


















































































































































































































































































































Автор: Казак С.А.
Теги: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка транспорт машиностроение грузоподъемные машины
ISBN: 5-06-000143-1
Год: 1989




CU -:-<••
£ - > i
fcin у! *
• г.
>’ - 1л’ ' г:- • ' л
I : । *'§8 : ' 4'с • • '•••. '
| Курсовое
проектирование
грузоподъемных
машин
• ’
р::-Х-4Г5
' - :
-#Д
. л-цл
.< • V • * V •
А Ж wl а Я - >
"SH
к
§=йй* / - ’ ' - '
Ч.
•r-'-v? ' :
уч . ~ПЛТ Я' iH” * . ” • , а
.“j-1 ^rl
___________________________________________________
’ -
. '•« г?. : '
Курсовое
проектирование
грузоподъемных
машин
Под редакцией
проф. С А. КАЗАКА
Допущено Госхдарственным комитетом СССР
по народному образованию
в качестве учебного пособия для студентов
машиностроительных специальностей вузов
МОСКВА
«ВЫСШАЯ ШКОЛА» 1989
ББК 39.9
К 93
УДК 621.86
Рецензенты: проф., д-р. техн, наук М.П. Александров (зав. кафедрой
«Подъемно-транспортные машины и оборудование» МГТУ им. Н.Э. Баума-
на); проф., д-р. техн, наук М.М. Гохберг (зав. кафедрой «Подъемно-
транспортные машины» ЛПИ им. М. И. Калинина).
Курсовое проектирование грузоподъемных машин: Учеб.
К93 пособие для студентов маши но стр. спец. вузов/С. А. Казак,
В. Е. Дусье, Е. С. Кузнецов и др.; Под ред. С. А. Казака-М.:
Высш, шк., 1989.-319 с.: ил.
ISBN 5-06-000143-1
В книге изложены методика и порядок проектирования механизмов и металлоконст-
рукций грузоподъемных машин, даны примеры курсового проекта и приложения. Много
внимания уделено конструированию, компоновке, оформлению чертежей в соответствии
с требованиями ЕСКД. Впервые в практике курсового проектирования введены расчеты
трех вид Oil! предварительные, проверочные и исследовательского типа.
2705140500(4300000000)-517
К---------------------------210-89
001(01) 89
ISBN 5-06-000143-!
у
ББК 39.9
6П5.6
© Коллектив авторов, 19S9
ИНС
Посвящается выпускникам кафедры
подъемно-транспортных машин и ро-
ботов Уральского политехнического
института
ПРЕДИСЛОВИЕ
Настоящее учебное пособие-резуль-
тат многолетней преподавательской
деятельности авторов на кафедре
подъемно-транспортных машин и ро-
ботов Уральского политехнического
института им. С. М. Кирова.
Данное пособие рассчитано на
студентов всех видов обучения спе-
циальности «Подъемно- транспорт-
ные машины и оборудование» выс-
ших технических учебных заведений,
рабочие планы которых предусматри-
вают выполнение семестровых курсо-
вого проек та по грузоподъемным ма-
шинам общего назначения (ГПМ) и
курсовой работы по строительной
механике и металлоконструкциям
11 о д вем н о- г ра н сш)ртпых машин (СМ
ПТМ).
Положения данного пособия мо-
гут' быть использованы при курсовом
проектировании по специальным кра-
нам, при выполнении студенческой
научно-исследовательской и диплом-
ной работ или дипломного проекта.
Многие специальности механико-
машиностроительных и технологи-
ческих факультетов втузов в своих
учебных планах имеют курсовое
проектирование по ПТМ, в состав
которых входят, как известно, и
ГПМ. Поэтому пособие может быть
использовано при выполнении соот-
ветствующих курсовых проектов и
работ.
В книге изложены методика и по-
рядок проектирования механизмов и
металлоконструкций ГПМ. В отличие
от многих других работ подобного
типа в ней уделено много внимания
методике проектирования: конструи-
рованию, компоновке. расчетам,
оформлению чертежей и специфика-
ций в соответствии с Единой систе-
мой конструкторской документации
(ЕСКД). Кроме предварительных и
проверочных расчетов введены также
уточненные расчеты, когда в силовых
трансмиссиях учитываются упругоко-
лебательные и ударные процессы, не-
линейные характеристики приводных
систем, переменность некоторых при-
веденных параметров.
Поскольку в настоящее время ши-
роко применяются методы автомати-
зированного проектирования машин,
авторы сочли необходимым в содер-
жание данного пособия включить со-
ответствующую главу.
Научно-технический прогресс, рез-
кое повышение производительности
труда, существенное увеличение про-
изводства средств механизации и ав-
томатизации подъемно-транспортных,
погрузочно-разгрузочных и складских
работ в целях значительного сокра-
щения сферы применения ручного,
малоквалифицированного и тяжелого
физического груда обусловили широ-
кое применение сбалансированных
манипуляторов. Ввиду этого в посо-
бии изложены особенности их проек-
тирования.
Для оценки работоспособности
механизмов и металлоконструкций
привлекаются не только статические
и кине госта г ическис, но и унругоди-
намические критерии. Учтена флук-
туация (рассеивание случайного ха-
рактера) механических свойств конст-
рукционных материалов и внешних
действующих нагрузок. Для количе-
ственной оценки надежности деталей
механизмов использованы вероят-
ностно-статистические методы.
Поскольку многие методики по-
добных расчетов имеют большое зна-
чение для создания надежного и эко-
номичного оборудования, они могут
оказаться полезными инженерно-тех-
ническим работникам, занимающим-
ся проектированием и модернизацией
ГПМ.
Большинство методик и подходов
к расчетам и конструированию, при-
веденных в данном пособии, в той
или иной мере опубликованы.
Материал пособия подготовили
следующие авторы: С. Л. Казак-пре-
дисловие, введение, гл. 1, 8. § 12.6,
заключение; Е. С. Кузнецов-гл. 2. 4,
$ 12.1, 12.2, 12.4, 12.7; Ю. В. Навар-
ский-гл. 3, 5, 4; 12.3, 12.5; В. Е. Ду-
сье-гл. 6, § 11.1-11.3, 12.8; Г. Г. Ко-
жушко и С. А. Кокшаров-гл. 7;
М.А, Гурин]-гл. 9; Л. В. Стойкая -
гл. 10, § 11.4-11.7 и Приложения.
Ограниченный объем пособия не
позволил осветить все вопросы проек-
тирования ГПМ в равной степени
подробно. Поэтому авторы будут
благодарны читателям за все крити-
ческие замечания и пожелания.
Авторы
J
ВВЕДЕНИЕ
Грузоподъемные машины - высоко-
эффективное средство комплексной
механизации и автоматизации подъем-
но-транспоргных, погрузочно-разгру-
зочных и складских (ПРТС) работ.
Применение таких машин уменьшает
объем использования тяжелых ручных
операций и способствует резкому по-
вышению производительности труда.
Автоматизация ГПМ позволяет
включить ее в поточную линию, а
универсальность использования -сде-
лать составным элементом гибкого
автоматизированного производства.
Курсовое проектирование ГПМ,
основываясь на практике ранее вы-
полнявшихся студентом графических
и расчетных работ по черчению, на-
чертательной геометрии, теории ме-
ханизмов и машин, деталям машин,
призвано выработать навыки проек-
тирования машины в целом и тем
самым закончить общеинженерную
подготовку будущего специалиста.
Практическая самостоятельная ра-
бота студента над темой курсового
проекта будет эффекшвной только в
том случае, если обучающийся твердо
усвоит основные теоретические поло-
жения ранее изучавшегося лекционно-
го материала, успешно выполни! рас-
четный (желательно с применением
ЭВМ в диалоговом режиме) и лабо-
раторный практикумы (рекомендует-
ся применение статистической обра-
ботки экспериментальных данных).
Курсовое проектирование способст-
вует практическому закреплению ра-
нее приобретенных знаний и навыков.
Вместе с этим курсовое проекти-
рование вводит студента в круг во-
просов, которые он будет изучать в
будущих спецдисциплинах. Характер
работы в процессе курсового проекти-
рования позволяет решать задачи
студенческой научно-исследователь-
ской работы. Хорошо подготовлен-
ные студенты могут выполнять реа-
льные проекты, выдвигаемые произ-
водством.
1
Глава 1
ОБЩИЕ ПОЛОЖЕНИЯ
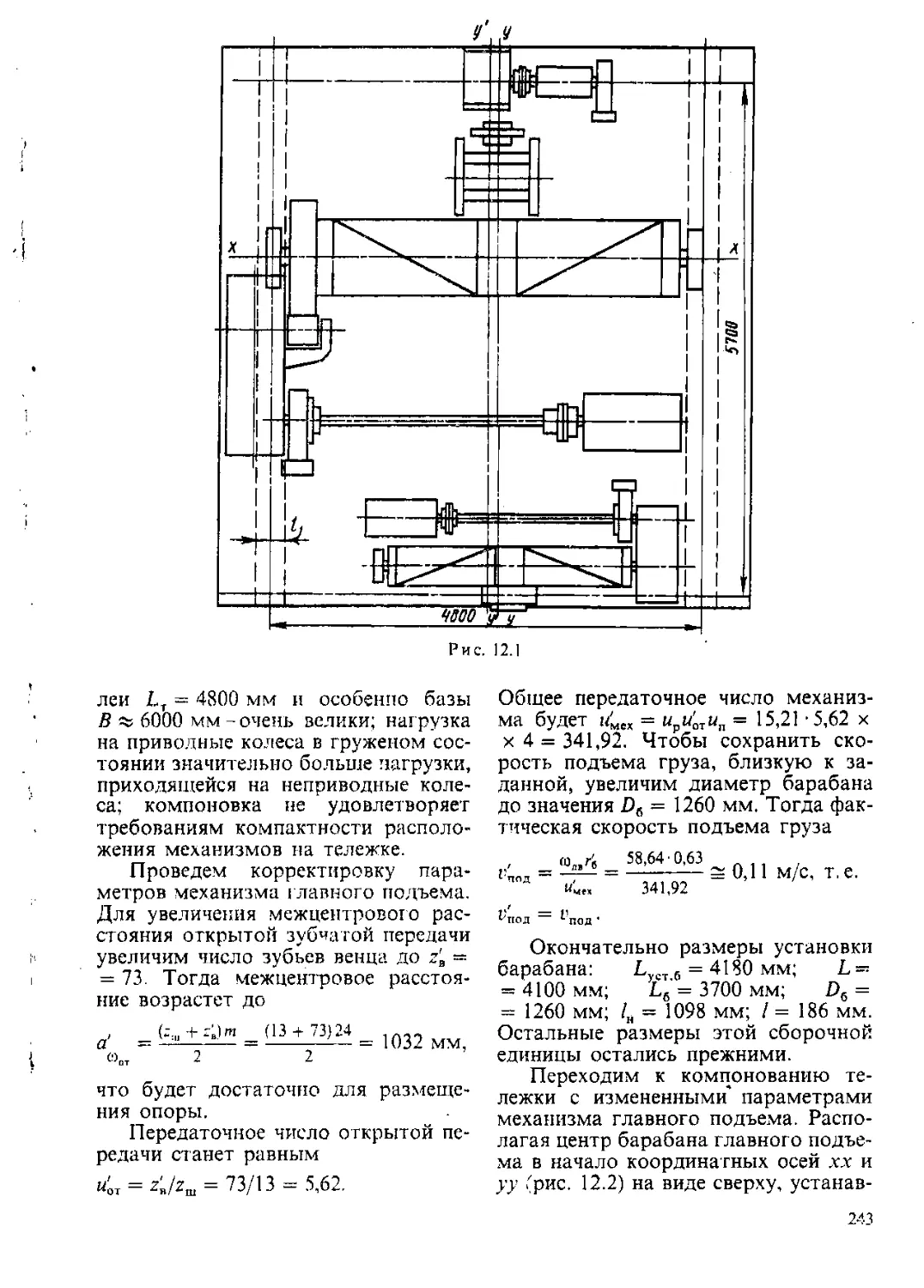
§ 1.1. Цели и задачи
курсового проектирования
Основная цель курсового проекти-
рования - обучение основам конструи-
рования сложной машины, закреп-
ление, углубление и обобщение зна-
ний, приобретенных студентом при
изучении теории дисциплин «Грузо-
подъемные машины» (ГПМ) и «Строи-
тельная механика и металлоконст-
рукции подъемно-транспортных ма-
шин» (СМ ПТМ). За время курсового
проектирования студент должен по-
лучить навыки конструирования слож-
ной сборочной единицы.
Приступая к курсовому проекти-
рованию ГПМ, студент уже имеет
опыт расчетно-графических работ,
выполненных им при изучении начер-
тательной геометрии, технического
черчения, теории механизмов и ма-
шин, деталей машин и других предме-
тов. Он уже должен понимать прин-
ципиальное отличие данного курсо-
вого проекта от предшествовавших.
Если раньше он проектировал детали
и обособленные сборочные единицы,
то здесь он впервые сталкивается с
проектированием всей машины, со-
стоящей из нескольких взаимосвязан-
ных механизмов и металлоконструк-
ций.
В чем же состоят особенности
проектирования машин? Здесь уже
нельзя рассматривать сборочные еди-
ницы обособленно одну от другой,
как эго делалось студентом раньше.
Нужно все время помнить об их взаи-
мосвязи-изменение конструкции или
параметров одной сборочной едини-
цы влечет за собой, как правило, со-
ответствующее изменение конструк-
ции и параметров других сборочных
единиц, входящих в состав данной
машины.
Вместе с гем проект по ГПМ яв-
ляется и первым проектом по спе-
циальности, подготавливая с гуцента
к выполнению более сложных курсо-
вых и дипломного проектов или ра-
бот. Студент знакомится с различ-
ными конструкциями машин, являю-
щихся средством комплексной меха-
низации и автоматизации погрузоч-
но-разгрузочных и транспортно-склад-
ских (ПРТС) работ, углубляет свои
знания и навыки в методах учета
динамических процессов (как детер-
минированными, так и статистически-
ми способами) при нагружениях ме-
ханизмов и несущих металлоконст-
рукций, совершенствуется в использо-
вании нормативной, учебно-методи-
ческой, научно-технической и спра-
вочной литературы [ГОСТов, СТ
СЭВ, ОСТов, руководящих техничес-
ких материалов (РТМ), нормативно-
технической документации (НТД),
справочников, таблиц, номограмм и
др.], а также проектно-конструктор-
ской документации краностроитель-
ных предприятий, специализирован-
ных проектных и научно-исследова-
тельских организаций.
Студент приобретает навыки по
увязке разнородных и разнохарактер-
ных требований и определяющих
факторов при выборе системы при-
вода и принципов управления маши-
ной, при учете «Правил устройства и
безопасной эксплуатации грузоподъем-
ных кранов» Государственного коми-
тета по надзору за безопасным веде-
6
нисм работ в промышленности и гор-
ному надзору при Совете Министров
СССР (Правила Госгортехназдора,
или Правила ГГТН) [16].
В процессе курсового проектиро-
вания студент выполняет графические
и расчетные работы. При этом, при-
меняя не только калькуляторы, но и
прибегая к программированному сче-
1 гу на ЭЦВМ и АВМ с использова-
нием банков данных и библиотек про-
грамм вычислительного центра фа-
культета или института, студент со-
вершенствует навыки расчета и зна-
комится с началами автоматизации
проектирования.
При работе нал заданной темой
1 курсового проекта с гуденту нужно
помнить, что создаваемая им машина
должна соответствовать действую-
щим ГОСТам, обладать необходи-
мыми прочностью, долговечностью и
’ надежностью. Вместе с тем она долж-
на быть создана при отсутствии избы-
точных запасов прочности, при соб-
людении экономии в расходовании
конструкционных материалов.
§ 1.2. Задание
на курсовое проектирование
Гема курсового проекта должна быть
комплексной. Обычно это проектиро-
вание крана общего назначения: мос-
тового, консольного, велосипедного,
стрелового поворотного, козлового и
др. Темой проекта может быть также
проектирование крановой тележки,
тали, напольной элек тро тележки,
сложной лебедки, шпиля, кабестана и
т. п.
Грузоподъемные машины - один
из наиболее подходящих объектов
для курсового проектирования при
подготовке будущего инженера-меха-
ника любой специальности. ГПМ ши-
роко распрост ранены в промышлен-
ности и будут часто встречаться на
практике специалисту любого про-
филя; они обычно состоят из несколь-
ких различных механизмов, привода
и металлоконструкций; на примере
таких машин можно четко и ясно
проследить силовые потоки от дейст-
вия внешне приложенных нагрузок.
изучить динамические процессы при
движении как всей машины в целом,
так и отдельных ее механизмов (а
иногда и при совмещенном их движе-
нии) и деталей, проследить динамику-
па гружения соединительных звеньев
как при переходных, так и при уста-
новившихся процессах. Это имеет су-
щественное значение для детального
изучения работы любой машины.
Так как учет рассеивания меха-
нических свойств конструкционных
материалов и действующих нагрузок
в ГПМ делает необходимым приме-
нение вероятностно-статистических
методов расчета, то в процессе вы-
полнения курсового проекта появ-
ляется возможность рассчитать на-
дежность как вероятность безотказ-
ной работы (ВБР) детали, механизма
уже па стадии проектирования.
Краны сложной конструкции мо-
гут проектироваться двумя-тремя
студентами, в результате чего выра-
батываются навыки совместной рабо-
ты. Может быть рекомендовано ва-
риантное проектирование одного и
того же крана: с разным приводом,
разным типом конструкции и мате-
риалом стрелы, моста или башни, с
различными конструкт явными реше-
ниями отдельных сборочных единиц,
механизмов и т.д. Каждый проект
должен содержат ь элементы новизны.
Способные студенты могут быть
привлечены к выполнению реальных
или поисковых проектов, в той или
иной мере связанных с госбюджетной
или хоздоговорной научно-исследо-
вательской или учебно-методической
работой кафедры.
Каждый курсовой проект выпол-
няется в полном соответствии с инди-
видуальным заданием установленно-
го образца. Задание желательно увя-
зывать с подготовкой и склонност ями
студента. Иногда вместе с заданием
или на его бланке помещается эскиз,
чертеж или фотография общего вида
прототипа проектируемой машины.
Задание обязательно должно быть
подписано руководителем. В отдель-
ных случаях оно утверждается заве-
дующим кафедрой (реальный проект,
курсовая работа, поисковая гема и
7
т.п.). Индивидуальное задание сохра-
няется на протяжении всего проекти-
рования и прикладывается к расчег-
но-пояспи тельной записке (РПЗ).
Курсовой проект по ГПМ, так же
как и все другие курсовые проекты,
должен выполняться в соответствии с
требованиями и указаниями ЕСКД.
Эта система включает около 150 стан-
дартов, в которые постоянно вносят-
ся уточнения и изменения.
Согласно стандартам ЕСКД. су-
ществуют следующие виды изделий:
детали, сборочные единицы, комплек-
сы, комплекты. Определены также
различные виды конструкторских до-
кументов графического и текстового
типа: чертеж детали, сборочный чер-
теж, чертеж общего вида, специфи-
кация, пояснигельпая записка, техни-
ческие условия, расчеты и др., а также
стадии их разработки (техническое
задание, техническое предложение,
эскизный проект, разработка рабочей
документации) и этапы их выпол-
нения.
Каждому документу проекта в за-
висимости от его принадлежности и
определенной стадии разработки
присваивается литера, которая ста-
вится в соответствующей графе основ-
ной надписи.
В ходе курсового проектирования
в большинстве случаев студент' рабо-
тает с деталями и сборочными едини-
цами той или иной сложности. Комп-
лект или комплекс встречается очень
редко.
Курсовой проект содержит в себе
элементы эскизного и технического
проектирования, а также разработки
рабочей документации. С методикой
эскизного проектирования студент
знакомится при выполнении предва-
рительных проектировочных расче-
тов и составлении кинематических и
структурных схем механизмов. Мето-
дика выполнения технического проек-
та осваивается студентом при разра-
ботке чертежей сложных сборочных
единиц, выполнении проверочных
расчетов, техническом описании ма-
шины, определении ее важнейших
технико-экономических показателей.
Навыки разработки документации
развиваются и углубляются при вы-
полнении чертежей заданных сбороч-
ных единиц и деталей, составлении
спецификации, проведении уточнен-
ных расчетов, составлении списка
использованной литературы и окон-
чательном оформлении РПЗ.
Стандартов на курсовое проекти-
рование нет, но можно руководство-
ваться ГОСТ 2.103-68*" (СТ СЭВ
208-75), в котором предусмотрены
определенные стадии проектирования
и этапы выполнения работ. Стадии
разработки, перечень основных ра-
бот, форма отчетности по курсовому
проекту приведены в табл. 1.1.
Различные стадии курсового
проектирования, последовательность
выполнения основных работ и описа-
ние отчетных материалов более по-
дробно описаны в последующих раз-
делах данного пособия и в литературе
[41].
Таблица 1.1
Стадии рачрабенки (ГОСТ 2.103 6Х) Перечень основных работ Форма отчетности
Разработка техни- ческого предложения (ГОСТ 2.118 73) Ознакомление с техническим за- данием (темой проекта, исходными данными, объемом работ и сро- ками выполнения). Подбор и изу- чение литературы и нормативно-* проектных материалов Выбор прототипа конструкции Составление кинематических схем механизмов Перечень литературы и нор- мативно-проектных материалов Кинематические схемы меха- низмов
Эскизное проекти- рование (ГОСТ 2.119-73) Предвари гельное определение основных параметров унифици- рованных изделий (крюковых под- Предварительные расчеты
8
Продолжение табл. 1.1
Стадии разработки (ГОСТ 2 Л 03-68) Перечень основных работ Форма отч-г* нести
весок, канатов, двигателей, редук- торов. муфт, тормозов, колесных установок и др.), входящих в состав механизмов, и их выбор Предвари геяьное определение основных параметров сборочных единиц, не являющихся унифици- рованными (барабанов, верхних бло- ков. уравнительного балансира, специальной подвески и др.), входя- щих в состав механизмов Компонование [^скольких ва- риантов механизмов с привязкой их к опорной металлоконструкции Выбор рационального варианта Предварительное определение размеров основных элементов ме- таллоконструкций кранов. Компо- нование конструкции Варианты компонования и их обоснование
Техническое проек- тирование (ГОСТ 2,120-73) Проверочные расчеты механиз- мов (проверка длительности пус- котормозных процессов, прочности деталей какой-либо сборочной еди- ницы, запасов сиепления колес с рельсами), прочности и жест- кости металлоконструкций Уточнение скоростей движения механизмов, коэффициентов полез- ного действия Конструирование и расчет па прочность какой-либо сборочной единицы, не являющейся унифици- рованной, входящей в состав меха- низма Определение динамических на- грузок, действующих на какой-либо элемент механизма Расчет прочностной надежности данного элемента Расчет положений конечных вы- ключателей, конпевых упоров и других приборов безопасности Разработка чертежа общего вида машины и составление се техничес- кой характеристики П ронеренн ые ру ководителем расчеты Подписанный руководителем и нормоконтролером чертеж об- щего вида машины Схема расположен и ч прибо- ров безопасности
Разработка рабочей конструкторской доку- ментации Составление спецификаций на сборочные чертежи тележки, меха- низмов и более мелких сборочных единиц Вычерчивание сборочных черте- жей и чертежей деталей Оформление расчетно-поясни- тельной записки Подписанные руководителем и нормоконтролером специфи- кации, сборочные чертежи, чер- тежи деталей и РПЗ Введение; назначение и область применения; техническая харак- теристика; описание и обоснова-
ние выбратюй конструкции;
расчеты, подтверждающие рабо-
тоспособность и надежность
конструкции; ожидаемые техни-
ко-экономические показал ели;
уровень у нифмкации (ГОСТ
2, !06 -73)
9
§ 1.3. Комплектность
и взаимосвязь документации
в составе курсового проекта
Многолетняя практика показала, что
задачи курсового проектирования мо-
гут быть успешно решены при сле-
дующем составе конструкторских до-
кументов. Семестровый курсовой
проект по ГПМ должен содержать
четыре листа чертежей формата А1.
спецификации и расчетно-пояснитель-
ную записку (РПЗ) общим объемом
30.. .50 страниц формата А4. Се-
местровая курсовая работа по СМ
ПТМ должна состоять из двух-трех
листов чертежей формата А1, специ-
фикации и РПЗ объемом 15.. .20 стра-
ниц формата А4.
Состав конструкторских и других
отчетных документов при выполне-
нии исследовательской курсовой ра-
боты (а не проекта) по ГПМ может
быть разным.
Распределение объема графичес-
кой части курсового проекта зависит
от целей и задач проектирования, но
чаще всего оно бывает следующим:
сборочный чертеж проектируемой ма-
шины -1 лист; сборочная единица
сложного чипа (например, какой-либо
механизм)- 1 лист; сборочная едини-
ца, входящая в сбстав механизма по
предыдущему листу,- I лист; четыре
детали, входящие в состав сборочной
единицы по предыдущему листу,
I лист. Аналогично распределяется
объем графической части и в курсо-
вой работе по СМ ПТМ: сборочная
единица моста, крановой балки, рамы
тележки, консоли или укосины - 1 лист;
балка, ферма и др,- 1 лист.
Основной конструкторский доку-
мент для сборочных единиц, комплек-
сов и комплектов -спецификация.
Сборочный чертеж вносится в специ-
фикацию на данное изделие и, следо-
вательно, по отношению к специфика-
ции является документом подчинен-
ным. Специфика ци я-это доку-
мент. определяющий состав сбороч-
ных единиц, комплексов или комплек-
тов. Следовательно, она отражает
технологию изготовления данной
сборочной единицы, комплекса или
комплекта. Вместе с тем от специфи-
кации зависит состав последующих
конструкторских документов.
В РПЗ должно быть введение с
обоснованием принятой конструкции,
технико-экономическими характерис-
тиками спроектированной машины и
определением коэффициента унифи-
кации. Кроме того, РПЗ должна
включать необходимые расчеты, свя-
занные с выбором основных парамет-
ров кинематических схем механизмов
и всей машины в целом, обоснование
использования унифицированных и
стандартных изделий, которые при-
меняют в разрабатываемых чертежах
описываемого проекта, а также про-
верочные и уточненные расчеты.
§ 1.4. Организационно-методические
основы проектирования
При конструировании любой маши-
ны перед конструктором стоит за-
дача-создать машину, которая бы
имела высокую производительность,
достаточные надежность и долговеч-
ность, сравнительно малую массу,
небольшие габариты, простую и без-
опасную систему обслуживания и
была удобной в управлении. Основ-
ные параметры ГПМ должны соот-
ветствовать стандартам СЭВ.
ГОСТам.
В курсовых проектах допускаются
некоторые обоснованные отступления
от стандартов в тех случаях, когда
эт о улучшает эксплуатационные пока-
затели машин.
Конструкции кранов должны от ве-
чать требованиям Правил ГГТН и
«Правил устройства электроустано-
вок». Более широкие расчетные, кон-
структивные и эксплуатационные тре-
бования к ГПМ предъявляют отра-
слевые и ведомственные РТМ (руко-
водящий технический материал) и
технические условия.
Практика показывает, что начало
проектирования - выбор общей схемы
машины и решение основных принци-
пиальных вопросов - для студентов
бывает наиболее трудным. Работа
студента над проектом должна вы-
полняться примерно в следующем по-
10
рядке (см. табл. 1.1). Получив задание
и прослушав вводную беседу руково-
дителя, студент должен изучить зада-
ние на проект, собрать необходимую
литературу, отобрать аналоги проек-
тируемой машины (ее механизмов и
несущих металлоконструкций), про-
веши критический анализ, уяснив пре-
имущества и недостатки прототипа.
Здесь предполагается обязательное
тщательное изучение всех видов тех-
нической литературы.
Схем у м а ш ины, м е х а п и з-
м о в выбирают путем сравнитель-
ного анализа нескольких вариантов, с
точки зрения конструктивной целесо-
образности. совершенства кинемати-
ческой и силовой схем, габаритов,
металлоемкости, надежности, степени
агрегатности, удобства обслуживания
и т.д.
Однако создать конструкцию,
полностью отвечающую предъявляе-
мым к ней требованиям, очень слож-
но, что обусловлено противоречи-
востью выдвигаемых требований.
Так, требование минимальных га-
баритов противоречит требованию
удобства обслуживания, требование
прочности и жесткости конструкции -
требованию минимальной массы и
т.д. В этих случаях идут на компро-
миссное решение, поступаясь неко-
торыми, нс имеющими в данных
условиях первостепенного значения
требованиями.
После выбора схемы механизма
производят предварительный
расчет:
1) определяют параметры основ-
ных стандартизованных или унифици-
рованных изделий, входящих в состав
механизмов (крюковых подвесок, ка-
натов, двигателей, редукторов, муфт,
тормозов, ходовых колес и др.):
2) выбирают типы (серии) и типо-
размеры данных изделий;
3) определяют основные параме-
тры изделий, не являющихся стандар-
тизованными или унифицированны-
ми (верхних блоков, уравнительных
балансиров, деталей открытых зубча-
тых передач, деталей опорно-пово-
ротных устройств и др.), или изделий,
унификация которых охватывает
лишь узкую часть их типоразмеров
(барабанов, блоков и др.).
Завершив предварительный расче т
и выбрав составляющие механизм
(машину) изделия, приступают к
компонованию. Попытки сначала все
предварительно рассчитать, а потом
производить компонование и вычер-
чивание, как правило, обречены на
неудачу, гак как на этой стадии не-
возможно предвидеть все особеннос-
ти конструкции.
При компоновании определяют
наиболее целесообразное взаимное
расположение сборочных единиц и
отдельных деталей. На этой стадии
проектирования очень важны разра-
ботка вариантов, углубленный их
анализ и выбор наиболее рациональ-
ного. Компонование несложных изде-
лий можно проводить в одной проек-
ции. в которой конструкция прояв-
ляется наиболее полно. При компоно-
вании наиболее сложных устройств
может потребоваться несколько
проекций. При компоновании сбороч-
ные единицы, входящие в проектируе-
мое изделие, изображают упрощенно
в виде «габариток» (см. § 2.1).
Компонование есть процесс поисков,
прикидок, разработки вариантов, их
сопоставления и выбора наиболее
удачного Окончательный вариант
компонования должен быть утверж-
ден руководителем. Компонование
должно быть помещено и описано в
РПЗ. Эта часть курсового проекта
представляет собой, по существу,
эскизную разработку общего вида ма-
шины.
После выбора наиболее рацио-
нального варианта компонования
приступают к конструктивной
проработке. В соответствии с вы-
полненным компонованием намеча-
ют расположение необходимого ко-
личества проекций, выбирая масштаб
изображения таким образом, чтобы
проектируемое изделие полностью
входило в поле чертежа и давало
ясное представление о сборке проек-
тируемого объекта из изделий, кото-
рые определяются спецификацией к
данному чертежу. Для этого состав-
ляют предварительные укрупненные
11
спецификации, соответствующие ти-
повой технологии сборки (монтажа)
изделия и его сборочных единиц, а
также тем учебным задачам, которые
поставлены в задании. На основании
предварительных спецификаций опре-
деляют состав и структуру чертежей
графической части проекта-необхо-
димое количество и масштабы проек-
ций. видов, сечений на чертежах ма-
шины и се сборочных единиц.
Конструктивную проработку ве-
дут последовательно, определяя раз-
меры отдельных деталей и исходя из
их взаимного расположения При
э том руководствую гея данными пред-
варительных расчетов, а уточненные
выбранные размеры сопровождают
соответствующими проверочными
расчетами. На этой стадии проекти-
рования работа должна осуществ-
ляться сразу на всех проекциях. По-
пытка сначала проработать одну
проекцию, потом вторую и, наконец,
третью обречена па неудачу из-за
того, что одна проекция полной
ясности не дает.
Окончательно оформляются чер-
тежи, спецификации и РПЗ.
Значительная часть курсового
проекта представляет собой выпол-
нение технического проекта и разра-
ботку рабочей документации. Проек-
тирование механизма или машины-
это творческий процесс расчетно-гра-
фической проработки конструкции, в
котором тесно увязываются в единое
целое конструктивные формы деталей
и сборочных единиц с проверкой их
прочности, выносливости и надеж-
ности. Параллельно выполняя чер-
тежные и расчетные операции в ходе
проектирования, студент должен стре-
миться придать рациональную форму
детали с учетом многообразных тре-
бований эргономики, эстетики, техно-
логичности и т.д.
Защита проекта производится пе-
ред комиссией в составе 2.. .3 человек,
в том числе и руководителя. В док-
ладе (5. ..7 мин) студент характери-
зует выполненную работу, отмечая ее
достоинства и недостатки, оригиналь-
ные разработки в расчетной и графи-
ческой части проекта.
§ 1.5. Общие положения
по расчету ГПМ
Режимы работы ГПМ. Как известно,
условия нагружения крана и его меха-
низмов в процессе эксплуатации учи-
тываются режимами работы, исходя
из которых определяют требования к
его надежности и безопасности. В
настоящее время действует ГОСТ
25835'83 «Краны грузоподъемные.
Классификация механизмов по режи-
мам работы».
По этому стандарту группу режи-
ма работы механизма определяют в
зависимости от класса использования
и класса нагружения (табл. 1.2).
Класс использования зависит от
общего времени работы за весь срок
службы, в течение которого данный
механизм находится в действии
(табл. 1.3).
Коэффициент нагружения К, ха-
рактеризующий класс нагружения,
вычисляют по формуле
где PL - нагрузка, действующая на
механизм (сила, момент) за время
Н, Н м; Fmax наибольшая нагрузка
(сила, момент), определяемая с уче-
том всех факторов, действующих на
механизм в течение рабочего цикла
Н, Нм; /.-продолжительность вре-
мени действия нагрузки Р{. ч; 2/,. -
суммарное время действия нагрузок
на механизм, ч.
Класс нагружения определяют но
табл. 1.4.
При определении времени работы
учитывают время разгона, установив-
шегося движения и торможения.
Общее время работы механизма (ре-
сурс) Т б является его машинным
временем за срок службы крана и
может быть определено по формуле
^"раб ~ 1
где /с--среднесуточное время работы
механизма, ч; нди-количество рабо-
чих дней в году; г С11-срок службы
крана до списания, лет.
12
Таблица 1.2
Класс исполь- зования Класс нагружения Класс исполь- зования Класс нагружения
В1 В2 вз 114 BI В2 вз В4
АО JM 1М 1М 2М А 4 зм 4М 5М 6М
Al 1М 1М 2М ЗМ А5 4М 5М 6М —
А2 IM 2М ЗМ 4М А 6 5М 6М —
АЗ 2М зм 4М 5М
Таблица 1.3
Класс использования АО Л1 А2 АЗ А4 А5 А6
Общее время работы, ч До 800 Св, 800 до 1600 Св. 1600 до 3200 Св. 3200 до 6300 Св. 6300 до 12 500 Св. 12 500 до 25 000 Св 25 000
до 50000
Г а б л и и a 1.4
Качественная характеристика класса нагружения
К л та се наг ру же - К оэфс] >и цн ен ч
НИЯ нагружения
В1 До 0,125 Св. 0,125 до 0,25 Св. 0,25 до 0,5 Св. 0.5 до 1,00
В2 Св. 0.125 до 0,25
ВЗ Св. 0,25 до 0,5
В4 Св. 0,5 до 1,00
Работа при нагрузках:
значительно меньших номинальных
и в редких случаях номинальных
средних и номинальных
преимущественно номинальных и
близких к номинальным
Постоянная работа при номинальных и близких к
номинальным нагрузкам
Среднесуточное время работы ме-
ханизма принимается в зависимости
от класса использования: для АО-до
0,5 вкл,, для Al-св. 0,5 до 1 вкл.,
А2-св. 1 до 2 вкл., АЗ-св. 2 до 4 вкл.,
А4-СВ. 4 до 8 вкл., А5-св. 6 до 16
вкл., Аб-св. 16.
Количество рабочих дней в году
принимают в зависимости от коли-
чества выходных дней в неделю: при
двух выходных днях пдн = 250, при
одном выходном дне = 300, при
непрерывном производстве идп = 360.
Срок службы крана до списания
/к сп = 15...25 лет. Конкретное значе-
ние принимают по нормативным до-
кументам. Сроки службы различных
элементов одного механизма могут
быть меньше регламентированного
общего времени механизма в целом.
При определении коэффициента
нагружения в качестве нагрузок
нужно принимать:
в механизмах подъема груза - веса
грузов, которые равны или меньше
номинального груза; веса грузоза-
хватных органов, а в обоснованных
случаях веса грузовых канатов и силы
инерции масс грузов и грузозахват-
ных органов;
в механизмах изменения вылета
стрелы - нагрузка от весов груза,
стрелы и элементов, перемещаемых
вместе с ней, силы сопротивления от
трения в опорных и шарнирных эле-
ментах, ветровую нагрузку рабочего
состояния; силы инерции масс груза и
стрелы; указанные нагрузки опреде-
ляют при разных вылетах;
в механизмах передвижения крана
(тележки) силы сопрртивления в хо-
довых частях крана (тележки), ветро-
вую нагрузку рабочего состояния;
силы инерции, создаваемые в период
разгона двигателями, а в период тор-
можения - тормозами;
13
в механизмах поворота-момен-
ты, создаваемые двигателями в пе-
риоды разгона и тормозами в перио-
ды торможения, моменты сопротив-
ления вращению в опорно-поворот-
ных устройствах от сил трения; ветро-
вую нагрузку рабочего состояния.
В качестве нагрузок Ртах нужно
принимать:
в механизмах подъема груза-
сумму весов номинального груза и
грузозахватных органов;
в механизмах изменения вылета
стрелы - наибольшую сумму ука-
занных для Pt нагрузок (см. выше) в
наиболее неблагоприятном положе-
нии стрелы;
в механизмах передвижения крана
(тележки) наибольшую нагрузку,
создаваемую максимальными момен-
тами двигателей в период разгона;
в механизмах поворота - наиболь-
шую нагрузку, создаваемую макси-
мальными моментами двигателей в
период разгона, а при наличии муфт
предельного момента-с учетом их
расчетного момента.
Так как в настоящее время дейст-
вую! Правила ГГТН, регламенти-
рующие режимы работы, и ГОСТ
25835-83. 25546-82, регламентирую-
щие группы режимов работы, то для
их сопоставления рекомендуется ис-
пользовать табл. 1.5.
Режим р а б о г ы к р а н а в целом
регламентирует ГОСТ 25546-82. В
этом стандарте классификация групп
режима работы кранов выполнена в
зависимости от класса использования
и класса нагружения, класс использо-
вания определяют в зависимости от
числа циклов работы за срок его
службы в соответствии с табл. 1.6.
В цикл работы крана входит пере-
мещение грузозахватного органа к
грузу, подъем и перемещение груза,
освобождение грузозахватного орга-
на и возвращение его в исходное по-
ложение.
Срок службы крана устанавли-
вают соответствующие стандарты
или технические условия на краны.
Класс нагружения по ГОСТ
25546-82 определяется коэффициен-
том нагружения
где Q;-масса груза, перемещаемого
краном с числом циклов QHnM-но-
минальная грузоподъемность (по
массе) крана; с.-число циклов рабо-
ты крана с грузом массой с, -
число циклов работы крана за срок
его службы; ст = £7,-.
Значение массы грузозахватного
органа, навешиваемого на крюк
крана или используемого для не-
Г а блица 1.5
Режим работы по
||равиаам ГГТН
ВТ
Группа режима работы механизма по ГОСТ L М
25X35 КЗ 2М?ЗМ 4М
Группа режима работы крана по ГОС! 1К,
25546-82 2KJK 41С5К
5М 6М
6К.7К
Таблица L6
Класс использова- ния Число циклон работы крана за срок его службы Класс использова- ния Число циклов работы крана за срок его службы
со До 1,6-104 С5 Св. 2,5- 105 до 5- 105
С1 Св. 1,6' 104 до 3.2* I04 С6 Св. 5 10- до 1 106
С2 Св. 3.2 ДО4 до 6.3-Ю4 С7 Св. 1 106 до 2- 10*
сз Св. 6.3-104 до 1.25 - К)5 С8 Св. 2-10'' до 4- 106
С4 Св. 1,25-10- до 2,5- 105 С9 Св. 4-10*
14
посредственного захвата груза (грей-
фер, подъемный электромагнит,
спредер и т.п.), включают в значения
Qi и еиом-
Зависимость класса нагружения от
коэффициента нагружения К дана в
табл. 1.7.
Таблица 1.7
Класс нагружения Коэффициент нагружения
Q0 До 0,063
Q1 Св. 0.063 до 1,125
Q2 Си. 0,125 до 0,25
Q3 Св. 0.25 до 0,50
Q4 Св. 0,5 до 1.0
Группу режима работы по ГОСТ
25546-82 определяют в зависимости
от класса использования и класса на-
гружения {табл. 1.8).
Соответствие между режимами
работы крановых механизмов по
Правилам ГГТН, ГОСТ 25835-83 и
25546-82 рекомендуется определять
по табл. 1.5 при условии, что для
режимов работы Л и С принят срок
службы 15...20 лет, а для режимов
работы Т и ВТ-5. ..10 лет.
Расчетные нагрузки. Расчет ме-
ханизмов и металлоконструкций
ГПМ проводят па действующие на-
грузки и их возможные комбинации,
которые могут возникнуть в процессе
эксплуатации. Все действующие на
кран нагрузки можно подразделить
следующим образом: вес груза, крана
и его элементов: сопротивления дви-
жению, возникающие при работе
(зрение, составляющие веса на уклоне);
гидрометеорологические нагрузки (от
ветра, снега, обледенения и т.д.); ди-
намические (инерционные, упругоко-
лебательные) и прочие (сейсмические,
от взрывной волны, от качки судна).
Все нагрузки как по значению, так
и по повторяемости и направлен-
ности имеют случайный (в понима-
нии теории вероятностей) характер и
должны учитываться как случайные
величины или случайные функции
[10]. Некоторые положения вероят-
ностного подхода изложены в гл. 8.
Здесь же приведены кра ткие указания
по детерминированному определе-
нию действующих нагрузок.
Весовые нагрузки. Опре-
деляют по рекомендациям, которые
будут изложены в гл. 6.
Ветровая нагрузка. Учитыва-
ют при расчете прочности и устойчи-
вости от опрокидывания ГПМ, рабо-
тающих под открытым небом, по
ГОСТ 1451-77 «Краны грузоподъем-
ные. Нагрузка ветровая. Нормы и
метод определения». Ее подразделя-
ют на ветровую нагрузку рабочего
состояния (при действии этой нагруз-
ки кран должен нормально работать)
и нагрузку нерабочего состояния (при
действии этой нагрузки кран и его
механизмы не работают).
Ветровая нагрузка состоит из
суммы статической и динамической
составляющих. Динамическую со-
ставляющую, вызываемую пульса-
цией скорости ветра, учитывают
только при расчете на прочность ме-
таллоконструкций и при проверке
устойчивости крана против опроки-
дывания.
Статическая ветровая нагрузка за-
висит от распределенной ветровой на-
грузки р на данной высоте и расчет-
ной площади металлоконструкции
крана и груза А [2]: Fer= рА.
Расчетную площадь конструкции
и груза определяют по фактическим
данным в соответствии с Приложе-
Таблица 1.8
Класс исполь- зования Класс нагружения Класс исполь- зования Класс нагружения
Q0 Q1 Q2 Q3 Q4 Q0 Q1 Q2 •* Q3 Q4
со 1К 1К !К С 5 ЗК 4К 5К 6К 7К
ст — 1К 1К 2К ЗК С6 4К 5К 6К 7К 8К
С2 1К 1К 2К ЗК 4К С7 5К 6К 7К 8К 8К
сз IK 2К ЗК 4К 5К С8 6К 7К 8К 8К
С4 2К зк 4К 5К 6К С9 7К 8К 8К — —
15
Таблица L9
Назначение кранов
Динамическое
давление, Па
Скорость ветра,
м/с
Строительные, монтажные для полигонов железобетонных
изделий, штучных грузов, а также стреловые самоходные
общего назначения 14,0 125
Всех типов, устанавливаемые в речных и морских портах Устанавливаемые на объектах, исключающих возможность 20,0 250
перерыва в работе 28,5 500
нием 1 к ГОСТ 1451 77, При отсутст-
вии данных в задании площадь груза
можно ориентировочно принимать в
зависимости от его массы:
Масса груза, т . . 0,5 1,0 2,0 5,0 10
Площадь груза, м2 2,0 2.8 4,0 7,1 10
Масса груза, т . , 16 20 32 50 100
Площадь груза,
м2 ............ 14 16 20 28 36
Распределенную ветровую на-
грузку находят по формуле р = qken.
Динамическое давление q в за-
висимости от скорости ветра прини-
мают по табл, 1.9.
Коэффициент к учитывает повы-
шение динамического давления ветра
в зависимости от высоты расположе-
ния крана над поверхностью земли:
Высота, м
Коэффициент
Высота, м
Коэффициент
до 10 20 60
1,0 1,25 1,75
100 200 350 и
ныще
2,1 2,6 3,1
Г руз считают находящимся в
крайнем верхнем положении.
Коэффициент аэродинамической
силы с принимаю! равным 0,8, ,.1,2
для трубчатых конструкций; 1,2 для
коробчатых конструкций, прямо-
угольных кабин, противовесов, кана-
тов, груза; 1,5.,,1,6 для балок с вы-
ступающими поясами и наружными
ребрами, плоских ферм из прямо-
угольных профилей; коэффициент
перегрузки и принимают равным 1
для нагрузок рабочего состояния, 1,1
для нерабочего состояния.
Ветровую нагрузку на груз прини-
маю! не менее 500 Н.
Ветровую нагрузку нерабочего
состояния определяют аналогично.
Динамическое давление принимаю! в
зависимости от района территории
СССР (всего 7 районов) q — 270...
1000 Па; если район точно не извес-
тен. то q = 450 Па.
В расчет вводят коэффициент
перегрузки п = 1,1, если делают рас-
чет металлоконструкций но методу
предельного состояния.
Снеговую на грузку определяют
как произведение горизонтальной
проекции воспринимающей поверх-
ности на давление снега qc — 500...
2000 Па в зависимости от климати-
ческой зоны. Для средней полосы
европейской части СССР и Сибири
она равна 1000 Па.
Инерционные (кинетостатические)
нагрузки возникают в кранах при
пускотормозных процессах. При
определении нагрузки растяжения
или сжатия умножают ускорение (за-
медление) а центра масс на сумму тех
масс т ., которые вовлекаются в дви-
жение данным звеном: Fj = ат-, при
вращательном движении определяют
крутящий момент сил инерции Т- =
= eJj, где 8-угловое ускорение; J--
момент инерции движущихся масс.
Упругоколебательные нагрузки
действуют в соединительных звеньях
вследствие упругой податливости
последних. Интенсивность этих на-
грузок зависит о г начальных условий,
а частота их повторяемости опреде-
ляется параметрами упругой сис-
темы. Колебания могут быть соб-
ственными и вынужденными. Если
частота периодического воздействия
совпадает с какой-либо частотой
собственных колебаний, возникнет
резонанс, часто дающий чрезмерные
перегрузки. Нарушение сцепления во
фрикционных парах (ведущее колесо-
16
рельс, фрикционная муфта предель-
ного момента и др.) приводит к воз-
никновению вредных фрикционных
автоколебаний, отличающихся высо-
кимрт частотами и размахами (см.
гл. 8).
При рассмотрении возможных
комбинаций совместного действия
различных нагрузок в крановых меха-
низмах принято рассматривать три
расчетных случая (табл. 1.10).
Таблица 1Л0
Вид нагрузки
Случаи
нагружения
1 II Ш
Собственный вес крана +
Вес номинального груза +
Динамичес- кие инерционные упругоколеба- тельные ф-
Ветровые рабочего сос- тояния нерабочего сос- тояния -ф-
Составляющие весов на уклонах,
при крене + + +
Примечав и е. Знак плюс означает, что нагрузку
нужно учитывать, знак минус-не нужно учитывать.
от снега и обледенения, а также от
резких и больших температурных пе-
репадов.
При перевозке и монтаже элемен-
ты крана могут подвергаться боль-
шим перегрузкам, что необходимо
учитывать еще на стадии проектиро-
вания.
Для случая I детали рассчитывают
на выносливость, долговечность и из-
нос. Для случая II детали механизмов
рассчитывают на прочность относи-
тельно пределов текучести и проч-
ности в зависимости от материала;
производят расчет на грузовую
устойчивость крана против опроки-
дывания. Для случая III рассчиты-
вают надежность работы тормозов,
противоугонных устройств крана, ме-
ханизмов изменения вылета стрелы,
опорно-ходовых и опорно-поворот-
ных устройств; производят расчет
собственной устойчивости порожнего
крана против опрокидывания^от дей-
ствия ветра нерабочего состояния.
Случаи нагружения металлоконструк-
ций имеют более детальную диффе-
ренциацию (см. гл. 6).
Расчет крановых деталей на вы-
носливость (случай I) производят по
эквивалентным нагрузкам но фор-
мулам
1кв max ИЛИ
= к Т
экв д max 1
Случай I-нормальные условия
эксплуатации при нормальных на-
грузках и скоростях;
случай И -максимальные рабочие
и динамические нагрузки в периоды
резких пусков, реверсов, экстренных
торможений и предельных ветровых
нагрузок рабочего состояния. При
этом могут возникать пробуксовки
приводных колес, срабатывания муфт
предельного момента, электрозащи-
ты и др.;
случай III - максимально возмож-
ные нагрузки нерабочего состояния
крана; он находится под открытым
небом при неподвижных механизмах
и без груза. На экран действуют
кроме собственного веса наибольшие
ветровые нагрузки (так называемый
ураганный ветер), а иногда нагрузки
тз. I/ .
ft?; 1,1 4 ; .
срок
к - коэффициент
где Гтях и i max- максимальные рас-
четные нагрузки, кд -коэффициент
долговечности, он равен kGkrkip; kCi-
коэффициент, учитывающий перемен-
ность нагрузки во времени;
коэффициент, учитывающий
службы детали;
тренировки.
Коэффициенты определяют
дующим образом.
Коэффициент k(t рассчитывают по
формуле ь*..-—
сле-
G
maxz р
где т- показатель степени уравнения
кривой усталости (при расчете на
коша кт ну ю прочность т = 3, при
расчете на изгибную прочность т =
17
= 9); Pt~ нагрузка за весь срок
службы, принимаемая по графику
нагружения; Ртах - максимальная на-
грузка; z,-число циклов действия
нагрузки Д; zp-суммарное число цик-
лов нагружения за расчетный срок
службы.
Для расчетною определения коэф-
фициента ка нужно располагать гра-
фиком загрузки. Такие графики
имеются в рекомендациях
ВНИИПТМАШа и приведены в учеб-
нике [8]. В первом приближении мож-
но принимать следующие значения
коэффициента: 0,65.. .0,8-при расчете
на изгиб; 0,4.. .0,65 - при расчете на
контактную прочность.
Коэффициент кт определяют по
формуле
*=д
V -о
где базовое число циклов нагру-
жения. принимаемое по рекоменда-
циям табл. 1.11; zp = 6077?'-при рас-
чете на кручение деталей механизма
подъема и передвижения, 307лр-при
Таблица 1.11
Вид расчета
Наименование
детали
На изгиб
или кручение
Валы
Зубья зубчатых
колес
Вал с напрессо-
ванной деталью
Вал при поверх-
ностном упрочне-
нии
4- I06
4 -10*
I07
5-10*
По кон-
тактным
напряже-
ниям
Зубья зубчатых
колес 107
расчете на контактную прочность
деталей механизма передвижения.
Здесь Т- суммарное машинное время
работы механизма в часах за полный
срок службы крана h в годах; вели-
чину Т для различных деталей можно
принимать но табл. 1.12.
Значение частоты вращения де-
тали в минуту принимают равным
0,9 для механизмов подъема и
н и м
«п = хО.01 ПВ для механизмов
р HUM V '
передвижения [2], где ином - частота
вращения при установившемся дви-
жении.
При определении zp для механиз-
мов подъема и передвижения /г'-чис-
ло включений механизма в минуту
машинного времени, принимаемое
для кранов общего назначения по
кривым рис. 47 учебника [2. с. 70] при
разных значениях относительной про-
должительности включения. «
Коэффициент тренировки опреде-
ляют по формуле [2] ктр = 1/^/ц, где
о-параметр, зависящий от материала
и соотношений уровней напряжений,
определяемый экспериментально.
Если кратковременные пиковые дина-
мические перегрузки отсутствуют,
то а = 1 и fc = 1. При наличии пере-
грузок высокого уровня а = 1,35 + 0.5 х
X 1g5П, где 8Г1 = rn/zp- коэффициент
относительной продолжительности
типовой нагрузки с числом
циклов нагружения
Для деталей, работающих на из-
гиб. в механизмах режима работы 6
коэффициент долговечности ка = 1.
При числе циклов переменных
напряжений менее 105 расчет на со-
Таблица 1.12
Группа режима работы Срок службы /г, лет
механизма
(ГОСТ 25835-83)
Суммарное машинное время
Т, тыс. ч
Подшип- ников качения зубчатых передач валов подшипни- ков качения зубчатых передач валов
1,2,3 10 15 25 1,0 1,5 2,5
4 5 10 15 3,5 7,0 10.0
5 3 8 10 5,0 13,0 16,0
6 3 5 10 10,0 16,0 32,0
18
противление усталости не произво-
дится.
Максимальную расчетную нагруз-
ку (7т„ (опа обозначалась или
— t JI <1X 4 IJI -4 Л
Т та.х) определяют по фор-
муле
= к Г
max * ном ‘
где (7НОМ-нагрузка статического со-
противления. определяемая при ра-
боте механизма с номинальным гру-
зом; к - расчетный коэффициент пе-
регрузки, зависящий от типа меха-
низма и условий его загружения.
При предварительных расчетах
расчетный коэффициент перегрузки
принимают равным к = 1.1 для меха-
низма подъема и 2,5.. .3,0 для меха-
низмов передвижения и поворота.
При проверочных расчетах этот коэф-
фициент определяют физическими
условиями загружения, зависящими
от коэффициента жесткости и места
нахождения рассчитываемой детали в
кинематической цени механизма, за-
зоров и интенсивности упругих коле-
баний, а также интенсивности соуда-
рения при ликвидации люфтов и др.
Допускаемые напряжения. В
подъемно-транспортном машиност-
роении при расчете одноосно напря-
женных детален крановых механиз-
мов допускаемое напряжение [о] или
[г] определяют по основному уравне-
нию прочности [2; 8]:
где ст!1р, тп -предельные напряжения
материала при данном напряженном
состоянии; п- запас прочности: ст, г-
фактические напряжения.
Расчет элементов на сопротивле-
ние усталости проводят по условию
a^[ark] = ^; 7^ [тгД -
где [ст,.Д, [тгД - допускаемые напря-
жения; стгк, длительный предел
выносливости, определяемый с уче-
том коэффициента асимметрии г, эф-
фективного коэффициен та концент ра-
ции к, размеров .детали и ее термо-
обработки; «j-коэффициент запаса
выносливост и, принимаемый по
табл. 1.13.
Предельные состояния. Вмес то ме-
тода расчета но допускаемым напря-
жениям все шире применяют более
совершенный метод расчета, но пре-
дельным состояниям. Однако noi
метод расчета используют главным
образом для крановых металлоконст-
рукций (см. гл. 6).
Допускаемые (предельные) вероят-
ности безотказной работы. Как дейст-
вующие нагрузки, так и основные
прочностные характерце тики коне i -
рукционных материалов обладают
статистическим рассеиванием (имеют
Рассчитываемые элсмен гы
Расчетные сочетания
Т а б. i ицн 1.13
1 П Ш
но сопро-
тивлению пи прочное I и
усталости
Металлические конструкции:
стаявшее 1.4 1.4 1.3
алюминиевые 1.5 1.6 1.5
Механизмы:
подъема груза, изменения вылета, ходовые и опорные
части, противоугонные устройства, грузозахватные
органы, тормоза 1,6/1.8 1,6/1.8 1,4'1.6
передвижения и поворота 1.4/1,6 1,4/1.6
Примечание. В числителе запасы прочности элемента, изготовленного из прока га и поковок, в
знаменателе-из стальных отливок. При плоском напряженном состоянии расчет веде гея но приведенным
напряжениям.
19
вероятностную меру). Поэтому рас-
четы прочности нужно выполнять ве-
роятностными методами. В инженер-
ной практике подъемно-транспортно-
го машиностроения эти методы при-
меняют пока редко. Исследования по-
казали [10], что основные прочност-
ные характеристики используемых
конструкционных сталей распределе-
ны по нормальным законам с пара-
метрами. указанными в табл. 1.14 и
1.15.
Таблица 1.14
Марка стали I од щи на заготовки, мм М атемати чес кие ож и да ния 11реде - лов выносливости
изгиб <n-i> кручение <л-1>
СтЗсп Любая 186,3 107,9
Ст.5 215,7 127,5
45 До 80 372.7 225,6
80. ..120 343,2 205,9
Более 120 245,2 147,1
40Х До 120 402,1 235,4
120. ..200 353.0 205,9
Более 200 313,8 196,1
40X11
До 200 411.9 245,2
Более 200 353.0 205,9
34X113M
Более 160 392,3 235,4
Следовательно, зная геометричес-
кий параметр сечения, можно полу-
чить параметры нормального закона
распределения прочности - математи-
ческое ожидание и среднеквад-
ратическое отклонение . При из-
вестных пределах изменения дейст-
вующей нагрузки F легко определить
ее математическое ожидание (F) и
среднеквадратическое отклонение оу.
Поэтому математическое ожидание
нормально распределенного резерва
прочности <(г) будет равно (рис. .1)
<г> = </?> —<F>.
Так как прочность конструкции и
действующие нагрузки чаще всего не
имеют корреляционной связи, средне-
квадратическое отклонение резерва
прочности
J 7
— х/ + СТГ •
Таблица 1.15
Марка стали Диаметр заготовки, мм <<ъ>, МПа V МПа V,
СтЗсп 4.. .26 284,4 539,4
10.. .40 274,6 0,09 500,1 0,09
40.. .60 264,8 470,7
С т5сп Любой (НВ 190) 323,6 0,07 588,4 0,07
80 (НВ 270) 745,3 1029,7
45 120 (НВ 240) 627,6 0,07 912,0 0,07
Любой (НВ 200) 519,8 833,6
120 (НВ 270) 833,6 1000,3
40 X 120 200 (Н В 240) 725,7 0,05 892,4 0.05
Любой (НВ 200) 559,0 814,0
40ХН 200 (НВ 240) 725,7 0,06 912,0 0,06
20
Вероятность безотказной работы, или
прочностная надежность
п
должна быть не меньше допустимой
(предельной) величины Р > [Р].
В соответствии с РТМ 24.090.25-
76 «Краны грузоподъемные. Расчет
вероятности безотказной работы эле-
ментов» для кранов общего назначе-
ния [Р] = 0,99.
Для приведенных выше трех рас-
четных сочетаний нагрузок (табл. 1.13)
выполняют различные вероятностные
расчеты прочностной надежности.
Для сочетания I выполняют рас-
чет усталостной надежности. Поэто-
му статистические характеристики ре-
зерва усталостной прочности равны
<п> = <а-1д> - <а«>;
'li ~~ V 1д 4“ Su,
где <о'-1дХ -математические
ожидания предела выносливости де-
лали и амплитуд переменных напря-
жений сочетания I нагрузок соответ-
ственно; 5 _ 1Д, 5а-среднеквадратиче-
ские отклонения предела выносливос-
ти детали и амплитуд переменных
напряжений сочетания II нагрузок со-
ответственно.
Усталостная надежность
('i -
4= ^[PJ.
Для сочетания II выполняют рас-
чет надежности по несущей способ-
ности. Поэтому статистические ха-
рактеристики резерва прочности по
несущей способности оз действия
наибольшей нагрузки сочетания бу-
дут равны
где \ ( Гц) - математические
ожидания несущей способности и мак-
симальной нагрузки сочетания II на-
грузок соответственно; судП, (jjn-дис-
персии несущей способности и наи-
большей нагрузки сочетания II нагру-
зок соответственно. *
Прочностная надежность по несу-
щей способности
гх 1 р «И - ОД)2 .
Л1 = f е Ъ" с/гп > [Рц].
Для сочетания III расчет проч-
ностной надежности выполняют (оч-
но так же, как и для сочетания II,
только здесь действующая нагрузка-
ветровая, а объекты расчета - элемен-
ты металлоконструкции.
В предварительных расчетах коэф-
фициент вариации предела выносли-
вости летали можно принимать рав-
ным [10] v_ 1Д = 0,05 ... 0,15. Более
подробно эти данные можно опреде-
лить методами, изложенными в рабо-
те [42] и др.
Глава 2
ПРЕДВАРИТЕЛЬНЫЕ РАСЧЕТЫ МЕХАНИЗМОВ
В главе рассмотрены принципы выбо-
ра элементов, комплектующих меха-
низмы подъема груза, передвижения
крапа (тележки) и поворота кранов
общего назначения (мостовых, на-
стенных, кранов с вращающейся и не-
подвижной колонной, велосипедных
кранов). Расчеты, излашсмые в данной
главе, являются предварительными,
так как в результате последующих
работ по компонованию и провероч-
ным расчетам может выясниться, что
какой-либо из выбранных элементов
необходимо заменить.
21
§ 2.1. Механизм подъема груза
Исходные данные. В качестве ис-
ходных данных должны быть заданы:
грузоподъемность Q, т; максималь-
ная высота подъема Н, м; скорость
подъема г. м/с; график нагружения;
срок службы машины, лет; режим ра-
боты механизма по Правилам ГГТН
[16] или группа режима работы по
ГОСТ 25835-83; род тока; тип ма-
шины.
В исходных данных могут указы-
ваться также класс нагружения меха-
низма, режим работы электрообору-
дования (или только относительная
продолжительность включения элект-
рооборудования ПВЭЛ) и др.
Выбор кинематической схемы ме-
ханизма. Чтобы выбрать кинемати-
ческую схему механизма, необходимо
познакомиться с конструкциями ме-
ханизмов подъема груза, применяе-
мых на различных машинах заданно-
го типа. При этом следует четко
уяснить: из каких составных частей
собирается механизм; назначение
данных составных частей; их конст-
руктивные особенности; как передает-
ся силовой поток от двигателя к рабо-
чему органу. Так, при проектирова-
нии мостового крана общего назначе-
ния предпочтение можно отдать кине-
матической схеме механизма подъема
груза, в которой двигатель соединен
с редуктором при помощи зубчатой
муфты с промежуточным валом; роль
тормозного шкива выполняет одна из
полумуфт; отсутствуют открытые зуб-
чатые передачи; концы быстроходно-
го и тихоходного валов редуктора
выходят в одну сторону; уравнитель-
ный блок в полиспасте заменен урав-
нительным балансиром.
При выборе кратности полиспаста
ип можно пользоваться рекомендуе-
мыми значениями кратности в зави-
симости от грузоподъемности (табл.
2.1).
При больших грузоподъемностях
(свыше 50 т) кратность сдвоенных по-
лиспастов можно принимать равной
[4]: при 80 и 200 т-4; при 100 и 250 г
-5; при 125 г-6; при 160 и
320 т-8.
Пример кинематической схемы
механизма подъема груза показан на
рис. 2.1. 'Какая схема встречается в мос-
а) 1 2 3 4 5
Рис. 2.1
(
Таблица 2.1
Характер навивки каната на бара- бан Тин поли- спаста до 1 г/п при грузоподъемности, т ' !
2...6 10.. .15 20...30 40...50
Непосредственно Сдвоенный 2 э 2;3 3:4 4:5
Одинарным 1 2 — — —
Через направляющие блоки Одинарный 1;2 2:3 3; 4 5; 6 -
(стреловые, некоторые козло- вые краны) Сдвоенный — 2 2; 3 — • —
22
ТОВЫХ, КОЗЛОВЫХ и консольных
кранах, у которых механизм подъема
груза входит в состав грузовой тележ-
ки. На рис. 2.1, а показана схема ле-
бедки, па рис. 2.1, б-схема запасовки
канатов. Механизм подъема груза в
данном случае состоит из электродви-
гателя /, соединительной муфты 2 с
промежуточным валом 3. тормоза 4.
редук тора 5, барабана 6, верхних бло-
ков 7, уравнительного балансира /?, ка-
ната 9 и крюковой подвески /«Вместо
уравнительного балансира 8 возможна
установка уравнительного блока.
Выбор крюковой подвески. В ы-
бор типа крюковой подвески.
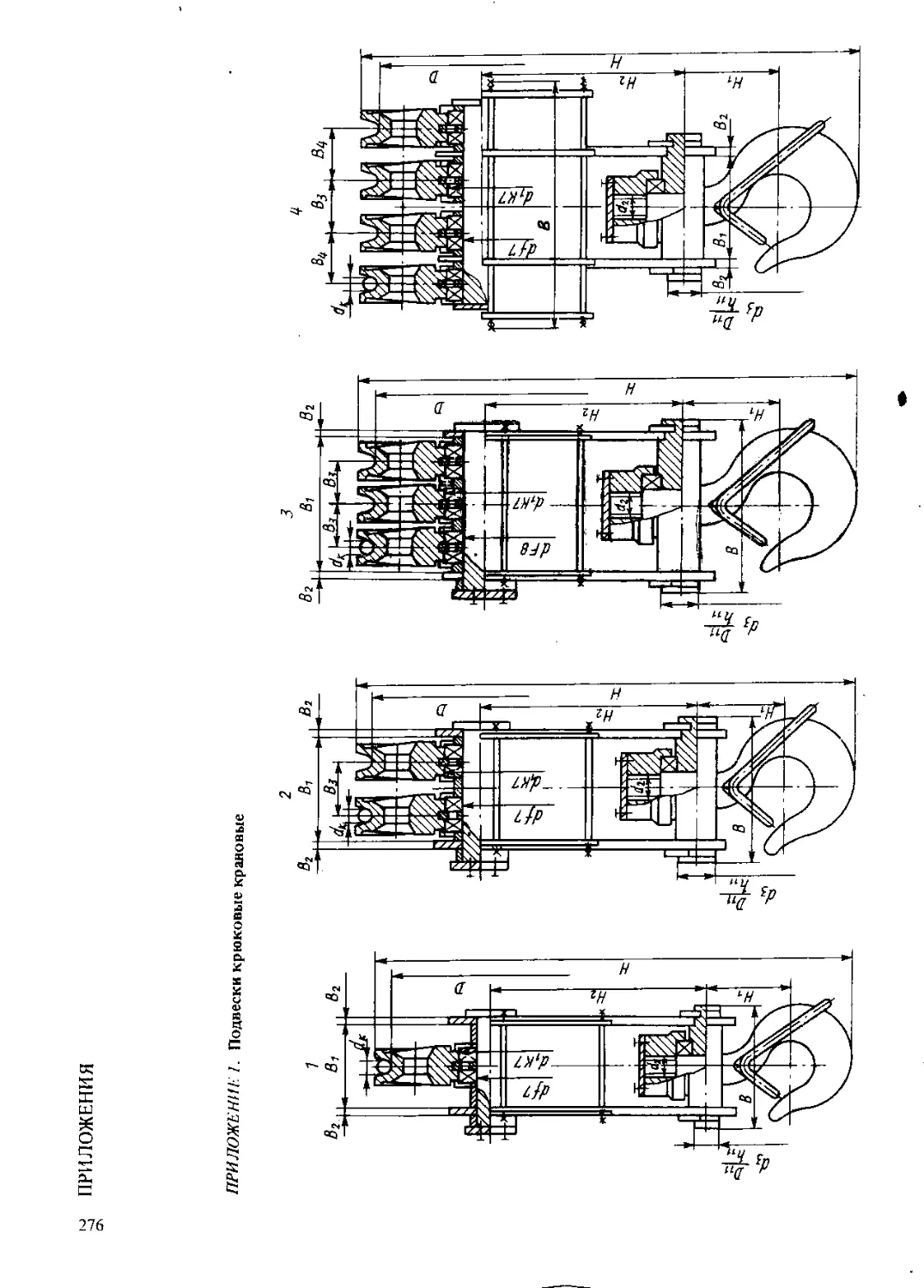
В Приложении I приведены различ-
ные типы крюковых подвесок. По
типу крюка они бывают с однорогим
и с двурогим крюком. Если в задании
не указано, для перемещения каких
грузов предназначен кран, то можно
выбирать любой тип. Если кран пред-
назначен для перемещения длинно-
мерных грузов, наиболее предпочти-
тельна крюковая подвеска с двурогим
крюком.
Выбор типоразмера к р ю-
к о в о й подвески. Первое условие -
грузоподъемность крюковой подвес-
ки не должна быть меньше заданной
грузоподъемности: 0п > Q. Второе
условие--режим работы крюковой под-
вески должен соответствовать режи-
му работы механизма. Если в задании
па проект указан не режим работы по
Правилам ГГТН, а группа режима
работы по ГОСТ 25835-83, их при-
мерное соответствие можно принять
по табл. 1.5.
После выбора крюковой подвески
необходимо выписать условное обо-
значение ее типоразмера и основные
параметры: грузоподъемность QtI; ре-
жим работы; число блоков Zn; диа-
метр блоков но дну канавок
расстояние между осями крайних
внутренних блоков 5В)|; расстояние
между осями крайних наружных бло-
ков Z? ; расстояние между осями
крайне) о наружного и соседнего с ним
внутреннего блоков hy массу подвес-
ки тг. Рекомендуется также начер-
тить в масштабе упрощенный габа-
ритный чертеж крюковой подвески. В
дальнейшем условимся называть его
«габарит кой» данного изделия.
Пример «габаритки» крюковой
подвески дан па рис. 2.2. «Габаригьу»
удобнее выполнять на миллиме i ро-
вой бумаге. Формат, обрамляющая
линия и основная надпись для «та-
баритки» не требуются. Мелкие, не-
существенные детали изображать не
надо. Число проекций должно быть
доста точным, чтобы показать габари-
ты и присоединительные размеры.
Масштаб уменьшения лучше выби-
рать таким, чтобы «габаритна» сво-
бодно умещалась на половине стан-
дартного листа писчей бумаги (на
половине формата 1 1). Этот масштаб
следует выдержать и в дальнейшем
при вычерчивании «габаритен» двига-
телей. редукторов, муфт, тормозов и
г. д. «Габаритки» всех составных час-
тей механизма подъема груза и дру-
гих механизмов потребуются в даль-
нейшем при компоновании механиз-
мов.
Уточнение схемы полиспаста и оп-
ределение его кратности. В том случае,
если число блоков выбранной крюко-
вой подвески отличается oi числа
блоков на предварительно принятой
кинематической схеме механизма, не-
обходимо уточнить кинема 1 si вескую
схему, а именно схему полиспаста.
После этого следует определить ис-
Таблица 2.2
и
ч„
9 3 4 5 6 7 8
0,99 0,97 0,96 0,94 0,93 0,91 0.90
редаточпое число (кратность) по-
лиспаста.
Выбор каната. Максимальное ста-
тическое усилие 5I[;.1X (Н) в канате
определяют по формуле:
(2Л)
Пн Пн.бл
где G - вес номинального груза и крю-
ковой подвески, Н; Икб-число ветвей
каната, навиваемых на барабан; ип-
передаточное число (кратность) по-
лиспаста; т|и-к.п.д. полиспаста; т|нбл-
к.п.д. направляющих (обводных) бло-
ков (направляющие блоки могут быть
в механизмах подъема груза консоль-
ных настенных кранов, поворотных
кранов на колонне, козловых кранов
и др.).
Значения к.п.д. полиспаста, опре-
деленные с учетом разницы потерь в
подвижных и неподвижных блоках
[19], приведены для различной крат-
ности полиспаста в табл. 2.2. Значе-
ния к.п.д. полиспаста подсчитаны в
предположении качественной густой
смазки подшипников качения в усло-
виях нормальных температур. К.п.д.
направляющих блоков можно опреде-
лить по формуле г|нбл = т^лн,бл, где
ZH . - число направляющих блоков;
т|бл = 0,98-к.п.д. одного неподвижно-
го блока при качественной смазке и
работе в условиях нормальных тем-
ператур [6].
Выбор типа каната. На гру-
зоподъемных машинах общего назна-
чения при однослойной навивке на
барабан рекомендуется применять
следующие два типа шестипрядных
стальных канатов двойной свивки с
одним органическим сердечником:
1) ЛК-Р6 х 19(1 + 6 + 6/6) + 1 о.с.
ГОСТ 2688-80; 2) ЛК-РО 6x36
(1 4- 7 + 7/7 + 14) + 1 о.с. ГОСТ
7668 -80.
В условиях абразивного износа
предпочтительнее канаты с меньшим
числом проволок, т.е. 6 х 19, по срав-
нению с канатами, у которых число
проволок 6 х 36 или 6 х 37.
Выбор типоразмера кана-
та (см. Приложение 2). Марку мате-
риала проволоки ГОСТ 7372-79 раз-
решает только В и 1.
Типоразмер каната выбирают ис-
ходя из следующих условий. Первое
условие - произведение максимально-
го статического усилия в канате на
коэффициент запаса прочности не
должно превышать разрывного уси-
лия каната в целом, указанного в
таблице ГОСТа:
^разр’ (~2)
где Sp^p - разрывное усилие каната в
целом, Н; &зап - коэффициент запаса
прочности каната, назначаемый ГГТН.
Значения кзап для разных групп режи-
ма работы приведены в табл. 2.3.
Таблица 2.3
Группа режима работы по
IM, 2М, ЗМ
4М
5М, 6М
5,0
5,5
6,0
Второе условие - должно выпол-
няться соотношение между диамет-
ром выбранного каната и диаметром
блока крюковой подвески
Ябл > (2.3)
где D6jI-диаметр блока, измеряемый
по средней линии навитого каната
(7)бл = D6J1O + t/J; <4-диаметр каната;
е - коэффициент, регламентируемый
нормами Госгортехнадзора СССР и
зависящий от типа машины и режима
работы; величина, обратная коэффи-
циенту е, прямо пропорциональна
степени перегиба каната на блоке
(табл. 2.4).
Для вновь проектируемых элект-
рических талей е = 22. Если соотно-
шение (2.3) не выполняется, то нужно
24
Т а о л ица 2,4
Тип машины
Г pyuria режима
работы
Грузоподъемные машины всех типов, за исключением стреловых
кранов, электроталей и лебедок
IM, 2М, ЗМ 20
4М 25
5М 30
6М 35
Все группы рс- 20
жима
Лебедки для подъема грузов и электротали
i
<
/
I
t
I
выбрать кана г другого диаметра с
соблюдением условия (2.2). При этом
можно изменить маркировочную груп-
пу или принять другой тип каната.
Если условие (2.2) продолжает не вы-
полняться, можно принять крюковую
подвеску с большим числом блоков,
что приведет к изменению кратности
полиспаста, уменьшению усилия и
диаметра каната. Можно не изменять
число блоков в крюковой подвеске, а
увеличивать их диаметр, но при этом
потребуется спроектировать специаль-
ную подвеску.
Выбрав канат, необходимо выпи-
сать его основные параметры: услов-
ное обозначение типа, условное обо-
значение типоразмера, диаметр
марку проволоки, расчетную пло-
щадь сечения всех проволок FK, мар-
кировочную группу, вид покрытия
поверхности проволоки, направление
свивки каната, сочетание направлений
свивки элементов, способ свивки ка-
ната.
Для грузоподъемных машин об-
щего назначения можно рекомендо-
вать проволоку без покрытия (значе-
ния разрывных усилий канатов с про-
волокой без покрытия указаны в таб-
лицах Приложения 2 правее жирной
линии) или оцинкованную проволоку
для среднеагрессивных условий рабо-
ты-группа С.
Направление свивки каната в раз-
ных половинах сдвоенного полиспас-
та рекомендуется принимать разным.
Это возможно, если уравнительный
блок полиспаста заменить уравнитель-
ным балансиром. В случае одинарно-
го полиспаста можно заказывать ка-
нат любого направления свивки. С
этим направлением в дальнейшем
должно быть согласовано направле-
ние нарезки на барабане.
По сочетанию направлений свивки
рекомендуют крестовую свивку. Од-
носторонняя свивка возможна, если
канат изготовлен нераскручиваю-
щимся, из заранее деформированных
проволок и прядей.
Определение основных размеров
сборочных единиц «Установка верхних
блоков» и «Уравнительный балансир».
Установка верхних блоков.
Диаметры блоков (за исключением
уравнительных) можно принимать
такими же, как в крюковой подвеске,
или вычислять по соотношениям:
^бл О ^бл ~
= ПблО + 2А2. (2.4.)
Здесь Я6л, £>бл0, Облгаах-соответ-
ственно диаметры блока по средней
линии навиваемого канала, ио дну
канавки и максимальный; h2 - глубина
канавки блока по ОСТ 24.191.05-72
(Приложение 3).
Формула дитя Рбл1Пах обязательна
лишь для литых блоков при диамет-
рах каната до 28,5 мм. В других слу-
чаях можно пользоваться соотно-
шением D6jl max £)бл 0 + 4<7К. ОСТ
24.191.05-72 устанавливает номиналь-
ный ряд значений D6.t 320: 380:
450/530; 630; 750 и 900 мм. Поэтому в
том случае, если блок лигой и диа-
метр каната не превышает 28.5 .мм,
после определения Лблтах по соотно-
шениям (2.4) необходимо принять
ближайшее большее стандар тное зна-
чение, а затем уточнить значение D-,t (i
и Р6л.
Диаметры уравнительных блоков
всех грузоподъемных машин, кроме
электроталей и самоходных стрело-
вых кранов, могут быть меньше, чем
диаметры обычных блоков, на 20%
^>Р.бл > 0^Рбл, где Рурбл-диа-
25
Вид А (повернуто)
метр уравнительного блока по сред-
ней линии навиваемого каната.
Конструкция сборочной единицы
^Установка верхних блоков» может
быть выполнена по разным вариан-
там. Некоторые варианты [4] пред-
ставлены в Приложении 3. На рис. 2.3
дан пример компонования трех верх-
них блоков н показаны основные раз-
меры. Знание данных размеров не-
обходимо для последующего компо-
нования механизма и грузовой тележ-
ки (см. 1л. 3). При предварительном
определении указанных размеров мож-
но воспользоваться ориентировочны-
ми соотношениями. приведенными в
табл. 2.5.
Расстояние между осями крайних
блоков То можно принять исходя из
условия одинакового допускаемого
отклонения каната при его набегании
на соответствующие верхние блоки и
блоки крюковой подвески:
Ь0 = ^р-^- (2.5)
где /7нар - расстояние между осями
крайних наружных блоков выбранной
крюковой подвески; Ьс - расстояние
между крайним наружным и сосед-
ним с ним блоками крюковой под-
вески.
По значению Lo можно опреде-
лить размер: Le бл = (1,4... 1,7) Lo.
Расстояния между осями присоедини-
тельных отверстий <], с2, с4 следу-
ет назначать конструктивно исходя из
удобства размещения болтов и закру-
чивания гаек.
После определения основных раз-
меров установки верхних блоков ре-
комендуется начертить «габаритку»
данной сборочной единицы, соблю-
дая выбранный ранее масштаб.
Установка уравнительно-
го балансира. На рис. 2.4 показан
один из возможных вариантов уста-
Таблица 2.5
Размер
Обозначение
размера
Отношение размера к диаметру блока D6jl 0
при числе верхних блоков
Габаршы ускшовки верхних длина ^в,бл
блоков ширина Ва 6л
высота //в,бл
Высота оси основных блоков /?в йд
Межоисвое расстояние между основными
и уравнительным блоками ^в5..
| л г ил
0,60
1,15
1.15
1,30 1,75
1,25
0,60
0,80
1,40
1,30 1,75
0.80
2.6
P и c. 2.4
новки уравнительного балансира и
обозначены основные размеры. Раз-
мер А 6 может быть определен из
условия одинакового по знаку откло-
нения каната на внутренних блоках
крюковой подвески и из условия мак-
симально допускаемого отклонения
при набегании на блок:
#ви Ар.б + 2//min ур.б tg [у], (2.6)
где Bhli - расстояние между осями
крайних внутренних блоков крюковой
подвески; йт5п д-минимальное до-
пускаемое расстояние между осью
блоков крюковой подвески и про-
дольной осью уравнительного балан-
сира; [у] - максимально принимае-
мое при предварительных расчетах
значение угла отклонения каната от
оси ручья блока.
Предварительно можно принять
^min ур.б *^блО’ С/1 б .
Остальные размеры установки
уравнительного балансира можно при-
нять по следующим ориентировоч-
ным соотношениям: L б = (1,2 ...
1,3) А 5; В & = (0,6... 0.7) А Н б =
= (0.45 ... 0,55) Л б; L й = (0.65
••.075)ЛР.б; Аур,6 = (0,25... 0,35)/fvp 6.
После определения данных разме-
ров рекомендуется начертить «габа-
ритку» установки уравнительного ба-
л ансира.
Определение основных размеров
сборочной единицы «Установка бара-
бана». На рис. 2.5 представлен один
1
I
4
27
из возможных вариантов установки
барабана, предназначенного для сдво-
енного полиспаста, и показаны ос-
новные размеры. Данный вариант
широко применяют, когда в механиз-
ме отсутствует открытая зубчатая пе-
редача. Установка барабана в этом
случае представляет собою сбороч-
ную единицу барабан с внешней опо-
рой. В качестве внутренней опоры оси
барабана используют конец тихоход-
ного вала редуктора, имеющий рас-
точку для размещения подшипника?
На рис. 2.6 показан вариант установ-
ки барабана для сдвоенного поли-
спаста с двумя внешними опорами и
зубчатым венцом, на рис. 2.7-ва-
риант установки барабана для оди-
нарного полиспаста при расположе-
нии одной из опор оси барабана в
расточке тихоходного вала редукто-
ра. Другие варианты установки бара-
Рис. 2.6
Опора по /
Рис. 2.7
I
ч
i
бана можно найти в литературе [2,
15] и др.
Диаметр барабана £>б, измеряе-
мый по средней линии навитого кана-
та, допускается принимать на 15%
меньше значения, найденного по фор-
муле (2.3). Приняв D6, следует найти
диаметр барабана по дну канавок:
Лб0 = (2.7)
Полученное значение D60 следует
округлить в большую сторону до
стандартного значения из нормально-
го ряда диаметров: 160; 200; 250; 320;
400; 450; 500; 560; 630; 710; 800; 900 и
1000 мм. Затем следует уточнить зна-
чение /Т. Диаметр максимальной
окружности, описываемой крайней
точкой установки барабана Z)max, пред-
варительно можно принять по сле-
дующим приближенным соотношени-
ям, полученным на основе анализа
существующих конструкций: %
se (1,1... 1,3) D6--рис. 2.5; Dmax ^
- 1,2Дб-рис. 2.6; £>max D6 + 5<-
рис. 2.7. Значение £*тах необходимо
для компонования механизма. В даль-
нейшем (при расчете и конструирова-
нии сборочной единицы «Установка
барабана») значение Dmax нужно уточ-
нить.
Длина барабана, изображенного
на рис. 2.5, равна
L6 = 2/I1 + /o + 24, (2.8)
где /и - длина одного нарезного участ-
ка; /0-длина гладкого среднего участ-
ка; 4-длина одного гладкого конце-
вого участка. Длина одного нарезно-
го участка равна
4 = +-кр), (2.9)
где t-шаг нарезки: значение t при-
нимается в зависимости от диаметра
каната по нормали машиностроения
МН 5365-64 [20]; при отсутствии
нормали значение t можно опреде-
лить по приближенному соотноше-
нию t « (1,10... 1,23) при этом по-
лученная величина t должна быть
округлена до значения, кратного 0,5;
z - число рабочих витков для навивки
половины полной рабочей длины ка-
ната; гнспр = 1,5-число неприкосно-
венных витков, требуемых Правила-
ми ГГТН для разгрузки деталей креп-
ления каната на барабане; гкр = 3 ... 4
число витков для крепления конца
каната. Число рабочих вилков опре-
деляют по формуле
-% = LK.P/(7UD6), (2.10)
где L - рабочая длина каната, со-
ответствующая одному нарезному
участку:
LK.P = //Hn. (2.11)
Длина гладкого среднего участка
может быть определена по формуле
/? <1 < В 4-'Vi щ Гу! РР)
пнар (0 ' ii.ip ~"min б L ( Ь
где минимальное допускаемое
расстояние между осью блоков крю-
ковой подвески и осью барабана
(предварительно можно принимать
^min6 3D6).
Длина гладкого концевого участ-
ка, необходимого для закрепления за-
готовки барабана в станке при на-
резании канавок, может быть опреде-
лена по соотношению /к = (4... 5) Jh.
При компоновании механизма, ко-
торое производится на следующем
этапе проектирования, требуется зна-
ние длины установки барабана Lyc) 6 и
длины основания опоры LOCH-Clli, а для
расчета оси барабана на прочность
знание расстояния между опорами Z.
На эти величины влияют: зазор меж-
ду барабаном и опорой б, ширина
опоры /%. ширина основания опоры
^осн.оп (см. Рис- 2.5), ширина зубчато-
го венца Bt а (см. рис. 2.6). дл . ,
переходного участка /пер, толщина ре-
борды / (рис. 2.7). а также значения
12 и о]. Точных формул для опре-
деления этих величин не существует.
Для принятия приближенных значе-
ний можно использовать соотноше-
ния подобия, получаемые путем ана-
лиза существующих конструкций.
Если крепление каната на бараба-
не, изображенном на рис. 2.7. осу-
ществляется с помощью закладного
клина, располагаемого в специальном
отверстии в приливе*цилиндричсской
стенки барабана с ее внутренней сто-
роны и не требующего витков на
рабочей поверхности стенки, то
4 Т 2^11СПр).
29
Высота оси барабана относитель-
но основания внешней опоры может
быть принята равной: h — (0,3 .., 0,6)
Z)6-барабаны по рис. 2.5 и 2.7; h =
~ (0.2 ... 0,3) £)6- барабан по рис. 2.6.
Расстояния между присоединитель-
ными отверстиями опор могут быть
приняты: С( - (0.2 ... 0.3) /?ОСН.'0[Т; С2 =
--- (0.5 ... 0,8) „п. После определе-
ния основных размеров установки ба-
рабана рекомендуется начертить ее
«габаригку».
Выбор двигателя. Определение
м а кс и малиной статической
м о in н о с т и. Максимальная стати-
ческая мощность А'СТ111ах (кВт), кото-
рую должен иметь механизм в период
установившегося движения при подъе-
ме номинального груза, равна
Ol Г1|:р- (2.13)
где 1] = 0,80... 0,85-предваритель-
ное значение к.п.д. механизма; G-вес
поминального груза и крюковой под-
вески, кН.
Выбор серии двигателя. В
крановых механизмах подъема целе-
сообразнее всего использовать асин-
хронные двигатели с фазным рото-
ром серий MTF, МТН, 4МТН, 4АК,
4АНК. И? них наибольшее примене-
ние получили серии MTF и МТН.
Однако практика эксплуатации послед-
них лет (по данным ВН И Ист рой дор-
маша) показала, чго двигатели серии
MTF. ус i анавливаемые на башенных
кранах, часто выходят из строя из-за
перегрева, обмотки. Поэтому приме-
нение их следует ограничить легким
режимом работы. Серия МТН отли-
чается более высоким классом нагре-
востойкости изоляции по сравнению с
серией MTF па 25 С. Поэтому дви-
гатели серии МТН можно использо-
вать при среднем, тяжелом и весьма
тяжелом режимах работы. Так как
стоимость двигателей серии МТН на
20.. 50% выше, чем стоимость дви-
гателей серии MTF, то использовать
дни) at ели серии МТН при легком
режиме работы нецелесообразно. Дви-
гатели серии MTF выпускают мощ-
ностью до ЗОкВг. а серии МТН-до
200 кВт.
За
При группах режимах работы 1М,
2М, ЗМ разрешается использовать
асинхронные двигатели с коротко-
замкнутым ротором общепромыш-
ленной серии 4А. При этом можно
выбирать или двухскоростные двига-
тели основного исполнения 4А, вы-
пускаемые мощностью до 71 кВт, или
модификацию основного исполнения -
двигатели серии 4АС с повышенным
скольжением, выпускаемые мощ-
ностью до 80 кВт . При весьма тяже-
лом режиме работы рекомендуется
использовать двигатели постоянного
тока с последовательным возбужде-
нием (серия Д), выпускаемые мощ-
ностью до 187 кВт. Технические дан-
ные двигателей приведены в ГОСТ
184-71. 185-70, 19523-81 и в литера-
туре [3, 12].
Выбор типа д в и г а т е л я. Тип
двигателя выбирают исходя из сле-
дующих условий.
Первое условие - относительная
продолжительность включения дви-
гателя ПВав должна быть равна сред-
нему значению относительной про-
должительности включения электро-
оборудования ПВЭЛ при заданном ре-
жиме работы: ПВЯН = ПВ,Я. Если в
исходных данных параметр ПВ,Л не
задан, то предварительно можно при-
нять [2, 6] средние значения ПВ)Л по
правилам ГГТН.
Второе условие номинальная мощ-
ность двигателя Ацв (значение, указы-
ваемое в таблице I ОСТа) может быть
принята меньше максимальной стати-
ческой, так как эквивалентная мощ-
ность. развиваемая двигателем при
работе с грузами разного веса и за-
висящая от использования механизма
по грузоподъемности, всегда меньше
Асттах [6]. Наши расчеты показали,
что в кранах общего назначения мож-
но принимать
Naa = (0,7...0,8)XT_.
При работе с грузами номинального
веса крановые двигатели, обладаю-
щие перегрузочной способностью,
выдерживают кратковременную пере-
грузку.
Меньшие значения Л/„в следует
брать для классов нагружения BI и
В2, а болыпие-для ВЗ и В4. При этом
необходима проверка выбранного дви-
гателя на нагрев. Методика проверки
изложена ниже.
Такой подход к выбору двигателя
позволяет уменьшить его габариты, а
следовательно, вес и стоимость.
Выбирая форму конца вала двига-
теля, следует отдавать предпочтение
цилиндрической, если намечается ис-
пользовал ь зубчатую муфту по ГОСТ
5006-83.
После выбора двигателя необхо-
димо выписать условное обозначение
его типа и следующие основные пара-
метры: номинальную мощность А'дн;
максимальный момент Тдвтах; отно-
сительную продолжительность вклю-
чения ПВдв; частоту вращения ндо;
момент инерции ротора или якоря
Jp дв; диаметр конца вала dn дв и массу
двигателя шдв„ Если выбран двига-
тель с фазным ротором, величина
ТГ1вт,1х не нужна, так как вместо нее
будет использоваться величина 7^iyckmaA.
Выбор передачи. Выбор типа
редуктора. В механизмах подъема
груза могут быть использованы сле-
дующие типы цилиндрических редук-
торов: двухступенчатые Ц2У, Ц2Н,
ЦДНД, ЦДН, Ц2, РК, РМ (типораз-
меры РМ -500 и РМ -650; остальные
типоразмеры РМ сняты с производ-
ства; если указанные типоразмеры не
удовлетворяют требованиям кинема-
тики и прочности, следует вместо ти-
па РМ взять другой тип редуктора) и
трехступенчатые ЦЗУ, ЦТНД и ГК.
Конструктивной особенностью дан-
ных типов (за исключением типа ГК)
является возможность исполнения
конца тихоходного вала с зубчатым
венцом для муфты и расточкой для
размещения опоры оси барабана. Ре-
дукторы типа ГК имеют на тихоход-
ном валу шестерню для открытой
зубчатой передачи.
Технические данные редукторов
приведены в Приложении 5, а также в
книгах [15, 17, 22] и др.
Выбор типоразмера редук-
тора производится по каталогу. При
этом должны быть проверены усло-
вия, касающиеся прочности, долго-
вечности и кинематики редуктора.
Первое условие-расчетный эквива-
лентный момент на тихоходном валу
редуктора Т не должен превышать
номинальный крутящий момент на
тихоходном валу Г по паспорту ре-
дуктора*:
Тр > « ТР.„ (2.14)
Если в каталоге на редукторы не
приводится номинальный крутящий
момент на тихоходном валу (это от-
носится, например, к редукторам ти-
па ГК), то значение Трн надо вы-
числить по другим номинальным па-
раметрам редуктора (допускаемая
мощность редуктора, допускаемая
частота вращения быстроходного ва-
ла, передаточное число, к.п.д.).
Эквивалентный момент равен
^ = к.Тр, (2.15)
где - коэффициент долговечности;
Т- расчетный крутящий момент на
тихоходном валу редуктора при
подъеме номинального груза;
ka = kQk„ (2.16)
где кд- коэффициент переменности
нагрузки; kf - коэффициент срока служ-
бы. Значение к^ определяю! но фор-
муле kf) = дД, где /(-коэффициент
нагружения. Значения к в зависимос-
ти от класса нагружения приведены в
табл. 1.4. Класс нагружения (если он
не задан в исходных данных) пред-
варительно можно принять любой,
соответствующий заданной группе
режима работы (см. табл. 1.2). Более
точно величину /с, а следовательно, и
kQ можно определить, используя со-
отношения в § 1.5; при этом относи-
тельные нагрузки Pj и продолжитель-
ность их действия можно взять по
типовому графику нагружения для со-
ответствующей группы режима рабо-
ты. Типовые графики нагружения
приведены в Приложении 4 и в книгах
[2, 6, 8]. Коэффициент kt можно опре-
делить по формуле '
3 _
= (2.17)
V -о
* РТМ 24.090.54-79
31
Здесь z - суммарное число циклов
контактных напряжений зуба шестер-
ни тихоходной ступени редуктора;
z0- базовое число циклов контактных
напряжений, для типажных редукто-
ров сп = 125-106;
-Р = 3ТПТ, (2.18)
где г,-число циклов нагружения на
тихоходном валу редуктора; ^-пере-
даточное число тихоходной ступени
редуктора; можно принимать среднее
значение ит = 5.
Значение определяют по фор-
муле
-т = 60итГмаш, (2.19)
где пт - частота вращения тихоходно-
го вала редуктора, об/мин; гмаш -ма-
шинное время работы механизма, ч.
Значения fMatI1 приведены в табл. 1.3.
Если найденное значение кд вы-
ходит за пределы диапазона 0,5 ... 1,0.
то его надо принимать равным бли-
жайшему граничному значению этого
диапазона.
Второе условие-передаточное чис-
ло редуктора ир не должно отличать-
ся от требуемого передаточного чис-
ла w более чем на ±15%:
100% < 15%. (2.20)
Если данное условие не выполня-
ется, можно идти следующими путя-
ми: а) выбрать другой тип редуктора
(например, трехступенчатый вместо
двухступенчатого) с большим переда-
точным числом; б) изменить требуе-
мое передаточное число путем изме-
нения частоты вращения барабана за
счет его диаметра (при этом надо
повторить все расчеты, связанные с
определением диаметра барабана); в)
ввести в кинематическую схему меха-
низма открытую зубчатую передачу.
Заводы-изготовители редукторов
указывают иногда допускаемую час-
тогу вращения быстроходного вала.
В таком случае необходимо прове-
рять третье условие-частота враще-
ния быстроходного вала редуктора
должна быть не меньше частоты вра-
щения вала двигателя. Выбирая фор-
му конца быстроходного вала, сле-
(
/
4
t
I
I
f
дует отдать предпочтение цилиндри-
ческой, если намечается использовать
зубчатую муфту.
После выбора редуктора необхо-
димо выписать условное обозначение
его типоразмера и следующие основ-
ные параметры: номинальный крутя-
щий момент на тихоходном валу Т ;
передаточное число wp; суммарное
межосевое расстояние дч,с; диаметры
концов валов <быстр и ^втих, номи-
нальную радиальную нагрузку на ко-
нец тихоходного вала Ррад; массу ре-
дуктора тр и схему сборки. Если вы-
бирают редуктор типа ГК, необходи-
мо выписать число зубьев шестерни
на конце тихоходного вала, модуль
зубьев т. ширину шестерни />ш.
Рекомендуется начертить «габа-
ритку» редуктора.
Определение основных па-
раметров открытой зубчатой
передачи. Открытая зубчатая пере-
дача может быть в механизме, если:
1) не находится редуктора с требуе-
мым передаточным числом; 2) по со-
ображениям компоновки (размеще-
ние верхних блоков полиспаста, зазор
между тормозом и барабаном и др.)
требуется увеличить расстояние меж-
ду осью быстроходного вала редукто-
ра и осью барабана.
Основными параметрами откры-
той зубчатой передачи обычно счита-
ют: передаточное число мот, числа
зубьев шестерни и венца и zB,
модуль зубьев т, межосевое расстоя-
ние .
Передаточное число выбирают из
ряда стандартных значений по ГОСТ
2185-66: пст = (3,55); 4,0; (4,5); 5,0; (5,
6). Значения, указанные в скобках,
менее предпочтительны.
После определения указанных па-
раметров необходимо уточнить зна-
чение Dm^, мм (см. рис. 2.6), принятое
выше: = m(zB + 2). Значение моду-
ля зубьев т известно, если выбран
редуктор типа ГК. В других случаях
модуль можно принять, ориентируясь
на существующие конструктивные ре-
шения.
В дальнейшем (на этапе «Конст-
руирование и расчет сборочных еди-
ниц»), если будет требоваться разра-
ботка чертежа сборочной единицы
«Установка барабана», необходимо
уточнить размеры этой сборочной
единицы L-. L, LycT 6, принятые выше,
так как они зависят и от ширины
зубчатого венца В1в. При этом можно
принять п ~ 0,95 7>ш.
После выбора передачи необходи-
мо определить фактическую скорость
подъема груза гпод и фактический
к.п.д. !СГеханизма Пмех.
Выбор муфт. Выбор т и н а
муфты (см. в § 3.1). Типоразмер
муфт выбирают по диаметрам кон-
цов соединяемых данной муфтой ва-
лов (ГОСТ 5006-83). При этом до-
пускается комбинация втулок различ-
ных исполнений (с цилиндрическим
или коническим отверстием). Диа-
метр отверстия втулки можно зака-
зывать равным диаметру конца вала,
если последний не превышает наиболь-
шего для данного типоразмера значе-
ния. указанного в таблице ГОСТа.
Технические данные муфт приведены
в Приложении бив ГОСТ 5006-83.
21424-75 и 20884-75.
После выбора гипоразмеров муфт
необходимо выписать условные обо-
значения типоразмеров и основные
пара метры каждой муфты (исключая
муф1Ы, ведущим элементом которых
является зубчатый венец на конце
тихоходного вала редуктора): номи-
нальный момент муфты Тм н; макси-
мально допустимые диаметры расто-
чек во втулках полумуфт под концы
валов <|евтах и </правтах; момент инер-
ции муфты JM и массу муфты тм.
Рекомендуется также начертить «га-
баритку» муфты.
Выбор тормоза. Расчетный т о р-
мозной момент определяют по
формуле
Тг.р = кгТ^, (2.21)
где кт- коэффициент запаса торможе-
ния. назначаемый Правилами ГГТН
в зависимости от режима работы
(табл. 2.6); ТС1 т - статический крутя-
щий момент при торможении, созда-
ваемый весом номинального груза на
валу, на котором устанавливается
тормоз (И • м):
где ртах-к.п.д. механизма, подсчи-
танный по максимальным значениям
к.п.д. отдельных участков кинемати-
ческой цепи; «мех-полное передаточ-
ное число механизма, включая пере-
даточное число полиспаста.
Выбор типа тормоза. В меха-
низмах подъема груза широко ис-
пользуют автоматические нормально
замкнутые тормоза с пружинным за-
мыканием и электромагнитным или
электрогидравлическим приводом ти-
пов ТКТ, ТКП, ТКГ. ТКТГ.
При группах режима работы 4М,
5М и 6М рекомендуется применять
тормоза с электрогидравлическим
приводом типа ТКГ. На кранах боль-
шой грузоподъемности широко при-
меняют тормоза с электромагнитами
постоянного тока и диаметрами шки-
вов 400 ... 600 мм конструкции произ-
водственного объединения «Сибтяж-
маш» [4] и тормоза типов ТКП с
диаметрами шкивов 700... 800 мм
конструкции ВНИИПТМАШа [21].
Выбрав тип тормоза, необходимо
изучить особенности его конструк-
ции, принцип работы, регулировку,
достоинства и недостатки. Наиболее
полно эти вопросы освещены в книгах
[2, 21].
Выбор типоразмера тормо-
за. Технические данные тормозов
приведены в Приложении 7, книгах
[15, 20, 21] и др. При выборе типо-
размера тормоза необходимо про-
верять следующие условия.
Первое условие-номинальный тор-
мозной момент тормоза должен быть
не меньше чем расчетный:
Таблица 2.6
Группа режима работы ... I М, 2М, ЗМ 4М 5М. 6М
Коэффициент К,............ 1,5 1,75 2,0 2,5
2 Зак. 19&8 33
Если величина Tt н значительно
(более чем на 10%) превышает вели-
чину 7^ то тормоз должен быть
отрегулирован на значение Т и во
всех последующих расчетах, касаю-
щихся процесса торможения, следует
оперировать величиной Т .
Второе условие (касается только
тормозов с электромагнитным приво-
дом) - относительная продолжитель-
ность включения катушки электро-
магнита должна соответствовать ре-
жиму работы механизма. В против-
ном случае катушка перегреется, что
приведет к уменьшению тягового уси-
лия электромагнита и тормоз не бу-
дет размыкаться.
Выбрав тормоз, необходимо вы-
писать условные обозначения типо-
размеров тормоза и его привода, а
также следующие основные парамет-
ры: номинальный тормозной момент
Т( и; относительную продолжитель-
ность включения катушки электро-
магнита ПВК (только для тормозов
с электромагнитным приводом); но-
минальное усилие на штоке толкате-
ля Ршт или тяговое усилие Рэп (тяго-
вый момент Тзл) электромагнита;
максимальный ход штока толкателя
Лшт т.1Х или якоря электромагнита
Л„тах; установочную длину замыка-
ющей пружины LycT; требуемый диа-
метр тормозного шкива Е)тш; ширину
колодок Вк и массу тормоза m .
Рекомендуется начертить «габарит-
ку» тормоза.
Выбор муфты, имеющей тормозной
шкив. В качестве тормозного шкива
целесообразно использовать одну из
нолумуфт соединительной муфты. В
этом случае муфта должна иметь спе-
циальное исполнение. Выбрать такую
муфту можно из типажного ряда [20].
При этом кроме требований, предъяв-
ляемых к соединительной муфте обыч-
ного исполнения, должны проверять-
ся следующие условия.
Первое условие - диаметр обода
полумуфты должен быть равен не-
обходимому диаметру тормозного
шкива (или расстоянию между колод-
ками); на величину необходимого
диаметра тормозного шкива указы-
вает первая цифра в обозначении ти-
поразмера тормоза, например для
тормоза ТКТ-300/200 необходимый
диаметр тормозного шкива равен
300 мм.
Второе условие - ширина обода
полумуфты должна быть на 5 мм
больше ширины колодки тормоза или
(в крайнем случае) равна ширине ко-
лодки, в противном случае не вся
поверхность колодки будет контакти-
ровать со шкивом, что приведет к
неравномерному износу фрикцион-
ных накладок.
Если не удается выбрать унифици-
рованную муфту с тормозным шки-
вом, то на базе ранее выбранной
стандартной соединительной муфты
можно сконструировать специальную
сборочную единицу «Муфта с тор-
мозным шкивом».
После выбора муфты, имеющей
тормозной шкив, необходимо выпи-
сать ее основные параметры: диаметр
тормозного шкива 1)тш; ширину обо-
да тормозного шкива 1?т ш; макси-
мально допускаемый диаметр расточ-
ки под конический конец быстроход-
ного вала редуктора rfKmax; момент
инерции Ум т ш и массу муфты тм,т.ш.
Рекомендуется также начертить «га-
баритку» муфты.
Выбор тормозного шкива.
Если компонование механизма (см. §
3.2) предполагает установку тормоза
с использованием тормозного шкива,
являющегося самостоятельным изде-
лием, а не входящего в состав сбороч-
ной единицы «Муфта с тормозным
шкивом», то тормозной шкив при его
диаметре 100... 400 мм следует выби-
рать по ОСТ 24.290.06-75. Размеры
тормозных шкивов приведены в При-
ложении 7.
После выбора стандартного тор-
мозного шкива необходимо выписать
условное обозначение его типоразме-
ра и следующие параметры: наруж-
ный диаметр £)т ш; ширину обода 2?об;
максимально допускаемый диаметр
расточки 4,асттак; массу шкива тт ш.
Также необходимо указать форму по-
верхности расточки под вал (цилинд-
рическая или коническая).
При диаметре более 400 мм де-
таль «Тормозной шкив» необходимо
34
конструировать. Конфигурацию дета-
ли можно принимать такой же, как у
стандартного тормозного шкива. Все
размеры тормозною шкива должны
соответствовать как тормозу, так и
концу вала, на который насаживается
шкив.
§ 2.2. Механизм передвижения
тележки (крана)
с приводными колесами
Особенности расчета механизмов пе-
редвижения ходовых гележек козло-
вых кранов рассмотрены в книге [1].
Здесь рассмотрены расчеты механиз-
мов передвижения мостовых кранов и
их тележек, получивших наибольшее
распространение во внутризаводском
транспорте.
Исходи ы е д а и н ы е. В качестве
исходных данных должны быть за-
даны: скорость передвижения г, м/с;
режим работы механизма по Прави-
лам ГГТН (или группа режима рабо-
ты по ГОСТ 25835-83); пролет крана
L, м: условия работы крана (в закры-
том помещении или на открытом воз-
духе и др.); график загрузки меха-
низма.
Остальные исходные данные (гру-
зоподъемность. род тока, срок служ-
бы, тип машины) те же, что были и
при проектировании механизма подъе-
ма груза.
Выбор кинематической схемы. Ме-
ханизмы передвижения гележек, как
правило, имеют центральный привод
с тихоходным трансмиссионным ва-
лом. Пример такой кинематической
схемы показан на рис. 2.8. Число
ходовых колес тележек зависит' от
грузоподъемности. При грузоподъем-
ности до 160 т предварительно мож-
но принимать четыре колеса, при
большей грузоподъемности - восемь.
Предпочтительно расположение ре-
дуктора посередине между приводны-
ми ходовыми колесами При эт ом обе
половины трансмиссионного вала за-
кручиваются под нагрузкой на одина-
ковый угол, что способствует одно-
временному началу движения привод-
ных колес и ликвидации перекосов.
Тем не менее в тележках применяется
Вид А
I’ и с.
2.S
и схема с боковым расположением
редуктора, достоинство которого
удобство монтажа редуктора. В этих
схемах используют навесные редукто-
ры. В механизмах передвижения ол-
нобалочных мостовых крапов встре-
чается привод с центральным распо-
ложением редуктора и о гкрыз ыми
зубчатыми передачами на колеса.
При этом уменьшаются масса и габа-
риты редуктора. При такой схеме лег-
че реализова ть большое передаточное
число механизма. В механизмах пере-
движения двухбалочных кранов неза-
висимо оз места их работы и одно-
балочных кранов, предназначенных
для работы на открытом воздухе,
применяют, как правило, раздельный
привод. Он леток и удобен в изготов-
лении и монтаже. Однако при раз-
дельном приводе нссинхроннисл ь дви-
жения сторон крана больше, чем при
центральном. Имеются рекомендации
[2] при nponciax меньше 16 м приме-
нять 1олько центральный привод.
Для удобства обслуживания т ормо-
зов их можно располагать на вторых
концах валов двигателей Различные
кинематические схемы приведены в
книгах [2. 8, 22] и др.
Число ходовых колес крана может
быть 4. 8. 16. Оно зависит от грузо-
подъемности, пролета, режима рабо-
2*
35
Таблица 2.7
Грузоподъемность механизма главного подъема, т Число ходовых колес крана До 80 4 80... 8 100 100...160 8; 16 Больше 160 16
Таблица 2.8
Грузоподъемность, т 5 8 10 12.5 16 16/32 20/5 32/5 50/12,5
Вес тележки, кН 19,6 21,6 23,5 29,4 36.3 46J 61,8 85,3 132,4
Примечание. В числителе-: ру зон одъсм ноет ь механизма главного подъема, а в знамена геле вспомога-
тельного, если тележка имеет дна механизма подъема.
ты и скорости движения крана. Пред-
варительно число ходовых колес кра-
на можно принять в зависимости от
1 рузоподъемности (табл. 2.7).
При числе ходовых колес 16 число
приводов может быть равно 4. В ме-
ханизмах передвижения однобалоч-
ных мостовых кранов опорного типа,
предназначенных для работы в по-
мещении. применяют, как правило,
центральный привод механизма пере-
движения.
Определение статических нагрузок
на ходовые колеса. Ходовые ко-
леса тележки. Максимальную (в
груженом состояний) и минимальную
(в порожнем состоянии) статические
нагрузки на ходовое колесо тележки
(Лттах и Лттш) слеДУет определять
с учетом коэффициента неравномер-
ности нагружения колес: в груженом
состоянии умножать на 1,1; в порож-
нем состоянии-на 0,9.
Вес тележки GT для кранов грузо-
подъемностью 5 ... 50 т можно взять
из табл. 2.8. Приведенные значения
определены на основании ГОСТ
25711-83.
Вес тележки для промежуточных
значений грузоподъемности можно
определить методом интерполяции.
Для тележек кранов, имеющих
грузоподъемность 80 ,.. 500 т, вес те-
лежки можно найти по ГОСТ 6711-81.
Если грузоподъемность крана не по-
падает в диапазоны грузоподъемнос-
тей названных стандартов, предвари-
тельно вес тележки можно принять
равным:
GT = (0,25... 0,35) G - группы режима
работы 1М ... 4М;
36
G3 =(0,4...0,5) G группы режима
работы 5М ... 6М.
Если проектируют тележку с од-
ним механизмом подъема, то прини-
мают меньшее значение числового
коэффициента при данной группе ре-
жима работы.
Ходовые колеса д в у х б а л о ч-
ного крана. На рис. 2.9 и 2.10
показаны расчетные схемы, по кото-
рым можно определить максималь-
ные нагрузки на все колеса одной
стороны крана ТП1ич. Эти схемы могут
быть использованы и для определе-
ния минимальных нагрузок /Jmhl (по-
казаны штриховой линией) на все.ко-
леса одной стороны крана, когда те-
лежка без груза находится в крайнем
положении. Выбор той или иной схе-
мы из представленных на рис. 2.9
Р и с. 2.10
и 2.10 зависит от грузоподъемности
крана и соотношения величин и /2,
представляющих расстояния от вер-
тикальной оси крюка механизма глав-
но! о подъема до оси ближайшего
подкранового рельса в крайних по-
ложениях тележки при несжатых бу-
ферах. Значение обычно больше
значения /2. Расчет показывает, что
для кранов грузоподъемностью до
16 т влияние веса кабины оказывается
более существенным, чем влияние
разницы плеч и /2, а значит, для
этих кранов следует использовать
схему на рис. 2.9. Для кранов грузо-
подъемностью 16/3,2 т и выше следу-
ет использовать схему на рис. 2.10. На
схемах обозначено: GM - вес моста
крана, включая вес электрооборудо-
вания, расположенного на нем: G, -
вес номинального груза механизма
главного подъема; GKa5- вес кабины
управления; /KdC-расстояние от цент-
ра массы кабины до оси ближайшего
подкранового рельса.
Представляя кран в виде двух-
опорной балки и составляя уравнения
моментов сил относительно опор,
можно получить выражения для опре-
деления Ртах и Pm5n. Для расчета этих
величин необходимо знать числовые
значения параметров GM, GKa6, /кай, /р
/3. Вес моста крана равен
6’м = GKP - - G„ (2.24)
где G - конструкт ивный вес крана с
электрооборудованием.
Краны облегченного типа грузо-
подъемностью 5 ... 50 т могут иметь
исполнение, при котором кран управ-
ляется с пола, г. е. кабина отсутству-
ет. В этом случае GM = GKp — GT.
Вес крана можно найти по табли-
цам ГОСТ 25711-83 и 6711-81. Вес
кабины управления зависит от того,
открытая или закрытая кабина. От-
крытые кабины предназначены для
установки на кранах, работающих
преимущественно в закрытых поме-
щениях при температуре —10...
4- 28 °C [22] и при наличии физически
опасных и вредных производст венных
факторов (концентрация аэрозолей и
вредных веществ в воздухе, уровень
шума, вибрация и др.), действующих
в течение времени меньше 20% от
времени смены. Вес открытой кабины
с электрооборудованием, расположен-
ным в ней, можно принять [20] рав-
ным 10 ... 13 кН, а закрытой - 14...
17 кН.
Значение /каб можно принять оди-
наковым для всех кранов и равным
2,4 м. Значения и /2 для кранов
различной грузоподъемности приве-
дены в табл. 2.9.
Нагрузки на колеса одной сторо-
ны крана можно принимат ь распреде-
ленными равномерно.
Ходовые колеса одноба-
лочного крана грузоподъем-
ностью до 5 т. В однобалочных
мостовых кранах значение (рис.
2.11) меньше значения /2, поэтому
расчет ным положением для определе-
ния максимальной и минимальной
нагрузок на ходовые колеса одной из
сторон крана является крайнее левое
положение электротали. На рис. 2.11
G4T-Bec электротали.
Расчетная схема кранов исполне-
ния А (управление с пола) отличается
от изображенной на рис. 2.11 отсут-
ствием кабины.
Рис. 2.11
Таблица 2.9
Q. 1 5 8 10 12,5 16 16/3,2 20/5 32/5 50/12,5
М 1,0 1,2 1.3 1,95 2,01 1.91 2,0
М 0.8 1,1 1.12 1,3 1,12 1.6 1.9
Q, г 80/20 100/20 125/20 160/32 200/32 250/32 320/32 400/80 500/80
/) . м 2,7 2,7; 3,1 3,2 3,4 4.3 5,2
м 1,9 1,9; 2,5 2,5 3,1 4,0 3,8
37
Вес моста крана равен GM = GKp —
— Gn-исполнение A; GM = GKp —
— GKa6 — G3T - исполнение Б (управле-
ние из кабины). Вес крана G можно
определить по ГОСТ 22045-82. Вес
электротали GH можно найти по
ГОСТ 22584-77. Значение /каб можно
принимать таким же, как и в двухба-
лочных кранах, т.е. 2,4 м. Значения
для кранов, работающих в помеще-
нии (тип 1) и на открытом воздухе
(тип 2), представлены в табл. 2.10.
Большие значения соответствуют
большим высотам подъема (высоты
подъема по ГОСТ 22045-82 могут
быть 6, 12 и 18 м).
Число ходовых колес однобалоч-
ных кранов, имеющих грузоподъем-
ность до 5 т, равно 4. Если кран имеет
управление с пола, то наименьшую и
наибольшую нагрузку на одно колесо
моЗкно определять, считая, что оба
колеса одной стороны крана нагруже-
ны одинаково. Если же кран имеет
управление из кабины, то необходимо
учитывать несимметричность ее рас-
положения относительно колес одной
стороны (рис. 2.12). На рис. 2.12 пока-
зана схема для наиболее нагруженной
стороны крана. Значения базы А кра-
на и размера приведены в табл.
2.10. Меньшие значения принимают
для меньших пролетов (пролеты по
ГОСТ 22045-82 могут быть от 4,5 до
28,5 м). Значение можно принять
равным 1,35 м. Нагрузки на колеса
определяют по уравнениям статики.
Выбор колес. В табл. 2.11 приведе-
ны диаметры ходовых колес D, диапа-
зоны допускаемых нагрузок [Ржшм]
Рис. 2.12
на колеса по ОСТ 24.090.44-82 и соот-
ветствующие типоразмеры рельсов.
Зная максимальную статическую
нагрузку на одно колесо, вычислен-
ную ранее, можно выбрать колесо по
условию
Р < ГР Т
ст max L-* ктах-Г
При этом для групп режима ра-
боты ЗМ и выше, а также при ско-
ростях движения 1 м/с и выше сле-
дует выбирать больший диаметр ко-
леса и больший типоразмер рельса из
приведенных в таблице. После выбо-
ра колеса необходимо выписать зна-
чения D и [Рктах].
Выбор колесных установок. Ходо-
вые колеса тележек и кранов входят в
состав сборочных единиц «Приводное
колесо в сборе» и «Неприводное ко-
лесо в сборе». Эти сборочные еди-
ницы называют и колесными уста-
новками. Кроме детали «Ходовое ко-
лесо» они содержат обычно еще вал
(ось), шпонку (шпонки), подшипники,
крышки подшипников и другие со-
Таблица 2.10
Грузоподъем- ность, 3 Тип 1 Тип 2
А А
1,0 0,55... 1,00 1,5; 2,0; 2.6 4,0 1,705 1,800 —
2,0 0,80... 1.10 0,70... 0,94 2,6; 4,0 1,85
3,2 0,605... 1,045 1,5 2,0; 2,6; 4,0; 5,0 1,705; 1,787; 1,800 0,75 ... 0,96
5.0 0,850... 1,275 1,705; 1,800; 1,787; 1,770 0,915... 1,115 2,6; 4,0; 5,0
38
Табл ица 2,11
Максимальная статическая натрут- Диаметр колеси, мм ка па колесо, кН Гипоразмер рельса с выпуклой ю- лемкой
30.. .. 50 200; 250 Р24 ГОСТ 6368 82
Св. 50 до 100 нключ. 320; 400 Р43 ГОСТ 7173 54 КР70 ГОСТ 4121 76
100 ...200 400; 500 Р43 ГОСТ 7173 54 Р50 ГОСТ 7174 75 КР70 ГОСТ 4121 76
200 ...250 500: 560; 630 Р43 ГОСТ 7173 54
Р50 ГОСТ 7174 75 КР70 ГОСТ 4121-76 КР80 ГОСТ 4121 76
250 ... 320 630; 710 Р43 ГОСТ 7173 54 Р50 ГОСТ 7174 75 КР80 ГОСТ 4121 76 КР 100 ГОС Т 4121 76
320 ... 500 710; 800 КР80 ГОСТ 4121 76 КР100 ГОС Т 412] 76
500 ...800 800; 900; 1000 КР190 ГОСТ 4121 76
800. ...1000 900; 1000 КР 120 ГОСТ 4121 76 КР120 ГОСТ 412 i 76 КР140 ГОСТ 4121 76
путствующие детали и стандартные
изделия. Конструкции и параметры
унифицированных колесных устано-
вок приведены в Приложении 8, а
также в ОСТ 24.090.09-75 и в книге
[4]. При группах режима работы
4М ... 6М рекомендуется применять
только унифицированные колесные
установки со сферическими ролико-
подшипниками. Существующий ОСТ
24.09.09 75 различает два типа двух-
ребордных колесных установок:
К2РП - с приводным колесом;
К2РН - с неприводным колесом.
Тип К2РП может иметь три ис-
полнения: исполнение I с одним кон-
цом вала со шпонкой; исполнение
2-с двумя концами вала (один со
шпонкой, второй-со шлицами); ис-
полнение 3-с одним концом вала со
шлицами.
ОСТ 24.090.09-75 содержит все
размеры колесных установок для ко-
лес диаметром 200 ... 1000 мм. Нали-
чие различных исполнений позволяет
рассматривать разные варианты ком-
поновки механизма передвижения.
Типоразмер колесной установки
выбирают по диаметру ходового ко-
леса. Выбрав колесные установки, не-
обходимо выписать условные обозна-
чения их типоразмеров и следующие
параметры: диаметр колеса D; диа-
метр конца вала с/; диаметр цапфы е/и;
ширину дорожки катания В: число
реборд среб: массу приводной у [tp и
неприводной тк.у.не11р установок, а
также указать форму поверхности ка-
чания и гип подшипника.
При очень малой или очень боль-
шой нагрузке на колесо (менее 30 и
более 1000 кН) после выбора ходового
колеса конс труирую ! и рассчитывают
специальную сборочную единицу
«Колесная установка».
Выбор рельса. В качестве подте-
лежечных и подкрановых рельсов
можно использовать рельсы как с вы-
пуклой головкой (типы Р и КР), гак и
плоские. Полосовую и квадратную
сталь желателыю использовать в кра-
нах сравнительно небольшой грузо-
подъемности. например в однобалоч-
ных (ГОСТ 22045 82) грузоподъем-
ностью до 5 т. Крановые рельсы типа
КР имеют стенку повышенной тол-
щины и более широкую опорную по-
верхность по сравнению с железно-
дорожными рельсами типа Р, по-
эюму допускают большую нагрузку
и обеспечивают более равномерную
передачу ее на верхний пояс опорной
балки. Рельсы этого Типа предпочти-
тельны для кранов большой грузо-
подъемности.
Выбор типоразмера рель-
са. При выборе по табл. 2.11 типо-
размера рельса необходимо прове-
зу
рять соотношение ширины дорожки
катания колеса В и номинальной ши-
рины головки рельса А; В должно
быть больше b на значение, указанное
в табл. 2.12.
Таблица 2.12
Тип колеса
Разница
(Z? - /Д мм
Крановое двухребордное
цилиндрическое 30
Крановое двухребордное
коническое 40
Тележечное двухребордное 15... 20
Тележечное однореборд-
ное 30
Без реборд ное Не более 60
Если данное условие не выпол-
нять, то не будет компенсироваться
неточность установки колес и укладки
рельсов.
Выбрав типоразмер рельса, необ-
ходимо выписать условное обозначе-
ние его типоразмера и следующие
параметры: номинальную ширину го-
ловки b и радиус головки г. Если
выбирается подтележечный рельс, то
дополнительно необходимо выпи-
сать: ширину основания рельса 60сн;
расстояние от основания до нейтраль-
ной оси у; площадь поперечного се-
чения Е; момент инерции сечения Jх\
линейную плотность тпог; мерные
длины /мерн; немерные длины /нем и
материал. Рекомендуется начертить
поперечное сечение рельса с указани-
ем всех размеров.
Определение сопротивлений пере-
движению тележек и кранов. Полное
сопротивление W (кН) передвижению
1 слежки или крана в период разгона,
приведенное к ободу колеса, может
включать в себя следующие состав-
ляющие:
и/= и;р + wr + и; + +
+ иб,
(2.25)
где И^р-сопротивление, создаваемое
силами трения; И7 - сопротивление,
создаваемое уклоном подтележечного
или подкранового нуги; И;,-сопро-
тивление, создаваемое вез ром, если
тележка (кран) работает на открытом
воздухе; jV„H-сопротивление, созда-
ваемое инерцией вращающихся и по-
ступательно движущихся масс тележ-
ки или крана; И^.иб -сопротивление,
создаваемое раскачиванием груза на
гибкой подвеске.
С о п р о г и в л е н и е, с о з д а в а е-
м о е сил а м и т реи и я. Для тележек
и кранов, имеющих ходовые колеса с
реборда.ми, сопротивления, создавае-
мые силами трения WTp (кН), опреде-
ляют по формулам:
для тележки
И;Р = (С,+ G,P)^^AU„„; (2.26)
для крана
И"Тр = (6\р + Gt p) ц кдОП , (2.27)
где ц коэффициент трения качения
колеса по рельсу, мм (табл. 2.13);
f приведенный коэффициент зрения
скольжения в подшипниках колес
(табл. 2.14); кд„п - коэффициен т до-
полнительных сопротивлений, оире-
Таблица 2.13
Форма головки рельса Диаметр колеса, мм 200...320 400...560 630...700 800 000...1000
Плоская Закругленная 0,3 0,5 0,6 0,65 0.7 0,4, 0.6 0,8 1,00 1.2 Таблица 2.14
Тип подшипника Г
Шариковый, роликовый (исключая роликовый с коническими роликами)
Роликовый с коническими роликами
Скольжения
0.015
0,020
0,100
40
Таблица 2.15
Объект Форма поверхности катания колеса Привод механиз- ма Примечание
Кран опорный Тс чежка Коническая Цилиндрическая Цилиндрическая Центральный Раздельный Центральный Раздельный Центральный 1.2 М 1.5 1.1 2.5 Троллейный токопро-
Крин подвесной Коническая Односторонний Двусторонний 2.0 2,0/2.5 1,8/2.0 ВОД 1 Гибкий токоподвод
деляемых в основном трением реборд
о юяовку рельса и трением элементов
токосъемного устройства (табл. 2.15);
GT, G , G-соответственно вес те-
лежки, крана и номинального груза,
кН; D- диаметр колеса, мм; диа-
метр цапфы вала (оси) колеса, мм.
В значениях /<ДО|1 цифра в числителе
означает использование в ходовых
колесах • подшипников качения, а в
знаменателе - подшипников скольже-
ния.
Если проектируется механизм пе-
редвижения с неунифицированиой
сборочной единицей «Колесная уста-
новка», г. е. диаметр цапфы вала (оси)
колеса неизвестен, го предварительно
можно принимать </ц = (0,20... 0.25) х
х D.
Сопротивление И/. (кН), со-
здаваемое у к л о и о м, определяют
но формулам:
для тележки Wv = a (G\ + Grp); (2.28)
для крана Иу = a(GKp + Gip), (2.29)
где а--уклон рельсового пути; для
тележки равен 0.002; для крана 0.001.
Сопротивление, создавае-
мое ветром р а б о ч е г о с о с г о я-
н и я. определяют по нормам ГОСТ
1451-77.
Сопротивление IV’,н (кН), со-
з д а в а е м о е с и л а м и и н е р ц и и,
определяю! по формуле
11 и н (2.30)
где 8-коэффициент, учитывающий
инерцию вращающихся частей меха-
низма (при скорости передвижения
меньше I м/с можно принимать
8 = 1,25 [6]; больше 1 м/с — 8 = 1,15):
гипост - масса поступательно движуще-
гося объекта (тележки или крана), т;
а-ускорение при разгоне, м/с2.
Значение а предварительно можно
принять равным а = (0,5 ... 1,0) [д],
где [п]-допускаемое ускорение м/с2,
приведенное в табл. 2.16.
Значения ускорений, приведенные
в табл. 2.16, следует понимать как
средние. Если выполняется условие
сцепления колес с рельсами, то кран
(тележка) может работать с ускоре-
нием 0.3 м/с2 и выше.
Сопротивление, создавае-
мое раскачиванием груза на
гибкой подвеске. При движении
тележки или крана груз совершает
колебания относительно оси, откло-
ненной от вертикали в сторону, про-
тивоположную направлению движе-
ния. В результате возникает дополни-
тельное сопротивление движению
И’гнС = G tg а, где а - угол отклонения
груза от вертикали; а 2а/^.
Данная составляющая вызывается
силой инерции, действующей на груз
при его колебаниях, и может быть
также выражена
и'гиб = (Wrp + (2.31)
Таблица 2J6
Назначение крана Грузоподъемность
кранал
до 3,2 3,2... свыше
12,5 12,5
Перегрузка штучных гру-
зов:
с помощью приводного.
захвата 0.10 0,10 0.10
при ручной строповке 0,20 0.15 0,10
Обслужи ванне монтажных работ 0,10 0.07 0,05
41
где шгр- масса груза, т; шп масса
подвески. 1\
Выбор двигателя. Мощность
д в и га г ел я. Необходимую мощ-
ность N (кВт) определяют но фор-
муле
Лг = . (2.32)
а п pV п, < р
где г|лр = 0,8 ,.. 0,85 - предваритель-
ное значение к.п.д. механизма; уПАТ-
кратпоегь среднепускового момента
двигателя по отношению к номиналь-
ному (табл. 2.17). Введение в форму-
лу коэффициента \|/пер объясняется
тем. чзо сопротивление передвиже-
нию Wопределено с учетом сил инер-
ции и раскачивания груза, исчезаю-
щих в момент окончания разгона ме-
ханизма. Достал очная же интенсив-
ность разгона механизма обеспечива-
ется благодаря перегрузочной способ-
ности, характеризуемой коэффициен-
том Vii.cp- Значение у,,.ср предвари-
тельно можно принять любым в
диапазоне, указанном в табл. 2.17.
Та б л и ца 2,17
Тип двинпеля ш
Асинхронный с фазным рото-
ром 1.5... 1,6
и короткозамкнутым ротором
МТКЕ 1.3... 2.6
МТКН 1,6... 2.4
4АС 1.65 ... 1,80
4ЛЕ 1,1 ... 1.8
Постоянною тока с паследО’
нагельным возбуждением 1.8... 2,0
Выбор серии двигателя.
Производится аналогично тому, как
это рекомендовано для механизма
подъема груза. Двигатели серий 4 А К
и 4АНК, предназначенные для лебе-
док, принимать не следует. Допол-
нительно при легком режиме работы
можно рекомендовать асинхронные
двигатели с короткозамкнутым рото-
ром серии 4АЕ. Данная серия пред-
ставляет собой модификацию основ-
ного исполнения общепромышленной
серии 4А. Двигатели серии 4АЕ име-
ют встроенный электромагнитный
тормоз й выпускаются мощностью до
25 кВт. Коэффициент запаса тормо-
жения тормоза, опредечяемый как от-
ношение тормозного момента к но-
минальному моменту двигателя, ра-
вен 1,5. При этом предпочтение сле-
дует' отдавать двух- и трехскорост-
ным двигателям серии 4АЕ,
Прогрессивным направлением в
проектировании крановых механиз-
мов является разработка унифициро-
ванных* блок-приводов. Блок-привод
механизма передвижения включает в
себя двигатель, тормоз, редуктор и
ходовое колесо (возможно, с горизон-
тальными направляющими ролика-
ми), объединенные в одну компакт-
ную сборочную единицу, не содержа-
щую трансмиссионных валов. В этом
смысле серия 4АЕ, выпускаемая в ви-
де блока «двигатель тормоз», пред-
ставляет интерес.
Выбор типа двигателя. Тип
двигателя выбирают исходя из сле-
дующих условий.
Первое условие - относительная
продолжительность включения дви-
гателя должна соответствовать отно-
сительной продолжительности вклю-
чения механизма.
Втор ое у ’ словие -номинальная
мощность двигателя должна быть
равна или несколько больше значения
мощност и, вычисленного по формуле
(2.32): Алв 7?N-центральный при-
вод; ЛГДВ Аг/'сПр - раздельный привод,
где г„р-число приводов механизма.
Если выбирают двигатель серии
MTKF, МТК.Н или 4АЕ, необходимо
уточнить кратность среднепускового
.момента уп.ср. после чего уточнить
значение мощности, полученное по
формуле (2.32), и повторить выбор
типа двигателя.
Уточнение значения уп.ср произво-
дится по формулам: \|/п ср = (0,7... 0,8)
Vmax Для двигателей серий МТК и
М3 КН, Уп.ср (.Vmin "Е Унач.пуск)/^ ДЛЯ
двигателей серии 4АЕ, где угаах, vmin.
Унач.пуск - кратности максимального,
минимального и начального пусково-
го моментов двигателя по отноше-
нию к поминальному. Значения Vma«'
Vmin и Унач.пуск -™бо приведены в ка-
талогах на двигатели, либо их можно
определить как отношение соответ-
ствующего момента двигателя к но-
минальному моменту (см. гл. 8).
После выбора типа двигателя не-
обходимо выписать условное обозна-
чение его типа и основные параметры
(те же, что рекомендованы для дви-
гателя механизма- подъема груза), а
также начертить «габаритку».
Выбор передачи. Передачу выби-
рают исходя из кинематической схе-
мы механизма. Если в схеме имеется
открытая зубчатая ступень или ее не-
обходимость вызвана большим пе-
редаточным числом механизма, то
вначале надо определить основные па-
раметры открытой зубчатой ступе-
ни: передаточное число мот, модуль
зубьев т, числа зубьев шестерни и
колеса г, и z2 и межосевое расстояние
aw. Передаточное число пот следует
назначать из ряда стандартных пе-
редаточных чисел (ГОСТ 2185—66):
2,0; (2,24); 2,5; (2,8); 3,15; (3,55); 4,0;
(4,5); 5,0; (5,6). Число зубьев пред-
варительно можно принять равным
минимальному, получаемому при на-
резании зубьев без смещения исход-
ного контура (zt = 17), или несколько
большим данного значения. Диаметр
начальной окружности колеса dw2
конструктивно можно принимать
равным диаметру ходового колеса D.
Получаемое значение модуля следует
округлить до ближайшего большего
значения из ряда стандартных моду-
лей (ГОСТ 9563-60); 5,0; (5,5); 6,0;
(7,0); 8,0; (9,0); 10,0; (11,0); 12,0; (14,0);
18,0. Значения, стоящие в скобках,-
менее предпочтительны. После округ-
ления модуля следует уточнить ве-
личину dw2 и определить межосевое
расстояние aw.
В дальнейшем, если заданием на
проект предусмотрены конструирова-
ние и расчет сборочной единицы
«Установка ходового колеса» и име-
ется открытая передача, необходимо
проверить зубья открытой передачи
на изгиб.
Выбор типа редуктора. В
механизмах передвижения тележек,
как правило, используют вертикаль-
ные крановые редукторы. Известны
различные типы вертикальных редук-
торов, из которых следует рекомен-
довать типы В К и ВКУ-М, закрепляе-
мые на вертикальной плите, и навес-
ные редукторы ЦЗВК (ОСТ 24.191.10—
75) и ЦЗВКФ.
В механизмах передвижения кра-
нов кроме вертикальных редукторов
можно использовать горизонтальные,
применяемые в механизмах подъема
груза (см. § 2.1).
При проектировании блок-приво-
дов механизмов передвижения могут
быть использованы планетарные ре-
дукторы, скомплектованные из сек-
ционных планетарных передач, разра-
ботанных канд. техн, наук М. С. Кауф-
маном.
Технические данные редукторов
приведены в Приложении 5, а также в
книгах [4, 15, 17] и др.
Выбор типоразмера редук-
тора. Типоразмер редуктора (кроме
планетарных редукторов) выбирают
по методике, аналогичной той, что
была изложена для механизма подъе-
ма груза, за исключением четырех
отличий.
Первое отличие - для редукторов
типа ЦЗВК и ЦЗВКФ Zo = 63- 1()6. Вто-
рое отличие-суммарное число цик-
лов контактных напряжений тихоход-
ного зубчатого колеса редуктора
определяют по формуле
гт = зонтиш, (2.зз)
так как работает не одна (как в ме-
ханизме подъема груза), а две актив-
ные поверхности зубьев.
Третье отличие -расчетный кру-
тящий момент Т (Н м) на тихоход-
ном валу редуктора Т определяю! по
формуле
Тцвтах^рЛр’ (3.34)
где Тчв тах - максимальный момент
двигателя, Н м; для двигателей с
фазным ротором необходимо исполь-
зовать момент Тптах; и , т]р-соответ-
ственно передаточное число и к.п.д.
редуктора.
Так как редуктор еще не выбран,
вместо и можно подставлять значе-
ние, взятое из паспорт-пых данных на
принятый тип редуктора и близкое к
требуемому передаточному числу.
К.п.д. редуктора можно принять по
табл. 2.20 для намечаемого тина ре-
дуктора.
43
Если в каталоге Тля П1ах не приведен
(например, в каталогах на двигатели
общепромышленной серии 4А вместо
Тавтах ПРИВОДИТСЯ КрагНОСТЬ МЛКСИ-
мального момента утах), то его мож-
но определить по формуле
Тцв max "^дв.ц^тах »
где 7^в.н-номинальный момент дви-
гателя, Н м:
Тдв.и = ^дв/Юдв- (2.35)
Здесь №лл - номинальная мощность
двигателя, Вт; (Пдв - номинальная уг-
ловая скорость двигателя, рад/с.
Четвертое отличие - коэффициен т
долговечности к должен быть в пре-
делах 0,63 .,. 1,00, за исключением ре-
дукторов типа 1ДЗЙК. Если он выходит
за пределы данного диапазона, то его
надо приравнять к ближайшему гра-
ничному значению. Для редукторов
типа ЦЗВК &д = 0,5 ... 1,0.
После выбора типоразмера редук-
тора следует выписать условное обо-
значение его типоразмера, основные
параметры и начертить «габаритку».
Кроме того, после выбора переда-
чи необходимо определить фактичес-
кое передаточное число механизма
имея, фактическую скорость передви-
жения 1?пср и фактический к.п.д. ме-
ханизма г]мех. После определения т|мех
следует уточнить значение мощности
по формуле (2.32).
Выбор муфт и тормоза. Выбор
муфт (см. § 2.1). Если выбирают зуб-
чатую муфту для соединения вала
двигателя с быстроходным валом ре-
дуктора типа ЦЗВКФ, то необходимо
проверять соответствие модуля, чис-
ла зубьев и ширины зубчатого венца
обоймы подобным параметрам зуб-
чатого венца втулки, поставляемой в
составе редуктора.
Выбор тормоза. Согласно
Правилам ГГТН, тормоза в механиз-
мах передвижения нужно устанавли-
вать в тех случаях, если: 1) машина
работает на открытом воздухе; 2) ма-
шина, предназначенная для работы в
помещении, передвигается по пути,
уложенному на полу; 3) машина (те-
лежка), предназначенная для работы
в помещении на надземном рельсо-
вом пути, перемещается со скоростью
более 0,53 м/с.
Расчетный тормозной момент ме-
ханизма ТТ р мсх при работе крана в
закрытом помещении определяют при
движении без груза под уклон в пред-
положении. чз о реборды колес (или
горизон тальные направляющие роли-
ки) не задевают за головки рельсов:
т.р.мстс
(2.36)
где Ту0, 7;жОч Ттр 0 - моменты, Н-м,
создаваемые уклоном, инерцией и си-
лами трения и приведенные к валу; на
котором установлен тормоз:
_______ I'K (Р к Т й
у 0 “------------------*
- ___ н Lt О,г к И ь - г ,
МН 0 ' “ -
- _
тр О “
^МС А П К “ I
(2.37)
где -радиус ходового колеса, м:
т|к_т-к. п. д. механизма на участке
кинематической цепи «приводное ко-
лесо-тормоз»; ГКо. И7ин0, Wrp0-со-
противления передвижению тележки
(крана) без груза, создаваемые укло-
ном. инезцией и трением соответ-
ственно. Н: Wy0 = ctGT - для тележки:
1Г0 nG'kp для крана; И;|10 = бття
для тележки; И' 0 = Ът^а для крана
’Трг) = Т(2ц +.МТ /Ь для тележ-
ку И''гр о = Скр(2|1 + fdls)/D для крана.
Здесь к - коэффициент, учитываю-
щий сопротивление движению те-
лежки при троллейном токоподводе;
^тРОЛ=,’25.
Замедление а берется того же зна-
чения, что и значение ускорения а при
разгоне. Этим закладываются одина-
ковые условия сцепления колес с
рельсами при разгоне и торможении.
Кроме того, создается одинаковое
силовое воздействие на груз при раз-
гоне и торможении.
Расчетный тормозной момент ме-
ханизма при работе на открытом воз-
духе и отсутствии противоугонных
устройств определяют по формуле
Т.р.мех 5 (аг1(7у() + 7g (} н^р Тр q ) ,
44
где /дап = 1,2-коэффициент запаса
торможения согласно Правилам
ГГТН; Тс о нсР" момен т ветровой на-
грузки нерабочего состояния И'нОнер,
действующей на тележку (крап), при-
веденный к валу, на котором уста-
новлен тормоз:
L О 1 гс р 0 нср' к П к — 1 '
И7,.п определяют но нормам, из-
ложенным в ГОСТ 1451-77.
Расчетный тормозной момент
тормоза TTV определяют по формуле
г 11 . р. м е х
'т р “
“ 1
где ,:г-число тормозов в механизме.
Выбор типа и типоразмера тор-
мозг! производится по тем же прин-
ципам, что и для механизма подъема
груза. Выбрав тормоз, необходимо
выписать условное обозначение его
типоразмера, типоразмера привода
тормоза, основные параметры, а так-
же начертить «габаритку» тормоза.
Выбор тормозного шкива произво-
дится аналогично тому, как это было
описано для механизма подъема гру-
за (см. § 2.1).
§ 2.3. Механизм поворота крана
И с х о д. н ы е да н и ы е. В качестве ис-
ходных данных должны быть заданы:
частота вращения крана /др, об/мин
(или угол и время поворота): режим
работы механизма по Правилам
ГГТН (или группа режима работы по
ГОСТ 25835 83): максимальный вы-
лет L, м; график загрузки механизма.
Остальные исходные ,чанные (гру-
зоподъемность, высота подъема, род
тока, срок службы, тип машины, ус-
ловия работы-па открытом воздухе
или в закрытом помещении и др.) те
же, что и при проектировании других
механизмов крана.
Выбор места расположения и ки-
нема гической схемы механизма. М е с-
то расположения механизма.
Механизм поворота может распола-
гаться как на поворотной, так и на
неповоротной части крана. Если за-
цепление «шестерня - венец» внешнее,
то при расположении механизма на
поворотной части передаточное
число данного зацепления увеличива-
ется на 1, так как шестерня, обегая
венец, совершает планетарное движе-
ние.
Кинематическая схема м е-
х а и и з м а. Схема содержит откры-
тую пару «шест ерня - венец», а также
двигатель, тормоз, редуктор. Кроме
того, в кинематическую схему могут
входить соединительная муфта, фрик-
ционная предохранительная муфта и
открытые зубчатые ступени (цилинд-
рическая или коническая). Лучшими
являются кинематические схемы, не
содержащие открытых пар (не считая
пары «шестерня-венец»). Предпочти-
тельным является применение тех или
иных редукторов с вертикальным рас-
положением тихоходного вала, так
как при этом исчезает необходимость
в открытой конической паре и по-
является возможность блочного вы-
полнения механизма (к редуктору
можно прикрепить вертикальный
фланцевый двигатель). К сожалению,
блочные конструкции механизмов по-
ворота пока недостаточно распро-
странены (исключение составляют
механизмы поворота башенных и са-
моходных стреловых кранов). Разви-
тие блочных конструкций сдержива-
ется отсутствием типажа на редукто-
ры с вертикальным расположением
валов.
Выбор конструкций опор поворот-
ной части. Различные конструктивные
эешения опор представлены в книгах
(8, 15, 20] и др. В стационарных
кранах с вращающейся колонной и в
настенных кранах, а также в верхних
опорах велосипедных кранов и ста-
ционарных кранов на неподвижной
колонне используют подшипники ка-
чения, чаше всего радиальные сфери-
ческие двухрядные. В качестве нижней
опоры в велосипедных кранах и ста-
ционарных кранах на неподвижной
колонне используют обойму с гори-
зонтальными роликами.
Построение расчетной схемы крана
и определение параметров, необходи-
мых для расчета. Настенный
к р а и . Пример расчетной схемы на-
стенного стационарного поворотного
45
крана показан на рис. 2.13. Принци-
пиально данный кран не отличается
от крана с вращающейся колонной
(рис. 2.14). но имеет другое соотно-
шение параметров и выделен ГОСТ
19811 82 как самое деятельный тип.
Расстояние между опорами /? для кра-
нов среднего режима работы с
электро г адью грузоподъемностью
0.5 ... 3,2 т, имеющих вылеты
2.5... 6.3 м, можно принять по ГОСТ
19811 -82.
Для кранов большей грузоподъем-
ности расстояние Л(м) должно быть
увеличено. Его следует принимать не
менее 0.5L. Расстояние с от оси вра-
щения до центра массы поворотной
части крана равно примерно
(0.25... 0,30) L. Диаметры цапф d} и
Рис. 2.13
Рис. 2.14
d2 под сферическими подшипниками
верхней и нижней опор предваритель-
но можно принять равными d^ =
= d2 = 0,07/?. диаметр цапфы с/, под
упорным подшипником нижней опо-
ры-(0,6 ... 0,7)rf2.
Вес поворотной части Сиов кранов
с электро талью грузоиодьемностью
0,5 ... 3,2 т также можно определить
по ГОСТ 1981 I -82. Для кранов боль-
шей грузоподъемнос ти и больших вы-
летов вес поворотной части можно
определить по удельной металлоем-
кости:
где тпов масса поворотной части
крана, т.
Расчеты показали, что значение
туя можно принять равным
0,25 т/(т м). Вес электротали С\ т
можно взять по ГОСТ 22584-77. Вес
электротали грузоподъемностью
0,5 т при высоте подъема до 6 м ра-
вен 0.83 кН.
Кран с вращающейся к о-
л о н н о й. Пример расчетной схемы
стационарного крана с вращающейся
колонной показан на рис. 2.14. Схемы
верхней и нижней опор в принципе не
отличаются от опор настенного кра-
на. Расстояние между опорами /? для
кранов среднего режима работы с
электроталью грузоподъемностью
0,5... 3.2 т. имеющих вылеты 2,5...
6,3 м, приведено в ГОСТ 19811-82.
Для кранов большей грузоподъем-
ности и больших вылетов расстояние
/г (м) можно определять, учитывая,
во-первых, что оно обычно близко по
значению к высоте подъема /7, и,
во-вторых, не должно быть меныпим,
чем
h = O,15QL. (2.38)
Второе условие вызвано тем, что с
возрастанием произведения QL воз-
растают нагрузки на опоры, следова-
тельно, и их размеры. Данное ограни-
чение h получено путем анализа су-
ществующих конструкций кранов по-
добного типа. Значения с, г/,. d2 и d2
можно принимать аналогично тому,
как это рекомендовано для настенных
кранов.
46
Вес поворотной части Gn0B кранов
с электроталью грузоподъемностью
0,5... 3,2 т также можно определить
по ГОСТ 19811-82. Для кранов боль-
шей грузоподъемности и больших вы-
летов вес поворотной части можно
определить по удельной металлоем-
кости аналогично тому, как это ре-
комендовано для настенных кранов,
принимая туд = 0,25 т/(т м).
Вес тележки на канатной тяге
можно принять равным GT = (0,07...
0,08) Grp.
Кран на неподвижной ко-
лонне. Пример расчетной схемы ста-
ционарного крана на неподвижной
колонне показан на рис. 2.15. Расстоя-
ние между опорами h можно принять
по формуле (2.38). Значения с, Lmin,
d2, </3, b, с/р и Dp можно принять по
соотношениям: с = (0,25 ... 0,30) L;
Lmin = 0,8 ... 2,0 м-большие значения
при грузоподъемности выше 5 т;
с/2 = 0,07й; d3 = (0,6... 0,7) d2; b =
= 0,3L; r/p = (0,25 ... 0,35) Dp; Dp =
= (0,5. _.0,6)DKOJJ. Диаметр DKOJ1 (m)
кованой колонны, имеющей круглое
сплошное сечение, следует принимать
по условию
3 ____
/ М
> °-2'7 V й
(2.39)
где Ми-момент, изгибающий колон-
ну, кН м; Мн = /?„/?; [ст]и- допускае-
мое напряжение при изгибе по сим-
метричному циклу нагружения [6],
приведенное в табл. 2.18; RH - гори-
зонтальная реакция опоры, кН.
Таблица 2J8
Предел [сг]ня МПа Предел МПа
прочности прочности
ан1 МПа ов, МПа
392,3 39,23 588.4 53,94
490,4 44,13 686.5 63,75
Значение RH находится из уравне-
' ния статики (уравнения моментов сил
относительно какой-либо точки А или
В из опор). Для этого необходимо
знать вес поворотной части крана
GnoB, включающий в себя вес тележки
GT (или вес электротали G.K1) и вес
противовеса Gnp. Вес поворотной час-
ти можно принять равным 0,9 веса
крана GKp (кН). Вес кранов с электро-
талью грузоподъемностью 0,5...
Р и с. 2.15
47
3,2 т можно определить по ГОСТ
19811-82, Вес крана большей грузо-
подъемности и больших вылетов
можно определить по удельной ме-
таллоемкости:
где ткр-масса крана (без противове-
са), т. Значение туд можно принять
равным 0,5 т/(т-м).
Рекомендации по определению ве-
са тележки (или электротали) приве-
дены выше. Вес противовеса Gnp опре-
деляют по условию равенства момен-
та. изгибающего колонну крана, ко-
гда тележка (электроталь) с номи-
нальным грузом находится на макси-
мальном вылете, и момента, когда
тележка (электроталь) без груза на-
ходится на минимальном вылете.
В соответствии с рекомендациями
ВНИИПТМАШа [6] значения преде-
ла прочности (МПа) по ГОСТ
1050-74 для некоторых марок кон-
струкционных сталей приведены в
табл. 2.19.
Таблица 2.19
Марка стали о.
Сталь 20 411,9
- » — 25 451,1
- » 30 490,4
— » 35 529,6
» — 40 568,8
Марка стали
Сталь 45 598,2
— » 50 627,6
- » — 55 647,3
- » — 60 676,7
Велосипедный кран. Расчет-
ная схема велосипедного крана при
расположении стрелы вдоль подкра-
нового пути показана на рис. 2.16.
При расположении стрелы поперек
подкранового пути горизонтальные
реакции 7?н уменьшаются, так как на-
грузка от опрокидывающего момента
воспринимается в основном горизон-
тальными направляющими ролика-
ми. Схемы верхней и нижней опор те
же, что и у стационарных кранов на
неподвижной колонне.
Велосипедные краны имеют по-
стоянный вылет. Расстояние между
опорами h можно принять равным
(0,58 .., 0,75) Н. Значения с, <72, и b
можно принимать по гем же соотпо-
Рис. 2.16
шениям, что приведены выше для ста-
ционарных кранов на неподвижной
колонне. Диаметр оси ролика г/ ниж-
ней опоры можно определять но фор-
муле (2.39), подставляя вместо DKOJ]
диаметр оси ролика. При этом
Ми-максимальный изгибающий мо-
мент. действующий на ось ролика.
Для конструкционных углеродис-
тых сталей 45 и 50 можно [2] при-
нять: [<т]и = 81,6... 102,0 МПа, рас-
стояние между опорами оси ролика
р = 2,5 </ , максимальную нагрузку
на ролик Р = RJ (2 cos а), угол а =
= 30 \ Значения £>р и DKO1 можно при-
нимать равными Dp = (2,5 ... 3,5) с/ ;
DKOJt = (5,5...6,5)Dp. Колонну, как
правило, выполняют сварной, и она
имеет сложное поперечное сечение
[8]. При ее проектировании следуеэ
проверить значение £)кол по условию
изгиба, определив момент сопротив-
ления сечения изгибу. Вес поворотной
части крана <?пов можно брать равным
0,5 GKP. В вес крана GKp не входит вес
противовеса Gtip. Как и в случае крана
на неподвижной колонне, вес крана
можно определить по удельной ме-
таллоемкости, принимая шуд =
= 0,35 т/(т м). Вес противовеса <7ир
определяют из равенства моментов
Мк1 и изгибающих колонну:
34и 1 — GfpL+ Gt[0ac (jppZc Л/и2
Определение опорных реакций и
выбор подшипников. Вертикальную
48
Ry и горизонтальную RH реакции (кН)
в опорах определяют путем составле-
ния уравнений статики. Так как часто-
та вращения кранов обычно не более
1 об/мин. а угол поворота, как пра-
вило, меньше 360/ то подшипники
выбирают по статической грузо-
подъемности.
Типы под ш и п ников. Для вос-
приятия горизонтальных (радиаль-
ных) нагрузок применяют радиаль-
ные сферические двухрядные шарико-
вые подшипники с цилиндрическим
отверстием (тин 1000) по ГОСТ
5720-75 или (реже) роликовые ради-
альные сферические двухрядные с ци-
линдрическим отверстием (тип 3000)
по ГОСТ 5721 -75. Для восприятия
вертикальных (осевых) нагрузок при-
меняю! шариковые упорные одинар-
ные подшипники (тип 8000) по ГОСТ
6874 75. При нагрузках, превышаю-
щих значения допускаемой статиче-
ской грузоподъемности, можно при-
менять нестандартные подшипники
качения.
Типоразмер подшипника.
Выбирают ио условию: максималь-
ная статическая нагрузка на подшип-
ник. равная реакции в опоре, не
должна превышать базовой статичес-
кой радиальной грузоподъемности
СО|. (для сферических подшипников)
или базовой статической осевой гру-
зоподъемности Сой (для упорных под-
шипников).
Выбрав типоразмер подшипника,
необходимо выписать его основные
параметры: обозначение типоразме-
ра; внутренний и наружный диамет-
ры; ширину (для сферических) или
высоту (для упорных); базовую с га-
ги вескую грузоподъемность.
Определение момента сопротивле-
ния повороту. Момент сопротивления
повороту (кН м) крана, действующий
в период разгона механизма, равен
К = ГП1 + Та + Тин,
где момент сил трения в опор-
но-поворотном устройстве; Тн мо-
мент ветровой шнрузки рабочего со-
стояния (если кран работает на от-
крытом воздухе); 7ИН момеш сил
инерции, действующих на груз, мед-
ленно поворачивающиеся части кра-
на (металлоконструкция поворотной
части, противовес и т.д.) и вращаю-
щиеся части механизма поворота (ро-
тор двигателя, тормозной шкив, муф-
ты и т.д.).
Момент сил трения в опор-
но-поворотном устройстве.
Равен сумме моментов сил трения в
верхней (Гтрв) и нижней (Ттрн) опорах:
т = т + Т
JTp 1 гр.В ~ *тр.н '
Момент сил трения в верх-
ней опоре. Для настенного крана и
крана с вращающейся колонной мо-
мент равен
Ттрв=/Яи-’10"\
I р < В pi
где f- приведенный коэффициент тре-
ния скольжения в подшипнике; для
подшипников качения/ = 0,015; dl бе-
рется в мм. Для крана на неподвиж-
ной колонне и велосипедного крана
7;р..=/(лну2 + л//)10-3.
Момент сил трения в ниж-
ней опоре для настенного крана и
крана с вращающейся колонной равен
Т = f\ R — + Я — J-I0-3.
гр.н ./ I н п /
Для крана на неподвижной колонне и
велосипедного крана
т = *н(2ц +.ЧИР,0Д + Рр)
тр н 2* l03Dpcosa
где ц-коэффициент трения качения,
м. Значение п можно взять из
табл. 2.13 (вместо диаметра колеса-
диаметр ролика Dp). Для роликов, у
которых ~ 100 ... 150 мм, ц =
= 0,25 мм. Если Dp < 100 мм, значе-
ние ц можно определить методом
экстраполяции.
М о мент ветровой нагруз-
ки рабочего состояния. Макси-
мальное (за время поворота крана)
значение
Т — Р / -1 р т — р h
S 1 В.ПОВ‘в ~ 1 В.гр^ 4 НЛ1р*у*
где Рв.11ов, Рв.гр, Рв.пР-соответственно
49
ветровая нагрузка рабочего состоя-
ния на поворотную часть крана, груз
и противовес, кН; /„-расстояние от
оси поворота до центра ветрового
давления на поворотную часть крана,
м; РВ.11ОВ, Л.гР. Л.пр и /в определяют по
ГОСТ 1451 -77.
Момент сил инерции Т„и =
= Je, где J-момент инерции (относи-
тельно оси поворота крана) медленно
поворачивающихся частей крана, гру-
за и вращающихся частей механизма
поворота, т-м2; е- угловое ускорение
крана, рад/с2.
Момент инерции J = у7м.п.ч, где
у = 1,2... 1,4 - коэффициент учета инер-
ции вращающихся частей механиз-
ма поворота; 7МПЧ -момент инер-
ции (относительно оси поворота кра-
на) груза и медленно поворачиваю-
щихся частей крана, тм2; 7МП Ч —
= где ж--массау-й медленно
поворачивающейся части (груз, про-
тивовес, стрела и т.д.); х--расстояние
от центра массы /-й медленно пово-
рачивающейся части до оси поворота
крана, м; £ = 1,3 ... 1,4-коэффициент
приведения геометрических радиусов
вращения к радиусам инерции.
Расстояния от центров массы гру-
за, поворотной части и противовеса
до оси поворота крана равны: хгр =
= L: хпов = с; хпо = Ь. Угловое уско-
рение при разгоне может быть най-
дено по допустимому линейному
ускорению груза [и] (табл. 2.16): е =
= [a]/L. Величины [а] и L должны
быть подставлены в данную формулу
в м/с2 и м соответственно.
Определение мощности двигателя и
выбор блок-схемы привода и типа дви-
гателя. Мощность двигателя N (кВт)
определяют по формуле
N = Т^р , (2.40)
П пр^п.ср
где сокр-угловая скорость вращения
крана, рад/с; т|пр - предварительное
значение к. п. д. механизма (т]пр =
= 0,8 ... 0,9; если планируется исполь-
зовать в механизме червячную пере-
дачу, то т|11р = 0,75 ... 0,80). Значения
Ч/П.ср приведены в табл. 2.17.
Выбор блок-схемы приво-
да. Привод механизма поворота мо-
жет представлять собой комбинацию
комплектующих его изделий по ва-
риантам, основные из которых по-
казаны на рис. 2.17.
Вариант 1 (рис. 2.17, а). Привод
механизма представляет собой еди-
ный блок «тормоз-двигатель-редук-
тор-шестерня» с вертикальным рас-
положением тихоходного вала. Име-
ется типаж, охватывающий три типо-
размера таких блок-приводов, приме-
50
няемых в строительных башенных
кранах [31].
Вариант 2 (рис. 2.17, б). Блок 1
состоит из вертикального фланцевого
двигателя и встроенного электромаг-
t нитного тормоза; с блоком состыко-
ван редуктор 2 с вертикальным тихо-
ходным валом, составленный, на-
пример, из планетарных секционных
передач. На конец тихоходного вала
’ редуктора насажена шестерня 3.
Вариант 3 (рис. 2.17, в). Верти-
кальный двигатель 7 с двумя концами
вала, фланцем и лапами (исполнения
по способу монтажа и направлению
вала М2001 или JM2081); на верхнем
конце вала двигателя закреплен тор-
мозной шкив 2 (ОСТ 24.290. 06-75); к
лапам двигателя крепится горизон-
тальный неунифицированный тормоз
3 (конструкция тормоза может быть
аналогична применяемой в блок-при-
t водах механизмов поворота строи-
тельных башенных кранов), колодки
которого охватывают шкив 2; к флан-
цу двигателя прикреплен редуктор 4 с
вертикальным тихоходным валом;
на конец тихоходного вала редуктора
насажена шестерня 5.
Вариант 4 (рис. 2.17,г). Блок 7
1 состоит из горизонтального двигате-
ля со встроенным электромагнитным
тормозом; с ним с помощью соедини-
тельной муфты 2 стыкуется неунифи-
цированный червячный редуктор 3 с
। предохранительной фрикционной
муфтой и вертикальным тихоходным
валом; на конец тихоходного вала
насажена шестерня 4.
Вариант 5 (рис. 2.17, д). При дан-
ном варианте привод собирают из
отдельных составных частей: тормоза
7. тормозного шкива 2, двигателя го-
: ризонтального на лапах 3. соедини-
тельной муфты 4, редуктора 5, от-
крытой конической передачи б, ци-
линдрической шестерни 7.
Выбор того или иного варианта
блок-схемы привода механизма пово-
1 рота целесообразно начинать с вари-
анта 7. Если этот вариант не про-
ходит, переходят к варианту 2 и т.д.
Блок-приводы выпускают мощ-
ностью 3.5 и 5 кВт. Их технические
данные представлены в Приложении
10. Мощность блок-привода не долж-
на быть меньше необходимой мощ-
ности Аг. Если блок-привод подходит,
необходимо выписать условное обо-
значение его гипоразмера, тип дви-
гателя. тип редуктора, j ин тормоза, а
также параметры: мощность двшазе-
ля 7УДВ; передаточное число редуктора
и , номинальный тормозной момент
ТГ1Н, число зубьев шестерни г11Г. мо-
дуль зубьев шестерни т и массу
блок-привода !Jip. Рекомендуется
начертить «габаритку» блок-привода.
При варианте блок-схемы привода
2 можно использовать двух- и трех-
скоростные двигатели серии 4AF. с
короткозамкнутым ротором и встро-
енным электромагнитным тормозом,
которые имеют вертикальное испол-
нение. их выпхскают мощностью до
25 кВт [3].
При варианте блок-схемы 5 мож-
но использовать двигатели серий
MTF, МТН е фазным ротором и
двух- и трехскорос [ ные двигатели с
короткозамкнутым ротором серии
МТКН. При легком режиме работы
можно применять односкоростные
двигатели с короткозамкнутын рото-
ром серий MTKF и 4АС. Все ли
серии могут иметь вертикальное ис-
полнение с фланцем и лапами и двумя
концами вала.
При варианте блок-схемы 4 мож-
но использовать двигатели серии
4АЕ, при варианте 5-двигатели се-
рии MTF, МТН, MTKF. МТКН и
4АС.
Мощность выбранного двигателя
не должна быть меньше значения /V.
вычисленного по формуле (2.40). При
выборе двшателей серий MTKF,
МТКН и 4АЕ необходимо уточнить
кратность среднепускового момента
V11<cp, после чего по формуле (2.40)
найти новое значение мощное iл и
повторить выбор типа двигателя, как
это было рекомендовано (см. § 2.2).
Выбрав тип двигателя, необходимо
выписать его основные параметры и
начертить «габаритку».
Выбор передачи. Разбивка пе-
редаточного ч и с л а механизма
на передаточные числа редуктора и
открытых ступеней может произво-
51
диться по-разному в следующих двух
случаях.
Случай I соответствует варианту 1
выбора блок-схемы привода (рис.
2.17. а), когда передаточное число ре-
дуктора и известно. Тогда определя-
ют необходимое передаточное число
открытой передачи: мот = м/w . Здесь
и необходимое передаточное число
механизма: и = лдп/икр.
Открытая передача может быть
одно- и двухступенчатой или более.
Лучше, если она будет одноступен-
чатой. Соотношение чисел зубьев вен-
ца опорно-поворотного устройства и
шестерни zB/zm обычно находится в
пределах 4... 10. При этом отноше-
ние zjzm должно быть равно одному
из значений стандартного ряда пере-
даточных чисел (ГОСТ 2185-66): 4,0;
(4.5); 5.0; (5.6); 6,3; (7.1); 8,0; (9.0); 10.
При расположении механизма по-
ворота на поворотной части крана и
внешнем зацеплении шестерни и вен-
ца передаточное число открытой пла-
нетарной ступени равно иш_в = zH/
r-ilT 4- 1; при внутреннем зацеплении
uw.. в = zjza. — I; при расположении
механизма на неповоротной части
крана пш_„ =
Если разница между мот и wlu_B не
превышает 15%, разбивку передаточ-
ного числа механизма можно закон-
чить. Если разница более 15%, необ-
ходимо вводить дополнительно 1 ... 2
ступени.
Случай 2 соответствует вариантам
2... 5 выбора блок-схемы привода
(рис. 2.17. б, в, г, д), когда передаточ-
ное число редуктора еще неизвестно.
Тогда задаются отношением 2в/гш,
определяют win_B и затем находят не-
обходимое передаточное число остав-
шейся части передачи и„ст = н/ыш_в.
После этого при вариантах 2 и 3
блок-схемы привода (рис. 2.17,6, в)
следует выбрать редуктор, состав-
ленный, например, из планетарных
секционных передач. Если передаточ-
ное число редуктора wp отличается от
передаточного числа мост не более чем
на 15%. на этом разбивку передаточ-
ного числа механизма можно закон-
чить. При варианте 4 блок-схемы
привода (рис. 2.17, г) передаточное
52
число неунифицир.ова иного червячно-
го редуктора можно брать равным
или близким мост, следя, чтобы рас-
хождение не превышало 15%, и вы-
бирая передаточные числа из стан-
дартного ряда: 80; 100; 125; 140; 160;
180; 200; 250. При этом редуктор мо-
жет быть одно- или двухступенчатым.
При варианте 5 блок-схемы при-
вода 5 (рис. 2.17,0) иост = иконпр.тр, где
пкон - передаточное число открытой
конической передачи; мрлр - требуе-
мое передаточное число редуктора.
Обычно мкон = 1,0... 6.3. Следует на-
значать пгон из стандартного ряда: 1.0;
(1,25); 1.6; (2,0); 2,5; (3,15); 4.0 (5.0);
6,3. Приняв значение мкон, определяют
пртр и выбирают унифицированный
цилиндрический, цилиндроконичес-
кий или червячный редуктор, стре-
мясь, чтобы расхождение величин н и
Цр.тр не превышало 15%.
Выбор унифицированного
редуктора. При вариантах блок-
схемы 2, 5, 5 привода (рис. 2.17.6. в, 0)
можно выбрать унифицированный ре-
дуктор. В вариантах 2 и 3 это может
быть редуктор, составленный из сек-
ционных планетарных передач. В ат-
ласе [15] приведены характерист ики и
чертежи двух типов червячных редук-
торов с вертикальным валом.
В варианте 5 можно использовать
типы горизонтальных цилиндричес-
ких редукторов, указанные в § 2.1 для
механизма подъема груза, коничес-
ко-цилиндрические двух- и трехсту-
пенчатые редукторы типов КЦ1,
КЦ2, КЦ2-М, КЦИ-Д, червячные ре-
дукторы типов 42, 24 и глобоидные
типов 4г и РГСЛ.
Принцип выбора редукторов (за
исключением планетарных) тот же,
что и в механизмах подъема груза и
передвижения крапа (тележки). При
этом Zo = 125 I06; ZT определяют по
формуле (2.33); Тр определяют по
формуле (2.34); должен находиться
в пределах 0,63 ... 1,00.
Выбрав унифицированный редук-
тор, необходимо выписать его основ-
ные параметры и начертить «габа-
ритку»,
Определение основных па-
раметров открытой зубча-
I
той передачи. Кроме передаточ-
ного числа основными параметрами
открытой зубчатой передачи являют-
ся числа зубьев, модуль и межосевое
расстояние. Число зубьев шастерни,
зацепленной с зубчатым венцом,
можно принимать равным 20... 30.
Модуль зубьев шестерни и венца сле-
дует назначать из ряда стандартных
модулей (ГОСТ 9563-60): 10: (11); 12;
(14); 16; (18); 20; (22); 25. '
Модули и числа зубьев других сту-
пеней открытой зубчатой передачи
можно принимать стандартными,
близкими по значению модулям и
числам зубьев подобной ступени ка-
кого-либо поворотного крана, пред-
ставленного в литера туре [15] или на
заводских чертежах.
После выбора передачи определя-
ют фактическое передаточное число
механизма пмех, фактическую частоту
вращения крана нкр.ф и к.п.д. меха-
низма рмсх, причем к.п.д. передачи
«шестерня-венец» при наличии плас-
тичной смазки 0,96... 0,97, к.п.д. ко-
нической передачи 0.96...0,97; к.п.д.
упругой втулочно-пальцевой муфты
[! 7] 0,99; к .и. д. зубчатой муфты
0.990... 0.995; к.п.д. редукторов см. в
табл. 2.20.
После определения к.п.д. меха-
низма необходимо уточнить по фор-
муле (2.40) значение мощности.
Выбор соединительной муфты. Вы-
бор соединительной муфты при
блок-схеме по вариантам 4 и 5
(рис. 2.17. г, д) производится анало-
гично тому, как это описано в § 2.1
для механизма подъема груза. При
вариантах 2 и 3 (рис. 2.17. б, в) для
соединения двигателя с редуктором
необходимо конструировать специ-
альную сборочную единицу «Соеди-
нительная муфта» или насаживать
первую шестерню редуктора непо-
средственно на конец вала двигателя.
Выбор тормоза. Расчетный
тормозной момент. При работе
крана на открытом воздухе его опре-
деляют по уравнению
т — т 4- т — т
JT.p * -*ин1 JTpl ’
При работе крана в помещении
Т = Т । — Т (
Так как тормозной момент опре-
деляют на валу, на котором установ-
лен тормоз (первый, он же быстро-
ходный, вал механизма), то Ть1, TKtti и
7]р1-приведенные к первому валу
моменты ветровой нагрузки, сил
инерции и сил трения в опорно-пово-
ротном устройстве. Они равны:
______ ^вЛмех.1 в 'г ЛшПмсхл ,
Н I “ ’ ин 1_*
__ Тр _
тр1
^мех Л мех . г
Здесь г|мех т-к. п. д. механизма при
торможении. Он может существенно
отличаться от к.п.д. механизма при
разгоне и установившемся движении
в том случае, если в механизме есть
червячная передача. При определении
Лмех.т надо использовать минималь-
ное значение к. п. д. червячного редук-
тора.
Выбор типоразмера тор-
моза. При выборе тормоза возмож-
ны три случая. Случай /-тормоз
встроен в двигатель (рис. 2.17,6, г).
Коэффициент запаса торможения
встроенного тормоза установлен рав-
ным 1,5 по отношению к номиналь-
ному моменту двигателя. Если ока-
Таблица 2.20
iип редуктора
Характеристика редуктора
Пр
Цилиндрический
Червячный
Конический одноступенчатый
Цилиндроконический
Планетарный
Двухступенчатый
Трехступенчатый
Передаточное 10... 25
число 26... 40
40
Двухступенчаный
Т рехступенчатый
0,96... 0,97
0,94Д... 0,955
0,82 ... 0,92
0,75... 0,82
0,70... 0,75
0,97 ... 0,98
0.950.., 0,965
0,93... 0,97
0,89 .,. 0.96
53
жегся, что тормозной момент встро-
енного тормоза меньше, чем Тт , не-
обходимо отказаться от данных ва-
риантов блок-схемы привода. Случай
2-тормоз с горизонтальным распо-
ложением колодок закреплен на ла-
пах вертикального двигателя (рис.
2.17. <7. 6-). При этом тормоз может
входить в состав блок-привода
(рис. 2.17, а) и тогда надо проверить
тормозной момент тормоза. Если же
тормоз с горизонтальным расположе-
нием колодок не унифицирован
(рис. 2.17), его надо конструировать и
рассчитывать как новую сборочную
единицу. При этом предварительно
выбирают тормозной шкив но ОСТ
24.290.06-75 путем согласования раз-
меров посадочного отверстия его сту-
пицы с размерами конца вала двига-
теля. Случай 3- тормоз устанавлива-
ют вертикально на собственной опоре
(рис. 2.17, д). В этом случае выбирают
унифицированный вертикальный тор-
моз. Выбор принципиально не отли-
чается от описанного в механизме
подъема груза.
Выбор предохранительной муфты.
Если кинематическая схема механиз-
ма содержит червячный редуктор, не-
достаток которого-возможность са-
моторможения, а следовательно, по-
ломки при торможении поворотной
части крана, то необходимо приме-
нять предохранительную муфту. Рас-
чет момента, на который должна ре-
гулироваться муфта, можно делать
по методике [19]. Целесообразно ис-
пользовать фрикционные предохра-
нительные муфты (ГОСТ 15622-77).
Глава 3
ОСНОВЫ КОНСТРУИРОВАНИЯ ГРУЗОПОДЪЕМНЫХ
МАШИН
§ 3.1. Некоторые правила
конструирования
Выбор материалов. При разработке
крановых конструкций необходимо
уделить большое внимание выбору
материала, так как от этого в зна-
чительной степени зависят ст оимость
машины и ее масса. Выбирая марку
материала, учитывают его необходи-
мую прочность, сопротивление уста-
лости, износостойкость, стремясь по-
лучить деталь с наименьшей массой.
Для малонагруженных деталей
широко используют конструкцион-
ные стали обыкновенного качества
(ГОСТ 380-71), которые подразделя-
ют на три группы в зависимости ог
регламентируемых показателей-ме-
ханических свойств (СтО, Ст1, ...,
Стб). химического состава (БСтО, ...,
БСтб) и обоих этих показателей (В
Ст1.....В Ст5).
Сталь углеродистую качествен-
ную (ГОСТ 1050-74) применяют для
изготовления более ответственных
деталей ПТМ. причем высокоуглеро-
дистые стали-для деталей, работаю-
щих при больших нагрузках любого
характера. Для изготовления тяжело-
нагруженных деталей, а также под-
верженных интенсивному истиранию,
применяют стали конструкционные
легированные (ГОСТ 4543-71), кото-
рые деляг на низко- и среднеугле-
родистые. В зависимости от числа
легирующих элементов и их количест-
ва различают хромистые (15Х, ...,
50Х), марганцовистые (15Г,...,
50Г2), хромомарганцовистые (18ХГ,
ЗОХГТ и др.), хромомолибденовые
(15ХМ, 30ХМ.А и др.), хромоникеле-
вые (20ХН, 30XH3A и др.) и др. Для
деталей машин, работающих в усло-
виях низких температур, применяют
сталь северного исполнения, малочув-
ствительную к хрупкому разруше-
нию. Такие стали можно применять
при температурах до —50...—80°C
(например, сталь 18Х2Н4ВА).
Литые детали подъемно-транс-
портных машин изготовляют из кон-
струкционной стали марок 15Л, ...,
55Л (ГОСТ 977-75) и серого чугуна
54
(ГОСТ 1412-79), который характери-
зуется хорошими технологическими
свойствами и малой стоимостью. От-
ветственные отливки выполняют из
высокопрочного (ГОСТ 7293-79) и
ковкого чугунов. Пределы прочности
высокопрочного чугуна с шаровид-
ным графитом 380 ... 1200 МПа, а
пределы текучести 240 ... 900 МПа-
для марок ВЧ38-17, ВЧ120-4. В
табл. 3.1 [22] указаны реко,меидуе-
мые основные материалы для изго-
товления деталей крановых механиз-
мов. Материалы для изготовления
металлических конструкций кранов
приведены в гл. 6.
Та б/I и на 3.1
Материал Марки Рекомендуемое применение Стоимость, %, от стоимости СТИЛИ С13
Сталь (ГОСТ СтО Распорные втулки, кольца, шайбы, крынг
380-71) ки и другие детали, не несущие значите яв- ных нагрузок 93
СтЗкп Кованые корпусы и крышки подшипни-
ков, привариваемые втулки, платики, коу- ши, сварные барабаны, блоки 100
ВСтЗсп Вилки и щеки крюковых подвесок, ба- рабаны. рычаги тормозов 1 14
Ст4сп Гайки грузовых крюков, болты, шпильки.
непривариваемые детали, от которых тре- буется повышенная по сравнению со сталью СтЗ прочность и твердость 1 14
Ст5сп Валы и оси механизмов передвижения, полу муфты, болты, работающие па срез в муфтах, венцах и ступицах барабанов ! 14
Стбсп То же, что и из стали Ст5, а также шпонки, штифты, гайки с закаливаемыми
шлицами 114
Сталь (ГОСТ 20 Кованые крюки, вилки и щеки крюковых
1050 - 74) подвесок, траверсы и другие детали, ко- торые подвергаются невысоким на и ряже- НИЯМ и должны быть вязкими: их можно применять для цементируемых деталей 129
35 Валы и оси механизмов передвижения.
болты, работающие на срез в муфтах, вен- цах и ступицах барабанов 129
40 Валы всех механизмов, ответе гвенные болты, втулки и полумуфты 129
Сталь (ГОСТ 45 То же, что и из стали 40, а также крю-
1050 74) ковыс траверсы, зубчатые колеса, налы, шестерни, тормозные шкивы, пальцы муфт и тормозов, буксы 128
Сталь (ГОСТ 65Г Ходовые колеса 157
4543 71) 40Х. Тяжело нагруженные валы, валы-шестер- 165
45Х ни, червяки и звездочки механизмов
50Г Детали, подверженные интенсивному ис- тиранию, диски трения, шестерни, валы- шестерни 157
Стальные отлив- 35Л Корпуса подшипников, буксы, ступицы
ки (ГОСТ 977-75) барабанов, барабаны, блоки, рычаги тор-
МОЗОВ 345
55Л Зубчатые колеса, тормозные шкивы 345
Чугунные отлив- СЧ15 Блоки (с толщиной стенок до 15 мм),
ки (ГОСТ 1412-79) крышки редукторов 150
Продолжение табл. 3.1
Материал Марка Рекомендуемое применение С то им ос г ь стоимости СтЗ %, OI стали
СЧ18 Блоки, барабаны, корпуса редукторов легкого и среднего режимов работы, тор- 215
мощные колодки, звездочки
СЧ28 Блоки, барабаны, корпуса и крышки ре- дукторов повышенной прочности 240
Венцы червячных колес, втулки и вкла-
дыши подшипников
Бронза (ГОСТ Бр,
493-79) АЖ9-4Л
Агрегатирование. Применяют как
метод компонования механизмов, ма-
шин, оборудования и других изделий
из рядов унифицированных деталей,
сборочных единиц и агрегатов, об-
ладающих геометрической и функ-
циональной взаимозаменяемостью.
При конструировании крановых ме-
ханизмов широко применяют такие
разработанные унифицированные из-
делия. как тормоза, редукторы, ба-
рабаны. крюковые подвески, ходовые
колеса, позволяющие «составлять» из
них механизмы с различными харак-
теристиками.
Унификация конструктивных эле-
ментов дает значительный экономи-
ческий эффект - сокращаю гея сроки и
стоимость проектирования и изготов-
ления машин, упрощаются обслужи-
вание и ремонт. Применение унифи-
цированных сборочных единиц позво-
ляет унифицировать краны (при пред-
варительной их типизации)-создать
унифицированные ряды из минималь-
ного количества однотипных кра-
нов. В мостовых кранах применяют
внутрирядовую и диагональную уни-
фикацию. Внутрирядовая унификация
применена в механизмах главного
подъема выпускаемых в СССР кранов
грузоподъемностью 80. .. 320 т; все
основные размеры узлов определены
из условия применения каната диа-
метром 30 мм для кранов грузоподъ-
емное тью 80 ... 160 т и диаметром
45,5 мм для кранов грузоподъем-
ностью 200 ... 320 т. Это позволило в
данных механизмах ограничиться
двумя гипоразмерами редукторов,
тремя гипоразмерами барабанов, од-
ним типоразмером тормоза и т.д.
Диагональная унификация использо-
вана в кранах грузоподъемностью
5 ... 50 т, при этом базовые модели
механизмов подъема грузоподъем-
ностью 12,5 и 20 г среднего режима
работы используют соответственно
как механизмы подъема грузоподъ-
емностью 20 и 32 т в легком режиме,
8 и 12,5 т в тяжелом режиме работы.
Рациональность силовой схемы.
Габариты, масса, а также в значи-
тельной степени работоспособность
конструкции зависят от рациональ-
ности заложенной в ней силовой схе-
мы. Под рациональной понимается
схема, в которой действующие силы
взаимно уравновешены на возможно
коротком участке различными эле-
ментами, работающими на растяже-
ние, сжатие или кручение. При этом
изгиб деталей либо исключается, ли-
бо сводится к минимальному.
В качестве примера рассмотрим
влияние места схода канатов с ба-
рабана механизма подъема, имеюще-
го открытую зубчатую передачу, на
нагрузки, действующие на ось и под-
шипники барабана. Вопрос о месте
схода канатов неизбежно возникает
при компоновании механизмов на те-
лежке, Здесь могут быть два вариан-
та: либо канаты опускают со стороны
зубчатого зацепления, либо с проти-
воположной стороны. Если канаты
сходят с противоположной стороны
зацепления зубчатого венца с шестер-
ней, то направления усилий S в ка-
натах, сходящих с барабана, и окруж-
ного усилия PQ в зубчатом зацепле-
нии, приложенного к зубчатому вен-
цу, совпадают (рис. 3.1д/). Если же
канаты сходят с барабана со ciороны
зубчатого зацепления (рис. 3.1,6), го
эти силы направлены в противопо-
56
I
P и c. 3.1
Рис. 3.2
ложные стороны. Таким образом, в
нервом случае изгибная нагрузке! на
ось барабана и радиальные силы, дей-
ствующие на подшипники, будут
определяться суммой натяжения ка-
натов и окружного усилия, во втором
случае-их разностью.
Другой пример. В приводе меха-
низма поворота консольного крана
(рис. 3.2), состоящего из двигателя 1.
редуктора 2, конической передачи 3 и
приводной шестерни 4, силовая схема
нерациональна. В агой конструкции
узлы передачи, крепежные болты и
фундаменты нагружены усилиями
привода, почти все детали работают
на изгиб. Габариты механизма вели-
ки, что объясняемся разобщенностью
отдельных сборочных единиц. Кони-
ческие зубчатые колеса и опоры вер-
тикального вала смазывают периоди-
чески. Для надежной работы механиз-
57
ма его элементы необходимо подвер-
гать тщательной регулировке.
Агрегатированная конструкция
привода поворота (рис. 3.3). состоя-
щая из фланцево! о двигателя и ре-
дуктора с приводной шестерней на
выходном валу, свободна от многих
недостатков предыдущей конструк-
ции: значительно меньше масса и га-
бариты, усилия привода гасятся в
корпусе редуктора, который нагружен
только окружным и распорным уси-
лиями на приводной шестерне; проще
монтаж и обслуживание. В конечном
итоге привод, выполненный по такой
силовой схеме, более надежен и дол-
говечен.
Компактность конструкции. Одним
из признаков рациональности кон-
струкции является ее компактность.
Компактные конструкции, как прави-
ло, имеют меньшие размеры, массу и
металлоемкость. Поэтому при кон-
струировании всегда стремятся целе-
сообразно использовать объем при
вписывании в него деталей, сбо-
рочных единиц и конструкций в
целом.
Осевые размеры некоторых изде-
лий могут быть уменьшены за счет
увеличения их поперечных сечений.
Так, длина канатного барабана мо-
жет быть уменьшена увеличением его
диаметра, что иногда приводит к зна-
чительному уменьшению габарита те-
лежки по колее. В шлицевых, зуб-
чатых, прессовых и других соедине-
ниях несущая способность проиор-
а)
Рис. 3.4
5К
циональна квадрату диаметра и при
одинаковой нагружаемости длина
соединения подчиняется соотноше-
нию /(//2 = (D2/£>i)2. Таким образом,
значительного сокращения осевых
размеров можно достичь сравнитель-
но малым увеличением диаметра.
Уменьшения осевых размеров сбо-
рочных единиц можно добиться в ря-
де случаев использованием свобод-
ных полостей для расположения в них
соединительных деталей, В узле сое-
динения выходного вала редуктора с
барабаном (рис. 3.4, а) использование
полости зубчатой полумуфты, выпол-
ненной заодно с валом редуктора, для
опирания оси барабана и введение
последней в полость барабана при-
водят (рис. 3.4,б) к значительному
уменьшению гаоарита механизма:
L2 < L!.
Использование планетарных ре-
дукторов в трехопорных тележках
[22] обеспечивает ее компактность
(рис. 3.5) и простоту компонования.
Барабан 7, опирающийся на подшип-
ники 2 и 7. соединяется шлицами с
блок-приводом 4. Приводное колесо 5
также жестко соединено с блок-при-
водом 6. На короткой балке Т-образ-
ной рамы 3 установлены два холос-
тых колеса.
Уменьшение вертикального габа-
рита тележки может быть достигнуто
за счет объединения корпусов редук-
торов и опор барабанов механизмов
подъема с балками рамы и отсут-
ствия настила [22]. Ходовые колеса
7 1 2
Рии. 3.5
59
такой тележки выступают из балок
минимально. Уменьшению габаритов
тележки способствует также исполь-
зование в качестве механизмов подъе-
ма электрических талей.
Центрирование деталей. Для
центрирования цилиндрических по-
верхностей применяют посадки как с
зазором, так и переходные. Из по-
садок с зазором рекомендуют посад-
ки //6/Л5 для особо точного центри-
рования; Htyhl для центрирования
поверхностей при пониженных требо-
ваниях к соосности. Посадки НЪ/№>,
H9/h8, H9/h9 применяют при центри-
ровании фланцевых соединений. Из
переходных посадок наиболее часто
применяют посадку Н7/КЬ, которая в
среднем дает небольшой зазор и обес-
печивает хорошее центрирование, не
требуя значительных усилий при
сборке и разборке. При больших дли-
нах посадочных поверхностей (типа
ступиц) вместо нее применяют HTjb
для облегчения сборки.
При назначении посадок необхо-
димо учитывать температурный ре-
жим работы соединения. Посадка мо-
жет сильно измениться при нагреве,
особенно если сопрягаемые детали
выполнены из материалов с различ-
ным коэффициентом линейного рас-
ширения. В таких случаях обязатель-
но делают тепловой расчет соедине-
ния. Посадка деталей может быть
осуществлена на различных диамет-
рах, например, как показано на
рис. 3.6,а. Однако с целью повыше-
ния точности центрирования и умень-
шения влияния температурных де-
формаций желательно центрировать
детали по наименьшему допустимому
конструкцией диаметру (рис. 3.6,6).
При центрировании дезалей типа
фланцев необходимо обеспечила гь
достаточную длину центрирующих
буртиков Н (рис. 3.7), высота кото-
Рис. 3.7
Рис. 3.8
60
рых может быть определена соотно-
шением [14] Н = 0.5ч/£), где /)-диа-
метр центрирующей поверхности,
мм.
Следует избегать центрирования
одновременно по двум поверхностям
(рис. 3.8, а). Центрировать необходи-
мо только по одной поверхности,
оставляя на другой зазор 8, достаточ-
ный для того, чтобы исключить со-
прикосновение при всех возможных
неточностях изготовления, упругих
деформациях и тепловых расширени-
ях деталей (рис. 3.8,6).
Принцип самоустанавливаемости. В
подвижных соединениях, где могут
быть перекосы и смещения деталей,
необходимо предусматривать воз-
можность дезали самоустанавливать-
ся. Такая возможность обеспечивает
нормальную работу соединения при
различных неточностях изготовления
и монтажа. Так, установку радиаль-
ных опор колонны поворотного кра-
на выполняют на сферических под-
шипниках качения для компенса-
ции неточностей установки их корпу-
сов. Поскольку упорные подшипники
весьма чувствительны к перекосам, в
конструкции нижней опоры преду-
сматривают самоустановку подшип-
ника посредством сферической по-
верхности. при этом центр ее сферы
должен совпадать с центром сфери-
ческой поверхности радиального под-
шипника.
Принцип самоустанавливаемости
широко применяют при конструиро-
вании опор валов и осей, подвергаю-
щихся изгибу и перекосам. При уста-
новке оси барабана на шариковых
радиальных подшипниках изгиб оси и
, неточная установка опор вызывают
перекос подшипников и односторон-
нюю нагрузку шариков, которая мо-
жет достигать номинальной. Для ис-
ключения этих дополнительных на-
грузок применяют двухрядные сфери-
ческие подшипники (см. рис. 3.4).
Работа тормоза, выполненного с
жестким креплением тормозных ко-
лодок 1 к вертикальным рычагам 2
(рис. 3.9.«), характеризуется боль-
шой неравномерностью распределе-
ния давления по поверхности контак-
та колодок с тормозным шкивом и
весьма неравномерным износом тор-
мозных накладок. При установке ко-
лодок на шарнирах (рис. 3.9,6) давле-
ние распределяется более равномерно
и прак тически не завис.'i оз степени
износа тормозных накладок. Поворот
колодок в расторможенном положе-
нии тормоза предотвращается уста-
новкой пружинных фрикционов.
Соединения валов. В агрегатиро-
ванных системах с механическим при-
водом для соединения валов электро-
двигателей с быстроходными валами
редукторов и их тихоходных валов с
барабанами, ходовыми колесами и
другими сборочными единицами ис-
пользуют различные муфты. В таких
соединениях муфты должны обеспе-
чить не только передачу заданного
крутящего момента, но и иметь воз-
можность компенсировать различно-
го рода смещения геометрических
осей соединяемых валов.
Осевые А и радиальные 8 смеще-
ния валов (рис. 3.1 Ото, йг), а также их
угловой перекос у (рис. 3.10.6) возни-
кают, во-первых, в результате упру-
гих деформаций дез алей под нагруз-
кой и, во-вторых, в результате не-
точностей изготовления и сборки уз-
И
Рис. 3.9
61
т
Рис. 3.10
лов. В реальных соединениях валов
все эти виды смещений наблюдаются
одновременно (рис. 3.10, г).
Для соединения валов механиз-
мов, передающих основные нагрузки
и относящихся к группам режима ра-
боты 6К, 7К, н ЗК но ГОСТ 25546-82,
рекомендуется на мостовых и козло-
вых кранах применять зубчатые муф-
ты по ГОСТ 5006-83. Муфты с разъ-
емной обоймой (тин 1), применяю-
щиеся для непосредственного (без
промежуточного вала) соединения ва-
лов, состоят из двух зубчатых втулок
и двух соединенных долгами зубча-
тых обойм (рис. 3,11. а).
Поскольку, зубчатые втулки муфт
перекашиваются относительно зубча-
тых обойм не только от перекоса
валов, но и от их радиального смеще-
ния (рис. 3.11. б. <;), то при максималь-
но допустимом перекосе одной втул-
ки, равном 0с30'. перекос соединяе-
мых валов не должен превышать Г1
при отсутствии их радиального сме-
шения. При наличии радиального сме-
щения допуск на перекос валов умень-
шается.
Зубчатые муфты типа 2 исполь-
зуют для соединения валов с приме-
нением промежуточного вала. Они
представляю! собой комплект из
Р и с. 3.] 1
двух полумуфт, каждая из которых
состоит из зубчатой втулки, зубчатой
обоймы и фланца (рис. 3.12). Ком-
пенсация перекосов и смещений валов
осуществляется гак же, как и муф-
тами первого типа, с той лишь раз-
ницей, что вследствие большего рас-
стояния между зубчатыми втулками
увеличивается допустимое радиаль-
ное смещение соединяемых валов.
/gg ж _ 160
Рис. 3.12
При работе зубчатых муфт вслед-
ствие неточностей изготовления вту-
лок и обойм нагрузка на зубья рас-
пределяется неравномерно и в резуль-
тате валы испытывают изгибающие
нагрузки. Кроме того, изгибающие
нагрузки возникаю 1 и от трения зубь-
ев при вращении смещенных валов.
Поэтому при расчете валов, соединен-
ных зубчатыми муфтами, необходи-
мо учитывать дополнительный изги-
бающий момент, который принято
считать равным 0,1 от передаваемого
муфтой наибольшего крутящего мо-
мента длительно действующего на
соединяемых валах.
Основные достоинства зубчатых
муфт: достаточно высокая несущая
способность и надежность: сравни-
тельно небольшие габариты; способ-
ность компенсировать небольшие
смещения валов. К недостаткам от-
носят наличие боковых зазоров в зуб-
чатых зацеплениях и жесткость соеди-
нения по сравнению с упругими муф-
тами.
Для соединения валов электродви-
гателей с быстроходными валами ре-
дукторов часто применяют упругие
муфты, способные смягчить удары и
гасить крутильные колебания. Муфты
упругие втулочно-пальцевые (ГОСТ
21424-75) рекомендуют для групп ре-
жима работы 1К....5К. Они состоят
из двух фланцевых полумуфт, соеди-
ненных стальными пальцами с рези-
новыми втулками или набором ре-
зиновых колец (рис. 3.13). Смещения
Рис. 3.13
соединяемых валов компенсируются
деформациями упругих элементов.
Перекос осей валов не должен пре-
вышать у - Г, наибольшие радиаль-
ные смещения равны 0.6 мм.
Муфты с упругой резиновой го-
рообразной оболочкой, параметры
которых регламентированы ГОСТ
20884-75, состоят из двух полумуфт,
резиновой или резинокордной обо-
лочки и прижимных колец (рис. 3.14).
В быстроходных муфтах оболочка
цельная, в остальных для удобства
монтажа-с разъемом. Достоинством
муфты является способность компен-
сировать значительные смещения ва-
лов (радиальные-5 = 1 ... 4 мм, осе-
вые- до А = 5 мм. угловые-у = 2 ...
6).
Устанановка муфт должна произ-
водиться обязательно в соответствии
63
Рис. 3.14
с их назначением, т. е. зубчатые муф-
ты типа 1, втулочно-пальцевые и с
торообразной оболочкой следует
применять только для соединения ва-
лов, установленных на подшипниках.
Попытка установить их на промежу-
точный вал, не имеющий таких опор,
приведет к сильному биению послед-
него, так как у него появляется до-
полнительная степень свободы в ра-
диальном направлении. Зубчатые
муфты типа 2 следует применять
только в соединениях с промежуточ-
ным валом, не имеющим опор, при-
чем фланцы муфт нужно насаживать
на валы двигателей, редукторов, ко-
лес и т.д. как более массивные, а
зубчатые втулки-на промежуточный
вал. Применение зубчатой полумуф-
ты типа 2 для непосредственного сое-
динения валов (например, вала дви-
гателя с быстроходным валом редук-
тора) приведет к невозможности ком-
пенсации радиальных смещений ва-
лов.
При выборе муфт сначала оцени-
вают возможные смещения соединяе-
мых валов из-за деформаций под на-
грузкой металлических конструкций,
на которых устанавливают соединяе-
мые сборочные единицы; в предвари-
тельных расчетах можно принимать
прогиб рам тележек равным
0,0005... 0,0006 от расстояния между
соединяемыми узлами, а крановых
мостов-0,0010... 0,0014. Далее оце-
нивают возможные смещения валов
от собственных деформаций под на-
64
грузкой барабанов, редукторов, ходо-
вых колес и т.д. Выбирают тип муф-
ты, которая способна компенсиро-
вать такие смещения. После этого но
наибольшему длительно действующе-
му крутящему моменту с учетом от-
ветственности соединения выбирают
типоразмер муфты и по диаметрам
соединяемых валов назначаю! разме-
ры расточки отверстий.
Заметим, что (в случае примене-
ния муфты с тормозным шкивом) на
механизмах передвижения и поворота
с целью снижения динамических на-
грузок на детали муфты, полумуфты
с тормозным шкивом следует уста-
навливать на вал с большей при-
веденной массой [9]. Поскольку в
быстроходных механизмах передви-
жения приведенная масса поступа-
тельно движущихся частей крана (те-
лежки) значительно больше вращаю-
щихся масс механизма, то полумуфту
с тормозным шкивом следует уста-
навливать на вал редуктора, а не
двигателя. Это приведет к увеличе-
нию долговечности элементов муф-
ты.
§ 3.2. Компонование механизмов,
тележек, кранов
После того как на основании пред-
варительных расчетов выбраны вхо-
дящие в механизм или машину основ-
ные элементы, приступают к их ком-
понованию- определяют наиболее це-
лесообразное расположение сбороч-
ных единиц друг относительно друга
и относительно металлических кон-
струкций. Выбор той или иной ком-
поновочной схемы производится с
учетом достоинств и недостатков, а
также всесторонней оценки их лехни-
ко-экономических особенностей. В
процессе компонования производится
принципиальная проработка опор-
ных металлоконструкций, на которые
устанавливают сборочные единицы.
Компонование должно обязатель-
но выполняться в масштабе, преиму-
щественно в двух проекциях план и
вид сбоку, лучше всего на миллимет-
ровой бумаге. Компонование маши-
ны в плане, состоящей из нескольких
механизмов, рекомендуется произво-
дить используя вырезанные из бумаги
«габаритки» основных элементов -
двигателей, редукторов, тормозов,
канатных барабанов, верхних блоков
и т.д. Окончательный вариант ком-
понования. утвержденный руководи-
телем, вшивается в расчетно-поясни-
тельную записку.
Компонование подъемной лебедки.
Общие требования к компонованию
лебедки механизма подъема приме-
нительно к наиболее распространен-
ной схеме с индивидуальным приво-
дом сводятся к рациональному раз-
мещению сборочных единиц, ее ком-
пактности, надежности в работе,
удобству обслуживания и экономич-
ности. На рис. 3.15 представлены раз-
личные схемы компонования подъем-
ной лебедки. Расположение сбороч-
ных единиц по схеме на рис. 3.15,и
отличается удобством монтажа и
обслуживания, но большими габари-
тами из-за расположения двигателя и
барабана по разные стороны от ре-
дуктора. Кроме того, увеличивают
габариты и большие осевые размеры
соединительных муфт.
Лебедка становится значительно
компактнее при расположении бара-
бана и двигателя с одной стороны
редуктора (рис. 3.15, о). Однако ее га-
барит по ширине остается относи-
тельно большим из-за значительных
размеров муфты, соединяющей ре-
дуктор с барабаном.
Наилучшие показатели по габари-
ту имеет конструкция лебедки с уста-
новкой одной из опор оси барабана
внутри консоли тихоходного вала ре-
дуктора (рис. 3.15,в). Преимущество
такого компонования лебедки - ее
компактность, блочность и передача
крутящего момента непосредственно
с редуктора на барабан при помощи
специальной зубчатой муфты минуя
ось барабана.
В мостовых кранах грузоподъем-
ностью 80... 320 т при небольших
скоростях подъема передаточное чис-
ло подъемной лебедки оказывается
достаточно большим. В этом слу-
чае применяется механизм с откры-
той тихоходной зубчатой передачей
(рис. 3.15, г) вместо более дорогого и
громоздкого трехступенчатого редук-
тора. Для реализации компоновоч-
ных схем с открытой передачей ПО
«Сибтяжмаш» разработало ряд уни-
фицированных редукторов ГК с на-
ружной шестерней на тихоходном ва-
лу [4].
Для улучшения условий компенса-
ции несоосности и перекоса валов
двигателя и редуктора, а также упро-
щения монтажа двигатель соединяют
с редуктором при помощи промежу-
3 Зак. 19WK
3. i 5
65
Р и с
i очного вала-вставки («плавающего»
вала) (рис. 3.15, а). В какой-то степени
'ло конструктивное решение позволя-
ет выравнивать вертикальные нагруз-
ки на ходовые колеса тележки изме-
нением положения электродвигателя.
Тормоз на подъемной лебедке уста-
навливают на редукторной полумуф-
те. которую в этом случае выполняют
в виде тормозного шкива, либо на
тормозном шкиве, устанавливаемом
на втором конце входного вала ре-
дуктора. Место для установки 'тормо-
за выбирают так, чтобы, во-первых,
обеспечить удобство его обслужива-
ния, во-вторых, не увеличивать габа-
риты тележки и, в-третьих, между
деталями юрмоза и барабаном, при
установке тормоза на редукторной
полу муфте, должен быть достаточ-
ный зазор.
Компонуя лебедку на виде сбоку,
устанавливают все предварительно
выбранное оборудование-двигатель,
редуктор, тормоз, барабан так. чтобы
их оси вращения лежали в одной го-
ризонтальной плоскости (рис. 3.16).
При этом всегда оказывается, что
расс тояние по высо те от оси до опор-
ных площадок сборочных единиц раз-
ное. При назначении высоты располо-
жения осей вращения над настилом
тележки Н руководствуются стремле-
нием расположить лебедку как можно
ниже. Как правило, определяющим
размером положения лебедки являет-
ся высота вала редуктора /т
Гак как оборудование нельзя ста-
вить непосредственно на верхний лист
рамы из-за его неровности, тс под
сборочные единицы устанавливают
рамы в визге приваренных и обра-
бот энных платиков. прокатных про-
филей или сварных подставок.
Таким образом, устанавливая ре-
дуктор на платики минимальной вы-
соты 20 ... 40 мм, получают высоту
всех остальных рам A,, h2, h3. Если
редуктор имеет поддон, "выступаю-
щий за опорные площадки, то в верх-
нем листе рамы под него делают
вырез. Устанавливая оборудование
на платики. обеспечить возможность
установки крепежных болтов с верх-
него листа рамы тележки при сборке
и ремонтах оборудования.
На компоновочной схеме относи-
тельное положение отдельных сбо-
рочных единиц фиксируют размерами
(рис. 3.17), одни (отмечены звездоч-
ками) берут из предварительных рас-
четов и по справочникам на стандар т-
ные изделия, другие (например, /,
/2) - рассчитыва ют. Расчет размеров,
определяющих относительное поло-
жение стандарт ных узлов, рассмот-
рим на примере непосредственного
соединения двигателя с редуктором
при помощи упругой втулочно-паль-
цевой муфты (рис. 3.18),
Положение полумуфты с тормоз-
ным шкивом на валу редуктора (раз-
мер /j) определяется диаметром рас-
точки втулки полумуфты. Если при
конусности вала 1:10 задать диаметр
расточки «Д с точностью ± 0,1 мм, то
будет гарантироваться установка по-
лумуфты в осевом направлении с точ-
ностью порядка + 1 мм. При необхо-
димости более точное положение по-
лумуфты относительно вала в зависи-
мости о г диаметров конусных по-
верхностей и их допусков можно рас-
считать по методике, приведенной в
справочном Приложении 4 ГОСТ
25307 - 82 (СТ СЭВ 1780-79) «Система
допусков и посадок для конических
соединений».
Рис. 3.17
Рис 3.18
На практике для расчета диаметра
расточки г/1 в зависимости от диамет-
ра цилиндрической части вала редук-
тора d и для контроля установки
полумуфты удобнее задавать размер
К между торцом полумуфты и нача-
лом конической части вала (рис. 3.18).
Таким образом, расстояние между
осями редуктора и тормоза
t . а , ж,
/ — /1 — - ~ I) 4" К -I- с — -.
Расстояние между осями редукто-
ра и двигателя
L /, Т Л г о .
при атом зазор между горлами ио-
лумуф; ‘.обдано д — 2... 5 мм) явля-
ется компенсатором смещений валон
двигателя и редукт ора. Заметим
здесь, ч го если длина /г снупицы полу-
муфты, устанавливаемой на вал дви-
гателя, несколько меньше, чем наса-
дочная длина вала С то между юрцо.м
полумуфты и упорным буртиком ва-
ла устанавливается дистанционная
шайба (иоз, /, рис. 3,18),
Располагая барабан и двигатель с
одной стороны редуктора, необходи-
мо обеспечить зазор (А 2? 50 мм)
между деталями крепления каната к
барабану и тормозом (см. рис, 3.17).
Причем, поскольку выступающие де-
тали барабана и тормоза лежат на
разных уровнях, необходимо рас-
сматривать наличие необходимого за-
зора на боковой проекции механизма.
Иногда из-за невозможности обеспе-
чить этот зазор принимают больший,
чем требуется по расчету, типоразмер
редуктора. Прежде чем принять такое
решение, рекомендуется рассмотреть
возможность установки тормоза на
другом конце быстроходного вала ре-
дуктора.
Компоновочные схемы подъем-
ных лебедок поворотных кранов не
отличаются от приведенных. Исклю-
чение составляют лебедки кранов
очень небольшой грузоподъемности,
где в качестве передаточного устрой-
ства применяют червячные редукто-
ры.
При установке лебедки на метал-
локонструкции поворотной части кра-
на с целью уменьшения угла откло-
нения каната (в плане) от продольной
оси стрелы стремятся увеличить диа-
метр барабана. Его длина и угол
отклонения каната при этом умень-
шаются, но возникает трудность в
размещении двигателя и барабана с
одной стороны редукюра, особенно в
случае применения редукторов типа
Ц.2, имеющих небольшие межосевые
расстояния. В связи с этим иногда
применяют компонование по схеме на
рис. 3.15, а.
Прорабатывая схему полиспаста
подъемного механизма, установлен-
ного на поворотной части крана, ре-
комендуется определить максималь-
ное провисание горизонзальных вет-
вей канатов при отсутствии груза на
крюке и прочертить их положение с
тем, чтобы не допустить задевания за
элементы металлических конструк-
ций. Если провисание оказывается
большим (свыше 1/30 от максималь-
6 к
ной длины свободно висящего кана-
та), то обычно несколько утяжеляют
крюковую подвеску, вес которой
можно определить по зависимости
> ^maxwn
где q- линейный вес каната; /тах - наи-
большее расстояние между точками
опирания грузового каната; [/]-до-
пускаемое провисание ветви грузово-
го каната; wn-кратность полиспаста;
т|п- к, п. д. полиспаста; г|и.бл-к. п. д,
отклоняющего блока; а - количество
отклоняющих блоков грузового ка-
ната.
Компонование привода механизма
передвижения тележки. Наиболее рас-
пространенной компоновочной схе-
мой приводной части является меха-
низм с центральным приводом
(рис, 3.19), в котором вертикальный
(редко горизонтальный) редуктор
располагают в середине колеи тележ-
ки. Двигатель соединяют с редукто-
ром через промежуточный вал, что
позволяет допускать большие смеще-
ния соединяемых валов, а также улуч-
шить доступ к Тормозу. Концы вы-
ходного вала редуктора соединяют с
валами ходовых колес посредством
трансмиссионных валов и зубчатых
муфт. Редуктор закрепляют на вер-
тикальном листе рамы тележки, при-
чем этот лист должен отстоять от
поперечной балки рамы на расстоя-
нии b > 50 мм (рис. 3.19), с тем чтобы
была возможность установить кре-
пежные болты.
При компоновании привода важ-
ное значение имеет межцентровое
расстояние редуктора. При малом
значении этого расстояния может
оказаться, что ходовые колеса упи-
раются в верхний горизонтальный
лист рамы тележки. В этом случае
приходится подбирать другой редук-
тор с большим межцентровым рас-
стоянием или подбирать ходовые ко-
леса с меньшим диаметром (если, ко-
нечно, при этом будет обеспечена их
прочность). Зазор между ребордами
колес и верхним листом рамы тележ-
ки должен быть не менее 50 мм:
С = А - Яр - /л - Лд,
f
Рис. 3.19
Рис. 3.20
где А -межцентровое расстояние ре-
дуктора; Я - радиус колеса по ребор-
дам; /л-толщина верхнего листа ра-
мы тележки с платиками; высота
расположения оси двигателя.
При небольшой колее тележки
длина трансмиссионных валов часто
оказывается очень малой. В таких
случаях редуктор смещают к одному
из колес, исключив один трансмис-
сионный вал (рис. 3.20). Иногда вер-
тикальный редуктор вообще выносят
за ходовое колесо на боковую сторо-
ну тележки.
При компоновании по такой схеме
применяется навесной редуктор типа
ЦЗВК и ЦЗВКФ, имеющий в тихоходном
валу полость со шлицами (рис. 3.21).
Такая схема исключает трудоемкую
работу по выверке и центровке ре-
дуктора и не требует устройства спе-
циальных опорных площадок под ре-
69
Рис. 3.21
дуктор на раме тележки. Преиму-
щество центрального привода пере-
движения перед приводом с боковым
расположением редуктора - одновре-
менность начала движения (или тор-
можения) обоих приводных колес,
Недостаток нецентрального рас-
положения привода - неодновремен-
ность начала движения приводных
колес, так как крутящий момент с
выходного вала редуктора сначала
передается на ближайшее к нему ко-
лесо и только после того, как транс-
миссионный вал закрутится на угол,
определяемый его крутильной жест-
костью и передаваемым крутящим
моментом, приходит во вращение
второе приводное колесо. Так, для
тележки с колеей 2,0 м и диаметром
колес = 500 мм при угле закручи-
вания вала 0 30' на 1 м второе колесо
начинает движение после того, как-
первое колесо пройдет путь, равный
4,4 мм. Боковые зазоры в зубчатых
муфтах еще более увеличивают этот
путь Запаздывание начала движения
одного из приводных колес приводи т
к перекосам тележки при пусках и
торможениях и может являться одной
из причин интенсивного износа хо-
довых колес. Кроме того, при ремон-
те механизма с боковым расположе-
нием редуктора заменить приводные
колеса гораздо труднее.
Компонование лебедки механизма
передвижения с канатной тягой прак-
• тически на отличается от компонова-
ния рассмотренных лебедок механиз-
ма подъема. Разница лишь в том, что
на барабане закрепляются обе ветви
тягового каната, обеспечивающего
движение тележки в обе стороны.
Благодаря размещению лебедки ме-
ханизма передвижения (а также и ле-
бедки подъема) вне тележки масса и
габариты последней резко уменьша-
ются. Недостатком этого типа меха-
низма является повышенный износ
канатов, вследствие чего такой вид
оборудования применяют лишь на
поворотных, козловых и некоторых
видах специальных кранов [2].
70
О)
Рис. 3.23
Компонование привода механизма
передвижения крана. Производится по
одной из кинематических схем, при-
нятых в предварительном расчете.
В схеме с тихоходной трансмис-
сией привод располагают на площад-
ке пролетной балки примерно в се-
редине моста. При применении верти-
кального редуктора ширина площад-
ки получается меньше, чем при ис-
пользовании горизонтального редук-
тора. Длина трансмиссионного вала,
соединяющего выходные валы редук-
тора с приводными колесами, зависит
от пролета крана. Вал состоит из
отдельных секций, соединяемых друг
с другом зубчатыми муфтами. Длину
секций принимают равной 2... 6 м, а
их число от двух при пролете крана
L — 13 м до шести при пролете
L-- 31 м. В качестве соединительных
зубчатых муфт применяю т муфты ти-
па МЗП. которые обеспечивают ми-
нимальное число опор трансмиссион-
ного вала. Гак, при шестисекционном
вале число опор, обеспечивающее не-
изменность геометрической схемы ва-
ла, равно всего лишь четырем
(рис. 3.22. с/). На валу, состоящем из
четырех секций, достаточна устано-
вить две подшипниковые опоры
(рис. 3.22. б).
71
Компонование центрального уз-
ла привода механизма передвиже-
ния крана со среднеходным валом
(рис. 3.23) не отличается от схемы с
тихоходной трансмиссией. Установка
крана на балансирных тележках пред-
определяет особенность установки
шестерни открытой передачи.
Поскольку балансир поворачива-
ется на некоторый угол при наезде
ходовых колес на встречную или по-
путную ступеньку в стыках рельсов,
то зубчатое колесо открытой пары,
закрепленное на ходовом колесе, так-
же перемещается относительно ме-
таллоконструкции крана. Неизмен-
ность межцентрового расстояния зуб-
чатого зацепления может быть обес-
печена лишь в случае установки вала
шестерни соосно с осью балансира,
что конструктивно выполнить до-
вольно сложно. Поэтому часто вал
шестерни устанавливают на линии,
соединяющей ось приводного колеса
с осью балансира. При таком ком-
поновании относительные перемеще-
ния зубчатых колес небольшие.
В схеме механизма с раздельным
(индивидуальным) приводом конце-
вых балок моста длинный трансмис-
сионный вал отсутствует. По этой
схеме каждая концевая балка моста
приводится в движение своим само-
стоятельным приводом. Раздельный
привод обеспечивает нормальную ра-
боту крана при отношении пролета
моста к его базе не более 6. При
большем соотношении необходимо
значительно повышать жесткость
моста в горизонтальной плоскости,
что ведет к утяжелению крана. Этот
вид привода находит самое широкое
применение.
Компонование привода зависит от
места его расположения и типа пере-
даточного механизма. При располо-
жении привода на площадке пролет-
ной балки моста применяют как вер-
тикальные редукторы (рис. 3.24), так
и горизонтальные. В последнем слу-
чае усложняется установка опорных
площадок под редуктор и увеличи-
вается ширина галереи. Однако мон-
таж и обслуживание привода при
эксплуатации более удобны,
В кранах большой грузоподъем-
ности иногда удается разместить при-
вод механизма передвижения на ба-
лансире. В этом случае к нему при-
варивают площадку для размещения
двигателя, тормоза и вертикального
редуктора (рис. 3.25).
Хорошие показатели дает исполь-
зование в качестве раздельных меха-
низмов передвижения, устанавливае-
мых на концевых балках моста или
балансирах, блок-приводов, в кото-
рых объединены двигатель, тормоз и
редуктор. Компонование блок-приво-
дов осуществляют по одной из схем
на рис. 3.26. В схемах а и б при-
вод колес осуществляется через от-
Рис. 3,24
72
Рис. 3.25
крытую зубчатую передачу редукто-
ром с установленным на нем дви-
гателем, имеющим фланцевое крепле-
ние или закрепленным на лапах. В
схеме в следует использовать редук-
торы типа ВКкрФ, в конструкции ко-
торых предусмотрено фланцевое креп-
ление электродвигателей. В схеме г
применяют соосные редукторы
В механизмах передвижения кра-
нов применяют как ребордные, гак и
безребордные колеса с горизонталь-
ными роликами. При установке без-
ребордных колес обязательное при-
менение горизонтальных роликов
усложняет конструкцию механизма
передвижения, однако получаемый
эффект-резкое уменьшение сопро-
тивления передвижения и отсутствие
износа реборд - компенсирует эго
усложнение. Горизонтальные ролики
устанавливают на металлоконструк-
циях моста (рис. 3.27) либо на ба-
лансирных тележках (рис. 3.28). В ка-
честве опорных элементов для этих
роликов могут служить боковые по-
верхности подкрановых рельсов или
специальные шины, закрепляемые на
верхнем поясе подкрановых балок.
Компонование механизма поворо-
та. Привод поворота, состоящий из
двигателя, передаточного механизма
и тормоза, можно расположить как
на поворотной части крана, так и на
не и о во роти ой (или на фундаменте ря-
дом с краном). То или иное разме-
щение привода определяется глав-
ным образом расположением пульта
73
ффффф1
Рис. 3.27
управления краном. Если пулы' рас-
полагают на поворо тной час ти крана,
то и механизм размещают здесь же.
Компонование привода поворота
применительно к наиболее распро-
страненной схеме с применением чер-
вячного редуктора состоит в уста-
новлении взаимного расположения
двигателя, тормоза и редуктора
(рис. 3.29), а также всею привода от-
носительно зубчатого венца. При
компоновании руководствуются не-
обходимостью удобного доступа ко
всем сборочным единицам для регу-
лировок и обслуживания.
При применении червячных редук-
торов механизмы поворота выполня-
ют с предохранительными устройст-
вами. которые ограничивают переда-
ваемый механизмом крутящий мо-
мент, Необходимость ограничения
крутящего момента вызывается тем,
что. поскольку приведенная масса по-
воротных частей крана значительно
больше вращающихся масс механиз-
ма. при отключении двигателя инер-
ционные силы поворотных частей
крана создают' момент, направлен-
ный к двигателю (от червячного коле-
са к червяку), и при наличии само-
тормозящейся передачи (несамотор-
мозящаяся передача в результате
плохой смазки, загрязнения, износа
может оказаться самотормозящейся)
могут привести к поломке деталей
механизма. Наиболее часто в качестве
предохранительного устройства при-
меняют фрикционные муфты, встро-
енные в редуктор (рис. 3.30), макси-
мальный передаваемый момент кото-
рых регулируется поджатием пружи-
ны. При компоновании привода пово-
рота с применением цилиндрических с
вертикальными валами или планетар-
ных редукторов (см. рис. 2.17, а, в, о)
фланцевый двигатель закрепляют на
редукторе, обеспечивая соединения их
валов и устанавливают нестандарт-
ный тормоз с замыканием в гори-
зонтальной плоскости. Тормоз укреп-
ляют на кронштейне, который крепят
к лапам двигателя (рис. 3.31).
При конструировании узла креп-
ления редуктора необходимо обеспе-
чить точность установки шестерни
открытой передачи относительно зуб-
чатого венца. Для этого корпус ре-
дуктора фиксируют обработанной по-
верхностью отверстия установочного
листа 1 (рис. 3.30), который после вы-
74
A
A~A
Рис. 3.TS
верки зубчатого зацепления привари-
вают к металлоконструкции. Такое
крепление редуктора обеспечивает
восприя тие горизонтальных нагрузок,
действующих на бегунковую шестер-
ню, не болтами, а наружными про-
точками корпуса редуктора.
Компонование. тележки мостового
двухбалочного крана. Расположение
механизмов на раме тележки должно
обеспечить ее минимальные габариты
и массу, равномерную нагрузку на
ходовые колеса при номинальном
грузе па крюке. Если на тележке ус та-
навливают два механизма подъема,
w равномерности нагрузки на ходо-
вые колеса добиваются при номи-
нальном грузе на крюке главного
подъема. Нагрузку на ходовые колеса
в порожнем состоянии с целью улуч-
шения сцепления колес с рельсами
стремятся распределить таким обра-
зом, чтобы на приводные колеса при-
ходилось несколько большая н-uрез-
ка, чем па непровод1тые.
В резулмате ко?лионования (слеж-
ки должны быть позучены: ) сеема
размещения механизмов на раме с
размерами, определяющими их поло-
жение относительно рамы тележки: 2)
Рис. 3.29
габариты тележки; 3) схема несущих
элементов рамы, воспринимающих
вертикальные нагрузки (положение
вертикальных листов, гнутых профи-
лей и т.д.); 4) положения центров
тяжести тележки в порожнем состоя-
нии и при работе с номинальным
грузом; 5) нагрузки на ходовые коле-
са в порожнем состоянии и от веса
груза.
При проектировании тележки мос-
тового крана с двумя механизмами
подъема рекомендуется следующим
порядок компонования (рис. 3.32).
1. Вырезанные из бумаги (по раз-
мерам в плане) «габаритки» бараба-
76
на, двигателя, тормоза, муфт и опор
барабана механизма главного подъе-
ма компонуют в одну из вышепри-
веденных схем лебедок. Перечислен-
ные сборочные единицы, прикрепляе-
мые болтами, устанавливают не не-
посредственно на лист настила тележ-
ки. а на специальные рамы (платики,
сварные подставки, прокатный сорта-
мент). При этом рамы всегда должны
опираться не менее чем на два верти-
кальных листа рамы тележки.
2. Центр барабана главною
подъема принимают за начало коор-
динат и проводят главные координат-
ные оси: ла-по оси барабана и уу-
перпендикулярно ей. Симметрично
относительно оси >’}' намечается по-
ложение подтележечных рельсов с та-
ким расчетом, чтобы продольная ось
редуктора совпадала (или была близ-
ка) с одним из них.
3. В соответствии с размерами уз-
ла ходовых колес (расстоянием меж-
ду корпусами подшипников) пункти-
ром прочерчиваются вертикальные
листы продольных («хребтовых») ба-
лок рамы тележки. Нагрузка от уси-
лий в канатах, наматывающихся на
барабан, через его опоры должна пе-
редаваться на эти балки, т. е. на них
должны опираться корпуса подшип-
Рис. 3.31
77
ников барабана (или корпус подшип-
ника и редуктор при схеме с опорой
на вал редуктора).
4. На этом этапе компонования
выбираюл места схода канатов с ба-
рабана и места установки верхних
блоков. С целью удобства обслужива-
ния верхних блоков последние жела-
тельно устанавливать выше уровня
настила рамы тележки.
В ряде конструкций при относи-
тельно небольшом межцентровом
расстоянии редуктора расположить
верхние блоки между барабаном и
промежуточным валом не удается,
поэтому верхние блоки часто распо-
лагают со стороны, противополож-
ной быстроходному валу. Теперь, из-
бегая S-образного перегиба каната
(что значительно повышает его вы-
носливость), назначают место схода
канатов с барабана.
5. Пунктиром прочерчивают вер-
тикальные листы поперечной балки
7*
рамы, на которую опираются верхние
блоки. При этом необходимо следить
(на боковой проекции) за отсутствием
касания вертикальных листов рамы
тележки канатами при раскачивании
груза. Прочерчивают вертикальные
листы, на которые будут опираться
двигатель и тормоз.
6. Вычерчивают в плане положе-
ние лебедки вспомогательного подъе-
ма. стремясь к компактному располо-
жению относительно лебедки главно-
го подъема. Здесь допускается неко-
торое несовпадение центра барабана
вспомогательного подъема с осью ут.
Иногда целесообразно двигатель и
барабан располагать по разные сто-
роны от редуктора. После этого пунк-
тиром прочерчивают вертикальные
элементы рамы, на которую будут
опираться подшипник барабана, дви-
гатель и тормоз.
7. Вычерчивают расположение
привода механизма передвижения те-
лежки с учетом возможности крепле-
ния редуктора и пропуска трансмис-
сионного вала при уже намеченных
элементах рамы тележки. Таким об-
разом задаются положением привод-
ных ходовых колес.
8. Намечают ориентировочно кон-
тур рамы с учетом возможности про-
хода обслуживающего персонала при
ремонтах и регулировках оборудо-
вания.
9. Определяют центр тяжести ра-
мы тележки (точка 0р), который с
достаточной степенью т очности мож-
но считать расположенным в геомет-
рическом центре рамы. Вес рамы
определяется разностью между ранее
принятым весом тележки и суммой
весов установленных на ней механиз-
мов.
10. На виде тележки сверху ко-
ординируются центры тяжести всего
оборудования, находящегося на раме,
причем вес двигателей, ба рабанов,
верхних блоков и вертикальных ре-
дукторов прикладывают в геометри-
ческом центре «габарит ок» соответ-
ствующих изделий. Вес тормозов,
промежуточных валов и муфт неве-
лик по сравнению с весом рамы те-
лежки и перечисленного оборудова-
ния. Поэтому при определении верти-
кальных усилий, действующих на хо-
довые колеса, их вес можно не учи-
тывать.
Вес горизонтальных редукторов
прикладывают на расстоянии 1/3 их
длины со стороны тихоходного вала.
11. Определяют координаты цент-
ра тяжести (точка OJ порожней те-
лежки:
Г у = (3.1)
где Gj-вес отдельных сборочных еди-
ниц; Xj, ту-координаты точек их при-
ложения.
12. Определяют координату г
центра тяжести груза, находящегося
на крюке главного подъема (точка
Огр). Эту координату легче всего
определить по положению крюковой
подвески, для чего рассматривают
равновесие последней в плоскости
базы тележки. Подвеску располагают
Рис. 3.33
между барабаном и верхними блока-
ми на наибольшей высоте (рис. 3.33).
В этом положении ось подвески нахо-
дится от оси барабана на расстоянии
н = щ + //р + н + нп.
где //--высота расположения оси ва-
ла барабана на/Т рамой тележки
(определяется высотой расположения
оси вала редуктора); //р-высота ра-
мы тележки; ее принимают равной
1/8... 1/5 от ориентировочно приня-
той базы тележки; Н' С 200 мм-рас-
стояние от подвески в ее верхнем
положении до металлоконструкции
тележки (регламентируется «Прави-
лами» ГГТН); Нп - расстояние от оси
до крайней верхней точки подвески.
Графическим методом* находят
равнодействующую усилий в канатах,
идущих на верхние блоки S", и равно-
действующую усилий в канатах, иду-
щих на барабан S'. Геометрически
складывая усилия S” и S', находят
равнодействующую усилий в ветвях
каната S, действующую на крюковую
* Соболев Э. М. Графический метод
определения равновесного положения подвиж-
ных блоков грузового полиспаста. Вестник ма-
шиностроения. 1975. № 5.
79
подвеску. Если она вертикальна, под-
веска, нагруженная весом груза, на-
ходится в равновесии; если равнодей-
ствующая наклонена, подвеска будез
перемещаться в сторону ее горизон-
тальной составляющей.
Равновесное положение подвески
находят в следующем порядке: а) из-
меряют расстояние между линией
действия равнодействующей 5 и цен-
тром барабана - отрезок О t О3 (рис.
3.33); б) откладывают это расстояние
по горизонтали от оси барабана в
сторону верхних блоков и через най-
денную точку А проводят вертикаль-
ную ось, на которой устанавливают
крюковую подвеску; в) снова прове-
ряют положение равнодействующей
усилий в канатах подвески и, если она
недостаточно приблизилась к верти-
кальному положению, повторяют по-
строение.
Равновесное положение крюковой
подвески и определяет положение
равнодействующей на тележке от веса
груза (точка Огр на рис. 3.32).
13. Определяют положение непри-
водных колес, т.е. базу тележки, из
условия одинаковой нагрузки на при-
водные и холостые колеса:
„ = WW) п
где у' и у"-расстояния от равнодей-
ствующих веса порожней тележки и
груза соответственно до оси привод-
ных колес.
14. Определяют нагрузку на ходо-
вые колеса тележки в порожнем со-
стоянии и от веса груза.
При этом с целью упрощения рас-
четов делают ряд допущений [22] -
считают, что все опоры тележки ле-
жат в одной плоскости, а рама пред-
ставляет собой абсолютно жесткую
конструкцию.
Перенеся силу тяжести порожней
тележки в точку Ор (см. рис. 3.32) и
уравновесив ее, получают силу в точ-
ке симметрии рамы и момент. Рас-
кладывая последний по продольной и
поперечной плоскостям, определяют
нагрузки на ходовые колеса от веса
порожней тележки:
(3.3)
Соответственно от веса груза
(3.4)
где GT = £(7.-вес порожней тележки;
G-вес номинального груза; Gn-Bec
подвески.
Статическая нагрузка на ходовые
колеса в груженом положении
1 = Лт + PigJ -^2 = Л
р\ /Wh + ^-Г }
Как уже отмечалось, при компо-
новании тележки стремятся к равно-
мерному распределению нагрузок на
колеса. Поэтому, если разница в ста-
тической нагрузке на колеса состав-
ляет более 10%, изменяют располо-
жение неприводных ходовых колес
или верхних блоков. Наиболее су-
щественное перераспределение нагру-
зок на ходовые колеса может быть
осуществлено за счет изменения мес-
та расположения верхних блоков,
опоры которых воспринимают на-
грузку от веса груза примерно в
и„ — 1 раз больше, чем опоры бара-
бана (ип- кратность полиспаста).
Окончательно прорабатывают ра-
му тележки, при этом обязательно
должно быть обеспечено отсутствие
задевания канатов за вертикальные
80
листы рамы. Проставляют габариты
и установочные размеры, определяю-
щие положение механизмов на раме.
Компонование - процесс творчес-
кий. Так, уже на втором этапе ком-
понования может оказаться, что вы-
носной подшипник барабана не по-
падает на балку над позележечным
рельсом и поэтому потребуется из-
менить компонование лебедки глав-
ного подъема либо предусмотреть по-
перечную балку для восприятия вер-
тикальных усилий от опоры бараба-
на. При выполнении шестого этапа
двигатель механизма вспомогатель-
ного подъема может попасть на мес-
то, уже занятое блоками механизма
главного подъема, положение кото-
рых определено в пятом этапе. Таким
образом, каждый последующий этап
компонования может войти в проти-
воречие с предыдущим и всякий раз
приходится пересматривать ранее
принятые решения.
Компонование крана. При компо-
новании мостового крана решают
следующие задачи:
1) исходя из грузоподъемности и
пролета крана выбирают тип и об-
щую схему моста крана, производят
разбивку его на монтажные блоки;
2) определяют крайние положения
тележки на мосту из условия макси-
мального приближения ее при дви-
жении к концевым балкам моста;
3) определяют места расположе-
ния кабины управления и люльки для
обслуживания троллеев крана. Наи-
большее применение находят торце-
вые кабины, закрепляемые с одной
стороны моста крана. Иногда, при
пролетах моста более 30 м для улуч-
шения обзора кабину прикрепляют к
середине моста (панорамная кабина)
либо непосредственно к тележке.
Здесь необходимо определить способ
входа в кабину и из нее на мост крана;
4) в зависимости от типа моста и
габаритов тележки размещают пло-
щадки для обслуживания оборудова-
ния, а также ограждения;
5) прорабатывают принятую ранее
схему механизма передвижения крана
с точки зрения размещения на ме-
таллоконструкции моста;
6) определяют габариты крана и
уточняют максимальные нагрузки на
колеса крана при крайнем положении
тележки со стороны кабины.
Компонование тележки мостового
однобалочного крана. В отличие от
гележек мостовых двухбалочных кра-
нов у тележек однобалочных кранов
крюковая подвеска расположена сбо-
ку от пролетной балки.
Конструкции тележек выполняют
по пяти различным схемам. На
рис. 3.34, а приведена схема угловой
тележки, перемещающейся по трем
рельсам. При этом приводные колеса
/ воспринимают вертикальную на-
грузку, а колеса 2 и 3-горизонталь-
ные нагрузки от эксцентрично при-
ложенного суммарного веса груза и
тележки относительно опорного ко-
леса.
Угловая тележка (рис. 3.34,6) пе-
ремещается по двум рельсам. Ее
центр тяжести как в порожнем, так и
в груженом состоянии находится
справа от опорного рельса, поэтому
обратные колеса 2 все время прижаты
к рельсу.
Несколько упрощает конструкцию
тележки применение наклонных ходо-
вых колес (рис. 3.34, в). Угол их на-
клона определяется из условия, чтобы
линия действия нормальных опорных
реакций верхних и нижних ходовых
колес пересекалась в точке, лежащей
на геометрической оси грузового по-
лиспаста (если пренебречь возмож-
ным незначительным отклонением
центра тяжести тележки от оси по-
лиспаста). Такой же угол наклона хо-
довых колес обеспечивает равновесие
тележки под действием вертикальных
нагрузок.
Консольная тележка, выполненная
по схеме 3.34, г, перемещается по пу-
тям, установленным на верхнем поясе
пролетной балки. Обратные колеса 2,
установленные внутри швеллера,
удерживают тележку от опрокидыва-
ния. Опорные колеса ^являются при-
водными.
Схема консольной тележки на
рис. 3.34,6 отличается от предыдущей
применением трапецеидальной балки
моста. В этом случае несколько
81
Рис. 3.34
уменьшается вылет полиспаста (раз-
мер д) и увеличивается колея гележки.
Сравнительная оценка рассмоз-
ренных схем тележек может быть
произведена ио ряду параметров: по
нагрузке на ходовые колеса, по массе
тележки, по степени удобства обслу-
живания, ремон та и монтажа *.
i: Kos М. Bewcrliing ricucrer Katzenbauar-
Un tier Finl/agerbriickeii and Ponalkrane VDI -
Z1 24 (19X2) Nr. 4 Fcbruar (iI. p. 135).
В табл. 3.2 приведены относитель-
ные нагрузки на ходовые колеса те-
лежек при b = 4а; h — 1,1/1. Номиналь-
ный вес груза принят равным едини-
це, а вес тележки - равным 30% от
него. Для схем а, б, в вес тележки
прикладывается в середине вылета
грузового полиспаста 0,5а, а для схем
г, 0-над приводным колесом.
Из табл. 3.2 следует, что наимень-
шую нагрузку воспринимают колеса
Таблица 3.2
ИснолнеЕ1ие гележки по схеме Нагрузка на колеса
приводные нижние опорные верхние опорные суммарная суммарная, %*
1,300 0.261 0,261 1,822 111,5
tf 1.588 0,288 - 1,876 114,8
в 1,328 0,261 — 1,589 97,2
f 1,550 0,290 1,800 110.2
J 1.467 •• 0.167 1,634 100,0
* Hili ру ^ка схемы J принята зв 100%
S2
тележек, выполненных по схемам в и
д, наибольшую - по схеме б.
На графике рис. 3.35 приведены
зависимости массы тележек от грузо-
подъемности. Меньшую массу имеют
тележки, выполненные по схемам в, д.
Тележка на схеме б тяжелее их на
3,5 ... 5,0%. Тележки, выполненные
по схеме п, имеют наибольшую мас-
су-они тяжелее тележек, выполнен-
ных по схемам в и д, на 17... 21 %,
С точки зрения обслуживания и
ремонта тележки схем п, б, в весьма
неудобны, так как доступ к нижним
колесам затруднен, а смена изношен-
ных нижних рельсов возможна толь-
ко с помощью специальных средств.
При сравнении рассматриваемых
схем тележек следует учитывать и
возможность унификации тележек
для кранов разного пролета. В схемах
а, б, в это затруднено, так как изме-
нение сечения балки моста неизбежно
приведет к изменению размеров рамы
тележки. В схемах г, д размеры те-
лежки не связаны с высотой балки
моста, и поэтому тележка одного ти-
поразмера может применяться на
мостах различного пролета.
Оценивая схемы тележек при
возникновении аварийной ситуации
(землетрясение, внезапный обрыв ка-
ната грузового полиспаста и т.д.),
заметим, что тележки схем б и в
могут упасть с моста, в то время как
падение тележек схем а, г и д при этом
исключено.
Преимуществом тележки, выпол-
ненной по схеме б. является мини-
мальный вылет грузового полиспас-
та. Этот вылез определяется требова-
нием незадевания канатов за балку
при раскачивании груза во время пус-
ка и торможения крапа.
Как видно из рис. 3.34, е, примене-
ние трапецеидальной балки позволяет
значительно уменьшить вылет по-
лиспаста (flj > а2) при обеспечении
зазора S.
Проведенная сравнительная оцен-
ка рассмотренных схем тележек по
различным параметрам (нагрузкам
на ходовые колеса, массе, удобству
обслуживания, ремонта и монтажа)
по пятибалльной системе показала
(табл. 3.3). что наилучшими техни-
ко-эксплуатационными показателями
обладают тележки, выполненные по
схемам г и j, на и худшим и - по схеме
о.
Та блица 3,3
%*
Схема тележки
(рис. 3.34)
Суммарная опенка
баллы
а 11,00 43
о 9.75 38
в 13.25 52
с 23,00 90
д 25,50 100
* Оценка esc мы d принята за 100%,
Компонование тележки одноба-
лочного крапа производится в том же
порядке, что и тележки двухбалочно-
го крана. При размещении механиз-
мов на тележке барабан главного
подъема стремятся расположить на
минимальном вылете, который огра-
ничивается требованием незадевания
канатов за балку моста при раскачи-
вании груза. Середину барабана глав-
ного подъема располагают вблизи се-
редины базы тележки, чтобы на ходо-
вые колеса была одинаковая нагрузка
при номинальном грузе на крюке
главного подъема. При расположе-
нии механизмов главного и вспомо-
гательного подъема на одной консоли
вспомогательный подъем устанавли-
вают на большем вылете, причем его
опрокидывающий момент от номи-
83
Рис. 3.36
нального груза должен быть не более
момента, создаваемого грузом глав-
ного подъема.
Пример компонования тележки
однобалочного крана грузоподъем-
ностью 50/10 т приведен на рис. 3.36.
Глава 4
ПРОВЕРОЧНЫЕ РАСЧЕТЫ МЕХАНИЗМОВ
§4.1. Механизм подъема груза
Проверка двигателя на время разгона.
Двигатель должен разгонять меха-
низм за достаточно короткое время,
иначе уменьшится производитель-
84
ность крана. С другой стороны, если
оно будет слишком мало, то разгон
будет сопровождаться большим уско-
рением, что скажется на прочности
элементов, устойчивости груза и т.д.
Время разгона механизма подъе-
Рис. 4.1
ма принимают 1 ... 2 с [20]. В книге
[23] рекомендуется диапазон времени
разгона 2 ... 4 с. ВНИИПТМАШ [6]
рекомендует для разных механизмов
кранов грузоподъемностью до 75 г
средние значения времени разгона, по-
лученные экспериментально (рис. 4.1):
механизм подъема груза - кривая /,
механизм передвижения тележки -2,
механизм передвижения крана -3.
- Для механизма подъема груза
наибольшее время разгона получа-
ется при разгоне на подъем. Его мож-
но определять по приближенной фор-
муле (с)
f — Чдв^.чех.р /д 1 X
рьфиКТ у1 4 •
ер р
где юдв-угловая скорость двигателя,
рад/с: 7мехр-приведенный к валу
двигателя момент инерции при раз-
гоне всех движущихся частей меха-
низма, включая поступательно дви-
жущиеся массы, кг-м2; Тпср-средне-
пусковой момент двигателя. Н м;
Т.т - момент статических сопротив-
лений при разгоне, приведенный к
валу двигателя, Нм.
Значение Тп ср определяют по фор-
муле
= Ттв.н Vn.cp’ (4-2)
где -кратность среднепускового
момента двигателя; для двигателей с
фазным ротором значение уп ср при-
нимают по табл. 2.17; для двигателей
с короткозамкнутым ротором
определяют по характеристике двига-
теля (см. § 2.2).
Значение Juex.p равно
*^мех.р яр 7” ^пост. р’ (4.3)
Здесь J -момент инерции при
разгоне всех вращающихся частей ме-
ханизма, приведенный к валу двига-
теля:
Лр = 7^р (4-41
где у =1,1 ... 1,2-коэффициент учета
инерции вращающихся масс, распо-
ложенных на втором, третьем и по-
следующих валах механизма; -мо-
мент инерции вращающихся масс,
расположенных на первом валу, рав-
ный сумме моментов инерции ротора
(якоря) двигателя Jp дв, муфт JM, тор-
мозного шкива 31Ш и т.д.; jtloCT р-
момент инерции при разгоне поступа-
тельно движущихся частей механизма
плюс груза, приведенный к валу двига-
теля. Значения Jp дн и приводятся в
каталогах. Значение JT ш можно опре-
делить по следующей приближенной
формуле: JT ш = т, шг;.шст ш, где
и соответственно масса, кг.
и радиус, м, тормозного шкива, а <;тш-
коэффициент, учитывающий распреде-
ленность массы шкива (коэффициент
приведения геометрического радиуса
вращения к радиусу инерции). Исполь-
зуя рекомендации в книге [9]. можно
принять £,т ш 0,6.
В механизме подъема груза значе-
ния Jno__ о и Г _ определяют следую-
щим образом:
пост.р
™1|ОСТ = mU +
^мех мех
ст,р
(4.5)
(4.6)
(4.7)
где гб- радиус барабана по оси нави-
ваемого каната, м; нмех-полное пере-
да точное число механизма, равное
произведению передаточных чисел
полиспаста и лебедки; масса под-
вески, кг.
Если время разгона окажется су-
щественно больше рекомендуемых
значений, необходимо выбрать дру-
гой, более мощный двигатель гой же
относительной продолжительности
включения и гой же или близкой час-
85
кчм вращения. После этого следует
проверить, не превышает ли рекомен-
дуемую величину (см. табл. 2.16) сред-
нее ускорение, возникающее при раз-
гоне нового двигателя. Среднее уско-
рение можно определить по формуле
TIO. (/' р. фак (*
Проверку двигателя при разгоне
механизма на опускание можно не
делал,. Это объясняется, во-первых.
[см. что время разгона на опускание
все! да меньше (статический момент
способствует разгону), а следователь-
но. можно не опасаться снижения
производительности крана. Во-вто-
рых, как показали исследования [9 и
др.], данный режим движения меха-
низма в динамическом отношении ме-
нее опасен, чем другие режимы.
Проверка времени торможения.
Наибольшее время торможения при
работе механизма подьема груза по-
лучается при дорможении при опус-
кании, так как статический момент от
веса груза препятствует остановке ме-
ханизма. Кроме того, запаздывание в
срабатывании тормозов увеличивает
время торможения сильнее всего
именно при юрможении при опуска-
нии. Наблюдается увеличение скорос-
ти движения механизма, разгоняюще-
гося под действием веса груза, в пе-
риод. когда двигатель выключен, а
тормоз запаздывает. В результате
собственно торможение механизма
начинается со скорости, значительно
п р с в ы I н а ю 1 це й но м и i тал ь н у! о.
Если гремя торможения при опус-
кании (см. гл. 8) окажется больше
рекомендуемого времени разгона, то
тормоз необходимо отрегулировать
на больший тормозной момент. Если
он будет превышать значение Тл то
необходимо выбрать следующий
(больший) типоразмер тормоза. Оп-
ределение времени торможения при
подъеме не имеет большого значения,
так как эго время влияет на произво-
дительность в меньшей степени.
Проверка двигателя на нагрев.
Двигатель механизма подъема груза
может не перегреваться. если даже его
поминальная мощность меньше зна-
чения, coo I ве ic гву юшего нодьему
груза максимального веса в устано-
вившемся режиме (см, § 2.1). Но про-
верка двигателя на нагрев необходи-
ма. и наиболее простой метод-про-
верка ио эквивалентному крутяще-
му моменту [2]. Этот метод требует
меньших сведений о двигателе по
сравнению с методом проверки по
эквивалентному току и пригоден для
асинхронных двигателей с фазным и
короткозамкнутым ротором, а также
для двигателей постоянного тока с
параллельным возбуждением.
Условие проверки:
?; i;a н, (4.8)
J /1,П< Л 4 <
где Д - эквивалентный момент на ва-
лу двигателя, при работе с которым
его нагрев будет таким же. как и при
работе с реальными моментами, воз-
никающими при подъеме и опускании
грузов различного веса. Н м; Т.1Я и-
номинальный момент двигателя, оп-
ределяемый но формуле (2.35), Нм.
Значение 'Д определяют но формуле
I ТсрХ. С) мчл Д Ст. (у. ни Д Ст-пп./ J Я Q\
1 де ^т. пол J ’ ^T.onj - еоот ветственно
статические моменты на валу двигате-
ля, возникающие при подъеме и опус-
кании груза/-го веса, Н м, ; - время
разгона механизма при работе с гру-
зом /-го веса, с; /у 110Д /у оп- соответст-
вепио время установившегося движе-
ния при подъеме и опускании, с;
р - коэффициент, учитывающий ухуд-
шение условий охлаждения двигателя
в период пуска.
Под знаком радикала стоят сум-
мы указанных параметров за время
рабочего цикла.
Статические моменты при подъе-
ме и опускании (Н-м) вычисляют по
соотношениям
^м<?х П мех /
cr.orrj
г/
мех
(4.10)
где 6' -вес /'-го груза, включая вес
крюковой подвески, Н; гю . - к. п. д.
1 ' М С X J
Рис. 4.2
5)
механизма при работе с грузом /-го
веса.
Значение и количество подъемов и
опусканий за один рабочий цикл
принимают по графику нагружения
механизма. Если график нагружения
не задан, можно воспользоваться
типовым усредненным графиком в
Приложении 4.
Рассмотрим типовой график для
группы режима работы 4М (рис. 4.2.ц),
Можно принять, что за рабочий цикл
производится всего 10 подъемов
(опусканий) грузов. Количество же
подъемов (опусканий) грузов /-го веса
следует брать пропорционально от-
носительной доле времени Мень-
ше десяти общее число подъемов
(опусканий) грузов принимать нельзя,
так как при этом может получиться
нецелое число подъемов (опусканий)
грузов при каком-либо значении от-
носительной доли времени (например,
при Г;/гц~О, I; 0,3 и т.д.). Принятие
большего общего количества подъе-
мов (опусканий) - 20, 30 и г. д,- не
вносит изменения в расчет по срав-
нению с 10.
При общем количестве подъемов
(опусканий) за цикл, равном десяти,
получается, что, в пашем случае, груз
весом G поднимается и опускается
один раз, 0,56-пягъ раз, 0,195(7-один
раз и 0,05(7-три раза (см. рис. 4.2,6).
Каждому столбику на данной диаг-
рамме соответствует своя приближен-
ная диаграмма изменения скорости
(рис. 4.3), а значит, четыре различных
значения времени: /у1ммх. tpon} и
Г п> а также два различных статиче-
ских момента: 7'с1Под/и На Рис-
4,3 заштрихованы участки, соответ-
ствующие нуги, проходимому гру-
зом, когда включен двигатель. До-
пускаем. что остановка механизма
(исзаштрихо ванные треугольники)
осуществляется механическим тормо-
зом без участия двигателя.
К.п.д. механизма при работе с
грузом /-го веса необходимо опреде-
лять, используя найденное значение
к.п.д. т|м<;к при работе с номиналь-
ным грузом (см. §2.1) и график на
рис. 4.4 [2]. При этом делается допу-
щение. что при подъеме и опускании
Рис. 4.3
87
i руза к. и. д. механизма одинаков.
Штриховой линией со стрелками на
графике показан порядок нахождения
ПГ11ех/-
Время разгона при подъеме и опу-
скании можно определить
__ в - под 'мех j
р г ПОД / -т- _ -г
1 п. ср * ст .жм j
(4.11)
_ ** м<?х j
Р он./ “ у ’
I д’ 1
iLcp 1
lie содя г1од. юдн оп-соответственно уг-
ловая скорость двигателя при устано-
вившемся подъеме и опускании номи-
нального груза, рад/с; JMexj приве-
денный к валу двигателя момент
инерции при разгоне всех движущихся
частей механизма и груза /-го веса,
кг-м2.
Допуская, что угловая скорость
двигателя при работе в установив-
шимся режиме зависит лишь от на-
правления движения груза и не зави-
сит от массы груза, получим
ч... ; * ! (412)
^цв. оп 2(ВС С0Д11 , J
где содя - номинальная угловая ско-
рость двигателя. ра>д/с- сос-синхрон-
ная угловая скорость двигателя (угло-
вая скорость идеального холостого
хода), рад/с:
со. = 2л//р. (4.13)
где /= 50 Гц-частота промышлен-
ного трехфазного тока; р- число пар
полюсов двигателя; значение р легко
определить по условному обозначе-
нию типа двигателя; последняя цифра
в условном обозначении есть число
полюсов. Например, двигатель МТН
713-10 имее! 10 полюсов, т.е. р = 5.
^мех,- кг-м2, где ./^-мо-
мент инерции массы /-го груза, вклю-
чая крюковую подвеску, приведенный
к первому валу, ki м2:
Г _ ^IIUCJ / G
JiVJ ’ J”"
tfMcx f
(4.14)
* Данная формула получена проф. С. А. Ка-
заком ял я дни 1 а гс лей. eci ест веяна я характе-
ристика которых есть наклонная прямая.
Здесь mnoCTJ. = mrp7 + mtl; mrpj~ масса
/-го груза, кг.
Время установившегося движения
определяют по формулам
'у, под = /Лр/^’под; Von = /Лр/' оп- (4.15)
Здесь 7/ср-средняя высота подъема
груза.
Рекомендуется [32] принимать
следующие значения Нср для кранов:
монтажных-1,0 ...1,5 м; сборочных-
1.5 ...2,0 м; транспортирующих гото-
вую продукцию на складах-6,0 м.
Фактические скорости движения
груза при подъеме и опускании опре-
деляют по формулам
_ °>л».по;1 . __ М.а он >6 (Л 1 Z\
ьТюд 4 %п ' v ,LVJ
“мех
Значение коэффициента р в форму-
ле (4.9) принимают [2] равным 1, если
^р.подЪ < Vrion/^O,
где ф.рпдь^ремя разгона механизма
при подъеме номинального груза.
Если же гр<под(? л /у,под/60. то сле-
дует брать значения: Р = 0,65 ...0,78-
закрытые двигатели с ребрами на
корпусе при наличии внешнего обдува
(двигатели серий MTF, МТН, MTKF,
МТКН. 4А); р = 0,62 ... 0,68-защи-
щенные двигатели и открытые двига-
тели с вентилятором на валу (двига-
тели серии Д с независимой вентиля-
цией).
Параметры, необходимые для вы-
числения Тэ по формуле (4.9), удобнее
представить в виде таблицы (напри-
мер, табл. 12.2).
Условие (4.8), как показывают
расчеты, обычно выполняется. Если
окажется, что эквивалентный мо-
мент Т. значительно меньше номи-
нального момента двигателя Тдви
можно принят ь другой двигатель т ой
же серии, гой же синхронной част от ы
вращения и той же относительной
продолжительности включения, но
несколько меньшей мощности. При
этом необходимо убедиться, что но-
вый двигатель обеспечивает необхо-
димую интенсивность работы меха-
низма (проверить двигатель на время
разгона).
«8
§ 4.2. Механизм
передвижения тележки (крана)
Проверка двигателя на время разгона.
Наибольшее, время разгона наблю-
дается, когда кран нагружен, а уклон
пути и ветер препятствуют движению,
Используя формулы (4.1) ... (4.5), в
качестве тпост нужно принять: тпост =
= тт + тгр для механизма передви-
жения тележки; тпост = mKp + m для
механизма передвижения крана; вмес-
то радиуса барабана следует подста-
вить радиус колеса гк:
Т„. „ = ; (4.17)
к и п
“мех । мех
и/ст = и/тр + и; + и;, (4.18)
где 1Е, статические сопротивления:
-от трения, Иу-от уклона.
И^-от ветра.
Если привод механизма передви-
жения раздельный, то при определе-
нии /пП0СТ и необходимо учитывать
число приводов.
Время разгона не должно превы-
шать [8]: для кранов-8 ...10 с, а для
тележек -5 ... 6 с. По найденному вре-
мени разгона следует вычислить сред-
нее ускорение при разгоне и прове-
рить, не превышает ли оно рекомен-
дуемое (см. табл. 2.16).
Проверка времени торможения.
Проверка производится для случая,
когда кран нагружен, а ветер и уклон
способствуют движению. Время тор-
можения должно быть примерно рав-
но времени разгона: гт - /р;
(4.19)
т + vr
где ./МСХ1момент инерции всех дви-
жущихся масс механизма и поступа-
тельно движущихся объектов при
торможении, приведенный к первому
валу механизма, кг-м2; Тст т - момент
статических сопротивлений при тор-
можении, приведенный к первому ва-
лу механизма, Н-м.
Данные параметры вычисляют по
соотношениям
мех. т
J _L J
вр 1 ПОСТ, т*
__ 1 Е ЛмСИ .
ПОСТ.Т 2 ’
“мех
(4.20)
(4.21)
= И';р - И; - И'в; .(4.23)
W' = G + (4 24)
где (7пост-вес, Н. поступательно дви-
жущихся объектов (тележки или кра-
на плюс груза). Формула (4.24) отли-
чается от соответствующих формул
(2.26) и (2.27) отсутствием коэффи-
циента дополнительных сопротивле-
ний (трение реборд колес о головки
рельсов, трение элементов токосъем-
ного устройства).
Если время торможения полу-
чится значительно больше времени
разгона, необходимо увеличить рас-
четный тормозной момент путем ре-
гулировки замыкающей пружины
тормоза, если это позволяет характе-
ристика тормоза, или выбора тормо-
за большего типоразмера.
Проверка запаса сцепления колес с
рельсами. Проверка производится для
случая, когда кран не нагружен и
реборды колес или горизонтальные
направляющие ролики не задевают за
головки рельсов. Если привод меха-
низма раздельный, проверяется запас
сцепления наименее нагруженного ко-
леса (колес).
Условие проверки:
(4-25)
где ксц-коэффициент запаса сцепле-
ния колеса с рельсом; [kclJ - допускае-
мый коэффициент запаса сцепления;
[кси] = 1,2 при работе крана в поме-
щении; [ксц] =1,1 при работе на от-
крытом воздухе.
Значение кси может быть определе-
но по выражению
кси = -----ТЦ.— —, (4.26)
где Тсцо-момент силы сцепления
(трения скольжения) колеса с рель-
сом, когда кран не нагружен; Т1И/(_р-
динамический момент при разгоне,
возникающий в трансмиссионном налу
вследствие ударно-упругого нагруже-
ния, когда в трансмиссии выби-
рается зазор; о к, Т8 О.К, Ттр о к-со-
89
ответственно моменты сил: уклона,
ветра рабочего состояния и трения,
действующие относительно оси при-
водных колес,
жен:
когда кран не нагру-
/ = Ь г
сц. о * сц. а к1
где ГСЦгО-сила
колеса (колес)
не нагружен:
(4.27)
сцепления приводного
с рельсом, когда кран
Fca.a=fmP„„.„- (4.28)
Здесь /сц-коэффициент сцепления
колес с рельсами: при работе крана в
помещении jcu = 0,2; при работе на
открытом воздухе ,/сц - 0,12; Рпр>о-
нагрузка на приводные колеса (коле-
со) крана или тележки, когда кран
работает без груза, Н.
Для приводных колес тележки зна-
чение Рпр о определяют по результа-
там компонования тележки (см. § 3.2).
Для приводных колес крана Рпр о оп-
ределяют с помощью расчетных схем,
изображенных на рис. 2.9 и 2.10, с той
разницей, что сила 6'1р (вес номиналь-
ного груза механизма главного
подъема) должна отсутствовать. При
этом, если привод механизма пере-
движения крана раздельный, в качест-
ве Рпр о берется нагрузка на привод-
ное колесо (колеса) наименее нагру-
женной стороны крана.
С учетом динамики нагружения
трансмиссионного вала [9] значение
ТДИ11 может быть определено по
формуле
ции при разгоне вращающихся частей
механизма, приведенный к валу дви-
гателя, Нм:
мн.вр.р ‘'пр р.п’ 'Л14'*/
где - момент инерции вращаю-
щихся масс механизма, приведенный
к валу двигателя, кг-м2; JBp =
у = 1.1 ... 1,2; еро-угловое ускорение
вала двигателя при трогании с места
ненагруженного крана (тележки),
£р.о
п, ср * ст. р.о
(4.32)
vMCK,p. I)
где Тс.г -статический момент при
разгоне ненагруженного крана (те-
лежки), приведенный к валу двига-
теля; JMexpo-момент инерции при
разгоне всех движущихся масс, приве-
денный к валу двигатёля; значение
^мсх.р.о определяют аналогично зна-
чению JMCX в § 4.1. Для определения
Тсг 0 следует брать положение крана
или тележки без груза с уклоном
рельсов в сторону движения при дей-
ствии ветровой нагрузки рабочего
состояния также в сторону движения:
(4.33)
где Ттро, Туо, Тво- моменты сил тре-
ния, уклона и ветра, приведенные к
валу двигателя.
Если привод механизма передви-
жения крана раздельный, то
СТ. Р* о
ip. о У-о
дин. р дя '*м. р
дн м. р
(4.29)
где Тдв-среднепусковой момент дви-
гателя, уменьшенный на момент сил
инерции вращающихся частей меха-
низма и приведенный к оси колеса;
fc -коэффициент, учитывающий со-
отношение масс в механизме при раз-
гоне (см. ниже); с - коэффициент жест-
кости тихоходного участка трансмис-
сии; ф - угловой зазор в муфтах
трансмиссионного вала;
Тал==(Т^р- ТЙН.вр)имехг|мех, (4.30)
где Тп - среднепусковой момент дви-
гателя, Н-м; Тин<вр-момент сил инер-
“пр
(4.34)
где х - коэффициент учета неравно-
мерной загрузки сторон крана; z -
число приводов в механизме;
у _ о min
~ Р
* u max
(4.35)
где Гони», нагрузки на колеса
наименее нагруженной и наиболее на-
груженной сторон крана в порожнем
состоянии.
Значение Ро min определяют из
уравнения статических моментов по
расчетной схеме на рис. 2.9, 2.10.
(4.36)
огпах '“'кр 1 о min*
90
При определении JMCX.P>O в случае
раздельного привода в качестве мас-
сы поступательно движущегося объ-
екта следует брать часть массы крана:
^пост. О "% “ пр'
Тогда
=
ПОСТ» р. О 2
Пмех
(4.37)
(4.38)
тех. р, о
вр
пост. р. (V
м. р
шс ।. р. о
(4.39)
(4.40)
ICM.р.О
I
I
I
t
I
J
Расчеты показываю! , что коэффи-
циент жесткости тихоходного участка
трансмиссии с учетом податливости
зубьев, подшипников, шпоночных
соединений и муфт можно определить
по соотношению [34]: с 0.3 с , где
ст в - условный коэффициент жест-
кости трансмиссионного вала, рассчи-
танный в предположении, что вал
имеет один диаметр на всем расстоя-
нии от тихоходного зубчатого колеса
редуктора до ходового колеса, соеди-
нительных муфт нет и зубчатое и
ходовое колеса выполнены заодно с
валом. При симметричном располо-
жении ходовых колес относительно
зубчатого колеса тихоходной ступени
редуктора стр в = 2 cv4, где суч-коэф-
фициент жесткости одного участка
трансмиссионного вала между зубча-
тым и ходовым колесами:
уч ^"упр *^тр. в/ (уч’ (4.41)
где Супр-модуль упругости второго
рода; ’ для стали Gynp = 7,943 х
х 104 МПа; J -полярный момент
инерции поперечного сечения вала:
Лр.в = ^4р.в/32; /уч, <7тр в-соответстве
нно общая длина участка валопро-
вода, равная расстоянию от центра
тихоходного зубчатого колеса редук-
тора до центра ходового колеса, и
диаметр трансмиссионного вала на
участке, имеющем наибольшую дли-
ну. Значение (мм) можно опреде-
лить из расчета на кручение. Для
круглого сплошного вала
3____
J = 17 /'^^, (4.42)
где ТС1 m.tx - максимальный статичес-
кий момент' на валу, кН-м; [г] —
~ 0,03 ав - допускаемое напряжение
кручения, МПа; стн -предел прочности
материала. МПа.
В качестве материала можно при-
нимать сталь 45, сталь 40Х и др.
Значение d необходимо округлить до
ближайшего больше! о значения ио
ГОСТ 12080-75. С этим значением
необходимо согласовать лиаме гр рас-
точки выбранной муфты. Значение
i/ip в будет больше, чем с/, и может
быть принято как следующее большее
значение из стандартного ряда диа-
метров.
Максимальный (с учетом возмож-
ного 10%-го износа зубьев) допускае-
мый угловой зазор (рад) для зубча гой
муфты с промежуточным валом, ко-
торая рекомендуется для использова-
ния на участке кинематической цени
«редуктор-колесо» в механизмах пе-
редвижения тележек с тихоходным
трансмиссионным валом, может быть
определен по формуле
Г ж
где /л- модуль зубьев, мм; г-число
зубьев;- толщины зубьев втул-
ки и обоймы, мм. Если 5\ и не-
известны, то ф можно определить по
приближенной формуле ф 0,4л:.
Если условие (4.25) не выполня-
ется. можно предложить следующее:
1) ввести в схему управления
электродвигателем предпусковую
ступень, работая на которой двига-
тель выберет зазоры в трансмиссии;
2) уменьшить Тп ср путем расчета
пусковых сопротивлений в цепи рото-
ра двигателя;
3) увеличить Д.ц (предусмотреть в
проекте крана песочницы или устрой-
ства. подмагничивающие зону кон-
такта колес с рельсами);
4) изменить компоновку тележ-
ки, с тем чтобы увеличить нагрузки
на приводные колеса;
5) увеличить число приводных ко-
лес (при этом уменьшится мощность
отдельного двигателя и изменятся все
расчеты, связанные с ней).
91
§ 4.3. Механизм поворота
Проверка двигателя на время разгона.
Для кранов с грузоподъемностью, за-
висящей от вылета, время разгона
можно принимать 3 ... 5 с при отсут-
ствии ветровой нагрузки и 4 ... 10 с
при наличии ветровой нагрузки [8].
Для расчета можно использовать
формулу (4.1). Параметры, входящие
в нее, таковы:
j / —
мех.р яр млъчР м.п-41
. п. ч.;^мех Лмсх.р^*
При наличии ветровой нагрузки
момент статических сопротивлений
при разгоне, приведенный к валу дви-
гателя, равен
Гг.р = (Гр + ТвЖ^мех.Л
Обозначения и суть параметров,
входящих в данные соотношения, из-
ложены в гл. 2. Влияние уклона в
формуле не учитывается, так как
поворотные краны общего назначе-
ния используются, как правило, в за-
крытом помещении.
Если время разгона окажется су-
щественно больше (на 20% и более)
указанных выше значений, необходи-
мо выбрать другой, более мощный
двигатель при той же относительной
продолжительности включения и той
же или близкой частоте вращения.
Проверка времени торможения. Ус-
ловие проверки и формула для време-
ни торможения те же, что и в меха-
низме передвижения крана (тележки):
кран нагружен, и ветер поддерживает
движение. Уклоном можно прене-
бречь.
Момент инерции при торможении
движущихся масс равен
Гех.т ’Гр 5” '^м.П.ч!' 'Г.И.Ч1
_ и. ч Пмих. т
Если в механизме имеется червяч-
ная передача, значение г|мех т следует
брать по минимальному значению
к.п.д. червячного редуктора (см.
табл. 2.20).
Статический момент при тормо-
жении следует определять по выра-
жению
^СТ,Т ^Тр1
^тр/(^мех мех. т)'
Л мех. т/^мех'
При невыполнении условия про-
верки (если время торможения будет
значительно больше времени разго-
на) следует увеличить тормозной мо-
мент.
Глава 5
РАСЧЕТ И КОНСТРУИРОВАНИЕ НЕКОТОРЫХ
СБОРОЧНЫХ ЕДИНИЦ
§5.1. Установка барабана
В наиболее распространенной конст-
рукции установки барабана механиз-
ма подъема кранов общего назначен
ния соединение вала барабана с тихо-
ходным валом редуктора осуществля-
ется с помощью специальной зубча-
той муфты (см. рис. 3.4). При этом
конец вала редуктора выполняют в
виде зубчатой шестерни, которая вхо-
дит в зацепление с венцом, укреплен-
ным на барабане. Крутящий момент
от вала редуктора передается через
зубчатое зацепление на венец-
ступицу и далее через болты на обе-
чайку барабана.
Толщину цилиндрической стенки
барабана (обечайки) определяют в
следующем порядке (РТМ 24.090.21-
76).
1. Вычисляют приближенное зна-
чение толщины стенки (м):
5 = 0,95^-, (5.1)
где Smax-наибольшее статическое на-
тяжение каната; /-расстояние между
92
соседними витками каната, м (рис.
5.1); [ сТ, -допускаемое напряжение.
МПа (табл. 5.1).
Заметим, что исходя из условий
технологии изготовления литых бара-
банов толщина стенки чугунного
барабана
5П > 0,02ВбО + (0,006 ... 0.010),
а стального
0,01 D6n + 0,003,
где £)б0 - диаметр барабана по дну
канавок, м.
2. Определяют значение коэффи-
циента V- учитывающего влияние де-
формаций стенки барабана и каната:
где Ек-модуль упругости каната. Для
шестипрядных канатов с органиче-
ским сердечником £к = 88 260 МПа, с
металлическим сердечником Ек =
= 107 800 МПа; Г\ -площадь сечения
всех проволок каната; Е-- модуль уп-
ругости стенки барабана. Для свар-
ных стальных барабанов Еб =
= 205 900 МПа; для литых стальных
Еб = 186 300 МПа; для чугунных
Еб = 98 000 МПа: 6 приближенно
принимается равной 5п.
3. Окончательно толщину цилин-
дрической стенки барабана определя-
ют зависимостью
5 = 1,07^^-'-. (5.3)
При отношении длины барабана к
Рис. 5J
Материал
Таблица 5,1
Предел те-
кучести
сгТ1 МПа
Предел
прочности
на изгиб
п,.., МПа
Группа режимов работы механизма по СТ СЭВ 2077 80
12 3; и 5 Ь
Сталь:
ВСтЗсп 245.0 196,1 166.7 147,1 127,5 Ю7.9
20 245,2 — 205,9 176,5 1 56,9 137.3 117 7
09Г2С 304,0 255,0 220.6 191,2 161,8 137.3
15ХСНД 343,2 — 274,6 235,4 205.9 171,6 147,1
35Л 274,6 -- 225,6 205,9 166,7 137,3 117,7
55Л 343,2 255,0 225,6 196,1 161,8 137,3
Чугун: СЧ15 — 313,8 107,9 98,1 88,3 — • -
СЧ18 — 353,0 127,5 112,8 98,1 88,3
СЧ24 — 431,5 166,7 147,1 127,5 112,8 98,1
93
ею диаметру > 2 допускаемые
Аю
напряжения [п]сж в тгой формуле
следует уменьшить на С% при навив-
ке на барабан двух концов каната и на
0,5С% при навивке одного конца,
L <
причем для —- -— = 0,1: 0,2; 0.3
^60 ^60
можно принять (допуская линейную
интерполяцию) С — 5; 10; 15% соот-
ветственно, где «4-диаметр каната.
Устойчивост ь цилиндрической
стенки барабана проверяют по фор-
муле
(5.4)
где п - запас устойчивости цилиндри-
ческой степени. Допускаемое его зна-
чение рекомендуется принимать
[н] 1,7 для стальных и [п] = 2,0 для
чугунных барабанов; ан - номиналь-
ные напряжения в цилиндрической
стенке:
н
(5.5)
ак - критическое напряжение:
й ! 6
но не более ак = 0.8п, для стальных
барабанов и = 0,6ст9И для чугун-
ных. Значения пределов текучести от
и пределов прочности на изгиб ствп
приведены в табл. 5.1; Ай0-радиус
барабана; /-расстояние между торце-
выми стенками, или кольцом жест-
кости и торцевой стенкой, или между
кольцами жесткости (см. рис. 5.1).
Если устойчивость цилиндриче-
ской стенки барабана недостаточ-
ная -не выполняется условие форму-
лы (5.4), то или увеличивают толщину
стенки 6, или вводят кольца жест-
кости.
Проверка устойчивости цилиндри-
ческой стенки барабана не произво-
дится. если значения Ь/Дб0 при раз-
ных значениях D60/5 и номинальных
напряжениях стн, вычисленных по фор-
муле (5.5). не превышают значений,
указанных в табл. 5.2.
Толщину кольца жесткости опре-
деляют до формуле
/-,
k \ к
причем, если отношение 5//? < 1/25,
кольцо жесткости проверяют на ус-
тойчивость по формуле
где н0-запас устойчивости кольца
жесткости. Рекомендуется п0 > 3; к-
коэффициент, определяемый в зависи-
мости от размеров кольца-r/R. При
r/R - 0,70;-0,75; 0,80; 0,85 к - 1,9; 2,3;
3,0; 4,1, соответственно; у-параметр,
зависящий от принятых размеров
барабана. Его значение определяют
по формуле
1
Таблица 5,2
Значения
МПа 25 30 35 40 45 50 55 60
Ста-гы/ые барабаны
147,! 6.5 5,2 4,2 3,5 3,0 2,7 2,4
196.1 5.2 3,9 3,1 2,6 2.2 2,0 1,8
245,2 4,2 3,1 2,5 2,1 1,8 1,6 1,4
Чугунные барабаны
98.1 5,2 4,6 3,7 3,0 2,5 2,1
122,6 4,1 3,7 2,9 2,4 2.0 1,7
147,1 3.4 3.1 2,5 2,0 1.7 1,4 -
94
размеры R и г-по рис. 5.1.
При длине барабана L> 3D60
цилиндрическую стенку следует про-
верять на совместное действие изгиба
и кручения. Для стальных барабанов
= ,о у
С И,- I- J
где Ми-максимальный изгибающий
момент; Тк~крутящий момент; а =
= 0,75 - коэффициент, учитывающий
различие опасных напряжений изгиба
и кручения; экваториальный мо-
мент сопротивления сечения бара-
бана.
Максимальный изгибающий мо-
мент при сдвоенном полиспасте (крю-
ковая подвеска находится в предель-
ном верхнем положении)
и — с L~ h'.
* и ^inax 1
где L-расчетная длина барабана, /1;|
длина средней не нарезан ной части ба-
рабана. Крутящий момент Тк =
= Экваториальный момент
сопротивления
32 Д1()
К конструкции крепления‘каната
на барабане предъявляют требования
большой надежности, доступности
для осмотра, удобства смены каната.
Нормами ГГТН обусловлено крепле-
ние каната на барабане клиновыми
зажимами или прижимными план-
ками.
Наибольшее применение находит
крепление каната планками, прижи-
мающими канат к барабану (рис. 5.2).
При этом канат из крайней канав-
ки барабана переводят сразу в тре-
тью, для чего частично вырубают
выступы нарезки, которые разделяют
канавки. Среднюю же канавку ис-
пользуют для установки крепежных
болтов или шпилек. Согласно прави-
лам ГГТН, число устанавливаемых
одноболтовых планок должно быть
•не менее двух, которые устанавлива-
ют с шагом в 60 . Суммарное усилие
растяжения бодтов, прижимающих
канат к барабану [8].
(5.6)
где /’ = 0.10... 0.12 - коэффициент тре-
ния между канатом и барабаном; у
угол наклона боковой грили трапе-
циевидного выреза, в планке к верти-
кали; «угол обхвата барабана не-
прикосновенными витками; е - осно-
вание натуральных логарифмов.
Необходимое число болтов
1.3 кР p/\ik
-<• :<7 !..(<. i/''
[П|„ 7
(5.7)
где /< 1,5- коэффициент запаса на-
дежности крепления капа га к бара-
бану; Л = —- - приведенный коэфф и-
siny
пиент грения между канач ом и по-
верхностью планки; / расстояние ог
дна канавки на барабане до верхней
плоскости прижимной планки.
Допускаемые пап ряжения растя-
жения в бол гс определяю! при запасе
прочности, равном 2.5 огноечнельпо
п ре де j [ а те к уч е с г и при р а в н о м е р н о м
распределении шн рузок между всеми
бол гимн:
(5.8)
(г*
Рис. 5 2
Таким образом, задаваясь диамет-
ром болта, получают необходимое их
количество. Обычно при диаметре ка-
ната до 12,5 мм принимают болты
(шпильки) М12. до 15,5 мм-болты
М16, до 17,5 мм-болты М20.
Ось барабана испытывает напря-
жение изгиба от действия усилий двух
ветвей каната при сдвоенном поли-
спасте, а также от собственного веса
барабана (рис. 5.3, а, б).
Нагрузки на ступицы барабана
(при пренебрежении его весом):
В этих формулах значения длины
нарезанной части /и. длины гладкой
части барабана /гл принимают по
предварительному расчету размеров
барабана. Расстояние от ступиц ба-
рабана до опор оси предваритель-
но можно принять /, = 120 мм, /2 =
= 200 мм, длину оси барабана / =
= L + 150... 200 мм, длину ступицы
/с = (1,0 ... 1,5)<.
Расчет оси барабана сводят к оп-
ределению диаметров цапф г/ц и сту-
пицы <7С из условия работы оси на
изгиб в симметричном цикле:
ст = [o-.J, (5.9)
где Ми-изгибающий момент в рас-
четном сечении; W- момент сопро-
тивления расчетного сечения при из-
гибе; | <т J - допускаемое напряжение
при симметричном цикле.
Допускаемое напряжение при сим-
метричном цикле можно определить
по упрощенной формуле
(5.10)
где к() - коэффициент, учитывающий
конструкцию детали (для валов, осей
96
4
и цапф к0 = 2,0... 2,8); ст ^ предел
выносливости; [и] -допускаемый коэф-
фициент запаса прочности (для групп
режимов работы IM, 2М, ЗМ-1,4;
для 4М-1,6 и для 5М-1.7).
После определения реакций опор
оси 7?! и R2 можно определить изги-
бающие моменты в любом ее сечении
(рис. 5.3,в). Наибольший изгибающий
момент под правой ступицей М2 =
= Л2/2, а момент сопротивления это-
го сечения оси И[ = 0,1^. Подстав-
ляя эти значения в формулу (5.9) и
используя зависимость (5.10), находят
предварительно диаметр оси под сту-
пицей:
3 _______
J /^2^2К0 [Д
витых канатов; = 0,75 me- расчет-
ное число болтов; -число установ-
ленных болтов (обычно 6... 8); [т] -
допускаемое напряжение среза:
[т] 0,6 [ст ] * 0,6-^, (5.12)
«1*2
где стт-предел текучести материала
болтов; кг-коэффициент безопаснос-
ти (для механизмов подъема кранов,
работающих с крюком, к{ = 1,3); к2
коэффициент нагрузки (для групп ре-
жимов работы IM, 2М. ЗМ к2 = 1,0;
для групп 4М к-, = 1.1 и для групп 5М
к2=1.2).
§ 5.2. Ходовые колеса
и боковые ролики
0,1
Установка ходовых колес. Для обес-
Аналогично определяют и диа-
метры цапф. Окончательно диаметр
уточняют после выбора подшипников
и проведения проверочных расчетов.
Соединение обечайки барабана с
венцом-ступицей осуществляется бол-
тами (ГОСТ 7817 -80), которые испы-
тывают рабочие напряжения среза, а
также напряжения растяжения и кру-
чения, возникающие при сборке узла.
Биение посадочной поверхности флан-
ца по отношению к геометрической
оси барабана допускается не более
0,1 мм на каждые 500 мм диаметра
барабана. Размеры венца-ступицы ба-
рабана определяются размерами зуб-
чатого венца тихоходного вала выб-
ранного редуктора. Предварительно
диаметр окружности установки бол-
тов может быть принят в пределах
D = (1,3... 1,4) D,, где ^-наруж-
ный диаметр зубчатого венца вала
редуктора.
Диаметр болта определяют по
формуле
(5.
V пт6 [т]
здесь Рокр-усилие, действующее
окружности установки болтов;
на
р _ ,
Г°*р П
^окр
диаметр барабана по центру на-
печения правильности монтажа и
удобства замены ходовые колеса
установливают на валах (осях), кото-
рые монтируют на сферических под-
шипниках в буксах. Наиболее широко
применяют угловые буксы, присоеди-
няемые к раме тележки, концевой
балке моста или балансиру с по-
мощью болтов. Такая конструкция
более технологична по сравнению с
разъемными буксами, которые ввари-
вают в металлоконструкцию моста
или тележки, так как ходовое колесо в
сборе с буксами представляет собой
технологически законченный узел, из-
готовляемый независимо от металло-
конструкции или балансира. От сме-
щений угловая букса удерживается
приваренными к металлоконструкции
вертикальными и горизонтальными
платиками, на которые устанавли-
//9
—- по боко-
А9
вается букса с посадкой
вым граням имеющихся в ней пазов
(рис. 5.4). Такая фиксация установ-
ки обеспечивает взаимозаменяемость
букс и сокращает трудоемкость при
замене колес за счет исключения вре-
мени на выверку их положения. В
соответствии с нормами проектиро-
вания (РТМ 24.090.54-79) ходовые
колеса мостовых и козловых кранов
групп режима работы 4... 6 должны
устанавливаться в угловых буксах на
сферических подшипниках.
4 Зак. 198?,
97
г
Таблица 5.3
Рис. 5.4
Расчет ходовых колес. Предвари-
тельно выбранные ходовые колеса те-
лежек и кранов проверяют по напря-
жениям в контакте обода и рельса
(ОСТ 24.090.44-82) «Колеса крано-
вые. Выбор и расчет»).
Напряжения а (МПа) в контакте
обода колеса и рельса с выпуклой
головкой определяют по формуле
3__
а - 7500 кк. (5.13)
1 \'Д
где !) диаметр колеса, см; к коэф-
фициент, зависящий от отношения ра-
диуса закругления головки рельса г к
диаметру колеса (табл, 5.3); /’-мак-
симальная статическая нагрузка на
колесо, кН; А д == 1 + «(’-коэффициент
динамичности пары «колесо-рельс»;
г - номинальная скорость передвиже-
ния, м/с; и коэффициент, зависящий
от жесткое т и кранового пути, с/м
(табл. 5.4); к t - коэффициен т, учиты-
вающий влияние касательной нагруз-
ки на напряжения в контакте (табл.
5.5).
Напряжения ст (МПа) в контакте
обода колеса с плоским рельсом
определяют по формуле
тде В = — 2г3 -рабочая ширина
плоского рельса, см; /?п-ширина
редка, см; Аи - коэффициент неравно-
мерности распределения нагрузки по
r/D к r/D к
0,3 0,176 1,0 0,119
0,4 0,157 1,1 0,117
0,5 0,143 1,2 0,113
0,6 0,137 1,3 0,111
0,7 0,133 1Д 0,106
0,8 0,127 1,5 0,107
0,9 0,123 1,6 0,105
Таблица 5.4
Тип кранового пути
а, с/м
Рельсы на:
шпалах на балласте 0,10
металлических балках 0,15
железобетонных балках 0,20
массивных фундаментах 0,25
Таблица 5.5
Условие работы кранов Kj
В закрытых помещениях:
при и < 2 м/с 1,05
при v > 2...3,2 м/с 1,07
Fla открытых площадках 1,10
ширине колеса, принимают ка = 2,0;
при опирании кранов на балансирные
тележки допускается кп — 1,5; г3- ра-
диус скругления кромок рельса,' см.
Контактные напряжения о не
должны превышать допускаемые на-
пряжения [а^] (МПа) при приведен-
ном за срок службы числе оборотов
колеса .V:
4 ___
М - [а0] (514)
где [ст0]-допускаемые напряжения
при /V 104 (табл. 5.6).
Приведенное и полное число обо-
ротов колеса за срок службы опреде-
ляют соответственно по формулам
0.V 1
I (5.15)
/Vc = 36-104^Tu.J
В этих зависимостях vc ~ 0г - усред-
ненная скорость передвижения коле-
са. м/с; (.’-номинальная скорость пе-
1
Таблица 5.6
Вид заготовки Марка материала Вид термообработки. гвердоить по [пД, МПа
Бринеллю
Поковка Сталь 45 (ГОСТ 1050 74) Нормализация. НВ 200 610
Сталь 50 (ГОСТ 1050 -74) Закалка, отпуск. НВ 240 700
Сталь 75 и 65Г (ГОСТ 14959 79) Закалка, отпуск, НВ 300 800
То же, НВ 330 860
» ИВ 350 890
Прокат Сталь 75 и 65Г (ГОСТ 14959 79) Сталь марки 1 и 2 (ГОСТ 10791 81) Закалка, отпуск, НВ 350 Закалка, отпуск, НВ 320 920 860
Отливка Сталь 55Л (ГОСТ 977 75) Отжиг, НВ 190 560
Сталь 35ГЛ (ГОСТ 977 75) Отжиг, НВ 210 600
редвижения, м/с; р-коэффициент, за-
висящий от отношения времени не-
установившегося движения /н (сум-
марное время разгона и торможения)
к полному времени передвижения г.
tjt 0,2 0.4 0,6 0.8 I
р............... 0.9 0.8 0.7 0,6 0.5
Тмаш-машинное время работы колеса
в часах за срок службы, ориентиро-
вочные значения приведены в табл.
5.7; б-коэффициент приведенного
числа оборотов колеса.
Т а б л и п а 5.7
Группа режима ра
боги по СТ СЭВ
2077 80
J Ч
л МйШ ’ *
Ориентировочный
срок службы, лез
1...2 3...4
..ft
1600 3200 12500
12 8 5...4
Соответствие действительного сро-
ка службы колеса расчетному Тмяш
обеспечивается при норме точности
установки колеса (угла перекоса его в
горизонтальной плоскости) а С 0,0005
и состоянии подкрановых путей, от-
вечающем требованиям Правил ГГТН.
При этих условиях срок службы коле-
са по ребордам Тр будет не меньше
заданного срока службы по
ободу.
Значение 0 определяют зависи-
мостью
О e + ^(М' + ...+^£-у.
napJ n\pJ nap J
(5.16)
где W)( N2..... N„- число оборотов
колеса под нагрузкой Pt. Р2..... Р„
соответственно.
При отсутствии исходных данных
по загрузке колеса значения 0 можно
принять в зависимости от отношения
минимальной нагрузки на колесо
к максимальной нагрузке Р:
/ААР 0.2 0.3 0.4 0,5 (1.6 ОД 0.8
0 ’ . . 0,16 0,19 0.24 0.30 0.58 0.49 0.63
Значение Pmin определяют расчетом
для случая, когда тележка без i руза
па х о ди тс я у противоположи о й опоры
крапа.
Вековые направлчимпие ролики.
Безребордные ходовые колеса с боко-
выми направляющими ноликами при-
меняют на мостовых кранах [руин
режима работы 4М, 5М. 6М. Для
предварительного определения раз-
меров установки боковых роликов
(рис. 5.5) мож!ю воспользоваться со-
отношениями I) — (0,4.. .0,5) I). <7 ~
(0.25...0.35) £>. 6 - 15...70 мм.
- h т 26 /)г.
Поверхность катания обода боко-
вого ролика должна быть сфериче-
ской или 'горообразной. В качестве
материала ролика применяю: стать
марки 75 или 65Г.
Для регулирования зазора между
роликом и головкой рельса рекомен-
дуется устанавливать боковой ролик
на оси с эксцентриситетом (рис. 5.6).
При этом должно быть предусмотре-
но надежное стопорение оси ролика в
установленном положении.
Проверку прочности бокового ро-
лика производят на напряжения смя-
тия поверхности катания*.
При точечном контакте ролика с
рельсом напряжения смятия (МПа)
* Здесь приведена .методика расчета узла
боковых роликов для мостовых кранов, раз-
работанная канд. техн, наук В, Л. Голошсйки-
ным (НИИтяжмаш. ПО «Уралмаш»),
асм = 7856/с (5.17)
' \|.1 Н<1
где /ссм-коэффициент, зависящий от
отношения наименьшего радиуса ро-
лика к наибольшему (рис. 5,7):
Ярол ~ боковая нагрузка на ролик,
принимают равной максимальной бо-
ковой нагрузке при установившемся
движении, кН; Hpwi Нтм у Н' =
= 0,85 Gop; Go = GM + GT + G; GM-
вес моста крана, кН; GT- вес тележки.
кН; G--номинальный вес груза, кН;
ц- коэффициент сцепления ходовых
колес с рельсами; принимают незави-
1.0 0,9 0,8 0,7 0,6 0,5 0,4 0.3 0,2 0.15 0,10 0,05
ксм 0,39 0,40 0,42 0,44 0,47 0,49 0.57 0,60 0.72 0,80 0,97 1.28
Рис. 5.7
Р и с, 5.6
100
симо от места работы крана (в закры-
том помещении или на открытом воз-
духе) равным 0.2; гнаиб - наибольший
радиус соприкасающихся поверхно-
стей, см; [ст] см-допускаемые напря-
жения [6] местного смятия (табл. 5.8).
Таблица 5.8
Материал Твердость Напряжения
ролика - сталь поверхности МПа, при контакте
катания НВ-----------------------------------
линейном точечном
45 735 1764
75
65Г 833 2156
40ХН 300... 400
50ХН Более Более
833 2156
55Л . 735 1666
ззхгс-л 784 1960
Расчет оси на статическую проч-
ность производят по максимальному
напряжению изгиба:
а = [а],
max W L J
где Митах-максимальный изгибаю-
щий момент от действия максималь-
ной (аварийной) боковой нагрузки на
ролик Нтах; И7-момент сопротивле-
ния сечения оси изгибу; [о] - допускае-
мое напряжение при расчете на ста-
тическую прочность, которое опреде-
ляют отношением предела текучести
материала оси ролика к общему запа-
су прочности. Значения последнего
для групп режима работы IM, 2М,
ЗМ п — 1.21; для 4М п = 1,32 и для
5М п = 1,43.
Максимальную (аварийную) боко-
вую нагрузку Нтя* 4-колесного крана
определяют для случаев:
краны с раздельным приводом -
аварийное отключение на ходу одно-
го из двигателей хода моста и тор-
можение на этой стороне;
краны с центральным приводом -
аварийная поломка одной из транс-
миссий с одновременным заклинива-
нием колеса на этой стороне.
В этих случаях максимальная бо-
ковая нагрузка
Ят« = vm ( 1 + к'
где т - масса крана, включающая
массы моста тм, тележки т7 и груза
/иг.
Входящие в эту зависимость попе-
речное ускорение крана г, угол сме-
щения фаз составляющих максималь-
ной нагрузки у и поправочный коэф-
фициент к определяют по формулам
____1____
1 +e-°'56j
у -= arctg
В этих зависимостях В-база крана,
L-пролет крана, Ах-боковой зазор
между роликом и рельсом, е-основа-
ние натуральных логарифмов.
Момент сопротивления развороту
крана
где Gn - + G.
Сумму сил поперечного скольже-
ния крана £ЯС и момент инерции
крана при развороте J определяют по
формулам
Приведенный коэффициент жесткости
с2 (Н/м), учитывающий поперечную
жесткость моста см и жесткость зда-
ния с1д, определяют зависимостью
где
70 550 Go
Л-высота колонн до головки рельса
подкранового пути, м.
Особенностью работы подшипни-
кового узла боковых направляющих
роликов является то, что помимо ста-
тической нагрузки, действующей во
время установившегося движения кра-
на Z/y, подшипники могут быть нагру-
101
жены максимальной (аварийной) наг-
рузкой Нтих при скорости их враще-
ния, равной нулю. Поэтому выбор
типоразмера подшипника необходи-
мо производить по статической гру-
зоподъемности исходя из максималь-
ной нагрузки Нтах. Поскольку нагруз-
ка на ролик приложена, как правило,
несимметрично по отношению к под-
шипнику. то усилие, воспринимаемое
одним подшипником, следует увели-
чить до 0,75 Лп.ах.
§ 5.3. Предохранительные устройства
Правилами ГГТН, а также стандар-
том СЭВ 725-77 на грузоподъемных
кранах с электрическим приводом
предусмотрена установка концевых
выключателей для автоматической
остановки:
крана (тележки), если его (ее) ско-
рость может превышать 0,533 м/с (по
стандарту СЭВ-0,5 м/с);
механизма подъема грузозахват-
ного устройства или стрелы перед
подходом к упору;
при опасном сближении кранов;
если с поста управления нельзя
надежно определить расстояние меж-
ду буферами и упорами.
Козловые краны и перегрузочные
мосты с бестрансмиссионным приво-
дом и пролетом более 40 м должны
снабжаться автоматическими ограни-
чителями перекоса.
Для автоматической остановки
механизмов применяют выключатели
рычажного и шпиндельного типа. Ры-
чажные выключатели обеспечивают
чаще всего одностороннее ограниче-
ние. Они срабатывают при наезде ли-
нейки или специального упора движу-
щегося механизма на рычаг непод-
вижного выключателя. Шпиндельные
выключатели применяют для случаев
как одностороннего, так и двусторон-
него ограничения. Привод их осу-
ществляют от вращающихся валов
механизмов.
В зависимости от мощности элек-
тродвигателей выбирают способы их
выключения - непосредственным вык-
лючением силовой цепи или посредст-
вом обеспечивания цепи управления.
Первый способ применяют в мало-
мощных электродвигателях или когда
конечный выключатель срабатывает
сравнительно редко. В этих случаях
для выключения асинхронных двига-
талей применяют двухполюсные вык-
лючатели, для двигателей постоянно-
го тока-однополюсные.
При втором способе защиты ме-
ханизма выключатель устанавливают
в цепь питания катушки главного или
реверсивного контактора. Концевые
выключатели устанавливают в элект-
рической цепи так, чтобы при их раз-
Таблица 5.9
1 ип Назначение
Привод
КУ 701 Механизмы гори- зонтального пере- мещения Рычажный с самовозвратом ±4 0,08... 2,5 600 10 2 2,7
КУ 703 Механизм подъе- ма Самовозврат под действием груза 0,016...1,33 600 10 2 10,3
КУ 704 Механизмы гори- зонтального пере- мещения Фиксиро- ванные поло- жения ±5 0,05... 1,66 600 10 2 2,7
КУ ВУ 706 150 То же Механизмы подъе- ма То же Шпиндельный ±4 50 0,16...5,0 Без ограниче- ния 600 300 10 10 2 1 3,3 6,0
ВУ 250 То же То же — 50 То же 300 10 2 9,0
в к 200 Блокировка две- рей и люков Рычажный с самовозвратом ±2 — -»- 300 10 1 0,6
102
мыкании сохранилась цепь для об-
ратного движения механизма.
Техническая характеристика кон-
цевых выключателей [12] приведена в
табл. 5.9,
Концевой выключатель механиз-
ма передвижения устанавливают та-
ким образом, чтобы в момент выклю-
чения тока расстояние от буфера до
упоров составляло не менее половины
пути торможения.
У козловых, башенных, порталь-
ных кранов и перегрузочных мостов
это расстояние должно быть не менее
полного пути торможения. Тормоз-
ной путь рассчитывают для кранов с
гибкой подвеской груза в порожнем
состоянии, а для кранов с жесткой
подвеской-с номинальным грузом.
Тормозной путь
ST = t>„R+d. (5.18)
где гн~ номинальная скорость крана
(тележки), м/с; /т- время торможе-
ния, с; г,-время отключения (затор-
маживания) тормоза (табл. 5.10), с.
Для тележки, работающей в поме-
щении,
где у - коэффициент, учитывающий
влияние маховых масс второго и по-
следующих валов. Принимают у =
— 1,1... 1,2; -момент инерции
масс, расположенных на первом валу
механизма; лдв-номинальная частота
вращения электродвигателя, об/мин;
тт - масса тележки, кг; D - диаметр
ходового колеса, м; и -передаточное
число механизма; -к.п.д меха-
низма; Tt -тормозной момент тор-
моза, Н • м.
Приведенный к валу тормоза мо-
мент сопротивления передвижению
тележки при торможении определяю г
по формуле
и/ D
Т^0 = ^ (5.20)
где W 0-сила сопротивления пере-
движению при работе без груза и
коэффициенте трения реборд Аг = I.
При небольших выбегах механиз-
ма применяют выключатель КУ 701.
который снабжен механизмом само-
возврата рычага. Поэтому линейка
должна иметь достаточную длину,
чтобы удерживать рычаг в выключен-
ном состоянии на всем пути останов-
ки механизма.
Положение выключателя механиз-
ма передвижения тележки мостово-
го крана определяю! зависимостью
(рис. 5.8)
/в = / + 0,5/6 - 0,5/., + А. (5.21)
где /в- расстояние выключателя от
упора; /-регламентированный выбег
тележки (7 = 0.5 5,); /5-длина дву-
стороннего буфера; /., - длина линей-
ки. которая должна быль не менее
половины тормозного пути тележки;
А-путь тележки за время поворота
рычага выключателя.
В большинстве случаев ввиду ма-
лости (для КУ 701 -60 мм) им можно
пренебречь.
Положение выключателя по высо-
те определяется размером /?. который
приводится в характеристике выклю-
чателя [для КУ 701 /1 = (134 ± 4) мм].
В тех случаях, когда механизм
имеет большой тормозной путь и.
Та б л и па 5.10
Постоянный ток Переменный ток
Короткоходовой привод с прямоход- ным электромагни- том ДЛИННОХОДОВОЙ Короткоходовой ДлШНЮХОДОВЫЙ привод привод с соленоид- привод ны м электро маг ни- - — том с однофазным по- с трехфазным пря- с элекгро!идравли- воротным электро- моходным электро- чееким юлка гелем магнитом магнитом
0,2... 0,5 0,5... 1,0 до 0,02 0.06...0,2 0 3...1,2
103
Рис. 5.8
следовательно, отключающая линей-
ка получается больших размеров,
применяют выключатель КУ 502. ры-
чаг которого имеет фиксатор поло-
жения и выполнен двуплечим. При
наезде выключающим упором, кото-
рый невелик по сравнению с линейкой,
рычаг поворачивается и остается в
таком фиксированном положении.
При ходе механизма в обратном на-
правлении упор поворачивает рычаг
выключателя в исходное положение.
Выключатели КУ 704 применяют
при двухступенчатом ограничении,
которое производится двумя последо-
вательно выключающими пальцами.
Эти выключатели ставят на механиз-
мах передвижения с последователь-
ной остановкой двигателей.
Выключатель КУ 706 предназна-
чен для ограничения движения быстро-
ходных кранов, имеет два рычага с
разных сторон корпуса, на которые
воздействуют короткие линейки-од-
на размыкает контакты выключателя,
а другая замыкает их при обратном
движении крана.
Концевой выключатель механиз-
ма подъема устанавливают так, что-
бы после остановки грузозахватного
устройства при подъеме без груза за-
зор между грузозахватным устрой-
ством и упором у электроталей со-
ставлял не менее 50 мм, а у всех
других грузоподъемных машин-не
менее 200 мм. Для этой цели приме-
няют выключатели КУ 703, имеющие
Рис. 5.9
двуплечий рычаг. Срабатывают они
после подъема крюковой подвеской
груза, висящего на,канатике, который
закреплен на одном из плеч рычага
выключателя (рис. 5.9).
§ 5.4. Буферные устройства
В соответствии с требованием Пра-
вил ГТТН все грузоподъемные маши-
ны с машинным приводом, движу-
щиеся по рельсовому пути, и их те-
лежки для смягчения возможного
удара об упоры или друг о друга
должны быть снабжены соответст-
вующими буферными устройствами.
С этой целью применяют упоры,
104
устанавливаемые на концах пути те-
лежек и мостов, а сами тележки и
мосты снабжают буферами, которые
крепят на мостах к концевым балкам
или балансирам, а на тележках-к ра-
ме с двух боковых сторон или на
мосту. В зависимости от массы те-
лежки, крана и груза и скорости дви-
жения тележки или крана применяют
деревянные, резиновые, пружинные
или гидравлические буферы.
Деревянные буферы, изготовляе-
мые из дубовых, буковых или клено-
вых брусков, используют только на
кранах с ручным приводом. Резино-
вые буферы весьма просты по конст-
рукции, компактны, удобны в эксплуа-
тации. Они имеют малую отдачу, так
как 30 ... 40% кинетической знерт ии
движущихся масс поглощается за счет
внутреннего трения резины. Однако в
силу ограниченной энергоемкости их
применяют при скоростях наезда
г < 1 м/с.
Широкое применение на кранах
получили пружинные буферы различ-
ных конструкций. Это обусловлено их
относительно простой конструкцией,
Рис. 5.10
простотой обслуживания, надежностью
работы при низких температурах.
При работе пружинных буферов поч-
ти вся кинетическая энергия движу-
щихся масс переходит в потенциаль-
ную энергию упругости пружины, ко-
торая возвращается в виде резкой
от дачи. При сравнительно небольшой
массе тележки (до 10 т) применяют
буферы двустороннего действия (рис.
5.10,tz). Укрепленные на тележке, они
работают в обе стороны. При массе
тележки, обладающей большой кине-
тической энергией, применяют одно-
сторонние буферы (рис. 5.10.6), уста-
навливаемые на балках моста.
Пружинные буферы имеют срав-
нительно небольшую энергоемкость
и большую длину? 1 кг пружинной
стали способен поглотить не более
200 Н-м кинетической энергии. При-
менение пружинных буферов целесо-
образно, если краны (тележки) имеют
скорости в момент наезда на упоры
не более 1,17 м/с. Для безопасной
остановки крана с большими скоро-
стями движения необходимо снабжать
надежными тормозами и концевыми
выключателями, снижающими ско-
рость к моменту наезда на упор до
гб = 1,17 м/с.
Гидравлические буферы (рис. 5.11)
работают практически без отдачи.
Они компактны, обладают большой
энергоемкостью. Их применение, од-
нако, ограничено из-за сложности
конструкции и необходимости тща-
тельного обслуживания при эксплуа-
тации. Применение гидравлических
буферных устройств доста точно эко-
Рис. 5.11
105
иомично, если скорость наезда кранов
на упоры нс превышает 2,66 м/с,
При расчете буферных устройств
допускаемые замедления кранов (те-
лежек) принимаю т б/т 3 ,.. 4 м/с2
для машин с гибким подвесом груза и
л, Э 8 ... 10 м/с2 для машин с жестким
под,весом груза.
Энергоемкость буферов опреде-
ляю! из условия поглощения ими ки-
нетической энергии крана (тележки),
наезжающего со скоростью гл, при-
чем при гибкой подвеске расчет ведет-
ся без учила массы груза, при жест-
кой с грузом [6]. Скорость наезда гй
на буфера определяют с учетом сра-
батывания конечного выключателя.
Нетрудно показа ть, что при уста-
новке упоров iia середине нул и тормо-
жения [ 16] скорое г ь крана (тележки) в
момент наезда составил 0,707 ол ско-
росл и, которую имел кран н момент
отключения двигателя. Таким обра-
зом, для крана с гибкой подвеской
груза
"’дЭ/ = (Р/гг + И/М’ -у Эл,
где масса крана (лележки); Ws-
тормозная сила тормоза, приведен-
ная к ободу ходовых колес; 5--осадка
штока буфера; ,4 энергоемкость бу-
фера; к число буферов.; JT' -сила
сопрогпвления передвижению.
'Энергоемкость буферного устрой-
ства зависит ол вида диаграммы, вы-
ражающей зависимость усилия буфе-
ра от его хода. Ее можно принять;
для пружинных и приближенно для
резиновых - 0.5 Fll]ilx5, для гидравли-
ческих - Flzl.iXS. где Рт1)*- максималь-
ное усилие,, действующее при ударе.
При выборе стандартных буферов,
для которых известна энергоемкость
дюколорые тины резиновых буферов
приведены в приложении), можно
пользоваться вышеприведенным урав-
нением.
При проектировании пружинных
буферов исходными параметрами для
расчел а пружины являются: скорость
крана (гележкн) в момент наезда на
буфера .’т. сила пружины при предва-
рительной ее деформации (предвари-
тельном поджатии) Fir сила пружины
при рабочей ее деформации Frnax, ра-
бочий ход пружины S. требуемая вы-
носливость пружины - число циклов
до разрушения.
Задаваясь значением предваритель-
ного поджатия пружины Sn, опреде-
ляют силу пружины Рп -- CSn, где
коэффициент жес ткости пружины [33]
(5.22)
здесь цт- принимаемое максимальное
замедление крана (тележки) в процес-
се деформации буферов; и> — +~- -
коэффициент сопротивления движе-
нию крана (тележки); (/-ускорение
свободного падения.
Сила пружины при максимальной
деформации и ее рабочий ход опреде-
ляют зависимостями
«(rj - 2н’<7£п)
«т + <7 и1
(5.23)
(5.24)
Определив исходные данные, произ-
водят расчет пружин.
При проектировании гидравличе-
ских буферных устройств предпочте-
ние отдают буферам с переменной
площадью истечения жидкости. Пере-
менная площадь кольцевой щели Fv
создается за счет’ разности площадей;
постоянной площади отверстия в
поршне F и переменной площади се-
чения штока Fxun. Таким образом,
проектирование гидравлического бу-
фера прежде всего сводится к профи-
лированию штока (рис. 5.12). Исход-
ными параметрами являются: масса
Рис. 5.12
крана (тележки) мж(т), допустимое за-
медление механизма дт, скорость на-
езда на буферы гб, принимаемые мак-
симальное давление в цилиндре и
диаметр поршня Dn.
Необходимое гидравлическое соп-
ротивление буфера, (Н) Ргтм =
Л
т
и его ход (осадка) S - —. Диаметр
2«t
отверстия в дне поршня определяют
зависимостью
где к 1,4... 1,6-поправочный коэф-
фициент общего учета гидро потерь и
сужения струи; 8Ж-массовая плот-
ность жидкости, кг/дмЛ; F3 - Fn - Fo =
- tin) А .
— „—- эффективная площадь
поршня.
Искомые значения диаметра што-
ка определяют зависимостью
4Р
.г Т4*
Скорость движения поршня опреде-
ляют через начальную скорость
и, = г6 = Дгб,
43
где z0 = аб/дт - время осадки буфера;
А- переменная величина, изменяю-
щаяся от единицы до нуля при изме-
нении скорости поршня от г0 до нуля.
Путь поршня, отсчитываемый от
начала его движения во время осадки
гидробуфера, х = s(l — Д2), и пере-
менная площадь кольцевой щели
(см2)
Профилирование регулирующего
штока удобно вести путем составле-
ния таблицы, где значение А = 1 раз-
бивают на интервалы, равные 0,1, а в
местах резкого изменения сечения
штока-0,05.
В качестве рабочей жидкости при-
меняю! несколько различных смесей.
В частности при работе гидробуфера
в зимних условиях рекомендуется
жидкость «Стеол», которая обладает
антикоррозионными свойствами и не
замерзает при температуре —30...
— 35°С. Она не горит и вполне взрыво-
безопасна. Для более низких темпера-
тур используют жидкость «Стеол М».
Глава 6
РАСЧЕТ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ
§ 6.1. Задачи расчетов
I Работоспособность, надежность и бе-
зопасность эксплуатации кранов во
многом зависят от качества исполне-
ния их металлических конструкций. В
связи с этим к крановым металлокон-
струкциям предъявляют определен-
ные требования; прочность, общая
устойчивость конструкции и местная
устойчивость отдельных ее элемен-
тов; статическая и динамическая жест-
кость; выносливость и вместе с тем
минимально возможная масса, высо-
кая технологичность изготовления и
монтажа, иногда ограниченные габа-
риты. Большинство этих требований
должно обеспечиваться на стадии
предварительного (проектного) рас
чета и компонования.
Под проектным расчетом и ком-
понованием металлоконструкции бу-
дем понимать тот объем расчетных и
графических работ.'который необхо-
димо выполнить для определения
размеров поперечных сечений основ-
ных несущих элементов по условиям
прочности, общей устойчивости, ста-
107
тической жесткости при действии рас-
четных комбинаций максимальных
нагрузок рабочего состояния, опреде-
ления взаимного положения основ-
ных несущих элементов в конструк-
ции и основных размеров конструк-
ции в целом.
Характерной особенностью проект-
ного расчета является неполнота ис-
ходных данных: неизвестны точный
вес конструкции, закономерности рас-
пределения нагрузок между элемента-
ми, динамические нагрузки, так как
эти факторы зависят от размеров
поперечных сечений несущих элемен-
тов, а определение этих размеров как
раз и является одной из задач расче-
та. В связи с этим проектный расчет
приходится выполнять последователь-
ными приближениями.
На стадии уточненных расчетов
производится проверка прочности от-
дельных деталей и соединений, про-
верка местной устойчивости, провер-
ка на усталость (если это необходи-
мо) или т.д. Выполнение провероч-
ных расчетов идет параллельно с
окончательной конструктивной про-
работкой крана.
§ 6.2. Исходные данные
В качестве исходных данных для рас-
чета и проектирования металлоконст-
рукций крана должны быть заданы
тип крана и его назначение, номи-
нальная грузоподъемность, пролет
(для мостовых) или вылет (для кон-
сольных) кранов, скорости движения
механизмов и группа режима работы.
В ряде случаев могут быть дополни-
тельно оговорены габариты, предель-
ный вес или предельные давления на
катки крана, расчетная температура
эксплуатации и т.д.
В большинстве случаев, в том чис-
ле и при курсовом проектировании,
расчет и разработка металлоконст-
рукций производятся после того, как
спроектированы механизмы крана и
грузовой тележки (если она имеется).
Поэтому в качестве исходных данных
для расчета крановых металлоконст-
рукций можно использовать значения
давлений на колеса тележки, усилия в
канатах (если они замыкаются на ме-
таллоконструкции), весовые данные
механизмов и т.д. При определении
динамических нагрузок в этом случае
также нужно использовать фактиче-
ские характеристики механизмов крана.
Тип металлической конструкции
(одно- или двухбалочная, коробчатая,
ферменная и т.д.) по усмотрению ру-
ководителя либо оговаривают в зада-
нии. либо выбирают и обосновывают
студенты в ходе проектирования.
§ 6.3. Порядок выполнения расчетов
I. Изучают задание, оценивают пол-
ноту исходных данных, устанавли-
вают перечень дополнительно зада-
ваемых параметров крана.
2. Выбирают и обосновывают тип
конструкции, если он не оговорен в
задании.
3. Выполняют проектный расчет:
выбирают материал конструкции,
определяют расчетные сопротивления
основного металла, сварных швов и
болтовых соединений;
по аналогии с выполненными кон-
струкциями или по литературным
данным принимают вес конструкции;
определяют расчетные значения
вертикальных нагрузок при работе
механизма главного подъема; при
этом динамические нагрузки жела-
тельно определять с учетом характе-
ристик привода механизма при его
совместной работе с металлоконст-
рукцией;
составляют расчетные схемы при-
ложения нагрузок, действующих на
несущие элементы конструкции при
работе механизма подъема груза; при
этом для каждого элемента необходи-
мо рассматривать наиболее неблаго-
приятный случай приложения нагру-
зок;
определяют силовые факторы (из-
гибающие моменты, продольные и
поперечные силы, скручивающие мо-
менты), строят их эпюры, выявляют
наиболее нагруженные (опасные) се-
чения;
определяют оптимальные по усло-
виям минимума веса размеры попе-
речных сечений несущих элементов;
108
производят конструктивное ком-
понование отдельных элементов и
конструкции в целом;
определяют фактические геометри-
ческие характеристики поперечных се-
чений несущих элементов;
оценивают фактическую несущую
способность конструкции по прочно-
сти, статической и динамической же-
сткости и общей устойчивости при
работе механизма подъема груза;
при необходимости производят
корректировку исходных данных, тог-
да расчет по предыдущим пунктам
повторяют.
4. Выполяют проверочный (уточ-
ненный) расчет.
определяют расчетные значения
нагрузок на конструкцию при работе
других механизмов крана с учетом
возможности совмещения операций
и, по аналогии с предыдущим слу-
чаем, производят проверку несущей
способности конструкции;
при необходимости производят
корректировку поперечных сечений
несущих элементов и расчетных на-
грузок, тогда расчеты повторяют.
5. Разрабатывают окончательный
вариант конструкции. Параллельно с
этим производят проверочные расче-
ты отдельных элементов конструкции
с учетом действия местных нагрузок,
проверяют местную устойчивость от-
дельных элементов, прочность свар-
ных швов, монтажных стыков и т.д.
При необходимости выполняют рас-
четы конструкции на усталость и на-
дежность.
§ 6.4. Конструкционные материалы
Металлические конструкции грузо-
подъемных кранов изготовляют пре-
имущественно из малоуглеродистых
и низколегированных конструкцион-
ных сталей, поставляемых в виде про-
ката различных типов: листового и
широкополосного, фасонного (уголки
горячекатаные и холодногнутые рав-
но- и разнополочные, швеллеры, дву-
тавры и т.д) и сортового (полосы,
прутки, квадрат), по ГОСТам.
В соответствии с «Правилами уст-
ройства и безопасной эксплуатации
грузоподъемных кранов» [16] мате-
риалы для изготовления крановых
металлоконструкций должны прини-
маться в соответствии с ГОСТами на
изготовление грузоподъемных машин
В тех случаях, когда в стандарте от-
сутствуют указания по применению
материалов, последние следует выби-
рать с учел ом температурных усло-
вий в районе эксплуатации крана из
числа материалов, рекомендованных
ВНИИПТМАШем. Наиболее употре-
бительными для расчетных (несущих)
элементов металлоконструкций яв-
ляются углеродистые стали марок
ВСтЗсп5 по ГОСТ 380-71* и сталь 20
по ГОСТ 1050-74*, а также низко-
легированные стали марок 09 Г2,
09Г2С, 15ХСНД и 10ХСНД по ГОСТ
19281 -73 и 19282-73.
Области применения этих марок
сталей в зависимости от толщины
проката и температуры эксплуатации
крана приведены в табл. 6.1, где при-
Таблица 6.1
Марка стали Вид и толщина, мм, проката при температуре ткеллуатацин крана, иС, не ниже
-20 -40 -65
ВСт Зсп5 Л, Ш, С, Ф до 25 - --
Сталь 20 Т ло 45 —
09 Г2 Л, Ш, С, Ф до 32 Л. Ш до 32; С до 20;
Ф до И
09Г2С Л, Ш до 50, С, Ф до 32, Л, Ш до 50, С до 20,
Т до 25 Ф до 11, Т до 1'5
15ХСНД Л, Ш, С, Ф до 32 Л, Ш до 32, С до 20,
Ф до 1 1
10ХСНД Л, Ш до 40, С, Ф до 15 Л. Ш до 40, С до 15,
Ф до 1 1
109
няты следующие обозначения для ви-
дов проката: Л-листовой, Ш-широ-
кополосный, С -сортовой, Ф-фасон-
ный, Т-трубы горячекатаные бес-
шовные. Под толщиной проката по-
нимается: для листов-толщина ли-
ста, для уголков - толщина полки, для
труб - толщина стенки трубы, для
швеллеров и двутавров-средняя тол-
щина полки, для прутка-диаметр
прутка.
Для кранов, эксплуатируемых при
температуре не ниже — 20 С. приме-
нение низкоколегированных сталей
может оказаться целесообразным
для изготовления металлоконструк-
ций кранов большой грузоподъемно-
сти и больших пролетов, так как в
этих случаях может быть достигнуто
снижение веса крана, В металлоконст-
рукциях этих кранов допускается со-
четание низколегированных и мало-
углеродистых сталей. При оценке це-
лесообразности замены малоуглеро-
дист ой стали сталью низколегирован-
ной следует иметь в виду, что стои-
мость сталей 09 Г2 и 09Г2С примерно
на 10% выше стоимости стали ВСтЗсп5,
а сталей 15ХСНД и 10ХСНД-соот-
ветственно на 15 и 25%. Низколегиро-
ванные стали более чувствительны к
концентрации напряжений и, следова-
тельно, при разработке конструкций
и технологии изготовления должны
быть предусмотрены специальные
меры понижения концентрации на-
пряжений, особенно для кранов ре-
жимных групп 6К ... 8К. для которых
лимитирующим фактором может
явиться усталость металла.
Нецелесообразно использование
низколегированных сталей в тех
случаях, когда лимитирующим фак-
тором является жесткость конструк-
ции, так как модули упругости всех
сталей практически одинаковы, и, сле-
довательно, одинаковыми в этом слу-
чае будут и поперечные сечения несу-
щих элементов.
Вспомогательные (нерасчетные)
элементы металлоконструкций (лест-
ницы, нерила, настилы и г.д.) можно
изготовлять из сталей марок ВСтЗпс2,
ВСтЗпс5 но ГОСТ 380—71* с толщи-
ной проката до 30 мм при температу-
ре эксплуатации не ниже — 20;'С. с
толщинами до 10 и 20 мм соответ-
ственно - при температуре не ниже
- 40°С и с толщинами до 5 и 10 мм
соответственно - при температуре не
ниже - 65 С.
Сварные соединения конструкций
должны быть равнопрочными с ос-
новным металлом. В связи с этим
ручную сварку элементов из мало-
углеродистой стали нужно проводить
электродами марки не ниже Э42А по
ГОСТ 9466-60. а полуавтоматиче-
скую и автома тическую - элек трод-
ной проволокой Св-08А по ГОСТ
2246-60 под слоем флюса. Для сварки
конструкций из низколегированных
сталей применяю! электроды марки
не ниже Э50А по ГОСТ 9466-60 и
электродную проволоку марки Св-08ГА
по ГОСТ 2246-60.
Типы сварных швов должны соот-
ветствовать действующим стандар-
там. Монтажные соединения реко-
мендуется выполнять на высокопроч-
ных или чистых болтах.
§ 6.5. Методы расчетов
Метод предельных состояний. Введен-
ный в действие с 01.07.84 г. ОСТ
24.090.72-83 «Нормы расчета сталь-
ных конструкций мостовых и козло-
вых кранов» устанавливает следую-
щие предельные состояния крановых
металлоконструкций.
Первое предельное состоя-
ние - потеря несущей способности
при однократном действии макси-
мальной нагрузки, т. е. по условиям
прочности или общей устойчивости.
Основная расчетная зависимость
имеет вид
(6Л)
где Р{и~нормативные значения внеш-
них нагрузок; а,-усилие (момент) в
рассчитываемом элементе при = 1;
^(-коэффициенты перегрузки норма-
тивных нагрузок; Ф-геометрический
фактор (площадь поперечного сече-
ния, момент сопротивления и т.д.);
/?- расчетное сопротивление материа-
ла конструкции при расчетах на проч-
но
ность; m0-коэффициент условий ра-
боты и неполноты расчета.
При проектном расчете, когда не-
обходимо определить геометрические
факторы, удобнее пользоваться выра-
жением вида
ф (6,2)
т0Я
Коэффициент условий работы под-
считывают по выражению
т0 = т1т2т3, (6.3)
где Wj-коэффициент, учитывающий
ответственность рассчитываемого
элемента, т. е. возможные последст-
вия его разрушения, и наличие пре-
дупредительных признаков разруше-
ния; т2-коэффициент, учитывающий
отклонения в геометрических разме-
рах конструкции, влияние коррозии и
т. п.; т3 - коэффициент, учитывающий
несовершенства расчета, связанные с
неточностями расчетных схем, непол-
нотой методов расчета и т.н,
Рекомендуемые ВНИИПТМАШем
коэффициенты т1? т2, т3 приведены в
табл. 6.2...6.6. расчетные сопротивле-
ния Я, МПа, основного металла,
сварных и болтовых соединений - в
табл. 6.7...6.9.
Таблица 6.2
Классификация элементов конструкции
Вид отказа
Элементы, отказ которых вызывает не-
посредственную угрозу для жизни че-
ловека или тяжелые технологические
последствия
Элементы, отказ которых связан с на-
рушением функционирования конструк-
ции (отдельной детали) или ограниче-
нием работоспособности конструкции
(отдельной детали)
Вспомогательные элементы
С предупредительным признаком* (вязкое
разрушение)..........................
Без предупредительного признака (хруп-
кое разрушение)......................
С предупредительным признаком:
влияние
на конструкцию в целом...........
на отдельные элементы............
Без предупредительного признака;
влияние
на конструкцию в целом...........
на отдельные элементы............
Независимо от отказа.................
0,9
0,6
* Подразумевается отказ, которому предшествует появление пластических (остаточных) деформаций.
Таблица 6.3
Профиль элемента
вь
Открытые профили при толщине полки (стенки) менее 5 мм и замкнутые коробчатые
и трубчатые профили при толщине стенки менее 4 мм..............................0,90
Все виды профилей и листы, кроме указанных:
в случае отсутствия данных о фактических значениях технологических допусков на
изготовление профилей и листов...............................................0,95
< при наличии гарантированных данных (не менее чем 95%-ной обеспеченностью) о
фактических значениях допусков ............................................ 1,0
Таблица 6.4
Элементы конструкции
Сжатые основные элементы решетки (кроме опорных раскосов таврового сеуения из
уголков) при гибкости X > 60................................................0,80
Сжатые элементы решетки из одиночных равнополочных уголков (или неравнопо-
лочных, прикрепленных большей полкой):
раскосы перекрестной и раскосно-стоечной решетки, стойки раскосной и полу-
раскосной решетки, раскосы полураскосной решетки..........................0,90
Продолжение табл. 6.4
Элементы конструкции
т3
раскосы раскосной решетки и перекрестной решетки с совмещенными узлами в
смежных гранях...........................................................0,85
раскосы и стойки при всех схемах решетки при креплении к поясам только через
фасонку, без дополнительных подкреплений.................................0,75
Сжатые элементы решетки из одиночных неравнополочных уголков при приварке к
поясам меньшей полкой......................................................0,75
Сжатые и растянутые элементы из одиночных швеллеров, прикрепляемые:
стенкой..................................................................0,90
полкой...................................................................0,75
Другие сжатые элементы (кроме замкнутых трубчатых) при расчетах на устойчи-
вость .....................................................................0,85
Затяжки, тяги, стяжки, подвески, выполненные из прокатной стали............0,90
Другие растянутые элементы решетки и пояса.................................0,95
Сплошные балки при расчетах на общую устойчивость..........................0,95
Таблица 6.5
Схема мост
Особенности конструкции моста и используемого метода расчета
пролетных балок
Двухбалочный
Коробчатые продетые балки при расположении подтеле-
жечного рельса;
Однобалочный с
консольной грузо-
вой тележкой
Одмобалочный с
подвесной моно-
рельсовой грузовой
тележкой
в середине балки.........................................0,85
у края балки, в том числе над стенкой, без учета стесненного
кручения.................................................0,75
у края балки, с учетом стесненного кручения..............0,85
Двутавровые прокатные и составные пролетные балки при
расположении подтележечного рельса над стенкой 1,0
При учете стесненного кручения пролетной балки.............0,90
Без учета стесненного кручения пролетной балки.............0,70
Пролетное строение:
из одиночной прокатной или составной одностенчатой
двутавровой балки ................................... 1,0
с коробчатой балкой....................................0,95
с трубчатой несущей балкой и ездовым монорельсом при
отношении наружного диаметра грубы D к толщине стен-
ки 8:
D/б 200 ........................................ 0,95
D/8 > 200 ........................................ 0,80
Таблица 6.6
Элемент конструкции
Режимная группа по ГОСТ 25546-82 ЗК...5К 6К...8К
Надбуксовые части конце- вых балок с угловыми буксами 0,6 0,4
Все остальные элементы концевых балок 0,8 0,6
Второе предельное состоя-
ние-потеря несущей способности
при многократном действии нагру-
зок, т. е. по условиям выносливости.
Основная расчетная зависимость
имеет вид
апр^т0Ян, (6,4)
где стпр - приведенное эквивалентное
напряжение; Яв - расчетное сопротив-
ление материала при расчете на уста-
лость. Коэффициент условий работы
т0 принимают таким же, как и при
расчетах по первому предельному
состоянию.
Третье предельное состоя-
ние - возникновение деформаций,
препятствующих нормальной эксплуа-
тации крана при сохранении несущей
способности по условиям первого и
второго предельных состояний.
112
Таблица 6,7
Напряженное состояние основного Условное Марки прокатных сталей Отливки из углеро-
металлп обозначение диетой спали марок
расчетного
сопротивле-
ния
ВСт.З 09 Г2 15ХСНД 10ХСНД 25Л 35Л 45Л
Растяжение, сжатие, изгиб Я 210 260 290 340 180 210 250
Срез 130 150 170 200 110 130 150
Смятие торцевой поверхности (при наличии пригонки) Лсмг 320 390 430 510 270 320 370
Смятие местное в цилиндри- ческих шарнирах (цапфах) при плотном касании » . м 150 200 220 250 130 160 180
Диаметральное сжатие Катков при свободном касании (в конструкциях с ограниченной подвижностью) 8 10 И 13 7 8 10
Таблица 6.8
Сварные Напряженное состояние сварною Условное Марки сталей
соединения соединения обозначение
расчетного
сопротивле-
ния
ВС 13 09Г2 15ХСНД 10ХСНД
Сжатие 210 260 290 340
Растяжение:
автоматическая сварка; полуавтоматическая и ручная сварка с физичес- ким контролем качества швов Я” 210 260 290 340
Встык полуавтоматическая и
ручная сварка при обыч- ных методах контроля .... Л” 180 220 250
Срез DUB ^ср 130 150 170 200
Угловые » псе 150 180 200 220
ШВЫ
Примечания:
L Для элементов из сталей разной прочности расчетное сопротивление сварною соединения встык
принимают равным расчетному сопротивлению соединения встык из менее прочной стали,
2. Расчетные сопротивления сварных соединений встык установлены для швов, выполненных двусторонней
сваркой или односторонней с подваркой корня шва; при невозможности осуществления подварки корня
расчетные сопротивления снижают умножением на коэффициент 0,7.
Таблица 6.9
Болты Напряженное состояние и группа соеди- няя Условное обозначе- ние расчет- ного соп- ротивле- ния Растяжение и срез болтов из стали класса прочности Смятие соединяемых конструкций из сталей марок
4.6 5.6 8.8 ВСтЗ 09Г2 15ХСНД 10ХСНД
Повышен- Растяжение я; 400 г
НОЙ точности Срез, В 300
Смятие, В с — 380 470 520 610
ИЗ
Продолжение табл. 6.9
Болты Напряженное Условное Растяжение и срез болтов из стали класса прочности Смятие соединяемых конструкций из сталей марок
состояние и обозначе-
группа соеди- ние расчет-
НИЯ пого сои-
ротивле- 4.6 5.6 8.8 ВСтЗ 09Г2 15ХСНД юхенд 1
НИЯ
Нормаль- Растяжение р 170 210 400 —- — —- —
ной точности Срез, В Смятие, В Я® 130 150 200 340 420 460 — -
Высоко- При термической обработке в готовом изделии (болте): для стали 35 по
прочные ГОСТ 1050-74, ст. > 800 МПа; для стали 40Х для сталей 40ХФА и 38ХС по ГОСТ 4543-71 по ГОСТ 4543-71 ст, > ст, > 1350 МПа 1100 МПа;
Примечания:
1. Класс прочности болта и гайки обозначен шумя цифрами» Первое число, умноженное на 100, означает
минимальное временное сопротивление, МПа; втрое число, умноженное на 10,- отношение предела текучести к
временному сопротивлению, %; произведение чисел, умноженное на 10,-предел текучести, МПа.
2. Механические свойства болтов, шпилек и гаек должны соответствовать требованиям ГОСТ 1759-70.
3. К j руппе В относят соединения, в которых болты поставлены в отверстия: сверленные на проектный
диаметр в собранных элементах; сверленные на проектный диаметр в отдельных элементах и деталях по
кондукторам: сверленные и продавленные на меньший диаметр в отдельных деталях с последующим
рассверливанием до проектного диаметра в собранных элементах.
4, Болты, поставленные в продавленные отверстия или в отверстия, сверленные без кондукторов в
отдельных деталях (без последующего рассверливания), в крановых конструкциях не допускаются.
Основная расчетная зависимость
может быть записана в виде
(6.5)
где Pf-расчетные нагрузки; Д- фак-
тор, отражающий статическую или
динамическую деформативность кон-
струкции (коэффициент жесткости);
/ - предельные деформации, регла-
ментированные соответствующими
нормами или условиями эксплуата-
ции.
Метод допускаемых напряжений.
Метод допускаемых напряжений
можно применять в тех случаях, ког-
да отсутствуют необходимые данные
(главным образом коэффициенты пе-
регрузок и условий работы) для
использования метода предельных
состояний.
Расчет на прочность. Основ-
ная расчетная зависимость по анало-
гии с (6.1) может быть записана в
виде [7, 20]
= = (6.6)
где отах - максимальное расчетное
напряжение в элементе; [а]-допу-
скаемое напряжение с учетом вида
деформации, МПа; (табл. 6.10...6.12);
стт-предел текучести материала; п-
общий запас прочности (см. гл. 1); а,;
Ф-см. формулу (6.1).
Расчет на усталость. Основ-
ная расчетная зависимость имеет вид
[4; 7; 20]
а, < [аяк] = (6.7)
Я О
где «^-эквивалентные по условиям
усталости напряжения в элементе,
приведенные к циклу с коэффициен-
том асимметрии нагружения
[стяк] -допускаемые по условиям
усталости напряжения при коэффи-
циенте асимметрии нагружения Rn и
эффективном коэффициенте концент-
рации напряжений <jrk - предел
выносливости материала; «-коэффи-
циент запаса, принимаемый обычно
таким же, как и при расчетах на
прочность.
Расчет на жесткость. Про-
верка статической жесткости произ-
водится по выражению [7; 20]
А Ш > (6.8)
где fL-расчетная относительная де-
формация конструкции; [fL] - допу-
скаемая относительная деформация
114
Таблица 6,10
Напряженное состояние основ-
ного металла
Условное
обозначе-
ние допус-
каемых
напряже-
ний
Марки прокатпых сталей
Отливки из углсрО’
диетой стали марок
ВСгЗ 09Г2 О9Г2С 15ХСНД 10ХСНД 2 5 Л 35 Л 45Л
Растяжение, ежа тис [ст] 170 210 250 285 150 180 210
Изгиб [ст„] 180 220 260 295 160 190 220
Срез [т] 100 130 150 170 95 110 130
Смятие торцевой поверх- [ct0M.J 255 320 375 430 230 270 315
ности (при наличии при- гонки) Смятие местное в цилин- [стем.Л 130 160 190 215 НО 135 155
дрических шарнирах (цап-
фах) при плотном касании
Таблица 6.11
Тип сварных швов
Род усилия
Сварка
Ручная толстообма-
данными электродами
Растяжение
Сжатие
Срез
0,8 [</
0,9 [о
0,6 Га‘
Ручная толстообмазанными электро-
дами при повышенных требованиях
контроля, автоматическая и полуавто-
матическая под слоем флюса
Стыковой
Стыковой и угловой
Примечания:
1. Для швов, выполненных при мшгаже, допускаемые напряжения понижаются на 10%, а при потолочной
сварке -во всех случаях нм 20%,
2. [ст] допускаемое напряжение на растяжение для основного металла но табл. 6.10.
Табл и ца 6,12
Вид соединения Напряжен* ное состо- яние Условное обозна- чение допускае- мых напряжений Марки сталей болтов
НЛ Ст2; СтЗ
в конструкциях из стали
НЛ и л Ci 3
Болты чистые и Растяже- [Ср] 0,7 [о] 0,5 [ст] 0,7 [ст]
получистые ние
Срез [ту 0,7 [ст' о,5 [ст; о,7 [ст;
Смятие [ctL] 2,0 [ст; 1,4 [ст" 2,0 [ст'
Болты черные Растяже- La'j -• 0,5 [ст; 0,7 [ст=
ние
Срез Гт’] 0.35 [ст] * 0,5 fa]
Смятие [<£j 0,8 [ст] 1,0 [о;
Болты анкерные Растяже- i<4j 0,45 [ст] 0,65 [ст]
ние
Примечания:
L [ст] допускаемые напряжения растяжения в конструкции при расчете на прочность ио табл. 6.10*
2. НЛ низколегированные стали марок, указанных в табл. 6.1.
115
конструкции, регламентируемая соот-
ветствующими нормами или услови-
ями эксплуатации крана.
Проверка динамической жестко-
сти производится по выражению [7;
20]
, (6.9)
где /э- расчетное время затухания ко-
лебаний порожнего крана; [гз]-допу-
скаемое время затухания колебаний,
назначаемое таким же образом, как и
допускаемый относительный прогиб.
§ 6.6. Мостовые краны
Расчетные комбинации нагрузок. Рас-
четные: комбинации нагрузок для
проектного расчета металлоконструк-
ций мостовых кранов приведены в
табл. 6.13: римская цифра означает
предельное состояние конструкции
(I-прочность, 11- выносливость, III-
деформачивноеть): арабская цифра -
расчетный случай положения тележ-
ки: 1 н середине пролета моста, 2 у
торцевой балки: буква - работу меха-
низмов: А-подъем груза, Б-движе-
ние крана. В -статическое дейст вие
номинального или испытательного
груза; коэффициенты перегрузок;
V/ - коэффициенты динамичности.
Расчетные нагрузки. Собствен-
ный вес моста. Вес пролетной
части моста принимают равномерно
распределенным по пролету. Интен-
сивность распределенной нагрузки
(кН/м) от собственного веса пролет-
ной части моста двухбалочного крана
(без торцевых балок, кабины управ-
ления. приводов механизма передви-
жения и электрооборудования) соста-
вит для каждой балки
ч„ »^=. (.6.10)
где Спм.н-нормативный вес пролет-
ной части моста (пролетные балки с
площадками обслуживания), кН; L
пролет крана, м.
Вес пролетной части моста можно
принимать по чертежам, специфика-
циям или по аналогии с существую-
щими конструкциями.
Таблица 6,13
1 |прм;.1типны1' uni ручки Расчс'1 ные наг рузки
НИ.1Ы НШруЗОК начс- ния мат ручки по комбинациям
1.!. А I.2.A 1.1.Б 1.2.Б III.IB
Весовая пос- V1I kg <itt V, kv </„ V, kg qu 4»
то я иная рас-
прсделенная
То же, сое ре- ^Ci Vt kc,
доточенная
Вес тележки vtJ kc g;h VT< A;' <?,„
Bev груза ^qh Vo 1 ^qh Vq ^Qh Vt2 *0‘ Gqh V, i kQ GQb
I оризонгалъ' p * dll. H Ь. p 1 sepit a A „ £ иерт/ a
ныс силы 1
инерции
Атмосфер- p p Д. H * tt, Ц Л.И A H P * Q. H —
лыс*
Силы пере- P лер - — Нсц ^np min
коса
Температур- P p 4 f A p< p.
НЬЮ
О г предвари-
тельного напри- P P * n. ;t * и, u Ai u paa pn„
жени я
* Для кранов пролетами более 40 работающих на открытом ноздухс.
I i6
)
Усредненные графики весов про-
летных частей двухбалочных кранов
режимных групп 4К, 5К с коробча-
тыми сплошностенчатыми балками
из стали СтЗ. приведены на рис. 6.1
[4, 20, 22]. При использовании леги-
рованных сталей вес снижается на
10...20%. Вес пролетных частей кра-
нов режимных групп 1К...ЗК меньше
на 10...15%, а 6К...8К больше на
10...15 %. При использовании балок с
вырезами в стенке вес может быть
снижен на 10...15%, а при одностен-
чатых балках-на 20...30%.
Следует иметь в виду, что вес
нерасчетных элементов (площадки
обслуживания, кронштейны и фунда-
менты механизмов и т.п.) может со-
ставлять 30... 60% от общего веса
пролетной части моста. Вес решетча-
тых мостов малых пролетов (до 16 м)
практически тот же, что и коробча-
тых; при больших пролетах решетча-
тые мосты легче коробчатых на
10...40% (большие значения-для ма-
лых грузоподъемностей). Однобалоч-
ные мосты легче двухбалочных на
20...40%.
Нагрузки от веса приводных узлов
механизмов передвижения, кабин
управления, панелей электрооборудо-
вания принимают сосредоточенными
и приложенными в центре их тяжести.
Вес привода механизма пере-
движения крана принимают в соот-
ветствии с чертежами и специфика-
циями, разработанными в курсовом
проекте по ГПМ. В случае отсутствия
данных при раздельном приводе вес
каждого приводного узла можно при-
нимать по усредненным данным [4,
22]: при Q = 5... 12,5 т G = 3...4 кН;
при Q = 20...50 т Gnp = 5...7-кН; при
Q = 80...320 т Gnp = 8...12 кН.
Вес кабины зависит от ее типа и
может приниматься [22]: при откры-
той кабине-8... 10 кН; при закрытой
кабине с электрооборудованием -
12... 16 кН; при закрытой кабине с
электрооборудованием и кондиционе-
ром-25... 30 кН. Вес панелей элект-
рооборудования на площадках моста
составляет обычно 3...5 кН [22].
Большинство источников [7; 20; 22
и др.] рекомендуют вводить в расчет
коэффициенты перегрузок: для метал-
локонструкций кд= 1,1; для оборудо-
вания kG — 1,2.
Вес тележки. Вес тележек при-
нимают по чертежам, спецификациям
или результатам непосредственного
взвешивания. При отсутствии таких
данных вес тележек режимных групп
4К и 5К в зависимости от i р\ зо-
подъемности можно принимать по
табл. 6.14 [4; 20; 22].
Вес тележек режимных групп
1К...ЗК можно брать на 10% мень-
ше, а групп 6К...6К-на 10% больше,
чем указано в табл. 6.14.
Коэффициент перегрузки веса те-
лежки принимают обычно kG = 1,1.
Вес груза. Расчетный вес груза
определяют по формуле
Gq ~ -> (6.11)
где GQh-номинальный вес груза;
коэффициент перегрузки для крюко-
вых кранов, принимаемый в соот-
ветствии с ОСТ 24.090.72 -83 по
табл. 6.15.
Таблица 6Л4
Q- т 5 8 12.5 12,5/3,2 20/5 32/8 50/12,5
кН 15 25 35 50 70 90 130
Q, т 80/20 100/20 125/20 160/20 200/32 250/32 320/32
(% кН 380 420 440 650 700 780 1150
117
Таблица 6.15
Грузоподъемность Режимная группа крана по
крана, т ГОСТ 25546-82
IK, 2КЗК. 4К5К 6К, 7К
До 5 Св. 5 до 12,5 1,15 1,10 1,25 1,20 1,35 1,25 1,50 1,50
Св. 12,5 до 20 1,10 1,15 1,20 1,40
Св. 20 до 100 ио 1,10 1,15 1.30
Св. 100 до 300 1,07 1,10 1,12 1,25
Св. 300 1,05 1,10 1,10 1,20
Динамические нагрузки при
работе механизма подъема.
Динамические нагрузки, возникаю-
щие при работе механизма подъема,
можно рассчитать умножением рас-
четного веса груза на коэффициент
динамичности определяемый по
графикам рис. 6.2 в зависимости от
соотношений веса груза GQ, массы
груза mQ, приведенных к грузу пуско-
вой силы двигателя Р, и массы при-
вода т, [9]. На рис, 6.2 цифрами 1, 2,
3, 4 обозначены графики отношений
соответственно равных 0,025;
0,05; 0,10; 0,20, Значения Р и см. в
гл, 8.
Вертикальные динамические на-
грузки при движении крана. Верти-
кальные динамические нагрузки, воз-
никающие при движении крана вслед-
ствие ударов на неровностях и стыках
подкрановых рельсов, учитывают
введением в расчет так называемого
«коэффициента толчков» х|/т* кото-
рый, по данным УПИ им. С. М. Ки-
рова, рекомендуется определять по
выражению
где /гс-высота ступеньки стыка рель-
сов, мм; для путей, находящихся в
эксплуатации, Ис = 3 мм [16]; а -ко-
эффициент, принимаемый по графи-
кам рис. 6.3 в зависимости от ско-
рости движения крана гж, м/с, и пар-
циальной частоты колебаний моста
<лм. 1/с; ^-коэффициент, зависящий
от схемы крана и вида нагрузки. Для
собственного веса моста двухбалоч-
ного четырехколесного крана
где Рк-база крана; LT-колея тележ-
ки. Для веса тележки двухбалочного
четырехколесного крана значение £
следует уменьшить в 2 раза, для веса
груза-в 4 раза. Для веса моста одно-
балочного мостового крана с кон-
сольной тележкой £ = 0,5; для тележ-
ки и груза £ = 0,25, Для кранов с
балансирными ходовыми тележками
дробную часть ут следует уменьшить
на 50%. При укладке крановых рель-
сов на упругой подкладке дробную
часть ут во всех случаях следует
уменьшить на 30%.
Парциальная частота собственных
поперечных колебаний моста
где См-коэффициент жесткости мо-
ста, кН/м; тм - приведенная масса
моста, т.
Коэффициент жесткости моста
предварительно может быть принят
как минимально возможный по усло-
виям третьего предельного состоя-
ния:
118
с > 4 + с7г 11 (6 15)
м - [//]л , '
где Gq.h, G’T.H-соответственно номи-
нальные веса груза и тележки, кН;
L пролет крана, м; [/JJ - предельный
относительный прогиб моста при
действии номинальной подвижной
нагрузки, принимаемый в соответст-
вии с ОСТ 24.090,72- 83 но табл. 6.16,
Приведенную массу моста крана
определяют по формуле
тм “ (0^С„.м + G\), (6,16)
и
где д - ускорение свободного падения;
Сп,м, (/т - соответственно вес пролет-
ной части моста и тележки.
Горизонтальные инерционные на-
грузки при движении крана. Горизон-
тальные инерционные нагрузки зави-
сят от ускорений (замедлений) при
разгоне или торможении крана и мо-
гут определяться по формуле
=7-Р. (6.171
где Рг.т‘, Р-соответственно горизон-
тальная инерционная и вертикальная
нагрузки; д. д-соответственно уско-
рение свободного падения и ускоре-
ние, возникающее в период неусгано-
вившейся работы механизма передви-
жения.
Сила перекоса при движении крана.
Сила перекоса возникает при движе-
нии крана с тележкой, расположенной
у одной из конневых балок, и счита-
ется приложенной вдоль другой, ме-
нее нагруженной, концевой балки.
Расчетная сила перекоса [20. 22]
Лит Исц4пр.тш , (6.18)
где цси-коэффициент сцепления при-
водных колес с рельсами; при работе
на открытом воздухе ^„-0.14; при
работе в помещении => 0,2; 4nptlllin -
суммарное давление на приводные
колеса менее нагруженной концевой
балки.
Атмосферные нагрузки. К атмо-
сферным нагрузкам относят давление
ветра и нагрузки от снега или об-
леденения. В соответствии с ОСТ
24,090-72- 83 они должны учитывать-
ся только для кранов пролетом более
40 м, работающих на открытом воз-
духе.
Ветровые нагрузки определяют в
соответствии с ГОСТ 1451 - - 77 (см.
гл. 1); нагрузки от снега и обледене-
ния принимают по СНиП-6 74 без
учета коэффициентов перегрузки.
Нагрузки от температурных воз-
действий. В соответствии с ОСТ
24.090.72 - 83 нагрузки от температур-
ных воздействий должны учитывать-
ся для установленных на открытом
воздухе кранов пролетом более 40 м;
для их определения допускается ис-
пользовать данные СНиП 11-6-74,
Нагрузки от температурных воздей-
ствий. источником которых является
установленное в непосредственной
близости от крана оборудование,
определяют в соответствии с темпе-
ратурным перепадом, предусмотрен-
ным в техническом задании на кран.
Нагрузки от предварительного на-
пряжения. Предварительное напряже-
ние конструкций производится в про-
цессе изготовления или монтажа, а
также при усилении металлокон-
струкций кранов, находящихся в экс-
плуатации. искусственным созданием
напряжений, противоположных по
знаку напряжениям oi расчетных
нагрузок.
Оптимальное предварительное на-
Таблиаа 6.16
Наличие и расположен не кабины управления Нормы juim режимных 1 руин по ГОСТ 2554b
1К 2К. ЗК 4К, 5К 6К. 7 К ЯК
Отсутствует 1/400 1 /500 1 /500 1 /700 ••
У края моста 1 /400 1 /500 1 /600 1 /800 1/900
В центре моста или на под- 1/400 1 '600 1 /800 1/1000 1/1000
важной тележке
119
пряжение определяют из условия до-
стижения суммарными напряжения-
ми допустимых значений для каждой
конкретной конструкции,
Расчетные схемы приложения на-
грузок. Вертикальные нагрузки про-
летных балок. Расчетные схемы при-
ложения вертикальных нагрузок ком-
бинаций 1. А, 1.1 Б и I1I.1.B к про-
летным балкам моста показаны на
рис. 6.4. п, б, где q -распределенная
нагрузка от собственного веса про-
летной части моста; G -вес приво-
дов механизма движения крана; GK-
вес кабины управления; Д}\ Д2- дав-
ления колес тележки на балку
<Д > Д2); ДЛ-равнодействующая
давлений колес тележки.
Расчетное давление колеса тележ-
ки Д равно
Д,-Дп +Да«. (6.) 9)
где ДТ1 -давление о; расчетного веса
тележки; Д^-давленяе от расчетного
веса груза.
При четырехколесной тележке
(рис. 6.4. п) наибольший изгибающий
момент от подвижной нагрузки дей-
ствует в сечении под колесом с давле-
нием Ди расположенным от опоры
на расстоянии
= 0Л(Ь- 6Д. (6.20)
Для лого сечения суммарный изги-
бающий момент равен
, г/ (L—b.l2
". = У + 4(--+Ьлрй1 +
+ ' (6.21)
При восьмиколесной тележке
(рис. 6.4, б) наибольший изгибающий
момент от подвижной нагрузки дей-
ствует под внутренним колесом с дав-
лением Д. расположенным от опоры
на расстоянии
z0 = 0,5(L~ ЬД (6.22)
в этом сечении суммарный изгибаю-
щий момент равен
м £ + +
1 8 4L 1 i
+ б„рП1 + G,a, '-Д. (6.23)
Горизонтальные нагрузки двух-
балочного моста. Схема приложения
горизонтальных нагрузок комбина-
ции 1.1.Б при четырехколесной тележ-
ке приведена на рис. 6.5. Влиянием
горизонтальных нагрузок оз инерции
масс приводов механизма передвиже-
ния и кабины можно пренебречь.
С достаточной степенью точности
суммарный горизонтальный изгиба-
ющий момент в расчетном сечении
пролета может быть определен по
выражению
М „ = • - — + (6.24)
8 j + 5 8 3 T S
а в узле соединения пролетной и кон-
цевой балок со стороны колеса с дав-
лением Д1г-по выражению
Рис. 6.4
Рис 6.5
имш imniMiwmuHfinr
Jiy; J2y -моменты инерции соответ-
ственно пролетной и концевой балок
относительно вертикальных осей.
При восьмиколесной тележке
можно пользоваться этими же фор-
мулами, подста вляя вместо b L рас-
стояние от оси балансира до равно-
действующей горизонтальных
давлений колес тележки.
Схема приложения нагрузок ком-
бинации 1.2.Б при четырехколесной
тележке показана на рис. 6.6; такая
же схема может быть принята и при
восьмиколесной тележке (по аналогии
с предыдущим случаем).
Наибольший горизонтальный из-
гибающий момент для пролетной
балки действует в узле ее сопряжения
с менее нагруженной концевой балкой
и равен [22]
у более нагруженной концевой балки
этот момент равен
LTK,; + -
- С,КД) + -^КР. (6.28)
'У
Рис. 6.6
1, р
V пер
*-1
по формула.м (6.24) и
определяют
(6.25) при
(6.30)
Расчетная схема приложения нагру-
зок комбинации 1.2.Б показана на
рис. 6.8.
Наибольший изгибающий пролет-
ную балку горизонтальный момент
действует в узле сопряжения пролет-
ной и более нагруженной концевой
балки и равен
= -ф: + 41.51 + Л.ерс (6.31)
Скручивающие нагрузки пролет-
ных балок. Скручивание поперечного
сечения пролетной балки происходи!
вследствие эксцентричного приложе-
ния нагрузок относительно центра
изгиба (Ц.И.). как это показано на
где
(6.29)
Рис. 6.7
Г оризонтальные нагрузки одно-
балочного моста. Расчетная схема
приложения нагрузок комбинации
1.1.Б показана на рис, 6.7. Изгибаю-
щие моменты для пролетной балки
Рис. 6.8
Рис. 6.9
рис. 6.9, где Дк -равнодействующая
давлений колес тележки; G,, 5 - вес
пролетной балки; (7б~вес балкона;
Grtp - вес приводного узла механизма
передвижения крана; Gk-bcc кабины
управления; ДКг> G;,6. G£, G^, G^-го-
ризонтальные инерционные нагрузки;
- эксцентриситеты приложения на-
грузок относительно 1Д.И. опорного
сечения; Тпр - реактивный момент
привода.
Скручивающие нагрузки распреде-
ляются вдоль пролета моста лак же,
как и поперечные силы. Следователь-
но, для опорного сечения пролетной
балки (рис. 6.9) расчетный скручива-
ющий момент может быть определен
по выражению
где с/[Г-распределение нагрузки; Р,-
сосредоточенные нагрузки; L- пролет
балки; z, - расстояние от рассматрива-
емого опорного сечения до i-й со-
средоточенной эксцентричной нагруз-
ки; - эксцентриситеты нагрузок от-
носительно Ц.И.; С..,-Реактивный
момент привода, передаваемый на
балку.
Нагрузки концевых балок. Схемы
нагружения концевых балок в верти-
р и с. 6.10
калькой плоскости показаны на
рис. 6.10: для двухбалочного (а) и
однобалочного (б) мостов, где ARi-
реакции пролетных балок от действия
приложенных к ним вертикальных на-
грузок; М,- изгибающие моменты,
соответствующие скручивающим
опорные сечения пролетных балок
моментам, определяемым по форму-
ле (6.32); Ст-колея тележки; L6 г =
— Вк-база крана или расстояние
между осями главных балансиров.
Схемы нагружения концевых ба-
лок в горизонтальной плоскости см.
рис. 6.5.. .6.8. При этом горизонталь-
ные реакции ходовых колес крана
вызываюз скручивание концевых ба-
лок на участках от ходового колеса
до ближайшей пролетной балки мо-
ментом
Пр-Л.А. (6.33)
где Дкг iоризонтальная реакция ко-
леса крана; см- расстояние от уровня
головки подкранового рельса до
центра изгиба рассматриваемого се-
чения концевой балки.
Расчет размеров поперечного сече-
ния пролетных балок двухбалочных
мостов в средней части пролета.
Сплошное ген ч а ты е коробча-
тые балки с рельсом по оси
пояса. Эту конструкцию применяют
для большинства двухбалочных кра-
нов. Чаще всего поперечное сечение
балки (рис. 6.11) имеет две оси сим-
метрии. Иногда верхний пояс по
условиям его устойчивости или проч-
ности с учетом действия местных на-
пряжений выполняют более толстым,
Рис. 6.11
чем нижний; в этом случае балка име-
ет только вертикальную ось сим-
метрии. Размеры поперечного сечения
определяют из условия обеспечения
прочности балки при действии нагру-
зок комбинации 1.1.А (см. табл. 6.13).
Момент сопротивления балки при из-
гибе в вертикальной плоскости
PVXiff(M3) должен отвечать условию:
где Л-принятая высота стенки.
По рекомендациям ВНИИ-
ПТМАШа гибкость стенок целесо-
образно назначать в пределах .sc =
= 100. ..300, но при этом из техно-
логических соображений 32 > 0,004 м,
а для кранов, работающих в агрес-
сивных средах, 32 > 0,008 м.
Из условия обеспечения заданной
минимальной жесткости в соответ-
ствии с формулой (6.15) момент инер-
ции балки в вертикальной плос-
кости (м4)
(6.38)
где См- коэффициент жесткости мос-
та по формуле (6.15), кН/м; £-мо-
дуль упругости материала, МПа;
L-пролет моста, м; 2?т-база тележки,
м. Оптимальную по минимуму веса
высоту стенки hf при обеспечении за-
данной жесткости определяют по
формуле
-^10"3,
(6.34)
I
I
)
где Mi-расчетный изгибающий мо-
мент по формулам (6.21) или (6.23),
кН ‘м; А-расчетное сопротивление
материала при работе на изгиб, МПа,
принимаемое по табл. 6.7; т0-коэф-
фициент неполноты расчетов по
формуле (6.3).
Оптимальную по условию мини-
мума веса при обеспечении заданной
прочности высоту стенки ha (м) для
балки с двумя осями симметрии опре-
деляют по выражению [5,7]
h'= (6.35)
или по формуле
Лу = y/3scJXJ-.
(6.39)
(6.40)
При одновременном удовлетворе-
нии условий прочности и жесткости
высота балки должна быть равна
2Jx/
W '
г ЛП
(6.41)
или по выражению
(6.36)
где 32-толщина стенки, м; ^-гиб-
кость стенки:
h
~ 8;'
(6.37)
Для балки оптимальной высоты
соотношения размеров пояса и стенки
(см. рис. 6.11) должны отвечать усло-
вию [7]
BS, = '-hb2. (6.42)
**
при этом [20]
=(1...3)32, (6.43)
„ Н Н L ,, ...
2 3 50 k ’
123
Из технологических соображений
обычно b 300 мм. В то же время из
условия обеспечения местной устой-
чивости сжатого пояса для стали, у
которой В = 210 МПа, b <
< (60...100)5!; Ь. < 155, [20]. Для
сталей другой прочности размеры b и
должны быть умножены на
ч/210/7?, где 7?-расчетное сопротив-
ление материала. МПа.
Толщина пояса должна быть не
более 50 мм для углеродистых и
40 мм для низколегированных сталей
[4; 7: 20 и др.]. Принятые значения h,
В, бр округляют до ближайших
стандартных размеров проката.
При расчетах по формулам (6.35),
(6.36) и (6.39). (6.40) целесообразно
проанализировать влияние толщины
стенки на ее высоту и на площадь
поперечного сечения балки. Критери-
ем рациональности принятого реше-
ния должно быть, очевидно, получе-
ние сечения минимальной площади
при приемлемых по конструктивным
соображениям габаритах.
По фактическим размерам сечения
необходимо уточнить вес моста и го-
ризонтальных и вертикальных инер-
ционных нагрузок от инерции массы
крана. При значительных (более 10%)
отклонениях от ранее принятых зна-
чений необходимо скорректировать
расчетные изгибающие моменты и
поперечные силы и при необходимос-
ти повторить расчеты.
Расчет балок с поясами различной
толщины проводится методом после-
довательных приближений.
Проверка прочности балки в сред-
ней части пролета при действии на-
грузок комбинации 1.1.Б производит-
ся после назначения размеров конце-
вых балок и определения горизон-
тальных нагрузок. Расчетная зависи-
мость имеет вид
ст = + m0R, (6.45)
и; и/, 0 '
где Mlv и х-соответственно из-
гибающие моменты в вертикальной и
горизонтальной плоскостях, опреде-
ляемые по формулам (6.21) или (6.23)
и (6.24); Wx и Wy - соответственно мо-
менты сопротивления балки при из-
гибе в вертикальной и горизонталь-
ной плоскостях; 7?-расчетное сопро-
тивление материала по табл. 6.7;
wig — коэффициент неполноты расчета
по формуле (6.3).
После расстановки ребер жесткос-
ти верхний пояс балки должен быть
проверен на прочность с учетом дей-
ствия местных напряжений от давле-
ний колес тележки.
Сплошностенчатая коробчатая бал-
ка с рельсом над стенкой. При рас-
положении рельса над одной из сте-
нок используют балки со стенками
различной толщины (рис. 6.12, а,б}.
Обычно у таких балок BjH — 0,8.. .1,0;
52/53 = 2.. .3. Вследствие эксцентриси-
Рис. 6.12
124
тета приложения нагрузки от веса
тележки и груза относительно центра
изгиба балка будет испытывать не
только изгиб в вертикальной плоскос-
ти, но и скручивание. Так как сплош-
ностенчатые балки коробчатого сече-
ния хорошо сопротивляются круче-
нию, влиянием последнего при рас-
четах средней части балки можно пре-
небречь и рассчитывать балку так же,
как и балку со стенками одинаковой
толщины. Тогда оптимальная высота
стенки при обеспечении заданной
прочности будет
а при обеспечении заданной жест-
кости
<6.47.)
В этих выражениях scl = Л/5Э. Высоту
стенки haf при одновременном удов-
летворении условий прочности и
жесткости определяют по формуле
(6.41). Окончательный выбор разме-
ров поперечного сечения производит-
ся аналогично случаю симметричной
балки.
Координата л\. центра изгиба бал-
ки (точка Ц. И. на рис. 6.12) может
быть определена по графикам рис. 6.13
[7], где кривая 7 соответствует 61/62 =
= 0.25; 2 - 5^ = 0,5; 3 - Зь/5, -
= 1.0; 4 - 3L/32 = 2,0; 5 - = 3,0;
Проверка прочности и устойчиво-
сти стенки под рельсом должна про-
изводиться с учетом местных напря-
жений сжатия в верхних волокнах
стенки от давления колеса тележки.
Местное напряжение равно [5; 20 и
ЛР-1
ст =М10’3, (6.48)
Г01
где Д-давление колеса тележки, кН;
62 -толщина стенки, м; kKi коэффи-
циент. учитывающий тип крана и ре-
жим его работы; для кранов режим-
ных групп 6К...8К при жестком под-
весе груза км = 1,4; то же. при гибком
подвесе груза км = 1,2; в остальных
случаях = 1.0; с-условная длина
распределения давления колеса ио
кромке стенки, м; для сварных и про-
катных балок
(6.49)
где ,/р: Jn -моменты инерции рельса и
пояса относительно собственных нейт-
ральных осей, м4; б2-толщина стен-
ки, м. Прочность подре.чьсовой стен-
ки на уровне сварного шва проверяют
ПО УСЛОВИЮ
х/о? + ст— ст.стм + Зт2 д m0R; (6.50)
при этом должны выполняться соот-
ношения
07?; стм т 0.6 mQR.
где ст. суммарные напряжения в
стенке от изгиба балки в двух пло-
скостях по формуле (6.45); стм- мест-
ные напряжения по формуле (6.48 j;
т-суммарные касательные напряже-
ния в стенке; Я-расчетное сопротив-
ление материала при работе на сжа-
тие: коэффициент неполноты ра-
счета, при о пределе! ши к о горою
можно принимать тл = 0.85...0,90.
Коробчатые балки с вырезом в од-
ной из стенок. Коробчатые балки с
вырезами прямоугольной формы в
одной из стенок применяют при рас-
положении рельса нал другой, сплош-
ной, стенкой. Схема такой балки по-
125
Рис. 6.14
казана на рис. 6.14. Обычно v таких
балок В/Н = 0,8... 1,0; а/Н =•• Г,0...2,5;
с/Л. ™ 0,5... 1,5; /ц/А = 0,55...0,75. При
h2/h 0,1 стенку с вырезами нуж-
но рассматривать как безраскосную
форму.* По условиям устойчивости
кромки выреза могут быть окантова-
ны либо отбортовкой, либо полосой,
приваренной к стенке в виде симмет-
ричного ребра жесткости.
Наличие вырезов в одной из сте-
нок практически нс влияет на общую
прочность и жесткость балки при ее
изгибе в вертикальной плоскости, по
существенно снижает сс прочность и
жесткость при изгибе в горизонталь-
ной плоскости и особенно крутиль-
ную жесткость.
Предварительно размеры сечения
можно определять как для енлопшо-
стенчагой балки со стенками различ-
ной толщины без вырезов, заменяя
стенку с вырезами эквивалентной
сплошной стенкой толщиной [7]:
* Концевой Г. М. Исследование и
методика расчета крановых балок конструкции
ЦКБ ВНИИПТМАШа на кручение. 'Гр.
ВНИИПТМАШа. 1964. Вы». 4 (45). С. 3 57.
126
где Е, G - соответственно модули уп-
ругости и сдвига материала, МПа; и\
с/-шаг стоек и расчетная высота стен-
ки по нейтральным осям ветвей, м
(см. рис. 6.14); Jfl, Jd-моменты инер-
ции ветви и стойки при изгибе в
плоскости стенки, м4. В соответствии
с рис. 6.14
Задаваясь толщиной стенки 53 и соот-
ношениями размеров стенки и выре-
зов в ней, можно определить эквива-
лентную толшину Sy и по формулам
(6.46) и (6.47)-оптимальную высоту
стенки.
Проверка прочности принятого се-
чения балки должна производиться с
учетом напряжений от стеснения при
кручении балки по формуле
(6.53)
где М j изгибающий момент по фор-
мулам (6.21) или (6.23); /^-изгибно-
крутящий бимомент для рассматри-
ваемого сечения балки; его значения
приведены в [20]; -момент инер-
ции сечения балки при изгибе в вер-
тикальной плоскости; -секториаль-
ный момент инерции сечения; г,-
координата i-й точки сечения от об-
щей нейтральной оси .v-x; со, - глав-
ная секториальпая координата ьй
точки сечения. Эпюра главных секто-
риальных координат показана на рис.
6.15, где
Р и с. 6.15
h^h + S,; i0 = i + M^
Ординаты эпюры по точкам:
О! = -со1О = - (Хи +
hQ
»2 = ~“9=
(О3= _(й8 = (/)0-хи)^;
(04 = -со7 = (b0 + d-xu)^
(05 = -шб = (Ьо ~ хи)~ + а(Ь0 + хи).
(6.54)
Знаки ординат эпюры со соответст-
вуют знакам нормальных напряже-
ний (« + »-растяжение, « —»-сжатие)
при изгибе пролетной балки в верти-
кальной плоскости.
Секториальный момент инерции
Jw - Jco2dF = |[(со| + toi)^i +
+ col—+ (col + coj + со3со5)а63],
(6.55)
где co,-модули ординат эпюры глав-
ных секториальных координат /-х то-
чек (см. также [20]).
Коробчатые силошностенчатые бал-
ки трапецеидального сечения. Схема
поперечного сечения балки показана
на рис. 6.16. Расчет балок такого типа
может быть выполнен аналогично
расчету коробчатых балок прямо-
угольного сечения со следующими
особенностями.
Оптимальные по минимуму веса
значения высоты стенок (точнее, их
вертикальных проекций) определяют
по формулам
А/а = Л/П/. (6.56)
где формуле (6.35) или (6.36);
Л^-по формуле (6.39) или (6.40): и
рг-поправочные коэффициенты, при-
нимаемые по графикам рис. 6.17 и
6.18 (кривые 1 соответствуют отно-
шению = 1: кривые 2-0,75; кри-
вые 3-0,5; кривые 4-0,25). В балках
такого типа обычно В/Н - 0,8.., 1,0;
=»(1...3) 32. Окончательно разме-
ры балки выбирают так же, как и для
балки прямоугольного сечения. Пос-
ле назначения размеров геометриче-
Р и с. 6.17
Рис. 6.16
Р и с. 6.18
127
ские характеристики сечения опреде-
ляются по формулам
2ё>, И
л* |
cos а
(6.57)
Проверка на действие нагрузок дру-
гих комбинаций производится так же,
как и для коробчатой балки прямо-
угольного сечения; проверка прочно-
сти стенки с учетом местных нагру-
зок-как для балки с рельсом над
стенкой.
Размещение ребер жесткости. Реб-
ра жесткости (поперечные основные,
поперечные дополнительные и про-
дольные) должны обеспечивать гео-
метрическую неизменяемость попе-
речного сечения балки, местную ус-
тойчивость стенок и сжатых поясов, а
при расположении рельса по оси верх-
него пояса-прочность рельса и пояса
при местном воздействии давлений
колес тележки.
Варианты размещения ребер жест-
кости показаны на рис. 6.19. Расчет-
ными размерами являются: А-высота
стенки; 6, - высота отсека между сжа-
тым поясом и продольным ребром; а,
а। -расстояния между осями основ-
ных и дополнительных ребер; Зс, 5р -
толщины стенки и ребра жесткости.
При гибкости стенки лс 70 для
малоуглеродистых и ic 55 ... 60 для
низколегированных сталей местная
устойчивость стенки обеспечена, если
обеспечена ее прочность. При гибко-
стях 70 Ос < 160 для малоуглероди-
стых и 55... 60 5С 135 ... 145 для
низколегированных сталей достаточ-
но устанавливать только основные
поперечные ребра жесткости (рис. 6.19.
д); при 160 .ус 265 для малоуглеро
дистых и 135 ... 145 225 ... .240
для низколегированных сталей необ-
ходимо устанавливать поперечные и
одно продольное ребро жесткости
(рис. 6.19, в, а); при больших гибко-
стях стенки необходимо устанавли-
вать два продольных ребра жесткости
в сочетании с поперечными ребрами.
Вариант по схеме рис. 6,19, б яв-
ляется нежелательным, так как име-
ется опасность появления усталост-
ных трещин у нижних концов корот-
ких ребер.
Размещение поперечных ребер. Для
отсеков, примыкающих к опорам,
шаг основных поперечных ребер а =
= /г; в последующих отсеках их шаг
может увеличиваться до а = (1,25... 2)
h. Ширина выступающей части ос-
новного поперечного ребра Ьр (см.
рис. 6.12,д) обычно принимается рав-
ной (мм)
Ь, > А + 40; (6.58)
толщина ребра из условия обеспече-
ния его устойчивости должна быть
5р > Z?p/15 для стали СтЗ и 5р Лр/12
для сталей более высокой прочности
[20].
Момент инерции поперечного реб-
ра относительно плоскости стенки
должен быть [7, 20] (м4)
7Р^ЗЛ53, (6.59)
где h и 5-высота и толщина стенки.
При определении момента инер-
ции ребра в расчет должна включать-
ся часть стенки шириной 20 5 по обе
стороны от ребра (см. рис. 6.12,д,б).
При расположении рельса по оси
пояса поперечное ребро проверяется
по условиям работы верхней кромки
128
на сжатие от местного давления
колеса [4; 7]:
асж= 1,15—Тsin—« т0А, (6.60)
so 2z
где Д -давление колеса тележки; 5 -
длина линии контакта рельса и пояса
над ребром; для крановых рельсов
spc = О,бАр(.; для железнодорожных
рельсов зрс = 6рс; Лрс-ширина подо-
швы рельса; 7?-расчетное сопротив-
ление материала при работе на сжа-
тие: с-расчетная зона распределения
давления колеса по ребру.
Для сварных балок
где о. = аг0 4- а.м; напряжение в
балке от ее общего изгиба в продоль-
ном направлении; и о2М-местные
нормальные напряжения в поясе со-
ответственно вдоль и поперек про-
дольной оси балки:
6k, 6'
(6.65)
(6.66)
где Д'-сила, передающаяся на пояс-
ной лист через рельс от давления
ходового колеса тележки.
При b д t/j
z = S.45jJ-^^, (6.61)
Д
(6.67)
где J:1. J -соответственно моменты
инерции пояса и рельса относительно
собственных нейтральных осей л-х
Если условие (6.60) не выполняет-
ся, необходимо усилить верхнюю
кромку ребра на ширине не менее b
накладками, приваренными с двух
сторон ребра.
Шаг основных и дополнительных
поперечных ребер жесткости, являю-
щихся опорами для рельса, опреде-
ляют из условия прочности последне-
го [4; 7] (м):
L
. io-\ (6.62)
при b а}
N=- —Д-------,
96k. 7,.
1 +---
«Л*
(6.68)
где 6П-толщина пояса; h-расстояние
между стенками балки в свету: -
расстояние между диафрагмами; J -
момент' инерции рельса в вертикаль-
ной плоскости; к2. ку коэффи-
циенты. принимаемые соответственно
по табл. 6.17 ..6.19 [20], где /?р ши-
рина подошвы рельса; Ь{ — 2.6 + 5 см;
Лр - высота рельса.
Та б л ина 6.17
где наименьший момент сон-
Л 111 111 -ъ
ротивления рельса при изгибе, м ;
(6.63)
где стт-предел текучести материала
рельса, МПа; с,-напряжения в рельсе
от /действия продольных сил: для не
приваренных к поясу рельсов и при
отсутствии гарантированного прижа-
тия рельса к поясу значением стг мож-
но пренебречь.
При контакте подошвы рельса с
поясом балки пояс находится в пло-
ском напряженном состоянии и его
прочность нужно проверять по усло-
вию [20]
^/ст? + Ст“м - а,ст>м С m(>R.
15 3d к. 198S
(6.64)
ui:b при Л < а,: к ,
6/н, при h i л,
1 Л) 0.1 27
1.1 0,138
1.2 0.148
1.4 0.162
ujb при h Т «,; А,
bill, при 6 >
1,6 0.171
1.8 0.177
2,0 0,180
^3,0 0.185
Таблица 6.18
ajh при />(,6
0.2 0,4 0.6 0,8
0.2 0,214 0,179 * 0.150 0,126
1.0 0,4 0.161 0,141 0.121 0,103
0.6 0,127 0.1 13 0,099 0.085
0.2 0.239 0.207 0.181 0.158
1,4 0,4 0.186 0,168 0,151 0,134
0.6 0,152 0. 138 0,126 0,1 12
0,2 0,250 0.219 0,192 0,171
129
Продолжение табл. 6.18
ирЪ h.jh при bpb
Г) ? ь/ ь W 0.4 0,6 0.8
1.8 0,4 0.197 0.179 0.161 0,146
0Л6 0,161 0.148 0.135 0,123
0.2 0,252 0,22! 0,195 0,174
2,0 0,4 0.199 0,181 0,164 0,148
0.6 0,163 0,150 0.138 0,126
Таблица 6.19
<;,/6 bvih при bjb
0.2 1) % 0,6 0,8
0.2 0.214 0,161 0,127 0.103
1.0 0,4 0.179 0,141 0,113 0,092
0.6 0,150 0,121 0.099 0,081
0.2 0.208 0.157 0,125 0,102
1.4 0.4 0.175 0.138 0.111 0,09!
0,6 0,147 0.119 0.097 0,080
0.2 0.204 0,154 0,121 0.098
1.8 0,4 0.17| 0,134 0,107 0.088
0.6 0.144 0,115 0,094 0,077
0.2 0,203 0.152 0.120 0,097
2.0 0,4 0.170 0,133 0,106 0,087
0,6 0.143 0,114 0,093 0,076
Формулы (6.67) и (6.68) получены
в предположении непрерывного кон-
такта по длине рельса и пояса, что в
действительности обеспечивается да-
леко не всегда. Поэтому при опреде-
лении коэффициента та можно при-
нимать для кранов режимных групп
6К. 7К ш3 = 0.65... 0.75; для кранов
режимных групп IК ... 5К т3 - 0,8 ...
0,9.
При расположении рельса над
стенкой основные поперечные ребра
жесткости (диафрагмы) должны обес-
печить геометрическую неизменяемость
поперечного сечения балки. Прочность
и жесткость диафра! мы в этом случае
проверяют по формулам [7]
.. „ •'
< ш0/?.
И?
А - (0,001 ... 0.002) В,
4ы‘-;./гД а/ J
(6.69)
1дс Ткр скручивающий момент, дейст-
вующий на балку в данном сечении;
147;У’- моменты инерции и сопро-
тивления ребра относительно его ней-
тральной оси с учетом работы части
стенки шириной 20<\. по обе стороны
ребра; А-вертикальный сдвиг стенок
друг относительно друга при дейст-
вии скручивающего момента; Н, В -
высота и ширина балки; R- расчетное
сопротивление материала при работе
на изгиб. При определении т0 можно
принимать т3 ~ 0,95... 1,0.
Размещение продольных ребер жест-
кости. Продольные ребра жесткости
для стенок ставятся на расстоянии
от крайней сжатой кромки стенки:
при одном ребре Ь{ = (0,2 ... 0,25) Л;
при двух ребрах: первое = (0,15...
0,2) А; второе Ь2 — (0,32 ... 0,4) h.
Требуемые значения момента инер-
ции продольного ребра относительно
плоскости стенки определяют по ре-
комендациям ВНИИПТМАШа в со-
ответствии с табл. 6.20.
Таблица 6.20
h^h Необходимый момент Предельные злаче-
ннерции продольного ния
ребра
0.2
0,25
03
мини- макси-
мальные малыше
l,5/i S’ 7Л6’
X* л
1.5А5’ 3.5Л6’
Лг А
Сжатые пояса коробчатых ба-
лок могут не подкрепляться продоль-
ными ребрами жесткости при шири-
не Лп < 603п для стали СтЗ и ЬЛ
у. 60бГ1 v 210//? для сталей другой
прочности, где R- расчетное сопро-
тивление материала.
Момент инерции ребра относи-
тельно кромки пояса должен быть
[20]
U = M, (6.70)
где Ьх - расстояние между продоль-
ным ребром и стенкой или между
ребрами. При этом остаются в силе
положения, изложенные для размеров
выступающих частей ребер жесткости.
Проверка местной устойчивости сте-
нок. Коробчатые балки с рельсом по
оси пояса. При подкреплении стенок
только поперечными основными реб-
рами жесткости местную устойчивость
стенок проверяют по выражению [20]
(6.71)
где о0, т0-критические напряжения,
МПа; а, т-максимальные расчетные
напряжения, МПа:
(6.73)
где <7-меньшая из сторон пластинки;
ц-отношение большей стороны плас-
тинки к меньшей; К0-коэффициент,
принимаемый для сварных балок по
табл. 6.21 в зависимости от значения
у, определяемого по формуле
?=4(Т'- (б’74>
h \ о /
где Ьп и Зп-ширина и толщина сжато-
го пояса; h и 5-высота и толщина
стенки: с - коэффициент, принимаемый
по табл. 6.22.
Таблица 6.21
у 0,8 1,0 2,0 4,0 6,0 10.0 ^30
Ко 6,30 6,62 7,0 7,27 7,32 7,37 7,46
Таблица 6.22
Типы балок Условия работы ежа- с тою пояса
Балки кранового моста, подкрано- вые балки Рельсы не приваре- ны 2,0
Рельсы приварены QO
Прочие При непрерывном опирании на сжа- тый пояс жестких плит ОО
В прочих случаях 0,8
* Здесь и далее формулы и числовые коэф-
фициенты для определения критических напря-
жений наложены в соответствии с кн.: Метал-
лические конструкции /Под ред. Н. П. Мель-
никова,-2-е изд., перераб. и доп,- М.: Строй-
издат. 1980. 776 с. (Справочник проектиров-
щика).
В коробчатых балках кранов ре-
жимных групп 1К...ЗК допускается
«закритическая» работа стенок, укреп-
ленных только поперечными ребрами
жесткости. В этом случае в правой
части формулы (6.71) ставится вели-
чина 1,2 и должны выдерживаться
условия о/сг0 < 0,25; т/т0 1,15.
В стенке балки симметричного
сечения, т. е. с поясами одинаковой
толщины, укрепленной кроме попереч-
ных основных ребер одним продоль-
ным ребром жесткости (рис. 6.19.«).
обе пластинки, на которые это ребро
разделяет отсек, проверяют отдельно.
Первую пластинку, расположен-
ную между сжатым поясом и про-
дольным ребром, проверяют по фор-
муле [20]
(6.75)
(6.76)
Вторую пластинку, расположен-
ную между продольным ребром и
растянутым поясом, проверяют по
формуле [20]
/Г—('] -2—'jT + f—Y 1,0, (6.77)
vLcTq’X Л/J
(6.78)
т01 и т02“ по формуле (6.73),
Если первая пластинка укрепляет-
ся дополнительно короткими попереч-
ными ребрами (рис. 6.19,?), то в этом
случае для ее проверки следует исполь-
зовать формулы (6.77) и (6.78).
Устойчивость стенок балок асим-
метричного сечения (с более разви-
тым сжатым поясом) проверяют ана-
логичным образом со следующими
изменениями.
Для стенок, укрепленных только
поперечными ребрами жесткости, в
формуле (6.72) под высотой стенки /1
понимается удвоенное расстояние от
нейтральной оси до расчетной (сжа-
той) границы отсека.
Для стенок, укрепленных попереч-
ными ребрами и одним продольным
ребром, расположенным в сжатой зо-
не, в формулу (6.76) вместо bl/h под-
ставляют a,bi/(2h), где а ~ (а — стр)/о;
о - краевое растягивающее напряже-
ние (со знаком минус) у расчетной
границы отсека.
Балка с рельсом над стенкой. Про-
верка местной устойчивости стенки,
укрепленной только основными по-
перечными ребрами, при одинаковой
толщине поясов производится по усло-
вию [20]
(6.79)
где ст-напряжения в стенке от общего
изгиба балки; ам местные напряже-
ния в стенке, определяемые по форму-
ле (6.48); т — суммарные касательные
напряжения в стенке; ст0-критические
сжимающие напряжения без учета
местных напряжений, определяемые
но формуле (6,72); г0-критические ка-
сательные напряжения, определяемые
по формуле (6.73); стм0-местные кри-
тические напряжения:
°м0
(6.80)
где Kj-коэффициент, определяемый
по табл. 6.23 в зависимости от от-
ношения я/Л и коэффициента у, вычис-
ленного по формуле (6.74).
При a/h 0,8 различают два случая в
зависимости от значений ам/а. Пер-
вый случай: сгм/о больше значений,
указанных в табл. 6.24. Тогда напря-
жения ам0 определяют по формуле
(6.80), а ст0 —по формуле
где К2-коэффициент, принимаемый
по табл. 6.25.
Второй случай: сгм/су не больше
значений, указанных в табл. 6.24. В
этом случае о0 определяют по фор-
муле (6.72), а ам0-по формуле (6.80).
Таблица 6.23
a/h
7 <0,5 0,6 0,8 1,0 1,2 1,4 1,6 1,8 >2,0
< 1 2,42 2,61 3,10 3,78 4,65 5,69 6,89 8,17 9,57
7 2,52 2,74 3,38 4,28 5.39 6,75 8,23 9,77 11,70 13.67
4 2,59 2,80 3,48 4,53 5,91 7,62 9,50 11,53
6 2,60 2,84 3,52 4,64 6,11 8,04 10,23 12,48 14,80
10 2.61 2,86 3,55 4,72 6.30 8,34 10,71 13,30 16,08
>30 2,62 2,87 3,58 4,81 6,50 8,75 11,30 14,33 14,57
Таблица 6.24
a/h
у----------------------------------------------------------------------
<0,8 0,9 1.0 1,2 1,4 1,6 L8 >2,0
«1 0 0,146 0,183 0,267 0,359 0,445 0,540 0,618
7 0 0,109 0,169 0,277 0,406 0,543 0,652 0,799
4 0 0,072 0,129 0,281 0,479 0,711 0,930 1,132
5 0 0,066 0,127 0,288 0,536 0,874 1,192 1.468
10 0 0,059 0,122 0.296 0,574 1,002 1,539 2,154
>30 0 0,047 0,112 0,300 0,633 1,283 2,249 3,939
Габлица 6.25
a/h <0.8 0.9 1,0 1,2 1,4 1,6 1.8 >2,0
к. По табл. 6.22, 7,78 ' 8.23 9.50 H.I 13,02 15,25 17,79
г.е. -- KJf
132
но с подстановкой а/2 вместо а как в
формулу (6.80), так и в табл. 6.23.
При укреплении стенки балки с
поясами одинаковой толщины основ-
ными поперечными и одним продоль-
ным ребром жесткости (рис. 6.19, в)
пластинку, расположенную между сжа-
тым поясом и продольным ребром,
проверяют по формуле [20]
(6.82)
где при = a/b 2
_ 0,25 (1 + pf)/J0005V
Ooi — ---77'---7—/ ’
(1 + pf)V10006Y
CTmOi - *01 J ,
(6.83)
(6.84)
где К01-коэффициент, принимаемый
в зависимости от соотношения ц =
= а/Ь};
р ~ а!Ь^ . . 1 1,5 2.0
К0] . . . 0.36 0,42 0.45
Если ajb2 > 2, то при вычислении
о01 и ам01 принимают а = 2Ь{. Значе-
ние т01 определяют по формуле (6.73)
с подстановкой в нее размеров про-
веряемой пластинки.
Вторую пластинку, расположен-
ную между продольным ребром и
растянутым поясом, проверяют по
формуле
с(1 - Ibjh)
СТ02
Проверка стенки балки с более
развитым сжатым поясом произ-
водится по тем же формулам, что и
выше, но со следующими измене-
ниями:
для стенок, укрепленных только
поперечными ребрами жесткости, под
h понимается удвоенное расстояние
от нейтральной оси до сжатой гра-
ницы отсека;
для стенок с поперечными и про-
дольными ребрами в формулу (6.86)
вместо (0,5 — bjh) подставляют (1/а —
— bl/li), где а = (ст — ор)/ст; стр- краевое
растягивающее напряжение (со зна-
ком минус) у границы отсека.
Проверка противоположной, не
несущей рельса, стенки производится
аналогично проверке стенок коробча-
той балки с рельсом по оси пояса.
Балки с вырезами в стенке. Мест-
ная устойчивость верхней пластинки
стенки над вырезом при отсутствии
подкрепления (окантовки) может быть
проверена по выражению
,/(4)’+(-Y ^°-9- <6-87)
где ст-большее из значений сжимаю-
щих напряжений для волокна пластин-
ки у пояса, определенных или по фор-
муле общего изгиба балки, или по
формуле (6.53); т-касательные напря-
жения в пластинке; т0-по формуле
(6.73):
1, (6.85)
где
ст02 —
1,14 fl 0006у
(0.5 - 6t/A)4 h ) '
(6.86)
Здесь К02-коэффициент, принимае-
мый по табл. 6.26 в зависимости от
закона изменения напряжений по вы-
Таблица 6*26
ом02-по формуле (6.80) и табл. 6.23
при у = 0,8, заменяя отношение a/h
значением a/(h — 6Г); т02-*по формуле
(6.73) с подстановкой в нее размеров
проверяемой пластинки; стм2 = 0,4сум
при приложении нагрузки к сжатому
поясу.
Если первую пластинку укрепляют
дополнительно короткими попереч-
ными ребрами (рис. 6.19, г), то в этом
случае следует пользоваться форму-
лами (6.82)... (6.84), в которых а за-
меняют на а х.
п = <Т - (Уп Mb
а 0t4 0,6 1.0 1,5
2 12,87 10,66 10,79 10,77 10,75
4/3 8,27 5,70 5,45 5,12 5,09
1,0 6,68 4,29 3,78 3,75 3,71
4/5 5,88 3,67 3,16 3,15 3,14
2/3 4,78 3,14 2,75 2,72 2,70
Примечание. Значение и - 2 относится к Слу-
чаю чистого н'либа, при а < 2--сочетание изгиба и
сжатия.
133
соте пластинки:
ryv = (7v0{ 1 - ау/ЛЛ (6.89)
где av0-напряжения на кромке плас-
тинки у верхнего пояса.
При подкреплении кромки выреза
окантовкой или отбортовкой разме-
ры последних должны определяться
как размеры продольного ребра жест-
кости.
Особенности расчета пролетных ба-
лок однобалочных мостовых кранов с
консольной опорной грузовой тележ-
кой.
Схемы поперечных сечений про-
лез пых балок и типов тележек по-
казаны на рис. 3.34. Особенности рас-
чета моста - необходимость учета скру-
чивающих нагрузок, вызванных экс-
центриситетом приложения веса груза.
Учет податливости моста снижает ди-
намические наг рузки в канатах на
15... 20%, а в металлоконструкции -
на 25... 30% [24. 25]. В связи с этим
при определении расчетных нагрузок
комбинации 1.1,Л можно пользовать-
ся юй же методикой, что и для
двухбалочных кранов, соответствен-
но уменьшая дробные части коэффи-
циентов динамичности.
В первом приближении расчет раз-
меров поперечного сечения можно
вести только на действие вертикаль-
ных изгибающих нагрузок, а влияние
скручивающих нагрузок учитывать,
вводя при определении коэффициента
значение = 0,7 (см. табл. 6.5).
После назначения размеров и оп-
ределения геометрических характерис-
тик сечения балки последняя должна
быть проверена на действие расчет-
ных нагрузок с учетом стесненного
кручения. При необходимости разме-
ры поперечного сечения должны быть
о т к о р ре кти ро ваны.
Методика оптимизации размеров
поперечного сечения пролетной балки
однобалочного моста с консольной
тележкой в принципе разработана, но
в практическом использовании она
весьма трудоемка.
При проверке прочности и мест-
ной устойчивости верхнего пояса кра-
на е тележкой, выполненной по схеме
рис. 3.34,а, необходимо учитывать
местные напряжения в поясе от давле-
ния горизонзальных роликов тележки.
В схемах (см. рис. 3.34, г, д) необ-
ходимо проверить прочность элемен-
тов, воспринимающих нагрузки от
действия обратных роликов (колес)
тележки.
Опорные части пролетных балок.
Размеры поперечного сечения опор-
ной части балки во многом зависят от
конструктивных факторов, в частнос-
ти от концевой балки и принятой
конструкции узла сопряжения пролет-
ной и концевой балок, Вследствие
этого расчет опорной части пролет-
ной балки носит, как правило, про-
верочный характер: проверяют проч-
ность поясных швов, элементов со-
пряжения балок, местную устойчи-
вость стенки и т.д.
Поясные швы. Прочность сварных
швов, соединяющих пояс со стенкой,
проверяют по формуле [7]
.<7, * ’ (6-90)
где Q - наибольшая поперечная сила в
рассматриваемом сечении: стати-
ческий момент брутто пояса балки
относительно ее общей нейтральной
оси; Лш-толщина углового шва, при-
нимаемая равной катету вписанного
в сечение шва равнобедренного тре-
угольника; р - коэффициент, принимае-
мый равным 1,0 для однопроходной
автоматической сварки 0,8 для одно-
проходной полуавтоматической свар-
ки, 0,7 для ручной и многопроходной
автоматической и полуавтоматичес-
кой сварки; Л*"ср - расчетное сопро-
тивление для углового шва (табл. 6.8);
ш0-коэффициент неполноты расчета
по формуле (6.3); момент инер-
ции брутто сечения балки.
Сопряжение балок одинаковой вы-
соты. Конструкция соединения балок
показана на рис. 6.20. Такое соедине-
ние применяют обычно для четырех-
колесных кранов. Высоту концевой
балки назначают обычно из конструк-
тивных соображений и, как правило,
Н2 = (0,4 ... 0,6) Н. а толщину поясов
принимают для обеих балок одинако-
вой, равной толщине пояса пролетной
балки. Накладки 1. 2, 3 являются
134
компенсаторами нормальных допус-
ков изготовления пролетных балок.
Варьируя размерами а (сечение В-В),
можно обеспечить заданную точность
сборки моста по пролету и разности
диагоналей. Кроме тою. накладки 2 и
3 обеспечивают жесткость стыка в
горизонтальной плоскости.
Прочность каждого вертикально-
го шва соединения проверяют по
условию
Рис. 6.21
Q
|М Рсв
'пОЛУ-ср
(6.91)
где Q и Ткр-максимальные значения
поперечной силы и скручивающего
момента для рассматриваемой ком-
бинации нагрузок; В{ и h2-размеры
балок (рис. 6.20); /ш-расчетная длина
шва, равная его геометрической дли-
не без удвоенной толщины шва. Ос-
тальные обозначения см. в формуле
(6.90).
Катет углового шва не должен
превышать наименьшей из толщин
соединяемых стенок. При необходи-
мости можно применить местное утол-
щение стенок по типу рис. 6.21.
«Этажное» сопряжение. Конструк-
ция опорной части пролетной балки
при «этажном» сопряжении показана
на рис. 6.22 [4]. Прочность опорного
сечения в зоне начала закругления
(точка а) проверяют по выражению
[Л
I “ ------ ~
СТпр = Мг\/СТ« “ 4" Ofj + <
(6.92)
ГДе Од —
радиальные, тангенциальные и каса-
тельные напряжения: ст0; т0-нормаль-
ные и касательные напряжения в точ-
ке а, определяемые по формулам со-
противления материалов; /<д; ке; kz;
^-коэффициенты, принимаемые по
графикам рис. 6.23 в зависимости от
угла перехода а, отношений FHII/FCZ:
h/H\ l/Н и r/Н: при этом на рис. 6.23
сплошные линии соответствую! углу
а = 90°, пунктирные-углу а = 135'”:
кривые 1,1' соответствуют IFH = 0.55;
2,2’-h/H = 0,40; 3,3’-h/Н = 0,25: Filir,
135
t
A-A
P и c. 6.22
Рис. 6.23
Fct-площади нижнего пояса и стенок
в сечении А-А; кш~ коэффициент фор-
мы сварного шва, учитываемый толь-
ко при расчете па выносливость: к1[: =
= 1,0 для таврового двустороннего
шва с полным проваром: кш 1,4 для
таврового одностороннего шва.
Так как графики на рис. 6.23 по-
лучены экспериментально, при опре-
делении т0 можно принимать = 0,9.
Действующие напряжения:
с0 = стд.+ ctv; То = Тп + Ткр. (6.93)
где а,-нормальные напряжения
от изгиба* балки в двух плоскостях;
тп-касательные напряжения от пере-
резывающей силы; ткр-касательные
136
напряжения от скручивания опорного
сечения;
„ Q г _
2Л5ет ’ кр 2Л„Л05ит ’
(6.94)
где Q, Ткр - перерезывающая сила и
скручивающий момент в опорном се-
чении при действии рассматриваемой
комбинации расчетных нагрузок; Л,
5СГ-высота и толщина стенки в опор-
ном сечении балки; Ло, ширина и
высота замкнутого контура попереч-
ного сечения по осям стенок и поясов.
В некоторых конструкциях для
усиления стыка применяют дополни-
тельное соединение (сварное или бол-
товое) вертикальных стенок пролет-
йой и торцевой балок, а также соеди-
нение их нижних поясов с помощью
накладок. Такое соединение является
статически неопределимым, и распре-
деление нагрузок по его элементам
зависит от большого числа случай-
ных факторов. Поэтому при такой
конструкции «зуб» балки рассчитыва-
ют так, как описано выше, а раз-
гружающее влияние остальных элемен-
тов учитывают назначением ги0 = 1,0.
При расположении балансиров хо-
довых колес крана непосредственно
в опорных частях пролетных балок
(рис. 6.24), как это сделано в некото-
рых конструкциях завода «Сибтяж-
маш», опорная часть может быть рас-
считана так же, как и при «этажном»
опирании.
Расчетная схема сварного монтаж-
ного шва при «этажном» опирании,
принятая в соответствии с [4], по-
казана на рис. 6.25. Проверка проч-
ности шва производится на действие
Рис. 6.24
нагрузок комбинации 1.2.Б по фор-
муле
Vf г
< т0Я“р. (6.95)
Р*'р. ш
где Му_ г - наибольший изгибающий
момент, действующий в горизонталь-
ной плоскости в узле сопряжения ба-
лок; расстояние от центра тя-
жести шва (точка О, рис. 6.25) до
максимально удаленной его точки;
Л ш-полярный момент инерции шва;
Лувср, т0, р-см. формулу (6.90);
р. ш
(6.96)
где Л. Jy-моменты инерции площади
поперечного сечения шва относитель-
но осей г — z и у-у.
Расчетная схема болтового мон-
тажного соединения при «этажном»
опирании балок показана на рис. 6.26.
Максимальное перерезывающее уси-
лие, действующее на наиболее удален-
ный от центра тяжести соединения
(точка О) болт, равно [5]
__ Л тч*
1 max v- 2
(6.97)
где М, г- то же, что и в формуле
(6.95); ^-расстояния от центра тяжес-
ти соединения до болтов.
Прочность соединения на «чистых»
болтах, работающих на срез и смя-
У
Рис. 6.25
137
тие, проверяют по формулам
S П1о^р; Яу±- s; m0R‘u, (6.98)
ft £<6
где 4,-диаметр гладкой части болта;
8m<n-меньшая из толщин соединяе-
мых листов; /?£м~ расчетные со-
противления, принимаемые по табл.
6.9. Коэффициент неполноты расчета
т0 назначается так же, как и для
сварного соединения.
При выполнении стыка на высоко-
прочных болтах усилие затяжки каж-
дого болта должно быть равно
Р> 1,1 (6.99)
где ;Му.Г) /у-см. формулу (6.97);/--ко-
эффициент грения, зависящий от спо-
соба подготовки соединяемых поверх-
ностей: для углеродистой стали при
пневматической обработке их песком,
металлическим порошком и т.п. или
обжиге /'== 0,45. а при обработке сталь-
ными проволочными щетками/ = 0,35;
для низколегированной стали при пнев-
матической обработке / = 0,55 [5].
Диаметр болта определяют из усло-
вия [5]
Т,1Г 7' (6.100)
где /•'„ । - площадь поперечного сече-
ния болта нетто (по резьбе); апр- вре-
менное сопротивление разрыву стали
высокопрочных болтов после терми-
ческой обработки в готовом изделии
(болге), принимаемое по табл. 6.9.
Концевые балки. Размеры конце-
вых балок определяются чисто кон-
структивными факторами. Так, рас-
четная длина балки равна базе крана,
т. е. расстоянию между осями ходо-
вых колес чстырехколесного крана
или осями главных балансиров мно-
гоколесного крана. Для исключения
заклинивания крана на рельсах при
перекосе базу крана принимают не
менее l/fl пролета. Заданной величи-
ной является расстояние между осями
пролетных балок, Размеры консолей
балки крана зависят от габаритов ко-
лесных установок, возможностей раз-
мещения приводов механизма движе-
ния. балконов и т.д. Размеры по-
перечного сечения балки в месте креп-
ления ходовых колес (балансиров)
также определяются габаритами по-
следних. При соединении балок по
схеме рис. 6.20 заданной величиной
является и толщина поясов. Таким
образом, поскольку балку выполняют
коробчатой по типу рис. 6.11, неиз-
вестной величиной является чаще все-
го только толщина стенок 3,. Из
технологических соображений о2 > 4
мм. Кроме того, как уже отмечалось,
толщина стенки может зависеть от
необходимого катета сварного шва
при соединении пролетной и торцевой
балок по схеме рис. 6.20.
Традиционная конструкция над-
буксовой части торцевой балки четы-
рехколесного крана, показанная на
рис. 6.27, принципиально работает так
же, как и «зуб» пролетной балки при
«этажном» опирании (см. рис. 6.22).
Поэтому при проверке прочности над-
буксовой части в точке а (рис. 6.27)
можно использовать формулу (6.92)
при действии нагрузок комбинаций
I.2.A и 1.2.Б.
Рис. 6.27
Рис. 6.28
Для определения скручивающего
момента для надбуксовой части бал-
ки по формуле (6.33) координату
центра изгиба можно найти с по-
мощью схемы на рис. 6.28, где сече-
ние балки представлено в виде двух
сварных двутавров (элемент /) и лис-
та (элемент 2). Тогда
уя = 2а^—\ (6.101)
где Fx-площадь поперечного сечения
элемента /; 21у-момент инерции сече-
ния элемента / относительно оси
у — у; Jy~ момент инерции всего сече-
ния относительно общей нейтральной
оси у — у.
Касательные напряжения в стен-
ках при кручении открытого сечения
будут равны
Г.р = ^=, (6.102)
где 8СТ-толщина стенки;
/Я?
= (б.юз)
где Zt, 5,-длины и толщины листов,
образующих поперечное сечение.
Увеличение крутильной жесткости
сечения может быть достигнуто за
счет образования замкнутых конту-
ров, например по типу рис, 6.29 ... 6.31
[26].
При выполнении сечения по липу
рис. 6.29 касательные напряжения в
стенке будут равны
т = —
кр 2М8€1
(6.104)
где b, h, 5СТ- размеры контура и тол-
щина стенки.
При выполнении сечения но рис.
6.30 скручивающий момент реализу-
ется как пара сил дополнительных
вертикальных реакций на каждый кон-
тур консоли и вместо касательных
напряжений кручения в расчет ном се-
чении будут действовать дополни-
тельные напряжения от изгиба в вер-
тикальной плоскости.
При выполнении сечения по типу
рис. 6.31 крут ящий момент будет рас-
пределяться между контурами а и б
пропорционально их жесткостям:
Рис, 630
у 5
Р и с, 631
139
a
где a = - , ..
3b2EJ*
(6.106)
l, Л-по рис. 6.31; G, E-модули сдвига
и упругости материала; ./^-момент
инерции при кручении замкнутого
контура a; 7/- момент инерции при
изгибе в вертикальной плоскости од-
ного замкнутого контура б.
Статическая жесткость мостов в
вертикальной плоскости. Статическую
жесткость моста в вертикальной плос-
кости оценивают по статическому про-
гибу балок в середине пролета при
действии нагрузок комбинации Ш.1.В.
В соответствии с обозначениями рис.
6.4 прогиб каждой пролетной балки
двухбалочного моста от действия по-
движной нагрузки равен [22];
при четырехколесной тележке
(6J07)
при восьмиколесной тележке
f Л<1Ж75/2-Л) + Л (0,75/7 -/()]
Ь 74Е/1л
(6.108)
где Дя-равнодействующа я давлений
колес тележки; L - пролет крана; Ju-
моменг инерции пролетной балки при
изгибе в вертикальной плоскости;
где 2?т- база тележки.
Предельные относительные про-
1ибы [/2] см. в табл. 6.16.
Дпя однобалочных кранов сущест-
венное значение имеют деформации
торцевых балок. В соответствии с
обозначениями рис. 6.10,6 вертикаль-
ный прогиб торцевой балки в узле
сопряжения с пролетной балкой равен
Ля<7/ / J d С \ | Q --з <
«/’ дн/ 100(6
(6.110)
а угол поворота в этом же сечении
(рад)
ф ~ Ь?. -и <!Л) 10 ’3 0,001,
(6/111)
где /1К -реакция опорной точки про-
летной балки, кН; 7^р-скручивающий
момент в опорном сечении пролетной
балки, кН-м; Е-модуль упругости
материала, МПа; J2x-момент инер-
ции торцевой балки при изгибе в вер-
тикальной плоскости, м4.
С учетом деформаций концевой
балки и скручивания пролетной вер-
тикальное перемещение грани балки
со стороны консоли тележки будет
(6.112)
где/„-вертикальный прогиб пролет-
ной балки, определенный по форму-
лам (6.107) или (6.108); Е, G--модули
упругости и сдвига материала; Jix-
момент инерции пролетной балки при
изгибе в вертикальной плоскости;
ЛД-момент инерции пролетной бал-
ки при кручении; е-расстояние от
центра изгиба пролетной балки до
центра тяжести тележки с грузом;
/вт-вертикальный прогиб концевой
балки по формуле (6.110); (рт-угол
поворота сечения концевой балки по
формуле (6.111); ег -расстояние от
центра изгиба пролетной балки до ее
грани (стенки) со стороны консоли
тележки. Относительный прогиб не
должен превышать значений, указан-
ных в табл. 6.16.
Динамическая жесткость мостов.
Проверку динамической жесткости мос-
та в вертикальной плоскости прово-
дят по длительности времени затуха-
ния колебаний в следующих случаях
Р2]:
при требовании повышенной точ-
ности установки груза;
при расчете металлоконструкции
на ограниченный срок службы с уче-
том явлений усталости;
для исключения вредного физио-
логическою воздействия колебаний
на организм машиниста крана.
Время затухания колебаний сталь-
ных крановых мостов, соответствую-
щее уменьшению амплитуды колеба-
ний до 5% от первоначального значе-
ния, приближенное составляет [7]
/, = 540 Т \
(6.113)
140
где Т- период собственных попереч-
ных колебаний моста крана при вы-
полнении рассматриваемой операции, с.
Предельное время затухания ко-
лебаний не должно превышать 12...
15 с. При чрезмерно длительных ко-
лебаниях крана для защиты кранов-
щика целесообразно применять гаси-
тели колебаний или виброзащиту ка-
бины, а не увеличение жесткости
моста.
Строительный подъем пролетных
балок. При пролетах мостов более
17 м пролетным балкам должен при-
даваться строительный подъем fQ (м),
который должен быть равен
+ (6.114)
2 800 7
где fq- прогиб пролетной балки от
действия постоянных нагрузок, м;
/я-прогиб пролетной балки от дейст-
вия подвижных нагрузок, м; L-- про-
лет крана, м.
Прогиб f4 равен
а: -5- Ю~3
/<г - 384£71ж ’
(6.115)
где ^--нормативная распределенная
нагрузка, кН/м; £-модуль упругости
материала, МПа; Jix- момент инер-
ции балки при изгибе в вертикальной
плоскости, м4.
Теоретический закон изменения
ординаты строительного подъема по
пролету /(г) принимают обычно в
виде синусоиды (рис. 6.32, а):
(6.116)
Из технологических соображений ли-
нию строительного подъема выпол-
няют ломаной за счет раскроя листов
в виде трапеций (рис. 6.32,6, в) или
путем соответствующей раскладки
листов. Скос при схеме раскроя по
рис. 6.32,6 равен
К «/о". (6.117)
При других схемах раскроя (с боль-
шим количеством листов) скосы опре-
деляют аналогичным образом.
Как правило, расчетная клиновая
подрезка К оказывается меньше, чем
допуск на раскрой листов, поэтому
преимущественным способом образо-
вания строительного подъема являет-
ся раскладка листов.
§ 6.7. Консольные
настенные передвижные краны
Кран с неповоротной ферменной кон-
солью. Схема общего исполнения кра-
на показана на рис. 6.33. Тележка /
передвигается по ездовым балкам 2,
выполненным обычно из прокатного
двутавра. Ездовые балки опираются
на коробчатую коренную 3 и за-
мыкающую 4 торцевые балки. Балка
4 выполняется из прокатного швел-
лера или двутавра и опирается на
вертикальные консольные фермы 5,
прикрепленные к вертикальной раме
Рис. 6.33
141
6. Горизонтальная жесткость крана и
общая устойчивость ездовых балок
обеспечиваются горизонтальными свя-
зями 7, имеющими, как правило,
сплошной настил. Расчетными ком-
бинациями нагрузок являются:
для ездовых балок - комбинация
1.1.А-подъем груза при расположе-
нии тележки в средней части ездовых
балок;
для всех остальных элементов -
комбинация I.2.A-подъем груза на
максимальном вылете, 1.2.Б-движе-
ние крана с грузом на максимальном
вылете, II 1.2. В-статическое приложе-
ние подвижной нагрузки на макси-
мальном вылете.
Расчетные нагрузки определяют
так же, как и для мостовых кранов
(см. табл. 6.13).
Схема приложения нагрузок ком-
бинации 1.1.А к ездовым балкам мо-
жет быть принята по аналогии с рис.
6.4 как для пролетных балок мостово-
го крана; аналогичным образом опре-
деляют расчетный изгибающий мо-
мент-по формуле (6.21) и момент
сопро тивления балки - по формуле
(6.34).
Концевые балки также рассчиты-
вают по аналогии с мостовыми кра-
нами. Расчетная схема приложения
нагрузок комбинации 1.2.Б может быть
принята по типу рис. 6.6, где вместо
силы перекоса необходимо приложить
силу инерции тележки и груза, а гори-
зонтальные фермы консольного кра-
на заменить эквивалентными балками.
Вертикальные фермы рассчитыва-
ют на действие сосредоточенных на-
грузок о г весов тележки, груза и собст-
венного веса консоли, приложенных к
узлам нижнего пояса. Продольные
усилия в стержнях можно определять
любым из известных способов. Под-
бор сечений растянутых стержней про-
изводят по условиям прочности
' . или (6.118)
[ст]
а центрально-сжатых стержней - по
условиям устойчивости
F>—или F>—, (6.119)
ф»'(Л
где N- продольное усилие в стержне;
£нт, F-площади нетто и брутто по-
перечного сечения стержня; Л - рас-
четное сопротивление материала при
растяжении (табл. 6.7); [о] - допускае-
мое напряжение (табл. 6.10) при рас-
тяжении - сжатии; т0 - коэффициент
неполноты расчета по формуле (6.3);
ср - коэффициент продольного изгиба,
принимаемый по табл. 6.27 в зави-
симости от гибкости элемента X:
(6.120)
^*пйп
Таблица 6.27
ГибКОС!Б элемен- тов Марки сталей
ВСтЗ О9Г2, О9Г2С 15ХСПД 10ХСНД
0 1,000 1,000 1,000 1,000
10 0,988 0.987 0,986 0,985
20 0,970 0,968 0.965 0,962
30 0.943 0,935 0,932 0,927
40 0,905 0,892 0.888 0,878
50 0,867 0,843 0,837 0,823
60 0,820 0,792 0,780 0,764
70 0,700 0,730 0,710 0,682
80 0,715 0,660 0,637 0,604
90 0,655 0,592 0,563 0,523
100 0,582 0,515 0.482 0,437
110 0,512 0,440 0,413 0,370
120 0,448 0,383 0,350 0,315
130 0.397 0,330 0.302 0,264
140 0,348 0,285 0.256 0,228
150 0,305 0,250 0,226 0,198
160 0,270 0,220 0,200 0,176
170 0.240 0,185 0,178 0,156
180 0,216 0,175 0,160 0,139
190 0,196 0,158 0.142 0,126
где /-геометрическая длина стержня;
ц- коэффициент, учитывающий харак-
тер закрепления концов стержня: при
изгибе в плоскости фермы ц = 0,7;
при изгибе из плоскости фермы р =
= 1,0 [7; 20 и др.]; rmin - минимальный
радиус инерции сечения стержня.
Предельные значения гибкости [X,]
стержней крановых ферм приведены в
табл. 6.28.
Прогиб конца консоли при про-
верке статической жесткости крана
может производиться по формуле
Мора (см., например, [5; 7] и др.).
142
Таблица 6.28
Вид стержня
Гибкость [X]
Сжатые пояса и опорные сжатые раскосы главных ферм....................120
Прочие сжатые стержни главных ферм ...................................150
Сжатые пояса и опорные сжатые раскосы вспомогательных ферм . . . .150
Растянутые пояса и опорные растянутые раскосы главных ферм............150
Растянутые пояса и раскосы вспомогательных ферм.......................250
Растянутые раскосы, стойки и решетки горизонтальных (инерционных) ферм и
связей .................................................................250
Стержни, служащие для уменьшения расчетной длины сжатых основных стерж-
ней ....................................................................200
Одностержневые (сжатые) конструкции стрел, колонн, мачт .............120... 150
Кран с поворотной ферменной кон-
солью. Общая схема исполнения кра-
на с постоянным вылетом и поворот-
ной ферменной консолью показана на
рис. 6.34.
Расчетные комбинации нагрузок:
1.1.А-подъем груза при расположе-
нии консоли перпендикулярно под-
крановому пути; 1.1.Б-движение кра-
на при этом же положении консоли;
1.1.В-вращение консоли с грузом;
Ш.1.Г-статическое приложение веса
груза.
Схема приложения нагрузок к кон-
соли в плоскости последней показана
на рис. 6.35, а. Собственный вес кон-
соли можно считать сосредоточен-
ным и приложенным в точке F. Уси-
лие в канате механизма подъема не-
обходимо разложить по узлам в со-
ответствии со схемой рис. 6.35,6.
Расчетное значение полезной на-
грузки определяют так же, как и для
мостовых кранов.
Возникающие при вращении крана
центробежная (в плоскости консоли)
сила Р,.ц и тангенциальная (по каса-
тельной к окружности, описываемой
концом консоли) сила Рг.т от инерции
массы груза считаются приложенны-
ми через канат к концу консоли. Зна-
Рис. 6.35
143
чение этих сил:
Л.ц = m2LmQ-, (6.121)
где mQ-масса груза; L-вылет кон-
соли; со, е-угловые скорость и ускоре-
ние вращения консоли, рад/с и рад/с2.
Подбор стержней ферм консоли
производят в соответствии с форму-
лами (6.118) и (6.119).
Так как кран имеет постоянный
вылет, прогиб конца консоли у него
не нормируется и, следовательно,
проверка ст атической и динамической
жесткости не является обязательной.
максимальном вылете; 1.1 .Б - враще-
ние крана с грузом на максимальном
вылете; III.l.B-статическое приложе-
ние веса груза на максимальном
вылете.
Весовые данные принимают по
аналогии с существующими конструк-
циями. Значения остальных нагрузок
принимают аналогично расчетам пе-
редвижных кранов с поворот ной кон-
солью.
Для уменьшения изгибающих на-
грузок на колонну кран обычно снаб-
жают противовесом. Вес противовеса
должен быть равен [2]
§ 6.8. Стационарные
консольно-поворотные краны
(6.122)
Консольно-поворотные стационарные
краны с постоянным или переменным
вылетом имеют либо поворотную ко-
лонну с верхней опорой, либо непо-
воротную колонну, жестко заделан-
ную в фундамент.
Кран с поворотной колонной пол-
ностью аналогичен поворотной кон-
соли передвижного крана (рис. 6.35) и
его рассчитывают аналогичным об-
разом. У крана с неповоротной ко-
лонной последняя выполнена из толс-
тостенной трубы или поковки, к ко-
торой через опорные устройст ва при-
соединяется поворотная часть крана,
состоящая из поворотной колонны,
рабочей консоли, по которой пере-
мещается грузовая тележка, и пло-
щадки для размещения механизмов и
противовеса. Расчетная схема крана
показана на рис. 6.36.
Расчетными комбинациями нагру-
зок являются: 1.1.А-подъем груза на
Р и с. 6.36
где -равнодействующая давлений
колес тележки с грузом; 6п-вес по-
воротной части крана без противо-
веса; ср - коэффициент, учитывающий
использование крана по грузоподъем-
ности; обычно ф = 0,70.. .0,85 [2];
с- расстояние от центра тяжести по-
воротной части крана без противо-
веса относительно оси вращения; Z.-
вылет крана; /пр -расстояние от цент-
ра тяжести противовеса относительно
оси вращения крана.
Диаметр колонны рассчитывают
из условия прочности при работе на
изгиб:
3
М 0.1 [а]
(6.123)
где d-диаметр колонны н расчетном
сечении, м; Ми-максимальный сум-
марный изгибающий момент, кНм;
[ст]-допускаемые напряжения, МПа;
для стали СтЗ [ст]-70...90 МПа;
для сталей Ст4 и Ст5 [ст] - 100... 120
МПа. Обычно высоту колонны при-
нимают не более половины высоты
крана и не более 3 м [2]. Горизон-
тальный прогиб конца колонны /жг
под действием суммарного изгибаю-
щего момента Ми
144
где 7 2-момент инерции сечения ко-
лонны, м4; Мя-изгибающий момент,
кН-м; Е-модуль упругости материа-
ла, МПа; д; Л-размеры колонны, м,
в соответствии с рис. 6.36.
Конструктивное исполнение фун-
даментной части колонны и ее расчет
см. в [2; 20] и др.
Консоль поворотной части крана
при опорной тележке выполняют в
виде двух сварных одностенчатых ба-
лок двутаврового сечения с горизон-
тальными площадками обслуживания
вдоль балок, которые одновременно
выполняют роль элементов жесткос-
ти, обеспечивая общую устойчивость
балок консоли.
Необходимый по условиям проч-
ности момент сопротивления консоли
Wx в расчетном сечении у колонны
может быть определен по формуле
(6.34), где расчетный момент при
действии нагрузок комбинации 1.1.А,
определяемый с учетом замыкающих-
ся на металлоконструкции усилий в
грузовых канатах.
Оптимальную по минимуму веса
высоту стенки каждой балки при
обеспечении прочности определяют
по формуле (6.35).
Окончательный выбор размеров
балки в расчетном сечении рекомен-
дуется проводить по той же методике,
что и для коробчатых пролетных ба-
лок мостовых кранов. Высота балок
к концу консоли уменьшается в со-
ответствии с характером эпюры из-
гибающего момента. Так как тележка
обычно приводится в движение канат-
ной тягой, жесткость консоли может
не лимитироваться. Вертикальную
часть (колонну) поворотной конструк-
ции выполняют обычно из листового
материала, и ее расчет аналогичен
расчету консоли.
§ 6.9. Рамы крановых тележек
Рамы опорных крановых тележек с
приводными колесами представляют
собой, как правило, две продольные
балки, в которых закреплены ходовые
колеса или балансиры, ряд попереч-
ных балок и сплошной настил, на
котором размещены фундаментные
рамы механизмов, опирающиеся на
балки рамы. Для нормальной работы
механизмов рама должна обладать
высокой изгибной жесткостью. В то
же время для уменьшения перегрузок
давлений на колеса, возникающих
вследствие деформаций металлокон-
струкций крана и неточностей уклад-
ки подтележечных рельсов и, как
следствие, подъема одного из колес
над уровнем остальных, поперечные
балки рамы должны иметь как можно
меньшую крутильную жесткость. В
связи с этим продольные балки мож-
но выполнять и рассчитывать анало-
гично торцевым балкам мостовых
кранов, а поперечные балки-в виде
одностенчатых балок типа сварных
двутавров.
Рама тележки представляет собой
многократно внутренне статически не-
определимую систему. Однако, учи-
тывая изложенное, ее расчетную схе-
му можно существенно упростить.
Каждую поперечную балку можно
рассматривать независимо от осталь-
ных. При этом для определения мак-
симально возможного изгибающего
момента в средней части пролета бал-
ки последнюю можно рассматривать
как шарнирно опертую на продоль-
ные балки, а для определения макси-
мально возможного момента в опор-
ной части-как защемленную в про-
дольных балках.
По полученным значениям изгиба-
ющих моментов и перерезывающих
сил определяют поперечные сечения
балок.
В связи с большим отношением
ширины балки к ее пролету в балке
будут возникать дополнительные на-
пряжения от стесненного изгиба, по-
этому при определении коэффициента
неполноты расчета следует прини-
мать т3 = 0,7... 0,8.
Продольные балки рассчитывают
как концевые балки мостовых кранов,
их нагрузками будут являться опор-
ные реакции и моменты со стороны
поперечных балок. Желательна про-
верка жесткости продольных балок в
вертикальной плоскости.
Рамы консольных опорных теле-
жек однобалочных мостовых кранов
рассчитывают аналогичным способом.
145
Опорные и подвесные рамы теле-
жек с канатной тягой выполняют, как
правило, из фасонного проката, чаще
всего из швеллеров. Каждый элемент
рамы рассчитывают как статически
определимую балку при пониженных
расчетных сопротивлениях материа-
ла, т, е. при = 0,5 ... 0,6.
Глава 7
ЭЛЕМЕНТЫ АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ ГРУЗОПОДЪЕМНЫХ МАШИН
§7.1. Общие сведения
Грузоподъемные машины- это ком-
плекс хорошо формализуемых расче-
тов, конструктивных решений узлов,
механизмов и конструкций, что по-
зволяет использовать ЭВМ при кур-
совом проектировании для автомати-
зации расчетных и чертежно-конструк-
торских работ.
В данной главе изложены вопросы
организации и структуры системы
автоматизированного проектирования
грузоподъемных машин (САПР ГПМ),
приведен пример конкретной реализа-
ции программы проектного расчета
механизма подъемг! мостового крана.
Основные требования к структуре
САПР ГПМ соответствуют ГОСТ
23501.4-79 «Системы автоматизиро-
ванного проектирования. Общие тре-
бования к программному обеспече-
нию» и сводятся к следующему:
САПР ГПМ должна содержать
ряд самостоятельных подсистем, объ-
единенных в единое целое функцио-
нальными и логическими связями.
Каждая подсистема должна иметь
возможность работать самостоятель-
но и быть совместимой с остальными
подсистемами;
САПР ГПМ должна быть «откры-
той» системой с точки зрения разви-
тия и дополнения ее подсистем и ком-
понентов. Совместимость отдельных
подсистем и компонентов САПР ГПМ
с другими системами САПР может
быть обеспечена использованием рас-
пространенных языков программиро-
вания высокого уровня, однозначно
определенных символов, кодов, сог-
лашений, обозначений переменных и
параметров, информационных и струк-
турных связей между подсистемами;
САПР ГПМ должна иметь разви-
тые средства диалога, диагностики и
устранения ошибок, что обеспечива-
ет быстрое освоение программных
средств непрофессиональным пользо-
вателем, комфортность и надежное! ь
работы.
Проектирование любой ГПМ со-
стоит (с некоторыми ограничениями)
из следующих этапов; предваритель-
ный расчет; проектирование механиз-
мов, металлоконструкций, электро-
оборудования и систем управления;
уточненные расчеты напряженно-де-
формированного состояния (НДС) эле-
ментов металлоконструкций, узлов и
деталей механизмов; оценка надежност-
ных характеристик механизмов, метал-
Рис. 7.1
146
локонструкций и машины в целом.
Выполнение отдельных этапов проек-
тирования обеспечивают основные под-
системы САПР ГПМ (рис. 7.1).
Управляющая программа MONI-
| TOR обеспечивает логическую и ин-
формационную связь между отдель-
ными подсистемами.
Подсистема PROEKT предназна-
чена для решения следующих задач:
। предварительный расчет механизмов,
подбор унифицированных и стандар-
тизованных узлов и деталей; приня-
тие обоснованных компоновочных ре-
шений механизмов; выполнение уточ-
ненных расчетов. Результаты работы
PROEKT-текстовые и графические
। документы с основными параметра-
ми узлов, справочными сведениями
об оборудовании и компоновочными
решениями механизмов. Параметры
механизмов заносят в архив для ис-
I пользования в других подсистемах.
Подсистема METAL предназначе-
на для решения следующих задач:
предварительный расчет металлокон-
струкций; принятие обоснованных ком-
поновочных решений; формирование
конечно-элементной модели металло-
конструкции и ее параметров; разбие-
; ние металлоконструкции на балочно-
оболочечные элементы, определение
их геометрических характеристик, фор-
мирование матриц жесткости, векто-
ров нагрузок и т.д.; определение на-
! пряженно-деформироваиного состояния
(НДС) элементов металлоконструк-
ции методом конечных элементов
(МКЭ); оптимизация геометрических
параметров сечений металлоконструк-
। ции с целью повышения коэффициен-
та использования металла по проч-
ности. Результатами работы METAL
I являются текстовые и графические
, документы с параметрами расчетных
схем и основными результатами рас-
четов, оптимальные компоновочные
! решения узлов и деталей металлокон-
1 струкций. Параметры конечно-эле-
* ментной модели заносят в архив для
I использования в подсистеме расчета
динамических нагрузок.
Подсистема DINAMIC предназна-
чена для решения следующих задач:
формирование динамических моделей
механизмов и определение нагрузок в
связях без учета жесткостных и дисси-
пативных свойств металлоконструк-
ции, в стационарных и нестационар-
ных режимах нагружения; формиро-
вание динамических моделей и опре-
деление нагрузок в связях ГПМ, при
рассмотрении совместной работы ме-
ханизмов и металлоконструкции; уточ-
нение НДС металлоконструкции при
критических режимах работы меха-
низмов; определение перераспределе-
ния динамических нагрузок между уз-
лами и механизмами ГПМ. Работа
подсистемы завершается подготовкой
документов с результатами расчетов
в виде динамических моделей, таблиц
собственных частот, графиков изме-
нения нагрузок в элементах ГПМ во
времени, и др. Это позволит делать
выводы о работоспособности ГПМ
при возникновении критических на-
грузок и является входной инфор-
мацией для подсистемы RLBLTY.
Подсистема RLBLTY предназна-
чена для решения следующих задач:
формирование математических моде-
лей, описывающих надежностные ха-
рактеристики узлов и механизмов и
всей ГПМ; математическое модели-
рование процессов нагружения узлов
и механизмов ГПМ случайными на-
грузками с учетом вероятностного ха-
рактера изменения прочностных, жест-
костных и других характеристик ме-
таллоконструкций; статистическая об-
работка результатов математическо-
го моделирования и получение надеж-
ностных оценок, характеризующих ра-
ботоспособность узлов и механизмов;
прогнозирование срока службы oi дель-
ных узлов и механизмов.
Справочный материал, являющий-
ся результатом работы RLBLTY, по-
зволяет проектировать ГПМ с учетом
надежностных характеристик и уста-
навливать обоснованные ресурсы ра-
боты ГПМ и ее отдельных частей.
Использование САПР ГПМ позво-
лит проектировать инженерно и эко-
номически оптимально обоснованные
ГПМ, ускорить подготовку и выпуск
проектно-конструкторской документа-
ции, повысить качество проектиро-
вания.
147
Разработку САПР ГПМ описан-
ной структуры целесообразно вести
поэтапно, отдельными подсистемами
и модулями. Наиболее простой с точ-
ки зрения создания является под-
система проектирования механизмов
PROEKT, которая должна охваты-
вать весь спектр механизмов (пере-
движения, подъема, поворота, изме-
нения вылета стрелы и т.д.). Наличие
большого количества алгоритмов рас-
чета отдельных механизмов и унифи-
кация оборудования позволяют раз-
рабатывать типовые программные мо-
дули, которые могут быть использо-
ваны при проектных расчетах.
§ 7.2. Подсистема
проектирования механизмов
Подсистема проектирования механиз-
мов грузоподъемных машин PROEKT
является первой подсистемой, с кото-
рой начинает свою работу проекти-
ровщик. Структура подсистемы PRO-
EKT (рис. 7.2) определяется составом
решаемых задач. Назначение монито-
ра аналогично функциям монитора
всей системы.
Предварительный расчет (блок 2)
обеспечивает определение основных
параметров механизма (мощность
электродвигателя, передаточное отно-
шение механической передачи, тор-
мозной момент, размеры основных
элементов и узлов) и подбор унифи-
цированного оборудования. При этом
на различных этапах проектировщику
предлагаю тся альтернативные вариан-
ты тех или иных решений, что позво-
ляет активно воздействовать на про-
цесс проектирования с учетом особен-
ностей производства и дальнейшей
эксплуатации проектируемого изделия.
После определения основных со-
ставляющих механизма производится
уточненный расчет (блок 3), который
позволяет конструктору сопоставить
расчетные характеристики с теми, ко-
торые необходимы для обеспечения
работоспособности проектируемого ме-
ханизма. При необходимости воз-
можно изменить состав оборудова-
ния и произвести уточненный расчет.
Формирование компоновочных схем
(блок 4) позволяет проектировщику
на основании имеющегося у него со-
става унифицированного оборудова-
ния сформировать одну или несколь-
ко компоновочных схем. Формирова-
ние компоновочных схем может быть
выполнено на базе теории графов, так
как известный состав оборудования и
имеющиеся у конструктора представ-
ления о их взаимном расположении
дают возможность формализовать
структурные связи, существующие в
механизме, в виде графа связей. Затем
имеющаяся библиотека параметри-
ческих моделей оборудования прог-
раммно обрабатывается и на осно-
вании графа связей формируется
компоновочная схема.
Подготовка текстовой документа-
ции (блок 5) ведется на основании
данных, полученных в ходе проекти-
рования. При этом цифровой мате-
риал преобразуется из кодов ЭВМ в
Рис. 7.2
148
символьную форму и заносится в со-
ответствующие разделы текста рас-
четно-пояснительной записки, кото-
рый хранится на магнитных дисках.
Обработка текста производится про-
граммно в автоматическом или полу-
автоматическом режиме.
Оформление расчетно-пояснитель-
ной записки (РПЗ) с адекватным пред-
ставлением хода проектирования и
получением оригинальных текстов
возможно при программной обработ-
ке текстов древовидной структуры.
Основой, или «стволом», такого текс-
та является образец наиболее общей
расчетно-пояснительной записки. Каж-
дая «ветвь» соответствует этапу про-
ектирования или логическому реше-
нию, которое может быть принято
конструктором. Отдельные «листья»
представляют собой типовые тексты,
отражающие возможные вариации в
пределах одного этапа или логическо-
го решения. Типовые тексты готовят-
ся заранее и заносятся на магнитные
диски. При проектировании ГПМ в
зависимости от решений, принимае-
мых конструктором, формируется век-
тор логических решений, который со-
держит информацию о последователь-
ности обработки древовидного текс-
та, Программа обработки формирует
текст РПЗ, заносит в него результаты
расчетов, формирует образы отдель-
ных документов, передает их в архив
на магнитный диск для дальнейшей
обработки программой вывода.
На заключительном этапе (блок 6)
текстовая и графическая документа-
ция выводится на твердый носитель
(бумага, калька, микропленка и т.д.)
через устройства вывода информа-
ции, чаще всего графопостроитель и
автоматическое цифровое печатаю-
щее устройство (АЦПУ). При необ-
ходимости конструктор может исполь-
зовать для вывода компоновочных
схем и другие средства визуализации,
например графический дисплей. Все
результаты работы подсистемы PRO-
ЕКТ (цифровые данные, текстовая и
графическая информация) упорядочен-
но выводятся в архив на внешние
носители (магнитные диски, магнит-
ные ленты и т.д.), что позволяет ис-
пользовать их при работе остальных
подсистем САПР ГПМ.
Для пояснения возможной органи-
зации подсистемы автоматизирован-
ного проектирования механизмов ГПМ
подробно рассмотрим работу про-
граммы автоматизированного проек-
тирования механизма подъема мосто-
вого крана, которая является конкрет-
ной реализацией блока 1 (рис. 7.2).
Программа KRAN предназначена
для выполнения предварительного про-
ектного расчета механизма подъема
мостового крана общего назначения.
В табл. 7.1 приведено соответствие
идентификаторов программы приня-
тым обозначениям переменных и па-
раметров гл. 2, где описан подробный
алгоритм предварительного расчета.
Табл и ца 7,1
Параметр
Обозначение Идентификатор
Расстояние между наружными блоками, м внар А
Коэффициент режима работы для муфт АЗ
Межосевое расстояние редуктора, м <hr AWW
Общая длина барабана, м Длина, м 1-6 BBAR
гладкого среднего участка барабана 4> BG
одного гладкого концевого участка барабана 4 BK
Минимальное расстояние от оси подвески до оси барабана, м BMIN
Длина одной нарезной части барабана, м 4 BN
Коэффициент запаса прочности каната Ч CK
К.П.Д.
механизма подъема Пм CPDM
полиспаста Пп CPDP
Диаметр, м
барабана по средней линии Do DBAR
блока подвески по средней линии навиваемого каната Dfn DB
уравнительного блока по средней линии навиваемого каната D61, DBL
149
Продолжение tnati/i. 7.1
Параметр Обозначение Идентификатор
каната конструктивный DC
каната минимальный “mln DK1
каната максимальный DK2
Максимальный крутящий момент двигателя. Н м 7* * mux DMAX
Диаметр быстроходного вала редуктора, м ^ap DVR
Коэффициент Маховой момент, Н-м2 e EK
муфты «™2)м GD2M
ротора двигателя (67)2)ДЙ GD2R
Вес груза, Н Q Q
Вес подвески, Н Qn QP
Кратность полиспаста Мощность двигателя, кВт: PN
необходимая PST
номинальная PSTN
Относительная продолжительность включения, % nh PW
Разрывное усилие каната, Н s; RK
Модуль открытой зубчатой передачи, мм m RMOD
Расчетное сечение каната, мм2 к SK
Максимально-допустимая частота вращения муфт, об/с SKOMAX
Частота вращения вала двигателя, об/с Натяжение канатов, Н SKORD
максимальное SMAX
минимальное SMiN
Шаг нарезки, мм t 1
Коэффициент запаса торможения К TK
Расчетный тормозной момент, Н м Передаточное число TT
открытой зубчатой передачи «О.Л COP
редуктора ГК «ГК U RED
Необходимое передаточное отношение механизма и UZP
Высота подъема груза, м H V
Скорость подъема груза, м/с Число рабочих витков для навивки половины полной рабочей V VG
длины каната z
зубьев шестерни открытой зубчатой передачи *1* ZZ1
зубьев колеса открытой зубчатой передачи *4 ** К ZZ2
Программа написана на языке
ФОРТРАН, имеет модульную структу-
ру, совпадающую с основными про-
ектными процедурами, обеспечена сред-
ствами организации диалога с поль-
зователем с помощью пакета про-
грамм (ПП) DISPL и ориентирована
на использование операционных си-
стем реального времени (ОС РВ) или
разделения функций (РАФОС) для
СМ ЭВМ.
Программа работает следующим
образом (рис. 7.3). В режиме диалога
(программа DIAL) вводят грузоподъ-
емность Q, скорость И высоту подъ-
ема груза Н, группу режима работы
механизма. По этим данным опреде-
ляют параметры и выбирают крю-
ковую подвеску в программе VKR, а
затем находят необходимый грузо-
захватный орган (программа VPD).
По нормам Госгортехнадзора опре-
деляются коэффициенты запаса для
каждого из элементов механизма подъ-
ема (программа KZAP). Имеющаяся
информация позволяет определить рас-
четные значения усилий в канатах
(программа SMAXIN), сформировать
запрос на поиск и подобрать необ-
ходимый канат (программа VKN).
Геометрические размеры барабана и
блоков определяются и корректиру-
ются программой RAZMB. Логичес-
кие блоки 9 и 10 определяют потреб-
ность корректировки параметров под-
вески, изменения размеров барабана
по различным условиям и дальней-
ший ход проектирования. Определив
! 50
BIAL
Ввод исходных
дНмных
VPD
гЧ-
Да
VO
т 1
KZAP
SMAXIN
- 7 ।
VKN
д 1 -
RAZM8 1 "
—
Определенае размера!
Требуется изгнить
выбор грузсха&ю-
ного органа
выбор стального
каната
Определение усилий
в канате
Определение нрмапаЛ-
ных коэффициентов
запаса
Нет
Производилась коррек-
тировка диаолтра
барабана ?
[Нет
оог]
002
Определение необходи-
мой статической
мощности зяектро-
Щк&атежг
25
Нет J
-*-< 1Р1=5?
Да
Выбор кранобога
эяектродЗаытелл
Опредедемзе переда-
то"негп отношения
механической пере-
дачи
Определение необхо-
димости гафрекпювдяи
диаметра барабана
-21—1—
VRTGK
Необходима коррек
Возможно примене-
ние редуктора только
с открытой зубча-
той передачей ?
Выбор редуктора ЦТ.
ЦТН
Необходима корректи
робка диаметра
барабана ?
Необходима изменить
па раме низы крюко
бой подвески ?
/&о&юдйию примене-
ние редуктора с ап-
крытой зубчатой
передачей
ГП
f Выбор
информацу-
V£H. TXT
выбор редуктора
- с открытой зудча -
той передачей
Да
Нет
Да
Нет
IP-Г
/Р=2?
T0RMQ2
VTR
VMF
RPZ
Тре&рякя изменить
параметры крюка
дои пдвеош?
Требуется корректи-
ровка диаметра ба-
рабана ?
дампа тормозного
момента тормоза
Выбор кранобых
Выбор скдиншпел-
— ных муунп
(Оформление пкя&па
нои записки
7.3
PROGRAM KEAN
С ПРОГРАММА РАСЧЕТА МЕХАНИЗМА ПОДЪЕМА МОСТОВОГО КРАНА
С ОБЩЕГО НАЗНАЧЕНИЯ
DIMENSION BUFVPDf20),BUFVKR(20),BUFVKN(20),BUFVDV(20),
#BUFVRD(20),BUFVTR(20),BUFVMF(20),IXC10),IY(10)
С ВВОД ИСХОДНЫХ ДАННЫХ
CALL DIALfQJ.PW.VG.GRR)
C
С ВЫБОР КРЮКОВОЙ ПОДВЕСКИ
25 CALL VPDiQ.PW.PN^Kl.DKZ.VP.A.QP.DB.AJ.PM.BUFVPD.IPOD)
JJ«0
c
ВЫБОР ГРУЗОЗАХВАТНОГО ОРГАНА
CALL VKR(Q,QK,FW,BUFVKR,IMKR)
c
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ЗАПАСА РЕГЛАМЕНТИРОВАННЫХ ГОСГОРТЕХНАДЗОРОМ
CALL KZAP(PW,A3,CK,EK,TK)
c
ОПРЕДЕЛЕНИЕ УСИЛИЙ В КАНАТЕ
CALL SMAX.lN(Q,VP,PN,CPDP,CKtSMAX.SMIN,RK)
c
c
26
C
C
ВЫБОР СТАЛЬНОГО КАНАТА
CALL VKNCRK.DC.SK.VK.DKi.DKS.BUFVKN.IWKN)
1P1-0
ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ГРУЗОВОГО БАРАБАНА
CALL RAZMB(EK,V,PN,A,DC,DBAR,BMIN,BN,BK,BG(BBAR,DBL,VG,
*SKORD,UZF,JJ,T,ZP,IP1,DBMIN,DBUtIN)
IF(IPl.EQ.l)G0T025 ! ТРЕБУЕТСЯ ИЗМЕНИТЬ ПАРАМЕТРЫ ПОДВЕСКИ
IF( JJ.EQ.DGOTO150 IПРОИЗВОДИЛАСЬ КОРРЕКТИРОВКА РАЗМЕРОВ БАРАБАНА
c
ОПРЕДЕЛЕНИЕ НЕОБХОДИМОЙ СТАТИЧЕСКОЙ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
CALL ELDVIG(Q,VP,VG,PSTN)
ВЫБОР КРАНОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
CALL VDVtPSTN.PW.PST.SKORD.CPDD.TD.GDER.VDVIG.TDl.TDS.BUFVDV,
*IWD)
С
С <
150
С ОПРЕДЕЛЕНИЕ НЕОБХОДИМОСТИ КОРРЕКТИРОВКИ РАЗМЕРОВ БАРАБАНА
ОПРЕДЕЛЕНИЕ ПЕРВДАТОЧНОГО ОТНОШЕНИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
> CALL REDUKT(SKORD,PN,VG(DBAR,UZP,VZFT)
CALL SKORW(SKORD,UZPtJGK,JJ)
EQ.1) GOTO 26 I НЕОБХОДИМА КОРРЕКТИРОВКА БАРАБАНА
IF(JGK.EQ.1)GOTO100 ! ВОЗМОЖНО ПРИМЕНЕНИЕ ТОЛЬКО РЕДУКТОРА ГК
С ВЫБОР РЕДУКТОРА ТИПА Ц2, ЦТН
CALL VRD(PW,PST,UZP,UZPD,AW,PSR(V1,OM,DRN,SKORD,JGK,DVR,
#IPltBUFVRD,IMR)
IF(IPl.EQ,l)G0T025 I НЕОБХОДИМА КОРРЕКТИРОВКА БАРАБАНА
IF(IPl.EQ.2)G0T028 I НЕОБХОДИМО ИЗМЕНИТЬ ПАРАМЕТРЫ ПОДВЕСКИ
IF(IP1.EQ.3)GOTO40 ! НЕОБХОДИМ СПЕЦИАЛЬНЫЙ РЕДУКТОР
GOTO!21
Рис. 7.4
с
С ВЫВОД ИНФОРМАЦИОННОГО СООБЩЕНИЯ
100 CALL GASH
CALL FILRDRf 'KRAN.TXT', IX, IY,N)
CALL POSIT(IX(N),IY(N))
READ(6,22,ERR«100)IW
22 F0RMAT(A2)
CALL RAZP(IW.IPR)
IF(IPR.LT.0.)STOP
C
С ВЫБОР КРАНОВОГО РЕДУКТОРА ТИПА ГК, ОПРЕДЕЛЕНИЕ
С ПАРАМЕТРОВ ОТКРЫТОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ
40 CALL VRTGK(PVi,PST,UZP,UZPD,SKORD,AW,ZZl,ZZ2,U0P,URED,IP,RW0D,PR)
IF(IP.EQ.l)G0T025 I ТРЕБУЕТСЯ ИЗМЕНИТЬ ПАРАМЕТРЫ ПОДВЕСКИ
IF(IP.EQ.2)G0T026 ! ТРЕБУЕТСЯ КОРРЕКТИРОВКА БАРАБАНА
G0T0121
С
С ОПРЕДЕЛЕНИЕ НЕОБХОДИМОГО ТОРМОЗНОГО МОМЕНТА ТОРМОЗА
121 CALL TORMOZCQ,VP.DBAR,UZP,PN,TK,TT,TQ1T,CPDM)
С
С ВЫБОР КРАНОВЫХ ТОРМОЗОВ
CALL VTRCrr.PW.BUFVTR.TTOR.IWT)
С
С ВЫБОР СОЕДИНИТЕЛЬНОЙ МУФТЫ
CALL VMF(TM,TD,SKORD,DVR,АЗ,TMUF,SKOMAX,GD2,DMXX,AMUF,
*BUFVMF,IWM)
C
С ФОРМИРОВАНИЕ РАСЧЕТНО-ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
STOP
ш
Рис. 7.4. Продолжение
статическую мощность двигателя (про-
грамма ELDVIG) и подобрав электро-
двигатель (программа VDV), находят
параметры для расчета передаточно-
го отношения всего механизма (про-
грамма REDUKT) и выбирают редук-
торы различных типов (программы
VRD, VRTGK). Логические блоки 15—16,
18—20 служат для принятия решения о
ходе проектирования. В зависимости
от условий они обеспечивают как воз-
можность возврата на предыдущие,
так и пропуск ряда проектных про-
цедур.
Программы TORMOZ и VTR оп-
ределяют полный набор характерис-
тик и выбор необходимого тормоза
механизма, а программа VMF обес-
печивает подбор муфт. В завершение
происходит формирование текста
расчетно- пояснительной записки
(программа RPZ), который записы-
вается в архив на магнитный диск для
последующего вывода на бумагу.
Программа KRAN, текст которой
приведен на рис. 7.4, ориентирована
на непрофессионального пользовате-
ля, знающего основы проектирования
ГПМ. Внутри большинства програм-
мных модулей (ПМ) имеются диало-
ги для информирования пользовате-
ля, принятия решений, изменения па-
раметров узлов. Экраны диалога фор-
мируются на дисплее средствами ПП
D1SPL и имеют конкретную трактов-
ку для каждого случая, как, например,
KRAN. TXT (рис. 7.5). Режимы вво-
да-вывода информации ПМ для по-
вышения надежности имеют защиту
от ошибок пользователя.
Модульный принцип построения
программ позволяет дополнить их
вновь разработанными, а также ис-
пользовать ПМ, имеющие общий ха-
153
01 KRAN.TXT
ББ
IS
*»#*««#**#*******ft*#1H*#»**tt*****##tt***«####*#**#*#**fHHHHHHHHHHHHHt***#tt
НЕОБХОДИМОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО ЗУБЧАТЫХ ПЕРЕДАЧ ВЕЛИКО ПРИ
БОЛЬШОЙ ПЕРЕДАВАЕМОЙ МОЩНОСТИ, ПОЭТОМУ РЕДУКТОРЫ ТИПА
Ц2 И ЩИ НЕ МОГУТ ПРИМЕНЯТЬСЯ. В ДАННЫХ УСЛОВИЯХ
ЦЕЛЕСООБРАЗНО ПРИМЕНЕНИЕ РЕДУКТОРА ТИПА ГК, КОТОРЫЙ
ИМЕЕТ НА КОНЦЕ ТИХОХОДНОГО ВАЛА
ЗУБЧАТОЙ ПЕРЕДАЧИ.
IID.
СТЕРН» ДЛЯ ОТКРЫТОЙ
t****#####**»*#»**#*»*******»****#****#*#*#*#****#*######*##***####*#
ВЫ СОГЛАСНЫ ПОСТАВИТЬ РЕДУКТОР ТИПА ГК?..(ДА/НЕТ)...
Рис. 7.5
SUBROUTINE DIAL(Q,V,PW,VG,GRR)
С П/П ВВОДА ИСХОДНЫХ ДАННЫХ РАСЧЕТА
С ВХОДНЫЕ ПАРАМЕТРЫ: НЕТ
С ВЫХОДНЫЕ ПАРАМЕТРЫ; Q-BEC ГРУЗА, [Н] ;
С V-ВЫСОТА ПОДЪЕМА ГРУЗА, [М] ;
С VG-СКОРОСТЬ ПОДЪЕМА ГРУЗА, [М/С] ;
С РМ-РЕЮШ РАБОТЫ, [ПВХЪ
С ВНЕШНИЕ ССЫЛКИ: GASH, W0D
С"
DIMENSION 1Х(Б), ШБ) .РИВТ(в) ,Х(4)
DATA PWST/1B.,1B.,16.,25.,40.,60./
С ВВОД ИСХОДНЫХ ДАННЫХ
CALL GASH
CALL W0D('DIAL.TXT',X,N)
Q-X(l)
VG-X(2)
V-X(3)
Q-Q*1000, I ПЕРЕВОД В [H]
GRR-X(4)
IK-IFIX(X(4))
PW-PWST(IK) ! ПЕРЕВОД В ПВ [%]
RETURN
END
Рис. 7.6
рактер (например подбор двигателей
VDV, редукторов VRD и т. п.) при
автоматизированном расчете других
механизмов ГПМ.
Подпрограмма DIAL (рис. 7.6) фор-
мирует на видеотерминале запрос на
ввод исходных данных для проекти-
рования (рис. 7.7).
Для определения расчетных пара-
метров механизма подъема в про-
154
05 DIAL.TXT
55 55 55 55 15
08 09 10 11 14
^Ч ^ч ^ч ^ч ^ч ^ч ^ч ^ч ^Ч ^ч ^ч ^Ч ^Ч ^т^Ч ^Ч^^^ч ^Ч ^Ч ^Ч^п^ч ^ч ^ч^ч ^ч *w ^ч ^ч ^Ч ^Ч ^Ч ^^^^Ч ^Ч^Ч^Ч^Ч^Т ^Ч
ПРОЕКТИРУЕТСЯ МЕХАНИЗМ ПОДЪШ МОСТОВОГО КРАНА ОБЩЕГО НАЗНАЧЕНИЯ
t
f М ц мММММММММJ<М.МММММMMMMMMMJLMJLJLMMm^mMAAALMMMMMAMLMAL^JLMMMMMMMJUULMMMMMMj* ц ц м
^ч ^ч ^ч^ч"^ч^ч ^ч^ч^ч ^ч ^ч^ч^ч^ч^ч^ч^ч^ч^ч^ч^^^^ч^ч^ч^ч^ч^ч^ч^Ч^Т
' ВВЕДИТЕ ИСХОДНЫЕ ДАННЫЕ:
I
’ ВЕС ПОДНИМАЕМОГО ГРУЗА, [КН] ................
’ СКОРОСТЬ ПОДЪЕМА ГРУЗА, [М/С]................
’ ВЫСОТУ, ПОДЪЕМА ГРУЗА, [М]...................
’ ГРУППУ РЕЖИМА РАБОТЫ МЕХАНИЗМА...............
’ (ПО ГОСТ 25835-83)
Рис. 7.7
Таблица 7.2
Имя Назначение
Определение:
минимального, максимального и разрывного усилий в канате
нормативных коэффициентов запаса прочности
необходимой статической мощности электродвигателя
необходимого передаточного числа механизма
необходимого тормозного момента на приводном валу механизма
размеров барабана и канатных блоков
Округление диаметра барабана и блоков до стандартною ряда значений
SMAXIN
KZAP
ELDVIG
REDUKT
TORMOZ
RAZMB
RDBAR
грамме KRAN используется ряд под-
программ (табл. 7.2).
Принцип определения параметров
механизма подъема соответствует ме-
тодике, изложенной в гл. 2. Подпро-
граммы SMAXIN, KZAP, ELDVIG,
REDUKT, TORMOZ не требуют до-
полнительных пояснений и приведены
на рис. 7.8 ... 7.13.
Подпрограмма RAZMB (рис. 7.14)
предназначена для определения гео-
метрических размеров барабана и бло-
ков полиспаста с возможностью их
корректировки. Корректировка раз-
меров возможна путем изменения крат-
ности полиспаста, диаметра бараба-
на, блоков и может быть выполнена
по решению проектировщика как не-
посредственно по результатам рабо-
ты подпрограммы (признак JJ = 0),
так и вследствие изменившихся условий
в вызывающей программе (признак
JJ = 1). Текст подпрограммы приве-
ден на рис. 7.15, диалога-на рис. 7.16.
Подпрограмма RBAR (рис. 7.17) вы-
полняет округление расчетного значе-
ния диаметра барабана до значений
предпочтительного ряда в пределах
0,1... 1,0 м. Если диаметр барабана
превышает 1,0 м, то его назначают
исходя из конструктивных соображе-
ний.
Для подбора оборудования и его
характеристик применяют подпрограм-
мы (табл. 7.3), основанные на логи-
ческом сравнении расчетных парамет-
ров со справочными характеристика-
ми оборудования.
Подбор оборудования выполняетт
ся подпрограммой PS (см. ниже), для
которой готовится необходимая ин-
формация: формируется вектор за-
проса BUFIN, содержащий требуе-
мые параметры оборудования; вектор
типов оборудования BUFOBR, содер-
* жащий информацию о просматривае-
мых типах оборудования; векторы
логики сравнения ILG, NUM.
Схемы алгоритмов подпрограмм
VKR, VKN, VRD, VDV, VTR, VMF
155
Таблица 7.3
Название
Назначение
Подбор:
VKR грузозахватных органов
VPD крановых крюковых подвесок грузоподъемностью 3,2...320 г
VKN стальных канатов типа ЛК-РО, ТЛК-0
VDV крановых электродвигателей МТН, MTF, MTKF, МТКН
VRD редукторов типа Ц2, ЦТН
VRTGK кранового редуктора типа ГК с открытой зубчатой передачей
VTR крановых тормозов типа ТКТ, ТКП, ТКГ и ТКТГ
VMF муфт типа М3, МЗП, МУВП
SUBROUTINE SMAXIN(Q,VP,PNtCPDP,CK,SMAX,SMIN,RK)
С I
С П/П ОПРЕДЕЛЕНИЯ УСИЛИЙ В КАНАТАХ ПОЛИСПАСТА
С ВХОДНЫЕ ПАРАМЕТРЫ: Q-ВЕС НОМИНАЛЬНОГО ГРУЗА, [Н] ;
С VP-ВЕС КРЮКОВОЙ ПОДВЕСКИ, [Н] ;
С PN -КРАТНОСТЬ ПОЛИСПАСТА ;
С CPDP-КПД ПОЛИСПАСТА ;
С СК-НОРМАТИВНЫЙ КОЭФФИЦИЕНТ ЗАПАСА .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: ЗМАХ-МАКСИМАЛЫЮЕ НАТЯЖЕНИЕ КАНАТА, [Н] ;
С SMIN-МИНИМАЛЬНОЕ НАТЯЖЕНИЕ КАНАТА, [Н] ;
С RK-ТРЕБУЕМОЕ РАЗРЫВНОЕ УСИЛИЕ КАНАТА, [Н].
С ВНЕШНИЕ ССЫЛКИ: GASH, FILRDR .VYVNUM
DIMENSION PARC 5)
CPDP»1.-(PN-1.)#0.02
SMAX-( Of VP)/(PN*2. *CPDP)
SMIN-( Q+VP)<CPDP/(2.*PN)
RKaCK#SMAX
С ВЫВОД РЕЗУЛЬТАТОВ РАСЧЕТА НА ЭКРАН ТЕРМИНАЛА
PAR(1)-CPDP
PAR(2)-SMAX
PAR(3)«SMIN
PAR(4)=RK
CALL VYVNUM('SMAX.TXT',PAR,IPR)
IF(IPR.EQ.1)STOP ! ПРОДОЛЖАТЬ РАБОТУ?
RETURN
END
Рис. 7.8
5 SMAX.TXT
45 45 45 45 50
6 8 10 12 18 18
###*»*#*###*#*#***»*###***#*##*#**#**#***#«**#*«#***#*»*
РЕЗУЛЬТАТЫ РАСЧЕТА УСИЛИЙ В КАНАТЕ:
#*#»****#*###*#***#»»****##***»«****##**»****#«*#**###*»
1. КЦД ПОЛИСПАСТА......................
2. МАКСИМАЛЬНОЕ УСИЛИЕ В КАНАТЕ, [Н]..
3. МИНИМАЛЬНОЕ УСИЛИЕ В КАНАТЕ, [Н]...
4. ТРЕБУЕМОЕ РАЗРЫВНОЕ УСИЛИЕ, ЕН]...
ЗАКОНЧИТЬ РАБОТУ ? .............
Рис. 7.9
156
c
SUBROUTINE KZAP(PW,A3,CK,EK,TK)
1
I
I
J
i
I
i
С П/П ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ЗАПАСА ПО НОРМАМ ГОСГОРТЕХНАДЗОРА
С ВХОДНЫЕ ПАРАМЕТРЫ: РМ~РЁМИМ РАБОТЫ МЕХАНИЗМА, СПВ%Л
С ВЫХОДНЫЕ ПАРАМЕТРЫ:СК,ТК,ЕК,АЗ-НОРМАТИВНЫЕ КЛЭФФИЦИЕНТЫ ЗАПАСА
DIMENSION Р(4),Х(4),Y(4>,Z(4),R(4)
DATA Р/15.,25.,40.,60./
DATA X/1.5,1.75,2.0,2.5/
DATA Y/5.0,5.5,6.0,6.0/
DATA Z/20.0,25.0,30.,30./
DATA R/l,0,1.1,1.2,1.3/
DO 1 1-1,4
L=>I
IF(PW.EQ.P(I))G0T02 '
1 CONTINUE
2 CK-Y(L)
IK«X(L)
EK-Z(L)
A3-R(L)
RETURN /'
END
Рис. 7.10
SUBROUTINE ELDVIG(Q,QP,VG,PSTN)
C ---------- ! - — "
С ПРОГРАММА ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОЙ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
С ВХОДНЫЕ ПАРАМЕТРЫ: Q-BEC НОМИНАЛЬНОГО ГРУЗА, [Н];
С QP-BEC ПОДВЕСКИ, [HJ;
С VG-СКОРОСТЬ ПОДЪЕМА, [М/С].
С ВЫХОДНЫЕ ПАРАМЕТРЫ: PSIN-СТАТИЧЕСКАЯ МОЩНОСТЬ ЭЛЕКТРОДВИГАТЕЛЯ
С , [КВТ].
PSTN-(Q+OP)*VG/(0.85*1000.)
RETURN
END
Рис. 7.11
157
SUBROUTINE R£DUKT(SKORD,PN,VG,DBAR,UZP,UZPT)
C
c
c
c
П/П ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОГО ЧИСЛА РЕДУКТОРА
ВХОДНЫЕ ПАРАМЕТРЫ:SKORD-ЧАСТОТА ВРАЩЕНИЯ ВАЛА ДВИГАТЕЛЯ, [ОБ/МИН] ;
PN-KPATHOCTb ПОЛИСПАСТА ;
VG-СКОРОСТЬ ПОДЪЕМА, [М/С] ;
DBAR-ДИАМЕТР БАРАБАНА, [М] .
ВЫХОДНЫЕ ПАРАМЕТРЫ:UZP-HEOBXOДИМОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ
PI-3.14159
UZP-PI*SKORD«DBAR/(PN»VG*80.)
UZPT-UZP
WRITE(8,5) U2P
5 FORMATt10X, ’ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ЗУБЧАТОЙ ПЕРЕДАЧИ',
#' UZP-*,F10.4)
RETURN
END
Рис. 7.12
SUBROUTINE TORMOZCQ,VP,DBAR,UZPD, PN, TK ,TT,TQ1T,CPDM)
С П/П ОПРЕДЕЛЕНИЯ НЕОБХОДИМОГО ТОРМОЗНОГО МОМЕНТА ТОРМОЗА
С ВХОДНЫЕ ПАРАМЕТРЫ ;Q-BEC ПОДНИМАЕМОГО ГРУЗА, [Н] ;
С VP-ВЕС ПОДВЕСКИ, [Н] ;
С DBAR-ДИАМЕТР БАРАБАНА, [М] ;
С UZPD-ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ;
С ТК-КОЭФФИЦИЕНТ ЗАПАСА ТОРМСЖНИЯ ;
С FN-КРАТНОСТЬ ПОЛИСПАСТА.
С ВЫХОДНЫЕ ПАРАМЕТРЫ:ТТ-Т0РМ03Н0й МОМЕНТ, [Н*М] ;
С TQ1T-MOMEHT НА ПЕРВОМ ВАЛУ, [Н»М] ;
С CPDM-КПД МЕХАНИЗМА ПОЮТА .
CPDM-0.86
TQlT-(Q+VP)*CPDM#DBAR/(2.<UZPD«PN)
TT-TK#TQ1T
RETURN
END
Рис. 7.13
158
«—J______
вычисление
диаметра
oapaiaHa
Да
Изменение
диаметра
дарована
Нея
RBAR
Окригление no ряду
предпочтите ль
ных чисел
Вычисление
геометричес-
ких разме-
/ Корректи-
' редка ,
размеров
Ю t
Да
Вывод
парамет-
ров
Нет
RAZMB. U7
Рис. 7.14
идентичны (рис. 7.18). Подпрограм-
мы VPD и VRTGK содержат диалог
для формирования и корректировки
вектора запроса и имеют незначи-
тельные отличия.
В каждой из подпрограмм выпол-
няется поиск нескольких типов обору-
дования, указанных в векторе BUFOBR
и хранящихся в банке данных (БД).
Логика выбора оборудования во всех
подпрограммах аналогична условиям
выбора, оговоренным в гл. 2. Необ-
ходимая информация (до 20 значе-
ний) о каждом из типов подобран-
ного оборудования содержится в эле-
ментах вектора BUFOUT. Всего в
векторе может храниться информация
о пяти типах оборудования: о первом
типе-с BUFOUT (I) до BUFOUT
(20), втором-с BUFOUT (21) до
BUFOUT (40) и т.д. Если какой-либо
тип оборудования не найден, то в
элемент BUFOUT (К), К = 1, 21, 41,
61,81 соответствующей части вектора
записывается признак —1.
Для выбора конкретного типа обо-
рудования в режиме диалога служит
подпрограмма VUBOR (рис. 7.19). Под-
программа VUBOR формирует на
дисплее диалог, выводит из массива
PAR необходимую информацию о па-
раметрах оборудования, удаляет под-
программой CLEAR с экрана тип
оборудования, который не подошел
по условиям запроса, и обеспечивает
выбор альтернативного решения. Ин-
формация о выбранной единице обо-
рудования заносится в массив BUFVB
(20). Текст подпрограммы приведен
на рис. 7.20, Экран диалога должен
содержаться в файле с именем, храня-
щимся в переменной FILNAM, и при-
водится при описании соответствую-
щей подпрограммы поиска оборудо-
вания.
В подпрограмме VKR (рис. 7.21,
7.22) запрос содержит информацию
для поиска одно- и двурогого (ковано-
го или пластинчатого) крюка по за-
данной грузоподъемности Q и режиму
работы в соответствии с ГОСТ 6627-74,
6628-73, 6619-75.
Подпрограмма VPD (рис. 7.23, 7.24)
выполняет поиск крюковых подвесок
по грузоподъемности О и режиму ра-
боты-данные ОСТ 24.191.08-81 и нор-
мы ПО «Сибтяжмаш». Справочные
данные приведены в Приложении I.
Подпрограмма VKN (рис. 7.25,
7.26) формирует запрос для/ поиска
стальных канатов с органическим и
металлическим сердечником по за-
данному разрывному усилию RK и
возможным пределам изменения диа-
метра каната DK1 (минимальный) и
DK2 (максимальный). Поиск ведется
по ГОСТ 2668-80, 3079-80, 7668-80,
3077-80, 7669 -80. Условие выбора ка-
ната описано в гл. 2, справочные дан-
ные приведены в Приложении 2.
Подпрограмма VDV (рис. 7.27,
7.28) обеспечивает выбор крановых
двигателей типа МТН, MTF, МТКН,
159
SUBROUTINE RAZMBCEK.V.PN.A.DC.DBAR.BMIN.BN.BK.BG.BBAR.DBL.VG,
#SKORD,UZP,JJ,T,ZP,IP1,DBMIN,DBLMIN)
Оаваимжямжвйаашпаайваммяммвяшввашошшшмжмамшммааммживппвта
С П/П ОПРЕДЕЛЕНИЯ ОСНОВНЫХ РАЗМЕРОВ БАРАБАНА
С ВХОДНЫЕ ПАРАМЕТРЫ: ЕК-КОЭИИЦИЕНГ, РЕГЛАМЕНТИРОВАННЫЙ НОРМАМИ
С ГОСГОРТЕХНАДЗОРА ;
С V-ВЫСОТА ПОДЪЕМА, [М] ;
С PN-KPATHOCTb ПОЛИСПАСТА ;
С А-РАССТОЯНИЕ МЕВДУ НАРУЖНЫМИ БЛОКАМИ
С ПОДВЕСКИ, [М] ;
С DC-ДИАМЕТР КАНАТА, СМ] .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: DBAR-ДИАМЕГР БАРАБАНА, [М] ;
С BMIN-МИНИМАЛЬНОЕ РАССТОЯНИЕ МЕЖДУ ОСЬЮ ВЕРХНИХ
С БЛОКОВ И ОСЫ) БЛОКОВ КРСКОВОЙ ПОДВЕСКИ
С VG-СКОРОСТЬ ПОДЪЕМА, [М/С] ;
С BN-ДЛИНА НАРЕЗНОЙ ЧАСТИ БАРАБАНА, [М] :
С JJ -ПРИЗНАК КОРРЕКТИРОВКИ БАРАБАНА ;
С UZP-ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ;
С ВК-ДЛИНА КОНЦЕВОЙ ЧАСТИ БАРАБАНА, [М] ;
С SKORD-4ACTOTA ВРАЩЕНИЯ ВАЛА ЭЛЕКТРО-
С ДВИГАТЕЛЯ, [ОБ/МИН] ;
С BG-ДЛИНА ГЛАДКОЙ ЧАСТИ БАРАБАНА, [М] ;
С BBAR-СУММАРНАЯ ДЛИНА БАРАБАНА, [М] .
С ВНЕШНИЕ ССЫЛКИ: POSIT,GASH,FILRDR,ASSIGN,CLOSE,W0D,VYV0D
,as '-a: fciee 1?ть1"т ina и ивдядЕа* i i i егюоясаяяя i
DIMENSION PAR(5)
DATA KL/0/
KL=KL+1 f СЧЕТЧИК ОБРАЩЕНИЯ К ПОДПРОГРАММЕ
IF(JJ.EQ.0)GOTO 2
С КОРРЕКТИРОВКА РАЗМЕРОВ БАРАБАНА
DBAR-UZP«PN*VG«120./(3.14150#SKORD)
GOTO 6
2 DBMIN“0.85*DC*EK ! ДИАМЕТР БАРАБАНА
DBAR-DBMIN
RAZ-DBAR
CALL RBAR(RA2,DEAR) ! ОКРУГЛЕНИЕ ПО РЯДУ ПРЕДПОЧТИТЕЛЬНЫХ
DBAR-RAZ I ЧИСЕЛ
6 - CONTINUE
DBLMIN -DC#EK IДИАМЕТР БЛОКА v
DBL-DBLMIN
200 PI-3.14158
ZP-(V»PN)/(PI«DBAR)I ЧИСЛО НАРЕЗОК
T-DC+0.003 ПЛАТ НАРЕЗКИ
BN-T#(ZP+4.5) ! ДЛИНА НАРЕЗНОЙ ЧАСТИ
BK-4.#DC 1 ДЛИНА ОДНОГО ГЛАДКОГО КОНЦЕВОГО УЧАСТКА
BMIN-3.*DBAR
BG-A I ДЛИНА ГЛАДКОЙ ЧАСТИ
BBAR-2,*BN+2,#BK+BG ! ДЛИНА БАРАБАНА
IF(JJ.EQ.l) RETURN
PAR(1)«DBAR
PAR(2)»DBL
PAR(3)«BN
Рис. 7.15
160
PAR(4)=BK
PAR(5)=BBAR
21 CALL VYVNUMt'RAZMB.TXT’,PAR,IPR)
IF(KL.EQ.1)DBMIN«DBAR
IF(KL.EQ.l)DBUfIN-DBL
IF(IPR.GE.0)GOTO22
CALL VYV0D(2,13,'ХОТИТЕ ИЗМЕНИТЬ КРАТНОСТЬ ПОЛИСПАСТА ?',38)
CALL P0SIT(45,14)
READ(6,20.ERR-21)IW
20 FORMAT(A2)
CALL RAZP(IW.IPR)
IF(IPR.GE.0)IP1-1
IF(IP1.EQ.l)RETURN
RETURN
22 CALL CLEAR(1,71,13,17)
CALL VYV0D(3,13, ’ВВЕДИТЕ ДИАМЕТР БАРАБАНА ...’,27)
CALL P0SIT(35,14)
READ(6,*,ERR»22)DBAR
24 CALL VYVOD(10,15,'ВВЕДИТЕ ДИАМЕТР БЛОКА...',24)
CALL POSIT(35,16)
READ(6,#,ERR-23)DBL
GOTO 200
23 CALL CLEAR(4,70,15,18)
GOTO 24
END
Рис. 7.15. Продолжение
06 RAZMB.TXT
55 55 55 55 55 55
06 07 08 08 10 13
>***********#*#«№##**1HHt**1HHHHHHf****** *********************
' РАЗМЕРЫ БАРАБАНА И БЛОКА :
'#*#*«#***♦»*###*»#**##***»*#*#«*•***#♦*#*-*♦#*****#*♦♦****♦*
1. ДИАМЕТР БАРАБАНА, М................
2. ДИАМЕТР БЛОКА, М. ..................
3. ДЛИНА НАРЕЗНОЙ ЧАСТИ БАРАБАНА, М....
4. ДЛИНА ГЛАДКОГО КОНЦЕВОГО УЧАСТКА, М
5. ДЛИНА БАРАБАНА, И...................
ХОТИТЕ ВЫ ИЗМЕНИТЬ ДИАМЕТРЫ БЛОКА, БАРАБАНА ?....
Рис, 7.16
6 Зак. 1988
161
SUBROUTINE RBAR(DBAR.RAZ)
0=============================™=™
С П/П ОКРУГЛЕНИЯ РАЗМЕРОВ БАРАБАНА ПО РЯДУ ПРЕДПОЧТИТЕЛЬНЫХ ЧИСЕЛ
С ВХОДНЫЕ ПАРАМЕТРЫ: DEAR-ДИАМЕТР БАРАБАНА, [М]
С ВЫХОДНЫЕ ПАРАМЕТРЫ: RAZ-ОКРУГЛЕННОЕ ЗНАЧЕНИЕ ДИАМЕТРА БАРАБАНА
Ге—ч и»
DIMENSION Х(13)
DATA Х/0.16,0.2,0.25,0.32,0.4,0.45,0.5,0.56,0.83,0.71,
*0.8,0.9,1.0/
DO 2 1=1,13
К=1
IF(RAZ.LE.Xd)) GOTO 1
2 CONTINUE
RETURN
1 RAZ=X(K)
RETURN
END Рис. 7.17
MTKF но необходимому значению
статической мощности двигателя PSTN
и режиму работы. Выбор ведется по
справочным данным [12].
Подпрограмма VRD (рис. 7.29 ...
7.30) выбирает редукторы крановые
типа Ц2 и ЦТН но передаваемой
мощности PST, необходимому пере-
даточному о тношению механизма UZP,
режиму работы и максимальной часто-
те вращения вала двигателя SKORD.
Справочные данные приведены в При-
ложении 5.
Если редуктор типа Ц2 и ЦТН не
удается подобрать, то либо предлага-
ется продолжить проектирование с
применением редуктора тина ГК и
открытой зубчатой передачи (признак
IPI = 3), либо изменить конструктив-
ные особенности ранее выбранного
оборудования (признак IPI — 1,2).
Подпрограмма VRTGK (рис. 7.31,
7.32) имеет несколько более сложную
лотку выбора редуктора, которая
учитывает возможные пределы из-
менения передаточного числа откры-
той зубчатой передачи.
Подпрограмма VTR (рис. 7.33,
7.34) подбирает необходимый тормоз
типа ТКТ, ТКП, ТКГ, ТКТГ по за-
данному тормозному моменту ТТ и
режиму работы. Справочные данные
приведены в Приложении 7. Подпро-
1рамма VMF (рис. 7.35, 7.36) пред-
назначена для выбора муфт типа М3,
МЗП, МУВП но крутящему моменту
Передача исход-
ных данных из
вызывающей
программы
г 5-----1----
Формирование
Зентород
запроса
Заполнение
массиве
параметров
-6-- 1
Выдор
необходимого
типа обору-
дования
Рис. 7.18
Рис. 7,19
162
SUBROUTINE VUBOR(BUFOUT,BUFVB,FILNAM,PAR,KOL,IW)
C -------- ------------ — ------ ----------- -----------
С П/П ОСУЩЕСТВЛЯЕТ ВЫБОР ОДНОГО ИЗ ПЯТИ (И МЕНЕЕ) ТИПОВ
С ОБОРУДОВАНИЯ ИНФОРМАЦИЯ О КОТОРЫХ НАХОДИТСЯ В МАССИВЕ
С BUFOUT(100) ПО ЖЕЛАНИЮ ПОЛЬЗОВАТЕЛЯ. ИНФОРМАЦИЯ О
С ВЫБРАННОМ ТИПЕ ЗАПИСЫВАЕТСЯ В МАССИВ BUFVB(20)
С ВХОДНЫЕ ПАРАМЕТРЫ: BUFOUT-БУФЕР ВВОДА ;
С FILNAM-ИМЯ ТЕКСТОВОГО ФАЙЛА ФОРМИРУЮЩЕГО ЭКРАН
С ДИАЛОГА ;
С PAR-МАССИВ ПАРАМЕТРОВ ВЫВОДИМЫХ НА ЭКРАН ;
С КОЬ-КОЛИЧЕСТВО ОБОРУДОВАНИЯ,
С ВЫХОДНЫЕ ПАРАМЕТРЫ: BUFVB-БУФЕР ВЫХОДНОЙ ИНФОРМАЦИИ ;
С IW-HOMEP ВЫБРАННОГО ТИПА В СООТВЕТСТВИИ
С С ТЕКСТОВЫМ ФАЙЛОМ FILNAM .
С ВНЕШНИЕ ССЫЛКИ: ASSIGN, CLOSE, POSIT, GASH, ZAB
DIMENSION BUFOUT (100).BUFVB(20),IPRI(5),PAR(5),IX(24),IY(24)
REAL*8 FILNAM
K=0
DO 1 1=1,100,20 ! ФОРМИРОВАНИЕ МАССИВА IPRI(5),
JIDf
IPRKK+D-l
! CO,
РЩАЩЕГО ПРИЗНАКИ ОЧИСТКИ СТРОКИ
IF(BUFOUT(I).EQ.-l.)IPRI(K+1)=0 1 ЕСЛИ -1 ЗАБОЙ ДАННОЙ СТРОКИ
К=К+1
1 CONTINUE
10 CALL GASH ! НАЧАЛО ВЫВОДА ИНФОРМАЦИОННОГО ТЕКСТА
CALL FILRDRiFILNAM,IX,IY,NX)
N=8 ' ВЫВОД ПАРАМЕТРОВ НАЧИНАЕТСЯ С 8 СТРОКИ ЭКРАНА
DO 2 1=1,KOL
CALL POSIT(IXd),IY(D)
WRITE(6,*)PAR(I)
IFdPRI(I).EQ.0)CALL CLEARfi,72,IY(I),IY(D)
2 CONTINUE
CALL POSITdX(NX), IY(NX)) !
READ(8,*,ERR=10)IW
С ЗАПОЛНЕНИЕ ВЫХОДНОГО МАССИВА ДАННЫХ
N=(IW-1)*20
DO 3 1=1,20
BUFVB(I)=BUFOUT(N+I)
3 CONTINUE
RETURN
END
Рис. 7.2D
6*
163
SUBROUTINE VKR(Q,QK,PW,BUFVB,IWW)
c----- . ----- ---------
С П/П ОСУЩЕСТВЛЯЕТ ВЫБОР КРАНОВЫХ КРЮКОВ
С ВХОДНЫЕ ПАРАМЕТРЫ: Q-BEC ГРУЗА, [Н] ;
С РШ-РЕЕММ РАБОТЫ, [%] .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: BUFVBt20)-СПРАВОЧНАЯ ИНФОРМАЦИЯ О КРЮКЕ
С ВНЕШНИЕ ССЫЛКИ: PS, VUBOR
DIMENSION BUFIN(10),BUFOUT(60),BUFVB(20),PAR(3)
*,NUM(10),ILG(10),BUF0BR(5)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/'=<',9*' '/
DATA BUFOBR/16627',’6628',’6619',2«' 7
NUM(1)=2
IF((PW-25.).GT.0.)NUM(1)=3
IF((PW-25.).LT.0.)NUM(1)-1
BUFIN(1)=Q
K-NUM(l)
C
CALL PSCBUFOBR.BUFIH.’VKR.TAB’.ILG.NUM.BUFOUT)
C
С ЗАПОЛНЕНИЕ МАССИВА ПАРАМЕТРОВ (PAR), ВЫВОДИМЫХ НА ЭКРАН
кк=0
DO 40 1=1,3
PAR(I)=BUFOUT(K+KK)
40 КК=КК+20
CALL VUBOR(BUFOUT.BUFVB,'VKR.TXT',PAR,3,IWW)
QK=PAR(IWW)
RETURN
END
Рис. 7.21
4 VKR.TXT
45 45 45 45
8 10 12 19
# ИЗ ПРЕДЛОЖЕННЫХ ТИПОВ КРАКОВ ВЫБЕРЕТЕ НУЖНЫЙ ВАМ ТИП: #
я##########*#####*####*#####*#*#######*##***#***###**#*##**#*#*****#*
НАР
1ОВАНИЕ КРЮКА
# ВЕС ПОДНИМАЕМОГО *
гп
* * ГРУЗА [Н] #
1. КРЮК ОДНОРОГИЙ КОВАНЫЙ ГОСТ 8627-74
2. КРЮК ДВУРОГИЙ КОВАНЫЙ ГОСТ 6628-73
3. КРЮК ДВУРОГИЙ ПЛАСТИНЧАТЫЙ ГОСТ 6619-75
ВВЕДИТЕ ПРИЗНАК КРЮКА
164
SUBROUTINE VPD(Q,PW,PN,DKl,DK2,VP,A,QP,DB,AJ,PM,BUF0UT,IP0D)
C 1 I in- 1-------1- 1 иг ч>1"т---11'wmw- 1Т1-П I [
0 П/П ВЫБОРА УНИФИЦИРОВАННЫХ КРАНОВЫХ КРЮКОВЫХ ПОДВЕСОК
С ВХОДНЫЕ ПАРАМЕТРЫ: Q-НОМИНАЛЬНЫЙ ВЕС ГРУЗА, [Н] ;
С PW-РЕЕИМ РАБОТЫ, [ПВ£|.
С ВЫХОДНЫЕ ПАРАМЕТРЫ: PN-KPATHOCTb ПОЛИСПАСТА ;
С DK1.DK2 МИНИМАЛЬНЫЙ И МАКСИМАЛЬНЫЙ ДИАМЕТРЫ
С КАНАТА ДЛЯ ДАННОЙ ПОДВЕСКИ, [М] ;
С VP-ВЕС ПОДВЕСКИ, [Н] ;
С QP-BEC ПОДНИМАЕМОГО ГРУЗА, [Н] ;
С А-РАССТОЯНИЕ МЕЖДУ НАРУЖНЫМИ БЛОКАМИ СМ] ;
С DB-ДИАМЕТР БЛОКОВ, [М] ;
С AJ-ПРИЗНАК ТИПА ПОДВЕСКИ .
С ВНЕШНИЕ ССЫЛКИ: GASH, POSIT, FILRDR, ASSIGN, CLOSE,
C PS, WOD,VYVOD
DIMENSION BUFIN( 10) ,BUFOUT(20) ,BUFVB(10) ,BUF0BR(5), ILG( 10),
#NUM(10),IX(7),IY(7)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA BUF0BR/’2419',4*' 7
DATA ILG/'=<*,9*' 7
DATA NUM/1,9*0/
С ВЫВОД ИНФОРМАЦИОННОГО ТЕКСТА
8 CALL WOD(1 VPD1.TXT',X,N)
IPOD-IFIX(X)
IF(IPOD.EQ.l) GOTO 100
12 CALL VYVOD(5,13,’ЗАДАЙТЕ КРАТНОСТЬ ПОЛИСПАСТА 7,31)
CALL P0SIT(35,14)
READ(6,#,ERR=10)PN
GOTO 11
10 CALL CLEAR(i,60,13,17)
GOTO 12
11 VP=0.05*Q
DK1=0.
DK2-100.
RETURN
100 CONTINUE
BUFINt1)«Q
CALL PS(BUFOBR,BUFIN,'VPD.TAB',ILG,NUM,BUFOUT)
K=8
IF((PW-40.).LT.0.)K=7
IF((PW-40.).GT.0.)K=9
VP=BUFOUT(K)
DB=BUF0UT(K+3)
С ВЫВОД НА ЭКРАН ПАРАМЕТРОВ ПОДВЕСКИ
21 CALL GASH
CALL FILRDRC'VPD.TXT'.IX.IY.N)
DO 3 1=1,N-4
CALL POSIT(IX(I) ,IY(D)
WRITE(8,*)BUF0UT(I)
3 CONTINUE
CALL P0SIT(IX(N-3),IY(N-3))
Рис. 7.23
165
WRITE(6,*)VP
CALL P0SIT(IX(N-2),IY(N-2))
WRITE(6,*)DB
PN=BUF0UT(2)
IF(BUF0UT(6).EQ.0.)CALL VYV0D(45,14,'УКОРОЧЕННАЯ',11)
IF(BUF0UT(6),NE.0.)CALL VYVOD(45,14,'НОРМАЛЬНАЯ',10)
CALL P0SIT(45,18)
READ(6,20,ERR=21)IW
20 F0RMAT(A2)
CALL RAZP(IW,IPR)
IF(IPR.LT.0)GOTO 8
DK1=BUFOUT(3
DK2=BUF0UT(4
A=BUF0UT(5)
AJ=BUF0UT(6)
QP-BUFOUT(l)
RETURN
END
Рис. 7.23. Продолжение
02 VPD1.TXT
45 10
11 11
**#<##*#**«####**OWf#*#**JHHHt#*##*#***#**#***###*O*##*#**#»##iHf*#
' ВЫ МОЖЕТЕ ВЫБРАТЬ ПОДВЕСКУ ПО ОСТ
’ ИЛИ ЗАДАТЬ КРАТНОСТЬ ПОЛИСПАСТА И ПРОДОЛЖИТЬ РАБОТУ
' БЕЗ ВЫБОРА ПОДВЕСКИ
'*******************************************************************
’ 1. ВЫБИРАЕТСЯ УНИФИЦИРОВАННАЯ ПОДВЕСКА
' 2. ЗАДАЕТСЯ КРАТНОСТЬ ПОЛИСПАСТА
I
' ВВЕДИТЕ НУЖНЫЙ ВАМ НОМЕР....
09
VPD.TXT
45 45 45 45 45 45 45 45 45
06 07 08 09 10 11 12 13 19
##»#*»#»# IHHHHf***»»»*****#**#*##*#********#**#####****#**#**»*
ВАМ ПОДХОДИТ КРАНОВАЯ ПОДВЕСКА
Г1»1
ЩАЯ СЛЕДУВЩИЕ ХАРАКТЕРИСТИКИ:
в***###**#*###*#######***#****»*******##**#»**#*#******##*#*#**
1. ВЕС ПОДНИМАЕМОГО ГРУЗА,Н...............
2. КРАТНОСТЬ ПОЛИСПАСТА...................
3. МИНИМАЛЬНЫЙ ДИАМЕТР КАНАТА,М...........
4. МАКСИМАЛЬНЫЙ ДИАМЕТР КАНАТА,М..........
5. РАССТОЯНИЕ МЕЖДУ НАРУЖНЫМИ БЛОКАМИ,М...
6. ВЕС ПОДВЕСКИ,Н........................
7, ДИАМЕТР БЛОКОВ,М.......................
8. ТИП ПОДВЕСКИ.....................
Рис. 7.24
ВАС УСТРАИВАЕТ ЭТА ПОДВЕСКА ? .......
1 66
SUBROUTINE VKN(RK,DC,SK,VK,DK1,DK2,BUFVB,IWW)
C T~..........— i -- r ----------l--------
С П/П ВЫБОРА УНИФИЦИРОВАННЫХ СТАЛЬНЫХ КАНАТОВ
С ВХОДНЫЕ ПАРАМЕТРЫ: RK-РАЗРЫВНОЕ УСИЛИЕ КАНАТА ,[Н] ;
С DK1-МИНИМАЛЬНЫЙ ДИАМЕТР КАНАТА ,[М] ;
С DK2-МАКСИМАЛЬНЫЙ ДИАМЕТР КАНАТА , [М] .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: DC-ДИАМЕТР КАНАТА, [М] ;
С VK-ЛИНЕЙНАЯ МАССА КАНАТА ,[КГ] ;
С SK-PAC4ETHOE СЕЧЕНИЕ, [М##2] .
С ВНЕШНИЕ ССЫЛКИ: PS.VYBOR
DIMENSION BUFINt10),BUFOUT(100),BUFVB(20),PAR(5),BUF0BR(5)
*,ILGd0),NUM(i0)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/'=>'-<’,7*' 7
DATA NUM/1,2,1,7*0/
DATA BUFOBR/'2668', '3079', '7668’, '3077’, ’7669 7
BUFIN(1)»DK2
BUFINt3)«DK1
BUFIN(2)=RK
CALL PStBUFOBR.BUFIN,’VKN.TAB',ILG,NUM,BUFOUT)
С ЗАПОЛНЕНИЕ МАССИВА ПАРАМЕТРОВ, ВЫВОДИМЫХ НА ЭКРАН
PARtl)“BUFOUT(1)
PAR(2)=BUF0UT(21)
PAR(3)=BUF0UT(41)
PAR(4)~BUFOUT(61)
PAR(5)=BUF0UT(81)
CALL VUBORtBUFOUT,BUFVB,’VKN.TXT’,PAR,5,1WW)
DC=BUFVB(1)
С ПАРАМЕТРЫ SK,VK И Т.Д., ЕСЛИ ЭТО НЕОБХОДИМО ,
С ЗАПОЛНЯЮТСЯ ИЗ МАССИВА BUFVB (СПРАВЕДЛИВО И ДЛЯ
С ДРУГИХ ПОДПРОГРАММ)
RETURN
Рис. 7.25
6
45 45 45 45 45 45
8 10 12 14 16 21
*********************************************************************
ИЗ ПРЕДЛОЖЕННЫХ ТИПОВ КАНАТОВ ВЫБЕРИТЕ НУЖНЫЙ ВАМ ТИП .
ж********************************************************************
* НАИМЕНОВАНИЕ КАНАТА * ДИАМЕТР КАНАТА, М *
*********************************************************************
1. КАНАТ ЛК-Р 6*19+1 О.С ГОСТ 2668-80
2. КАНАТ ТЛК-0 6*37+1 О.С ГОСТ 3079-80
3. КАНАТ ЛК-РО 6*38+1 О.С ГОСТ 7668-80
4. КАНАТ ТЛК-0 6*19+1 О.С ГОСТ 3077-80
5. КАНАТ ЛК-РО 6*36+7*7 ГОСТ 7669-80
ВВЕДИТЕ ПРИЗНАК КАНАТА ..................
Рис. 7.26
167
SUBROUTINE VDV(PSTN, PW, PST,SKORD, CPDD, TD, GD2R, VDVIG
*TD1,TD2,BUFVB,INN)
с
с
с
с
с
с
П/П ВЫБОРА УНИФИЦИРОВАННОГО КРАНОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
ВХОДНЫЕ ПАРАМЕТРЫ; PSTN-НЕОБХОДИМАЯ МОЩНОСТЬ, [КВТ] ;
PW-РЕЯИМ РАБОТЫ.
ВЫХОДНЫЕ ПАРАМЕТРЫ: PST-МОЩНОСТЬ ДВИГАТЕЛЯ, [КВТ] ;
CPDD-КПД ДВИГАТЕЛЯ ;
SKORD-ЧАСТСТА ВРАЩЕНИЯ ВАЛА ДВИГАТЕЛЯ, [ОБ/С];
TD-МАХ МОМЕНТ ДВИГАТЕЛЯ, [Н«М] ;
GD2R-MAX0B0fl МОМЕНТ РОТОРА, [КГ*М**2] ;
VDVIG-MACCA ДВИГАТЕЛЯ, [КГ] ;
TDl-ТИПОРАЗМЕР ДВИГАТЕЛЯ ;
П)2-ЧИСЛ0 ПАР ПОЛЮСОВ.
DIMENSION BUFIN(10),BUFOUT(80),BUFVB(20),PAR(4),BUF0BR(5),
»ILG(10),NUM(10)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/’^'.S#' '/
DATA BUFOBR/'MTH ‘,‘MTF ',’MIKF’,’MTKH’,' 7
PWW=PW-40.
NUM(1)=2
IF(PNW.LT.0.)NUM(D-1
IF(PWW,GT.0.)NUM(1)=3
K-NUM(l)
BUFIN(I)=PSTN
CALL PS(BUFOBR,BUFIN,'VDV.TAB',ILG,NUM,BUFOUT)
С ЗАПОЛНЕНИЕ МАССИВА ПАРАМЕТРОВ ВЫВОДИМЫХ НА ЭКРАН
КК=0
DO 40 1=1,4
PAR(I)=BUFOUT(K+KK)
40 КК=КК+20
CALL VUBOR(BUPOUT,BUFVB,'VDV.TXT',PAR,4,IWW)
K-l
IF(PW.GE.40.)K=2
IF(PW.GE.60.)K=3
PST=BUFVB(K)
SK0RD-BUFVB(K+5)
TD1=BUFVB(4)
TD2=BUFVB(5)
CPDD=BUFVB(7)
VDVIG=BUFVB(H)
TD*BUFVB(10)
GD2R-BUFVB(12)
RETURN
END
Рис. 7.27
168
5
45 45 45 45 45
8 10 12 14 21
VDV.TXT
я#####»*#»*»#***#»***»»»#*»***»****************»*#************
ИЗ ДАННЫХ ТИПОВ ЭЛЕКТРО,
пхгл
ПАТЕЛЕЙ ВЫБЕРИТЕ НУЖНЫЙ ВАМ:
ТИП ДВИГАТЕЛЯ я»*****#**»#*# МОЩНОСТЬ,[КВТ]
я*************************************************************
iTyJT
ПАТЕЛЬ МГН...............................
2.ДВИГАТЕЛЬ MTF.............................
3.ДВИГАТЕЛЬ МГКЕ............................
4.ДВИГАТЕЛЬ МГКН............................
ЯШ
ВВЕДИТЕ НГйПгр
Рис. 7,28
3
VRD.TXT
30 30 38
7 9 20
**<**«*»*»***»*##******#<************»*#****************#**********#
ИЗ ПРЕДЛОЖЕННЫХ ТИПОВ РЕДУКТОРОВ ВЫБЕРИТЕ НУЖНЫЙ ВАМ ТИП И ВВЕДИТЕ
ЕГО НОМЕР ПО ДАННОМУ КАТАЛОГУ
* МАРКА РЕДУКТОРА # ПЕРЕДАТОЧНОЕ ЧИСЛО ' *
яо**#*#**»***#*##****»*»*##***»*»**************#**#*****************
1.РЕДУКТОР ТИЛА Ц2. ........
2.РЕДУКТОР ТИПА ЩН..........
3.РЕДУКТОР ТИПА ГК............
4. ИЗМЕНИТЬ КРАТНОСТЬ ПОЛИСПАСТА
5. ИЗМЕНИТЬ РАЗМЕРЫ БАРАБАНА
ВВЕДИТЕ ПРИЗНАК РЕДУКТОРА
ИЛИ ДАЛЬНЕЙШЕГО ДЕЙСТВИЯ. .
ОТКРЫТАЯ ЗУБЧАТАЯ ПАРА
Рис. 7.2')
169
SUBROUTINE VRD(PW,PST,UZP,UZPD,AN,PSR,V1,OM,DRN,SKORD,
#JGK, DVR, IP1, BUFVB, IW)
C.....i ............ и- - ------------,
С П/П ВЫБОРА РЕДУКТОРОВ ТИПА Ц2, ЦТН
С ВХОДНЫЕ ПАРАМЕТРЫ: PW-PEHMM РАБОТЫ СПВ%] ;
С , UZP-НЕОБХОДИМОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ;
С PST-ТРЕБУЕМАЯ передаваемая МОЩНОСТЬ, [КВТ] .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: UZPD-ДЕЙСТВИТЕЛЬНОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ;
С AW-МЕВОСЕВОЕ РАССТОЯНИЕ РЕДУКТОРА, [ММ] ;
С PSR-ПЕРЕДАВАЕМАЯ РЕДУКТОРОМ МОЩНОСТЬ, [КВТ] ;
С VI-МАССА РЕДУКТОРА, [КГ] ;
С ОМ-ОБЪЕМ МАСЛА В РЕДУКТОРЕ, [Л] ;
С DVR-ДИАМЕТР БЫСТРОХОДНОГО ВАЛА, [ММ] ;
С BUFVB-BEKTOP СПРАВОЧНОЙ ИНФОРМАЦИИ ;
С 1Р1-ПРИЗНАК ВОЗВРАТА НА ПРЕДЫДУЩИЙ ЭТАП
С ПРОЕКТИРОВАНИЯ ;
С ВНЕШНИЕ ССЫЛКИ: PS,VUBOR
Сп------------------— пт----------, -и-.—------------Т - т—г-,г т
DIMENSION BUFIN(10),BUFOUTf60),BUFVB(20),PAR(2),BUF0BR(5),
#ILG(10),NUM(10)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/'=<6*' 7
DATA BUFOBR/’Ц2 ’/ЦТН’.З#' ’/
BUFIN(1)=PST
BUFIN(2)=AINT(UZP)
BUFIN(4)=1,15*UZP
BUFIN(3)-SK0RD
NUM(1)=2
IF((PW-40.).LT.0.)NUM(1)=I
IF((PW-40.).GT.0.)NUM(1)=3
NUM(2)=5
NUM(3)=4
NUM(4)=5
CALL PS(BUFOBR,BUKIN,’VRD.TAB',ILG,NUM,BUFOUT)
С ЗАПОЛНЕНИЕ МАССИВА ПАРАМЕТРОВ ВЫВОДИМЫХ НА ЭКРАН
PAR(l)=BUF0UT(5)
PAR(2)=BUF0UT(25)
CALL VUBOR(BUFOUT,BUFVB.'VRD.TXT’,PAR,2,IWW)
IF(IWW.EQ.4)IP1-1 ’ ТРЕБУЕТСЯ ИЗМЕНИТЬ ПАРАМЕТРЫ ПОДВЕСКИ
IF(IWW.EQ.5)IPl-2 ! ТРЕБУЕТСЯ ИЗМЕНИТЬ РАЗМЕРЫ БАРАБАНА
IF(IWW.EQ.3)IP1=3
IF(IP1.EQ.1.OR.IP1.EQ.2.OR.IP1.EQ.3)RETURN
DVR=BUFVB(16)
AW=BUFVB(6)
PSR-=BUFVB(NUM(D)
RETURN
END
Рис. 7.30
I 70
SUBROUTINE VRTGK(PW,PST,UZP,UZPD,SKORD,AW,221,222,UOP,URED,IP,
*RMOD,PR)
C
C
C
C
C
C
C
3G1
с
с
с
с
с
с
П/П ВЫБОРА РЕДУКТОРА ТИПА ГК ИМЕЮЩЕГО ОТКРЫТУЮ ЗУБЧАТУЮ ПЕРЕДАЧУ
ВХОДНЫЕ ПАРАМЕТРЫ: PW- РЕЖИМ РАБОТЫ, [ПВ%] ;
PST-ТРЕБУЕМАЯ ПЕРЕДАВАЕМАЯ МОЩНОСТЬ, [КВТ] ;
UZP-ТРЕЕУЕМОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ;
SKORD-ЧАСТОТА ВРАЩЕНИЯ ВАЛА Э.Д., [ОБ/МИН].
ВЫХОДНЫЕ ПАРАМЕТРЫ: UZPD-ДЕЙСТВИТЕЛЬНОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ
AW-ME1OCEBOE РАССТОЯНИЕ (ТИПОРАЗМЕР), [ММ]
URED-ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ РЕДУКТОРА ;
НОР-ПЕРЕДАТОЧНОЕ ЧИСЛО ОТКРЫТОЙ ПАРЫ ;
PR-ПЕРЕДАВАЕМАЯ РЕДУКТОРОМ МОЩНОСТЬ, [КВТ]
RMOD-МОДУЛЬ ОТКРЫТОЙ ПАРЫ, [ММ] ;
ZZ1,222-ЧИСЛА ЗУБЬЕВ ШЕСТЕРНИ И КОЛЕСА ;
IP- ПРИЗНАК НЕУДАЧНОГО ПОИСКА.
ВНЕШНИЕ ССЫЛКИ: GASH,POSIT,FILRDR,PS, WOP, VYVOD
=<',5*’
DIMENSION BUFIN(10),BUFOUT(20),BUF0BR(5),ILG(10),NUM(10)
*,IX(8),IY(8),PAR(7)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/’=<’,'=<
DATA BUFOBR/'gk ',4#'
DATA NUM/1,4,2,5,5,5*0/
RMXUZP=U2P/3.I МАКСИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО
RMNUZP=UZP/7.» МИНИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО
1Р-«
SK=724.
IF(SKORD.LE.650)SK=580.
BUFIN(1)=SK
BUFIN(2)=PW
BUFIN(3)“PST
BUFIN(4)=RMXUZP
BUFIN(5)=RMNUZP
CALL PS(BUFOBR,BUFIN,'VGK.TAB',ILG,NUM,BUFOUT)
IF(BUFOUT(i).EQ.-l.JGOTO 222 1 НЕУДАЧНЫЙ ПОИСК
AW=BUF0UT(3)
PR=BUF0UT(2)
URED=BUF0UT(5)
UOP=UZP/URJ
AWW=AW
ZZl=BUF0UT(7)
RMODbBUFOUT(B)
Z22=AINT(UOP*ZZ1)
UOP=ZZ2/ZZ1
С ВЫВОД ИНФОРМАЦИОННОГО ТЕКСТА НА ЭКРАН
PAR(1)=AW
PAR(2)=PR
PAR(3)=URED
PAR(4)=U0P
PAR(5)=ZZ1
NS
Рис. 7.31
17!
PAR(6)=ZZ2
PAR(7)-RM0D
CALL VYVNUMCVRTGK.TXT’,PAR,IPR)
IF(IPR.LE.0)STOP
IF(IPRE.NE.0)STOP
UZP1>UOP»URED
RETURN
222 CALL GASH
С ВЫВОД СООБЩЕНИЯ О НЕУДАЧНОМ ИСХОДЕ ПОИСКА
CALL FILRDR('VRTGK1.TXT',IX,IY,NX)
CALL POSIT(IX(NX),IY(NX))
READ(6,*,ERR»222)IP IПРИЗНАК ДАЛЬНЕЙШЕГО ДЕЙСТВИЯ
RETURN
END
Рис. 7.31, Продолжение
08 VRTGK.TXT
45 45 45 45 45 45 45 45
08 09 10 11 12 13 14 19
»*#**«***»##O***#**<#****#**«*1Hf it**##»*###**#****#»***#*»*»**#*****
’ ВАМ ПОДХОДИТ РЕДУКТОР ТИПА ГК ИМЕЮЩИЙ СЛЕДУЮЩИЕ
' ТЕХНИЧЕСКИЕ ДАННЫЕ:
'#*»##<**»*»*###*#*#<**»»****#*»«#******«##**###*#**#**#**#***#*#«#
’ 1. МАРКА РЕДУКТОРА ГК-
' 2. ПЕРЕДАВАЕМАЯ РЕДУКТОРОМ МОЩНОСТЬ [КВТ]
' 3. ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ РЕДУКТОРА
' 4. ПЕРЕДАТОЧНОЕ ЧИСЛО ОТКРЫТОЙ ПАРЫ
’ 5. ЧИСЛО ЗУБЬЕВ ШЕСТЕРНИ
’ 6. ЧИСЛО ЗУБЬЕВ КОЛЕСА
' 7. МОДУЛЬ ОТКРЫТОЙ ЗУБЧАТОЙ ПАРЫ
' ВАС УСТРАИВАЕТ ЭТОТ РЕДУКТОР............?
01 VRTCK1.TXT
07
********»**»#****#**»*»*#»#**#*«*»**##*##*#*»*******»###»«**»*
РЕДУКТОРЫ ИМЕЮЩИЕСЯ В БАНКЕ ДАННЫХ,НЕ УДОВЛЕТВОРЯЮТ
ТРЕБУЕМЫМ ПАРАМЕТРАМ. РЕКОМЕНДУЕТСЯ:
1. ИЗМЕНИТЬ КРАТНОСТЬ ПОЛИСПАСТА
2. ИЗМЕНИТЬ ДИАМЕТР БАРАБАНА
»*#***#*#**#*»*#*#####»*#»***##***####**»***###*##*##о#***###*
' ВВЕДИТЕ НОМЕР НЕОБХОДИМОГО ДЕЙСТВИЯ..........
Рис. 7.32
172
frt z. ™d
dSNOH ЗХИЖ9
jxhx eoiwox't
•jmx eowdox'e
•щи еомох’з
> eoudoi’i
***************************************************************।
К*Н‘ЛЙЯОИ HOHSONdOX ******* VSOKdOX ПИХ
ieOKdQL HV9 ЙЯНИИОХЗОЯН aiMd39Hg
************************************************************ *
IS VI SI 01 80
XXX‘НХЛ
gv SV SV SV SV
50
trz. ’«d
аш
юшхзн
(мпни-жш,
(мГ^'ета^Ш’ш/аипя’хпайм^оадА two
03+МИ=ЧМ I0T
(HM+W)in0dn8=(I)HVd
v‘t=i i0i oa
0=HH
SDNIXNOO 001
SfiNIXNOO 66
0010X03 (’ 0" 3D (Md- (DXSMd)) dI
I=H
S*IeI 66 od
HVdMe w хнийГозгй aodxwavu vsmxvh яинзшт о
(хпояшЧтк’этГ .етх-нхл, ‘шпя‘н8мпя)&1 ттто
Х1=(1)ШП0
e=(i)№N (-емлтвмиш!
Т-(ПШШ (O’XTCeWdDdl
S=(I)WON
/'09‘‘0V‘‘SS/XSMd VXVd
/. , ‘.ххих. ‘, jmx, *, них, *, хшм/акмпя vxva
/» .«e'^-./OTi vxva
vooduve vdoxwas яинтеонинаоф о
(e)xsMd*(0T)io‘(0i)fni*
* (д)аяозпа1 (v)HVd‘ (esiswa* (0e)xnodins‘ (01 шаля noisnshig
0
0
ИИЙУЛЮФНИ BOHhOSVdUO аЗФЛЗ-ЯЛЗЛЯ :FHL3WVdVU SNHtfOXW 0
[X9U] HXOSVd l№d-Md
; [H*H]‘ ХНЗЯ0И HOHSOHdOX-XX fldHSWVdVU ЗПН1/0Х9
aoeowdox хняонузя vdosna ц/п
D
3
0
0
(мм1‘наи*ялж‘ы‘11)шл зшхпонапз
SUBROUTINE VMF(IM,TD,SK0RD,DVR,A3,TMUF,SK0MAX,GD2,DMXX,AMUF,
♦BUFVB,IWW)
C -------------<—--Г— ' ---------------------
С П/П ВЫБОРА МУФТ, ТИПОВ: МЗ,МЗП,МУВП
С ВХОДНУЕ ПАРАМЕТРЫ: TD-MOMEHT ДВИГАТЕЛЯ, [Н*М] ;
С SKOR-4ACTOTA ВРАЩЕНИЯ ВАЛА ДВИГАТЕЛЯ [ОБ/С];
С DVR-ДИАМЕТР ВАЛА РЕДУКТОРА, [ММ] ;
С АЗ-КОЭФФИЦИЕНТ ЗАПАСА ,
С ВЫХОДНЫЕ ПАРАМЕТРЫ: TMUF-MAKC.ДОПУСТИМЫЙ МОМЕНТ МУФТЫ, [Н*М] ;
С GD2-MAX0B0fl МОМЕНТ МУФТЫ, [КГ#М**2] ;
С DMXX-МАКСИМАЛЬНЫЙ ДИАМЕТР МУФТЫ, [М] ;
С BUFVB- СПРАВОЧНАЯ ИНФОРМАЦИЯ ;
С ЗКОМАХ-МАКСИМАЛЬНО ДОПУСТИМАЯ ЧАСТОТА
С ВРАЩЕНИЯ МУФТЫ, [ОБ/С] .
С -------------------- ..................
DIMENSION BUFINC10),BUFOUT(80),BUFVB(20),PAR(3),BUF0BR(5),
*ILG(10),NUM(10)
С ФОРМИРОВАНИЕ ВЕКТОРА ЗАПРОСА
DATA ILG/’=<T,7*’ 7
DATA NUM/1,2,3,7*0/,BUFOBR/'М3 ’,’МЗП ','МУВП',2*’ '/
TM=1.3*A3#TD ! НЕОБХОДИМЫЙ МОМЕНТ ПЕРЕДАВАЕМЫЙ МУФТОЙ
SK=SKORD/60.
BUFIN(1)=TM
BUFINC2)=SK
BUFIN(3)=DVR
CALL PSCBUFOBR,BUFIN,’VMF.TAB’,ILG,NUM,BUFOUT)
С ФОРМИРОВАНИЕ МАССИВА ПАРАМЕТРОВ ВЫВОДИМЫХ НА ЭКРАН
PARC 1)=BUFOUT(1)
PAR(2j=BUF0UT(21)
PAR(3)=BUF0UT(41)
CALL VUBORCBUFOUT,BUFVB,'VMF.TXT’,PAR,3.IWW)
RETURN
END
Рис. 7.35
04
45 45 45 45
08 10 12 21
VMF.TXT
ИЗ ДАННЫХ ТИПОВ МУФТ ВЫБЕРИТЕ НУЖНЫЙ ВАМ:
ТИП МУФТЫ *********** НОМИНАЛЬНЫЙ КРУТЯЩИЙ МОМЕНТ,Н*М
♦ж****************************************************************
1 .МУФТА М3.........................
2 .МУФТА МЗП........................
3 .МУФТА МУВП.......................
ВВЕДИТЕ НОМЕР.........................
Рис. 7.36
174
Т&есенце ря-
да передав-
ных чисел,,
редукторов
ных (БД) определенной структуры.
БД построен на файлах последо-
вательного доступа (табл. 7.4).
Таблица 7.4
признаков
JJ=On
lt}K=D
Нет
г -ДД
Проверка пе-
редаточного
отнсиения
ДОЗ 1=1,73
копит Д2
6
12
11
Г7 CMTUNltf
;?_i—
JGK=1
Нет
8
\75ifiu* 1,1S-I
Нет
r-10—L
JGK= 1
12
12
Необходима кор-
рек та редка раз-
меров бара -
бана
Рис. 7.37
на валу двигателя ТТ, скорости вра-
щения вала SKORD, диаметру вала
редуктора DVR. Подбор производит-
ся по справочным данным Приложе-
ния 6.
В комплексе с подпрограммами
выбора оборудования VRD, VRTGK
работает подпрограмма SK.ORW (рис.
7.37), которая позволяет определить
возможность подбора передаточного
отношения редуктора путем коррек-
тировки диаметра барабана. Текст
подпрограммы приведен на рис. 7.38.
Справочная информация об обо-
рудовании, используемая подпрограм-
мами выбора, хранится в банке дан-
Имя файла Хранимая информация
Данные по;
VPD.3AB крановым крюковым подве-
скам
VKR.TAB. грузозахватным органам
VKN.TAB стальным канатам
VDV. TAB крановым элекгродвига ге-
лям
VRD.TAB редукторам Ц2. ЦТП
VTR. ГАВ зормозам
VMF. TAB соединительным муфтам
VRTGK..TAB редуктору типа ГК
Внутренняя структура БД позво-
ляет полностью описать основные ви-
ды кранового оборудования. Каждый
файл БД формируется из последова-
тельных блоков по четыре зоны и
закапчивается признаком конца файла
(рис. 7.39). Комбинация блоков по-
зволяет хранить в одном файле ин-
формацию о различных типах обору-
дования одного вида, например кана-
тах. На БД накладывается ограниче-
ние ио числу типов оборудования:
внутри одного вида может быть не
более пяти типов оборудования. Та-
кое ограничение вызвано необходи-
мостью обеспечить реакцию програм-
мы на запрос в пределах 3 -5 с. Ин-
формация в БД заносится с l-й пози-
ции каждой строки. Зона коммента-
риев REMlj должна быть расположе-
на в начале очередного блока. Зона
идентификатора типа QOOONNNN
содержит символьную информацию
NNNN о типе оборудования в дан-
ном блоке. Следующая за этой зоной
строка в переменной К содержит ин-
формацию о количестве единиц обо-
рудования в блоке. Под характерис-
тики каждой единицы оборудования
отводится вектор X длиной 20 чисел,
размещенных в две строки по 10 чисел
в каждой. Весь век гор' X (20) является
информационной характеристикой еди-
ницы оборудования. Конкретное со-
держание элементов вектора индиви-
дуально для каждого вида оборудова-
175
SUBROUTINE SKORW(SKORD,UZP,JGK,JJ)
--- - l--L.IL, - III - ЗДЬ---------- =-r- J-C-
С П/П ОПРЕДЕЛЕНИЯ НЕОБХОДИМОСТИ КОРРЕКТИРОВКИ РАЗМЕРОВ БАРАБАНА
С ВХОДНЫЕ ПАРАМЕТРЫ: SKORD-4ACTOTA ВРАЩЕНИЯ ВАЛА ДВИГАТЕЛЯ, [ОБ/С] ;
С UZP-НЕОБХОДИМОЕ ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ
С МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ .
С ВЫХОДНЫЕ ПАРАМЕТРЫ: UZP-ПЕРВДАТОЧНОЕ ОТНОШЕНИЕ (МОДИФИЦИРОВАННОЕ) ;
С JJ-ПРИЗНАК КОРРЕКТИРОВКИ ДИАМЕТРА БАРАБАНА ;
С JGK-ПРИЗНАК НЕОБХОДИМОСТИ ПРИМЕНЕНИЯ РЕДУКТОРА
С С ОТКРЫТОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ.
Ст1— ад=Едаяя=з=ддаадм^=асаа==шдаессЕа=адГ1ТТП1 -"tithi г..4. — i 1 ..ттн—т- i
DIMENSION SK0RST(4),WST(13)
DATA WST/8,32,9.8,12.41,16,30,19.88,24.90,32,42,41.34,50.94,
*62.56,78.53,103.98,158.92/
JJ=0 ! ОБНУЛЕНИЕ ПРИЗНАКОВ
JGK=0
IF(UZP.GE.i60.)GOTO 55 ! РЕДУКТОРЫ Ц2 ЦТН HE ПОДХОДЯТ
2 CONTINUE
DO 3 1=1,13 1 ПРОВЕРКА ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ, ИСХОДЯ ИЗ
К-I I УСЛОВИЯ, ЧТО ТРЕБУЕМОЕ ДОЛЖНО ОТЛИЧАТЬСЯ ОТ
IF(UZP.LE.(1.15#WST(I)).AND.UZP.GE.(0.75*WST(I)))G0T04
IF(UZP.LT.(0,75*WST(I))) GOTO 5
3 CONTINUE ? ДЕЙСТВИТЕЛЬНОГО HE БОЛЕЕ ЧЕМ НА 15 %
JGK=1 1 НЕОБХОДИМ РЕДУКТОР С ОТКРЫТОЙ ЗУБЧАТОЙ ПАРОЙ
RETURN
4 UZP=WST(K)
RETURN
55 JGK=1 ! НЕОБХОДИМ РЕДУКТОР С ОТКРЫТОЙ ЗУБЧАТОЙ ПАРОЙ
RETURN
5 CONTINUE
JJ=1 ! СКОРРЕКТИРОВЕТЬ РАЗМЕРЫ БАРАБАНА
UZP=WST(K)
RETURN
END
Рис. 7.38
ния и указано в комментариях БД.
Признаком окончания файла БД яв-
ляется сочетание символов EOFlj.
Содержание БД для программы
KRAN соответствует справочному ма-
териалу Приложений и может быть
легко дополнено и изменено как спе-
циальными программными средства-
ми систем управления базами данных
(СУБД), так и системными програм-
мами редактирования текстов в ОС
РВ и РАФОС. На рис. 7.40 ... 7.47
приведены основные файлы БД. Для
сокращения приводится головная часть
каждого блока и информация об од-
ной единице оборудования.
Для обработки БД предназначена
специальная подпрограмма PS, кото-
рая обеспечивает поиск оборудования
по сформированному запросу, содер-
жащему числовую и логическую ин-
формацию. В программах выбора
оборудования PS (рис. 7.48) выполня-
ет поиск унифицированного оборудо-
вания по заданным значениям сило-
вых и геометрических параметров и
передачу найденных характеристик
единицы оборудования в вызываю-
щую программу.
Переменная FILNAM определяет
имя файла БД, хранящего необходи-
мую информацию. Элементы вектора
типов оборудования BUFOBR (5) со-
держат идентификаторы NNNN...
176
Блок I
REM
REM
WW NNNN
К
X(1)...X(10)
X(1D...X(20)
> зона комментариев
- зона идентификаторов типа
зона количества единиц
оборудовния данного типа
%
зона характеристик
оборудования данного типа
REM
REM
ИИИД ММММ1
Блок К < КК
Х(1)...Х(10)
Х( 10)...Х(20)
EOF
признак конца файла
Рис. 7.39
ММММ длиной по четыре символа,
которые соответствуют различным
типам оборудования, хранящимся в
данном файле БД (рис. 7.39).
Размерность BUFOBR определена
ограничениями структуры БД на чис-
ло типов оборудования.
Наличие в элементе вектора BU-
FOBR сочетания символов uuuu яв-
ляется признаком прекращения про-
смотра БД и передачи управления
вызывающей программе. Элементы
вектора BUFIN (10) содержат пара-
метры, по которым выполняется под-
бор оборудования. Для определения
логики сравнения элементов вектора
BUFIN и параметров оборудования в
БД служат векторы ILG (10) и NUM
(10). Вектор ILG содержит символы
логических операций сравнения (табл.
7.5) для соответствующего элемента
BUFIN, а вектор NUM содержит но-
мера столбцов в БД, с которыми
выполняют логические операции срав-
нения этих элементов.
Например, если
ILG(1) = ’=>'
NUM (2) = 4,
то при просмотре БД для BUF1N (2) и
вектора информационной характерис-
тики каждой единицы оборудования
Таблица 7.5
Обозначение Логическая опера- Эквивалент ло-
ция сравнения 1ической опера-
ции ФОРТРАН а
равно . EQ.
больше или равно .GE.
меньше но или рав- . L1.
больше чем . GT.
меньше чем . LT.
177
REM >>>>> VKR.TAB <<<<<
REM ====^^======================
REM КРЮКИ ОДНОРОГИЕ, ДВУРОГИЕ КОВАНЫЕ И ПЛАСТИНЧАТЫЕ
REM Х(1)-ВЕС ПОДНИМАЕМОГО ГРУЗА, ПРИ ПВ15% [И]
REM Х<2)~ ТО ЖЕ ПРИ ПВ25?£ [Н]
REM Х(3)- ТО ЖЕ ПРИ ПВ40?£,ПВв0^ [Н]
REM Х(4)-Х(10)-ГЕОМЕТРИЧЕСКМЕ РАЗМЕРЫ КРЮКОВ,М
REM =-------------- ------------
REM КРЮКИ ОДНОРОГИЕ ГОСТ 6827-74
£}ЖЙ6327
26
320®. 2500. 2500. 0.020 0.0140 0.018 0. 0.080 1.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
REM =====— ---==
REM КРЮКИ ДВУРОГИЕ КОВАНЫЕ ГОСТ 6628-73
REM ==........................................... и.
йИй&6628
14
30000. 63000. 50000. 0.060 0.0 0,060 0.0 0.475 1.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
REM —...................---- ------- --------
REM КРЮКИ ДВУРОГИЕ ПЛАСТИНЧАТЫЕ ГОСТ 6619-75
REM =========--------------- ................................
ВДЙЯ6619
7
800000, 800000. 630000. 0.000 0.000 0.000 0. 0.000 1. 0.0
0.0 0.0 0,0 0.0 0.0 0.0 0.0 0,0 0.0 0,0
EOF
Рис. 7.40
X (20) файла FILNAM должно про-
веряться соотношение BUFIN (2) > X
(4). Совокупность информации, содер-
жащейся в BUFIN, ILG, NUM, и фор-
мирует запрос к БД. Формирование
запроса и его элементов может вы-
полняться программно либо в режи-
ме диалога.
Единица оборудования считается
выбранной, если для каждого элемен-
та BUFIN и X (20) будет выполнена
соответствующая логическая опера-
ция вектора ILG. Текст подпрограм-
мы PS приведен на рис. 7.49. Важным
этапом на стадии принятия проект-
ных решений является компонование
механизма (см. блок 4 на рис. 7.2),
представляющее сложную геометри-
ческую задачу [27, 28]. В общем слу-
чае необходимо на основании графа
связей узлов и частей механизма с
помощью пакета графических про-
грамм сформировать в ЭВМ графи-
ческий образ и нанести размеры на
компоновочную схему, а после этого
выполнить ее отображение на устрой-
стве вывода графической информа-
ции.
178
REM >>>>>VPD.TAB<<<<<
REM - - — - - - - — —----------------
REM ПОДВЕСКИ КРАНОВЫЕ УНИФИЦИРОВАННЫЕ ПО ОСТ-24.191.08-81.
REM И НОРМАМ ЗАВОДА "СИБТЯЖМАШ"
REM - - — - - - - — .
REM XCD-BEC ПОДНИМАЕМОГО ГРУЗА, ЕН]
REM Х( 2 ^КОЛИЧЕСТВО БЛОКОВ ПОДВЕСКИ
REM Х(3)-МИНИМАЛЬНЫЙ ДИАМЕТР КАНАТА, [М]
НЕМ Х(4)-МАКСИМАЛЬНЫЙ ДИАМЕТР КАНАТА, [М]
REM Х(5)-РАССТОЯНИЕ МЕЖДУ НАРУЖНЫМИ БЛОКАМИ ПОДВЕСКИ, £М]
REM Х(7),Х(8),Х(9)-ВЕС ПОДВЕСКИ ИСПОЛНЕНИЯ ДЛЯ
REM ПВ25Х, ПВ40Х, ПВ60% СООТВЕТСТВЕННО, ЕН]
REM Х(10),Х(11),Х(12)-ДИАМЕТРЫ БЛОКОВ ПОДВЕСКИ ДЛЯ
REM ПВ25%, ПВ40Х, ПВ60%, [М]
REM - ---------- - — ===========
two 2419
16
2000. 1. 0.0110 0.0140 0. 0. 364. 478, 618. 0.3360
0.4060 0.5 0. 0. 0. 0, 0. 0. 0. 0.
Рис. 7.41
] EOF
I
Рассмотрим одну из наиболее час-
г то решаемых в ходе проектирования
ГПМ задачу: компонование механиз-
, ма подъема. Для простоты будем го-
ворить о компоновании одного меха-
I низма подъема (главного или вспомо-
* гателыюго) без учета взаимного рас-
положения соседних механизмов. Ком-
понование механизма подъема может
быть выполнено с использованием
{ теории графов и параметрических мо-
делей [29, 30].
Как известно, механизм подъема
может состоять из следующих основ-
ных узлов: двигателя, редуктора, тор-
। моза, барабана, опор барабана, про-
межуточного вала, муфт, открытой
зубчатой передачи, опор зубчатой пе-
J редачи. Число возможных вариантов
графа компоновочных решений (ГКР)
ограничивается формализованными ус-
ловиями проектирования. Например,
открытая зубчатая передача исполь-
• зуется только на тихоходном валу.
Это позволяет существенно умень-
шить число возможных реализаций
ГКР, который приведен па рис. 7.50:
двигатель (Д), тормоз (Т), редуктор
(Р), барабан (Б), зубчатая передача
(ЗП), опора (О), муфта (М), промежу-
точный вал (ПВЛ). ГКР механизма
подъема должен быть дополнен ка-
чественной характеристикой, описыва-
ющей взаимное расположение компо-
нуемых узлов на плоскости относи-
тельно базового элемента (справа или
слева, какой плоскостью сопрягаются
и т.д.). Чаще всего базовым компоно-
вочным элементом схемы является
барабан, к которому привязана от-
носительная система координат меха-
низма подъема. Информация ГКР о
взаимном расположении барабана, ре-
дуктора, двигателя и т.д. позволяет
однозначно определить расположение
элементов компоновочной схемы в
плане и другие проекции.
Формирование результирующего
решения выполняет конструктор в ин-
терактивном режиме работы с ЭВМ
путем трансформации исходного ГКР
последовательным отсечением несу-
ществующих связей и занесением ин-
формации о взаимном расположении
элементов. Полная геометрическая ин-
формация о любом элементе компо-
новочной схемы содержится в биб-
лиотеке параметрических моделей.
Обработка библиотеки параметри-
ческих моделей узлов и частей меха-
179
REM >>>>VKN.TAB<<<<<
REM LJJ --1 1 1 —1 • • L > - 4 >1-.I , , ---— — ТЧГ —— ' . ... , _ _L_. _T—
REM КАНАТЫ СТАЛЬНЫЕ МАРКИРОВОЧНОЙ ГРУППЫ 1764 МПА
REM Х(1)-ДИАМЕТР КАНАТА, [М]
REM Х(2)-РАЗРЫВНОЕ УСИЛИЕ КАНАТА, [Н]
REM Х(3)-МАССА 1000 МЕТРОВ КАНАТА,. [КГ]
REM ХОЗРАСЧЕТНАЯ ПЛОЩАДЬ СЕЧЕНИЯ КАНАТА, [ММ**2]
REM ------------------------------- ---------------------
REM КАНАТЫ ЛК-РО 6*19+1 О.С. ГОСТ 2688-80
REM
«ЙЙЧ2888
35
0.038 8400, 55.1 5.63 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0,
REM I .1ИТИГ," ’ЧП .... I, --i. 1. L. I и ; тп i — --lt
REM КАНАТЫ ТЛК-0 6*37+1 О.С. ГОСТ 3079-80
REM ------------------------------ I |1'..гггтг|-" ' --— —---;...._-
ШПП3079
28
0.0058 18150. 124. 12.42 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
REM ==
REM КАНАТЫ ЛК-РО 6*36+1 О.С. ГОСТ 7668-80
REM , —.................
йвви7668
34
0.0063 22650. 156, 15.72 0. 0. 0. 0. 0. 0.
0. 0. 0. 0, 0. 0. 0. 0. 0. 0.
КАНАТЫ ТЛК-0 6*19+1 О.С. ГОСТ 3077-80
REM =
авйв3077
30
0.0046 11550. 78. 7.94 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
REM — ---------------------
REM КАНАТЫ ЛК-РО 6*37+7*7 ГОСТ 7669-80
REM *—‘•'..‘in irmiv - , .. ......... ----ж-i-.i । । нт
№№7669
31
0.0059 21600. 145. 15.93 0.0 0.0 0.0 0.0 0.0 0.0
0. 0. 0. 0, 0. 0. 0, 0, 0. 0.
IM
EOF
P и c. 7.42
>;>>?VDV.TAB<<<<<
REM
REM =
REM
ЙЕМ «
ЙЕМ
REM
НЕМ
НЕМ
REM
ЙЕМ
REM
REM
REM
REM
REM =-
REM
REM ==
айкпМТН
КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ МТН, MTF, MTKF, МГКН
TiiiJ
Х(1),Х(2),Х(3)-М0ЩН0СТИ НА ВАЛУ ЭЛЕКТРОДВИГАТЕЛЯ, ПРИ
ПВ25$,ПВ40%,ПВ80Х СООТВЕТСТВЕННО, [КВТ]
Х(4)-ТИП0РАЗМЕР ДВИГАТЕЛЯ
X(5)-ЧИСЛО ПАР ПОЛЮСОВ
Х(в),Х(7),Х(8)-ЧАСТ0ТА ВРАЩЕНИЯ ВАЛА, ПРИ
ПВ25%, ПВ40Х, ПВ60Х, [ОБ/МИН]
Х(9)-КПД ДВИГАТЕЛЯ
Х(10)-МАССА ДВИГАТЕЛЯ, [КГ]
Х(11)-МАКСИМАЛЬНЫЙ МОМЕНТ, [Н*М]
X(12)-МАХОВОЙ МОМЕНТ РОТОРА, [КГ*М**2]
ЭЛЕКТРОДВИГАТЕЛИ СЕРИИ МТН
23
3.4 2.5 2. 111. 6. 895. 820. 840. 0.650 76.
85. 0.19 0. 0. 0. 0. 0. 0. 0. 0.
ЙЕМ ..........- -—--------.......- - ' —
REM ЭЛЕКТРОДВИГАТЕЛИ СЕРИИ MTF
REM -т — -------— -
ппгшМТР
12
1.7 1.4 1.2 И. 6 . 850 . 885 . 910 . 0.600 51
39. 0.08 0. 0. 0. 0. 0. 0. 0. 0.
REM . ....- .....— ~.............. —
REM ЭЛЕКТРОДВИГАТЕЛИ СЕРИИ MTKF
ЙЕМ - -- -нгг • -ггг --------
ярййМТКР
12
1.7 1.4 1.2 И. 6 . 835 . 875 . 900 . 0.610 47
41. 0.08 0. 0. 0. 0. 0. 0. 0. 0.
ЙЕМ ....... .....- —=—------------г—-т-------------
ЙЕМ ЭЛЕКТРОДВИГАТЕЛИ СЕРИИ МГКН
ЙЕМ - —- — — ---------===«======
шзпМТКН
10
3.5 3.0 2.5 111. 6. 890. 910 . 930. 0.680 70
97 . 0.18 0 . 0 . 0 , 0 . 0 . 0 . 0 . 0.
EOF
Рис. 7.43
(81
REM >>>>>VRD,TAB<<<<<
REM ===============================
REM РЕДУКТОРЫ ТИПОВ Ц2, ЦТН
REM Х(1),Х(2),Х(3)-М0ЩН0СТЬ НА БЫСТРОХОДНОМ ВАЛУ РЕДУКТОРА,
REM ПРИ ПВ25%,ПВ40^,ПВ60°/ СООТВ., [КВТ]
REM Х(4)-Д0ПУСКАЕМАЯ ЧАСТОТА ВРАЩЕНИЯ БЫСТРОХОДНОГО
REM ВАЛА РЕДУКТОРА, [ОБ/МИН]
REM Х(5)-ПЕРДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
REM Х(6)-МЕЖОСЕВОЕ РАССТОЯНИЕ РЕДУКТОРА, [ММ]
REM Х(7)-0БЪЕМ ЗАЛИВАЕМОГО МАСЛА, [Л]
REM Х(8)-Х(15)-ПАРАМЕТРЫ ЗУБЧАТЫХ ПЕРЕДАЧ
REM X(16)-ДИАМЕТР БЫСТРОХОДНОГО ВАЛА, [ММ]
REM Х(!7)-МАССА РЕДУКТОРА, [КГ]
REM =====--------- г—г..............===—====...............
REM РЕДУКТОРЫ ТИПА Ц2
REM =====-------------------------------- -н-
ЙИЙЙЦ2
266
19.3 14.2 9.6 600. 8.320 250. 3. 28. 59. 20.
79. 2.0 30. 3.0 75. 30. 85. 0. 0. 0.
REM —1---------- ----------- „.....................
REM РЕДУКТОРЫ ТИПА ЦТН
REM --.......................... -—-------- ----
ЖЖЦГН
9.10 9.10 9.10 750. 50.250 6. 24. 74. 21. 77.
18. 80.00 3. 60. 4. 60. 80, 120. 6. 0.
EOF
Рис. 7.44
REM >>>>>VGK.TAB<<<<.<
REM ============================================
REM РЕДУКТОРЫ ТИПА ГК С ОТКРЫТОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ
REM ------------
REM Х(1^ДОПУСТИМАЯ ЧАСТОТА ВРАЩЕНИЯ БЫСТРОХОДНОГО ВАЛА,[ОБ/МИН]
REM Х(2)-М0ЩН0СТЪ НА БЫСТРОХОДНОМ ВАЛУ РЕДУКТОРА,[КВТ]
REM Х(3)-МЕЖ0СЕВ0Е РАССТОЯНИЕ,[ММ]
REM Х(4)-РЕЖИМ РАБОтаДПВ/]
REM Х(5)-ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
REM Х(6}-МОДУЛЬ ШЕСТЕРНИ ОТКРЫТОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ,[ММ]
НЕМ Х(7)-ЧИСЛ0 ЗУБЬЕВ ШЕСТЕРНИ ОТКРЫТОЙ ПЕРЕДАЧИ
ййййГК
22
580.000 95.000 800.000 15.000 31.500 20.000 19.000 0. 0. 0.
0. 0. 0, 0. 0. 0. 0. 0. 0. 0.
EOF
Р я с. 7.45
182
REM >>>>>VTR.TAB<<<<<
REM ==^— ------------==- ----- -----==s======s======s===
REM ТОРМОЗА КОЛОДОЧНЫЕ типов ткт, ткп, ткг, тктг
REM ------------------------ —.......... ------------ -------
REM X(1)-ТОРМОЗНОЙ МОМЕНТ ТОРМОЗА ПРИ ПВ25%, [Н#М]
REM Х(2)- ТО ЙЕ ПРИ ПВ40#, [Н#М]
REM Х(3)- ТО ЖЕ ПРИ ПВ100%, [Н*М]
REM Х(4)-ДИАМЕТР ТОРМОЗНОГО ШКИВА, [М]
REM Х(5)-ШИРИНА ТОРМОЗНОЙ КОЛОДКИ, СМ3
REM Х(6)-МАССА ТОРМОЗА, [КГ]
REM ---------,------ -------------------------
REM ТОРМОЗА ТИПА ТКТ
REM —......- ------=
ййДОТКТ
4
20. 20. 11. 0.1 0.07 11. 0. 0. 0. 0.
0, 0. 0. 0. 0. 0. 0. 0. 0. 0.
REM =======================
REM ТОРМОЗА ТИПА ТКП
REM ================================
тшп
5
20. 18. 0. 0.1 0.07 16. 0. 0. 0. 0.
0. 0, 0. 0, 0. 0. 0. 0. 0. 0.
REM ============================================
REM ТОРМОЗА ТИПА ТКГ
REM ===== - — ----------
ййййТКГ
5
100. 100. 100. 0.16 0.07 21. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
REM =====--------------------- — -----------------------------
REM ТОРМОЗА ТИПА ТКТГ
REM ============================================================
ЙИУВТКТГ
3
5000. 5000. 5000, 0.6 0.24 435. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
EOF
Рис. 7.46
183
REM >>>>>VMF.TAB<<<<<
REM —------------т--------—^-r---------------------T-
REM МУФТЫ: ЗУБЧАТЫЕ ПО ГОСТ 5006-83 И УПРУГИЕ
REM ВТУЛОЧНО-ПАЛЬЦЕВЫЕ ПО ГОСТ 21424-75
REM ------------
REM Х(1)-НОМИНАЛЬНЫЙ КРУТЯЩИЙ МОМЕНТ ПЕРЕДАВАЕМЫЙ МУФТОЙ , [Н*М]
REM Х(2)-МАКСИМАЛЬНАЯ ЧАСТОТА ВРАЩЕНИЯ МУФТЫ, [ОБ/С]
REM Х(3)-ДИАМЕТР ПОСАДОЧНОГО ОТВЕРСТИЯ В МУФТЕ, [М]
REM Х(4)-МАКСИМАЛЬНЫЙ ДИАМЕТР МУФТЫ, [М]
REM Х(5)-МАХ0В0Й МОМЕНТ МУФТЫ, [КГ*М»«2]
REM Х(6)-МАССА МУФТЫ, [КГ]
REM Х(7)~ПРИЗНАК МУФТЫ: 1-МУФТА М3, 2-МУФТА МЗП
REM ==================-===========^^
REM МУФТЫ ТИПА М3
REM ====—=——----------------==========--------------=
ияа«МЗ
10
1000. 90. 40. 0.145 0.05 6.7 1.0 0. 0. 0.
0.0 0.0 0.0 0,0 0.0 0.0 0.0 0. 0. 0.
REM ,....................---------------
REM МУФТЫ ТИПА МЗП
REM ....।-----~-г-------т--- —==
ЙИЙЙМЗП
10
1000 . 90 . 40 . 0..145 0.05 6.7 2.0 0 . 0 . 0.
0,00 0.0 0.0 0.0 0.0 0.0 0.0 0. 0. 0.
REM —--------------------- г.................. ...
REM МУФТЫ ТИПА МУВП
REM ---------------
ЯЙЙЯМУВП
13
6.3 147. И. 0.071 0.00 0.0 0.0 0 . 0 . 0.
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0. 0. 0.
EOF
Рис. 7.47
184
Передача исход-
ных данных
BlWdti, 8UF1K
Начало
работы
с БД
FILNfiM
Чтение
массива
*(W)
Логическая
проверка
признаков
Комен
торий
Коней,
Файла
-6-
Конец
Зонных
FI LN AM
Чтение коли-
честваеви- j
кии. одари- I
давания I
Определение
заполненности
вектора
8UFLN
-9—t.
ОйраМтка
файла
проверка
логических
условий
W-L-—
Оборудова-
ние подходит?
r-12----1------
Занесение ин-
формами _ 8
выходной
массив
Рис. 7.48
r®
низма подъема на основании ГКР
обеспечивает выбор необходимых эле-
ментов библиотеки и формирование
результирующих геометрических пре-
образований над этими элементами.
Это позволяет сформировать массив
графической информации, описываю-
щей компоновочную схему, и пере-
дать его на графическое устройство
или в архив на магнитный даек для
дальнейшей обработки подсистемой
вывода результатов.
Использование рассмотренных про-
грамм позволяет значительно ускорить
расчет и компонование механизмов
ГПМ. Например, полный расчет и
подбор оборудования, вывод двух ком-
поновочных схем на графопостроите-
ле типа ПАГ-500 (СМ 6408) занимают
около 20 мин.
Начиная с 1984 г. первый вариант
подсистемы PROEKT, являющийся
частью САПР ГПМ, внедрен в учеб-
ный процесс па кафедре «Подъемно-
транспортные машины и роботы»
Уральского политехнического инсти-
тута им. С. М. Кирова*.
§ 7.3. Программные средства
организации диалога
При организации интерактивного ре-
жима работы с пользователем с по-
мощью пакета программ DISPL име-
ется возможность быстро модифици-
ровать содержание диалогов, очи-
щать часть экрана от ненужной ин-
формации, выводить символьную и
числовую информацию в заданное
место и т.д. Пакет DISPL ориенти-
рован на использование видеотерми-
налов типа VT52 (ВТА 2000-30, СМ
7209, СМ 1611, VIDEOTON и др.).
Возможно использование и других
видеотерминалов при замене в про-
граммах кодов управляющих симво-
лов на необходимые для конкретного
типа видеотерминала. Для организа-
ции диалога экран видеотерминала
представляется в виде цоля размером
80 х 24 позиции с системой коорди-
нат, начало которой совпадает с верх-
ним левым углом экрана. Положи-
* В разработке программ участвовали
Д. А. Ямпольский и С. Г. Вялухин.
185
SUBROUTINE PS(BUFOBR,BUFIN,FILNAM,ILG,NUM,BUFOUT)
C --------------------------- - --- ~
С
П/П ПОИСКА ИНФОРМАЦИИ ПО ДАННЫМ, СОДЕРЖАЩИМСЯ В
С ЗАПРОСЕ
- ВЕКТОР ТИПОВ ОБОРУДОВАНИЯ;
- ВЕКТОР ЗАПРОСА, КОТОРЫЙ СОДЕРЖИТ
ЗНАЧЕНИЯ ПАРАМЕТРОВ ПОИСКА;
- ИМЯ ФАЙЛА БАНКА ДАННЫХ, СОДЕРЖАЩЕГО
ИНФОРМАЦИЮ;
- ВЕКТОР ЛОГИКИ ПОИСКА;
- ВЕКТОР НОМЕРОВ ХАРАКТЕРИСТИК ОБОРУДОВАНИЯ,
С КОТОРЫМИ ПРОВОДИТСЯ СРАВНЕНИЕ ЭЛЕМЕНТОВ
ВЕКТОРА ЗАПРОСА.
С ВХОДНЫЕ ПАРАМЕТРЫ:
С BUF0BR(5)
С BUFIN(IS)
С
С FILNAM
С
С ILGC10)
С NUMC10)
С
С
С ВЫХОДНЫЕ ПАРАМЕТРЫ:
С BUFOUT(100)-ВЕКТОР ВЫХОДНОЙ ИНФОРМАЦИИ, СОДЕРЖАЩИЙ
С ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ.
С--- — - ---г ... ------
DIMENSION ILG(10),IL0G(5),BUF0BR(5),BUFIN(10),NUM(10),
#IPR(10),BUFOUT(100),X(20)
REAL*8 FILNAM
DATA ILOG/’«’<<7
CALL ASSIGN(1,FILNAM)
K=1
100 READ(l,lll)(Xd),I=l,10)
111 FORMAT(10A4)
IF(X(I).EQ.'EOF ’)GOTO900 ’ПРИЗНАК КОНЦА ФАЙЛА
IF(X(1).EQ.'REM ')GOTO100 ’ПРИЗНАК КОММЕНТАРИЯ
IF(BUFOBROf) .EQ.’ ')GOTO900 ’ПРИЗНАК ОКОНЧАНИЯ ПОИСКА
IF(X(2).EQ.BUFOBR(К))GOTO123
GOTO100
123 READ(1,«)N
NM=0
DO 2 J=l,10
2 IF(NUM(J),NE.0)NM=NM+1
DO 1 1=1,N
L=I
READd,*)(X(M),M=l,10) (ЧТЕНИЕ СПРАВОЧНОЙ ИНФОРМАЦИИ
READ(1,*)(X(M),M=11,20)
DO 10 J=1,NM
KJ=J
IF(NUM(J).EQ.0.)GOTO 10
KN=NUM(J)
С ОПРЕДЕЛЕНИЕ ЛОГИКИ СРАВНЕНИЯ
DO 11 JJ-1,5
KJJ=JJ
IF(ILG(KJ).EQ.ILOG(JJ))G0T012
11 CONTINUE
GOTO10
12 VEC=BUFIN(KJ)
VEC1=X(KN)
IPR(KJ)=0
Рис. 7.49
186
С ОПЕРАЦИЯ СРАВНЕНИЯ
21 GOTOC21,22,23,24,25)KJJ IFCVEC.EQ.VEC1)IPR(KJ)=1
23 GOTO10 IF(VEC.GE.VEC1)IPR(KJ)=1 GOTO10 IF(VEC.LE.VEC1)IPR(KJ)=1
24 GOTO10 IF(VEC.GT.VEC1)IPR(KJ)=1
25 10 GOTO10 IFCVEC.LT.VEC1)IPR(KJ)=1 CONTINUE
30 DO 30 J=1,NM IF(IPR(J).EQ.0)GOTO1 CONTINUE GOTO90
1 CONTINUE
Х(1)=-1. ’ ПРИЗНАК НЕУДАЧНОГО ПОИСКА
С ЗАПИСЬ В ВЫХОДНОЙ МАССИВ
90 1К=20#(К-1)
DO 6 1=1,20
BUFOUT(IK+I)=X(I)
6 CONTINUE
IF(L.EQ.N)G0T08
DO 7 I=L+1,N
READ(1,*)X(1)
READCl,#)X(1)
7 CONTINUE
8 K=K+1
GOTO100
900 CALL CLOSE(l)
RETURN
END
Рис. 7.49.
Продолжение
тельное направление оси г-сверху вниз,
а оси Л'-слева направо. Такая система
координат удобна при заполнении эк-
рана видеотерминала информацией
построчно сверху вниз.
Все подпрограммы написаны на
языке ФОРТРАН и могут быть разде-
лены на две функциональные группы:
подпрограммы изменения состояния
экрана и подпрограммы ввода - вы-
вода информации. Первая группа ос-
нована на программной отработке
ряда управляющих символов клавиа-
туры видеотерминала дйя его перево-
да в автономный режим (АР) и даль-
нейшего изменения состояния экрана.
Все подпрограммы этой группы ис-
пользуют гашение экрана видеотер-
минала или позиционирование мар-
P и c. 7.50
кера в заданное место. Подпрограмма
GASH (рис. 7.51) обеспечивает фор-
мирование группы управляющих сим-
волов: S-перевод в АР, S1-установ-
ка маркера в левый верхний угол
экрана, S2-гашение экрана.
Передача группы символов S, S1,
S2 па экран видеотерминала по сим-
вольному формату 4А1 с управляю-
щим символом (пробел в первой по-
зиции спецификации формата) вызы-
вает очистку экрана. Аналогично ра-
ботает POSIT (рис. 7.52), вызываю-
щая установку экранного маркера в
позицию с заданными координатами
IX по оси X и /У по оси У
Сервисные операции с экранным
маркером выполняют подпрограммы
NEWLIN, НОМЕ (рис. 7.53 ... 7.54).
Для удаления части информации с
экрана служат две дополнительные
подпрограммы. Подпрограмма ZABOJ
(рис. 7.55) выполняет удаление груп-
пы из N символов, при этом коорди-
наты IX, /У соответствуют крайнему
правому из группы удаляемых симво-
лов. Программа CLEAR (рис. 7.56)
выполняет очистку части экрана, ог-
раниченную начальными координата-
ми IXN, IYN и конечными координа-
тами IXK, IYK. Возможна очистка
с 1 роки при IYN = IYK или столбца
экрана при IXN = IXK.
Вспомогательная программа BELL
(рис. 7.57) формирует звуковой сиг-
нал в течение 1 ... 2 с, который выда-
ется на видеотерминал.
Для организации ввода (вывода)
информации в DISPL используют
программы FILRDR, VVOD, VYVOD,
RAZP, VYVNUM.
Программа FILRDR (рис. 7.58) вы-
водит на видеотерминал экран диало-
га, хранящийся на магнитном диске в
файле FIL. Экран диалога (см. рис.
7.36) содержит в первой строке число
вопросов, на которые необходимо от-
ветить, вторая и третья строки со-
держат векторы координат положе-
ний маркера на экране IX и IY соот-
ветственно. Содержание экрана диа-
лога может быть легко модифициро-
вано экранным редактором ОС РВ.
Программа VVOD (рис. 7.59) по-
зволяет выполнить ввод ряда чисел в
режиме диалога. Введенная информа-
ция заносится в вектор Х(24) и может
быть отработана в вызывающей про-
грамме.
Программа RAZP (рис. 7.60) вы-
полняет распознавание группы сим-
волов и наличие положительного от-
вета при шести возможных сочетани-
ях группы утвердительных символов
(ДА, DA) русского и латинского ал-
фавита.
При необходимости вывести не-
большое сообщение или комбинацию
символов используется подпрограмма
VYVOD (рис. 7.61). Размер сообще-
ния не должен превышать 60 сим-
волов.
Подпрограмма VYVNUM (рис.
7.62) позволяет вывести на экран ви-
деотерминала сообщение, содержа-
щееся в файле FIL, и вектор Х(24)
действительных чисел.
Изучив управляющие коды видео-
терминалов и описанные выше про-
граммы, пользователи могут значи-
тельно расширить и дополнить при-
веденные программы.
SUBROUTINE GASH
с. -------- ---------и—,----................. . ----
С П/П ОЧИСТКИ ЭКРАНА ТЕРМИНАЛА
С ......................... чт-
BYTE S.S1.S2
DATA S,S1,S2/”33,"li0,"112/ «ФОРМИРОВАНИЕ УПРАВЛЯВШИХ СИМВОЛОВ
WRITE(6,1)S,S1,S,S2 ! ОЧИСТКА ЭКРАНА
1 FORMATE '.4AD
RETURN
END
Рис. 7.51
188
SUBROUTINE POSIT!IX,IY)
C 1--ГГ г n.,-^ ,
С П/П ПОМЕЩАЕТ КУРСОР В ЗАДАННУЮ ПОЗИЦИЮ ЭКРАНА ТЕРМИНАЛА.
С ВХОДНЫЕ ПАРАМЕТРЫ I
С IX - НОМЕР ПОЗИЦИИ ПО ГОРИЗОНТАЛИ, I<- IX <=80;
С IY - НОМЕР ПОЗИЦИИ ПО ВЕРТИКАЛИ, 1<- IY <=24;
С
С ПРИМЕЧАНИЕ: IX , IY - ЦЕЛЫЕ ДЕСЯТИЧНЫЕ ЧИСЛА.
BYTE X.Y.S.Sl
DATA 3,31/"33,'Ч31/
X»IX
Y=IY
X=X+"36
Y-Y+"37
WRITE!8,1) S,S1,Y,X
1 FORMAT!' ’4A1)
RETURN
END
1 ФОРМИРОВАНИЕ УПРАВЛЯЮЩИХ
! СИМВОЛОВ
!ПОЗИЦИОНИРОВАНИЕ МАРКЕРА
Рис. 7.52
SUBROUTINE NEWLIN
С ... ,т_ ------- ,, - ,
С П/П ВЫПОЛНЯЕТ ПЕРЕВОД МАРКЕРА НА НАЧАЛО НОВОЙ СТРОКИ ЭКРАНА
BYTE 50, S1
ВАТА 50,31/"033,"012/
WRITEfS,1)50,31
FORMAT!’ ’,2А1)
RETURN
’ФОРМИРОВАНИЕ УПРАВЛ5
|*Щ5Е
( символов
END
Рис. 7.53
SUBROUTINE НОМЕ
С П/П ВЫЗЫВАЕТ ВОЗВРАТ МАРКЕРА В ЛЕВЫЙ ВЕРХНИЙ УГОЛ ТЕРМИНАЛА
BYTE S0,S1
DATA 30,51/"033,"110/ СФОРМИРОВАНИЕ УПРАВЛЯЮЩИХ СИМВОЛОВ
WRITE(6,1)S0,S1 ! ВОЗВРАТ МАРКЕРА
1 FORMAT!' ’,2А1)
' RETURN
END
Рис. 7.54
IK9
SUBROUTINE ZABOJfN,IX,IY)
C-----,-------------- --------------------------
С П/П ВЫПОЛНЯЕТ "ЗАБОЙ" НЕНУЖНОЙ ИНФОРМАЦИИ, Т.Е. УДАЛЯЕТ С
С ЭКРАНА ТЕРМИНАЛА ГРУПЙЫ СИМВОЛОВ В НАПРАВЛЕНИИ СПРАВА НАЛЕВО
С ВХОДНАЯ ИНФОРМАЦИЯ: N-ЧИСЛО УДАЛЯЕМЫХ СИМВОЛОВ
С IX,IY-КООРДИНАТА ГРУППЫ СИМВОЛОВ НА ЭКРАНЕ
С----г------—..............================«======
BYTE S
S=г 1
N=IABS(N)
IF(N.GT.80)RETURN ’ ПРОВЕРКА ДОПУСТИМОСТИ УДАЛЕНИЯ
К=1Х
K1-IX-N
DO 5 J=1,N !ОРГАНИЗАЦИЯ УДАЛЕНИЯ СИМВОЛОВ
I=IX-J
CALL POSIT(I,IY)
WRITEC6,10)S ’УДАЛЕНИЕ СИМВОЛА
5 CONTINUE
10 FORMAT<Al,tt)
RETURN
END
Рис. 7.55
SUBROUTINE CLEAR(IXN,IXK,IYN,IYK)
C =------
С П/П ВЫПОЛНЯЕТ ЧИСТКУ ЧАСТИ ЭКРАНА ТЕРМИНАЛА
С ВХОДНЫЕ ПАРАМЕТРЫ: IXN.IXK-НАЧАЛЬНАЯ И КОНЕЧНАЯ КООРДИНАТЫ
С "X" ПОЛЯ ОЧИЩАЕМОГО УЧАСТКА
С IYN,IYK-НАЧАЛЬНАЯ И КОНЕЧНАЯ КООРДИНАТЫ
С "Y" ПОЛЯ ОЧИЩАЕМОГО УЧАСТКА
С=--------- , --------
BYTE 3(80)
DATA S/80#’ '/
IXN=IABS(IXN) ’ ПРОВЕРКА КОРРЕКТНОСТИ ВВОДА
IXK=IABS(IXK)
IYN=IABS(IYN)
IYK=IABS(IYK)
IF(IXK.GT.80.OR.IYK.GT.24)RETURN
IF(IXK.LT.IXN.OR.IYK.LT.IYN)RETURN
DO 1 J=IYN,IYK ’ОРГАНИЗАЦИЯ ОЧИСТКИ
JK=J
CALL POSIT(IXN,JK)
WRITE(6,10)(S(K),K=IXN,IXK)! ОЧИСТКА
1 CONTINUE
10 FORMATS ',80AD
RETURN
END
Рис. 7.56
190
SUBROUTINE BELL
C —..................- ------- ----- ----------------
С П/П ВЫЗЫВАЕТ ПОЯВЛЕНИЕ ЗВУКОВОГО СИГНАЛА НА ТЕРМИНАЛЕ
С ПОЛЬЗОВАТЕЛЯ
С ---- ........................................ -г
BYTE 30, S1
DATA S0,S1/”033,'W/ ! ФОРМИРОВАНИЕ УПРАВЛЯЮЩИХ СИМВОЛОВ
WRITE(6,1)S0,S1
1 FORMATC ’,2А1)
RETURN
END
Рис. 7.57
SUBROUTINE FILRDR(FIL,IX,IY.NX)
IIJ3==---L/'iri-T41J-U., | Ж
С П/П ВЫВОДА НА ТЕРМИНАЛ ТЕКСТОВОГО ФАЙЛА.
С ВХОДНЫЕ ПАРАМЕТРЫ:
С FIL - ИМЯ ТЕКСТОВОГО ФАЙЛА.
С ВЫХОДНЫЕ ПАРАМЕТРЫ:
С IX,И - ВЕКТОРЫ ПОЛОЖЕНИЯ МАРКЕРА;
С NX - РАЗМЕРНОСТЬ ВЕКТОРОВ.
С -------------- ---------------------------------------------------------------------------------------г-
DIMENSION IX(1),IY(1),IBUF(30)
BYTE IBUF
CALL ASSIGN(l.FIL)
READ (1,*) NX
READ (1,#) (IX(I),I-1,NX)
READ (1,*) (IY(I),I=i,NX)
N-IY(NX)
! ЧТЕНИЕ:
! РАЗМЕРНОСТИ
» ВЕКТОРА IX(NX)
I ВЕКТОРА IY(NX)
С
1
С
2
DO 1 J=i,N I ВЫВОД НА ТЕРМИНАЛ
READ (1,2) IBUF
WRITE(6,2) (IBUF(K),K=1,80)
CONTINUE
CALL CLOSE(l)
FORMAT (80A1)
RETURN
END
Рис. 7.5S
191
SUBROUTINE WOD(FILXN)
C-1 -l~ I I ' T’ J --Г, J -----~=
С П/П ВЫПОЛНЯЕТ ВВОД МАССИВА ИСХОДНЫХ ДАННЫХ В РЕЖИМЕ ДИАЛОГА
С С ЭКРАНА ТЕРМИНАЛА
С ВХОДНЫЕ ПАРАМЕТРЫ: FIL-ИМЯ ТЕКСТОВОГО ФАЙЛА ДИАЛОГА
С ВЫХОДНЫЕ ПАРАМЕТРЫ: X(N-l) -МАССИВ ДАННЫХ
С N-1 -РАЗМЕРНОСТЬ МАССИВА ДАННЫХ
DIMENSION X(24),IX(24),IY(24)
10 CALL GASH
CALL FILRDR(FIL,IX,IY,NX)1ВЫВОД НА ЭКРАН ДИАЛОГА
' DO 1 J-l.NX-l I ОРГАНИЗАЦИЯ ВВОДА ДАННЫХ
KX-IX(J)
KY“IY(J)
CALL POSIT(KX.KY)
READ(8,*,ERR=10)X(J)
1 CONTINUE
CALL POSIT(IX(NX),IY(NX))
WRITE(6,2)
READ(6,3)IW
CALL RAZP(IW.IPR) ! ПРИНЯТИЕ РЕШЕНИЯ
IF(IPR.GT.0)GOTO10
N=NX
2 FORMAT(5X,-'ХОТИТЕ ВНЕСТИ ИЗМЕНЕНИЯ В ДАННЫЕ ? ’,«)
3 FORMAT(А2)
RETURN
END #
Рис. 7.59
SUBROUTINE RAZP(IW.IPR)
С П/П ВЫПОЛНЯЕТ РАСПОЗНАВАНИЕ ВВЕДЕННЫХ СИМВОЛОВ
С ВХОДНЫЕ ПАРАМЕТРЫ: IW-ГРУППА СИМВОЛОВ
С ВЫХОДНЫЕ ПАРАМЕТРЫ: IPR-ПРИЗНАК ОТВЕТА
С IPR>0 - ПОЛОЖИТЕЛЬНЫЙ ОТВЕТ
С IPR<0 -ОТРИЦАТЕЛЬНЫЙ ОТВЕТ
DIMENSION 1В(В)
DATA IB/’DA’,*DA',’ДА’,’ДА’,’YE',’YE’/
IPR=~1
DO 1 J=l,6
IF(IW.EQ.IB(J))IPR=1
1 CONTINUE
RETURN
END
Рис. 7.60
192
SUBROUTINE VYVOD(IX,IY,ITEXT,N)
С П/П ВЫВОДА МАССИВА ТЕКСТА В ЗАДАННОЕ МЕСТО ЭКРАНА ТЕРМИНАЛА
С ВХОДНЫЕ ПАРАМЕТРЫ: IX,IY-КООРДИНАТЫ Т.Т, ОТКУДА
С НАЧИНАЕТСЯ ВЫВОД ТЕКСТА
С 1ТЕХТ(Ю-МАССИВ ТЕКСТОВОЙ ИНФОРМАЦИИ
С N - РАЗМЕРНОСТЬ МАССИВА, N <- 60.
С ---- -г- - .-т --
BYTE 1ТЕХТ(80)
N-IABS(N) ! ПРОВЕРКА КОРРЕКТНОСТИ ВВОДА
IX-IABS(IX)
IY=IABS(IY)
IF((N+IX).GT.90.OR.IX.EQ.1) RETURN
IF(IY.GT.24)RETURN
IF(IX.EQ.0.OR.IY.EQ.0)RETURN
CALL POSIT(IX.IY) ! ПОЗИЦИОНИРОВАНИЕ КУРСОРА
WRITE(6,1)(ITEXT(J),J»1,N) I ВЫВОД ТЕКСТА
1 FORMATC ’.60А1Л)
RETURN
END
Рис. 7.61
SUBROUTINE VYVNUM(FIL,X,IPR)
C. -........................-.......- ------ -
С П/П ВЫВОДА НА ЭКРАН МАССИВА ДЕЙСТВИТЕЛЬНЫХ ЧИСЕЛ.
С ВХОДНЫЕ ПАРАМЕТРЫ: FIL-ИМЯ ФАЙЛА С ЭКРАНОМ СООБЩЕНИЯ;
С Х-МАССИВ ДЕЙСТВИТЕЛЬНЫХ ЧИСЕЛ.
С ВЫХОДНЫЕ ПАРАМЕТРЫ: IPR-ПРИЗНАК ПРИНИМАЕМОГО РЕШЕНИЯ
С - -- — --г- —1 -- ----
DIMENSION X(24),IX(24),IY(24)
10 CALL GASH
CALL FILRDR(FIL,IX,IY,NX)
IFCNX.EQ.DGO TO 2
DO 1 J=1,NX-1
CALL POSIT(IX(J),1Y(J))
WRITE(6,*)X(J)
1 CONTINUE
2 CALL POSIT(IX(N),IY(N})
READ(6,3,ERR=10)IW
3 F0RMAT(A2)
CALL RAZP(IW.IPR)
RETURN
END
Рис. 7.62
7 Зак 19Hb
193
Глава 8
УТОЧНЕННЫЕ РАСЧЕТЫ
§8.1 . Задачи расчетов
и их краткая характеристика
К уточненным расчетам относят:
а) расчеты длительности и интен-
сивности пускотормозных процессов
с учетом нелинейности механических
характеристик различных видов при-
водов, переключений в схеме управле-
ния, работы привода в сверхсинхрон-
ной или рекуперативной зоне, време-
ни срабатывания многих тормозных
систем. Могут быть приняты во вни-
мание переменность приведенного мо-
мента инерции механизма поворота
при одновременном изменении выле-
та и потери в канатной подвеске груза
при его поперечных колебаниях как
маятника;
б) определение нагрузок в элемен-
тах механизмов и несущих металло-
конструкций с учетом упругих коле-
баний и соударений вследствие ликви-
дации (выборки) зазоров (люфтов) в
кинематических парах, а также ула-
ров колес при их прохождении по
стыкам рельсов подкрановых путей.
В зависимости от фактических усло-
вий эксплуатации рассматривают раз-
личные виды нагружения (подъем с
веса и торможение при опускании,
подхват, стопорение крюка, резонанс,
автоколебания и др.). Используют от-
носительно новые методы частотного
анализа и структурного способа рас-
чета динамических нагрузок;
в) расчеты с использованием кри-
териев для оценки опасности возник-
новения очень вредных высокочастот-
ных разрывных фрикционных автоко-
лебаний. На этой основе принимают
практические меры исключения таких
процессов. Если же эти колебания не-
избежны (а это встречается довольно
часто), то тогда определяют их харак-
теристики и учитывают при расчете
прочности, выносливости, износоустой-
чивости, теплостойкости контактирую-
щих пар;
г) расчеты с дифференцированным
учетом диссипации (рассеивания в ок-
194
ружающую среду) энергии при коле-
баниях многомассовых систем расчет
нагрузок в условиях вынужденных ко-
лебаний и, если эго требуется, при
резонансе;
д) расчеты с учетом податливости
металлоконструкции и минимизация
нагрузки механизма;
е) вероятностные расчеты прочност-
ной и иной надежности, когда учиты-
вают флуктуации (статистический раз-
брос) и механические свойства кон-
струкционных материалов, и действую-
щих нагрузок, для чего используют
методы статистической динамики;
ж) расчет с применением современ-
ной вычислительной техники для ва-
риантного проектирования и оптими-
зации, применение соответствующих
пакетов прикладных программ и бан-
ков данных, использование ЭВМ в
диалоговом режиме и др.
Рассмотренные в пособии примеры
таких расчетов даны с применением
простейших вычислительных средств.
Поэтому здесь открываются неогра-
ниченные возможности уточнения по-
становки и способов решения различ-
ных задач за счет увеличения числа
степеней свободы, учета переменнос-
ти и распределенности параметров,
нелинейных и стохастических (вероя т-
ностных) подходов, применения мо-
делирующих и цифровых машин для
математического исследования и со-
поставительного проектирования и
г. д. Различные усложнения возмож-
ны при углубленном изучении про-
граммного материала, при выполне-
нии различных УИРС. кафедральных
НИР и др. Необходимость в таких
расчетах может возникнузь не только
в процессе курсового, но и дипломно-
го проектирования, когда разрабаты-
ваются принципиально новые конст-
рукции или когда оцениваются раз-
ные конструктивные варианты испол-
нения одной и той же машины. По-
добные расчеты рекомендуются так-
же для обоснованной проработки ме-
тодики и программы натурного испы-
гания головного образца вновь изго-
товленной машины перед проведени-
ем модернизации и в других анало-
гичных случаях. Следовательно, по-
добные расчеты полезны и на произ-
водстве, и в практике проектных и
научно-исследовательских учреждений.
Все приведенные далее алгоритмы
относятся к этапу проверочного рас-
чета.
§ 8.2. Расчеты длительности
или интенсивности
пускотормозных процессов
Многие приводные двигатели имеют,
как известно, нелинейные механичес-
кие характеристики. Их аппроксима-
ция различными непрерывными сте-
ленными полиномами и известными
функциями позволяет получить ряд
решений в замкнутой форме. Наряду
с этим вполне удовлетворительные
результаты дает более простая кусоч-
но-линейная аппроксимация.
Расчет длительности пуска при ав-
томатизированном линейно-ступенча-
том управлении приводным электро-
двигателем (когда проектируется пус-
ковой контроллер) осуществляется в
такой последовательности. Соответст-
вующим подбором резисторов в цепи
ротора (якоря) создают семейство ис-
кусственных характеристик электро-
двигателя, обеспечивающее переклю-
чение с одной характеристики на дру-
гую при точном соблюдении соответ-
ствующих перегрузок двигателя: наи-
большей Vmax (Для асинхронных дви-
гателей ^тах 2,25, для двигателей
постоянного тока 2,5 ... 3.0) и
переключения обычно \|/пер =1,1
...1,2 (рис. 8.1). Отработка пусковой
диаграммы может выполняться за
счет определенных выдержек времени
на каждой характеристике.
Кратности перегрузок \|/пср и ymrix,
число переключений z (обычно прини-
мают равным 3...4) и номинальное
скольжение естественной характерис-
тики .$'н = (оэх — (Oj/wx должны соот-
ветствовать соотношению
Ч'иср 'УпШ \ (8-1)
Здесь сд. синхронная и номиналь-
ная скорости вращения ротора.
Кроме того, необходимо выпол-
нить условие, чтобы момент переклю-
чения Тпеп был больше статического
Т„:
Tslt:v = VnepTH > Тсг. (8.2)
Время разгона до скорости на
естественной характеристике, соответст-
вующей моменту переключения
+ - (Vnep/VnuJZ+1L (8-3)
будет равно
= -^^2 + 1, fc^/E ( Vmax Vnep) » (8-4)
где при разгоне в сторону, противо-
положную действию статических со-
противлений,
а = 1п[(т;,<|<т„ - т„)/(т„ч<„ер - т„)].
(8.5)
При разгоне для случая, когда мо-
мент двигателя действует в сторону
статических сопротивлений (разгон
при опускании, при движении по вет-
ру и под уклон и т. п.), скорость дви-
гателя асимптотически приближается
к точке, лежащей на продолжении
естественной характеристики в
сверхсинхронной зоне или зоне реку-
перативного движения и соответст-
вующей моменту статических сопро-
тивлений, т.е.
о) = «Д1 + Тстлн/Тп) 2о)л - юн. (8.6)
Исходя из допустимой погреш-
ности в 5% и считая разгон закончен-
ным, когда момент двигателя достиг-
195
нет 0,95 Тст, получим
г = In ^нУдцц + +
Р Г (Тичпер+Т'У1Т^
+ 2,995732 9г+1, (8.7)
где
R _ 1 - 1 * .
р------------у----------------,
Vmax “ Упер Ушах - Упер
8 = ^.; ег+1 = ^. (8.8)
• U
Уточненное определение парамет-
ров процесса торможения (времени,
пути, скорости в начале торможения)
в механизмах подъема требует учета
сравнительно большого времени сра-
батывания некоторых конструкций
тормозов при торможении во время
опускания груза. Ускорение опуска-
ния груза, когда двигатель выключен,
а тормоз еще не сработал,
а0 = G/(m1T + m2), (8.9)
где G-вес груза (включая вес крюко-
вой подвески); т2-масса груза и под-
вески; т1т-приведенная к грузу при
торможении масса вращающихся
частей.
Скорость груза к моменту начала
торможения
% О = V + Мер» <8-10)
где г-скорость опускания груза
(большая, чем скорость подъема),
Г - время срабатывания тормоза.
Время срабатывания указывается
в паспортных данных; в первом при-
ближении его можно принимать рав-
ным по 0,01 с на каждые 100 мм диа-
метра тормозного шкива.
Скорость опускания (8.6) v =
= 2t\ — ин, где ин-скорости, соот-
ветствующие сох и сон (см. выше).
Путь опускания груза за время
срабатывания тормоза
*vi = + °,5л0'ср- (8-И)
Фактическое время торможения
'т.Ф = (т1т + ™2)%о/(Л - G), (8-12)
где Рт-сила тормоза, вызванная дей-
ствием тормозного момента и приве-
денная к грузу,
Рт = ТтМ/(0,5П6т]). (8.13)
Здесь и, т] - общее передаточное
число (включая кратность полиспас-
та) и к.п.д. механизма; £>6-диаметр
барабана; -расчетный тормозной
момент.
Путь торможения
^т.ф = 0>гро'т- (8-14)
Полное время торможения
гг = 'ср + гт.ф. (815)
полный путь торможения
лт = (8.16)
Расчеты показывают, что учет вре-
мени срабатывания при опускании
груза вскрывает существенно увели-
ченную скорость опускания, с уровня
которой начинается процесс тормо-
жения; то же относится к времени и
пути остановки груза.
Рассмотрим установку грузового
датчика конечного выключателя типа
КУ 703 в механизме подъема. Для
обеспечения гарантированного зазора
в соответствии с Правилами ГГТН в
целях исключения опасного явления
«переподъема» крюковой обоймы
следует рассчитать три составляющие
ординаты установки датчика
(рис. 8.2):
А = /ij -4- h2 + A3, (8.17)
где А1-«выбег» крюковой подвески;
его можно определить, считая движе-
ние за время срабатывания тормоза
равномерным:
hi'=vntcp; (8.18)
Рис. 8.2
196
h2 - путь торможения порожнего
механизма:
А2 = т1тГн/(2Рт); (8.19)
Л3-гарантированный зазор, равный в
соответствии с правилами ГГТН
0,05 м для талей и 0,2 м для кранов.
Вертикальное расстояние между
нижней точкой грузика конечного
выключателя КУ 703 и точкой теоре-
тически возможной встречи крюковой
подвески механизма и металлокон-
струкции крана или тележки должно
быть равно или больше величины h.
§ 8.3. Расчет динамических нагрузок в
механизмах при различных процессах
нагружения
Динамические нагрузки в основных
элементах механизмов и металло-
конструкциях ГПМ с достаточной
для практики точностью можно рас-
считывать при помощи схем с неболь-
шим числом степеней свободы. Эти
схемы содержат несколько абсолют-
но жестких точечных масс, соединен-
ных упругими (или вязкоупругими)
звеньями конечной жесткости.
Получение приведенных масс в
поступательном движении или мо-
ментов инерции во вращательном
движении является общеизвестным.
Коэффициенты жесткости соеди-
нительных звеньев определяются по
правилам сопротивления материалов
и строительной механики. Соответст-
вующие таблицы с необходимыми
расчетными формулами имеются во
многих справочниках и книгах ([9] и
ДР-).
При определении горизонтальной
составляющей натяжения канатов в
условиях небольших углов раскачива-
ния подвеску в первом приближении
можно представить как дополнитель-
ное упругое звено с коэффициентом
жесткости
ск = G/1, (8.20)
где G - вес колеблющегося груза с
крюковой подвеской; /-длина канат-
ной подвески.
Коэффициент жесткости муфт с
резиновыми упругими элементами
определяю! по данным различных
работ, например [34].
Коэффициенты жесткости с одно-
го вала на другой приводятся точно
так же, как и моменты инерции,-с
помощью квадрата передаточного
числа (п.ч.) между валами и к.п.д. в
первой степени. При силовом режиме
в формулах приведения к.п.д. ста-
вится в одной строчке с квадратом
л. ч., при тормозном режиме-в раз-
ных строчках.
Преобразование коэффициента
жесткости растяжения - сжатия в
коэффициент жесткости кручения и
наоборот осуществляется с помощью
квадрата радиуса рабочего органа-
барабана, ходового колеса и др.
Зазоры (люфты) в соединениях
определяют по соответствующим
стандартам или нормалям на зубча-
тые передачи и зубчатые муфты. С
одного вала на другой зазоры при-
водятся с помощью п. ч. Зазор линей-
ный преобразуется в угловой и на-
оборот с помощью радиуса рабочего
органа.
Примеры получения различных
расчетных схем крановых механизмов
даны в работе [9] и др. Расчетную
схему для определения динамических
нагрузок составляют по кинемати-
ческой схеме, содержащей данные о
двигателе, системе зубчатых передач,
барабане, канате, ходовых колесах,
тормозах, муфтах, валах и др. Чаще
всего механизм имеет крупные массы
малой податливости и упругие эле-
менты малой массы. Поэтому в целях
упрощения основные массы предпо-
лагают абсолютно жесткими и сосре-
доточенными в центрах тяжести, а
валы, канаты и дугие соединительные
звенья-упругими и невесомыми. В
результате таких упрощений полу-
чают достаточно простую расчетную
схему, имеющую ограниченное число
степеней свободы; ее называют дис-
кретной.
Если исходные параметры кинема-
тической схемы приводят к какому-
нибудь валу, получают схему враща-
тельного движения, в которой нагруз-
ки представляют собой крутящие мо-
менты. Если же параметры приводят,
197
например, к грузу, получают схему
поступательного движения, в которой
нагрузки определяются как силы.
Расчеты и исследования динами-
ческих нагрузок в многомассовых схе-
мах крановых механизмов показали
их одночастотность (наибольшая ам-
плитуда колебаний при какой-то од-
ной определяющей частоте), разную
в разных звеньях и при различных
видах нагружеий (при различных на-
чальных условиях). Эти специфичес-
кие свойства позволили рекомендо-
вать для практических расчетов упро-
щенные схемы [10]. При этом нужно
все исходные параметры приводить к
тому звену, нагрузка в котором под-
лежит определению.
Упрощенные схемы в крановых
механизмах в большинстве случаев
дают известное представление о глав-
ной (основной, определяющей) часто-
те. Главной частотой называют ту,
которая имеет наибольшую ампли-
туду,-она далеко не всегда низшая. В
многомассовой системе представле-
ние о главной частоте для /-го звена с
коэффициентом <?. может дать фор-
мула
I к +1 ' ~j к + 1
(Oj / Г; £ Е Е mZ ’ (8'2 1 )
V z= 1 z= 1 s = j + t
где к + 1 - число масс в системе.
Расчет нагрузок в трехмассовых
схемах с двумя звеньями дан в работе
[9].
Частотный анализ в многомас-
совых системах можно выполнить по
рекомендациям [35], а определить на-
грузки звеньев таких схем можно с
использованием матричных методов.
Предельные нагрузки в двухмас-
совой схеме с одним упругим звеном
и зазором А при пуске «с подхватом»
определяют но формуле [9]
max — дц -______£
mm
Здесь - ведущая масса системы,
m2 - ведомая масса. Рдв - движущая
сила привода, И7-сила статических
сопротивлений движению (для меха-
низма подъема - вес груза.), ( -коэф-
фициент жесткости звена (рис. 8.3).
Все величины, входящие в две пос-
ледние формулы (так же как и во все
последующие),- постоянные. Если гак
называемая «сила разрядки» меньше
статического сопротивления, т. е.
.<12ох/™1< (Х.24)
то силового размыкания не проис-
ходит CFmjn > 0). Если же сила раз-
рядки больше статического сопротив-
ления, то вредное явление силового
размыкания неизбежно.
При подхвате на скорости устано-
вившегося движения (г = const) фор-
мула для предельных нагрузок упро-
щается [9]:
= Hz± (8.25)
Эта формула дает хороший результат
и для ускоренного подхвата в систе-
ме, где выдерживается соотношение
масс » т2 (тихоходные подъемные
механизмы, здесь И/=6’-вес груза,
т2-сго масса).
Если нагрузка статических сопро-
тивлений пренебрежимо мала (И«
« механизмы , передвижения и
поворота), тогда
Fnm (। + .
шах ш^шД V т2 P„J
(8.26)
Для механизмов передвижения и
поворота массы несоизмеримы и по-
этому для тг »ш1 возможно даль-
нейшее упрощение:
ТО.(1 + AT„) (8-27)
Две последние формулы примени-
мы и для торможения, только тогда
вместо движущей силы Рлл следует
ml (fflj + т2)(л']20см2 - IV2)
(Рдвт2 4- Win,)2
V
(8.22)
(8.23)
н.д.
Рис. 8.3
*120 —
198
подставить тормозную силу Рт. В
этих случаях силовые размыкания не-
избежны.
Формула (8.27) может быть при-
менена и при несостоявшемся пуске
любого механизма, т. е. при гаком
включении привода, которое не выз-
вало движения механизма (крапа), но
привело к большому нагружению его
трансмиссии.
При торможении второй массы
при опускании груза на валу с зазо-
ром (когда быстроходный вал имеет
зубчатую муфту второго типа) возни-
кает динамическая нагрузка, наиболь-
шее значение которой (рис, 8.4) равно
Г Gm, ~ 2c’A(jhj + m,)
(P, - O') »!1 _ (Л “
Рис. 8.5
(8.28)
При торможении первой массы
механизма поворота и передвижения
наибольшая нагрузка трансмиссии
равна (рис. 8.5)
„ Р,т2 - IVm, J. ,
/Т (Р, + Н)т,Т
+ / Г-------+ (8.29)
2с A (fflj -I- ш2Ц
РТт2 - Wm{ J
В том случае, если при движении
рабочий орган машины встречает
непреодолимое препятствие и в ее
кинематической схеме отсутствует
муфта предельного момента, транс-
миссия будет испытывать действие
наибольшей нагрузки, определяемой
но формуле В. Ф. Черного (рис. 8.6):
F + С (8.30)
Эта формула справедлива только
в том случае, если несущая металло-
конструкция является низкочастотной
упругой системой. Если же ее пар-
циальная частота колебаний больше
парциальной частоты колебаний
подъемного механизма после стопо-
рения груза (а это характерно для
всех кранов большой грузоподъем-
ности), то требуется учет упругости
несущего каркаса.
Последняя формула с очевид-
ностью свидетельствует, что стопор-
ные нагрузки порожнего состояния
(И7=0) больше нагрузок груженого
состояния (И/0). Расчет нагрузок в
многомассовых схемах при стопоре-
нии последней массы можно выпол-
нить по рекомендациям [9].
Исследования и расчеты показы-
вают, что по приведенным здесь фор-
мулам можно получить наибольшие
динамические нагрузки с небольшим
завышением. Поэтому практическое
использование этих формул не опасно
для прочности, их погрешность идет
«в запас прочности». Учет затухания
колебаний, податливости «постели»
груза и несущей металлоконструкции
машины, а также переменности дви-
жущей силы привода (гак называемая
обратная связь)-все эти и некоторые
другие факторы, как правило, сни-
жают динамические перегрузки.
Во многих механизмах поворота
кинематическая схема предусматри-
вает применение фрикционной муфты
предельного момента. Момент за-
тяжки такой муфты с приемлемой
точностью можно определить по
199
формуле
Гм = 1,1 (Тпр + ТП2Р + 2с<р Tnp), (8,31)
где Тпрмомент привода на ведущих
частях муфты, который следует при-
нимать по большему из двух-средне-
пусковому или тормозному; с-коэф-
фициент жесткости трансмиссии на
участке между приводом и муфтой:
при разгоне - между ротором двига-
теля и муфтой, при торможении-
между тормозом и муфтой; ср-угло-
вой зазор зубчатых соединений и пе-
редач на участке между приводом и
муфтой.
Ведущие и ведомые части муфты
предельного момента при такой за-
тяжке будут проскальзывать друг от-
носительно друга только при стопо-
рении рабочего органа. Тогда в
трансмиссии между приводом и ве-
дущими частями муфты неизбежно
возникнут высокочастотные фрикци-
онные автоколебания, которые следу-
ет учитывать при расчете прочности
деталей механизма.
Практика показывает, что в ме-
ханизмах возможны резонансы. Для
определения возможных резонансных
нагрузок необходимо знать рассеива-
ющие (диссипативные) свойства кра-
новых систем. Эти свойства подробно
изучены в портальных и плавучих
кранах [36]. Данные о коэффициенте
относительного рассеивания энергии
ср, который в первом приближении
численно равен удвоенному логариф-
мическому декременту колебаний,
т.е. v = 25, приведены в табл. 8.1.
Данные табл. 8.1 можно исполь-
зовать и при расчете других кранов,
так как механизмы портальных и пла-
вучих кранов имеют много общего с
механизмами кранов других типов.
Резонансные нагрузки могут воз-
никать как при кинематическом, гак и
при силовом возбуждении. Кинемати-
ческое возбуждение характерно для
случаев несоосного соединения вра-
щающихся деталей (крепление с так
называемым дезаксиалом), при су-
щественном отступлении геометриче-
ской формы барабанов, блоков, ходо-
вых колес (исследования В. Ф. Гайда-
маки) и других рабочих органов от
круглой, при движении крана или те-
лежки по волнообразным рельсам
(исследования А. Г. Горбачева) и т.д.
Если амплитуда кинематического
возбуждения равна Ь, то резонансную
нагрузку определяют по формуле
= c*Vl +(2n/V)2, (8.32)
где с - коэффициент жесткости звена,
резонансная нагрузка которого под-
лежит определению. Значение b оп-
ределяется полем допуска размеров
барабанов, ходовых колес и других
рабочих органов, допускаемым на не-
точность соосной сборки, неровностя-
ми подкранового пути и др.
Радикал, входящий в приведенную
формулу, может быть принят в соот-
ветствии с табл. 8.2.
Таблица 8.1
Наименование узла
Коэффициент v
наибольший наименьший средний
Механизмы Металлоконструкция стрелового устройства 0,7 0,05 1,8 0,2 0,8...1.2 0,1
Металлоконструкции портала (включая опорно-пово- ротное устройство, ходовые тележки и подкрановые пути) при нагружении:
в вертикальном направлении 0,4 1,0 0,/...0,8
в горизонтальном направлении 0,6 1,2 0,8... 0.9
Грузовые канаты 0,4 0,6 0,5
Контакт грузовых канатов с барабаном 1,0 1,5 1,2
Система:
подъема груза 0,6 1,0 0,8
поворота 0.5 1,0 0.8
изменения вылета стрелы 0,3 0,8 0,6
200
Таблица 8.2
¥ 0,05 0,1 0,15 0,2 0,3 0,4 0,5
/| + (2тс/ч/)2 125,7 62.8 41,9 31,4 21,0 15,7 12,6
У 0,6 0,7 0,8 0,9 1,0 1,5 1,8
/ i + (2я/у)2 10.5 9,0 7,9 7,1 6,4 4,3 3,6
Если периодическая нагрузка Рт =
= Pq cosio t приложена к первой массе
двухмассовой схемы с одним со-
единительным звеном, го его резо-
нансная нагрузка
F= Р„ угt- (2я/у)у. (8.33)
Р WJ; + т2 v
Если же нагрузка Рг приложена ко
второй массе т2, то
= (8.34)
Величина Ро для зубчатого колеса
есть окружное усилие, для эксцен-
трично закрепленной вращающейся
массы - центробежная сила и т.д.
§ 8.4. Расчет динамических нагрузок
при совместном нагружении
несущей металлоконструкции моста
и механизма крана
Сложность точного расчета совмест-
ного нагружения механизма и метал-
локонструкции моста (или другого
каркаса) заключается в том. что такие
системы имеюг бесконечно большое
число степеней свободы. Колебания
таких систем описываются уравне-
ниями в частных производных, ре-
шить которые можно только в прос-
тейших случаях, при этом решения
представляют бесконечные ряды.
Вместе с тем доказано, что для рабо-
ты механизма достаточно точные ре-
зультаты дают схемы, в которых ме-
таллоконструкция представлена од-
номассовой парциальной системой.
Простейшей схемой, описываю-
щей совместное нагружение моста и
механизма подъема, является трех-
массовая схема с двумя звеньями
(рис. 8.7). Здесь тг = 4/} и2 Х]/0% - при-
веденная к грузу масса вращающихся
частей механизма, кг, Д-момент
инерции вращающихся масс, приве-
денный к валу двигателя, кг-м2;
и - общее передаточное отношение
механизма (с учетом кратности поли-
спаста); р - к. п. д. механизма; £>6-
диаметр канатного барабана, м;
т2 = Q + т„ кг; Q- масса груза, кг;
- масса подвески, кг; т2 - приведен-
ная к середние пролета масса моста й
тележки, кг, найденная по формуле
(6.16); Gm = m3д -приведенный вес
моста, Н; ускорение свободного
падения, м/с2; Grp = т2д-нес груза и
подвески, Н; Р№ = 2Тст „ и р/О6-при-
веденная к грузу пусковая сила двига-
теля, Н; Т - среднепусковой мо-
мент двигателя, Н м; с1 =
коэффициент жесткости каната, Н/м;
пк-число ветвей каната в полиспасте;
модуль упругости каната, МПа;
FK - «металлическая» площадь попе-
речного сечения каната, м2; Н-длина
одной ветви каната (высота подъема),
м; с2 -коэффициент жесткости моста,
Н/м, найденный по формуле (6.15).
Учет податливости моста для на-
грузок в канате при подъеме с веса и
при подхвате имеет меньшее значе-
ние, чем при стопорении крюка.
Уравнения движения для такой схемы
при стопорении крюка выглядят сле-
дующим образом (рис. 8.8):
Рис. 8.7
Рис. 8.8
201
"h*! = paB~FF
™з*з = + Fi - F2;
Fj = ci — л'з)’
F1 = &м F C2-X3,
(8.35)
где Рдп~нагрузка привода при пуске;
в первом приближении ее можно
брать на уровне среднепусковой силы
и принимать неизменной.
Для нагрузок можно получить
следующие двухчастотные функции:
= Ах cos (В) / + sincoj/ +
+ t42cos(d2/ + F2sinco2/ 4-
F 2 — A 2 cos аз { t + £ 3 s i n co ! r +
+ y44cosco2/ + F4sm(o2Z + D2 (8.36)
где
(8.37)
(8.38)
Здесь v- скорость массы тг перед
стопорением, а первому индексу у А.
В и о) соответствует верхний знак
перед дробью.
Наибольшие нагрузки в канатах и
в мосту с небольшим завышением
могут быть подсчитаны по следую-
щим выражениям:
F 1т„ £ х/лГГв? + + В1 + И,;
(8.39)
F= УЛТв2 + у/Al + Bl + D2.
Практическое использование этих
формул показано в гл. 12.
При передвижении крана мосто-
вого типа нагружение испытывают
одновременно элементы трансмис-
сии механизма передвижения и моек
а груз при его гибкой подвеске на
канатах начинает раскачиваться, как
маятник. Эти особенности движения
систем для описания нагрузок застав-
ляют использовать четырехмассовую
расчетную схему с тремя соедини-
тельными звеньями (рис. 8.9). Здесь
т( - масса вращающихся частей меха-
низма передвижения; т2- масса по-
ступательно движущихся частей кон-
цевых элементов моста; ту масса по-
ступательно движущихся пролетных
частей моста плюс масса тележки;
т4 - масса гибко подвешенною 1 руза;
с12-коэффициент жест кости транс-
миссии; с23 коэффициент жесткости
моста в горизонталыюм направле-
нии; си- коэффициент жесткости гиб-
кой подвески груза; W- сила сонро-
т ивлепия движению.
Нагрузки звеньев в таких схемах
как при разгоне, гак и при торможе-
нии также обладают свойствами од-
ночастот пости упругих колебаний,
что позволяет и здесь использовать
упрощенный способ определения на-
грузок с 11 о м о щ ь ю д в у х м а ссо вых
схем, разных для различных звеньев
(и в этих случаях массы всей системы
приводятся ио концам рассчитывае-
мого звена). Установлено, что учет
соударений в зубчатых муфтах и зуб-
чатых передачах трансмиссии меха-
низма имеет значение только для пер-
вого звена (с коэффициентом жест-
кости с12), нагрузки во втором и
третьем звеньях можно определять
без учета соударений в передачах ме-
ханизма.
Учет соударений с концевыми упо-
рами требует усложнения расчетной
схемы необходимо рассматривать
«встречу» массы ш2 с дополнитель-
ным звеном, имеющим коэффициент
жесткости буферов |"9ф
202
Как при центральном, так и при
индивидуальном приводе механизма
передвижения возможна асимметрия
кинематической схемы и по коэф-
фициентам жесткости параллельно
работающих трансмиссионных валов,
и по зазорам в передачах, и по рас-
пределению масс. Установлено не-
благоприятное влияние любой асим-
метрии в кинематической схеме [9].
§ 8.5. Определение вероятности
безотказной работы
Основные механические характерис-
тики конструкционных материалов
(временное сопротивление, пределы
текучести и выносливости) представ-
ляют (см. гл. I) собой случайные ве-
личины, имеющие нормальный закон
распределения (см. табл. 1.14 и 1.15).
В табл. 8.3 приведены допускаемые
границы изменения («допускаемый
разбег») предела прочности канатной
проволоки (МПа) [37].
Исследования и расчеты показы-
вают, что наибольшая нагрузка как
случайная величина или как функция
ряда случайных аргументов имеет' за-
кон распределения, близкий к нор-
мальному. Тогда, если известны пре-
дельные значения наибольшей на-
грузки F, > F], на основании исполь-
зования правила «трех сигм» для ма-
тематического ожидания (F) и
среднеквадратического отклонения
наибольшей нагрузки aF данного ре-
жима нагружения получаем [10]
<F> = : сгЛ = . (8.40)
Таблица 8.3
Маркировочная Марка приволоки
группа _______________
980,7 980,7... 1147 980,7... 1187
1097 1079... 1245 1079... 1285
1177 1 177... 1442 1 177...1481
1373 1373...1657 1373... 1697
1569 1569... 1853 1569... 1893
1765 1765...2050 1765... 2089
1961 1961...2265 1961... 2305
2157 2157...2461 2157...2501
2354 2354...2658 2354...2697
2550 2550...2854 2550...2893
При любом другом законе рас-
пределения с конечной дисперсией на
основании известного неравенства
П.Л. Чебышева вероятность откло-
нения случайной наибольшей нагруз-
ки за трехсигмовые пределы от мате-
матического ожидания не превышает
1/9.
Методика расчета вероятности
безотказной работы (ВБР) детали
сводится к следующему. При извест-
ных статистических характеристиках
нормально распределенных механи-
ческих свойств - математическом
ожидании (/?)> и среднеквадратичес-
ком отклонении <уд-легко опреде-
лить статистические характеристики
резерва прочности: математическое
ожидание
<г> = <Я) - <F> . (8.41)
среднеквадратическое отклонение
(при отсутствии корреляции)
(8.42)
и ВБР детали (или ее надежность)
1 _tr ~ ^'||2
f е dr [Р].
у2яп о
(8.43)
Более подробно эта методика изложе-
на в гл. 1, а в гл. 12 рассмотрен
соот ветствующий числовой пример.
Зная нсдежность каждой детали и
учитывая их соединение в кинемати-
ческой схеме механизма, машины,
можно рассчитать надежность всего
крана в целом [38].
Отказ системы, состоящей из
последовательно соединенных эле-
ментов, происходит при отказе лю-
бого из них. В этом случае ВБР сис-
темы определяют по формуле
Р-ПЛ’ (8-44)
7= ।
где П-символ перемножения, Р,-
ВБР элемента у, к-число элементов в
системе.
Отказ системы, состоящей из
параллельно соединенных элементов,
происходит в случае отказа всех эле-
ментов. При параллельном соедине-
нии п элементов и при неизменной
203
ВБР оставшихся элементов (после от-
каза части из них) общую ВБР систе-
мы определяют по зависимости
к
Р=}-]](1-Р}). (8.45)
J= I
Приведенная здесь методика рас-
чета позволяет вносить надежность в
техническую характеристику спроек-
тированного механизма или крана на-
ряду с другими параметрами (грузо-
подъемностью, производитель-
ностью и т.д.), как этого требует
ГОСТ 27.301.83.
ВБР может рассматриваться для
различных предельных состояний-по
разрушению, появлению пластичес-
ких деформаций, накоплению уста- I
лостных повреждений, износу, нагре-
ву и т.д. В настоящее время такие
методы расчета успешно разрабаты-
вают и их результаты публикуют в
различных статьях и монографиях !
[Ю].
Глава 9
РЕКОМЕНДАЦИИ ПО ПРОЕКТИРОВАНИЮ
СБАЛАНСИРОВАННЫХ МАНИПУЛЯТОРОВ (СМ)
§9.1. Общее устройство
Сбалансированные манипуляторы -
перспективная разновидность грузо-
подъемных машин, устанавливаемых,
как правило, непосредственно на ра-
бочем месте или участке. Манипуля-
торы называют сбалансированными
потому, что они имеют специальные
пружинные устройства для уравнове-
шивания (балансировки) веса подвиж-
ных частей, а многие из них имеют
системы автоматической балансиров-
ки с помощью привода и веса груза.
Тогда перемещение груза в любом
направлении осуществляется усилием
руки человека, приложенным к рукоя-
ти грузозахвата.
Сбалансированные манипуляторы
служат массовым средством механи-
зации погрузочно-разгрузочных и
транспортно-складских работ с гру-
зами массой 10... 1000 кг-средние и
тяжелые СМ и более 1000 кг-сверх-
тяжелые СМ. Технические характери-
стики СМ определяют ГОСТ 26055-
84 и 26057-83. Ряд номинальных гру-
зоподъемностей устанавливают ГОСТ
25204-82 и 1575-81 (сверхтяжелые),
номенклатура основных параметров-
ГОСТ 25378-82, эргономические тре-
бования-ГОСТ 16035-81. Основные
технические данные СМ, выпускае-
мых в СССР и странах СЭВ, приведе-
ны в каталоге [39].
Сбалансированный манипулятор
представляет собой шарнирно-стре-
ловое грузоподъемное устройство с
жесткой подвеской груза, установлен-
ное на колонне, кронштейне или под-
веске на неподвижном или подвиж-
ном основании. Общее устройство и
габариты СМ наиболее распростра-
ненных типов приведены на рис. 9.1:
Л-зона обслуживания при управле-
нии манипулятором с помощью ру-
коятки на грузозахвате или рукоятки
на удлинителе 7; Б- то же, при управ-
лении с удлинителем 5; /-оголовок,
2-стрела, 3-рука, 4-грузозахват,
5-удлинитель для работы с повы-
шенной высотой подъема, б-вынос-
ной пульт управления, 7-удлинитель
для работы с крупногабаритными
грузами. Перемещение груза в лю-
бом направлении в пределах зоны
обслуживания, ограниченной геоме-
трическими характеристиками СМ,
осуществляется самим рабочим по-
средством управления одной рукой
рукоятью, установленной на основа-
нии грузозахватного устройства или
на выносном пульте управления. На-
бор сменных грузозахва гов обеспечи-
вает выполнение всех необходимых
работ на данном рабочем месте. СМ
имеет обычно не менее четырех неза-
висимых степеней подвижности гру-
зозахвата, включая его поворот во-
204
Р и с. 9.1
круг собственной оси. Движение по
вертикали и горизонтали, а также по
любой траектории в вертикальной
плоскости обеспечивается шарнир-
ным механизмом типа «пантограф»,
звенья которого образуют стрелу и
руку СМ. СМ в целом имеет возмож-
ность поворота вокруг вертикальной
оси относительно неподвижного ос-
нования или подвижной тележки.
Грузозахват обязательно имеет под-
вижность вокруг собственной, чаще
всего вертикальной, оси. а в необхо-
димых случаях - и вокруг других осей,
что обеспечивает возможность мани-
пуляций грузом. Специальные устрой-
ства грузового, пружинного или иного
типа уравновешивают вес металло-
конструкций СМ, что позволяет иск-
лючить самопроизвольное перемеще-
ние грузозахвата по горизонтали под
действием силы тяжести стрелы ма-
нипулятора, а также устанавливать
привод меньшей мощности. Управ-
ляя всеми движениями одной рукой,
находящейся на многопозиционной
рукояти управления, рабочий другой
рукой может поддерживать груз, по-
могая ориентировать его в нужном
направлении таким образом, чтобы
обеспечить необходимую скорость и
точность позиционирования груза
при установке его на позицию обра-
ботки, контроля, сборки или хране-
ния.
Конструкция привода механизма
подъема обеспечивает удержание гру-
за на весу и в том случае, если рабо-
чий снял руку с рукояти управления
или произошло отключение подачи
энергии. Приведенные на рис. 9.1 раз-
меры СМ и зон обслуживания опре-
деляются эргономическими требова-
ниями к оборудованию, размещен-
ному на рабочем месте. Если по ха-
рактеру производства необходим
подъем груза на высоту более 1,5 м,
применяют удлинители, на которые
выносят рукояти управления. Подоб-
ные удлинители применяют при ра-
боте с крупногабаритными и листо-
выми грузами. Скорость подъема
груза достигает 20 м/мин и регули-
руется.
Цель проектирования СМ-обо-
снование и разработка такого техни-
ческого решения, которое обеспечи-
вает наибольшую социально-эконо-
мическую эффективность механиза-
ции ручного труда для типовой груп-
пы рабочих мест. Существует три
пути достижения указанной цели:
а) проектная привязка типового
СМ к конкретному рабочему месту
или типовой группе рабочих мест с
учетом данной производственной си-
205
туации (пространственной, предмет-
ной. технологической и эргономиче-
ской);
б) модернизация типового СМ с
конструктивной разработкой грузо-
захватных и сопутствующих прием-
ноподающих устройств, например
роликовых и других питателей, стел-
лажей, контейнеров, поддонов и г. п.;
в) разработка новой конструкции
СМ на основе анализа проблемной
ситуации и постановки проблемной
задачи проектирования.
Рекомендации по анализу и расче-
ту социально-экономической эффек-
тивности проектных решений приме-
нения роботов и манипуляторов, свя-
занных с повышением производитель-
ности и сокращением ручного труда,
приведены в литературе [43].
§ 9.2. Геометрические схемы
Конструкции большинства современ-
ных СМ основаны на принципе пан-
тографа.
На рис. 9.2 приведены некоторые
геометрические схемы пантографов,
применяемые в конструкциях СМ:
традиционная схема («), схема с уд-
линенным рычагом СЕ (б), схема с
удлиненным рычагом AD («). схема с
удлиненными рычагами BE и DE (а),
зона управления г, зона обслужива-
ния А], пример управления и испол-
нения движения по горизонтали а и
jp то же по вертикали Ь и bv Пантог-
раф представляет собой шарнирный
параллелограмм с удлиненными сто-
ронами, обеспечивающими располо-
жение точек А. Е и О на одной пря-
мой, сохраняющееся при различных
положениях рычагов. Это условие
для геометрических схем (рис. 9.2,а, б)
обеспечивается следующими соотно-
шениями размеров рычагов пантог-
рафа: ЕС = СО: ЕЕ = AD = ВС.
Для геометрических схем на
рис. 9.2,/?, г соотношения размеров
рычагов должны удовлетворять сле-
дующим условиям: BE = В0\ ЕЕ =
= AD = ВС - А А,.
Замечательным свойством пантог-
рафа, возникающим при указанных
условиях и используемым в СМ, яв-
ляется го, что траектория движения
206
. точки О, к которой обычно крепится
грузозахват, будет подобна траекто-
рии точки А или точки если к
। одной из них присоединить привод, а
другую закрепить на шарнире.
I Соотношение линейных размеров
траектории грузозахвата и траекто-
рии точки управления, к которой при-
соединен привод, будет зависеть от
соотношения ЕО/АЕ. которое приня-
I то называть коэффициентом панто-
графа X,: для геометрической схемы
(рис. 9.2,a) = А(Ё + I), где 1 =
= ЕО)АЕ; для остальных геометри-
ческих схем соответственно а, = гА;
^1^2 = а1 = = Ь(к + 1).
Таким образом, любую траекто-
рию движения грузозахвата в плоско-
сти пантографа, включая строго го-
ризонтальное или строго вертикаль-
ное направление движения, можно
осуществить двумя путями. В первом
! случае, закрепив шарнирно одну из
! точек А и Ё, к другой присоединяют
привод, способный перемещать точку
управления по двум независимым
координатам (вертикальной и гори-
зонтальной). Во втором случае к каж-
дой из точек А и Е присоединяют по
одному приводу, способному пере-
мещать свою точку управления лишь
по одной координате, вертикальной
или горизонтальной. Шарнирное зак-
репление одной из точек в этом слу-
чае не требуется. Такой вариант гео-
метрической схемы СМ приведен на
рис. 9.3, где G --масса противовеса,
Gv-приведенная масса подвижных
частей пантографа, /, -плечи при-
ложения приведения масс противове-
са и пантографа, Z, Л'-высота и ши-
рина зоны обслуживания, R радиус
зоны обслуживания.
Опыт проектирования и примене-
ния СМ позволяет рекомендовать
следующие соотношения размеров
пантографа и СМ в целом (рис. 9.3):
1) коэффициент пантографа при-
нимать в пределах 6... 8, меньшие зна-
чения коэффициента приводят к росту
размеров СМ при заданных размерах
зоны обслуживания, большие-к уве-
личению нагрузок в шарнирных сое-
динениях пантографа;
2) углы отклонения руки и стрелы
от вертикали и горизонтали аир,
Рис. 9.3
207
соответствующие заданной зоне об-
служивания, принимать в пределах
+ 35 ... — 35°. В качестве исходного
положения СМ принимать такое, ко-
гда оба угла равны 0, т. е. стрела
горизонтальна, а рука вертикальна, и
в то же время точка О находится в
центре зоны обслуживания по высоте
и ширине;
3) длину руки СМ, т.е. размер
рычага ВО (см. рис. 9.2) принимать
равным 1,1 ... 1,3 от высоты зоны об-
служивания или от ширины зоны об-
служивания, если ширина превосхо-
дит высоту;
4) с целью обеспечения плоскопа-
раллельного движения груза панто-
граф СМ во многих случаях допол-
няют соответствующими тягами, соз-
дающими вместе с рычагами панто-
графа два шарнирных взаимосвязан-
ных параллелограмма, не позволяю-
щих грузозахвату раскачиваться на
шарнире О в период разгонов, тормо-
жений и других рабочих режимов.
Примеры конструкции таких панто-
графов приведены на рис. 9.4 и 9.5. На
рис. 9.4 взаимосвязанными паралле-
лограммами будут А^ВА и BzOjOB.
Меньшие стороны этих параллело-
граммов принимают одинаковыми и
равными 0,4... 0,5 от меньшей сторо-
ны параллелограмма пантографа, на-
пример ВС;
Рис. 9.4
208
Р и с.
5) габариты СМ в целом незави-
симо or его типа определяются эрго-
номически обоснованными размера-
ми зоны обслуживания, которые при-
ведены на рис. 9.1, и конструктивны-
ми соотношениями, указанными в п.
1...4. Габариты элементов подвески
СМ (колонны, кронштейна, тележки и
т. п.) определяются характеристиками
типового рабочего места, однако не
следует принимать габарит по высоте
более 3,5... 4,0 м независимо от типа.
§ 9.3. Уравновешивание СМ
С целью облегчения управления вруч-
ную и уменьшения необходимой мощ-
ности приводов применяется статиче-
ское уравновешивание веса подвиж-
ных частей пантографа СМ с по-
мощью противовеса или пружинного
устройства. Вследствие статической
неуравновешенности при заторможен-
ном состоянии механизма подъема
возникает горизонтальная сила увода
пантографа, которая может вызвать
самопроизвольное движение грузо-
9.5
захвата по горизонтали после снятия
руки рабочего с рукояти управления.
Задача уравновешивания - подо бра [ ь
такое грузовое или пружинное уст-
ройство, которое бы позволяло сни-
зить указанную силу увода при всех
положениях пантографа, чтобы она
не превышала приведенную силу зре-
ния во всех подвижных шарнирных
соединениях. В этом случае, даже при
отсутствии тормоза горизонтального
движения, после снятия руки рабочего
с рукояти управления пантограф и
грузозахват останутся в том же поло-
жении. С целью компенсации неточ-
ностей при изготовлении и монтаже
СМ целесообразно уравновешиваю-
щие устройства проектировать с воз-
можностью регулирования, например
за счет изменения плеча груза или
натяжения пружины при наладке и
эксплуатации СМ на рабочем месте.
На рис. 9.3 приведена схема расче-
та массы противовеса, установленно-
го на продолжении рычага СЕ, при
заданной приведенной массе подвиж-
ных частей пантографа (включая гру-
209
зозахват), которая присоединена к
тому же рычагу в точке С. Расчет
следует провести для нескольких
крайних положений грузозахвата со-
гласно зоне обслуживания.
Простейшее пружинное устройст-
во уравновешивания приведено на
рис.9.6: Сп-коэффициент упругости
пружинного устройства, d-плечо
установки пружинного устройства.
Особенности выбора места установки
и конструкции пружины определяют-
ся необходимостью обеспечения урав-
новешивания при всех положениях
пантографа, что требует большого
рабочего хода пружины, превышаю-
щего ее длину в нерастянутом со-
стоянии. Пружина изготовляется с
предварительным поджатием витков
друг к другу с таким расчетом, что ее
свободная длина, т.е. длина пружины
в недеформированном состоянии,
равна нулю. Это значит, что предва-
рительное деформирование витков
пружины при изготовлении таково,
что если бы толщина прутка пружины
была бесконечно малой, то длина
(высота) пружины в свободном со-
стоянии, когда усилие в ней отсутст-
вует, стремилась бы к нулю. Следо-
вательно, началом растяжения пру-
жины Сп (рис. 9.6) условно служит
точка К, в которой пружина шарнир-
но закреплена на оголовке СМ. Коэф-
Рис. 9.6
фициент жесткости пружины опреде-
лим, приравнивая моменты сил рас-
тяжения пружины и приведенной си-
лы тяжести подвижных частей пан-
тографа относительно шарнира А. В
соответствии с расчетной схемой рис.
9.6 получим уравнение
G^cosP = Cn/KLJcospp
Следовательно, коэффициент жестко-
сти пружины (Н/см) найдем по фор-
муле
Q АВ C()S Р
d ^KL COS Pj
Расчет следует выполнить для не-
скольких крайних положений пантог-
рафа в пределах зоны обслуживания.
Оптимальный синтез пружинных ме-
ханизмов уравновешивания СМ рас-
смотрен В. М. Кузнецовым в работе,
опубликованной в журнале «Вестник
машиностроения» № 2 за 1983 г. Для
регулирования пружинного устройст-
ва в период отладки и эксплуатации
СМ предусматривают возможность
регулирования длины тяги LB,
например, с помощью резьбовой
муфты.
В ряде конструкций СМ приме-
няются системы уравновешивания
также и веса поднимаемого груза. В
этих случаях пневматический, гидрав-
лический или электрический приводы
имеют чувствительные датчики, кото-
рые после балансировки СМ с грузом
или без груза улавливают небольшие
усилия руки человека, подающей че-
рез рукоять грузозахвата команды на
подъем или опускание грузозахвата.
На рис. 9.7 приведен СМ с автомати-
ческим пневмоприводом уравновеши-
вания груза, включающим пневмоци-
линдр Р, поддерживающий пантограф,
кнопки «О» и «Q», расположенные на
грузозахвате и предназначенные для
включения систем балансировки СМ
без груза и с грузом, и чувствитель-
ный датчик.
Рекомендации по проектированию
СМ с пневмо-, гидро- и электропри-
водом даны в работе [40].
210
Рис. 9.7
§ 9.4. Обобщенная кинематическая
и расчетная схема СМ
и рекомендации по расчету
Обобщенная кинематическая схема
наиболее сложного подвесного пе-
редвижного СМ, имеющего приводы
всех четырех степеней подвижности,
приведена па рис. 9.4: привод подъе-
ма I, привод горизонтального движе-
ния //, привод поворота III, привод
передвижения тележки IV; Pf, pfT, Pjk ,
Pjv, Рц> Рт и др.-силы инерции в
поступательном движении соответст-
венно груза, тележки, оголовка, руки
и стрелы, возникающие при разгонах
и торможениях приводов I, II и IV,
R?I1, Rin- и др.-силы инерции,
возникающие при разгоне и тормо-
жении механизма поворота: с индек-
сом т - касательные; без индекса - цен-
тробежные, /?тах - наибольший радиус
обслуживания. Более простые схемы
СМ, например стационарного типа на
колонне, могу г быть получены путем
упрощения обобщенной схемы и из-
менением схемы пантографа. При со-
ставлении расчетной схемы СМ. не-
обходимой для определения нагру-
зок, подбора приводов и расчетов на
прочность и долговечность элементов
конструкции, учитывают следующее.
I. Опасным положением СМ сле-
дует считать такое, в котором цен гр
тяжести груза наиболее удален от оси
механизма поворота, расположенной
в центре опорной конструкции, на-
пример тележки. В этом случае опор-
ные нагрузки в пантографе, опор-
но-поворотном устройстве и механиз-
ме передвижения тележки будут на-
ибольшими.
2. Одновременное выключение всех
механизмов создаст наибольшие инер-
ционные нагрузки, которые необходи-
мо учитывать при расчете всех при-
водов. С целью упрощения определе-
ния инерционных нагрузок можно
211
ориентироваться на максимальные
ускорения, возникающие в переход-
ных режимах механизмов СМ. Опыт
проектирования и эксплуатации, а так-
же экспериментальные исследования
показывают, что эти ускорения, при-
веденные к центру груза, находятся в
следующих пределах: механизм
подъема-до 5 м/с2; механизм гори-
зонтального движения груза и пере-
движения тележки-до 2 м/с2; меха-
низм поворота СМ-до 2 м/с2.
3. Определение собственной массы
элементов СМ на стадии проектиро-
вания можно производить по прибли-
женным статистическим данным,
приведенным, например, на рис. 9,8, с
последующим уточнением после
принятия всех конструктивных реше-
ний. Верхняя кривая дает приближен-
ное значение отношения массы СМ
к массе максимально поднимаемого
груза, достигнутое в конструкциях,
изготовленных из нелегированных
сталей без применения специальных
тонкостенных профилей проката и
гнутых профилей. Совершенствова-
ние принципов конструкции СМ, при-
менение легированных сталей, спе-
циального проката и гнутых профи-
лей позволит снизить отношение масс
МС и максимального поднимаемого
груза KG до значений, соответствую-
щих нижней кривой KG. Заметим, что
большие значения для СМ меньшей
грузоподъемности объясняются тем,
что габариты СМ мало зависят от
грузоподъемности при сохранении
размеров зоны обслуживания.
Распределение массы СМ между
его элементами можно принять сле-
дующим образом: оголовок с приво-
дами - 30 ... 35%; подвеска (колонна,
тележка и т. п.)-30.. .35%; пантограф-
Р и с. 9.8
20.. .25%; грузозахват-5... 10%.
Распределенностью массы элемен-
тов СМ в первом приближении мож-
но пренебречь, а центры тяжести эле-
ментов сосредоточить таким обра-
зом, как указано на рис. 9.4.
После составления расчетной схе-
мы СМ методами, аналогичными
применяемым для кранов общего на-
значения, определяют опорные реак-
ции, силы инерции и трения и необхо-
димые максимальные значения дви-
жущих усилий приводов. В случае
применения СМ для технологических
операций, например ковки, клепки,
сверления, зачистки и т.п., необхо-
димо при расчете учитывать техноло-
гическое усилие.
Мощность (Вт) привода механиз-
ма подъема определится по формуле
N = ^,
Г|\|1
где т]-к.п.д. передачи усилия от при-
вода к шарниру управления £; у-
коэффициент перегрузочной способ-
ности привода (для пневмо- и гидро-
привода принимается равным 1, для
электропривода - согласно механиче-
ской характеристике). Введение в
формулу мощности коэффициента
перегрузочной способности привода
вызвано тем, что в отличие от грузо-
подъемных машин общего назначе-
ния, где расчет приводя! по статиче-
ской мощности, в данном случае кро-
ме статических сил сопротивления
учитывают все силы инерции. Это
связано с гем, что ускорения, воз-
никающие при работе СМ, сущест-
венно превышают ускорения, допу-
стимые в кранах. Следовательно, оп-
ределяют максимальное пусковое
усилие привода. Расчет же мощности,
как принято, проводится по устано-
вившемуся режиму работы, что и вы-
зывает необходимость учета коэффи-
циента перегрузочной способности
привода, реализующегося при разго-
не СМ. Сила Ry, приведенная к шар-
ниру управления Е, -вертикальная
составляющая равнодействующей всех
сил, действующих на пантограф, Н;
Vv-скорость подъема груза, приве-
денная к шарниру Е, м/с.
212
Привод горизонтального переме-
щения грузозахвата в СМ малой и
средней грузоподъемности, как пра-
вило, осуществляется вручную. Одна-
ко если в результате расчета горизон-
тальной составляющей равнодейст-
вующей всех сил, приложенных к пан-
тографу, приведенной к шарниру уп-
равления Е, окажется, что эта состав-
ляющая превышает 10... 15 Н, то
следует установить привод. В против-
ном случае при длительной работе
СМ рабочий будет уставать. Мощ-
ность привода определится по фор-
муле
R V
N =
где Rn, - горизонтальная состав-
ляющая равнодействующей всех сил,
приложенных к пантографу, и гори-
зонтальная скорость перемещения
грузозахвата, приведенные к шарниру
Е.
Замечание об ограничении ручно-
го привода относится и к механизму
поворота СМ. Если для поворота тре-
буется приложить к рукояти управ-
ления усилие больше 10... 15 Н, то
установка привода целесообразна.
Мощность привода может быть опре-
делена по следующей формуле: =
= 7со/(т]\|/), где Т- приведенный к оси
новорога СМ суммарный момент
всех сил, действующих на пантограф,
оголовок и опорно-поворотное уст-
ройство, Нм; св-угловая скорость
поворота СМ, 1/с.
Мощность механизма передвиже-
ния тележки СМ определяют по не-
обходимому пусковому усилию (Н)
привода: Рп = Рхх + Рия + Ря + Ру,
гдеРп-пусковое усилие привода; Ряя-
максимальная сила инерции СМ в
поступательном движении, определяе-
мая из условия отсутствия буксова-
ния, г. е. не превышающая силу сцеп-
ления приводных колес с рельсами.
Если учесть, что приводными являют-
ся все ходовые колеса, а для увеличе-
ния силы сцепления может быть при-
менен дополнительный поджим ходо-
вых колес с помощью нижних роли-
ков с суммарным усилием Ря, указан-
ная сила сцепления определится по
формуле
где /*см-сила тяжести СМ без груза;
Ксц-коэффициент сцепления привод-
ных колес с рельсами; следовательно,
должно быть Рии Рс11; /^-приве-
денная сила сопротивления качению
всех ходовых и дополнительных ко-
лес с учетом сил трения качения колес
по рельсам, сил зрения в подшипни-
ках и сил трения между ребордами
колес и рельсами; сила сопротив-
ления ветра (если СМ работает в
помещении, то следует учесть венти-
ляционный напор, если таковой есть);
Р -составляющая сила тяжести СМ,
определяемая уклоном рельсов при
неточном монтаже; не превышает 1%
от силы веса СМ.
Тогда мощност ь привода механиз-
ма передвижения определится так:
Р И
nv
где Гп - скорость передвижения, м.с;
ц-к.п.д. передачи от двигателя к при-
водным колесам.
Если Рп не превышает 10... 15 Н,
возможно применение ручного при-
вода.
§ 9.5. Примеры конструкций
В настоящее время в СССР и стра-
нах-членах СЭВ серийно выпускают
более тридцати моделей СМ различ-
ных типов, грузоподъемностей и сис-
тем приводов. В каталоге приведены
основные технические данные и прин-
ципы конструкций этих СМ. Разра-
ботке и применению СМ уделяется
большое внимание в развитых капи-
талистических странах, прежде всего
в Японии.
Значительная часть современных
СМ имеет лишь единственный при-
вод-привод механизма подъема гру-
зозахвата. На рис. 9.5 и 9.7 приведены
примеры конструкций СМ подвесно-
го и напольного типов с пневмопри-
водом механизма подъема. Типораз-
мерные ряды этих СМ разработаны
японской фирмой «DAINICHIKIKO
СО, LTD». Габариты (мм) СМ раз-
личной грузоподъемности приведены
213
Га б л и ца 9J
Грузоподъемность, СМ напольного типа (рис. 9.5)
кг ______________________________
/ J Е
СМ подвесного типа (рис. 9.7)
/ J Ct j
55 1980 2780
125 1980 2780
225 1950 2880
350 1950 2880
в табл. 9.1. СМ всех приведенных
грузоподъемностей имеют одинако-
вые зоны обслуживания и близкие
габариты, одинаковые у двух сосед-
них типоразмеров.
Большое распространение начина-
ют получать СМ с асинхронным при-
водом и тиристорным регулировани-
ем. Весьма плодотворным является
модульный подход к созданию гипо-
размерных рядов СМ на базе мини-
мального числа модулей электропри-
водов. которые могут быть примене-
ны не только в механизмах подъема,
но и в других. Таким образом, огра-
ниченное число модулей электропри-
водов, пантографов, оголовков, теле-
жек и других конструктивных элемен-
тов позволяет создавать гибкие мо-
дульные конструкции СМ многом не-
1850 3040 470 3410
1850 3040 470 3410
1770 .3140 400 3440
1770 3140 400 .3440
ленных типоразмеров. Рассмотрим в
качестве : примера общие данные не-
скольких типоразмерных рядов СМ
японской фирмы «DAINICIKIKO
СО, LTD» на базе четырех модулей
однофазных асинхронных приводов,
которые приведены на рис. 9.9, в
табл. 9.2 и 9.3.
Приведенные материалы опреде-
ляют основные показатели несколь-
ких десятков СМ двух конструктив-
ных схем: напольной и подвесной на
неподвижных основаниях. Количест-
во типоразмеров можно удвоить,
если применить подвижные основа-
ния-тележки. Все типоразмеры раз-
делены на четыре ряда но числу при-
нятых за основу модулей электропри-
водов (табл. 9.2). Наиболее много-
численным является типоразмерный
R
Рис. 9.9
214
Таблица 9.2
Мощность модуля привода, кВт 1 'рузопод ьемность Количество типоразме- ров Скорость подъема, м/мин Размеры зоны обслуживания для СМ гиноразмерлен о ряда, м
базового CMt кг типоразмеров
высота диаметр
СМГ КГ
0.25 50 37* ..50 3 20 1.8... 3,0 4.0... 6.0
2.0 100 75. ..250 11 20 1,1 ...2,2 3,0... 6.0
2,5 180 120. .. 270 4 20 1.1...2.2 3.0... 6.0
4.0 250 185. ..500 5 18 10 1,1...2,2 3,0... 6,0
Т а б л и ца 9.3
Гр у з о - Собе г- М ощя ость
подъем- венная привода, А'
ность, кг масса, кг кВт
Геомс] рическис размеры, мм
В' С 1У Е F (У Z7 /
150 150 2 1450 180 300 1450 3043 3143 441 269 1660 2370 1593 1150 1600
100* 160 2 1800 200 300 1800 3653 3750 441 269 2000 2710 1853 1500 2000
85 170 2 2400 280 300 2300 4613 4713 441 269 2650 3360 23 1 3 2000 2700
75 180 2 2800 350 300 2700 5353 5453 441 269 3 130 3840 2653 2400 3100
270 240 2,5 1350 215 300 1400 3122 3222 585 305 1650 2540 1605 1100 1500
180* 250 2,5 1795 215 300 1800 3710 38)0 585 305 2030 2920 1880 1500 2000
150 260 2,5 2280 270 300 2200 4461 4561 585 305 2560 3450 2231 1900 2500
120 280 2.5 2650 360 300 2550 5189 5289 585 305 3070 3960 2587 2250 3000
375 285 4,0 1400 225 300 1400 3160 3300 610 280 1620 2515 1760 1100 1600
250* 300 4,0 2000 230 300 1800 3930 4050 610 280 2100 2990 2130 1500 2200
215 315 4,0 2450 300 300 2200 4698 4800 610 280 2600 3480 2498 1900 2750
185 * 350 4,0 2800 Базовый типоразмер СМ для 370 300 2550 5370 5550 610 280 данного модуля асинхронною привода. 3000 3910 2820 2250 3250
Примечание. Скорость подъема для СМ 1 на базе приводов мощной ыо 2 и 2,5 к! 1т принята равной
26 м/мин, для СМ на базе привода мощностью 4 кВт -18 м/мин, кроме СМ т рузопод ъемностью 375 кг, для
которого скорость принята равной 10 м/мин.
ряд на основе модуля электропривода
мощностью 2 кВт, базовой моделью
которого является СМ грузоподъем-
ностью 100 кт, соответствующий наи-
более массовым потребностям меха-
низации рабочих мест в промышлен-
ности. За счет варьирования грузо-
подъемности и размеров зоны обслу-
живания (наибольшего радиуса А и
высоты подъема Z) создаются моди-
фикации СМ, зависимости характе-
ристик которых для трех базовых мо-
делей СМ приведены на рис. 9.10. В
соответствии с рисунком грузоподъ-
емность и высота подъема для каж-
дой модификации определяются в за-
висимости от желаемого радиуса зо-
ны обслуживания и грузоподъемности
базовой модели (графики: 1 - грузо-
подъемность 100 кг. 2 180 кг, 3-
250 кг). Осуществляется каждый ти-
поразмер ряда за счет смены рычагов
пантографа, грузозахвата и измене-
ния передаточного числа привода, ес-
ли скорость подъема сохраняется
прежней. В некоторых случаях уста-
новленная мощность привода будет
не использована. В целом это эко-
номически выгоднее, чем существенно
увеличивать число типоразмеров при-
водов.
На рис. 9.11 приведен СМ гипа
ШБМ- 150. Конструкция ею состоит
из грузозахвата клещевин о /, рукояти
управления 2, руки 3, стрелы 4. ого-
ловка 5, блока управления приводом
б, электродвигателя постоянного тока
7. редуктора Л’, опорно-поворот ного
устройства 9, колонны /0.
Для обеспечения подвижности СМ
на колонне при грузоподъемности до
350 кг может быть применена непри-
водная конструкция тележки с отки-
дывающимися упорами, приведенная
па рис. 9.12. Конструктивные разме-
ры таких тележек для СМ различной
грузоподъемности приведены в табл.
9.4.
Неприводные тележки допустимо
применять для редких перемещений
СМ.
Если одним СМ необходимо об-
служивать несколько единиц обору-
дования, расположенного на значи-
тельном расстоянии, целесообразно
применить подвесной тип СМ, за-
крепленный на приводной тележке.
Пример конструкции приводной те-
лежки с электроприводом приведен
на рис. 9.13, а конструктивные разме-
ры тележек для СМ различных грузо-
подъемностей-в табл. 9.5. В этой же
216
Таблица 9.4
Грузоподъем- ЦООСЗЪ, KI Размеры, мм
*1
55 1900 1200 1980 220
125 2400 1400 1980 260
225 2800 1500 1950 300
350 2900 1600 1950 350
таблице указаны основные данные
рельсового пути в виде двух подвес-
ных двутавров. Кроме приводных хо-
довых колес тележки имеют дополни-
тельные колеса, установленные под
нижней полкой двутавра, для обеспе-
чения устойчивости тележки при лю-
бых положениях СМ с грузом. При-
водные колеса соединены с приводом
цепной передачей.
Таблица 9.5
I ру юподъем-
Мощноить приво-
Размеры, мм
ность. кг вода. кВт Я, Вг £>2 рельс-двутавр
55 0,2 + 0,2 900 1225 1200 1425 125 х 75 х 5,5
125 0,2 + 0.2 1000 1325 1300 1525 150 х 75 х 5.5
225 0,4 + 0,4 1100 1450 1400 1650 200 х 100 х 7,0
350 0,4 т- 0,4 1200 1550 1550 1750 250 х 125 х 7,5
Л
2)7
Универсальность СМ на рабочем
месте в значительной мере обеспечи-
вается набором сменных грузозахва-
i ов. позволяющих механизировать
захват н манипуляцию любого груза,
характерного для данного технологи-
ческого процесса. На рис. 9.14 при-
ведены примеры конструкций грузо-
захватов поддерживающего (н. б) и
зажимающего (в, а) типов, а на рис.
9. ] 5 - конструкции удерживающих гру-
зе захватов: злекгромагнитных (н, б) и
вакуумных (/>. а).
§ 9.6. Рекомендации
по проектированию грузозахватов
Цель проектирования грузозахватов
для типового СМ - разработка такого
комплекса быстросменных конструк-
ций, которые бы обеспечили выполне-
ние всех операций взятия, удержания,
манипуляции, складирования всех гру-
зов. предусмотренных типовым рабо-
чим местом, при наименьших затра-
тах ручного труда и наибольшем со-
циально-экономическом эффекте.
Рекомендации по проектированию
грузозахватов. 1. Выбору принципов
конст рукции комплект а грузозахва-
тов должен предшествовать анализ
грузопотока и комплексных техноло-
гий типового рабочего места с целью
определения комплекса требований к
грузозахватам.
2. Принцип конструкции грузоза-
хвата должен обеспечивать минимум
трудоемкости его замены за счет при-
2IX
менепия нормализованных креплений
к СМ, желательно без применения
инструмента и сложных манипуля-
ций.
3. Конструкция грузозахвата долж-
на обладать гибкостью, позволяющей
быструю переналадку на другой тип
груза или захват без переналадки раз-
личных гипоразмеров данного типа
груза за счет применения сменных и
регулируемых элементов конструк-
ции.
4. Конструкция должна быть мо-
дульной. позволяющей объединять
несколько грузозахватов на одной
траверсе, а также создавать комбини-
рованные грузозахваты, соединяю-
щие в себе грузозахваты нескольких
зилов.
5. Вместе с тем следует стремить-
ся к уменьшению веса грузозахвата.
что позволит увеличить фактическую
грузоподъемность СМ при прочих
равных условиях.
6. При расчете грузозахвата сле-
дует учитывать, кроме веса груза, и
силы инерции, возникающие при од-
новременном пуске всех приводов,
как это указано на рис. 9.4, техноло-
гические нагрузки, если таковые пред-
усмотрены технологическими процес-
сами на данном рабочем месте вы-
полнять с помощью СМ.
7. Если для зажатия или кантова-
ния груза требуется усилие более
50 ... 100 Н, нужно установить привод
для осуществления этих операций без
применения ручного труда [40].
219
Глава 10
ЭРГОНОМИЧЕСКИЕ И ЭСТЕТИЧЕСКИЕ ТРЕБОВАНИЯ
К ГРУЗОПОДЪЕМНЫМ МАШИНАМ
§ 10.1. Общие эргономические
и эстетические требования
Современный уровень развития тех-
ники дает конструктору возможность
и обязывает его создавать такие изде-
лия, которые не только выполняют
свое назначение, но и максимально
удобны при обслуживании и пользо-
вании ими.
Наука эргономика занимается
проблемами согласования конструк-
тивных и функциональных особеннос-
тей машин и среды с возможностями
человека. Этому посвящены многие
научные труды, разработаны ГОСТ
12.2.049-80, 16.035-81, 15.001-73,
21.035-75 и др.
При проектировании ГПМ автор
проекта рассматривает систему «ГПМ-
машинист-среда», в которой каждый
элемент выполняет определенные
функции. ГПМ предназначена для
подъема, опускания, перемещения и
позиционирования груза. Машинист-
оператор управляет ГПМ, обслужи-
вает и ремонтирует ее. Среда или
условия, в которых находятся маши-
на и человек, в зависимости от произ-
водства могут быть различными: это
и закрытое отапливаемое или неотап-
ливаемое помещение, и эстакада на
открытом воздухе, и специфические
условия, связанные с перепадами тем-
ператур, запыленностью, загазован-
ностью или повышенной лучевой
энергией и т. п.
В процессе производства человек и
машина находятся в постоянном взаи-
модействии между собой и окружаю-
щей средой. На начальной стадии
проектирования необходимо провес-
ти анализ этих взаимодействий и
определить их оптимальное совмеще-
ние.
Прежде чем распределять функции
между машиной и человеком, автор
проекта должен располагать сведе-
ниями о возможностях человеческого
организма, конструктивных и функ-
220
циональных возможностях машины и
особенностях рабочей среды. Так, раз-
личные по конструкции ГПМ имеют
различные технические характеристи-
ки, но при этом все они имеют воз-
можность одновременно выполнять
несколько операций, например подъем
и перемещение, перемещение в раз-
ных плоскостях и г. п.; развивать
большие усилия с достаточной сте-
пенью плавности и точности; быть
достаточно устойчивыми к внешним
воздействиям (влажности, перепадам
температур, динамическим воздейст-
виям и т. п.).
Что касается возможностей чело-
века, то они зависят от антропомет-
рических и психофизиологических
свойств организма. Существуют ста-
тические характеристики антропомет-
рических признаков человека для раз-
личных групп населения. На рис. 10.1
приведены некоторые характерные
параметры человека из группы насе-
ления со средним значением продоль-
ных признаков (ГОСТ 12.2.033-78);
характеристики средних антропомет-
рических признаков (/): в положении
стоя (а), лежа (б) и сидя (в); размеще-
ние ручных органов управления при
работе сидя (//). указанные размеры-
в сантиметрах. Руководствуясь этими
данными, автор проекта определяет
размеры пространства, необходимого
человеку для управления и обслужи-
вания машин, устанавливает размеры
проходов и площадок, лестничных и
входных проемов, определяет воз-
можные габариты приближения дру-
гого технологического оборудования
в зоне работы ГПМ. При этом необ-
ходимо пользоваться указаниями и
рекомендациями, предусмотренными
Правилами устройства и безопаснос-
ти эксплуатации грузоподъемных кра-
нов и требованиями Системы стан-
дартов безопасности груда (ССТБ),
санитарными правилами по устрой-
ству и оборудованию кабин маши-
нистов кранов. Но возможности чело-
веческого организма не ограничива-
ются его антропометрическими дан-
ными. не менее важны ею психофи-
зиологические свойства. Учеными
установлены очень интересные свой-
ства организма, например: при вне-
запном появлении объекта требуется
1J с, чтобы оператор отреагировал и
включил аппараты управления; реак-
ция человека на звук-0,16 с; на за-
пах-0,3 с; на тепло и холод-0,2 с.
При наличии предупредительных зна-
ков время реакции можно сократить
на 40%.
При проектировании должны быть
уч тены и такие особенности человека,
как:
точность движения рук больше в
положении сидя, меньше-при работе
стоя;
наибольшая точность движений
при небольших (до ЮН) нагрузках
совершается пальцами рук, меньшая -
движением кисти;
максимальное усиление, развивае-
мое правой (рабочей) рукой, на
10... 15% больше усилия, развивае-
мого левой рукой;
скорость движения рук больше
при движении в направлении «к себе»,
меньше при движении «от себя»;
скорость движения правой руки
больше при движении слева направо,
левой руки-справа налево;
усилия давления и тяги, развивае-
мые руками при движении их перед
корпусом, больше, чем при движении
рук в стороны;
максимальное усилие, развивае-
мое стопой ноги в положении сидя.
221
достигается, сел и у 1’OJi между г одеяью
и бедром составляет 95... 120 У
максимальное усилие при движе-
нии ног достигается в положении си-
дя при упоре на спинку сиденья;
скорость и частота движений, со-
вершаемых стопой ноги, больше в
положении сидя, чем в положении
стоя;
способное Iь человека восприни-
мать последова тельные сигналы обыч-
но не превышает 10 сигналов в секун-
ду;
тлаза человека реагируют на такие
малые количества световой энергии,
как 4. . , 5 квантов, и могут различать
объект, видимые узловые размерит ко-
торого составляют 0,5':
слух человека воспринимает сигна-
лы с эперт ней звука до 1 • 10” 10 эрг/с;
при быстрой смене звуков или яр-
ких предметов у человека возникает
бестюконст во;
холод ассоциируется с голубым и
синим цветом, тепло -- с желтым или
красным.
Зная особенности орт апизма и
учитывая возможные изменения и в
поведении человека под воздействием
внешней среды, автор проекта должен
предусмат риват ь сани т арно-гигиени-
ческие меры безопасности труда в
соответствии с нормами Госса ни ист гек-
ции Министерства здравоохранения
СССР
§ 10.2. Требования
к кабинам мостовых кранов
Анализ сисл емы «машина человек -
среда» завершается составлением об-
щих эргономических требований к
т рузонодъемпой машине, в част ности
к кабине машиниста мостового крана
или к месту работы рабочего-кранов-
щика при шарнирно-балансирном ма-
нипуляторе. Приведем некоторые ре-
комендации но проектированию ка-
бин мостовых кранов:
кабины крапов, работающих в
закры т ых помещениях при темпера-
т урс окружающет о воздуха 10... 28 С,
могу г бы т ь от крыт ого исполнения:
на кранах, работающих на огкры-
т ом воздухе, устанавливаю г кабины
закрытою исполнения с теплоизоля-
цией, при температуре ниже --10 С в
кабине должны быть отопительные
устройства, а при температуре более
+ 28 С- принудительная вентиляция
или кондиционеры;
кабину размещают1 в торце под
галереей моста крана, со стороны,
противоположной основной зоне об-
служивания. При длине моста более
17,5м допускается центральное рас-
положение кабины в пролете:
кабина должна находиться вне зо-
ны главных троллейных проводов;
машинист в положении сидя и
стоя должен иметь максимальную об-
зорность зоны работы грузозахватио-
т о устройства от нижнет о до верхнего
положения (в вертикальной-вперед и
вверх от горизонтали 30 , вниз -90е, в
горизонтальной плоскости-в обе сто-
роны 135);
размеры рабочего пространства, в
котором помещается машинист, долж-
ны учитывать удобства работы и ухо-
да за механизмами и приборами.
Свободный от оборудования объем
кабины должен бы ть 15 м3 на одного
работающего, высота кабины - не ме-
нее 2,5 м;
рабочее место при выполнении ра-
боты сидя должно соответствовать
т ребованиям ГОСТ 12.2.032-78, в по-
ложении стоя - ГОСТ 12.2.033-78
(рис. J0.I);
кабины крапов, работающих в
условиях повышенной запыленности
или загазованности, должны быть
герметически закрытыми;
для обеспечения чистоты воздуха
и необходимого его давления внутри
кабины (2 ... 3 мм вод. ст.) в них уста-
навливают' кондиционеры в соответ-
ствии с ГОСТ 12.4.021-75;
температура воздуха в кабине в
зимнее время должна быть 16... 20 С.
а в легнее-не выше 28 С;
относительная влажность воздуха
должна быт ь 60... 70% при 20 С и
50% при 25: С;
объем подаваемого воздуха в ка-
бине должен быть 30... 33 м3ч на од-
ного человека;
интенсивность теплового облуче-
ния крановщика нс должна превы-
шать 0,5... 0,7 г/кал па i см2 в мин;
в кабине должно быть равномер-
ное. достаточное по силе света осве-
щение;
уровень шума па рабочем месте
машиниста должен отвечать греб ова-
циям ГОСТ 12.1,005- 76 (и не пре-
вышать 80 дБ);
вибрационные характеристики на
рабочем месте машиниста должны
соответствовать ГОСТ 12.1.012-78.
Особые требования предъявляют
к органам управления крана, в част-
ности:
органы управления размещают с
учетом зон оптимальной и макси-
мальной досягаемости. При проекти-
ровании ГПМ можно использовать
рекомендации, представленные на
рис. 10.1;
форма и размеры приводных эле-
ментов органов управления должны
обеспечивать надежный захват их ру-
ками и предотвращать соскальзыва-
ние ног;
предпочтительнее рычаги управле-
ния тележкой и мостом располагать
Мернуто
223
Рис. 10.2, Продолжение
под правой рукой, подъемами - под
левой (ОСТ 24,290,09-76);
места контактов органов управле-
ния с руками и ногами работающего
выполняют из нетоксичных, нетепло-
проводных и электроизоляционных
материалов;
органы управления кодируют фор-
мой, цветом, размером или другими
видами кода (ГОСТ 21829-76);
для обозначения функционального
назначения органов управления при-
меняют надписи, символы по ГОСТ
12.4.040-78;
ножные органы управления (пере-
мещение педали не более 800 мм и
ширина опорной поверхности не ме-
нее 60 мм) должны применяться при
небольшой точности управления с
усилием 30...200 Н;
усилия на рычагах управления не
должны превышать 30... 60 Н.
На рис. 10.2 приведены схемы ка-
бин для кранов мостового типа [20]:
закрытого (/) и открытого (II) испол-
нения.
Говоря об эргономике, нельзя не
учитывать и качество внешнего ис-
полнения изделия. Конструктор дол-
жен максимально сочетать форму из-
делия, его функции, конструкцию, ма-
териал, технологию изготовления,
экономичность с требованиями тех-
нической эстетики. Окраска, форма,
224
рациональное размещение изделий
создаю! комфорт в работе машинис-
та и обслуживающего персонала, от-
вечают эстетическим потребностям
человека. Например, окраску кабины
изнутри рекомендуют делать спокой-
ных, светлых тонов и хорошо мою-
щейся. Рабочее место крановщика
оборудуют креслом, позволяющим
работать в удобной позе и отдыхать в
перерыве между операциями. Пара-
метры кресла должны соответство-
вать данным ГОСТ 21880-76 с учетом
требований техники безопасности
(ГОСТ 12.2.003 78). Конструктивные
и отделочные материалы кресла долж-
ны быть прочными, огнестойкими,
нетоксичными, легко моющимися.
Кабину с наружной стороны окраши-
вают в виде чередующихся полос чер-
ного и желтого цвета (согласно ГОСТ
12.4.026- 76). расположенных под уг-
лом 45°. Аварийный выключатель
окрашивают в красный цвет и т. д.
Используя результаты анализа сис-
темы «машина-человек-среда», ав-
тор проекта имеет возможность соз-
дать такую конструкцию ГПМ, та-
кую организацию операций и рабочей
среды, которые, делая труд высоко-
производительным и надежным, в то
же время Обеспечивали бы человеку
необходимые удобства и сохранили
его работоспособность и здоровье.
I л а в a H
СОСТАВЛЕНИЕ И ОФОРМЛЕНИЕ СПЕЦИФИКАЦИЙ,
СБОРОЧНЫХ ЧЕРТЕЖЕЙ И РАСЧЕТНО-
ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
§ ПЛ. Задачи,
решаемые в спецификации
и на сборочном чертеже
В соответствии с ГОСТ 2.102-68 спе-
цификация является основным кон-
структорским документом для любой
сборочной единицы, комплекта или
комплекса, так как она однозначно
определяет состав изделия.
При работе нал конструкцией в
первую очередь необходимо решить,
из каких самостоятельных сборочных
единиц, деталей, стандартных изде-
лий и материалов будет состоять раз-
рабатываемое изделие (сборочная
единица). Совершенно очевидно, что
до завершения разработки чертежа
изделия полная спецификация состав-
лена быть не может. В связи с этим на
первом этапе разработки конструк-
ции на основании изучения аналогов,
литературы, патентных материалов
должен быть составлен примерный
перечень самостоятельных, более мел-
ких сборочных единиц и деталей, из.
которых будет состоять изделие: кран,
тележка, механизм, металлоконструк-
ция и т.д. Членение разрабатываемой
сборочной единицы на более мелкие
самостоятельные узлы, летали, стан-
дартные изделия желательно базиро-
вать либо на принятой для конкрет-
ного краностроительного завода тех-
нологии изготовления и сборки, либо
на основании литературных данных,
Под самостоятельной сборочной
единицей обычно понимается такое
изделие, которое может быть собрано
независимо от других изделий и в
готовом вице поступает на сборку
более крупной сборочной единицы.
Применительно к кранам такими из-
делиями обычно являются унифици-
рованные крюковые подвески, верх-
ние блоки и балансиры, канатные ба-
рабаны. ходовые колеса или балан-
сирные тележки, редукторы, тормоза,
буферы, рамы тележек, крановые не-
сущие металлоконструкции или их
отдельные крупные части, состоящие,
в свою очередь, из ряда сборочных
единиц в зависимости от типа крана,
а также стандартные изделия: двига-
тели, концевые выключатели и др.
Специфическая особенность кра-
нов-их механизмы обычно не имеют
собственной рамы и монтируются не-
посредственно на раме тележки или
металлоконструкции крана. Таким
образом, они формально не могут
быть собраны независимо от другой
сборочной единицы металлоконструк-
ции. Тем не менее в практике проекти-
рования их обычно принято рассмат-
ривать как самостоятельные сбороч-
ные единицы-это упрощает специфи-
кации и позволяет разрабатывать на
сборку каждого механизма самостоя-
тельный, достаточно простой сбороч-
ный чертеж.
Итак, спецификация отражает (или
определяет) технологию сборки изде-
лия. Наиболее целесообразно соби-
рать каждую сборочную единицу из
минимального числа элементов, т. е.
производить сборку из крупных бло-
ков. В связи с этим при составлении
спецификаций необходимо стремить-
ся к целесообразному минимуму по-
зиций, содержащихся в ней.
Сборочный черзеж в соответствии
с ГОСТ 2.109-^-73 «Правила выполне-
ния чертежей деталей, сборочных, об-
щих видов, габаритных и монтаж-
ных» должен содержать:
изображение сборочной единицы,
дающее представление о расположе-
нии и взаимной связи составных час-
тей, соединяемых по данному чертежу
и обеспечивающих возможность осу-
ществления сборки и контроля сбо-
рочной единицы;
размеры, предельные отклонения
и другие параметры и требования,
которые должны быть выполнены
или проконтролированы по данному
чертежу;
К Зак
225
номера позиций составных частей,
из которых состоит данная сборочная
с; (и ни да.
указания о характере сопряжений
деталей;
габариты, установочные, присое-
дини )ельные, сборочные и необходи-
мые справочные размеры, а также
определяемые требованиями техники
безопасности;
основные характеристики изделия
(при необходимости), если они не ука-
заны в другом документе, например
на габаритном чертеже, в технических
условиях и др.
Таким образом, основное произ-
воле! венное на значение сборочного
чир।ежа указание о сборке (монта-
же) изделия из отдельных входящих в
пего элементов- сборочных единиц,
деталей и стандартпых изделий, пере-
чне четных в спецификации. Именно
из итого назначения чертежа опреде-
ляю! необходимое количество проек-
ций, видов, разрезов и сечений, а так-
же масштабы их изображений.
Сборочный чертеж показывает (в
единицах! конфигурацию, габариты,
присоединительные элементы, взаим-
ное расположение и способ соедине-
ния сборочных единиц, легален и
стандартных изделий, перечисленных
в спецификации, из которых состоит'
дзпна.и сборочная единица. Кроме то-
го, сборочный чертеж решает еще
одну важную задачу- он является от-
правной точкой для дальнейшего
проектирования сборочных единиц и
деталей., входящих в состав изделия,
изображенного на да шт ом чертеже.
Наконец, сборочный чертеж дает ин-
формацию о присоединительных эле-
ментах, i.e. о тех. посредством кото-
рых данное изделие присоединяется
или взаимодействует с другими изде-
лиями, что дос газ очно наглядно про-
иллюстрировано в гл. 1.
При составлении спецификаций, на
металлические конструкции желатель-
но в качестве самостоятельных сбо-
рочных единиц выбирать части, вы-
полненные с помощью заводских не-
разьл.шъьх соединений (сварные или
клепаные). Тогда на сборочном черте-
же о ин; де дополни тельло
показа ть способ выполнения монтаж-
ных (чаше всего болтовых) разъем-
ных или неразъемных стыков.
Итак, содержание и объем сбороч-
ного чертежа в решающей стет тени
зависят от спецификации, так как чер-
теж в первую очередь должен пока-
зать взаимное расположение и способ
соединения тех элементов, которые
перечислены в спецификации, а специ-
фикация (членение изделия на само-
стоятельные части)зависит от приня-
той технологии сборки.
На сборочном чертеже решается
еще одна важная задача: он является
основой для разработки чертежей бо-
лее мелких сборочных единиц и дет а-
лей. Поэт ому на сборочном чертеже в
качестве справочных должны присут-
ствовать необходимые для этого раз-
меры и другая информация.
§ Н.2. Общие принципы
построения сборочных чертежей
Иод пос троением чертежа понимает-
ся определение необходимого коли-
чества проекций, видев, разрезов, се-
чений, их рациональное размещение
на листе, выбор масштабов изображе-
ния, установление необходимости по-
мещения на чертеже текстовой инфор-
мации и г и.
Количество проекций изображе-
ния изделий и их масштабы должны
обеспечить:
возможност ь пока та конфигура-
ции изделия и взаимного положения
его составных частей;
расстановку г абаритов и уст ано-
вочных (при возможности и присое-
динительных ) размеров;
расстановку позиций на составные
части изделия, при этом выносные
линии позиций должны ставиться
только на видимые (а не на пунк-
тирные) изображения, желательно рас-
положенные в проекции главного ви-
да этой сборочной единицы или де-
т али.
Практ ически определить мини-
мальное количество проекций можно
следующим образом Ня. отдельном
листе бумаги (нс на чертеже) нужно
нюбразить очень упрощенно главную
проекцию (не обязательно в масшта-
бе) и поставить на ней все возможные
размеры. Если они не полностью оп-
ределяют взаимное положение эле-
ментов и конфигурацию изделия, а
также положение присоединительных
элементов, необходимо добавить еще
одну проекцию и т. д. В ряде случаев
вместо проекций могут быть исполь-
зованы виды сечения в том же или
ином масштабе, что и главный вид.
Очевидно, для поставленной зада-
чи масштабы проекций могут быть
достаточно мелкими (1:100... 1:10).
Для того чтобы показать способ
соединения взаимодействующих эле-
ментов, включаемых в спецификацию,
используют сечения, выполненные в
Достаточно крупном масштабе (1:5
...1:1). Масштаб изображения дол-
жен обеспечить простановку сбороч-
ных размеров в допусках и посадках.
Определив необходимое количест-
во проекций, видов и сечений и их
масштабы, нужно рационально раз-
местить их на листе чертежа. Во всех
случаях необходимо стремиться вы-
полнить чертеж на минимально воз-
можном формате, но не в ущерб его
содержанию и возможности чтения,
§ 11.3. Простановка размеров
на чертежах
Простановка размеров-один из са-
мых сложных и ответственных этапов
разработки чертежа. Сборочный чер-
теж может содержать размеры:
а) габаритные, определяющие пре-
дельные размеры изделия по крайним
(выступающим) элементам контура с
привязкой к базовым осям; при этом
различают транспортные габариты,
определяющие возможность перевоз-
ки изделия в готовом виде, и габари-
ты движения, проставляемые на те
части изделия, у которых возможна
аварийная остановка (заклинивание)
в процессе рабочих движений при не-
соблюдении указанных габаритов
(или зазоров);
б) присоединительные, определя-
ющие координаты тех элементов, с
помощью которых данная сборочная
единица взаимодействует с другими
8*
сборочными единицами предыдущей
ступени входимости, например для
тележки такими элементами являют-
ся ходовые колеса, буферы, линейки
концевых выключателей и т.п.;
в) установочные, определяющие
положение данной сборочной едини-
цы по отношению к более крупной
сборочной единице (например, поло-
жение лебедки механизма подъема на
раме тележки; положение крюковой
подвески по базе и колее, по высо-
те-в зависимости от установки при-
вода ограничителя высоты подъема);
г) сборочные (в допусках и посад-
ках), определяющие характер взаимо-
действия и способ сборки деталей в
сборочных единицах;
д) определяемые правилами тех-
ники безопасности (высота огражде-
ний. крайнее верхнее положение крю-
ковой подвески и т.п.);
е) справочные.
Все размеры, кроме справочных,
выполняют и контролируют по дан-
ному чертежу и, следовательно, явля-
ются обязательными для исполнения
при сборке машины. Точность испол-
нения свободных размеров оговари-
вают в технических требованиях на
чертеже.
Справочные размеры служат для
удобства пользования чертежом, они
по данному чертежу нс выполня-
ются и не контролируются. Справоч-
ные размеры на чертеже отмена юз
«звездочкой», напр. 0120*.
Один и тог же размер па различ-
ных чертежах может иметь различное
назначение. Например, размеры кон-
ца вала приводного ходового колеса
па сборочном чертеже «Колесо при-
водное» будут являться присоедини-
тельными, а на чертеже «Привод ме-
ханизма передвижения» сборочными,
т.е. сборочные размеры на чертеже
предыдущей ступени входимости яв-
ляются присоединительными разме-
рами на чертеже последующей ступе-
ни входимости.
При простановке размеров жела-
тельно размещать размерные .пинии и
числа, относящиеся к сборке какой-
либо группы деталей, в одном сече-
ния или на одной проекции-эго об-
^.«1 f
легчает чтение чертежа, выполнение
сборки и ее контроль.
§ 11.4. Общие принципы составления
расчетно-пояснительной записки
Расчетно-пояснительная записка, как
правило, состоит из следующих раз-
делов: содержание; введение; обзор
литературы; предварительные расче-
ты; компонование; проверочные рас-
четы; заключение; список использо-
ванной литературы.
Задание на курсовой проект поме-
щают в начале заглавного листа рас-
четно-пояснительной записки (РПЗ).
В введении раскрывают общие по-
ложения по решению поставленных
задач: определяют актуальность те-
мы, ее народнохозяйственное значе-
ние; описывают условия, в которых
предполагается работа проектируе-
мой ГПМ с акцентом на специфичес-
кие, экстремальные воздействия (тем-
пературные, сейсмические и т.п.); пе-
речисляют, сравнивают возможные
отечественные и зарубежные варианты
ГПМ, которые можно было использо-
вать в указанных условиях. По воз-
можности приводят их схемы, фото,
рисунки, технические характеристики.
На основании сделанного автором
библиографического обзора и патент-
ного поиска приводят описание и
обоснование выбранной для проекти-
рования ГПМ, ее схему или эскиз.
Дается обоснование конструкции,
технических возможностей, условий
ремонта, эксплуатации и монтажа,
технико-экономических показателей.
Предварительный расчет основ-
ных параметров ГПМ, как и все даль-
нейшие расчеты, выполняют в такой
последовательности: расчетная схема;
исходные данные для расчета; задача
расчета; расчет; выводы по резуль-
татам расчета.
Расчетная схема отражает принци-
пиальное устройство рассматривае-
мой сборочной единицы с указанием
направления и места действия сил на
нее. Правильно составленная расчет-
ная схема позволит сократить про-
должительность расчета и повысить
его достоверность.
В ходе расчетов указывают ис-
пользуемую литературу. Только са-
мостоятельные решения исключают
необходимость ссылок на первоис-
точник.
Выбранные на основании предва-
рительных расчетов унифицирован-
ные и неунифицированные изделия
(крюковые подвески, двигатели, кана-
ты, редукторы и т.п.) описывают в
РПЗ с указанием их основных техни-
ческих данных (мощности, скорости,
частоты вращения, передаточного чис-
ла и т. п.) и литературного источника.
Выводы указывают о соответст-
вии параметров выбранного изделия
расчетным данным. Дается оценка
расхождений между проектируемыми
и заданными параметрами машины.
Подобранные в результате пред-
варительных расчетов основные изде-
лия компонуют между собой и рас-
полагают на металлоконструкции ма-
шины. В РПЗ помещают один или
несколько вариантов компонования
сборочной единицы с указанием ос-
новных присоединительных размеров
и габаритов. Приводят сравнение
вариантов и обоснование выбран-
ного.
Объем и содержание проверочных
расчетов определяет руководитель
проекта. Проверочные расчеты могут
базироваться на результатах исследо-
ваний (аналитических или экспери-
ментальных). проведенных автором
проекта. В таком случае целесообраз-
но поместить в РПЗ программы ЭВМ,
фото, осциллограммы, графики, таб-
лицы, подтверждающие расчеты. На
основании проверочных расчетов осу-
ществляют выбор приборов безопас-
ной эксплуатации ГПМ. В РПЗ указы-
вают основные технические данные
этих приборов и сравнивают их с
расчетными.
В заключение дают оценку спроек-
тированной конструкции, указывают
внесенные в ходе работы изменения,
приводят укрупненные технико-эко-
номические расчеты нового варианта
и прототипа конструкции, делают
выводы об эффективности решения и
возможности использования проекта
на производстве.
22S
§ ii.5. Оформление
рзечетг^ьпоясни тельной записки
Расчетно-пояснительную записку
оформляют в соответствии с общими
требованиями к выполнению тексто-
вых документов согласно ГОСТ
2.105-79 и СТ СЭВ 2667-80. РПЗ
выполняют на листах формата А4
(210 х 297) ГОСТ 2.301-68 и СТ СЭВ
1181-78 одним из следующих спосо-
бов: либо машинописным на одной
стороне листа через два интервала, с
высотой букв и цифр не менее 2,5 мм,
либо рукописным, на одной или двух
сторонах листа шрифтом по ГОСТ
2.304-81 с высотой букв и цифр не
менее 2.5 мм. Цифры и буквы необхо-
димо писать четко чернилами, черной
тушью или пастой.
Листы должны- иметь рамку и
основную надпись, как показало на
рис. 11.1, а для заглавного и после-
дующих листов. Нумерацию листов
делают сквозной для всей РПЗ и ста-
вят в основной надписи листа.
Основную надпись выполняют в
соответствии с требованиями ГОСТ
2.104-68 по форме 2 и 2а и размеща-
ют в нижней части заглавного листа
РПЗ (рис. 11.1, а, б), а на остальных
листах-по усмотрению преподавате-
ля (рис. 11.1, а, в). Так как в учебном
процессе не используют таблицы из-
менений по ГОСТ 2503-74, в содер-
жание граф могут быть внесены изме-
нения, основная надпись при этом
сохраняется. Так, в графах рекомен-
дуемой основной надписи указывают:
Рис. 11.1
229
в графе 1 -наименование изделия.
Например, барабан в сборе;
в графе 2-обозначение документа.
Структура обозначения текстового и
графического документа проекта мо-
жет быть рекомендована следующая'.
ХХХХ.ХХХХХХ.ХХХ XXX, где
ХХХХ номер учебной специаль-
ности, ПО которой ВЫПОЛНЯЮ! да IT-
НЫЙ курсовой проект. Например,
0501- подъемно-! ранспоргные маши-
ны и оборудование;
ХХХХХХ-код классификационной
ларакгеристики в соответствии с об-
щесоюзным классификатором про-
мышленной и сельскохозяйственной
продукции (ОКИ). Например, 417120 —
краны мостовые электрические одно-
балочные, опорные (см. Прилож. 13):
XXX - порядковый (рет ист рацион-
ный) номер проекта, установленный
кафедрой, ведущей проект. Напри-
мер, 6(2:
XXX -вид документа по шифрам
документов (ГОСТ 2.102-68). Напри-
мер, сборочный чертеж-СБ; расчет-
но-пояснительная записка - РПЗ; чер-
теж общего вида-ВО. На чертежах
деталей и в спецификациях вид доку-
мента нс указывают . Пример обозна-
чения документа: 0510.417120.012.РПЗ;
в графе 3 - название института.
Например. УПИ им. С. М. Кирова;
в графе 4- литеру, присвоенную
данному проекту. Например, ПК -
проект курсовой, РК-работа курсо-
вая;
в графе 5 порядковый номер
листа,
в графе 6- общее количество лис-
тов;
в графе 7 - наименование кафедры.
Например, кафедра ПТМиР;
в 1 рифе 8-номер академической
группы студента. Например, М-368;
в графе 9-фамилия и инициалы
лиц, принимавших участие в проекте;
в графе 10-подписи вышеперечис-
ленных лиц;
в графе 11-дата подписания до-
кумента.
На рис. 11.1,6. в приведены разме-
рь1 основных надписей для заглавного
и последующих листов РПЗ.
РПЗ должна иметь обложку, за-
2 Ц)
меняющую титульный лист, выпол-
ненную из ват мана формат ом А4.
Лист обложки нс нумеруется. Надпи-
си на обложке делают тушью или
черной настой шрифтом типа А по
ГОСТ 2.304 81.
Форма и пример заполнения об-
ложки представлены на рис. 11.2. В
зоне / указывают: наименование ми-
нистерства, вуза, факультета, где обу-
чается студент (шрифт 7 или 5), в зоне
2 - тему курсового проекта, без слов
«гема» (шрифт 10 или 14), вид проек-
та и по какой учебной дисциплине эта
работа выполнена (шрифт 7), в зоне
3 - наименование документа и его
обозначение (шрифт 7), в зоне 4-пе-
речень и подписи лиц, участвующих в
исполнении, руководстве и контроле
проекта. При подписании документа
укатывают оценку за проект и дату. В
зоне 5 сгавяг год выполнения РПЗ
(без указания слова «год» или «г»).
Записи в зонах 4 и 5 выполняют
шрифтом 5 или 7. Переносы слов в
надписях не допускаются. Точку в
конце фраз не ставят.
Текст РПЗ разбивают на разделы,
подразделы и пункты, количество ко-
торых определяется содержанием и
объемом записки. Все разделы, кроме
введения, заключения, списка литера-
туры, должны иметь порядковый но-
мер. обозначенный арабскими цифра-
ми. Подразделы нумеруют в пределах
№ и год рсфср Л
.. УПИ им, CM Kupoh
Механика - машиностроительный
Факультет_________
11
2
Кран мостоЗои
однеЗалоиный
КурсоЗм проект
по дисциплине
Грузоподъемные машины
Расчетно- пояснительная
записка
0510. УП120. 012. РПЗ
Студент
Руководитель
Норм, контр
198 ...
Я?
210
Р и с.
каждого раздела, а пункты-в преде-
лах подраздела. Например, 1.2.4. Рас-
чет оси колеса, где 1-раздел; 1.2-
подраздел; 1.2.4-пункт. После каж-
дой цифры ставится точка. Наимено-
вания разделов и подразделов долж-
ны быть краткими и записаны в виде
заголовков прописными или строчны-
ми буквами шрифтом 5 или 7. Пере-
носы слов в заголовках не допускают-
ся. Заголовки не подчеркивают. Точку
в конце заголовка не ставят. Между
заголовками и текстом должно быть
расстояние не менее 10 мм. Расстоя-
ние текста от рамки Листа слева не
менее 5 мм, справа не менее Змм.
Перечень всех разделов, подразде-
лов, пунктов с указанием номеров
страниц в тексте включают в содер-
жание записки и помещают в начале
записки со сквозной по тексту нуме-
рацией страниц. Слово «содержание»
записывают в виде заголовка пропис-
ными буквами шрифтом 7 и не под-
черкивают. Наименования, включен-
ные в содержание, записывают строч-
ными буквами шрифтом 5.
В конце РПЗ пол заголовком
«Список литературы» приводят пере-
чень использованной литературы. Спи-
сок нумеруют арабскими цифрами и
составляют в соответствии с требо-
ваниями ГОСТ 7.1 -76 (см. Приложе-
ние 12). Ссылки в тексте на перво-
источники дают в квадратных скоб-
ках, с указанием номера источника по
списку литературы и страниц (таб-
лиц), откуда взяты сведения, напри-
мер [6, с. ЮЗ], что означает шестой
источник литературы, 103-я страница.
Формулы, если их в тексте более
одной, нумеруют арабскими цифрами
в пределах раздела. Номер формулы
состоит из номера раздела и поряд-
кового номера формулы. Номера раз-
деляют точкой. Номер указывают
справа от формулы в круглых скоб-
ках. Формулы записывают в общем
виде, затем с подставлением парамет-
ров и в конце приводят результат
вычисления. Символы, входящие в
формулу, и их значения должны иметь
расшифровку и единицы величин, ко-
торые приводят сразу после форму-
лы, если они не вынесены в приложе-
ние в виде перечня обозначений, на-
пример
т = 7LT]„ 7S22'('^^ 192 Н-м. (7.2)
м 35
где 7^-статический момент при тор-
можении, Н; Тб-момент на валу ба-
рабана, Н-м; ц-к.п.д. механизма (на
участке барабан-тормоз); к-переда-
точное число зубчатых передач.
В формулах в качестве символов
следует применять обозначения, уста-
новленные международными стандар-
тами и рекомендованные ИСО, МЭК,
МСЧПФ и др. Ссылки в тексте на
формулы помещают в круглых скоб-
ках, например: «...в формуле (7.2)».
Цифровой материал, как правило,
оформляют в виде таблиц по ГОСТ
2.105-79. Таблица может иметь за-
головок, который пишут строчными
буквами и помещают над таблицей
посередине. Надпись «Таблица» по-
мещают выше заголовка справа с ука-
занием номера раздела и порядкового
номера таблицы, номера разделены
между собой точкой. В тексте ссылки
на таблицы дают по типу «... в табл.
2.4» или при отсутствии номера таб-
лицы «... в таблице».
Иллюстрации в виде фото, рисун-
ка, графика, схемы, чертежа, сделан-
ные к данному расчету или тексту,
могут быть выполнены в произволь-
ном масштабе на ватмане, писчей бу-
маге или кальке форматом А4 (210 х
х 297 мм) и должны нести полную
информацию согласно решаемым за-
дачам. Возможно оформление иллю-
страции тушью, карандашом, пастой,
фломастером при условии аккуратно-
го исполнения. Допускается иллюст-
рации сопровождать поясняющими
записями. В этом случае наименова-
ние помещают над иллюстрацией, а
поясняющий текст-под ней. Ниже
поясняющего текста помещают но-
мер иллюстрации. Номера иллюстра-
ций пишут арабскими цифрами, вклю-
чая номер раздела и'свой порядковый
номер. Например: Рис. 2.4..., где
2-номер раздела, 4 порядковый но-
мер иллюстрации. Иллюстрации рас-
полагают, как правило, сразу после
первой ссылки на них. Ссылки на
23 г
иллюстрации в тексте помещают по
типу: «Рис. 1.1» или «см. рис. 1.1»,
Как продолжение РПЗ со сквозной
нумерацией страниц помещают при-
ложение к тексту. Слово «Приложе-
ние» пишут прописными буквами в
правом верхнем углу листа и рядом
арабскими цифрами ставят номер, на-
пример Приложение 3.
В «Содержании» РПЗ перечисляют
все приложения и указываю! их номе-
ра страниц. Рисунки, таблицы, фор-
мулы, помещенные в приложении, ну-
меруют арабскими цифрами в преде-
лах каждого приложения, при этом в
нумерацию входит буква «П», напри-
мер: «Рис. П.3.4» означает четвертый
рисунок третьего приложения.
§ 11.6. Оформление
графической части проекта
Графическую часть курсового проек-
та выполняют на листах ватмана
стандартного формата по ГОСТ
2.301-68 карандашом или тушью.
Форматы листов чертежей определя-
ют размерами внешней рамки, вы-
полненной сплошной тонкой линией,
согласно ГОСТ 2.303-68. Обозначе-
ния и размеры сторон основных фор-
матов должны соответствовать ука-
занным в табл. 11.1.
На листе ватмана должны быть
границы формата, рамка, отстоящая
на 5 мм по периметру от линии фор-
мата, за исключением левой стороны,
где для брошюровки чертежа остав-
ляют 20 мм (рис. 11.3).
Поле чертежа разбивают на зоны
для удобства нахождения на нем из-
делия или его составной части (рис.
11.3,5). Протяженность зоны кратна
одной из сторон формата А4. По
вертикали зоны записывают снизу
вверх и обозначают прописными бук-
вами латинского алфавита, по гори-
зонтали-справа налево и обозначают
арабскими цифрами, например зона
ЗА, 2В, 4С и т. п. На чертежах, выпол-
ненных на нескольких листах с одним
обозначанием, нумерация зон должна
быть сквозной.
В правом нижнем углу формата
помещают основную надпись черте-
жа-1, а в левом верхнем углу-2-
помещают номер документа (рис.
11.3, а). Основные надписи и дополни-
тельные графы к ним выполняют
сплошными основными линиями по
ГОСТ 2.303-68.
Расположение и размеры граф
основной надписи на чертежах курсо-
вого проекта несколько изменены по
сравнению с ГОСТ 2.104-68 (рис.
11.4). Предлагается следующий поря-
док их заполнения:
в графе 1 - наименование изделия
в именительном падеже, например
кран мостовой однобалочный;
в графе 2-обозначение документа
(см. § 11.5);
в графе 3-обозначение материала
и номер стандарта на материал (для
детали);
в графе 4-литера, присвоенная
данному проекту (см. § 11.5);
в графе 5-масса изделия в кило-
граммах без указания единиц;
в графе 6-масштаб изображения
по ГОСТ 2.302-68;
в графе 7-порядковый номер лис-
та;
в графе 8 - общее количество лис-
тов проекта;
в графе 9-наименование институ-
та;
в графе 10-наименование кафед-
ры;
в графе 11 - номер академической
группы, в которой обучается студент;
в графе 12-фамилия и инициалы
лиц, участвующих в проектировании;
в графе 13-подписи вышеперечис-
ленных лиц;
в графе 14-дата подписания до-
кумента;
Таблица 11.1
Формат А 0 А 1 А 2 А 3 А 4
Размеры СТО' рои, мм 841 х 1189 594 х 841 420 х 594 297 х 420 А 210 х 297
232
2
Рис. 11.3
Рис. 11.4
в графе 15 - обозначение докумен-
та, повернутое на 1803
На последующих листах чертежей
основную надпись выполняют по
форме рис.
Масштабы изображений на черте-
жах, согласно ГОСТ 2.302- б8, нужно
выбирать из следующего ряда:
масштабы уменьшения 1:2; 1 : 2,5;
1:4: 1:5; 1:10: 1:15; 1:20; 1:25;
1:40: 1:50, 1:75: 1:100; 1:200;
1 :400: 1 : 500; 1 :800; 1 : 1000;
масштабы увеличения 2:1; 2,5:1;
4:1; 5:1; 10:1; 20:1; 40; 1; 50:1:
Ю0;1;
натуральная величина I;1.
Масштабы во всех случаях, кроме
предназначенных для этого граф, обо-
значают но типу: М2:1; М 100:1;
Ml: 100 и т.д.
Текст, таблицы и надписи, как
правило, располагают параллельно
основной надписи чертежа. Текст по-
мещают на поле чертежа над основ-
ной надписью, длина строки равна
ширине основной надписи.
Заголовок «Технические требова-
ния» на чертеже не пишут. Пункты
технических требований нумеруют и
записывают с новой строки.
Техническую характеристику по-
мещают о тдельно от технических тре-
бований на свободном поле под за-
юловком « Техническая характеристи-
ка..Заголовок не подчеркивают.
При выполнении чертежей необхо-
210
70
S3
10. 2? ,
Обозначение
Наименование
£
«Г-
Рис. 11,5
Основная надпись }, см. рис. 11.1,5
1
димо соблюдать требования, уста-
новленные государственными стан-
дартами (см. Приложение 14).
Предельные отклонения размеров,
формы, взаиморасположения поверх-
ностей указанные на чертежах долж-
ны соответствовать правилам Единой
системы допусков и посадок СЭВ и
требованиям Основных норм взаимо-
заменяемости.
Шероховатости поверхностей ука-
зывают в соответствии с ГОСТ
2.309-73* и 2789-73*.
§ 11.7. Оформление спецификации
Спецификацию оформляют согласно
ГОСТ 2.108-68 на отдельных листах
формата А4 на каждую сборочную
единицу, комплект, комплекс и под-
шивают в конце РПЗ со своей ну-
мерацией страниц.
Заглавный лист спецификации вы-
полняют по форме 1 ГОСТ 2.108-68,
все последующие листы отличаются
от него основной надписью. Основ-
ную надпись выполняют по типу ос-
новной надписи РПЗ (см. рис. 11.1, б).
Форма и порядок заполнения спе-
цификации изделия представлены на
рис. 11.5. В графах спецификации ука-
зывают:
в графе «Формат» - форматы чер-
тежей (документов). Например. А4,
АО и т.п. Для деталей, на которые не
выполнены чертежи в проекте, в гра-
фе указывают БЧ-без чертежа. Гра-
фу не заполняют для разделов «Стан-
дартные изделия», «Прочие изделия»,
«Материалы»;
в графе «Зона» - обозначение зоны
чертежа, в которой находится номер
позиции указанной части изделия. На-
пример, 1 А, ЗБ и т. п.
в графе «Поз»-порядковые номе-
ра по чертежу составных частей спе-
цифицируемого изделия;
в графе «Обозначение» - обозначе-
ния документов, входящих в такие
разделы спецификации, как «Комп-
лексы»», «Сборочные единицы», «Де-
тали» и «Комплекты»;
в графе «Кол»-количество состав-
ных частей на одно изделие;
в графе «Примечание» дополни-
тельные сведения о марках материа-
лов, массе изделия, об организации
производства;
в графе «Наименование»-разделы
спецификации и входящие в них доку-
менты, наименования и обозначения
изделий в соответствии со стандар-
тами или документами на поставку.
Разделы располагают в такой по-
следовательности: документация, ком-
плексы, сборочные единицы, детали,
стандартные изделия, прочие изде-
лия, материалы, комплекты.
Наименование каждого раздела
указывают в виде заголовка в графе
«Наименование» и подчеркивают тон-
кой сплошной линией. Ниже каждого
заголовка должна быть оставлена од-
на строка, выше-не менее одной сво-
бодной строки.
В раздел «Документация» вносят
наименования документов, составляю-
щих комплект конструкторских доку-
ментов к проекту, например: установ-
ка ходового колеса (сборочный чер-
теж); ось ходового колеса (чертеж
детали >; кинематическая схема лебед-
ки (схема) и т. п.
В разделы «Комплексы», «Сбо-
рочные единицы», «Детали» вносят
комплексы, сборочные единицы, де-
тали, непосредственно входящие в
специфицируемое изделие. Для дета-
лей. на которые не разрабатывают в
проекте чертежи, указывают наиме-
нование, материал и размеры, необ-
ходимые для изготовления. Детали
классифицируют по их функциональ-
ному назначению и записывают в ал-
фавитном порядке, например: кре-
пежные изделия; подшипники; элект-
ротехнические изделия и I. п.
В разделе «Стандартные изделия»
записывают' изделия, применяемые
по государственным, республиканс-
ким и отраслевым стандартах*. по
стандартам предприятий. Порядок
записи тот же, что и в предыдущем
разделе.
Разделы «Прочие изделия», «Ма-
териалы», «Комплексы» допускаете»;,
на усмотрение руководителя проекта,
не включать в спецификацию. Запол-
нение спецификации следует выпол-
нять шрифтом 5 по ГОС Т 2.304-81.
Глава 12
ПРИМЕР ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
МОСТОВОГО КРАНА ОБЩЕГО НАЗНАЧЕНИЯ
§ 12.1. Задание на проект
Исходные данные. Кран мостовой
электрический двухбалочный для ра-
боты в механосборочном цехе. Грузо-
подъемность-80/20 г. Максимальная
высота подъема - 25/28 м. Проле г
крана-19 м. Скорость подъема гру-
за-0,1 /0,2 м/с. Скорость передвиже-
ния тележки-0,5 м/с. Скорость пе-
редвижения крана - 1.0 м/с. Группы
режимов работы: механизма вспомо-
гательного подъема-ЗМ; остальных
механизмов-4М. Относительная про-
должительность включения электро-
обору до в а н и я - 2 5 %. Срок с л у ж -
бы крана -10 лет. Род тока и напря-
жение - переменный; 380 В. Графики
нагружения механизмов - чиповые
усредненные графики ВНИИПТМАШа.
Коэффициент применяемое:!’ уни-
фицированных изделий 75%.
Содержание работ. Предваритель-
ные расчеты всех механизмов крана.
Компонование механизмов и тележ-
ки. Проверочные расчел ы механиз-
мов. Расчет металлоконструкций.
Уточненные расчеты. Спецификации
и сборочные чертежи тележки, меха-
низма главного подъема, установки
барабана главного подъема, механиз-
ма передвижения тележки, моста кра-
на, главной и концевой балок моста.
Далее приведена часть работ нз
данного проекта.
§ 12.2. Предварительные
расчеты механизмов
Механизм главного подъема. В ы б о р
кинематической схемы. Так как
скорость подъема небольшая, пере-
даточное число механизма будет боль-
шим. Поэтому, принимая за основу
кинематическую схему, изображен
ную на рис. 2.1, введем в нее откры-
тую зубчатую передачу. При этом
увеличшея расстояние между быстро-
ходным валом и барабаном, значил,
будет удобно размещать верхние бло-
ки полиспаста. Применение уравни-
тельного балансира возводи! повы-
сить срок службы канала за счел лик-
видации его износа на уравншелъном
блоке и за счел дополничельной под-
крутки при набегании на барабан обе
их ветвей канала.
В ы б ор к р юко в о и п одвес кн.
Но нормали НО «Сибтяжмсшъ вы-
бираем крюковую подвеску. имею-
щую параметры, (у,, - 80 т; режим
рабош-средний; --- ф =
— 800 мм; Z?wl ~ э80 мм; — г00 мм:
== 210 мм: /ц, ~ 3675 к<. Среднему
режиму работы соо гве i с । руеч >. п\ пна
ре ж и м а ра б о г ы 4 М (см. i а б л. 1.5).
Число блоков выбранной крюко-
вой под вес к и соол вс тс л в у е i - . и ш v
блоков па кинематической схеме, поэ-
тому схема запасовки каналов в ноли
cnacie сохраняемся, Гю передаточное
число (KpaiHocib) равно 1.
В ы б о р к а н а 1 а. Вес поминаль-
ного 1 руза и крюковой иолпес-чп равен
6 - (т \ Л шг)ц - (80 I 0л ч 36751 и
V 9^07*^ 820600 Н. Но ; абл. 2.2 па
ходим ц|; — 0,96: Zk - — 2. I йн’ран.чч’о-
щие- блоки в схеме о гсу те i ву ни,
полому qjf, = I, По формуле (2.1)
- 820 600/(2 • 4 0,96 1 i ‘06800 Н.
Выбираем лип канала ЧСДЩ ?
х 19(1 + 6 6 Т 6, h! л- 1 о.с. i С
2688-80. ’имеющий линейное юнли-шс
проволок и разные диаметры прово-
лок в верхнем слое лц» ли. Но
лаб..т 2.3 находим 6(11|1 — 5.5. Вычис-
ляем: ~ 106 800-5.5 л'Н.’-0'.> Н
Но условию (2.2) из одбп-щы
ГОСТа выбипаем гиперизме-'’ канал а.
Кммл ЗОА-Г-В-С-О-Н -1 764 НКТ
2688-80 имес! парамедик S’, ,j, —
•• 629000 Н; , С • • 30.5 мхн /\ -
- 356,72 мм2: назначение м.н’.а i а-
грузовое; марка проволоки вмещая;
маркировочная j ценна - 1764 Ml la;
вид покрытия проволоки оцинкован-
ная для среднеагрессивных условий
работы, сочетание направлений свив-
ки элементов - одностороннее; способ
свивки канала иераскрупирлиоцпиТ.п:
236
направление свивки каната-для од-
ной половины полиспаста-правое,
для другой-левое.
По условию (2.3) проверим пере-
гиб каната на блоках подвески, пред-
варительно найдя по табл, 2.4 значе-
ние е — 25; de = 30,5 25 = 762.5 мм;
- Аь.о + 4 = 800 + 30,5 « 830,5 мм;
Обл > е- Следовательно, условие
проверки выполняется.
Основные размеры «Уста-
новки верхних блоков». Кон-
струкцию узла верхних блоков при-
нимаем по типу конструкции, разра-
ботанной ПО «Сибтяжмаш» (см.
рис. 2.3). По формулам (2,4) опреде^
ляем Рб1 — d*e --- 30,5-25 — 762,5 мм.
В первом приближении Двл0 = £>бл -
— dK- 762,5 - 30,5 = 732,5 мм. Значе-
ние Г>блп18х не Должно быть меньше,
чем Рбл,тах = Рбл0 + 4dK = 732,5 + 4 х
х 30,5 = 854,5 мм, По ОСТ 24.191.
05-72 (Приложение 3) находим бли-
жайшее значение max - 900 мм.
Окончательно D6 - 900 мм; D6;;0 =
= 778 мм; £>бл = 808,5 мм. По табл. 2.5
определяем остальные размеры, по-
казанные на рис. 2,3: Т„.бл = 1,15 х
х рбл0 я= 1,15-778 = 895 мм; примем:
кбл = 90° мм; Алл = ЬЗ Рбл0 = 1.3 х
х 778 1011 мм; Ввй = 1010 мм;
Яв бл = 1,25 Дбл0 = 1,25 -778 s 972 мм;
Яв 6л = 980 мм; <бл = 0,6 P6jl0 =
- 0,6- 778 s 467 мм; Лв<вл = 470 мм.
Расстояние между осями крайних
блоков определим по формуле (2.5):
= 5нвр - \ = 800 - 210 = 590 мм.
Кроме того, значение должно быть
в пределах: (0,6,..0,7) Д,.вл = (0,6...0,7) х
х 900 = 540...630 мм. Примем Ц ~
= 590 мм. Расстояния между осями
болтов крепления назначаем кон-
структивно: ед = 250 мм; г2 ~ 770 м-
Основные размеры уравни-
тельного балансира (см. рис. 2.4). .
Значение ^1пур.в * ЗЯбл0 = 3*778 =
- 2334 мм. Тогда, по формуле (2.6),
380 мм < Лурл < 380 мм 4- (2 • 2334 tg
б11) мм, или 380 мм Иур б 871 мм.
Примем Лурб -- 500 мм. Используя
. ориентировочные соотношения в § 2.1,
определим: Ьурб = 600 мм; Вур б =
= 300 мм; Яурб = 250 мм; Lon.yp.e =
= 350 мм; Лур б = 150 мм.
Основные размеры «Уста-
новки барабана». Примем диа-
метр барабана меньше, чем диаметр
блока, на 15%. Вычислим: 0,85 dKe —
= 0,85 х 30,5 25 = 648 мм. Примем
Рб = 650 мм. По формуле (2.11) LK p =
= Huv = 25-4 = 100 м. По формуле
(2.10) найдем число рабочих витков:
-% = А,Р/(Д^б) = 100/(3,142'0,65) £ 49.
Принимая ZHctjp = 1,5 и ZKp = 3, а
также / = 36 мм, по формуле (2.9)
определяем длину одного нарезного
участка: /к = 36(49 + 1,5 + 3) = 1926 мм.
Значение Лт|П.й = 3 = 3 • 650 =
= 1950 мм. Длину гладкого среднего
участка определим по соотношению
(2.12): 800 мм^/0« 800 мм + 2 х
х 1950 (tg 6е) мм, или 800 мм /0
^1210 мм. Примем /0 = 1000 мм.
Длина гладкого концевого участка
равна /к = (4...5)< = (4...5) 30,5 =
= 122... 152,5 мм. Примем /„ = 130 мм.
Ширину зубчатого венца примем
Вл в = 120 мм. Длина барабана с зуб-
чатым венцом будет равна к*
= 2/и + Zo + 2Z, + В = 2*1926 +
+ 1000 + 2-130 + 120 = 5232 мм.
Данное значение Ц довольно велико.
Оно превышает диаметр барабана в 8
раз. Это приведет к увеличению ши-
рины тележки, ее колеи, а следова-
тельно, и длины концевых балок
моста. Кроме того, в стенке барабана
будут действовать большие напряже-
ния изгиба. С целью уменьшения
длины барабана примем минималь-
ное значение длины /0, равное 800 мм,
диаметр барабана увеличим до зна-
чения D6 = 900 мм, а ширину зубчато-
го венца-до значения 2?1В = 170 мм.
Произведя расчет, аналогичный изло-
женному, получим ZH = 1458 мм; L6 =
= 4146 мм. Теперь длина барабана
превышает диаметр в 4,6 раза,, что
вполне приемлемо.
Определим другие размеры «Уста-
новки барабана» (см. рис. 2.5), ис-
пользуя ориентировочные соотноше-
ния, приведенные в § 2.1. При этом
принимаем средние или близкие к
ним значения в соответствующих
диапазонах. Получим DmHX = 1080 мм;
6 = 45 мм; 5j = 35 мм; 50П = 180 мм;
Асн.опв 180 ь= 4416 мм; =
= 4596 мм; ^сн.оп ~ 670 мм; л =
= 220 мм; Су = 100 мм; с2 — 550 мм.
237
В ы бор двигателя. Предвари-
тельное значение к.и.д. механизма
. примем равным р - 0,85. По фор-
муле (2.13) A’cirous - ог/Ппр - 820,6 х
х 0.1/0,85 = 96,54 кВт. Выбираем се-
ри; о МТН. отличающуюся высоким
классом нагревостойкости изоляции.
С учесом коэффициента использования
мощности Л/,,, = — (0,7...0.8) х
х 96,54 — 67,6... 77,2 кВт . Выбираем
двигатель типа МТН 612-10 ГОСТ
185 70. имеющий параметры: Л\1П —
-70 кВт; ПВлв =-25%; нД11 =
- 560 об/мин; J ~ 5,25 кг-м2;
с/.. — 90 мм; /?1_й = 1070 кг.
It ь Д п Д л
Выбор передач и. Част о га
вращения барабана равна
0,1 *60'4 о ,,
я т.-. * -11. - —---= 8,49 об/мин.
” пД, 3,142-0,9 1
Требуемое передаточное число лебед-
ки илтр = " 560/8,49 = 65,96.
Примем передаточное число откры-
той передачи равным мот = 4. Требуе-
мое передаточное число редуктора
*С.тР «л.1рЧт = 65.96/4 - 16,49.
Определим расчетный эквивалент-
ный момент на тихоходном валу ре-
дуктора. Принимаем класс нагруже-
ния механизма В2. Ему при заданной
группе режима работы 4М соответ-
ствует класс использования А4 (см.
табл. 1.2). По табл. 1.4 находим зна-
чение коэффициента нагружения к =
- 0,25. Значение коэффициента kQ
вычисляем по формуле kQ =
= Ч/Т = V(U5 z 0,63. По табл. 1.3
находим машинное время работы ме-
ханизма /мзш 12500 ч. Частота вра-
щения тихоходного вала редуктора
должна быть равна = /?би01 = 8,49 х
х 4 = 33,96 об/мин. Число циклов на-
гружения на тихоходном валу редук-
тора ZT = 60«т/маш = 60 33,96 х
х 12 500 = 25.47- 106. Передаточное
число тихоходной ступени редуктора
предполагаем близким к значению
щ = 5. По формуле (2.18) Zp — 25,47 х
х 10f' 5 = 127,35- 106. Значение Zo
равно 125- 106. По формуле (2.17) вы-
числим fct
127,35-Ю6
125-Ю6
1,01.
По формуле (2.16) вычислим значение
кд = 0,63 1,01 = 0,64. Значения к.п.д.
опор барабана и открытой передачи
примем равными: т|б ~ 0,99; лот =
= 0,97. Расчетный крутящий момент
на I ихоходном валу редуктора при
подъеме номинального груза в пе-
риод установившегося движения
т = = 106800-2 ^5
Р ЧД1.ЩУ. 0.99-0,97-4’ =
S 25030 Н-м.
По формуле (2.15) I' = к Т - 0.64 х
х 2503016 020 Н м.
Для обеспечения выбранной кине-
матической схемы удобно использо-
вать редуктор типа ГК, имеющий
шестерню на конце тихоходного вала.
Однако в нормали ПО «Сибтяжмаш»
на редукторы данного типа не приво-
дится поминальных крутящих момен-
тов на тихоходных валах. Определим
расчетом данный момент. Предвари-
тельно выберем редуктор типоразме-
ра ГК-1000 исполнения IV, имеющий
передаточное число пр = 15.21. Разни-
ца между нр и нр составляет 7,8%,
что допустимо. Мощность, которую
можно подводить к редуктору, равна
Vp = 256 кВт при среднем режиме ра-
боты и частоте вращения быстроход-
ного вала ибмстр = 585 об/мин. К.п.д.
данного редуктора, по расчетам заво-
да-изготовителя. равен рр я 0,94. До-
пускаемая угловая скорость быстро-
ходного вала редуктора равна
«быстр ™быстр/30 - 3.142-585/30 £
£ 61,26 рад/с. Номинальный крутя-
щий момент на быстроходном валу
равен Тб = 'V:>6btCTp = 256* 10%
/61,26 s 4179 Н м. Номинальный кру-
тящий момент на тихоходном валу
равен Грд1 = ТбыстрмрПр = 4179-15,21 х
х 0,94 й 59 750 Н-м. т.е значитель-
но больше расчетного эквивалентно-
го момента 7). Следовательно, редук-
тор Г К-1000 исполнения IV соответ-
ствует требованиям прочности и ки-
нематики механизма. Редуктор имеет
параметры, кроме выше найденных:
awc - 1000 мм; <быстр = ПО мм; 2Ш =
= 13; m = 24 мм; = 350 мм; m =
= 3550 кг. Схема сборки редуктора
соответствует выбранной кинемати-
ческой схеме.
Определим основные параметры
открытой передачи. Число зубьев вен-
ца равно ----- дшнот = 13-4 — 52. Меж-
осевое расстояние равно aw = т(гя +
+ zm)/2 = 24(13 + 52)/2 = 780 мм.
Уточним размеры Взя, L^, L
и Lvcr.e: D'mm = m(za 4- 2) = 24(52 4- 2) =
= Г296 мм; = 0,95/>ш = 0,95-350 =
= 332 мм; Lf), L и Lvct6 возрастут на
5% - Л.в = 332 - 170 = 162 мм; Ц =
— 4308 мм; L' = 4578 мм; /Лет б ==
= 4758 мм.
Определим фактическую скорость
подъема груза и фактический к.п.д.
механизма. Передаточное число ме-
ханизма равно имсх = иритиа = 15,21 х
х 4-4 = 243,36. Угловая скорость вала
двигателя равна содв = пнда/30 = 3,142 х
х 560/30 = 58,64 рад/с. По формуле
(4.25) гпод = 58,64 0,45/243,36 = 0,11
м/с. Данная скорость отличается от
заданной на 10%, что допустимо.
К.п.д. муфты на быстроходном валу
примем равным г|м.б = 0,99. К.п.д.
всего механизма равен п..ек = r|nnfi х
хПотПрПм.6 = 0.96 0,99-0,97 - 0,94 х
х 0,99 = 0,87. Данное значение мало
отличается от значения г|11р = 0,85,
принятого выше. Поэтому перерасчет
мощности не делаем.
Выбор соединительной
муфты. Для соединения залов дви-
гателя и редуктора выбираем тип муф-
ты-зубчатую с промежуточным ва-
лом. Такая муфта хорошо компен-
сирует возможные неточности монта-
жа и может передавать большие кру-
тящие моменты. Диаметры концов
валов: г/НД1Ч = 90 мм; ^в.быС|р =110 мм.
По таблице (Приложение 6) выбира-
ем типоразмер: муфта 2-16000-90-2-
110-2У2 ГОСТ 5006-83. Данная муфта
имеет параметры:
Тмн = 16000 Н-м; ./м = 1,15 кг-м2;
ев max = ^ттрав max “120 ММ, Му1 —
= 62,5 кг. Расточки в полумуфтах вы-
полняют по заказу.
Выбор тормоза. По табл. 2.6
находим к1 = 1,75. Определим макси-
мальное значение к.п.д. механизма rf
на участке кинематической цепи от
крюка до тормоза. Оно будет отли-
чаться от значения г|м<.я отсутствием
сомножителя к|м б, а также величиной
т|р. В качестве гф возьмем максималь-
но возможное значение к.п.д. для
двухступенчатого цилиндрического
редуктора по табл. 2.20: р' = 0,97.
Тогда п' = РпПеПотПр = 0,96 0,99 х
х 0,97-0,97 S 0,89. По формуле (2.22)
Тстт = Gr6p'/wMCX = 820 600-0,45 0,89/
/243,36 1350 Н-м. Расчетный тор-
мозной момент находим по формуле
(2.21): , = 1.75-1350 =
= 2362 Н м. Данному значению тор-
мозного момента соответствуют два
типоразмера тормозов разных типов:
тормоз ТКГ-500 с номинальным
тормозным моментом 2452 Н-м и
тормоз ГКП-500 конструкции ПО
«Сибтяжмаш» с номинальным тор-
мозным моментом 2500 Н-м. Пер-
вый тормоз легче, потребляет меньше
электроэнергии и работает на пере-
менном токе, второй требует выпрям-
ляющего устройства, но зато его на-
дежность не зависит от такого факто-
ра, как качество уплотнений в элек-
трогидравлическом толкателе, в ко-
торый заливается рабочая жидкость.
Данный фактор является определяю-
щим для механизма главного подъе-
ма-самого ответственного механиз-
ма в проектируемом кране. Поэтому
выбираем тормоз конструкции ПО
«Сиб тяжмаш» с параметрами: Тт м =
= 2500 Н-м; ПВ„ =25%, Р^ =
= 12945 Н; L = 222 мм; штор =
= 400 кг;1), ш = 500 мм; В* — 200 мм:
s 4 мм. Тормоз регулируется на
расчетный тормозной момент Тт р.
Выбор муфты с тормозным
шкивом. Учитывая требуемый диа-
метр тормозного шкива, ширину ко-
лодок и диаметр быстроходного вала
редуктора, выбираем муфту, имеющую
параметры: £>т ш = 500 мм; Вг ш =
= 205 мм; а' х = 129,5 мм; /м.т>щ =
= 3.75 кг т~; тм , ш = 122 кг.
Уточнение момента инер-
ции муфт, расположенных на
быстроходном валу механиз-
ма. Ранее была выбрана соединитель-
ная зубчатая муфта с промежуточ-
ным валом, момент инерции которой
равен JM = 1,15 кг-м2. Половину этой
муфты, расположенную ближе к ре-
дуктору, мы заменили муфтой с тор-
мозным шкивом. Следовательно,
момент инерции муфт на быстроход-
239
ном валу механизма изменится и бу-
дет равен ^м.быстр 'Ам/** 1
- 1,15/2 + 3,75 = 4,32 кг-м3.
Механизм передвижения тележки.
В ы б о р кинематической схем ы.
Выбираем кинематическую схему с
центральным приводом, изображен-
ную на рис. 2.8. Ее достоинством
является отсутствие перекоса колес
при работе двн1ателя и тормоза во
время нускрв и торможений.
С тат ические н а грузки н а
колеса. Вес номинального груза ра-
вен G — 784.5 кН. Вес тележки
определим по соотношению GT -
- (0,25... 0,35) G - (0,25... 0,35) 784.5 =
= 196,1... 274.6 кН. Примем G, =
= 274,6 кН. С учетом коэффициента
неравномерности нагружения колес
максимальная статическая нагрузка на
одно колесо будет равно />CTmBS = (G +
+ GJ 1,1/4 = (784,5 + 274,6) 1.1/4
= 291,2 кН. Минимальная статическая
нагрузка на одно колесо Р ml - G, х
х 0,9/4 ~ 274,6'0,9/4 ^61,8 кН.
Выбор колес. По табл. 2.11,
используя значение ?c.t tn.u, выбира-
ем колесо диаметром D ~ 630 мм:
[%.J = 320 кН.
Выбор колесных установок.
По диаметру колеса выбираем стан-
дартные колесные установки (Прило-
жение 8): приводную колесную уста-
новку К2РП-630 исполнения I (один
конец вала со шпонкой) и неприводпую
К2РН-630, имеющие параметры: В =
= 630 мм; <7=110 мм; 7Ц = 130 мм;
В = 100 мм; тК1У Г1р = 471,7 кг; ткл кепр =
= 452,1 кг; греб = 2. Форма поверх-
ности кат ания - цилиндрическая. Тип
подшипника - роликовый радиальный
сферический двухрядный с симмет-
ричными роликами.
Выбор под г е ле жеч н о г о
рельса. По табл. 2.20 выбираем
рельс КР-80 ГОСТ 4121-76 с выпук-
лой головкой. Значение b равно 80 мм.
Проверим соотношение ширины до-
рожки катания колеса В и головки
рельса 6: В - b = 100 80 = 20 мм,
что не меньше нормы, указанной в
табл. 2.12. Другие параметры рельса:
г - 400 мм; b = 130 мм; у = 6,43 см;
Г = 81,1 Зсм, Jx= 1547 cm4; mnor =
= 63.7 кг; /меря = 9,0; 9,5; 10,0; 10.5;
11,0; 12,0 м: ~ 4 . . . 12 м; маге-
риал -шаль М62.
С о п ро г и в л е н и е передни ж е-
нию тележки. Опреде шм вначале
сопро гивлеште. сот даваемое i рением.
Из laO'i. 2.13 вотьмем значение
и = 0,8 мм, И1 1ибл. 2.14 - значение
/ - 0.015. При гибком i оконод.воде
тележки по табл. 2.15 к - 2,0. Но
формуле (2.27) определим с*»нр(и пи-
ление сил 1рения: П1Р (2/4.6 т
+ 784,51(2-0.8 | 0.015- I 30) 2,0/630
I 1,94 кН.
Определим сонротивлеппе. созда-
ваемое уклоном под 5 еле же чти о ну
ти. Уклон ранен и. 0,002. По форму-
ле (2.28) найдем И’. — (1.002 (2 74.6 +
+ 784,5) 2..12 кН.
Определим сопрет ивление, со тла -
ваемое при разгоне силами инерции.
При скорости движения тележки ме-
нее 1 м/с 3 = 1.25. Масса тележки рав-
на 28 т. Из этого значения необходи-
мо вычесть массу крюковой иод вески,
совершающей вместе с iрузом слож-
ное колебательное движение. Тогда
масса пос i у пат слыю двпж у'п?1 гея
объекта будет равна ж|1(.г • - иу,
= 28 - 3.675 = 24,325 1. Но i аб>г 2.16
примем значение а - 0.5 11/ | ”0.5 х
х 0,1 -0,05 м/с2. По формуле (2.30)
найдем Н\я = 1.25 24.325 0.05 =
= 1,52 кН.
Сопротивление, создаваемое рас
качиванием груза на гибкой подвеске,
определим по формуле (2.31 у
= (80 4- 3,675)0.05 = 4.18 кН.
Учитывая, что кран рабочим в
помещении, но Формуле (2.25) нахо-
дим И = 11,94 д 2,12 4 1,52 I 4,18
= 19,76 кН.
Выбор дви 1 ат ел я. Предвари- *
тслыюс значение к.п.д,. механизма
примем равным )]1|р 0,9. h > ибл.
2.17 примем значение Ч‘и г 1, :. Но
формуле (2.32) определим ? дам ди;
мую мощное 1ь:
19,76 0.5
0,9-1’.55
7,08 кВт
Выбираем двигатель типа МГН
211-6 ГОСТ 185-70, имеющий
метры: N = 8,2 кВт; ПВ[Я 2УС:
и,- = 900 об/мин; дп - 0. i 15 кг м2:
ап _ = 40 мм: шГ1И = 120 кг.
JS л—I *7
240
Выбор передачи. Частота вра-
щения колеса равна пк = v/(nD) = 30/
/3,142-0,63 ~ 15,16 об/мин. Требуемое
передаточное число механизма равно
(У = = 900/15,16 s 59,37. Выбе-
рем тип редуктора ВКУ-М -верти-
кальный крановый усиленный модер-
низированный.
• Определим эквивалентный мо-
1 менг на тихоходном валу редуктора
; 7' . Аналогично механизму главного
подъема примем для группы режима
4М класс нагружения В2 и класс ис-
пользования А4. При этом к = 0,25;
kQ = 0,63; /маш = 12 500 ч (см. табл. 1.3,
1.4). Частота вращения тихоходного
вала редуктора равна частоте враще-
ния колеса: п.( ~ 15,16об/мин.
1 Число циклов нагружения на тихо-
ходном валу редуктора по формуле
(2.33): ZT = 30 х 15,16 х 12500 =
= 5,685 • 10б. Передаточное число тихохо-
дной ступени редуктора предполагаем
близким к значению wT = 5. Суммарное
число циклов контактных напряжений
зуба шестерни тихоходной ступени
Zp = Zt(< = 5,685 -106- 5 28,42 ’ 106.
Базовое число циклов контактных
напряжений равно Zp = 125 х Ю6. Ко-
эффициент срока службы равен
Vz,, _ Л/28,42 10
VZ0 V 125-HJ6
~0,61.
Коэффициент /долговечности равен
кл ~к(.к( - 0,63-0,61 s 0,38. Значение
/<л необходимо принять не менее чем
0.63, поэтому окончательно кя ~ 0,63.
Определим расчетный крутящий
момент Г на тихоходном валу редук-
тора. Будем ориентироваться на ти-
поразмер редуктора ВКУ-765М. Бли-
жайшее’передаточное число этого ти-
поразмере равно нр = 63, что расхо-
дится со значением и на допустимую
величину, равную 5,8%. К.п.д. редук-
тора, по данным за во да-изготовите-
ля, равен -- 0,94. Также находим
значение tn - п« /30 = 94,26 рад/с;
= 8,2-10794,26
— 87 Н-м. Примем = 2,0. Тог-
fn п,ях Тцв.еУпшах 2,0
= 174 Н-м. По формуле (2.34) опре-
делим расчетный крутящий момент
на тихоходном валу редуктора: Тр —
= 174’63 0,94 = 10 300 Н-м. По фор-
муле (2.15) найдем расчетный эквива-
лентный момент: Тр , = 0,63 • 10 300 =
= 6492 Н м. Редуктор ВКУ-765М
имеет номинальный крутящий мо-
мент на тихоходном валу, равный
Тр н — И 964... 14612 Н • м. Следова-
тельно. условие (2.14) выполняется.
Кроме указанных, редуктор имеет па-
раметры: аш<: = 765 мм; 4рЫСТр
= 50 мм; dn П)Х — 125 мм; тр = 800 кг.
Схема сборки редуктора 23 или
13- в зависимости от того, где рас-
положен редуктор. Полное условное
обозначение типоразмера редуктора:
ВКУ-765М-50-23-У2 ТУ 24.01.3673 79.
Определение фактической
скорости и к.п.д. механизма.
Фактическая скорость передвижения
тележки равна г л = 0)„г,/«ц„ =
= 94,26 • 0,315/63 = 0,47 м/с. Это значе-
ние отличается от заданного на 6%,
что допустимо. К.п.д: одной зубчатой
муфты равен рм = 0,99. Поставим одну
муфту между двига телем и редуктором
(зубчатую муфту 1-го типа-с наружной
обоймой) и между редуктором и ко-
лесом также одну муфту (зубчатую
муфту 2-го типа - с промежуточным
валом). Поэтому Пм„ ж п’мЛРПм =*
= 0,99’0,94’0,99 ^0,92. Данное зна-
чение к.п.д. мало отличается от при-
нятого предварительно, поэтому пег
рерасчет мощности не делаем,
Выбор муфт. По диаметрам
концов соединяемых валов выбираем
муфты: для быстроходного вала - зуб-
чатую муфту 1 -1600-40-2-50-2-2У2
ГОСТ 5006-83; для тихоходного вала -
зубчатую муфту 2-25000-125-1 -110-1-2У2
ГОСТ 5006-83. Параметры муфгы на
быстроходном валу: 7М „ = 1600 Н м;
*^м 0,06 КГ М , ^titnux - так
= 55 мм; тм = 9,2 кг. Параметры
муфты на тихоходном валу; Т„ „
- 25000 Н м; JM = 2,25 кг • м3;
^лентах ” ^ирп» nwx “ ^0. ММ,
= 100 кг.
Выбор тормоза. По формулам,
приведенным в § 2.2,лаходим значе-
ния: 1У 0, и/н0, jylp0. w;0 = ug;=-
= 0,02-274,6 S 0,55 кН; 1Уия0 = 5m, г/ =
= 1,25-28-0,05 = 1,75 кН; «
= GT(2p + Шк /D = 274,6(2-0,8 +
+ 0,015-130) 1,0/630 ё 1,55 кН. По
24]
формулам (2.37) находим значения
соответствующих крутящих момен-
тов, приведенных к первому валу ме-
ханизма:
Tv0 = 0,55 IO3-0,315-0,92/63 s
^2,53 Н-м; Тйи0 = 1.75-103-0,315 х
х 0,92/63 8,05 Н-м; Т 0 = 1,55 х
х 103-0,315/(63-0,92) 8.42 Н-м. Здесь
Лмск ~ Лмех = так как тормоз
планируем ставить на втором конце
вала двигателя с целью повышения
удобства обслуживания.
Расчетный тормозной момент ме-
ханизма по формуле (2.36) будет ра-
вен ^.мех = 2.53 + 8’05 ~ М2 = 2,16
Н м. Расчетный тормозной момент
тормоза равен Тт.р = Гпр.мсх = 2,16 Н-м,
так как тормоз в механизме один.
Выбираем тормоз типа ТКГ, так
как электрогидравлический толка-
тель, являющийся приводом тормоза,
служит одновременно своеобразным
демпфером, снижая динамику замы-
кания тормоза. Это благоприятно
скажется на сцеплении колес тележки
с рельсами при торможении.
Выбираем типоразмер тормоза:
тормоз ТКГ-160-У2-50-380-40 ОСТ
24.290.08-82, имеющий следующие
параметры: Тт „ = 98 Н-м; DTш =
= 160 мм; В* = 70 мм; Ршт =157 Н;
^шттпах ММ, Туст 200 ММ, Л1тор
= 25 кг. Типоразмер электрогидрав-
лического толкателя-ТЭГ-16М.
Выбор тормозного шкива.
По диаметру конца вала двигателя и
требуемому диаметру шкива выбира-
ем стандартный тормозной шкив 2-го
исполнения (с цилиндрическим поса-
дочным отверстием). Стандартных
шкивов с коническим посадочным от-
верстием на требуемый диаметр вала
нет. Шкив имеет следующие пара-
метры: £)т ш = 160 мм; = 70 мм;
^расттах = = 6’9 КГ^ УСЛОВ-
ное обозначение типоразмера шкива
Шкив Ш2-160/40 ОСТ 24.290.062-75.
Уточнение исполнений дви-
гателя и муфты на быстроход-
ном валу. Так как двигатели серии
МТН могут иметь исполнение с двумя
концами вала только в том случае, если
форма концов одинакова, то тот конец
вала, который стыкуется с муфтой, так-
же должен быть цилиндрическим. Сле-
242
дователъно, зубчатая муфта па быстро-
ходном валу должна состоять из двух
полумуфт, имеющих различную фор-
му посадочных отверстий во втулках:
коническую-со стороны редуктора и
цилиндрическую-со стороны двига-
теля. Поэтому типоразмер муфты из-
менится и будет иметь следующее
условное обозначение: Муфта 1-1600-
40-1-50-2-2У2 ГОСТ 5006-83.
§ 12.3. Компонование тележки
Нанеся координатные оси ла и гг,
помещаем центр барабана главного
подъема в начало координат (рис.
12.1). Положение редуктора опреде-
лится межцентровым расстоянием от-
крытой зубчатой передачи и распо-
ложением зубчатого венца.
Хребтовые балки тележки, обра-
зуемые вертикальными листами, рас-
полагаем (пунктирными линиями) под
опорами барабана. Расстояние между
листами /j = 330 мм берем из вы-
бранной колесной установки.
Ввиду того что на барабане имеет-
ся зубчатый венец, середина барабана
оказывается смещенной относительно
продольной оси тележки -середины
колеи. Стремясь к минимальному
смещению барабана, отодвигаем не-
сколько правую хребтовую балку с
таким расчетом, чтобы большая часть
опоры барабана все же находилась
над балкой.
Принимая сход канатов с бараба-
на со стороны зубчатого зацепления,
что уменьшает нагрузки на подшип-
ники барабана, размешаем верхние
блоки и уравнительный балансир со
стороны, противоположной полюсу
зацепления открытой передачи. Дви-
гатель главного подъема располагаем
ближе к правой хребтовой балке те-
лежки, применяя промежуточный вал-
вставку. Предусматривая проходы
между механизмами, располагаем ле-
бедку вспомогательного подъема и
механизм передвижения тележки.
Оценивая на этой стадии получен-
ное компонование механизмов, отме-
чаем. что межцентровое расстояние
открытой передачи мало, в резуль-
тате чего опора барабана «налезает»
на редуктор; полученные размеры ко-
n' V
Рис. 12.1
леи LT = 4800 мм и особенно базы
В 6000 мм-очень велики; нагрузка
на приводные колеса в груженом сос-
тоянии значительно больше нагрузки,
приходящейся на неприводные коле-
са; компоновка не удовлетворяет
требованиям компактности располо-
жения механизмов на тележке.
Проведем корректировку пара-
метров механизма главного подъема.
Для увеличения межцентрового рас-
стояния открытой зубчатой передачи
увеличим число зубьев венца до z'B —
= 73. Тогда межцентровое расстоя-
ние возрастет до
а' мм,
0„ 2 2
что будет достаточно для размеще-
ния опоры.
Передаточное число открытой пе-
редачи станет равным
«от = 4ДШ = 73/13 = 5,62.
Общее передаточное число механиз-
ма будет i/M„ = мр«оТип = 15,21 -5,62 х
х 4 = 341,92. Чтобы сохранить ско-
рость подъема груза, близкую к за-
данной, увеличим диаметр барабана
до значения £)й = 1260 мм. Тогда фак-
тическая скорость подъема груза
/ _ _ 58,64-0,63
«меи 341.92
0,11 м/с, т. е.
^'под ^ПОД •
Окончательно размеры установки
барабана: L 6 = 4180 мм; L —
= 4100 мм; £6 = 3700 мм; £>б =
= 1260 мм; lit - 1098 мм; / = 186 мм.
Остальные размеры этой сборочной
единицы остались прежними.
Переходим к компонованию те-
лежки с измененными параметрами
механизма главного подъема. Распо-
лагая центр барабана главного подъе-
ма в начало координатных осей хх и
>7 (рис. 12.2) на виде сверху, устанав-
243
Рис. 12.2
22 W
Рис. 12.3
ливаем корпуса подшипников оси ба-
рабана через платики па верхний лист
рамы тележки на виде сбоку (рис,
12.3). Далее устанавливаем редуктор,
положение которого на виде сверху
зависит от его положения относитель-
но барабана по высоте. Принимая
высоту рамы под редуктор йф =
= 150 мм (из условия удобства уста-
новки крепежных изделий), определя-
ем горизонтальную проекцию меж-
центрового расстояния:
[(Лр Ф *Ф) -
-(ЛОП+\Л)Г = У1032Г-
- [(580 + 150) - (320 4- 40)]2 =
— 963,4 мм.
Намечаем пунктиром положения
хребтовых балок тележки из условия
опирания на них опор барабана, стре-
мясь к минимальному смещению
центра барабана относительно про-
дольной оси тележки.
Попы лаемся расположить верхние
блоки и уравнительный балансир со
стороны зубчатого зацепления (это
значительно уменьшает базу тележ-
ки), намечая сход канатов с барабана
с противоположной стороны.
Намечаем пунктиром вертикаль-
ные поперечные листы рамы таким
образом, чтобы они воспринимали
вертикальную нагрузку от верхних
блоков и уравнительного балансира.
С целью компактного расположения
механизмов отказываемся от проме-
жуточного вала и устанавливаем дви-
гатель непосредственно у редуктора,
заменив муфту с тормозным шкивом
па соединительную зубчатую муфту,
типоразмера: Муфта 1-16000-90-2-
110-2У2 ГОСТ 5006-83. Статический
крутящий момент при торможении,
приведенный к быстроходному валу в
’ связи с изменением парамет ров, бу-
дет ранен
_ _ «20571-0,63 -0,89 __
с,'г ’ CLT 341Д2
= 1 346 Н М.
Отсюда расчетный тормозной мо-
мент Тт р - кг Тстл = 1,75 1346 =
2356 Нм, что несколько меньше
определенного ранее. Таким образом,
тормоз остается прежним. Его уста-
навливаем с внешней стороны редук-
тора, на входной вал которого (изме-
нилась схема сборки редуктора) необ-
ходимо установить тормозной шкив
диаметром 500 мм. Эту деталь следу-
ет конструировать исходя из разме-
ров тормоза и вала редуктора. В ле-
бедке вспомогательного подъема так-
же отказываемся от промежуточного
вала, соединяющего двигатель с ре-
дуктором, что позволяет располо-
жить ее ближе к барабану главного
подъема. Тормоз устанавливаем на
втором конце входного вала редукто-
ра. Намечаем положение вертикаль-
ных листов рамы гележки, на кото-
рые будут опираться двигатели, опо-
ра барабана и редуктор лебедки вспо-
могательного подъема.
Для обеспечения лучших условий
сцепления приводных колес с рель-
сами в порожнем состоянии привод
механизма передвижения располага-
ем со стороны барабана главного
подъема, так как на этой стороне
тележки расположено более тяжелое
оборудование.
Ориентировочно намечаем поло-
жение неприводных ходовых колее и
контур рамы тележки. Геометричес-
кий центр рамы принимаем за центр
тяжести- точка OD на рис. 12.2. Вес
рамы определится разностью между
ранее принятым весом тележки и ве-
сом оборудования, установленного на
ней (табл. 12.1): G* = 274,6 - 235,3 =
= 39,3 кН.
На виде сверху отмечаем центры
тяжести всего оборудования и коор-
динаты относительно осей тх и i Г
заносим в табл. 12.1. Определяем ко-
ординаты центра тяжести порожней
гележки (точка От) но формулам (3.1
_ - J2.164 96(> — IJ.ftOS i К20-Т .. 4-21D0 _
_ 274.---
= — 360 мм;
12.164 4960 0.60 I960 - . . 1 .^40
-— --1 — — - - — - где
274,6
= —930 мм.
Для определения координат точки
приложения веса груза к раме тележ-
245
Таблица ! 2.1
Механизм Оборудование Масса, кг Вес. кН Координаты, мм
Двигатель 1240 12,164 - 960 1960
Главного Муфта 62 0,608 - 1820 1960
подъема Редуктор с тормозным 3640 35.708' - 2280 1020
ШКИВОМ
Барабан в сборе 6600 64,746 - 240 0
Верхние блоки 1000 9,810 + 100 1120
Уравнительный балансир 300 2.943 + 100 1640
Тормоз 400 3,924 - 2760 1960
Канаты 1300 12,753 + 100 1 120
Крюковая подвеска 3675 36,052 + 100 i 120
Двигатель 345 3,384 + 840 2200
Вспомогатель- Муфта 15 0,147 + 1380 2200
кого подъема Редуктор с тормозным
ШКИВОМ 342 3,355 + 1740 2 Г 60
Тормоз и т. д. 92 0,903 + 2060 2200
Передвижения Двигатель с тормозным
шкивом 130 1,275 + 840 г 1100
тележки Редуктор с муфтой 810 7.946 0 4- 1 100
Тормоз Трансмиссионные валы с 25 0,245 -1 1240 + 1100
муфтами 650 6,377 0 + 1100
Неприводные колеса 472 4,630 -2100 3000
472 4.630 + 2100 3000
Приводные колеса 492 4,820 -2100 + 1 ' 00
492 4,820 + 2100 + поо
Рама тележки 4011 39.348 0 9^0
Всего,,. 28000 274,600
ки рассматриваем равновесие подвес-
ки в верхнем положении. В результате
проведенных построений, описанных
в § 3.2, подвеска займет положение,
показанное на рис. 12.3 пунктирной
линией. Обратим внимание на го, что
канаты с подвески идут на барабан
под большим углом к вертикали, при-
мерно 20°. С большими отклонения-
ми от вертикали канаты идут также
на уравнительный балансир и на верх-
ние блоки. Все это приведет к увели-
чению статического усилия в канатах
и появлению значительных горизон-
тальных усилий в опорах барабана,
опорах верхних блоках, а также на
уравнительном балансире. Для устра-
нения этих недостатков изменяем за-
пасовку канатов, меняя место их схо-
да на противоположную сторону ба-
рабана. При такой запасовке прихо-
дится мириться с другим недостат-
ком - S-образным изгибом каната.
Крюковая подвеска в этом случае
займет положение под верхними бло-
ками, зак как углы отклонения кана-
тов, идущих на барабан и на уравни-
тельный балансир, примерно одина-
ковы. Теперь уточняем положение не-
приводных ходовых колес, ч.е. базу
гележки, из условия одинаковой на-
грузки на приводные и неприводные
колеса по формуле (3.2):
2 (274,6 2030 + 784,8-2220) _
-------------------------— 4j42 мм,
274.6 -I- 7Н4,К
Окончательно принимаем 8. -
— 4300 мм и, поскольку’ база измени-
лась (озносительно принятой) меисе
чем на 5%, уточнений в положении
центров тяжести геисжки и груза fie
производим.
2-360\ гт
4200/ = 84’2 КН;
2 360\ _ u
Т20оЬб0'?КН;
2•36С\
Определяем нагрузки на ходовые
колеса тележки в порожнем состоя-
нии по формулам (3.3):
D 274,6/. £ 2-120 t
Рь=-Д1+7зоо +
274,6Л ( 2-12С
1Т 4 \ 4300
Р - 274>6Л 2-120 !
2т 4 \ 4300 4200 /
- 76,6 кН;
у, _ 274.6 Л __ 2- 120 _ 2 36О\
21 4 \ ОЮ ~4200~/
= 53,1 кН.
Нагрузки на ходовые колеса от
веса поминального груза главного
подъема определяем, используя фор-
мулы (3.4) и учитывая, что равно-
действующая смещена не только от-
носительно оси у'/, ио и относитель-
но оси х'х’:
р _ 784.8 Л _ 2-170 _ 2-100> _
= 171,5 кН:
784.8/', '2-170 2- l00'\
Р, г =-----I —---------Г ----- =
lG 4 \ 4300 ' 4200 /
- 189,9 кН;
Р _ 784.8Л + 7-170 __ 2-Ю0\ _
20 4 V ’ 4ДЙГ 420Щ/
- 202,5 кН;
D, 784,8/. 2Л70 2- 10()\
4 \ 4300 4200 /
- 220,9 кН.
Суммарные статические нагрузки па
ходовые колеса:
Р, - 84,2 ч- 171,5 = 255,7 кН:
Р\ 60,7 -1- 189,9 - 250,6 кН;
Р2 = 76,6 + 202.5 « 279.1 кН.
Р'2 -= 53,1 + 220,9 = 274.0 кН.
Максимальная разница в нагрузках
па колеса
д/>=1оо--^До
10%.
что является приемлемым.
Наносим установочные размеры и
габариты, после чего меллго перехо-
дить к конструктивной проработке
механизмов и тележки в целом (рис.
12.4).
§ 12.4. Проверочные
расчеты механизмов
Проверка двигателя механизма глав-
ного подъема на время разгона. При
компоновании тележки были внесены
изменения в кинематическую схему
механизма главного подъема. В ре-
зультате изменились параметры: диа-
метр барабана D'f, = 1260 мм; переда-
точное число механизма и'мек = 341.92.
Так как тормоз перенесен на второй
конец быстроходного вала редуктора,
необходимо определить момент инер-
ции тормозного шкива, который не
входит теперь в состав муфты. Масса
шкива 84,5 кг. Коэффициент, учиты-
вающий распределенность массы (см.
§ 4.1), принимаем равным £тш = 0,6.
Момент инерции тормозного шкива
будет равен JT ш = тт.ш г2 $т.ш =
= 84,5-0,252-0,6 = 3,17 кг-м . Момент
инерции вращающихся масс, распо-
ложенных на быстроходном валу
механизма, Л = J + + 7ТЩ =
= 5,25+1,15 + 3,17 = 9,57 кг-м2. По
формулам (4,3)... (4.7) определя-
ем параметры: J = 1,15-9,57 5
S Н,01 кг-м2; тпост = 3675 + 80000 =
= 83 675 кг;
83 675'0,632 Л 2
П0СТ'Р “ 341,922 0,86 ~ 0,33 КГ ’ М ’
JMex.p = И,01 + 0,33 = 11,34 кг-м2;
820 600 0,63
341.92-0,86
= 1758 Н • м.
По табл. 2.17 примем кратность
среднепускового момента двигателя
Vn.cp = 1,55. Номинальный момент
двигателя определим по формуле
(2.35): Тдвл, = 70-103/58.64 й 1194 Н-м.
Среднепусковой момент двигателя по
формуле (4.2) равен Т = Vn.cp Лв.н =
= 1,55-1194 = 1850 Н м.
По формуле (4.1) Цайдем время
разгона механизма при подъеме но-
минального груза:
58.64-11,34 _ -
t * = —'------= 7.2 с.
₽ф»«т 1850-1758
247
5700
Рис. 12.4
5000 *
Схемы надидки канотаёг Вспомогательный
Главный подъем подъем
ходоВые колеса
Придовные колеса
* Размеры для елрадок
От Веса тележки От дес а груза
PfT, кН su Рю, кН 777,5
PfT, кН 50,7 Р&,кН 759,9
Р2Т,КЯ 75,0 Р№,КН 202,5
Р2Т, кН Р2С,кН 220,9
Основная надпись
Рис. 12.4. Продолжение
Данное время очень большое (см.
рекомендации в § 4.1), что приведет к
снижению производительности крана.
Поэтому принимаем решение вы-
брать более мощный двигатель
МТН-613-10, имеющий параметры:
N == 90 кВт; ПВ - 25%: - 570
об/мин; J - 6,25 кг м , 4Д0 =
= 90 мм; m.IB = 1240 кг.
По тем же формулам определяем
пара метры: содв £ 59,69 рад/с; уяод 2
S 0,11 м/с; Ji - 10,57 кг • м2: jlip s
12,16 кг • м2; JMex й 12,49 кг-м2;
Тдвн £ 1508 Н-м; Тпй9 ^ 2337 Н-м;
^р.фнкт “ 1,3с.
Значение ^,фцкт находится в диапа-
зоне рекомендуемых значений време-
ни разгона; следовательно, вновь
выбранный двигатель обеспечит не-
обходимую интенсивность работы.
Среднее ускорение груза при та-
ком времени разгона равно а — Цюд//р -
= 0,11/1,3 £ 0,08 м/с2. Это значение
не превышает рекомендуемое значе-
ние для кранов, работающих в меха-
носборочных цехах (см. .дабл. 2.16).
Диаметр конца вала4' двигателя
не изменился, поэтому выбранная
ранее соединительная муфта сохраня-
ется.
Проверка двигателя механизма
главного подъема на нагрев. Вновь
выбранный двигатель должен разви-
вать в период установившегося подъе-
ма поминального груза мощность,
которая с учетом фактических вели-
чин Г’по ( и Г|М|,Ж будет равна N'1max -
- - 820,571-0,11/0,86 £
S 105 кЕт. Это значение на 16,7%
превышает номинальную мощность
двигателя. Следовательно, двигатель
должен быть проверен на нагрев.
По графику на рис. 4.4, используя
значение номинального к.п.д. меха-
низма r|MtK ~ 0,86, найдем значения
к.п.д, при подъеме грузов, вес кото-
рых соответствует относительной до-
ле от поминального, указанной па
ординате типового графика на рис.
4.2, а. Значения к.п.д. занесем в табл.
12.2.
По формулам (4.10) определяем
значения статических моментов, соз-
даваемых на валу двигателя при
подъеме и опускании весом /-го груза,
и заносим их в табл. 12.2.
Определим моменты инерции всех
движущихся частей механизма при
работе с грузами /-й массы. Значения
у-х масс, включая массу крюковой
подвески, равны: m[р 1 = 83 675 кг;
mrp2 - 43 675 кг; тгр ? - 19 275 кг;
mrp4, “ 7675 кг. По формуле (4.5) оп-
ределяем значения Jrp;, а по формуле
(4.3)-моменты инерции и зано-
сим их в табл. 12.2.
Таблица f2.2
Параметр Значение параметра при
G 0,5(7 0,195 6’ 0,05 6’
подъем опускание подъем опускание подъем опускание подъем опускание
о;, н 820600 410300 ]60000 41000
Л МАЯ j 0,86 0,82 0,66 0,38
г„ J, Н м 1758 1300 922 620 447 195 199 29
J,p J, КГ'М2 0,33 0,18 ОДО 0,07
Л КГ’М2 12,49 12,34 12,26 12,23
С 1,30 0,23 0,52 0,28 0,39 0,32 0,34 0,34
С 18,18 16,67 18,18 16,67 18,18 16,67 18,18 16,67
250
Определим угловую скорость дви-
гателя при опускании. Число полюсов
у двигателя МТН 613-10 равно 10.
Следовательно, число пар полюсов р
равно 5. Синхронная угловая ско-
[ рость (скорость идеального холосто-
го хода) вала двигателя равна wc =
= 2л/’/р - 2'3,142'50/5 £ 62,83 рад/с.
По формуле (4.12) находим а}1НО11 =
, - 2от - (одв = 2-62,83 - 59,69 = 65,97
'< рад/с. По формулам (4.11) вычисляем
значения времени разгона механизма
при подъеме и опускании различных
грузов и заносим данные значения в
табл. 12.2. Среднюю высоту подъема
при работе крана в сборочном цехе при-
нимаем (см. § 4.1) равной //ср = 2 м.
; Скорость опускания груза равна г =
= = 65,97 0.63/341.92 к
^0,12 м/с. По формулам (4.15) опре-
деляем значения времени установив-
шегося движения при подъеме (/у>|ШД)
I и при опускании (/ оп) и заносим их в
} табл. 12.2.
Проверим условие, необходимое
для выбора коэффициента р, учиты-
вающего ухудшение охлаждения дви-
гателя в период пуска. Время разгона
механизма при подъеме номинально-
го груза равно 1,3 с. Величина /у под/60
) равна 0,3 с. Следовательно, /р.пОдС>
> t под/60. Поэтому значение коэффи-
циента р можно выбрать из диапазо-
на 0,65 .. .0.78. Примем р — 0,7.
Теперь вычислены значения всех
! параметров, входящих в формулу
(4.9). Остается уточнить количество
! подъемов и опусканий грузов различ-
' пого веса в течение рабочего цикла.
Этому количеству будет соответство-
1" вать количество значений времени
разгона, времени установившегося
, движения, а также количество стати-
t , ческих моментов, которые необходи-
мо будет подставить в формулу (4.9).
Примем общее количество грузов,
поднимаемых за время рабочего цик-
< ла, равным 10, Тогда от графика на-
; гружения (см. рис. 4.2,а) можно
перейти к диаграмме нагружения (см,
рис. 4.2,6). Количество столбиков на
диаграмме соответствует относитель-
ной доле времени работы механизма
с грузом /-го веса. За время принятого
рабочего цикла груз весом G подни-
мается и опускается 1 раз, груз весом
0,5 G- 5 раз, груз весом 0,195 G-1 раз
и груз весом 0,05 G3 раза.
Подставим значения параметров в
формулу (4.9):
Т = /23372(1,30 + 0,23 + 5-0,52 + 0.28 +
’ V ОЛОЗО + 0,23 + 5-0.52 + 5-0,28 +
+ 0,39 + 0,32 + 3 - 0,34 + 3 • 0,34) + 18,18 х
+ 0,39 + 0,32 +З“б,34 + 3'0,34) + 10 х
(I7582 + 5'9222 +4473 * + 3 1992) +
х ------------------------------------...
х 18,18 + 10-16,67
+ (б,67(13002 + 5~ 6203 + 1953 + 3 293)
S 834 Н-м.
Проверим условие (4.8): Тэ —
= 834 Н-м < Тяли = 1508 Н-м. Дви-
гатель не перегреется.
Проверка двигателя механизма
передвижения тележки на время разго-
на. Определим момент инерции тор-
мозного шкива. Значение коэффициен-
та, учитывающего распределенность
массы, равно £ = 0.6. Тогда /т ш будет
равен Тт ш = тт.шг£ш£ = 6,9 • 0,082 х
х 0,6 0,026 кг-м2. Момент инерции
всех вращающихся частей на быстро-
ходном валу механизма будет равен
J 1 = Л . Ш р . д в + J м = 0,026 +
+ 0,115 + 0,06 = 0,201 кг-м2. Сумма
поступательно движущихся масс
равна тпост = m + m = 28 + 80 =
= 108 т = 1,08- 10s кг. По формулам
(4.2)... (4.7) находим другие пара-
метры, необходимые для расчета:
J = yj = 1,15 0,201 = 0,23 кг-м2;
т _ = 1.08' 105'0,3152 _
П0СТ'Р 63*0,92
= 2.93 кг-м2;
^мех.р = Лр + Лост.р = О-23 + =
= 3,16 кг-м2;
'Гп.ср = Уп.ср^дв.н = 1.55'87 =
= 134,85 Н-м;
РТст = ГТтр + 1+;= 11,93 + 2,12 =
= 14,05 кН = 14050 Н; '
и;гг, _ 14050'0,315
63 0,92
= 76,36 Нм.
По формуле (4.1) вычислим время
разгона:
251
рфиК1 Лер -- Л,.р 04,85 - 76,36
- 5.1 с.
Данное значение не превышает
рекомендуемого (см. § 4.2). Следова-
тельно, выбранный двигатель обеспе-
чит необходимую интенсивность
разгона.
Проверим среднее ускорение при
разгоне: а = гперДр = 0,47/5,1
= 0,09 м/с2. Это значение также не
превышает рекомендуемого (см.
табл. 2.16).
Проверка времени торможения ме-
ханизма передвижения тележки. По
формулам (4.19) ... (4.24) определяем
параметры:
пост.г 2
"мех
1,08- 1()5 -0,3152 0,92 _ ло 2
= 2,48 кг • м2
632
•Л^.т = Лр + Лостл - 0,23 + 2,48 =
= 2,71 кг • м2;
и;р = (f7T + G,.P) = (274,6 +
+ 784.5) 103LSl±°-015'13Jj 5965
'К. , - и;; -
= 3845 Н:
т И-‘Г‘
'с:, г
*^МСЛ 1 мех
630
и; - 5965 - 2120 =
3845-0.315 _ Qn u
-------— = 20,90 Н • м;
63 0,92
(о,1И./^Х1 94,25-2.71
Т.р -1~С, ~ 2.53 + 2(190
Данное значение времени очень
велико. Желательно, чтобы время
торможения тележки не превышало
времени разгона. Если принять 4 —
5с. то необходимо увеличить тор-
мозной момент тормоза. Он должен
быть равен 33,1 Н-м. Тормоз ТКГ-
160 необходимо отрегулировать на
данный тормозной момент. Характе-
рце гика тормоза позволяет это, гак
а к Т1Н = 98 Н-м.
Проверка запаса сцепления колес
тележки с рельсами при разгоне. При
компоновании тележки были получе-
ны фактические статические нагрузки
на приводные колеса, когда тележка
не нагружена. Сумма нагрузок на
приводные колеса равна 0 -
= 144,9 кН. По формулам (4.^7) и
(4.28) находим: F<tt 0 С1р 0 =
= 0,2- 144,9 = 28,98 кН; Тспс =-
= Гсц. о = 28,98 0,315^9.13 кН м.
Момент на оси приводных колес, со-
здаваемый уклоном, равен 7у 0 к =
= и; ork. = 0,55 • 0,31 5 = 0,17 кН -м.
Момент на оси приводных колес, со-
здаваемый силами трения, равен
Ттр.0.к - %о(М +Ю = 144,9(0,8 х
х 10“3 4- 0,015-0,065) 0,26 кН-м.
Здесь гц-радиус цапфы. Используя
формулы (4.5) и (4.3), определяем мо-
менты инерции для порожнего со-
стояния тележки:
_ штг2 _ 28- 103-0,3152
,10С‘'Р* ° “ ' "63^2“ ’ = >
= 0,76 кг • м2;
^мех.р.о *^вр Т Aioci.p.o 0,-23 [
+ 0,76 = 0,99 кг-м2.
Сила статического сопротивления
движению равна И/, л -
- И/.0 = 1,55 - 0,55 - 1,00 кН. .Ис-
пользуя формулы (4.17), (4.32), (4.31),
(4.30) и (4.40), последовательно опре-
деляем параметры:
1
т _ ИС.р.о'У = 1,00 10 ' 0.3 I 5
tT-p-° и п 63-0.92
“мсц 1мсх
5,43 И • м;
Е - 4.eP-C,.p.k1 = В4.85_- 5.43
Р‘°'~ Л_.р,и П.99
= 130,7 рад/с2;
Тин.вр.р =/врер.0 = 0,23-130,7 г=
30,06 Н-м;
2дв (^.ср ^iiH. вр. р) ^мех Ом<х
= (134,85 - 30,06)/(63-0,92- Ю’3)
6,07 кН-м;
^м.р = ^ст.р.о/’/мсх.р.о = 0,76/0,99 2-
0,77.
*
г
Определим коэффициент жесткос-
ти тихоходного участка трансмиссии.
Максимальный статический момент
на тихоходном трансмиссионном
валу, действующий при передвижении
тележки с номинальным грузом на
крюке механизма главного подъема,
равен
I
I
т
и
i
1
ь
ч
^И^+И; _ 11.94 + 2.12 3
max *
x 0,315 s 2213 Н-м.
В качестве материала трансмиссион-
ного вала принимаем сталь 45. По
табл. 2.19 стй - 598 МПа. Тогда
[г] = 0,03^ = 0,03-598 = 17,94 МПа.
По формуле (4.42) находим
2-2.146'102-0,034)
6.07 ОД7 )
~ 14,16 КН.М.
Используя формулу (4.26), опре-
делим
d = 17 /—^84,6 мм.
V 17,94
Принимаем диаметр конца вала рав-
ным 90 мм. Такой диаметр должна
также иметь расточка во втулке полу-
муфты. Тогда диаметр трансмиссион-
ного вала на наиболее длинном его
участке можно принять равным 100
мм. При компоновании тележки было
получено значение для ее колеи, рав-
ное 4,2 м. Длину одного участка
трансмиссионного вала принимаем
равной половине колеи, т. е. 2,1 м.
Полярный момент инерции попереч-
ного сечения трансмиссионного вала
равен J = nd* в/32 = 3,142 х
х 0,14/32 = 9,819-10 .м4. По форму-
ле (4,41) находим
7,648'104' 9,81910'*
С =------------------
уч 2,1
2= 0,3576 МН-м/рад = 3.576 х
х 10* I 2 кН-м/рад.
Теперь определим с = 2с =
= 2'3,576'102 кНм/рад. Коэф-
фициент жесткости тихоходного уча -
стка трансмиссии будет равен с st
0,3с = 0,3'7,152' 102 s 2,146 х
х 102 кН • м/рад.
Соединительная зубчатая муфта
на трансмиссионном валу имеет пара-
метры: z = 56; т — 4 мм; Sj =
= 6,01 мм; S2 = 5,83 мм. Суммарный
угловой зазор в двух полумуфтах
равен [jio формуле (4.43)]
4 [3,142'4 - 0,9(6.01 + 5.83)]
----------ЙП----------=
S 0,034 рад.
Динамический момент, которым
трансмиссионный вал нагружается
при разгоне, определим по формуле
(4.29):
Так как запас сцепления недоста-
точен, необходимо ввести в схему
управления двигателем предпусковую
ступень. При этом зазор в передаче
нужно выбрать до приложения пол-
ного момента двигателя. Динамичес-
кий момент будет меньше.
Проверим запас сцепления колес с
рельсами при разгоне тележки с но-
минальным грузом на крюке меха-
низма главного подъема. При компо-
новании тележки была получена на-
грузка на приводные колеса в груже-
ном состоянии, равная Рпр =
= 506,3 кН. Определим соответ-
ствующие параметры:
Тсц = Ш = 506-3,0’2’°315 =
= 31,90 кН м;
Тул = И/ гк = 2,12-0,315 = 0,67 кН-м;
Ттр.к - ЛР(М +.Ю = 506,3(0,8 х
х 10’3 * S + 0.015-0,065) s 89 кН-м;
_ (т, + т, р) г;
noct.p 2
'•мех Чмеч
(28 + 80 103'10,3152 _ (1_
= 2,93 кг • м";
632-0,92
I = 7 4- 7 = 0 23 + "> 93 =
^мех.р JBp 1 ^пост.р т —
= 3J6 кг • м2;
kp = W>.«.p = 2,93/3,16 S 0,93;
= (Ст + Сгр)(2ц </<)/£> = (274,6 +
+ 784,5)(2'0.8 + 0,0’15 • 130У630 s
S 5,97 кН;
wc.r - и;; - и; = 5,97 - 2,12 =
= 3,85 кН;
т _ _ 3.85- 103-ff,315
С1'₽ “ ч/Гп/// " 63'0/92 =
S 20.92 Н-м;
ер = п;.ср- W/JMes.p = (134,85 —
- 20,92)/3,16 s 36.05 рад/с2;
253
Тин.вр.р = ^ = 0,23-36,05 3=
S 8,29 H м;
Т == (Т — Т )м и =
*дв v4 *n,cp • ин,вр/ммех ' 1м«х
= (134,85 - 8,29) 10 3'63-0,92 £
S 7,34 кН м;
т,,,.,» Т„к„.,( \ + J1 + =
\ v 'да^м.р^
= 7,34-0,93^1 +
/ 2-2,146' 102 0.034Х
+ V 1 + 7,34-0.93 J =
S 18,92 кН • м;
31,90 ] 7
18,92 + 0,67 - 0.89 “ ’
Необходимый запас сцепления
при разгоне груженой тележки обес-
печивается.
§ 12.5. Расчеты сборочных единиц
Барабан главного подъема. Толщина
цилиндрической стенки. Принимая в
качестве материала барабана сталь
35Л([осж] - 137 МПа, см. табл. 5.1),
по формуле (5,1) определяем прибли-
женное значение толщины стенки
барабана:
2 лп, 106800
6 - 0,95-----------—т = 0,022 м.
’ 0,036-137-10й
Уточним полученное значение,
для чего по формуле (5,2) определим
коэффициент влияния деформаций
стенки барабана и каната
„ . 356,72 .
/ 88 200- О6----г- . 1
V/ — 1 1 + ~-------------------I —
\ 205 800-10й-0,022-0,036/ '
= 0,91.
Так как
L 3400
~ 1229^
30,5
1229,5
= 0,07,
L d 3400
И--------— =--------
^я.о ^а.о 1229,5
то допускаемые напряжения смятия
необходимо понизить (см. пояснения
к формуле (5.3) на С = 0,07 5/0,1 =
= 3,5%.
Тогда
137-3 5
а = 137 --- ---- 132 МПа.
100
С учетом уточнений толщина ци-
линдрической стенки барабана, опре-
деляемая формулой (5.3), равна
5 = 1,07-0,91 ...... - 0.022 м.
’ 0,0.36- 132- ilT
Из условия технологии изготовле-
ния литых барабанов толщина стенки
должна быть не менее 6., =
= 0,01 £>Г1,. + 0,003 = 0.01 1,2295 +
+ 0,003 = 0,0153 м.
Учитывая, что стенка барабана в
процессе эксплуатации изнашивается,
принимаем 6 = 30 мм.
Устойчивость цилиндрической стен-
ки барабана. Для определения необхо-
димости проверки устойчивости под-
считываем ио формуле (5.5) номиналь-
ное напряжение сжатия в стенке бара-
бана
106800-10~й
7x024-0,036
123,6
МПа
и отношение
40,98.
8 30
При этих параметрах из табл. 5.2
следует, что проверку устойчивости
стенки необходимо производи ть, если
отношение L/Dr-.o > 4. Для проекти-
руемого барабана Л/Р60 =
- 3400/1229,5 = 2,76. Следовательно,
проверки устойчивости стенки не
требуется.
Расчета стенки на совместное дей-
ствие изгиба и кручения также не
производим, ПОСКОЛЬКУ L/A5.0 < 3.
Крепление каната к барабану. При-
меняя способ крепления прижимными
планками с полукруглыми пазами,
прижимающими два соседних витка,
по формуле (5.6) определяем сум-
марное усилие растяжения болтов
2-106800 _
—-*-•- 1 1 1 " л».-— I » --*- -1-' ' 1 --
0,1 f-j— + 0,1Ус:л т 1 )с01 ,А-'
\sin40 А /
= 82855 Н.
254
Используя нормализованные планки
ПО «Сибтяжмаш» для диаметров
каната 27,5... 31,0 мм. задаемся диа-
метром болта МЗО по диаметру от-
верстия в планке. Тогда необходимое
число болтов (планок), выполненных
из стали ВСтЗсп (о = 230 МПа),
будет равно [см. (5.7)]
~ _ 1,3 * 1.5 82855
“ “ , 3.14 0.02622 +
9210 -----------
4
82855 1,159*0.045 1,5 о
Ч" — --------------;— — о • О О«
92 • I О*'0.1 0,02623
Принимаем число крепежных болтов
= 9.
Ось барабана. Ось барабана ис-
пытывает напряжения от веса бараба-
на, усилий в канатах, сходящих с
барабана, усилий в зубчатом зацепле-
нии открытой передачи.
Составляем расчетную схему оси
(рис. 12.5), на которую наносим вес
барабана G6, передающийся на ось
через ступицы, и вес зубчатого венца
Gu. Вес последнего принимаем (по
аналогии с выполненными конструк-
циями) около 30% от веса всей уста-
новки.
Усилия на ось от натяжения кана-
тов определяется из уравнений мо-
ментов:
, _ 106 800' 14(0 4- 106 800(1460 4- 800)
max [460 4- 800 4-1140
= 115300 Н;
_ 106 800 1140 + 106800(800 + 1140)
max 1460 + 800 + 1140
- 96750 Н.
Окружное и радиальное усилия на
зубчатом венце
р - 2S^^6_ 2-106 800'1260 _
° D, 1752
= 153 680 Н;
Рр = р« tga = 153 600 • 0,364 =
= 55 910 Н,
где а = 20°-стандартный угол за-
цепления. Проецируя эти усилия на
горизонтальную и вертикальную оси,
получаем:
Рс в = Pocosip — 153 600-0,934 =
= '143 500 Н;
= Posin(p - 153 600 0,358 =
= 54990 Н;
Рис. 12.5
„ = ?psiny = 55910-0,358 =
- 20 020 H;
Pp= Ppcosy = 55910- 0,934 =
= 52220 Н.
Суммарные усилия, действующие в
ступице барабана,
Л.п-Рс.0-Рр.в= 143 500 - 20020 =
- 123 500 Н;
Р, t = poi + pp i = 54990 + 52 220 =
= 107200 Н.
Из уравнений моментов, состав-
ленных отдельно для всех сил, дей-
ствующих на вал в вертикальной и
горизонтальной плоскостях, получа-
ем реакции опор барабана соответ-
ственно в двух плоскостях: Ап =
= 24 160 Н; Л, = 99160 Н и Ва =
= 129 100 Н, Вг = 8040 Н.
Реакции опор равны геометричес-
кой сумме реакций, действующих в
плоскостях:
А = х/24 1602 + 9?ГбО2 = 102 100 Н;
Р • ч. 129 1002 4- 80402 = 129 300 Н.
Изгибающие моменты в сечениях под
ступицами барабана:
Л< = 102 100-0,3 = 30 630 Н-м;
М , = 129 300 • 0,3 = 38 790 Н - м.
Принимаем в качестве материала оси
сталь 45 (<тв = 598 МПа, ст, =
-•257 МПа). Допускаемые напряже-
ния [см. (5.10)]
[ст. = 257/(2,5• 1,6) = 64,25 МПа.
Предварительно диаметр оси под
правой ступицей (здесь действует
наибольший момент) определяем по
формуле
3____, 3 _______
J / 38790
( “ \/ ОлТа’ , ]’ \ 0?Т^64.2540й
= 0.183 м.
Принимаем d;i = 190 мм. Исходя
из этого диаметра конструируем ось
барабана (см. рис. 12.5).
Проверочный расчет производим
в сечениях /-/, II-II. Ш-1П, IV-IV.
В этих сечениях действуют наиболь-
шие изгибающие моменты и имеются
концентраторы напряжений.
Запас прочности по сопротивле-
нию усталости в сечении III -III
где к'а - коэффициент концентрации в
данном сечении оси; ев-масштабный
фактор при изгибе; 0-коэффициент
упрочнения; /сд - коэффициент долю-
вечности. Значения коэффициентов Ау,.
eff, 0, Ад [см. в (5.3)];
М, 38 790
o”,Tdf “ 6,Голо5
= 56,55 МПа
напряжение изгиба в рассчитываемом
сечении.
Прочность в сечении Ш-Ш обес-
печена, так как наименьший допусти-
мый запас прочности для расчитывае-
мой оси составляет /с =1,6. Анало-
гичный расчет, проведенный для сече-
ний I-I, II-II, IV-IV, показал, что и
в этих сечениях прочность оси также
обеспечена-па > 2.
Расчет болтов, соединяющих зуб-
чатый венец с барабаном. Соединение
осуществляем болтами для отверстий
из-под развертки по ГОСТ 7817-80,
материал болтов-сталь 45 (ст, =
= 353 МПа). Болты устанавливаем на
диаметре £> = 1000 мм. Окружное
срезающее усилие, действующее на
все болты,
Р = = 2 406800-1260 =
QKp ’ 1000
= 269000 Н.
Допускаемое напряжение среза болта
[см. (5.19)]
353
Гт] = 0,6------ 148 МПа.
1,3 - 1.1
Задаваясь числом болт ов - 6,
по формуле (5.11) определяем их диа-
метр:
j 4-269100
\1 ПТюдГТСТда io6
= 0.026 м.
р
I
Принимаем диаметр болта d
— 30 мм. Напряжение смятия
f
CM
Л,<р =______269 L00____
iibc„m6 0.03 0.028-4.5
= 71,19 МПа,
где 6CM = 28 мм - расчетная длина
болта. Прочность болтов на смятие
обеспечена, так как допускаемые на-
пряжения смятия болтов, выполнен-
ных из стали 45, [осм] = 280 МПа.
Ходовые колеса тележки. Колеса
предварительно выбранных колесных
установок К2РП и К2РН проверяем
на напряжения в контакте обода и
рельса. Принимая материал колес
сталь марки 70 Л (с закалкой до
твердости 300 ... 350 НВ) и условия
работы крана-на металлических опо-
рах, определяем коэффициенты,
входящие в формулу (5.13):
г 400
к = 0,136 при — — =
D 630
= 0,63 (см. табл. 5.3);
= 1,05 при гк < 2 м/с (см. табл. 5.5);
кд = 1 + 0,15-0,47 =
= 1,071 (см. табл. 5.4).
Контактные напряжения
о?Г 279 1
о = 7500-0,136-1,05 /-- 7 ’ =
V 632
= 452 МПа.
Так как значение допускаемого на-
пряжения при числе циклов нагруже-
ния N < 104 для выбранного материа-
ла колес в табл. 5.6 отсутствует, то
допускаемые напряжения определяем
ио формуле (ОСТ 24.090.44-82)
[Ст ] = 3,92 НВ е = 3,92-300 х
300
X 2,718 '*да = 809 МПа.
Для литых колес полученное значение
су0]п следует уменьшить на 4,0%:
а0]п = 809-0,96 = 776 МПа.
Усредненная скорость движения
тележки (при отношении времени не-
установившегося движения к полному
времени движения к = 0,26) равна
[см. (5.15)] rc = pyw = 0,87-0,47 =
= 0,41 м/с-
Полное число оборотов колеса за
срок службы при машинном времени
Г = 3200 ч (см. табл. 5.6)
М <111 ' z
9 Зак. 198*
М = 36- ю4 °’-4---3200 = 2,386 106.
с 3.142 63
Значение коэффициента 0 опре-
деляем по таблице к формуле (5.16) в
зависимости от отношения минималь-
ной: нагрузки на колесо к максималь-
ной при 76,6/279,1= 0,27 0 = 0,182.
Приведенное число оборотов колеса
за срок службы [см. (5.15)]
N = 0,182-2,39-106 = 0,44- 106.
Допускаемое контактное напряжение
определяем по формуле (5.14):
9 _____
I ю4
[а ] = 776 / = 512 МПа.
L NJ \ 0.44-10
Поскольку а = 452 МПа <
< [ст5] = 512 МПа, условия прочно-
сти удовлетворяются.
Установка конечного выключателя
механизма передвижения тележки. В
качестве конечного выключателя при-
меняем рычажный выключатель с
самовозвратом тип КУ 701, который
включаем в цепь управления двига-
теля. Заметим, что по правилам
ГГТН установка конечного выключа-
теля при скорости передвижения те-
лежки = 0,47 м/с не обязательна.
Поскольку положение выключате-
ля зависит от тормозного пути, опре-
деляем приведенный момент сопро-
тивления передвижению тележки в
порожнем состоянии и время тормо-
жения по формулам (5.20) и (5.19):
1540 0.63 о
rn п =------------= 8,56
тр*° 2 63 0,9
Н • м;
1.15-0.201 -900 28- 103 • 0,63’ • 900 0,9
___ + 38 2-632
33,1 + 8.56
= 1,9 с.
Тогда тормозной пуль с учетом вре-
мени отключения тормоза /, = 1 с
[см. (5.18)]; .8] = 0,47 (1,9/2 + 1) =
= 0,92 м.
Ввиду того что тележка обладает
большой кинетической энергией, при-
менение двусторонних буферов за-
труднено из-за их больших размеров.
Поэтому устанавливаем четыре одно-
сторонних буфера на мосту крана, а
257
на тележке-упоры в местах крепле-
ния букс ходовых колес к раме тележ-
ки. Тогда расстояние между упорами
на тележке (рис. 5.8) /б = Вг — 2/ =
= 4,3 — 2-0,18 = 3,94 м, где Вт =
= 4,3 м-база тележки; / = 0,18 м-
расстояние от оси колеса до упора.
Длина линейки из условия удержа-
ния рычага выключателя в поверну-
том положении на пути выбега тележ-
ки /л > 0,5 5Т = 0,5 0,92 = 0,46 м.
Принимаем /л = 1 м. Положение ко-
нечного выключателя относительно
буферов, установленных на мосту
крана (5.21), /в = 0,5 -0,92 + 0,5 х
х 3,94 - 0,5-1 + 0,06 = 2,0 м.
Буферные устройства тележки. Так
как скорость тележки гт = 0,47 м/с <
< 1,17 м/с (см. § 5.4), применяем
пружинные буферы одностороннего
действия.
Максимальное замедление тележ-
ки в процессе наезда на буферы при-
нимаем </, = 1,4 м/с2. Скорость те-
лежки в момент наезда на буферы при
отключении двигателя в середине
тормозного пути гб = 0,707 гт =
= 0,707-0,47 = 0,33 м/с. Коэффициент
сопротивления передвижению тележ-
ки [см. (5.22)]
И’
2 -0.8 + 0.015 130
630
- 0,006.
Теперь, задавшись значением
предварительного поджатия пружины
буфера 5П = 10 мм, определяем силу
пружины при максимальной ее де-
формации но формуле (5.23):
28(НЮ( 1.4 - 0,006-9.81) х
2(0.33- - 2 0.006 9,81 (W1)
Рабочий ход пружины [см. (5.24)]
0,33- + 2 0,006 9.81 -0,01
Г/Г+ 9,81 -0,006
0,075 м.
По этим исходным данным рассчиты-
ваем пружину буфера. Принимая для
пружины пруток круглого сечения из
стали марки 60С2А с углом подъема
средней винтовой линии витков а =
= 12 е, определяем допускаемое на-
пряжение:
[т] = [T']fcHiir = 735-0,6 = 441 МПа,
где [V] = 735 МПа-допустимое каса-
тельное напряжение при действии
статической нагрузки, /снаг = 0,6-
коэффициент, учитывающий харак-
тер приложения нагрузки. Подбираем
пружину:
490 490
= р — 1Q140 =
1 к 490 ^max44i U 44)
= 21230 Н.
Для силы ^490 = 21230 Н под-
ходит пружина из прутка d = 25 мм с
индексом С — — = 4, Средний диа-
d
метр пружины /+ = 100 мм.
Проверяем пружину на прочность.
Напряжение кручения в материале
пружины
2,55 Л!1ах D Т- 2,55- 19107-0,1 1,375
- 0,0253 К)6
= 429 МПа < [т] = 441 МПа.
Здесь к — 1,0 + 1,5/С = 1,0 +
+ 1,5/4 = 1,375-коэффициент кривиз-
ны пружины. Необходимое число вит-
ков
_ Gd*S 78400-10(> 0.0254 -0,075 _
"н ” 8 ” 8 +U3 •’ 1’9107 ”
= 15,
где (7 = 78400 МПа-модуль сдвига
для принятой марки стали.
Общее число витков пружины
= ~Г) + 1,5 = 15 + 1,5 = 16,5. Длина
разгруженной пружины Но = zB f +
+ <7= 15-32,5 + 25 = 512,5 мм. Шаг
витков пружины
t = 1,1б/ + 5/\ = 1,1-25 + 75/15 =
= 32,5 мм.
По полученным значениям пружины
проектируют корпус буфера.
§ 12.6. Примеры некоторых
уточненных расчетов механизмов*
Расчет времени разгона механизма
главного подъема при автоматизиро-
ванном линейно-ступенчатом запуске
приводного электродвигателя. Крат-
ности перегрузок \|/пср и утах подби-
раем исходя из выполнения соотно-
* Некоторые числовые расчеты выпол-
нил инж. С. К. Хромых.
258
шения (8.1). Из ранее выполненных
расчетов момент от сил статических
сопротивлений 7'., = 1758,0 Н-м.
При у = 1,175 7; = 1,175 х
х 1508 = 1772 Н-м, Тпср = 1772 Н-м >
> Тст = 1758,0 Н-м, что соответ-
ствует требованию условия (8.2). Но-
минальное скольжение естественной
характеристики выбранного электро-
двигателя равно 0,05.
При числе переключений с одной
искусственной характеристики элект-
ропривода на другую - = 4 по фор-
муле (8.1) имеем
утах = 1.1754 0.05 = 2,0.
Скорость на естественной харак-
теристике, соответствующая моменту
Тпер, по формуле (8.3),
®г + 1.к = 62,83 [1 -(1,175/2,0)5] =
= 58.43 с“’.
Из ранее выполненных расчетов
суммарный приведенный момент инер-
ции вращающихся частей механизма
и от груза J = 12,49 кг • м2.
Время разгона (до скорости на
естественной характеристике, соот-
ветствующей моменту 7/ер), по фор-
мулам (8.4) и (8.5),
_ 12.49 - 58.43 j 1508-2 - 1758 _
/р - <2,0 - 1.175)1508 1508 1.1 75 - 1758
= 2,6 с.
Расчет времени разгона по средне-
пусковому моменту дает заниженное
в два раза (см. § 12.4) значение дли-
тельности пускового процесса в срав-
нении с вышеприведенным уточнен-
ным значением.
Расчет динамических нагрузок в
элементах механизма главного подье-
ма по многомассовой расчетной схеме.
Расчетная схема механизма может
быть представлена в виде пяти сосре-
доточенных масс со следующими мо-
ментами инерции, кг-м2: момент инер-
ции ротора электродвигателя J1 = 6,25:
момент инерции муфты J2 = 1.15; мо-
мент инерции тормозного шкива J5 =
= 3,17; момент инерции остальных
вращающихся частей = 1,59; при-
веденный к первому валу механизма
(валу электродвигателя) момент инер-
ции от веса груза и крюковой подве-
ски ./.4 = 0,33. Коэффициенты жестко-
сти соединительных звеньев имеют
следующие значения, Н-м: с12 = 855 100;
с23 = 1 623 000; с35 = 4 799 000. Приве-
денный к первому валу коэффициент
жесткости канатов = 209,7.
Среднепусковой момент электро-
двигателя Тср Т1 = 2337 Н м. Приве-
денный к первому валу грузовой мо-
мент Тст, = 1738 Н-м. Частоты соб-
ственных колебаний определяют из
уравнения (,х = or):
.х4 — ПрХ3 + а2х2 — а3х + = 0.
Коэффициенты частотного урав-
нения ш получены комбинаторным
методом: = 7 844000; а-, = 1,302 х
х 10’3; и, = 2,243-1018; = 1,458 х
х 1021.
Частотное уравнение имеет сле-
дующие корни: лу = 652.6; лу = 193700;
.v3 = 2,066- Ю6; д4 = 5,583- Г0б.
Исходные уравнения движения си-
стемы можно составить ио методике,
изложенной в работе [9]. Решая си-
стему уравнений, получаем выраже-
ния для нагрузок (Н м) в виде
4
= Е -1;. COS СО/,
4 = 1
Таблица 12.3
Соединения £>f чвеньев Амплитуды А^ = = 0,4- С™. “° двухмаС’ совым схемам Л Ошибка двухмас- совой схе- мы по Fj nwi. %
4 = 1 4 = 2 4 = 3 4 = 4
1-2 2037 - 8,190 - 277,8 - 13,13 - 0,1816 2337 2337 0
2-3 1982 - 9,689 - 256,5 + 20,94 1,149 2270 2226 - 1.984
3 4 1754 - 15.889 0,0533 0,0003 - 0,0001 - 1770 1770 0
3-5 152,0 4,123 - 178,5 25,68 - 3,297 363,6 304,1 - 19,6
259
9*
где Dy и Ajq.-в Н м (см. табл. 12.3).
Из данных этой таблицы следует;
что для звеньев 7Z 23, 34 простые
схемы дают небольшие неточности
при определении наибольших нагру-
зок. Погрешность двухмассовой схе-
мы для звена 35 идет в запас проч-
ности.
Определение вероятности неразру-
шения каната механизма подъема по
несущей способности. Выбранный ка-
нат имеет диаметр d* = 30,5 мм, мар-
кировочная группа-1764 МПа. Рас-
четная площадь сечения всех прово-
лок SK = 356.7 мм2. Разрывное усилие
каната в целом А — 520 000 Н.
При определении вероятности не-
разрушепия каната за максимальную
расчетную нагрузку примем нагрузку
стопорного нагружения порожнего
механизма при крайнем верхнем по-
ложении крюковой подвески:
= Р + х/р2 +
Коэффициент жест кости канатов
при модуле упругости Ек = 1,177- 10ь
даН/см2 (11,77- 1О10 Па) и расстоянии
от оси блоков крюковой подвески до
осей неподвижных блоков и барабана
в крайнем верхнем положении крюко-
вой подвески Н = 1,9 м, с — 176.8 х
х 106 Н/м.
Момент инерции вращающихся
частей механизма = 12,16 кг-м2.
приведенная масса вращающихся
ча-
307,5 - 104кг.
Среднепусковой момент
Гср.п = 7к,Лср.п = 1508-1,55 =
= 2337 Н-м.
Среднепусковая сила электродвигате-
ля, приведенная к грузу. Р^ п = 1118 х
х 103 Н. На колебания нагрузки дви-
гателя влияет большое число равно-
значных факторов, поэтому распре-
деление этой нагрузки близко к нор-
мальному и значение среднепусковой
силы принимаем за математическое
ожидание нагрузки электродвигателя
<Р) 1118-103 Н.
Максимальные нагрузки двигателя
Гт1Х = 3016,0 Н-м, Ртл = 1407- 103 Н.
260
Минимальные нагрузки двигателя
Tndn = T(l¥llcl, = 1772 Н-м: =
= 826.4-103 Н.
Предельные значения стопорной
нагрузки канатов найдем по формуле
(8.30):
F = 4,332-106Н; F -пах 3.521 10° Н.
h max к гпхп
Поскольку зависимость стопор-
ной нагрузки от усилия электродви-
гателя слабонелииейная, можно счи-
тать распределение стопорной нагруз-
ки канатов нормальным. Статисти-
ческие характеристики нагрузки:
Разбег предела прочности кала г ной
проволоки типа В маркировочной
группы 1765 МПа равен 1765... 2050
МП а (см. табл. 8.3).
Таким же будет и разбег разрыв-
ного усилия: 7?П1Ь1 = 520 000 Н.
Ял,ах --= (2050. 1765) A'min = 604000 И.
Статистические характеристики
разрывного усилия канатной подвес-
ки:
ма гема гическос ожидание
<Я> = у А’" - ’ = 4495. юз н.
среднеквадратическое отклонение
а = 8 = ] И.7 103 Н.
к о
Математическое ожидание нормаль-
но распределенного резерва прочно-
сти <г> = <А> - <Т> - 4495- 103 -
- 3927- Ю3 = 568,0- 103 Н. Средне-
квадратическое отклонение резерва
прочности
or = v/f7C + = 175.3 103 И.
Вероятность безотказной работы (или
прочностная надежность)
/2л:-175.3 10
Применяем замену переменной,
чтобы привести интеграл к таблич-
ному виду:
г - 568.0- 103
] 75,3 • 10~
х 103 d.x.
= д', откуда dr = 175,3 х
Нижнее значение предела интег-
рирования для новой переменной
D, = 1,118-106 Н; D2 = 1,118-Ю6 +
4- 4,191 Ю5 = 1,537- 106 Н.
Амплитуды гармонических состав-
ляющих найдем по формулам (8.38);
/1.768-10s \
1,118 - 10" -— ~ 5041
А _ \3.075-I0" / _
1 ’ 5041 - 9.768
= - 1 107000 Н;
0 - 568.0-10J
---------------- т = — 3,24,
Г Т 1ЛЗ ’
I
I
Поэтому нужный нам для расчета
интеграл будет равен
/1.768-10 Л
1.118- 10" —------- - 9.768
\З.О75 1О°
” " 5041 - 9.768
= -10610 Н;
1,768- 10s 0,11
1 = +—-------------х
1 3.125
1
I
I
J
।
i
>
b
<1
I
1
i
।
I
।
т
।
ВБР канатной подвески при сто-
порешли груза 0,9994s s 0,995.
В соответствии с РТМ 24.090.25 -
76 для кранов общего назначения
должно выполняться условие Р >
Л [Р] = 0,99, чз о и соблюдается в
данном случае.
Расчет совместного нагружения ка-
натов механизма главного подъема и
моста при стопорении порожнего крю-
ка. Исходные данные в соответствии
с рис. 8.8: Р = 1,118 - 10ft Н; Ct =
= 1.768’10» Н/м; т1 = 3,075 • 106 кг;
т3 = 4,274-104 кг; GM = 4,191 • IO5 Н;
с2 = 3,660-107 Н/м; г = 0.11 м/с.
Расчеты выполняли с высокой точ-
ностью, далее приведены округлен-
ные значения.
Частоты собственных колебаний
найдем по формулам (8.37):
।
7 1/1.768- 10я 1.768-10я + 3,660-ЮЛ
СО 1 = - -------- + —---------------—
2 53,075-109 4.274-Ю4 /
_ 1 //1,768-108 1.768-Ю8 + 3,660-ЮЛ1
+ 2 У \3.075 -106 + 4.274-104 /
~ 4-1,768-108-3.660 107 _
“ ' * “ 3.075-106-4.274- 104
= 2525 ± 2515;
соу = 9,768 1/с2; Ю1 - 3.125 1/с; coi -
= 5041 1/с2; й>2 = 71,00 1/с.
Частные решения найдем по фор-
мулам (8.37):
/1.768-10я 1.768-10я
5041 - ------— - ------—т
\3,О75 10г’ 4,274- I04
Х ’ 5041 - 9,768
= I 047 000 Н;
2
1,768- Ю’ О.Н
71,00
х
1,768-10я 1,768-10я
3,075-10" + 4,274-IО4
~5041 - 9,768
= 227 800 Н;
.4, = - 1,118 106-———
3 5041 - 9,768
= -1 120000 Н;
,14 + 1,118-ЮА—^--8—
4 5041 - 9,768
3.660- 1 о7
„ 1.768- 108-0.11 4,274 1О4
J 3.125 5041- 9,768
= 1059000 Н;
3,660-10"
в __ 1,768 10я 0,11 4.274-104
4 ~ TUX) ” 5041 - 9,768
= -46630 Н.
Наибольшие нагрузки в канатах и
мосту найдем по формулам (8.39):
Flmax Л v l 1070002"+Т0470()02 +
+ У106Ю2 + 2278002 + 1 118 000 =
= 2 870000 Н;
261
^2тлк = V/I 120 0002 + 1 059 0002 +
+ 721712 + 466302 + 1 537 000 -
= 3 125 000 Н.
Эти же нагрузки при 1Т’=0 без
учета податливости моста найдем по
формуле (8.30):
ЛП1;1Х_ = 1 118000 + __________
+ 7'1 1180002 + 0,112-1,768-108 х”
Ух 3,075-10° = 3 916 000 Н;
Г2тцх = 3916000 + 419 100 =
= 4335000 Н.
П ренебрежение податливостью
моста дает в данном случае сущест-
венное завышение нагрузок:
3 916 000/2 870000 = 1,364;
4 335 000/3 125 000 = 1,387,
т. е, на 36,4% для канатов и на 38,7%
для моста.
Таким образом, учет податливо-
сти моста в данном случае настолько
существен, что с этим нельзя не счи-
таться.
§ 12.7. Оценка уровня унификации
механизмов главного подъема
и передвижения тележки
В соответствии с ГОСТ 23945.2-80
для оценки уровня унификации может
быть использован коэффициент при-
меняемости
к = 100%,
1 и
где п-общее количество типоразме-
ров составных частей изделия; и0-то
же, оригинальных.
Расчет сделан для механизма глав-
ного подъема (табл. 12.4) и механиз-
ма передвижения тележки (табл. 12.5).
Величины п и п0 для механизма
главного подъема равны п = 28; д0 = 6.
Тогда /с = [(28 - 6)/28] х
х 100% = 79%.
Данное значение превышает ука-
занное в задании па проект (75%);
следовательно, уровень унификации
соответствует предьявляемым требо-
ваниям.
Таблица 12.4
№ п/п Наименование составной части Унифициро- ванная («да») или не г («нет»)
1 Крюковая подвеска Да
2 Канат левой половины по- »
3 лиспасга Канат правой половины по- »
4 5 лиспасга Установка: верхних блоков уравнительного балан- Нет »
6 сира барабана »
7 Двигатель Да
8 Редуктор »
9 Муфта »
10 Промежуточный вал-встав- Нет
11 ка Тормозной шкив »
12 Тормоз Да-
13 Болты, гайки и шайбы для »
4 + 27 28 крепления двигателя, редуктора, тор- моза, установки барабана, установки верхних блоков, установки уравнительного балансира всего 15 раз- личных типоразмеров Упоры для лап двигателя Нет
Таблица 12.5
№ Наименование Унифициро- .
11/ц составной части ванная («да») или пег («нег»)
1 Колесная установка при- водная Да
2 Колесная установка непри- водная »
3 Двигатель »
4 Редуктор »
5 Муфта на быстроходном валу »
6 Муфта на тихоходном валу »
7 Промежуточный трансмис- сионный вал Нет
8 Тормоз Да
9 Тормозной шкив »
10 Болты, гайки, шайбы для »
л крепления двигателя, ре-
* дуктора, колесных устано-
вок и тормоза - всего 12
21 различных типоразмеров
22 Упоры для лап двигателя Нет
23 Платики под редуктор
Определим значения п, п0 и кпр для
механизма передвижения тележки:
п = 23; н0 = 3; тогда
262
A- = 'ДДД 100% = — - 100% = 87%,
,,p и 23
Данное значение превышает ука-
занное в задании на проект; следо-
вательно, уровень унификации меха-
низма передвижения тележки, как и
механизма главного подъема, соответ-
ствует предъявляемым требованиям,
§ 12.8. Расчет металлоконструкции
моста
Исходные данные. В соответствии с
заданием необходимо спроектиро-
вать двухбалочный мост с коробча-
тыми сплошностенчатыми балками, с
рельсом, расположенным по оси верх-
него пояса. Примем в качестве анало-
га «блочное» исполнение моста по
типу конструкции завода «Сибтяж-
маш» [4] с «этажным» опиранием
пролетных балок на торцевые балки,
В дополнение к исходным дан-
ным, указанным в задании на проек-
тирование (см. § 12,0, на основании
расчетов и проработки конструкции
гележки и механизмов крана имеем:
6Т = 274,6 кН -вес тележки; 2?т = 4,3 м-
база тележки; LT = 4,2 м-колея те-
лежки; тл = 3075 т-приведенная к
грузу масса вращающихся частей ме-
ханизма главного подъема; (7 =
= 36,0 кН-вес крюковой подвески
механизма главного подъема; Р — 1118
кН-приведенная к грузу среднепуско-
вая сила двигателя механизма глав-
ного подъема; сп = 13,43-103 кН/м-
коэффициент жесткости канатов по-
лиспаста механизма главного подъе-
ма при подъеме груза с земли, т,е.
при длине подвеса груза Н = 25 м;
Gnp = 9,0 кН - вес одного приводного
узла механизма передвижения крана;
ук = 0,1 м/с2-среднее ускорение крана
при разгоне; 7^р = 9,54 кН м-макси-
мальный реактивный момент приво-
да, передаваемый на фундамент ре-
дуктора механизма движения крана.
В соответствии с результатами
компонования тележки статические
давления на колеса составляют:
от номинального собственного ве-
са: /Л, = 76,6 кН; ДЪ = 84.2 кН;
= 60,7 кН; ДЪ = 53,1 кН;
от веса номинального груза:
= 202,5 кН; ДД) = 171,5 кН;
ДД> = 189,9 кН; Д^ = 220,9 кН;
суммарные статические: Д" = 279,1
кН; = 255.7 кН; ДЦ = 250,6 кН;
= 274,0 кН,
Тележку па мосту ориентируем та-
ким образом, чтобы ее приводные
колеса с давлениями Д2 и Д3 были
обращены в сторону кабины маши-
ниста. Это несколько скомпенсирует
взаимное влияние веса кабины и мак-
симального давления колеса Д} на
изгибающие моменты и поперечные
силы. Таким образом, колеса тележки
с давлениями Дг и Д2 будут распола-
гаться на приводной балке моста.
Вес кабины управления прини-
маем равным = 15 кН.
Предварительный расчет.Материал
конструкции. В качестве материала
для основных несущих элементов в
соответствии с табл. 6.1 принимаем
малоуглеродистую сталь ВСтЗсп5 по
ГОСТ 380-71*.'
Расчетные сопротивления основ-
ного металла R (МПа) в соответствии
с табл. 6,7 равны:
при растяжении, сжатии, изгибе-
R = 210; при срезе - = 130;
при смятии торцевой поверхнос-
ти-/?^ = 320.
Расчетные сопротивления сварных
соединений (МПа) принимаем в соот-
ветствии с табл. 6.8:
для заводских стыковых швов при
работе на растяжение и сжатие - Дсв =
= 210;
при работе на срез-/?'р = 130;
для угловых швов при работе на
срез /?^“ср = 150.
Собственный вес пролетной части
моста. Для заданных параметров кра-
на при выбранной общей схеме его
исполнения и принятом материале по
графикам рис. 6,1 находим в качестве
первого приближения G[1M н = 350 кН.
Интенсивность нормативной рас-
пределенной нагрузки на каждую бал-
ку моста определяем по формуле
(6.10). Для первого приближения
<Лн = 350/(2- 19) = 9,211 кН/м.
Расчетные нагрузки. Расчетные на-
грузки комбинации 1.1.А определяем в
соответствии с табл. 6.13.
263
Коэффициенты перегрузок для ве-
совых постоянных нагрузок: к = 1,1;
kG = 1,2; kGr = 1,1; для веса груза (см.
табл. 6.15) kQ = 1.1.
Коэффициент динамичности
определяем в зависимости от пара-
метров крана:
вц 9,807 - (80 + 3,671)
~р ~ ТПГ"
= = 0,03.
т, 3075
По графикам рис. 6.2 находим
Уу = 1,01. Тогда q — 1,1 -9,21 = 10,13
кН/м; GK = 1,2-15,0 = 18,0 кН: Grip -
= 1,2-9.0 - 10,80 кН; Д. = 1,1-76,6 +
+ 1,1-1,01 -202,5 = 307,0 кН; Д2 = 1.1 х
х 84,2 + 1,1 1,01 • 171,5 = 2813 кН;
= 307,010 + 281,270 = 588,3 кН.
Расчетная схема приложения на-
грузок принята в соответствии с
рис. 6.4, а, где
">8] 3
Ь, = 4,3—- - 2,289 м;
1 588.3
z0 - 0,5(19 - 2.289) = 8,356 м.
По формуле (6.21),
cqq а<1У - 2-289’2 10-13- 19'
М < = 588.3 -------- +-------
1 4-19 8
]9 - ”’89
+ 10,8-2.3 + 18-2,5——^—- =
2 19
= 2672 кН-м.
_ 33 100-19'
V “ 962.1” К)5 _
х 10 3 = 10.57- 10“3 м4
Высоту стенки пролетной балки,
удовлетворяющую условию миниму-
ма веса яри соблюдении требований
или прочности, или жесткости в за-
висимости от толщины слепки, оп-
ределяем по формулам (6.35) или
(6.39). Результаты расчетов представ-
ляем в виде кривых 1 и 2 на рис. 12.6.
Как видно из рис. 12.6, в реальном
диапазоне толщин стенок 0,004...
...0.015 м определяющей является'вы-
сота /?ff, так как Д > hf.
Построим график зависимое i и
гибкости стенки с высотой h„ от ее
толщины (кривая 3). При рекомендуе-
мых ВНИИПТМАШем гибкостях
стенки ,8\. = 200 ... 300 толщина пос-
ледней в нашем случае лежит в преде-
лах 0,0065 ...0.0086 м. Принимаем для
дальнейших расчетов толщину стенки
62 = 0,008 м, тогда оптимальная вы-
сота ее будет равна hg = 1,758 м при
гибкости = 219,8.
В соответствии с формулой (6.42)
для оптимальной балки В/И = 1/3,
тогда Sj — 62 = 0,008 м. При ДН =
— 1/2 необходимо будет также прини-
мать 5j = б2. что заведомо приведет к
увеличению площади поперечного се-
чения балки по сравнению с опти-
мальной.
Коэффициент неполно ты расчета
определяем по формуле (6.3): in} = 0,9
(см. табл. 6.2); т2 = 1,0 (см. табл. 6.3);
т3 = 0,85 (см. табл. 6.5); т() = 0.9 х
х 1,0-0,85 = 0,765.
Момент сопротивления сечения
пролетной балки, необходимый по
условию прочности, определяем но
формуле (6.34):
16,49- 10 "3 м3;
момент инерции сечения по условиям
минимальной статической жест-
кости-по формулам (6.15) и (6.38):
„ 784,8 + 274,6 ,
= —---------= 33455 кН/м:
м пип ]
-- 19
, 600
264
На рис. 12.6 построим графики
зависимости площади поперечного
сечения балки для В/Н = 1/3 (кривая
4) и для В/Н = 1/2 (кривая 5). На
основании анализа графиков рис. 12.6
можно заключить, что наиболее ра-
циональной по условию минимума
веса будет балка с размерами
5, = S2 = 0,008 м; hff = 1,758 м; В =
= Н/3 = 0.586 м. Площадь попереч-
ного сечения балки в этом случае
равна Fo = 0,0375 м2.
Компонование узла сопряжения
пролетной и ) орцевой балок и приво-
да механизма передвижения крана по-
казано на рис. 12.7. При компонова-
нии учтены требования ГОСТ
6711-81 на размеры крана, а именно:
расстояние между осями балансиров
А2 > 4900 мм: высота буфера от го-
ловки подкранового рельса Нх =
= 1200 мм. Размеры элементов при-
вода механизма передвижения приня-
ты в соответствии с его расчетом.
Из компонования видно, что вы-
сота стенки балки может бы ть умень-
шена до h = 1,59 м. Примем толщину
пояса б t =0,01 м; тогда для обеспече-
ния заданного момента сопротивле-
ния сечения найдем минимально
необходимую ширину пояса балки В:
Н = 1.59 + 2-0,01 = 1,61 м;
Н' С В
<Т 4
6 ( Н 3 5 j
8ь 10 ’ Г61 . __
—----—г = 0,59г» м.
3-10-10“3
16,49 -10 3
10- 10"3’ 1.61
Для обеспечения дополнительного
запаса прочности и жесткости прини-
маем В = 0,62 м.
Окончательно h = 1,59 м; В =
= 0,62 м; 8, = 0,01 м; 5, = 0,008 м.
Схема поперечного сечения показана
на рис. 12.8. Геометрические характе-
ристики сечения:
= э
1х
< 2
*0,008- 1,5‘Р
+ 0,01 0,62 X
13,39-10‘3 м
и:
tv
И'
2-13,39- 10“
= 2
= 16,74-10"3 м3;
0,01 0.623
-----—----+ 0,008-1.59 х
12
0,56
----+ 0,008
. э
= 2,507- 10 -’ м4;
1/ ' = 8,097 . j0 - з мз.
F = 2 (1,590 • 0,008 + 0,62-0,01) =
= 0,0378 м2.
А-А
Рис. 12.7
265
Рис. !2.«
Площадь поперечного сечения
увеличилась по сравнению с опти-
мальной менее чем на 1%.
Опорная часть пролетной балки.
Основные размеры определились при
компоновании опорного узла (см.
рис. 12.7). Используя опыт завода
«Сибтяжмаш». увеличим толщину
стенки в опорной части до 82 =
= 0.01 м. а толщину нижнего пояса
(гнутого листа) примем 8^ = 0,012 м.
Принятое поперечное сечение показа-
но на рис. 12.9.
Г еометрические характеристики
сечения:
Fon = 0,01 • 0.62 + 2 0,01 0.5 +
+ 0,012- 1,45 = 0.0336 м2;
0,56 + 0.012 0.01 -0.622
4 1
= 4,059-10"3м4;
4 0,572 0.5112
0,01 0.01 ' 0.012
- 1,642-10”3 м4-
Торцевая балка. Основные разме-
ры торцевой балки определились
при компоновании опорного узла
(рис. 12.7). Расчетная длина балки
(расстояние между осями балансиров)
равно L6 т = 5,17 м. Поперечное сече-
ние показано на рис. 12.10. Геомет-
рические характеристики сечения.
F2 = 2(0,01-0,5 + 0,012-0,35) =
= 0,0184 м2;
х ( 0.012 + + 0.62 0,01 [ 0,012 +
\ 2 / \
Л = 2 ( °’010-53 + (),0042 0.2562
= 7,586- 10’4 м4;
= 0J76 м;
7 SQ'10 "4
= /.59 2,895- Ю”3 м3;
2л 0,262
S,x = 0.0042 • 0,256 + 2-0.01 °'2-" =
= 1.7- Ю”3 м3;
j = 2fo-Oi2O-352 0,005-0.155^1 =
2> \ 12 /
= 3,258- 10'4 м4;
= 3,26-10-* = 862-1О~3 м3.
2у 0,175
\ЖЛ. = 2-0,01 Ш46 2 + 0,62 х
х 0.01 ^0.346 - =
= 3,243- 10"3 м3;
Корректировка исходных данных.
Вес пролетной часзи моста был при-
нят по данным завода «Сибтяжмаш».
который для кранов грузоподъем-
ностью 80 т и пролетом до 25 м ис-
пользует унифицированные балки
266
Рис. 12.10
следующих размеров: 5t =0,012 м;
52 = 0,01 м; Л = 1,68 м; В = 0,86 м.
Площадь поперечного сечения балки
равна Fx =2(0,012-0,85 + 0,01 х
х 1,68) = 0,054 м2, т. е. почти на 43%
больше, чем у спроектированной балки.
В соответствии с [7] примем, что
вес продольных и поперечных ребер
жесткости составляет 0,3 от веса не-
сущих элементов. Тогда погонный вес
«собственно балки» завода «Сиб-
тяжмаш» составит
= 1,3 yq F{ = 1.3 • 7.85 9.807 х
х 0,054 = 5,404 кН/м,
где у = 7,85 т/м3 - плотность матери-
ала; д = 9,807 м/с2 - ускорение силы
тяжести; А, = 0.054 м2 - площадь по-
перечного сечения заводской балки.
Погонный вес остальных элементов
(рельс и его крепление, балконы, ог-
раждения и т.д.) </1н = qlK - </6 =
= 9.211 - 5,404 = 3.807 кН/м. где
qin = 9,211 кН/м-нормативная вер-
тикальная распределенная нагрузка в
первом приближении. Следовательно,
во втором приближении нормативная
интенсивность распределенной на-
грузки
F 0,0378 _ .п.
и= —йг- + и л — ——- 5,404 +
*/2н Чо ПД)540
+ 3,807 = 7.590 кН/м;
расчетная интенсивность распреде-
ленной нагрузки равна
q2 = 1,1 -1,0-7,59 = 8,349 кН/м.
Уточненный расчетный изгибающий
момент
М12 = = 2672 -
О
192
- — (10, 13 - 8.359) = 2590 кН-м,
8
что отличается от первоначального
значения Мt = 2672 кН • м на 3% в
сторону уменьшения, г.е. идет в запас
прочности. Корректировку попереч-
ного сечения балки можно не прово-
дить.
Проверочный расчет. Проверочные
расчеты выполняем одновременно с
конструктивной проработкой балок
моста.
Средняя часть пролетной балки.
Прочность балки при ее общем изги-
бе в двух плоскостях проверяем на
действие нагрузок комбинации 1.1.Б
(см. табл. 6.13).
Для определения расчетных верти-
кальных нагрузок по формулам
(6.12), (6.13) и рис. 6.4 находим коэф-
фициенты толчков с учетом схемы
моста и наличия балансирных теле-
жек ходовых колес.
Вес пролетной части моста
G„ м = 2q2wL= 2-7,590- 19 = 288,4 кН;
приведенная масса моста и тележки
тк = —(0,5- 288,4 + 274.6) =
к 9,807
= 42,74 т;
фактический коэффициент жесткости
моста, по формуле (6.38).
парциальная частота поперечных ко-
лебаний моста
= 29,26 1 /с.
42.74
м
При сом = 29,26 1/с и = 1 м/с
а = 0.035;'
= ._Л_/ + Ч., Q 9()62
5 2-5,17
ут = 1 + 0,5-3-0,035-0.9062 = 1.048;
ут1 = 1,024; ут? = 1,012.
*
Тогда вертикальные нагрузки будут
равны:
q = 1,048-1.1-7,59 = 8,777 кН/м;
<7 = 1,048 -1,215 = 18,9 кН:
Гь
267
Gtip= 1,048-1,2-9 = 11.34 кН:
= 1,024- 1,1-76,6 + 1,012- 1,1 х
х 202,5 = 312,0 кН;
Д2 = 1,024- 1,1-84,2 + 1,012-1,1 х
х 171,5 = 286,0 кН;
= 312,0 + 286,0 = 598,0 кН.
По формулам (6.20), (6.21) и
рис. 6.4,«,
, л 286,0 _ ЛС_ „ -
/>, = 4,3---= 2,057 м; zn - 0,5 х
] 598,0 0
х (19 - 2,057) = 8,472 м;
<19 — 057)2 8 777-192
М. = 598,05 -_L + 2122J2L +
1 4-19 8
19 _ 1 057
+ 11,34-2,3 + 18,9-2,5 ~ =
= 2715кН-м.
При /к = 0,1 м/с2, т.е. при jjg =
= 0,0102, горизонтальные инерцион-
ные нагрузки будут равны:
qr = 0,0102-1,1 7,59 = 0,085 кН/м;
GKr = 0,0102-1,2-15 = 0,184 кН;
Gnp = 0,0102-1,2-9 = 0,011 кН;
Р1Г = 0.0102(1,1 • 76,6 + 1,1-202,5) =
= 3,131 кН;
D2t = 0.0102(1,1-84,2 + 1,1 171,5) =
= 2,869 кН;
DRr = 3.131 + 2.869 = 6,0 кН.
Схему приложения горизонталь-
ных нагрузок принимаем по рис. 6.5.
По формулам (6.24) и (6,26) находим:
5,17-2.507-10 3
~19-3,26-10“4
М1Г =
0,0852-192(1 + 1.136)
8 (3 + 1,136) +
2733,338 103 . h , 20.149-Ю3
ст —---------— 10 -Ь -— ------- х
16.741-10’3 8.047-10 3
X Ю"6 = 165,8 МПа < Яр =
= 179,6 МПа.
Прочность средней части балки
при общем изгибе в двух плоскостях
обеспечена.
Ребра жесткости. Фактическая гиб-
кость стенки пролетной балки в ее
средней части Sc = 1590/8 = 198,8 <
< 200. т.е. стенка может укрепляться
Только поперечными основными и
дополнительными ребрами жесткости
(большими и малыми диафрагмами).
Диафрагмы будем выполнять из лис-
тового проката; в больших диафраг-
мах выполним вырезы в средней час-
ти. Ширину выступающей части реб-
ра определяем по условию (6.58):
/?р 2 1590/30 + 40 = 93 мм; толщина
ребра должна быть не менее 8р 2
2 93/15 = 6,2 мм. Момент инерции
ребра относительно плоскости стенки
в соответствии с формулой (6.50) дол-
жен быть не менее J 3 • 1,59 х
х 0,0083 = 2.442 - 10 м4.
Принимаем Ьр = 0,1 м; 5р =
= 0,008 м. Тогда его момент инерции
относительно плоскости стенки
= 0Д08-0Д* . 0 [ V =
р 12 \ 2 /
= 2,667-10“* м4.
Проверку прочности ребра по ус-
ловиям работы его верхней кромки на
сжатие по формулам (6.60) и (6.61):
= ОЛТ^ОД!3 = 0,0517-10’6 м4;
Лс = 2805,88 см4 = 28,0588- 10”6 м4;
(0,0517 + 28,0588) 10"ъ
0,008
6- 19(3 3- 2-1.136)
+ 8(3 + 1,136) ”
= 20,15 кН-м.
сж
312.012- I03 . п-0,6-0,15
-----:-----— S1U-----------—
0,6-0,15-0,008 2- 1,285
При определении коэффициента
неполноты расчета принимаем т3 =
= 0,95, тогда т0 = 0,9-1,0 0,95 =
= 0,855 и R = 0,855-210 =
= 179,6 МПа.
Проверку производим по условию
(6.45):
= 54,7 МПа.
При т3 = 0,9; т0 = 0.81 и R —
= m0R = 0,81 -210 = 170 МПа
= 54,7 МПа < R = 170 МПа:
следовательно, прочность верхней
кромки диафрагмы обеспечена.
268
Е~Е (поВерндто]
Раскрой поясоВ
Строительный подъем Валки
(при ее положении но дону)
7000
1900
Верхнего _'
>
нижнего
98S0
'г
4№0 9000
-*--------------
Раскрои стенки
Рис. 12.11
Таблица
сВарных lu8oB
Основная надпись
Шаг ребер. Из условия прочности
рельса но формуле (6.62) имеем
0.62/0,01 V
659 \0,008/
5* 367.87* 10-290
(I, <-----------------------
1 312,012
1,71 м.
Ко = 6,8188;
Учитывая, что пояс балки достаточно
тонкий, для обеспечения его проч-
ности при действии местных напря-
жений от давления колес тележки
принимаем конструктивно шаг малых
диафрагм в средней части балки
<7; = 0.88 м, а шаг больших диафрагм
а = За, = 2,64 м. В концевых частях
балки ребра ставим в соответствии с
необходимостью приварки фундамен-
тов под привод механизма передви-
жения крана. Расстановка диафрагм
показана на чертеже пролетной бал-
ки, приведенном на рис. 12.11.
Прочность верхнего пояса. С уче-
том действия местных напряжений
проверяем по формулам (6.64)...
(6.68). При ujb = 0,88/0.56 = 1,786;
b{!b = (2- 15 + 5)/56 = 0,625; bjb =
= 15/56 = 0,27 по 1абл. 6.17 ... 6.19
принимаем кх = 0.1747; к2 = 0.1784;
/<3 = 0,1196. Тогда
= 6,8188
= 172,6 МПа;
27I5103-1.59 „6
2 -13.39 16" 3
162.3 МПа.
96-0.1747-0,56= 28.0588-10"6
+ ОЖ’-О.ОГ’
= 1,434 кН;
2715* 10’ ,„_6
~------------716 6 = 163 МПа ;
16.74* 10" ’
0.1 196* 1.434* Иг’ <
= 10,29 МПа;
6 *0.1784* 1.434- 103
Запас местной устойчивости п =
= 172,6/162,3 = 1,06 > I. Местная
устойчивость стенок в средней части
балки обеспечена.
Опорное сечение пролетной балки.
Прочность опорного сечения пролет-
ной балки проверяем для случаев
действия нагрузок комбинаций 1.2.А и
1.2.Б (см. табл. 6.13).
Как видно из предыдущих расче-
тов, вертикальные нагрузки комбина-
ции 1.2.А будут такими же, как и для
комбинации 1.1.А, а для комбинации
1.2.Б-как для комбинации 1.1.Б; при
этом вертикальные нагрузки комби-
наций Б оказались больше, чем ком-
бинаций А. В связи с этим опорное
сечение пролетной балки проверяем
только на действие более опасного
случая-комбинации нагрузок 1.2.Б.
Как отмечено выше, вертикальные и
горизонтальные инерционные нагруз-
ки комбинации 1.2.Б равны соот-
ветствующим нагрузкам комбинаций
1.1.Б.
Определим более опасное с точки
зрения максимальной поперечной си-
лы в опорном сечении положение те-
лежки на мосту.
При положении тележки с грузом
у опоры А (см. рис. 6.4, а и 6.6) реак-
ции опор приводной пролетной балки
= 15,35 МПа;
ппр = /(163.27 + 10.29)2 + 15,352~~
- (163^27 + 10,29)1535 =
= 166,4 МПа < т0/? = 170 МПа.
+ 598,0
19 - 4,3 + 2.01
= 637,1
кН;
Прочность верхнего пояса обеспе-
чена.
Местная устойчивость стенки.
Местную устойчивость стенки в сред-
ней части балки, где т = 0, проверяем
но формулам (6.71)... (6.74):
„ 8,777* 19 , „ 1О „2,5
^min — -----7 — + 1 1 .34 + 1 8,9 +
4 з — 01
+ 598,0-—= 169,3 кН .
19
При положении тележки у опоры
В\
270
mm
|9 — 9 S
11,34 4- 18,9 —+
19
i 01
+ 598,0 — = 174,4 кН;
19
n 8.777-19 ...... 1O n2.5
^max — ---~----Ь 1 1,34 4- 18,9— +
I 9 _ 7 () 1
+ 598,0 — - = 629.9 кН .
19
Более опасным будет случай поло-
жения тележки у опоры Л.
Силу перекоса моста определя-
ем по формуле (6.18): Рпер 0,2 х
х 169,289 = 33,86 кН.
Наибольший вертикальный изги-
бающий момент в гонке а (см.
рис. 6.22) в соответствии с размерами
балки (см. рис. 12.7 и 12.11) равен
Ма.ь= Лтах/= 637,104-0,7 =
= 445,97 кН-м.
Горизонтальные изгибающие мо-
менты в узлах сопряжения балок
определяем по формулам (6,27)...
(6.29):
М 4г = М7гn = (19 — 4,2 • 1,627) 4-
+ ^(2-4,3 - 4,2-8,526) +
I R Эй
+ 4,2-4,217 = 129.1 kH-m;
2
nnfts * IQ
МВг = M™' = - 4.2 1.627 +
3 18 Зй
+ 1±Д4,2-8,526 + ^7 • 4,2 4,217 =
= 223.7 кН-м.
Эксцентриситеты скручивающих
нагрузок в соответствии со схемой
рис. 6.9 и рис. 12.7... 12.10: <4 = е7 =
= 0; е2 = 0,496 м; = 0,459 м; =
= 0,676 м; е5 = 1.45 м; е(, = 2,85 м;
= 0,54 м; ед = 0,72 м; е10 = 0.84 м.
Скручивающий момент для опор-
ного узла приводной пролетной бал-
ки в соответствии с формулой (6.32)
19 — 301
Thn I = 2.869 • 0.496 • -—— -
кр.1
_ (XOS5J90 459 _ 0,011'0,676 -
> 3 * *5 19
- 0,184-2.85 + ^Ц—0,54 +
19 - з s
+ 11,34-0.72 + 18.9 ’-----0.84 +
19
+ 9,54 = 48.53 кН-м:
для неприводной пролетной балки
г /х 19 - 2-01 0.085-19
Ткр,2 = 2.869-0,496 — —--------э— X
х 0.459 - 1312*2o.54 = - 15,03 кН • м .
э
Напряжения в стенке опорной час-
ти приводной пролетной балки в точ-
ке а (см. рис. 6.22) находим но фор-
мулам (6.92)... (6.94):
445,97 10'-0.25 1П_6
СУП = ——-——Z— Ю 6 * * * +
° 1.506Ю'3
П9 I * 1П3 -0^7
+ hilJUTr/ 1(Г о = 82ч6 мПа ;
4,059- 10“ 3
637.1-10\ 6
т» = ГоГолГ 10 +
----48» КР--. 1О.„ = 72.0 МПа
2-0.57-0.511 -0.01
Для соотношении ИН - 0,5/1.61 =
= 0.311; I/H = 0,7/1,61 = 0,435; г/Л =
= 0.3/0,5 = 0.6; Г И.п/Г „ = 0.0174/
/0,01 = 1,74 при а = 90 ’ по графикам
рис. 6.23 находим: KR = 1,22; Kf, =
= 1,60; К, = 0.9; Кг = 0,9; Кш = 1,0;
тогда
= 1,22 82,6 = 100.8 МПа; ай =
= 1,6-82,6 = 132.16 МПа; rftR =
= 0.9-72 = 64,8 МПа;
о,,], = 0.9 1,0 х
х У100.82 - 100,8- 132,16 + 132.162"Т
+ 3 64,8^ = 147,6 МПа .
Принимаем = 0,9, тогда т0 =
= 0,9-1.0-0.9 = 0,81 и /?р = т0А =
271
= 0,81 210 = 170 МПа; апр = 147,6
МПа < 7?р = 170 МПа; следователь-
но, прочность сечения обеспечена.
Сварной шов. Соединяет пояс и
стенку балки. Проверяем его проч-
ность по формуле (6.90):
637.1 • I03 3.586 • 10“ 3 1П_6
Тсв =-------—----------,--10 =
2- 1.00,01 1.663 10" 3
= 68,7 МПа.
Принимаем ш3 = 0,9, тогда =
= 0,81 и Я‘в = т0Я“ р = 0,81 • 150 =
= 135 МПа; тев = 68,7 МПа < =
— 135 МПа. Прочность шва обеспе-
чена.
Монтажный сварной шов узла сое-
динения балок. Проверяем по форму-
ле (6.95) в соответствии со схемой
рис. 6.25 на действие горизонтально-
го изгибающего момента Мвг =
= 223,7 кН м. Принимаем катет шва
равным толщине пояса торцевой бал-
ки, т. е. Лш = 0,012 м.
Координату центра тяжести шва
по отношению к оси лобового шва
(параллельного оси торцевой балки)
находим в соответствии с размерами,
приведенными на рис. 12.12:
2- 1 0.5 _ _о,
=-----------= 0,286 м
2 - 1 + 1.5
Расстояние от центра тяжести шва
до наиболее удаленной его точки
Гтах = 70’752 + О - 0.286)2 =
= 1.036 м.
Полярный момент инерции шва
_ э 0.012-13 0.012-I.53 _
— - — -I 12 —
= 0,005375 м4.
Тогда
223.7 - 103 1.036 1П_6
тсо =----------------10 = 61,6 МПа.
ср 0,7 0,005375
балки определяем по формулам
(6.107), (8.114)... (6.116):
Г =______5-7,590-19* 10-3 +
'° 384-2.1- 105- 13.39- 10“3
534,8-7,35(0,75- 192 - 7,352). 3 _
2-12-2,1 105-15,05- Ю"3 ~
= 0,015 м < — = — = 0,024 м.
800 800
Здесь / = (19 - 4,3)/2 = 7,35 м.
Принимаем /0 = 0,024 м. Схема
раскроя листов вертикалов для обес-
печения строительного подъема по-
казана на рис. 12,11. По формуле
(6.116),
Л = 0,024 sin "-Ь6 = 0,006 м;
Л = 0,024-sin—= 0,019 м.
22 19
Значения скосов кромок листов,
по формуле (6.117),
к. = 0,0061-9~ = 0.0048 м 0,005 м;
1 2000
к2 = (0.019 - 0,005)——15911— =
2 2000 + 4360
= 0,0035 м = 0,004 м .
Окончательный сборочный чертеж
пролетной балки показан на рис.
12.11,
Торцевая балка. Конструкция бал-
ки показана на чертеже рис. 12.12.
Проверку прочности балки в опасном
сечении-в узле сопряжения с пролет-
ной приводной балкой-производим
для случая действия нагрузок ком-
бинации 1.2.Б. Расчетную схему на-
гружения принимаем в соответствии с
рис. 6.10, а и 6.6.
Максимальный изгибающий мо-
мент в вертикальной плоскости равен
Для монтажного шва примем т3 =
= 0,8, тогда w0 = 0,9- 1,0 0,8 = 0,72 и
= 0,72 150 = 108 МПа;
тср= 61,6 МПа < /?;в= 108 МПа.
Прочность шва обеспечена.
Строительный подъем пролетных
балок. Необходимую амплитуду
строительного подъема пролетной
272
Мв “ ^тах^Ч 1 + (^кр.1 Т<р.2.) Х
X LtS ~ L‘ = 637,1 5,17 ~ 47 +
+ (48,53 + 15,03)537 " 47 =
= 320,9 кН-м.
Рис. 12.12
Горизонтальный момент равен
Л/!г = 129,1 кН м. Нормальные на-
пряжения от изгиба в двух плоскостях
320,9- I03
2.9- i0“3
1СГ6
129,1 - 103
1,86- iF3
10“6
= 180 МПа.
Принимаем /и0 = 0,9, г.е. 7?р = 0,9 х
х 210 - 189 МПа; а = 180 МПа <
< Ар = 189 МПа.
Максимальные касательные на-
пряжения среза в стенке
т= 637.1.10-б= '
2 - 0,01 7,586 10“4
= 71,3 МПа < = 0,9- 130 =
= 117 МПа,
Прочность торцевой балки обес-
печена.
Проверка динамической жесткости
моста. Проверку динамической жест-
кости моста проводим по времени
затухания колебаний порожнего кра-
на,
В соответствии с формулой (6,1 13)
время затухания колебаний при их
периоде, равном
= 0,214 с,
составит = 540-0.2143 = 5,29 с <
< 17з] = 12 ... 15 с. Динамическая
жесткость моста удовлетворительна.
Литература
1. Абрамович И. И., Котельников Г. А, Козло-
вые краны общего назначения. М,. 1983.
2. Александров М,П. Подъемно-транспорт-
ные машины. М., 1985.
3. Асинхронные двигатели серии 4А: Спра-
ночник/А. Э. Кравчик, М. М Шлаф,
В. И. Афонин. А. Е. Соболевская,
М.. 1982.
4. Богинский К. С., Зотов Ф.С.. Николаев-
ский Г. М. Мостовые и металлургические
краны. М.. 1970.
5. Вершинский А. В., Гохбсрг М, М., Семе-
нов В. П. Строительная механика и метал-
лические конструкции. Л., 1984.
6. ВНИИПТМАШ Расчеты крановых меха-
низмов и их дез алей. М., 1971.
7. Гохберг М. М Металлические конструкции
подъемно-транспортных машин. Л.. 1976.
8. Александров Н. П., Колобов Л. Н.. Ло-
бов Н.А. и др. Грузоподъемные машины.
М., 1986.
9. Казак С. А. Динамика мостовых кранов
(расчет нагрузок при переходных режимах).
М., 1968.
10. Калик С. А. Статистическая динамика и на-
дежность подъем но-транс портных машин.
Свердловск, 1987.
IL Козырев Ю,Г. Промышленные роботы:
Справочник. М., 1983.
12. Крановое электрооборудование: Справоч-
ник/Под род. А. А, Рабиновича. М.,
1979.
13. Общесоюзный классификатор промышлен-
ной и сельскохозяйственной продукции.
Высшие классификационные группировки.
Т. 2. М., 1968.
14. Орлов П.И. Основы конструирования/Под
род. П. М. Учаева. Кн. 1. М., 1988.
15. Подъемно-транспортные машины. Атлас
конструкций/Под ред. М. П. Александ-
рова и Д. Н, Решетова. М . 1987.
[6. Правила устройства и безопасной эксплуа-
тации грузоподъемных кранов. М,. 1983.
17. Приводы машин: Справочник/Под рея.
В. В. Длоугого. Л., 1982.
18. Расчет деталей машин на ЭВМ/Под ред.
Д. Н. Решетова и С. А. Шувалова.
М., 1985.
19. Расчеты металлургических кранов С. А. Ка-
зак, В. И. Котов, П. 3. Петухов,
В. Н. Су тор и хин М.. 1973.
20. Справочник по кранам/Под ред. М. М. Гох-
бср! а. Л. Т. Г 2, 1988.
21. Тормозные устройства: Справочник/
М. П. А л е кса н д р о в, А. Г. Л ы с я к о в,
В. Н. Федосеев^ М. В. Новожилов;
Под ред. М. П. Александрова. М.,
1985.
22. Шаботов АЛК Лысяков .4. Г. Мостовые
краны общего назначения. М.. 1980.
23. Шеффлер М., Пайер Курт Ф. Основы
расчета и конструирования подъемно-транс-
портных машин: Сокр. пер. с нем. М., 1980.
24, Дзехцер АНН. К вопросу о максимальных
динамических нагрузках в металлоконст-
рукциях мостовых однобалочных кранов/
/Тр. ВНИИПТМАШа. Вып. 1. М., 1976.
25. Лобов Н.А., Мосягин А. В., Пивко А. В. и
др. Динамические нагрузки мостовых од-
нобалочных кранов при подъеме груза//Из-
вестия вузов. Машиностроение. 1983. № 2.
26, Концевой Б. М,, Розентейи Б.М, Ремонт
крановых металлоконструкций. М., 1979.
27. Дитрих Я. Проектирование и конструиро-
вание. Системный подход. М., 1981.
28. Мемелов В. Б. Особенности моделирования
процессов конструирования в САПР меха-
нических систем. В кн.: Геометрические
модели в процессах конструирования.
Минск. 1985.
29. Методические указания. САПР. Типовые
математические модели объектов проекти-
274
ровавия в машиностроении, РО 50-464-84.
М.. 1984.
30. Автоматизация проектирования: Со. ста-
тей Под ред. В. А. Трапезникова. Вып. 1.
М.. 1986.
31. Вайнсом А. А. Подъемно-транспортные ма-
шины строительной промышленности. Ат-
лас конструкций. М., 1976.
32. Расчеты грузоподъемных и транспортиру-
ющих машин/Ф. К. И в а н ч е н к о, В. С. Бон-
дарев, В. Я. Барабанов, Н.П. Ко-
лес н и к, - Киев: Вища школа. 1978.
33. ВНИИПТМАШ. Отраслевые расчеты кра-
нов/Под. ред. А. X. Комашснко. М.,
1974.
34. Ривин В. И. Динамика привода станков. М,.
1966.
35. Казак С. А. Расчет частот собственных ко-
лебаний в дискретных цепных нсразвегв-
ленных консервативных сишемах/Извс-
_.стия вузов. Машиностроение. 1979. № 12.
36. Григорьев II. II. Пагрхзки кранов. М.-Л..
1964.
37. Королев В. Д. Канатное производство М.,
1980.
38. Хазов Б. Ф.. Дидусев Б. А. (. правимник по
расчету надежност и машины на стадии
проектирования. М.. I486.
39. Промышленные роботы и манипуляторы с
ручным управлением: Каталог. .М., 1986.
40. Гурин XI. .1. Проектирование ручных ма-
нипуляторов. Свердловск. 1986.
41. Савицкий В. П. Грузоподъемные машины:
Курсовое проектирование. Минск. 1981.
42. Когаев В.П. Расчеты на прочност ь при нап-
ряжениях, переменных во времени. М..
1977.
43, Сбалансированные манипуляторы/ Вла-
дов И. Л., Данилевский В. II.. Ио-
нов П. Б. и др. Под ред. П Н. Беляни-
на. М., 1988.
276
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1. Подвески крюковые крановые
J
J
Рис. ILIJ. Подлески крюковые крановые для Q — ЗЛ.ТО i (OCT 24J9I.08 8)):
/ с одним блоком; 2 с дв\мя блоками: 5 с тремя блоками: 4 с четырьмя олоками; 5 е пятые блоками
ю подвески крюковые крановые (ОСТ 24J91.08—81) Табл ос и ца П. 1 J
Типоразмер по стандарту 1-3, 2-336 Размеры, мм Мас- са, кг Грузе подъ- емность, т Ре- жим рабо- ты Диаметр каната - мм
D d d2 ^3 В В\ Bi В3 /?4 Н /72 //2 L НО
336 55 100 мзз 28 138 90 8 666 106 285 440 36,4 3,2 11...14
1-3, 2-406 406 М.36 32 772 114 330 520 47.8 Т
1-3, 2-500 500 872 380 620 61,8 ВТ
1-5-406 406 90 140 М42 70 148 96 840 143 355 180 180 520 70,6 5 Л; С 14...17
1-5-500 500 М48 987 162 420 620 90.2 Т
1-5-610 610 1117 485 756 120 ВТ 14...18
2-5-336 336 55 100 М42 >448 55 ПО 118 56 766 143 320 110 440 61,3 Л; С И.,.14
2-5406 406 887 162 370 520 84,9 Т
2-5-500 500 987 420 620 107 ВТ
2-8406 406 90 140 М52 70 190 130 12 62 940 182 390 180 520 116 8 Л; С 14...17
2^8-500 500 М56 1079 202 440 620 157 Т
2-8-610 610 1207 505 750 213 ВТ Л; С 14...18 14,..17
2-10-406 406 977 390 520 129 10
2-10-500 500 М64 90 1172 242 475 620 180 Г
2-10-610 610 1302 540 750 285 ВТ 14...18
3-10-336 336 М56 70 250 192 897 202 350 440 145 Л; С И...14 11...14
3-10406 406 М64 90 1072 242 425 520 161 Т
3-10-500 500 1172 475 620 193 ВТ
3-12,5406 406 260 16 1077 430 520 205 12.5 Л; С 14...17
3-12.5-500 500 Тран. 70X10 270 1215 260 480 620 250 Т
3-12,5-610 610 1345 545 750 340 ВТ 14.„18
3-16406 406 1115 430 520 223 Л; С 14.,.17
Типоразмер по стандарту Размеры, мм
D d ^3 В В\ Вг
3-Е6-500 500 1 10 170 Трап.80*10 110 290 216 16
3-16-610 610
4-16-406 406 Трап. 70X10 445 152
4-16-500 500 Грап. 80*10
4-16-610 610
4-20 Л 06 406
4-20-500 500 130 200 Трап. 90* 12 130 510 190 20
4-20-610 610
4-32-610 610 Грап. 100*12
4-32-710 710 150 200 150 585 314
Трап. 110*12
4-32-810 810 Трап. 120* 16
5-50-710 710 710 318 30
5-50-810 810 150 ЗЮ Трап. 140x16 770 360
5-50-960 960
Продолжение табл. П.1.1
Мас- са, кг Грузоподъ- емность, т Ре- жим рабе- ты Диаметр каната с/к> мм
Вз Д4 Н /4 L А.
70 92 1287 292 490 220 640 308 16 т 14...17
1417 555 770 394 ВТ Л; С 14...18 14...17
76 1115 260 440 540 314
1287 292 490 640 368 Т
1417 555 770 488 ВТ 14...18
1187 440 540 318 Л; С 14...17
1 10 106 1366 322 515 260 640 514 20 Т
1511 595 770 627 ВТ 14...18
1571 352 687 32 Л; С 18.„23
104 130 1807 402 695 300 880 1016 Т
1907 745 980 1185 ВТ
140 1917 452 705 880 1361 50 Л; С 23.„28
118 154 2138 498 795 340 980 1963 т
2283 865 ИЗО 2153 ВТ
Рис. 11.1.2. Подвески крюковые крановые для Q = 80. ..320 т (ПО «Сибтяжмаш»):
1 80; 200 т; 11 - 100; 250 т; ///-125 т; IV 160; 320 т; Л //Л /Р-подвески удлиненного типа; II- под-
веска укороченного типа
Табл и ца Г1.1.2
i
Основные размеры подвесок, мм (ПО «Сибтяжмаш») (Рнс, ПЛ-2)
Грузоиодь- CMHOClb, т Тип под- вески н h Ai А2 ^3 В В\ В, ч— В, в<
80 1 2195 500 450 495 900 1250 1020 600 270 150
100 II 2875 550 500 575 » 1300 » — » »
125 ш 3295 600 540 605 1050 1400 1060 650 300 180
160 IV 3505 650 575 680 1100 1500 » 800 320 210
200 I 4100 820 665 765 1230 1800 1360 900 320 200
750 II 4255 900 800 825 1210 2200 » — 345 225
320 IV 4910 1030 850 945 1415 2250 1400 1150 360 240
Продолжение табл. П.1.2
Г рузоподь- емностк, i Тип под- вески 4 0 Л л ] ^2 ^3 d Д 4, Д1 L Масса, . KI
80 I 275 210 — 380 250 800 900 — - 1150 3 675
100 II » 157 — — 984 » » » 600 700 1650 4900
125 III 315 218 131 - 160 300 » » 900 1000 1210 5 520
160 IV 350 157 256 157 200 350 » » 1730 8 570
200 I 400 290 — 480 400 1100 1240 — 1440 10 250
250 11 450 162 — — 1086 450 » » 900 1040 1760 И 000
320 IV 475 » 310 162 326 » » )> 1200 3140 1980 18 600
ПРИЛОЖЕНИЕ 2. Канаты
।
к
।
1
Таблица П.2.1
Kauai двойной свивки типа ЛК Р конструкции
6 X 19(1 + 6 + 6/6) + I о.и. ГОСТ 2688 80 (Рис. П.2.1)
Диаметр Расчел нал Ориенги- л Маркировочная группа, МПа
ппнлчня я
им сечения масса 137^ 1470 1578 1666 1764 1862 1960
проволок, 1000 м
мм2 имазанно-
го каната. Разрывное усилие*, кН, не менее
К1
9,9 36.66 358,6 . — 48,85 51.85 53,45 55,95 58,85
1 1.0 47,19 461,6 — 62,85 66,75 68,80 72,00 75,15
P.O 53.87 527,0 — 71,75 76,20 78,55 81,90 85,75
13,0 61,00 596,6 71,05 76,19 81,25 86,30 89,00 92,80 97,00
*14.0 74,40 728,0 86,70 92,85 98,95 105,00 108,00 112,50 118,00
15,0 86.28 844,0 100,00 107.00 114,50 122,00 125,50 131,00 137,00
16,5 104,61 1025,0 121,50 130,00 139,00 147,50 152,00 159,00 166.00
18,0 124,73 1220.0 145,00 155,00 106,00 176,00 181,50 189,50 198.00
19,5 143,61 1405,0 167,00 179,50 191,00 203,00 209,00 218,50 228,00
71.0 167,03 1635.0 194,50 208,00 222,00 236,00 243,50 254,00 265,50
5 188.78 1850,1 220,00 235,50 251,00 267,00 275,00 287,50 303,50
74Д) 215,49 2110,0 250,50 269,00 287,00 304,50 314,00 328.00 343,00
75,5 244,00 2390,0 284,00 304,50 324,50 345.00 355,50 372,00 388,50
* 27.0 274,31 2685.0 319.00 342,00 365,00 388,00 399.50 418,00 436,50
28,0 297,63 2910,0 346,50 371,00 396,00 421.00 434,00 453,50 473,50
30,5 356,72 3490.0 415,50 445.50 475,00 504,50 520.00 544,00 567,50
32,0 393.06 3845,0 458,00 490.50 523,50 556,00 573,00 599,50 625.50
33,5 431,18 4220.0 502,50 538,50 574,00 610,50 748,00 782.50 686.00
37,0 512,79 5015.0 597.50 640,50 683,00 725,00 629,00 658,00 816.00
* Разрывное усилие каната в целом.
281
Рис. 1 1.2.1. Kunar двойной свивки типа ЛК -
Р конструкции 6 х 19 (1+6-1- 6/6) + I о.с.
ГОСТ 2688 80
Рис. П.2.2. Канат двойной свивки типа
ЛК РО конструкции 6 х 36 (1 + 7 +
+ 7/7 + 14) + 1 о.с. ГОСТ 7668- 80
Канат двойной свивки типа ЛК РО конструкции
6 X 36(1 + 7 -Н 77 -+ 14) +- 1 о.с. ГОСТ 7668-80 (Рис. П.2.2)
Таблица 11.2.2
Диаметр Расчел нам Ориен । и- Маркировочная группа, МПа
кана га и ющадь районная
ММ сечения масса 137" М70 I57S 1666 1764 1862 1960
прево. ЮК, I0W м
м м с.шзанпо-
i о кана га Разрывное усилие*, кН, не менее
кг
11.5 51.96 513.0 66,75 70,95 75,100 78.30 80,70
13.5 70.55 696.5 90,65 96.30 101.50 106.00 109,0
15.0 82.16 812.0 104.50 111.50 116.50 122,50 128,0
16.5 105.73 1045,0 135,50 144.00 150,00 157,50 165.0
18Л 125.78 1245,0 161,50 171,50 175.50 186,50 190,50
20.0 1 53.99 ] 520.0 197.50 210,00 215,00 229,00 233.50
22.0 185.10 1830,0 207.50 222.50 237.50 252.50 258,50 275,00 280,60
23.5 215.94 2130.0 242.50 259.50 277,00 294,00 304,00 321.00 338,00
25,5 252.46 2495,0 283,50 303,50 234.00 344,00 352,50 375,50 383.00
27.0 283.79 2800,0 318,50 341,50 364.50 387,50 396,50 422.00 430,50
29.0 325.42 3215 0 366,00 392.00 417,50 444,00 454,50 484,00 493,50
31.0 369.97 3655.0 416.00 445.00 475.00 505,00 517.00 550.50 561,50
33.0 420.96 4155,0 473,00 507.00 540.50 574,00 588,00 626.50 638.50
34.5 461.07 4550.0 5IS.00 555.50 592.00 629,50 644,50 686,00 700,00
36,5 503.09 4965,0 565,50 606,00 646,00 686,50 703,50 748,50 764,00
* Разрывное усилие каната в целом.
282
Рис. П.2.3. Канат двойной свивки типа ЛК -
РО конструкции 6 х 36 (1 +7 + 74-7/7+ 14) +
+ 7 х 7(1 + 6) ГОСТ 7669-80
Таблица П.2.3
Канат двойной свивки типа ЛК РО конструкции
6 X 36(1 + 7 + 7/7 4- 14) + 7 х 7(1 + 6) ГОСТ 7669-80 (Рис. П.2.3)
Диаметр канага Расчетная н лота 1ь Ориенти- ровочная масса Маркировочная группа, МПа
мм сечения 1372 1470 1578 1666 1764 1862 1960
проволок. 1000 м
ММ" смаза лис-
го каната. Разрывное усилие*, кН, не менее
кг
10,5 52.9 482,0 — 661,50 70.45 71.80 77.40 75.80
13,0 80,46 733,0 — — 100.00 106,50 108.50 115,50 1 18.50
14,5 96,36 906,0 — 120,50 128,00 130,00 138,50 141.50
16,0 121,87 1145,0 — — 152,00 162,00 165,00 175,00 178.50
17.5 145,03 1360,0 — — 181,50 193,00 196,00 209.00 213,00
19,5 179.07 1630,0 — 224.00 238,50 242,50 258.00 263,00
21,0 213,39 1950.0 233,50 250,50 267.50 284,00 289,50 307.00 313,50
23,0 251,21 2290,0 275,00 294.50 315,00 334,50 341,00 362,00 368,50
25,0 292,1 2660,0 320,00 343,00 366,00 389,00 396.00 417,50 429,00
26,5 327,43 2975.0 358,50 384,50 410,00 436,00 444.00 472,00 480,50
28,0 373,25 3395,0 408,50 438,50 467,00 497.00 506,50 538.00 547,50
30,0 426.76 3890,0 467,50 501.50 535.00 568,00 579.00 615,00 627,00
32,5 487,48 4445,0 534,50 572.50 611,00 649,00 661.50 703,00 716.00
35.5 580,11 5290.0 683,50 682,00 727.50 772,50 787,50 835.00 852,50
36.5 646.37 5895.0 709,00 759,50 810,00 861,00 877,50 930,00 950,00
39.0 716.29 6530,0 785,50 842,00 898.00 954.50 972,50 102 5.ОТ) 1045Л0
41.0 796.83 7265.0 874,00 936,50 994.50 1055.00 1075,00 1145,00 1170.00
* Разрывное усилие каната в целом.
J
ИРНПОЖЕНИИ 3. Канатные блоки и барабаны
Рис. П.3,1, Компонование верхних
блоков механизмов подъема кранов (ПО «Сибтяжмаш»)
Таблица П.3.1
Основные размеры установок верхних блоков (Рис. П.3.1)
Гру зоподъем- ность крана, т Тип Диаметр каната, мм Размеры, мм Масса, кг
L 1 /1 h 1з В Г н й А
80 1 30 800 600 840 550 247 131 1387 980 500 400 620 1295
100 11 — 1100 — 1040 500 1420
125 III 600 247 1387 400 500 620 1740
160 IV 800 1741 — 232 880 1332 1000 500 2600
200 I 45,5 1100 900 1240 900 320 — — 1690 730 3250
250 II — 1360 700 — 162 — 1360 — 3190
320 IV 900 2288 — 250 1200 1690 1360 600 680 850 5685
t
Таблица П.3.2
Размеры профилей канавок барабанов, мм (Рис. П.3.2 и П.3.3)
Диаметр каната, мм i Л Я, S Диаметр каната, мм 1 R Л, S
11 14 6,0 1,0 3,5 24 28 13,5 2.5 7,5
12 14 6.5 1,0 3.5 25 и 26 28 14,0 . 2.5 8,0
13 16 7.0 1,5 4,0 28 32 15,0 2,5 8,5
15 18 8,5 1,5 5,0 30 34 17,0 2,5 9,0
17.5 и 18 20 10.0 1,5 5,5 31 и 32 38 18,0 4,0 10,0
21 24 12,0 2,5 6,5 33 38, 40 19.0 4,0 10,5
22 и 22.5 24 12,5 2.5 7.0 36 40 21.0 4.0 11.5
23 28 13.5 2.5 7.5 44 и 45 50 25,0 4.0 14,0
285
Рис. П.1.2. Примеры установок верхних блоков:
лля О - 20 к 11. 111. IV для О = 12 i, 200м, 320м
Рис П.3.3. Профили канавок бараба-
на механизма подъема
Таблица П.3.3
Параметры блоков для стальных канатов, мм. (рис. П. 3.4)
D Испол- нение th d <h d2 d3 H h Ai A 2
320 6 От. 9 до 11 284 170 80 85 120 30 42 13 8 8 18 7 ? 28
7 Св. 11 до 14 276
8 Св. 14 до 18 264
380 6 От 9 до 11 3441 220 100 105 150 50 16 10 10 18 7 ? 28
7 Св. 11 до 14 336
8 О. 14 до 18 324
450 7 От 11 до 14 406 250 125 130 180 45 60 * 20 12 12 22 28 36
8 Св. 14 до 18 394
9 Св. 18 до 23 378
530 7 От 11 до 14 486 300 160 170 230 45 70 22 14 14 22 28 36 45
8 Св. 14 до 18 474
9 Св. 18 до 2 3 458
10 Св. 23 до 28,5 440
630 8 От 14 до 18 574 380 200 210 280 70 75 25 16 28 36 45
9 Св. 18 до 23 558
10 Св. 23 до 28,5 540
750 8 ' От 14 до 18 694 470 240 250 340 90 85 28 18 16 28 36 45
9 Св. 18 до 23 678
10 Св. 23 до 28,5 660
900 10 От 23 до 28,5 810 550 260 275 360 150 95 31 25 45
D Испол- нение В п R Г '2 Л с Масса, кг
6 От 9 до 11 22 32 3 6 12 12 2,5 85
320 7 Св. 11 до 14 27 40 4 75 20 16 3 9.0
8 Св. 14 до 18 34 50 6 9,5 25 20 3 10,0
6 От 9 до 11 22 32 3 6 12 12 2 5 12.0
380 7 Св. 11 до 14 27 40 4 7,5 20 16 3 6 1 13,0
8 Св. 14 до 18 34 50 6 9.5 25 20 3 16,0
7 От 11 до 14 27 40 4 7,5 20 16 3 21,0
450 8 Св. 14 до 18 34 50 6 9,5 25 20 3 23,0
9 Св. 18 до 23 45 65 8 12,5 32 25 4 26.5
7 От 11 до 14 27 40 4 75 20 16 3 32,5
5 30 8 Св. 14 до 18 34 50 6 95 25 20 3 1 34,0
9 Св. 18 до 23 45 65 8 12,5 32 25 4 40,0
10 Св. 23 до 28,5 55 80 10 155 40 32 6 10 7 _47,0
8 От 14 до 18 34 50 6 95 25 20 3 1 48,5
630 9 Св. 18 до 23 45 65 8 12,5 32 25 4 52,0
10 Св. 23 до 28,5 55 80 10 15,5 40 32 6 . 2 58,0
8 От 14 до 18 34 50 6 9,5 25 20 3 1 74,0
750 9 Св. 18 до 23 45 65 8 125 32 25 4 16 81,0
10 Св. 23 до 28,5 55 80 10 15,5 40 32 6 7 90,0
900 10 От 23 до 28,5 55 80 10 15,5 40 32 6 97,0
287
Рис, 11.3.4. Блоки стальные /ОСТ 24,191,05)
Графики ншрузок механизмов кранов
Р ю.. 11.41. 1 рафики (кн рузок
мсхани jmob под нема
кранов (по данным ВНИИПТМАШа)
Рис. П.4.2. Графики nai рузок механизмов передвижения крановых тележек (по данным
ВНИИПТМАШа) •
Рис. П.4.3. Графики нагрузок механизмов передвижения кранов (по данным ВНИИПТМАШа)
ПРИЛОЖЕНИЕ 5. Редукторы
Таблица П.5.1
Редукторы цилиндрические типа Ц2У (Рис. П.5.1)
Типоразмер редуктора Размеры редукторов, мм
L ^2 ^3 /^4 Li В в2 Н н2 Л d'
Ц2У-315Н 315 200 1040 740 370 215 365 300 420 -—- 395 260 340 685 335 35 28
Ц2У-355Н 355 225 1170 850 425 250 405 320 440 —- 435 280 370 740 375 35 28
Ц2У-400Н 400 250 1300 950 475 280 455 380 500 475 330 420 835 425 42 35
Ц2Н-450 450 280 1475 1060 530 310 510 500 — 650 630 515 590 955 475 50 35
Ц2Н-500 500 315 1660 1220 615 360 575 530 — —' 690 700 580 650 1050 530 60 42
Ц2Н-560 560 400 1850 1400 700 400 620 600 — 750 730 600 680 1100 600 60 42
Продолжение табл. П.5.1.
Типоразмер редуктора Быстроходный вал Тихоходный вал
d 4 / Ц h d / G ^2 4 h.
Ц2У-315Н Ц2У-355Н Ц2У-400Н Ц2Н-450 Ц2Н-500 Ц2Н-560 50 55 60 80 90 100 М36 X 3 М36 х 3 М42 х 3 М56 х 4 М64 х 4 М72 х4 НО НО 140 170 170 210 82 82 105 130 130 165 12 14 16 16 22 25 29,95 28,95 31,4 40,75 46,75 50,9 ПО 125 140 М80 х 4 М90 х 4 М100 х 4 210 210 250 165 165 200 25 28 32 55,9 64,4 72 160 180 220 300 300 350 40 45 50 169 190 231
Таблица П.5.2
Размеры концов тихоходных валов в виде части зубчатой муфты, мм (Рис. П.5.1)
Типоразмер редуктора Зацепление li К N d <4
m z M HOM, ОТКЛОН.
Ц2У-315Н 6 40 30 250 20 25 60 HO + 0,04 , +0,09 140
Ц2У-355Н 7 40 35 280 20 30 65 110 » 140
Ц2У-400Н 8 40 40 300 20 35 65 150 + 0,050 + 0,105 215
Ц2Н-450 10 40 50 400 _ 20 40 70 160 » 2Q0
G2N-500 10 40 50 430 20 40 70 160 230
C2N-560 ' 12 40 60‘ 440 20 50 60 200 » f 290
10 Зак. 1988
289
Рис. П.5.1. Редукторы цилиндрические двухступенчатые типа Ц2Н-450. Ц2Н-5ОО,
Ц2Н-560, Ц2У-315Н. ЦЗУ-35511. Ц2У-400Н
Таблица П.5.3
Нагрузки, допускаемые при непрерывной нагрузке (см. рис. П.5.1)
Типоразмер редуктора Ц2У-315Н Ц2У-355 Н Ц2У-400 Н
Передаточное число 20 25 31.5 40 50 20 25 31,5 40 50 20 25 31.5 40 50
Режим работы Легкий Л Средний С Тяжелый Г Непрерывный «Н Допускаемый крутя! 9,0 9.3 9,7 8,6 8,9 8,6 8,6 8,6 8,6 7,6 8.6 8,6 8,6 8,4 7,6 7.7 7,8 7,6 7,5 7.5 дий момент на тихоходное 12,1 12,7 13,2 11,8 12,2 11,3 11,7 11,7 10,4 16,4 11.2 11,7 11,7 10,4 16,4 9,8 10,9 11,1 10,5 10,4 и налу редуктора Т., кН м 17,2 17,8 17,9 15,9 17,0 16,4 16,4 16,4 15,9 14,6 16,4 16,4 16,4 15,9 14,6 15,6 15,9 15,6 14,6 14,6
Продолжение табл. П.5.3
Г и по размер редуктора Ц2Н-450 Ц2Н-5ОО Ц2Н-560
Передаточное число 20 25 31,5 40 50 20 25 31,5 40 50 20 25 31,5 40 50
Режим работы Легкий Л Средний С Тяжелый Т Непрерыв- ный Н Допускаемый крутящи 29,1 36,3 32,1 33,5 32,9 29,1 33,4 32,1 29,5 29,5 29,1 33,4 32,1 29,5 29,5 29,0 33.4 32,1 29,5 29,5 и момент на тихоходном j 39,8 48.1 41,2 45,5 42,5 39,8 45,2 41.2 40,0 40.0 39.8 45,2 41,2 40,0 40,0 39,8 45,2 41.2 40,0 40,0 шлу редуктора Тт, кНм 69,0 65,0 67.0 60,0 53.0 63,0 60,0 60,0 53,0 53,0 63,0 60,0 60,0 53,0 53,0 63,0 60,0 60,0 53,0 53,0
t
290
г'
Рис. П.5.2. Редукторы цилиндрические двухступенчатые типа Ц2УИО0 - 250 (ГОСТ
20758-75)
Таб л и ца П.5.4
Редукторы цилиндрические типа Ц2У-100...250 (Рис. П.5.2)
Типоразмер Размеры редукторов, мм
редуктора _____________________________________________________
L Г, / /, L Н /Л й л •Т В а’
Ц2У-100 387 325 136 85 136 165 230 112 22 290 109 160 15
Ц2У-125 450 375 160 106 145 206 272 132 25 335 125 180 19
Ц2У-160 560 475 200 136 170 224 345 170 28 425 140 212 24
Ц2У-200 690 580 243 165 212 280 425 212 36 515 165 250 24
Ц2У-25О 825 730 290 212 265 335 530 265 40 670 218 300 28
Продолжение гний.1. П.5.4
Типоразмер редуктора Размеры редукторов, мм
Тихоходный вал Быстроходный вал
d 1л /5 bi d </, /4 . h i
Ц2У-100 M20 x 1,5 35 80 58 6 18,55 М12 х х 1,25 20 50 36 4 10,6
Ц2У-125 M30 x 2 45 110 82 12 23,45 20 50 36 4 10,6
Ц2У-160 МЗбхЗ 55 НО 82 14 28,95 М18 х 1,5 25 60 42 5 13,45
Ц2У-200 М48 х 3 70 140 105 18 36,38 М20 х 1.5 30 80 58 6 16,05
Ц2У-250 М64 х 4 90 1.70 130 ?? 4^ 46,75 М24 х 2 40 110 82 10 20.95
10*
291
Продолжение табл. П.5.4
Типоразмер ре д у кто ра t Размеры редукторов, мм
Зацеплен. ^2
м 4 К n <4
m z bx ном. отклон.
Ц2У-100 — — — — - - — — — —
Ц2У-125 — — — — — - — . —
Ц2У-160 4 40 20 48 20 19 38 72 — 95
Ц2У-200 5 40 25 55 20 22 50 80 -0,03 -0,06 105
Ц2У-250 6 40 30 66 20 25 60 ПО -0,04 -0,075 140
Основные параметры и размеры редукторов Ц2У - 100.. .250 (см. рис. П.5.2) Таблица П.5.5
Типораз- Межосевое рас- Но МИ’ Ном. кру- Ном. радиальн. ТСп,д„ не Масса, Ki\
мер ре- стояние» мм налиные тяш. МО- натр, на вых. менее не более
дуктора тихоход- переда- мент на валу, Н'М 1
иыш ри точные тихох . на-
ной ступе - ходной числа лу, Н м быстро- тихо-
ни а tat ступени а ходном ходном
Ц2У-100 100 80 8; 10; 12,5 250 250 4000 0,97 35
Ц2У-125 125 80 16; 18; 20 500 500 5600 * 0,97 53
Ц2У-160 160 100 22; 24; 25; 1000 1000 8000 0,97 95
28
Ц2У-200 200 125 31,5 2000 2000 11200 0,97 170
Ц2У-250 250 160 35,5; 40 4000 3000 16000 0,97 320
Таблица П.5.6
Основные размеры редукторов ГК, мм (Рис. П.5.3)
Редуктор Тип Размеры, ММ
А ^2 ^3 L В н в, вэ Яд я5
ГК-850 I 850 500 350 -- 1685 1100 1125 945 75 305 260 530 485
ГК-1000 I 1000 600 400 — 1980 1350 1300 1148 — 330 350 650 530
ГК-и 50 I 1150 700 450 — 2165 1640 1350 1305 295 350 720 565
ГК-1300 1300 800 500 — 2465 2270 1327 1485 265 335 290 830 550
ГК-1500 I 1500 900 600 - 2770 2550 1427 1722 270 335 300 935 615
2710 2025 1580 1545 - 350 330 860 680
ГК-1700 1700 100 700 — 3090 2200 1568 1900 280 345 360 1045 645
ГК-1050 тт 1050 500 350 200 1685 1100 1125 945 75 305 260 530 485
п
ГК-1250 1250 600 400 250 1980 1350 1300 1148 — 330 350 650 530
(См. продолжение таблицы на с. 294)
292
Тип!
I
Рис, П.5.3. Редукторы цилиндрические горизонтальные крановые типа ГК
(ПО «Сибтяжмаш»)
Продолжение табл. П.5.6
Редуктор Тип Размеры, мм Масса, кг
в6 С ч Г м т н К, *3
ГК-850 I 50 485 400 40 - 505 — 108 82 125 2570
ГК-1000 I 100 472 580 40 —— —— 436 — 125 200 250 3550
ГК-1150 I 100 570 660 50 - 520 125 НО - 5440
ГК-1300 295 510 480 35 230 600 260 80 — 135 155 5550
ГК-1500 1 300 594 600 55 222 620 301 91 165 150 130 7960
225 740 780 60 — 680 — 225 225 160 8850
ГК-1700 195 650 680 40 230 — 325 85 150 155 130 10330
ГК-1050 50 485 400 40 -- 505 - - 108 82 125 2450
ГК-1250 11 100 472 580 40 - I-- 436 — 125 200 250 3645
Таблица П.5.7
Характеристика редукторов ГК (см. рис. П.5.3)
Редукторы Переда- точное число Число оборотов в минуту на входном валу Мощность, подводимая к Момент на
редуктору, кВт выхо^ щом валу,
Режим работы И М
л С т
ГК-850 31,5 580 95 83 65 68 000
6,27 450 430 376 296
15,21 585 293 256 202
ГК-1000 23,95 580 192 168 132 105 000
40,17 580 114 100 78
48,57 580 91 80 63
ГК-1150 19,10 540 251 220 173 117 500
17,96 590 1- . — 145
ГК-1300 29,3 430 —— — - 130 87 000
34,0 430 - 106
9,69 650 V Ж * - — 456 164 500
ГК-1500 35,84 455 — 81 155 000
ГК-1700 40,06 586 — — 139 229 000
ГК-1050 99,46 725 32 28 22 58 000
124,00 725 28 24 19
84,80 575 51 44 35
100.50 575 43 37 29
ГК-1250 122,10 575 34 30 24 75 500
140,74 720 32 28 22
151,94 757 32 28 22
294
Рис, П.5,4, Редукторы цилиндрические трехступенчатые типа ЦЗУ-160; 200; 250
Таблица П.5.8
Основные размеры редукторов типа ЦЗУ, мм (Рис. П.5.4)
Типораз- L L; I lt 12 /э Н Н,_ h A At В В,
мер ре-
дуктора
ЦЗУ-160 630 530 195 136 160 224 345 170 28 475 140 212 195 24
ЦЗУ-200 775 650 236 165 190 280 425 212 36 580 165 250 230 24
ЦЗУ-250 950 825 290 212 236 335 530 265 40 750 218 300 280 28
Продолжение табл. И.5.8
Типораз- Тихоходный вал Быстроходный вал Зацеплен. М 1Ъ К N d2 d3
мер ре- ------------------------------------------------ -------------
дуктора d /4 /5 b{ l d dy /4 /s / m z b
ЦЗУ-160 55 M36 x 3 110 82 14 28,95 20 M12 x 50 36 4 10,60 4 40 20 48 20 19 38 72 95
x 1,25
ЦЗУ-200 70 M48 x 3 140 105 18 36,38 25 M16 x 60 42 5 13,45 5 40 25 55 20 22 50 80 105
x 1,5
ЦЗУ-250 90 M64 x 4 170 130 22 46,75 30 M20 x 80 58 6 16,05 6 40 30 66 20 25 60 110 140
x 1,5
295
Таблица П.5.9
Основные параметры и размеры редукторов ЦЗУ (см. рис. П.5.4)
Типораз- мер ре- дуктора Межосевое расстояние, мм Номиыалъ ные пере- даточные ' числа Ном. крутя- щий момент на тихоходн. валу, Нм Ном, рад. натр, на вых. валу» Н • м К.п.д,, не менее Маска, кг, не более
тихоход, ступени а промеж, ступени а быстро- ход. сту- пени а
быс. ход. тихо- ход.
ЦЗУ-160 160 100 80 45; 50; 56; 63; 1000 500 800 0.96 106
ЦЗУ-200 200 125 100 80; 100; 2000 1000 1120 0,96 186
ЦЗУ-250 250 160 125 125; 160; 200 4000 2000 1600 0,96 335
Таблица П.5.10
Коэффициент увеличения номинальной нагрузки для редукторов типа ЦЗУ (см. рис. П.5.4)
Режим работы Легкий (Л) Средний (С) Тяжелый (Т) Непрерывный (Н)
Продолжительность включе- 15 25 40 ния, ПВ % свыше 40
Допуск, коэффициент увели- 2,0 1,6 1,25 чения ном. нагрузки 1,0
Таблица П.5.11
Основные размеры редукторов типа Ц3№ и ЦЗвкф (Рис. П.5.5 и П.5.6)
Типоразмер редуктора Размеры» мм
А ^2 А В L l2 ^3 H
ЦЗв1-200 350 165 — — 234 825 190 327 420 450
U3 -250 ' в* 380 200 — — 278 1015 240 379 480 552
ЦЗ-315 ОБ 510 220 — — 330 1255 300 472 614 700
ЦЗвкф-200 285 165 100 200 234 840 190 327 — 450
ЦЗ„ф-250 380 200 163 200 278 1015 240 370 — 552
ЦЗвкф-315 510 220 230 200 330 1255 300 472 700
! Продолжение табл. П.5.11
Типоразмер Размеры, мм Масса, кг
редуктора Я. Ь / <1 n «1
ЦЗ.,-200 — 40 68 50 — — — — — 190
ЦЗвв-250 - - 50 70 60 — — —- — 240
Ц3„-315 886 70 110 80 — — — — 300
ЦЗ„ф-200 —- 40 68 50 М16 17 300 2 2 220
ЦЗвкф-250 — 50 70 60 М16 17 300 2 2 365
Шввф-315 886 70 110 80 М16 — 300 — 6 730
296
Зал 5ыстролоОныд
Л
Сборки е копиями 1оло6 под нурты
или 6 fade части му<рты
Вал тишодный полый
5Й
Г8С76ВЗН1
Рис. П.5.5. Редукторы цилиндрические вертикального исполнения типа ЦЗвк
Рис. Г1.5.6. Редукторы цилиндрические вертикальные фланце-
вого исполнения типа ЦЗвкФ
Таблица П.5.12
Размеры конца быстроходного нала (см. рис. П.5.5 и П.5.6)
Типоразмер редук! ора Размеры, ММ
Л b Is 4,
ЦЗ -200 ЦЗиФ-200 35 32,1 42 3.5 6 6 58 80
ЦЗ -250 ЦЗФ-250 ИХ 38 35.11 50 3,5 6 6 58 80
UV315 Ц3>315 45 40,9 60 5 8 12 82 110
Таблица П.5.13
Размеры полого тихоходного валя, мм (см. рис. П.5.5 и П. 5.6)
Типоразмер редуктора At А) Эн: Д х m xz ГОСТ 6033 51
ИЗ -200 ЦК ЦЗ^-200 240 60 32 44 75 70 х 2,5 х 2,6
ЦЗ Ф-250 ЦЗ -250 л п 286 70 60 43 95 90 х 2,5 х 34
ЦЗ Ф-315 U3uk-3I5 336 90 86 35 115 110 х 2,5 х 42
Таблица П.5.14
Основные параметры и размеры редукторов типа ЦЗВК и ЦЗВКФ (см. рис. П.5.5 и П.5.6)
Типоразмер редукгира Мсжоссвое расстояние, мм Режим работы Крутящий момент на тихоход- ном валу Тг, Н м
а % С/ %L А [4,б
Передаточное число
10 12,5 16...100
ЦЗ -200 як 200 160 125 Легкий (Л) 400 450 500
Средний (С) 400
Тяжелый (T) 315
ЦЗ^Ф-200 Весьма тяжелый (ВТ) 250
ЦЗИ,-25О Легкий (Л) 850 1000
250 200 160 Средний (С) - - 800
Тяжелый (Г) 630
ЦЗ Ф-250 □ * Весьма тяжелый (ВТ) 500
UV3I5 Легкий (Л) 2000
315 250 200 Средний (С) - • - 1600
Тяжелый (Т) 1'250
ЦЗ^Ф-315 Весьма тяжелый (ВТ) 1000
298
варианты сварок редукторов
Рис. П.5.7. Редукторы цилиндрические вертикального исполне-
ния типа ВКУ-500М, 610М, 765М, 965М
Таблица П.5.15
Основные размеры редукторов типа ВКУ (Рис. П.5.7)
Типоразмер редукторов Размеры, мм
Й b d Н я, й L
ВКУ-500М 320 360 17 475 160 40 310 30 840 200
ВКУ-610М 365 350 17 585 250 — 380 35 1000 240
ВКУ-765М 435 445 26 675 290 - 470 40 1220 284
ВКУ-965М 560 620 33 920 320 75 610 45 1555 385
299
Продолжение табл. П.5.15
Типоразмер редукторов Размеры, мм Масса, кг
L2 ^3 L4 ^-5 ^6 t7 ^8 Mo
ВКУ-500М 305 310 85 70 240 70 160 320 20 330
ВКУ-610М 325 355 50 70 375 70 152,5 305 22,5 450
ВКУ-765М 370 440 45 110 440 110 192,5 385 30 800
ВКУ-965М 450 495 75 120 570 120 270 540 40 1500
Таблица П.5.16
Размеры тихоходных концов валов, мм (см. рис. П.5.7)
Типоразмер редуктора Варианты сборок по ГОСТ 20373-74 <1 ^2 ь.
ВКУ-500М 12; 13; 65 105 18 71
ВКУ-610М 21; 23; 80 130 22 88
ВКУ-765М 33 125 165 32 136
ВКУ-965М 13; 23; 33 125 165 32 136
12; 21 140 200 36 152
Таблица П.5.17
Размеры быстроходных концов валов, мм (см. рис. П.5.7)
Типоразмер редуктора d / Л b t
ВКУ-500М 40 М 24 х 2 75 85 НО 10 21
ВКУ-610М 40 М 24 х 2 75 85 110 10 21
ВКУ-765М 50 М 36 х 3 95 85 по 12 26
ВКУ-965М 65 М 42 х 3 100 108 140 16 33,9
Таблица П.5.18
Основные параметры редукторов типа ВКУ (см. рис. П.5.7)
Типоразмер редуктора Межосевое рас- Номинальное передаточное Подводимая Номинальный крутя- стояние мм число мощность, кВт щий момент на т/х | валу, Н м
ВКУ-500М 500 20; 28; 63 7,6... 18,6 3320...4300
ВКУ-610М 610 14; 25; 40; 80; 112 8,4...47,6 6000...8500
ВКУ-765М 765 18; 20; 22, 4; 25; 31; 5; 35,5; 12. . 75,5 12200... 14900 40; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140
ВКУ-965М 965 16; 18; 20; 22,4; 25; 28; 31,5; 21,5. ..137 19750. .2720 33,5; 40; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140
300
ПРИЛОЖЕНИЕ 6. Муфгы
Рис. П.6.1. Муфгы зубча-
тые (ГОСТ 5006 S3) типа
I, в двух исполнениях
Рис. П.6,2. Муфгы зубчатые (ГОСТ 5006 83) типа IL варианты сборки
' Таблица П.6. I
Муфгы зубчатые (ГОСТ 5006 83) (Рис, 11.6,1 и ГТ6.2)
Номинальный Размеры а мм Частота -в пате н ия Динам, момент масса для 1ипа 1, Ki,
крутящий 4 '
момен'1 М_„, //, Л Jlt Д^ / (лредель-Ене более С не менссс 1 не для типа не более
Н м : ное откло* более 1, 10 ’Н X
нс более нсние по X м‘
Л 14)
| ООО 40 145 105 60 82 174 12 90 0.05 6.7
1600 55 170 125 80 » » » 80 0,06 9,2
2500 60 185 135 85 105 220 » 75 0,08 10.2
4000 65 200 150 95 » » 18 62 ’0,15 15,2
£100 80 230 175 115 130 270 » 55 0,25 22,6
10000 100 270 200 145 165 340 » 47 0,50 36,9
16 000 120 300 230 175 165 345 25 40 1.15 62.5
25 000 140 330 260 200 200 415 30 35 2,25 100,0
40 000 160 410 330 230 » » » 29 6.00 164,3
63 000 200 470 390 290 240 500 35 20 10,50 228,0
301
ПРИЛОЖЕНИЕ 7. Тормоза и тормозные шкивы
Рис. П.7.1. Тормоз серии ТКГ (ОСТ 24.290.08-82)
Таблица П. 7.1
Размеры тормозов типа ТКГ, мм (Рис. П.7.1)
Тип тормоза L 1 а н Л А, *2 5 D d В ^2 ^3
ТКГ-160 490 414 200 180 415 180 НО 6 160 13 201 116 120 80 90
ТК Г-200 603 530 350 265 436 355 200 170 8 200 18 213 125 100 100 60
» » » » » » » » » » » » » » 150 >> 120
ТКГ-ЗОО 772 696 500 390 526 400 240 240 12 300 22 227 125 120 140 80
ТК Г-400 942 870 340 520 630 400 247 320 12 400 25 227 125 140 180 90
ТК Г-500 1160 1085 410 640 735 400 247 400 12 500 27 235 125 160 200 85
302
Рис. Ii.7.2. Тс.рмоч серии ТКП
Г а б л пца 11.7. 2
Основные размеры колодочных юрмезоч серии ТКП (Рис П.7.2)
Размер Диаметр юрмозно»о шкива, мм Размер Дпамсч р Е OpMO lliOl О USKHBd. \’М
4(Ю 500 600 400 51Ю
А 699 831 935 с 8 70 1049 1 165
Б 675 805 950 т 372 4^6 536
В 225 280 330 У 220 270 200
Г' 315 375 450 ф 196 183 202
Е 8 8 8 X 300 325 365
К 320 380 450 ц 180 200 240
Л 400 500 600 ч 170 210 230
м 600 720 820 ш 204 М 275
п 528 631 685 £/ 550 660 760
п 70 70 70 <7 23 27 27
36'3
Таблица П.7.3
Тормозные моменты тормозов серии ТКП, Нм (ПО «Сибтяжмаш» (см. рис. П.7.2)
Типоразмер Катушка параллельного возбуждения Катушка последовательного возбуждения
тормоза --------------------------------------------------------------------------—_________
ПВ 25% ПВ 40% ПВ 100% 60% тока 40% тока
ПВ 25% ПВ 40% ПВ 25% ПВ 40%
ТКП-400 1500 1200 550 1500 1200 900 550
ТКП-500 2500 1900 850 2500 1900 1500 1000
ТКП-600 5000 3550 1550 5000 3550 4800 2050
ТКП-700 8000 5750 2800 8000 5750 4800 3250
ТКП-800 12500 9100 4400 12500 9100 7500 5050
А
Рис. П.7.З. Шкивы
тормозные (ОСТ
24.290.06-75):
1 -исполнение 1; //-ис-
полнение 2
I
304
Таблица П.7.4
Конструкция и размеры тормозных шкивов исполнения 1 (ОСТ 24,290.06-75) (Рис, П.7.3)
Размеры шкивов, мм Масса, кг
D Di £>2 D3 Ds d di В Bi B2 B3 Bi b Л c
160 140 65 45 50 100 21,5 11 55 70 60 30 36 4 21,5 1.6 4,1
70 50 55 27,5 65 35 42 5 27,7 4,3
85 60 » 60 35,5 85 45 70 58 6 35,4 2,0 4,9
200 180 135 13 ' 95 80 58 6 35,4 8,4
155
100 75 85 60 135 49,5 115 82 12 48,7 9,2
155
250 225 85 60 135 35,5 13 17 85 45 58 6 35,4 13,6
155
185 13,5
105 75 85 135 49,5 13 115 70 82 12 48,7 14,5
155 14,4
185 17
300 275 110 80 155 13 145 138 23,0
23,1
185 17
215
125 90 100 155 5 $5 13 145 95 105 16 58,55 25,5
185 17 25,4
215
320 295 по 80 85 155 49,5 13 115 70 82 72 48,7 23,8
185 17 23,7
215
125 90 100 155 59,5 13 145 95 105 16 58,53 ** s . 26,2
185 17 26,1
215
100 185 59,5 17 - 2,0 45,3
215 45,2
245 21
305
Продолжение табл. П. 7.4
Размеры шкивов, мм Масса, кг
D to 1 £>з £>4 Ds d В Bi Bl Вз В4 b ft c
400 370 130 100 215 64,5 17 145 185 165 95 105 16 68,55 3,0 48,6
105
245 21 48,5
275
140 110 110 215 69,5 17 48,5
245 21
275 48,5
155 120 125 245 79,5 21 175 115 130 20 77,9 50,4
275
305
Таблица П.7.5
Конструкция и размеры тормозных шкивов, исполнение II (ОСТ 24.290 06-75) (см. рис, П, 7.3)
Размеры шкивов, мм Масса, тщ, кг
D £>i Di d В 51 в2 В h
100 85 45 28 60 50 40 8 31,3 1,8
160 140 50 70 55 5,1
65 35 80 10 38,3 6,0
70 40 НО 12 43,3 6,9
80 50 14 53,8 7.5
200 180 65 35 80 95 80 10 38,3 9,2
70 40 ПО 12 43,3 10,3
80 50 14 5 3,8 11,0
250 225
12,0
Примечание: Момент инерции шкива приблизительно может быть определен так:
D
~ х 0,6 х тш‘>
Л
306
ПРИЛОЖЕНИЕМ. Колеса крановые н их установки
а
Рис. Л.8.1. Колеса краиопые на. угловых буксах (ОСТ 24.090.09 75):
I lipiiua iiibie. II fH.jiipH!4'.'!in>re
Таблица П.8.1
Размеры крановых колес на узловых буксах, мм (ОСТ 24.090.09-75) (Рис. П.8.1)
D d В Bl ь А А 1 А, Ari а
200 230 40 13 35x2x16 50 80 12 35 3 i 226 526 150
250 290 45 1’ 45X2X22 70 1 10 14 : 376 271 572 175
32О~1 360 55 17 55x2x26 80 120 16 414 292 649 200 .
400 450 80 Ч 7 70x2.5x26 80 130 22 491 340 763 270
100 150
500 550 100 26 90x2,5x34 100 150 28 542 405 877 330
560 600 но ”1 1 0 1 26 И 0X2,5X42 90 130 28 631 462 350
630 680 33 1 10x25x42 100 130 150 180 28 614 449 — 400
710 770 ! 33 110x25x42 НО 1 30 150 160 180 200 32 629 669 459 499 — 400
800 880 140 33 — 110 150 170 170 210 250 36 712 772 505 565 ... 460
900 980 160 40 — 130 150 190 210 40 758 547 — 505
1000 1080 170 40 170 250 1 40 805 610 5 30
307
Продолжение табл. I7.8J
D 31 F Л М / h m е У Г М зсса колеса, кг
ириводн ого непри- годного
200 68 150 284 82 167 20 4 30 43 38,14 40,08 36,30
250 75 185 328 82 152 20 5 30 48,5 54,24 5 6,79 5 2,44
320 88 200 377 82 172 20 S 30 59 80,72 85,02 77,16
400 120 230 438 130 210 30 5 40 90 165,72 175,72 176,05 186,05 15 6,67 166,67
500 150 ‘ 265 525 165 220 46 6 50 106 _J 310,73 . 326,1 0 295,89
560 160 ’ 300 - • 165 255 50 6 50 116 403,61 388,08
630 180 280 165 1 255 . 50 8 60 132 471,61 491,72 452,14 472,14
710 180 290 330 165 260 50 8 60 132 548,87 5 68,87 7 19,22 5 27,48 547,48 686,78
800 900 1000 210 315 375 — 260 310 54 8 60 148 795,38 823,38 10! 7,42 761,00 791,00 967,900
230 345 — 240 320 60 10 70 169 990,09 953,96
240 390 ... 240 320 65 10 70 179 1050,09 1564,87 1012,96 1519,76
‘Га б л и и a IL S. 2
Основные размеры крановых колес тина К1Р, мм (Рис. П.8.2)
D о. <1 б/. <Л В Я. М а KI
200 230 50 80 175 18 65 80 12
250 290 60 85 215 18 70 90 20
320 360 65 95 285 18 80 100 31
85 145
400 450 85 130 360 ^4-" 105 130 61
95 145
500 550 105 155 442 28 125 150 113
Примечания:
1. Размеры шпоночною паза-но ГОСТ 23360 7Я.
2. Для неприполных колеи донускаеюя бесил юноч ное соединение.
Ряс, П .8,2. Колеса
крановые типа К1Р
(ГОСТ 3569 74)
308
Таблица П.8.3
Рис. П.8.3. Колеса
крановые типа К2Р
(ГОСТ 3569 -74)
Основные размеры крановых колес типа К2Р, мм (Рис. П. 8.3)
D Di d d| В 5 L Масса, кг
200 230 50 80 175 50 80 18 80 20
250 290 55 85 220 70 110 18 110 30
320 360 70 120 275 80 120 20 120 50
400 450 95 150 350 86-110 130-150 25 120- 130 90
500 550 110 115 170 175 440 90-100 150 35 135 150 140
560 600 100 150 230 310 500 90 130 35 180 200
630 680 135 200 530 90-130 140-180 35-40 150 250
710 770 135- 180 200 200 290 640 100-150 150-200 35-60 150- 200 410
800 880 155- 165 200- 220 240 360 720 100-170 150-250 35-70 150- 170 200- 230 640
900 980 175 190 280 820 120-150 190-210 45 170 190 490
1000 1080 220 340 880 170 250 70 230 890
Примечания: 1. Размеры шпоночного паза - по ГОСТ
23360-78.
2. Для неприводных колес допускается бесшпоночное соединение
ПРИЛОЖЕНИЕ 9. Рельсы крановые
Таблица П. 9.1
Основные размеры крановых рельсов (Рис. П.9.1)
Тины рельсов ь ^2 S h Размеры, мм Г ri г?
А, А? Я Л,
КР50 50 55 90 20 90 25 20 300 18 26 * 6 5 1,5
КР60 60 65.5 105 24 105 27,5 22 350 20 32 6 5 1,5
КР70 70 76,5 120 28 120 32,5 24 400 23 38 6 6 1,5
КР80 80 87 130 32 130 35 26 400 26 ^>1 8 6 1.5
КР100 100 108 150 38 150 40 30 450 30 50 8 8 2
КР120 120 129 170 44 170 45 35 500 32 56 8 8 7
КРИО 140 150 190 50 190 50 40 600 34 63 10 10 3
309
Рис. П.9.1. Рельсы крановые (ГОСТ
4121 76)
Рис. П.9.2. Примеры установки рельс
)
Таблица П. 9.2
Технические параметры крановых рельсов (см. рис. П.9.11
Типы рельсов Площадь по- перечного сече- пня, см2 Расстояние до нейтр. оси Момент инерции. см4 Масса 1 пог м* кг
у, Ух
КР50 38,02 4,32 357.54 29,85
КР60 50,99 4,83 654,60 40,03
КР70 67,30 5.93 1081,69 52,83
КР80 81.13 6,43 1547,40 63,69
КР100 113,32 7,60 2864,73 88,96
КР120 150.44 8,43 4923,79 118,10
•Гр» in ! 05.5 3 9.84 7427,23 153,49
ПРИЛОЖЕНИЕ 10. Механизмы поворота кранов
2S5
Рис. П.10.1. Механизмы поворота кранов
Таблица П. 10.1
Техническая характеристика механизма вращения (Рис. П.10.1)
Исполнение
Электродвигатель, тип
Мощность, кВт
Частота вращения, об/мин
Редуктор, тип
Передаточное число
Тормоз, тип
Диаметр тормозного шкива, мм
Электроматит
Масса механизма, кг
III
I
МТ-111-6 МТ-112-6 МТ-111-6
3,5 5 3,5
915 940 915
Планетарный, трехступенчатый
258 258 350
Колодочный с двумя короткоходовыми
электромагнитами, выключающими раздельно
каждую колодку
200
2 х МО 100Б
436 448 436
Рис. П.11.1. Буфер резиновый
311
Таблица П. 11.1.
Основные размеры буфера (Рис. П.П.1)
Энергоемкость буфера. кНм Размеры, мм Масса, _кг
D 1л Л В С а d R Л, Ri *3
630 100 115 102 100 5 140 110 11 125 15 5 13 2,7
6450 225 245 227 200 8 270 216 17 200 20 5 20 11,7
ПРИЛОЖЕНИЕ 12. Образцы оформления списка использованной литературы в расчез но-пояснн
тельной записке
Книга не более трех авторов
Александров М.П. Подъемно-транспортные машины.-М.: Высшая школа, 1979. 558 с.
Шабашов А. П., Лысяков А. Г. Мостовые краны общего назначения. -5-е изд., перераб. и доп.-М.:
Машиностроение. 1980.-304 с.
Книга более трех авторов
Иванченко Ф.А. и др.расчеты грузоподъемных и транспортирующих машин.-2 изд. перераб. и
доп. - Киев.: Вища школа, 1978. 574 с.
Сгазья из сборника
Каюк С. А. Частотный анализ в консервативных цепных дискретных упругих схемах.-Науч. тр.
Челяб. политех, ин-та; Сб. 123. Челябинск, 1973, с. 39 -45.
Статья из журнала
ДусьеВ.Е. Наварский Ю, И., Кокшаров С, А, Коэффициент трения в тормозах литейных кра-
нов'/Безопасность труда в промышленности. 1979. № 11, с. 37.
Авторское свидетельство
А. с. 887448 (СССР). Устройство для аварийного торможения подъемной лебедки.-Опубл, в
Б. И., 1981. № 45.
Стандарт
ГОСТ 2.105-70. Единая система конструкторской документации. Общие требования к текстовым
документам. Ввел. 01.07. 80.- М.: Изд-во стандартов, 1968,-22 с.
ПРИЛОЖЕНИЕ 13. Выписка из общесоюзного классификатора промышленной и сельскохозяйст-
венной продукции *
417000 Оборудование подъемно-транспортное и погрузочно-разгрузочное, краны.
417100 Краны мостовые ручные и электрические, общего назначения, в том числе подвесные.
4)7120 Краны мостовые, электрические, однобалочные, опорные.
417130 Краны мостовые, электрические, однобалочные, подвесные, однопролетные.
417170 Краны мостовые электрические, двухбалочные, опорные, общего назначения, управле-
ние из кабины (легкого и среднего режима работы).
417180 Краны мостовые, электрические, двухбалочныс, опорные, общего назначения, управле-
ние из кабины (тяжелого и весьма тяжелого режима работы).
417190 Краны мостовые, электрические, двухбалочные, подвесные.
417420 Краны потукозловые, электрические.
417450 Краны козловые, электрические.
417460 Краны козловые, электрические, самомонтирующисся.
417470 Краны козловые, электрические, монтажные и строительные.
417650 Краны консольные (на колонне, поворотные).
417680 Краны консольные (поворотные велосипедные, напольные, краны консольные пово-
торные, на тележках).
* Государственный плановый комитет Совета Министров СССР «Общесоюзный классифи-
катор промышленной и сельскохозяйственной продукции» Высшие классификационные группи-
ровки. Г. 2. М.. 1968.
312
ПРИЛОЖЕНИЕ 14. Перечень стандартов, упоминаемых в пособии
ГОСТ 82-70*
ГОСТ 103 -76*
ГОСТ 184-71*
ГОСТ 185-70*
ГОСТ 380 71*
ГОСТ 493-79
ГОСТ 534-78*
ГОСТ 977-75*
ГОСТ 1050-74**
ГОСТ 1412-85
ГОСТ 1451-77
ГОСТ 1759-70**
ГОСТ 2185-66*
ГОСТ 2591-71*
ГОСТ 2688-80*
ГОСТ 4121-76*
ГОСТ 4543-71*
ГОСТ 5006-83*Е
ГОСТ 5264-80
ГОСТ 5720-75*
ГОСТ 5721-75*
ГОСТ 5915-70*
ГОСТ 6368-82
ГОСТ 6402-70*
ГОСТ 6711-81*
ГОСТ 6713-75*
ГОСТ 6874-75*
ГОСТ 7173-54*
ГОСТ 7293-85
ГОСТ 7372-79*
ГОСТ 7668-80
ГОСТ 7796-70*
ГОСТ 7798-70*
ГОСТ 7817-80*
ГОСТ 8239-72*
ГОСТ 8240-72*
ГОСТ 8278-83
ГОСТ 8282-83
ГОСТ 8509 -72*
ГОСТ 8510-72*
ГОСТ 8568-77*
ГОСТ 8713-79*
Сталь прокатная широкополосная универсальная. Сорта-
мент.
Полоса стальная горячекатаная. Сортамент.
Электродвигатели постоянного тока металлургические и
крановые. Технические условия.
Двигатели трехфазные асинхронные крановые. Техниче-
ские условия.
Сталь углеродистая общего назначения.
Бронзы безоловянные литейные. Марки.
Краны мостовые опорные. Пролеты.
Отливка из конструкционной нелегироваиной и легиро-
ванной стали.
Сталь углеродистая качественная конструкционная.
Отливки из серого чугуна с пластинчатым графитом.
Краны грузоподъемные. Нагрузка ветровая. Нормы и
методы определения.
Болты, винты, шпилки, гайки. Технические требования.
Передачи зубчатые цилиндрические. Основные параметры.
Сталь горячекатаная квадратная. Сортамент.
Канат двойной свивки типа ЛК-Р конструкции 6 х
х 19(1 + 6 + 6/6) + 1о. с. Сортамент.
Рельсы крановые. Технические условия.
Сталь легированная конструкционная.
Муфты зубчатые. Технические условия.
Ручная дуговая сварка. Соединения сварные. Основные
типы, конструктивные элементы и размеры.
Подшипники шариковые радиальные сферические двух-
рядные.
Подшипники роликовые радиальные сферические двухряд-
ные
Гайки шестигранные (нормальной точности). Конструкция
и размеры.
Рельсы железнодорожные узкой колеи типов Р8, Pl 1, Р18 и
Р24. Конструкция и размеры.
Шайбы пружинные.
Краны мостовые электрические общего назначения грузо-
подъемностью от 80 до 250 т. Основные параметры и
размеры.
Сталь низколегированная конструкционная для мостост-
роения. Марки и технические требования.
Подшипники шариковые упорные одинарные.
Рельсы железнодорожные типа РЧЗ для путей промыш-
ленного транспорта. Размеры.
Отливки из высокопрочного чугуна с шаровидным гра-
фитом.
Проволока стальная канатная. Технические условия.
Канат двойной свивки типа ЛК-РО конструкции 6 х
х 36(1 + 7 + 7/7 + 14 + 1) о.с. Сортамент.
Болты с шестигранной уменьшенной головкой (нормаль-
ной точности). Конструкция и размеры.
Болты с шестигранной головкой (нормальной точности).
Конструкция и размеры.
Болты повышенной точности с шестигранной уменьшен-
ной головкой для отверстий из-под развертки.
Сталь горячекатаная. Балки двутавровые. Сортамент.
Сталь горячекатаная. Швеллеры. Сортамент.
Швеллеры стальные гнутые равнополочные. Сортамент.
Сталь холодногнутая корытная равнополочная. Сорти-
мент.
Сталь прокатная угловая равнополочная. Сортамент.
Сталь прокатная угловая неравнополочная. Сортамент.
Листы стальные с ромбическим и чечевичным рифлением.
Технические условия.
Сварка под флюсом. Соединения сварные. Основные типы,
конструктивные элементы и размеры.
гл. 6
гл. 2
гл. 2
гл. 2
гл. 3, 6
гл. 3
гл. 6
гл. 3
гл. 2. 3,
6
гл. 3
гл. 1, 2,
6
гл, 6
гл. 2
гл. 2
гл. 2
гл. 2. 6
гл. 3
гл. 2
гл. 6
гл. 2
гл. 2
гл. 6
гл. 2
гл. 6
гл. 2. 6
гл. 6
гл, 2
гл. 6
гл. 3
гл. 2
гл. 2
гл. 6
гл. 6
гл, 5
гл. 6
гл. 6
гл. 6
гл. 6
гл. 6
гл. 6
гл. 6
гл. 6
313
ГОСТ К732 78* ГОСТ 9454-78* Трубы стальные бесшовные горячекатаные. Сортамент. Металлы. Метод испытания на ударный изгиб при пони- женной, комнатной и повышенной температурах. гл. 6 гл. 6
ГОСТ 9563-60* Колеса зубчатые. Модули. гл. 2
ГОСТ 10906-78* Шайбы косые. гл. 6
ГОСТ 10791 81 Колеса цельнокатаные. Технические условия. гл. 5
ГОСТ 11371-78* Шайбы. Размеры. гл. 6
ГОСТ 11533-75 Автоматическая и полуавтоматическая сварка под флю-
сом. Соединения сварные под острыми и тупыми углами.
Основные типы, конструктивные элементы и размеры. гл. 6
ГОСТ 11534 75 Ручная дуговая сварка. Соединения сварные под острыми
и тупыми углами. Основные типы, конструктивные эле-
менты и размеры. гл. 6
ГОСТ 14637 69 Сталь толстолистовая и широкополосная (универсальная)
углеродистая обыкновенного качества. Технические требо-
вания. гл. 6
ГОСТ 14776 79 Дуговая сварка. Соединения сварные точечные. Основные
типы, конструктивные элементы и размеры. гл. 6
ГОСТ 14959 79* Сталь рессорно-пружинная углеродистая, легированная. гл. 5
ГОСТ 15164 78 Сварные соединения и швы. Электрошлаковая сварка.
Основные типы и конструктивные элементы. гл. 6
ГОСТ 15622- 77 Муфты предохранительные фрикционные общею назна-
чения. Основные параметры и размеры. гл. 6
ГОСТ 15878 79 Контактная сварка. Соединения сварные. Конструктивные
элементы и размеры. гл. 6
ГОСТ 18123 82* Шайбы. Технические требования. гл. 6
ГОСТ 19240 73* Рельсы для наземных и подвесных путей. гл. 6
ГОСТ 19281-73* Сталь низколегированная сорговая и фасонная. гл. 6
ГОСТ 19282 73* Сталь низколегированная толстолистоная и ширекопо-
лочная универсальная. гл. 6
ГОСТ 19494 74 Краны консольные стационарные поворотные ручные.
Типы. Основные параметры и размеры. гл. 6
Технические условия. гл. 2
ГОСТ 19771 74* Уголки стальные гнутые равнополочные. Сортамент. гл. 6
ГОСТ 19772 74* Уголки стальные гнутые неравнополочные. Сортамент. гл. 6
ГОСТ 19811 82* Краны консольные электрические стационарные. Типы.
основные параметры и размеры. гл. 2
ГОСТ 19903 74 Сталь листовая горячекатаная. Сортамент. гл. 6
ГОСТ 20884 82* Муфта упругие с горообразной оболочкой. Основные па-
раметры. габаритные и присоединительные размеры. гл. 2, 3
ГОСТ 21424 75* Муфты упругие втулочно-пальцевые. Основные парамет-
ры, Габаритные и присоединительные размеры. гл. 2. 3
ГОСТ 21829-76 Система «человек машина». Кодирование зрительной ин-
формации. Общие эргономические требования. гл. 10
ГОСТ 21889- 76* Система «человек - машина». Кресло человека-оператора.
Общие эргономические требования. гл. 10
ГОСТ 22045 82* Краны мостовые электрические однобалочные опорные. ,
Типы, основные параметры и размеры. гл. 6
ГОСТ 22269-76 Рабочее место оператора. Взаимное расположение эле-
ментов рабочего места. Общие эргономические требова-
ния. гл. 10
ГОСТ 22353-77* Болты высокопрочные (нормальной точности). Конструк-
ции и размеры. гл. 6
ГОСТ 22354 -77* Гайки высокопрочные (нормальной точности). Конструк-
ции и размеры. гл. 6
ГОСТ 22355 77* Шайбы к высокопрочным болтам (нормальной точности).
Конструкции и размеры. гл. 6
ГОСТ 22356-77* f Болты и гайки высокопрочные и шайбы. Общие техниче-
ские требования. гл. 6
ГОСТ 22487-77 Проектирование автоматизированное. Термины и опреде-
ления. гл. 7
ГОСТ 22584-77* Тали электрические канатные. Технические условия. гл. 2
ГОСТ 23501-79 Системы автоматизированного проектирования. Общие
требования к программному обеспечению. гл. 7
ГОСТ 23518-79 Дуговая сварка в защитных газах. Соединения сварные под
острыми и тупыми углами. Основные типы, конструктив-
ные элементы и размеры. гл. 6
ГОСТ 24378-80*Е Краны мостовые электрические. Технические условия. гл. 6, 10
314
I
t
1
*
t
i
ГОСТ 25307- 82 Основные нормы взаимозаменяемости. Система допусков и посадок для конических соединений. гл. 3
ГОСТ 25546-82 Краны грузоподъемные. Режимы работы. гл. 1.
ГОСТ 25835-83 Краны грузоподъемные. Классификация механизмов по
(СТ СЭВ 2077-80) режимам работы. гл. 1,
ГОСТ 2.001-70 ЕСКД Общие положения. гл. 11
ГОСТ 2.101-68* Виды изделий. гл. 11
2.102-68* Вилы и комплектность конструкторских документов. гл. I 1
2.103-68* Стадии разработки. гл. 1 1
2.104 68* Основные надписи. t гл. 11
2.105-79* Общие требования к текстовым документам. гл. 11
2.108- 68* Спецификация. гл. 1 1
2.109-73 Основные требования к чертежам ГЛ. 1 1
ГОСТ 2.118-73 Техническое предложение. гл. 1
ГОСТ 2.119-73* Эскизный проект. гл. 1
ГОСТ 2.120-73* Технический проект. гл. 1,
ГОСТ 2.201-80 Обозначение изделий и конструкторских документов. гл. 11
ГОСТ 2.301-68* Форматы. гл. 11
ГОСТ 2.302-68* Масштабы. гл. 1 1
ГОСТ 2.303 68* Линии. гл. 1 1
ГОСТ 2.304-81 Шрифты чертежные. гл. 11
ГОСТ 2.305-68** Изображения - виды, разрезы, сечения. гл. 11
ГОСТ 2.306-68* Обозначения графические материалов и правила их нане-
сения на чертежах. гл. 11
ГОСТ 2.307 68* Нанесение размеров и предельных отклонений. гл. 1 1
ГОСТ 2.308- 79* Указание на чертежах допусков форм и расположения
поверхностей. гл. 1 1
2.309-73* Обозначение шероховатостей поверхностей. гл. 11
2.311-68 Изображение резьбы. гл. 11
ГОСТ 2.312-72 Условные изображения и обозначения швов сварных со-
единений. гл. 6
ГОСТ 2.313-82 Условные изображения и обозначения неразъемных со-
единений. гл. 6
ГОСТ 2.313-82 Условные изображения и обозначения швов сварных со-
единений. гл. 1 1
2.313 -82 Изображения условные и упрощенные крепежных деталей. ГЛ. 1 1
2.316-68* Правила нанесения на чертежах надписей, технических
требований и таблиц. ГЛ. 1 1
ГОСТ 2.503 74* Правила внесения изменений. ГЛ, 1 1
2.605-68* Плакаты учебно-технические. Общие технические требо-
вания. гл. 11
2.701 84 Схемы. Виды и типы. Общие требования. ГЛ. 11
2.789-74** Обозначения условные графические. гл. 1 1
7.1-84 Библиографическое описание произведений печати. гл. 1 1
8.417 81* Единицы физических величин. гл. 11
ГОСТ 12.1.005-76 ССБТ. Воздух рабочей зоны. Общие санитарно-гигиени-
ческие требования. гл. 10
ГОСТ 12.1.012-78* ССБТ. Вибрация. Общие требования безопасности. гл. 10
ГОСТ 12.2.003 74* ССБТ. Оборудование производственное. Общие требова-
ния безопасности. гл. 10
ГОСТ 12.2.032 78 ССБТ. Рабочее место при выполнении работ стоя. Общие
эргономические требования. гл. 10
ГОСТ 12.2.033-78 ССБТ. Рабочее место при выполнении работ сидя. Общие
эргономические требования. гл. 10
ГОСТ 12.2.049-80 Оборудование производственное. Общие эргономические
требования. гл. 10
ГОСТ 12.2.098-84 Кабины звукоизолирующие. гл. 10
ГОСТ 12.4.021-75 ССБТ. Системы вентиляционные. Общие требования. гл. 10
ГОСТ 12.4.040-78 ССБТ. Органы управления производственным оборудова-
нием. Обозначения. гл. 10
ГОСТ 12.4.026-76* ССБТ. Цвета сигнальные и знаки безопасности. гл. 10
ГОСТ 15.001-73* Разработка и постановка продукции на производство. гл. 10
ОСТ 24.090.44 -82 Колеса крановые. Выбор и расчел . гл. 5
ОСТ 24.090.72-83 Нормы расчета стальных конструкций мостовых и коз-
ловых кранов. гл. 6
ПРИЛОЖЕНИЕ 15. Функция нормального распределения
(Все значения умножены ня 106)
0 1 2 3 4 5 6 7 8 9
0,0 500000 503989 507978 511966 515953 519939 523922 527903 531881 535856
о.] 539828 543795 547758 551717 555670 559618 563559 567495 571424 575345
0,2 579260 583166 587064 590954 594835 598706 602568 606420 610261 614092
0,3 61791I 621720 625516 . 629300 633072 636831 640576 644309 648027 651732
0,4 655422 659097 662757 666402 670031 673645 677242 680822 684385 687933
0,5 691462 694974 698468 701944 705401 708840 712260 715661 719043 722405
0,6 725747 729069 732371 735653 738914 742154 745373 748571 751748 754903
0,7 758036 761148 764238 767305 770350 773373 776373 779350 782305 785236
0.8 788145 791030 793892 796731 799546 802337 805105 807850 810570 813267
0,9 815940 818589 821214 823814 826391 828944 831472 833977 836457 838913
1,0 841345 843752 846136 848495 850830 853141 855428 857690 859929 862143
1,1 864334 866500 868643 870762 872857 874928 876976 879000 881000 882977
1,2 884930 886861 888768 890651 892512 894350 896165 897958 899727 901475
1,3 903200 904902 906583 908241 909877 911492 913085 914657 916207 917736
1.4 919243 920730 922196 923642 925066 926471 927855 929219 930563 931888
1,5 933193 934478 935745 936992 938220 939429 940620 941792 942947 944083
1,6 945201 946301 947384 948449 949497 950529 951543 952540 953521 954486
1,7 955435 956367 957284 958185 959071 959941 960796 961636 962462 963273
1,8 964070 964852 965621 966375 967116 967843 968557 969258 969946 970621
1,9 971283 971933 972571 973197 973810 974412 975002 975581 976148 976705
2.0 977250 977784 978308 978822 979325 979818 980301 980774 981237 981691
2,1 982136 982571 982997 983414 983823 984222 984614 984997 985371 985738
2.2 986097 986447 986791 987126 987455 987776 988089 988396 988696 988989
2.3 989276 989556 989830 990097 990358 990613 990863 991106 991344 991576
2,4 991802 992024 992240 992451 992656 992857 993053 993244 993437 993613
2,5 993790 993963 994132 994297 994457 994614 994766 994915 995060 995201
2.6 995339 995473 995604 995731 995855 995975 996093 996207 996319 996427
316
0 1 0 3 4 5 6 7 8 9
2,7 996533 996636 996736 996833 996928 997020 997110 997197 997282 997364
2,8 997445 997522 997599 997673 997744 997814 997882 997948 998012 998074
2,9 998134 998193 998250 998305 998359 998411 998462 998511 998559 998605
3,0 998650 998694 998736 998777 998817 998856 998893 998930 998965 998999
Ф(4) = 0.999968329; Ф(4,5) = 0,999996023; Ф(5) = 0,99999971335
Для вычисления функции Ф(.г) при л > 5 можно воспользоваться асимптотическим рядом:
Ф(х) « 1
1-3 1'3'5
Данные приведенной таблицы взяты из кн.: Большов Л. Н., Смирнов А, В. Таблицы математи-
ческой статистики. - 3-е изд. - М.: Наука, 1983.-416 с. В ней приведены более подробные данные
функции нормального распределения.
ОГЛАВЛЕНИЕ
Предисловие ........................... 3
Введение .............................. 5
Глава 1. Общие положения .... 6
§ 1.1. Цели и задачи курсового проек-
тирования ............................. 6
§ 1.2. Задание на курсовое проектирова-
ние ................................... 7
§ 1.3, Комплектност ь и взаимосвязь до-
кументации в составе курсовою
проекта .............................. 10
§ 1.4. Организационно-методические ос-
новы проектирования .... 10
§ 1.5. Общие положения по расчету
ГПМ .................................. 12
Глава 2. Предварительные расчеты ме-
ханизмов .................. 21
§ 2.1, Механизм подъема груза . ... 22
§ 2.2. Механизм передвижения тележки
(крана) с приводными колесами 35
§ 2.3, РЛсханизм попорота крана ... 45
Глава 3. Основы конструирования гру-
зоподъемных машин .... 54
§3.1. Некоторые правила конструиро-
вания ............................... 54
§ 3.2, Компонование механизмов, теле-
жек. кранов ......................... 64
Глава 4, Проверочные расчеты меха-
шымоп ............................... 84
§4.1. Механизм подъема груза . ... 84
§ 4.2. Механизм передвижения (крана)
тележки ................. 89
§ 4.3. Механизм поворота .... 92
Глава 5. Расчет и конструирование ве-
ко юрых сборочных единиц 92
§ 5.1. Установка барабана .... 92
§ 5.2. Ходовые колее., и боковые ролики 97
§ 5.3. Предохранительные устройства 102
§ 5.4. Буферные устройства .... 104
Глава 6. Расчет металлических конст-
рукций ............................. 107
§6.1. Задачи расчетов ............... 107
§ 6.2. Исходные данные ............... 108
§ 6.3. Порядок выполнения расчетов 108
§ 6.4. Конструкционные материалы . 109
§ 6.5. Методы расчетов ............. 110
§ 6.6. Мостовые краны .............. 116
§ 6.7 Консольные настенные передвиж-
ные краны........................... 141
§ 6.8. Стационарные копсольно-ново-
ротвыс краны ................. 144
§ 6.9. Рамы крановых тележек ... 145
Глава 7. Элементы автоматизирован-
ного проектировании грузо-
подъемных машин ... 146
§7.1. Общие сведения .............. 146
§ 7.2. Подсистема проектирования ме-
ханизмов ........................... 148
§ 7.3. Программные средства организа-
ции диалога ........................ 185
Глава 8. Уточненные расчесы ... 194
§8.1. Задачи расчетов и их краткая ха-
рактеристика ....................... 194
§ 8,2. Расчеты длительности или интен-
сивности пускотормозных процес-
сов ................................ 195
§ 8.3. Рнсчс! динамических нагрузок в
механизмах при различных про-
I(сссах нагружепия ................. 197
§ 8.4, Расчет динамических нагрузок при
совмсегном нагружении несущей
металлоконструкции и механизма
крана................................201
§ 8.5. Определение вероятности безот-
казной работы .......................203
Глава 9. Рекомендации но проектиро-
ванию сбалансированных ма-
нипуляторов (ОМ) . . . 204
§ 9 1, Общее устройство ...........204
§ 9.2. Геометрические схемы . . . 206
§ 9.3. Уравновешивание СМ . . . 209
§ 9.4. Обобщенная кинематическая и
расчетная схема СМ и рекомен-
дации по расчету .....................211
§ 9.5. Примеры конструкций . . . 213
§ 9.6. Рекомендации по проектированию
трузозахватов ................. 218
318
Глава 10. Эргономические и эстетиче-
ские требования к грузо-
подъемным машинам . . 220
§ 10.1. Общие эргономические и эстети-
ческие требования................... 220
§ 10.2. Требования к кабинам мостовых
кранов ..............................222
Глава И. Составление и оформление
спецификаций, сборочных
чертежей и расчетно-поясни-
тельной записки .... 225
§ 11.1. Задачи, решаемые в специфика-
ции и на сборочном чертеже . . 225
§ [1.2 . Общие принципы построения
сборочных чертежей .... 226
§ 11.3. Простановка размеров на черте-
жах .................................227
§ 11.4. Общие принципы составления
расчетно-пояснительной записки 228
§ 11.5. Оформление расчетно-поясни-
тельной записки .....................229
§ 11.6. Оформление графической части
проекта .............................232
§ 11.7. Оформление спецификаций . 235
Глава 12. Пример выполнения курсово-
го проекта мостового крана
общего назначения . . . 236
Jj 12.1. Задание на проект .... 236
§ 12.2. Предварительные расчеты меха-
низмов ..............................236
§ 12.3. Компонование тележки . . . 242
§ 12.4. Проверочные расчеты механиз-
мов ................................ 247
§ 12.5. Расчеты сборочных единиц 254
§ 12.6. Примеры некоторых уточненных
расчетов механизмов . . . 258
§ 12,7. Оценка уровня унификации меха-
низмов главного подъема и пе-
редвижения тележки .... 262
§ 12.8, Расче ста т металлоконструкции мо- t • 263
Литература 44*>"*ae" 274
Приложения ......... 276
Приложение /. Подвески крюковые
крановые 276
Приложаниа 2. Канаты 281
Приложение 3. Канатные блоки и бара-
баны 284
Приложение 4. Графики нагрузок меха-
низмов кранов , , . 288
Приложение 5. Редукторы .... 289
Приложение 6. -Муфты 301
Приложение 7. Тормоза и тормозные
ШКИВЫ 302
Приложение 8. Колеса крановые и их
установки .... 307
Приложение 9. Рельсы крановые . . 309
Приложение 10. Механизмы поворота
кранов 311
Приложение //. Буфер 311
Приложение 12, Образцы оформления
списка использованной
литературы в расчегно-
пояснительной записке 312
Приложение 13. Выписка из общесоюз-
кого классификатора
промышленной и сель-
СКОХОЗЯЙСТВСИНОЙ про-
дукпии 312
Приложение 14. Перечень стандартов,
упоминаемых в посо-
бии 313
Приложение /5. Функция нормалы-ют о
распределения . . . 316
Учебное издание
Казак Сергей Антонович
Дусье Виктор Евгеньевич
Кузнецов Евгений Сергеевич
Стоцкая Людмила Васильевна
Наварский Юрий Владимирович
Кожушко Герман Георгиевич
Кокшаров Сергей Анатольевич
Гурин Марк
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
ГРУЗОПОДЬЕМНЫХ МАШИН
Зав. редакцией А. В. Дубровский. Редактор Н. С. Сафронова. Мл. редактор
И. М. Иванова. Художник В. Н. Хомяков. Художественный редактор Л. К.Гро-
мова. Технические редакторы: Г. А. Фетисова, Л. Ф. Попова. Корректор
Г. И. Кострикова
ИБ 7710
Изд, № От-615. Сдано в набор 01.03.89. Подп. в печать 09.10.89. Формат 70 х 100*Ав.
Бум. офс. № 2. Гарнитура литературная. Печать офсетная. Объем 26,00. усл.печ.л. 26,00.
усл.кр.-отт. 25,73 уч.-изд. л. Тираж 50000 экз. Зак. № 1988, Цена 1 руб.
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглинная ул., д. 29/14.
Набрано в Можайском полиграфкомбинате Госкомпечати СССР, 143200, г. Можайск,
ул. Мира. 93
Отпечатано с готовых диапозитивов в Московской типографии № 4 Госкомпечати СССР,
129041, Москва, Б. Переяславская, ул., 46.