое условие соблюдается.
Случай 2-^qq-членной группы.
Подобно предыдущему случаю, вначале выполним структурный
синтез 3-подвижной одноконтурной КЦ, включающей виртуальную
цепь РРР и имеющей 2-С^-членную группу. В соответствии с гл. 3,
3-подвижная одноконтурная КЦ, включающая виртуальную цепь РРР
и имеющая 2-^^-членную группу, состоит из семи кинематических
пар. Подобная одноконтурная КЦ состоит из одной пространствен¬
ной параллельноосевой композиционной единицы (рис. 6.4, а-6.4, г).
2-Соо'членная гРУппа состоит из всех оси которых перпендикуляр¬
ны осям всех вращательных кинематических пар.
Одноконтурная КЦ, в которой кинематические винты всех кинема¬
тических пар, кроме входящих в виртуальную цепь, линейно зависимы,
должна быть отброшена. RRRRV КЦ (рис. 6.4, а) должна быть от¬
брошена, так как кинематические винты всех четырех вращательных
кинематических пар линейно зависимы.
Для КЦ, показанных на рис. 6.4, 6-6.4, г, КЦ, составленные из всех
кинематических пар, кроме входящих в виртуальную цепь РРР, пред¬
ставляют собой пространственную параллельноосевую композицион¬
ную единицу. Указанное геометрическое условие для них соблюдается.
Случай 1-Ссю-членной группы.
Наконец, рассмотрим случай 1-(^-членной группы. Сначала вы¬
полним структурный синтез 3-подвижной одноконтурной КЦ, вклю¬
чающей виртуальную цепь РРР и имеющей 1-(^-членную группу.
В соответствии с гл. 3 3-подвижная одноконтурная КЦ, включаю¬
щая виртуальную цепь РРР и имеющая 1-(^-членную группу, со¬
стоит из восьми кинематических пар. Такая одноконтурная КЦ со¬
стоит из двух пространственных параллельноосевых композиционных
единиц и/или плоской композиционной единицы либо может быть
6.6. Шаг 2: Структурный синтез опор
103
Рис. 6.4. Некоторые 3-подвижные одноконтурные КЦ, включающие виртуаль¬
ную цепь РРР (сг = 2)
получена включением одной соосной композиционной единицы (R)ь
в 3-подвижную одноконтурную КЦ, включающую виртуальную цепь
РРР и имеющую 2-Соо-членную группу. Некоторые из возможных ар¬
хитектур представлены на рис. 6.5. 1-(^-членная группа представляет
собой Соо» направление которого перпендикулярно осям всех враща¬
тельных кинематических пар.
Одноконтурная КЦ, в которой кинематические винты всех кинема¬
тических пар, кроме входящих в виртуальную цепь, линейно зависи¬
мы, должна быть отброшена. КЦ RRRRRV (рис. 6.5, а) должна быть
отброшена, так как кинематические винты всех вращательных кине¬
матических пар кроме пары R линейно зависимы. Для КЦ, показан¬
ных на рис. 6.5, 6-6.5, з, заключаем, что кинематические винты всех
кинематических пар, кроме входящих в виртуальную цепь, линейно
независимы.
В обозначениях 3-подвижных одноконтурных КЦ, включающих
виртуальную цепь РРР и имеющих с^С^-членную группу, оси враща¬
тельных кинематических пар, обозначенных одинаковыми символами,
R или R, параллельны, тогда как оси вращательных кинематических
пар, обозначенных различными символами, не параллельны.
Следует отметить, что поступательные кинематические пары и вра¬
щательная кинематическая пара из композиционной единицы (R)ь
могут быть расположены в любой точке одноконтурной КЦ. Например,
одноконтурная КЦ RRPRV может быть получена путем изменения
104
Гл. 6. 3-подвижный РРР= параллельный механизм
*
Рис. 6.5. Некоторые 3-подвижные одноконтурные КЦ, включающие виртуаль¬
ную цепь РРР (сг = 1)
6.6. Шаг 2: Структурный синтез опор
105
положения поступательной кинематической пары в одноконтурной КЦ
PRRRV (рис. 6.4, б). Для краткости мы приводим только 3-подвижные
одноконтурные КЦ, из которых посредством подобной операции могут
быть получены все остальные 3-подвижные одноконтурные КЦ.
6.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся РРР=ПКЦ (раздел 6.3) структуры
опор могут быть легко получены из найденных на шаге 2а (раз¬
дел 6.6.1) 3-подвижных одноконтурных КЦ удалением виртуальной
цепи РРР. Геометрические условия, гарантирующие выполнение усло¬
вия (1) для РРР=ПКЦ, легко видны из нотации, принятой для
обозначения структур опор: оси вращательных кинематических пар,
обозначенных одинаковыми символами, R или R, параллельны, тогда
как оси вращательных кинематических пар, обозначенных различными
символами, не параллельны.
Например, удаляя виртуальную цепь из кинематической цепи
RRRRRV (рис. 6.5,6), получаем опору RRRRR (рис. 6.6, а). В опоре
RRRRR, показанной на рис. 6.6, а, оси первых двух вращательных ки¬
нематических пар параллельны друг другу, оси других трех вращатель¬
ных пар также взаимно параллельны. Такая опора имеет 1-(^-членную
группу. Направление Соо перпендикулярно осям всех вращательных
кинематических пар. Удаляя виртуальную цепь из 3-подвижной одно¬
контурной кинематической цепи PRRRV (рис. 6.4, б), получаем опо¬
ру PRRR (рис. 6.6,6). В опоре PRRR оси всех вращательных ки¬
нематических пар параллельны. Опора имеет 2-С^-членную группу,
составленную из всех оси которых перпендикулярны осям всех
вращательных кинематических пар.
а) Опора RRRRR
б) Опора PRRR
Рис. 6.6. Некоторые опоры РРР= ПКЦ
106
Гл. 6. 3-подвижный РРР= параллельный механизм
Таблица 6.1. Опоры РРР=ПКЦ
с'
Класс
№
Структура
Описание
3
ЗР
1
РРР
2
3R-1P
2
RRRP
Оси всех вращательных кинематических
3
4
RRPR
&PRR
пар параллельны
5
PRRR
2R-2P
6
7
8
9
10
11
ЙЙРР
RPRP
RPPR
PRRP
PfcPR
PPRR
1R-3P
12
RPPP
13
14
PRPP
РРЙР
Только вращательные кинематические па¬
ры пассивны
15
PPPR
1
5R
16
RRRR&
Оси двух или трех последовательных вра¬
17
RRRRR
щательных кинематических пар парал¬
18
RR&RR
лельны, оси остальных вращательных пар
19
RRRRR
также параллельны
20
RRRRR
4R-1P
21
RRRRP
Оси двух последовательных кинематиче¬
22
RRRPR
ских пар или двух вращательных пар, со¬
23
RRP&R
единенных поступательной парой, взаим¬
24
ЙРЙЙЙ
но параллельны, оси других двух враща¬
25
PRRRR
тельных пар взаимно параллельны
26
RRRRP
27
RRRPR
28
R&PRR
29
RPRRR
30
РЙЙЙЙ
31-50
См. табл. 6.2
Оси трех вращательных кинематических
пар параллельны. Только вращательная
кинематическая пара, ось которой не па¬
раллельна осям остальных вращательных
пар, пассивна.
3R-2P
51-80
Оси двух вращательных кинематических
пар взаимно параллельны. Только враща¬
тельная кинематическая пара, ось кото¬
рой не параллельна осям остальных вра¬
щательных пар, пассивна.
2R-3P
81-90
Обе вращательные кинематические пары
пассивны
0
—
—
—
—
6.7. Шаг 3: Сборка опор
107
Таблица 6.2. Опоры РРР=ПКЦ (№№ 31-90)
№
Структура
31-35
RRRRP RRRRP RRRPR RRRPR RRPRR
36-40
ЙЙРЙЙ ЙРЙЙЙ ЙРЙЙЙ РЙЙЙЙ РЙЙЙЙ
41-45
ЙРЙЙЙ РЙЙЙЙ РЙЙЙЙ ЙЙРЙЙ ЙРЙЙЙ
46-50
RRRPR RRPRR RRRRP ЙЙЙЙР ЙЙЙРЙ
51-55
ЙЙЙРР RRRPP RRPRP RRPPR RRPRP
56-60
RPRRP ftPRPR ftRPPR ЙРРЙЙ RPftfiP
61-65
PRRRP PRRRP РЙЙРЙ ЙРЙРЙ РЙЙРЙ
66-70
PRPRR RPPRR PRPRR PPRRR PPRRft
71-75
PPRRR PRRPft PRPRR PRRftP ЙЙРРЙ
76-80
RPRPR RPPRR RRPRP RPftRP RRRPP
81-85
PMPP PRPRP PRPPR PPRftP PPfcPR
86-90
РРРЙЙ ftRPPP ЙРЙРР ЙРРЙР ЙРРРЙ
Все полученные структуры опор для РРР=ПКЦ приведены
в табл. 6.1. Для упрощения ее использования, в последней колонке
табл. 6.1 приведено общее описание опор. В ней указываются
пассивные кинематические пары при их наличии. Отметим, что
геометрические условия, которые распространяются на опоры
РРР=ПКЦ, действуют только в пределах самой опоры. Эти условия
наследуются непосредственно из соответствующих одноконтурных
кинематических цепей.
6.7. Шаг 3: Сборка опор
РРР=ПКЦ может быть получена сборкой показанных в табл. 6.1
опор для РРР=ПКЦ, выбранных в соответствии с комбинациями
групп силовых винтов опор из табл. 5.2. При сборке РРР=ПКЦ долж¬
но соблюдаться следующее условие: линейная комбинация групп сило¬
вых винтов опор должна составлять З-С^-членную группу (см. усло¬
вие (2) для РРР=ПКЦ в разделе 6.3).
Для РРР=ПКЦ, в которой не все группы силовых винтов опор
инвариантны относительно основания или подвижной платформы, ли¬
нейная комбинация групп силовых винтов опор обычно составляет
З-Соо-членную группу. Для РРР=ПКЦ, в которой все группы сило¬
вых винтов опор инвариантны относительно основания или подвижной
платформы, геометрия основания или подвижной платформы должна
удовлетворять определенным условиям, гарантирующим, что линей¬
ная комбинация групп силовых винтов опор составляет З-С^-членную
группу. Например, если взять одну опору (рис. 6.6, а) и одну опо¬
ру PRRR (рис. 6.6,6), получим RRRRR-PRRR РРР=ПКЦ с двумя
108
Гл. 6. 3-подвижный РРР= параллельный механизм
опорами (рис. 6.7). Обе группы силовых винтов опор инвариантны
относительно основания или подвижной платформы, следовательно,
для того чтобы гарантировать, что их линейная комбинация составляет
3"Соо"членнУю ГРУППУ> необходимо чтобы оси всех вращательных кине¬
матических пар в РРР=ПКЦ не были параллельны одной плоскости.
Так как число РРР= ПКЦ очень велико, в табл. 6.3 приведены лишь
РРР=ПКЦ с тремя опорами с одинаковыми структурами опор.
Таблица 6.3. РРР=ПКЦ с тремя опорами с одинаковыми структурами опор
Класс
№
Структура
Геометрические условия
ЗР
1
3-РРР
3R-1P
2-3
4-5
з-ftfcftp з-кйрй
3-RPRR 3-PRRR
Оси не всех вращательных кинемати¬
ческих пар параллельны
2R-2P
6-7
8-9
10-11
3-RRPP 3-RPRP
3-RPPfi 3-PRRP
3-PRPR 3-PPRR
1R-3P
12-13
14-15
3-RPPP 3-PRPP
3-PPRP 3-РРРЙ
5R
16-17
з-ййййк з-кйййй
Три прямые, перпендикулярные всем
вращательным кинематическим парам
опоры, не параллельны одной плоско¬
сти
18-19
3-RRRRR 3-RRRRR
20
3-flRRRft
6.8. Шаг 4: Выбор приводных кинематических пар
109
Продолжение табл. 6.3
Класс
№
Структура
Геометрические условия
4R-1P
21-22
3-RRRRP 3-RRRPR
См. условия для структур 16 и 17
23-24
З-ЙЙРЙЙ 3-ЙРЙЙЙ
25-26
3-PRRRR 3-RRRRP
27-28
3-ЙЙЙРЙ З-ЙЙРЙЙ
29-30
3-RPRRR 3-PRRRR
31-40
см. табл. 6.4
41-50
См. условия для структур 16 и 17
3R-2P
51-70
71-80
2R-3P
81-90
См. условия для структур 16 и 17
Таблица 6.4. Структуры РРР=ПКЦ (№№ 31-90)
№
Структура
31-35
3-RRRRP 3-RRRRP 3-RRRPR 3-RRRPR 3-RRPRR
36-40
З-ЙЙРЙЙ 3-ЙРЙЙЙ 3-ЙРЙЙЙ 3-РЙЙЙЙ 3-РЙЙЙЙ
41-45
3-ЙРЙЙЙ 3-РЙЙЙЙ 3-РЙЙЙЙ З-ЙЙРЙЙ 3-ЙРЙЙЙ
46-50
3-ЙЙЙРЙ З-ЙЙРЙЙ 3-ЙЙЙЙР 3-ЙЙЙЙР 3-ЙЙЙРЙ
51-55
3-ЙЙЙРР 3-ЙЙЙРР 3-ЙЙРЙР 3-ЙЙРРЙ 3-ЙЙРЙР
56-60
3-ЙРЙЙР 3-ЙРЙРЙ 3-ЙЙРРЙ 3-ЙРРЙЙ 3-ЙРЙЙР
61-65
3-РЙЙЙР 3-РЙЙЙР 3-РЙЙРЙ 3-ЙРЙРЙ 3-РЙЙРЙ
66-70
3-РЙРЙЙ 3-ЙРРЙЙ 3-РЙРЙЙ 3-РРЙЙЙ 3-РРЙЙЙ
71-75
3-РРЙЙЙ 3-РЙЙРЙ 3-РЙРЙЙ 3-РЙЙЙР 3-ЙЙРРЙ
76-80
3-ЙРЙРЙ 3-ЙРРЙЙ 3-ЙЙРЙР 3-ЙРЙЙР 3-ЙЙЙРР
81-85
3-РЙЙРР 3-РЙРЙР 3-РЙРРЙ 3-РРЙЙР 3-РРЙРЙ
86-90
3-РРРЙЙ 3-ЙЙРРР 3-ЙРЙРР 3-ЙРРЙР 3-ЙРРРЙ
6.8. Шаг 4: Выбор приводных кинематических пар
6.8.1. t-компоненты приводных силовых винтов. Для обо¬
значения базиса W РРР=ПКЦ может быть использована некоторая
система координат [0Т iT]T, [0Т jT]T, [0Т кт]т. Здесь i, j и к
обозначают единичные векторы, направленные вдоль осей X, Y и Z
соответственно, а 0 — нулевой вектор размерности 3x1. Учитывая, что
первые три скалярных компонента всех базисных силовых винтов W
равны нулю, ^-компонент состоит из первых трех скалярных
компонент •, т. е.
Ct*i = Cbi’ (6.1)
110
Гл. 6. 3-подвижный РРР= параллельный механизм
Подвижная
платформа
ОснованжГ^
а) опора RRRRR
б) опора RRRRR
в) опора PRRR
Рис. 6.8. Приводные силовые винты некоторых опор РРР=ПМ
где Cf^j ~ единичный вектор, параллельный осям вращательных
кинематических пар опоры г.
На рис. 6.8 показаны приводные силовые винты приводных кинема¬
тических пар некоторых опор РРР=ПМ. В опоре RRRRR (рис. 6.8, а),
первая вращательная кинематическая пара является приводной. При¬
водной силовой винт — любой Со* ось которого параллельна осям трех
последних вращательных кинематических пар и пересекает ось второй
вращательной кинематической пары. В опоре RRRRR (рис. 6.8,6),
приводной является вторая вращательная кинематическая пара. При¬
водным силовым винтом является любой Со* ось которого параллельна
осям трех последних вращательных кинематических пар и пересека¬
ет ось первой вращательной кинематической пары. В опоре PRRR
(рис. 6.8,в) приводной является первая поступательная кинемати¬
ческая пара. Приводным силовым винтом является любой Со* ось
6.8. Шаг 4: Выбор приводных кинематических пар
111
a) MRRR-PRRR РРР= ПМ б) RRRRR-PRRR РРР= ПМ
Рис. 6.9. Выбор приводных кинематических пар для RRRRR-PRRR РРР= ПКЦ
которого параллельна осям трех вращательных кинематических пар.
^-компонентом каждого из рассмотренных приводных силовых винтов
является единичный вектор в направлении его оси.
6.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для РРР= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого РРР=ПМ пассивна, набор приводных кинема¬
тических пар неверен и такой РРР= ПМ следует отбросить.
Шаг 46. Если для предполагаемого РРР= ПМ ^-компоненты, т. е.
векторные компоненты всех приводных силовых винтов привод¬
ных кинематических пар C$j линейно зависимы в неособом
112
Гл. 6. 3-подвижный РРР= параллельный механизм
Рис. 6.10. Некоторые новые РРР=ПМ
положении, набор приводных кинематических пар неверен.
В этом случае РРР= ПМ следует отбросить.
В соответствии с критерием выбора приводных кинематических пар
(раздел 5.7) и процедуре проверки правильности выбора приводных
кинематических пар можно получить все РРР=ПМ с т (га > 2)
опорами для каждой РРР=ПКЦ.
Например, предполагаемыми РРР= ПМ, соответствующими
RRRRR-PRRR РРР= ПКЦ и удовлетворяющими указанным критери¬
ям, являются РРР=ПМ RRRRR-PRRR, RRRRR-PRRR и RRRRR-
PRRR (рис. 6.9). Следуя процедуре проверки правильности выбора
приводных кинематических пар, RRRRR-PRRR РРР=ПМ должен
быть отброшен, так как определитель матрицы, составленной
из ^-компонентов трех приводных кинематических пар, равен
нулю. Таким образом, РРР=ПМ, соответствующий RRRRR-PRRR
РРР=ПКЦ, - это RRRRft-PRRR РРР=ПМ и ЙЙЙЙЙ-РЙЙЙ
РРР=ПМ.
Из-за большого количества РРР=ПКЦ может быть сгенерировано
большое количество РРР=ПМ. Перечислим только РРР=ПМ с тремя
идентичными опорами и приводными кинематическими парами, распо¬
ложенными на основании (табл. 6.5). Среди перечисленных в табл. 6.5
множество новых РРР=ПМ. Два из них, а именно 3-PRRRR и 3-PRRR
РРР=ПМ, показаны на рис. 6.10.
Как показано в [37, 69], эти 3-PRRRR и З-PRRR РРР=ПМ обла¬
дают следующими характеристиками: (1) прямая задача о положениях
6.8. Шаг 4: Выбор приводных кинематических пар
113
Подвижная платформа
Подвижная
а) 3-РЙЙЙ
Подвижная
Подвижная
платформа
Подвижная
в) 3-PRRRR (случай 1)
(г) 3-PRRRR (случай 2)
Рис. 6.11. Развязанные по входу-выходу РРР=ПМ (с линейными приводами)
для них может быть решена путем решения системы линейных урав¬
нений; (2) якобиан таких РРР=ПМ является константой. Может быть
вычислен обратный якобиан, и, соответственно, нет необходимости
114
Гл. 6. 3-подвижный РРР= параллельный механизм
Таблица 6.5. РРР= ПМ с тремя опорами
Класс
№
Структура
Геометрические условия
ЗР
1
3-РРР
Три прямые, перпендикулярные осям
двух пассивных поступательных кине¬
матических пар в опоре, не параллель¬
ны одной плоскости
3R-1P
2-3
4
3-RRRP 3-RRPR
3-ЙРЙЙ
5
3-PRRR
Оси всех кинематических пар R не па¬
раллельны одной плоскости
2R-2P
6-7
3-ЙЙРР
См. условие для структуры № 1
7-8
9-10
И
3-ЙРЙР 3-ЙРРЙ
3-РЙЙР 3-РЙРЙ
3-РРЙЙ
1R-3P
12-13
14-15
3-ЙРРР 3-PRPP
3-РРЙР 3-PPPR
См. условие для структуры № 1
5R
16
3-ЙЙЙЙЙ
См. условие для структуры № 5
17-18
19-20
3-ЙЙЙЙЙ 3-ЙЙЙЙЙ
3-ЙЙЙЙЙ 3-ЙЙЙЙЙ
4R-1P
21-22
23-24
25-26
27-28
29-30
3-ЙЙЙЙР 3-ЙЙЙРЙ
З-ЙЙРЙЙ 3-ЙРЙЙЙ
3-РЙЙЙЙ 3-ЙЙЙЙР
3-ЙЙЙРЙ З-ЙЙРЙЙ
3-ЙРЙЙЙ 3-РЙЙЙЙ
31-38
см. табл. 6.6
39-43
См. условие для структуры № 5
44-50
3R-2P
51-54
См. условие для структуры № 1
55-79
80
См. условие для структуры № 1
2R-3P
81-90
в многократном вычислении обратного якобиана при прямом анализе
перемещений и скоростей. (3) В них отсутствуют особенности ограни¬
чений. (4) В них отсутствуют неопределенности положения. Кроме то¬
го, у таких РРР= ПМ может быть осуществлена развязка входа-выхода
(рис. 6.11) Основной характеристикой развязанных по входу-выходу
РРР=ПМ является то, что три перемещения подвижной платформы
по трем ортогональным направлениям могут независимо управляться
тремя приводами. В лаборатории робототехники университета Лаваль
6.8. Шаг 4: Выбор приводных кинематических пар
115
Таблица 6.6. Структуры РРР=ПМ (№№ 31—90)
№
Структура
31-35
3-RRRRP
3-RRRRP
3-RRRPR
3-RRRPR
3-RRPRR
36-40
3-RRPRR
3-RPRRR
3-RPRRR
3-PRRRR
3-PRRRR
41-45
3-RPRRR
3-PRRRR
3-PRRRR
3-RRPRR
3-RPRRR
46-50
3-RRRPR
3-RRPRR
3-RRRRP
3-RRRRP
3-RRRPR
51-55
3-RRRPP
3-RRRPP
3-RRPRP
3-RRPPR
3-RRPRP
56-60
3-RPRRP
3-RPRPR
3-RRPPR
3-RPPRR
3-RPRRP
61-65
3-PRRRP
3-PRRRP
3-PRRPR
3-RPRPR
3-PRRPR
66-70
3-PRPRR
3-RPPRR
3-PRPRR
3-PPRRR
3-PPRRR
71-75
3-PPRRR
3-PRRPR
3-PRPRR
3-PRRRP
3-RRPPR
76-80
3-RPRPR
3-RPPRR
3-RRPRP
3-RPRRP
3-RRRPP
81-85
3-PRRPP
3-PRPRP
З-РЙРРЙ
3-PPRRP
3-PPRPR
86-90
3-PPPRR
3-RRPPP
3-RPRPP
3-RPPRP
3-RPPPR
Рис. 6.12. Развязанный по входу-выходу З-RRRRR РРР=ПМ (с вращательны¬
ми приводами)
были построены несколько пластиковых моделей механизмов, иллю¬
стрирующих полученный результат (см. рис. 4 цветной вклейки). Кроме
того, в университете Лаваль был создан и протестирован основанный
на З-PRfcR РРР= ПМ параллельный манипулятор, названный «Трип-
терон» (рис. 3, а цветной вклейки). Триптероном очень просто управ¬
лять, так как его якобиан представляет собой единичную матрицу.
С помощью бесколлекторных двигателей постоянного тока Триптерон
отрабатывал траекторию с ускорениями до 8g. За дополнительной
информацией по Триптерону отсылаем читателя к [37, 38, 68, 69].
Проведенный выше структурный синтез РРР= ПМ позволяет вы¬
делить два перспективных класса манипуляторов. Первый класс —
развязанные по входу-выходу РРР=ПМ (рис. 6.11 и 6.12) [68], второй
116
Гл. 6. 3-подвижный РРР= параллельный механизм
класс — РРР= ПМ, имеющие линейную связь между входом и выходом
(рис. 6.10) [70, 76].
6.9. Резюме
В данной главе подробно рассмотрен структурный синтез РРР= ПМ
с помощью предложенного в главе 5 подхода, основанного на при¬
менении виртуальных цепей. РРР=ПКЦ, представленные в [45, 55],
получены заново. Также получены РРР= ПКЦ с пассивными кинемати¬
ческими парами. Исследованы РРР=ПКЦ как с избыточными связями,
так и без них. Условие проверки правильности выбора приводных кине¬
матических пар для РРР= ПМ упрощено до вычисления определителя
матрицы размерностью 3x3. Получено несколько новых РРР= ПМ.
Следует отметить, что, заменяя вращательные кинематические па¬
ры на соосные винтовые (Н) в любом полученном в данной главе
РРР=ПМ, можно получить некоторые РРР=ПМ с винтовыми кине¬
матическими парами. Другие РРР=ПМ, содержащие винтовые кине¬
матические пары, могут быть получены из 3-подвижной одноконтурной
КЦ, содержащей виртуальную цеь РРР и как минимум одну винтовую
кинематическую пару в соответствии с изложенной в данной главе
процедурой. Можно рассмотреть два случая: (1) 3-подвижные одно¬
контурные КЦ, полученные из КЦ RRRRV (рис. 6.4, а) заменой одной
или более кинематической пары R соосной кинематической парой Н,
и (2) 3-подвижные одноконтурные КЦ, полученные из КЦ RRRRRV
(рис. 6.5, a), RRRRRV, RRRRRV, RRRRRV, RRRRRV заменой одной
или более кинематических пар R (или R) соосными кинематическими
парами Н (или Н). Наконец, заменяя поступательные кинематические
пары плоскими параллелограммными механизмами [33, 45, 68, 91, 99]
или наборами из двух последовательных поступательных кинематиче¬
ских пар с пространственным параллелограммным механизмом, могут
быть получены дополнительные варианты РРР= ПМ.
Глава 7
3-ПОДВИЖНЫЙ S= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Параллельные механизмы, совершающие произвольные повороты
вокруг фиксированной точки, часто применяются в робототехнике,
производстве и т. д. Они являются важным семейством устройств и их
структурный синтез — актуальная задача. В данной главе с помощью
общей методики, предложенной в гл. 5, производится структурный син¬
тез 3-подвижного S= ПМ (называемого также сферическим параллель¬
ным механизмом). Б=ПМ обозначает 3-степенной ПМ, осуществляю¬
щий сферическое перемещение с тремя степенями свободы. Подробно
рассмотрены четыре шага структурного синтеза S= ПМ.
7.1. Введение
S= ПМ, называемый также сферическим параллельным механиз¬
мом, — 3-степенной ПМ, осуществляющий сферическое перемещение
с тремя степенями свободы. Б=ПМ широко применяются, в частности,
в качестве операционных устройств и запястий роботов.
Б=ПМ, предложенные до сих пор, представляют собой, главным
образом: (a) S= ПМ, в которых каждая опора состоит из трех вра¬
щательных кинематических пар, оси которых проходят через центр
вращения [16, 17, 35], (б) Б=ПМ, в которых одна из опор состо¬
ит из единственной пассивной вращательной кинематической пары,
(в) S= ПМ, в которых каждая из трех опор состоит их двух вращатель¬
ных кинематических пар, оси которых проходят через центр вращения,
соединенных кинематической цепью, эквивалентной поступательной
кинематической паре [61], (г) Б=ПМ, в которых каждая из трех опор
состоит из двух последовательных вращательных кинематических пар
с параллельными осями и трех вращательных кинематических пар, оси
которых пересекаются в центре вращения подвижной платформы [22],
и (д) S= ПМ, в которых каждая из трех опор состоит из кинематиче¬
ских пар R, П (плоский параллелограммный механизм) и S [113].
В [61] предложен подход к структурному синтезу Б=ПМ, основан¬
ный на теории групп движений. С помощью этого подхода получены
несколько новых структур 5=ПКЦ и Б=ПМ [23, 61]. К сожалению,
не выявлено число избыточных связей для S= ПМ. Выбор приводных
кинематических пар также не рассматривался систематически.
Данная глава посвящена структурному синтезу Б=ПМ с приме¬
нением общей методики, изложенной в гл. 5. Декомпозиция группы
118
Гл. 7. 3-подвижный S= параллельный механизм
силовых винтов S= ПКЦ подробно рассмотрена в разделе 7.5. Струк¬
турный синтез опор Б=ПКЦ выполнен в разделе 7.6. В разделе 7.7
проведена сборка опор для генерирования Б=ПКЦ, а выбор приводных
кинематических пар для S= ПМ обсуждается в разделе 7.8.
7.2. Группа силовых винтов S= ПКЦ
В любой неособой конфигурации группа кинематических винтов
Б=ПКЦ или ее виртуальной цепи S является 3-£0-членной группой,
центр которой является центром вращения подвижной платформы. Лег¬
ко видеть, что группа силовых винтов S= ПКЦ является 3-£о-членной
группой с центром в центре вращения подвижной платформы (рис. 7.1).
Подвижная платформа
Рис. 7.1. Группа силовых винтов Б=ПКЦ
7.3. Условие, при котором ПКЦ является S= ПКЦ
При соединении основания и подвижной платформы Б=ПКЦ вир¬
туальной цепью S функционирование ПКЦ не изменяется. Любая из ее
опор и виртуальная цепь S образуют 3-подвижную одноконтурную
кинематическую цепь. Если порядок группы силовых винтов опоры
больше 0, создаваемая одноконтурная кинематическая цепь должна
быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет Б=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью S образуют
3-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи S, т. е. является 3-£о-членной группой в любом
неособом положении.
7.4. Методика структурного синтеза Б=ПМ
Общая методика структурного синтеза S= ПКЦ может быть пред¬
ставлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 3-подвижной Б=ПКЦ.
7.5. Шаг 1: Декомпозиция группы силовых винтов S=flKL[
119
Шаг 2. Структурный синтез опор S= ПКЦ.
Здесь под опорой Б=ПКЦ понимается опора, удовлетворяющая
условию (1) для Б=ПКЦ.
Шаг 3. Сборка опор S= ПКЦ.
S= ПКЦ может быть получена сборкой двух или более опор
Б=ПКЦ, полученных на шаге 2, при условии соблюдения усло¬
вия (2) для S= ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
S= ПМ может быть получен выбором набора приводных кинема¬
тических пар для каждой S= ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
7.5. Шаг 1: Декомпозиция группы силовых винтов
S=nKU
Декомпозиция группы силовых винтов Б=ПКЦ с т опорами со¬
стоит в отыскании всех групп силовых винтов опор и комбинаций
из т групп силовых винтов опор для Б=ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
7.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
S= ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для У=ПКЦ.
В любой неособой конфигурации группа силовых винтов Б=ПКЦ
идентична группе силовых винтов виртуальной цепи S, т. е. является 3-
£0-членной группой, составленной из всех £0, проходящих через центр
виртуальной цепи S.
Следовательно, группа силовых винтов опор
порядка сг > О для Б=ПКЦ в неособом поло¬
жении будет 3-£0-членной группой, 2-£0-членной
группой или 1-£0-членной группой (рис. 7.2).
7.5.2. Определение комбинаций групп си¬
ловых винтов опор. Для рассматриваемой тра¬
ектории движения S все силовые винты в груп¬
пе силовых винтов имеют одинаковый параметр.
Группа силовых винтов опоры представляет собой
сг-членную (0 ^ сг ^ с) группу с нулевым пара¬
метром. Комбинации групп силовых винтов опор
могут быть представлены просто комбинациями
их порядков.
Рис. 7.2. Группа си¬
ловых винтов опор
S=nKU
120
Гл. 7. 3-подвижный S= параллельный механизм
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.1-5.5.
7.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для S= ПКЦ в соответ¬
ствии с двумя подшагами, предложенными в разд. 5.5.
7.6.1. Шаг 2а: Структурный синтез 3-подвижных кинема¬
тических цепей, включающих виртуальную цепь S и имеющих
заданную группу силовых винтов опоры. Структурный синтез
3-подвижной одноконтурной кинематической цепи, включающей вир¬
туальную цепь S и имеющей заданную группу силовых винтов опоры,
может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь S и имеющей заданную группу сило¬
вых винтов опоры (см. гл. 3). Во вторых, отбрасываются те одноконтур¬
ные КЦ, в которых кинематические винты всех кинематических пар,
за исключением виртуальной цепи S, линейно зависимы.
Случай 3-£0-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь S, группа силовых винтов
которой представляет собой 3-£0-членную группу. Как было показано
в гл. 3, такая КЦ состоит из шести кинематических пар. Такая одно¬
контурная КЦ состоит из одной сферической композиционной единицы
(рис. 7.3). Получаем единственную 3-подвижную одноконтурную КЦ,
включающую виртуальную цепь S и имеющую 3-£0-членнук) группу:
PPPS. 3-£0-членная группа состоит из всех Со» проходящих через центр
Во-вторых, одноконтурная КЦ, в которой
кинематические винты всех кинематических
пар, кроме входящих в виртуальную цепь,
линейно зависимы, должна быть отброшена.
Для краткости заметим, что указанное усло¬
вие соблюдается автоматически.
Случай 2-£0-членной группы.
Во-первых, выполним структурный синтез
3-подвижной одноконтурной КЦ, включающей
виртуальную цепь S и имеющей 2-£0-членную
группу. В соответствии с гл. 3, 3-подвижная
одноконтурная КЦ, включающая виртуальную
цепь РРР и имеющая 2-С0-членную группу,
состоит из семи кинематических пар. По¬
добная одноконтурная КЦ формируется пу¬
тем встраивания соосной или сонаправленной композиционной едини¬
цы в сферическую композиционную единицу (рис. 7.4). 2-£0-членная
виртуальной цепи S.
Рис. 7.3. Трехподвиж¬
ная одноконтурная КЦ,
включающая виртуаль¬
ную цепь S и имею¬
щая З-Со-членную груп¬
пу: PPPS КЦ
7.6. Шаг 2: Структурный синтез опор
121
Рис. 7.4. 3-подвижные одноконтурные КЦ, включающие виртуальную цепь S
и имеющие 2-С0-членную группу
группа состоит из всех Со» оси которых проходят через центр вирту¬
альной цепи S и пересекают оси вращательных кинематических пар
соосной композиционной единицы или перпендикулярны направлению
поступательных кинематических пар сонаправленной композиционной
единицы.
Во-вторых, отбросим те одноконтурные КЦ, кинематические винты
всех кинематических пар которых, за исключением входящих в вирту¬
альную цепь, линейно зависимы. Для этого требуется, чтобы в соос¬
ной композиционной единице была одна вращательная кинематическая
пара, либо в сонаправленной композиционной единице была одна по¬
ступательная кинематическая пара.
Случай 1-£0-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь S и имеющей 1-£0-членную
группу. В соответствии с гл. 3 3-подвижная одноконтурная КЦ, вклю¬
чающая виртуальную цепь S и имеющая 1-£0-членную группу, состо¬
ит из восьми кинематических пар. Такая одноконтурная КЦ состоит
из (а) двух сферических композиционных единиц или (2) одной сфе¬
рической композиционной единицы и одной плоской композиционной
единицы (рис. 7.5, а-7.5, г) или может быть получена встраиванием со¬
осной либо сонаправленной композиционной единицы в 3-подвижную
одноконтурную КЦ, включающую виртуальную цепь S и имеющую
2-£0-членную группу (рис. 7.5,5-7.5, е). 1-£0-членная группа пред¬
ставляет собой Со» направление которого перпендикулярно осям всех
вращательных кинематических пар.
Во-вторых, отбросим те одноконтурные КЦ, кинематические винты
всех кинематических пар которых, за исключением входящих в вирту¬
альную цепь, линейно зависимы. Для этого требуется, чтобы в соос¬
ной композиционной единице была одна вращательная кинематическая
пара, либо в сонаправленной композиционной единице была одна по¬
ступательная кинематическая пара.
В обозначениях 3-подвижных одноконтурных кинематических це¬
пей, включающих виртуальную цепь S и имеющих сг-£0-членную
122
Гл. 7. 3-подвижный 5= параллельный механизм
Рис. 7.5. 3-подвижные одноконтурные КЦ, включающие виртуальную цепь S
и имеющие 1-С0-членную группу
группу, ft — вращательные кинематические пары, оси которых пересе¬
каются в центре виртуальной цепи S, (XXX)# (где X — вращательная
либо поступательная кинематическая пара) — эквивалентная плоская
кинематическая пара, образованная тремя последовательными кинема¬
тическими парами, (RRR)s — эквивалентная сферическая кинематиче¬
ская пара, сформированная тремя последовательными вращательными
кинематическими парами. Оси всех вращательных кинематических пар
из (ХХХ)# и (RRR)s не проходят через точку пересечения осей пар R,
Оь — соосная или сонаправленная композиционная единица.
7.6. Шаг 2: Структурный синтез опор
123
Следует отметить, что кинематические пары (P)l и (R)ь могут
быть расположены в любой точке одноконтурной КЦ. Для краткости
мы приводим только 3-подвижные одноконтурные КЦ, из которых
посредством подобной операции могут быть получены все осталь¬
ные 3-подвижные одноконтурные КЦ. Например, одноконтурная КЦ
RRPRS может быть получена перестановкой поступательной кинема¬
тической пары в одноконтурной КЦ RRRPS (рис. 7.4).
7.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющихся 5=ПКЦ (раздел 7.3) структуры опор
могут быть легко получены из найденных на шаге 2а (раздел 7.6.1)
3-подвижных одноконтурных КЦ удалением виртуальной цепи S. Гео¬
метрические условия, гарантирующие выполнение условия (1) для
5=ПКЦ, легко видны из нотации, принятой для обозначения струк¬
тур опор.
Например, удаляя кинематическую цепь S из КЦ (RRR)^RRS
(рис. 7.5,6), получаем опору (RRR)^ftft (рис. 7.6, а). В этой опоре оси
первых трех вращательных кинематических пар параллельны, а оси по¬
следних двух вращательных кинематических пар пересекаются. Такая
опора имеет 1-С0-членную группу. £0 проходит через точку пересечения
двух кинематических пар R и параллелен осям первых трех враща¬
тельных кинематических пар.
Рис. 7.6. Некоторые опоры S= ПКЦ
Все полученные типы опор для 5=ПКЦ перечислены в табл. 7.1.
Опоры, используемые для синтеза 5=ПКЦ, должны удовлетворять
геометрическим условиям не только в пределах самой опоры, но и меж¬
ду ними.
124
Гл. 7. 3-подвижный S= параллельный механизм
Таблица 7.1. Опоры S= ПКЦ
с'
Класс
№
Структура
3
3R
1
2
4R
2
3
4
ftRftft
5
Rftftft
3R1P
6
RRftP
7
RRPR
8
ftPftR
9
Pftftft
1
5R
10-19
Перестановки RRRRR
20
M(RRR)e
21
ft(RRR)Bft
22
(RRR)Eftft
23
ftft(RRR)s
24
ft(RRR)sft
25
(RRR)sftft
4R1P
26-45
Перестановки ftftftRP
46
ftft(RRP)B
47
RR(RPR)B
48
RR(PRR)b
49
ft(RRP)Eft
50
ft(RPR)Eft
51
ft(PRR)Eft
52
(RRP)bM
53
(RPR)sftft
54
(PRR)bRR
3R2P
55-64
Перестановки ftftftPP
65
RR(RPP)e
66
RR(PRP)e
67
M(PPR)e
68
ft(RPP)sft
69
ft(PRP)Bft
70
ft(PPR)Bft
71
(RPP)EM
72
(PRP)Bftft
73
(PPR)sftft
0
-
-
-
7.7. Шаг 3: Сборка опор
125
7.7. Шаг 3: Сборка опор
Б=ПКЦ может быть получена сборкой показанных в табл. 7.1
опор для Б=ПКЦ, выбранных в соответствии с комбинациями групп
силовых винтов опор из табл. 5.1-5.5. При сборке Б=ПКЦ должно
соблюдаться следующее условие: линейная комбинация групп силовых
винтов опор должна составлять 3-£0-членную группу (см. условие (2)
для Б=ПКЦ в разделе 7.3).
Для Б=ПКЦ, в которой не все группы силовых винтов опор ин¬
вариантны относительно основания или подвижной платформы, линей¬
ная комбинация групп силовых винтов опор обычно составляет 3-£0-
членную группу. Для Б=ПКЦ, в которой все группы силовых винтов
опор инвариантны относительно основания или подвижной платформы,
геометрия основания или подвижной платформы должна удовлетворять
определенным условиям, гарантирующим, что линейная комбинация
групп силовых винтов опор составляет 3-£0-членную группу.
На рис. 7.6 показаны две опоры Б=ПКЦ. В опоре (RRR)^RR,
показанной на рис. 7.6, а, оси первых трех вращательных кинематиче¬
ских пар параллельны, а оси последних двух пересекаются. Эта опора
имеет 1-£0-членную группу. £0 проходит через точку пересечения осей
кинематических пар R и параллелен осям первых трех вращательных
кинематических пар. В опоре ftRRft, показанной на рис. 7.6, б, оси всех
кинематических пар R пересекаются в одной точек. Эта опора имеет
2-£0-членную группу, состоящую из всех £0, оси которых проходят
через общую точку кинематических пар R и пересекают ось кинема¬
тической пары R. Взяв одну опору (RRR)^ftR и одну опору ftRRR,
получим (RRR)^ftft-ftRRR S= ПКЦ (рис. 7.7). В этой S= ПКЦ оси всех
кинематических пар R пересекаются в одной точке.
Так как число Б=ПКЦ очень велико, в табл. 7.2 приведены лишь
Б=ПКЦ с тремя опорами с одинаковыми структурами опор.
Группы силовых винтов каждой из опор 3-(RRR)eRR, 3-(RRR)sRR,
3-(RRP)eRR, 3-(RPR)eRR, 3-(PRR)eRR, 3-(RPP)eRR, 3-(PRP)eRR,
3-(PPR)^RR инвариантны относительно основания. Чтобы гарантиро¬
вать, что линейная комбинация трех таких опор составит 3-£0-членную
группу, основание должно быть сконструировано таким образом, что¬
бы нормали к эквивалентным плоским поступательным парам всех
опор не были параллельны одной плоскости либо центр вращения
подвижной платформы и центры эквивалентных сферических поступа¬
тельных пар не лежали в одной плоскости. Группы силовых винтов
каждой из опор 3-RR(RRR)^, 3-RR(RRR)s, 3-ftR(RRP)£, 3-RR(RPR)e,
3-RR(PRR)£, 3-ftft(RPP)£, 3-RR(PRP)£, 3-RR(PPR)e инвариантны от¬
носительно подвижной платформы. Чтобы гарантировать, что линейная
комбинация трех таких опор составит 3-£о-членную группу, подвиж¬
ная платформа должна быть сконструирована таким образом, чтобы
нормали к эквивалентным плоским поступательным парам всех опор
126
Гл. 7. 3-подвижный S= параллельный механизм
Таблица 7.2. S= ПКЦ с тремя опорами с одинаковыми структурами опор
с*
Класс
№
Структура
Число избыточ¬
ных связей
3
3R
1
3-ftftft
6
2
4R
2
3-MftR
3
3
4
3-ftRM
5
3-RftM
3R1P
6
3-MftP
7
3-RRPR
8
3-RPRR
9
3-PftM
1
5R
10-19
3-Перестановки RRRRR
0
20
3-RR(RRR)E
21
3-ft(RRR)jsR
22
3-(RRR)EM
23
3-ftft(RRR)s
24
3-ft(RRR)sft
25
3-(RRR)sftft
4R1P
26-45
3-Перестановки ftftftRP
46
3-M(RRP)e
47
3-M(RPR)e
48
3-M(PRR)e
49
3-R(RRP)jsft
50
3-ft(RPR)gft
51
3-ft(PRR)E6
52
3-(RRP)EM
53
3-(RPR)Eftft
54
3-(PRR)EM
3R2P
55-64
3-Перестановки RRRPP
65
3-M(RPP)E
66
3-RR(PRP)E
67
3-RR(PPR)e
68
3-R(RPP)Eft
69
3-R(PRP)gft
70
3-R(PPR)eR
71
3-(RPP)EftR
72
3-(PRP)EM
73
3-(PPR)Eftft
7.8. Шаг 4: Выбор приводных кинематических пар 127
Подвижная платформа
не были параллельны одной плоскости либо центр вращения подвиж¬
ной платформы и центры эквивалентных сферических поступательных
пар не лежали в одной плоскости.
7.8. Шаг 4: Выбор приводных кинематических пар
7.8.1. t-компоненты приводных силовых винтов. Положим,
что порядок группы винтов не зависит от координат и, для простоты,
что все приводные силовые винты выражены в системе координат
с началом в центре группы силовых винтов. Пусть [0Т iT]T, [0Т jT]T,
[ог кТ — базис W. Здесь i, j и к обозначают единичные векторы,
направленные вдоль осей X, Y и Z соответственно, а 0 — нулевой
вектор размерности 3x1. Последние три скалярных компонента всех
базисных силовых винтов W равны нулю. Тогда ^-компонент Ct^j Сд?
состоит из последних трех скалярных компонент т. е.
С^=СЬг (7.1)
где Cs^j ~ второй векторный компонент
На рис. 7.8 показаны приводные силовые винты приводных ки¬
нематических пар для некоторых опор Б=ПМ. Первые две опоры
соответствуют одной и той же опоре 5=ПКЦ. Группа силовых винтов
этих опор представляет собой 1-£о_членнук) группу. В опоре (RRR)^RR
(рис. 7.8, а) приводной является первая вращательная кинематическая
128
Гл. 7. 3-подвижный S= параллельный механизм
Подвижная платформа
б) (RRR)eRR
Рис. 7.8. Приводные силовые винты для некоторых S= ПКЦ
7.8. Шаг 4: Выбор приводных кинематических пар
129
пара. £о^1 может быть выбран как Со» направленный вдоль пересечения
плоскости, определенной осями второй и третьей кинематических пар,
с плоскостью, определенной осями двух последних кинематических
пар. В опоре (RRR)^RR (рис. 7.8,6) приводной является вторая вра¬
щательная кинематическая пара. Со?>2 может быть выбран как Со» на"
правленный вдоль пересечения плоскости, определенной осями первой
и третьей кинематических пар, с плоскостью, определенной осями двух
последних кинематических пар. В опоре RftRR (рис. 7.8, в) приводной
является первая вращательная кинематическая пара. Сотн может быть
выбран как Со» ось которого проходит через точку пересечения оси
кинематической пары R с плоскостью, определенной осями двух непри¬
водных кинематических пар R и не проходит через точку пересечения
осей всех трех кинематических пар R.
7.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для S= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого S= ПМ пассивна, набор приводных кинематиче¬
ских пар неверен и такой S= ПМ следует отбросить.
Так как существуют различные подходы к выявлению пассивных
кинематических пар, приведем здесь один из альтернативных
подходов.
Кинематическая пара в S= ПКЦ пассивна, если второй векторный
компонент ее приводного силового винта, Сэдг Равен Другими
словами, кинематическая пара в S= ПКЦ пассивна, если ее при¬
водной силовой винт принадлежит З-Со'членной группе S= ПКЦ.
Физически, приводные силовые винты пассивных кинематических
пар не влияют на движение подвижной платформы в пределах
группы ее кинематических винтов.
Например, приводные силовые винты опоры RRRR S= ПМ при
выборе в качестве приводной кинематической пары пары R пред¬
ставляют собой Со» оси которых проходят через точку пересече¬
ния осей кинематических пар R и не пересекают ось пары R.
Второй векторный компонент всех таких приводных силовых
винтов равен 0, следовательно, кинематическая пара R пассивна
и не может быть выбрана в качестве приводной. Фактически, для
опоры, содержащей три кинематические пары R, все кинематиче¬
ские пары кроме R пассивны.
Шаг 46. Если для предполагаемого S= ПМ ^-компоненты, т. е. вторые
векторные компоненты всех приводных силовых винтов привод¬
ных кинематических пар Сjj линейно зависимы в неособом по¬
ложении, набор приводных кинематических пар неверен. В этом
случае S= ПМ следует отбросить.
5 Кун С., Госселин К.
130
Гл. 7. З-подвижный S= параллельный механизм
В соответствии с критерием выбора приводных кинематических пар
(раздел 5.7) и процедурой проверки правильности выбора приводных
кинематических пар можно получить все S= ПМ с т (га > 2) опорами
для каждой S= ПКЦ.
Например, предполагаемые S= ПМ, соответствующие S= ПКЦ
с двумя опорами (RRR)^RR-RRRR и удовлетворяющие указанным
критериям, — (RRR)^Rft-RRRR S= ПМ и (RRR)^RR-RRRR S= ПМ
(рис. 7.9). В соответствии с процедурой проверки правильности
выбора приводных кинематических пар (RRR)^RR-RRRR Б=ПМ
должен быть отброшен, так как определитель матрицы, составленной
из ^-компонентов трех приводных кинематических пар, равен 0.
Таким образом, (RRR)^RR-RRRR Б=ПКЦ соответствует только один
параллельный механизм: (RRR)fRR-RRRR Б=ПМ.
Подвижная платформа Подвижная платформа
Рис. 7.9. Выбор приводных кинематических пар для (RRR)eRR-R&RR 5=ПКЦ
Из-за большого количества Б=ПМ, в табл. 7.3 приведены только
S= ПМ с одинаковыми структурами опор, удовлетворяющие вышеука¬
занным критериям. В табл. 7.3 11 новых Б=ПМ (см. № 16, 18-27).
7.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез Б=ПМ. Вновь были получены
Б=ПКЦ, предложенные в [45, 55]. Были также получены Б=ПКЦ
с пассивными кинематическими парами. Были получены Б=ПКЦ
7.9. Резюме
131
Таблица 7.3. S= ПМ с тремя опорами
ci
Класс
№
Структура
3
3R
1
3-RRR
2
4R
2
3-RRRR
3
3-RRRR
4
3-RRRft
5
3-Rftftft
1
5R
6-15
3-Перестановки RRRRR
16
3-ftR(RRR)B
17
3-ft(RRR)£R
18
3-(RRR)Bftft
19
3-Rft(RRR)s
20
3-ft(RRR)sft
21
3-(RRR)sM
4R1P
22
3-(RRP)£;Rft
23
3-(RPR)£;RR
24
3-(PRR)BRft
как с избыточными связями, так и без них, а также несколько новых
Б=ПМ.
Заменяя комбинацию вращательной и поступательной кинематиче¬
ских пар с параллельными осями, комбинацию двух вращательных
кинематических пар с непараллельными осями и комбинацию трех
вращательных кинематических пар с непараллельными осями на ки¬
нематические пары С, U и S соответственно, можно получить все
частные случаи S= ПМ. Так, RUU S= РМ [22] является частным слу¬
чаем 3-RftRRR S= ПМ. Для ясного и простого представления условий
для Б=ПМ такие частные случаи не приведены в табл. 7.3.
Четыре новых Б=ПМ, а именно 3-(RRR)£RR, 3-(RRR)sRR, 3-RSR
и 3-RRS, показаны на рис. 7.10. На основе этих новых Б=ПМ могут
быть предложены несколько вариантов «Живого глаза» [36] (рис. 7.10).
По сравнению с «Живым глазом», расположение приводных кинема¬
тических пар на основании 3-(RRR)#RR (рис. 7.10, (3) и 3-(RRR)sRR
(рис. 7.10, е) Б=ПМ более гибкое. В случае 3-(RRR)sRR оси трех
приводных кинематических пар могут быть параллельны (рис. 7.10, е).
Однако структура этих двух новых S= ПМ сложнее структуры «Жи¬
вого глаза». В сравнении с «Живым глазом», содержащим избыточные
связи, Б=ПМ, показанные на рис. 7.10, б и 7.10, в избыточных связей
не содержат.
5*
132
Гл. 7. 3-подвижный S= параллельный механизм
Подвижная платформа
Подвижная платформа
^Основание
a) 3-RRR S= ПМ
Подвижная платформа
Опора 3
Основание
в) 3-RftS S= ПМ
Подвижная платформа
Опора 1
Подвижная платформа
Опора 3
Основание
г) 3-RC С S= ПМ
Подвижна^ платформа
Опора 2
Опора 3
Опора 1
Основание Основание
д) 3-(RRR)£jftR S= ПМ е) 3-(RRR)sRR S= ПМ
Рис. 7.10. Шесть Б=ПМ в изотропной конфигурации
3-RSR S= ПМ может рассматриваться как частный случай 3-
RRRRR, З-RRRRR или 3-RRRRR S= ПМ, a 3-RRS S= ПМ может рас¬
сматриваться как частный случай 3-RRRRR, З-RRRRR или 3-RRRRR
S= ПМ.
Глава 8
3-ПОДВИЖНЫЙ PPR= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Предыдущие главы были посвящены структурному синтезу ПМ,
совершающих только поступательные либо только вращательные пе¬
ремещения. Другой часто используемой траекторией движения явля¬
ется траектория движения PPR. Эта траектория движения включает
два перемещения и одно вращение. В данной главе с помощью об¬
щей методики, предложенной в главе 5, осуществляется структурный
синтез 3-подвижных PPR= ПМ (называемых также цилиндрическими
параллельными механизмами). PPR=nM — 3-подвижный ПМ, от¬
рабатывающий траекторию PPR. Подробно рассмотрены четыре шага
структурного синтеза PPR= ПМ.
8.1. Введение
PPR=nM — параллельный двойник 3-подвижного последователь¬
ного робота, состоящего из двух поступательных и одной вращатель¬
ной кинематических пар. Подвижная платформа PPR= ПМ может со¬
вершать повороты вокруг оси, совершающей перемещения в плоскости.
ПМ подобного класса широко применяются, особенно при сборке и об¬
работке. Сравнивая структурный синтез поступательных ПМ [56], сфе¬
рических ПМ [44, 56, 72] и цилиндрических ПМ [11, 29, 31, 45, 55, 62,
67, 76, 118, 120], можно сделать вывод о том, что структурному синте¬
зу PPR=nM посвящено несколько больше исследований. До настоя¬
щего времени было предложено лишь несколько PPR=nM [92, 120] 0.
Данная глава посвящена систематическому исследованию структурного
синтеза PPR= ПМ.
Данная глава посвящена структурному синтезу PPR= ПМ с при¬
менением общей методики, изложенной в гл. 5. Декомпозиция груп¬
пы силовых винтов PPR= ПКЦ подробно рассмотрена в разделе 8.5.
Структурный синтез опор PPR= ПКС выполнен в разделе 8.6. В разде¬
ле 8.7 проведена сборка опор для генерирования PPR= ПКЦ, а выбор
приводных кинематических пар для PPR= ПМ обсуждается в разде¬
ле 8.8.
1) В [92, 120] для PPR=nM использованы различные названия
134
Гл. 8. 3-подвижный PPR= параллельный механизм
8.2. Группа силовых винтов РРК=ПКЦ
В любой неособой конфигурации группа кинематических вин¬
тов PPR=nKU является 2-^-1-^о-членной группой. Соответственно,
группа силовых винтов PPR=nKLi, или ее виртуальной цепи PPR
(рис. 8.1) является 2-Соо-1-С0-членной группой, состоящей из (а) всех
Соо, оси которых перпендикулярны оси вращательной кинематической
пары, (б) всех £0, оси которых перпендикулярны направлению поступа¬
тельной кинематической пары и компланарны оси вращательной кине¬
матической пары, и (в) других £, являющихся линейными комбинаци¬
ями указанных Соо и Со- Одним из наборов базисных силовых винтов
для 2-Соо- 1-Со"членн°й группы является Соо2 и Соз (Рис- 8.1).
Рис. 8.1. Группа силовых винтов PPR=fIKU
8.3. Условие, при котором ПКЦ является PPR= ПКЦ
При соединении основания и подвижной платформы PPR=nKU,
виртуальной цепью PPR функционирование ПКЦ не изменяется. Лю¬
бая из ее опор и виртуальная цепь PPR образуют 3-подвижную од¬
ноконтурную кинематическую цепь. Если порядок группы силовых
винтов опоры больше 0, создаваемая одноконтурная кинематическая
цепь должна быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет PPR=ПKЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью PPR образу¬
ют 3-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи PPR, т. е. является 2-£оо-1-£0-членной группой
в любом неособом положении.
8.5. Шаг 1: Декомпозиция группы силовых винтов PPR=I7KL(
135
8.4. Методика структурного синтеза PPR= ПМ
Общая методика структурного синтеза РРИ=ПКЦ может быть
представлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 3-подвижной
PPR= ПКЦ.
Шаг 2. Структурный синтез опор PPR= ПКЦ.
Здесь под опорой РРИ=ПКЦ понимается опора, удовлетворяю¬
щая условию (1) для РРИ=ПКЦ.
Шаг 3. Сборка опор PPR= ПКЦ.
РРН=ПКЦ может быть получена сборкой двух или более опор
РРИ=ПКЦ, полученных на шаге 2, при условии соблюдения
условия (2) для PPR= ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
PPR= ПМ может быть получен выбором набора приводных кине¬
матических пар для каждой PPR= ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
8.5. Шаг 1: Декомпозиция группы силовых винтов
PPR= ПКЦ
Декомпозиция группы силовых винтов РРИ=ПКЦ с т опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из т групп силовых винтов опор для PPR= ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
8.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
РРИ=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для PPR= ПКЦ.
В любой неособой конфигурации группа силовых винтов
РРИ=ПКЦ идентична группе силовых винтов виртуальной цепи
PPR, т. е. является 2-^-1-^о-членной группой. Следовательно, группа
силовых винтов опор порядка сг > О для РРИ=ПКЦ в неособом
положении будет 2-С00-1-£0-членной группой, l-C^-l-Co-членной груп¬
пой, 2-^-членной группой, 1-£0-членной группой или 1-(^-членной
группой (рис. 8.2). сг здесь обозначает порядок группы силовых винтов
опоры г.
8.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения PPR не все силовые винты
в группе силовых винтов имеют одинаковый параметр. Комбинации
групп силовых винтов опор определяются из уравнения (2.28) и пока¬
заны в табл. 5.7.
136
Гл. 8. 3-подвижный PPR= параллельный механизм
а) 2-Coq- 1-Со-членная группа б) l-C^-l-Co-членная группа
Соо2
Cool
в) 2-Соо-членная группа г) 1-£0-членная группа д) 1-С^-членная группа
Рис. 8.2. Группы силовых винтов опор PPR=nKLJ,
8.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для PPR= ПКЦ в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
8.6.1. Шаг 2а: Структурный синтез 3-подвижных кинема¬
тических цепей, включающих виртуальную цепь PPR и имею¬
щих заданную группу силовых винтов опоры. Структурный синтез
3-подвижной одноконтурной кинематической цепи, включающей вирту¬
альную цепь PPR и имеющей заданную группу силовых винтов опоры,
может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь PPR и имеющей заданную группу
силовых винтов опоры (см. гл. 3). Во-вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар за исключением виртуальной цепи PPR, линейно зависимы.
Случай 2-£оо-1-£0-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь PPR, группа силовых вин¬
тов которой представляет собой 2-Соо-1-£0-членную группу. Как бы¬
ло показано в гл. 3, такая КЦ состоит из шести кинематических
пар. Она формируется встраиванием соосной композиционной единицы
в плоскую поступательную композиционную единицу (рис. 8.3). Одним
из наборов базисных силовых винтов для 2-£00-1-С0-членной группы
является Соо\^ Соо2 и Соз- Направления Соо2 перпендикулярны
осям вращательных кинематических пар, ось Соз перпендикулярна
8.6. Шаг 2: Структурный синтез опор
137
Рис. 8.3. 3-подвижная одноконтурная КЦ, включающая виртуальную цепь
PPR, группа силовых винтов которой представляет собой 2-Соо-1-£0-членную
группу: (РР)^ЙУ
направлениям всех поступательных кинематических пар и пересекает
оси вращательных кинематических пар.
Во-вторых, одноконтурная КЦ, в которой кинематические винты
всех кинематических пар, кроме входящих в виртуальную цепь ли¬
нейно зависимы, должна быть отброшена. Это условие выполняется
лишь в том случае, если в соосной композиционной единице будут
только две вращательные кинематические пары. В результате получаем
единственную 3-подвижную одноконтурную КЦ, включающую вирту¬
альную цепь PPR, группа силовых винтов которой представляет собой
2-Соо"1"Со"членнУю группу: (PP)|;RV.
Случай 1 -Coo" 1 -Со"членн°й группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь PPR, группа силовых винтов
которой представляет собой l-C^-l-Co-членную группу. Как было по¬
казано в гл. 3, такая КЦ состоит из семи кинематических пар. Она фор¬
мируется встраиванием соосной композиционной единицы в плоскую
композиционную единицу (рис. 8.4, а). Одним из наборов базисных
силовых винтов для 1 "Сею" 1 "Со"членн°й группы является и £02. На¬
правление Cool перпендикулярно осям вращательных кинематических
пар, а ось С02 перпендикулярна направлениям всех поступательных ки¬
нематических пар и пересекает оси вращательных кинематических пар.
Во-вторых, одноконтурная КЦ, в которой кинематические винты
всех кинематических пар, кроме входящих в виртуальную цепь, ли¬
нейно зависимы, должна быть отброшена. Это условие выполняется
лишь в том случае, если в соосной композиционной единице будут
только две вращательные кинематические пары. В результате получаем
единственную 3-подвижную одноконтурную КЦ, включающую вирту¬
альную цепь PPR, группа силовых винтов которой представляет собой
1-Соо"1"Со"членнУю группу: (XXX)|ftV.
138
Гл. 8. 3-подвижный PPR= параллельный механизм
Случай 2-Соо-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь PPR, группа силовых вин¬
тов которой представляет собой 2-С^-членную группу. Как было
показано в гл. 3, такая КЦ состоит из семи кинематических пар.
Она формируется одной параллельноосевой композиционной единицей
(рис. 8.4,6). 2-£оо"членная группа состоит из всех Соо> направления
которых перпендикулярны осям вращательных кинематических пар,
входящих в параллельноосевую композиционную единицу.
a) (RRR)|RV КЦ б) RRPRV КЦ
Рис. 8.4. 3-подвижные одноконтурные КЦ, включающие виртуальную цепь
PPR, группа силовых винтов которой представляет собой 2-£-членную группу
Во-вторых, одноконтурная КЦ, в которой кинематические винты
всех кинематических пар, кроме входящих в виртуальную цепь, линей¬
но зависимы, должна быть отброшена. В результате получаем един¬
ственную 3-подвижную одноконтурную КЦ, включающую виртуаль¬
ную цепь PPR, группа силовых винтов которой представляет собой
1'Соо"1"Со"членнУю группу: (XXX)|RV.
Случай 1-£0-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь PPR, группа силовых винтов
которой представляет собой 1-£0-членную группу. Как было показано
в гл. 3, такая КЦ состоит из восьми кинематических пар. Такая
одноконтурная КЦ состоит из одной плоской композиционной едини¬
цы и одной сферической композиционной единицы (рис. 8.5, а), либо
может быть получена встраиванием соосной композиционной единицы
в 3-подвижную одноконтурную КЦ, включающую виртуальную цепь
PPR и имеющую 1-Соо"1"Со"членнУю группу. 1-£0-членная группа — £0,
ось которого проходит через пересечение осей вращательных кинемати¬
ческих пар сферической композиционной единицы и перпендикулярен
плоскости, соответствующей плоской композиционной единице.
8.6. Шаг 2: Структурный синтез опор
139
a) (RRR)|RRV КЦ б) RRRRRV КЦ
Рис. 8.5. 3-подвижные одноконтурные КЦ, включающие виртуальную цепь
PPR, группа силовых винтов которой представляет собой 1-£-членную группу
Во-вторых, одноконтурная КЦ, в которой кинематические винты
всех кинематических пар, кроме входящих в виртуальную цепь, линей¬
но зависимы, должна быть отброшена. Это условие выполняется лишь
в том случае, если в соосной композиционной единице будут только
две вращательные кинематические пары.
Случай 1-Соо-членной группы.
Сначала выполним структурный синтез 3-подвижной одноконтур¬
ной КЦ, включающей виртуальную цепь PPR, группа силовых винтов
которой представляет собой 1-(^-членную группу. Как было показано
в гл. 3, такая КЦ состоит из восьми кинематических пар. Такая
одноконтурная КЦ состоит из (а) двух пространственных параллель¬
ноосевых композиционных единиц (рис. 8.5, б), (б) одной простран¬
ственной параллельноосевой композиционной единицы и одной плос¬
кой композиционной единицы (рис. 8.5, в). Она может быть получена
также встраиванием соосной композиционной единицы в 3-подвижную
одноконтурную КЦ, включающую виртуальную цепь PPR и имеющую
2"Соо‘членнУю ГРУППУ (рис. 8.4, б), либо встраиванием сонаправленной
140
Гл. 8. 3-подвижный PPR= параллельный механизм
композиционной единицы в 3-подвижную одноконтурную КЦ, включа¬
ющую виртуальную цепь PPR и имеющую 1-С00-1-Со'членнУю группу
(рис. 8.5, а). 1-С^-членная группа — Соо» направление которого пер¬
пендикулярно осям всех вращательных кинематических пар.
Во-вторых, одноконтурная КЦ, в которой кинематические винты
всех кинематических пар, кроме входящих в виртуальную цепь, ли¬
нейно зависимы, должна быть отброшена. Для краткости заметим,
что указанное условие соблюдается автоматически.
В обозначениях 3-подвижных одноконтурных КЦ, включающих
виртуальную цепь PPR и имеющих сг-С0"Членную группу, 0^ обозна¬
чает кинематическую цепь, в которой кинематические пары располо¬
жены таким образом, что все звенья перемещаются в параллельных
плоскостях, R обозначает вращательные кинематические пары, оси
которых в пределах опоры пересекаются, R обозначает вращательные
кинематические пары, оси которых в пределах опоры параллельны,
R обозначает соосные вращательные кинематические пары, оси кото¬
рых проходят через точку пересечения осей пар R, если таковые име¬
ются, в пределах ПМ и R обозначает вращательные кинематические
пары с параллельными осями, которые параллельны осям пар R или
прямой, как минимум дважды пересекающей оси пар R, если тако¬
вые имеются, в пределах ПМ. ()д обозначает кинематическую цепь,
содержащую как минимум одну вращательную кинематическую пару
и одну поступательную кинематическую пару, кинематические пары
в которой расположены таким образом, что оси всех вращательных
кинематических пар параллельны и направления движения не всех
поступательных кинематических пар перпендикулярны осям враща¬
тельных кинематических пар. ()в обозначает кинематическую цепь,
содержащую как минимум одну вращательную кинематическую пару,
кинематические пары в которой расположены таким образом, что оси
всех вращательных кинематических пар параллельны. ()д (Ов) ~ это
кинематическая цепь ()д (()в), в которой оси каждой вращательной
кинематической пары параллельны либо осям кинематических пар R
и R либо линии, проходящей как минимум через два пересечения осей
кинематических пар R в пределах механизма.
8.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющихся PPR=nKU, (раздел 7.3) структуры
опор могут быть легко получены из найденных на шаге 2а (раз¬
дел 8.6.1) 3-подвижных одноконтурных КЦ удалением виртуальной
цепи PPR. Геометрические условия, гарантирующие выполнение усло¬
вия (1) для PPR=nK^ легко видны из нотации, принятой для обо¬
значения структур опор.
Например, удаляя виртуальную цепь из кинематической цепи
(RRR)|RRV (рис. 8.5, а), получаем опору (RRR)|,RR (рис. 8.6, г).
На рис. 8.6 показаны некоторые опоры РВД=ПКЦ и их группы си¬
ловых винтов. Группа силовых винтов опоры (RRR)JgR (рис. 8.6, б)
8.7. Шаг 3: Сборка опор
141
представляет собой Ь^-Ь^-членную группу. Ее базис может быть
описан как ось которого перпендикулярна осям всех вращательных
кинематических пар и £0, ось которого пересекает ось R и параллельна
осям вращательных кинематических пар из (RRR)^. Группы силовых
винтов опор RRRRR (рис. 8.6, (5) и RRRRR (рис. 8.6, е) представляют
собой 1-(^-членные группы. Оси базисных силовых винтов Соо пеР"
пендикулярны осям всех вращательных кинематических пар в пределах
опоры.
Все полученные типы опор для PPR= ПКЦ перечислены в табл. 8.1.
Среди опор с сг = 0 интересны опоры простой структуры: RUS, PUS
и UPS [56]. Опоры, используемые для синтеза PPR=nK^ должны
удовлетворять геометрическим условиям не только в пределах самой
опоры, но и между ними.
Таблица 8.1. Опоры PPR= ПКЦ
с'
Класс
№
Структура
3
2-Сос-Ко
1
(РР)|Й
2
Коо-К0
2
(ХХХ)|Й
8
V
С\|
3
(ХХХХ)Я
1
Ко
4
(XXX)|RR
5
(XX)^RRR
Кос
6
(ХХ)'£(ХХХ)в
7
R(XXX)BR
8
(XXXX)^ft
9
Й(ХХХХ)Д
10
(ХХХ)в(ХХ)£
11
(ХХХ)£(ХХ)В
12
(ХХ)в(ХХХ)£
0
-
-
-
8.7. Шаг 3: Сборка опор
PPR=ПKЦ могут быть получены сборкой приведенных в табл. 8.1
опор для PPRnK^ выбранных в соответствии с комбинациями групп
силовых винтов опор из табл. 5.7. При сборке PPR= ПКЦ должно
соблюдаться следующее условие: линейная комбинация групп силовых
винтов опор должна составлять 2-£оо-1-£0-членную группу (см. усло¬
вие (2) для PPR=n^ в разделе 8.3).
Рассмотрим для примера PPR=ПKЦ семейства 3 (табл. 5.7).
PPR=ПKЦ семейства 3 имеет две опоры с 1-^-1-^о-членной груп¬
пой и одну опору с -(^-членной группой. Выберем требуемые опоры
из табл. 8.1. Собирая эти опоры, мы получим PPR=ПKЦ семейства 3.
142
Гл. 8. 3-подвижный PPR= параллельный механизм
Подвижная
Подвижная
Подвижная
г) (RRR)^RR
Подвижная
Рис. 8.6. Некоторые опоры PPR= ПКЦ
Например, набор из двух опор (RRR)|R с 1-С00-1-Со'членн°й группой
и одной опоры RRRRR с 1-(^-членной группой дает 2-(RRR)|R-
RRRRR PPR=n^ (рис. 8.7,6). Набор из двух опор (RRR)|R
с 1-Соо-1-Со'членн°й группой и одной опоры RRRRR с 1-(^-членной
группой дает 2-(RRR)|R-RRRRR PPR=ПKЦ (рис. 8.8).
8.7. Шаг 3: Сборка опор
143
а) б)
Рис. 8.7. о) 2-(RRR)jgR-RRRRR PPR=I"IKIJ, с виртуальной цепью PPR и б) 2-
(rrr)|r-r6Mr ppr= пкц
Подвижная платформа
Рис. 8.8. 2-(RRR)|.R-RRRRR PPR=nKU
Как можно видеть из табл. 5.7, из всех возможных комбинаций
групп силовых винтов опор, только одна, состоящая из трех 2-C^-I-Cq,
является комбинацией, в которой все группы силовых винтов опор
имеют одинаковую структуру. В табл. 8.1 есть только одна опора
с 2-£00-1-£0-членной группой силовых винтов: (PP^R. Соответствен¬
но, существует лишь одна PPR= ПКЦ, все опоры которой имеют оди¬
наковую структуру — 3-(РР)|Й (рис. 8.9).
Следует отметить, что PPR=ПKЦ семейств 1, 2, 4, 5, 6, 9, 10, И
и 12 не имеют особенных ограничений [130]. В PPR=nM особенные
ограничения появляются лишь в случае, если порядок группы силовых
винтов меньше 3.
144
Гл. 8. 3-подвижный PPR= параллельный механизм
Подвижная платформа
8.8. Шаг 4: Выбор приводных кинематических пар
В данном разделе сосредоточимся на PPR= ПМ, связанных с вирту¬
альной цепью PPR, в которой ось вращательной кинематической пары
и направления поступательных кинематических пар параллельны одной
плоскости.
8.8.1. t-компоненты приводных силовых винтов. Положим, что
порядок группы винтов не зависит от координат и, для простоты, что
все приводные силовые винты выражены в системе координат, ось X
которой перпендикулярна направлениям двух поступательных кинема¬
тических пар, а ось Y направлена вдоль оси вращательной кинема¬
тической пары виртуальной цепи PPR. В этом случае второй, третий
и пятый скалярные компоненты всех базисных силовых винтов W
равны нулю. Тогда t-компонент Ct^j Сд? состоит из второго, третьего
и пятого скалярных компонент
На рис. 8.10 показаны приводные силовые винты привод¬
ных кинематических пар некоторых опор PPR=nM. В опоре
RRRRR (рис. 8.10, а) приводной является первая вращательная
кинематическая пара. В качестве может быть выбран любой £0,
ось которого пересекает ось пассивной кинематической пары R
и параллельна осям всех вращательных пар из RRR. В опоре
RRRRR (рис. 8.10,6) приводной является первая вращательная
кинематическая пара. В качестве может быть выбран любой £0,
ось которого пересекает ось пассивной вращательной кинематической
пары из RR и параллельна осям вращательных кинематических пар
RRR. В опоре (RRR)|,R (рис. 8.10, в) приводной является первая
вращательная кинематическая пара. В качестве может быть
выбран любой Со» ось которого пересекает оси трех пассивных
8.8. Шаг 4: Выбор приводных кинематических пар
145
Подвижная
в) (rrr)|r
Рис. 8.10. Приводные силовые винты некоторых опор PPR= ПКЦ
вращательных кинематических пар и не параллельна осям вращатель¬
ных кинематических пар из (RRR)^.
8.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для PPR= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого PPR=nM пассивна, набор приводных кинема¬
тических пар неверен и такой PPR= ПМ следует отбросить.
Шаг 46. Если для предполагаемого PPR= ПМ вторые векторные ком¬
поненты всех приводных силовых винтов приводных кинема¬
тических пар C$j линейно зависимы в неособом положении,
набор приводных кинематических пар неверен. В этом случае
PPR=nM следует отбросить.
В соответствии с критерием выбора приводных кинематических пар
(раздел 5.7) и процедурой проверки правильности выбора приводных
кинематических пар можно получить все S= ПМ с т (га > 2) опорами
для каждой S= ПКЦ.
Например, предполагаемым PPR=nM, соответствующим
2-(RRR)|R-RRRRR PPR= ПКЦ (рис. 8.8), будет 2-(RRR)|R-ftl№6ft
146
Гл. 8. 3-подвижный PPR= параллельный механизм
Подвижная платформа
Опора 2
Основание
а)
Основание
б)
Рис. 8.11. Некоторые предполагаемые PPR=nM: a) 2-(RRR)|R-RRRRR
PPR= ПМ, б) 2-(RRR)|R-ftRRRR PPR= ПМ
Рис. 8.12. Некоторые 3-подвижные PPR=nM семейства 3: a) 2-(RRR)^R-
RRRRR PPR= ПМ, б) 2-(RPR)|R-MPRR PPR= ПМ
PPR=nM (рис. 8.11, а). Имеем
где * — произвольное число.
В соответствии с условием проверки правильности выбора набора
приводных кинематических пар, этот набор приводных пар неверен. Со¬
ответственно, 2-(RRR)pR-RRRRR PPR=nM должен быть отброшен.
II ••
Предполагаемым PPR=nM, соответствующим (RRR)^R-
RRRRR PPR= ПКЦ (рис. 8.7,6), будет (RRR) |, R-RRRRR
PPR=nM (рис. 8.11,6). В соответствии с условием проверки
Основание
а)
Основание
б)
* * *
I СЬн Ct 2Я С?2Н | = * * * =0-
ООО
8.8. Шаг 4: Выбор приводных кинематических пар
147
Подвижная платформа
Рис. 8.13. Некоторые 3-подвижные PPR=nM семейства 13: a) 2-(RRR)|eRR-
RRRRR PPR= ПМ, 6) 2-(RR)!RRR-RRRRR PPR= ПМ
Подвижная платформа
Рис. 8.14. Некоторые 3-подвижные PPR=nM семейства 2: a) 2-(RRR)|;R-
ЙЙРЙ PPR= ПМ, б) 2-(PRR)|R-PRPR PPR=nM
правильности выбора набора приводных кинематических пар, этот
набор приводных пар верен.
Из-за большого числа полученных PPR= ПМ и ограниченности
объема книги, представим лишь некоторые из PPR= ПМ (рис. 8.11,6,
8.12, 8.13 и 8.14).
Следует отметить, что для ПМ, соответствующего 3-(PP)|,R
PPR=nKU (рис. 8.9) — единственной PPR=nKU с одинаковыми
структурами опор, набор из трех поступательных кинематических
148
Гл. 8. 3-подвижный PPR= параллельный механизм
пар, расположенных на основании, не является правильным набором
приводных кинематических пар. Таким образом, 3-подвижного
PPR= ПМ с опорами одинаковой структуры не существует.
8.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез PPR=nM. Вновь были полу¬
чены PPR=nKU, предложенные в [45, 55]. Были также получены
PPR=nKU, с пассивными кинематическими парами. Были получены
PPR=nKU, как с избыточными связями, так и без них, а также
несколько новых PPR=nM.
Для полученных PPR=nM могут быть найдены некоторые вариа¬
ции благодаря применению следующих правил:
• замена комбинации вращательной и поступательной кинемати¬
ческих пар с параллельными осями на кинематическую пару С
или один из ее эквивалентов [45];
• замена последовательности из двух вращательных кинематиче¬
ских пар с не параллельными осями на кинематическую пару U;
• замена комбинации из трех соосных последовательных поступа¬
тельных кинематических пар на кинематическую пару S;
• замена каждой из одной или более поступательных кинематиче¬
ских пар плоским параллелограммным механизмом [120];
• замена последовательности из двух или трех поступательных
кинематических пар пространственным параллелограммным ме¬
ханизмом [33];
• замена каждой из одной или более вращательной кинематической
пары в опоре с с^С^-членной группой на соосную кинематиче¬
скую пару Н.
Рис. 8.15. 2-RPU-UPU PPR= ПМ
8.9. Резюме
149
К примеру, на рис 8.15 показан 2-RPU-UPU PPR=FIM. Этот ПМ
получен из 2-(RPR)|;R-RRPRR PPR=nM, показанного на рис. 8.12, б,
заменой комбинации из двух последовательных вращательных кинема¬
тических пар, оси которых не параллельны, кинематической парой U.
По сравнению с исходным ПМ, в этом варианте меньше звеньев. Сле¬
дует также заметить, что PPR=nM, предложенный в [92], фактически
является вариацией PPR=nM, изображенного на рис. 8.14, получен¬
ной (а) заменой комбинации из двух последовательных вращательных
кинематических пар, оси которых не параллельны, кинематической
парой U, и (б) заменой каждой неприводной последовательной кинема¬
тической пары плоским параллелограммным механизмом.
Глава 9
4-ПОДВИЖНЫЙ PPPR= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Во многих приложениях робототехники требуется перемещение
объекта по всем декартовым координатам одновременно с его поворо¬
том вокруг заданной оси. Типичным примером подобной задачи явля¬
ется сборка компьютерных плат, на которых должны быть установлены
электронные компоненты. В этом случае необходим поворот только
вокруг оси, перпендикулярной плате, а перемещения — по всем направ¬
лениям для позиционирования и установки компонентов. Специально
для этого класса задач в 1970-х гг. были разработаны последова¬
тельные SCARA-роботы. SCARA-роботы очень популярны и широко
применяются в промышленности. Траектория движения SCARA-робота
может быть описана с помощью виртуальной цепи PPPR. В данной
главе с помощью общей методики, изложенной в главе 5, производит¬
ся структурный синтез PPPR=fIM (называемых также 3T1R ПМ).
PPPR= ПМ — параллельный аналог SCARA-робота, обрабатывающий
движение PPPR по 4 степеням свободы (так называемое движение
Шёнфлиса). Как указано выше, ПМ с траекторией движения PPPR
имеют широкую область применения. Подробно рассмотрены четыре
шага структурного синтеза PPPR= ПМ.
9.1. Введение
SCARA-роботы [94] — широко используемые 4-подвижные роботы.
Выходное звено SCARA-робота совершает движение PPPR (называ¬
емое также движением Шёнфлиса либо движением SCARA), кото¬
рое состоит из вращения вокруг некоторой заданной оси в сочета¬
нии с поступательными перемещениями по трем степеням свободы.
PPPR=nM — параллельный аналог SCARA-робота. В PPPR=nM по¬
движная платформа совершает движение PPPR и управляется четырь¬
мя приводными кинематическими парами, распределенными по различ¬
ным опорам.
Несколько параллельных кинематических цепей PPPR
(PPPR=nKU) было предложено в [56]. Однако из этих PPPR=nKU
не было получено PPPR= ПМ, все приводные кинематические пары
которых располагались бы на основании. PPPR=nM, предложенные
в [14, 15, 107] либо состоят из четырех опор различной структуры,
либо содержат сферические кинематические пары. 4-подвижный
3-UPU PPPR=nM был предложен в [52]. Наконец, в [123] было
9.2. Группа силовых винтов PPPR= ПКЦ
151
произведено систематическое исследование структурного синтеза
PPPR= ПМ на основе цепей со свободным концом. Были найдены три
структуры PPPR= ПМ с опорами одинаковой структуры с неприводной
поступательной кинематической парой. Было заявлено требование,
что все приводные кинематические пары должны быть расположены
на основании. Однако две из предложенных в [123] структуры мани¬
пуляторов функциональны, третья же, с четырьмя поступательными
степенями свободы кинематической пары С, неработоспособна. Во вся¬
ком случае, четыре поступательные степени свободы кинематической
пары С не способны управлять поступательной степенью свободы
в направлении, перпендикулярном осям четырех кинематических
пар С. Причина этой ошибки кроется в неудовлетворительном решении
проблемы выбора приводных кинематических пар. Кроме того,
не было рассчитано число избыточных связей PPPR=nM. Несколько
PPPR=nM были предложены в [129].
Фактически, большинство работ, посвященных систематическо¬
му синтезу PPPR=nM [123], связаны с систематическим синте¬
зом PPPR=nKU,. Кроме того, результаты по структурному синтезу
PPPR=nKU, с 5 опорами, опубликованные в [123], неполны. Наконец,
структурный синтез PPPR= ПМ, включая выбор приводных кинемати¬
ческих пар, был проведен в [75].
Данная глава посвящена структурному синтезу PPPR= ПМ с при¬
менением общей методики, изложенной в гл. 5. Четыре шага структур¬
ного синтеза PPPR=nM, т. е. (1) декомпозиция группы силовых вин¬
тов PPPR= ПКЦ, (2) структурный синтез опор PPPR= ПКС, (3) сборка
опор для генерирования PPPR= ПКЦ и (4) выбор приводных кинема¬
тических пар для PPPR=nM приведены в разделах 9.5, 9.6, 9.7 и 9.8
соответственно.
9.2. Группа силовых винтов РРРК=ПКЦ
В любой неособой конфигурации группа кинематических винтов
PPPR=ПKЦ является 3-^-1-^о-членной группой. Так как виртуаль¬
ная сила, развиваемая каждым направление которого перпенди¬
кулярно оси вращательной кинематической пары виртуальной цепи
PPPR, вдоль любого кинематического винта 3-^-1-^о-членной группы
равно 0, то группа силовых винтов PPPR=ПKЦ или ее виртуальной
цепи является 2-^-1-Со-членной группой (рис. 9.1), в которой направ¬
ления всех Соо перпендикулярны оси вращательной кинематической
пары виртуальной цепи PPPR.
152 Гл. 9. 4-подвижный PPPR= параллельный механизм
Рис. 9.1. Группа силовых винтов PPPR=nKU
9.3. Условие, при котором ПКЦ является PPPR= ПКЦ
При соединении основания и подвижной платформы PPPR=nKU
виртуальной цепью PPPR функционирование ПКЦ не изменяется.
Любая из ее опор и виртуальная цепь PPPR образуют 4-подвижную
одноконтурную кинематическую цепь. Если порядок группы силовых
винтов опоры больше 0, создаваемая одноконтурная кинематическая
цепь должна быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет РРРР=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью PPPR обра¬
зуют 4-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи PPPR, т. е. является 2-С^-членной группой
в любом неособом положении.
9.4. Методика структурного синтеза PPPR= ПМ
Общая методика структурного синтеза РРРР=ПКЦ может быть
представлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 4-подвижной
РРРР=ПКЦ.
Шаг 2. Структурный синтез опор PPPR= ПКЦ.
Здесь под опорой PPPR= ПКЦ понимается опора, удовлетворяю¬
щая условию (1) для РРРР=ПКЦ.
9.5. Шаг I: Декомпозиция группы силовых винтов РРРЯ=ПКЦ 153
Шаг 3. Сборка опор PPPR= ПКЦ.
PPPR= ПКЦ может быть получена сборкой двух или более опор
PPPR= ПКЦ, полученных на шаге 2, при условии соблюдения
условия (2) для PPPR= ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
PPPR=flM может быть получен выбором набора приводных
кинематических пар для каждой PPPR= ПКЦ, полученной
на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
9.5. Шаг 1: Декомпозиция группы силовых винтов
PPPR= ПКЦ
Декомпозиция группы силовых винтов PPPR=ПKЦ с га опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из га групп силовых винтов опор для PPPR=nKLj, при заданном
числе избыточных связей А. Шаг 1 может быть выполнен с помощью
уравнений (2.24) и (2.28).
9.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
У=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для У=ПКЦ.
В любой неособой конфигурации группа силовых винтов
PPPR= ПКЦ идентична группе силовых винтов виртуальной цепи
PPPR, т. е. является 2-С^-членной группой, состоящей из всех £оо’
направления которых перпендикулярны оси вращательной кинематиче¬
ской пары виртуальной цепи PPPR (рис. 9.1). Следовательно, группа
силовых винтов опоры порядка сг > О для PPPR=ПKЦ в неособом
положении будет 2-С^-членной группой или 1-(^-членной группой
(рис. 9.2).
Рис. 9.2. Группа силовых винтов опоры РРРИ=ПКЦ
154
Гл. 9. 4-подвижный PPPR= параллельный механизм
9.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения PPPR все силовые винты
в группе силовых винтов имеют одинаковый параметр. Группа силовых
винтов опоры представляет собой сг-членную группу с бесконечным
параметром, где 0 ^ сг ^ с. Комбинации групп силовых винтов опор
могут быть представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.1-5.5.
9.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для РРРР= ПКЦ в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
9.6.1. Шаг 2а: Структурный синтез 4-подвижных кинема¬
тических цепей, включающих виртуальную цепь PPPR и имею¬
щих заданную группу силовых винтов опоры. Структурный синтез
4-подвижной одноконтурной кинематической цепи, включающей вир¬
туальную цепь PPPR и имеющей заданную группу силовых винтов
опоры, может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь PPPR и имеющей заданную группу
силовых винтов опоры (см. гл. 3). Во вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар, за исключением виртуальной цепи PPPR, линейно зависимы.
Случай 2-Соо-членной группы.
Во-первых, выполним структурный синтез 4-подвижной однокон¬
турной КЦ, включающей виртуальную цепь PPPR и имеющей 2-^-
членную группу. В соответствии с гл. 3, 4-подвижная одноконтурная
КЦ, включающая виртуальную цепь PPPR и имеющая 2-^^-членную
группу, состоит из восьми кинематических пар. Подобная одноконтур¬
ная КЦ состоит из одной пространственной параллельноосевой компо¬
зиционной единицы (рис. 9.3). 2-^^-членная группа состоит из всех
оси которых перпендикулярны осям всех вращательных кинемати¬
ческих пар.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинематиче¬
ские винты всех кинематических пар, кроме входящих в виртуальную
цепь, линейно зависимы. RRRRV КЦ (рис. 9.3, а) должна быть отбро¬
шена, так как кинематические винты всех четырех вращательных пар R
линейно зависимы. Для КЦ, показанных на рис. 6.4,6-6.4, г, КЦ,
составленные из всех кинематических пар, кроме входящих в вирту¬
альную цепь PPPR, представляют собой пространственную параллель¬
ноосевую композиционную единицу, т. е. указанное геометрическое
условие для них соблюдается автоматически.
9.6. Шаг 2: Структурный синтез опор
155
Виртуальная цепь PPPR
Виртуальная цепь PPPR
a) RRRRV КС
в) PPRRV КС
Рис. 9.3. Некоторые 4-подвижные одноконтурные КЦ, включающие виртуаль¬
ную цепь PPPR (сг = 2)
Случай l-Coo-членной группы.
Во-первых, выполним структурный синтез 4-подвижной однокон¬
турной КЦ, включающей виртуальную цепь PPPR и имеющей 1-Соо‘
членную группу. В соответствии с гл. 3, 3-подвижная одноконтурная
КЦ, включающая виртуальную цепь PPPR и имеющая 1-(^-членную
группу, состоит из восьми кинематических пар. Такая одноконтурная
КЦ состоит из (а) двух пространственных параллельноосевых компо¬
зиционных единиц или (б) одной пространственной параллельноосевой
композиционной единицы и одной плоской композиционной единицы,
либо может быть получена включением одной кинематической па¬
ры (R)l в 4-подвижную одноконтурную КЦ, включающую виртуаль¬
ную цепь PPPR и имеющую 2-С^-членную группу. 1-(^-членная груп¬
па 4-подвижной одноконтурной КЦ, включающей виртуальную цепь
PPPR, представляет собой £оо’ направление которого перпендикулярно
осям всех вращательных кинематических пар.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинематиче¬
ские винты всех кинематических пар, кроме входящих в виртуальную
цепь, линейно зависимы. 4-подвижные одноконтурные КЦ RRRRRV,
RRRRRV, RRRRRV и RRRRRV должны быть отброшены, так как
кинематические винты всех четырех пар R либо всех четырех пар R
линейно зависимы.
156
Гл. 9. 4-подвижный PPPR—параллельный механизм
Виртуальная цепь PPPR
Виртуальная цепь PPPR
б) RRRRRV
Рис. 9.4. Некоторые 3-подвижные одноконтурные КЦ, включающие виртуаль¬
ную цепь PPPR (сг = 1)
В обозначениях структур 4-подвижных одноконтурных КЦ, вклю¬
чающих виртуальную цепь PPPR, R обозначает вращательные кине¬
матические пары, оси которых параллельны оси вращательной кинема¬
тической пары виртуальной цепи PPPR, a R обозначает вращательные
9.6. Шаг 2: Структурный синтез опор
157
Виртуальная цепь PPPR Виртуальная цепь PPPR
Рис. 9.4. Некоторые 3-подвижные одноконтурные КЦ, включающие виртуаль¬
ную цепь PPPR (сг = 1) (продолжение)
кинематические пары, оси которых не параллельны оси вращательной
кинематической пары виртуальной цепи PPPR.
Следует отметить, что поступательная кинематическая пара и един¬
ственная кинематическая пара R, а также комбинация пар R могут
быть расположены в любом месте 4-подвижной одноконтурной КЦ.
Для краткости мы приводим только те 4-подвижные одноконтурные
КЦ, из которых посредством указанной операции могут быть получены
все остальные. Например, одноконтурная КЦ RRPRV может быть
получена из КЦ RRRPV (рис. 9.3, б) изменением положения посту¬
пательной кинематической пары, а КЦ RRRRRV — из КЦ RRRRRV
(рис. 9.4, б). В 4-подвижных одноконтурных КЦ, включающих вирту¬
альную цепь PPPR, содержащих только одну кинематическую пару R
(рис. 9.4, а и 9.4, д), эта кинематическая пара пассивна.
9.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся РРРР=ПКЦ (раздел 9.3) структуры
опор могут быть легко получены из найденных на шаге 2а (раз¬
дел 9.6.1) 4-подвижных одноконтурных КЦ удалением виртуальной
цепи PPPR.
158
Гл. 9. 4-подвижный PPPR= параллельный механизм
Геометрические условия, гарантирующие выполнение условия (1)
для РРРк=ПКЦ, легко видны из нотации, принятой для обозначения
структур PPPR= ПКЦ, PPPR= ПМ и их опор: оси всех кинематиче¬
ских пар, обозначенных символами R, параллельны друг другу, оси
всех кинематических пар, обозначенных символами R, также парал¬
лельны друг другу.
Например, удаляя виртуальную цепь PPPR из КЦ RRRRRV
(рис. 9.4,6), получаем опору RRRRR (рис. 9.5, а). В опоре RRRRR,
показанной на рис. 9.5, а, оси первых двух вращательных кинематиче¬
ских пар параллельны и оси последних трех вращательных кинемати¬
ческих пар также параллельны. Эта опора имеет 1-(^-членную группу.
Ось базисного винта 1-(^-членной группы перпендикулярна осям
всех вращательных кинематических пар. В опоре RRRRR, показанной
на рис. 9.5, б, оси первых трех вращательных кинематических пар
параллельны и оси последних двух вращательных кинематических пар
также параллельны. Эта опора имеет 1-(^-членную группу. Ось
базисного винта 1-С^-членной группы перпендикулярна осям всех вра¬
щательных кинематических пар.
Рис. 9.5. Некоторые опоры PPPR= ПКЦ
Все полученные структуры опор для PPPR= ПКЦ приведены
в табл. 9.1. Опоры, используемые для синтеза PPPR=nK^ долж¬
ны удовлетворять не только геометрическим условиям, действующим
в пределах самих опор — наследуемым непосредственно из соответ¬
ствующих одноконтурных кинематических цепей, но и геометрическим
условиям, действующим между опорами.
9.7. Шаг 3: Сборка опор
159
Таблица 9.1. Опоры PPPR= ПКЦ
с*
Класс
№
Структура
2
3RP
1-2
PRRR RPRR
3-4
RRPR ЙЙЙР
2R-2P
5-10
Перестановки РРЙЙ
1R-3P
11-12
РРРЙ РРЙР
13-14
РЙРР ЙРРР
1
5R
15-16
ЙЙЙЙЙ ЙЙЙЙЙ
17-18
RRRRR RRRRR
19-20
ftRRRft RRRRR
21
RftRRR
4R-1P
22-41
Перестановки ftRRRP
42-43
RRRRP RRRPft
44-45
ЙЙРЙЙ ЙРЙЙЙ
46-47
РЙЙЙЙ ЙЙЙЙР
48-49
РЙЙЙЙ ЙЙЙРЙ
50-51
ЙЙРЙЙ ЙРЙЙЙ
52-53
ЙЙЙЙР ЙЙЙРЙ
54-55
ЙЙРЙЙ ЙРЙЙЙ
56-57
РЙЙЙЙ ЙЙЙЙР
58-59
ЙЙЙРЙ ЙЙРЙЙ
60-61
ЙРЙЙЙ РЙЙЙЙ
62-63
ЙЙЙЙР ЙЙЙРЙ
64-65
ЙЙРЙЙ ЙРЙЙЙ
66
РЙЙЙЙ
3R-2P
67-69
Перестановки RRRPP
70-112
Перестановки RRRPP
2R-3P
113-132
Перестановки RRPPP
0
-
-
-
9.7. Шаг 3: Сборка опор
РРР1*=ПКЦ может быть получена сборкой показанных в табл. 9.1
опор для РРР1*=ПКЦ, выбранных в соответствии с комбинациями
групп силовых винтов опор из табл. 5.3. При сборке РРР1£=ПКЦ
должно соблюдаться следующее условие: линейная комбинация
групп силовых винтов опор должна составлять 2-^-членную группу
(см. условие (2) для РРР1*=ПКЦ в разделе 9.3).
Для РРР1£=ПКЦ, у которых не все группы силовых винтов опор
инвариантны относительно основания либо подвижной платформы,
160
Гл. 9. 4-подвижный PPPR= параллельный механизм
Подвижная платформа
линейная комбинация групп силовых винтов опор обычно формиру¬
ет 2-Соо-членную группу. Для PPPR=11KI4, у которых все группы
силовых винтов опор инвариантны относительно основания либо по¬
движной платформы, основание либо подвижная платформа должны
удовлетворять геометрическим условиям, гарантирующим, что линей¬
ная комбинация групп силовых винтов опор сформирует 2-^^-членную
группу.
Так как число PPPR=I1KU очень велико, в табл. 9.2 приведены
лишь PPPR=I1KU с опорами одинаковой структуры.
9.8. Шаг 4: Выбор приводных кинематических пар
9.8.1. t-компоненты приводных силовых винтов. Для упроще¬
ния и принимая во внимание, что порядок группы винтов не зависит от
системы координат, выразим все силовые винты и приводные силовые
винты в системе координат, ось X которой параллельна вращательной
степени свободы подвижной платформы. Пусть [0Т jT]T, [0Т кт]т
обозначает базис W, где j = {1 0}т, к = {0 1}т. Первые четыре
скалярных компонента всех базисных силовых винтов W равны нулю.
Соответственно, t-компонент Ct?>j С к* состоит из первых четырех ска¬
лярных компонент C^j.
На рис. 9.7 показаны приводные силовые винты приводных ки¬
нематических пар некоторых опор PPPR=nM. Группа силовых вин¬
тов каждой из этих опор является 1-(^-членной группой (рис. 9.5).
9.8. Шаг 4: Выбор приводных кинематических пар
161
Таблица 9.2. PPPR=nKU, с т опорами одинаковой структуры
с*
Класс
Ко.
Структура
Nqc^
т = 2
т = 3
т = 4
2
3RP
1-2
m-РЙЙЙ т-ЙРЙЙ
2
4
6
3-4
т-ЙЙРЙ т-ЙЙЙР
2R-2P
5-10
т-Перестановки РРЙЙ
1R-3P
11-12
771-РРРЙ 771-РРЙР
13-14
m-РЙРР m-RPPP
1
5R
15-16
m-RRRRR m-RRRRR
0
1
2
17-18
m-RRRRR m-RRRftR
19-20
m-RRRRR m-RftRRR
21
m-RRRRR
4R-1P
22-41
m-Перестановки RRRRP
42-43
m-RRRRP m-RRRPR
44-45
m-RRPRR m-RPRRR
46-47
m-РЙЙЙЙ т-ЙЙЙЙР
48-49
m-PRRRR m-RRRPR
50-51
т-ЙЙРЙЙ m-RPRRR
52-53
т-ЙЙЙЙР т-ЙЙЙРЙ
54-55
т-ЙЙРЙЙ т-ЙРЙЙЙ
56-57
т-РЙЙЙЙ т-ЙЙЙЙР
58-59
т-ЙЙЙРЙ т-ЙЙРЙЙ
60-61
т-ЙРЙЙЙ т-РЙЙЙЙ
62-63
т-ЙЙЙЙР т-ЙЙЙРЙ
64-65
т-ЙЙРЙЙ т-ЙРЙЙЙ
66
т-РЙЙЙЙ
3R-2P
67-69
т-Перестановки ЙЙЙРР
70-112
m-Перестановки ЙЙЙРР
2R-3P
113-132
m-Перестановки ЙЙРРР
^ Nqc — количество избыточных связей PPPR=nKU,
В опоре RRRRR (рис. 9.7, а) приводной является первая вращательная
кинематическая пара. В качестве • может быть выбран любой £0, ось
которого параллельна осям последних трех вращательных кинематиче¬
ских пар и пересекает ось второй вращательной кинематической пары.
В опоре RRRRR (рис. 9.7, б) приводной является первая вращательная
кинематическая пара. В качестве C$j может быть выбран любой £0,
осью которого является пересечение плоскости, проходящей через оси
6 Кун С., Госселин К.
162
Гл. 9. 4-подвижный PPPR= параллельный механизм
Рис. 9.7. Приводные силовые винты некоторых опор PPPR=nKU,
Рис. 9.8. PPPR=nKLJ с пассивными кинематическими парами и без них
двух неприводных вращательных кинематических пар R, с плоскостью,
проходящей через оси двух кинематических пар R.
9.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для PPPR=nM может быть осуществлена с помо¬
щью следующих шагов.
9.8. Шаг 4: Выбор приводных кинематических пар
163
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого PPPR=FIM пассивна, набор приводных кинема¬
тических пар неверен и такой PPPR= ПМ следует отбросить.
Шаг 46. Если для предполагаемого PPPR=nM ^-компоненты, т. е.
векторные компоненты всех приводных силовых винтов привод¬
ных кинематических пар Cj^j линейно зависимы в неособом по¬
ложении, набор приводных кинематических пар неверен. В этом
случае PPPR= ПМ следует отбросить.
Например, для RRRRR-RRRRR-RRRRR PPPR=nKU, (рис. 9.6)
возможны следующие PPPR=nM: RRRRR-RRRRR-RRRRR, RRRRR-
RRRRR-RRRRR и RRRRR-RRRRR-RRRRR (рис. 9.9). Для потенциаль¬
ного ПМ, изображенного на рис. 9.9, а, имеем
Ct.21 2 Ct,21 Ct,21
* * * *
о о * *
о о * *
о о * *
= о,
где * — произвольное число.
В соответствии с критерием проверки правильности выбора привод¬
ных кинематических пар такой набор приводных пар неверен. Предпо¬
лагаемый RRRRR-RRRRR-RRRRR PPPR=nMj)nc. 9.9, а должен быть
отброшен. Аналогично можно доказать, что и RRRRR-RRRRR-RRRRR
и RRRRR-RRRRR-RRRRR имеют верный набор приводных кинемати¬
ческих пар. Следовательно, RRRRR-RRRRR-RRRRR PPPR= ПКЦ со¬
ответствуют только два ПМ, т. е. RRRRR-RRRRR-RRRRR (рис. 9.9, б)
и RRRRR-RRRRR-RRRRR (рис. 9.9, в).
С помощью критерия выбора приводных кинематических пар (раз¬
дел 5.7) и процедуры проверки правильности выбора приводных ки¬
нематических пар для каждой PPPR=nKU могут быть найдены все
соответствующие PPPR=nM с га (ш ) 2) опорами.
Для упрощения представления условий для PPPR=nM и из-за
большого их количества, в таблице 9.3 и на рис. 9.10 приведены,
с учетом вышеизложенных критериев, лишь PPPR=nM с четырьмя
опорами одинаковой структуры (включая идентичное расположение
приводных кинематических пар), состоящие из вращательных и посту¬
пательных кинематических пар. Для 4-RRRRR и 4-PRRRR PPPR= ПМ
условие правильности выбора приводных кинематических пар выпол¬
няется, если оси не всех кинематических пар R параллельны одной
плоскости. Для 4-RRRRR и 4-PRRRR PPPR=nM условие правиль¬
ности выбора приводных кинематических пар выполняется, если оси
не всех кинематических пар R перпендикулярны осям кинематических
пар R. Девять из 11 структур PPPR= ПМ с четырьмя опорами явля¬
ются новыми и лишь частные случаи PPPR=nM № 6 и № 9 были
предложены в [123].
6*
164
Гл. 9. 4-подвижный PPPR= параллельный механизм
a) RRRRR-RRRRR-RRRRR
Рис. 9.9. Выбор приводных кинематических пар для RRRRR-RRRRR-RRRRR
PPPR= ПКЦ
Прототип, изображенный на рис. 2, б цветной вклейки — факти¬
чески частично развязанный по входу-выходу случай PRRR-3-PRRRR
PPPR=nM, принадлежащего к семейству 2-1-1-1 PPPR=nM.
9.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез PPPR= ПМ. Были также получе¬
ны PPPR=nK14 с пассивными кинематическими парами. Были полу¬
чены PPPR=nKU как с избыточными связями, так и без них. Условие
9.9. Резюме
165
Подвижная платформа
Основание
а) 4-ЙЙЙЙЙ
Подвижная платформа
Подвижная платформа
Подвижная платформа
Основание
б) 4-ЙЙЙЙЙ
Подвижная платформа
Основание
г) 4-ЙЙЙЙЙ
Рис. 9.10. Одинадцать PPPR=nM с четырьмя опорами одинаковой структуры
проверки правильности выбора приводных кинематических пар было
упрощено до вычисления определителя матрицы размерностью 4x4.
Найдено несколько новых PPPR= ПМ.
166
Гл. 9. 4-подвижный PPPR= параллельный механизм
Подвижная платформа Подвижная платформа
Подвижная платформа
з) 4-PRRRR
Подвижная платформа
Основание
к) 4-PRRRft
(л) 4-PftRRR
Рис. 9.10. Одинадцать PPPR= ПМ с четырьмя опорами одинаковой структуры
(продолжение)
9.9. Резюме
167
Таблица 9.3. PPPR= ПМ с четырьмя опорами одинаковой структуры
с*
Класс
№
Структура
1
5R
1
4-RRRRR
2
4-RRR6R
3
4-fiftRRR
4
4-RftR6R
5
4-RRRRR
6
4-RRRRR
4R-1P
7
4-PRftRR
8
4-PRRRR
9
4-PftRRR
10
4-PRRRR
11
4-PRRRR
Заменяя комбинацию вращательной и поступательной кинематиче¬
ских пар с параллельными осями, комбинацию двух вращательных
кинематических пар с непараллельными осями и комбинацию трех
вращательных кинематических пар с непараллельными осями на кине¬
матические пары С, U и S соответственно, можно получить все частные
случаи PPPR=FIM, включающие кинематические пары С, U и S.
В опорах, в которых оси вращательных кинематических пар параллель¬
ны двум прямым, не могут быть расположены кинематические пары S.
В опорах с 0-Соо"членн°й группой могут использоваться любые типы
кинематических пар. Некоторые структуры PPPR=FIM, содержащие
кинематические пары Н, могут быть получены путем замены враща¬
тельной кинематической пары на соосную кинематическую пару Н.
Другие структуры PPPR=FIM, содержащие кинематические пары Н,
могут быть получены из 4-подвижных одноконтурных КЦ, включа¬
ющих виртуальную цепь PPPR и одну или более кинематическую
пару Н, найденных с помощью предыдущей процедуры, следующим
образом: (1) 4-подвижные одноконтурные КЦ получают из RRRRV
(рис. 9.3, a), RRRRRV (рис. 9.4, a), RRRRRV и RRRRRV, заменяя
одну или более кинематическую пару R на соосную кинематическую
пару Н и (2) 4-подвижные одноконтурные КЦ получают из RRRRRV
(рис. 9.4, г), заменяя одну или более кинематическую пару R на
соосную кинематическую пару Н. Наконец, вариации PPPR=FIM
могут быть получены заменой поступательной кинематической пары
плоским параллелограммным механизмом либо набора из двух после¬
довательных поступательных кинематических пар пространственным
параллелограммным механизмом.
Глава 10
4-ПОДВИЖНЫЙ SP= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Другой траекторией движения с 4 степенями свободы, находящей
достаточно широкое применение, является траектория движения, ас¬
социированная с виртуальной цепью SP. Например, она применяется
в автоматизированной лапороскопической хирургии, при которой про¬
никновение в тело осуществляется через специальный прокол. После
установки в таком проколе робот должен иметь возможность переме¬
щаться вокруг, при этом оставляя прокол без изменений. 4-подвижный
робот, который может работать в теле, должен вести себя как вир¬
туальная цепь SP, сферическая кинематическая пара которой распо¬
ложена в проколе. Использование таких роботов — в противополож¬
ность 6-подвижным манипуляторам — гарантирует, что положение
прокола никогда не измениться и, тем самым, обеспечивает безопас¬
ность. В данной главе с применением общей методики, изложенной
в главе 5, осуществляется структурный синтез 4-подвижных SP= ПМ
(называемых также 3R1T ПМ). БР=ПМ — параллельный двойник
4-подвижного последовательного робота, состоящего из одной сфери¬
ческой и двух поступательных кинематических пар. Подробно рассмот¬
рены четыре шага структурного синтеза SP= ПМ.
10.1. Введение
4-подвижные БР=ПМ — класс ПМ с редуцированным числом
степеней свободы. БР=ПМ применяются в ряде приложений, включа¬
ющих подвижные симуляторы и лапороскопическую хирургию [132].
В литературе [39, 51, 131, 132] предложено несколько структур
БР=ПМ.
Следует отметить, что число избыточных связей, а также реакции
в опорах, для ПКЦ с пассивными кинематическими парами и без
них различны, несмотря на то, что пассивные кинематические пары
не влияют на перемещения подвижной платформы [24, 69]. Однако, до
настоящего времени не предложено ни одной SP= ПКЦ с пассивными
кинематическими парами. Кроме того, в [39, 51, 131] не уделено
достаточного внимания вопросу выбора приводных кинематических
пар [1, 53, 64, 72, 75, 76, 77]. Следовательно, необходимы дальнейшие
исследования структурного синтеза SP= ПМ.
Данная глава посвящена структурному синтезу БР=ПМ с приме¬
нением общей методики, изложенной в гл. 5. Декомпозиция группы
10.3. Условие, при котором ПКЦ является БР=ПКЦ
169
силовых винтов БР=ПКЦ выполнена в разделе 10.5. Структурный
синтез опор SP=I1KC осуществлен в разделе 10.6. В разделе 10.7
описана сборка опор для генерирования SP= ПКЦ, а выбор приводных
кинематических пар для БР=ПМ — в разделе 10.8.
10.2. Группа силовых винтов 8Р=ПКЦ
В любой неособой конфигурации группа кинематических винтов
SP= ПКЦ является 3-£0-1-^-членной группой, в которой оси всех £0
пересекаются в одной точке, лежащей на основании. Легко определить,
что группа силовых винтов SP= ПКЦ представляет собой 2-£0-членную
группу, состоящую из всех £0, оси которых проходят через центр
сферической кинематической пары и перпендикулярны поступательной
кинематической паре виртуальной цепи SP (рис. 10.1).
10.3. Условие, при котором ПКЦ является SP= ПКЦ
При соединении основания и подвижной платформы SP= ПКЦ вир¬
туальной цепью SP функционирование ПКЦ не изменяется. Любая
из ее опор и виртуальная цепь SP образуют 4-подвижную одноконтур¬
ную кинематическую цепь. Если порядок группы силовых винтов опоры
больше 0, создаваемая одноконтурная кинематическая цепь должна
быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет БР=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью SP образуют
4-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи SP, т. е. является 2-£0-членной группой в лю¬
бом неособом положении.
170
Гл. 10. 4-подвижный SP= параллельный механизм
10.4. Методика структурного синтеза SP=IIM
Общая методика структурного синтеза SP= ПКЦ может быть пред¬
ставлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 4-подвижной
SP= ПКЦ.
Шаг 2. Структурный синтез опор SP= ПКЦ.
Здесь под опорой SP= ПКЦ понимается опора, удовлетворяющая
условию (1) для БР=ПКЦ.
Шаг 3. Сборка опор SP= ПКЦ.
SP= ПКЦ может быть получена сборкой двух или более опор
SP= ПКЦ, полученных на шаге 2, при условии соблюдения усло¬
вия (2) для БР=ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
БР=ПМ может быть получен выбором набора приводных кине¬
матических пар для каждой SP= ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
10.5. Шаг 1: Декомпозиция группы силовых винтов
SP= ПКЦ
Декомпозиция группы силовых винтов SP= ПКЦ с га опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из га групп силовых винтов опор для БР=ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
10.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
БР=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для SP= ПКЦ.
В любой неособой конфигурации группа силовых винтов SP= ПКЦ
идентична группе силовых винтов виртуальной цепи SP, т. е. является
2-£0-членной группой, состоящей из всех £0, направления которых
перпендикулярны оси вращательной кинематической пары виртуальной
цепи SP (рис. 10.1). Следовательно, группа силовых винтов опоры
порядка сг > 0 для SP= ПКЦ в неособом положении будет 2-£0-членной
группой или 1-£0-членной группой (рис. 10.2).
10.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения SP все силовые винты
в группе силовых винтов имеют одинаковый параметр. Группа силовых
винтов опоры представляет собой сг-членную группу с бесконечным
10.6. Шаг 2: Структурный синтез опор
171
параметром, где 0 ^ сг ^ с. Комбинации групп силовых винтов опор
могут быть представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.3.
10.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для БР=ПКЦ в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
10.6.1. Шаг 2а: Структурный синтез 4-подвижных кинема¬
тических цепей, включающих виртуальную цепь SP и имеющих
заданную группу силовых винтов опоры. Структурный синтез
4-подвижной одноконтурной кинематической цепи, включающей вир¬
туальную цепь SP и имеющей заданную группу силовых винтов опоры,
может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь SP и имеющей заданную группу си¬
ловых винтов опоры (см. гл. 3). Во-вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар, за исключением виртуальной цепи SP, линейно зависимы.
Случай 2-£0-членной группы.
Во-первых, выполним структурный синтез 4-подвижной однокон¬
турной КЦ, включающей виртуальную цепь SP и имеющей 2-£0-
членную группу. В соответствии с гл. 3, 4-подвижная одноконтурная
КЦ, включающая виртуальную цепь SP и имеющая 2-£0-членную
группу, состоит из восьми кинематических пар. Подобная однокон¬
турная КЦ состоит из одной сонаправленной композиционной едини¬
цы, встроенной в сферическую композиционную единицу (рис. 10.3).
2-£0-членная группа состоит из всех Со* оси которых проходят че¬
рез центр виртуальной цепи SP и перпендикулярны направлениям
поступательных кинематических пар сонаправленной композиционной
единицы.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинематиче¬
ские винты всех кинематических пар, кроме входящих в виртуальную
172
Гл. 10. 4-подвижный SP= параллельный механизм
Рис. 10.3. 4-подвижная одноконтурная КЦ, включающая виртуальную цепь SP
(с1 = 2)
цепь, линейно зависимы. Это условие выполняется, если в опоре при¬
сутствует только одна поступательная кинематическая пара, либо две
поступательных кинематических пары в сонаправленной композицион¬
ной единице.
Случай 1-£0-членной группы.
Во-первых, выполним структурный синтез 4-подвижной однокон¬
турной КЦ, включающей виртуальную цепь SP и имеющей 1 -Со"
членную группу. В соответствии с гл. 3, 4-подвижная одноконтурная
КЦ, включающая виртуальную цепь SP и имеющая 1-£0-членную груп¬
пу, состоит из девяти кинематических пар. Такая одноконтурная КЦ
состоит из (а) одной сферической композиционной единицы и одной
плоской композиционной единицы (рис. 10.4, а—10.4, в) или (б) одной
сферической композиционной единицы и одной плоской поступатель¬
ной композиционной единицы (рис. 10.4, ж), либо может быть полу¬
чена включением одной сонаправленной или соосевой композиционной
единицы в 4-подвижную одноконтурную КЦ, включающую виртуаль¬
ную цепь SP и имеющую 2-С0-членную группу (рис. 10.4, з-10.4, а).
Оси базисных Со 1-Со-членн°й группы проходят через центр сфериче¬
ской кинематической пары виртуальной цепи SP и перпендикулярны
плоскости, ассоциированной с ()#. Поступательные кинематические
пары из ()l виртуальной цепи SP пересекают оси вращательных кине¬
матических пар из ()l*
Во-вторых, отбросим те одноконтурные КЦ, в которых кинематиче¬
ские винты всех кинематических пар, кроме входящих в виртуальную
цепь, линейно зависимы. Это требование выполняется, лишь если
в соосную композиционную единицу входит только одна вращательная
10.6. Шаг 2: Структурный синтез опор
173
ж) RM(PP)^V з) MftRP'V и) MftPP'V
Рис. 10.4. 4-подвижные одноконтурные КЦ, включающие виртуальную цепь SP
(с* = 1)
174
Гл. 10. 4-подвижный SP= параллельный механизм
кинематическая пара либо если в сонаправленную композиционную
единицу входит только одна поступательная кинематическая пара.
В обозначениях 4-подвижных одноконтурных КЦ, включающих
виртуальную цепь SP и имеющих 2-£0-членную группу, (ХХХ)^ (X —
вращательная либо поступательная кинематическая пара) обознача¬
ет эквивалентную плоскую кинематическую пару, сформированную
последовательностью из трех кинематических пар, ассоциированная
с которой плоскость параллельна направлению поступательной кине¬
матической пары виртуальной цепи SP; р! обозначает поступательную
кинематическую пару, направление которой параллельно направлению
поступательной кинематической пары из виртуальной цепи SP, ()l обо¬
значает соосную либо сонаправленную композиционную единицу.
Следует отметить, что (R)ь и (Р)д могут быть расположены в лю¬
бой точке виртуальной цепи SP. Для краткости мы приводим только те
4-подвижные одноконтурные КЦ, из которых при помощи указанной
операции могут быть получены все остальные. Например, однокон¬
турная КЦ RRRPlRV может быть получена из одноконтурной КЦ
RRRRPlV (рис. 10.4, з) изменением положения поступательной кине¬
матической пары.
10.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся 5Р=ПКЦ (раздел 10.3) структуры опор
могут быть легко получены из найденных на шаге 2а (раздел 10.6.1)
4-подвижных одноконтурных КЦ удалением виртуальной цепи SP.
Геометрические условия, гарантирующие выполнение условия (1)
для SP= ПКЦ, легко видны из нотации, принятой для обозначения
структур БР=ПКЦ, БР=ПМ и их опор.
Например, удаляя виртуальную цепь из КЦ RRR(RR)^V
(рис. 10.4, а), получаем опору RRR(RR)^ (рис. 10.5,6). Такая опора
имеет 1-£0-членную группу. Ось базисного Со 1-Со"членн°й группы
проходит через общую точку осей трех кинематических пар R
и параллельна осям вращательных кинематических пар из (RR)^.
Все полученные структуры опор для SP= ПКЦ приведены
в табл. 10.1. Опоры, используемые для синтеза SP= ПКЦ, должны
удовлетворять не только геометрическим условиям, действующим
в пределах самих опор, но и геометрическим условиям, действующим
между опорами.
10.7. Шаг 3: Сборка опор
БР^ПКЦ может быть получена сборкой показанных в табл. 10.1
опор для SP= ПКЦ, выбранных в соответствии с комбинациями групп
силовых винтов опор из табл. 5.3. При сборке БР=ПКЦ должно
соблюдаться следующее условие: линейная комбинация групп силовых
10.7. Шаг 3: Сборка опор
175
а) опора RR(RRR)|e б) опора RRR(RR)|e
Рис. 10.5. Некоторые опоры БР=ПКЦ
Таблица 10.1. Опоры SP= ПКЦ
с'
Класс
№
Структура
2
3R1P
1
RftRP1
1
5R
2
RRCRRR)^
3
RRR(RR)^
4R1P
4
RR(RRP)IB
5
RRCRPR)^
6
ftftCPRR)^
7
RRRCRP)^
8
ftftft(PR)lB
9-13
Перестановки ftRRRP^
2R3P
14
ftR(RPP)g
15
Rft(PRP)lB
16
RRCPPR)^
17
ftM(PP)lB
18-22
Перестановки ftftftPP'
0
-
-
-
винтов опор должна составлять 2-£0-членную группу (см. условие (2)
для БР=ПКЦ в разделе 10.3).
Для SP= ПКЦ с опорами, имеющими 2-£0-членную группу, усло¬
вие (2) выполняется автоматически.
Для SP= ПКЦ, опоры которых не имеют 2-£0-членной группы, оси
базисных силовых винтов любой опоры с 1-Со-членной группой пер¬
176
Гл. 10. 4-подвижный SP= параллельный механизм
пендикулярны некоторой прямой и, соответственно, параллельны од¬
ной плоскости. Чтобы гарантировать, что линейная комбинация групп
силовых винтов опор образует 2-£0-членную группу, эти SP=flKU
должны быть построены таким образом, что не все плоскости отно¬
сительного перемещения, ассоциированные с ()е всех опор, имеющих
1-£0-членную группу, параллельны.
Например, собирая две опоры RRR(RR)^ (рис. 10.5,6), выбранные
на шаге 3, получаем 2-RRft(RR)^ БР=ПКЦ (рис. 10.6, 6). В БР=ПКЦ
оси вращательных кинематических пар на подвижной платформе долж¬
ны быть не все параллельны одной плоскости.
Кроме известных ранее структур SP= ПМ были предложены новые
структуры, т. е. структуры с опорами, имеющими 2-С0-членную груп¬
пу или пассивную кинематическую пару. Из-за большого количества
БР=ПКЦ в табл. 10.2 приведены лишь БР=ПКЦ с опорами одинако¬
вой структуры. Из этих 5Р=ПКЦ 12 структур не имеют пассивных
кинематических пар (№№ 1-8 и 14-17).
10.8. Шаг 4: Выбор приводных кинематических пар
10.8.1. t-компоненты приводных силовых винтов. Для упро¬
щения и принимая во внимание, что порядок группы винтов не зависит
от системы координат, выразим все силовые винты и приводные сило¬
вые винты в системе координат с центром в центре группы силовых
винтов SP= ПКЦ, ось Z которой перпендикулярна всем силовым вин¬
там группы силовых винтов 5Р=ПКЦ. Пусть [i 0]т, [j 0]т обозначает
базис W, где i и j — единичные векторы по осям X и Y соответствен¬
но. Последние четыре скалярных компонента всех базисных силовых
a) 2-ftft(RRR)^
б) 2-ftftft(RR)^
Рис. 10.6. Некоторые 5Р=ПКЦ
10.8. Шаг 4: Выбор приводных кинематических пар
177
Таблица 10.2. SP= ПКЦ с 4 опорами
с'
Класс
№
Структура
2
3R1P
1
4-RRRP1
1
5R
2
4-ftft(RRR)|B
3
4-ftftft(RR)lB
4R1P
4
4-ftR(RRP)|B
5
4-RR(RPR)|B
6
4-ftR(PRR)|B
7
4-RM(RP)!e
8
4-ftftR(PR)k
9-13
4-Перестановки ftftftRP^
2R3P
14
4-ftft(RPP)lB
15
4-ftft(PRP)g
16
4-RR(PPR)lB
17
4-ftftft(PP)lB
18-22
4-Перестановки ftftftPP'
винтов W равны нулю. Соответственно, J-компонент Ct^j состоит
из последних четырех скалярных компонент Сд?*
В опоре RR(RRR)^ (рис. 10.7, а) приводной является первая вра¬
щательная кинематическая пара. Приводной силовой винт — Со» ось
которого пересекает оси второй кинематической пары R, параллельна
осям вращательных кинематических пар в (RRR)^ и не пересекает
ось приводной кинематической пары. В опоре RRft(RR)^ (рис. 10.7, б)
приводной является первая вращательная кинематическая пара. При¬
водной силовой винт — £0, ось которого пересекает плоскость, про¬
ходящую через оси двух неприводных кинематических пар R, и плос¬
кость, проходящую через оси двух вращательных кинематических пар
в (RRR)e-
10.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для SP= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого БР=ПМ пассивна, набор приводных кинемати¬
ческих пар неверен и такой SP= ПМ следует отбросить.
Шаг 46. Если для предполагаемого SP= ПМ t-компоненты, т. е. век¬
торные компоненты всех приводных силовых винтов приводных
кинематических пар C$j линейно зависимы в неособом поло¬
жении, набор приводных кинематических пар неверен. В этом
случае SP=flM следует отбросить.
178
Гл. 10. 4-подвижный SP= параллельный механизм
Основание^^^
a) ftft(RRR)'
б) ftftft(RR)'
Рис. 10.7. Приводные силовые винты некоторых 5Р=ПКЦ
Один из возможных SP=fIM, соответствующих 2-RR(RRR)^
SP=nKU (рис. 10.6, а) - 2-ftft(RRR)E SP=nM (рис. 10.8, а). Оси
всех его приводных силовых винтов проходят через общую точку
кинематических пар R и перпендикулярны оси Z. Имеем
Ct,2И
/•2
st,7^1
/•2
St, 7^2
0 0 0 0
* * * *
* * * *
* * * *
= о,
где * — произвольное число.
В соответствии с условием проверки правильности выбора привод¬
ных кинематических пар данный набор приводных кинематических пар
неверен. 2-RR(RRR)^ SP= ПМ должен быть отброшен.
Один из возможных SP= ПМ, соответствующих 2-RRR(RR)Je;
SP= ПКЦ (рис. 10.6,6) - 2-MR(RR)e SP=nM (рис. 10.8,6). Оси
приводных силовых винтов его приводных силовых пар направлены
вдоль пересечения плоскости, определенной осями двух вращательных
кинематических пар из (RR)^, и плоскости, определенной осями
двух кинематических пар R (исключая приводную пару, показанную
на рис. 10.7, б). В соответствии с условием проверки правильности
выбора приводных кинематических пар данный набор приводных
кинематических пар верен.
С помощью критерия выбора приводных кинематических пар (раз¬
дел 5.7) и процедуры проверки правильности выбора приводных ки¬
нематических пар для каждой БР^ПКЦ могут быть найдены все
соответствующие БР=ПМ с га (га ^ 2) опорами. Из-за большого их
количества, в таблице 10.3 приведены, с учетом вышеизложенных
критериев, лишь БР=ПМ с четырьмя опорами одинаковой структуры.
10.9. Резюме
179
a) 2-M(RRR)e SP= ПМ б) 2-RRR(RR)L sp= пм
Рис. 10.8. Выбор приводных кинематических пар для некоторых 5Р=ПКЦ
a) 4-RRR(RR)lB б) 4-RR(PRR)lB
Рис. 10.9. SP=fIM с четырьмя опорами идентичной структуры
На рис. 10.9 показаны две структуры БР=ПМ с четырьмя опорами без
неприводных поступательных кинематических пар.
10.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез SP= ПМ. Были получены
SP= ПКЦ как с пассивными кинематическими парами, так и без них.
Условие проверки правильности выбора приводных кинематических пар
было упрощено до вычисления определителя матрицы размерностью
4x4. Среди полученных SP= ПКЦ присутствуют как ранее известные,
так и новые. Также найдено несколько новых SP= ПМ.
180
Гл. 10. 4-подвижный SP= параллельный механизм
Таблица 10.3. SP= ПМ с 4 опорами
с*
Класс
№
Структура
1
5R
2
4-RR(RRR)jB
3
4-ftM(RR)|E.
3
4-ftM(RR)^
3
4-ftftft(RR)'E
4R1P
4
4-M(RRP)^
5
4-ftft(RPR)|B
6
4-ftft(PRR)^
7
4-ftftft(RP)|B
7
4-ftftft(RP)|B
7
4-Mft(RP)|B
8
4-ftM(PR)^
8
4-ftM(PR)|E.
8
4-RRR(PR)lB
2R3P
14
4-ftft(RPP)!B
15
4-RR(PRP)g
16
4-M(PPR)|e;
17
4-RRR(PP)g
17
4-ftftft(PP)^
17
4-ЙМ(РР)|б
Вариации 5Р=ПКЦ могут быть получены путем (а) замены ком¬
бинации из одной поступательной кинематической пары и одной вра¬
щательной кинематической пары с параллельными осями, комбинации
из двух вращательных кинематических пар с пересекающимися осями
и комбинации из трех вращательных кинематических пар с совпа¬
дающими осями на кинематические пары S (или ее эквивалентные
формы RH, PH, НН), U, S соответственно, (б) замены поступательных
кинематических пар в ()^ на плоский параллелограммный механизм,
плоскость движения которого параллельна плоскости относительно¬
го движения, ассоциированной с 0^, и/или (в) замены пассивных
вращательных или поступательных кинематических пар на пассивные
кинематические пары Н.
Следует отметить, что если комбинацию вращательной и поступа¬
тельной кинематических пар с параллельными осями, в которой одна
из пар пассивна, заменить кинематической парой С в форме RH или
НН, в комбинациях RH или НН не будет пассивных кинематиче¬
ских пар.
Глава 11
5-ПОДВИЖНЫЙ US= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
Эта и две последующих главы посвящены синтезу 5-подвижных
ПМ. В каждой из этих глав рассматривается своя траектория дви¬
жения. Использование траекторий движения позволяет создать си¬
стематическую классификацию 5-подвижных ПМ и избежать недо¬
разумений, возникающих в литературе при описании 5-подвижных
ПМ. В данной главе с применением общей методики, изложенной
в главе 5, осуществляется структурный синтез 5-подвижных US=nM.
US=nM — параллельный двойник 5-подвижного последовательного
робота, состоящего из одной кинематической пары U и одной кине¬
матической пары S. Подробно рассмотрены четыре шага структурного
синтеза US= ПМ.
11.1. Введение
US= ПМ — параллельный двойник 5-подвижных последовательных
манипуляторов. Подвижная платформа US= ПМ может совершать про¬
извольные вращения вокруг точки, перемещающейся по сферической
поверхности. Первый US=nM был предложен в [116].
Следует отметить, что число избыточных связей, а также реакции
в опорах, для ПКЦ с пассивными кинематическими парами и без
них различны, несмотря на то, что пассивные кинематические пары
не влияют на перемещения подвижной платформы [24, 69]. Однако, до
настоящего времени не предложено ни одной US= ПКЦ с пассивными
кинематическими парами. Кроме того, в [116] не уделено достаточного
внимания вопросу выбора приводных кинематических пар [1, 53, 64,
72, 75, 76, 77]. Следовательно, необходимы дальнейшие исследования
структурного синтеза US= ПМ.
Данная глава посвящена структурному синтезу US=nM с приме¬
нением общей методики, изложенной в гл. 5. Декомпозиция группы
силовых винтов иБ=ПКЦ выполнена в разделе 11.5. Структурный
синтез опор US=nKC осуществлен в разделе 11.6. В разделе 11.7
описана сборка опор для генерирования US= ПКЦ, а выбор приводных
кинематических пар для US=nM — в разделе 11.8.
182
Гл. 11. 5-подвижный US= параллельный механизм
11.2. Группа силовых винтов иБ=ПКЦ
В любой неособой конфигурации группа кинематических вин¬
тов US= ПКЦ или ее виртуальной цепи US представляет собой
2-£оо"3-£о"членнУю ГРУППУ- В эт°й группе кинематических винтов оси
базисных £0 проходят через центр сферической кинематической пары,
а оси базисных ^ перпендикулярны прямой, соединяющей центры
кинематических пар S и U. Так как виртуальная сила, развиваемая
любым С0, ось которого проходит и через центр кинематической пары
U, и через центр кинематической пары S, в направлении любого ки¬
нематического винта из 2-£00-3-£0-ч«ленной группы равна нулю, группа
силовых винтов представляет собой 1-£0-членную группу (рис. 11.1).
Ось базисного £01 1-Со"членн°й группы проходит и через центр кине¬
матической пары U, и через центр кинематической пары S.
Подвижная платформа
11.3. Условие, при котором ПКЦ является иБ=ПКЦ
При соединении основания и подвижной платформы US= ПКЦ вир¬
туальной цепью US функционирование ПКЦ не изменяется. Любая
из ее опор и виртуальная цепь US образуют 5-подвижную одноконтур¬
ную кинематическую цепь. Если порядок группы силовых винтов опоры
больше 0, создаваемая одноконтурная кинематическая цепь должна
быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет Ш=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью US образуют
5-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи US, т. е. является 1-£0-членной группой в лю¬
бом неособом положении.
11.5. Шаг 1: Декомпозиция группы силовых винтов US=flKLl
183
11.4. Методика структурного синтеза US=IIM
Общая методика структурного синтеза US=nKU может быть пред¬
ставлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 5-подвижной
Ш=ПКЦ.
Шаг 2. Структурный синтез опор US= ПКЦ.
Здесь под опорой US= ПКЦ понимается опора, удовлетворяющая
условию (1) для Ш=ПКЦ.
Шаг 3. Сборка опор Ш=ПКЦ.
Ш=ПКЦ может быть получена сборкой двух или более опор
иБ=ПКЦ, полученных на шаге 2, при условии соблюдения усло¬
вия (2) для иБ=ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
US=nM может быть получен выбором набора приводных кине¬
матических пар для каждой Ш=ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
11.5. Шаг 1: Декомпозиция группы силовых винтов
US= ПКЦ
Декомпозиция группы силовых винтов Ш=ПКЦ с га опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из га групп силовых винтов опор для Ш=ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
11.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
иБ=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для Ш=ПКЦ.
В любой неособой конфигурации группа силовых винтов Ш=ПКЦ
идентична группе силовых винтов виртуальной цепи US, т. е. являет¬
ся 1-£0-членной группой, ось базисного винта £0 которого проходит
и через центр кинематической пары U, и через центр кинематической
пары S. Следовательно, группа силовых винтов опоры порядка сг > О
для Ш=ПКЦ в неособом положении будет 1-£0-членной группой
(рис. 11.1).
11.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения US все силовые винты
в группе силовых винтов имеют одинаковый параметр. Группа силовых
винтов опоры представляет собой сг-членную группу с бесконечным
184
Гл. 11. 5-подвижный US= параллельный механизм
параметром, где 0 ^ сг ^ с. Комбинации групп силовых винтов опор
могут быть представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.3.
11.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для US=nKLJ, в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
11.6.1. Шаг 2а: Структурный синтез 5-подвижных кинема¬
тических цепей, включающих виртуальную цепь US и имеющих
заданную группу силовых винтов опоры. Структурный синтез
5-подвижной одноконтурной кинематической цепи, включающей вирту¬
альную цепь US и имеющей заданную группу силовых винтов опоры,
может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь US и имеющей заданную группу си¬
ловых винтов опоры (см. гл. 3). Во-вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар, за исключением виртуальной цепи US, линейно зависимы.
Случай 1-£0-членной группы.
Во-первых, выполним структурный синтез 5-подвижной однокон¬
турной КЦ, включающей виртуальную цепь US и имеющей 1-По¬
членную группу. В соответствии с гл. 3, 5-подвижная одноконтурная
КЦ, включающая виртуальную цепь SP и имеющая 1-£0-членную
группу, состоит из десяти кинематических пар. Такая одноконтурная
КЦ состоит из двух сферических композиционных единиц (рис. 11.2).
Ось базисного винта £0 1-Со_членн°й группы проходит и через центр
кинематической пары U, и через центр кинематической пары S.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинема¬
тические винты всех кинематических пар, кроме входящих в вирту¬
альную цепь, линейно зависимы. Это требование выполняется, лишь
если в сферическую композиционную единицу входят самое большее
три вращательных кинематических пары, оси которых проходят через
центр кинематической пары U (или S) из виртуальной цепи, исключая
саму кинематическую пару U (или S).
В обозначениях 5-подвижных одноконтурных кинематических це¬
пей, включающих виртуальную цепь US и имеющих 1-£0-членную
группу, Й обозначает вращательную кинематическую пару, ось которой
проходит через центр кинематической пары U виртуальной цепи US. R
обозначает вращательную кинематическую пару, ось которой проходит
через центр кинематической пары S виртуальной цепи US.
Случай сг — 0.
Теоретически, любые шесть вращательных и поступательных ки¬
нематических пар, кинематические винты которых линейно зависимы,
11.6. Шаг 2: Структурный синтез опор
185
Рис. 11.2. 5-подвижные одноконтурные КЦ, включающие виртуальную цепь
US (с* = 1)
образуют вместе с виртуальной цепью US 5-подвижную одноконтур¬
ную КЦ.
Следует отметить, что из каждой из вышеперечисленных
5-подвижных одноконтурных КЦ, включающих виртуальную цепь
US и имеющих 1-£0-членную группу, можно получить целый класс
5-подвижных одноконтурных КЦ, включающих виртуальную цепь
US и имеющих 0-£0-членную группу, используя соосную (R)ь или
сонаправленную (P)l композиционные единицы. Следует отметить,
что кинематические пары (R)l или (Р)^ пассивны и могут быть распо¬
ложены в любой точке одноконтурной КЦ. Например, одноконтурная
КЦ ft(R)LRftRRV может быть получена путем изменения положения
кинематической пары (R)ь в одноконтурной КЦ ftftRRR(R)LV.
11.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся US=nKLl, (раздел 11.3) структуры опор
могут быть легко получены из найденных на шаге 2а (раздел 11.6.1)
5-подвижных одноконтурных КЦ удалением виртуальной цепи US.
Геометрические условия, гарантирующие выполнение условия (1)
для и5=ПКЦ, легко видны из нотации, принятой для обозначения
структур и5=ПКЦ, US=I1M и их опор: R обозначает вращательные
кинематические пары из и5=ПКЦ, US=11M или опоры, оси которых
пересекаются в одной общей точке, Й обозначает вращательные ки¬
нематические пары из и5=ПКЦ, US=I1M или опоры, оси которых
пересекаются в другой общей точке, ()ь обозначает соосную или сона¬
правленную композиционную единицу.
186
Гл. 11. 5-подвижный US= параллельный механизм
Например, удаляя виртуальную цепь из КЦ ftftRRRV (рис. 11.2, а),
получаем опору ftftRRR (рис. 11.3, а). Группа силовых винтов опо¬
ры RRRRR (рис. 11.3, а) представляет собой 1-£0-членную группу.
В качестве базисного силового винта можно выбрать Со» ось которого
проходит через точку пересечения осей кинематических пар R и точку
пересечения осей кинематических пар R.
Рис. 11.3. Некоторые опоры US=nKU
Из опор с сг = 0 нас интересует два класса:
1. Опоры с простой структурой: RUS, PUS и UPS [116].
2. Опоры, полученные добавлением вращательной или поступатель¬
ной кинематической пары к опорам с 1-£0-членной группой. На¬
пример, опора
Все полученные структуры опор для US= ПКЦ приведены
в табл. 11.1. Опоры, используемые для синтеза и5=ПКЦ, должны
удовлетворять не только геометрическим условиям, действующим
в пределах самих опор, но и геометрическим условиям, действующим
между опорами.
Таблица 11.1. Опоры US= ПКЦ
с'
№
Структура
1
1
ймт
2
ййййй
0
-
-
11.7. Шаг 3: Сборка опор
187
11.7. Шаг 3: Сборка опор
Ш=ПКЦ может быть получена сборкой показанных в табл. 11.1
опор для US= ПКЦ, выбранных в соответствии с комбинациями групп
силовых винтов опор из табл. 5.4. При сборке иР=ПКЦ должно
соблюдаться следующее условие: линейная комбинация групп силовых
винтов опор должна составлять 1-£0-членную группу (см. условие (2)
для иБ=ПКЦ в разделе 11.3).
Так как иБ=ПКЦ содержит как минимум одну опору с 1 -Со"
членной группой, условие (2) удовлетворяется автоматически. Напри¬
мер, З-RRftRR иБ=ПКЦ (рис. 11.4, а) может быть получена сборкой
трех опор RRRRR (рис. 11.3, а). Группа силовых винтов ПКЦ, яв¬
ляющаяся линейной комбинацией групп силовых винтов опор, также
является 1-£0-членной группой. Базисный силовой винт £01 группы
силовых винтов ПКЦ совпадает с базисным силовым винтом £qi любой
группы силовых винтов опор. Аналогично, собирая три опоры RRRRR
(рис. 11.3, б), можно получить 3-RftRRR US= ПКЦ (рис. 11.4, б). Груп¬
па силовых винтов ПКЦ, являющаяся линейной комбинацией групп
силовых винтов опор, также является 1-£0-членной группой. Базисный
силовой винт £01 группы силовых винтов ПКЦ совпадает с базисным
силовым винтом Coi любой группы силовых винтов опор.
В дополнение к предложенным в литературе структурам Ш=ПКЦ
были получены новые структуры, т. е. структуры с как минимум двумя
опорами, имеющими 1-£0-членную группу каждая или структуры с как
минимум одной опорой, содержащей пассивную кинематическую пару.
Подвижная платформа
a)
б) 3-ЙЙЙМ
Рис. 11.4. Некоторые US=nKU
188
Гл. 11. 5-подвижный US= параллельный механизм
По сравнению с ПКЦ, генерирующими другие траектории движе¬
ния, число структур иБ=ПКЦ невелико. Для краткости, в табл. 11.2
перечислены лищь Ш=ПКЦ с пятью опорами, каждая из которых
имеет 1-£0-членную группу. Число избыточных связей для каждого
из перечисленных в табл. 11.2 иБ=ПКЦ с пятью опорами равно 4.
Из шести структур Ш=ПКЦ две (№№ 1 и 6) состоят из пяти опор
одной и той же структуры.
Таблица 11.2. US= ПКЦ с пятью опорами
№
Структура
1
5-ЙЙЙЙЙ
2
4-ййййй-ййййй
3
3-ЙЙЙЙЙ-2-ЙЙЙЙЙ
4
2-ЙЙЙЙЙ-З-ЙЙЙЙЙ
5
ЙЙЙЙЙ-4-ЙЙЙЙЙ
6
5-ЙЙЙЙЙ
11.8. Шаг 4: Выбор приводных кинематических пар
11.8.1. t-компоненты приводных силовых винтов. Для упро¬
щения и принимая во внимание, что порядок группы винтов не зависит
от системы координат, выразим все силовые винты и приводные сило¬
вые винты в системе координат, ось X которой соосна оси силового
винта Coi US= ПМ. Базисный силовой винт US= ПМ может быть выра¬
жен как £01 = {1 0iX5}T. Последние пять скалярных компонент всех
базисных силовых винтов W равны нулю. Соответственно, ^-компонент
Ct^j Сд? состоит из последних пяти скалярных компонент
На рис. 11.5 показаны приводные силовые винты приводных кине¬
матических пар некоторых опор US=nM. Группы приводных силовых
винтов всех этих опор являются 1-£0-членными группами (рис. 11.3).
В опоре ЙЙЙЙЙ (рис. 11.5, а) приводной является первая вращательная
кинематическая пара. В качестве ■ может быть выбран любой £0,
ось которого проходит через точку пересечения осей кинематических
пар Й, пересекает оси неприводной кинематической пары Й и не пе¬
ресекает ось приводной кинематической пары Й. В опоре ЙЙЙЙЙ
(рис. 11.5,6) приводной является первая вращательная кинематиче¬
ская пара. В качестве C^j может быть выбран (а) любой £0, ось
которого определяется пересечением плоскости, определенной осями
двух неприводных кинематических пар Й и плоскости, определенной
осями двух кинематических пар Й, в случае, если эти плоскости
не параллельны, или (б) Со» ось которого перпендикулярна указанным
плоскостям, в случае, если они параллельны.
11.8. Шаг 4: Выбор приводных кинематических пар
189
Подвижная
Подвижная
Подвижная
Подвижная
платформа
б) опора RRRRR
Подвижная Подвижная
в) опора ЙЙЙЙЙ
Рис. 11.5. Приводные силовые винты некоторых опор US=nKU
11.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для US= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого US=nM пассивна, набор приводных кинемати¬
ческих пар неверен и такой US= ПМ следует отбросить.
Шаг 46. Если для предполагаемого US= ПМ ^-компоненты, т. е. век¬
торные компоненты всех приводных силовых винтов приводных
кинематических пар линейно зависимы в неособом поло¬
жении, набор приводных кинематических пар неверен. В этом
случае US= ПМ следует отбросить.
190
Гл. 11. 5-подвижный US= параллельный механизм
Например, предполагаемый US=fIM, соответствующий 3-RRRRR
US=nKU (рис. 11.4, а), будет 2-RRRRR-RRRRR US=nM
(рис. 11.6, а). Оси всех приводных силовых винтов в нем проходят
через точку пересечения осей кинематических пар R (рис. 11.5, а
и рис. 11.5, в). Имеем
Сг.ти Ct,
/*2
/•2
2
1
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
= о,
где * — произвольное число.
В соответствии с условием проверки правильности выбора привод¬
ных кинематических пар данный набор приводных кинематических пар
неверен. 2-RRRRR-RRRRR US= ПМ должен быть отброшен.
Предполагаемый US= ПМ, соответствующий 3-RRRRR US= ПКЦ
(рис. 11.4, б), будет 2-ftRRRft-ftRftRR US= ПМ (рис. 11.6, б). Оси всех
его приводных силовых винтов показаны на рис. 11.5,6 и рис. 11.5, г.
В соответствии с условием проверки правильности выбора приводных
кинематических пар данный набор приводных кинематических пар
верен.
a) 2-MRRR-RRRRR US= пм б) 2-RRRRR-RRRRR US= пм
(неверно) (верно)
Рис. 11.6. Выбор приводных кинематических пар для некоторых US=nKU
С помощью критерия выбора приводных кинематических пар (раз¬
дел 5.7) и процедуры проверки правильности выбора приводных ки¬
нематических пар для каждой иБ=ПКЦ могут быть найдены все
соответствующие US= ПМ с т (т ^ 2) опорами. Найдена лишь одна
11.9. Резюме
191
структура US=I1M с пятью опорами одинаковой структуры (включая
идентичное расположение приводных кинематических пар), состоящая
из вращательных и поступательных кинематических пар и удовле¬
творяющая вышеперечисленным критериям: PM, 5-RRRRR US=I1M
(рис. 11.7).
Подвижная платформа
Рис. 11.7. US=nM
11.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез US= ПМ. Были получены
US=nKU как с пассивными кинематическими парами, так и без них.
Условие проверки правильности выбора приводных кинематических пар
было упрощено до вычисления определителя матрицы размерностью
5x5. Среди полученных US= ПКЦ присутствуют как ранее известные,
так и новые. Найдено также несколько новых US= ПМ.
Вариации US= ПКЦ могут быть получены путем (а) замены ком¬
бинации из одной поступательной кинематической пары и одной вра¬
щательной кинематической пары с параллельными осями, комбинации
из двух вращательных кинематических пар с пересекающимися осями
и комбинации из трех вращательных кинематических пар с совпа¬
дающими осями на кинематические пары S (или ее эквивалентные
формы RH, PH, НН), U, S соответственно, и/или (б) замены пассивных
вращательных или поступательных кинематических пар на пассивные
кинематические пары Н.
Глава 12
5-ПОДВИЖНЫЙ PPPU= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
В данной главе с применением общей методики, изложенной в гла¬
ве 5, осуществляется структурный синтез 5-подвижных РРРи=ПМ
(называемых также 3T2R ПМ). РРРи=ПМ — параллельный двойник
5-подвижного последовательного робота, отрабатывающего траекторию
движения PPPU. Он имеет большое количество применений, в част¬
ности, 5-координатные обрабатывающие станки, в которых симмет¬
ричный инструмент позиционируется и ориентируется для обработки
сложных поверхностей. Подробно рассмотрены четыре шага структур¬
ного синтеза РРРи=ПМ.
12.1. Введение
Выходное звено робота PPPU отрабатывает траекторию движения
PPPU (называемую также движением 3T2R), при которой подвижная
платформа может вращаться вокруг универсальной кинематической
пары, центр которой совершает независимые перемещения.
Как и US=nM, РРР0=ПМ — 5-подвижный ПМ с потенциально
очень большой областью применения. РРРи=ПМ является параллель¬
ным двойником последовательного робота PPPU, применяющегося,
например, в 5-координатных обрабатывающих станках. В РРРи=ПМ
подвижная платформа отрабатывает траекторию движения PPPU,
управляемую пятью приводными кинематическими парами, распреде¬
ленными по различным опорам.
Плодотворные результаты в структурном синтезе РРРи=ПМ пуб¬
ликуются с 2001 г. [29, 33, 50, 59]. Однако большинство работ,
посвященных систематическому синтезу РРРи=ПМ [29, 33, 50, 59],
фактически связаны с систематическим синтезом РРРи=ПКЦ. Дру¬
гими словами, нет систематического исследования выбора приводных
кинематических пар для 5-подвижных ПМ. В [29] для обозначения
ситуации, в которой выбранный набор приводных кинематических пар
неверен, используется термин приводная сингулярность.
В данной главе с применением общей методики, изложенной
в главе 5, осуществляется структурный синтез 5-подвижных
РРРи=ПМ. Декомпозиция группы силовых винтов РРРи=ПКЦ
выполнена в разделе 12.5. Структурный синтез опор РРРи=ПКС
осуществлен в разделе 12.6. В разделе 12.7 описана сборка опор
12.3. Условие, при котором ПКЦ является PPPU= ПКЦ
193
для генерирования РРРи=ПКЦ, а выбор приводных кинематических
пар для РРРи=ПМ — в разделе 12.8.
12.2. Группа силовых винтов РРРи=ПКЦ
В любой неособой конфигурации группа кинематических винтов
РРРи=ПКЦ или ее виртуальной цепи PPPU представляет собой
3-^-2-^о-членную группу. Так как виртуальная сила, развиваемая лю¬
бым Соо» направление которого перпендикулярно осям вращательных
кинематических пар виртуальной цепи PPPU, в направлении любого
из кинематических винтов 3-^-2-^о-членной группы равно 0, то груп¬
па силовых винтов РРРи=ПКЦ или ее виртуальной цепи PPPU яв¬
ляется l-Coo-членной группой (рис. 12.1), в которой направление базис¬
ного винта Соо\ перпендикулярно осям вращательных кинематических
пар виртуальной цепи PPPU.
При соединении основания и подвижной платформы РРРи=ПКЦ
виртуальной цепью PPPU функционирование ПКЦ не изменяется.
Любая из ее опор и виртуальная цепь PPPU образуют 5-подвижную
одноконтурную кинематическую цепь. Если порядок группы силовых
винтов опоры больше 0, создаваемая одноконтурная кинематическая
цепь должна быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет РРРи=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью PPPU обра¬
зуют 5-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых винтов
виртуальной цепи PPPU, т. е. является 1-(^-членной группой
в любом неособом положении.
Виртуальная Подвижная платформа
Рис. 12.1. Группа силовых винтов РРРи=ПКЦ
12.3. Условие, при котором ПКЦ является
ррри=пкц
7 Кун С., Госселин К.
194
Гл. 12. 5-подвижный PPPU= параллельный механизм
12.4. Методика структурного синтеза РРРи=ПМ
Общая методика структурного синтеза РРРи=ПКЦ может быть
представлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 5-подвижной
ррри=пкц.
Шаг 2. Структурный синтез опор РРРи=ПКЦ.
Здесь под опорой РРРи=ПКЦ понимается опора, удовлетворяю¬
щая условию (1) для РРРи=ПКЦ.
Шаг 3. Сборка опор РРРи=ПКЦ.
РРРи=ПКЦ может быть получена сборкой двух или более опор
РРРи=ПКЦ, полученных на шаге 2, при условии соблюдения
условия (2) для РРРи=ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
РРРи=ПМ может быть получен выбором набора приводных
кинематических пар для каждой РРРи=ПКЦ, полученной
на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
12.5. Шаг 1: Декомпозиция группы силовых винтов
PPPU=ПКЦ
Декомпозиция группы силовых винтов РРРи=ПКЦ с т опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из т групп силовых винтов опор для РРРи=ПКЦ при заданном
числе избыточных связей Д. Шаг 1 может быть выполнен с помощью
уравнений (2.24) и (2.28).
12.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
РРРи=ПКЦ является подгруппой ее группы силовых винтов. В со¬
ответствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для РРРи=ПКЦ.
В любой неособой конфигурации группа силовых винтов
РРРи=ПКЦ идентична группе силовых винтов виртуальной цепи
PPPU, т. е. является 1-^-членной группой, ось базисного винта
которого проходит через центр сферической кинематической пары
и перпендикулярен направлениям поступательных кинематических
пар виртуальной цепи PPPU. Следовательно, группа силовых винтов
опоры порядка сг > О для РРРи=ПКЦ в неособом положении будет
1"Соо‘членн°й группой (рис. 12.1).
12.6. Шаг 2: Структурный синтез опор
195
12.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения PPPU все силовые винты
в группе имеют одинаковый параметр. Группа силовых винтов опоры
представляет собой сг-членную группу с бесконечным параметром,
где 0 ^ с1 ^ с. Комбинации групп силовых винтов опор могут быть
представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.4.
12.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для РРРи=ПКЦ в со¬
ответствии с двумя подшагами, предложенными в разд. 5.5.
12.6.1. Шаг 2а: Структурный синтез 5-подвижных кинема¬
тических цепей, включающих виртуальную цепь PPPU и имею¬
щих заданную группу силовых винтов опоры. Структурный синтез
5-подвижной одноконтурной кинематической цепи, включающей вир¬
туальную цепь PPPU и имеющей заданную группу силовых винтов
опоры, может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь PPPU и имеющей заданную группу
силовых винтов опоры (см. гл. 3). Во-вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар, за исключением виртуальной цепи PPPU, линейно зависимы.
Случай 1-Соо-членной группы.
Во-первых, выполним структурный синтез 5-подвижной однокон¬
турной КЦ, включающей виртуальную цепь PPPU и имеющей 1-Соо“
членную группу. В соответствии с гл. 3, 5-подвижная одноконтурная
КЦ, включающая виртуальную цепь SP и имеющая 1-(^-членную
группу, состоит из десяти кинематических пар и включает как мини¬
мум две вращательные кинематические пары. Такая одноконтурная КЦ
состоит из (а) двух пространственных параллельноосевых композици¬
онных единиц (рис. 12.2, в, г, ж, з, и) и (б) одной пространственной
параллельноосевой композиционной единицы и одной плоской ком¬
позиционной единицы (рис. 12.2, а, б, д, е). Ось базисного винта Соо
Коо-члеииой группы перпендикулярна осям всех вращательных кине¬
матических пар виртуальной цепи PPPU.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинема¬
тические винты всех кинематических пар, кроме входящих в вир¬
туальную цепь, линейно зависимы. 5-подвижные одноконтурные КЦ
RRRRRV (рис. 12.2, a), RRRRRV (рис. 12.2, б), PRRRRV (рис. 12.2, д),
и PRRRRV (рис. 12.2, ё) должны быть отброшены, так как кинемати¬
ческие винты четырех пар R или четырех пар R линейно зависимы.
7*
196
Гл. 12. 5-подвижный PPPU= параллельный механизм
д) PRRRRV
Рис. 12.2. 5-подвижные одноконтурные КЦ, включающие виртуальную цепь
PPPU (с* = 1)
12.6. Шаг 2: Структурный синтез опор
197
Рис. 12.2. 5-подвижные одноконтурные КЦ, включающие виртуальную цепь
PPPU (сг = 1) (продолжение)
В обозначениях 5-подвижных одноконтурных кинематических це¬
пей, включающих виртуальную цепь PPPU, R обозначает вращатель¬
ные кинематические пары, оси которых параллельны оси первой враща¬
тельной кинематической пары виртуальной цепи PPPU, a R обозначает
вращательные кинематические пары, оси которых параллельны оси
второй вращательной кинематической пары виртуальной цепи PPPU.
Следует отметить, что в 5-подвижных одноконтурных КЦ поступа¬
тельные кинематические пары могут быть расположены в любой точке.
Для краткости мы перечисляем только те 5-подвижные одноконтурные
КЦ, из которых посредством указанной операции могут быть получены
все остальные.
198
Гл. 12. 5-подвижный PPPU= параллельный механизм
Случай сг = О.
Теоретически, любые шесть вращательных и поступательных ки¬
нематических пар, кинематические винты которых линейно зависимы,
образуют вместе с виртуальной цепью PPPU 5-подвижную однокон¬
турную КЦ.
Следует отметить, что из каждой из вышеперечисленных
5-подвижных одноконтурных КЦ, включающих виртуальную цепь
PPPU и имеющих 1-(^-членную группу, можно получить целый
класс 5-подвижных одноконтурных КЦ, включающих виртуальную
цепь PPPU и имеющих 0-£-членную группу, используя соосную (R)l
композиционную единицу. Следует отметить, что кинематические
пары (R)l пассивны и могут быть расположены в любой точке
одноконтурной КЦ. Например, одноконтурная КЦ (R)lRRRRRV может
быть получена изменением положения кинематической пары (R)l
в одноконтурной КЦ RRRRRV(R)l-
12.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся РРРи=ПКЦ (раздел 12.3) структуры
опор могут быть легко получены из найденных на шаге 2а (раз¬
дел 12.6.1) 5-подвижных одноконтурных КЦ удалением виртуальной
цепи PPPU.
Геометрические условия, гарантирующие выполнение условия (1)
для РРРи=ПКЦ, легко видны из нотации, принятой для обозна¬
чения структур РРРи=ПКЦ, РРРи=ПМ и их опор: R обозначает
вращательные кинематические пары из РРРи=ПКЦ, РРРи=ПМ или
опоры, оси которых параллельны, R обозначает вращательные кинема¬
тические пары, оси которых также параллельны, но не параллельны
осям R.
Например, удаляя виртуальную цепь из КЦ RRRRRV_(pHc. 12.2, г),
получаем опору RRRRR (рис. 12.3,6). В опоре RRRRR, показанной
на рис. 12.3,6, оси первых трех вращательных кинематических пар
параллельны, и оси последних двух вращательных кинематических
пар также параллельны. Опора имеет 1-(^-членную группу. Ось Coo\
базисного винта 1-(^-членной группы перпендикулярна осям всех
вращательных кинематических пар. В опоре PRRRR, показанной на
рис. 12.3,в, оси первых двух вращательных кинематических пар па¬
раллельны, и оси последних двух вращательных кинематических пар
также параллельны. Опора имеет 1-(^-членную группу. Ось ба¬
зисного винта 1-(^-членной группы перпендикулярна осям всех вра¬
щательных кинематических пар.
Все полученные структуры опор для РРРи=ПКЦ приведены
в табл. 12.1. Опоры, используемые для синтеза РРРи=ПКЦ, долж¬
ны удовлетворять не только геометрическим условиям, действующим
в пределах самих опор, которые непосредственно наследуются из со¬
ответствующих одноконтурных КЦ, но и геометрическим условиям,
действующим между опорами.
12.7. Шаг 3: Сборка опор
199
Таблица 12.1. Опоры PPPU= ПКЦ
с*
Класс
№
Структура
1
5R
1
RRRRR
2
RRRRR
4R1P
3
RRRRP
4
RRRPR
5
RRPRR
6
RPRRR
7
PRRRR
3R2P
8
RRRPP
9
RRPRP
10
RPRRP
11
PRRRP
12
RRPPR
13
RPRPR
14
PRRPR
15
RPPRR
16
PRPRR
17
PPRRR
2R3P
18
RRPPP
19
RPRPP
20
PRRPP
21
RPPRP
22
PRPRP
23
PPRRP
24
RPPPR
25
PRPPR
26
PPRPR
27
PPPRR
0
-
-
-
12.7. Шаг 3: Сборка опор
РРРи=ПКЦ может быть получена сборкой показанных в табл. 12.1
опор для РРРи=ПКЦ, выбранных в соответствии с комбинациями
групп силовых винтов опор из табл. 5.4. При сборке РРРи=ПКЦ
должно соблюдаться следующее условие: линейная комбинация
групп силовых винтов опор должна составлять 1-(^-членную группу
(см. условие (2) для РРРи=ПКЦ в разделе 12.3). Это условие требует
просто, чтобы количество опор с 1-С^-членной группой было больше
200
Гл. 12. 5-подвижный PPPU= параллельный механизм
Подвижная платформа
Подвижная платформа
Рис. 12.3. Некоторые опоры PPPU =ПКЦ
либо равно 1. Следует отметить, что в РРРи=ПКЦ отсутствуют
особенные ограничения.
На рис. 12.4 изображены две РРРи=ПКЦ. З-RRRRR РРРи=ПКЦ,
показанная на рис. 12.4, а, состоит их трех опор RRRRR, показанных
на рис. 12.3, а. З-RRRRR РРРи=ПКЦ, показанная на рис. 12.4,6,
состоит их трех опор RRRRR, показанных на рис. 12.3, 6.
Из-за большого количества РРРи=ПКЦ с т опорами в табл. 12.2
перечислены лищь РРРи=ПКЦ с опорами идентичной структуры.
12.8. Шаг 4: Выбор приводных кинематических пар 201
Подвижная платформа Подвижная платформа
а) З-RRRRR б) 3-RRRRR
Рис. 12.4. Некоторые PPPU =ПКЦ
12.8. Шаг 4: Выбор приводных кинематических пар
12.8.1. t-компоненты приводных силовых винтов. Для упро¬
щения и принимая во внимание, что порядок группы винтов не зави¬
сит от системы координат, выразим все силовые винты и приводные
силовые винты в системе координат, ось Z которой перпендикулярна
осям всех вращательных кинематических пар ПМ. Обозначим как
{ 0 0 0 0 0 1 }т базисный силовой винт VV. Первые пять скаляр¬
ных компонентов W равны нулю. Соответственно, ^-компонент •
I 1
С-д• состоит из первых пяти скалярных компонент £-д,-
На рис. 12.5 показаны приводные силовые винты приводных кине¬
матических пар некоторых опор РРРи=ПМ. Группы силовых винтов
этих опор являются 1-Соо-членными группами (рис. 12.3). В опоре
RRRRR (рис. 12.5, а) приводной является первая вращательная ки¬
нематическая пара. В качестве Ср\ может быть выбран любой £0,
ось которого пересекает ось второй вращательной кинематической па¬
ры и параллельна осям последних трех вращательных пар. В опоре
RRRRR (рис. 12.5,6) приводной является первая вращательная кине¬
матическая пара. В качестве С$\ может быть выбран любой £0, ось
которого определяется пересечением плоскости, определяемой осями
двух неприводных пар R, с плоскостью, определяемой осями двух
пар R. В опоре PRRRR (рис. 12.5, в) приводной является поступатель¬
ная кинематическая пара. В качестве С$\ также может быть выбран
любой Со» ось которого определяется пересечением плоскости, опре¬
деляемой осями двух пар R, с плоскостью, определяемой осями двух
пар R.
202
Гл. 12. 5-подвижный PPPU= параллельный механизм
Таблица 12.2. РРРи=ПКЦ с т опорами идентичной структуры
с*
Класс
№
Структура
1
5R
1
m-RRRRR
2
m-ftftRRR
4R1P
3
га-RRRRP
4
га-RRRPR
5
ra-RRPRR
6
ra-RPRRR
7
ra-PRRRR
3R2P
8
ra-RRRPP
9
ra-RRPRP
10
m-RPRRP
11
m-PRRRP
12
m-RRPPR
13
m-RPRPR
14
m-PRRPR
15
m-RPPRR
16
m-PRPftR
17
m-PPRRR
2R3P
18
m-RRPPP
19
m-RPRPP
20
m-PRRPP
21
m-RPPRP
22
m-PRPRP
23
m-PPRRP
24
m-RPPPR
25
m-PRPPR
26
m-PPRPR
27
m-PPPRR
12.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для РРРи=ПМ может быть осуществлена с помо¬
щью следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого РРРи=ПМ пассивна, набор приводных кинема¬
тических пар неверен и такой РРРи=ПМ следует отбросить.
12.8. Шаг 4: Выбор приводных кинематических пар
203
Подвижная платформа
в) опора PRRRR
Рис. 12.5. Приводные силовые винты некоторых опор PPPU =ПКЦ
Шаг 46. Если для предполагаемого РРРи=ПМ ^-компоненты, т. е.
векторные компоненты всех приводных силовых винтов привод¬
ных кинематических пар линейно зависимы в неособом по¬
ложении, набор приводных кинематических пар неверен. В этом
случае РРРи=ПМ следует отбросить.
Одним из возможных РРРи=ПМ, соответствующих 3-RRRRR
РРРи=ПКЦ (рис. 12.4, а), является 2-RRRRR-RRRRR РРРи=ПМ
(рис. 12.6, а). Для этого ПМ оси всех приводных силовых винтов
204
Гл. 12. 5-подвижный PPPU= параллельный механизм
перпендикулярны оси Z (рис. 12.5, а). Имеем
* * * * *
где * — произвольное число.
В соответствии с условием проверки правильности выбора привод¬
ных кинематических пар данный набор приводных кинематических пар
неверен. 2-RRRRR-RRRRR РРРи=ПМ должен быть отброшен.
Одним из возможных РРРи=ПМ, соответствующих 3-RRRRR
РРРи=ПКЦ (рис. 12.4,6), является 2-RRRRR-RRRRR РРРи=ПМ
(рис. 12.6, б). В соответствии с условием проверки правильности выбо¬
ра приводных кинематических пар данный набор приводных кинемати¬
ческих пар верен.
a) 2-MRRR-RRRRR pppu= пм б) 2-MRRR-RRRRR pppu= пм
Рис. 12.6. Выбор приводных кинематических пар для некоторых PPPU =ПКЦ
С помощью критерия выбора приводных кинематических пар (раз¬
дел 5.7) и процедуры проверки правильности выбора приводных ки¬
нематических пар для каждой РРРи=ПКЦ могут быть найдены все
соответствующие РРРи=ПМ с ш (ш ) 2) опорами.
Подвижная платформа
Подвижная платформа
Опора ТТГ опора 2Т Ч
Основание
Таблица 12.3. РРРи=ПМ с пятью опорами
сг Класс № Структура
1 5R 1 5-RRRRR
4R1P 4 5-PRRRR
12.9. Резюме
205
Подвижная платформа
a) 5-RRRRR PPPU= ПМ б) 5-PRRRR PPPU= ПМ
Рис. 12.7. РРРи=ПМ с пятью опорами идентичной структуры
Из-за большого количества РРРи=ПМ, в табл. 12.3 и на рис. 12.7
показаны только PPPU= ПМ с пятью идентичными (включая иден¬
тичное расположение приводных кинематических пар) опорами, со¬
стоящими из вращательных и поступательных кинематических пар,
удовлетворяющие указанным критериям.
12.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез РРРи=ПМ. Были получены
РРРи=ПКЦ как с пассивными кинематическими парами, так и без
них. Условие проверки правильности выбора приводных кинематиче¬
ских пар было упрощено до вычисления определителя матрицы размер¬
ностью 5x5. Среди полученных PPPU= ПКЦ присутствуют как ранее
известные, так и новые. Найдено также несколько новых РРР11=ПМ.
РРРи=ПМ, содержащие кинематические пары С, U и S, могут
быть получены заменой комбинации из одной поступательной кинема¬
тической пары и одной вращательной кинематической пары с парал¬
лельными осями, комбинации из двух вращательных кинематических
пар с пересекающимися осями и комбинации из трех вращательных
кинематических пар с совпадающими осями на кинематические пары
С, U, S соответственно. В опорах, оси вращательных кинематиче¬
ских пар которых параллельны двум прямым, не может быть сфери¬
ческих кинематических пар. Для опор с 0-С^-членной группой мо¬
гут использоваться любые кинематические пары. Заменой вращатель¬
ной кинематической пары на соосную кинематическую пару Н могут
быть получены некоторые РРР11=ПМ, содержащие кинематические
206
Гл. 12. 5-подвижный PPPU= параллельный механизм
пары Н. Другие структуры РРРи=ПМ, содержащие кинематические
пары Н, могут быть получены из 5-подвижных одноконтурных КЦ,
включающих виртуальную цепь PPPU и одну или более кинематиче¬
скую пару Н, найденных с помощью предыдущей процедуры, следу¬
ющим образом: (1) из 5-подвижн_ых_одноконтурных КЦ, полученных
из RRRRRV (рис. 12.2, а) или PRRRRV (рис. 12.2, д) заменой одной
или более кинематических пар R на соосные кинематические пары Н,
или (2) из 5-подвижных одноконтурных КЦ, полученных из RRRRRV
(рис. 12.2,6) или PRRRRV (рис. 12.2, е) заменой одной или более
кинематических пар R на соосные кинематические пары Н. Наконец,
вариации РРРи=ПМ могут быть получены заменой поступательной
кинематической пары плоским параллелограммным механизмом либо
набора из двух последовательных поступательных кинематических пар
пространственным параллелограммным механизмом.
Глава 13
5-ПОДВИЖНЫЙ PPS= ПАРАЛЛЕЛЬНЫЙ
МЕХАНИЗМ
В данной главе с применением общей методики, изложенной в гла¬
ве 5, осуществляется структурный синтез 5-подвижных РРБ=ПМ
(называемых также 3R2T ПМ). РРБ=ПМ — параллельный двойник
5-подвижного последовательного робота, состоящего из двух поступа¬
тельных и одной сферической кинематических пар. Подробно рассмот¬
рены четыре шага структурного синтеза РРБ=ПМ.
13.1. Введение
Подвижная платформа PPS= ПМ может поворачиваться вокруг точ¬
ки, перемещающейся по плоскости. Структурный синтез РРБ=ПМ
выполнялся в [29, 39, 49, 51].
Как отмечалось в предыдущих главах, число избыточных связей,
а также реакции в опорах для ПКЦ с пассивными кинематическими
парами и без них различны, несмотря на то, что пассивные кинематиче¬
ские пары не влияют на перемещения подвижной платформы [24, 69].
Однако, до настоящего времени не предложено ни одной РРБ=ПКЦ
с пассивными кинематическими парами. Кроме того, в [39, 51] не уде¬
лено достаточного внимания вопросу выбора приводных кинемати¬
ческих пар [1, 53, 64, 72, 75, 76, 77]. Следовательно, необходимы
дальнейшие исследования структурного синтеза PPS= ПМ.
В данной главе с применением общей методики, изложенной в гла¬
ве 5, осуществляется структурный синтез 5-подвижных РРБ=ПМ.
Декомпозиция группы силовых винтов РРБ=ПКЦ выполнена в раз¬
деле 13.5. Структурный синтез опор РРБ=ПКС осуществлен в раз¬
деле 13.6. В разделе 13.7 описана сборка опор для генерирования
PPS= ПКЦ, а выбор приводных кинематических пар для PPS= ПМ —
в разделе 13.8.
13.2. Группа силовых винтов PPS=IIK]J
В любой неособой конфигурации группа кинематических вин¬
тов PPS= ПКЦ или ее виртуальной цепи PPS представляет собой
2"£оо"3"£о"членнУю группу. Как легко определить, ее группой силовых
винтов будет 1-С0-членная группа, в которой ось базисного Со прохо¬
дит через центр сферической кинематической пары и перпендикулярна
направлениям поступательных кинематических пар (рис. 13.1).
208
Гл. 13. 5-подвижный PPS= параллельный механизм
13.3. Условие, при котором ПКЦ является PPS= ПКЦ
При соединении основания и подвижной платформы РРБ=ПКЦ
виртуальной цепью PPS функционирование ПКЦ не изменяется. Лю¬
бая из ее опор и виртуальная цепь PPS образуют 5-подвижную од¬
ноконтурную кинематическую цепь. Если порядок группы силовых
винтов опоры больше 0, создаваемая одноконтурная кинематическая
цепь должна быть кинематической цепью с избыточными связями.
На основании концепции виртуальных цепей получаем, что ПКЦ
будет РРБ=ПКЦ при выполнении следующих двух условий:
1. Каждая опора ПКЦ совместно с виртуальной цепью PPS образу¬
ют 5-подвижную одноконтурную кинематическую цепь.
2. Группа силовых винтов ПКЦ совпадает с группой силовых вин¬
тов виртуальной цепи PPS, т. е. является 1-£0-членной группой
в любом неособом положении.
13.4. Методика структурного синтеза PPS=IIM
Общая методика структурного синтеза РРБ=ПКЦ может быть
представлена в виде:
Шаг 1. Декомпозиция группы силовых винтов 5-подвижной
PPS= ПКЦ.
Шаг 2. Структурный синтез опор PPS= ПКЦ.
Здесь под опорой РРБ=ПКЦ понимается опора, удовлетворяю¬
щая условию (1) для РРБ=ПКЦ.
13.5. Шаг 1: Декомпозиция группы силовых винтов PPS=FIKL[
209
Шаг 3. Сборка опор PPS= ПКЦ.
РР5=ПКЦ может быть получена сборкой двух или более опор
РРБ=ПКЦ, полученных на шаге 2, при условии соблюдения
условия (2) для PPS= ПКЦ.
Шаг 4. Выбор приводных кинематических пар.
PPS= ПМ может быть получен выбором набора приводных кине¬
матических пар для каждой PPS= ПКЦ, полученной на шаге 3.
Предложенная методика подробно рассматривается в нижеследую¬
щих разделах.
13.5. Шаг 1: Декомпозиция группы силовых винтов
PPS=nKU
Декомпозиция группы силовых винтов РРБ=ПКЦ с т опорами
состоит в отыскании всех групп силовых винтов опор и комбинаций
из т групп силовых винтов опор для PPS= ПКЦ при заданном числе
избыточных связей Д. Шаг 1 может быть выполнен с помощью урав¬
нений (2.24) и (2.28).
13.5.1. Определение групп силовых винтов опор. Так как
группа силовых винтов ПКЦ является линейной комбинацией групп
силовых винтов всех ее опор, то любая группа силовых винтов опоры
РРБ=ПКЦ является подгруппой ее группы силовых винтов. В соот¬
ветствии с процедурой, предложенной в разделе 2.1.3, можно легко
определить все группы силовых винтов опор для PPS= ПКЦ.
В любой неособой конфигурации группа силовых винтов
PPS= ПКЦ идентична группе силовых винтов виртуальной цепи
PPS, т. е. является 1-£0-членной группой, ось базисного винта Со
которого проходит через центр сферической кинематической пары
и перпендикулярна направлениям поступательных кинематических
пар виртуальной цепи PPS. Следовательно, группа силовых винтов
опоры порядка сг > 0 для РРБ=ПКЦ в неособом положении будет
1-£0-членной группой (рис. 13.1).
13.5.2. Определение комбинаций групп силовых винтов опор.
Для рассматриваемой траектории движения PPS все силовые винты
в группе силовых винтов имеют одинаковый параметр. Группа силовых
винтов опоры представляет собой сг-членную группу с бесконечным
параметром, где 0 ^ сг ^ с. Комбинации групп силовых винтов опор
могут быть представлены просто комбинациями их порядков.
Комбинации порядка сг групп силовых винтов опор определяются
из уравнения (2.28) и показаны в табл. 5.3.
210
Гл. 13. 5-подвижный PPS= параллельный механизм
13.6. Шаг 2: Структурный синтез опор
В данном разделе выполняется синтез опор для PPS= ПКЦ в соот¬
ветствии с двумя подшагами, предложенными в разд. 5.5.
13.6.1. Шаг 2а: Структурный синтез 5-подвижных кинема¬
тических цепей, включающих виртуальную цепь PPS и имею¬
щих заданную группу силовых винтов опоры. Структурный синтез
5-подвижной одноконтурной кинематической цепи, включающей вирту¬
альную цепь PPS и имеющей заданную группу силовых винтов опоры,
может быть выполнен следующим образом.
Во-первых, выполняется структурный синтез одноконтурной КЦ,
включающей виртуальную цепь PPS и имеющей заданную группу
силовых винтов опоры (см. гл. 3). Во-вторых, отбрасываются те одно¬
контурные КЦ, в которых кинематические винты всех кинематических
пар за исключением виртуальной цепи PPS линейно зависимы.
Случай 1-£0-членной группы.
Во-первых, выполним структурный синтез 5-подвижной однокон¬
турной КЦ, включающей виртуальную цепь PPS и имеющей 1 "По¬
членную группу. В соответствии с гл. 3, 5-подвижная одноконтурная
КЦ, включающая виртуальную цепь SP и имеющая 1-£0-членную груп¬
пу, состоит из десяти кинематических пар и включает как минимум три
вращательные кинематические пары. Такая одноконтурная КЦ состоит
из (а) одной сферической композиционной единицы и одной плоской
композиционной единицы (рис. 13.2, а-13.2, д) или (б) одной сфериче¬
ской композиционной единицы и одной плоской поступательной компо¬
зиционной единицы (рис. 13.2, е). Ось базисного винта £0 1-£0-членной
группы проходит через центр сферической кинематической пары вирту¬
альной цепи PPS и перпендикулярна плоскости, ассоциированной с ()я.
Во-вторых, отбросим те одноконтурные КЦ, в которых кинематиче¬
ские винты всех кинематических пар, кроме входящих в виртуальную
цепь, линейно зависимы.
В обозначениях 5-подвижных одноконтурных кинематических це¬
пей, включающих виртуальную цепь PPS и имеющих 1-£0-членную
группу, R обозначает вращательные кинематические пары, оси которых
проходят через центр сферической кинематической пары виртуальной
цепи PPS, ()|; обозначает эквивалентную плоскую кинематическую
пару, сформированную последовательностью из двух или трех посту¬
пательных кинематических пар, ассоциированная с которой плоскость
движения параллельна направлениям поступательных кинематических
пар виртуальной цепи PPS.
Следует отметить, что в 5-подвижных одноконтурных КЦ поступа¬
тельные кинематические пары из могут быть расположены в лю¬
бой точке в пределах ()^Е. Для краткости мы перечисляем только те
5-подвижные одноконтурные КЦ, из которых с помощью указанной
операции могут быть получены все остальные.
13.6. Шаг 2: Структурный синтез опор
211
Виртуальная
Виртуальная
в) (PRR)|,ftftV
г) (PR)|ftftftV д) (RPP)|.RftV е) (PP)|.RRRV
Рис. 13.2. 5-подвижные одноконтурные КЦ, включающие виртуальную цепь
PPS (сг = 1)
Случай сг = О.
Теоретически, любые шесть вращательных и поступательных ки¬
нематических пар, кинематические винты которых линейно зависимы,
образуют вместе с виртуальной цепью PPS 5-подвижную одноконтур¬
ную КЦ.
Следует отметить, что из каждой из вышеперечисленных
5-подвижных одноконтурных КЦ, включающих виртуальную цепь
PPS и имеющих 1-£0-членную группу, можно получить целый класс
5-подвижных одноконтурных КЦ, включающих виртуальную цепь PPS
212
Гл. 13. 5-подвижный PPS= параллельный механизм
и имеющих 0-£0-членную группу, используя соосную (R)l или со-
направленную (P)l композиционные единицы. Следует отметить, что
кинематические пары (R)^ или (P)l пассивны и могут быть располо¬
жены в любой точке одноконтурной КЦ. Например, одноконтурная КЦ
(RRR)|,(R)lRRV может быть получена путем изменения положения
кинематической пары (R)ь в одноконтурной КЦ (RRR)^RR(R)lV.
13.6.2. Шаг 26: Получение структур опор. В соответствии
с условием (1), для имеющейся PPS=nKLJ, (раздел 13.3) структуры
опор могут быть легко получены из найденных на шаге 2а (раз¬
дел 13.6.1) 5-подвижных одноконтурных КЦ удалением виртуальной
цепи PPS.
Подвижная платформа
в) (PRR)|ftR
Рис. 13.3. Некоторые опоры РР5=ПКЦ
Геометрические условия, гарантирующие выполнение условия (1)
для РР5=ПКЦ, легко видны из нотации, принятой для обозначения
структур РР5=ПКЦ, PPS=I1M и их опор: R обозначает вращатель¬
ные кинематические пары из РР5=ПКЦ, PPS=I1M или опоры, оси
13.7. Шаг 3: Сборка опор
213
Таблица 13.1. Опоры PPS= ПКЦ
с'
Класс
№
Структура
1
5R
1
(RRR)|ftR
2
(RR)^ftftft
4R1P
3
(RRP)|ftft
4
(RPR)J^ftft
5
(PRR)J^ftft
6
(RP)|.RRR
7
(PR)J^ftRR
3R2P
8
(RPP)|;ftR
9
(PRP)fjRft
10
(PPR)|gRR
11
(PP)^Rftft
0
—
-
-
которых пересекаются в общей точке, ()|Ё обозначает эквивалентную
плоскую кинематическую пару, сформированную последовательностью
из двух или трех кинематических пар. В пределах PPS= ПКЦ или
РРЭ=ПМ плоскости движения, ассоциированные с ()^, параллельны.
Например, удаляя виртуальную цепь из КЦ (RR)^RRftV
(рис. 13.2,6), получаем опору (RR)|,RRft (рис. 13.3,6). Эта опора
имеет 1-£0-членную группу. В качестве базисного силового винта
можно выбрать £0, ось которого проходит через точку пересечения
осей трех кинематических пар R и параллельна осям вращательных
кинематических пар из (RR)|,.
Все полученные структуры опор для PPS= ПКЦ приведены
в табл. 13.1. Опоры, используемые для синтеза РРЭ=ПКЦ, должны
удовлетворять не только геометрическим условиям, действующим
в пределах самих опор, но и геометрическим условиям, действующим
между опорами.
13.7. Шаг 3: Сборка опор
РРЭ=ПКЦ может быть получена сборкой показанных в табл. 13.1
опор для PPS= ПКЦ, выбранных в соответствии с комбинациями групп
силовых винтов опор из табл. 5.4. При сборке иР=ПКЦ должно
соблюдаться следующее условие: линейная комбинация групп силовых
винтов опор должна составлять 1-£0-членную группу (см. условие (2)
для РРЭ=ПКЦ в разделе 13.3). Это условие требует просто, чтобы
количество опор с 1-£0-членной группой было больше либо равно 1.
Следует отметить, что в PPS= ПКЦ отсутствуют особенные огра¬
ничения.
214
Гл. 13. 5-подвижный PPS= параллельный механизм
В дополнение к предложенным в литературе структурам
PPS= ПКЦ, были получены новые структуры, т. е. структуры с опорой,
содержащей пассивную кинематическую пару. Из-за большого
количества РР5=ПКЦ в табл. 13.2 перечислены лищь РР5=ПКЦ
с пятью опорами идентичной структуры.
Таблица 13.2. PPS= ПКЦ с пятью опорами
с*
Класс
№
Структура
1
5R
1
5-(RRR)|ftR
2
5-(RR)gftftft
4R1P
3
5-(RRP)^ftR
4
5-(RPR)|ftft
5
5-(PRR)]Jjftft
6
5-(RP)|gRRft
7
5-(PR)|;Mft
3R2P
8
5-(RPP)|;RR
9
5-(PRP)|ftft
10
5-(PPR)]^ftR
11
5-(PP)^RftR
На рис. 13.4 показаны две РРЭ=ПКЦ. 3-(RRR)|RR РРЭ=ПКЦ,
показанная на рис. 13.4, а, состоит из трех опор (RRR^RR,
показанных на рис. 13.3, a. 3-(RR)|;RRR РРЭ=ПКЦ, показанная
на рис. 13.4,6, состоит из трех опор (RR)|;RRR, показанных
на рис. 13.3, 6.
13.8. Шаг 4: Выбор приводных кинематических пар
13.8.1. t-компоненты приводных силовых винтов. Для упро¬
щения и принимая во внимание, что порядок группы винтов не зависит
от системы координат, выразим все силовые винты и приводные сило¬
вые винты в системе координат с началом в точке пересечения осей
кинематических пар R, ось X которой перпендикулярна плоскости,
ассоциированной с 0^.
Обозначим как {1 0 0 0 0 0 }т базисный силовой винт W.
Соответственно, t-компонент Ct^j состоит из последних пяти ска¬
лярных компонент
В опоре (RRR^RR (рис. 13.5, а) приводной является первая вра¬
щательная кинематическая пара. Приводным силовым винтом явля¬
ется £0, осью которого является прямая, образованная пересечени¬
ем плоскости, проходящей через оси двух кинематических пар R,
13.8. Шаг 4: Выбор приводных кинематических пар 215
a) 3-(RRR)|.ftft б) 3-(RR)|Mft
Рис. 13.4. Некоторые РР5=ПКЦ
и плоскости, проходящей через две неприводные вращательные кине¬
матические пары из (RRR)!;. В опоре (RR^RRR (рис. 13.5,6) привод¬
ной является первая вращательная кинематическая пара. Приводным
силовым винтом является £0, ось которого проходит через точку пере¬
сечения осей кинематических пар ft, пересекает ось второй вращатель¬
ной кинематической пары и не параллельна оси первой вращательной
кинематической пары.
Подвижная платформа
Подвижная платформа
а) опора (RRR)JgftR б) опора (RR)|,RftR
Рис. 13.5. Приводные силовые винты некоторых опор РР5=ПКЦ
216
Гл. 13. 5-подвижный PPS= параллельный механизм
13.8.2. Процедура проверки правильности выбора приводных
кинематических пар. Проверка правильности выбора приводных ки¬
нематических пар для PPS= ПМ может быть осуществлена с помощью
следующих шагов.
Шаг 4а. Если по крайней мере одна приводная кинематическая пара
предполагаемого РРБ=ПМ пассивна, набор приводных кинема¬
тических пар неверен и такой PPS= ПМ следует отбросить.
Шаг 46. Если для предполагаемого PPS= ПМ ^-компоненты, т. е. век¬
торные компоненты всех приводных силовых винтов приводных
кинематических пар линейно зависимы в неособом поло¬
жении, набор приводных кинематических пар неверен. В этом
случае PPS= ПМ следует отбросить.
Одним из возможных PPS=nM, соответствующих 3-(RR)|;RRR
PPS= ПКЦ (рис. 13.4,6), является 2-(RR)|rRR-(RR)|rRR РРБ=ПМ
(рис. 13.6, б). Оси всех его приводных силовых винтов проходят через
точку пересечения осей кинематических пар ft. Имеем
где * — произвольное число.
В соответствии с условием проверки правильности выбора привод¬
ных кинематических пар данный набор приводных кинематических пар
неверен. 2-(RR)|;RRR-(RR)|;RRR РРБ=ПМ должен быть отброшен.
Одним из возможных PPS=nM, соответствующих 3-(RRR)|,RR
РРБ=ПКЦ (рис. 13.4, а), является 2-(RRR)|RR-(RRR)|kR PPS=FIM
(рис. 13.6, а). Оси всех его приводных силовых винтов проходят
вдоль прямой, образованной пересечением плоскости, определенной
осями вращательных кинематических пар из (RRR)|, кроме приводных,
и плоскости, определенной осями кинематических пар R (рис. 13.5, а).
В соответствии с условием проверки правильности выбора приводных
кинематических пар данный набор приводных кинематических пар
верен.
С помощью критерия выбора приводных кинематических пар (раз¬
дел 5.7) и процедуры проверки правильности выбора приводных ки¬
нематических пар для каждой РР5=ПКЦ могут быть найдены все
соответствующие PPS=nM с т (га ^ 2) опорами. Из-за большого
количества PPS=nM, в табл. 13.3 показаны только РРБ=ПМ с пя¬
тью идентичными опорами, удовлетворяющие указанным критериям.
На рис. 13.7 показаны две структуры РРБ=ПМ с 5 опорами без непри¬
водных поступательных кинематических пар.
* * * * *
о
о
0 0 0 0 0
13.9. Резюме
217
a) 2-(RRR)|ftft-(RRR)|ftft б) 2-(RR)|;ftftft-(RR)|ftftft
PPS= ПМ PPS= ПМ
Рис. 13.6. Выбор приводных кинематических пар для некоторых РРБ=ПКЦ
Таблица 13.3. PPS= ПМ с пятью опорами
с'
Класс
№
Структура
1
5R
1
5-(RRR)|ftft
2
5-(RRR)|ftft
3
5-(RRR)!bM
4R1P
4
5-(RRP)!bM
5
5-(RPR)|ftft
6
5-(PRR)|ftR
13.9. Резюме
В данной главе на основе общей методики, предложенной в гл. 5,
был произведен структурный синтез РРБ=ПМ. Были получены
PPS= ПКЦ как с пассивными кинематическими парами, так и без них.
Условие проверки правильности выбора приводных кинематических пар
было упрощено до вычисления определителя матрицы размерностью
5x5. Среди полученных РРБ=ПКЦ присутствуют как ранее
известные, так и новые. Найдено также несколько новых РРБ=ПМ.
Вариации PPS= ПКЦ могут быть получены путем (а) замены ком¬
бинации из одной поступательной кинематической пары и одной вра¬
щательной кинематической пары с параллельными осями, комбинации
из двух вращательных кинематических пар с пересекающимися осями
и комбинации из трех вращательных кинематических пар с совпа¬
дающими осями на кинематические пары S (или ее эквивалентные
формы RH, PH, НН), U, S соответственно, (б) замены поступательных
218 Гл. 13. 5-подвижный PPS= параллельный механизм
Подвижная платформа
Основание
a) 5-(RRR)|ftft PPS= ПМ б) 5-(PRR)|ftft PPS= ПМ
Рис. 13.7. PPS=fIM с пятью опорами идентичной структуры
кинематических пар из ()^Е плоским параллелограммным механизмом,
плоскость движения которого параллельна плоскости относительно¬
го движения, ассоциированной с ()|i, и/или (в) замены пассивных
вращательных или поступательных кинематических пар на пассивные
кинематические пары Н.
Глава 14
ПАРАЛЛЕЛЬНЫЕ МЕХАНИЗМЫ
С ПАРАЛЛЕЛЬНЫМИ ВИРТУАЛЬНЫМИ
ЦЕПЯМИ
В предыдущих главах производился структурный синтез ПМ, тра¬
ектория движения которых описывалась последовательной виртуальной
цепью. Однако некоторые траектории движения не могут быть описаны
такой последовательной виртуальной цепью. Подобные траектории дви¬
жения, возможно, будут иметь практическое значение. Соответственно,
в некоторых случаях требуется структурный синтез ПМ с параллель¬
ной виртуальной цепью.
В данной главе на основе структурного синтеза ПМ с после¬
довательной виртуальной цепью разрабатывается метод структурного
синтеза ПМ с параллельной виртуальной цепью. Предлагается общая
процедура, состоящая из четырех основных шагов, а именно: (1) деком¬
позиция количества опор, (2) структурный синтез под-ПКЦ, (3) ком¬
бинирование под-ПКЦ для генерации ПКЦ и (4) выбор приводных
кинематических пар. Эти шаги будут обсуждены в отдельных разделах.
14.1. Введение
В данной главе структурный синтез ПМ с последовательной вир¬
туальной цепью, представленный в предыдущих главах, используется
в качестве основы для структурного синтеза ПМ с параллельной вир¬
туальной цепью. Предлагаемая общая процедура структурного синтеза
ПМ с параллельной виртуальной цепью излагается в разделе 14.2.
В разделах 14.3-14.5 предложенная процедура иллюстрируется на при¬
мерах синтеза трех классов ПМ с параллельной виртуальной цепью.
14.2. Процедура структурного синтеза параллельных
механизмов
Рассмотрим ПМ с т опорами с параллельной виртуальной це¬
пью с ту опорами. Каждая из опор параллельной виртуальной цепи
с ту опорами может рассматриваться как последовательная виртуаль¬
ная цепь, г-ая из которых называется виртуальной цепью V*. В ПМ
с т опорами должна существовать под-ПКЦ, состоящая из mi опор
с Q-С'Членной группой (с* > 0), генерирующая траекторию движения
виртуальной цепи Vi. Пусть то — количество опор с 0-£-членной
220
Гл. 14. ПМ с параллельными виртуальными цепями
группой, т. е. опор, не накладывающих ограничений на подвижную
платформу. Имеем
ту
шг + Шр = ш. (14.1)
г=1
Следует отметить, что га* должно быть больше либо равно едини¬
це. Под-ПКЦ, ассоциированная с виртуальной цепью VJ, может быть
получена с помощью результатов структурного синтеза ПМ с последо¬
вательной виртуальной цепь из предыдущих глав, где мы сосредотачи¬
вали внимание на ПМ как минимум с двумя опорами. Как будет пока¬
зано в нижеследующих разделах, начинать следует с поиска под-ПКЦ,
состоящей из одной опоры, ассоциированной с виртуальной цепью V*.
Обобщенная процедура структурного синтеза ПМ с параллельной
виртуальной цепью может быть представлена следующим образом:
Шаг 1. Декомпозиция количества опор ПКЦ, т. е. определение коли¬
чества опор га*, соответствующих каждой виртуальной цепи Vi.
Его можно определить с помощью (14.1).
Шаг 2. Для г = 1 ,ту выполняется структурный синтез г-ой под-ПКЦ,
генерирующей движение виртуальной цепи VJ.
Шаг 3. Генерация ПКЦ. ПКЦ могут быть сгенерированы сборкой ком¬
бинаций из ту под-ПКЦ, каждая из которых соответствует
одной виртуальной цепи V*, полученной на шаге 2, а также
то опор с 0-£-членной группой.
Шаг 4. Генерация ПМ выбором приводных кинематических пар раз¬
личным образом для каждой ПКЦ (раздел 3.1), полученной
на шаге 3.
Проверка правильности выбора приводных кинематических пар мо¬
жет осуществляться следующим образом:
Шаг 4а. Если одна или более приводных кинематических пар пас¬
сивны, то набор приводных кинематических пар неверен и такой
V=PM следует отбросить.
Шаг 4Ь. Если все приводные силовые винты и ? приводных ки¬
нематических пар вместе с базисными силовыми винтами группы
силовых винтов W ПКЦ для предполагаемого ПМ не образуют
6-членную группу, то набор приводных кинематических пар неве¬
рен и такой V=PM следует отбросить.
Выполнив процедуру выбора приводных кинематических пар (раз¬
дел 5.7), можно сгенерировать все У=ПМ с т (га ^ 2) опорами
для каждой У=ПКЦ.
Шаги 1-4, описанные выше, в последующих разделах иллюстриру¬
ются примерами.
14.3. Структурный синтез 3-PPS= ПМ
221
14.3. Структурный синтез 3-PPS= ПМ
3-PPS= РМ — ПМ, который генерирует движение З-PPS. Ассоци¬
ированная виртуальная цепь состоит (рис. 14.1) из трех соединенных
параллельно цепей PPS.
Подвижная платформа Виртуальная цепь
14.3.1. Декомпозиция количества опор. В данном разделе мы
ограничимся ПМ с тремя опорами. В этом случае из (14.1) получим
га0 = 0, (14.2)
ТП\ = Ш2 = тз = 1. (14.3)
14.3.2. Структурный синтез под-ПКЦ. Так как все опоры
виртуальной цепи З-PPS имеют одинаковую структуру, нам необходимо
синтезировать под-ПКС, состоящую из одной опоры и имеющую такую
же группу силовых винтов, что и виртуальная подцепь PPS.
В соответствии с процедурой, представленной в главе 5, получим
следующие типы опор: RRRRR, RRPRR, RPRRR, PRRRR, RPPRR,
PRPRR, PPRRR, RRRRR (рис. 14.2, a), RPRRR (рис. 14.2,6), PRRRR
и PPRRR.
Из этих опор получаем большое количество под-ПКЦ с га* опорами.
14.3.3. Комбинирование под-ПКЦ. Выбирая три (в соответ¬
ствии с шагом 1) под-ПКЦ, каждая из которых соответствует одной
опоре виртуальной цепи З-PPS, и собирая их вместе, можно получить
множество структур 3-PPS= ПКЦ с идентичными либо различными
структурами опор.
Для краткости на рис. 14.3 показано только три 3-РРБ=ПКЦ
с опорами одинаковой структуры.
222
Гл. 14. ПМ с параллельными виртуальными цепями
Подвижная платформа Подвижная платформа
Рис. 14.2. Некоторые под-ПКЦ 3-PPS= ПКЦ
Подвижная платформа
б) 3-ftPS
Подвижная платформа
в) 3-PRS
Рис. 14.3. Некоторые З-РРБПКЦ
14.4. Структурный синтез 2-PPPU= ПМ
223
14.3.4. Выбор приводных кинематических пар. Выполнив
процедуру выбора приводных кинематических пар, мы можем получить
все 3-PPS= ПМ, соответствующие каждой 3-PPS= ПКЦ, полученной
на шаге 2. На рис. 14.4 показаны несколько 3-РРБ=ПМ, соответству¬
ющих 3-РРБ=ПКЦ, показанным на рис. 14.3.
в) 3-PRS
Рис. 14.4. Некоторые З-РРБПМ
14.4. Структурный синтез 2-PPPU= ПМ
2-РРРи=ПМ — ПМ, генерирующий движение 2-РРРи=ПМ. Ас¬
социированная с ним виртуальная цепь 2-PPPU (рис. 14.5) состоит
из двух цепей PPPU, соединенных параллельно.
14.4.1. Декомпозиция количества опор. В данном разделе
мы ограничимся ПМ с четырьмя опорами. Полученные в этом случае
из (14.1) комбинации то и га* перечислены в табл. 14.1.
224
Гл. 14. ПМ с параллельными виртуальными цепями
Виртуальная Подвижная платформа
Основание
Рис. 14.5. Группа силовых винтов 2-РРРи=ПКЦ
Таблица 14.1. Комбинации га* и то для 2-PPPU= ПКЦ с 4 опорами
No
ТП\
777-2
то
1
3
1
0
2
2
2
0
3
2
1
1
4
1
1
2
14.4.2. Структурный синтез под-ПКЦ. Так как все опоры вир¬
туальной цепи 2-PPPU имеют одинаковую структуру, нам необходимо
синтезировать под-ПКС с га* опорами, ассоциированную с виртуальной
цепью PPPU.
В соответствии с процедурой, представленной в главе 5, получим
следующие типы опор:_ RRRRRL RRRRRI PRRRR, RPRRR, R RPR_ R,
RRRPR, RRRRP, PRRRR, RPRRR, RRPRR, RRRPR, RRRRP, PPRRR,
PRPRR, RPPRR, RRRPP, PRRPR, RPRPR, RRPPR, PRRRP, RPRRP,
RRPRP и перестановки PPPRR.
Из этих опор можно получить большое количество под-ПКЦ с га*
опорами.
14.4.3. Комбинирование под-ПКЦ. Выбирая набор из ту под-
ПКЦ в соответствии с шагом 1, а также то опор с 0-£-группой и со¬
бирая их вместе, можно получить множество структур 2-РРРи=ПКЦ.
Для краткости на рис. 14.6 показаны только два 2-РРРи=ПКЦ,
соответствующие строкам №№ 1 и 2 табл. 14.1.
14.4.4. Выбор приводных кинематических пар. Выполнив про¬
цедуру выбора приводных кинематических пар, мы можем получить все
2-РРРи=ПМ, соответствующие каждой 2-РРРи=ПКЦ, полученной
на шаге 2. На рис. 14.7 показаны несколько 2-РРРи=ПМ, соответ¬
ствующих 2-РРРи=ПКЦ, показанным на рис. 14.6.
14.5. Структурный синтез US-PPS= ПМ 225
Подвижная платформа
Подвижная платформа
Основание
a) 3-RRRR_RRRRRR б) 2-ftftftRR_2-RftRRR
Рис. 14.6. Некоторые 2-РРРи=ПКЦ
Подвижная платформа
Подвижная платформа
Основание
a) 3-RRRRj£RRRRR б) 2-RRRRR_2-RRRRR
Рис. 14.7. Некоторые 2-РРРи=ПМ
14.5. Структурный синтез US-PPS=IIM
US-PPS=nM — ПМ, генерирующий движение US-PPS=nM. Ас¬
социированная с ним виртуальная цепь US-PPS (рис. 14.8) состоит
из одной опоры US и одной опоры PPS, соединенных параллельно.
14.5.1. Декомпозиция количества опор. В данном разделе
мы ограничимся ПМ с четырьмя опорами. Полученные в этом случае
из (14.1) комбинации то и га* перечислены в табл. 14.2.
14.5.2. Структурный синтез под-ПКЦ. Так как все опоры
виртуальной цепи US-PPS состоят из опор двух структур, т. е. опор US
и РР, нам необходимо синтезировать под-ПКС с га* опорами, ассоции¬
рованную и с виртуальной цепью US и с виртуальной цепью PPS.
8 Кун С., Госселин К.
226
Гл. 14. ПМ с параллельными виртуальными цепями
Подвижная платформа
Таблица 14.2. Комбинации Шг и то для US-PPS=fIKU с 4 опорами
No
7711
7712
7710
1
3
1
0
2
2
2
0
3
2
1
1
4
1
1
2
В соответствии с процедурой, представленной в главе 5, получим
следующие типы опор для под-ПКЦ US: &RRRR и RR&RR и следую¬
щие типы опор для под- ПКЦ PPS: (RRR^Rft, (RR^RRR, (PRR^RR,
(RPR^RR, (RRP^RR, (PR^ftRR, (RP^RRR, (PPR^Rft, (PRP)^ftft,
(RPP^RR и (PP^RRR.
Из этих опор можно получить большое количество US= под-ПКЦ
и PPS= под-ПКЦ с mi опорами.
14.5.3. Комбинирование под-ПКЦ. Выбирая набор из ту под-
ПКЦ в соответствии с шагом 1, а также то опор с 0-£-группой и со¬
бирая их вместе, можно получить множество структур US-РРЗ^ПКЦ.
Для краткости на рис. 14.9 показаны только два US-РРЗ^ПКЦ,
соответствующие строкам №№ 1 и 2 табл. 14.2.
14.5.4. Выбор приводных кинематических пар. Выполнив про¬
цедуру выбора приводных кинематических пар, мы можем получить все
US-PPS=nM, соответствующие каждой и5-РР5=ПКЦ, полученной
на шаге 2. На рис. 14.10 показаны несколько US-PPS=nM, соответ¬
ствующих и5-РРБ=ПКЦ, показанным на рис. 14.9.
14.6. Резюме
В данной главе предложен метод структурного синтеза ПМ с па¬
раллельной виртуальной цепью, основанный на структурном синте¬
зе ПМ с последовательной виртуальной цепью. Показано, что ПМ
14.6. Резюме
227
Рис. 14.9. Некоторые US-PPS=nKU
Подвижная платформа
a) 2-ftMRft_2-(RRR)'
б) 3rftRftRR_(RRR)' RR
Рис. 14.10. Некоторые US-PPS=nM
с параллельной виртуальной цепью может быть получен в четыре шага:
(1) декомпозиция количества опор, (2) структурный синтез под-ПКЦ,
(3) комбинирование под-ПКЦ с целью сгенерировать ПКЦ и (4) выбор
приводных кинематических пар.
8*
Глава 15
ЗАКЛЮЧЕНИЕ
Зная что-либо, считай, что
знаешь;
не зная, считай, что
не знаешь, —
это и есть мудрость.
Конфуций (551-479 до н.э.)
15.1. Основные результаты
Эта книга посвящена систематическому исследованию структурного
синтеза ПМ. Основные его результаты следующие.
1. Описание и классификация траекторий движения.
С помощью введенной концепции виртуальных цепей, траекто¬
рии движения описываются очень просто. Определено несколько
наиболее важных с практической точки зрения траекторий дви¬
жения.
2. Подход к структурному синтезу ПМ, основанный на виртуальных
цепях.
На основе концепции виртуальных цепей и теории винтов, ПМ
могут быть сконструированы из семи композиционных единиц
при помощи конструирования многоподвижных одноконтурных
КЦ в четыре шага: (1) декомпозиция группы силовых винтов
параллельной кинематической цепи, ассоциированной с виртуаль¬
ной цепью (У=ПКЦ), (2) структурный синтез опор, (3) сборка
опор с целью получить У=ПКЦ и (4) выбор приводных кинема¬
тических пар. После того как ПМ сконструирован, часть одной
или более его конструкционных единиц может стать невидимой
из-за удаления виртуальной цепи в процессе структурного синте¬
за. Отмечается [77], что:
• подход, основанный на виртуальных цепях, требует мень¬
шего количества вычислений, чем подходы, предложенные
в [И, 31, 62, 76];
• подход, основанный на виртуальных цепях, концептуально
более прост и, следовательно, более легок для понимания,
чем подход, предложенный в [55];
15.2. Направления дальнейших исследований
229
• подход, основанный на виртуальных цепях, является более
общим, чем подходы, предложенные в [45, 118]. При при¬
менении этих подходов не могут быть получены некоторые
структуры ПМ с 5 опорами, имеющие 3 и 4 степени свободы.
В отличие от большинства существующих подходов к струк¬
турному синтезу, в данном подходе систематически исследуется
задача выбора приводных кинематических пар. Также подчеркнем
применение пассивных кинематических пар.
3. Потенциально наиболее применимые структуры ПМ.
С применением подхода, основанного на виртуальных цепях,
были синтезированы несколько ПМ с последовательными вир¬
туальными цепями. Получено некоторое количество РРР= ПМ,
S= ПМ, PPR= ПМ, PPPR= ПМ, SP= ПМ, US= ПМ, PPPU= ПМ
и РРБ=ПМ, состоящих из вращательных и поступательных ки¬
нематических пар. На основе результатов структурного синтеза
ПМ с последовательными виртуальными цепями выполнен син¬
тез двух классов ПМ с параллельными виртуальными цепями.
Получены структуры 3-РРБ=ПМ и 2-PPPRR=nM, состоящих
из вращательных и поступательных кинематических пар.
В результате получены все ПМ, отрабатывающие соответству¬
ющую траекторию движения, как ранее известные, так и но¬
вые. На основе полученных результатов читатель может разрабо¬
тать все новые и новые инновационные устройства, основанные
на ПМ, в частности, параллельные манипуляторы, тактильные
устройства, медицинские роботы, наноманипуляторы и микро¬
манипуляторы (приложение А).
4. Анализ подвижности ПМ.
В качестве побочного продукта предложенного подхода к струк¬
турному синтезу ПМ, разработан новый подход к анализу по¬
движности ПМ, изложенный в приложении Б. Предложенный
процесс анализа подвижности является обратным по отноше¬
нию к процессу структурного синтеза ПМ. Он призван стать
эффективным инструментом для читателей в исследовании ПМ,
не описанных в данной книге.
15.2. Направления дальнейших исследований
Несмотря на значительные достижения, изложенные в книге,
все еще существуют проблемы, проистекающие из сложной природы
ПМ и требующие дальнейших исследований. Одновременно, развитие
нано-, биотехнологий, технологий МЭМС и других высоких техноло¬
гий создает новые возможности и проблемы для исследований в об¬
ласти устройств, основанных на ПМ (приложение А). Дальнейших
исследований требуют следующие проблемы:
230
Гл. 15. Заключение
1. Определение новых траекторий движения для практического при¬
менения, например, для каждого из параллельных модулей ком¬
бинированного станка, с последующим выполнением структурно¬
го синтеза ПМ. Кроме описанных в данной книге ПМ, отраба¬
тывающих заданную траекторию движения, выполнялся синтез
ПМ, отрабатывающих другие траектории движения, и были по¬
лучены некоторые новые ПМ, например, 3-подвижный иР=ПМ
[79]. Эти результаты не представлены потому, что (1) применение
общей методики хорошо иллюстрируется на примерах структур¬
ного синтеза восьми классов ПМ и (2) включение этих резуль¬
татов привело бы к неоправданному увеличению объема книги.
Классификация траекторий движения является открытой теоре¬
тической проблемой [105].
2. Выполнение структурного синтеза ПМ со смешанным режимом
работы. В связи с успехами, достигнутыми в структурном синтезе
ПМ с постоянным режимом работы, логично перейти к разра¬
ботке ПМ со смешанным режимом работы. Одно из достоинств
ПМ со смешанным режимом работы — уменьшение количества
приводов [83]. В настоящее время предложено лишь несколько
ПМ со смешанным режимом работы [30, 83].
3. Расширение предложенного подхода к структурному синтезу ПМ
в область синтеза механизмов с более сложной структурой [48].
В некоторых приложениях [15, 126] подобные механизмы необ¬
ходимы, несмотря на их сложную структуру.
4. Выполнение структурного синтеза податливых ПМ. По сравне¬
нию с обычными ПМ, на ПМ с гибкими кинематическими па¬
рами не влияют реакции в кинематических парах, что делает
возможным их применение в наноманипуляторах. В сочетании
с результатами исследований гибких механизмов [46, 86, 108],
проделанная в данной книге работа является солидным фунда¬
ментом для структурного синтеза гибких ПМ.
5. Выполнение структурного синтеза микро-ПМ. Принимая во вни¬
мание доступность технологий производства МЭМС, результаты
данной книги могут стать хорошей отправной точкой для струк¬
турного синтеза микроманипуляторов [57]. Кроме того, большое
практическое значение имеют ПМ с простыми кинематическими
характеристиками. Управление такими ПМ обычно очень про¬
стое. В сочетании с техникой кинематического анализа, данная
работа может использоваться для структурного синтеза развязан¬
ных по входу-выходу ПМ [69], частично развязанных ПМ [101],
ПМ с выборочным приводом (selectively actuated) [60] и анали¬
тических ПМ [80].
Приложение А
ПРОЕКТИРОВАНИЕ УСТРОЙСТВ, ОСНОВАННЫХ
НА ПАРАЛЛЕЛЬНЫХ МЕХАНИЗМАХ
В данном приложении мы кратко изложим применение ПМ к проек¬
тированию инновационных параллельных манипуляторов, тактильных
устройство, медицинских роботов, наноманипуляторов и микроманипу¬
ляторов. Рассмотрено несколько общих и специфических задач, отно¬
сящихся к проектированию устройств, основанных на ПМ.
А.1. Общие задачи
Поскольку внешний вид и функции различных устройств, осно¬
ванных на ПМ, существенно различны, рассмотрим несколько общих
задач, возникающих при их проектировании.
A.l.l. Обзор процесса проектирования. Проектирование
устройств, основанных на ПМ, обычно следует типовой процедуре,
схематически изображенной на рис. АЛ.
А.1.2. Выбор режима работы. При выполнении обратного
анализа положений ПМ любая из его опор может быть представлена
в виде последовательного манипулятора. Соответственно, к опорам ПМ
может быть применена концепция положения последовательного мани¬
пулятора. Режим работы ПМ определяется как комбинация положений
его опор. ПМ, имеющие множество решений обратной задачи о поло¬
жениях, являются ПМ с множественным режимом работы. Различные
режимы работы отличаются положением по меньшей мере одной опоры.
Рабочая область данного ПМ очень сильно изменяется при изменении
режима. На практике в качестве режима работы обычно принимается
режим с наибольшей рабочей областью.
А.1.3. Избыточность для данной задачи. Вообще, не рекомен¬
дуется введение избыточных для данной задачи степеней свободы ПМ,
чтобы минимизировать число используемых приводов.
Однако, если структурная ошибка ПМ без избыточных связей для
данной задачи превышает допустимый предел, следует рассмотреть во¬
прос об использовании ПМ с избыточными для данной задачи связями.
Например, для отработки траектории движения РРР может ис¬
пользоваться РРР=ПМ (поступательный параллельный механизм).
Однако, если ожидаемая структурная ошибка превышает допустимые
пределы, могут использоваться ПМ с избыточными для данной задачи
связями: PPPR=nM, РРРУ=ПМ или 6-подвижный ПМ.
232
Прил. А. Проектирование устройств, основанных на ПМ
Рис. А.1. Блок-схема проектирования устройств, основанных на ПМ
А. 1.4. Количество опор. Количество опор ПМ определяется
расположением приводов, числом степеней свободы приводов, рабочей
областью и требованиями жесткости.
В большинстве ПМ приводы стараются располагать возле основа¬
ния. Если используются приводы с одной степенью свободы, то коли¬
чество опор равно числу степеней свободы ПМ. Если используются
приводы с несколькими степенями свободы, то количество опор будет
меньше числа степеней свободы ПМ.
Если необходимо спроектировать ПМ с большой рабочей областью,
следует выбрать меньшее количество опор, чем число степеней свобо¬
ды ПМ. Обратно, если требуется увеличить жесткость ПМ, следует
выбрать большее количество опор, чем число степеней свободы ПМ.
А.2. Специфические задачи
233
А. 1.5. Выбор структур опор. Обычно используются ПМ с иден¬
тичными структурами опор. Однако при невозможности получения
удовлетворительных результатов с применением ПМ с опорами иден¬
тичной структуры, следует рассмотреть возможность применения ПМ
с различными опорами (см., например, [5]).
А.2. Специфические задачи
В данном разделе рассмотрены некоторые специфические задачи,
возникающие при разработке параллельных манипуляторов, тактиль¬
ных устройств, медицинских роботов, наноманипуляторов и микро¬
манипуляторов.
А.2.1. Параллельные манипуляторы. Обратная задача о по¬
ложениях параллельного манипулятора сильно нелинейна по своей
природе. Помочь в решении данной проблемы может разработка ана¬
литических параллельных манипуляторов, специального класса парал¬
лельных манипуляторов с линейной зависимостью между входом и вы¬
ходом.
В результате рассмотрения геометрической интерпретации прямой
задачи о положениях РРР= ПМ было предложено большое количество
РРР=ПМ с линейным решением этой задачи [37, 68, 69]. Изучение
условий, при которых для РРР= ПМ имеется линейное решение обрат¬
ной задачи о положениях, позволило в [70] получить класс РРР= ПМ
с линейными уравнениями зависимости входа-выхода.
Учитывая требования к рабочей области, можно предложить пред¬
почтительные проекты РРР= параллельных манипуляторов (называе¬
мых также поступательными параллельными манипуляторами).
На рис. 6.11 показаны два предпочтительных проекта
РРР= параллельных манипуляторов, полученных из 3-PRRR
РРР=ПМ. Характерной особенностью манипулятора, изображенного
на рис. 6.11, а, является его полная развязка по входу-выходу. Каждый
выход этого параллельного манипулятора приводится в движение
в точности одним приводом. Эта характеристика сильно упрощает
управление манипулятором. Характерной особенностью манипулятора
на рис. 6.11,6 является то, что диапазон перемещений в направлении,
параллельном направлению линейного привода, ограничен только
ходом линейного привода.
На рис. 3, а цветной вклейки показан прототип Триптерона, ос¬
нованный на предпочтительном проекте, показанном на рис. 6.11, а.
Для З-PRRR РРР= параллельного манипулятора существует два пра¬
вильных набора решений, различающихся положением неприводных
кинематических пар в опорах и восемь решений обратной задачи
о положениях для заданного положения подвижной платформы. Таким
образом, РРР= параллельный манипулятор имеет восемь режимов ра¬
боты. Различные режимы работы разделяются особыми положениями
234
Прил. А. Проектирование устройств, основанных на ПМ
одной или нескольких опор. Из-за пересечений опор рабочие области
в различных режимах работы сильно различаются.
Если устранить особые положения на границах рабочей обла¬
сти ограничением перемещений приводных кинематических пар,
РРР= параллельный манипулятор с линейной системой зависимостей
входа-выхода всегда будет оставаться в пределах режима работы,
в котором он находился при сборке.
Прототип Триптерона приводится в движение тремя бесколлектор-
ными серводвигателями постоянного тока, имеющими вращательный
момент 0,388 Нм и рабочую скорость вращения до 6000 об/мин. Управ¬
ление прототипом осуществляется простым ПИД-регулятором в обрат¬
ной связи для каждого двигателя. Управление реализовано в Simulink
и осуществляется на платформе реального времени RT-LAB Opal-RT.
Прототип был протестирован и показал способность перемещаться по
заданной траектории с ускорением до 8g [38]. Производители после¬
довательных декартовых роботов могли бы значительно улучшить свои
изделия, если бы приняли на вооружение концепцию Триптерона.
А.2.2. Тактильные устройства. Тактильные устройства —
устройства, позволяющие компьютеру имитировать осязание для
использования в окружении виртуальной реальности. Тактильные
устройства имеют управляемую обратную связь по силе с пальцами
пользователя с тем, чтобы они чувствовали прикосновения к предметам
в виртуальном пейзаже. Тактильные устройства применяются при
обучении хирургов, лапороскопической хирургии, в индустрии
развлечений и т. д.
Высокопроизводительные тактильные устройства должны обладать
следующими характеристиками [98]: малая инерционность, большая
жесткость, малое трение, маневренность, почти нулевая отдача, грави¬
тационная уравновешенность, большая рабочая область, большое число
степеней свободы и соответствие силе пользователя. Механические
характеристики тактильного устройства не должны искажать отраже¬
ние им сил и моментов. Кроме того, желательно, чтобы они были
компактны.
Как можно видеть, ПМ являются хорошими кандидатами на роль
тактильных устройств, так как они известны своей большой жест¬
костью, малой инерционностью, что обеспечивает широкую полосу
пропускания по силе [5]. Другие желаемые характеристики могут
быть достигнуты разработкой подходящей механической конструкции
и системы управления. Предпочтительно не использовать в тактильных
устройствах неприводные поступательные кинематические пары.
Для имитации работы запястья подвижная платформа должна со¬
вершать независимые вращения с тремя степенями свободы вокруг
центра запястья. Таким образом, тактильное устройство, имитиру¬
ющее работу запястья, может быть разработано на основе класса
S= ПМ. На рис. 1, ж цветной вклейки показано тактильное устройство,
А.2. Специфические задачи
235
разработанное в университете Лаваль, основанное на RRR-RRR-
R(RRR)Bft S=nM. Следует отметить, что для избежания столкно¬
вения опор в этом S= ПМ использованы опоры различных структур:
две опоры структуры RRR (№1 в табл. 7.1) и одна опора структуры
R(RRR)eR (№21 в табл. 7.1).
А.2.3. Медицинские роботы. Медицинские роботы используют¬
ся для расширения возможностей хирургии. Вместо непосредственно¬
го обращения с инструментами, хирург удаленно управляет роботом,
совершающим необходимые движения. Это позволяет устранить нега¬
тивное влияние дрожи в руках, особенно при очень точных небольших
движениях. Обзор вопросов проектирования медицинской робототех¬
ники представлен в [110].
Хирургия минимального вмешательства производится через
несколько маленьких проколов, в отличие от традиционной хирургии,
при которой все действия производятся через один большой разрез
на теле пациента. Это позволяет значительно уменьшить время
послеоперационной реабилитации. Для управления хирургическими
инструментами в этом случае применяется так называемый удаленный
центр движения (remote centre-of-motion, RCM) — центральная
часть любого хирургического робота, применяемого в хирургии
минимального вмешательства.
Особенно интересна лапороскопическая хирургия, при которой
опреации выполняются в брюшной полости пациента. Хирург действует
с помощью длинных и тонких инструментов, вставляемых в брюшную
полость через небольшие отверстия. Согласно [132], механизм, несу¬
щий инструмент в операциях с минимальной инвазией, должен иметь
четыре степени свободы, чтобы гарантировать вращение инструмента
вокруг точки, в которой он проник в тело пациента, и перемещение
вдоль оси (введение/сокращение). Из этих требований к совершаемым
движениям видно, что для применения в хирургии минимального вме¬
шательства может использоваться класс SP=nM (глава 10).
На рис. 5 цветной вклейки показан предложенный в [132] 4-
ftftftCRR)^ SP=nM, отвечающий всем требованиям к рабочей области
и удаленному центру движения.
А.2.4. Наноманипуляторы. Под наноманипуляторами (называе¬
мыми также гибкими параллельными манипуляторами в [100]) здесь
понимаются манипуляторы с (суб)нанометрической точностью. Такая
точность может быть достигнута путем замены обычных кинематиче¬
ских пар ПМ гибкими кинематическими парами. Ключевой проблемой
в этой замене является сохранение высокой жесткости манипулятора.
Наноманипуляторы относятся к гибким механизмам, некоторые ли¬
бо все движения которых осуществляются путем упругой деформа¬
ции гибких сегментов. Преимущества гибких механизмов над тради¬
ционными твердотельными механизмами заключаются в повышенной
236
Прил. А. Проектирование устройств, основанных на ПМ
износостойкости из-за устранения трения и в отсутствии обратных
реакций и зазоров.
На рис. 6 цветной вклейки показана пластиковая модель нано¬
манипулятора, предложенного в [117]. На рис. 2,6 цветной вклейки
показан прототип наноманипулятора, предложенного в [100]. В от¬
личие от манипулятора, предложенного в [117], в котором каждая
гибкая кинематическая пара очень широка, здесь три группы опор
расположены параллельно, что сильно уменьшает ширину гибких ки¬
нематических пар. Как отмечено в [100], ошибка наноманипулятора
составляет (что проверено с помощью оптических лазерных датчиков)
менее 3% и в диапазоне 20 //м может не учитываться. Кроме того,
по экспериментальным данным, точность и стабильность позициониро¬
вания при диапазоне перемещений 10 //м составляют 0,2 //м и менее
0,4 //м соответственно.
А.2.5. Микроманипуляторы. С помощью доступных в настоящее
время технологий производства МЭМС и беря за основу ПМ, предло¬
женные в данной книге, могут быть разработаны микроманипуляторы.
При этом могут быть разработаны как твердотельные, так и гибкие
манипуляторы [57].
Как указано в [57], ограничения лицевой микромеханической об¬
работки определяются положением и геометрией опор. При существу¬
ющих процессах лицевой микромеханической обработки ось враща¬
тельной кинематической пары должна быть либо параллельна, либо
перпендикулярна плоскости, а направление поступательных кинема¬
тических пар должны быть параллельны той же плоскости. В неко¬
торых процессах лицевой микромеханической обработки одно звено
может быть расположено над другими. Для других процессов это
невозможно. Кроме того, предпочтительно использование линейных
приводных кинематических пар, расположенных на основании и неже¬
лательно использование неприводных поступательных кинематических
пар. Теперь кратко рассмотрим микроманипуляторы, соответствующие
3-RRPR РРР=ПМ (см. № 3 в табл. 6.5).
Во-первых, расположим вращательные и поступательные кинемати¬
ческие пары таким образом, чтобы оси вращательных кинематических
пар были либо параллельны, либо перпендикулярны одной плоскости,
а направления поступательных кинематических пар были параллельны
той же плоскости (рис. А.2, а). Здесь, как и на рис. А.З, для простоты
основание не показано. Во-вторых, заменим в каждой опоре непри¬
водные поступательные кинематические пары плоскими параллело-
граммными механизмами (рис. А.2, б). В-третьих, чтобы использовать
линейные приводы для вращательных кинематических пар на основа¬
нии, подсоединим последовательную КЦ, состоящую из двух звеньев,
соединенных вращательной кинематической парой, к первому звену
вращательной кинематической парой, а к основанию — поступательной
кинематической парой. Теперь последовательная кинематическая цепь,
А.2. Специфические задачи 237
Рис. А.2. Проектирование микроманипулятора на основе 3-RRPR РРР= ПМ
Рис. А.З. Проектирование микроманипулятора на основе 3-PRPR РРР=ПМ
первое звено и основание образуют плоский шарнирный четырехзвен-
ник (рис. А.2, в). Таким образом поворот вращательной кинематиче¬
ской пары, расположенной на основании, может управляться линейным
приводом через плоский четырехзвенник. Наконец, для увеличения
жесткости микро-параллельного манипулятора добавим звено, соеди¬
няющее две первых кинематических пары в каждой опоре (рис. А.2, г).
На рис. 2,в цветной вклейки показан микроманипулятор [57], со¬
ответствующий ПМ, изображенному на рис. А.2, г.
Аналогично, можно получить РРР=ПМ (рис. А.З, б), так что со¬
зданный на его основе микроманипулятор может использоваться для
лицевой микромеханической обработки. Этот РРР=ПМ получается
из 3-RRPR РРР=ПМ следующим образом: во-первых, расположим
238
Прил. А. Проектирование устройств, основанных на ПМ
вращательные и поступательные кинематические пары таким обра¬
зом, чтобы оси вращательных кинематических пар были либо па¬
раллельны, либо перпендикулярны одной плоскости, а направления
поступательных кинематических пар были параллельны той же плос¬
кости (рис. А.З, а). Во-вторых, заменим неприводные поступательные
кинематические пары плоскими параллелограммными механизмами
(рис. А.З, б). Этот ПМ состоит из меньшего количества звеньев, чем
изображенный на рис. А.2, г 0.
А.З. Резюме
В данном приложении представлено несколько примеров приме¬
нения результатов, полученных в данной книге, к проектированию
устройств, основанных на ПМ. Можно надеяться, что на основе из¬
ложенного в книге подхода и результатов может быть разработано
множество инновационных устройств, основанных на ПМ.
!) Систематическому изучению структурного синтеза микроманипуляторов
будет посвящена одна из будущих наших публикаций.
Приложение Б
АНАЛИЗ ПОДВИЖНОСТИ ПАРАЛЛЕЛЬНЫХ
МЕХАНИЗМОВ
Так как в одной книге невозможно рассмотреть все структуры ПМ
и чтобы помочь читателю в изучении ПМ, в данной книге не рас¬
смотренных, необходимо разработать систематический подход к ана¬
лизу подвижности ПМ. На основе процесса, обратного структурному
синтезу ПМ, разработанному в данной книге, предложен системати¬
ческий подход к анализу подвижности ПМ [71]. Он иллюстрируется
некоторым количеством примеров. Другие недавние работы в области
анализа подвижности ПМ см. в [20, 21, 34, 45, 47, 66, 69, 88, 103, 104,
118, 127].
Б.1. Принципы проверки подвижности полного цикла
Б. 1.1. Эквивалентные последовательные кинематические це¬
пи. Подобно концепции виртуальных цепей для структурного синтеза,
для анализа подвижности ПМ введем концепцию эквивалентных по¬
следовательных КЦ.
Обозначим группу силовых винтов ПКЦ с к опорами (рис. Б.1,а),
состоящей из к опор ПКЦ с т опорами (рис. 2.17), как Эквива¬
лентная последовательная КЦ ПКЦ с к опорами — последовательная
КЦ, имеющая такие же группы силовых и кинематических винтов,
что и ПКЦ с к опорами.
Если задана группа кинематических винтов подвижной платфор¬
мы, поиск последовательной КЦ с такой же группой кинематических
винтов не представляет большого труда. Например, если группа ки¬
нематических винтов ПКЦ представляет собой 3-^-членную группу,
то последовательной КЦ с такой же группой кинематических винтов
может быть любая КЦ РРР, направления поступательных кинема¬
тических пар в которой не все параллельны одной плоскости. Если
группа кинематических винтов ПКЦ представляет 3-^-1-£0-членную
группу, то последовательной КЦ с такой же группой кинематических
винтов может быть любая КЦ PPPR, в которой ось вращательной
кинематической пары параллельна оси £0 и направления поступатель¬
ных кинематических пар не все параллельны одной плоскости. Если
в ПКЦ с к опорами присутствует опора г, для которой Wl = W[k],
то непосредственно она и выбирается в качестве эквивалентной после¬
довательной КЦ.
240
Прил. Б. Анализ подвижности параллельных механизмов
Эквивалентная последовательная
Рис. Б.1. ПКЦ с к опорами параллельной кинематической цепи с т опорами:
а) исходная ПКЦ и б) ПКЦ с добавленной эквивалентной КЦ
Если эквивалентная последовательная КЦ не является опорой ПКЦ
с к опорами, можно соединить подвижную платформу и основание
с помощью эквивалентной последовательной КЦ (рис. Б. 1,6), не на¬
рушая мгновенную подвижность ПКЦ с к опорами. Мгновенная по¬
движность полученной ПКЦ с (fc+ 1) опорами равна (Тщ + Re) у гДе
Тщ — подвижность ПКЦ с к опорами, Re — количество независи¬
мых параметров, определяющих конфигурацию эквивалентной после¬
довательной КЦ при зафиксированной подвижной платформе. Обыч¬
но выбирают эквивалентную последовательную КЦ так, что Re = 0,
как в предыдущем примере.
Очевидно, что достаточным условием соответствия группы кинема¬
тических винтов эквивалентной последовательной кинематической це¬
пи группе кинематических винтов ПКЦ с к опорами в любой неособой
конфигурации является то, что эквивалентная КЦ с каждой опорой
ПКЦ формирует (C[k] + Re + Яг)-подвижную одноконтурную КЦ с по¬
движностью полного цикла. Здесь Сщ и R1 обозначают порядок группы
кинематических винтов подвижной платформы и число независимых
параметров, описывающих конфигурацию г-ой опоры при зафиксиро¬
ванной подвижной платформе соответственно. Эквивалентная последо¬
вательная КЦ для ПКЦ с к опорами, соответствующая этому условию,
называется эквивалентной последовательной КЦ полного цикла.
Б. 1.2. Достаточное условие наличия подвижности полного
цикла у ПМ. Достаточное условие наличия у ПКЦ подвижности
полного цикла с помощью концепции эквивалентной последовательной
КЦ может быть сформулировано следующим образом:
ПМ имеет подвижность полного цикла, если (а) он имеет экви¬
валентную последовательную КЦ полного цикла или (б) он состоит
из более чем одной ПКЦ, имеющей эквивалентную последовательную
Б.2. Процедура анализа подвижности
241
КЦ полного цикла и все эквивалентные последовательные КЦ полного
цикла образуют КЦ без избыточных связей.
Так как многоподвижную одноконтурную КЦ без избыточных свя¬
зей легко определить и структуры многоподвижных одноконтурных КЦ
без избыточных связей подробно описаны в главе 3, анализ подвижно¬
сти ПМ может выполняться на основе этого достаточного условия.
Б.2. Процедура анализа подвижности
Анализ подвижности ПКЦ подразделяется на анализ мгновенной
подвижности и проверку подвижности полного цикла.
Б.2.1. Анализ мгновенной подвижности. Анализ мгновенной
подвижности ПКЦ выполняется с помощью результатов раздела 2.2.3
и [66]. Как и в разделе 2.2.3, обозначим т — количество опор ПМ,
с и Т — порядок группы силовых винтов W и подвижность (число
степеней свободы) ПКЦ соответственно. Аналогично, обозначим как
сг и р порядок группы силовых винтов W2 и число степеней свободы
опоры г. К1 обозначает число избыточных степеней свободы опоры г.
Для выполнения анализа подвижности ПМ следует вычислить следу¬
ющие три индекса.
Порядок С группы кинематических винтов ПКЦ (или связность
подвижной платформы) равен (см. (2.18))
С = 6-с. (Б.1)
Подвижность (или число степеней свободы) Т ПКЦ равна
(СМ. (2.21))
f = C + fl = 6-c+f ff, (Б.2)
г= 1
ГДе ТС = р - (6 - с4) = р - 6 + с\ (Б.З)
Число избыточных связей (называемых также пассивными связя¬
ми) (если А > 0) равно (см. (2.22))
т
А = ]Г с* - с. (Б.4)
г— 1
Рассмотрим 3-(PRRR)a ПКЦ, показанную на рис. Б.2, а. Анализ
подвижности такого механизма производился в [69, 103]. В этой ПКЦ
оси всех вращательных кинематических пар в пределах каждой опоры
параллельны. Оси поступательных кинематических пар не перпенди¬
кулярны осям вращательных кинематических пар той же опоры. Оси
вращательных кинематических пар на подвижной платформе не па¬
раллельны. Группа силовых винтов каждой опоры представляет собой
2-Соо-членную группу, состоящую из всех £оо> оси которых перпен¬
дикулярны осям всех вращательных кинематических пар этой опоры.
242
Прил. Б. Анализ подвижности параллельных механизмов
Группа силовых винтов ПКЦ представляет собой 3-£оо“членнУю груп¬
пу. Имеем сг = 2, с = 3, R1 = 0. С помощью (Б.1), (Б.2) и (Б.4) получим
С = 6 - с = 3
Г = С + '£ IP = 3.
i= 1
Число избыточных связей данной ПКЦ с 3 опорами равно
Д = £У-с = 6- 3 = 3.
г— 1
Подвижная платформа
Подвижная Эквивалентная
платформа последовательная
кинематическая цепь
Опора 3\^
Опора 1
б)
Рис. Б.2. Анализ подвижности 3-(PRRR)a ПКЦ: а) исходная КЦ и б) КЦ
с встроенной эквивалентной последовательной КЦ
Б.2.2. Проверка подвижности полного цикла. Подвижность
ПМ, полученная с помощью (Б.2), обычно является мгновенной по¬
движностью. В данном разделе рассматривается вопрос об определении
наличия у ПМ подвижности полного цикла.
На основании достаточного условия наличия у ПМ подвижности
полного цикла, проверка подвижности полного цикла может выпол¬
няться следующим образом:
Шаг 1. Проверить, равно ли Д ПКЦ нулю. Если да, то проверка
подвижности полного цикла закончена. Иначе переходим к сле¬
дующему шагу.
Шаг 2. Определить и удалить пассивные кинематические пары.
Б.З. Примеры
243
Цель данного шага заключается в упрощении проверки подвиж¬
ности полного цикла. Пассивная кинематическая пара всегда
уменьшает число степеней свободы ПКЦ. При удалении из ме¬
ханизма пассивных кинематических пар относительное движение
подвижной платформы ПКЦ не изменяется. Пассивные кинема¬
тические пары могут быть определены методами, описанными
в [69, 76].
Шаг 3. Проверить, существует ли для полученной на шаге 2 ПКЦ
эквивалентная последовательная кинематическая цепь. Если да,
то ПКЦ имеет подвижность полного цикла и проверка закончена.
Иначе переходим к следующему шагу.
Шаг 4. Для j = 2, т — 1 проверить, может ли ПКЦ быть разложена на
j ПКЦ с mi опорами, имеющих эквивалентные последовательные
КЦ полного цикла. Здесь Ya=\ = m- Если Для некоторого
j ответ положителен, ПКЦ имеет подвижность полного цикла
и проверка окончена. Иначе переходим к следующему шагу.
Шаг 5. ПКЦ не имеет подвижности полного цикла 0 и проверка за¬
кончена.
Мы нашли, что мгновенная подвижность 3-(PRRR)a ПКЦ, по¬
казанного на рис. Б.2, а, равна 3. Теперь обсудим проверку полной
подвижности. В соответствии с вышеизложенной процедурой имеем:
Шаг 1. Так как А = 3 ф 0, переходим к следующему шагу.
Шаг 2. В данной ПКЦ нет пассивных кинематических пар.
Шаг 3. Может быть найдена эквивалентная последовательная КЦ
(рис. Б.2, б), и каждая опора (PRRR)^ с формирует с ней од¬
ноконтурную КЦ с 3 степенями свободы. Следовательно, эк¬
вивалентная последовательная КЦ РРР является эквивалентной
последовательной КЦ полного цикла для 3-(PRRR)a ПКЦ. За¬
ключаем, что ПКЦ имеет подвижность полного цикла.
Б.З. Примеры
Далее проиллюстрируем предложенный метод анализа подвижности
с помошью пяти примеров.
Пример Б.1. Рассмотрим (PRRR^R^^PRRR)^ ПКЦ, изображен¬
ную на рис. Б.З. В этой ПКЦ оси вращательных кинематических пар
в пределах каждых «()» параллельны. Оси вращательных кинематиче¬
ских пар не перпендикулярны осям вращательных кинематических пар
в пределах некоторых «()».
Анализ мгновенной подвижности.
Группа силовых винтов опоры (PRRR)^R представляет собой 1-Соо"
членную группу, в которой базисным является силовой винт Соо> оси
1) Могут, однако, существовать парадоксальные ПКЦ с подвижностью пол¬
ного цикла, однако они не рассматриваются в данной книге.
244
Прил. Б. Анализ подвижности параллельных механизмов
Рис. Б.З. Анализ подвижности (PRRR)aR-2-(PRRR)a ПКЦ: а) исходная КЦ
и б) КЦ без пассивных кинематических пар
которого перпендикулярны осям всех вращательных кинематических
пар этой опоры. Группа силовых винтов опоры (PRRR)^ представляет
собой 2-Соо-членную группу, составленную из всех £оо> оси которых
перпендикулярны осям всех вращательных кинематических пар этой
опоры. Группа силовых винтов ПКЦ представляет собой З-С^-членную
группу. Имеем с1 = 1, с2 = с3 = 2, с = 3, R1 = 0. Из (Б.1), (Б.2) и (Б.4)
получаем
С = 6 - с = 3
И 771
т = с + J2 Ri =3-
г= 1
Число избыточных связей этой ПКЦ с тремя опорами равно
771
Д = £с*-с=1+2 + 2- 3 = 2.
г-1
Проверка подвижности полного цикла. В соответствии с проце¬
дурой проверки подвижности полного цикла имеем:
Шаг 1. Так как Д = 2 ф 0, переходим к следующему шагу.
Шаг 2. Для данной ПКЦ вращательная кинематическая пара опо¬
ры (PRRR)^R, расположенная на подвижной платформе, пассив¬
на [69, 76]. Удаляя пассивную кинематическую пару, получаем
3-(PRRR)a ПКЦ, изображенную на рис. Б.З, б.
Б.З. Примеры
245
Шаг 3. Как было сказано выше, 3-(PRRR),4 ПКЦ имеет эквивалент¬
ную последовательную КЦ полного цикла. Эквивалентная после¬
довательная КЦ полного цикла может быть представлена в виде
последовательной КЦ РРР. Следовательно, ПКЦ имеет подвиж¬
ность полного цикла.
Пример Б.2. Рассмотрим З-ftftftRR ПКЦ, показанную на рис. Б.4.
В такой ПКЦ оси всех кинематических пар R проходят через общую
точку, а оси всех кинематических пар R проходят через другую общую
точку. Анализ подвижности данной ПКЦ может быть выполнен следу¬
ющим образом.
Подвижная платформа
Рис. Б.4. Анализ подвижности З-ЙЙЙЙЙ ПКЦ
Анализ мгновенной подвижности.
Группа силовых винтов каждой опоры представляет собой 1-По¬
членную группу, в которой базисным является £0, ось которого прохо¬
дит через обе общие точки. Группа силовых винтов ПКЦ также будет
1-£0-членной группой. Имеем сг = 1, с = 1, R1 = 0. Из (Б.1), (Б.2)
и (Б.4) получаем
С=6-с=6-1=5
и
Т = С + £ R1 = 5.
г=1
Число избыточных связей такой ПКЦ с 3 опорами равно
га
Д = ]TV-c = 3- 1 =2.
г-1
246
Прил. Б. Анализ подвижности параллельных механизмов
Проверка подвижности полного цикла.
В соответствии с процедурой проверки подвижности полного цикла
имеем:
Шаг 1. Так как Д = 2 ф 0, переходим к следующему шагу.
Шаг 2. В данной ПКЦ нет пассивных кинематических пар.
Шаг 3. Эквивалентная последовательная КЦ полного цикла для такой
ПКЦ может быть найдена. Она представляется опорой 1. Следо¬
вательно, ПКЦ имеет подвижность полного цикла.
Пример Б.З. Рассмотрим 4-RRRRR ПКЦ, изображенную на
рис. Б.5, а [75]. В данной ПКЦ оси всех кинематических пар R
параллельны, а оси всех кинематических пар R параллельны
в пределах опоры. Анализ подвижности данной ПКЦ может быть
выполнен следующим образом.
Подвижная платформа
Эквивалентная
последовательная
Подвижная кинематическая цепь
платформа
Основание
б)
Рис. Б.5. Анализ подвижности 4-RRRftR ПКЦ: а) исходная КЦ и 6) КЦ
с встроенной эквивалентной последовательной КЦ
Анализ мгновенной подвижности.
Группа силовых винтов каждой опоры представляет собой 1-Соо"
членную группу, в которой базисным является силовой винт Соо
с осью, перпендикулярной осям всех вращательных кинематических
пар этой опоры. Группа силовых винтов опоры представляет собой
2-Соо"членнУю группу, составленную из всех оси которых перпен¬
дикулярны осям кинематических пар R. Имеем сг = 1, с = 2, R1 = 0.
Из (Б.1), (Б.2) и (Б.4) получаем
С=6—с=6—2=4
Б.З. Примеры
247
т = с + Y1Ri = 4-
г= 1
Число избыточных связей данной ПКЦ с 4 опорами равно
771
д = ^у — с = 4 — 2 = 2.
г-1
Проверка подвижности полного цикла.
В соответствии с процедурой проверки подвижности полного цикла
имеем:
Шаг 1. Так как Д = 2 ф 0, переходим к следующему шагу.
Шаг 2. В данной ПКЦ нет пассивных кинематических пар.
Шаг 3. Эквивалентная последовательная КЦ полного цикла для такой
ПКЦ может быть найдена. Она представляет собой последова¬
тельную КЦ PPPR, в которой оси всех вращательных кинемати¬
ческих пар параллельны осям кинематических пар R (рис. Б.5, б).
Следовательно, ПКЦ имеет подвижность полного цикла.
Пример Б.4. Рассмотрим 2-RRRR-RRRRR ПКЦ, показанную на
рис. Б.6, а [74]. В этой ПКЦ оси всех кинематических пар R парал;
лельны, кинематические пары R соосны, оси кинематических пар R
параллельны осям кинематических пар R, а оси кинематических пар R
параллельны в пределах опоры. Анализ подвижности данной ПКЦ
может быть выполнен следующим образом.
Подвижная платформа
Эквивалентная
последовательная
кинематическая цепь
Подвижная
платформа
Опора 3
б)
Рис. Б.6. Анализ подвижности 2-RRRR-RRRRR ПКЦ: а) исходная КЦ и б) КЦ
с встроенной эквивалентной последовательной КЦ
248
Прил. Б. Анализ подвижности параллельных механизмов
Анализ мгновенной подвижности.
Группа силовых кинематических винтов каждой опоры RRRR яв¬
ляется l-Co-l-C^-членной группой, базис которой представляется
ось которого перпендикулярна осям всех вращательных кинематиче¬
ских пар, и С0, ось которого пересекает оси кинематических пар R
и параллельна осям кинематических пар R. Группа силовых винтов
опоры RRRRR является 1-(^-членной группой, ось базисного сило¬
вого винта Соо которой перпендикулярна осям всех вращательных
кинематических пар опоры. Группа силовых кинематических винтов
ПКЦ является l-Co-2-С^-членной группой, состоящей из всех
оси которых перпендикулярны осям кинематических пар R, и всех £0,
оси которых параллельны осям кинематических пар R и пересекают
оси кинематических пар R. Имеем с1 = с2 = 2, с3 = 1, с = 3, К1 = 0.
Из (Б.1), (Б.2) и (Б.4) получим
С = 6 — с = 6 — 3 = 3
и
Т = С + R1 = 3.
г= 1
Число избыточных связей данной ПКЦ с 3 опорами равно
771
Д = ^с*-с = 2 + 2+1-3 = 2.
г-1
Проверка подвижности полного цикла.
В соответствии с процедурой проверки подвижности полного цикла
имеем:
Шаг 1. Так как Д = 2 ф 0, переходим к следующему шагу.
Шаг 2. В данной ПКЦ нет пассивных кинематических пар.
Шаг 3. Эквивалентная последовательная КЦ полного цикла для такой
ПКЦ может быть найдена. Она представляет собой последова¬
тельную КЦ PPR (рис. Б.6, б), в которой вращательная кинема¬
тическая пара соосна кинематическим парам R, расположенным
на подвижной платформе, а направления поступательных кине¬
матических пар перпендикулярны осям кинематических пар R.
Следовательно, ПКЦ имеет подвижность полного цикла.
Пример Б.5. Рассмотрим ПКЦ 2-RRRRR_2-RRRRR, изображенную
на рис. Б.7, а. Эта ПКЦ состоит из двух групп опор: группы из двух
опор RRRRR и группы из двух опор RRRRR. Геометрические огра¬
ничения, накладываемые на положения кинематических пар, видны
из обозначений этих пар и действуют только в пределах групп опор.
В этой ПКЦ оси всех кинематических пар R в опорах RRRRR проходят
через общую точку, оси всех пар R в опорах RftftRR проходят через
вторую общую точку, оси всех пар R в опорах RRRRR проходят через
третью общую точку, оси всех кинематических пар R параллельны.
Б.З. Примеры 249
Рис. Б.7. Анализ подвижности 2-ЙЙЙЙЙ_2-ЙЙЙЙЙ ПКЦ: а) исходная КЦ
и б) КЦ, составленная из двух эквивалентных последовательных КЦ
Анализ подвижности данной ПКЦ может быть выполнен следующим
образом.
Анализ мгновенной подвижности.
Группой силовых винтов каждой опоры RRRRR является 1-По¬
членная группа, базисным силовым винтом которой является Со» ось
которого проходит через общую точку всех кинематических пар R
и общую точку всех кинематических пар R. Группой силовых винтов
каждой опоры RRRR& является 1-£0-членная группа, базисным сило¬
вым винтом которой является Со» ось которого проходит через общую
точку всех кинематических пар R и параллельна осям всех кинема¬
тических пар R. Группой силовых винтов ПКЦ является 2-£0-членная
группа, являющаяся линейной комбинацией указанных 1-£0-членных
групп. Имеем сг = 1, с = 2, К1 = 0. Из (Б.1), (Б.2) и (Б.4) получаем
С=6-с=6-2=4
и
Т = С + £ Я* = 4.
2=1
Число избыточных связей данной ПКЦ с 4 опорами равно
га
Д = £с* — с = 4 — 2 = 2.
г-1
Проверка подвижности полного цикла.
В соответствии с процедурой проверки подвижности полного цикла
имеем:
250
Прил. Б. Анализ подвижности параллельных механизмов
Шаг 1. Так как Д = 2 ф 0, переходим к следующему шагу.
Шаг 2. В данной ПКЦ пассивные кинематические пары отсутствуют.
Шаг 3. Данная ПКЦ не имеет эквивалентной последовательной КЦ
полного цикла. Переходим к следующему шагу.
Шаг 4. Найдено, что ПКЦ, составленная из опор 1 и 2 имеет эквива¬
лентную последовательную КЦ полного цикла, представляемую
опорой 1, ПКЦ, составленная из опор 3 и 4 имеет эквивалентную
последовательную КЦ полного цикла, представляемую опорой 3.
Кроме того, опоры 1 и 3 формируют КЦ без избыточных свя¬
зей. Следовательно, заданная ПКЦ имеет подвижность полного
цикла.
Приведенные выше примеры показывают, как просто выполняется
анализ подвижности ПКЦ с помощью предложенного метода. Следует
отметить, что анализ подвижности ПМ, подобный рассмотренному
в примере Б.1, может быть выполнен с помощью подходов, предло¬
женных в [20, 21, 34, 45, 47, 66, 69, 88, 103, 104, 118, 127]. Однако
подвижность некоторых механизмов, например, механизмов из приме¬
ров Б.4 и Б.5, не может быть определена с помощью предложенных
ранее подходов в их современном состоянии. Следует также отметить,
что существуют ПМ с только мгновенной подвижностью и ПМ со
смешанной мгновенной подвижностью и подвижностью полного цик¬
ла [71]. Такие ПМ требуют дальнейших исследований.
Б.4. Резюме
В данном приложении предложен систематический подход к анали¬
зу подвижности ПМ. С применением данного подхода анализ подвиж¬
ности выполняется в два шага. Первым шагом выполняется анализ
мгновенной подвижности, вторым — проверка подвижности полного
цикла. Первый шаг выполняется на основе теории винтов. Второй шаг
выполняется на основе концепции эквивалентных последовательных
КЦ и структур многоподвижных одноконтурных КЦ с избыточными
связями. Представленные здесь результаты должны способствовать
изучению и применению ПМ. Расширение предложенного подхода на
более сложные многоконтурные механизмы будет результатом дальней¬
ших исследований.
Приложение В
МЕТОД, ОСНОВАННЫЙ НА ТЕОРИИ ГРУПП
ДВИЖЕНИЙ
В данном приложении мы кратко рассмотрим приложение к струк¬
турному синтезу ПМ метода, основанного на теории групп движе¬
ний [3, 32, 40, 42, 45, 78, 102, 109]. Данный метод был предложен
в [40, 45, 109] для структурного синтеза параллельных механизмов
РРР= и позднее был распространен на структурный синтез ПМ других
классов, в частности ПМ S= [61], ПМ PPPR= [3] и ПМ PPS= [39].
С помощью данного методы непосредственно создаются ПМ с задан¬
ным конечным движением. Отпадает необходимость в определения
мгновенных подвижностей и мгновенных ограничений для ПМ. Недав¬
но метод, основанный на теории групп движений, был использован
для синтеза линейного ПМ РРР= [78]. Линейный ПМ РРР= — это
такой ПМ РРР=, расчет движений которого осуществляется на основе
системы линейных уравнений. Однако в настоящее время метод, осно¬
ванный на теории групп движений, имеет определенные ограничения.
В.1. Группы движений и их генераторы
Набор всех возможных движений имеет структуру группы и, со¬
ответственно, называется группой движений V [3, 32, 40]. Группа
движений V включает 12 подгрупп движений, в том числе и саму
группу V (см. таб. В.1). Для упрощения описания групп движений,
особенно пересечений подгрупп движений, используются обозначения,
подобные принятым в [3]. Группы движений и оси вращательных
и винтовых кинематических пар обозначаются «каллиграфическим»
шрифтом. Векторы обозначаются полужирными строчными буквами.
Любая механическая система, производящая подгруппу движений, на¬
зывается ее механическим генератором. В таблице В.1 приведены
механические генераторы для всех подгрупп движений, состоящие
из поступательных, вращательных и винтовых кинематических пар.
Как отмечено в [45], в качестве генераторов для подгрупп T(n), Т,
Г(п), У(и,р), Х(и) и V могут использоваться плоские параллело-
граммные механизмы. Кроме того, в качестве генераторов для подгрупп
движения Т, Д'(и) и V могут использоваться пространственные парал-
лелограммные механизмы [3, 33].
В литературе приняты различные обозначения для описания
подгрупп движений. Чтобы облегчить использование литературы,
252
Прил. В. Метод, основанный на теории групп движений
посвященной подгруппам движения, в таблице В.2 приведены различ¬
ные их обозначения.
Таблица В.1. Подгруппы движений и их генераторы
Размер¬
ность
Под¬
группа
Описание
Генератор
0
X
Отсутствие движений
—
1
Пи)
Перемещение в направ¬
лении и.
Р, где направление движе¬
ния поступательной кинемати¬
ческой пары параллельно и.
ЩА)
Вращение вокруг оси А.
R, где ось вращательной ки¬
нематической пары совпадает
с А.
Н(А,р)
Поворот на угол (р во¬
круг оси, параллель¬
ной и, с перемещением s
в направлении этой оси
с шагом 5 = pip.
Н с осью А и шагом р.
2
Т(п)
Перемещения в направ¬
лениях двух различ¬
ных единичных векторов
и и v, перпендикуляр¬
ных п.
РР, в котором направления
движения поступательных ки¬
нематических пар перпендику¬
лярны п.
С(А)
Независимое вращение
вокруг оси А и переме¬
щение в ее направлении.
PR, RP, PH, HP, RH, HR или
НН, в которых оси каждой
из вращательных или цилинд¬
рических кинематических пар
совпадают с осью А и направ¬
ление движения поступатель¬
ной кинематической пары па¬
раллельно оси А.
3
Т
Перемещения в направ¬
лении трех различных
единичных векторов.
РРР
Г(п)
Два независимых пере¬
мещения в направлении
двух различных единич¬
ных векторов и и v, пер¬
пендикулярных п, и вра¬
щение вокруг оси, па¬
раллельной п.
PPR, PRP, RPP, PRR, RPR,
RRP или RRR, в которых оси
вращательных кинематических
пар параллельны п, а направ¬
ления движения поступатель¬
ных кинематических пар пер¬
пендикулярны п.
S(0)
Вращения вокруг точ¬
ки О.
RRR, в котором оси враща¬
тельных кинематических пар
проходят через О.
В.2. Операции над подгруппами движений
253
Продолжение табл. В. 1
Размер¬
ность
Под¬
группа
Описание
Генератор
Поворот на угол во¬
круг оси, параллель¬
ной и, с перемещением s
в направлении этой оси
с шагом s = pip и два
независимых перемеще¬
ния в направлении раз¬
личных единичных век¬
торов, нормальных и.
РРН, РНР, НРР, РНН, НРН,
ННР или ННН, в которых
кинематическая пара Н имеет
шаг р и ось, параллельную и,
а направление каждой посту¬
пательной кинематической па¬
ры перпендикулярно и.
4
Л’(и)
Поворот на угол (р во¬
круг оси, параллельной
и, и перемещения в на¬
правлении трех различ¬
ных единичных векто¬
ров.
РРРХ, РРХР, РХРР, ХРРР,
РРХХ, РХХХ, ХРХХ, ХХРХ,
ХХХР ИЛИ ХХХХ, в кото¬
ром ось каждой кинематиче¬
ской пары X (вращательной
или винтовой) параллельна и.
6
V
Три независимых враще¬
ния и три независимых
перемещения.
отсутствует
Таблица В.2. Подгруппы движений и их генераторы
Размерность
Обозначение
В [42]
Обозначение
в [32]
Обозначение
В [3]
Обозначение
в данной книге
0
{Е}
—
I
X
1
Ши)}
P
P(e)
Р(и)
{R(N, u)}
R
ЩА)
ЩЛ)
{H(N, u,p)}
H
ЩА, p)
ЩА, р)
2
{T(P)}
P2
T2(u,v)
Т(п)
{C(N, u)}
С
C(A)
С(А)
3
m
P3
%
Т
{G(P)}
F
^(u,v)
Г(п)
{sm
S
S(0)
S(0)
{Y(w,p)}
HP2
У(е>р)
УЬ*'Р)
4
{X(w)}
RP3
X{e)
Х(и)
6
{D}
D
V
V
В.2. Операции над подгруппами движений
Над подгруппами движений определены две операции — пересе¬
чение и произведение. Пусть (?ь (?2* • • •»— п подгрупп движений.
Тогда их пересечение и произведения обозначаются соответственно
254
Прил. В. Метод, основанный на теории групп движений
как Q\ П (/2 П ... П Qn и Q\ • 02 • ... • 0П- Обе операции ассоциативны.
Кроме того, пересечение коммутативно. Имеем
(01 П Q2) П £/з = Q\ П ({?2 П 0з),
^1 П (/2 = 02 П Q\,
(01 • 02) • 03 = 01 • (02 • 0з)-
В таблице В.З приведены результаты операции пересечения двух
подгрупп движений [32]. Эти результаты непосредственно используют¬
ся для структурного синтеза ПМ. Для краткости таблица произведений
двух подгрупп движений, приведенная в [3, 40], в данной работе
не обсуждается.
Таблица В.З. Неединичные пересечения подгрупп движений
Подгруппа 1
Подгруппа 2
Пересечение
Условие
?Ы
V{u2)
ты
U1 = u2
ТЫ
РЫ
U1 _Ln2
С(А2)
ты
Ui||^2
Т
ты
ты
ты
U1 _Ln2
Ки2,Р2)
ты
U1 J_U2
<V(u2)
ты
V
ты
ЩА\)
ща2)
П(Ах)
11
ro
С(А2)
Я(А{)
II
lb
ro
ГЫ
ЩАй
-4i||n2
S(02)
ЩАх)
A\ проходит через Oi
*(u2)
П(А{)
A\ |u2
V
ЩА1)
Н(А\,р\)
н(а2,Р2)
ЩА\,р\)
A\ = A2 и pi = p2
С(А2)
Tt{A\,p\)
II
ro
У(и2,Р2)
Н{А\,р\)
A1
U2 и P\ = P2
ХЫ
Н{А\,р\)
Ai
ll2
V
HiAi.pi)
ты
ты
ТЫ
ni = n2
Т(и), где и±щ
И и±П2
ni Ф n2
С(А2)
Т{и), где и| А2
П\±Л2
т
ТЫ
ты
ТЫ
m = n2
Т{и), где u±ni
И и_1_П2
ni Ф n2
У{Ч2,Р2)
ты
ni = n2
V(u), где u_Lni
И и±П2
ni Ф n2
В.2. Операции над подгруппами движений
255
Продолжение табл. В.З
Подгруппа 1
Подгруппа 2
Пересечение
Условие
Х(и2)
ТЫ
V
ТЫ
седо
С(Л2)
С{Л\)
см
II
'Р(и), где и
А\
А\| Д2
Т
'Р(и), где и
Ai
ТЫ
'Р(и), где и
А\
Д1±п2
П{А\)
Д1±п2
5(02)
ЩАх)
А\ проходит через 02
У(и2,Р2)
V(u), где 11ЦД1
А\-\-П2
П(Лир2)
Ах
U2
хы
С(Ах)
Ах
U2
'P(u), где 11ЦД1
А\ /Ци2
V
С(Ах)
т
г
Т
ты
Т(п2)
Ди2,Р2)
ты
Д'(иг)
т
V
т
ты
ты
П1 = п2
'Р(и), где u±ni
И и±П2
П1 ^ п2
s(o2)
ЩА), где Д про¬
ходит через О2
и параллельна ni
У(Щ,Р2)
Т(п.)
П1 = и2
Р(и), где u_Lni
И U±U2
П1 ^ U2
хы
^(ni)
П1 = U2
ТЫ
П1 Ф U2
V
^Ы
5(0,)
s(o2)
5(0,)
0\ = о2
7£(Д), где Д про¬
ходит через 01
и 02
0\ф02
Л’(иг)
ЩА), где Д про¬
ходит через 0\
и параллельна 112
V
5(0,)
y(ui,pi)
Ди2,рг)
У(иьр>)
Щ = U2 и pi = Р2
T(u.)
\1\=\12\\р\ф р2
'P(u), где u_Lu,
И Uj-U2
Ul ф U2
хы
У(иьр0
Ul = 112
ТЫ
Ul ф 112
256
Прил. В. Метод, основанный на теории групп движений
Продолжение табл. В.З
Подгруппа 1
Подгруппа 2
Пересечение
Условие
V
*(ui)
ХЫ
Л’(щ)
Ui = U2
Т
Ui ф U2
V
Х(щ)
V
V
V
В.З. Кинематическая связь
Кинематическая связь (механическая связь) C(i,j) между двумя
твердыми телами г и j — набор разрешенных относительных переме¬
щений этих двух тел [3, 40]. В общем случае кинематическая связь
может быть представлена группой движений или произведением групп
движений. Любая механическая система, создающая кинематическую
связь, называется ее механическим генератором.
Подобно подгруппам движений, над кинематическими связями так¬
же определены операции пересечения и произведения.
В.4. Последовательность структурного синтеза
параллельных кинематических цепей
Для ПМ с т опорами (рис. 1.1), траектория движения подвижной
платформы, определяемая здесь как кинематическая связь £, является
пересечением кинематических связей £* (г = 1,2, ...,т), соответству¬
ющих опорам, т. е. „ л ^
С = С\ П£2П...П£т. (В.1)
Для выполнения структурного синтеза ПМ с т опорами с заданной
траекторией движения необходимо определить набор из т кинемати¬
ческих связей, пересечение которых дает заданную кинематическую
связь (В.1). Далее, кля каждой кинематической связи выбирается ге¬
нератор, в результате чего получаем ПКЦ с т опорами.
Для демонстрации данной процедуры произведем синтез ПКЦ
РРР= с тремя опорами. Траектория движения ПКЦ РРР= соответ¬
ствует подгруппе движений Т. Для краткости ограничимся кинема¬
тическими связями опор, соответствующими единичным подгруппам
движений.
Из таблицы В.З находим множества из двух подгрупп движений,
пересечение которых дает Т:
Т = ТпТ, (В.2)
Т = Т Г) Х(и), (В.З)
T = TnV, (В.4)
Г = %)П%), (В.5)
где iii ф и2.
В.4. Последовательность структурного синтеза ПКЦ
257
Для выбора множеств из трех групп движений, пересечение кото¬
рых дает Т, необходимо заменить одну из подгрупп движений в каж¬
дом из приведенных множеств из двух групп движений на соответ¬
ствующее множество из двух групп движений с помощью следующих
уравнений, также взятых из таблицы В.З:
Т = Л’(и1)ПЛ’(и2), (В.6)
где U] = и2>
Л'(и) = ЛГ(и) П V, (В.7)
V = VDV. (В.8)
Подставляя (В.2)-(В.8) в (В.2)-(В.5), имеем
Т = Т П Т П Т,
Т = ТГ)ТПХ{и),
Т = Т Г)Т Г) V,
Т = ТГ\Х{ ui)n*(u2),
Т = TnX{u)nV,
Т = ТПТ>Г)Т>,
Т = Х(и1)ПХ{щ)Г\Х(и3),
где не все из щ, и2, из параллельны;
Т = ДГ(и1)ПЛ'(и2)ПР, (В.16)
где ui ф и2.
Из приведенных выше уравнений получаем следующие множе¬
ства из 3 групп движений, пересечение которых дает группу движе¬
ний Т: Т-Т-Т, Т-Т- Х(и), T-T-V, Т - *(Ul) - ЛГ(и2),
Т - Х{м) —V, Т — Т> — Т>, A’(ui) — Х(щ) — Х(щ) (не все из щ, и2
и из параллельны) и -^(ui) - A"(u2) - V (ui ф u2).
Если заменить каждую подгруппу движений на ее генератор
(см. табл. В.1) в каждом из вышеприведенных наборов из трех под¬
групп движений, мы получим набор ПКЦ РРР=.
Например, для набора групп движений A’(ui) — Л"(и2) — Л'(из) по¬
лучаем следующие ПКЦ РРР=: 3-РРРХ, 3-РРХР, 3-РХРР, 3-ХРРР,
3-РРХХ, 3-РХХХ, 3-ХРХХ, 3-ХХРХ, 3-ХХХР и 3-ХХХХ.
Выбором трех приводных кинематических пар в каждой ПКЦ РРР=
получаем большое количество ПМ РРР=. К РРР= ПМ относятся
Y-образный (Y-star) робот и Н-робот [109], основанные на 3-RHPR
РРР= ПМ, Триптерон [63, 69], основанный на З-PRRR РРР= ПМ,
Ортоглайд [99], основанный на 3-PRPR РРР= ПМ, и 3-РРР-робот
РРР= ПМ [33], основанный на 3-РРР РРР= РМ. В Y-образном роботе,
Н-роботе [109] и Ортоглайде [99] каждая неприводная поступательная
кинематическая пара заменена плоским параллелограммом. В РРР=
(В.9)
(В. 10)
(В.11)
(В.12)
(В.13)
(В. 14)
(В. 15)
9 Кун С., Госселин К.
258
Прил. В. Метод, основанный на теории групп движений
ПМ [33] по две неприводных поступательных пары в каждой опоре
заменены пространственным параллелограммом.
Вышеперечисленные ПМ относятся к следующим восьми классам
РРР= ПМ из 16, предложенных в главе 6 (см. 5.2): 3-3-3, 3-3-2,
3-3-0, 3-2-2, 3-2-0, 3-0-0, 2-2-0 и 3-0-0.
В [87] представлен структурный синтез РРР= ПКЦ, содержащей
опоры с кинематической связью, являющейся произведением двух под¬
групп движения Т{и). Предложенный в [87] РРР= ПМ относится
к классу 1-1-1 из предложенных в главе 6.
Сравнивая метод, основанный на теории групп движений, с под¬
ходом, основанным на концепции виртуальных цепей, можно сделать
вывод, что структуры РРР= ПКЦ, полученные с помощью первого
подхода, являются подмножеством структур, полученных с помощью
второго подхода. Это происходит из-за большой сложности подсчета
всех кинематических связей опор для заданной траектории движения
(кинематической связи) подвижной платформы, а также генераторов
этих кинематических связей опор. Например, опора PRRRR (табл. 6.1)
РРР= ПМ не была найдена. В настоящее время эта проблема нахо¬
дится в фокусе исследований по структурному синтезу, основанному
на теории групп движений [39, 61, 87, 89], и ощущается потребность
в дальнейших исследованиях.
Список литературы
1. Agrawal S. К. Rate kinematics of in-parallel manipulators systems I I In
Proceedings of the 1990 IEEE International Conference on Robotics and
Automation. Cincinnati, USA, 1990. P. 104-109.
2. Agrawal S.K. Study of an in-parallel mechanism using reciprocal screws
// In Proceedings of the Ninth World Congress on the Theory of Machines
and Mechanisms. Prague, 1991. P. 405-408.
3. Angeles J. The qualitative synthesis of parallel manipulators // In Pro¬
ceedings of the Workshop on Fundamental Issues and Future Research
Directions for Parallel Mechanisms and Manipulators (Ed. С. M. Gosselin
and I. Ebert-Uphoff). Quebec, October 3-4 2002. P. 160-169.
4. Appleberry W. T. Anti-rotation positioning mechanism. — United States
Patent, 1992.
5. Birglen L., Gosselin C.M., Pouliot N.y Monsarrat В., and T.Laliberte'.
Shade, a new 3-DOF haptic device // IEEE Transactions on Robotics and
Automation. 2002. 18(2), p. 166-175.
6. Bonev I. Delta parallel robot: the story of success //
http: //www.parallemic.org/Reviews/Review002 .html, 2002.
7. Bonev I. Bibliography on parallel mechanisms //
http: // www. robotics . org, 2002.
8. Bonev I. and Gosselin C.M. Advantages of the modified Euler angles in the
design and control of PKMs // In Proceedings of the 3rd Chemnitz parallel
kinematics seminar. Chemnitz, Germany, 2002. P. 171-188.
9. Brogdrdh Т. PKM research — important issues, as seen from a product
development perspective at abb // In Proceedings of the Workshop on Funda¬
mental Issues and Future Research Directions for Parallel Mechanisms and
Manipulators (Ed. C.M. Gosselin £nd I. Ebert-Uphoff). Quebec, October
3-4 2002. P. 68-82.
10. Bruyninckx H. Unified kinematics for serial, parallel and mobile robots //
In Advances in Robotic Kinematics: Analysis and Control (Ed. J. Lenarcic
and M. Husty). Kluwer Academic Publishers, 1998. P. 343-352.
11. Carricato M. and Parenti-Castelli V. A family of 3-DOF translational
parallel manipulators // In Proceedings of the 2001 ASME Design Engi¬
neering Technical Conferences & Computers and Information in Engineering
Conference. Pittsburgh, PA, 2001. P. DETC2001/DAC-21035.
9*
260
Список литературы
12. Carricato М. and, Parenti-Castelli V. Position analysis of a new family
of 3-DOF translational parallel robot manipulators // In Proceedings of
the 2001 ASME Design Engineering Technical Conferences & Comput¬
ers and Information in Engineering Conference. Pittsburgh, PA, 2001.
P. DETC2001 /DAC-21036.
13. Chan V.K. and Ebert-Uphoff I. Constraint singularities of parallel me¬
chanisms I I In Proceedings of the 2001 IEEE International Conference on
Robotics and Automation. V. 2. Seoul, Korea, 2001. P. 1313-1320.
14. Clavel R. Device for the movement and positioning of an element in
space. — United States Patent, 1990.
15. Company O., Marquet F., and Pierrot F. A new high-speed 4-dof parallel
robot synthesis and modeling issues I I IEEE Transactions on Robotics and
Automation. 2003. 19(3). P. 411-420.
16. Cox D.J. and Tesar D. The dynamic model of a three-degree-of-freedom
parallel robotic shoulder module // In Proceedings of the Fourth Interna¬
tional Conference on Advanced Robotics. Columbus, 1989.
17. Craver W.M. Structural analysis and design of a three-degree-of-freedom
robotic shoulder module. — Master’s thesis / The University of Texas at
Austin, 1989.
18. Dai J.S. and Rees Jones J. A linear algebraic procedure in obtaining
reciprocal screw systems I I Journal of Robotic systems. 2003. 20(7). P. 401-
412.
19. Dai J.S. and Rees Jones J. Interrelationship between screw systems and
corresponding reciprocal systems and applications // Mechanism and Ma¬
chine Theory. 2001. 36(5). P. 633-651.
20. Dai J. S., Huang Z., and Lipkin H. Screw system analysis of parallel mecha¬
nisms and applications to constraint and mobility study // In Proceedings of
the 2004 ASME Design Engineering Technical Conferences & Computers
and Information in Engineering Conference. Salt Lake City, USA, 2004.
P. DETC2004/MECH-57604.
21. Dai J.S., Huang Z., and Lipkin H. Mobility of overconstrained parallel
mechanisms I I ASME Journal of Mechanical Design. 2006. 128(1). P. 220-
229.
22. Gregorio R.Di. A new parallel wrist using only revolute pairs: the 3-RUU
wrist I I Robotica. 2001. 19(3). P. 305-309.
23. Gregorio R.Di. Kinematics of a new spherical parallel manipulator with
three equal legs: the urc wrist I I Journal of Robotic Systems. 2001. 18(5).
P. 213-219.
24. Gregorio R.Di. Translational parallel manipulators: New proposals // Jour¬
nal of Robotic Systems. 2002. 16(12). P. 595-603.
25. Gregorio R.Di and Parenti-Castelli V. Mobility analysis of the 3-UPU par¬
allel mechanism assembled for a pure translational motion // In Proceedings
of the 1999 IEEE/ASME International Conference on Advanced Intelligent
Mechatronics. 1999. P. 520-525.
26. Gregorio R.Di and Parenti-Castelli V. A translational 3-DOF parallel
manipulator // In Advances in Robot Kinematics: Analysis and Control
(Ed. J. Lenarcic and M. Husty). Boston: Kluwer Academic Publishers, 1998.
P. 49-58.
Список литературы
261
27. Earl С. F. and Rooney J. Some kinematic structures for robot manipulator
design // Journal of Robotic Systems. 1983. 18(5). P. 213-219.
28. Erdman A.G. Modern Kinematics: Developments in the Last Forty Years.
Chapter 3. — John Wiley & Sons Inc, 1993.
29. Fang Y. and Tsai L.-W. Structure synthesis of a class of 4-DOF and 5-DOF
parallel manipulators with identical limb structures // The International
Journal of Robotics Research. 2002. 21(9). P. 799-810.
30. Fanghella P., Galletti C., and Giannotti E. Parallel robots that change their
group of motion // In Advances in Robot Kinematics — Mechanisms and
Motion (Ed. J. Lenarcic and B. Roth). The Netherlands, Springer, 2006.
P. 49-56.
31. Frisoli A., Checcacci Z)., Salsedo /\, and Bergamasco M. Synthesis by
screw algebra of translating in-parallel actuated mechanisms // In Advances
in Robot Kinematics (Ed. J. Lenarcic and М. M. Stanisic). Kluwer Academic
Publishers, 2000. P. 433-440.
32. Galletti C. Mobility analysis of single-loop kinematic chains: an algorithmic
approach based on displacement groups // Mechanism and Machine Theory.
1994. 29(8). P. 1187-1204.
33. Gao F., Li W., Zhao X., Jin Z., and Zhao H. New kinematic structures
for 2-, 3-, 4-, and 5-DOF parallel manipulator designs // Mechanism and
Machine Theory. 2002. 37(11). P 1395-1411.
34. Gogu G. Mobility criterion and overconstraints of parallel manipulators
// In Proceedings of CK 2005, International Workshop on Computational
Kinematics. Cassino, Italy, 2005. P. paper 20-CK2005.
35. Gosselin C.M. and Angeles J. The optimum kinematic design of a spherical
three-degree-of-freedom parallel manipulator // ASME Journal of Mecha¬
nisms, Transmission and Automation in Design. 1989. 111(2). P. 202-207.
36. Gosselin C.M. and Hamel J.-F. The agile eye: a high-performance three-
degree-of-freedom camera-orienting device // In Proceeding of the 1996
IEEE International Conference on Robotics and Automation. San Diego,
1996. P. 781-786.
37. Gosselin C.M. and Kong X. Cartesian parallel manipulators. — United
States Patent, 2004.
38. Gosselin C.M., Tale Masouleh M., Duchaine V., Richard P.-L., Fou¬
cault S., and Kong X. Parallel mechanisms of the multipteron family: Kine¬
matic architectures and benchmarking // In Proceedings of the 2007 IEEE
International Conference on Robotics and Automation. Roma, Italy, 2007.
39. Негиё J.M. The planar-spherical kinematic bond: implementa¬
tion in parallel mechanisms // http://www.parallemic.org/
Reviews/ReviewO 13 .html, 2003.
40. Негиё J.M. The lie group of rigid body displacements, a fundamental tool
for mechanisms design // Mechanism and Machine Theory. 1999. 34(5)
P. 719-730.
41. Негиё J.M. Parallel mechanisms with pseudo-planar motion generators I I In
On Advances in Robot Kinematics (Ed. J. Lenarcic and C. Galletti). Boston:
Kluwer Academic Publishers, 2004. P. 431-440.
262
Список литературы
42. Непё J.M. Analyse structurelle des mecanismes par groupe des
deplacements I I Mechanism and Machine Theory. 1978. 13(4). P. 437-450.
43. Негиё J.M. Design of parallel manipulators via the displacement group //
In Proceedings of the 9th World Congress on the Theory of Machines and
Mechanisms. Milan, Italy, 1995. P. 2079-2082.
44. Негиё J.M. and Karouia M. The novel 3-RUU wrist with no idle pair // In
Proceedings of the Workshop on Fundamental Issues and Future Research
Directions for Parallel Mechanisms and Manipulators (Ed. C.M.Gosselin
and I. Ebert-Uphoff). Quebec, October 3-4 2002. P. 284-285.
45. HerveJ.M. and Sparacino F. Structural synthesis of parallel robots generat¬
ing spatial translation // In Proceedings of the fifth International Conference
on Advanced Robotics. Pisa, Italy, 1991. P. 808-813.
46. Howell L.L. Compliant Mechanisms. — Boca Raton: JohnWiley & Sons
Inc., 2001.
47. Huang Z. and Ge Q.J. A simple method for mobility analysis using
reciprocal screws // In Proceedings of the 2006 ASME Design Engineering
Technical Conferences & Computers and Information in Engineering Con¬
ference. Philadelphia, USA, 2006. P. DETC200699677.
48. Huang Z. and Kong X. Kinematic analysis on the spatial parallel mecha¬
nisms with redundant degree of freedom // Chinese Journal of Mechanical
Engineering. 1995. 31(3). P. 44-50.
49. Huang Z. and Li Q. C. Two novel symmetrical 5-DOF parallel mechanisms
// Journal of Yanshan University. 2001. 25(4). P. 283-286.
50. Huang Z. and Li Q. C. General methodology for the type synthesis of low-
ermobility symmetrical parallelmanipulators and several novelmanipulators
// The International Journal of Robotics Research. 2002. 21(2). P. 131-145.
51. Huang Z. and Li Q.C. On the type synthesis of lower-mobility parallel
manipulators // In Proceedings of the Workshop on Fundamental Issues
and Future Research Directions for Parallel Mechanisms and Manipula¬
tors (Ed. C.M.Gosselin and I. Ebert-Uphoff). Quebec, October 3-4 2002.
P. 272-283.
52. Huang Z. and Li Q. C. Construction and kinematic properties of 3-UPU
parallel mechanisms // In Proceedings of the 2002 ASME Design Engineer¬
ing Technical Conferences & Computers and Information in Engineering
Conference. Montreal, Canada, 2002. P. DETC2002/MECH-34321.
53. Huang Z. and Zhao T. S. Theory and application of selecting components
of spatial mechanisms // Chinese Journal of Mechanical Engineering (in
Chinese). 2000. 36(10). P. 81-85.
54. Hunt K.H. Kinematic Geometry of Mechanisms. — Cambridge, Cambridge
University Press, 1990.
55. Hunt K.H. Constant-velocity shaft couplings: a general theory // ASME
Journal of Engineering for Industry. 1973. 95.
56. Hunt К. H. Structural kinematics of inparallel-actuated robot-arms // ASME
Journal of Mechanical Design. 1983. 105(4). P. 705-712.
57. Jensen K.A., Lusk C.P., and Howell L.L. An XYZ micromanipulator with
three translational degrees of freedom I I Robotica. 2006. 24(3). P. 305-314.
58. Jin Q. and Yang T.-L. Position analysis for a class of novel 3-DOF
translational parallel robot mechanisms // In Proceedings of the 2001 ASME
Список литературы
263
Design Engineering Technical Conferences & Computers and Information in
Engineering Conference. Pittsburgh, PA, 2001. P. DETC2001/DAC21151.
59. Jin Q.y Yang T.-L., Liu A.-X., Shen and Yao F.-H. Structure
synthesis of a class of 5-DOF parallel robot mechanisms based on
singleopened-chain units // In Proceedings of the 2001 ASME Design Engi¬
neering Technical Conferences & Computers and Information in Engineering
Conference. Pittsburgh, PA, 2001. P. DETC2001/DAC-21153.
60. Jin Y.y Chen I.-M., and Yang G. Kinematic design of a 6-DOF parallel
manipulator with decoupled translation and rotation // IEEE Transactions
on Robotics. 2006. 22(3). P. 545-551.
61. Karouia K. and Негиё J.M. A three-DOF tripod for generating sphe¬
rical rotation // In Advances in Robot Kinematics (Ed. J. Lenarcic and
М. M. Stanisic). Kluwer Academic Publishers, 2000. P. 395-402.
62. Kim D. and Chung W. K. Kinematic condition analysis of three-DOF pure
translational parallel manipulators // ASME Journal of Mechanical Design.
2003. 125(3). P. 323-331.
63. Kim H.S. and Tsai L.-W. Evaluation of a cartesian parallel manipulator
// In Advances in Robot Kinematics — Theory and Applications (Ed.
J. Lenarcic and F. Thomas). Boston: Kluwer Academic Publishers, 2002.
P. 21-28.
64. Kong X. Detection of input interference in spatial linkages // Journal of
Mechanical Transmission (in Chinese). 1999. 23(4). P. 23-25.
65. Kong X. Detection of type-II passive joints in spatial kinematic chains //
Mechanical Science and Technology (in Chinese). 1999. 19(1). P. 73-74.
66. Kong X. Type synthesis and kinematics of general and analytic parallel
mechanisms. — PhD thesis. — Universit4 Laval, 2003.
67. Kong X. and Gosselin C.M. Generation of parallel manipulators with three
translational degrees of freedom using screw theory // In Proceedings of
the CCToMM Symposium on Mechanisms, Machines and Mechatronics.
Montreal, Canada, 2001. P. paper M3-01-012.
68. Kong X. and Gosselin C.M. Type synthesis of linear translational parallel
manipulators // In Advances in Robot Kinematics — Theory and Appli¬
cations (Ed. J. Lenarcic and F. Thomas). — Boston: Kluwer Academic
Publishers, 2002. P. 411-420.
69. Kong X. and Gosselin C.M. Kinematics and singularity analysis of a novel
type of 3-CRR 3-DOF translational parallel manipulator // The International
Journal of Robotics Research. 2002. 21(9). P. 791-798.
70. Kong X. and Gosselin C.M. A class of 3-DOF translational parallel manipu¬
lators with linear input-output equations // In Proceedings of the Workshop
on Fundamental Issues and Future Research Directions for Parallel Mecha¬
nisms and Manipulators (Ed. C.M. Gosselin and I. Ebert-Uphoff). Quebec,
October 3-4 2002. P. 25-32.
71. Kong X. and Gosselin C.M. Mobility analysis of parallel mechanisms based
on screw theory and the concept of equivalent serial kinematic chain // In
Proceedings of the 2005 ASME Design Engineering Technical Conferences
and Computers and Information in Engineering Conference. Long Beach,
USA, September 24-28 2005. P. DETC2005/MECH-85337.
264
Список литературы
72. Kong X. and Gosselin C.M. Type synthesis of 3-DOF spherical parallel
manipulators based on screw theory // ASME Journal of Mechanical
Design. 2004. 126(1). P. 101-108.
73. Kong X. and Gosselin C.M. Type synthesis of 4-DOF SP-equivalent parallel
manipulators: A virtual-chain approach // Mechanism and Machine Theory.
2006. 41(11). P. 1306-1319.
74. Kong X. and Gosselin C.M. Type synthesis of 3-DOF PPR-equivalent pa¬
rallel manipulators based on screw theory // ASME Journal of Mechanical
Design. 2005. 127(11). P. 1113-1121.
75. Kong X. and Gosselin C.M. Type synthesis of 3T1R 4-DOF parallel
manipulators based on screw theory // IEEE Transactions on Robotics and
Automation. 2004. 20(2). P. 181-190.
76. Kong X. and Gosselin C.M. Type synthesis of 3-DOF translational parallel
manipulators based on screw theory // ASME Journal of Mechanical
Design. 2004. 126(1). P. 83-92.
77. Kong X. and Gosselin C.M. Type synthesis of 3-DOF translational parallel
manipulators based on screw theory and a virtual joint // In Proceedings
of the 15th CISM-IFToMM Symposium on Robot Design, Dynamics and
Control. Saint-Hubert, Montreal, Canada, 2004. P. paper rom04-06.
78. Kong X. and Gosselin C.M. Type synthesis of 3-DOF linear translational
parallel manipulators I I In Proceedings of the 12th World Congress in
Mechanism and Machine Science. Besangon, France, 2007.
79. Kong X. and Gosselin C.M. Type synthesis of 3-DOF UP-equivalent
parallel manipulators using a virtual chain approach // In Advances in Robot
Kinematics — Mechanisms and Motion (Ed. J. Lenarcic and B. Roth). —
The Netherlands: Springer, 2006. P. 123-132.
80. Kong X. and Gosselin С. M. Generation and forward displacement analysis
of RPR-PR-RPR analytic planar parallel manipulators // ASME Journal of
Mechanical Design. 2002. 124(2). P. 294-300.
81. Kong X. and Gosselin C.M. Type synthesis of three-degree-of-freedom
spherical parallel manipulators // The International Journal of Robotics
Research. 2003. 23(2). P. 237-245.
82. Kong X. and Yang T.-L. Detection of improper general spatial kine¬
matic chains involving deferent types of joints // In Proceedings of the
1998 ASME Design Engineering Technical Conferences. 1994. DE-Vol. 70.
P. 323-328.
83. Kong X.y Gosselin C.M., and Richard P.-L. Type synthesis of parallel mech¬
anisms with multiple operation modes // In Proceedings of the 2006 ASME
Design Engineering Technical Conferences & Computers and Information in
Engineering Conference. Philadelphia, USA, 2006. P. DETC2006-99628.
84. Koseki Y., Tanikawa Т., Koyachi N., and Arai T. Kinematic analysis of
translational 3-dof micro-parallel mechanism using matrix method // In
IEEE International Conference on Intelligent Robots and Systems (IROS).
2000. Takamatsu, Japan. P. 786-792.
85. Kumar V., Waldron K.J., Chrikjian G., and Lipkin H. Applications of screw
system theory and lie theory to spatial kinematics: A tutorial // Presented
at the 2000 ASME Design Engineering Technical Conferences & Computers
and Information in Engineering Conference. 2000.
Список литературы
265
86. Labontiu N. Compliant Mechanisms: Design of Flexure Hinges. — Boca
Raton: CRC Press, 2003.
87. Li C.-C. and Негиё J.M. Translational parallel manipulators with doubly
planar limbs // Mechanism and Machine Theory. 2006. 41(4). P. 433-455.
88. Li Q. C. and Huang Z. Mobility analysis of lower-mobility parallel ma¬
nipulators based on screw theory // In Proceedings of the 2003 IEEE
International Conference on Robotics & Automation. Taipei, Taiwan, 2003.
P. 1179-1183.
89. Li Q. C., Huang Z., and Негиё J.M. Type synthesis of 3R2T 5-DOF parallel
mechanisms using the lie group of displacements // IEEE Transactions on
Robotics and Automation. 2004. 20(2). P. 173-180.
90. Li Y. and Xu Q. Design and analysis of a new 3-DOF compliant parallel
positioning platform for nanomanipulation // In Proceedings of 5th IEEE
Conference on Nanotechnology. Nagoya, Japan, 2005. P. 93-98.
91. Liu X.-J. and WangJ. Some new parallel mechanisms containing the planar
four-bar parallelogram // The International Journal of Robotics Research.
2003. 22(9). P. 717-732.
92. Liu X.-J.y Wang Gao F., and Wang L.-P. On the analysis of a new
spatial three-degrees-of-freedom parallel manipulator // IEEE Transactions
on Robotics and Automation. 2001. 17(6). P. 959-968.
93. Luo Y.y Yang T.y and Seireg A. Structural types synthesis of multi-loop
spatial kinematic chains with general variable constraints // In Proceedings
of the 1998 ASME Design Engineering Technical Conferences. Atlanta,
USA, 1998. P. DETC98/MECH-5895.
94. Makino H. and Furuya N. SCARA robot and its family // In Proceedings
of the International Conference on Assembly Automation. Boeblingen, Ger¬
many, 1982. P. 433-444.
95. Merlet J.-P. Parallel robots: Open problems I I
http: //www-sop.inria.fr/coprin/equipe/merlet/
Problemes/isrr99-html.html, 2002.
96. Merlet J.-P. Parallel Robots. — Dordrecht: Kluwer Academic Publishers,
2002.
97. Merlet J.-P. An initiative for the kinematics study of parallel manipu¬
lators // In Proceedings of the Workshop on Fundamental Issues and
Future Research Directions for Parallel Mechanisms and Manipulators (Ed.
C.M. Gosselin and I. Ebert-Uphoff). Quebec, October 3-4 2002. P. 2-9.
98. Millman P. A. and Colgate J.E. Design of a four degree-of-freedom force
reflecting manipulandum with a specified force/torque workspace // In
Proceedings of the 1991 IEEE International Conference on Robotics and
Automation. 1991. V. 2. Sacramento, USA. P. 1488-1493.
99. Pashkevich A.y Wenger P., and Chablat D. Design strategies for the geo¬
metric synthesis of orthoglide-type mechanisms // Mechanism and Machine
Theory. 2004. 40(8). P. 907-930.
100. Pham H.H., Yeh H.C., and Chen I-M. Micromanipulation system design
based on selective actuation mechanisms // The International Journal of
Robotics Research. 2006. 25(1). P. 171-186.
266
Список литературы
101. Richard P.-L., Gosselin С. М., and Kong X. Kinematic analysis and pro¬
totyping of a partially decoupled 4-DOF 3T1R parallel manipulator I I In
Proceedings of the 2006 ASME Design Engineering Technical Conferences
& Computers and Information in Engineering Conference. Philadelphia,
USA, 2006. P. DETC2006-99570.
102. Rico J.M. and Ravani B. On mobility analysis of linkages using group
theory // ASME Journal of Mechanical Design. 2003. 125(1). P. 70-80.
103. Rico J.M., Aguilera L.D., Gallardo /., Rodriguez /?., Orozco H., and
Barrera J. M. A more general mobility criterion for parallel platforms // In
Proceedings of the 2004 ASME Design Engineering Technical Conferences
& Computers and Information in Engineering Conference. Salt Lake City,
USA, 2004. P. DETC2004/MECH-57064.
104. Rico J.M., Aguilera L.D., Gallardo /., Rodriguez /?., Orozco and
Barrera J.M. A more general mobility criterion for parallel platforms //
ASME Journal of Mechanical Design. 2006. 128(1). P. 207-219.
105. Rico J.M., Cervantes-Schez Tadeo-Chez A., Pez-Soto G.I., and
Rocha-Chavarr J. A comprehensive theory of kinematic synthesis of parallel
platforms // In Proceedings of the 2006 ASME Design Engineering Techni¬
cal Conferences & Computers and Information in Engineering Conference.
Philadelphia, USA, 2006. P. DETC2006-99070.
106. Rolland L. About parallel robots // http://www.loria.fr/rolland/
apropos eng.html,2002.
107. Rolland L.H. The manta and the kanuk: Novel 4-DOF parallel mechanisms
for industrial handling // In Proceedings of 1999 International Mechanical
Engineering Congress and Exposition. Nashville, USA, 1999. P. 831-844.
108. Smith S. T. Flexures: Elements of Elastic Mechanisms. — Singapore: Gor¬
don and Breach Science Publishers, 2000.
109. Sparacino F. and Негиё J.M. Synthesis of parallel manipulators using
Liegroups: Y-star and H-robot // In Proceedings of the 1993 IEEE/Tsukuba
International Workshop on Advanced Robotics. Tsukuba, Japan, 1993.
P. 75-80.
110. Taylor R. and Stoianovici D. Medical robotics in computer-integrated
surgery I I IEEE Transactions on Robotics and Automation. 2003. 19(5).
P. 765-781.
111. Tsai L.-W. The enumeration of a class of three-DOF parallel manipulators
// In Proceedings of the 10th World Congress on the Theory of Machines
and Mechanisms. Oulu, Finland, 1999. P. 1121-1126.
112. Tsai L.-W. Robot analysis: The Mechanics of Serial and Parallel Manipula¬
tors. — John Wiley & Sons Inc, 1999.
113. Vischer P. and Clavel R. Argos: A novel 3-DOF parallel wrist mechanism
// The International Journal of Robotics Research. 2000. 19(1). P. 5-11.
114. Vorndran S. Low-inertia parallel-kinematics systems for submicron
alignment and handling // http://www.parallemic.org/Reviews/
Review012.html, 2002.
Список литературы
267
115. Waldron K.J. Hybrid overconstrained linkages // Journal of Mechanisms.
1967. V. 3. P. 73-78.
116. Wang J. and Gosselin C.M. Kinematic analysis and singularity represen¬
tation of spatial five-degree-of-freedom parallel mechanisms // Journal of
Robotic systems. 1998. 14(12). P. 851-869.
117. Wang Y. and Gosselin C.M. On the design of a 3-PRRR spatial parallel
compliant mechanism // In Proceedings of the 2004 ASME Design Engi¬
neering Technical Conferences and Computers and Information in Engineer¬
ing Conference. Salt Lake City, USA, 2004. P. DETC2004-57472.
118. Yang 7\, Jin Q., Liu A., Shen and Luo Y. Structural synthesis and
classification of the 3-DOF translational parallel robot mechanisms based
on the units of single-opened-chain // Chinese Journal of Mechanical
Engineering. 2002. 38(9). P. 31-36.
119. Yang T.-L. Structural analysis and number synthesis of spatial mechanisms
// In Proceedings of the 6th World Conference on the Theory of Machines
and Mechanism. New Dehli, 1983. P. 280-283.
120. Yang T.-L. Topology Structure Design of Robot Mechanisms (in Chi¬
nese). — Beijing: China Machine Press, 2004.
121. Yang T.-L. and Sun D.-J. A general formula of degree-of-freedom for par¬
allel manipulators and its application // In Proceedings of the 2006 ASME
Design Engineering Technical Conferences & Computers and Information
in Engineering Conference. 2006. P. DETC200699129.
122. Yang T.-L. and Yao H.-F. Topological characteristics and automatic ge¬
neration of structural synthesis of spatial mechanisms. Part II: automatic
generation of structural types of kinematic chains // In Proceedings of
the 1992 ASME Design Technical Conference. Scottsdale, AZ, USA, 1992.
P. 187-190.
123. Yang T.-L., Jin Q., Liu A.-X., Yao F.-H., and Luo Y. Structure synthesis
of 4-DOF (3-translation and 1-rotation) parallel robot mechanisms based
on the units of single-opened-chain // In Proceedings of the 2001 ASME
Design Engineering Technical Conferences & Computers and Information in
Engineering Conference. Pittsburgh, PA, 2001. P. DETC2001/DAC-21152.
124. Yang T.-L. Kinematic structural analysis and spatial single-loop chains // In
Proceedings of the 1986 ASME Design Engineering Technical Conferences.
Columbus, USA, 1986. P. paper 86-DET-181.
125. Yi B.-Y., Chung G.B., Na H.Y., Kim W.K., and Suh I.H. Design and
experiment of a 3-DOF parallel micromechanism utilizing flexure hinges //
IEEE Transactions on Robotics and Automation. 2003. 19(4). P. 604-612.
126. Yoon J. and Ryu J. A new family of hybrid 4-DOF parallel mechanisms
with two platforms and its application to a footpad device // Journal of
Robotic Systems. 2005. 22(5). P. 287-298.
127. Zhao T.S., Zhou К., and Feng Z.-J. A theory of degrees of freedom for
mechanisms I I Mechanism and Machine Theory. 2004. 39(5). P. 621-643.
128. Zhao T.S. and Huang Z. A novel three DOF translational platform mech¬
anism and its kinematics // In Proceedings of the 2000 ASME Design
Engineering Technical Conferences & Computers and Information in Engi¬
neering Conference. Baltimore, USA, 2000. P. DETC2000/MECH-14101.
268
Список литературы
129. Zhao Т. S., Dai /.S., and Huang Z. Geometric synthesis of spatial parallel
manipulators with fewer than six degrees of freedom // Journal of Mechan¬
ical Engineering Science. 2002. Proc, IMechE, 216. P. 1175-1186.
130. Zlatanov D., Bonev /., and Gosselin C.M. Constraint singularities of
parallel mechanisms // In Proceedings of the 2002 IEEE International
Conference on Robotics and Automation. 2002. V. 1. Washington DC, USA.
P. 496-502.
131. Zlatonov D. and Gosselin C.M. A new parallel architecture with four
degrees of freedom // In Proceedings of the 2nd Workshop on Computational
Kinematics. Seoul, Korea, 2001. P. 57-66.
132. Zoppi М., Zlatanov D., and Gosselin C.M. Analytical kinematics models
and special geometries of a class of 4-DOF parallel mechanisms // IEEE
Transactions on Robotics. 2005. 21(6). P. 1046-1055.
Предметный указатель
2-PPPU= параллельный механизм,
74
— приводная кинематическая пара
выбор, 225
— структура, 225
2-PPPU= параллельная кинемати¬
ческая цепь
— структура, 225
2T3R параллельный механизм, см.
PPS= параллельный механизм
3-PPS= параллельная кинематиче¬
ская цепь
— структура, 222
3-PPS= параллельный механизм, 74
— приводная кинематическая пара
выбор, 224
— структура, 221
3-РРР робот, 258
3R1T параллельный механизм, см.
SP= параллельный механизм
3T1R параллельный механизм, см.
PPPR= параллельный механизм
3T2R параллельный механизм, см.
PPPU= параллельный механизм
Е
Е= параллельный механизм, 28, 71
Н
Н-робот, 258
Р
РРР= параллельная кинематиче¬
ская цепь, 99
— группа силовых винтов, 100
декомпозиция, 101
— группа силовых винтов опор, 80,
101
РРР= параллельная кинематиче¬
ская цепь, опора
структура, 108
— структура, 109
— условие существования, 100
РРР= параллельный манипулятор,
234
РРР= параллельный механизм, 28,
71, 99, 232, 237, 252
— t-компонент приводного силового
винта, 110
— линейный, 252
— приводная кинематическая пара
выбор, 110
— структура, 113
PPPR движение, 73, 151
PPPR= параллельная кинематиче¬
ская цепь, 151
— группа силовых винтов, 152
декомпозиция, 154
— группа силовых винтов опор, 154
— опора
структура, 158
— структура, 160
— условие существования, 153
PPPR= параллельный механизм, 28,
73, 151, 232, 252
— t-компонент приводного силового
винта, 161
— приводная кинематическая пара
выбор, 161
— структура, 164
PPPU= параллельная кинематиче¬
ская цепь, 194
— группа силовых винтов, 194
декомпозиция, 195
— группа силовых винтов опор, 195
— опора
структура, 199
PPPU= параллельная кинематиче¬
ская цепь, структура, 200
270
Предметный указатель
— условие существования, 194
PPPU= параллельный механизм,
74, 193, 232
— t-компонент приводного силового
винта, 202
— приводная кинематическая пара
выбор, 202
— структура, 206
PPR= параллельная кинематиче¬
ская цепь, 135
— группа силовых винтов, 135
декомпозиция, 136
— группа силовых винтов опор, 80,
136
— опора
структура, 141
— структура, 142
— условие существования, 135
PPR= параллельный механизм, 72,
134
— t-компонент приводного силового
винта, 145
— приводная кинематическая пара
выбор, 145
— структура, 148
PPS= параллельная кинематическая
цепь, 208
— группа силовых винтов, 208
декомпозиция, 210
— группа силовых винтов опор, 210
— опора
структура, 213
— условие существования, 209
PPS= параллельный механизм, 74,
208, 252
— t-компонент приводного силового
винта, 215
— приводная кинематическая пара
выбор, 215
— структура, 218
PS= параллельный механизм, 73
S
S= параллельная кинематическая
цепь, 118
— группа силовых винтов, 119
S= параллельная кинематическая
цепь, группа силовых винтов,
декомпозиция, 120
— группа силовых винтов опор, 120
— опора
структура, 123
— структура, 126
— условие существования, 119
S= параллельный механизм, 28, 71,
118, 235, 252
— t-компонент приводного силового
винта, 128
— приводная кинематическая пара
выбор, 128
— структура, 131
SCARA движение, см. PPPR движе¬
ние
SCARA параллельный механизм,
см. PPPR= параллельный меха¬
низм
SP= параллельная кинематическая
цепь, 169
— группа силовых винтов
декомпозиция, 171
— группа силовых винтов опор, 171
— опора
структура, 175
— структура, 175
— условие существования, 170
SP= параллельный механизм, 73,
169, 236
— t-компонент приводного силового
винта, 177
— приводная кинематическая пара
выбор, 177
— структура, 179
U
UE= параллельный механизм, 74
UP= параллельный механизм, 231
US-PPS= параллельная кинемати¬
ческая цепь
— структура, 227
US-PPS= параллельный механизм,
226
— приводная кинематическая пара
выбор, 227
— структура, 227
Предметный указатель
271
US= параллельная кинематическая
цепь, 183
— группа силовых винтов
декомпозиция, 184
— группа силовых винтов опор, 184
— опора
структура, 186
— структура, 188
— условие существования, 183
US= параллельный механизм, 74,
182
— t-компонент приводного силового
винта, 189
— приводная кинематическая пара
выбор, 189
— структура, 191
V
V= параллельная кинематическая
цепь
— группа силовых винтов
декомпозиция, 79
— группа силовых винтов опор, 79
— комбинация групп силовых вин¬
тов опор, 79
— опора
структура, 90
— условие существования, 77
V= параллельный механизм
— t-компонент приводного силового
винта, 94
— виртуальная цепь, 29, 69, 77
параллельная, 69, 222, 224, 226
последовательная, 69, 99, 120,
136, 152, 169, 183, 194, 208
— приводная кинематическая пара
выбор, 93
условие правильности выбора,
94
— приводной силовой винт, 94
Y
Y-образный робот, 258
Б
биотехнология, 230
В
взаимности условие, 36
взаимный винт, 36
винт, 32
— линейно независимый, 33
— обозначение, 32
виртуальная сила, 39, 100, 152, 183,
194
виртуальная цепь
— подход, 76
вращательный параллельный меха¬
низм, см. S= параллельный ме¬
ханизм
Г
Гауфа-Стюарта платформа, 20
гибкий механизм, 231
гибкий параллельный манипулятор,
236
группа винтов, 32
— 1-членная группа, 33
l-Soo-членная группа, 33
1-So-членная группа, 33
— 2-членная группа, 33
1-Soo-l-So-членная группа, 33
2-8оо-членная группа, 33
2-8о-членная группа, 33
— 3-членная группа, 34
l-Soo-2-Зо-членная группа, 34
2-Soo-l-So-членная группа (об¬
щий случай), 34
2-Sool -So-членная группа
(перпендикулярный случай), 34
3-8оо-членная группа, 34
3-8о-членная группа, 34
— 4-членная группа, 34
3-Soo-l-So-членная группа, 34
— базис, 33
— взаимная группа винтов, 37
— линейная комбинация, 34
— подгруппа, 34
— порядок, 32
группа кинематических винтов
— 3-членная группа
2-^-1-^о-членная группа, 135
3-^-членная группа, 100
3-£0-членная группа, 119
272
Предметный указатель
группа кинематических винтов,
4-членная группа
3-^-1-^о‘Членная группа, 152
3-£0‘1‘£оо‘членная группа, 170
— 5-членная группа
2-^-3-^о-членная группа,
183, 208
3-^-2-^о-членная группа, 194
группа опор, 21
группа силовых винтов
— 1-членная группа
1-Соо-членная группа, 194
1-£0-членная группа, 183, 208
— 2-членная группа
2-С^-членная группа, 152
2-С0-членная группа, 170
— 3-членная группа
2-Соо-1*Со*членная группа, 135
З-Соо-членная группа, 100
З-Со-членная группа, 119
д
датчик силы, 20
движение
— плоскопараллельное, 21
— поступательное, 21
— с 3 степенями свободы, 21
— сферическое, 21
движений группа, 252
— механический генератор, 252
— операция, 254
— пересечение, 254
— произведение, 254
движений подгруппа, 252
Дельта робот, 20
Ж
жесткость, 19
Живой глаз, 20, 132
— вариации, 132
И
избыточная связь, 50
избыточность числа степеней свобо¬
ды для данной задачи, 232
К
Квадруптерон, 28
кинематическая пара, 22, 39
кинематическая пара С, 22, 39
— Е, 22
— Н, 22
— Р, 22, 39
группа кинематических вин¬
тов, 40
группа силовых винтов, 40
— R, 22, 39
группа кинематических вин¬
тов, 40
группа силовых винтов, 40
— S, 22, 39
— U, 22, 39
— группа кинематических винтов,
40
— группа силовых винтов, 40
кинематическая связь, 257
— механический генератор, 257
кинематическая цепь, 19
— группа кинематических винтов,
38
— группа силовых винтов, 38
количество избыточных связей, 50
комбинированный станок
— параллельный модуль, 231
композиционная единица, 42, 56-66
— параллельноосевая, 42, 103, 139,
155
— плоская, 43, 103, 122, 138, 156,
173, 196, 211
— плоская поступательная, 43, 137,
173, 211
— пространственная параллельно¬
осевая, 196
— пространственная поступатель¬
ная, 43, 102
— сонаправленная, 44, 121, 141, 172
— соосная, 44, 104, 121, 137, 173
— сферическая, 43, 121, 122, 139,
172, 185, 211
координатно-измерительная маши¬
на, 20
КЦ, см. кинематическая цепь
М
медицинский робот, 20, 232, 236
— хирургический робот, 236
Предметный указатель
273
механизм
— многоконтурный, см. многокон¬
турный механизм
— параллельный, см. параллельный
механизм
— последовательный, см. последова¬
тельный механизм
— пространственный, см. простран¬
ственный механизм
микроманипулятор, 19, 20, 232, 237
— РРР= параллельный механизм,
238
— гибкий, 237
— твердотельный, 237
микросистема, 20
микроэлектромеханическая система
(МЭМС), 20
многоконтурный механизм, 25
МЭМС, 230
— технология производства, 237
Н
наноманипулятор, 19, 20, 232, 236
нанотехнологии, 20, 230
О
одноконтурная кинематическая
цепь, 47
— с 1 -^оо" 1 -£q-член ной группой
3-подвижная, 138
— с 1-Соо-членной группой
3-подвижная, 104, 140
4-подвижная, 156
5-подвижная, 196
— с 1 -£0-членной группой
3-подвижная, 122, 139
4-подвижная, 173
5-подвижная, 185, 211
— с 2-С00-1-Со"членн°й группой
3-подвижная, 137
— с 2-Соо-членной группой, 58
3-подвижная, 90, 103, 139
4-подвижная, 155
— с 2-£0-членной группой, 60
3-подвижная, 120
4-подвижная, 172
— с З-Coo -членной группой, 57
3-подвижная, 102
— с З-Со-членной группой, 59
одноконтурная кинематическая
цепь с З-Со-членной группой
3-подвижная, 121
— структурный синтез, 56, 89
опора, 19, 24
определитель, 30, 94, ИЗ, 117, 131,
166, 180, 192, 206, 218
ориентирующий параллельный ме¬
ханизм, см. S= параллельный
механизм
Ортоглайд, 258
особенные ограничения (constraint
singularity), 93
П
параллелограммный механизм
— плоский, 117, 118, 150, 168, 181,
207, 219, 237, 252
— пространственный, 117, 168, 207,
252
параллельная кинематическая под¬
цепь, 220, 228
— структурный синтез, 222, 225,
226
параллельная кинематическая цепь,
24
— 3-подвижная РРР=, см. РРР=
параллельная кинематическая
цепь
— 4-подвижная PPPR=, см. PPPR=
параллельная кинематическая
цепь
— 5-подвижная PPPU=, см.
PPPU= параллельная кинемати¬
ческая цепь
— PPR=, см. PPR= параллельная
кинематическая цепь
— PPS=, см. PPS= параллельная
кинематическая цепь
параллельная кинематическая цепь,
S=, см. S= параллельная кине¬
матическая цепь
— SP=, см. SP= параллельная ки¬
нематическая цепь
— US=, см. US= параллельная ки¬
нематическая цепь
— обозначение, 24
274
Предметный указатель
параллельная кинематическая цепь,
подвижность
мгновенная, 49
параллельный механизм
— гибкий, 231
— микро-параллельный механизм,
231
— развязанный по входу-выходу,
231
— сложной структуры, 231
параллельный манипулятор, 232
— 6-подвижный
Гауфа-Стюарта платформа, см.
Гауфа-Стюарта платформа
— РРР=
3-РРР, см. 3-РРР робот
Н-робот, см. Н-робот
Y-образный, см. Y-образный
робот
Дельта робот, см. Дельта ро¬
бот
Ортоглайд, см. Ортоглайд
Триптерон, см. Триптерон
— PPPR=
Квадруптерон, см. Квадрупте-
рон
— S=
Живой глаз, см. Живой глаз
— линейные уравнения
входа-вы хода, 234
параллельный механизм, 19
— 3-подвижный
3-PPS=, 74, 222
Е=, 71
РРР=, 70, см. РРР= парал¬
лельный механизм
PPR=, см. PPR= параллель¬
ный механизм
S=, см. S= параллельный ме¬
ханизм
— 4-подвижный
2-PPPU=, 74, 224
PPPR=, см. PPPR= парал¬
лельный механизм
PS=, 73
SP=, см. SP= параллельный
механизм
US-PPS=, 226
параллельный механизм,
5-подвижный
PPPU=, см. PPPU= парал¬
лельный механизм
PPS=, см. PPS= параллель¬
ный механизм
UE=, 74
US=, см. US= параллельный
механизм
— 6-подвижный, 232
— аналитический, 231
— классификация, 70
— обозначение, 24
— опора, см. опора
— с выборочным приводом, 231
— с параллельной виртуальной це¬
пью, 220, 227
— с последовательной виртуальной
цепью, 76, 220, 227
— со смешанным режимом работы,
231
— частично развязанный, 231
параллельный механизм без круче¬
ний, см. 3-PPS= параллельный
механизм
пассивная кинематическая пара, 30,
48, 95, 108, 130, 158, 177, 188,
219
— определение, 48
пассивная связь, 50
пассивные связи, 242
ПКЦ, см. параллельная кинематиче¬
ская цепь
плоский параллельный механизм,
см. Е= параллельный механизм
плоский поступательный параллель¬
ный механизм, см. РРР= парал¬
лельный механизм
ПМ, см. параллельный механизм
подвижная платформа, 19
подвижность, 26, 243
— мгновенная
анализ подвижности, 32, 242
критерий, 32, 47, 48, 50, 242
— полного цикла
достаточное условие, 241, 243
критерий, 26
проверка, 50, 242, 243
Предметный указатель
275
подход
— основанный на открытых цепях
с жестко закрепленным концом,
29
— основанный на теории винтов, 29
— основанный на теории групп дви¬
жений, 29, 252-259
порядок С группы кинематических
винтов, 242
последовательная кинематическая
цепь
— группа кинематических винтов,
41, 43
— группа силовых винтов, 41, 45
— подвижность
критерий, 47
последовательный механизм, 19
поступательный параллельный ме¬
ханизм, см. РРР= параллельный
механизм
приводная кинематическая пара, 18,
27
— выбор, 30, 225
— условие правильности выбора, 54
приводной силовой винт, 54
пространственный механизм, 25
— структурный синтез, 26
процесс проектирования, обзор, 232
прямая задача о положениях, 234
Р
рабочая область, 19, 234
реакции в опорах, 30
режим работы, 232
С
связность, 49, 242
станок с параллельной кинематикой,
20
структурный синтез, 21
сферический параллельный меха¬
низм, см. S= параллельный ме¬
ханизм
Т
тактильное устройство, 20, 232, 235
теория винтов, 29, 32
теория групп движений, 252
топология, 46
точность, 19
траектория движения, 68, 77
— 3-подвижная
3-PPS, 74
Е, 71
РРР, 71
PPR, 72
S, 71
— 4-подвижная
2-PPPU, 74
PPPR, 73
PS, 73
SP, 73
— 5-подвижная
PPPU, 74
PPS, 74
UE, 74
US, 74
— классификация, 229, 231
— описание виртуальной цепью, 229
Триптерон, 28, 234, 258
У
устройство ориентации камеры, 20
устройство позиционирования, 20
устройство, основанное на парал¬
лельном механизме, 232
Ц
цилиндрический параллельный ме¬
ханизм, см. PPR= параллельный
механизм
Ч
Чебышева критерий, 27
число избыточных связей, 30, 76,
242
число избыточных степеней свобо¬
ды, 50
число степеней свободы, 46, 76, 242
Ш
Шёнфлиса движение, см. PPPR
движение
Э
эквивалентная последовательная ки¬
нематическая цепь, 240
— полного цикла, 241
Научное издание
КУН Сянъвэнъ
ГОССЕЛИН Клемент
СТРУКТУРНЫЙ СИНТЕЗ ПАРАЛЛЕЛЬНЫХ МЕХАНИЗМОВ
Редактор В.А. Гусев
Оригинал-макет: Д.А. Воробьев
Оформление переплета: В.Ф. Киселев
Подписано в печать 28.06.2012. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Уел. печ. л. 17,25. Уч.-изд. л. 19. Тираж 300 экз.
Заказ No. К-9155
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с электронных носителей издательства
в ГУП «ИПК«Чувашия», 428019,
г. Чебоксары, пр-т И.Яковлева, 13
Сяньвэнь Кун
Клемент Госселин
СТРУКТУРНЫЙ СИНТЕЗ
ПАРАЛЛЕЛЬНЫХ
МЕХАНИЗМОВ