/









































































































Текст
ББК 39.33
А23
УДК 629.1.073
Рецензент А. С. «Литвинов
Агейкин Я. С.
А23 Проходимость автомобилей. — М.: Машиностроение,
1981.— 232 с., ил.
2 р. 20 к.
Монография охватывает широкий круг вопросов эффективности работы авто-
мобилей в условиях плохих дорог и бездорожья. В ней рассмотрены условия ра-
боты автомобилей вне дорог с твердым покрытием, теория движения автомоби-
ля по мягким грунтам и неровным поверхностям, аналитические и эксперимен-
тальные методы оценки проходимости автомобилей. Дан анализ конструктивных
элементов машины и дополнительных съемных средств, повышающих проходи-
мость, изложена методика выбора конструктивных параметров автомобиля для
получения заданного уровня проходимости.
Для научных работников, занимающихся конструированием и эксплуата-
цией автомобилей.
А 31893'5--—Подписное. БЗ-27-35-80. 3603030000
038(01)-81
ББК 39.33
6Т21
© Издательство «Машиностроение», 1981 г.
ВВЕДЕНИЕ
Одним из основных достоинств автомобильного транспорта
является возможность доставки грузов непосредственно к месту
их использования,
Хотя автомобили и предназначены для движения по специ-
ально подготовленной поверхности — автомобильной дороге, они
в отличие от железнодорожного транспорта способны двигаться
и по естественной поверхности земли без предварительной под-
готовки пути пли с незначительной подготовкой, не требующей
больших капитальных затрат. Эту способность автомобилей ха-
рактеризует специальное эксплуатационно-техническое свойст-
во — проходимость.
Значение проходимости автомобилей находится в обратной
зависимости от плотности сети дорог с твердым покрытием.
Однако в какой-то мере это значение сохраняется и для районов
с хорошо развитой дорожной сетью, так как и здесь не исклю-
чена необходимость подвоза грузов в места, отстоящие в сто-
роне от дороги.
Рассмотрение проходимости автомобилей необходимо для
решения следующих важных народнохозяйственных задач: по-
вышения эффективности использования большого парка авто-
мобилей на грунтовых дорогах в период распутицы, дождей,
зимой; создания оптимальной конструкции автомобилей, в наи-
большей мере приспособленных к конкретным тяжелым дорож-
ным условиям их использования; создания автомобилей особо
высокой проходимости для заболоченных районов страны и рай-
онов с глубоким снежным покровом.
Автомобиль в течение всей своей истории непрерывно совер-
шенствовался в направлении повышения эксплуатационных ка-
честв на дорогах с твердым покрытием. Вместе с тем постоянно
велись работы и по созданию автомобилей для работы на грун-
товых дорогах и вне дорог. Особенно большое число исследова-
ний в этом направлении проведено в послевоенный период. Оте-
чественной промышленностью созданы полноприводные автомо-
били, обладающие высокой проходимостью (УАЗ-469, ГАЗ-66,
ЗИЛ-131, Урал-375, КрАЗ-255Б, МАЗ-543), разработаны новые
1342 3
типы вездеходных шин (с регулируемым давлением, широкопро-
фильные, арочные, пневмокатки).
Значительно возросли возможности использования автомо-
билей вне дорог, а также возможности по созданию еще более
эффективных автомобилей высокой проходимости и по повыше-
нию проходимости массовых дорожных автомобилей.
Закономерности движения автомобиля по грунтовым поверх-
ностям значительно сложнее, чем по дорогам с твердым покры-
тием, — механические свойства грунтовых поверхностей очень
многообразны и нестабильны, характер их деформируемости
сложен и недостаточно изучен. Для решения многих задач еще
нет общепризнанных методов. Ряд важных вопросов находится
лишь на начальной стадии обсуждения и разрешения. Все это
затрудняет практическое использование накопленных, но весьма
разрозненных результатов научных исследований.
В настоящей книге систематизированы вопросы, связанные
с понятием «проходимость автомобилей». Под проходимостью
понимается способность автомобилей двигаться вне дорог, вы-
полняя возложенные на них транспортные или другие функции.
Возможность движения автомобиля определяется условием
(1)
где ST— суммарная сила тяги; ЕРф—суммарная сила сопро-
тивления движению.
Ввиду большого разнообразия грунтовых поверхностей их
механические свойства необходимо оценивать статистическими
методами, а в качестве показателя проходимости целесообраз-
но использовать вероятность выполнения условия (1) на задан-
ном маршруте. Однако движение автомобилей в тяжелых грун-
товых условиях иногда сопряжено с чрезмерными материальны-
ми затратами и с существенным снижением производительности
(скорости). Поэтому в качестве дополнительных показателей
проходимости обычно используют абсолютные или относитель-
ные значения скорости, производительности, расхода топлива в
рассматриваемых условиях.
Следует подчеркнуть, что для определения основного показа-
теля проходимости необходима оценка тяговых свойств автомо-
биля, поворачиваемости и устойчивости, а для определения до-
полнительных показателей проходимости определяют, кроме то-
го, еще плавность хода и топливную экономичность. Таким об-
разом, оценка проходимости автомобиля сводится к оценке мно-
гих его эксплуатационно-технических свойств в условиях движе-
ния вне дорог.
Г л а-в a I
ХАРАКТЕРИСТИКА ПОВЕРХНОСТЕЙ
ДВИЖЕНИЯ ВНЕДОРОГ С ТВЕРДЫМ
ПОКРЫТИЕМ
Определяющее влияние на возможность движения автомоби-
ля вне дорог оказывают механические свойства основания
(грунтовой поверхности, по которой движется автомобиль) и
характеристики ходовой части автомобиля. Причем показатели
проходимости являются характеристиками взаимодействия ав-
томобиля с основанием; они существенно зависят как от свойств
основания, так и от свойств автомобиля. Для оценки проходи-
мости автомобилей с различными конструктивными параметра-
ми ходовой части необходимо знать не зависимые от конструк-
ции автомобиля параметры, характеризующие механические
свойства поверхностей движения, которые вне дорог в общем
случае образуются верхним слоем поверхности земли. Механи-
ческие свойства этого слоя (почв, грунтов) изучаются строителя-
ми, дорожниками и специалистами по механизации сельского
хозяйства.
§ 1. Дорожно-грунтовые поверхности, используемые для движе-
ния автомобилей
Поверхностями для движения автомобилей вне дорог с твер-
дым покрытием являются грунтовые дороги (проселочные, поле-
вые, лесные), колонные пути на грунтовой и заснеженной по-
верхностях, естественные грунтовые и заснеженные поверхности
земли.
Основными факторами, затрудняющими движение автомо-
билей по этим поверхностям, являются недостаточная прочность
(деформируемость) верхнего слоя грунта и существенная не-
ровность поверхности.
Под грунтом понимают все виды верхнего слоя земли: грун-
ты, почвы, снег и т. д. Грунты относятся к дисперсным телам;
в отличие от сплошных тел в них твердые частицы занимают
лишь часть объема, причем прочность связи между отдельными
частицами значительно меньше прочности материала самих час-
тиц. При действии внешней нагрузки в них в первую очередь
происходят перемещения и сдвиги отдельных твердых частиц.
Механические свойства грунтов определяются величиной
5
твердых частиц (гранулометрическим составом), влажностью,
плотностью и дерновым покровом
От размеров твердых частиц зависит величина общей по-
верхности раздела, а следовательно, и число молекул, находя-
щихся на поверхности тела. Последние имеют некоторую из-
быточную энергию, поэтому, чем меньше размеры частиц, тем
больше сцепление между ними, тем прочнее они связывают воду.
При размере частиц меньше 0,1 мкм (глинистые частицы) сум-
марная поверхность раздела достигает громадной величины и
играет доминирующую роль в поведении грунта, который начи-
нает проявлять свойства коллоида.
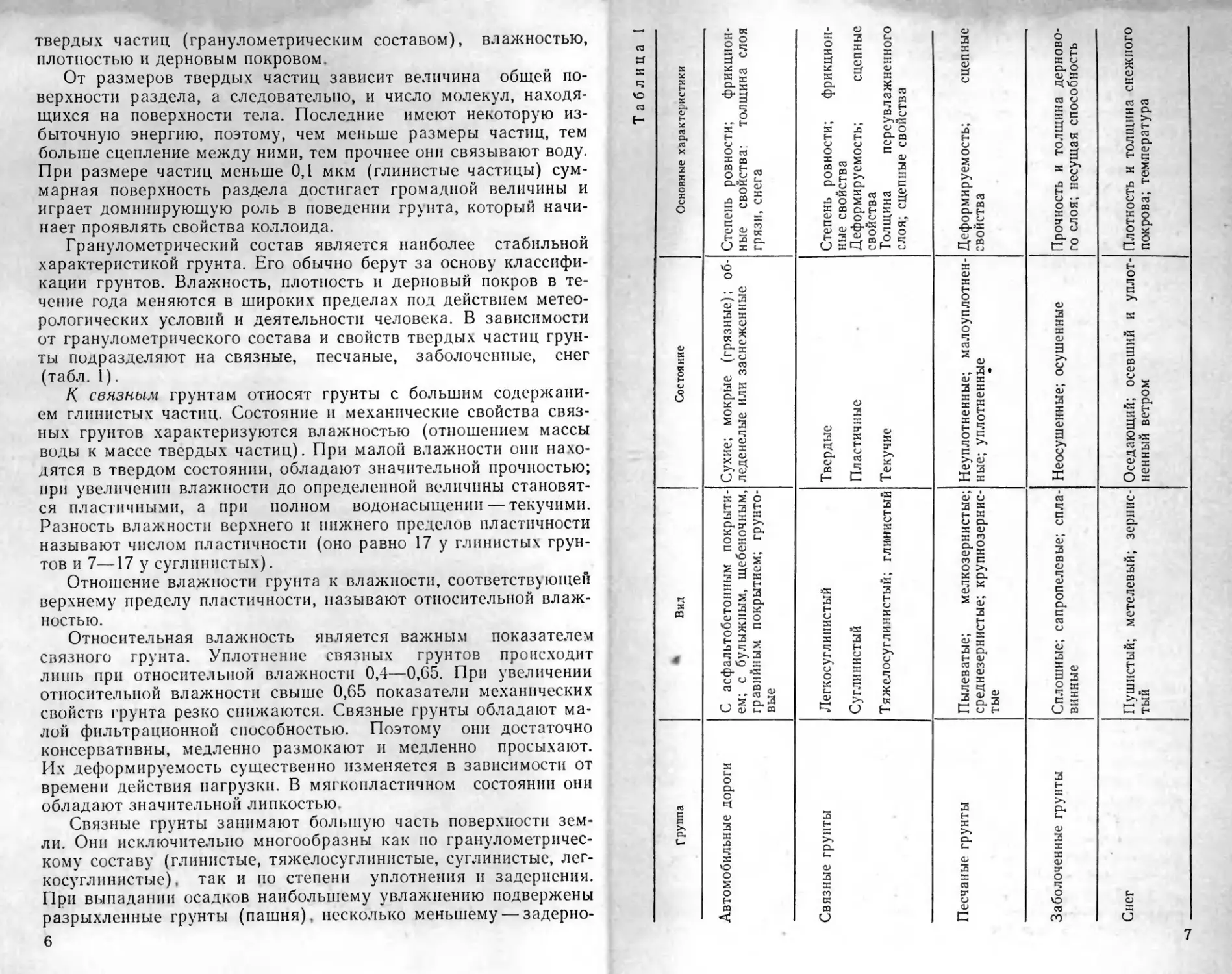
Гранулометрический состав является наиболее стабильной
характеристикой грунта. Его обычно берут за основу классифи-
кации грунтов. Влажность, плотность и дерновый покров в те-
чение года меняются в широких пределах под действием метео-
рологических условий и деятельности человека. В зависимости
от гранулометрического состава и свойств твердых частиц грун-
ты подразделяют на связные, песчаные, заболоченные, снег
(табл. 1).
К связным грунтам относят грунты с большим содержани-
ем глинистых частиц. Состояние и механические свойства связ-
ных грунтов характеризуются влажностью (отношением массы
воды к массе твердых частиц). При малой влажности они нахо-
дятся в твердом состоянии, обладают значительной прочностью;
при увеличении влажности до определенной величины становят-
ся пластичными, а при полном водонасыщении — текучими.
Разность влажности верхнего и нижнего пределов пластичности
называют числом пластичности (оно равно 17 у глинистых грун-
тов и 7—17 у суглинистых).
Отношение влажности грунта к влажности, соответствующей
верхнему пределу' пластичности, называют относительной влаж-
ностью.
Относительная влажность является важным показателем
связного грунта. Уплотнение связных грунтов происходит
лишь при относительной влажности 0,4—0,65. При увеличении
относительной влажности свыше 0,65 показатели механических
свойств грунта резко снижаются. Связные грунты обладают ма-
лой фильтрационной способностью. Поэтому они достаточно
консервативны, медленно размокают и медленно просыхают.
Их деформируемость существенно изменяется в зависимости от
времени действия нагрузки. В мягкопластичном состоянии они
обладают значительной липкостью
Связные грунты занимают большую часть поверхности зем-
ли. Они исключительно многообразны как по гранулометричес-
кому составу (глинистые, тяжелосуглинистые, суглинистые, лег-
косуглинистые), так и по степени уплотнения и задернения.
При выпадании осадков наибольшему увлажнению подвержены
разрыхленные грунты (пашня), несколько меньшему — задерно-
6
гЗ
t=f
s
«=:
XO
C3
7
ванные (стерня, луг) и еще меньшему — уплотненные (нака-
танные) грунты (грунтовые дороги).
Обеспечение проезда автомобилей по связным грунтам вес-
ной несравненно сложнее, чем осенью, так как осенью несущая
способность грунта уменьшается постепенно, по мере накопле-
ния влаги в грунте, а весной оттаивающий грунт уже насыщен
водой и влажность его увеличивается от поступления талой и
дождевой воды. Просачиванию воды в глубь грунта в этот пе-
риод препятствует мерзлый слой.
Песчаные (несвязные) грунты характеризуются сравнитель-
но большими размерами твердых частиц (отсутствуют глинис-
тые частицы). Состояние песчаных грунтов определяет их плот-
ность, оказывающая наибольшее влияние на механические свой-
ства. Плотность грунта оценивают значением пористости или
объемной массы. Сыпучие пески в естественном залегании отли-
чаются малой уплотняемостью, так как пористость песка изме-
няется главным образом от степени утряхивания, а не от дав-
ления. Пески легко деформируются за счет сдвигов.
С увеличением влажности сопротивляемость песков внешним
нагрузкам сначала несколько возрастает, а затем, при достиже-
нии предела текучести, вновь уменьшается. Песчаные грунты
характеризуются значительной фильтрационной способностью.
Они быстро размокают и быстро просыхают. Их деформируе-
мость мало изменяется в зависимости от времени действия на-
грузки. Проходимость автомобилей по песчаным грунтам су-
щественно повышается при наличии дернового слоя, а также
при уменьшении толщины сыпучего слоя. Образование колеи на
песчаных грунтах тем интенсивнее, чем однороднее песок по
гранулометрическому составу, чем меньше в песке пылеватых и
глинистых фракций и чем меньше влажность песка. Наиболее
тяжелыми для движения являются дюнные пески, отсортирован-
ные по фракциям ветром.
Заболоченные грунты характеризуются избыточным увлаж-
нением, наличием влаголюбивой растительности, накоплением
органических веществ, т. с. остатков животных и растительных
организмов, образующих слои торфа.
По дорожной классификации болота подразделяют на три
вида: сплошные, у которых торф располагается непосредствен-
но на минеральном дне; сапропелевые, имеющие под торфяной
корой органический или полуорганический ил; сплавинные, с
торфяной корой, плавающей на воде.
Торф отличается исключительно большой пористостью и
сжимаемостью. Механические свойства заболоченных грунтов,
определяющие возможность движения по ним автомобиля, ха-
рактеризуются прочностью и толщиной дернового слоя.
Заболоченные грунты и болота занимают значительную тер-
риторию в северной и центральной полосах Европы и Азии.
8
В Восточной и Центральной Сибири они занимают около 20%
площади. В Западной Сибири площадь болот еще больше.
Снег покрывает значительную территорию нашей страны
длительное время (северные районы почти весь год, а среднюю
полосу — полгода) и существенно затрудняет движение автомо-
билей. Механические свойства снега и возможность движения
по снегу автомобилей зависят от толщины снежного покрова,
его плотности, структуры и температуры. Наибольшая толщина
снежного покрова до 200 см характерна для Приуралья, Кам-
чатской области, Чукотского округа и Приморского края. В се-
вероевропейской части и среднесибирском районе снежный по-
кров колеблется от 10 до 160 см. В центральноевропейской час-
ти толщина снега составляет 30—100 см; в Западном, Казах-
станском и Забайкальском районах 30—60 см.
Средняя плотность свежевыпавшего снега составляет 0,075—
0,2 г/см3, осевшего и уплотненного ветром снега 0,2—0,4 г/см3.
По структуре снежинок различают снег пушистый, метелевый
и зернистый. Пушистый снег в первоначальном виде сохраняет-
ся недолго. Метелевый снег имеет диаметр снежинок 1—2 мм,
плотность 0,2 гем3 и более. Зернистый снег образуется из пу-
шистого л метел-евого в результате их таяния или перекристал-
лизации. Он состоит из ледяных зерен диаметром до 3—4 мм,
имеет плотность 0,25 г/см3 и более. Процессы перехода снега из
одного вида в другой необратимы. При снижении температуры
показатели механических свойств снега несколько повышаются.
Неровности грунтовых поверхностей можно подразделить на
следующие группы.
Уклоны. Земная поверхность с уклонами 6—17° составляет
около 23%, а с уклонами более 17° около 19%. Среднее значе-
ние крутизны оврагов оценивается в 10—15°.
Барьерные препятствия. Их профиль описывается сочетани-
ем пакленных п ступенчатых линий (коротких уклонов и поро-
гов). К ним относятся дорожные насыпи (10—15% насыпей име-
ют крутизну 20—34° и высоту 1,5—3,0 м, остальные — меньшие
крутизну и высоту); ирригационные и мелиоративные каналы,
придорожные кюветы. Рвы с крутизной скатов более 45° выделя-
ются в самостоятельную группу.
Дискретные препятствия. К ним относятся пни, кочки, валу-
ны и т. д.
Перечисленные неровности вызывают как снижение скорости
движения автомобилей, так и застревание (полную потерю про-
ходимости). Поэтому все их можно назвать препятствиями.
Кроме того, встречаются многочисленные неровности, вызываю-
щие снижение скорости движения из-за существенных динами-
ческих нагрузок и колебаний автомобиля. В зависимости от
длины такие неровности условно разделяют на три группы:
импульсные с длиной до 0,3 м; выбоины, имеющие длину 0,3—
6,0 м; ухабы, длина которых 6—25 м. В зависимости от высоты
9
неровностей различают шероховатости (высота до 1 см), впа-
дины и выступы (высота 1—30 см). Неровности с высотой бо-
лее 30 см относят к препятствиям. В зависимости от характера
размещения рассматривают периодически чередующиеся неров-
ности, обособленные неровности, случайный микропрофиль.
§ 2. Деформация грунта при воздействии нормальной нагрузки
Изучение деформируемости грунтов под нагрузкой проведено
многими исследователями вдавливанием в грунт штампов раз-
личной формы. Однако только при применении штампов посто-
янного сечения можно получить абсолютные характеристики
грунта.
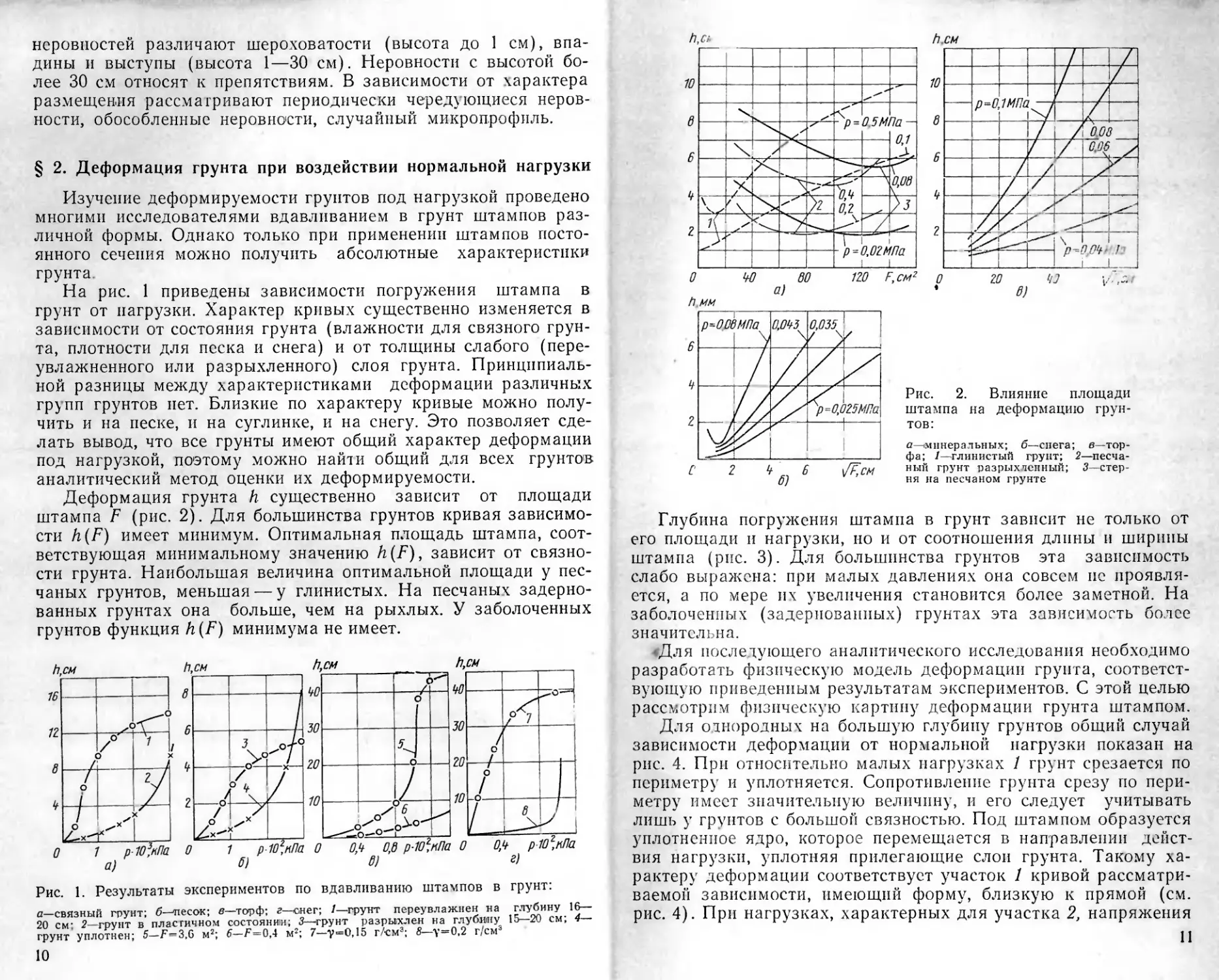
На рис. 1 приведены зависимости погружения штампа в
грунт от нагрузки. Характер кривых существенно изменяется в
зависимости от состояния грунта (влажности для связного грун-
та, плотности для песка и снега) и от толщины слабого (пере-
увлажненного или разрыхленного) слоя грунта. Принципиаль-
ной разницы между характеристиками деформации различных
групп грунтов нет. Близкие по характеру кривые можно полу-
чить и на песке, и на суглинке, и на снегу. Это позволяет сде-
лать вывод, что все грунты имеют общий характер деформации
под нагрузкой, поэтому можно найти общий для всех грунтов
аналитический метод оценки их деформируемости.
Деформация грунта h существенно зависит от площади
штампа F (рис. 2). Для большинства грунтов кривая зависимо-
сти h(F) имеет минимум. Оптимальная площадь штампа, соот-
ветствующая минимальному значению h(F), зависит от связно-
сти грунта. Наибольшая величина оптимальной площади у пес-
чаных грунтов, меньшая — у глинистых. На песчаных задерно-
ванных грунтах она больше, чем на рыхлых. У заболоченных
грунтов функция h(F) минимума не имеет.
Рис. 1. Результаты экспериментов по вдавливанию штампов в грунт:
а—связный грунт; б—'песок; в—торф; г—снег; /—грунт переувлажнен на глубину 16—
20 см: 2—грунт в пластичном состоянии; 3—-грунт разрыхлен на глубину 15—20 см; 4—
грунт уплотнен; 5—F=3,G м2; 6—Г=0,4 м2; 7—у=О, 15 г/см3; 8—у=0,2 г/см°
10
F.cm2 0 20 W
♦ Z?1
Рис. 2. Влияние площади
штампа на деформацию грун-
тов:
а—(минеральных; б—снега; в—тор-
фа; /—глинистый грунт; 2—песча-
ный грунт разрыхчснный; 3—стер-
ня на песчаном грунте
Глубина погружения штампа в грунт зависит не только от
его площади и нагрузки, но и от соотношения длины и ширины
штампа (рис. 3). Для большинства грунтов эта зависимость
слабо выражена: при малых давлениях она совсем не проявля-
ется, а по мере их увеличения становится более заметной. На
заболоченных (задернованных) грунтах эта зависимость более
значительна.
Для последующего аналитического исследования необходимо
разработать физическую модель деформации грунта, соответст-
вующую приведенным результатам экспериментов. С этой целью
рассмотрим физическую картину деформации грунта штампом.
Для однородных на большую глубину грунтов обший случай
зависимости деформации от нормальной нагрузки показан на
рис. 4. При относительно малых нагрузках 1 грунт срезается по
периметру и уплотняется. Сопротивление грунта срезу по пери-
метру имеет значительную величину, и его следует учитывать
лишь у грунтов с большой связностью. Под штампом образуется
уплотненное ядро, которое перемещается в направлении дейст-
вия нагрузки, уплотняя прилегающие слои грунта. Такому ха-
рактеру деформации соответствует участок 1 кривой рассматри-
ваемой зависимости, имеющий форму, близкую к прямой (см.
рис. 4). При нагрузках, характерных для участка 2} напряжения
11
Рис. 3. Влияние отношения длины штам-
па к его ширине на деформацию грунта:
сплошные линии — песчаный
вые — торф
грунт; штрихо-
в грунте в некоторых зонах
достигают предельных по
прочности грунта значений
и вызывают сдвиги. По мере
увеличения нагрузки увели-
чиваются объем грунта, под-
вергшегося сдвигу, и пог-
ружение штампа в грунт.
Участок 3 характеризует-
ся сдвигом всего объема
грунта, прилегающего к
штампу. Значительное пог-
ружение штампа при пез-
начительном повышении
нагрузки сопровождается
выпиранием грунта в сторо-
ны от штампа. Среднее дав-
ление на участке 3 зависи-
мости р(А) называется несущей способностью грунта, его обоз-
начают ps. Некоторое повышение p-s при увеличении погруже-
ния штампа объясняется увеличением объема грунта, подвер-
женного боковому выпиранию штампов.
Изменение эпюр нормальных давлений по мере возрастания
нагрузки показано на рис. 4,6. При малых нагрузках зоны мак-
симальных давлений располагаются у краев штампа, что объяс-
няется значительным влиянием сопротивления грунта срезу.
Увеличение нагрузки приводит к росту давлений в средней час-
ти штампа из-за снижения доли сопротивления срезу в общем
сопротивлении деформированию грунта. Сдвиги грунта приво-
дят к значительному перераспределению давлений, эпюра на
участке 2 принимает вид параболы, а на участке 3 приближает-
ся к треугольнику. Величина участка 1 определяется уптэтняе-
мостыо грунта.
Рис. 4. Характер деформации однородного грунта:
а—зависимость удельного сопротивления грунта вдавливанию от глубины погружения’
штампа; б—эпюры нормальных давлений под штампом
12
Рис. 5. Зависимость деформации грунта от размера штампа:
а—однородный грунт; б—грунт с близлежащим твердым основанием; /—штамп № 1; 2-—
штамп № 2
Влияние площади штампа на характер зависимости р(Л)
двойственно. С одной стороны, чем больше площадь штампа,
тем больше толщина грунта, подверженного уплотнению (см.
кривые равных напряжений на рис. 5), и соответственно боль-
ше погружение штампа, обусловленное уплотнением грунта; с
другой стороны, чем больше ширина (площадь) штампа, тем
больше сопротивление грунта сдвигам и, следовательно, меньше
погружение штампа из-за сдвигов грунта. Последнее можно
объяснить тем, что площадь сечения призм грунта, сдвигаемых
при давлении (заштрихованы на рис. 5,а) связана с шириной
штампа квадратичной зависимостью.
Противоположное влияние площади штампа на деформации
уплотнения и сдвига обусловливает сложный характер зависи-
мостей /?(f), кривые которых имеют минимум (см. рис. 2). Уве-
личение площади штампа при р = const приводит при малых на-
грузках, когда основной составляющей деформации грунта
является уплотнение, к увеличению погружения штампа в грунт;
при больших нагрузках, когда основной составляющей деформа-
ции грунта является сдвиг, к уменьшению погружения штампа
в грунт.
Соотношением сопротивления грунта деформациям уплотне-
ния, с одной стороны, и сдвига или среза — с другой, можно
объяснить п влияние соотношения длины и ширины штампа на
его погружение в грунт (см. рис. 3). При постоянной площади
штампа увеличение 1/Ь означает уменьшение ширины штампа и
увеличение его периметра Поэтому на малосвязных грунтах по-
13
вышается склонность грунта к сдвигам, и погружение штампа
в грунт увеличивается. На грунтах с большой связностью несу-
щая способность при этом повышается из-за большего перимет-
ра, и, следовательно, погружение штампа в грунт уменьшается.
Толщина уплотняемого гранта при уменьшении b и F= const
уменьшается, следовательно, уменьшается погружение штампа
за счет уплотнения грунта.
Естественные грунты в большинстве случаев неоднородны
по глубине. Наиболее часто встречаются грунты, имеющие мяг-
кий верхний и сравнительно жесткий нижний слои (распахан-
ные грунты, грунты в период распутицы, снежная целина и
т. д.). У этих грунтов глубина распространения деформаций
ограничивается толщиной верхнего мягкого слоя. При малом
расстоянии между штампом и жестким основанием повышается
сопротивление сдвигу грунта в стороны. Таким образом, наличие
близлежащего жесткого основания приводит к уменьшению и
деформаций уплотнения, и деформаций сдвига. Степень этого
влияния зависит от соотношения толщины мягкого слоя грунта
и ширины (диаметра) штампа (см. рис. 5,6). При вдавливании
малого штампа влияние жесткого основания начинает сказы-
ваться только после значительного заглубления штампа в грунт
(/г>Л1), а для большого штампа это влияние сказывается с са-
мого начала погружения в грунт.
Встречаются грунты и с обратной комбинацией слоев, более
прочным верхним слоем и слабым основанием (очень влажные
грунты со слоем дерна или подсохшей коркой па поверхности,
заболоченные грунты). У них несущая способность определяет-
ся сопротивлением срезу верхнего слоя по периметру штампа.
Поэтому увеличение площади штампа приводит не только к рас-
ширению зоны уплотнения грунта, но и к снижению его несу-
щей способности. Увеличение отношения длины штампа к его
ширине повышает несущую способность грунта. Остальные воз-
можные комбинации слоев грунта можно свести к рассмот-
ренным.
Аналитическая оценка нормальной деформируемости грунта
В механике грантов при оценке деформаций и прочности грунта
широко используют такие параметры, как модуль деформации
Е и несущая способность
Значение модуля деформации грунта в отличие от модуля
упругости сплошных тел определяют по общей деформации
грунта (обратимой и необратимой):
(2)
где ст — напряжения; Хг — относительная деформация.
Использование модуля деформации для оценки деформируе-
мости грунта целесообразно потому, что этот параметр имеет
строго определенный физический смысл, его значение не зависит
от размеров вдавливаемого тела; накоплен большой статисти-
14
ческии материал его коли-
чественных значений для
различных грунтов. В меха-
нике грунтов получены дос-
таточно надежные зависи-
мости, выражающие несу-
щую способность через раз-
меры вдавливаемого тела, и
имеются необходимые экс-
периментальные величи-
Рис. 6. Расчетная схема линейной де-
формации грунта
НЫ ps.
Чтобы использовать па-
раметры Е и р5, грунт рас-
сматривают как линейно-де-
формируемое тело с моду-
лем Е, а отклонение дейст-
вительных деформаций от
линейных (йгл) выражают соотношением нормального давления
и несущей способности грунта:
hr=hr»Ps/(Ps — Pl (3)
что хорошо согласуется с экспериментальными данными (см.
рис. 1).
Расчетная схема определения линейной деформации грунта
представлена на рис. 6. Сжатие элементарного слоя с начальной
толщиной dzQ выражается уравнением ^А2Л = Хг^о, а толщина
элементарного слоя в деформированном состоянии — уравнени-
ем dz=dz0(\—Лг).
Решив последние два уравнения совместно с уравнением (2),
получим
dhrJi=adz[(E — о).
Учитывая малость значений а по сравнению с Е можно за-
писать
dhrJ=cdz Е.
Распределение напряжений в грунте по глубине выражается
соотношением [1]
JP
1 -ь (z/abp
где z — расстояние от рассматриваемого элементарного слоя до
поверхности контакта штампа с грунтом; а — коэффициент за-
тухания напряжений в грунте; b — ширина штампа; / — коэф-
фициент, учитывающий соотношение длины и ширины штампа;
J = (O,O3+-L) I (0,6 + 0,43 ±'i .
(4)
15
Суммарная линейная деформация грунта
^Г~ЛГ1
ИЛИ
Агл = :ipdbJQx 2Е,
2
где Qj — — arctg[(/7r —//гл) ab\ —параметр, учитывающий толщи-
л
ну мягкого слоя грунта.
Подставив выражение Лгл в формулу (3), получим уравнение
для определения деформации грунта с учетом сдвигов:
hT=npps'ibJQl'2E{ps—p). (5)
Несущая способность грунта не является независимой по-
стоянной грунта, а изменяется в зависимости от размеров штам-
па и глубины его погружения. Несущая способность однородно-
го грунта может быть выражена уравнениями
ps}—J (6)
X^ygCL-Ш*) Ш% Х, = 2с0(Ш^1)
X^ygllP' ZZZ=tg(45°-?0<2\
где Y2, АД и Ш — параметры грунта; у — плотность грунта;
Со — внутреннее сцепление в грунте; <р0 — угол внутреннего тре-
ния грунта; у, с0 и ср0 являются независимыми параметрами
грунта, характеризующими его прочность; Ц и J2 — коэффици-
енты, учитывающие влияние соотношения длины и ширины
штампа на несущую способность. Для ленточного (1^>Ь) штам-
па тля квадратного штампа Ji = 0,8; /2—1,3; для круг-
лого штампа /1=0,6; /2=1,3. В общем случае
При ограниченной толщине деформирующегося слоя грунта
№=-0,5n/7S)Q2: Q2 = .Tr/2arctg ~ /гТ , (7)
2Ь
где Q2—параметр, учитывающий увеличение несущей способно-
сти грунта по мере приближения штампа к жесткому основанию.
На грунтах, имеющих сравнительно топкий прочный верхний
слой, расположенный на слабом основании, потеря несущей
способности происходит при срезе верхнего слоя: ps=CoHASu/Fy
где /Д— толщина слоя дерна (корки); SJT—периметр вдавлива-
емого тела; F— площадь вдавливаемого тела.
Для удобства пользования уравнение (5) целесообразно пре-
образовать относительно р:
p=2EpshT [2Е1гг-\-^ps2bJ
(8)
16
Порядок расчета зависимости р(Лг) для грунтов с верхним
мягким слоем следующий: выбирают несколько значений йг и
для каждого из них определяют pso, Ps, Q2, Л Qi и р. По этому
методу можно рассчитать характеристику деформируемости
грунта с учетом толщины мягкого слоя, площади и формы вдав-
ливаемого тела.
Деформируемость многослойных грунтов может быть описа-
на уравнениями
п \
I PSc[) (/А$ср' " Р\
1 J
\hri —
pHri
1 4- [(7/r(Z_^Г(/_i)), aby Ei
где pSCp— среднее значение ps для всех слоев грунта; п— число
слоев грунта; i— порядковый номер слоя.
Для оценки деформируемости грунта достаточно широко ис-
пользуют также следующие формулы [1]:
р=с!^ (9)
р=с)^ (10)
/;=(^4-^ЯЛу; (11)
р — X xbХ%-\-X(12)
здесь с сь с2, и — параметры уравнения, определяемые при об-
работке экспериментальных кривых, полученных методом вдав-
ливания в грунт плоских штампов.
Эти формулы эмпирические. Возможности их применения
более узкие, чем формулы (8). В формуле (9) совсем не учтено
влияние площади и формы штампа па деформируемость грунта.
Параметры с и р подбирают для ограниченного диапазона на-
грузки. Формула (10) учитывает влияние площади штампа на
глубину распространения деформаций, но нс учитывает повыша-
ющееся при этом сопротивление грунта сдвигам. В формуле
(11) влияние размеров штампа па деформацию грунта учтено
также односторонне. Согласно экспериментам, при малой тол-
щине мягкого слоя увеличение ширины штампа приводит к по-
вышению сопротивления грунта вдавливанию, а по формуле
(11) получается наоборот. Формула (12) справедлива для не-
уплотпяющихся грунтов, когда погружение штампа в грунт про-
исходит только в результате сдвигов, она нс отличается от фор-
мулы (6) тля определения несущей способности грунта.
Учитывая, что в литературе приведено много эксперимен-
тальных данных по параметрам, входящим в степенные форму-
лы (9), (10), (11), найдем метод перехода от этих формул к
формуле (8).
17
Переход от формулы (9) к (8):
Для приняв /7г=оо, можно написать
Выбрав на кривой p(h) две произвольные точки и hr2 при /ir=/irl, най-
дем выражение для ps:
ps -(*/ (13)
при hv = hY2i подставив выражение ps, получим •
Е = Ь (Л;-/ - ЛГ2’)/[(сЛг^)-1 - (с/гг%)-1 ]. (14).
Для fj. > 1 можно принять 1/ps= 0, arctg [(Яг— hY) ab] — (Нг— hr)/ab,
и соответственно
р == ch% = 2Ehr/n (Нг — hr),
при hr=hYl получим выражение
Е = 0,5лс (//г— Лг1)
Заменив Е в уравнении для р, найдем
Яг= (Й?2-
Переход от формулы (10) к (8):
Учитывая выражение \Y — hYlbJt
р ~с (hr/bJ'f»
Действуя как в предыдущем случае, получим
при р < 1 Е = с (Л-j1 - Л^1)/ [(с^р-1 - (сй'гх2)-1]};
Ps = [с"1 (i/Ari)11- £-'й/ЛГ1]-1,
при р > 1, Нг = (Л^2 - h^/(h^1 - Л'У ’);
Е=лс (Нг — Лг1) A’Jf '/2 (Ь/у.
Зависимости p(hY), выражаемые формулой (8) и формулами (9) и (10),
пересекаются в двух точках с абсциссами hri и hr2. Поэтому следует вни-
мательно подходить к выбору значений АГ1 и hr2.
Переход от формулы (11) к (8):
При р^1, Нг=оо имеем
Р = (С1 + с2/Ь) 1 + b/(EhT)]-i.
По аналогии с предыдущим, приняв Ci+c2/6 = c, можно использовать
выражение (13) для определения ps и выражение (14) для определения Е.
В данном случае можно описывать зависимости р(Лг) при различных зна-
чениях b пли зависимость р(Ь) при 7zr=const.
Приняв /гг=АГ1 = 1, получим
Cl + c-2/b1 = Eps!(E + psbx)-,
С\ 4- c2/i2 = Eps](E + psb-2.).
Из этих уравнений pg 1 = Ьу^с^ + с2)—b-JE = й2/(С1*2 + Ь>)—b-i/E,
откуда Е = ,, А—д1,, . ,----------Г" I Ps = [* '(ci* + С2) — b/E]~i.
b2/(C1b2 + C2) — b1/(C1b1+C2) s
18
§ 3. Деформация грунта
при воздействии на него
произвольно направленной
нагрузки
В реальных условиях дви-
жения автомобиля на грунт
действует произвольно направ-
ленная нагрузка. Отклонение
вектора нагрузки от нормали к
поверхности грунта приводит
к снижению несущей способно-
сти грунта, к увеличению про-
тяженности мягкого слоя при
ограниченной его толщине и к
появлению касательных сил в
контакте вдавливаемого тела
с грунтом.
Для определения величины
несущей способности грунта
при произвольном направле-
нии нагрузки получены следу-
ющие уравнения [1]:
Рис. 7. Зависимость несущей способ-
ности грунта от направления прило-
женной нагрузки:
]—суглинок, фо“Ю°; сО“Э,02 МПа: 2—гли-
на, ф0=С; Со=0,0П5 МПа; 3—песок, <Ро=
=32°; с0=О
PS$ = (ATpl/iХхЬ + К р2/2^2 г) Q‘2^ (15)
/<?1 = (n_48tg?0)'(n-j-4?tg?0); К02 = (3л-23)/(3л + 23), (16)
где К$\ и К^2 — параметры, учитывающие влияние на несущую
способность отклонения вектора нагрузки от нормали; |3— угол
между вектором нагрузки и нормалью к поверхности грунта в
радианах.
На рис. 7 показаны рассчитанные по уравнениям (15), (16)
зависимости д?з(₽) для различных грунтов. Наиболее сущест-
венное снижение несущей способности от угла наклона нагрузки
характерно для песчаных грунтов.
Протяженность мягкого слоя грунта в направлении вектора
нагрузки НГ$ = НГ cos?, а в деформированном состоянии —
— /zr₽ = (Нг — Лг) cos 3.
Выражение для деформации грунта в рассматриваемом об-
щем случае с использованием уравнения (8) будет иметь вид
= Eps^h^:(Eh^ -|-O,5.TO&/2spQ1?),
(17)
где Qi{5 = — arctg[(77r — /zr) (afccos?)].
л
Выразив дз через нормальную р и касательную pY составляю
щие: = ] Р2Х-\~Р^ и учитывая /zp = /zr/cos ?; cos?=/>//р2-\-рх>
19
Рис. 8. Влияние касательной силы на погружение штампа в грунт:
а—песчаный грунт; б—глинистый грунт; 1—Яг>100 см; 2—НГ=ЕО см; 3—Яг=25 см
1/р
можно получить выражение, позволяющее оценивать влияние
касательной силы на погружение вдавливаемого тела в грунт:
nabpQ^
2£ [ 1 - Vpi +
(18)
При возрастании рх увеличивается |3, соответственно снижа-
ется р$? (см. рис. 7) и повышается Qip [см. (17)]. Следователь-
но, увеличение касательной силы во всех случаях приводит к
росту величины погружения тела в грунт.
Для грунтов без близлежащего твердого основания Qip=k
Уравнение (18) оказывается решенным относительно Лг.
Для грунтов с ограниченной толщиной мягкого слоя удобнее,
пользоваться уравнением, решенным относительно р\
p=Eps?hrcos^ {Ehv-\-Q^nabps?Q^^sr^). (19)
В этом случае, задаваясь значениями Лг и |3, последователь-
но определяют р и рх=р tg (3.
• На рис. 8 представлены зависимости 1гг (р; рх/р) для раз-
личных грунтов. При малых нормальных давлениях, до 30% от
несущей способности грунта, влияние касательной силы на по-
гружение тела в грунт мало ощутимо. По мере приближения
нормального давления к несущей способности грунта дополни-
тельное погружение вдавливаемого тела в грунт от касательной
силы прогрессивно увеличивается. При давлениях, близких к не-
сущей способности грунта, действие небольшой касательной си-
лы приводит к резкому увеличению нормальной деформации
грунта.
На песчаном грунте влияние т на Лг значительно больше,
чем на глинистом, что согласуется с характером влияния (3
на psy
20
При ограниченной толщине мягкого слоя грунта характер
зависимостей Аг(р; т/р) сохраняется (см. рис. 8). Для решения
той же задачи существует эмпирическое уравнение [2]
^г==(Р~ Ps) J T'max’
где ДЛГ — дополнительное погружение тела в грунт от касатель-
ной силы; /— касательный сдвиг тела; ттах— удельное сопро-
тивление грунта сдвигу.
Согласно этому уравнению дополнительное погружение тела
в грунт от касательной силы происходит только в случаях, ког-
да нормальное давление больше несущей способности грунта.
Причем значение несущей способности считается независимым
от касательной силы. Эти допущения противоречат рассмотрен-
ным выше физическим процессам взаимодействия вдавливаемого
тела с грунтом. Удовлетворительные результаты получаются
только для некоторых связных грунтов.
Максимальная возможность грунта по восприятию касатель-
ных сил может быть ограничена двумя факторами: потерей не-
сущей способности грунтом и сдвигом массы грунта в сторону
действия касательной силы; скольжением вдавливаемого тела
по грунту после преодоления сил сцепления тела с грунтом.
Максимальную удельную касательную силу, ограничиваемую
несущей способностью грунта, можно найти, используя уравне-
ние (15). Учитывая выражение ps^=p!^sr^ получим
(J X b tg?0
\ 1 1 Л + 4? tg <f>o
Зя —2g
Зл+ 2?
Н-А'зЛг Q2 cos?. (20)
Задаваясь значениями р, построим график р(р) и по нему
найдем значение р, соответствующее заданной величине р. Ис-
комое значение максимальной удельной касательной силы
tinax=/’tg8. (21)
Максимальную удельную касательную силу, ограничиваемую
скольжением тела по грунту, определяют уравнением
(22)
Реальное значение т111ах будет равно меньшему из значений,
полученных по уравнениям (21) и (22).
Перемещение вдавливаемого в грунт тела в касательном на-
правлении вызывают два фактора: касательная составляющая
деформации грунта и скольжение в зоне контакта.
Первую составляющую можно определить уравнением Лгх =
=^hrx/p. Величину Аг находят по формулам (18), (19). При этом
предполагают, что при отсутствии скольжения в контакте штамп
перемещается в направлении вектора нагрузки. Это предполо-
жение не вызывает сомнений для однородного грунта и требует
экспериментального подтверждения для неоднородных грунтов.
Для оценки сдвига штампа по грунту рассмотрим физичес-
21
Рис. 9 Схема сдвига штампа по грунту,
/—штамп № 1; 2—штамп № 2
кую картину деформации грунта, заключенного между выступа-
ми штампа (рис. 9).
При малых значениях касательной силы происходит уплот-
нение грунта в зоне, прилегающей к упорной стенке штампа.
По мере увеличения касательной силы расширяются зона уп-
лотнения грунта и зона распространения напряжений в плоско-
сти S0Si> рис. 9, но вместе с тем увеличивается сдвиг штампа
и соответственно сокращается величина площади S0Si. Когда
сдвигающие напряжения распространятся на всю площадь S0Si
и достигнут величины Tmax = p tg фо+^о, происходит срез грунта,
н сопротивление сдвигу будет обусловлено только трением.
Сопротивление срезу грунта, заключенного между выступа-
ми штампа, можно выразить уравнением ТС$=Р2 tg cp0+c0Z? (/'—
—jo), где Р2— нормальная нагрузка на рассматриваемый объем
грунта; b — ширина штампа; /'—^расстояние между выступами
штампа; /0— сдвиг штампа в момент начала среза.
Разделив все члены уравнения на площадь ЬГ, получим
rc?=/?tg<f>o + <?o(l—/Ж)- (23)
При увеличении расстояния Г между выступами штампа
значение j0 возрастает вследствие большего проявления неодно-
времеиности сдвигов в различных зонах плоскости среза. Этот
фактор приводит к снижению тСр. Вместе с тем, при увеличении
в меньшей мере разрушается структурная связность грунта
выступами штампа, что должно привести к увеличению т1р. Про-
тивоположное действие двух факторов обусловливает незначи-
тельное изменение тСр в зависимости от Г.
Характер зависимостей сопротивления грунта сдвигу от ве-
личины сдвига для разных грунтов существенно отличен
(рис. 10). У несвязных грантов Cq = 0 и кривая т(/) не имеет мак-
симума. Чем больше связность грунта, тем значительнее выде-
ляется максимум.
Сопротивление сдвигу штампа по грунту зависит также от
трения между выступами штампа и грунтом. Опыты показывают
22
Рис. 10. Зависимость сопротив-
ления сдвигу от величины
сдвига:
а—сдвиг грунта; б—сдвиг резины
по грунту; в—расчетные значения
т=т(/); 1—/'=20 см; 2—1'—4^ см;
3—£t=2,0 МПа, расчет по формуле
(25); 4—Е|=2,0 МПа, /'=5 см, рас-
чет по формуле (27); 5—£j =
=2,0 МПа, Z'=10 см, раст v< по
формуле (27); 6—£j = l,0 МПа, /'=
= 10 см, расчет по формуле (27);
сплошные кривые —суглинок; штри-
ховые кривые — песок
(рис. 10,6), что характер зависимости тр(/) при сдвиге по грун-
ту резиновой пластины аналогичен зависимостям для сдвига
грунта по грунту.
Для математического выражения зависимости т(/) поступим
так же, как при рассмотрении нормальной деформации грунта.
По аналогии с уравнением (3)
j == ЛДср/^ср (^4)
Ввиду малого значения I' по сравнению с b можно с некото-
рым приближением принять равномерное распределение напря-
жений сдвига. Тогда %=Exjjr или /л=’'гД/£ь где Е\ — модуль
деформаций сдвига.
Подставив выражение для /л в уравнение (24), получим
J—IЕх (тСр т).
После подстановки тср из уравнения (23) и преобразования
будем иметь
х = JEi [f>tg?o + co(Г—J)] , /25)
t [jEx + I'p tg to + co G' — J)]
где (/'—/)>0.
Для описания зависимости т(/) предложено также много
эмпирических и полуэмпирических формул [1]. Из них наиболь-
шее распространение получила формула
ехр(—7/Лх)], (26)
23
где тш—максимальное удельное сопротивление грунта сдвигу.
Эга формула хорошо согласуется с экспериментальными
данными для малосвязных грунтов, у которых зависимость т(/)
не имеет максимума. Если в формуле (26) вместо тт принять
тСр по уравнению (23) и вместо kT взять kJ' (где /гт безразмер-
ная величина, численно равная 1/Ei), то получим уравнение
пригодное для всех случаев,
T = htg'?.)+Co(l— J ОШ—exp(—J V')b
(27)
На рис. 10,в приведены зависимости т(/), полученные по
формулам (25) и (27); они хорошо согласуются с опытными
данными.
§ 4. Влияние времени действия нагрузки на деформацию грунта
и его сопротивление сдвигу
Эксперименты показывают, что грунты обладают релаксаци-
онными свойствами. Используемые релаксационные модели
грунта обычно основаны па теории Максвелла. К. Максвелл,
исходя из предположения, что выравнивание или релаксация
напряжений в пластичных телах во времени совершается про-
порционально наличной величине напряжений, получил зависи-
мость
az=aoexp(l—/7р), (28)
где со— напряжение в данный момент; о0—начальное напря-
жение; /р — время релаксации; t — время действия нагрузки.
Предпосылки, принятые Максвеллом, справедливы и дтя дис-
персной системы, поэтому уравнение (28) можно использовать
для выражения напряжений в грунте во времени.
Напряжения в грунте определяют как деформации уплотне-
ния, так и деформации сдвига. Следовательно, кратковремен-
ность действия на грунт нагрузки можно учесть коэффициен-
том снижения напряжений /<д, зависящим от релаксационных
свойств грунта.
Значение этого коэффициента определяют из уравнения (28)
t
а0 [ [ехр (1 — / ?р)] (it
Лгд==-------------------= 1 — exp (- 11,).
Go I [exp (1 — t ^p)] dt
b
Это выражение можно заменить близким ему, но более удоб-
ным дтя практического использования выражением
(29)
Г. II. Покровский предложил уштывать кратковременность
нагрузки увеличением модуля деформации грунта
Ед = Е -j- Бх t. (30)
24
Деформацию грунта он считает линейной, т. е. р = Ед/гл=(Е +
Н-5] t)hn.
Н. Н. Кленин [6], рассматривая линейно-деформируемый
грунт, использует выражение En = E+52^a, практически не отли-
чающееся от равенства (30). Б\ и Б2—параметры, характеризу-
ющие релаксацию грунта. Действительно, приняв скорость рав-
номерной и выразив ее через время, получим
ЕЛ=Е 4” E2s [t=Е Б i,t.
Если использовать выражение (29) для линейно-деформиру-
емого грунта, то получим аналогичное выражение
pKji=Eh\ p=Eh(l—tp/f).
Выше показано, что деформация грунта в общем случае име-
ет нелинейный характер, она зависит не только от модуля де-
формации, но и от несущей способности грунта. Несущая спо-
собность грунта повышается при кратковременном действии на-
грузки. Это может быть выражено введением коэффициента
в формулу (8). Введение динамического модуля £д вместо Е в
уравнение (8) не решает этой задачи. Более того, использование
выражения (29) позволяет оценить влияние кратковременности
действия нагрузки на сцепные свойства грунта. Для этого необ-
ходимо в формулы (25) и (27) подставить динамическое значе-
ние нормального давления:
P^K.P-ptWJ- (31)
Следовательно, в расчетных уравнениях предусмотрено, что
при кратковременном действии нагрузки происходит снижение
сил внутреннего трения в грунте. Это соответствует физической
картине сдвига грунта и результатам экспериментов.
§ 5. Числовые значения механических параметров грунтов
Выше установлено, что механические свойства грунтов в са-
мом общем случае можно оценить параметрами Е а, ф0» £о,
Еj или фр, /р, у.
Параметры Е, <р0, с0 и фр специалисты различных отраслей
широко используют почти для всех грунтов. По численным зна-
чениям этих параметров накоплен значительный эксперимен-
тальный материал. Установлена корреляционная связь этих па-
раметров с физическими константами грунтов.
Значения коэффициента трения резины по грунту (<рр) для
основных видов дорог и грунтов приведены ниже.
Асфальтобетонное покрытие:
сухое ....... 0,7—0,9
мокрое ... 0,4—0,6
покрытое грязью ... 0у25—0,45
Сухое булыжное покрытие . . . 0,5—0,7
25
Щебеночное покрытие:
сухое . мокрое ...... 0,5—0,7 0,3—0,5
Грунтовая дорога:
сухая ..... 0,5—0,7
мокрая . 0,2—0,4
переувлажненная 0,15—0,25
Песок:
сухой . . . . 0,3—0,5
влажный 0,3—0,4
Суглинок:
сухой ....... 0,4—0,6
в пластичном состоянии . 0,2—0,4
в текучем состоянии .... 0,15—0,25
Глина:
сухая 0,4—0,6
в пластичном состоянии . 0,15—0,35
в текучем состоянии .... 0,05—0,15
Торф с дерновым покровом . 0,1 —0,2
Рыхлый снег:
сухой 0,2—0,3
мокрый Oil— 0,2
Укатанный снег 0,1—0,2
Гладкий лед 0,05—0,15
Параметры Нт, a, tv и Е\ или kx до настоящего времени срав-
нительно мало использовали для оценки механических свойств
грунта. По этим параметрам еще не накоплено достаточно ста-
тистических данных. Оценку этих параметров проведем раз-
дельно по видам грунтов.
Связные грунты. Значения основных механических парамет-
ров связных грунтов имеют функциональную связь с влажно-
стью (рис. 11). Влажность изменяется в течение года в зависи-
мости от гранулометрического состава и плотности грунта, а
также от рельефа местности и условий стока воды. В качестве
примера в табл. 2 приведены средние статистические значения
относительной влажности для степной зоны СССР.
Таблица 2
Относительная влажность
Вид поверхности весной летом осенью зимой
Рыхлая (пахотная) 1,0 0,35 0,65 0,9
Целина 0,9 0,4 0,7 0,б5
Уплотненная 0,68 0,52 0,58 0,65
Грунтовые дороги 0,65 0,5 0,55 0,62
Толщина мягкого слоя грунта имеет существенное значение
для связных грунтов в текучем и мягкопластичном состояниях
(относительная влажность 0,8—1,1). Для этих грунтов она из-
меняется в пределах 10—50 см — весной, 15—30 см — осенью,
26
0 ZO 40 60 80W,7°
о го w 60 &j\‘j,7o
Рис. 11. Зависимость механических параметров грунтов от влажности:
/—мелкозернистый песок; 2, 3—легкая супесь; 4—супесь; 5—легкий суглинок; 6 сугли-
нок; 7—глина и тяжелый суглинок
5—10 см — летом. При меньшей влажности грунта можно при-
нимать Яг = оо.
Значение а изменяется в пределах 0,64—1,50 и зависит глав-
ным образом от слойности грунта. С достаточной для практики
точностью оно может быть определено по уравнению
а=0,64(1 + ^Яг). (32)
Время релаксации /р зависит от фильтрационной способно-
сти грунта и имеет корреляционную связь с обратной величиной
угла внутреннего трения <р0 (рис. 12):
^р==^р/?О» (33)
где £р = 0,5°, сро —в градусах.
Модуль деформации сдвига Е\ изменяется в больших преде-
лах 0,3—2,0 МПа, увеличиваясь при повышении связности грун-
27
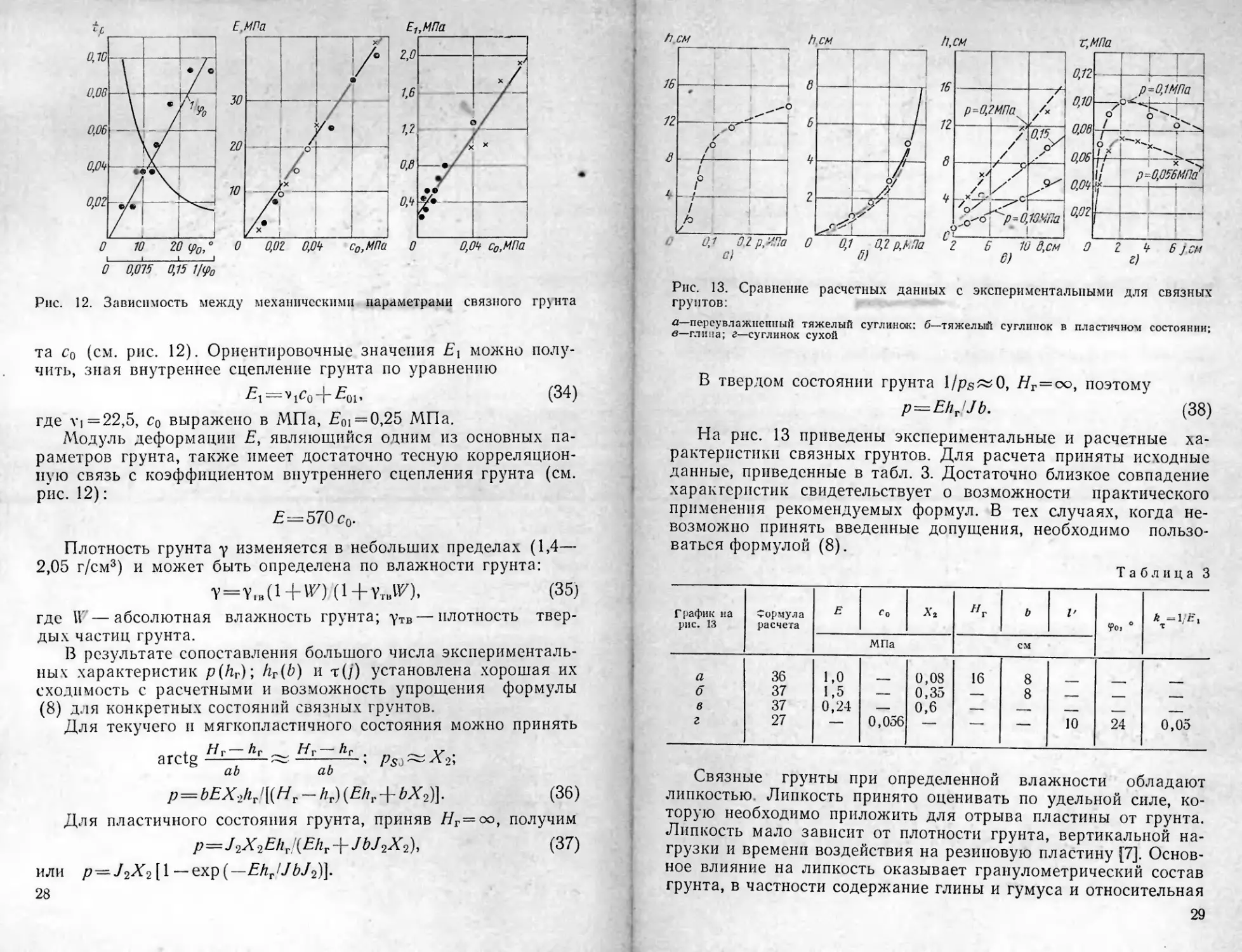
Рис. 12. Зависимость между механическими параметрами связного гранта
та с0 (см. рис. 12). Ориентировочные значения Et можно полу-
чить, зная внутреннее сцепление грунта по уравнению
£i = vi^o + £oi- (34)
где vi =22,5, с0 выражено в МПа, Е01 = 0,25 МПа.
Модуль деформации Е, являющийся одним из основных па-
раметров грунта, также имеет достаточно тесную корреляцион-
ную связь с коэффициентом внутреннего сцепления грунта (см.
рис. 12):
Ez=570f0.
Плотность грунта у изменяется в небольших пределах (1,4—
2,05 г/см3) и может быть определена по влажности грунта:
T=Y„,(1 + ^)(1+Yrjn (35)
где 1Г—абсолютная влажность грунта; уТв — плотность твер-
дых частиц грунта.
В результате сопоставления большого числа эксперименталь-
ных характеристик р(Лг); М&) и т(/) установлена хорошая их
сходимость с расчетными и возможность упрощения формулы
(8) для конкретных состояний связных грунтов.
Для текучего и мягкопластичного состояния можно принять
arctg як ; Pso ~ Л\>;
ab ab
р = bEX2ht'[(HT - hr) (Ehr 4- ЬХ2)]. (36)
Для пластичного состояния грунта, приняв Hr=oot получим
p^J2X.2E/lr/(Ehr+JbJ2X2), (37)
или р — J2X2 [1 — ехр(— EhjJJbJt'}].
28
Рис. 13. Сравнение расчетных данных с экспериментальными для связных
грунтов:
а—переувлажненный тяжелый суглинок: б—тяжелый суглинок в пластичном состоянии;
в—глина; г—суглинок сухой
В твердом состоянии грунта l/ps«0, /7г=оо, поэтому
p=EhT!Jb.
(38)
На рис. 13 приведены экспериментальные и расчетные ха-
рактеристики связных грунтов. Для расчета приняты исходные
данные, приведенные в табл. 3. Достаточно близкое совпадение
характеристик свидетельствует о возможности практического
применения рекомендуемых формул. В тех случаях, когда не-
возможно принять введенные допущения, необходимо пользо-
ваться формулой (8).
Таблица 3
График на рис. 13 Формула расчета Е Го %2 "г ь 1' «о. °
МПа см
а 36 1.0 0,08 16 8 -- -
б 37 1.5 0,35 —— 8 —— — 1
в 37 0,24 — 0,6 — ’ -
г 27 — 0,056 — — — 10 24 0,05
Связные грунты при определенной влажности обладают
липкостью Липкость принято оценивать по удельной силе, ко-
торую необходимо приложить для отрыва пластины от грунта.
Липкость мало зависит от плотности грунта, вертикальной на-
грузки и времени воздействия на резиновую пластину [7]. Основ-
ное влияние на липкость оказывает гранулометрический состав
грунта, в частности содержание глины и гумуса и относительная
29
Рис. 14. Сравнение расчетных данных
грунтов:
/—песок уплотненный; 2—песок разрыхлении
с экспериментальными для песчаных
; 5—h(b) при l/b = l; 4—h(l/b) при Ь=€ см
влажность Экспериментальные данные по липкости грунтов
приведены в табл. 4.
Таблица 4
Липкость грунта р (в кПа) при относитель-
ной влажности
Грунт 0.7 0,8 0,9 1 1Д
Cvnccb а 12 18 8 а
Лёсс 20 30 47 40 28
Л\гово-болотная почва 14 23 45 54 38
Чернозём 8 40 50 48 48
Несвязные (песчаные) грунты. Механические свойства пес-
чаных грунтов определяются в основном их плотностью. На
рис. 14 приведены характеристики т(/) для песка в предельных
плотном и рыхлом состояниях. При значительном сдвиге вели-
чина т у них выравнивается. Коэффициент внутреннего сцепле-
ния с0 в рыхлом состоянии близок к нулю, а в предельно плот-
ном состоянии может достигать значений 0,03—0,05 МПа.
Для сыпучих песков основным параметром, определяющим
механические свойства, является угол внутреннего трения фЭ
[8]; <р0 = 30о + ф1-1-(р2 + фз4-<Р4, где ф1 зависит от плотности песка,
ф2 — от однородности, фз — от окатанности (наименьшее значе-
ние угла соответствует наиболее хорошо окатанным пескам),
Ф4—”от крупности зерен. Ниже приведены значения этих углов.
Углы ?2
Предельно малое . . . .—6 —3 —5 0
30
Среднее .
Предельно большое
.00 »
.+6 +3 4-1
Расчетные значения механических параметров песчаных
грунтов, полученные в результате обработки литературных дан-
ных, сведены в табл. 5.
Таблица 5
Песок Фо, ° МПа 7, г/см3 Е, МПа
Тонкозернистый (пылеватый) 26 0,000 1,4 0,3—1,0
28 0,001 1,6 2,0—4,0
32 0,0500 1,8 10,0—15,0
Мелкозернистый 26 0 1,43 0,5—1,0
32 0,0005 1,63 2,5—4,5
34 0,0400 1,78 12,0—18,0
Среднезернистый 28 0 1,45 0,7—1,2
32 0,0005 1,65 2,5—5,0
36 0,0300 1,75 15,0—20,0
Крупнозернистый 30 0 1,5 1,0—1,5
34 0,0005 1,6 3,0—4,0
40 0,0300 1,7 20,0—25,0
Примечание. Три перечисленных значения параметров соответствуют следующим
состояниям песка: разрыхленный, средней плотности и плотный
В результате обработки экспериментальных данных и иссле-
дования взаимосвязи отдельных параметров установлено, что
уравнения связи (32), (33), (34), используемые для определе-
ния а, /р и Д(^), справедливы и для песчаных грунтов.
Учитывая, что для сыпучих песков (малая и средняя плот-
ность) значение с0 мало и толщина сыпучего слоя ограничена
(Яг= 10-4-50 см), формулы (8) и (27) приобретают следующий
вид:
Р _________h-yEb \Х\Ь 4- J 2Х2 ~Ь~ ^з^г)_ (39)
"(//г - М [Ehr + Jb (JxXxb 4- J2X2 4- *зМ] ’ 1
T=Z?tg<p0[l— exp (—0,3/)]. (40)
Для плотных песчаных грунтов можно принять Яг=оо и
p=Ehr (JxX}b~\-J2X^I\Ehr-\-Jb (7727V2)] - (41)
Сопоставление расчетных данных с экспериментальными
(рис. 14) подтверждает возможность их практического исполь-
зования. Исходные данные, принятые для расчета, приведены
ниже.
31
Рис. 15. Сравнение расчетных данных с экспериментальными для торфа и
снега:
а—торф; б—заболоченный грунт; в, г—снег; /—6=30 см; 2—6=20 см; 5—6=15 см; 4—
£>ш«63 см; 5—/?ш75 см; 6—lXb=25X75 см; 7—Т=т(/); 8—т=т(р)
Рис. 14. . а, 1 а, 2 б, 2 в, 2 и 3 г, / 3
Расчетная формула Параметры: 27 40 41 39 41
До,° . 28 28 — —
Со, МПа . 0,03 0 — - 11 '
Е, МПа . . —— — 1.5 1,5 о
р. МПа ’ 0,08 0,08 —-• 0,1 —
Hr, см . — 35 25 —
МПа.м 0,4 0,3 0,2
А2, МПа . . 0,104 0,08 0,266
Ь, см — —- 24 — 6
Примечание.
Для кривой а, 1 Л «0,1, I =10 см.
Заболоченные грунты. Сопротивление торфа срезу и сцепные
свойства торфа характеризуются, как и у минеральных грунтов,
внутренним сцеплением с0 и углом внутреннего трения <р0. Для
большинства заболоченных грунтов толщина слабого слоя грун-
та значительно больше ширины колес, поэтому для них можно
принять Яг=оо, что приведет к упрощению формулы (8).
Арктические болота оттаивают на незначительную глубину—
не более 40—50 см, их механические свойства можно сравнить
со связными грунтами в период весенней распутицы.
Для расчета сопротивления деформации заболоченных за-
дернованных грунтов используют формулу (8).
Сравнение расчетных и экспериментальных зависимостей
р(Лг), Лг(^) и т(/), приведенное на рис 15, подтверждает спра-
ведливость формул (8) и (27) для заболоченных грунтов. Ис-
ходные для расчета данные приведены ниже.
Числовые значения механических параметров заболоченных
грунтов представлены в табл. 7. Значения и = опреде-
ляют по уравнениям (33) и (34).
32
Таблица 6
Параметры Расчетная формула График на рис. 15
а 6 в г
Е, кПа 8 8,40 1,33 »
Р tg<po. «Па 27 —- 23 — 51
27 — 0,21 —- 0,10
Г, см 27 —- 14 —- 14
Примечание: Для кривой a 7/Ь==1; для кривой б /7г=9О см; Х2=1,5; для кривой
г со==О.
Снежная целина. Зависимости деформации снега от нагруз-
ки при вдавливании штампа аналогичны соответствующим за-
висимостям для грунтов При увеличении размеров штампа
глубина погружения увеличивается почти по линейному закону,
что характерно для грунтов с малым внутренним трением. Не-
сущая способность снега при небольших значениях угла внут-
реннего трения с изменением ширины штампа изменяется незна-
чительно.
Таблица 7
Вит, Сото га Характеристика дернового покрова Толщина дернового покрова см <Ро- 0 rOi кПа F, кПа
Моховое Преобладают сфагновые мхи без кустарника То же, с кустарником Преобладают гипновые мхи с кустарником 33,5—38,5 35—36 27—28 12—14 13—16 11—15 5—8 10—17 8—14 260—290 360—430 290—340
Травяное Осоковый покров с разви- тыми осоковыми кочками С межкочсчными пониже- ниями 35—42 10—11 18—20 3—8 16—45 4—14 1050— — 1580 143—244
Лесное Березово-лесной в межко- чечны.х понижениях 5—5,5 17—19 4—10 86—143
Осушенное Г ипново-осоково-лесной 38—42 1 16—20 30—50 650—1400
Зависимость сопротивления снега сдвигу от нормальной на-
грузки в общем случае существенно отличается от линейной.
Такой характер зависимости объясняется сложными физико-
химическими процессами, происходящими при деформации сне-
га. Однако в диапазоне удельных давлений, характерных для
2 1342 33
движителей снегоходных машин: р= (0,01—0,05) МПа, можно
с достаточной точностью принять линейную зависимость сопро-
тивления сдвигу от нормальной нагрузки и использовать для
оценки сцепных свойств снега те же параметры, что и для
грунта, — коэффициент внутреннего трения tg <р0 и внутреннее
сцепление с0.
Параметры, характеризующие механические свойства снега
в зависимости от плотности снега и температуры, приведены в
табл. 8.
Таблица 8
Параметры Плотность снега, г/см8
0,15 0,2 о,з 0.4 0,5 0,6
Внутреннее сцепление с0, МПа, при следующих температурах, ° С: 0,04 0,05 0,05 0,09
—5 0,07 0,19
-->10 0,05 0,06 0,052 0,09 0,12 0,22
—20 0,06 0,09 0,08 0,105 0,27 0,47
Коэффициент трения tg фо, при сле- дующих температурах, °C: 0,25 0,33 0,35 0,42 0,6
—5 0,40
—10 и. 0,35 0,40 0,43 0,45 0,5
—20 — — 0,4 0,4 0,48 0,5 0,55
Модуль деформации Е МПа, при сле- дующих температурах, °C: 0,2— 1,0 1,5— 4,0 7,5
—5 0,4-
—10 0,3 0,6 0,6— 1,5 2,0 2,5— 5,5 10,0
—20 0,8 1,0 2,0 3,0 4,0 8,0 13,0
Коэффициент трения скольжения фр при следующих температурах, ° С: 0,14 0,097 0,065 0,035 0,02
+ 2-4—1 0,08
—4 0,1 0,05 0,07 0,055 0,025 0,015
— 16ч—30 0,18 0,01 0,09 0,075 0,045 0,028
Плотность снега в естественном состоянии изменяется в пре-
делах у = 0,14-0,4 г/см3, возрастает при повышении температуры
и времени залегания. Для оседающего снега у = 0,1-н0,2 г/см3,
для осевшего и уплотненного ветром снега у = 0,24-0,4 г/см3.
Плотность уплотненного снега на укатанной дороге у ~0,5 г/см3.
Примеры расчета механических характеристик снега по фор-
мулам (8) и (27) приведены на рис. 15, откуда видно, что и для
снега можно использовать расчетные формулы (8) и (27).
Глава II
ВЗАИМОДЕЙСТВИЕ АВТОМОБИЛЬНОГО
КОЛЕСА С ГРУНТОМ
Существует несколько подходов аналитического исследова-
ния взаимодействия автомобильного колеса с грунтом.
При первом подходе [9] эмпирические зависимости парамет-
ров взаимодействия колеса с грунтом от параметров колеса и
грунта обрабатываются методом размерностей. Полученные та-
ким образом формулы удобны для практического использова-
ния, но справедливы только для условий экспериментов.
Второй подход заключается в замене эластичного колеса
жестким, но с большим радиусом, и применении основных зако-
номерностей, полученных при рассмотрении взаимодействия
жесткого колеса с грунтом [3]. При этом не учитывается сбега-
ющая часть контакта (за осью колеса), в которой нормальные
реакции грунта на колесо не препятствуют, а помогают каче-
нию. Такой подход целесообразен для колес со сравнительно
жесткими шинами.
Третий подход основан на экспериментальном изучении фор-
мы поверхности контакта шины с грунтом и составлении рас-
четной схемы для конкретного сочетания типа шины и вида
грунта. При таком подходе могут быть учтены характерные осо-
бенности и шипы, и грунта, но затрудняется общее аналитичес-
кое решение пригодное для различных типов шин и грунтов.
Четвертый подход основан на исследовании общих законо-
мерностей деформируемости грунтов и шин, на основании кото-
рых проводится аналитическое рассмотрение их взаимодействия
[1,2, 5].
Для решения вопросов проходимости автомобилей по раз-
личным грунтам при условии использования разнообразных ти-
пов шин наиболее целесообразен четвертый подход. В последу-
ющем изложении ему уделяется основное внимание.
§ 6. Механические характеристики автомобильных шин
Современные автомобильные шины, представляющие собой
резинокордную оболочку, заполненную сжатым воздухом, обла-
дают эластичностью во всех направлениях. Обычно различают
нормальную» тангенциальную и боковую эластичность шины.
2* 35
В реальных условиях движения автомобиля шины деформиру-
ются одновременно в трех направлениях: в нормальном, танген-
циальном и боковом. Все три вида деформации органически вза-
имосвязаны. Например, воздействие на колесо боковой силы не
только вызывает боковую деформацию шины, но и увеличивает
£е нормальный прогиб.
Эластичность шин во всех направлениях делает более слож-
ными физические явления, происходящие при взаимодействии
колеса с грунтом, сильно усложняя процесс рассмотрения зако-
номерностей движения машины. В целях упрощения принято
рассматривать отдельно нормальный прогиб шин только о г воз-
действия нормальных сил, боковую деформацию шин только от
действия боковых сил. Проведенные эксперименты показывают,
что такое упрощение возможно Для большинства современных
тин приложение крутящего момента к колесу оказывает малое
•влияние на нормальный прогиб шины Влияние боковой силы на
нормальный прогиб шин несколько больше, однако во многих
случаях им также можно пренебречь. Влияние нормальной си-
лы на боковую эластичность шины велико, и пренебрегать им
нельзя.
Проходимость автомобиля в основном определяет нормаль-
ная эластичность шины, характеризуемая величиной нормально-
го прогиба. Экспериментально нормальный прогиб шины опре-
деляют измерением расстояния по нормали от оси колеса до
опорной поверхности при нагружении колеса нормальной силой;
ГС ’
(42)
где h2 — нормальный прогиб; гс — свободный радиус колеса
(наружный радиус шины в свободном состоянии); гст — стати-
ческий радиус колеса (расстояние по нормали от центра коле-
са до опорной поверхности).
Расстояние от центра колеса до опорной поверхности при ка-
чении колеса обозначают гд и называют динамическим радиу-
сом колеса. Динамический радиус колеса отличается от стати-
ческого, однако это отличие очень мало и им обычно пренебре-
гают.
Зависимости нормального прогиба шины 12.00—18 «И111» от
нагрузки (рис. 16) показывают, что кривые нагружения и раз-
гружения шины нс совпадают, это объясняется наличием внут-
реннего трения в резинокордной оболочке шины (явлением гис-
терезиса). При снижении давления воздуха в шине площадь
петли гистерезиса увеличивается.
Характер зависимости Р2(/г2) явно нелинейный при малых
нагрузках (прогибах шины) и приближается к линейному при
их увеличении. Нелинейность характеристики увеличивается при
«снижении отношения высоты к ширине профиля шины (см.
рис. 16). Для тороидных шин упругая (нагрузочная) характе-
ре
Рис. 16. Характеристики нормальной деформации шин на плоской твердой
поверхности:
а—«шина 12.00—18; б—шина 1140—700; 1—pw—C,Q5 МПа; 2—pw=0,15 МПа; 3—pw—Q,3 МПа
ристнка принимается линейной и жесткость шины определяют
по формуле
сш=др;ж.
При нормальном прогибе шины происходят как деформация
профиля шины (кривизна беговой части уменьшается до нуля,
а кривизна боковин увеличивается), так и деформация продоль-
ного сечения шины, которая существенно зависит от конструк-
ции каркаса, но во всех случаях наблюдается и за пределами
зоны контакта, рис. 17. Длина контакта I шины с твердой плос-
кой поверхностью составляет 0,75—0,85 от хорды /0- Чем боль-
ше жесткость оболочки, тем больше различие между I и /0. Ши-
рина контакта при наг-
рузках, близких к номи-
нальной, у большинства
шин равна ширине про-
тектора.
Для теоретического
определения нормально-
го прогиба шины на твер-
дой поверхности предло-
жен ряд формул. Наибо-
лее простой из них явля-
ется следующая форму-
ла [9]
Pz=npwh2V2i~D, (43)
Рис. 17. Изменение формы шины при нор-
мальном прогибе:
а—в продольной плоскости; б—в поперечной пло-
скости
37
где rnp — радиус кривизны протектора; D — наружный диаметр
шины.
Эта формула выведена при двух грубых допущениях: сред-
нее давление шины на опорную поверхность приняли равным
внутреннему давлению воздуха в шине; считали, что вне зоны
контакта шина не деформируется, а поверхность контакта име-
ет форму эллипса, получаемого при сечении шины плоскостью.
Эти допущения не подтверждаются экспериментальными
данными. Например, для шины 12.00—18 «И 111» при pw=
= 0,05 МПа, р = 0,11 МПа, при pw = 0,15 МПа р = 0,2 МПа. Как
видно из рис. 17,6 шина сильно деформируется и за пределами
зоны контакта.
В. Л. Бидерманом [ IQ] для той же цели предложена формула
(44)
где Ci, С2— постоянные для данной шины коэффициенты, за-
висящие от конструктивных параметров шины и материалов;
Ро — давление в контакте при ри = 0; С} и определяют из
уравнений
Фх-Mip
2гпр£)
К'л) 2гир£)
где /<п — коэффициент насыщенности протектора; ф1 — коэффи-
циент, учитывающий неравномерность распределения давления
по площади контакта; ф2— коэффициент увеличения жесткости
в связи с затрудненностью поперечных деформаций резины;
£р — модуль упругости протекторной резины; Апр — толщина
протектора; К'— отношение изменения объема шины при нор-
мальном прогибе к объему эллиптического сегмента, получаемо-
го при сечении шины плоскостью.
Формула (44) учитывает влияние жесткости резинокордной
оболочки шины на давление в контакте и деформацию резины
протектора, однако, как и формула (43), не учитывает деформа-
цию шины вне зоны контакта. Если пренебречь деформацией
резины протектора (Ci = 0) и подставить в формулу (44) значе-
ние С2, то она будет иметь вид
Рг=-Л''л/гд/?да+/?0) )/ 2г1ф£>.
(45)
Формула (45) отличается от выражения (43) добавлением
параметров р0 и К'\ причем К7 можно- рассматривать как коэф-
фициент, введенный для компенсации ошибок, вызываемых пре-
небрежением деформацией оболочки шины вне зоны контакта.
Ввиду сложности определения коэффициентов ф2, /С
обычно пользуются формулой (44) без раскрытия параметров
С\ и С2, а выбирая их значения по экспериментальным данным.
Практика показывает, что формула (44) хорошо согласуется с
результатами экспериментов при незначительной величине про-
38
гиба шины (меньше или только
незначительно превышающей
стрелу дуги протектора). Это
подтверждается и результатами
специальных экспериментов с
раздельным определением дефор-
мации боковин и протектора
(рис. 18). Деформация боковин
до полного выпрямления протек-
тора незначительна. Это соответ-
ствует прогибу шины порядка
(0,11—0,13) И (Н — высота про-
филя шины). Дальнейшее увели-
чение прогиба шипы осуществля-
ется за счет изгиба боковин.
При изгибе боковин увеличи-
вается ширина профиля шины.
Шины с регулируемым давлени-
Рис. Ь8. Деформация отдельных
элементов шины при «нормальном
прогибе:
hnp—прогиб шины от деформации про-
тектора; 7i6—прогиб шины от изгиба
боковин; hz—суммарный нормальный
про-гиб шины
ем, используемые на современ-
ных автомобилях высокой проходимости, работают при нормаль-
ном прогибе до 0,35 Н, при этом ширина профиля увеличивает-
ся примерно на величину прогиба. Для мягкого грунта это об-
стоятельство особенно важно, так как ширина образуемой коле-
сом колеи равна ширине профиля шины. Следовательно, оцени-
вать нормальную деформируемость шины необходимо с учетом
изменения формы и ширины профиля шины.
Для этого рассмотрим элемент шины, образованный сечени-
ем шины нормальной плоскостью, проходящей через ось колеса.
Длина элемента бесконечно малая. Оболочка шины принимает-
ся бесконечно тонкой, гибкой, но нерастяжимой и несжимаемой
(рис. 19).
Напряженное состояние в каждой точке рассматриваемого
элемента шины можно характеризовать двумя уравнениями
мембранного равновесия:
^y!r=Pw — Р', dNyidtj= —dNxyldx,
где Ny — растягивающая сила в меридиональном направлении;
г—радиус кривизны в меридиональном сечении; Nxy— сила
среза.
При отсутствии внешней нагрузки напряженное состояние
шины симметрично относительно оси, поэтому i/VX2/ = 0; dNyldy =
= 0; Ny = const, и, так как р = 0, получим Ny/pw—ro = const.
При симметричном нагружении элемент шины на твердой
плоской поверхности будет деформироваться до того момента,
пока сумма реакций опорной поверхности не станет равной
приложенной нагрузке (pbdx=dQ).
На основании симметрии и в этом случае будем иметь Nxy —
= 0 и Ny = const.
39
Рис. 19. Схема деформации идеализированной шины:
а—форма профиля при отсутствии внешней нагрузки; б—форма профиля при воздейст-
вии нормальной нагрузки; в—схема деформапии шины в продольной плоскости
В зоне контакта вследствие плоской формы поверхности
контакта г = оо и, следовательно, p = pw=const. Для боковых
участков, не соприкасающихся с опорной поверхностью, р = 0,
Nylr=pw и r=Nxlpw = const, т. е. кривизна боковых участков
элемента шины постоянна. Центры кривизны должны находить-
ся на вертикалях, проходящих через граничные точки контакта;
в противном случае или не выполнялось бы условие r=const,
или нс было бы плавного перехода от зоны контакта к боковым
стейкам, что, очевидно, невозможно.
На основании этого и геометрических соотношений (см.
рис. 19) можно написать уравнения
hz=Ha — r(l + cosY);
b=BF — 2r sin у;
4У = /? + 2г(л-~у),
где BF—ширина обода шины; U — периметр элемента шины.
Преобразовав эти уравнения, получим
r=(U — Вр) 2 (я —у — sin у); 1
hz = HQ — r(l + cos у); г (46)
Ь~Вр — 2г sin у. J
Задаваясь различными значениями угла у (см. рис. 19) мож-
но определить радиус боковин г, прогиб шины hz. ширину кон-
такта Ь, а также ширину профиля по уравнению В — Ь + 2г и вы-
соту профиля шины по уравнению Н — Н$—hz.
Чтобы перейти от элемента к целой шине, необходимо про-
интегрировать уравнение
Pz = 2p | bdxy
о
где I — длина поверхности контакта.
Это уравнение можно решать графически, используя зависи-
мость Ь(х), гдех—] — Л) — (/?г —Л)2, функция b(h) опре-
40
деляется системой уравнений (46), где вместо hz берется теку-
щее значение прогиба шины /г, соответствующее длине контакта
2х, рис. 19,в.
Для упрощения решения можно принять форму контакта эл-
липтической, тогда
P=0,5-ipbVDhz-/^.
(47)
Процесс деформации реальной шины отличается от рассмот-
ренного из-за сложной формы и неоднородности механических
свойств резинокордной оболочки. Резинокордная оболочка обла-
дает значительной упругостью, часть нагрузки передается че-
рез нее, в результате чего давление в контакте р должно быть
больше внутреннего давления воздуха в шине. Из-за существен-
ной изгибной жесткости оболочки ее деформация распространя-
ется на область, прилегающую к зоне контакта, это приводит к
увеличению давления в контакте и уменьшению длины поверх-
ности контакта по отношению к длине хорды окружности.
У большинства шин кривизна беговой поверхности шины в
поперечной плоскости (кривизна протектора) меньше кривиз-
ны внутренней поверхности шины из-за неодинаковой по шири-
не толщины протектора. Вследствие этого при малых значениях
прогиба шины ширина контакта увеличивается, а средние дав-
ления в контакте снижаются. При больших прогибах на твер-
дой плоской поверхности происходит искажение формы профиля
(обратная кривизна на внутренней поверхности шины), что при-
водит к увеличению средних давлений в контакте.
По результатам экспериментального исследования влияние
формы и жесткости оболочки шины на ее упругую характерис-
тику может быть учтено заменой в уравнениях (46), (47) значе-
ния р выражением
(48)
где ро — составляющая давления в контакте от жесткости
(упругости) оболочки; — коэффициент, учитывающий иска-
жение формы деформированного профиля из-за неодинаковой
толщины протектора.
Значения р0 и k\ для некоторых шин с регулируемым давле-
нием приведены ниже.
Размеры шин . . 11.00—18 12.00—18
ро, кПа . . 60 55
. 0,8 0,75
Примечание Для шин 14.00—18 приведены
шинам с восемью, шестью и четырьмя слоями корда.
13.00-18 14.00—18
50 50 45 40
0,75 0,7
три значения р0, соответствующие
Уравнения (46) и (47) целесообразно использовать для тон-
костенных шин. Отсутствие в технических характеристиках шин
параметров U, и р0 несколько затрудняет пользование этими
уравнениями.
41
hZtCM
hz,CM
Рис. 20. Сравнение данных расчета по формуле (50) с экспериментальными:
а—шина с регулируемым давлением 12.00—48; б—пневмокаток 1200X1200—500; в—шина с
регулируемым давлением 14.00—18 при Pz = 15000 Н; г—тракторные шины; r—Pw =
-0,С5 МПа; 2—pw=0.01 МПа; 3—ри=О,15 МПа; 4-pw~Q,2 МПа; 5—шина 15.00—30; 6—
шина 11.00—38; 7—шина S.00—42
Более практичными и универсальными являются следующие
формулы, полученные методом аппроксимации,
Р. = hz (pw+р0) ) (1 - ) V Dhz - (50)
4 \ ri Zd J \ D }
где 6Пр—ширина протектора. Сопоставление многочисленных
расчетов, проведенных по формулам (49) и (50) с эксперимен-
тальными данными, позволило сделать вывод, что эти формулы
пригодны для описания деформируемости (с учетом изменения
ширины профиля) всех современных шин высокой проходимости,
включая арочные и ппевмокаткн. В качестве иллюстрации на
рис. 20 приведены некоторые расчетные и экспериментальные
зависимости для шин различных типов (точками показаны ре-
зультаты эксперимента, а кривыми — результаты расчета).
Методика расчета деформируемости шин с учетом конструк-
тивных особенностей каркаса, протектора и боковин приведена
в специальной литературе [1ф
42
Для оценки нормального прогиба в зависимости от нагрузки
и давления воздуха может быть использована следующая эмпи-
рическая формула [11]:
йг=^./4/(1+^),
где К—постоянный для данной шины коэффициент, определяе-
мый экспериментально, имеет следующие значения:
Дчи диагональных шин низкого дав-
ления . . .... Ю,41—0,74
Для шин с регулируемым давлением 0,45—0,63
Для шнрокопрофпльных шин . . 0,25—0,50
Величины боковой и тангенциальной деформаций шины
определяются, как правило, экспериментально [12]. Достаточно
простых и надежных аналитических выражений для этой цели
еще не получено, что объясняется сложностью для математи-
ческого описания процессов, происходящих в шине при ее на-
гружении нормальной, боковой и продольной силами.
Боковая (тангенциальная) жесткость шин, строго говоря, не
является постоянной, а увеличивается с ростом боковой (танген-
циальной) силы. Однако в диапазоне эксплуатационных значе-
ний Ру, Рх это изменение невелико, им можно пренебречь и счи-
тать зависимости Py(hy) и P.x(/ix) линейными.
При изменении нормальной нагрузки на колесо существенно
изменяются и боковая и тангенциальная деформации шин. Бо-
лее стабильными являются относительные характеристики [12]
^yl^z ^ту^у Рz' ^x!^z
где ХШу и лшх— коэффициенты относительной боковой и танген-
циальной эластичности шины. Однако и эти характеристики
справедливы лишь при ограниченных значениях нормального
прогиба шины.
§ 7. Деформация шины и грунта при качении колеса по мягко-
му грунту
При взаимодействии шины с грунтом происходит деформа-
ция обоих контактирующих тел. При этом характер деформации
шины отличается от ее деформации на твердой поверхности, а
характер деформации грунта отличается от его деформации при
вдавливании жесткого штампа.
Площадь контакта шины с мягким грунтом больше, чем с
плоской твердой поверхностью (рис. 21). В связи с этим увели-
чивается зона шины, подверженная деформации, но вместе с
тем уменьшаются давления и деформация в средней части кон-
такта Форма деформированного профиля на мягком грунте и
твердой поверхности при равных значениях прогиба hz различна.
Эго различие существенно при больших прогибах шины (/г2>
>0,ЗЯ) с наличием обратной кривизны и несущественно при
Л2<0,ЗЯ.
43
Рис. 21. Деформация шины 12.00—18 и песчаного грунта (у =
= 1,3 г/см3), распределение нормальных давлений по площади
контакта при качении колеса по мягкому грунту:
Р = 15000 Н: а—р =0,2 МПа; б-р =Q,l МПа; в— с =0,05 МПа
& CU <4/ си
р 1П II I
Поперечные сечен и .
44
1
В продольных сечениях контакта шины с грунтом кривизна
постепенно уменьшается от максимальной величины в передней
части до нулевого значения в задней части. Зона с нулевой кри-
визной возрастает по мере увеличения прогиба шины. При очень
больших прогибах (йг>0,ЗЯ) появляется обратная кривизна,
как и в поперечных сечениях. Кроме того, распределение проги-
ба шины по длине контакта зависит от свойств грунта и режима
нагружения. Чем больше склонность грунта к сдвигам (несвяз-
ный грунт), тем больше прогиб в средней зоне контакта и мень-
ше в передней. На связных грунтах прогиб шины в передней
части контакта несколько больше. При увеличении момента,
передаваемого колесом, также увеличивается прогиб шины в пе-
редней части контакта, зона максимального прогиба шины нес-
колько смещается вперед относительно оси колеса.
Деформация грунта зависит от деформируемости шины и со-
ответственно от формы ее опорной поверхности, а также от на-
правления сил, действующих от шины на грунт При малых зна-
чениях прогиба (см. рис. 21,а) шина имеет выпуклую опорную
поверхность, в результате чего повышается склонность грунта к
сдвигам по сравнению с вдавливанием плоского штампа, и со-
ответственно увеличивается погружение шины в грунт. При
большом прогибе шины (рис. 21,в) ее опорная поверхность ста-
новится вогнутой, что приводит к снижению сдвигов грунта и
меньшему погружению шины в грунт.
В процессе качения колеса воздействие шины на грунт в
различных точках контакта существенно отличается и по на-
правлению, и по силе, и по скорости, что также способствует
увеличению сдвигов грунта. При изменении момента, подводи-
мого к колесу, изменяется направление сил, действующих на
грунт и, как следствие этого, увеличивается или уменьшается
погружение шины в грунт. При этом существенно меняются эпю-
ры нормальных и касательных сил в контакте
Для теоретического рассмотрения деформации шины и грун-
та при их взаимодействии возможны два подхода. Первый под-
ход основан на определении эпюр нормальных и касательных
давлений в контакте, их интегрировании и приравнивании си-
лам, приложенным к осп колеса [1]. Такой метод расчета гро-
моздок, но позволяет достаточно точно определить все парамет-
ры взаимодействия шины с грунтом (прогиб шины, деформацию
грунта, размеры и форму поверхности контакта, распределение
нормальных и касательных сил по поверхности контакта, сопро-
тивление качению, сцепление шины с грунтом в зависимости от
пробуксовки).
Второй подход основан на рассмотрении характерных зон по-
верхности контакта, параметры которых аналитически выража-
ются через деформацию шины и грунта. Для описания распре-
деления нагрузки в остальных зонах контакта применяют из-
вестные математические выражения, дающие результаты, доста-
45
Рис. 22. Расчетная схе-
ма взаимодействия ко-
леса с грунтом
I II IV
точно близкие к экспериментальным. С использованием этих
выражений составляют уравнения равновесия реакций грунта
и сил, приложенных к оси колеса. Такой подход позволяет
упростить методы расчета, но снижает возможности для прове-
дения глубокого анализа. Учитывая приближенность любых ре-
шений ио взаимодействию колеса с грунтом из-за неоднородно-
сти и нестабильности грунта, в большинстве случаев использо-
вание второго подхода оказывается более целесообразным.
Рассмотрим один из методов второго подхода. Расчетная
схема представлена на рис. 22. В качестве определяющей выб-
рана зона контакта / (длиной 1 см и шириной 6пр). Нагрузка в
этой зоне может быть аналитически выражена через деформа-
цию шины уравнением (49), в преобразованном виде:
и через деформацию грунта с помощью уравнения (8):
О
Л=/^>₽=
(2Ehr!ba$) 4- лр^/Qi
(52)
На многих пластичных грунтах глубина образуемой колеи
соизмерима с высотой грунтозацепов протектора шины. В этих
случаях целесообразно определять раздельно погружение в
грунт грунтозацепов и впадин протектора. Для этого необходи-
мо определить связь между средним давлением в зоне 1 и дав-
лением под грунтозацепами и во впадинах: kuprp+ (1—&н)/?вп =
= р (где рГр — давление под грунтозацепами; рвп — давление во
45
Рис. 23. Графики для расчетного определения деформации шины и грунта
при качении колеса по мягкому грунту
впадинах протектора; ku — коэффициент насыщенности протек-
тора).
Используя выражения для ргр и рвп, аналогичные (8), по-
лучим
2Ep^hrkn 2Ep„(hr Длр)(1 &н)
Р. — nhn=------------------------------------------------- ,
р (2Е hjb^) + npsaJQx [2Е (hr — Дпр)/£пр] 4- xpsaJQ{
(53)
В случае Лг< Дпр во втором слагаемом принимается Лг—ДцР =
= 0.
По уравнениям (51), (52) можно построить графические ха-
рактеристики деформируемости шины р(Л2) и грунта р(Лг)
(рис. 23). Отклонение вектора силы Pi от нормали к поверхно-
сти грунта учитывается при определении значения ps$ по Фор-
муле (15).
Через боковины шины (см. рис. 22, зона II) передается до-
полнительная, но значительно меньшая часть нагрузки. Строго
говоря, дополнительная нагрузка должна увеличивать и дефор-
мацию шины и погружение шины в грунт. Однако, как показы-
вает практика, это увеличение столь несущественно, что его вли-
янием на деформацию шины и грунта можно пренебречь.
Нагрузка в зоне II
Рц = (й—&„F)X.
(54)
где b — ширина поверхности контакта (ширина колеи); £— ко-
эффициент неравномерности распределения давлений.
Величину b можно определить из уравнения
10 (В 4- hz— />пр) Лг
Н— hz 4- 10Лг
а значение £ находят по уравнению
сг
С =4
О
(55)
(56)
47
которое легко решается графически, рис. 23.
Распределение нагрузки по зонам III и IV поверхности кон-
такта можно принять эллиптическим, тогда уравнение равнове-
сия сил, действующих на колесо, будет иметь вид
Pz+ 0,5я/к (Р{ + Рп), (57)
I и выражаются через hz и /гг как полухорды окружности:
1 = ~ ',2г'_________ (58)
/к=|-2г(Лг + Лг)-(/гг + Лг)2.
По формулам (51) — (58) можно получить график зависимо-
сти Pz(hr). Порядок расчета: выбирают несколько значений Аг,
для каждого из них по графикам (рис. 23) находят значения р
п hz и затем по уравнениям (53), (55), (56), (54), (58), (57) по-
следовательно определяют соответственно Pi, b, Рц> Z, /к и Рг.
По графику Р2(/гг) получают значения /гг0, соответствующие за-
данному значению Р20, и затем соответствующие значения р, й2,
А, I и /к.
Для построения графиков вместо уравнений (51) и (52) мо-
гут быть использованы и экспериментальные характеристики де-
формируемости шины и грунта.
§ 8. Тяговые и кинематические свойства колеса
Для всех автомобилей, в том числе и для автомобилей высо-
кой проходимости, характерно преимущественное качение колес
по относительно твердой поверхности. Взаимодействие эластич-
ного колеса с твердой опорной поверхностью изучено более глу-
боко и представляет меньшие трудности для исследования, чем
взаимодействие колеса с грунтом. Поэтому целесообразно рас-
смотреть вначале вопросы качения эластичного колеса по твер-
дой опорной поверхности, а затем ознакомиться с особенностя-
ми качения колеса по мягкому грунту.
Качение колеса по твердой поверхности. Рассмотрим схему
качения колеса по твердой ровной поверхности на свободном
режиме, который характеризуется тем, что от корпуса машины
к колесу приложена сила, нормальная к опорной поверхности,
а сила, параллельная опорной поверхности, РЛ=0 (рис. 24). От
привода к колесу подводится крутящий момент Л1к. Со стороны
дороги па колесо действуют нормальные, тангенциальные и бо-
ковые реакции. В данном случае тангенциальные и боковые ре-
акции вызваны деформацией шины; в зоне контакта сферичес-
кая беговая поверхность превращается в плоскую в результате
сжатия элементов шины и их проскальзывания относительно
дороги. Однако равнодействующая этих реакций равна нулю,
так как силы от корпуса (рама, кузов, мосты и т. д.) на колесо
в этом направлении не действуют.
48
Рис. 24. Схема качения эластичного колеса
по твердой поверхности:
а, б—па свободном режиме; в—в общем случае
Величина нормальных элементарных реакций дороги опреде-
ляется сопротивлением прогибу соответствующих элементов
шины. При качении колеса каждый элемент шины, проходя зо-
ну контакта, испытывает цикл нормальной деформации: в пе-
редней половине контакта происходит постепенное увеличение
нагрузки на элемент шины и его прогиб увеличивается от 0 до
hz, а в задней половине контакта происходит постепенное умень-
шение прогиба от hz до 0 с соответствующим снижением нагруз-
ки на элемент шины.
При равных значениях прогиба сопротивление деформирова-
нию при увеличении нагрузки больше, чем при снижении на-
грузки, вследствие наличия внутреннего трения в оболочке ши-
ны. Поэтому элементарные реакции дороги в передней части
контакта шипы с дорогой больше, чем в задней части, а равно-
действующая нормальных реакций дороги Rz смещена вперед
относительно осн колеса на величину пк.
В результате этого пара сил RZPZ создает момент сопротив-
ления качению колеса
/И f = R,aK ~ PzaK.
J ' 4 l\ £ К
(59)
Для обеспечения равномерного качения к колесу должен
быть подведен момент =
Сложная форма и эластичность колеса затрудняют аналити-
ческое определение пути, проходимого колесом, и скорости его
движения. Учитывая, что равнодействующая тангенциальных
сил в контакте равна нулю, можно сказать, что при повороте
колеса на угол 2а ось колеса должна пройти путь, равный дли-
не контакта /. (Колесо катится по дороге на сжатых в окруж-
ном направлении элементах шины, поэтому путь колеса, соот-
ветствующий углу поворота 2а, равен не длине дуги окружно-
49
сти шины в свободном состоянии, а длине этой части шины в
сжатом состоянии)
Радиус качения для свободного режима г0 (радиус условно-
го жесткого колеса, которое за один оборот будет проходить
путь, равный пути, проходимому эластичным колесом) можно
определить по выражению г$ = 112а.
Подставив вместо / выражения
/ = 2гс sin u^2rc(a —а3 6); Z=2r4tga^ 2гд (а-|-а3/3),
получим
г0=rc (1 — а2/6); г0=гл (1 а2/3).
Последние два уравнения решаем относительно г^\
__ 3^гсгд __ З^гс(гс—Аг)
го — — ттг, гд •
гс 4- 2гЛ гс 4- 2 (rc — hz)
Коэффициент ki учитывает деформации элементов шины в
зоне контакта, вызываемые тем, что сферическая беговая по-
верхность шины «расстилается» на плоскость. гс является на-
ружным радиусом центрального пояса шины. Остальные коль-
цевые пояса шины имеют меньший радиус (рис. 24,6). Следова-
тельно, они должны иметь меньший радиус качения и прохо-
дить меньший путь за один оборот колеса.
Таким образом, на свободном режиме качения колеса сред-
нее кольцо стремится пройти больший путь, чем крайние. В дей-
ствительности все кольца проходят какой-то средний путь. При
этом происходит дополнительная окружная деформация колец
в различных направлениях. Величина этой деформации зависит
от конструкции протектора и каркаса шины.
Для современных шин с регулируемым давлением ^ = 0,98,
для арочных шин Л/=0,97.
Качение колеса при наличии продольной силы Рх отличает-
ся от рассмотренного случая тем, что в дополнение ко всем про-
цессам, происходящим при качении на свободном режиме, про-
исходят тангенциальная деформация шины и проскальзывание
элементов шины относительно дороги в направлении действия
силы Рх (рис. 24,в). Кроме того, в результате искривления ра-
диальных сечений контакта ось колеса смещается на величину
с?! относительно средней поперечной оси контакта в направлении
действия силы Рх\ равнодействующая нормальных сил дополни-
тельно смещается вперед на величину с2 за счет несимметрич-
ного приложения нагрузки и соответственно несимметричности
упругих деформаций шины [12]. Путь, проходимый колесом за
один оборот, уменьшается при действии на колесо силы тяги и
увеличивается при действии на колесо толкающей силы:
где Sa — путь, проходимый колесом прц его повороте на угол
50
Рнс. 25. Кинематические и силовые зависимости при различных режимах ка-
чения колеса:
а—зависимость радиуса качения от силы тяги; б—зависимость силы тяги от момента,
подведенного к колесу; /—ведущий режим; 2—свободный: 3—нейтральный; 4—ведомый;
5—тормозной
2а; — тангенциальное сжатие шины от силы Рх\ SCK—сколь-
жение шины.
Соответственно изменяется и величина радиуса качения:
Г _ ~ *$сж + *$ск _ _ /1 *^сж 4“ •Sen \
Г к — ~г0-------------Г(1 I 1------------“
2а 2а \ 2а/о J
Кривая зависимости гк(Рх) показана на рис. 25,а. При отно-
сительно малых значениях Рх эта зависимость близка к линей-
ной. При этом скольжение практически отсутствует (£Ск = 0), и
радиус качения определяется уравнением
Гко=го(1-ХгЛ), (61)
где гко — радиус чистого качения; = ——------коэффициент
2 а Го Рх
тангенциального сжатия беговой поверхности шины.
При относительно больших значениях Рх происходит еще и
проскальзывание элементов шины в направлении действия силы
Лг-
Уравнение для радиуса качения в этом общем случае может
быть преобразовано в следующий вид:
Гк = ^ко(1-«б). (62)
где S6 = SCK/2arltc — коэффициент буксования.
Числовые значения хб для твердой поверхности находят по
эмпирическому уравнению:
^б = (ГЛ Pz^\ (ЬЗ)
где — показатель, определяемый экспериментально.
Скорость колеса определяют по формуле
^k=Vk=wZko(I -$б)>
Кроме того, она может быть выражена уравнением
= ®ко — => ^кО (1 - ^ко) >
51
где уко, vs— соответственно скорости чистого качения и сколь-
жения. Из сравнения последних двух уравнений следует, что
So = Vs/v^Q.
Используя рис. 24,в, напишем уравнения движения эластич-
ного колеса по твердой поверхности:
mx=m,j = Rx — Рх\ (64)
inz=Rz — Pz=fy (65)
JK-^=MK-RxrA-Rz{a^Cl-\-c2), (66)
dt
где in— масса колеса; j — ускорение; JK— момент инерции ко-
леса.
Для определения значения fi + f2 напишем уравнение мощ-
ностного баланса колеса, приняв sCK = 0,
Жк«к=/?хгк0«>к+JKwK +R2omk. (67)
Из уравнений (66) и (67)
(гкО“Гд)’
Для оценки сопротивления качению помимо момента Mf ис-
пользуют силу сопротивления шины качению Р/ш = Л1//гк0 и ко-
эффициент сопротивления шины качению колеса }ш = Р/ш/Рг-
Подставив в уравнение (66) значение С\ + с2 и учитывая
Rx=mj-\-Px\ Rza=Mf=fulPzrK;
d^dt = j/rK,
получим уравнение тягового баланса колеса:
/->к=A4K/rKQ = fш Pz -j- Rx *т~ JKJ1 гкогк> (68)
где PK—полная окружная сила на колесе, подведенная от дви-
гателя.
От колеса на корпус машины передается сила тяги Рт, чис-
ленно равная силе но противоположно направленная.
Режим движения колеса определяется совокупностью сил и
моментов, приложенных к оси колеса (рис. 25,6).
При Л1к = 0
/?Л-<0..................Ведомый режим
При Л1к>0
/?х<0...................Нейтральный »
/?х>0...................Ведущий »
/?у = 0 . . . . . . Свободный »
При Л4к<0
/?х<0...................Тормозной »
Возможность движения колеса определяется не только урав-
нением тягового баланса, но и соотношением требуемой для
движения тангенциальной реакции дороги Rx и возможной силы
сцепления колеса с дорогой.
Движение возможно при Rx^<pRz, где <р — коэффициент
сцепления колеса с дорогой.
52
Заметим, что на свободном
режиме (RX = Q) возможно ка-
чение колеса при ср = 0.
Особенности качения коле-
са по мягкому грунту. При ка-
чении колеса по мягкому грун-
ту (см. рис. 21) существенно
усложняются форма передней
части поверхности контакта,
характер распределения нор-
мальных и касательных сил в
контакте, изменяется кииема-
Рис. 26. Схема качения эластичного
колеса по мягкому грунту
тика качения колеса вследст-
вие деформации грунта.
Для упрощения обычно принимают, что продольное сечение
передней части контакта состоит из двух частей: первая (АВ)
дуга окружности с радиусом rQ и вторая (ВС) прямая линия
(рис. 26). Тогда, в дополнение к схеме (рис. 24), появляются
реакции грунта на участке АВ. Нормальная их составляющая
проходит через центр колеса, поэтому никакого дополнительно-
го момента они не вызывают. Горизонтальная составляющая
этих реакций Rx' = Pfr является силой сопротивления качению,
а вертикальная составляющая Rz повышает несущую способ-
ность шины Рг при том же нормальном прогибе hz.
Уравнения движения для качения колеса по мягкому грунту
имеют вид
mx=Rx — Px — R'x\
mz=Rz-\-Rz —PZ = Q\
«7кб/<^к/ di~ Rz (d ] Ci -р c<z) (Rx ’ Rx)
(69)
а уравнение тягового баланса
p.=MK!rK.=(/ш + /r) Pz + Rx + j J ’rKQr„ (70)
где fr=Rx'/Pz — коэффициент сопротивления грунта качению
колеса.
Ограничение возможности качения колеса по сцеплению
Rx=(Px+R^)<Pz^
На мягком грунте даже при Рх = 0 возможно буксование ко-
леса, если Rx'>Pz<$’
В общем случае возможны две схемы ограничения сцепления
колеса с грунтом.
По первой схеме (рис 27, а) ограничение сцепления колеса
с грунтом (буксование) происходит вследствие среза грунта,
53
Рис. 27. Схемы ограничения сцепления колеса с грунтом:
а—сопротивлением скольжения колеса по грунту в плоскости контакта; б—несущей спо-
собностью грунта
заключенного между выступами протектора, и скольжения выс-
тупов протектора по грунту:
Р vсц = Рг^р + Л (1 - *в) (Р tg ?0 + ^о) ks, (71)
где /?ГСц — возможная по сцеплению тангенциальная реакция
грунта; срр — коэффициент трения резины по грунту; /г„ — коэф-
фициент насыщенности протектора; FK—площадь контакта;
Лд —коэффициент изменения сцепных свойств грунта по глу-
бине. Значение /гд может быть выражено уравнением /?д=1-|-
-4<д//£Л, где Сд и |1д—параметры неоднородности грунта.
Разделив все члены уравнения (71) на Pz, получим выраже-
ние для коэффициента сцепления
+ (1 — ^(tgTo + Cv/?)^. (72)
По второй схеме ограничение сцепления колеса с грунтом
происхохит в результате потери грунтом несущей способности,
когда суммарная нагрузка на колесо становится равной несу-
щей способности грунта P = QS. В этом случае сдвиг грунта при
буксовании происходит на некотором удалении от поверхности
контакта:
(73)
где Qs — допустимая нагрузка на грунт, ограничиваемая его не-
сущей способностью; значение Qs определяется уравнением
(20):
Qs = Ps^'k cos 3 ==
я—4g tg у0
1 к л + 43 tgy0
cos 3 -j- 2C2
-|-Х3йг FKcos?.
54
a)
Рис. 28. Зависимость коэффициента
от нормального давления в контакте:
сцепления колеса с песчаным грунтом
а—экспериментальные данные; б—расчетные данные; 1—по формуле (72); 2—по форму-
ле (73); Pz = 20 000 Н; 3— по формуле (73), Г=2 м2; □—шины низкого давления; Q—ши-
ны с регулируемым давлением; X—арочные шины, у/—<п невм ок а тки
Действительное значение предельного сцепления колеса с
грунтом равно меньшему значению из полученных по формулам
(72) и (73). В качестве примера ниже приведены эксперимен-
тальные данные (рис. 28,а) и результаты расчета (рис. 28,6)
сцепления колес с песчаным грунтом. Для расчета приняты сле-
дующие исходные данные, определяющие механические свойст-
ва грунта: (р0 = 34°, с0=1 кПа; у= 1400 кг/м3; #г=0,35 м; Е =
= 4,5 МПа; а=1; Xi = 313 кПа/м, Л'2=17 кПа/м, Х3 = 50 кПа/м.
Для того чтобы получить результаты, сопоставимые с экспе-
риментальными данными, проведено два варианта расчета.
В первом варианте принято Pz = 20 000 Н, Fl{ = Pzfp\ ZK=]
во втором — 77к = 2 м2; Pz = /7Kp.
Анализируя результаты расчетов, можно сделать вывод, что
на песчаном грунте со значительной толщиной сыпучего слоя
сцепление колеса с грунтом ограничивается несущей способно-
стью грунта. Результаты расчета по второй схеме хорошо со-
гласуются с экспериментальными данными. Расчет по первой
схеме дает завышенные результаты.
Приведенный пример позволяет ответить на труднообъясни-
мые в прошлом вопросы: почему для песчаных грунтов коэффи-
циент сцепления колеса с грунтом, как правило, меньше значе-
ния коэффициента внутреннего трения tg сро и почему значение
коэффициента сцепления существенно снижается при увеличе-
нии нормальных давлений на грунт.
На связных грунтах в большинстве случаев сцепление огра-
ничивается срезом грунта в плоскости контакта и определяется
по первой схеме Однако при нормальных давлениях на грунт,
55
Рис. 29. Расчетные схемы для определения силы сцепления колеса с грун-
том в зависимости от буксования:
а—схема для определения тангенциального смещения элементов шины относительно грун-
та; б—схема графического решения интеграла
близких к несущей способности гранта, и на связных грунтах
сцепление ограничивается несущей способностью грунта.
Максимальные возможности по сцеплению колеса с грунтом
могут быть реализованы, например, при трогании машины с мес-
та, когда распределение тангенциального сдвига грунта по дли-
не контакта близко к равномерному. В процессе качения колес
максимально возможная сила сцепления меньше вследствие не-
равномерного распределения тангенциального сдвига грунта по
длине контакта. При этом реализуемая сила сцепления зависит
от величины буксования колеса.
Зависимость удельной касательной силы от величины смеще-
ния грунта определяется формулами (25), (27) или можег быть
представлена в виде графика (см. рис. 10). Распределение тан-
генциального смещения по длине контакта можно рассчитать,
рассматривая качение колеса по грунту как поворот относитель-
но мгновенного центра (рис. 29).
При повороте колеса относительно мгновенного центра О\ на
угол da точка М перемещается на величину ds — O^Mda. Танген-
циальная составляющая этого перемещения
dj = ds sin (а — 13) = О1/И sin (а — f)da.
Используя выражения
= — z)tga cos3; tg3==[rK —(£ —z)] (£— г) to а,
можно написать
dj = [(В — z\ cos a — rK cos a] da;
7 = J [(£ —~) cos a — rK cos a] (—da),
ai
где rK=r0(l-s6).
56
Для участка АВ (£ —z)/cosa —г,
jx = r(ax — a) — r0(l — sj (sin cq — sin a).
Для участка ВС
y2 = r(a1 — a2) — r0(l — s6)(sin c^ — sin a2)4-($-)-Ar)lnx
tg (0,25 л + 0,5a2)
tg (0,25л + 0,5a)
(74)
(75)
Значения cq, аг и sin аг можно выразить через деформацию
шины и грунта:
aj=arccos [1-(Лг+Аг)/г];
a2=arccos(l ~/zz/r);
Суммарную силу сцепления находят интегрированием эле-
ментарных сил по длине контакта:
—а2
Rx = b j* x(j)rda.
'll
По формулам (25), (74) и (75) строят зависимость rt(ai—a)
(рис. 29,6) и проводят графическое интегрирование (величина
искомого интеграла равна заштрихованной площади): г = г0 на
участке АВ и r = r0 cos а на участке ВС.
Для упрощения решения можно неравномерность распреде-
ления j и р по длине контакта учесть коэффициентом и ис-
пользовать уравнение (25) или (27):
1 — kH
1/(Р tg?о + Cov) -Ь Сjt/E' j
(76)
или
где
А лец={k^p [ 1 — exp (— + (1 -- А>н) (р tg % + ) х
х[1-ехр(-^/7С/)]), (77)
J = s6lK = s6Pz ’pb; v = (1 — j/t) > 0.
Значение определяют сопоставлением данных, получаемых
по формуле (76) или (77), с экспериментальными данными или
с результатами расчета первым (графическим) методом. Для
большинства случаев ^ = 24-3.
Безразмерными показателями, оценивающими тяговые и
кинематические свойства колеса, являются коэффициент сцеп-
ления <p = Rx/Pz\ коэффициент сопротивления грунта качению
fY=Rx'IPz и коэффициент буксования s^ = vs!v.
В качестве обобщенного показателя тяговых свойств можно
использовать зависимость &т($б), где &т= (ср—fr) — коэффициент
тяги по сцеплению.
57
Рис. 30. Схемы к определению работы,
затрачиваемой на деформацию грунта:
а—схема деформации грунта; б—схема графи-
ческого решения интеграла уравнения (78)
§ 9. Энергетические затраты
на качение колеса
Качение эластичного ко-
леса по грунту связано с за-
тратами механической энер-
гии на деформацию грунта,
на гистерезисные потери в
шине, на проскальзывание
щины относительно грунта,
на преодоление прилипания
грунта к шине, а также на
совершение полезной (тяго-
вой) работы силой, переда-
ваемой от колеса на корпус
автомобиля в направлении
движения.
Работа, затрачиваемая
на деформацию грунта (АГ),
зависит от размеров образу-
емой колеи и характеристи-
ки сопротивления грунта
вдавливанию. При приближенном решении можно принять фор-
му сечения колеи
= ^ир Н (^к ^пр)
о
прямоугольной (рис. 30) с
и использовать для определения
шириной
работы
уравнение
Лг
Arz=Sb j pdhr,
’о
(78)
где S — длина колеи.
Функция р(/гг) выражается уравнением (8) или представля-
ется графически. В самом общем случае, при любом характере
этой функции, уравнение (78) решают методом графического
интегрирования (величину интеграла определяют по заштрихо-
ванной на рис. 30 площади).
При решении конкретных задач функция р(Аг) упрощается,
и возможно аналитическое решение. Например, при Нт = со
(грунт не имеет близлежащего твердого основания) Qi = Q2=L
функция p(hr) выражается уравнением (37), Лг можно опреде-
лить по уравнению
p$baJ j psbaJ—Ehr
Е p$baJ
Влияние сдвига грунта вперед имеет существенное значение
в тех случаях, когда угол между вектором перемещения эле-
ментов шины в контакте и нормалью к поверхности контакта
58
больше коэффициента сцепления. При этом происходит нагреба-
ние грунта колесом (бульдозерное действие), и работа, затра-
чиваемая на деформацию грунта, повышается.
Качение колеса с бульдозерным действием еще мало изуче-
но. Для ориентировочного определения дополнительного сопро-
тивления качению, вызываемого бульдозерным действием, мо-
жет быть использована формула
ОТП’
(79)
где роти — удельное сопротивление грунта горизонтальному сме-
щению (отпор грунта);
Porn
= 0,5 yhT tg2 (45° + %/2) + 2с0 tg (45°+%/2).
Для той же цели предложена следующая формула [2]:
₽«= 7‘."(°+то)
2 sin a cos То 040 180
(80)
4" tg (45° Д- ф0 2),
где £c=GV2-tg<?0)cos2%; ^ = [(2%,/^%)+1] cos2%;
Z0=Artg2(45° — ®0/2); a=arccos(l —2hTlD).
Сопротивление качению колеса по вязкому грунту на твер-
дом основании определяют по уравнению
Р fb IIOn£&,
где Qm — плотность; v — скорость; /лов — смачиваемая поверх-
ность; са — коэффициент лобового сопротивления, представляе-
мый в функции числа Рейнольдса Лг = QmV//TeK/|i; Нт<ж — толщи-
на слоя текущего грунта; р, — вязкость.
Сопротивление качению колеса, вызываемое гистерезисными
потерями при деформации шины, обычно определяют экспери-
ментально. При этом для анализа влияния различных парамет-
ров на Pflu используют математические выражения, полученные
обработкой экспериментальных данных [13]. Такие выражения
действительны, как правило, только для условий эксперимента.
В полуэмпирическом способе определения Р/ш при измене-
нии внутреннего давления воздуха в шине в больших пределах
исходным параметром взяты гистерезисные потери, определяе-
мые по величине площади гистерезиса нагрузочных характерис-
тик [14]. Интегрированием работ сил внутреннего трения (гисте-
резисные потери) всех элементов шины в зоне контакта при
однократном цикле нагружения-разгружения получена следую-
щая формула для удельной силы внутреннего трения шины:
Q ___________________________Кг____________________________
2г [2arccos (1 — hz/r) — (1 — hz/r) In [(1 + j 2hJr)/( 1 — yC2hz/r)]
где Kr — величина гистерезисных потерь, определяемая по на-
грузочной характеристике.
59
Рис. 31. Схема к определению ра-
боты, затрачиваемой на проскаль-
зывание элементов шипы относи-
тельно дороги (грунта)
Работа сопротивления каче-
нию определяется уравнением
Af—4^Cnhz,
где п — частота вращения ко-
леса.
Рассмотренный метод вклю-
чает только один конструктив-
ный параметр шины г. Влияние
всех остальных конструктив-
ных параметров скрыто в пара-
метре Кг, определяемом экспе-
риментально.
Попытка аналитически вы-
разить Р/ш через основные
конструктивные параметры
шины была сделана в работе
автора [1]. Принятая там мето-
дика взята за основу при теоретическом рассмотрении вопроса,
проводимом ниже.
При свободном качении колеса по твердой поверхности поте-
ри подведенной механической энергии (превращение ее в тепло-
вую) обусловлены внутренним трением в резинокордной оболоч-
ке шины при ее прогибе и восстановлении формы, резине про-
тектора при циклическом сжатии и проскальзыванием элемен-
тов протектора относительно опорной поверхности. Работу на
сжатие воздуха можно считать полностью обратимой из-за ма-
лого внутреннего трения.
Работа, затрачиваемая на деформацию оболочки за один
оборот шины,
11 z
ЛШ1 = [2лг^1/(/л1И + fl,)] f pbavdhz,
О
где выражение роф1/(р™+ро) характеризует часть работы, кото-
рая теряется на внутреннее трение в оболочке; фц— коэффици-
ент гистерезисных потерь.
После подстановки значения рЬЩ) по выражению (49) и ин-
тегрирования получим
А ш 1=(В,/Н+ЗЯ 12В) (0,5 - AJ3B). (81)
Работа, теряемая на циклическое сжатие резины протектора
за один оборот,
Лпр
Лш2=2ягф2 J pb„fdhnp,
о
60
где г|'2 — коэффициент гистерезисных потерь в резине протекто-
ра; ЛПр — сжатие резины протектора.
Вследствие малого изменения диапазона давлений можно
принять линейный характер деформации резины, тогда
Р ^пр^н^р ^ир»
где Лп — коэффициент насыщенности протектора; £р— модуль
деформации резины; Лпр— толщина протектора.
После подстановки и интегрирования имеем
Дш2=лгф2(ря,-[-/70)2 Д1|р&„р//гн£р. (82)
Работа, затрачиваемая на проскальзывание элементов шины
относительно дороги (рис. 31),
Ух °’5&пр
Дш3=2 f 4л2г0(г — r0) p<?dy-\-(2 J 4л2г0 (г0 — г) pvdy.
о Ух
Согласно рис. 31 = ]/2г„р(гс — г0); г=гс-Лзд; /г2у = у2/2г„р.
После подстановки этих выражений в уравнение для Лш3
получим
Аш3=8л2г0р® {(гс — г0) [2 } 2гпр (гс — г0) — 0,5г>„р] +
+ (ЙР - 16 [2гпр (гс - г0)]з/2)/48г11р}.
Все рассмотренные виды затрат механической энергии на ка-
чение колеса вызывают сопротивление качению, оцениваемое
коэффициентом сопротивления качению
где fr (71гfm — (-Лип^ш2 “1“fr коэф-
фициент сопротивления грунта качению колеса; — коэффици-
ент сопротивления шины качению колеса.
Мощность, затрачиваемая на тангенциальную деформацию
шины,
M=yWk(i»,rK0 — г>,г0).
Учитывая гкй=г0 — \хМк и Л4к=Рг<р(г0 —ХЛЛ1К), после подста-
новки получим
7Vt=^zV/(l+X^?).
где v=Px!Pz.
Мощность, затрачиваемая на буксование,
Ns=RxVs== R^s^ 1 + \XRX).
Действительное значение не постоянное, а уменьшается
по мере увеличения Л4К, так как модуль упругости резины по ме-
ре ее деформации увеличивается. Поэтому раздельное рассмот-
61
рение Nx и Ns несколько условное. Если суммарное значение
тангенциальной деформации шины и проскальзывания шины от-
носительно грунта оценивать коэффициентом буксования
s6s, то получим
(84)
Потери мощности на преодоление прилипания грунта к шине
имеют существенное значение для связных грунтов при опреде-
ленной влажности. Липкость грунта создает препятствие для
качения колеса в зоне выхода шины из контакта с грунтом, где
происходит отрыв шины от грунта. Сопротивление качению, вы-
зываемое прилипанием грунта, пропорционально ширине кон-
такта и удельной силе сопротивления отрыву резиновой плас-
тинки от грунта. Кроме того, липкость грунта повышает силы
сцепления в контакте, в результате чего повышаются потери
мощности на буксование.
Наиболее существенный недостаток, вызываемый липкостью
грунта, заключается в забивании грунтом углублений протекто-
ра, а иногда и в налипании на всю беговую часть шины. Это
приводит к существенному увеличению затрат мощности на ка-
чение и снижению сцепления.
Обеспечение самоочищаемости протектора шин при движе-
нии по липким грунтам — сложная, еще не решенная полностью
задача.
Количественно затраты механической энергии на преодоле-
ние прилипания грунта можно оценить по формуле
s
Лл = 0,5 J рЛЫ(1х^0,5рпЫ8.
‘о
Дополнительная сила сопротивления качению от прилипания
грунта и соответствующий коэффициент сопротивления качению
Р/л-Д, S=0,5A1W; /л = 0,5А16/ Pz. (85)
Значения р,ч приведены в табл. 4.
При рассмотрении энергетических затрат на качение полезно
использовать уравнение мощностного баланса качения колеса
где jVK = MK(oK — мощность, подведенная к колесу; NT = Pxv —
сопротивления
fTPzv — мощность сопротивления
z§Pzv — мощность бульдозерного
:лР2Го<Ок — мощность сопротивле-
тяговая мощность; Njm=fmPzr^u— мощность
шины качению колеса; Nfr=
грунта качению колеса; Nq —
сопротивления качению; N^ =
ния качению, вызываемая липкостью грунта; А^5=(рР2гой)к^б—
мощность буксования.
62
Разделив все члены уравнения (86)
на Pzv, получим уравнение удельных
энергетических показателей колеса:
где fN = NK/Pzv — коэффициент под-
веденной к колесу мощности;
- N f ш + N f г + Л^б + + Ns
fNf~---------------------------KO-
Pzv
эффициент мощности сопротивления Рис 32 Тягово.экономиче.
качению; /ст — коэффициент тяги. ская характеристика колеса
После подстановки выражений для
N6, и Ns, а также выражения v = rocoK(/—$б), по-
лучим
f Nf — fг + /б 4" (/ш + Л 4г ?5б)/( 1 — 5б)- (87)
В качестве обобщенного показателя для оценки тяговых и
энергетических свойств колеса можно использовать зависимость
/гт(Лх), приведенную на рис. 32.
Г л а в a 111
ДВИЖЕНИЕ АВТОМОБИЛЯ ПО
ДЕФОРМИРУЮЩЕЙСЯ ГРУНТОВОЙ
ПОВЕРХНОСТИ
Автомобиль взаимодействует с грунтом через систему колес,
характеризующуюся параметрами шин, числом колес, схемой их
расположения, распределением нагрузки, типом силовой и кине-
матической связей между ними. Движение автомобилей нельзя
рассматривать как простое суммирование параметров взаимо-
действия отдельных колес с грунтом. Колеса включены в общую
систему автомобиля, они находятся в сложной силовой и кине-
матической связи между собой, с корпусом автомобиля, с транс-
миссией и двигателем, рулевым управлением, тормозной систе-
мой. Проходя по грунту, колесо изменяет механические свойства
последнего, а значит, изменяет условия взаимодействия с грун-
том следующего за ним колеса.
В результате указанной взаимосвязи и взаимообусловленно-
сти различные колеса могут одновременно работать на различ-
ных режимах (ведущем, ведомом, свободном и даже тормозном).
Система автомобиль — грунт с исключительным многообра-
зием взаимосвязей еще не исследована. Рассмотрено лишь вве-
дение в систему [2]. Успешно осуществляется процесс накопле-
ния материалов исследования отдельных подсистем. Поэтому в
настоящее время взаимодействие автомобиля с грунтом рас-
сматривается с большим числом упрощающих допущений, с уче-
том лишь самых основных связей.
§ 10. Внешние силы, действующие на автомобиль при движе-
нии по грунту
Внешние силы, действующие на автомобиль в общем случае
движения по грунту, представлены на рис. 33. Кроме рассмот-
ренных выше реакций грунта на колеса Rziy Rxi\ Pfr на автомо-
биль действуют сила веса Ga, сила сопротивления воздуха Pw,
при буксировке прицепа сила тяги на крюке РКр, при погруже-
нии в грунт элементов корпуса автомобиля нормальные и каса-
тельные реакции гранта /?К2, 7?кх, а также бульдозерная
сила 7?б.
Выражение для Pw известно из теории автомобиля
Pw = kFv2a/\3,
64
Рис. 33. Внешние силы, действующие на автомобиль при движении по
грунту
где k — коэффициент обтекаемости, Нс2/м4; F — лобовая пло-
щадь автомобиля, м2; оа— скорость автомобиля в неподвижной
среде, км/ч.
Для современных автомобилей повышенной и высокой про-
ходимости k — 0,044-0,06. Так как при движении по грунту ско-
рость автомобилей, как правило, не превышает 50 км/ч и значе-
ние Pw менее 0,01 Ga, им в большинстве случаев пренебрегают.
Реакции грунта на колеса определяются весом машины, чис-
лом колес, схемой их расположения и характером связи с кузо-
вом автомобиля, параметрами грунтовой поверхности, режимом
движения.
Нормальные реакции грунта. Найдем выражение нормальных
реакций (JRzi) при движении многоосного автомобиля по на-
клонной грунтовой поверхности (рис 33). Положение автомоби-
ля определяется координатами центра тяжести hgi lQ и углом
наклона его продольной оси 0. Напишем уравнения статики
(уравнение моментов относительно точки О)
п
V RzJi — = Cos а + Gfig Sill а Д' ? fig 4~
1
и
+ 2 Mf+- Як +Як Ал + ЯкрЛкр+ja6;
1
п
a COS Ct
1
где /а — момент инерции автомобиля; Pj — сила инерции.
3 1342
65
Кроме того, составим уравнения прогиба подвески, приняв
грунтовую поверхность ровной, а характеристику подвески ли-
нейной,
/z,=/zi+Z(tg0;
ht = RZiiCh
где hi — прогиб Z-й подвески; Ai — прогиб передней подвески;
Сг — жесткость /-й подвески.
Получим 2/г+1 уравнений и столько же неизвестных (/? зна-
чений RZi\ п значений и 0).
Решив приведенные уравнения с учетом выражения
= /r0Oacosa и Pj—QJJg, получим
где
7WS = Оа (/0 cos а + hg sin a Д- /го c°s a + Д- + Pkz^kz +
(89)
По формуле (88) можно рассчитывать нормальные реакции
грунта на колеса для автомобиля с любым числом осей при лю-
бом соотношении жесткостей подвесок.
Для двухосного автомобиля (Zi = 0) получим
i Лг- .
Это же выражение получается непосредственно из первого
2
уравнения статики, так как V PZih~
1
Нормальная реакция грунта на передние колеса находится
по уравнению RZ\ = GA cos a—RKZ—R&. Методика определения
/?KZ приведена ниже.
Погружение колес в грунт. Значения Rxi и ДГг зависят от
погружения колес в грунт. Для определения погружения колес
в грунт необходимо рассмотреть последовательное их качение
по одному следу. Выше (§ 3) было выяснено, что деформация
грунта зависит от времени действия нагрузки, эта зависимость
выражается уравнениями (8) и (31). Повторяемость нагрузок,
свойственная последовательному движению колес по одному
следу, как бы удлиняет продолжительность их воздействия на
66
грунт. При этом в результате прохода колес в одних случаях
происходит упрочнение микроструктуры и повышение несущей
способности и модуля деформации грунта, а в других случаях,
наоборот, нарушается структура грунта и его деформация мо-
жет превзойти деформацию от длительно действующих нагрузок
при однократном их приложении.
Возможны четыре случая накопления деформаций при пов-
торных нагрузках.
1. Деформация, оставаясь упругой, практически не нараста-
ет, микроструктура и плотность грунта почти не изменяются.
Такой характер деформации наблюдается на связных грунтах
при влажности ниже предела пластичности и воздействия на
них любых нагрузок, встречающихся на практике.
2. Постепенное возрастание деформаций по логарифмичес-
кому закону. Этот случай соответствует пластичному состоянию
грунта, когда нагрузка не превышает предела несущей способ-
ности.
3. Сначала деформация нарастает так же, как в предыду-
щем случае, а затем — по зависимости, близкой к линейной (без
затухания), что характерно для влажности грунта ниже преде-
ла текучести и нагрузки выше несущей способности грунта.
4. Деформация прогрессивно возрастает, что соответствует
влажности грунта, приближающейся к пределу текучести, или
действию нагрузок, значительно превышающих несущую спо-
собность.
Для математического описания функции р(Лг) при последо-
вательном проходе колес по одному следу в уравнении для kA
(29) выразим время действия нагрузки через скорость V, Дйсло
проходов п и длину контакта колеса с грунтом /к, и со-
ответственно
(90)
Заменив в уравнении (8) значение р на ря=ркя и подставив
выражение ka, получим
1кп + М'
р ------------------. (91)
lKn(\/p^+abQx/Ehr) v ’
По уравнению (91) можно проводить расчет при условии
ZKi = const; pt = const, т. е. при равномерном распределении нор-
мальной нагрузки по осям. При неравномерном распределении
нагрузки по осям задача усложняется, но может быть также
сведена к определению значений &д или рд=рЛд. При последова-
тельном проходе колес нагрузку на грунт можно рассматривать
как постепенно нарастающую. При первом проходе происходит
деформация грунта, соответствующая t = tx — полностью дефор-
мация произойти не успевает
3*
67
При втором проходе, если р не изменилось, увеличивается
время действия нагрузки и соответственно происходит дополни-
тельная деформация грунта. Суммарная деформация после двух
проходов (/=Л + /2) определяется величиной рд2:
Prt=P(ti
Если при повторном проходе нагрузка на колесо больше, чем
при первом проходе (Р2>Р1), то дополнительная деформация
грунта также будет больше. Учитывая постепенность приложе-
ния нагрузки, можно предположить, что при увеличении пов-
торной нагрузки до величины р{ дополнительная деформация
протекает, как и в первом случае (/?2=Pi), а когда эта нагрузка
станет больше (/?2>Pi), деформация грунта распространится на
большую глубину, начнут деформироваться еще нетронутые
слои грунта и действие этой дополнительной нагрузки будет
аналогично нагрузке, прилагаемой при первом проходе или нес-
колько уменьшено действием верхнего уплотненного слоя. Это
уменьшение действия нагрузки можно оценить коэффициентом
ki. Тогда
Для третьей оси, рассуждая аналогично, получим
а в общем случае для n-й оси
+ kl(Pn~ РЛ-1)
где i— порядковый номер оси.
Если нагрузка на колесо максимальная у первой оси и пос-
тепенно снижается у последующих, то при каждом последую-
щем проходе дополнительная деформация от увеличения време-
ни действия нагрузки протекает, как и в случае равномерного
распределения нагрузки, но до меньшей величины:
68
п
При любом законе распределения нагрузки по осям
если Рп>Рп-ь
Погружение /-го колеса в грунт определяется по формуле
P.i=^Ps^b^Eh^-\ (93)
В случае, когда погружение колес в грунт больше дорожно-
го просвета, часть веса автомобиля передается на грунт через
корпус. При этом возникают еще две силы сопротивления дви-
жению: /?кх и
Для определения глубины погружения корпуса автомобиля
в грунт, а также части веса машины, передаваемой на грунт че-
рез корпус, используем расчетную схему на рис. 34 и уравнение
Gacosa = y /?г4-/?кг.
Для перехода от функции рд(Лг) к функции (Аг) = (Лг)
используют уравнение (57) (задача решается при фиксирован-
ном значении /гг).
Чтобы получить зависимости £/?2(Лг), выбираем несколько
значений Аг, для каждого из них по уравнениям (92), (93), на-
п
ходим значение рд, по уравнению (57) величины Rzi и 7?^.
1
Функцию /?К2(ЛГ) рассчитывают по уравнению Rkz = рЕкор и
зависимости р(/гг), где Екор— площадь частей автомобиля (мос-
тов), которые погружаются в грунт Если эта площадь перемен-
яя
на по высоте, RKZ= Pi^kopi (где т — число ступеней по
1
вертикали; i — порядковый номер ступени).
При построении графика (рис. 34) функции R^z{hT) за нача-
ло отсчета берут точку v, а значение Ri{z отсчитывают от кри-
69
Рис. 34. Схемы к определению погружения корпуса (мостов) автомобиля
в гр>нт
вой Rz (Лг). Затем па оси ординат откладывают значение
Ga cos сс, проводят горизонтальную линию до пересечения с
п
кривой
1
—и находят величины погружения
корпуса (ЛКОр) и колеса (/гг) в грунт, а также нормальную реак-
цию грунта на корпус автомобиля (см. рис. 34). В результате
уточняют решение уравнения (88).
Реакции грунта по оси х. Сила сопротивления грунта каче-
нию колес определяется погружением колес в грунт и характе-
ристикой деформируемости грунта. Методика расчета сопротив-
ления качению одиночного колеса рассмотрена в § 8. Дополни-
тельная трудность расчета сопротивления качению при последо-
вательном проходе колес по одному следу состоит в изменении
характеристики деформируемости грунта в результате прохода
по нему колес. Способ определения количественных значений
параметров деформируемости грунта £, <р0, с0 после прохода ко-
лес еще не разработан. Однако выше было установлено, что де-
формацию грунта при последовательном качении колес можно
рассчитать введением коэффициента динамичности, зависящего
от скорости и числа проходящих колес. По полученным форму-
лам (92) и (93) можно построить зависимость рд(Лг) для всех
колес автомобиля (рис. 35) и определить суммарную силу со-
противления грунта качению по уравнению, аналогичному (78),
= рлМг, (94)
о
где величина- интеграла численно равна площади ограниченной
70
Рис. 35. График к определению
силы сопротивления качению
кривой рд(Лг), ординатой Лг и
осью абсцисс.
При определении силы сопро-
тивления грунта качению каждо-
го из колес берутся площади /,
/Л III.
Для определения бульдозерно-
го сопротивления грунта, нагре-
баемого мостами (кузовом) ав-
томобиля, отработанной методи-
ки нет. Однако имеются методы
решения аналогичных вопросов
для дорожно-строительных ма-
шин.
Сопротивление грунта срезу
бульдозером рассчитывают по формуле
2
#б=— ^л1Л^^ад2^ + с0с1§%(^сД2— 1)]. (95)
о
где b, h — ширина и высота срезаемого грунта; &сдЬ ЛСД2 — коэф-
фициенты, определяемые углом внутреннего трения ср0 и углом
резания 6 (см. табл. 9).
Таблица 9
5. 0 W*CH2 ПР“ ° s, ° *сд1/*сч2 "PH °
10 20 30 10 20 30
10 20 1,75/1,02 1,36/1,05 2,54/1,03 1,74/1,11 3,46/1,07 2,19/1,21 40 1,16/1,16 1,32/1,40 1,62/1,58
30 1,24/1,09 1,47/1,23 1,75/1,41 50 1,11/1,19 1,23/1,54 1,36/2,2
Эта формула может быть использована и для ориентировоч-
ного расчета бульдозерного сопротивления движению автомо-
биля.
При «лыжеобразной» носовой части корпуса и небольшом
погружении корпуса в грунт происходит смятие грунта корпусом
ЛКОр
без бульдозерного действия. В этом случае /?б — bK j pdfo^-
о
Тангенциальные реакции грунта на колесо RXi рассчитывают
по формуле (76), которая с введением коэффициента динамич-
ности и заменой по выражению j = sePz/pbnp получает вид
_______________1
1____________
tg То + Cqv
(96)
71
Сила трения корпуса автомобиля о грунт определяется выра-
жением х = /?К24Рк,
где <рк — коэффициент трения стали по грунту.
Сопротивление шин качению колес, характеризуемое момен-
том для ведомого и тормозного режимов может быть пред-
ставлено внешней силой сопротивления шин качению : Р/ш —
= M/IU/rK0, а для ведущего и свободного режимов внутренним
моментом сопротивления или коэффициентом полезного дейст-
вия колеса т]к= 1—Муш/Мк.
§11. Уравнения движения автомобиля по грунту
Для оценки тяговых, скоростных и экономических возмож-
ностей автомобиля при движении по грунту и решения практи-
ческих задач по определению предполагаемой скорости движе-
ния, расхода топлива, возможности буксирования прицепа и т. п.
необходимо составление уравнений движения. В общем случае
уравнение движения имеет вид (см. рис. 33)
п п
По уравнениям (76), (96) определяют значение RXi, учиты-
вая сцепные возможности пары колесо — грунт.
Для определения RXi по тяговым возможностям автомобиля
необходимо знание параметров системы двигатель — трансмис-
сия — движитель.
Рассмотрим тяговые возможности двухосного автомобиля
при трех наиболее часто встречающихся принципиально различ-
ных схемах распределения моментов между осями: 1) момент
подводится только к одной оси автомобиля; 2) момент подво-
дится к обеим осям; связь между осями дифференциальная;
3) момент подводится к обеим осям, связь между осями блоки-
рованная. Затем рассмотрим общий случай, приемлемый для
всех многоприводных автомобилей.
Автомобиль 4X2. Уравнение (68) для передней ведомой оси
имеет вид
^zlf nil ^к17а ^kG1^*k1’
а для ведущей оси
/^х2 = 2Мк2/Г КР2 — Rz2f m2 J K2JaJr кС2Гк2»
где 7К — момент инерции колес; /а— ускорение автомобиля.
Момент, подводимый к ведущим колесам от двигателя,
\ (it )
где Мд — момент двигателя; сод— угловая скорость вала двига-
теля; Лг — момент инерции вращающихся деталей трансмиссии;
72
i]T — коэффициент полезного действия трансмиссии; ?г— переда-
точное число трансмиссии.
Заменив d^Jdt на /а/т/гк, получим
^^к*2 ( rJ d'£ С<) ЛтС*
Подставив в уравнение (97) выражения ЛТк2, Рх2 и /?vi, по-
лучим уравнение тягового баланса автомобиля 4X2
Pf ш + Pfr + Рб + + Л + Pw + ЛР + Ph (98)
где Pk = ^^t^t//*ko — условная окружная сила на ведущих коле-
сах, подводимая от двигателя; Pj = j^GJg — сила сопротивлс-
7К) g
ния разгону (сила инерции); о — 1 + --------—--------коэффи-
ГкоГкОа
циент учета вращающихся масс.
Для определения 6 можно использовать упрощенное выра-
жение
8=1+0,04(1+/?).
Формула (98) характеризует условие прямолинейного дви-
жения по тяговым возможностям автомобиля.
Ограничение возможности движения по сцеплению колес с
грунтом определяется неравенством
^?.г2сц 1 (991
ИЛИ Pf Ш1 4~ Р/г -ф /?0 + RKx + Pi + Pw + Лср+Л/ Р г2сц- J
Величина Дх2сц ограничивается двумя факторами: сцепными
возможностями левого и правого колес с грунтом, которые вы-
ражаются уравнением (76), и свойствами дифференциала, уста-
новленного между колесами. Приняв /ш = 0 и гкол~/копр, мож-
но написать
Рх2'Л\ ^А'СЦПГП (1
Рх2сц <Рл^?а2л ~1' c?ap^z2np»
(100)
где /?xcnmin — наименьшая величина сцепления колес с грунтом
(для рассматриваемых двух колес); X — коэффициент блокиров-
ки дифференциала (отношение момента на отстающем валу к
моменту па забегающем валу); л, Пр — индексы левого и право-
го колес.
Скорость автомобиля с симметричным дифференциалом меж-
ду колесами — у = содГк2//т» где /К2 — радиус качения оси авто-
мобиля.
Для определения /к2 рассмотрим уравнение кинематики сим-
метричного дифференциала 2соо = сол + соПр.
Выразив угловую скорость через линейную скорость и ра-
диус качения, получим
= Гкл + +гкпр, откуда гК2=2гклгкпр/(гкл+гкпр). (101)
73
Значения гкл и гкпр определя-
ют по уравнениям
^кл ^*0л 0 $бл)»
пр ^*Опр ( 1 *$6ifp
Значения $бл, £б пр находятся
в зависимости от Rx по графикам,,
представленным на рис. 36.
Для простого дифференциала
Rx 2jl~Rx 2пр = 0,57?х2. При нали-
чии блокированной связи между
колесами моста
Рис. 36. Графики к определению
буксования:
а—при дифференциальной связи меж-
ду колесами; б—при блокированной
связи между колесами
откуда
G<2 ^*кл — ^кпр*
Учитывая уравнения
имеем
(102),
$бл 1 (1 *^6 пр) ^*0гр ^*Сл*
(ЮЗ)
Значения $бл и $б пр определя-
ют по графикам /?х($б) (рис.
36, б), так чтобы они отвечали
соотношениям (ЮЗ) и /?Хл +
+ Rx пр = Rx2- Для этого график
#хл($бл) перестраивают с изме-
нением абсцисс по уравнению
(103) — кривая /?хл(5б/)-
По кривой (RXn + Rxnp) находят значение $б, при котором
сумма ординат равна Rx2. Найденное значение $6 равно $бпр-
Значение $бл находят по уравнению (103).
При большой разнице радиусов колес гОпр и гОл и малой ве-
личине Rx2 возможно отрицательное значение буксования одно-
го из колес (юз) и соответственно отрицательное значение тан-
генциальной реакции грунта (подробнее этот вопрос рассмотрен
ниже, в разделе «Автомобиль 4X4 с блокированным приво-
дом») .
Если между колесами установлен самоблокирующпйся диф-
ференциал с коэффициентом блокировки л, необходимо опреде-
лить отношение Лхл/Rxnp при блокированной связи между ко-
лесами. Значения 7?хл и RXnp определяют как в предыдущем
случае.
Если Rxn/RxnP<Jv, дифференциал будет заблокирован, если
Rx.h/Rxkp^a, дифференциал будет разблокирован. В последнем
случае должны удовлетворяться уравнения
74
Решая эти уравнения относительно /?ХПр 11 &л, имеем
+\); A>,np-/?x2/(l +А).
По графикам (рис. 36,а) находят значения $бпр и $бл, соот-
ветствующие значениям /?ХПр и 7?х л-
Автомобиль 4x4 с дифференциальным приводом. В отличие
от предыдущего случая сила тяги передается на все четыре ко-
леса. Значения 7?Л] и Rx2 определяют по формуле (68). После
подстановки выражений и Rx2 получается уравнение тягово-
го баланса в общем виде, ничем нс отличающееся от уравнения
(98). В развернутом виде оно отличается лишь значением КПД
трансмиссии
Пг-, = 1ъ (ПтгДтыА'р) (1 Д/Ср).
где цтп—приведенный КПД трансмиссии с дифференциальной
связью между осями; тц — КПД механизмов трансмиссии,
расположенных между двигателем и межосевым дифференциа-
лом; т|Т1 и т)Т2 — КПД механизмов трансмиссии, расположен-
ных между межосевым дифференциалом и ведущими колесами
соответственно первой и второй осей; /<р — отношение моментов
на выходных валах межосевого дифференциала. Во многих слу-
чаях указанным различием КПД можно пренебречь.
Условие ограничения возможности движения по сцеплению
колес с грунтом будет иметь вид
Pf г + + А’к V + Pi Н" Pw + Лер + Pj Pxi сц-
1
(104)
Неравенство (104) отличается от неравенства (99) отсутст-
вием силы Р1ш\, на величину которой уменьшается необходимая
для движения сила сцепления колес с грунтом. Ограничения
реализуемой суммарной для всех колес силы сцепления выра-
жаются неравенствами
+u
Сц
гец min
(105)
где /?Л-сипГп—минимальное сцепление колес одного моста с грун-
том, определяемое неравенством (100); л0—коэффициент бло-
кировки межоссвого дифференциала.
Скорость автомобиля с симметричным дифференциальным
приводом
2со {/\-Кк2
IГ (''К1 + Гк2)
(106)
Значения радиусов качения осей rKi п гк2 определяют в зави-
симости от характера связи между колесами оси по уравнениям
(101), (102), как и для автомобиля 4X2.
75
Рис. 37. Схемы распределения моментов и сил тяги при блокированной
связи между осями:
а—при наличии циркуляции мощности; б—при создании положительной силы тяги на
обеих осях
Если между осями автомобиля установлен простой несим-
метричный дифференциал, уравнение кинематики которого име-
ет вид
toi -|~/fpa)2 = (l -J-^p) too»
где сов (02 — угловые скорости выходных валов; (оо — угловая
скорость входного вала, то
‘г'==а>д(1 +tfp) ^1гк2, К (*Ук1 +^к2)]- (107)
При определении значений гк1 и гк2 по уравнениям (101) >
(102), (103) и рис. 36 следует иметь в виду фиксированное со-
отношение моментов и, следовательно, сил тяги на первой и вто-
рой осях:
Учитывая, что Rxi+Rx2=Rx,
Rxi = Rx, (1 Н-А'р); | fl08v
Rx2=KyRAi-W- J
Автомобиль 4X4 с блокированным приводом (рис. 37). По-
скольку оси связаны между собой блокированным приводом, то
= сок2» Гк1 = гк2-
Продольные реакции грунта, действующие на колеса, связа-
ны с радиусами качения уравнениями (61), (62). Для упроще-
76
ния решения обычно используют уравнения
Гк1 — г01 — К xiRxi'i
гк2 = г02 кЛ2^х2- .
(W9)
где /<Л-=\-сГоСт — при отсутствии буксования (малых значениях
Кх); Кх = 8вг0Сч — при наличии буксования (больших значениях
Кх); Ст — коэффициент упругости привода.
В последнем случае величина Кх переменная, так как зависи-
мость Sq(Rx) нелинейная.
Из уравнений (109) следует
Rxl^xl RxlR х2— г01 г 02*
(110)
Решая уравнение (ПО) совместно с (98) и учитывая RX—PK—
Rfui' Rf>~\~Rkx~\~RRw~\~R^p~\~Rj==^iR^^ ^oi го2=ДГ]12,
Равенство радиусов (Дг=0) практически никогда не имеет
места. Причинами этого являются неодинаковый нормальный
прогиб шин из-за различных нормальных нагрузок и давления
воздуха в шинах, неодинаковый износ протектора, допуски на
изготовление шин и др., поэтому в большинстве случаев Rx\=^
y=RX2- Причем, если то RX2<S), т. е. на колесах
данной оси возникает сила, направленная против движения
(рис. 37, а). Продольные реакции грунта на колесах другой оси
в этом случае должны быть больше суммы сил сопротивления
движению 2-Рф. Если ЛГ.,-2 Дг, то /?я2>0 (рис. 37, б).
Однако наличие отрицательной касательной реакции на ко-
лесах одной из осей еще не означает, что к этим колесам не под-
водится крутящий момент от двигателя.
Пользуясь уравнениями (68) и (111), можно написать
Анализируя уравнения (112), следует отметить три случая:
1) если Дг12^>0 и ДГ12ЛХ25 ^)ф4"(/2А,2 +Afy^)(/fxlф-Кд-г)»
то Жк2<0; AfK1>0:
2) если Дг21>0 и Дг21>АГЛ12 Л'+(/1^1+ЛЪк1)(ЛФ1+Лл2),
то Л1к1<0; ТИК2>0;
3) еСЛИ ДГ12</Сд.22А>ф + (/2^2 + А17к2)(АГх1+^2);
Дг21 <7Cri 2
то Л1к1 > 0; Л1к2>0.
77
В третьем случае крутящий момент от двигателя через разда-
точную коробку подводится к колесам обеих осей. Если отрица-
тельная продольная реакция грунта на колесах одной из осей
невелика, то момент этой реакции /?Лг0 не может преодолеть
сумму моментов [Rr0+Mj. В этом случае моменты /7?/04-Л1; час-
тично преодолеваются за счет момента, подводимого к колесам
от двигателя.
В первом и втором случаях момент от двигателя подводится
только к одной из осей. К другой оси момент от двигателя не
подводится, наоборот, крутящий момент подводится от колес
этой оси к раздаточной коробке, и суммированный с крутящим
моментом двигателя передается на колеса первой оси (см. рис.
37, а). Это явление принято называть циркуляцией мощности в
замкнутом контуре трансмиссии автомобиля с блокированным
приводом. В результате циркуляции мощности увеличивается из-
нос шин и трансмиссии, повышается расход мощности на дви-
жение [15].
Для упрощения вывода уравнения тягового баланса прини-
мается Кх\=Кх2 = Кх\ г0{=г02 = г0.
Согласно схеме распределения потоков мощности (рис. 37, а)
Л/р1-Л4рк + М12, (113)
кроме того,
Учитывая, что колеса задней оси согласно принятой схеме
работают в тормозном режиме;
Используя уравнения (113)—(115), после преобразования
получим
' як = /1 + А Я2+Л 4- Pw + +Як х + якр+Pj+Л, • (116)
где условная сила сопротивления движению, вызываемая цирку-
ляцией мощности,
Рц—0,5(Arp.//<v — Pi -Pw-2/2Я2-Яб-Якr) (1 -ч’пЪг).
Индексы Ar, R и / зависят от направления циркуляции мощ-
ности.
Сила Рц тем больше, чем больше разница радиусов свободно-
го качения колес первой и второй осей, меньше суммарная сила
сопротивления движению, меньше тангенциальная эластичность
шин и привода и меньше КПД механизмов трансмиссии на уча-
стках между раздаточной коробкой и колесами.
Общий случай. В общем случае автомобиль может иметь лю-
бую связь между колесами и группами колес: блокированную,
дифференциальную с различными значениями коэффициента
блокировки или отключенные от привода ведомые колеса.
78
Рис. 38. Схемы определения SJ?Xi в об-
щем случае:
Л)
а—связи между колесами и мостами; б—графики для определения Rxi при блокирован-
ной связи между колесами; X—блокированная связь; Q—простой дифференциал; Q—
самоблокирующийся дифференциал
Уравнение (97) справедливо для общего случая. Задача
п
заключается в определении значений и Гк*
I
Примером может служить схема трансмиссии автомобиля,
представленная на рис. 38.
Так как между тележками установлен простой симметричный
дифференциал
Л11-|-7И2=7И3 + /И4.
Соответственно при Р/ Шг = const, = const и малой разнице
между свободными радиусами колес
1 + = 0,5 2 /V
Все колеса третьей и четвертой осей имеют между собой бло-
кированную связь, следовательно,
^"кЗл ^*кЗнр ^*к4л ^*к4пр I •
В общем случае при нелинейной зависимости гк(Рх) значе-
ние гь- п, а также Rx Зл, Rx зпр, Rx 4л, Rx 4пр могут быть найдены
по графикам r^(Rx) (рис. 38). Для этого выбирают три произ-
вольных значения гх ц, проводят соответствующие горизонталь-
ные линии и определяют значения SPxi. По полученным трем
(4 \
Rxi I находят значение гк ц, соот-
з J
4
ветствуюшее RAi = 0,5 Р^.
3
В случае линейной зависимости гк(Ях) (малые значения
4
£Р^ по системе уравнений (109) и ^/?х/=0,5Рф
з
Т
(117)
79
Между 1-й и 2-й осями также блокированная связь, но меж-
ду левыми и правыми колесами этих осей установлены самобло-
кирующиеся дифференциалы (Z#=l). В этом случае предвари-
тельно необходимо найти для осей зависимости rKi(Rvi) и
/к2(^л-2) •
При нелинейных для колес зависимостях rK(Rx) их находят
аналогично случаю, рассмотренному для автомобиля 4x2
При линейной зависимости rK(Rx)
^"кл Л)Л К ХЛR VZ ( 1
^"кпр ^Опр xiip^xi^/ О
2гкпГк<лр/ (гкя ГК1|р).
В случае КлЛ = Кх2=Кх
г _ +а)-А\^у1][го,ф(1 4-a)--XAx/?.v1]
(1 -7- ^)(Аол + А Опр A^.vAvi)
Аналогичная зависимость получается для гк2. Однако это
справедливо только при условии разблокировки дифференциала.
В качестве такого условия рекомендовано неравенство [16]
1)ДХ4-1)<Дг0.
Если это неравенство не удовлетворяется, то дифференциал
будет в заблокированном состоянии и значения гк1, гк2 опреде-
ляют гак же, как для случая блокированной связи между коле-
сами.
Получив зависимости и ^2(^x2), можно найти при-
веденный радиус качения 1-й и 2-й осей уже рассмотренным вы-
ше способом.
Приведенный радиус качения всех колес автомобиля и сум-
марный коэффициент буксования выражаются уравнениями
/к=2гк1гкп ^ki+^kii):
, ( /<, \ (И8)
5б=1— ГКП > .
\ I 1 /
Условием возможности движения автомобиля является нера-
венство гк>0. При малых значениях гк (большом буксовании)
велики затраты мощности на движение.
Для определения затрат мощности на движение рассмотрим
уравнения мощностного баланса автомобиля, полученные на ос-
нове уравнений тягового баланса:
' ^дПт=^/+^+^+^+^ + Агб+ЛгК1- + Л\, (119)
где A4=Gao\(/mr0+/rrb)cosa; АА,=Оа«>кгк sin a; Nw=kF («\.гк)3;
Nj=/а^к К + Л, (6 - 1)] Ga g; Ns = (r0 - rK) Oa cos a;
N6 = /eVA cos a; ДГКЛ.=fKXwKrKGa cos a; Nu = _/>kr0Ga cos a;
jt _ Аб . yr ______ Rk x . f _____ Ry.
J 6 > J К X „ ’ J Ц •
Ga cos a uacosa uac3sa
80
Обозначение составляющих мощности определяется индек-
сами. Разделив все члены уравнения (119) на GacoKro. получим
выражение для коэффициента мощностных затрат:
/,у = Y ОаГко)к—[/шго. гк"Ь/г + ?(ги rh~ 1) +/б +/k.v
+ Аг0, Гк] cos аф- sin а-ф[1 ф(8— 1) rv/rK] ja g+kFtf Оа. (120)
Критерием оценки возможности движения в заданных грун-
товых условиях может быть неравенство
У V шах f N чоп»
если определяющим фактором является экономичность, или не-
равенство
’ ^inin доп»
если определяющим фактором является производитель-
ность автомобиля. Индексом доп обозначена допустимая величи-
на fy или v. Величину скорости v определяют по тяговой харак-
теристике автомобиля и уравнению тягового баланса (98) или
по динамической характеристике автомобиля и преобразован-
ному уравнению тягового баланса
=/cos а-ф sin аф-/а — ф-(/6ф-/кф-/ц) cos а. (121)
<ja g
Используя тяговые или динамические характеристики авто-
мобиля, с учетом ограничения по сцеплению, и уравнение
(98) или (121), можно определить максимальный преодолевае-
мый угол подъема при заданных характеристиках грунта или
максимальное ускорение, если заданы параметры грунта и угол
подъема.
Рассмотренный метод решения тяговых задач дает возмож-
ность оценить влияние конкретных конструктивных факторов
автомобиля на его тяговые, скоростные и топливно-экономиче-
ские возможности при любом, практически встречающемся, не-
благоприятном сочетании грунтовых условий под различными
колесами автомобиля. Он может быть применен при выборе оп-
тимальных параметров автомобиля в процессе проектирования;
для решения задач по троганию автомобиля с места, для реше-
ния многих других задач. Однако при решении ряда практиче-
ских задач, учитывая осредняющее действие автомобиля при
движении по неоднородному грунту, этот метод может быть су-
щественно упрощен. »
В действительных условиях движения автомобилей, исклю-
чая случай трогания с места, невыполнение условия
^cpGacosa еще не означает остановки и застревания автомо-
биля, возможно продолжение движения с замедлением за счет
кинетической энергии автомобиля (при (р—Sf= —0,1 и у =
= 10 м/с автомобиль проходит примерно 50 м). Следовательно,
короткие участки пути с низкими сцепными свойствами могут
81
Рис. 39. Характеристика грунтового маршрута
быть легко преодолены при достаточном запасе кинетической
энергии (достаточной начальной скорости).
С другой стороны, из-за случайного распределения механиче-
ских свойств грунта по пути в большинстве случаев невозможно
установить механические показатели грунта под каждым коле-
сом автомобиля. Можно установить лишь средние значения
этих показателей для характерных участков маршрута или ста-
тистические характеристики грунта для маршрута.
В качестве примера рассмотрим движение автомобиля по
грунтовому участку маршрута с характеристикой, представлен-
ной на рис. 39. В данном случае участок пути применительно к
конкретному автомобилю характеризуется значениями коэффи-
циента сопротивления дороги i|i=/cosa+sina и коэффициента
сцепления ср, полученного при условии s6<0.2.
На рассматриваемом участке имеются три интервала: I —
16 м; II— 10 м, III — 24 м, на которых ф>ср, и, следозателыю,
трогание с места или движение с очень малой скоростью невоз-
можны. В случае же начала движения от границы участка авто-
мобиль свободно проходит весь участок. Найдем скорость дви-
жения автомобиля в характерных точках маршрута, используя
упрощенное выражение тягового баланса, преобразованное для
динамического фактора: D = 4’+/a6/g. Принимаем, что динами-
ческий фактор ограничивается только сцеплением колес с грун-
том (D = (p).
Согласно приведенному уравнению /а max — (D—Учи-
тывая, что dvldt=jz и dt^dsfv, получим vdv=j^dSJ а после под-
становок и решения
82
v=]/ (2g/S) \ (D-tydS. (122)
6
s
Приняв f (D — tydS=(D — 0)q5 = (? — ф)ср5, получим
о
^=|/2S(?-^)cpg8. (123)
При полном использовании приведенных значений qp по урав-
нению (122) получены следующие значения скорости для харак-
. терных точек маршрута:
Характерные точки / 2 3 4 5 6 7
уа, км/ч ... . 13,6 11,5 14,4 13,9 16,8 13,9 15,6
Как видно, на участках с отрицательным значением ср—
снижение скорости составляет от 0,5 до 2,9 км/ч. Следовательно,
при движении со скоростью более 3 км/ч обеспечивается свобод-
ное, без застревания, прохождение рассматриваемого маршрута.
Однако в случае остановки автомобиля на одном из трех участ-
ков с (ср—1|')<0 дальнейшее самостоятельное движение стано-
вится невозможным.
При использовании средних для всего маршрута параметров
(ф—Ф) ср = 0,058 скорость в конце маршрута, определенная по
уравнению (123), равна 15,6 км/ч, т. е. соответствует скорости
в точке 7, полученной по уравнению (122).
§ 12. Особенности движения автомобиля по грунту на повороте
Криволинейное движение автомобиля по грунту имеет следу-
ющие особенности. На колеса действуют боковые силы, вызы-
вающие качение колес с боковым уводом; при блокированной
связи между колесами и осями имеет место большое кинемати-
ческое рассогласование; в результате действия центробежной
силы происходит перераспределение нормальной нагрузки меж-
ду левыми и правыми колесами; распределение продольных сил
между колесами более неравномерное, чем при прямолинейном
движении; возможность движения машины ограничивается не
только буксованием колес, но и их боковым скольжением. Все
это существенно осложняет аналитическое рассмотрение криво-
линейного движения автомобиля.
Теория поворота многоосных автомобилей разработана
А. С. Литвиновым [16] и Я- Е. Фаробиным [17]. Поворотливость
автомобиля подразделяется на статическую и динамическую.
При движении по мягким грунтам важна статическая поворот-
ливость, характеризующая способность машины к равномерным
поворотам с малым радиусом и невысокими скоростями.
Расчетная схема поворота трехосного автомобиля приведена
на рис. 40. Силы, действующие на колеса автомобиля, приведе-
ны к поперечным (боковым) /?б i и продольным R-j силам, при-
83
Рис. 40. Расчетная схема движения автомо-
биля на повороте
ложенным к середи-
нам осей. Моменты —
к суммарному момен-
ту сопротивления пово-
роту А!с. Равнодейству-
ющие внешних сил, при-
ложенных к корпусу ав-
томобиля, приведены к
силам РАХ и Рау с точ-
кой приложения, опреде-
ляемой координатой xQ.
Угол поворота управля-
емых колес 0 и угол увода
колес оси б равны
0/=О,5(0л + 811р);
8;=0,5(8л4-8„р).
Согласно схеме рис. 40
можно написать три урав-
нения статики:
A*™ cos 0,- — A’si sin 0,- — Рах=0; (124)
Rxi sin 0,- У Ra cos 0,- — Pai,=0; (125)
i i
V RxiR sin 0; +2 cos 0(. - PayxQ~ Mc=0. (126)
1 1
Кроме того, можно составить уравнения упругих и геометри-
ческих связей:
7?б i К б / ’
Л—-^o=Ktg(6f —
где Кб г — суммарный коэффициент сопротивления
уводу двух колес оси.
Так как обычно 0г<ЗО° И б<^0г, можно принять
tg 0г- tg бг<С 1, тогда из последнего уравнения получим
ние ДЛЯ бг!
(127)
боковому
tg бг = бг-;
выраже-
Подставив выражение для бг в уравнение
систему из п уравнений:
(127) , получим
(128)
84
По двум уравнениям этой системы (i=l и / = 2) найдем вы-
ражения для R и х0:
h — h
tg — tg 02 — А^б1/АГб1 — ^62/^62
x0=z1-/?(tge1-~/?61/K61).
(129)
(130)
Подставив в уравнения (128) выражения R и х0, получим
систему п—2 уравнений (i = 3~n):
(Zi~Z2)Z?6/Z^6z“(Z/ —Z2)Re ^6/+^/ —/1)^62 Кы —
= (Zi ~ /2) tg 6/ ~ (Zz - Z2) tg 6X + (Zz - Л) tg 60.
(131)
В систему уравнений (124) — (131) входят 2/г+2 неизвест-
ные величины Rxi\ Re г, R и х0, а число уравнений п4-3.
Для получения недостающих уравнений составим еше систе-
му уравнений кинематики: ^ = СОгГк г = й)г(/*Ог—KxiRxi)-
Приняв приближенно cos(6z — Bz) = cos+ (Z?6//^6z) sin ez>
можно написать
^=(r0/ — Kx//?xz) [cos +(/?6//K6/) sin 6J <oz-
или, пренебрегая членом второго порядка малости {KxlRxiX
XRei/Ket) sin 0г-,
^=wz koz cos 0/ + (/?6z^oz/Ar6z) sin 0z — KxiRxi cos 9J. (132)
Система уравнений первой степени (124)—(132) позволяет
найти продольные реакции грунта на колеса Rxi, знание кото-
рых необходимо для определения ограничений возможности
движения по сцеплению и для определения мощности, необхо-
димой для поворота автомобиля; боковые реакции грунта на ко-
леса г, которые ограничивают условия поворота по заносу;
радиус поворота R и смещение центра поворота х0, характеризу-
ющие вписываемость автомобиля в профиль пути.
Движение колес автомобиля на повороте возможно, если
(133)
Следует отметить, что система уравнений (124) — (132) ре-
шается при условии, что момент сопротивления повороту Мс —
величина известная (задана).
Общий момент сопротивления повороту автомобиля склады-
вается из моментов сопротивления повороту колес: а) от кине-
матического увода SAIck*, б) от силового увода 2Л4СС; в) от сил
реакций грунта, действующих в контакте колес с грунтом,
2МСГ; г) от перераспределения моментов колесными дифферен-
циалами 2Л1Сд-
Для определения этих составляющих момента сопротивления
повороту предложены следующие формулы [16]:
85
<к=(-ф Го.5^ +ф+&<6
к L \ <lx) J
Л4сс = 0,33 ZK/?6;
_Wcr=0,375?PJ 7\;
Л1сд==0,52?а(7ех + 1) (к + 1).
п
Из этих формул следует, что величина Afc=V
1
+^14сг/-рД4Сд1) зависит от параметров R, 7?го
сятся к неизвестным величинам.
(134)
(34СК/- ф /Исс/ ф-
которые 0Т1Ю-
Для ориентировочного расчета, который может быть исполь-
зован и в качестве первого этапа при выполнении более точного
расчета, можно исходное значение Аф выразить уравнением
<=0,375?С?аЮ++0,5£-2^ V У-H . (135)
/? А,- + 1
1
Определив значения Аоь А, ^о, можно проводить уточ-
нение расчета, используя эти данные для более точного нахож-
дения составляющих Л4С и других параметров, входящих в рас-
четные формулы, например, Кхь Кб ? при нелинейных зависимо-
стях /кх(/'к) и Ко (б), проводя расчет методом постепенного при-
ближения.
Величина бокового увода колеса при качении по мягкому
грунту определяется боковой силой, сопротивлением шины боко-
вому уводу Куш, сопротивлением сдвигу в контакте шины с грун-
том Ку ед и сопротивлением смятию грунта боковой стенки ко-
леи Ку см- Боковая деформация шины может произойти только
при условии смятия грунта боковой стенки колеи, поэтому для
определения Кб можно использовать модель, представленную
на рис. 41:
Кб^^ А у СМ "фК уШКуСЧ (КуШ"фКуС:ф -136)
Величину АУш определяют, как правило, экспериментально.
Для оценки влияния на Куш различных факторов можно ис-
пользовать следующие уравнения:
Куш(А?=Куэ[1 ~о,6К2фф0,4(АКф/фф];
/<+., (ДМ =/<уэ 1 1-(^-+?+ / (1 + 0,375 ф ) ;
Ауш(3)=Ау0^. где е - (3-0,026) л/<уЭ/2?А/,
Pw Д_ Q 5 Pw
PwO PwO
/ Р™
PwO
36
Рис. 41. Схемы определения параметров при криволинейном качении колеса
по мягкому грунту:
а—суммарного коэффициента сопротивления боковому уводу; б—бокового смятия грунта
Индекс о означает оптимальное значение параметра, при ко-
тором получается максимальное значение /Суш- Величину КУо
определяют экспериментально.
Для определения величины Ку Сд можно использовать форму-
лу (77), считая, что /?Сц — суммарная сила сцепления колеса с
грунтом:
/?сц=У +
/2 — суммарное смещение шины относительно грунта в сере-
дине контакта;
7 s— ТАЛ+Уб-
(137)
Выразим / через коэффициент буксования (77), а /б — через
угол поворота контактной площади колеса относительно грунта
(бу гр) •
1& °у гр*
2b р
(138)
Решив уравнения (137), (138) совместно с (77) и учитывая
Ау сд = #б/бу гр, получим
КУ с?2 - (Л+^т)2. (139)
sy гр
р>
где <р определяют по формуле (77) и выражению <р=—,
PZ
при этом берется суммарное значение сдвига грунта
j=Jv= V Se + tg28
2p^lP 3
В формулах (139), (77) учитывается влияние на /Су сд не
только параметров грунта (с0 и фо), параметров колеса (A, k„,
Лр, р), но также и режима движения, характеризуемого коэф-
фициентами буксования sg. и тяги kT.
87
При малых значениях сил и /?б
^yci ^£*0уГ .
Заменив /3 выражением (137) и Л\ выражением Л\=
+ (1 — А’Н)А\ /', имеем
^усд = ^[Мн+-(1-^)^ /'].
Выражение для Ку См найдем, используя уравнение (8) для
деформации грунта при Яг=оо и приняв Рз=рОтп- Значение
Ротп определяют формулой (80). Из формулы (8):
Росн^угр
где ГСЛ1 — площадь смятия грунта в боковом направлении
[^см = Лг^, (рис. 41, б)], йугр — величина бокового смятия грун-
та, рбок — боковое давление.
Приняв линейный характер изменения Лугр по длине кон-
такта (Лугр = ^буГр, где бугр — угол поворота шины относи-
тельно грунта), можем написать
l
рг ^бсм hv tg ^ydx
yCM tgl;/ tg8„ J 2£xtga!/ + «Гот J РТы
о
После интегрирования и преобразований получим
2£ tg b.
___ ^r^Fori!
у с м . Л
у tg
'Уотп
Е tg Ъу
При малых углах увода можно принять /?бок=£Лугр
2Е л ] F, тогда ЛГусм=0,5Аг£2£.
Коэффициент Кх> учитывающий изменение радиуса
А,- /
(140)
где Е—
качения
в зависимости от силы тяги, определяется выражением
К v ^*0^6 z •
Значение в зависимости от /гт и бугр выражается уравнени-
ем (77).
Дополнительное сопротивление качению колес на повороте
обусловлено затратами энергии на боковой сдвиг шины относи-
тельно грунта /б сд, на боковое смятие грунта /б см> на трение
боковин шины о грунт /бтр, на дополнительное увеличение глу-
бины колеи /б h и на боковую деформацию шины f6 ш-
Для определения f6 сд и fa см можно написать уравнения
/6cx=0,5Ayc,tg2^rp/P„ (141)
1
fЪ см \ Рбок^г^'^у гр*
88
Определив, Рбон = Лу см tg 6?/ из уравнения (140) и проинтегриро-
вав, получим
Убс м =
(142)
Совместно решив уравнения (140), (142), можем выразить /б см
через Ку см:
Боковые сдвиги в контакте колеса с грунтом и боковое смя-
тие грунта зависят не только от бокового увода колеса, но и от
криволинейного качения колеса. Как видно из рис. 41, б, при
б, = 0
Лу гр = /(Ячоп + bi2)2 + (1/2)2 - (fllI0B + 6/2).
Угол поворота контактной площадки колеса относительно
грунта при бу = О:
8prp=arctg(26yrp/£).
При наличии бокового увода потери мощности на боковые
сдвиги в контакте определяются суммарным углом поворота
контактной площадки колеса относительно грунта:
гр ^У гр in»
где бу ш — угол бокового увода, определяемый боковой дефор-
мацией шины (бу ш = ^б/Ку ш); б?у — суммарный угол бокового
увода.
Потери мощности на боковое смятие грунта определяются
суммарным углом поворота шины относительно грунта:
8y = 8yrp + V
Дополнительное сопротивление качению, вызываемое трени-
ем боковин о грунт, приближенно можно определить по фор-
муле
Л ТР=2KyCMcpAr tg уЗРЛ. (143)
При криволинейном движении в результате бокового смеще-
ния колеса часть поверхности контакта (Род) шины с грунтом
перемещается на неуплотненный грунт, что приводит к увеличе-
нию глубины колеи Д/гкр:
^сл = 0,52.2 tgS^.
В общем случае выражение для ДЛкр можно найти, исполь-
зуя формулу (8):
89
F Fci
Нг 1 ab Нv ~~
„ + г h arct£ 7 —4---------arctg-----------
Ps ab ps £ДЛКР ab
I F Р'сл.
1 ab H v h? -^^кр
где F— площадь контакта колеса с грунтом; РСд— часть пло-
щади контакта на неуплотненном грунте; Лг — глубина колеи
при прямолинейном движении.
В простейшем случае, при линейной характеристике деформа-
ции грунта, FEhT=(F — Fc^{hr-\-^hK?)E^-Fz~E\hK^
tg W (144)
U
Дополнительная составляющая коэффициента сопротивления
качению из-за увеличения глубины колеи
В случае линейной характеристики деформации грунта
f6h=bE\hlvl2Pz.
Выразив ДЛкр по уравнению (144) и приняв feh/fr = (Мкр//г)2,
получим
/бЛ=А (АЛкр/Лг)2 = /г (L tg Ъу гр/2^. (145)
Составляющую коэффициента сопротивления качению от бо-
ковой деформации шины можно приближенно выразить уравне-
нием, аналогичным (141),
/бш=0,5КушФ^е2^ш/Р2, (146)
где ф1 — коэффициент гистерезисных потерь.
Для проверки полученных аналитических выражений на
рис. 42, б приведены зависимости боковой силы от угла увода
при различных значениях радиуса поворота, полученные в ре-
зультате экспериментов и расчетов по уравнениям (135), (138),
(140) и выражению Pq = K^v.
На рис. 42, а приведены кривые отдельных составляющих до-
полнительного сопротивления качению, обусловленного качени-
ем колеса с уводом. Из пяти приведенных составляющих допол-
нительного сопротивления качению при криволинейном движе-
нии ввиду малости можно не учитывать лишь значения h- По-
тери энергии на боковое смятие грунта и трение боковин о грунт
зависят от глубины колеи. Для рассмотренного случая (Лг =
= 8 см) они составляют третью часть дополнительных потерь.
90
Рис. 42. Характеристики криволинейного качения колеса с уводом:
а—зависимость дополнительных составляющих коэффициента сопротивления качению от
угла увода: б—зависимость боковой силы от угла увода и радиуса поворота (Р2 —
= 19600 Н; шина 7.5С—20; грунт—песчаный)
При /?пов>12г0, малых углах увода (бу^2°) и достаточном
запасе сцепления дополнительное сопротивление качению нез-
начительно: /б^0,2Д и может быть ориентировочно определено
по формуле
/o = 2/tg^, (147)
где 6У — суммарный поворот колеса относительно грунта при
криволинейном движении.
На рис. 43 приведены результаты расчета эксплуатационных
характеристик колеса при криволинейном качении с учетом си-
лы тяги. С увеличением удельной силы тяги (&т+/г) снижается
величина коэффициента сопротивления боковому уводу и
увеличиваются коэффициент буксования s6 и коэффициент /<х,
характеризующий изменение радиуса качения. Величины s6 и
Кх существенно возрастают также и при увеличении угла боко-
вого увода. Суммарное влияние бокового увода и буксования на
затрачиваемую на качение мощность оценивается значением ко-
эффициента мощностных затрат fN. Как видно из рис. 43, тяго-
во-экономическая характеристика fiAk-v) колеса существенно
изменяется от угла бокового увода. При увеличении 8У возрас-
тает значение fN и снижается kT max.
При характерных для автомобиля радиусах поворота и ма-
лых углах увода (бу^2°), в случае достаточного запаса сцепле-
ния, fN в зависимости от ду увеличивается незначительно и
может быть подсчитано по уравнению
Луб~ /дгоП 4~2 tg 8J, (148)
где /no — коэффициент сопротивления качению при 6^ = 0.
В качестве конкретного примера проведем расчет параметров поворота
автомобиля 4x4 с блокированной связью между осями и дифференциаль-
ной связью между колесами.
91
Рис. 43. Эксплуатационные характе-
ристики колеса при движении по мяг-
кому грунту на повороте (шина
7.50—20; Рг = 10600 Н; грунт — пес-
Напншем уравнения статики
cos 01 4- Rx2 — ^61 sin 01 — = °;
7?т1 sin 0! 4- /?6i cos 0i 4- Т?б2— Ру ~ 0;
Rxl L sin ©1 4- /?б1 L cos 0i — М с — Ру х$ = 0.
Кроме того, воспользуемся уравнением (132). Формула (131) пригодна
лишь при л^З.
Приняв 7*01 = Г02 = r0l ^А'1 = Кх2 = К о = Кб2 = W1 = w2>
получим Го — К*РХ2 ~ ro cos ^1 4- г0/?б sin 01/Кб— RxRxicos 61-
После преобразования приведенных четырех уравнений относительно
/?ть ^61 будем иметь
Т?б2 z=z Р у (Д -^о/— Мс/Pt
(го \ *1 * с 4- Р и х о
Кх - -4 • — Sin 20!
Л б /
Кх2= *
Кх (1 + cos2 61) + ~~ sin2 ©1
Кх cos2 014-—— sin2 0! |
Кб/
KxV 4-cos2 0i)4-~““ sin2 61
Кб
7?6i = [(Ale + Ру) cos 01] L — Px sin 01 4- Rx2 sin 6b
Rxl = Px cos ©i 4- [(Me + Py Xq) sin ©J L — Rx2 cos ©i .
(149)
(150)
(151)
(152)
(153)
Значения R и x0 определяем по формулам (129), (130).
_______________L____________ .
1g ©i — Рб\/Кб1 — R&i! Кб2
Xq = L — R (tg ©i — Rci/K6i) = RR62I^62-
Пример. Дано: Ga = 60 кН; Ba = 2,8 м; L = 3,3 м; /?тш = 9,5 м; г0 = 0,5 м;
Кх = 0,5• 10’3 м/Н; Кб = 200 кН/рад; Гк = 0,9 м2; Х=4; Рх = 6 кН; Ру=0;
(р = 0,5; е! = 20°.
92
Решение. 1 этап. По уравнениям (135), (150) — (153), (129), (130) оп-
ределяем значения следующих параметров: Л1с = 4960 Нм; /?т2 =6120 Н;
/?б1 = 1451 Н; 7?х1 = 405 Н; 7? = 9 м; хо = 0,067 м.
Условие возможности движения по сцеплению (133) выполняется.
II этап. Уточняем расчет ио уравнению (134): дк = 25 см; /=36 см;
Л1ск = 580 Н-м; Л1СС = 244 Н-м, Мсг=3360 II- м; Мсц = 2330 Н м; Л1С =
= 6510 Н-м; /?б2= —1970 Н; /?т2 =6160 Н; tf6i = 1890 Н; /?х1 =1740 Н;
7? = 8,7 м; Л'о = —0,08 м;
I R262 + R22 = 6460 < ?/?г2 = 15000Н.
Условие возможности движения по сцеплению колес с грунтом выпол-
няется.
Для определения максимально допустимой скорости движения на пово-
роте иПр принимаем ограничение движения по сцеплению колес с грунтом:
+ (154)
Значение Ру переводим в разряд искомых. По величине Ру определяем
предельную по сцеплению скорость движения.
Считая, что Ру создается центробежной силой (Р = G^igR), получим
^нр = 1 PyRg/G^
Преобразовав расчетную систему уравнения с учетом (154) применитель-
но к решаемой задаче, получим
ЛА ± I (AA)2 + (А2 + Б2) [Z?2 + (^2S2)»]
^2~ а2 + б2 ’
R62 = У (№)2 — R\; Ру = (LR62 + Л4С) (L — х0);
Rei = [(ЛГс + Ру xu) c°s 61]/L + Рх sin 8j — Rx sin
= [(+ Py Лц) sin ej/Д + Рх cos 6j — Rx2 cos 6i;
где A =Kx(l + cos2 6]) +/-q sin2 61/^61
A =ro(l — cos 6i)4- Px(Rx cos2 6! + r0 sin2 0i//<6) +
, Л1С ( Xn \
+ (Kx~ rQlKb) 1 - --------------- sin 26i;
2L \ L — xq ]
r- I „ r0 \ x0 sin 2«!
bo —Лг —------- I T--------- •
\ Кб / ^(L — xq)
В рассматриваемом числовом примере получим /41 = 0,97-10~4; Bj =
= 586-10-4; £2=0,08-10-4; Rx2 =14600 Н; /?б2=3460 Н; Pv = 9900 Н;
J?6i = 8990 Н; Rt =—5900 Н; ^=11,1 м; Хо = О,19 м; уПр = 4,24 м/с=
= 15,3 км/ч.
Глава IV
ДВИЖЕНИЕ АВТОМОБИЛЯ ПО НЕРОВНЫМ
ГРУНТОВЫМ ПОВЕРХНОСТЯМ
Как было показано в гл. I, неровности грунтовых поверхно-
стей отличаются исключительным многообразием форм, разме-
ров и спектральной плотности. Соответственно и характер дви-
жения автомобиля по неровностям различен.
Наиболее глубоко исследовано движение автомобиля по не-
ровностям, вызывающим дополнительные динамические нагруз-
ки и колебания машины, но не являющимся препятствием для
движения [18, 19, 20, 21].
Неприятные ощущения и повышенная утомляемость води-
теля, вызываемые колебаниями и динамическими нагрузками,
приводят к снижению скорости и производительности автомо-
биля. Кроме того, неровности поверхности движения вызывают
дополнительное сопротивление движению, снижают тяговые воз-
можности автомобиля, повышают расход топлива, существенно
снижают срок службы в особенности элементов ходовой части.
При эксплуатации грузовых автомобилей на дорогах с неровной
поверхностью средняя скорость движения и производительность
снижаются на 40—60%, расход топлива и себестоимость перево-
зок увеличиваются на 50—70% [18]. Степень снижения эффек-
тивности автомобиля из-за неровностей пути зависит главным
образом от качества подвески.
В значительно меньшей мере исследованы возможности дви-
жения автомобилей по крупным неровностям, называемым пре-
пятствиями [1, 2, 21]. Относительная частота встречи автомоби-
ля с препятствиями, естественно, значительно меньше, чем с не-
ровностями первой группы. Однако по многообразию формы и
размеров и по степени воздействия на производительность авто-
мобиля они значительно превосходят первые.
Возможности движения автомобилей по уклонам ограничи-
ваются тяговыми свойствами, параметрами устойчивости к оп-
рокидыванию и заносу, а также несущей способностью грунта,
вследствие значительной перегрузки отдельных колес. Вопросы
движения колесных машин по уклонам в большей мере изучены
для тракторов и других сельскохозяйственных машин [2, 22].
Условия движения автомобиля по поверхности с дискретны-
ми препятствиями (пни, камни и т. д.) характеризуются соотно-
94
шением высоты препятствий и дорожного просвета автомобиля,
а также расстоянием между препятствиями, с одной стороны, и
габаритными размерами и поворотливостью автомобиля — с
другой. Теоретическое рассмотрение этого вопроса с использова-
нием статистических данных по дискретным препятствиям про-
ведено М, Г. Беккером [2].
Довольно часто приходится преодолевать различные барьер-
ные препятствия типа насыпей, кюветов [2]. Возможность дви-
жения автомобилей в таких условиях определяется, во-первых,
геометрическими параметрами автомобиля (углы свеса, ради-
усы проходимости и т. д.), во-вторых, тяговыми возможностями
автомобиля по преодолению пороговых препятствий.
Следует специально выделить вопрос о преодолении автомо-
билями рвов поверху. Глубоких теоретических исследований
этого вопроса не проведено. Однако достаточно обширные экс-
периментальные данные позволяют проводить оценку возмож-
ностей автомобилей по преодолению рвов.
§ 13. Особенности движения автомобиля по неровностям
Учитывая широкое освещение в литературе вопросов колеба-
ния и плавности хода автомобилей, рассмотрим лишь конкрет-
ные методы расчета параметров движения автомобиля по неров-
ной поверхности без подробных выводов и глубокого объяснения
физической сущности явлений. При этом выделим три случая
движения: через единичную неровность, по периодически повто-
ряющимся неровностям (волнообразной поверхности) и по
грунтовой поверхности со случайным микропрофилем.
Движение автомобиля через единичную неровность. При
встрече с единичными неровностями водитель снижает скорость
с целью исключения чрезмерных динамических нагрузок. Основ-
ным критерием ограничения скорости является удар в ограничи-
тели (пробой) подвески: скорость должна быть такой, чтобы
машина переехала неровность без удара в ограничители.
Энергия, идущая на подъем колеса при преодолении неров-
ности, в самом первом приближении может быть выражена
уравнением [20]
где Хп— отношение высоты неровности к радиусу колеса; пг—
масса неподрессоренных частей автомобиля
Запас потенциальной энергии подвески (энергоемкость) оп-
ределяется выражением
ЛТ 4“
Cpdh,
^ст
95
где Рст — статическая нагрузка; йСт — статический прогиб под-
вески; Лд — динамический прогиб подвески: Ср — жесткость под-
вески.
Условие движения без пробоя Л^ДП. Учитывая это, из при-
веденных двух уравнений можно найти допустимое значение
скорости
^шэх
ст
Для подвески с линейной характеристикой это уравнение
имеет вид
^nax = l (l-XH)(2PCT^+Cp/z4)/'m/(2+kH). (155)
Из приведенных уравнений видно, что основным показателем
подвески, влияющим на скорость движения автомобиля через
единичную неровность, является энергоемкость. Если характе-
ристика подвески линейная, то определяющее влияние оказыва-
ет динамический ход подвески.
Для более глубокого исследования движения автомобиля че-
рез единичную неровность могут быть использованы уравнения
неустановившихся колебаний. Нас интересуют, прежде всего,
вертикальные перемещения подрессоренной части, которые опре-
деляются уравнением [19]
Z = Zi71e~6i/sin ^2^ +A^j) —Zr2e^82/ sin (22/4-Ar(72)»
ГДе ZLfl>2==] + ^l,2i
Aztr1>2 = arctg [21>2 (ab2 —
—2 (U1 02 -^7281)/Дз; ^1,9— —^1,2(^2 — — ^2°1)]>
= ^2 = ^2“|“22i
До=4 (?)2 — (Ui o2 — U2 §i) + (Z72 — U\X
IS (1 + 1 ,102^2
Oj 2 — f\ ---------------------—- ,
2Q? 2— [o>2 ( 1 + 1/p.) 4-0)2
Z — вертикальные перемещения; t — время; Qb Q2 — частота
свободных колебаний; co — парциальная частота колебаний под-
рессоренной массы; сок — парциальная частота колебаний не-
подрессоренной массы; ц — коэффициент неподрессоренных
масс; К — приведенный коэффициент неупругого сопротивления
подвески, индексы 1, 2 характеризуют соответственно переднюю
и заднюю подвески.
По результатам аналитического исследования колебаний ав-
томобиля при проезде единичной неровности [18] установлено,
96
что перемещения кузова и колеса достигают наибольшей величи-
ны во время движения по неровности при v = U (т— частота
действия возмущающей силы). При этом перемещения кузова
превышают высоту неровности примерно в 1,5 раза, а перемеще-
ния колес не превышают высоты неровности. Изменение коэффи-
циента затухания сказывается на характеристиках неустановив-
шихся колебаний сравнительно слабо.
Движение автомобиля по волнистой поверхности. В общем
случае распределение неровностей по грунтовому пути является
случайным. Однако часто встречаются правильно чередующиеся
ухабы и выбоины, вызывающие наиболее сильные колебания
автомобиля. Движение по таким неровностям ограничивается
неприятным воздействием колебаний на человека. Принято счи-
тать, что ощущения людей при езде в автомобиле и наступаю-
щее при этом утомление связаны с ускорениями, которые испы-
тывает человек при колебаниях, и с частотой воздействия этих
ускорений.
При движении автомобиля наибольшее влияние на человека
оказывают вертикальные колебания. В качестве максимальных
допустимых среднеквадратичных значений приняты Z — 0,25g*
при длительном воздействии и Z^=0,4g при непродолжительном
воздействии (до двух часов в сутки). Амплитудные значения
допустимых ускорений при движении по синусоидальным не-
ровностям в 1,41 раза больше. Эти нормы ускорений сиденья ус-
тановлены для наиболее неблагоприятной для человека полосы
частот (4—8 Гц).
Уменьшенную чувствительность человека к колебаниям на
других частотах учитывают весовыми коэффициентами. Напри-
мер, международная организация по стандартизации JSO нор-
мирует колебания по октавам (полосам частот, у которых верх-
няя частота в два раза больше, чем нижняя)
Средние частоты октав, Гц 1,4 2,8 5,6 11,2 22,5 45 75 •
Весовые коэффициенты . .0,60 0,85 1 0,71 0,35 '.0,18 0,11
При колебаниях с различными частотами ускорения опреде-
ляют по формуле
п
Z=1 ^zial (156)
1
Следует заметить, что при измерении ускорений головы че-
ловека спектральный состав колебаний учитывается автомати-
чески, так как составляющие спектра каждой частоты усилива-
ются или ослабляются упругими свойствами тела в соответст-
вии с их влиянием на человека.
Для расчета параметров колебаний автомобилей принимают
ряд упрощающих допущений
При рассмотрении колебаний двухосных ав-
томобилей обычно пренебрегают связью между колебаниями
4 1342 97
1 'ialqo.l/d
Рис. 44. Схемы оценки плавности хода автомобиля при движении по вол-
нистой дороге:
/—двухосного; II—многоосного; а—эквивалентная колебательная система автомобиля;
б—амплитудно-частотная характеристика
передней и задней частей автомобиля и исходят из двухмассовои
системы Mi—или М2—т2 (рис. 44, /). Мь М2 — подрессорен-
ная масса соответственно передней и задней частей; mb т2 —
неподрессоренная масса.
Уравнения движения подрессоренной и неподрессоренной
масс:
MZ^K(C-Z) + Cp(C-Z);
mt= К {Z - С) + Ср (z “ О+W ~ О-
В результате решения этих уравнений с учетом уравнения
^ = ^0(1—cos v/), описывающего профиль неровности, получают
уравнения амплитудно-частотной характеристики автомобиля:
Z/<7o=Clu] (№v2 + Cp)/A; (157)
2/?0 - СШУ2]/(Л'2У24~СР)/Д; (158)
С>q0=Сш /[(Ср-ЛЬ2)2-/^2]/!; (159)
д = [/Итм4 — (Ср /п-|-СрЛ44-Сш М) v2-j-C’pCuJ2-{-
+К2 *2[СШ-v2(m + Al)]2, (160)
98
здесь Z— перемещение подрессоренной массы; £— перемещение
неподрсссоренной массы; Z— ускорение подрессоренной массы;
v = 2.tu»/S— частота возмущения, рад/с; 2q0 — высота неровно-
сти; S — длина неровностей; Ср — жесткость подвески; Сш —
жесткость шин; К — коэффициент сопротивления амортизато-
ров.
Для расчета возможной скорости движения зависимость
Z/q0(v) по уравнению (158) представляют в виде графика и до-
полняют его зависимостью v(v) (рис. 44, /, б). Зная высоту и
длину неровностей и максимальное допустимое ускорение коле-
баний, можно определить допустимую скорость движения. На-
пример, определим допустимую скорость при кратковременном
движении по неровностям с ?0 = 5 см, 5 = 5м. Допустимое значе-
ние ускорений Zmax = 0,56g, следовательно, Z/q0=lll м/с. Прово-
дим горизонтальную линию с ординатой 111 м/с до пересечения
с кривой Z/qG(v) (рис. 44, /, б). Из точки пересечения проводим
вертикальную линию до пересечения с прямой y(v) при S = 5 м.
Этой точке соответствует максимально допустимая скорость
v = 12,5 км/ч.
Для оценки параметров движения автомобиля по волнистой
поверхности важно знать также дополнительное сопротивление
движению от неровностей грунта и изменение нормальных реак-
ций грунта на колеса. При резких колебаниях нормальных реак-
ций грунта на колесг! и в особенности при отрыве колес от грун-
та повышается буксование колес, снижаются тяговые возможно-
сти автомобиля, устойчивость движения и управляемость.
Кинетическая энергия движущегося автомобиля при встрече
с неровностями дороги частично расходуется на преодоление го-
ризонтальной составляющей реакции дороги и частично на воз-
буждение колебаний подрессоренной и неподрессоренной масс
автомобиля. Для определения дополнительной мощности сопро-
тивления движению по неровностям можно использовать следу-
ющее уравнение [21]:
Л^лоп - + Л^р + 7VIU -= [4,06?к tmh^ + 2,02^/гМ J-
4- 2,02А’щ А2 г’2 + 1,48^ecA^/104S2,
(161
где А/г, Мь Мъ Мп — мощность, затрачиваемая соответственно
па преодоление горизонтальных сил, на сопротивление в аморти-
заторах па трение в рессорах, па внутреннее трение в шинах;
М, /<ш — коэффициенты сопротивления амортизаторов и шин.
Н-см-с; h — амплитуда относительных перемещений кузова и
колес, h = Z—£; Z и £ определяют по формулам (157), (159):
<рк0—парциальное затухание колебаний неподрессоренной мас-
сы при неподвижной подрессоренной массе, Г/с; Лрес —сила соп-
ротивления в рессорах.
4* 99
• Ч L
Перейдя от мощности сопротивления движению к коэффици-
енту дополнительного сопротивления движению по неровностям
грунта, получим
270уУ,оп _ O,O54va/i2(2?KoW+/C3 + ^u) > 0.04Apec/i
Тдоч — — /-со • г с ’
Gava Gao- Gao
Нормальные реакции грунта на колеса 7?z можно определить
по деформации шины /zz = £—q:
R^C^-q). (163)
Значения £ изменяются в пределах ±G, где^—амплитуда
колебаний неподрессоренной массы определяется по уравнению
(159), а значения q изменяются в пределах ±^0, где qQ — поло-
вина высоты неровности. Например, при G 0,8 значение R
изменяется в пределах от Rz = 0,2CmqQ до /?г= 1,8Сш<70-
Для многоосных автомобилей обычно пренебрега-
ют неподрессоренной массой ввиду ее малости по сравнению с
подрессоренной, рис. 44, //, а. Кроме того, учитывая симмет-
ричность колесного движителя у большинства многоосных авто-
мобилей, принимают равной нулю сумму моментов относитель-
но центра массы сил, действующих от подвески на кузов. Это да-
ет возможность получить независимые уравнения для вертикаль-
ных и продольных угловых колебаний кузова:
MZ0+2KzZ0+2CzZ0==Q^] (164)
Mq2u а + 2Каа+2С,а=Qa, J
Qy — радиус инерции кузова; п — число осей автомобиля; т —
число осей с амортизаторами.
Для установившихся гармоничных колебаний
a = Z? cos у/Д-D sin v/; а1ПЭХ —(165)
Е — v2) •—2<ра v F
(«>а — v2)2 4- 4<ра V2
J00
2?0 Z [С«‘-1 i 8in (2jtZ'/S>] г ^c~
p _ 0_________________ . __ . / .
M^y ’ °a V MQy ’
2?0vV -[/<;zz sin (2nZ;/S)]
г =-------------------------- —.
O ’ ‘ <1 Q
a*q“ jiq;
Аналогичные уравнения получаются для Z.
Вертикальное ускорение произвольной точки автомобиля,
например сиденья водителя, находят по уравнению
2Л=2О- ЛА 4-а2йл> (166)
где 20=Z0maxv2; а=ашахЛ a=av.
Для определения допустимой скорости движения (рис.
44, II, б) целесообразно построить амплитудно-частотные харак-
теристики автомобиля (Za/7o) (^а) для неровностей различной
длины (в диапазоне реально встречающихся).
Огибающую, проведенную через резонансные точки, называ-
ют кривой интенсивности колебаний. Целесообразно, чтобы экс-
тремальная скорость иа находилась за пределами рабочего диа-
пазона скоростей автомобиля. Чтобы найти допустимую ско-
рость движения по волнообразной поверхности с параметрами
неровностей qQi S, находят максимально допустимое значение
2дОП/^о и проводят горизонтальную линию до пересечения с кри-
вой (ZA/q0) (va), соответствующей заданной длине неровности.
Если такой кривой нет, то ее строят, пользуясь методом интер-
поляции.
Движение автомобиля по грунтовой поверхности со случай-
ным микропрофилем. Грунтовые поверхности, используемые для
движения автомобилей, как правило, имеют случайный микро-
профиль меняющийся даже в пределах одного участка.
В качестве характеристики такой поверхности используют
спектральную плотность SQ(S) ее неровностей. Спектральная
плотность неровностей пути — это непрерывная функция, харак-
теризующая распределение дисперсий высот неровностей по их
длине. Микропрофиль дороги (грунтового пути) принято рас-
сматривать как случайную функцию со следующими допущения-
ми: функция стационарна и эргодична; ординаты микропрофиля
подчиняются нормальному закону распределения; длины неров-
ностей ограничены; микропрофиль меняется случайным образом
только в вертикальной продольной плоскости.
Характеристика микропрофиля пути представляется в виде
корреляционной функции, которая дает представление об изме-
нении микропрофиля по длине участка пути, или в виде спект-
ральной плотности дисперсий, которая дает представление о
101
частоте повторения длин неровностей. Спектральная плотность
имеет аргументом «путевую частоту» 0 = 2д/5, ее непосредствен-
но используют при расчетах колебаний автомобиля, вызванных
случайным микропрофилем дороги.
Корреляционная функция RQ(xs) и спектральная плотность
дисперсий S(/(6) взаимно являются преобразованием Фурье:
s9 (0) =— \ М c°s о xs (fxs; I
Л J
оо
Rq (•*$) = 2 j Sq cos r>xs(l
(167)
0
Классификация микропрофиля грунтовых поверхностей [23]
получена с использованием математической модели корреляци-
онной функции
^(x5) = 4e“^cos?%5. (168)
Значения коэффициентов приведены в табл. 10.
Если известна спектральная плотность микропрофиля пути,
можно рассчитать среднеквадратичное значение вертикальных
ускорений:
'>0
(169)
где Rq — спектральная плотность функции микропрофиля; v —-
частота возмущающего воздействия. Приведенное уравнение ре*
шают.в такой последовательности.
1. По уравнению (158) строят амплитудно-частотную харак-
теристику автомобиля.
2. Все ординаты Z амплитудно-частотной характеристики
возводят в квадрат (рис. 45, а).
Таблица 10
Частота
Вид грунтового пути инфранизкая низкая
А а 3 А а 0
Ровные луга 12 0,09 0,24 6 0,12 0,4
Малопсресеченные луга 42 0,09 0,24 67 0,12 0,4
Среднепересеченные луга 184 0,09 U, 2 80 0,12 0,4
Снлыюпересечснные луга 245 0,21 0,26 289 0,13 0,36
Валы 760 0,13 0,18 760 0,16 0,4
Кочки - — — — — —
Ровные дороги 12 0,09 0,24 3,0 0,12 0,4
Разбитые дороги 140 0,24 0,24 30 0,1 0,4
102
Продолжение табл. 10
Вил грунтового пучи Частота
сретняя высокая
А а А а р
Ровные луга 5,2—4 0,2— 1 0,6—1 1,7- 0,85— 0,2—3
Малопересеченные луга 25—. 16 -0,4 0,2— 0,6—1 —2,4 16—11 — 1,15 0,85— 2,0—3
Среднепересеченные луга 54 -0,4 0,25 0,82 —1,15 —•
Сильнопересеченные луга —• — — — -
Валы •— — —- —
Кочки — — 64 3,4 8
Ровные дороги 3,5— 0,2— 0,6—1 2,5—1 0,65— 1,8-
Разбитые дороги —2,5 40—27 —0,55 0,6-ч 0,6— 25 -1,6 0,55 —3,2 1,8
—0,55 -1,0
3. Характеристику спектральной плотности перестраивают
для различных значений скорости Rqv=zRqvdv\ vv = w0, (рис.
45,6).
4. Строят зависимость S^(v) =Z2Rq=f(v) для выбранной
скорости (рис. 45, в).
5. Частотный диапазон последней зависимости разбивают на
октавы и проводят графическое интегрирование функции S^(v)
Рис. 45. Графики для определения допустимой скорости движения по по-
верхности со случайным микропрофилем
103
по октавам. Полученные площади с учетом масштаба построения
графиков равны Z?-2.
6. Определяют взвешенное суммарное значение ускорений по
уравнению (156) с использованием весовых коэффициентов.
7. Пункты 4, 5, 6 повторяют для различных скоростей движе-
ния.
8. Строят график функции Zc(t’a) и наносят допустимые зна-
чения вертикальных ускорений (рис. 45, г).
Пересечение кривых дает искомую допустимую скорость дви-
жения.
§ 14. Движение автомобиля по уклонам
Для движения автомобиля по уклонам характерны значи-
тельная неравномерность распределения нормальной нагрузки
по колесам, снижение суммы нормальных реакций грунта на ко-
леса по сравнению с горизонтальным положением автомобиля
(Gacosa вместо Ga), увеличение продольных (боковых) сил,
действие больших опрокидывающих моментов. В связи с этим
возникает ряд причин, способных вызвать потерю проходимости:
недостаточное сцепление колес с грунтом; недостаточная несу-
щая способность грунта для перегруженных колес; опрокидыва-
ние автомобиля; отрыв управляемых колес от грунта и потеря
управляемости.
Преодоление подъемов. Для современных автомобилей ос-
новной причиной, ограничивающей преодолеваемый угол подъ-
ема, является недостаточное сцепление колес с грунтом. Пре-
дельный угол подъема по сцеплению колес с грунтом можно оп-
ределить, разделив все члены уравнения (97) на Gacosa:
tg«.n3x=^? —(Л g cos а) -/г - Л> (170)
гте ko — коэффициент использования сцепления колес с грун-
том; — коэффициент сопротивления от движения корпуса по
грунту.
Максимальный угол подъема для современных полнопривод-
ных автомобилей составляет по сухому задернованному грунту
20—27°, по сыпучему песку 8—10°, по снегу глубиной до 15 см —
10—12°.
Для неполноприводных автомобилей угол подъема на сухом
грунте может быть ограничен силой тяги двигателя
/cosamlx4-sin am3x=/W4Z1. i]r r0Ga — jag.
При движении по слабому грунту возможна потеря проходи-
мости, вызванная увеличением нагрузки на задние колеса и пре-
вышением несущей способности грунта. Предельный угол подъ-
ема, ограничиваемый несущей способностью грунта, находят
совместным решением уравнений (88), (97), (73), а также урав-
нения
ainax=a retg [(Rx I Rz) — /г — Д].
104
Расчеты показывают, что допустимая по несущей способно-
сти грунта нагрузка на колеса при преодолении подъема в 30°
снижается по сравнению с горизонтальным участком на песча-
ном грунте в 2—2,5 раза, а на связном грунте — в 1,5—2 раза.
Перераспределение нормальной нагрузки по осям в процессе
движения на подъем определяют уравнением (88). Приняв
/?zi = 0, /1 = 0, найдем условие ограничения угла подъема по от-
рыву передних управляемых колес от грунта
Выражение для условия статического продольного опрокиды-
вания автомобиля можно получить из уравнения (88), приняв
Rzn =:- ° a Cos tg О < -'4'' fr" — Д- ,
hg g
где А — параметр, определяемый схемой движителя и жестко-
стью подвески,
Если жесткость подвески одинакова для всех осей, то
Эксперименты на моделях показали, что угол преодолева-
емого подъема несколько хвелпчивается (на 2—6°) при движе-
нии автомобиля под углом 20—40° к оси подъема. Это можно
объяснить незначительным увеличением сцепления колес с грун-
том при действии в контакте суммарной силы под углом 20—40°
к продольной осп колеса.
Многоосные автомобили несколько лучше приспособлены к
преодолению подъемов, чем двухосные. В случае равномерного
движения на подъем при ср = 0,8 четырехосные автомобили пре-
одолели подъем 36—38ъ, а двухосные — 33°, при <р = 0,2, соответ-
ственно 8е и 6°. Это различие, по-видимому, также объясняется
неодинаковыми условиями сцепления колес с опорной поверхно-
стью. Вес моделей и размеры шин были одинаковыми. При уве-
личении числа колес сцепление несколько увеличивается за
счет большей суммарной поверхности контакта.
105
Движение на спуске. Основную опасность при движении на
спуске представляет возможность продольного и бокового опро-
кидывания.
При статическом решении задачи максимальный угол спуска,
ограничиваемый продольным опрокидыванием, определяется
уравнением (88). Однако в реальных условиях движения на
спуске процесс нагружения динамический. До того, как произой-
дет выравнивание опрокидывающего и восстанавливающего мо-
ментов, происходит угловое перемещение кузова с ускорением.
При этом увеличиваются угловая скорость и кинетическая энер-
гия, которая расходуется на дальнейшую деформацию системы.
Угловое перемещение будет продолжаться, пока кинетическая
энергия углового движения не будет израсходована полностью.
Угловое перемещение выражается уравнением
J у а = а ^yi О
где Jy — момент инерции кузова относительно оси у; Су — угло-
вая жесткость подвески в продольной плоскости.
Решение уравнения имеет вид
Постоянные интегрирования найдем из начальных условий
/=0; ₽ = 0; р=0:
Максимальное (амплитудное) значение
крена
угла продольного
2hg V р
^ШЗХ * ~ --~О'к.ст»
где аКст — статический наклон в продольной плоскости при дей-
ствии нагрузки SP.
Таким образом, динамический наклон в продольной плоско-
сти при линейной характеристике подвески вдвое превышает ве-
личину статического, т. е. динамический наклон корпуса автомо-
биля может достигнуть величины статического при воздействии
вдвое меньшей продольной силы.
1С6
Учитывая условия опрокидывания /?zi = Gacosa и Пдоп^
= 0,5«ст, приняв ^кг, Кк х, Л<р» Э равными нулю, из уравне-
ния (88) получим
1
/729
где
'О
т 1
п
vct-
1
Анализ приведенного уравнения показывает, что увеличение
замедления /а существенно уменьшает допустимый угол опроки-
дывания и может иметь значительную величину /а при торможе-
нии или резком увеличении сопротивления движению (наезде на
пороговое препятствие) при большой начальной скорости.
Наезд на пороговое препятствие на спуске вызывает опроки-
дывание, если запас кинетической энергии автомобиля достато-
чен для подъема центра тяжести до уровня точки опоры
Ga^p/2g = GaA^; ^кр=| 2gA/z,
где Д/г —подъем центра тяжести автомобиля, A/z = —
— /zr cos a — /0 sin a.
о
Для современных полноприводных автомобилей при крутиз-
не спуска a = 30° критическая скорость составляет 8—•
11 км ч.
Движение по косогору (рис. 46). Возможность движения по
косогору, в основном ограничивается сползанием колес одной
из осей, реже — боковым опрокидыванием.
Ограничение угла преодолеваемого косогора по сцеплению
колес с грунтом выражается неравенством
1 (Оа sin fj)2 -j- [Ga (/?f + /г)]2 < Ga <f cos 3.
Левая часть неравенства представляет суммарную силу всех
боковых и продольных реакций грунта, а правая — максималь-
но возможную силу сцепления колес с грунтом. Преобразовав
это неравенство, получим
sin 8 < ) Ъ2-(*т+/г)2] (!+?-’) (172)
В неравенстве (172) ф— среднее значение коэффициента
сцепления для левых и правых колес. Если грунт неоднороден,
значения ф для отдельных колес могут существенно отличаться.
На грунтах с верхним слабым слоем на плотном основании из-за
перераспределения веса по колесам сцепление колес с грунтом
может значительно измениться, так как при разгрузке колес ко-
107
Рис. 46. Схема движения автомо-
биля по косогору
эффициент сцепления уменьшает-
ся. а при увеличении нормаль-
ной нагрузки — повышается, но*
не по линейному закону.
Предельный (статический)
угол опрокидывания на косогоре
можно найти, составив уравнение
положения центра тяжести авто-
мобиля в вертикальной плоско-
сти, проходящей через точки опо-
ры (см. рис. 46),
0,5ВК h .,р hg ш h gQ hg tg p,
где
— hg G a р/i> hgQ Ga sin ^шб/»
ftgp, hgUi, hg б — перемещение центра тяжести автомобиля, выз-
ванное соответственно деформацией рессор, нормальным про-
гибом шин и боковой деформацией шин; /гкр — расстояние по
высоте от центра тяжести подрессоренных частей до оси крена
на рессорах; G& —вес подрессоренных частей автомобиля;
ZjC’r/pz — суммарная угловая жесткость рессорной подвески
при боковом крене; Сум ~ суммарная угловая жесткость
шин при боковом крене; VCm6/—суммарная боковая жест-
кость шин.
Уравнение можно решить относительно р, приняв tg р^
^sin р^р,
При динамическом решении задачи по аналогии с рассмот-
ренным случаем движения на спуске можем принять, что допус-
тимый боковой крен кузова в два раза меньше статического или,
иначе, при / = 0 допустимая кренящая нагрузка в два раза мень-
ше, следовательно, и допустимый угол преодолеваемого косого-
ра в два раза меньше.
Таким образом, с учетом динамичности процесса
стах
4б?а (v/i^Kp. -. Gy р I 4~
1/Сшб /) -г
В случае криволинейного движения по косогору на автомо-
биль дополнительно действует центробежная сила GoV2!gR,
тогда
108
(173)
знак минус соответствует повороту в сторону подъема, vn — от-
ношение подрессоренной массы автомобиля к полной
массе.
При движении по косогору наличие значительной боковой
силы вызывает боковой увод колес. При равном боковом уводе
колес различных осей (автомобили с нейтральной поворачива-
емостью) автомобиль движется с небольшим сползанием, опре-
деляемым величиной угла увода Неодинаковые углы увода раз-
личных осей вызывают криволинейное движение, для устранения
которого необходимо поворачивать управляемые колеса в сто-
рону, обратную уводу. Наличие бокового увода колес приводит
к увеличению сопротивления движению ДР<р = Ga sin |3 sin 6. Ве-
личина бокового увода зависит не только от параметров шин, но
и от положения колес относительно опорной поверхности. В ре-
зультате исследования крутосклонных колесных тракторов уста-
новлено, что угол бокового увода колеса, катящегося по косого-
ру в плоскости, нормальной к поверхности грунта, в 6—И раз
превышает величину этого же угла для колеса, катящегося в
вертикальной плоскости [22].
На слабых грунтах потеря несущей способности при движе-
нии по косогору наступит, если 7?гтах окажется равной или боль-
ше значения PZi определенного по уравнению (73). В данном
случае вместо /к надо брать ширину контакта Ь.
Согласно рис. 46,
Г cos 3 . . о. t/2 \
max — Ga----------------I р -I---------}
xzmax а 2 . ‘ 1 gR )
По результатам расчетов допустимая по несущей способно-
сти грунта нагрузка на колеса на косогоре с углом 25° снижает-
ся по сравнению с горизонтальным участком на связном грунте
почти в два раза, а на песчаном грунте—примерно в три раза.
§ 15. Преодоление автомобилем барьерных препятствий
Барьерные препятствия при большой протяженности трудно
объехать. Несмотря на многообразие профилей барьерных пре-
пятствий (кюветы, насыпи, надолбы, каналы и т. д.), их можно
свести к комбинации порогов (уступов) и коротких подъемов
(спусков) [2].
Возможность преодоления барьерных препятствий ограничи-
вается геометрическими параметрами автомобиля, его тягово-
109
сцепными свойствами и допустимыми динамическими нагрузка-
ми. Основными причинами застревания автомобиля при преодо-
лении барьерного препятствия являются значительное увеличе-
ние сопротивления движению из-за упора носовой (кормовой)
части кузова в грунт или погружения средней части кузова в
грунт; снижение сцепления колес с грунтом из-за передачи на
грунт части веса автомобиля через элементы кузова (мосты);
чрезмерные динамические нагрузки.
Определение возможности вывешивания машины на выступа-
ющей части препятствия или упора носовой части в барьерное
препятствие представляет в основном геометрическую задачу,
которую проще всего решать графически. Для решения этой за-
дачи используют плоскую модель автомобиля и чертеж профиля
пути с барьерным препятствием. Деформацию шин можно
учесть, придав колесам модели радиус, соответствующий стати-
ческому радиусу шины. Если грунт деформирующийся, то на
чертеже профиля пути наносится глубина колеи. Модель прока-
тывают колесами по линии колеи и фиксируют все перемещения
элементов кузова ниже линии поверхности пути. Деформацию
шин и глубину колеи предварительно определяют по уравнениям
(8), (50), (51).
Однако не каждое «задевание» корпуса автомобиля за грунт
приводит к его застреванию. Если суммарное сопротивление дви-
жению с учетом бульдозерного сопротивления, определяемого
уравнением (95), и сопротивления скольжению кузова по грунту
меньше силы тяги, возможной по сцеплению колес с грунтом,
определяемой уравнениями (98), (99), то возможность движе-
ния сохраняется.
Условие преодоления автомобилем пороговых препятствий
по сцеплению колес с грунтом (рис. 47). Преодоление полнопри-
водным автомобилем порогового препятствия заключается в
последовательном преодолении этого препятствия всеми колеса-
ми. Поэтому имеет смысл вначале рассмотреть преодоление по-
рогового препятствия отдельным ведущим колесом.
Процесс преодоления колесом с пневматической шиной поро-
га высотой ЛпОк можно подразделить на два этапа:
1) колесо движется по горизонтальному участку перед пре-
пятствием, имея деформацию шины /?ш от силы, действующей на
колесо GK, и входит в контакт с препятствием в точке Ль При
этом шина имеет две зоны контакта с грунтом: с горизонталь-
ным участком у основания порога и с ребром порога;
2) под влиянием крутящего момента Л1К и толкающей силы
Рх колесо поднимается на высоту, равную величине деформа-
ции шины Аш, и отрывается от опорной поверхности горизон-
тального участка. Причем точка опоры колеса перемещается на
ребро порога, где шина значительно деформируется (от 9 до
50% высоты профиля шины).
Рассмотрим последовательно эти этапы.
ПО
-- V
Рис. 47. Схема преодоления колесом порогового препятствия:
а—первый этап; б—второй этап
1-й этап. На колесо действуют подведенный крутящий мо-
мент 7ИК, тангенциальная реакция грунта Т на ребре, сила тяга
/?х, толкающее усилие от корпуса автомобиля Рх (рис. 47). Ве-
личина нормальной реакции грунта Rz в точке А изменяется от
максимального значения GK до нуля. Соответственно уменьша-
ется от своего максимального значения GK<p до нуля и сила тяги
по сцеплению Rx Сц. Нормальный прогиб шины при этом равен
на горизонтальном участке препятствия /гш, на ребре препятст-
вия Лш'.
Проектируя силы на оси xz и рассматривая равновесие сил и
моментов, действующих на колесо при условии максимального
использования сил сцепления колеса с грунтом, можно записать
следующую систему уравнений:
TV sin p-f-TVcp' cosp ——/?х=0;
N cos P + W sin ₽ — GK-|-^=0;
N<f' (г0 — Лш)+А’г Ч> (r0 — Лш) — AfK=0,
где ср — коэффициент сцепления между шиной и плоскостью ка-
чения; ф7 — коэффициент сцепления между шиной и ребром по-
рога в точке Д1 (ф'= 1,2ф4-1,3ф).
Из первых двух уравнений найдем
t g ₽== + +-КИУ-НИ (174)
7V = (GK-0(cosp+<p'sinp).
Рассматриваемые реакции имеют непосредственную связь с
деформациями шины в точках контакта, поэтому имеет смысл
тригонометрические функции углов выразить через параметры
колеса и параметры препятствия (см. рис. 47):
111
COS ? = (r0 — /z„ — //,„) '(r0 — /zl);
tg? = l/ l(r0 —/гш) (r0 — /z„ —/zlu)]2- 1. (175)
Преобразовав уравнение (174) относительно PXt получим
Проанализируем изменение Рх в зависимости от Rz и р.
В процессе подъема колеса на препятствие Rz изменяется от GK
до 0, а р — от значения, определяемого выражением (175), до
нуля. Максимальное значение Рх принимает при Rz = 0 и Лш=0.
Следовательно, наиболее трудным для 1-го этапа является мо-
мент после потери колесом контакта с грунтом; колесо оторва-
лось от опорной поверхности горизонтального участка и подня-
лось на высоту, равную величине деформации шипы. Опорная
реакция при этом полностью будет перенесена в точку и
tfz = O.
Для определения деформации шины на ребре препятствия
можно использовать уравнение (50), введя в его правую часть
коэффициент &i = 0,64-0,7.
Формулы для определения tg р и Рх могут быть преобразо-
ваны для этого случая (/?z = 0) следующим образом:
=GK (tg ? — <?')'( 1 +<?' tg ?)•
Выражения (175), (176) позволяют оцепить необходимое
толкающее усилие для въезда ведущего колеса на порог высо-
той /гп<гк.
2-й этап. Происходит дальнейшее движение колеса на порог,
когда сила Rz фактически перестает действовать, колесо несколь-
ко продвинулось вперед, угол р и плечо действия весовой на-
грузки GK в каждый момент движения уменьшаются, что созда-
ет благоприятные условия для преодоления порога. Таким об-
разом, анализ процесса в целом показывает, что расчетным по-
ложением для преодоления порога колесом является момент
потери контакта колеса с горизонтальной поверхностью.
Возможная величина толкающего усилия зависит от распре-
деления веса по осям и коэффициента сцепления (если связь
между колесами блокированная). При равномерном распределе-
нии веса по осям Pv = GK<p(n—1). где п — число осей.
Учитывая, что в критический момент въезда колеса /?z = 0,
преобразовав уравнение (176), можно получить следующее вы-
ражение для tg р:
tg? = [(»—1)?+?'] (17Ч
112
Разрешая уравнение (175) относительно Лп/г0 и подставляя
вместо tg р выражение (177), можно получить формулу для не-
посредственного определения высоты преодолеваемого по усло-
виям сцепления порогового препятствия Лп:
(178)
Из полученного выражения видно, что возможность преодо-
ления порога автомобилем определяют коэффициент сцепления
колес с препятствием и грунтом, эластичность шин и количест-
во осей.
Если передние колеса ведомые, то ф' = 0, и формула (178)
принимает вид
Динамическое преодоление препятствий. На грунтовых по-
верхностях с малым значением ф преодоление пороговых пре-
пятствий возможно только с использованием кинетической энер-
гии, накопленной при подходе к препятствию. Запас кинетиче-
ской энергии автомобиля может быть использован как источ-
ник дополнительной толкающей силы или как единственный ис-
точник получения силы Рх. Первый случай требует более точно-
го расчета скорости, но он менее опасен в отношении динамиче-
ских нагрузок.
Процесс динамического преодоления автомобилем порогово-
го препятствия можно разделить на три этапа.
1-й этап характеризуется упругим ударом передних колес о
стенку порога и резким снижением скорости движения. Потен-
циальная энергия нормального прогиба шины равна энергии
удара, которая определяется по потерянной скорости. Часть
этой энергии расходуется на подъем колеса.
2-й этап начинается с подъема колес передней оси на порог
за счет кинетической энергии автомобиля и силы тяги, развива-
емой ведущими колесами Этап заканчивается выносом центра
тяжести автомобиля за грань препятствия, и машина на мгнове-
ние занимает равновесное положение.
На 3-м этапе происходит перевал автомобиля относительно
ребра порога, падение передней части машины, удар колес о
грунт, сжатие упругого элемента подвески и удар в ограничите-
ли хода подвески Этот удар сопровождается большими пере-
грузками водителя и динамическими нагрузками, в особенности
у длпннобазных машин с колесной схемой 1—2—1. Следующая
за этим этапом раскачка автомобиля уже не вызывает больших
перегрузок водителя и динамических нагрузок.
113
Необходимую для преодоления препятствия скорость нахо-
дят из равенства кинетической энергии машины и энергии, зат-
рачиваемой на преодоление сопротивлений движению:
sin 2 ?+Ga ( V /к) tg 3 + Gah, (179)
2g 4
где d — коэффициент учета инерций вращающихся масс;
(2S ^к) tg? — энергия, затрачиваемая на преодоление сопротив-
лений движению при переезде препятствия последующими ося-
ми; (Gav2 sin2 p)/2g- — энергия, затрачиваемая на въезд перед-
ними колесами на пороговое препятствие; Ga/zn — энергия, зат-
рачиваемая па подъем машины в вертикальной плоскости; р —
угол встречи колеса с пороговым препятствием; 2Е4 —длина
контакта шин с грунтом.
Из уравнения (179)
V=У 2g [А., + (2 4) tg й] '(Н -si п 2 ?). (180)
Совокупность сил, действующих на колесо, сводится к двум
составляющим: Рх — сумме проекции всех сил в горизонтальной
плоскости и Pz — сумме проекции всех сил в вертикальной пло-
скости. Рх и Pz имеют максимальное значение при въезде колес
на неровность. Для оценки динамического воздействия неровно-
сти на колесо А. К. Фрумкиным были введены коэффициенты
динамического воздействия
тзх/ Pz 0» Вд- — Р,хтак/' л0>
где Pzo — вертикальная нагрузка на переднее колесо на горизон-
тальном участке; Рхо — горизонтальная нагрузка на переднее
колесо при въезде на неровность со скоростью, стремящейся к
нулю.
Значения коэффициентов динамичности в зависимости от
различных факторов приведены на рис. 48. Анализ приведенных
графиков показывает, что {коэффициент gx зависит только от ско-
рости движения, влияние остальных факторов настолько незна-
чительно, что им можно пренебречь. Это на первый взгляд пара-
доксально. Однако следует отметить, что значение Рх0 перемен-
ное и зависит от тех же факторов, что и РХшах- В связи с этим
предложена следующая формула для определения максимально-
го значения РХТпах-
[(1-cos2/3?)sin (arccos2/3?)] (1+0,075^). (181)
Как видно из уравнения (181), динамические нагрузки умень-
шаются при снижении давления воздуха в шинах, снижении Сш>
Сш . Однако при этом возникает опасность пробоя шины
114
4л z
Рис. 48. Зависимости коэффициентов динамичности:
/гп=0,5 м; 6-4jx=f(cin+cp): /?п=0,5 м; t’a=20 км/ч
Деформация шины при динамическом преодолении порога
на 1-м этапе определяется из равенства кинетической энергии
работе, затрачиваемой на деформацию шины,
откуда
Выразив допустимую деформацию шины через высоту про-
филя шины Лш.доп=?Я, где £ = 0,74-0,8, можем написать уравне-
ние допустимой по пробою шины скорости:
Т' =—----------
vmax . о
sin 3
Допустимое снижение давления воздуха в шинах можно оп-
ределить по допустимому снижению Cuimin:
^inniin 2^. уу ) $
Из уравнения (51)
С^~1Г (77 + -О1 - Т~)
4 \ п Zd / \ D /
учитывая Лггаах=поаучим
_ 20av2 sin 3
Л''— 7в 3/7 \ / ~
Используя последнее уравнение совместно с уравнениями
(180), (182), можно найти минимально необходимую для пре-
одоления порога скорость при условии снижения давления воз-
духа в шинах до минимального значения.
115
Рис. 49. Схема движения автомобиля через ров:
а—&п<0,8/); б—bn>D
б)
Скорость динамического преодоления короткого подъема на-
ходят аналогично:
GavW2g=Ga (sin а + /) S — Gak.r 5;
^=l/2gS(/-|~sin « —#Т)Л
где S — длина подъема; kT — коэффициент тяги на ведущих ко-
лесах.
При большом угле подъема и соответственно большой на-
чальной скорости возможен пробой подвески. Энергия, затрачи-
ваемая на деформацию передней подвески,
y4K=0,5GaA(sin а--|-/— Лг)tga.
Приравняв ее к энергоемкости подвески получим выражение
для определения допустимого по условиям пробоя подвески ди-
намически преодолеваемого угла подъема:
0,5GaA(sin a-L f — &r)tga = Perfta+0,5Cp/zp.
При малых значениях f и £т
sin a tga = (2Pcr/z4+Cp^p)/GaA. (182)
Преодоление рва. Преодоление рва двухосным автомобилем
можно связать с преодолением порога (рис. 49, а). Зависимость
ширины рва от высоты порога выражается уравнением хорды
&р=2] Dhn — li"n. Максимальная ширина рва не превышает
0,7£.
Рассмотрим схему преодоления рва автомобилем с числом
осей более двух (рис. 49, б). При преодолении рва шириной бо-
лее диаметра колеса критическими моментами являются выве-
шивание передних и задних колес над рвом и подъем опустив-
шихся в ров колес на переднюю стену рва, что аналогично пре-
одолению порога. В момент вывешивания передних (или задних)
116
колес над рвом происходит значительное увеличение нагрузки
на вторую (или предпоследнюю) ось. Поэтому первым условием
возможности преодоления рва является достаточная прочность
стенок рва. В противном случае происходит их обвал и значи-
тельное погружение передних или задних колес в ров.
В общем случае выражение для нагрузки па вторую ось при
вывешенных передних колесах найдем из уравнения (88). При-
няв значения а, /?б, /?Kz, Якх, Р^р, 0 равными нулю, Сг = const,
вместо п выражение п—1 и вместо lL выражение Ц—12, получим
При увеличении числа осей перегрузка второй оси уменьша-
ется. Самая большая нагрузка на вторую ось у трехосного ав-
томобиля 1—1 — 1, у которого в рассматриваемый момент верти-
кальная нагрузка на вторую ось почти равна весу машины.
Погружение передних колес в ров зависит от жесткости и
хода подвески, положения центра тяжести автомобиля и режи-
ма движения. Наклон корпуса машины вперед при передних вы-
вешенных колесах можно найти, решив следующее уравнение
совместно с уравнением (88):
п
tga = [(«- l)^2-Ga]/[CnJ(/2-O]- (184)
2
Согласно уравнениям (183), (184), при увеличении числа
осей наклон снижается. Зная наклон корпуса и расстояние меж-
ду осями, найдем погружение передних колес в ров:
КОД’
(185)
где /?под — опускание передних колес вниз за счет прогиба пе-
редней подвески; СТ1 — приведенная жесткость подвески.
Возможность выхода передних колес из рва определяется
уравнениями (178). (185) и неравенством/zni<^n
где Rz2 определяется уравнением (183).
(186)
117
Неравенство (186) является вторым условием возможности
преодоления рва шириной более диаметра колес. В соответствии
с этим для преодоления рва требуется уменьшение хода подвес-
ки и тем большее, чем меньше значения /?т и п. Для трехосной
машины практически необходима блокировка подвески средней
оси. Так как при преодолении рва колеса вывешиваются пооче-
редно, связь через трансмиссию между колесами разных осей
должна быть блокированной.
Последним условием возможности преодоления рва является
неравенство /?za>0, где Rzn— вертикальная нагрузка на зад-
нюю ось при вывешенных передних колесах.
Если 7?zn = 0, то произойдет клевок передних колес в ров.
Из уравнения (88)
Для выполнения этого неравенства необходимо, чтобы коор-
дината центра тяжести машины находилась в зоне между вто-
рой и предпоследней осями. Для трехосного автомобиля эти оси
вырождаются в одну, поэтому центр тяжести должен быть на од-
ной вертикали со средней осью (/о = ^)- В этом случае /?2?7>0
будет только при /гт>0. Если а = 0 т. е. при наезде пе-
редних колес на ров, трехосная машина должна двигаться с ус-
корением. При переезде рва задними колесами необходимо, что-
бы Ат<0— машина должна двигаться с замедлением. При
/?^4 ров может быть преодолен и без специальных приемов
вождения.
Таким образом, по условиям преодоления рва трехосный ав-
томобиль должен быть с симметричным размещением средней
оси и с равномерным распределением веса по осям. Для четы-
рехосного автомобиля допускается незначительное отклонение
от равномерного распределения.
Результаты экспериментального исследования преодоления
автомобилями рвов под различными углами к их оси показали,
что оптимальным является угол 80—90°. При меньших углах
встречи с препятствием автомобиль разворачивает вдоль рва, и
справиться с рулевым управлением водителю не удается.
Испытания, проведенные на моделях с неповоротными коле-
сами, дали несколько другие результаты. Оптимальный угол
встречи для них равен 60—80°. Следовательно, есть некоторые
возможности по увеличению ширины преодолеваемого рва авто-
118
мобилями с колесной схемой 1 — 1 и 1—2 за счет конструктивно-
го совершенствования рулевого управления, подвески и блоки-
ровки дифференциалов.
У автомобилей 1—2 ширину преодолеваемого рва мож-
но несколько увеличить за счет смещения центра тяжести
назад.
Существенное влияние на преодоление рвов автомобилями
оказывает наличие в трансмиссии гидротрансформатора. Маши-
ны с гидротрансформаторами могут двигаться с очень малой
скоростью, это снижает динамические нагрузки и колебания
кузова и соответственно уменьшает опасность клевков носовой
или кормовой части машины.
Г л а в a V
АНАЛИТИЧЕСКИЕ МЕТОДЫ ОЦЕНКИ
ПРОХОДИМОСТИ АВТОМОБИЛЕЙ
Оценку проходимости можно проводить аналитически и экс-
периментально. Аналитическое определение проходимости поз-
воляет сравнивать проходимость различных автомобилей в оди-
наковых дорожно-грунтовых условиях, что экспериментальными
методами практически невозможно из-за нестабильности и неод-
нородности грунтовых поверхностей. Количественно оценить
влияние различных конструктивных параметров автомобиля на
его проходимость возможно в полной мере только аналитиче-
ски, так как, во-первых, практически невозможно создать боль-
шое число экспериментальных образцов автомобилей, отличаю-
щихся только исследуемым параметром, во-вторых, нельзя обес-
печить одинаковые механические свойства грунтовой поверхно-
сти при опытных заездах нескольких автомобилей.
Только аналитическим методом возможно оценивать прохо-
димость автомобиля на стадии проектирования.
§ 16. Анализ оценочных показателей проходимости автомоби-
лей
Проходимость автомобилей оценивают с различными целя-
ми, в связи с чем имеется большое число оценочных показате-
лей.
Для определения возможности движения автомобиля в кон-
кретных грунтовых условиях широко используется [3, 24] выра-
жение
^сц? —/>tga. (187)
где А’ец — коэффициент сцепного веса автомобиля; ср — коэффи-
циент сцепления; f— коэффициент сопротивления качению; а —
угол подъема.
Это выражение привлекает простотой и наглядностью. Одна-
ко следует иметь в виду, что оно не учитывает трех важных фак-
торов.
1. Значение /гсц ср характеризует максимально возможное
сцепление ведущих колес с грунтом. Возможность использования
этого значения зависит от свойств трансмиссии, в частности,
120
при неодинаковом сцеплении колес с грунтом — от свойств диф-
ференциалов;
2. Значение f характеризует суммарное значение коэффици-
ента сопротивления качению f=/r+An- Выше (уравнения 81—
83) было показано, что источником возникновения fm для веду-
щих колес являются внутренние потери в шине, на их преодоле-
ние затрачивается часть окружной силы Рк, подведенной к коле-
су, но не затрачивается сила сцепления колеса с грунтом (Рк=
= Pf ш+^х) • Следовательно, из значения f в уравнении (187)
должна быть исключена составляющая, вызываемая затратами
механической энергии на внутреннее трение в шинах ведущих
колес;
3. При погружении колес в грунт на величину большую, чем
дорожный просвет, снижается сцепной вес автомобиля и появ-
ляется дополнительное сопротивление движению, вызываемое
скольжением мостов (кузова) автомобиля по грунту и бульдо-
зерным действием автомобиля, что не учитывается коэффициен-
том f.
Уточненное выражение для оценки возможности движения
автомобиля можно получить из уравнения движения (97), при-
няв Pw = 0 и учитывая сказанное о /ш для ведущих колес:
п nt
или в развернутом виде
cos а > Gafr cos а -[- (1 — Лсц) GafM cos а 4
+ Оа(/к + /б) COS a + Ga sin а.
Разделив все члены уравнения на Ga cos а, получим
/г + ( 1 ^сц) /ш 4" /к + /б 4- а ’
(188)
где — коэффициент сопротивления движению корпуса автомо-
биля по грунту; kv — коэффициент использования сцепления ко-
лес с грунтом;
п п
k<?=(kQll-2 MKi/r0 V Рг,
1 1
(189)
при условии Л4К г^/'осрЛг- Значения определяются кон-
кретным характером связи между колесами, см. § 11.
Неравенство (188) можно рассматривать как критерий прохо-
димости автомобиля.
Для количественной сравнительной оценки проходимости ав-
томобилей по грунтам с осреднениыми показателями механиче-
ских свойств используют выражение, аналогичное (187),
П Q 1g ах ^сцТ ~ f *
12 1
В уточненном виде из выражения (188) получим
п=tg а,„ 1х=kv? — Л — /к — /б - (1 - £сц) . (190)
П — показатель проходимости. Он численно равен тангенсу
максимального угла подъема па данном грунте, или запасу
удельной силы тяги по сцеплению, которая может быть исполь-
зована на преодоление различных препятствий, разгон и т. д. Чем
больше значение 77, тем выше проходимость автомобиля. Выра-
жение (190) дает четкое представление об уровне проходимости
автомобиля в определенных грунтовых условиях.
Для той же цели иногда используют следующее выраже-
ние [24]:
п'^м^-м^м^
где Л1? и Mf — соответственно момент сцепления колес с грун-
том и момент сопротивления качению. Этот показатель дает
представление о степени использования момента сцепления ко-
лес с грунтом и относительной части этого момента, которая ос-
тается в резерве. П( изменяется от 0 до 1; чем больше П', тем
выше проходимость. Показатель 77' удобен для сравнения прохо-
димости нескольких автомобилей в одинаковых грунтовых усло-
виях. Однако он оказывается неудобным при сравнительной
оценке проходимости автомобиля на нескольких различных
грунтах. Например, на обледенелой поверхности ср! «0,1,
^0,03, следовательно, 77/= 0,7; на влажном суглинистом грун-
те <р2 = 0,4; /г2 = 0,2; 772, = 0,5, т. е. во втором случае проходимость
автомобиля ниже, чем в первом случае. В действительности во
втором случае автомобиль имеет запас удельной силы тяги по
сцеплению (ф2—/г2 = 0,2) больший, чем в первом случае (epi—
—^Г1 =0,07), следовательно, на суглинке автомобиль имеет воз-
можность преодолеть более крутой подъем или другое большее
препятствие.
В некоторых случаях [24] проходимость автомобиля по мяг-
кому грунту оценивают несколькими относительными показате-
лями:
здесь ПР — показатель проходимости по несущей способности;
77с — показатель проходимости по сцеплению колес с грунтом;
77т — показатель проходимости по тяге двигателя.
К этим показателям можно добавить еще показатель прохо-
димости по погружению колеса в грунт nfl—\—hr/hK. Показате-
ли ПР. Пс, Пт и nh могут оказаться целесообразными при реше-
нии некоторых частных задач.
При оценке проходимости автомобилей по маршрутам мно-
гообразных грунтов или поверхностям, механические показатели
которых могут быть заданы только статистическими характе-
122
рпстиками, в качестве показателя проходимости целесообразно
использовать вероятностный показатель
/7B=^[/V?>/r + A + /6 + (l-MA + tga], (191)
который характеризует вероятность преодоления автомобилем
заданного маршрута без застревания. Этот показатель численно
равен части маршрута, по которой возможно движение автомо-
биля без застревания. В настоящее время имеются статистиче-
ские характеристики некоторых грунтов, что дает возможность
применить уравнение (191) для вероятностной со стороны грун-
та оценки проходимости. При наличии статистических материа-
лов по конструктивным параметрам автомобиля и по действиям
водителя в процессе движения уравнение (191) может быть ис-
пользовано и для вероятностной оценки проходимости автомо-
биля с точки зрения конструкции и эксплуатации.
Все рассмотренные показатели характеризуют способность
автомобиля преодолевать различные препятствия при движении
по грунту. Однако в соответствии с определением проходимости
необходимо оценить не только возможность, но и эффективность
движения автомобиля вне дорог. Для этой цели [3, 24] предло-
жены четыре показателя:
4=QZQP; лар,
(192)
здесь %с, Лт, Аэ, Zp — показатели соответственно скорости, грузо-
подъемности, экономичности, работоспособности одной полосы
проезда; v, Grp, Q — соответственно скорость, нагрузка и расход
топлива при движении по грунту; N— число автомобилей, про-
пускаемых по одной полосе проезда до полного выхода ее из
строя; ир, Grp.p, Qp, Np — расчетные параметры движения по до-
рогам с усовершенствованным покрытием.
Показатели (192) характеризуют, в какой мере сохраняются
эксплуатационные показатели автомобиля при его использова-
нии вне дорог. Поэтому они целесообразны для сравнительной
оценки проходимости одного автомобиля на различных грунтах.
При сравнении проходимости различных автомобилей в одних
грунтовых условиях они менее удобны. В случае равных значе-
ний параметров v, Grp, Q на определенном грунте показатели
проходимости оказываются ниже у автомобилей, имеющих боль-
шие значения vp, Grp, Qp. Поэтому у неполноприводных (дорож-
ных) автомобилей показатели (192) всегда занижены по срав-
нению с полноприводными автомобилями.
Предложены также обобщенные показатели проходимости,
характеризующие их относительную эффективность при исполь-
зовании вне дорог [24],
, „ Gr S/tQ
Пэ=Огл Orppu; П3 = -------— , (193)
гр , rp.p р, GrM.Sp/^Qp v ’
123
здесь S — длина маршрута; t — время движения; Q — расход
топлива.
Показатель Я/ представляет отношение производительности
автомобиля на грунте к его номинальной производительности на
дороге. Показатель Я/' дополнительно учитывает расход топли-
ва. Показатели (193), как и показатели (192), удобны лишь
для сравнения производительности конкретного автомобиля при
использовании на дорогах и вне дорог. Для сравнения различ-
ных автомобилей целесообразнее использовать абсолютные по-
казатели производительности автомобиля вне дорог или произ-
водительности, отнесенной к единице израсходованного топлива,
а не их отношение к показателям производительности на доро-
гах:
n^G^Q. (194)
В результате рассмотрения большого числа показателей
можно сделать заключение, что для оценки проходимости авто-
мобиля целесообразно использовать критерий проходимости —
неравенство (188) и показатели проходимости, выражаемые
уравнениями (190), (191), (194).
Показатели проходимости автомобилей определяются не
только конструкцией и техническими возможностями автомоби-
ля, но и свойствами грунта как опорной поверхности для дви-
жения (мастерство водителя принимается идеальным). Оценка
грунта как одной из рассматриваемых подсистем представляет
наибольшую трудность из-за многообразия грунтов и ограничен-
ности данных их механических свойств. При решении практиче-
ских задач оценки проходимости автомобилей механические
свойства грунтов могут быть заданы или осредненными пара-
метрами, или статистическими характеристиками. В соответст-
вии с этим и методика расчета показателей проходимости будет
различной.
§ 17. Методика расчета показателей проходимости по осреднеш
ным параметрам грунта
Механические параметры рассматриваемого участка грунта
представляются в виде осреднению значений. Такой метод до-
пустим при сравнительно небольшой неоднородности грунта по
маршруту, которая компенсируется рассмотренным выше (см.
§11) сглаживающим действием автомобиля.
В качестве параметров, характеризующих механические
свойства грунта, используют модуль деформации £, толщину
мягкого слоя Яг, коэффициент внутреннего трения грунта tg <р0,
внутреннее сцепление в грунте Со, коэффициент трения резины
по грунту фр, коэффициент трения стали по грунту <рк, парамет-
ры изменения сцепления грунта по глубине сд и плотность
грунта у.
124
Как показано выше (см. § 4), при ограниченной информации
о грунте необходимо знать параметры грунта с0, сро. Нт, а осталь-
ные можно определить корреляционными зависимостями (32) —
(35).
При известных значениях влажности связных грунтов и плот-
ности снега и песка расчетные параметры грунта можно опре-
делить по графикам (см. рис. 11) и табл. 7, 10, 11.
Методику расчета рассмотрим на конкретном примере оцен-
ки проходимости автомобиля 4X4 п0 песчаному грунту при не-
равномерном распределении веса по бортам.
Исходные данные: D= 115 см; В = 30 см; // = 30 см; ЬПр = 26 см; pw —
= 0,06 МПа; ро = 0,04 МПа; FK = 0,225 м2; бКпр=И80ЮО И; 6КЛ = 12000 Н;
л=1; V = 3,25 м/с; м = 88 кВт; 6к = 60 см; Пт = 0,8; /ги = 0,8; //г = 80 см; £==
= 4 МПа; ср0 = 34°; со=0,0005 МПа; сд=50~3; Цд=3; фР = 0,3; (рк = 0,3;
у =15 кН/м3; ф1=0,6.
Последовательность расчета. I. Решение для первого прохода колеса
(для целинного грунта).
1. Определяем зависимость давлений в контакте от деформации шины
по уравнению (50):
nhz / В ЗН \ / fiz
р = 0,а(/?«, + ро) —- + 2В в )
Представляем эту зависимость графически (рис. 50, а).
Рис. 50. Графики к расчету показателя проходимости:
а—нагрузочная характеристика шины; б—характеристика деформации грунта; в—зави-
симость ширины колеи от глубины; а—графики для определения реакции грунта на кор-
пус и погружения корпуса в грунт; д—зависимость допустимых нормальных давлений
на грунт от угла наклона приложенной силы; е—график для определения глубины колеи
в момент касания корпусом грунта
125
2. Находим несущую способность грунта по формулам (6), (15), (16)
Ш = tg (45° — 0.5ft) = 0,531;’ A'j = gy (' — ^!) ’2W/S = °. I63 МПа/м;
Yo = 2c (Ш2 + 1) Я/з= 0,02855 МПа; Л'3=л'У№ 0,053МПа'м
?<|31 = (л — 4? tg ft,) ’(я + 43 tg ft,) = 0,842;
/<152 = (3т — 23) (Зл 4- 23)= = 0,958;
ps3 = b„p + Х2 К92 + 2б3Лг = 0,0438 + 0,053Лг .МПа.
3 Определяем зависимость давлений в контакте от глубины колеи (18),
(7). (5)
р = Е1гг
2Ehr л(ЯгАг)
— arctg ——-------
71 ”50 2рцр
77 р Ар
4- abnV arctg-----------
л/>ир
где а = 0,64 (1 4- Ьпр!Нг) — 1,06.
Строим график функции р(Аг) (рис. 50, б)
4. Определяем и выражаем графически (рис. 50, г) зависимость грузо-
подъемности колеса от деформации шины и грунта:
задаемся несколькими значениями hz (2, 4, 6, 10 см);
для каждого из них определяем значение р по графику рис. 50, а (со-
ответственно 0,027; 0,059; 0,085; 1,1’22 МПа),
определяем коэффициент динамичности по формулам (29), (33), (50),
(90):
А( = In I (in + 1 п = I, 1^2 J Dhz,
I \ 2?о /
(Ад = 0,86; 0,9; 0,92; 0,93);
находим значения рд = рАд (0,022; 0,053; 0,078; 0,114 МПа);
для значений pt по графику на рис. 50, б находим значения Аг (Аг=1,
33, 59, 66 см);
определяем ширину колеи (55)
А — Anp 4* [10Ar (73 4- hz — Анр) (10/ip 4~ H — A2)],
см. рис. 50, в кривая 1 (A = 27,8; 33,7; 35,7; 39,7 см);
определяем коэффициент неравномерности давлений в контакте по урав-
нению (55):
(интеграл определяем по графику рис. 50, б) (£1=0,7; 0,75; 0,64; 0,48);
находим грузоподъемность колеса по формулам (56) — (58)
Рz = 0,25л/? [/?ирI (1 — 0,5r J 4- А/к С1 ]>
I = 2 —Л“; 1к = (Лг 4- Л,) - (Лг - Лг)2 < 0,50,
(Pz = I860, 9560, 14 ICO, 2Э4С0 Н), рис. 50, г, кривая /.
5. Определяем погружение корпуса в грунт:
по кривой 7 (рис. 50, г) находим глубину колеи, соответствующую задан-
ной нагрузке на колесо (АГПр —65 см, Агл = 50 см);
сравниваем глубину колеи с дорожным просветом (Аг п₽—Ак>0; Агл —
—Ак>0) (глубина колеи больше дорожного просвета),
по кривой 7 (рис. 50, г) находим нагрузку на колесо, соответствующую
АГ = ЛК (Р,= 10700 Н);
в диапазоне АГ>АК выбираем три значения Аг (50; 60; 65 см);
находим разность А/Г = АГ—Ак (А'г=10; 20; 25 см);
126
по графику (рис. 50, б) находим значения рд, соответствующие /г'г
(рд = 0,037; 0,043; 0,047 МПа);
определяем реакцию грунта на корпус в зависимости от погружения
= (flKZ=9l50, 10600, 11450 И);
откладываем от кривой Pz(/zr) (рис. 50, г) значения для выбранных
значений Лг>^к» проводим кривую
по кривой /' находим глубину погружения колес при заданной нагруз-
ке на колесо (Лг пр = 45 см; Лгл = 41 см);
по графикам (рис. 50, г) определяем глубину погружения автомобиля
в грунт (/гппр==5 см; йПл = 1 см) и реакцию грунта на корпус автомобиля,
определяемую разностью ординат кривых Г и 1 для /гг Пр и /*гЛ(/?кгпр =
= 6800 Н; /?К2Л = 1200 Н).
6. Определяем коэффициент сопротивления грунта качению колеса
(78, 83) :
pdhri
значение b находим по графику Ь(1гГ) (рис. 50, в) (6пр = 34 см? £?л =
= 33,6 см);
интеграл решаем графически, используя рис. 50, б (frnp = 0,375, /гл —
= 0,482).
7. Находим коэффициент сопротивления движению, обусловленный
скольжением автомобиля по грунту,
/к ~ О к (/к пр = 0, 1 13; /кл~^,03).
8. Находим коэффициент сопротивления качению, обусловленный дефор-
мацией шины (81, 83)
/ш = 1.75роФ1 h2z (В2 + 1,5№) (В - 0.3AJ/GKWB2;
величину hz определяем в следующей последовательности: по графику
(рис. 50, г) находим /гг, соответствующее /?Z = GK—/?кг; по графику (50, б)
находим hz, соответствующее найденному hr, по графику (50, а) находим
^z(^znp==4,7 см; fш пр = 0,013; йгл = 4,5 см; /шл==0,017).
9. Определяем коэффициент сцепления колеса с грунтом.
По схеме 1 (72)
?= ^н?р + (1 — ^н) tg?o +
находим Хд по уравнению /<д = 1 + Сд Л^4 (/<Дпр = 1,74; /<Д1 = 1,51);
находим рд по графику р(йг) (рис. 50, б) —рЯпР = 0,063; рдл =0,059
определяем значения ср—ерпр —0,52; <рл = 0,67.
По схеме II (73) = tg 3 Pz!Gvt
р = ps cos 3 =
я 4- 43 tg <р0 Зя 4- 23
Az2 + А”зЛг
cos 3.
Задаваясь значениями р, по приведенному уравнению, определяем и
представляем графически на рис. 50, д зависимость р(Р). По графику (рис.
50, а) находим рпр и рл, соответствующие hz пр и /ггл (рпр = 0,078; рл =
= 0,072 МПа).
Находим значение р и соответствующее значение (р (рПр = 30 ; српр =
= 0,36; рл = 32°; <рл = 0,57).
127
Из полученных по I и II схемам выбираем меньшие значения ср (Цпр —
= 0,36; фл — 0,57).
II. Решение для прохода колес второй оси по колее, образованной ко-
лесами первой оси.
1. Определяем грузоподъемность колеса в зависимости от деформации
шины и грунта:
задаемся значениями hz (2, 4, 6. 10 см);
для каждого из них определяем значение р по графику (рис. 50, а)
(0,027; 0.059; 0,085; 0,122 МПа);
определяем коэффициент динамичности /гд при п = 2 (0,93; 0,95; 0,96;
0,97);
находим значения р12 (0,025; 0,056; 0,081; 0.118 МПа);
определяем по графику (рис. 50, о) соответствующие значения Лг(Лг2 =
= 1 5; 37; 62, 67 см);
находим ширину контакта Ь2 по рис. 50, в (Ь2 = 26,9\ 30,8; 31,6; 30,7 см);
находим значения £2 по уравнению
Лг2
| pdhr
’Лг1
С2-—т-------— «2-0,96, 0,97; 0,98; 0,9а),
р(/гг2~ Аг1)
определяем грузоподъемность колеса
л
Р z2 ~ “7“ Р [Аф Z (1 — 9,оъ2) + 6ZK^2]*>
4
I = 2 V Dhz - Л2;
/к = ) Р(Л2 + Л,-2-Лг1)—(/гг4 Лг2-Лг1)2; (Р22=1.79; 6,78; 11,50; 16,95кН)'
2. Определяем погружение автомобиля в грунт и реакцию грунта:
строим график функции |(/ir) (рис. 50, е)
£ = hK — hi— hz -f- hz$ (Iizq ~ 0,137V — 3,9 cm).
По графику находим, что дорожный просвет полностью выбирается при
/гг0 = 40 см;
выбираем три значения /ir>40 см (45, 50, 60 см);
находим hT' = hY—hY^ (/г/= 5, 10, 20 см);
по графику рис. 50, б находим значения рд', соответствующие /гг (р/ —
= 0,033; 0,037; 0,043 МПа);
определяем реакцию грунта в зависимости от погружения автомобиля
^К2 = рдТк/7гд(/?К2 = 7,80; 8,24; 10,20 кН);
строим график Pz + Ri<z — f (hr) (рис. 50, г, кривая II'};
по кривой 1Г (рис. 50, г) находим глубину погружения колес при задан-
ной нагрузке (ЛГ2пр — 47 см; /гг2л —42,5 см);
находим глубину погружения автомобиля в грунт: hn = hr2-—hr0 (ha пр =
= 7 см; /гПл— 2,5 см);
по разности ординат кривых 1Г и II (рис. 50, г) находим реакцию грунта
на корпус: ?4г2 (A<z2 up — 9,8; RKZ2л — 4,5 кН).
3. Определяем коэффициент сопротивления грунта качению колес вто-
^г2
рой оси по уравнению /Г2 — (b | pdhr) GK, используя график рис. 50, б,
ЛГ1
значения b находим по графику b(hY) рис. 50, в — кривая 11 (6Пр —31,2 см,
fr2np = 0,022; 6л = 31 см; Мл-0,023).
4. Находим коэффициент сопротивления движению, вызываемый сколь-
жением автомобиля по грунту, /к(/к2пр —0,163; 0,112) .
5 Определяем коэффициент сопротивления качению от деформации
шины: • , •’ I/.. ,
128
по графикам (рис. 50, г, б, а) определяем значение hz, соответствую-
щее действительной нагрузке на колесо PZ = GK—Rkz (ЛгпР = 4,6 см, /iz.i =
= 4,2 см);
находим значения fm (формулу см. п\нкт 8, I проход) (/ш Пр=0,013;
/шл = 0,015).
6. Определяем коэффициент сцепления колес с грунтом.
По схеме II находим значение (3 (уравнение см. пункт 9, I проход);
график функции р([3) строим на рис. 50, д\
по графику рис. 50, а находим значения р2пР и ргл, соответствующие
величинам hz пр и hz!l (ргпР = 0,067; р2л=0,06 МПа);
по графику рис. 50, д находим значения р2, соответствующие р2пР и
Р2л (Ргпр = 34°; р2л=36);
определяем значения <р, отнесенные к GK: cp=Pz2 tg P/GK (cp2nP = 0,31;
ф2л = 0,45).
III. Показатели проходимости автомобиля.
1. Определяем коэффициент сопротивления грунта движению
Фгр = /г.ср + /кер + /б!
определяем среднее для автомобиля значение коэффициента сопротивле-
ния грунта качению колес:
/гер— [(/rlnp 4- /г2нр)^кпр 4“ (/г1л 4” /г2л) ^кл]/^а» (/гор = 0,22);
определяем среднее значение коэффициента сопротивления, вызываемо-
го скольжением осей автомобиля по грунту,
/кер — [(/к1пр 4~ /к2пр) ^кнр 4- (/к1л 4" /к21) ^кл]/^а> (/кер— 0,11),.
определяем коэффициент сопротивления движению, вызываемый смяти-
ем грунта корпусом (95),
/> h
inip нл
/б — (^кпр I Т^^^коР 4“ ^кч 1 (/б— 0,026);
о о
определяем суммарное значение фгр (фгр = 0,356).
2. Определяем суммарный коэффициент тяги:
а) при заблокированных дифференциалах (полное использование сцеп-
ления колес с грунтом)
= [Gk-iip(?111Р 4~ ?2ир) 4- <7кл(?1.1 4- ?2л)]/(7а> Ц?? =0,407);
б) при иезаблокированных дифференциалах (Х=1)
^? = [^кчр?1пр(1 4-X) 4-6КЛ ?2л (1 4-X)]/Ga, (6?<р= 0,326).
3. Показатель проходимости /7=^ (р—фгр при заблокированных диф-
ференциалах 0,05; при иезаблокированных 0,03 (при незаблокированиых
дифференциалах движение невозможно, при заблокированных автомобиль
может преодолевать подъемы не более 3°).
§ 18. Расчет показателей проходимости автомобилей по стати-
стическим характеристикам грунтовых поверхностей
Из-за нестабильности механических свойств грунтовых по-
верхностей в большинстве случаев целесообразно их задавать
статистическими характеристиками.
Для связных грунтов в качестве исходных материалов могут
быть использованы данные по распределению влажности [25].
Закон распределения влажности грунта в степной зоне весной и
осенью близок к нормальному (см. рис. 51, а и г). Однако одной
5 1342 129
Рис. 51. Графики к расисту показателя проходимости по статистическим
характеристикам связного грунта:
а—распределение влажности; б—распределение показателя проходимости, в—распреде-
ление подъемов: г—дифференциальное распределение влажности грунта весной; /—сла-
бохолмистая местность; 2—холмистая местность; 3—резко пересеченная местность; 4—
суглинистый чернозем; 5—тяжелосуглинистый чернозем
кривой распределения влажности недостаточно для расчета. Не-
обходимы еще данные по изменению влажности по глубине, ко-
торые могут быть представлены в виде кривой распределения
толщины верхнего слоя или в виде зависимости толщины сла-
бого слоя от влажности. Для оценки проходимости целесообраз-
но использовать интегральные кривые распределения (рис.
51, а).
По этим характеристикам выбираются четыре значения веро-
ятности, например 0,25; 0,5; 0,75; 0,85, и для каждого из них на-
ходятся значения влажности и толщины мягкого слоя грунта. По
величине влажности по графикам рис. 11 определяют значения
механических параметров грунта £, с0; Фо, а по уравнениям
(32—35) значения a, Zp, у. Таким образом получают пара-
метры механических свойств четырех грунтов, соответствующих
выбранньш значениям вероятности. По методике, изложенной в
§ 17, рассчитывают параметр проходимости П для каждого из
четырех грунтов и строят интегральную кривую распределения
F(/7) (рис. 51,6).
Для определения вероятности проходимости автомобиля в
рассматриваемых грунтовых условиях необходимо определить
30
минимальное значение Пт, при котором гарантируется движе-
ние автомобиля. Надежное движение автомобиля возможно при
определенном запасе удельной силы тяги для преодоления воз-
можных подъемов, для трогания с места и разгона, для преодо-
ления мелких препятствий и поворотов Требуемая величина
удельной силы тяги зависит от характера местности и, в частно-
сти, от рельефа и наличия различных препятствий, в большинст-
ве случаев она определяется величиной подъемов.
Учитывая возможности объезда автомобилем недоступных
подъемов, следует ориентироваться на подъемы, характерные
для дорог на рассматриваемой местности. В качестве примера
на рис. 51, в приведены кривые распределения подъемов, харак-
терных для полосы дорог на холмистой и пересеченной местно-
стях [25]. На слабохолмистой местности подъемы практически
(с вероятностью 99%) не превышают 0,08, на холмистой — 0,12,
а для резко пересеченной местности — 0,20.
Поэтому в первом приближении в качестве минимального
значения Пт можно принять: для слабохолмистой местности
77w = 0,08, для холмистой 77т = 0,12, для резко пересеченной
Лт = 0,2. По найденному значению Пт и кривой распределения
П (рис. 51, б), находят вероятностный показатель проходимости
/7В (штриховые кривые на рис. 51, б). Значение Пв в рассмот-
ренном примере получается на различной местности соответст-
венно 0,7; 0,6; 0,45.
В случае, если известно распределение подъемов на рассмат-
риваемом маршруте (местности), вероятностный показатель
проходимости находят по графикам (рис. 51, бив).
Для снежной целины в качестве исходных могут быть ис-
пользованы данные по распределению высоты снежного покро-
ва. Методика вероятностного расчета высоты снежного покрова
с учетом территориальной неравномерности залегания приведе-
на в специальной литературе [26]. Распределение высоты снеж-
ного покрова в общем случае подчинено гамма-распределению
(рис. 52, а). Для определения вероятности распределения высо-
ты снежного покрова может быть использована номограмма
(рис. 52, б), где %И = НХ/Н; St =т/т^-^относительные величины
высоты снежного покрова и времени; Н — средняя высота снеж-
ного покрова; Нх — текущая высота снежного покрова; —
продолжительность периода снегонакопления; т — текущее зна-
чение времени; Cvx — коэффициент вариации;
С.(т)=о[Я]/Л4 [Я].
Исходными данными для построения номограммы могут быть
значение коэффициента С для построения семейства /(§#; ST)
по формулам
5*
131
Рис. 52. Распределение высоты снежного покрова:
а—экспериментальные характеристики; б—номограмма; в—функция распределения; 1—
октябрь; 2—декабрь; 3— март
и распределение р(Н) средней величины многолетней высоты
снежного покрова. Оба параметра представляют собой основной
обобщенный и информационный материал современной службы
гидрометеорологии. Схема пользования номограммой показана
штриховой линией. В качестве исходной величины принята точ-
ка наиболее вероятных зим.
Кривую распределения Яг можно построить следующим об-
разом. В зависимости от рассматриваемого времени, для ко-
торого проводится оценка проходимости автомобилей, определя-
ем относительную величину времени снегонакопления (на-
пример, g? = 0,6) и пользуемся соответствующей кривой F(Zh)-
Выбираем четыре значения Н (например, Я=20, 40, 60, 80 см).
132
а—зависимость механических параметров грунта от глубины погружения плотномера
(пенетрометра); б—функция распределения глубины погружения пенетрометра; в—функ-
ция распределения показателя проходимости
Определяем интегральную частость встречи выбранного значе-
п
ния Н по уравнению F р(Н) F где п — число
участков кривой распределения р(Н). Строим кривую распреде-
ления F(H) (рис. 52, в) и по ней находим значения Яг, соответ-
ствующие выбранным значениям вероятности (например, 0,25;
0,5; 0,75; 0,95). По высоте снежного покрова и относительному
времени снегонакопления можно определить плотность снега
[27]. По плотности снега определяют его механические свойства,
характеризуемые параметрами Е; с0; Фо (см. табл. 8).
Далее последовательность расчета та же, что и для связных
грунтов: определяют величину показателя проходимости для че-
тырех значений параметров грунта, строят интегральную кривую
распределения Z7, минимальное значение Пт, гарантирующее
надежное движение автомобиля, и находят значение вероятно-
стного показателя проходимости 77в.
При оценке проходимости по конкретным маршрутам меха-
нические свойства грунта могут быть определены инструмен-
тальной разведкой. При этом быстрее и проще определить пене-
трометрами параметры Е\ с0; фо; а не влажность. Так как
кривые распределения этих параметров могут быть различными,
необходимо найти один обобщенный параметр, связанный функ-
циональными или корреляционными зависимостями с рассмат-
риваемыми параметрами грунта. В качестве такого параметра
может быть использована величина погружения плунжера (пе-
нетрометра) в грунт при каком-то постоянном давлении, близ-
ком к максимальному давлению в контакте колес с грунтом для
автомобилей, проходимость которых оценивают. Пример зави-
симости (Е; с0; Фо’, 7/r)=f(/zr) для суглинистого грунта весной
приведен на рис. 53, а. Для получения таких зависимостей при
каждом вдавливании пенетрометра кроме определения Е; с0; Фо;
133
Нг попутно определяют значение при выбранном значении р.
Для расчета вероятностного показателя проходимости поми-
мо указанных зависимостей используют интегральную кривую
распределения /гг0.
В качестве примера проведем расчет проходимости автомобиля ГАЗ-66
по статистическим характеристикам суглинистого грунта, полученным при
обследовании маршрута пенетрометром (рис. 53, а и б). По кривой распре-
деления F(hro) находим значения Лг©, соответствующие значениям вероятно-
сти 0,25; 0,50; 0,75; 0,90 (/гг= 12,5; 18, 22, 30 см). По графикам рис. 53, а
определяем значения Е\ Нг\ с0 и <р0» соответствующие найденным значениям
Аго, и помещаем их в табл. 11. Остальные параметры грунта, необходимые
для расчета: qP; kx ; у определяем по уравнениям (34) и (35).
Расчетные параметры автомобиля: D =108,4 см; В = 32,2 см; И = 31,3
см; бпр = 25,2 см; ро = 0,05 МПа; &п = 0,425; ДПР=1,5 см; п=2; /гк = 31,5
см; Gki=13,5 кН; дн2= 15,35 кН; %=4; р = 2,78 м/с.
По методике, изложенной в § 17, определяем П для четырех групп грун-
та п строим кривую распределения Е(П), рис. 53, в.
Таблица 11
Параметры F (Лг0) Параметры F (ftro>
0,23 0,5 0,75 0,9 0,25 0,5 0,75 0,9
А г с., см £, МПа Нг, см 12,5 3,4 21 18 2,0 30 22 1,5 35 30 1.2 40 с0, хМПа ° 0,010 18 0,008 12 0,007 8 0,005 О
Если принять преде 1ьиые значения подъемов согласно рис. 51, в 0,08;
0,12 и 0.2, то вероятность проходимости в зависимости от рельефа местно-
сти составит 0,75; 0,66; 0,42.
. Оценим потребность в дополнительных тяговых средствах для обеспече-
ния движения автомобиля по непроходимым участкам маршрута. По рис.
53, в отрицательные значения П достигают величины (—0,1). Максимально
возможные подъемы с учетом использования объездов составляют 11,5
(tg Стах — 0,2). Следовательно, на тяжелых участках маршрута необходимы
тягачи с удельной силой тяги на крюке не менее 0,3(ркр=|—Z7|+tga=
=0,3).
§ 19. Расчет скорости, ожидаемого расхода топлива и показа-
теля эффективности
Основанием для расчета скорости на участке, характеризу-
емом осредненными параметрами грунта, являются значения ко-
эффициента сопротивления дороги ф, коэффициента буксования
s6 и динамическая характеристика автомобиля. По динамиче-
ской характеристике определяют максимально возможную ско-
рость из условия D~x\\ Затем эту величину уточняют учетом
буксования.:
г/=г>т(1—s6), (195)
где — величина скорости по динамической характеристике.
134
Расход топлива в литрах на 100 км пути для рассматриваемо-
го участка определяют по формуле
Q = 0,lge//vGa/'MT1]T, (196)
где fN — коэффициент потерь мощности на движение, определя-
емый по формуле (120); ут— плотность топлива; ge — удельный
расход топлива.
Показатель эффективности автомобиля определяют по фор-
муле (194):
H9=GTVva!Q.
Для труднопроходимых участков целесообразно провести
расчет va, Q и Пэ для нескольких значений Grp. По полученной
зависимости /7э(Огр) можно найти оптимальное значение грузе*
подъемности, соответствующее максимальному значению 17э.
Для неоднородных маршрутов со статистическими характе-
ристиками механических свойств грунта в качестве исходной бе-
рется дифференциальная кривая распределения грунта (как и
раньше, в качестве обобщенного показателя механических
свойств грунта берется или влажность, или плотность грунта,
или погружение плунжера в грунт). На кривой распределения
выбирают четыре—пять точек значений грунта, по методике из-
ложенной в § 17 определяют f и ф из уравнений (96), (98), (118)
и (120); затем находят s6 и fN и строят дифференциальную кри-
вую распределения ф и график функций 5б(ф) и /^(ф).
По динамической характеристике автомобиля и кривой рас-
пределения /(ф) строят дифференциальную кривую распределе-
ния скорости с учетом буксования. Для каждой выбранной точ-
ки распределения /(ф) определяют значение ит по динамической
характеристике и значение sg, соответствующее рассматрива-
емой величине ф; действительную скорость определяют по гра-
фику рис. 38 и по уравнению (195).
По кривой распределения уа определяют среднюю скорость
1
®сР=1Д dPilva.
О
Расход топлива в литрах на 100 км пути определяют по пре-
образованному уравнению (196):
1
Q___ 0>1^а Sef $ р
УгДт ^а
0
Значения Ду для каждой рассчитываемой точки распределе-
ния определяют по значениям ф, а также по графикам функций
$б(ф) и Ду(ф). Величину ge находят по экономической характе-
ристике двигателя в зависимости от частоты вращения, связан-
ной со скоростью автомобиля зависимостью
2,65‘Уа/Тр/гк.
135
Во многих случаях расход топлива может быть определен по
среднему для маршрута значению fN ср:
Q== 0, ^асрУтЛт*
Величину fN ср определяют по формуле
о
В тех случаях, когда скорость движения ограничивается не
тяговыми возможностями автомобиля, а условиями движения
(большими динамическими нагрузками, большими ускорениями
колебаний, соображениями безопасности движения и т. д.) дви-
гатель работает на частичных нагрузках. Значения удельного
расхода топлива выбирают по экспериментальным характери-
стикам двигателя или по полученным методом аппроксимации
уравнениям [25]:
ge=gN ко+</2 (лд/^)2];
q.=К»+Kfi 4- K-fl2 4- /<3а3+К4а\
где а — относительный угол открытия дроссельной заслонки
(отношение действительной мощности двигателя к максималь-
ной при данной частоте вращения коленчатого вала).
Расчетные значения коэффициентов Кг приведены в табл. 12.
Т а б л п ц а 12
Ко m ффициенты Коэффициенты
Яо Я1 я8 я3 я4
3,327 — 13,646 29,863 —28,272 9,849
—20,336 125,893 —.293,617 295,724 —108,2
37,623 —238,759 559,527 -565,148 207,246
§ 20. Сравнительная оценка проходимости по конструктивным
параметрам автомобилей
Общая сравнительная оценка проходимости автомобилей без
рассмотрения грунтовых условий может быть проведена по сле-
дующим конструктивным параметрам: минимальному давлению
на грунт Pmiii = Pw mm+Ро и дорожному просвету которые ха-
рактеризуют опорные возможности автомобиля; коэффициенту
136
насыщенности протектора шин &н, высоте грунтозацепов Адр, ко-
эффициенту сцепного веса £сц, коэффициенту блокировки части
привода, расположенной между ведущими колесами X, дина-
мическому фактору Dmax и удельной мощности ДГуд, характери-
зующими тяговые возможности автомобиля; а также геометри-
ческим параметрам проходимости: радиусу колеса г0, углам све-
са аа и |За, продольному радиусу проходимости Гдр. Числовые
значения этих параметров для ряда отечественных автомобилей
приведены в табл. 13.
Таблица 13
Параметры Автомобили
1? 1 ЗИЛ-130 УАЗ-469 ГАЗ-66 । ЗИЛ-131 Урал-375 КрАЗ-255Б
1. pm in, кПа 2. /1к. см 3. kn 4. Апр» см О. kcu. 6. % 7. П.аах 8. TVyi, кВт/т 9. гс, см iiO. а, ° и. Р, 0 12. г|1р, м 450 26,5 0,65 1,5 0,75 1 0,32 13,2 45,6 41 27 3,2 500 27,0 0,65 1,5 0,73 1 0,32 13,0 48 37 39 3,2 250 30,0 0,45 1,5 1 1 0,72 22,4 41 54 48 1,8 100 31,5 0,42 1,5 1 4 0,67 14,2 54,2 41 32 3,94 100 33,0 0,44 1,6 1 0,78 10.6 57,3 36 40 4,9 100 40,0 0,39 2,8 1 0,97 10,1 63,6 44 40 4,97 150 36,0 0,42 2,15 1 1 0,62 9,0 64 47 32 5,6
Пср 0,54 0,57 0,75 0,81 0,82 0,87 0,77
Обобщенный сравнительный показатель проходимости можно
получить, выразив указанные показатели в виде относительной
величины (по отношению к максимальному или минимальному
значению из всех рассматриваемых), выбрав коэффициенты ве-
сомости для каждого из параметров,
77Cp = ^i/Jmin I "Т Сз^н “1“ *4" Суетах -р
ул4~Сэго4“С1Оа/ 4’ Ч“С12Гпр. (197)
Например: выбрав значения коэффициентов весомости
Ci С2 Сз С4 Со Сб С7 Сз С9 С10 ч11 С12
0,12 0,15 0,08 0,07 0,15 0,05 0,1 0,07 0,08 0,05 0,04 0,04
«и определив для автомобиля ГАЗ-66 относительные значения рассматривае-
мых параметров: p'mh: = 1; А/к = 0,79: k „ = 0,925; Д'ир = 0,55; //сц=1; Х =
= 1; £>'тах = 0,69; У'уч = 0,55; г'о = О,85; а' = 0,76; £' = 0.67; г'пр = 0,45 (см.
табл. 13 г'пр=‘1,8/3,94’) по уравнению-(197) получим /7ср = 0.81.
137
Определенные значения ПСр для остальных автомобилей
представлены в табл. 13.
При выбранных значениях весовых коэффициентов наиболее
высокой проходимостью обладает автомобиль Урал-375, а наи-
меньшей— ГАЗ-53, что соответствует опыту эксплуатации этих
автомобилей. Естественно, возможны случаи (сочетание дорож-
но-грунтовых условий), когда соотношение проходимости авто-
мобилей будет иным. Например, при использовании автомобилей
на местности с большим числом препятствий, вызывающих зна-
чительное перераспределение нормальной нагрузки между ле-
выми и правыми колесами, возрастает роль коэффициента бло-
кировки дифференциала. Для этих условий следует увеличивать
значение весового коэффициента £6, что приведет к возрастанию
77ср автомобиля ГАЗ-66, имеющего самоблокирующие дифферен-
циалы (%~4).
Г л а в a VI
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ОЦЕНКИ
ПРОХОДИМОСТИ АВТОМОБИЛЕЙ
Одних аналитических методов для всесторонней оценки про-
ходимости автомобилей недостаточно. Экспериментальные ме-
тоды оценки необходимы для подтверждения правильности ана-
литической оценки проходимости автомобилей. Комплексное ис-
пользование аналитических и экспериментальных методов дает
возможность решать задачу опенки проходимости большого чис-
ла автомобилей по различным грунтовым поверхностям в мини-
мальное время и с наименьшими материальными затратами.
Экспериментальные методы необходимы также для опреде-
ления параметров грунтовой поверхности и параметров автомо-
биля, которые входят в расчетные формулы аналитических ме-
тодов.
§ 21. Лабораторные методы определения параметров автомоби-
ля» характеризующих его проходимость
Определение конструктивных параметров автомобиля. В ла-
бораторных условиях могут быть определены конструктивные
параметры (рш[п, kH, Дпр, Z, г0), используемые для сравни-
тельной оценки проходимости автомобилей по мягким грунтам;
все геометрические параметры проходимости, а также некото-
рые параметры взаимодействия колеса с грунтом.
Параметры pmln и kn определяют снятием отпечатков шин и
обработкой данных. Вначале измеряют нормальную нагрузку
на колесо автомобиля ладометром или весами. Затем автомо-
биль ставят па горизонтальную ровную твердую поверхность,
давление в шинах снижают до минимального значения, ограничи-
ваемого допустимой их деформацией (для шин с регулируемым
давлением 0,35 Н), поддомкрачивают колесо, беговую поверх-
ность шины смазывают краской, под колесо кладут бумагу и де-
лают отпечаток.
Планиметром измеряют общую площадь отпечатка Ео и пло-
щадь грунтозацепов Егр. Значения pmln и ku определяют по фор-
мулам pmin = GK/F0; ka=F^/FQ. Значение ртщ определяют для
автомобиля с грузом и без груза.
139
Рис. 54. Схема стенда для определе-
ния коэффициента блокировки диф-
ференциала:
1—балансирный электродвигатель; 2—ба-
лансирные генераторы; 3—главная переда-
ча с дифференциалом
Значения р могут быть оп-
ределены при любом сочета-
нии нормальной нагрузки и
внутреннего давления в шинах.
В простейшем случае для это-
го достаточно иметь кроме ав-
томобиля ладометр и домкрат.
В процессе эксперимента сле-
дует следить за положением
колеса, не допуская его накло-
на. При наклоне колеса изме-
няются упругая характеристи-
ка шины, форма и площадь по-
верхности контакта. Удобнее
снимать отпечатки на стендах
для испытания шин, позволя-
ющих изменять нормальную нагрузку на колесо. На барабан-
ном стенде при этом используют вкладыш с плоской опорной
поверхностью.
Для измерения г0 можно использовать простейший способ
меловых отметок. На беговой поверхности шины делают две—
четыре равномерно расположенные поперечные полосы. Автомо-
биль прокатывают по ровной твердой поверхности. Замеряют
расстояния между следами поперечных полос и определяют ра-
диус качения по выражению r0 = S/a, где а — угол размещения
меловых отметок; S — расстояние между меловыми отметками.
Коэффициент блокировки дифференциала определяют на спе-
циальных стендах. На рис. 54 приведена схема одного из таких
стендов [28]. Вместо балансирных генераторов могут быть ис-
пользованы гидравлические тормозные механизмы. Для оценки
влияния дифференциала на проходимость необходимо знать со-
отношение моментов на колесах при буксовании одного из ко-
лес. Поэтому коэффициент блокировки целесообразно опреде-
лять как Х = Л4Отст/Мзаб- Порядок испытаний может быть следу-
ющим. После прогрева механизмов предварительной обкаткой
стопорят ротор одного из генераторов (например, правого), у вто-
рого (левого) генератора устанавливают минимальный ток воз-
буждения (т. е. минимальный момент сопротивления). Через
дифференциал с приводом от электродвигателя приводится во
вращение ротор левого генератора с постоянной скоростью, при
этом измеряют реактивные моменты на обоих генераторах. Ко-
эффициент блокировки равен соотношению реактивных момен-
тов. Эту операцию повторяют при различных значениях скоро-
сти и при различных значениях задаваемого момента сопротив-
ления генератора с вращающимся ротором (в рассматриваемом
случае левого).
Для определения коэффициента блокировки дифференциала,
установленного на автомобиле, необходимо вывешенные веду-
140
Рис. 55. Схема определения геометрических параметров проходимости авто-
мобиля:
а—<в продольной плоскости; б—в поперечной плоскости
щие колеса одного моста соединить с гидравлическими или элек-
трическими тормозными механизмами и провести испытания,
аналогичные описанным. Для этой цели можно использовать
стенды для проверки тормозов. При использовании платформен-
ного стенда под одно колесо на измерительной платформе уста-
навливают скользкую опорную плиту. Автомобиль крепят троса-
ми к фундаменту. Колеса на скользкой опоре доводят до буксо-
вания. При этом замеряют горизонтальные силы (как при тор-
можении), действующие на платформы буксующего и непод-
вижного колес.
Дорожный просвет Лк определяют измерением расстояния от
плоской твердой опорной поверхности до нижней точки мостов,
рамы, корпуса. Следует учитывать ширину выступающей ниж-
ней части. Если ширина выступающей части мала, то при дви-
жении по деформирующемуся грунту она будет оставлять на
грунте борозду, создавая незначительное дополнительное сопро-
тивление движению, не оказывая существенного влияния на по-
казатель проходимости. Однако это характерно только для мяг-
кого грунта. На твердой опорной поверхности упор в такую не-
большую выступающую часть может привести к потере проходи-
мости автомобиля. Поэтому целесообразно определять дорож-
ный просвет до картеров мостов, а также до нижних частей кор-
пуса малой и большой площаци.
Углы свеса (передний аа и задний ра) определяют непосред-
ственным замером (рис. 55, а), пользуясь угломером и щитом,
который устанавливают касательно к колесам и выступающим
нижним точкам передней или задней части автомобиля. При
этом автомобиль устанавливают на твердой горизонтальной по-
верхности. Измерения проводят для автомобиля с грузом и без
груза, при номинальном и минимальном значениях внутреннего
давления воздуха в шинах. Кроме того, целесообразно провести
измерения при полном прогибе упругих элементов подвески.
В этом случае получают минимально возможное значение угла
свеса. При наличии сравнительно мелких выступающих частей
141
(буксирные крюки, сцепное устройство и т. п.) необходимо про-
водить измерения как с ними, так и без них. Для некоторых ав-
томобилей разница получается весьма существенной.
Радиусы проходимости целесообразно определять графиче-
ски по масштабной схеме автомобиля (см. рис. 55). Для мно-
гоосных автомобилей при этом возникают трудности оценки
прогиба подвески различных осей. Поэтому рекомендуется оп-
ределять радиусы проходимости при положении колес, соответ-
ствующем статическому ходу на горизонтальной поверхности, а
также при предельном прогибе подвески наиболее нагруженных
колес (при определении верхнего радиуса проходимости — край-
них, нижнего радиуса — средних). Поперечный радиус проходи-
мости для автомобилей с независимой подвеской надо опреде-
лять при статическом и полном динамическом прогибах под-
вески.
Для оценки проходимости автомобиля по неровным поверх-
ностям важное значение имеет ход колес, определяемый кинема-
тикой подвески. Для их измерения колеса автомобиля, установ-
ленного на ровной горизонтальной площадке, на ладометрах,
последовательно поднимают до упора домкратом или другим
устройством, воспроизводя все положения, возможные в процес-
се движения по неровностям. Измеряют перемещения колес,
нормальные нагрузки на них, углы перекоса осей. Фиксируют
положения колес при поднятом до упора одном или нескольких
колесах, а также при отрыве колес от опорной поверхности.
Например, для балансирной задней подвески трехосного ав-
томобиля воспроизводят следующие положения: 1) все колеса на
горизонтальной площадке; 2) поднято правое колесо заднего
моста; 3) поднято левое колесо заднего моста; 4) подняты оба
колеса заднего моста; 5) поднято правое колесо среднего моста;
6) поднято левое колесо среднего моста; 7) подняты оба колеса
среднего моста; 8) поднято правое колесо заднего моста и левое
колесо среднего моста; 9) поднято левое колесо заднего моста и
правое колесо среднего моста.
Определение параметров взаимодействия колеса с грунтом.
В лабораторных условиях целесообразно проводить определе-
ние параметров контакта колеса с грунтом (форму и размеры
поверхности контакта, распределение давлений и удельных ка-
сательных сил по поверхности контакта), глубины колеи, дефор-
мации шипы, силы сопротивления качению и коэффициента бук-
сования в зависимости от силы тяги, конструктивных парамет-
ров шины и параметров грунта.
Для проведения этих экспериментов используют стенды с
грунтовым каналом. Схема одного из таких стендов приведена
на рис. 56. Стенд включает грунтовой канал 8, тележку 4 с уст-
ройством для установки испытуемого колеса /, устройство для
создания нормальной нагрузки 2, устройство для создания наг-
рузки в направлении движения (силы тяги) 6\ устройство для
142
Рис. 56. Схема стенда для лабораторного исследования взаимодействия ко-
леса с грунтом
подвода момента к испытуемому колесу 7, измерительные уст-
ройства для силы тяги 5, момента, углового и линейного переме-
щения колеса. Кроме того, могут быть использованы измерите-
ли деформации шины, деформации грунта, нормальных давле-
ний в контакте, удельных касательных сил в контакте.
Основное требование к нагрузочному устройству — постоян-
ство нормальной нагрузки в процессе качения колеса, что дости-
гается при установке испытуемого колеса на качающейся раме.
Для изменения нагрузки может быть использован перемеща-
емый вдоль рамы груз или неподвижно установленный бак, за-
полняемый водой, со шкалой нормальной нагрузки, передавае-
мой на колесо. Второй способ облегчает процесс изменения наг-
рузки.
Для создания переменных значений силы тяги тележку сое-
диняют тросом с регулируемым тормозным механизмом. Учиты-
вая малую скорость перемещения тележки, обычно применяют
механические тормозные механизмы с хорошо оттарированным
приводом. Могут быть использованы гидравлический и электри-
ческий тормозные механизмы, связанные с тормозным бараба-
ном через редуктор. Удобно применение электрической машины,
работающей как на генераторном режиме (тормозной меха-
низм) так и на моторном режиме, что необходимо для переме-
щения тележки при испытании колеса на ведомом или тормоз-
ном режимах. При применении тормозных механизмов других
типов для перемещения тележки используют лебедку с электро-
приводом. Значительно реже применяют привод к колесам те-
лежки.
Для измерения силы тяги чаще всего используют тензометри-
ческое звено, работающее на растяжение. Момент подводят к
колесу от электродвигателя через механическую трансмиссию.
Параметры электродвигателя и трансмиссии подбираются так,
чтобы обеспечить изменение момента от пуля до Л4тах =
= RZ тпауГофтах. Момент, подводимый к колесу, обычно измеряют
с помощью тензометрического вала или динамометрической сту-
пицы [29]. Для испытания колеса на тормозном режиме может
быть установлен как колесный, так и трансмиссионный тормоз.
Суммарную нормальную деформацию грунта и шины опре-
деляют измерением расстояния от оси колеса до базовой поверх-
143.
Рис. 57. Схемы измерения:
о.—деформации шины; б—деформации грунта; 1—реостат со шкивом; 2—трос; 5—втулка;
-/—гофрированная трубка; 5—крепление троса к камере: 5—пружина; 7—кронштейн; 5—
.реостат; $—система рычагов; 10—лыжа
поста стенда с помощью стрелочного устройства или реохордно-
го датчика. Для раздельного определения деформаций необхо-
димо проводить дополнительное измерение деформации грунта
или шины. Технически проще измерить деформацию грунта.
В простейшем случае измеряют глубину колеи после прохода
колеса. Однако следует иметь в виду, что в этом случае не будет
учтена упругая деформация грунта, т. е. значение деформации
шины будет завышено. Если испытания проводят на грунте, об-
ладающем значительной упругой деформацией, необходимо из-
мерять и нормальную деформацию шины.
Измерение нормальной деформации шины связано с больши-
ми трудностями. Для этой цели во внутренней полости шины
устанавливают реохордный датчик, рис. 57. Применение такого
датчика позволяет достаточно точно измерить деформации ши-
ны по длине зоны контакты шины с грунтом, что дает возмож-
ность воспроизвести форму поверхности контакта шины с грун-
том в продольной плоскости.
На описанном стенде могут быть проведены самые различные исследо-
вания взаимодействия колеса с грунтом. Для определения основных пока-
зателей методика эксперимента может быть следующей. 1) Подготавливают
грунт (увлажняют н разрыхляют для получения выбранных значений влаж-
ности п плотности). Для контроля состояния грунта может быть использо-
ван плотномер-влагомер Ковалева [30]. 2) Устанавливают заданное давление
воздуха в шине. 3) Разгрузочным устройством колесо устанавливают до ка-
сания с грунтом. Это положение фиксируют как пулевое для измерения де-
формации шины и грунта. 4) Устанавливают нормальную нагрузку на коле-
со, колесо погружается в грунт. 5) Уточняют внутреннее давление воздуха
в шине. 6) С помощью электродвигателя (лебедки) колесо прокатывают по
грунтовому каналу на ведомом режиме. При этом регистрируют показания
тягового звена и суммарную деформацию шины и грунта. После прокаты-
вания колеса измеряют глубину колеи. Определяют: глубину колеи /гг, де-
формацию шины hz и коэффициент сопротивления качению f= (Рг—Рто) GK,
где Pro — показания тягового звена при перемещении тележки с вывешен-
ным колесом. 7) Тележку с колесом возвращают в исходное положение.
144
8) Грунт разрыхляют до исходного состояния.
9) Тормозом устанавливают силу тяги Рт.
10) Включают привод к колесу, и оно катится по грунту, перемещая
тележку и преодолевая установленную тормозную силу, которую контроли-
руют по показаниям тягового звена. Кроме того, измеряют момент, подво-
димый к колесу, и суммарную деформацию шины и грунта, угловое и ли-
нейное перемещения колеса. По измеренным значениям определяют силу тя-
ги Px=PT-j-PY0; коэффициент сопротивления качению при заданной силе
тяги: /=[Л4к/гк0—РЛ-]/С?к; коэффициент буксования — 1—5и/гкОа; дефор-
мацию шины и грунта.
11) Колесо возвращают в исходное положение. Вновь разрыхляют грунт,
устанавливают следующее большее значение силы тяги и повторяют прока-
тывание колеса под действием подводимого момента. Определяют те же па-
раметры, что и в пункте 10, но при большем значении силы тяги.
12) Прокатывание колеса проводят еще при нескольких ступенчато по-
вышаемых значениях силы тяги, пока не бучет достигнуто полное буксова-
ние колеса.
В результате этого эксперимента получают зависимости коэффициента
сопротивления качению, глубины колеи, деформации шины и коэффициента
буксования от силы тяги, определяют максимально возможную удельную
силу тяги k? и тягово-экономическую характеристику колеса f_Y(/?T).
При отсутствии стенда с грунтовым каналом эксперименты
по изучению взаимодействия колеса с грунтом могут быть про-
ведены на автомобиле, одно колесо которого перемещается по
исследуемому грунту, а остальные — по специальным направля-
ющим. Горизонтальное положение моста с испытуемым колесом
устанавливается регулированием высоты направляющей и изме-
нением давления в шипе колеса, перекатываемого по этой нап-
равляющей. Эта простейшая установка позволяет проводить ис-
пытания в условиях качения колеса на ведущем, ведомом и тор-
мозном режимах, но при малых перемещениях.
Силы, действующие на колесо от автомобиля, замеряют тен-
зометрированием. Тензодатчики для измерения момента Л4К,
подводимого к колесу, наклеивают на полуось, а для измерения
вертикальной Pz и горизонтальной Рх сил — на балку моста в
зоне между колесом и опорой рессоры.
Силу сопротивления качению определяют по уравнению
Pf= (MK/GK)—Рх, а силу сцепления колеса с грунтом по уравне-
нию Рсц= (Л4к/гк0) —Р/ш-
Для разделения силы сопротивления качению на основные
составляющие Р/г и проводят специальные эксперименты
на ровной твердой поверхности и на мягком грунте. При этом
получают значения Р/ш в зависимости от нормального прогиба
шипы hz и от крутящего момента на колесе Л4К. Так как при
рш=const потери на внутреннее трение в шине определяются ве-
личинами ее нормальной и тангенциальной деформации, тс
можно предположить, что при равных значениях этих деформа-
ций на мягкой и твердой поверхностях и потери на деформацию
шины будут равны. На основании этого предположения по экс-
периментальным зависимостям Р/Ш(Л2; Л4К) для твердой по-
верхности и по значениям h2 и Л4К, полученным при качении ко-
145
леса по мягкому грунту, находят искомую зависимость
PfmiPwV Силу Pfr определяют вычитанием потерь на деформа-
цию шины из общих потерь: PfY=Pf—Pfm.
§ 22. Методы экспериментального определения параметров
грунта в полевых условиях
Для определения параметров деформируемости грунта в по-
левых условиях чаще всего используют метод вдавливания
штампов (метод пенетрации).
Применяемые пенетрометры отличаются: 1) формой штам-
пов (плоские, конусные, колесные); 2) размерами штампов (пор-
тативные — диаметрами 1—3 см и соизмеримые с поверхностью
контакта движителя с грунтом); 3) способом нагружения: ди-
намические пенетрометры (лом ударник, пенетрометр Айова);
статические пенетрометры (Горячкина, Ревякина, Голубева,
Всегиигео, игла Проктора, Датский конический пенетрометр).
Для. полевого определения сцепных параметров грунта при-
меняют срезыватели в виде пластины с грунтозацепами и коль-
цевые сдвиговые приборы [2] Часто портативные сдвиговые при-
боры выполняют в комбинации с пенетрометрами (комбиниро-
ванные пенетрометры Гончара, Балдина, Рокаса; модулемер
Хархуты; бевпметр Беккера). Широкое применение различных
пенетрометров, включая комбинированные, в строительном и до-
рожном деле объясняется их сравнительно малым весом и раз-
мерами, простотой замеров, возможностью детального исследо-
вания грунтов на различной глубине.
Использование портативных пенетрометров позволяет наибо-
лее гпосто и с минимальными затратами средств определять па-
раметры грунта НГ\ Е; с0; <ро, необходимые для оценки проходи-
мости автомобилей аналитическим методом. Однако использо-
вание пенетрометров для оценки проходимости автомобилей со-
пряжено с рядом трудностей. Вследствие нестабильности грун-
тов для получения надежных результатов необходимо проводить
большое число замеров. Получаемые результаты невозможно
непосредственно применить для оценки проходимости автомоби-
лей. так как размеры штампов несоизмеримы с размерами ко-
леса; режим нагружения и характер деформации грунта под
очень малым штампом и колесом различные. В связи с этим
требуется нахождение корреляционных зависимостей, которые
изменяются при изменении параметров колеса.
Применение штампов, равновеликих поверхности контакта
движителя с грунтом, требует очень громоздких и тяжелых ус-
тановок, много времени для замеров. Для обследования боль-
ших площадей грунта и протяженных маршрутов эти установки
практически неприемлемы. Установки с крупноразмерными
штампами целесообразны для проведения специальных исследо-
146
ваний, например, исследования влияния формы штампа на со-
противление грунта вдавливанию, определения оптимальных
размеров поверхности нагружения для данного вида грунта,
определения оптимального рисунка протектора (грунтозацепов)
и т. д.
Отмеченные трудности заставляют искать новые способы
определения параметров грунта, которые позволили бы в корот-
кое время обследовать протяженные маршруты и большие грун-
товые площади. К таким «скоростным» способам можно отнести
оценку грунтов с точки зрения проходимости, проводимую при
прокатывании по ним эталонных колес (колеса). Эталонные ко-
леса широко используют для определения параметров взаимо-
действия колеса с грунтом (глубины колеи, коэффициента со-
противления качению, коэффициента сцепления) в зависимости
от состояния грунта (влажности, плотности), которые изменя-
ются в течение года в широких пределах [2, 3].
М. Г. Беккер предложил определять параметры грунта про-
катыванием двух колес, отличающихся шириной (Вi = 4,15 см;
#2 = 0,35 см; £>1>2 = 48,3 см) [2]. Третье колесо измерительной ус-
тановки уравновешивается противовесами так, что катится по
грунтовой поверхности, не погружаясь в него, и используется в
качестве эталона нулевой линии для определения глубины ко-
леи, образуемой нагруженными колесами. В процессе испытаний
ступенчато изменяется вертикальная нагрузка на колеса и за-
писывается глубина колеи за каждым колесом. В результате
получаются зависимости /zr(GK) для двух колес, отличающихся
шириной. Из полученных двух зависимостей пересчетом опреде-
ляют три искомых параметра грунта с2 и ц, которые входят
в формулу (11). Рассмотренный метод позволяет обследовать
большие площади грунтовой поверхности в сравнительно корот-
кое время. Однако применение и этого метода связано с рядом
трудностей.
1 Грунтовые маршруты отличаются исключительной неста-
бильностью механических свойств. На участках, отстоящих друг
от ’руга в нескольких метрах, деформируемость грунта может
быть существенно различной. При измерении глубины колеи при
различных нагрузках на одном колесе практически невозможно
обеспечить равные грунтовые условия при GKI и Gk2, а расчет
параметров грунта основан на их равенстве при всех на-
грузках.
2 . Параметры грунта определяются для последующего ис-
пользования их применительно к пневматическим шинам.
В процессах взаимодействия с грунтом пневматического (элас-
тичного) и жесткого колес есть значительные отличия. При ка-
чении колеса по грунтовой поверхности неизбежно периодичес-
кое изменение вертикальной нагрузки вследствие колебаний тя-
гача и измерительной тележки. Изменение вертикальной нагруз-
ки различно сказывается на деформации грунта под жестким
147
и пневматическим колесами. У пневматического колеса при уве-
личении вертикальной нагрузки увеличивается деформация ши-
ны, увеличивается площадь плоской зоны контакта и очень ма-
ло изменяются удельные давления. Изменение деформации
грунта происходит в основном вследствие увеличения опорной
площади. У жесткого колеса при этом увеличиваются макси-
мальные удельные давления и погружение колеса в грунт.
Для измерения сцепных свойств грунта при этом методе ис-
пользуют одно из нагруженных колес. Это колесо затормажива-
ют с постепенно увеличивающейся интенсивностью от Л1т = 0 до
Л4т=Л1Т1пах- Записывают тормозную силу на колесе и частоту
вращения, по которой определяется величина сдвига. Получает-
ся зависимость силы сцепления от сдвига для нескольких верти-
кальных нагрузок на колесо. Обработав математически полу-
ченные кривые, находят параметры с0, фо и Е^ входящие в урав-
нения (22), (25).
Основная трудность и в этом случае обусловлена нестабиль-
ностью грунта. При математической обработке данных прини-
мают параметры грунта с0, фо и Е} постоянными при записи с
различными значениями GK. В действительности эти параметры
могут быть различными. Это же замечание относится и к про-
цессу записи кривой ?(/), так как различные точки этой кривой
получаются па различных участках грунта. Величина погреш-
ностей возрастает по мере увеличения неоднородности грунта.
Следует также отметить, что этим способом нельзя определить
параметры грунта на малых участках.
Учитывая отмеченные недостатки описанного скоростного
способа, рассмотрим способ, позволяющий определять парамет-
ры грунта на малых грунтовых участках и, следовательно, при-
годный для оценки грунтов, неоднородных по поверхности. Этот
способ основан на использовании жесткого цилиндрического ко-
леса с датчиками измерения нормальных и касательных к обо-
ду колеса реакций грунта (рис. 58). Датчики, установленные на
беговой поверхности колеса совмещение или возможно ближе
друг к другу, имеют ширину, равную ширине колеса п возможно
меньшую длину. Кроме этого, используют приборы для измере-
ния углового перемещения и пути, проходимого колесом, а так-
же силовой привод к оси колеса.
В процессе качения колеса при прохождении через зону кон-
такта с грунтом датчика нормальных усилий изменяется погру-
жение датчика в грунт от нуля (при входе в контакт) до вели-
чины, равной глубине колеи (при выходе из контакта) (рис.
58,а), что дает возможность определить зависимость деформа-
ции грунта от нагрузки. При этом записывается нормальное дав-
ление в функции угла поворота колеса р(а). Зная угол поворо-
та колеса, по формуле h = r(cos а—cos cq) можно определить
величину погружения датчика в грунт. Здесь р — среднее удель-
ное давление на датчик (p = Pn/F), F — площадь датчика; Р,г—
148
Рис. 58. Схема «скоростного» определения механических параметров грунта:
а—схема качения колеса; б—график нормальных реакций грунта; в—график касатель-
ных реакций грунта
замеренная нормальная сила; h\— глубина погружения датчика
в грунт в передней зоне; а — текущее значение угла поворота
колеса от начала контакта; cxi — угол передней зоны контакта.
В результате получается искомая зависимость деформации
грунта от нормальной нагрузки p(h}) (рис. 58,6).
По задней части зоны контакта (от осевой линии до линии
выхода из контакта) определяется упругость грунта /j(/12z) ;
/*2' =/'(cos а—cos 0С2), где Л/ — глубина упругой деформации
грунта; а2— угол задней части зоны контакта.
При прохождении через зону контакта датчика касательных
усилий в случае качения колес с постоянным значением буксо-
вания изменяется сдвиг датчика относительно грунта от нуля
при входе в контакт до максимального значения на выходе из
контакта. Это дает возможность определить вторую характерис-
тику грунта т(/) (рис. 58,в):т— удельная касательная сила, дей-
ствующая на датчик, т = Ртр/Р/7; Рт — замеренная касательная
сила; / — величина сдвига грунта: j=(rcq—SJcc/ai (где Si —
путь, проходимый колесом при повороте на угол ои).
По полученным зависимостям р(Лг) и т(/) можно рассчиты-
вать все основные параметры грунта.
Для расчета выбирают две точки: ртах и /?2, р2-
Если , го £=(Д------—}/(—---------—).
Р2 h-2 \ Й2 Aj // \ р2 ртак I
ps—Ehpi(Eh — bp).
Если > А-, то Е=р2ртзх (/?1 — Л2К(/21ПЗХ/?2 — р2Ь1);
Р2 Л2
/V,. —(/г
Чтобы использовать полученные данные для пневматических
шин, необходимо измерить глубину колеи за одним из пневмати-
149
ческих колес и найти коэффициент корректировки у для модуля
деформации Е.
Если — ах <Г , то v =---------------.
Если
где Л и р — соответственно глубина колеи п среднее нормальное
давление в плоской зоне контакта для пневматической шины.
Для определения сцепных параметров грунта выбирают три
точки на экспериментальной зависимости т(/). Точка 1 — в кон-
це зоны контакта, где проскальзывание 0,7?—0,8Zz (Г— рассто-
яние между грунтозацепами)—служит для определения фо,
tgТо= г\1р\• Точку 2, соответствующую максимуму зависимости
т(/‘), используют для определения с0, £о= (тг—Pz tg фо)//'—/2).
Точка 3 промежуточная, на участке т = 0~т11ШХ. По параметрам
ЭТОЙ ТОЧКИ Тз, /з определяют Е, Ei=T3Tmax-//3(Tmax—Тз) .
Коэффициент корректировки для пневматических шин мож-
но найти, замерив на одном из ведущих колес силу тяги Рх и
буксование sn:
Л/v
lr
4-2/£156Z ’
56=-l—S r/zK;
Н-2/^SoZ
где S — путь; пл- — частота вращения.
Для получения статистических характеристик грунта в ка-
честве обобщенного параметра принимают значение 1ц (рис.
58,а) и для него строят кривую распределения. Значения ос-
тальных параметров грунта выражают функциональными (кор-
реляционными) зависимостями через Ль
§ 23. Оценка проходимости автомобилей в полевых условиях
В полевых условиях проводят экспериментальное определение
показателей проходимости на характерных труднопроходимых
грунтах (сыпучий песок, снежная целина, заболоченный грунт,
размокший суглинистый грунт), показателя эффективности ав-
томобиля па комбинированных маршрутах с участками размок-
ших дорог целинного грунта, возможностей автомобиля по пре-
одолению препятствий.
Грунтовые условия для испытаний выбирают с учетом типа,
казн..пения и условий эксплуатации автомобиля. Ориентировоч-
ная характеристика грунтов для определения показателей про-
ходимое! и автомобилей приведена в табл. 14.
150
Таблица И
Параметр Автомобили
неполнопривол- ные полноприводные
Глубина разрыхления сухого сыпучего песка, см Пашня боронованная: глубина вспашки, см влажность, % Несущая способность заболоченных лугов, МПа Снежная целина: высота снежного покрова, см плотность снега, г/см3 15—20 15—20 40—60 0,2—0,25 20—30 0,2-0,3 30—40 20—30 60—90 0,1—0,15 35—45 0,2—0,3
Испытательные участки должны быть ровными, горизонталь-
ными, желательно с однородной поверхностью и одинаковыми
физико-механическими свойствами. Размеры участка должны
обеспечивать возможность проведения полного комплекса ис-
пытаний на однородной поверхности.
Обязательным элементом испытаний является определение
физико-механических свойств грунта: толщины разрыхленного
(переувлажненного) слоя и гранулометрического состава для
всех грунтов (для снега), влажности — для пашни на суглинке
и заболоченного грунта, плотности — для песка и снега, прочнос-
ти дернового слоя — для заболоченного грунта. Кроме того, не-
обходима описательная характеристика грунта. Определение фи-
зико-механических свойств грунта проводят ежедневно перет на-
чалом испытаний, а также при существенном изменении грунта
во время испытаний. Гранулометрический состав грунта опреде-
ляют пипеточным методом или методом отмучивания и набуха-
ния [30]. структуру снега — визуально. Влажность и плотность
связного грунта можно определять влагомером-плотномером
Н. П. Ковалева пли пипеточным методом, плотность снега —
методом отбора проб с последующим определением его объема
и массы. Мерный стакан наполняют снегом, вдавливая сто в
снег в горизонтальном направлении. Плотность снега определя-
ют как отношение массы снега к объему пробы — мерного ста-
кана. Для определения влажности и плотности пробы грунта
следует брать на глубине 0,5; 15—20; 35—40 см.
Толщину разрыхленного (переувлажненного) слоя грунта
определяют вдавливанием тарированного стержня. Для опреде-
ления прочности дернового слоя могут быть исподьзованы пене-
трометры. С помощью пенетрометров целесообразно также
определять параметры грунта Е; cQ и <р0-
Места отбора проб выбираются так, чтобы можно было по-
лучить объективную характеристику механических свойств
грунта для всего испытательного участка. Количество точек от-
151
бора по площади зависит от характера грунтового участка и, в
частности, от однородности грунта Однако даже при видимой
однородности грунтовой поверхности пробы нужно брать в двух-
трех местах участка.
После проезда автомобиля определяют плотность грунта на
дне колеи (проводят не менее трех-четырех замеров в каждой
колее). По изменению плотности грунта в результате прохода
колес определяют его уплотняемость. При налипании грунта на
колеса величину липкости грунта определяют, используя метод
отрыва плоского резинового диска от грунта.
Следует заметить, что неполная оценка физико-механических
свойств грунта испытательного участка значительно снижает
научную ценность провеценного эксперимента и возможности
последующего использования его результатов.
Для определения показателей проходимости автомобиля не-
обходимо измерение следующих параметров: силы тяги на крю-
ке Ркр, момента, подводимого к ведущим колесам, А1К, радиусов
качения на свободном режиме г0, частоты 'вращения колес п,
пройденного пути S.
По этим параметрам определяют показатель проходимости
коэффициент сопротивления качению /= (Мк/го—
Ркр); коэффициент буксования $б=1—5/2лг0^; коэффициент
мощностных затрат/у= (f4-Sq/7)/(1—so). Полное представление
о проходимости отдельного автомобиля по данному грунту дает
график /л-(Я).
Для оценки проходимости по одному пути большого числа
автомобилей указанные измерения надо повторять по одной
колее до полного застревания автомобиля. При этом дополни-
тельно замеряют глубину колеи, фиксируют случаи задевания
корпуса автомобиля за грунт, определяют дополнительное со-
противление движению, вызываемое скольжением корпуса по
грунту и нагребанием грунта.
Переменную силу тяги на крюке обычно имитируют с по-
мощью второго автомобиля или динамометрического тягача и
измеряют динамометром пли тензометрическим звеном.
Для измерения момента на колесах могут быть применены
различные способы. Наиболее часто используется тензометри-
ческий способ с наклеиванием датчиков на полуось (вал) и при-
менением торцовых токосъемников. Измерив момент на всех ве-
дущих колесах, можно оценить неравномерность распределения
момента по колесам, выявить слабые (в отношении проходи-
мости) места в системе привода к колесам и найти пути повы-
шения проходимости за счет совершенствования трансмиссии
автомобиля. Однако при этом способе значительно усложняется
измерительная система и увеличивается трудоемкость проведе-
ния испытаний и обработки экспериментальных данных.
Трудоемкость эксперимента снижается при измерении сум-
марного момента на карданном валу между коробкой передач и
152
раздаточной коробкой. В этом случае применяют проходной то-
косъемник. Однако точность измерения при этом снижается, так
как необходимо вводить поправки, чтобы учесть потери мощно-
сти в элементах трансмиссии (от вала, на котором измеряют
момент, до ведущих колес). Для этого требуется проведение
специального эксперимента.
Радиус качения колес на свободном режиме целесообразно
определять на твердой опорной поверхности, соблюдая условия
равенства нормального прогиба шин. Технически это можно осу-
ществить так. Определить радиус качения при нескольких зна-
чениях нормального прогиба шины, изменяемого при изменении
внутреннего давления воздуха в шине. Построить зависимость
радиуса качения от нормального прогиба шины. В процессе ис-
пытания автомобиля на грунте измерить расстояние от оси ко-
леса до поверхности контакта, определить нормальный прогиб
шины п для этого прогиба брать величину радиуса качения по
зависимости r0(/zz). Погрешность, получаемая при этом, весьма
незначительна и ею можно пренебречь.
Суммарное число оборотов колес обычно измеряют прерыва-
телем, устанавливаемым совместно с токосъемником, и счетчи-
ком электрических импульсов. Если измеряют момент на одном
из карданных валов трансмиссии, то соответственно измеряют
суммарное число оборотов этого вала и определяют среднее чис-
ло оборотов колеса /ik = ^bWo- Путь, проходимый автомобилем,
можно измерять, определив частоту вращения пятого колеса,
или использовать для этого шкив с прерывателем и трос: при
движении автомобиля шкив перекатывается по тросу, натянуто-
му вдоль движения автомобиля; путь определяется выражени-
ем S=arn, где г— радиус шкива (пятого колеса); п — число
импульсов, зарегистрированных счетчиком; а — угол между раз-
рывами прерывателя. Способ использования шкива и троса бо-
лее точен, его целесообразно применять при испытании автомо-
билей на сильно деформирующихся грунтах.
Порядок проведения испытаний может быть таким. Испытуе-
мый автомобиль через тензометрическое звено соединяют тро-
сом длиной 15—20 м с «тормозным» автомобилем. Пока трос
не натянут, силы тяги на крюке нет. Определяется сила сопро-
тивления качению на свободном режиме. Затем начинает дейст-
вовать сила тяги на крюке, которая постепенно увеличивается
притормаживанием буксируемого (тормозного) автомобиля до
полного буксования колес испытуемого автомобиля. По резуль-
татам измерений на втором этапе определяют зависимость
/лДЛф) и 77. Для уточнения величины показателя проходимости
могут быть проведены дополнительные заезды при нескольких
постоянных значениях силы тяги на крюке.
В простейшем случае испытания можно проводить без при-
менения тензометрической аппаратуры и осциллографа с ис-
пользованием только динамометра. При этом определяют зна-
153
чения показателя проходимости, силы сопротивления качению
(буксировкой испытуемого автомобиля или протягивания лебед-
кой через динамометр) и силы сцепления колес с грунтом (по
показанию динамометра при буксовании колес автомобиля на
месте).
Учитывая, что методы оценки грунта с точки зрения прохо-
димости пока еще недостаточно отработаны, отраслевым стан-
дартом «Автомобили полноприводные. Типовая программа и
методы испытаний на проходимость» предусмотрены сравни-
тельные испытания не менее двух моделей автомобилей. Опре-
делению физико-механических свойств грунтов в стандарте от-
водится вспомогательная роль, и методы их измерения отдельно
нс регламентируются.
В качестве основного оценочного показателя опорной прохо-
димости принята тягово-скоростная характеристика автомобиля
на заданном участке грунта, определяющая зависимость удель-
ной силы тяги автомобиля kT от скорости движения ил на раз-
ных передачах. Испытания проводят на размокшей грунтовой
дороге и связном грунте, на сухом сыпучем песке, на снежной
целине с глубиной снежного покрова не менее 30—40 м. Длину
зачетного участка выбирают не менее 40 см, длину дополнитель-
ного (разгонного) участка — 25—50 м.
В качестве дополнительных оценочных показателей опорной
проходимости автомобилей рекомендуются зависимость мощно-
сти сопротивления качению автомобиля от скорости движения
и критерии проходимости — способность преодоления трудно-
проходимых участков грунта, наибольшая глубина снежной це-
лины, наибольшая крутизна грунтовых подъемов. Испытаниям
подвергаются два автомобиля каждой модели. В случае преодо-
ления выбранного участка или подъема в заданных условиях
заезды сравниваемых автомобилей повторяют в более тяжелых
условиях до выявления предельной проходимости каждого авто-
мобиля.
Длина подъемов должна быть не менее увеличенной вдвое
габаритной длины автомобиля. Определение глубины преодо-
леваемой снежной целины проводят при движении в направ-
лении увеличения высоты снежного покрова до застревания.
Определяют среднюю высоту снежного покрова в центре базы
при застревании. Затем на участках с меньшей, чем при застре-
вании, высотой снежного покрова определяют наибольшую вы-
соту снежного покрова, при которой возможно устойчивое дви-
жение автомобиля.
Для оценки' профильной проходимости рекомендуется опре-
делять ширину рва и высоту преодолеваемого порогового пре-
пятствия. Эти параметры определяют на ровной поверхности с
сухим твердым грунтом. Ширина рва — от 0,5 м с возрастанием
для каждого последующего участка на 0,3 м. Глубина рва не
менее 1 м. Высота порогового препятствия на различных участ-
154
ках увеличивается на 0,2 м, начиная с минимального значения
0,4 м.
Ширину участков выбирают не менее 5 м. При преодоле-
нии рва и порогового препятствия автомобиль движется под
прямым углом к препятствию на низшей передаче При застре-
вании автомобиля испытание повторяют по новой колее. Ре-
зультат повторного испытания принимают окончательным.
Определение показателя эффективности проводят при про-
беге автомобилей по комбинированному маршруту. Учитывая
нестабильность состояния грунта на возможных маршрутах и
сложность точной оценки механических свойств грунта на про-
тяжении всего маршрута, проводят сравнительные испытания с
использованием эталонного автомобиля. В комбинированный
маршрут в зависимости от времени года включают участки пе-
реувлажненной грунтовой дороги, размокшего грунта, заснежен-
ной дороги, снежной целины. Ориентировочная характеристика
состояния грунтовой поверхности для испытательных маршру-
тов приведена в табл. 15.
Таблица 15
Характеристика поверхности пя автомобилей
Опорная говерхность неполнойриводных полноприводных
Перех влажненпая грун- товая дорога Поле и лесные просеки, просеки с переувлажнен- ным грунтом Заснеженная грунтовая дорога Снежная целина Толщина переувлажнен- ного слоя грунта до 10 см; основание грунтовое, плотное; местность рав- нинная; подьемы и спус- ки до 10% Толщина переувлажнен- ного слоя до 15 см; подь- емы и спуски до 16% Частично укатанная; тол- щина снежного покрова до 15 см; местность рав- нинная Толщина снега до 20 см; плотность 0,2—0,3 г/см3 Толщина переувлажнен- ного слоя до 20 см; до- рога разбитая с колеями, рытвинами и другими не- ровностями’ местность пересеченная; подъемы и спуски до 18% Толщина переувлажнен- ного слоя до 25 см; подъ- емы и спуски до 15% Разбитая, мало укатан- ная; толщина снежного покрова до 30 см; мест- ность пересеченная, подъ- емы и спуски до 15% Толщина снега до 40 см; плотность 0,2—0,35 г/см3
Выбранные маршруты должны быть подробно описаны, раз-
делены на характерные участки и перед пробегом изучены води-
телями при предварительном проезде по ним. В процессе дви-
жения для каждого характерного участка фиксируют путь, вре-
мя движения, расход топлива, число и характер застреваний,
способ вывода автомобиля из застревания и время, затраченное
на это.
155
В качестве оценочных показателей определяют:
1. Среднюю скорость движения без учета застревания fCp=
= 5//дв, где /дВ — время движения автомобиля; S — путь.
2. Время, затраченное на преодоление застреваний, /п.
3. Среднюю скорость с учетом застреваний (показатель под-
вижности ) vu=S/ (/дв + /п).
4. Расход топлива на 100 км пути Q л.
5. Обобщенный показатель эффективности автомобиля Пэ =
— VnGpg/Q.
При необходимости определения влияния величины перево-
зимого груза на транспортную эффективность автомобиля заез-
ды по маршруту проводят при различной степени загрузки ав-
томобиля.
Гл а в а VII
АНАЛИЗ КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ
АВТОМОБИЛЯ И ДОПОЛНИТЕЛЬНЫХ
СЪЕМНЫХ СРЕДСТВ, ПОВЫШАЮЩИХ
ПРОХОДИМОСТЬ
Повышение эффективности автомобилей вне дорог может
быть достигнуто главным образом за счет усовершенствования
конструкции автомобиля и более полного использования его
технических возможностей. Изменять свойства грунтовой по-
верхности в большинстве случаев практически невозможно, по-
этому очень важно знать, каким образом конструктивные фак-
торы автомобиля влияют на его проходимость. В наибольшей
мере проходимость автомобиля зависит от конструкции ходовой
части (колесного движителя и подвески). Вместе с тем на про-
ходимость существенно влияют параметры трансмиссии, двига-
теля и несущей системы автомобиля.
§ 24. Влияние параметров ходовой части
Из конструктивных параметров автомобиля наиболее су-
щественное влияние на проходимость по мягким грунтам оказы-
вает конструкция движителя, характеризуемая числом и схемой
размещения колес, размерами и формой шин, конструкцией про-
тектора шин. В приведенных в гл. II уравнениях это влияние
характеризуется параметрами D; В\ Н\ р0; V, lAnpJ l'\ п- Прохо-
димость автомобилей по мягким грунтам повышают в основном,
увеличивая размеры шин или число колес.
Влияние наружного диаметра шины (D). На твердой поверх-
ности при увеличении наружного диаметра шины повышаются
длина и соответственно площадь поверхности контакта, незна-
чительно снижаются давления на дорогу, что повышает сцепле-
ние шины с грунтом и снижает пробуксовку.
На мягком грунте увеличение наружного диаметра шины в
большинстве случаев приводит не к возрастанию, а даже к
уменьшению длины контакта вследствие меньшего погружения
колеса в грунт. Последнее объясняется более равномерным рас-
пределением давлений у шин с большим наружным диаметром.
Сцепление колеса с грунтом с изменением наружного диа-
метра шин изменяется различно в зависимости от свойств грун-
та. Если сцепные свойства грунта возрастают по мере погруже-
ния в грунт, то при увеличении наружного диаметра сила сцеп-
ления уменьшается; если сцепные свойства грунта не изменяю-
157
тся по глубине, то, как правило, при увеличении наружного диа-
метра сила сцепления колеса с грунтом возрастает за счет бо-
лее равномерного распределения давлений и векторов касатель-
ных сил в контакте.
Сопротивление грунта качению колеса при увеличении на-:
ружного диаметра шин снижается на всех видах грунта. Сниже-1
ние коэффициента /г происходит как за счет уменьшения глуби-
ны колеи, так и за счет снижения бульдозерного действия. Чем
мягче грунт и больше неровностей, тем эффективнее влияние
наружного диаметра. Высота преодолеваемых препятствий и
допустимая для движения глубина колеи увеличиваются про-;
порционально радиусу колеса.
При увеличении диаметра уменьшается число циклов нагру-:
жения элементов шины на определенном пути, соответственно,
повышается допустимая по нагреву скорость движения. |
К отрицательным последствиям увеличения наружного дна-'
метра шины следует отнести значительное увеличение массы и]
момента инерции колеса, повышение центра тяжести машины
Влияние ширины профиля шины (В). Увеличение только ши-
рины профиля шины при Н = const, D = const приводит к увели-
чению ширины контакта без изменения его длины [1]. При этом
площадь контакта возрастает почти пропорционально ширине
профиля. Максимально допустимая деформация шины не изме-|
няется. Преодоление вертикальных препятствий практически не
улучшается. Допустимая для движения глубина колеи также не?
изменяется. [
Сопротивление качению колес по мягкому грунту при этом.1
определяет изменение как глубины, так и ширины колеи.*
В большинстве случаев при увеличении ширины профиля шины
превалирует значительное уменьшение глубины колеи, и поэто-
му сопротивление качению снижается.
Сцепление колес с грунтом при увеличении В обычно возрас-*
тает в соответствии с увеличением площади контакта и значе-1
нием внутреннего сцепления в грунте с0. Исключение составля-1
ют грунтовые поверхности с резко неоднородными сцепными'
свойствами. Например, глинистая грунтовая поверхность после-
дождя, на которой понижение давлений иногда приводит '
уменьшению сцепления |
При условии равенства объемов колес увеличение ширины
профиля по сравнению с увеличением наружного диаметра су-1
щественно эффективнее на заболоченном грунте, имеет незначи-'
тельное преимущество на суглинке и худшие результаты на снегу;
Влияние диаметра профиля (В = Н\ с/=const). В отличие от
рассмотренных двух случаев при увеличении как ширины, так
и высоты профиля шины пропорционально возрастает допусти-|
мый нормальный прогиб, что дополнительно увеличивает длину
н ширину поверхности контакта, а также расширяет возможно-;
сти регулирования внутреннего давления в шине. Сопротивление
158
качению по твердой поверхности незначительно повышается в
результате роста величины проскальзывания в контакте и уве-
личения массы резинокордного материала, подверженного де-
формации. Сцепление на сухих дорогах, как правило, возраста-
ет, а на мокрых может и увеличиваться, и уменьшаться. На де-
формируемых грунтах влияние увеличения диаметра профиля
шины на сопротивление качению и сцепление колес с грунтом
имеет промежуточный характер по сравнению с первыми двумя
случаями. Однако увеличение коэффициента тяги может быть и
более значительным вследствие лучшего соотношения геометри-
ческих параметров поверхности контакта.
Влияние формы профиля шины. В самом общем виде форму
профиля можно охарактеризовать параметром Н/В. У извест-
ных типов шин этот параметр изменяется в пределах 1,1—0,2.
Следует отметить, что возможности уменьшения относительной
высоты профиля при увеличении ширины обода и применении
опоясывающего кольца почти не ограничены. Максимальное же
значение Н/В ограничено равновесной конфигурацией профи-
ля [10].
Рассмотрим влияние формы профиля (Н/В) на размеры кон-
тактной поверхности и нормальный прогиб шины при следую-
щих условиях: сумма ширины и высоты профиля постоянна:
В-т-Н—const; угол изгиба боковин на единицу длины для всех
рассматриваемых шин при деформации профиля принят посто-
янным для обеспечения равных условий работы боковин; прини-
маются постоянными соотношения
/ziip//7 —0,15; bup/B=0& D/(H + B) = 2.
На рис. 59 показаны форма профиля в недеформированном
состоянии при значениях Н/В=\\ 0,75; 0,5; 0,25 к изменение не-
которых эксплуатационных показателей в зависимости от фор-
мы профиля. При уменьшении Н/В прогрессивно возрастает
жесткость шины F/hZi увеличивается относительная ширина кон-
такта ft, площадь F' = F/0,5D (Н+В) имеет максимальное значе-
ние при Н/В = 0,5. При снижении Н/В от 1 до 0,5 площадь кон-
такта увеличивается на 30%, а относительная эластичность
уменьшается на 65%. Таким образом, при сохранении перимет-
ра профиля и наружного диаметра неизменными можно увели-
чить площадь контакта, снижая параметр Н/В до 0,5, но это
приводит к уменьшению нормальной эластичности шины При
Н/В ниже 0 5 площадь контакта не увеличивается, но очень
резко снижается эластичность.
На рис. 59,в приведены расчетные значения эксплуатацион-
ных показателей колеса в зависимости от формы профиля (Н/В)
при условии равенства объема колеса (Ук = 0,65 м3). Значения
наружного диаметра выбирались из условия применения мини-
мального диаметра обода, необходимого для размещения колес-
ных тормозов, D = 2H+KGu/B, где К= 103 м2/Н Из приведенных
159
Рис. 59. Влияние формы про-
филя шипы на эксплуатацион-
ные показатели:
а—форма профайл я при различных значениях Н В; б—зависимость параметров контакта
от НВ; в—зависимость показателей проходимости от Н/В; 1—H/B = Q,25; 2—Н/В=0,5;
3—Н/В=0,75; 4—HjB=\; 5—на размокшей грунтовой дороге; 6— на размокшей пашне; 7—
К." смежной целине (//г = 50 см); 5—на сыпучем песке
графиков следует, что влияние формы профиля шины на экс-
плуатационные показатели колеса на различных грунтовых по-
верхностях различно, многие зависимости экстремальные. На
грунтовой дороге все показатели лучшие при Н/В = 0,754-1,0.
На размокшей пашне изменение показателей fN и в зависи-
мости от Н/В незначительное. Наибольшая проходимость полу-
чается при Н/В=\, а лучшая экономичность — при Н/В = 0,25.
На снежной целине лучшее сочетание показателей получается
при /7/23 = 0,5, а на песке — при Н/В = 0,64-0,7.
В настоящее время выпускаются вездеходные шины четырех
типов, существенно отличающиеся формой профиля: тороидные,
широкопрофильные, арочные и пневмокатки. На рис. 60 приве-
дены сравнительные размеры шин различных типов одинаковой
грузоподъемности. Там же показаны размеры площади контак-
та при номинальном и минимальном значениях внутреннего
давления воздуха. В табл. 16 приведены основные сравнитель-
ные показатели по этим шинам.
У современных шин с регулируемым давлением размеры про-
филя на 25—40% больше, чем у шин низкого давления той же
грузоподъемности. Принципиальное их отличие заключается в
возможности кратковременного движения при нормальном про-
гибе до 0.35 Н. Возможность их использования при еще боль-
шем прогибе ограничивается потерей боковой устойчивости.
Минимальные удельные давления на грунт у шин с регули-
руемым давлением, применяемых для современных автомоби-
лей, около 0,09 МПа. Для получения еще меньших давлений не-
обходимо увеличивать размеры профиля. При этом увеличива-
ется и наружный диаметр [1], а диапазон изменения давлений
снижается.
160
Рис. 60. Вездеходные шины:
а—низкого давления; б—тороидная с регулируемым давлением; в—широкопрофильная С
регулируемым давлением; г—арочная; д—пневмокаток
Арочные шины отличаются специфической формой профиля,
напоминающей арку. Боковины шины имеют малую высоту и
большую пзгибпую жесткость. Поэтому при больших значениях
нормального прогиба беговая часть арочной шины деформиру-
ется подобно мембране, прогибаясь внутрь шины. При этом
Таблица 16
Параметры Тип шин
тороидные с регулируемым давлением широкопрофиль- ные арочные пневмокатки '
Н/В 1 0,7 0,37 0,32
DIB 3 2,5 1,6 1,0
Вр/В 0,75 0,8 1,0 1,0
Йпр/Я 0,1 0,12 0,3 0,2
fш 0,015 0,012 0,020 0,028
бщ, кН/м 400 500 330 160
/<г/г0, 1/кН 0,008 0,004 0,015 0,007
Ртах!РпгIп » МПа 0,35/0,09 0,35/0,08 0,2/0,08 0,08/0,03
0,4 0,35 0,2 о,1
Гк/Ок, мЗ/кН 0,0246 0,0182 0,0267 0,0630
G*m/GK 0,05 0,028 0,037 0,05
* С7Ш—вес шины
6 1342
161
происходит резкое перераспределение нормальных давлений по
ширине контакта — уменьшение в средней части и увеличение
по краям. Такой характер деформации шины на мягком грунте
способствует меньшему погружению шины в грунт, а на твердой
дороге вызывает повышенный износ протектора.
В еще большей мере износ протектора арочных шин увеличи-
вается вследствие проскальзывания элементов шины относи-
тельно дороги из-за большого значения стрелы дуги протектора.
Шпрокопрофильные шины принципиально отличаются от
арочных наличием легкоподвижных боковин. Параметры профи-
ля, присущие широкопрофильным шинам, являются оптималь-
ными для большинства эксплуатационных показателей. Однако
универсальность, определяемая диапазоном возможного измене-
ния нормальной эластичности и давлений в контакте, у них нес-
колько ниже, чем у тороидных шин с регулируемым давлением.
Пневмокатки имеют наибольшую по сравнению со всеми
другими шинами ширину профиля при сравнительно небольшом
наружном и очень малом внутреннем диаметрах. Для пневмо-
катков характерны самые малые удельные давления на грунт и
высокая нормальная эластичность за счет увеличения размеров
профиля в ширину и в высоту. Наибольшая эффективность
пневмокатков отмечается в условиях движения по песку и забо-
лоченным грунтам. При использовании на твердых дорогах
пневмокатки имеют недостатки, отмеченные для арочных шин.
но выраженные в меньшей степени.
Влияние конструкции протектора. На эксплуатационные ка-
чества колеса существенно влияют следующие параметры про-
тектора: относительная ширина Ьпр/В\ радиус кривизны гпр; ко-
эффициент насыщенности протектора £н; рисунок протектора
(размеры и форма грунтозацепов и впадин). Характер влияния
этих параметров различный в зависимости от дорожно-грунто-
вых условий.
При выборе параметров протектора для дорог с твердым по-
крытием исходят из необходимости обеспечить надежное сцеп-
ление в продольном и поперечном направлениях, малые потери
на внутреннее трение, бесшумность, минимальные давления на
дорогу для снижения износа протектора и дорожного покрытия.
При увеличении ширины протектора уменьшается давление
на дорогу, но вместе с тем увеличивается толщина протектора
по краю беговой дорожки, в результате чего повышаются поте-
ри на внутреннее трение, температура и опасность разрушений
в этой зоне, увеличиваются жесткость боковых стенок шины и
напряжения в каркасе боковин.
При уменьшении до определенного предела кривизны бего-
вой поверхности снижаются потери на качение и износ протек-
тора вследствие уменьшения деформации элементов шины и их
проскальзывания относительно дороги. Недостатки, связанные с
уменьшением кривизны беговой поверхности протектора обус-
162
Рис. 61. Зависимость коэффициента сцепления
от параметров протектора:
/—на снегу; 2—на заболоченном грунте; 3— на суг-
линке
ловлены главным образом разностью
между радиусами кривизны каркаса и
беговой дорожки, что приводит к пере-
грузке плечевых зон протектора и повы-
шает неравномерность распределения
давлений по ширине протектора при
большой деформации шины.
Увеличение коэффициента насыщенно-
сти протектора kn приводит к снижению
давлений на дорогу и уменьшению изно-
са протектора. Однако при этом ухудша-
ется сцепление колеса с дорогой, когда
она мокрая и грязная. Практикой уста-
новлены для автомобильных дорог опти-
мальные значения /?п = 0,6-4-0,8.
При увеличении высоты грунтозаце-
пов повышается долговечность протекто-
ра, улучшается сцепление на грязных до-
рогах, но вместе с тем увеличиваются по-
тери на качение, возрастают масса и мо-
мент инерции шины. Увеличение потерь
на качение при повышении высоты грунтозацепов объясняется
как ростом гистерезисных потерь в резине протектора, так и уве-
личением проскальзывания грунтозацепов относительно дороги.
На мягком грунте протектор должен прежде всего обеспечи-
вать возможно большую силу сцепления в продольном направ-
лении при минимальном буксовании.
Влияние на силу сцепления коэффициента насыщенности
протектора kn выражено уравнением (71) Коэффициент насы-
щенности рисунка протектора ku оказывает различное влияние
на силу сцепления в зависимости от соотношения сил трения ре-
зины по грунту тр и сил сопротивления грунта срезу т. В случае
т<тр, что характерно для песчаных грунтов, целесообразно уве-
личение коэффициента kH. Если тр<т, что свойственно связным
грунтам, то целесообразно уменьшение коэффициента ku. На
рис. 61 показана зависимость коэффициента сцепления ср от ве-
личины kn для снега, заболоченного грунта и суглинка.
Влияние расстояния между грунтозацепами менее изучено.
На деформирующемся связном грунте при малых значениях
буксования сила сцепления больше для небольших расстояний
между грунтозацепами (Г), а при больших значениях буксова-
ния сила сцепления повышается по мере увеличения значений
I до определенного предела. Этот вывод сделан без учета влия-
163
ния самоочищаемости протектора. Чем больше /, тем лучше са-
моочнщаемость. В тех случаях, когда грунтозацепы не полно-
стью погружаются в грунт (малые давления, плотный грунт,
высокие грунтозацепы), сопротивление грунта срезу обусловле-
но лишь силами внутреннего сцепления. Срез происходит в виде
скалывания под некоторым углом к горизонтальной плоскости.
При этом увеличение расстояния между грунтозацепами приво-
дит к уменьшению сил сцепления.
Влияние высоты грунтозацепов на сцепление колеса с грун-
том проявляется различно в зависимости от типа и состояния
грунта. На песчаных грунтах большая высота грунтозацепов
вредна, так как в этом случае сцепление, обусловленное трени-
ем резины по песку, больше, чем за счет сдвига грунта. На связ-
ных грунтах без близлежащего твердого слоя высота грунтоза-
цепов в основном влияет на самоочищаемость протектора и на
площадь бокового среза грунта. С увеличением высоты грунто-
зацепов несколько увеличивается площадь среза грунта и соот-
ветственно сцепление. Очень большое влияние на сцепление
оказывает высота грунтозацепов на грунтах с близлежащим
твердым основанием и на неоднородных грунтах, с увеличива-
ющейся по мере заглубления плотностью.
В общем случае аналитически оценить влияние высоты грун-
тозацепов Дпр на удельную силу сцепления ттах можно по урав-
нениям, преобразованным из выражений (72) и (53):
*тах = КРЪ> -1- (1 — £н) <Р tg <р.) + С ) [ 1 + Сд (Лг + ( 198)
ЕРS ^ир)
Р=
E(hr + Дпр) 4- ablivps arctg [{Иг — /гг — Дир) а£пр]
(199)
где Сд и Цд—параметры, определяемые опытным путем и зави-
сящие только от неоднородности грунта по глубине. Величина
Сд может быть как положительной, так и отрицательной.
Эти уравнения подтверждают приведенные выше соображе-
ния. При со = О и tg <ро<<Рр, что характерно для песков, наиболь-
шее сцепление получается при А’н->-1. При с0>1 и <pP<tg <ро
(связные грунты) наибольшее сцепление получается при мини-
мальном значении /гп. При этом, если Сд <0, целесообразно,
чтобы грунтозацепы имели небольшую высоту, а если Сд>0,
желательно увеличить их высоту. Эффективность увеличения
высоты грунтозацепов тем больше, чем выше значения Сд и цд
и меньше коэффициент kn. Экспериментальные зависимости
ср (/') и ср (ДПр) приведены на рис. 61.
Для снега существенное влияние Z' и ДПр на величину <р от-
мечается при очень малом нормальном давлении (р<0,015 МПа)
[31]. Для этих условий рекомендуется соотношение //=8ЛПр-
При увеличении р и снижении связности снега влияние Г и Дпр
существенно снижается.
164
Форма грунтозацепов определяет сцепление, самоочищае-
мость и эластичность шины В результате увеличения угла на-
клона упорной поверхности грунтозацепа повышается уплотне-
ние грунта между грунтозацепами, что увеличивает сопротивле-
ние грунта срезу. При очень большом угле наклона упорной по-
верхности ау возможно проскальзывание шины относительно
грунта без его среза. При этом сила сцепления шины с грунтом
может уменьшиться, так как не используется внутреннее сцепле*
ние грунта. Влияние угла ссу на самоочнщаемость неоднозначно.
При увеличении угла ау, с одной стороны, уменьшается опас-
ность заклинивания грунта между грунтозацепами, с другой —
повышается изгибная жесткость грунтозацепов, уменьшается их
подвижность относительно беговой поверхности, вследствие чего
самоочпщаемость снижается. При значительном увеличении уг-
ла ссу и /?н = const расширяется основание грунтозацепов, повы-
шается жесткость протектора и увеличивается его масса.
Влияние числа осей. Проведем качественный анализ, приняв
форму контакта колеса с грунтом прямоугольной, ljb = x, рас-
пределение удельных давлений по контакту равномерным, р =
= const для всех осей. Выразим ширину контакта через вес ма-
шины Ga и число осей п:
Ь=Д Oa/2»uvnp. (200)
В качестве оценочного показателя используем максимально
возможное число проходов автомобилей по одному следу пм-
Воспользовавшись уравнениями (6), (7), (91), (200), найдем
общее выражение для максимально возможного числа проходов
машин по одному следу в зависимости от веса машины Ga, до-
пустимой глубины колеи /гк, параметров грунта X], Х2; £; Яг и
параметров движителя п; v; р:
2tyV
п —-----—— ------------------------------------------ .
т / 2Ganv Г 2р л(77г — hK) ab Нг—hK
I VL«№HX2)arctg----------й----+^arctg_^r“
(201)
Рассмотрим несколько конкретных случаев.
1. На суглинистых и глинистых грунтах без близлежащего твердого ос-
нования, учитывая %1=0, Нг—со и выражение (200), получим
2/р v
/2 м .
naGa/2EhK + (р А'зН-!)) 2Ganv р
Полученная функция пм(/г) возрастает при р<Х2 и убывает при р>Х2.
Следовательно, в случаях, когда удельные нагрузки меньше несущей способ-
ности грунта (грунт уплотняется), целесообразно увеличивать число осей.
В случае р>Х2 (грунт не уплотняется) целесообразно минимальное число
осей.
2. На песчаных грунтах без близлежащего основания Hi—oo
2fl) v
пм =------------------‘________________" •
2pxnlXy 4- naGa/2EhK— 2Gapy p
165-
Исслеював функцию пУ1(п) на максимум, получим
/2o:t = GaX2i 8рЗ V.
В большинстве случаев Х1<Ю,04; р>1; v>l, поэтому nOpt0,000)1 Зба. При
Ga 150 кН максимальное число проходов получается при применении двух-
осного автомобиля. Трех- и четырехосные автомобили мог^т оказаться бо-
лее эффективными на песках только при общем весе более 150 кН.
3. На суглинистых и глинистых грунтах с близлежащим твердым
ванием Xi«0; arctg (F)« (F)
осно-
/р v
vpn (//,• - Лк)/л2 + I Ganv.'2p [p (fir - Лк)/EhK - 1] '
В случаях, когда p(Hr—hK)jEhr> 1, функция пы(п) убывающая,
ибольшее число проходов получается при минимальном числе осей
В наиболее вероятных случаях р(Нг—hK)!Ehu<Z\ функция /?м(л)
максимум
На-
имеет
2
"o?t” 8vp3
EhK
4. На песчаных грунтах с близлежащим твердым основанием
А'о^О; arctg (F).^(F)
/р-у
/?М= -----------------==-----------------------------,
vpn(Hr — hK) | / 2yp/i Ganv p(Hr—hK) ~
/Vi I аа J 2р L
<VG[1 -p{HT-hK)!EhK
"o:t" 6vp2(tfr-AK)
Таким образом, на грунтах с близлежащим твердым основанием, если
дорожный просвет больше толщины мягкого слоя, допустимое число про-
ходов неограничено при любом числе осей. Чем больше разность Hv—hK и
меньше отношение р.^/р, тем меньше оптимальное число осей автомобиля
Влияние внутреннего давления воздуха в шине. Внутреннее
давление воздуха в шинах можно легко изменять в условиях экс-
плуатации в зависимости от вида и состояния дорожно-грунто-
вой поверхности. Этот параметр входит во все расчетные форму-
лы, по которым можно оценить его влияние на эксплуатацион-
ные показатели автомобиля.
На рис. 62,а приведены зависимости основных составляю-
щих сопротивления качению /г и от внутреннего давления
воздуха. Кривая зависимости f(pu) имеет минимум, обусловлен-
ный противоположным характером функций /г(рм?) и /ш(р?с)•
На рис. 62,6 приведены экспериментальные зависимости
j(pv) для разных грунтов и различных шин. Эти зависимости
имеют общий характер для всех шин, включая арочные и пнев-
мокатки. Оптимальное значение внутреннего давления воздуха в
шинах ptfopt возрастает при увеличении вертикальной нагрузки
на колесо, модуля деформации грунта и гистерезисных потерь в
шине. При увеличении размеров шины и толщины деформируе-
мого слоя грунта величина pw Opt уменьшается. На грунтах с пе-
166
Рис. 62. Влияние внутреннего давления воздуха в шипах на показатели
проходимости:
а—зависимость составляющих сопротивления качению от давления воздуха в шинах
(шина 12.00—18; С1; = 15000 Н); б, в—зависимости [(р. ) и (р(р .) для различных шин и
грунтов; г—тягово-экономические характеристики движения колеса по песку. (шина
12.00—18; Ок = 15000 II); сплошные кривые—шины 1140—700; штриховые кривые—шины
12.00—18; ытрихпунктирпые кривые—шины 1200X1200X500; I, 5-и 6—песок; 3, 4 и 7—
суглинок; 2—снег
реувлажненным верхним слоем и твердым основанием при сни-
жении pw значение f уменьшается мало, а в некоторых случаях
повышается вследствие увеличения ширины колеи и внутрен-
них потерь в шине.
Сводные экспериментальные и расчетные данные по влиянию
внутреннего давления в шине на коэффициент сцепления колеса
с грунтом приведены па рис. 62,в. Параметры контакта зависят
от изменения внутреннего давления воздуха и определяют сцеп-
ление шины с грунтом. На однородных по глубине грунтах ре-
шающим фактором является площадь контакта. При этом из-
менение сцепления определяется значением Cq (внутреннего
сцепления в грунте) На слабых грунтах величину сцепления
167
часто ограничивает несущая способность грунта. В этом случае
<Pmax<tg Фо- При очень малом значении pw, когда шина в сред-
ней части контакта прогибается вверх и на величину давления
на грунт большое влияние оказывает жесткость стенок по кон-
туру контакта, значительно повышается несущая способность
грунта и сцепление колеса с грунтом. На грунтах с неодно-
родными по глубине сцепными свойствами определяющим явля-
ется характер изменения грунта по глубине. Если с увеличением
глубины сцепные свойства грунта повышаются, то при сниже-
нии pw сила сцепления может быть уменьшена (рис. 62,в, кри-
вая 7).
Тягово-экономические характеристики колеса для различных
значений pw приведены на рис. 62,г. Эти характеристики на-
глядно показывают, что при качении колес по рассматриваемой
грунтовой поверхности на всех режимах, кроме /гтшах, лучший
показатель экономичности получается при pw=0,l МПа. pw —
= 0,05 МПа рационально только при £т>0,33.
По аналогичным характеристикам для других рассмотренных
грунтов установлены следующие оптимальные значения pw\
снег — 0,053 А1Па; пашня на суглинке (весной)—0,04 МПа;
заболоченный лхт— 0,05 МПа; размокшая грунтовая дорога —
0,15 МПа.
Для оценки влияния внутреннего давления воздуха в шинах
автомобиля ГАЗ-66 на плавность хода при движении по неров-
ным дорогам проведен расчет по формулам (158), (168), (169).
Из результатов расчетов (рис. 63) следует, что при снижении
давления воздуха в шинах от 0,3 до 0,15 МПа среднеквадратич-
ное значение вертикальных ускорений снижается во всем диапа-
зоне скоростей па булыжном шоссе на 13—19%, а на грунтовой
дороге на 11,5—14,5%. Снижение давления в шинах от 0,3 до
0,15 МПа позволяет увеличить допустимую по плавности хода
скорость движения на грунтовой дороге с 15 до 20 км/ч (на
33% ), на булыжном шоссе с 40 до 60 км/ч (на 50%).
На рис. 63,6 приведены характеристики (Z^/q0) (у) для ка-
бины автомобиля ГАЗ-66 при различных давлениях воздуха в
шинах. Максимальные относительные значения эффективных
вертикальных ускорений составляют при рн.=0,3 МПа —
430 1/с2, при pw = 0,15 МПа—275 1/с2 и при ргг = 0,05 МПа—
170 1/с2.
При граничном значении 2Эф = 2^ допустимая высота перио-
дических неровностей следующая:
Рк, МПа..................... 0,3 0,15 0,05
2^ошах» см.................. 9,1 14,8 23,0
Следовательно, при снижении ргс с 0,3 до 0,15 МПа высота
преодолеваемых без снижения скорости периодических неров-
ностей увеличивается с 9,1 до 14,8 см (на 38,5%), а при pw =
= 0,05 МПа допустимая высота периодических неровностей по-
168
км!4
б)
Рис. 63. Влияние внутреннего давления воздуха в шинах на показатели
движения по неровной поверхности:
а—на <с и допустимую скорость движения; б—амплитудно-частотная характеристика ар-
томобитя ГАЗ-66 при различных значениях р<г; /—грунтовая дорога; 2—булыжное шоссе
вышается до 23 см (в 2,5 раза). Однако при этом ограничивает-
ся скорость по условиям нагрева шин.
Влияние величины нормальной нагрузки на колесо. В
ГОСТах на шины приведены поминальные значения грузоподъ-
емности и внутреннего давления, при которых обеспечивается
рациональное сочетание эксплуатационных свойств шины на
автомобильных дорогах.
На грунтовых поверхностях оптимальная грузоподъемность
шипы изменяется в зависимости от механических свойств грун-
та. Знать характер влияния нормальной нагрузки на эксплуата-
ционные показатели колеса на различных грунтах важно не
только конструктору, но и специалисту по эксплуатации автомо-
билей, так как современные типы подвесок позволяют перерас-
7 1342 169
пределять нагрузку между колесами в процессе эксплуатации.
На мягком грунте деформация шины меньше, чем на твердой
поверхности. Поэтому по условиям срока службы шины ее гру-
зоподъемность на мягком грунте может быть увеличена: GKrp =
” GK Тв (1 + 0,5c,Ar//iz).
Сила сопротивления качению при повышении GK увеличивает-
ся во всех случаях, так как увеличивается деформация грунта
(почти вся работа, затрачиваемая на деформацию грунта, явля-
ется потерянной, а большая часть работы, затраченной на де-
формацию шины, является обратимой).
При наличии близлежащего твердого слоя повышение GK при-
водит главным образом к увеличению деформации шины.
Сила сцепления колеса с грунтом при увеличении нормаль-
ной нагрузки в большинстве случаев повышается. Однако коэф-
фициент сцепления при этом может как увеличиваться, так и
уменьшаться. Определяющее значение имеет изменение сцепных
свойств грунта по глубине. На грунтах с постоянными по глуби-
не сцепными свойствами коэффициент сцепления при повыше-
нии GK обычно снижается, так как площадь контакта возрастает
в меньшей мере, чем нагрузка.
Зависимость показателя эффективности колеса на трудно-
проходимых грунтах от нормальной нагрузки приведена на
рис. 64. Исследование проведено для двух случаев: a) pw = const
и б) /?2 = const. Параметр погружения (/zz+/ir) на всех грунтах
в обоих случаях при повышении GK увеличивается. Чрезмерно
большое погружение получается на пашне и снежной целине
при GK>10 000 Н и на заболоченном лугу при GK>20 000 Н.
Наиболее важной и показательной для труднопроходимых грун-
тов является функция П(СК). При Az = const для четырех видов
грунтов получены разнохарактерные зависимости. На заболо-
ченном грунте увеличение GI{ приводит к снижению II и потере
проходимости при GK>25 000 Н. На грязной грунтовой дороге
совершенно противоположная зависимость. На пашне при на-
грузках 20 000—25 000 Н значение П приближается к нулю, а на
песке во всем диапазоне нагрузок /7 = 0,324-0,35.
В случае pw = const на суглинке функция /7(GK) имеет опти-
мум при Gl{= 15000 Н. На снегу при //г=40 см проходимость
обеспечивается лишь при минимальном значении p(V. При pw—
= 0,2 МПа движение возможно лишь при GK<12 000 Н.
Характер изменения показателя экономичности соответству-
ет зависимости 77(GK). При уменьшении П значение Ду, как пра-
вило, увеличивается. При /7^0, fN = oo.
Влияние подвески. Три основных фактора определяют влия-
ние подвески на проходимость автомобиля.
От параметров подвески существенно зависит характер
изменения нормальных сил в контакте колес с грунтом и, следо-
вательно, характер изменения сил сцепления. В результате ко-
лебаний подрессоренной и неподрессоренной масс нормальная
170
hr ’<•
hr! hк
Рис. 64. Влияние нормальной нагрузки на колесо на показатели проходи
мости:
fl~^w=c°nst; б—/iz=9,8 см; /—песок; 2—пашня: 3—заболоченный луг; 4—размокшая
грунтовая дорога; 5—снег; 6—суглинок
нагрузка на колеса может изменяться от 0 до 2GK. При GK=0
происходит отрыв колес от грунта, силы сцепления становятся
равными нулю; при последующем увеличении нормальной силы
(до 2GK) сила сцепления возрастает до величины большей, чем
при статическом нагружении. Однако средняя величина силы
сцепления при этом в большинстве случаев снижается. По ре-
зультатам экспериментов при высокочастотном резонансе силы
сцепления колес с дорогой снижаются примерно на 20%. Сум-
марная сила тяги, развиваемая колесами, особенно сильно сни-
жается при колебаниях левых и правых колес в различных фа-
зах при наличии между ними простого дифференциала. В этом
случае существенная разгрузка одного колеса приводит к сни-
жению силы тяги и на другом колесе.
Значительная разгрузка отдельных колес возможна при пре-
одолении различных геометрических препятствий. Для устране-
7* 171
ния отрицательного влияния подвески на сцепление колес с
грунтом необходимо: во-первых, иметь блокированную связь
между колесами; во-вторых, максимально увеличивать ход под-
вески.
2. От параметров подвески зависит сопротивление движе-
нию. Кинетическая энергия движущейся машины при встрече с
неровностью дороги частично затрачивается на преодоление го-
ризонтальной составляющей дополнительной реакции дороги и
частично на возбуждение колебаний подрессоренных и неподрес-
соренпых масс машины.
• Из уравнения (161) следует, что всякие мероприятия, умень-
шающие относительную амплитуду колебаний Л, уменьшают до-
полнительное сопротивление. При уменьшении сопротивления
амортизаторов /< возрастает А, поэтому значение фдоп может
быть как увеличено, так и уменьшено в зависимости от соотно-
шения К и А. По-видимому, должно существовать оптимальное
значение /(, при котором получается фДОптт-
При движении по мягкому грунту от характера изменения
нагрузки на колеса, определяемого подвеской, зависит величина
деформации грунта и значение сопротивления грунта качению.
Это влияние особенно значительно на грунтах с низкой несущей
способностью, на которых под воздействием динамических на-
грузок может существенно увеличиться глубина колеи.
От параметров подвески зависит максимально допустимая
по плавности хода скорость машины. Известно, что проходи-
мость может быть значительно повышена за счет использования
кинетической энергии машины для преодоления непродолжи-
тельных участков тяжелого грунта. Для реализации этой воз-
можности необходимо не только увеличение удельной мощности
двигателя, но и совершенствование подвески для повышения
плавности хода. На рис. 45 приведены расчетные характеристи-
ки плавности хода автомобиля ГАЗ-66 по грунтовой дороге, из
которых следует, что максимально допустимая скорость для
кратковременного движения 27 км/ч. Следовательно, при выб-
ранном уровне неровностей поверхности движения увеличение
мощности двигателя не приведет к повышению скорости и про-
ходимости. Необходимо улучшение параметров подвески. Ре-
зультаты исследования показывают, что увеличение мощности
двигателя автомобиля ГАЗ-66 в 2 раза привело к повышению
их средней скорости по грунтовой дороге лишь на 7%. Увеличе-
ние же хода подвески в 2 раза позволило увеличить среднюю
скорость па 36%.
Современные автомобили преодолевают без ударов подвесок
в ограничители неровности высотой 5—10 см Повышение спо-
собности преодолевать неровности без ударов в ограничители
может быть достигнуто при увеличении сопротивления аморти-
заторов, но это несколько ухудшает плавность хода автомобиля
на коротких мелких неровностях.
172
От параметров подвески зависят возможности автомобиля
по преодолению геометрических препятствий.
Наличие упругой подвески колос снижает динамическую ус-
тойчивость от бокового опрокидывания автомобиля. Чем больше
ход колес относительно кузова, тем меньше допустимый угол
бокового крена (преодолеваемый косогор) из-за дополнительно-
го динамического бокового крена на упругих элементах подвес-
ки. Для уменьшения бокового крена ставят стабилизаторы попе-
речной устойчивости. На некоторых автомобилях высокой про-
ходимости часть колес (обычно средние) соединяют с кузовом
жестко, без применения упругого элемента. Возможности авто-
мобилей по преодолению рвов, при прочих равных условиях, за-
висят от величины хода колес вниз, а для автомобиля 6X6 с
симметричным размещением средней оси также от жесткости и
хода вверх колес средней оси. Чем меньше жесткость и больше
ход подвески, тем выше показатели динамического преодоления
автомобилем пороговых препятствий.
Как следует из формулы (182), при увеличении энергоемко-
сти подвески передних колес повышаются возможности автомо-
биля по динамическому преодолению коротких подъемов без
удара подвески в ограничители.
Независимые подвески по сравнению с зависимыми имеют
следующие преимущества в отношении влияния на проходи-
мость автомобиля: возможность получения более мягкой под-
вески с большими ходами колес без повышения центра тяжести
автомобиля, меньшие неподрессоренные массы и, следовательно,
меньшую вероятность высокочастотного резонанса [18], лучшую
приспосабливаемость колес к неровностям пути, возможность
исключения автоколебаний и непроизвольного поворота управ-
ляемых колес, возможность получения гладкого днища. Вместе
с тем следует иметь в виду, что у независимой подвески дорож-
ный просвет должен быть больше, чем у зависимой, так как он
изменяется при колебаниях кузова.
§ 25. Влияние конструкции трансмиссии и мощности двигателя
Основными факторами, определяющими влияние трансмис-
сии на проходимость, являются степень использования сцепле-
ния колес автомобиля с грунтом, плавность изменения момента,
подводимого к ведущим колесам, затраты мощности на буксо-
вание.
Решающее значение при оценке возможности полного ис-
пользования сцепления колес с грунтом и затрат мощности на
буксование колес имеет характер связи между колесами, опре-
деляемый схемой трансмиссии, а также свойствами и местом
размещения дифференциалов в трансмиссии.
Влияние типа межколесного дифференциала. На современ-
ных полноприводных автомобилях между колесами устанавли-
173
вают простой (шестеренчатый) дифференциал, простой диффе-
ренциал с принудительной блокировкой, самоблокирующиеся
дифференциалы с повышенным внутренним трением, дифферен-
циал с механизмами свободного хода.
Простой (шестеренчатый) дифференциал имеет малое внут-
реннее трение и соответственно малую величину коэффициента
блокировки, Х=Л1Отет/Л4заб= 1,07ч-1,1. Поэтому при равных зна-
чениях сцепления левого и правого колес с грунтом как при
прямолинейном, так и при криволинейном движении обеспечи-
ваются наилучшие показатели проходимости и экономичности.
Если силы сцепления с грунтом левого и правого колес неоди-
наковы, такой дифференциал не обеспечивает возможности пол-
ного использования сцепления колес с дорогой в случаях, когда
коэффициент блокировки К меньше отношения сил сцепления
левого и правого колес е. Коэффициент использования сцспле-
ния колес с грунтом равен /г? — . Соответственно умень-
шаются значения показателей проходимости П и 77:).
При применении простого дифференциала с принудительной
блокировкой может быть обеспечено полное использование сцеп-
ления колес с грунтом и при 8^1, так как при заблокирован-
ном дифференциале %=оо. Однако при криволинейном движе-
нии автомобиля с заблокированным дифференциалом нарушает-
ся соответствие между угловой и линейной скоростями колес,
внутреннее колесо движется с пробуксовкой, что снижает П и
/7,ъ увеличивает износ шин и деталей механизма привода к ко-
лесам. По экспериментальным данным [32], при блокировке
межколссного дифференциала радиус поворота увеличивается
на 25—30%.
Таким образом, простой дифференциал с принудительной бло-
кировкой обеспечивает высокие показатели проходимости, пово-
рачиваемости и топливной экономичности только при условии
своевременного включения и выключения механизма блокиров-
ки, что определяется правильностью и своевременностью дейст-
вий водителя.
Возможны такие условия движения (неоднородный грунт,
криволинейный путь), в которых водителю трудно найти пра-
вильное (оптимальное) решение или требуется очень частое
включение и выключение блокировки, трудновыполнимое для
водителя. Часто встречаются случаи, когда включение блоки-
ровки после застревания и «зарывания» в грунт буксующего
колеса не обеспечивает возможности движения. Если же блоки-
ровка включается до подхода к труднопроходимому участку,
автомобиль двигается без застревания. Учитывая, что водитель
не всегда способен определить необходимый момент включения
блокировки, неизбежно проявляются недостатки и блокирован-
ной и дифференциальной связи.
1 74
Самоблокирующиеся дифференциалы с повышенным внут-
ренним трением имеют коэффициент блокировки, значительно
больший единицы. Они обладают некоторой автоматичностью
действия. Дифференциал автоматически блокируется при отно-
шении моментов на колесах меньшем, чем коэффициент блоки-
ровки. И только в случае равенства отношения моментов коэф-
фициенту блокировки дифференциал разблокируется и дает
возможность колесам вращаться с неодинаковой угловой ско-
ростью.
При увеличении коэффициента блокировки возможность ис-
пользования сцепления колес с грунтом в большинстве случаев
. , 1 + Л \ ..
повышается , исключение составляет случаи дви-
I 1 ч- £ /
жени я на повороте по однородному грунту или при меньшем
сцеплении с грунтом внутренних колес по сравнению с наруж-
ными (забегающими). В этом случае для реализации макси-
мально возможной силы тяги внутренние колеса двигаются с
пробуксовкой большей, чем наружные, что может привести к
снижению сцепления колес с грунтом.
Затраты мощности на криволинейное движение по однород-
ному грунту при увеличении К повышаются, в особенности в слу-
чаях, когда дифференциал остается заблокированным.
Найдем зависимость ф//С<р=/(%) для граничного случая раз-
блокирования, здесь К — коэффициент сцепного веса. Макси-
мально возможное сцепление внутреннего (например, левого)
колеса с грунтом РСц.л = 0,5 GaK<p. При разблокированном диф-
ференциале на наружном (забегающем) колесе должна быть
сила тяги РПр = 0,5 Ga/<cp,/A. Уравнение тягового баланса при
Лг = 0 и /а = 0 будет иметь вид Gat|) = 0,5 Ga/Ccp(l + 1/Х), откуда
ф/К<Р = 0,5(1 + 1Д).
Следовательно, чем больше коэффициент блокировки диффе-
ренциала, тем при меньшем отношении ф/Лдр дифференциал
блокируется (при %=1, ч|7К<р=Г, при Х=5, ф/Лдр = 0,6). Как ви-
дим, даже при Х=5 и движении на повороте по однородному
грунту 40% сцепления колес с грунтом не может быть реализо-
вано при разблокированном состоянии дифференциала.
Сопротивление повороту и минимальный радиус поворота по
мере увеличения л также увеличиваются. По эксперименталь-
ным данным, полученным при испытаниях автомобиля ГАЗ-66
с кулачковым дифференциалом (/,=2,54-3,0), радиус поворота
увеличивается на 6—34%, а момент, необходимый для движения
на повороте, увеличивается на 14—8% по сравнению с тем же
автомобилем с шестеренчатым дифференциалом (первые значе-
ния получены для угла поворота колес 30°, а вторые — для 5°).
Вопрос о влиянии коэффициента блокировки на устойчивость
движения более сложен. При увеличении X увеличивается мо-
мент сопротивления повороту, который можно рассматривать
как стабилизирующий, и, следовательно, устойчивость должна
повышаться Вместе с тем происходит увеличение боковых сил
на колесах, что вызывает увеличение бокового увода колес и мо-
жет привести к снижению устойчивости по заносу. По экспери-
ментальным данным, для Урал-375 удовлетворительная устойчи-
вость по заносу получается при Х=3,5, при увеличении X до
5,5—6,0 управляемость ухудшается, особенно на скользких до-
рогах.
Проведем оценку известных типов дифференциалов с повы-
шенным внутренним трением.
Конические дифференциалы с фрикционными блокирующими
муфтами делятся на две группы: 1) дифференциалы с дополни-
тельными муфтами, нормальное давление на поверхностях тре-
ния которых создается за счет осевых сил, возникающих в зуб-
чатом зацеплении; 2) дифференциалы с дополнительными муф-
тами с постоянной величиной нормального давления. Эти диф-
ференциалы имеют сравнительно малый коэффициент блокиров-
ки. По экспериментальным данным [32], дифференциалы 1-й
группы: с увеличенными шайбами сателлитов имеют %= 1,6, с
двухдисковыми блокировочными муфтами Л=1,81, с трехдиско-
выми блокировочными муфтами Л = 2,24. Для получения боль-
ших значений коэффициента блокировки существенно усложня-
ется конструкция дифференциала и увеличиваются габаритные
размеры. К достоинствам этих дифференциалов можно отнести
частичную унификацию с простыми коническими дифференциа-
лами.
Червячные дифференциалы имеют коэффициент блокировки
равный 6—15. По результатам экспериментов [33], коэффициент
блокировки червячного дифференциала для Урал-375 увеличи-
вался от 6 при малой относительной скорости до 10 при большой
относительной скорости полуосей. Отмечена достаточно высокая
его долговечность: за 128 тыс. км пробега он не имел дефектов.
Наиболее эффективно применять такой дифференциал на раз-
битых грязных дорогах и снежной целине. Вместе с тем в ре-
зультате установки червячного дифференциала примерло вдвое
повысилась вероятность заноса на скользких дорогах. В гололед
автомобиль с червячным дифференциалом имел плохую управ-
ляемость. Отмечены случаи прямолинейного движения с повер-
нутыми управляемыми колесами. Применение червячных диффе-
ренциалов весьма ограничено в связи с конструктивной и техно-
логической сложностью. 1
У кулачковых дифференциалов с осевым расположением су-
харей коэффициент блокировки 5—6. У этих дифференциалов
возникают значительные напряжения в месте контакта сухарей
с кулачками, поэтому они применяются в основном на легких
автомобилях.
Кулачковые дифференциалы с радиальным расположением
сухарей имеют коэффициент блокировки 2,5—5,0. Чаще приме-
няют двухрядные дифференциалы. Эти дифференциалы отлича-
176
ются неодинаковыми значениями коэффициента блокировки в
одну п другую сторону. Кулачковый дифференциал автомобиля
ГАЗ-66 имеет коэффициент блокировки в движении 1,7—2,2, а
коэффициент блокировки «покоя» 2,4—4,0. Его масса на 6 кг
меньше массы конического дифференциала с принудительной
блокировкой, он отличается достаточной долговечностью (до
150 тыс. км пробега).
Специфическими свойствами обладает дифференциал с меха-
низмами свободного хода. Он обеспечивает автоматическое от-
ключение забегающей полуоси. При кинематическом соответст-
вии в ведомых звеньях обеспечивается их блокировка с ведущим
звеном. (При прямолинейном движении по ровной поверхности
буксование одного колеса исключается, обеспечивается полное
использование сцепления колес с грунтом). При движении на
повороте сила тяги создается только на внутренних колесах, что
соответствует предельному увеличению % до о©. Соответственно
происходит значительное ухудшение поворачиваемости и повы-
шение вероятности заноса (потери устойчивости). В случае зна-
чительного сопротивления движению на повороте происходит
буксование внутреннего колеса, наружное колесо подключается
к приводу. Этот случай аналогичен случаю движения с блокиро-
ванной связью между колесами, но отличается возможностью
периодического включения и выключения привода к наружному
колесу.
Ни один из рассмотренных дифференциалов не обеспечивает
оптимального характера связи между колесами для всех усло-
вий движения. При увеличении к происходит увеличение прохо-
димости при прямолинейном движении, но ухудшение управляе-
мости и снижение топливной экономичности во многих случаях
движения на повороте.
Более универсальными являются дифференциалы с перемен-
ной величиной блокировки, например дифференциалы с гидрав-
лическими элементами для создания дополнительного сопротив-
ления. Принцип действия их заключается в том, что параллель-
но с простым шестеренчатым дифференциалом устанавливают
гидронасос (поршневой, лопастной и др.). При разной частоте
вращения полуосей возникает относительное движение ведущих
и ведомых частей гидромеханизма, при этом жидкость продав-
ливается через малые проходные сечения. Гидравлическое сопро-
тивление у них пропорционально квадрату относительной ско-
рости полуосей, и, следовательно, коэффициент блокировки про-
грессивно увеличивается по мере увеличения скорости буксова-
ния одного из колес. При движении на повороте с минимальным
радиусом относительная скорость полуосей сравнительно не-
большая, величина коэффициента блокировки уменьшается, что
обеспечивает высокую экономичность и хорошую управляемость.
Заслуживает внимания и простой дифференциал с устройст-
вом для автоматической блокировки. В качестве задающего па-
177
раметра целесообразно использовать соответственно выбранную
величин} относительной скорости или углового ускорения полу-
осей.
Влияние способа связи между мостами (осями). Между мос-
тами автомобиля могут быть применены, кроме рассмотренных
дифференциалов, зубчатая муфта или муфта свободного хода
для отключения одного из мостов, которые обеспечивают или
блокированную связь между мостами или перевод на ведомый
режим колес отключаемого моста.
При неодинаковом сцеплении с грунтом колес различных
мостов возможность полного использования сцепления колес с
грунтом обеспечивается лишь при блокированной связи. При
дифференциальной связи относительная величина сцепления ко-
лес с грунтом, которая не может быть реализована, по аналогии
с рассмотренным выше случаем определяется выражением
7----^>0. При переводе колес одного моста на ведомый режим
I 4- еп
сцепление этих колес с грунтом для получения силы тяги не ис-
пользуется.
Вместе с тем характер связи между мостами существенно
изменяет величину мощности, затрачиваемой на движение и,
следовательно, показатель экономичности.
При движении по однородным грунтовым поверхностям наи-
более экономично применять простой дифференциал. Это объяс-
няется равномерным распределением силы тяги по всем колесам
и, соответственно, минимальным значением буксования. При от-
ключении одного моста (зубчатой муфтой или муфтой свободно*
го хода) увеличивается сила тяги на оставшихся ведущих коле-
сах и соответственно увеличивается величина коэффициента
буксования.
Муфты свободного хода могут быть использованы в несколь-
ких вариантах.
1. Муфта свободного хода включается в привод к переднему
мостут при равных передаточных числах трансмиссии к колесам
первого и второго мостов. В этом варианте передние колеса от-
ключаются от привода в случаях, когда их угловая скорость
больше скорости задних колес (при движении на повороте или
по неровным поверхностям, а также при меньшем радиусе ка-
чения у передних колес). При сохранении кинематического со-
гласования между колесами (прямолинейное движение по ров-
ной поверхности и равных радиусах качения колес), а также в
случаях кинематического рассогласования, но большей угловой
скорости задних колес, момент подводится ко всем четырем ко-
лесам. К недостаткам такого варианта включения муфты сво-
бодного хода следует отнести возможность циркуляции момента
при наличии кинематического рассогласования с большей угло-
вой скоростью задних колес, а также чрезмерно частое в ключе-
178
ние и выключение переднего моста при движении в сравнитель-
но легких дорожно-грунтовых условиях.
2. Муфта свободного хода включается в привод к переднему
мосту при незначительном снижении передаточного числа транс-
миссии к передним колесам по сравнению с задними. Из-за вве-
денного кинематического рассогласования передние колеса бу-
дут отключены от привода во всех случаях, когда их угловая
скорость равна или больше скорости задних колес В результа-
те этого уменьшается число циклов включения и выключения
переднего моста, снижается вероятность возникновения цирку-
ляции момента. При движении в легких дорожно-грунтовых ус-
ловиях передний мост, как правило, отключен. По сравнению
с вариантом принудительного отключения переднего моста зуб-
чатой муфтой в данном случае обеспечивается автоматичность
действия, передний мост автоматически включается при незна-
чительном буксовании задних колес, т. е. во всех случаях, когда
силы тяги, создаваемой задними колесами, становится недоста-
точно. Негативной стороной этого варианта является невозмож-
ность включения привода к передним колесам для повышения
устойчивости движения по скользким дорогам, а также боль-
шая величина буксования задних колес по сравнению с перед-
ними при движении в тяжелых условиях. Последнее приводит
к снижению запаса сцепления и ухудшению устойчивости дви-
жения.
3. Муфты свободного хода включаются в привод и к перед-
нему, и к заднему мостам. В этом варианте практически исклю-
чается возможность возникновения циркуляции момента. Перед-
ние пли задние колеса отключаются только при возникновении
кинематического рассогласования. Основным недостатком этого
варианта является большое число включений и выключений
мостов при движении как в легких, так и в тяжелых дорожно-
грунтовых условиях.
Во всех случаях блокированной связи меж ту мостами при
криволинейном движении по сравнительно однородным грунтам
запас сцепления колес с грунтом меньше, а затраты мощности
на движение больше, чем при дифференциальной связи, из-за
большего буксования задних колес.
Самоблокирующиеся межосевые дифференциалы обеспечи-
вают лучшие показатели проходимости и экономичности в слу-
чаях, когда л=е. В остальных случаях они или заблокированы
и при этом проявляются недостатки блокированной связи, или
разблокированы и, следовательно, в какой-то мере, меньшей чем
у простого дифференциала, проявляются недостатки дифферен-
циальной связи.
При применении межосевого дифференциала с постоянным
значением коэффициента блокировки следует учитывать, что
возможные значения е для осей в большинстве случаев меньше,
чем для колес одной оси. В связи с этим есть предложение [34]
179
выбирать для межколесных дифференциалов Л=7 тля межосе-
вых дифференциалов Х=1,75. Однако этот вывод нельзя рас-
пространить на все возможные случаи использования автомоби-
лей. Например, при преодолении геометрических препятствий
при вывешивании одного из колес и установке между колесами
дифференциала с ограниченным значением коэффициента бло-
кировки для полного использования сцепления колес другого
моста с грунтом необходимо =
При выборе целесообразного характера связи между осями
следует учитывать возможную величину кинематического рас-
согласования, которая зависит от расстояния между осями. При
максимально возможном сближении осей (задние оси автомоби-
лей ЗИЛ-131, Урал-375, КрАЗ-255Б), как показали эксперимен-
ты [35, 36], кинематическое рассогласование невелико, и поэто-
му применение блокированной связи между осями практически
не ухудшает управляемость и топливную экономичность, обес-
печивая максимальные показатели проходимости.
Влияние схемы и типа механизмов трансмиссии. Применяе-
мые на современных автомобилях схемы трансмиссии можно
разделить на две группы: мостовые (рис. 65) и Н-образные
(рис. 66).
Мостовые схемы применяют на автомобилях как с зависи-
мой, так и с независимой подвесками. В этих трансмиссиях в
мостах имеются главные передачи и межколесные дифференци-
алы. Распределение мометта между мостами осуществляется
одной или несколькими раздаточными коробками. Раздаточные
коробки отличаются числом передач (одна или две), числом вы-
ходных валов, характером связи между выходными валами.
Влияние на проходимость характера связи между колесами мос-
тов или между мостами трехосного автомобиля показано на
рис. 67.
Большой интерес представляет схема трансмиссии четырех-
осного автомобиля МАЗ-537 (рис. 65,1/) с тремя раздаточными
коробками и семью дифференциалами трех различных типов.
У четырехосной машины с одним двигателем при меньшем чис-
ле дифференциалов невозможно полностью исключить блокиро-
ванную связь между колесами с присущей ей недостатками.
Совокупность четырех дифференциалов с механизмами свобод-
ного хода, двух фрикционных и одного простого с принудитель-
ной блокировкой достаточно эффективна для обеспечения ма-
шине высоких эксплуатационно-технических свойств при движе-
нии по дорогам и вне дорог.
При применении на четырехосном автомобиле двух двигате-
лей (рис. 65,IV) число дифференциалов снижается до 6. Если
оставить только четыре межколесных дифференциала, приме-
нив в раздаточных коробках зубчатые муфты для включения
передних мостов, заметно снижается топливная экономичность
автомобиля при движении по дорогам и вне дорог, а также сни-
180
дифференциал
дифференциал
с принудитель-
ной блокироВ-
нои
Самоблокирую
ицийся фрак-
ционный диф-
ференциал
(р\ Самоблокирую-
щийся кулач-
ковый диффе-
ренциал
(?) Самоблокирую-
1цийся диффе-
ренциал с муф
гпами свобод-
ного хода
Рис. 65. Мостовые схемы трансмиссии
жается поворачиваемость и тяговые возможности при криволи-
нейном движении. При отсутствии жесткой кинематической свя-
зи между двумя двигателями, что дает возможность исключить
установку одного из дифференциалов, возможны случаи недоис-
пользования полных тяговых возможностей двух двигателей.
Это происходит при значительной разности распределения веса
автомобиля между мостами, связанными с одним и другим дви-
гателями, если суммарный момент сцепления с грунтом колес,
связанных с одним двигателем, меньше максимально возможно-
го момента по двигателю, а в то же время сцепление с грунтом
колес, связанных с другим двигателем, существенно больше
момента по двигателю.
Н-образпыс трансмиссии (рис. 66) применяют, как правило,
на автомобилях высокой проходимости с независимой подвес-
кой. Момент распределяется раздаточной коробкой между дву-
181
Рис. 66. Бортовые и комбинирован-
ные схемы трансмиссии
мя валами и от них через конические редукторы подводится к
колесам. Для полного исключения блокированной связи между
колесами требуется 2/г—1 дифференциалов, как и у мостовых
трансмиссий. Однако учитывая допустимость блокированной
связи между колесами с малым кинематическим рассогласова-
нием можно установить только один дифференциал. При приме-
нении двух двигателей (рис. 66,//) не нужен и этот дифферен-
циал, но аналогично схеме приведенной на рис. 65,IV тяговые
возможности двигателя не всегда используются полностью. При-
менение Н-образной трансмиссии обеспечивает больший дорож-
ный просвет и лучшее использование внутреннего объема кузо-
ва, так как в сочетании с независимой подвеской получается
гладкое днище, что повышает компоновочные возмож-
ности.
Возможно применение смешанных схем трансмисии (рис.
66, IV и V). В схеме на рис. 66,1V, рационально используется
182
Wn
Рис. 67. Влияние коэффициента блокировки дифференциала на дополнитель-
ное сопротивление криволинейному движению:
о—поворот автомобиля на однородном грунте; б—сцепные характеристики грунта под
левыми и правыми колесами; в—отстающие колеса движутся пэ грунту II, а забегаю-
щие — по грунту /; г—отстающие колеса движутся по грунту /, а забегающие—по
грунту II
сочетание независимой подвески для управляемых колес и за-
висимой— для неуправляемых. Число дифференциалов для че-
тырехосного автомобиля удается снизить до трех.
Индивидуальный подвод мощности к каждому ведущему ко-
лесу применяют при наличии электрической или гидрообъемной
силовой передачи. Для механической трансмиссии индивидуаль-
ный привод к ведущим колесам конструктивно сложен, имеет
низкий КПД и меньшую надежность из-за большого количества
карданных передач, и поэтому не применяется.
Большое значение для проходимости автомобилей имеет тип
главной передачи, определяющий в значительной мере величину
дорожного просвета. Для мостовых схем лучшей в этом отноше-
183
нии является двойная разнесенная главная передача, состоящая
из конической передачи, смонтированной совместно с межколес-
ным дифференциалом, и колесных редукторов, выполненных в
виде цилиндрической пары с наружным зацеплением и разме-
щением ведущей шестерни над ведомой. При применении плане-
тарных колесных редукторов дорожный просвет несколько
уменьшается.
Влияние на проходимость плавности изменения момента,
подводимого к колесам, существенно на грунтах, задернованных
или имеющих тонкий верхний корковый слой. При резком изме-
нении момента возможен срез верхнего слоя грунта, сила сцеп-
ления снижается, повышается буксование, увеличивается погру-
жение колес в грунт, показатель проходимости снижается.
Плавное изменение момента обеспечивается при наличии в
трансмиссии гидротрансформатора или гидромуфты, а также
при исключении в процессе переключения ступенчатых передач
разрыва потока мощности между двигателем и ведущими коле-
сами. Величина снижения проходимости из-за резкого измене-
ния момента может достигать (р tg фо + со)/р tg <Ро-
Влияние удельной мощности двигателя. Зависимость прохо-
димости от удельной мощности двигателя обусловливается тре-
мя факторами.
Во-первых, при увеличении удельной мощности двигателя
сокращается число переключений передач с разрывом потока
мощности, в результате чего снижается вероятность как сниже-
ния реализуемой силы тяги, так и срыва верхнего слоя грунта
Во-вторых, при увеличении удельной мощности двигателя
повышается возможная скорость движения и соответственно
увеличивается возможность испо тьзования кинетической
энергии машины для преодоления участков с отрицательным
значением показателя проходимости. При отрицательном значе-
нии показателя проходимости путь, проходимый автомобилем за
счет кинетической энергии, выражается формулой S = y2/2g (fr—
—ф). При движении по резко неоднородной поверхности мак-
симальная по тяговым свойствам машины скорость определяет-
ся по формуле
В-третьих, при увеличении скорости уменьшается время дей-
ствия нагрузки от колес на грунт, уменьшается деформация
грунта (глубина колеи) и соответственно уменьшается сопротив-
ление движению. Однако при наличии неровностей на грунтовой
поверхности увеличение скорости приводит к повышению сопро-
тивления движению из-за возрастания динамических нагрузок.
Суммарное сопротивление движению при увеличении скорости
может как уменьшаться, так и увеличиваться.
184
Для иллюстрации влияния мощности двигателя на проходимость можно
привести результаты экспериментов [37]. Испытывались [37] автомобили
КрАЗ (6\6) с двигателем без наддува (удельная мощность 8,8 кВт/т) и с
двигателем с наддувом (удельная мощность 10 кВт/т, повышена на 13,4%).
Скорость движения у автомобиля с большей удельной мощностью оказалась
выше па связных грунтах при глубине размокшего слоя 15—20 см на 23—
28%, а при глубине размокшего слоя 30—35 см па 32—40%, на песчаном
грунте — на 11—‘14%, при движении по снежной целине — на 50—70%.
На снежной целине и связном грунте с переувлажненным верхним сло-
ем отношение скоростей движения значительно больше отношения удельных
мощностей, что объясняется уменьшением глубины колеи при увеличении
скорости, а также расширением возможности движения на более высоких
передачах с меньшим буксованием.
§ 26. Влияние компоновки автомобиля
Компоновка автомобиля высокой проходимости должна обес-
печивать целесообразное распределение веса по мостам и коле-
сам низкое расположение центра тяжести, высокие геометричес-
кие параметры проходимости автомобиля, приспособленность
для самовытаскпвания и вытаскивания из застрявшего положе-
ния другими средствами, приспособленность к техническому об-
служиванию и ремонту, удобство управления автомобилем.
Компоновка автомобиля зависит от типа несущей части, от
числа колес и схемы их размещения, от взаимного расположе-
ния двигателя (силовой установки), кабины и грузовой плат-
формы, от типа трансмиссии.
Па современных автомобилях повышенной и высокой прохо-
димости применяют несущую часть рамную, кузовную, комбини-
рованную (рама с несущим кузовом).
Рамная несущая часть проста по устройству, технологична,
удобна для унификации автомобилей различного назначения.
Однако при применении рамной конструкции несколько увели-
чиваются высота и общая масса автомобиля. У лонжеронной
рамы трудно при минимальной массе одновременно обеспечить
необходимую прочность, при работе на изгиб и кручение. Рамы
у тяжелых и длиннобазных автомобилей стараются делать с
малой угловой жесткостью, но с достаточно большой изгибной
жесткостью, так как уменьшение угловой жесткости способст-
вует сохранению контакта с дорогой в условиях, вызывающих
закручивание рамы. Однако при слишком малой жесткости соз-
даются тяжелые условия для работы установленных на раме
агрегатов.
Лучшее сочетание прочности на изгиб и кручение обеспечива-
ет хребтовая рама [38], применяемая на автомобилях «Татра».
Применение хребтовой рамы позволяет снизить собственную
массу автомобиля, обеспечить большой ход независимой подвес-
ке, полечить меньший минимальный радиус поворота автомобиля
за счет возможности поворота управляемых колес на больший
угол, применять более широкие шины без увеличения ширины
автомобиля. К недостаткам хребтовой рамы автомобиля «Тат-
185
ра» следует отнести необходимость применения сложных по кон-
струкции мостов с качающимися полуосями, трудность обеспе-
чения надежного уплотнения проемов качающихся полуосей,
затрудненный доступ к узлам трансмиссии, расположенным
внутри трубы, наличие ряда технологических трудностей.
Кузовные и комбинированные несущие части типичны для
легковых и специальных автомобилей, автомобилей-амфибий и
автобусов. Они обеспечивают повышенную жесткость и сниже-
ние массы и высоты автомобиля по сравнению с рамными кон-
струкциями. Надежно защищают агрегаты трансмиссии и пере-
возимое имущество, облегчают возможность создания плаваю-
щих автомобилей. На несущем кузове не накапливается большо-
го количества грязи, и се легко счищать. Недостатками несу-
щего кузова являются его относительная сложность и высокая
стоимость.
От схемы размещения колес автомобиля зависят возмож-
ность преодоления рвов и других препятствий; перераспределе-
ние веса по колесам (осям) в процессе движения; устойчивость
движения; поворотливость машины; сопротивление при криво-
линейном движении по мягким грунтам; сложность рулевого
управления; целесообразные типы подвесок; целесообразные
схемы трансмиссии; возможность использования узлов дорож-
ных автомобилей массового производства. Колесные схемы трех-
и четырехосных автомобилей приведены на рис. 68.
Схема движителя 1—2 в настоящее время наиболее распро-
странена для трехосных автомобилей, так как по сумме пока-
зателей она наиболее целесообразна для использования на ав-
томобильных дорогах. При применении такой схемы машина
получается наиболее простой и дешевой; для поворота машины
достаточно иметь одну управляемую ось, для двух задних осей
можно использовать простую балансирную подвеску, в транс-
миссии практически не требуется установка дифференциала
между задними осями. Возможна широкая унификация между
полноприводными и неполноприводными автомобилями.
Для движения по неровным дорогам такая схема не явля-
ется оптимальной, так как, во-первых, не обеспечивает преодо-
ление препятствий типа рвов шириной более 0,7D, во-вторых,
величина радиуса продольной проходимости получается боль-
шей, чем у других схем, что повышает опасность задевания за
порогу при переезде выпуклых дорожных неровностей.
Па мягких грунтовых поверхностях для таких автомобилей
характерно значительное снижение поворотливости, приращение
удельной силы сопротивления движению при повороте на грунте
примерно в 2 раза больше, чем у двухосных.
Схема движителя 2—1 применяется сравнительно редко,
лишь на автомобилях, у которых центр тяжести смещен вперед.
На таких машинах в качестве управляемых используют первые
две оси, что улучшает поворотливость, но усложняет конструк-
186
Рис. 68. Схемы размещения колее
цию машины. При движении на повороте образуется шесть ко-
лей. Суммарное сопротивление качению на мягком грунте может
быть больше, чем у автомобилей с колесной схемой 1—2, а на
твердых поверхностях — меньше.
Автомобили со схемой 1 — 1—1 имеют качественное отличие
от остальных трехосных автомобилей. Только такое размещение
колес обеспечивает возможность преодоления рвов шириной бо-
лее тиаметра колес при выполнении условий, отмеченных в § 15.
При преодолении выпуклых неровностей практически исключа-
ется опасность задевания за грунтовую поверхность. В случае
применения схемы с двумя крайними управляемыми осями обес-
печиваются лучшие показатели при криволинейном движении.
При повороте на мягких грунтах сопротивление движению мень-
ше, чем у других автомобилей. Вместе с тем при переходе от
движителя 1—2 к движителю 1 — 1 — 1 повышаются требования
по обеспечению устойчивости движения [30]. Усложняется руле-
вое управление, в особенности при применении двух крайних
управляемых осей. Увеличивается перераспределение нагрузки
по осям в процессе движения, па неровных дорогах возможно
вывешивание колес одной из осей, снижается возможность ис-
пользования узлов дорожных автомобилей.
Применение четырехосного движителя позволяет снизить
осевые нагрузки, уменьшить размеры шин, повысить проходи-
мость машины по неровным и мягким грунтам. Диапазон до-
рожно-грунтовых условий, в которых возможно использование
автомобиля, расширяется. Повышается надежность движителя.
Вместе с тем усложняется конструкция автомобиля и увеличи-
вается объем его технического обслуживания.
187
Схема движителя 2—2 позволяет получить наиболее простую
конструкцию четырехосного автомобиля. Так как оси попарно
сближены, можно применять балансирную подвеску. Хорошую
поворотливость обеспечивает применение управляемых первых
двух осей, при этом рулевой привод проще, чем при крайних
управляемых осях. Учитывая, что между сближенными осями
можно не ставить дифференциалы, возможно применение срав-
нительно простой трансмиссии, включающей раздаточную ко-
робку с двумя выходными валами п проходные главные переда-
чи для средних мостов. Движитель 2—2 среди четырехосных
обеспечивает лучшую устойчивость прямолинейного движения и
наименьшее перераспределение нагрузки между осями в про-
цессе движения.
К недостаткам автомобилей с движителем 2—2 можно отнес-
ти сравнительно малую ширину преодолеваемого рва, определя-
емую расстоянием между сближенными колесами; повышенный
продольный радиус проходимости при большой базе вследствие
увеличенного расстояния между средними осями; большое со-
противление качению при криволинейном движении по мягко-
мя грунту, так как образуются шесть колей, из них две колеи
увеличенной ширины; некоторое увеличение деформации грунта,
вызываемое попарным сближением осей. По результатам иссле-
дований приращение силы сопротивления движению, вызванное
переходом от прямолинейного движения к криволинейному, у
таких машин приблизительно в 1,5 раза больше, чем у двухос-
ных машин; ограничение поворотливости машин 2—2 с двумя пе-
редними управляемыми осями в любых условиях движения всег-
да происходит по потере проходимости, вызывается буксованием
неуправляемых колес; увеличение базы существенно увеличива-
ет радиус поворота, но улучшает контактные условия первой и
в особенности третьей осей [17].
Автомобили с колесной схемой 1—2—1 имеют более высо-
кие геометрические параметры проходимости, а также лучшую
поворотливость машины при условии применения крайних уп-
равляемых осей. Сопротивление качению при криволинейном
движении по мягкому грунту получается меньше, чем у автомо-
билей с колесной схемой 2—2, так как образуются только четы-
ре колеи. Однако при применении движителя 1—2—1 вместо
2—2 повышаются требования к устойчивости, снижается плав-
ность хода, усиливается перераспределение веса по осям при
движении; возможно вывешивание средних или крайних колес,
что вызывает повышение нагрузки в трансмиссии, подвес-
ке, шинах и раме; несколько усложняется конструкция ма-
шины.
Схема 1 — 1—1 — 1 является промежуточной. При применении
этой схемы в качестве управляемых используют или первые две
оси пли переднюю и заднюю оси. В обоих случаях по поворотли-
вости она уступает первым двум схемам. Вместе с тем она обес-
188 • 1
Ill
Рис. 69. Компоновочные схемы автомобилей
IV
почивает наиболее равномерное распределение нагрузки на
грунт.
Схемы 1—3 и 3—1 применяют вынужденно, при неблагопри-
ятном размещении центра тяжести машины. Эти схемы не обес-
печивают ни преодоления широких рвов, ни хорошей поворот-
ливости.
Представляют интерес движители с увеличенным диаметром
только передних колес. Увеличение диаметра передних колес
снижает бульдозерное действие, уменьшает сопротивление каче-
нию, улучшает уплотнение грунта, улучшает преодоление поро-
говых препятствий, канав, рвов.
Для полноприводных автомобилей принято считать наиболее
целесообразными движители с одинарной ошиновкой и равной
колеей для всех осей. Для большинства грунтовых условий, в
особенности для уплотняющихся грунтов и грунтов с малой тол-
щиной деформирующегося слоя, такие движители обеспечивают
наименьшее сопротивление качению и наибольшее сцепление.
Исключение составляют задернованные грунты и слабые грунты
без близлежащего твердого основания, для которых характерно
прогрессивное увеличение глубины колеи при последовательных
проходах по одному следу. При движении по таким грунтам же-
лательно, чтобы каждое колесо катилось по новому следу.
По взаимному расположению двигателя, кабины и грузовой
платформы применяют четыре компоновочные схемы, представ-
ленные на рис. 69. При размещении двигателя впереди кабины
(схема 7) получается распределение веса автомобиля по осям
в соотношении 25—35% на переднюю ось и 65—75% на одну
или две задние оси, чго приемлемо для пеполноприводных ав-
томобилей. Такая компоновка обеспечивает нормальные усло-
вия работы водителя, хороший доступ к двигателю, однако при
этом увеличиваются длина и масса автомобиля, ухудшается об-
189
зорность. В настоящее время, применяя такую компоновку ав-
томобиля, стремятся к перемещению кабины вперед и к сокра-
щению унты двигателя.
Для схемы II (рис. 69) характерно размещение двигателя в
кабине пли под полом кабины. Относительная часть веса, при-
ходящегося на переднюю ось, увеличивается до 45—55%. Улуч-
шаются геометрические параметры проходимости (увеличение
углов свеса, уменьшение радиуса проходимости). Такая компо-
новка широко распространена иа современных полноприводных
автомобилях. Отсутствие выступающего вперед капота улучша-
ет обзорность. По сравнению с первой схемой сокращаются ба-
за и длина автомобиля или появляется возможность увеличить
длину платформы. К недостаткам такой компоновки можно от-
нести уменьшение числа посадочных мест в кабине, ухудшение
условий работы водителя. Доступ к двигателю обеспечивается
пли изнутри кабины, через люки, или при откидывании кабины.
Применение откидывающейся кабины сопряжено с усложнением
приводов, необходимостью выхода пассажиров при откидывании
кабины и рядом других трудностей.
Расположение двигателя сзади кабины в специальном мо-
торном отсеке (схема III рис. 69) применяется на тяжелых ав-
томобилях-тягачах и специальных автомобилях. При такой ком-
поновке увеличивается число мест в кабине и доступ к двига-
телю более удобен, но сокращаются размеры грузовой платфор-
мы, затруднено охлаждение двигателя, так как недостаточно
используется встречный поток воздуха. Радиаторы при такой
компоновке ставят по бокам или сзади моторного отсека, привод
к вентиляторам усложняется. Углы свеса получаются больше,
чем у автомобилей второй схемы.
Схему IV с размещением двигателя в задней или средней
части автомобиля применяют для автобусов и автомобилей с
несущим кузовом, автомобилей-амфибий. Эта схема позволяет
придать необходимые формы передней части кузова, обеспечи-
вает высокую обзорность и лучшую комфортабельность. Нега-
тивными сторонами такой компоновки являются сложность
дистанционных приводов управления двигателя и механизмов
трансмиссии, трудности в обеспечении эффективной системы
охлаждения.
Компоновочные схемы трансмисии делятся на две группы:
мостовые и Н-образные. У мостовых схем основные агрегаты
трансмиссии размещены вдоль продольной оси автомобиля, по-
средине машины, а у Н-образных схем — вдоль бортов. При при-
менении Н-образной схемы несколько увеличивается вес транс-
миссии, но во многих случаях обеспечиваются более благопри-
ятные условия для компоновки автомобиля в целом: освобож-
дается средняя часть машины для размещения силовой установ-
ки и специального оборудования, уменьшается погрузочная и
общая высота автомобиля.
190
§ 27. Съемные средства повышения проходимости автомобилей
Из быстросъемных средств повышения проходимости автомо-
билей наиболее широкое распространение получили мелкозвен-
чатые цепи лестничного и сетевого типа (рис. 70). Для продоль-
ных ветвей используют обычные мелкозвенчатыс цепи, а для по-
перечных стяжек — цепи с витыми звеньями.
Отечественная промышленность выпускает цепи противо-
скольжения (ГОСТ 13326—67) лестничного типа с двумя про-
дольными ветвями для односкатных и двускатных колес и с
тремя продольными ветвями для двускатных колес.
Для автомобилей КрАЗ и МАЗ звенья продольных ветвей
изготовляют из прутка сталь Ст-2 диаметром 9 мм. Звенья по-
перечных ветвей делают из прутка той же стали диаметром
11 мм и скручивают на 70—90е, а затем цементируют на глуби-
ну 1,0—1,3 мм. Гарантийный срок службы цепей около 1,5 тыс.
км пробега £39].
Сетевые цепи с косым расположением поперечных стяжек
более эффективны. Они существенно повышают сцепление на
скользких поверхностях как в продольном, так и в поперечном
направлениях. Однако они более сложны и массивны.
(р
0,6
0,5
0Л
0,3
0,2
°''о
6)
а, б—лестничного типа; в—
сетевого типа; г—влияние
установки цепей на повыше-
ние коэффициента
пия (штриховые -
ние без цепей, сплошные —
движение с цепями); /—на
лесном сухом грунте; 2—на
снежной дороге- 3—на об-
леденелой дороге
б)
0,2 0,3 so
г)
л >1^. 70. Мелкозвенчатые
цепи:
сцепле-
движе-
191
Для улучшения сцепления с обледенелыми поверхностями
на поперечные стяжки цепей наваривают зубья различной фор-
мы (цилиндрические, V-образные, призматические и т. п.).
Фирма ЛККО (США) применяет цилиндрические и V-образ-
ные зубья; фирма Кэмбел (США)—призматические зубья.
Шведская фирма Ныочепинг Автомобильфабрик изготовляет
цепи, рабочим звеном которых является кольцо с шипами. В Че-
хословакии выпускают цепи с рабочим звеном, выполненным в
виде жесткой рамки с шипами [39].
Применение цепей противоскольжения на некоторых автомо-
билях затрудняется малыми зазорами между шиной и рессорой,
между шиной и крылом, между колесами задней тележки трех-
осных автомобилей. Постоянная комиссия СЭВ по машиностро-
ению считает целесообразным применение цепей противосколь-
жения высотой не более 25 мм для шин 9.00—20 и 31 мм для
шин большего размера. Общество автомобильных инженеров
SAE рекомендует минимальный зазор между крылом и шиной
42—44 мм.
Экспериментальные данные по использованию мелкозвенча-
тых цепей в различных дорожно-грунтовых условиях приведены
на рис. 70,6. Сравнительно большое увеличение сцепления полу-
чается на снежной целине (36—38%), укатанной снежной доро-
ге (31—66%), грунтовой дороге после дождя (25—45%). Усло-
вием эффективного использования мелкозвенчатых цепей явля-
ется наличие твердого основания под небольшим слоем снега
или переувлажненного грунта.
Увеличение сопротивления движению при установке мелко-
звенчатых цепей для различных поверхностей составляет 4—
50%.
Цепи, изготовленные даже из качественных сталей или це-
ментованные, имеют срок службы не более 3—4 тыс. км пробе-
га. Поэтому, как правило, мелкозвенчатые цепи устанавливают
на коротких труднопроходимых участках пути, затрачивая на
мош аж и демонтаж 10—15 мин.
Для повышения проходимости по грунтам со значительной
толщиной слабого слоя, но заметным повышением сцепления
при заглублении, применяют траковые цепи (рис. 71) с трака-
ми различной формы: тавровыми, с косым расположением и
ромбовидными. Принципиальное их отличие от мелкозвенчатых
цепей состоит в большей высоте грунтозацепов. Тавровые тра
ковые цепи значительно повышают сцепление лишь в продоль-
ном направлении. Ромбовидная форма и косое расположение
траков обеспечивают более плавную передачу усилий при вза-
имодействии колеса с грунтом, значительное сцепление с грун-
том и в продольном и в боковом направлениях. Наиболее совер-
шенными являются ромбовидные траки, однако они и самые
сложные в изготовлении. Траковые цепи применяют только для
двускатных колес. Время установки траковых цепей на два ве-
192
Рис. 71. Траковые и пли-
цсвые цепи:
а—с поперечными траками;
б—с ромбовидными трака-
ми; в—с косыми траками;
г—плицевые цепи
дущих колеса составляет 30—40 мин, время снятия и укладки
цепей — около 20 мин.
Эффективность траковых цепей в значительной мере зависит
от высоты грунтозацепов. На большей части грунтов существен-
ное повышение показателей проходимости получается при уве-
личении высоты грунтозацепов до 4 см. При дальнейшем увели-
чении высоты грунтозацепов прирост показателей проходимости
незначительный, но резко ухудшаются условия движения по
сравнительно твердой поверхности, увеличивается масса цепей,
повышается сопротивление движению, затрудняется их установ-
ка на колесо.
На сильно деформирующихся грунтах (сыпучий песок, за-
болоченные грунты), на которых важнейшим условием повыше-
ния проходимости является увеличение площади контакта с
грунтом, применяют плицевые цепи. Они состоят из штампован-
ных пластин (плиц), с развитой опорной поверхностью, которые
соединяются между собой цепями или другими шарнирными
звеньями. Плицевые цепи, так же как и траковые, металлоемки,
массивны, практически непригодны для движения по твердой
поверхности.
Помимо цепей, охватывающих
шину по периметру, для по-
вышения проходимости могут быть использованы и более прос-
тые и менее массивные средства: браслеты из звенчатой цепи,
противобуксовочные колодки (одногребневая или ромбовидная),
193
эластичные манжеты (рис. 72). Эти приспособления значитель-
но легче и быстрее крепить к колесу.
Если цепи противоскольжения необходимо надевать на ко-
лесо до въезда на труднопроходимый участок, то браслеты и
колодки можно надеть и на колеса застрявшего автомобиля.
Автомобиль с противобуксовочными колодками движется не-
равномерно, толчкообразно; чтобы сгладить эту неравномер-
ность, целесообразно надевать на каждое колесо по три-четыре
колодки. Следует иметь в виду, что при применении браслетов
и противобуксовочпых колодок возможна потеря устойчивости
при торможении, так как на одних колесах в контакте с грунтом
может оказаться колодка, а на других нет. При этом тормозные
силы на левых и правых колесах существенно различаются.
Эластичные противобуксовочные манжеты изготовляют из кар-
каса старых, не пригодных к употреблению покрышек (см.
рис. 72). Они в отличие от металлических не разрушают шину,
и поэтому их можно не снимать с колес автомобиля и после то-
го, как труднопроходимый участок пройден.
Весьма эффективным средством повышения проходимости
неполноприводиых автомобилей по размокшим грунтовым доро-
гам является применение арочных шин на ведущих колесах.
При этом благодаря малому давлению на грунт снижается со-
противление движению, а наличие высоких грунтозацепов обес-
печивает высокое сцепление с нижним плотным слоем грунта.
194
Сравнительные данные по проходимости автомобиля с арочны-
ми и обычными шинами по размокшей на глубину 8—12 см гли-
нистой дороге приведены в табл. 17.
Таблица 17
Показатели Арочные шинн Шины низкого [давления
Я-146 Я-170 М-29 И-125
0,470 0,475 0,310 0,260
0,088 0,093 0,151 0,160
0,290 0,282 0,097 0,048
В результате эксплуатации автомобилей с арочными шинами
установлено, что применять их наиболее эффективно в условиях
весенней и осенней распутицы. Использование колес с арочными
шинами на заснеженных дорогах и в ряде случаев по снежной
целине признано также целесообразным Автомобили с грузом
на арочных шинах преодолевают слежавшийся снег высотой
35—40 см и свежевыпавший снег — до 50 см.
На накатанных снежных и обледенелых дорогах и на сухих
дорогах с колеями арочные шины уступают обычным. Причина-
ми этого являются пониженная устойчивость автомобилей с
арочными шинами на скользких дорогах и недостаточно надеж-
ная их работа на дорогах с замерзшей или сухой колеей. Ароч-
ные шины более целесообразны, чем траковые цепи, для ис-
пользования в комбинированных условиях, включающих сильно
размокшие грунты и грунтовые дороги в твердом состоянии,
снежную целину и заснеженные дороги.
В обычных условиях эксплуатации при установке арочных
шип на ведущие колеса, как правило, не возникают перегрузки
трансмиссии автомобиля. При неумелом вождении, в частности
при буксовании колес с арочными шинами, возникают чрезмер-
но большие нагрузки, которые могут вызвать поломки деталей
трансмиссии.
Для работы автомобилей в условиях бездорожья из-за воз-
можности застревания машины важно иметь устройства для са-
мовытаскивания. На многих полноприводных автомобилях для
этого имеются лебедки. Для автомобилей, не имеющих лебедок,
разработаны съемные приспособления для самовытаскивания.
Наиболее простым и эффективным .приспособлением является
барабанный самовытаскиватель (рис. 73). Он состоит из двух
съемных барабанов, которые крепятся к ступицам ведущих ко-
лес через переходный фланец, двух тросов длиной 50—60 м и
двух направляющих для троса, прицепляемых к ступицам перед-
них колес. Съемные барабаны с намотанным тросом возят в
кузове автомобиля и устанавливают на колеса перед пользо-
ванием.
195
/—диск; 2—трос; 3
сатор; 6—цепь; 7—болт
Рис. 73. Устройство для самовытаскивания ав-
томобилей:
о. лебедка-самовытаскиватель; б—цротивэбуксатор;
диск^ 2 трос; j якорь; 4—штььрь; 5—протпвобук-
В качестве неподвижного упора могут быть использованы
деревья, пни и т. п., а при отсутствии их анкеры. Наиболее лег-
ким и удобным является плоский складной анкер (рис. 73л).
Однако он недостаточно эффективен на слабых песчаных грун-
тах и на заболоченных грунтах. На слабых грунтах эффективны
анкеры, выполненные из бревен.
Для самовытаскивания застрявшего на мягком грунте авто-
мобиля можно применять также противобуксатор (рис. 73, б).
Противобуксаторы не требуют применения специальных анке-
ров, однако они более громоздки и менее эффективны по срав-
нению с барабанным самовытаскивателем.
§ 28. Конструкции автомобилей высокой проходимости
Условия использования автомобилей отличаются исключи-
тельным многообразием и очень большим диапазоном измене-
ния механических свойств опорных поверхностей. В связи с этим
наметились два направления работ по созданию автомобилей
высокой проходимости. Для первого направления характерно
стремление расширить диапазон грунтовых условий применимо-
сти автомобилей за счет повышения универсальности и пре-
дельного уровня проходимости автомобилей. Особенностью вто-
196
Рис. 74. Схемы автомобилей с комбинирован-
ным движителем
рого направления является создание специализированных авто-
мобилей для определенных труднопроходимых грунтовых усло-
вий (снегоходов, болотоходов и т. д.).
К первому направлению относятся работы по созданию авто-
мобилей с комбинированными движителями и многозвенных со-
члененных автомобилей. У движителей современных автомоби-
лей имеются два регулируемых в процессе движения парамет-
ра— внутреннее давление воздуха в шинах и число ведущих
колес. В результате этого универсальность автомобилей сущест-
венно расширена. Значительно большие возможности по регули-
рованию рабочих параметров движителя и соответственно по
расширению универсальности имеют автомобили с комбиниро-
ванным движителем. Комбинированными называют движители,
обеспечивающие несколько комбинаций конструктивных рабо-
чих параметров. К ним относят движители с переменным чис-
лом колес, колесно-гусеничные движители.
Применение движителей с переменным числом колес позво-
ляет основные колеса в максимальной мере приспособить для
движения по дорогам с твердым покрытием, а параметры допол-
нительных колес выбирать исходя из обеспечения требуемой
универсальности и надежности.
В случае применения движителя с колесной формулой 4X4
(8X8) (рис. 74) при опущенных вспомогательных колесах авто-
мобиль превращается в обычный четырехосный. Наличие уст-
ройств для подъема и опускания четырех колес усложняет кон-
струкцию автомобиля, вместе с тем эффективность использова-
ния автомобиля в различных грунтовых и дорожных условиях
увеличивается. На дорогах он может быть более эффективен
197
вследствие лучшей приспособленности к дорогам шин основных
колес и более высокой устойчивости двухосного автомобиля.
На различных грунтах автомобиль может оказаться эффектив-
нее, потому что шины вспомогательных колес можно специаль-
но подобрать для мягких грунтов, а также потому, что есть
грунты, на которых эффективнее движитель с увеличенной на-
грузкой на колеса. При применении движителя с колесной фор-
мулой 4X4 (8X8) для обеспечения поворота автомобиля с опу-
щенными вспомогательными колесами целесообразно иметь все
основные колеса управляемыми.
В случае применения движителя 4X4 (6X6) с одной средней
поднимающейся осью, обеспечивается преодоление рвов, и воз-
можно использование одной передней управляемой осп. Автомо-
биль получается сравнительно простым. По сравнению с трех-
осным автомобилем 1 — 1 — 1 обеспечиваются более высокие экс-
плуатационные качества на дорогах с твердым покрытием и
большая универсальность в различных грунтовых усло-
виях.
Принципиально возможно применение движителей 6x6
(8X8). Если поднимаются колеса второй оси, то достаточно
иметь одну первую ось управляемой.
Использование поднимающихся колес первой оси дает воз-
можность использовать их для преодоления вертикальных пре-
пятствий (в поднятом положении) и при движении по мягким
грунтам (в опущенном положении).
Во всех рассмотренных движителях при движении по доро-
гам используют только основные колеса, поэтому параметры
шин этих колес выбирают исходя из распределения всего веса
машины па основные колеса, а максимальный вес автомобиля
ограничивается допустимой осевой нагрузкой. Применение под-
нимающихся колес повышает массу движителя и занимаемый
им объем. Однако, учитывая, что дополнительные (поднимаю-
щиеся) колеса используют сравнительно редко, они могут быть
рассчитаны с соответственно меньшими запасами прочности и
в максимальной степени облегчены. Вместе с тем на тяжелых
участках при введении в рабочее состояние дополнительных ко-
лес частично разгружаются основные колеса. Если применены
шины с регулируемым давлением, то давление в них снижают
только в частично разгруженном состоянии, поэтому размер
шип может быть несколько снижен.
Из большого числа возможных комбинаций колесного и гу-
сеничного движителей наибольший интерес представляет комби-
нация, при которой колесный движитель полноразмерный, а гу-
сеничный — вспомогательный, временно используемый, облег-
ченный (см. рис. 74).
Такой колесно-гусеничный движитель близок к колесному
движителю с поднимающимися средними колесами. Однако гу-
сеничный движитель можно создать более эффективным для
198
слабых грунтов, чем вспомогательный колесный. Учитывая
кратковременность использования вспомогательного гусенично-
го движителя, можно максимально уменьшить его массу. Вместе
с тем параметры этого движителя подбирают так, что во мно-
гих случаях автомобиль с таким движителем будет иметь про-
ходимость выше, чем с гусеничным движителем. Например, на
гусеничном движителе нельзя применять острые грунтозацепы,
так как он окажется непригодным для твердых поверхностей, а
у вспомогательного гусеничного это сделать можно.
Сравнивая автомобили с комбинированным колесно-гусенич-
ным движителем и с колесным движителем 8X8, можно отме-
тить следующее. Масса автомобиля с колесно-гусеничным дви-
жителем будет больше, так как колеса рассчитывают на нагруз-
ку в 2 раза большую, чем у автомобиля с движителем 8x8, а
вес гусеничного движителя не менее веса двух средних мостов.
Однако следует учитывать, что у колесно-гусеничного движите-
ля можно несколько уменьшить размер шин, ибо при снижен-
ном давлении воздуха они работают только при половинной на-
грузке. Вместо подвески четырех колес вводится более сложное
и дорогое устройство для подъема и опускания гусеничного дви-
жителя, совмещенное с подвеской. Трансмиссия колесно-гусе-
ничного автомобиля равноценна или даже проще, так как при-
вод к ведущим колесам гусеничного движителя не сложнее при-
вода ко второй и третьей осям у автомобиля 8X8. У колесно-
гусеничной машины управляемыми должны быть передние и
задние колеса. У машины 8x8 управляемыми могут быть пер-
вые две оси с более простым рулевым приводом. Максимальная
грузоподъемность колесно-гусеничного движителя ограничива-
ется допустимой нагрузкой на две оси, а у движителя 8x8 —
допустимой нагрузкой на четыре оси.
Как видим, автомобиль с колесно-гусеничным движителем
должен быть более тяжелым, сложным и дорогим. Вместе с тем
значительно расширяется диапазон грунтовых условий, в кото-
рых автомобиль может быть использован. Существенно повыша-
ется проходимость на очень мягких грунтах и на поверхностях,
где требуются высокие грунтозацепы; одновременно улучшают-
ся эксплуатационные качества при движении по дорогам с
твердым покрытием, так как параметры основного колесного
движителя можно подобрать ближе к оптимальным для дорог
с твердым покрытием, чем у вездеходного движителя 8X8.
В 30—40 годы в работах по повышению проходимости авто-
мобилей большое место уделялось полугусеничным автомоби-
лям (впереди ведущие и управляемые колеса, сзади гусеницы
(см. рис. 74). В последующем работы над полугусеничными
автомобилями были прекращены из-за появления у них недос-
татков колесного (большое давление на грунт) и гусеничного
(большая масса, малый срок службы) движителей. В настоящее
время в связи с наличием шин, обеспечивающих малое давле-
199
ние на грунт, соизмеримое с гусеничным движителем, и сущест-
венным повышением долговечности гусениц интерес к полугу-
сеничным автомобилям может быть возрожден По сравнению
с гусеничными машинами они могут иметь большие максималь-
ные скорости движения из-за использования кинематического
способа поворота (за счет поворота управляемых колес), а по
сравнению с колесными автомобилями — более высокую про-
ходимость.
В результате исследования проблемы передвижения по пере-
сеченной местности М. Г. Беккер [2] пришел к выводу о застое
формы наземных экипажей, как одной из существенных причин,
задерживающих прогресс в повышении эффективности внедо-
рожных автомобилей. Он считает, что общий морфологический
закон, относящийся к движущимся телам, одинаков для рыб,
подводных лодок, самолетных фюзеляжей или сухопутных эки-
пажей. На основании этого им предложена концепция поезда,
т. е. создание транспортных средств с длиной, значительно пре-
вышающей ширину. Конкретным результатом работ в этом на-
правлении явилось создание многозвенных шарнирно-сочленен-
ных машин, а также автопоездов с приводом ко всем колесам
(активный привод).
На грунтовых поверхностях с близлежащим твердым основа-
нием автопоезда с активным приводом имеют проходимость
значительно выше, чем одиночные машины. Это объясняется,
во-первых, уменьшением сопротивления движению, так как по
целинному грунту движутся лишь два колеса, а значительно
большая часть колес движется по сравнительно твердой поверх-
ности колеи, во-вторых, увеличением среднего значения сцепле-
ния колес с грунтом из-за активного использования уплотнения
грунта, в-третьих, тем, что при попадании даже нескольких ко-
лес па слабые участки грунта, движение обеспечивается за счет
силы тяги, получаемой на других колесах. Особенно эффектив-
ны автопоезда с активным приводом при движении по снежной
целине. Грузоподъемность автомобил я может быть увеличена
или за счет увеличения машины при сохранении отношения
длины и ширины, или за счет увеличения числа звеньев (приме-
нения автопоезда без увеличения ширины машины). Во многих
случаях предпочтительнее оказывается второй вариант из-за
меньшего значения давлений на грунт, меньшей ширины образу-
емой колеи, однако встречаются грунтовые условия, когда целе-
сообразнее увеличивать до определенного предела размеры
автомобиля. Это было подтверждено при рассмотрении влияния
на проходимость числа осей в § 24. Поэтому применение авто-
поезда оказывается целесообразным лишь для части грунтовых
условий, но весьма значительной.
Многозвенные шарнирно-сочлененные машины имеют целый
ряд заслуживающих внимания преимуществ. По сравнению с
однозвенными автомобилями они характеризуются бочее высо-
200
кими геометрическими параметрами проходимости, лучшей по-
ворачиваемостью по мягким грунтам за счет возможности отно-
сительного перемещения звеньев. Для сочлененных машин воз-
можно преодоление особо тяжелых участков пути методом «пол-
зания». Этот метод заключается в том, что одно звено переме-
щается гидроцилиндрами, установленными между звеньями,
скользя по грунту, а второе звено в этот период является опо-
рой, имея надежное зацепление с грунтом с помощью «сошни-
ков». На следующем этапе первое звено зацепляется за грунт,
а второе подтягивается к нему.
Основными недостатками сочлененных машин являются
большая сложность конструкции, низкий коэффициент грузо-
подъемности, повышенное волнообразование на грунтовом пути,
пониженная устойчивость движения.
Рассмотрим основные типы сочлененных автомобилей, на-
шедших практическое применение.
На рис. 75,а показана компоновочная схема двухзвенного
автомобиля 4X4 семейства Гоэр. На первой секции размещают-
ся силовая установка и кабина водителя. Задняя секция грузо-
вая. Привод передних колес механический, задних — па различ-
ных моделях — механический, электрический или гпдрообъем-
ный. Колеса вращаются на осях, жестко соединенных с корпу-
сом без упругого элемента подвески. Это упрощает привод к ко-
лесам, уменьшает объем колесных ниш, дает возможность ис-
пользовать шины большого размера, что обеспечивает машине
высокую проходимость. Поворот автомобиля осуществляется за
счет поворота одной секции относительно другой. При примене-
нии электрического механизма поворота секции поворачивают-
ся одна относительно другой на 90\ а при применении для по-
ворота гидроцилнндров — на 60°. Такой автомобиль имеет высо-
кую проходимость по мягким грунтам благодаря шинам боль-
шого размера, а также за счет принудительного раскачивания
передней секции относительно задней. Как показали экспери-
менты, такое раскачивание сопровождается медленным продви-
жением вперед застрявшего автомобиля. Автомобили обычной
конструкции в этих условиях передвигаться не могли. Однако
автомобили семейства Гоэр имеют и существенные недостатки:
пониженную устойчивость из-за наличия шарнира, низкую плав-
ность хода из-за отсутствия упругих и гасящих элементов под-
вески. Максимальная возможная скорость таких автомобилей
не превышает 50 км/ч. Их проходимость снижается вследствие
большой базы и соответственно большого радиуса продольной
проходимости.
Автомобили США Гама-Гоут и М-561 (рис. 75,6) имеют
двухосную переднюю секцию и одноосную заднюю. Передняя
секция автомобиля Гама-Гоут может передвигаться самостоя-
тельно и может сцепляться с задними секциями различного наз-
начения. На плаву автомобиль движется с помощью винта, раз-
8 1342
201
в)
Рис. 75 Схемы шарнирно-сочлененных автомобилей:
в—Гоэр; б—Гама-Гоут; в—Метрак; г—Куад-Трак
202
впвая скорость до 8 км/ч. Трансмиссия механическая ступен-
чатая с отключением управляемых переднего и заднего мостов.
Шарнир между звеньями допускает относительный угол поворо-
та до 30° вокруг продольной и до 40° вокруг поперечной осей.
Кроме того, задний мост передней секции может дополнительно
поворачиваться относительно продольной оси на угол 15° в каж-
дую сторону. Все это обеспечивает равномерное распределение
нагрузки по колесам. Все шесть колес даже в самых тяжелых
условиях имеют контакт с грунтом. Подвеска всех колес незави-
симая рычажная пружинная.
У автомобиля М-561 в отличие от автомобиля Гама-Гоут
шарнир не допускает взаимного перемещения секций в горизон-
тальной плоскости (относительно вертикальной оси). Это повы-
шает устойчивость движения. Секции не складываются при по-
даче автомобиля назад. Поворот осуществляется за счет пово-
рота колес крайних осей. Угол поворота задних колес в 2 раза
меньше, чем угол поворота передних. Наличие управляемых ко-
лес на крайних осях обеспечивает хорошую управляемость на
подъемах.
Весьма интересна конструктивная схема швейцарского авто-
мобиля Метрак (рис. 75,в). Вокруг жесткой средней оси автомо-
биля качаются передняя и задняя части кузова, а также четыре
полых балансира, на концах которых установлены передние и
задние колеса. При преодолении вертикальных препятствий пе-
редняя и задняя секции поворачиваются вокруг средней осп на
угол до 30°. Возможна и блокировка взаимного положения сек-
ций для преодоления рвов. Опустив колеса одного борта, авто-
мобиль может двигаться по косогору.
Создание сочлененных автомобилей расширяет возможности
разработки автомобилей с различными типами движителей, в
частности с колесно-гусеничным. У двухсекционного автомоби-
ля 8X8 Кауд-Трак (рис. 75,г) на передние и задние пары колес
могут быть надеты гусеницы. Соединительный шарнир допуска-
ет перемещение секций в трех плоскостях.
Из специализированных автомобилей (снегоходов, болотохо-
дов) кроме широко используемых гусеничных и лыжно-гусенич-
ных заслуживают внимание автомобили с катково-гусеничным,
с колесно-шагающим, с винтовым движителями и с частичной
разгрузкой колес воздушной подушкой.
У автомобиля с катково-гусеничным движителем (рис. 76,а)
функцию траков выполняют пневматические катки, осп кото-
рых соединены с обеих сторон цепями Цепи находятся в за-
цеплении с ведущими колесами. Опорные катки, которые имеют
обычные гусеничные движители, в данном случае отсутствуют.
Корпус автомобиля опирается непосредственно на пневмокатки
нижнего ряда. При вращении ведущих колес цепи перемещают
корпус относительно катков. Корпус, скользя по каткам, переме-
щает их по дороге. Скорость перемещения корпуса относительно
8* 203
Рис. 76. Специальные автомобили для особо тяжелых грунтовых условий:
а—с катково-гусеничным движителем; б—с колесно-шагающим движителем; в—с много-
катковыми колесами; г—-с роторпо-винтовым движителем
дороги в 2 раза больше скорости перематывания цепи и окруж-
ной скорости катков.
Во время движения по слабым грунтам катки погружаются
в грунт. Сопротивление качению катков по грунту становится
очень большим, и их качение прекращается. При этом корпус
перемещается вперед, скользя по каткам.
Характер работы катково-гусеничного движителя на режи-
ме качения катков аналогичен многоколесному движителю.
Поэтому выводы по исследованию влияния параметров шин и
числа осей на эксплуатационные показатели приемлемы для
этого режима.
Сравнивая работу катково-гусеничного автомобиля на режи-
ме скольжения корпуса по каткам с колесным или гусеничным
автомобилем, можно отметить, что максимальная сила тяги по
сцеплению у катково-гусеничного автомобиля должна быть
больше, так как увеличивается сцепление движителя с грун-
том— большая масса грунта подвергается сдвигу (объемный
сдвиг грунта); почти вся сила сцепления движителя с грунтом
может быть реализована как сила тяги Ттах= Ga<p, потому что
катки не катятся и не образуют колеи. У колесного или гусенич-
ного движителя часть силы сцепления затрачивается на оиразо-
вание колеи; Гтах=Оа(<р—fr)-
Вместе с тем внутренние потери энергии у катково-гусенич-
ного автомобиля больше, чем у колесного и гусеничного, из-за
значительных потерь на трение корпуса относительно катков.
Снижать коэффициент трения корпуса по каткам ц нецелесооб-
разно, так как при движении по малодеформируемым грунтам
204
от величины коэффициента ц зависит максимально возможная
сила тяги.
Таким образом, достоинство катково-гусеничного автомобиля
заключается в том, что он может обеспечить более высокую, чем
гусеничный, проходимость по очень слабым грунтам (болота,
снег) и вместе с тем способен работать на дорогах с твердым
покрытием без их разрушения. К недостаткам этого автомобиля
по сравнению с гусеничным следует отнести большие затраты
энергии на движение, меньшую эффективность на скользких
твердых и неровных поверхностях, меньшие преодолеваемые
подъемы, большие размеры, меньшую максимальную скорость
в связи с отсутствием упругой подвески с амортизаторами. Вве-
дение упругой подвески значительно усложняет конструкцию
автомобиля.
Отличительной особенностью автомобиля с колесно-шагаю-
щим движителем (рис. 76,6) является то, что продольные рыча-
ги подвески, на которых установлены колеса, могут поворачи-
ваться относительно кузова на 360". Имеются раздельные сило-
вые приводы к колесам и рычагам подвески. При использовании
привода к колесам движитель ничем не отличается от обычного
колесного. При вращении рычагов подвески машина перемеща-
ется по траектории, описываемой рычагами. Предельная воз-
можность движения но горизонтальной поверхности определяет-
ся в данном случае не соотношением возможной силы тяги и со-
противления движению, а только несущей способностью грунта.
Если пренебречь силами инерции (полагать движение с очень
малой скоростью), то горизонтальная составляющая при взаи-
модействии колеса с грунтом близка к нулю. Значит, граничные
условия движения определяются возможностью подъема авто-
мобиля над грунтом при поворачивании рычагов подвески.
При движении методом шагания на подъем в контакте с до-
рогой действует сила, параллельная поверхности грунта, равная
Ga sin а, которая может привести к скольжению колеса по грун-
ту или к сдвигу грунта. В этом случае возможность движения
машины определяется не только погружением колес в грунт, но
и сопротивлением грунта сдвигу. Если принять, что метод ша-
гания используется только на сильно деформируемых грунтах,
то скольжение колес по поверхности грунта исключается и воз-
можность движения машины определяется несущей способно-
стью грунта при приложении нагрузки под углом к поверхности
грунта. Чем больше этот угол, тем меньше несущая способность
грунта [см. уравнение (15)]. По результатам исследований [1],
условный коэффициент сопротивления движению такого автомо-
биля по горизонтальной поверхности находится в пределах
0,1—0,5.
В рассмотренной схеме при перемещении автомобиля одно-
временно всеми рычагами получается прерывистое движение.
При перемещении автомобиля двумя рычагами обеспечивается
205
движение без пауз для перекидывания колес, однако затрудня-
ется обеспечение устойчивости на двух опорах и вдвое увеличи-
ваются нагрузки на опоры, что повышает их погружение в
грунт.
Для обеспечения непрерывного перемещения одновременно
на четырех колесах используют многокатковые колеса (рис
76,в). Принципиально характер перемещения автомобиля при
вращении многокаткового колеса такой же, как и в рассмотрен-
ном выше случае. При увеличении числа катков на одном коле-
се усложняется конструкция колеса, уменьшается диаметр кат-
ков, возрастают объем деформируемого грунта и потери энергии
на эту деформацию, увеличивается горизонтальная составляю-
щая реакции грунта (лобовое сопротивление) при вдавливании
катков в грунт, вследствие чего снижается проходимость ма-
шины.
Практически можно использовать трехкатковые колеса. Дви-
житель с такими колесами по сравнению с рассмотренным вы-
ше движителем (рис. 76,6) обеспечивает большую плавность
движения, большую скорость метолом шагания, меньшие затра-
ты энергии на перемещение. Кроме того, в этом случае машину
можно использовать как обычную колесную (8X8 пли 4X4).
Однако движитель получается более сложным и громоздким.
По сравнению с предыдущим автомобилем допустимый диаметр
катков значительно меньше, проходимость по мягким грунтам
ниже, а способность преодоления различных препятствий хуже.
Общим недостатком колесно-шагающих движителей являет-
ся трудность обеспечения поворота машины. Конструктивно
трудно выполнить колеса поворотными. Колесно-шагающий вез-
деход (см. рис. 76,6) состоит из двух секций, соединенных меж-
ду собой шарнирно так, что обеспечивается относительный по-
ворот секций в горизонтальной плоскости.
По результатам экспериментальных исследований [40], дос-
таточно высокие эксплуатационные свойства на очень слабых
грунтах и, в частности, на снежной целине имеют машины с ро-
торно-винтовыми и лыжно-винтовыми движителями (рис. 76,г).
Сцепные свойства винтового движителя обеспечиваются
только упорной поверхностью зацепов. Поэтому удельная сила
тяги повышается при уменьшении веса машины. Сопротивление
движению определяется величиной трения скольжения движи-
теля о грунт. Наименьшее оно на снежной поверхности. Величи-
на сопротивления движению сильно зависит от веса машины.
Наибольшее влияние на тягово-сцепные свойства машины ока-
зывает величина угла подъема винтовой лопасти. Увеличение
угла подъема винтовой лопасти с 8 до 37° уменьшает сопротив-
ление движению на 50—60%, а запас удельной тяги (ср—/г) ос-
тается постоянным. Влияние диаметра ротора на сопротивление
движению различно на мокром и сухом снегу. При увеличении
диаметра ротора на мокром снегу сопротивление движению уве-
206
лпчивается, а на сухом — уменьшается. При этом запас удель-
ной силы гяги на обоих видах снега увеличивается более значи-
тельно. Таким образом, увеличение диаметра ротора повышает
его тягово-сцепные свойства. Наибольшее отношение удельной
силы тяги к коэффициенту сопротивления движению получается
при высоте винтовой лопасти 0,2—0,25 шага (расстояния меж-
ду лопастями). Установлены оптимальные значения отношения
длины ротора к диаметру около четырех, а угла подъема винто-
вой линии лопасти 35—38". Направление вращения роторов
предпочтительнее такое, при котором снег при буксовании вы-
брасывается лопастями в стороны от машины.
Результаты испытания снегохода с лыжно-винтовым движи-
телем приведены в табл. 18. Масса машины 500 кг (180 кг — на
лыжи, 320 кгм — на движитель), диаметр ротора 300 мм; длина
1650 мм; высота лопасти 45 мм, угол винтовой линии 42э, угол
при вершине 20°.
Таблица 18
Поверхность движения Угол подъ- ема, 0 Угол косо- гора, ° / 5о, %
Заснеженная дорога 30 18 0,31 1,21 2,0
Полевая снежная целина 18 18 0,315 0,81 6,0
Заснеженная река — — 0,22 0,82 2,5
Лесной рыхлый снег 16 16 0,29 0,78 2,0
Снегоход легко маневрировал и преодолевал соизмеримые с
его размерами препятствия. Вместе с тем было отмечено, что
при медленном преодолении островерхих валов снегоход зави-
сает передней и задней частями движителей. При выезде снегохо-
да с малой скоростью па песок, шлак и другие загрязнения дви-
житель буксует. С увеличением скорости движения отмечен эф-
фект «глиссирования» снегохода, существенное уменьшение глу-
бины колеи и снижение сопротивления движению.
Для районов со слаборазвитой дорожной сетью с большими
площадями, покрытыми грунтами с очень малой несущей спо-
собностью (снежная целина, болота), могут оказаться целесо-
образными машины на воздушной подушке (парящие) и маши-
ны с частичной разгрузкой движителя воздушной подушкой.
Для парящих машин характерны большие габаритные размеры,
большая удельная мощность двигателей, большой шум, пылеоб-
разование, низкие динамические свойства, недостаточная управ-
ляемость
Ориентировочно мощность, необходимая для создания воз-
душной подушки, может быть определена по формуле
Ne = HQ^ID^M.
207
где Н — зазор между опорной поверхностью и ограждением воз-
душной камеры, м; G — масса автомобиля, кг; D — диаметр
опорной площади, м; .VI— фактор совершенства.
При применяемой высоте парения 0,1—0,4 м удельная мощ-
ность составляет 75-^220 кВт/т.
У машин с частичной разгрузкой движителя воздушной по-
душкой меньше габаритные размеры, меньше мощность, проще
решаются вопросы управляемости. Однако машина получается
сложной с малым коэффициентом грузоподъемности. Причем
эффективность такой машины достаточно высокая лишь на
грунтах с большой связностью, так как при разгруженном дви-
жителе сила тяги создается в основном за счет упорной реакции
грунта. На грунтах с малой упорной реакцией грунта сила тяги
невелика и динамичность машины получается весьма низкой.
Для повышения транспортной эффективности на грунтах с
очень низкими сцепными свойствами, обледенелых поверхнос-
тях, снежной целине и т. д. для получения недостающей у кон-
тактного движителя силы тяги могут быть использованы аэро-
и гидродинамические движители. Тяговое усилие, развиваемое
аэро- или гидродинамическим движителем, согласно закону ко-
личества движения, пропорционально произведению массы за-
хватываемой среды и скорости, сообщаемой этой среде. Потеря
энергии отбрасываемого движителем потока в единицу времени
пропорциональна произведению массы потока и квадрата его
скорости. Следовательно, коэффициент полезного действия тако-
го движителя увеличивается при уменьшении относительной ско-
рости отбрасываемого потока, т. е. при увеличении скорости
движения. Ориентировочная величина коэффициента пропуль-
сивных качеств Gv/N равна для машин с винтовой тягой 2—5;
для вертолетов 3—4; для самолетов 9—14.
Широкое применение воздушных винтов на машинах с воз-
душной подушкой и аэросанях объясняется сравнительной прос-
тотой их конструкции, экономичностью и возможностью работы
как на суше, так и на воде. Удельная тяга у воздушных винтов
выше, чем у гребных (водяных) при скорости более 90 км/ч.
К недостаткам воздушных винтов относят малую способность
изменять тягу, большие размеры, высокий уровень шума, опас-
ность для людей, незащищенность от воды и от твердых пред-
метов.
У газометных движителей (турбореактивных двигателей)
часовой расход топлива вдвое больше, чем у винтовых, поэтому
их использование менее экономично и оправдывается лишь на
стартовых режимах.
Глава VIII
РАСЧЕТ основных конструктивных
ПАРАМЕТРОВ АВТОМОБИЛЯ,
ОПРЕДЕЛЯЮЩИХ ЕГО ПРОХОДИМОСТЬ
Процесс проектирования автомобиля характерен тем, что
используемые па современном этапе расчетные методы обеспе-
чивают получение количественных показателей, необходимых
для принятия конструктором решений, но не вырабатывают са-
мих решении, так как в процессе принятия решения зачастую
необходимо привлечь накопленный опыт и учесть факторы, ко-
торые трудно оценить количественно и ввести в расчет. При
проектировании автомобиля ищут оптимальные решения, кото-
рые обеспечивают требуемую транспортную эффективность при
минимуме материальных затрат.
Расчет конструктивных параметров автомобиля, обеспечива-
ющих необходимую проходимость, можно рассматривать как
решение отдельных подсистем сложной системы машина — во-
дитель— внешние условия движения. В таких случаях рекомен-
дуется находить оптимальные параметры отдельных подсистем
при условии идеальной связи с другими подсистемами, а затем
учесть влияние конкретных значений связей.
Как показано выше, определяющее влияние на проходимость
оказывают конструкция движителя, подвески и системы двша-
тель — трансмиссия. Ниже рассмотрены методы расчета этих
подсистем автомобиля для условий движения вне дорог.
Опре деление оптимальных параметров рассматриваемых
подсистем автомобиля будем вести в следующей последователь-
ности:
выбор критериев, по которым проводится оптимизация;
построение математической модели связи выбранного крите-
рия с параметрами рассматриваемой подсистемы;
определение исходных данных, вводимых в модель;
математический расчет оптимальных конструктивных пара-
метров подсистемы автомобиля.
§ 29. Расчет параметров движителя
Выбор критериев для оптимизации и расчетной математичес-
кой модели. Важнейшими требованиями, которым должны отве-
чать критерии, являются представительность, или иначе, — пря-
209
мое отображение основной цели решаемой задачи, и чувстви-
тельность к исследуемым параметрам. Основная цель решаемой
задачи—определение такого сочетания конструктивных парамет-
ров движителя, при котором обеспечивалась бы необходимая
проходимость автомобиля при минимальном ухудшении эксплу-
атационных свойств автомобиля па дорогах и при минимальных
материальных затратах. Оговорки делаются потому, что любые
способы изменения параметров движителя для повышения про-
ходимости автомобиля связаны с ухудшением эксплуатацион-
ных свойств автомобиля на дорогах и с увеличением материаль-
ных затрат.
Для количественной оценки проходимости автомобиля в § 16
рекомендованы три показателя: 1) показатель проходимости П,
характеризующий уровень, проходимости в конкретных грунто-
вых условиях; 2) вероятностный показатель проходимости /7В;
3) показатель эффективности /7Л. Кроме того, используют такие
показатели проходимости, зависящие от конструкции движите-
ля, как показатели преодоления вертикальных и горизонталь-
ных препятствий Ап, Ап» минимальный радиус поворота автомо-
биля Основными показателями, характеризующими влия-
ние движителя на эксплуатационные свойства автомобиля в ус-
ловиях автомобильных дорог, являются жесткость шин Сш, хо-
димость шин X, коэффициент сопротивления боковому уводу
колес Ку, коэффициент мощностных затрат Влияние конст-
рукции движителя на материальные затраты может быть ориен-
тировочно оценено по удельному объему, занимаемому движи-
телем [1].
Решение задачи с оптимизацией по всем этим показателям
практически невозможно. Желательно иметь один критерий.
В случае нескольких критериев известны следующие варианты
решения.
1. Построение единого критерия, представляющего собой
линейную форму имеющихся. Применение такого метода край-
не затруднительно, так как методов определения «коэффициен-
тов важности критериев» пока не существует. Поэтому от одной
трудности можно перейти к другой.
2. Превращение всех критериев, кроме одного, в ограниче-
ния, уровень которых должен быть достаточно обоснован. Ос-
новная трудность при использовании этого варианта заключа-
ется в обосновании количественных значений ограничений.
3. Критерии располагают в порядке важности и отыскивают
решение, оптимальное по первому из них. Затем определяют
область, в которой значение этого критерия отличается от опти-
мального на заданную величину (например 5%). В этой области
(она ввиду пологости функции критерия в районе экстремума,
как правило, оказывается значительной) производят оптимиза-
цию по второму критерию, и оптимальным считают решение,
соответствующее экстремуму второго критерия в данной облас-
210
ти. Если число критериев больше двух, то далее поступают ана-
логичным образом. Часто наиболее целесообразными оказывает-
ся сочетание второго и третьего вариантов.
Из перечисленных выше оценочных показателей движителя
наиболее представительными, т. с. отвечающими существу зада-
чи и значительно изменяющимися при изменении исследуемого
параметра, являются /7В, fNi 1/дв. Удельный объем, занимаемый
движителем 1/дв, является важнейшим показателем для автомо-
биля, так как от значения этого параметра зависят общие га-
баритные размеры автомобиля и соответственно его вес и сто-
имость. При изменении основных параметров движителя D, В,
Н, п величина Удв значительно изменяется. Ее можно рассмат-
ривать как критерий, косвенно оценивающий материальные за-
траты. Параметры /7В и fN характеризуют возможности движи-
теля по обеспечиванию проходимости автомобиля. Значение Пв
дает представление о диапазоне грунтовых условий, в котором
обеспечена проходимость автомобиля, а значение fN характери-
зует затраты механической энергии на движение машины и в
большей мере, чем все другие показатели, определяет возмож-
ную скорость движения автомобиля. Оба параметра значитель-
но изменяются с изменением почти всех конструктивных пара-
метров движителя и в меньшей мере зависят от конструктивных
параметров других частей автомобиля.
При заданных значениях требуемой проходимости автомоби-
ля можно установить ограничения для Пв и в качестве критериев
использовать ]N и Идв. Для остальных оценочных показателей
движителя можно найти крайне допустимые значения и рас-
сматривать их как ограничения. Значения параметров преодоле-
ваемых препятствий йп, &п, а также /?min определяют исходя*из
назначения автомобиля. Ограничения показателей Сш, Ку и X
могут быть выбраны по статистическим данным.
В предыдущих главах приведены аналитические зависимо-
сти, определяющие связь всех рассмотренных эксплуатационных
показателей, используемых в качестве критериев оптимизации
и ограничений, с конструктивными параметрами движителя, а
также с параметрами грунта и режима движения. Эти аналити-
ческие зависимости и являются математическими моделями, не-
обходимыми для расчета параметров движителя. Методика рас-
чета основного критерия в зависимости от параметров движи-
теля приведена в § 17.
Определение исходных данных. Исходные данные, вводимые
в модель, включают: 1) параметры, которые конструктор выби-
рает в процессе решения задачи, 2) параметры, которые не мо-
гут изменяться по воле исследователя (конструктора).
К 1-й группе относятся конструктивные параметры движите-
ля: О, В, Я, Z?np, ДПр, &п, Ер, рОу Bp, п и параметры, харак-
теризующие режим движения Ga, va, so. Из них основными,
определяющими, оптимальное сочетание которых требуется най-
211
ти, являются четыре параметра: D, В, Н и п. Остальные пара-
метры можно выбрать до выполнения процесса оптимизации
исходя из заданных условий, статистических данных по автомо-
билям и приведенных выше материалов. Так, значения йцр, БД,
Дщ,, /7, можно выразить через Н и В по статистическим дан-
ным для шин высокой проходимости (см. § 5) [1]. В последую-
щем, после выбора оптимальных значений D, В и Я, их можно
уточнить при решении частных задач оптимизации. Значения
£р и г|д выбирают по характеристикам шинных материалов. Ве-
личина Gd, как правило, задается, ро— выражается через основ-
ные размеры шипы и нагрузку на колесо, р0= (0,14-0,15) X
Хрюшах. Значение (Pwmax+Po) находится по уравнению (50).
Скорость при изменении в небольших (практически возмож-
ных) пределах оказывает слабое влияние на величину Пъ и Ду
и поэтому может быть выбрана приближенно, исходя из внеш-
них условий и предполагаемого использования автомобиля.
Ко второй группе относятся параметры, характеризующие
дорожно-грунтовые условия. Выбор расчетных значений этих
параметров представляет сложную задачу вследствие порази-
тельной неоднородности и нестабильности грунтовых поверхнос-
тей, недостаточной их изученности и малого объема статистичес-
ких данных. Поэтому задачу выоора параметров движителя по-
ка приходится решать при наличии неполной информации о
внешних условиях.
В разработанные математические модели входят следующие
параметры грунтовых поверхностей: Е, Яг, а, <р0, с0, <рр, Б- у, а.
В главе I найдены аналитические выражения значений п, Бт, tp
у через основные независимые параметры: с0, <р0, Яг. Установле-
на также зависимость механических параметров грунта от ви-
да грунта и его влажности и механических параметров снега ог
его плотности и температуры. Все это позволяет определить ди-
апазон количественных значений параметров основных грунто-
вых поверхностей (см. рис. 11 и табл. 7, 8).
Анализ значений, представленных в таблицах, показывает,
что для снежной целины, заболоченных поверхностей и связных
грунтов в период распутицы значения параметров, соответству-
ющих самым неблагоприятным условиям, настолько малы, что
обеспечить проходимость автомобилей в этих условиях практи-
чески невозможно. Следовательно, необходимо знать закон рас-
пределения параметров грунта по площади (пути) и по време-
ни, чтобы оценить относительную часть грунтовых поверхностей
не пригодных для использования автомобилей.
При проектировании автомобилей рассматривают грунтовые
условия на обширной территории и для длительного времени.
14звестно также, что влажность грунта изменяется в зависимо-
сти от большого числа случайных факторов. Для этих условий
нормальный закон, являющийся предельным законом, к которо-
му приближаются другие законы распределения, наиболее ве-
212
роятен. Поэтому для рассматриваемых нами задач вплоть до
получения надежных, опровергающих возможность применения
нормального закона статистических данных, целесообразно ис-
пользовать нормальный закон распределения влажности грунта.
В качестве подтверждения можно указать, что по результатам
исследований г^25] (см. рис. 51) закон распределения влажности
грунта в степной зоне весной и осенью близок к нормальному.
В § 24 было установлено, что на различных грунтовых по-
верхностях характер влияния параметров движителя па эксплу-
атационные качества автомобиля весьма различен. Поэтому
чем ограниченнее грунтовые условия применения автомобиля,
тем ближе к ним могут быть подобраны параметры движителя.
Создание специализированных для определенных грунтовых по-
верхностей автомобилей, безусловно, повысит их эффективность
на этих поверхностях, но существенно снизит ее в других усло-
виях. Вот почему важно возможно точнее установить область
предполагаемого использования автомобиля. В настоящее вре-
мя наиболее широко распространены универсальные по грунто-
вым условиям автомобили. По-видимому, ориентация на уни-
версальные автомобили сохранится еще некоторое время. Вмес-
те с тем уже теперь возможно использование и специализиро-
ванных автомобилей в дополнение к универсальным, например,
болотоходов для лесисто-болотистой местности, снегоходов для
районов с глубоким снежным покровом.
Наиболее трудными для движения автомобилей являются
суглинистые и глинистые грунты в период распутицы и заболо-
ченные грунты. Порядок выбора расчетных параметров грунтов
по имеющимся статистическим данным приведен в § 5. В табл.
19 приведены граничные значения параметров связных грунтов
весной, соответствующие четырем значениям интегральной час-
тости по пути. Эгп значения получены по статистическим дан-
ным для связных грунтов в зависимости от влажности. Закон
распределения влажности принят нормальным.
Таблица 19
Ин гегральная частость 7, г/см3 fp ° с0> МПа яг, см Е. МПа Elt МПа 'р. с
0,5 1,3 0,30 7 0,008 35 1,5 0,3 0,07
0,75 1,2 0,25 6 0,007 35 1,5 0,4 0,07
0,95 1,15 0,17 а 0,005 40 1,2 0,3 0,08
0,99 1,1 0,05 3 0,002 50 0,3 0,3 0,10
Значения уклонов на местности можно принять те же, что и
на грунтовых дорогах, имея в виду возможность объездов кру-
тых подъемов. Кривые распределения уклонов на грунтовых до-
рогах приведены на рис. 51,в [25].
213
Определение оптимальных конструктивных параметров дви-
жителя. После того как выбраны критерии и ограничения, сос-
тавлены математические модели и определены исходные данные,
можно определить оптимальные параметры движителя. Для это-
го целесообразно использовать методы математического про-
граммирования. В рассматриваемой нами задаче критерии и
ограничения являются нелинейными функциями. Это задача не-
линейного программирования. Не существует методов решения
таких задач в общем случае. В нашем конкретном случае мож-
но использовать два метода: метод случайного последовательно-
го поиска п метод блочного программирования. Из большого
количества алгоритмов простого случайного поиска используем
алгоритм, именуемый «шаговый поиск с пересчетом».
Для нахождения минимума рассматриваемого критерия фор-
ма этого алгоритма имеет вид
к 4" 1
Av _|я(В)'г+1, если Кп<^Кп-\ (удачный шаг)
+ i — j __
I — Дхл_р.а($)я+1, если (неудачный шаг),
где п— номер шага; х — аргумент; а — масштаб, определяемый
возможными пределами изменения; g — параметр шага; /<n-i —
минимальное значение критерия, получаемое за п шагов.
Рассмотрим конкретный пример выбора оптимальных пара-
метров движителя для универсального автомобиля с общей мас-
сой 13 т.
1. В качестве критериев для оптимизации принимаем после-
довательно минимальный объем движителя Удв и показатель
экономичности fN.
2. Исходные для расчета данные по дорожно-грунтовым по-
верхностям приведены в табл. 19 и 20. Самыми тяжелыми для
движения автомобиля являются болота и распаханные поверх-
ности со связными грунтами в период распутицы.
Таблица 20
Вид «грунтовой поверхности Е, МПа "г, СМ tgrO с О'» МПа Т, г/см8
Размокшие грунтовые дороги 2,5—6,0 40—10 0,1—0,35 0,001 — —0,013 1,2-1,4
Пахотные поверхности на суг- линке (весной) 0,3—2,5 50-х20 0,05— —0,25 0,002— —0,017 1,1-1,3
Заболоченные поверхности 0,2-1,5 150— — Ю 0,05— —0,25 0,003— —0,02 1,0-1,4
Сыпучие пески 3,5—8,5 90—30 0,4—0,7 0-002 1,3—1,6
Снежная целина 0,1—1,0 100— —20 0,03—0,3 0,001 — —0,02 0,2—0,4
214
Поверхности, покрытые связными грунтами, составляют бо-
лее 40% равнинной и среднеперссеченной местности. Если обес-
печить движение автомобиля по этим поверхностям в период
распутицы, то будет обеспечена возможность движения и на
всех других поверхностях, кроме болот. Следовательно, расчет
необходимо вести для грунта пахотной поверхности па суглинке.
Как показывают расчеты, для обеспечения проходимости ав-
томобиля по грунту, соответствующему границе интегральной
частости 0,99 (см. табл. 19), требуется движитель с практически
неприемлемыми размерами. Задача проектирования колесного
движителя автомобиля, обеспечивающего абсолютную проходи-
мость по всем грунтам в любое время года, практически нере-
альна и нецелесообразна. Следует учитывать возможность объ-
езда наиболее тяжелых участков или строительство облегченно-
го дорожного пути. Вероятность проходимости, численно равная
интегральной частости грунтов, по которым возможно движение
проектируемого автомобиля, может быть определена в результа-
те специального экономического исследования.
Целью экономического исследования является определение
задаваемой вероятности проходимости автомобиля, при которой
может быть обеспечено выполнение транспортных задач с наи-
меньшими затратами. Это типичная задача с определением ми-
нимума затрат, так как при увеличении вероятности проходи-
мости повышается стоимость автомобиля и расходы на его экс-
плуатацию в легких дорожно-грунтовых условиях, но уменьша-
ются затраты на дорожную подготовку маршрутов. Следова-
тельно, чтобы зацать вероятность проходимости для проектиру-
емой машины, необходимо решить комплексную задачу большо-
му кругу специалистов. В настоящей работе приводятся мате-
риалы для определения параметров движителя, обеспечиваю-
щих заданную вероятность проходимости, т. е. для получения
исходного материала для оценки стоимости автомобиля.
3. Значения оценочных показателей движителя, используе-
мых в качестве ограничений, можно принять следующие:
/гт>0}05; м; ЛП^НГ; рттС0,08 МПа; Ку =^Ky!G^ 1
1/рад; Сш<400 кН/м; Яшт<8 м.
Требуемая высота преодолеваемого препятствия выбрана из
условия обеспечения выхода машины из колеи. Глубина колеи
при многократных проходах принята равной толщине размок-
шего (оттаявшего) слоя грунта. Требуемый минимальный ра-
диус поворота принят равным минимальному радиусу поворотов
на горных дорогах.
4. Основными расчетными параметрами движителя будут
число осей п, наружный диаметр Я, ширина и высота профиля
В и Я. Остальные параметры движителя выразим через основ-
ные или выберем их значения, используя материалы § 24: /?пр =
= В(1,02—0,2 В/Я); /гг = 0,3 Я; Дпр = 2,5 см; /ги = 0,4; /'-10 см;
г?а = 20 км/ч; Вр = 4 МПа; i|4 = 0,5; р0 = 0,12 pWmax.
215
По условиям преодоления рва п^З. При выборе значений D,
В и Н следует учитывать установку колесного тормоза. Это на-
кладывает дополнительное ограничение
D>2vfi-Ls.rG,./Z?,
I I К 7
где ^ = Bd/G^ по статистическим данным 8т^0,01 м2/кН, vh =
= HjB, характеризует тип шин.
Таким образом, мы пришли к задаче с тремя произвольно
задаваемыми параметрами. Для наглядности решения, учитывая,
что п имеет всего два значения (3) и (4), а целесообразная об-
ласть изменения незначительная (vn = 0,5-4-1,0), можно раз-
бить рассматриваемую задачу на шесть вариантов с одним ар-
гументом В, после чего уточнить оптимальные значения хп:
Вариант
п
Хн
Рг
В
. I 2 3 4 а 6
3 3 3 4 4 4
1 0,75 0,5 1 0,75 0,5
. 2160 2160 2160 1625 1625 1625
35 40 50 30 35 45
Начальные значения В для поиска выбраны с учетом статис-
тических данных для различных типов шин (рис. 77). В данном
случае критерий для оптимизации Гдв связан с аргументом В
уравнением
1/дв=д(2^яВ2+етОк)24ОкВ.
(202)
Следовательно, решение каждого варианта сводится к опре-
делению минимального значения В, при котором удовлетворя-
ются все ограничения.
5. Проводим решение по методике, изложенной в § 17. Ре-
зультаты решения для рассматриваемых шести вариантов при-
ведены на рис. 77,а. Графики рис. 77,а представляют исходный
материал для экономического исследования с цепью определе-
ния оптимальной вероятности проходимости для проектируемого
автомобиля. Не имея возможности провести такое исследование,
можно, пользуясь только полученными графиками, установить,
что в рассматриваемом случае проектировать автомобиль с ве-
роятностью проходимости более 90% нецелесообразно, так как
при 77в>90% требуемые размеры движителя резко увеличива-
ются. В выполненных к настоящему времени конструкциях ав-
томобилей удельный объем движителя составляет Гдв = 0,15-4-
0,29 м3/т, что соответствует/7В = 50-4-60%. Для дальнейшего ис-
следования выберем значения /7в = 50, 75 и 90%. На рис. 77.6
приведены зависимости Vhb(vh) для выбранных значений Пв.
По этим графикам определим диапазоны значений ун, находя-
щихся в зоне экстремумов Идв = (1-4-1,05) Гдвшт-
6. Уточним параметры движителя по второму критерию —
показателю экономичности fN для всей совокупности грунтовых
условий, представленных в табл. 19. Для этой цели выполним
216
Рис. 77. Графики для выбора параметров движителя:
at б, в,—результаты расчета; г—зависимость ширины профиля шины от грузоподъемно
сти; 1—шины с регулируемым давлением; 2—арочные шины; 3—ппевмокатки; 4—обыч
ные автомобильные шины
решение с минимизацией по /Л- методом шагового поиска или
графоаналитическим методом.
Результаты расчета представлены на рис. 77,в. По сумме
всех показателей самым предпочтительным является движитель
с п = 4, D=122 см, В = 42,5 см и // = 35,3 см.
Из шин, выпускаемых промышленностью, наиболее близкие
размеры имеет шина 1230X425—533 (ТОСТ 17394—79).
§ 30. Расчет основных параметров подвески
Как выяснено выше, от свойств подвески зависят допустимая
скорость движения по неровным поверхностям, ограничиваемая
колебаниями кузова и динамическими нагрузками, изменение
217
нормальных нагрузок в процессе движения автомобиля, допол-
нительное сопротивление движению.
Основными показателями, оценивающими свойства подвески
являются энергоемкость подвески, амплитуды перемещения под-
рессоренной и нсподрессоренных масс, ускорения вертикальных
колебаний. Энергоемкость подвески характеризует возможность
преодоления неровностей без удара в ограничители. Амплитуды
перемещения подрессоренной и неподрессоренной масс опреде-
ляют изменение нормальных нагрузок на колеса и возможность
отрыва их от дороги. Ускорения вертикальных колебаний явля-
ются основным показателем воздействия колебаний на человека.
Все эти показатели изменяются в зависимости от величины не-
ровностей пути, скорости движения, параметров подвески и об-
щих параметров автомобиля.
Задача расчета состоит в выборе параметров подвески, обес-
печивающих возможность движения в предполагаемых дорож-
но-грунтовых условиях (с экономически оправданной скоростью
движения). Основными параметрами подвески, которые должны
быть определены, являются упругая характеристика (жест-
кость) подвески, ход колос статический и динамический, сопро-
тивление амортизаторов. При снижении жесткости подвески и
увеличении хода колес допустимая скорость движения увеличи-
вается практически па всех неровных поверхностях, но вместе с
тем увеличивается часть объема автомобиля, занимаемая под-
веской и колесами, усложняется автомобиль и увеличивается
его стоимость. Учитывая это, можно выбрать в качестве крите-
рия оптимизации соотношение допустимой скорости движения
и относительной стоимости машины. Заметим, что при примене-
нии подвески с прогрессивной упругой характеристикой требуе-
мый динамический ход снижается, но отношение стоимости под-
вески и автомобиля к единице динамического хода подвески при
этом увеличивается.
При выполнении расчета в качестве исходных данных ис-
пользуют характеристику неровностей или спектральную плот-
ность неровностей грунтового пути [см. гл. IV, формулу (167),
табл. Iff].
Методика расчета допустимой скорости движения при из-
вестных значениях спектральной плотности неровностей пути,
конструктивных параметров автомобиля и подвески приведена в
§ 13. Показатели спектральной плотности микрорельефа различ-
ных грунтовых поверхностей приведены в табл. 15.
Для построения передаточной функции (амплитудно-частот-
ной характеристики) для двухосною (или приведенного к двух-
осному) автомобиля используют подрессоренную Л1 и пеподрес-
соренную т массы, жесткость шин Сш, жесткость рессор Ср и
коэффициент сопротивления амортизаторов К. Значения Л4, т
и Сш определяют по заданной массе автомобиля, выбранным
параметрам движителя и ориентировочно выбранному типу под-
218
вески (зависимая или независимая). При определении соотно-
шения И и т следует использовать данные, имеющиеся для из-
вестных автомобилей с близкой конструктивной схемой [18]. От-
ношение Mjm для грузовых автомобилей без груза с зависимой
подвеской находится в пределах: для передней подвески 2,5—
5,0 (3,0—5,0 с грузом); для задней подвески 1,2—3,0 (4,5—6,5
с грузом). При использовании независимой подвески неподрсс-
соренная масса в 1,5—2,0 раза меньше, чем при использовании
зависимой.
Коэффициент сопротивления амортизаторов па первом этапе
расчета выбирают в зависимости от коэффициента затухания
ф2, который принимают постоянным, например, ф2 = 0,25
К=0,5фг /2ЖСРСШ/(СРН-СШ).
Значение Ср выбирают в качестве основного, произвольно
выбираемого параметра. Возможный диапазон изменения жест-
кости рессор определяют по величине частоты свободных коле-
баний, которая должна находиться в пределах й0"= 64-10 рад/с:
^'р==^гст'^р» Ар==(& ^о)
TW Лр — статический прогиб рессоры; /гш— статический прогиб
шины.
Величину рабочего (динамического) хода колеса определяют
по коэффициенту динамичности (для полноприводных автомоби-
лей Лд= 1,84-2,5).
Динамический ход необходимо проверять по условиям рабо-
ты передней подвески без удара в ограничители хода при рез-
ком торможении
В результате расчета по уравнениям (158), (160) получают
значения вертикальных ускорений колебаний в зависимости от
скорости при выбранной величине Ср. Для определения макси-
мально возможной скорости движения в-ыбирают допустимое
среднеквадратичное значение вертикальных ускорений колеба-
ний, 0,25 g для неограниченного времени движения и 0,4 g для
кратковременного движения (до двух часов). Проведя расчет
для нескольких значений Ср получим зависимость ^тах(Ср), яв-
ляющуюся основой для последующего экономического анализа
с целью выбора оптимальных параметров подвески. Для выб-
ранного значения СР уточняют значение /<, для чего проводят
расчет при нескольких значениях К и выбирают оптимальное.
Полученные по условиям допустимых ускорений колебаний
параметры подвески необходимо проверить на отсутствие ударов
в ограничители хода подвески и отрыва колес от опорной по-
верхности. Для этого по уравнениям (157), (159) строят ампли-
219
тудно-частотные характеристики относительного перемещения
колес ——~(v) и -—~(у). Затем по методике, аналогичной
Q Q
определению среднеквадратичных ускорений (см. § 13), опреде-
ляют средние квадратичные значения (г—^)с и (£—^)с для по-
лученных выше значений Ср и л.
Для исключения удара в ограничители хода и отрыва колес
от дороги должны выполняться условия
(г-С)с<О,ЗЗЛгд; ;С-Лс<0,ЗЗДш. (203)
Кроме того, по формуле (155), преобразованной для подсче-
та Лрд, проверяют возможность удара в ограничители хода при
движении через часто встречающиеся единичные неровности:
гд —
Если эти условия не выполняются, необходима корректиров-
ка параметров подвески. Для исключения удара в ограничители
хода подвески рассматривают возможность увеличения динами-
ческого хода или введения дополнительного упругого элемента.
Возможность отрыва колес от дороги может быть устранена при
уменьшении жесткости шин или увеличении сопротивления
амортизаторов.
Если характеристика неровностей грунтовой поверхности за-
дана параметрами периодически повторяющихся неровностей
расчет возможной скорости упрощается (см. § 13, раздел «Дви-
жение автомобиля по волнистой поверхности»). В данном слу-
чае допустимыми значениями вертикальных ускорений являются
их абсолютные значения, а не среднеквадратичные (Z = 0,35g—
для длительного движения и Z = 0,56g— для кратковременного
движения).
Возможности удара в ограничитель хода и отрыва колес от
дороги также оценивают по абсолютным значениям перемеще-
ний z и С, определяемым по амплитудно-частотной характерис-
тике г(у) и £(v). При этом должны быть выполнены неравен-
ства
(-г — 0<Лр.д; (£—
(204)
При расчете параметров подвески для многоосного автомо-
биля амплитудно-частотные характеристики строят по форму-
лам (165) (см. рис. 44). Затем их перестраивают в координатах
(пшахЛ/о—S), где S — длина неровности (рис. 78).
При определении параметров подвески многоосного автомо-
биля расчет ведут в такой последовательности.
1 По формулам (165) строят амплитудно-частотные харак-
теристики ccmax/<7o(^a, S) (см. рис. 44) и перестраивают в коор-
динатах («тах/^0—5) (см. рИС. 78).
220
Рис. 78. Графики для расчета параметров подвески
2. Строят графики спектральных плотностей угловых пере-
мещений автомобиля Sa(S) для различных скоростей движения
(см. рис. 78). Для этого используют формулу
Sai(S)=
Счпах
9
(5) ^(S).
(205)
Значения Sq(S) определяют по графику спектральной плотнос-
ти (рис. 45), а значения ------1-*-(S)— по графикам рис. 78.
3. Для каждого значения скорости определяют сретнеквад-
ратичные значения угловых перемещений корпуса по уравнению
^•=1/ (S)dS.
о
Интегрирование выполняется графически.
4. Определяют среднеквадратичные значения вертикальных
ускорений в зоне размещения водителя
2Х
гце lc — расстояние от центра тяжести машины до сиденья во-
дителя, м, Vi = 2aVi/Si (Si — длина неровности, соответствующая
наибольшему значению Sa(S) для z-й скорости).
5. По полученным данным строят график Zc(v) (см. рис. 78)
и по нему определяют допустимую скорость движения.
221
Возможность удара в ограничитель хода может быть оценена
по среднеквадратичному значению перемещения корпуса в зоне
крайних колес
асЛпах <'С ^>ЗЗАреД,
ГДе /щах — расстояние от центра тяжести машины до оси наибо-
лее удаленных колес (передних или задних).
Отрыв колес от дороги происходит, если высота неровностей
превышает некоторую величину ^ОТр, определяемую уравнением
7огр-2//ш(1+^-) . (206)
X Сш ' 2тик
При применении подвески, обладающей нелинейной упругой
характеристикой, расчеты усложняются, и их проводят с исполь-
зованием ЭВМ по специально разработанным программам [18].
Для пневматических упругих элементов жесткость определя-
ют по выражению
С —k р+ 1 A+d <//?эф
где k— показатель политропы; р— избыточное давление возду-
ха; V — текущее значение объема упругого элемента; Vp — объ-
ем дополнительного резервуара; ЕЭф— эффективная площадь
упругого элемента.
Жесткость гпдропневматического упругого элемента прибли-
женно можно определить по следующим формулам:
Cy—kpF2iV (без противодавления);
Ср=Л(р1Л1 Vx-Yp2F\ V2) (с противодавлением),
где I 1, р\ и Fi — соответственно объем газа, его давление и пло-
щадь поршня рабочей камеры; V2; р2; F% — то же, для камеры
противодавления. Собственная частота колебаний определяется
по формуле
ц) = (1+/А) kg >
I G — А) /ч
где /z2; \ = F2p2 F\px\ и Л2 — приведенная высота стол'
бов газа.
§ 31. Расчет параметров двигателя и трансмиссии
Выбор параметров двигателя для автомобилей высокой про-
ходимости имеет существенные особенности Если для обычных
автомобилей мощность двигателя выбирают из условия обеспе-
чения максимальной заданной скорости при движении по хоро-
шим дорогам (ф = 0,024-0,04) независимо от параметров движи-
теля и подвески, то для автомобилей высокой проходимости
222
мощность двигателя выбирают по результатам расчета парамет-
ров движителя и подвески.
В процессе расчета параметров движителя определяют зна-
чение коэффициента мощностных затрат, а при выборе парамет-
ров подвески — допустимую скорость движения в предполагае-
мых дорожно-грунтовых условиях. Опыт эксплуатации полно-
приводных автомобилей показывает, что при их использовании
вне дорог с твердым покрытием допустимая скорость ограничи-
вается возможностями подвески.
По известным значениям и уП1ах необходимая для движе-
ния в рассматриваемых условиях мощность определяется по
формуле
^>ппх = (/лг^а_|“ ^max/^70Т] ГЛ n,
где Кв — коэффициент использования мощности двигателя с
учетом отбора мощности на навесное оборудование.
При применении механической трансмиссии значение т]т
обычно выбирают в зависимости от колесной формулы автомо-
биля :
Колесная формула . 4x2 6x4 4x4 6x6 8x8
Пт ' .0,9—0,95 0,85—0,9 0,85—0,9 0,8—0,85 0,75—0,8
Значение Кв выбирают в пределах 0,6—0,8 в зависимости от
показателей навесного оборудования и предполагаемых условий
эксплуатации. Величина коэффициента обтекаемости для полно-
приводных автомобилей 0,054-0,07, а площадь лобового со-
противления F= (44-5) м2 для грузовых тяжелых автомобилей;
3,5—4,5 м2 — для средних и 3,0—4,0 м2 — для грузовых легких
автомобилей.
Основанием для выбора двигателя являются величина мощ-
ности, необходимой для движения в наиболее вероятных дорож-
но-грунтовых условиях, а также результаты экономического
анализа и оценки производственных возможностей отрасли. По-
вышение удельной мощности приводит к увеличению подвижно-
сти автомобиля вне дорог. Вместе с тем увеличение мощности
двигателя связано с отрицательными последствиями, с увеличе-
нием массы силового агрегата и трансмиссии, с повышением
стоимости автомобиля. Важное значение имеет и выбор типа
двигателя; при равной удельной мощности применение дизель-
ного двигателя обеспечивает более высокие показатели проходи-
мости по сравнению с карбюраторным двигателем [37J.
На рис. 79 для ориентировки приведена зависимость удель-
ной мощности от веса для некоторых отечественных и зарубеж-
ных автомобилей. Следует заметить, что в последнее время на-
метилась тенденция к уменьшению удельной мощности для до-
рожных (неполнопрпводных) автомобилей и к увеличению
удельной мощности для автомобилей высокой проходимости.
Для повышения экономичности полноприводных автомобилей
223
Рис. 79. Графики для выбора мощности двигателя
исследуются возможности использования двух двигателей, что
обеспечивает достаточную топливную экономичность на автомо-
бильных дорогах и в городских условиях, когда работает только
один двигатель, и необходимую транспортную эффективность в
тяжелых дорожно-грунтовых условиях, когда работают два дви-
гателя.
Учитывая ограничение скорости движения как возможностя-
ми подвески, так и мощностью двигателя, можно получить целе-
сообразное соотношение удельной мощности двигателя и стати-
ческого хода подвески (рис. 79). По этим графикам, зная вели-
чину статического хода подвески, можно ориентировочно опре-
делить необходимую удельную мощность двигателя.
Выбор параметров трансмиссии осуществляют с таким рас-
четом, чтобы обеспечить автомобилю максимальные тяговые и
экономические свойства в разнообразных дорожно-грунтовых
условиях. Трансмиссия полноприводных автомобилей высокой
проходимости должна обеспечить полное использование возмож-
ностей движителя по сцеплению с грунтом и тяговые возможно-
сти двигателя.
Исходными данными для выбора параметров трансмиссии
являются: указываемые в техническом задании грузоподъем-
ность, скорость и т. д., предполагаемые дорожно-грунтовые ус-
ловия, требования унификации с массовыми автомобилями,
принятые (предварительно) решения по параметрам движителя,
подвески, двигателя, а также по геометрическим параметрам
проходимости автомобиля.
Расчет параметров трансмиссии включает: определение кинематического
и силового диапазонов автомобили, диапазона передаточных чисел, выбор
схемы трансмиссии (типа механизмов, составляющих трансмиссию, и их раз-
мещение) и числа передач, расчет передаточных чисел всех агрегатов транс-
миссии, определение типа и схемы размещения дифференциалов.
При выборе схемы трансмиссии и типа основных ее агрегатов рекомен-
дуется учитывать следующее. Мостовая трансмиссия хорошо сочетается с за-
висимой подвеской и рамной несущей системой; целесообразна при простой
конструкции автомобиля и необходимости обеспечения широкой унификации
о массовыми автомобилями. Н-образную трансмиссию обычно выбирают при
224
разработке оригинальных автомобилей, без широкой унификации с массовы-
ми мостовыми автомобилями. Она целесообразна при применении независимой
подвески всех колес, несущего корпуса, передних и задних управляемых ко-
лес. Агрегатами с переменным передаточным числом в той и в другой схе-
мах являются коробка передач и раздаточные коробки. Постоянное пере-
даточное число имеют в мостовой схеме главные передачи и бортовые пли
колесные редукторы, в Ы-обравной схеме — бортовые и колесные редук-
торы. Вопросы выбора типа дифференциалов и схемы их размещения рас-
смотрены в гл. VII.
При выборе типа коробки передач (типа трансмиссии) обычно исходят
из следующего. Ступенчатые коробки с неподвижными осями наиболее про-
стые, они имеют наименьшие размеры и массу. Ступенчатые планетарные
коробки передач, переключаемые фрикционными или электр 'магнитными
устройствами, обеспечивают более высокие тяговые и динамические свойст-
ва. Это объясняется тем, что переключение передач может осуществляться
без разрыва потока мощности. Планетарные коробки передач целесообразно
применять в случае дистанционного и автоматического управления.
Гидромеханические коробки передач, состоящие из гидротрансформатора
и ступенчатой коробки передач, обеспечивают автоматическое непрерывное
изменение передаточного числа в определенном диапазоне, в результате чего
облегчается управление автомобилем, повышается плавность изменения мо-
мента, повышается коэффициент использования мощности двигателя, что по-
вышает проходимость автомобиля по мягким грунтам и при преодолении пре-
пятствий. Кроме того, наличие гидротрансформатора обеспечивает возмож-
ность движения с очень малой скоростью, повышает надежность автомобиля
при работе в напряженных условиях вне дорог. Вместе с том КПД гидро-
механических к )робак передач меньше, чем у механических ступенчатых, и
возможность торможения двигателем ниже. Отмеченные недостатки в значи-
тельной мере снижаются при автоматической блокировке гидротрансформа-
тора на высших передачах и на тормозном режиме.
Гидрообъемные передачи не являются автоматическими, но позволяют в
сравнительно широком диапазоне регулировать непрерывно по любому закону
передаточные числа трансмиссии. Гидрообъсмная передача может заменить
все механизмы трансмиссии и дает большие компоновочные преимущества,
особенно для многозвенных автопоездов со всеми ведущими колесами, так
как гидромоторы могут быть размещены на любом расстоянии от гидро-
насоса.
Электромеханические трансмиссии обеспечивают автоматическое бессту-
пенчатое изменение передаточных чисел, что значительно облегчает управление
и повышает проходимость автомобиля. При применении электромеханической
трансмиссии можно получить оптимальное распределение момента по ведущим
колесам в соответствии с режимом их качения и величиной сцепления с грун-
том. Возможность размещения электродвигателей в колесах и большие ком-
поновочные возможности электромеханических трансмиссий делает их особен-
но целесообразными для тяжелых автопоездов со всеми ведущими колесами.
К недостаткам электрических трансмиссий относятся: большие размеры и
масса, низкий коэффициент полезного действия, ботес высокая стоимость.
Диапазон передаточных чисел трансмиссии равен
D т р = 4 m a x/i m in.
Максимальное передаточное число трансмиссии должно удовлетворять
двум требованиям: 1) обеспечивать оцепление колес с грунтом во всех до-
рожно-грунтовых условиях предполагаемого использования автомобиля;
2) обеспечивать возможность устойчивого движения автомобиля с заданной
минимальней скоростью.
Первое требование очевидно, второе — предъявляется к автомобилям,
предназначенным для использования в особо тяжелых условиях, а также к
автомобилям с повышенными требованиями к маневрированию на ограничен-
ной площади.
225
Если предполагается использование в трансмиссии гидротрансформато-
ра или гидромуфты, то значение zmax определяется без учета второго требо-
вания, так как указанные механизмы обеспечивают возможность устойчивого
движения со сколь угодно малой скоростью.
Исходя из первого требования, /щах^фтах^аКсцГкоМЬ шах^г- Выше
было выяснено, что максимальное значение коэффициента сцепления может
быть принято равным фтах = 0,8-ь1,0. Большее значение возможно при прео-
долении твердых пороговых препятствий со сравнительно острыми ребрами
и при пониженном давлении воздуха в шинах.
Для обеспечения второго требования необходимо выполнение неравен-
ства
^тах^Ю,337/1д mlnGio/^a mln,
где пл min — минимальная возможная частота вращения коленчатого вала
двигателя.
Минимальное передаточное число трансмиссии обычно выбирают из ус-
ловия обеспечения движения с заданной максимальной скоростью
^mln=,0,377 Ид шах^ко/^а max-
Разбивку диапазона передаточных чисел по ступеням проводят, исходя
из требований получения высоких средних скоростей движения, высоких тя-
говых свойств, хорошей топливной экономичности, хороших динамических
свойств автомобиля. Для условий движения вне дорог главным требовани-
ями являются первые два.
Для выполнения первого требования необходимо обеспечить наиболее
высокую скорость движения на каждом участке пути, характеризуемом ве-
личиной ф. Максимальная возможная скорость определяется выражением
V = T\iNе maxV/(6аф + Рw) ,
где v — коэффициент использования мощности двигателя.
Как видно из последнего уравнения, для получения возможно большей
скорости необходимо обеспечить высокие значения цт и v. Если учесть, что
коэффициент полезного действия зависит от величины используемой мощно-
сти T)t = VT)t max, ТО ПОЛуЧИМ
V = V2V)t тах77е тах/(^аф4“-Еи)). (207)
Таким образом, для обеспечения высокой средней скорости движения ав-
томобиля в различных условиях необходимо в первую очередь иметь высокий
коэффициент использования мощности v (зависимость квадратичная). Значе-
ние v= 1 возможно получить только при применении бесступенчатой транс-
миссии. Сравнительные испытания автомобилей с гидромеханической и меха-
нической трансмиссиями показывают, что у первых, несмотря па более низ-
кий КПД, средняя скорость выше на 10—40%, причем разница тем больше,
чем меньше удельная мощность двигателя. С повышением удельной мощно-
сти двигателя коэффициент использования мощности автомобиля со ступен-
чатой трансмиссией повышается из-за сокращения числа переключения пере-
дач, соответственно повышается и скорость. Следовательно, при больших
удельных мощностях двигателя применение бесступенчатых трансмиссий ме-
нее эффективно.
Приняв, что на каждой из передач автомобиль движется с расчетной
скоростью соответствующей работе двигателя с частотой nNi и используя
выражение &аф + /?^ = ФдСа, можно преобразовать уравнение (207)
Фд==‘\?2А^е шахЦт max/(CaUp), (208)
где М? тахТ)т тах/£а0р = фд max для каждой передачи величина постоянная
Следовательно, на каждой передаче автомобиль может двигаться с рас-
четной скоростью по дорогам с фд = 0-нфдтах, при этом коэффициент ис-
пользования мощности изменяется в пределах v=0h-1. Если сопротивление
226
превышает фдшах, то осуществляется переход на следующую низшую пере-
дачу. В результате перехода на низшую передачу при той же самой удельной
силе тяги коэффициент использования мощности снизится от 1 до 0 вследст-
вие увеличения передаточного числа трансмиссии и< соответственного умень-
шения скорости. При ЭТОхМ появляется ВОЗМОЖНОСТЬ увеличения фд ДО фдтах
при увеличении значения v от 0 до 1. При условии 'фДг=‘фд(*+1)
V0i = /-KmaxG+lA' !• <209>
Перемножив левые и правые части уравнения (2*09) для всех передач,
будем иметь
V01V02 — v0(/z_1) =1/1^ £>гр. (210)
Если принять постоянной для всех ступеней среднюю величину voi, то
получим выражение для среднего значения коэффициента использования
мощности
1
vOcp = (211)
Используя уравнение (211), можно определить необходимое число пере-
дач по заданному значению коэффициента использования мощности пли ре-
шить обратную задачу. Следует иметь в виду, что при увеличении числа
передач повышается коэффициент использования мощности, что должно при-
вести к повышению средней скорости, однако усложняет конструкцию короб-
ки передач и затрудняет управление ею, так как при слишком большом чис-
ле передач водитель не в состоянии своевременно их переключать. Опти-
мальное число передач зависит от диапазона передаточных чисел и удель-
ной мощности двигателя. Для современных легковых автомобилей оптималь-
ным числом передач считается 3—4, для грузовых автомобилей 4—6 при диа-
пазоне 6—11, для тягачей и специальных автомобилей с большим диапазоном
передаточных чисел число передач достигает 8—12. Значение среднего ко-
эффициента использования мощности находится в пределах 0,80—>0,85.
После выбора числа передач и среднего значения коэффициента исполь-
зования мощности проводят корректировку значений для каждой из передач.
Значения v0 увеличивают для ходовых передач и уменьшают для неходо-
вых, при этом должно быть соблюдено условие (210).
227
СПИСОК ЛИТЕРАТУРЫ
1. Агейкин Я. С. Вездеходные колесные и комбинированные движители.
М.: Машиностроение, 1972. 184 с.
2. Беккер М. Г. Введение в теорию систем местность — машина. 1W. Ма-
шиностроение, 1973. 520 с.
3. Бабков В. Ф., Бируля А. К., Сиденко В. М. Проходимость колесных
машин по грунту. М.: Автотрансиздат, 1959. 189 с.
4. Хархута Н. Я., Иевлев В. М. Реологические свойства грунтов. М.: Ав-
тотранспздаг, 1961. 63 с.
5. Ульянов И. А. Основы теории и расчета колесного движителя земле-
ройных машин. М.: Машгиз, 1962. 208 с.
’6 . Кленин Н. И. Исследование процесса смятия почвы твердыми телами.
М.: Сельхозгиз, 1960, т. 12, 56 с.
7. Говорущенко А. П. Сцепление автомобильного колеса с грунтом. — Тр.
ХАДИ, 1960, вып. 22, с. 39—46.
8. Маслов Н. Н. Основы механики грунтов и инженерной геологии. М.:
Высшая школа, 1968. 629 с.
9. Работа автомобильной шины/В. И. Кпороз, Е. Б. Кленников, И. И. Пет-
ров и др. М.: Транспорт, 1976. 238 с.
10. Автомобильные шины/В. Л. Бидерман, Р. Л. Гуслинер, С. П. Захаров
и др. М.: Госхимиздат. 1963. 384 с.
11. Расчет нормальной жесткости шин для оценки их эксплуатационных
показателсн./А. Н. Евграфов, В. А. Петрушов, В. В. Московкин и др. — Авто-
мобильная промышленность, 1977, № 3, с. 20—22.
12. Исследование работы пневматических шин. Омск: Западно-Сибирское
книжное издательство. 1970, 142 с.
13. Московкин В. В., Петрушов В. А., Стригин И. А. Влияние нормальной
нагрузки и внутреннего давления воздуха на коэффициент сопротивления ка-
чению колеса с пневматической шиной на ведомом режиме. — Труды НАМИ.
М. 1971, вып. 131, с. 32—40.
14. Шелухин А. С. Анализ потерь на качение пневматических шин в ус-
ловиях движения автомобиля по дороге с твердым покрытием. Труды НАМИ,
вып. 79, с. 21—44.
15. Транспортные средства на высокоэластичных движнтелях/Н. Ф. Боча-
ров, В. II. Гусев, В. М. Семенов и др. М.: Машиностроение, 1974. 208 с.
16. Литвинов А. С. Управляемость и устойчивость автомобиля. М.: Ма-
шиностроение, 1971. 416 с.
17. Фаробин Я. Е. Теория поворота транспортных машин. М.: Машино-
строение, 1970. 176 с.
18. Ротенберг Р. В. Подвеска автомобиля. М.: Машиностроение, 1972
392 с.
19. Яценко Н. Н., Прутчиков О. К. Плавность хода грузовых автомоби-
лей. М.: Машиностроение, 19*69.
20. Щетина В. А. К вопросу исследования пороговой неровности и ее
влияния на перемещение неподрессореиных масс. — Автомобильная и трактор-
ная промышленность, 1953, № 1, с. 17—18.
228
21. Говорущенко Н. Я. Основы теории эксплуатации автомобилей. Киев:
Впща школа, 1971. 232 с.
22. Двали Р. Р., Махалдиани В. В. Механическая тяга в горной местно-
сти. М.: Наука, 1970. 235 с.
23. Классификация микропрофиля бездорожья территории Советского Со-
юза.— Известия вузов СССР.'Машиностроение, 1975, № 5, с. 13—15.
24. Кпороз В. И., Петров И. П. Оценка проходимости колесных машин. —
Труды НАМИ. 1973, вып. 142, с. 66—76.
25. Безбородова Г. Б., Галушко В. Г. Моделирование движения автомо-
биля. Киев: Вища школа, 1979. 168 с.
26. Софиян А. П., Мазур А. И. Вероятностный расчет высоты снежного
покрова с учетом территориальной неравномерности залегания. — Метеороло-
гия и гидрология, 1974, № 5, с. 80—85.
27. Рихтер Г. Д. Снежный покров, его формирование и свойства. М: АН
СССР, 1945. 539 с.
28. Куров Б. А., Лаптев С. А., Балабин И. В. Испытания автомобилей.
М.: Машиностроение, 1976. 208 с.
29. Васильев А. Б., Раппопорт Л. В. Тензометрирование и его применение
в исследованиях тракторов. М.: Машгиз, 1963. 339 с.
30. Антонов Д. А. Теория устойчивости движения многоосных автомоби-
лей. М.: Машиностроение, 1978. 216 с.
31. Рукавишников С. В. Некоторые особенности проектирования гусенич-
ного движителя спегоходиых машин. — Труды ГПИ. Горький, 1967, Т. XXIII,
вып. 7, с. 11—20.
32. Лефаров А. X. О применении блокирующихся дифференциалов. — Ав-
томобильная промышленность, 1962, № II, с. 16—18.
33. Коротоношко Н. И., Щуклин С. А. Влияние конструкции шин п само-
блокирующихся дифференциалов на проходимость Урал-375. — Автомобильная
промышленность, 19*68, № 7, с. 22—25.
34. Левин И. А. О рациональной степени блокировки дифференциалов.—
Автомобильная промышленность, 1964, К? 3 с. 14—18.
35. Диванов Н. В., Левин И. А. О рациональном приводе к среднему и
заднему мостам автомобиля 6X6. — Автомобильная промышленность, 1962
№8, с/18—21.
36. О нагруженное ги привода трехосного автомобиля при различных схе-
мах связен ведущих мостов. — Автомобильная промышленность, 1977, № 4,
с. 13—14.
37. Таболин В. В., Щуклин С. А. О влиянии удельнной мощности двига-
теля на скоростные свойства полноприводного автомобиля КрАЗ.—Автомо-
бильная промышленность, 1975, № 12, с. 6—8.
38. Колесные автомобили высокой проходимости. М.: Машиностроение,
1967. 240 с.
39. Горбачев В. А. Работа шин на лесотранспорте. М.: Машиностроение,
1970. 120 с.
40. Вологдин В. И. О влиянии параметров роторно-зиптового движителя
на тягово-сцепные качества снегохода. — Труды ГПИ, 1969, Т. XXV, вып. 9,
с. 73—76.
ОГЛАВЛЕНИЕ
Стр.
Введение . . . ............................... 3
Глава I. Характеристика поверхностей движения вне дорог с твердым
покрытием........................................................... 5
§ 1. Дорожно-грунтовые поверхности, используемые для движения ав-
томобилей .......................................................... 5
§ 2. Деформация грунта при воздействии нормальной нагрузки ... 10
§ 3. Деформация грунта при воздействии на него произвольно направ-
ленной нагрузки.................................................... 19
§ 4. Влияние времени действия нагрузки на деформацию грунта и его
сопротивление сдвиг) ............................................ 24
§ 5. Числовые значения механических параметров грунтов................................................... 25
Глава II. Взаимодействие автомобильного колеса с грунтом ... 35
§ 6. Механические характеристики автомобильных шин . 35
§ 7. Деформация шины и грунта при качении колеса по мягкому грунту 43
§ 8. Тяговые и кинематические свойства колеса . . . . . . . 48
§ 9. Энергетические затраты на качение колеса............................................................ 58
Глава III. Движение автомобиля по деформирующейся грунтовой по-
верхности ......................................................... 64
§ 10. Внешние силы, действующие на автомобиль при движении по
грунту............................................................. 64
§ 11. Уравнение движения автомобиля по грунту.......................................... 72
§ 12. Особенности движения автомобиля по грунту на повороте 83
Глава IV. Движение автомобиля по неровным грунтовым поверхностям 94
§ 13. Особенности движения автомобиля по неровностям . . 95
§ 14. Движение автомобиля по уклонам............................... 104
§ 15. Преодоление автомобилем барьерных препятствий. 109
Глава V. Аналитические методы оценки проходимости автомобилей 120
§ 16. Анализ оценочных показателей проходимости автомобилей ... 120
§ 17. Методика расчета показателен проходимости...............по осрсдненпым.па-
раметрам грунта ... 124
§ 18. Расчет показателей проходимости автомобилей по статистическим
характеристикам грунтовых поверхностей............................ 129
§ 19. Расчет скорости, ожидаемого расхода топлива и показателя эф-
фективности . ....................................... 134
§ 20. Сравнительная оценка проходимости по конструктивным парамет-
рам автомобилей................................................... 136
Глава VI. Экспериментальные методы оценки проходимости автомобилей 139
§ 21. Лабораторные методы определения параметров автомобиля, ха-
рактеризующих его проходимость ................................... 139
§ 22. ААетоды экспериментального определения параметров грунта в
полевых условиях . . ........................... 146
230
Стр.
§ 23. Оценка проходимости автомобилей в полевых условиях . . , 150
Глава VII. Анализ конструктивных элементов автомобиля и дополни*
тельных съемных средств, повышающих проходимость . . 157
§ 24. Влияние параметров ходовой части ............................ 157
§ 25. Влияние конструкции трансмиссии и мощности, двигателя . . . 173
§ 26. Влияние компоновки автомобиля................................ 185
§ 27. Съемные средства повышения проходимости автомобилей . . . 191
§ 28. Конструкции автомобилей высокой проходимости .... 196
Глава VIII. Расчет основных конструктивных параметров автомобиля,
определяющих его проходимость...................................... 209
§ 29. Расчет параметров движителя.................................. 209
§ 30. Расчет основных параметров подвески.......................... 217
§31. Расчет параметров двигателя и трансмиссии.................... 222
Список литературы.................................................. 228
231
ИБ № 1373
Яков Семенович Агейкин
ПРОХОДИМОСТЬ
АВТОМОБИЛЕЙ
Редактор Е. В. Радовская
Технический редактор Л. А. Макарова
Корректоры Н. И. Шарунина и Л. Я. Шабашова
Обложка художника Ю. Е. Фомина
Сдано в набор 29.08.80,
Подписано в печать 27.03.81. Т-01390.
Формат 60X907^6.
Бумага типографская № 2.
Гарнитура литературная. Печать высокая.
Усл. псч. л. 14,5. Хч.-изд. л. 14,9.
Тираж 2488 экз. Заказ 1342. Цена 2 р. 20 к.
Издательство «Машиностроение», 107076,
Москва, Стромынский пер., 4.
Московская типография № 8
Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии
и книжной торговли.
Хохловский пер., 7.