/































































































































































































Автор: Павлов Г.М. Меркурьев Г.В.
Теги: электротехника управление предприятиями, организация производства, торговли и транспорта автоматика электроэнергетика энергосистемы
ISBN: 5-87472-196-7
Год: 2001



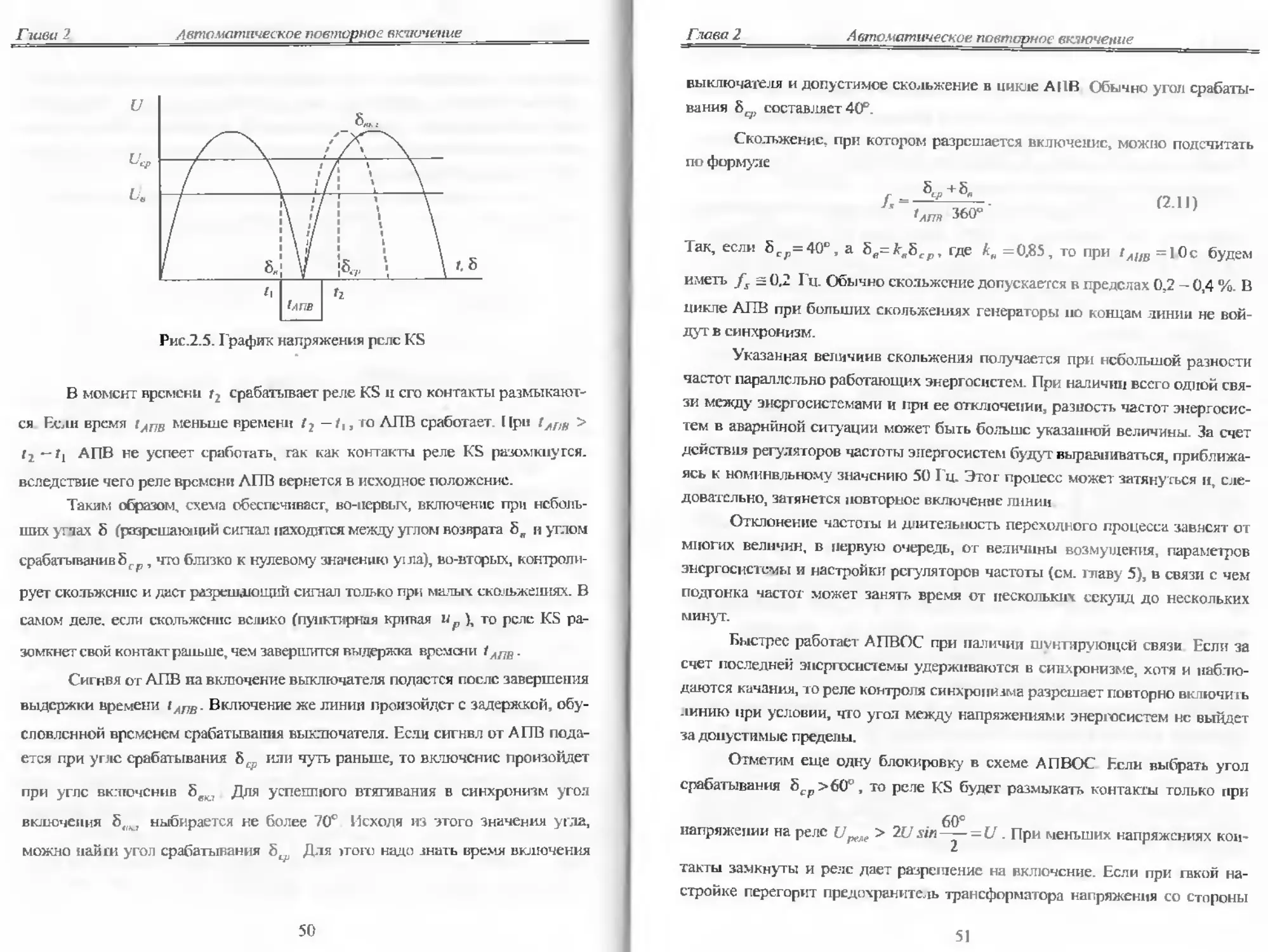
Текст
РАО «ЕЭС России»
Центр подготовки кадров
(СЗФ АО «1 ВЦ Энергетики»)
Г.М. Павлов, Г.В. Меркурьев
Автоматика энергосистем
С анкт-Петсрбу рг
2001
УДК 621.311:65.Oil.56
Павлов Г.М.. Меркурьев Г.В. «Автоматика итергосинем»: Издание Цен-
тра подготовки кадров РАО «ЕЭС России», Санкт-Петербург, 2001
Рассмотрены основные устройства автоматизации энергосистем, при-
ведены структурные схемы устройств автоматики. Большое внимание уделе-
но анализу аварийных режимов энергосистем, объясняющих принципы по-
строения и функционирования автоматики нормальных и аварийных режи-
мов
Книга предназначена для студентов электроэнергетических специаль-
ностей ВУЗов, слушателей институтов и учебных центров повышения ква-
лификации, инженерно-технических работников проектных и научно-
исследовательских организаций энергосистем и диспетчерских управлений.
Рецензент д.т.н., проф. Ванин В К.
Редактор Орлова Е.Г.
Утверждено Научно-методическим Советом Центра подготовки кадров
РАО «ЕЭС России» (СЗФ АО «ГВЦ Энергетики») 20 03 2001
© Павлов Г М., Меркурьев Г В 2001 г.
© Центр подготовки кадров,
(СЗФ АО «ГВЦ Энергетики»), 2001 г
Павлов Геннадий Михаилович -
доктор технических наук, профес-
сор Санкт-Петербургского госу-
дарственного технического уни-
верситета, заслуженный деятель
науки и техники РСФСР, <аспу-
женный работник ЕЭС России
Работает в области режимов
энергосистем, релейной защиты и
противоаварийной автоматики
Меркурьев 1 еннадпн Васильевич -
доктор технических наук, профессор,
директор Центра подготовки кадров
РАО «ЕЭС России» (СЗФ АО «ГВЦ
Энергетики»), член-корреспондент
Международной энергетической ака-
демии Работает в области оператив-
но-диспетчерского управления энер-
госистемами
Введение
ВВЕДЕНИЕ
Энергетические системы представляют собой сложные энергетические
комплексы, состоящие из десятков электростанции, сотен подстанций и де-
сятков тысяч километров электрических сетей различных классов напряже-
ний. Объединение энергосистем в объединенные энергетические системы,
являясь логическим завершением укрупнения энергетического хозяйства
страны, привело к созданию Единой энергетической системы России (ЕЭС
России) Управление таким огромным энергетическим комплексом представ-
ляет собой большие трудности.
Следует учитывать и такую особенность энергетических систем как
непрерывность выработки электрической энергии - в каждый момент време-
ни необходимо вырабатывать столько, сколько требует потребитель
Кроме количественною требования к продукции энергосистемы
предъявляют вестЖта высокие требования в отношении качества. Такие каче-
ственные показатели электроэнергии как частота и напряжение должны под-
держиваться строго на задвнном уровне Весьма существенно требование в
отношении надежности и бесперебойности электроснабжения, поскольку
имеются потребители, которые нс допускают даже кратковременного пере-
рыва в электрон» гании. Всем ним требованиям, а также требованию эконо-
мичности производства электроэнергии, немыслимо удовлетворить без ши-
рокого использования средств автомат ики в энергосис гемах
Условно автоматики делят на технологическую и системную К техно-
логической автоматике, в первую очередь, относят автоматику котла, турби-
ны и другого оборудования станции, т.е ту автоматику, которая непосредст-
венно участвует в контроле и управлении технологическим процессом гене-
рации электрической энергии на станции Под системной подразумеваю!
автоматику, которая контролирует и управляет общесистемными параметра-
ми, такими, например, как напряжение и частота К этой категории относят-
ся автоматическое повторное включение, автоматическая разгрузка энерго-
системы по частоте и другие виды автоматики, действие которых отражается
на работе не только линии или участка сети, где они установлены, но и на
всей энергосистеме в целом.
Отметим условность подобного деления, поскольку энергосистема
представляет собой единое целое и неполадки в любой ее части, например,
аварии на котле или турбине могут отразится на работе всей энергосистемы
Но принятое деление в какой-то степени помогает изучению предмета, по-
скольку в одном учебном курсе может изучаться только одна часть исключи-
ВвеОеиие
icjibHO обширного арсенала автоматики, применяемой на элек1рических
станциях, в сетях и во всей энергосистеме в целом
Настоящая книга посвящена системной автоматике. Традиционно, в
учебный курс с названием «Автоматизация энергетических систем» вклю-
чаются такие разделы как автомашческий ввод резерва (АВР), автоматиче-
ское повторное включение (АПВ), синхронизация генераторов, раулирова-
ине напряжения и частоты, частотная аварийная разгрузка энергосистем.
При изучении указанных разделов рассматриваются не только отдель-
ные схемы регуляторов и устройств, обеспечивающггх автоматизацию соответ-
ствующих операций, но и значительное внимание уделяется физическим про-
цессам, происходящим при выполнении тех или иных операций. Так, напри-
мер, при изучении разделов регулирования частоты и напряжения в первую
очередь рассматриваются вопросы необходимости регулирования этих вели-
чин, влияния отклонения частоты и напряжения от задвнного значения на ра-
боту как потребителей, так и самой энергосистемы. а также соответствующие
законы, по которым следует производить регулирование этих величин
Авторы стремились изложить материал с учетом требований широкого
круга читателей. Сначала излагаются основы самой проблемы, раскрывается
сущность явлений, происходящих при выполнении тех или иных операций
Этот материал излагается в доступной форме для инженеров, имеющих элек-
тротехническое образование.
В дальнейшем теоретический уровень подачи материала повышается,
приводится математическое описание процессов в нормальном и аварийном
режимах, изучение проводится на математических моделях объекта Такой
подход к изложению материала, от простого к сложному, будет полезен как
для начинающих инженеров, так и для гсх, кто имеет большой стаж работы в
этой области и заинтересован повысить свою квалификацию.
В учебном пособии приводятся упрощенные схемы автоматики, не пе-
регруженными второстепенными деталями и блокировками, имеющимися в
реальных установках Это облегчит принципиальное, общее ознакомление с
автоматикой Заинтересованный читатель ио всем этим вопросам может по-
лучить отает нз справочной .шгтературы.
При подготовке книги использовался преподавательский опыт авто-
ров Все замечания и пожелания просим направлять по адресу: 194223,
Санкт-Петербург, а/я 44
Автоматическое включение резервного питания и оборудования
ГЛАВА 1
Автоматическое включение резервною
|1И1анпя и оборудования
1.1. Назначение и облаегь применения АВР
Одним из основных требований потребителей электрической энергии
является требование надежности. Подключение потребителей к одному ис-
точнику питания через одиночную линию не обеспечивает высокой надежно-
сти электроснабжения. В случае выхода из строя генератора или линии элек-
троснабжение прекращается
Надежность питания может быть повышена как за счет повышения
надежности самих элементов схемы — генераторов, линий электропередачи,
выключателей и т.д, так и за счет резервирования, сущность которого заклю-
чается в том, что при выходе из строя какого-либо основного элемента схемы
сети в работу вводится резервный элемент.
Схемы резервирования показаны на рис. 1 1.
В схеме, представленной на рпс. 1 I, а, питание потребителей в нор-
мальном режиме осуществляется от генератора ГI через линию Л1, которая
является рабочей Линия Л2 является резервной — она находится под напря-
жением (выключатель ВЗ включен), но ток но ней не проходит (выключатель
В4 отключен). При выходе из строя рабочей линии питание потребителей
переводится на резервную. Дня этого поврежденная линия отключается, а
выключатель В4 резервной линии включается. Перерыв в питании оказывает-
ся вполне допустимым практически для всех потребителей.
В рассмотренной схеме резерв представлен в явном виде: в нормаль-
ном режиме резервная линия стоит под напряжением без нагрузки. На схеме
рис.1.1, б резервирование выполнено в неявном виде. Здесь обе линии явля-
ются рабочими. В нормальном режиме выключатель В5 отключен, и каждая
линия обеспсчияает питание потребителей, подключенных к соответствую-
щей секции.
Гvieti I Авгноматичес кое включение резервного питании и оборуооыния
Рис.1.1. Схемы резервирования линий
При коротком замыкании на одной из линий, например на Л1, послед-
няя отключается. После этого включается выключатель В5, установленный
на перемычке между секциями. В результате такого переключения потреби-
тели левой секции начнут получать питание по линии Л2 Для того, чтобы
оставшаяся в работе линия Л2 могла дополнительно обеспечивать пигание
потребителей и левой секции, она должна быть рассчитана на суммарную
нагрузку потребителей обеих секций. В нормальном режиме линия Л2 оказы-
вается недогруженой, тс. содержит в себе скрытый (неявный) резерв, кото-
рый может быть использован в аварийном режиме.
В обеих схемах потребители, питающиеся в нормальном режиме от
одного источника питания, в аварийном режиме подключаются к другому
источнику, который должен быть рассчитан на дополнительную нагрузку.
Так как в нормальном режиме оба источника несут определенную нагрузку,
то имеющийся у них резерв для покрытая дополнительной нагрузки является
скрытым.
На схеме рис. 1.1, в показана кольцевая схема питания потребителей на
подстанциях В, С, D и Е. В нормальном режиме питание осуществляется пи
разомкнутой схеме — выключатель В5 отключен. Потребители подстанций В и
С получают питание по линиям гевой части кольца. Электроснабжение под-
станций Е и D осуществляется по правой части кольца. Линия ЛЗ между под-
7
Автоматическое включение речерсп.^о питания и оборудования
станциями С и D находится под напряжением, но без нагрузки. В данном слу-
чае имеется явный резерв.
При к.з. в точке К1 на линии Л! релейная защита отключит поврежден-
ную линию выключателями В1 и В2. Сборные шины подстанций В и С оста-
нутся без напряжения Для восстановления их питания необходимо включить
выключатель В5 линии ЛЗ Такое переключение возможно, если линии ЛЗ, Л4,
Л5 имеют достаточную пропускную способность для питания этих потребите-
лей, т е имеют неявный резерв.
При явном резерве возникает вопрос: почему он не используется в
нормальном режиме? Ведь сооружение резервной линии или любого друюю
резервного элемента требует определенных затрат и, если затраты сделаны,
то желательно такой элемент эксплуатировать и в нормальном режиме. Па-
раллельное подключение резервного элемента, например, лниип, в нормаль-
ном режиме уменьшает потери энергии и падение напряжения в линиях, а
при выходе из строя рабочей линии резервная воспринимает на себя всю на-
грузку без перерыва. Эти претгмущества вполне очевидны и их следует име л,
в виду при выборе схемы питания потребителей. Однако параллельная работа
приводит и к иным условиям: увеличиваются токи короткого замыкания, а
следовательно, утяжеляется аппаратура, усложняется релейная защита
Как следствие указанных условий, сооружение питающих линий н
распределительных подстанций становится дороже. Расчеты показывают, что
в распредели тельных сетях 6-) 0 кВ целосообразно применять разомкнутые
схемы, а надежность электроснабжения повышать за счет введения имеюще-
гося резерва Замкнутые схемы рекомендуется применять только в случаях
питания особо ответственных потребителей большой мощности.
Эффективность введения резерва тем выше, чем меньше перерыв в
питании с момента отключения рабочего элемента до включения резервною.
Быстрое же включение резервного элемента возможно только с помощью
средств автоматики. Устройства, которые осуществляют такое включение,
называются устройствами автоматического включения резерва (АВР).
8
Г \-ва I Автоматическое включение релервп . опия и оборудования
1.2. Выбор параметра пуска схемы АВР
Схема автоматического включения резерва должна производить вклю-
чение резервного элемента при вполне определенных условиях. Правиль-
ность выбора пусковых параметров во многом определит успешность АВР и
простоту схемы
Рассмотрим схему, в которой рабочая линия Л1 резервируется линией
Л 2 (рис. 1.2j. Тогда, казалась бы, схема АВР должна приходить в действие
только при авариях на самой рабочей линии Однако при этом требуются
весьма избирательные пусковые органы, которые бы четко фиксировали ме-
сто аварии Наличие такого пускового орзана усложняет схему АВР
Рис 1.2. Схема для пояснения выбора параметра пуска АВР
Возможен другой подход в выборе пускового парамезра схемы АВР,
когда схема приходит в действие при аварии не только на самой рабочей ли-
нии, ио и при авариях в других точках сети Если же авария происходит вне
рабочей линии, схема блокируется, и переход па резервную линию нс проис-
ходит. Преимуществом такого подхода является простота пускового органа,
который может быть выполнен на базе реле напряжения. При исчезновении
Гтава I. Автоматическое включение резечатко питания и ооореооиания
напряжения на резервируемых шинах по любой причине, а также при умень-
шении напряжения до определенной величины, схема АВР запускается.
При коротком замыкании на отходящих линиях в точках К2. КЗ или К4
переходить на питание по резервной линии не имеет смысла. В этих случаях
неправильное действие схемы АВР, запускаемой по напряжению, может быть
устранено временной задержкой и правильным выбором уставки срабатыва-
ния пускового реле.
Особым случаем является короткое замыкание на шинах в точке К5. От-
строить защиту по напряжению или за счет выдержки времени от такого по-
вреждения нельзя. На начальном этапе применения АВР это служило основным
препятствием для использования простых пусковых органов по напряжению.
Опьгг эксплуатации показал, что не следует отстраивать действие АВР
от короткого замыкания на сборных шипах. Короткое замыкание на сборных
шинах в ряде случаев после снятия напряжения самоликвидируется. Переход с
рабочей линии на резервную сопровождается кратковременным отсутствием
напряжения ив шипах. Иногда это приводит к восстановлению нормального
питания, но уже с помощью резервной линии. При устойчивом коротком замы-
кании на сборных шинах резервная линия включается кратковременно После-
дующее ее отключение осуществляется действием релейной защиты.
В силу отмеченных преимуществ способ пуска схемы АВР но напря-
жению получил наибольшее распространение.
1.3. Сачозапуск дшп а гелей
Перевод питания с рабочей линии (трансформатора) па резервную ли-
нию (трансформа юр) сопровождается кратковременным перерывом питания
За это время частота вращения двигателей уменьшается Если перерыв про-
должителен, то двигатели останавливаются полностью При восстановлении
напряжения по резервной линии двигатели сноав запускаются и разворачи-
ваются до рабочей частоты вращения Этот процесс называют самозапуском
двигателей
Условия самозапуска двигателей значительно отличаются от условий
нормального пуска, что обусловлено одновременностью разворота всех дви-
гателей, которые переводятся па резервное питание.
10
Автоматическое включение резервного питания и оборудования
В момент пуска из сети потребляется ток в 4 — 5 и более раз выше но-
минального значения тока двигателя. Пусковой ток создает дополнительное
падение напряжения, например в трансформаторе, от которого питается дви-
гатель. Мощность двигателя, как правило, меньше мощности трансформато-
ра, поэтому дополнительное падение напряжения в трансформаторе состав-
ляет незначительную величину. Можно считать, что пуск одного двигателя
происходит при номинальном напряжении В таком случае асинхронный мо-
мент двигателя в 1,5 — 2,0 раза превосходит момент нагрузки и под действием
значительного избыточного момента АЛ/ — Мас — Мк происходит быстрый
разаорот двигателя (рис. 1.3).
Рис. 1.3. Характерист ики асинхронного (кривые 1,2) и тормозного
(кривая 3) мо.мепюв асинхронных двигателей
При одновременном запуске всех двигателей дополнительное падение
напряжения в трансформаторе может быть значительным. Действительно,
если предположить, что вся нагрузка на трансформаторе состоит только из
двигателей, пусковой ток может в 4 — 5 раз превосходить номинальный ток
трансформатора. Реактивный характер периодической составляющей пуско-
вого тока приводит к значительному уменьшению модуля напряжения
При пониженном напряжении асинхронный момент двигателя умень-
шается (кривая 2), пуск двигателя затягивается, а в особо тяжелых случаях
двигатели могут не запуститься.
Допустимое время запуска электродвигателей для электростанции со
средними параметрами пара составляет 30 — 35 с [б] и определяется условиями
нагрева двигателей. Для станций с блоками высокого давления пара допусти-
мое время самозапуска уменьшается до 10 — 15 с и определяется сохранением
Г-iciett 1 Автоматическое включение резервного питания и оборудования
технологического процесса котлоагрегата из-за прекращения подачи пита-
тельной воды. На атомных электростанциях, особенно оборудованных глав-
ными циркуляционными насосами с малыми вращающимися массами, допус-
тимое время самозапуска сокращается до 1 — 5 с. При большем времени само-
запуска возможно прекращение циркуляции теплоносителя через активную
зону реактора с последующим его отключением от аварийной защиты.
Такое резкое сокращение допустимого времени самозапуска на АЭС
заставляет снижать все возможные задержки в процессе восстановления ре-
зервного питания — применять быстродействующую релейную защиту', ос-
тавлять для самозапуска только ответственных потребителей, иметь запас по
мощности у резервного трансформатора и даже учитывать сопротивление
кабеля от резераного трансформатора до потребителя.
На рис. 1 4 показаны диаграммы изменения напряжения, тока и часто-
ты вращения двигателей при их переходе на резервное питание. После от-
ключения рабочей линии в момент времени tt напряжение на двигателях
становится равным нулю и начинается их торможение Длительность сниже-
ния частоты вращения зависит от момента сопротивления механизмов, при-
водимых в движение двигателями. В момент времени г2 включается резерв-
ная линия. На двигателях вновь появляется напряжение, и оии начинают раз-
ворачиваться.
Рис.1.4. Диаграмма тока, напряжения и частоты вращения
двигателя при действии АВР
Из рис. 1.4 видно, что, несмотря на уменьшение напряжения, вызванно-
го большими пусковыми токами, самозапуск происходит успешно. Если бы
включение резервного источника питания происходило раньше, когдв тор-
можение двигателей было еще небольшим, то очевидно, процесс самозапуска
прошел бы более легко, т.е пусковые токи были меньше, и следовательно.
12
Гюва I
Автоматическое включение резервное^ питания и оборудования
меньшим было бы и снижение напряжения. Отсюда следует, что с точки зре-
ния самозапуска двигателей переход на резервный источник питания должен
происходить как можно быстрее.
При быстром включении незаторможенных двигателей включение мо-
жет быть несинхронным, тк. у отключенных, но вращающихся двигателей
имеется остаточное напряжение. Последующее включение таких двигателей
может привести к токам, превышающим пусковые, обусловленные только
напряжением источника питания.
Опыт эксплуатации устройств АВР показал, что несинхронные включения
двигателей не представляют серьезной опасности Несмотря на стремление как
можно быстрее включить резервный источник питания, восстановление напря-
жения происходит с некоторой задержкой из-за времени срабатывания элементов
автоматики и выключателя. Этой задержки достаточно, чтобы напряжение па
заторможенных двигателях снизилось до безопасной величины.
Вследствие большого снижения напряжения в момент перехода на ре-
зервное питание двигатели могут не запуститься В таких случаях часть дви-
гателей должна быть отключена для запуска оставшихся двигателей наиболее
ответственных потребителей. Их число должно быть рассчитано. Расчет са-
мозапуска следует проводить с учетом моменшых характеристик двигателей,
моментов сопротивления и мощности источника питания.
В большинстве случаев такие расчеты проводить необязательно. Об ус-
пешности самозапуска можно судить по ориентировочному расчету, в котором
определяется лишь остаточное напряжение на выводах двигателей в момент
самозапуска. Считается, что для успешного самозапуска напряжение должно
составлять не менее 0В этом случае вращающий момент двигателей не
снижается больше, чем на 50 % от номинального значения
Успешный самозапуск возможен при более низком остаточном напря-
жении, однако разворот двигателей при этом загягиваегся. Длительное про-
текание пусковых гиков приводит к перегреву как самих двигателей, так и
питающих элементов, поэтому затягивание самозапуска нежелательно.
Величина остаточного напряжения, а следовательно, и успешность
самозапуска зависит от соотношения мощностей запускаемых двигателей и
резервного источника, а также от того, был или не был нагружен резервный
элемент до подключения к нему запускаемых двигателей. Для определения
мощности двигателей, которые могут быть оставлены для самозапуска при
13
Автоматическое мочение резервного питания и иГюреЛчватт
действии схемы ЛВР. рекомендуйся пользоваться таблицей 1 1 Величины
сопротивлений и мощностей приведены в относительных единицах За базис-
ную принята мощность резервного црансформатора (3 J.
Таблица 1 1
Сопротивление це- ни до шип собст- венных нужд Допустимая величина асинхронной нагрузки, оставляемая для самозапуска
Резервный трансфор- ма гор не нагружен Резервный трансфор- матор нагружен
0,08 1,75 1,50
0,10 1,45 1,20
0,12 1,20 1,00
0,14 1,00 0,80
Данные таблицы 1.1 получены для наиболее тяжелого случая самоза-
пуска, когда двигатели полностью остановлены. Критерием успешною само-
запуска принята величина остаточного напряжения па двигателях в момент
их пуска, равная 0,55С/ИОМ. Как было отмечено выше, при таком напряжении
самозапуск оказывается затянутым. Следует иметь в виду, что в таблице ука-
заны предельные значения мощностей. Практически эти значения меньше, и
самозапуск двигателей происходит достаточно быстро
1,4. Настройка элементов схемы АВР
Пусковым органом схемы АВР является реле напряжения, реагирую-
щее на понижение нвлряжения в аварийных режимах Селективное действие
схемы достигается за счет правильного выбора напряжения срабатывания
пускового реле. Для отстройки от короткого замыкания за реактором или
трансформатором отходящей линии (см. рис. 1.2. точки КЗ и К4) напряжение
пуска должно быть меньше остаточного напряжения на сборных шинах при
коротком замыкании в указанных точках
14
Автоматическое включение резервна™ питания п оборудования
В момент самозапуска происходит посадка напряжения. В это время
схема АВР также не должна приходить в действие. Для этого напряжение
пуска проверяется по условию
где UCi- напряжение в момент самозапуска, А„ = 1.2-|,3- коэффициент
надежности. Пракгнчески напряжение срабатывания реле выбирается равным
03-0.4U,™.
Отстройка от неправильного действия схемы АВР при коротком за-
мыкании на отходящей нереакгированной лилии (рис. 1.2, точка К2) осуще-
ствляется за счет выдержки времени. Время отключения рабочей липни вы-
бирается больше времени срабатывания зашиты отходящей линии:
>лвр = 1с_1 + А А
где Дг-ступень избирательности.
Переход на резервную линию опраддвн в случае, если последняя гото-
ва принять нагрузку. Для этого резервная линия должна в случае явного ре-
зерва находиться под напряжением. Наличие напряжения на резервной пинии
контролируется с помощью реле максимального напряжения, уставка которо-
го выбирается по условию.
к
ср Uраймнн ’
здесь минимальное значение напряжения в рабочем режиме;
kв = 0,85 - коэффициент возврата; к„ = 11 -1.2 - коэффициент надежности.
При неявном резерве ток самозапуска двигателей накладывается на
рабочий ток резервной линии В этом режиме релейная защита резервной
линии не должна срабатывать. Селективное действие защиты достигается за
счет выбора тока срабатывания I£J, по условию:
где 1СЗ— ток нагрузки с учетом самозапуска двигателей.
15
Автоматическое включениерезервного питания и оборудования
1.5. Схемы АВР линий
Автоматическое включение резервного питания и оборудования
Принципиальная схема автоматического ввода резерва линии показана
б)
Рис. 1.5. Схемы питания (а) и АВР (б).
1 Линия Л1 валяется рабочей. Линия Л2 в нормальном режиме нс ра-
I ботает и находится в резерве Соответственно выключатели Bl, В2 и ВЗ
। включены, а выключатель В4 отключен. Для повышения надежности резерв-
। ная линия питается от другого источника
1 Схемы автоматики содержат большое число замкнутых и разомкнутых
| контактов При срабатывании элементов разомкнутые контакты становятся
| замкнутыми и наоборот Во избежание неправильного чтения схем, нсобхо-
I
16
димо принять изображение контактов для вполне определенного состояния
элементов. Как правило, на схемах контакты изображаются для обесточенно-
го состояния элемента
Рассмотрим АВР линии на простом примере. На рис. 1.6 показан вы-
ключатель В1 с четырьмя вспомогательными контактами Bl.l, В1.2, ВЕЗ и
В 1.4. В отключенном положении выключателя вспомогательные контакты
В 1.1 и ВЕЗ нормально открыты, а два других контакта В! 2 и В 1.4
— замкнуты.
Рис.1.6. Схема выключателя В1 с электромагнитами включения УАС и
отключения УАТ и вспомогательными контактами ВЕ1-В1 4
Выключатель имеет электромагнитный привод. Катушка включения
УАС включена последовательно с контактами В1 2 В цепь катушки отключе-
ния УАТ включены контакты Bl 1 Это еде;дно для того, чтобы разрыв цепи
включения или отключения осуществлялся вспомогательными контактами вы-
ключателя, а не контактами пускового элемента, которые имеют сравните.1ьно
небольшую разрывную мощность
Рассмотрим процесс включения выключателя BI Для этого ключом
управления должно быть подано питание в цель катушки включения УАС. Как
только выключатель включится, его вспомогательные контакты в згой цепи
BI .2 разомкнутся и разорвут цепь пи гания.
Аналогичное замечание относится к изображению контактов реле. На
схемах они изображаются для состояния, когда их обмотки обесточены
Пуск схемы АВР (рнс. 1.5, б) осуществляется с помощью реле мини-
мального напряжения KVI и KV2, контакты которых включены последова-
17
Гмв^ !
Аетолгапшчесьое включение резер> нога питания и оиоргОонииия
тельно Напряжение срабатывания этих реле выбирается равным 0,3 — 0 4£/иои
Использоавние двух реле напряжения, включенных на разные фазы, исключает
возможность ложного пуска схемы из-за перегорания одного предохранителя в
цепи трансформатора напряжения Одновременное перетирание двух предо-
хранителей маловероятно.
При снижении напряжения на сборных шинах подстанции ниже
03—0,4t/HOU реле срабатывают и запускают схему Выдержка времени осу-
ществляется с помощью реле времени КТ. Если на рабочей линии установле-
но АПВ, го уставка реле времени должна быть больше времени, необходимо-
го для отключения рабочей линии с последующим ее включением действием
АПВ.
Реле времени подаст сигнал на отключение выключателя В2. Через
вспомогательные контакты этого выключателя В2 3 снимается напряжение с
реле KLT. имеющего выдержку при отпускании якоря. Вспомогательные
контакты В2.4 подают сигнал на включение выключателя В4. В случае ус-
пешного цикла АВР резервная линия Л2 остается в работе. Если запуск схе-
мы АВР произошел при устойчивом коротком замыкании на шипах подстан-
ции. то действием релейной защиты линия Л2 отключается Повторного
включения линии не произойдет, поскольку к этому времени якорь реле KLT
отпускается и его контакты в цепи злектромагнша УАС4 размыкаются.
Даже однократное включение резервной липин на устойчивое к.з. на
сборных шинах достаточно опасно. Для того чтобы сократить время включе-
ния на устойчивое к.з., применяется ускорение действия релейной защиты
Если на линии установлена максимальная токовая защита, то селективность
сс действия создается за счет выдержки времени, которая выбирается больше
выдержки времени защиты на отходящих к потребителям линиях
На время действия схемы АВР выдержку времени защиты резервной
линии сокращают практически до нуля. При включении на устойчивое к.з. на
сборных шинах резервная линяя мгновенно будет отключена. Более подробно
ускорение релейной зашиты д.тя сотласования ее действия с устройствами ва-
томат ики рассмотрено в параграфе 2.7
Проверка напряжения на резервной линии осуществляется с помощью
реле КУЗ. При нормальном напряжении на резервной линии контакты реле
замкнуты. Ести напряжение на резервной линии отсутствует, то контакты
Гзам 1 Автоматическое включение резервно., о питания и оборудована
размыкаются, и питание с реле времени снимается. В этом случае схема АВР
блокируется.
На многих подстанциях распределительных сетей отсутствуют акку-
муляторные батареи. На таких подстанциях релейная защита и автоматика
выполняются на переменном оперативном токе, источником которого являет-
ся трансформатор напряжения. Из-за ограничен! юй мощности источника
оперативного тока не могут быть использованы выключатели с соленоидным
приводом. На легких выключателях широкое распространение получили гру-
зовые или пружинные приводы В грузовых приводах для включения выклю-
чателя испо.1ьзусгся энергия падающего груза, в пружинном — энергия пред-
варите гы го натянутой пружины Подъем груза или нашжение пружины мо-
жет осуществляться вручную или с помощью »кжтродвшагеля мощностью
50—100 Bi. Для питания такого двигателя мощности трансформатора напря-
жения вполне достаточно В своей основе схема АВР с действием на выклю-
чатель с грузовым или пружинным приводом аналогична схеме АВР на по-
стоянном оперативном гоке.
1.6. Схемы АВР трансформа юров
На распределительных подстанциях 6-10 кВ устаиавлиавется, как пра-
вило, два и более понижающих трансформатора. Схема электроснабжения с
одним трансформатором применяется редко.
Рассмотрим подстанцию с двумя трансформаторами (рис. 1.7, а). Как
правило, группы соединений и аппаратура на стороне 0,4 кВ допускают па-
раллельную работу этих трансформаторов.
Обычно на параллельную работу устанавливают трансформаторы оди-
наковой мощности. В таком случае суммарная нагрузка потребителей рас-
пределяется между трансформаторами поровну При большой нагрузке по-
требителей, когдв трансформаторы загружены на 07FJi<u и выше, совмест ная
работа трансформаторов оправдана.
В случае небольшой нагрузки может оказаться вьп'одно отключить
один из трансформаторов — суммарные потери в обмотках трансформатора и
потери холостого хода при этом будут снижены в сравнении с параллельпой
работой двух трансформаторов. Выбор моментов включения и отключения
19
Автоматическое включение резер ного питания и оборудования
второго грансформатора на параллельную работу определяется графиком
нагрузки потребителей и производится на основе соответствующих расчетов
к шинам
а) б) в1
Рис. 1.7 Схемы резервирования трансформаторов
Проблема надежности заключается в обеспечении автоматического
введения в работу отключенного трансформатора при выходе из строя рабо-
тающего
Возможен другой вариант построения схемы питания потребителей,
когда в нормальном режиме секционный выключатель отключен, и каждый
трансформатор питает свою нагрузку (рис. 1.7, б).
Если в одном из трансформаторов, например Т1. произойдет короткое
замыкание и он будет отключен действием релейной защиты, то после от-
ключения выключателей В1 и В2 необходимо включить секционный выклю-
чатель В5. Потребители левой секции получат питание от трансформатора
Т2. Конечно, это возможно, если трансформатор Т2 имеет достаточную мощ-
ность для питания потребителей двух секций.
Автоматический ввод резерва широко применяется в схемах питания
собстаенных нужд электростанции. Для повышения надежности трансформа-
торы собственных нужд резервируются. Каждый трансформатор собственных
нуищ может резервировать любой другой трансформатор, если это позволяет
схема электрических соединений Однако при таком подходе схема автома-
тики получается более сложной и менее надежной. Более простой является
схема явного резервирования, когдв функции резервирования закреплены за
одним, не работающим в нормальном режиме трансформатором (рис I 7, в)
20
Автоматическое включение резервного питания.
Рассмотренные примеры свидетельствуют о многообразии вариантов
резервирования, что должно учитываться при разработке схем автоматики.
Схема питания двух секций с резервным трансформатором показана на
рис. 1.8 Общая идеология резервирования щссь аналогична той, которая рас-
смотрена на примере резервирования линии. В случае выхода из строя рабо-
чего трансформатора, например Т1, последний отключается с двух сторон, а
питание потребителей первой секции переводится на резервный трансформа-
тор ТЗ Отключение поврежденного трансформат ора двумя выключателями
устраняет возможность включения резервного трансформатора на повреж-
денный рабочий трансформатор
В нормальном режиме трансформатор ТЗ отключен и находится в яв-
ном резерве Его включение в работу осуществляется выключателями В5 и
В7 при резервировании трансформаторв Г1 или выключат елями В6 n В7 при
резервировании трансформатора Т2.
Напомним, что резервная линия находилась в резерве под напряже-
нием и включалась в рвботу одним выключателем на приемном конце Такое
решение оправдано, так как потери электроэнергии в линии на холостом ходу
21
Гзава !___Автоматическое акятчеиие /узервного питания и оборудования
невелики К тому же для управления выключателем на питающем конце ли-
нии необходимо иметь контрольный кабель от схемы АВР, что экономически
невыгодно.
В нормальном режиме резервный трансформатор отключается с двух
сторон - со стороны потребителей и дополнительно со стороны источника
питания. Поэтому в режиме резерва трансформатор не находится под напря-
жением. что дает экономию на потерях холостого хода Выключатели с низ-
кой и высокой стороны трансформатора находятся на территории одной под-
станции, поэтому особых проблем с контрольным кабелем не возникает.
Пуск схемы АВР трансформатора можно осуществить по-разному
Возможен вариант пуска от релейной защиты рабочего трансформатора При
срабатывании газовой иди дифференциальной защиты трансформатор от-
ключается от сети, например, выключателями Bl и В2 в случае повреждения
трансформатора TI. Эта же защита запускает схему АВР для включения ре-
зервного трансформатора ТЗ.
Возможен пуск схемы с помощью реле минимального напряжения, как
это осуществлено в схеме АВР пинии. Выбор аврианта определяется допол-
нительными обстоятельствами
Схема АВР трансформатора для подстанции с двумя рабочими транс-
форматорами показана на рис. 1.9 Для упрощения показана схема резерви-
рования одного трансформатора Т1. Для трансформатора Т2 схема АВР диа-
логична.
Пуск схемы осуществляется с помощью реле минимального напря-
жения KV1 и KV2. По истечении выдержки времени реле времени КТ пода-
ется сигнал на промежуточное реле KL1 и далее через контакты KL1.1 и
KL1 2 на отключающие катушки УА'П и УАТ2.
Вспомогательные контакты выключателя В2.3 снимают напряжение с
промежуточного реле KLT Это реле имеет задержку на отпускание якоря,
что обеспсчнаает однократность включения резервного трансформатора. При
отключении выключателя В2 его контакты В2.4 запускают реле K.L2, которое
в свою очередь подает сигналы на катушки включения УАС5 и УАС7- Пос ie
выдержки времени, достаточной для однократного включения выключателей
В5 и В7, контакты реле KLT размыкаются и разрывают цепь реле KL2.
Если резервный трансформатор включился на устойчивое к з на сбор-
ных шинах секции 1, то действием релейной защиты он отключится. Повтор-
22
Гitisu i Imwr'airminetnvt »к:т>каие{.мереного питания и оби/'чч vuHWt
ного включения резервного трансформатора ле произойдет, так как к этому
времени контакты реле KLT разомкнутся и сигнал на катушки включения
УАС5 н УАС7 не поступит.
KV1 KV2 КУЗ FT
'i -Ч. х Li
кт KV3 nKLl
—х и—
РЗ
-г
KL1.1 В1.1 У АП
п
и
KL1.2 в21 пУЛТЗ
и
В2.3 г‘''г
Н_'.4 (-.KL!
Ч и
KL2.1 В7 2 _УЛС7
П
KL2 2 В5.2 ПУАС5
Ч! 1
Рис. 1.9. Схема АВР трансформатора
В случае неявного резерва до цикла АВР каждый трансформатор рабо-
тает на «йирузку своих потреби гелей, подключенных к секции (рис. 1.10).
Секционный выключатель В5 нормально отключен. В аварийном режиме оба
трансформатора взаимно резервируют друг друга.
Па рис I 11 показана упрошенная схема АВР При отключении од-
ного из трансформаторов, например первого, вспомогательные контакты вы-
ключателя В2.3 размыкают цепь реле KLT. Контакты В2.4 замыкаются и по-
лают напряжение на промежуточное реле KL1, которое срабатывает и своими
контактами замыкает цепь питания катушек включения выключателей УАСЗ.
УАС4 и УАС5.
23
Глава J
Автоматическое включение резервного питания и оборудования
Рис. 1.11. Схема АВР трансформатора с действием на
секционный выключатель
24
Автоматическое включение резерв* - »го питании - of-т бпвания
Если грансформатор Т2 был включен, то включается только секцион-
ный выключатель В5. При отключенном трансформаторе Т2 будут включать-
ся три выключателя. Для устранения перегрузки аккумуляторной батареи за
счет одновременного включения трех выключателей предусматривается бло-
кировка с помощью дополнительных контактов выключателя ВЗ Выключа-
тель В4 включается только после того, как выключатель ВЗ уже включен.
В рассмотренных случаях после действия схемы АВР на первую секцию по-
дается напряжение от трансформатора Т2. Аналогичным образом трансфор-
матор Т2 резервируется трансформатором Т1
Следует иметь в ваду, что в случае неявного резерва трансформаторы
оказываются перегруженными. В целях устранения перегрузки остающегося
в работе трансформатора часть менее ответственных потребителей должна
быть отключена Величина мощности отключенных потребителей должна
быть обоснована расчетом.
25
Гчсва 2 Автоматическое повторное включение
ГЛАВА 2
Ав i статическое повторное включение
2.1. Общие положения
Опыт эксплуатации электрических сетей показывает, чго в большинст-
ве случаев короткие замыкания, вызванные нарушением изоляционных
свойств воздушных промежутков, успешно самоликвддпруююя после снятия
напряжения. Это объясняется способностью воздуха восстанавливать свои
изоляционные свойстаа после погашения электрической дуги в месте пробоя.
Следовательно, можно восстановить нормальную работу сети, выполнив сле-
дующие операции:
отключить поврежденную линию от источника питания и оставит!, ес
на некоторое время без напряжения:
после паузы, в течение которой происходит ликвидация короткого за-
мыкания, подать напряжение на отключенную линию.
Отключение повреждапюй линии, трансформатора, шин и тд. осуще-
ствляется релейной защитой. Их повторное включение может быть выполне-
но как вручную, так и средствами автоматики. Комплекс автоматики, обеспе-
чивающий повторное включение линии (трансформатора. шин и тд.) называ-
ется устройством автоматического повторного включения или сокращенно
АПВ Далее АПВ рассматриаается для линии электропередачи.
Если после повторного включения линия остается в работе, то говорят, чго
цикл АПВ был успешным, если отключается вновь, то цикл АПВ был неуспеш-
ным.
ОпЫ1 эксплуатации АПВ на линиях показывает, что приблизительно в
65 — 70 % случаев действие АПВ является успешным Эго означает, что в боль-
шинстве аварийных случаев действием АПВ линии сохраняются в работе.
Устройства АПВ выполняются однократными и многократными. В
многократных АПВ цикл повторного включения осуществляется несколько
раз. Из многократных АПВ обычно используются двукратные п трехкратные
циклы АПВ.
26
Авто.нптиче< кое новпю^г,, с включение
Эффективность последующих циклов АПВ шоке, чем эффективность пер-
вого цикла (однократного АПВ). Так, статистические данные показывают, что
успешность восстановления тантт в работе за счет второго цикла сосгааляет око-
ло 15%, а третьего — всего 1,5 —3,0%. Более подробные данные о работе устрой-
ства АПВ приведены в таблице 2 1 [2,3].
Таблица 2.1
Статистические данные об успешности работы АПВ (в процентах)
Тип устройства Напряжение линии, кВ
2-10 20-35 110-154 220-330 400-500
ТАПВ однократное 53,5 69.5 75,0 76,5 67,0
ТАПВ многократное 56.2 78.1 80.5 77,2 -
ОАПВ - - 73.2 80.“ 59.5
Вес виды 53.6 ’0,5 75.5 "7.0 64,5
В энергосистемах России наибольшее распространение получило АПВ
однократного действия.
За счет многократного действия успешность АПВ повышается Однако
необходимо иметь в виду, что осуществление многократного АПВ усложняет
схему автоматики и утяжеляет режим работы выключателей. Даже при одно-
кратном цикле АПВ выключатель рнботаст в более тяжелых условиях, чем в
режиме обычного отключения. Это определяется тем, что под действием элек-
трической дуги, возникающей между контактами выключателя в режиме от-
ключения. масло в гасительной камере в какой-то степени теряет свои изоляци-
онные свойства. Ухудшение свойста масла сказывается на отключающей спо-
собности вы1С1ючаге.1я в цикле неуспешного однократного АПВ В случае мно-
гократного АПВ ухудшение свойста масла проявляется в большей степени
В воздушных выключателях готовность к повторному включению опреде-
ляется давлением воздуха в резервуаре. При установке устройства АПВ одно-
кратного илн многократного действия должны быть предусмотрены запасы сжа-
того воздуха для обеспечения действия выключателя в нескольких циклах
27
Гшеа 2 Автоматическое повторное включение
В цикле АПВ линия некоторое время находится без напряжения. С
точки зрения потребителей, а также устойчивости параллельной работы энер-
госистемы, время отключенного состояния линии желательно иметь наи-
меньшим. Для этого повторное включение должно осуществляться как мож-
но быезрее. В то же время длительность отключенного состояния линии
должна быть достаточной для деионизации среды в месте повреждения
Опытным путем установлено, что минимальное время деионизации электри-
ческой дуги при снятом напряжении с линии составляет: для ЛЭП-110 кВ
0,15-0,2 с, для ЛЭП-500 кВ 0,35 - 0,4 с. Поэтому повторное включение ли-
нии под напряжение должно произаодится не ранее указанного времени [1,4].
Время включения масляных выключателей составляет 0.5 -
1,2 с. Таким образом, собственного времени включения масляного выключа-
теля апопне достаточно для деионизации среды в месте повреждения линии.
Время включения быстродействующих воздушных выключателей меньше
времени деионизации, и это необходимо учитывать при настройке устройств
АПВ.
Обычно подачу импульса на включение выключателя при однократном
АПВ осуществляют с задержкой в 0,3 - 2,0 с. Отсчет времени задержки на-
чинается с момента отключения выключателя. Время задержки при даукрат-
ном АПВ может составлять 10 - 15 с В течение этой паузы линия находится
без напряжения В случае трехкратного АПВ время третьей паузы доходит до
60-120 с.
Учитывая высокую эффективность автоматического повторного вклю-
чения, Правилами устройств электроустановок предусматривается обязатель-
ная установка АПВ на линиях всех напряжений [1,2].
2.2. Основные нариашы устройств АПВ
В зависимости от конкретных условий используются различные вари-
анты устройств АПВ Чаще всего на ЛЭП происходят однофазные короткие
замыкания Двухфазные короткие замыкания, а тем более трехфазные встре-
чаются реже. В случае однофазного короткого замыкания имеет смысл от-
ключать. а затем повторно включать только поврежденную фазу Автомати-
28
Глава 2 Автоматическое повторное включение
ческие устройства, которые выполняют такой селективный цикл, называются
устройствами однофазного автоматического повторного включения (ОАПВ)
Из-за необходимости выбора поврежденной фазы схема ОАПВ усложняется.
К тому же для реализации ОЛПВ необходимо иметь выключатели с раздель-
ным приводом фаз Многие выключатели такого привода не имеют Поэтому
значительно чаще применяется трехфазнос автоматическое повторное вклю-
чение (ТАИВ), при котором независимо от числа поврежденных фаз отклю-
чаются, а затем повторно включаются все три фазы одновременно. Как пра-
вило, в случае трехфазного автоматического повторного включения не под-
черкивается сам факт трехфазности. Если речь идет одновременно о трехфаз-
ном и однофазном автоматическом повторном включении, то эт различия
должны быть указаны особо.
Существенное влияние на устройство АПВ оказывает схема питания
линии. С этих позиций различают линии с односторонним и двусторонним
питанием. Па линиях с двусторонним питанием дополнительные усложнения
возникают из-за необходимости соблюдения синхронности работы источни-
ков питания по концам линии Для этого применяют устройства АПВ с ожи-
данием или улавливанием синхронизма (А11ВОС или АПВУС)
В некоторых случаях синхронность работы возможно восстановить за
счет сочетания автоматического повторного включения с самосинхронизаци-
ей генераторов. Комплекс автоматики, осуществляющий такой цикл, сокра-
щенно обозначают АПВС.
Следует иметь в виду, что элементы автоматики по контролю пли улавли-
ванию синхронизма затягивают цикл повторного включения. Поэтому применять
эти тины АПВ следует в случаях действительной необходимости.
При использовании быстродействующих выключателей весь цикл от-
ключения поврежденной линии с последующим повторным включением мо-
жет быть осуществлен весьма быстро Такое АПВ называется быстродейст-
вующим автоматическим повторным включением (БАПВ). За короткий про-
межуток времени нарушения связи между источниками питания последние,
как правило, нс выходят из синхронизма, в связи с чем в схемах БАПВ ие
требуется иметь дополнительные элементы по контролю или улавливанию
синхронизма.
29
Глава 2 Автоматическое повторное включение
Если сопротивление линии савзи между источниками питания велико,
то при повторном включении допустимо несинхронное включение. Расчет-
ным путем определяются условия, при которых части энерюсистсмы входят
в синхронизм. Такое включение осуществляется с помощью несинхронною
АПВ (НАПВ).
Наиболее простыми являются схемы АПВ однократного действия для
линии с односторонним питанием. В зависимости от принципа пуска разли-
чают схемы АПВ с пуском от релейной защиты и с пуском от несоответст-
вия положения ключа управления и выключателя. Особую разновидность
составляют устройства АПВ для выключателей с пружинным или грузовым
приводом. Для этих выключателей применяются так называемые механиче-
ские устройства АПВ
2.3. Схема АПВ с пуском от релейной зашигы
Устройство АПВ должно обеспечивать установленную кратность ав-
томатического повторного включения. В случае однократного АПВ допуска-
ется единственное повторное включение. Если такое включение не приводит
к восстановлению нормальной работы, то линия должна отключаться. После-
дующих включений не должно быть. При ручном отключении линии автома-
шчсское повторное включение не допускается.
В схемах АПВ с пуском от релейной защиты программа однократного
действия автоматики осуществляется с помощью реле времени КТ2 с про-
скальзывающим контактом (рис. 2.1).
Схема работает следующим образом. При повреждении на линии сра-
батывает релейная защита, которая подает сигнал на отключение выключате-
ля. Последовательно с катушкой отключения УАТ включено промежуточное
реле КТ1 так. что при подаче сигнала на отключение это реле срабатывает и
запускает схему повторного включения - реле KLI, КТ2 и KL2. Как было
сказано, реле времени КТ2 является программным устройством схемы, обес-
печивающим однократность действия АПВ Реле КТ2 имеет три пары кон-
тактов. Контакты I служат для самоудерживания Проскальзывающий кон-
такт 2, замыкающийся с выдержкой времени т2, создает импульс на повторное
30
Гчава 2
Автоматическое повторное включение
включение. Выдержка времени замыкания третьего контакта А больше вы-
чсржки времени замыкаиня второго контакта ь. Реле времени возвращается в
исходное положение только после замыкания контакта 3, т.е. тогда, когда вся
программа цикла выполнена
Кратко рассмотрим действие схемы при успешном и неуспешном цик-
ле АПВ
Рис 2.1. Схема ЛПВ с пуском оз релейной зашиты
У спешный цикл AJ1B. При повреждении на линии срабатывает ре-
лейная защита и отключает линию. Одновременно запускаются .моменты
схемы АПВ. Если на отключенной линии повреждение самоликвидируется,
то релейная зашита, а также реле КТ1 u KL1 возвращаются в исходное'поло-
жение Однако реле КТ2 самоудерживается и обеспечивает выполнение про-
граммы повторного включения. По истечении выдержки времени ь, равной
порядка 0,5 с, подается сигнал па реле КЕЗ, которое в свою очередь подаст
сигнал на включение выключателя. Реле КЕ2 имеет дополнительную, после-
довательную обмочку, за счет которой якорь удерживается до момента вклю-
31
Гшва 2.
Автоматическое повторное включение
Ггава 2 Автоматическое повторное включение
чения выключателя По истечении выдержки времени /3 замыкается третий
контакт реле К.Т2 и это реле возвращается в исходное положение
Неуспешный цикл АПВ. Релейная защита отключает линию, а уст-
ройстао АПВ подаст сигнал на включение выключателя В случае устойчиво-
го повреждения релейная защита вторично отключает линию Выдержка вре-
мени выбирается больше времени срабатывания релейной защиты и равня-
ется обычно 8—10 секундам. Поэтому реле времени КТ2, запущенное при
первом срабатывании зашиты, продолжает работать Действие проскальзы-
вающего контакта КТ2.2 быто использовано, по ному сигнала на включение
не будет При замыкании контакта К.Т2.3 схема возвращается в исходное по-
ложение.
Проскальзывающий контакт 2 реле КТ2 может застревать, что явля-
ется недостатком этой схемы. При этом получается длительный импульс на
включение, а следовательно, возможно многократное включение выключате-
ля. Для устранения этого явления цепь включения дополнительно заводится
через нормально закрытый контакт реле KL1 При очередном отключении
реле KLI срабатывает и «затянувшийся» сигнал на включение через контакт
K.LI.2 переведет- на себя. В таком случае контакты KLl 1 будут удерживаться
в разомкнутом состоянии и сигнал на включение не пройдет.
При отключении линии от ключа управления схема АПВ не запускает-
ся и повторного включения не будет.
2.4. Схема АПВ с пуском от несоответствия положения
ключа у правления и выключателя
Пуск схемы АПВ производится от иесоответстаия положения ключа
управления и выключателя. Так, если ключ управления SA находится в по-
ложении «включено», а выключатель но какой-либо причине отключился, то
устройство АПВ будет запущено и подаст сигнал на повторное включение.
Напомним алгоритм действия автоматики повторного включения. При
коротком замыкании на линии срабатывает релейная зашита и отключает ее.
Через некоторое время автоматика повторно включит линию Выдержка вре-
мени необходима для того, чтобы потвела дуга в месте короткого замыкания.
Если корогкое замыкание было проходящим, то после повторного включения
линия сохрвнится в работе На этом действие релейной защиты и АПВ закан-
чивается.
При устойчивом коротком замыкании на линии за время бестоковой
паузы повреждение не ликвидируется. Повторная подача напряжения на линию
не приведет к желаемому результату - сохранению линии в работе Релейная
зашита повторно отключит линию. Поскольку АПВ однократное, го линна ос-
танется в отключенном состоянии Схема автоматики, реализующая рассмот-
ренный алгоритм, показана на рис. 2.2.
Рис 2.2. Схема АПВ с пуском от несоотвегстаия между положениями
выключателя и ключа управления
32
33
I тип ?
Автоматическое повтори^ значение
Прежде всего, обратим внимание па ручное управление пинией, которое
осуществляется ключом SA. Рукоятка этого ключа может занимать три поло-
жения — нейтральное, левое и правое. Поворот ключа влево соответствует ко-
манде «отключено». В правом положении подастся команда на включение.
При возвращении ключа SA в нейтральное положение поданная ко-
манда может исчезнуть или сохранится Сохранение (запоминание) команды
на схеме ключа S А отмечено точкой на средней пунктирной линии. Контакты
1-2 замыкаются при повороте ручки ключа вправо и после возврата ручки в
нейтральное положение остакмся замкнутыми.
Рассмотрим действие схемы по рис. 2.2 При включенном положении
SA его контакты 1—2 замкнуты и конденсатор С заряжается через сопротив-
ление 1R. Если выключатель отключился, то сто вспомогательные контакты
В1.1 замыкают цепь реле KL1 Это реле является пусковым реле схемы АПВ.
При пуске устройства АПВ срабатывает реле К.Т1, которое с выдержкой вре-
мени подключает конденсатор С к параллельной обмотке реле К! 2. Срабаты-
вание этого реле обеспечивает подачу сигнала на включение выключателя. В
случае успешного АПВ линия сохраняется в работе.
Однократность повторного включения обеспечивается за счет цепочки
IR—С. При включении на обмотку реле KL2 конденсатор С разряжается.
Время заряда конденсатора через сопротивление 1R выбирается в пределах
15 - 20 с. При неуспешном АПВ действием релейной защиты линия вновь
отключается. Однако, поскольку конденсатор к этому времени нс успевает
зарядиться, то очередного повторного включения не произойдет. В отклю-
ченном состоянии выключателя конденсатор не может зарядиться, так как он
шуншрован обмоткой реле KL2
В случае ручного отключения выключателя повторное включение не
произойдет, поскольку контакты 1—2 ключа управления разомкнуты ц, не-
смотря на возможное срабатывание реле KL1, КТ1 и KL2, сигнала па вклю-
чение нс будет.
Следует заметить, что при очередном включении линии устройство
АПВ становится готовым к действию через 15 — 20 с, г.е. после того как заря-
дится конденсатор. Поэтому при ручном включении выключателя на повреж-
денную линию повторного включения не последует.
34
Глава 2 Автоматическое повторное включение
Реле KL3 обеспечивает доминирующее действие сигнала на отключе-
ние. Так, если релейная защита подаст сигнал на отключение, то это реле
сработает. Если при этом существует импульс на включение (например, при-
варились контакты реле KL2), то он не пройдет через разомкнутые контакты
2 реле KL3, а б>дет переведен на обмотку этого реле. Таким образом, не-
смотря на наличие импульса на включение, линия будет отключена
Рассмотренная схема положена в основу устройств автоматического по-
вторного включения с реле типа АПВ-1 и РПВ-58 На схеме дополнительно по-
казаны цепочки ускорения защиты, запрета действия АПВ и некоторые другие
детали устройства.
Схема АПВ с пуском от несоответствия может бы л» использована и на
телеуправляемых подстанциях Наличие телеуправления привносит некото-
рую специфику в условия работы устройства АПВ Так. при отключении вы-
ключателя с помощью средста телемеханики, ключ управления на самой под-
станции остается в положении «включено» Эго обстоятельство приводит к
несоответствию положения выключателя и ключа управления и служит пус-
ковым импульсом к повторному включению. Однако повторного включения
нс должно быть, поскольку телеотключеине соответствует ручному отключе-
нию с помощью ключа управления. Для устранения повторного включения в
рассмотренной ситуации предусмотрен «запрет» действия устройства АПВ
При срабатывании реле телеуправления ТУ одновременно с сигнвлом па от-
ключение подается минус в точку «а» Конденсатор разряжается, и повторное
включение не происходит.
Рассмотренный способ запрета может быть использован и в любом
другом случае, когда при отключении выключателя повторное включение не
требуется.
2.5. Механические устройства АПВ
Для выключателей малой и средней мощности напряжением до 35 кВ
используют грузовые и пружинные приводы.
Рабочее усилие пружины не остается постоянным К концу хода вклю-
чения усилие уменьшается. Для улучшения тяговой характеристики пружтл!-
35
Автоматическое повторное вкяючепие
ный привод дополняют маховиком Вначале процесса включения избыточная
энергия пружины вдет на разгон маховика. К концу хода включения энергия,
накопленная в маховике, передается механизму включения Получается сво-
его рода пружинно-грузовой привод
Время отключения выключателя с пружинным приводом составляет
0,1 — 0,15 с, время включения 0,2 — 0,4 с.
Грузовой привод имеет встроенное механическое устройство АПВ.
которое осуществляет однократное повторное включение выключателя без
каких-либо дополнительных электрических элементов Встроенное АПВ ра-
ботает следующим образом. При коротком замыкании на линии действует
релейная защита и подает сигнал в отключающую катушку выключателя
Происходит расцепление защепки, удерживающей выключатель во включен-
ном положении, и выключатель отключается. С некоторой задержкой сер-
дечник отключающей катушки воздействует и на другую защелку, удержи-
вающую груз в верхнем положении Освобожденный груз производит вклю-
чение выключателя Время автоматического повторного включения с меха-
ническим пуском составляет 0,3 — 0.6 с.
В случае устойчивого короткого замыкания релейнав зашита повторно
отключает линию Однако теперь включение выключателя не произойдет,
поскольку груз находится в своем нижнем положении. Для сто подъема тре-
буется время около 10 с, к тому же в результате действия встроенного АПВ
шкив привода дополнительно запирается.
Возможно дистанционное управление грузовым приводом Для этого
имеется катушка включения и дистанционная отключающая катушка. 11рн по-
даче питания в дистанционную отключающую катушку выключатель отключа-
ется, однако повторное включение не происходит.
Пружинный привод может изготавливаться как со встроенным меха-
ническим AIШ, так и без пего. В последнем случае автоматическое повтор-
ное включение может быть осуществлено с помощью электрической схемы.
36
Автоматическое повторное включение
2.6. АПВ многокра итого действия
Многократные автоматические повторные включения повышают веро-
ятность восстановления нормального режима поврежденной линии. Так. за счет
двукратного включения удастся восстановить нормальнъгй режим работы в
15 % случаев, а за счет трехкратного - 1,5 —3,0% случаев дсйстаия устройства
АПВ в соответствующем цикле.
Однако многократные циклы АПВ утяжеляют условия работа выклю-
чателей, что требует их более частой ревизии К тому же схемы многократ-
ных АПВ сложнее и менее надежны. Эти соображения должны приниматься
во внимание при выборе кратности циклов устройств АПВ В энергосистемах
России из многократных АПВ наибольшее применение имеют двукратные
АПВ.
Схема двукратного АПВ с pe.ie РПВ-25Я бывшего Чебоксарского элек-
троаппаратного завода в основном аналогична схеме рис.2 2. что вполне объяс-
нимо, поскольку элементы управления выключателем остаются теми же самыми.
Для двукратного повторного включения предусмотрены две цепочки
«памяти» 1R—1С и 2R—2С, каждая из которых обеспечивает се однократное
повторное включение с заданной выдержкой времени. Для этой цели преду-
смотрено реле времени с тремя выдержками. Нормально замкнутый контакт
КТ 1.1 размыкается и снимает шунтирование резистора в цепи реле времени.
Тем самым обеспечивается термическая стойкость обмотки реле КТ1. Выдерж-
ка времени h = 0,5 — 1,0 с (проскальзывающий контакт реле) используется для
однократного повторного включения. Выдержка времени l3 = 10 — 15 с обсспе-
чнаает двукратный цикл АПВ
2.7. Ускорение действия загни гы до и после АПВ
Селективное действие некоторых зашит достигается за счет выдержки
времени. Если на линии установлено устройство АПВ, то такая задержка в
отключении может оказаться неоправданной. С помощью АПВ может быть
предпринята попытка восстановить нормальную работу поврежденной линии
до истечения выдержки времени релейной защиты, выбранной по условию
37
Глива 2
Автоматическое повторное включение
селективное! и. Для реализации этого мероприятия релейная защита должна
заведомо сработать без выдержки времени неизбнрательно, т.е ее действие
специально должно быть ускорено до цикла АПВ.
Возможен другой вариант согласования действия релейной защиты и
устройства АПВ Релейная защита отключает поврежденную линию избира-
тельно с выдержкой времени. В случае успешного цикла АПВ линия сохра-
няется в работе. Если цикл АПВ неуспешен, то релейная защита снова ог-
ключае! линию. Для повторного отключении линии дет надобности выжи-
дать истечения выдержки времени релейной зашиты Теперь уже известно
какая линия повреждена, поэтому действие релейной защиты може! быть
ускорено. Такое мероприятие называют ускорением действия релейной защи-
ты после АПВ.
Рассмотрим примеры электрической сети, где целесообразно ускоре-
ние действия релейной загпнты до и после А1 IB.
Ускорение до \ПВ. Схема сети показана на рис. 2.3.
Рассмотрим схему, на линиях которой установлены максимальные то-
ковые зашиты с выдержками времени, выбранными по ступенчатому прин-
ципу. Ступенчатый принцип обеспечивает селективность действия релейной
защиты по времени. Недостатком способа является наличие больших выдер-
Усгройство АПВ устанавливается только на головном участке сети.
Релейная защита этого участка действует с ускорением до АПВ. Это значит,
что до цикла АПВ время срабатывания защиты третьего участка зааедомо
уменьшается до величины, меш>шсй t, Несомненно, что такая перенастройка
38
Liana 2 Автоматическое повторное включение
привелся к неселективному действию защиты. Однако при наличии ЛИВ на
головном участке такое неселективное действие оправдано.
В случае короткого замыкания на любом участке сети в первую оче-
редь срабатывает зашита 3 участка и отключает магистраль целиком. Устрой-
стао АПВ производит повторное включение магистрали. При успешном цик-
ле АПВ все линии сохраняются в работе. Если короткое замыкание устойчи-
вое, то после ЛПВ опять придет в действие релейная защита Однако теперь
зашита будет действовать с выдержкой времени и произведет селективное
отключение только поврежденного участка
Ускорение действия релейной защиты до ЛПВ имеет свои положи-
тельные и отрицательные стороны. Достоинством метода является быстрая
ликвидация проходящих коротких замыкании, независимо от места их воз-
никновения.
Следует иметь в виду, что ускоренное отключение поврежденной линии
повышает вероятность успешного АПВ, так как в ряде случаев проходящее к.з.
не успеет перейти в устойчивое короткое замыкание.
Отрицательной стороной ускорения действия релейной защиты до
АПВ является утяже.гснпе условий работы выключателя на головном участке
сети. Этот выключатель работает наиболее часто и, следовательно, чаще
обычного должен выводится в ревизию
Ускорение после АПВ. Пояснение целесообразности ускорения ре-
лейной защиты после АПВ проведем на том же примере сети по рис. 2 3 Бу-
дем считать, что па линиях установлены максимальные токовые защиты с
выдержками времени Г,, fa и выбранными по ступенчатому принципу
Примем также, что устройства АПВ установлены на всех участках магистра-
ли. В случае короткого замыкания релейная зашита работает с выдержкой
времени и сслектнано отключает поврежденный участок. Устройство АПВ
повторно включает линию. При успешном цикле АПВ машетраль сохраняет-
ся в работе Если короткое замыкашге устойчиво, то поврежденный участок
должен быть снова отключен, причем чем быстрее, тем лучше. Быстрое от-
ключение достигается за счет ускорения действия релейной защиты после
АПВ Отсутствие выдержки времени при повторном срабатывании не приво-
дит к песелективному отключению, так как место повреждения уже опреде-
лено при первом отключении
39
Гuiea 2.
Автоматическое повторное включение
В рассмотренном случае каждый выключатель отключает лишь повреж-
дение на своей линии, так что условия работы выключателей одинаковы, и это
является преимуществом схемы по сравнению с вариантом ускорения релейной
защиты до АПВ. Однако в этом случае проходящие короткие замыкания лик-
видируются медленнее и к тому же вероятность успешного АПВ ниже — пока
защита задерживает первое отключение, проходящее повреждение может пе-
рейти в устойчивое.
Ускорение действия релейной защиты желательно иметь как при авто-
матическом, так и при ручном включении выключателя. Это меропрнатие
позволяет быстро отключить линию при ее включении на короткое замыка-
ние, например, на неснятое заземление. Гарантия быстрого отключения по-
зволяет осуществлять опробование исправного состояния линии после ее ре-
монта. Нужно отметить, что при опробовании оборудования АПВ выводится
из действия
Для ускорения действия защиты до АПВ, кроме селективной релейной
защиты (СРЗ), устанавливают неселективную ускоренную защиту (НРЗ). на-
пример, токовую отсечку. После действия АПВ токовая отсечка выводится из
работы. Принципиально можно ускорить действие релейной защиты до АПВ за
счет временного шунтирования реле времени защиты. Однако благодаря осо-
бым условиям выбора тока срабатывания защиты, ускоряемой до АПВ, чаще
используется первый способ, т.с. специально устанавпнааемые токовые реле.
Ускорите защиты после АПВ также может быть осуществлено либо за
счет временного шунтирования контактов реле времени основной защиты, либо
за счет установки дополнительных токовых реле, вводимых в действие на неко-
торое время. Токовые реле ускоренной защиты должны быть отстроены от пус-
ковых токов двигателей, заторможенных в процессе короткого замыкания.
Ускорение действия релейной защиты должно вводится на определен-
ный промежуток времени Это осуществляется с помощью специального реле
KL, имеющего замедление на возврат Пуск реле производится от реле KL2
(рис. 2.2).
40
Глава 2 Автоматическое повторное включение
2.8. АПВ линий с двусторонним шнанием
На линиях с двусторонним питанием за время бестоковой паузы источ-
ники питания могут выйти из синхронизма. Поэтому перед повторным включе-
нием линии необходимо провести проверку некоторых условий, гарантирую-
щих допустимость повторного включения. В ряде случаев такую проверку про-
изводить необязательно, ибо успешность повторного включения обеспечивает-
ся определенными факторами
В зависимости от структуры сети и типа выключателей на ЛЭП, воз-
можны следующие решения:
1 Линия имеет шунтирующие связи I три. четыре I. за счет которых сохра-
няется синхронная работа источников питания в цикле АПВ В лом случае
рекомендуется применять устройства АПВ без проверки синхронизма, такие
же, как п на линиях с односторонним питанием. При выборе уставки АПВ
необходимо учитывать время о попечения коротко! о замыкания с противопо-
ложного конца линии.
2. Линия не имеет шунтирующих святей Если линия оборудована быстро-
действующими выключателями и быстродействующей релейной защитой, то
рекомендуется применять быстродействующее автоматическое повторное
включение (БАПВ). Время полного цикла БАПВ может составить 0,2-0,3 с.
За это время источники питания по концам линии не успеют выйти из син-
хронизма, что и служит предпосылкой для включения без проверки синхрон-
ности встречных напряжений
3. При отсутствии шунтирующих связен возможно применять несинхрон-
ное автоматическое повторное включение (НАПВ). Способ рекомендуется
использовать тогда, когда величина тока при самом неблагоприятном угле
включения не превосходит допустимых для генераторов, синхронных ком-
пенсаторов и трансформаторов значении.
4 Для гидростанций с небольшим числом агрегатов возможно повторное
включение линии без проверки синхронности встречных напряжений В этом
случае автоматическое повторное включение сочетают с самосинхронизацией
генераторов ГЭС (АПВС).
5. Если на линии недопустимо несинхронное повторное включение и не-
возможно применять БАПВ, то рекомендуется использовэть автоматическое
41
Абтомшштагк^’ повтор • -- >чепие
повторное включение с ожиданием или у тавливанием синхронизма
(АПВУС)
2.9. Несинхронное АПВ
Работа релейной защиты и автоматики несинхронного повторного вклю-
чения происходит следующим образом. При коротком замыкании на линии
действием релейной защиты линия отключается с обеих сторон. Устройство
АПВ повторно включает линию без проверки синхронности встречных напря-
жений Восстановление синхронизма происходит или немедленно или сопро-
вождается качаниями и асинхронным ходом. Длительные качания и асинхрон-
ный ход допускаются в течение не более 2 минут. За это время должны быть
приняты меры, обеспечивающие восстановление синхронизма В противном
случае необходимо произвести разделение систем вручную или автоматически
Для несинхронного повторного включения используются устройства
АПВ аналогичные тем, которые применяются на линиях с односторонним
питанием. Времена действия устройств АПВ по концам линии выбираются
различными Этим обеспечивается неолновременность повторного включе-
ния линии с двух сторон. С той стороны линии, гае АПВ включает раньше,
вводится ускорение релейной защиты после цикла АПВ на время 0,5 — 1.0 с
В случае одновременного включения выключателей на обоих концах
линии и при наличии устойчивого повреждения, режим несинхронного вклю-
чения наложится на режим короткого замыкания. В таких условиях возмож-
пы отказы и неправильные действия защиты на защищаемой линии и па
смежных участках Разновременность действия устройств АПВ с ускорением
зашиты исключает такую возможность Однако и в этом случае приходится
принимать специальные меры для предотвращения неправильного действия
релейной защиты.
Несинхронное включение допустимо, если электромагнитные моменты,
возникающие на валу агрегата при включении, не превышают моментов, кото-
рые возникают при внезапном коротком замыканшт на выводах машины.
Максимальные электромагнитные монет-гы возникают на валу гидрогене-
раторов при включении с утлом 5 = 120е- 135°, а у турбогенераторов — с утлом
42
Автоматическое ммипорпое включение
110° — 120°. Расчет моментов при АПВ затрудните лен, поэтому на практике в
качестве приближенного критерия допустимости несинхронного включения ис-
пользуют значения токов. Для турбогенераторов и гидрогенераторов с успокои-
тельными обмотками несинхронное ЛПВ допустимо, если соблюдается условие
Для гидрогенераторов без успокоительных обмоток
(22)
Синхронные компенсаторы можно включать несинхронно, если
(щпв О-84 (2.3)
(ним xd
В формулах /,шпв — максимальное значение периодической составляющей
тока в статоре генератора, рассчитанное при включении с углом 8=180°
Если известно, что при несинхронном включении частота и напряже-
ние сети не отличаются от номинального значения более, чем на ± 5 %, то
найденные по формулам значения допустимых уравнительных токов можно
увеличить на 13 % для турбогенераторов и на 35 % для гидрогенераторов с
успокоительными обмотками.
Для трансформаторов НАГ1В допустимо, если уравнительный ток,
найденный для несинхронного включения с углом 3= 180°, не превышает
тока короткого замыкания, допустимого для данного трансформатора, т.е.
43
Гтава 2 Автоматическое повторит: включение
Несинхронное включение кратковременно сопровождается появлени-
ем токов и напряжений нулевой и обратной последовательностей, снижением
напряжения и протеканием больших уравнительных токов. Большинство за-
щит, за исключением защит, основанных на дифференциальном принципе
(ДФЗ, РДЛ), могут не отличить несинхронное включение oi короткого замы-
кания и сработвть несе.1сктивно
Известны различные способы, предотвращающие ложное срабатыва-
ние зашиты при несинхронном включении:
понижение чувствительности релейной защиты до такой величины,
при которой релейная защита не реагирует на несинхронное включение:
увеличение времени действия защиты на величину, достаточную для от-
стройки от влияния симметричных составляющих обратной и пулевой последо-
вательности, обусловленных псодновременностью замыкания фаз выключателей;
кратковременный вывод защиты из действия перед несинхронным по-
вторным включением.
2.10. Быстродействующее АПВ
Назначение БАПВ состоит в том, чтобы произвести повторное вклю-
чение как можно быстрее За незначительное время нарушения электриче-
ской связи генераторы по концам линии не успевают разойтись на большой
угол и вхождение в синхронизм будет сопровождаться относительно неболь-
шим толчком уравнительною тока. Схема автоматики устройства БАПВ по-
лучается простой, ибо не требуются элементы по проверке условий синхрон-
ности встречных напряжений. Применение быстродействующего АПВ стало
возможным с появлением быстродействующих выключателей и быстродей-
ствующих защит.
Допустимость БАПВ определяется следующими условиями:
в момент включения угол между встречными напряжениями не должен
превосходить допустимого значения, определяемого динамической устойчи-
востью системы, т.е. 5eMS 8Ооп;
время бестоковой паузы должно быть больше времени деионизации
электрической дуги в месте повреждения;
44
Глава 2 Автоматическое повторное включение
максимальные электромагнигные моменты, возникающие на валу ге-
нераторов при включении, нс должны превосходить значений моментов при
коротком замыкании на выводах машины.
Время бестоковой паузы ориентировочно можно оценить следующим
образом. Рассмотрим пример, ко1да станция работает через одиночную ЛЭП
в энергосистему с начальным значением угла 60= 20° . По условию сохране-
ния динамической устойчивости предельное значение vma принимается рав-
ным 8 пр^ 70°. Предпола! ая движение ротора машины в начале возникнове-
ния аварии и до повторного включения рваномерно ускоренным, для прира-
щения угла в радианах, будем иметь
(2-5)
где Tj — инерционная постоянная времени агрегатов станции, с;
ДР. — мощность станции, выдаваемая в энергосистему, ол.
Для расчета приращения угла в электрических градусах формула пре-
образуется к виду
ДР
Д8 = 9000-^г (2 6)
Если положить, чю ло короткого замыкания станция половину мощ-
ности выдавала в энергосистему (ДР, —0.5), а также Г, =10 с и 8/у,= 70°. то
получим, что предельное значение угла будет достигнуто через время 0.33 с.
Время действия быстродействующей защиты 0,04 с Время гашения дуги в
выключателе составляет 0,06 с. Следовательно, напряжение с линии будет
снято через 0.1 с. Отсюда видно, что для деионизации электрической дуги на
поврежденной линии остается время 0.23 с. На линиях ПО кВ этого времени
достаточно для полной деионизации дуги. Если бы до аварии станция выда-
вала полную мощность в систему, то Р, =1,0 и предельное значение угла
достигалось бы за меньшее время Условия БАПВ были бы более тяжелыми.
45
Гюво 2
Автолитическое повторное включение
Увеличение времени бссгоковой паузы повышает вероятность завер-
шения деионизации в месте пробоя, однако это приводит к увеличению угла
включения 5В„ и возможного нарушению устойчивости Для деионизации
электрической дуги на .линиях 220 — 500 кВ требуется время 0,3 —0,4 с. В
соотвегствии с приведенными выше данными, за это время угол S может
превысить допустимое значение И, тем не менее, па линивх 220 — 500 кВ
БАПВ применяется. Это обусловлено сиедмошими обстоятельствами Во-
первых, многие ЛЭП имеют шунтирующие линии, по которым поддержива-
ется связь между частями энергосистемы и расхождение по углу в аварийной
ситуации происходит медленнее. Во-вгорых, мощность, передаваемая по
ЛЭП, как правило, составляет небольшую долю от мощности энергосистемы.
В таком случае отключение пинии приводит к относительно небольшому
возмущению (A7i«1.0>, что в свою очередь уменьшает скорость изменения
угла б.
Быстродействующее автоматическое пов горное включение обеспечи-
вает включение линии с меньщими во сравнению с НАПВ углами включения.
Поэтому условия работы релейной защиты в цикле БАПВ твкже легче. Быст-
родействующие зашиты нулевой и обратной последовательностей должны
быть отстроены 1ю времени от возможного срабатывания за счет появления
этих составляющих при неодновременном замыкании фаз выключателя Что-
бы защиты от между фазных коротких замыканий (кроме дифференциальных)
не срабатывали от уравнительных токов, они должны быть затрублены или
замедлены на время действия БАПВ
К релейной защите предъявляегся требование одновременности от-
ключения линии с обеих сторон Высокочастотные защиты, которыми обору-
дованы линии напряжением 110 кВ и выше, как правило, удовлетворяют это-
му требованию.
В основу устройства быстродействующего автоматического повторно-
го включения положено комплектное реле РПВ-58 Для того чтобы реле по-
давало сигнал на включение без задержки, контакты реле времени КТ1 2
(рис. 2.2) шунтируют.
Успешная работа воздушного выключателя зависит оглавления воздуха
в резервуаре. Для воздушных выключателей напряжением 110 кВ и выше но-
46
Автоматические повторное включение
минальное давление равно 2.0 МПа Минимальное давление, обеспечивающее
отключение короткого замыкания, равно 1,6 МПа. При одном отключении вы-
ключателя давление снижается на 0J МПа В случае неуспешного АПВ вы-
ключатель должен обладать потенциальными возможностями для повторного
отключения, для эти в резервуаре после АПВ должно быть не ниже 1,6 МПа, а
следовательно, до АПВ не ниже 1,9 МПа. В схеме АПВ предусматривается
блокировка по давлению воздуха: действие автоматики разрешается только в
том случае, если давление воздуха нс менее 1,9 МПа При ручном управлении
можно отключать выключатель вплоть ло давления 1.6 МПа. В случае сниже-
ния давления ниже 1,6 МПа все операции запрещаются.
2.11. АПВ с ожиданием синхронизма
Если на линии с двусторонним питанием нельзя применить БАПВ, а
несинхронное включение приводит к недопустимым уравнительным токам,
АПВ линии должны быть оборудованы специальными устройствами, кото-
рые разрешают производить повторное включение только в том случае, когда
встречные напряжения синхронны
При возниююаеюзд аварии линия отключается с двух сторон и остается
без напряжения. Перед повторным включением с той стороны, где включение
производится в первую очередь, проверять синхронность напряжешш истребует-
ся, так как иа линии напряжения нет. Проверка синхронности должна осуществ-
иться только на другом конце, на котором повторное включение линии произво-
дится иод нагрузку Таким образом, такой способ повторного включения предпо-
лагает строгую очередность включения выключателей ио концам .шнии. ,'|дя по-
лучения очередности включения АПВ шнии дополнительно оборудуются с од-
ной стороны устройством контроля отсутствия напря кения (KV), с другой — уст-
ройством контроля синхронности напряжения (KS1
На рис. 2 4 показана схема подключения АПВ с устройствами KV и
KS.
Цепь включения выключателя от устройства АПВ дополнительно замы-
кается через контакты этих реле. Если напряжение па линии отсутствует, то
реле держит контакты замкнутыми и сигнал от АПВ идет на включение вы-
47
Автоматьчееыпг повпюрнчц окиочение
кяючателя В1. Этот выключатель включится и. если за время бес токовой паузы
повреждение самоликвидировалось. линия останется под напряжением. С про-
тивоположной стороны включение произойдет только тогда, когда напряжение
линии и второго источника будут синхронны В этом случае контакты KS будут:
замкнуты и сит нал от устройства АПВ пройдет на включение выключателя В2
Рис 2.4 Схема АПВ линии с двусторонним питанием
На том конце линии, где проверяется отсутствие напряжения, выключа-
тель находится в более тяжелых условивх. Действительно. в случае устойчивых
коротких замыканий, после того как линия отключена, этот выключатель снова
произведет включение, а затем и отключение повреждешюй .шипи. Выключатель
с противоположной стороны такого цикла не осуществляет.
Для выравнивания условий работы выключателей, устройства контро-
ля напряжения KV и контроля синхронизма KS устанавливаю гея на обоих
концах линии и включаются поочередно
В основу АПВ линии с двусторонним питанием положена схема АПВ
тупиковой линии Дополнительная блокировка контроля напряжения и син-
хронности встречных напряжений осуществляется с помощью реле KV и KS.
Для этого достаточно включить между точками «т» и «п» контакты этих ре-
ле, как это показано на рис. 2 2. При разомкнутом состоянии этих контактов
цепь реле времени разомкнута, и схема АПВ работать нс можег.
На том конце линии, где необходимо контролировать отсутствие на-
пряжения на ЛЭП, включают накладку (положение 1-2) При отсутствии
напряжения реле KV замыкает контакт и разрешает действие АПВ На про-
тивоположном конце ЛЭП накладка отключена (положение 1 — 3). Разре-
шающий сит нал проходит тогда, когда замкнуты контакты реле KS
В цени контактов KS накладка не ставится Сделано это по следующим
соображениям. Возможно отключение ЛЭП только с одной стороны, как пра-
вило, со стороны ивибоаее мощного источника. При таком одностороннем
48
Автоматическое повторное включение
отключении повреждение на ЛЭП может скандироваться. В этом случае на
ЛЭП восстановится напряжение и оно может быть синхронно с напряжением
шин на отключенной стороне. Разрешение на включение в такой ситуации
пройдет через контакты реле KS, коль скоро это реле нс выводится из дейст-
вия ни на одном конце линии.
Для контроля синхронизма используется электромагнитное реле с
двумя обмотками. К реле подводится разность напряжении
иР =«»-«, (2 7)
Поскольку
иш - Uw «я > ил = *Z,r s">10л1 (2 8)
и полагая Uw ~ил = 1). имеем
ир = l/(sin— sinia ,1 )=2Usin Юш Ы' » cosЮ|Ц t (2 9)
Якорь реле реагирует только на амплитуду этого напряжения, поэтому
для дальнейшего рассмотрения можно написать
= W sin —= IL sin —.
2 2
(2.10)
где се^—to,= tov частота скольжения.
8 — угол расхождения между век горами U1
График напряжения ир = 2U sin у показан на рис. 2.5.
Дтя контроля синхронизма используется реле с нормально замкнуты-
ми контактами При срабатывании реле его контакты размыкаются. Напря-
жение срабатывания и возврата указаны но оси ордиивт рис 2.5. Зная эти
напряжения, можно определить углы возврата 6в и срабазывания 8с/г, при
которых реле замыкает и размыкает свои контакты. По оси абсцисс отклады-
вается угол 6 и время / Отметим время возврата реле через t В этот мо-
мент контакты реле KS замкнутся и дадут разрешение к действию АПВ С
этого же момента идет отсчет времени АПВ (IА11В ) .
49
.Ticieii 2
Автиютпческое повторное включение
U
Рис.2.5. График напряжения реле KS
В момент времени г2 срабатывает реле KS и его контакты размыкают-
ся Если время tAnB меньше времени 1г —, то ЛПВ сработает. При tAflB >
12 —г, АПВ не успеет сработать, гак как контакты реле KS разомкнутся,
вследствие чего реле времени ЛПВ вернется в исходное положение.
Таким образом, схема обеспечивает, во-нервьгх, включение при неболь-
ших углах 5 (разрешающий сигнал находится между углом возврата 6„ путлом
срабатыванив8гр, что близко к нулевому значению yina), во-вторых, контроли-
рует скольжение и даст разрешающий сигнал только при малых скольжениях. В
самом деле, если скольжение велико (пунктирная кривая и ), то реле KS ра-
зомкнет свой контакт раньше, чем завершится выдержка времени /АПВ.
Сигнвя от АПВ на включение выключателя подастся после завершения
выдержки времени 1ЛГ1В. Включение же линии произойдет с задержкой, обу-
словленной временем срабатывания выключателя. Если сигнвл от АПВ пода-
ется при угле срабатывания 8ср или чуть раньше, то включение произойдет
при угле включение 3et7 Для успешного втягивания в синхронизм угол
включения 6<1К, ныбирается не более 70е Исходя из этого значения угла,
можно найти угол срабатывания 8^ Для угого надо знать время включения
50
Глава 2
Автоматическое повторное включение
выключателя и допустимое скольжение в цикле АПВ Обычно угол срабаты-
вания 8с;, составляет 40°.
Скольжение, при котором разрешается включение, можно подсчитать
по формуле
Так, если 8ср=40°, а 8я=А-«8ср, где кк =0.85, то при 1Л/1В =10с будем
иметь fs = 0.2 Гц. Обычно скольжение допускается в пределах 0.2 — 0,4 %. В
цикле АПВ при больших скольжениях генераторы но концам линии не вой-
дут в синхронизм.
Указанная величина скольжения получается при небольшой разности
частот параллельно работающих энергосистем. При наличии всего одной свя-
зи между энергосистемами и пр* ее отключении, разность частот энергосис-
тем в аварийной ситуации может быть больше указанной величины. За счет
действия регуляторов частоты энергосистем будут выравниваться, приближа-
ясь к номннвльному значению 50 Гц. Этот процесс можез затянуться и, сле-
довательно, затянется повторное включение линии
Отклонение частоты и длительность переходного процесса зависят от
многих величин, в первую очередь, от величины возмущения, параметров
энергосистемы и настройки регуляторов частоты (см. главу 5), в связи с чем
подгонка частот может занять время от нескольких секунд до нескольких
МИНуТ.
Быстрее работает АПВОС при наличии шунтирующей связи Если за
счет последней энергосистемы удерживаются в синхронизме, хотя и наблю-
даются качания, то реле контроля синхронизма разрешает повторно включить
линию при условии, что угол между напряжениями энергосистем нс выйдет
за допустимые пределы.
Отметим еще одну блокировку в схеме АПВОС Если выбрать угол
срабатывания 8ср>б0°, то реле ICS будет размыкать контакты только при
60°
напряжении на реле > HJsin-^--U . При меньших напряжениях кон-
такты замкнуты и реле дает разрешение на включение. Если при гвкой на-
стройке перегорит предохранитель трансформатора напряжения со стороны
51
J пава 2 Автоматическое повторное включение
сборных шин, то на реле будет подано напряжение U=U и оно всегда
будет держать контакты замкнутыми. Это приведет к неправильному вклю-
чению линии при отсутствии синхронизма. Для устранения такого срабаты-
вания предусмотрено блокирующее реле KV,,, (см. рис 2 2), которое контро-
лирует наличие напряжения ив сборных шинах.
Повторное включение в цикле АПВОС происходи) с малыми скольже-
ниями и при угте включения 8ЛК, < 70° Втягивание в синхронизм происхо-
дит успешно и не сопровождается асинхронным ходом Вследствие этого, как
правило, не применяются дополнительные меры для предотвращения ложно-
го срабатывания релейной защиты. Отмеченные обстоятельства являются
достоинством ЛПВОС
Повторное включение с ожиданием синхронизма применяется на ли-
ниях с двусторонним питанием либо одиночных. либо с шунтирующими свя-
зями, когда более простые схемы НАПВ или БАПВ не могут быть использо-
ваны.
Допустимые скольжения в пикле АПВ выбираются с учетом требова-
ния успешного втягивания в синхронизм повторно включаемых энергосис-
тем. В цикле АПВОС допустимое скольжение запижепо вследствие того, что
непосредственно повторное включение линии (замыкание контактов выкяю-
чатс-тв) происходит не в наиболее благоприятный момент времени, когда
угол включения 8ек,= 70°. Наплучшиы моментом замыкания контактов вы
кпючателя является момент, когда угол включения 80(., =0. Если схема АПВ
обеспечит такое включение, то успешное втягивание в синхронизм может
происходить при более высоких скольжениях, вплоть до 3 — 4 %.
Для реализации идеи включения при угле включения Бвю=0 схему
АПВ необходимо готовить с определенным опережением по времени, чтобы
замыкание контактов выключателя происходило при угле включен ив 8,t =0
(рис. 2.5). Повторное включение, в котором реализуется это условие, называ-
ется АПВУС — повторное включение с улавливанием синхронизма. Подроб-
нее реализация условия включения при угле включения 8пк,= 0 будет рас-
смотрена в разделе синхронизации генераторов.
Гчава 2 Автоматическое повторное включение
2.12. АПВ с самосинхронизацией генераторов
Сущность рассматриваемого метода повторного включения (АПВС)
заключается в следующем. В случае аварии на линии с двусторонним пита-
нием она отключается Повторное включение осуществляется поочередно.
Сначала пиния включается с одной стороны. Для реализации очередности в
комплекте ЛПВ на этом конце ЛЭП имеется реле напряжения, которое дает
разрешение на повторное включение при отсутствии напряжения на линии
За время раздельной работы тенсраторы на противоположном конце линии
развозбуждаюзея Их повторное включение осуществ.тяется методом само-
синхронизации
Подробнее метод самосинхронизации генераторов рассматривается в
третьей главе. Здесь напомним лишь, что по этому методу не требуется точ-
ная подгонка частоты вращения синхронизируемого генератора и, поскольку
синхронизируемый генератор не возбужден, то не требуется выбирать соот-
ветствующий момент включения по углу.
С этих позиций реализация повторного включения весьма проста и,
казалось бы, метод заслуживает самого широкого применения. Однако об-
ласть его использования ограничена по схемным соображениям. Практически
метод может быть использован для гидростанций, работающих через ЛЭП в
энергосистему.
Рассмотрим принцип действия АПВС на стороне ГЭС. в которой все
азрегаты выдают мощность по линии в энергосистему (рис. 2 6).
Действие автоматики происходит следующим образом После отклю-
ченти выключателя В1 подается сигнал на автомат гашения поля (АГП) гене-
раторов. действием которых генераторы развозбуждаются За счет сброса
нагрузки агрегаты ускоряются, и их частота вращения растет Приходят в
действие регуляторы частоты вращения, которые с течением времени умень-
шат скорость вращения агрегатов до величины, близкой к синхронной При
скольжении в 2 — 5 % схема самосинхронизации (СС) подаст р:тзрсшающий
сигнал на включение выключателя В1. Включение последнего произойдет в
гом случае, если есть напряжение на линии (контролируется с помощью реле
KV3), а на сборных шнпах ГЭС напряжения нет (контроль с помощью реле
KV2). После включения выключателя В1 схема самосинхронизации подаст
возбуждение на генераторы. К синхронной частоте вращения генервторы
53
Глава
Автоматическое повторное включение
подтягиваются за счет асинхронного момента. Втягивание в синхронизм
обеспечивается за счет синхронного момента генератора.
В случае устойчивою короткого замыкания линия еще раз будет от-
ключена со стороны энергосистемы. Повторного включения со стороны ГЭС
не произойдет, так как напряжение на липни отсутствует и реле KV3 держит
свои контакты разомкнутыми.
2.13. Однофазное АПВ
На воздушных линиях электропередачи высокого напряжения наиболее
часто происходят однофазные короткие замыкания. Это объясняется тем. что с
повышением напряжения увеличивается расстояние между фазами шпии и, как
следствие этого, уменьшается вероятность зювре-кдения между фазами. При
однофазном повреждении представ.ыется целесообразным применять цикл
повторного включения только для поврежденной фазы. Гаком цикл называют
ОАПВ — однофазное (нофазное) автоматическое повторное включение.
ОАПВ имеет определенные преимущества. Так, при отключении од-
ной фазы передача мощности сохраняется по двум другим фазам. Обычно в
двухфазном режиме передается около 60 - 70 % номинальной мощности. За
счет этого устраняется перерыв в питании потребителей, получающих энер-
гию ПО ОДИНОЧНОЙ ЛИНИИ.
54
Автоматическое повторное
включение
Не менее важно это обстоятельство для одиночных линий с двусто-
ронним питанием. За счет работы двумя фазами сохраняется связь между
источниками питания, и последующее повторное включение поврежденной
фазы проходит легче, чем в цикле трехфазного АПВ
С другой стороны ОАПВ присущи определенные недостатки и возни-
кают некоторые затруднения в реализации подобного цикла, а именно
выключатели на линии должны иметь пофазный привод;
схема АПВ усложняется за счет избирателей поврежденной фазы и
других блокировок;
в цикле ОАПВ появляются токи и ивпряжения нулевой и обратной по-
следовательности. Защиты рассматриваемой линии и прилегающей сети долж-
ны быть загрублены или заблокированы от ложного действия в таком режиме;
двухфазный режим несимметричен и оказывает вредное влияние на
работу генераторов и телефонных линий связи;
непосредственно ОАПВ нс действует при междуфазных коротких за-
мыканиях, в связи с чем возникает необходимость создания комбинирован-
ных устройств, которые при однофазных коротких замыканиях выполняют
никл ОАПВ. а при многофазных — работают как ТАПВ.
В ряде случаев после неуспешного ОАПВ предусматривается длитель-
ная работа линии по схеме две фазы-земля Такой режим работы выдвигает
повышенные требования к релейной защите смежных участков сети в отно-
шении ее селективности. К тому же дпнтельнвя несимметрия магнитного тю-
тя генераторов и двигателей приводит к их повышенному нагреву и вибра-
ции. С учетом этих обстоятельсгв, возможность длительной работы .шнии
двумя фазами проверяется для каждой линии в отдельности
Несмотря на то, что при ОАПВ линий с двусторонним питанием связь
между источниками питания сохраняется и, следовательно, нет надобности в
проверке синхронности встречных напряжений, тем не менее, уместно рас-
смотреть раздельно повторное включение на тупиковых линиях и линиях с
двусторонним питанием
На линиях с односторонним питанием в качестве избирательных орга-
нов поврежденной фазы устанавливаю гея токовые реле (на питающем конце!
На приемном конце линии применяются реле минимального напряжения,
которые включаются на фазные напряжения. Если на сборных шинах нст
трансформаторов напряжения, то реле избиратели подключаютсв к транс-
55
Гяави 2 Автоматическое повторное включение
форматорам напряжения более низкого напряжения. Однако при этом чувст-
вительность избирательного органа сильно снижается В таких случаях ино-
гда используются реле направления мощности, которые включаются на гок
нулевой последовательности и линейные напряжения
На линиях с двусторонним питанием рассмотренные избирательные
органы непригодны Здесь используют более сложные избиратели повреж-
денной фазы — фильтровые, комбинированные фильтровые и дистанционные
Последние получили наибольшее распространение Дистатшиониые реле
включаются на фазное напряжение и фазный ток, компенсированный током
нулевой последовательности. Эта компенсация улучшает показатели дистан-
ционных органов в различных режимах работы — однофазных и двухфазных
коротких замыканиях, качаниях
2.14. ОЛИВ линии с односторонним питанием
Совместно с релейной защитой автоматика на ЛЭП настраивается на
следующую программу:
при однофазных коротких замыканиях выбирается поврежденная фаза
и отключается. Через заданный промежуток времени поврежденная фаза
включается повторно В случае успешного цикла ОАПВ линия сохраняется в
работе,
ОАПВ действует однократно;
после неуспешного ОАПВ линия или переводится на работу двумя фа-
зами, если такой режим допустим, или отключается тремя фазами:
при работе линии длительно двумя фазами в случае возникновения
еще ощюго повреждение на линии, последняя отключается без попыток по-
вторного включения поврежденной фазы;
при двух и грехфазных повреждениях линия отключается тремя фаза-
ми После этого возможно применение трехфазного АПВ
Принципиальная схема ОАПВ по рассмотренной программе показала
на рис. 2.7.
56
Автоматическое повторное включение
Рцс.2.7. Схема ОА| [В линии с односторонним питанием
Условно схему можно разделить на две части — избиратели повреж-
денной фазы (рис 2.7, а) н непосредственно схему повторного включения
(рис. 2.7. б). Предположим, что на линии произошло повреждение одной фа-
зы, которое самоликвидируйся при сиятн напряжения Допустим, что про-
изошло повреждение фазы «а» (с цепью упрощения на схеме показаны це-
57
Автоматическое повторное включение
почки, относящиеся только к фазе «а»). Для друт их фаз аналогичные цепочки
на схеме не приводятся. При этом, те элементы других фаз, которые должны
приниматься во внимание при рассмотрении фазы «а» на рисунке присутст-
вуют.
В аварийной ситуации релейная защита срабатывает и подаст плюс в
точку М. Также работает избиратель поврежденной фазы - токовое реле КАЯ
Своим контактом это репс подаст питание на промежуточное реле КЦ,, кото-
рое отключает поврежденную фазу. Отключение осуществляется катушкой
УАТВ, получающей питание через контакты KLa. Последовательно в цепочку
отключения включепы блок—контакты выключателя В 1.2а.
Повторное включение поврежденной фазы осуществляется схемой вато-
матики (рис 2.7, б). Основу этой схемы составляет комплект реле
P1IB—58, а именно реле времени КТ], цепочка однократности действия
R2—С и промежуточное реле KI I. Заметим, что такой комплект один ив все три
фазы.
Пуск схемы повторного включение производится посредством реле поло-
жения выключателя, контакты которого В1 1„, В1.1К н В1.1С включены парал-
лельно В свою очередь эти реле пускаются от нссоогастствия ключа управления
и положения выключателя поврежденной фазы. С выдержкой времени реле KTI
включает промежуточное реле KL. которое подает питание на реле катушки
включения УАС Это реле обеспечивает включение поврежденной фазы
В случае неуспешного ОАПВ автоматика может работать различным
образом. Если допускается двухфазный режим линии, то поврежденная фаза
еще раз отключается релейной защитой. Теперь повторного включения не
произойдет, так как к этому моменту конденсатор С разряжен, а в отключен-
иом состоянии линии (фазы) его подзаряд не производится. Работа будет
продолжаться на двух фазах.
При недопустимости длительного двухфазного режима, после неус-
пешного ОАПВ линия должна быть выведена из работы. Такой вариант за-
программирован в схеме рис. 2.7 и реализуется следующим образом. Если
одна из фаз отключилась, то срабатывает- репе K.L2. которое является как бы
устройством памяти такого отключения. В нормальном режиме это реле на-
ходится под напряжением. Своим контактом реле KL2 шунтирует один раз-
рыв в контактных цепочках KL,-KLB, KLB— KLC и КЦ-KL., подготавливая
тем самым трехфазное отключение через реле КЬавс Если далее сработает
58
Глава 2.Автоматичес кое повторное включение
один избиратель КАЛ, го реле KLB подаст сигнал на реле KLMC. которое и
обеспечивает отключение.
При двухфазном коротком замыкании работают два избирателя фаз,
иапример, КАа и КА„. Через контакты KLa и КЦ, будет подано питание на
реле KLmc, которое отключит три фазы. Для того, чтобы при двухфазных ко-
ротких замыканиях ОАПВ не действовало, предусмотрены цепочки из блок-
контактов В1.3а-В1 3„, В1.3в—В 1.3, и В 1.3,—В1 Зи, которые осуществляют
«запрет» действия АПВ Через эти контакты и сопротивление R3 конденсатор
С разряжается. Это происходит в том случае, когда отключаются выключате-
ли сразу двух фаз и блок-контакты В| этих выключателей замыкаются.
В схеме предусмотрена подстраховка на случай повреждения тбнра-
теля или его недостаточной чувствительности. В этой сигуации поврежден-
ная фаза не отключается Для защиты линии в таком случае выполнена це-
почка из трех последовательно включенных контактов избирателей КАа, КАа,
КА,. Нормально эти контакты замкнуты. Если работает релейная защита, но
ни один из избирателей не срабатывает, то подается сигнал на реле KLdBL для
трехфазного отключения линии.
На приемном конце линии устанавливается аналогичный комплект авто-
матики. Отличие заключается липл, в том. что на приемном конце нет репейной
защиты, п сигнал к дейс твию подается от избирателя поврежденной фазы.
Еще раз обрашм внимание на наличие несиммедени при отключении
одной фазы. Защиты, реагирующие на песиммесрию режима, должны быть
или затрублены пли их время срабатывания должно быть бо.1ьше времени
цикла ОАПВ.
2.15. ОАПВ линии с двусторонним питанием
При однофазном отключении связь между источниками питания со-
храняется по даум иеповрсждсияым фазам. Поэтому при последующем по-
вторном включении нет необходимости проверять синхронное гь встречных
напряжении. С этих позиций ОАПВ линий с двусторонним питанием не от-
личаются от ОАПВ тупиковых линий.
59
Гlava 2__________Автоматические приторное включение
Напомним, что в случае трехфазного повторного включения, наличие
одного или двух источников питания приводило к существенному различию
в схемах автоматического повторного включения
В то же время между схемами ОАПВ тупиковых линия и линий с дву-
сторонним питанием имеется существенное различие, обусловленное сле-
дующими обстоятельствами:
на линиях с двусторонним питанием применяются более сложные ю-
бнрагсли поврежденной фазы. Наиболее часто используются дистанционные
избирательные органы,
чаще используются более сложные программы действия автоматики,
такие, например, как сочетание однократного ОАПВ с последующим дейст-
вием трехфазного АПВ (имеется в виду случай неуспешного ОАПВ), перевод
линии после неуспешного цикла ОАПВ на двухфазный режим и т.д.
Очевидно, что как выполнение более сложных избирательных органов,
так и комбинированных программ не представляет собой принципиальных
трудностей при создании схем ОАПВ. Ради упрощения последующего изло-
жения, ниже рассматривается наиболее простая схема ОАПВ, разработанная
во ВНИИЭ для линий с двусторонним питанием напряжением ПО — 220 кВ,
рис. 2.8.
В этой схеме реализуется следующая программа действий релейной
защиты и автоматики:
при однофазном коротком замыкании выбирается поврежденная фаза,
которая затем отключается. Действием ОАПВ поврежденная фаза включается
повторно В случае успешного никла повторного включения линия сохраня-
ется в работе;
ОАПВ действует однократно;
при неуспешном повторном включении |иния отключается гремя фа-
зами,
если на линии происходи! междуфазное короткое замыкание, то от-
ключаются три фазы и повторное включение не производится.
Весь комплект релейной защиты линии разделен на три части. Те за-
щиты, которые реагируют на нссимметрию токов и напряжений подключают
к точке N. На схеме эта группа защит условно обозначена 1РЗ. Защиты, не
реагирующие на несимметрию режима, подключаются к точке М н обозначе-
ны 2РЗ. Резервные защиты ЗРЗ, имеющие выдержки времени больше времени
60
Автоматичы л« е повторное включены
цикла ОАПВ, действуют прямо на выходное реле KL„CJ отключающее три
фазы линии.
61
Глава 2
Автоматическое повторное включение
Проследим действие автоматики в соответствии с вышеизложенной
программой.
Успешное ОАПВ. Предположим, что произошло однофазное короткое
замыкание, которое самоликвидируется при отключении поврежденной фазы.
В этом случае срабо тает релейная защита 1РЗ п 2РЗ. Поскольку контакт KL5 2
нормально замкнут, то как защита 1РЗ, так и зашита 2РЗ подадут питание на
контакты избирателей поврежденной фазы Ид, Ил и Ис, и на промежуточное
реле KL1. Это реле самоудержиавется контактом K.LI .1. Срабатывание избира-
теля поврежденной фазы и замыкание его контакта (например, Иа) обеспечиав-
ет включение реле KLa, которое в свою очередь отключает поврежденную фазу.
Схема повторного включения приходит в действие от факта отключе-
ния поврежденной фазы. Так. если сработало реле KLn (KLB, KLJ, через кон-
твкты KLal, KLB1 и KLC1 подается питание на рек времени КТ1, которое
имеет три выдержки времени КТ1.1, КТ1 2 и КТ1 3. Эго реле устанавлиавст
временную программу повторного включения Гак, с выдержкой времени
КТ1.2 подастся питание на реле KL3, которое в слою очередь через контакты
KL3.1 подает питание на реле KL2 При срабатывании трех реле KL1, KL2 и
KL3 подается напряжение на реле KL4, которое включает поврежденную
фазу.
Па этом заквнчивается цикл успешного ОАПВ По истечении выдерж-
ки времени КТ 1,3 снимается питание с реле KL1 (его обмотка шунтируется
контактом КТ1.3) и схема автоматики возвращается в исходное положение.
Однократность действия ОАПВ обеспечивается тем, что выдержка
времени KTI.2 реализуется на проскальзыавютем контакте, аналогично то-
му, как это сделано в схеме ТАПВ с пуском от релейной защиты.
Неуспешное ОАПВ. После повторного включения на устойчивое по-
вреждение, релейная зашита снова подаст импульс на отключение В соответ-
ствии с программой, теперь следует отключить три фазы Устройством, запо-
минающим факт действия автоматики в первом цикле, является реле KL2.
Контакты этого репс KL2 1, KL2 2 и KL2.3 шунтируют контакты избирателей
поврежденных фаз При срабатывании одного из избирателей питание сразу
через контакты KL2.1, KL2 2 и KL2.3 подается па отключение трех фаз K.La,
КЬаиКЬа.
62
Гчава 2 Автомипическое повторное включение
Напомним, что никл повторного включения осуществляется с выдерж-
кой времени КТ1.2, а возврат схемы автоматики повторного включения проис-
ходит с выдержкой времени КТ1.3. Поскольку выдержка времени КТ1.3 на не-
сколько секунд больше выдержки времени КТ1.2, то в случай неуспешного
ОАПВ вторичное отключение шнии происходит до завершения выдержки
времени КТ1 3, т.е. до того как автоматика повторного включения вернется в
исходное положение. За счет этого вторичное отюиочепие линии происходит
сразу же, как только сработает избиратель поврежденной фазы, гак как плюс в
точку N уже подан посредством контакта KL1.1. Таким образом, отключение
производится даже без действия релейной защиты 1РЗ и 2РЗ.
Метвдуфазныс повреждения. В случае трехфазпого повреждения сра-
батывают избиратели И„ Ив и Ц и линия отключается тремя фазами. Авто-
матика повторного включения приходит в действие в той же последователь-
ности. как и при успешном цикле ОАПВ. Но конечный сигнал на повторное
включение — подача плюса на реле KL4 блокируется. Эта блокировка выпол-
нена с помощью сочетания контактных пар KLa2 — KL„2, KLa2 — KLC2,
KLC2 - KLa2. Если отключалось не менее двух фаз, то, ио крайней мере, одна
из контактных пар, например, KLa2 - KLS2 замкнута и плюс подается на вто-
рой зажим реле KL4, благодаря чему оно блокируется
В случае двухфазного повреждения эти же контактные лары, кроме рас-
смотренного «аанрета» повторного включения, подают питание через контакт
KL1.3 на реле КТ .2. Как было рассмотрено выше, эго реле подготавливает схе-
му для трехфазного отключения независимо от числа сработавших избирателей
поврежденных фаз. Таким образом, и при двухфазном повреждении произво-
дится отключение трех фаз линии.
В схеме ОАПВ имеется ряд блокировок и дополнений, повышающих
ее надежность и обеспечивающих правильность действия схемы в различных
ситуациях Рассмотрим одну из таких блокировок. С небольшой выдержкой
времени после начала действия схемы, срабатывает paic KL5 (обмотка этого
реле на схеме не показана). Через контакты реле KL5.1 действие релейной
защиты 2РЗ переводится па трехфазнос отключение
Поскольку защита 2РЗ не реагирует на нссиммшрию токов и напряже-
ний. то сс срабатывание в неполнофазном режиме свидетельствует о повреж-
дении еще одной фазы. В такой ситуации следует подавать сигнал не на от-
63
Гчава 2 Автоматическое повторное включение
ключепие одной фазы, а па отключение всех фал, что и осуществляется по-
средством реле KL5.
Ряд других блокировок и дополнений на схеме не показаны и здесь нс
рассматриваю 1Ся
2.16. АПВ сборных шип
Короткие замыкания на сборных шинах могут быть проходящими Ес-
ли с шин снять, а затем снова подать напряжение, то проходящее короткое
замыквнне самоликвидируется и .может быть восстановлена нормальная ра-
бота С учетом этого, на сборных шинах уместно применять АПВ
Автоматическое повторное включение шин принципиально нс отлича-
ется от АПВ линий, поэтому для этой цели используются те же принципы и
аппаратура. Некоторая специфика этого вопроса рассматривается ниже.
Различают два подхода в создании АПВ шин. По первому варианту
подстанцию включают в зону действия АПВ питающей пинии. Такой вариант
рассматривается па рис. 2.9.
Рис 2 9. К пояснению АПВ сборных шин
Здесь питание подстанции В осуществляется но НЭП, на которой уста-
новлено АПВ I. В зону действия этого АПВ1 включают и сборные шины под-
станции В Независимо от места повреждении - на самой линии или на сбор-
ных шинах подстанции В - релейная заиытв отключает ЛЭП и она повторно
включается действием АПВ] Отключение и включение производится вы-
ключателем В1
По второму варианту подстанция имеет собственную автоматику по-
вторного включения с действием на выключатель В2, приемного конца пи-
64
Гчава 2
Автоматическое повтц
1 включение
тающей линии Отключение выключателя В2 производится дифференциаль-
ной защитой тин подстанции В. Повторное включение этого выключателя
осуществляется действием АТТВ2.
Каждый из рассмотренных вариантов имеет свои достоинства и недос-
татки и. соответственно, определенную область применения Первый аврианс
выгоднее с точки трения количества аппаратуры Но этому варианту не надо
устанавливать АПВ2 и собственную защиту сборных шин. Этот способ ши-
роко применяется на тупиковых подстанциях с одной питающей липиси
Второй вариант предпочти гельнее для подсташши с несколькими пи-
тающими линиями. В этом случае дифференциальнав защита шин отключает
выключатели всех питающих линий, а автоматика повторного включения
действует или па один или последовательно па несколько выключателей, тем
самым повторно включает одну или несколько пн тающих линий
Если в послеааарийном режиме для обеспечения потребителей под-
станции достаточно включить всего одну линию, то используется АПВ толь-
ко одной люши. Если для питания потребителей одной питающей типии не-
достаточно. то АЛВ2 действует на несколько или на все линии. В этом вари-
анте необходимо соблюдать очередность включения линий Сначала включа
ется одна линия, что создает подстраховку на случай неуспешного АПВ при
устойчивом коротком замыкании. В такой ситуации повторно включеннав
линия еще раз отключается, а действие АПВ на другие линии блокируется,
устраняя тем самым их включение на устойчивое короткое замыкание
Если АПВ успешное. то продолжается автоматическое включение по-
следующих линий Эта очередность продиктована невозможностью одновре-
менного включения нескольких вык;почаге.чей нз-за ограниченной мощности
аккумуляторной батареи.
В аврианте с несколькими питающими линиями необходимо учиты-
вать изменение условий для дейстаия дифференциальной защиты шин. Когда
включены все питающие линии, то ток короткого замыкания при поврежде-
нии на сборных шипах вполне достаточен для действия дифференциальной
зашиты. Если повреждение устойчивое и происходит повторное включение, а
такое включение производится на одной линии, то гок короткого замыкания
может бьнь значительно меньше чувствительности дифференциальной заши-
ты. В такой ситуации необходимо либо автоматически менять уставку днф-
65
Гпсюв 2 Автоматическое повторное включение
фсрснциальной зашиты в связи с действием АПВ, либо иметь вторую, более
чувствительную зашиту, вводимую в работу в цикле АПВ.
В случае нескольких питающих линий от разных источников, при по-
вторном включений сборных шин необходимо следить за синхронностью
встречных напряжений. Здесь возможны те же варианты, что и при АПВ ли-
нии с двусторонним питанием Может оказаться, что между источниками
питания имеются другие линии, которые обеспечивают синхронность работы
этих источников при отключении рассматриваемой подстанции В этом слу-
чае может применяться наиболее простое АПВ шин без проверки синхронно-
сти напряжений. Если отключение питающих подстанцию линий может при-
вести к выходу из синхронизма отдельных станций энергосистемы, то АПВ
шин должно дополнительно иметь устройства контроля синхронности
встречных напряжений, т.е по сути дела на подстанции должен применяться
комплект АПВОС. При должном обосновании может быть использовано
НАПВ.
1 ЛАВА 3
Синхронизация генераторов
3.1. Способы синхронизации генераторов
Синхронизацией называется процесс включения синхронного генера-
тора на параллельную работу с друтими генераторами юти энергосистемой.
Перед включением генератора на параллельную работу (синхрониза-
цией), требуется выполнить ряд операций, которые могут быть проведены
как вручную. так и специальными автоматическими устройствами В соот-
ветствии с этим различают два вида синхронизации — ручную и автоматиче-
скую. Возможен и промежуточный авриант - так называемой полуавтомати-
ческой синхронизации, когда часть операций выполняется персоналом стан-
ции вручную, а другая - автоматически. Далее рассматривается только авто-
матическая синхронизация.
Существуют два способа синхронизации — точная и самосинхрониза-
ция. Термин точная синхронизация полнее отражает сущность метода, под-
черкивая факт точной подгонки частоты, величины и фазы напряжения син-
хронизируемого генератора
Термин самосинхронизация не раскрывает полностью сущности это-
го метода. Необходимые операции для синхронизации генератора и в этом
случае выполняются либо персоналом вручную, либо автоматикой, но при
этом не требуется столь точная подгонке указанных величин синхронизируе-
мого генератора.
3.2. Самосинхронизация генераторов
Процесс самосинхронизации генератора производится следующим
образом. Ротор генератора разворачивается турбиной до частоты врашенив
близкой к синхронной и без возбуждения включается в сеть, после чего в ро-
тор подается возбуждение. Возниквющие в генераторе электрические момен-
ты обеспечивают подтягнавние ротора к синхронной частоте вращения и его
втягивание в синхронизм При последующем увеличении открытия регудп-
67
рующсго органа туроины генератор начинает принимать активную нагрузку
и работать параллельно с другими генераторами.
При самосинхронизации нет необходимое ги соблюдать условия точ-
ной синхронизации Действительно, поскольку подключение синхронизируе-
мого генератора в есть происходит без возбуждения, то его напряжение равно
нулю и действия по подгонке этого напряжения, как по величине, так и по
фазе теряют смысл. Частота вращения генератора также не обязательно
должна быть точно синхронной. Процесс самосинхронизации может быть
произведен весьма быстро, поскольку пе требуется точная подгонка рассмот-
ренных параметров В этом заключается одно из основных прсимущсста это-
го способа, особенно в аварийных режимах, когда частота сети может отли-
чаться от 50 Гц и меняться во времени. Отсутствие устройств точной подгон-
ки напряжения и частоты вращения генератора приводит к тому, что схема и
аппаратура самосинхронизации получается простой и надежной.
При самосинхронизации возникает большой уравнительный iok в
моменг включения генератора в есть Максимальное амплитудное значение
этого тока определяется формулой:
где/-'^— продольная э.л.с. эквивалентного генератора энерюсистемы за
сверхпереходным индуктивном сопротивлением т^.!
vt. - эквивалегпиос индуктивное сопротивление сети, через которое
генератор связан с эиерюсистемоп;
лл, и — сверхпереходныс индуктивные сопротивления подключаемо-
го и эквивалентного генераторов по продольной оси,
А-,.Л -коэффициент, учитывающий наличие апериодической составляющей
тока,обычно = 1.8—1.95
Наиболее тяжелые условия синхронизации возникают при включении
генератора на сборные шины бесконечной мощности, когда сопротивление сети п
генератора равны 1ту.тю (хг — 0, г^_ — 0). В этом случае максимальное значение
68
Гяаяа 3.
Синхронизация .’i'i , рапюрав
уравнительного тока равно ударному току короткого замыкания на выводах гене-
ратора
Как правило, сопротивление энергосистемы не равно нулю хг * 0, и урав-
нительный ток меньше тока короткого замыкания на выводах генератора По-
скольку уравнительный ток является реактивным, то при самосинхронизации
больших толчков активной мощности и опасных механических усилий па валу
генератора нс возникает
Наличие больших уравнительных токов является существенным не-
достатком способа самосинхронизации. Короткое замыкание на выводах ге-
нератора является аварийным режимом и происходит сравнительно редко.
Синхронизация генераторов производихся значительно чаще н. следователь-
но, в каждом случае генератор нретнамеренно подвергается действию боль-
ших уравнительных токов
Включение генератора методом самосинхронизации сопровождается
снижением напряжения на сборных шинах станции. Напряжение на i опера-
торе может быть определено по формуле
иг=ис-1, х (3 3)
Уравнительный ток, протекающий через генератор
Совместное решение уравнении (3.3) и (3 4) дает
Ь—I (3S)
откуда снюьение напряжения на выводах юнераюраопрсдетяегся как
69
Сииггппилшм екпкрс гпороч
Таким образом, величина снижения напряжения зависит от соотно-
шения сопротивлений энергосистемы хГ и генератора л , что в свою очередь
определяется соотношением мощностей энергосистемы и генератора. При
соизмеримых значениях этих сопротивлений снижение напряжения может
достшагь 50 % от номинального значения, однако, обычно г < лг, поэтом)
снижение напряжения составляет меньшую величину.
По мере типизация генератора в синхронизм напряжение па сбор-
ных шинах восстанавливается. Это определяется, во-первых, тем, что сопро-
тивление генератора увеличивается (так, для гидрогенератора лj = Зл^) и.
во-вторых, действием регулятора напряжения и устройства форсировки воз-
буждения. Втягивание генератора в синхронизм происходит сравнительно бы-
стро — за время 1 — 2 с, так что снижение напряжения получается кратковре-
менным и. как правило, не оказывает существенного влняпия на режим рабо-
ты энергосистемы и большинстав потребителей Поэтому практически пет
ограничений величины мощности генераторов, включаемых в сеть методом
самосинхронизации.
Возможность применения самосинхронизации оценивается по сле-
дующему критерию Если действующее значение периодической составляю-
. - ,, ие
щей толчка уравнительного тока, определяемого форму юи ivp =——£,
не превосходит 3,5 кратного значения номинального тока генератора, го ге-
нератор можно включать по способу самосинхронизации
Для гидрогенераторов переходное сопротивление составляет величину
x'd =0,3 Отсюда следует, что у гидрогенераторов толчок уравнительного тока
не превосходит 3,5 кратного значения, даже если сопротивление энергосистемы
равно нулю, хс = О Таким образом, включение гидрогенераторов по способу
самосинхронизации допустимо независимо от схемы электрических соедине-
ний станции.
70
3.3. Моменты, действующие на ротор генератора
при самосинхронизации
Рассмотрим моменты, действующие на ротор генератора в процессе
самосинхронизации.
На холостом ходу избыточный момент турбины идет на ускорение агре-
гата.
7, *’ = М,.-М, ^АМ,1Л. (3.7)
где (а — частота вращения.
Tj — инерционная постоянная времени агрегата,
— момент турбины,
.Vc - момент сопротивления,
AA/„,6 — избыточный момент турбины
После включения генератора в есть возникают электромагнитные
моменты - асинхронный, реактивным и синхронный [14]
7;^+«.с+И,+И„„=ЛИ.,». (38)
Если избыточный .момент турбины равен нулю, т.е. развиваемый
турбиной момент целиком расходуется на преодоление момента сопропиле-
ния. то дальнейшее изменение частоты вращения возможно только за счет
электромагнитных моментов Рассмотрим эти моменты подробнее
Асинхронный монет- Мас. Этог момент является одним из опреде-
ляющих моментов, обеспечивающих вхождение генератора в синхронизм.
Именно за счет асинхронного момента происходит подтя! ивание ротора ге-
нератора к синхронной частоте вращения. Чем больше асинхронный момент,
гем легче генератор подтянется к синхронной частоте вращения и за счет
синхронного момента втянется в синхронизм
Асинхронный момент генератора создается за счет взаимодействия
вращаюшсгося магнитного потока статора н токов, наведенных им в обмотке
возбуждения и успокоительной обмотяс ротора.
71
Синхронизация генегитнргт
Точное аналитическое выражение асинхронного момента очень
сложно. В тоже время решающее значение для подведения ротора к синхрон-
ной частоте вращения имеют постоянные составляющие момента, образую-
щие так называемый средний асинхронный момент Поэтому ниже приводят-
ся формулы только для среднего асинхронного момента генератора.
Поскольку асинхронный момент определяется параметрами генерато-
ра, то у турбогенератора и гидрогенератора асинхронные моменты различны
Величина момента зависит также от наличия у генератора успокоитель-
ной обмотки Для гидрогенератора без успокоительной обмотки величина сред-
него асинхронною момента для практических расчетов может быть выражена
так;
М. .. — -1 * * * S *-7^- . (3.9)
2 i +f sTri )
Для турбогенератора выражение среднего асинхронного момента
может быть предстааяено в виде
(3-10)
1 дс , х - синхронное и переходное индуктивные сопротивления генера-
тора по продольной оси;
-Тч .— синхронное и сверхпереходнос индуктивные сопротивления
генератора по поперечной оси,
Г/; ностояннав времени переходной составляющей тока по продоль-
ной оси при закороченной обмотке статора;
Т" — ностояннав времени для сверхпереходной составляющей тока по
поперечной оси при закороченной обмотке статора;
s — скольжение
Бочсе наглядное представление о величине и характере среднего
асинхронного момента даег графическая зависимость эюю момента в функ-
ции скольжения генератора. На рис. 3 1 показаны кривые среднего асинхрон-
ного момента для различных типов синхронных генераторов.
CwixpoirufcJiinn л
Рис.3.1.1 рафики средних асинхронных моментов для турбогене-
ратора (1), гидрогенератора с демпферной обмоткой (2) и без
демпферной обмотки (3)
Лучшей характерце! икой асинхронного момента обладают lypoorc-
нераторы. За счет большого асинхронного момента турбогенераторы успеш-
но втя! нваются в синхронизм даже при скольжении равном s = ± (15 - 20) %
в течение времени 2 —3 с.
Значительно меньший асинхронный момент имеют гидрогенерато
ры. особенно гидрогенераторы без успокоительной обмотки Однако, как
показал опыт, гидрогенераторы также надежно подтягиваются к синхрон-
ной скорости, если включение в сеть производится со скольжением не бо-
лее s = + (2 — 3) % и принимаются надлежащие меры для уменьшения уско-
рения ротора при включении В первую очередь это относится к гидрогене-
раторам без успокоительной обмотки.
Как видно из рис. 3.1, максимум асинхронного момента достшается
при скольжениях до s 1 %, затем асинхронный момент убывает и при
скольжении з - 0 он естественно становится равным нулю Таким образом,
окончательное втягивание генератора в синхронизм не может быть осуществ-
лено за ечст асинхронною момента.
Реактивный момент Мр Этот момент определяется взаимодействи-
ем вращающегося поля статора с явно выраженными полюсами ротора Ве-
личина реактивного момента рассчитывается по формуле
М = —-— -------~хт 25 (3.11)
2 xdxq
Реактивный момент не играет существенной роли при самосинхрони-
зации генератора, поскольку его величина не столь большая, квк средний
73
Сичхроншчция геперопи.: -«
асинхронный момент. I ак, для гидрогенераторов максимальное значение ре-
активного момента нс превосходиt значение М — (0.2 — 0,4) W„„, Более су-
щественным яаяяется тог факт, что реактивный момент изменяется во време-
ни е двойной частотой скольжения. За счет этого ротор генератора может
втянуться в синхронизм как при угле 5=0, так и при уг.зе 5=180°. Вхожде-
ние в синхронизм с углом 5=180и недопустимо, так квк после подачи воз-
буждения генератор оказывается включенным в противофазе Под действием
синхронного момента ротор генератора должен будет повернуться на угол
5 = 180°, что будет сопровождаться дополнительными качаниями ротора,
значительными толчками тока и активной мощности
Синхронный момент Л/гия. За счет синхронного момента происхо-
дит втягивание ротора генератора в синхронизм. В установившемся режиме
синхронный момент генератора определяется известным выражением
tin 5
(3 12)
Вследствие запаздывания в обмотке возбуждения, ток возбуждения
нарастает постепенно Поэтому после подачи возбуждения синхронный мо-
мент устанавливается не мгновенно, а нарастает по экспоненциальному зако-
ну с постоянной времени 7J
(3.13)
При подтягивании генератора к синхронной частоте вращения его ро-
тор движется с некоторым ускорением Поэтому в первый момент синхронной
работы в силу инерции ротора генератор будет качаться относительно среднего
значения угла 5. Качания ротора сопровождаются колебаниями тока статора и
полчками активной мощности, которые постепенно затухают Существенное
влияние на затухание колебаний оказывает успокоительная обмотка генерато-
ра. У гидрогенераторов с успокоительной обмоткой колебания затухают через
2 — 3 периода после вхождения ротора в синхронизм. У гидрогенераторов без
успокоительной обмотки качания ротора продолжаются в течение времени
t = 10 —15 с Качания проявляются в меньшей степени, если сразу же после
вхождения в синхронизм генератор примет на себя активную ншрузку.
Сц,-, оптация «. .,.f>amopt
3.4. Пусковые характеристики rurpoai pci a ia
Продолжительность пуска гидроагрегата с постедуюшей самосин-
хронизацией зависит о г величины открытия направляющего аппарата Чем
больше открытие направляющего аппарата, тем больше момепт турбины и
тем быстрее нарастает частота вращения агрегата
Зависимость нарастания частоты вращения в функции времени назы-
вают пусковой характеристикой Каждой характеристике соответствует опре-
деленное открытие направляющего аппарата на холостом ходу Па рис. 3 2
показаны три характеристики- сниженная 1, нормальная 2 и повышенная 3
Рис.З 2 Пусковые характеристики гидрогенератора
Вследствие запаздывания в системе регулирования гидротурбины
процесс изменения частоты вращения пост колебательный характер. Уста-
новившееся значение частоты вращения по нормальной характеристике соот-
ветствует синхронной частоте <00 Автоматика синхронизации контролирует
достижение подсинхронной частоты вращения сояе и подает сигнал на вклю-
чение генератора в есть.
Точки пересечения пусковых характеристик с линией солг. опреде-
ляют время включения генератора. Очевидно, самое быстрое включение про-
исходит при пуске по повышенной характеристике 3.
Наибольший интерес представляет нормальная характеристика,
обеспечивающая достаточно быстрое включение генератора в сеть и эффек-
тивное втягивание сю в синхронизм. Эффективность втягивания в синхро-
низм зависит от ускорения, с коюрым генератор проходит синхронную час-
тоту вращения свп. На рисунке это ускорение определяется углом наклона
75
"tiHxptiHunmiux ^.риторов
касательной к пусковой характеристике при синхронной частоте враще-
ния Of,.
В свою очередь ускорение ротора генератора dbtldt определяет из-
быточный момент Т— = ЬМиЛ. Этот избыточный момент должен быть
J dt
скомпенсирован электромагнитными моментами и. в первую очередь, асин-
хронным моментом генератора после прохождения синхронной частоты ta„
С этих позиций нормальная пусковая характеристика обеспечивает неболь-
шой избыточный момент при прохождении генератором ситгхронной частоты
(0с и его быстрое включение в сеть.
При повышенной пусковой характеристике прохождение синхронной
частоты 0)с происходит с большим ускорением, а следовательно, со значи-
тельным избыточным моментом Следствием этого может быть не втягивание
генератора в синхронизм.
Наиболее эффективное втягивание генератора в синхронизм обсспе-
чнавстся сочетанием пусковых характеристик, а именно, до частоты враще-
ния (0,7 — 0,8) соо агрегат пускается по повышенной характеристике затем
открытие направляющего аппарате гидротурбины переводится в положение
соответствующее нормальной характеристике Это несколько усложняет схе-
му самосинхронизации гидрогенератора
Обычно время синхронизации гидрогенератора при пуске но нор-
мальной характеристике лежит в предслвк 30 - 40 с. При пуске агрегата по
сниженной характеристике требуется время 80 — 120 с
Как только генератор втягивается в синхронизм, действием на механизм
изменения числа оборотов (МИЧО) ретулятора частоты врашспня в соответствии
с программой пуска агрегата производится дополнительное открытие направ-
ляющего аппарата турбины и генератор начинает набирать активную нагрузку.
76
Г чана 3
3.5. Устройства контроля подсинхронной частоты вращения
Контроль подсинхронной скорое । и ротора генератора может выпол-
няться с помощью как механических, так и электрических устройств. Меха-
нические реле реашруют на величину частоты вращения, а не на скольжение
и отличаются сравнительно невысокой точностью, в результате чего выбор
момента включения синхронизируемого генератора может бьпь произведен
неверно, особенно в аварийной ситуации, когдв частота энергосистемы отли-
чается от номинальной
Более совершенным является принцип измерения скольжения, т.е раз-
ности частот сети и синхронизируемого генератора. В »том случае при любом
практически встречающемся отклонении частоты сети момент подключения
генератора выбирается правильно и определяется уставкой скольжения
Поскольку при самосинхронизации генератор разворачивается не-
возбужденным, го возникают затруднения с питанием обмотки реле разности
частот со стороны генератора Широкое распространение получило реле раз-
ности частот типа ЙРЧ—0IA. Особенность этого реле заключается в том, что
для возбуждения одной из его обмоток вполне достаточно напряжения оста-
точного намагничивания
Ниже рассмотрен принцип действия реле ИРЧ-01А (рис. 3 3).
Рис.3.3. Схема и характеристика реле I IP4-0IА
Реле выполнено на индукционном принципе и состоит из четырехпо-
люсного статора, цилиндрического ротора и контактной системы Неподвиж-
77
Гтиеи J._________________СинxpcihiiMtiivi zeitijKiiuop.№
ные контакты располагаются с двух сторон и замыкаются подвижным кон-
тактом. укрепленным па якоре реле.
Реле имеет две обмотки Одна обмотка рассчитвна на напряжение
100 В и подключается через трансформатор напряжения к сети. Вторая об-
мотка включается через трансформатор напряжения на остаточное напряже-
ние генератора. Эта обмотка выполнена с малым сопротивлением, так что
остаточного напряжения D = 0,5 — 1,5 В вполне достаточно для ее шпашм.
Момент, действующий на ротор индукционного реле, определяется
известной формулой
М,, = кФсФг sm СФ,Ф, ) (3 14)
Поскольку
Ф, =С’с иФ2и1/г,
то
М„р = кЪ'сиг sin (U*L' l=kUЛ sin 5. (3.15)
Угол 5 между напряжением энергосистемы Ut и напряжением генераторов
С'г равен.
8=(<flc.-co,) t = osl,
где cos скольжение
Учитывая сказанное, получим
= kU, 11 . sin <o,i (3 16)
Таяим образом, на ротор реле действует вращающий момент с часто-
той. равной частоте скольжения ft =^~ Величина момента зависит от на-
пряжения сети и остаточного напряжения i-снсратора
В реле ИРЧ-Ol исиолыуется явление резонанса. Амплитуда колебания
ротора реле с укрепленным на нем подвижным контактом тем больше, чем ближе
частота вращающего момента реле к частоте собственных колебаний якоря
78
Синхронизация гепсратпрое
На рис. 3 3, б показана резонансная кривая реле. Здесь /0 — частота
собстаенных колебаний якоря; /’-амплитуда отклонения подвижного кон-
закта и fc - расстояние между неподвижными контактами
В обесточенном состоянии якорь реле удерживается пружиной в сво-
ем среднем положении. При возбуждении обмоток якорь начинает колебать-
ся. До тех пор, пока частота скольжения/ велика, амплитуда отклонения
подвижного контакта незначительна и неподвижные контакты не замыкают-
ся С увеличением частоты вращения генератора частота скольжения /,
уменьшается, при этом амплщуда колебаний подвижного контакта увеличи-
вается Реле выполнено так. что при частоте /, =fip~ 1,0 Гц амплитуда ко-
лебаний становится равной -у- (точка «а» рис.З 3,6) и реле срабатывает. При
срабатывании реле неподвижные контакты замыкаются кратковременно,
причем за одно колебание ротора репе срабатывает дважды- сначала замыка-
ется одна пара неподвижных контактов, затем — другая Реле подвет кратко-
временные импульсы, таким образом после него необходимо ставить проме-
жуточное реле, подхватывающее эти импульсы
Уставка срабатывания реле зависит от величины напряжения энерго-
системы мс. и генератора иг . При изменении этих величин резонансная кри-
вая реле изменяется Например, если одно из напряжений увеличивается, го
резонансная кривая поднимается и точка пересечения згой кривой с линией
f
— перемешается вправо (точка «d») Это означает, что начало замыкания
неподвижного контакта наступит несколько раньше, при большей частоте
скольжения /,.
Однако, при использоавнни явления резонанса зависимость уставки
реле от напряжения не столь значительна Так, при изменении напряжения
сети в пределах И = (50 - 120 %)Ь'ИОЛ1 и остаточного напряжения renepaiopa
+ 50 % от среднего значения, уставка срабатыг.'ния реле нахощпся в преде-
лах/ — 0,5 — 1,3 Гц, что вполне допустимо
79
Сннхрунтацня генератор™
Следует отметить, что уставка реле 11РЧ-01 также зависит и от уско-
рения синхронизируемого генератора. При переменном скольжении реле сра-
батывает с погрешностью
После синхронизации генератора, напряжение на второй обмотке
реле ИРЧ-01 резко возрастает, что может вызвать ее повреждение. Поэтому
она немедленно отключается
Если остаточное напряжение генератора мало для надежного сраба-
тывания реле, то его необходимо включать через специальный стабилизатор
напряжения.
В настоящее время выпускается реле разности частот на полупро-
водниковых элементах [3]. Кратко изложим принцип исполнения этого реле.
Напряжение генератора иг и энергосистемы izt преобразуются в импутьсы
прямоугольной формы, соответствующие положительным полуволнам лих
сигналов Измеряется смещение импульсов по фазе угла 6 При наличии
скольжения смешение но фазе меняется во времени Б (t) = CO,. t. Дифферен-
цированием chi пала 6(1) получается скольжение напряжения генератора
относительно напряжения сети Компаратор на выходе схемы реле реагирует
на скольжение и срабатывает при заданном значении
Полупроводниковое реле разности частот РГР—II надежно срабаты-
вает при остаточном напряжении генератора в (2 — 15 %)£7„ои Уставка реле
по скольжению находится в пределах f* 1.0 —1Л Ги
3.6. Схема самосипхропизаиии гидрогенератора
Принципиальная схема самосинхронизации гидрогенератора показа-
на на рис 3 4
Схема разработана для пуска агрегата но нормальной пусковой ха-
рактеристике Контроль подсинхронной скорое। и осуществляется с помощью
реле разности частот ИРЧ-01 А.
Схема работает следующим образом Включается ключ самосинхро-
низации (SA) Этим действием определяется дальнейшее программа пуска и
включения генератора по методу самосинхронизации Готовность агрегата к
80
Синхронизация генераторов
пуску контролируется рядом реле: РО, ДД, ЛТП и БК. Пуск разрешается, ес-
ли реле останова РО обесточено и его контакты замкнуты, тормозная система
в исправности и когггакт датчика давления ДД находится в замкнутом со-
стоянии, автомат гашения поля и выключатель генератора от ключены и кон-
такты АГП и БК также замкнуты
KLO I
Рис 3 4. Схема самосинхронизации гидрогенератора
Поворотом ключа SA1 осуществляется пуск агрегата- включается реле
ватоматического пуска KL0, которое подает команду на регулятор частоты
Глава 3 Синхронизация геператпров
вращения. Через контакт KL0.2 подается питание на реле КЫ Если включение
генератора производится по методу точной синхронизации, то контакты ключа
SA-CC разомкнуты и при пуске агрегата реле KL1 не включается
Включение ключа SAI может быть кратковременным, поэтому в
дальнейшем реле KL0 самоудерживается своим контактом К10 I
Реле KL1 предназначено для выполнения ряда операций. Через кон-
такты KLI.T подается питание на реле KL2. Контакты KL1.2 и KL1 3 исполь-
зуются для подключения реле разности частот KF Четвертый и пятый кон-
такты этого реле являются блокировочными контактами в цепи включения
выключателя, АГП и реле KL3. Питание в чти цени подается только в том
случае, если реле KL1 сработало
Одновременно с реле KL2 пускается реле времени КТ1, которое че-
рез определенную выдержку времени своим контактом КТ1.1 разрывает цепь
реле KL2. Таким образом, нормально открытый контакт KL2 I замыкается
лишь на определенный промежуток времени, определяемый выдержкой вре-
мени реле КТ1.
Через контакт KL2.1 подается питание на реле РУД (реле управления
двигателем МИЧО) Это реле включает двигатель Д. С помощью репс РУД! и
ГУД2 возможно управлять двигателем Д как автоматического синхронизато-
ра ACT, так и вручную ключом SA2 В этом случае можно подать импульсы
на «прибавить» (через реле РУДО и на «убавить» (через реле РУД2).
При самосинхронизации точная подгонка скорости агрегата нс требу-
ется, поэтому через контакты KL2 I подается импульс только на «прибавить»,
причем такой длительности, чтобы открытие направляющего аппарата турбины
соответствовало нормальной пусковой характеристике. Длительность этого
импу зьса определяется репе времени КТ! и подбирается экспериментально.
При частоте генератора, близкой к частоте сети, срабатывает реле
разносш частот KF! (ИРЧ-01), которое своим контактом KF 1. J пускает реле
КПЗ Реле ИРЧ-0! обеспечивает кратковременный импульс. Для надежного
срабатывания реле KI.3 последнее самоудерживается через контакт KL3.1.
Вторая обмотка реле ПГЧ-01 рассчитана на ток в 60 МА (включается
на остаточное напряжение генератора). При включении генератора в есть она
отключается контактом KL3 2 во избежание повреждения
Реле KL3 подает импульс на включение АГП и выключателя АГП
срабатывает, и в цель ротора подается возбуждение, при эгом ротор втягива-
82
Гчава Л
инхропшация генератор
ется в синхронизм На этом процесс пуска турбины и самосинхронизации
заканчивается.
3.7. Точная синхронизация генератора
Точная синхронизация генератора осуществляется следующим обра-
зом Ротор генератора разворачивается турбиной и возбуждается Перед
включением генератора в сеть выполняются следующие условия-
U =L — величина напряжения генератора подгоняется к напряжению сети,
। = fc частота генератора выравнивается с частотой сети;
6=0 — выбирается наиболее благоприятный момент включения, когда угол
между векторами напряжения генератора и сети равен нулю.
Подгонка указанных величин осуществляется или вручную персона-
лом станции (ручная синхронизация), или с помощью автоматических уст-
ройств (автоматическая синхронизация)
Включение возбужденного генератора в сеть сопровождается уравни-
тельным током Величина и характер этого тока зависит от того, насколько точ-
но выполняются условия синхронизации. Уравнительный ток вызывает толчки
мощности. Толчок активной мощности через генератор передается на турбину.
Толчок реактивной мощности воспринимается только генератором.
В случае Е”аг = = E"d величина уравнительного тока равна
. 6
мп —
(3.17)
де Е^ и Edr — продольные • д.с. синхронизируемого генератора и эквива-
лентного генератора энергосистемы за сверхпереходным индуктивным со-
противлением Xdl И по продольной оси.
хсв — эквивалентное индуктивное сопротивление связи;
6—угол сдвига фаз между Edl и Е& .
83
Гчава 3
Синхронизация генератор в
При угле 6 — 0 уравнительный ток равен нулю В этом и заключается ос-
новное преимущество точной синхронизаций: если момент включения вы-
бран правильно, то включение происходит без толчка уравнительного тока.
Наибольшее значение уравнительного тока получается при угле
5 = [80°, когда яи = 1,0. В этом случае величина уравнительного тока равна
(3 18)
Особо значительным уравнительный ток может быть при включении
генератора на шины «бесконечной» мощности. Так как при этом сопротив-
ление связи хсв = 0 и Х& = 0, то получим следующее уравнение для урвани-
тельного тока
VI 1.8 2А'
(3 19)
В этом случае уравнительный ток в два раза больше ударного тока
короткого замыкания на выводах генератора. Это весьма опасный режим для
генератора, поскольку возникающие механические усилия уже в четыре раза
больше механических усилий, которые создаются при коротком замыкании
на выводах генератора. Отсюда следует, что нельзя включать генератор при
таких условиях
Величина и характер уравнительного тока зависит от точности соблю-
дения условий синхронизации. Рассмотрим, к чему приводит несоблюдение
того или иного условия. В целях упрощения анализа будем полагать, что не
выполняется какое-либо одно условие, а два других выполняются абсолютно
точно
Первы й случай: I/. Ф Uc, /г = f,, 6 = 0 К моменту включения генера-
тора его напряжение не выравнено с налряженисм сети Под действием разно-
сти напряжений потечет уравнительный ток. По своему характеру этот ток ре-
активный. Если напряжение генератора больше напряжения сети (У. >UC, то
для генератора уравнительный ток будет отстающим Известно, что индуктив-
ный ток размагничивает генератор. Если напряжение генератора меньше на-
84
I 'зава 3
С шаронизация генераторов
пряжения сети Ue<Uc, то для генератора уравнительный ток будет опере-
жающим, намагничивающим. В обоих случаях за счет дополнительного намаг-
ничивания или размагничивания напряжения генератора и сети будут выравне-
ны
Вюрий случай: Ъ’г=Ъ’с, 6 *0. Включение генератора произ-
водится. koi да угол 6 нс равен нулю Векторная диаграмма для этого случая
показана на рис. 3.5
Рис 3.5 Векторная диаграмма напряжений и токов
При малых значениях угла 6 уравнительный ток в основном будет
активным. В момент включения генератора возникает толчок активной мощ-
ности Этот толчок воспринимается и генератором, и турбиной. Если э.д.с
генератора Е опережает эд с сетиЕ^., то в первый момент генератор при-
мет на себя активную нагрузку, вследствие чего ротор начнет тормозиться и
угол 6 будет уменьшаться. Если э.д.с. генератора Ег отстает от э д с. сети
Ес, то синхронный момент будет отрицательным и генератор начнет рабо-
тать в режиме синхронного двигателя, потребляя активную мощность из сети.
За счет этого ротор ускорится и угол 6 начнет уменьшаться.
Третий случай: Uг = U, *fc,& = 0 Включение генератора про-
изводится при неравенстве частот генератора и сети. Если частота генератора
больше частоты сети/г> fc, то под действием избыточного момента ротор
генератора начнет опережать ротор эквивалентного генератора энергосисте-
мы. С появлением угла ё генератор примет на себя активную нагрузку,
вследствие чего его ротор начнет тормозиться Чем больше разность частот,
тем большим будет вылет угла При значительном расхождении частот ротор
генератора может не войти в синхронизм на первом цикле, а несколько раз
85
Глава 3
Синхронизации .vHipamopot
провернуться на угол 360°в асинхронном режиме до успешной или неуспеш-
ной синхронизации. Это будет сопровождаться значительными толчками
уравнительного тока и мощности. При частоте генератора ниже частоты се-
ти f£<f ротор генератора начнет отставать от ротора эквивалентного гене-
ратора энергосистемы. Появится уравнительный момент, который будет ус-
корять ротор с последующей успешной или неуспешной синхронизацией.
3.8. Принцип улавливания момента синхронизма
Для создания устройства улавливания момента синхронизма (угол
6 = 0) используют так называемое напряжение скольжения. Это напряжение
может быть получено следующим образом. Вторичные обмотки трансформа-
торов напряжения генератора и сети включаются ио схеме рис 3 6.
11апряженис между' точками «а» и «б» равно
Поскольку
пг = (7г тпа г t ur=U, sintoc I
то иаб = Ur sin сог г - Ur ЫП(£>С1.
При Сг =L>C =U получим.
.... - <о,+ ю.
nag = U №‘п <0 г1 — sin со ct) = 2L sin — -—t cos — -- r
86
Синхронизация генераторов
I рафик напряжения скольжения ипоказан на рис. 3.7.
Ж
Рис 3 7 График напряжение скольжения
Из графика видно, что напряжение скольжения иоС представляет
собой гармоническое колебание в функции двух частот, равных полусумме и
нолуразности угловых частот вращения генератора и сети.
Величину 2U xin I можно рассматривать как амплитуду
г . о) + то
гармонического колебания с частотой---, т.е
ио5=ил.««--—L-r,
где
<о-<о.
и, = 2L sin— -1
2
Для создания элементов синхронизатора эта амплитуда представляет
наибольший интерес Известно, что для выделения амплитуды переменного
напряжения необходимо произвести выпрямление и сыаживание при лом
выходное напряжение за выпрямителем будет пропорционально амплитуде
приложенного напряжения Из рис. 3.6 видно, что напряжение скольжения
иаб приложено к выпрямителю, на выходе которого имеется сглаживающий
фияы р RC При соответствующем выборе параметров этого фильтра напря-
жение на его выходе равно
етг-со,
и, =ки sin----t
' 2
Это напряжение называется напряжением скольжения.
87
Глава 3
Сшпронишция генераторов
Принимая во внимание, что со,— сог= соs. получим:
со,.<
w, = kU sin---,
2
и поскольку СО sl = 8 , то
И,=Н/т| (320)
Таким образом, напряжение скольжения и, является функцией угла
8. Максимальное значение напряжения скольжения ws получается при угле
6= [80° При угле 6=0 напряжение скольжения равно и И 0. Отсюда следу-
ет возможность контроля времени прохождения угла 5 через ноль. Для этого
нет необходимости непосредственно измерять угол 6, а достаточно контроли-
ровать момент, когда напряжение скольжения равно и, = 0. Эту операцию
можно выполнить посредством реле, у которого возврат якоря происходит при
нулевом напряжении
3.9. Способы контроля напряжения и частоты
Контроль напряжения генератора не вызывает особых затруднений и
может быть выполнен с помощью обычного электромагнитного реле напря-
жения Схема элемента контроля равенства напряжений показана на рис. 3.8.
Рис.3.8. Схема элемента контроля равенства напряжений
88
Гiaea3
Синхронизация генераторов
Фазы В трехфазной системы вторичных напряжений генератора и се-
ти соединяются между собой. Между фазами С включается потенциометр R.
Реле KV включается через выпрямитель между средней точкой потенциомет-
ра R и фазой Ь. При таком включении на реле KV подается напряжение
скольжения и„.
Диаграмма напряжения, приложенного к ре ie в различные моменты
времени, показана на рис 3 9.
Рис 3 9 Диаграммы, поясняющие принцип действия
□Лемейia контроля равенства напряжений
Если напряжение генератора I и сети Ut. равны, то при угле 6 = 0
(фазы совпадают, рис.3.9, а) на реле KV подается линейное напряжение
При угле 6 = 180° напряжение на реле не подается (рис.3.9, б), и оно отпуска-
ет свой якорь.
Когда величины напряжений генератора и сети не равны между' собой,
реле будет находится под напряжением при всех значениях угла, в том числе и
при угле 6 = 18(Т. Действительно, при угле 6 = 0 (рис.3.9, в) на реле подается
напряжение, не равное нулю. Когда угол 6= 180° (рис. 3.9, г), то напряжение,
подаваемое на реле, также ие равно нулю, и якорь реле отпускаться не будет.
Итак, равенство напряжений определяется состоянием реле- ести
якорь реле не отпускается, то напряжения не равны: если в определенные
моменты времени якорь реле отпускается, то напряжения равны.
89
Сшкрсяшчацня ’Litcpamupoti
Контроль частоты генератора также не вызывает особых затрудне-
ний. При точной синхронизации генератор возбужден и для контроля часто-
ты можно применить электрическое реле. В аварийных условиях частота
энергосистемы может отличаться от 50 Гц, поэтому правильнее контролиро-
вать не частоту генератора, а его скольжение относительно сети.
В автоматических синхронизаторах для контроля скольжения генера-
тора применяются простые электромат нитные реле. Их использование воз-
можно, так как контроль скольжения производится косвенным образом, при
этом контролируется скорость изменения напряжения скольжения us. Ранее
было показано, что напряжение скольжения равно п, =А'яи-^ При малых
значениях угла ё напряжение скольжения равно иг = к 6 и далее
откуда следует, что о скольжении генератора можно судить по скорости из-
менения напряжения скольжения нх.
Принцип выполнения схемы контроля скольжения поясняется на рис.3.10.
□лекгромят ни гное реле KL включается на напряжение скольжения
При максимальном значении напряжения скольжения якорь реле под-
тянут и контакты разомкнуты. Реле срабатывает, когда напряжение на его
катушке равно или меньше напряжения отпускания U„m„ На рису нкс пока-
заны моменты срабатывания рете KL (точки мл» и «аг») Здесь представлено
два цикла изменения напряжения скольжения w, первый — со сравнительно
большой скоростью и второй — с меньшей скоростью изменения ия
Рис.3.10. График работы элемента контроля скольжения
90
Синхронизация генераторов
В схеме имеется реле времени (так называемое реле опережения),
выдержка времени которого отсчитывается с некоторого момента гол до мо-
мента, koi да напряжение скольжения равно v =0.
Далее осуществляется проверка изменения напряжения скольжения
и, от напряжения отпускания U„mn до нули в течение контрольного време-
ни 1пп Если за контрольное время /оп напряжение скольжение успевает из-
мениться от Uonm до нуля, то это означает, что скорость его изменения вели-
ка, если же не успевает — скорость мала.
Скорость изменения напряжения скольжения us, а следовательно, и
скольжение генератора определяется на основании очередности срабатыва-
ния реле KL и реле времени КТ Так. при большом скольжении прежде всего
срабатывает реле времени, а затем действует реле KL. При небольшом
скольжении первым срабатывает репе KL. а затем срабатывает реле времени.
Это свидетельствует о допустимом скольжении генератора.
ЗЛО. Выравнивание напряжения и частоты генератора
Выше были рассмотрены элементы, контролирующие равенство на-
пряжений и частот генератора и сети При равенстве этих величин они дают
разрешающий сигнал на включение синхронизируемого генератора.
Если напряжение генератора не равно напряжению сети Ur и
частота генератора не равна частоте сети Ф fc, то прежде чем включить
генератор, необходимо выровнять эти величины.
Выравнивание напряжении. Принципиально элемент выравнива-
ния напряжения можно выполнить на основе реле напряжения В случае не-
равенства напряжений генератора и сети он будет подавать импульсы па уст-
ройство изменения возбуждения |енератора в сторону «прибавить» или «уба-
вить» в зависимости от знака рассогласования.
В ряде случаев такой элемент не требуется Гелераторы снабжаются ав-
томатическими регуляторами напряжения, поэтому выравнивание напряжений с
достаточной для практических целей точностью обеспечивается автоматически.
Предположим, что регулятор напряжения генератора настроен на уставку
91
Гэава i
Синхронизация генераторов
С,ЮЛ1 ± ЛИ, где Ли — отклонение напряжения от среднего значения При вклю-
чении генератора напряжение сети может оказаться равным Ь'Я(1И + Л11. В та-
ком случае расхождение напряжений составит величину 2 Л U.
Поскольку огклонение напряжения на сборных шинях в нормальном
режиме возможно в пределах ЛИ — ± 5 %1/„вЛ1, го максимальное расхожде-
ние напряжения в момент синхронизации составит нс более ЛС = 10 %С’1/ПЛ1,
что вполне допустимо с точки зрения толчка уравнительного тока
Исключение составляют генераторы, на которых установлены регуля-
торы возбуждения сильного действия. Они имеют высокий коэффициент
усиления, в силу чего при включении генератора в сеть с разницей напряже-
ния в Ли = 10 %L//W II могут возникнуть длительные колебания реактивной
мощности. Для устранения такого режима регуляторы возбуждения сильного
действия имеют блок подгонки уставки по напряжению, который подводит
значение уставки АРВ к значению напряжения энергосистемы и запрещает
включение, если разность этих значений больше ЛС =1—2 %1/ваи.
Выравнивание час го i. Выравнивание частот устройствами, рабо-
тающими на электрическом принципе, осуществляется двумя электромагнит-
ными реле KF1 и KF2, включеными па напряжение скольжения и, (рис.3.11).
Рис 3.11 Схема включения (а) и векторная диаграмма (6) элемента
выравнивания частот
Реле KF2 включается на напряжение фазы с генератора и фазы С сети
Реле KF1 включается на напряжение фазы с генератора и фазы А сети
92
Г1ака 3
Сшкрышыция л'нерсфюрае
Фазы В трехфазных систем напряжений генератора и сети соединены между
собой При таком соединении напряжения скольжения на этих реле сдвинуты
относительно друг друга на угол 8 = 60° (рис. 3.12).
Рис.3.12. График работы элемента выравнивания частот
При угле 8=0 напряжение на реле KF2 равно нулю. Па реле KFI
напряжение равно нулю при угле 5 = —60° Усгавки срабатывания реле KF1 и
KF2 выбираются одинаковыми
Если частота гснератсра больше частоты сети, то вектор напряжения Uu
начнет опережать вектор UA и угол 8 будет расти в положительном направле-
нии Из рис 3.12. видно, что при положительном росте угла 8 вначале появляет-
ся напряжение L'KFi. а затем напряжение Реле KF1 срабатывает иераым и
подает импульс на сигнал «убавить» частоту. Схема выполняется так, что как
только срабатывай- одно из реле (KF1 или KF2), другое реле блокируется и не
срабатывает
При частоте генератора меньше частоты сети вектор сети Ua отстает
от вектора напряжения Uл. Угол 8 растет в отрицательном направлении. В
случае отрицательного изменения угла S сначала появляется напряжение
&kf2> а затем — напряжение С/кп- В этом случае первым работает реле KF2 и
дает импульс на «прибавить» частоту. Реле KF1 не работает.
Для ограничения длительности импульсов на «прибавить» и «уба-
вить» сигнал от реле KF1 и KF2 дополнительно проходит через контакты ре-
ле времени Обычно выдержка этого реле устанавливается а пределах
t = 0.2 — 0,3 с, так что независимо от величины скольжения, на механизм из-
менения числа оборотов регулятора частоты вращения турбины поступают
одинаковые по продолжительности импульсы
93
3.11. Классификация автоматических синхронптатороп
Оптимальным моментом включения синхронизируемого генератора в
сеть является момент прохождения угла 5 через ноль. Для включения вы-
ключателя требуется время. Это означает, что синхронизатор должен пода-
вать импульс на включение выключателя с некоторым опережением по вре-
мени fon. Время опережения должно равняться собственному времени сраба-
тывания выключите 1я и других вспомогательных реле и кош акторов, нахо-
дящихся в схеме между синхронизатором и выключателем Только в этом
случае синхронизация будет происходить без толчков уравнительного тока.
Точная синхронизация разрешается при выполнении трех усло-
вий’ 6=0, /г = Ь'С. Практически не требуется абсолютно точное
выравнивание частот. Синхронизация допускается при разности частот
/д. =0,2 - 0,3 Гц или при скольжении (0,= 1,2 -1,9 рад/с
Если синхронизация происходит с расчетным скольжением
С01ЙОЯ= const , то 8o„s 1е„ , где 1В„— время опережения; 6 — угол опереже-
ния. Следовательно, для того чтобы контакты выключателя замьгквлись в
момент, когда угол 6= 0, автоматический синхронизатор может создавать
опережение или по времени гоп, или по углу бял.
В зависимости от того, как создается опережение (по времени t или
углу 6 ), существующие синхронизаторы разделяют на два тила: синхрониза-
торы с постоянным временем опережения, момент срабатывания которых
определяется непосредственно заданным временем опережения и синхрони-
заторы с постоянным утлом опережения, момеш срабатывания которых оп-
ределяется деланным углом опережения.
При переменной частоте w* const опережение по углу не равно-
значно опережению по времени Следовательно, синхронизатор с постоян-
ным опережением по углу 6 не всегда правильно улавливает момен! подачи
сигнала на включение выключателя В этом отношении синхронизаторы с
постоя иным временем опережения 1вп выгодно отличаются от синхронизато-
ров с постоянным углом опережении, в силу чего этот тин синхронизаторов
получил наибольшее распространение.
94
/ wea j Сччхротчиция .ънсрнширои
3.12. Принципы создания опережения по vrny и по времени
Опережение по углу- Постоянное опережение по углу может быть
получено включением электромагнитного реле на напряжение скольжения
us п настройкой его на напряжение срабатывания и1р Поскольку между На-
S. ПГ- Б
пряжением скольжения и, и углом о существует зависимость и, = 2usm—,
го реле, настроенное на срабатывание при напряжении иср. будет работать
при вполне определенном значении угла 6 .
Контроль скольжения в синхронизаторе с постоянным углом опере-
жения осуществляется следующим образом Два реле KVJ н KV2, включен-
ные на напряжение скольжения п,(рис 3 13). настраиваются на напряжение
срабатывания иср1 и несоответственно. Гем самым эти реле фиксируют
значения углов 8, и б2.
С помощью реле времени КТ задастся контрольное время tk. Пуск
реле времени осуществляется посредством реле KVI. Реле KV2 подает
«плюс» источника низания на промежуточное реле KL1.
Если скольжение велико (первый цикл изменения напряжения
скольжения п5на рис.З 13), то изменение угла от значения 6, до 62 про-
изойдет быстрее, чем будет исчерпан контрольный интераал времени Это
свидетельствует о недопустимом скольжении. Фиксация этого события про-
исходит за счет определенной очередности срабатывания реле
а) б)
Рис.З. 13. Схема (а) и график (б) элемента контроля скольжения
95
Сшкроиизаиия генераторов
Схема работает следующим образом При us = и р( срабатывает ре-
ле KVI и запускает реле времени КТ! С этого момента начинается отсчет
контрольного времени. Затем срабатывает реле KV2 и полает «плюс» на реле
KLI. При большом скольжении реле KV2 сработает раныне контрольного
времени т* и схема будет заблокирована
В случае небольшого скольжения (второй цикл изменения напряже-
ния скольжения н,.), изменение yi ia от 6। до 6 2 происходит медленнее, за
больший промежуток времени, чем контрольное время tk . Сигнал проходит
через замкнутые контакты KLI 1 на выходное реле KL2
Последовательно включенные контакты KL I 2 и К[ 2.2 обеспечивают
появление сигнала на выходе схемы при срабатывании реле KV2, что проис-
ходит при заданном значении угла 8.
Опережение по времени. Принцип создания постоянного опереже-
ния но времени заключается в том, что контролируется момент прохождения
через ноль не напряжения скольжения w,, а некоторого вспомогательного
напряжения w' . сдвинутого относительно первого на постоянное время г„„
Схема создания опережения но времени состоит из дифференци-
рующего трансформатора ДТ, включенного на напряжение скольжения и,. и
поляризованного реле KL с двумя обмотками (рис. 3.14).
Рис.3.14. Схема устройства опережения по времени
Первая обмотка реле включается на напряжение скольжения н,, вто-
рая — на вторичное напряжение дифференцирующего трансформатора На-
бй/.
пряжение на вторичной обмотке этого трансформатора л2 =-. Так как
96
Синхронизация , нератпр^.
dus т, ta,t
—— =o,U cos------
df s 2
(323)
Реле отпускает свои контакты, когда u' = AIa1+A2w2 = 0 Учиты-
вая принятые обозначения, условие отпускания якоря реле запишем в виде
Hc^U sin^~- +k2tosU cos^^- = 0, (3.24)
откуда
Таким образом, время сдвига напряжения к' по отношению к напряжению
скольжения и, практически не зависит от скольжения генератора и всегда
отрицательно, т.е. напряжение у' опережает по времени напряжение сколь-
жения us Реле, отпуская якорь в момент прохождения напряжения и' через
ноль, подает сигнал с постоянным опережением по времени относительно
момента прохождения через ноль напряжения и,,.
3.13. Автосинхронизатор АСТ-4
Автоматический синхронизатор АСТ-4 предназначен для включения
генератора по методу точной синхронизации н является синхронизатором с
постоянным временем опережения
Элемент подгонки частоты вращения реагирует не на абсолютную
частоту синхронизируемого генератора, а на его скольжение. В этом случае
синхронизатор правильно подгоняет частоту вращения генератора не только
при нормальном режиме энергосистемы, когда частота равна 50 Гц, но и в
97
аварийном режиме, сопровождающемся отклонением частоты от номиналь-
ного значения Лабораторные испытания показывают, что синхронизатор ра-
ботает правильно при посадках частоты до 45 Гц
На работу синхронизатора нс оказывает существенного влияния из-
менение налряжения генератора и сети. При отклонении напряжения в пре-
делах ДП' = + 15 % от номинального значения все элементы синхронизатора
функционируют нормально.
Время опережения синхронизатора настраивается с учего.м времени
срабатывания выключателя и практически остается постоянным независимо
от скольжения В диапазоне разности частот f 0.04 - 0.25 Гц разброс вре-
мени опережения не превышает трех электрических градусов [3.5].
По своим техническим и эксплуатационным характеристикам син-
хронизатор ЛСТ—4 является одним из лучших автоматических синхрониза-
торов, в силу чего он получил наибольшее распространение па станциях.
Схема синхронизатора ЛСТ—4 показаив па рис 3 15.
Синхронизатор ACT—4 состоит из следующих основных элементов:
дифференцирующего трансформатора и реле опережения, реле контроля раз-
ности частот, реле конгроля разности напряжений и устройства для подгонки
частоты.
Учитывая, что генераторы снабжаются автоматическими регуляторами
напряжения, обеспечивающими подгонку напряжения генератора к напряже-
нию сети с расхождением не более = ± 10 % L'IWW, синхронизатор выпол-
няется без устройства подгонки напряжения
На синхронизатор подается напряжение со стороны генератора и сети Фазы
В трехфазных систем напряжения генератора и сети соединяются между собой
Оперативный ток напряжением (00 В полается от аккумуляторной батареи.
Дифференцирующий трансформатор и реле опережения создают по-
стоянное время опережения подачи импульса на включение. Уставка времени
опережения регулируется с помощью сопротивления в цепи обмотки реле
KVI, включенной на напряжение скольжения и
< . /и. ч /нация генерап/с г
дифференцирующий
трансформатор
реле опережения
контроль частоты
контроль напряжения
«убавить» частоту
«прибавить» частоту
реле времени
на МИЧО
(исполнительный
элемент
Рис 3.15 Схема синхронизатора АСТ-4
99
Глава 3.Сикхронтация генераторов
Реле контроля разности частот KF1 контролирует скольжение генера-
тора. Заключение о величине скольжения делается на основании очередности
срабатывания реле контроля частоты и реле времени опережения. При сколь-
жении меныием или равном допустимому, первым срабатывает реле контроля
частоты, а затем работает реле опережения Определенная очередность сраба-
тывания этих реле учитывается в исполнительном элементе синхронизатора.
Контроль равенства напряжений осуществляется с помощью реле KV2. Если
напряжения генератора и сети равны, то в определенные моменты времени
при угле 5=180° напряжение па реле KV2 становится равным нулю п реле
отпускает свой якорь. Нормально замкнутые контакты реле KV2.1 заведены в
схему исполнительного элемента При напряжении U р = 0 контакты замыка-
ются и подготавливают цепочку исполнительного элемента.
Элемент подтопки частоты включает и себя реле скольжения «приба-
вить» и « убавить», реле времени и цепочку включения МИЧО. Принцип дей-
ствия реле подгонки скорости был рассмотрен в 3.10. Из рис. 3.15 видно, что
пуск реле времени KTI осуществляется нормально открытым контактом реле
KF2.2 («убавить» частоту) или реле KF3.2 («прибавить» частоту). Как только
срабатывает одно из этих реле, например реле KF2, оно своим контактом KF2.2
запускает реле времени, а контактом KF2.3 подает импульс на МИЧО.
Реле времени состоит из реле КТ1, конденсатора CI и резистора 7?1.
Конденсатор С1 подключается параллельно обмотке реле КТ1. Зарядка кон-
денсатора происходит через резистор /?7, так что при замыкании контакта
KF2.2 или KF3 2 напряжение па конденсаторе, а следовательно, и на обмотке
реле KTI нарастает постепенно, с постоянной времени Т— J?1 Cl Как только
напряжение достигнет напряжения срабатывания реле KTI, последее срабо-
тает и контакт КТ1 3 разорвет цепь питания МИЧО Контактом КТ 1.1 разры-
вается цепь зарядки конденсатора, а контакт К Г 1.2 переключает конденсатор
на разрядное сопротивление R1, тем самым реле времени готовится к повтор-
ному действию. Выдержка времени реле регулируется резистором RI
Исполнительный элемент включает в себя промежуточное реле KL1
и реле исполнения KL2. Пуск реле KL1 состоится только в случае, если кон-
такты KV2.I реле контроля напряжения замкнуты. Это происходит только
при равенстве напряжений генератора и сети U?=UC и угле В =180° Таким
образом, синхронизатор готовится к подаче импульса на включение в момент
прохождения угла через 180°.
100
Глава 3.
Синхронизация генераторов
Следует иметь в виду, что положение контактов реле изображено на
схеме для случая, когда обмотки реле не возбуждены Рассмотрим изменение
Vi ла б от 180° до 360° При угле б= 180" напряжение скольжения и, дости-
гает максимума. В этом случае контакты KVI 2 и KF замкнуты. Стедователь-
но, при угле б = 180° и условии Ut =UL pe.ie KL1 запускается.
Реле KV2 работает кратковременно. При увеличении угла более чем
180°, на обмотке реле появляется напряжение (см рис 3.9) и контакты KV2 1
размыкаются Как только реле KL1 сработает, оно своими контактами KL1 I
и KL1 2 самоудерживается.
Дальнейшее состояние реле KL1 зависит от очередности срабатывания
реле KV1 и KF1. Если при подходе угла б к 360° первым отпускается якорь
реле KF1 и его контакты K.FI 1 замыкаются, го цепь питания реле KL1 будет
разорвана и импульс на включение генератора не пройдет. Это правильно, по-
скольку при такой очередности отпускания реле KV I и KF I скольжение велико
и включение генератора недопустимо. Если же скольжение будет меньше или
равно допустимому, то сначала отпустит свой якорь реле KF1 и замкнет кон-
такт KF1.1, а уже после этого отпустит якорь реле KV1 и разомкнет свой кон-
такт KVI 2. В этом случае цепь питания реле KLI сохраняется и сигнал прой-
дет на включение. Так как реле K.L1 возбуждено, то его контакт KLI.3 замкнут.
При значении у ига б близком к 360° на обмотке реле KV2 есть напряжение и
контакты KV2.2 замкнуты. Срабатывание реле KL2 зависит только от состоя-
ния контакта KV 11В момент времени t — tm реле отпустит свой якорь и этот
контакт замкнется. Таким образом, сигнал на включение реле KL2 будет подан
при соблюдении всех необходимых условий и в точно установленное время В
свою очередь реле KL2 контактом KL2.3 подаст сигнал на включение выклю-
чателя синхронизируемого генератора.
3.14. Хвтосинхроннзэгор СА—1
Основными элементами автосинхронизатора СА-1 являются элемент
контроля скольжения синхронизируемого генератора и элемент выбора мо-
мента включения при угле б = 0 Для этой цели используется напряжение
скольжения ил(б>, которое получается в результате обработки напряжений
101
генератора иг ~иг 5Ш(0г1 и сети uc — Ucsin(i>ct. При равенстве напряже-
нии I/, —Uc, получим
,,, - . <Д,+<пс . ,агп
и.—ut —2ucsin------—---1 cos ----1 (з.21)
и после выпрямления напряжение скольжения равно п, (&) = 2UC sin —
Если напряжение генератора -=UC±&(. . где ДСГ расхождение
напряжений по величине, то после некоторых преобразований получим
со,—и со,+ (о
и —и. = 2Ur sin------—t cos--------t+ДЬ sinfO.i (3.28)
г c e 2 2
Рассмотрим влияние величины Д1/ sin а>г! на напряжение скольже-
ния. При равной нулю разности напряжений ДО =0 напряжение скольжения
равно us(6)=2Uc s,n“ и при Уг-,,с 5 = 0 также равно нулю. Это обстоятель-
ство и используется в элементах синхронизатора для фиксации факта прохо-
ждения нулевого значения угла.
При отличной от нуля разности напряжений Д(7 * 0 выражение
Д1/яи<огг оказывает влияние ла работу измерительных элементов. Особый
интерес представляет это влияние на величину выпрямленного напряжения при
малых значениях угла 8 * при разности напряжений Д(7 * 0 и угле 8 ~ 0 напря-
жение скольжения uxffi) = AU. График напряжения скольжения 1^(8) при
разности напряжений Д(7 / 0 показан на рис. 3.16 (кривая 1).
Рис.З 16. Напряжение скольжения и,(8).
102
Из графика видно, что в области углов 5= О, напряжение скольжения
нечетко фиксирует момент равенства нулю утла 8(8 ~0) и что является суще-
ственным недостатком автосинхронизатора АС! —4
Для устранения этого недостатка в МЭИ [2] разработан бесконтакт-
ный синхронизатор СА—1, содержащий измерительный преобразователь (фа-
зометр). выходное напряжение которого линейно зависит от угла (рис. 3.16.
кривая 2). Разность напряжений до 30 % не влияет па характеристику преоб-
разователя.
Сигнал на включение определяется ио условию
*1». + ^2 . -,оя + &3 . ->* ® ’ 0-29)
СГ dr 2
т.е контролируется не только значение А|НЛ. =0, но и введены сигналы по
первой и второй производным.
Алгоритм действия автосинхролизатора СЛ-1 аналогичен алгоритму
действия синхронизатора АСТ-Д
3.15. Сравнение методов синхронизации и их область применения
Каждый из рассмотренных способов синхронизации имеет свои пре-
имущества и недостатки и применение одного из них зависит от конкретных
условий. Прежде чем определить область применения способа синхрониза-
ции. напомним их основные преимущества и недостатки.
К основным преимуществам способа самосинхронизации относятся:
простота включения синхронизируемого генератора на параллельную
работу;
возможность быстрого включения генератора в сеть при авариях, свя-
занных с изменениями частоты во время синхронизации;
простота схемы и аппаратуры;
надежность работы устройства
Два первых преимущества проявляются в первую очередь в аварийных
режимах, когда имеется отклонение частоты от номинального значения и тре-
103
CuiixpnuujaituM генераторов
буется весьма быстрое включение генератора в сеть В нормальном режиме
энергосистемы эти преимущества не столь значительны, поскольку задержка
при включении генератора на 2 - 3 минуты не играет существенной роли
Простота схемы и надежность работы в первую очередь необходимы
для автоматизированных гидростанций, поскольку пуск и останов гидроагре-
гатов производится сравнительно часто
Недостатком способа самосинхронизации является большой уравни-
тельный ток Напомним, что величина уравнительного тока при самосинхро-
низации определяется только параметрами генератора и схемой электриче-
ских соединений и не зависит от того, сколь тщательно выполняется опера-
ция синхронизации. От качества работы аппаратуры зависит лишь длитель-
ность протекания уравнительного тока
Основным преимуществом точной синхронизации является возмож-
ность синхронизации без толчка уравнительного тока По друз нм показате-
лям точная синхронизация уступает способу самосинхронизации Правда,
применение в автосинхронизаторе типа АСТ-4 элемента подгонки частоты,
реагирующего на разность частот генератора и сети, обеспечивает возмож-
ность проведения точной синхронизации и в аварийных режимах, сопровож-
дающихся изменениями частоты.
Что касается надежности работы устройства, то здесь преимушестаа
явно на стороне самосинхронизации. Аппаратура точной синхронизации со-
держит сравнительно большое количество реле и контактов и. следовательно,
ее действие менее надежно. Особенно четко должен работать элемент выбора
момента включения генератора Ошибка в действии этого элемента приводит к
включению в неблагоприятный момент времени, когда угол 5* 0. Возможные
в этом случае толчки уравнительного тока могут оказаться недопустимыми.
Критерием допустимости применения метода самосинхронизации
является величина уравнительного тока Когда уравнительный ток не превос-
ходит значение 3,5 /„0„ самосинхронизация считается допустимой Однако
при рекомендации метода самосинхронизации необходимо учитывать и сле-
дующее обстоятельство Критерий 1}Р< 3,5 1„м установлен из тех соображе-
ний, что уравнительный ток такою значения не вызывает серьезных повреж-
дений в генераторах, которые рассчитаны на лейсгаие больших по величине
токов короткого замыкания. Но опыт применения самосинхронизации пока-
зал, что следует обеспечить надежность не только самого генератора, но и
104
Cun \pniiii катя генирсппо/мтв
другой аппаратуры, подверженной /Действию уравнительного тока, и в пер-
вую очередь приходится учитывать воздействия на выключатель
В нормальном режиме, как правило, операция включения и отключе-
ния производится с небольшими токами. Так, при отключении генератор раз-
гружается, и выключатель разрывает цепь с небольшим током. При включении
генератора ио методу точной синхронизации в момент включения уравнитель-
ный ток также невелик. В таком режиме выключатель может работать большое
число раз без каких-либо заметных изменений в его контактной системе.
Обычно на гидростанциях устанавливается аппаратура и самосин-
хронизации и точной синхронизации. В нормальном режиме, когда нет необ-
ходимости в быстром пуске генератора, последний синхронизируют методом
точной синхронизации В аварийном режиме для быстрого включения ре-
зервных гидрогенераторов пользуются методом самосинхронизации. В этом
режиме применение метода самосинхронизации яаляется обязательным, не-
зависимо от мощности генератора и схемы его включения
Вследствие большой надежности метод самосинхронизации реко-
мендуется также на полностью автоматизированных гидростанциях при от-
сутствии дежурного персонала
Гчава 4
Ре. пирование напряжения генератора
ГЛАВА 4
Регулирование напряжения генераюрм
4,1. Назначение регулирования напряжения
Необходимость регулирования напряжения в энергосистеме определя-
ется как энергосистемой, так и потребителями Системные требования к
уровню напряжения в сетях высшего напряжения диктуются устойчивостью
параллельной работы энергосистем.
Регулирование напряжения у потреби те лей может быть обеспечено
только в том случае, если в контрольных точках энергосистемы напряжение
будет меняться по заданному графику в зависимое™ от режима. В первую
очередь это относится к сборным шинам электростанций, генераторьт кото-
рых оснащаются соответствующими регуляторами.
Регуляторы должны эффективно работать не только в нормальных, но и
в аварийных режимах, длительность которых обычно не превышает нескольких
секунд и лаже долей секунды. Эти задачи способны выполнять только быстро-
действующие электрические регуляторы непрерывного действия
Различают регулятор напряжения и регулятор возбуждения. Регулятор
напряжения поддерживает напряжения на выводах генератора путем воздей-
ствия на его возбуждение.
В случае необходимости риулирования возбуждения для повышения
устойчивости параллельной работы энергосистем. повышения четкости дейст-
вия релейной защиты, обеспечения самозапуска двигателей и тп, функции,
возлагаемые на регулятор, расширяются и сто принято называть регулятором
возбуждения.
4.2. Функциональная и с фактурная схемы
Для изменения напряжения на выводах синхронного генератора необ-
ходимо возлейстаовать на его возбуждение- при увеличении возбуждения
напряжение повышается, при уменьшении - снижается. Возбуждение можно
регулировать вручную или автоматически. В дальнейшем изложении будет
рассматриваться только автоматическое регулирование возбуждения, а сле-
довательно, и напряжения генератора.
106
Гiaea 4 Регушрование напряжения генератора
Па рис 4 I, а показана функциональная схема автоматического регулиро-
вания напряжения генератора В состав схемы входит сам объект регулирования
- генератор с системой возбуждения и регулятор напряжения Совместно регуля-
тор и объект составляют систему ватоматического регулирования (САР)
В свою очередь регулятор состоит из измерительного (Изм.). усилительно-
го (У) и исполнительного (Исп) элементов. В общем случае в одном элементе
могут быть совмещены несколько функций, например, измерение отклонения и
усиление или усиление и исполнение. Может быть и обратное решение, когда
одна функция реализуется на двух элементах, например, когда усиления одного
усилителя недостаточно и последовательно включается в горой усилитель
Регулятор напряжения Объект регулирования
Рис.4 1. Функциональная (а) и структурная (б) схемы реагирования
напряжения
На вход измерительного элемента подаются заданное напряжение (7П,
которое должно подчеркиваться на генераторе, и фактическое напряжение
генератора U (последнее позволяет замкнуть систему регулирования). Факти-
ческое напряжение U действует встречно с заданным напряжением (7е, вслед-
ствие чего в измерительном элементе происходит измерение разности этих
напряжений. При отклонении фактического напряжения генератора от задан-
ного измерительный элемент подает воздействие через усилительный и ис-
107
Г1аеа 4 Регулирование напряжения генератора
полнительный элементы на систему возбуждения Происходит корректировка
возбуждения, и напряжение генератора восстанавливается до заданного зна-
чения
На рис 4.1. 6 показана структурная схема САР напряжения генератора.
На сгруктурной схеме могут быть представлены и другие связи элементов,
которые не указаны на функциональной схеме, но являющиеся существен-
ными для анализа и настройки регулятора. К таким связям относятся обрат-
ная связь, охватывающая элементы 2 и 3, а также место приложения внешне-
го возмущения F На приведенном рисунке указаны номера элементов. В со-
ответствии с этой нумерацией должны быть приведены уравнения элементов
или их передаточные функции.
4.3. Cucieubi возбуждения
Система возбуждения синхронного генератора состоит из обмотки ро-
тора генератора и источника постоянного тока К наиболее часто
встречающимся видам систем возбуждения относятся следующие;
электромашинное возбуждение с генератором постоянного тока;
электромашиниое возбуждение с генератором переменного тока часто-
той 500 Гц (высокочастотное возбуждение),
тиристорное возбуждение,
бесщеточное возбуждение.
Возможны и другие модификации систем возбуждения. Поскольку они
не получили широкого распространения, то далее не рассматриваются. При-
менение различных систем возбуждения обусловлено особенностями турбо—
и гидрогенераторов
Исходя из нормального и аварийного режимов, к системе возбуждения
генератора предъявляются определенные требования. В нормальном режиме
источник возбуждения должен обеспечить на кольцах ротора номинальное
напряжение и номинальный ток возбуждения, при которых генератор выдает
номинальную мощность В аварийных ситуациях к источнику возбуждения
предъявляются требования в отношении быстродействия и предела измене-
ния напряжения на кольпах ротора С этих позиций система возбуждения
оценивается двумя величинами скоростью подъема напряжения dU,uie /dt и
108
Гчава 4.
Регулирование напряжения генератора
кратностью максимального значения напряжения (потолок возбуждения) по
отношению К номинальному l/M36..Uo>rc / ^возб-вч
Для современных электромашинных возбудителей скорость подъема
напряжения возбуждения должна быть не менее в секунду Крат-
ность форсировки составляет не менее 2(7eu,5„n„. В случае работы гидростан-
ции через линию большой протяженности к системе возбуждения предъяв-
ляют более высокие требования I вк, например, тиристорная система возбу-
ждения гидрогенераторов выполняется с кратностью напряжения при форси-
ровке 4U„O36 ном- В отношении быстродействия тиристорная система практи-
чески безынерционна.
-Мектроиашишюе возбуждение с генератором нощоянного тока
Основой системы элсктромашинного возбуждения является генератор
постоянного тока (возбудитель В), который непосредственно соединяется с
обмоткой возбуждения (ОБ) синхронного генератора (Г) (рис. 4.2). Обмотка
возбуждения возбудителя (ОВВ) питается от самого возбудителя (система
самовозбуждения) Воздействие ватомагического регулятора напряжения
(АРН) на возбудитель может осуществляться двумя способами- путем изме-
нения сопротивления в цепи ОВВ путем перемещения движка резистора R
(рис 4.2, а) или за счет введения в обмотку возбуждения дополнительной
подпитки постоянным током (рис. 42, б). Такая подпитка может осуществ-
ляться либо в основную, либо в дополнительную обметку возбуждения воз-
будителя.
Для изменения положения даижка реостата регулятор должен иметь в
своем составе электромеханическое устройство, преобразующее электриче-
ский сигнал в механическое перемещение. Из-за существенных недостатков
электромеханические регуляторы не используются на современных крупных
генераторах. Более надежным является регулятор (сксма на рис 4.2, б), в ко-
тором нет вращающихся и трущихся частей К тому же такая схема обладает
большим быстродействием, благодаря чему получила распространение в
электромашинных системах возбуждения.
К достоинству электромашинной системы возбуждения следует отне-
сти ее независимость от коротких замыканий в сети синхронного генератора.
109
Регулирование напряжения генератора
овв в OB
Рис 4 2. Электромашишюе возбуждение с генератором постоянного тока
В большинстве случаев возбудитель находится на одном валу с син
кронным генератором, чем обеспечивается высокая надежность системы воз-
буждения Этот вариант используется на турбогенераторах мощностью до
100- 160 МВт.
Применение машинного возбудителя постоянного тока для генерато-
ров большей мощности встречает ряд затруднений, обусловленных условия-
ми работы коллектора и механической прочностью возбудителя. Для круп-
ных турбогенераторов мощностью 200 МВт и 300 МВт разработаны и приме-
няются два варианта электромашинной системы возбуждения на основе воз-
будителя постоянного тока с пониженной частотой вращения. В первом вари-
анте возбудитель приводится во вращение асинхронным двигателем с махо-
виком Этот двигатель подключается на сборные шины собственных нужд
станции Во втором варианте возбудитель постоянного тока имеет привод от
вала турбогенератора через редуктор За счет снижения частоты вращения
улучшаются условия работы коллектора.
Электромаш никое возбуждение с генератором переменного гока
(высокочастотное возб} ждение)
Принципиальная схема высокочастотной системы возбуждения пока-
зана на рис. 43.
Основой системы возбуждения также является электрическая машина.
Однвко, учитывая серьезные недостатки коллектора у машин постоянного
тока, здесь в качестве возбудителя используется генератор переменного тока
с частотой 500 Гц, а функции выпрямления выполняют полупроводниковые
110
Гiaea 4
Регулирование напряжения генератора
вентили (ПВ). Выбор повышенной частоты 500 Гц сделан с целью уменьше-
ния пульсации выпрямленного тока, снижения габаритов возбудителя, повы-
шения надежности. Последнее обстоятельство требует пояснения. Дело в
том, что на повышенной частоте 500 Гц представляется возможным выпол-
нить генератор индукторного типа, у которого н обмотка возбуждения. и об-
мотка переменного тока расположены в пазах статора Вследствие этого воз-
будитель не имеет контактных колец со щетками, что и повышает надеж-
ность его работы.
ОВВ ПВ ов
Рис. 4 3. Высокочастотная система возбуждения
Возбудитель переменного тока располагается на одном валу с главным
генератором, кроме того, электрически система возбуждения не связана с
основной сетью, что также повышает се надежность
Основное возбуждение возбудителя обеспечивается последовательной
обмоткой ОВВ] Автоматический рету.тятор напряжения создаст дополни-
тельную подпитку в обмотку ОВВт. Дополнительных обмоток может быть
несколько(как правило, две). Высокочастотная система возбуждения исполь-
зуется для турбогенераторов мощностью 200 - 300 МВт
I цристорное возбуждение
Свое название тиристорная система возбуждения получила от тири-
сторов, используемых в качестве управляемых выпрями гелей В зваисимости
от типа источника тока различают два варианта тиристорного возбуждения.
Первый вариант - система независимого возбуждения с питанием от вспомо-
Гзчиа 4
Ре г, трогание напряжения генератора
гательнсго синхронного генератора (ВСГ), установленного на одном валу с
главным генератором (рис 4.4, ад Второй вариант - система самовозбужде-
ния с питанием от главного генератора (рис. 4 4, б).
ORB R ВСГ ОВ
Рис.4.4. Тиристорное возбуждение с независимым источником питания (а)
и с самовозбуждением (б)
Недостатком схемы самовозбуждения является зависимость напряже-
ния, подаваемого на выпрямители, от режима работы главного генератора
Частично эгот недостаток компенсируется тем, что с помощью трансформа-
тора Т| в цепь возбуждения подается дополнительная составляющая напря-
жения, пропорциональная току генератора. В режимах близких коротких за-
мыканий, когда напряжение на выводах генератора значительно уменьшает-
ся, подпитка в функции тока через трансформатор Т। увеличивается Однако
полной компенсации во всех режимах получить не удается. Недостатком
схемы является и то, что при пуске генератора сто первоначальное возбужде-
ние должно осуществляться от постороннего источника, поскольку остаточ-
ное напряжение генератора недостаточно.
В схеме независимого возбуждения напряжение питания вентилей не
зависит от режима работы главного генератора и станнин в целом, что явля-
ется достоинством этой схемы Однако эта схема дороже и сложнее.
К достоинствам тиристорного возбуждения также озносягся высокое
быстродействие и высокая кратность форсировки, для чего достаточно имщъ
напряжение источника питания (ВСГ или Tj на заданную кратность форси-
ровки. При полном открытии выпрямителей это напряжение практически
мгновенно прикладывается к обмотке возбуждения генератора I В нормаль-
ном режиме выпрямители открыты нс полностью, поэтому к обмотке возбу-
ждения подводится номинальное напряжение возбуждения.
112
Гчава 4
Регулирование напряжения генератора
Так как турбогенераторы мощностью 200 - 300 МВт и выше останавли-
ваются достаточно редко и. следовательно. переключение возбуждения при пуске
на автономный источник не требует частых переключений в цепях возбуждения,
для них рекомендуется применять систему самовозбуждения.
На гидрогенераторах также применяется система самовозбуждения,
что объясняется экономическом целесообразностью. Следует отметить, что
системы возбуждения без вспомогательного синхронного генератора, распо-
лагаемого на одном валу с главным генератором, снижают высоту агрегата, а
следовательно, и высоту здания ГЭС
Система бесшеючного возбуждения
Коллектор со щетками у генератора постоянного тока является одним
из ненадежных элементов электромашинкой системы возбуждения. Этот не-
достаток устранен в высокочастотной системе возбуждения, где выпрямление
осуществляется с помощью полупроводниковых вентилей. Однако и в этой
системе остаются щетки и контактные кольца для подключения системы воз-
буждения на ротор. При использовании надежных полупроводниковых вен-
тилей представляется возможным создать систему возбуждения полностью
без щеток Такой вариант получил название бесщеточного возбуждения
Принципмальнав схема бесщеточного возбуждения представлена на
рис. 4 5 Источником тока возбуждения служит вспомогательный синхрон-
ный генератор повышенной частоты (ВСГ). раыпиюженный на одном валу с
глваным генератором. Для целей выпрямления тока применяется вращаю-
щийся выпрямитель (ВВ), выполненный па основе неуправляемых вентилей,
которые монтируются на валу генератора. При такой схеме отпадает надоб-
ность в контактных кольцах и щетках
Регулирование возбуждения осуществляется путем воздействия на ток
возбуждения вспомогательного синхронного генератора. Обмотка возбужде-
ния вспомогательного синхронного генератора (ВСГ) неподвижна Регули-
рование возбуждения посредством воздействия на машинный возбудитель
несомненно уступает по быстродействию тиристорной системе возбуждения
Однако применение в качестве возбудителя специального многофазного ге-
нератора позволяет получить требуемые показатели системы, а именно, лото-
Глава 4
Регулирование напряжения генератора
ночное возбуждение не менее двукратного и быстродейсгвие не менее
2U„n]S.„ov в секунду.
отАРН
Рис 4.5 Система бесщеточного возбуждения
Бесщеточнав система возбуждения является весьма надежном и при-
меняется для турбогенераторов мощностью 300 МВт и выше
В таблице 4 1 приведены типовые системы возбуждения для турбо- и гид-
рогенераторов. Полные данные представлены в [6]. В таблице I приняты обозна-
чения: ТС — тиристорное с самовозбуждением; ВЧ — высокочастотное возбужде-
ние (элопромашинное возбуждение с генератором переменного тока); TH — тири-
сторное независимое; БЩ - бесщеточное возбуждение.
Таблица 4 1
Тип Номинальная мощность. МВт Система возбуждения
Турбогенератор
ТВФ-63- 2УЗ 63 ВЧ
ТВФ- 120 2УЗ 100 ВЧ
ТВФ-200 2АУЗ 200 ВЧ
ТВВ—320- 2ЕУЗ 320 TH
ТГВ-300-2УЗ 300 ТСЦН, БЩ)
1ВВ- 500- 2ЕУЗ 50» TH
Т1 В—800-2УЗ 800 TH
ТВВ- 1000- 4УЗ 1000 БЩ
Гидрогенератор
ВГС 525/150-20 46 мектромашинная
ВГСФ 930'233— 30 250 TH
ВГСВФ 940.235- 30 300 тс
СВФ- 1690/175-64 500 TH
СВФ- 1285/275— 42У4 640 ТС
114
Глава 4.
Регулирование напряжения генератора
4.4. Релейная форсировка возбуждения
Релейная форсировка возбуждения предназначена для сохранения ус-
тойчивости параллельной работы генератора при коротком замыкании в при-
стающей сети Как известно, активная мощность генератора равна
n EU s
Р=-----яп 5 (4 1)
При близких к з. напряжение па шинах генератора снижает ея. что снижает
предел передаваемой мощности Р. Для компенсации снижения сомножителя
U в числителе выражения (4 I) необходимо соответственно увеничить со-
множитель Е - э.д.с. генератора, что выполняет форсировка возбуждения.
Релейнва форсировка возбуждения осуществляется переводом возбуди-
теля в режим с потолочным напряжением путем шунтирования его регулиро-
вочного сопротивления. При увеличении напряжения возбудителя ток возбуж-
дения генератора возрастает Поскольку время срабатывания реме мало. то ско-
рость нарастания возбуждения определяется только постоянными времени це-
пей возбуждения и генератора. Таким образом, релейная форсировка является
быстродействующим средством повышения возбуждения генератора.
Принципиальная схема устройства релейной форсировки возбуждения
приментстьно к электромашинкой системе возбуждения показана на рис 4 б.
ОВВ в ов
Рис.4.6. Схема релейной форсировки возбуждения
При номинальном напряжении генератора контакты реле напряжения
KV разомкнуты. Уставка реле обычно выбирается около 0,85L/„o.„ При сни-
жении напряжения генератора ниже 0,851/„о„ реле напряжения замыкает кон-
такт и подает напряжение на промежуточное реле KL, при срабатывании ко-
115
/лава 4 Регулирование напряжения генератора
торого дополнительное сопротивление в цепи возбуждения возбудителя за-
мыкается накоротко. За счет этого возбуждение генератора форсируется.
Для устранения ложного действия релейной форсировки при перегора-
нии предохранителя в цепи трансформатора напряжения используется схема с
двумя реле напряжения, которые подключаются к разным трансформаторам
напряжения Контакты этих реле должны быть включены последовательно. Для
этих же целей рекомендуется подключить реле KV непосредственно к выводам
трансформатора напряжения до предохранителей С одним реле напряжения
устройство форсировки работает правильно при трехфазпом коротком замыка-
нии и двухфазном коротком замыкании гех фаз. на которых установлено реле.
Для правильного действия форсировки при любых двухфазных коротких замы-
каниях реле напряжения подключается через фильтр напряжения положитель-
ной последовательности Возможно использование схемы с двумя реле, вклю-
ченными через трансформатор напряжения на разные фазы
На гидрогенераторах с электромашинкой системой возбуждения по-
мимо устройства форсировки возбуждения усганав.шваются дополнительно
устройства развозбуждения Необходимость установки устройств развозбуж-
деиия на гидрш енераторах вызывается следующими обстоятельстаами При
сбросе нагрузки число оборотов гидрогенератора может превысить номи-
нальное значение на 30 - 40 %, вследствие медленною действия его регуля-
тора частоты вращения. За счет увеличения частоты вращения генератора и
уменьшения размагничивающего действия тока статора напряжение генера-
тора может значительно увеличиться. Поскольку регулятор напряжения не
рассчитан на регулирование напряжения генератора в широких пределах, то
его действие при сбросе нагрузки оказывается недостаточным.
Устройство развозбуждения выполняется с помощью одного реле мак-
симального напряжения KV и промежуточного реле KL Обычно реле KV
настраивается па напряжение 1,15(7 при этом оно замыкает свой контакт и
подает напряжение на промежуточное реле. Последнее в свою очередь раз-
мыкает контакт, и тем самым в цепь обмоткл возбуждения возбудителя вво-
дится дополнительное сопротивление Схема развозбуждения настраивается
так, чтобы при ее срабатывании напряжение гидрогенератора при полном
сбросе нагрузки не поднимвлось выше 1,3(7„,„,
В аварийных режимах форсировка возбуждении весьма эффективна,
поэтому опа применяется на всех турбо- и гидрогенераторах с любой снсге-
116
Гуава 4
Регулирование напряжения генератора
мой возбуждения Форсировка возбуждения выполняется либо с помощью
реле, либо аходит в структуру регулятора возбуждения.
Система возбуждения обеспечивает форсировку- напряжения до 2t/„o.v,
следовательно, и ток возбуждения в режиме форсировки будет достигать дву-
кратного значения Для генераторов с форсированным охлаждением такое
повышение тока ротора допускается только на непродолжительное время.
Так, для турбогенераторов серии ТВФ двукратное значение тока ротора раз-
решается в течение 30 с, а для турбогенераторов типа ТВВ и ТГВ двукратная
форсировка тока ротора допускается в течение 20 с
4.5. Статическое и асгатическое регулирование
Система автоматического регулирования может иметь астатическую
(независимую от нагрузки) или сзагическую (зависимую от нагрузки) харак-
теристики регулирования. Пример таких характеристик показан на рис 4.7
Рис.4 7 Астатическая (1) и статическая (2) характерна нки
регулирования
Аналитическое выражение статической характеристики, как прямой с
некоторым наклоном, записывается в виде
U = Uu-slp (4.2)
где — напряжение, поддерживаемое генератором при холостом ходе (уставка
регулятора); s - статизм регулирования, Jp - реактивный ток генератора.
Нагрузкой генератора является полный ток. Однако размагничивается
генератор в основном реактивным током. Поэтому в дальнейшем нагрузка
генератора будет учитываться только реактивной составляющей тока. Фор-
мулу (4 2) можно записать
117
Гуава 4.
Рвггчирование напряжения генератора
Uo-U-dp=O
(4 3)
АС -х[р = О
Астатическую характеристику можно рассматривать как частный слу-
чай, когда статизм равен нулю. При этом уравнение астатической характери-
стики
Д1/ = 0 . (4.4,
За счет изменения напряженья itiieparopa на холостом ходу С1(. г.е.
уставки регулятора, имеется возможность получить вместо одной характери-
стики (статической или астатической) семейство таких характеристик Спо-
собы изменения уставкн регулятора будут рассмотрены на примерах кон-
кретных регуляторов.
Статизм регулирования определяется следующим выражением:
MJ
s=iga=—— (4 5)
За положительный статизм регулирования условно принимается ста-
тизм, при котором его характеристика наклонена в сторону положительных
значений нагрузки. Статизм регулирования удобно выражать в относитель-
ных единицах
Д/р /,„аи Д/р.
При Д/р, =1,0 получим
5, =ДС, (47)
т,е статизм регулирования равен относительному изменению напряжения
генератора при изменении его нагрузки от нуля до номинальной.
Обычно регуляторы напряжения генераторов, работающих непосред-
ственно на сборные шины, настраиваются на статическую характеристику со
статизмом 4 — 5 %, т е. при изменении реактивной нагрузки генератора от
нуля до номинвльной напряжение уменьшается на 4 - 5 %.
118
Гчава 4
Регулирование напрям -ння генератора
4.6. Распределение реактивной нагрузки между
параллельно работающими генераторами
Гснсраюры включены па спорные шины. Определим распределе-
ния приращения реактивной нагрузки между генераторами, работающими
непосредственно ла сборные шины (рис. 4 8) Так как полученные результа-
ты не зависят ст числа параллельно работающих генераторов, будем рассмат-
ривать два генератора
Рис.4 S Схема работы генераторов на сборные шины
Примем, что па генераторах установлены регуляторы. настроенные на
статические характеристики.
При статических характеристиках напряжение на генераторах, а следо-
вательно, и па сборных шинах будет равно
^i~^m~s^pl‘ 2 =^isi ~ pi- W8)
Коэффициенты сгатизма регуляторов задаются в относительных еди-
ницах. Поскольку мощности генераторов могут быть различными, коэффици-
енты статизма регулирования необходимо приводить к единым базисным
условиям. Булем считать, что такой пересчет выполнен
Воспользуемся формой записи уравнений в приращениях:
AU., _ At/»,
(4.9)
119
Г шва 4 Регулирование напряжения генератора
Поскольку оба генератора имеют статические характеристики то характери-
стика всей станции будет также статической:
гве Д= Д/.,,, + Д7.г-> При параллельной работе генераторов на сбор-
ные шины изменения напряжения генераторов равны между собой, т *
ДС., = Л С/. □ = Д< - АС .
В таком случае
' , v =------------= ~,---1—— (4 И)
Д^«р + Д^»р2 S»| + Vi’»2
Изменение напряжения при приращении нагрузки Д7 рел, равно
Д[7. =£«СЯ1Д 1,рс„ Подставляя это значение в формулу (4.10) для статиз-
мов отдельных станций, получим:
ДЛР1=^Д/.Р . Д/./г2=^ДДрхт, (4.12)
т.е. распределение приращения нагрузки происходит обратно пропорцио-
нально статизму характеристик регулирования
Если один из генераторов станини имеет астатическую характеристи-
ку, то характеристика всей станции будет также астатической. В этом случае
при изменении реактивной нагрузки напряжение на сборных шинах станции
не меняется Агрегаты, имеющие статические характеристики, будут рабо-
тать с неизменной нагрузкой. Вес изменения нагрузки воспримет на себя ге-
нератор с астатической характеристикой.
Если бы на станции имелось несколько i операторов с астатическими
характеристиками, то характеристика станции была бы также астатической.
Однако распределение нагрузки между генераторами с астатическими харак-
теристиками будет неопределенным Поскольку нельзя допускать неопреде-
ленность в распределении нагрузки между генераторами, то при отсутствии
каких-либо устройств выравнивания нагрузок риуляторы напряжения всех
генераторов должны быть настроены на статические характеристики.
120
Гюва 4
Регулирование напряжения генератора
Па рис. 4.9. показано распределение дополнительной реактивной на-
грузки между двумя генераторами при статических характеристиках регули-
рования Исходный режим генераторов определяется точками «а» и «б». В
этом режиме реактивная нагрузка станции равна /Р сга. Увеличение нагрузки
до Iр t7n Д7р ст приводит к снижению напряжения В соответствии со ста-
тическим законом регулирования каждый генератор принимает на себя опре-
деленную долю реактивной нагрузки А/р1 и А/р? В этом случае режим ра-
Гснсраторы работают в блоке с трансформатором. Рассмотрим
схему, в которой два генератора работают в блоке генератор-трансформатор
на сборные шины высокого напряжения (рис. 4 10.1
Найдем распределение приращения реактивной нагрузки между этими
(енераторами. Примем, что на генераторах установлены регуляторы напря-
жения, настроенные на статические харакгсристикы.
Напряжение на шипах определяется через напряжение первого генера-
тора следующим образом
^=и.,-л.л/.р1. (4 13)
где х,Т1 - сопротивление трансформатора-
Поскольку при статически настроенном регуляторе имеем
121
Указанный закон регулирования может быть записан в форме прираще-
ний
АС/.,
»и=7Г1. <417>
где выражение s*|v = + х.Г1 можно представить как суммарный статизм
регулирования первого блока. Эта формула аналогична формуле для работы
генераторов непосредственно на сборные шины. Различие заключается лишь
в том, что в данном случае фигурирует суммарный статизм Выполнив соот-
ветствующие преобразования, получим закономерность распределения при-
ращения реактивной нагрузки между генераторами.
122
Г1ава4
Регулирование напряжения генератора
Так же, как и ранее, распределение приращения реактивной нагрузки
происходит oSpai но пропорционально спцизму характеристики регулирования
с одной особенностью. Если регуляторы всех генераторов настроены на астати-
ческие характеристики, то суммарный статизм каждого регулятора не будет
равен нулю, а оказывается равным сопротивлению трансформатора в относи-
тельных единицах, т.с. = з.|+х,г при =0 статизм равен
s*ij: = Х»Т| При этои однозначность в рас [треде те ни и приращения реак ши-
ной нагрузки обеспечивается Распределение происходит обратно пропор-
ционально сопротивлениям трансформаторов При астатически настроенных
регуляторах напряжение будет постоянным только на выводах генераторов.
Па сборных шинах высокого напряжения вследствие падения напряжения в
трансформаторах напряжение будет меняться по статическому закону
4.7. Некоторые положения теории регулирования
Напомним некоторые । изложения из теории автоматического регулиро-
вания [8], которые объясняют принципы построения системы автоматическо-
го регулирования напряжения.
Уравнения и персчатнчные функции элементов САР
Уравнение элемента системы автоматического раулирования уста-
навливает соотношение между входным и выходным chi налами этого эле-
мента. В общем случае статическая зависимость выходною сигнала от вход-
ного нелинейна. При упрошенном анализе САР, помогающем выяснить ос-
новные закономерности статики и динамики, можно пойти на линеаризацию
характеристик элементов САР, т.е описывать их линейными дифференци-
альными уравнениями.
123
Гтаеа4
Ресь-чирование напряжения генератора
Линеаризация допустима, если изучается поведение САР только при
малых отклонениях от установившегося режима и если погрешность за счет
линеаризации не оказывает принципиального значения па результаты анализа.
В теории автоматического регулирования для линеаризованных эле-
ментов и систем принята операторная форма записи дифференциальных
уравнений. Для системы второго порядка уравнение записывается так
(Т2рг + Т2р+\)у-(к, + к2р + к2р~ )х (4.19)
d A.Y А)'
где р =------символ дифференцирования по времени. т=-,у =-----нри-
dt Ус
ращения переменных; к — коэффициент передачи; Т— постоянная времени
Уравнение (4 19) можно записать в иной форме
(к, + к-,р + кур2 )х
У = 1 ----Lf— (420)
z/p2 +T,F + 1
или
v = И' ( р )х ,
(4 21)
, f^+kyp+kyp2)
где W(р)~------— ---------передаточная функция звена или системы
r,V +Т,р+1
Использование передаточных функций очень удобно и они широко
применяются в теории автоматического регулирования Для исследования
САР ее разбиванп обычно на так называемые простейшие, типовые звенья К
типовым звеньям относятся:
инерционное звено первого порядка с передаточной функцией
И'(7М = —.
7р + 1
(4 22)
безынерционное звено
W(p)=k, (4.23)
колебательное звено второю порядка
----------------------------------------------. 14 24)
r,V +ЛР + 1
124
Гчава 4
Регулирование напряжения генератора
интегрирующее звено
W(p) = —, (4 25)
Р
дифференцирующее звено
W(p)=kp (4 26)
В пределах малых отклонений все элементы известных регуляторов
напряжения могут быть представлены типовыми звеньями САР. При изоли-
рованной работе генератора и постоянной частоте вращения ротора генератор
также может быть представлен инерционным звеном псраого порядка Вы-
ходным сит налом в этом случае является отклонение напряжения генератора
от своего установившегося значения Входной сигнал — приращение напря-
жения на кольцах ротора Предполагается, что гистерезисом магнитной цепи
генератора можно пренебречь.
При изучении переходных процессов, связанных с большими возмуще-
ниями, например, при близких коротких замыканиях, а также при исследова-
нии усюйчивости параллельной работы генераторов и энергосистем, такое
упрощенное предстааление генератора не может быть использовано Однако
для анализа статики регулирования и выяснения основных закономерностей
поведения САР при малых возмущениях принятое упрощенное математиче-
ское описание элементов САР и 1енератора вполне приемлемо и будет ис-
пользовано ниже.
Передаточная функция элемента, охваченного обратной связью
Рассмотрим элемент с передаточной функцией W(p). Предположим, что
на вход элемента направленного действия подается сигнал х„„ тогда выход-
ной сигнал равен y=xmW(p). Под направленностью понимается прохождение
сигнала только в направлении от входа к выходу, т.е. от х„ к v I oi да выход-
ной сш нал у не оказывает влияния на вход.
В ряде случаев оказывается целесообразным установить пополнитель-
ную зависимость входного chi нала от выходного у Для этой цели вводится
так называемая обратная связь — по каналу этой сиязи выходной сю нал или
часть его подается на вход элемента. В канал обратной связи может быть
включен элемент со своей передаточной функцией. Определим передаточную
функцию элемента, охваченного обратной сиязью.
125
Глава 4
Регулирование напряжения генератора
При наличии обраткой связи на вход подается сумма сш налов
хвх + yWoc (р), поэтому выходной сигнал будет раней
[х„ + уИ’ . (р)]ц (р)= V, 027)
откуда x„W( р)= v[l - И (р) WBX (р)\.
= W'(p) =
W(p)
l-W(p)Wnr(p)'
(4 28)
где W '(р) — передаточная функция звена с учетом обрапюй связи
В зависимости от передаточной функции WBL (р) различают жесткую и
гибкую обратные связи Для жесткой обратной связи Wac (р) = ко.с, т.е. сигнвл
по каналу обратной связи не зависит от времени В случве гибкой обратной
связи WBt (р)=косТр, откуда следует, что по каналу обратной связи подает-
ся воздействие, пропорциональное скорости изменения выходной величины
элемента. Коэффициент fcfJX определяет величину сигнала, передаваемого по
каналу обратной связи Этот коэффициент лежит в пределе от нуля до единицы
При kOjC = 1,0 весь выходной сигнал подается на вход элемента.
По каналу обратной связи сигнал может приходить того же знака, что
и основной входной сигналхкг, или иметь противоположный знак В первом
случае говорят, что обратная связь положительная. Для этой связи кос > 0. Во
втором случае обратная связь отрицательнвя, и соответственно к,к1 < 0
Передаточная функция замкнутой САР. Рассмотрим одноконтур-
ную структурную схему САР (рис. 4.11). В общем случае W,(p) и Wi(P)
могут предстаалять собой передаточные функции нескольких последователь-
но включенных элементов.
Входной сигнал xet представляет собой заданное значение регули-
руемого параметра, например, напряжения. Выходной сигнал отражает фак-
тическое значение параметра регулирования, которое поддерживается систе-
мой регулирования. Возмущение к системе приложено между первым и вто-
рым элементами САР.
126
Fiaea 4
Регулирование напряжения генератора
Рис 4 11 Структурная схема замкнутой САР
Рассмотрим прохождение возмущающего сигнала F па выход САР
Для этого необходимо найти передаточную функцию элементов САР от точ-
ки приложения возмущения ло выхода. На рис 4.11, б показана ia же схема
САР с некоторыми изменениями.
Сигнал F проходит на выход САР через второй элемент, охваченный
обратной связью, в состав которой входят передаточные функции Wx(p ) и
Wocy Р) ^|я элемента с обратной связью персдаточнвя функция приведена
ранее, поэтому по аналогии можем записать
WFy(p)
WL, ( Р) =--------------------
1 ~ WO.c (P)^i(p)Wi(p)
(4.29)
Здесь индексы «Fy» показывают, между какими точками проходит
сигнал, а «штрих» означает, что передаточнвя функция получена для замкну-
том системы
Принцип вывода этой формулы следующий: в числителе указывается
передаточная функция элемента между точками F н у. а в знаменателе — раз-
ность между единицей и произведением передаточных функций всех элемен-
тов, входящих в контур САР
В замкнутых САР персдаточнвя функция (р) ——1,0. Это обу-
словлено самим принципом работы САР — фактическое значение регулируе-
мого параметра сравнивается (вычитается) с заданным. Эта разность и кор-
ректирует работу САР. С учетом сказанного, формулу можем записать как;
, WFr(P)
W’ (Р)=------------. (4-30)
‘ 1 + И7Р)
127
Глава 4.
Регулирование напряжения генератора
где W( p) = W{( p)W2(p) — передаточная функция разомкнутой системы.
Выходной сигнал у зависит от возмущения F следующим образом-
_FWFt(p)
V“ \-*-W(p)
(4 31)
Если возмущение приложено на входе регулятора (это соотаетствует
изменению уставки регулятора), го передаточнвя функция будет иметь вид-
. WxJP) W(p) W„ = — = — . (4 32) \ + W(p) \. + W(p)
а выходной сигнал j определится через хвх следующим образом:
У=х W(P> . (4.33)
Положим IP (p) = HfP) , (4 34) Q(p)
тогда K.(P) = . (435) 4 Qfp)+H(p)
на основании чего уравнение замкнутой системы запишем в виде:
\Q(р) + Hfpj] v = хН(р).
(4 36)
Характер переходного процесса линейной системы не зависит от всия-
чины возмущения, поэтому анализ на устойчивость проводится при x(t} = 0
и рассматривается только левая часть уравнения
\Q(P)+H(p)]y=o
(4 37)
Точность отработки задания. Напомним, ч го входной сиз нал хаг
отражает собой заданное значение регулируемого параметра. Система авто-
матического регулирования поддерживает фактическое значение регулирус-
128
Регулирование напряжения генератора
мого параметра у. По основному каналу, замыкающему САР, выходная ве зи-
чина подается на вход для сравнения. На рис. 4.11, а это представлено в виде
сигнала х„х Разность между и г с и составляет погрешность отработки
задания. Найдем, от чего зваиент погрешность отработки, или, другими сло-
вами, точность системы регулирования
Погрешность регулирования
В свою очередь = у Учитывая формулу (4 31), получим
W(p)
\ + Wfp)
(438)
Погрешнеегь удобно выражать в относительных единицах. Преобразу-
ем формулу для погрешности.
1 + WfpJ
(4.39)
4.8. Статика регулирования
Структурная схема регулирования напряжения генератора показана
на рис. 4.12
Охотной величиной является отклонение напряжения от установивше-
гося значения Основным возмущаюшнм фактором для генератора яаляегся
нагрузка реактивным током. Реактивный ток размагничивает генератор. Это
эквивалентно изменению напряжения возбудителя, на который подает свое
воздействие АРИ. На структурной схеме возмущающее воздействие 1Р при-
ложено между исполнительным элементом АРП и генератором
Рис .4.12. Структурная схема регулирования напряжения генератора
129
Гюва 4
Регулирование напряжения генератора
Анализ формул предыдущего параграфа показывай основные харак-
теристики системы регулирования напряжения в статических режимах Фор-
мула (4 31) устанавливает зависимость выходного сигнала у от возмущения Р
В установившемся режиме производные переменных равны нулю, поэтому
нодстввляя р = 0, для ствгического режима получим
у~ i+fFto;
(4 40)
Структурная схема современных регуляторов напряжения не содержит
интегрирующих элементов с передаточной функцией ^';Ср) = — Все эле-
менты регулятора и сам генератор имеют передаточные функции вида
£
W(p) =------. Для таких элементов W(0} = к. С учетом сказанного для ста-
7р+1
тики формулу (4.31) можно записать так-
1 + Л ’
(4 41)
где — коэффициент передачи через элементы от места приложения воз-
мущения до выходного сигнала, к — коэффициент передачи разомкнутой
САР
Принимая во внимание, что выходным сигналом яаляется отклонение
напряжения ДО., а возмущением — отклонение тока Д , получим
ДО1, kFj
&Цр~1+к
(4 42)
Отношение ИЛ],1^Г,р есть не что иное, как статизм регулирования л,, по-
этому окончательно запишем
(4-43)
130
Гюва 4 Регушрование напряжения генератора
Твяим образом, статизм обратно пропорционален коэффициенту передачи
разомкнутой системы, т.к. к» 1,0.
Допустим kF} = 0.2. Это значит, что без регулятора при изменении
реактивной нагрузки генератора от нуля до номинальной (отклонение тока
1,0) напряжение генератора уменьшаема на 20 % Но ус юаням экс-
плуатации это может оказаться недопустимым. Установив на генераторе АРП
с таким коэффициентом передачи, чтобы к — 100 (заметим, что в к входит и
к ), получим также статическое (зависимое от нагрузки) регулирование, од-
нако статизм оказывается почти в 100 раз меньше: т* = kFj jk ~0,2/100-0 002.
При изменении нагрузки от пуля до номинальной уменьшение напряжения ге-
нератора составит всего 0,2 %.
Следует отметить, что если бы структурная схема АРН содержала ин-
тегрирующий элемент, то регулирование было бы астатическим. В самом
деле, пояагвя, что передаточная функция W ( р) содержит г—й элемент с пе-
редаточной функцией Wt (р/ = kj /р, можно записать
ЧГ(Р)^~ Wn-i(p). (4 44)
Р
где р)~ передаточная функция всех элементов САР, кроме г—го. Для
ствтизма получим
s. =---—------J =0 {4 45)
Точность поддержания регулируемой величины на заданном уровне в
установияшсмся режиме также зависит от коэффициента передачи системы
регулирования к. В установившемся режиме при р = 0 получим
откуда следует, что чем выше Л, тем меньше погрешность и, следовательно,
точнее происходит отработка задания. С позиций точности регулирования
желательно увеличивать коэффициент передачи (уси «ення). Однако уветиче-
131
Гчава4
Регутирование напряж ения генератора
ние коэффициента передачи к ухудшает устойчивость системы регулирова-
ния. Этот факт необходимо учитывать при ее настройке
4.9. Способы изменения статизча
Современные регуляторы напряжения имеют высокий коэффициент
усиления, при этом статизм получается в пределах 0,5 — 1,0 %. Для однознач-
ности распределения реактивной нагрузки между генераторами, работающи-
ми на сборные шины, статизм должен быть порядка 4,0 — 5,0 %. В то же вре-
мя при работе блока генератор-трансформатор суммарный статизм регули-
рования ,г,т - л, + х.Г получается большим И в том и в другом случае воз-
никает необходимость изменения статнзма- в первом — увеличение, а во вто-
ром - уменьшение
Прежде всего статизм можно изменить за счет коэффициента усиления
автоматического регулятора. Практически этот способ не используется, так
как от величины коэффициента усиления зависят лр\'гие характеристики ре-
гулирования. Коэффициент усиления выбирается из условия получения тре-
буемой точности регулирования и устойчивости САР.
Рассмотрим способ изменения статизма, в котором используется сиг-
нал по возмущению. Статизм определяется формулой
5. =——. (4.47)
1 + к
Представляется возможным изменить статизм, не заграгивая коэффици-
ент усиления к. воздействуя лишь на числитель этой формулы Очевидно, что
сам коэффициент передачи Ау, также не может быть изменен, так как задан
для объекта регулирования Запишем выражение (4.4?) в следующем виде.
v. = (4.48)
1 + к
Наличие дополнительного коэффициента передачи kpni свидетельству-
ет о том, что сигнал возмущения помимо обычниго канала парад гельно про-
ходит через другие элементы САР (структуривя схема на рис 4 13)
132
Гчава 4
Регулирование напряжения генератора
Индекс у коэффициента kFlU показываег, что сигнал проходит от точ-
ки приложения возмущения F через п элементов АРП и далее на выход Пе-
ред коэффициентом kFn) можно иметь положительный или отрицательный
знак 1]рн отрицательном знаке происходит уменьшение стагнзма. В случае
kFy +(—^ту) = ^ статизм отсутствует Это значит, что возмущение нс ока-
зывает влияний на выходной сигнал В теории автоматического регулирова-
ния это называется компенсацией возмущения. При положительном знаке
kFny статизм увеличивается
Рис.4 13. Схема компенсации возмущения
Компенсационный сигнал по возмущению можно подвяать через один
или несколько элементов АРИ- Коль скоро речь идет о корректировке харак-
теристик САР в установившемся режиме, ия который не оказывает апияния
запаздывание в элементах регулятора, то эффективнее подавать сигнал по
возмущению на вход регулятора. Па рис 4 13 этот путь выделен сплошной
линией. Фактически это означает, что на вход регулятора помимо сигнала по
напряжению должен быть подан сигнал по току Схемы подключения регуля-
тора с целью изменения статизма регулирования показаны на рис 4.14.
Различие в схемах заключается лишь в знаке сигнала по току. В схеме
рис 4 14, a Upef =иг+1рг. а в схеме рис 4.14. б U-Ь'г -I рГ (здесь для
простоты коэффициенты трансформации тока и напряжения опущены). При
включении генератора по рис. 4.14, а статизм увеличивается. Это делается на
генераторах, работающих параллельно на сборные шины. Увеличение ста-
тизма способствует однозначности распределения реактивной нагрузки. По-
этому такую схему называют схемой токовой стабилизации.
По схеме (рис. 4 14, б) статизм уменьшается. Данная схема использу-
ется на блоках генератор-трансформатор с целые компеневппи падения на-
133
/'шва4
Реагирование напряжения генератора
пряжения в трансформаторе, в utiy чего схема получила название схемы то-
ковой компенсации
а) б)
Рис.4 14. Схемы подключения регуляторов
Чтобы напряжение па выводах генератора зависело только от реактив-
ной нагрузки, сочетание подводимых к регулятору фаз напряжения и тока вы-
бирается соответствующим образом. Так, в схемах рис. 4.14 напряжение берет-
ся с фаз Л — С, а ток — фазы В. Схемы юковой стабилизации и компенсации в
грехфазном исполнении рассмотрены на примерах конкретных регуляторов
4.10. Динамика ршуимронаипя
К системе автоматического регулирования предъявляются определенные
требования в отношении ее динамических характеристик. Первым является
требование устойчивости САР. Под устойчивостью понимается способность
системы возвращаться в исходный или близкий к нему установившийся режим
после любого выхода из него в результате какою-либо воздействия.
На рис.4 15 показаны возможные кривые переходного процесса в ус-
тойчивой и неустойчивой системах Устойчивая система после возмущения
возвращается к установившемуся режиму. Переходный процесс можег быть
колебательным (кривая 1) или апериодическим (кривая 2)
Рис 4.15 График переходного процесса
134
Гчава 4
Регулирование напряжения генератора
В неустойчивой системе даже незначительное в начальный момент
возмущение выводит систему из равновесия. С течением времени регулируе-
мая величина не принимает установившееся значение (кривая 3).
Вторым требованием в отношении динамических характеристик САР
является требование к качеству переходного процесса Качественными пока-
зателями переходного процесса являются его длительность и колебатель-
ность На рис.4 16 показаны характеристики переходного процесса устойчи-
вой системы автоматического регулирования при изменении уставки регуля-
тора. т.е. при таком воздействии, когда регулируемвя величина должна прий-
ти к своему новому заданному значению Криввя 1 иллюстрирует колеба-
тельный переходный процесс. По техническим условиям иногда такой про-
цесс может оказаться недопустимым. В гаких случаях следует настраивать
систему на апериодический переходный процесс (кривые 2 и 3) В го же вре-
мя, несмотря на колебательность переходного процесса быстродействие та-
кой системы может быть выше, чем у апериодически настроенной САР. Бы-
стродействие определяется временем перехолного процесса, которое измеря-
ется с начала возмущения и до момента, когда отклонение регулируемой ве-
личины от нового установившегося значения станет меньше определенной
достаточно малой величины.
Рис.4 16. Переходный процесс при изменении уставки регулятора
В значительной степени устойчивость « качество переходного процес-
са зваисят от коэффициента усиления САР. Для итпюстрации этого положе-
ния обратимся к частотным характеристикам системы регулирования.
Разомкнутая система автоматического регулирования, включающая регуля-
тор и объект регулирования, имеет передаточную функцию
w(p)=W\(P) Щ(р) .W„(p), где Wt (р ) - передаточная функция г-го звена
системы; п — число элементов САР. Имея передаточную функцию системы,
Пава 4
Регулирование напряжения генератора
можно построить ес амплитудно-фазовую характеристику. Для этого. как
известно, необходимо в выражении W(p) заменить р на jto и произвести по-
строение годографа W(jio) при изменении частоты от 0 до « По вицу ам-
плитудно-фазовой характеристики можно судить о динамических свойствах
системы регулирования. Как уже отмечалось ранее, схемы современных ре-
гуляторов напряжения (возбуждения) не содержат интегрирующих элемен-
тов При наличии только инерционных элементов с передаточными функ-
циями вида W,( p) = kt /(TiP + 1 .?, амплигудно-фазоввя частотнвя характе-
ристика имеет вид, показанный на рис 4.17
Для устойчивой в разомкнутом состоянии системы критерий устойчи-
вости формулируется следующим образом, замкнутая система будет устой-
чива, если амнлигудно-фазоввя частотная характеристика не охватывает точ-
ку (-1.0.- jO)
Частотную функцию можно записать так:
IF (jm) = A(wje1ч>(а), 0.49)
ще А (оз)— модуль, ср — аргумент. При нулевой частоте А(О)=к. С увели-
чением коэффициента передачи вероятность охавтв амплитудно-фазовой ха-
рактеристики точки (—1.0; jO) увеличивается. При некотором критическом
коэффициенте к ~ кгр, когда характеристика проходит через точку (-1,0; jO),
система находится на грани устойчивости. При к > к^ система неустойчива.
Амплитудно-фазовые частотные характеристики для устойчивой (кривая 1) и
неустойчивой (кривая 2) систем показаны на рис. 4.17.
Рис.4.17. Амплитудно-фазовые характеристики САР
136
Гчава 4
Регулирование напряжения генератора
Как отмечалось ранее, для улучшения показателей СЛР в установив-
шихся режимах следует стремиться к увеличению коэффициента усиления
САР Однако это приводит к неустойчивости системы Обычно по условиям
динамики выбирают к - 0,5к„р Это мшченме коэффициента обеспечивает
достаточный запас по устойчивости и удовлетворительное качество переход-
ного процесса.
Рассмотрим вопрос о быстродействии САР Пояснение приведем на
примере простой схемы, включающей два элемента — инерционный с переда-
l
точной функцией W.(p) =-------- и безниерционный с передаточной
Z^p+l
функцией W2(р) = к^ (рис. 4 18}.
Рис 4.18. Структурная схема (а) и переходнвя характеристика САР (б).
Для разомкнутой СЛР передаточная функция
T-jp + l
В замкнутом состоянии передаточная функция имеет вид
W------
Г(р)+\
050)
(4 51)
• • 'I
Поскольку к, к-, » 1,то к ~ 1 и Т =------. Переходная характеристика
А, А,
замкнутой системы показана на рис. 4.18, б.
137
Гчава 4 Регулирование напряжения генератора
При x(t) = \(t) выходной сигнал v(f) нарастает по экспоненциально-
му закону с постоянной времени Т* и в установившемся режиме равен
к' si (кривая I).
Рассмотрим влияние коэффициента усиления разомкнутой системы на
длительность переходного процесса в замкнутом состоянии. Для этого увели-
чим к-,, приняв к\ = пк 2 . где и > 1 Теперь к' также стремится к единице, а
постоянная времени уменьшается в п раз, т.е. Т '* = ———. Переходный про-
nk^ki
цесс при единичном воздействии на входе будет' проходить по кривой 2. Отсю-
да следует, что увеличение коэффициента усиления разомкнутой системы по-
вышает быстродействие СЛР. Вот почему все быстродействующие регуляторы
делают с высоким коэффициентом усиления, а стабилизацию процесса регули-
рования получают за счет корректирующих цепей.
4.11. Коррекция динамических свойств САР
Динамические свойства САР. имеющей высокий коэффициент усиле-
ния по условию статики, мотут быть улучшены за счет введения местных
обратных связей вокрут элементов САР и дополнительного воздействия по
производным регулируемого параметра, а также за счет коррекции САР по
возмущающему воздействию
Введение обратных связен. Рассмотрим САР. в которой один или
несколько элементов охватываются обратной связью с передаточной функци-
ей (р). С учетом действия обратной связи передаточная функция эле-
мента принимает вид
w(p>
Wec(p)'
Из этой формулы понятен смысл введения обратной саязц: ии изменяет пе-
редаточную функцию элемента Необходимо стремиться к такому измене-
нию, при котором бы улучшились динамические слойшва СЛР
Действие жесткой обратной саязи в САР не зависит от времени и осуще-
ствляется как в установившемся, так и в переходном режимах Для корректи-
(4 52)
i-W(p)
138
Гюва 4
Регулирование напряжения генератора
ровки динамических свойств САР применяется гибкая обратив» связь с переда-
точной функцией (Р) = ^ес^осР Проиллюстрируем действие гибкой об-
ратной сяязи на примере инерционного и интегрирующего элементов.
Инерционный элемент имеет передаточную функцию W(p) =—-— За
7р+1
счет гибкой обратной связи передаточная функция этого элемента принимает вид
W’fp) =
(Т+кк„сТ)р + 1
(4 53)
Здесь знак «минус» соответстаует положительной обратной связи, а «плюс»—
отрицательной. Гибкая обратпвя связь изменяет только постоянную времени
инерционного элемента, коэффициент усиления при этом остается неизмен-
ным. Коррекшровка инерционных свойств элемента (постоянной времени)
может благоприятно сказаться на динамических свойе шах всей САР.
При интегрирующем элементе получим
W'(p> =
(Т+кпс'1ис)р '
(4 54)
т.е. в данном случае также изменяется постояннвя времени.
Интегрирующий элемент, охваченный отрицательной жесткой обрат-
ной связью, теряет свойства интегрирования Действительно, при
^Ое(Р?=-Лв.с имеем
г.с интегрирующий элемент превращается в инерционный Такое изменение
сущестнеш|О Bjume'i на свойства САР При этом корректируются не только
динамические, но и его статические свойства.
Введение воздействия по производной Элемент, реагирующий па
скорость изменения регулируемой величины (рис 4 19, а), включается парал-
юльно измерительному ллемету, выявляющему отклонение регулируемого
параметра.
139
Глава 4
Регулирование напряжения генератора
Рис.4 19 Схема воздействия по производной (а) и коррекция частотной
харктеристики (б)
Рассмотрим влияние воздействия по производной на примере системы
с передаточной функцией
W(p) = —-------
(4 56)
где к„ — коэффициент уситения всех элементов САР, кроме измерительного
Для простоты примем, что измерительный и дифференцирующий элементы
имеют передаточные функции Н'ьш(р) = kvai и К'аиф(р) = кбиф р т.е. не
имеют запаздывания. Передаточная функция двух параллельно включенных
элементов равна сумме передаточных функций этих элементов. С учетам ска-
занного при введении дополнительного воздействия по производной переда-
точная функция системы примет вид
W(p) =
(кт. +к6иф Р)к„
П™(Т,р+\)
(4 57)
Это выражение можно представить так
1- ь I « т
1+-^р
W*(p} =-----W(p)(i + к’р), (4 58)
П£(Т,р+1)
откуда
W* (ja) = W( j(O)(l+jk'ta), l4.59)
т.е. амплитудно-фазовая характеристика при введении производной может
быть получена сложением комплексных величин:
140
Гзава4
Регулирование напряжения генератора
W*(jta) = М'( j(p) + jk\oW( jd)). (4.60)
На рис.4 19, б представлены амплитудно—фазовая характеристика ра-
зомкнутой САР и характеристика этой же системы с дополнительным воз-
действием по производной. Построение произведено для одного значения
частоты св, при этом к добавляется вектор jk"toW(jVi), благодаря
чему вектор W (joj оказывается повернутым на некоторый угол против
часовой стрелки За счет введения дополнительного воздействия по произ-
водной амплитудно—фазовая характеристика может быть получена такой,
чтобы оиа не охватывала точку (—1,0,у0>. Введение сигнала по производной
повышает устойчивость системы и делает ее менее колебательной.
Коррекция по возмущению Рассмотрим систему из трех элементов, к
которой приложено возмущение F (рис. 4 20)
В общем случае возмущающее воздействие может быть приложено
между' любыми элементами CAP. в результате чего появляется отклонение
регулируемой величины. Наибольший интерес представляет зависимость ре-
гулируемой величины у от полезной нагрузки, которую можно рассматри-
вать как возмущение, прикладываемое к объекту регулирования Примем, что
возмущение F приложено между вторым и третьим элементами При разомк-
нутой системе возмущение F проходит на выход схемы с передаточной
функцией W3(p), те. y=F Wrfp). Для замкнутой системы передаточная
функция от F до у может быть записана так:
г—
Рис .4.20. Коррекция САР по возмущению
, , Щр)
(Р) =-----,
\+W(p)
(461)
141
Г.шва 4
Регулирование напряжения генератора
где W( р) = Hz| (р) 1У2(р) И'3(р), а зависимость выходного сигнала от воз-
мущения равна
(4.62)
1 + И'О)
Смысл коррекции СЛР по возмещению заключается в создании до-
полнительного пути для прохождения сигнала возмущения с таким расчетом,
чтобы результирующее влияние возмущения на выходную величину было
равно нулю. Напомним, что такой способ уже был использован для компен-
сации отклонения регулируемой величины в статическом режиме
В динамическом режиме компенсация должна быть такой, чтобы воз-
мущающее воздействие не вызывало лаже небольшого отклонения регули-
руемой величины как в статическом, так и в переходном режимах.
Дополнительный путь коррекции показан на рис. 4.20 пунктиром. С
учетом этого пути зависимость выходного сигнала от возмущения может
быть записана так
_ р (Р) + (РI W,(p) W2(p)
У кор -г-------;——-------------------• (4.63)
\ + П(р)
Выходная величина не будет зависеть от возмущения при условии
W2(p) + Weo„(p)W2(p)W^(p) = Q, (4 64)
откуда
waon(p)=a,} *4 65)
. (4 66)
тгр + 1
то
*». (р ) = + ' = -(к + ке„ф р) , л-67)
т.е элемент дополнительного канала должен формировать воздействие по
возмущению и его первой производной
142
Гiaea 4
Регулирование напрямсения генератора
Практически трудно создать дополнительный путь для прохождения сиг-
нала по нагрузке, чтобы регулируемая величина полностью нс зависела от нес.
Однако значительное улучшение динамических свойств САР достигается. если
уравнение (4.67) соблюдается нс абсолютно точно. Если коррекцию по вот туше-
нию вводить на вход первого элемента, то при W, (р) = ———р и
W2( р) = ——~—- Для передаточной функции канала коррекции Weon (р) по-
лучим
т.е. дополнительный элемент должен формировать воздействие по возмуще-
нию и двум его производным
Получение производных в системах СЛР прсдстааляст определенные
трудности, вследствие чего коррекцию по возмущению желательно выпол-
нять через меньшее число элементов. Эффективность коррекции чсрст боль-
шее число элементов существенно снижается. В то же время коррекция через
небольшое число элементов, т.е как можно ближе к самому объекту регули-
рования, требует значительной мощности от дополнительного элемента.
Отметим отличительные особенности коррекции САР посредством
введения воздействия по возмущению. Так как контур коррекции не входит в
основной замкнутый контур САУ. то тем самым он нс влияет на устойчи-
вость системы, и се устойчивость определяется однородным дифференциаль-
ным ураяненисм
lQlp)+Hlp)]y=O <4 69)
Коррекция по возмущению алияет на качест во переходною процесса, вы-
званного только тем воздействием. по которому она осуществлена Качество пе-
реходных процессов от других воздействий остается без изменений и определяет-
ся только структурой и параметрами основного замкнутого контура САР
143
Гзава 4.
Регулирование напряжения генератора
4.12. Структурная схема регулирования напряжения
Схема регулирования напряжения генератора показана на рис 4.21. В
ее состав входят генератор и регулятор с измерительным, усилительным и
исполнительным элементами. На вход регулятора подается заданное значе-
ние напряжения L'o, которое должно поддерживаться генератором. Фактиче-
ское значение напряжения генератора также подается на аход измерительно-
го элемента. в котором выявляется разность этих напряжений 17 — Uq, в ее
функции и регулируется возбуждение генератора.
Элементы регулятора могут быть выполнены на разной основе Более
подробное описание их будет дано при изучении схем конкретных регулято-
ров. По своим динамическим характеристикам измерительный и усилитель-
ный элементы представляют собой инерционные элементы первого порядка
Напряжение генератора равно Uz = Ео +£а. где Еа — э.д.с. реакции
якоря (статора) [14]. Поскольку £о = —учитывая, что размагничива-
ние генератора в основном определяется реактивным током статора, получим
Vг = Ео — Iрхи. Пренебрегая рассеянием обмотки статора для неявнополюс-
ного генератора, можно считать лИ = xd, так что напряжение генератора рав-
Рис.4.21. Структурная схема регулирования напряжения генератора
Рассматривая обмотку возбуждения как элемент системы регулирова-
ния, будем иметь
144
Гчава 4
Регулирование напряжения генератора
<Др}-
ТоР+\
(4 70)
где ток и напряжение выражены в относительных единицах, Тп— постоянная
времени обмотки возбуждения.
Поскольку
1в=Ч>0.=Ео.
то
= = (А71)
‘-'в,- 'оР+1
Размагничивающее действие тока статора учтем введением отрица-
тельной обратной связи с коэффициентом передачи Р=’\ при этом
передаточную функцию генератора получим в виде
Таким образом, генератор также может быть представлен инерцион-
ным элементом первого порядка. Безусловно, это упрощенное описание син-
хронного генератора, но вполне приемлемое для анализа основных показате-
лей системы регулирования. Строгая мате>матическая модель генератора
описывается уравнениями Парка-Горева.
Отметим особенность режима генератора под нагрузкой в сравнении с
холостым ходом Под нагрузкой коэффициент усиления и постоянная време-
ни генератора меньше, чем на холостом ходу Это благоприятно сказывается
на устойчивости САР Однако, и на холостом ходу обеспечить устойчивость
рассматриваемой системы, состоящей нз четырех инерционных элементов, не
представляв г больших затруднений К тому же, к автоматическому регулиро-
ванию напряжения не предъявляется высоких требований по быстродейст-
вию. а следовательно, коэффициент усиления разомкнутой системы может
быть невысоким.
145
Глава 4
Регулирование напряжения генератора
Рассмотрим СЛР, в котором усилительный и исполнительный элементы
регулятора охвачены обратной связью Эта саязь используется для изменения
параметров (коэффициента усиления, постоянной времени, элементов. Связь
может быть жесткой и гибкой. Динамические свойства САР корректируются
гибкой обратной связью На статические показатели эта связь не оказывает
влияния. Жесткая обратная связь изменяет параметры моментов независимо от
времени, поэтому ее действие проявляется и в динамике, и в сгатике
На схеме предусмотрена коррекция САР по нагрузке генератора. Под
действием нагрузки напряжение генератора уменьшается В статике это от-
клонение компенсируется действием раулитора. Выявив отклонение напря-
жения генератора от заданного, регулятор подает воздействие на возбужде-
ние с целью уменьшения отклонения. Сигнал регу тятора проходит через не-
сколько элементов, которые имеют запаздывание. Именно поэтому невоз-
можно мгновенно устранить отклонение регулируемого параметра действием
элементов основного контура СЛР Следствием запаздывания в элементах
регулятора является колебательность переходного процесса
Корректирующий сигнал по току нагрузки подается на вход исполни-
тельного элемента регулятора Если бы этот элемент был безинеркионным. то
любое изменение нагрузки компенсировалось бы мт новенпо При запаздыва-
нии необходимо формировать корректирующий сигнал с дополнительным
воздействием по производной, что и должно быть сделано в корректирующем
элементе. Кроме коррекции динамических свойств СЛР сигнал по натрузке
подается на вход регулятора. В 4 10 было показано, что это делается для из-
менения статизма регулирования
4.13. С ipyкгурная схема регулятора возбуждения
сильного цейсвня
Па крупных электростанциях, работающих через длинные линии элек-
тропередачи, остро стоит вопрос о сохранении устойчивости параллельной
работы с энергосистемой Рассмотрим условия параллельной работы генера-
тора с системой. В нормальном режиме сохраняется баланс мощностей тур-
бины Рт и генератора Р3, в точке «а» (рис 4 22, а). При к.з. на линии переда-
ваемая мощность снижае тся и может стремиться к нулю. Нод действием нз-
146
Гчава 4. Регулирование напряжения генератора
быточмого момента турбины ротор ускоряется и угол 8 растет. После ликви-
дации к.з. и восстановления передачи ротор начнет тормозитьсв. Изменение
угла 6 в послеаваринном режиме представлено на рис 4 22, б.
Рис.4.22 Характеристики генератора
Колебательный процесс 5ft) может быть затухающим или расходя-
щимся. В последнем случае произойдет нарушение устойчивости Для сохра-
нения устойчивости и ускорения затухания 6ft) необходимо воздействовать
на возбуждение генератора. Очевидно, когда 6ft) >6Ь следует увеличивать
возбуждение и, следовательно, з.д.с. генератора. Передаваемвя мощность
Е„17 „
Р =-----sin о при этом бутет повышаться, что будет способствовать тормо-
жению генератора При 6ff)<6t следует разводу ждать генератор.
Таким образом, возбуждение генератора необходимо роулировать в
соответствии с колебаниями утла 6 Практически период колебаний ротора
может равняться 0,5 — 1 с. С таким же периодом или частотой J — 2 Гц следу-
ет изменять возбуждение генератора. Это задача регулирования возбуждения
с целью сохранения устойчивости Регулятор, осуществляющий такое воз-
действие, называют регулятором возбуждения, хотя одновременно он регу-
лирует и напряжение генератора.
Регулирование возбуждения должно быть быстродействующим и из-
менять ток возбуждения в заметных пределах с указанной выше частотой.
147
Глава 4 Регулирование напряжения генератора
несмотря на значительную инерционность обмотки возбуждения. Отметим
требования к системе регулирования возбуждения:
наличке высокого коэффициента усиления САР в разомкнутом со-
стоянии (в пределах до ки = 50 ед.возб./ед.ст напр.),
регулирование возбуждения не только в функции напряжения гене-
ратора. но и в функции угла 6 или других параметров, адекаатных углу;
использование при высоком коэффициенте усиления всех средств
стабилизации, включая обратные связи, дополнительное воздействие по про-
изводной регулируемых величин и коррекцию по возмущению.
Подобный регулятор принято называть автоматическим регулятором
возбуждения сильного действия (ЛРВ — СД). Оп широко используется в сис-
темах возбуждения крупных гидро- и турбогенераторов как многоканальное
устройство, обеспечивающее поддержание требуемого уровня напряжения в
заданной точке энергосистемы, форсирование возбуждения в аварийных ре-
жимах, демпфирование колебаний при возмущениях, ограничение минималь-
ного и максимального тока ротора, а также выполнение ряда других функций
Структурная схема регулятора АРВ-СД показана на рис. 4.23. Регуля-
тор используется на генераторах, имеющих тиристорную систему возбужде-
ния. На схеме она отмечена элементом ТВ с системой управления тиристора-
ми (СУТ). В закон регулирования введено несколько параметров Во-первых,
это регулирование по отклонению нвцряжения ДУ . Для улучшения динами-
ческих показателей системы управления введено дополнительное воздейст-
„ du
вие но производной —.
dt
Выше отмечаяась эффективность регулирования возбуждения в функ-
ции угла 8 Реализовать такое регулирование весьма сложно - для измерения
угла 8 необходимо иметь каналы связи для передачи вектора напряжения с
приемного конца линии электропередачи на станцию. Это приводит к сниже-
нию надежности системы регулирования. Вместо угла 8 вводится сигнал по
Г dS dj d~S
частоте, исходя из соотношения j =— и — =--------Кроме того, вводятся
dt dt dt2
канал ограничения минимального тока возбуждения и канал по току
статора для изменения статизма регулирования.
148
Регулирование напряжения генератора
В регуляторе возбуждения имеется контур коррекции по току генера-
тора Рвнее было показано, что канал коррекции должен осуществляться че-
рез возможно менынее число элементов, например, сразу на вход возбудите-
ля. В этом случае корректирующий сигнал должен формироваться по откло-
нению и первой производной тока нагрузки Введение коррекции через
большее число элементов регулятора приводит к необходимости воздействия
нс второй и высшим производным.
В случае тиристорной системы возбуждения, являющейся практически
безынерционной, и элементов регулятора возбуждения на основе электронных
усилителей корректирующий сигнал по току нагрузки может быть подан на
аход регулятора возбуждения. Учитывая малое запаздыввние в элементах регу-
149
Глава 4. Регулирование напряжения генератора
лятора и практически безынерняонность тиристорного возбуждения, корректи-
рующее воздействие формируется потоку и его первой производной.
Для наглядности па структурной схеме элементы по производной по-
казаны независимо ^параллельно) по отношению к измерительным элементам
регу тируемого параметра. В действительности, сначала реализуется измери-
тельный элемент по отклонению, выходное напряжение которого пропорцио-
нально отклонению регулируемого параметра от значения уставки, а затем
этот сигнал дифференцируется посредством цепочки RC.
Все перечисленные каналы воздействуют па суммирующий усилитель
СУ. который в свою очередь через СУТ управляет тиристорами Элементы
СУ. СУТ и ТВ охвачены жесткой обратной связью. Система регулирования
является замкнутой, напряжение генератора подается на вход измерительных
элементов но напряжению и час tore.
4.14. Компаундирование синхронного генератора
Сущность компаундирования заключается в том, что регулирование
возбуждения синхронного генератора производится в функции тока ствтора
[14] Такое регулирование для коррекции динамических свойств САР можно
осуществлять на синхронных iCHCparopax с различными системами возбуж-
дения. Однако термин «компаундирование» используется только примени-
тельно к элсктромашшнюй системе возбуждения Принципиальная схема
компаундирования синхронного генератора показана на рис 4 24.
В схемах компаундирования применяются два варианта подпитки воз-
буждения. Если возбудитель генератора имеет дополнительную обмотку воз-
буждения (ДОВВ), то подпитка током статора производителя в эту обмотку.
Если же возбудитель не имеет дополнительной обмотки, то подпитка выпол-
няется в основную обмотку возбуждения возбудителя (ОВВ) На рис. 4 24. а
показана схема компаундирования в дополнительную обмотку возбудителя
Пунктиром показана подпитка статора в основную обмотку возбудителя в
функции тока.
150
Гчава 4 Регучирование напряжения генератора
б)
Рис.4 24 Схемы компаундирования синхронного генератора (а) и генератора
постоянного тока (б)
Идея компаундирования синхронного генератора заимствована из об-
ласти машин постоянного тока. При перенесении этой идеи на синхронные
генераторы необходимо в цепь компаундирования включить трансформатор
тока (ТТ) и выпрямитель (Вып). Мощность, которую можно передать со сто-
роны статора через трансформатор тока, сравнительно мала и недостаточна
для того, чтобы непосредственно воздейстаовать на возбуждение синхронно-
го генератора. Поэтому такое воздействие подастся через возбудитель, т.е.
осуществляется регулирование возбуждения возбудителя в функции тока
статора. Возбудитель используется как усилительный элемент в канале регу-
лирования возбуждения синхронного генератора и функции тока статора.
Этот элемент имеет запаздывание.
У компаундированного генератора постоянного тока запаздывания нет.
При изменении тока якоря одновременно изменяется и ток в сериесной об-
мотке возбуждения (рис 4 24, б).
Ретулирование возбуждения в конечном итоге приводит к регулирова-
нию напряжения синхронного генераюра По ряду причин компаундирование в
чистом визе пе может обеспечить поддержание напряжения на постоянном
уровне Для поддержания напряжения на синхронном генераторе приходится
ставить регулятор напряжения. При компаундировании регулятор напряжения
должен корректировать тс отклонения напряжения, с которыми не справляется
система компаундирования. По этой причине такой регулятор называют кор-
151
Гчава 4 Регулирование напряжения генератора
ректором. Сочетание компаундирования с коррекцией напряжения широко
применяется на синхронных генераторах с машинной системой возбуждения
На систему компаундирования с корректором напряжения можно по-
смотреть иначе. Если на первый план в названии поставить корректор напря-
жения, представляющий собой регулятор напряжения синхронного генерато-
ра. го само компаундирование есть не что иное, как коррекция системы регу-
лирования напряжения по нагрузке, которая выполняется для коррекции ди-
намических свойств СЛР. Такой подход соответствует изложенному выше
рассмотрению структурной схемы регулирования с позиций теории автома-
тического регулирования.
Учитывая, оинахо, сложившуюся терминологию - компаундирование
генератора с коррекцией по напряжению, далее используется принятая тер-
минология При изучении же динамических характеристик этой системы ре-
гулирования следует помнить, что она представляет собой систему регулиро-
вания напряжения, динамические характеристики которой скорректированы
за счет воздействия по возмущению
Поскольку в канале коррекции по возмущению имеется запаздывание,
то для полной коррекции отклонения напряжения в переходном режиме в
канале коррекции следовало бы формировать воздействие по току и его про-
изводной. Практически это осуществить затруднительно, поэтому коррекция
вводится только по отклонению тока
Так как нагрузкой генератора является полный ток, а размагничивание
генератора происходит в основном реактивной составляющей тока, то кор-
рекцию динамических свойств системы регулирования напряжения предпоч-
тительнее делать в функции реактивной составляющей тока статора или, что
то же самое, в функции тока с учетом его фазы. Такая система используется
на синхронных генераторах с машинной системой возбуждения и называется
системой фазового компаундирования.
Сочетание компаундирования с корректором напряжения обеспечивает
эффективное регулирование возбуждения генератора в нормальном и ава-
рийном режимах. Корректор выполняется на основе электромагнитных дле-
ментов, вследствие чего он и называется элсктрома! ннтным. Компаундиро-
вание с электромагнитным корректором прсдстааляет собой весьма надеж-
ную систему регулирования Благодаря высоким показателям регулирования
как в статике, так и в динамике, а также в силу высокой надежности и про-
152
Гiaea 4. Регулирование напряжения генератора
стоты обслуживания компаундирование с электромагнитным корректором
получите широкое распространение на гидро- к турбогенераторах с элек-
тромашинкой системой возбуждения
Из недостатков компаундирования с электромагнитным корректором
необходимо отметить следующие При близких коротких замыканиях, сопро-
вождающихся значительными посадками напряжения, компаундирование не
обеспечивает достаточной форсировки возбуждения Эго определяется тем.
что при больших значениях гока короткого замыкания трансформаторы тока
насыщаются, и увеличение тока статора не дает пропорционального увеличе-
ния подпитки возбуждения С другой стороны, при посадках напряжения
корректор не сможет выдавать свою номинальную мощность, так как под-
питка возбуждения снижается и ио этому каналу Для устранения указанного
недостатка генераторы, имеющие компаундирование с электромагнитным
корректором, оснащается устройством релейной форсировки.
Недостатком электрона! нитного корректора являетсв значительное
замедление процесса регу дарования в виду большого запаздывания в Mai нит-
пых усилителях
4.15. Принцип действия электромагнитного
корректора напряжения
Корректор представляет собой регулятор напряжения Обычно регуля-
тор содержит измерительный, усилительный и исполнительный элементы. В
электромагнитном корректоре напряжения успл тельный и исполнительный
элементы совмещены в одном электромагнитном усилителе Таким образом,
основными элементами такого корректора являются измерительный и усили-
тельный элементы.
11с своим динамическим свойствам элемешы корректора инерционные
В структурной схеме корректора нет интегрирующего элемента, поэтому он
является статическим регулятором. Блаюдаря высокому коэффициенту усиле-
ния элементов стагмзм раулирования невелик Большой коэффициент усиле-
ния обеспечивает также высокую чувствительность Практически можно счи-
тать, что элскгромагиитный корректор нс имеет зоны нечувствительности.
153
Регулирование напряжения генератора
Измерительный орган корректора преобразует отклонение напряжения
генератора от заданного значения в пропорциональный сигнал постоянного
тока Упрошенная принципиальная схема измерителя представлена на
рис.4 25, а. Измеритель состоит из двух элементов- линейного К и нелинейно-
го X. Ток в линейном элементе пропорционален приложенному напряжению,
в нелинейном — зависимость тока от приложенного напряжения нелинейна.
Характеристики этих элементов показаны на рис 4.25.б
Усилительным элементом корректора яаляется матнгаый усилитель,
имеющий две обмотки управления Wt и И'-. Одна из обмоток включена по-
следовательно в цепь линейного элемента, другая — в цепь нелинейного. Об-
мотки включены встречно, так что их намагничивающие силы вычитаются.
Рассмотрим магнитный усилитель с одинаковым числом витков в обмотках.
Результирующее действие этих обмоток при U = 1/п равно нулю Действи-
тельно, при U - Uo (рис. 4 25, б; токи линейного и нелинейного элементов
равны между собой и намагничивающие силы управляющих обмоток взаим-
но компенсируются.
Рис. 4.25 Схема измерительного элемента коррекюра (а) и
его характеристики (б)
При увеличении напряжения U > Uo ток нелинейного элементе стано-
вится больше тока линейного элемента. В этом случае преобладает- действие
обмотки IVi. Условно примем это действие за отрицательный сигнал измери-
теля. При U <U0 ток нелинейного элемента становится меньше тока линейно-
го, вследствие чего преобладающим является действие обмотки Wt, которое
сяедует принять за положительный сигнал. Результирующая характеристика
показана кривой abc рис 4 25, б.
154
Гпова 4.
Регутирование напряжения генератора
Обычно для турбогенераторов применяется твк называемый односис-
темный корректор, который выполняется на базе однотактного магнитного
усилителя. Характеристика такого усилителя показана па рис. 4 26 (кривая 11
Входным сигналом 1ВХ яапяется разность токов обмоток управления, а ток
является выходным сигналом магнитного усилителя.
Рис.4.26. Характеристики магнитного усилителя
Однотактный машитный усилитель не пояярен, т.е. он не реатрует на
знак сигнала. Как при положительном, так и при отрицательном входном
сигнале ток выхода растет. Без принятия специальных мер это может привес-
ти к тому, что как при уменьшении, так и увеличении напряжения генератора
от значения Uo корректор будет оказывать действие в одном направлении,
например, на увеличение напряжения генератора Дая устранения умчанною
недостатка односистемного корректора в измерительный upian включается
вентиль Bj, благодаря которому отрицательные сигналы измерительного ор-
гана шунтируюгея Действительно, при отрицательном сигнале ток нелиней-
ного элемента становятся больше тока линейного элемента При тгом паде-
ние напряжения на обмотке И'г могло бы оказаться выше падения напряже-
ния на обмотке Wt. При наличии вентиля Вз при самых небольших превыше-
ниях напряжения над Цп вентиль начинает проводить, и эти напряже-
ния выравниваются. Следовательно, токи в управляющих обмотках также
будут выравниваться, и результирующий входной сигнал магнитного усили-
теля станет равным нулю. Вместо характеристики abc (см рис 4.25. б) полу-
чается характеристика abd. Когда сигнал положителен, вентиль не проводит и
155
Гwea 4
Регулирование напряжения генератора
характеристика измерительного органа остается неизменной, такой же, как и
при отсутствии аентиля
Таким образом, односистемняй корректор создает дополнительную
подпитку возбуждения при снижении напряжения ниже и$. При повышении
напряжения корректор бездействует, что в какой-то степени является недос-
татком Однако на турбогенераторе повышение напряжения выше напряже-
ния холостого хода маловероятно, так что действия односистемного коррек-
тора вполне достаточно.
Для гидрогенераторов действия односистемного корректора недоста-
точно. Отключение гидрогенератора, сопровождающееся сбросом нагрузки,
прнаоднт к значительному увеличению напряжения Это объясняется, с од-
ной стороны, переходом с нагрузочном характеристики генератора на харак-
теристику холостого хода и, с другой стороны, увеличением скорое ш гидро-
агрегата Так, про сбросе нагрузки с гидрогенератора вследствие инерцион-
ности системы регулирования скорость гидроагрегата может превысить но-
минальную на 30 — 40 %. Учитывая это обстоятельство, на гидрогенераторах
рекомендуется устанавливать так называемый двухсистемный корректор на-
пряжения. в котором усилительный элемент выполняется на основе двух-
тактного магнитного усилителя. Такой ма!ннтиый усилитель реагирует на
знак входного сигнала, так как его характеристика симметрична относитель-
но оси ординат (кривая 2 на рис. 4 ,26).
Двухгвктиый усилитель выполняется на основе двух однотактных, каж-
дый из которых работает на отдельную обмотку возбуждения возбудителя.
Один из них создает дополнительную подпитку (кривая 1) согласно с основным
током возбуждения, другой создает развозбуждеиие (кривая 3). Результирую-
щее воздействие определяется характеристикой 2. Таким образом, двухсистем-
ный корректор можно представить как одновременное включение двух одно-
системпых, согласованного и противовключениого, корректоров
4,16. Магни г ные усилители
Действие любого усилителя заключается в том. что возможно управ-
ление мощным выходным сигналом с помощью небольшого сигнала. В
магнитном усилителе управление базируется на принципе изменения
магнитной проницаемости ферромагнитных материалов. Принцип действия
156
Гюва 4
Регулирование напряжения генератора
магнитного усилителя можно пояснить на примере стального сердечника с
двумя обмотками, одна из которых обмотка переменного тока, другая - по-
стоянного. Обмотка постоянного тока является управляющей, обмотка пере-
менного тока — рабочей (рис. 4 27)
а) б)
Рпс.4.27. Простейший усилитель (а) и его характеристика (б)
Все величины, относящиеся к обмотке переменного тока, будем отме-
чать знаком а к обмотке постоянного тока — знаком «О».
В цепь рабочей обмотки включается нагрузка, ток в которой опреде-
ляется выражением
где Ru — сопротивление нагрузки, O)L — индуктивное сопротивление рабочей
обмотки. Для простоты предполагается, что активное сопротивление рабочей
обмотки мвло и им можно пренебречь
Индуктивность рабочей обмотки равна
0,4л И'_:£2ц _
I 10 й
(4-74)
где ИС - число витков рабочей обмотки: Q — сечение сердечника; р - - маг-
нитная проницаемость материала сердечника для переменной составляющей
магнитного поля, f- длина магнитопровода.
При звланных и нерегулируемых геометрических размерах изменять
индуктивность рабочей обмотки можно за счет магнитной проницаемости
ц - Это изменение получается намагничиванием с помощью управляющей
обмотки.
157
Гчава4
Регулирование напряжения генератора
Изменение магнитной проницаемости р - приводит к изменению ин-
дуктивности L , что в свою очередь изменяет ток в рабочей обмотке Харак-
теристика магнитного усилителя, представляющая зависимость тока в рабо-
чей обмотке от управляющего тока /п, показана на рис.4 27, б (кривая 1).
Усилитель с такой характеристикой является неполярным, т.е. не реа-
। нрует на знак управляющего сигнала. Как при положительных, так и при
отрицательных значениях управляющего тока в рабочей обмотке ток растет
однозначно Другим недостатком этого усилителя является индуктирование
переменной э.д.с. в обмотке управления под действием переменой состав-
ляющей магнитного потока. Если магнитный усилитель выполняется по схе-
ме рис. 4.27, то для уменьшения переменной составляющей |Ока последова-
тельно с управляющей обмоткой включается дополнительная индуктивность
Lд. Применяются магнитные усилители на двух сердечниках, рабочие об-
мотки которых соединяют последовательно или параллельно, а обмотки
управления соединяют таким образом, чтобы индуктируемые в этих обмот-
ках э.д.с. взаимно компенсировались При этом переменный ток в унраяляю-
щей обмотке будет OTcyTCTBOuaib.
На рис. 4.28, а предстаалена схема усилителя с последовательным со-
единением рабочих обмоток. Часто оба сердечника заменяют одним с
LII—образным mhj иитопроводом (рис. 4.28. о).
158
Гчава 4.
Регулирование напряжения генератора
В этом случае обмотку управления размешают на среднем сердечнике
магнитопровода, а рабочие обмотки — на крайних При этом переменный
магнитный поток основной частоты и нечетных гармоник в среднем сердеч-
нике будет отсутствовать. Однахо, такой усилитель остается неполярным, и
его характеристика нелинейна. В силу пеполярпоети характеристики эти
усилители называются однотактиыми или нереверсивными
С помощью дополнительной обмотки смешения, раскола! аемой на
среднем сердечнике магни гопровода, можно переметать рабочую ючку уси-
лителя по кривой Так, если по обмотке смещения пропустить
ток в положительном направлении, то рдбочвя точка сместится и займет не-
которое положение на правой ветви характеристики Усилитель станет по-
лярным, так как положительный управляющий ток будет увеличивать ток в
рабочей обмотке, а отрицательный — уменьшать. Однако при смещении рабо-
чей точки усилителя в рабочей обмотке протекает значи тельный ток xo.ioc то-
го хода, что иногда нежелательно Коэффициент усиления такого усилителя
невелик. Одиотактные усилители без обратной связи применяются в основ-
ном для больших мощностей (около 20 Вт и выше).
Для увеличения коэффициента усиления в магнитном усилителе вы-
полняется обратная связь. Для этой цели на средний сердечник магиитопро-
вода наматывается специальная обмотка обратной связи. Питание в эту об-
мотку подается через выпрямитель из цепи рабочей обмотки (рис 4.29).
Рпс.4.29. Магнитный усилитель с обратной связью
159
Гчава 4
Регулирование напряжения генератора
Проследим за изменением характеристик магнитною усилителя при
наличии обратной связи. Поскольку питание в обмотку обратной связи пода-
ется через выпрямитель, направление в ней будет неизменным при любом
направлении тока в управляющей обмотке. Следовательно, если условится,
что при положительном токе управления обратная связь будет положитель-
ной, то при отрицательном направлении тока в обмотке управления эта же
связь будет отрицательной. В самом деле, при изменении знака тока в управ-
ляющей обмотке намагничивающая сила этой обмотки также изменится Ио
так как направление тока в обмотке обратной саязи нс меняется, го в этом
случае намагничивающие силы этих полей будут действовать встречно
Введение обратной связи меняет коэффициент усиления усилителя
Положительная обратная связь увеличивает коэффициент усиления, отрица-
тельная — уменьшает. Поскольку прп смене знака управляющего тока знак
обратной связи также меняется, то влияние обратной связи на левую и пра-
вую ветви характеристики /_= будет различным. Повышение коэф-
фициента усиления при управляющем токе /0 > 0 приведет к увеличению
крутизны характеристики, понижение коэффициента усиления при управ-
ляющем токе 4 < 0 уменьшит крутизну характеристики На рис.4.27, б (кри-
вая 2) представлен характер трансформации характеристики магнитного
усилителя за счет введения обратной саязи. При отсутствии обратной святи
ток в рабочей обмотке /_ имеет минимум при /и = 0 и характеристика сим-
метрична относительно оси ординат. При наличии обратной связи минимум
смещается в сторону отрицательного значения управляющего тока В точке
минимума характеристики усилителя с обратной связью намагничивающие
силы управляющей обмотки и обмотки обратной связи компенсируются.
Обратную связь можно выполнить иначе (рис 4 29, 6), Здесь в каждую
полуобмогку WLj и включен вентиль таким образом, что по по.туобмотке
протекает одна полуволна тока, а по полуобмотке W^2 — другая. По на-
грузке течет переменный ток. За счет выпрямления тока в обмотках , н HL,
создается дополнительное подмагничивание сердечника, эквивалентное под-
магничиванию со стороны обмотки обратной связи Такой магнитный усили-
тель называется магнитным усидите тем с внутренней обратной связью.
160
Глава4
Регулирование напряжения генератора
Для получения полярного магнитного усилителя, реагирующего на
знак управляющего тока, обычно собирается так называемая двухтактная
схема При эгом два однотактиых усилителя включаются дифференциально
так, чтобы тоь в нагрузке равнялся разности токов этих усилителей
Магнитные усилители широко применяются в устройствах автомати-
ческого управления и регулирования К преимуществах} магнитных усилите-
лей следует отнести- отехтствие подвижных частей, надежность, высокий
к.п л., большой коэффициент усиления, возможность суммирования многих
сигналов, немедленная готовность к работе после включения питания и
большой срок службы Одним из существенных недостатков магнитных уси-
лителей является высокая инерционность.
4.17. Схемы компаундирования с элек-i ро1чапнг1ным
корректором напряжения
Структурная схема рассматриваемой системы регулирования напряже-
ния синхронного генератора показана на ряс.4.30 Основной контур САР на-
при ьения включает объект регулирования — синхронный генератор и регуля-
тор — электромагнитный корректор напряжения. Возбудитель следует рас-
сматривать как исполнительный элемент регулятора. Па вход регулятора на-
пряжения подаются заданное значение напряжения и фактическое напря-
жение С В регуляторе имеются две обратные саязи. Жесткая обратная связь
охватывает магнитный усилитель, что сделано для улучшения характеристи-
ки самого магнитного усилителя. По каналу гибкой обратной связи сигнал
подается с выхода возбудителя на вход магнитного усилителя. Гибкая обрат-
ная связь улучшает динамику регулирования.
В системе регулирования используется воздействие по току генерато-
ра. Сигнал по току подается ия вход измерительною элемента регулятора
напряжения п на вход возбудителя. В первом случае сигнал по гоку исполь-
зуется для изменения статизма регулирования. Воздействие по току на входе
возбудителя предназначено для улучшения динамики регулирования
Как мы уже отмечали, на пераый план выделяется контур регулирова-
ния возбуждения в функции тока — компаундирование. Контур регулирова-
ния напряжения выполняет вторичные функции коррекции отклонений, с
1Ы
Регулирование напряжения генератора
которыми не справляется канал регулирования по току. Несомненно, что
акцентирование внимания па том или ином контуре системы регулирования
не меняет сущности дела, которая заключается в том. что для улучшения ста-
тики и динамики управления регулирование осуществляется в функции и
напряжения, и тока генератора.
Рис 4 30 Структурная схема компаундирования с коррекцией по
напряжению
Комнат и шроваппе с односистемным корректором. На рис 4 31
показана принципиальная схема компаундирования с односистемным кор-
ректором.
Корректор называется односистемным в связи с тем, что в нем исполь-
зуется однотактпый магнитный усилитель.
Пелосредс!венно компаундирование включает следующие элементы:
трансформатор тока ТТ. сопротиаление Я, , трансформатор Т| и выпрями гель
В, . С помощью этих элементов осуществляется регулирование возбуждения
в функции тока статора. Сопротивление Л, выполняет две функции. Во-
первых, с помощью этого сопротивления обеспечивается нормальный режим
работы трансформаторов гока ТТ. Во-вторых, с сопротивления Л снимается
часть напряжения и подастся в схему корректора, за счет чего изменяется
статизм регулирования. Трансформатор Т| является разделительным транс-
форматором и служит для согласования параметров компаундирования и це-
пи возбуждения
Остальные элементы схемы составляют корректор напряжения. Измери-
тельный орган корректора подключается к генератору через трансформатор
напряжения TH и установочный автотрансформатор АТ Линейный элемент
корректора ЛЭ состоит из ненасыщенного трехфазного или трех однофазных
реакторов с воздушным зазором и выпрямителя Bj. Тик в цепи линейного эле-
162
Гwea 4
PtzvwpoeaHue напряжения генератора
мента пропорционален приложенному напряжению. Пафузкой линейного эле-
мента яалястся одна из обмоток упраалепия магнитного усилителя.
Рис. 4.31 Принципиальная схема компаундирования с односистемным
корректором
Нелинейный элемент ПЭ состоит из трехфазного пятистержневого на-
сыщающегося трансформатора Вторичная обмотка этого трансформатора
соединена разомкнутым треугольником, в рассечку которого включен одно-
фазный выпрямитель В3 Выпрямленный ток нелинейного элемента подается
во вторую уцрааляюшую обмотку маснитного усилителя До тех пор пока
сердечник трансформатора нелинейного элемента нс насыщен, суммарное
напряжение трех фаз равно нулю и ток во вторичной обмотке отсутствует. С
увеличением напряжения генератора сердечник трансформатора насыщается.
Во вторичной обмотке появляются третья н кратные ей гармоники, под дей-
163
Г^ава 4 Регулирование напряжения генератора
сгнием которых во второй обмотке управления магнитного усилителя будет
протекать ток Разность намагничивающих сил, обусловленных токами ли-
нейного и нелинейного элементов, является входным сигналом мапгитного
усилителя. Вентиль В:, включенный между управляющими обмотками уси-
лителя, выравнивает токи в этих обмотках при повышении напряжения гене-
ратора выше напряжения холостого хода. При этом входной сигнал магнит-
ного усилителя становится равным нулю, и последующее увеличение под-
питки тока возбуждения, являющееся следствием неполярности усилителя,
прекращается. Кроме двух обмоток управления магнитный усилитель имеет
еще две обмотки обратной связи. С помощью обмотки 3 выходной сигнал
усилителя подается на его вход, т е эта связь охватывает всего лишь один
магнитный усилитель С помощью такой обратной саязи изменяется характе-
ристика евмого усилителя Обмотка обратной связи 4 включается через
трансформатор стабилизации IC на выводы возбудителя. Эта связь охваты-
вает магнитный усилитель и возбудитель и служит средством стабилизации
процесса регулирования.
В установившемся режиме напряжение возбудителя постоянно В этом
случае напряжение па вторичной обмотке трансформатора ТС равно нулю, и
ток в обмотке 4 отсутствует. Следовательно, в установившемся режиме эта
связь нс действует. В переходном режиме на вторичной обмотке ТС появля-
ется эд.с , пропорциональная скорости изменения напряжения возбуждения,
и по обмотке 4 течет ток Таким образом, обратная связь, осуществляемая с
помощью трансформатора ТС, является гибкой, действующей только в пере-
ходном режиме Назначение гибкой обратной связи — стабилизация процесса
регулирования.
Структурная схема корректора не содержит интегрирующего элемента,
поэтому корректор осуществляет регулирование по статическому закону.
Однако статизм характеристики регулирования корректора невелик и для
однозначности распределения реактивных нагрузок между параллельно рабо-
тающими генераторами его необходимо увеличить. Это достигается за счет
включения корректора по схеме токовой стабклизапии. Для осуществления
схемы токовой стабилизации па измерительный орган необходимо подавать
дополнительное напряжение, пропорциональное нагрузке генератора. В схе-
ме корректора это производится с помощью установочного сопротивления R.
и разделительного трансформатора Т>. Изменяя фазу напряжения на вторич-
164
Глава 4
Регулирование напряжения генератора
ной стороне трансформатора Т2, можно получить схему токовой компенса-
ции, т.е. создавать отрицательный статизм регулирования Уставка корректо-
ра регулируется с помощью автотрансформатора АI.
Компаундирование с чвухсистемным корректором Схема непо-
средственно компаундирования не отличается от ранее рассмогренного вари-
анта компаундирования с олносистемным корректором Измерительный эле-
мент корректора также состоит из линейного и нелинейного элементов. От-
личие заключается в исполнении усилителя электромагнитного корректора. В
схеме компаундирования с двухсисгемным корректором усилительный эле-
мент создан на основе двухтактного магнитного усилителя, который реагиру-
ет на знак входного сигнала, поскольку его характеристика симметрична от-
носительно оси ординат (см. рис.4 26).
Двухсистемный корректор используется на гидрогенераторах, на кото-
рых кроме форсировки возбуждения необходимо производить и расфорси-
ровку, что вызавно возможным повышением напряжения гидрогенератора
при сбросе нагрузки. Более подробно со схемой компаундирования с двух-
системиым корректором можно познакомиться в [5].
4.18. Фа твое компаундирование
Недостачей обычного компаундирования является невозможность
поддержания напряжения на генераторе при разных значениях costp. Это
обстоятельство приводш к необходимости дополнительного pei у пирования
возбуждения генератора в функции напряжения Па регулятор напряжения
при этом возлагается функция коррекции характеристики компаундирования
При обычном компаундировании корректор должен быть рассчитан на боль-
шую выходную мощность. Увеличение мощности приводш к увеличению
размеров элементов корректора и большим запаздываниям, особенно в маг-
нитном усилителе.
Более совершенным является фазовое компаундирование, сущность ко-
торого заключается в том, что подпитка возбуждения генератора осуществляет-
ся не в функции полного тока генератора, а в основном в функции реактивной
составляющей тока, т е. подпитка дополнительно зависит от фазы тока. Рез*ль-
татом этого является меньшая зависимость характеристики компаундирования
165
Г шва 4.
Регулирование напряжения генератора
от cosq>, и следовательно, функции корректора напряжения еще больше огра-
ничиваются. В этом случае становится возможным уменьшить габаритные раз-
меры элементов корректора и. что особенно важно, уменьшить запаздывание в
элементах. При этом, естественно, повышается быстродействие регулирования
Принцип действия фазового компаундирования поясняется па рис. 4.32.
где представлены упрощенная схема компаундирования (рис 4 32, а) и векторная
диаграмма напряжения и тока для разных значений cosy (рис 4 32, б, в)
Основным элементом фазового компаундирования является промежу-
точный трансформатор с подмагничиванием Т Этот трансформатор имеет
три первичные обмотки. Обмотка 1 подключается к трансформатору тока
166
Гчава 4
Регучирошпше напряжения сенершгюра
генератора В обмотку 2 полается шпанис от трансформатора напряжения.
Последовательно с этой обмоткой включена реакиишая катушка (К) со
стальным сердечником, обладающая большим индуктивным сопротивлением,
благодаря чему ток в згой обмотке отстает от приложенного напряжения
примерно на 90° С помощью автотрансформатора АТ осуществляется рсгу
ировка тока во второй обмотке. 1ретья обмотка является подмагничиваю-
щей Она подключена через выпрямитель к трансфоматору напряжения TH
Трансформатор имеет одну вторичную обмотку 4. ток которой «лет на
подмагничивание возбчдптеля. Ток зтоп обмотки пропорционален геометри-
ческой сумме токов первичных обмоюк 1 и 2: /4 = к111 +кг1г. пли
/4 —kj^ -t-kylj-y
Рассмотрим два режима работы генератора — режим активной и режим
реактивной ншрузки Если генератор имеет чисто акт явную нагрузку, то ток
обмотки 1 трансформатора сдвину! относительно тока 1ТН обмотки 2 на
)гол 90° При этом ток вторичной обмотки 4 определится векгором (рис.
4 32, б) При чисто реактивной нагрузке генератора вектор !тт будет совпа-
дать по фазе с вектором тока 1Т11. В этом случае ток вторичной обмотки оп-
ределится вектором 1Л (рис 4 32, в). Нетрудно видеть, что при чисто реак-
тивной нагрузке вектор тока/4 больше этого вектора в активном режиме
генератора
Подпитка возбуждения генератора определяется величиной тока /4.
Отсюда следует, что реактианая составляющая юка генератора создает
большую подпитку возбуждения, чем активная составляющая, т.е подпитка
зависит от фазы тока генератора
Наличие подмагничивающей обмотки 3 обеспечивает зависимость то-
ка возбуждения от напряжения генератора Так, при понижении напряжения
генератора подмагничивание уменьшается, бгагоцаря чему коэффициент
трансформации I по току становится большим, и подпитка возбуждения рез-
ко j величивается
На рис 4 33 приведена структурная схема фазового компаундирования
с корректором напряжения.
167
1'iaea 4
Регулирование напряжения генератора
Рис.4 33 Структурная схема фазового компаундирования
Основной коп гур регулирования напряжения включает |енератор и
корректор напряжения В свою очередь корректор напряжения состоит из
измерительного элемента и лвух усилителей У । и У>. Принципиально возбу-
дитель следует рассматривать, как исполнительный элемент регулятора (кор-
ректора). Для увеличения коэффициента усиления усилители охвачены жест-
кой обратной связью
Контур компаундирования представляет собой кон гур коррекции С \Р
по нагрузке. Для этой цели сигнал по току подается на вход второго усилите-
ля. Этот усилитель дополнительно реагирует на фазу тока, для чего в него
подастся напряжение генератора, относительно которого и выявляется фаза
тока Таким образом, коррекция динамических свойств САР осуществляется
в функции реактивной составляющей тока генератора что является достоин-
ством схемы.
Попутно напомним, что коррекция по нагрузке эффективна в том слу-
чае, когда сигнал по току в системах С АР подается как можно ближе к точке
приложения самого возмущения В схеме обычного компаундирования кор-
ректирующий сигнал по току вводится на вход возбудителя. Поскольку воз-
будитель имеет запаздывание, то правильнее было бы делать коррекцию по
току и его производной В случае фазового компаундирования корректирую-
щий сигнал подается через два элемента САР относительно точки приложе-
ния самого возмущения Здесь необходимо было бы, если считать возбуди-
тель и усилитель У2 инерционными элементами первого порядка, коррекцию
вводить по току и двум производным. Вынаяение производных сигнала пред-
ставляет определенные трудности, и в данной схеме они не используются.
Таким образом, усилитель У2, с одной стороны, выявляет фазу тока и тем
самым улучшае! характеристику компаундирования С другой стороны, он
168
Гiaea4
Регулирование напряжения генератора
привносит запаздывание, вследствие set о эффективность коррекции динами-
ческих свойста САР по возмущению снижается
Сигнал по току подается и на вход усилителя У |. Это сделано для ком-
пенсации статической ошибки регулятора (схема токовой компенсации или
стабилизации) Поскольку речь идет о корректировке характеристики регуля-
тора в статике, то запаздывние элементов регулятора ис играет роли, и сигнал
можно подавать через любое число элементов В рассмотренных ранее схе-
мах такой сигнал подавался па вход измерительного элемента
4.19. Автоматический регулятор напряжении юнераюра
с высокочастотным возбуждением
Принципиальная схема высокочастотного возбуждения приведена на
рис. 4.3. Источником тока в схеме является вспомогательный генератор по-
вышенной частоты, расположенный на одном валу с главным генератором
Выпрямление тока осуществляется полупроводниковыми выпрямителями.
На рис. 4.34 приведена структурная схема регулятора напряжения син-
хронного генератора, имеющего высокочастотную систему возбуждения
Схема регулятора проста и состоит из контура регулирования по напряжению
п контура компенсации статической ошибки по нагрузке (схема токовой ком-
пенсации и стабилизации).
жос
гос
Рис.4.34. Структурная схема регулятора напряжения генератора
с высокочастотной системой возбуждения
Усилитель регулятора охватывается жесткой обратной связью. Для
стабилизации процесса регулирования в динамике применяется гибкая об-
ратиан саязь с выхода исполнительного элемента (возбудителя! па вход уси-
лителя Сам регулятор напряжения, включающий измерите тьиый н усили-
169
Гшва -I PesviupoBcmue ininpKwriin генератора
тельный элементы, имеет много общего с регулятором напряжения сисвсмы
компаундирования Элементы регу тятора комн юауются заводом-
изготовителем па одной панели типа ЭПЛ— 325 Б
Обратим внимание на то, что регулятор напряжения не содержит кана-
ла компаундирования Сигнал по tokv подается только на вход регу.тятора,
что сделано для изменения статизма регулирования.
Магнитные усилители регулятора собраны по двухтактной схеме Ка-
ждый из однотактных усилителей работает на отдельную обмотку во лбу ж те-
ния высокочастотного возбуди юля. 'J ок в одной обмотке создает подмаг пи-
чивающее действие. Дру гая обмотка разыа!пичивает возбудитель В возбуди-
теле имеется третья обмотка возбуждения, которая включена через выпрями-
тель последовательно в цепь роюра генератора. 31а обмотка создает основ-
ное нама1 ничивание возбудителя
4.20. Тирис।ирная система возбуждения генератора
В 4.3 были рассмотрены два принципа исполнения тиристорной систе-
мы возбуждения. с независимым источником питания и по схеме самовозбу-
ждения, Ниже будет рассмотрен более подробно режим работы системы воз-
буждения на примере системы с независимым источником питания. Схема
возбуждения показана на рис. 4.35.
ел =Esin cat, eB=ksin(at—2i^3); ес = Ехт(Ш+2л/3 J
170
Гчава 4.
Регулирование напряжения генератора
- симметричную 1рехфазную систему где. вспомогательного синхронного
генератора (ВСГ), включенную через индуктивность источника питания на
тиристоры, ОВ — обмотка возбуж тения синхронного генератора Поскольку
индуктивное сопротиаление обмотки возбуждения значительно бнлыне ее
активного сопротивления, то выпрямленный ток 1К можно считать идеально
сглаженным.
Рассмотрим процесс коммутации тока между 1ирисюрами 1-6 Преж-
де всего рассмотрим коммутацию тока при отсутствии управления В этом
случае пропускать ток будет гот вентиль, напряжение которого выше На рис.
4.36 показана диаграмма э.д с, еЛ, ев и ес. приложенных через индуктивность
I к вентилям В1,132 и ВЗ (рис 4.35),
а) б) в)
Рис.4 36 Диаграмма работы управляемых вентилей
При cof=7t/6 в момент Ц начинает работать вентиль В1, так как на-
пряжение на нем больше напряжений вентилей 2 и З.Из группы вентнтей В4.
В5 и В6 в этот момент работает вентиль В5 Принцип коммутации вентилей
верхней п нижней групп аналогичен, поэтому в дальнейшем рассмотрим этот
процесс только для одной группы, например для вентилей Bl, В2 и ВЗ. В мо-
мент времени ь произойдс г коммутация тока с вентиля В1 на вентиль В2 В
момент времени о начнет работать вентиль ВЗ, после чего цикл повторится.
Заметим, что каждым вентиль работает в пределах угла ) 20°, что естественно
Для симметричной трехфазной системы
При наличии управления начало работы тиристоров можно задержать
Это показано на рис 4 36. б Здесь первый тиристор начинает работать при угле
171
Глава 4
Регулирование напряжения генератора
ол =п/6 + а (а — угол управления). Принимая, что угол управления а одина-
ков для всех фаз, получим равную задержку' начала работы тиристоров.
На рис 4 36, б отмечена еще одна существенная деталь процесса ком-
мутации Переход тока с одного вентиля на другой происходит не mi новенно,
а с задержкой во времени На протяжении некоторого времени работают лва
вентиля один заканчивает работу, другой начинает Так, для вентиля В1, на-
чавше! о работать при yiле (£И = я/6 + а, полный переход тока с предыдущего
вентиля закончится, когда угол достигнет значения оу = тс/6 + а+ у (у — угол
коммутации). Величина этого угла зависит от индуктивности цепи коммута-
ции и тока нагрузки.
При угле а=О по обмотке ОВ протекает максимально возможный ток
возбуждения. Действительно, в этом случае каждая фаза включается в рабо-
ту, когда ее э.д.с. превышает э.д.с. других фаз. Когда угол не равен нулю
а* 0, ток в обметке возбуждения будет меньше, так как в конце периода
работы вентиля э.д.с. питающей фазы меньше эл.с. следующей фазы, готовой
к работе, но задержанной вследствие управления.
На рис. 4 36, в показал график работы вентилей при угле а >30° В
этом случае вентиль продолжает работать, когда э д.с. питающей фазы стано-
вится отрицательной. На протяжении времени t —l't фаза создает подпитку
в обмотку возбуждения, а затем с момента времеки до момента времени
f2 стреми|ся уменьшить ток возбуждения. Среднее значение действия фазы
определяется разностью площадей заштрихованных фигур. При дальнейшем
увеличении угла а, начиная с утла <1=90°. отрицательное действие превали-
рует и происходит развозбуждепие генератора
Работа вентиля при отрицательной з д.с. питающей фазы объясняется
тем, что выпрямитель работает на индуктивную нагрузку. Обмотка возбуж-
дения имеет большую индуктивность, вследствие чего в течение одного по-
лупериода ток в ней остается почти неизменным. Таким образом, несмотря на
отрицательное напряжение работающей фазы, ток продолжает протекать в
прежнем направлении.
172
Гчава 4
Регулирование напряжения генератора
Путем регулировки угла а можно увеличить или уменьшить ток воз-
буждения генератора. На рис. 4.37 показаны внешние характеристики тири-
сторной системы возбуждения для различных углов а
Рис 4.37. Характеристики тиристорной системы возбуждения
В нормальном режиме угол <х=(70 ..80)°, при этом система обеспечи-
вает номинальный ток возбуждения. В аварийных режимвх, когда необходи-
мо форсировать возбуждение генератора, угол а следует уменьшать до нуля
За счет этого обеспечивается максимальное напряжение на кольцах ротора и
происходит рост тока возбуждения, вплоть до максимального допустимого
тока обмотки. Если необходимо быстро погасить магнитное поле возбужде-
ния. то следует установить угол <x=(l20 150)°. вследствие чего в работу
включаются значительные отрицательные участки синусоид фазных эд.с
Такой режим работы вентилей называется инверторным. В инверторном ре-
жиме ток возбуждения быстро уменьшается
Рассмотрим вопрос о напряжении, которое прикладывается к тиристо-
ру Это напряжение определяется разностью зле. фазы источника питания
(на рис. 4 36 изображены пунктиром) и напряжением обмотки возбуждения
(выделено жирной линией). Если тиристор проводит ток, то падение напря-
жения на нем практически равно нулю. После начала работы следующего
аентиля на предыдущем появляется так называемое обратное напряжение.
Весьма опасным режимом является обратная проводимость вентиля,
при которой поврежденный вентиль проводит ток в обоих направлениях.
Имеется ряд причин, приводящих к обратной проводимости В первую оче-
редь следует указать на величину обратного напряжения. Этот фактор учиты-
173
Гчава 4 Регулирование напряжения генератора
вается при выборе типа вентилей* возможное обратное напряжение должно'
быть меньше допустимого
Существенное влияние па процесс обратной проводимости оказывает
характер изменения обратного напряжения. При резком скачкообразном из-
менении обратного напряжения вероятность обратной проводимости вентиля
возрастает С этих позиций режим работы с углом а- 0 наиболее благоприя-
тен, так как обратное напряжение нарастает постепенно. При угле а* 0 об-
ратное напряжение нарастает скачком, причем при углах ан 60° скачок име-
ет максимальное значение, поэтому при прочих равных условиях вероятность
обратной проводимости наибольшая
Рассмотрениав схема называется схемой с одной группой вентилей.
Она применялась в начале внедрения тиристорного возбуждения на крупных
I ндрогенераторах. Эта схема имеет следующие недостатки:
неблагоприятные значения углов с точки зрения обратной проводи-
мости а=(70. 80).
для гидрогенераторов, работающих через протяженные ЛЭП, необ-
ходимо осуществлять 3 — 4 — кратную форсировку возбуждения в аварийном
режиме. Такая форсировка получается при полном открытии вентилей, т.е.
при ут чс а=о Исходя из этого, в нормальном режиме напряжение должно
быть в 3 — 4 раза меньше форсировочного. что достигается при углвх
а = (70...80}=;
большие пульсации выпрямленного напряжения относительно сред-
него значения при работе в нормальном режиме с ушами а=(70. 80)°. что
утяжеляет условия работы изоляции обмотки возбуждения;
большая мощность вспомогательного синхронного генератора, рав-
ная мощности возбуждения в нормальном режиме, умпоженная на кратность
форсировки,
низкий коэффициентом мощности возбудительной установки
Из-за существенных недостатков этой схемы в настоящее время при-
меняют более совершенную схему с двумя группами параллельно включен-
ных вентилей, в которой возбуждение нормального режима обеспечивает
одна группа вентилей, вторая группа яаляется форсировочной. Вентили этих
групп подключаются на разные напряжения Дня этого обмотка вспомога-
174
Г1ава 4
Регулирование напряжения генератора
тельного генератора имеет выводы на два напряжения: номинальное, которое
подается на рабочие вентили, и повышенное, которое подастся на форенро-
вочпую группу ВСППЫСН.
Работу каждой группы вентилей можно рассматривать независимо от
другой группы Это обусловлено тем. чго в усшцовившсмся режиме генера-
тора фореировочная группа тиристоров загружена незначительно и на режим
работы рабочей гру ппы оказывает малое алияние В режимах форсирования
возбуждения, наоборот, можно пренебречь влиянием рабочей группы
Схема возбуждения с Двумя группами вентилей с питанием от вспомо-
гательного генератора показана на рис 4 ЗХ Для упрощения схемы выпрями-
тельные группы представлены для одной фазы с выпрямителями I3P и 13Ф.
Рис 4.38 Схема тиристорного возбуждения с двумя группами вентилей
Обычно принимаются следующие значения yi юв регучироавния: для
вентшгей рабочей группы V-pgf,= 40°, для форенровочной а,^= 120° В таком
ре’кимс ток возбуждения практически определяется рабочей группой вентилей.
В режиме форсировки вентили ВФ могут быть открыты полностью с
углом а#=0°, при этом вентили рабочей группы оказыавются запертыми
действием г л с. форсировочных обмоток вспомогательного генератора.
Режим развозбуждення генератора, в том числе полное гашение поля
генератора в аварийных ситуациях, также осуществляется только за счет
форсировочнон группы вентилей, обеспечивающей значительную отрица-
тельную величину напряжения возбуждения в инверторном режиме. Для пре-
дотвращения включения вентилей рабочей группы в таком режиме в системе
автоматического управления предусмотрено отключение управляющих им-
пульсов этих вентилей
Схема с двумя г-руппами вентилей сложнее, но в то же время обладает
существенными преимуществами, а именно- снижает скачки обратного на-
пряжения и обеспечивает лучшее использование вспомогательного генера го-
175
Гчава4 регулирование напряжения генератора
ра. Так, в сравнении со схемой возбуждения с одной группой вентилей скач-
ки обратного напряжения снижаются б три раза Поскольку режим форсиров-
ки является кратковременным, то форсировочная часть обмотки вспомога-
тельного генератора может бьпь с малым сечением меди При этом умень-
шаются габариты вспомогательного генератора.
Для лучшего использования предельной способности вентилей по току
разработаны более совершенные варианты возбуждения по шестифазной
схеме с уравнительными реакторами. Детальное изучение лих схем выходит
за пределы книги
4.21. Pci у. штор возбуждения сильного действия
Структурная схема раулятора возбуждения сильного действия была
показана на рис. 4 23. Далее будут рассмотрены несколько подробнее элемен-
ты регулятора и inc реализации. Напомним, -что в общем случае в закон регу-
лирования возбуждения вводятся такие параметры, как отклонение напряже-
ния от заданного значения, ток сгагорн. огклоненпе частоты и их производ-
ные. Дополнительно вводится регулирование тока ротора с цепью ограниче-
ния его максимального и минимального значений В соответствии с этим в
схеме регулятора должны быть измерительные элементы по напряжению,
току статора и ротора, частоте Кая правило, измерительные элементы преоб-
разуют измеряемый параметр в напряжение постоянно! о тока. В таком случае
дифференцирование сигнала осуществляется посредством цепочки КС
Исполнение элементов может быть осуществлено на основе аналого-
вой, так и цифровой вычислительной техники. Нс обсуждая преимущества и
недостатки способов реализации, рассмотрим традиционное исполнение эле-
ментов регулятора возбуждения
Измерительный элемент ио напряжению и току. Па измерительный
нелинейный мост, в плечи которого включены стабилитроны и резисторы,
подается вьтрямленное, отфильтрованное трехфазное напряжение генерато-
ра. Параметры элементов моста выбираются таким образом, чтобы при номи-
нальном напряжении генератора выходное напряжение было равно нулю
При отклонении напряжения генератора на выходе моста появляется сигнал,
пропорциональный этому отклонению.
176
Гчава 4.
Pt ’пирование напряжения генератора
Сигнал по току статора вводится на вход элемента но напряжению.
Фазировки цепей тока и напряжения выбираются в соответствии со схемой
рис. 4.14, при этом суммарное напряжение элемента зависит от реактивной
составляющей тока АС = kuL + kt! Посредством пеночки RC напряжение
Л1/ дифференцируется Сигналы по отклонению напряжения 5£ и его про-
три
наводной — подаются на суммирующий магнитный усилитель СУ
Введение стирала по току выполняется для изменения сыгтязма регу-
A,d/„
пирования Производная -------- осуществляет коррекцию по возмущению.
di
По каналу напряжения устаиавлиавются коэффициенты усиления [10].
ЛЛ„ — 25 или 50 ед.возб /ед.напр.;
к'и ~ 0 ..7,5 ед.возб /ед.напр /с.
Измерительный элемент по частоте. Измерительная схема выполня-
ется на основе двух резонансных контуров, настроенных соответственно на
частоту 45 1 ц и 55 Гц. Токи зтич контуров выпрямляются и подаются в
управляющие обмотки магнитного усилителя, на вых > >ге которого появляется
напряжение, пропорциональное отклонению часто!ы от номинального значе-
ния. Этот сигнал, в свою очередь, подается па вход суммирующего магнитно-
го усилителя регулятора Сигнвл по производной получается с помощью диф-
ференцирующей цепочки RC. Коэффициенты усиления по этому каналу рав-
ны
Лд/‘‘0 .12 ед возб/Гд,
fcj = 0...5 ед.возб./Гц/с
В регуляторе применяется обратная сиять (жесткая или гибкая) с об-
мотки возбуждения на вход суммирующего усилителя, а также имеется канал
ограничения тока ротора. Для этой цели ток ротора измеряется с помощью
трансформатора постоянного тока 1! 1Т, его измеренное значение подается па
вход усилителя. При достижении верхнего или нижнего предела тока ротора
подается соотвегс|вую1ции сигнал Коэффициент усиления по каналу огра-
177
Ггава 4
Регулирование напряжения генератора
ничсния выбирается большим, благодаря чему гок ротора не выходит за ус-
тановленные пределы
Суммирующий звтхкаскадпый ма« пп 1 пый усилитель осуществля-
ет суммирование и усиление сигналов. поступающих по входным каналам.
Оба каскада выполняются по дифференциальной схеме. Вторые каскады уси-
лителя включаю гея на системы управления рабочей и форсировочной групп
тиристоров.
Система управления тиристорами содержит два основных функцио-
нальных устройства: узел фазосметения, изменяющий фазч управляющего
напряжения по отношению к напряжению питания вентилей в зависимости
от величины сигнала управления, н устройства формирования, позволяющего
получить па выходе импульс необходимой формы и с определенными пара-
метрами.
Регулирование уставки по напряжению выполняется с помощью дис-
танционного привода и может изменяться в пределах ±10% Обычно автома-
тические синхронизаторы не подгоняют напряжение генератора к напряжению
сети, а разрешают включение при разности напряжений в 10%. В комплыггс
регулятора сильного действия предусматривается устройство подгонки напря-
жения генератора к напряжению сети. Это обусловлено тел, что при большом
коэффициенте усиления по каналу напряжения в регуляторе сильного действия
отклонение напряжения генератора в момент синхронизации в 2 — 3 % может
дать либо полную форсировку, либо полнее развозбуждение генератора. В лом
случае восстановление нормальной параллельной работы генератора воздейст-
вием на привод уставки регулятора требует значительного времени (1,5.2,0
мни), что опасно для генератора. Устройство осуществляет подгонку напряже-
ния генератора к напряжению сети с погрешностью порядка 0,5 %.
4.22. Групповое управление возбуждением генераторов
Групповое управление возбуждением генераторов предназначается для
одновременного регулирования напряжения несколькими генераторами стан-
ции с заданным распределением реактивной Hai-рузки между ними (акое
управление в первую очередь может быть использовано на электрических
станциях с однотипными агрегатами, например на ГЭС В этом случае суммяр-
178
Гюва 4
Peeynipaeatiue мтрчжения генератора
пая реактивная нагрузка станции распределяется поровну между всеми генера-
торами Принципиально нагрузка может распределяться в любой пропорции
Возможны два варианта управления: с разомкнутой и замкнутой сис-
темами регулирования по току Прежде всего рассмотрим разомкнутую сис-
тему управления Ее структурная схема регулирования напряжения генерато-
ра показана на рис. 4 39.
а) б)
Рис. 4.39. Структурная схема (а) и характеристики (б) гр\ ивового управления
возбуждением генераторов но разомкнутой схеме
В отношении напряжения эта система замкнута - выходной сигнал по
напряжению подается на вход измерительного элемента, вследствие чего ге-
нератор поддерживает заданное значение напряжения. Погрешность отработ-
ки задания зависит от коэффициента усиления разомкнутой системы к и оп-
ределяется формулой
I
*" Щ ! + *
(4 75)
При высоких коэффициентах усиления современных регуляторов по-
грешность отработки заданного значения получается незначительной и фак-
тически выполняется условие И - Ъ'о
Реактивная нагрузка генератора (или реактивный ток) непосредственно
регулятором не контролируется В то же время существует косвенная связь
между напряжением генератора и его реактивной нагрузкой-U = U0—sJ р
Изменение уставки напряжения t/0 , а следовательно, и фактического значе-
ния напряжения генератора U. меняет реактивную нагрузку генератора при
его параллельной работе в энергосистеме Регулирование тока при этом осу-
ществляется по разомкнутой схеме На рис 4.39, б показано изменение на-
грузки генератора за счет изменения >сгваки регулятора напряжения.
179
Гюва4. Регулирование напряжения генератора
Групповое регулирование возбуждения генераторов по разомкнутой
схеме выполняется путем одновременного и со1ласованного изменения уста-
вок напряжения Uo всех генераторов станции. Поскольку реактивная нагруз-
ка связана с уставкой регулятора напряжения, то и нагрузка будет меняться
одновременно на всех генераторах.
Недостатком этой схемы является невысокая точность выравнивания
нагрузки между отдельными генераторами Это связано с тем. что коэффици-
енты усиления Л/и и k не остаются постоянными Любое изменение этих
коэффициентов привозит к изменению статизма г. а это, в свою очередь, при-
водит к изменению реактивной нагрузки Это положение поясняется на
рис 4 39. б. При неизменных коэффициентах усиления статизм остается по-
стоянным, и характеристика смещается параллельно самой себе. Так, если
изменить уставку напряжения с t/m до [/02, то нагрузка изменится с ipi до
1р2 Нестабильность коэффициентов усиления, а следовательно, и статизма
приводит к другой нагрузке 7', (характеристика показана пунктиром).
Схему регулирования реактивного тока можно сделать замкнутой
(рис. 4.40).
Здесь фактическое значение реактивного тока генератора сравнивается
с заданным значением 1зд Сигнал по отклонению тока А/ = Iр — 1г0 подает-
ся на вход регулятора. Этот сигнал можно рассматривать как изменение ус-
тавки регулятора, которое осуществляется до тех пор, пока отклонение тока
А/ не будет стремиться к нулю.
Рис. 4.40. Групповое регулирование по замкнутой схеме
180
Пава 4
Регулирование напряжения генератора
Элементы выравнивания реактивной нагрузки генератора не входят в
основной замкнутый контур регулирования напряжения, следовательно, не
оказывают влияния на устойчивость регулирования.
Введение сигнала нагрузки i р ив вход peiy-нятора напряжения приво-
дит к изменению статизма регулирования Па схеме рис 4 40 показано введе-
ние сигнала по отклонению тока Д/. Как только генератор примет на себя
заданное значение нагрузки, сигнал отклонения тока стремится к нулю
Д/ —>0 и коррекция статизма исчезнет. Такие схемы называют схемами с
проходящим (мнимым) статизмом
Заданным значением тока 1зд может служить среднее значение реак-
тивного тока участвующих в групповом регулировании генераторов
у
<4-76)
На рис 4 41 представлена схема группового регулирования возбужде-
ния генераторов по первому варианту (разомкнутая схема) с одновременным
изменением уставок регуляторов
Рис.4.41. Схема группового регулирования возбуждения
181
Глава 4
Регулирование напряжения генератора
В згой схеме дополнительное напряжение Д1У, подаваемое на вход ре-
гулятора, получается с помощью поворотных трансформаторов (ГН). Первич-
ные обмотки их питаются от трансформаторов напряжения TH соответствую-
щих генераторов Напряжение вторичной обмотки ПТ суммируется с напряже-
нием трансформатора (TH) и подается на вход регу опора Величина этого на-
пряжения зависит от положения ротора относительно статора. Роторы всех по-
воротных трансформаторов механически связаны между собой, и их положение
определяется утлом поворота двигателя (Д) При повороте двигателя одновре-
менно поворачиваются на один и тот же угол роторы всех ПТ, тем самым обес-
печиваются одновременность и одинаковая степень изменения дополнительно-
го напряжения , подаваемого па входы всех регуляторов За счет этого вы-
полняется одинаковое изменение усгавок регуляторов Ручная подстройка ус-
тавки производится с помощью установочного реостата R^,
11ри большом числе агрегатов выполнение механической связи между
установочными устройствами представляет определенные трудности. В таких
случаях применяется схема с вольтодобаяочными трансформаторами. Прин-
ципиального различия в этих схемвх нет, кроме того» что дополнительное
напряжение /5(7 создается с помощью вольтодобавочных трансформаторов,
на первичные обмотки которых подается напряжение от центрального уста-
новочного трансформатора
Точность распределения реактивной нагрузки в этих схемах зависит ог
характеристик регуляторов и возбудителей различных генераторов. Если бы
характеристики всех регуляторов и возбутптелей были идентичны. то при
одинаковом изменении уставок всех регу гяторов реактивную нагрузку' гене-
раторы изменяли бы в равной степени. В силу пеидентичности характеристик
элементов, входящих в схему регулирования (различные коэффициенты уси-
ления, наличие зоны нечувствительности, неоднотипность генераторов и воз-
будителей, наличие нелинейной и нестабильной характеристик и т.д), рас-
пределение реактивной нагрузки происходит с определенной погрешностью
При прочих равных условиях эта погрешность тем больше, чем меньше сга-
тизм регулирования. Однако при тщательной настройке элементов системы
ре1улироваиия и статнзме порядка 4 % удается получить удовлетворительное
распределение реактивной нагрхзки между отдельными генераторами с рас-
хождением по мощности не более + 5%, чго вполне допустимо.
182
Г/ава 4.
Pe?> .i/poeaime напряжения, грстюра
На электростанциях с большим числом агрегатов применение рассмот-
ренного варианта регулирования напряжения генератора встречает опреде-
ленные затруднения. I [ри большом числе генераторов разброс характеристик
становится столь значительным, что выполнить систему автоматического
распределения реактивных нагрузок на основе этой схемы с небольшими по-
грешностями не представляется возможным. В случае многоагрегатных стан-
ций применяется замкнутая система регулирования Схема с одновременным
изменением уставок всех регуляторов от единою задатчика снабжается до-
полнительно следящей схемой выравнивания нагрузок.
Преимущество данного варианта заключается в том. что точность вы-
равнивания реактивной нагрузки между генераторами не зависит от идентич-
ности характеристик генераторов, возбудителей и других элементов следящей
системы. Однако эта схема значительно сложнее предыдущих. Включение в сс
состав инерционных маг ннтиых усилителей и двигателя, являющегося интег-
рирующим элементом структурной схемы, уменьшает устойчивость процесса
регулирования напряжения п распределения реактивной нагрузки
Реп чпровапне чистоты и активной мощности
ГЛ АВА 5
Регулирование часюид и активной мощности
5.1. Общие сведения
Частота является одним т качественных показателей электрической
энергии. При изменении частоты у большинства потребителей меняется их
производительность. Существенное влияние оказывает отклонение частоты
на работу самой энергосистемы Согласно ГОСТ 131109-87 частота в ЕЭС
России должна поддерживаться на уровне j 50 ± 0,1 Гц Допускается
кратковременная работа с отклонениями частоты до Af т 0,2 Гп [1]
Изменение нагрузки на величину ДР, приводит к отклонению часто-
ты вращения агрегата Переходный йроцесс описывается уравнением
Г^+ЛЛ01 = Р„-Р„=ЛР, (5 1)
at
где: Т — постоянная времени, со - частоте вращения; D — коэффициент демп-
фирования
В момент возмущения отклонение частоты вращения ротора агрегата
равно нулю До>=0, поэтому d<£>/di = &Р Г При увеличении нагрузки
появляется отрицательное ускорение и частота вращения агрегате уменьша-
ется. Если мощность (правильнее момент) турбины превышает мощность
(момент) нагрузки ДР > 0, то d(fy]dt > 0, и частота вращения агрегата воз-
растает Таким образом, при постоянном открытии регулирующего органа
турбины изменение потребления электрической энергии происходит за счет
кинетической энергии агрегата
Затем отклонение частоты вращения вограстает, вследствие чего ме-
няются нагрузки потребителей и мощность гурбины. Это обетоятсльсшо
учитывается в уравнении (5 1) коэффициентом демпфирования D. В новом
установившемся режиме (dca/dt - 0 ) величина отклонения частоты опре-
деляется выражением ДО= -&P/D.
Для поддержания частоты вращения на заданном уровне необходимо
посгоянпо сохранять баланс мощностей турбины и генератора (нагрузки).
184
гiaea 5 Регулирование частоты и активной нои/ности
Приведенные выше рассуждения для одного изолированного агре-
гата, работающего на изолированную нагрузку, справедливы и для несколь-
ких агрегатов, работающих параллельно на общую нагрузку. Так, для энер-
оснстемы, состоящей из большого числа турбо— и гидрогенераторов, в пер-
вый ыомеш изменения нагрузки (при неизменном открытии регулирующих
органов) последняя покрывается за счет кинетической энергии всех вра-
щающихся масс системы При увеличении нагрузки кинетическая энергия и
частота вращения агрегатов снижается Снижение на|рузки приводит к уве-
личению частоты вращения и, следовательно, к увеличению кинетической
•’нергии вращающихся масс системы.
Так как нагрузка системы непрерывно меняется, то для поддержания
постоянной частоты вращения агрегатов системы необходимо менять мощ-
ности, развиваемые турбинами, постоянно сохраняя при этом баланс выра-
батываемой н потребляемой мощное гей. Такое непрерывное наблюдение за
сохранением баланса мощностей генерации и потребления в энергосистеме
выполняется автоматически регуляторами частоты вращения паровых, ид-
равличсских и газовых турбин.
Рис. э [ С грукгурная схема работы турбоагрегата в энергосистеме
В энергосистеме, помимо сохранения баланса мощностей, возникает
задача распределения нагрузок между отдельными агрегатами, KOiopas ре-
шается с помощью дополните |Ьных регуляторов — регуляторов частоты и
мощности.
Таким образом, проблема регулирования частоты и активной мощ-
ности заключается в управлении вырабо|кой заданно! о значения мощности с
распределением ее между параллельно работающими генераторами энерго-
системы в текущий момент времени.
185
rwetiS Ре?, траве * । * частоты и активной »чапк>спт
5.2. Влияние изменения частоты на paooix пи 1 ребителeii
и энергосистемы
Все потребители разделяются иа группы, которые характеризуются
определенной зависимостью производительности oi частоты
Нулевая группа. Эго потребители, мощность ко горых не зависит от
частоты: осветительная нагрузка, электоропечи, электрифицированный
транспорт и другие приемники, питаемые через выпрями гели. Зависимое! ь
потребляемой мощности от частоты д.ш этой группы запишется
'о = Ро™, <) / /,™ > ° , 0 2>
Первая группа Потребители, мощность которых зависит oi частоты
в первой степени
(53)
В эту группу входят металлообрабатывающие станки, компрессоры и др
Вторая группа. Механизмы, мощность которых зависит от квадрата
частоты
1'г = Ргп1ГЬ~./- <5-4>
Потребители этой группы занимают промежуточное положение между по-
требителями первой и третьей групп В чистом виде нет потребителей с
квадратичной зависимостью производительности от частоты, но у некоторых
из них есть зависимость, близкая к данной.
Третья группа Зависимость потребляемой мощности определяется
кубом частоты
Pj = Ръ,п„ ( 1 I - <5 51
К этой группе относятся вентиляторы и насосы при небольшой величине
статического напора сопротивления.
Четвертая группа Потребители, мощность которых зависит от час-
тоты в четвертой и выше степени К этой категории относятся насосы с
большим статическим напором сопротивления, например питательные насо-
сы котлов и др.
186
I utea >. Pt eji HifueanuL wmmuri и tJKimieiioit uohihw mu
P, = P,„(f//^/‘. («)
где n =4 — 5 .
Указанные зависимости справедливы при небольших отклонениях часто-
ты Отметим также, что разделение всех потребителей ла пять групп является
условным У ряда потребителей показатель степени не является целым числом,
и эти потребители отнесены к ближайшей целой степени условно.
Нагрузка всей лнсргосистемы определяется потребителями указанных
групп, в соответствии с чем
где а, — коэффициент долевого участия потребителей I — й группы.
Найдем изменение потребления при малых отклонениях частоты
д/
Поскольку f=, то
Ргиц" 1аг+2а, т3а, -г4ал]
А/ /„-
или в относительных единицах
Отношение ДР,с/ду, обозначается кн и называется регулирующим
эффектом нагрузки.
В качестве примера рассмотрим энсргосисгсму. имеющую следующий
состав потребителей- нулевой группы — 20 %, первой 40 %, второй — 5 %,
третьей — 20 % и чегвертои — 15 % В соогвегствии с принятыми обозначе-
ниями
а0 = 0,2, ос। — 0 4, а, = 0,05, а3 = 0.2 и а4 0.15
Регулирующий эффект нагрузки этой энергосистемы равен к„ 1.7
187
Глава 5 Регх псрование частоты и активной мощноеata
В течение суток состав потребителей энергосистемы не постоянен,
что влечет та собой изменение регулирующего эффекта нагрузки. Обычно
эти изменения не очень велики и в течение суток не выходят за пределы
±(10—15)%.
Для энергосистем России pci-улируюший эффект нагрузки лежит в
пределах kH = 1 - 3, т.е. при снижении частоты в энергосистемах на 1 %
(0.5 Гц) потребление уменьшается на 1 — 3 %.
Для отдельных потребителей регулирующий эффект нагрузки числен-
но равен показателю степени пли при принятой нумерации групп потребите-
лей равен номеру 1руппы 1ак, например, для потребителей третьей группы,
регулирующий эффект равен — 3 Это значит, что при уменьшении часто-
ты на 1 % производительность механизмов погребнте.тей этой группы сни-
жается на 3 %.
Считается, что отклонение производительности потребителей на
1 - 3 % вполне допустимо. Установив эту величину и зная регулирующий
эффект нагрузки, можно определить допустимые отклонения частоты с
учетом требовании потребителей- A fr,o„ = А РЛо„ /к,,. Так, принимая
= 3 %, для первой и третьей групп потребителей, найдем соответст-
венно ± 1.5 Гц и Af6or(i ~ 0.5 Гн. Отсюда следует, что подавляю-
щее большинство потребителей (по третью группу включительно) допус-
кают отклонение частоты в пределах A [= + 0,5 Гц, поскольку это не ока-
зывает заметного влияния па их работу.
Ьолес жесткие 1ребовання к поддержанию частоты предъявляет энерго-
система. Распределение на!рузки между агрегатами производится с учетом их
технике—экономических показателей. Эта задача решается диспетчером энерго-
системы. Для соблюдения наиболее экономичного режима все агрегаты должны
работать с заданной диспетчером нагрузкой Однако в соответствии со статиче-
скими характеристиками регуляторов частоты вращения заданный диспетчером
режим поддерживаем я только при поминальной частоте 50 Гц. Даже незначи-
тельные отклонения частоты приводят к существенным отклонениям от задан-
ного режима, н экономичность работы системы нарушается.
Рассмотрим пример. Генератор в соответствии с заданием диспет-
чера несет нагрузку Р. Агрегат имеет статизм s — 0,04, частота в системе
50 Гц. При отклонении частоты на Af мощность aipciara изменится в
188
Гтова 5 Pezviиронии не частоты и активной uoutuormit
соответствии с &Р = Af /s. При отклонениях частоты Af ~ ± 0.5 Гц изме-
нение мощности агрегата составит ± 25 %, что, конечно, недопустимо
Для оценки допустимого отклонения частоты с точки зрения поддер-
жания заданного режима агрегата следует решить задачу в обратном поряд-
ке. Отклонение мощности агрегата, нс приводящее к существенному изме-
нению режима, оценивается в ± 2,5 %. Отсюда следует, чго при статизме
т =0,004 отклонения частоты системы должны быть не более ± 0,05 Гц.
5.3. Регулятор частоты крашения
Регулятор предназначен для поддержания частоты вращения турбины
на заданном уровне, а также пуска и останова агрегата и перераспределения
активной нагрузки между агрегатами при их параллельной работе
Частота вращения турбины изменяется за счет изменения апуска ра-
бочего тела — воды, пара, газа. V паровых турбин для изменения впуска пара
используется дроссельное или соптовое регулирование. Расход воды через
паротурбину регулируется направляющим аппаратом
При параллельной работе в энергосистеме частота вращения агрегате
пракпгчески остается неизменном, дополнительное изменение открытия регу-
лирующего органа приводит лишь к изменению активной мощности агрегата.
Совместно с объектом регулирования (турбо-, гидроагрегат) регулятор
частоты вращения составляет систему автоматического регулирования (САР).
Обращая
Рис 5 2 Функциональная схема регулятора частоты вращения
На рис 5 2 показана функциональная схема САР, которая состоит из
следующих элементов: измерительного (маятник), усилительного (золотник),
исполнительного (сервомотор) и агрегата (ТГ). В измерительном элементе
189
Гiaea 5 Регулирование часто,,,,» л „^швной мощности
производится выявление отклонения регулируемой величины от заданного
значения. Для этого на вход элемента подается фактическое значение частоты
вращения f и заданное /(> Система регулирования замыкайся путем подачи
фактического значения частоты вращения f на вход регулятора Про такую
сие гему автоматического регулирования говорят, что она замкнута.
Сигнал, пропорциональный отклонению частоты вращения от задан-
ного значения. через усилительный элемент подается на вход исполнитель-
ного элемента, который в свою очередь действует на регулирующий орган
турбины
Статические и динамические характеристики САР определяются соста-
вом ее элементов По динамическим свойствам элементы разделяют на безы-
нерционные, инерционные и интегрирующие Выявительный и усилительный
элементы регулягора частоты вращения с достаточной степенью точности мож-
но считать безынерционными звеньями, исполнительный — интегрирующим
звеном. Наличие интегрирующего элемента в схеме регулятора обеспечивает
возможность получения астатической характеристики регулирования.
Усилительный и исполнительный -элементы регулятора охватываются
обратной связью. По знаку действия эта связь является отрицательной Обрат-
ная связь может быть жесткой (ЖОС) или гибкой (ГОС). В регуляторе частоты
вращения гидроагрегата применяется так называемая комбинированная обрат-
ная связь, сотержангая элемент и гибкой, и жесткой обратных связей.
С помощью обротиой связи можно изменять основные параметры
элементов регулятора (коэффициенты усиления, постоянные времени) и
трансформировать один вид элемента в другой. Так, за счет жесткой обрат-
ной связи, охватывающей ннтет рируюший элемент, последний теряет свой-
ства интегрирования. Это обстоятельство приводит к тому, что интегрирую-
щий элемент регулятора вращения заменяется инерционным. Отсутствие
интегрирующего элемента в структурной схеме регулятора приводит к ста-
тическому регулированию Действием гибкой обратной связи улучшается
качество переходного процесса, устраняется перерегулирование На характе-
ристики установившегося режима гибкая обратная связь не влияет
Упрощенная схема регулятора частоты вращения представлена на
рис 5 3. Выявительныы элементом регулятора яаляется центробежный ма-
ятник 1. усипитетъным элементом является золотник 4. исполнительным -
сервомотор 5. Обратная саязь, с помощью которой сигнал с выхода исполни-
тельного элемента подается на вход усилителя, выполняется посредством
190
рюва 5 Pewiiipneainie частоты и активной мощности
рычагов 7, X, 9 (ЖОС) и масляного катаракта 6 (ГОС) Вращение маятника
осуществляет либо механическая передача от вала турбины, либо электриче-
ский двигатель синхронно вращающийся с генератором.
Рис. 5 3 Принципиальная схема регулятора частоты вращения
Под действием центробежной силы грузы маятника стремятся разой-
П1сь. Действием пружины 2 и собственного веса грузы удерживаются в при-
жатом состоянии. При заданной частоте вращения центробежная сила и усп-
1ИЯ от пружины и веса грузов уравновешиваются между собой. При этом муф-
га маятника 3 занимает свое нейтральное положение. С увеличением частоты
вращения центробежная сила начинает преобладать над усилием пружины и
весом грузов, и последние начинают расходиться, увлекая за собой муфту 3
При увеличении частоты вращения муфта перемещается вверх С
уменьшением частоты вращения происходит обратная картина' преобла-
дающим с 1 любится усилие пружины и веса грузов. В этом случае происхо-
дит перемещение му ф гы 3 вниз.
Рассмотрим действие регулятора при отклонении частоты вращения
агрегата Проследим прохождение сигнала через элементы регулятора при
отсутствии обратных связей. В этом случае можно считать, что точка А ры-
чага АБ является неподвижной Гак как муфта связанна с рычагом АБ. то
191
Гчава 5 Регулирование частоты и активной мощности
при любых перемещениях муфты (при условии неподвижности точки А)
будет перемещаться точка Б. а следовательно, и поршни золотника 4. Пере-
мещение поршней золотника приведет к тому, что одни из трубопроводов 12
соединится с резервуаром масла под давлением, а другой — со сливным ба-
ком. При этом в одну из полостей сервомотора 5 6} дет подаваться масло под
давлением, а другая полость будет соединена со сливным баком Пол дейст-
вием разности давлении в полостях сервомотора его поршень .начнет пере-
мешаться и через рычаг изменит положение направляющего аппарата (НА)
Рассмотрим действие регулятора при повышении частоты вращения
агрегата. В этом случае муфта 3 переместиться вверх, поршни золотника 4
также переместятся вверх. При этом нижняя полость сервомотора соединит-
ся с баком масла под давлением, а верхняя со сливным баком Поршень
сервомотора пойдет аяерх, и направляющий аппарат будет закрываться За-
крытие направляющего аппарата 'прекратится лишь при перекрытии окна
золотника поршнем Это произойдет тогда, когда муфта 3 будет находиться
в нейтральном положении, что возможно при задашюй скорости Нетрудно
проследить действие регулятора при понижении частоты вращения агрегата
В этом случае регулятор будет открывать НА.
Рассмотрим работу регу гятора с обратной саязыо В основном дейст-
вие остается таким же, как и без образной саязи. Каналом жесткой обратной
связи являются рычаги 7—8—9 Через них передается воздействие с выхода
сервомотора на вход золотника Обратная связь смешает точку А при за-
крытии НА точка А поднимается вверх, в случае открытия опускается
вниз. Это смещение приводит к тому, что установившейся режим наступает
при другом значении частоты вращения. Если точка А сместится в положе-
ние А', то регулятор прекратит действие в момент, когда точка 3 будет на-
ходится на линии Л' - Б Это произойди при пониженной скорости враще-
ния агрегата
Воздействие i покой обратной саязи передается через масляный ката-
ракт б, который имеет следующие устройство. Внутри цилиндра, заполнен-
ного маслом, находится поршень. Масло может перетекать из одной полости
цилиндра в другую через отверстие в трубке 10 Цилиндр соединен с порш-
нем сервомотора, а поршень катвракта через систему рычагов соединен с
точкой А При движении поршня сервомотора цилиндр катаракта перемеша-
ется В первый момент перемещается и поршень катаракта. При этом в од-
ной полости цилиндра происходит сжатие масла, а в другой понижение дав-
192
Гчава 5 Регулирование частоты и активной мощности
ления Через отверстие 10 масло перераспределяется, поэтому в установив-
шемся режиме под действием пружины 11 поршень катаракта, а следова-
тельно, и точка В всегда возаращается в свое исходное положение.
Масляный катаракт часто называют изодромом, а регулирование при
наличии катаракта - изодромным. В переходном режиме действие гибкой
обраткой связи аналогично действию жесткой обратной связи. В установив-
шемся режиме гибкая обратная связь не действует.
5.4. Уравнении элементов системы регулирования
Так как регулятор состоит из отдельных элементов, то прежде чем
составлять уравнение всей системы, уместно рассмотреть уравнения элемен-
тов и самого объекта
При выводе уравнений, описывающих движение отдельных элементов
регулятора и объекта, рассматриваются малые отклонения величин, т.е. в
этом случае характеристики элементов можно считать линейными.
Элементы регулятора различаются между собой как по своей физиче-
ской природе, так и по конструктивному исполнению. Их классификация про-
водится на основе дифференциальных уравнений, описывающих динамиче-
ские свойства элементов. К одной ipynne относят элементы, динамические
свойства которых описываются одним и тем же дифференциальным уравнени-
ем или имеют одинаковые передаточные функции
Уравнение центробежного маятника Входной величиной центро-
бежного маятника является частота вращения со, выходной — перемещение
штифта Ду (рис 5.4»
ф
Рис. 5.4 Центробежный маятник
Введем относительные величины-
<p=52z^
(5.8)
193
Г1ава5 Регулирование частоты и активной иощности
где и - номинальное значение частоты вращения, гж, - положение
штифта при номинальной скорости. Пренебрегая массами грузов, ураяненис
маятника имеет вил
|де 1/у — коэффициент, устанавливающий соотношение между перемещени-
ем штифта маятника и частотой вращения. Величина у называется неравно-
мерностью маятника.
Передаточная функция маятника
<з.9>
<р у
Уравнение ju.ibiпика Золотник является гидравлическим усилите-
лем Штнф< маятника воздействует через рычаг АБ (см. рис. 5 3) на поршни
золотника При перемещении поршней открываются окна золотника, через
которые подастся масло в сервомотор 1аким образом, входной величиной
золотника служит перемещение штифта маятника Д| или в отиоситеэьных
величинах т|. Выходной величиной яаляется открытие окон золотника £1
Переходя к относительным величинам, иоиучим О = £2/£2Ж.Х(.. где £2 мак-
симальное открытие золотника.
Пренебрегая инерционностью подвижных частей золотника, можно
записать
о=т) (5.10)
Это и есть уравнение золотника, из которого следует, что относитель-
ному перемещению штифта маятника соответствует такое же относительное
открытие окон золотника. Передаточная функпня золотника
IV (р) = — = 10
П
Уравнение сервомотора Входным сиг налом сервомотора является
открытие окон золотника о Выходным сигналом является перемещение
штока сервомотора (открытие направляющего аппарата турбины). В относи-
тельных единицах обозначим его через р.
194
Гюва 5 Регулирование частоты и активной мощности
Скорость перемещения поршня и штока сервомотора пропорциональ-
на открытию окон золотника, т. с
где Тарв— постоянная времени сервомотора.
d
Примем обозначение — = р Тогда уравнение (5.11) запишем так
PH = —° (5 12)
и д.1я передаточной функции получим
w^(P) = - = ^r1------’ (iI3)
О тсерв Р
что соответствует передаточной функции интегрирующею элемента
Физическая сущность Т№рв — это время, в течение которого поршень
сервомотора прошел бы весь путь от своего начального положения до ко-
нечного, если бы двигался с максимальной скоростью (при полном открытии
окна золотника).
Уравнение обратной связи По каналу образной связи сигнал пере-
дается с выхода сервомотора на вход золотника. В регуляторе частоты вра-
щения гидроагрегата обратная связь комбинированная - жесткая и гибкая
По направлению действия обе связи — отрицательные
Канал жесткой обратной связи является безинерцнонным Масляный
катаракт является дифференцирующим элементом. У идеального дифферен-
цирующего элемента выходной сигнал пропорционален скорости изменения
входной величины. Реальный дифференцирующий элемент вносит запазды-
вание в операцию дифференцирования Приведем уравнение передаточной
функции комбинированной обратной связи без вывода
195
Глава 5 Регулирование частоты и активной чощиистч
где Г„ — постоянная времени масляного катаракта (изодрома); р — коэффи-
циент гибкой обратной связи; V— коэффициент жесткой обратной саязи; Е,
— выходной сигнал обратной саязи
Постоянная времени Ти - это время, в течение которого поршень
масляного катаракта переместился бы из одного крайнего положения в дру-
гое, если бы двигался с максимальной скоростью (такая скорость возникает в
первый момент максимального воздействия на стакан масляного катаракта).
Постоянная времени Ти зависит от величины отверстия, через которое пере-
текает масло из одной полости катаракта в другую. Величина этого отвер-
стия регулируется положением иглы масляного катаракта
Коэффициенты р и v зависят от соотношения плеч рычагов, через
которые передается воздействие по каналу обратной саязи.
Для установившегося режима (р = ^>) имеем
W(p)=v, (5.15)
т. е. функционирует только жесткая обратная связь.
В начальный момент переходного процесса (р = °°) $Т„р » v и
Тир» 1, тогда
И7р) = Р (5.16)
и комбинированную обратную связь можно рассматривать следующий об-
разом: в начальный момент переходного процесса обратная связь достаточ-
но сильна и имеет коэффициент р В установившемся режиме действие об-
разной связи уменьшается и определяется коэффициентом v.
Комбинированная обратная связь применяется в рсгуляторвх гидрав-
лических турбин В регуляторах паровых турбин достаточно иметь только
жесткую обратную саязь.
Сервомотор, охваченный обратной саязью с коэффициентом v. ста-
новится инерционным элементом с передаточной функцией
>=7^77- <517>
где 1/v — коэффициент усиления, Т'= T/v — постоянная времени элемента.
196
Глава 5 Регулирование частоты и активной мощности
Для качельного момента переходного процесса при комбинированной
обратной саязи передаточная функция имеет вид
К!р>=^~. (5 18)
— р + 1
р
Инерционность регулятора частоты вращения гидроагрегата опреде-
ляется в основном постоянной времени сервомотора. Для регуляторов паро-
вых турбин постоянная времени сервомотора равна Тсерв = 0,1 — 0.2 с. Ко-
эффициент обратной связи v= 1,0. В таком случае Т’ = Тсеря /v = Тсеря .
Отсюда следует, что потенциально регулятор способен быстро передавать
управляющее воздействие для ускоренного изменения мощности турбины.
Математическое моделирование турбины. Для паровой турбины без
промежуточного перегрева пара передаточная функция представляется в виде [5]
»w = —= тД—7. <5.19)
Р- ттр+1
ге Р„,— мощность турбины, р— открытие регулирующего органа, — по-
стоянная времени турбины, определяемая запаздыванием в преобразовании
энергии пара в механическую энергию.
Переходная характеристика паровой турбины показана на рис. 5.5. В
среднем ее постоянная времени 7^ составляет 0,1 с, откуда следует, что па-
ровая турбина способна изменить свою мощность в соответствии с требова-
ниями аварийного управления мощностью агрегата.
Рис. 5.5. Переходная характеристика паровой турбины
У паророй турбины с промежуточным перегревом пара мощность оп-
ределяется цилиндрами высокого (ЦВД> и низкого давления (ЦНД)
197
Глава 5 Регулирование частоты и активной мощности
а) б)
Рис. 5.6. Принципиальная (а) и структурная (б) схемы паровой турбины
] 1еред ЦНД находится промежуточный пароперегреватель (ПП) Пре-
образование энергии пара в ЦВД в структурной схеме учтено элементом 1
(рис. 5.6). Долевое участие ЦВД в обшей мощности турбины определяется
коэффициентом С.
Оставшаяся часть мощности I - С вырабатывается ЦНД. В этом кана-
ле запаздывание в преобразовании энергии пара в мощность определяется
постоянной времени промперегревателя ТПГ!. В соответствии со структур-
ной схемой рис.5.6 передаточная функция турбины имеет вид
W(p>=^~^\ С
стппР+1
(ТтР+^)(ТцпР+^)
(5 20)
У гидрогенераторов мощность нарастает с большим запаздыванием по
отношению к открытию направляющего аппарата, что объясняется большой
инерционностью в подводящем водоводе. К тому же в первый момент до-
полнительного открытия направляющего аппарата давление воды на рабо-
чем колесе турбины падает. Это приводит к тому, что в начале открытия на-
правляющего аппаратв мощность гидроагрегата не уве тичивастся, а умень-
шается. Характеристика изменения мощности гидроагрегата при дополни-
тельном открытии направляющего аппарата показана на рис 5 7
С некоторыми упрощениями передаточная функция гидроагрегата
может быть представлена в виде
(5-21)
И GoaP'2+I
198
Гшва 5 Регулирование частоты и активной мощности
где TeoB=vL/gH — постоянная времени напорного водовода; v — скорость
воды в водоводе; Н — напор; g — ускорение, L — длина водовода
Рис. 5 ’ Переходная характеристика мощности гидротурбины
Для смягчения гидравлического удара необходимо снижать скорость
открытия направляющего аппарата Это достигается та счет сильного демп-
фирования переходного процесса действием гибкой обратной связи регуля-
тора гидротурбины. Вследствие этого гидротурбина не способна изменять
свою мощность в соответствии с требованиями аварийного управления
мощностью агрегата
5.5. Уравнения и передаточные функции генератора
5.5.1 Общее уравнение генератора
В нормальном режиме генератор работает синхронно с энергосисте-
мой, его ротор вращается с номинальной частотой соо и опережает вектор
напряжения статора на угол 8 Этот режим принимается за базисным
Возникшая дополнительная мощность турбины Р„ расходуется на
ускорение ротора. Затем возникает асинхронная мощность генератора, обу-
словленная движением ротора относительно вращающегося магнитного поля
в зазоре со скорость Д со = со - сои
Смещение ротора по углу ДБ = Б—8fl приводит к изменению син-
хронной мощности генератора. Зги составляющие Рс уравновеши-
вают дополнительную мощность турбины
199
Гinva 5 Регу-шроваиие частоты и активно» «тупости
P^Pj+P^ *РС (522)
Мощность выражается в именованных ита относительных единицах
Избыючный момент турбины создает ускорение агрегата
ДЛ/
dm
dt
(5.23)
, GD2
где J---------момент инерции генератора, со — частота вращения в рад.,
При переходе к относительным единицам выражение для скольжения или
приращения частоты вращения примет вид-
со- ы0
Д<0, =-----;-—
г/ш dm.
откуда----— сои----, далее получим
dt dt
dm.
AM.=Jm0—-
dt
(5 24)
Разделим левую и правую части уравнения (5.24) на W„o„
Jcoo dm, _ AM
Мщи! dt M uav
и введем обозначения
'“и/Л/№М -Г,., ДМ,Л/ТОИ = АМ. ,
где Г; — постоянная времени aiperara, AM, - относительное приращение мо-
мента турбины. С учетом jToro уравнение агрегата примет следующий вид
dm.
Т.-------АМ. (5 25)
dt
При исследовании режимов с небольшими отклонениями частоты ci
номинальной, т.е. ю=со0, можно принять AM. =АР, и формулу для мощ-
ности представить в виде
200
! шва 5 Регу пирование частоты и активной чощностч
(5.26)
С учетом очевидных соотношений
d5 da d2& da. 1 da
co-— —=—--------------------.
dt dt df di t0|) dt
формуча (5.22) примет вид
— Т,р2Ь = Р.,
CO(J
d
me p =—.
dt
Отметим размерность величин, входящих в формулу: 5 - радианы, t —
d"5 рад ял ж п
секунды, —7- - Д—. Мощность Дг* выражается в относительных едипи-
df
нах [о.е.]
Иногда время выражается в радианах
Т рад — с
Тогда формула (5.27) примет вид
или
(5.28)
Асинхронная мощность ^момент) генератора есть результат взаимо-
действия магнитного поля статора с токами в замкнутых контурах ротора
Асинхронный момент зависит от скольжения ротора, напряжения сети на
выводах генератора и его параметров
201
Ггави 5 Регу тровспте частоты и активной мощности
Формулы для расчета асинхронного момента приводятся в [14]. Опп
достаточно точно отражают характер переходного процесса в асинхронном
режиме, но сложны и даже громоздки.
В упрошенных исследованиях оперирую i хсредненным асинхронным
моментом генератора Характеристика усредненного асинхронного момента
показана на рис. 5 8.
Эта характеристика отражает зависимость асинхронного момента Л/„.
от скольжения д-. Полагая, что в переходном режиме генератор работает «
небольшими скольжениями, меньше критического значения можно счи-
тать k =^^-= const и для асинхронной мощности в относительных еди-
ds
ницах записать
(5.29)
Мт
Рис. 5 8. Характеристика асинхронного момента
Учитывая, что скольжение л» =------, тля асинхронной мощности получим
- 1 к
•"соо “dT
(5.30)
Синхронная мощность генератора определяется известей формулой
202
Глава 5 Регулирование частоты и активной жлцности
тельно номинального режима, то и характеристику синхронной мощности
Рс.
- krf>, где кс =--------
/’.(б) можно считать линейной Р£.
Б-угол в радианах
С учетом сделанных предположений, формулу мощностей (5.221 пред-
ставим в виде
— Г,р!6 + —*.,Р6+<,6=ЛГ,... 1531)
ь>о оэ|(
где Б — угол в радианах, ы— рад/с. время в секундах.
Если время и постоянную времени агрегата выразить в радианах, то
уравнение (5.31) нринимае г вид.
TjP-b+ касРЬ+ = ЬР„, . (5.32)
Еще раз напомним, что линеаризация уравнения сделана с целью уп-
рощения анализа электромеханических переходных процессов в различных
режимах работы синхронного генератора. Точное моделирование генератора
обеспечивается только по полным уравнениям Парка-Горева [14].
5.5.2. Режим холостого хода
В режиме холостого хода электрическая нагрузка генератора отсутст-
вует. В таком случае избыточный момент гурбины расходуется только на
ускорение ротора
ДР_=—Г.р^. <5.33)
Выходным параметром генератора, как элемента системы регулиро-
вания, является частота со. Учитывая, что dS dl = со, формулу (5.33) за-
пишем так
АР . = —Г.рДсо
(534)
и для передаточной функции получим
203
Fiaea 5 Регулирование частоты и активной мощности
т.е. в этом режиме генератор учитывается ках интегрирующий элемент.
В структурной схеме регулятора (рис. 5.2.) уже имеется интегрирую-
щий элемент (сервомотор) Наличие в схеме двух интеграторов делает сис-
тему неустойчивой. Вот почему сервомотор регулятора охватывают отрица-
тельной обратной связью, переводя элемент из интегрирующего в инерцион-
ный пераого порядка.
В режиме холостого хода генератора переходный процесс носит явно
выраженный колебательный характер, особенно при больших значениях ко-
эффициента усиления САР
Рис. 5 9. Изменение частоты турбоагрегата при ступенчатом изменении
уставки регулятора
Па рис 5 9 показан характер изменения частоты турбоагрегата при
ступенчатом изменении уставки регулятора и при разных значениях остаю-
щейся неравномерности у. Кривые 1, 2 и 3 соответствуют неравномерности
0,1, 0.05 и 0.02.
Найдем приращение угла 5 при избыточной мощности турбины .
Для ускорения имеем
Ао= АР„,(0я
dr Tjjc ’
204
Г1ава 5 Регулирование частоты и активной мощности
откуда т = + (5 36) 0 1 if
При = const получим ДР-, (On “ - г ' + (5 37)
В начальный момен твремени / — 0 и co=cofl. С учетом этого Са =соп , по-
этому со - (00 = Дсо = - (5 38)
Для расчета угла 5 i гмеем 5= J(OdZ + C6 . 0
Тахже + (5.39, 0 1 j.c
и далее 6-6„ =Д6= Д2',"-Ю|1 г (5.40)
Переведем радианы RO s 360 в градусы о = о,^ , тогда получим 2л
(5-41)
&.Р . -1
Дб°=9000—^-t1.
Рассмотрим случай сброса нагрузки генератора. Предположим, что в
исходном режиме генератор работал с полной нагрузкой. При коротком за-
мыкании на линии генератор теряет нагрузку. Избыточная мощность турби-
205
'iaea 5 Регтп/рование частоты ц активной, мощности
мы ДРЯ1. - 1,0 пойдет на ускорение ротора и увеличение угла 5 в соответст-
вии с формулой (5.41).
В таблице приведены резу. платы расчета угла 5Б° в функции
длительности сброса нагрузки при постоянной времени Т- =10 с.
Таблица 5.1
t,C 0.1 0,2 0.3 0.4 0,5
ДБ,град 9 36 81 144 400
Из данных таблицы 5 1 видно как быстро нарастает угол в аварий-
ных режимах.
Поврежденную линию отключит релейная защита Это произойдет
примерло через время 0.2 - 0,3 с За гем срабо гаем АПВ, и в случае успешного
цикла АПВ линия будет включена в работу Даже быстролсйстаующес АПВ
произведет эту операцию нс менсс. чем через время 0.2 — 0.3 с. За полное вре-
мя перерыва передачи мощности генератора в энергосистему утоп увеиичшся
весьма значительно и возникает проблема устойчивости параллельной работы
генератора Вот почему для успешной ликвидации подобной аварии стремя гея
сделать релейную защиту и АПВ с высоким быстродействием и использовать
возможности экстренного управления мощностью турбины и отключением
генераторов
5-5-3. Работа генератора на выделенную на1рузку
Нагрузка оказывает положительное влияние на переходный процесс
генератора. Имеется в виду нагрузка, потребление которой зависит от часто-
ты. Количественная оценка згой зависимости определяется регулирующим
др
эффектом нагрузки к,„ который равен кн =-—, где ДР. Д f. относитель
А/.
ные изменения мощности и частоты.
С учетом регулирующего эффекта нагрузки уравнение агрегата при-
мет вид
d(j).
~dt
(5-42)
206
Гюва 5 Рел щровстие частоты и активной мощности
Поскольку в ошосмтсльных величинах to, = /., и учитывая, что
— = р, формулу (5 42) запишем в виде
Т} рЛ./. + *„Д /. = ДР, (5 43)
и для передаточной фу нкции генератора получим
А/.
ДР.
р 44)
где Т' =Tjпостоянная времени агрегата с учетом регупирующего
эффекта нагрузки.
Таким образом, учет нагрузки кривел к замене интегрирующего эле-
мента в структурной схеме на инерционный Это обстоятельство благопри-
ятно сказывается па устойчивости п характере переходного процесса систе-
мы регулирования. Физически эго объясняется эффектом саморегулирования
нагрузки.
53.4. Работа генератора в энергосистеме
В качестве математической модели генератора, работающего в энер-
госистеме, используем уравнение (5.3!)
Рг6 + — кхРЬ + к,Ъ = р...
“о
Выходным параметром генератора является электромагнитная мощ-
ность, которую он выдав] в эцерюсистему. С учетом этого передаточная
функция генератора будет
W(p)=
(5-45)
207
Гчава 5 Регулирование частоты и активной мощности
Знаменатель (5.45), который имеет вид арг + йр + 1, где а —-Т ,
ыпк,
b - ^ас , можно, как известно, разложить на множители
Ш0кс
ap2+hp+l = (Tlp+l)(T2p + U,
где р| = —, р2 = — корни уравнения ар 2 + bp + 1 = О
т, т2
Уравнение ар 2 + bp +1 = О имеет два корня
или
“(Л Vv “«Ас > шок‘
Р' 2 - 2Т^
<М<.
При I———I >4—-— корни вещественные Найдем значение к
^co()fce J
при которых выполняется это условие. Примем в качестве примера.
Tj =10 с, кс =2,0. Тогда кос > 160 Будем считать это значение к„с кри-
тическим и рассматривать в дальнейшем случаи, кома квс >каскр .
Для корней можно записать р. 2 =—^—Ct^ , где а < 1,0 — коэффиии-
2а
ент, учитывающий уменьшение подкоренного выражения /b2 —4а за счет
второго члена 4а.
208
Глава 5 Регулирование частоты и активной мощности
При kaL > fco Ct—>1,0 и для первого корня получим р=—, апо-
~ а
1 а rl Т,
стоянпая времени т -----= — В данном случае т, =-----
Рг ь
Для определения второй постоянной времени т2 воспользуемся соот-
ношением TjT2 =—-— Тогда т-> = ^og . Передаточная функция определя-
йте
стоя выражением
Если Лис=160, то Т| = Tifkac = 0,06. При больших кис получим
т < 0.06 с, что свидетельствует о малом запаздывании генератора как пре-
образователя механической энергии в электромагнитную В первом прибли-
жении 1¥( р) = 1,0 и для 1урбогенератора (турбина совместно с генератором)
будем оперировать выражением
ИТ,,-—=----------!-- <5 471
И Ь.Р + 1
Весьма простая передаточная функция турбоагрегата благоприятно
сказывается на регулировании активной мощности при работе 1урбогецера-
тора в энергосистеме.
Если в уравнении (5 31) за выходной параметр принять 5, то переда-
точная функцив примет вид
Воспользуемся разложением знаменателя на множители
209
/ idea 5 Регулирование частоты и активной мощности
W(p) =
(Tlp + lJ(t2p + l)
(5.49)
что ссотастс|вует последова1ельному соединению двух инерционных эле-
ментов первого порядка. В данном случае т2 > Ti • поэтому характер пере-
ходного процесса будет определяться в основном вторым элементом.
Переходная характеристика генератора показана на рис 5.10 (кривая 1).
Синхронная мощность генератора является функцией угла, вследствие чего
характеристика 1 отражает собой изменение синхронной мощности генера-
тора в переходном режиме
Рис. 5.10 Переходные характеристики генератора
Дифференцирование кривой 1 дает функцию 2, определяющую в
масштабе l/fcc(00 асинхронную мощность генератора. Кривая 3 соответст
вует мощности турбины, идущей на ускорение ротора турбогенератора За-
висимость 4 определяет собой суммарную э.чектрома! пнтпуто мощность.
Из рис 5.10 видно, что разворот ротора no yuiy происходит сравни-
тельно медленно Тем самым, изменение синхронной мощности генератора
идет также медлешю. Значительно быстрее меняется асинхронная мощность,
что и определяет «быстродействие» генератора, как преобразователя меха-
нической энергии в элсктроматигную
Кривая 3 показывает характер изменения мощности, идущей на уско-
рение. В начальный момент мощность турбины расходуется на ускорение
210
Гчава Ч Реп тировиние частоты к активной мощности
ротора турбогенератора, после момента времени it ротор начинает тормо-
„ Ы <(2Й
зиться. В установившемся режиме составляющие-----и —— равны нулю и
tit di2
для мощности турбины имеем Рт =РС~ кс8.
Структурная схема регулирования активной мощности при работе
Рис 5.11. Структурная схема регулирования мощности турбоагрегата
Измерительный элемент регулятора мощности воздействует через
механизм изменения числа оборотов (МИЧО) на регулятор частоты враще-
ния. За счет этого регулируется мощность генератора, выдаваемая в энерго-
систему. Фактическое значение мощности генератора подается на измери-
тельный элемент регулятора. Для упрощения измерение мощности показано
в виде включения трансформатора тока на выводах генератора
На рис. 5.12 показана преобразованная схема управления турбогене-
ратором МИЧО представлен как интегрирующий элемент схемы
k
W(p)=—L~ Золотник и сервомотор с обратной сяязыо представлены эле-
Т,Р
ментом с передаточной функцией IF ( р ) = ——— , турбогенератор пока-
Г2р + 1
зан в виде передаточной функции W( р ) =-----.
Tip+l
211
Гчава 5. Регулирование частотны и активной мощности
Рис. 5.12. Преобразованная схема управления турбоагрегатом
В представленном виде очевидна простота схемы управления. Пере-
ходный процесс изменения мощности генератора происходит почти по экс-
поненциальному закону с достаточно небольшой постоянной времени.
5.6. Математическая модель энергосистемы
Каждая станция (генератор) энергосистемы несет определенную на-
грузку, заданную диспетчером энергосистемы От нагрузки генератора Р,
зависит угол 5, между вектором зл с каждого генератора и эквивалентной
Э-д.с энергосистемы Ес (рис. 5.13).
Рис 5-13 Вектораная диаграмма э д с. станций
Совокупность векторов эл.с. генераторов Е,синхронно вращается с
частотой fe. Разброс векторов Е, по углу 8, невелик при электрически
близком расположении электростанций друг относительно друга.
В некоторых задачах, ради упрощения, все генераторы энергосистемы
или их часть заменяются одним эквивалентным, который работает на единую
эквивалентную нагрузку. При авариях с большим дефицитом генерации энер-
госистему или выделившийся район системы, допустимо представлять экви-
212
Гчава 5 Регулирование частоты и активной мощности
валентным генератором Неучст качаний роторов отдельных генераторов от-
носительно друг друга не привносит значительной погрешности
В такой постановке уравнение энергосистемы может быть записано
df.
Т, —+ Д/, = ДР. (5 50)
Начальные условия возмущения имеют вид ДД=0 и = ДЛ.
“"и
т.е. все возмущение АР. расходуется на ускорение роторов энергосистемы. В
d f „ ДР. I
установившемся режиме имеем---=0 и AJ. =------
». I...
В переходном режиме снижение частоты определяется экспонентой
где T'j - Tj /ки - постоянная времени энергосистемы с учетом регулирую-
щего эффекта нагрузки.
Замена энергосистемы эквивалентным генератором сводит задачу к
схучаю работы одного генератора на выделенную нагрузку, рассмотренную
ранее.
В объединенной энергосистеме обменная мощность энергосистем
представляет собой нагрузку, величина которой зависит от угла б[2 в соот-
ветствии с известной формулой
П EV -
Лл.,=—s'«o12.
EU
Обозначая —— = кс и выражая угол в радианах, получим Ро6л1 = АС812- С
учетом этого, уравнение баланса мощностей имеет вид
Г>^-+А„Д/; + Лс5|,=Р.. (5.52)
213
Глава 5 Регулирование частоты и активной мощности
Так как —=Д / и — = р. формула (5.52) примет вид
dt dt
TtP^f.+W.+-t,Af.=F„. (5 53)
р
Передаточная функция равна
П'(р} =
(5.54)
АР«.
Структурная схема энергосистемы, работающей в энергообъелинении.
показана на рис. 5.14.
Моделирование по схеме рис. 5.14 используется для исследования
регулирования частоты и активной мощности в объединенной энергосисте-
ме. Результаты подобного исследования приведены в |5 251
Рис. 5.14. Структурная схема энергосистемы, работающей
в эчергообъединепии
Для исследования аварий с большим объемом дефицита генераторной
мощности приведенная выше схема не может быть использована. При боль-
шом дефиците генерации в одной из энергосистем объединения, как прави-
ло, теряется устойчивость на межсистемной линии электропередачи и она
отключается Па структурной схеме рис 5 14 это приводит к отключению
канала с элементами 3 и 4 После отключения этих элементов схема прпво-
214
Гiaea 5 Регулирование частоты и активной шлцностч
яится к виду рис. 5 I, на котором зафиксирована работа энергосистемы на
выделенную нагрузку
5.7. Статическое и астатическое регулирование
Характеристика регулятора в установившемся режиме представляет
зависимое! ь регулируемого параметра от нагрузки В данном случае эта зави-
симость выражает собой зависимости вида т=\^(Р) или f =у/(Р). Регулятор
можно настроить па астатическую (линия 1, рис.5.15, а) ияи статическую ха-
рактеристику (линия II)
Рис 5.15. Астатическая и статическая характеристики (а) и структурная
схема (6) регулятора частоты вращения
В первом случае регулятор поддеркивает постоянную частоту враще-
ния агрегата независимо от нагрузки, во втором случае нагрузка влияет на
величину частоты вращения. С увеличением нагрузки частота вращения аг-
регата уменьшается.
При параллельной работе агрегатов помимо поддержания частоты
вращения на заданном уровне возникает и друзах задача — распределение
нагрузок между' агрегатами Для решения этой задачи необходимо настраи-
вать регулятор частоты вращения на статическую характеристику регулиро-
вания. коэффициент статизма. который определяется как
г = <ga - Дсо/ДР.
или
,¥ = Д//ДР.
215
Fiaea 5 Регулирование частоты и активной мощное мн
Удобно выразить статизм в относительных единицах
v _ _дл
ЬР/Р„ОЛ1 ДР.
(5 55)
Если в формулу (5.55) подставить ДЯ =10, то получим s. = ДГ. т.е
статизм равен относительному изменению частоты при изменении нагрузки
агрегата от холостого хода до номинального значения.
Обычно регулятор частоты вращения настраивается на статическую
характеристику со статизмом s = 2 — б %, т.е. при изменении нагрузки агре-
гата от технического минимума то номинального значения частота вращения
снизится на 2—6 %.
Указанный статизм s 2 - 6 % определяет собой усредненный ста-
тизм. В начале и конце характеристики статизм больше, чем на среднем уча-
стке.
При наклоне характеристики в сторону положительных значений
мощности статизм принято считать положительным (рис. 5 15, б) При этом
уравнение статической характеристики записывается в виде
A/+jP = 0. (5.56)
Астатическую характеристику можно рассматривать как частный слу-
чая статического регулирования со статизмом, равным нулю.
Выясним, от чего зависит статизм регулятора Обратимся к структур-
ной схеме регулятора частоты вращения (рис 5.15, б). В статике зависимое! ь
выходного сигнала у от возмущающего воздействия Р в замкнутой САР оп-
ределяется формулой
Г WFy(P)
\ + W(p)
(5.57)
где — передаточная функция элементов между точкой приложения возму-
щения F и выходом 1, W( р)~ передаточная функция разомкну гой СЛР
Для определения зависимости частоты вращения агрегата f от на-
грузки Р рассмотрим формулу
216
I'-iaeti 5 Регулирование частоты и активной wiuitocmu
л/.=лр. ,
У+иуо;
(5 58)
в которой приращения частоты Af, и нагрузки JP, представлены в относи-
тельных единицах. Из формулы (5.58) получим
А/. WP„(0)
&Р. ''“1+И70)
(5 59)
Дтя регуляторов, в структурной схеме которых нет интегрирующих элемен-
тов, формула (5.59) принимает вид
г-=Г?Г’ <5-60>
при к » 1,0
(5.61)
т.с статизм обратно пропорционален коэффициенту усиления разомкнутой САР.
Регулятор частоты вращения имеет сервомотор, являющийся интег-
рирующим элементом с передаточной функцией Wrep,(p) = \fTCi,pt р Ха-
рактеристика регулирования зависит от того, охвачен сервомотор жесткой
обратной связью или нет. Если жесткая обратная связь включена (V*0),
сервомотор становиться инерционным элементом В силу конечности коэф-
фициента усиления регулирование получается статическим
При отключении жесткой обратной связи (v= 0) передаточную функ-
ции разомкнутой системы Wf р) можно представить гак
Wf Р)~~---«ки (р)
ТсервР
(5.62)
где 1/Гсе/,„р = ^серв(р) ~ передаточная функция сервомотора; Wn_}( р) ~
передаточная функция всех элементов САР, кроме сервомотора.
С учетом формулы (5.62) выражение для статизма примет следующий
вид
И₽„(0) к,, I
у. = р" =-----------—--------- = 0. (5 63)
1 + ^(0) l + р|р=п
217
‘ 5 Реагирование час поты н активной мощности
Г1ава 5. Регулирование частоты и активной мощности
Таким образом, без жесткой обратной связи регулирование становится аста-
тическим.
Астатическое (независимое) регулирование получено относительно
полезной нагрузки, точка приложения которой на структурной схеме
(рис 5 15) находится справа от интегрирующего элемента Для возмущения,
которое приложено слева от интегрирующего злемента (на рисунке показало
пунктирными шниями), регулирование будет статическим В этом случае
сигнал возмущения проходит на выход дополнительно через итерирую-
щий элемент, в связи с чем формула для статизма может бьпь записана так
Имеем
^OC(PJ =
(Ж,Р4-У)|
(Т„Р + *> |р=0
^^(Р)=^1ерй<Р}
(5 67)
(5 68)
P+V|p=c
(5 69)
а для статизма получим
Передаточная функция Wpn( pi включает все элементы между точкой при-
ложения возмущения н выходом, кроме интегрирующего элемента. После
преобразования получим
, »•;,/<!> j'r.
Таким образом, относительно этих возмущений система яаляетоя ста-
тической, т е. любое возмущение, приложенное слева от сервомотора, при-
ведет к отклонению скорости агрегата. Такую зависимость пельзя считать
офицатсльным явлением, напрозив, это используется в практических целях.
Так, прикладывая воздействие на вход измерительного элемента, можно ме-
нять час гигу вращения aiperara. Такое воздействие есть не что иное, как из-
менение уставки регулятора.
При наличии обратной связи передаточная функция золотника и сер-
вомотора принимает вид
. _______^6» Wtv»(P)
1О,СеР’ P
В статике с учетом передаточных функций элементов
К К Jy
(1 + k) fl +*„отл, к^ ) ’
где кыоят, кзпя,ксерв и кГу— коэффициенты усиления маятника, золотника,
сервомотора и агрегата. В данном случае kFi =1,0, ^иавт =1/Y»
=Vv - Поэтому для статизма получим
fl+l/vy)
(5 711
Обычно v= 1.0, и у = 0.04, так что l/yv»1.0. поэтому s* = yr = 0.04. Из-
меняя v (регулированием плеч рычагов жесткой обратной связи), статитм
устанавливается равным 0,02 — 0,06.
В первый момент толчка нагрузки (соответствует возмущению с
СО = оо ) передаточная функция обратной связи равна
Woc(p) =
рт;,р4-у|
=₽
(5.72)
218
219
Гчаво 5 Регулирование частоты и активной мощности
5.8. Распределение wai рузкн между агрегатами
С точки зрения поддержания номинальной частоты вращения агрегата
следовало бы настраивать регуляторы астатически Однако для однозначно-
сти распределения активных нагрузок настройка характеристик должна быть
выполнена по статическому закону.
Рассмотрим п параллельно работающих агрегатов, регуляторы часто-
ты вращения которых настроены на статические характеристики. Определим
распределение нагрузки между этими агрегатами.
Коэффициенты статизма характеристия регулятора задаются в относи-
тельных единицах, причем за относительное приращение мощности, равное
единице, выбирается номинальная мощность агрегата Поскольку мощности
aiperaroa различны, то при оперировании с коэффициентами статизма с це-
лью нахождения распределения нагрузки энергосистемы между отдельными
агрегатами эти коэффициенты необходимо пересчитывать к единой базисной
мощности Для упрощения выкладок предположим, что агрегаты имеют оди-
наковую мощность, принятую за базисную. В таком случае пересчет статизма
делать не требуется.
Найдем распределение нагрузки между двумя агрегатами, работаю-
щими параллельно на общую нагрузку Pt Примем sy=Af}/&P].
s2 = . При этом характеристика системы будет s~A.f /&Р.
Предположим, что в системе произошло изменение нагрузки на величину
ЛРС В таком случае частота в энергосистеме изменится на Д/ = sAPt Так как
агрегаты работают параллельно, то ДД = Д f2 = &f В соответствии с характе-
ристиками регулирования агрегатов найдем их долевое участие в покрытии воз-
никшего изменения нагрузки ДР,. Для отдельных станций получим
ДР| = —ДР,, ДР2 =—ЛРС (5 73)
Распределение нагрузки происходит обратно пропорционально статизму ха-
рактеристики регулирования. Если хотя бы один из агрегатов системы имеет
астатическую характеристику, характеристика всей энергосистемы будет также
астатической. В этом случае (при любых изменениях нагрузки) частота в энер-
госистеме меняться не будет, а агрегаты, имеющие статические характеристи-
220
rjtiea 5 Регулирование час поты и активной мощности
ки, будут работать с постоянной нагрузкой. Все изменения нагрузки воспримет
на себя агрегат с астатической характеристикой регулирования.
При наличии в энергосистеме нескольких агрегатов с астатическими
характеристиками, характеристика системы также будет астатической, одна-
ко распределение нагрузки между этими агрегатами станет неопределенным.
Поскольку неопределенность в распределении нагрузки между агрегатами не
допустима, регуляторы частоты вращения всех агрегатов должны быть на-
строены на статические характеристики.
Распределение нагрузки между агрегатами показано на рис. 5.16. Ре-
жим в точках «я» и «б» принят за исходный. Увеличение нагрузки энергосис-
темы на &РС приводит к снижению частоты. При новой частоте режим опре-
делится точками «а'» и «б'», при этом каждый агрегат принимает на себя на-
грузку в соответстаии с ее характеристикой регулирования
Рис. 5.16 Распределение нагрузки между генераторами по статическим
характеристикам
5.9. Первичное и вторичное регулирование
Астатическое регулирование может быть получено двумя способами
Можно настроить сам регулятор частоты вращения астатически. Для этого
необходимо сделать равным нулю коэффициент жесткой обратной связи Это
достигается за счет изменения длины рычагов обратной связи. Наличие ин-
тегрирующего элемента в структурной схеме регулятора (сервомотор), не
охваченного жесткой связью, обеспечивает астатическую настройку регуля-
тора Возможен второй способ. Регулятор частоты вращения агрегата на-
страивается на статическую характеристику. Астатическое регулирование
получается за счет смещения статической характеристики параллельно самой
себе (см.рис.5.15). С точки зрения статики регулирования между этими спо-
собами нет принципиальной разницы. Так, если в процессе регулирования
221
Гiaea 5 Рег) чирование частоты и активной мощности
агрегат должен принять на себя дополнительную нагрузку ДР, то безраз-
лично, каким образом режим агрегата переходит из точки 1 я точку 2- либо
этот переход протекает по астатической характеристике, тибо по статической
с дополнительным смещением самой характеристики
Смешение характеристики осуществляется воздействием на механизм
изменения числа оборотов (МИЧО). Этот механизм включает в себя ревер-
сивный электрический двигатель, при вращении которого воздействие через
червячную передачу и систему рычагов передается на пружину маятника
Изменение натяжения пружины маятника приводит к изменению уставки
регулятора.
Управление агрегатом может быть ручным иди автоматическим В
первом случае оператор вручную подаст импульсы на двигатель МИЧО. Если
агрегат работает изолированно, то это приводит к изменению частоты вра-
щения агрегата. При параллельной работе в энергосистеме, частота которой
остается практически неизменной, импульсы на двигатель МИЧО смещают
характеристику регулятора параллельно самой себе, за счет чего обеспечива-
ется регулирование мощности агрегата При автоматическом управления им-
пульсы на двигатель МИЧО подаются от специального регулятора. Такой
регулятор и само регулирование называют вторичным
Регулятор частоты вращения является первичным регулятором. Несо-
мненно, деление регуляторов на первичные и вторичные условно. При пол
ключении вторичного регулятора к регулятору частоты вращения образуется
единый регулятор для управления агрегатом как при изолированной, так и
параллельной работе. Чаще всего применяются вторичные регуляторы, реа-
I иру юшие на частоту и мощность
Двигатель МИЧО является интегрирующим элементом структурной
схемы. Наличие интегрирующего элемента делает систему вторичного регули-
рования астатической. Однозначность распределения нагрузки между парал-
лельно работающими агрегат ами с астатическими характеристиками достига-
ется за счет введения в закон регулирования заданного значения мощности.
Одним из достоинств вторичного регулирования является то, что вто-
ричный регулятор может реагировать на многие параметры и управлять агре-
гатом в их функции (частота, мощность станции, обменная мощность и тд.)
В то же время подключение вторичного регулятора к регулятору частоты
вращения усложняет схему регулирования и требует практических мер для
обеспечения устойчивости регулирования.
222
Гшва 5 Регулирование- частоты и активной мощности
Принципиально регулятор частоты вращения также может управлять
агрегатом в функции многих параметров. Для этого следует подключить к ма-
ятнику дополнительные измерительные элементы, реагирующие на необходи-
мые параметры. В этом случае астатическое регулирование достигается за счет
сервомотора регулятора час юты вращения Для этого жесткая обратная связь
отключается. Однозначность распределения нагрузок при этом также получа-
ется за счет введения в закон регулирования заданного значения мощности
Подключение дополнительных измерительных элементов используется
на тех станциях, которые привлекаютсв к регулированию частоты мощности
и на которых установлены обычные регуляторы частоты вращения
В современных системах регулирования вместо маятники используется
электрический измерительный элемент. В электрическом элементе легко
суммировать сигналы но частоте, мощности и другим параметрам. Такой ре-
гулятор называется электрог ндранлическмм.
5.10. Э.1ектрогидравл1ческнй регулятор частоты вращения
Принципиальная схема выяви тельного элемента электрогидравличс-
ского регулятора частоты вращения агрегата представлена на рис 5.17.
В основу выявигелыюго элемента положена фазочувствительнав
схема, реагирующая на фазу напряжения, включаемого в средний провод
схемы
Напряжение от вспомогательного генератора, имеющего одинаковую
частоту вращения с глаяным генератором, подастся на трансформатор В
средний провод фазочувстаптельной схемы между точками «о» и «б» подает-
ся напряжение тех величин, в функции которых необходимо управлять агре-
гатом. На рисунке показаны цепочки I, II и III, которые подают напряжение в
средний провод фазочувствительной схемы.
Первая цепочка обеспечивает выявление сигнала по частоте. Для
этого в схеме имеется резонансный контур £, -Cj, настроенный на частоту
50 Гц. при которой сопротивление резонансного контура велико, и ток в це-
почке I практически равен нулю При отклонении часто гы сопротивление
контура /| -С|, уменьшается, и напряжение, пропорциональное этому от-
223
Глава 5 Регулирование частоты и активной мощности
клонению, подается в точки «о» и «с». Знак этого сигивла соответствует зна-
ку отклонения частоты.
Рис 5 17 Упрошенная схема электрогидравлического pci улятора
частоты вращения
С сопротивления 7? по цепочке И подается дополнительное напряже-
ние, которое обеспечивает ручное изменение уставки регулятора. Напряже-
ние с сопротивления R2 регулируется в функции перемещения штока серво-
мотора и, следовательно, выполняет роль сигнала по каналу жесткой обрат-
ной связи. Движок сопротивление 7?} также перемещается от штока серво-
мотора. Напряжение с сопротивления 7?3 затем выпрямляется, сглаживается 11
дифференцируется цепочкой С4 — . Так формируется сигнал по канал*
t ибкой обратной саязи.
Все рассмотренные сшналы подаются на магнитный усилитель МУ в
котором они суммируются и усиливаются. Само собой на вход МУ может
быть подан дополнительный сигнал Д47. Этот сигнал может быть сформи-
рован пропорциональным любому параметру, в функции которого необходи-
мо дополнительно управлять агрегатом
224
Глава 5 Регулирование частоты и активной мощности
Нагрузкой на магнитный усилитель МУ являются катушки электро-
магнита И\ и W2, имеющего единый сердечник. При равенстве токов в ка-
тушках сердечник уравноаешиваегся в своем среднем положении. При нару-
шении равенства токов сердечник втягивается в катушку, ток которой боль-
ше. Соотношение токов в кагушкак зависит от частоты генератора
Сердечник электромагнита воздействует на иглу побудительного зо-
лотника. Расположение катушек выбрано таким образом, что при уменьше-
нии частоты генератора игла перемещается сердечником электромагнита в
сторону увеличения открытия направляющего аппарата, а при увеличении
частоты — на его закрытие Подавая на магнитный усититедь MV сигнал
Д(/ = кр (Рг — X Р/п) регулирование будет осуществляться по уравнению
Д/+кр(Рг -^Р[п) = §, т.е. будет производится астатическое регулирова-
ние частоты с ныравннванисм мощности менаду агрегатами по среднему зна-
чению.
5.11. Методы регулирования часто>ы в Tfiepi оеистемс
Частота в энергосистеме служит показателем соответстиия генера-
ции и потребления в текущий момент времени. Чтобы поддерживать частоту
постоянной, необходимо сохранять баланс мощностей генерации и потребле-
ния. С этой целью службы энергетических режимов энергосистем составляют
графики нагрузки на следующие сутки (плановая нагрузка) наиболее эконо-
мичным образом с учетом потерь электроэнергии в сетях. На рис.5.18 сплош-
ной линией а показан пример суммарного графика нагрузки энергосистемы и
его покрытие отдельными станциями (I — III).
Рис. 5.18. График нагрузки энергосистемы
225
Гчава i. Регулирование частоты и активной мощности
Нагрузка каждого агрсгага энергосистемы задается настройкой регу-
лятора частоты вращения. Корректировать отклонения графика нагрузки от
заданного поручается специально выделенной станции (или станциям), регу-
лирующим частоту
Существует несколько методов регулирования частоты в энергосисте-
мах По сути дела различие методов заключается в том, каким образом опре-
деляется однозначность распределения нагрузки между регулирующими аг-
регатами. Чгобы иметь однозначное распределение нагрхзки между агрега-
тами, необходимо в закон регулирования ввести заданную мощность, кото-
рую должен принять на себя агрегат в процессе регулирования.
Известные методы можно разделить на тва вита - регулирование по
мгновенному и интегральному отклонению частоты. В первом метоле одно-
значность в распределении определяется тем, что сигнал заданною значения
мощности вводится в закон регулирования в явном виде. В методе инте-
грального регулирования сигнал заданною значения мощности определяется
косвенным путем - через интегральное отклонение частоты системы.
Исполнение регулирования по мгновенному отклонению имеет ряд
разновидностей Эти разновидности регулирования по мгновенному откло-
нению иногда называют самостоятельными методами, а именно, ведущего
генератора, ведущей станции и мпимосгатических характеристик. Фактиче-
ски опн являются частным случаем регупировагпгя частоты по мгновенному
отклонению методом мнимостатических характеристик. Однако, учитывая
сложившуюся терминологию, прежде всего рассмотрении проблему регули-
рования частоты с метода ведущего агрегата
5.12. Регулирование по методу ведущего агрегата
Сущность метода ведущего агрегата заключается в том, что один из
агрегатов энергосистемы настраивается по астатической, а все остальные —
по статической характеристике. Агрегат, настроенный на астатическую ха-
рактеристику, называют ведущим Учитывая форму записи астатической и
статической характеристик, закон регулирования по методу ведущего агрега-
та можно записать в следующем виде;
для ведущего агрегата А/ = 0;
для остальных агрегатов системы
22(з
Гтава 5. Регулирование частоты к активной мощности
bf+s2&P2 =0
Af+s3AP3 =0
(5-74)
Д/+5яЛРя=0
Поскольку один кз агрегатов имеет астатическую характеристику, то харак-
теристика всей энергосистемы будет также астатической. При астатической
характеристике частота энергосистемы будет поддерживаться в пределах
зоны [хечувстаительности регулятора ведущего агрегата на уровне f =51) Гп.
Рассмотрим вопрос распределения нагрузок между агрегатами энерго-
системы н установившемся режиме. При изменении нагрузки энергосистемы,
не выходящем за пределы регулировочного диапазона ведущего агрегата,
частота системы будет поддерживаться равной 50 Гц.
Положим для определенности, что первый агрегат энергосистемы на-
строен на астатическую характеристику, а все остальные на статическую
Определим распределение изменяющейся нагрузки между ведущим агрега-
том и агрегатами, настроенными на статическую характеристику' Поэтому
все агрегаты, за исключением ведущего, можно заменить одним эквивалент-
ным агрегатом со статазмом s. Допустим, что в установившемся режиме при
номинальной частоте 50 Гц нагрузка энергосистемы распределяется следую-
щим образом ведущий аграат несет нагрузку Phl, а остальные агрегаты -
нагрузку Pj6 . при этом режим определяется точками «я» и «б» соотаетст-
венно (рис. 5 19)
Рис. 5.19. Регулирование нагрузки генераторов по статическим
характеристикам
Гчава 5 Регулирование частоты v активной мощности
Увеличим нагрузку энергосистемы на величину АР В силу того, что
характеристика системы астатическая, в новом установившемся режиме час-
тота останется номинвльной и равной 50 Гц. Режим работы эквивалентного
агрегата сохранится в точке «б», т е этот агрегат будет нести прежнюю на-
грузку P3Z , дополнительную нагрузку возьмет ведущий генератор, так что
режим его изменится и определится точкой « а'»
Если нагрузка энергосистемы уменьшится на ДР, то в этом случае
изменение нагрузки будет воспринято только ведущим генератором, а ос-
тальные генераторы будут работать с прежней нагрузкой. Таким образом,
при регулировании частоты по метолу ведущего генератора все изменения
нагрузки воспринимаются ведущим генератором, остальные генераторы
энергосистемы работают с постоянной (заданной диспетчером) нагрузкой.
Рассматриваемый метод регулировнния частоты может быть использо-
ван в небольших энергосистемах, где мощность одного генератора достаточ-
на для покрытия неплановых изменений нагрузки
5.13. Метод ведущей станции
Основным недостатком метода ведущего генератора является то, что
мощности одного генератора, как правило, недостаточно для покрытия не-
плановых нагрузок энергосистемы. Для увеличения регулировочного диапа-
зона по мощности к регулированию частоты в энергосистеме используется
не один ведущий генератор, а целая станция или даже несколько станций.
Такую станцию называют ведущей. Агрегаты на всех станциях, кроме веду-
щей, настраиваются на статические характеристики. А|регаты ведущей
станции насгранваются на астатические характеристики, при этом характери-
стика всей энергосистемы получается также астатической.
С точки зрения распределения нагрузки, ведущую станцию можно
рассматривать как ведущий агрегат энергосистемы, следовательно, выводы,
сделанные для метода ведущего агрегата, справедливы и для этого случав
При одновременной астатической настройке нескольких агрегатов
станции или нескольких станций распределение нагрузки между ними полу-
чается произвольным, что недопустимо. Для устранения этого недостатка в
закон регулирования вводится заданная мощность, которую должен брать на
себя агрегат в процессе регулирования.
228
Глава 5 Регулирование частоты и активной мощности
Уравнение регулирования мощности я—го агрегата ведущей станции
запишется так:
A/- + ^„rPn-P„B; = O. (5 75)
где Рп - фактическая мощность п —го генератора; Р^,,- заданная мощность;
кр„- коэффициент регулирования по мощности
Обычно ведущей станцией является гидростанция. В силу однотипно-
сти агрегатов 1"ЭС желательно, чтобы регулирующие агрегаты распределяли
нагрузку поровну. В этом случае заданным должно быть среднее значение
мощности регулирующих агрегатов ГЭС. Учитывая сказанное, уравнение
регулирования мощности агрегата ведущей станции можем записать так
-Ге,/»7-0. (5 76)
где и — число регулирующих агрегатов станции Из уравнения видно, что регу-
лирование заканчивается, когда отклонения частоты и мощности равны нулю.
Если агрегаты нс однотипны, то распределение нагрузки между регу-
лирующими агрегатами ведущей станции Будет неодинаковым В этом слу-
чае на ведущей станции необходимо иметь специальное устройстао распре-
деления активной нагрузки, в функцию которого входит определение эконо-
мически выгодной нагрузки для каждого агрегата.
Преимуществом метода ведущей станции является его простота. Не-
достатком метода является то, что в крупных энергосистемах одна станция
может не справиться с покрытием неплановой нагрузки энергосистемы. Сле-
дует отметить, что поскольку все неплановые изменения нагрузки восприни-
маются ведущей станцией, то режим этой станции, а также всей энергосисте-
мы в целом получается неэкономичным. Целесообразно неплановые измене-
ния нагрузки распределять между несколькими станциями энергосистемы.
Отклонения частоты являются следствием изменения нагрузки энерго-
систем. Последние можно условно распределить на два вида: случайные (бы-
стро изменяющиеся! и усредненные (медленно изменяющиеся). В соответст-
вии с этим колебания частоты также могут быть подразделены на случайные
и усредненные. Характер изменения частоты крупного энергообьединения
показан на рис. 5.20
229
Гпава 5 Регулирование частоты н активной мощности
Гц
50 2
Рис 5.20. Запись частоты в крупном энергообъединении
С ростом энергетических систем относительная величина случайного
толчка нагрузки уменьшается Так. для 1_ЭС России в составе энергосистем
Центра. Юга. Средней Волги, Северо-Запада и Урала относительные изме-
нения суммарной нагрузки оцениваются не более 0,7 — 1.0 % суммарной на-
грузки энергообьединсния.
Кроме общего характера изменения частоты в крупном энергообъеди-
нении, на осциллограмме (рис 5.20) видна зависимость величины усреднен-
ных отклонений частоты от суммарной мощности энергообьединения. Так,
на правом участке осциллограммы (10 — 11 ч) показана запись частоты, когда
мощность энергообъеденения максимальна. Слева (9— 10 ч) запись частоты
сделана, когда одна из крупных энергосистем работада отдельно от энерго-
объеденения.
Зная статизм энергосистемы, нетрудно определить отклонение частоты,
вызванное случайным изменением нагрузки системы. Ориентируясь на наибо-
лее неблагоприятный случай статизма энергосистемы в г = 20 % при случай-
ном толчке нагрузки в ДР = ± (1.0 - 0,7) %Р,.7««•»,., для опсюнения частоты
получим Д/"= + (0,07 - 0,1) Гц. Экспериментальная проверки также показы-
вает, что в нерегулируемой энергосистеме отклонения частоты, вызванные
случайными изменениями нагрузки, не выходят за указанные пределы, кото-
рые .можно принять за допустимые как с точки зрения потреби гелей, гак и са-
мой энергосистемы.
Отсюда следует, что случайные колебания частоты в энергосистеме
ограничиваются действием первичных регуляторов, и применение для этих
целей вторичного регулирования не требуется. Усредненная нагрузка энерго-
системы изменяется в значительно больших пределах, следовательно, откло-
230
Гчава 5 Реггчироваиие частоты и активной мощности
нения средней частоты, обуслоаленные этими изменениями нагрузки, не мо-
гут быть ограничены статически настроенными первичными регуляторами
Для этой цели и выделяются ведущие станции с астатической настройкой
Здесь уместно подчеркнуть что ведущие станции предназначены
только для устранения усредненных отклонений частоты, обусловленных
средним изменением нагрузки энергосистемы. И если к регулированию час-
тоты энергосистемы привлекается ограниченное число станций, го из этого
не следует, что эти станции принимают на себя все толчки нагрузки и тем
самым работают в исключительно тяжелых условиях Случайные толчки на-
грузки воспринимаются не только ведущими станциями, но и всеми другими,
за исключением тех, которые поставлены на ограничитель.
Процесс распределения толчка нагрузки между станциями энергосис-
темы условно можно разделить на три этапа. В момент возникновения толчка
ток нагрузки распределяется между всеми станциями обратно пропорцио-
нально сопротивлению от места приложения нагрузки до источников генера-
ции Доля толчка нагрузки, «доставшаясв» каждому генератору, тормозит
агрегат и его частота снижается
Далее вступают в действие первичные регуляторы (второй этап) и рас-
пределяют нагрузку по закону статических характеристик этих регуляторов.
На третьем этапе вступает в действие ведущая станция и восстанавливает
частоту на уровне 50 Гц. При этом все другое станции возвращаются к сво-
ему исходному режиму.
Деление процесса регулирования частоты на три этака достаточно ус-
ловно Реально, действие автоматических регуляторов второго и третьего
этапов наступает одновременно
5.14. Метод мнимостатических характеристик
По методу мнимостатических характеристик к регулированию частоты
могуч- одновременно привлекаться агрегаты нескольких станций энергосистемы.
Для однозначного распределения нагрузки между регулирующими
агрегатами регулирование производится по закону
231
Гiaea 5 Peet lupoecntw частоты и активной w/upiocmu
A/+»^«-4iifl,7“oJ (577)
где А/ — отклонение частоты; Р„ - фактическая мощность n-го генератора;
- суммарная нагрузка я регулирующих агрегатов; Лй — коэффициент
долевого участия в покрытии нагрузки системы; к £ Р„ - заданная мощ-
ность, которую должен нести агрегат в процессе регулирования, кр — коэф-
фициент регулирования по мощности. По условию метода предполагается, что
£ кЛп =1 Регулирование заканчивается при равенстве нулю обоих членов
уравнения (5.77) для каждого агрегата, т.е. А / =0 и Р„ -кд„^Р„ = 0 Таким
образом, регулирование по метолу мнимостатических характеристики являет-
ся астатическим по частоте и обеспечивает однозначное распределение
нагрузок между генераторами Эта однозначность обусловлена введением в
закон регулирования заданного значения мощности в виде Р1й п = кл„ £ Р„
Для исполнения регулирования по методу мнимостатических характе-
ристик необходимы канвлы связи между регулирующими станциями л дис-
петчерским пунктом (ДП) энергосистемы. По прямому каналу от станции на
ДП необходимо передать сигнал, пропорциональный фактической мощности
регулирующих агрегатов станции. При получении этих сигналов со всех ре-
гулирующих станций на ДП производится и.х суммирование и определение
заданного значения мощности для каждой регулирующей станции по форму-
ле Р,/>л=кб1,У1Р11. Коэффициент долевого участия к#„ устанавливается дис-
петчером из условия экономически наивыгоднейшего распределения нагру-
зок между регулирующими станциями и пропмекной способностью связей
Сигналы, пропорциональные заданным значениям мощности, перелаются по
обратным каналам связи на регулирующие станции и вводятся в закон регу-
лирования.
232
Г>ива 5 Регулирование частоты it активной мощности
Регулирование частоты является астатическим, если соблюдается ус-
ловие = 1-0 • Однако это условие практически выполнить трудно. В си-
лу погрешности входящих в систему регулирования устройств (измеритель-
ных трансформаторов тока и напряжения, телеканалов связи и др.) условие
= 0 не выполняется При этом регулирование частоты в энергосистеме
будет заканчиваться при отклонении частоты, не равном нулю А7 *0 Это
обстоятельство является недостатком регулирования частоты по методу
мнимостатических характеристик Наличие тетеканалов связи делает этот
метод регулирования весьма дорогим и сложным и в то же время недоста-
точно надежным, поскольку выход одного из каналов связи нарушает регу-
лирование но данному закону.
Из-за указанных недостатков метод мпимостгпических характеристик
в общем виде ретулирования частоты несколькими станциями не получил
широкого распространения в энергосистемах, однако, частные елх чан этого
метода являются распространенными.
Действительно, частным случаем метода мнимостатических характе-
ристик является регулирование частоты одной станцией. Такой метод был
назван методом ведущей станции В этом случае отпадает необходимость
передачи сигналов на ДП и обратно, поскольку операция получения задан-
ной мощности Рзд „ У, Р„ может осуществляться иа самой станции На-
дежность и точность регулирования при этом повышаются
Рассмотрим предельный случай регулирования частоты по методу
миимостатнческнх характеристик одним агрегатом. 11ри п — 1 заданным зна-
чением МОЛ1НОСГИ является фактическая мощность генератора, поэтому член
Д. — к6п£Р„ равен нулю, и закон регулирования запишется в виде Af=O .
Такой закон ретулирования устанавливается на ведущем генераторе энерго-
системы Отсюда следует, что метод ведущего генератора является частным
случаем регулирования по методу мннмостатических характеристик, когда
число регулирующих агрегатов равно единице
233
Гwa 5 Регу трование частоты и активной моирюсти
5.15. Mctoj интегрального pci удпрования
Название метода определяется тем. что в уравнение регулирования
вторичного регулятора вводится воздействие, пропорциональное интегралу
от отклонения частоты по времени.
2л JД / dt = 2л J7 f - /0 )dl, (5 78)
1де f— текущее значение частоты энергосистемы: fD — эталонная частота. Из
формулы (5.78) видно, что для осуществления регулирования по интеграль-
ному методу в регулятор необходимо передавав сигнал, пропорциональный
эталонной частоте . Возможны два принципиально отличных друг от дру-
га способа получения эталонной частоты на регулирующей станции. Оба
способа будут рассмотрены ниже
Заменим в формуле (5.78) частоту/ величиной го/2п, при этом имеем
2nfff-f0 )dt = {('ю-(оп М = ф-фи = Д<р,
где ф— угон, пройденный вектором, вращающимся с частотой СО за время
интегрирования; ф0— тоже самое для вектора, вращающегося с частотой (0(]
1аким образом, при интегральном регулировании воздейепше регулятора
пропорционально углу расхождения векторов напряжения, имеющих cooi-
встствснио частоты f и .
Интегральное регулирование может быть астатическим или статиче-
ским по углу ф. Закон астатического регулирования запишется в форме
Дф = 0. Астатическая настройка регуляторов нс обеспечивает заданного
распределения нагрузок между регулирующими агрегатами. Для однозначно-
го распределения мощности регулирование должно осуществляться по зако-
ну интегрального регулирования со статизмом по мощности, который можно
записать в виде
^(4>-4>о)+(р-ро) = 0, (5 79)
1де Р — фактическое значение мощности генератора, Рп — значение мощности
генератора при ф= ф0; кд, — коэфф индент регулирования ио углу.
234
pqaea 5. Регулирование частоты и активной мощности
Уравнение (5.79) удобно представить в форме
*фДф + ДР = О (580)
Гак как векторы з д.с генераторов, расположенных в разных тючках
энергосистемы, сдвину 1Ы друг относительно друга на угол 8,, (см. рис 5 21),
то приняв э д.с. i—й станции за начало отсчета углов S, получим следующее
значение углов, которые пройдут векторы эд с. за время интегрировании
ф(,— угол вектора, вращающегося с частотой вращения соо, ф,, ф;- углы
векторов эл с. । -й и j—й станций Соответственно для приращения углов
будем пмегь Дф, — ф, — ф0. Дф. = ф, -ф(| = Дф, + 8 ; угол Дф, измеряется
несколькими оборотами ротора, а угол 8 лежит в пределах к/2 те.
8„- « Дф,. I (оэтому
Дф, " Дфу = Дф.
Рис 5 21 Векторная диаграмма э д. с. регулирующих станций
С учетом сказанного для нескольких регулирующих агрегатов закон
регулирования для каждого из них запишется следующим образом:
Лф|Дф+ДР(=0'|
Лф2ДФ+ДР2=0
(5.81)
ЛфяДф+ДРи=0
Сложив уравнения (з 81), получим
235
Глава 5 Регулирование частоты и активной мощности
(5.82)
где &Ру- изменение нагрузки энергосистемы; к^- суммарный козффипн-
ент регулирования по углу.
Рассмотрим вопрос о поддержании частоты в энергосистеме и распре-
деления нагрузки между регулирующими агрегатами при интегральном
регулировании (pic. 5.22).
Рис. 5.22. Распределение нагрузок при интегральном регулировании
Из характеристики регулирования следует, что при нагрузке энерго-
системы Р^ режим будет определятся точкой «а», а угол системы ф=ф0
При изменении нагрузки, например, при увеличении ее до Р-^ , рабочая точ-
ка переместится в точку «б», при этом угол системы будет равен ф,.
При приращении нагрузки от Р^ до Р£ произойдет изменение угла
на величину Дф = ф|—ф0 Для установившегося режима отклонение угла
Д<р = const Так как 2л [(/ -fa )dl = Д ф> Дф=const, то f=/0 т е. частота
энергосистемы f будет равна номинальной частоте fa. В переходном режиме
Дф* const и, следовательно, f & fa.
Отсюда следует, что при интегральном регулировании частота энерго-
системы будет поддерживаться на постоянном уровне независимо от нагруз-
ки энергосистемы, т.е по отношению к частоте интегральное регулирование
является астатическим. Распределение нагрузок между регулирующими агре-
гатами получается однозначным. Так, если известно изменение нагрузки
236
Гзава 5 Регулирование частоты и активной мощности
дР^-, то из уравнения системы А^-гАфт ДА- =0 можно найти изменение
угла
ДРу
Дср =---(5.83)
*ч>£
Поскольку изменение угла Дф одинаково для всех агрегатов, го легко
найти изменение нагрузки любого из них. Для и -го агрегата
*«AA-
АР.—(5 84)
Че
т.е. дополнительная нагрузка распределяется между регулирующими агрега-
тами системь! пропорционально коэффициентам к^.
Этот результат показан на графите рис. 5.22. Действительно, значение
нагрузки, воспринимаемой агрегатом, определяется точкой пересечения пря-
мой = const с характеристикой регулирования (I —3). Так, если при на-
грузке Р% система работает с углом ф0, то нагрузки агрегатов равны Д, Р2
и Ру. 11ри переходе в режим с углом ф, нагрузки агрегатов изменятся и бу-
дут равны Pj' , Р2 ч fj , т.е их значения определяются только наклоном
характеристик
Если к источнику эталонной частоты подключить устройсгво, которое
отсчитывает периоды эталонного источника напряжения, то оно будет изме-
рять время. 11оскольку период остается постоянным, то время, указанное та-
ким устройстаом. будет совпадать с астрономическим. На основании этого
можем записать
= (S.S5)
где ta:mp— астрономическое время
Если же устройство включить в энергосистему с частотой f то вслед-
ствие изменения частоты энергосистемы, время, указываемое этим усгройст-
вом, будет отличаться от астрономического. Время, измеренное устройством,
включенным в энергосистему, называется синхронным временем, а само уст-
ройство - электрическими часами.
Аналогично будем иметь
237
Гуича 5 Регу lUpoeaime чистоты и активной мощности
Ц/Л = ‘с..< (5.S6)
гас Г„ю — синхронное время
В закон регулирования вводится воздействие, пропорциональное инте-
1рал> -
[АН» =(</-/„)* (587)
Учитывая значения tacmp и епнхр, получим
0.88)
т.е. вводимое воздействие пропорционально отклонению синхронного вре-
мени 01 астрономического Поэтому метод интегрального регулирования
иногда называют также методом синхронного времени
Гели бы интегральное регулирование было астатическим, то в устано-
вившемся режиме отклонение синхронного времени от астрономического
было бы всегда равно нулю п электрические часы, включенные в энергосис-
тему. всегда показывали бы точное время. При статическом законе регулиро-
вания синхронное время будет отличаться от астрономического Это откло-
нение определяется наклоном характеристики /^ДрЬ Д/\ =0 . С увеличе-
нием коэффициента к^ отклонения угла Дф и времени ДГ^ уменьшают-
ся Однако увеличение коэффициента к^_ приводит к уменьшению точности
распределения нагрузок между регулирующими агрегатами и ухудшению
динамики регулирования.
Для осуществления интегрального регулирования на каждой регули-
рующей станции необходимо иметь эталонную частоту fu Практически это
можно выполнить двумя способами По первому способу предусматривается
установка эталонного источника на диспетчерском пункте (ДП) энергосисте-
мы и передача сигналов, пропорциональных эталонной частоте f, г га регули-
рующие станции по телеканалам. По второму способу на каждой регули-
рующей станции устанавливается собственный датчик эталонной частоты.
Точность этих эталонов должна быгь достаточно высокой Допускается отно-
сительная погрешность не выше 0,5-10 ^ — при условии, что эталоны
будут проверяться несколько раз в сутки.
238
Pwea 5. Регу чирование частоты и активной мощности
Следует заметить, что эталоны с очень высокой степенью точности
достаточно дороги в изготовлении
Распределение нагрузки между регулирующими агрегатами определяется
коэффициентами Если слезить характеристики ЛфДр+ДР,=О нелиней-
ными, что будет иметь место при переменных коэфф и плешах kv, то с изме-
нением режима системы долевое участие агрегатов в покрытии нагрузки бу-
дет меняться Можно так подобрать зависимости = xyfAcp?, что распреде-
ление нагрузок между регулирующими станциями будет осуществляться с
учетом их экономических характеристик. При таком регулировании частоты
в системе одновременно будет решаться задача нанвыголнейшего распреде-
ления нагрузок между регулирующими станциями.
Корректирующее воздейст вне интегрального регуля гора появляется со
значительным запаздыванием по отношению к возмущающему фактору. Для
устранения указанного недостатка можно применить так называемые комби-
нированные регуляторы, в закон регулирования которых, помимо интеграль-
ного отклонения, вводится воздействие по мгновенному отклонению часто-
ты. При этом уравнение регулирования записывается в виде
Л/Д/'+Лф{А/'Л+ДР = 0,
(5.89)
где kt и fc^ — коэффициенты регулирования по час го ie и yr iy
5.16. Особенности регулирования чистоты
в обьс.пшенных энергосистемах
Особенностью объединенных энергосистем является пвличие межсис-
темных линий электропередачи, по которым происходит обмен мощностями
между энергосистемами Как правило, эти линип имеют ограниченную (по
сравнению с установленной мощностью энергосистему пропускную способ-
ность.
Регулирование частоты в объединенных энергосистемах предъявляет
более высокие требования к качеству регулирования частоты, так как даже
незначительные ее отклонения могут вызывать существенные отклонения от
номинального значения обменной мощности
239
Гчава 5. Регулирование частоты и активной мощности
Поскольку интерес в данном случае представляет обменная мощность
между энергосистемами без учета распределения нагрузки между генерато-
рами, то каждую энергосистему можно представить в виде эквивалентных
генераторов А и В каждый со своим статизмом.
В качестве примера рассмотрим энергосистемы с равной мощностью
и равными статизмами, т.е. РЛ=Р8=Р, s - 0.1. Предположим, что пропускная
способность межсистсмной ЛЭП равна Ртал=0.1Р Определим изменение пе-
ретока мощности по межсистемном ЛЭП при наброьах или сбросах нагрузки в
одной из энергосистем объединения. Будем считать, что изменение нагрузки
произошло в энергосистеме В, причем по величине это изменение таково, что
частота энергообъединения изменилась на 0,2 Гц При отклонении частоты на
0,2 Гц в соответствии со статической характеристикой мощность энергосисте-
мы А измениться на величину APj = ± 0,4 % /0,1 - ± 4.0% Изменение
мощности энергосистемы А пойдет на покрытие дополнительной нагрузки
энергосистемы В, т.е будет передаваться по межсистемной ЛЭП. Если пре-
небречь регулирующим эффектом нагрузки, т.е. считать, что мощность по-
требителей не зависит от изменения частоты, то все изменения мощности
энергосистемы А будут передаваться по межсистсмной ЛЭП Поскольку по
условию пропускная способность мсжснстемной ЛЭП равна Рц^и = ОДР, то
относительное изменение обменной мощности составит ^Рлэп ~ 40 %. Таким
образом, при изменении частоты в энергосистемах па 0,2 Гп обменная мощ-
ность изменяется на значительную величиях Если перед изменением нагруз-
ки по ЛЭП передавалось предельное или близкое к нему значение обменной
мощности из энергосистемы А в энергосистему 13. го после наброса нагрузки
в энергосистеме В межсистемная ЛЭП оказалась бы перегруженной. Для
предотвращения возможной перегрузки с последующим возможным разде-
лением энергосистем вследствие нарушения устойчивости параллельной ра-
боты энергообъединения, необходимо снижать пределы возможного откло-
нения частоты. Именно этим обстоятельством обусловлено уменьшение до-
пустимого отклонения частоты до А/ = ± 0,1 Гц [1]. Так как даже незначи-
тельные изменения частоты в объединениях могут вызвать существенные
отклонения обменных мощностей, то помимо регулирования частоты, необ-
ходимо регулироавть и обменную мощность
Для каждого режима энергосистемы величина обменной мощности
определяется из условия получения наибольшего экономического эффекта
240
Гчава 5. Регулирование частоты « активном мощности
для всего энергообъединсния При этом обменная мощность либо поддержи-
вается регуляторами на заданном уровне, который периодически меняется в
соответствии с требованиями энергообъединения, либо регулируется по ста-
тическим характеристикам.
5.17. Раздельное регулирование частоты и обменной мощности
Рассмотрим метод раздельного регулирования частоты и обменной
мощности на примере двух энергосистем, соединенных одной мсжсистемной
линией связи (рис. 5 23) Задача регулирования частоты и обменной мощности
решается следующим образом: регулирование частоты возлагается на одну
энергосистему (например, на энергосистему .4), а ре)улированце обменной
мощности на другую (энергосистему В) Для этой пели в каждой из энерго-
систем выделяются регулирующие (ведущие; станции.
лл=с дрс5л,=0
Рис. 5.23 Схема объединенной энергосистемы
Метод регулирования является простым. Предположим, что в энерго-
системе В возникла дополнительная нагрузка. Частота энергообъединсния
при этом будет снижаться, вследствие чего придут в действие регуляторы
частоты. Эти регуляторы обеспечат увеличение мощности ведущей станции
энергосистемы Л. Дополнительная генерация на энергосистемы А пойдет в
энергосистем} В. где произошло увеличение нагрузки. Результатом этого
будет изменение обменной мощности, что приведет в действие регуляторы
мощности в энергосистеме В, которые будут стремиться сохранить обменную
мощность на прежнем уровне
В отношении обменной мощности действия регуляторов энергосистем
<4 и В будут встречными, что может привести к длительным качаниям как по
обменной мощности, так и по частоте Длительность качаний зависит от на-
стройки первичных и вторичных регуляторов, а также от параметров энерго-
систем. Особенно неблагоприятны условия, когда энергосистемы равновели-
241
Гчока 5 Регг/ироеание частоты и активном мощности
ки по мощности. Наилучшие результаты получаются при значительном раз-
личии мощностей энергосистем, копа наибольшей по мощности энергосис-
теме поручается регулирование частоты, а меньшей энергосистеме - регули-
рование обменной мощности.
5.18. Регулирование частоты с блокировкой
по об меппон мощности
Это г метод предусматривает установку регуляторов частоты во всех
энергосистемах объединения. Схема регулирования строится таким образом,
что бы при изменении нагрузки в одной из энергосистем приходил в дейст-
вие регулятор только этой энсргоспсгемы, а другие блокировались. Избира-
тельное действие регуляторов обусловлено гем, что блокировка осуществля-
ется с учетом знаков изменения частоты и обменной мощности в каждой
энергосистеме Предположим, что в одной из энергосистем произойдет уве-
личение нагрузки, при лом частота всего объединения понизится При сни-
жении частоты в энергообъединении согласно статическим характеристикам
перанчных двигателей агрегаты увеличат свою мощность, которая пойдет на
покрытие дополнительной нагрузки. Таким образом, все энергосистемы нач-
нут генерировать дополнительную мощность Энергосистема, в которой про-
изошло увеличение нагрузки, будет принимать эту мощность Если условно
обозначить выдачу мощности знаком «плюс», а прием — знаком «минус», то
видно, что знаки изменения обменных мощностей в энергосистеме, в которой
произошло увеличение нагрузки, и в других энергосистемах различны
В энергосистеме, в которой произошло увеличение нагрузки, знак из-
менения обменной мощности совпадает со знаком изменения частоты (в рас-
сматриваемом примере - отрицательным). В других энергосистемах знак
изменения мощности противоположен знаку изменения частоты Эю заклю-
чение справедливо и при уменьшении Hai-рузки в одной из знергосистем
Для выполнения регулирования ио указанному методу необходимо сиг-
нал от регулятора частоты пропускать через контакты блокирующего реле
Поскольку блокирующее реле должно реагировать на злак обменной мощно-
сти, то на регулирующей станции необходимо иметь телеканалы связи с под-
станциями, от которых отходят межсистсмпые ЛЭ!! данной энергосистемы.
242
Глава 5 Регулирование частоты и активной мощности
Принципиальная система регулирования частоты с блокировкой по
обменной мощности для двух энергосистем с одной межсистсмной ЛЭП
представлена на рис. 5 24
В н
Рис 5 24. Схема регулирования частоты с блокировкой
по обменной мощности
При возмущении в энергосистеме В знаки изменения частоты и об-
менной мощности энергосистемы А различны, поэтому сигнал от регулятора
частоты не проходит {блокируется реле мощности) В энергосистеме В знаки
отклонения частоты и обменной мощности совпадают, и сш нал от раулято-
ра частоты проходит через реле мощности Изменение нагрузки +ДР„ , про-
исшедшее в энергосистеме в, будет покрываться только агрегатами этой
энергосистемы, а обменная мощность сохранится на заданном уровне.
5.19. Регулирование частот ы со стат нзмом по обменной
мощности
Регулирование частоты в объединенной энергосистеме может быть
улучшено, если значение обменной мощности использовать не в качестве
блокирующего сигнала, а вести регулирование следующим образом.
Л7+*₽ДРвй(=0.
где кр — коэффициент регулирования по мощности;
^шйи — Рийч jA •
243
Глава Л Регулирование частоты и активной мощности
здесь Ро&1 ; Pvf},, - заданное и фактическое значения обменной мощности
Рассмотрим действие регуляторов на примере объединенной
•энергосистемы, состоящей из двух энергосистем Ан В (рис. 5 25).
Рис. 5.25 Схема регулирования частоты со ствтизмом
по обменной мощности
В каждой энергосистеме выделяется ведущая станция и в установив-
шемся режиме по межсистемной ЛЭП из энергосистемы А в энергосистему В
передается заданное значение обменной мощности Р^,^-
Если в одной из энергосистем, например в энергосистеме В, произой-
дет увеличение на1 рузки на величину +ДР(| , то частота энергообъединения
снизится, и регуляторы в обеих энергосистемах будут иметь составляющую
сигнала, пропорциональную отклонению частоты и направленную на увели-
чение открытия направляющих аппаратов турбин ведущих ствнций.
В силу статических характеристик при пониженной частоте энергосис-
темы увеличат свои мощности. Эта дополнительная мощность пойдет на по-
крытие изменения нагрузки +ДРН В данном примере при принятом направ-
лении заданной обменной мощности Pas,,;,;) ее значение увеличится. Условно
за положительное направление обменной мощности принимается направле-
ние, когда энергосистема выдает мощность. При приеме мощности направле-
ние считается отрицательным.
С учетом знака изменения обменной мощности для энергосистем А и В
уравнения регулирования для последних запишутся так:
-Ду + А^ДР^,, =0
для энергосистемы А,
-AJ -кpBAP<lS„ =0
244
Гчава 5. Регулирование частоты и активной мощности
для энергосистемы В, откуда видно, что за счет согласованного направления
сигналов по Af и ДТ^!11и в регулятор энергосистемы В будет подаваться уси-
ленный корректирующий импульс на открытие направляющих аппаратов
ведущей станции своей энергосистемы. В энергосистеме Л корректирующий
импульс будет ослабленным. Можно так настроить регуляторы, что в систе-
ме, в которой отсутствует изменение нагрузки, регулятор будет бездейство-
вать. Для этого необходимо выбрать коэффициент кр равным коэффициенту
статизма JT. Действительно, поскольку g=AffAP и учитывая. что
ДРгЛж = АР, получим АР,Л<, = Af /s и далее
-О
Если выполняется условие kp=s то для энергосистемы, в которой
отсутствует изменение нагрузки, воздействие регулятора будет равно нулю.
В этом случае регулирование осуществляется только той энергосистемой, в
которой произошло изменение нагрузки
Выше отмечалось, что коэффициент статизма энергосистемы s не оста-
ется постоянным. С изменением нагрузки и состава оборудования энергосисте-
мы он меняется, поэтому настроить регулятор с соблюдением условия кр = s
практически не представляется возможным Если же кр * s, то регулирование
протекает следующим образом. При кр<яв первый момент регу шрования ре-
гулятор энергосистемы, в котором нет изменения нагрузки, придет в действие и
будет увеличивать мощность этой энергосистемы, а следовательно, еще больше
увеличивать величину обменной мощности Р()б>,. С течением времени измене-
ние частоты Af будет уменьшаться, а изменение обменной мощности АР^ —
расти Наступит момент, когда сигнал от Ри&1, будет преобладать нал сигналом
по Af Знак результирующего сигнала изменится, и pej-улятор будет стремиться
уменьшить мощность агрегатов ведущей станции.
При kp>s в начале процесса регулирования регулятор энергосисте-
мы, в которой нет нарушения баланса, будет стремиться уменьшить обмен-
ную мощность В установившемся режиме воздействие обоих регуляторов
245
Гчава 5 Регулирование частоты и активной мощноспш___________________
равно нулю, что будет иметь место про номинальной частоте и заданном зна-
чении обменной мощности.
5.20. Регулирование частшы и обменной мощности
при наличии ЛЭП постоянного тока
В крупных знергообъединениях без вторичного регулирования частота
поддерживается в пределах 50 ± 0,1 Гц. В объединенных энергосистемах на
первый план выступает проблема регулирования обменной мощности Чем
крупнее энергосистемы, входящие в объединения, тем острее становится эта
проблема На рис. 5.26 показана запись частот двух крупных энергосистем А
и В до их объединения на параллельную работу
Рис. 5.26. Запись частоты в двух thcjTj осистемах
В некоторые моменты времени расхождение частот энергосистем А и
В составляет до Л/ = ± 0,2 Гц. Примем за положительную величину откло-
нение частоты, когда частота энергосистемы А больше частоты энергосисте-
мы В. Предположим, что мощности и статизмы энергосистем А и В равны,
т.е. = sB =0.1 и РЛ=РВ. Тогда в соответствии со статическими характе-
ристиками генерация каждой энергосистемы 6vjei меняться в пределах
др =^=*^=±4%
4 0.1
Полагая пропускную способность межсистемной пинии связи в
Рсв — 5% от установленной мощности энергосистемы А или В, получим коле-
бания обменной мощности в пределах ДРСВ = ± 80 % Pcs от пропускной спо-
собности межсистемной линии связи, что недопустимо Вторичное регулиро-
246
Ганя-' 5 Pt'i-yiupoattHiie чмта1пы иакитвной мощности
вание обменной мощности может снизить эти отклонения обменной мощно-
сти. но не решает проблему радикально.
Решением проблемы является использование межсистемной линии
связи на постоянном токе В таком случае переменный ток сначала преобра-
зуется в постоянный, а затем инвертируется в переменный, но уже с частотой
другой энергосистемы.
Линия электропередачи на постоянном токе как таковая может отсут-
ствовать. В таком случае говорят о передаче на постоянном юке через
«вставку», где выпрямительная и инверторная установки территориально
находятся на одной подстанции.
Управление выпрямлением и инвертированием осуществляется путем
воздействия на тиристорные преобразователи. Такое управление практически
безинерционно, следовательно, безынерционно и управление обменной мощ-
ностью.
5.21. Регулирование sacioiw и обменной мошноси»
в Единой Энсргеiической Системе России
Вдипая эиср|етическая система — это мопшое энергообъсдинсннс. с
ограниченными возможностями перетоков мощности но мсжсистемным ли-
ниям электропередачи. Поэтому метод регулирования частоты и обменной
мощности должен соответствовать этим ограничениям. С точки зрения дина-
мики переходных процессов лучшим является метод регулирования частоты
со с 14ТИЗМОМ по обменной мощности. Однако он не приемлем в ЕЭС России,
поскольку весьма трудно обеспечить достаточную надежность каналов связи
по всем межсистеыпым линиям передачи на все регулирующие станции, ис
говоря уже о том, что практически невозможно установить алгоритм управ-
ления регулирующими станциями, например, станциями ОЭС Северо-Запада
в отношении обменных мощностей ОЭС Урала
Еще раз напомним, что в мощных и гем более сверхмощных энерго-
объезиненпях относительная величина случайных толчков нагрузки умень-
шается и оценивается нс более чем в 0,7 — 1,0 % от суммарной нагрузки объ-
единения Эти случайные толчки воспринимаются всеми станциями в соот-
ветствии с динамическими и статическими характеристиками первичных ре-
гуляторов частоты вращения На долю ведущих станций возлагается регули-
247
Гчави 5 Pezvnupovtinue частоты и активной мои(.-п гта
рование усредненных отклонений частоты, обусловленных расхождением
прогнозированной и фактической нагрузкой энергообъединения. Эти расхо-
ждения также оцениваются в пределах до одного процента от мощности
крупней энергосистемы
Эти обстоятельства обуславливают применение в ЕЭС России наи-
более простого метода раздельного регулирования частоты и обменной мощ
поста. Для этой цели в ЕЭС России выделяется ведущая по частоте ОЭС
(точнее, одна—две гидростанции в ОЭС), мощности которых достаточно для
поддержания усредненных отклонений частоты в f-ЭС России. По сделанной
выше оценке необходимы ГЭС с установленной мощностью в 2 — 3 млн. кВт.
Такими ГЭС являются, как правило, гидростанции Волжского каскада Все
другие энергообьеди нения регулируют обменные мощности по мсксистем-
ны.м линиям связи Каналы связи с этих линий передают сигналы на ведущие
по обменной мощности станции энергосистем Схема управления получается
простой, падежной и весьма эффективной.
5.22. Схемы регулирования частоты и мощности
В общем виде уравнение регулирования агрегата, участвующего в ре-
гулировании частоты и мощности, может быть записано так:
*,Д/+*рДР = 0,
где Др— отклонение мощности агрегата от заданного значения. Способ оп-
ределения заданного значения мощности и составляет принципиальное раз-
личие существующих методов регулирования частоты в энергетических сис-
темах и их объединениях.
Закон раулирования определяет структуру САР. В то же время прак-
тическое исполнение регулирования может быть различным и зависит от то-
го, какие регуляторы частоты вращения установлены па станции — электро-
гидравлические или гидромеханические. В последнем случае к регулятору
частоты вращения может быть подключен вторичный регулятор или коррек-
тор мощности. Эти схемы регулирования частоты и мощное ги будут рас-
смотрены ниже. Каждая из схем в свою очередь может иметь модификации,
отличающиеся между собой некоторыми деталями. С этими разповидностя-
248
Г iaen 5. Регулирование частоты и активной утцности
ми можно познакомиться в специальной литературе, поэтому здесь они не
рассматри ваются.
Структурная схема подключения вторичного регулятора к регулятору
скорости показана на рис 5.27.
Рис 5 27. Схема регулирования частоты и мощности
с вторичным регулятором
Пунктирной линией на рисупке указаны границы вторичного регуля-
тора. Элементы первичного регулятора используются в качестве усилитель-
ною и исполнительного элементов схемы автоматического регулирования.
Вторичный регулятор содержит измерительные элементы частоты и
мощности и воздействует на двигатель МИЧО, который является интегри-
рующим элементом САР. Создастся впечатление, что при таком подключе-
нии я системе САР получаются два измерительных элемента частоты — маят-
ник и измерительный элемент вторичного регулятора Разъясним это поло-
жение. Выходная координата элемента САР связана с аходной соотношением
y=xW(p). Найдем обратное соотношение х=у/ W(р). Воздействие от
маятника А/ приложено к золотнику. Это воздействие пересчитаем до
МТ1ЧО, при этом получим AffW(р)~ p&f Таким образом, маятник созда-
ет дополнительное воздействие по производной от частоты. Упрощенная
схема подключения вторичного регулятора к агрегатам ведущей станции по-
казана на рис. 5.28.
249
Глава 5 Pe^wupoeanui- чистоты it «н.тьг.ной мощности
Рис. 5.28 Схема подключения вюрнчного регулятора
Поскольку частота всех генераторов едина, на станции ограничивают-
ся одним выявителъным элементом частоты Число измерительных элемен-
тов мощности и исполнительных элементов вторичного регулятора должно
быть равно числу агрегатов станции Условно воздействие от вторичного
регулятора на агрегат показано стрс гкой па турбину агрегата
Схема имеет задающий элемент, выполняющий операцию Р,(,=У Р;п.
Поскольку заданным является среднее значение мощности регулирующих
агрегатов, то такую схему называют схемой регулирования ведущей станции
с выравниванием мощности по среднему значению Изменение числа рейди-
рующих агрегатов должно автоматически учитываться в задающем элементе
Так, при отключении одного из регулирующих агрегатов сигнал по мощно-
сти от этого alperaia должен автоматически отключаться от задающего эле-
мента, а суммарная задающая мощность Р,л должна делиться между остав-
шимися на вторичном регулировании агрегатами.
Устройства группового регулирования мощности. Возможен другой
вариант исполнения регулирования Поскольку каждый регулятор частоты
вращения уже имеет виявнтельнып элемент по частоте, то для осуществле-
ния регулирования такой регулятор необходимо, лишь дополнить уравни-
тельным элементом мощности Воздействия от уравнительного элемента
мощности и маятника должны складывагься на входе побудительного золот-
ника регулятора частоты вращения. Сам регулятор частоты вращения следует
настраивать астатически, для чего необходимо отключить жесткую обратную
связь. Таким образом, рассмотренное устройство, которое называется уст-
ройством группового регулирования мощности (У1 PMY обеспечит астатиче-
ское регулирование частоты с заданным распределением мощности.
250
Г1С1вп J Регулирование частоты ч активной wut>n><.mu
Регулирование агрсгага с подключением к его регулятору частоты
вращения уравнителя мощности □ первую очередь используется на многоаг-
регатиых гидростанциях В связи с однотипностью агрегатов ГЭС в качестве
заданного значения мощности может служить среднее значение мощности
регулирующих агрегатов, т.е. = Y,P,lr> при этом
AP=P,-Z— (5 90)
п
Датчики мощности, преобразующие мощность |тенерагоров в сигналы
по напряжению, включаются по схеме многолучевой звезды. По нагрузке
многолучевой звезды протекает ток
,.=W'--W< (5.91)
/?„
который пропорниопалев отклонению фактической мощности генератора от
заданной. Этот ток преобразуется в усилие, которое воздейс ! вует на побуди-
тельный золотник регулятора частоты вращения. Таким образом, схема груп-
пового регулирования получается весьма простой: она содержит лишь датчи-
ки мощности и преобразоватечи, включенные по схеме многолучевой звезды.
Измерение мощности агрегата производится косвенным путем по от-
крытию направляющего аппарата, т.е. по сути дела система регулирования
выравниваег не мощности генераторов, а открытия направляющих аппаратов.
При однотипности агрегатов 1 ЭС такая замена даез вполне удовлетворитель-
ные результаты.
5.23. Моделирование объединенной энергосис омы .тля нее 1сдо-
вания реагирования частоты и мощности
Ранее было показано влияние параметров регулятора скорости на
статические и динамические характеристики изолированно работающего аг-
регата При парал гелыюй работе с энергосистемой и тем более с объединен-
ной энергосистемой структурная схема САР значительно усложняется в свя-
зи с необходимостью представления энергосистемы, межсистемных связей,
регулирования агрегатов в функции частоты и мощности и тл. При этом ана-
251
Гчава 5 Регулирование частоты и активной мощности
литическое исследование влияния параметров САР на переходный процесс
даже с использованием частотных методов становится затруднительным.
Для решения поставленной задачи можно воспользоваться методом мо-
делирования Существует два основных метода моделирования.* физический и
математический. Физическое моделирование основано на изучении калений на
моделях одной физической природы с оригиналом. Так, физическая модель
энергосистемы представляет собой миниатюрную копию энергосистемы Ос-
новные элементы энергосистемы — генераторы, трансформаторы, реакторы,
лниии электропередачи, двигатели, регуляторы и другое оборудование воспро-
изводятся физически подобными элементами. На модели устанавливаются па-
раметры, пропорциональные соответствующим параметрам оригинала.
Математическое моделирование основывается на идентичности диф-
ференциальных уравнений, описывающих явления в оригинале и модели.
Математические модели обеспечивают быстрый переход от решения одной
задачи к другой, легко позволяют регулировать параметры исследуемой сис-
темы в сравнительно широких пределах, исследовать влияние изменения
этих параметров на качество работы и т.п
Далее воспользуемся математической моделью объединенной энер-
госистемы. Структурная схема модели параллельной работы агрегата с энер-
госистемой показана на рис. 5.29, а.
I Нагрузка
система
252
Глава 5. Регулирование частоты и активной мощности
На рис 5.29, 6 приведена структурная схема модели с указанием пе-
редаточных функций элементов. Передаточные функции турбогенератора и
гидрогенератора различаются между собой На рис 5 29. б указана переда-
точная функция турбогенератора без промежуточного перегрева пара. Неко-
торые упрощения допушены и в схеме регулятора С учетом этих упрощений
регулятор частоты вращения турбогенератора представлен одним инерцион-
ным звеном с постоянной времени .
Коэффициент усиления регулятора частота вращения в установив-
шемся режиме равен 1/yv . Этот коэффициент учтен на структурной схеме в
канале основном саязи с выхода блока энергосистемы на вход регулятора.
Для правильного функционирования регулятора сигнал на вход подается с
отрицательным знаком. Поскольку статизм регулирования равен s = 'yv, то
на последующих схемах коэффициент усиления регулятора частоты враще-
ния учтен в виде блока с коэффициентом передачи l/.s.
При исследовании регулирования частоты и мощности на гидроагрега-
тах необходимо на модели иметь элемент с передаточной функцией
Wfp)= р+1) (5 92)
(Тво6рИ+Ч
и учитывать наличие гибкой обратной саязи в регуляторе гидротурбины
Межсистемные электрические связи в объединенной энергосистеме ока-
зывают влияние на работу каждой энергосистемы, входящей в объединение
Изменение обменной мощности по саязям служит дополнительной нагрузкой
для одной энергосистемы и одновременно дополнительной генерацией для
другой. В уравнениях энергосистем это отразится следующим образом
Т,„ , />" S,+ D, PS,+ Г1д Гб6 г ; = - ДР.,
г...„г рг52+С,рбг+Г1гГ62-6,; = ЛРг2-ДР.,. <5.И)
Здесь индексы 1 и 2 соответствуют первой и второй энергосистемам
объединения, члены rj2(St-S2A Т\2(Ъг-Ь}) определяют собой воздействие
на энергосистему со стороны межсистемной связи. При малых отклонениях
угла изменение обменной мощности пропорционально приращению относи-
тельного угла между элс. по копнам межспстемной ЛЭП. Предположим, что
253
Гдава 5. Регулирование частоты и активной мощности
агрегаты энергосистемы в электрическом отношении расположены близко друг
от друга, что позволяет заменить их эквивалентным агрегатом
На модели воздействие межсистемнон линии связи учитывается следую-
щим образом На выходе каждой энергосистемы имеется значение р8, и /?8,
Подавая рти сигналы на интеграторы, получаются значения углов 8, и
S2 В блоке суммирования происходит сравнение углов Затем их разность
умножается на постоянную времени 7] 2 Полученное произведение опреде-
ляет изменение обменной мощности по связи Д^,й„ = 7 t 2(б,- 527
Воздействие, пропорциональное обменной мощности по связи, пода-
ется в узел .модели, в котором складывают ся генерированные и нагрузочные
мощности
Структурная схема модели для объединенной энергосистемы, состоя-
щей из двух энергосистем, представлена на рис. 5 30.
Рис. 5 30. Структурная схема модели объединенной энергосистемы
С учетом идентичности структурных схем энергосистем на рис 5.30
предствалсна схема всего лишь одной энергосистемы и га часть схемы, кото-
рая воспроизводит межсистсмную электрическую связь.
Представленная модель объединенной энергосистемы является прибли
женной. В установившемся режиме энергообъединение работает с единой часто-
той fycm и с заданной обменной мощностью. В переходном режиме обменная
мощность может изменяться Следовательно, будет изменяться расположение
векторов эквивалентных генераторов каждой энергосистемы, т.е. один ротор бу-
дет перемещаться (скользить) относительно другого При этом в генераторах б>-
254
Гчава 5 Регулирование частоты и актшиюй иощноапы
дут возникать асинхронные моменты, которые будут алиять на динамику пере-
ходного процесса. На модели рис 5 30 это алиянне не учтено, что обусловлено
след)ющими обстоятельствами.
Изменение нагрузки энергосистемы в нормальном режиме относи-
тельно мало и происходит сравнительно медленно, в связи с чем отклонения
частоты от номинального значения не превышают А/ = ±0.1 Гц. В объеди-
ненной энергосистеме скольжение одной энергосистемы относительно дру-
гой определяется разностью частот этих энергосистем. Если частоты энерго-
систем почти одинаковы, то скольжение получается очень небольшим и учет
этого фактора не обязателен.
Асинхронный момент всегда стремится подтянуть ротор генератора к
частоте сети. В данном примере это есть подтягивание частоты одной энерго-
системы к другой и наоборот Таким образом, учет асинхронного момента при-
ведет к выравниванию частот энергосистем, входящих в зисргообъединсиис, и
к некоторому демпфированию колебаний частоты и обменной мощности.
Реализация регулирования частоты и обменной мощности может осу-
ществляться путем вторичного или первичного регу шроваиия. Независимо
от способа закон регулирования имеет вид
Д/+*рДРо6„ =0
ити
ЛгД/ + *рДРоб„=0.
где kf и кр - коэффициенты регулирования по частоте и мощности.
Сигнал вторичного регулятора подается на даигатель МИЧО. Двига-
тель является интегрирующим элементом, поэтому на регулятор скорости со
стороны вторичного регулятора поступает воздействие
ДР = id! <5.941
Учитывая, что Ро61, = Т\ -,1St— 63J и Д/=р6, уравнение вторичного
регулирования для первой энергосистемы запишется так.
ДР! =-(App8I+Al_7l2('Sl-8,j) (5 95)
Р
или
255
Глава 5 Регулирование частоты и активной мощное ти
(5 96)
Структурная схема регулирования частоты и обменной мощности в
объединенной энергосистеме показана на рис 5 31
Рис 5 31.Структурная схема регулироввания частоты и
обменной мощности в объединенной энергосистеме
Формирование воздействия на входе вторичного регулятора осуществ-
ляется следующим образом. Сигнал р8, с блока модели, имитирующего со-
бой первую энергосистему, умножается на отношение коэффициентов
fc, f Jklp и подается на сумматор В этот же сумматор подается сигнал об
обменной мощности 7] 2(8,—62? Вторичный регулятор интегрирует сум
марный сигнал и воздействует на регулятор скорости. Запаздывание вторич-
ного регулятора учитывается в инерционном элементе
W(p)=---------
Тт Р+1
256
Гчава 5 Регулирование частоты и активной мощности
5.24. Статика регулирования в объединенной
inept осистеме
Рассмотрим повеление системы регулирования объединенной энерго-
системы в установившемся режиме при отсутствии вторичного регулирова-
ния (см. структурную схему рис 5.31)
Изменение мощности агрегата связано с отклонением частоты сле-
дующими зависимостями:
(5.97)
Для установившегося значения уравнения (5.97) принимают вид
^1р6|+Г|2(5|-627=ДРи -ДР|в,
D2p62+T12(S2-6j = ДЯ,, -ДР2„.
(5-98)
Подставляя значения мощностей из уравнений (5 97) в уравнения (5 98), получим
(D, +1/л-, 7р5|+7’12(81-82) = -ДР1в.
ГЛ2 + l/s2 JpS 2+1,2(82-8,) = -ДР2„. (5.99)
Сложим эти у равнения и учтем, что в установившемся режиме р8,= р82= р8
((D, +D2) + fl/s, +1 's2 ))р6= -AP,„ - ДР1н,
откуда
-ДР,„ - ДР,„
((Л>,+Л,) + (!,,, + V’-))
(5 100)
1 аким образом, отклонение частоты зависит от величины возмущения
коэффициента демпфирования и статизма Решая уравнения (5 99) относи-
тельно Т, 2(8,— 8г), получим
257
Глава 5 Рег\'чирование частоты и активной мощности
(5.100
1 1 (D,+ls,) + (D,+ls2)
Если энсрюсистсмы. входящие в объединенную энергосистему, имеют
одинаковые параметры Д =£>, = О и т, =4^ =s, то можно записать
2fD + l/s) ’
(5.102)
(5 103)
Вторичный регулятор формирует сигнал по частоте и обменной мощности
дР=^£_ ^_/,g+7’|2^I-52)
М*₽
(5.104)
Рассмотрим поведение вторичного регулятора при возмущении только
в одной энергосистеме объединения В энергосистеме, в которой происходит
возмущение, знаки отклонения частоты и обменной мощности совпадают.
Например, при увеличении нагрузки частота объединения снижается на ве-
личину —Л/. и энергосистема принимает дополнительную обменную мощ-
ность —Ро&и. В энергосистеме, в которой пет возмущения, знаки отклонения
частоты и обменной мощности различны Это обстоятельство позволяет оп-
ределить место приложения возмущения и настраивать вторичные регу^то-
ры так, чтобы в действие приходил регулятор только той энергосистемы, в
которой возникло возмущение
Предположим, что возмущение возникло во второй энергосистеме энер-
гообъединения. Тогда в соответствии со статической характеристикой первич-
ного регулирования частота энергообъединения измени ,ься иа величину
рЬ-
__________-ЛЛ„____________
+ 1/52
(5 105)
а обменная мощность
Г; 2(8|- $}) —
(Dt +lfsl)&P2„
(Di+Vsl) + fD2+lls2)
(5 106)
258
Гити 5 Регулирование частоты ч актин ной мои/пости
Регулятор первой энергосистемы нс придет в действие, если выполня-
ется условие
АР„ = — 14^ ₽61+ г, г(Ь6.) = О (5.107)
р Н'р )
Подставляя в уравнение (5 107) значение рБ и получим
AlfAP2„
JAP2„
откуда
(5 108)
Аналогично при возмущении в пераой энергосистеме регулятор вто-
рой энергосистемы будет бездействовать при условии
15 109)
Отсюда следует, что рассмотренная настройка вторичных регуляторов
зависит только оз параметров своей Э1|ергосистемы и не зависит от парамет-
ров смежной энергосистемы, входящей в энергообъединение.
5.25- Динамика регулирования в объединенной энергосистеме
Исследование динамики регулттровання частоты и обменной мощности
в объединенных энергосистемах представляет определенные трудности. Оно
может быть выполнено путем проведения натурных испытаний, однако такой
эксперимент достаточно сложен. К тому же многие случайные факторы мо-
гут исказить результаты опыта.
Для выяснения основных закономерностей при регулировании частоты
и обменной мощности в объединенной энергосистеме вполне приемлемы ис-
следования как на аналоговых, так и на цифровых вычислительных машинах
При использовании АВМ ее элементы необходимо набрать в соответствии со
259
Гчава 5. Регулирование частоты и активной мощности
структурной схемой рис. 5 31 и установить коэффициенты усиления и посто-
янные времени согласно передаточным функциям элементов
При решении задачи на ЭВМ также используется структурная схема
объекта совместно с регулятором. Передаточные функции всех элементов
должны быть известны. Для дальнейших исследований возможно использо-
вание программ Matbead и Matlab (Simulink)
По первой программе прежде всего необходимо найти передаточную
функцию совокупности всех элементов от точки приложения возмущения до
выхода схемы. Это делается по известным правилам теории ре|улирования с
учетом последовательного и параллельного соединения элементов, а также с
учетом действия обратных связей.
Предположим, что в результате подобных преобразований получена
передаточная функция WDe (р). где точки «и» и «в» соответствуют месту при-
ложения возмущения и выходной величине исследуемой энергосистемы. Ин-
терес представляет переходная характеристика системы Для этого к точке «а»
прикладывается единичное возмущение 1(7)=—. Передаточная функция и
Р
изображение входного сигнала позволяют найти изображение выходной вели-
чины jK(p)-fa( p)Was( р). Обратный переход от изображения /„(р,/к ори-
гиналу fe(t) совершается с помощью обратного преобразования Лапласа, т.е.
(5 110)
По программе Simulink в ЭВМ вводится структура набора элементов
исследуемого объекта и передаточные функции этих элементов Здесь не
требуется расчет передаточной функции от входной точки на» до выхода в
точке «в» Задача решается автоматически. Следует только назначить точки
«а» и «в» и к первой из них приложить воздействие \(t), а к точке «в» под-
ключить регистрирующий прибор (осциллограф), на котором и будет зафик-
сирована переходная характеристика f„(t)
Таким образом, идеологии проведения исследования на АВМ и ЭВМ
близки друг к другу. Модель объединенной энергосистемы в программе мо-
делирования Simulink показана на рис. 5.33. Модель дает возможность варьи-
ровать параметры передаточных функций регуляторов и энергосистем и ос-
260
Гк/вп 5 Регулирование частоты и активной мощности
циллографировать сигналы в любой точке схемы. Предусматривается осцил-
лографирование изменения частот и обменной мощности при ступенчатом
включении нагрузки в первой энергосистеме. Частота и мощность измеряют-
ся в относительных единицах, время и постоянные времени — в секундах,
углы — в радианах.
Рис. 5.32. Модель объединенной энергосистемы в примере
моделирования Simulink
В реальной энергосистеме толчки нагрузки носят случайный характер
Воспроизводить подобный процесс на модели нет необходимости. Для этих
целей вполне достаточно проследить за переходным процессом при единич-
ном изменении нагрузки в той или иной энергосистеме объединения
Характер регулирования зависит от параметров оборудования энерго-
систем. Следовало бы каждый агрегат или, по крайней мерс, каждую станцию
энергосистемы представить на модели соответствующими блоками, модель
была бы представительной, но становится громоздкой. Для упрощения модели
прибегают к замене группы агрегатов или всей энергосистемы эквивалентным
агрегатом. Проще заменить подобные агрегаты, например, турбогенераторы
261
Гчава 5, Pea чироштие частоты и активной мощности
или гидрогенераторы. Труднее объепнпять разнотипные агрегаты — точность
при этом значительно снижается С учетом этого исследование регулирования
частоты и обменной мощности в объединенной энергосистеме проще провести
раздельно — для объединения, состоящего только из тепловых станций и затем
для объединения, состоящего только из гидростанций.
Пример Энергообъединение состоящее из тепловых станций При
исследовании частоты и обменной мощности использовались следующие па-
раметры
I ЛВС|=Л„С2=10с
2 О, = 29, =1.0.
Низкий коэффициент демпфирования выбран прсднамсрсно. В реальной энерго-
системе этот коэффициент выше, в связи с чем будет выше и запас устойчивости.
3 7] 2 =0,1— соответствует мощности межснстемной ЛЭП
< rwl = - Т,„, = Г,., = = 7-., = 0,2с
5 .Sj =s2.
б . = k2f. klp = k2p.
Параметры по п 5 и б варьируются в процессе эксперимента
Характер переходного процесса в объединенной энергосистеме без
учета вторичного pei-улирования показан на рис. 5.33.
В начальный момент времени к знергообьединепию приложена толч-
ком дополпитсльнав нагрузка — 1 % Во всех последующих экспери-
ментах, если нс сделано особой оговорки, к зиергообъединешио прикладыва-
ется подобное возмущение. На графиках иллюстрируются изменение частоты
в первой р8| и второй р32 энергосистемах и изменение обменной мощно-
сти 7j2(8|—829 Обратим внимание на начальный характер изменения час-
тоты. В первой энергосистеме, где произошло возмущение, частота уменьша-
ется быстрее. За счет этого вектор эщ.с. эквивалентного генератора системы
Et отстает от вектора Е2. Под действием разности векторов и Е2 возни-
Исследования на ЭВМ выполнены к.т.н., доц. Ю М Шаргиным.
262
Гюва 5 Регулирование частоты и активной мощности
кает обменнав мощность, вследствие чего вторая энергосистема принимает
участие в покрытии дополнительной нагрузки Л Рх„
Рис. 5.33. Переходный процесс в объединенной энергосистеме
без вторичного регулирования
Определим установившиеся значения частоты и мощности при
= s, = 0,167 и { О, =£)2 = 0,75 }:
ps---Ц—=— -----
VO+1/sJ 2(0.75 + 6;
-0,074%,
-Л/Т -1,0
2 " 2
На рис. 5 34 показан переходный процесс в объединении энергосис-
тем, имеющих вторичное регулирование. В момент возникновения возмуще-
ния частота в энергосистемах снижается. Однако в установившемся режиме и
частота и обменная мощность возвращаются к своим заданным значениям.
На математической модели достаточно просто анализировать влияние
различных параметров на переходный процесс в энергосистеме. Па
рис. 5.34 приведи основные графики оптимального процесса. При оценке
динамики регулирования учитывались перерегулирование и быстрота перс-
263
Глава 5 Регуунрование часгтипы а активной чощнис ши
ходного процесса Наилучшим считается тот процесс, который происходит
быстро, хотя и имеет незначительное перерегулирование Затянутый процесс
без перерегулирования не считается оптимальным.
Рис. 5 34 Переходный процесс в объединенной энергосистеме
при вторичном рсгулироавнии
Исследования на модели показывают, чго имеется оптимальное значе-
ние отношения коэффициентов усиления по частоте и обменной мощности
kpfkf. Это отношение близко к значению, ранее полученному из анализа
установившегося режима, и равно статизму энергосистемы. Оптимальная
настройка вторичного регулятора по частоте и мощности не зависит от пара-
метров смежной энергосистемы.
Интересны результаты исследования раздельного регулирования час-
тоты и обменной мощности, т.е. когда одна энергосистема регулирует только
частоту, а другая поддерживает на заданном уровне обменную мощ-
ность; #0.^2/ =0, kip =0, к2р *0. В этом случае возникают дополни-
тельные медленные колебания частоты и обменной мощности, и процесс ре-
гулирования затягивается. Сравнительно с регулированием частоты со ста-
тизмом по обменной мощности результаты получаются значительно хуже.
Существенное влияние на переходный процесс оказывают параметры
первичного регулятора. Уменьшение статизма cs = 16,7 % до s = 5 % снижа-
ет максимальное отклонение по частоте на 75% и по обменной мощности на
10%. Снижение статизма и одновременное увеличение коэффициента по час-
264
1 'uiea 5 Рееучирование частоты и активной мощности
тотс и обменной мощности значительно улучшают переходный процесс. Ха-
рактер переходного процесса при s( = х2 = 0,05 и Л|р=Л2/,=ЫЗ и
, -к2/ - 6.66 предстаален на рис 5 35
Ри; 5 35. Влияние статизма первичных регуляторов на переходный процесс
Коэффициенты статизма энергосистем, входящих в энергообъедине-
ние, могут отличаться друг от друга. Влияние различных коэффициентов ста-
тизма s1 и .«2 на процесс регулирования легко проследить на математиче-
ской модели. В качестве примера проведено исследование для стэтизмов
S| =0167 и л-2 =0,05. Поскольку энергосистемы неодинаковы, то возмуще-
ние ДР,, создавалось то в одной, то в другой энергосистеме. Было найдено,
что оптимальное значение коэффициентов fcp и kf практически не зависят
от статизма смежной энергосистемы. Следовательно, настраивать вторичные
регуляторы необходимо по параметрам собственной энергосистемы При
различной настройке регуляторов переходный процесс зависит от места
приложения возмущения.
Рассмотрим пример, когда коэффициенты усиления вторичного регу-
лятора первой энергосистемы больше коэффициентов усиления вторичного
регулятора второй энергосистемы. Более высокие коэффициенты усиления
обеспечивают более быстрое возвращение регулируемой величины к задан-
ному значению (имеется ввиду увеличение коэффициентов до достижения
зна«пгтсльного перерегулирования). Если возмущение произойдет в пераой
265
Гшва 5 Регулирование частоты и активной мощности
Гюеа 5. Регстрованче частоты и активной uoiunu ти
энергосистеме, то частота всего объединения восстановится быстрее по срав-
нению со случаем, когда возмущение возникает во второй энергосистеме
Таким образом, на переходным процесс основное влияние оказывают регуля-
торы той энергосистемы, в которой происходит возмущение.
Отметим основные результаты исследования регулирования частоты и
обменной мощности:
регулирование частоты со статизмом по обменной мощности дает
лучшие результаты, чем раздельное регулирование частоты одной энергосис-
темы и обменной мощности другой энергосистемы;
оптимальная настройка вторичных регуляторов практически не эавн-
си г от мощности межсистемной ЛЭН;
максимальное отклонение частоты прежде всего зависит от настройки
первичного регулятора и в меньшей степени от вторичного регулирования;
оптимальное соотношение коэффициентов k^/kj приблизительно
равно статизму энергосистемы. Однако поскольку оценка оптимального пе-
реходного процесса в какой-то мере условна, то допускаются вариации этого
соотношения,
в области оптимального соотношения коэффициентов kpjkj даль-
нейшее увеличение коэффициента к р способствует демпфированию колеба-
ний, в то время как увеличение коэффициента к, приводит к увеличению
этих колебаний;
при различных параметрах энергосистем переходный процесс определя-
ется действием регуляторов той энергосистемы, в которой произошло возму-
щение.
Пример. Энергообъединение, состоящее из гидростанции. По сравне-
нию с турбогенераторами гидрогенераторы имеют особенности, которые оп-
ределяются в основном большой инерцией воды как источника энергии По-
следнее обслоятельство приводит к существенному запаздывания изменения
мощности агрегата при дополнительном открытии направляющего аппарата
гидроагрегата При быстрых открытиях направляющего аппарата вначале
появляется тенденция к уменьшению мощности агрегата Эти обстоятельства
учитывают при проектировании регулятора скорости гидротурбины. Во-
первых, необходимо увеличивать постоянную времени сервомотора. Во-
вторых. снедует применять регуляторы скорости с большей постоянной вре-
мени изодрома. Оба мероприятия приводят к замедлению процесса регули-
рования Стремление увеличить быстродейстаие за счет повышения коэффи-
циентов усиления в других элементах схемы регулирования нс дает положи-
тельных результатов, ибо приводит к неустойчивости регулирования.
Структурная схема модели для исследования частоты и обменной
мощности в объединенной «гидроэнергоснстеме» не отличается от схемы
рис 5 3] Изменяются лишь передаточные функции регулятора частоты вра-
щения и самого агрегата. Па модели необходимо иметь блоки с передаточ-
ными функциями гидроагрегата
Характер переходною процесса в объединенной «гидроэнергосисте-
ме» при возмущении Д/J,, представлен на рис 5.36 (Kf~ 0 104. КГ = 0.035.
s = 0.167. D = 1.5, 7}= 8 с. Г.» 5 с, Г„= 4 с, р = 6)
Рис. 5 36. Переходный процесс в эпергообъеднненип
при возмущении в «гидроэнерюсистеме»
Из рис. 5.36 видно, что по сравнению с регулированием в эпергообъе-
линении, состоящем из тепловых станций, процесс восстановления частоты
происходит значительно медленнее. В то же время наблюдаются медленно
затухающие колебания обменной мощности Существенное алияние на пере-
ходный процесс оказывает постоянная времени 7^ой, уменьшение которой
сокращает длительность переходного процесса
При изучении статики регулирования было показано, что оптимальное
соотношение коэффициентов усиления вторичного регулятора должно опре-
деляться по формуле;
266
267
Глава 5 Регулирование частоты и активной мощности
При исследовании динамики регулирования в энсргообъединеяии.
состоящем из гидростанций, это соотношение также подтаерждается. Необ-
ходимо лишь учитывать следующее обстоятельство. В начале переходного
процесса статизм регулятора скорости гидроагрегата определяется в основ-
ном действием гибкой обратной связи и равен г - Ру Это значение статизма
должно учитываться при выборе оптимального соотношения kpjk {
Пример. Эиергообъединение. состоящее из тепловых и гидравлических
станций. Соотношение тепловых и гидравлических станций в объединенной
энергосистеме может быть различным. Рассмотрим простой пример, когда од-
на из энергосистем объединения состоит из тепловых станций, а другая — из
гидростанций. Подобный случай объединения с различными параметрами
энергосистем уже был рассмотрен ранее. Правда, объединение из ««тепловых»'
и «гидроэнергосистем» представляет собой предельный случай энергосистем с
различными параметрами, тем не менее выводы, сделанные ранее, справедли-
вы и в данном случае. Ранее было получено, что оптимальная настройка вто-
ричного регулирования определяется параметрами «своей» энергосистемы.
Применительно к данному примеру это означает, что настройка вторичных
регуляторов в «гешювой» и «гидроэнергосистемах» должна быть различной и
выбрана с учетом параметров каждой энергосистемы.
Переходный процесс в смешанном энергообъединении зависит от мес-
та приложения дополнительной нагрузки. Последнее обстоятельство опреде-
ляется тем, что характер переходного процесса в основном зависит от дейст-
вия вторичных регуляторов той энергосистемы, где произошло возмущение
Так, если возмущение происходит в «тепловой» энергосистеме, то учитывая
большее быстродействие первичных регуляторов паровых турбин и более
высокие коэффициенты усиления вторичного регулятора «тепловой» энерго-
системы, становится понятным быстрое завершение переходного процесса,
рис. 5.37. В случае возмущения в «гидроэнергосистеме» процесс регулирова-
ния затягивается, рис. 5-38.
Для «тепловой» энергосистемы kf/ fkip = 1/6 (статизм тепловой
энергосистемы я, - 16,7 %). В «гидроэнергосистеме» вторичный регулятор
настроен с коэффициентами k2f /к1р = 0,063 к^ /0,125Л1р . Из осциллограмм
268
Гтава 5 Регулирование частоты и активной мощности
видно, что максимальное значение отклонения частоты также зависит от мес-
та приложения дополнительной нагрузки.
Рис.5.37
Рис. 5.37 Переходный процесс в энергообъединении при возмущении в «те-
пловой» энергосистеме
Рис. 5.38. Переходный процесс в энергообьединении при возмущении в «гид-
роэнергосистемс»
На ранее приведенных рисункак показан переходный процесс при
единичном толчкообразном возмущении в одной из энергосистем В реаль-
ных объединениях возмущения носят случайный характер и происходят то в
одной, то в другой энергосистемах К тому же каждая энергосистема может
состоять как из тепловых, так и гидравлических станций Поэтому устано-
вить строгие различия в переходном процессе в зависимости от места при-
ложения возмущения не представляется возможным
Основные результаты исследования регулирования частоты и обмен-
ной мощности на моделях «гидроэнергообъединения» и смешанного энерго-
объединения могут быть сформулированы следующим образом
Оптимальное значение коэффициентов усиления вторичного регуля-
тора в «гидроэнергосистеме» должны быть меньше подобных коэффициен-
тов для «тепловой» энергосистемы. В первом приближении можно ориенти-
роавться на соотношения
269
Гчаки 5 Регу шраиапие частоты н активной мощности
Переходный процесс объединенной энергосистемы в основном зави-
сит от настройки и действия регуляторов той энергосистемы, в которой про-
изошло возмущение.
Оптимальное соотношение коэффициентов kp/kf для «гидроэнерго-
системы» должно выбираться с учетом проходящего статизма первичного ре-
гулятора л' = Ру. В то же время изменение коэффициента кр незначительно
влияет на отклонение частоты, и в свою очередь, изменение коэффициента к,
не приводит к заметному влиянию на отклонение по обменной мощности
Гтава 6
Аварийная частотная разгрузка
ГЛАВА 6
Аварийная частотная разгрузка
6.1. Назначение АЧР
Установившийся режим энергосистемы характеризуется балансом
мощностей' суммарная мощность генерапии должна быть равна нагрузке
энергосистемы, включая потери в cem Р, = Р„. В нормальном режиме этот
баланс сохраняется при номинальной частоте 50 Гц Если мощность юнера-
ции меньше нагрузки Рг < Р,„ то частота уменьшается, если больше Р > Р„, то
частота увеличивается.
В объединенных энергосистемах вероятность большой потери генери-
рующей мощности и глубокого снижения частоты мала В узлах нагрузки,
получающих значительную часть энергии по линиям связи из зпергообъеди-
иения, вероятность возникновения больших местных дефицитов мощности
при аварийном отделении этих узлов выше
Однако, в объединенных энергосистемах, изолированно работающих
энергосистемах и в отделившихся районах крупного эиергоооъединения воз-
можны аварийные дефициты мощности Поскольку при аварийном отключе-
нии выделившийся район можно рассматривать как отдельную
энерюсистему, то в дальнейшем будет рассматриваться аварийное снижение
частоты в изолированно работающей энергосистеме.
В [16] указана ipaiuma допустимого аварийною отклонения частоты в
энергосистеме Она зависит от величины и длительности отклонения час готы
(рис.б.1)
Не допускается даже кратковременное снижение частоты ниже 45 Гц,
время работы с частотой 47 Гц не должно превышать 20 с. а с частотой
48,5 Гц - 60 с
Поддерживать частоту в ia данных пределах необходимо по следую-
щим причинам.
I. При снижении частоты снижается скорость вращения асинхронных
двигателей и, соответственно, снижается производительность механизмов
собстаенных нужд электростанций и, прежде всего, питательных электрона-
271
Глава 6.
Аварийная частотная разгрузка
сосов. Для поддержания давления пара на выходе котлов регуляторы давле-
ния понижают расход пара на турбину, а регуляторы горения - подачу топ-
лива в котел в соответствии со сниженным расходом питательной воды. Это
ведет к снижению мощности паровых турбин, а в условиях дефицита мощно-
сти в энергосистеме — к дальнейшему снижению частоты. Это лавинообраз-
ное снижение частоты и, соответственно, мощности турбоагрегатов может
привести к полному погашению энергосистемы. Этот процесс носит название
«лавина частоты».
Рис. 6.1. Границы допустимого аварийного отклонения
частоты в энергосистеме
2. «Лавина частоты», как правило, сопровождается «лавиной напря-
жения» Проблема заключается в следующем.
При снижении числа оборогов ротора снижается напряжение на выво-
дах статора генератора При снижении частоты с 50 Гц до 45 Гц (на 10 %)
напряжение снизится, например, с номинального значения 6,6 кВ .чс
6,0 кВ. что уже не допустимо. Система возбуждения генератора начинает по
вышать ток возбуждения, но полностью компенсировать снижение числа
оборотов не может. Вырабатываемая генератором реактивная мощность сни-
жается При дальнейшем лавинообразном снижении частоты лавинообразно
снижается вырабатываемая генератором реактивная мощность, снижается
напряжение в сети. Этот процесс носит название «лавина напряжения»
272
Глава 6 Аварийная частотная разгрузка
3. Все заводы—изготовители паровых турбин указывают диапазон из-
менения частоты, безопасный для сохранности турбины. Работа с пониженной
частотой вызыавет резонансные колебания проточной части турбин, и заводы
лимитируют возможное время работы с пониженной частотой (например, при
частохе 48,5 Гн работа не более 60 с) и указывают частоты, при которых турби-
на должна быть остановлена (как правило, зта частота выше 45 Гц)
4. Многие турбины имеют на валу маслонасос, подающий масло в
систему смазки и в систему регулирования. При снижении частоты давление
масла может снизиться до аварийного значения, что приведет к аварийной
посадке стопорных клапанов, отключению агрегата от сети и дополнитель-
ной потере генерирующей мощности.
5. Распределение нагрузки между работающими агрегатами, имею-
щими статические характеристики регулирования, сильно зависят от точно-
сти поддержания частоты Изменение частоты более чем на 0,2 Гц приводит к
неэкономичному перераспределению нагрузок между агрегатами
6. Многие потребители весьма требовательны к постоянству скорости
приводных двигателей, так как изменение частоты приводит к браку продук-
ции.
При повышении частоты на турбинах должны работать автоматы безо-
пасности (с уставкой (1,07 - 1,12) л„, где п„ - номинальное число оборотов)
для избежания их механического разрушения (лопаточного аппарата паровых
турбин, наборных полюсов ротора гидрогенераторов).
Поскольку длигельнав работа с пониженной частотой не допустима и
восстановление частоты нс может быть получено за счет нормальных средста
регулирования частоты, го приходится прибегать к аварийному мероприятию —
автоматической аварийной разгрузке по частоте (АЧР). При отсутствии горяче-
го резерва аварийная частотная разгрузка валяется средством поддержания час-
тоты энергосистемы в допустимых пределах путем регулируемого отключения
часта потребителей
В энергосистемах России применяется частотная разгрузка двух кате-
горий — АЧР-1 и АЧР-2 Выбор уставок по частоте и времени, а таюкс выбор
величины мощности потребителей, присоединенных к очередям АЧР, реко-
мендовано производить в соответствии с [11].
273
Гшва 6
Аварийная частотная разгрузка
С целью уменьшения аварийною отклонения частоты и сокращения
длительности се восстановления уместно скорректировать настройку частот-
ной разгрузки, опираясь при j том на исследования динамики на ЭВМ.
Цель оптимизации настройки АЧР заключается в том. чтобы при эю
бых возможных авариях криавя переходного процесса снижения часто-
ты f(l} не выходила из допустимой зоны На рис. 6. J кривая 0 характеризует
снижение частоты в аварийных условиях без действия АЧР, кривая 1 показы-
вает снижение и подъем частоты с помощью авюматической частотной раз-
грузки, кривая 2 определяет границу допустмой зоны
6.2. Снижение часю1Ы в inept ©системе при дефицит генерации
Снижение генерации при постоянной нагрузке ведет к снижению час-
тоты в энергосистеме, переходный процесс в которой описывается уравнени-
ем
Т,р2Б+ D Р5 = Р„, - Р, .
где Т) зкливалентнав постоянная времени энергосистемы;
S угол от клонения век юра з д с эквивалентного генератора от перво-
начального значения.
D - коэффициент демпфирования, учитывающий регулирующий эффект
нагрузки п изменение мощное in турбины в функции частоты,
— мощность турбины, обусловленная от крытием регулирующего ор-
гана;
Р„ - мощность нагрузки без учета регулирующего эффекта;
р — знак дифференцирования
Постоянная времени Tj обуслоалена инерционностью вращающихся
масс энергосистемы турбин, генераторов и нагрузки. Физический смысл
постоянной времени агрегата заключается в следующем: это сеть время, в
течение которого агрегат переходит из состояния покоя до номинальной час-
тогы вращения при номинальной мощности турбины, что соответствует
274
Гчава б
Аварийная частитная разгрузка
полному открытию регулирующего органа Для турбо- и < парогенераторов
значения постоянной времени 7} находятся в пределах 5 - 10 с
Коэффициент демпфирования равен-
где ДР„/ df = k„ — регулирующий эффект нагрузки;
dPm df — коэффициент, определяющий изменение мощности тубины в
зависимости от изменения частоты при постоянном открытии peiyпирующего
органа.
С учетом р? = Л/, формулу (6 I) запишем в виде
(6.31
где А/'и t\P выражены в о. с
В уравнении (6.3) каждое слагаемое определяет собой мощность. Со-
ставляющая Tjptf определяет часть мощности ДР. идущую на ускорение
вращающихся масс энергосистемы, сосгааляющав ------Д/~ изменение по-
dP
требления в функции изменения частоты и составляющая ——l\j нчмеие-
df
нне мощности турбины, обусловленное изменением частоты.
dP„ dP„
Ооычно поэтому можно оперировать
_ dP„ ЛР„
13 =---=-----= к„ и уравнение энергосистемы (6 1) записать
df &f
выражением
TjpA[+k„Af ДР
(6 4)
ДР/
д/
"н
(6 Ч)
275
Гчава 6.
Аварийная частотная разгрхчка
Уравнение (6.4) справедливо при любом знаке небаланса мощности
ДР = Р — Рн. В случае дефицита генерации ДР < О, поэтому — < 0 и
dt
Af < О, что соответствует снижению частоты В случае избытка генерации
ДР > 0, что будет вызывать подъем частоты
Иногда перед небалансом мощности ДР в уравнении (6 4) знак «ми-
нус» опускают, понимая из текста, что речь идет о дефиците генерации и то-
гда Д/в (б 5) соответствует снижению частоты. В ряде случаев твкой подход
вполне допустим. Однако ино|да знак перед небалансом мощности ДР необ-
ходимо учитывать обязательно
В качестве примера рассмотрим Исходный режим, при котором дефи-
цит генерации равен ДР, = Рт, - Р„,. При действии ЛЧР часть нагрузки от-
ключается Рн1 — ДР„ и дефицит становится меньше. Если опустить знак
«минус» перед членом ДР„ то расчет будет неверным
ЬРг = Ртл~ (Р.. । - Л/5.. )=^+
С учетом знака «минус», корректно получим
-ДР, =-ДР, +ДР„
Рассматривав энергосистему как элемент системы регулирования,
аходным воздействием следует считать рассогласование мощностей. Выход-
ным сигналом является изменение частоты. При этом передаточная функция
энергосистемы запишется в виде
W(pJ=—=------------------------------------
др а.,р+кв)
(б.б)
и далее
1/Л
W(p)=~ " . (6 7)
Г/Р+1
, Т.
где Tj—~£---постоянная времени энергосистемы с учетом регулирующего
эффекта нагрузки.
276
Глава б
Аварийная частотная разгрузка
Выражение (6.7) соответствует передаточной функции элемента пер-
вого порядка с постоянной времени Tj
Регулирующий эффект нагрузки зависит от состава потребителей, по-
этому в различных энергосистемах он имеет свое значение и лежит в преде-
лах к„ - 1.0 - 3,0 В течение суток состав потребигелей меняется, вследствие
чего регулирующий эффект нагрузки также не остается постоянным. При
действии ЛЧР величину и динамику снижения частоты в основном определя-
ет плотность разгрузки, поэтому в дальнейших расчетах можно принимать
среднее значение регу тирующего эффекта нагрузки к„ - 2
Структурная схема агрегата, работающего в энергосистеме, показана
на рис. 6.2. Регу.гятор частоты вращения peai ирует на отклонение частоты от
номинальной и воздействует на турбину. Мощность турбоагрегата уравнове-
шивается нагрузкой Р„
Рис 6 2 Структурная схема агрегата
При ступенчатом воздействии небаланса мощности ДР характер измене-
ния частоты зависит от наличия вращающегося резерва Рели имеется доста-
точный резерв мощности, то при снижении частоты регулятор частоты
вращения увеличит открытие регулирующего органа турбины. Мощность тур-
бины Рт есть функция частоты и переходный процесс в энергосистеме будет
происходить по кривой 1 (рис. 6.3). При недостатке резерва мощности переход-
ный процесс пойдет по кривой 2
При отсутствии резерав мощность турбины постоянна Pm=const. Pciy-
лктор частоты будет бездействовать, что соответствует отключению ключа В
(рис 6 2). В таком случае структурная схема упрощается (рис. 6.4).
При воздействии небаланса мощности ДР изменение частоты во вре-
мени определяется выражением
277
Гзача б.
/Марийная частотная разгрузка
Рис 6.3. Графики переходных процессов в энергосистеме
Рис.6.4. Структурная схема ат регага при P„,-consi
Если небаланс мощности ДР < 0, то частота снижается ио экспоненци-
альному закону на величину Л/,™ - АР к„ и в установившемся режиме будет
равна j„n = 50 - Процесс снижения частоты показан в виде кривой 3
(рис. 6 3).
6.3, Требования к АЧР
Па основе анализа работы электростанций и потребителей при снижении
частоты и особенностей возпикповепня и развития аварийных ситуаций с неба-
лансом мощности в энергосистемах и крупных энергообъелинсниях сформули-
роавны следующие основные требования к АЧР [11,16]’
Глава 6
Аварийная частотная ршгру&си
1. Автоматическая частотная разгрузка должна успешно ликвидиро-
вать все всевозможные аварийные ситуации с дефицитом мощности в энерго-
системах, начиная от локальных и заканчивая общесистемными авариями.
Она должна обеспечить нормальное функционирование энергосистем незави-
симо от дефицита мощности, характера развития аварий (пристав авария или
каскадная), значения и скорости включения резервов мощности.
2. Автоматическая частотная раз!рузка должна быть ориентирована на
вероятностный характер возникновения и протекания аварии АЧР должна
обеспечивать успешную ликвидацию аварии независимо от того, каково зна-
чение регулирующего эффекта нагрузки, постоянной механической инерции
и каков характер их изменения в течение суток, недели, периода года и в
процессе ликвидации аварии
3. Автоматическая частотная разгрузка нс должна допускать снижения
частоты ниже определенного уровня на время большее, чем некоторое пре-
дельное. т.е при работе АЧР должна обеспечиваться некоторая предельно
допустимая частотно-временная зона. Это требование объясняется тем, что
реакция агрегатов, узлов н энергосистемы в целом на снижение частоты про-
является не мгновенно, а с некоторым запаздыванием. С точки зрения надеж-
ности работы энергосистемы к АЧР должны предъявляться требования,
исходя из наиболее тяжелых условий работы электростанций (наименьших
допустимых длительностей работы при пониженной частоте).
4 Объем потребителей, отключаемых АЧР в процессе аварии, должен
быть но возможное!и минимальным при условии обеспечения нормального
функционировании энергосистемы. АЧР должна выполняться таким образом,
чтобы она, как правило, вступала в работу после того как полностью или час-
тично приведены в действия врашаюшиеся резервы. АЧР должна обладать
свойством селективности в выборе величины и очередности отключения по-
требителей.
5 Действие АЧР, обеспечивающее ликвидацию аварии, должно удов-
ле|ворять требованию минимального ущерба при отключении потребителей
Это требование может быть обеспечено, если последовательность отключе-
ния потребителей будет такова, что в первую очередь отключаются менее
ответственные потребители, а более ответственные остаются в работе. Кроме
того, АЧР должна выполняться так, чтобы не происходило излишнего отклю-
279
Гзава б
Аварийная частотная разгрузка
чения потребителей (перерегулирования) и частота после работы устройств
АЧР не превысила номинального значения 50Гц
6. Автоматическая частотная разгрузка должна обеспечивать подъем
частоты до значений, при которых энергосистема может длительно работать
нормально. К АЧР не предьяаляется требование восстановления частоты до
номинального значения Допустимо, чтобы после действия устройств АЧР
уровень частоты быт несколько ниже номинального (т. е. находился в диапа-
зоне 49 - 49,5 Гц). В 1 ех случаях, когда восстановление нормального режима
в дефицитной энергосистеме обеспечивается автоматически средствами час-
тотного АПВ (ЧАПВ), к АЧР предъявляется требование восстановления час-
тоты до значений, необходимых для срабатывания АПВУС (АПВ с
улавливанием синхронизма отключившейся связи) или ресинхронизации.
7 Автоматическая частотная разгрузка не должна по возможности
ложно срабатывать при процессах, отличных от переходных процессов в энер-
госистеме при дефиците мощности, но также сопровождающихся изменениями
частоты (при синхронных качаниях, а также в асинхронных режимах, если нет
необходимости в работе АЧР для обеспечения ресинхронизации)
6.4. Принципы частотной разгрузки
Под разгрузкой понимают снижение суммарной нагрузки энергосис-
темы за счет отключения части потребителей. Разгрузка является аварийным
мероприятием, которое должно применяться только в том случае, если все
резервы системы исчерпаны, а частота продолжает снижаться. Из этого сле-
дует, что нельзя сразу же прибегать к разгрузке энергосистемы, как только
часюта станет ниже поминальной ('читается, что до тех пор пока частота
находится на уровне 49,5 Гц и выше, прибегать к отключению потребителей
не следует Этот же подход (не производить лишнего отключения потребите-
лей) должен соблюдаться и при действии разгрузки.
Разгрузить энергосистему означает, во-первых, приостановить сниже-
ние частоты, не допуская ее ниже 45 Ги и, во-вторых, поднять частоту до но-
минального значения. Если энергосистема работает изолировано, то за счет
аварийной разгрузки достаточно поднять частоту до 49,5 Гц с последующим
ее восстановлением вручную до 50 Гц действием оперативного персонала.
280
Глава 6
Аварийная частотная разгрузка
В отделившейся части энергообъединения необходимо стремиться
поднять частоту до уровня 50 Гц для ресинхронизации с объединением.
При возникновении дефицита мощности генерации ДР за счет отклю-
чения мощного генератора или целой станции снижение частоты будет про-
исходить по экспоненциальному закон}
Г6.9)
В первый момент возникновения возмущения ДР отклонение частоты
от номинального значения равно нулю, поэтому все возмущение расходуется
на ускорение (замедление) вращающихся масс
Tj (df/dt) I,„о = ДР
Измерив «ускорение» df/di 1,-с, можно определить величину воз-
мущения и произвести отключение потребителей на соответствующую вели-
чину. При очень больших дефицитах мощности способ разгрузки по
производной снижения частоты df/dt является весьма эффективным
Обычно разгрузка ведется по отклонению частоты. На рис 6 5 пред-
ставлены две кривые снижения частоты.
Рис. 6.5. Изменение частоты при дефицитах мощности
Кривая 1 соответствует большему дефициту мощности, и «посадка»
частоты здесь более глубокая. Аварийная разгрузка отключит часть потреби-
телей при частоте срабатывания/,. Реагируя только ив отклонение частоты,
автоматика не уловит различия ситуаций в точках «а» и «б» и произведет
281
Глава 6
Аварийная частотная разгрузка
отключение потребителей на одну и ту же мощность Такою отключения в
точке «б» может оказаться достаточно, чтобы восстановить частоту до задан-
ного уровня, а в точке «о» не обеспечит восстановления частоты. Отсюда
возникает необходимость следующей очереди разгрузки при более низкой
частоте/?
Как правило, назначают несколько очередей разгрузки, которые назы-
вают также ступенями Уставка по частоте первой очереди выбирается чуть
ниже 50 Гц, например 49,5 Гц. При снижении частоты до этого уровня
отключаются потребители на общую мощность На рис. 6.6 кривая «0»
соответствует снижению частоты без действия АЧР После отключения по-
требителей ДРь снижение частоты пойдет по кривой «I»
Предположим, что мощности отключения АР| недостаточно, и частота
продолжает снижаться. При частоте^ сработает вторая очередь разгрузки и
отключит потребителей на мощность ДР?. В нашем примере после третьего
отключения частота стабилизируется, поэтому вес последующие очереди раз-
грузки не работают.
Рис 6 6 Снижение частоты в энергосистеме при отключении потребителей
Таков общий алгоритм действия частотной разгрузки. Разница в ис-
полнении АЧР в отдельных энергосистемах заключается лишь в выборе уста-
вок по частоте, числа очередей, а также мощности потребителей,
присоединяемых к каждой очереди
282
Гшва 6
Аварийная частотна» разгрузка
Число очередей АЧР, величина отключаемой мощности (суммарно и
каждой очередью), уставки по частоте энергосистемам задаются объединен-
ными диспетчерскими управляениями iia основе рассмотрения наиболее тя-
желых реальных системных аварий
6.5. АЧР—1 и АЧР-2
Первоначально в энергосистемах применятся метод автоматической
частотной разгрузки с небольшим числом очередей. Основным требованием к
данному методу являлась селективная работа очередей разгрузки Но с уве-
личением мощности энергосистем, с объединением и укрупнением энерго-
объединений, требования к АЧР изменились
АЧР с небольшим числом очередей не удовлетворяет,, в частности, од-
ному из основных требований —• «самонастраиванию» с точки зрения объема
отключаемой нагрузки. В некоторых случаях использование данного метода не
способно удержать частоту в пределах, а иногда приводит к перерегулирова-
нию. го есть к подъему частоты выше номинального значения.
Основной принцип современной разгрузки — существенное увеличе-
ние числа очередей. Чем больше число очередей и, следовательно, чем мень-
ше нагрузка, отключаемая каждой очередью, тем более гибкой становится вся
система разгрузки Максимально возможное число очередей! АЧР определя-
ется конструкциями реле АЧР, их достижимой селектиянон настройкой и
соответственно стоимостью всей системы АЧР, хстанааливаемой на объекте.
«Самонастройка» разгрузки, кроме выполнения ес большим числом очередей,
достигается также разбиением всех устройств на несколько категорий’
АЧР—1 — быстродействующая разгрузка, имеющая различные уставки по
часто г с;
АЧР—2 — медленнодействующая разгрузка с близкими уставками по чае-
тоге и различными уставками по времени,
дополнительная — дспаъующая при больших дефицитах мощности и
предназначенная для ускорения отключения потребителей и увеличения объ-
ема отключаемой нагрузки.
Первая категория АЧР—I предназначена для предотвращения iлубокого
снижения частоты и имеет уставки по частоте 48.5 —46,5 Гц. В этом дпалазо-
283
Fiaea 6 Аварийная частотная разгрузка
зоне частот назначается большое число очередей (до 15 - 20) В этом случае
между смежными очередями уставки различаются на А/= 0,1 Гц и вследст-
вие погрешности реле частоты возможно неселективное срабатывание очере-
дей. Очереди, отстоящие друг от друга на А/- (0,2 - 0,3) Гц, и более,
работают селективно. Для ус гранения ложной работы реле частоты в пере-
ходном режиме назначается небольшая выдержка времени 0,2 — 0,5 с.
К очередям с уставками, близкими к верхнему пределу 48,5Гц, присое-
диняют малоответствепных потребителей Ответственные потребители от-
ключаются при больших посадках частоты
Суммарная мощность потребителей, присоединяемых к АЧР—I, назна-
чается по максимально возможному дефициту генерации, взятому с некото-
рым запасом. Расчетным значением мощности может быть принята мощность
наиболее крупного тенератора, целой станции или дефицита мощности, обу-
словленного отключением линии связи с энергосистемами В первом при-
ближении можно ориентироваться на 25 - 30 % от мощности выделяемого
района (энергосистемы)
Вторая категория АЧР-2 с единой уставкой по частоте 49,3 Г ц для
всех очередей этой категории и различными уставками по времени предна-
значена для предотвращения «зависания» и «вытягивания» частоты после
действия АЧР-1 до уровня 49,3 49.5 Гц. Минимальная уставка по времени
АЧР-2 выбирается равной 10 - 15 с. Таким образом, АЧР—2 начинает дейст-
вовать тогда, когда все очереди АЧР—I практически уже сработали
Мощность потребителей, присоединяемых к АЧР-2, ориентировочно
назначается по условию АР4ЧР2 = 0,4AP4W>|. Число очередей АЧР-2 также
выбирается большим, например, 10 с задержкой по времени между’ смежны
ми очередями А / = 2 — 3 с. АЧР-2 производит раз«рузку мелкими порциями,
обсспечияая подъем частоты за счет дальнейшего отключения потребителей.
Верхние уставки АЧР-1 и АЧР-2 принимаются близкими к 49 49,3 Гн,
чтобы отключение потребителей происходило после того, как будет реализован
вращающийся резерв мощности, в чтобы подъем частоты обеспечил возмож-
ность длительной надежной работы турбоагрегатов и электростанций.
284
Гчава б
Аварийная частотная pajep\ iku
6.6. Динамика снижения частоты при действии АЧР
Допустим, что вращающийся резерв в энергосистеме отсутствует В
таком случае, при возникновении дефицита генерации АР, частота в системе
будет снижаться по экспоненциальному закону
(6.10)
где АР» и А/. о выражены в относительных единицах.
При частоте/, - f сработает первая очередь разгрузки и отключит
потребителей на мощность APj За счет регулирующего эффекта нагрузки
потребление снизится на величину АД = — к„(50 - /() = 2 Гц. Таким обра-
зом, дальнейшее снижение частоты определится выражением
(6.11)
После г—й ступени разгрузки снижение частоты будет
^-AF + EAJ? + 2V50-/J
(6.12)
На рис 6.7 показан процесс снижения частоты при действии АЧР -1
При некоторой частоте /( наступит баланс мощностей, ге. первона-
чальный дефицит генерации будет скомпенсирован за счет снижения потреб-
ления, вследствие регулирующего эффекта нагрузки и за счет отключения
потребителей, т.е.
-ДР+£ДР,+2*/50-/J = 0. (6.13)
285
1 idea 6 Аварийная частотная разгрузка
В таком случае Д Л = 0 и дальнейшее снижение частоты прекратится
На этом дейстаис АЧР—1 заканчивается, а частота f будет находиться в пре-
делах 49.0 >f> 46.5 Гн
Рис 6 7 Снижение частоты в энергосистеме при действии АЧР
При отключении потребителей меняется соствв нагрузки энергосисте-
мы. В этой связи изменяется регулирующий эффект нагрузки и постоянная
времени энергосистемы Т.. Практически, эти изменения невелики и можно
оперировать первоначальными значениями этих параметров.
Алгоритм расчета переходного процесса но изложенной методике
сравнительно прост. Однако, ему присущи значительные недостатки. По-
строение кривой снижения частоты производится методом приласовывания,
т с. на каждом отрезке времени от начала действия г—ой и ло i т I очереди
снижение частоты идет по экспоненте с параметрами, соответствующими
этому отрезку времени
Резу ила г получается только в конце расчета. В данной методике нет
строгой аналитической зависимости, указывающей на влияние числа очере-
дей АЧР, величины мощности каждой ступени и других параметров на ко
нечный результат — установившееся значение частоты и время переходного
процесса; нет достаточно точного о г вега на вопрос как построить АЧР. чтобы
получить заданный переходный процесс с заданным установившимся зпачс-
2«6
Гчава 6. Аварийная частотная разгрузка
нисм частоты после действия АЧР и заданным временем переходного про-
цесса.
Действие АЧР—2 начинается после тыл. как завершится работа очере-
дей АЧР—1, т е. при частоте fj и через 10-15 с после пуска АЧР.
Первая очередь АЧР—2 отключит нюрузку Ри|, вследствие чею часто-
та начнет подниматься. Через 3 с сработает вторая очередь АЧР—2. Частота
поднимется еще выше В нашем примере после третьей очереди частота пре-
высит значение 48.5 Гц, после чего действие АЧР-2 прекратится. Таким об-
разом АЧР-2 «вытянет» частоту только чуть выше 48,5 Гц (рис. б 8).
Рис. 6.8. График работы АЧР-l и АЧР-2
Возможен другой вариант с учетом запаздывания в канале отключения
нагрузки. Первая очередь срабатывает, а отключение потребителей происхо-
дит с задерхской т Тогда подъем частоты происходит но кривой I* Анало-
гичное запаздывание может привести к тому, что сначала сработают все
очереди АЧГ—2. а затем начнется подъем частоты. Гели &Р.4чр-< = 30 %, то
ДР.4Ч/>_- = 0.4 ДР lw._j — 12 %. Отключение всех очередей приведет к повы-
шению частоты на 3,0 Г ц. Если /(= 47,5 Гц. то действием АЧР-2 частота
будет поднята до 50 Гц.
Такой разброс установившегося значения частоты после действия
АЧР—2 является следствием несовершенств алгоритма частотной разгрузки
287
Гчава 6
Аварийная частотнаяразгрузка
Радикальной мерой улучшения алгоритма является сокращение диапазона, в
котором находится установившееся значение частоты fj после действия
АЧР-1. Если значение постоянно при всех возможных авариях в энерго-
системе. то задача АЧР-2 становится элементарно простой — поднять частоту
с fj =const до заданного значения, например, 50 Гц. Для этого следует от-
ключить нагрузку на величину
ДР„ . = к„ bf. = 2к„ (50 -fj). (6.14)
Если установившееся значение частоты после действия АЧР-1 будет
иметь разброс f гр ± Д fj. то отключая нагрузку по формуле (6.14) с ориен-
тацией на среднее значение fiXp, этот разброс ±Д/; перейдет на устано-
вившееся значение частоты после действия АЧР—2 Отсюда следует
рекомендация сокращать разброс частоты ±А/, в действии АЧР-l. Спо-
соб сокращения ±Д/, будет рассмотрен в следующем параграфе
6.7. Линеаризованная модель АЧР-1
Для упрощения теоретических исследований процесса снижения час-
тоты при действии АЧР—1 предлагается увеличить число очередей до беско-
нечности п ->•» [12, 13]. В таком случае при бесконечно мвлом отклонении
частоты производится бесконечно малое отключение потребителей, а ступен-
чатая характеристика частотной разгрузки АЧР-1 (см. рис. 6.6) вырождается
в прямую линию. Линеаризация модели разгрузки значительно упрощает ана-
лиз динамики снижения частоты при действии АЧР
Что касается практической реализации частотной разгрузки, то она
должна осуществляться конечным числом ступеней.
Введем понятие плотности разгрузки
dPp
'If
Если принять разгрузку
dP
-d/s "°-
равномерной во всем диапазоне действия АЧР, то
288
Гчава 6
Аварийная частотная разгрузка
этому, начиная с частоты ft, действие разгрузки в уравнении энергосистемы
учтем так:
T,pbf+k„bJ + */,Д/=-ДР+2Л„<50-/1>, (6 15)
а передаточная функция энергосистемы с учетом действия АЧР будет
W(p,^^^k^-fO. (6.16)
ДР ?}/>+*.+*,
Принимав Аг£=Лл +кр, получим
W(p -A/?- 2У50~Л>, (617)
ДР W^p+U
. Ti
где Tj =-f-
k-r
Снижение частоты во времени будет происходить следующим образом:
до начала действия АЧР по экспоненте с постоянной времени Т',, а с момента
срабатывания первой очереди АЧР согласно выражения
Л,.-^.<Я-МП_'Ъ), (6]й
Установившееся значение отклонения частоты за счет дейстаия АЧР будет
С6.Я
ЙЕ
а частота установится при значении
/>e« = 5O-/t-Al5™- (6.20)
Аналитические выкладки иллюстрируются на рис. 6.9, где показана
структурная схема модели энергосистемы с каналом частотной разгрузки. На
рис. 6.10 представлены статическая и динамическая характеристики энерго-
системы с учетом дейстаия АЧР
289
Гчава 6 Аварийная частотнаяритгрчзка
Рис 6.9 Структурная схема модели энергосистемы с каналом
частотной разгрузки
Рис. 6.10 Статическая и динамическая характеристики энергосистемы
с учетом действия АЧР
По оси ординат отложена частота с первой ft и конечной /, уставками
АЧР В этом диапазоне f и f„ отключается общая нагрузка Ршр. Теку шее
значение отключаемой нагру зкн определяется прямой 3
Плотность разгрузки пропорциональна тангенсу утла су, т.е
kp — tga = Рлчр/ (fi — J„). Прямая 2 определяет снижение нагрузки из-за регу-
лирующего эффекта нагрузки к„. Характеристика 4 дает суммарное снижение
потребления, обусловленное регулирующим эффектом нагрузки и действием
АЧР
290
Гчаки б Аварийная частотная разгрузка
При возникновении дефицита генерации в энергосистеме на величину
ДР снижение частоты пойдет в первый момент (от 50 Гц) по экспоненте 0, а
за гем. начиная с/, по экспоненте 1 с постоянной времени Tj=—^~ до усга-
ловившегося значения J}cm.
Новая методика построения переходного процесса в энергосистеме при
дейстаии АЧР позволяет сделать следующие выводы:
1 Эффективность АЧР в значительной степени зависит от плотности
разгрузки кр Чем больше плотность разгрузки, тем меньше отклонение час-
тоты Д^.п и тем быстрее завершается процесс стабилизации частоты Пусть,
например, 7j= 10 с, к„ = 2.0 и кр = 8.0 При згом Tj = 1 с. Принимая длитель-
ность переходного процесса для экспоненты tncp = 3 Tj*. получим завершение
процесса снижения частоты от точки «а» до/,™, за 3 секунды. Отсюда следу-
ет, что задержка в дейстаии АЧР-2 равная 10-15 с выбрана необоснованно и
может быть сокращена до 5 с
2. Плотность разгрузки можно повысить за счет увеличения мощности
отключения ог АЧР ДРщр или сокращения диапазона изменения чвсют/i —
3. Обычно величина мощности отключения от АЧР выбирается
на основе оценки максимально возможного дефицита i снерации в энергосис-
теме. Если к АЧР будет присоединено потребителей на величину более
ДР.шр- то это не означает, что АЧР произведет лишнее отключение При лю-
бом дефиците мощности ДР < ДР ^/•частота установится в диапазоне f{ —fn
без излишних отключений Нельзя допускать недостаточную мощность от-
ключения от АЧР ДРлчг < 6Р. В этом случае АЧР исчерпает свои возможно-
сти прежде, чем наступит стабилизация частоты.
4. Для ускорения действия АЧР целесообразно сокращать диапазон по
частоте f f„. Имеются ограничения по реализации этой рекомендации, кото-
рые обусловлены запаздыванием в канале АЧР.
5 Практическая реализация АЧР безусловно предполагается в виде
ступенчатой разгрузки с конечным числом ступеней, т.е п Контрольные
расчеты на ЭВМ показывают, что замена непрерывной характеристики на
ступенчатую с и > 10 уже дает почти одинаковые результаты
6 Изложенная методика позволяет апвлизировать разгрузку с нели-
нейной и ступенчатой характеристиками. На вертикальном участке ступени
291
Глава 6.
Аварийная частотная разгрузка
кр - 0, на горизонтальном - кр - <». Если кр = 0, то контур АЧР на структурной
схеме (рис. 6.9) разомкнут. Постоянная времени рвана
Г,
7j=— При кр = оо
получается перерегулирование.
7. Характеристика 3 может быть нелинейной. В зоне частоты /( сле-
дует иметь форсированное действие АЧР-1 (пунктирная кривая 3', рис 6 10).
Общий объем отключения нагрузки остается тем же самым, поэтому при час-
тоте fn характеристика 3'совпадает с линейной.
6. 8. Запаздывание в канале отключения потребителей
Линеаризация модели АЧР-1 упрощает анализ действия этой автома-
тики. Весьма простое построение переходного процесса при снижении часто-
ты показано на рис. 6.11
Рис 6.11 Перерегулирование при запаздывании в канале
отключения потребителей
Вместе с тем, линеаризация позволила искры гь новые, ранее незаме-
ченные явления в повелении АЧР—1. Имеется в виду перерегулирование в
292
Гзава б
Аварийная частотная разгрузка
канале отключения потребителей, то есть излишнее отключение, не преду-
смотренное по основному алгоритму действия АЧР-1.
Прежде всего выясним физическую сущность перерегулирования в
действии ЛЧР—1 Пусть каждая очередь отключения ногребителей имеет
задержку на время т Это время определяется выдержкой реле времени и вре-
менем срабатывания выключателя Если нет запаздывания, то снижение час-
тоты происходит по экспоненте 1, причем отклонение частоты равно
7 2<Л„+Лр> I |
При этом срабатывают не все очереди, а только их часть, достаточная для
стабилизации частоты.
Введем запаздыввиие Т. Теперь первая очередь сработает так же в точ-
ке «а» при частоте ft, но отключение потребителей произойдет в точке «Ь».
Следовательно, до точки «Ь» снижение частоты будет происходить по экспо-
ненте «О», что соответствует бездействию автоматики. Следующая очередь с
уставкой ft + df сработает после точки «о». Из-за запаздывания аффект от
отключения потребителей этой очереди проявится так же после точки «Ь».
Аналогично будут срабатывать все последующие очереди Ио результат дей-
ствия проявится только после точки «Ь» В гаком случае частота будет сни-
жаться по экспоненте «О» от точки «и» до точки «Ь», что приведет к
срабатыванию всех очередей, вплоть до очереди с уставкой
Срабатывание всех очередей является изтишним и частота будет изме-
няться по кривой 5, приближаясь к своему установившемуся значению/^,».
Следует учесть направленность действия АЧР—I. Автоматика отклю-
чает потребителей при снижении частоты, но она не включает их при увели-
чении частоты (ЧАПВ здесь не рассматривается). На модели эго учитывается
ключом В, который разрывает соответствующую цепь при df'dl £ 0. В твком
случае подъем частоты пойдет сначала по участку 5 с переходом на устано-
вившееся значениеЭто установившееся значение выше полученного ранее.
При неблагоприятных условиях автоматика может привести к забрасыванию
частоты выше значения 48,5 Ги.
Заметим, что значительное перерегулирование и излишнее отключение
потребителей может произойги при аварии как раз с небольшим дефицитом
293
Глава 6
Аварийная частотная разгрузка
мощности Действительно, при мвлом дефиците мощности отключению под-
лежит небольшая часть потребителей и установившееся значение частоты
близко к чаш от с/ В случае большего запаздывания в канале АЧР—1 могут
сработать все очереди АЧР, а зто означает, что излишнее отключение будет
достаточно большим.
Если дефицит тенерации приближается к максимально возможному, то
отключению подлежит нагрузка близкая к максимальному значению АЧР
Излишнее отключение в этом случае будет небольшим.
Такова сущность перерегулирования в действии АЧР—]. Перейдем к
аналитическому учету запаздывания и количественной оценке этого явления.
На рис. 6.12 представлена схема-модель энергосистемы с учетом дей-
ствия АЧР-1 с запаздыванием. Запаздывание в канале АЧР-1 учтено эле-
ментом с передаточной функцией И7ру=е-1*. Характеристика элемента
представлена на рис. 6.12, б. График 1 изображает единичное воздействие на
входе элемента Характеристика 2 соответствует запаздыванию выходного
сигнала на время т.
а) б)
Рис 6 12 Схема АЧР с запаздыванием отключения погребитезей
Передаточная функция W'(p) — может быть представлена так
(6.22)
294
Гчае а б. Аварийная частотная разгрузка
В свою очередь нонином знаменателя в формуле (6 22) может быть раз-
ложен на множите ш и весь элемент с W( р) = е~гр представлен из множества
последовательно включенных элементарных элементов lF*(p) =—-—, где т»
1 + Тр
— постоянная времени элементарного элемента Чем больше число элементар-
ных элементов, тем точнее воспроизводится идеальная характеристика 2. Прак-
тически, уже при 10 элементах совпадение характеристик модели и идеального
элемента W(p) = е-"’’ удовлетворительно.
Для упрощенного анвлиза можно принять
И'Ы = е-,',з—!— (6.23)
Тр+1
Переходная характеристика этого элемента представлепа на рис.6 12 в виде
кривой 3
С учетом этой замены передаточная функция для всей системы
(рис. 6.12) будет равна:
"(p)=f7. <6М)
Характер переходного процесса при действии АЧР определяется ха-
рактеристическим уравнением:
Tj tp2 + (Tj+кл) р + к, + Лр = 0. (6.25)
При (Tj т кл)г < 4 (к, + кр) Tjt процесс будет колебательным
Поскольку к„1 « Tj, то формулу (6.3) можем упростить: Tj< 4т (кИ кр)
откуда следует, что колебательный процесс с перерегулированием наступит
при
,аб)
Для энергосистемы с постоянной времени Т, = 10 с и к„ + к р — 10
колебательный процесс наступит при т > 0,25 с
С учетом направленного действия АЧР— 1 (автоматика не работает при
подъеме частоты) переходный процесс повде! по характерно! икс отточки «а» до
195
Глава 6 Аварийная частотнаяразгрузка
точки «Ь» (экспонента «О»), затем кривая 5 и участок 6 зафиксирует перерегули-
рование по отношению к установившемуся значению экспоненты 1. Величина
перерегулирования определится числом излишне отключенных потребителей.
Исследования на ЭВМ показывают, что замена передаточной функции
вида \У(р)~е~'” функцией Ю'(р)=------ снижает перерегулирование По-
1+гр
этому критерий колебательности следует считать приближенным, используе-
мым для ориентировочных расчетов.
Из формулы (6.26) следует, что главным фактором, влияющим на пе-
ререгулирование, является плотность разгрузки кр. Чем выше кр, тем раньше
наступает перерегулирование. Отсюда следует практическая рекомендация,
для снижения перерегулирования необходимо сокращать запаздывание в ка-
нале отключения потребителей
6. 9. Учет неопределенности исходной информации
При выборе уставок ЛЧР необходимо учитывать изменение графика
нагрузки потребителя Так как нагрузка меняется в течение суток, то отклю-
чение одного и того же потребителя дает различный эффект в зависимости от
времени отключения.
Поскольку фактически нагрузка носит случайный характер, ее оценка
может быть сделана только на верояг постной основе. Па рис. 6.13 показана
детерминированная характеристика нагрузки (прямая) и зона возможных (ве-
роятностных) значений нагрузки (зона заштрихована). При вероятностной
оценке, при одной и той же частотемощность может иметь значения Р,Я1|Л,
Р,ср и Pimaj (ПО закону «Зо» нормвльного закона распределения). Так как
мощность выражена в относительных единицах, го разброс нагрузки в про-
центном отношении остается неизменным во всем диапазоне отключений.
Фактор случайности нагрузки должен быть учтен при выборе и настрой-
ке АЧР. Принципиально можно выполнить автоматику, которая учитывала бы
суточные изменения нагрузки, но схема и реализация та:-;ого варианта намного
усложнится и, как следствие, будет менее простой и надежной.
Поэтому практически АЧР рассчитывают на усредненное значение
нагрузки в течение суток.
296
Глава б.
Аварийная частотная разгрузка
Рис 6.13 Неопределенность исходной информации
Поскольку очередей разгрузки несколько, то погрешность в оценке
отключаемой нагрузки уменьшается за счет компенсации погрешности от-
дельных составляющих. Заметим, что такое решение вынужденное, как наи-
более простое и достаточно приемлемое для практики. В отдельных случаях
пытаются учесть изменчивость нагрузки Р (t)
Неопределенность информации о нагрузке может быть учтена при вы-
боре уставок АЧР—I .Лучше подвести подАЧР—1 больше потребителей, чем
Рлчр-i S Рав тих- Увеличение объема потребителей, присоединяемых к авто-
матике разгрузки, не приведет к излишнему отключению, изменится лишь
установнашесся значение частоты после включения этих потребителей.
На рис. 6.13, б показана детерминированная усредненная характери-
стика Рлур-1 = P(t) (линия 1). Для упрощения принято к„— 0. Тогда эта же
характеристика будет соответствовать суммарной характеристике рис. 6.11 и
по ней устанавливается значение частоты при дефиците генерации ДР.
Если в силу непредвиденных обстоятельств характеристика сместится
в положение 2 или 3, то это приведет только к изменению частоты flKm Из-
лишнего отключения потребителей не произойдет, АЧР-1 отключит нагрузку
строго в соответствие с характеристикой энергосистемы
Однако в данной ситуации наблюдается разброс fKm при действии
АЧР-1, который затруднит настройку АЧР-2.
297
Гчаса 6
Аварийная частотная разгрузка
Глава 6. Аварийная частотная разгрузка
6.1 0. Разгрузка энергосистемы по скорости снижения частоты
Одной из главных проблем, влияющих на структуру и настройку час-
тотной разгрузки, является проблема определения дефицита генерации в слу -
чившейся аварии
Ранее уравнение энергосистемы при дефиците генерации бы то приня-
то в виде
Т} p&J k.tsf &Р (6.2Т,
В первый момент аварии отклонение частоты равно Д./ = 0. поэтому
гЛ| =ЙР (6 28)
Зная постоянную времени 7} и измерив производную — , можно оцепить
' Л|.-о
аварийный дефицит мощности ДР. При отключении потребителей на эту рас-
четную величину баланс мощностей в энергосистеме восстановится при час-
тоте 50 Гц.
Однако такую автоматику выполнить невозможно. Модель энергосис-
темы по уравнению (6 5) приближенная, она нс учитывает некоторые обстоя-
тельства. оказывающие принципиальное влияние на автоматику,
реагирующую на производную dj/dt Дело в том, что в реальной энергосис-
теме происходит качание роторов генераторов друг относительно друга Это
обусловлено многими причинами и. в первую очередь, зоной нечувствитель-
ности регуляторов частоты вращения
Более подробные исследования этого явления выходят за рамки на-
стоящей работы и здесь нс рассматриваются Укажем только на характер из-
менения частоты в реальной энерюсистсме Из-за качания роторов частота
непрерывно меняется и запись ее изменения в действующей энергосистеме
выглядит так, как на рис. 6.14.
Отклонение частоты обычно не выходи! за пределы ± 0.1 Гц и, следо-
вательно, частота считаете» нормальной в соответствии с IIIЭ На эти откло-
нения частотная разгрузка не реагирует. По другому ведет себя автоматика,
реагирующая на производную df/dt. Во-первых, здесь возникает проблема
измерения производной Из-за высокочвстотных составляющих производная
df/dt может быть очень большой, в саязи с чем автоматика по производной
может сработать и вызвать ложное отключение потребителей
Рис. 6 14 К пояснению погрешности измерения производной
В связи с изложенным, необходимо измерять производную
dl Ы
где Л/- отклонение частоты на отрезке ДГ. При этом возникает проблема
выбора отрезка времени Д/. Варьируя ДгЛ0, можно получить 0 и, следо-
вательно, ^—= 0. Если выбрать Д/ас, то отклонение частоты Л/ = fu —fc , и
дг
производная оказывается очень большой. Желательно увеличить интервал
Дг, ис. усреднить процесс за больший отрезок времени, при этом можно вы-
брать отрезок времени Д I (J ,2 и даже 0,3 с. 11о увеличение Д / до нескольких
десятых секунды не исключает методолщичсской погрешности, продемонст-
рированное на рис. 6.14. Здесь погрешность проявляется независимо от вели-
чины выбранного интервала времени 1И. и i„t.
Сказанное свидетельствует о большой погрешности измерения произ-
водной df/dt.
Практически можно рекомендовать другой вариант — по производной
делать дополнительную разгрузку, которая срабатывав! при условии
dt
298
299
Гуава 6.
Аварийная частотная разгрузка
где F — заданная уставка по ускорению, например, F = 2 Гц/с. При малых
. <1
дефицитах генерации и, следовательно, малых I дополнительная раз-
Л1,=о
грузка не рабогвет. В случае большого дефицита генерации, когда производ-
ная по частоте оказывается значительной
^1 .^1 >6
(6.29)
автоматика сработает и отключит часть потребителей. После такого отклю-
чения для основной автоматики наступает «облаченный» вариант аварии.
На рис 6 15 рассмотрен процесс взаимодействия частотной разгрузки
по отклонению частоты А/ и производной dffdt.
Рис.6 15 Взаимодействие АЧР по отклонению частоты Л/ в
производной df/dt
Рассмотрим пример выполнения АЧР со ступенью срабатывания по про-
изводной df/dl. Допустим в энергосистеме возник дефицит ДР. Без действия
АЧР частота будет снижаться по экспоненте «О» В точке «а» при частоте
начнет действовать разгрузка. В соответствии с характеристикой 2, которая
учитывает уменьшение потребление в системе за счет регулирующего эффекта
нагрузки к„ и действия АЧР с плотностью разгрузки кр, установившееся значе-
300
Глава б
Аварийная частотная разгрузка
ние частоты будет соответствовать точке «Ь» этой характеристики. Снижение
частоты от точки «о» до fiK„, произойдет по экспоненте 3 с постоянной времени
Т" Предположим, что в точке вс» через время Д/ сработает разгрузка по про-
изводной и отключит определенную долю потребителей После этого отключе-
ния тяжесть аварии уменьшится. На рис. 6.15 это выразится переводом
начального возмущения ДР в новое положение ДР* Этому возмущению соот-
ветствует переходный процесс по экспоненте 4.
Дополнительная очередь по производной помогла действию основной
автоматики, но принципиального изменения ситуации не произошло — ре-
зультаты снижения частоты по экспоненте 3 и 4 близки друг к другу.
„ df
Измеряя —=------- и выбирая интервал времени At несколько десятых
dt Дг
секунды, мы тем самым вводим задержку в действие разгрузки по производ-
ной. При уставке F - 2 Гц /с снижение частоты от 50 Гц до 48.5 Гц произой-
дет за время 0,75 с. Таким образом, в рассматриваемой аварии основная АЧР
вступит в действие чуть позднее дополнительной очереди по производной.
Правильно настроенная АЧР—1 с высокой плотностью разгрузки кр весьма
быстро справится с аварией без дополнительной очереди по производной
Предполагается, что с режимной точки зрения использование фактора
скорости снижения частоты в первую очередь наиболее целесообразно для
дополнительной (местной) разгрузки в отдельных районах, т.е в условиях,
когда скорость снижения частоты при местном дефиците мощности сущест-
венно больше, чем при общесистемном В таких условиях, с одной стороны,
применение разгрузки по производной дает наибольший эффект и, с другой
стороны, достаточно просто могут быть осуществлены выбор параметров и
настройка такой разгрузки
Укажем еще на одно затруднение, возникающее при реализации раз-
грузки по производной. Рассмотрим энергосистему А, которая связана с энер-
госистемой В линией электропередачи и получает от нее обменную мощность
(рис- 6.16)
За базисную мощность примем суммарную мощность энергосистем А и В.
причем мощность энергосистемы А — 20 %, а энергосистемы В — 80 % от общей
мощности этого объединения По мсжсистемной ЛЭП передается обменная мощ-
301
Глава 6
Аварийная частотная разгрузка
ность равняя Pofat = 10 % от суммарной мощное™ энергообъединення. Нагрузка
РКгХ =30%, нагрузка Ри В =70%.
Рис б. 16. Схема объединенной энергосистемы
Пусть энергосбъедннемце потеряно 10 % генерации В таком случае в
первый момент аварии
rft|f=u Г, Юс
d/
|>чи в герцах = 0,5 Гц i с.
dl
Следовательно, при скорости снижения частоты равной 0,5 Гц /с необ-
ходимо отключить 10 % нагрузки, допустим 8 % в системе В и 2 % в системе
А Такое распределение нагрузки приведет к положительному результату,
если потеря генерации произошла в системе В
Создадим такой же дефицит генерации, но в энергосистеме 4. До тех
пор, пока сохранится в работе межсисте.мная ЛЭН, энергосистемы будут ра-
ботать параллельно. Теперь большую долю нагрузки следует отключить в
энергосистеме А, но автоматика на это не рассчитана.
Этот простой пример показывает, что производная, являясь дополни-
тельной информацией, нс решает проблему полностью, в связи с чем возни-
кают трудности по насгройке АЧР, реагирующей на отклонение частоты и ее
производную.
6.1 1. Дополнительная разгрузка
Некоторые энергосистемы получают значительную мощность от энерго-
объединения по межеистемным линиям связи При отключении этих связей
энергосистема становится остродефицитной. Если ие принять соответствую-
302
Гюва 6
Аварийная частотная разгрузка
ших мер, го в отделившейся энергосистеме может возникнуть «лавина часто-
ты»
При значительном дефиците мощности обычная разгрузка может ока-
заться не эффективной Во-первых, АЧР начнет действовать с опозданием
при снижении частоты до 48.5 Гп. во-вторых, очереди АЧР имеют выдержку
времени t = 0,3 —0,5 с, в-третьих, при значительном дефиците активной
мощности «лавина частоты» может сопровождаться «лавиной напряжения»,
когда реле частоты могут работать неправильно.
Эти обстоятельства заставляют производить разгрузку энергосистемы
не ио факту снижения частоты, а по какому-либо другому параметру, фикси-
рующему факт «острого дефицита мощности». Дополнительная разгрузка
возможна по изменению величины тока по мсжсистемпой линии, изменению
величины или направления мощности линии связи (трансформатора связи),
отключению линии саязн или крупного генератора и тд. Выбор параметра
срабатывания дополнительной разгрузки должен быть обоснован с учетом
местных условий
На рис 6 17 показана схема дополнительной разгрузки энергосисте-
мы. работающей параллельно с эиергообьединением Предполагается, чго по
ЛЭП из энергообьединения в систему поступает значительная мощвость
(50% и более). В рассматриваемой энергосистеме, кроме обычной разгрузки,
следует применять дополнительную, срабатывающую при аварийном отклю-
чении ЛЭП.
При отключении выключателя Вь его блок-контакты Bt । замыкаются
и подают сигнал на отключение потребителей. Достоинством дополнитель-
ной разгрузки является ее быстрота — потребители отключается одновремен-
но с отключением .межсистемной ЛЭП.
Энергосистема
Рис. 6.17. Схема дополнительной разгрузки
303
Глава 6 Аварийная частотная разгрузка
6.1 2, Схемы АЧР
Схемы частотной разгрузки довольно просты, их основу составляют
реле частоты, фиксирующее снижение частоты, реле времени и промежуточ-
ное реле. На рис. 6.18 показана одна из возможных схем АЧР. обеспечиваю-
щая отключение одной очереди потребителей с запретом действия АПВ
KL2 о
_______> Запрет
АПВ
Рис. 6.18. Схема АЧР
Реле частоты KF настраивается па заданную уставку При снижении час-
тоты до этого значения реле срабатывает и запускает реле времени КТ С вы-
держкой времени через промежуточное реле KL подается сигнал на отключение
потребителей. Одновременно реле KL подает запрещающий сигнал на АПВ.
В случае размещения на подстанции нескольких ступеней АЧР отклю-
чения потребителей при различных уставках по частоте, необходимо иметь
несколько рассмотренных схем АЧР. Возможен н другой вариант, в котором с
целью экономии аппаратуры используется одно реле частоты с перенастройкой
его на разные частоты. Схема такого варианта показана на рис. 6.19.
Исходно реле частоты KF настраивается на более высокую уставку по
частоте. При срабатывании этого реле запускается реле времени КТ Мгно-
венным контактом КТ2 снимается питание с промежуточного реле KL1, ко-
торое возвращается с замедлением и через 0,5 с замыкает цепь реде KL2
Реле KL2 производит отключение потребителей первой очереди. Это же реле
контактом KL2.3 перенастраивает реле KF на другую, более низкую, уставку
по частоте. После перенастройки реле KF возвращается в исходное положе-
ние При дальнейшем снижении частоты реле KF срабатывает вновь, повтор-
304
Глава 6.
Аварийная частотная разгрузка
но запуская реле КТ, которое с выдержкой КТЗ включая реле К1_3. Это реле
производит отключение потребителей второй очереди.
Рис 6.19. Схема АЧР с одним реле частоты
Рассмотренный принцип изменения уставки реле частоты может быть
использован и для большего числа очередей
Восстаноаление питания потребителей осуществляется в основном
автоматически, с применением так называемого частотного АПВ. Схема од-
ной очереди АЧР с ЧАПВ показана на рю. 6 20.
При заданном снижении частоты срабатывание реле KF осуществляет
пуск реле времени KTI Это реле через контакты КТ1 запускает реле KLI.
Промежуточное реле KL1 выполняет ряд функций. Контактом KLI. 1 обеспечи-
вается отключение потребителей, контакт KL1.2 используется для запуска реле
К1 2, которое самоудерживается через KL2 2; контакт KI 1 3 находится в цепи
реле времени КТЗ; четвертый контакт KLI 4 производит изменение уставки
pencKF.
Этот контакт шунтирует дополнительное сопротивление в цепи пита-
ния репе KF и тем самым повышает его уставку срабатывания Обычно реле
перенастраивается на уставку 49,5 - 50 Гц. Таким образом, пока частота не
восстановится до указанного уровня, реле часто ты будет держал ь свой кон-
такт замкнутым.
305
I таю 6.
Аварийная частотная разгрузка
Рис 6 20 Схема АЧР с ЧЛ1 IB
Если частота восстановится, то реле частоты KF, реле времени КТ1 и
промежуточное реле KLI верпу ics в исходное положение Возврат ре ic KL1
и замыкание его контакта KL1 3 обеспечивают пуск реле времени КТ2. С
выдержкой времени КТ2 1 будет запущено реле KL3, которое производит
повторное включение потребителей
Дли пуска реле KL3 используется проскальзывающий контакт КТ2.1
Кратковременный импульс контактов КТ2.1 подхватывается самим реле K.L3.
через контакты KL3 2 это реле самоудерживается. Упорный контакт реле КТ2 с
выдержкой КТ2.2, которая больше выдержки КТ2.) на I - 2 с, возвращает схе-
му в исходное положение Действительно, этот контакт шунтирует обмотку
реле KL2, и автоматика втпвратается к первоначальному положению
Используя накладки 1Н и 2Н. схема может быть настроена только на
АЧР или АЧР и ЧАПВ и тщ
Восстановление питания отключенных потребителей следует произво-
дить весьма осторожно Необходимо быть уверенным, что подключение по-
требителей не приведет к повторному «провалу» частоты Поэтому операция
включения выполняется только тогда, копа частота энергосистемы поднята
до уровня 45,5 Гц и даже 49,8 I ц. Повторно моту т вк початься не все потре-
бители. а только ответственные
306
Гчава 6 Аварийная частотная разгрузка
Аварийные ситуации со снижением частоты зачастую сопровождаются
снижением напряжения При значительном уменьшении напряжения реле
частоты работает с большой погрешностью, возможен и его отказ. Необхо-
димо стремиться обеспечить достаточное напряжение на реле за счет соот-
ветсгвуюшей схемы подключения или стабилизатора напряжения с целью
исключения неправильного действия автоматики
6.1 3. Исследование переходных процессов па ЭВМ*
6.13.1. Методика моделирования АЧР
Аналитические исследования переходных процессов позволяют рас-
крыть влияние основных параметров частотной разгрузки на характер сниже-
нии частоты, длительности переходного процесса и предельное отклонение
частоты при действии АЧР. Главным недостатком аналитических исследова-
ний валяется их ограниченность и приемлемость только для простых моделей
объекта, когда переходный процесс описывается дифференциальными урав-
нениями невысокого порядка. С усложнением модели, вызванным необходи-
мостью учета дополнительных факторов, аналитические исследования
Становятся громоздкими, а в ряде случаев невыполнимыми
Более гибким инструментом является ЭВМ На вычислителыюй ма-
шине можно набрать модель объекта, описываемого сравнениями высокого
порядка, и приложить возмущающее воздействие в интересующей точке мо-
дели. Изменение параметра в любой точке модели может быть отражено гга
дисплее и выведено на регистрирующий прибор.
Уместно провести серию тестов с изменением параметров модели Ана-
лизируя характеристики переходных процессов можно сделать заключение о
влиянии того или иного параметра на коггечньш результат эксперимента.
Отметим специфику моделирования энергосистемы Если в энергосис-
теме имеется вращающийся резерв, который может быть использован в ава-
рийной ситуации, то агрегаты энергосистемы моделируются с действующими
Моделирование переходных процессов с АЧР выполнил
к т.н., доц Шаргин Ю.М.
307
Гiaea б Аварийная частотная pinepi чка
на них регуляторами частоты вращения (см рис. 6 2). При отсутствии вра-
щающегося резерва регутяторы частоты вращения будут бездействовать и их
моделирование необязательно. Для такого случая модель энергосистемы
представлена на рис. 6.9.
При моделировании на ЭВМ прежде всего составляется структурная
схема объекта и записываются уравнения (передаточные функции) всех эле-
ментов, входящих в схему Выбирают параметры элементов- коэффициенты
усиления и постоянные времени, которые вводятся в ЭВМ.
Для проведения исследовании используются готовые программы, спе-
циально разработанные для решения определенного класса задач. Одной из
подобных программ является программа Mathcad. Для ее реализации необхо-
димо назначить на схеме точку приложения «а» исходного воздействия (воз-
мущения) и точку выхода «/»>, где следует регистрировать переходную
характеристику h(t) Между этими точками следует преобразовать схему на-
бора элементов модели и привести ее к виду одного элемента с передаточной
функцией ИсЬ(дг. Эти преобразования выполняются по известным правилам
теории регулирования для последовательного и параллельного соединения
элементов, а также с учетом действия обратных связей.
В точке «о» прикладывается единичное возмущение x(t) = 1fl) Изо-
бражение этой функции по Лапласу В таком случае изображение
Р
выходного сигнала будет равно Н(pi — —Wuh(p). Переходная характеристи-
Р
ка h(r) обратным преобразованием Лапласа
(бзо)
Приведение схемы модели к простейшему виду одного элемента явля-
ется трудоемкой задачей, поэтому очевидно стремление избежать эгой стадии
решения задачи Разработаны специальные программы моделирования, не
требующие преобразования структурной схемы исследуемого объекта. Од-
ним из известных программных пакетов математического моделирования
яалястся Malhlab
308
Гзава б
Аварийная уастотная разгрузка
Задача исследователя заключается в том, чтобы по заданной структур-
ной схеме исследуемого объекта составить математическую модель с указа-
нием передаточных функций элементов этой модели Следующим этапом
является назначение точек «вход — выход» на модели с приложением задан-
ного воздействия х(1) ко входу модели. Это могут быть единичное, ступенча-
тое, гармоническое и другие воздействия Все остальные операции
выполняются на ЭВМ по программе Mathlab, с изображением переходного
процесса vfi) на дисплее Используя программу Mathlab, исследователь осво-
бождается от рутинной работы приведения схемы модели к простейшему
виду с одним элементом
На ЭВМ исследованы переходные процессы снижения частоты при
действии АЧР—1 Ниже приводятся результаты этих исследований.
6.13.2. Влияние чиста ступеней АЧР — 1
Недостатки АЧР— I с малым числом ступеней очевидны из аналитиче-
ских исследований Поскольку число ступеней мало, то каждая из них отклю-
чает большой объем потребителей Это может привести к значительному
подъему частоты, что особенно заметно на границе стабилизации частот
dfldi~V.
При малом числе очередей (л = 3 — 4) автоматика получается «1рубой» В
самом принципе заложена возможность перерегулирования, когда предьщуще-
го отключения недостаточно, а последующее отключение приводит к неоправ-
данному повышению частоты. Сказанное иллюстрируется на рис 6 21
Здесь автоматика имеет всего три очереди. При РлЧР = 45 % от мощ-
ности энергосистемы каждая очередь отключает 15 % потребителей При де-
фиците генерации 45% без действия АЧР— I снижение частоты происходит по
кривой 0. При частоте 48,5 Гц срабатывает первая очередь, после чего сниже-
ние частоты происходит но кривой 1 При уставке 47,5 Гц работает вторая
ступень и частота снижается по кривой 2 После срабатывания третьей очере-
ди (47.0 Гц) частота поднимается до 50 Гц
Может сложиться впечатление, что автоматика сработала очень хоро-
шо, частота «поднята» почти до номинального уровня. Однако это случайное
совпадение. В рассмотренной ситуации при частоте срабатывания
309
Гwna ft
Аварийная частотная разгрузка
На рис. 6 21, б показан переходный процесс при дефиците мощности
АР = 8 %. При этом срабатывает первая очередь при частоте 48,5 Гц и под-
нимет частоту выше 511 и
Можно привести множество вариантов с разными сочетаниями дефи-
цитов генерации и уставок АЧР-1, из которых видно, что разгрузка с малым
числом очередей работает неудовлетворительно
На линеаризованной модели число ступеней срабатывания АЧР бесконеч-
но п - оо. В начале действия АЧР снижение частоты происходит по экспоненте
д/=-д/,*2*-»|,-48Ч-,,- ] (6.3|)
Это идеальный вариант разгрузки, к которому необходимо стремить-
ся при настройке АЧР—I . На ЭВМ были проведены исследования АЧР—1 с
большим, но конечным числом очередей На рис. 6 22 показано снижении
частоты при действии ЛЧР-1 с числом очередей 3 (кривая В, 5 (кривая 2) и
10 (кривая 3).
Из рисунка видно, что при и = 10 снижение частоты происходит почти
по экспоненте, приближаясь к идеальному варианту с числом ступеней п -
310
Глава б
Аварийная частотная разгрузка
Рис. 6 22 С ниженне частоты при действии АЧР с различным числом
очередей разфузки
6.13.3. Влияние платности разгрузки Ау,
Плотность разгрузки kr оказывает существенное влияние на переход-
ный процесс изменения частоты f(t) Во-псраых, увеличение плопюсти разгруз-
ки кр уменьшает отклонение частоты А/" При одном п том же дефиците
генерации установившееся значение частоты после дейстапя АЧР—1 будет вы-
ше. если увеличить плотность раз1рузкп. Во-вторых, с увеличением плогносги
разгрузки к уменьшается постоянная времени Т* = Т,1(к„ + кр ), что свиде-
тельствует о быстром завершении переходного процесса.
Процесс снижения частоты при исходных данных Рщр-г — 50 «,
1 - 48,5 i ц, f _46 5 1 ц. л = 20, кГ — I 2.5 и разных мощностях ДР
50 %. 2-40 %, 3 - 30 %, 4 - 20 % и 5 10 % показан на рис 6 23. а
Пи рис 6.23, б представлен переходный процесс f(t) также при дейст-
впн АЧР—1, но при других исходных данных. АРдчи 30 %. I = 48.5 Гц.
/. 46.5 Гц н - 20. кр- 7.5. Дефицит мощности ДР. 1 — 50ио. 2 — 40%,
3 - 302b. 4 - 20%. 5 - 10%
311
Гзава 6
Аварийная частотная разгрузка
Рис. 6 23. Изменение частоты в энергосистеме при различной
плотности разгрузки
Результаты исследований на ЭВМ иллюстрируют влияние плотности
разгрузки на характер переходного процесса f(i). Если не учитывать возмож-
ного перерегулирования при высоких плотное гях нагрузки то необходимо
всегда стремиться к повышению плотности разгрузки.
312
Гзава 6 Аварийная частотная разгрз зка
6.13.4- Запаздывание в канале отключения нагрузки
Запаздывание в канале отключения потребителей (в канале разгрузки;
привносит усложнение в математическую моле*л> объекта в виде дополни-
тельного элемента с передаточной функцией W(p)—e~XF Это оказывает су-
щсственное влияние на переходный процесс изменения частоты f(t) при
действии АЧР—I . Становится возможным перерегулирование за счет излиш-
него отключения потреби гелей.
Этот момент не освещен в литературе. Полное отсутствие исследований
в этом направлении приводит к необоснованному введению запаздывания в
канале АЧР-1 в виде выдержки времени, создаваемой с помощью реле време-
ни. Выдержку доводят до 0,3 ..0.5 с, что недопустимо, поскольку задержка при-
водит к перерегулированию Факт перерегулирования объяснялся иными
неверными причинами, на основании чего предлагались некорректные реше-
ния Примером этого валяется так называемая совмещенная разгрузка — под-
ключение потребителей АЧР-2 к некоторым очередям АчР-1 и наоборот.
Дело конечно не в совмещении очередей АЧР-2 и АЧР—I Необходи-
мо выяснить реальную причину перерегулирования и разработать конкрет-
ные рекомендации по устранению этого недостатка частотной разгрузки.
Создание линеаризованной математической модели частотной раз-
грузки позволило разобраться в этом негативном явлении. Без запаздывания
математическая модель получается весьма простой и переходный процесс
происходит по экспоненте
При наличии запаздывания процесс усложняется. Отключаются излиш-
ние потребители, что приводит к завышению значения частоты Характер про-
цесса становится колебательным. Направленность действия АЧР—1 (отсутствие
включения потребителей при повышении частоты; вноеггт коррективы в про-
цесс восстановления частоты. 11осле излишнего отключения частота монотонно
повышается до своего установившегося значения (см. рис 6.11).
Ранее предлагалось элемент с запаздыванием И (р)=е~хр создавать
на математической модели в виде элемента с передаточной функцией
‘v =------т2—7--
313
Гчава 6
Аварийная частотная римргяса
Представлялось возможным выбрать л 1 В таком случае передаточная
функция всей модели между точками «вход — выход» соотастствуег выраже-
(6.33)
Здесь точка «входа» соответствует точке приложения возмущения /1Р,
а точка «выхода» — это частота эиср|тосистсмы.
Характер снижения частоты при действии ЛЧР-1 зависит от запаздывания
л плотности разгрузки к р. В этой саязи эксперимент на модели выполнялся в
соответствии со структурной схемой рис. 624 с вариациями кр =var и 1=var
Рис. 6.24 Схема—модель энергосистемы в программе Simulink
Перейдем к краткому пояснению результатов выполненных экспери-
ментов В нашем случае входное воздействие отрицательно. £dJ<0. Следо-
вательно, частота будет снижаться и изображаться в виде кривой ниже
пулевой оз метки Привычно переходную характеристику изображать при
положительном входном воздействии Toi да переходная характеристика изо-
бражается выше нулевой отметки Примем это традиционное изображение
переходной характеристики, для чего на рисунках выходной сигнал будем
изображать со знаком минус.
314
Г weci 6.
Аварийная частотная репруяеа
На рис 6-25 показаны переходные характеристики изменения часто-
ты ff!) при разной детализации моделирования мемента с запаздыванием
т = 0,5 с. кр 15, к., - 2, Т> 10 с, частота выражена в относительных единицах В
первом случае (рис 6.25, а) запаздывание элемента воспроизводитесь элементом
первого порядка. Далее (рис 625, Б, в) моделирование уточнялось элсмеш £
запаздыванием моделировался звеном 2—то и 4-го порядков На рис. 6 25, г пока-
зана переходная характеристика при использовании идеального элемент запаз-
дывания. Из рисунков видно, что более детальное моделирование звена с
запаздыванием приводит к выраженной колебательности переходного процесса.
Переходные характеристики на рис 6.25. в, г практически одинаковы, что свиде-
тельствует о достаточной точности предо пыления элемента с запаздыванием зве-
Рис.6.25. Переходные характеристики энергосистемы и АЧР
с непрерывной разгрузкой
Па рис 6 26. показаны переходные характеристики в зависимости от
плотности разгрузки кр. Запаздывание выбрано в 0.25 с и оставалось посзо-
315
Глава б
Аварийная частотная разгрузка
яиным в пределах эксперимента, плотность разгрузки к р изменялась в диа-
пазоне от 10 до 50. С увеличением плотности разгрузки к р установившееся
отклонение частоты уменьшается, но при этом переходный процесс приобре-
тает колебательный характер, причем с ростом плотности разгрузки /:р коле-
бательность возрастает. Возникновение колебаний при достижении
установившегося отклонения частоты в результате действия АЧР свидетель-
ствует о перерегулировании, то есть об отключении нагрузки больше, чем
необходимо для прекращения понижения частоты. Чем выше плотность раз-
грузки кр, тем больше перерегулирование. Следовательно, при увеличении
плотности разгрузки кр необходимо уменьшать запаздывание в канале АЧР.
Рис. 6.26. Переходные характеристики энергосистемы и АЧР с непрс
рывной разгрузкой при изменении плотности разгрузки
Указанные особенности переходных характеристик объясняются тем.
что. как уже отмечалось выше, модель с непрерывной разгрузкой не учитыва-
ет одностороннего действия АЧР, действующей только на отключение на-
грузки (ЧАГГВ здесь не рассматривается), и при повышении частоты нагрузка
начинает с запаздыванием включаться. Независимо от запаздывания при от-
ключении нагрузки, модель дает установившееся отклонение частоты, а ко-
лебательность процесса свидетельствует о возникновении перерегулирова-
316
Гзава 6. Аварийная частотная разгрузка
ния. Для того, чтобы модель обеспечивала односторонность действия ЛЧР,
используется ключ В, рис. 6.12. Этот ключ включает канал разгрузки при по-
нижении частоты и отключает его при изменении знака производной частоты
с одновременной коррекцией ДР на величину отключенной нагрузки
Если принять начало и коней разгрузки при чистоте /( — 48.5 Гц и
/„ 46,5 Гц, то весь диапазон составит 2 Гц, т.е в 4 "с от номинальной частоты.
К ав томатике АЧР-1 присоединятся мощность потребителей, равная максималь-
но возможному чефнци iy генерации Положим =30% Тогда также
равно тридцати процеп гам. В таком случае плоп гость разгрузки равна
k __*Р<чр 3<^75
р Л/ 4%
На рис. 6 27. представлено алиянис запаздывания на характер переход-
ного процесса изменение частоты f(t) для ДР — 30 %, кр - 7,5, к„ — 2,
Tj =10 с. При такой плотности разгрузки кр увеличение запаздывания до
т — 0,5 с еще не приводит к перерегулированию Заметное перерегулирова-
ние получается при сравнительно большом запаздывании (т — I с и более).
Это вполне очевидно, поскольку перерегулирование зависит не только от
значения т, но и значения кр
Выше было показано, что желательно повышать плотность разгрузки кр.
Это можно сделать за счет увеличения мощности подведенной под АЧР
Р)чр> ^оятах 113И за счег сокращения частотного диапазона с f = 48,5 Гцтоль-
кодо /п =47,5 Гц. Плотность разгрузки кр при этом будет равна:
р^=зо%=15
р к/ 2%
Па рис.6.28, показаны переходные процессы в энергосистеме при дей-
стаии АЧР-1 для к,, = 15, к„ = 2. Tj = 10 с при возникновении различных
дефицитов мощности и при различном запаздывании в канале АЧР. Отсутст-
вие перерегулирования при такой плотности разгрузки кр и времени запазды-
вания t = 0,25 с свидетельствует о допустимости такой разгрузки. Но при
увеличении плотности разгрузки кр > 15 наступает перерегулирование, а
следовательно, и излишнее отключение потребителей. Увеличение запазды-
317
Гзава б
Аварийная частотная рсиеруыа
вания до 0,75 с и более приводит к значительному перерегулированию. При
ДР = Рлур такое запаздывание приводит к повышению частоты до 50 Гц, а
при ДР < Pji/n к забросу частоты выше 50 Гц
Рис.6.27. Влияние запаздывания на перерегулирование АЧР— I
i т = 0,25с, 2 — т = 0.5с.
3- г = 0,75 с; 4- Т=1,0с.
Рис.6.28. Изменение частоты в энергосистеме при действии ЛЧР—1
а — дефицит мощности 30% 1 г = 0,25 с; 2 — т - 0,5 с;
б — дефицит мощности 20% 3 — т-0.75 с; 4— Т= 1,0 с.
318
ptaea 6 Аварийная частотная рчярхш,
Исследованы процессы при больших значениях плотности раз1рузки
кр Они показывают, что такая нао-ройка АЧР недопустима Для устранения
перерегулирования необходимо снижать запаздывание в канале отключения
потребителей.
Следует понимать, что время т<0,25 с получается только из-за запаз-
дывания в срабатывании выключателя и промежуточных элементов. Специ-
альная выдержка времени на реле времени здесь недопустима
6.1 4. АЧР при наличии резерва в энергосистеме
В нормальном режиме aipciaTbi • сктршл акции работают не всегда с
подпой нагрузкой. В таком случае они способны при необходимости увели-
чить свою мощность. "Это так называемый вращающийся резерв. Величина
его зависит от графика нагрузки и времени суток и может состааля1ь
10 — 15 % и более от номинальной мощности агрегатов.
Резервные агрегаты меяут находиться в остановленном состоянии Иод
таковыми следует понимать тс агрегаты, которые сравнительно быстро смо-
гут быть пушены в ход. синхронизированы с системой и принять на себя на-
грузку. Имеются в виду । парогенераторы, пуск которых занимает 40-80 с,
включая самосинхронизацию с энергосистемой, а также гидрогенераторы,
работающие в режиме синхронного компенсатора. В аварийной ситуации,
сопровождающейся дефицитом юнерацип. эти iпарогенераторы переводятся
в режим с выдачей активной мощности
Интерес представляет ре тер способный сократить дефицит генерации
при работе частотной разгрузки Время частотной разгрузки сравнительно
мало, за 3 - 5 с срабатывают все очереди АЧР- I. Вторая категория АЧР-2
начинает действовать через время t = 10 — 20 с от момента снижения частоты
до 48,5 Гц, и через время 10 15 с заканчивает отключение потребителей.
Таким образом, время действия часгошой раз1рузкп занимав! 20 — 30 с с на-
чала возникновения аварии. Это приближенная оценка, но она позволяет сде-
лать вывод о том, что только вращающийся резерв может быть использован в
течении этого времени.
В аварийной ситуации вращающийся резерв используется по мере
снижения частоты, koi да регуляторы частоты вращения приходят в действие
319
Гинза 6
Аварийная yacmrimiiati разгрх зка
и увеличивают открытие регулируют» о органа турбины При большом от-
клонении частоты, имеющим место при дейавии АЧР, регулятор полностью
открывает впуск пара (воды) в турбину, увеличивая тем самым мощность
турбины до номинальной
Принципы моделирования элементов регулятора, турбины и генерато-
ра были рассмотрены в пятой главе Модель агрегата с регулятором частоты
и энергосистемы можно упростить. Это нс приведет к заметной погрешности
исследований, но облегчит набор элементов модели на ЭВМ Структурная
схема агрегата, работающего в энергосистеме, показана на рис 6.29. Матема-
тическая модель объекта представлена па рис 6 30
Рис 6.29. Структурная схема работы турбоагрегата в энергосистеме
Рис.6.30. Математическая модель объекта
Здесь регулятор частоты представлен всего одним элементом перво-
го порядка с постоянной времени Т Аналогичный подход к упрощению
использован при моделировании агрегата. Ранее были подучены передаточ-
ные функции турбины и генератора Паровая турбина без промежуточного
перегрева пара была представлена инерционным элементом. Генератор имеет
очень малое запаздывание. Эти обстоятельства дают возможность объеди-
нить турбину и генератор и представить их единым элементом с постоянной
времени Ти Энергосистема представлена в виде инерционного элемента. Ко-
320
Гита 6
Аварийная частотная ршгрузка
.. 1
эффициент усиления регулятора частоты равен — . где у - остающаяся сте-
yv
пень неравномерности, v — коэффициент жесткой обратной связи регулятора
частоты. Поскольку v= 1,0, то коэффициент усиления представим так
кра. = ' ГДе 5 — статизм регулирования
При исследовании регулирования на гидроагрегатах необходимо на
модели иметь элемент с передаточной функцией гидравлической турбины и
учитывать наличие гибкой обратной связи в регуляторе
Эксперимент проводится следующим образом На входе блока «энер-
госистема» создается воздействие ДР. имитирующее изменение нагрузки
энергосистемы На модели выставляются коэффициенты усиления и постоян-
ные времени в соответствии с исследуемым режимом Регистрируется сигнал
на выходе блока «энергосистема». Этот сигнал определяет собой изменение
частоты в системе
Схема математической модели для исследования переходных процес-
сов при использовании программы Sirmilink представлена на рис 6 31. Ре-
зультаты исследований показаны на рис.6.32
Параметры элементов на модели были выбраны следующими:
s = 0,05, Tpei -= 0,5 с, = 1, = 0,1 с, к„ = 1,0; 7,н с = 10 с, к„ = 1,0,
вращающийся резерв ДР = 10 % и наброс нагрузки также ДР - 10 %.
При ступенчатом увеличении нагрузки часто гд энергосистемы снижает-
ся. Сигнал об этом поступает на вход ре1улятора, который воздействует на аг-
регат, устраняя появившееся отклонение При конечном коэффициенте
321
Аварийная частотная разг/ч чка
усиления разомкнутой системы регулирования к = крк кТа к^а регулирова-
ние получается статическим - увеличение нагрузки уменьшает ус i гневившееся
значение частоты В эксперименте дефицит мощности ДР был небольшим,
поэтому изменение частоты А [у1п. оказалось таю,ке незначительно.
Рис 6 32. Снижение и подъем частоты в «тепловой» энергосистеме
Обратим внимание на начальный характер переходного процесса В
первый момент возмущения нет отклонения частоты, и регулятор бездейст-
вует Снижение частоты происходит по экспоненте с постоянной времени
энергосистемы (кривая 1). Только началом действия регулятора частота на-
чинает подниматься, что и демонстрирует кривая 2.
Эксперимент проводился применительно к «тепловой» энергосистеме,
состоящей только из турбогенераторов. Поэтому длительность переходного
процесса весьма незначительна Это положительный фактор. Очевидно, что
при действии АЧР система регулирования окажет заметное влияние на харак-
тер переходного процесса.
На рис. 633 показаны результаты подобного эксперимента для «гид-
рознергоемстемы», состоящей только из гидроагрегатов. Кривая 1 показывает
процесс снижения частоты при отсутствии вращающегося резерва, а кривые 2
и 3 - при наличии ДР = 10 % вращающегося резерва и набросе нагрузки в
ДР 10% Постоянная времени регулятора проварьировапа: для кривой 2-
= 10 с, а для кривой 3 - Т =20 с.
322
Паш 6
Аварийная частотная разгрузка
Система регулирования частоты на ГЭС имеет существенное замедле-
ние. о котором говорилось ранее. Следствием этого является медленное «вытя-
гивание» частоты после ступенчатого воздействия ДР
Рис. 6 33. Снижение и подъем частоты в «гидроэнергосистеме»
На рис. 6 34. и рис 6 35 показаны графики переходного процесса при
большом воздействии, обусловленном дефицитом генерации в энергосисте-
ме Принято, что дефицит генерации, возникший при отключении либо энер-
гоблоков, либо связи с ОЭС. составляет 40 % и равен мощности нагрузки
отключаемой ЛЧР. а вращающийся резерв составляет 12 %
На рисунках приняты следующие обозначения Индексом «1» отмече-
но снижение частоты при отсутствии АЧР и при отключенном регуляторе
частоты Кривая 2 соответствует изменению частоты при действии только
ЛЧР-1. Кривая 3 подучена при совместном действии ЛЧР и регулятора час-
тоты с ограничением.
Обратим внимание на ограничения возможности системы регулирова
ния в данной ситуации- Ести дефицит генерации значительно превышает ве-
личину вращающегося резерва, то система регулирования сначвла начинает
действовать, но вскоре исчерпывает свои ограниченные возможности. Отме-
тим также, что установившееся значение частоты после завершения переход-
ного процесса в «гидроэнергосистеме» выше, чем в чисто «тепловой»
энергосистеме Это объясняется тем, что при значительном замедлении в
действии регулятора частоты АЧР отключает больше потребителей в сравне-
нии с «тепловой» энерг-осистемой. После того как действие регулятора про-
явится, установившееся значение оказывается выше
323
Гiaea б
Аварийная частотная разгрузка
Рис. 6.34 Рис. 6.35
Рис. 6 34 Снижение частоты в «тепловой» энергосистеме при АЧР и ограни-
ченном действии регулятора частоты
Рис 6 35 Снижение частоты в «гидроэнсргосис геме» при АЧР и ограничен-
ном действии регулятора частоты
Сделаем некоторые выводы по результатам экспериментов
Вращающийся резерв не оказывает радикальною влияния на характер
переходного процесса при большом дефиците генерации Это обусловлено
небольшой величиной вращающегося резерва и замедленностью системы
регулирования частоты.
Переходный процесс при действии АЧР-1 длится всего несколько секунд.
За это время генераторы не успевают достат очно изменить свою мощность
Сделанные выводы не снимают ответственности с диспетчера но мо-
билизации вращающегося резерва. В аварийной ситуации должны быть вве-
дены в действие все остановленные и готовые к пуску генераторы, включая
тс, которые работали в режиме синхронного компенсатора
6.1Э. Постоянная времени энергосистемы
Постоянная времени Tj обусловлена инерционностью вращающихся
масс турбо- и гидроагрегатов и механизмов нагрузки. В уравнении движения
инерционность учитывается моментом инерции/, а именно
...
J----= е,М
dt
(6.34)
где J-GETtA Здесь G - масса и Z) - диаметр ротора агрегата.
324
Глава б.
Аварийная частотная разгрузка
Из этого уравнения следует, что избыточный момент сознает ускоре-
ние движения.
Обычно частоту вращения выражают в относительных единицах
О>.
w0
। де соц - номинальная частота вращения, ш - ее текущее значение. Отсюда
<fto dw. .,
следует, что----= too----- Иодстааляя в уравнение движения получим
dt dt
Л*—= V„, - М„ = Ш (6 35)
dt
В уравнении (6.35) избыточный момент ДА/представлен как разность
моментов турбины М„ и нагрузки М„.
Моменты удобно выражать в относительных единицах. Для этого левую
и правую части уравнения (6.35) следует разделитына номинальный момент
/<ч„ tfo). ДА/
' л = «ZT
Выражение J(S)a - Мпаи определяет собой постоянную времени Tj. При
этом уравнение движения запишем в форме
б/to.
Т,----=ДЛ/. (6 37)
dt
В справочной литературе для агрегатов приводятся значения 7j, выра-
женные в секундах.
В уравнении движения (6.37) произведем преобразования, то есть
Jcop d(O. сОрДТИ
В таком случае подучим
(6.38)
(6.39)
325
Глава 6
Аварийная частотная разгрузка
где Tj - /Ши2/ P„uv
Расчет 7; производится по формуле
;4GD2rt210’6
(6 40)
где GD1 маковый момент агрегата, т №; и - частота врашения об/мин,
Р . номинальная мощность агрегата, МВт.
Из уравнения движения (6.37) следует
ю« =— Га,И.Л .
6 с
(6.41)
Если ДА/. = 1,0, то Ь>, — I / Tj, и частота вращения, равная единице (□.= !,
получается при / =Tj. Эти выкладки подтверждают определение постоянной
Tj — это есть время, в течении которого агрегат переходит из состояния покоя
до номипвльной частоты вращения при номинальном движущем моменте, что
соответствует полному' открытию регулирующего органа
Если момент АЛ/. или мощность АР- отрицательны, то происходит
торможение агрегата. Теоретически можно представить такой эксперимент:
турбина отключается, а генератор продолжает работать на полную нагрузку,
величина которой остается постоянной и независимой от напряжения и час-
тоты вращения. Первое условие можно выполют., имея на входе нагрузки
регулятор напряжения, который поддерживает постоянство напряжения на
нагрузке независимо от частоты генератора Второе условие выполнимо, если
в качестве нагрузки выбрать потребителя нулевой категории, например, по-
требителя на постоянном токе, мощность которого не зависит от частоты.
Отключение турбины соответствует мгновенному закрытию регули-
рующего органа турбины, те Рт — 0. Начиная с этою момента времени,
ДР = - 1,0, при этом будет происходить срабатывание кинетической энер-
гии ротора агрегата и он остановится через время Tj с.
Если в тиком эксперименте после отключения турбины на генераторе
оставить неполную нагрузку, а только часть ее, например, механизмы собст-
венных нужд агрегата, то в этом случае 1 ДР-1< 1,0 и срабатывание кинети-
ческой энергии агрегата будет происходить медленнее, так при AP.I ‘ 0,1
энергии хвати! на 100 с.
Гчава 6
Аварийная частотная разгрузка
Практически срабогагь кинетическую энергии полностью невозможно —
при низкой частоте вращения и малом напряжении генератора нс удастся переда-
вать мощность к нагрузке Однако, в диапазоне скорости крашения от Шу до 0.7сОц
это вполне ос} шествимо.
Формально постоянную времени 7j можно пересчитать к новым базис-
ным условиям, например, к базисной мощности Р 'Этот пересчет произво-
дится по формуле
Tju = Tj P"u'1 (6.42)
Рассмотрим вопрос о постоянной времени энергосистемы. Пусть два
агрегата работают параллельно. В этом случае моменты инерции первого Л и
второго Jj агрегатов суммируются = Jj + Суммарная постоянная вре-
мени найдется как
(643)
Возможны различные частные случаи:
I Положим Pl = Рп И 7’n=7j2-
2. ПриР|*Рь чоТл-Тл.
3. ЕслиР, ^Р2, но Т„ *ТЛ.
В общем случае Pt *Р2 и Тл ^TJ2
тогда T^Tji-Tji
имеем Т-£.=Тл=Тл
то 7>т=0,5(Тя+ T,J
Положим 7‘л = Юс, PffPz ~ 0,9,
Tj2 =6 с, Р2 Р± = 0,1. Тогдв имеем Tj £ =10 0,9 6 0,1= 9,6 с.
Отсюда следусг, чго энергосистема, состоящая из однотипных агрегатов.
имеет ту же самую постоянную времени, что н постоянные времени каждого
агрегата. Однако, эта постоянная времени рассчитывается относительно сум-
марной номинальной мощности, тх. номинальной мощности целой энергосис-
темы Таким образом, включение или отключение агрегатов системы нс меняет
величину постоянной времени, понимая при этом, что каждый раз она рассчи-
тывается но отношению к номинальной мощности работающих агрегатов.
В общем случае постоянная времени энергосистемы получается как
средневзвешенная величина, причем параметры мощных агрегатов играют
доминирующ}'Ю роль.
Момент инерции колеса урбины Jra меньше подобного параметра ге-
нератора Л- В расчете постоянной времени агрегата он учитывается так
327
Гчава 6.
Аварийная частотная разгрузка
J, >юо
(6.44)
Механизмы, приводимые во вращение электродвигателями. также за-
пасают кинетическую энергию. Связь генератор-нагрузка можно рассматри-
вать как электрический вал. В таком случае момент инерция этих механизмов
следует учитывать в расчете постоянной времени агрегата так же, как учи-
тывается инерционность колеса турбины, соединенного с ротором генератора
механическим валом
При изменении состава агрегатов энергосистемы, а также изменении
состава потребителей, постоянная времени энергосистемы меняется. Однако
эти изменения невелики и в расчетах частотной разгрузки вполне приемлемо
принимать средневзвешенное значение, например Tj = 10с, тем более, что в
расчетах АЧР фигурирует постоянная времени T"j ~ Tj (кч + кр), практи-
чески в десять раз меньшая чем Tj. Усреднение Tj в таком случае не приведет
к заметной погрешности расчета динамики снижения частоты.
328
Гчава 7
Аварийная разгрузка электрических станций
ГЛАВАп
Аварийная разгрузка элекфических станций
7.1. Назначение разгрузки
Аварийная разгрузка генератора (API 1 нли станции (АРС) наряду с
системами аварийного отк мочения нагрузки (САОН) является основным
средством сохранения устойчивости параллельной работы энергосистем и
крупных станций.
Аварийная разгрузка осуществляется отключением генераторов в ре-
зультате экстренного воздействия на систему регулирования паровой турби-
ны путем уменьшения впуска пара. Гидротурбины не участвуют в экстрен-
ном изменении мощности в саязи с большими инерционными массами и
большими постоянными времени переходных процессов с одной стороны, а с
другой из-за возможности возникновения гидроуларов в водоводах.
При синхронной работе генератора в энергосистеме (рис 7 1, а) суще-
ствует баланс мощностей - турбины (Ри,) и генератора (Рг), при этом генера-
тор работаете постоянным утлом 6.
В аварийной ситуации этот баланс нарушается. Мощность гурбины
может быть больше или меньше мощности генератора Избыточная (дефи-
цит na»j мощность турбины идет на ускорение (торможениеj ротора ai регата.
Частота вращения при этом не равна синхронной, и положение ротора меня-
ется (изменяется уюл 8)
Уравнение движения ротора может быть записано так
7}р'&+ косрЪ+ кс&= . (7 1)
где Т р2Ъ — мощность агрегата, идущая па ускорение (торможение),
каср&— асинхронная мощность генератора,
ксЪ — синхронная мощность генератора
329
Аварийная разгрузка электрических станций
Рис. 7.1. Схема энергосистемы и графики и вменения угла 8 и мощности Р
13 послеаварийной ситуации изменение \ гла 8 происходит по кривой
1 или 2 (рис. 7.1). Кривая 1 соответствует сохранению устойчивой синхрон-
ной работы генератора в энергосистеме Во втором случае угол непрерывно
возрастает и генератор выходит из синхронизма
Дтя сохранения устойчивой синхронной работы генератора в энерго-
системе возникав! необходимость втлдействия на турбину. Этот вопрос рас-
смотрен ниже
Для выяснения качественной стороны переходного процесса, задачу
упрощают, полагая, что в случае сохранения синхронной работы скорость
изменения угла 8 невелика (рЪ=О), а также невелико и ускорение ротора
(р"8=01. В таком случае достаточно учесть синхронную мощность генера-
тора, равную, клк известно
р = (? 2)
Графики изменения мощности генератора Р. и турбины P„(8j в функ-
ции угла показаны на рис. 7.1, б.
До аварии режим определяется точкой «о». В этой точке существует
баланс мощностей Р„, = Р, и неизменность угла Б Отметим что точка «д»
находится на устойчивой части характеристики Рг(Ъ) При любом отклонс-
330
Г та 7 Аварийная разгрузка электрических станций
иип режима от точки «о» по характеристике мощности F, <8 > возникает мо-
мент. стремящийся вернуть режим к точке ко»
Другая ситуация имеет место в точке «</>• 11ссмотря на то, что в самой
точке <«/» формально существует баланс мощности турбины и генератора
Р,„ = Р» режим в этой точке неустойчив. При любом бесконечно малом сме-
щении от точки <«/» возникает момент, стремящийся увеличить это отклоне-
ние. Так в точке «if» мощность |енсратора больше мощности турбины
Р >Рт и появляется тенденция к переходу в точку «я». В точки «J'S» угол
будет увеличиваться Таким образом, точка «J» является i раничноп точкой
устойчивого режима Необходимо воздействовать на генератор и lypoiiny
таким образом, чтобы в переходном режиме угол не достигал значения 8d
В аварийной ситуации осуществляется воздействие на возбуждение
генератора с целью его максимального увеличения. Проблема форсировки
возбуждения для сохранения устойчивости синхронного генератора подроб-
но излагается в учебной литера гуре [7], поэтому здесь не рассматривается
Остановимся детальнее на аварийном управлении мощностью 1 урбины.
До СИХ пор МЫ ИСХОДИЛИ ИЗ |ОГО, чго мощность турбины постоянна
Теперь будем полагать, что имеется возможность изменить эту мощность. На
рис.7.1, б при 8Ь мощность турбины резко снижается до значения Р„,'. Рас-
смотрим алияние такого управления турбиной на процесс стабилизации ре-
жима рабО1Ы агрсгатв.
Возможны два варианта. По первому из них при угле 6Г мощность
турбины возвращается к своему исходному значению Рп,. Па участке углов
от 8Л до 8ь мощность генератора Рг превосходит мощность турбины
значительно больше, чем до Рг! На этом участке идет торможение ротора
агрегата. Следовательно, за счет воздействия на турбину, процесс торможе-
ния сгаловзггся более интенсивным, чго положительно скажется на характере
переходного процесса изменение угла 8/7 J.
По второму варианту после узла 8Г мощность турбины сохраняется
на уровне Рп~. Теперь дополнительное торможение продолжается на боль-
шом участке углов 8 и, в свою очередь, перемещение точки <«/» в положе-
ние «<Г» также положительно сказывается на переходном процессе
331
Аварийная разгрузка электрических станций
Следует напомнить, что при устойчивом переходном процессе мак-
симальное значение угла 8 не должно доходить до значения 8^ Следова-
тельно, при подходе к этому значению рост угла прекращается и его произ-
г/6 ..
водная — ®0. В таком случае неучет асинхронном составляющей электро-
d'/
магнитной мощности генератора Рвс =кпсрЪ не оказывает заметного влия-
ния на переходный процесс.
Из-за инерционности процесса в канале управления мощность турби-
ны не может изменяться скачкообразно, как это было принято на
рис. 7 1,6 Реально процесс изменения мощности турбины происходит по-
степенно Однако общин характер процесса сохраняется и в этом случае,
управление мощностью турбины положительно сказывается на устойчивости
синхронной работы генератора.
В объединенных энергосистемах возникает необходимость аварийной
разгрузки станции или даже нескольких станций. Для сохранения баланса
мощности в дефицитной энергосистеме необходимо отключать потребите-
лей В избыточной системе следует снизить генерируемую мощность, т.е
провести аварийную разгрузку станций.
Подчеркнем значение быстродействия разгрузки. Па рис 7 2 показана
зависимость мощности требуемой разгрузки от ее задержки с момента воз-
никновения аварии
Рис 7.2. Зависимость необходимой разгрузки от быстродействия автоматики
332
Глава 7
Аварийная разгрузка электрических станций
Если разгрузка генератора начинается в самый момец i возникновения
аварии, то для сохранения динамической устойчивости генератор необходи-
мо разгрузить на величину Ро. При задержке начала разгрузки на время /,
разгрузку следует увеличить до величины Д. иначе динамическая устойчи-
вость не будет сохранена. Дальнейшая задержка резко повышает мошность
необходимой разгрузки. При задержке разгрузки на некоторое предельное
время tnp мощность требуемой разгрузки увеличивается до бесконечности,
что свидетельствует о неэффективности подобного действия
7.2. Регулятор частоты вращения с ЭГП
Мощность турбины изменяется посредством регулятора частоты вра-
щения (рис. 7.3).
Рис.7.3. Схема регулятора частоты вращения с ЭГП
Для этой цели все регуляторы имеют механизм изменения скорости
вращения (МИСВ). Посредством МИСВ изменяется устввка регулятора по
частоте При параллельной работе агрегата в энергосистеме это приводит к
изменению мощности генератора.
В соствве МИСВ имеется двигатель, который выполняет функции ин-
тегрирующего элемента системы автоматического регулирования. Наличие
интегрирующего элемента позволяет управлять мощностью (частотой вра-
щения) агрегата с помощью импульсов Так, chi нал на изменение заданной
333
Глава 7 Аварийная разгрузка лекп/рических станций
мощности Рл может быть подан кратковременно. Интегрирующий элемент
проинтегрирует и сохранит его значение до следующего воздействия со сто-
роны персонала или автоматики Такой канал регулирования удобен для
управления агрегатом в нормальном режиме. Для экстренного изменения
мощности этот канал неприемлем из-за большого замедления, вносимого
интегрирующим элементом.
Учитывая потребность быстрого снижения мощности агрегата в ава-
рийных условиях, на регуляторах частоты вращения мощных турбогенерато-
ров выполняется еще одип канал рстулнрования через э.чсктрогнлравличе-
скую приставку (ЭГП), которая преобразует входной электрический ситнап
в механическое воздействие на золотник регулятора частоты вращения.
Практически ЭГП можно рассматривать как безынерционный элемент сис-
темы автоматического регулирования с передаточной функцией W(p) = k .
Как только сигнал на изменение мощности Р] подан па вход ЭГП, он без
задержки передастся на золотник регулятора частоты вращения. При снятии
мощности Р.{ с ЭГП уставка регулятора частоты вращения возвращается к
своему прежнему значению Другими словами, изменение уставки регулято-
ра частоты вращения сохраняется, пока па входе ЭГП присутствует сиги вл
Р3. Этот сигнал можно менять как по величине, так и по длительности.
Обычно воздействие на ЭГП подается в вине прямоугольного импуль-
са определенной величины и продолжительности Величина импульса изме-
ряется в единицах неравномерности. Напомним об этом понятии, которое
использовалось в главе 5 при изучении характеристик регулятора частоты
вращения.
Регулятор может обладать статической характеристикой, при которой
частота зависит от мощности агрегата рт. Наклон этой характеристики оп-
ределяется ствтизмом s. При изменении нагрузки от нуля до номинальной
(ДД,,« = частота уменьшается на величину статизма, также выраженно-
го в относительных единицах. Это положение можно изложить по другому:
перемещение статической характеристики на величину статизма s* приво-
дит к 100 % изменению мощности агрегата. С некоторыми допущениями
s. -у, где у — остающаяся неравномерность маятника регулятора частоты
вращения. Таким образом, смещение статической характеристики на одну
334
Гшва 7
Аварийная разгрчлка ззектрических i таицчй
неравномерность увеличивает мощность гурбоа1регатв на величину номи-
нальном мощности
Обычно подача импульса составляет 2 — 4 неравномерности Увеличе-
ние мощности агрегата по отношению к номинальному значению в 2 —4 раза,
конечно, не происходит, поскольку нмну чье подастся кратковременно. Ин-
тенсивность импульса влияет на скорость открытия окон зо.ют пика — чем
больше импульс, тем они быстрее открываются
Увеличение степени разгрузки агрегата зависит от длительности им-
пульса. Обычно импульсы подаются в несколько десятых долей секунды.
Подачей импульса на ЭГ11 экстренно снижают мощность турбины
При снятии импульса мощность восстанавливается до исходного значения
Это восстановление может проходить колебательно с перерегулированием
Для апериодического восстаноанения мощности уменьшение импульса осу-
ществляется плавно.
7.3. Импульсные характеристики турбоагрегата
Импульсная характеристика представляет собой реакцию элемента
или иелой системы регулирования на импульсное воздсйс гвис. Такое воздей-
ствие можно рассматривать как ретультвз двух ступенчатых воздействий
N -1(1) и -N -Vt—E), где с - сдвиг по времени (рис. 7 4). Данное представ-
ление импульсного воздействия помогает достаточно просто пояснить реак-
цию элемента ца это воздействие
N Г(т-е)
-N-J(t)
Рис.7 4 Формирование импульса из двух единичных воздействий
335
Гюш 7. Аварийная разгрузка электрических станций
Реакция элемента на ступенчатое воздействие представляет собой пе-
реходную характеристику Aft > элемента. Для инерционного элемента перво-
го порядка переходная характеристика изображается экспонентой
, следовательно, импульсное воздействие приведет к результату,
представленному на рис. 7 5 в виде пунктирной кривой.
Рис 7 5 Импульсная характеристика инерционною элемента
Так как система регулирования содержит несколько элементов, то пе-
реходная характеристика системы описывается уравнением более высокого
порядка, при этом усложняется описание импульсной характеристики.
Для практических печей импульсные характеристики получают экспе-
риментально На вход 31 II подается импульс заданной интенсивности и дли-
тельности и фиксируется изменение мощности агрегата. Поскольку выпол-
нить измерение мощности на валу турбины затруднительно, го измеряется
электрическая мощность генератора В таком случае эту характеристику на-
зывают импульсной характеристикой агрегата.
На рис. 7 б изображены импульсные характеристики турбоагрегата
Рг(1) кривая 1 соответствует импульсной разгрузке агрегата при подаче на
вход ЭГП импульса величиной в две неравномерности и длительностью
0,23 с. Импульс начинает подаваться при 1=0. Кривая 2 получена при по-
двче импульса величиной в четыре неравномерности и той же длительности.
Изменение мощности atperara происходит с некоторой задержкой по
отношению к моменту подачи импульса. Это обстоятельство обусловлено
запаздыванием в системе регулирования турбины. Разгрузка через ЭГ11 осу-
ществляется в виде импульса. Как только импутьс снимается с ЭГП, мощ-
336
Гтава 7
Аварийная разгрузка электрических станций
ность агрегата возвращается к своему исходному значению. Плавное изме-
нение мощности на подъеме также объясняется запаздыванием в системе
регулирования турбины.
Рис. 7 6 Импульсные характеристики турбоагрегата
При воздействии через ЭГП глубина н скорость разгрузки получается
вполне удоалстворнтельными и приемлемыми для проведения разгрузки с
целью сохранения динамической устойчивости Эксперименты и опыт экс-
плуатации подтверждают допустимость подачи таких воздействий на турби-
ну.
В целях сохранения статической устойчивости в нослеаварийном ре-
жиме или для разгрузки агрегата, генератор которого потерял возбуждение,
поступают следующим образом: сигнал на разгрузку одновременно подают
через ЭГП и МИСВ. Подача ст нала через ЭГП обеспечивает быстродейст-
вие раз|рузкн Сигнал через МИСВ обеспечивает изменение мощности в ус-
тановившемся режиме. Изменение мощности агрегата при таком воздействии
показано на рис. 7.6 в виде кривой 3.
Большинство агрегатов электростанций, где используется аварийное
управление турбиной, представляют собой агрегаты с промежуточным пере-
гревом пара в пароперегревателях, расположенных между частью высокого
давления и частями низкого п среднею давления гурбины. Передаточные
функции этих турбин рассмотрены в главе 5. Наличие перегревателя пара
привносит значительное запаздывание в переходную характеристику турби-
337
Гтва 7 Аварийная разгрузка электрических станций
цы. Поэтому при рассмотрении динамики аварийного управления мощно-
стью турбины возникает вопрос об учете инерции пара в пароперегревате-
лях.
При анализе малых колебаний, когда работают регулирующие клапа-
ны турбины, учет инерции пара обязателен. При больших колебаниях поми-
мо регу пирующих клапанов приходят в действие также отсечные клапаны,
отделяющие части среднего и низкою давления турбин oi пароперегревате-
ли
Таким образом, изменение подача пара к частям среднею и низкою
давления турбин происходит почти одновременно и параллельно с измене-
нием подачи пара в часть высокого давления турбины. При этом турбину
можно представить как две самостоятельные турбины без промежуточного
перегрева пара, регулируемые параллельно и замещаемые одной обшей сум-
марной моделью. Такой подход является приближенным, однако он приго-
ден как для качественной, так и для количественной оценки процессов и яв-
лений при автоматическом регулировании турбины
Электро! идравлпческие преобразователи (ЭГ11) устанавливаются на
регуляторах частота! вращения всех паровых турбин мощностью 300 МВт и
выше.
7.4. Способы разгрузки генератора и станнин
При потере возбуждения генератор средней мощности необходимо
быстро разгручигь. снизив мощность турбины до 40 —70% Phi} тем самым
перевести генератор в стационарный асинхронный режим
Снижение мощности турбины производится путем вощсйствия на
регу тягор час готы вращения через ЭГП и МИСВ одновременно
Разгрузка станции при избыточной генерации в системе вреде гав.зяе!
собой более сложную задачу В первую очередь, необходимо определить
мощность, на которую следущ разгрузить станции щергосистемы Разгрузка
зависит от многих обстоятельств- места и тяжести аварии, режима энерго-
системы и г.д. Предположим. что эти задачи решены, и на станцию подан
сигнал, пропорциональный требуемой разгрузке. В задачу станционной ав-
338
Fiaea 7
Аварийная разгрузка ъчектрическик станций
гоматнки входит реализация задания с учетом фактического состояния обо-
рудования станции.
Разгрузка станции может осуществляться двумя путями: отключением
генераторов или снижением генерации на работающих агрегатах Каждый из
этих способов имеет свои преимущества и недостатки, которые следует учи-
тывать при выборе метода разгрузки.
К достоинству способа разгрузки путем отключения генератора следу-
ет отнести его быстродействие Действительно, при отключении выключате-
ля генератора (блока), станция снижает свою генерацию на ту мощность с
которой работал отключенный генератор (блок) Этот способ имеет ряд не-
достатков. Пос те отключения и остановки генератора требуется время на его
пуск и включение в сеть. К тому же отключение является ступенчатой раз-
грузкой, что приводит к погрешности величины разгрузки. Эта погрешность
может достигать 50 % мощности блока. Так. если на станции установлены
блоки мощностью 300 МВ г, то при необходимой разгрузке в 450 МВ г требу-
ется отключить два блока и превысить тем самым разгрузку на 150 МВт От-
ключение же одного блока не достаточно.
В этом отношении предпочтительнее быстрое снижение генерации на
работающих агрегатах, поскольку о гмечеппые выше недостатки нс присущи
этому способу Достоинством этого способа является дозировагшая разгрузка
агрегатов.
Каждый агрегат (блок) имеет технический минимум по мощности
ниже которого агрегат (блок) не разгружается. Импульс на разгрузку форми-
руется с учетом фактической загрузки агрегата
К недостат кам мою мента следует о гнести большую длительность,
более сложную реализацию и снижение регулировочного диапазона мощно-
сти разгрузки.
Как правило, эти способы разгрузки объединяются Причем в пераую
очередь стремятся использовать возможности снижения генерации на рабо-
тающих агрегатах и только затем переходить к отключению генераторов
Очередность способов разгрузки нс должна приводить к сс задержке, т е.
обсспечггвать сохранение устойчивости параллельной работы станций и
энергосистем-
339
Глава 7 Аварийная разгрузка электрических станций
13- Схемы аварийной разгрузки генератора и станции
Структурная схема разгрузки генератора, потерявшего возбуждение,
показана на рис 7.7.
Устройство выявления потери возбуждения подает сигнал на проме-
жуточное реле KL При его срабатывании импульс подается на ЭГП и
МИСВ регулятора частоты вращения. Высота и дпитсчьность этого импутьса
должны зависеть от требуемой разгрузки Р3. Значение Р3 определяется в
блоке мощности: где Рф- фактическая мощ-
ность; Р -коэффициент, определяющий допустимую нагрузку в асинхронном
режиме. С учетом мощности разгрузки Р, в блоке формирования импульса
(ФИ) вырабатывается импульс на разгрузку, высота которого пропорцио-
нальна требуемой разгрузке Этот блок работает при условии/^ >0.
Рис. 7 7 Разфучка турбоа1регата при потере возбуждения
Разгрузка станции для снижения генерации па работающих агрегатах
может производится как по замкнутой, так и по разомкнутой схеме При
замкнутой схеме управления фактическая мощность генератора сравнивается
с заданной. Известно, что замкнутые схемы системы ая соматического управ-
340
Глава 7 Аварийная разгрузка электрических станции
пения (САУ) обеспечиваю! высокую точность озрабо'жи задания К их не-
достаткам следует отнести дополнительную сложность Разомкнутые САУ
проще, но точность отработки задания ими ниже. Любые изменения в коэф-
фициентах усиления элементов приводят к погрешности отработки задания
Выполнение устройств разгрузки может осуществляться на различной
элементной базе, например, разработанные в С116ГТУ устройства реализова-
ны на операционных усилителях интегрального исполнения Схема этого
устройства показана на рис, 7.8.
на отключение
генераторов
Рис.7.8. Схема устройств разгрузки (а) и отключения (б) генераторов
341
Гзава 7 Аварийная разгрузка эпектртеских станции
Схема, изображенная на рис. 7.8, а. вырабанивае г сигнал на разгрузку
агрегатов до их технического минимума. Схема состоит из сумматора I, ин-
тегратора 2 и нелинейных блоков 3. Число нелинейных блоков соогветстахст
числу агрегатов станции. Блоки 1,2 и 3 работают по замкнутой схеме- выход
с блоков 3 подается на вход сумматора I Поскольку схема содержит инте-
гратор. то в установившемся режиме <70 - О Отсюда следует
ipi-p. Ьь-о
г—I i-
В схеме Pf - фактическое значение мощности i-ro агрегата, Р3 - зада-
ние на разгрузку станшщ; Р, л— отработанная устройством мощность, с ко-
торой должен работатьi- ый агрегат.
Если представить блоки 3 линейными с одинаковыми коэффициента-
ми передачи, то при одном и том же сигнале на входе сигналы на выходе
будут равны:
и для задания мощности I—го агрегата получим
п
тде п - число агрегатов
р
Есни мощность разгрузки Рг =0, то Pi г - £—, т.е. сигнал па выходе
п
блока 3 соответствует среднему значению мошносш, приходящейся ни один
aiperaT. При мощности разгрузки Р, ^0 это положение сохраняется.
При нелинейных характеристиках блоков 3, как правило, средний уча-
сток характеристики линеен, а нслинсйносш вводятся для ограничения
Pi ппп и pi шах • Если значение Pt} одного из aiperaroR выходит за техниче-
ский минимум, то при дальнейшей разгрузке станции >то значение остается
неизменным, а снижение генерации продолжается на яругах агрегатах
342
Глав, 7 Аварийная ризгрмка метрических станций
На выходе блоков 3 включены ключи 5 Эти ключи управляю гея
схемой (рис. 7.8. б), которая отрабатывает сигнал на отключение генерато-
ров. Работа схемы была рассмотрена выше при замкнутых ключах Если
один из ключей S, отключи гея, то имеем Р, , =0. что равносильно разгрузке
агрегата до нудя Так как задания У Р{ и Р, отмаются неизменными, го на-
грузка поотключенных агрегатов повысится
Элемент 4 схемы на рис. 7 8, а отрабатывает сигнал па разгрузку агре-
гата 11а его вход подается фактическая мощность агрслата Р, и заданная
мощность Р, 3. Разность этих значений поступает на выход блока 4
Часть схемы устройства разгрузки, вырабатывающая сигнал на от-
ключение агрегата, показана на рис.7 8, б. На вход сумматора нодяются сиг-
налы Р,, Р1т1Пч Р,. Разность £Р, -Yp,mn соответстауст регулировочно-
му диапазону сгаицпи. Если необходимо отключать
генераторы В этом случае напряжение на выходе сумматора U'v меняет
Знак и срабатывают компараторы К Их выходной сигнал подастся па отклю-
чение генераторов и на управление ключами 5, (рис 7 8, aj. Очередность
отключения генераторов задается персоналом станции и осуществляется пу-
тем задания опорных напряжений Um) на компараторах.
В целом схема работает следующим образом. До прихода сигнала на
разгрузку на выходе блоков 3 отработан сигнал Р, л. На выходе блока 4 от-
работано значение . на которое следовало бы изменить мощность агре-
гата. чтобы он работал со средним значением мощности. Если сит налы с вы-
хода блоков 4 подать на регуляторы частоты вращения, т.е замкнуть схему,
то она будет управлять мощностью станции, уравнивая эту мощность по
среднему значению между агрегатами. Фактически схема является разомкну-
той, н значения параметров сохраняются на выходе устройства.
При постулчснип команды на разгрузку станции, вкпючается ключ S
(на входе сумматора 1) и схема отрабатывает новые значения ДР,, с учетом
заданной мощности Р,. Пос те завершения переходного процесса в самом
вычислительном устройстве кратковременно срабатывают ключи на входе
343
Глава 7. Аварийная разгрузка электрических станций
элементов 4 (на рисунке нс показаны) и сигнал подается на разгрузку стан-
ции. В зависимости от ситуации в системе этн ckj налы подаются или только
на ЭГП регулятора частоты вращения или на Э1 П и на МИСВ Реализация
этих команд обеспечивает разгрузку шрегзтов
На рис 7 8 показаны упрощенные схемы Фактически устройся во ава-
рийной разгрузки станции имеет более сложную схему и включает в себя
элементы входа и выхода, элементы памяти и различные блокировки, обес-
печивающие самоконтроль и правильность работы устройства в различных
режимах.
I шва 8
Автоматика прекращения асинхронного хода
ГЛ \В А 8
Автоматика прекращения асинхронного хода
8.1. Асинхронный режим
Под асинхронным режимом понимают кратковременную работу энер-
госистемы при несинхронной работе одного или нескольких генераторов
(энергосистем), что обусловлено либо нарушением устойчивости, либо поте-
рей возбуждения.
Выскажем некоторые соображения, касающиеся терминологии.
По нашему мнению, термин «асинхронный режим» целесообразно ис-
пользовать для режимов, сопровождающихся совместной работой возбуж-
денных и певозбужденных (потерявших возбуждение) синхронных машин но
аналогии с режимами работы асинхронных электрических машин Ведомую
роль в этом играют синхронные электрические машины.
Термин «асинхронный ход» целесообразно использовать для несин-
хронной работы возбужденных синхронных машин.
Во время асинхронного хода возбужденного генератора фазовый сдвиг
между вектором эд.с. генератора и вектором напряжения приемной сети
многократно проходит значения от 0° до 360°. При этом машина работает то
в генераторном, то в двигательном режиме, что сопровождаегся очень боль-
шими уравнительными токами, значительными отклонениями напряжения, а
также большими моментами, действующими на генератор и турбину. Асин-
хронный ход в энергосистеме не допустим.
При потере возбуждения генератор может перейти в устойчивый асин-
хронный режим При этом его возбуждение осуществляется за счет потребле-
ния реактивной мощности из энергосистемы В результате скольжения ротора
генератора возникает асинхронный момент, при этом генератор выдаст в энер-
госистему определенную активную мощность. Такой режим кратковременно
допустим и для генератора и для энергосистемы, поэтому «Правилами техни-
ческой эксплуатации» разрешается работа турбогенераторов в асинхронном
режиме без возбуждения в течение определенного времени [1,2].
345
Г 8
Автоматика прекращения асинхронного хода
Рекомендации по ликвидации асинхронного режима 1 оператора в ре-
зультате потери возбуждения зависят от типа генератора (турбо-, гидро) и его
системы охлаждения Для турбогенераторов с косвенным охлаждением до-
пускается работа в асинхронном режиме в течение 30 минут. При этом его
активная мощность должна быть снижена до (0,5 — 0,7) PHav, а ток в статоре
не должен превосходить 1,И,га«-
Так как турбогенераторы с непосредственным охлаждением имеют бо-
лее высокие поминальные плотности тока в обмотке статора, то длительность
асинхронного режима для них не должна превышать 15 минут. Допустимая
асинхронная нагрузка ограничивается в пределах (0,55 — 0,4)Р„, Допусти-
мость асинхронного режима генератора определяется и требованиями энер-
госистемы Так как при потере возбуждения итератор потребляет реактив-
ную мощность из сети, мощность энергосистемы должна быть достаточной
для поддержания напряжения на сборных шинах прилегающей сети не ниже
0,7Ьг„О1(. чтобы предотвратить нарушение устойчивости параллельной работы
генераторов
Характеристики асинхронного момента гидро- и турбогенераторов
отличаются дру| от друга Причем максимальный асинхронный момент гид-
рогенератора ниже, чем j турбогенератора, прежде всего это относи гея к
гидрогенераторам без успокоительных обмоток Поэтому при потере возбуж-
дения эти генераторы значительно увеличивают частоту вращения и умень-
шают активною нагрузку почти до нуля. Вследствие этого гидрогенераторы
при потере возбуждения должны немедленно отключаться от сети
Гидрогенераторы с демпферными обмотками имеют больший асин-
хронный момент, в результате чего может насту нить установившийся асин-
хронный режим. Но это равновесие происходит при значительном скольже-
нии (3-5 %), что но условиям нагрева демпферных обмоток недопустимо
Исключение составляют сверхмощные гидрогенераторы, имеющие
демпферную систему Моментная характеристика подобных генераторов
приближается к характеристике турбогенераторов с высоким использованием
активных материалов. Для этих генераторов рассматривается вопрос о воз-
можности асинхронного режима при потере возбуждения с ак1 йеной нагруз-
кой в пределах до 30 % от номинальной.
Релейная зашита должна выявлял, возникновение асинхронного ре-
жима независимо от причины, вызвавшей этот режим Но действие релейной
346
Гчача S. Автоматика прекращення асинхронного хода
защиты должно быть селективным. При асинхронном холе возбужденного
генератора несущего полную нагрузку, последний необходимо как можно
скорее отключить от сети. Потерявший возбуждение турбогенератор может
сравнительно долго работать, если снизить его ишрузку до уровня допусти-
мой За это время причина потерн возбуждения может быть ликвидирована
или генератор может быть переведен на резервное возбуждение Таким обра-
зом, релейная зашита должна фиксировать не только сам факт асинхронного
режима, но и устанавливать причину нарушения режима
Из того факта, что асинхронный режим при потере возбуждения дли-
тельно допустим, не следует вывод, что релейная зашита может быть мед-
лешгодейстаующей И в этом случае, так же как п при асинхронном ходе воз-
бужденной машины, выявление режима должно осуществляться как можно
быстрее
Поясним это положение На рис 8.1 показаны характеристики асин-
хронного момента генератора (кривые I, 3) и моментные характеристики
турбины (прямые 2, 4) Точка пересечения моментной характеристики турби-
ны с осью ординат соответствует прсдаварлйному режиму. В этом случае
скольжение равно нулю и асинхронный режим отсутствует. Момент турбины
Мт уравновешивается синхронным моментом генератора При потере
возбуждения синхронный момент исчезает Тогда избыточный момент
W, с = А/„ - пойдет на ускорение ротора, которым будет врашаться с не-
которым скольжением относительно ноля статора Возникает асинхронный
момент, максимальный при критическом скольжении Для генератора,
имеющею моментную характеристику 1, установившийся асинхронный ре-
жим наступит в точке «а» По инерции скольжение ротора может превзойти
su, но при этом момент изменит знак и будет тормозить ротор Если точ-
ка «а» находится на достаточном расстоянии от максимума кривой I, то ре-
жим со скольжением «„будет устойчивым
Как видно из рис. 8.1, для получения устойчивого асинхронного режима
без каких-либо дополнительных мероприятий необходимо пересечение мо-
ментной характеристики турбины с характеристикой асинхронного момента
генератора Это возможно пнбо при большом моменте Мшти1 (М^.^ > МС11).
либо при условии, что в прсдаварийаом режиме агрегат работал с незначи-
тельной нагрузкой (точка «/?» на пересечении характеристик 3,4).
347
Глава 8
Автоматика прекращения асинхронного хода
Рис 8 I Характеристики асинхронного момента
Иная картина получается у генератора, имеющего небольшой момент
Мтти и работающею в исходном режиме с номинвльной мошноегью. Выпа-
дение генератора из синхронного режима поясним, ориентируясь на характе-
ристику асинхронного момента 3 и моментную характеристику турбины 2 При
таком расположении характеристик момент Мас меньше момента М„ при всех
значениях скольжения и установившийся асинхронный режим без дополни-
тельных мероприятий нево«можен Из-за избыточною момента частота враще-
ния ротора будет непрерывно повышаться до тех пор, пока ие сработает авто-
мат безопасности турбины и турбогенератор не oyaei отключен от сети
Устойчивый асинхронный режим возможно получил, в результате бы-
строго снижения момента турбины Ради упрощения дальнейших рассуждений
сделаем предположение, что такое снижение осуществляется без задержки.
Еще раз обратимся к характеристикам 2, 3 и 4 Экстренное снижение момента
турбины осуществляется здесь из точки «с» в точку «с/». До точки «с» ротор
генератора ускорялся. При переходе в точку «г/» избыточный момент изменит
знак, и ротор генератора может начать тормозиться, при этом принципиально
возможен переход в устойчивый асинхронный режим в точке «Ь» Может ока-
заться, что снижение момента недостаточно и скольжение будет нарастать
дальше. Очевидно, что чем раньше будет совершен подобный переход, тем
больше вероятность получения устойчивого асинхронного режима.
Необходимо стремиться к тому, чтобы переход на сниженную мо-
ментную характеристику производился раньше, чем скольжение достигнет
348
Гуава 8
Автоматика прекращения асинхронного хода
значения s^, С учетом этого переход с характеристики 2 на характеристику 4
в точках m, п предпочтителен в сравнении с рассмотренным ранее случаем.
Ориентируясь на характеристики агрегата I и 2. оценим время, в тече
ние которого достигается значение скольжения s„. Будем считать, что возбу-
ждение генератора исчезает полностью и с этого времени синхронный мо-
мент генератора равен нулю Тогда избыточный момент при т - 0 равен мо-
менту турбины. С течением времени асинхронный момент нарастает, вслед-
ствие чего избыточный момент уменьшается При скольжении s избы-
точный момент становится равным нулю.
</от
Уравнение агрегата имеет вид Тj — = , где 7} постоянная вре-
мени агрегата; со - частот а вращения; AM - момент в относительных единицах.
Поскольку асинхронный момент в диапазоне скольжения от s - 0 до 5 ~ su уве-
личивается почти по линейному закону, то в упрощенном расчете можно при-
нять АЛ! = const = 0,5Д-/га и время достижения заданного скольжения можно рас-
соГ,
считать по формуле t =----:. Подставляя М„ = I, Т, — 10 с, от - .v - 0,005,
имеем I — 0,1 с. Обычно sa < 0,005, поэтому воздействие на турбину с целью
получения устойчивого асинхронного режима должно начинаться не позже,
чем через 0,1 с Вот почему время выявления начала асинхронного хода долж-
но быть как можно меньше
8.2. Асинхронный ход возбужденного генератора
В доаварийном режиме генератор работает синхронно на энергосисте-
му (рис. 8.2).
Е2 Е2 Ег Е.
Рис.8.2. Схема работы генератора на энергосистему
349
Гзава 8. Автоматика прекращения асинхронного хода
При синусоидальных зле генератора
ег(1) = Е„и sinfai+ &) (8 1)
и энергосистемы
eL(t) = E„,c sin tot (8 2)
и одинаковой частоте вращения со э.д с. изображаются векторами К. и Е„,
сдвинутыми между собой на угол 5. Расчет токов и напряжении в этой схеме
выполняется с использованием комплексных величин
При асинхронном ходе jj^c генератора равна ег (i ) = Еп„ sin О),! и
Э.Д.С. энергосистемы ec(t) = Enic .те эдс этих источников имеют раз-
ные частоты СО. и <вс . Положим ь)г > <ос В таком случае угол будет расти
= -(0с)1 --со,/ Здесь время отсчитывается с момента возникновения
асинхронного хода; u>r =d5/dt - скольжение Скольжение выражают также в
СО? -Cl),
относительных единицах--------= 5»
При возникновении скольжения создается асинхронный момент Мас и
генератор генерирует асинхронную мощность С некоторыми упрощениями
можно представить полный электромагнитный момент синхронной машины
двумя составляющими: синхронной А£.„ и асинхронной Мш:, причем
М = М1Н + Мас. Соответственно мощность Р =Ра1+Рос. При этом при-
ближенно можно считать, что наличие возбуждения не оказывает алиянис на
асинхронную составляющую Р1К, г.с. при расчетах можно использовать на-
ложение синхронных и асинхронных моментов н мощностей [7J
Синхронная составляющая момента зависит от параметров маши-
ны, тока возбуждения, приложенного напряжения и утла 8. а асинхронная
составляющая момента Мос - от параметров машины, приложенного напря-
жения, угла 8 и скорости его изменения, г.с скольжения s - </8 / dr. В укро-
щенных расчетах оперируют усреднепным асинхронным моментом
который не зависит от угла 8.
Рассмотрим режим с бесконечно малым скольжением v = — == О В та-
dt
ком случае асинхронный момент мал, и его можно не учитывать. Выдаваемая
мощность генератора будет определяться только его синхронной мощностью.
350
Глава 8 Автоматика прекращения асинхронного хода
С учетом сказанного, можно построить аекторную диаграмму по
рис. 8.2 для любых значений 6. Ег,Ес и найти ДЕ , ток и напряжение в лю-
бой точке схемы.
Бесконечно малое скольжение предполагает близость час ют щ. и (nit
т.е. наличие в схеме как бы одночастотиой э.д.с. Это упрощение помогает
раскрыть картину асинхронного режима, выяснить основные закономерности
и получить приближенную количественную оценку параметров. Такой под-
ход бчдет использован нами в начале рассмотрения проблемы. В дальнейшем
изложении при построении векторных диаграмм сопротивление Zp в ком-
плексной плоскости будет учтено действие асинхронного момента (мощно-
сти}, используя при этом принцип суперпозиции, о чем сказано выше.
Допустимость сделанных упрощений поясним еще раз следующими
соображениями. Пу ст ь ег (t) = Eaic sin и ec(t ) = Enic sin (j)ct У равнитель-
ный ток в линии определится разностью э л,с источников
^e(l) = е,(1)-ес(1)=ЕГ11г sinОг1~ЕЛ1С sin(Oct (8.3)
Ради упрощения, рассмотрим случай, когда Е„г = Е^. = Ет. При этом
_ „ Ы. - (й, W. +Ы,
&e(t) = 2Еп sin---———I cos-----------1 (8.4)
или
Де(t) = 2Е„ (t)cos (йер1. (8 5)
Из этих формул следует, что Де( I) представляет собой гармониче-
ское колебание со средней частотой юс/) = 0,5((Вг + (0с ), амплитуда которого
со. z 5
изменяется во времени по закону 2F sin—^— = 2Emsin— Строго говоря,
этот сигнал не является чисто гармоническим, что загрудияет математиче-
ские операции с ним.
В инженерных задачах идут на некоторые упрощения, допустимые с
точки зрения точности расчетов. Так. при исследовании поведения релейной
зашиты в асинхронном режиме, следует помнить, что подавляющее боль-
шинство рече реагирует на действующее значение тока (напряжения), при
этом время наблюдения за сигналом составляет один или почти один период
промышленной частоты [17J. В таком случае при частоте скольжения/» < I Гц
Глава 8
Автоматика прекращения асинхронного хода
на отрезке времени Д I = 20 мс можно считать Em(t) = const и рассматривать
hep) как гармонический сигнал со средней частотой шг;, и постоянной ам-
плитудой.
Для одночастотного сигнала можно оперировать комплексными со-
противлениями z = » +• fit, где х = ti)L, а также комплексными токами I и
напряжениями U.
С учетом сказанного, для действующего значения уравнительного тока
в линии запишем
/ =(86)
Ху 2
График изменения тока в функции угла 8 показан на рис 8.3 На этом
же рисунке показано изменение активной мощности генератора, рассчитан-
ной по формуле:
Е Е
Р. - — ---— sin 8 (8 7)
Рис 8.3 Г рафик изменения тока 7(8) и активной мощности
Р(Ъ) генератора
Из графика следует, что асинхронный режим генератора является
очень тяжелым режимом - через генератор протекает очень большой уравни-
тельный ток, а активная мощность принимает весьма большие значения при
углах 8 = 90° т и -180”, где и — 0,1,2 .. и меняет свой знак в течение одного
про ворота ротора
Принимая во внимание высказанную выше оговорку об одпочастотио-
сти сигнала, можно рассчитывать напряжение в л-ой точке сети по формуле;
U„=Ee-xnjv (8 8)
352
Гiaoa к Аптихштика прекращении итнхропшко хода
Характерным режимом яаляется случай 8 180е, для которого по-
строена векторная диаграмма на рис. 8.4 Здесь схема представлена сопро-
тивлениями генератора Z.., линии Z, и энергосистемы 2^. Эл с. генератора Ег
и системы £, приложены по концам схемы и сдвинуты на 180°, что соответ-
ствует рассматриваемому случаю
Полагая z = х, получим уравнительный ток чисто реактивным, сдвину-
тым относительно чл-с на угол 90°, тогда падение напряжения к}ур будет
совпадать по фазе с направлением эдс В таком случае величина напряже-
ния в точке «ин будет равна U„ =Et -xnIv и эпюра напряжений вдоль зи-
нми электропередач изобразится прямой, соединяющей концы векторов
£,. и Ес
В некоторой точке Ц, называемой электрическим центром, напряжение
равно нулю. Во всех точках сета от э.д с Е, до электрического центра напря-
жение совпадает по направлению с вектором Ё После точки Ц напряжение
(в точке ит») будет ориентировано согласно с вектором Ёс.
Для энергосистемы большой мощности можно положить сопротивле-
ние энергосистемы Zc = 0. Тогда вектор Ё{ переместится в точку «/и» и будет
изображаться вектором Е( , а эпюра напряжений вдоль схемы будет опреде-
ляться линией. соединяющей концы векторов Ег и Ё’ Отсюда следует, что
электрический центр также сместится и займет положение Ц* При работе
353
Гчпва 8
Автоматика прекращения асинхронного хиОа
блока генератор-трансформатор на шины бесконечной мощности электри-
ческий центр будет располагаться «внутри» блока генератор-трансформатор
Если э.д.с генератора } мсньшить до значения Ех , то эпюра напряже-
ний также изменится. Если генератор невозбужден.те Ег = 0, то центр про-
ворота переместится в нейтраль генератора.
Релейная защита, реагирующая па напряжение (реле напряжения, дис-
танционное реле) и расположенная вблизи от электрического центра отреа-
гирует на факт снижения напряжения как па короткое замыкание в точке Ц
Это обстоятельство должно учитываться при выборе уставок таких защит.
На рис 8 5 показана схема сети и векторная диаграмма напряжения в
месте установки реле при асинхронном ходе. Пусть Ег = Е^',li, гг = хе,
zc = xt, а также Ес = Er. С изменением угла S в схеме действует хд.с.
ЕЕ = Ес - Ег = El - Еге#(’‘
Рис. 8.5 Схема сети (а) и векторная диаграмма (б).
Напряжение Up определяется так
(8.9)
354
Гмюа 8
Автоматика прекращения асинхронного хода
Обозначим----£—=хс ., тогда
U = Е - с _£c(l-ert I (8.10)
Это уравнение определяет собой окружность, которая проходит через точки-
при 8 - 0, Up = Ёе, если 8 _ 180°, то Up = Е,,(\ ~2\с.
Для случая хс. ~ 0,5 окружность Ь'р{8) отмечена цифрой I. При этом
конеп лектора Up скользит по окружности 1
Если хс* > 0,5, то окружность L'p(8) охватывает начало координат
(отмечено цифрой 2). Теперь вектор Up врашается с частотой со., и дополни-
тельно колеблется относительно вектора Ег.
Еще раз обратимся к выражению
Д е(!) = 2Ет s in у cos Wcpt (8 II;
Такая запись формулы справедлива в пределах изменения угла 8 — О 360°.
при дальнейшем увеличении угла функция wj8/2 меняет знак, вследствие
чего может создаваться неправильное предстаалспие, что после 8 - 360° сиг-
нал costOept следует изображать в виде пунктирной липли 2 (рис. 8.6), цро-
модулированный по закону sin&2
Для сшнала &в(!) корректнее оперировать углом G (рис 8 6, б). График
изменения углов 8 и G показаны на рис 8.6, в В пределах углов 0 - 360е
формула 0 = 8/2 справедлива, но при дальнейшем сколькснин вектора Е,
относительно вектора Е-> вектор АЛ" уменьшается до нуля и после угла 360й
возрождается в виде ЛЕ', те. как бы поворачивается на 180° На рис. 8 6, в
это отмечено скачкообразным изменением утла 0 от 180° до 360°. После утла
360° функция у? и0 положительна.
1 'чава 8 Автоматика прекращения асинхронного хода
Рис.8.6. Изменение тока (а) и дшцраммы напряжений и э д.с. (б, в) при
асинхронном ходе
8.3. Асинхронный режим невозбужденною генератора
Причиной асинхронного режима яапяется потеря возбуждения генера-
тора. Маловероятна одновременная потеря возбуждения сразу на двух или
нескольких генераторах. Поэтому в данном случае рассматривается асин-
хронный режим одного генератора станции, в системе возбуждения которого
произошла авария, и он потерал возбуждение
356
Гiaea 8
Автоматика прекращения асинхронного хода
Напомним кратко сущность перехода генератора в асинхронный ре-
жим. Если возбуждение генератора потеряно, то его синхронный момент
также исчезает. Будем полагать, что в такой ситуации момент турбины оста-
ется неизменным. Тогда под действием момента турбины, нсурая новен генно-
го теперь синхронным моментом генератора, агрегат начнет ускоряться Поя-
вится скольжение ротора относительно магнитного поля статора. В замкну-
тых контурах ротора булег наводиться э.д.с и токи, взаимодейстаие которых
с магнитным полем статора создает асинхронный момент генератора
Если при некотором скольжения s асинхронный момент сравняется с
моментом турбины, то может возникнуть новый стационарный режим. Если
такого баланса нет, то скольжение будет нарастать и при скольжении
s = 7 - 10% турбина будет остановлена дейстиисм аятомата безопасности.
Для выявления асинхронного режима, обусловленного потерей возбу-
ждения, казалось бы, основным параметром должен быть ток возбуждения
Однако по ряду причин подобная защита работает нсудоапе твори гельно и,
как правило, не используется. Потеря возбуждения может произойти по раз-
ным причинам На рис 8.7 показаны системы возбуждения генераторов. На
этих системах контактами I, 2, 3 отмечены места возможных разрывов цели
в системе возбуждения При всех отмеченных разрывах возбуждение генера-
тора теряется, но состояние цепи обмотки возбуждения может быть различ-
ным. 1 ак, при разрыве цепи 1 обмотка ротора (рис. 8.7, а) остается замкнутой
на возбудитель Пренебрегая сопротивлением возбудителя, можно считать,
что обмогка возбуждения замкнута накоротко В этом контуре будет цирку-
лировать ток под действием э.д.с, наведенной со стороны статора.
357
Гtuua 8
Автоматика прекращения асинхронного хт 'ю
Если отключится контакт 3, то обмотка возбуждения будет включена
на дополнительное сопротивление автомата гашения поля (АГП). При от-
ключении в точке 2 цепь обмотки возбуждения полностью будет разорвана.
Еще сложнее ситуация для тиристорной системы возбуждения
(рис 8.7, б) При выходе из строя некоторых тиристоров здесь возможна
частичная потеря возбуждения При разрыве цепи 1 обмотка возбуждения
остается замкнутой на возбудитель, но в зтой цепи стоит тиристор В асин-
хронном режиме в обмотке возбуждения будет наводится э.д.с. из-за сколь-
жения ротора относительно поля статора Но при наличии тиристора ток мо-
жет протекать только в одном направлении.
Из сказанного следует, что простота фиксации потери возбуждения по
току ротора кажущаяся По указанным причинам защита от асинхронного
хода из-за потери возбуждения по рассмотренному принципу не выполняется.
Зависимость асинхронного момента от угла 8 приводит к его периоди-
ческому изменению MV!(s) и к колебаниям мощности в 5 - 7 %, поэтому
асинхронный режим без возбуждения, строго говоря, не является установив-
шимся. Обычно характеристику Mac(sj приводят для усредненного асин-
хронного момента. На pic. 8.8 приведена такая характеристика для турбоге-
нератора ТГВ мощностью 300 МВт Кривая I соответствует замкнутой нако-
ротко обмотке. В случае 2 обмотка ротора замкнута на гасительное сопро-
тивление, равное пятикратному значению сопротивления обмотки возбужде-
ния. Трегья характерце!ика соответствует разомкнутому состоянию обмотки
Все характеристики определены при нормальном напряжении сети.
На рис. 8 9 показаны характеристики асинхронного момента для раз-
ных типов генераторов Характеристика J соответствует турбогенератору
сравнительно небольшой мощности с косвенной системой охлаждения С
точки зрения асинхронного режима при потере возбуждения эта характери-
стика является наилучшей Так, если в довварийном режиме агрегат работал с
номинальной мощностью турбины (характеристика 4), то асинхронный ре-
жим автоматически установится в точке «а» без допо.шительного воздейст-
вия со стороны персонала или специальной автоматики
Вторая характеристика соответствует турбогенератору большой мощ-
ности с форсированной непосредственной системой охлаждения и высоким
коэффициентом использования конструкционных .материалов. Максимальное
значение асинхронного момента здесь соответствует около 60 % от тюми-
358
Гтава8
Автоматика прекращении асинхронного хоОа
нального момента турбины. Поэтому, если в доаварийисм режиме агрегат
работал с номинальной нагрузкой, то при потере возбуждения необходимо
быстро перейти с характеристики 4 на характеристику 5, чтобы можно быто
создать баланс моментов в точке «о'».
Рис. 8.8 Усредненная характеристика асинхронного момента генератора
в зависимости от состояния обмотай возбуждения
Рис 8.9. Характеристики асинхронного момента от
состояния обмотки возбуждения
Гидроагрегаты без демпферных обмогок не могут развивать большой
асинхронный момент (характеристика 3), поэтому при потере возбуждения
эти генераторы значительно увеличивают частоту врашения и уменьшают
359
Г шва Л Автоматика прекращения асинхронного хода
нагрузку почти до нуля. Такие генераторы при потере возбуждения должны
немедленно отключаться от сети.
Исключение составляют сверхмощные гидрогенераторы, имеющие
сильную демпферную систему Например, гидрогенераторы Красноярской
ГЭС имеют возможность работать в асинхронном режиме с 30% нагрузкой
при умеренных скольжениях и при вполне допустимом температурном ре-
жиме ротора.
На основе экспериментальных исследований асинхронного режима
турбогенераторов с косвенным охлаждением, установлены следующие реко-
мендации по допустимости такого режима:
1. Потери в роторе в асинхронном режиме должны быть не бочее потерь
при синхронном режиме.
2. Ток в обмотке статора не выше 1,17»,..
3. Длительность асинхронного режима не должна превышать 30 минут
4. Допустимая активная мощность турбогенератора при зтих условиях
ограничена током статора и составляет от 0.5 до 0.7 номинальной
5. Потребление реактивной мощности из сети должно быть не более
50 — 70 % от номинальной активной мощности, в гаком случае соуф — 0,7.
Правилами технической эксплуатации электрических станций и сетей
разрешается установившийся асинхронный режим без возбуждения и для
генераторов с непосредственным охлаждением, однако, возникают дополни-
тельные условия, которые должны соблюдаться при этом:
1 Генераторы имеют повышенные значения x'j и x'j, что приводит к
меньшей величине асинхронного момента. В таком случае для создания ста-
ционарпого асинхронного режима в точке «а'» (см.рис. 8.9) необходимо бы-
строе снижение активной мощности.
2 Длительность асинхронного режима не должна превышать 15 минут.
3 . Предельно допустимая асинхронная нагрузка ограничивается током ста-
тора и составляет не более О,55Р„а„ для машин типа ГВФ мощностью 60 МВт и
100 МВт и 0,4Р„,,., для генераторов ТВФ, ТВ В и ТГВ мощностью 60 - 300 МВт.
360
Гиюа 8
Автоматика прекращения асинхронного хода
8.4. Способы кыяпдеиия асинхронного режима
Существуют различные способы выявления асинхронного режима
Различие их определяется тем, на основе какого параметра осу тес шляется
>то выявление
Наиболее информативным является угол 6 между векторами э.д.с. ге-
нератора и сети Однако по углу нельзя установить причину асинхронного
режима — вызвано ти нарушение режима внешним возмущением или потерей
возбуждения- Поэтому ниже рассматриваются способы выявления асинхрон-
ного режима отдельно для возбужденного и невозбуждецного генератора.
Асинхронный хоч возбужденного генератора. Причиной нарушения
устойчивости и перехода в асинхронный режим являются возмущения — ко-
роткие замыкания, неправильная синхронизация н ресинхронизация, отклю-
чение линии передачи с последующим нарушением устойчивости ио остав-
шимся связям и тд. В таком случае в асинхронный режим переходит, как
правило, не один генератор. а целая станция пли часть системы относительно
другой ее части.
Для выявления асинхронного хода в первую очередь следует рассмот-
реть утоп 6 между векторами э д с , именно увеличение угла и прохождение
значений 90°. 180° и tji. свидетельствует о возникновении асинхронного хо-
да. Это наглядно видно из рис. 8 3. В го же время имеются определенные не-
достатки и трудности использования этого параметра для целей выявления
асинхронного режима. Во-первых, для измерения угла необходимо иметь
канал связи для передачи информации (вектора U) с противоположного кон-
ца линии передачи. В простых случаях эту задачу решают за счет моделиро-
вания напряжения противоположного конца по формуле 17-,=^— 1Х~ и,
следовательно, U-, измеряют посредством параметров своего конца линии
Затруднения возникают в более счожных схемах сети На рис. 8 10
представлена такая схема В общем случае в каждой точке сети может быть
как генерация, так и нагрузка. Д,1я некоторых точек это отмечено на рисунке
Разделение такой системы на несинхронно работающие части может про-
изойти по нескольким сечениям, которые указаны nVHicnipHbiMu линиями 1 и 2
В таком случае возникает неопределенность в измерении утла б ог станнин Af до
точки М (при первом сечении) ши до точки Q (при втором сечении).
361
Рис 8 10 Схема сложной энергосистемы
В реальных схемах известны наиболее вероятные слабые сечения, ко-
торые могут служить границей раздела между несинхронно работающими
частями объединенной энергосистемы. С учетом этих сечений и осущесталя-
ется измерение угла.
Следует иметь в виду «изменчивость» положения электрического цен-
тра при асинхронном режиме в энергосистеме Рели две точки на схеме сети
выбраны по одну сторону относительно электрического центра (см. рис. 8 51.
то полного проворота напряжений этих точек не будет
Для надежного выявления возникновения асинхронного хода исполь-
зуется факт увеличения тока в асинхронном режиме и периодическое изме-
нение действующего значения тока в функции угла. При коротком замыка-
нии ток также возрастает, но закон изменения тока к.з. в функции времени
совершенно иной. Для более четкого срабатывания защиты при строго опре-
деленном значении угла, устройство защиты дополняют элементом направ-
ления мощности, срабатывающим, например, при угле 180° Сочетание этих
двух факторов обеспечивает селективное выявление асинхронного хода и
срабатывание при первом же провороте векторов э д.с
Асинхронный режим невозбуждеппого генератора. Причиной пе-
рехода генератора в асинхронный режим является потеря возбуждения.
Рассмотренные ранее возможные аварии в системе возбуждения пока-
зывают, что источник возбуждения может быть отключен, а обмотка ротора
замкнута накоротко или на гасительное сопротивление, при этом ток в об-
мотке ротора будет наводится со стороны статора. Этот случай говорит о
362
Гзава 8
Автоматика прекращения асинхронного хода
том, что величина и характер тока в роторе не являются наилучшими и дос-
товерными признаками потери возбуждения.
При потере возбуждения генератор начинает потреблять большой ре-
активный ток из сети Так. турбогенератор ТГВ-300 в нормальном режиме
генерирует 300 МВт активной и приблизительно 200 МВар реактивной мощ-
ности. При переходе в асинхронный режим генератор начинает потреблять
около 200 МВар На факте изменения направления реактивного тока (реак-
тивной мощности) иногда выполняют защиту от потери возбуждения. Одна-
ко следует иметь в виду, что в определенных нормальных режимах, когда в
системе избыток реактивной мощности, генератор может быть переведен на
режим потребления реактивной мощности. Поэтому этот способ выявления
потери возбуждения применяют очень редко.
Угол б также почти не используют для создания защиты oi потери
возбуждения Во-первых, дело в том. что при полной потере возбуждения
э.д.с. генератора равна нулю, т.е. вектор Ег вырождается в точку и измере-
ние угла невозможно В случае частичной потерн возбуждения угол можно
измерить, однако фиксация факта асинхронного режима по углу не устанав-
ливает причины возникновения этого режима Последующие действия ре-
лейной защиты зависят от того, является ли асинхронный режим следствием
внешних возмущений или есть результат потери возбуждения В первом слу-
чае должна сработать делительная автоматика и разделить две несинхронно
работающие части энергосистемы Во втором случае делительная автоматика
бездействует, а релейная защита переводит агрегат в стационарный режим на
15 (30) минут. За это время неполадка в системе возбуждения может быть
устранена, и турбогенератор продолжит свою работу в энергосистеме.
Дли выявления потери возбуждения чаще используют полное сонро-
Ut о ж
швление, измеряемое на выводах генератора Эту формулу можно
UfeJ*u 1Л, .78„-в,-з
записать гак z =-----ГГ* = —~е > откуда видно, что сопротивление
J.,eJ ‘
является весьма информативным параметром, поскольку учитывает величину
напряжения и тока, а также фазу между ними. Учитывая это обстоятельство,
подавляющее большинство защит от потери возбуждения выноцнается на
основе этого параметра.
363
Автоматика прекращения асинхронного хода
8.5. Автомшика прекращения асинхронного хода
в энергосистеме
Рассмотрим энергосистему, в которой возник асинхронный ход, т.е
одна часть энергосистемы вращается несинхронно относительно другой час-
ти Эквивалентируя каждую часть энергосистемы в виде одного генератора,
мы получим схему, подобную рис. 8 2. Такой режим является исключительно
тяжелым но схеме протекает- большой уравнительный ток и в течение каж-
дого нроворота векторов э.д.с генератор переходит из режима генерации в
режим потребления Такне колебания активной мошности создают большие
моменты, которые передаются на вал агрегата. Ввиду особой опасности тако-
го режима необходимо применять меры к его быстрому прекращению Счи-
тается возможным допустить нс более трех и даже одного проворота при
асинхронном ходе.
Первая задача - выявить факт возникновения асинхронного хода. Для
простой схемы сделать это сравнительно просто. В сложной энергосистеме
предварительно намечаются наиболее вероятное сечение, которое условно
делит энергосистему на две работающие части Поясним эго на конкретном
примере На рис. 8.1! представлена схема энергосистемы. Здесь две части
энергосистемы соединены междх собой двумя линиями JI-I и Л-2. Линия
J1-I более высокого класса напряжения и по ней передается основная доля
мошности из первой части энергосистемы во вторую.
При аварийном отключении линии Л-1 полная мощность нс .может
быть передана по линии Л—2. В таком случае произойдет нарушение устой-
чивости и возникнет асинхронный ход - первая часть энергосистемы начнет
ускоряться относительно второй части. Прекратить асинхронный ход можно
только за счет разделения энергосистемы на две несинхронно работающие
части посредстаом отключения выключателей BI пли В2. Целесообразнее
отключить выключатель В2, так как в этом случае все потребители по линии
Л-2 будут питаться от левой, избыточной части энергосистемы. При разде-
лении энергосистемы выключателем В1 нагрузка этих потреби гепен придег-
ся на правую часть энергосистемы, которая и без того имеет дефицит генера-
ции Таким образом, сечение раздела энергосистемы на части должно прохо-
ди ib через В2
364
Гуава К
Автоматика прекращения асинхронного хода
В целом автоматика должна выяв.шть факт возникновения асинхрон-
ного хода между частями энергосистемы и подавать сигнал на отключение
выключателя В2. Такую автоматику называют ^целительной» Используя
терминологию «асинхронный ход», автоматику называют автоматикой
прекращения асинхронного хода (АПАХ).
Рассмотрим схему ЛПЛХ, выполненную на основе реле тока и двух
реле мощности. Реле тока фиксирует факт увеличения тока при асинхронном
ходе и запускает схему (рис 8.121 На рис. 8 13 приведена диаграмма, пояс-
няющая взаимодействие реле тока и направления мошности. Предположим,
что вектор Е1 идет со скольжением относительно вектора При некото-
ром значении угла 6 юк превысит уставку реле и оно сработает (точка «а»).
Контакты реле будут замкнуты до значения угла 6 = 34. приближающегося к
значению 360" На диаграмме зона срабатывания реле тока в функции угла 6
отмечена жирной линией.
Реле направления мощности дели г плоскость на две зоны - срабатыва-
ния и несрабатывания. Практически зона срабатывания занимает чуть мень-
ше 180°. Выберем зону срабатывания первого реле направления мощности в
соответствии с диаграммной (рнс 8 13) Эта зона заштрихована и расположе-
на от мвлых значений утла б приблизительно до 180" Второе реле направле-
365
Глава 8
Автоматика прекращения асинхронного хода
ния мощности имеет зону срабатывания в пределах углов чуть больше 180° и
почти до 360°. Эта зона также заштрихована
Пуск схемы осуществляет реле тока КА. К этому времени реле на-
правления мощности KW! держит свои контакты замкнутыми Через конзвк
ты KL2.3 запускается промежуточное реле KL1 и обеспечивает себе свмо-
подпитку через KLI 1. В зоне 180° реле KWi размыкает свои контакты, но
реяе KL1 получает питание через контакты KL1.I. При дальнейшем увеличе-
366
Гзава 8. Автоматика прекращения асинхронного хода
нии угла 6 срабатывает реле направления мощности KW2. Через контакты
KW2 и KL1 2 запускается выходное реле KL3, которое подает сигнал на раз-
деление системы на несинхронно работающие части.
Обратим внимание, что этот сигнал подан в зоне углов 180°, т е. деле-
ние энергосистемы происходит на первой половине первого проворота.
Если вектор отстает от £2, то после срабатывания токового реле
КА первым сработает реле направления мощности KW2 и подаст си! нвл на
реле KL2. Питание па реле KL3 теперь будет подано через цепочку
KW1-KL2 2, которая будет замкнута при срабатывании реле KW1. Благодаря
такому построению схемы, автоматика фиксирует не только факт асинхрон-
ного режима, но и указывает опережение или отставание вектора Е|.
8.6. Изменение сопротивления ня выводят тонера юра
при асинхронном ходе
Рассмотрим схему на рис. 8.14. Генератор Г работает на энергосисте-
му С. На выводах генератора установлено реле сопротивления, включенное
на фазный ток и напряжение.
Примем также, что скольжение d?>/dt = s ~0, те изменение угла 6
происходит очень мед зенно. В таком случае асинхронный момент мвл, им
можно пренебречь и учитывать только синхронный момент (мощность) При
v =0 генератор следует представлять синхронным сопротивлением х,/. В ана-
литических выкладках примем пока сопротивление генератора Z, и энерго-
системы Zc
При асинхронном ходе час юты щ. и щ неодинаковы Однако с учетом
1-0, можно считать Щ. = щ и онерпровать с одночастотиым сигналом со
W.-KD, _
средневзвешенной частотой аср = ——— Такое упрощение вполне допус-
тимо и будет использовано для получения зависимости Z^fE* Ес, 6J.
367
Г шва 8
Автоматика прекращения асинхронного хода
Рис. 8 14 Схема энергосистемы (а) и диаграмма (6) Л-м определениях.:
Когда скольжение ? / О, то появится значительный асинхронный мо-
мент генератора. В таком случае генератор до тжен быть представлен сопро-
тивлением, зависящим от скольжения Ze(sj Это обстоятельство будет учтено
в дальнейшем при анализе этого случая
Для одночастогного сигнвла ток в липин
Ёг(\-де1Ъ)
(8.12)
где/ = Z..+ Z. и <7 Е,/Е,
Папрялкиие в месте установки реле U =Ег—^ 1. Полное сопротивле-
ние, измеряемое реле, составляет
(8.13)
Учитывая формулу для тока (8 12). выражение для измеряемого сопро-
тивления приведем к виду
(8 141
Если генератор нс возбужден, то, как следует из формулы (8.14), реле
сопротивления измерит Z„ - - Z, При Ес = 0 имеем Zp = Zt. Таким образом, в
данных режимах реле измерит либо сопротивление генератора, либо сопро-
тивление системы. В других режимах это будет фиктивное сопротивление,
обуслоаясшюе значениями токов и напряжений гр =^~.
В соотаетстаии с формулой (8.14) можно построить диаграмму, на ко-
торой будет отмечено геометрическое место концов вектора Zp в зависимо-
368
Глава Я
Автоматика прекращения асинхронного хода
сти от угза б и от отношения q - Ес . F? (рис 8 15) При построении диа-
граммы примем Z, = X, и £с = Хс.
При изменении угла 5 от 0° до 360° выражение qeсоответствует
вращающемуся вектору, конец которого вычерчивает окружность с центром
в начале координат Выражение 1 - qe * " соответствует окружности, центр
которой смешен на 1,0 В результате обращений этой окружности
1/(1 - qe'its"!) конец вектора /Т также будет перемешаться по окружности
[18]. Не рассматривая здесь метод определения местоположения центра и
радиуса обращения окружности, укажем лишь на порядок построения инте-
ресующей нас диаграммы.
Па комплексной плоскости сопротивлений концы векторов 7-f и 7г обо-
значим соответственно 4 и В. Отрезок АВ изображает вектор Z. Центры ок-
369
Пана Я
Звпшматика прекращения асинхронного мню
ружностей, по которым скользит конец вектора Zp при изменении упа 6, на-
ходятся на продолжении отрезка АВ вниз от точки А при q > 1 и вверх от
точки В при q < I. Положение центра и радиус окружностей определяется
величиной д. На рис 8.15 показано несколько таких окружностей, причем
q । * Ч2 > > Чъ- При q — I радиус окружности равен бесконечности и ок-
ружность вырождается в прямую CD Эта прямая проходит через середину
отрезка АВ (точка М) и перпендикулярна ему.
При постоянном значении угла 5, но переменном q копен вектора Zp
также располагается на дугах окружностей, которые строятся следующим
образом Центры этих окружностей располагаются на прямой CD Дополни-
тельным условием для построения окружностей является условие их прохо-
ждения через точки 4 и В Отрезок 4В может рассматриваться как дуга ок-
ружности бесконечно большого радиуса Конец вектора Z, располагается на
этом отрезке при угле 5 — 180° Геометрическим местом концов вектора Zr
при 5 < 180® являются дуги окружностей справа от отрезков АВ При угле
5 > 180® конец вектора Z, располагается на дугах окружностей слева от от-
резка АВ Пользуясь диатраммой, можно определить сопротивление Zp при
любых значениях угла 5 и коэффициента д.
В предыдущих рассуждениях принято, что сопротивление генератора
неизменно В асинхронном режиме это сопротивление меняется и зависит от
скольжения s. Это обстоятельство необходимо учитывать при построении
диаграммы ZP (Ег Ес, Б. х). На рис 8 16 показана зависимость сопротивления
мевозбужденного генератора от скольжения ротора s [14]. В силу несиммет-
рни ротора сопротивление различно по продольной zdt. н поперечной осям
Рассмотрим сопротивление z*. При отсутствии скольжения турбогенератор
замещается синхронным сопротивление Xj. При скольжении s = <*> машина
представляется сс сверхпереходпым сопротивление х"г- В обласгн 0 < « -
геометрическим местом концов вектора сопротивления 1урбогснсратора яв-
ляется характеристика, показанная на рис. 8.15 В первом приближении она
близка к полуокружности, построенной на отрезке xj — x"d, как на диаметре.
В некоторых точках этой характеристики указаны значения скольжения, при
котором определены сопротивления. Характеристика построена в области
отрицательных значений х Это обусловлено тем, что в данном случае изме-
рение осушествляется с помощью реле сопротивления, для которого за поло-
370
Гчава 8
Aenio.\KitnttKti прекращения асинхронного хода
жигелыюе направление сопротивления принято направление от места уста-
новки реле к сети.
Рис. 8.16. Упрощенные частотные характеристики синхронного генератора
Аналогичные пояснения можно привести относительно характеристики
~qv При неизменном значении Z, - х,> имеем одно положение точки А, изобра-
женное на диаграмме рис 8 15 Фактически в зависимости от скольжения и
положения ротора по углу мыслимо множество подобных диаграмм с распо-
ложением точки 4 как на характерно гиках Zj, и 2^,,, так и в зоне между ними
Это обстоятельство не должно затенять главную идею диаграммы
рис. 8 15, которая заключается в следующем:
при полной потере возбуждения коней векгора Zp попадает в точку Аг
в асинхронном режиме частично возбужденного генератора конец век-
тора Zp перемешается также по окружности вокруг точки А, но эта окруж-
ность имеет больший радиус, например окружность ^2
I |ояснпм процесс потери возбуждения и связанный с ним факт изме-
нения сопротивления Zp с помощью рассмотренной диаграммы В нормаль-
ном режиме при генерации активной и реактивной мощностей вектор 7„ изо-
бражается точкой .¥. В асинхронном режиме сопротивление Zp будет ме-
няться по величине и фазе. Кривая, по которой перемещается конец вектора
Zp, называется годографом. Если изменяется только один параметр, например
угол 6, а возбуждение остается постоянным, то начиная с точки Д' телеграф
371
Глава 8.
Автоматика прекращения асинхронного хода
Z„ пойдет по окружности 94, что соответствует асинхронному ходу возбуж-
денного генератора При изменении только вектора Е, конец вектора будет
скользить по окружности, отмеченной углом 5 < 90° В конечном итоге, при
полной потере возбуждения конец вектора Zp попадет в точку А. Если теряет-
ся возбуждение и угол растет, то годограф изображается пунктирной кривой.
Отсюда следует, что по виду годографа можно судить о характере
асинхронного режима возбужден генератор или нет. Это подтверждает вы-
сказанную ранее мысль о том, что сопротивление, измеряемое на выводах
генератора, является весьма информативным параметром.
Еще раз напомним, что при полной потере возбуждения конец вектора
Zp находится в точке А Окружность q\ мы можем рассматривать как зону
недовозбуждения. Определим диаметр окружности
При 6 — 180° точка пересечения окружности с линией АВ лежит на
, z
отрезке АВ на расстоянии отточки / равном С —-. В случае у i да 5 _360°
1 + ?
окружность пересекается с продолжением линии АВ за точкой А и находится
Г„ Z
от нее на расстоянии > =-, поэтому диаметр окружности равен
1-9
2R = £'-£” = —---(815)
1+9 1-9
Выполняя преобразования получим
2R =—(8.16)
1-9‘
2Z
Если 9 > 1. то 2R = — Если принять Ес 1,0 и выразить недовозбужденис
Я
Е 1
в относительных единицах —— = Е. = —, то формулу /Я 16) можно предста-
9
вить в виде R = ZE^
Рассмотрим влияние асинхронного хода возбужденного генератора на
режим всей энергосистемы.
При изменении угла 5 в пределах от 0 - 360° асинхронно работающий
генератор будет выдавать иди потреблять активную мощность Эта мощность
является возмущающим воздействием для энергосистемы и воспринимается
372
Пава 8
Автоматика прекращения асинхронного хода
является возмущающим воздействием для энергосистемы и воспринимается
всеми ее генераторами. В таком случае возмущение будет относительно не-
большим для каждого генератора энергосистемы, [операторы будут продол-
жать работать с доаварийной нагрузкой плюс некоторые колебания мощно-
сти относительно этого значения.
При малых по величине колебаниях мощности генераторы будут ра-
ботать с неботьшими скольжениями, причем все генераторы и система в це-
лом может быть предстаалена синхронным сопротивлением _т<(. Поэтому точ-
ка В на диаграмме (рис. 8.15) остается в том же положении, как и в доаварий-
ном режиме.
Оценим величину скольжения энергосистемы при асинхронном ходе
одного возбужденного генератора. Уравнение энергосистемы (агрегата) име-
ет вид
TJp2S+Dpb = Pm-Pll
(8.17)
где Р„, Р„ - мощность турбины и нагрузки;
Гу - постоянная времени энергосистемы (агрегата);
5 -угол;
/>5 —частота,
D— коэффициент демпфирования;
d
р=-----оператор дифференцирования
df
Коэффициент демпфирования
Поскольку то 2-=К„, 1Де К., — регулирующий эф-
df df df '
фект нагрузки.
С учетом принятых обозначений, уравнение энергосистемы (8.17) за-
пишем в виде
Tpbf+K„bj=bP
(8 19)
Передаточная функция системы
373
Пава 8
4emowmnKti прекращения асинхронного хода
П'(р1 =
тР+к„
1820)
где Т’ = , ДР — воздействие па входе. Д/ отклонение выходной величи-
ны. Амплитудная частотная характеристика
А«&) = г' *
^1 + СГы)1
где <п = 2nf, и следовательно.
Д/ = Л(Ш)ДР
(8-21)
(8.22)
Предположим, что один генератор работает асинхронно с частотой
скольжения Д/4 = 1 Гц, т.е. свг = 6.28 с ' Примем номинальную мощность ге-
нератора в 5 % от мощности системы. В асинхронном режиме эта мощность
будет изменяться во времени Р = Р„„, sin (ОД Пусть Ргаа1 - 2 Р.„,„. В таком
случае воздействие генератора на энергосистему в относительных единицах
будет равно ДР. — 0,1 siniost. Примем Т= 10 с и К„ = 2.0 , тогда Я (со) = 0,015
и, следовательно, Л/ = 0,015 Р,. Макснмвлыюе значение отклонения частоты
AUa будет при максимальном воздейстаин и составит ЛД,Ш - 0,0015. При
таком малом скольжении энергосистема может быть представлена синхрон-
ным сопротивлением xj.
8.7. Характеристики зашиты о г потери возбуждения
Рассмотрим защиту, выполненную на основе измерения сопротивле-
ния на выводах генератора Такая защита фиксирует не только сам факт вы-
явления асинхронного режима, но и устанавливает его причину
На основе электромеханических реле сопротивления характеристику
зашиты выбирают в виде окружности, смещенной в область отрицательных
значений х Па рис. 8.17 показан один из наиболее распространенных вариан-
тов характеристики с окружностью, проходящей через точки 0,5х/7 и kxd
(k> 1,0). Действительно, при потере возбуждения годограф сопротивления Zf
374
Г1ава 8
Автоматика прекращения асинхронного хода
(кривая 1) попадает внутрь этой окружности, что приводит к срабатыванию
реле.
Рис.8.17. Характеристики защиты от потери возбуждения
Некоторыми авторами рекомендуются различные радиусы для харак-
теристики реле и смещение его центра по оси х Здесь мы нс будем рассмат-
ривать эти детали, а отметим основной недостаток зашиты. При такой на-
стройке возможны неверные действия защиты. Так, в случае асинхронного
хода возбужденного генератора годограф 2 также может попасть в зону сра-
батывания реле, что наиболее вероятно при работе генератора с педовозбуж-
дением в доваарийном режиме и потреблении им реактивной мощности
(точка V* годограф 2е). Теоретические и экспериментальные исследования
подтверждают возможность неправильных срабатываний заши ты
Именно этим обстоятельством и объясняется стремление многих авто-
ров отстроиться от ложного дейстаия защиты путем разных рекомендаций
относительно радиуса окружности и сс смещения по осн г.
Радикальной мерой отстройки защиты от неправильного действия явля-
ется выдержка времени порядка от одной до двух секунд. Годограф 2 проходит
зону срабагывапия реле от точки ««» до точки «£>» быстрее этой выдержки и
защита не успевает срабатывать При потере возбуждения годограф 1 длитель-
но находи юя в области срабатывания защиты и она работает правильно.
375
Гтина 8
Автоматика прекращения асинхронного хоЛа
Введение выдержки времени приводит к замедлению выяаления поте-
ри возбуждения и, следовательно, к задержке сигнвла на снижение активной
мощности турбогенератора в аварийных условиях. Как было показано в пара-
графе 8.1. это может привести к потере стационарного асинхронного режима
с докритическим скольжением.
Характеристика защиты с диаметром 0,5v/' - kxd охватывает очень
большую зону на комплексной плоскости, что ухудшает избирательность
защиты. Эту зону необходимо сократить.
На кафедре «Электрические станции» СПбГТУ разработан вариант
защиты сраяннтелыю простой по реализации и обладающей высокими пока-
зателями по селективности и быстродействию В основу этого варианта по-
ложены следующие соображения. Зоной малого возбуждения при заданном
скольжении s, является окружность д, (см.рис 8.18) Для скольжения от 0 те
«» необходимо построить множество таких окружностей с расположением их
центров на характеристиках Zd, и Z^ Понимая сложность создания реле со-
противления. у которого характеристика являлась бы функцией скольжения,
можно пойти на упрощение. Асинхронный режим с малыми скольжениями
продолжается короткое время. Наиболее интересными значениями скольже-
ний являются величины от 0,2 до 0,5 %, т.е. начиная с середины и до макси-
мума восходящей части характеристики асинхронного момента.
На рис. 8.19 представлено семейство характеристик в виде окружно-
стей Qi для фиксированного значения скольжения s=sv и разной степени не-
довозбуждения генератора. Построение проведено для турбогенератора с
параметрами xd = 2.0, xd" - 0.2, Zd, = ZQK. Для системы принято Zr=Хс~ 0.15.
Радиус окружности определен по формуле R = 7Ег», где Z — сопротивление
на комплексной плоскости между точками А и В Эде. генератора выражена
в относительных единицах и ее значение указано у каждой окружности Цен-
тры окружностей расположены на продолжении прямой АВ ниже точки А.
Представленные характеристики позволяют лучше понять характер
процесса при потере возбуждения и установить границу между возбужден-
ным и невозбужденным состоянием генератора
Генератор может находиться в состоянии полной и частичной потери
возбуждения Даже полная потеря не является таковой в переходном режиме -
376
Гчана К Автоматика прекращения асинхронного хода
при отключении источиика питания ток в обмотке возбуждения затухает по-
степенно.
Рис. 8.18 Зависимость зоны недовозбуждения от скольжения
Рис 8.19. Характеристики недовозбужденного генератора
377
Гчиеа 6' Автоматика прекращения асинхронного хода
Для повышения вероятности выявления действительной потери воз-
буждения необходимо рекомендовать зону срабатывания защиты с малым
радиусом окружности, т.е с малым значением например F 0,2 Эта
окружность выделена на рисунке штриховкой. Годограф возбужденного ге-
нератора и лаже генератора, имеющего Ег- > 0,2, не может попасть в эту зону
Но это справедливо только при заданном скольжении .т = 0,5 %.
Если построить подобную диаграмму для скольжения « > 0,5 %, то
годограф даже возбужденного генератора может проходить через «запрет-
ную» заштрихованную область на данном рисунке.
Таким образом, даже значительное сокращение зоны срабатывания не
дает полной уверенности в селективности зашиты, реагирующей только на
сопротивление Z?. Необходимы дополнительные признаки, уточняющие факт
потери возбуждения.
Предложено область срабатывания защиты сократить и представить в
виде эллипса 2 (рис. 8 20), охватывающего характеристику /Л и Z/v в зоне
указанных скольжений. Кроме этого па рисунке показана характеристика I с
диаметром кх,, -0.5 Гд" а также годограф Z. возбукдениого (кривая 3) и те-
ряющего возбуждение (кривая 4) генератора в асинхронном режиме. При
потере возбуждения годограф полностью попадаег в зону эллипса I одограф
возбужденного генератора проходит через эллипс в точках «Ь» и «с». Таким
образом, даже сокращение зоны срабатывания реле сопротивления не исклю-
чает возможность срабатывания защиты при асинхронном ходе возбужден-
ного генератора- Однако, видна принципиальная разница в действии защиты
с характеристиками 1 и 2. По первой характеристике годограф находится в
зоне срабатывания от точки ««» до точки <«/». По времени это соответствует
почти половине проворота ротора и составляет несколько десятых секунды.
Ibiemio по этой причине в этой защите создавалась задержка до 1,0 - 1,5 с,
чтобы нс было срабатывания при возбужденном генераторе.
Эллиптическую характсришику годограф проходит в 8 — 10 раз быст-
рее. Выдержка времени не более 0,1 с вполне достаточна для отстройки от
этого режима.
Предложен вариант защиты генератора от потери возбуждения с ис-
пользованием двух реле сопротивления, имеющих характеристики срабаты-
вания I и 2. Срабатывание реле 1 фиксирует возникновение асинхронного
режима Следующее срабатывание реле 2 на время большее, чем 0,1 с свиде-
378
ГiaeaS
Автоматика прекращения асинхронного хода
тельствует о потере возбуждения. Первое реле срабатывает при углах около
180°. Окончательно защита сработает в районе 360°.
Рис. 8.20. Эллиптическая характеристика от потери возбуждения
Защита имеет развитую логическую часть, которая обеспечивает пра-
вильное действие в более сложных ситуациях. Так, например, при потере
возбуждения с медленным спадом тока ротора годограф 4 (штриховая линия)
может выйти из области второй характеристики в точке к. В таком случае
время пребывания годографа в зоне срабатывания может быть меньше вре-
мени 0,1 с и защита не сработает. Однако, поскольку годограф закручивается
и не пересекает характеристику 1, то логика не сбрасывает счет времени, а
запоминает его. При повторном вхождении в зону 2 в точке I счет времени не
начинается заново, а продолжается, что обеспечивает ускоренное срабатыва-
ние защиты. Возможны и другие сочетания, заложенные в логическую часть
защиты. Более подробно этот вопрос рассматривается в параграфе 8.8.
379
Гчава 8 Автоматика прекращения асинхронного хода
8.8. Выбор уставок
Рассмотрим защиту от потери возбуждения с эллиптической характе-
ристикой. Настроечными параметрами такой защиты являются местоположе-
ние и размеры эллипса в комплексной плоскости сопротивлений и выдержка
времени.
Прежде чем давать рекомендации по Э(им вопросам, необходимо
уточнить смысл термина «потеря возбуждения» Точнее говоря, необходимо
установить границу между состояниями возбужденного и невозбужденного
генератора- В нормальном режиме генератор может работать с недовозбуж-
дснием и потреблять реактивную мощность из системы. Зашита не должна
фиксировать этот режим, как факт потери возбуждения
Возможны полная и частичная потеря возбуждения. Первый термин
более четко характеризует режим генератора И, тем не менее, даже полная
потеря возбуждения не является таковой в переходном режиме - при отклю-
чении источника питания, но замкнутой обмотке ротора, ток возбуждения
затухает постепенно.
Для решения вопроса обратимся еще раз к характеристикам защиты,
представленным на рис. 8 19 Здесь выделена (заштрихована) область недо-
возбуждения с Д. = 0,2. Реле с такой характеристикой сравнительно легко
выполнить на элементах вычислительной техники Но даже такое глубокое
снижение возбуждение не является полной гарантией для селективного дей-
ствия защиты. Действительно, при большем скольжении, чем в точке .4, на-
меченная зона срабатывания с Е^ = 0,2, также сместится в эту сторону, а го-
дограф возбужденного генератора может проходить через «запретную зону»
Отсюда следует, что для полной селективности зашиты необходимо,
кроме параметра Zp имеет еще один дополнительный признак, устанавли-
вающий различие между возбужденным и невозбужденным генератором.
Эффективным параметром является небольшая выдержка времени, позво-
ляющая следить за временем нахождения годографа Zp в зоне срабатывания.
Теоретические и экспериментальные исследования позволяют сфор-
мулировать следующие положения иля выбора характеристик срабатывания
и построения алгоритма работы защиты от потери возбуждения С точки зре-
ния быстродействия целесообразно выделить область срабатывания в виде
эллипса с минимальной выдержкой времени Охват этой совокупности точек
380
Глава 8.
Автоматика прекращения асинхронного хода
позволит резко снизать область неселективной работы и повысить быстро-
действие. Для предотвращения отказа или затягивания выявления потери
возбуждения в режимах с большими колебаниями параметров целесообразно
выделить область фиксации, которая с запасом охватывает первую, а также
обеспечивает своевременный пуск и блокировку зашиты. Такие области по-
казаны на рис. 8 21 совместно с традиционной круговой (кривая 1) в виде
характеристик 2 и 3 Характеристика 2 полностью охвагыяает реальную зону
потери возбуждения и имеет эллиптическую форму с соотношением осей 2.1
Диаметр большой оси ранен I, I отн ед., а смещение его относительно начала
координат по узлу (60 — 70°) должно бьнь осуществлено на величину х'а, что
для мощных генераторов составляет 0,3 - 0,4 отн ед Цен гр характеристики
срабатывания 3, имеющей круговую форму, совпадает с центром эллипса, а
диаметр составляет 1,2 — 1,3 отн ед.
Такой выбор параметров характеристик срабатывания осуществлен на
основе математического и электродинамического моделирования аварийных
режимов мощных генераторов, результатов натурных испытаний и анализа
экспериментальных частотных характеристик машин
Предполагаемый алгоритм работы логической части защиты основан
на оценке времени нахождения конца вектора сопротивления в областях 2, 3
и сравнении этого времени со временем срабатывания 1г/1.
Моделирование показало, что у машин мощностью 500 - 1000 МВт
период асинхронного проворота с возбуждением может длиться не более
0,5 с При эюм конец вектора сопротивления находится в области срабаты-
вания 2 не менее 0,05 - 0,1 с Поэтому нижнюю границу времени срабатыва-
ния tp целесообразно ограничить величиной 0,1 с. У менее мощных машин
аналогичный процесс проходит медленнее, и конец вектора сопротивления
может находится в области срабатывания до 0,5 с. Таким образом, сокраще-
ние области времени срабатывания до зллишической позволяет с учетом
мощности генератора установить дивназон выдержек времени 0,1 - 0,5 с
Конкретное значение выдержки определяется реальными режимами генера-
тора и энергосистемы.
381
Гчава fi
Автоматика прекращения асинхронного хода
Jx
Рис 8.21. Годограф 2p(q, Ъ) и характеристики защиты
Выскажем некоторые соображения насчет быстродействия зашиты. В
предыдущих параграфах всегда подчеркивалась необходимость быстрого
выявления потери возбуждения Но с какого момента следует вести отсчет
времени9 Можно отсчитывать время с момента возникновения аварии Но
может получиться так. что авария произошла, а возбуждение сохраняется
еше на достаточном уровне и зашита не воспринимает это как факт потери
возбуждения. Можно сказать, что защита ждет, пока э л.с. генератора не сни-
зится до величины Ег* = 0,2. Л на это уходит время. Можно ли утверждать,
что в таком случае защита небыстродействующая?
На характеристиках рис.8.22 указаны времена, когда годограф достигает
того или иного значения. Действительно, в область срабатывания (рис. 8 22)
годограф попадает через несколько десятых долей секунды и даже через не-
сколько секунд. Но на этом же рисунке видно, что годограф попадает в об-
ласть эллипса в зоне углов 180°, а срабатывание защиты происходит при углах
360° С этих позиций можно утверждать, что защита является быстродейст-
вующей - она срабатывает при первом провороте ротора генератора.
382
Гзава 8.
Автоматика прекращения асинхронного хода
а) 6) н)
Рис. 8.22. Годографы хр(р, 6j для различных режимов работы
8.9. Исследование асинхронного режима на
математическом модели
Для проверки дейстаия защиты и дальнейших исследований режимов
работы генератора при потере возбуждения была создана математическая
модель генератора на основе уравнений Парка-1 орева с представлением ро-
тора трехконтурной схемой замещения Расчетная схема содержит два мощ-
ных турбогенератора, работ ающих через блочные трансформаторы и сопро-
тивление связи на сеть бесконечной мощности. На одном генераторе модели-
ровались режимы потери возбуждения, другой — замещая остальные парал-
лельно работающие генераторы станции
Математическая модель включает уравнения автоматических регуля-
торов возбуждения генераторов и систему регулирования частоты вращения.
Численное интегрирование системы дифференциальных уравнений, описы-
вающих переходные процессы, осуществлялось в следующих случаях потери
возбуждения: отключение АГП, замыкание обмотки возбуждения на сопро-
тивление, па венти ли и накоротко, частичная потеря возбуждения.
383
Гчава 8 Автоматика прекращения асинхронного хода
На рис. 8.22, а, б, в представлены наиболее характерные годографы
сопротивления на выводах генератора при различных исходных режимах и
аварийных ситуациях. Цифрами I и 2 отмечены круговая и эллиптическая
характеристики срабатывания защиты Кривые 3 - 7 отражают изменение
сопротивления в послеаварийных режимах. Па годографах поставлены циф-
ры, отмечающие время достижения данного значения сопротивления от на-
чала авария.
Ложное отключение ЛГП генератора, работающего с большой доава-
рийной нагрузкой, сопровождается асинхронным ходом и уже через
0.4 - 0,45 с (годограф 4) достигает областей срабатывания I и 2. Режим ха-
рактеризуется быстрым ростом скольжения, которое к концу проворота мо-
жет достигать 4 - 5 %. При недовозбуждении в исходном режиме годограф 3
еше быстрее достигает области срабатывания защипы (0,3 - 0,4 с).
Процесс выпадения из синхронизма при небольшой исходной пагрузке
и замыкании обмотки возбуждения накоротко происходит значительно мед-
леннее (годограф 5), что объясняется постепенным затуханием тока в обмот-
ке ротора.
Обратим внимание на характер изменения сопротивления Zp в пере-
ходном режиме. В начвльный момент времени после возмущения годограф
идет по окружности из точки N в точку А (см. рис 8.15) Это соответствует
уменьшению э.д.с. генератора при очень малом скольжении ротора. Затем
начинает нарастать скольжение и соогвстстаенно увеличивается угол 8, что
приводит к перемещению конца вектора Zp справа налево по рисунку В
дальнейшем продолжается снижение возбуждения и увеличение угла 8, так
что годограф закручивается против часовой стрелики, приближаясь к точке А
на характеристике Z^.
Годшраф 6 (рис 8.22. б) при качаниях генератора расположен в ниж-
ней части полуплоскости Характерно начальное закручивание годографа по
часовой стрелке, что свидетельствует об уменьшении угла 8 в сравнении со
значением в доаварийном режиме. В точке М годограф достигает своего пре-
дельного значения по углу 8, после чего начинается обратное движение про-
тив часовой стрелки. Годограф заходит в область срабатывания характери-
стики I и защита, выполненная только на одном таком реле, может сработать
неверно.
384
Гчава К
AcmovomifKa прекращения асинхронного хода
Наличие выдержки времени у подобной защиты предотвращает лож-
ное действие Защита с эллиптической характеристикой не подвержена дей-
ствию качаний, и никакой дополнительной отстройки здесь не требуется.
Асинхронный режим возбужденного генератора показан на рис. 8 22, в В
доаварийном режиме генератор работал с мвяой активной нагрузкой и был
недовозбуждсн. В отношении выявления потери возбуждения этот режим
наиболее сложный. И тем не менее, развитая логика защиты позволяет четко
фиксировать зги режимы.
8.10. Поведение дистанционной зашиты при асинхронном ходе
Рассмотрим поведение дистанционной защиты при асинхронном ходе
в энергосистеме. Па рис. 8.23 энергосистемы 1 и В представлены эквива-
лентными генераторами и Ек. На межснстемной ЛЭП расположена под-
станция М. На каждом участке линии МА и MR установлена дистанционная
зашита К7И4 и KZMfi с направленной круговой характеристикой для первой
зоны защиты
Рис.8.23. Схема энергосистемы
Обратимся к диаграмме рис. 8.24. Она аналогична диаграмме рис. 8.15
с соблюдением условия Z< — Zb В гаком случае точка М совмещается с точ-
кой 0 (начало координат). Круговые характеристики зашиты KZWJ и KZM9
показаны иа рисунке в виде окружностей I и 2 Для наглядности эти окруж-
ности заштрихованы
Попадание годографа Z(3, g) в область этих окружностей означает
срабатывание защиты. Так. если исходный синхронный режим характеризо-
вался точкой N, то при возникновении асинхронного хода годограф Zf8, ц)
пойдет по кривой qn и попадет в зону первой окружности. Произойдет лож-
ное срабатывание защиты.
385
Глава 8 Автоматика прекращения асинхронного хода
Для устранения срабатывания защиты необязательно иметь полный
проворот Zf6 (/) ио характеристике qA. Дос iaточно годографу зайти в об-
ласть окружности I, а затем вернуться в точку N такое движение происходил
при качаниях роторов генераторов Поэтому блокировку часто называют
блокировкой защиты от качаний
Рнс. 8.24 Дца|рамма, поясняющая возможность срабатывания
дистанционной защиты при асинхронном ходе
386
Литерптурп
IMTFPAI УРА
1 Правила устройства электроустановок. Главзиергонадзор России: - М,
1998.
2 Электротехнический слрваочник - М: Энергоатомиздат, 1988.
3. БарзамА.Б Системная автоматика. - М: Энергоатомиадат, 1988
4. Автома1изация энергетических систем. Под ред Дроздова А.Д М:
Энергия, 1977
5. Павлов Г М. Автоматизация энергетических систем ЛГУ, 1977.
6. Электрическая часть элсктростанпий. Под рсд.Усова СВ — Л:
Энергоатомиздат. 1987
7 Электрические системы. Под род. Веникова В.А. — М: Высшая школа,
1979
8 Юревич Е И. Теория автоматического управления -Л: Энергия, 1975.
9. Kirchmayer L К Economic Control of Interconnected System New fork, 1959
10. Груздев И.А., Шикаева ОМ Системы аятоматичсского регулирования
возбуждения синхронных генераторов.—ЛПИ, 1978
11. Рабинович Р.С. Автоматическая частотная разгрузка энергосистем - М"
Энергия, 1980.
12. Павлов Г.М., Меркурьев АГ., Шаргин ЮМ. Авюматичсская частотная
разгрузка в энергетических системах. Электричество №1,1999.
13. Pavlov G.M. Under Freqnency Load Shedding in Power System Proceedings.
Curitiba, Brasil, CIGRE, 1994.
14. Важнов A-И. Электрические машины. —Л: Энергия, 1969.
15. Мотыгина С А Эксплуатация электрической части тепловых
электростанций. - М: Энергоатомиздат. 1988
16. Совалов С. А., Семенов В. А. Противоаварийное управление в
энергосистемах - М: Энергоатомиздат 1988
17. Ванин В К., Павлов Г.М Релейная защита на элементах вычислительной
техники. - Л: Энергоатомиздат, 1991
18. Атабеков Г.П. Теоретические основы релейной зашиты высоковольтных
сетей. - М- Госэнсргоиздат, 1991.
19. Гуревич Ю.Е., Либова ЛЬ, Окин А.А. Расчеты устойчивости и
противоаварийной автомашки в шергосистсмах. - М: Энергоатомиздат.
1990.
20. Окип А А. Противоаварийная автоматика — М: Издательство МЭИ, 1995.
387
Оглавление
Оглавление
Введение 4
Глава 1. Автоматическое включение резервного
питания и оборудования 6
Глава 2. Автоматическое повторное включение 26
Глава 3. Синхронизация генераторов 67
Глава 4. Регулирование напряжения генератора 106
Глава 5. Регулирование частоты и активной мощности 184
Глава 6. Аварийная частотная разгрузка 271
Глава 7. Аварийная разгрузка электрических станций 329
Глава 8. Автоматика прекращения асинхронного хода 345
Ли герату ра 387
I .М. Павлов, Г.В. Меркурьев
Автоматика энергосистем
Издание Центра подготовки кадров (СЗФ АО «ГВЦ Энергетики»)
РАО «ЕЭС России», 194223. Санкт-Петербург, а/я 44
2G0I I
ISBN 5-87472-196-7
Издательство «Папирус»
192028, Санкт-Петербург ул. Пестеля д. 8
Лицензия № 090143 от 18 03 96
Тираж 1000 Заказ 300
Отпечатано в типографии ООО “ИПК Ьионт
СПб Средний пр . д. 86.