/




























































































































































































































































































































































Автор: Яблонский А.А
Теги: теория машин и механизмов общие вопросы технической механики механика
Год: 1985




Текст
Сбодник
заоании
для курсовых работ
по теоретической
механике
Под общей редакцией проф.
А. А. ЯБЛОНСКОГО
ИЗДАНИЕ ЧЕТВЕРТОЕ, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
Допущено Министерством высшего и среднего специального
образования СССР в качестве учебного пособия
для студентов втузов
МОСКВА ВЫСШАЯ ШКОЛАМ»
ББК 22.21
С 23
УДК 531.8
\. А. Яблонский, С. С. Норейко, С. А. Вольфсон, Н. В. Карпова,
5. Н. Квасников, Ю. Г. Минкин, Н. И. Никитина, В. Е. Павлов,
А.
Б.
Ю. М. Тепанков, Д. Д. Акимов-Перетц, В. С. Доев, Ф. А. Доронин,
К. Ю. Красносельский
Рецензент: д-р техн. наук, проф. М. М. Гернет (Московский
технологический институт лищевой промышленности)
Сборник заданий для курсовых работ по теорети-
С23 ческой механике: Учеб. пособие для техн.
вузов/Яблонский А. А., Норейко С. С, Вольфсон С. А. и др.;
Под ред. А. А. Яблонского. — 4-е изд., перераб. и доп.
М.: Высш. шк., 1985. - 367 с, ил.
В пер.: 90 к.
Сборник содержит 45 заданий по ста гике, кинематике, динамике,
аналитической механике и колебаниям механической системы для
курсовых работ, предусмотренных программой курса теоретической механики.
Ряд заданий требует проведения исследований. В некоторых заданиях
предусматривается использование ЭВМ. Каждое задание содержит
30 вариантов. Приведены примеры выполнения заданий.
Предназначается в качестве учебного пособия для студентов втузов
очной, вечерней и заочной систем обучения.
001@1)-85 531
Издательство «Высшая школа», 1978
Издательство «Высшая школа», 1985, с изменениями
ПРЕДИСЛОВИЕ
Теоретическая механика как одна из важнейших физико-математических
дисциплин играет существенную роль в подготовке инженеров любых
специальностей.
На основных законах и принципах теоретической механики базируются
многие общеинженерные дмсциплины, такие, как сопротивление материалов,
строительная механика, гидравлика, теория механизмов и машин, детали
машин и др.
В различных курсах по машиностроительным, механическим,
строительным, приборостроительным и многим другим специальностям также
широко используются положения теоретической механики. На основе
теорем и принципов теоретической механики решаются многие
инженерные задачи и осуществляется проектирование новых машин, конструкций
и сооружений.
Хорошее усвоение курса теоретической механики требует не только
глубокого изучения теории, но и приобретения твердых навыков в
решении задач. Для этого необходимо самостоятельно решить большое
количество задач по всем разделам.
Четвертое издание настоящего сборника содержит 45 заданий, каждое
в 30 вариантах, по всем основным темам программ, утвержденных
Минвузом СССР: 9 — по статике, 9 — кинематике, 13 — динамике, 9 —
аналитической механике и 5 — колебаниям механической системы.
В некоторые задания, входившие в третье издание, внесены изменения
и дополнения, некоторые из них существенно переработаны, отдельные
задания, сходные по тематике, объединены, добавлены новые задания.
В сборнике помещены три задания (по статике, кинематике и
динамике), при выполнении которых целесообразно использование ЭВМ.
По каждому из этих заданий дан пример с алгоритмом решения и
результатами расчета на ЭВМ.
Примеры выполнения заданий не содержат программ и рекомендаций
по их составлению, так как в вузах страны могут применяться
различные языки программирования и операционные системы и
использоваться разные ЭВМ.
Для выполнения заданий по статике и кинематике необходимо решать
системы линейных алгебраических уравнений, а при выполнении задания
по динамике - численно интегрировать дифференциальное уравнение. В биб-
3
лиотеке стандартных программ любой ЭВМ такие программы
имеются.
Большое число заданий по каждому из разделов курса обеспечивает
возможность устанавливать тематику и количество курсовых работ в
зависимости от профиля подготовки специалистов, т. е. от объема и
содержания изучаемого курса теоретической механики.
Набор вариантов индивидуальных заданий, входящих в курсовую
работу, студент может определить по своему шифру, пользуясь
специальной таблицей, приведенной в конце книги. Шифр каждому студенту
устанавливает преподаватель.
В сборнике приведены примеры выполнения заданий. Основываясь на
этих примерах, студенты (особенно заочных и вечерних факультетов)
смогут самостоятельно выполнять задания из этого сборника.
Ряд заданий при выполнении требует проведения некоторых
исследований. Они могут служить основой для организации
учебно-исследовательской работы студентов по теоретической механике.
Сборник могут использовать также инженеры и техники для
углубления знаний по теоретической механике.
В подготовке настоящего издания сборника наряду с авторами
предыдущих изданий приняли участие Д. Д. Акимов-Перетц, В. С. Доев,
Ф. А. Доронин и К. Ю. Красносельский.
Авторы выражают искреннюю благодарность профессору М. М. Гер-
нету за обстоятельный разбор рукописи сборника и ряд ценных
предложений, а также коллективам кафедр и отдельным преподавателям за
полезные советы, учтенные при подготовке настоящего издания.
Отзывы и предложения, направленные на улучшение этого издания,
просим посылать в адрес издательства «Высшая школа».
Авторы
РАЗДЕЛ ПЕРВЫЙ
СТАТИКА ТВЕРДОГО ТЕЛА
I. ПЛОСКАЯ СИСТЕМА СИЛ
СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ
Задание С.1. Определение реакций опор твердого тела
На схемах (рис. 1—4) показаны три способа закрепления бруса, ось
которого - ломаная линия. Задаваемая нагрузка (см. табл. 1) и размеры
(м) во всех трех случаях одинаковы.
Определить реакции опор для того способа закрепления бруса, при
котором реакция, указанная в табл. 1, имеет наименьший модуль.
Таблица 1
Номер
варианта
(рис. 1-4)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Л кН
10
20
15
5
10
6
2
20
10
2
4
10
20
15
10
Л/, кН м
6
5
8
2
4
2
4
10
6
4
10
5
12
4
5
<?, кН/м
2
4
1
1
—
1
2
4
—
2
1
2
2
3
2
Исследуемая
реакция
YA
Ма
Yb
Yb
Хв
Ma
Ха
Rb
Ya
Ха
Rb
Ya
Ya
Ya
Xa
Номер
варианта
(рис. 1-4)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
ЛкН
12
20
14
16
10
20
6
10
4
10
20
10
20
25
20
М,кНм
6
4
4
6
—
10
6
4
3
10
5
6
10
—
10
<у, кН/м
2
3
2
1
4
2
1
2
1
2
2
1
2
1
2
Исследуемая
реакция
Мл
YA
Ха
Rb
Ya
МА
YA
МА
YA
Хл
м4
xt
Y4
МА
Rb
Пример выполнения задания. Дано: схемы закрепления бруса
(рис. 5, а, б, в); Р = 5 кН; М = 8 кН • м; <? = 1,2 кН/м.
Определить реакции опор для того способа закрепления, при котором
момент МА в заделке имеет наименьшее числовое значение.
Решение. Рассмотрим систему уравновешивающихся сил,
приложенных к конструкции. Действие связей на конструкцию заменяем их реак-
У\А
a) jm
>Гх
lA ЩЪА
В \ В
ЩША
3 0 ?У
0
м
5)
V////. -.
6)
15°
М
А'Ж
В v,
HI
\в
V5°
ж.
7 У\ , Я
х . А
Рис. 1
30°
\
хна
3D9
12
а)У\
•w /
л
тл
/4 У\
Я
X t
HUjlE
Ш* А
Ir?
& _ \A
'45'
Рис. 2
17
а) У\
60У
м
-е-
A Cm
6)
Аа.
18
°
м-
ь
А
'А
2
п
АГШ
///Я'т1
20 60°
21
« Г* X
_ 2 _
т б)
45
4
5)
?
РЖ5
Ш&А
Я \*
тттт
6)у<
11
Ал I АС
Рис. 3
25
У\
\А
К. J
м
¦ п I R
X
5)
i
В]
45Щ
26
а)
ъ
i
a)
у.
I ?%
45°
29
a)
Ж
V V/.
-г .i^ 1
' ^ 4
в
ж
% 2
п i
' I CM
Щ
6) fr-|C ш*
Рис. 4
Рис. 5
циями (рис, 6): в схеме а — XAj YA, МА, в схеме б — Y'Ay M'A и RBi
в схеме в — М"А, Хв и YB. Равномерно распределенную нагрузку
интенсивностью q заменяем равнодействующей
<2 = ^.2-2,4 кН.
Чтобы выяснить, в каком случае момент в заделке является
наименьшим, найдем его для всех трех схем, не определяя пока остальных
реакций.
Для схемы а
? Мм = 0; МА - Р • 2 sin 45° + М - Q • 5 = 0.
Вычисления дают
Для схемы б
МА= 11,07 кН-м.
+ M-Q.5 = 0 и М'л = 4,00 кН . м.
Для схемы в
? MiB = 0; МА -f Р • BD + М + Q • 1 = 0 и М^ = -31,61 кН . м.
Здесь
BD = BE + ?D = [/2 + 2 j/2 = 4,24 м.
Таким образом, наименьший момент в заделке получается при
закреплении бруса по схеме б. Определим остальные опорные реакции для этой
схемы:
У] Xt ^ 0; Р cos 45° - RB = 0, откуда RB = 3,54 кН;
? у. = 0; У'А-Р- sin 45° - Q = 0, откуда У^ = 5,94 кН.
10
Результаты расчета приведены в табл. 2.
Схема по рис. 6
а
6
в
Момент
11,07
4,00
-31,61
Та
Силы, кН
Уа
5,94
о л и ц а 2
*в
3,54
Задание С.2. Определение реакций опор и сил
в стержнях плоской фермы
Определить реакции опор фермы от заданной нагрузки, а также силы
во всех ее стержнях способом вырезания узлов. Схемы ферм показаны
на рис. 7-9. Необходимые для расчета данные приведены в табл. 3.
Таблица 3
Номер
варианта
(рис. 7-9)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Р\
Pi
Pi
кН
4
10 !
2
10
2
3
4
5 .
10
3
2 ''
5
4 :
3
2
5
4
5
8
2
3
4
5
6
7
8
9
10
12
5
9
3
12
10
4
7
6
7
8
4
6
7
6
5
2
6
4
2
4
3
2
2
8
10
10
12
4
5
8
10
2
4
6
5
2
5
3
7
2
5
8
2
2
5
10
2
10
8
10
5
7
9
8
2
5
2
4
3
2
4
2,0
2,5
3,0
4,0
4,0
4,0
3,2
5,0
4,4
2,5
4,0
4,8
3,0
4,0
5,0
4,0
—
5,0
4,0
6,0
4,0
4,0
3,6
4,4
4,0
4,0
5,0
6,0
4,0
/?
—
—
—
2,0
3,0
_
—
3,3
3,0
—
3,6
—
6,0
—
6,0
5,0
10,0
650
—
9,0
—
3,3
—
3,0
—
—
2,0
эс, град
30
60
60
60
60
—
60
45
60
—
_
60
_
60
_
60
_
60
6Q
_
45
45
30
45
30
—
30
45
—
Номера
стержней
3, 8, 9
2, 5, 7
4, 5, 10
5, 6, 11
4, 5, 10
8, 9, 11
4, 6, 12
3, 4, 5
6, 7, 12
3, 5, 7
2, 7, 8
4, 5, 10
4, 5, 10
5, 6, 8
2, 6, 9
3, 5, 6
4, 7, 8
1, 4, 8
4, 5, 7
5, 6, 8
5, 8, 9
2, 6, 8
4, 7, 9
4, 5, 10
8, 10, 11
4, 5, 9
5, 9, 11
3, 5, 6
5, 6, 11
6, 7, 12
11
/з
а
5
4 /
А
/7
р
V
д
\ю
8л
р
а
р3
«х
п /
а
Рг
г •
S 1
У//////
10
о ft
Рис. 7
11
13
/5
16
1
<:
р, УзХ
- 1\у\
а
10 |
17
W
М
X
8 j
•с:
Pj i
Рис. 8
8
А\
S 7
j
j
В
Щ
vz a ф
Puc 11
Рис 12
Дополнительно определить в трех стержнях фермы силы от той же
нагрузки способом Риттера (номера стержней указаны в табл. 3).
Пример выполнения задания* Дано: схема фермы (рис. 10); Рх~2 кН,
Р2 = 4 кН, Р3 = 6 кН, а = 4,0 м; h = 3,0 м.
Решение. 1. Определение реакций опор. Покажем внешние силы,
приложенные к ферме: активные (задаваемые) силы Рь Р2, Рз и реакции
опор А и В (рис. 11).
Так как линия действия реакции опоры Л неизвестна, определим ее
составляющие по координатным осям ХА и 9А.
Опора В - стержневая; линия действия ее реакции известна — она
направлена вдоль опорного стержня.
Составим уравнения равновесия сил, приложенных к ферме:
?Х, =0;
?У,. =0;
Из этих уравнений
RB = -10,5 кН;
A)
YA = 6,0 кН;
Z^ = 16,5 кН.
2. Определение сил в стержнях фермы способом вырезания узлов.
Стержни, сходящиеся в узле фермы, являются для узлового соединения
связями. Отбросим мысленно связи и заменим их действие на узлы
реакциями. На рис. 12 показаны узлы фермы с приложенными к ним
активными и реактивными силами.
Силу в стержне с номером i обозначим St, Реакцию стержня,
приложенную к узлу М, -SiM. Для стержня, соединяющего узлы М и N,
&iM = — ?>iN9 НО SiM = $iN = Si.
Направления реакций всех стержней показаны от узлов внутрь
стержней в предположении, что стержни растянуты. Если в результате решения
реакция стержня получится отрицательной, это будет означать, что
соответствующий стержень сжат.
15
Для каждого узла составим два уравнения равновесия:
0иХ^ = 0. B)
Нетрудно убедиться, что из этих уравнений можно определить не
только все силы, но и реакции опор, так что предварительное
определение р'еакций опор не является необходимым. Действительно, узлов 7
(А, Б, С, D, E9 F, Я), уравнений, следовательно, 14, а неизвестных тоже
14, т. е. 11 усилий в стержнях и 3 составляющих опорных реакций. Ранее
найденные реакции опор могут служить для проверки решения.
Если уравнения предполагается решать без применения ЭВМ,
рекомендуется рассматривать узлы в такой последовательности, чтобы каждый
раз в уравнения B) входило не более двух неизвестных.
Начнем с узла Я:
? Yi = 0; — Sih sin a — 52Я = О,
откуда определяем
S1H = 5i = —2,5 кН (стержень сжат) и 52Я = 52 = 1,5 кН.
Для узла Е
? Xt = 0; SlE cos a + S3? = 0;
? Yt = 0; S1? sin a - P3 - S4? = 0,
откуда находим
S3? = S3 = 2,0 кН, S4? = S4 = -7,5 кН (стержень сжат).
Затем составляем уравнения равновесия сил, приложенных к узлам F,
С, D, В, Л.
Для проверки расчета полезно для каждого узла построить
многоугольник сил (рис. 13).
Для узла Я откладываем в масштабе силу Рх и проводим через конец
и начало этого вектора направления реакций SlH и 52Я до их взаимного
пересечения. Стрелки векторов ~$ш и ~$2Я ставим так, чтобы силовой
$2
Рис. 13
16
Сжатый стержень
Растянутый стержень
Стержень, сила в
котором радна нулю
Рис. 14
треугольник был замкнут. Для этого
на рис. 13 стрелку §ш пришлось
направить в сторону,
противоположную показанной на рис. 12,—это
соответствует знаку минус в
аналитическом решении. При построении
многоугольника сил для узла Е откладываем силы Р3 и Si? (направляется
противоположно Зш) и проводим до взаимного пересечения направления
реакций S3? и S4e и т. д. Измеренные в масштабе построения реакции
стержней должны мало отличаться от найденных аналитически.
Приводим таблицу сил в стержнях (табл. 4) и схему фермы с
фактической картиной сил (рис. 14).
Таблица 4
Номер стержня
Знак силы
Сила, кН
1
-
25
2
+
1 5
3
+
?0
4
-
75
5
75
6
+
6,0
7
6,0
8
-
12,0
9
-
7,5
10
+
10,5
11
0
3. Определение сил в стержнях способом сечений (способом
Риттера). Требуется определить силы в стержнях 49 5 и 8.
По способу Риттера каждая сила должна быть определена из
отдельного уравнения и не должна выражаться через силы в других стержнях.
Для определения сил 54 и S5 мысленно разрежем ферму сечением 1—1
(рис. 15).
Рассматриваем равновесие сил, приложенных к верхней части фермы *.
Действие отброшенной нижней части на верхнюю представлено силами
S4, Ss и 56.
По-прежнему условно предполагаем все стержни растянутыми. Знак
минус в ответе укажет на то, что стержень сжат.
Для определения S4 составим уравнение моментов сил относительно
точки F, где пересекаются линии 'действия сил S5 и S6 (точки Риттера
* Выбор части фермы обычно определяется объемом вычислительной работы.
В данном случае следует отметить, что выбор верхней части позволяет получить
искомые силы, выраженные только через заданные силы, независимо от ранее
найденных опорных реакций.
17
76
для стержня 4):
?M/f = 0; 54а
Отсюда получим
S4 = - 7,5 кН.
Для определения S5, чтобы
исключить из уравнения усилия S4 и S6,
проецируем силы на ось х:
?X, = 0; -?! - Р2 - S5 cos ot = 0.
Отсюда получим S5 = - 7,5 кН.
Для определения силы S8 проводим сечение II —II (можно было бы
провести его и через стержни 8, 7 и 6). Рассмотрим равновесие сил,
приложенных к нижней части фермы (рис. 16).
Точкой Риттера для стержня 8 является узел D, где пересекаются
линии действия сил S9 и S10, исключаемых из уравнения:
Отсюда получим
S8= -12,0 кН.
Задание С.З. Определение реакций опор составной конструкции
(система двух тел)
Конструкция состоит из двух частей. Установить, при каком способе
соединения частей конструкции модуль реакции, указанной в табл. 5,
наименьший, и для этого варианта соединения определить реакции опор,
а также соединения С.
Таблица 5
Номер
ВО V4tVO U*T*O
варианта
(рис. 17-19)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Л
кН
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
12,0
9,0
6,0
5,0
10,0
9,0
—
8,0
7,0
6,0
—
—
5,0
4,0
6,0
—
8,0
кНм
24,0
22,0
20,0
18,0
16,0
25,0
20,0
15,0
10,0
12,0
14,0
16,0
18,0
20,0
22,0
0,8
1,0
1,2
1,4
1,6
1,8
2,0
2,2
2,4
2,6
2,8
3,0
3,2
3,4
3,6
Исследуемая
реакция
ХА
Ra
МА
МА
Rb
Ха
Ra
Rd
Rb
Ra
Ma
MB
Номер
варианта
(рис. 17-19)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Л
Pi
кН
7,0
9,0
11,0
13,0
15,0
10,0
5,0
8,0
11,0
14,0
12,0
10,0
8,0
6,0
10,0
10,0
12,0
10,0
9,0
8,0
7,0
6,0
5,0
4,0
6,0
8,0
7,0
9,0
10,0
12,0
м,
кНм
14,0
26,0
18,0
30,0
25,0
20,0
15,0
10,0
5,0
7,0
9,0
11,0
13,0
15,0
17,0
кН/м
3,8
4,0
3,5
3,0
2,5
2,0
1,5
1,4
1,3
U2
1,1
1,0
1,2
1,4
1,6
Иссле-
п«;л« «Л ft
дуемая
реакция
Rb
Ra
мв
Мв
Rb
Ra
Ra
Ra
MA
Rb
Rb
xA
Ra
Ma
MB
18
На рис. 17—19 показан первый способ соединения — с помощью
шарнира С. Второй способ соединения — с помощью скользящей заделки,
схемы которой показаны в табл. 6.
м с
А
в
JJLL
1
. - ?
i
1
t
J
/л
Рис. /7
19
. г Л1.
•%¦
Ь
. 2 !
А/
> ^^?
/J
/5
77
x г ,
в
С 3 ^г
в
1 Ь t '
С
^2 „
ем'
21
*r
1
/1
см
2
С i
;
j
у/У/ЯЛ
22 ,%
ТТУГПС
23
тттттп
ТТЛ)
27
г .1- ¦*
с. /9
Таблица 6
Номер
варианта
1, 2, 3
4
5
6, 7, 8
9
10
11
12
13
Вид
скользящем
заделки
-1
1-
I
-е-
Номер
варианта
14
15
16
17
18
19
20
21
22
Вид
скользящей
заделки
Т
-4
-*
V
Т
Номер
варианта
23
24
25
26
27
28
29
30
Вид
скользящей
заделки
/а-
*-
—
-Л
Пример выполнения задания. Дано: схема конструкции (рис. 20);
Рх = 5 кН, Р2 = 7 кН; М = 22 кН • м; q = 2 кН/м; а = 60°.
Определить реакции опор, а также соединения С для того способа
сочленения (шарнир или скользящая заделка), при котором модуль
реакции опоры А наименьший.
Решение. 1. Определение реакций опоры А при шарнирном
соединении в точке С.
Рассмотрим систему уравновешивающихся сил, приложенных ко всей
конструкции (рис. 21). Составим уравнение моментов сил относительно
точки В. Для упрощения вычисления момента силы ?i разложим ее на
вертикальную и горизонтальную" составляющие: Pi = Рх cos 60° = 2,5 кН;
Р'[ = Рх sin 60° = 4,33 кН,
X Мш = 0; Pi • 3 + РI • 8 - Q • 1 - YA • 5 + XА • 1 - М + Р2 j/l^-f 1,52 = 0,
(I)
где Q = q • 4 = 2 • 4 = 8 кН.
После подстановки данных и вычислений уравнение A) получает вид
XA-5YA= -24,74 кН. (Г)
Второе уравнение с неизвестными ХА и YA получим, рассмотрев
22
J
т
А '
С
J ^
i \
i t
^90* *>
\g
ш
I 1
—/
L\
^i
p,
Q
J
A
^:
j
С
t KA
I M
\4
<\^
В
Рис, 20
Рис. 21
систему уравновешивающихся сил, приложенных к части конструкции,
расположенной левее шарнира С (рис. 22):
или после вычислений
кН.
B)
Решая систему уравнений (П и B), находим:
ХА = -7,97 кН, Уд = 3,36 кН.
Модуль реакции опоры Л при шарнирном соединении в точке С
равен
Яд = ]/Х\ + ^ = j/7,972 + 3,362 = ]/74M = 8,65 кН.
2. Расчетная схема при соединении частей конструкции в точке С
скользящей заделкой показана на рис. 23. Системы сил, показанные на
рис. 21 и 23, ничем друг от друга ве отличаются. Поэтому уравнение (Г)
остается в силе. Для ккшучения второго уравнения рассмотрим систему
уравновешивающихся сил, приложенных к части конструкции,
расположенной левее скользящей заделки: С (рте
э»—-
ш
Q
3
1
!
i
А
А
Га
J
сч
J
с м
\ч
Л
- 2
1
/Га
J i
6
г
>
Pwc. 22
Рис. 2$
Составим уравнение
равновесия:
0;X, + 6-Pi = 0, C)
Рис. 24
откуда
ХА = - 5,50 кН,
и из уравнения (Г) находим
YA = 3,85 кН.
Следовательно, модуль
реакции опоры А при
скользящей заделке в С равен
R"A « ]/x2A +Y2A = j/5,502 + 3,852 = j/45,07 = 6,71 кН.
Итак, при соединении в точке С скользящей заделкой модуль реакции
опоры А меньше, чем при шарнирном соединении (« на 22%). Найдем
составляющие реакции опоры В и скользящей заделки.
Для левой от С части (рис. 24, а)
D)
откуда
Ус = Pi - Уа = 0,48 кН.
Составляющие реакции опоры В и момент в скользящей заделке
найдем из уравнений равновесия, составленных для правой от С части
конструкции (рис. 24, б):
Ш = 0;
Мс + Yc-2 - М + Р2 • 1,80 = 0,
0; -Р2 cos Р + ZB = 0,
E)
F)
G)
Из прямоугольного треугольника BCD
sin p = ВД/ВС = 2,0Д/22 + З2 = 2,0/3,61 = 0,555;
cos р = CD/ВС = 3,0/3,61 = 0,832.
Решая уравнения E)—G) относительно Мс, Хв, YBi получим:
Мс = 8,44 кН • м; Хв = 5,82 кН; YB = 4,37 кН.
Для проверки правильности определения реакций убедимся, что
соблюдается не использованное ранее уравнение равновесия для сил,
приложенных ко всей конструкции (см. рис. 21), например
-h Ув-5 = 2,5-4+ 4,33-3-8-2-22-7-0,555.4+ 7.0,832-2,5 ~
- 5,82 -1 + 4,37 - 5 = 59,40 - 59,36 к 0.
Результаты расчета приведены в табл. 7.
24
Таблица 7
Для схемы
на рис. 20
Для схемы
на рис. 23
ХА
-7,97
-5,50
Уа
3,36
3,85
Силь
*л
8,65
6,71
, кН
Ус
-
±0,48
Хв
-
5,82
Ув
-
4,37
Момент,
кН-м
-
±8,44
Задание С.4. Определение реакций опор составной конструкции
(система трех тел)
Найти реакции опор составной конструкции, состоящей из трех тел,
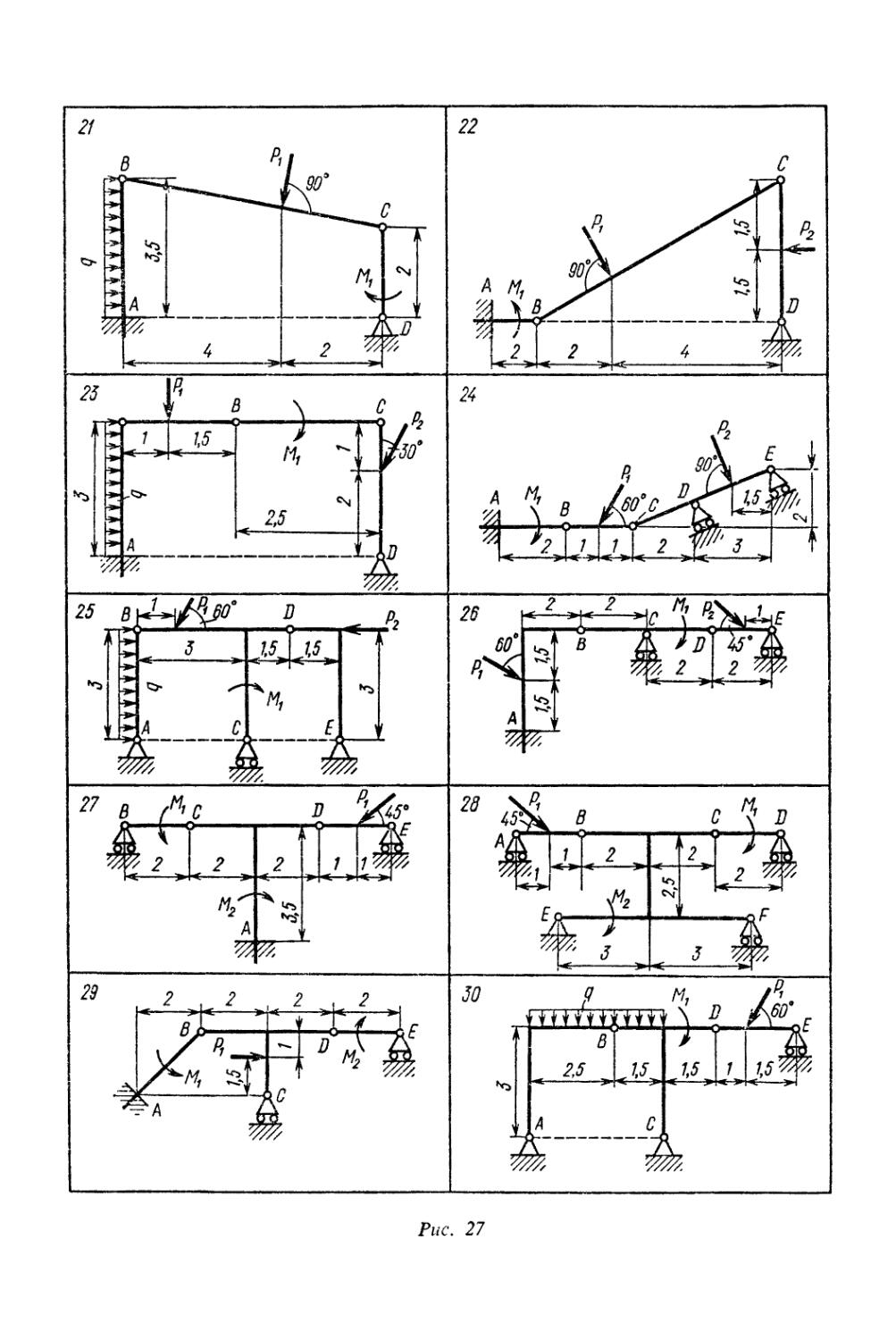
соединенных в точке D. Схемы конструкций представлены на рис. 25 — 27
(размеры — в м), нагрузка указана в табл. 8. В вариантах 1 — 15, 21 — 30
составные части соединены с помощью шарниров, а в вариантах 16-20 —
с помощью гладкой втулки малой длины.
Пример выполнения задания. Дано: схема конструкции (рис. 28);
нагрузка: Pi = 10 кН, Р2 = 20 кН, М = 40 кН • м, q = 2 кН/м.
Определить реакции опор в точках А, В, С и Е.
Решение.На рис. 29 изображены отдельно все три тела, образующие
систему. К каждому из тел приложены задаваемые (активные) силы
и реакции связей.
Так как направления составляющих реакций и реактивных моментов
в соединении D заранее не известны, покажем их направленными
одинаково для каждой части конструкции. Истинные направления реакций и
моментов определяются по знаку ответа: знак плюс укажет на то, что
истинные их направления соответствуют показанным на рисунке. Общее
Таблица 8
Номер ва-
Y\lJT*b ||>ГП
рианта
(рис.
31-33)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
кН
6,0
11,0
9,0
10,0
8,0
10,0
16,0
13,0
11,0
12,0
8,0
12,0
15,0
10,0
12,0
8,0
12,0
14,0
15,0
17,0
10,0
12,0
—
—
14,0
—-
16,0
8,0
Л/,
кН
25,0
34,0
20,0
30,0
22,0
28,0
—
25,0
29,0
34,0
28,0
36,0
30,0
35,0
32,0
м2
*м
—
—
20,0
—
—
30,0
34,0
37,0
35,0
28,0
21,0
—
—
кН/м
0,8
1.0
1,0
1,1
1,0
—
—
—
1,4
1,0
—
—
—
1,2
Номер
ПО *NlffS 11 ТО
варианта
(рис.
31-33)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Л
Рг
кН
13,0
7,0
9,0
12,0
11,0
6,0
11,0
9,0
10,0
8,0
10,0
16,0
13,0
11,0
12,0
_
7,0
9,0
7,0
—
—
8,0
12,0
14,0
15,0
17,0
—
—
—
—
Л/,
кН
26,0
23,0
29,0
33,0
38,0
25,0
34,0
20,0
30,0
22,0
28,0
36,0
25,0
29,0
34,0
Л/2
• м
_
34,0
—
—
—
—
—
—
—
3,0
34,0
37,0
—
кН/м
0,9
—
1,3
1,2
1,5
0,8
_
1,0
_
1,1
—
—
1,4
25
\*L~)/\60' С
Я~ ?
15
В
к
1 2,5
V
L_L
\ ллу| /
4
'1,5
?%P.
77> i
Л/с. 25
//7,
Ш
зо'Л
в
15 q
W
г 4 Щ7„ 4
о %eo'jJ
11 Di
30%
20
ID
Рис. 26
22
25
n *. 7
1,5
24
A Mi
)
;
Ц
1
J i
25
С
A
р0
26
д в
Щ 2
Z 2
с м< в
IV/.
. 2
v J
29
tfmtmi
A С
JiLXlJM-^
Рис. 27
У\
50°
Re
У
С "
к
\\
2 ^
) (
%
К L
X
Ъ3
?
-с 2 »
А'
Рис. 28
Рис. 29
количество неизвестных реакций в задаче — 11 (ХА, YA, MB> YDi, YDi, YDi,
MDl, MDl9 MD3, Rc, RE).
Для каждого из трех тел может быть составлено три независимых
уравнения равновесия, что даст в совокупности девять уравнений. Для
того чтобы получить недостающие два уравнения, рассмотрим силы и
моменты, приложенные в Du D2 и ?>3. Из закона о равенстве действия
и противодействия вытекает, что геометрическая сумма этих сил и сумма
реактивных моментов должны быть равны нулю. Следовательно, сумма
проекций на любую ось всех сил, приложенных в точках Du D2 и ?>3,
должна быть равна нулю. Алгебраическая сумма моментов всех пар
в Dl9 ?>2» 0з также равна нулю. Эти уравнения дополняют уравнения
равновесия до системы 11 уравнений.
В рассматриваемом примере сначала рассмотрим систему
уравновешивающихся сил, приложенных к телу ABDX (рис. 29):
М = 0;
= 0; ХА + Р2 =0;
Мв + М + MDl + YDl-2 = 0.
Уравнения равновесия сил, приложенных к телу CD2:
X Xt = 0; Pi cos 60° - Rc = 0;
X Y( = 0; -Pi cos 30° + YDl = 0;
= 0; Mp2 + PX cos 30° ¦ 2 - Pt cos60° • 1 = 0.
A)
B)
C)
D)
E)
F)
29
Уравнения равновесия сил, приложенных к телу ?/>3:
?Xt = 0; Я?-е = 0; G)
? У, = 0; 7D3 = 0; (8)
?Л/,х = 0; MD3 + e-l=0. (9)
Уравнения, вытекающие из аксиомы о равенстве действия и
противодействия:
?1^ = 0; YDi + YDl+YDi = 0; A0)
A1)
MD
= 0.
X MDi = 0; M
Решая последовательно уравнения A), D), E)-A0), B), A1) и C),
получим числовые значения искомых величин. Результаты вычислений
приведены в табл. 9.
Таблица 9
Силы, кН
Х4
-20
Уа
8,66
RC
5
Re
4
-8,66
8,66
0
Моменты, кН-м
-19
**Dl
16,32
-12,32
-4
Для проверки правильности расчетов следует убедиться в том, что
соблюдаются уравнения равновесия сил, приложенных ко всей конструкции
(рис. 30).
Например:
? X,г = ХА + Р2 + Pi sin 30° - Rc - Q 4- RE = - 20 + 20 + 10 • 0,5 - 5 - 4 + 4 = 0;
X Yt = У* - Pi cos 30° = 8,66 - 10 • 0,866 = 0;
? MiA == -P2 • 1 4- MB 4- M 4- Pi sin 30° • 3 - Rc • 4 + K? • 4 - Q • 3 =
= _20 + (-19) + 40+ 10-0,5.3 -5-4+ 4-4-4-3 = -71 + 71 =0.
Примечание. Если тела соединены в точке D шарниром и к нему
приложена сосредоточенная сила, то ее можно отнести к любой составной части.
На рис. 31 в качестве примера показан
случай, когда сила Р отнесена к части /
конструкции.
JD,
Ж
Рис.
Рис. 31
30
Задание С.5. Равновесие сил с учетом сцепления
(трения покоя)
Определить минимальное (в вариантах 1-20, 25, 26, 29, 30) или
максимальное (в вариантах 21-24, 27, 28) значение силы Р и реакции опор
системы, находящейся в покое. Схемы вариантов представлены на
рис. 32-34, а необходимые для расчета данные - в табл. 10.
В вариантах 1—20 сцепление (трение покоя) учесть только между
тормозной колодкой и барабаном. В вариантах 21-30 учесть сцепление
в двух опорных точках тела весом G.
Таблица 10
Номер
ваоианта
Ь*\Л ^/ Ж МЧА <Л *ь\Л
(рис. 32-34)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
G
Q
кН
1,1
1,3
1,8
1,5
1.6
2,0
2,2
2,1
1
,8
,9
М>
1,6
,7
,8
1,2
1,3
1,4
1,7
1,6
1,0
1,5
2
3
1>0
2,0
4
5
2,0
1
10
—
14
15
16
18
20
18
20
22
24
25
20
24
20
15
12
14
16
18
—
—
—
—
—
—
—
—
—
а
0,20
0,10
0,45
0,10
0,20
0,15
0,20
0,20
0,10
0,30
0,40
0,10
0,10
0,10
0,10
0,20
0,15
0,20
0,50
0,10
2
3
5
4
0,8
0,4
4
5
2
2
Ъ
м
0,10
0,15
0,40
0,40
0,30
0,10
0,50
0,10
0,20
0,30
0,50
0,25
0,10
0,25
0,15
0,45
0,15
0,30
0,20
0,15
0,50
0,80
1,4
0,8
0,4
—
1,0
0,8
0,3
8,0
с
0,04
—
0,05
0,06
0,04
—
0,05
—
—
0,04
0,06
—
—
0,04
_.
0,04
—
0,05
0,06
—
—
—
—
—
—
—
—
—
град
30
30
45
_
45
45
30
30
30
45
—
30
45
60
45
45
45
60
30
45
30
—
—
30
—
45
30
30
30
Коэффициент
сцепления
(коэффициент
трения покоя)
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,35
0,30
0,25
0,20
0,15
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,45
0,35
0,40
0,30
0,25
0,25
0,35
0,40
0,20
0,20
Точки, в
которых
определяются
реакции
О, А
О, А, В
О, А
О, А
О, А
О, А, В
0, А
0, А, В
О, А9 В
О, А
О, А
О, А, В
О9 Л, В
О, А
О, А, В
О, А
О, А, В, С
О, А
А, С, D
О, А, В
А, В, С, D
А, В, С, D
А, В, С
А, В, С, D
А, В, С, D
А, В, С
А, В, С, D
А, В, С, D
А, В, С
А, В, С, D
Пример выполнения задания (варианты 1-20). Дано: G = 2 кН; Q «
= 20 кН; коэффициент сцепления (трения покоя) /сц = 0,1; а = 20°, а =
= 10 см; Ъ = 20 см (рис. 35).
Определить минимальное значение силы Р и реакции опор О, А и В
31
to
Рис. 32
12
15
16
19
20
Рис. 33
21
23
25
26
28
29
B',
30
Рис. 34
Рис. 35
Рис. 36
Решение. Рассмотрим сначала систему уравновешивающихся сил,
приложенных к телу Q (рис. 36). На тело действуют сила тяжести (J,
реакция нити Т и нормальная реакция Л?х.
Рассматривая тело Q как материальную точку, составим уравнения
равновесия указанных сил:
X Xt = 0; Q cos 45° - Г = 0; ? Yt = 0; Arx - б sin 45° = 0.
Отсюда
Т = Q cos 45°; Nx = Q sin 45°.
Затем рассмотрим равновесие сил, приложенных барабану (рте. 37):
? Мю = 0; - TR + Fcu. 1,5Д = 0, U)
где Fcu - сила сцепления (сила трения покоя);
?Х< = 0; Г + Fcucosa - iV2sina + Хо = 0; B)
? У,; = 0; ЛГ2 cos a 4- Fcu sin ot + Yo - G = 0. C)
В состоянии предельного равновесия сила Р минимальна, а сила
сцепления (трения покоя) между тормозной колодкой и барабаном
определяется равенством
Fcu = fc*N2. D)
Из уравнений A) —D) получим:
Fcu = Г/1,5; N2 = Fcu//cu; Хо= -Г -F^ cos a + N2 sin a;
Yo= — N2 cos a - Fcu sin a + G.
Для определения минимального значения силы Р и реакций опор А
и В (эти реакции перпендикулярны направляющим А и В, так как трением
здесь пренебрегаем) рассмотрим равновесие сил, приложенных к штоку
тормозного устройства (рис. 38):
? MiA = 0; F'cna + RBb = 0; E)
35
Рис. 37
Рис. 38
iV2-Pmin =
F)
X У, = 0; Ra + Rb- F'm = 0. G)
Решая эти уравнения, получаем: RB = -F'CJXa/b; Pmin = iV'2; JR^ = ~-Rb + F'w
Учитывая заданные в условии числовые значения, получим:
СЦ '"""* ^> ' АХХ,
Хо = 9,2 кН;
RB = -4,7 кН;
Рт;„ = 94 КН.
iVi = 14,1 кН;
N2 = 94 кН;
Уо=: -89,6 кН;
RA = 14,1 кН;
Для определения реакций опоры С достаточно составить уравнения
равновесия сил, приложенных к блоку.
Пример выполнения задания (варианты 21-30), Дано: G = 1 кН;
/сц = 0,4; а = 6 м; Ь = 2 м (рис. 39).
Определить максимальное значение силы Р и реакции в точках А,
В9 D и Е.
Решение. Рассмотрим сначала систему уравновешивающихся сил,
приложенных к телу весом G (рис. 40). К телу приложены сила тяжести
G9 сила Р9 нормальные составляющие реакции ND и ЙЕ, а также
касательные составляющие силы сцепления РСц(О) и Fcn^E) (силы трения покоя).
—X
Рис. 39
Рис, 40
36
Составим три уравнения равновесия указанных сил:
X X, = 0; - Fcm - Fcu(?) + Р = 0; A)
I У, = 0; iVD + iV? - G = 0; B)
? Afш = 0; - Gb/2 + N?b - Pb/4 = 0. C)
В случае предельного равновесия Р = Pmax. В этом случае силы
сцепления (силы трения покоя) принимают экстремальные значения, а система
уравнений A) —C) дополняется равенствами
/cuiV?. E)
Решая систему уравнений A) — E), получаем:
Pmax = /cuG; N? = (G/2)(l+0,5/cu); ЛГ0 = (G/2)A - 0,5/сц).
Отсюда
Лпах =0,4 кН; iV? = 0,6 кН;
ND = 0,4 кН; Fcm = 0,16 кН;
Fcm = °'24 кН-
Совокупности сил f$D и ТСЦ(В)9 $е и ?Сц(?) образуют соответственно
опорные реакции в точках D и Е.
Рассмотрим теперь равновесие системы сил RA, ltBi YB, S и Р = Ртл„
приложенных ко всей системе (см. рис. 39):
?Х< = 0; XB + Pmax = 0; F)
Х^ = 0; Ял-О+Ув-О; G)
? Af ш = 0; - Ртах. Ь/4 + G ¦ а/2 - Кл • а = 0. (8)
Решая эти уравнения, получаем:
Отсюда Хв = -0,4 кН; RA = 0,467 кН; Ув = 0,533 кН.
II. СИСТЕМА СИЛ,
НЕ ЛЕЖАЩИХ В ОДНОЙ ПЛОСКОСТИ
Задание С.6. Приведение системы сил к простейшему виду
Определить главный вектор Л* и главный момент Мо заданной
системы сил относительно центра О и установить, к какому простейшему
виду приводится эта система. Размеры параллелепипеда (рис. 41), а также
модули и направления сил указаны в табл. 11.
При выполнении задания необходимо сделать следующее.
1. Изобразить заданную систему сил, выполнив построение
параллелепипеда в масштабе, показав z. xOy на чертеже равным 135°; сокращение
размеров по оси Ох принять равным 1:2.
37
Таблица 11
s
вариа
Номер
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Размеры 1
1ря-
моугольного
параллелепипеда
(рис. 41),
60
30
20
30
20
30
30
20
30
10
10
4
20
20
40
30
15
10
20
20
20
40
50
30
30
30
30
10
30
40
«о
30
40
10
40
20
40
40
30
40
10
40
8
20
5
20
30
15
15
15
20
20
20
20
40
20
40
20
14
30
20
см
,
20
40
10
20
20
20
40
10
30
20
30
6
20
8
40
30
20
20
15
10
20
30
40
30
40
20
40
40
40
30
Силы системы
модуль.
4
20
4
15
8
8
10
10
10
20
8
6
8
40
15
6
30
40
40
10
10
30
10
40
25
10
8
4
80
10
при-
я
точка
ложени:
F
А
В
А
О
А
В
О
А
А
А
А
О
В
Е
О
Е
А
С
А
О
О
О
А
А
Е
О
О
В
А
к
о
направ/
FK
АС
ВА
АВ
OD
АО
ВК
ОА
АС
АС
АЕ
АЕ
ОВ
ВА
АЕ
ОС
ЕВ
АВ
СА
AD
OD
ОА
ОА
AD
АС
ЕА
OD
ОА
ВК
AD
X
модуль,
6
24
2
20
10
4
16
10
20
30
12
20
8
30
10
10
40
20
20
20
8
50
5
20
20
12
6
10
100
5
Р2
при-
я
точка
ложени:
А
О
С
К
D
Е
С
В
К
О
С
F
С
О
F
В
В
К
D
В
В
Е
F
К
В
О
С
F
D
В
|
1
§
а
а.
а
АЕ
OD
СК
КС
DF
EF
СО
BF
KB
OD
СВ
FA
CD
OD
FE
ВК
ВК
КС
DF
ВО
ВА
ЕВ
FB
КЕ
ВА
ОС
СВ
FE
DC
ВО
X
модуль,
8
10
8
_
8
6
20
10
_
20
20
10
8
—
15
20
10
16
—
10
6
50
8
—
25
10
4
16
—
10
р
при-
точка
ложени)
В
К
Е
—
К
F
D
D
—
К
О
с
Е
—
В
к
о
D
—
К
к
с
к
—
к
с
D
С
_
К
гение
направл
ВА
KB
ED
—
КС
FB
DF
DK
—
КЕ
OK
CK
EK
—
BF
КО
ОС
DE
—
KB
KF
CD
KD
—
KE
CK
DK
CK
—
KB
X
A
1
10
—
—
—
10
20
—
—
30
16
8
—
—
10
—
32
—
—
20
8
25
—
—
20
8
—
—
—
5
Pa
приточка
| ложенш
D
—
—
_
В
D
—
—
_
E
К
D
—
—
D
_
D
—
D
D
D
—
—
D
К
—
—
D
ЭИНЭ1
s
1
DK
—
—
BO
DF
_
—
EA
KD
DK
—
—
DK
—
DO
—
—
DF
DK
DK
—
DK
KF
_
—
—
DF
2. Выбрав систему координатных осей, определить модуль и
направление главного вектора заданной системы сил по его проекциям на
координатные оси и изобразить R* на чертеже.
3. Вычислить главный момент заданной системы сил относительно
центра О по его проекциям на координатные оси и изобразить Йо на
чертеже.
4. Вычислить наименьший главный момент заданной системы сил.
5. На основании результатов вычислений главного вектора и
наименьшего главного момента М* установить, к какому простейшему виду
приводится заданная система сил. При этом необходимо сделать следующее:
38
X'
^ b
7
Рис. 41
Рис. 42
а) если заданная система сил приводится к паре сил, то показать
момент этой пары, приложив его к точке О;
б) если заданная система сил приводится к равнодействующей, то
найти уравнение линии действия равнодействующей, определить точки
пересечения этой линией координатных плоскостей и изобразить Й
на чертеже;
в) если заданная система сил приводится к динаме (силовому винту),
то найти уравнения центральной оси, определить точки пересечения этой
осью координатных плоскостей и изобразить К* и М* на чертеже.
Пример выполнения задания. Дана система сил Ри Р2, ?з> Р*\ модули,
точки приложения и направления этих сил указаны в табл. 12.
Таблица 12
Размеры
прямоугольного
параллелепипеда, см
Силы системы
I
ill
Г.
30
50
40
10
О
ОС
FB
СВ
11
D
DA
Решение. 1. Определение главного вектора заданной системы сил.
Заданная система сил показана на рис. 42.
Предварительно определяем
cos ос = а/У а2
пг.
В данном случае cos а = 0,6; sin а = 0,8.
Проекции главного вектора на оси координат:
Z = -Р2 - P4sino.
Модуль главного вектора
R* =
+ У2 + Z2.
39
Направляющие косинусы:
cos (?*, Т) = X/R*; cos (Л*, j) = У/Я*; cos (Я*, ?) = Z/JR*.
В соответствии с исходными данными получаем: X = 10,6 Н; Y = 10,0 Н;
Z= -12,8 Н; Я* = 19,4 Н;
cos (Я*, 0 = 0,547; cos(?*, j) = 0,515; cos (Я*, fc) = -0,660.
Главный вектор показан на рис. 43.
2. Определение главного момента заданной системы сил относительно
центра О.
Главные моменты заданной системы сил относительно координатных
осей:
Мх=-Р2Ь; Му = Р2а + Р4 cos ас; М2=-РЪЬ.
Модуль главного момента
м0 = ]/м\ + м\ + Ml
Направляющие косинусы:
cos{Мо, 1) = Мх/М0; cos(Мо, ;) = Му/М0; cos (ХЗо, ^) = М2/Мо.
В результате вычислений имеем:
Мх = -200 Н.см; Му = 384 Н. см;
Мг *= -200 Н • см; Мо = 477 Н • см;
cos (Мо, 7) = -0,419; cos (Йо, 7) - 0,805; cos (Мо, 1с) = -0,419.
Главный момент Мо показан на рис. 43.
3. Вычисление наименьшего главного момента заданной системы сил:
М* = {ХМХ + YMy 4- ZMZ)/R*.
По этой формуле
получаем
М* = 221 Н-см.
4. Гак как К* #0, М* Ф О,
то заданная система сил
приводится к динаме (силовому
винту).
Уравнение центральной оси
таково:
Рис. 43
Таолица 13
Т чк
Ах
Аг
Аъ
Координаты,
л:
0
-5,4
21,1
У
5,1
0
25,0
см
Z
25,5
32,0
0
40
[Мх - iyZ - zY)-]/X = [M, - (z* - xZ)]/Y = M2 - (xY - yX)]/Z = М*/Д*.
Из этих трех уравнений независимыми являются только два.
Подставляя в два из этих уравнений найденные числовые значения величин,
находим:
[Мх - {yZ - zY)/X = М*/Д*; 6Ау + 5z = 160;
[М, - (zX - xZ)]/7 = М*/Я*; 5,3z + 6,4x = 135.
Значения координат точек пересечения центральной осью координатных
плоскостей, определенные с помощью этих уравнений, помещены
в табл. 13.
Центральная ось системы сил показана на рис. 43.
Примечание. Если силы приводятся к равнодействующей, т. е.
М* = 0, a R = Й* ф 0, то уравнения линии действия равнодействующей:
Mx = yZ-zY\ My = zX-xZ; M2 = xY-yX,
где X, Y, Z - проекции равнодействующей силы на координатные оси;
Мх, Му, Mz - главные моменты заданной системы сил относительно
координатных осей.
Из этих трех уравнений независимыми также являются только два.
Задание С.7, Определение реакций опор твердого тела
Найти реакции опор конструкции. Схемы конструкций показаны на
рис. 44 — 46. Необходимые для расчета данные приведены в табл. 14.
Номер
Ва.рИаН Id.
(рис. 44-46)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Силы,
Q
2
4
20
3
5
1
—
4
5
1
4
10
—
3
Г
—
—
—
—.
4
3
6
—
4
2
—
—
2
—
кН
G
20
2
18
2
3
2
1
3
3
2
1
1
5
1
2
20
20
400
30
30
40
30
20
20
30
20
25
40
30
60
Размеры
Ь
30
10
400
20
40
30
10
40
15
40
30
20
30
90
20
с
10
30
450
40
20
20
5
15
10
20
15
8
20
20
40
, см
R
15
10
_
15
20
20
18
20
30
20
15
15
25
30
20
г
5
10
_
10
15
10
6
10
40
10
10
10
15
10
5
Номер
DO MTlO tTTrt
ВарИаНТа
(рис. 44-46)
16
17
18
19
20
21
22
23
ТАГ—~
25
26
27
28
29
30
Силы,
Q
4
2
6
—
4
2
—
—
__
10
35
_
5
Г
_
8
—
—
4
—
кН
G
2
1
2
2
—
5
4
7
3
1
32
3
—
Т а б л и ц 2
i 14
Размеры, см
а
50
15
60
20
60
40
20
40
50
20
50
400
15
40
Ъ
30
10
40
30
40
60
50
30
50
60
30
200
20
40
с
_
20
60
40
20
30
30
J5Q
60
40
50
200
15
10
R
_
20
—
20
—
—
15
—
г
_
5
15
_
—
10
—
Примечания: 1. Считать, что в вариантах 16, 18, 22 — 26 петли не
препятствуют перемещению рамы вдоль АВ.
2. В вариантах 20 и 21 соприкасающиеся поверхности
считать абсолютно гладкими.
Пример выполнения задания. Дано: рама ABCD весом G - 1 кН
Р = 2 кН, Р || Ау, АО = ВС = 60 см, АВ = CD = 100 см, а = 30°, C = 6Г
(рис. 47). Найти реакции опор А и В (А - шаровой шарнир, В - петля.
Рис. 44
Рис. 45
22
о. ! . Ь , . с
——у
CULAy
23
\2
с,
/
X
А
//
а
1 ъ
С
h
/
'-=7 У
CULAy
, у
CBLAx
Р LAX
у
CDLAZ
CBWAy
27
28
\г
¦Г
SO
CBWTUFWAx
Рис. 46
Решение. К раме ABCD приложены сила тяжести S, сила Д
реакция S стержня СЕ и реакции опор А и^В. Реакция шарового шарнира А
определяется тремя составляющими: ХА, YA, ZA, а реакция петли В-
двумя: ]?в и ZB (рис. 48).
44
—X
Рис. 47
Рис. 48
Из этих сил — шесть неизвестных. Для их определения можно
составить шесть уравнений равновесия.
Уравнения моментов сил относительно координатных, осей:
?Mix = 0; ~Р • AD cos 30° - G • ЛВ/2 + S cos 30МБ + ZB • AB = 0, A)
? Miy = 0; G (ВС/2) sin 30° - S - ВС sin 60° = 0, B)
? Miz = 0; Р • AD sin 30° + S cos 60°AB - ZB • AB = 0. C)
Из уравнения B) определяем S, затем из уравнений A) и C) находим
ZB и Хв.
Уравнения проекций сил на оси координат:
?Х< = 0; ХА + Хв - Scos60° = 0, D)
X Yt - 0; Ул + Р = 0, E)
?Z, = 0; Z,4 - G + ZB + Scos 30° - 0. F)
Из этих уравнений находим XAi YA и ZA.
Результаты вычислений приведены в табл. 15.
Таблица 15
S
0,289
-0,600
Силы,
Уа
-2,00
кН
zA
-0,54
хв
0,744
1,29
ЦЕНТР ТЯЖЕСТИ
Задание С.8. Определение положения центра тяжести тела
Найти координаты центра тяжести плоской фермы, составленной из
тонких однородных стержней одинакового погонного веса (варианты 1 — 6),
плоской фигуры (варианты 7—18 и 24 — 30) или объема (варианты 19 — 23),
показанных на рис. 49 — 51. В вариантах 1 — 6 размеры указаны в метрах,
а в вариантах 7 — 30 — в сантиметрах.
45
У\
х
У\
8
Ю
У\
020'
Рис. 49
У
9
\
}
'2
У////////////////
*—-
J X
13
x
15
16
—ь^ х
17
18
У\
19
—у
Рис, 50
21
22
! ^
-7-7- У
-&/--/--, у
X
25
26
У\
х
х
27 У\
\.*> . |
28 У\
29
30 У\
Л _» ^ г>
с. 57
-X
Рис. 52
Рис. 53
Пример выполнения задания. Определить координаты центра тяжести
плоской фигуры, показанной на рис. 52.
Решение. Координаты центра тяжести плоской фигуры определяем
по формулам
хс = Sy/F; ус = SJF. A)
Здесь Sy = ? FfXb Sx = ]Г F^ - статические моменты фигуры относительно
осей у и х, F — площадь фигуры.
Чтобы воспользоваться формулами A), делим плоскую фигуру на
части, для которых известны или легко определяются площади Ft и
координаты центров тяжести xt и уг.
В данном случае в качестве таких частей принимаем прямоугольник,
треугольник и половину круга (рис. 53). Площадь половины круга,
вырезанной из прямоугольника, считаем отрицательной.
Все расчетные данные заносим в таблицу (табл. 16).
Таблица 16
Номер
элемента
1
2
3
2
1200
1000
-628
1572
Л*/, СМ
15,0
46,7
8,5
—
Уь см
20,0
13,3
20,0
—
Sjy^FiXj, см3
18000
46700
-5 338
59362
5/Y=F^/, см3
24000
13 300
-12 560
24700
По формулам A) вычисляем координаты центра тяжести плоской
фигуры:
хс = 59 362/1572 = 37,8 см; ус = 24 700/1572 = 15,7 см.
Центр тяжести площади указан на рис. 53.
Примечание. Площади и координаты центров тяжести некоторых плоских
фигур, встречающихся при выполнении заданий, приведены в табл. 17.
49
Таблица 17
Плоская фигура
Площадь
Координаты центра
тяжести
Треугольник
где Х\, х2, х3—
координаты вершин О, А, В
Круговой
сектор
2i?sina _ R2b
la ~3F
а=я/2
(полукруг)
а=я/6
xc=2R/n
Круговой
сегмент
I
F=-l&x
xBa-sin2a)
3Ba-sin2a)
12F
III. ПРИМЕНЕНИЕ ЭВМ
К РЕШЕНИЮ ЗАДАЧ СТАТИКИ
Задание С.9. Определение реакций опор составных конструкций
с внутренними односторонними связями
Найти реакции опор и силы во внутренних двусторонних и
односторонних связях составной конструкции.
Схемы конструкций представлены на рис. 54—56 (размеры — в м),
нагрузка указана в табл. 18. Учесть, что при заданной схеме нагружения
конструкции реакция возникает только в одной из односторонних связей
JS или F* Зазоры отсутствуют. При снятии внешних сил реакции внешних
и внутренних связей обращаются в ноль.
Таблица 1§
Номер
варианта
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
/>,, кН
8
9
12
7
8
9
9
8
6
7
12
20
11
8
. 22
8
20
16
18
19
6
10
16
14
8
6
16
14
16
17
>2> кН
9
10
15
5
12
14
6
10
7
5
14
15
12
10
18
7
18
15
14
14
11
10
15
11
9
5
16
11
12
23
М, кН • м
10
12
20
13
16
8
10
12
8
14
6
23
16
12
20
10
24
20
12
18
15
11
9
20
18
7
20
15
14
18
q, кН/м
1,5
1
2
1,2
1
3
1,5
2
,8
,4 ,
12
1,5
1,8
1,2
2
2,8
3
2,5
1,8
2
3
2
1,6
1,6
2,5
1,9
2
1,7
Примечания
ЕК и iVF-нити
ЕК и JVF — нити
ЕК к NF- нити
ЕК и NF - нити
NF-нить
ЕК п NF- нити
?А" — нить
?# л Ni7— нити
№ - нить
ЕК и NF - нити
ЕК п NF- нити
Пример выполнения задания. Дано: схема конструкции (рис. 57);
Рх = 10 кН, Р2 = 3 кН, М = 20 кН. м, q = 1 кН/м.
Определить реакции опор А и В, а. также усилия во .внутренних
двусторонних связях (шарнирах С и D) и в односторонних связях (Я и F).
Решение. Так как в условии задачи отсутствует информация о том,
в какой из односторонних связей Е или F возникает реакция, необходимо
рассмотреть два случая.
1-й случай: RF = 0. В этом случае (рис. 58) элементы ED и АС
конструкции прижаты один к другому и, следовательно, направление реакции RE
будет таким, как показано на рис. 59. Связь F «не работает».
Сначала рассмотрим силы, приложенные к части АС конструкции
(рис. 59). Уравнения равновесия этой системы имеют следующий вид:
%М1С = 0; RE2 + М - ХА. 3 + 7^7 = 0; A)
Y, = 0;
YA + RE + Yc = 0.
C)
Затем запишем систему уравнений равновесия для сил, приложенных
к элементу CD (рис. 60):
51
pg 'd
a
g
Uy
01
pa
J
%
9
)
*
?
4
Ъ
z
Ш,
ь
^
a
з v
UUA/U
V
8
1
-*-»>
И
Ф
\
к
9
) 7^
0
\0? ¦
^ld
N>
¦*--«e—>>•«-
J N
? Z
J
ь
д
—
a
h
%
к
V :
'"S3
L ?
409i
о J
(Г
У :
> :
Id
)/ 3
J N
11
ем,
у///, В
J 2Ш?
«si!
С
г
—^-~
601
V,
V?.
2
4
?J
J 2
I
16
Ж
/7
cnj!
ж
L Р/\
f
С
f
ШШШШ1
E К
N F
В
v z
CM
CN
CSi
CM
c. 55
21
А
г
%г*
гЧ
7 7
22
с м/
Е7
В D
\F А. Г Р2
1-ши^
23
24
<А
А/^
А
1
i лл
/V,
J
Ч
4
2
A
JO
2
1
s
25
26
J
1
J
' r
c"
f
2
2
J
__l еч':'
.2 И
27
28
«ЛИ
^t
2 J
••о
А
в ъ
т
2
И
3
С
1 ?
1?Х?
J
Es
2
А60°
2
29
»^>
В
/V
2?
t1
/
2
А
'?¦ ^
г
к
А/
cm
60°
F N
я 3 а
Рис. 56
В г А\
¦
С
2
J
Уа
\
в1
1,
1
4Jti Ч Ч
2
Ус
Рис. 59
Рис. 57
ю
Рис. 60
Рис. 58
Рис. 61
т
,-0;
-УЬ-Ю-Р2.10 = 0; D)
X'c + XD = 0; E)
^У( = 0; УЬ + Ра+Ув=р. F)
Далее переходим к рассмотрению системы уравновешивающихся сил,
приложенных к элементу ED (рис. 61).
Уравнения равновесия сил, приложенных к этой части конструкции,
имеют следующий вид:
0в.6-е-1 + УЬ-2 = 0; G)
IX, = 0; Х'о + Хв - Pi cos 60° = 0; (8)
I Yt = 0; -Я'? - Pt sin 60° + YB - Q + TD = 0. (9)
Помимо уравнений равновесия A)—(9) запишем уравнения, выражаю-
щие равенство действия и противодействия в шарнирах С и D.
55
Для шарнира С
Для шарнира
У, = 0; Yc+Y'c = 0;
? У, = 0; YD + Y'D = 0;
?Х; = 0; ZD + Xb = 0.
Из уравнений A0)-A3) следует:
A0)
A1)
A2)
A3)
в следующем виде:
C= — *с> лс= -Ac, i D — "" * Z)> А/)— —Л/).
Учитывая это, а также Я>? = JR?, представим систему уравнений A)-(9)
Xc + Хд = 0;
^ + *? + Ус = 0;
10Ус - 10Р2 = 0;
A4)
- Ус + Р2 + YD = 0;
6R? 4- 6Pi sin 60° - Q • 1 - 2УЙ = 0;
-X/) + Xs - Pi cos 60° == 0;
-RE - Pi sin 60° + YB - Q - yD = 0.
Система линейных алгебраических уравнений A4) определяет истинные
значения всех искомых сил лишь при условии, что ее корень RE > 0.
2-й случай: RE = 0. В этом случае (рис. 62) элементы FD и CD прижаты
один к другому и, следовательно, направление реакции RF будет таким,
как показано на рис. 63 и 64 (R'F = RF). Связь Е «не работает».
Рассмотрим систему сил, приложенных к части АС конструкции
(рис. 65). Уравнения равновесия этой системы сил имеют следующий вид:
X MiC = 0; М + Уд. 7 - Хл • 3 = 0; A5)
?*, = (>; ХА + Хс = 0; A6)
Запишем уравнения равновесия сил, приложенных к элементу CD
конструкции (см. рис. 63):
, = 0; - Y'c • 10 - X'c • 1 - Р2 • 10 + Kf • 6 = 0;
У, = 0;
P2-Rf+Yd = 0.
A8)
A9)
B0)
Уравнения равновесия сил, приложенных к элементу FD (см. рис. 64):
= 0; 6РХ sin60° - RF4 - g. 1 + УЬ-2 = 0; B1)
X Zf = 0; Хв + X'D - Рх cos 60° = 0; B2)
*i = 0; Ув + Y'D - Q + RF - Pi sin 60° = 0. B3)
56
*
р2
г А_
с 1 А
\А6О*
f
3
D i
1
л
4 Y4 t ¦
i
Puc. 62
c. 65
.*.
1
Puc. 64
Puc. 65
n«..
4
Puc. 66
Учитывая и здесь результаты, вытекающие из уравнения A0) — A3),
перепишем систему уравнений A5)—B3) в следующем виде:
М +71^-3^ = 0; \
B4)
10Yc + ХС- ЮР2 + 6RF « 0;
-Xc + XD = 0;
- Ус + Pi - Rf + *Ъ = 0;
6Px sin 60° - 4RF - Q - 27^ = 0;
XB-XD- Pi cos 60° = 0;
YB - Yd ~ б + ^F - Pi sin 60° = 0.
Система линейных уравнений B4) определяет истинные значения всех
неизвестных лишь в случае, когда ее корень RF > 0.
Системы уравнений A4) и B4) с учетом значений Р, М и Q перепишем
в матричной форме:
АХХХ = В; B5)
А2Х2 = В. B6)
57
Здесь
-3700 0
10 0 0 О
0 10 0 О
0 0 0 0 О
0000 1
0 0 0 0 О
0 0 0 0 О
0 0 10-1
0 0 0 1 О
-3700
10 0 0
0 10 0
0 0 0 0
л2 = | о оооо
0 0 0 0
0 0 0 0
0 0 10
0 0 0 1
Системы B5) и B6) должны решаться совместно с неравенствами
«ключами», выбирающими систему уравнений равновесия. Если в процессе
решения системы B5) выясняется, что RE > 0, то уравнениями равновесия
рассматриваемой составной конструкции являются уравнения B5). Если же
оказывается, что RE < 0, то, следовательно, RF > 0, а поэтому уравнениями
равновесия являются уравнения B6).
Для решения полученных систем алгебраических уравнений можно
использовать метод Гаусса (метод последовательного исключения
неизвестных).
Блок-схема программы решений систем B5) и B6) совместно с
«ключами» представлена на рис. 66, где Фх — ввод исходных данных; Ф2 —
решение системы B5) методом Гаусса; Ф3 - если RE > 0, то переход к Ф4,
если же RE < 0, то переход к Ф6; Ф4 — печать результатов; Ф5 — конец
работы программы, Ф$ — решение системы B6) методом Гаусса.
Результаты расчета приведены в табл. 19.
Из таблицы видно, что реакция RF оказалась положительной. Это
означает, что при заданной схеме нагружения составной конструкции
«работает» связь F, а в связи Е усилие не возникает.
58
Таблица 19
Силы, кН
RF
9,949
*л
11,023
Хв
-6,023
11,023
Хс
-11,023
Уа
1,867
Ув
5,793
Yd
5,082
Ус
-1,867
Для проверки правильности произведенных расчетов следует убедиться
в том, что соблюдаются уравнения равновесия для сил, приложенных
ко всей конструкции:
? MiA = М + ?! sin 60° • 5 - Рх cos 60° • 4 - Р2.7 + YB • 1 + Хв • 4 - Q • 2 =
= 20+ 10.0,866-5- Ю-0,5'4-3.7 + 5,793-6,023.4-2-2 =
= 49,093 - 49,092 « 0;
? П = Ул + Ув + Р2 - Pi sin 60° - б = 1,867 + 5,793 + 3 - 8,66 - 2 =
= 10,66 - 10,66 = 0;
X Х{ = XA + XB-Pt cos 60° = 11,023 - 6,023 - 10 • 0,5 = 0.
РАЗДЕЛ ВТОРОЙ
КИНЕМАТИКА
I. КИНЕМАТИКА ТОЧКИ
Задание КЛ. Определение скорости и ускорения точки
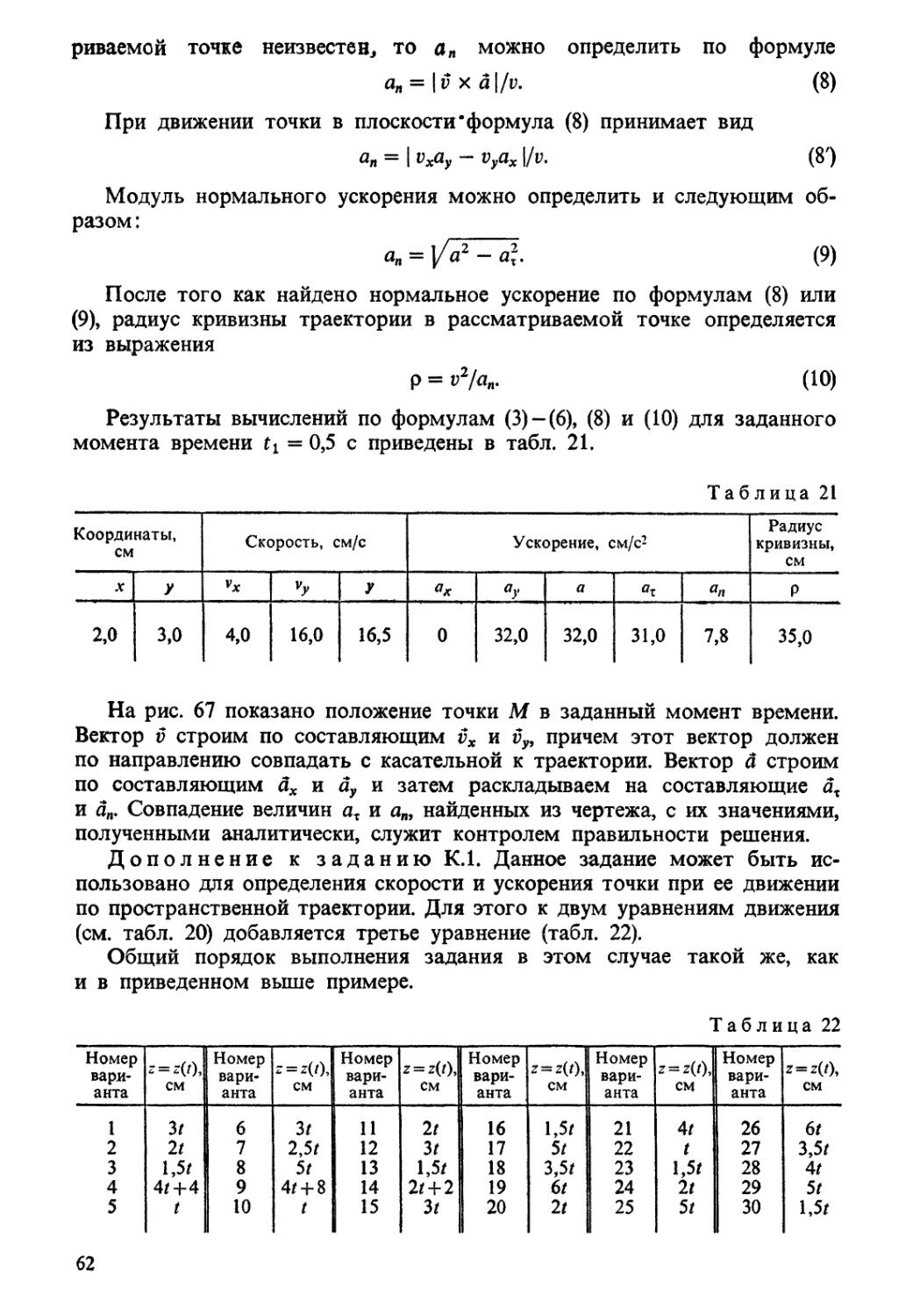
по заданным уравнениям ее движения
По заданным уравнениям движения точки М установить вид ее
траектории и для момента времени t = tt (с) найти положение точки на
траектории, ее скорость, полное, касательное и нормальное ускорения, а также
радиус кривизны траектории.
Необходимые для решения данные приведены в табл. 20.
Пример выполнения задания. Исходные данные:
tх = 0,5 (х и у - в см, г и ti - в с).
Решение. Уравнения движения A) можно рассматривать как
параметрические уравнения траектории точки. Чтобы получить уравнения
траектории в координатной форме, исключим время t из уравнений A).
Получаем у = х2 — 1, т. е. траекторией точки является парабола,
показанная на рис. 67.
Вектор скорости точки
v = vj+ vj. B)
Вектор ускорения
а = ахг + а/.
Здесь Г, /— орты осей х и у; vX9 vy, ax, ay — проекции скорости и ускорения
точки на оси координат.
Найдем их, дифференцируя по времени уравнения движения A):
vx = х = 4 см/с; ах = х = 0;
vy = у = 32t; ау = у = 32 см/с2. ( )
По найденным проекциям определяются модуль скорости:
и модуль ускорения точки:
60
Таблица 20
Номер
варианта
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Уравнения
x—x(t), см
-2/2 + 3
4соэ2(я//3) + 2
- cos (я/2/3)+ 3
4/+4
2 sin (я//3)
3/2+2
3/2-/+1
7 sin (я/2/6) + 3
-ЗД/+2)
—4 cos (я//3)
-4/2 + 1
5sin2'fr//6)
5 cos (я/2/3)
-2/-2
4 cos (я//3)
3/
7sin2(rc//6)-5
1+3 cos (я/2/3)
-5/2-4
2-3/-6/2
6 sin (я/2/6)-2
7/2-3
3-3/2 + 1
-4со8(я//3)-1
-6/
8cos2ft//6)+2
— 3—9sin(tt*2/6)
-4/2 + 1
5f2 + 5//3-3
2со8(я/2/3)-2
движения
y=y(t), см
-5/
4зт2(я//3)
sin (я/2/3)— 1
-4/(/+1)
-Зсов(я//3)+4
-4/
5/2-5//3-2
2-7 cos (я/2/6)
3/+6
-2sinft//3)-3
-3/
-5соз2(я//6)-3
-5 sin (я/2/3)
— 2/(/ + 1)
— 3sinft//3)
4/2 + 1
— 7 cos2 (я//6)
3sinfr/2/3) + 3
3/
3 - 3//2 - 3/2
6 cos (я/2/6)+3
5/
4—5/2 + 5//3
—4 sin (я//3)
-2/2-4
— 8 sin2 (я//6)—7
—9cosGtf2/6) + 5
-3/
3/2 + /+3
-2sin(*/2/3) + 3
Чг
1
1
2
1
Чг
1
1
2
1
Чг
1
1
2
1
Чг
1
1
1
0
1
Ча
1
1
1
1
[
Модуль касательного ускорения точки
ax=\dv/dt\, (в)
F')
или
dv/dt выражает проекцию ускорения точки на
направление ее скорости. Знак «+» при dv/dt
означает, что движение точки ускоренное,
направления ах и v совпадают; знак «—» —что
движение замедленное.
Модуль нормального ускорения точки
ап = v2/p. G)
Если радиус кривизны траектории р в рассмат-
У
6
у '
\'
\.
V
. I
' 1
¦ С"
; /
П
L
1
2 х
2см
0 2 4 6 8
..1 1 I I t I
0 5 10 15 20 25СМ/С1
5 0 5 10 15 20 25
hfrj » Г i i i
Puc. 67
61
риваемой точке неизвестен, то ап можно определить по формуле
an = \vxa\/v. (8)
При движении точки в плоскости'формула (8) принимает вид
ап = | Vxdy - vyax \/v. (8')
Модуль нормального ускорения можно определить и следующим
образом:
ап = J/V - al (9)
После того как найдено нормальное ускорение по формулам (8) или
(9), радиус кривизны траектории в рассматриваемой точке определяется
из выражения
Р = »2М, A0)
Результаты вычислений по формулам C)-F), (8) и A0) для заданного
момента времени tx = 0,5 с приведены в табл. 21.
Таблица 21
Координаты,
см
X
2,0
У
3,0
Скорость, см/с
4,0
vy
16,0
У
16,5
Ускорение, см/с2
0
ау
32,0
а
32,0
31,0
ап
7,8
Радиус
кривизны,
см
р
35,0
На рис. 61 показано положение точки М в заданный момент времени.
Вектор v строим по составляющим vx и vy9 причем этот вектор должен
по направлению совпадать с касательной к траектории. Вектор а строим
по составляющим ах и ау и затем раскладываем на составляющие ах
и ал. Совпадение величин ат и а„, найденных из чертежа, с их значениями,
полученными аналитически, служит контролем правильности решения.
Дополнение к заданию К.1. Данное задание может быть
использовано для определения скорости и ускорения точки при ее движении
по пространственной траектории. Для этого к двум уравнениям движения
(см. табл. 20) добавляется третье уравнение (табл. 22).
Общий порядок выполнения задания в этом случае такой же, как
и в приведенном выше примере.
Таблица 22
Номер
варианта
1
2
3
4
5
* = z(f),
см
3/
2/
1,5/
4/-Н4
/
Номер
варианта
6
7
8
9
10
Z = 2@,
СМ
3/
2,5/
5/
4/ + 8
/
Номер
варианта
11
12
13
14
15
г=2@,
см
2/
3/
1,5/
2/ + 2
3/
Номер
варианта
16
17
18
19
20
* = z@,
см
1,5/
5/
3,5/
6/
2/
Номер
варианта
21
22
23
24
25
2 = 2@,
см
4/
/
1,5/
2/
5/
Номер
варианта
26
27
28
29
30
z=z@,
см
6/
3,5/
4/
5/
1,5/
62
П. КИНЕМАТИКА ТВЕРДОГО ТЕЛА
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Задание К.2. Определение скоростей и ускорений
точек твердого тела при поступательном и вращательном движениях
Движение груза 1 должно описываться уравнением
х = c2t2 + cxt + с0,
A)
где t — время, с; со_2 — некоторые постоянные.
В начальный момент времени (t = 0) координата груза должна быть
х©, а его скорость — v0.
Кроме того, необходимо, чтобы координата груза в момент времени
t = t2 была равна х2.
Определить коэффициенты с0, сх и с2, при которых осуществляется
требуемое движение груза 1. Определить также в момент времени t = 11
скорость и ускорение груза и точки М одного из колес механизма.
Схемы механизмов показаны на рис. 68 — 70, а необходимые данные
приведены в табл. 23.
Таблица 23
Номер
ваоианта
(рис.
68-70)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Радиусы, см
R2
60
80
100
58
80"
100
45
35
40
15
40
20
30
15
15
20
15
20
15
25
20
40
40
30
50
32
40
40
25
30
45
_»
60
45
—
60
35
10
30
—
25
15
20
10
10
15
10
15
10
15
10
20
30
15
20
16
18
20
20
15
36
60
75
60
45
30
105
10
15
40
20
10
40
15
15
15
20
10
20
10
30
35
30
40
60
32
40
40
50
20
45
_
30
—
—
35
—
__
—
—
—
—
—
—
10
—
15
20
__
16
18
15
25
-
Координаты и скорости
груза 1
х0, см
2
5
8
4
3
7
8
6
10
5
9
5
7
6
5
4
8
3
5
10
6
7
5
9
8
6
5
8
4
10
Vq, СМ/С
12
10
6
4
15
16
5
2
7
3
8
10
0
3
2
6
4
12
10
8
5
6
9
8
4
14
10
5
6
7
*2, СМ
173
41
40
172
102
215
124
111
48
129
65
179
557
80
189
220
44
211
505
277
356
103
194
105
119
862
193
347
32
128
Расчетные
моменты
времени, с
h
3
2
4
4
3
4
4
3
2
4
2
3
5
2
4
4
2
4
5
3
5
2
3
4
3
4
2
3
2
2
'i
2
1
2
3
2
2
3
2
1
3
1
2
2
1
2
3
1
1
3
1
2
1
2
2
2
2
1
2
1
1
63
м
м
м
\х
м
Рис. 68
12
14-
15
и
17
Рис. 69
23
25
29
Рис. 70
Пример выполнения задания. Дано: схема механизма (рис. 71); R2
= 50 см, гг = 25 см, R3 = 65 см, г3 = 40 см, х0 = 14 см, v0 = 5 см/с, х2
= 168 см, tt = 1 с, t2 = 2 с.
66
Найти уравнение движения
груза, а также скорости и
ускорения груза и точки М в
момент времени t = 1Х.
Решение. Уравнение
движения груза 1 имеет вид
x-ca^ + cxf + co. A) ^ Рис. 71
Коэффициенты с0, сх и с2 могут быть определены из следующих
условий:
при г = О х0 = 14 см, х0 = 5 см/с, B)
при ^2 = 2с х2 = 168 см. C)
Скорость груза /
v = х = 2c2t + ct. D)
Подставляя B) и C) в формулы A) и D), находим коэффициенты
с0 = 14 см, Сх = 5 см/с, с2 = 36 см/с2.
Таким образом, уравнение движения груза 1
х = 36r2 + St + 14. E)
Скорость груза 2
I, = х = 72Г + 5. F)
Ускорение груза 1
а = х = 72 см/с2.
Для определения скорости и ускорения точки М запишем уравнения,
связывающие скорость груза v и угловые скорости колес <о2 и ю3*
В соответствии со схемой механизма
v = r2a>2; |
R2<o2 = о - г G)
откуда
или с учетом F) после подстановки данных
(о3 = 2,215* + 0,154.
Угловое ускорение колеса 3
s3 = ю3 = 2,215 рад/с2.
Скорость точки М, ее вращательное, центростремительное и полное
ускорения определяются по формулам
= ^з»з;
Результаты вычислений
для заданного момента
времени ti = 1 с приведены
в табл. 24.
Скорости и ускорения
тела 1 и точки М
показаны на рис. 72.
Таблица 24
v, см/с
77
а, см/с2
72
оо3, рад/с
2,37
е3, рад/с2
2,22
vM, см/с
94,8
«А/, см/с2
224
«Jf» СМ/С2
88,6
Лд/, СМ/С2
241
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Задание К.З* Кинематический анализ плоского механизма
Найти для заданного положения механизма скорости и ускорения точек
В и С, а также угловую скорость и угловое ускорение звена, которому
эти точки принадлежат. Схемы механизмов помещены на рис. 73 — 75,
а необходимые для расчета данные приведены в табл. 25.
Таблица 25
Номер
варианта
(рис.
73-75)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
.23
24
Размеры, см
ОА
40
30
—
35
25
40
35
—
—
25
—
25
45
40
55
—
10
20
—.
30
35
25
г
15
15
50
—
_
15
—
—
—
—
_
__
15
15
20
30
_
15
_
—
—
-
АВ
_
—
75
20
45
80
30
30
55
—
—
10
—
20
60
60
60
35
АС
8
8
45
20
6
60
10
30
20
15
20
40
8
8
—
10
5
10
6
15
40
20
15
«ОА»
рад/с
2
3
4
1
1
5
—
—
1
2
3
1
2
—
2
1
_
3
4
_
2
соь
рад/с
—
1
—
—
_
__
12
—
2,5
—
-
рад/с2
2
2
—.
8
1
0
10
—
—
2
4
0
1
5
6
0
8
10
3
vA, см/с
50
—
—
40
20
10
20
_
—
80
10
_
5
—
а^ см/с2
100
20
10
0
20
—
50
_
15
__
10
-
68
Номер
варианта
(рис.
73-75)
25
26
27
28
29
30
Размеры, см
ОА
20
20
20
12
40
г
15
15
—
—
АВ
70
—
_
50
35
—
АС
20
10
5
25
15
2Q
<0ОА,
рад/с
1
2
—
1
4
5
щ
рад/с
—
1,2
—
—
—
—
Продолжение
рад/с2
2
0
—
1
6
10
v^ см/с
—
—
60
—
—
табл. 25
аАь см/с2
-
—
30
—
—
Примечание. (Oqa и еоа — угловая скорость и угловое ускорение
кривошипа О А при заданном положении механизма; щ — угловая скорость колеса /
(постоянная); vA и я^ — скорость и ускорение точки А. Качение колес
происходит без скольжения.
Пример выполнения задания. Дано: схема механизма в заданном
положении (рис. 76); исходные данные (табл. 26).
Таблица 26
Размеры, см
ОА
10
АВ
60
АС
20
©ОЛ» Рад/с
1,5
Сол, рад/с2
2
Решение. 1. Определение скоростей точек и угловой скорости звена
(рис. 77). Вычисляем модуль скорости пальца А кривошипа ОА при
заданном положении механизма:
"а = ®оа • О А.
Скорость точки А перпендикулярна кривошипу ОА. Скорость ползуна
В направлена по вертикали. Мгновенный центр скоростей РАВ шатуна АВ
находится в точке пересечения перпендикуляров, проведенных из точек А*
и В к их скоростям.
Угловая скорость звена АВ
СРАВ.
Расстояния АРАВ9 ВРАВ и СРАВ определяются из рассмотрения
треугольников АВРАВ и АСРАВ:
АРАВ = 52,0 см; ВРАВ = 30,0 см; СРАВ = 36,1 см.
В соответствии с этим vA = 15,0 см/с; &АВ = 0,29 рад/с; vB = 8,7 см/с;
гс = 10,5 см/с.
Вектор ?с направлен перпендикулярно отрезку СРАВ в сторону,
соответствующую направлению вращения звена АВ.
69
Модули скоростей точек В и С
• ВРАВ; vc
FZ '
8L
УуУуУУУуУУУУ/УУУ/////У////////
11
12
-¦С
13
f/7//b?, ' "
/S
17
19
20
'зо9
Рис. т
21
А С
-Т20"
22
с ВЛ
/
23
С--
25
26
27
28
29
30
1
Рис. 75
Рис. 76
Рис. 77
Для проверки определим скорость точки В другим способом.
Воспользуемся теоремой о равенстве проекции скоростей точек на ось,
проведенную через эти точки.
Направим ось х вдоль шатуна АВ в направлении от В к А,
Имеем vA cos (vA, х) = vB cos (vB, x), или, как видно из рис. 77,
vA cos 60° = vB cos 30°.
Отсюда
vB = 8,7 см.
Полезно убедиться, что и найденная ранее скорость точки С
удовлетворяет этой теореме.
2. Определение ускорений точек и углового ускорения звена (рис. 78).
Ускорение точки А складывается из вращательного и центростремитель-
Рис.
73
ного ускорении:
&л = а\ + а\ ; а\ = еа4 • ОЛ; яцл = ш20/1 • ОА.
Согласно теореме об ускорениях точек плоской фигуры,
ав = а4 + яв4В + а*АВ,
или
Центростремительное ускорение точки В во вращательном движении
шатуна АВ вокруг полюса А
По приведенным формулам вычисляем:
а\ = 20,0 см/с2; а^ = 22,5 см/с2; я«в = 5,0 см/с2.
Вектор d^ направлен от Л к О. Вектор <?А перпендикулярен вектору &\
и направлен противоположно vA (вращение кривошипа О А —
замедленное).
Вектор а\в направлен от В к Л. Что касается $*скорения ав точки В
и вращательного ускорения д^в, то известны только линии действия этих
векторов: ав — по вертикали вдоль направляющих ползуна, а*АВ —
перпендикулярно АВ.
Зададимся произвольно их направлениями по указанным линиям
(рис. 78, а). Эти ускорения определим из уравнений проекций векторного
равенства (i) на оси координат. Знак в ответе показывает, соответствует ли
истинное направление вектора принятому при расчете.
Выбрав направление осей х и у, как показано на рис. 78, а, получаем:
ав cos 39° = -аъА cos 60° + ац4 cos 30° + ацАВ; B)
ав cos 60° = а\ cos 30° + а\ cos 60° + авАВ. C)
Из уравнения B) находим
ав = 16,7 см/с2.
Ускорение % направлено, как показано на рис. 78, а.
Из уравнения C) получаем
,а\в = -20,2 см/с2.
Направление Л^в противоположно показанному на рис. 78, а.
Ускорение ав и все его составляющие с учетом их истинных
направлений и масштаба показаны на рис. 78, б.
Угловое ускорение шатуна АВ с учетом того, что здесь а\в —
алгебраическая величина, определяется по формуле
*ав = I <?АВ \/АВ.
Вычисляя, находим
гпв = 0,34 рад/с2.
Направление ускорения а3АВ относительно полюса А определяет
направление углового ускорения еАВ. Здесь под направлением углового ускоре-
74
ния понимается направление дуговой стрелкиу которое при» ускоренном
вращении звена совпадает е направлением* его» вращения, а при
замедленном — противоположно ему. В данном случае узловое ускорение
противоположно направлению; вращения* шатуна.
Определить ав и с?АВ можно и графически — построением
многоугольника ускорений.
Отложим из точки В согласно A) в выбранном масштабе
последовательно векторы а*А, апА и а\в (рис. 78, в). Через конец вектора 3*АВ:
проведем прямую, параллельную вращательному ускорению о^в, т. е.
перпендикулярно АВ, до пересечения ее с прямой, по которой направлено
ускорение ав.
Последнее определяется как замыкающая сторона многоугольника
ускорений.
Модули ав и а\в могут быть найдены измерением на чертеже.
Определяем ускорение точки С:
Вращательное и центростремительное ускарения точки С во
вращательном движении АВ вокруг полюса А
или
а*АС = 6,8 см/с2; ацАС = 1,7 ем/с2.
Вектор сРАС перпендикулярен вектору о^с и направлен соответственно
угловому ускорению гАВ.
Ускорение точки С находим способом проекций (рис. 78, а):
аСх = апАС + ацА cost 30я - аъА cos 60°,
аСу = а\ cos 60° + а\ cos 30° - а^о
В результате вычислений получаем: аСх = 14,2 см/с2; aCv = 21,& см/с2;
ас = 24,5 см/с2 (рис. 78, г).
Приведем решение этой же задачи другим*
более общим методом*
На рис. 79 показана схема механизма ц
некотором произвольном положении.
Проведем оси координат. Уравнениями
связи для данного механизма* являются условия
(fB - радиус-вектор точки В, проведенный из
центра 0),
E)
хв
¦ const.
Проецируя D), на ось х, с учетом E) имеем
— О А • sin а + АВ • sin J3 = а. F)
Biul.7.9
Для определения угловой скорости звена АВ ®АВ = C и углового
ускорения гАВ = $ нет необходимости выражать р из F). Проще
непосредственно дважды продифференцировать F).
Имея в виду, что d = соол> получаем в результате первого
дифференцирования
— О А • cos а • (йол + ЛВ • cos р • соАВ = 0. G)
Отсюда
®ав = ®оа * О A cos ос/(ЛБ • cos Р). (8)
Дифференцируя G) и учитывая, что ю^л = ?ол> имеем
ОЛ • sin а • @%А — О А • cos а • ?ол — ЛЛ • sin Р • со^в + 4? • cos P • гАВ = 0;
еля = <°лв tg Р + ОЛ (еол cos а - ®%А sin ос)/(ЛБ • cos P). (9)
Выражения (8) и (9) позволяют вычислять а>АВ и еАВ для любого
положения механизма, в частности для заданного (а = 0°, р = 30°).
Заметим, что а>0А и г0А входят в эти выражения со знаком « + » или
« —» в соответствии с принятым направлением отсчета угла а. В данном
случае (оОа= 1>5 рад/с, г0А — —2,0 рад/с2. Смысл знаков <оАВ и гАВ
определяется направлением отсчета угла р.
Модуль скорости точки В vB = | ув |. Модуль ускорения ав — \ув |.
Проецируя D) на ось у, получаем
ув = О Л • cos a + АВ • cos p.
Отсюда после дифференцирования получаем
ув = — ОЛ • sin а • (й0А — АВ • sin р • солв;
Й = — О А • cos а • ШоЛ — 04 • sin а • еол — АВ • cos р • со ^ — Л? • sin Р • еАВ.
Для определения скорости и ускорения точки С следует составить
уравнения выдвижения в координатной форме, проецируя радиус-вектор
гс = О А + ЛС на оси х иу.
Задание К.4. Кинематический анализ
многозвенного механизма
Кривошип ОХА вращается с постоянной угловой скоростью щгА =
я=2 рад/с. Определить для заданного положения механизма:
1) скорости точек Л, В9 С, ... механизма и угловые скорости всех его
звеньев с помощью плана скоростей;
2) скорости этих же точек механизма и угловые скорости звеньев
с помощью мгновенных центров скоростей;
3) ускорения точек А и В и угловое ускорение звена АВ;
4) положение мгновенного центра ускорений звена АВ;
5) ускорение точки М, делящей звено АВ пополам.
Схемы механизмов показаны на рис. 80-83, а необходимые для
расчета данные приведены в табл. 27.
76
Таблица 27
Номер
варианта
(рис.
80-83)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Ф.
град
200
60
90
155
125
60
250
90
200
20
50
55
315
0
220
40
145
45
40
145
115
305
130
115
325
215
140
215
180
25
Расстояния, см
а
18
56
15
26
19
65
11
27
23
55
50
10
17
28
46
36
96
70
42
27
46
46
31
36
72
36
71
30
35
46
Ь
23
10
25
15
19
49
42
18
19
21
30
86
54
40
31
22
9
39
24
—
23
30
39
36
53
27
20
15
28
с
18
26
54
23
10
_
11
14
20
25
—
32
_
6
_
15
__
37
—
30
—
11
50
13
_
36
32
35
38
17
d
22
16
35
—
22
_
7
15
28
_
—
28
18
—
—
—
31
_
32
40
—
7
—
е
23
25
—
—
—
24
30
21
—
—
—
15
—
—
—
—
—
—
—
—
—
14
21
15
15
12
15
16
14
21
15
14
21
15
15
15
15
15
16
20
20
15
15
15
17
15
19
16
19
10
16
О2В
28
25
28
65
—
29
34
29
31
_
29
31
20
20
28
_
_
50
—
15
30
23
—
40
30
—
16
25
O2D
—
19
—
—
—
24
_
40
—
40
—
39
20
—
45
—
—
30
—
—
19
—
Длина
ObD
28
_
58
—
24
—
23
25
—
55
_.
15
20
—.
—
—
38
50
17
_
_
50
_
15
75
O,F
__
20
—
—
—
41
—
—
—
—
—
25
_
30
—
—
_
—
—
19
—
—
—
звеньев, см
АВ
21
54
42
51
55
50
25
55
65
70
45
60
50
50
45
45
84
78
71
80
78
44
40
35
76
76
46
59
50
50
ВС
21
52
21
22
19
25
25
32
62
35
54
30
35
25
15
20
20
38
30
32
39
25
16
11
46
38
33
29
33
11
CD
48
69
47
38
23
32
42
15
31
33
34
19
40
70
31
24
51
41
—
58
26
30
60
45
50
68
40
24
16
33
СЕ
38
35
26
_
__
23
21
—
—
60
22
35
17
19
—
29
52
22
30
25
35
35
20
—
—
—
DE
—
—
—
38
—
—
45
11
17
37
—
22
—
17
40
_
57
—
—
15
25
—
_
—
48
45
26
EF
42
32
31
—
22
39
49
—
29
12
49
50
50
37
—
—
57
—
35
38
40
30
44
51
29
50
36
33
44
Пример выполнения задания. Дано: 1) схема механизма в заданном
положении (рис. 84); 2) исходные данные (табл. 28).
Таблица 28
ф.
град
52
Расстояние, см
а
32
е
4
с
39
d
19
е
32
Длина звеньев, см
О\А
12
АВ
46
AD
29
O2D
32
DE
53
ОЪЕ
18
FG
25
GH
14
FH
14
O4G
20
Решение. 1. Определение скоростей точек и угловых ускорений
звеньев механизма с помощью плана скоростей.
а) Определяем скорости точек. Строим схему механизма в выбранном
масштабе (рис. 85). Вычисляем модуль скорости точки А кривошипа ОХА:
vA = cdOiA • OtA = 2 • 12 = 24 см/с.
77
АЕ^АВ
8
03C=03D
Рис. 80
Jk В
11
15
Рис. 81
в о2с=о2в
Рис. 82
25
п
28
/i \
!\ d/'
Тле
29
Рис. 83
Вектор vA перпендикулярен OtA
и направлен в сторону вращения
Е кривошипа.
Строим план скоростей. Из
(|? произвольно выбранного полюса О
-^проводим луч Юа, изображающий
в выбранном масштабе скорость
точки А. Для определения
скорости точки В через полюс О
проводим прямую, параллельную
скорости vB, через точку &-~
прямро, перпендикулярную АВ.
Получаем точку Ь; «хрезок ОЬ
определяет скорость точки В.
Измеряем длину луча ОЬ и,
пользуясь масштабом скоростей,
находим vB =t 17,5 см/с.
Для определения скорости точки С делим отрезок аЪ плана скоростей
в отношении ac/cb = АС/СВ.
Луч Ос изображает скорость точки С. Пользуясь масштабом
скоростей, получаем
vc — 17,5 см/с.
Продолжая построение плана скоростей находим па, Vb> vc, vd9 ve, vf,
Qg, vh (табл. 29).
Рис, 84
Способ определения
По плану скоростей
С помощью мгновенных
центров скоростей
Таблица 29
24
24 «
Скорости -
17,51 17,5 | 17,5
, 17,3 | 17,5 1 ПА ,
гочек, см/с
17,5
44.
17,5
13*4-
14,8,
14,6
14,4
Рис, 85
5 0 5 W4M/C
...л t i
82
На чертеже механизма концы векторов скоростей точек
прямолинейного звена (например, А, В, С или D, Е) находятся на одной прямой.
б) Определяем угловые скорости звеньев механизма. Отрезок ab плана
скоростей выражает вращательную скорость точки В вокруг точки А:
отсюда угловая скорость звена АВ
аАВ = ab/AB = 19,5/46 = 0,424 рад/с.
Аналогично определяются угловые скорости звеньев AD, DE, FGH:
(о AD = ad/AD;
<&de = de/DE;
cofgh = fg/FG.
Угловую скорость (oFGH можно определить также из соотношений
Угловая скорость звена O2D определяется по вращательной скорости
точки D вокруг неподвижного центра О2*.
®o2D = vD/O2D.
Аналогично определяются угловые скорости звеньев ОЪЕ, O^G:
Вычисленные по этим формулам угловые скорости приведены в табл. 30.
Таблица 30
Способ
определения
По плану скоростей
С помощью
мгновенных центров
скоростей
Угловые скорости звеньев, рад/с
АВ
0,424
0,421
AD
0,500
0,505
DE
0
0
O2D
0,547
0,544
ОзЕ
0,972
0,967
FGH
0,272
0,278
O4G
0,740
0,730
2. Определение скоростей точек и угловых скоростей звеньев
механизма с помощью мгновенных центров скоростей.
а) Определяем положения мгновенных центров скоростей звеньев
механизма. Строим схему механизма в выбранном масштабе (рис. 86). Звенья
ОХА, O2D9 ОЪЕ, O±G вращаются вокруг неподвижных центров Оь О2, О3> 04.
Мгновенный центр скоростей РАВ звена АВ находится как точка
пересечения перпендикуляров, проведенных из точек Л и Б к их скоростям.
Аналогично определяется положение мгновенных центров скоростей PAD
и Pfgh- Мгновенный центр скоростей звена DE находится в бесконечности.
б) Определяем скорости точек. Скорости точек звеньев механизма
пропорциональны расстояниям от этих точек до мгновенных центров
скоростей соответствующих звеньев.
83
Эти расстояния измеряются на чертеже.
Для определения скоростей точек В и С звена АВ имеем пропорции
ЛРАВ/ВРАВ; vA/vc /CP
Следовательно,
vc^Va- CPab/APab.
Аналогично, для точки D звена AD
vjvo = APAD/DPAD9
откуда
vD = vA- DPAD/APAD.
Так как мгновенный центр скоростей звена DE находится в
бесконечности, то vE = vp = t??>.
Для определения скоростей точек G и Я имеем пропорции 1^/|>с =
= FPFGH/GPFGH; vF/vH = FPFGH/HPFGH.
Следовательно,
vG = vF- GPFGH/FPFG№ ; ид = i?r • HPFGH/FPFGH.
Пользуясь масштабом длин, определяем расстояния от точек до
мгновенных центров скоростей.
Эти расстояния (в см) приведены в табл. 31.
Скорости точек, вычисленные по указанным формулам, приведены в
табл. 29.
Одновременно с определением модулей скоростей точек находим их
направления, а также направления
вращений звеньев механизма.
Например, по направлению скорости точки
А и положению мгновенного центра
скоростей РАВ устанавливаем, что
вращение звена АВ происходит по часо*
Рис. 87
АРлв
57
врав
41
СРав
41,5
APad
47,5
DPad
34,5
FPfgh
62,7
Таблица 31
GPfgh
52,8
UPfgh
50,8
вой стрелке. Поэтому скорость точки В при данном положении
механизма направлена вверх.
Аналогично определяем направления вращений остальных звеньев и
направления скоростей точек механизма (рис. 86).
в) Определяем угловые скорости звеньев механизма. Скорость любой
точки звена равна произведению угловой скорости этого звена на
расстояние от точки до мгновенного центра скоростей:
Va = ®ав • ЛРАВ = o>AD • APAD.
Отсюда определяем угловые скорости звеньев АВ и AD:
(оАВ = Va/APab; (had = va/APad.
Угловая скорость звена O2D определяется по скорости точки D:
vD/O2D.
Угловая скорость звена DE при данном положении механизма равна
нулю, так как мгновенный центр скоростей звена в этом случае находится
в бесконечности: ©?,? = 0.
Аналогично определяем угловые скорости остальных звеньев механизма:
со0з? - vE/OzE;
®fgh = Vf/FPFGH;
®0<G = VG/04G.
Угловые скорости звеньев, вычисленные по указанным соотношениям,
приведены в табл. 30.
3, Определение ускорений точек А, В, D и угловых ускорений звеньев
АВ и BD *.
а) Определяем аАу ав и гАВ (рис. 87). С помощью теоремы об ускорениях
точек плоской фигуры определяем ускорение "точки В:
«в = dA + &A8 + а^.
Так как кривошип О±А вращается равномерно, то ускорение точки А
направлено к центру Ох и равно
пА = й = OiA'G>biA = 1222 = 48 см/с2.
Центростремительное ускорение точки В во вращательном движении
шатуна АВ вокруг полюса А направлено от точки В к точке А и равно
a% = АВ • ©is = 46 • 0,42 = 7,36 см/с2.
* Условие задания предусматривает определение ускорений точек А, В и
углового уекорения звена АВ. Однако в примере определяются также ускорение
точки D и угловое ускорение звена AD в соответствии с двумя случаями,
встречающимися в задачах такого типа.
85
Откладываем от точки В в соответствующем масштабе ускорение
полюса аА. Из конца вектора аА строим вектор а%, проводя его
параллельно ВА1 Через конец вектора dfo проводим прямую,
перпендикулярную- В А, т. е. параллельную вращательному ускорению я^. Точка
пересечения этой прямой с прямой, по которой направлен вектор ускорения
ползуна В9 определяет концы векторов» ав и <%в<*
Измерением на чертеже получаем ав = 39 см/с2; dfo = 3% ем/е2.
Таю как а^= AB^eABi то угловое ускорение звена АВ
?лв = а%/АВ = За/46 = $652 рад/с2.
§) Определяем а® at ba& (рис. 8&)i Точка D принадлежит двум» звеньям:
AD и O2D. Взяв за пшюс точку А, получаем
Ускорение точки А найдена выше: аА = 4%
Центростремительное, ускорение точки D во вращательном движении
звена AD вокруг полюса А направлено от точки D к точке А и равно
а% = AD • (й2^ = 28,5 • СГ,52 = 7,1 см/с2.
Откладываем из точки D в соответствующем масштабе ускорение
полюса ф*. Из конца? вектора аА строим вектор о^в, иооводя: его параллельно
DA. Через конец вектора ацАВ проводим прямую JK перпендикулярно DA,
т. е. параллельно вращательному ускорению uBAD. Однако определить
ускорение а& этим построением невозможно,, так. как его направление: неизвестно.
Чтобы найти ускорение точки J>, необходимо выполнить второе
построение, рассматривая эту точку как принадлежащую звену O2D. В этом случае
&D = Oft + Of>.
Центростремительное ускорение точки D
аЪ = 02D • cob2D = 8 см/с2.
Откладываем от точки D вектор dg, направив его к центру О2. Через конец
вектора og проводим прямую LN перпендикулярно О2Д т. е. параллельно
вращательному ускорению о|>.
Точка пересечения этой прямой с JK определяет концы векторов
а% и ЗЬ.
Измерением на чертеже получаем aD •= 42 см/с2; а% = 30 см/с2.
Так как а% = AD • zAD, то угловое ускорение звена AD
sad = aW^D = 30/29 = 1,03 рад/с2.
4. Определение положения мгновенного центра ускорений звена АВ
(рис. 89). Примем точку А за полюс. Тогда ускорение точки В
Строим параллелограмм ускорений при точке В по диагонали а5 и
стороне аА. Сторона параллелограмма алв выражает ускорение точки В
во вращении АВ вокруг полюса А. Ускорение аАВ составляет с отрезком
АВ угол а, который можно измерить на чертеже.
Направление вектора а% относительно полюса А позволяет
определить направление гАВ, в данном случае соответствующее направлению
вращения часовой стрелки. Отложив угол а от векторов аА и ав в этом
направлении и проводя две полупрямые, найдем точку их пересечения
QAB — мгновенный центр ускорений звена АВ.
5. Определение ускорения точки М. Найдем ускорение точки М с
помощью мгновенного центра ускорений.
Ускорения точек плоской фигуры пропорциональны их расстояниям
до мгновенного центра ускорений:
ам/аА =
Подставив расстояния, определенные по чертежу, MQAB = 67,5 см,
= 77 см, получим ускорение точки М:
*м = аА • MQab/AQm = 48 • 67,5/77 = 42Д см/с2.
Ускорение ам составляет с прямой MQAB угол а; направление этого
вектора соответствует угловому ускорению гАВ.
СФЕРИЧЕСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Задание К.5. Определение кинематических характеристик
движения твердого тела и его точек по уравнениям Эйлера
Заданы уравнения сферического движения твердого тела ф = \[г(Д 8 =
= 9^) и <р = <р (t), где vj/, 9 и ф — углы Эйлера (рис. 90).
Определить для момента времени t = tt угловую скорость и угловое
ускорение тела, а также скорость и ускорение тпочки М, координаты
которой в подвижной системе, жестко связанной с телом, ?, т|, ?.
Необходимые данные приведены в табл. 32.
Пример выполнения задания. Исходные данные,: \|/ = 2t2 4- 3t рад,
9 = тс/6 рад, ф = 24t рад, \ = 3 см, ц = 2 см, ? = 5 см, tt = 1 с.
Решение. 1. Определение угловой скорости тела. Проекции угловой
скорости тела на подвижные оси координат определяются по следующим
$7
Таблица 32
Номер
варианта
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Уравнения движения тела
ф=ф(О, рад
3/2+6/
2/
-4/
2*2+3/
4/2
3/
4/2-2/
/2+4/
-3/2+2/
5/
-2/
2/2-4/
3/2+2/
-3/
-4/2+3/
2/
-2/2+5/
4/2+3/
/2-2/
4/
-5/
-2/2-2/
3/2-2/
2/
-/
3/
-3/2+4/
-5/
/
-3/
в=в(О, рад
я/3
(п/6) sin 2/
(я/4) cos 3/
я/6
-я/4
-(я/3) cos 4/
я/4
я/3
я/6
(я/3) cos 2/
(я/4) sin 3/
-я/4
-я/3
(я/6) sin 8/
я/4
(я/3) cos 6/
я/5
Ф
-я/6
(я/5) cos 3/
(я/4) sin 6/
-я/5
я/4
-(я/5) sin 3/
(я/9) cos 8/
(я/3) sin 2/
-я/9
-(я/3) sin 3/
(я/4) cos 6/
(я/6) cos 4/
Ф=Ф@, рад
4/
25/
15/
-2/
20/
6/
-20/
18/
30/
10/
-12/
15/
24/
-30/
16/
3/
5/
25/
-4/
18/
12/
2/
-5/
-30/
18/
10/
5/
8/
9/
-15/
Координаты
точки М, см
2
3
4
-2
3
2
6
7
-4
5
4
-6
3
10
9
6
1
7
5
-3
8
4
-5
10
7
-2
8
4
7
6
П
5
1
-3
4
2
3
2
4
5
3
4
10
-4
5
8
3
5
4
2
6
-1
7
8
4
1
9
-2
6
8
m
4
2
5
4
-3
2
3
1
3
3
4
2
5
3
5
10
-2
4
3
1
10
3
4
-6
5
3
6
-2
10
5
•1» ^
1
2
1
3
2
1
0,5
1
2
0,5
2
1
0,5
1
2
1
1
0,5
2
2
1
4
3
1
2
1
2
2
3
1
формулам:
о>? = \j/ sin 9 sin ф + 9 cos <p;
сол = \jf sin 9 cos ф — 9 sin ф;
(o; s \j/ cos 9 4- ф.
Используя исходные данные, находим;
е>4 = D/ + 3H,5 sin 24/;
сос=: D/ + 3H,866 + 24.
Проекции угловой скорости на неподвижные оси координат:
юх « ф sin \|/ sin 0 + О cos \|/;
сэу = — ф cos \|/ sin 9 + 9 sin v|/;
со2 = ф cos 9 + \jf,
A)
или в данном случае
<ох = 24-0,5 sinBt2 +30;
(оу = -24 • 0,5 cos (It2 + 30;
B)
&z = 24.0,866 + At + 3.
Для определения угловой
скорости тела при tx = 1 с
предварительно вычисляем:
sin 24r = sin 24 = sin (%n - 1,133)
= sin (-1,133)= -0,906;
cos 24t = 0,424; pUc. 90
sin B*2 + 30 = sin 5 = sin B% - 1,283) = sin (-1,283) = -0,959;
cos Bt2 + 30 = 0,284.
Тогда согласно A) и B) в результате вычислений получаем (рад/с):
щ = -3,17; соп = 1,48; юс = 30,1;
сох = -11,5; соу = - 3,41; ю2 = 27,8.
Модуль угловой скорости
3 + <»?,
ИЛИ
G)
-и
co2
Можно определить модуль угловой скорости, минуя вычисление ее
проекций на оси координат, по формуле
со
б2 + \|/2 + 2\H>cos&
По любой из этих формул находим
со = 30,3 рад/с.
Направление угловой скорости, а следовательно, и мгновенной оси
вращения тела можно определить направляющими косинусами, например
cos
Совершенно аналогичны формулы для других направляющих
косинусов.
В результате вычислений получаем:
в подвижной системе координат
cos (Й, %) = -0,105; cos (Й, ц) = 0,049;
в неподвижной системе
cos(o&, х) = -0,380; cos(c5, у) = -0,113;
cos F5, 0 = 0,993;
cos(c5, z)=
2. Определение углового ускорения тела. Проекции углового ускорения
тела на подвижные оси координат определяются следующим образом:
89
В соответствии с A)
s^ = 2 sin 24* + B* + 1,5) 24 cos 24*;
en = 2 cos 24* - {It + 1,5) 24 sin 24*;
e; = 3,46.
Проекции углового ускорения на неподвижные оси координат:
гх = (Ьх; гу = со,; ег = ю2
В соответствии с B)
3)sinB*2 + 3*);
8S=4.
При *i = 1 с находим (рад/с2):
8^ = 33,8; еп = 76,9; 8^3,46;
ех = 23,9; гу = -80,5; е2 = 4.
Модуль углового ускорения
8 = |/е| + е2 + е2,
или
е = 1/е2 + е2 + в2.
По любой из этих формул,
8 = 84,1 рад/с2.
Направление углового ускорения определяется направляющими
косинусами.
В подвижной системе координат
cos (Г, Q = 0,402; cos (Г, >ц) = 0,914; cos (ё, Q = 0,041.
В неподвижной системе координат
cos(Г, х) = 0,284; cos(Г, У) = -0,957; cos(Г, z) = 0,048.
3. Определение скорости точки М(^, r\9 Q. Проекции скорости точки
на подвижные оси координат определяются по формулам
Для момента времени tt = 1 с и заданных значений ?, г\> ? имеем (см/с):
^ = - 52,8; vn =* 106,2:; ^ = -1®,/7.
Модуль скорости точки
v = /У1 + ^п + »?•
Вычисляя, находим t; = 119 см/с.
Направляющие косинусы: cojs.( у, ^) = -0,444; cos (v, r|) = 0,892; cos (?,?)=»
= - 0;09В.
4. Определение ускорения точки М (^, r|, Q. Проекции ускорения точки
на подвижные оси координат определяются по формулам
Ш
В момент времени гх = 1 с имеем (см/с2):
^=-2829; дп=-1780; вс=
Модуль ускорения тючки
или.
а = 3567 см/с2.
Направляющие косинусы:
, У = —^841; eos(d, r|) = -0,529;. cos (d, Q =
Задание К.6. Кинематический анализ движения
твердого тела, катящегося без скольжения
по неподвижкой поверхности
и имеющего неподвижную точку
Тело А каягитея без скольжения по поверхности неподвижного тела В,
имея неподвижную точку О. Ось ОС, тела А вращается вокруг
неподвижной оси Oz и имеет при заданном положении тела А узловую скорость
(О! и угловое ускорение 8*..
Определишь угловую* (шврость и угловое ускорение теяа А, а также
скорость и ускорение точюг М в указанном положении хела. А
Схемы показаны на рис 91—93, а необходимые для расчета данные
приведены в табл. 33.
Таблица 33
Номер
варианта
фис.91-93)
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
OMq,
см
30
45
50
40
40
60
40
50
20
30
40
20
30
40
со,,
рад/а
1>2
2,0Г
0,8
2,4
312
019
2,2
3,8
о$
рад/с*
4,0
ЗУ)
-3»6
4,2
2,0
5,6
-2,5
3,2
-4,7
1,8
2,6
3,0
4,3
2,2
см
16
5
—
10
10
30
—
20
10
10
20
—
10
10
и
Номер
варианта
рис. 91-93)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
см
45
50
30
50
30
40
30
40
60
40
40
30
45
40
50
рад/с
1у0
2,7
3,3
4,0
2,0*
Г,6
2,2
4,1
3,0
1,4
2,9-
рад/с^
5,4
-3,0
2,2
4,4
-4,6
-5,0
2,8
3,7
4,1
-3,0
3,3
-5,5
4,2
3,6
-5,2
см
20
10
10
20
10
25
5
5
10
15
15
10
5
15
15
Примечание. Положительный и отрицательный знаки у г{ означают
соответственно, что вращение оси ОС, вокруг оси Oz происходит в направлении,
показанном на схеме, ускоренно или замедленно.
Q1
16 '
УАА///////ААААА/А/А/////АУ//А//////////4
01
9 <g
-v
'H 'Я
V////A//A/A/////////////.
12
15
17
19
20
О '//////////////Л
Рис. 92
21
22
25
В
25
23 С\
29
Рис. 93
Пример выполнения задания. Тела А и В представляют собой прямые
круговые конусы (рис. 94).
Дано: а = 60°, |3 = 90°, ОМО = / = 30 см, (ох = 1,2 рад/с, гх = 2,7 рад/с2,
М0М = 10 см.
Решение. 1. Определение угловой скорости телеи Конус А совершает
сферическое движение. Мгновенная ось вращения 00, совпадает с общей
образующей конусов (рис. 95).
Выберем направления координатных осей Ох и Оу так, чтобы ось О?,
а следовательно, и OQ находились в плоскости xOz.
Скорость vc точки С является вращательной скоростью вокруг
мгновенной оси.
Следовательно,
ес = с5 х б?9 A)
где Й — угловая скорость тела А
С другой стороны,!; с - вращательная скорость вокруг оси Oz, поэтому
х б?. B)
vc
Из A) и B) следует
со sin (а/2) = G)x sin [(а + р)/2].
C)
С учетом исходных данных находим со = 2,32 рад/с.
Направление о5 определяется направлением vc в соответствии с A).
Угловую скорость тела А можно
найти также путем сложения
вращений вокруг пересекающихся осей —
построением параллелограмма
угловых скоростей фис. 96):
Здесь &2 - угловая скорость коцу-
са А во вращении вокруг
собственной оси О?.
Рис. 94
СЗС 4- 4->Чг-^-~-"Ть^
Рис. 95
0J
Рис. 96
По теореме синусов,
cd/sin [(а + Р)/2]
что совпадает с выражением C).
2. Определение углового ускорения тела. Угловое ускорение
Z = dffi/dt. D)
Вектор угловой скорости запишем в виде
Й = Ша, E)
где со - модуль вектора Й; Го - орт его направления.
Следовательно,
е = (doo/dt)?ft + со dijdt. F)
Заметим, что
dio/dt = Si х ГЛ
• а с учетом направлений Йх и Го (рис. 97)
disi/dt = a>! sin (р/2)/.
Теперь вместо F) имеем
е = (dco/dt) iu + шо)! sin (P/2)/ G)
или
« = в| + в±, (8)
где
)fb (9)
sin (p/2)/. A0)
Эти же выражения составляющих й непосредственно следуют из
условия, что угловое ускорение геометрически равно скорости и конца
вектора Й. Ее составляющие щ = ёй и п± = й± — соответственно радиальная
и трансверсальная (поперечная) скорости этой точки.
Вектор 8ц направлен по мгновенной оси вращения OQ. Его модуль
Согласно C) и учитывая, что dcoi/dr = 8Ь
dco/dt = 8! sin [(a + P)/2]/sin (a/2),
или с учетом исходных данных
dco/dt = 5,22 рад/с2.
Следовательно,
8,1 = 5,22 рад/с2.
Знак «+» при dco/dt (при 8А) показывает, что направления gg и Й
совпадают.
Вектор §i, как следует из A0), имеет направление орта /. Его модуль
е± = шсо! sin (P/2),
96
или
е± = 1,97 рад/с2.
Так как е± и 8ц взаимно перпендикулярны, то
= j/e2
82,
или
с = 5,58 рад/с2.
Векторы ?ц, ёх и ё показаны на рис. 97.
3. Определение скорости точки тела. Скорость точки М определяем
как вращательную вокруг мгновенной оси:
гтм = 65 х ОМ. A1)
Векторы <Й и ОМ расположены в плоскости xOz; следовательно, вектор
vM параллелен оси Оу. Он имеет одинаковое направление с вектором vc.
Модуль скорости
t?M = со ОМ sin (б, ОМ). A2)
Как видно из рис. 95,
ОМ • sin (&, ОМ) = MN = DM • cos (a/2);
DM = 2/ sin (а/2) - ММ0.
С учетом этих соотношений по формуле A2) находим
vm = 40,2 см/с.
4. Определение ускорения точки тела. Ускорение точки М находим
как геометрическую сумму осестремительного и вращательного ускорений:
Осестремительное ускорение
оно направлено по перпендикуляру к мгновенной оси вращения (рис. 97).
Его модуль
а°м — g>vm sin 90° = cot'M.
<%lr a"ll
Puc. 97
Вращательное ускорение
явм = t х ОМ,
или, учитывая (9),
где
а°/;! = г,хдМ, A3)
aBwl = t± x ОМ. A4)
Сравнивая A3) с A1) и принимая во
внимание, что направления 8 ц и о5
совпадают, заключаем, что и направления
йщ и i;M тоже совпадают.
Модуль составляющей ускорения точки М
а\ц = 8ц • ОМ • sin (8ц, дм) = s,| • DM • cos (a/2).
Вектор а%± расположен в плоскости xOz и перпендикулярен ОМ.
Его модуль
= s± • ОМ * sin 90° = е± • ОМ;
ОМ = ]//2 + (М0МJ - 2/ • М0М • sin (a/2).
В результате вычислений находим:
Дми = 90,4 см/с2; a*ML = 52,2 см/с2.
Ускорение точки М найдем как геометрическую сумму трех
составляющих:
Векторы ли и а*м± расположены в плоскости xOz, а вектор &щ ей
перпендикулярен.
Поэтому модуль ускорения точки М (рис. 97)
им = 1/(«ЙJ + (*iJ - 2^8*! cos у + (авМ11J.
Здесь
cos у = cos < MOD = (/ - DM • sin (a/2))/0M.
Окончательно после вычислений получаем
ам = 110,9 см/с2.
Если бы в этой задаче требовалось определить кинематические
характеристики движения тела и его точки не в некоторый заданный, а в любой
момент времени, условие задачи удобно было бы записать в форме
уравнений Эйлера.
Полагая, например, что ех = const, а^ - начальное значение угловой
скорости вращения оси ОС, вокруг Oz (рис. 98), имеем
\|/ = (ott -f 8it2/2
98
(принято, что начальное значение угла \|/0 = 0),
Для определения ф = ф (t) заметим, что угловые скорости фиф обратно
пропорциональны длинам окружностей или радиусам оснований
конусов, т. е.
ф = [sin (|3/2)/sin (ос/2)] \j/ (то же следует из рис. 96),
или
Ф = [sin (p/2)/sin (a/2)] \j/ (ф0 « 0).
Следовательно,
Ф = [sin (p/2)/sin (а/2)] (Щ1 + г^2/2).
В условиях данной задачи
i|/ = l,35t2 + 1,20?; 0 = 5я/12; ф - |/2\|/.
Координаты точки М в подвижной системе координат:
% - /sin(а/2) - М0М « 30-0,5 - 10 - 5,0 см,
л = о,
С = / cos (а/2) = 30 • 0,866 - 26,0 см.
Порядок решения такой задачи показан в примере выполнения
задания К.5.
III. СЛОЖНОЕ ДВИЖЕНИЕ
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Задание К.7. Определение абсолютной скорости
и абсолютного ускорения точки
Точка М движется относительно тела D. По заданным уравнениям
относительного движения точки М и движения тела D определить для
момента времени t = tx абсолютную скорость и абсолютное ускорение
точки М.
Схемы механизмов показаны на рис. 99 — 101, а необходимые для
расчета данные приведены в табл. 34.
Пример выполнения задания. Дано: схема механизма (рис. 102),
sr = ОМ = 16-8cos Зм см; <рв = 0,9*2 - 9tz рад; tt = 2/9 с.
Решение. Будем считать, что в заданный момент времени плоскость
чертежа (рис. 102) совпадает с плоскостью треугольника ?>. Положение
точки М на теле D определяется расстоянием sr = ОМ.
При t = 2/9 с
sr = 16 - 8 cos (Зя • 2/9) = 20,0 см.
Таблица 34
Номер
варианта
(рис.
99-101)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Уравнение
относительного
движения точки М
OM=sr~sr(t),
см
18sinGT//4)
20 sin nt
6/3
10sinGi//6)
40rccos(n//6)
—
20 cos 2 я/
6(/+0,5/2)
10(l+sin2K/)
207CCOSGt//4)
25sinGt//3)
15я/з/8
1207C/2
3 + 14sinrc/
20sin7t/
8/3+2/
10/+/*
6/+4/3
307CCOS(it//6)
25я(/+/2)
107rsinGt//4)
67C/2
75я@,1/+0,3/3)
15sinGC//3)
8cos(ft//2)
—
2,5 я/2
5Я/3/4
4Л/2
Уравнение
движения тела
рад
2/3-/2
0,4/2+/
2/+0,5/2
0,6/2
3/-0,5/3
—
0,5/2
/3-5/
4/+1,6/2
1,2/-/2
2/2-0,5/
5/-4/2
8/2-3/
4/-2/2
0,2/3+/
/-0,5/2
0,5/2
8/-/2
/+3/2
6/+/2
2/-4/2
4/-0,2/2
—
2/-0,3/2
10/-0,1/2
-2я/2
—
2/3-5/
—
xe—xe(t),
см
—
—
—
—
3/+
+ 0,27/3
—
—
—
—
—
-
-
—
—
—
—
—
—
—
—
50/2
—
—
/3+4/
f
с
2/з
5/з
2
1
2
10/з
3/8
i/8
4/з
4
2
Чг
2/з
2
Чг
1
2
2
3
Чг
Ъ
1
1
5
3/2
2
2
. 2
2
СМ
20
—
—
30
15
—
—
—
20
—
30
40
-
—
-
40
60
25
30
18
30
—
75
40
30
48
см
25
—
30
—
—
—
40
—
—
20
25
30
—
-
60
20
4J/5
—
—
—
—
—
—
—
—
—
—
—
а,
град
—
—
60
—
—
60
30
—
—
—
30
45
—
-
60
—
—
—
—
—
—
—
45
—
—
—
Дополнительные
данные
фг=0,15л/3
ф=я/3/6;
= 20 см
(рг=5я/3/48
ф==тг/3/8;
= 40 см
Примечания. Для каждого варианта положение точки М на схеме
соответствует положительному значению sr; в вариантах 5, 10, 12, 13, 20 — 24,
28 — 30 OM—sr — дуга окружности; на схемах 5, 10, 12, 21, 24 ОМ —дуга,
соответствующая меньшему центральному углу. Относительное движение точки М
в вариантах 6 и 27 и движение тела D в вариантах 23 и 29 определяются
уравнениями, приведенными в последнем столбце табл. 34.
160
А/
6
I
J „
м
У
у~///, ***
О М
8
У>е
Рис. 99
а „ а
12
13
15
16
17
а ™
™ ' а
19
20
Рис. 100
21
22
м
25
о
в
ъ
м
><Ре
29
30
Рис. 101
Абсолютную скорость точки М найдем как
геометрическую сумму относительной и переносной
скоростей :
v =
Модуль относительной скорости
vr = | vr |,.
где
vr = dsjdt = 24л sin
При t = 2/9
?г = 65,2 см/с; vr = 65,2 см/с.
Рис. 102
Положительный знак у vr показывает, что вектор
vr направлен в сторону возрастания sr.
Модуль переносной скорости
v. = Ясое, A)
где R — радиус окружности L, описываемой той точкой тела, с которой
в данный момент совпадает точка М, R — sr sin 30° = 10,0 см; сое — модуль
угловой скорости тела:
юе = | юе |; (Ье = dyjdt = I98t - 2712.
При t = 2/9 с
юе « ~G,93 рад/с; сов = 0,93 рад/с.
Отрицательный знак у величины юе показывает, что вращение
треугольника происходит вокруг оси Oz в сторону, обратную направлению отсчета
угла ф. Поэтому вектор сбе направлен по оси Oz вниз (рис. 103, а).
Модуль переносной скорости, по формуле A),
V'e = 9,3 СМ/С.
Вектор ve направлен по касательной к окружности L в сторону
вращения тела. Так как ve и vr взаимно перпендикулярны, модуль
абсолютной скорости точки М
или
v = 65,9 см/с.
Абсолютное ускорение точки равно геометрической сумме
относительного, переносного и кориолисова ускорений:
а = аг -Ь ае + а€9
или в развернутом виде
а = аг% + агп + % +
104
—у
Рис. 103
Модуль относительного касательного ускорения
где
arT=d2s,/di2==727c2cos3itt.
При
ап = —355 см/с2; агх = 355 см/с2.
Отрицательный знак агх показывает, что вектор агт направлен
отрицательных значений 5Г. Знаки vr и агх одинаковы; следовательно,
сительное движение точки М ускоренное.
Относительное нормальное ускорение
Ъп = Гг2/Р = О,
так как траектория относительного движения — прямая (р = оо).
Модуль переносного вращательного ускорения
а] = Ree9
B)
где ее = | ге \ — модуль углового ускорения тела D:
?e = d2<p,/dt2 = 1,8-54*.
При t = 2/9 с
ее = -10,2 рад/с2; ге = 10,2 рад/с2.
Знаки ее и с5е одинаковы; следовательно, вращение треугольника D
ускоренное, направления векторов с5в и йе совпадают (рис. 103, а, б).
Согласно B),
о? = 102 см/с2.
Вектор о% направлен в ту же сторону, что и ve.
105
Модуль переносного центростремительного ускорения
о? = Дсо* или а* = 9 см/с2.
Вектор о? направлен к центру окружаости L.
Кориолисово ускорение
ас = 2с5е х vr.
Модуль кориолисова ускорения
ас =
sin
где
sin (c5e, vr) = sin 150° = 0,5.
С учетом найденных выше значений озе и vr получаем
ас = 61 см/с2.
Вектор dc направлен согласно правилу векторного произведения
(рис. 103,6).
Модуль абсолютного ускорения точки М находим способом проекций:
c; ay= -a*- artcos60°;
Таблица 35
аг = -artcos30°; а = |/а2 + а] + а2.
Результаты расчета сведены в табл. 35.
рад/с
-0,93
Скорость,
9,3
vr
65,2
см/с
V
65,9
рад/с*
-10,2
9
102
ат
0
Ускорение, см/с2
*т
-355
«с
61
163
-186
в*
308
а
395
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА,
СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПАРАЛЛЕЛЬНЫХ
И ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ
Задание К.8. Определение угловых скоростей звеньев
планетарного редуктора
Найти угловые скорости ведомого вала II и сателлитов редуктора.
Схемы редукторов показаны на рис. 104—106, необходимые для расчета
данные приведены в табл. 36.
Пример выполнения задания (варианты 1 — 20). Редуктор с
цилиндрическими колесами. Исходные данные: схема редуктора (рис. 107); радиусы
колес (см): гх = 30, г2 = 15, г3 = 30, г4 = 75; угловые скорости (рад/с):
©I = 80, сох = 20.
Решение. Применим способ мгновенных центров скоростей. По
угловым скоростям ведущих звеньев найдем скорость точки А оси блока
сателлитов и скорость точки В касания колес 2 и 2 (рис. 108, а).
r2); vB =
106
Таблица 36
Номер
варианта (рис.
104-106)
1
2
3
4
5
6
7
8
9
10
11
12
13
А4
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Радиус, см
г\
15
30
15
20
40
80
50
20
15
10
50
30
20
100
15
40
50
50
20
50
100
50
40
20
20
40
30
45
20
15
Г2
20
30
30
30
10
15
10
15
7
10
10
15
30
30
5
10
15
10
15
10
92
28
42
44
10
42
30
60
20
15
'3
15
15
15
20
20
35
15
25
5
12
15
30
15
20
9
20
10
10
10
15
52
16
22
20
20
20
30
45
40
20
и
20
45
60
120
10
30
55
60
17
54
55
75
35
50
11
50
25
50
25
25
60
30
22
—
30
20
_
40
20
Угловая скорость, рад/с
щ
200
350
240
10
60
120
80
300
70
200
30
330
30
40
270
40
50
40
200
90
20
70
90
250
40
130
100
50
320
30
_
50
-30
-20
—
—
—
100
-50
__
-30
40
50
-40
-10
_
150
-250
-120
-350
со3
_
_
—
_
—
—
40
—
—
щ
-40
_
50
_
20
-10
-30
70
_
—.
-150
200
40
50
©5
_
_
40
-20
30
__
__
20
-30
__
—
...
—.
—
Примечание. Положительный и отрицательный знаки угловых скоростей
означают соответственно направление вращения против и по часовой стрелке,
если смотреть со стороны ведущего вала / (для редуктора с цилиндрическими
колесами) или со стороны положительного направления соответствующей оси
(для редуктора с коническими колесами).
или
3600 см/с; Vb = 600 см/с.
Отложив векторы vA и vB, найдем мгновенный центр скоростей ?г-ъ
сателлитов 2-3. Покажем также скорость Не точки С и направления
вращений сателлитов 2 — 3 и колеса 4 (ведомого вала //). Согласно чертежу,
угловая скорость сателлитов
Скорость точки С
vc = vA' + co2 - з
Угловая скорость ведомого вала
107
]
'ш
5 Ж
J. "*¦" —^~
-~= JT
J—
FT
Ir
hbs—JT
? ЛТ
S B-
-s— JT
-J
-4
to
Pwc.
и
Г ,„.... •
I
т „
17
19
I _
3—
4 —
2
1
-=
S7"
2
1
: :
^3
^4
:
1.J
2—
{
— J
--4
—/
р т,
1
LJ
4
: :
¦*-
2
1
Jjr
Ж
л
• ¦- 7Г
Рис.
12
т
j. •
/4
2 —
т ...
г .....
20
I
105
/^
-^ =
2-
1
Г
_
-¦
т
т.
1т
-2
: :
:
I-T
Li
1
u
—i jti
¦«¦
J Х-
12 "
1
F
t
-s—
^•4
-J
J
—M
¦jr
"JL
„ ir
Ж
и
м
's / ч
4
II
-fffl
-1
и
-2
Их
A
25
\i
26
i'u
. \ .I
A*^
J
7
/
j
, \
lllj
27
28
z
L*\_i
29
N /
-Я
. V
J
30
j
и
иг
л 106
Вычисляя, находим:
ф2-з = 200 рад/с; vc = 9600 см/с;
со/; = 128 рад/с.
Для проверки решения используем
способ, основанный на применении теории
сложения вращений твердого тела вокруг
параллельных осей (способ Виллиса).
Колеса редуктора участвуют: 1) в
относительном вращении (по отношению к
водилу) вокруг собственных осей и 2) в
переносном вращении вместе с водилом
вокруг его оси.
Переносной угловой скоростью для
каждого колеса является угловая скорость
водила со0.
Относительные угловые скорости колес определяются
абсолютных и переносных угловых скоростей:
coir == coi — со0;
Ш2г = со! - со0;
как разности
Эти относительные скорости являются угловыми скоростями колес
при мысленно оставленном водиле.
В этом случае между относительными угловыми скоростями имеются
такие же соотношения, как в зубчатых передачах с неподвижными осями
вращений. Следовательно,
(ah - юо)/(<ю* - g>o) = (- If h A)
где т - число внешних зацеплений между колесами 1 и к; i —
передаточное число от колеса 1 к колесу к в относительном движении (при
остановленном водиле).
2 з
Рис. 108
111
Отметим, что в это соотношение (формулу Виллиса) входят
алгебраические значения угловых скоростей; знак « + » примем соответствующим
вращению против часовой стрелки, а « —» — вращению по часовой стрелке.
Применим формулу A) к решению рассматриваемой задачи (рис. 108,6).
Так как колеса 1 и 2 находятся во внешнем зацеплении, а колеса 3 и 4 -
во внутреннем и угловая скорость водила равна coz (рис. 108, а, б), то
- соО = (- II
откуда
соц = со4 = 03i - (а>1 - coi) Г1Г3ЛГ2Г4).
Угловую скорость со2-з сателлитов 2 — 3 определяем из следующего
отношения:
откуда
со2_3 =ю1-(сэ1 — соО Гх/гг-
Используя исходные данные, находим:
соп =128 рад/с; оэ2-з = 200 рад/с.
Знаки « + » в ответах указывают на то, что вал II и сателлиты 2 — 3
вращаются в направлении, противоположном вращению часовой стрелки.
Пример выполнения задания (варианты 21 — 30). Редуктор с коническими
колесами. Исходные данные: схема редуктора (рис. 109), радиусы колес
(см): гг - 24, г2 = 30, г3 = 40, г4 = 44 см, угловые скорости (рад/с): щ = 60,
со! = -40.
Решение. Движение блока сателлитов 2 — 3 может рассматриваться
как совокупность двух вращательных движений. При этом в качестве
переносного движения можно принять не только вращение водила вокруг оси
Oz (в рассматриваемой задаче угловая скорость водила равна угловой
скорости ведущего вала соО, но и вращение колеса 1 или колеса 4.
Следовательно.
Sc = Si + с51с; с5с = Sx + Slc; coc = 654 + oV B)
Здесь 6з1с, Sic, oLc — угловые скорости сателлитов относительно водила,
колеса 1 и колеса 4 соответственно.
Заметим, что линии действия любых двух составляющих вектора сос
известны. Угловые скорости 6\ б^ и с54 направлены по оси Oz (рис. 110, а),
б51с — по оси ОС,; с51с и со4с — соответственно по линиям Оа и Ob (по
мгновенным осям вращения в относительном движении).
Из произвольного полюса Ох (рис. 110,6) отложим векторы заданных
угловых скоростей с5[ и c5i параллельно оси Oz, а векторы с51с, с51с и о54с —
параллельно О^, Оа и Ob соответственно.
Спроецировав векторные выражения B) на оси ? и z получим:
сос, = coIc; aycz = (o{:
юс; = colcsina; cocz = — a^ + colccosa; C)
cocr = co4c cos P; coc. = 0L - co4c sin p.
Решая систему уравнений C), находим:
112
cocz = соь
co4 = со! + («h + cox) tg a tg p.
При вычислениях заметим, что tg a =
= ri/r2; tg p = гг/г4; ю„ = co4.
Учитывая исходные данные и имея в
виду, что здесь сог = 40 рад/с (знак «-»
учтен в направлении с5х на рис. 110,6),
получаем (рад/с):
coci; = 80; cocz = 60; соп = 132,7.
Угловая скорость сателлитов 2 — 3
или
+ со?2,
сос = 100 рад/с.
Рис. 109
Отметим, что векторные уравнения B) могут быть решены и
графически. Для этого из произвольного центра О2 (рис. ПО, в) отложим в
выбранном масштабе параллельно оси Oz векторы заданных угловых
скоростей (^i и o5t. Через конец вектора Si проводим прямую KL,
параллельную ОС, (линии действия б51с), из конца вектора c5t — прямую MN9
параллельную Оа (линии действия coic). Точка пересечения этих прямых
определяет конец вектора Sc, а также Slc и о51с.
Измерением на чертеже находим
шс = 100 рад/с.
Направление 65С определяет положение мгновенной оси вращения
сателлита ОП (рис. 110, а).
Для определения соц разложим сос на две составляющие,
направленные параллельно Oz и Ob. Полученные векторы представляют собой
и с5Пс(б54с).
Измерением на чертеже находим соп = 135 рад/с.
Приведем также решение этой задачи способом Виллиса. Формулу A)
i
их
—к
20
О 20 40см
Рис. ПО
113
можно применять и для механизма с коническими колесами, т* е. когда
оси вращения колес пересекаются. В этом случае надо иметь в виду
следующее:
1. Сателлиты 2-3 участвуют во вращениях вокруг пересекающихся
осей. Поэтому их угловая скорость относительно водила не может быть
выражена алгебраической разностью между абсолютной и переносной
угловыми скоростями.
2. Знаки передаточного числа от одного колеса к другому в формуле
Виллиса определяются из следующего условия: « + », если глядя со стороны
положительных направлений осей, видеть вращения соответствующих
колес происходящими (при остановленном водиле) в одном направлении;
« —», если вращения колес видеть происходящими в разных
направлениях.
В рассматриваемой задаче угловая скорость водила равна угловой
скорости ведущего вала coj. Угловая скорость сателлитов относительно
водила обозначена со1с. Тогда для колес 1 и 2 имеем
(со! -соОМс^ -г2/г!. D)
Для колес 3 и 4
<*>ic/(<o4 - Щ) = г4/гг. E)
Перемножая D) и E), получаем
(<»i ~ <*)i)/(<o4 - cor) = -r2r4/(r1r2),
откуда
СОП = С04 = COi - (Gh - COi) ГгГ3/(Г2Г4). F)
Подставляя в F) числовые значения, находим соц = 132,7 рад/с.
Положительный знак у соц показывает, что ведомый вал вращается в
направлении против вращения часовой стрелки (если смотреть со стороны
положительного направления оси Oz\
Для определения угловой скорости сателлита из D) определяем сначала
его угловую скорость относительно водила:
сою = - (со! - ©О rt/r2,
или
(oIc = 80 рад/с.
Абсолютная угловая скорость сателлита
сбс = c5i + c5ic,
причем вектор cfy направлен по оси Oz, a c5jc - по оси О?.
Так как 65lc и 65j взаимно перпендикулярны, то
или
0)с = 100 рад/с.
114
IV, ПРИМЕНЕНИЕ ЭВМ К РЕШЕНИЮ ЗАДАЧ КИНЕМАТИКИ
Задание К.9. Определение угловых скоростей
и угловых ускорений звеньев механизма манипулятора
по заданному движению рабочей точки
Манипулятор робота представляет собой плоский механизм (рис. 111 —
113). Звенья этого устройства образуют «механическую руку» с захватом
в точке А.
В заданной системе координат известны уравнения движения рабочей
точки А (захвата). Движение точки А длится 1 с.
Требуется определить в этом интервале времени углы ф, \|/, 0 и
расстояние s. Вычислить также угловые скорости и угловые ускорения звеньев и
относительные (варианты 1 — 13, 15—25, 27 — 30) или абсолютные (варианты
14, 26) скорости s и ускорения s точки В, Все вычисления произвести
для промежутка времени от 0 до 1 с с шагом At = 0,2 с.
Положительные направления отсчета углов ср, \|/, 0 и расстояния s
показаны на рисунках вариантов. Считать, что начальные значения углов
ф = ф0, vj/ = v|/0 известны. Необходимые для расчета данные приведены
в табл. 37.
Таблица 37
Номер
варианта (рис.
111-113)
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
A
и
и
с
м
0,5
0,4
0,4
0,4
0,3
0,8
0,9
0,3
0,74
0,3
0,28
0,6
0,8
0,46
0,5
0,6
0,42
0,4
0,34
0,4
0,3
0,3
0,24
0,3
0,4
0,4
0,2
0,3
0,34
0,28
1,2
0,7
1,2
0,7
0,8
0,6
0,24
0,66
0,8
0,36
0,34
0,8
0,6
0,82
0,3
1,2
1,0
0,46
0,9
0,5
0,9
1,3
0,82
0,5
0,9
0,8
0,3
0,3
0,24
0,86
0,4
0,24
—
—
0,4
0,6
0,64
—
0,32
_
—
—
0,6
0,54
0,56
—
—
—
—
0,34
0,4
0^6
0,34
—
0,4
—
0,4
Фо
град
60
70
115
45
115
30
40
38
35
80
50
35
35
70
125
35
50
40
65
60
50
60
135
32
40
50
65
130
55
135
15
25
25
10
25
25
25
25
15
5
40
15
15
15
25
25
15
20
12
17
30
20
35
17
15
20
20
35
30
41
Уравнения движения
хА
уа
м
1,4091
0,7712
0,6466+0,2/
0,9722
0,4715
:
,2366
1,559-0,2/
1,071
1,3789-0,3/
1,128
1,3213
1,2642-0,2/
1,2349
0,9494+0,2/
0,5289
0,5961+0,2/
1,236
1,6032-0,3/
1,024
1,6345-0,3/
0,5866
1,3716-0,3/
0,502
1,226+0,2/
1,4056-0,2/
1,1374
1,339-0,3/
0,5444+0,3/
1,0264
(
3,4511+0,2/
0,7436-0,3/
0,0800+0,2/
0,7429
0,4044-0,2/
0,8819+0,3/
0,1464+0,2/
0,1728
0,0947+0,3/
0,6315
0,3896-0,3/
-0,0122+0,3/
0,1371
0,3036+0,2/
0,2200
0,7899-0,4/
0,8513
0,5806-0,2/
0,7291
0,121 + 0,3/
0,785
0,6798-0,2/
0,7044
0,64-0,2/
0,0987
0,6839
0,7332-0,2/
0,0427
0,746
-0,2015 + 0,2/
0,7622
115
Рис. Ill
у у
46
У/2
П у
25 у
26
29
Рис. 113
В конструкции манипуляторов использовано соединение, схема которого
и условное обозначение приведены на рис. 114, а, б; взаимное
относительное движение звеньев 1 —3 — поступательное, 2 и 3 — вращательное, 1 и
2 — плоское.
118
Рис. 114
Пример выполнения задания. На
рис. 115, а изображен в начальном
положении механизм манипулятора и
показаны положительные направления от- ^
счета углов <р, \|г, 9 и расстояния s.
Размеры звеньев (м): а = 1,30, Ъ = 1,10,
с = 0,55.
Захват (точка А) движется согласно уравнениям
х,(г)-1.5329-ОД* \
i = 0,5487 -0,089t J
в течение 1 с.
В начальный момент времени (t = 0)
Рис. 115
A)
Определить значения углов <р, \|/, 9 и расстояние s для указанного
промежутка времени.
Вычислить также угловые скорости ф, \j/, 9, угловые ускорения
Ф, ф, 9, относительную скорость s и относительное ускорение s точки В.
Вычисления произвести для моментов времени 0; 0,2; 0,4; 0,6; 0,8; 1 с.
Решение. Для любого положения механизма справедливы векторные
соотношения (рис. 115,6)
где
ОЛ = Ot + СА,
DB = DC + CB,
| ОС | = а = const; | СА \ = 6 = const;
| DC | = 0,31а = const; | DB | = с = const.
B)
C)
D)
Равенства B) — D) являются уравнениями связей, наложенных на систему.
Спроецируем B) и C) на оси координат:
хА = a cos ф 4- Ь cos \|/; |
у а = a sin ф — Ъ sin \|/; J
119
ф2 cos ф + Ьф2 cos \|/, |
кр2 sin ф — Ьф2 sin \j/, J
A0)
с cos 0 = 0,31 a cos ф -f s cos v|/; )
} F)
с sin 0 = 0,31 a sin ф — s sin \|/. J
Продифференцируем E) и F) дважды по времени, учитывая D). В
результате первого дифференцирования получим алгебраические уравнения
относительно неизвестных угловых скоростей ф, ф, 0 и скорости s:
- аф sin ф - Ьф sin \|/ = х^; |
аф cos ф — Ьф cos ty = Уа\ )
— 0,31 аф sin ф - 5ф sin \|/ + s cos v|/ + с0 sin 0 — 0; ]
0,31 аф cos ф — яф cos \|/ — s sin \|/ — с0 cos 0 = 0. J
После второго дифференцирования получим две системы алгебраических
уравнений, связывающих угловые ускорения ф, vj/, 0 и относительное
ускорение s:
— аф sin ф — bvj/ sin \[/ = хА + аф2 cos ф
аф cos ф — Ьф cos \|/ = уА -Ь i
— 0,31 аф sin ф — svj/ sin v|/ + s cos ф + c0 sin 0 =
= 0,31аф2 cos ф + 2s^j/ sin \|/ + 5ф2 cos \|/ - c02 cos 0;
0,31 аф cos ф — s\j/ cos \(/ — s'sin v|/ — c0 cos 0 =
= 0,31 аф2 sin ф + 2^ф cos \[/ — 5ф2 sin ty — c02 sin 0.
Величины хА, yA, xA, yA, входящие в выражения G) и (9), определяются
дифференцированием уравнений движения захвата A):
хА = —0,2;
уА - -0,089;
Для начального момента времени t = t0 = 0 системы уравнений G) и
(8) имеют следующий вид:
— аф0 sin ф0 — Ьф0 sin \1/0 = — 0,2; )
} G)
аф0 cos ф0 — bv]/0 cos \|/0 = -0,089; J
— 0,31 аф0 sin ф0 — 5офо sin v[/0 + s0 cos v|/0 + c0o sin 0O = 0 |
0,31аф0 cos ф0 - 50ф0 cos \[/0 - s0 sin \|/0 - c0o cos 0O = 0. J
Для определения s0 и 0О воспользуемся системой F) для начального
положения (t = 0):
с cos 0О = 0,31 a cos ф0 + s0 cos \|/0;
с sin 0О = 0,31 a sin ф0 - s0 sin \|/0.
Разрешив данную систему относительно s0 и tg 0O, получим:
s0 = |/@,31 аJ + с2 - 0,62 а • с • cos (ф0 - 0О); s0 = 0,4102 м;
tg 0о == —* ?
0,31 a cos ф0 + s0 cos \J/0
120
откуда
90 = 13,946°.
Подставляя значения а, Ь, с, ф0, фо, $о> s0 в G), (8'), имеем следующую
систему уравнений:
-1,1478 фо-0,5991 ф0 = -0,2;
0,6103 фо - 0,9225 ф0 = 0,089;
-0,3558 фо - 0,2234 ф0 + 0,8387 s0 + 0,1326 60 = 0;
0,1892 фо - 0,344 ф0 - 0,5446 s0 - 0,5338 0О = 0.
Решая эту систему уравнений, получим:
ф0 = 0,0921 рад/с; \j/0 = 0,1574 рад/с;
0О = -0,1806 рад/с; s0 = 0,1095 м/с.
Заметим, что первые два уравнения решаются совместно, независимо
от двух последних.
Используя найденные результаты, составим систему для начального
положения уравнений (9) и A0):
- 1Д478 Фо -0,5991 ф0 = 0,028;
0,6103 фо -0,9225 фо = -0,0051;
-0,3558 ф0 -0,2234 фо + 0,8387 s0 +0,1326 0О = 0,0115;
0,1892 фо -0,344 ф0 -0,5446 s0 -0,5338 0О = 0,0221.
Решая эту систему уравнений, получим:
Фо = -0,0203 рад/с2; ф0 = -0,0079 рад/с2;
ё0 = -0,0555 рад/с2; s0 = 0,0118 м/с2.
Отметим, что и в этом случае первые два уравнения решаются
независимо от двух последних.
Следующим моментом времени, при котором необходимо определить
искомые величины, является t = tx = At = 0,2 с. Считая At малой
величиной, можно записать:
9i = Фо + Фо &* + фо Д*2/2;
; '
)
sx = s0 + s'o At + s0 At2/2.
Выражения A2) непосредственно вытекают из разложения функций ф(г),
ф (t), 0 (t), s (t) в ряд Маклорена в окрестности t = 0.
Вычислим согласно A2) фь фь 0! и sx:
q>! = 1,1001 рад; фх = 0,6073 рад;
0Х = 0,2062 рад; sx = 0,4323 м.
121
В общем случае переход от <р(-, х|/ь 0;, st к <pJ + 1, v|/t + 1, Qi+U si+l будет
осуществляться по формулам
2;
е.+1 = ег + ёгАг + е;А^2/2;
5* +1 = Si + 5( АГ + 5) Af 2/2,
где j - порядковый номер рассчитываемого положения механизма.
Отметим, что уравнения A3) соответствуют закону изменения параметров
Ф, х|/, 6, s в интервале времени [tb ri+i] с постоянным ускорением
(равнопеременное движение).
По найденным согласно A2) <рь х|/ь 0Ь st вновь строим систехмы
уравнений G) и (8) относительно неизвестных фь tyu 0Ь s^:
-1,1586 ф! -0,6277^ = -0,2;
0,5896 фх -0,9033^! = -0,089;
-0,3592 ф! -0,2467 \К +0,8212^ +0,1126 0! = 0;
0,1828 фх -0,3550x1/! -0,5707^ -0,538301 =0.
Решая эту систему уравнений, получим:
фх = 0,0881 рад/с; xj/t = 0,1560 рад/с;
6i = -0,1913 рад/с; sx = 0,1116 м/с.
Используя полученные результаты, опять составляем системы уравнений
(9) и A0) относительно неизвестных фь х|/ь 0Ь s\:
-1,1586 ф! -0,6277 xpi = 0,0265;
0,5896 ф! -0,9033 х]/! = -0,0063;
-0,3592 ф! -0,2467 хр! +0,8212^ +0,11260! = 0,0102;
0,1828 ф! -0,3550х]/! -0,5707 s\ -0,5383 0\ = 0,0211
Решая эти системы уравнений, получаем:
Ф1 = -0,0197 рад/с2; ^ = -0,0059 рад/с2;
0! = -0,0520 рад/с2; s\ = 0,0092 м/с2.
Очередным моментом времени, при котором необходимо определить
искомые величины, является t = 12 = 2 At = 0,4 с.
Воспользовавшись A3), при i = 1 найдем ф2, xj/2, 02, s2-
Описанная выше вычислительная процедура выполняется к раз, где
Здесь х — длительность процесса движения (т = 1 с).
Блок-схема описанного алгоритма показана на рис. 116.
Здесь А^ — ввод исходных данных;
А2 — решение системы G), определение <р, xff;
122
Рис. 116
Аъ — решение системы (8), определение 9, s;
Л4 — решение системы (9), определение ф, ф;
А 5 — решение системы A0), определение 9, s;
Л6 — печать результатов;
Л 7 — вычисление ф, \|/, 9, s для следующего момента времени
согласно A3);
Л8 — если 1 < 6, вычисления повторить;
А9 — конец работы.
После проведения всех вычислений составляется таблица значений ф,
\|/, 9, 5, ф, ф, 9, s, <р, ф, 9, s для различных моментов времени.
Для приведенного примера результаты вычислений с точностью до
третьего десятичного знака приведены в табл. 38.
Таблица 38
', с
0,000
0,200
0,400
0,600
0,800
1,000
г, с
0,000
0,200
0,400
0,600
0,800
1,000
t, с
0,000
0,200
0,400
0,600
0,800
1,000
Ф, рад
1,082
*100
L,H7
1,134
1,150
1,164
ф, рад/с
0,092
0,088
0,084
0,080
0,077
0,073
Ф, рад/с2
-0,020
-0,020
-0,019
-0,019
-0,019
-0,020
ф, рад
0,576
0,607
0,638
0,669
0,700
0,731
ф, рад/с
0,157
0,156
0,155
0,154
0,154
0,154
ф, рад/с2
-0,008
-0,006
-0,004
-0,002
0,000
0,001
0, рад
0,243
0,206
0,167
0,126
0,083
0,038
Й, рад/с
-0,181
-0,191
-0,201
-0,211
-0,220
-0,228
0, рад/с2
-0,056
-0,052
-0,049
-0,046
-0,043
-0,040
S, М
0,410
0,432
0,455
0,478
0,501
0,524
S, М/С
0,110
0,112
0,113
0,114
0,115
0,115
S, М/С2
0,012
0,009
0,007
0,004
0,002
-0,001
РАЗДЕЛ ТРЕТИЙ
ДИНАМИКА
I. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
Задание Д.1. Интегрирование дифференциальных уравнений
движения материальной точки,
находящейся под действием постоянных сил
Варианты 1 — 5 (рис. 117, схема !)¦ Тело движется из точки А по
участку АВ (длиной /) наклонной плоскости, составляющей угол а с
горизонтом, в течение т с. Его начальная скорость vA. Коэффициент трения
скольжения тела по плоскости равен /
В точке В тело покидает плоскость со скоростью vB и попадает со
скоростью Vc в точку С плоскости BD, наклоненной под углом Р к
горизонту, находясь в воздухе Г с.
При решении задачи тело принять за материальную точку;
сопротивление воздуха не учитывать.
Вариант 1. Дано: а = 30°; ил = 0;/= 0,2; /=10 м; р = 60°.
Определить т и h.
Вариант 2. Дано: а = 15°; vA = 2 м/с;/= 0,2; h = 4 м; р = 45°.
Определить / и уравнение траектории точки на участке ВС.
Вариант 3. Дано: а = 30°; ^ = 2,5 м/с; /V 0; / = 8 м; d = 10 м;
р = 60°. Определить vB и т.
Вариант 4. Дано: 1^ = 0; т = 2 с; / = 9,8 м; Р = 60°;/=0.
Определить аи I
Вариант 5. Дано: а = 30°; vA = 0; / = 9,8 м; т = 3 с, р = 45°.
Определить / и vc.
Варианты 6—10 (рис. 117, схема 2). Лыжник подходит к точке А участка
трамплина АВ, наклоненного под углом а к горизонту и имеющего
длину /, со скоростью vA. Коэффициент трения скольжения лыж на участке
АВ равен/. Лыжник от А до В движется т с; в точке В со скоростью vB он
покидает трамплин. Через Т с лыжник приземляется со скоростью vc в
точке С горы, составляющей угол р с горизонтом.
При решении задачи принять лыжника за материальную точку и не
учитывать сопротивление воздуха.
124
Вариант 6. Дано: а = 20°;/= 0,1; т = 0,2 с; h = 40 м; |3 = 30°. Опре-
делить / и vc.
Вариант 7. Дано: ос = 15°; / = 0,1; vA = 16 м/с; / = 5 м; C = 45Г
Определить ив и 71-
\
XX,-
v* В \ 1
УЛУУ/УУУУУУ/УУУ/УУ,
d
г
УУ////УУ/УЛ
Рис. 117
12.
Вариант 8. Дано: гл = 21 м/с;/=0; т = 0,3 с; vB = 20 м/с; р = 60°.
Определить а и d.
Вариант 9. Дано: а=15°; т = 0,3 с;/=0,1; Л = 30]/2 м; р = 45°.
Определить vB и vA.
Вариант 10. Дано: а=15°;/=0; ^ = 12 м/с; d = 50 м; Р = 60°.
Определить т и уравнение траектории лыжника на участке ВС.
Варианты 11—15 (рис. 117, схема 3). Имея в точке А скорость vA,
мотоцикл поднимается т с по участку АВ длиной /, составляющему с
горизонтом угол а. При постоянной на всем участке АВ движущей силе Р
мотоцикл в точке В приобретает скорость vB и перелетает через ров
шириной d9 находясь в воздухе Тс и приземляясь в точке С со скоростью
Vo Масса мотоцикла с мотоциклистом равна ш.
При решении задачи считать мотоцикл с мотоциклистом
материальной точкой и не учитывать силы сопротивления движению.
Вариант 11. Дано: а = 30°; Р ф 0; / = 40 м; vA = 0: ^ = 4,5 м/с;
d = 3 м. Определить т и //.
Вариант 12. Дано: а = 30°; Р = 0; / = 40 м; vB = 4,5 м/с; /* = 1,5 м.
Определить vA и d.
Вариант 13. Дано: а = 30°; т = 400 кг, vA = 0; т = 20 с; d = 3 м;
h = 1,5 м. Определить Р и /.
Вариант 14. Дано: а = 30°; ш = 400 кг; Р = 2,2 кН; vA = 0; / = 40 м;
d = 5 м. Определить vB и t?c.
Вариант 15. Дано: а = 30°; vA = 0; Р = 2 кН, / = 50 м; Л = 2 м;
d = 4 м. Определить Г и /п.
Варианты 16—20 (рис. 117, схема 4). Камень скользит в течение т с
по участку АВ откоса, составляющему угол а с горизонтом и имеющему
длину /. Его начальная скорость vA. Коэффициент трения скойьжения камня
по откосу равен / Имея в точке В скорость vB, камень через Т с ударяется
в точке С о вертикальную защитную стену. При решении задачи
принять камень за материальную точку; сопротивление воздуха не
учитывать.
Вариант 16. Дано: а = 30°; vA^l м/с; / = 3 м;/=0,2; d = 2,5 м.
Определить h и Т.
Вариант 17. Дано: а = 45°; /-бм;% = 2^;т = 1с;/|«6м,
Определить d и /
Вариант 18. Дано: а = 30°; / = 2 м; vA = 0; /== 0,1; </ = 3 м.
Определить h и т.
Вариант 19. Дано: а = 15°; / == 3 м; ^ = 3 м/с,/У 0;т= 1,5 с; d = 2 м.
Определить vA и h.
Вариант 20. Дано: а « 45°, vA = 0; /= 0,3; J = 2 м; // = 4 м.
Определить / и т.
Варианты 21 — 25 (рис. 117, схема 5). Тело движется из точки А по
участку АВ (длиной /) наклонной плоскости, составляющей угол а с
горизонтом. Его начальная скорость vA. Коэффициент трения скольжения равен/
Через т с тело в точке В со скоростью vB покидает наклонную плоскость и
падает на горизонтальную плоскость в точку С со скоростью vcl при
этом оно находится в воздухе Т с.
При решении задачи принять тело за материальную точку и не
учитывать сопротивление воздуха,
126
Вариант 21. Дано: а = 30°; /= 0,1; vA = 1 м/с; х = 1,5 с; h = 10 м.
Определить vB и d
Вариант 22. Дано: vA = 0; а = 45°; /=10 м; т = 2 с. Определить
/ и уравнение траектории на участке ВС.
В а р и а н т 23. Дано: /= 0; vA = 0; / = 9,81 м, т = 2 с; h = 20 м.
Определить а и Т.
Вариант 24. Дано: vA = 0; а = 30°;/=0,2; /= 10 м; d = 12 м.
Определить т и /?.
Вариант 25. Дано: vA = 0; а = 30°; /= 0,2; / = 6 м, h = 4,5 м.
Определить т и 11с.
Варианты 26—30 (рис, 117, схема 6). Имея в точке А скорость vA,
тело движется по горизонтальному участку АВ длиной / в течение х с.
Коэффициент трения скольжения тела по плоскости равен /. Со скоростью
Vb тело в точке В покидает плоскость и попадает в точку С со скоростью
vc, находясь в воздухе Г с. При решении задачи принять тело за
материальную точку; сопротивление воздуха не учитывать.
Вариант 26. Дано: vA — l м/с;/= 0,2; / = 8 м; h = 20 м.
Определить d и vc.
Вариант 27. Дано: vA = 4 м/с; /= 0,1; х = 2 с; d = 2 м. Определить
vB и h.
Вариант 28. Дано: vB = 3 м/с; /= 0,3; / = 3 м; h = 5 м. Определить
vA и т:
Вариант 29. Дано: ^ = 3 м/с; i?B = 1 м/с; / = 2,5 м; h = 20 м.
Определить / и d.
Вариант 30. Дано: /= 0,25; / = 4 м; d = 3 м; h = 5 м. Определить
vA и х.
Пример выполнения задания (рис. 118). В железнодорожных скальных
выемках для защиты кюветов от попадания в них с откосов каменных
осыпей устраивается «полка» DC. Учитывая возможность движения камня
из наивысшей точки А откоса и полагая при этом его начальную
скорость v0 = 0, определить наименьшую ширину полки Ь и скорость v& с
которой камень падает на нее. По участку АВ откоса, составляющему
угол а с горизонтом и имеющему длину /, камень движется х с.
При решении задачи считать коэффициент трения скольжения / камня
на участке АВ постоянным, а сопротивлением воздуха пренебречь.
Дано: vA = 0; а = 60°; / = 4 м; х = 1 с; /# 0; h = 5 м; р = 75°.
Определить Ъ и vc-
Решение. Рассмотрим движение камня на участке АВ. Принимая
камень за материальную точку, покажем (рис. 118) действующие на него
силы: вес 5, нормальную реакцию # и силу трения скольжения Р.
Составим дифференциальное уравнение движения камня на участке АВ:
тх\ = Y,xn; мк\ = G sin a ~ F.
Сила трения
F=/JV,
где
N = G cos a.
Таким образом,
тх\ = G sin a — /G cos ос
127
Рис. 118
ИЛИ
х\ = gsin a —fgcos а.
Интегрируя дифференциальное уравнение дважды, получаем
*i = ^(sin a —/cos а) г -f- Сх;
хх = [g(sin а -/cos а)/2] г2 + С^ + С2.
Для определения постоянных интегрирования воспользуемся
начальными условиями задачи: при t = 0 х10 = 0 и х10 = О*.
Составим уравнения, полученные при интегрировании, для t = 0:
Найдем постоянные:
С, = 0, C2 = 0.
Тогда
л*х = g(sin a —/cos a) t;
Xi = [^"(sin a —/cos a)/2] t2.
Для момента т, когда камень покидает участок,
Х 1 == ^В > Х1 == ^5
т. е.
ys = ^(sin a -/cos a)x;
/ = [^(sin a —/cos a)/2] x2,
* Постоянные интегрирования С, - С6 во всех 30 вариантах задания можно
найти, вводя начальные условия на первом и втором участках движения точки.
Тем не менее в ряде вариантов более естественно воспользоваться граничными
условиями, когда значения координат и скоростей заданы не для одного, а для
разных моментов времени.
128
откуда
vB = 2//Т,
т. е.
ив = 2-4/1 = 8 м/с.
Рассмотрим движение камня от точки В до точки С.
Показав силу тяжести G, действующую на камень, составим
дифференциальные уравнения его движения:
тх — 0; ту = G.
Начальные условия задачи: при г = 0
х0 = 0, у0 = 0;
х0 = vB cos a; yo = vb sin а.
Интегрируем дифференциальные уравнения дважды:
х = С3; у = ^ + С4,
х = C3t + С5, у = gt2/2 + С4 + Сб.
. Напишем полученные уравнения для t = 0:
х0 = Сз; j'o = С*4?
Хо = С5; у0 = С6.
Отсюда найдем, что
С3 = vb cos a; C4 = v8 sin а;
С5 = 0; С6 = 0.
Получим следующие уравнения проекций скоростей камня:
х = vB cos а, У = gt + vB sin а
и уравнения его движения:
х = vB cos ос • t, у = g?2/2 + ^в sin a • t.
Уравнение траектории камня найдем, исключив параметр t из
уравнений движения. Определив t из первого уравнения и подставив его значение
во второе, получаем уравнение параболы:
У = gx2№vl cos2 a) + х tg а.
В момент падения у — /i, x = d.
Определяя d из уравнения траектории, найдем
dx = 2,11 м, d2 = -7,75 м.
Так как траекторией движения камня является ветвь параболы
с положительными абсциссами ее точек, то Л~2Д1 м.
Минимальная ширина полки
, или Ъ = 0,77 м.
129
Используя уравнение движения камня х = vB cos a • ?, найдем время Т
движения камня от точки В до точки С:
Г= 0,53 с.
Скорость камня при падении найдем через проекции скорости на оси
координат
х = vB cos ос, у — gt + vB sin a
по формуле
Для момента падения t = Г= 0,53 с
vc = ]/(vb cos aJ + (#Г+ vB sin аJ,
или
ус = 12,8 м/с.
Задание Д.2. Интегрирование дифференциальных уравнений движения
материальной точки, находящейся под действием переменных сил
Найти уравнения движения тела М массой m (рис. 119-121),
принимаемого за материальную точку и находящегося под действием
переменной силы Р = ХГ+ Y/+ Zk, при заданных начальных условиях. Во всех
вариантах ось z (где показана) вертикальна, за исключением вариантов 8 и 30.
Необходимые для решения данные приведены в табл. 39, в которой
приняты следующие обозначения: ?, j, к — орты координатных осей
(соответственно х, у, z); g— ускорение свободного падения (9,81 м/с2);/—
коэффициент трения скольжения; t - время, с; х, у, z, х, у, z - координаты
точки и проекции ее скорости_на оси координат соответственно, м и м/с.
Во всех случаях, где сила Р зависит от х, х, z, z, рассмотреть
движение точки, при котором эти величины только положительны.
Пример выполнения задания. Дано: тп — 1 кг, х0 = 0, z0 = 10 м, х0 = 20 м/с,
z0 = 0, Р = cr (i cos ф + к sin ф); R = - осЯ, с = 4 Н/м, а = 2 Н • с/м.
Найти уравнения движения точки без учета и с учетом силы R.
Решение. На материальную точку действуют силы тяжести 3 и
сила Р, линия действия которой проходит через неподвижный центр О
(рис. 122). Силой R пренебрегаем. Сила Р притягивает точку М к центру О.
Модуль этой силы прямо пропорционален расстоянию г от точки до полюса.
В начальный момент времени (t = 0) точка М находится на оси z на
расстоянии 10 м от начала отсчета и ей сообщается начальная скорость
20 м/с, направленная параллельно оси х.
Заданные силы Р, G и вектор v0 начальной скорости расположены в
плоскости xOz, и поэтому дальнейшее движение точки происходит в этой
плоскости.
Дифференциальные уравнения движения материальной точки имеют вид
шх = — cr cos ф; mz = — cr sin ф — G.
Так как
cos ф = x/r; sin ф = z/r,
130
0М(Х,2)
м L
77у77//7
'//////////////////////у.
м
п ? ф; ;
17 ///////////////////////////у/////////////
\х
/УУУУУУУУУ/////////////////////////,
10
X М
/УУУУУУУУУУУУУУУУУУУУ/УУУУУУ/
Рис. 119
ОН '
0Z
X
X—
'///////////У///////////////////////////-
у////////////
61
hi
|
j
m
V//////
21
М
72
^g
//////////у///////////////
23
24-
X —*'
J ¦
• L
- 'x
M
-—о
////////////////////////У
25
26
О M(X,2)
27
26
/////////////////////у
29
30
М
Рис. 121
Таблица 39
Номер
варианта
(рис.
119-121)
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
/и,
кг
2
0,25
2
т
50
т
2
150
1
1
20
т
т
1,5
1,5
?, н
-0,5(*? + **)
100 *?
-B0*-4*)?
-E*-25*)?
4?cos(M/6)+j(J
120/(»cos30° + ? sin 30°)
4r(?cosq>+ /с sin <p)
-з|/*7
-3?
~m?*2z-2?
—9mr(?cosoc 4- Jcosp 4- ?cosy)
D,5 4- 3*)?
F-1.5. + ЭД*
-
0,3
0
0
0
0
0
-
0
-
-
0,1
0
0
0,03
0,15
0
a
0
0
0
0
-
-
2
1
—
Начальные
M
—
-
_
;
-
0
0
-
-
0
2
-
—
0
-
-
a
-
-
0
2
-
0
R
2
-
0,5
условия
X
20
0,5
1
1
vo
0
0,5
5
16
-
-
1
0,3
-
h
м/с
20
-
-
-
3
2
_
15
-
0
-
—
-
-
-
]/2\xj{ma)
-
-
0
0
-
0
]/2gR
1
-
1
Примечание
Учесть только силу Р\
\i, a — положительные
постоянные
v0 > 0, |л > 0
(const)
Рассмотреть движение
при у > 0, z > 0
Учесть только силу Р,
R > 0 (const)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
100
1
2
6
0,1
0,1
т
100
3
1,5
0,1
2
4
0,01
100
-20*?
5A-е~2')?
C0<Г3/-18дг-12;с)?
—4mr(? cos ф +7 sin ф)
50C + xI
-Bz*3- 0,981) if
120G,5 + 0G cos30° + ? sin 30°)
0
0
0
0
-
-
0
0,2
0
-
-
0
-
-
0,25
0
0
0
0
-
-
20
0
0
0
-
0
0
0
-
-
-
-
-
0
-
-
-
-
0
0
-
-
-
-
-
200
300
0
-
-
100
0
-
0
0
0
2,5
0
10
10
-
-
0
1
2
4
-
3
1
-
0,5
-
-
-
-
-
-
8
-
-
-
4
1
-
-
-
-
-
0,1
2,5
0
-
' -
0
7
0
2
125
0
Учесть только силу Р
To же
Влиянием силы
тяжести пренебречь
z
ft
и
/г
в)
z
*>M(x,z)
M(x,z)
X
TO
mx =
или
3c + k2x
где
-ex;
= 0;
mi = — cz — G
•z + k*z~-g,
Puc- 122 к = j/e/m, к = 2 рад/с.
Уравнения A) — линейные дифференциальные уравнения второго
порядка с постоянными коэффициентами. Первое из них однородное, а
второе — неоднородное.
Решения уравнений A) имеют вид
х = d cos kt + C2 sin kt; 1
z = Съ cos kt + C4 sin fct - g/k2 J
и, следовательно,
x = - d k sin kt 4- C2 k cos kt; |
z = - C3 k sin kt + C4 k cos kt. J
Постоянные интегрирования Сь C2, C3, C4 найдем из начальных усло-
ыж
при t = 0 х0 ~ 0: z0 — 10: 1
о,о,/ D)
х0 = 20; z0 = 0. J
Подставляя D) в B) и C), получим:
v^ — С* к- Ь Г Ь
j\,q — \^2 л, Zq — L/4/C.
Отсюда
d =0; С2 = Хо/k; С$ = z0 + ^/к2; С4 = 0. E)
Подставляя E) в B), будем иметь окончательно
х = (xo/k) sin kt = 10 sin 2t; j
z = (zo + g/k2) cos kt - g/k2 = 12,45 cos 2t - 2,45. J . F)
Следовательно,
x = x0 cos kt — 20 cos 2t;
z = — к (z0 + #/k2) sin kt = -24,9 sin 2t,
В рассматриваемом примере может быть получено уравнение
траектории точки. Для этого запишем уравнения движения F) в виде
z + p/k2
- = sin kt; 2~-т- = cos kt.
1
. j G)
х
136
Возведя эти выражения в квадрат и сложив
результаты, получим
2J
Л2~ +
jz+g/k2)
или
(хо/кJ ^ (zo+g/k2)
(z + 2,45J
2 >
102 2,452
Это уравнение эллипса, центр которого А
смещен по оси z относительно начала
координат на 2,45 м вниз. Полуоси эллипса:
горизонтальная а = 10 м, а вертикальная Ь= 12,45 м
(рис. 123). В процессе движения точки М
по эллипсу сумма моментов сил ? и б
относительно центра А остается все время
равной нулю. Иными словами, равнодействующая сил ?ибво все время
движения проходит через точку А.
Период обращения точки по эллипсу
Г= 2к/к = п = 3,14 с.
Площадь заметания радиусом-вектором точки за период ртт шощади
эллипса:
F = nab = я (z0 + g/k2) xo/k.
Обратимся теперь к изучению движения* точки с сопротивлением. Сша
сопротивления движению
? = — аг = — at? = — а (!х + ]у). 0)
Дифференциальные уравнения движения материальной точки примут
вид
или
тх = — сх — ax; mz = — cz — ai — G,
x + 2nx + /c2x = 0; z + 2ni -f k2z == -^,
(9)
где
In = a/m; n = 1 с l.
Так как « < /с, то решения уравнений (9) имеют вид
х = e~nf (Cx cos М + С2 sin Kt)\
z = е""иг (С3 cos /c,t + С4 sin kj) - g/k2,
A0)
где
к. = у к2 - п2 = 1/4 - 1 « 1,73 рад/с,
и, следовательно,
х = e~"r (~ CK sin /c»f + C2Kt) - e~ntn {Сг cos kj + G2 sin k,t);
i = e-wf (~C3/c, sin k*t + Qk» cos /c,t) - e~ntn (C3 cos k.t + C4 sin k#0-
A1)
137
Подставив начальные условия D) в A0) и A1),
получим:
zo = С3 - g/k2;
z0 = C4fc» - nC3i
откуда
A2)
Рис.
С3 = z0 -h g/k2; Cj. = JL(z0 4- g/k2).
Подставляя A2) в A0), окончательно имеем
х = Y~e~nt sin Kt = ll,56e"f sin 1,73*;
* -nt{ , n . , \ n2
z = (z0 + g/fc ) e I cos fc** + -:—sin /с,* I — g/k ,
V К )
или
z = 12,45е~г (cos l,73t + 0,577 sin l,73t) - 2,45.
Нетрудно понять, что траектория точки представляет собой спираль,
навивающуюся на точку А (рис. 124), в которой силы ? и 6 взаимно
уравновешиваются. Отметим, что материальная точка будет
асимптотически приближаться к точке А. Радиус-вектор точки будет делать один
полный оборот за
Т. = 2тс/к#; Г, = 3,63 с.
При этом расстояние от центра А до движущейся точки будет каждые
Т% с убывать в епТ* раз, т. е. примерно в 37,7 раза.
Задание Д.З. Исследование колебательного движения
материальной точки
Варианты 1 — 5 (рис. 125). Найти уравнение движения груза D массой
mD (варианты 2 и 4) или системы грузов D и Е массами mD и тЕ
(варианты 1, 3, 5), отнеся их движение к оси х; начало отсчета совместить
с положением покоя груза D или соответственно системы грузов D и Е
(при статической деформации пружин). Стержень, соединяющий грузы,
считать невесомым и недеформируемым.
Вариант 1. Груз D(mD — 2 кг) прикреплен к бруску АВ,
подвешенному к двум одинаковым параллельным пружинам, коэффициент жесткости
каждой из которых с = 3 Н/см. Точка прикрепления груза D находится
на равных расстояниях от осей пружин.
В некоторый момент времени к грузу D подвешивают груз Е (ше =
= 1 кг). Сопротивление движению системы двух грузов пропорционально
скорости: R = 12t? (Н), где v — скорость (м/с).
Массой абсолютно жесткого бруска АВ и массой части демпфера,
прикрепленной к бруску, пренебречь.
138
Вариант 2. В момент, когда стержень, соединяющий грузы D
(mD = 1 кг) и Е (тЕ — 2 кг), перерезают, точка В (верхний конец
последовательно еоединенных пружин) начинает совершать движение по закону
х
'////////////У////////////
т
Рис. 125
139
?, = 1,5 sin 18r (см) (ось ? направлена вертикально вниз). Коэффициенты
жесткости пружин сх = 12 Н/см, с2 = 36 Н/см.
Вариант 3. Груз D (mD = 0,8 кг) висит на пружине, прикрепленной
к точке F бруска АВ и имеющей коэффициент жесткости Сх = 10 Н/см.
Брусок подвешен к двум параллельным пружинам, коэффициенты
жесткости которых с2 = 4 Н/см, с3 = 6 Н/см; точка F находится на расстояниях
а и b от осей этих пружин: а/b = с3/с2-
В некоторый момент времени к грузу D подвешивают груз Е
(тЕ =1,2 кг). В этот же момент системе грузов сообщают скорость
v0 = 0,2 м/с, направленную вниз. Массой абсолютно жесткого бруска АВ
пренебречь.
Вариант 4. Статическая деформация двух одинаковых параллельных
пружин под действием грузов D (mD — 0,5 кг) и Е (тЕ =1,5 кг) /ст = 4 см.
Грузы подвешены к пружинам с помощью абсолютно жесткого бруска
АВ. В некоторый момент времени стержень, соединяющий грузы,
перерезают. Сопротивление движению груза D пропорционально скорости:
R = 6v, где v - скорость. Массой бруска и массой прикрепленной к бруску
части демпфера пренебречь.
Вариант 5. Одновременно с подвешиванием к грузу D (mD =1,6 кг),
висящему на пружине, коэффициент жесткости которой с = 4 Н/см, груза
Е (тЕ — 2,4 кг) точка В (верхний конец пружины) начинает совершать
движение siпо закону ? = 2 sin 5t (ось ? направлена вертикально вниз).
Примечание. Положение начала отсчета на оси х соответствует среднему
положению точки В (? — 0).
Варианты 6—10 (рис. 125). Найти уравнение движения груза D массой
т по гладкой наклонной плоскости, составляющей с горизонтом угол а,
с момента соприкасания груза с пружиной или с системой пружин,
предполагая, что при дальнейшем движении груз от пружин не отделяется.
Движение груза отнести к оси х, приняв за начало отсчета положение
покоя груза (при статической деформации пружин).
Вариант 6. Пройдя без начальной скорости по наклонной плоскости
(а = 30°) расстояние s = 0,1 м, груз D (т = 4 кг) ударяется о
недсформированные, последовательно соединенные пружины, имеющие коэффициенты
жесткости сх = 48 Н/см и с2 = 24 Н/см.
Вариант 7. В некоторый момент времени груз D (т = 2 кг)
присоединяют без начальной скорости к концу А недеформированных
последовательно соединенных пружин, имеющих коэффициенты жесткости
ct = 12 Н/см, с2 = 6 Н/см. В тот же момент времени (t = 0) другой конец
пружин В начинает совершать движение вдоль наклонной плоскости
(а = 45е) по закону Ъ, = 0,02 sin 20t (м) (ось ? направлена вдоль наклонной
плоскости вниз).
Примечание. Положение начала отсчета на оси х соответствует среднему
положению точки В (? = 0)-
Вариант 8. Две параллельные пружины 1 и 2, имеющие
коэффициенты жес1 кости Ci = 4 Н/см и с2 = 6 Н/см, соединены абсолютно
жестким бруском АВ, к точке К которого прикреплена пружина 3 с
коэффициентом жесткости с3 = 15 Н/см. Точка К находится на расстояниях
а и Ъ от осей пружин 1 и 2: a/b = c2/cj.. Пружины 1, 2 и 3 не дефор-
140
мированы. Груз D массой 1,5 кг присоединяют к концу N пружины 3;
в тот же момент грузу D сообщают скорость v0 = 0,5 м/с, направленную
вниз параллельно наклонной плоскости (а = 45°). Массой бруска АВ
пренебречь.
Вариант 9. Груз D (т = 1,2 кг), пройдя без начальной скорости
ло наклонной плоскости (а = 30°) расстояние s = 0,2 м, ударяется о не-
деформированную пружину, коэффициент жесткости которой с = 4,8 Н/см.
В этот же момент (t = 0) точка В (нижний конец пружины) начинает
совершать вдоль наклонной плоскости движение по закону ? = 0,03 sin 12*
(м) (ось ^ направлена вдоль наклонной плоскости вниз) (см. примечание
к варианту 7).
Вариант 10. Груз D (т = 1 кг) прикрепляют в середине абсолютно
жесткого бруска АВ, соединяющего концы двух одинаковых параллельных
пружин, не сообщая начальной скорости; пружины не деформированы.
Коэффициенты жесткости пружин с = 1,5 Н/см. Сопротивление движению
груза пропорционально скорости: R = 8v, где v — скорость, а = 60°. Массой
бруска АВ и массой прикрепленной к бруску части демпфера пренебречь.
Варианты 11 — 15 (рис. 126). Груз Ъ, массой т укреплен на конце
невесомого стержня, который может вращаться в горизонтальной
плоскости вокруг оси Е. Груз соединен с пружиной или с системой пружин;
положение покоя стержня, показанное на чертеже, соответствует недефор-
мированным пружинам. Считая, что груз Z), принимаемый за
материальную точку, движется по прямой, определить уравнение движения этого
груза (трением скольжения груза по плоскости пренебречь).
Движение отнести к оси х, за начало отсчета принять точку,
соответствующую положению покоя груза.
Вариант 11. Груз D (т = 2,4 кг) соединен с точкой F бруска АВ,
связывающего концы двух параллельных пружин, коэффициенты жесткости
которых сх = 1 Н/см и с2 = 1,4 Н/см. Точка F находится на расстояниях
а и Ъ от осей пружин: а/Ь = c2/ci-
Груз D отклоняют на величину X = 2 см влево от положения,
показанного на чертеже, и отпускают без начальной скорости. Сопротивление
движению груза пропорционально скорости: R = 6v, где v — скорость.
Массой абсолютно жесткого бруска АВ и массой демпфера пренебречь.
Вариант 12. В некоторый момент времени груз D (т = 3 кг),
удерживаемый в положении, при котором пружина сжата на величину X =
= 2 см, отпускают без начальной скорости. Коэффициент жесткости
пружины с = 9 Н/см. Одновременно (t = 0) точка В (правый конец пружины)
начинает совершать движение по закону ? = 1,2 sin 8t (см) (ось § направлена
влево).
Примечание. Положение начала отсчета на оси х соответствует среднему
положению точки В (? = 0).
Вариант 13. Груз D (т = 1 кг) прикреплен к концу пружины,
имеющей коэффициент жесткости сх = 12 Н/см и соединенной другим концом
с точкой F бруска АВ. Брусок АВ связывает концы двух параллельных
пружин, коэффициент жесткости каждой из которых с = 3 Н/см. Точка F
находится на равных расстояниях от осей параллельных пружин. Грузу
в положении стержня, показанном на чертеже, сообщают скорость vQ =
= 0,5 м/с, направленную вправо.
141
Сопротивление движению груза пропорционально скорости: R = 12t
где v — скорость.
Шток демпфера пропущен через отверстие в невесомом бруске АВ
и соединен с грузом D.
11
В. А
X Г
L
1
J
в
Е
f ftrg
у
12
Y//ssss.
15
х
\В —
17
В
19
20
Рис. 126
И 2
Вариант 14. Груз D (m = 1,5 кг) прикреплен одной стороной к концу
пружины, имеющей коэффициент жесткости сх = 4,4 Н/см, а другой
стороной - к концу двух последовательно соединенных пружин, коэффициенты
жесткости которых с2 = 2 Н/см, с3 = 8 Н/см.
Груз отклоняют на величину X = 2,5 см влево от его положения,
показанного на чертеже, и отпускают, одновременно сообщая грузу
начальную скорость v0 — 0,4 м/с, направленную вправо.
Вариант 15. Груз D (т = 1 кг) прикреплен к концу А последовательно
соединенных пружин. Другой конец пружин В движется по закону
? = 1,8 sin 12t (см) (ось \ направлена влево). Коэффициенты жесткости
пружин Ci = 4 Н/см, с2 = 12 Н/см. При t = 0 груз находится в положении покоя,
соответствующем недеформированным пружинам (см. примечание к
варианту 12).
Варианты 16—20 (рис. 126). Найти уравнение движения груза D
массой mD (варианты 17 и 19) или системы грузов D и Е массами то
и тЕ (варианты 16, 18, 20), отнеся движение к оси х; начало отсчета
совместить с положением покоя груза D или соответственно системы
грузов D и Е (при статической деформации пружин). Предполагается, что
грузы D и Е при совместном движении не отделяются.
Вариант 16. Пружина 2, на которой покоится груз D (mD~ 10 кг),
опирается в точке F на брусок АВ, соединяющий концы двух параллельных
пружин 2 и 3. Коэффициенты жесткости (Н/см) пружин 1, 2 и 3: сх = 200,
с2 = 160, с3 = 140.
Точка F находится на расстояниях а и Ъ от осей пружин 2 и 3:
а/Ь = с3/с2.
В некоторый момент времени на груз D устанавливают груз Е (тЕ =
= 20 кг); одновременно системе грузов сообщают скорость v0 = 0,4 м/с,
направленную вниз. Массой абсолютно жесткого бруска АВ пренебречь.
Вариант 17. В некоторый момент времени груз Е снимают с груза
D (оба груза находятся в состоянии покоя, соответствующем статической
деформации пружины). Циклическая частота собственных колебаний
системы грузов D и Е на пружине к = 20 рад/с, отношение масс mD/mE = 2/3,
Вариант 18. Статическая деформация каждой из двух одинаковых
параллельных пружин под действием груза D (mD = 20 кг) равна /ст/> =
= 2 см. В некоторый момент времени на груз D устанавливают груз Е
(тЕ = Ю кг). Сопротивление движению грузов пропорционально скорости:
R = 601/3 v, где v — скорость. Массой абсолютно жесткого бруска АВ
и массой части демпфера, связанной с ним, пренебречь.
Вариант 19. Два груза D и Е (mD=15 кг, тЕ = 25 кг) покоятся
на последовательно соединенных пружинах, имеющих коэффициенты
жесткости Сх = 250 Н/см и с2 = 375 Н/см. В момент, когда снимают
груз Е, точка J5 опирания пружин начинает совершать движение по закону
? = 0,5 sin 30t (ось % направлена вертикально вниз).
Примечание. Положение начала отсчета на оси х соответствует среднему
положению точки В (? = 0).
Вариант 20. На груз D, находящийся в состоянии покоя,
соответствующем статической деформации пружины, в некоторый момент
времени устанавливают груз ?. В этот же момент времени системе двух
143
грузов сообщают скорость v0 = 0,3 м/с, направленную вниз. Циклическая
частота собственных колебаний груза D на пружине kD = 24 рад/с,
отношение масс mE/mD = 3.
Варианты 21-25 (рис. 127). Найти уравнение движения груза D массой
т по гладкой наклонной плоскости, составляющей с горизонтом угол а,
отнеся движение к оси х; за начало отсчета принять положение покоя
груза (при статической деформации пружин).
Вариант 21. В некоторый момент времени груз D (т = 2 кг)
прикрепляют к концам недеформированных пружин, имеющих коэффициенты
жесткости с1! = 7 Н/см и с2 = 3 Н/см; одновременно грузу сообщают
скорость г0 = 0,4 м/с, направленную вдоль наклонной плоскости (а = 45°)
вниз.
Вариант 22. Груз D находится на наклонной плоскости (а = 30°)
в состоянии покоя, соответствующем статической деформации пружины
/ст = 2 см. В некоторый момент времени (t = 0) точка В (верхний конец
пружины) начинает совершать движение по закону ^ = 0,01 sin 10t (м) (ось
^ направлена вдоль наклонной плоскости вниз).
Примечание. Положение начала отсчета на оси х соответствует среднему
положению точки В (? = 0).
Вариант 23. Груз D (т = 3 кг) прикрепляют к точке F бруска АВУ
соединяющего концы двух недеформированных параллельных пружин,
и отпускают без начальной скорости. Коэффициенты жесткости пружин
ci = 2 Н/см и с2 = 4 Н/см. Точка F находится на расстояниях а и Ъ от
осей пружины: a/b = c2/ci; a = 60°.
Сопротивление движению груза пропорционально скорости: R = I2v,
где v — скорость. Массой бруска ЛВ и массой демпфера пренебречь.
Вариант 24. В некоторый момент времени груз D (т = 1 кг)
прикрепляют к концу Л недеформированных последовательно соединенных
пружин, имеющих коэффициенты жесткости сх = 12 Н/см и с2 = 4 Н/см,
и отпускают без начальной скорости.
Одновременно (t = 0) другой конец пружин В начинает совершать
движение по закону ? = 1,5 sin 10t (см). Ось '% направлена вдоль наклонной
плоскости вниз (а = 30е) (см. примечание к варианту 22).
Вариант 25. Концы двух одинаковых параллельных пружин
соединены бруском ЛВ. Статическая деформация каждой из пружин под
действием груза D (т =1,5 кг), находящегося на наклонной плоскости
(а = 30°), /ст = 4,9 см. В некоторый момент грузу D сообщают скорость
v0 = 0,3 м/с, направленную вверх вдоль наклонной плоскости.
Сопротивление движению груза пропорционально скорости груза: R = 6и, где v —
скорость.
Массой абсолютно жесткого бруска АВ и массой части демпфера,
связанной с бруском, пренебречь.
Варианты 26—30 (рис. 127). Пренебрегая массой плиты и считая ее
абсолютно жесткой, найти уравнение движения груза D массой т с
момента соприкасания его с плитой, предполагая, что при дальнейшем
движении груз от плиты не отделяется.
Движение груза отнести к оси х, приняв за начало отсчета положение
покоя этого груза (при статической деформации пружин).
144
Вариант 26. Плита лежит на двух параллельных пружинах,
имеющих коэффициенты жесткости ct = 600 Н/см и с2 = 400 Н/см. Груз D
(т = 50 кг) падает без начальной скорости с высоты h — ОД м в точку F
плиты, находящуюся на расстояниях а и b от осей пружин: a/b~c2/ci.
21
22
25
25
26
27
¦л-
28
29
Рис. 127
Вариант 27. Коэффициент жесткости каждой из двух параллельных
пружин, на которых лежит плита, с - 130 Н/см. Груз D (т = 40 кг)
устанавливают на середину плиты и отпускают без начальной скорости при
недеформированных пружинах. Сопротивление движению груза
пропорционально скорости: R = 400г, где v — скорость. Массой плиты и демпфера
пренебречь.
Вариант 28. Груз D падает на плиту с высоты h = 5 см.
Статический прогиб пружины под действием этого груза /ст = 1 см.
Вариант 29. Плита лежит на двух одинаковых параллельных
пружинах 1 и 2, коэффициенты жесткости которых сх = с2 = с = 400 Н/см.
В некоторый момент времени груз D (т = 200 кг) устанавливают на
середину плиты и одновременно прикрепляют к недеформированной
пружине 3, имеющей коэффициент жесткости съ = 200 Н/см. В тот же момент
времени (при недеформированных пружинах) грузу сообщают скорость
v0 = 0,6 м/с, направленную вниз.
Вариант 30. В некоторый момент времени груз D (т = 100 кг)
устанавливают на плиту и отпускают (при недеформированной пружине) без
начальной скорости. В этот же момент времени точка В (нижний конец
пружины) начинает совершать движение по вертикали согласно закону
? = 0,5 sin 20t (см) (ось % направлена вниз). Коэффициент жесткости
пружины с = 2000 Н/см.
Примечание. Начало отсчета на оси х соответствует среднему положению
точки Bg = 0).
Пример выполнения задания (рис. 128). Два груза D и Е массами
mD = 2 кг и тЕ = 3 кг лежат на гладкой плоскости, наклоненной под
углом а = 30° к горизонту, опираясь на пружину, коэффициент жесткости
которой с = 6 Н/см = 600 Н/м.
В некоторый момент времени груз Е убирают; одновременно (t = 0)
нижний конец пружины В начинает совершать вдоль наклонной плоскости
движение по закону % = 0,02 sin 10t (м). Найти уравнение движения груза D.
Решение. Применим к решению задачи дифференциальные
уравнения движения точки. Совместим начало координатной системы с
положением покоя груза D, соответствующим статической деформации пружины,
при условии, что точка В занимает свое среднее положение (^ = 0).
Направим ось х вверх вдоль наклонной плоскости (в сторону движения
груза D после снятия груза ?). Движение груза D определяется по
следующему дифференциальному уравнению:
mDx = X Xi9
где Y, Х( ~ сумма проекций на ось х сил, действующих на груз D
(рис. 128, a): 6D — веса, Я — нормальной реакции наклонной плоскости,
Р - силы упругости пружины.
Таким образом,
mDx = — GD sin a - P.
Здесь
146
— статическая
деформация пружины под
действием груза D; Z, —
перемещение точки прикрепления
нижнего конца пружины,
происходящее по закону
? = d sin pt (d = 0,02 м, p =
= 10 рад/с).
Статическую
деформацию пружины fCTD найдем
из уравнения,
соответствующего состоянию покоя
груза D на наклонной
плоскости (рис. 128,6):
а)
— GD sin a 4-
0,
Рис. 128
т. е.
откуда
-GD sin а
0,
/ст2> = GD sin а/с.
Дифференциальное уравнение движения груза D примет вид
mDx = - GD sin a - с (х - /стР - ^),
или после преобразования
mDx + сх = cd sin pt.
Разделив все члены уравнения на mD и введя обозначения
c/mD = /с2, cd/mx) = ft,
приведем дифференциальное уравнение к следующему виду:
х 4- к2х = h sin pr.
Решение этого неоднородного уравнения складывается из общего
решения х*, соответствующего однородного уравнения и частного решения
х** данного неоднородного уравнения:
х = х* -г х**.
Общее решение однородного уравнения имеет вид
х* = Ci cos kt + С2 sin fcf.
Частное решение неоднородного уравнения:
Общий интеграл
х = Сх cos /cf + С2 sin /cf + [/i/(/<2 - p2)] sin pt.
Для определения постоянных интегрирования СА и С2 найдем, кроме
того, уравнение для х
i-- Cxk sin kt + C2fe cos kt + [fep/(fe2 - p2)] cos pt
й попользуем начальные условия задачи.
147
Рассматриваемое движение начинается в момент {t — 0), когда
деформация пружины является статической деформацией под действием грузов
D и Е. При принятом положении начала отсчета О начальная координата
груза D равна х0 = —/сте, причем /СТ? = Ge sin а/с — статическая
деформация пружины под действием груза Е.
Таким образом, при t = 0
Составим уравнения х = х (t) и х = х (t) для t = 0:
*о = Ci; х0 = С2к + hp/(k2 - Р2\
откуда
Сх = -/сть С2 = -fcp/[k (/с2 - р2I
Уравнение движения груза D имеет следующий вид:
х = -/ст? cos kt - 2 Р 2 sin fa + уз r sin pf.
k(kz — pz) \r — p
Найдем числовые значения входящих в уравнение величин:
4^= 17,3 с;
G?sina 3-9,81 0,5
6-100 =0'(G45m;
Ы _ 600-0,02
к2 - р2 mD (к2 - р2) 2 C00 - 100)
Следовательно, уравнение движения груза D
х = -2,45 cos 17,3t ~ 1,73 sin 17,3f + 3 sin Юг (см).
Задание Д.4. Исследование относительного движения
материальной точки
Шарик М, рассматриваемый как материальная точка, перемещается
по цилиндрическому каналу движущегося тела А (рис. 129-131). Найти
уравнение относительного движения этого шарика x=/(t), приняв за
начало отсчета точку О.
Тело А равномерно вращается вокруг неподвижной оси (в вариантах
2, 3, 4, 7, 10, 11, 14, 20, 23, 26 и 30 ось вращения zx вертикальна, в
вариантах 1, 12, 15 и 25 ось вращения Xi горизонтальна). В вариантах 5,
6, 8, 9, 13, 16, 17, 18, 19, 21, 22, 24, 27, 28 и 29 тело А движется
поступательно, параллельно вертикальной плоскости y^O^z^
Найти также координату х и давление шарика на стенку канала при
заданном значении t = tx. Данные, необходимые для выполнения задания,
приведены в табл. 40.
148
Таблица 40
Номер
варианта
(рис.
129-131)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
а,
град
—
45
—
60
—
—
30
30
60
30
—
—
—
—
45
—
40
—
—
30
—
—
60
—
—
75
—
60
50
т,
кг
0,02
0,02
0,03
0,09
0,02
0,01
0,03
0,03
0,02
0,05
0,05
0,08
0,01
0,05
0,01
0,02
0,02
0,02
0,08
0,01
0,05
0,03
0,01
0,01
0,05
0,09
0,02
0,03
0,10
0,02
со,
рад/с
л
л
2л
4л
Юл
2л
—
—
6л
л
6л
—
4л
л
—
6л
—
—
Юл
4л
2л
—
2л
л
—
—
—
л/2
Начальные
данные
дг0, м
0
0
0,5
0,2
0,6
0,5
0,3
0,8
0,4
0,4
0
0,05
0
0,5
0,5
1,0
0
0,6
0,4
0,1
0,5
0,1
-0,5
0
0,1
0,2
1,0
0,8
0,4
0
м/с
0,4
0,2
0
-0,8
0
0
0
0
0
0
0
0
0,5
0
0
2,0
4,0
0
-0,8
0
0,1
3,0
-0,1
0,2
-0,4
0,3
0,6
0
1,0
0,5
л,
с
0,5
0,4
0,2
0,1
0,2
0,2
0,2
0,1
0,1
0,1
0,4
0,1
0,2
0,1
1,0
0,1
0,2
0,1
0,1
0,2
0,1
0,1
0,2
0,2
0,1
0,1
0,3
0,3
0,1
0,2
с,
Н/см
__
—
—
0,36
—
—
—
—
0,20
—
—
0,20
—
—
—
—
—
0,40
0,20
—
—
—
0,20
0,20
—
—
0,20
—
'о.
м
—
—
—
0,15
—
—
—
—
0,20
—
0,10
—
—
—
—
—
0,20
0,10
—
—
0,20
0,1
0,20
—
Уравнение движения
тела А
_
—
—
—
^ = 0,6-2*3 (м)
—
—
jti = 0,1cos2iu (м)
у{ — № (м)
—
—
—
zf = 5 —10/2 (М)
—
-
ух = 0,06/3 (М)
—
^ = 0,1 sin л/ (м)
Vl = 8/-/3 (М)
_
^1 = 2 +/2 ДМ)
—
^ = 0,1 cos 1,5л/ (м)
—
_
z^OJ sin0,5 л/(м)
^ = 8-5/3 (м)
^ = 84-/3 (М)
—
г/г,
м
_
0,15
—
—
0,10
0,20
—
—
0,20
—
—
—
0,20
—
—
0,20
—
—
—
—
0,10
—
—
—
—
—
—
0,50
0
0
0
0
0
0
0
0
0
0
0
0
0,1
0,2
0
0
0
0
0
0
0,2
0
0
0
0
0
0
0,1
0
0
В задании приняты следующие обозначения: т — масса шарика М;
со - постоянная угловая скорость тела А (в вариантах 1-4, 7, 10—12,
14, 15, 20, 23, 25, 26, 30) или кривошипов ОгВ и О2С (в вариантах 6, 17,
22); с - коэффициент жесткости пружины, к которой прикреплен шарик М;
/0 - длина недеформированной пружины;/ - коэффициент трения
скольжения шарика по стенке канала; х0, х0 — начальная координата и проекция
начальной скорости на ось х.
Пример выполнения задания (рис. 132). Дано: а = 30°, со = тг рад/с;
т = 0,01 кг; т = 0,2 с; х0 = 0,3 м; х0 = 2 м/с; с = 1 Н/м; /0 = 0,2 м; г = 0,2 м.
Найти уравнение х = х (г) относительного движения шарика М, а также
координату Xi и давление шарика на стенку канала при заданном t = tx.
Решение. Свяжем подвижную систему отсчета Oxyz с вращающимся
каналом (трубкой), совместив ось х с траекторией относительного
движения шарика М.
149
~ i X
iM
rr / У/////////////Л
(О,
'////////////
X
10
о, I
V//////,
\
X
Рис. 129
12
tp=u>t
13 z'
м
a
-У*
м
15
ПА VV ЬЛ„„ У*
17
А-
м 4
С
г Л
р I
9
20
W/////////////////////////////,
77/777Р,
м
Рис. 130
21
22
(p-CJt
23
А —
I
I
h
J
У*
26
27
г, i
^7 У//////////////, /
29
30
///
///
///
y/z/T//
f
S
У/УУУ/УУУУ/
УУУ///У////
A
0,
g
Pwc. 737
Вращение этой системы вокруг оси zx является переносным движением
для шарика М. Относительным движением шарика М является его
движение вдоль трубки. В том случае, когда переносное движение является
152
Рис. 132
равномерным вращением,
относительное движение точки определяется
уравнением
К шарику М приложены силы:
вес 5, реакция пружины Р и
нормальная реакция стенки трубки; эту
реакцию можно разложить на две
взаимно перпендикулярные
составляющие N1 и N2.
Присоединяем к силам,
действующим на шарик М, переносную
центробежную силу инерции Ф? и кори-
олисову силу инерции 4>с,
направленные противоположно ускорениям
а* и ас. Направление ускорения ас
найдем по известному правилу.
Предположим, что направление
относительной скорости Ьг точки М
совпадает с положительным
направлением оси х. В этом случае кориолисова сила инерции Фс
перпендикулярна плоскости xOz и направлена, как показано на рис. 132.
Модули сил инерции определяются по формулам
Фпе = тапе = т(й2е (г 4- х sin a);
Фс = тас = 2m(oevr sin а,
где
С0е = @, Vr = | X |.
Основное уравнение относительного движения точки М в данном
случае имеет вид
mar = S 4- Р + /?! + $2 + &ие + Фс- A)
Составим дифференциальное уравнение относительного движения
шарика М вдоль оси х:
тх = J) Xt = Ф* sin а - G cos а — Р;
тх — тсо2 (г + х sin а) sin а — mgcos а — с (х — /0)
(реакция пружины Р равна произведению коэффициента жесткости на
деформацию пружины).
Последнее уравнение представим в виде
х + (с/т — со2 sin2 a) x = co2r sin a - gcos а + clo/m. B)
Общее решение полученного дифференциального уравнения B) имеет
вид
Х = Х* + X**,
где х* — общее решение соответствующего однородного уравнения; х** -
частное решение уравнения B).
153
Составим характеристическое уравнение и найдем его корни:
X2 + с/т - со2 sin2 a = 0;
Jti = )/co2 sin2 a - c/m = ]/n2 • 0,52 - 1/0,01 = 9,876/;
X2 = -9,876/.
Таким образом, общее решение однородного уравнения имеет,вид
х* = С! cos 9,876* + С2 sin 9,876*.
Частное решение уравнения B) находим в форме
х** = Я.
Из дифференциального уравнения B) находим
х** = В = 2 . 2 —.
с/т — or sur a
В результате вычислений получаем
В = 0,128 м.
Решение дифференциального уравнения B) относительного движения
шарика М получает вид
х = Сх cos 9,876* + С2 sin 9,876* + 0,128. C)
Скорость этого движения
х = -9,876Ci sin 9,876* + 9,876С2 cos 9,876*. D)
Постоянные Сх и С2 определяем, используя начальные условия:
при * = 0 х0 = 0,3 м, х0 — 2,0 м/с.
Составим уравнения C) и D) для * = 0:
х0 = С1 + 0,128; х0 = 9,876С2,
откуда
С, = 0,172; С2 - 0,202.
Уравнение относительного движения шарика М принимает вид х =
= 0,172 cos 9,876* + 0,202 sin 9,876* + 0,128.
Скорость относительного движения шарика х = —1,69 sin 9,876* +
+ 1,99 cos 9,876*.
Для определения составляющих реакции стенки трубки Nt и N2 при
t = *х = 0,2 с выразим векторное уравнение A) в проекциях на оси у и z.
Учитывая, что вектор аг перпендикулярен этим осям, получаем
0 = N2 - Фс, 0 = Nt - Gcos60° - Ф^сов 30°.
Из этих уравнений находим
jV2 = Фс = 2mwtv sin a;
Nt = G cos 60° + Ф« cos 30° = m^cos 60° + mco2 (r + x sin a) cos 30°.
154
Для получения числовых значений Nx и N2 необходимо определить
координату Хх и проекцию относительной скорости точки хь
соответствующие значению ^ = 0,2 с:
хг = 0,172 cos (9,876 • 0,2) + 0,202 sin (9,876 • 0,2) + 0,128 =
= 0,172 cos 113° 4- 0,202 sin 113° + 0,128 = 0,246 м;
Xi = -1,69 sin 113° + 1,99 cos 113° = -2,33 м/с.
Следовательно, составляющие реакции Nx = 0,077 H; N2 = 0,080 H.
Реакция стенки трубки
N = ]/N\ + N22 = ]/0,0772 + 0,0802 = 0,111 Н.
Искомое давление шарика М на стенки трубки по числовому
значению равно найденной реакции N и направлено в противоположную
сторону.
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ МАТЕРИАЛЬНОЙ ТОЧКИ
Задание Д.5. Применение теоремы
об изменении количества движения к определению скорости
материальной точки
Телу массой т сообщена начальная скорость v0, направленная вверх
по наклонной плоскости, составляющей угол а с горизонтом. На тело
действует сила Р9 направленная в ту же сторону (рис. 133).
Зная закон изменения силы Р = Р (t) и коэффициент трения скольжения
/, определить скорость тела в моменты времени tu t2, tb и проверить
полученный результат для момента времени tt с помощью
дифференциального уравнения движения.
Необходимые для решения данные приведены в табл. 41.
Таблица 41
Номер
варианта
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
да,
кг
35
20
25
10
16
40
20
16
12
50
10
12
10
20
14
20
24
15
м/с
5,4
0
0
4,5
9,0
4,0
8,0
7,6
0
12,0
5,0
3,0
8,0
8,5
9,0
3,0
10,0
13,0
I,
h
'з
с
4
6
4
5
4
4
5
6
6
2
6
3
4
5
7
5
6
8
10
10
10
10
8
8
8
11
10
6
10
8
12
8
12
9
10
16
18
15
16
16
16
12
И
13
14
12
16
14
16
15
18
17
15
20
Л,
Р2
Ръ
Н
100
200
200
0
120
400
0
75
100
0
50
60
0
40
0
300
0
по
200
160
200/120
180
120/0
300
300
200
140
300
100
180
150
100
140
150
180
150
150
160
120
40
0
300
0
0
0
200
100
120
150
150
0
100
60
0
250
180
0
100
160
0
0
0
0
200
200
120
100
0
100
100
140
90
а,
град
25
37
21
32
24
40
25
23
20
27
35
42
30
23
18
39
15
26
/
0,10
0,25
0,10
0,12
0,08
0,06
0,20
0,12
0,20
0,08
0,24
0,15
0,18
0,07
0,15
0,12
0,20
0,22
155
Продолжение табл. 41
Номер
анта
19
20
21
22
22
24
25
26
27
28
29
30
кг
15
22
13
11
12
10
18
8
17
9
20
10
м/с
7,2
8,2
10,0
6,0
4,5
7,0
0
9,0
5,0
7,5
9,5
10,2
'i | h
h
с
3
2
8
7
5
4
8
4
7
4
5
6
10
9
12
9
10
14
10
8
10
12
6
7
16
11
16
14
16
29
16
12
18
17
11
10
л>
Pi
Ръ
н
150
70
0
160
50
100
180
0
190
0
0
120
ПО
110
200/0
0
120
50
160/0
150
170/0
140/70
400
70
90
110
0/200
0/100
40
50
0/140
0
100
100/70
400/100
0
120
50
100
120
80
0
180
120
280
70
200
120
а,
град
30
15
28
31
21
18
33
45
38
26
15
33
/
0,30
0,15
0,14
0,11
0,22
0,09^
0,17
0,10
0,21
0,20
0,25
0,15
При построении графика изменения силы Р по заданным ее значениям
Ро, Рь ^2» ^з Для моментов времени t0, tu t2, h считать зависимость
Р = Р (t) между указанными моментами времени линейной. Значение силы
Р, задаваемое в табл. 41 в виде дроби, указывает на то, что модуль
силы в заданный момент времени претерпевает «скачок»: в числителе
указан модуль силы в конце промежутка времени, а в знаменателе —
в начале следующего промежутка времени.
Пример выполнения задания. Дано: т = 40 кг; Vq = 10 м/с; ?х = 3 с,
t2 = 8 с, t3 = 12 с; Ро = 0; Рх = 250 Н; Р2 = 300/200 Н; Р3 = 150 Н; а = 30°;
/=0Д.
Определить vu v2 и v3 для tu t2, t3.
Решение. Покажем силы, действующие на тело: вес S, нормальную
реакцию плоскости Й9 силу ? и силу трения скольжения Р, направив ее
противоположно начальной скорости, т. е. вниз по наклонной плоскости.
Построим график P = P(t) по заданным значениям Ро, Рь Р2 и Р3
(рис. 134).
1. Для тела, принимаемого за материальную точку, составим
уравнение, выражающее теорему об изменении количества движения в проекциях
на ось х для промежутка времени от 0 до ^:
mvlx - mvOx = ? SiX9 A)
где
X Six = - Gtt sin a - Ftt + Spx
Рис. 134
Проекция импульса переменной силы Р за время tx
н
Spx=\Pdt.
о
Этот интеграл определим как площадь треугольника ОВМ на графике
Spx = 3 • 250/2 = 375 Н. с.
Учитывая, что сила трения скольжения F = fN = fG cos а, получаем
уравнение A) в следующем эиде:
— wg*i sin ос — fingti cos a + 375,
откуда
*>i* = Vox — gti sin a — fgt! cos a + 375/m.
С учетом исходных данных находим
^ 1 = I vix I = 2,10 м/с.
Примечание. Сила трения скольжения Т направлена противоположно
скорости, и поэтому, прежде чем производить приведенный расчет, нужно выяснить,
не изменит ли скорость тела за время гг первоначального направления вверх
по наклонной плоскости (vOx > 0), а следовательно, сила трения - направления вниз.
Для этого надо установить, возможен ли такой момент времени
Г* < f 1, при котором скорость тела станет равной нулю под действием
постоянных сил 8, Л, Р и силы Р, изменяющейся по закону прямой
ОВ:Р = B50/3) t.
Составим уравнение, выражающее теорему об изменении количества
движения, для предполагаемого промежутка времени от 0 до t*:
mvx — mvOx = — mgt* sin a — fingt* cos a + Spx,
где в данном случае
vx = 0, Spx = f Px dt - f B50/3) t dt « A25/3) t*2.
о о
В результате получим следующее уравнение для определения t*:
A25/3) г*2 -Wg(sin a + /cos a) t* .+ mvOx = 0,
т. e.
t*2 - A96,2 + 34,1) 3^/125 + 400 • 3/125 = 0,
или
t*2 - 5,52t* + 9,6 - 0.
Решая это уравнение, делаем вывод, что не существует такого момента
времени, для которого скорость тела, находящегося под действием
указанных сил, будет равна нулю.
2. Для определения скорости тела в момент времени t2 составим
уравнение, выражающее теорему об изменении количества движения, для
промежутка времени t2 — ti'.
»n'2x-invix = 2Хх> B)
где
X Six = - G (t2 - tг) sin a - F {t2 - tt) + Spx.
Проекция импульса переменной силы Р за t2 — 11 выражается площадью
трапеции MBCI на графике Р = Р(г):
Spx = 5 B50 + 300)/2 = 1375 Н. с.
Поэтому уравнение B) имеет вид
mv2x - mvix = -mg{t2 - ti) sin a - fmgeos a (t2 - tt) + 1375,
откуда
r2x = vix - ^(r2 - r0 sin a - /gcos a (f2 ~ fi) + 1375/m,
или
^2 = I V2x I = 7,68 М/С.
Примечание. Прежде чем составить уравнение B), нужно убедиться, что
за время t2 — f i первоначальная скорость Vi {vlx > 0) не изменит своего
направления. Действительно, в начале движения на этом участке сила Р > (G sin a + /G cos a)
h продолжает расти, значит скорость тела не может изменить своего
первоначального направления.
3. Уравнение, выражающее теорему об изменении количества
движения и составленное для промежутка времени t2 — t2, дает возможность
определить скорость тела vz в момент г3-
mvsx - ™v2x = Ya six> C)
где
X Six - - G (f з - r2) sin a - /G cos a (r3 - t2) + S,,v
Проекция импульса переменной силы Р за (/3 —12) выражается
площадью трапеции IDEK:
Spx - 4 B00 + 150)/2 = 700 Н. с.
Тогда
гзх = r2x -gih- t2) sin a - /#cos a (f3 - t2) + 700/40,
откуда
ГзН t>3*l = 2,15 м/с.
Примечай и с. Уравнение C) можно составить после того, как установлено,
что II на третьем участке тело не изменяет направления своей первоначальной
скорости (v2x > 0) и сила трения скольжения направлена в течение всего
промежутка времени t$ — t2 вниз по наклонной плоскости. Для этого следует выяснить,
возможен ли такой момент времени т* < 13, когда скорость тела станет равной
пулю под действием постоянных сил б, Af, P и силы Р, закон изменения которой
представлен на третьем участке графика (см. рис. 133) прямой DE. Уравнение DE
имеет вид
158
Р = 200 - [B00 - 150)/4] т = 200 - 12,5т,
где х - время, отсчитываемое от момента t2 - 8 с.
Составим уравнение, выражающее теорему об изменении количества
движения, для промежутка времени от т0 = 0 до т = т*:
mvx — wv2x — —mgz* sin ос — fnigz* cos a + SpX9
где для данного случая vx = 0, а
т* г*
5рх = J Px dx = J B00 - 12,5т) dx = 200т* - 6,25т*2.
о о
В результате лолучим следующее уравнение, позволяющее определить
т*:
6,25т*2 - 200т* + mg(sin a + /cos a) т* - mv2x = 0,
230,3-200 40.7,68
Х + Х U
6,25 ~U'
или
т*2 + 4,85т* - 49,1 = 0,
откуда
т* = -2,42 ± |/5,86 + 49,1 = -2,42 ± 7,41 с.
Таким образом,
т* = 4,99 с.
Скорость станет равной нулю при т = 4,99 с, но (?3 — t2) < т*, поэтому
изменения скорости в рассматриваемый промежуток времени t3 — t2 не
произойдет.
4. Найдем в момент ti значение скорости vx с помощью
дифференциального уравнения
Раскроем правую часть уравнения:
тх = — G sin a — F -f P,
или
тх = -mgsin a — fmgcos a + P,
т. e.
x = -gsin a - J^cos a + P/m9
где Р = B50/3) t — уравнение прямой ОВ, а поэтому
x = -? sin a - fg cos a + B5/12) r.
Интегрируя полученное дифференциальное уравнение, получаем
х = -#(sin a + /cos a) t + B5/24) t2 + С
Для определения С используем начальное условие задачи: при t = Q
vox = х0 = 10 м/с.
Составим уравнение, полученное интегрированием, для t = 0; найдем,
что С = 10 м/с. Таким образом, уравнение, определяющее изменение
скорости за промежуток времени от 0 до гь имеет вид
х = -g{sin а + /cos а) t 4- B5/24) t2 + 10.
При t = fx
^1 = 1^=^1 = 2,10 м/с.
Задание Д.6. Применение основных теорем динамики
к исследованию движения материальной точки
Шарик, принимаемый за материальную точку, движется из положения
Л внутри трубки, ось которой расположена в вертикальной плоскости
(рис. 135 — 137). Найти скорость шарика в положениях В и С и давление
шарика на стенку трубки в положении С. Трением на криволинейных
участках траектории пренебречь. В вариантах 3, 6, 7, 10, 13, 15, 17, 19, 25,
28, 29 шарик, пройдя путь h0, отделяется от пружины.
Необходимые для решения данные приведены в табл. 42.
Таблица 42
Номер
варианта
(рис.
135-137)
i
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
w,
кг
0,5
0,6
0,4
0,2
0,1
0,3
0,4
0.2
0,5
0,4
0.2
0,4
0,3
0,6
0,1
0,4
0,2
0,3
ол
0,2
0,7
0,4
0,6
0,5
ол
0,2
0,8
0,3
0,5
0,8
м/с
20
16
0
5
8
2
5
1
2
4
6
5
0
0
1
2
0
3
4
10
3
1
2
0
0
2
3
4
0
5
т, с
2,0
0.2
2,0
0,5
1,5
2,0
1,0
0,5
1,5
0,1
1,0
0,4
0,1
2,0
0,1
0,2
0,1
0,4
0,1
1,0
0,3
0,2
0,4
0.5
0,2
0,1
0,2
0,1
0,2
0,3
R, м
2,0
4,0
0,2
1,0
2,0
4,0
1,0
1,5
4,0
0,5
1,0
2,0
1,0
3,0
1,0
2,0
1,0
1,5
0,4
0,5
0,3
0,2
0,2
0,6
0,5
0,2
0,4
0,6
0,5
0,6
f
0,20
0,10
0,15
0,10
0,20
0,10
0,10
0,15
0,25
0,10
0,30
0,20
0,10
0,20
0,15
0,40
0,20
0,10
0,30
0,10
0,20
0,40
0,20
0,30
0,25
0,20
0,15
0,35
0,20
0.15
град
30
45
30
45
30
30
30
30
20
30
45
30
30
60
60
30
30
45
30
60
45
45
45
60
—
30
45
30
45
30
Р,
град
45
20
—
—
—
20
—
60
60
60
—
60
60
30
20
—
—
60
—
—
—
—
30
30
—
—
15
30
-
/<о>
см
—
10
—
—
30
50
0
—
0,2
—
—
50
—
50
—
40
—
10
0
—
0
—
—
30
—
—
60
50
—
с,
Н/см
—
1
—
—
2
5
4
—
0,2
3
—
10
—
0,2
—
1,0
—
0,5
1,2
—
1,1
—
—
0,4
—
—
0,1
0,8
-
Величины,
которые требуется
определить
дополнительно
Я
_
h
I'D
vD
vDi h
I'd
s
I'D
I'd
vd
__
VD
/l
—
—
H
, I'D
I'D
vD
I'D
vD
160
В задании приняты следующие обозначения: т — масса шарика;
изначальная скорость шарика; х — время движения шарика на участке А1
(в вариантах 1, 2, 5, 8, 14, 18, 20, 21, 23, 24, 27, 30) или на участке BL
(в вариантах 3, 4, 6, 7, 9-13, 15-17, 19, 22, 25, 26, 28, 29);/- коэффициент
2ак
К"
л
ySSSSSSSsS/?A[/f
1Q
Рис. 135
16
12 А
15
16
В '
у////////////////*
18
19
20
Рис. 136
'/У///////////////////////////
у////////////////
6Z
'ЛДУУ//////////.\
LZ
9Z
QZ
ZZ
трения скольжения
шарика по стенке
трубки; h0 — начальная
деформация пружины;
й,— наибольшее сжатие
пружины; с —
коэффициент жесткости
пружины; Я —
наибольшая высота подъема
шарика; s — путь,
пройденный шариком
до остановки.
Пример выполнения
задания (рис. 138).
Дано: т зав 0,5 кг; vA =
= 0>8 м/с; t = 0,1 с
(время движения на
0,2 м; /=0,1; а = 60°; р = 30°; h0 = 0; с « 10 Н/см =
Рис. 138
участке BD); R
= 1000 Н/м.
Определить vB> vc, No vD9 h.
, Решение. Для определения у5 и vc применим теорему об изменении
кинетической энергии материальной точки. Движение шарика на участках
АС и АВ траектории происходит под действием силы тяжести G (силы
трения на криволинейных участках не учитываем):
то\/2 —
mvl/2 -
vc =
или
? Л,- = ОЯА » mgAB sin а = т#6Я sin а;
v\-v\- 2g6R sin а;
t?5 = 4,59 м/с;
= G#2 = mgDK sin а + 2R cos а);
= 4gR B sin а 4- cos a);
д + 4gR B sin a + cos a),
vc = 4,26 м/с.
Определяем давление шарика на стенку канала в положении С.
В соответствии с принципом Даламбера для материальной точки
геометрическая сумма сил, приложенных к точке, и силы инерции этой
точки равна нулю:
Q + Я'с + ф в 0.
Силу инерции материальной точки можно разложить на нормальную
в касательную составляющие:
Сумма проекций сил (j, N'c и Ф на ось х должна быть равна нулю:
АГС - G cos 60° - Ф„ = 0.
164
Отсюда
N'c = G cos 60° + Фп = mgcos 60°
или
N'c = 25,2 H.
Реакцию N'c можно также определить с помощью естественного
уравнения движения:
^ = ?Pt cos(Ph n) = N'C-Gcos 60°.
Отсюда
N'c = G cos 60° +
Искомое давление iVc шарика на стенку трубки по числовому
значению равно найденной реакции N'c и направлено в противоположную
сторону.
Скорость шарика в положении D найдем, применив на участке BD
теорему об изменении количества движения материальной точки (рис. 139):
mvDx — mtJjsjc:
К точке приложены сила тяжести б, реакция стенки трубки /?' и сила
трения F:
F = flf'=fG cos p.
Так как
0?Х = #?), и5х = Vg9 2^ 5,х = — G sin P • t — Ft ^ — t
то
— mvB = — m^sin P • t — fmgcos p • f,
откуда
4,01 м/с.
Для определения
максимального сжатия h пружины
воспользуемся на участке DE
теоремой об изменении
кинетической энергии материальной
точки:
mv2E/2 - mvl/2 =
= -ch2/2-GH3~-Fh.
Учитывая, что vE = 0 и Я3 =
= /i sin P, получаем
с/*2/2 + G (sin Р + /cos p) ft -
- mt?/2 = 0,
Рис. 139
165
или
h2 + 2Gh (sin p + /Cos p)/c - mvl/c = 0.
Решая полученное квадратное уравнение относительно й, получим
h = (-0,003 ±0,090) м.
Принимаем в качестве искомой величины положительный корень
квадратного уравнения:
h = -0,003 + 0,090 = 0,087 м.
II. ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Задание Д.7. Применение теоремы о движении центра масс
к исследованию движения механической системы
Тела 1 и 2 (рис. 140—142) движутся по отношению к телу 3 с помощью
механизмов, установленных на этом теле (силы, приводящие в движение
механизмы, являются внутренними силами данной механической системы).
Тело 3 находится на горизонтальной плоскости.
1. Предполагая горизонтальную плоскость гладкой, определить
зависимость между перемещением s3 = s3 (t) тела 3 и относительным
перемещением sir = sir (t) тела 1 (по отношению к телу 3), если механическая
система в начале рассматриваемого движения {t = 0) находилась в
состоянии покоя, причем slr0 = s2ro = $зо = ®> определить величину
горизонтальной составляющей реакции Rx одного из упоров, которые удерживали бы
тело 3 от перемещения.
2. Предполагая горизонтальную плоскость шероховатой, написать
дифференциальное уравнение движения тела 3; определить условие, при
котором тело 3 (при заданных параметрах системы) придет в движение,
и найти зависимость между s3 (t) и sir (t\ считая, что дальнейшее движе-
впе происходит при соблюдении этого условия (при t = 0 slr0 = 52r0 =
= ho = 0, slr0 = s2r0 = 5зо ~ 0).
Известны: mb m2 — массы тел 1 и 2; тъ — масса тела 3 с
находящимися ка нем механизмами привода (центр масс С3 по отношению к телу 3
не перемещается); R, г - радиусы больших и малых окружностей тел 1 и 2
или звеньев А и В механизмов' привода; ос, р — углы наклона граней
призм (тел 3) и лент транспортеров к горизонтальной плоскости; /СЦ5
/ - коэффициенты трения покоя (сцепления) и трения скольжения
соответственно, принимаемые одинаковыми во всех вариантах:/сц = 0,11,/= 0,10;
sir = Sir @ ~ непрерывная и возрастающая функция времени (ее
производная тоже непрерывна и возрастает).
Качение тел происходит без проскальзывания; нити невесомы и
нерастяжимы.
На схемах тела J, 2, 5 - в отклоненных от начального (t = 0)
положениях; показаны относительные перемещения sln s2r тел 1 и 2 и
предполагаемое абсолютное перемещение s3 тела 3 в сторону возрастания
этих перемещений. Необходимые для решения данные приведены в табл. 43.
Массой зубчатой рейки (варианты 1, 6, 7, 14, 15, 20, 22, 29) пренебречь.
Пример выполнения задания (рис. 143). Дано: тг = 600; т2 - 240;
»!3 = 400 кг; RA/rA = 3; а = 30°; р = 60°; /сц = 0,11; / = 0,10.
166
Таблица 43
Номер
варианта
(рис.
140-142)
1
2
3
4
• 5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
т\
т2
кг
800
200
300
200
100
600
300
500
400
500
600
300
700
400
400
600
500
700
300
800
500
300
600
400
200
600
200
500
600
300
200
600
800
800
700
300
500
200
200
300
200
600
300
500
900
200
400
400
600
200
180
700
300
300
700
300
600
200
300
800
800
1000
500
1000
600
600
1000
400
500
600
800
500
600
1000
| 500
700
800
800
700
1000
300
500
1 500
600
600
800
800
600
800
600
Ra/га
2
Ъ1г
3
2
3/2
2
2
2
2
2
3
2
2
2
2
, 2
3/2
2
3
2
2
2
2
2
2
2
2
2
&в!гв
2
2
2
2
2
2
2
3
2
2
3
2
2
2
2
2
2
2
Rilri
3
2
2
Rjr2
4
2
3
3
3
3
4
4
g
град
30
30
60
15
45
30
45
60
30
45
30
30
30
45
60
30
30
30
45
45
30
30
30
15
30
30
за
45
30
45
30
45
60
60
30
30
J45
15
60
60
45
60
60
60
15
Примечание
гА = гв
Ra — Rb
Ra=Rb
rA — rB
ТА~ГВ
rA—rB\ Ra' = Ra\
Массой
подвижного блока пренебречь
ГА==ГВ
гА — гв
Ra = &b\ rA> = rA\
гв-'в
rA — rB
rA—rB
Ra — Rb
Массой
подвижного блока пренебречь
га = гв\ Ra>s=Ra;
fAZBB
rA = rB; RA=RA;
Rj? = Rb
Массой
подвижного блока пренебречь
rA~rB
га-Rb
Ra — Rb
rA=rB
Решение. 1. Горизонтальная плоскость — гладкая. Напишем
дифференциальное уравнение, выражающее теорему о движении центра масс
механической системы (рис. 143, а), в проекциях на ось х:
A)
167
В данном случае
™*с = 0,
где т = mi + т2 + т3 - масса всей системы.
/УУУУУУУУУУУУУУУУУУУУУУ.
' УУУУУУУУУУУУУУУУУУУУУУУу
Рис. 140
У/7$//АААААААААААААААу7А/ААААААААААААх
УАААААААААААААААААААААААА/ х
аахухаааашаШаааааааааааааааааа,
'A A/ 'SYAAAAAAAAAAAAAAAAAAAAAAAAA/ X
aaaaaaaaaaaa/aaaaaaa/aaaaaa
16
У////////
18
V, У, ys/УУУУААААААААААААААААААААА/ Х
УААААААААААААААААААААААА, X
АААААААААААААААААААААААААААА X
УУУУУУУУУУУУУУУУУУУУУУУУ/ х
Рис. 141
Oil
лчнчшзьвн
ndu
•0 = odx kQ ^ odx q - ^ паи
(]) эинснавс!/С PMs/.diidiSi
XV//////////////////////X, ?ЛУА
0
x У//////////////////////
Эти уравнения для t = О
имеют вид
откуда Сх = О, С2 = хСо Таким
образом, для любого момента
времени
хс = 0, хс = хсо. B)
Из уравнений B) видно, что
вдоль оси х центр масс
механической системы не
перемещается и что движение тел
1 и 2 возможно только с
одновременным движением
тела к
Приравняем на основании B)
абсциссу центра масс системы
в любой момент времени t
C)
т
его абсциссе в начальный
момент рассматриваемого
движения:
хсо==-
т
D)
Покажем перемещение 53
тела 3, предполагая его
направленным в сторону возрас-
тания координаты s3.
В выражении C)
сР
ft '/'/////////////////Ж//////////////////,
- s2r cos р =
Рис. 143
cos
E)
В E) следует выразить s2r через slr. Для этого устанавливаем связь
между относительными скоростями v2r = s2r и vlr = 5lr.
Из чертежа (рис. 143, я) находим
1г/У2г = RA/rA, откуда y2r = virrA/RAi
т. е.
^s2r/dt = (dslr/dt)rA/RA, или ds2r = dslrr
Интегрируя это выражение при нулевых начальных условиях, имеем
s2r = sirrA/RA.
171
Из полученного видно, что линейные перемещения находятся в такой
же зависимости, что и соответствующие линейные скорости.
Приравняв C) [с учетом E)] и D), имеем
wi {хсю + S3 + sir cos a) + т2 (хСго + s3 ~ s{rrA cos fi/RA) + Щ (*сзо + S3) =
= ЩХсю 4- m2xC2o +
откуда найдем искомую зависимость
-W! cos а + ш2гл cos P/jR^
S3 = - slr, F)
или, используя числовые данные, получим
s3 = -O,39slr (м).
Знак «—» означает, что при заданных параметрах системы
положительной, координате slr тела 1 соответствует координата s3 < 0, т. е.
тело 3 перемещается из первоначального положения влево (а не в
положительном направлении отсчета s3, как первоначально предполагалось).
Очевидно, что зависимость между абсолютной скоростью г3 = s3 тела
3 и относительной скоростью vir = slr тела 1 определяется на основании
F) выражением
- тх cos a + m2rA cos tyRA
v3 = vlri G)
или
»з= -0,39у1г (м/с). G1)
Пусть тело 3 на гладкой горизонтальной плоскости удерживается
упорами (на рис. 143,6 они показаны пунктиром).
Учитывая по G) направление скорости тела 3, покажем горизонтальную
составляющую Rx реакции левого упора.
Для определения ее величины составим дифференциальное уравнение
движения центра масс системы:
В данном случае ? Xf = Rx.
Выразим проекцию ускорения центра масс системы на ось через
соответствующие проекции ускорений центров масс тел системы, взяв
производные по времени от выражения C):
.. _ rnjk'ci + гп2хс2 + ЩХсг /gx
с"" т
Тогда
+ w2x"c2 + R (9)
Вторые производные от координат E) центров масс тел системы:
x'ci = s3 + s\r cos a, x'c2 = s3 - s\,rA cos Р/Дл, Хсз = s3. A0)
При наличии упоров тело 3 перемещаться не будет (s3 = 0 = const),
т.е. s3 = 0. A1)
172
Из уравнения (9) с учетом A0) и A1) находим
Я* - (щ cos a - m2rA cos р/Дл) s\n A2)
или
Rx = 480,2 Н.
Выражение A2) позволяет заключить, что упор будет испытывать
горизонтальное давление тела 3 (а тело 3 — реакцию Rx) только тогда,
когда тела 1 и 2 движутся с ускорением (s\r Ф 0).
Заметим, что Rx может оказаться равной нулю, когда s\r Ф 0, при
некоторых сочетаниях параметров системы. Например, в данной задаче,
как это видно из A2), при mx cos a = m2rA cos P/R^-
2. Горизонтальная плоскость шероховата. Составим дифференциальное
уравнение движения центра масс системы:
В данном случае (рис. 143, в) на ось х проецируется сила трения
скольжения F между телом 3 и горизонтальной плоскостью, направленная
противоположно скорости тела 3, а направление скорости тела 3
определяется выражением G'), поэтому ]? Xf = F.
Используя (8), напишем
т{хС{ + т2хС2 + m3xC3 = F
или, учитывая A0), имеем
Ш! (s3 + slr cos а) + т2 (s3 - slrrA cos Р/Кл) + m3s3 = F. A3)
Найдем силу трения скольжения:
F = jN\ A4)
где N' — нормальное давление системы на горизонтальную плоскость.
Для определения величины N' составим уравнение, выражающее
теорему о движении центра масс системы, в проекциях на ось у:
1 Yf.
Выразим проекцию ускорения центра масс системы на ось у через
соответствующие проекции ускорений центров масс отдельных тел системы
[по аналогии с (8)]:
+ Ю2Усг + ЩУсз .
Уств
Тогда дифференциальное уравнение примет вид
mja + тгусг + тгуСг = - G\ - О2 - G3 + N. A5)
Здесь /? — нормальная реакция горизонтальной плоскости: Й=—Йг;
Gl9 G2, G3 — силы тяжести тел 1, 2, 3.
Составим выражения ординат центров масс тел системы:
Уа = Уст + sir sin а, уС2 =*Усю + 52r sin р = уС2о + ^1,гл sin р/Кл, Усз = ^сзо-
Взяв производные по времени от этих выражений, получим:
Уа = Sir sin a, j/C2 = sirrA sin р/Ял, 3;сз = 0. A6)
173
Из A5) с учетом A6) найдем величину реакции:
N = G + т^и sin a + m2slfr,4 sin $/RA A7)
(G = Gi-f-G2 + G3 — сила тяжести всей системы).
Используя A4) и A7), напишем дифференциальное уравнение A3)
в следующем виде:
Wi И + s\r cos a) + m2 (s3 - sirrA cos P/Ra) + m3s3 =
= /(G -f mi5lr sin а + m2s\rrA sin р/ЯД
Ускорение телаЗ определяется выражением
/G - [ни cos a - {mArA cos P/RU) ~ /("U sin oc + щ2гл sin p/R^)] sir
5
3
Отсюда заключаем, что движение тела 3 на шероховатой плоскости
возможно только тогда, когда тела 1 и 2 движутся с ускорениями,
причем ускорение Slr превосходит некоторую величину S?r.
В самом деле, | s31 > 0, когда
[fG - [mx cos a - {m2rA cos P/R^) — /(«x si» a + и*2гл sin Р/Дл)] Str I > 0,
т. e.
I mi cos a - (m2rA cos p/R^) ~ /(mi sin a + m2r4 sin Р/Ял) I it, > /G. A9)
Движение тела З начинается из состояния покоя, когда на него
действует максимальная сила трения покоя (сцепления) Fcumax = /^iV =
=s /cnG; поэтому, определяя s?r из выражения A9), следует ввести
коэффициент сцепления /сц:
^* > f<*
1г0 | mi cos a - (m2rA cos p/RA) - /сц (mi sin а + m2rA sin $/RA) Г
Произведя вычисления, получим
s*ro > 3,05 м/с2.
Пусть относительное ускорение изменяется по некоторому
непрерывному закону s\r = s\r @ так, что в любой момент времени s\r > §\г.
Тогда движение тела 3 описывается дифференциальным уравнением
A8). Разделив каждое из слагаемых числителя правой части A8) на
знаменатель и обозначив
| mi cos ot - (m2rA cos Р/Ял) - /"(mi sin a + m2rA sin $/RA) \
=B,
B0)
получим это уравнение в следующем виде:
Заметим, что условие A9') при принятом обозначении имеет вид
Интегрируем B0) (начальные условия: при t = 0 slr0 = s2r0 == s^ = 0,
suo = 52ro = hro = 0):
h=fgt~ Bsir + C, 53
174
Напишем эти уравнения для t = 0:
530 = ~BslrQ + С, 530 = -BslrQ + D,
откуда найдем (имея в виду начальные условия) постоянные
интегрирования:
С = 0, D = 0.
Таким образом, s3 = fgt — Bslr, s3 = (fgt2/2) - Bsir.
Сделав числовые расчеты, имеем -
s3 = 0,98f - 0,36sln s3 = 0,49t2 - 0,36slr. B1)
Задание Д.8. Применение теоремы об изменении количества
движения к исследованию движения механической системы
Механическая система (рис. 144—146) состоит из тел 1, 2, 3 с массами
соответственно ти т2 и т3. Массами остальных тел, составляющих
систему, пренебречь.
На тело 1 наложены две связи. Опора А препятствует перемещению
по нормали к опорным поверхностям (по вертикали). Опора В не
препятствует перемещениям по вертикали и горизонтали, но исключает
возможность поворота.
В некоторый момент времени (принятый за начальный), когда скорость
тела 1 равна v0, а угловая скорость тела 2 — ш20, движение тел 2 и 3
относительно тела 1 начинает замедляться (направление вращения тела 2
и направление скорости ?0 показаны на рис. 144-146). Торможение
осуществляется внутренними для всей системы силами. Устройство,
осуществляющее торможение, на схемах не показано. В процессе торможения
угловое ускорение г2 (замедление) тела 2 остается постоянным.
Определить скорость vT тела 1 в тот момент времени, когда сэ2
становится равным нулю, т. е. относительное движение тел 2 и 3
прекращается. Вычисление vT произвести для одного из следующих условий*:
а) на тело 1 со стороны направляющих А действует сила кулоновского
(сухого) трения Т = — /1JV | v/\ v \ (/ — коэффициент трения скольжения,
| N | — модуль реакции в точке А);
б) на тело 1 кроме силы трения скольжения Р в опоре А действует
сила «вязкого» трения R со стороны опоры В: R = — bv (b — коэффициент
«вязкого» сопротивления, v — вектор скорости тела 2).
Вычисление vT произвести точно и приближенно. В приближенном
расчете пренебречь величинами первого и более высоких порядков малости
относительно промежутка времени Т = согоМ-
Для всех вариантов принять vQ = 2 м/с; оз2о = Ю рад/с, s2 = 250 рад/с2;
/=0,25; Ь-10 Н-с/м.
Считать, что проскальзывание колес по соответствующим поверхностям
отсутствует.
Необходимые для расчета данные приведены в табл. 44.
* Выбор условий — по усмотрению преподавателя. Условие б) рекомендуется
для самостоятельного исследования.
175
Таблица 44
Номер
варианта
(рис.
144-146)
1
2
3
4 .
5
6
7
8
9
10
И
12
13
14
15
кг
10
12
10
12
10
15
16
19
10
12
18
13
12
12
10
5
4
4
4
1
1
4
2
5
4
6
1
2
6
5
2
3
5
2
6
6
4
6
5
6
4
6
6
2
3
*2
м
0,5
0,5
0,35
0,7
0,5
0,5
0,7
0,7
0,7
0,8
0,8
0,8
0,4
0,8
0,8
0,5
0,4
_
0,7
0,5
0,6
0,4
0,6
0?4
0,4
а,
град
40
30
20
40
30
40
40
40
30
30
25
35
40
40
30
Номер
варианта
(рис.
144-146)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
т\
т2
тъ
кг
10
15
12
12
14
13
12
20
13
10
11
20
14
10
12
5
4
2
2
2
1
4
1
1
2
2
1
1
4
4
2
1
4
6
4
6
2
8
6
4
4
6
6
3
4
D
м
0,9
0,8
0,8
0,6
0,8
0,8
0,6
0,8
0,6
0,6
0,7
0,7
0,8
0,8
0,8
0,4
0,2
0,8
0,5
0,4
0,4
—
—
—
_
0,6
0,6
0,6
а,
град
30
30
40
30
20
25
20
35
30
25
25
30
20
20
25
Пример выполнения задания. Дано (рис. 147): mt = 12 кг, т2 = 4 кг;
тъ = 3 кг; R2 = 0,5 м; г2 « 0,25 м; ос = 30°; v0 = 2 м/с; со20 = 10 рад/с;
г2 = 250 рад/с2; / = 0,25; Ъ = 10 Н. с/м;
<о2 = о2о — &it @ < f < со2О/е2). A)
Определить t;T — скорость тела 7 в момент времени Г = со2О/е2.
Решение, а). На механическую систему действуют внешние силы:
Т - сила сухого трения в опоре А; бь б2, б3 - силы тяжести тел 1,2 и 5;
# - сила нормальной реакции в точке А; Мв- реактивный момент
в опоре В.
Применим теорему об изменении количества движения механической
системы в дифференциальной форме. В проекциях на оси координат
dKJdt = X xf; dKy/dt = X Yf9 B)
где Кх, Ку — проекции вектора количества движения системы на оси
координат; ?xf, ]T Ff — суммы проекций внешних сил на
соответствующие оси.
Количество движения системы тел 1, 2 и 3
? = ?х + Ё2 + ?3> C)
где
= т2 (иС2е
Здесь "й, "уС2, "усз — скорости центров масс тел 1, 2, 3; ~ЬС2е> "$сз« ^С2п "^сзг —
соответственно переносные и относительные скорости центров масс
(рис. 147).
Очевидно, что
= 2R2®2; vK = cd2 {R2
1
+ r2); J
E)
176
vK)/2 =
«3 = (ft - »к)/Bгз) =
r2j/2; )
- r,)/Bra). I
F)
8
;177
15
Ж
19
J
Ж
Рис. 145
22
гз
А 'Я^ъ
25
27
28
ш
29
Рг/с.
Проецируя обе части векторного равенства C) на координатные оси,
получаем с учетом D), E) и F)
Кх = тх - j.ico2 cos а, Ку = цсо2 sin а,
G)
179
где х — проекция вектора v на ось х;
т z= mi ~\" т2 И- Ш3 > И" ==
Проекции главного вектора внешних сил на координатные оси
?Af =+/|JV|; ?yf = -Gi - G2 - G3 + N. (8)
Здесь знак « — » соответствует случаю, когда х > 0, а знак «-{-» —
случаю, когда х < 0.
Подставляя G) и (8) в B), получим
тх + це2 cos а = +/1N |; - Ц82 sin а = -Gi- G2- G3 + N. (9)
Выразим из второго уравнения системы (9) алгебраическую величину
нормальной реакции и подставим ее в первое уравнение. В результате
получим
A0)
где
а = — S2 cos a + /
т
т
х = -а
х = — а
г — Л ?2 sin a
при х:
при х
A1)
: — s2 cos а -,
т
т
Рассмотрим промежуток времени О < t ^ Г*, в течение которого тело
1 движется вправо х > 0. Из A0) следует, что
*«-et + C= -af + tfo, A2)
где С — постоянная интегрирования, определяемая из начального условия:
при t =» 0
Xq = 1?о» \^3/
При t = Г, скорость тела 1 обращается в ноль, поэтому
T. = vo/a. A4)
Для дальнейшего решения необходимо сравнить найденную величину
Г, с величиной Т-
Рис. 147
с
180
Если окажется» что Г* > Г, то искомая скорость t?r может быть
найдена по формуле A2) при Г = Т.
Если Г* = Т9 то очевидно, что vT = 0, т. е. движение всех тел в системе
прекращается одновременно при t = Т.
Если Г* < Г, то тело 1 либо останавливается при t = Т» {vi = 0 при
любом * > TJ, либо начинает двигаться в обратном направлении. Первая
из этих возможностей реализуется при ~а = 0, а вторая — при а > 0.
Справедливость этих утверждений вытекает из дифференциального
уравнения (И).
В рассматриваемом примере
а = 57,92 м/с2; 5 = 47,60 м/с2;
7* = 0,0346 с; Г =0,04 с,
т. е. Г* < Т и а > 0. Следовательно, тело J начинает при ? = Г* двигаться
в обратную сторону. Это движение описывается дифференциальным
уравнением A1) при начальном условии: при t = Т„
х = 0. A5)
Интегрируя A1) с учетом A5), получим при Т+^t < Т
x=-5(t-rj. A6)
При t = Г получим из A6) искомое значение скорости тела 1 в момент,
когда со2 == 0:
vTX = х{Т) = -д(Г- Г#); i?TX = -0,26 м/с.
Интересно сопоставить этот результат со скоростью vT, вычисленной
при отсутствии силы трения. В этом случае надо положить во всех
выкладках/= 0. В результате вычислений будем иметь vTX = —0,11 м/с,
что в два раза меньше, чем в системе с трением.
б) На механическую систему помимо перечисленных в предыдущем
пункте внешних сил действует сила «вязкого» трения R.
Точное решение задачи. Воспользовавшись методикой, изложенной
в п. а), получим дифференциальное уравнение движения тела 1:
х + Рх = -а при х > 0; A7)
х + Рх=-а прих<0, A8)
где р = b/m (p = 0,526 рад).
Из A7) и начальных условий A3) следует, что при 0 < t ^ Г,
откуда
или
Г# = 0,0343 с.
Из A8) и начальных условий A5) получаем при T^t ^ Т:
-Р*-т«>-1]. A9)
181
При t = Г из A9) находим
vlx = —0,27 м/с.
Приближенное решение задачи. * Воспользуемся теоремой об изменении
-количества движения механической системы в конечной форме для
промежутков времени 0 ^ t ^ Т* и T*^t ^Т:
B0)
где 2j Ь?, 2, bi> 2- ^?, L ^5 *" сумма проекции импульсов внешних сил на
координатные оси соответственно за первый и второй промежутки
времени.
Очевидно, что проекции количества движения системы равны
Кх0 = mvox — [ЛС020 cos a;
B1)
= |icd2* sin a;
KXT =
где со2„, — угловая скорость тела 2 при t = Г*.
Проекции импульсов внешних сил будут соответственно
Т.
?--fi
: "~(Gi + G2 •
где х*; хт - смещения тела 1 соответственно за Т* и Тс.
Подставим B1) и B2) в B0):
— [ico2* cos а — mvox + цсо2о cos а = — Ьх* — /1ЛГ | Г»;
(со2* - со2О) ц sin а = -(Gx + G2 + G3) T* + JVT*;
myTX + |л<д>2* cos а = — b (хт — xJ + / j N \ (T— T»);
- jico2* sin а = ~(Gx + G2 + G3) (T- T,) + JV (T- TJ.
B2)
B3)
B4)
B5)
B6)
Выразим из уравнений B4) и B6) соответственно NT* и N(T—TJ
и подставим эти результаты в B3) и B5):
- |ясо2* cos a ~ mvox + цсо2О cos a = - bx* - /1 (Gi + G2 + G3) T* +
+ (a>2* - co2O) \x sin a |; B7)
* Порядок приближенного решения задачи для условия а) такой же.
182
mvlx + |дсо2, cos ot = - b {xT - xj +/| (Gx + O2 + G3) (T- TJ - |дсо2 sin a |. B8)
Текущая координата х, описывающая поступательное движение тела 1,
является некоторой функцией времени г. Разложим х = х (t) в ряд Макло-
рена по степеням t:
х (г) = х0 + xot + ... .
Так как х0 = 0, а t ^ Г, где Г - малая величина, то, пренебрегая
величинами первого и более высоких порядков малости относительно Т, мы
тем самым пренебрегаем смещением тела 1 за любой промежуток
времени, меньший Г, т. е.
х, « 0 и хт « 0.
Из тех же соображений следует в B7) и B8) пренебречь слагаемыми
(Gt + G2 + G3) Г. и (Gx + G2 + G3) (T- Г,).
С учетом сказанного строгие равенства B7) и B8) переходят в более
простые приближенные:
-|ico2* cos a ~ mvox + цо>2о cos a « -/(co2o - ю2*) ц sin a; B9)
mpTX + |ioJ* cos a w /оJ*|Д sin oc. C0)
Из B9) определяем со2*, а из C0) - vTX:
со2* « со2о - mvOx/[}i (cos a + / sin a)]; C1)
vTX « co2* (ц/m) (/ sin a — cos a). C2)
Произведя вычисления по формулам C1) и C2), будем иметь vTX ъ
на —0,31 м/с. Этот результат приемлемо согласуется с полученным выше
точным.
Задание Д.9. Применение теоремы об изменении
кинетического момента к определению
угловой скорости твердого тела
Тело Я массой пг1 вращается вокруг вертикальной оси z с постоянной
угловой скоростью со<ь при этом в точке О желоба АВ тела Я на
расстоянии АО от точки А, отсчитываемом вдоль желоба, находится
материальная точка К массой пг2. В некоторый момент времени (t = 0) на систему
начинает действовать пара сил с моментом Мг — Mz (t). При г = т действие
сил прекращается.
Определить угловую скорость сот тела Я в момент t = т.
Тело Я вращается по инерции с угловой скоростью сот.
В некоторый момент времени tt = 0 (ti - новое начало отсчета времени)
точка К (самоходный механизм) начинает относительное движение из
точки О вдоль желоба АВ (в направлении к В) по закону OK = s = s{ti).
Определить угловую скорость сот тела Я при tt = Т.
Тело Я рассматривать как однородную пластинку, имеющую форму,
показанную на рис. 148-150. Необходимые для решения данные
приведены в табл. 45—46.
183
Таблица 45
Номер
варианта
(рис.
148-150)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
т\
т2
кг
32
200
120
16
66
160
300
80
20
100
60
40
24
40
120
60
50
120
90
50
40
150
90
50
36
150
120
15
20
150
10
60
40
5
10
80
50
20
5
40
20
10
4
10
50
10
10
50
30
12
10
50
20
12
8
40
30
4
5
50
рад/с
-1
-2
0
-3
1,5
-1,25
-2
0
5
2
-1
-3
4
2
-4
-5
-2
3
1
3
-6
— 1
2
-3
-5
-4
0
-2
5
0
а,
м
1
—
2
—
2
1,5
1,6
1,2
1,2
2
2
1
1
—
1
1
—
2
1,5
1
—
1,6
V*
0,6
—
1,5
1
0.6
0.6
1,6
bt
м
1,5
—
—
-
1,5
1
-
—
1/2
—
—
—
—
1,2
—
3
—
1,2
1
—
—
—
—
1,2
Л,
м
1,2
2
—
1
2,5
0,8
2
0,4
-
-
2
—
1
2
—
1,6
0,8
-.
1,2
1
0,6
—
—
0,5
2
-
—
0,6
а,
град
—
120
—
30
—
—
—
—
45
—
15
—
—
—
—
30
30
—
—
—
—
—
60
—
—
60
—
—
АО,
м
nR/6
j/3/2
0
0,4
0
па/6
0
па/2
nR/4
1/2/2
0
0
0,5
0
0
0,4
0,6
nR/2
0
па/6
1^2/2
nR/2
1/3/2
0,2
0
па/6
0
0,1
0
1,6
M2~Mi(t)
Нм
-29,6/2
101
-120/
21/
\5\/J
-700/
968
240J/7
-29,2/
-90[/7
40/
50/2
-27 j//
120/
330/2
74
69/
324
-135/
-14/2
75V7
163
-210
27/2
20/
11701/7
-25/
5,6/
-6,3{/7
652/
т,
с
3
5
4
2
4
3
1
4
3
4
2
3
1
1
2
2
4
3
2
3
1
4
2
2
2
1
2
3
4
2
л »•_ — (* \
E*R/12)ti
]/3t2
0/2/4)/?
0,6ri
0,5*,
Eя-а/18)<?
(**/2)/?
(яд/4)/,
<ЗкЛ/4)<?
(l/2/4)<f
0,4/?
(ita/3)/i
0,3/i
0,5/i
(яв/2)/?
0,3/?
0,6/,
(яЛ/8)/?
(яй/4)/?
(яа/12)/?
0^/1б)<?
(яЛ/2)/?
(l/5/2)/i
0,4/,
(icA/6)Z?
(яа/2)/?
/?
0,4/,
E л Л/6)/,
0,2/?
с
1
1
2
2
2,5
3
1
2
1
1
2
2
2
3
1
2
2
2
1
2
2
1
1
2
2
1
1
1
1
2
Примечание. Знак минус перед М2 и со соответствует направлению
вращения часовой стрелки, если смотреть со стороны положительного направления
оси z.
184
Таблица 46
Осевые моменты инерции однородных пластинок
h
ф
Щ
Ш
%
а
18
тЬ*
IS
та*
ш
. а .
Е
0
та2
та2
Пример выполнения задания (рис. 151). Дано: т1 = 200 кг; тг = 80 кг;
Ms = 592t Н • м; ю0 = ~2 рад/с; 40 « 0,8 м; R = 2,4 м; а = 1,2 м; t =
= т = 4 с; OK = s=> 0,5*? м; ^ = Г = 2 а
185
/
/ а
/
/
г
f
д
/
а
Ч
%
i
<,
I
у а/у*
-У
8
10
%
н
"V/
/ а
1
1
i
Рис. MS
12
13
Н
16
17
18
19
го
Рис. 149
21
/У
23
н-
25
н—
А
26
27
28
5
В
Определить сох и о)г, считая тело Я однородной круглой пластинкой.
Решение, К решению задачи применим теорему об изменении
кинетического момента механической системы, выраженную уравнением
188
где Lz — кинетический момент системы, состоящей в данном случае из
тела Я и точки К, относительно оси z; ? М? = М2 — главный момент
внешних сил, приложенных к системе, относительно оси z.
На систему за время от t = 0 до t = т действуют силы: вес Qt тела
Я, вес б2 точки К, пара сил с моментом Мг и реакции подпятника
и подшипника (рис. 151, а).
Предположим, что вращение тела Я происходит против вращения
часовой стрелки, если смотреть со стороны положительного направления
оси z; будем считать это направление положительным при определении
знаков кинетических моментов.
Найдем выражение кинетического момента Lz системы, который
складывается из кинетического момента тела Jzco и момента количества
движения точки К9 находящейся в точке О тела Я и имеющей скорость
m2v •
Таким образом,
L2 = Jzg>
т2@ •
= (Js + m2 • ОХО2) со.
Главный момент внешних сил равен, вращающему моменту Мг9 так
как другие силы момента относительно оси z не создают.
Уравнение, выражающее теорему об изменении кинетического момента,
примет вид
dt
-М2;
A)
(с = 592 Н • м/с).
—У
Рис. 151
189
Разделим в уравнении A) переменные и проинтегрируем левую и
правую части уравнения:
Тогда
(J, + m2.0102)((Dt-©o) = cx2/2. B)
Найдем числовые значения входящих в уравнение B) величин.
Момент инерции тела Я относительно оси z найдем, используя теорему
о зависимости между моментами инерции относительно параллельных
осей:
Л = Jzc + Mia2,
где JzC — момент инерции тела Н — однородной круглой пластинки
относительно вертикальной оси, проходящей через центр масс тела
параллельно оси z:
Лс =
Тогда
Jz = mxR2/2
т. е.
Зг = 864 кг • м2.
Из чертежа (рис. 151, б) находим
(О,ОJ = (ОСJ + (OiQ2, или (О,ОJ = 4 м2,
поэтому
Л + т2 • ОХО2 = 864 4- 80 • 4 = 1184 кг • м2.
Таким образом, из уравнения B)
1184[cot-(-2)] = 592.472
имеем
<ох = 2 рад/с.
После прекращения действия момента М2 тело Я вращается по
инерции с угловой скоростью сот; при этом к системе приложены силы Gu
б2, реакции подпятника и подшипника (рис. 151, б).
Те же внешние силы действуют на систему и в течение промежутка
времени от ^ = 0 до ti = Т при движении самоходной тележки.
Уравнение, выражающее теорему об изменении кинетического момента
системы, имеет для этого периода времени вид
dLJdt = 0,
т. е.
Lz = const.
190
Определим значения кинетических моментов Lz0 при t\ = 0 и L2T при
t1 = T и приравняем эти значения.
Для f! = О
Lz0 = (Л + т2 • ОХО2) сот = 2368 кг • м2/с
При ?! > 0 скорость точки К складывается из относительной скорости
vr по отношению к телу Я и переносной скорости ve в движении вместе
с телом Я. Поэтому для tг = Т покажем два вектора количества
движения точки: m2i\ и m2ve.
Для tx = Т
LzT = JzcoT 2
Найдем
где
СКГ = ОХГ - ОС, ОКГ = stl = r = 0,5Т2 = 0,5 • 22 = 2 м,
т. е.
СКГ = 2 - 1,6 = 0,4 м, (ОгКтJ = 1,22 + 0,42 = 1,6 м2.
Относительная скорость
vr = ds/dt = *ь
при tx = Г = 2 с.
у, = 2 м/с.
Поэтому
L2T = 864сог + 80сот. 1,6 - 80 ¦ 2 • 1,2 = 992сот - 192.
Приравнивая L20 и L2r:
2368 = 992сог - 192,
находим
шг = 2,59 рад/с.
Задание Д. 10. Применение теоремы об изменении кинетической энергии
к изучению движения механической системы
Механическая система под действием сил тяжести приходит в
движение из состояния покоя; начальное положение системы показано на
рис. 152 — 154. Учитывая трение скольжения тела 1 (варианты 1 — 3, 5, 6,
8 — 12, 17 — 23, 28-30) и сопротивление качению тела 3, катящегося без
скольжения (варианты 2, 4, 6-9, 11, 13-15, 20, 21, 24, 27, 29), пренебрегая
другими силами сопротивления и массами нитей, предполагаемых
нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный
им путь станет равным 5.
В задании приняты следующие обозначения: ть т2, т3, т4 — массы
тел 2, 2, 39 4; R2, r2, #з> ?*з ~~ радиусы больших и малых окружностей;
hx, hi — радиусы инерции тел 2 и 3 относительно горизонтальных осей,
проходящих через их центры тяжести; а, Р - углы наклона плоскостей
к горизонту;/ — коэффициент трения скольжения; S — коэффициент трения
качения.
Необходимые для решения данные приведены в табл. 47. Блоки
191
Таблица 47
Номер
варианта
(рис.
152-154)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
го,
т2
кг
т
т
т
т
т
т
т
т
т
т
т
т
т
т
т
т
т
Am
Ч*п
т
2т
2т
Ът
2т
Ч2т
2т
Ч4т
Ч2™
Ч2т
2т
V2m
1/2»!
Чът
Уът
40т
т
т
2т
Ч*п
9т
Ч4т
Vsw
5т
5т
Am
V20
'Ism
4/3т
т
т
—
-
-
i/siti
-
т
2т
Am
Ч2т
Чк/п
Л2
см
-
-
20
20
-
16
-
30
30
-
20
10
20
—
30
-
40
15
28
25
30
30
-
30
-
20
25
15
12
hx
см
—
-
18
18
-
14
-
-
20
26
18
-
15
—
20
-
-
-
-
-
20
-
25
-
-
-
-
а
р
град
60
30
45
-
60
30
30
30
30
60
30
30
30
-
60
60
—
45
-
-
45
_
45
-
45
-
-
-
—
/
0,10
0,22
0,10
0,12
0,10
-
0,15
0,12
0,10
0,П
0,20
-
-
0,10
8,
см
—
0,20
0,30
—»
0,28
0,20
0,20
0,25
-
0,20
-
0,24
0,20
0,25
-
s>
м
2
2
2
0,1я
0,28*
1,5
2
1,75
1,5
3
2,5
2,5
2
2
1,5
0,05тс
ОЛбтс
Примечание
Массами звеньев А В, ВС и
ползуна В пренебречь
Массой водила пренебречь
Массы каждого из четырех колес
одинаковы
Массой водила пренебречь
Шатун 3 рассматривать как тонкий
однородный стержень
18
19
20
21
22
23
24
25
26
27
28
29
30
m
m
m
m
m
m
m
m
m
m
m
m
m
3m
2m
m
V2m
m
3m
1/з»
V2m
m
2m
lUm
42m
m
Vio™
20m
2m
44m
20m
V4m
m
6m
3m
Vam
m
-
—
-
4/5m
-
-
—
3/2m
Л35
24
20
20
20
20
20
16
30
20
20
—
26
15
15
20
10
-
30
20
20
-
35
20
32
20
16
16
18
18
—
20
16
14
20
-
—
—
-
-
—
-
—
18
60
60
30
30
60
30
-
30
60
15
30
—•
-
-
45
-
-
—
-
30
—
0,15
0,15
0,10
0,20
0,17
0,10
-
—
• """¦
0,10
0,20
0,12
-
0,20
0,32
-
-
0,60
—
0,20
-
0,20
—
0,2я
1,5
0,2*
1,2
0,1я
1
0,08я
0,04я
0,6it
2
0,1тс
2,4
2
Массой водила пренебречь
Массами звеньев А В, ВС и
ползуна В пренебречь
Массой водила пренебречь
Массами звеньев АВ, ВС и
ползуна В пренебречь
Массой водила пренебречь
Массы и моменты инерции блоков
2 и 5 одинаковы.
Шатун 3 рассматривать как тонкий
однородный стержень
Шатун 3 рассматривать как тонкий
однородный стержень
AB*5R2
c. 752
У//////////777/77////У/777/
15
П
19
АВ=бг2
Г2х 0,6'R z
Рис. 153
я
23
25
26
28
Рис. 154
я катки, для которых радиусы инерции в таблице не указаны, считать
сплошными однородными цилиндрами.
Наклонные участки нитей параллельны соответствующим наклонным
плоскостям.
196
Пример выполнения задания. Дано: тх - масса груза 1, т2 = Ьпи
jjw3 = Wj, ДО4 s=: 0,5wii, Ш5 = 20wii, K2 — J^3== 12 см, v2 =z 095R2, r3 = 0,751^з,
R5 = 20 см, AB = / = 4R3, z2^ = 8 см; j3x = 10 см, a = 30°,/ = 0,1, 5 = 0,2 см,
s = 0,06к м. Соцротивление качению тела 2 не учитывать. Шатун 4
считать тонким однородным стержнем; каток 5 — однородный сплошной
цилиндр. Массами звена ВС5 и ползуна В пренебречь. На рис. 155, a
показана механическая система в начальном положении.
Найти Vi — скорость груза 1 в конечном положении.
Решение. Применим теорему об изменении кинетической энергии
системы:
¦I *"" * о == 2^ i 2ш1 i' \ /
где TQ и Г- кинетическая энергия системы в начальном и конечном
положениях; ?-4f — сумма работ внешних сил, приложенных к системе,
на перемещении системы из начального положения в конечное; ]?^/~
сумма работ внутренних сил системы на том же перемещении.
Для рассматриваемых систем; состоящих из абсолютно твердых тел,
соединенных
нерастяжимыми нитями и
стержнями,
Так как в
начальном положении
система находится в покое,
то То = 0.
Следовательно,
уравнение A)
принимает вид
г=Е4?- B)
Для определения
кинетической энергии
Г и суммы работ
внешних сил надо
изобразить систему в
конечном положении
(рис. 155, б, в).
Напишем
кинематические соотношения
между скоростями и
перемещениями точек
системы, т. е.
уравнения связей, при этом
скорости и
перемещения выразим
соответственно через скорости
и перемещения
груза 1.
Рис. 155
Скорость центра масс С катка 2 равна скорости груза 1:
Vci = !>i. C)
Угловая скорость катка 2, мгновенный центр скоростей которого
находится в точке Р2,
Учитывая C), получим
(о2 = vt/R2. D)
Скорость точки D катка 2 •
Т. €.
Г2).
Л2
Скорость точки Е блока 3 равна скорости точки D катка 2:
Но
Ve = СО3Г3.
Следовательно, по E),
Так как
R2 = 2г2,
Т0 3/
откуда
Юз — _ _L# (q
Заменяя в формуле F)
— dq>3 _ ds
получим
dcp3 _ 3 ds
dt ~~ 2r3 dt *
или
3
(}ф3 — &St
После интегрирования (при нулевых начальных условиях)
G)
Когда груз 1 пройдет путь s = 0,06я м, блок 3 повернется на угол
_ 3 s _ 3 0,06тс _
фз ~ 2 г3 " 2 Я
При этом повороте блока 3 на 180° его точка Ао перейдет в конечное
положение А и шатун 4 из начального положения А0В0 перейдет в
конечное положение АВ.
Каток 5 переместится влево при повороте блока 3 на угол тг/2 и
вправо при повороте блока еще на тс/2; значит, конечное положение катка
5 совпадает с его начальным положением.
Таким образом, конечное положение всей системы вполне определено
(рис. 155,6).
Вычислим кинетическую энергию системы в конечном положении как
сумму кинетических энергий тел 1, 2, 3, 4, 5:
Т = 7\ + Т2 + Тъ + Г4 + Т5. (8)
Кинетическая энергия груза 19 движущегося поступательно,
Тх = тМ/2. (9)
Кинетическая энергия катка 2, совершающего плоское движение,
где 32\ — момент инерции катка 2 относительно его продольной централь-
ной оси С2$:
J2% = m2ilfy A1)
Подставляя C), D), A1) в формулу A0), получаем
i
Кинетическая энергия тела 3, вращающегося вокруг оси Ох,
Гз=у./з*а>!, A3)
где Jsx - момент инерции блока 3 относительно оси Ох:
Jbx == «зЙх. A4)
Подставляя F), A4) в формулу A3), получаем
Кинетическая энергия шатуна 4, совершающего плоское движение,
где vca — скорость центра масс С4 шатуна 4; со4 — угловая скорость
шатуна 4; J44 —момент инерции шатуна относительно центральной оси Сц.
Для определения иС4 и ш4 найдем положение мгновенного центра
скоростей шатуна 4. Так как скорости точек А и В в этот момент
параллельны, то мгновенный центр скоростей шатуна 4 находится в
бесконечности; следовательно, угловая скорость шатуна в данный момент <о4 = О,
а скорости всех его точек параллельны и равны между собой. Таким
образом, кинетическая энергия шатуна 4
Г4 « m4i?4/2, A6)
где
vCA = vA. A7)
Вращательная скорость точки А тела 3
vA = со3Яз, A8)
или с учетом A4)
vA «= 3/2^3^i/r3.
Поскольку Гз = 3/4#з> получим
vA = 2i?i.
По A7)
1>С4 = ^Л, ^С4 = 2l>!. A9)
После подстановки A9) в A6) выражение кинетической энергии
шатуна 4 принимает вид
T^1/2m4BviJ = 2m4vl B0)
Кинетическая энергия катка 5, совершающего плоское движение,
Ts = msvh/2 4-
где vC5 — скорость центра масс С5 катка 5; J5$ — момент инерции катка 5
(однородного сплошного цилиндра) относительно его центральной
продольной оси С5$, Js$ — m5Rl/2; co5 — угловая скорость катка J.
Так как каток катится без скольжения, то мгновенный центр скоростей
находится в точке Р5. Поэтому
Следовательно,
Так как звено ВС5 совершает поступательное движение, то vCs = vB,
но Vb = t?c4 = 2t?i. Значит, vcs = 2i?i.
Поэтому выражение кинетической энергии катка 5 принимает вид
T5 = 3Um5{2vlJ = 3m5vl B1)
Кинетическая энергия всей механической системы определяется по
200
формуле (8) с учетом (9), A2), A5), B0), B1):
Г = mxvl/2 + т2 A + iU/Rl) v\/2 + 9Umzv\ilJrl + 2m4v? + 3m5t;f.
Подставляя сюда заданные значения масс, получаем
Т ш тМ [1 + 2 A + ИМ) +.%&/г| + 2 + 120]/2,
или
B2)
Найдем сумму работ всех внешних сил, приложенных к Системе, на
заданном ее перемещении. Покажем внешние силы, приложенные к
системе (рис. 155, в).
Работа силы тяжести 5Х
AGi = Gihx « wiigs sin a. B3)
Работа силы трения скольжения ?тр
Так как
то
AFjv = -fmigs cos a. B4)
Работа силы тяжести 62
АС2 = О2йс2 = w2gs sin a. B5)
Работа сил сцепления ?сц2, ?СЦ5 катков 2 й 5 равна нулю, так как эти
силы приложены в мгновенных центрах скоростей этих катков.
Работа силы тяжести S4
где &С4 "~ вертикальное перемещение центра тяжести С4 шатуна 4 из
начального положения в его конечное положение (рис. 155, г):
B6)
Работа пары сил сопротивления качению катка 5
ЛМс- -Мсф5, B7)
где Мс = 6^5 = S^5 — момент пары сил сопротивления качению катка 5;
Фз — угол поворота катка 5.
ч Так как каток 5 катится без скольжения, то угол его поворота
ф5 - Scs/Rs, B8)
где sCs ~ перемещение центра тяжести С5 катка 5.
В данном примере работу пары сил сопротивления вычислим как
сумму работ этой пары при качении катка 5 влево при повороте тела 3
на угол я/2 и качении вправо, когда тело 3 повернется еще на угол я/2.
201
Перемещение центра тяжести С5 катка 5 равно перемещению ползуна
В влево и право:
sC5 = 2(B0B'). B9)
Определим перемещение В0В' при повороте тела 3 на угол я/2.
За начало отсчета координаты точки В выберем неподвижную точку К
плоскости (рис. 155, г). При этом повороте тела 3 шатун из положения
А0В0 перейдет в положение KB'. Тогда
BqB = K.Bq — KB ,
где
КВ0 = КО + ОВ0 = Яъ + V(A0B0J - (Л0ОJ = Я3 + //2 - Яз>
KB' = / = 4Д3.
Следовательно,
Б0Я' = R3 + ]//2 - Кз - / = Л3 + /DЯ3J - Кз - 4К3 = 0,88Л3. C0)
Подставляя C0) в B9), а затем в B8), находим полный угол поворота
катка 5:
ф5 = 1,76R3/K5- C1)
Работа пары сил сопротивления качению по B7)
Сумма работ внешних сил определится сложением работ, вычисляемых
по формулам B3)-B6) и C2):
? Af = mxgs sin a - fin^s cos а -Ь m2gs sin а + wu#R3 - 8m5g- 1,76Я3/Я5.
Подставляя заданные значения масс, получаем
Л . . . R3 5-20-l,76R3\
I sin a - /cos a + 2 sin a + -= 5 ,
или
? C3)
Согласно теореме B), приравняем значения Т и ? Af, определяемые
по формулам B2) и C3):
откуда
I?! = 0,21 м/с.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Задание Д.11. Исследование поступательного
и вращательного движений твердого тела
Механическая система состоит из механизма (колес I и 2) и груза 3.
К колесу I приложена пара сил с моментом М — М (t) (движущий
момент) или движущая сила Р = Р (t).
202
Время t отсчитывается от некоторого момента (t = 0), когда угловая
скорость колеса 1 равна со1О. Момент сил сопротивления ведомого колеса
2 равен Мс- Другие силы сопротивления движению системы не учитывать.
Массы колес 2 и 2 равны тх и тъ а масса груза 3 — тъ.
Радиусы больших и малых окружностей колес Ru ru R2, г2.
Схемы механических систем показаны на рис. 156—158, а
необходимые для решения данные приведены в табл, 48.
Найти уравнение движения тела системы, указанного в последней
графе табл. 48.
Определить также натяжение нитей в заданный момент времени,
а в вариантах, где имеется соприкасание колес 1 и 2, найти, кроме того,
окружное усилие в точке их касания. Колеса 1 и 2, для которых радиусы
инерции iXi и iX2 в табл. 48 не заданы, считать сплошными однородными
дисками.
Пример выполнения задания. Дано: шА = 100 кг; т2 = 150 кг; тъ — 400 кг;
М = 4200 + 200* Н • м; Мс = 2000 Н • м = const; Rx = 60; R2 = 40 см; r2 =
= 20 см; iXl = 20 j/2; iX2 = 30 см; оо10 = 2 рад/с.
Найти уравнение (р2 = f(t) вращательного движения колеса 2 механизма,
а также окружное усилие S в точке касания колес 1 и 2 и натяжение
нити Г в момент времени f i = 1 (рис. 159, а).
Решение. В данной механической системе колеса 2 и 2 механизма
вращаются вокруг неподвижных осей, а поднимаемый груз 3 совершает
поступательное движение.
Напишем дифференциальные уравнения движения каждого из этих трех
тел, для чего отделим одно от другого, разрезав нить, удерживающую
груз 3, и разъединив колеса 1 и 2 в точках соприкасания зубцов
(рис. 159, б).
К колесу 1 механизма приложены сила тяжести St движущий момент
М, составляющие реакции подшипника ?А, 2А, окружное усилие 5а
и нормальная реакция $t колеса 2.
К колесу 2 механизма приложены сила тяжести S2, момент сил
сопротивления Мс, составляющие реакции подшипника ?в, 2В, натяжения Т
нити, к которой подвешен груз 3, окружное усилие 32 и нормальная
реакция $2 колеса 1.
К грузу 3 приложены сила тяжести б3 и натяжение нити Т'.
Очевидно,
Составим дифференциальное уравнение вращательного движения
колеса 1 вокруг оси хх:
здесь MExi =ХМ^х1 —главный момент внешних сил, приложенных к
колесу 1, относительно оси вращения хх:
(Момент М приводит в движение колесо 1 и поэтому принят
положительным, а момент, создаваемый окружным усилием Зь препятствует
вращению колеса 1 и, следовательно, отрицателен.)
203
Таблица 48
Номер
варианта
(рис.
156-158)
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
16
т,
т2
тг
кг
100
300
200
100
150
400
300
300
200
250
150
100
180
150
300
300
300
80
100
250
300
250
200
250
100
100
300
200
100
80
180
250
500
500
400
300
600
600
400
700
500
400
700
600
300
400
500
400
*i
R2
см
20
70
60
20
30
70
60
50
80
40
40
30
50
40
20
60 .
-
50
-
-
-
-
40
30
60
20
30
•20
40
20
10
40
60
20
30
50
50
30
30
40
20
30
60
60
30
30
50
50
Г2
см
40
-
20
30
20
20
20
20
-
30
20
-
-
30
_
60
60
_
70
50.
40
50|/2
30.
30
20J/2
зоу5
30
10J/2
50
50
-
20J/2
40
30
20J/2
20
30
-
-
40
60
20
50
40
М,
Нм
2100+20/
6100+20/
1000+40/
-
4800+10/
-
-
5900+30/
2500+50/
-
-
1800+20/
700+40/
—
-
•10200+100/
-
-
5500+200/
-
3000+100/
9700+50/
-
-
3900+50/
5700+50/
2700+200/
-
-
7300+100/
Нм
1000
600
800
1400
1500
800
500
500
600
1200
1000
1500
400
700
300
1200
«10,
рад/с
2
1
0,5
1,5
2
3
0
1
2
0
1
2
0,5
1,5
0
1
с
2
0,5
2,5
2
1
4
3
2
3
1,5
2
2
1
2,5
1,5
2
Тело, для
которого нужно
определить
уравнение
движения
1
2
1
1
3
1
3
1
2
2
1
1
2
3
1
1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
250
200.
250
400
200
250
200
100
150
250
250
60
50
300
100
100
150
100
150
100
80
200
80
200
150
200
200
60
800
600
400
800
300
800
400
500
400
500
500
900
500
'600
50
20
50
50
50
60
40
30
60
50
50
20
20
50
30
_
30
20
40
20
20
-
20
30
-
30
20
50
30
30
30
10
30
40
20
40
40
60
40
20
-
-
20
-
20
-
-
20
30
30
10
30
-
40
-
40
40
30]/2
50
30
_
60
40
30|/2
-
40
50
20|/5
-
20
-
30
-
30
30
50
25]/2
-
5400+50/
1900+20*
-
3700+50/
-
-
2300+20/
-
4900+40/
-
900+10/
2100+20/
—
14200+200/
-
3800+100/
9700+200/
-
12600+100/
-
3500+150/
15200+100/
-
7200+50/
900
1500
500
1200
800
700
900
500
800
600
700
1500
1000
700
2
0,5
0,5
2
1
2
0,5
1,5
0
2
1,5
0
2
1,5
2
1
2
1
1,5
0,5
1
1
1,5
2
1
2
,0,5
1
<~> Примечание. Радиусы инерции звеньев 1 и 2 ixx и ixz заданы относительно неподвижных осей этих звеньев.
2 Р
]м
8
М
10
Рис. 156
12
13
15
16 мс
18
19
Рис. 157
21
22
23
26
27
28
29
30
Рис. 158
м
Рис. 159
Дифференциальное уравнение вращательного движения колеса 1 при-
!ет вид
J,l*i=M-SKi. A)
Составим дифференциальное уравнение вращательного движения ко-
ieca 2 вокруг оси х2:
Л2Ф2 - МЕх2.
Здесь МЕ2 = ? MEtx2 — главный момент внешних сил, приложенных к
колесу 2, относительно оси вращения х2:
(Момент, создаваемый окружным усилием 32, приводит в движение
колесо 2 и поэтому принят положительным, а момент силы натяжения
нити 1* и момент сил сопротивления М с препятствуют движению колеса
и," следовательно, отрицательны.)
Дифференциальное уравнение вращательного движения колеса 2 имеет
вид
Jrffo-SaRa-tta-Me. B)
Составим дифференциальное уравнение поступательного движения
груза 3:
mzz = ZE.
Здесь ZE = Yu %? ~ проекция главного вектора внешних сил, приложенных
к грузу 3, на ось z, направленную в сторону движения груза, т.е. вверх:
209
Дифференциальное уравнение поступательного движения груза 3
T-Gb. C)
В уравнениях A), B), C) неизвестными являются силы Т' = Т и
St = S2 = S, а также функции фх (t), i$2 (*) и z(t) - угловые ускорений
колес 19 2 и ускорение груза 3 соответственно.
Но указанные функции связаны между собой соотношениями
D)
E)
так, что в трех уравнениях — три неизвестные: Т, S и ф2.
Выразим фх из D):
Ф1 =
и подставим в A):
JxiViRi/Ri = М - SRi. F)
Исключим из дифференциального уравнения B) силу Г, для чего
выразим Т(Г=7") из C):
Т = w3z -Ь G3.
Учитывая E), напишем
Г я= тзф2г2 + О3.
Тогда B) приобретает вид
Л2Ф2 = ^2*2 - (т3ф2г2 + G3)r2 - Мс,
или
(Jx2 -f m3r|) ф2 = S2JR2 - въгг - Мс. G)
Исключим S (S = 5А = S2) из F) и G), для чего умножим F) на R2,
а G)-на Rx:
(Jx2
Сложив соответствующие части полученных уравнений, имеем
Ф2 Vxi (R2/R1) + Jx2Ri + mzrlR{\ = MR2 -
откуда
Выражение (8) определяет в общем виде угловое ускорение колеса 2
механизма.
Моменты инерции колес 1 и 2 относительно осей хх и х2:
Учитьюая исходные данные, находим
Jxi =? 8 Ki • м2; Jxl «=13,5 кг • м2.
210
Теперь по формуле (8) получаем
ф2 = 4,034* + 0,4597. (9)
Интегрируем это уравнение дважды, используя следующие начальные
условия задачи: при t = 0
Ф20 = 0 ф20 = g>ioKi/&2, или ф20 = 3 рад/с.
Первый интеграл ф2 = 2,017t2 + 0,4597t + Сх.
. Второй интеграл (р2 = 0,672t3 -Ь 0,230*2 + Ctt + С2.
Напишем полученные уравнения ф2 = Ф2 (*) и ф2 = ф2 @ для * = 0:
Ф20 = Сь ф20 ^ С2,
откуда
d = 3 рад/с, С2 = 0.
Уравнение угловой скорости звена 2 имеет вид
ф2 = 2,017t2 + 0,4597t + 3 (рад/с).
Искомое уравнение вращательного движения колеса 2 имеет вид:
ф2 = 0,672t3 + 0,230t2 + Ъг (рад).
Натяжение нити Т найдем, как было показано, из уравнения C):
T=m3z4-G3,
или
Т = т3фг2 + m3g.
При г = 1 с, учитывая (9) и исходные данные, имеем
Г =4285 Н.
Окружное усилие определяем из уравнения B):
S = S2 » (Jx2q>2 + 7}-2 4- MG)/R2;
при f - 1 с S = 7295 Н.
Задание Д.12. Исследование плоского движения твердого тела
Определить значение постоянной силы Р под действием которой
качение без скольжения колеса массой ш носит граничный характер, т. е.
сцепление колеса с основанием находится на грани срыва.
Найти также для этого случая уравнение движения центра масс
колеса С, если в начальный момент времени его координата хСо== 0
и скорость vCo = 0.
Варианты задания показаны на рис. 160—162, а необходимые для
решения данные приведены в табл. 49.
В задании приняты следующие обозначения: %с - радиус инерции
колеса относительно центральной оси, перпендикулярной его плоскости;
R и г — радиусы большой и малой окружностей; /сц — коэффициент
сцепления (коэффициент трения покоя); 5 - коэффициент трения качения.
Примечание. Колеса, для которых радиусы инерции не указаны, считать
сплошными однородными дисками.
211
Таблица 49
Номер
варианта
(рис.
160-162)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
IS
19
20
21
22
23
24
25
26
27
28
29
30
m, кг
300
200
180
220
240
200
200
150
250
150
200
220
140
300
180
180
160
260
200
250
200
150
200
240
100
150
120
150
200
160
*С, см
50
40
50
30
40
—
45
40
—
40
30
—
—
20
30
50
_
50
40
—
30
30
30
—
—
30
—
—
R, см
80
60
60
70
60
50
60
70
_
50
50
—
—
—
50
50
60
50
60
50
40
50
60
70
—
—
30
60
—
40
г, см
40
30
20
25
15
—
25
25
—
15
20
—
—
20
35
20
—
20
30
—
20
30
30
—
—
—
25
—
—
а, град
20
—
30
30
—
15
30
15
—.
20
30
30
—
30
—
—
15
—
20
30
_
30
15
-.
30
—
25
__
20
Р, град
—
—
30
—
—
15
30
—
30
30
—
15
—
20
—
20
—
—
15
_
60
15
—.
20
/сц
0,35
0,20
0,10
0,20
0,10
0,20
0,25
0,50
0,15
0,30
0,20
0,25
0,10
0,15
0,15
0,15
0,30
0,10
0,10
0,25
0,25
0,25
0,40
0,15
0,10
0,15
0,40
0,30
0,30
0,20
5, см
Q
0,8
0
0
1,0
0
0
0
0
0,7
0,6
0
0
0,6
0
0,9
0
U0
0
0
1,2
1,2
0
0
0
0
1,5
0
0
0
Пример выполнения задания. Дано: т = 200 кг; R = 60 см; г = 10 см;
ic = 50 см; а = 15°; р = 30°; /сц = 0Д0; 5 = 0 (рис. 163, а).
Решение. На колесо действуют силы: сила тяжести колеса <5,
нормальная реакция Й9 сила Р и сила сцепления Рсц (рис. 163, б) (в случае,
если 5 ф 0, необходимо показать момент пары сил сопротивления качению).
Силу ^сц направляем условно в сторону положительного направления
ОСИ X.
Дифференциальные уравнения плоского движения колеса:
тхс = ? Xf\ тус = ? Yf; Jc<? = ? М&¦
* Дифференциальное уравнение вращения колеса может быть записано в
такой же форме и относительно оси, перпендикулярной плоскости движения и
проходящей не через его центр масс, а через мгновенный центр скоростей (точку
контакта колеса с основанием). Такая возможность обусловлена тем, что
расстояние между центром масс и мгновенным центром скоростей остается при
движении колеса постоянным.
212
091 fo
у/////////////////////,
У//////////Х///////////,
11
12
13
15
16
'////ПУ//77*
Z 7
17
УУ/УУУУ//Уа^УУУ//УУУУУ/
Рис. 161
21
22
'УУУУ7ХУУУУУЛ
ЖУУУУУ.
25
26
yyyyyy/yyyyifi
27
28
30
УУУУУУУУУУУМУУУУУУУУУУ,
Рис. 162
Рис. 163
сц
или в данном случав
тхс = Р cos р — G sin a + Fm;
тус = N — G cos а - Р sin P;
A)
B)
C)
Положительным направлением отсчета угла поворота колеса принято
направление по часовой стрелке, что соответствует движению центра
колеса в положительном направлении оси х.
В соответствии с этим направление по часовой стрелке принято
положительным и при определении знаков моментов внешних сил
в уравнении C).
К дифференциальным уравнениям A)-C) добавим уравнения связей
yc = R « const; D)
ю в ф = Vc/r = xc/R. E)
Последнее уравнение, связывающее угловую скорость колеса © со
скоростью центра vc, выражает условие качения колеса без скольжения.
Из D) следует
ус « 0. F)
Дифференцируя E) по времени, получаем
Ф = Xc/R. G)
Подставляя F). и G) в B) и C) и учитывая, что G = mg, Jc = mic*
получим
N = Р sin E + mgcos a; B')
Исключая Хс из уравнений A) и (З7), находим
cu = [Р (Яг - г2с cos Р) + (gmgsin a]/(R2
или с учетом исходных данных
-0,257? + 208.
(8)
График зависимости (8) показан на рис. 164. График пересекает ось Р
в точке Ро = 809 Н.
216
При 0 < Р < Ро Fcu > О — сила сцепления направлена, как показано на
рисунке, в положительном направлении оси х.
При Р > Ро Fcu < 0 — сила сцепления направлена в противоположную
сторону.
Модуль силы сцепления, обеспечивающей качение колеса без
скольжения, подчинен следующему ограничению:
(имеется в виду, что всегда N > 0).
Предельное значение модуля силы сцепления согласно B0
I ^с« I* « W/cu = (Р sin р + mgcos а)/сц,
или с учетом исходных данных
|FcJ* = 0,05P + 19O. (9)
На рис. 164 показан график зависимости 1РСц1 от Р, представляющий
собой ломаную линию. Там же проведена прямая (9). Она пересекает
график IFcjJ в точках А и В с абсциссами РА и Р2.
Область значений силы Р, при которых колесо катится без скольже-
Pi < Р < Р2.
Граничные значения силы Р находим, пользуясь (8) и (9), из условий
^сц=|Рсц|* И -Рсц =| Fcu I*.
В результате вычислений получаем Pi = 58,6 Н, Р2 = 1923 Н*
Дифференциальное уравнение движения центра колеса после
исключения F^ из A) и C0 принимает вид
Зсс = R [P (R cos P + г) - mg sin a • JR]/[m (Я2 + ?)],
или с учетом исходных данных
хс = 0,003047Р - 1,498. A0)
График зависимости A0) показан на рис. 165: хс = 0 при Р = 492 Н.
При Р = Pi имеем хс = -1,32 м/с2.
Дважды интегрируя это дифференциальное уравнение и имея в виду
нулевые начальные условия, находим
хс= -0,66*2;
колесо катится вниз по наклонной плоскости.
При Р = Рг
хс = 4,36 м/с2, хс = 2Д8Л
Колесо катится в сторону положительного направления оси х вверх
по наклонной плоскости.
Примечание. Равнодействующая всех сил, приложенных к колесу,
катящемуся без скольжения, проходит через точку К, расположенную на диаметре,
перпендикулярном скорости центра масс, на расстоянии СК = ic/R от него.
При этом точка К и мгновенный центр скоростей колеса находятся по
разные стороны от центра масс.
217
0,2
0,1
0,1
0,2
¦
Pi
-
-
\
^—¦
/ill
r
1 1 1 1
\
В
/
f
p
1
2 2tOP(KH)
Puc. 164
Рис. 165
В данном примере
СК = 502/60 = 41,7 см.
Точка К показана на- рис. 163, б.
Сумма моментов всех сил, приложенных к колесу, относительно оси,
проходящей через точку К и перпендикулярной плоскости движения,
равна нулю:
1М|7С = 0. A1)
Условие A1) позволяет без составления дифференциальных уравнений
найти зависимость силы сцепления от других сил, действующих на
колесо.
Это условие можно также использовать для проверки результатов
вычислений, произведенных при решении задачи на основе
дифференциальных уравнений плоского движения твердого тела.
УДАР
Задание Д. 13. Исследование соударений твердых тел
Варианты 1-10 (рис. 166)* Вариант 1. Тележка 1 общей массой
nii = 6000 кг, движущаяся со скоростью vx = 2,5 м/с по горизонтальному
прямолинейному пути, наталкивается на неподвижную тележку 2,
имеющую вместе с контейнером марсу т2 = 4000 кг. В конце соударения
тележка 2 приобретает скорость и2 = 2 м/с, а контейнер — угловую
скорость вращения вокруг ребра А, закрепленного упорной планкой. Считать
контейнер массой т0 = 500 кг однородным прямоугольным
параллелепипедом {а = 0,8 м, h = 1,5 м). Вертикальные плоскости соударения тележек
полагать гладкими. Поверхность рельсов абсолютно шероховата, т. е.
препятствует проскальзыванию колес при соударении тележек. Моменты
инерции колес относительно их осей пренебрежимо малы.
Определить скорость тележки 1 в конце соударения с тележкой 2,
а также ударный импульс, воспринимаемый упорной планкой.
218
У///,7?7.
Рис. 166
Вариант 2. Груз, массой т0 = 500 кг падает с высоты Ы м
в точку D абсолютно жесткой балки, имеющей шарнирно-неподвижную
опору А и упругую опору В, коэффициент жесткости которой с =
= 20000 Н/см; удар груза о балку - неупругий. Масса балки т = 6000 кг,
219
ее длина / = 4 м. Горизонтальное положение балки, показанное на
чертеже, соответствует статической деформации упругой опоры под
воздействием веса балки. Принять балку за тонкий однородный стержень,
а груз — за материальную точку.
Определить ударный импульс, воспринимаемый балкой в точке Д
а также наибольшую деформацию упругой опоры, считая, что движение
точки В происходит по прямой.
Вариант 3. Вследствие разрыва удерживающего троса груз массой
т0 = 500 кг падает с высоты Ы м на платформу, покоящуюся на
одинаковых и симметрично расположенных рессорах. Точка Л, в которую
падает груз, находится в вертикальной поперечной плоскости симметрии
платформы и отстоит от центра тяжести С платформы на расстоянии
d = 0,6 м.
Удар груза о платформу — неупругий. Масса платформы т = 5000 кг,
ее радиус инерции относительно горизонтальной продольной оси
симметрии ic = 0,5 м.
Принимая платформу за абсолютно твердое тело и считая груз
материальной точкой, определить скорость центра тяжести и угловую
скорость платформы в конце удара. Определить также ударный импульс
в точке Л.
Вариант4. Груз — однородный сплошной цилиндр массой т = 200 кг
и радиусом г = ОД м — перемещается транспортером. Лента транспортера
горизонтальна, ее постоянная скорость v = 0,6 м/с; скольжение ленты
по шкивам I и 2 отсутствует. В некоторый момент времени движение
транспортера внезапно прекращается.
Поскольку поверхность ленты транспортера абсолютно шероховата,
т. е. не допускает скольжения тела при ударном воздействии, цилиндр
вследствие внезапной остановки транспортера покатится по ленте.
Сопротивление качению пренебрежимо мало.
Определить ударный импульс, воспринимаемый абсолютно
шероховатой поверхностью ленты при внезапной остановке транспортера.
Проверить найденную для этого скорость центра тяжести (или
угловую скорость) цилиндра по теореме Карно.
Определить ударный импульс, воспринимаемый упорной ступенькой
высотой h = 0,03 м, о которую ударяется цилиндр, пройдя некоторое
расстояние, если не происходят отрыв цилиндра при ударе о ступеньку
и его проскальзывание.
Вариант 5. Транспортируемые грузы катятся из положения А без
начальной скорости по наклонной плоскости, составляющей угол а = 15°
с горизонтом, проходя вдоль нее расстояние sx = 3 м, и продолжают
катиться по горизонтальной плоскости. Скольжение отсутствует;
коэффициент трения качения 5 = 0,8 см.
Определить, на каком расстоянии s2 должна быть поставлена
упорная ступенька высотой h = 0,2 м, чтобы грузы, ударившись о
ребро F ступеньки, лишь поднимались на нее, не перемещаясь дальше
ребра F.
Расчет произвести для груза — однородного сплошного цилиндра
массой т = 500 кг и радиусом г = 0,5 м.
Считать, что отрыва цилиндра от ступеньки не происходит, а поверх-
220
ность ступеньки абсолютно шероховата, Т: е. препятствует скольжению
цилиндра при ударном воздействии.
Определить также горизонтальную и вертикальную составляющие
ударного импульса, воспринимаемого цилиндром со стороны ступеньки,
при указанных условиях.
Вариант 6. Маятник состоит из стержня длиной 1=1Дми
однородного круглого диска радиусом г = 0,1 м. Масса стержня пренебрежимо
мала; масса диска щ = 5 кг.
Маятник, отклоненный от положения устойчивого равновесия, падает
под действием собственного веса, вращаясь вокруг неподвижной оси О;
в вертикальном положении, имея угловую скорость о *= 3 рад/с, маятник
ударяется о точку В боковой грани тела D — однородного
прямоугольного параллелепипеда массой т = 6т0 (я = 0,8 м, Ь = 0,4 м, h = 0,2 м).
Коэффициент восстановления при ударе к = 0,5. Поверхности маятника
и тела D в точке соударения гладкие. Плоскость, на которой локоится
тело D, абсолютно шероховата, т. е. не допускает скольжения тела при
ударном воздействии.
Определить угловую скорость вращения тела D вокруг ребра А
в конце удара, а также ударный импульс, воспринимаемый шероховатой
поверхностью в точке А.
Вариант 7. Рычаг состоит из двух абсолютно жестких стержней АВ
и AD, соединенных под прямым углом. Рычаг имеет неподвижную
горизонтальную ось вращения А и удерживается в точке В пружиной;
AD = а = 1,5 м.
В точку D горизонтального стержня рычага, находящегося в покое,
с высоты h = 0,5 м падает груз массой т0 = 100 кг. Масса рычага
т = 1000 кг, радиус его инерции относительно оси вращения \А = 0,5 м.
Положение центра тяжести С рычага определяется координатами хс =
= 0,4 м и ус = 0,3 м. Считать груз материальной точкой, а удар груза
о рычаг принять неупругим.
Определить ударный импульс, испытываемый грузом, а также
горизонтальную и вертикальную составляющие ударного импульса,
воспринимаемого опорой А.
Вариант 8. На тележке 1 лежит груз — однородный полый
тонкостенный цилиндр массой т0 = 500 кг и радиусом г = 0,4 м, который
удерживается от возможного перемещения по тележке ступенькой и
наклонной плоскостью, составляющей угол а = 60° с горизонтом.
Тележка 7, имеющая вместе с грузом массу тх = 3000 кг, двигаясь
по горизонтальному прямолинейному пути, наталкивается со скоростью
t?! = 3 м/с на неподвижную вагонетку 2 общей массой т2 = 6000 кг.
В конце соударения тележка 1 останавливается,^ а цилиндр, ударясь
о наклонную плоскость, начинает катиться по ней.
Отрыва цилиндра при ударе о наклонную плоскость не происходит;
абсолютная шероховатость наклонной плоскости исключает скольжение
цилиндра при ударном воздействии. Считать вертикальные плоскости
соударения тележки и вагонетки гладкими. Поверхность рельсов
абсолютно шероховата, т. е. препятствует проскальзыванию колес при
соударении тележек. Моменты инерции колес относительно их осей
пренебрежимо малы.
221
Определить угловую скорость цилиндра в конце удара о наклонную
плоскость; проверить найденное выражение угловой скорости цилиндра
по теореме Карно.
Определить скорость вагонетки 2 в конце соударения с тележкой U
Вариант 9. Тело D массой т0, поступательно движущееся по
горизонтальной плоскости, ударяется со скоростью v0 = 3 м/с об узел С
покоящейся фермы. Поверхност и тела b и узла С в точке соударения —
гладкие; коэффициент восстановления при ударе к = 0,5. Абсолютно
жесткая ферма имеет шарнирно-неподвижную опору О и упругую опору
А; ВС = а = 2 м. Масса фермы т = 20т0, радиус ее инерции относительно
горизонтальной оси вращения О i0 = 1 м.
Определить угловую скорость фермы, в конце удара и проверить ее
по теореме Карно.
Определить, какую скорость поступательного движения по гладкой
горизонтальной плоскости получит тело D после удара.
Вариант 10. Отклоненный на угол а = 60° от положенич
устойчивого равновесия маятник падает без начальной скорости под действием
собственного веса, вращаясь вокруг неподвижной оси О. В вертикальном
положении маятник ударяется точкой F о покоящееся тело, находящееся
в положении А.
Расстояния от точки О пересечения оси вращения вертикальной
плоскостью симметрии маятника до его центра тяжести С и до точки F,
находящейся в той же плоскости, ОС = d = 0,9 м и OF = / = 1,1 м.
Масса маятника т = 18 кг, радиус его инерции относительно оси
вращения j0 = 1 м. Тело имеет массу т0 = 6 кг и может быть принято
за материальную точку. Коэффициент восстановления при ударе маятника
о тело к = 0,2.
Вследствие удара тело падает из точки А плоскости АВ в точку D
гладкой горизонтальной плоскости DE. Плоскость DE расположена ниже
плоскости АВ на h = 1 м. Удар тела в точке D можно считать неупругим
(*i«0).
Определить ударный импульс в точке D и уравнение движения тела
после этого удара, отнеся движение к координатной системе xDy.
Определить также угол р отклонения маятника после удара о тело
в точке А.
Варианты 11-20 (рис. 167). Вариант 11. При испытании на
ударную нагрузку маятник копра массой т0 = 500 кг, отклоненный из
положения устойчивого равновесия на угол а = 60°, падает без начальной
скорости под действием собственного веса, вращаясь вокруг неподвижной
оси О.
В вертикальном положении маятник ударяется точкой А о середину D
покоящейся вертикальной балки BF массой т = 2000 кг, имеющей
шарнирно-неподвижную опору В и упругую опору F (BF ~2а = 3,2 м);
балку можно считать однородным тонким стержнем; коэффициент
восстановления при ударе к = 0,4.
Расстояние от точки О пересечения оси вращения маятника
вертикальной плоскостью его симметрии до центра тяжести С маятника ОС ~
= d = 1,5 м, а расстояние от точки О до точки Л, лежащей в той же
плоскости симметрии, О А — I = 2 м; радиус инерции маятника относи-
222
гельно оси вращения i0 = 1,8 м. Отклонившийся после удара на угол Р
маятник задерживается в этом положении специальным захватом.
Определить ударный импульс в точке D и расстояние от точки В
до точки, в которую следует наносить удар, чтобы опора В не
испытывала ударного импульса.
t1
12
¦V.
'/////////////////у. ТУ////////*
20
Тис. 167
223
Вариант 12. Тележка J, имеющая вместе с контейнером массу тх я
= 2000 кг и движущаяся по горизонтальному прямолинейному пути со
скоростью vi = 2,5 м/с, наталкивается на тележку 2 общей массой т2 =
= 8000 кг, движущуюся со скоростью v2 = 0,5 м/с по тому же пути
и в том же направлении.
В конце соударения тележка 1 останавливается, а контейнер
приобретает угловую скорость вращения вокруг ребра Л, закрепленного упорной
планкой. Считать контейнер массой т0 = 500 кг однородным
прямоугольным параллелепипедом (а = 0,9 м, h = 1,2 м), а вертикальные плоскости
соударения тележек — гладкими. Поверхность рельсов абсолютно
шероховата, т. е. препятствует проскальзыванию колес при соударении тележек.
Моменты инерции колес относительно их осей пренебрежимо малы.
Определить угловую скорость контейнера в конце соударения тележек
и проверить найденное выражение по теореме Карно. Определить
скорость тележки 2 в конце соударения с тележкой 1.
Вариант 13. Ось О подвеса маятника движется поступательно в
горизонтальной плоскости с постоянной скоростью, при этом маятник
занимает вертикальное положение относительного покоя. Радиус инерции
маятника относительно оси О i0 = 0,8 м.
При внезапной остановке оси подвеса маятник, находясь в том же
положении и приобретя угловую скорость, ударяется точкой А о
покоящееся тело D, имеющее массу т0 = 2,5т, где т — масса маятника.
Поверхности маятника и тела D в точке соударения — гладкие.
Коэффициент восстановления при соударении маятника и тела к = 0,6.
Расстояния от точки О до точки Л и до центра тяжести С маятника,
отсчитываемые вдоль его вертикальной оси симметрии, / = 1 м и d = 0,7 м
соответственно.
В конце соударения с маятником тело D приобрело скорость и =
= 0,5 м/с поступательного движения по гладкой горизонтальной плоскости.
Определить- скорость оси О подвеса маятника перед внезапной
остановкой, а также угол р отклонения маятника после удара о тело D.
Вариант 14. Абсолютно жесткая конструкция, имеющая форму
прямоугольного треугольника со сторонами АВ = а = 1 м и BD = Ь = 2 м,
опирается на шарнирно-неподвижную опору А и удерживается в точке В
пружиной.
В точку D конструкции, находящейся в состоянии покоя, при котором
сторона BD горизонтальна, с высоты h = 0,5 м падает груз массой т0 =
= 200 кг; удар груза — неупругий. Считать конструкцию, масса которой
т = 20 000 кг, однородным треугольником, а груз — материальной «точкой.
Определить угловую скорость системы в конце удара и проверить
найденное выражение угловой скорости по теореме Карно; Определить
также ударный импульс, испытываемый опорой Л.
Вариант 15. При транспортировке грузы из положения А скользят
без начальной скорости по наклонной плоскости, составляющей угол
а = 30° с горизонтом, проходя вдоль нее расстояние s1 = 3 м, и
продолжают движение по горизонтальной плоскости.
Определить, на каком наименьшем расстоянии BD должен быть
поставлен упор D для остановки грузов, чтобы они при этом не
опрокидывались. Расчет произвести для груза — однородного прямоугольного
224
параллелепипеда массой т - 500 кг (Ь = 1а = 1 м). Принять коэффициент
трения скольжения / = 0,2.
Определить также ударный импульс, воспринимаемый упором при
указанных условиях.
Вариант 16. Вагонетка 1 общей массой тх — 6500 кг, движущаяся
по горизонтальному прямолинейному пути, наталкивается на неподвижную
тележку 2, имеющую вместе с грузом массу т2 = 4000 кг. Груз —
однородный полый тонкостенный цилиндр массой т0 = 500 кг и радиусом
г = 0,5 м - удерживается от возхможного перемещения по тележке двумя
упорами - ступеньками.
В конце соударения вагонетка 1 и тележка 2 приобретают одинаковую
скорость движения по горизонтальному прямолинейному пути, а
цилиндр — угловую скорость вращения вокруг ребра Е ступеньки DE.
Поверхность ступеньки абсолютно шероховата, т. е. препятствует
проскальзыванию цилинлра при ударном воздействии; отрыва цилиндра при ударе
о ребро Е не происходит. После удара цилиндр поднимается на ступеньку
DE высотой h - ОД м. Считать, что за время подъема цилиндра на
ступеньку скорость тележки 2, приобретенная ею в конце удара, остается
постоянной, а вертикальные плоскости соударения вагонетки и тележки —
гладкие. Поверхность рельсов абсолютно шероховата, т. е. препятствует
проскальзыванию колес при соударении тележек. Моменты инерции колес
относительно их осей пренебрежимо малы.
Определить ударный импульс, испытываемый цилиндром со стороны
ступеньки DE, а также скорость вагонетки 1 до столкновения ее с
тележкой 2.
Вариант 17. Ось О подвеса маятника движется поступательно в
горизонтальной плоскости с постоянной скоростью v — 2 м/с, при этом
маятник занимает вертикальное положение относительного покоя.
Маятник — однородный тонкий стержень длиной 1=1ми массой т0 =* 20 кг.
При внезапной остановке оси подвеса маятник, находясь в том же
положении и приобретя угловую скорость, ударяется точкой Е о
неподвижный однородный полый тонкостенный цилиндр радиусом г = ОД м
и массой т = 2т0. Коэффициент восстановления при соударении тел
к = 1/3. Поверхности маятника и цилиндра в точке соударения — гладкие.
Плоскость, на которой покоится цилиндр, абсолютно шероховата, т. е.
не допускает скольжения тепа при ударном воздействии.
Определить ударный импульс, испытываемый осью О подвеса
маятника при ее внезапной остановке, а также угловую скорость цилиндра
в конце соударения с маятником.
Вариант 18. Абсолютно жесткая балка массой т = 8000 кг и
длиной / = 4 м имеет упругую опору А и шарнирно-неподвижную опору В.
Балка занимает в состоянии покоя, соответствующем статической
деформации пружины А, горизонтальное положение; коэффициент жесткости
пружины с =10 000 Н/см. Радиус инерции балки относительно
горизонтальной оси вращения В iB = 2,2 м.
Балка испытывается на воздействие ударной нагрузки с помощью
парового молота, в котором масса молота, штока и поршня т0 = 800 кг.
Молот и связанные с ним части падают под давлением пара на середину
балки с высоты h = 0,8 м, имея в момент соприкосновения с балкой
225
скорость, в два раза превышающую скорость при свободном падении.
Коэффициент восстановления при ударе молота о балку к = 0,2.
Принять молот и связанные с ним элементы за материальную точку;
считать, что движение точек балки происходит по прямым.
Определить наибольшую деформацию упругой опоры Л, считая, что
молот, отскочив от балки, не падает снова, а удерживается обратным
давлением пара; определить также ударный импульс, воспринимаемый
опорой В.
Вариант 19. При испытании упорных (буферных) брусьев на удар
маятник копра массой т = 500 кг, радиус инерции которого относительно
неподвижной горизонтальной оси вращения О i0 = 1,2 м, отклоняют от
положения устойчивого равновесия на угол а = 90° и отпускают без
начальной угловой скорости. Падая, маятник точкой А ударяется о
буферный брус массой т0 = 1000 кг, коэффициент жесткости комплекта
пружин которого с = 10000 Н/см. Коэффициент восстановления при ударе
к = 0,5. Отклонившийся после удара на угол р маятник задерживается
в этом положении специальным захватом.
Расстояние от точки О пересечения оси вращения вертикальной
плоскостью симметрии маятника до его центра тяжести С ОС = d = 0,9 м;
расстояние от точки О до точки А, находящейся в той же плоскости
симметрии, О А = / = 1,5 м.
Пренебрегая трением скольжения бруса о горизонтальную плоскость,
определить величину наибольшего сжатия буферных пружин, ударный
импульс в точке А, а также расстояние от точки О до центра удара.
Вариант 20. В гипоциклическом механизме кривошип ОС массой
т = 2 кг и зубчатое колесо 1 радиусом г = 30 см вращаются с угловыми
скоростями соо = 1,5 рад/с и o>i = 1 рад/с соответственно. Зубчатое колесо
2 имеет массу ш2 = 8 кг и радиус г2 = 10 см. В некоторый момент времени
колесо 1 внезапно останавливают.
Считая кривошип однородным тонким стержнем, а колесо 2 -
однородным сплошным диском, определить угловую скорость кривошипа
в конце удара, а также ударные импульсы в точках А и С.
Варианты 21 — 30 (рис. 168). Вариант 21. Лента транспортера
составляет угол а = 15° с горизонтом. Радиусы шкивов г = 0,2 м. На ленте
транспортера, скольжение которой по шкивам 1 и 2 отсутствует,
находится груз — однородный куб массой т0 = 200 кг с ребрами длиной
а = 0,5 м. В некоторый момент времени движение транспортера внезапно
прекращается, при этом груз приобретает угловую скорость вращения
вокруг ребра А, закрепленного упорной планкой.
Определить наименьшую угловую скорость шкивов в момент
остановки, если груз опрокидывается; определить также ударный импульс,
воспринимаемый упорной планкой, при внезапной остановке шкивов,
вращающихся с этой угловой скоростью.
Вариант 22. Груз - однородный полый тонкостенный цилиндр
массой т = 800 кг и радиусом г = 0,4 м - покоится на движущейся
платформе между упорами - ступеньками. При внезапной остановке
платформы ступенька АВ не удерживает груз: цилиндр, поднимаясь на
ступеньку, прокатывается по участку BD = s = 1m горизонтальной площадки
BE и, ударившись о ребро F другого упора — ступеньки EF высотой
226
Jk« ОД м, поворачивается вокруг ребра F, вследствие чего центр тяжести
цилиндра поднимается по вертикали на высоту hx = 0,07 м. Качение
цилиндра от В до F происходит без скольжения; коэффициент
сопротивления качению цилиндра 8 = ОД см. Отрыва цилиндра при ударе о сту-
23
22
25
26
Рис. 168
227
пеньку не происходит, абсолютно шероховатая поверхность ступеньки не
допускает скольжения цилиндра при ударном воздействии.
Определить, какую скорость имеет центр тяжести цилиндра в начале
движения на участке ВО, а также ударный импульс, испытываемый
ребром F ступеньки EF.
Вариант 23. Маятник состоит из тонкого однородного стержня АВ
массой т = 4 кг, длиной / = 0,7 м и однородного сплошного шара
массой т0 = 2 кг и радиусом г = 0,1 м. Ось А маятника движется
поступательно в горизонтальной плоскости с постоянной скоростью v = 1,4 м/с,
при этом маятник занимает вертикальное положение устойчивого
равновесия.
Вследствие внезапной остановки оси подвеса маятник получает угловую
скорость вращения вокруг этой оси и, находясь в том же вертикальном
положении, ударяется точкой D о неподвижную вертикальную плоскость.
Поверхности маятника и вертикальной плоскости в точке соударения —
гладкие. Коэффициент восстановления при ударе к = 0,4.
Определить угловую скорость маятника при внезапной остановке
оси его подвеса и проверить найденное выражение по теореме Карно.
Определить также угол отклонения р маятника после удара о
вертикальную плоскость и ударные импульсы, испытываемые осью А маятника.
Вариант 24. При испытании фундамента на ударную нагрузку
маятник копра, вращаясь вокруг неподвижной оси, падает из вертикального
положения, показанного на чертеже, под действием собственного веса без
начальной угловой скорости. В горизонтальном положении маятник
точкой А ударяется о середину верхней грани покоящегося фундамента.
Масса маятника т0 = 500 кг, радиус его инерции относительно оси
вращения i0 = 1,8 м, масса однородного фундамента т = 10000 кг.
Коэффициент восстановления при ударе к = ОД. Отклоняющийся после удара
маятник задерживается в этом положении специальным захватом.
Расстояния от точки О пересечения оси вращения вертикальной плоскостью
симметрии маятника до его центра тяжести С и до точки А,
находящейся в той же плоскости симметрии, ОС = d = 1,5 м и О А = 1 = 2 м.
Определить наибольшую упругую осадку основания, имеющего
коэффициент жесткости с = 16 * 105 Н/см, ударный импульс в точке А и
расстояние от точки О до центра удара.
Вариант 25. Тележка 1 общей массой тх = 3000 кг, двигаясь по
горизонтальному прямолинейному пути со скоростью v1 = 5 м/с,
наталкивается на тележку 2, имеющую вместе с грузом массу т2 = 2000 кт и
движущуюся по тому же пути и в том же направлении со скоростью
1?2 = 1 М/С.
Груз — однородный полый тонкостенный цилиндр массой т0 = 500 кг
и радиусом г = 0,5 м - удерживается от возможного перемещения по
тележке двумя упорами — наклонными плоскостями.
В конце соударения скорости движения тележек по тому же
горизонтальному прямолинейному пути изменяются, а цилиндр, ударяясь о
наклонную плоскость АВ, составляющую угол а = 60°, начинает качение
по ней.
Цилиндр по наклонной плоскости проходит без скольжения расстояние
s = 0,1 м; сопротивление качению пренебрежимо мало. Отрыва цилиндра
228
при ударе о. наклонную плоскость не происходит, абсолютная
шероховатость наклонной плоскости исключает скольжение цилиндра при
ударном воздействии.
Считать, что за время подъема цилиндра на наклонную плоскость
скорость тележки 2, полученная ею в конце удара, остается постоянной,
а вертикальные плоскости соударения тележек — гладкие. Поверхность
рельсов абсолютно шероховата, т. е, препятствует проскальзыванию колес
при соударении тележек. Моменты инерции колес относительно их осей
пренебрежимо малы.
Определить скорость тележки 1 в конце соударения с тележкой 2, а
также ударный импульс, воспринимаемый наклонной плоскостью со стороны
цилиндра.
Вариант 26. В эпициклическом механизме кривошип ОС массой
m = 3 кг и длиной / = 30 см вращается с угловой скоростью ш0 = 2 рад/с,
а зубчатое колесо 1 — с угловой скоростью сох = 3 рад/с. Масса зубчатого
колеса 2 т2 = 10 кг, а радиус г2 = 10 см.
В некоторый момент времени колесо 1 внезапно останавливают.
Считая колесо 2 однородным сплошным диском, а кривошип - однородным
тонким стержнем, определить угловую скорость колеса 2 в конце удара,
а также ударные импульсы в точках А и С
Вариант 27. В точку D абсолютно жесткой балки массой т = 5000 кг
и длиной / = 3 м с высоты h = 1,2 м падает груз массой т = 400 кг.
Балка имеет шарнирно-неподвижную опору А и упругую опору В; в
состоянии покоя балка занимает горизонтальное положение, показанное
на чертеже. Удар груза о балку - неупругий.
Считать балку однородным тонким стержнем, а груз — материальной
точкой.
Определить угловую скорость балки в конце удара и проверить
найденное выражение угловой скорости по теореме Карно. Определить также
ударный импульс, воспринимаеАмый опорой А,
Вариант 28. Механизм состоит из шестерни с кулачками, которая
приводится во вращение вокруг неподвижной горизонтальной оси О.
Масса механизма т = 50 кг, радиус инерции относительно оси вращения
i0 = 0,2 м. Механизм сбрасывает металлические болванки массой т0 — 2 кг
из точки А горизонтальной плоскости АВ на горизонтальную плоскость
ED на расстояние d = 1,5 м, отсчитываемое по горизонтали от точки А,
Плоскость ED расположена ниже плоскости АВ на высоту h = 1 м.
Неупругий удар между кулачком и болванкой (kt = 0) происходит на
расстоянии I = 0,4 м от оси вращения механизма. Коэффициент
восстановления при ударе болванки о гладкую горизонтальную плоскость в точке
Е к2 = 0,2.
Принимая болванку за материальную точку, определить угловую
скорость шестерни в начале удара, а также ударные импульсы,
испытываемые болванкой в точках А и Е.
Вариант 29. Маятник, отклоненный от положения устойчивого
равновесия на некоторый угол ос, падает без начальной скорости под
действием собственного веса, вращаясь вокруг неподвижной оси О, и в
вертикальном положении точкой А ударяется о покоящийся однородный
полый тонкостенный цилиндр массой mG = 200 кг и радиусом г = 0,2 м.
229
Масса маятника т = 100 кг, радиус его инерции относительно оси
вращения i0 = 1 м. Расстояния от точки О пересечения оси вращения
вертикальной плоскостью симметрии до центра тяжести С маятника и до точки А,
находящейся в той же плоскости симметрии, ОС = d = 0,8 м и О А = / =
= 1,2 м. Коэффициент восстановления при соударении маятника и цилиндра
к - 0,6.
После удара цилиндр скользит, не вращаясь, по гладкой
горизонтальной плоскости и, натолкнувшись на ступеньку DE высотой h — 0,05 м,
поднимается на нее, не перемещаясь дальше ребра Е. Отрыва цилиндра от
ребра Е при ударе о ступеньку не происходит, а абсолютно шероховатая
поверхность ступеньки исключает проскальзывание цилиндра при
ударном воздействии.
Определить угол а первоначального отклонения маятника, а также
ударный импульс, испытываемый цилиндром со стороны маятника.
Вариант 30. Рычаг состоит из двух абсолютно жестких стержней
OD и OF, соединенных под прямым углом; OD — а = 1 м, OF = b = 1,5 м.
Рычаг имеет шарнирно-неподвижную опору О и удерживается в точке Е
пружиной. Масса рычага т = 400 кг, радиус его инерции относительно оси
вращения О i0 ~ 0,4 м.
Рычаг находится в покое, соответствующем статической деформации
пружины, при этом его стержень OD горизонтален. В точку D рычага падает
груз А массой тА = 20 кг с высоты h = 0,5 м. Удар груза о стержень OD
рычага — неупругий (кх = 0). Приобретя угловую скорость, рычаг точкой F
ударяется о неподвижное тело В массой тв = 120 кг; коэффициент
восстановления при этом ударе к2 = 0,2. Считать груз А и тело В
материальными точками.
Определить, какую скорость получает тело В в конце его
соударения со стержнем OF, а также ударный импульс, воспринимаемый
телом В.
Пример выполнения задания (рис. 169). Груз - однородный сплошной
цилиндр массой т = 500 кг и радиусом г = 0,5 м - лежит на движущейся
платформе и удерживается от возможного перемещения по платформе
упорами — ступеньками.
При внезапной остановке платформы цилиндр ударяется о ребро D
ступеньки BD высотой h = ОД м и поднимается вверх на эту ступеньку.
Далее цилиндр катится по участку DE горизонтальной площадки DK и,
ударившись о другой упор — наклонную плоскость KN, составляющую
угол а = 60° с горизонтом, проходит по ней расстояние FN — s = 0,1 м.
Качение цилиндра не сопровождается скольжением, сопротивление качению
пренебрежимо мало.
Отрыва цилиндра при ударах о ступеньку и о наклонную плоскость
не происходит, абсолютная шероховатость ступеньки и наклонной
плоскости исключает скольжение цилиндра при ударном воздействии.
Определить скорость платформы до ее остановки, а также ударные
импульсы, испытываемые цилиндром со стороны ступеньки и наклонной
плоскости.
Поверить найденные выражения угловых скоростей цилиндра после
ударов о ступеньку и наклонную плоскость с помощью теоремы Карко.
Решение. При внезапной остановке платформы поступательное дви-
230
Рис, 169
жение цилиндра мгновенно изменяется на вращательное движение вокруг
ребра D ступеньки BD, т. е. цилиндр испытывает удар.
Составим уравнение, выражающее теорему об изменении кинетического
момента механической системы при ударе, взяв за ось моментов
горизонтальную ось, проходящую вдоль ребра D (положения I и J7,
соответствующие началу и концу удара о ребро D ступеньки BD, совпадают;
рис. 170, а):
9)
Рис. 170
231
Сумма моментов внешних ударных импульсов, приложенных к
цилиндру, относительно оси D равна ? Мо $п = 0 (ударный импульс 3d
пересекает ось D) и потому
Кинетический момент цилиндра относительно оси D в начале
удара
LlD = mvC\ {r - h),
где vq\ = у — скорость центра тяжести цилиндра в начале удара, равная
скорости платформы до внезапной остановки.
Кинетический момент цилиндра относительно оси D в конце удара
где Jp — момент инерции цилиндра относительно оси D; соц — угловая
скорость цилиндра в конце удара
U\d = (Jc + и»'2) Юн = (wr2/2 + mr2) соп = 3/2шг2о)ц ^
Но
т. е.
3/2^г2соп = wit; (г - h),
откуда
Ши = 2(г-%/(Зг2). A)
Проверим полученное выражение A) угловой скорости цилиндра по
теореме Карно:
Ti - Г„ = Т*,
где Т\ — кинетическая энергия системы материальных точек в начале удара;
Гц — кинетическая энергия системы в конце удара; Г* - кинетическая
энергия, соответствующая потерянным скоростям точек системы.
Кинетическая энергия цилиндра в начале удара о ступеньку
Тх = 1/2mv2.
Кинетическая энергия цилиндра в конце удара о ступеньку
Теперь выведем выражение кинетической энергии,
соответствующей потерянным скоростям Avt точек Mt твердого тела при плоском
движении:
где
ftl = Vci + VlCMp ViU = Veil + VCMt>
причем вращательные скорости вокруг оси С имеют выражения
&сщ = cui х ?h JcMi = Зц х ft.
232
Кинетическая энергия тела, соответствующая потерянным скоростям
его точек,
Т* = 7а Im, [(tfci - *cii) + (vlCMi - ЗД2,
т. е.
Т* = 7а Q>, (tTci - г^спJ + 2? m, (iTn - » $
Здесь
(t?a - »aiJ = m [va -
( [ 6Я1) x 2>Л] = 0;
так как
I w, Dм, - $м.) = X т, (©1^ - еюнпJ = Jc (®i ~ соиJ.
Таким образом,
Т* - 7а «(*а - ^сиJ + V2^с Ы - «иJ>
или
Г* = 7а « И»ах - »сихJ + (^ - »сп/] + 7аЛг(«1 - о)„J. B)
Выражение B) является общей формулой кинетической энергии,
соответствующей потерянным скоростям точек твердого тела при плоском
движении.
Для цилиндра (рис. 170, б) в рассматриваемой задаче
Т* = 7а л [("а - ven cos pJ + \?ai sin2 P] + 7
т. е.
Г* = 7а ^ (»?л -
Так как
Уа = v, vcu = cour, Jc = mr2/2,
то, приравнивая Ti — Гц и Г*, получаем
+ V2 mco?^2 -h 74гог2со2ь
или
3/2 ^С02!Г2 = ту СОцГ COS р,
где
cos р = (г - h)/r.
Отсюда
233
Составим уравнение, выражающее теорему об изменении кинетической
энергии механической системы и соответствующее подъему цилиндра на
ступеньку BD из положения II в положение III (рис. 170, в):
Так как перемещение осуществляется поворотом вокруг оси D, то
или
откуда
сош = j/co?! - АфЦЪг2). C)
Составим уравнение, выражающее теорему об изменении кинетической
энергии механической системы и соответствующее качению цилиндра на
участке DE из положения III в положение IV {рис. 170, г):
Так как на рассматриваемом перемещении ?,4f = 0, то
T\v = Tnh
т. е.
= van и oIV = шш. D)
При соприкосновении цилиндра с наклонной плоскостью мгновенная
ось вращения цилиндра (мгновенный центр скоростей) мгновенно
перемещается из Е в F, т. е. цилиндр испытывает удар.
Составим уравнение, выражающее теорему об изменении кинетического
момента механической системы при ударе, взяв за ось моментов
горизонтальную ось, совпадающую с образующей F цилиндра (положения
цилиндра IV и V, соответствующие началу и концу удара, совпадают;
рис. 170, д):
Но Y, Mf Cf) = 0, так как ударный импульс §f, приложенный к цилиндру,
пересекает ось F. Поэтому
При вычислении кинетических моментов цилиндра Livf и Lyp
используем теорему о кинетическом моменте системы в общем случае ее движения.
Кинетический момент цилиндра относительно оси F в начале удара
LiVf = mvavr cos a + Jc®iv>
где vc\\i = (»iv?C поскольку мгновенный центр скоростей — в точке Е;
LiyF = mcoivr2 cos а + (тг2/2) ш1У = тщуг2 (cos а + 11г\
Кинетический момент цилиндра относительно оси F в конце удара
Lyp = 1YlVc\V Л"
234
где Vcv = covCF, так как мгновенный центр скоростей - в точке F;
LV? = mcovr2 + {mr2/2) cov = 3/2mcowr\
Но L\f = L\\f, т. е.
3/г rocovr2 = тщуг2 (cos a + l/2)>
поэтому
cov = co!v B cos a + l)/3. E)
Проверим найденное выражение угловой скорости цилиндра по теореме
Карно:
TIV - Ту = Т*.
Кинетическая энергия цилиндра в начале удара о наклонную плоскость
Кинетическая энергия цилиндра в конце удара о наклонную плоскость
то, приравнивая 7JV — Tv и Г*, получаем
Кинетическую энергию, соответствующую потерянным скоростям точек
цилиндра, найдем, используя формулу B) (рис. 170, д):
Г* = 1/2m [(t?civx - vcvxJ + (vcivy - v<yyJ + l/2Jc (o>iv ~ coyJ,
т. e.
T* = 72m [(rav - Vcy cos aJ + tcv sin2 a] + l/2Jc Kv - covJ,
или
T* = li'2m{v1c\v - 2yCiv^cv cos gc ? 22
Так как
mcolvcovr2 cosa-f
о^ = coIvcov (cos a + 72),
откуда
cov = coIVBcosa + l)/3.
Составим уравнение, выражающее теорему об изменении кинетической
энергии механической системы и соответствующее качению цилиндра по
наклонной плоскости из положения V в положение VI на расстояние s
(рис. 170, е):
235
l2^ -f 1/4тг2Щу - 1/2тг2(О\\гЩ 4-
или
Так как Туг = 0, то
или
~ - - = - mgs sin a,
т. е.
откуда
2
Используя выражения (З) — E), находим
Учитывая выражение F), имеем
__ 2 / 3gssinoc gh
Таким образом, скорость платформы, по A),
г2 11 /
-h) r (/(
Bcosoc+lJ 3 э
т. е.
v = 3,68 м/с.
Найдем ударный импульс, воспринимаемый цилиндром со стороны
ступеньки, для чего составим уравнения, выражающие теорему об
изменении количества движения механической системы при ударе, в проекциях
на оси х и у (рис. 170, а):
или
— invcii cos p — ( — TfttJci) == Sdxi nwcii sin P = S/ty,
о i куда
SDx — mvci ~ rnvcu cos P = mv - mconr (r — h)/r = mv [1 — 2/3 (r — hJ/r2\
т. e.
SDx = 1055 H • c,
SDy = mvcn sin p = т®цг ]/l - cos2 p = 2/з (r - h)(mv/r) |/l - (r -
236
т. е.
SDy = 589 Н • с.
Ударный импульс, воспринимаемый цилиндром со стороны ступеньки,
или SD = 1208 Н • с.
Найдем ударный импульс, воспринимаемый цилиндром со стороны
наклонной плоскости, для чего составим уравнения, выражающие теорему
об изменении количества движения системы при ударе, в проекциях на
оси ? и х\ (рис. 170, д):
- mvavr\ =
или
—( — mvciv sin a) = Sp$; mvcv — tnvav cos a = Sfn,
откуда
Sf$ = mt?civ sin a = mwivr sin a = mScovr sin a/[B cos a + 1)];
SF? = mi?cv -" mvciv cos a = тщг — mcoiyr cos a = тщг —
— m3cavr cos a/[B cos a + 1)],
Используя выражение F), найдем
Sf$ = 6m j/#ssin a/3 sin a/[B cos a 4- 1)],
t. e.
Sn = 691 He;
SFr] = 2m ]/gS sin a/3 [1-3 cos a/B cos a + 1)],
t. e.
SFn = 133 H-c.
Ударный импульс, воспринимаемый цилиндром со стороны наклонной
плоскости,
ИЛИ
SF « 704 Н • с.
III. АНАЛИТИЧЕСКАЯ МЕХАНИКА
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Задание Д. 14. Применение принципа возможных перемещений
к решению задач о равновесии сил, приложенных
к механической системе с одной степенью свободы
Схемы механизмов, находящихся под действием взаимно
уравновешивающихся сил, показаны на рис. 171 — 173, а необходимые данные
приведены в табл. 50.
237
К> Ю *— *— >—
•—О VO 90 -J
4ь u>
Номер
варианта (рис.
171-173)
§
I)
il
Ъо
fc О О
И II II
II N)
to
II г
oil'
too
II
о
о
1
II
со
о
о
;
и
о
о
О
II
О
О
II
О
о
О О
бе х
и и
II О
° ?
О
II
J1^1 ОО О JT* ^" О OJ* >? ОО
II II ^ О О || II ^ О II И X ^
о
I
111 l^l
8
S8
g I I III
18 !
i i
i i
1 8 J 8
8
i i
1 ol 8
Момент
пары сил Af»
Нм
i t
8
i i
о о
iii
Коэффициент
жесткости
с, Н/см
•M I
I I
*l ы
I * 111
Деформация
пружины Л,
о 5;to
«o S;
Величины,
подлежащие
определению
? 5
3 Г
•о
\S>3
3^S
8
to
ll
О
S
to
,1й
, й5
§ о
g О
О ^
8 1
? ?
В ^
a 4
p E §
Продолжение табл. 50
Линейные размеры
Силы, Н
а*
ll
II
о &
с о
Примечания
26
27
28
29
30
= 25 см
U
АО=30 см, BD = OXD
rt = 15 см, г2 = 36 см,
гэ= 10 см, г4 = 20 см
500
450
600
120
120
180
100
с
р
Пружина
растянута
Применяя принцип возможных перемещений и пренебрегая силами
сопротивления, определить величину, указанную в предпоследней графе
табл. 50.
Примечание. Механизмы а вариантах 3, 6, 10, 14, 16, 18, 19, 25 4И .30
расположены « вертикальной ялоскости, а остальные - в горизонтальной.
Пример выполнения задания. Дано: Q - 100 Н; с = 5 Н/см; г4 «20 см;
г2 = 40 см; г3 = 10 см; ОА = I = 50 см; а = 30°; р = 90° (рис. 174).
Определить деформацию h пружины, пренебрегая весом звеньев О А и
АВ.
Решение. Рассматриваемый механизм (рис. 174) находится под
действием следующей системы уравновешивающихся сил: силы упругости
F, сил тяжести бх вала 1 с шестерней 2, б3 шестерни 3, <54 ползуна В,
Q груза и реакций опор.
Составим уравнение работ, выражающее принцип возможных
перемещений:
Связи, наложенные на механизм,, допускают следующие возможные
перемещения его звеньев; поворот вала / с шестерней 2 на угол 5(рь
поворот шестерни 3 на угол 8ср3 и поступательное перемещение груза по
вертикали на bsQ. Ползун В может иметь перемещение bsB (перемещение
по горизонтали), а точка А - перемещение &sA (отрезок 55^
перпендикулярен ОА). Уравнение работ, выражающее принцип возможных
перемещений, получает вид
QbsQ - FbsB = 0. A)
Найдем зависимость между возможными перемещениями точек системы.
Поскольку нить, к которой привязан груз б, нерастяжима и скольжение
между нитью и валом 1 отсутствует, перемещение груза Q равно пере*
мещению точки обода колеса 1. Поэтому угол поворота вала I и шестерни 2
Перемещение точки К обода колеса 2
239
м
'S/S/У/,
Oi\/
В
/
p
8 y\
t—и
Рис. 171
11
У\
12
ж\
t—у
И 4-U4-
19
а:
Рис. 172
21
23
—х
24-
У\
sQO°
D о
В
25
В
27
29
30
Рис. 173
Рис. 174
Так как скольжение между шестернями 2 и 3 отсутствует, то
возможные перемещения точек касания этих шестерен равны и угол поворота
шестерни 3
Перемещение точки А кривошипа, жестко соединенного с колесом,
bsA « О А 8ф3 = [r2//(rir3)] bsQ.
Для определения зависимости между возможными перемещениями
Ь$А и bsB найдем положение мгновенного центра вращения звена АВ —
точки Р.
Тогда
8sB/SsA = РВ/РА; bsB = (PB/PA) bsA.
Из ЬАРВ
РВ/РА = 1/cos 30°.
Теперь
bsB = [r2//(rir3 cos 30°)] 85а.
Сила упругости пружины пропорциональна ее деформации: F = ск
Подставив в уравнение" работ A) выражения силы упругости и
возможных перемещений точек системы, получим
QbsQ - ch [г21/(ггг3 cos 30°)] bsQ = 0,
243
откуда
Qrxrz cos 30°
h = 1,74 см.
Следовательно, пружина сжата на 1,74 см.
Решим ту же задачу составлением уравнения мощностей,
выражающего принцип возможных скоростей:
или
Сообщим валу 1 с шестерней 2 возможную угловую скорость cOj-2
вокруг оси Ои допустим, по часовой стрелке (рис. 175). Груз Q получит
вертикальную скорость vq. Шестерня 3 вместе с жестко соединенным с нею
кривошипом ОА приобретает угловую скорость со3 вокруг оси О. Звено АВ
будет иметь угловую скорость <оАВ, которую покажем вокруг
мгновенного центра скоростей РАВ, находящегося на пересечении перпендикуляров
к скоростям vA и vB точек А и В звена АВ (скорость vA точки Л,
принадлежащей кривошипу ОА> направлена перпендикулярно ОА, а скорость vB
точки В, принадлежащей ползуну, направлена параллельно его
направляющим).
Составим уравнение мощностей:
или
chvB = 0.
Здесь неизвестными являются деформация пружины h9 а также
скорости Vq И VB.
Скорость груза равна
скорости точек обода колеса,
так как нить, к которой
подвешен груз, нерастяжима,
и поэтому
Скорости точек касания
К шестерен 2 и 3
выражаются соответственно
следующим образом:
Рис. 175
они равны между собой,
так как проскальзывание
шестерен отсутствует.
Скорость точки А можно
выразить двояко, поскольку
она принадлежит
кривошипу ОА и звену АВ одно-
временно:
244
Скорость точки В звена АВ
Vb = ®ав • ВР.
Таким образом,
о>!. 2г2 = со3г3; со3 • О А = <олв • АР,
откуда
со1_2г2 ОА
со3 -
7лр
Скорость точки В
Щ-.2Г2-ОА-ВР
гъАР
Из &АРВ
АР = БР • cos 30°.
Следовательно,
Увr3cos30° '
Итак, уравнение мощностей приобретает вид
Разделив все члены этого уравнения на ©!-2, найдем искомую
деформацию пружины:
бг^з cos 30°
/7 =
СГ21
Задание Д. 15. Применение принципа возможных перемещений
к определению реакций опор составной конструкции
Применяя принцип возможных перемещений, определить реакции опор
составной конструкции.
Схемы конструкций показаны на рис. 176—178, а необходимые для
решения данные приведены в табл. 51. На рисунках все размеры указаны
в метрах.
Пример выполнения задания. Дано: составная рама (рис. 179); Рх = 2 кН;
Р2 = 4 кН; М = 5 кН • м; q = 1,5 кН/м.
Определить реакции опор рамы.
Решение. ЗахМеним равномерно распределенную нагрузку
сосредоточенной силой Q = g.4= 1,5 -4 = 6 кН, приложенной в середине
загруженного участка.
Найдем реакцию подвижной опоры Л, для чего мысленно отбросим эту
связь, заменив ее действие реакцией (рис. 180).
245
Табл и ца 51
Номер
варианта
(рис.
176-178)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Нагрузка
кН
15
13
И
9
7
8
7
6
5
4
12
10
9
7
6
к
14
12
10
8
6
5
4
6
8
10
И
6
5
10
8
кН/м
3
2
1
3
2
1
2
1
3
2
1
2
]
2
I
А/
кНм
10
6
5
14
12
4
10
7
8
6
12
10
6
13
5
Номер
варианта
(рис.
176-178)
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Нагрузка
кН
3
1
3
5
7
10
8
6
4
2
7
6
5
4
3
кН
10
8
6
4
2
9
7
5
3
1
1
2
3
4
5
кН/м
2
1
3
2
1
2
1
2
1
2
2
1
2
1
2
А/,
кИ м
10
8
6
7
5
4
7
8
3
2
7
5
10
5
10
Возможным перемещением левой части рамы является ее поворот
вокруг шарнира С на угол 6<р, например против вращения часовой стрелки;
правая часть рамы останется неподвижной.
Составим уравнение работ, выражающее принцип возможных
перемещений, при этом учтем, что работа силы при повороте тела равна
произведению момента силы относительно центра вращения на угол поворота
тела:
Q • 25ф + М5ф - RA • 45ф = 0,
откуда
RA = 4,25 кН.
Для определения реакций заделки воспользуемся уравнением
возможных мощностей
где v — возможные скорости.
Сначала найдем реактивный момент Мд. Для этого отбросим связь,
препятствующую повороту правой части рамы, заменив заделку
шарнирной неподвижной опорой и приложив искомый момент Мв (рис. 181).
Сообщим правой части рамы возможную угловую скорость coj вокруг
оси В по направлению вращения часовой стрелки. Левая часть рамы
получит угловую скорость со2 вокруг мгновенного центра скоростей Ох,
находящегося на пересечении перпендикуляров к скоростям ус и vA точек
Си А (скорость точки С направлена перпендикулярно CS, а скорость точки
подвижной опоры направлена параллельно опорной плоскости).
Скорость точки С можно выразить двояко, поскольку эта точка
принадлежит левой и правой части: vc = coj • СВ; vq = co2 • СОи
т. е.
= со2- СО ь
246
ч-
f
5x5 vZ
1 2
1 I / I 2
Mr
ч о
т*
гттттт
't
IS
Рис. 176
12
'/////f
Рг
f
13
1_
3 J
л
Y/////,
15
1
2
V////)ft
17
18
19
¦КПП
1
7 Ф
Г
20
Wy W
M
Рис, 177
Рис. 178
ШШ
с г
Рис. 179
Рис. 180
у
i
Рис. 181
откуда
©! = ©2 = со, поскольку СВ = С0х.
Составим уравнение возможных мощностей:
М<о - Q • 2ш - Рх • 2ш - Р'2 • 5со - Мвсо = О,
где
Р;2 = Р2 sin 30°.
Из уравнения следует
Отсюда
-21 кНм.
Для определения вертикальной составляющей Тд реакции заделки
отбросим связь^ препятствующую вертикальному перемещению точки В,
заменив жесткую заделку скользящей (вертикальными направляющими)
и приложив реакцию Тв (рис. 182).
Сообщим правой части рамы возможную скорость v поступательного
движения вверх (направляющие исключают возможность поворота правой
части).
Левая часть рамы получит угловую скорость со вокруг мгновенного
центра скоростей О2, находящегося на пересечении перпендикуляров к
скоростям vc и ЬА точек С и A (vc = v). Составим уравнение возможных
мощностей:
где
250
Мсо - б • 2со -
Р5 = Pi cos 30°,
• v - Pi' • v + Тв • I? = 0,
vc = со • CO2 = со • 4.
л/
¦У
A *
с
Рис. 182
1° Г
» С X
г г
Следовательно,
Мсо - Q • 2со -
откуда
- 4ш + Р2 • 0,866 • 4ш + YB - 4со = О,
-Ра.0,866• 4)/4 = 0,29 кН.
Для определения горизонтальной составляющей %в реакции заделки
отбросим связь, препятствующую горизонтальному перемещению точки
В, заменив жесткую заделку скользящей (горизонтальными
направляющими) и приложив реакцию Хв (рис. 183).
Сообщим правой части рамы возможную скорость v поступательного
движения вправо (направляющие исключают возможность поворота правой
части). Скорости точек С и А левой части будут параллельны.
Следовательно, левая часть рамы, как и правая, получит скорость v
поступательного движения.
Составим уравнения возможных мощностей:
-P2cos6Q°-v + XB-v = Q,
откуда
= 2 кН.
Проверим правильность решения задачи.
Убедимся, что найденные числовые значения величин удовлетворяют
уравнениям равновесия сил для всей рамы (рис. 184):
Имеем
~ Q -
- 4,25
i + P2 cos 30° + YB = 4,25 -6-2 + 4. ОД7 + 0,29 =
= 8,02 - 8,00 s 0;
A • 8 + M + Q • 6 + Px • 2 + P2 cos 60°. 5 + MB =
+ 5-1-6-6 + 2-2 + 4- 0,5-5-21 = 55- 55 = 0.
251
ПРИНЦИП ДАЛАМБЕРА
Задание Д. 16. Применение принципа Даламбера
к определению реакций связей
Определить реакции внешних связей механической системы:
а) в произвольный момент времени — для вариантов 4, 5, 10, 12-18,
21-30 (рис. 185-187);
б) в момент времени t = tt — для вариантов 1, 8, 9, 11, 20;
в) в тот момент времени, когда угол поворота ср = cpi,— для вариантов
2, 3, 6, 7;
г) в положении, показанном на чертеже для вариантов 15 и 19.
На схемах (рис. 185-187) плоскость хОу (хАу) горизонтальна, плоскость
yOz(yAz) вертикальна. Необходимые для решения данные приведены в
табл. 52, в которой со - угловая скорость, ф0 и соо - значения угла поворота
и угловой скорости в начальный момент времени.
Таблица 52
Номер
варианта
(рис.
185-187)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
ет,
кг
20
25
40
20
30
40
20
50
20
20
25
30
25
20
20
80
100
_
—
—
1,5
—
—
30
5
40
—
25
20
45
20
10
/
R
м
0,60
0,50
0,80
0,80
0,60
—
—
0,50
0,25
0,30
0,40
0,40
0,40
0,20
—
1,50
—
—
—
0,30
0,25
0,30
0,10
—
—
—
—
—
0,10
—
А/,
Н м
1,0
—
—
—
—
—
4,0
20-ОДг
—
5-0,W
—
—
—
— '
65
160
(Л
const)
>ад/с
—
—
—
—
—
—
—
—
—
10
15
_
8
—
-
г,
с
10
—
—
—
—
5
200
—
50
—
—
—
—
—
-
Фо
град
60
60
—
—
30
60
—
—
—
—
—
—
—
—
-
0
0
0
—
—
0
0
0
—
—
—
—
—
—
—
-
рад/с
0
0
6,3
—
—
0
5,5
0
0
—
0
—
—
—
—
—
-
Примечания
При /=*!
координаты центров
тяжести шкивов Сх и С2;
= —0,1 см; zCi =
=a + b; xc2=0,l см;
Ус2=0; zc2=a
При t~t\ ось
стержня /
параллельна оси у, а ось
стержня 2
параллельна оси х; /j =
= 25, /2=40 см
Радиус инерции
ротора 2 двигателя
3 /х = 0,10 м
252-
Продолжение табл. 52
Номер
варианта
(рис.
185-187)
18
19
20
21
22
23
24
25
26
27
28
29
30
т,
т2
кг
30
40
40
80
100
30
60
50
80
100
80
20
50
—
—
10
40
20
70
200
150
40
20
—
/
R
м
0,40
0,60
—
1,20
_
0,60
0,50
—
1,50
1,20
—
0,42
0,60
0,30
0,15
0,20
—
—
0,20
0,25
0,20
—
—
—
Л/,
Нм
_
—
3,0
124
216
—
—
—
—
—
—
—
@
const)
рад/с
12
9
—
—
—
9
—
—
—
_
—
_
12
с
_
-
4
-
—
—
—
—
-
—
_
—
Фо
град
_
—
—
—
—
—
—
—
—
—
—
—
_
—
0
—
—
—
—
—
—
—
—
рал/с
_
-
2,0
—
-
—
—
_
—
_
_
Примечания
Радиус инерции
ротора 2
двигателя 3 /\ = 0Л2 м
Радиус инерции
шкива 3 /Л = 0,18 м
То же, ix = 0,22 м
» /т = 0,15м
/>=1300 Н
Примечания: 1. Вращающиеся тела, для которых не указан радиус
инерции, рассматривать как тонкие однородные стержни
(варианты 1-5, 11-15, 18, 19, 23, 24, 29, 30) или сплошные
однородные диски (варианты 6 — 9, 16, 20, 22, 28);
в варианте 10 тело 2 рассматривать как материальную
точку.
2. На схемах 1, 8, 9, 11, 16, 17, 20-22 указаны внешние
моменты М.
Пример выполнения задания. Дано: тх — 3 кг, т2 = 2 кг, w3 = 5 кг;
<! = 0,30 м, /2 = 0,20 м; ос = 30°; со = 120 рад/с = const. Схема системы и
необходимые размеры приведены на рис. 188, а.
Найти реакции подпятника А, подшипника В, а также пружины DN.
Поперечными размерами стержней 1,2, 3 и массой пружины пренебречь.
Решение. Для определения реакций связей воспользуемся принципом
Даламбера. Так как со = const, рассмотрим только центробежные силы
инерции частиц каждого стержня. Известно, что главный вектор сил
инерции точек вращающегося тела определяется по формуле
ф* = ~
где т - масса тела, а ас — ускорение центра масс тела.
Равнодействующая сил инерции точек тела равна их главному вектору.
Поэтому для стержней 1 и 2
<Е>1 = тхаС\ = mx(sr @,5/А sin a + /2);
Ф2 =
• 0,5/2.
Для^ определения реакций опор необходимо знать точку приложения
силы Фх (линия действия силы Ф2 совпадает с осью стержня 2 и поэтому
определена). Так как сумма моментов параллельных сил инерции точек
253
Рис. 185
—у
~~i У
12
а =0,11
15 J*
16
17
18
\2
0,51
03^0,21
у
19
20
ОС"«/г
Рис. 186
21
IB
=3 U
/J~| ms = Z0m2
АО-an
22
I
74
2i
^
*c
D ЛР ^
25
m3 = 0,2 m1
№
27
1
30°
R=2r
m3~0,1mf
ГТ"^
та7
29
30
2AO=08=0,5l
Рис. 187
стержня относительно точки О равна моменту равнодействующей этих
сил, то
h
Фхк = J ^cosad0,
о
где h - плечо силы Ф! относительно точки О;йФ - сила инерции элемента
стержня длиной d^; ? - координата элемента стержня (рис. 188, б).
Используя значение силы Фг и учитывая, что
где у — масса участка стержня единичной длины, получаем
h
mico2 @,5/i sin a + h) h = J (/2 + ^ sin a) o>2y^ cos a di;,
о
откуда после интегрирования
, h (h + Уэ/i sin a) cos a
Л = : : —jr1 = 16,4 COS a.
/А sin a -f 2t2
Показываем составляющие реакций подпятника $А, 1fA> 24 и
подшипника Хв, Тв, силы тяжести стержней <5Ь б2, G3 и силы инерции Ф1 и <Ё>2
(рис. 188, в). Эти силы должны удовлетворять уравнениям, вытекающим
из принципа Даламбера:
- Ф2 D0 - 16,4 cos а) = 0 => YB = - 8,47 кН;
кН;
Zo = 0,098 кН.
Так как рассматриваемые силы расположены в плоскости yAz, то
Хв — ХА = 0.
Для определения реакции пружины DN составим уравнение ]Г Mi0 = 0,
рассматривая силы, приложенные к стержню 1 (рис. 188, г):
-Gx (IJ2) sin a + Фхк - Plx cos а = 0,
откуда Р = 6,47 кН.
Задание Д. 17. Определение реакций опор
при вращении твердого тела вокруг неподвижной оси
Однородное тело Q массой m вращается вокруг неподвижной
вертикальной оси z под действием пары сил с моментом М, расположенной
в горизонтальной плоскости. Определить реакции подпятника А и
подшипника В в момент времени t = tx, считая, что в этот момент плоскость
материальной симметрии тела совпадает с плоскостью yAz. Начальная угловая
скорость соо = 0. Массой стержней, связанных с телом Q, пренебречь.
Варианты задания показаны на рис. 189—191, необходимые данные —
в табл. 53.
Таблица 53
Номер
варианта
(рис.
189-191)
,
2
3
4
5
6
7
8
9
Ю
11
12
13
14
/и,
кг
40
42
20
38
120
45
40
40
26
12
50
28
90
36
R
Я
УС
ГС
см
25
10
8
10
_
10
—
10
12
15
10
—
12
6
—
50
30
45
60
50
30
40
48
—
40
50
50
42
0
0
3
-20
0
0
-20
5
33
3
0
14
1
60
32
30
38
50
33
55
28
50
32
28
36
35
25
У,
град
20
16
20
25
18
20
30
10
20
15
12
30
10
—
АВ,
СМ
120
70
55
80
НО
75
100
60
100
70
48
80
75
52
А/,
Нм
10,0
2,8
2,0
18,0
22,0
3,6
12,0
2,2
16,0
1,2
4,0
1,8
13,0
0,8
и*
с
10,0
8,0
3,5
7,0
10,0
7,0
12,0
6,0
15,0
5,0
6,0
11,0
7,0
5,0
Дополнительные
размеры, см
а = 40, 6 = 40
д = 24 Ь = 20
я=18 6=30
258
Продолжение табл. 53
Номер
варианта
(рис.
189-191)
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
т,
кг
8
48
55
60
32
65
80
24
55
85
22
64
80
85
80
ПО
R
Я
УС
см
12
20
8
16
15
6
15
10
16
14
—
18
14
15
12
16
50
10
70
50
6
30
40
40
50
60
48
8
55
45
56
52
15
-22
5
0
0
0
—
0
0
—
—
3
-6
—
-2
—
36
32
55
28
15
36
35
28
42
30
42
36
50
48
42
50
Y.
град
8
30
12
10
15
15
30
10
5
10
15
12
15
25
20
8
АВ,
см
70
65
120
60
35
75
78
60
80
90
75
70
80
76
80
85
М,
Н м
2,4
15,0
4,0
5,0
4,5
6,2
16,0
0,6
3,8
4,4
5,0
7,0
9,0
8,5
9,5
10,5
'1.
с
4,5
18,0
14,0
16,0
5,5
9,0
10,0
6,5
8,5
9,5
4,0
9,0
6,0
7,0
8,0
9,0
Дополнительные
размеры, см
л=30
Пример вьшолнения задания. Тело Q (однородный цилиндр, из которого
вырезан конус) вращается вокруг неподвижной оси z (рис. 192, а).
Дано: т = 32 кг; М = 60 Н-м; г = 0,25 м; 00i = 0,5 м; h = 1 м;
у = 30°; а = 1 м; b = 2 м; х = 2 с. Стержень ОО i совпадает с осью
симметрии тела Q. Массой стержней пренебречь. Найти RA и RB.
Решение. Показываем главные центральные оси инерции тела J):
т| и ?, а также силу <5, момент М и составляющие реакции опор XAi
% 2а, *л % (рис. 192, б).
Для решения задачи используем систему уравнений, вытекающую из
принципа Даламбера:
ХА + Хв + тхссо2 + тусг = 0;
YA+YB + туе®2 - тхсе = 0; ZA - G = 0;
- YB{a + b) -G • ОС sin у - Jyza>2 + Jzxe = 0;
XB(a + b) + Jzxco2 + Jyzz = 0; M - Jze = 0.
Для определения углового ускорения е из последнего уравнения системы
A) найдем момент инерции тела Q относительно оси вращения z по формуле
Jz = Jzx + md2, B)
где Jzl - момент инерции тела Q относительно центральной оси Czu
параллельной оси z; d - расстояние между осями z и z1#
Воспользуемся формулой
A)
Jzi = J$ cos2 a + Jn cos2
+
c cos2 у,
где ос, р и у - углы, составленные осью zx с осями
Так как а = 90°, то
Jzi = Jn cos2 р + J^ cos2 у.
C)
Л, С соответственно.
D)
259
j
t
с
i
Jru
N
1
IS
t
—*-
——-^
« /^^.
\ /,/*
I
Щ i ттпд
~ *tit ^
_H\—-
TTTro
Ш
=>»
n ^4
^^
%?§
*^
i
\ ОС
N3 -
V4
4
У
сз
ЧЛ
N
>^
to
Of
:Щ
н—
\
\
\
\ \
x
A
/qcL
1 //
^?*
Sis
У7
w /
\
A
ft
ul
^#
&
/
й
\
Ш
V
m
Щ
Si
\
Л
J
"A
Ш
i
\
-a
L
*r>
C?
(I
Определим моменты инерции Jn и /с как разности моментов инерции
тела J (сплошного цилиндра) и тела II (конуса) (рис. 205):
¦ J\-Jl
E),
Зная массу тела 6, равную т, определим массу тела J и тела II v
т\ = ргсг2й, тц = 1/zpnr2h,
где р — плотность тела; г — радиус основания цилиндра и конуса.
Следовательно,
Отсюда
тп
т = т\ — тц =
= 32 кг.
mi = 3/г 32 = 48 кг; тп = 48/3 = 16 кг.
Для вычисления моментов инерции тела Q необходимо знать положение
его центра тяжести — расстояние от точки Ох. {Во всех вариантах
координаты центра тяжести заданы, а определению подлежат другие величины,
необходимые при решении задачи.)
Это расстояние
где
О.Сц = ъи\х =
Следовательно,
263
Момент инерции цилиндра относительно оси Сц
J\ = Jl^+ml(ClC)\ F)
где Jln] = ич(г2/4 + h2/l2)* — момент инерции цилиндра относительно оси
г|ь проходящей через центр тяжести С\ этого тела; С\С = 0хС\ — ОХС =
= 1/2 — 3/e = 7 8 ~" расстояние между осями г| и г^.
Подставляя в F) значение этих величин, получим
J* = 48 @,252/4 + 12/12) + 48 G8J = 5,5 кг • м2.
Момейт инерции конуса относительно оси Сц
А1 = ^2 +mil (СцСJ, G)
где J — момент инерции конуса относительно оси цъ проходящей через
центр тяжести Сц этого тела.
В свою очередь, для конуса имеем
lk %nJ. (8)
Здесь «/"з ~ момент инерции конуса относительно оси т|3, проходящей
через центр основания конуса О2 и параллельной оси г|2.
Подставляя (8) в формулу G), получим
А = J% - m,, (O2CUJ + «и (СпСJ = J»3 + т„ [(СиСJ - (О2С„J],
причем момент инерции конуса относительно оси ц3 определяется по
•формуле
J% = 0,15т„г2 + 0,1 mn/i2 = @,15 • 0,252 + 0,1 • I2) 16 = 1,75 кг.м2;
СиС = ОгСп - OiC = 3/4 - 3/8 = 3/s м;
О2С„ = /i/4 = 74 м.
Таким образом,
J» = 1,75 + 16 [C/8J - G4J] = 3 кг • м2.
Теперь Jn и J^ можно вычислить по формулам E):
^ = ^-^==5,5-3 = 2,5 кг-м2; ^ = J\ - Jj1,
где
j? = Ш!Г2/2 = 48 • 0,252/2 = 1,5 кг ¦ м2;
J\l = 0,3wnr2 = 0,3 • 16 • 0,252 = 0,3 кг • м2.
Тогда
Л= 1,5-0,3= 1,2 кг-м2.
По формуле D) вычисляем J2l, учитывая, что Р = 120°, у — 30°:
Jzl - Jncos2 120° + J^cos2 30° = 2,5 G2J + U (]/з/2J = 1,525 кг. м2.
Момент инерции тела Q относительно оси вращения z вычисляем по
* См., например: Лойцянский А. Г. и Лурье А. И. Теоретическая
механика. Физматгиз, 1954; Фаворин М. В. Моменты инерции тел. М., 1977.
264
формуле B):
Л = Jzi
где
rf = ОС sin у = @01 + ОХС) sin у = (l/2 + s/s>sm 30° = 0,437 м;
Jz = 1,525 + 32@,437J = 7,65 кг*м2.
Из последнего уравнения системы A)
6 = M/Jz = 60/7,65 = 7,85 рад/с2 = const.
Угловая скорость при равноускоренном вращении тела
со = соо + sf,
поэтому при соо = 0 и t = х = 2с
со = 7,85-2= 15,7 рад/с.
Для определения реакций опор следует определить центробежные
моменты инерции Jyz и Jzx тела. Jzx — 0, так как ось х,
перпендикулярная плоскости материальной симметрии тела Q, является главной осью
инерции в точке А.
Центробежный момент инерции тела Jyz определим по формуле
c, где JyUl = (Jn - J^(sin
т. е.
¦7,1.1 » B,5 - l,2)(sin 60°)/2 = 562 кг. м2.
Координаты центра тяжести тела D следующие:
*с = 0; ус = d =ч0,437 м;
zc = a + OCcosy = а + (ООХ + ОгС)cosy = 1,76 м.
Таким образом,
Jyz = 0,562 + 32 • 0,437.1,76 = 25,16 кг. м2.
Подставляя известные величины в систему уравнений A) и учитывая,
что d = 0,437 м, получаем следующие равенства:
ХА + ХВ + 32-0,437.7,85 = 0;
Уа +Ув + 32 • 0,437- A5,7J = 0;
2^- 32-9,81=0;
-3YB - 32-9,81-0,437 - 25,16-A5,7J = 0;
З^ГВ +25,16-7,85 = 0.
Отсюда
Х.4 = -43,6 Н; YA = -1340 Н; ZA = 314 Н; Хв = -65,8 Н;
Ув= -2120 Н.
265
Задание Д. 18. Применение теорем и принципов динамики
к исследованию движения механической системы
Механическая система состоит из тела А массой тА, колеса В
массой тв и электродвигателя, приводящего систему в движение. Тело А
опирается на ось колеса В и на горизонтальную шероховатую плоскость.
Вращающиеся части двигателя жестко связаны с колесом В, и их массы
и моменты инерции учтены соответственно в массе и моменте инерции
колеса В.
Вращающий момент М (t), развиваемый электродвигателем,
определяется дифференциальным уравнением
bt —- + Ь2М = Ь3 - оссо, A)
at
где Ьь Ь2, Ьг и a — постоянные коэффициенты, а со — угловая скорость
вращения вала двигателя. Проскальзывание колеса В по опорной плоскости
отсутствует.
Корпус двигателя в вариантах 1 — 7, 9, 11 — 20, 30 жестко связан с
телом А и его масса учтена в тА.
В вариантах 8, 10, 21-29 корпус двигателя не связан с телами А и В
и, следовательно, вращающий момент является внешним по отношению
к системе этих тел.
Двигатель включается в начальный момент времени (t = 0), когда
система находится в покое. Наличие силы трения покоя (сцепления),
приложенной к телу А со стороны опорной плоскости, приводит к тому, что
движение механической системы начинается только через т с после включения
двигателя. Затем скорость поступательного движения системы возрастает
до некоторого значения t>*. В дальнейшем производится торможение и
скорость поступательного движения системы на пути s снижается до
значения 0,9 v*.
Требуется:
1. Определить зависимость М - М (t) при 0 ^ t < т, значение Мн = М (х)
в начальный момент движения и время т.
2. Определить зависимость v = v (t) при г ^ т, найти значение
установившейся скорости v* и значение установившегося момента М,.
3. На этапе торможения определить пути, проходимые системой при
снижении v до значения 0,91?# для двух режимов торможения.
1-й режим — торможение двигателем — двигатель работает как тормоз.
При этом момент на валу двигателя определяется уравнением
. dM
ЬХ— --««,
2-й режим — механическое торможение. При этом М = const = 0.
Сравнить пути торможения s и / при первом и втором режимах
торможения.
Схемы механизмов приведены на рис. 193-195, а необходимые
данные для расчета - в табл. 54.
На рис. 193 — 195 С — центр тяжести тела А, О - центр тяжести
однородного колеса Б, стрелкой указано направление движения; D — точка опирания
тела А на шероховатую поверхность.
266
я
s
ID
s
с
II
О
11^
О
II
hi
о
и
о
II
Г ~ о о"ол сГ о" о" о" о"о"
ooowor-w->ooorooowofNroooro«noNrfo<Sfoo o±*o r- cn <ч © го oo oo
о4 ~ i-T ~S ~ ^-T ~ o" o4 o4 ~ -Г ~ -^ -? ^л ^ -Г ^ fvf rS о* о о" «-Г -Г -^ ^-Г о" о"
CM ГО Г4 — <M ГО •—rf ГО ГО ГО ГО SO CN <4 —* О —* C4 *-« CN <S ГО Г4 ГО
55
О
^o^*—.<s-« — -«©oo~o — ~
•-г S
С 2
r<~. — tri rfr cs f-i со
?61 mo
О
О 7 N
Л
01
'/////////////^/////У/Л
Ш v
У//////////////А6УЛ/.
А
У///////У/У///У/УУУ//У,
l/f—
а
I
/ п
УУУУУУ/////Л
0
\
\
—ь
у
V
1
ЪУ
ищ
1 V?
-т\ А
~7~}
h
vyyjryyyyyyyyyyyyyyyyyyyyytyyyyyyyyyy/yyyyyyyACww*
D Я,
12
17
В У
(
\
У/ууу>
**-
-J
0
Sm
) №
У
/J
E
d
t
'УУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУУЛУУУУУУУУУЛ
19
H E
20
i
(E)
1
V
л
Рис. 194
26
22
ЕМ
yyyywyy*
28
25
V
30
ун 4
уууууууууууу/уу/уу/а
У/УУУУуУуТСУУУУУУ/УУУ,
Рис. 195
В вариантах 9,11, 30 при разгоне тело А контактирует с опорной
поверхностью в точке D, а при торможении - в точке Dlf
В табл. 54 приведены значения следующих параметров: тм тв — массы
тел А и В; г — радиус колеса В; i — радиус инерции колеса В относительно
оси вращения; /— коэффициент трения, ОН, НС, ОЕ, ED — см. рис. 193-
195, ау Ьи Ъг, Ъъ — постоянные коэффициенты.
Пример выполнения задания. Дано: тА =» 20 кг, тв = 100 кг; г = 0,5 м;
is=0,4 м;/=О,35; ОН = а- 1,4 м; ОЕ==Ь = 2,0 м; СЯ = й = 0,4 м; ?D = c =
= 0,7 м; а = 2; bt « 2,5 • 10~2, Ь2 = 0,25, Ьъ = 50.
Найти: М = М (t) при 0 < t ^ т; Мн, т, v = t? (t) при Г > т, i;*; M#, s и /.
Решение. 1. Определение параметров движения системы на этапе
разгона до установившейся скорости.
Механическая система представлена на рис. 196. Расчетная схема этой
системы — на рис. 197.
Составим дифференциальные уравнения, описывающие движение
механической системы (рис. 197, а)~ К колесу В приложены вращающий момент
М, сила тяжести G = mBg, нормальная реакция YK в опорной точке К и
сила сцепления Fcu, предположительно направленная вправо. На тело А
действуют сила тяжести Q = m/g, приложенная в центре тяжести С, реакция
YD, сила трения XD—fYD и реактивный момент корпуса двигателя Ml
Силы взаимодействия в точке О между телом А и колесом В являются
реакциями внутренних идеальных связей и не показаны на рисунке. При
расчленении системы на части (рис. 197, б, в) в точках О прикладываются
силы взаимодействия Хо = Х'о и Yo — Y'o между телами А и В.
Для получения дифференциальных уравнений движения воспользуемся
теоремой об изменении кинетической энергии в дифференциальной форме
Г«5>„ B)
где мощность Nt определяется для всех сил и моментов, как внешних,
так и внутренних,
Составим выражение для кинетической энергии системы:
+ ^?- C)
mAv2A
Уравнения связей:
х = v = vA = vc = v0; о = x/r.
Подставив D) в C), будем иметь
Т^'/гт^х2, E) _у
D)
где приведенная масса
тпр = ^ + тв
В
К)
Составим выражение для
мощности сил и моментов в системе:
N = Мш - XDx =
х. F)
/Ъс. /96
Рис. 197
Подставляя выражения E) и F) в B), получаем
Это уравнение содержит неизвестную силу YD. Чтобы ее исключить,
составим для тела А (рис. 197, в) в соответствии с принципом Даламбера сумму
моментов всех сил и силы инерции Ф относительно точки О и
приравняем ее нулю:
М' - Qa -fYDc + YDb + Ф • h = 0.
Учитывая, что Ф = тАх\ получим уравнение
mAxh = — М; + mAga — У^ (8)
где
Исключая из уравнений G) и (8) силу YD, получаем
аъх = а^М - аъ (9)
где
«1 =/+ <*А; а2 =famAg\ аъ = wnp^ -fhmA. (9f)
Дифференциальное уравнение (9) описывает движение системы вдоль
оси х.
Определим зависимость М = М (t) в интервале изменения t от 0 до т.
Для этого проинтегрируем уравнение A), положив в нем о = 0.
Учитывая начальное условие М(гв0> = 0, будем иметь
-<Г^) A0)
Условие трогания с места имеет вид х > 0.
Используя уравнение (9), получаем условие трогания с места для
вращающего момента:
М > а2/а1.
Начальное значение момента М„, при котором система приходит в
движение,
М^аг/а,. A1)
Определим интервал времени т от момента включения двигателя до
272
начала движения системы. Учитывая, что Мн — М (т), из уравнения A0)
получаем
Найдем зависимость v = v (t) при t ^ т.
Учитывая, что х = v, уравнения A) и (9) запишем в виде
dM . ш, . а
г A3)
у; )
г
Из второго уравнения этой системы находим
Cli Cli Qt
Продифференцируем это уравнение по t:
аъ d2v
dt ai dt2 '
A5)
Подставим A4) и A5) в первое уравнение системы A3).
После преобразований получаем
d2v . dv t2 _ „,,
-гт- + 2и —г- + /с2у = D, A6)
где
A7)
Начальные условия для уравнения A6):
при ^ = т v = 0 и dy/dr = 0. A8)
Значение dv/dt = 0 следует из второго уравнения системы A3) при
Как известно, решение уравнения A6) при п> к имеет вид (в том, что
п > /с, легко убедиться подстановкой числовых значений)
v = Ae'nt. sh (k.t + P) + D//c2, A9)
где
к, = |/и2 - /с2.
Постоянные интегрирования Л и Р определим по начальным условиям
A8):
А*"- th^ + w:
273
Установившееся значение скорости v* определяется вторым членом
правой части выражения A9), так как первый стремится к нулю:
i?. = D/k2. B0)
Отметим, что при движении с установившейся скоростью момент на
валу электродвигателя достигает установившегося значения Л#о
определяемого из второго уравнения системы A3) при dvfdt~O:
М# = Мп = а2/аи B1)
Подставим исходные данные и определим значения параметров
движения на этапе разгона.
Значения коэффициентов, входящих в уравнение (9): шпр = 184 кг; d =
= 1,735 м; ях = 3,82; а2 = 96,04 Нм; аъ = 316,44 Не2.
Момент электродвигателя M = M{t) на этапе разгона [см. A0)]
М(г) = 200A-<Г10').
Начальное значение момента Мн при трогании с места, определяемое
A1)
Мн = 25,14 Н-м.
Интервал времени т от момента включения двигателя до начала
движения, вычисленный в соответствии с A2), равен
т = 0,0134 с.
Определим зависимость v (t). Для этого вычисляем значения параметров,
входящих в уравнения A6) и A9): п = 5 с; к = 1,39 с; D = 21,11 м/с3;
к, = 4,80 с; А = -3,38 м/с; р = 1,89.
Значения установившейся скорости [см. B0)]
v+ = 10,93 м/с.
Подставляя значения величин Л, р и vm в равенство A9), получаем
зависимость v(t) при t ^ т: v{t)= ~338e~5<shD,80r + 1,8^)+ 10,93.
Значение установившегося момента на этапе разгона, как показывает
B1), совпадает с начальным значением М„:
М, = 25,14 Н<м.
2. Определение пути при торможении. Торможение начинается при
скорости поступательного движения v = v* и моменте М = М#, а
заканчивается при 0 = 0,9 iv
Исследуем два режима торможения.
1-й режим торможения. Для определения тормозного пути s составим
теорему об изменении кинетической энергии механической системы в
конечной форме:
B2)
где Yj^i ~ сумма работ внешних и внутренних сил:
<J>2 Х2 1 Х2 Х2
ХЛ= J Мёф-J XDdx=— J Mcbc-/J
274
Используя выражение E), представим B2) в виде
^Е (х! - х?) =-1 J M dx -/j YD dx. B3)
Здесь индексом 1 обозначены значения неизвестных в момент tt начала
торможения, а индексом 2 — в момент t2 конца торможения. Второе
слагаемое правой части уравнения B3) содержит неизвестную YD. Поэтому
необходимо составить еще уравнение, содержащее ту же неизвестную.
Проинтегрируем выражение (8) по х.
Учитывая, что х dx = d I —- L получаем
U Х2 Х2
Ц-{*1 - х?) = - f M dx + mAga (x2 - xj - f YD dx; d. B4)
Исключим из уравнений B3) и B4) интеграл от YD и, используя
обозначения (9'), будем иметь
Х2
a3fX^X') = ei I Mdx~a2(x2~x1). B5)
Заметим, что это уравнение можно также получить, проинтегрировав
(9) по х. Дифференциальное уравнение для момента на валу двигателя при
торможении имеет вид
, dM
Проинтегрируем это уравнение в пределах от tt до t:
М-Мх= - -4~(х - хД B6)
Проинтегрируем B6) по х в пределах от хх до х2:
Х1
Подставим B7) в B5):
B8)
В этом выражении следует принять:
Xi =0, Xi = t?#, Mi = M* = a2lau
х2 = s, х2 = 0,9 v..
275
Подставляя эти значения в B8), получим
Путь s торможения, на котором скорость снижается до значения 0,9 у,,
s = v. U-iL-J-0,19. B9)
2-й режим торможения. Уравнение, характеризующее движение системы
при втором режиме торможения, получается из B8) при а^ =0:
— (x!~xf)= -а2(х2-хх) C0)
Принимая л*! = 0; хх = v+\ х2 — \\ х2 = 0,9у, получаем
/e^erri C1)
Подставляя значения параметров в формулы B9) и C1), получаем
s = 3,43 м; / = 37,39 м.
Сравнивая пути s и / при первом и втором режимах торможения,
заключаем, что приложение тормозного момента двигателя значительно
сокращает тормозной путь.
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Д. 19. Применение общего уравнения динамики
к исследованию движения механической системы
с одной степенью свободы
Для заданной механической системы определить ускорения грузов и
натяжения в ветвях нитей, к которым прикреплены грузы. Массами
нитей пренебречь. Трение качения и силы сопротивления в подшипниках
не учитывать. Система движется из состояния покоя.
Варианты механических систем показаны на рис. 198 — 200, а
необходимые для решения данные приведены в табл. 55.
Блоки и катки, для которых радиусы инерции в таблице не указаны,
считать сплошными однородными цилиндрами.
Пример выполнения задания. Дано: Gy = G2- 2G; G3 = G4 = G; R = 2r;
j
Блок 3 - сплошной однородный цилиндр (рис. 201). Определить
ускорения грузов 1 и 4 и натяжения ветвей нити 1-2 и 3-4.
Решение. Применим к решению задания общее уравнение динамики.
Так как система приходит в движение из состояния покоя, направления
ускорений тел соответствуют направлениям их движения.
Ввиду того что среди сил, действующих на тела системы, есть сила
трения, целесообразно по исходным данным найти истинное направление
движения системы, чтобы правильно показать направление силы трения.
276
Таблица 55
|I7
i
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
G
G
30
G
20
20
20
20
2G
20
20
2G
40
-
40
-
20
30
40
40
50
О
О
20
60
60
О
30
60
80
Силы тяжести
G
G
G
G
G
G
G
G
G
G
2G
0
G
20
2G
G
G
0
0,20
0,30
0,20
0,10
0,20
0,20
0
2G
0
G
G
3G
0
3G
G
G
2G
G
20
20
20
2G
G
20
2G
G
G
20
20
G
O,1G
0,2G
O,1G
0,20
0,30
O,1G
G
2G
20
G
G
G
0
r
-
-
-
G
-
—
-
—
-
0,2G
0,2G
40
4G
40
4G
0,50
3G
3G
-
-
-
80
G
4G
-
0
20
Rjr
2
2
2
-
3
3
3
3
3
4
3
3
-
-
—
-
2
2
3
2
3
2
1,5
—
—
-
2
2
2
Радиусы
инерции
ф
ф
-
2г
2г
2г
2г
2г
2г
2г
r2j/2
г2|/2
r2j/2
'2]/2
Ф
-
2г
1,6г
-
-
1,2г
—
—
-
Ф
Ф
_
—
-
—
—
-
—
—
—
2г
—
—
2г3
2г3
2г3
2'3
-
—
1,2г
Ф
Ф
ф
-
—
-
Ф
—
Ф
р
JT
_
-
-
-
—
-
—
-
0,2G
G/3
—
-
8G
—
4G
-
-
—
0
G
2G
—
—
-
—
—
—
i ^
i 1
|||
—
-
0,1
0,2
—
0,2
0,2
0,2
0,2
0,4
0,2
0,2
—
—
—
-
0,1
0,4
0,1
0,2
—
-
—
—
—
—
—
0,1
—
0,1
Дополнительные
данные
Г2=Г3
г2=2г3; Л2=Я3
/*2=2гз5 ^3~ l,5&j
/*2==2Гз5 M\^s=z 1,5/\2
Г2 == 2Гз у /?з =s 1,5/i2
r3==l,2r; Л3=1,2г3
г2==1,5г; Л2=1,2г2
Л3=1,2г
Массы четырех
колес одинаковы
Г3==Г4
г3=г2
hx=hx
Примечания: 1. Радиусы инерции даны относительно центральных осей,
перпендикулярных плоскости чертежа (рис. 198 — 200).
2. Коэффициент трения принимать одинаковым как при
скольжении тела по плоскости, так и при торможении колодкой (варианты 9 — 12).
277
kts т
TTi
Or'
///////////Л///////////,
3
1 Г
2R
f Г,
У////У//////////////////////Л
I
I
г
L
2
J '
12
O-'
D-'
Q-4
15
16
18
Г2)
Ч /*/йфЛ'/ У
2г
/99
21
22
23
25
У///////УУ/////У//////////А
27
* U-ir-
2R
30°,
29
30
Рис. 200
21
а-
22
23
^/^/Л/УУУУУУУУУУУУУ/У/УУУУУУ,
7
25
29
30
Рис. 200
Если направление движения системы выбрано ошибочно, то искомое
ускорение получается со знаком « —». В этом случае необходимо изменить
направления силы трения и сил инерции и внести соответствующие поправки
в общее уравнение динамики.
В данном примере движение системы таково, что груз ./ опускается.
Покажем задаваемые силы: силы тяжести й^ — груза /, G2 — блока 2,
G3 — блока 3 и С/4 — груза 4, а также F — силу трения скольжения груза 1
по наклонной плоскости (рис. 202).
Приложим силы инерции. Сила инерции груза /, движущегося
поступательно с ускорением йи выражается вектором
Силы инерции блока 2, вращающегося вокруг неподвижной оси с
угловым ускорением е2, приводятся к паре, момент которой
М f = J2x82.
Силы инерции блока 3, совершающего плоское движение, приводятся
к вектору
где а3 — ускорение центра масс блока 3, и к паре сил, момент которой
где 83 — угловое ускорение блока.
Сила инерции груза 4, движущегося поступательно с ускорением я4>
Сообщим системе возможное перемещение в направлении ее
действительного движения (рис. 202) (можно сообщить возможное перемещение
и в обратном направлении).
Рис. 201
Рис. 202
281
Составим общее уравнение динамики:
Gibs{ sin 60° — Fbsi — 0lbsl — Mf 8ф2 — G38s3 - Ф38я3 - Mf 8ф3 —
— G^bs^ — <P4bs4 = 0, A)
где 8ф2 и 8ф3 - углы поворотов блоков 2 и 3.
Зависимости между возможными перемещениями такие же, как и между
соответствующими скоростями.
Выразим скорости центров масс и угловые скорости тел системы через
скорость тела / (составим уравнения связей).
Как показано на рис. 202, мгновенный центр скоростей блока 3
находится на одной вертикали с центром блока 2. Расстояние между
мгновенным центром скоростей и центром блока 3
Ь = Зг/2 - г = г/2.
Теперь находим
ш2 = с&з « vJR = vJ2r\ ,
Такие же зависимости и между возможными перемещениями:
5ф2 =
853 =8s4-."- " ' C)
Уравнение A) с учетом C) принимает вид
Gx sin 60° - F - Фх - Mf/{2r) - G3/4 - Фз/4 - Mf/Br) - G4/4 - Ф4/4 = 0*.
Учитывая, что
Gt = G2 = 2G = 2mg\ G3 = G4 = G = mgt D)
имеем
F = /Gx cos 60° =.
E)
= J2xe2 = m2ilxe2 = 4mr2e2;
M? = J3xe3 = [m3 (l,5rJ/2] ?3 = 9mr%/%;
Ф4 == wi4ci4 = шй4.
Зависимости между ускорениями в соответствии с B)
е2 = е3 :
* Это же уравнение можно получить, если вместо A) составить уравнение
мощностей, сообщив системе возможные скорости. Соотнощения B), приведенные
для действительных скоростей тел системы, те же, что и для любых возможных
скоростей.
212
К AB=AV=2L
•У\
Я N
У\
D N
У\
10
У\
Рис. 205
/7
У\
13
/4
15
!
19
Рис. 206
21
23
25
27
29
Pt/c. 207
Перемещение звена 1 (варианты 3, 4, 7, 12, 22, 24-26, 28-30) или
звена 2 (варианты 1, 2, 5, 6, 8-11, 13-21, 23, 27) манипулятора ограничено
препятствиями К и L, поэтому изменение угла поворота ф = ф (t) этого
звена возможно лишь в интервале [ф @), ф (х)], где т — время движения
звена. Технические условия работы манипулятора требуют, чтобы
указанное звено сошло со связи К при г = Ои «мягко» коснулось препятствия L
при t = т, т. е. так, чтобы были удовлетворены условия
dt2
?¦•«
t-0» t-
0;
= 0.
1 = 0, t = t
Программные движения звена J, удовлетворяющие требованиям «мягкого»)
касания, приняты в таком виде:
1} ф (г) = Ф @) + [ф (т) - ф @)] A0 - 15г/т + Ы2/х2}г3/х3 (варианты 2, 4, 6,
7, 11, 12, 16, 19, 22, 24-26, 28-30);
2) ф @ - Ф @) + [ф (т) - ф @)] [гД - AД2тс)) sin Bя*/т)] (варианты 1, 3, 5,
8-10, 13-15, 17, 18, 20, 21, 23, 27).
Значения ф @) и ф (т) заданы в табл. 56, а график Ф = Ф @ показан на
Табли ца 56
Номер ва-
jJiltffl 1 о ItJJrll'*
205-207)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
кг
3
4
2
2,5
4
2,5
2
3
2
3,5
2,5
3
4
3
2,5
3
3
2
3
3,5
4
2,5
4
3
2,5
3,5
2
3
2
2,5
—
—
2,5
—
—
3
—
—
—
3
—
—
—
—
—
—
—
—
—
4
—
3
3
4
—
2,5
3
4
КГ- М2
0,5
1
1
0,8
2
1,2
0,6
0,9
0,8
(
,4
,5
,4
,2
1,2
0,6
1,7
1,2
2
1,2
1,1
1,4
1,6
1,1
0,7
1,3
I
3,8
0,6
2
2
—
2
1,5
2
1,4
1,6
1,4
—
2
1,8
1,2
2
2
0,8
2
1,6
2
1,8
1,7
—
—
2
1,5
—
/, м
0,5
0,3
0,2
0,8
0,5
0,3
0,7
0,4
0,3
0,4
0,5
0,7
0,3
0,4
0,5
0,3
0,3
0,4
0,3
0,4
0,5
0,3
0,4
0,6
0,8
0,4
0,4
0,7
0,5
0,6
Т (*
1» V
0,25
1
0,5
2
0,9
0,5
0,3
1
2
0,5
0,4
0,5
1,5
0,5
0,3
1,8
0,8
0,6
0,6
0,5
0,8
1
1
0,5
0,9
0,7
0,4
1,2
0,4
Ф@>
Ф(т)
рад
я/3
0
0
тг/6
я/6
0
я/6
я/6
0
0
0
я/6
0
я/6
я/6*
0
я/6
я/6
я/6
я/4
я/6
я/6
я/3
0
0
0
я/6
0
я/6
2я/3
я/3
я/3
я/6
я/3
'. я/3
я/3
я/3
я/3
я/6
Я/4
я/3
я/6
я/3
я/3
я/4
я/3
я/3
я/3
я/2
я/4
я/2
я/2
я/3
я/3
я/6
я/3
я/3
я/3
я/4
287
рис. 208. Силами сопротивления движению пренебречь. Механизм
расположен в горизонтальной плоскости. Движением захвата относительно
звена 1 пренебречь.
В задании приняты следующие обозначения:
mi — масса первого звена, захвата и переносимого в захвате объекта;
т2 — масса второго звена;
Jt — момент инерции звена 19 захвата и переносимого в захвате
объекта относительно главной центральной оси инерции;
J2 — момент инерции звена 2.
Центр тяжести звена 1 находится в точке С (варианты 1—4, 6—8,
11-13, 16, 18-20, 22-30) или в точке А (варианты 5, 9, 10, 14, 15, 17, 21).
Требуется:
1. Вычислить значения управляющих сил и моментов в начале
торможения звена 1. Считать, что торможение звена 1 начинается в тот момент,
когда угловое ускорение звена обращается в ноль.
,2. Построить графики зависимости управляющих моментов и сил от
времени.
Пример выполнения задания. Дано: mt = 2 кг; т2 = 3 кг; Jy = 0,8 кгм2;
/ = 1 м; ф @) = 0, ф (т) = 7i/6 рад; х = 0,5 с.
Центр тяжести звена 1 находится в точке Ci (рис. 209):
Ф (г) - Ф @) + [Ф (т) - Ф @)] 0/т - A/Bя)) sin Bя*/т)].
Найти управляющий момент М и управляющую силу Р.
Решение. Для решения задачи применим уравнения Лагранжа II рода.
Будем рассматривать механическую систему как систему с двумя
степенями свободы, приняв за обобщенные координаты угол ф поворота звена
1 и смещение х звена 2.
Для рассматриваемой механической системы можно записать:
= const; xCi = х + / cos ф; уС\ = / sin ф. A)
УС2
Эти равенства играют роль уравнений связей.
В соответствии с выбранными обобщенными координатами имеем
at \ дф) d(p v
d (дТ\ дТ
dt \дзс) дх ~Qx
B)
о
Рис. 208
Рис. 209
288
Совокупность уравнений A) и B) позволяет составить
дифференциальные уравнения движения механической системы.
Составим выражение для кинетической энергии системы Г как
функцию обобщенных скоростей ф и к и обобщенных координат фих.
Кинетическая энергия системы равна сумме кинетической энергии Tt
звена 1 и Т2 звена 2.
Кинетическая энергия звена 1, совершающего плоское движение,
Кинетическая энергия звена 2, совершающего поступательное
движение,
где
2 '
coi = ф; v2 = х.
Продифференцировав A) по времени, будем иметь
хС1 = х — /ф sin (p; 3>oi = /ф cos ф,
откуда
Таким образом,
"" 2^ s*n Ф-
хф^т ф)/2
m2x2/2 •-
• (тх + m2) x2/2 + (mx/2 + JJ <j>2/2 -
слагаемых урав
)x — mi/ф sin ф;
sin
Найдем значения слагаемых уравнений Лагранжа:
дТ v
—
дТ . ... ....
-jt-= (wii 4- w2) x - ;»1/ф sin ф -
-vr = (m^l- + Jj) ф - nij/х sin cp;
Сф
cos ф;
-——
at аф
ф - wi/3c sin ф ~ т^хф cos ф;
C)
дТ ,..
——= —niilXip COS ®.
C(p
Определим обобщенные силы Qx и Qr
Для определения Qx мысленно наложим на систему связь ф = const
289
и, сообщив системе возможную скорость х, вычислим возможную
мощность сил, действующих на нее:
Nx = Qxx = Рх,
отсюда
Qx = Р. D)
Аналогично, мысленно наложив на механическую систему связь х =
= const и сообщив ей возможную скорость ф, получим выражение
возможной мощности Nyi
^ф = 6фФ = Af ф,
отсюда
6ф = М. E)
Обобщенные силы Qx и <2Ф можно определить и из выражения
работы сил на элементарных перемещениях системы, соответствующих
вариации каждой обобщенной координаты:
ЬАХ = Qxbx = P Sx; 6ЛФ = бФ 5ф = М 5ф.
Подставляя C), D) и E) в B), получим
(т1 -f т2) х —
/ф sin ф — шх/ф2 cos ц> = Р; I
+ Ji) Ф — mjx sin ф = М. )
Так как захват D манипулятора по условию задачи должен двигаться
вдоль прямой, перпендикулярной оси х, на механизм дополнительно
оказывается наложенной связь х -I- 2/ cos ф = х0, или
х = х0 - 21 cos ф (х0 = const),
следовательно,
х = 2/ф sin ф.
Отсюда
х = 2/ф sin ф + 2/ф2 cos ф. G)
Подставляя G) в F), приходим к соотношениям
М = (mj2 + Ji) Ф - 2/2шхф sin2 ф - 12тгц>2 sin 2ф; ]
р = (mi -f 2т2) (ф sin ф + ф2 cos ф) /. J
Равенства (8) представляют собой зависимость управляющего момента
М и управляющего усилия Р от известных функций ф, ф и ф. Так как
Ф является заданной функцией времени, то вычисление производных ф
II ф, а следовательно, и управляющего момента М и усилия Р не
представляет труда.
Вычислим М и Р в момент начала торможения звена 2.
290
В этот момент угловое ускорение ф обращается в нуль. Производные
Ф и ф соответственно равны:
ф = [Ф (т) - ф @)] A - cos2 ntf%)/%; ф = 2тс [ф (т) - Ф @)] (sin 2nt/x)/x2.
Отсюда
ИЛИ
2тс
—
= n и t-y.
Таким образом, торможение звена 1 начинается в момент времени
t = т/2. В этот момент времени
•<Р(т)]/2,
, = 2[Ф(т)-ф(О)]/т,
Подставляя (9) в (8), получаем
М (т/2) = - Атх12 [Ф (т) - Ф <0)]2 A/т2) sin [фЩ + ф (т)];
Р (т/2) = 4/ (т, + 2ш2) [ф (т) - ф (О)]2 A/т2) cos [(ф @) + Ф (т))/2].
Учитывая условие задачи, имеем
М (т/2) = -4,39 Н • м; Р (т/2) = 33,90 Н.
Обратимся, наконец, к построению графиков зависимостей
управляющих моментов и сил от времени.
Вычисления будем производить в интервале [0; т] с шагом 0,1т.
Графики зависимостей М и Р от времени показаны на рис. 210, 211.
Так как вычисления заключены в простом обсчете формул (8) при
разных значениях аргумента, то они могут быть легко организованы
на любых клавишных вычислительных машинах.
Рис. 210
Рис. 211
291
Задание Д.21. Применение уравнений Лагранжа II рода
к исследованию движения механической системы
с двумя степенями свободы
Механическая система_^тел 1—6 (рис. 212-214) движется под
воздействием постоянных сил Р и пар сил с моментами М или только сил
тяжести.
Найти уравнения движения системы в обобщенных координатах qt и q2
при заданных начальных условиях. Необходимые данные приведены
в табл. 57; там же указаны рекомендуемые обобщенные координаты
(х и ф — обобщенные координаты для абсолютного движения, а ? — для
относительного движения).
При решении задачи массами нитей пренебречь. Считать, что качение
колес происходит без проскальзывания. Трение качения и силы
сопротивления в подшипниках не учитывать. Колеса, для которых в таблице
радиусы инерции не указаны, считать сплошными однородными дисками.
Водила (кривошипы) рассматривать как тонкие однородные стержни.
Принять, что в вариантах 6, 9, 11, 20, 22 и 30 механизм расположен
в горизонтальной плоскости.
Пример выполнения задания. Дано: массы тел механической системы
(рис. 215) nil = 3m; т2 = 8m; m3 * == m4 = пг6 = 2ш; m5 = 4m; m7 = m; P -~
постоянная сила, приложенная к телу 2; М - постоянный момент,
приложенный к колесу 6; Ъ — коэффициент пропорциональности в выражении
силы сопротивления движению тела 5 R— -bv$ (?5 - скорость тела 5),
L — длина нити 3; г - радиус колес 4 и б.
Все колеса считать сплошными однородными дисками. Трение
скольжения тела 2 не учитывать.
Найти уравнения движения системы в обобщенных координатах qY =
Начальные условия: qi0 = 0 (при этом начальное расстояние по
вертикали от нижнего конца нити 3 до ее горизонтального участка равно /0)>
#20 == 0, ^ю == 0, q2Q = x2q.
На рис. 215 система изображена в начальном положении.
Решение. Для решения задачи применим уравнения Лагранжа
II рода:
d дт___дт_:=_т_
dt dxi dxi cbcj
d 6T дТ дП
дх2 дх2
+ G2- B)
Здесь Г — кинематическая энергия системы; Я - потенциальная энергия;
6i и 0,2 ~ обобщенные силы, соответствующие неконсервативным силам.
Для данной системы
T=tTi. C)
* Здесь нить 3 принята весомой - это усложнение в сравнении с общим
условием задания.
292
<зо'
2
/
f
^ 1
10
Рмс. 212
15
15
A/1
-1 fhhr-2
17
Рис. 213
21
23
///у'///////////У/У//////У/УУ/УУ/У) УУУУУУУУ/У/уу9
25
Х
!_
2-\\-J
29
30 3
У//////////УУ//УУУУУУУУУ/
Рис. 214
Таблица 57
ев
S3*
«*?
Номер вар
(рис. 212-
1
2
3
4
5
6
7
8
9
10
11
12
13
2т
т
т
т
т
т
Ът
т
т
2т
т
2т
т
Массы
2
6т
Ът
Ът
Am
2т
2т
Ът
2т
2т
2т
Ът
5т
Ът
3
т
-
2т
-
Am
Ът
т
2т
Ът
т
2т
т
2т
тел
4
т
-
-
.-
2т
т
2т
2т
т
-
-
5
-
-
-
-
2т
-
-
Ъп
т
-
-
-
Радиус
инерции
-
ф
-
—
2г
-
—
Аг
-
-
-
-
-
—
-
-
-
—
Ф
-
Силы Р
-
—
-
Л; р2
-
-
р
-
Моменты М
м
м
-
—
-
-
Мх\ М2
М1;М2
-
-
Коэффициенты
трения
скольжения
-
-
-
0
/
-
/
/
/
вязкого
сопротивления
-
-
-
Ъ
—
-
-
-
—
-
ъ
Обобщенные
координаты
X
Ф
Ф
X
*\
Я>1
хх
X
Ф1
X
Ф1
X
X
Л*
i
Ч»2
Ч>2
1
Начальные условия
9ю
0
0
0
0
0
0
0
0
0
0
0
0
0
#20
0
*о
0
0
0
0
0
0
0
0
0
5о
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4о
0
0
0
0
Дополнительные данные
Массу ленты не учитывать
Момент М приложен к
водилу
1 — материальная точка
Блоки 5 и 6 насажены на
общую ось свободно, их
массы одинаковы
Момент М1 приложен к
водилу
Момент Mi приложен к
водилу
1 — материальная точка
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
2m
3m
2m
m
2m
2/77
2/»
2/w
m
2m
m
2m
m
2m
m
2m
Ът
m
m
3m
3m
2m
2m
3m
2m
3m
m
Ът
2m
3m
2m
3m
4m
2m
m
2m
2m
m
Ът
m
Ът
2m
m
m
m
2m
Ът
m
m
2m
2m
-
m
m
m
Ът
2m
m
m
-
-
Ът
m
m
-
-
3m
-
-
m
Ът
-
-
m
2m
-
-
2r
—
-
-
-
-
-
Ф
-
-
-
-
—
-
Ф
-
Ф
-
-
r
Ф
-
-
-
-
-
—
-
P
-
-
p
p
-
M
M
-
MX;M2
Ml;M2
-
-
M
M
Mi;A/2
0
/
/
—
-
/
/
-
/
-
-
b
-
-
-
—
-
-
b
-
-
-
-
-
Ф
Ф
Ф
л:
X
X
«Pi
X
9i
X
*1
Ф
Ф
X
«Pi
X
ф2
ф2
^2
Ф2
0
0
• о
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
So
0
0
0
0
0
0
5о
0
0
0
0
0
0
0
0
0
0
0
*0
0
*0
0
0
0
0
0
0
0
*0
Фю
0
0
0
0
0
0
0
§0
0
0
4о
0
4о
0
0
Массу ленты не учитывать
Момент М приложен к
водилу
1 — материальная точка
Момент М1 приложен к
водилу
Тоже
— материальная точка
Примечания: 1. Радиус инерции тела 2 или 3 определены относительно центральной оси, перпендикулярной плоскости
чертежа.
2. Коэффициентом вязкого сопротивления назван коэффициент пропорциональности в выражении силы
сопротивления относительному движению тел 1 п 2 R= —b~v9 где ^—относительная скорость тела.
Рис. 215
Рис. 216
Выразим скорости центров масс твердых тел системы через
обобщенные скорости:
v2 = v6 = х2;
vn = (*i + х2J/4 + х\ - (хг -f х2)х2 cos a,
D)
или, имея в виду, что а = 30°,
i? + E - 2|/з)х§ - 2Q/3 - 1)ххх2].
Здесь учитывалось, что (xt + х2)/2 — скорость центра масс тела 7
относительно тела 2, а х2 — его переносная скорость (рис. 216).
Угловые скорости тел (см. рис. 215 — 217)
E)
С06 = С07 = (Xi + Х2)/Г.
Моменты инерции колес относительно центральных осей
J4 = J6 = 2mr2/2 = mr2;
Кинетическая энергия тел 1, 2, 4 — 7:
Тх = m^f/2 = Ътх\/2\
Т2 = т202/2 = 4тх2;
Т4 - J^ = mx?/2;
^6 = тб|?|/2 + 76оэ|/2 = 0,5т (х? + 3x1 + 2ххХ2);
Т7 = т7у2/2 + J7co?/2 = (т/16) [Зх? + A1 - 4 ]/з) х| - 2 B |/з - 3) ххх21
Кинетическую энергию нити 3 Г3 = 0,5 J] т3^з
находим, учитывая, что
скорости всех ее точек одинаковы, т. е. v3i = v$ = хг и ?m3i = m:
Тъ =
= mxf.
Подставляя все эти величины в C), получим
Т = (т/16) [15x1 + (99 - 41/5) х2 + 2 A1 - 2 j/З) Х!Х2]. F)
298
Рис, 217
ятл
•*' i
¦Li A'
а'- а
Рис. 218
Потенциальную энергию системы находим как работу сил тяжести
твердых тел 1 и 7 и нити 3 при их перемещении из данного положения,
характеризуемого координатами хх и х2, в некоторое исходное нулевое,
например то, от которого ведется отсчет обобщенных координат:
7, G)
где у7 - высота центра колеса 7 над уровнем, где он находится при
Xi = 0 и х2 = 0. Так как проекция скорости центра колеса на ось у
(см. рис. 216)
то, интегрируя это выражение при нулевых начальных условиях, получим
У1 = (*i + ^г) 0,5 sin a.
Следовательно,
Я7 = т7?(х! + х2) 0,5 sin a.
Для определения Пъ заметим, что работа силы тяжести нити 3 при
ее перемещении из положения db' в положение ab, при котором хх = 0,
равна работе силы тяжести участка нити bb' при его перемещении в
положение ad (рис. 218).
Таким образом,
Подставляя эти значения в G), находим
П = g[-mtxt + т1{рс1 + х2H,5 sin а -
или
= mg [ - x\/L - B,75 + 2/0/L) xx + x2/4].
(8)
Обобщенные силы Qt и Q2 можно определить из выражений работы
неконсервативных сил на элементарных перемещениях системы,
соответствующих вариации каждой обобщенной координаты, или, что то же
самое, из выражений мощности Ni и N2 неконсервативных сил на
возможных скоростях системы, соответствующих возрастанию каждой
обобщенной координаты
299
В данном случае
или с учетом D) и E)
Nt = -Rxt -Mxjr.
Отсюда
д1В=-Л-М/г,
ИЛИ
Gi= -bxt-M/r. (9)
Аналогично,
Учитывая D) и E), имеем
JV2 = Рх2 - Mx2/r;
Q2 = p - Af/r. A0)
Подставляя F), (8), (9) и A0) в A) и B), получаем дифференциальные
уравнения движения системы:
^
99-41/3 11-21/3
Выражая jc2 из A2) и подставляя в A1), получаем
х\ Н- 2nxt - схх = а. A3)
Здесь п = 0,0538fc/m; с = 0,215^/L; a =g @,298 + 0,215/0/L) ~ 0,099M/(rm) -
— 0,0088P/m. Найдем решение линейного неоднородного
дифференциального уравнения A3).
Характеристическое уравнение
z2 + 2nz - с = 0.
Его корни
Z1}2 = —И ± ]/п2 + С.
Общее решение дифференциального уравнения A3) имеет вид
X! = e~nt (C1e^/'llT7t + C^"^1) - —. A4)
с
Для определения постоянных Сх и С2 дифференцируем A4):
хх = е-»< [(-п + /^М ^1^>;1Т7г - (" + 1/^?+^) Сав"^771]. A5)
Пользуясь начальными условиями: при t = 0 xt = 0; хх = 0,- находим
из A4) и A5)
Ci + С2 - а/с = 0;
(-7t + /и2 + с) Сг - (п + ]/п2 + с) С2 = 0.
300
Отсюда
С1== Д=-(и^|/и2 + с);
A6)
Уравнение A4) с учетом A6) является уравнением движения системы,
описывающим изменение первой обобщенной координаты.
Чтобы получить второе уравнение движения, находим из A2)
X 8 / g Р М V 11-21/3 „
*2~ 99~4]/з \ 4+т т*г/ 99-4]/зЛЬ
или
Х2 = fc - О,О818л?ь A7)
где /с = 0,0869 — (Р 1 - -
Интегрируя A7), получаем
х2 = kt - 0,0818;*! + С3; A8)
х2 = kt2/2 - О,О818хх + СЪХ + С4. A9)
Для определения постоянных С3 и С4 используем все четыре
начальных условия: при t = 0 хг = 0; х2 = 0; хх = 0; х2 = х2о«
Из A8) и A9) следует
Теперь вместо A9) с учетом A4) имеем
х2 = -^ 0,0818 e~nt(C^n2 + Ct + С2е
Это второе уравнение движения системы.
УСТОЙЧИВОСТЬ СОСТОЯНИЯ РАВНОВЕСИЯ (ПОКОЯ)
КОНСЕРВАТИВНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Задание Д.22. Определение положений равновесия (покоя)
консервативной механической системы с одной степенью свободы
и исследование их устойчивости
Для консервативной механической системы с одной степенью свободы
требуется:
1. Определить положения равновесия, пренебрегая массами упругих
элементов.
2. Провести исследование устойчивости найденных положений
равновесия.
Варианты механических систем показаны на рис. 219 — 221, а
необходимые соотношения приведены в табл. 58.
301
Таблица 58
Номер
варианта
(рис.
219-221)
1
2
3
4
5
6
7
8
9
10
П
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Соотношения между параметрами
/G. = ZRG
G2= l,5Gt
G2=U5Gi;
16с/=50!
G2 = 3Gt;
G2 = 2,5G!
G2 = Gx; A
Gx + 2G2 =
GX = G2 =
Gl = 2G2;
R = 2j/2/
Gx = c/; /0
"; /0 = 2/; 7c/ = 12Gt
cl=4G{; /0=2/
, /0=2Л
/0 = 2/;c/=8Gl
; /0= 1,5/; c/= 12Gi
kr/= 5Ct; lo = b
= 2сЛ;/=0
с/; /0 = /
cR = 6G2; /= 2/?
G{ = cf
= 0,5/
Gt = G2; Gx = cl; /0 = 0,5/
G2 = 3Gi; (
G2 = \,5G{
Gj/ = 4G?/
Gt = 2G2; i
G{ = 2G2;
Gt = 6c/; <
Gt = 3G2 =
G{ — G2 =
G2=l,5yj
Gi = c/; 4
G{ = 0,5y/
4G2= 15G
Gt = cl; G
G1 = 0,5 pi
C?2=:c/; /0 = 0,5/
= O,i5c3/; С1 = с2 = 2с3;
= c/;/=/
?
'0 = /J; cR = 0,5G2; l=2R
I = 0,52д
z = 2/; 6= i,5/0; /0 = J/1/
= 3c/; b -21 + l0
cl; b = 3/; /0 = 4/
r; 4c/0 - 18y/— 5c/= 0
F-/0-L)=3/
r
i
, = c(/ + 0,5/)
; L = 2/
Примечания
Весом нити пренебречь
Трением пренебречь
К цилиндру приклеивается
лента 2
Весом нити пренебречь
Весом нити пренебречь
То же
Весом стержней пренебречь
То же
Учесть вес стержней
Весом нити пренебречь
Учесть вес стержней
Весом стержней пренебречь
Весом нити пренебречь
Провисанием нити
пренебречь
В таблице обозначено: Gl9 G2 - веса тел; р — вес единицы длины тяжелой
нити, ленты; L - длина нити; с - коэффициент жесткости пружины; /-
деформация пружины при (р = 0; у — вес единицы длины стержня; /0 - длина недеформи-
рованной пружины; R - радиус диска; Ь, /-конструктивные размеры.
В качестве обобщенной координаты выбрать угол <р. На рис. 219-221
показаны механические системы при некотором положительном угле ф.
Во всех вариантах качение колес происходит без проскальзывания и трение
в сочленениях отсутствует. При решении задачи считать все стержни
и диски однородными.
Пример выполнения задания. Консервативная механическая система
(рис. 222) состоит из однородного стержня ЛВ длиной 2/, тел 1 и 2,
пружины с коэффициентом жесткости с и тяжелой нити BE длины L.
302
w
Рис. 219
11
'///////////////А
www
12
16
17
18
19
20
Рис. 220
21
22
25
26
21
29
30
Рис. 221
Рис. 222
Рис. 223
Вес единицы длины нити р. В качестве обобщенной координаты примем
угол ф. При ф = 0 пружина сжата на величину /. Вес тел 1 и 2
соответственно Gi и G2. Провисанием нити пренебречь.
Параметры системы удовлетворяют условиям
Найти положения равновесия системы и исследовать их на
устойчивость.
1. Определение положений равновесия системы. Для исследования
равновесных состояний системы составим выражение потенциальной
энергии. Потенциальная энергия системы складывается из потенциальной
энергии элементов системы в поле силы тяжести Яст и потенциальной
энергии сил упругости деформированных пружин Дсу
п = пе,г + пс.
A)
В качестве нулевого уровня потенциальной энергии элементов в поле сил
тяжести выберем горизонтальную прямую, проходящую через точку О.
Тогда для каждого z-ro элемента при выбранном направлении оси Оу
получим
#с.т (GO = ?,}>„
где Gt — вес i-ro элемента, ау{- вертикальная координата центра тяжести
1-го элемента.
Для рассматриваемой системы ПСТ имеет вид
#ст = вхух + G2y2 + ОвкУъ + GKEy4.
Здесь Gbk и &ке ~~ вес участков ВК и КЕ тяжелой нити BE, а уъ и у^ —
вертикальные координаты их центров тяжести (рис. 223):
306
GBK = p-BK; GKE = p.KE = p(L- БК).
Длину ВК определим из равнобедренного треугольника ОВК, в котором
sin
Ф
Ф
Модуль при sin-— введен для того, чтобы формула была верна как
для ф > 0, так и для ф < 0. Тогда имеем
GBK = 2р/
Координаты # равны;
sin-
GKE=p\L-2l any Y
. — 2/ sin -у-
Подставив найденные соотношения в выражения для Яст, имеем
Яс.т = Gj(l - 2 sin2 ±\-
- 21
Потенциальная энергия силы упругости пружины определяется
равенством
"с.у ~
где X — деформация пружины, равная
• Ф
япт
/ > 0, если при ф = 0 пружина растянута,
/ < 0, если при ф = 0 пружина сжата,
. Ф
smy
Складывая выражения для Пст и Яс>у, получаем выражения для
потенциальной энергии системы в виде
307
П = П (ф) =
2 sin2 ^-)-
sin
ф
-2PP
¦ ф
sm--
L-^Ч +
Функция Я(ф) зависит от sin2-—- и
и потому является четной,
т.е.
Так как функции sin2-— и
удовлетворяют равенствам
. 7 Ф • -> ft ф\.Ф /, фМ
sin -у = sur ( kn + — I; sm -у- = sin I кк -f — 11 для любого целого к,
то график функции Я (ф) симметричен относительно вертикалей ф = кп.
Это позволяет провести анализ функции Я(ф) только на участке
О ^ ф < % и, пользуясь соображениями симметрии, распространить
результаты на любой другой интервал изменения ф.
Удобно ввести обозначение
ф
Тогда
B)
Положения равновесия определим из условия равенства нулю
обобщенной силы Q:
дП _ ая дП дх .
-^— = 0 или —— == -S х— ^ О*
оф 5ф ох 5ф
О)
Выражение B) содержит функцию | х |, график которой при х = 0 (ф = 0) имеет
излом, т. е. производная ~— при х == 0 не определена. Поэтому сначала
определим корни уравнения C) при х > 0 (ф > 0), а затем проведем
исследование положения х = 0 (ф = 0).
Для интервала 0 < ф < к потенциальная энергия может быть
представлена выражением
Я (х (Ф)) = 2/ Cj х3 - Ъх2 + d - х J + const,
D)
где а = Зр/; Ъ = Gx + (р — с) 1; d = G2 + p/ + с/. Учитывая соотношения,
заданные в условии, получаем:
308
d = c|/K-ip/+pZ-c|/| = ~p/;
П (x (Ф)) = 2р/2 (х3 - 2х2 + 1,25х) + const. E)
Слагаемые в правой части D) и E), не зависящие от х, выписывать
подробно нет надобности.
„ дП дх
Получим -=— и -х—:
J дх Зф
Условие C) дает два уравнения:
-^ = 0, или сс»^- = О; F)
<7ф ^
= 0, или Зх2 - 4х + 1,25 = 0. G)
В интервале 0 < ф ^ п уравнение F) имеет единственный корень ц>1 — к
(Ф1 - 180°).
Рассмотрим квадратное уравнение G). Его корни:
j/l6-4.3-l,25 5 4-1/16-4-3.1,25
. Х = 0,5.
Xl= _ __ Х2 =
Так как Xi и х2 по модулю меньше единицы, то им соответствуют
положения покоя системы, определяемые равенствами
. Фа . Фз
sin — = хх; sm — = х2.
В интервале 0 < ф < п получаем два положения равновесия:
ф2 ~ 2 arcsin xt = 2 arcsin — = 112,89°,
6
Фз = 2 arcsin x2 = 2 arcsin 0,5 = 60°.
Исследуем теперь положение системы при ф = 0. Легко видеть, что
при ф = 0 (х = 0) механическая система находится в равновесии, так как
все активные силы направлены вдоль вертикали OD и уравновешиваются
реакцией Ro опоры О (рис. 224).
Отметим, что при ф = 0 нить растянута вдоль всей длины L, так как,
по условию задачи, с \ f \ < G2.
Итак, в интервале 0 < ф < % система имеет четыре положения
равновесия: ф! = 180°; ф2 = 112,89°; ф3 = 60°; ф4 = 0.
Примечание. При других значениях параметров механическая система
может иметь в интервале 0 < <р ^ я три или два положения равновесия.
Положения равновесия рассматриваемой системы в интервале п ^ ф ^
< 2я (или — я < ф < 0) определяются из условия четности функции П(<р)
и равны
309
pi
-112,940° 0 60° 111 f 180°
90° Ж
Рис. 225
д60°ср
27l
44
Шсн
Рис. 224
ф5=: ~ф3= -60° =300°;
фб = -ф2 = -112,89° =247,11°.
2. Исследование положений равновесия на
устойчивость. Исследуем на устойчивость положения
равновесия в интервале 0 ^ ф ^ тс. Для этого определим вид экстремума
функции П (ф) (максимум или минимум) в положениях равновесия.
Составим вторую производную от Я по ф:
д2П
д2п
дх2
2 ЗП д2х
дх дфх
(8)
При ф = фх = к производная дк/ду = 0 [см. F)}, поэтому из (8) имеем
дп (д2х
Л
Учитывая, что при фх = к х = 1, получаем
Следовательно, при ф = ф1 = п функция Л (ф) имеет максимум. При
дП . _ /т_
^Ф = «|^ и «р = ф3 производная ~— = 0 [см. G)], поэтому
ох
/д2п\
д2п / дх\21
(9)
Из (9) следует, что знак второй производной при ср = ср2 и ф = ф3 опре-
д2п
зеиаетса знаком . , .
ох
JJO
Так как 52Я/йх2 = 2р/2 Fх - 4), то при ф = ф2 х = хг = 5/б и д2П/дх2 =
«2р/2F-5/б-4) = 2р/2>0, при ф = ф3 х = х2 = 0,5 и -^JL = 2р/2 F - 0,5 -
-4)= -2р/2<(>.
Таким образом, при ф = ф2 функция Я (ф) имеет минимум, а при
ф = ф3 — максимум.
В положении равновесия при ф = ф4 = 0 не определены ни первая,
ни вторая производные от потенциальной энергии по углу ф. Поэтому
проведем исследование функции Я (ф) при ф = 0 по знаку —— в
окрестности положения ф = 0.
Производная в нуле справа
/ф=+о х->+о
Ф>0 х>0
+
Ф>0
= lim 2р/2 (Зх2 - 4х + 1,25) lim 0,5 cos-^- = 1,25р/2 > О.
+0 ф>+0 2
х>0
ф->+0
Ф>0
Так как производная в нуле справа положительна, то функция Я(ф)
возрастает при увеличении ф (ф > 0), т. е.
Я (Аф) > Я (ф = 0) при малом Аф > 0.
Вследствие четности функции Я (ф) она удовлетворяет также неравенству
Я(-Аф) > Я(ф = 0). Следовательно, при ф = 0 функция Я(ф) имеет
минимум. Таким образом, при ф = фх = 180° и ф = ф3 = 60° функция Я (ф)
имеет максимум, а при ф = ф2 = 112,89° и ф = ф4 = 0 — минимум. На
основании теоремы Лагранжа —Дирихле при ф = ф2 и ф = ф4 система имеет
положения устойчивого равновесия, а на основании теоремы Н. Г. Че-
таева при ф = (?% и ф = ф3 — положения неустойчивого равновесия.
Теорема Н. Г. Четаева. Бели в изолированном положении равновесия
потенциальная энергия, предполагаемая аналитической функцией
обобщенных координат, не имеет минимума, то равновесие неустойчиво.
Положение равновесия ф = ф5 является, как и ф = ф3, неустойчивым,
а положение равновесия ф = ф5, соответствующее положению ф = ф2,—
устойчивым.
Сведем результаты исследования в табл. 59 и отметим положения
равновесия на графике функции Я(ф) (рис. 225).
Таблица 59
Положение
равновесия
ф! = 180°
Ф2= 112,89°
ф3 = 60°
Устойчивость
положения
равновесия
Неустойчиво
Устойчиво
Неустойчиво
Положение
равновесия
Ф4 = О
Ф5 = - 60°
Фб=- 112,89°
Устойчивость
положения
равновесия
Устойчиво
Неустойчиво
Устойчиво
311
IV. КОЛЕБАНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Задание Д.23. Исследование свободных колебаний
механической системы с одной степенью свободы
Определить частоту и период малых свободных колебаний
механической системы с одной степенью свободы, пренебрегая силами
сопротивления и массами нитей.
Найти уравнение движения груза 1 у = у (t), приняв за начало отсчета
положение покоя груза 1 (при статической деформации пружин). Найти
также амплитуду колебаний груза 2.
Схемы систем показаны на рис. 226 — 228, а необходимые данные
приведены в табл. 60.
Таблица 60
Номер
варианта
(рис.
226-228)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
0,5
0,5
0,5
0,6
0,6
0,6
_
-
0,6
0,6
-
0,5
0,3
0,4
0,4
—
—
—
0,2
0,5
_
—
0,4
—
ix
Г4
м
—
-
-
-
-
-
-
-
-
-
-
г\/ъ
-
-
—
-
—
2г
—
-
—
-
-
-
-
—
-
-
—
-
-
-
-
—
-
—
-
—
-
—
_
1/5
—
—
0,2
—
_
0,15
0,15
-
-
-
-
0,1
-
-
—
-
—
—
0,2
-
т\
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
щ
т4,
т5
кг
2
2
-
2
-
-
-
3
2
2
2
2
1
_
-
2
2
2
1
2
—
2
2
-
_
2
4
3
3
1
2
2
-
-
-
-
1
2
2
3
1
-
-
2
4
2
3
3
3
3
2
3
1
2
-
3
3
3
3
2
3
2
_
2
_
1
3
3
-
3
2
с
Н/см
40
40
20
36
16
40
40
40
38
32
30
20
32
20
20
32
20
40
32
20
32
40
40
40
Начальные
условия
</=0)
Уо, см
0,1
0
0,2
0,2
0
0,3
0,4
0
0,5
0
0,4
0,2
{ о
0
0,1
0,3
0
0
0,1
0,4
0
0,1
0,3
0
Уо»
м/с
5,0
6,0
7,0
0
8}0
7,0
0
6,0
5,0
6,0
7,0
0
8,0
7,0
0
6,0
5,0
6,0
0
7,0
8,0
7,0
0
6,0
312
Продолжение табл. 60
Номер
варианта
(рис.
226-228)
25
26
27
28
29
30
fx
м
0,3
-
-
-
ф
-
-
-
-
Зг/2
rj/3
4г/3
од
-
-
-
щ
т2
кг
1
1
1
1
1
1
2
2
2
2
2
2
2
3
3
3
3
1
-
с
Н/см
40
40
40
40
40
40
Начальные
условия
.Уо» см
0,2
0,3
0
0,2
0
0,3
Уо,
м/с
5,0
0
6,0
0
7,0
7,0
В задании приняты следующие обозначения: 1 — груз массой тх;
2 — блок массой т2 и радиусом г2 (сплошной однородный диск); 3 — блок
массой т3 и радиусом инерции ix; 4 — сплошной однородный диск массой
т4 и радиусом г4; 5 — диск массой* т5 и радиусом инерции i'x; 6 — тонкий
однородный стержень массой т6 и длиной /; 7 — стержень, масса
которого не учитывается; с — коэффициент жесткости пружины; у0 — начальное
отклонение груза 1 по вертикали от положения покоя, соответствующего
статической деформации пружины; j^0 — проекция начальной скорости v0
груза 1 на вертикальную ось.
На рис. 226 — 228 системы 'тел 1 — 7 показаны в положении покоя (при
статической деформации пружин).
В вариантах 5, 6, 14 и 23 стержень 6 жестко соединен с диском 4.
Пример выполнения задания. Дано: тл — \ кг, т2 = 2 кг, т4 = 1 кг,
т6 =*3 кг; / = 0,6 м; с = 20 Н/см; у0 = 0,2 см; у0 = 8 см/с (рис. 229).
Определить циклическую частоту & и период Г малых свободных
колебаний системы, а также получить уравнение у = у (t) колебаний
груза 1 и найти амплитуду а его колебаний.
Решение. Воспользуемся уравнением Лагранжа II рода для
консервативной системы. Приняв за обобщенную координату системы
вертикальное отклонение у груза 1 от положения покоя, соответствующего
статической деформации пружины, имеем
^/^\ /5Г\ дП
<Ь\ду) \ByJ- ду'
A)
где Г — кинетическая энергия системы; Я — потенциальная энергия
системы.
Кинетическую энергию Т вычислим с точностью до величин второго
порядка малости относительно у и у, а потенциальную энергию П —
с точностью до величин второго порядка * малости относительно
обобщенной координаты у.
Найдем кинетическую энергию системы, равную сумме кинетических
энергий тел 7, 2, 6 и 4:
313
Цлл/wv
^
я C
V
&
SS?
iS?
$»
Q-/
A
?2*3?
/-a
7 ^ %i , %
i_ /
/-a
5-
Pmc. 226
/)///s/
12
'?////*
/J
15
7
V
17
18
c> 4 yz.\
19
mQ=2m6
20
V/'/УД
Рис. 227
21
23
6-
у'УУУУУУУУУУУЖУ/УУУУ/у,
/-a
27
28
"SB*
29
Puc. 228
Выразим скорость центра масс тела 4 и угловые скорости тел 2, 4 и 6
через обобщенную скорость у:
Так как рассматриваются малые колебания, то vB — vA, а ввиду того,
что диск 4 катится без скольжения, vc = vB/2; следовательно,
vc = vA/2 = соб//2 = оз2//2 == yl/Br2) = 2j>;
ю4 = vc/r4 = 2j;/r4.
Момент инерции тела 4 относительно центральной оси
Jc = m4rJ/2.
Моменты инерции тел 2 и 6 относительно оси вращения
Зг = Л12Н*/2; «/в = m6l2/3.
Кинетическая энергия тел 1, 2, 4 и 6 имеет следующий вид:
тху2 u _ J2g>2 тгУ2 .
Таким образом, кинетическая энергия рассматриваемой механической
системы
Г = Ti + Г2 + Гб + Г4 = тх jJ/2 + m2j?2/4 + 8/з^бЗ>2 + Зт4у2 =
= Чг [^i + "*2/2 + 16/зтб + 6т4] у2.
Найдем потенциальную энергию системы, которая определится
работой сил тяжести системы и силы упругости пружины на перемещении
системы из отклоненного положения, когда груз имеет координату у,
в нулевое положение, которым считаем положение покоя системы:
Потенциальная энергия, соответствующая силам тяжести при
указанном перемещении,
где h - вертикальное смещение центра тяжести стержня б, которое
вычисляем с точностью до величины второго порядка малости относительно
обобщенной координаты у.
По рис. 230,
h = 1/2 - A/2) cos ф = A/2) A - cos ф).
Ограничиваясь в формуле разложения
cos ф = 1 - ф2/2! + ф4/4! - ...
двумя первыми членами и учитывая, что
Ф = У/г 2 =
Рис. 229
Рис. 231
имеем
Таким образом,
-^ = V/l
Потенциальная энергия деформированной пружины при указанном
перемещении системы равна
Яп = с (/„ + ^/2-^/2,
где /ст — статическая деформация пружины; Хк — перемещение точки
прикрепления пружины К, соответствующее координате у.
Так как (см. рис. 229)
7*1*
7*1
т. е. Хк = Зу, то
cf
9
l 9
2~~"" "
Потенциальная энергия системы
Л = Л! + Лп = - Gl3; - DG6/0 j2 + Зс/ст3; + 9/2су2.
Так как в положении покоя, соответствующем статической деформации
пружины,
фП/ду),ш0=О, то -G1 + 3c/CT = 0. (a)
318
Уравнение (а) можно получить также, составив уравнение моментов
сил ?МЮ2 = 0 для положения покоя системы (рис. 231):
или
c/cr-3/4/-Gi*/4==0, т.е. Зс^-G^O.
Таким образом, потенциальная энергия рассматриваемой механической
системы
Найдем значения членов уравнения A):
иь 16
ду ' ду
Уравнение A) приобретает вид
или
mt + Шг/2 + 16тб/3 + 6т4
Обозначив к2 коэффициент при у, имеем
у 4 tfy - 0. B)
Циклическая частота свободных колебаний
¦у:
• w2/2 + 16wg/3 + 6W4
Период свободных колебаний
Г = 2п/к = 2 • 3,14/27,1 = 0,23 с.
Интегрируя уравнение B^ шолучаем уравнение движения груза 1:
y = Ci cos kt + С2 sin kt.
Для (шредеявЕНЯ жкгишнных Сх и С2 найд^я урвшеешв© скорости груза
у = - fcCj sin fe + feC2 cos kt
и воспользуемся начальшлми условиями задачи. Из урашиений y = y(t)
и У = У @ при f = 0 имеем:
Уо-Сг; Уо = кС2.
Следовательно,
i = Jo? ^2 :
Подставляем эти значения С± и С2 в уравнение y = y{t):
у = у0 cos kt -f {уо/к) sin fo;
у = 0,2 cos 27, If + 0,3 sin 27,1 г.
Уравнение у = у (t) можно получить в другом виде, если перейти
к другим постоянным интегрирования аир, приняв
Сх = a sin p; С2 = a cos p.
Тогда у = a sin (fo + р), где а = ]/с\ + Ci, p = arctg (Ci/C2) или а =
= /Уо + (JoAJ; Р = arctg (куо/уо).
Найдем числовые значения а и Р: а = 3,6-10 2 м, р = arctg 0,68.
Так как sin р > 0 (Сх > 0), то р = 34° 12' = 0,597 рад.
Окончательно
у = 3,6 • 10" 2 sin B7,1* + 0,595) м.
Задание Д.24* Исследование свободных колебаний
механической системы с двумя степенями свободы
Определить частоты малых свободных колебаний и формы главных
колебаний системы с двумя степенями свободы, пренебрегая силами
сопротивления, массами пружин и моментами инерции скручиваемых
валов.
Схемы механических систем тел 1—3 в положении покоя показаны
на рис. 232 — 234, а необходимые для решения данные приведены в табл. 61.
Примечание. Во всех вариантах колеса считать сплошными однородными
дисками, стержни — тонкими однородными. Во всех случаях качение колес
происходит без скольжения.
Пример выполнения задания. Определить частоты свободных
колебаний и найти формы главных колебаний системы с двумя степенями
свободы, указанной на рис. 235.
Дано: 1Х = 0,2 м; 12 = 0,6 м; /3 = 0,3 м; масса груза шх = 0,5 кг; масса
однородного стержня ED т2 = 3 кг; коэффициенты жесткости пружин:
С! = 60 Н/см; с2 = 40 Н/см; с3 = 40 Н/см.
Решение. Система состоит из груза В, подвешенного к рычагу ED
на пружине с коэффициентом жесткости съ. В точках Е и D рычаг
опирается на пружины с коэффициентами жесткости с± и с2.
В состоянии покоя рычаг занимает горизонтальное положение.
Пружины с коэффициентами жесткости сх и с2 деформированы (сжаты или
растянуты) соответственно на величины /ст1; /ст2. Пружина с
коэффициентом жесткости съ растянута на величину /ст3.
За обобщенные координаты примем: z - вертикальное смещение груза
от положения покоя; ф — угол поворота рычага ED от положения покоя.
На рис. 236 показано положение системы при положительных
обобщенных координатах.
Найдем кинетическую и потенциальную энергии системы.
Кинетическая энергия системы состоит из кинетической энергии груза и кинети-
320
Ш
W/////
\05l
рлчя
21
г///)// r/f////.
8
Cf \y
7///W/,
--WAvf
10
Рис. 232
11
13
2-i
15
16
W? W?r
I ,
/ z
/ /
21
' 21
17
18
1(wvdz
v/7/7///////////////////////////.
19
20
2M ,. I
>c2
Рис. 233
22
х—1 ^Л^-АЛт-^1 ос
26
WAW/Л
28
УУУУУУУУ^У^/У/УУ'
30
Рис. 234
Таблица 61
Номер
варианта
(рис.
232 234)
1
2
3
4
5
6
7
8
9
10
11
Масса
тел, кг
***
т\
1
10
4
2
5
8
3
4
1
6
10
т2
2
2
-
5
2
2
1
1
0,5
4
3
3
_
4
—
—
—
—
—
—
—
-
Радиус
Л, м
—
0,2
—
—
—
0,2
—
0,2
-
Радиус
инерции
тела 1
носительно оси
вращения iXt м
—
0,6
-
—
—
—
—
—
0,3
-
Н/см
40
400
30
6
8
20
6
40
80
4
10
Коэффициенты жесткости
элементов
с
Нм/рад
-
—
—
—
—
—
—
-
с
Н/см
30
-
20
8
6
15
4
30
10
3
10
Нм/рад
__
2-103
—
—
—
—
—
—
—
-
упругих
с
Н/см
20
-
10
7
7
—
8
—
60
—
5
Нм/рад
—
—
—
—
—
—
—
—
—
Расстояние /, м
0,5
1
-
0,5
0,5
—
0,5
0,3
0,4
0,1
0,4
Примечания
Корпус редуктора имеет возможность
поворачиваться вокруг оси колеса 3. Ось
колеса 2 неизменно связана с корпусом.
Центр тяжести корпуса совпадает с
центром колеса 2
Система расположена в
горизонтальной плоскости, в которой происходит
движение. В положении покоя пружины
не деформированы. Тело 1 принять за
материальную точку
Центр тяжести тела 1 находится на оси
пружины с коэффициентом жесткости сх.
В положении покоя пружины не
деформированы
В положении покоя пружина с
коэффициентом жесткости сх не
деформирована
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
6
30
40
6
4
50
2
40
8
4
30
3
40
2
6
8
6
4
30
30
20
—
6
60
3
60
10
2
40
2
1
2
2
4
3
30
10
10
—
40
8
30
—
—
20
-
0,5
3
—
—
—
—
0,4
—
—
0,2
0,4
0,35
—
—
0,4
-
—
—
—
—
—
0,6
0,6
0,5
0,4
20
—
—
40
60
—
20
—
40
20
10
2
20
40
30
20
30
—
2-104
3 104
—
2-104
—
1-104
-
1-104
-
—
—
—
2-104
30
—
100
30
100
—
40
—
60
30
20
1
40
30
60
10
20
80
_
1-104
—
—
3-104
—
3 104
-
5-103
_
-
—
—
—
—
40
200
150
50
80
—
30
—
-
30
30
-
30
10
—
30
40
100
_
—
—
1-104
—
—
-
2-104
-
-
—
—
—
-—
0,5
1
0,4
-
0,5
0,5
—
0,4
0,3
0,2
0,5
ix — радиус инерции относительно оси,
проходящей через центр тяжести и
перпендикулярной плоскости рисунка
Система расположена в
горизонтальной плоскости, в которой происходит
движение. В положении покоя пружины
не деформированы
hi = *х2
Система расположена в
горизонтальной плоскости, в которой происходит
движение. В положении покоя пружины
не деформированы. Тело 1 принять за
материальную точку
В положении покоя пружины не
деформированы. Тело 1 состоит из трех
одинаковых стержней
WI4 == Wtj
hi - hi
li ^
^"~НЛ
G2T < Сз
Рис. 235
Рис. 236
ческой энергии рычага:
T=m1z2j2 + J0<j>2A
где it, <p- обобщенные
скорости; Jo — момент инерции
стержня ED> относительно
оси вращения О,
Момент инерции
Jo = т212/12 + m2d2,
где / - длина стержня ED,
d = ОС — расстояние от
центра тяжести С стержня
до оси вращения О (см.
рис. 235):
Момент инерции стержня
будет Jo = 0,28 кг • м2.
Потенциальная энергия
системы равна работе сил
при перемещении системы
из отклоненного положения
в нулевое (положение
статического равновесия).
р
Потенциальную энергию системы вычислим как сумму:
n^n^ п1Ъ
где Я! — потенциальная энергия груза и рычага в поле сил тяжести;
Пи - потенциальная энергия деформированных пружин;
Так как
то
Потенциальную энергию пружин найдем, рассматривая сначала
перемещение системы из отклоненного положения в положение,
соответствующее недеформированным пружинам, а затем из этого положения -
в положение покоя.
Деформации пружин следующие: Хх = /хф ±/ст1 -дая пружины с
коэффициентом жесткости сг; Х2 = *2<Р ± /Ст2 ~ Для пружины о
коэффициентом жесткости с2; А* =/стз + 'зФ + z - для пружины с коэффициентом
жесткости с3.
326
Следовательно,
ЯП = 72*i (h<? ± /cxlJ - 72Ci/2CTl + 7аС2 («2Ф ± /ей)* -
" 72С2/2ст2 + 7*3 (/сгЗ + Ьф + & ~ 7а</2«*
или после упрощений
Яп = 7аС1ЙФ2 + 7аСаЙФ2 + 7а*з СэФ + *J ± Ci'i/спФ ±
± ClhfcrlV + Сз/сгЗ (*зф + 4
Потенциальная энергия всей системы
- /х)/2] Ф + 7aCiftP2 +
± Ct/i/спФ ± с2/2/ст2ф
Из условий покоя рассматриваемой системы, находящейся под
действием сил, имеющих потенциал, имеем
(dll/dz)z=o = -Gi + сз/сгз = 0;
(аЛ/Эф)я-0 = ^2 "Ц^- ± Cji/cri ± С2/2/ст2 + Сз/з/стЗ = 0.
Потенциальная энергия системы с учетом условий покоя имеет вид
Таким образом,
Я = l/2c3z2 + Сз/з^Ф + 7а (ci% + c2ll + с3/|) Ф2
или
Т = 7а fan*2 + 2а122ф + а22ф2>;
Я = 7а (Сц22 + 2c12z9 + с22ф2).
Здесь ау — коэффициенты инерции:
пц—Шх; а12 = 0; a22 = J0\
Су — коэффициенты жесткости:
Си = С3, CW = С3/3, С22 = Ci/J + С2/1
Для рассматриваемой консервативной системы уравнения Лагранжа
имеют вид
&t \ dz) dz "" ^2 ' dt ""
Вычислив производные
дТ
С22ф
Э27
а) ПерЬобглйЬьое колебание системы
и подставив их в уравнения
Лагранжа, получим
t)
UJB
i
Второе главное колебание системы
А2 = W4c'1; jiz =• 1,2 рад/м $
где с21 = с12.
Таким образом, для
данной системы
дифференциальные уравнения свободных
колебаний имеют вид
Я22Ф + c2iz + с22ф = 0.
Частное решение этих
уравнений:
z = Аг sin (to + р);
Ф = Лф sin {kt -f p),
где Лг и Др — амплитуды
главных колебаний; к —
частоты свободных колебаний;
Р — начальная фаза
колебаний.
Уравнение частот, вытекающее из данной системы дифференциальных
уравнений, имеет вид
(Си - «11^)(С22 - Я22*2) - С\2 = 0.
Рис. 237
Корни этого биквадратного уравнения, соответствующие квадратам
частот, определим по формулам
- с\2)
В рассматриваемой задаче: ait = mt = 0,5 кг; сп = с3 = 4000 Н/м; с12 =
= с3/3 == 1200 Н, а22 = Jo = 0,28 кг • м2; с22 = cjj + с2\\ + съ\\ = 2040 Н • м.
Следовательно, частоты свободных колебаний
с; /с2 = 104 с.
с'1; к2
Коэффициенты распределения, соответствующие частотам к1 и /с2,
в общем случае имеют вид
- ^1.= » сп -flii^i = _ с12 - g12fef а
1 AXt с12 - а12к\ с22 - а22^? *
22
cl2 ~ a12kl с22 - а22к\ '
В данном случае цх = —1,49 рад/м; ^i2 = 1,2 рад/м.
Уравнения, определяющие первое главное колебание, примут
следующий вид:
328
zt = AZl sin F6,4t + pO; <Pi = - 1,49ЛЧ Ян F6,4* 4- px).
Уравнения, определяющие второе главное колебание,
z2 = As, sin A04* + p2); <p2 = h2A22 sin A04* + p2).
Формы колебаний показаны на рис. 237, я, б.
Общее решение дифференциальных уравнений представляет собой
сумму частных решений:
г = гг + z2 = i4Sj sin F6,4* + pt) + ЛГ;2 sin A04* + р2);
Ф = <Pi + Ф2 = -0,0149Л21 sin F6,4* + Pi) + 0,012Лг2 sin A04* + р2).
Значения A2i и р,- определяются по начальным условиям задачи.
Задание Д.25. Исследование вынужденных колебаний
механической системы с одной степенью свободы
Исследовать вынужденные колебания механической системы с одной
степенью свободы при силовом (варианты 2 — 5, 7 — 9, 12—15, 17, 18, 20,
22-25, 27, 28, 30) или кинематическом (варианты 1, 6, 10, 11, 16, 19, 21,
26, 29) возмущении.
Схемы механических систем показаны на рис. 238 — 240.
Силовое возмущение. Необходимые сведения о параметрах системы
и силового возмущения приведены в табл. 62. Диссипативные свойства
системы заданы логарифмическим декрементом колебаний системы.
В вариантах 9, 23, 30 механические системы расположены в
горизонтальной плоскости.
В вариантах 2, 7, 9, 18 пружины с коэффициентом жесткости сх в
положении покоя не деформированы.
Определить: коэффициент а, характеризующий вязкое сопротивление,
осуществляемое в демпфере, уравнение вынужденных колебаний системы
при заданной частоте возмущения; максимальные и резонансные значения
амплитуд изменения обобщенных координат, скорости и ускорения
в предположении, что частота возмущения может изменяться.
Примечание. Во всех вариантах колеса считать сплошными однородными
дисками, стержни - тонкими однородными, качение колес происходит без
скольжения.
Условия к вариантам с кинематическим возмущением 1, 6, 10, 11, 16,
19, 21, 26, 29 см. в табл. 63.
Система состоит из подвижного якоря массы т, который с помощью
пружины удерживается в положении покоя, изображенном на чертеже
(см. рис. 238-240).
Якорь считать тонким однородным стержнем. Центр тяжести якоря
находится в точке С. При движении якоря на него действует со стороны
шарнира момент сил вязкого сопротивления, пропорциональный угловой
скорости якоря (коэффициент пропорциональности р).
На якорь со стороны постоянного магнита действует сила притяжения,
329
Таблица 62
I,
1
1
г?
2
3
4
5
7
8
9
12
13
14
15
17
18
20
22
23
24
25
27
28
30
Масса
mi
8
2
20
40
5
40
40
40
30
20
45
40
50
80
40
30
70
10
40
25
40
кг
т2
2
4
5
10
5
30
15
_
30
15
30
30
10
20
—
15
—
50
—
-
гел,
4
20
—
10
—
_
—
—
—
_
—
—
-
0,3
0,2
_
0,4
| —
0,3
0,2
0,3
0,2
0,3
0,4
0,4
0,2
03
0,2
0,3
—
s
"о
Я
я
1
0,9
—
0,1
—
0,6
0,5
—
—
—
0,4
_
0,6
0,4
—
—
—
—
-
1
II
Я Н
—
—
—
—
—
—
0,4
—
—
—
—
0,5
—
—
—
—
-
Коэффициенты жесткости
Н/см
50
—
10
20
15
20
10
18
—
12
—
14
10
22
16
12
14
25
14
15
12
пружин
С1
Н • м/рад
2-104
—
—
—
—
1-104
—
2-104
—
—
—
—
—
—
—
—
-
с
Н/см
—
—
—
—
—
—
—
—
—
—
—
—
—
30
—
—
—
-
Н • м/рад
__
3-104
—
—
—
—
—
—
—
—
3-104
—
—
—
—
—
—
-
н
,50
ко
30
10
15
S5
8
12
25
20
16"
24
26
18
14
W
24
4а
12
18
20
А,
м
0,2
од
—
—
0,4
—
0,1
—
—
0,Г5
0,1
0$5
—
—
-
п
У
с
2я
—
4я
4я
3,5 я
2я
1,5я
2,5 я
4,5 я
2,2 я
Зя
2я
Зя
1,4я
3,2 я
2,2яг
Зя
2^5я
1,5я
3,2 я
2,5 я
1
S
гарифм
ремент
0,48
1,75
0,50
0,40
0,35
0,62
1,70
0,66
1,32
0,50
1,10
1,08
0,56
1,60
1,04
0,95
1,62
0,98
1,14
0,86
1,35
Таблица 63
Номер
варианта
(рис.
238-240)
1
6
10
И
16
19
21
26
29
т, кг
0,08
0,09
0,1
0,08
0,15
0,05
0,07
0,12
од
D 10 5
1
2
2,5
1
1,5
1
1,1
3,6
1,5
Р Н-м/с
0,009
0,009
0,008
0,008
0,01
0,007
0,08
0,08
0,007
5
0,005
0,006
0,008
0,005
0,006
0,007
0,014
0,011
0,006
1
0,12
0,12
0,09
0,008
0,1
0,08
0,12
0,08
0,12
/
м
0,02
0,04
—
0,02
—
0,03
0,03
—
—
d
0,01
—
—
0,06
0,06
0,06
0,09
—
—
ъ
0,07
0,05
0,07
0,04
0,08
0,05
0,04
0,07
0,06
направленная вдоль оси воздушного зазора. Эта сила F = />/52, где
D — некоторая постоянная; 5 — величина воздушного зазора.
Плоскость чертежа совпадает с вертикальной плоскостью. Величина
воздушного зазора в положении покоя равна до-
Корпус устройства вибрирует, перемещаясь поступательно вдоль
указанного на чертеже направления, по закону ? = %Q sin pt, где %0 — малая
величина; р — циклическая частота вибрации.
330
Для нормального функционирования устройства должны быть
удовлетворены следующие условия:
1. Амплитуда относительного перемещения конца якоря при резонансе
Лрез (р = К где к — циклическая частота свободных колебаний) должна
составлять 2/з величины 80.
3-небесомый с,
стержень
=A$in pt
РЦАВ
П
V
Щ
Iwr—
taj jtpi
(lit
a
10
Рис. 238
33
п
<p=cot
s
x-Asln pt
<p-O)t
16
45V
-«—
V
i
i
i
Jj T
18
x=Asin pi
Л/с.
22
23
Asinpt
x=Asin pt
x^Asinpt
27
29
30
Рис. 240
2. Амплитуда относительного перемещения конца якоря А^ при
высоких частотах возмущения (р » к) должна быть равна */з от величины 50.
Исходя из этих требований, определить:
1. Циклическую частоту малых свободных колебаний якоря.
2. Статическую деформацию Хо и коэффициент жесткости ct пружины.
3. Максимально допустимую величину ?0 амплитуды вибрации
корпуса устройства.
4. Максимальную амплитуду вынужденных колебаний якоря.
Необходимые для решения данные приведены в табл. 63.
Пример выполнения задания к вариантам 2—5, 7—9, 12 — 15, 17, 18, 20,
22-25, 27, 28, 30.
Дано: тх = 20 кг, т2 = 5 кг, тъ = 2 кг, т4 = 18 кг; R = 0,3 м; / = 0,9 м;
С! =40, с2 = 70 Н/см; Р = 20 Н; x = Asinpt; А = ОД м; р = 4тг с;
Т] = 0,812. Обе пружины в положении покоя не деформированы.
Вычислить коэффициент ос, характеризующий вязкое сопротивление,
осуществляемое в демпфере, включенном в систему 1 — 3 в соответствии
с рис. 241.
Определить уравнение вынужденных колебаний системы при заданной
частоте возмущения р. Найти также максимальные и резонансные
значения амплитуд изменения обобщенных: координаты, скорости и
ускорения.
Решение. За обобщенную координату примем фх — угол поворота
колеса 1 (рис. 242).
Уравнение Лагранжа в рассматриваемом случае имеет вид
( _дТ_= _ Ж__ ^
dt \dJ d д дф
где Т — кинетическая энергия системы; Ф — функция рассеяния системы
(диссипативная функция Релея); П — потенциальная энергия системы;
QP — обобщенная возмущающая сила.
Функции Г, Ф и Я вычисляются с точностью, при которой
справедливы формулы
Т=1/2ац>21; Ф = 72Ьф?; Я =
где а и с - коэффициенты инерции и жесткости системы, а Ь -
коэффициент, характеризующий сопротивление в системе.
Найти кинетическую
энергию системы как
сумму кинетических энергий
тел 7, 2, 3 и 4:
Г=Т1 + Т2 + Г3 + Г4.
Выразим скорости
центров масс vcl и vC3
тел 1 и 3, скорость тела
2 и угловые скорости соь
ш3 и со4 тел 19 3 и 4
через обобщенную ско-
Рость фх:
Рмс. 241
334
co4 = <j>i; vC\ =
Стержень З совершает плоское движение. Мгновенный центр скоростей
этого звена при его положении, совпадающем с положением покоя,
находится в бесконечности. Следовательно, для обеспечения указанной
выше точности выражения кинетической энергии системы можно считать,
что ю3 = 0 и vC3 = vD = vB = v2 = 2Дфь ш4 = vD/l = IRyJl
Момент инерции тела 1 относительно центральной оси JC1 = т^2/2.
Момент инерции тела 4 относительно оси вращения J4 = m4/2/3.
Кинетическая ^ергия тел 1, 2, 3 и 4 имеет вид
1l2 4-
Кинетическая энергия всей системы
Г= 3/4т^2ф? + 2т2Д2ф? + 2т3Я2ф? +
где коэффициент инерции системы
я = [3/2^i + 4ш2 + 4т3 + 4/з^4] R2-
Найдем функцию рассеяния системы:
ф = 1/2ви,1 = 1/2аBЯф1J = 72Ьф!,
где
Ь = 4Д2ос.
Переходим к определению потенциальной энергии системы.
В положении покоя
поэтому в выражении для П сумма всех членов первого порядка малости
равна нулю. Это позволяет непосредственно производить определение
потенциальной энергии системы, вычисляя только члены второго порядка
малости.
Найдем потенциальную энергию системы как сумму работ сил тяжести
и сил упругости пружин на перемещении системы из отклоненного
положения, определяемого углом <рь в нулевое положение, каковым
считаем положение покоя системы. При этом в выражениях для
деформации пружин, не загруженных в положении покоя, учитываются только те
слагаемые, которые имеют первый порядок малости относительно <рь
а в выражениях для вертикальных смещений центров тяжести элементов
системы — слагаемые, имеющие второй порядок малости. Деформации
пружин, загруженных в положении покоя, вычисляются с точностью до
величин второго порядка малости включительно.
Потенциальная энергия Пъ соответствующая силам тяжести, равна
335
а
где Лсз и йС4 - вертикаль-
ные смещения центров тя-
жести элементов 3 и 4,
вычисленные с точностью
до величин второго
порядка малости.
Из рис. 242 видно,
что
?4 =(//2)(l-cos94).
Ъ Ограничиваясь в формуле
Рис 242 ^ разложения
cos ф4 = 1 — ф4/2! +
двумя первыми членами и учитывая, что
имеем
hC4 = (l/2)q>l/2 = WLR2<pl/l2
Учитывая, что ксг = hD/2 = йС4, получаем
Потенциальная энергия Яп деформированных пружин при указанном
перемещении системы равна
Я„ = ll2cxX\ + V2C2 (^f cos 45° - А,кJ,
где ^?, ^f, XK — перемещения точек прикрепления пружин, вызванные
поворотом диска 1 на угол фх.
Вычисляя эти величины с точностью до слагаемых первого порядка
малости относительно фь имеем
ХЕ = 1?-щ=К^2щ; XF = LF-
Таким образом,
Потенциальная энергия системы
П = Я, + Яп = -(Л2/0 (Сз + G4) Ф? + (С! + с2/18) Л2Ф? =
где коэффициент жесткости системы
Определим обобщенную силу QP, соответствующую возмущающей
силе Р:
QP =
= Рх = Р • Л sin pt.
336
Здесь бфх — приращение обобщенной координаты; Рх5ф1—работа силы
Р на элементарном перемещении системы, соответствующем приращению
5ф! обобщенной координаты.
Используя полученные для Т, Ф, П и QP выражения, получаем
уравнение A) в следующем виде:
alpi + Ьфх + су! = Р • Л sin р?,
или
Фх + 2ифА + /с2фл = 'A sin pf, B)
где b/a = 2и; с/а = /с2; РЛ/а = А.
Уравнение вынужденных колебаний системы является частным"
решением неоднородного дифференциального уравнения B) и имеет вид
Фх =A,i sin {pt-e)9 C)
где /t9l — амплитуда вынужденных колебаний; s - сдвиг фазы вынужденных
колебаний;
A9i = ; tg е = ,2 2- D)
Ф1 j/(fc2 ^ р2J + 4п2р2 /С2р2
Определим А, /с, и:
h = P-A/a;
откуда А = 0,271 с*; ft = 10,2 с.
Величину п определим по заданному логарифмическому декременту
колебаний системы:
кп Г* _ 2к
Л = ¦
Отсюда
п = . , т.е. и = 2,55 с.
1/1 + п2М2
Коэффициент а, характеризующий сопротивление, осуществляемое в
демпфере, вычисляем по формуле
Ъ an
Таким образом, а = 104,5 Н • с/м.
Амплитуду изменения угла фх и сдвиг фазы вынужденных колебаний
системы при р = 4п с = 12,57 с определяем по формулам D):
Лф1 = 0,00325 рад; tg s = -1,19; г = 130°04г = 2,27 рад.
Окончательно по формуле C) имеем
ФХ = 0,00325 sin Dnt - 2,27) рад.
Определяем максимальные значения амплитуд изменения фь фх и фх
при условии, что частота возбуждения р может изменяться.
12 Под общ. ред. А. А. Яблонского 337
Амплитуда колебаний Лф1 имеет максимум при
p = Pi = j/V - 2п2 = l/lO,22 - 2. 2,552 = 9^53 с,
откуда
Лф1тах = ,_? = / = О5ОО537 рад.
Ъх ]/к2 -п2 2< 2,55 j/lO,22 - 2,552
Обобщенная скорость
ф2 = cos (pt - е) = cos {pt - в),
|/(*2 2J 422 1/Л22J/22 '
Следовательно, амплитуда обобщенной скорости имеет максимум при
р2 = к:
^ф1 гаач = 0,0531 Н • рад/с.
Обобщенное ускорение
sin (pf - е) =
2J 22
-sin (pt — г).
к2-
— I +4|
P,
Найдем то значение р = р3, при котором амплитуда обобщенного
ускорения имеет максимум, а следовательно, подкоренное выражение
[(/с2 — р2)/р2]2 + 4(«/рJ имеет минимум. Для этого вычислим
производную этого выражения по р и приравняем ее нулнк
-^1 Г' / I +41 — 1 1 = 21 - / П —^ ^ ^| +
dp
Р
После упрощений получаем
/с4 - р2к2 + 2?гр2 = О,
откуда
р = к2/\;/к2 - 2п2.
В рассматриваемой задаче^
р = р3 = 10,9 с.
Максимальное значение амплитуды обобщенного ускорения
h
после вычислений получим Л(р1<юах = 0,559 рад/с2.
33&
Определим теперь амплитуды изменения обобщенных координат,
скорости и ускорения при резонансе:
ЛфК,-л> = /т/B^') = °>271Л2 • 2,55 -10,2) = 0,00520 рад;
Лф1<р=/<) - Аф|тах = 0,0531 рад/с;
= 0,271.10,2/B.2,55) = 0,54 рад/с2.
}Ш ^вычислений следаея:, чш> амплитдаы изменения обобщенной
координаты и ускорения при резонансе <(р = к) -весьма близки к максимальным
значениям.
Пример выполнения задания к вариантам 1, 6, 10, 119 16, 19, 21, 26, 29.
Схема устройства показана на рис. 243.
Дано: т = 0,1 кг; C = 0,01 Н-м-с; 50 = 0,006 м; / = 0,1 м;/ = 0,04 м;
d='0'JB5 м; Ь=,08 м; D = 3-10 Н-м2.
Решение. За обобщенную координату примем угол <р поворота
якоря (рис. 244), который будем отсчитывать от положения покоя в
сторону уменьшения воздушного зазора 5.
Уравнение Лагранжа II рода, описывающее относительное движение
якоря, имеет вид
дц>
A)
где
= Qn + Q
дП
Здесь Т — кинетическая энергия якоря; 0П = — обобщенная сила
дц>
от механических сил, имеющих потенциал (Я — потенциальная энергия);
дФ
Qhi - обобщенная сила от сил притяжения якоря; QR = ——— обобщен-
оф
ная сила от сил вязкого сопротивления; Q0 — обобщенная сила от
переносной силы инерции Фе.
При изучении колебательного движения системы функции Т, Я и Ф
будем вычислять с точностью до величин второго, а обобщенные силы —
до величин первого гщрядка малости относительно (р,, ф, ? и ?.
Рис. 243
Рис. 244
12*
Вычисление обобщенных сил. Обобщенную силу QM найдем
по формуле
„ "f f-Ън
где NF ~ мощность силы притяжения якоря F; vM — скорость точки
приложения силы F.
Так как v^ — /ф, а векторы Ъы и F направлены по одной прямой
в одну сторону, то, учитывая, что 5 = 50 - /ф, будем иметь
Разложим <2д/ в ряд Маклорена с точностью до величин первого
порядка малости относительно ср:
Qm = Qm @) + Q'M @) ф/1! + ..., (Q1 = dQ/d<p). B)
Так как
то
Учитывая, что <2л/ @) = Dl/bg, получим
Qm = Dl/Ы + 2D/2/5^. C)
Обобщенная сила <2Л равна
где ЛГЛ — мощность момента сил вязкого сопротивления; MR = Рф —
момент сил вязкого сопротивления.
Таким образом,
2я=-РФ. D)
Обобщенную силу <2Ф, соответствующую переносной силе инерции Фе,
определим по формуле
еФ = ^ф/ф = Фе-15с/ф, E)
где Ыф — мощность переносной силы инерции Фе; Ьс — скорость точки
приложения силы Фе; vc = (//2) ф.
Переносная сила инерции
где ае = | — переносное ускорение.
Подставляя значения Фе и vc в E), получаем
дф = — ш^ (//2) ф cos ф/ф = — т\ A/2) cos ф.
Разложив (?ф в ряд Маклорена и удержав в этом разложении
слагаемые не выше первого порядка малости относительно ф, получим
СФ=-т/?/2. F)
340
Для вычисления Qn найдем потенциальную энергию Я,
складывающуюся из потенциальной энергии якоря П1 в поле сил тяжести и
потенциальной энергии Пи деформированной пружины:
Я = Пг + Л„. G)
Потенциальная энергия П{ с принятой выше точностью
Пх= -G A/2)sin <p~ -GA/2) <р. (8)
Потенциальная энергия Пи определяется выражением
Я„ = сх (Хо + \J/2 - ClX20/2, (9)
где Хо — деформация пружины в положении покоя; Хф — дополнительная
деформация пружины, вызванная поворотом якоря на угол ф.
Из (9) следует, что для обеспечения принятой погрешности в
вычислении потенциальной энергии достаточно \ подсчитать с точностью до
величин второго порядка малости относительно ф.
Вычисление \ удобно произвести следующим образрм. Придадим
отрезкам ОА, ЛВ и BE ориентацию, показанную на рис. 244. Тогда
ОА + АВ + BE = const. A0)
Спроецируем A0) на оси х и у, выбранные так, чтобы одна из осей
была параллельна оси пружины в положении покоя:
Ъ + d = d cos ф + /sin ф + (b - Хф) cos v|/;
/ = —d sin ф + /cos ф + (b — А,ф) sin ф, l
где \|/ - угол поворота оси пружины (рис. 244).
Разложим A1) в ряд по степеням малых величин ф, \ и \|/ и удержим
слагаемые до второго порядка малости включительно:
Ь + d = d(\ - ф2/2) + /ф + Ь - \ - bv|/2/2, A2)
/= -Жр +/A - Ф2/2) + (Ь - К) ф. A3)
Перепишем эти уравнения так, чтобы слагаемые, содержащие первые
порядки малости относительно искомых величин Х^ и v|/, находились в
левых частях равенств:
2 + ^ф1|/. A5)
Выражение A4) содержит квадрат угла \|/, поэтому для сохранения
принятой точности вычисления А,ф нужно угол подсчитывать с точностью до
величин первого порядка малости относительно ф. Для этого отбросим
в A5) величины второго порядка малости:
Ь\|/ = ^ф или v|/ = (d/b) ф.
Следовательно,
K=f<$>- d(ф2/2)A + d/b) =/Ф - еФ2/2, A6)
где e = d(l + d/b).
341
Подставим A6) в (9). С точностью до величин второго порядка малости
относительно ср функция (9) принимает вид
Ли = Gа) с, (/2 - М Ф2 + сАо/Ф- A7)
Складывая (8) и A7) в соответствии с G), получим
П = - G A/2) ф + 72ci (/2 - М Ф2 + Л0/ф. A8)
Отсюда обобщенная сила
Йя--^- G//2 - сх (/2 - М Ф - ^ до/ A9)
Подставив выражения <2М, <2я, <2Ф и Qn из C), D), F) и A9) в B), получаем
еф = D//62, + 2О12ф30 - РФ - т/С/2 + G//2 - сг (f2 - Хое) ф - сАо/,
или
б9 = - сф - рср - m$J2 - Ciд0/ + G//2 + D(/8§, B0)
где
с = Cl (/2
Условие относительного покоя (равновесия) механической системы при
= 0, ф = 0и? = 0 имеет вид
Отсюда
G^-cAo/+i>^o = 0. B1)
Таким образом,
е?=-сф-Рф-(т//2)? B2)
Вычисление кинетической энергии. Так как в
относительном движении якорь совершает вращение вокруг оси, проходящей через
точку О, то его кинетическую энергию вычисляют по формуле
где Jo = rnl2/3 — момент инерции якоря относительно оси вращения, т. е.
Г=(ш/2/3)(Ф72) = аф2/2, B3)
где а = т12/Ъ — коэффициент инерции системы.
Дифференциальное уравнение вынужденных колебаний якоря получим,
подставив B2) и B3) в A):
аф + рф + сф = - (ml/2) I',
или
Ф + 2иф + /с2ф = hp2 sin pt9 B4)
где In = р/а, h = ml^0/Ba); к = ]/c/a — циклическая частота свободных
колебаний.
Ш
Вынужденные колебания
системы описываются частным
решением неоднородного
дифференциального уравнения B4)
Ф = Ав sin (pt - б),
где Ав — амплитуда
вынужденных колебаний; е — сдвиг
фазы вынужденных колебаний
по отношению к фазе
возмущающей силы:
0,6
0,4
0,2
hp2
VW2-P2J
tgs =
« V
B5)
40 60 80 100 120 ПО 160 160 200 Р
р=к
Рис. 245
Функция Аь = Аъ (р) имеет максимум (см. аналогичную функцию в
предыдущем примере) при
p. = k2f\/k2 - In2
Этот максимум будет равен
{к2 > 2п2\
"max
B6)
При неограниченном увеличении р амплитуда вынужденных колебаний
Ав асимптотически стремится к Л.
При резонансе, когда к = р, имеем
B7)
На рис. 245 показан вид графика функции Ав = Ав (р) при различных п.
Сплошной линией вьщелен график Ав = Ав (р) для рассматриваемой задачи.
Вычисляем искомые параметры. Из условия известна амплитуда
относительного перемещения конца якоря при резонансе; следовательно, из B7)
можно определить циклическую частоту его свободных колебаний.
Учитывая, ЧТО А^3 = Мфрез И ^ = lh, ПОЛуЧИМ
Л B8)
к = 2Л9рап/Ь = ЪЛ
Для определения статической деформации пружины Хо и ее .коэф
циента жесткости сх выразим к0 из уравнения B1):
B9)
Тогда из
С-= i
Так как с
B0) находим
cj2 - с.Хое -
= ак2, то
сх = [ml2k
2Dl2/b
2/з + («
о = cj2
*lf)(<№
-(e/f)(Gl/2 +
+ Dl/bl) + 2DI
Dl/H) - 2D/2
2/83]//2.
/83.
C0)
343
Для вычисления ?0 воспользуемся тем, что задается амплитуда
относительного перемещения конца якоря А^ при высоких частотах
возмущения. При ру$> к имеем АЪ^Н — ^от1/Bа). Отсюда максимально
допустимая амплитуда вибрации корпуса устройства может быть найдена по
формуле
^о = 2ah/(ml) = 2aAJ(ml2) = 2/2A^ C1)
Подставляя в формулы B8) —C1) числовые значения входящих в них
величин, получаем: к = 60 с; сх = 2654 Н/м; Хо = 0,00125 м = 1,25 мм;
^0 = 0,00133 м= 1,33 мм.
Подсчитаем с помощью формулы B6) максимальную амплитуду
вынужденных колебаний конца якоря и частоту возмущающей силы, при
которой этот максимум наступает:
= к2/\/к2 -9$2/Bm2l4) =
-=0,0041 м.
Видно, что Лтах практически не отличается от Л
рез-
Задание Д.26. Исследование вынужденных колебаний
механической системы с двумя степенями свободы
Механическая система с двумя степенями свободы находится под
действием силового гармонического возмущения в виде силы Р = Ро cos P*
или момента М = Мо cos pt. Пренебрегая сопротивлением, исследовать
вынужденные колебания системы.
Схемы механических систем в положении покоя показаны на рис. 232 —
234. Необходимые сведения об инерционных и упругих свойствах системы,
а также ее размеры приведены в табл. 61. Массами пружин и скручиваемых
валов пренебречь.
В табл. 64 указано, к какому из тел системы приложена
возмущающая сила Р или пара сил с моментом Й. Линия действия силы Р во всех
случаях проходит через центр тяжести тела, к которому она приложена.
Таблица 64
Номер
варианта
(рис.
232-234)
1
2
3
4
5
6
7
8
Вид
возмущения
М
М
Р
М
м
р
р
р
Номер тела,
к которому
приложено
возмущение
1
3
1
2
1
1
1
1
Линия
действия силы Р
—
Вертикальна
Горизонтальна
»
»
Линейное
смещение
пои Р = Рл м
lipjTl Л — Л Q, IV!
—
0,002
—
0,001
0,002
0,001
Угловое
смещение
при М = М0,
рад
0,01
0,01
—
0,005
0,02
—
—
344
Продолжение табл. 64
Номер
варианта
(рис.
232-234)
9
10
11
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Вид
возмущения
М
м
р
р
г
р
р
м
м
м
р
м
р
м
м
р
м
р
м
р
р
р
м
Номер тела,
к которому
приложено
возмущение
1
1
1
1
3
2
1
1
2
2
1
2
1
2
2
1
Линия действия
силы Р
Вертикальна
Горизонтальна
Вертикальна
—
—
__
Горизонтальна
—
Вертикальна
—
Горизонтальна
—
Вертикальна
—
Горизонтальна
»
»
Линейное
смещение
при
р==ро>м
_
—
0,001
0,002
0,003
0,001
—
—
0,002
—
0,001
—
—
0,003
—
0,005
—
0,004
0,003
0,002
Угловое
смещение
при
Д/= Мо, рад
0,005
0,01
—
—
0,01
0,02
0,005
0,005
_
0,01
0,005
—
0,01
—
0,02
—
—
0,005
В процессе колебаний линия действия силы остается либо вертикальной,
либо горизонтальной.
Пара сил с моментом А/ расположена в плоскости колебаний тела,
к которому она приложена. Во всех вариантах положительное направление
силы Р и момента Л?, изменяющихся по гармоническому закону, можно
выбирать произвольно.
В табл. 64 задано линейное или угловое смещение от положения покоя
для тела, к которому приложено силовое возмущение при условии
воздействия постоянной силы Р = Ро или момента М = Мо (случай нулевой
частоты изменения возмущения силы или момента). Для систем,
находящихся под действием силы, смещение задается вдоль линии ее действия,
а для систем, находящихся под действием пары сил, задается угловое
смещение в плоскости действия этой пары сил.
Пример выполнения задания. Пренебрегая сопротивлением, исследовать
вынужденные колебания системы с двумя степенями свободы,
изображенной в положении покоя (рис. 246). Колебания происходят под действием
пары сил, приложенной к стержню DE и расположенной в плоскости
чертежа. Момент возмущающей пары изменяется по закону
М = Мо cos pL
Дано: массы элементов системы тх =0,5 кг, т2 == 3 кг, коэффициенты
345
жесткости пружин (Н/см): сх = 60, с2 = 40, с3 = 40; линейные размеры (см):
h = 20, /2 = 60, /3 = 30. Угол поворота стержня DE под действием пары сил
с постоянным моментом М = Мо равен ф0 = 0,01 рад.
Решение. За обобщенные координаты примем: z - вертикальное
смещение груза от положения покоя и ф - угол поворота рычага DE от
положения покоя.
На рис. 246 пунктиром показано положение системы при положительных
обобщенных координатах.
Уравнения Лагранжа для рассматриваемой системы имеют вид
A (JlL\ -11= „°Е^+0 . ±_ (Л1\ _ Л1_ _ _ 8П
где Q2 и Q9 - обобщенные возмущающие силы.
Выражения для кинетической и потенциальной энергии получены в
примере к заданию Д.24, где исследовались свободные колебания
рассматриваемой системы:
B)
где ои и су - коэффициенты инерции и жесткости системы, равные:
at t = mt = 0,5 кг, а12 = 0, а22 = Jo = 0,28 кг ¦ м2; сп = с3 = 4000 Н/м,
^и = c2i = съ1ъ =J200 Н; с22 = Clll + c2/i + с3/| = 2040 Н • м.
Частоты свободных колебаний и соответствующие коэффициенты
распределения, получены в примере к заданию Д.24:
к, = 66,4 с; iii = -1,49 рад/м; к2 = 104 с; ц2 = 1,2 рад/м.
Определим обобщенные силы ?>г и бФ, связанные с действием
возмущающего момента:
Qz ~ 8ЛМг/Eг); 2ф = 5ЛМф/Fф), D)
где 8ЛМ, - элементарная работа возмущающего момента на перемещении
системы, вызванном элементарным приращением обобщенной координаты
z при ф = const; 8ЛЛ/Ф - элементарная работа возмущающего момента на
перемещении системы, вызванном элементарным приращением обобщенной
координаты ф при z = const;
M^MjCQSpt Ч А
ф р ;
8ф - элементарные прира-
щения обобщенных координат.
Если принять направление
зозмущающего момента при
t — 0 положительным и
считать, что оно совпадает с
направлением отсчета
положительных значений угла ф, то
из соотношений D)
получаем
Мо cos pt.
Рис. 246
346
Следовательно, дифференциальные уравнения A), описывающие
вынужденные колебания системы в обобщенных координатах z и ср, имеют
вид
fliif' + ctlz + с12ф = 0; а22ф + c21z + с22ф = M0cospf. E)
Частное решение системы дифференциальных уравнений' E),
определяющее вынужденные колебания, находим в виде
z = Az cos pt, ф = A^cos pt.
Подставляя эти выражения в дифференциальные уравнения E),
получаем
(си - Дцр2) Лх + с12Лф = 0; с21А2 + {с22 - а22р2) Лф = М0.
Из этой системы двух алгебраических уравнений относительно Az и
находим:
Ах = Af ocia/[(cn - flnp2) (с22 - а22р2) - с\г\ F)
ф = М0(сп - Лцр2)/[(сц - ацр2)(с22 - «22Р2) - с?2)]. G)
Амплитуды вынужденных колебаний равны абсолютным значениям А2 и
Аг Воспользуемся формулой G) для определения амплитуды Мо
возмущающего момента. По условию задачи при р = 0 угол поворота стержня DE
равен ф0; следовательно, при р = 0
ЛФо = Фо = M0c11/(clic22 - с\2\
откуда Мо = Фо {с22 - С12/сц) = 16,8 Н • м.
Перемещение груза под действием постоянного момента М = Мо,
приложенного к стержню DE, можно найти из соотношения F) при
р = 0:
Аго = *о = -МоС^Дсц^г - с?2); Ах0 = -0,003 м.
Так как знаменатель в формулах F) и G) является квадратным
многочленом относительно р2, а корнями этого многочлена являются квадраты
частот свободных колебаний системы к\ и к2, то формулы F) и G) можно
представить в виде
М0с12144000
«11*22 (Р2 - kl) (р2 - к\) (р2 - 4414) (р2 - 10870) '
Мр (с, х - аг У) к. 120 D000 - 0,5р2)
(р2 - к{)(р2 - /cf) (р2Л - 4414) (р2 - 10870) *
А=
Ф ~
Формулы F), G) или (8), (9) позволяют проследить за зависимостью
Аг и Лф от частоты р и построить соответствующие графики (рис. 247У а„ б).
Рассмотрим поведение Аг и Лф для трех интервалов изменения
циклической частоты возмущающего момента:
0 < р < kt9 кх < р < к2 и к2 < р < ост.
1. 0 < р < кг. Так как кг < к2, то р2 - к\ < Q и р2 - к\ < 0-; следовйг-
142
-0,02
-0,03
10 20 30 4-0 50 6O\7O 80 ]/90 100
щг р
110 120 130
Рис. 247
тельно, знаменатель формул (8) и (9) положителен. Из этого вытекает, что
в первом интервале Az < 0 и Аф > 0. С ростом величины р амплитуды
колебаний стержня и груза возрастают, при этом колебания стержня
происходят в одной фазе с изменением возмущающего момента, а колебания
груза — в противофазе (рис. 248, а).
При р = 0 имеем А9 = (р0 = 0,01 рад и Az = z0 = -0,03 м.
При р = /v'i = 66,4 с в системе наступает первый резонанс и функции
Az и Лф претерпевают бесконечный разрыв (см. рис. 247).
2. кх < р < к2. Так как к1 < к2, то р2 — к\ > 0, а р2 — к\< 0.
Следовательно, знаменатель формул (8) и (9) отрицателен. Из этого следует, что
во втором интервале Az > 0, т. е. колебания груза происходят синфазно с
изменением возмущающего момента (рис. 248, б, в).
При определении знака функции Лф необходимо рассмотреть числитель
формулы (9). Если ki < р < уСц/ац, то Лф < 0 и колебания стержня про-
исходят в противофазе с возмущающим моментом (рис. 248, б). Если
усц/ац <р<къ то Лф>0 и колебания стержня, так же как и груза,
синфазны с изменением М (рис. 248, в).
348
kt<P<
Рис. 248
При р = 1/сц/ац = у4000/05 == 89,4 с первая парциальная частота
(частота собственных колебаний системы, изображенной на рис. 249, а)
амплитуды вынужденных колебаний стержня равна нулю (А^ = 0 — случай
антирезонанса). В этом случае груз массой шх может рассматриваться
как гаситель колебаний стержня. Величину Az в этом режиме проще
определить по формуле F): Az — M0/c12; Az = 0,014 м.
Амплитуда колебаний стержня | Az | убывает до нуля при возрастании
р от kt до j/сц/аи, а затем с увеличением р от ]/сц/ац до к2 возрас-
тает. При р = Усгг1а1г = 2040/0,28 = 85,4 с" *, т. е. при второй парциальной
частоте (частоте собственных колебаний системы, изображенной на
рис. 249,6), амплитуды вынужденных колебаний Az и А^9 определяемые
по формулам F) и G) равны:
Аг = M0/cl2;Az = 0,014м; Лф = -М0{сц - ахiC22/a2гЦс\г\
Лф= -0,00414 м.
При изменении р в интервале от кх до к2 функция А2 для амплитуды
вынужденных колебаний груза имеет минимум, соответствующий
максимуму знаменателя формул F) и G). Взяв от этого выражения
производную по р и приравняв ее нулю, получим
2 а22сп) = 0,
349
а)
б)
0
h
¦
'/////у/
Рис. 249
откуда найдем значение р, при котором А2 достигает минимума:
Р = l/°'5'(c22/a22 + CnAiii) = 87,4 с.
A0)
При р = к2 = 104 с 1 в системе наступает второй резонанс.
3. к2 < р < оо. Так как к± <къ то р2 — к\ > 0 и р2 - к\ > 0;
следовательно знаменатель формул (8) и (9) положителен. Учитывая, что к2 >
> J/Сц/ац, можно заключить, что в этом интервале и А2 < 0 и Лф < 0,
т. е. колебания происходят в противофазе с возмущающим моментом (см.
рис. 248, г). С возрастанием р амплитуды вынужденных колебаний | Л2 \ и
| Лф | уменьшаются, стремясь к нулю.
Отношение функций .А^ и AZ9 определяющих амплитуды вынужденных
колебаний, получим, разделив (9) и (8):
AJAZ = - (сп - ацр2У/с12 - - D000 - 0,5р2)/1200. (И)
При р = 0 AJAX='-Ciifcl2; AJAZ = -3.33 рад/м. При р = кг = 66,4 с"*1
Ач/Az = Hi = - 1,49 рад/м. При р = j/сц/ац = 89,4 с" AJAZ = 0. При р =
= к2 = 104 с; Л^Л, = |i2 = 1,2 рад/м.
График зависимости AJA2 от частоты возмущения р показан на
рис. 250. При резонансах формы вынужденных и свободных колебаний
совпадают (см. рис. 247).
Дтш иссяедования резонансных колебании (р = ki ир- к2) оауще-отгвим
переход К1главным координатам системы: г\г и г[2. Они связаны с
координатами z и ф соотношениями
z = tii + л*; ф = Hini + Ц2П2. A2)
Дифференциальные^уравнения колебаний механической системы с двумя
степенями свободы в главных координатах % и т\2 при обобщенных
возмущающих силах QA = Яц sin (pt + 6); Q2 = H:2.sin (pt tf §), соответствующих
обобщенным координатам qi и /?2, имеют вид
inipt 4-5), .A3)
где
a2 =
H-
A4)
- коэф-
фициенты распределения обобщент
ных координат qx и q2 при свобод- J
ных колебаниях.
В данном случае Нх = 0; Н2 =
= Мы 8'= я/2.
Поэтому, дифференциальные
уравнения A3) принимают вид
sin [pt + —
sin
а2
1.
-;
-i
-J>
A<p (!p0t
AZ\M
20,
-
9
/>«
60
Mi
У
/
| 80У100 120 (t.
Рис. 250
При рг = /ex (цервый(резонанс),частный интеграл.первого
дифференциального уравнения системы A5) имеет вид*
Частный интеграл второго дифференциального уравнения
Л2 = /у 2 —2ч 81ш'к^Г-^ *тг )•
Переходя, К' обобщенным? координатам, 2L и< (%л по< фррмуугам (J2) полу^-
чаем
Ф =
¦
sin
(*6)i
2, cosrkxt:
1)}
При р, = к2 (второй резонанс), частные интегралы дифференциальных
уравнений A5) имеют вид
Л1 =
откуда обобщенные координаты z иф!
Ф
-г- ; Л2.=
t sin
2/с'2а2 ^
A7»
Параметры^, входящие: в, уравнения A6), и A7), имеют следующие:
числовые, значения: М'О — 16^8 Н-м;, \^\{= —-1;49,' рад/м; ц.2 =т1Д рад/мй,
Согласно.» A4) ai,= 1ДЗ кгт;,а23= О^кп
Подставляя эти значения в формулы (J6) и Ц7), получаем уравненшь
вынужденных колебаний при первом и втором резонансах.
Первый резонанс: р = кг = 66,4 с *; z = — 0,168 t sin 66,41 -f
+ 0,0035 cos 66,41; ф = 0,252? sin 66,4 f + 0,0042 cos 66,41.
Второй резонанс: р = k2 = 104 c; z = 0,108 f sin 104 г + 0,0035 cos 1041;
Ф = 1,301 sin 104 f - 0,0052 cos 1041.
Полученные результаты позволяют оценить колебания, происходящие
в системе при резонансе в том случае, когда силы сопротивления
незначительны, а резонансные режимы кратковременны.
V. ПРИМЕНЕНИЕ ЭВМ
К РЕШЕНИЮ ЗАДАЧ
ДИНАМИКИ
Задание Д.27. Интегрирование дифференциального уравнения
свободных колебаний механической системы
с помощью ЭВМ
Механическая система с одной степенью свободы (рис. 251-253) может
совершать колебания относительно положения равновесия. В начальный
момент (t = 0) система выведена из положения равновесия и скорости всех
ее точек равны нулю. Предоставленная далее самой себе система
колеблется, находясь под действием только консервативных сил.
В схемах вариантов 8 и 20 применены пружины, сила упругости
которых связана с деформацией X соотношением Р (X) = сХ + oik3. В остальных
схемах использованы пружины, для которых зависимость силы упругости Р
от деформации X — линейная, т. е. Р = сХ. В вариантах 3, 4, 7, 9-11, 21, 22
пружины имеют деформацию/в положении покоя (предварительный натяг).
В схемах вариантов 12-17, 23-28 пружины установлены с зазором 5.
В задании требуется:
1. Составить Дифференциальное уравнение, описывающее движение
системы (свободные колебания системы).
2. Численным интегрированием на ЭВМ найти решение
дифференциального уравнения при заданных начальных условиях.
3. По результатам численного интегрирования определить циклическую
частоту к и период Т колебаний.
Схемы механических систем приведены на рис. 251-253 в положении
покоя. На каждой схеме указана координата, которую нужно принять в
качестве обобщенной. Необходимые для расчета данные приведены в табл. 65.
Здесь ml9 m2 — массы тел системы; i - радиус инерции тела, участвующего
во вращательном движении относительно центральной оси; сь с2 -
коэффициенты жесткости для линейных пружин; сх и а — коэффициенты для
определения зависимости силы упругости от деформации для нелинейных
пружин, / — деформация пружины в положении покоя (в примечании
указано, сжата пружина или растянута); q0 - начальное значение
обобщенной координаты, s — величина зазора, d — расстояние от оси вращения
до центра тяжести тела. Качение тел во всех случаях происходит без
проскальзывания. Тела, для которых радиус инерции не указан, считать
сплошными цилиндрами.
352
21
yyyyyyyyyyyyj
ц.т.
<УУУУУУУУ/У>
'УУУУУУУУУУУУ.
¦С, 2
У
О, 9
У//////У//'/УУ// Г^"Ч '%%//////////'
С; [Ь уП С, |
/?УУУУ/.у^*^ О
УУУУУУУУУУУУУУУУ/УУУУУУУУУ,
ПГ2 ОТ2
'ШК
gwz/ щ&
~-2
10
УУУУУУУУУУУУ/УУУУУУУУУУУУУ/
Рис. 251
11
12
////////////////777////////,
13
@1 <2Z22
\^y////j
75
16
11
18
'///////,
19
20
сЛ
НО"
V/,
Рис. 252
21
22
4
25
26
s
с, i
УУ////9
' /
f'/////////y//\
AVMZhWV
Ц/У/////////////1г
7777777,
wm
I
/' ^1
27
-
—|VVV^
с
4C> ¦
^./77.
29
JO
777777777)
г
пМ ¦ i i |щ;шш?I
Pwc. 25J
Таблица 65
Номер
варианта
(рис.
251-253)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
mlf кг
15
25
10
15
30
20
30
7
14
10
12
25
20
12
т2, кг
0,25
0,22
15
10
-
15
20
12
5
16
8
5
10
—
/, м
—
-
-
-
-
-
0,2
-
-
-
-
—
Н/см
—
-
5
7
-
-
8
3
14
20
15
5
12
15
Н/см
—
•
-
-
-
-
-
-
-
-
10
8
10
а, ,
Н/см
—
-
-
-
-
0,02
-
-
-
-
-
—
-
0,05
0,08
-
-
0,05
0
0,15
0,1
0,08
0
-
—
Р,град
-
60
-
30
45
-
-
-
30
30
-
/
d
Ь
R
м
0,2
0,1
-
-
-
-
-
-
-
-
-
0,8
__
-
-
-
-
-
-
0,4
0,39
-
_
-
0,2
-
-
-
-
-
0,5
-
0,2
0,25
-
0,2
-
0,3
-
-
0,15
—¦
град
0,122
0,07
0,1
0,12
1,2
0,2
0,35
0,08
0,2
0,1
0,14
0,2
1,0
0,122
5, М
—
-
-
-
-
-
-
—
_
-
0,1
0,06
0,03
Примечание
sinq *q
Массой диска пренебречь
При q = 0 пружина сжата
Пружины сжаты при q = 0
Массой роликов пренебречь
Пружина растянута при q = 0
Параметры пружин
одинаковы
Пружины сжаты при q = 0
Массой ролика пренебречь
Пружина сжата при q = 0
Массой роликов пренебречь
Пружина сжата при q = 0
sin q « q
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
15
10
16
12
20
30
12
10
25
30
12
16
18
8
20
25
_
10
0,24
20
30
-
10
14
—
10
20
__
18
18
10
10
_
0,25
0,35
-
-
_
0,43
0,3
0,3
-
-
0,4
-
—
-
23
5
21
-
3
10
15
25
20
22
20
5
26
6
7
23
_
2
-
-
-
—
-
-
-
—
-
—
-
_
-
-
-
0,1
—
—
-
-
-
-
-
—
-
_
-
-
-
-
0
0,2
0,1
—
-
-
-
-
0
-
_
-
-
-
-
—
-
-
-
-
—
-
—
30
0,7
0,6
-
0,6
0,8
-
—
-
—
-
-
0,4
0,5
0,5
0,4
-
_
—
0,35
-
-
0,48
—
-
-
0,35
0,1
—
-
_
0,4
-
-
-
0,6
0,3
_
-
-
-
0,3
—
-
_
-
0,3
0,25
0,3
0,35
0,2
0,4
0,35
0,4
0,3
0,3
—
0,15
0,1
0,11
0,04
0,5
0,35
0,5
0,3
0,14
0,6
0,75
0,5
0,13
0,15
0,10
0,4
0,15
0,02
0,02
0,01
-
-
-
—
0,08
0,06
0,07
0,016
0,03
0,015
—
-
sin q « q
й
sinqvq — —
6
Пружины одинаковы. AB и
ВС - нити
Пружина растянута при q = 0
Пружина растянута при
q = 0, sin q л q
Механизм расположен в
горизонтальной плоскости, sin q&
Примечание. В вариантах 7, 21 и 22 выражение для обобщенной силы разложить в ряд Маклорена и удержать члены
не выше третьего порядка малости относительно обобщенной координаты. В вариантах 1 и 2 принять, что колебания «перевалки»
вокруг опорных ребер происходят без потери энергии.
Пример выполнения задания. Механическая система представлена на
рис. 254, а. При поступательном движении тела / в направляющих диск
2 катится без проскальзывания по горизонтальной поверхности. Система
удерживается в положении равновесия двумя пружинами, которые сжаты в
положении покоя на величину /. Силы упругости пружин передаются на
тело / через шайбы 3. Перемещение правой шайбы ограничено левым
упором, а левой — правым. Расстояние между упорами равно длине тела 1.
Поэтому при перемещении тела 1 от положения равновесия влево на него
действует сила упругости только от левой пружины (рис. 254, б), а при
перемещении вправо от положения равновесия - только правой. Сила
упругости Р каждой пружины связана с ее деформацией X зависимостью
Р (X) = сХ + а?.3 (рис. 255, а). Зависимость силы Р (х), действующей на тело
1 со стороны пружин, представлена на рис. 255, б, где Ро - значение силы
упругости в положении покоя, ах — смещение тела 1 по горизонтали.
При решении задачи не учитывать массы шайб 3 и силы сопротивления
движению.
Решить задачу при следующих данных: «^ = 20 кг, пи = 40 кг;
с = Ю Н/см, ос = 0,03 Н/см3, R = 0,3 м, г0 = 0, q0 = 0,5 рад; q0 = 0;
/ = 0,1 м.
Решение. Для получения дифференциального уравнения движения
системы воспользуемся уравнением Лагранжа // рода для консервативных
систем:
^V —=-— m
dq) dq dq ' V '
где Т и П — кинетическая и потенциальная энергии системы. В
качестве обобщенной координаты q примем угол поворота (р диска 2
(q = ф).
Кинетическая энергия системы
v2c Jc34>2
dt
Учитывая уравнения связей
х = 2Rq
B)
г ^2R -
и выражение для момента инерции 3Съ — —-— однородного диска 2 от-
3 4
Рис. 254
358
Рис. 255
носительно центральной оси, получаем выражение для кинетической
энергии: ,
т- ^1
2 '
C)
где
а = Dт,. + 1,5т2) Д2; а = 12,6 кг • м2.
Потенциальная энергия системы определяется как работа сил
упругости гга перемещении из отклоненного положения в нулевое (положение
покоя):
о
П (х) = JР(х) dx = J(- Р(х)) dx.
л- О
D)
Зависимость Р (х) (рис. 255, б) определяется выражением
'-р0 - м - ь2*2 ^ а*3> * > °;
О, х = 0; E)
Ро - b{x -h Ь2х2 — ах3, х < 0,
где Ро =/(с 4- а/2); bt — с 4- За/2; Ь2 = Згх/. Это выражение можно
представить более компактной записью, если использовать функцию -j—-,
которая принимает значение +1 при х > 0 и -1 при х < 0. Условимся, что
х
значение -—- при х = 0 равно нулю.
Зависимость Р(х) иринимает вид
Р (х) = - (Ро + Ъ2х2)
- b,x - ах3.
Подставляя F) в D), получаем выражение дая Я(х):
F)
G)
359
Выразим потенциальную энергию, как функцию от q, учитывая, что
(8)
В уравнение Лагранжа И рода следует подставить производную от
П по q.
Функция (8) имеет производную -j— = F (q) всюду, кроме точки q = О,
F (q) = BPQR
V
V)
р
(9)
При q = 0 функция F (#) должна быть принята равной нулю, ибо в этом
положении силы, действующие на тела системы, взаимно уравновешены.
Подставляя C) и (9) в уравнение A), получим нелинейное
дифференциальное уравнение движения системы:
a?+F(g) = 0. A0)
Вычислим коэффициенты выражения (9):
Ро = cf + а/3 = 103 • 0,1 + 0,3 • 105 • ОД3 = 130 Н;
2RP0 = 2 • 0,3 • 130 « 78 Н. м; bt = 1900 Н/м; 4R2bl = 684 Н ¦ м;
16аЯ4 = 16 • 0,3 • 105 • 0,34 = 3888 Н • м; 8Л3Ь2 = 1944 Н • м.
Функция F(q) имеет вид:
F (q) = G8 + 1944^2)
684^ + 3888^3.
A1)
Дифференциальное уравнение движения рассматриваемой системы
12,64* + G8 + 1944^2) т^у + 684^ + 3888^3 = 0. A2)
Для определения движения системы следует численно
проинтегрировать на ЭВМ уравнение A2) при начальных условиях:
при t = 0
q0 = 0,5 рад,
9
ОА
ол
0,1
о
,1
360
A3)
0,01 0,05 0,10 \ 0,15
Рис. 256
Результаты вычислений сведены
в табл. 66. На рис. 256 по
результатам вычислений представлена
зависимость ф = ср {t). Достаточно
, построить лишь ту часть графика,
0,20 t,c где ф изменяется от максимального
значения ф0 до нуля. Продолжение
графика можно построить из
соображений симметрии.
По графику легко определить четверть периода колебаний 0,25 Г: в
момент ?* = 0,25 Т значение ф обращается в ноль. Так как г* = 0,114 с, то
период колебаний составляет Т = 0,456 с, а циклическая частота к =
= 13,77 с.
Таблица 66
/, с
0,000
0,011
0,022
0,033
0,044
0,055
0,066
0,077
Ф@, рад
0,5000
0,4933
0,4737
0,4420
0,3999
0,3491
0,2913
0,2284
t, с
0,088
0,099
0,110
0,121
0,132
0,143
0,154
0,165
Ф@. Рад
0,1618
0,0927
0,0220
-0,0488
-0,1189
-0,1871
-0,2524
-0,3134
', с
0,176
0,187
0,198
0,209
0,220
0,231
0,242
0,253
Ф(')> рад
-0,3687
-0,4164
-0,4546
--0,4818
-0,4966
-0,4982
-0,4867
-0,4625
f, С
0,264
0,275
0,286
0,297
0,308
0,319
0,330
0,341
Ф(/), рад
-0,4268
-0,3814
-0,3279
-0,2682
-0,2038
-0,1363
-0,0667
+0,0042
ТАБЛИЦА ВАРИАНТОВ ЗАДАНИЙ,
ВХОДЯЩИХ В КУРСОВЫЕ РАБОТЫ
ш
и
ф
р
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
.
1
7
13
19
25
Номера
2
8
14
20
26
3
9
15
21
27
Варианты
23
20
17
14
11
8
5
2
19
16
13
10
7
15
30
27
24
21
18
15
12
9
6
3
1
29
28
23
20
14
11
8
5
2
25
22
19
10
13
10
7
4
30
27
24
21
18
29
12
9
6
3
1
29
26
23
20
17
14
11
8
5
2
19
16
13
10
7
19
2
20
28
22
5
8
11
14
17
20
23
26
13
1
3
9
6
12
18
15
21
24
27
30
4
7
10
13
22
25
28
2
5
задании
4
10
16
22
5
11
17
23
заданий
3
6
9
12
15
18
21
24
27
30
4
7
10
12
16
19
11
25
28
5
2
8
11
14
17
20
23
26
29
3
6
9
12
15
5
8
И
17
14
20
23
26
29
1
3
6
9
30
15
18
21
24
27
4
30
7
10
13
16
19
22
25
28
2
5
8
11
14
6
12
18
24
i
1
3
6
9
12
15
18
21
24
27
2
5
8
11
14
17
20
23
26
29
2
5
8
11
14
17
20
23
26
29
30
4
7
10
ш
и
ф
р
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
1
7
13
19
25
Номера
2
8
14
20
26
3
9
15
21
27
Варианты
19
16
13
10
7
4
30
27
24
21
18
15
12
9
6
3
1
29
26
23
20
17
28
25
22
18
16
13
10
7
4
30
27
24
4
30
27
24
21
18
15
12
9
6
3
1
29
26
23
20
17
14
11
8
5
2
19
16
13
10
4
30
27
24
21
18
15
12
8
11
14
17
20
23
20
29
1
3
6
9
12
15
18
21
24
27
30
4
7
10
13
19
16
15
5
8
11
14
17
20
23
26
заданий
4
10
16
22
5
11
17
23
заданш
18
21
24
27
30
4
7
10
13
16
19
22
25
28
5
8
11
14
17
20
23
26
29
6
9
12
15
18
21
24
27
30
4
17
24
21
28
1
29
3
6
9
12
15
18
21
24
27
30
4
7
10
13
16
19
22
25
28
2
5
11
8
14
17
20
23
26
6
12
18
24
\
13
16
19
22
25
28
30
4
7
10
12
16
19
22
25
28
1
30
6
9
12
15
18
21
24
27
17
3
16
9
12
15
18
21
Ш
И
Ф
Р
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
1
7
13
19
25
Номера
2
8
14
20
26
3
9
15
21
27
Варианты
21
18
15
12
9
6
3
1
29
26
9
20
17
14
11
8
5
2
25
21
7
19
30
27
24
21
18
15
12
9
6
26
9
6
3
1
29
26
23
20
17
14
11
8
5
2
19
16
13
10
7
4
27
24
21
18
15
12
9
6
3
1
29
28
29
1
7
6
9
12
15
18
21
24
27
30
4
7
10
13
16
19
2
5
8
11
19
17
20
23
26
29
1
3
6
16
заданий
4
10
16
22
5
И
17
23
заданий
7
10
13
16
19
22
25
28
2
5
8
11
14
17
20
23
26
29
1
9
12
15
18
21
24
27
30
4
7
10
13
1
1
29
18
6
8
15
12
11
19
20
23
3
18
8
16
7
6
9
22
25
28
2
5
8
11
14
17
9
23
26
19
2
6
12
18
24
i
24
27
2
5
18
И
14
17
20
23
26
29
2
5
8
11
14
17
20
23
26
29
30
4
7
10
13
16
22
25
28
16
ЛИТЕРАТУРА
Бабаков Я. М. Теория колебаний. М., 1965.
Бутепин Н. В. Введение в аналитическую механику, М., 1971
Бутении Н. В. Теория колебаний. М., 1963.
Бутенин Н. В., Лунц Я. Л., Меркни Д. Р. Курс теоретической механики, ч. I и II.
М., 1971 и последующие издания.
Воронков Я. Л/. Курс теоретической механики. М., 1954 и последующие
издания.
Гернет М. М. Курс теоретической механики. М., 1965 и последующие
издания.
Добронравов В. В., Никитин Я. Я. Курс теоретической механики. М., 1983.
Космодемьянский А. А. Курс теоретической механики. М., 1954.
Лойцянский Л. Г., Лурье А, Я. Курс теоретической механики, ч. I и II. М.,
1954 и последующие издания.
Николаи Е. Л. Теоретическая механика. М., 1952.
Пановко Я. Г., Губанова Я. Я. Устойчивость и колебания упругих систем, М.,
1964.
• Пановко Я. Г. Введение в теорию механических колебаний. М., 1971.
Пановко Я. Г. Введение в теорию механического удара. М., 1977.
Савип Г. П., Килъчевсккй Н. А., Путята Т. В, Курс теоретической механики.
Киев, 1963.
Старжинский В. М. Теоретическая механика. М., 1980.
Таре С. М. Курс теоретической механики. М., 1963 и последующие издания.
Яблонский А. А., Никифорова В. М. Курс теоретической механики, ч. I, M.,
1971 и последующие издания.
Яблонский- А. А. Курс теоретической механики, ч. II. М., 1971 и последующие
издания.
Яблонский А. А,, Норейко С. С Курс теории колебаний. М., 1966 и последующие
издания.
Сборники задач и руководства к решению задач
Айзенберг Т. Б., Воронков И.. М.„ Осецкий В, М. Руководство к решению
задач по теоретической механике. М., 1968.
Батъ М. И., Джанелидзе Г. Ю., Кельзон А. С. Теоретическая механика
в примерах и задачах, ч. I и II. М., 1961 и последующие издания.
Браоюшченко Н. А. и др. Сборник задач по теоретической механике. М., 1967 и
последующие издания.
Мещерский Я. В. Сборник задач по теоретической механике. М., 1971 и
последующие издания.
П.чттщкий Е. С, Турхан Н. М., Ханукаев Ю. Я., Яковенко Г. Н. Сборник
задач по аналитической механике. М., 1980.
Светлицкий В. А., Стасеико Я, В. Сборник задач по теории колебаний.
М., 1973 и последующие издания.
Сборник задач по теоретической механике/Под ред. проф. К. С. Колесникова
М., 1984.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Раздел первый
Статика твердого тела
I. Плоская система сил 5
Система произвольно расположенных сил 5
Задание С.1. Определение реакций опор твердого тела 5
Задание С.2. Определение реакций опор и сил в стержнях плоской
фермы 11
Задание С.З. Определение реакций опор составной конструкции
(система двух тел) 18
Задание С.4. Определение реакций опор составной конструкции (система
трех тел) 25
Задание С.5. Равновесие сил с учетом сцепления (трения покоя) ... 31
II. Система сил, не лежащих в одной плоскости 37
Задание С.6. Приведение системы сил к простейшему виду 37
Задание С.7. Определение реакций опор твердого тела 41
Центр тяжести 45
Задание С.8. Определение положения центра тяжести тела 45
III. Применение ЭВМ к решению задач статики 50
Задание С.9. Определение реакций опор составных конструкций с
внутренними односторонними связями 50
Раздел второй
Кинематика
I. Кинематика точки 60
Задание К.1. Определение скорости и ускорения точки по заданным
уравнениям ее движения - 60
364
Стр.
И. Кинематика твердого тела 63
Поступательное и вращательное движения твердого тела 63
Задание К.2. Определение скоростей и ускорений точек твердого тела
при поступательном и вращательном движениях 63
Плоское движение твердого тела 68
Задание К.З. Кинематический анализ плоского механизма 68
Задание К.4. Кинематический анализ многозвенного механизма .... 76
Сферическое движение твердого тела • 87
Задание К.5. Определение кинематических характеристик движения
твердого тела и его точек по уравнениям Эйлера 87
Задание К.6. Кинематический анализ движения твердого тела,
катящегося без скольжения по неподвижной поверхности и имеющего
неподвижную точку 91
III. Сложное движение 99
Сложное движение точки 99
Задание К.7. Определение абсолютной скорости и абсолютного
ускорения точки 99
Сложное движение твердого тела, сложение вращений вокруг
параллельных и пересекающихся осей 106
Задание К.8. Определение угловых скоростей звеньев планетарного
редуктора 106
IV. Применение ЭВМ к решению задач кинематики . ¦ . .v 115
Задание К.9. Определение угловых скоростей и угловых
ускорений звеньев механизма манипулятора по заданному движению рабочей
точки 115
Раздел третий
Динамика
I. Динамика материальной точки 124
Дифференциальные уравнения движения материальной точки .... 124
Задание Д.1. Интегрирование дифференциальных уравнений движения
материальной точки, находящейся под действием постоянных сил .... 124
Задание Д.2. Интегрирование дифференциальных уравнений движения
материальной точки, находящейся под действием переменных сил .... 130
Задание Д.З. Исследование колебательного движения материальной
точки 138
Задание Д.4. Исследование относительного движения материальной
точки 148
Основные теоремы динамики материальной точки 155
Задание Д.5. Применение теоремы об изменении количества движения
к определению скорости материальной точки • 155
Задание Д.6. Применение основных теорем динамики к исследованию
движения материальной точки 160
И. Динамика механической системы , , 166
3*5
Стр.
Основные теоремы динамики механической системы 166
Задание Д.7. Применение теоремы о движении центра масс к
исследованию движения механической системы ,. . 166
Задание Д*8. Применение теоремы об изменении количества движения
к исследованию движения механической системы . 175
Задание Д.9. Применение теоремы об изменении кинетического момен-
аса к определению угловой .скорости твердого тела ,. 183
Задание Д. 1.0. Дрименение .теоремы об .изменении лсин&тической энергии
-к изучению движения механической системы .•„.¦- ,. . 191
Дифференциальные уравнения движения твердого жела 202
Задание Д.11. Исследование лоступахельного ,и вращательного
движений твердого тела ..,,..,., 202
Задание Д. 12. Исследование плоского движения твердого тела . ... 211
Удар .218
Задание Д. 13. Исследование соударений твердых тел ......... 218
Ш. Аналитическая механика 237
Принцип возможных перемещений ^ 237
Задание Д. 14. Применение принципа возможных перемещений к
решению задач о равновесии сил, прилаженных к механической системе с одной
степенью свободы 237
Задание Д..15. Применение принципа возможных .перемещений к
определению реакций опор составной конструкции 245
Принцип Даламбера ...«.....,...., ,. .. . . 252
Задание Д.L6. Црименение принципа Даламбера к .определению реакций
связей ,. 252
Задание Д. 17. Определение реакций опор при вращении твердого тела
вокруг неподвижной оси 258
Задание Д. 18. Применение теорем и принципов динамики к
исследованию движения механической системы 266
Общее уравнение динамики 276
Задание Д. 19. Применение общего уравнения динамики к
исследованию движения механической системы с одной степенью свободы .... 276
Уравнения Лагранжа II рода 283
Задание Д.20. ^Применение уравнений Лагранжа II рода jc
определению сил и моментов,, .обеспечивающих программное движение
манипулятора 283
Задание JJ,21. Применение уравнений Лагранжа II рода к исследованию
движения механической системы с двумя .степенями .свободы ........ 292
Усзюйнивюгшь .состояния равновесия (локоя) >кошервахивной
механической системы 301
Задание Д22. Определение положений равновесия х(локоя»)
консервативней механической системы с одной степенью свободы и исследование их
устойчивости , • 301
IV» Колебания механической «системы ,. . . л 312
Задание Д23. Исследование свободных колебаний «механической системы
с одной степенью свободы ••••«•*...«.. - . 312
Задание Д24. Исследование свободных колебаний механической системы
с двумя степенями свободы .•....•. 3*20
Стр.
Задание Д.25. Исследование вынужденных колебаний механической
системы с одной степенью свободы s . 329
Задание Д.26. Исследование вынужденных колебаний механической
системы с двумя степенями свободы 344
V. Применение ЭВМ к решению задач динамики 352
Задание Д.27. Интегрирование дифференциального уравнения свободных
колебаний механической системы с помощью ЭВМ 352
Таблица вариантов заданий, входящих в курсовые работы 362
Литература * - 363
Александр Александрович Яблонский
| Сергей Сергеевич Норейко |
Саул Аронович Вольфсон
Наталья Васильевна Карпова и др.
СБОРНИК ЗАДАНИЙ ДЛЯ КУРСОВЫХ РАБОТ ПО ТЕОРЕТИЧЕСКОЙ
МЕХАНИКЕ
Зав. редакцией К. И. Аношина. Редактор М. А. Алексеева. Младший редактор
Н. М. Иванова. Художник В. Н. Хомяков. Художественный редактор
Т. А. Дурасова. Технический редактор Н. А. Битюкова.
Корректор Г. И. Кострикова
ИБ Х° 3978
Изд. № ОТ-410. Сдано в набор 31.07.84. Подписано в печать 25.04.85. Формат
60x90Vi6- Бум. тип. № 1. Гарнитура тайме. Печать высокая. Объем 23 усл. печ. л.
23 усл. кр.-отт. 21,58 уч.-изд. л. Тираж 255 000 экз. Зак. № 1526. Цена 90 коп.
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглшшая ул., д. 29/14
Ордена Октябрьской Революции, ордена Трудового Красного Знамени Ленинградское
производственно-техническое объединение «Печатный Двор» имени А. М. Горького Союз-
полиграфпрома при Государственном комитете СССР по делам издательств, полиграфии
и книжной торговли. 197136, Ленинград, П-136, Чкаловский пр., 15