/














































Автор: Писарев А.Л. Дерим-Оглу Г.Н. Зыков В.А.
Теги: регулирование и управление машинами, процессами автоматика
Год: 1969
Текст
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 360
А. Л. ПИСАРЕВ, Г. Н. ДЕРИМ-ОГЛУ, В. А. ЗЫКОВ
ВЫХОДНЫЕ
УСТРОЙСТВА
БЕСКОНТАКТНЫХ
СИСТЕМ
АВТОМАТИКИ
«ЭНЕРГИЯ»
МОСКВА 1969
6Ф6.5
П 34
УДК 62-52
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
И. В. Антик, Г. Т. Артамонов, А. И. Бертинов, А. А. Воронов,
Л. М. Закс, В. С. Малов, В. Э. Низе, О. В. Слежановский,
Б. С. Сотсков, Ф. Е. Темников, М. Г. Чиликин, А. С. Шаталов
Писарев А. Л. и др.
П 34 Выходные устройства бесконтактных систем
автоматики. М., «Энергия», 1969.
120 с. с илл. (Б-ка по автоматике. Вып. 360)
Перед загл. авт.: А. Л. Писарев, Г. Н. Дерим-Оглу,
В. А. Зыков
В книге рассматриваются принципы действия, схемы и параметры
выходных устройств систем автоматического управления, построенных
на бесконтактных логических элементах. Описаны три основных типа
выходных устройств: магнитные, транзисторные и тиристорные, рас-
смотрены их характеристики и области применения. Даны рекоменда-
ции по выбору выходных устройств для конкретных нагрузок и приве-
дены основные расчетные соотношения для этих устройств.
Книга предназначена для инженерно-технических работников, за-
нимающихся разработкой автоматизированных систем управления тех-
нологическими процессами и эксплуатацией этих систем.
3-3-13
Ж69 6Ф6'5
Писарев Андрей Львович, Дерим-Оглу Георгий Николаевич,
Зыков Виктор Александрович
Выходные устройства бесконтактных систем автоматики
Редактор С. С. Ройзен
Технический редактор О. Д. Кузнецова Корректор Н. В. Лобанова
Сдано в набор 6/V 1969 г. Подписано к печати 23/Х 1969 г. Т-11587
Формат 84ХЮ87М Бумага типографская № 1
Уол. печ. л. 6,3 Уч.-изд. л. 8,41
Тираж 12 ООО экз. Цена 45 коп. Зак. 2219
Издательство „Энергия". Москва, Ж-114, Шлюзовая наб., 10.
Московская типография № 10 Главполиграфпрома
Комитета по печати при Совете Министров СССР.
Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
Системы автоматики и электропривода, построенные на бескон-
тактных логических элементах, уже нашли широкое применение
в народном хозяйстве СССР. В ближайшие годы значение бескон-
тактной автоматики еще более возрастает. Об этом говорит уже
достигнутый и продолжающий непрерывно расти уровень произ-
водства бесконтактных логических элементов и систем на их основе.
Для осуществления полностью бесконтактных систем управле-
ния необходимы устройства, осуществляющие связь между выход-
ными сигналами логических элементов, обладающими мощностью
в доли ватта, и .исполнительными механизмами, имеющими мощно-
сти до десятков киловатт. Эти выходные устройства (усилители) бла-
годаря их разнообразию по принципу действия и широкому диапа-
зону мощности образовали самостоятельный класс устройств бес-
контактной техники, предназначенный для замены существующих
релейно-контактных аппаратов и обладающих более широкими воз-
можностями по сравнению с последними.
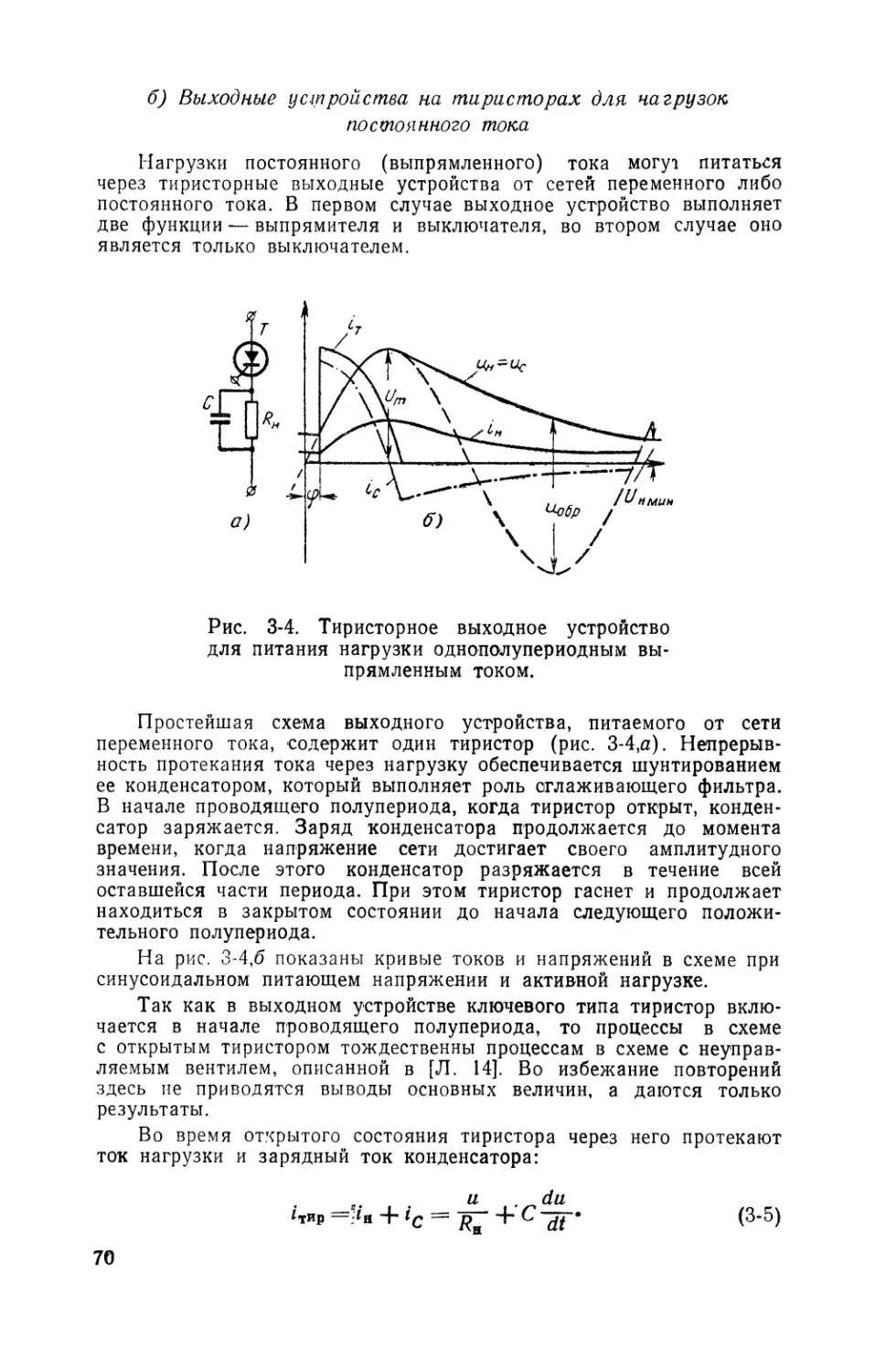
Несмотря на большой интерес, проявляемый как в СССР, так
и за границей к бесконтактным выходным устройствам, и налажен-
ное серийное производство этих устройств [Л. 1], в настоящее
время отсутствует систематизированное описание выходных
устройств различных типов, позволяющее детально с ними позна-
комиться и сделать обоснованный выбор устройств того или иного
типа для решения конкретных задач. Цель настоящей книги — вос-
полнить этот пробел.
В книге рассмотрены принципы действия основных типов выход-
ных устройств — магнитных, транзисторных и тиристорных, их
схемы и основные расчетные соотношения, определяющие их выбор
для тех или иных конкретных нагрузок. Даны примеры примене-
ния и технические данные выпускаемых серийно выходных
устройств.
Материал книги является обобщением опыта авторов по раз-
работке рядов выходных устройств, построенных на магнитных
усилителях, транзисторах и тиристорах. Первые два ряда выпуска-
ются серийно Калининским заводом электроаппаратуры, последний
подготавливается к серийному выпуску.
Глава 1 написана Г. Н. Дерим-Оглу, гл. 2
В. А. Зыковым
введение и гл. 3 — А. Л. Писаревым. Последним выполнено также
общее редактирование рукописи.
Все замечания по содержанию книги будут приняты авторами
с благодарностью. Просим присылать их по адресу: Москва, Ж-114,
Шлюзовая наб., 10, изд-во «Энергия».
Авторы
ВВЕДЕНИЕ
Использование в системах промышленной автоматики бескон-
тактных статических элементов дискретного действия (логических
элементов) ©место контактных реле позволяет повысить надеж-
ность систем управления за счет большей надежности и долговеч-
ности логических элементов, независимости их срока службы от
числа переключений, повышенной стойкости .их против влияния окру-
жающей среды.
Бесконтактные системы управления на логических элементах
включают три труппы элементов: входные (датчики), собственно ло-
гические элементы и выходные устройства (усилители).
Датчики осуществляют преобразование иеэлектрических вели-
чин ('положения, скорости, угла поворота, давления, температуры
и т. п.) в электрические сигналы, а также преобразование непре-
рывно изменяющихся величин в дискретные сигналы. Логические
элементы выполняют ряд операций, позволяющих реализовать нуж-
ную программу управления исполнительными механизмами в зави-
симости от информации, поступающей от датчиков.
Выходные устройства усиливают выходные сигналы логических
элементов до уровня, необходимого для управления исполнитель-
ными механизмами (двигателями, электромагнитами, контакторами
и т. п.).
Степень замены контактной аппаратуры бесконтактной может
быть различной. Наиболее совершенными являются полностью бес-
контактные системы автоматического управления, где все операции,
начиная с ввода управляющих команд и кончая управлением ис-
полнительными двигателями, осуществляются при помощи бескон-
тактных аппаратов. Возможность осуществления таких полностью
бесконтактных систем управления зависит от наличия выходных
устройств с необходимыми параметрами (род тока, напряжение,
мощность).
Уточним понятие «выходное устройство». Выходным устройст-
вом мы будем называть устройство типа выключателя, имеющее
только два положения: «включено» и «выключено». Это свойство
выходного устройства либо заложено в нем самом (релейная ха-
рактеристика вход — выход), либо обеспечивается за счет наличия
только двух возможных значений сигнала управления: 0 и L
По принципу действия бесконтактные выходные устройства
делятся на магнитные, транзисторные и тиристорные. Рассмотре-
нию этих трех классов выходных устройств, их особенностей, пара-
метров, областей применения и посвящена настоящая книга.
В табл. 1 дана классификация выходных устройств по роду
тока. В числителе первого столбца указан род тока питающей
4
сети, в знаменателе — род тока нагрузки. Во втором столбце дан
примерный перечень типичных 'нагрузок выходных устройств,
а в третьем — ориентировочный диапазон их выходных мощностей.
Следует отметить, что выпрямление переменного тока может
осуществляться либо самим выходным устройством (выходной маг-
нитный усилитель с нагрузкой постоянного тока), либо специальным
источником питания — одним на несколько выходных устройств
(выходной транзисторный усилитель).
Транзисторные выходные усилители могут питаться как от
специальных источников литания, так и от сети постоянного тока.
Их можно отнести как к п. 2, так и к п. 3 табл. 1. Поэтому типичные
нагрузки в этих графах частично повторяются.
Таблица 1
№ п/п.
Род тока питаю-
щей сети
Типичные нагрузки
Ориентировоч-
ный верхний
предел выход-
ной мощности
Род тока нагрузки
1
Переменный
Переменный
Асинхронные двигатели
Электромагниты
Катушки контакторов
Нагреватели, осветительная
нагрузка
Сигнальные устройства
до 100 ква
до 10 ква
до 3 ква
до 100 ква
до 0,1 ква
2
Переменный
Постоянный
Двигатели постоянного тока
Электромагниты
Катушки контакторов
Электромагнитные муфты
Сигнальные устройства
до 10 кет
до 0,5 кет
до 0,5 кет
до 0,1 кет
до 0,1 кет
со
Постоянный
Постоянный
Катушки высоковольтных
выключателей.
Те же, что п.2
до 10 кет
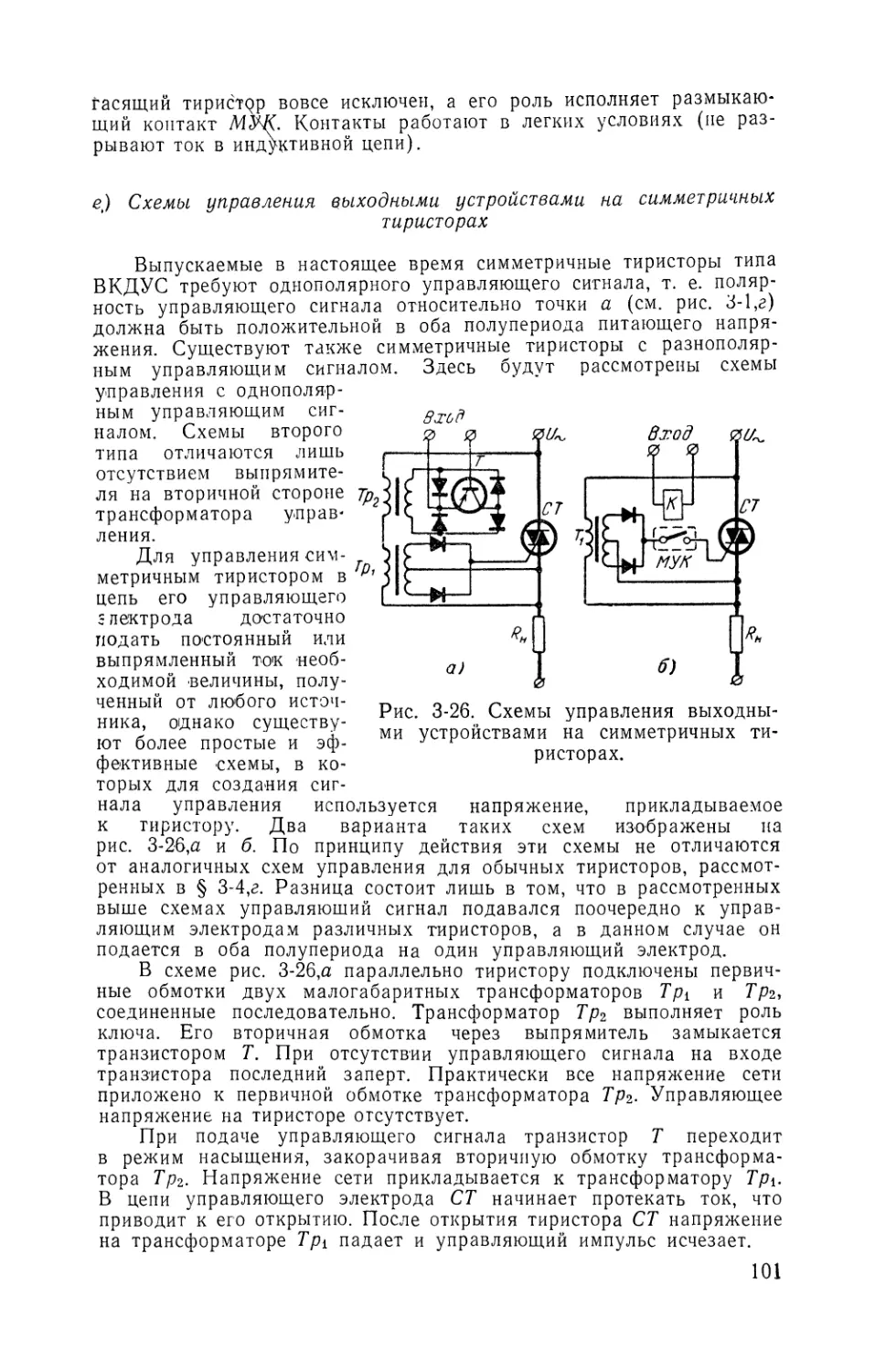
На вход бесконтактных выходных устройств поступают сигналы
управления, получаемые от логических элементов. Желательно, что-
бы любое выходное устройство могло управляться выходным сиг-
налом логических элементов любой из выпускаемых промышлен-
ностью серий. Это серия транзисторных логических элементов ЭТ,
серия магнитных логических элементов с частотой питания 50 гц
ЭЛМ, серия магнитных логических элементов с частотой питания
400 гц ЭЛМ-400 и серия бесконтактных магнитных реле с частотой
питания 400 гц ЛТ-
В настоящее время на базе указанных выше элементов выпу-
скается унифицированная система логических элементов «Логика»
{Л. 28]. В системе «Логика» все ранее выпускавшиеся логические
элементы серий ЭЛМ, ЭЛМ-400, ЛТ и ЭТ имеют модернизирован-
ные схемы и единую конструкцию. Обозначения элементов в HO§oft
системе соответствуют прежним обозначениям;
М — ЭЛМ;
МК —ЭЛМ-400;
б
MP —ЛТ;
T — ЭТ.
Особенности перечисленных серий логических элементов, их
состав, электрические и конструктивные параметры рассмотрены
в [Л. 1].
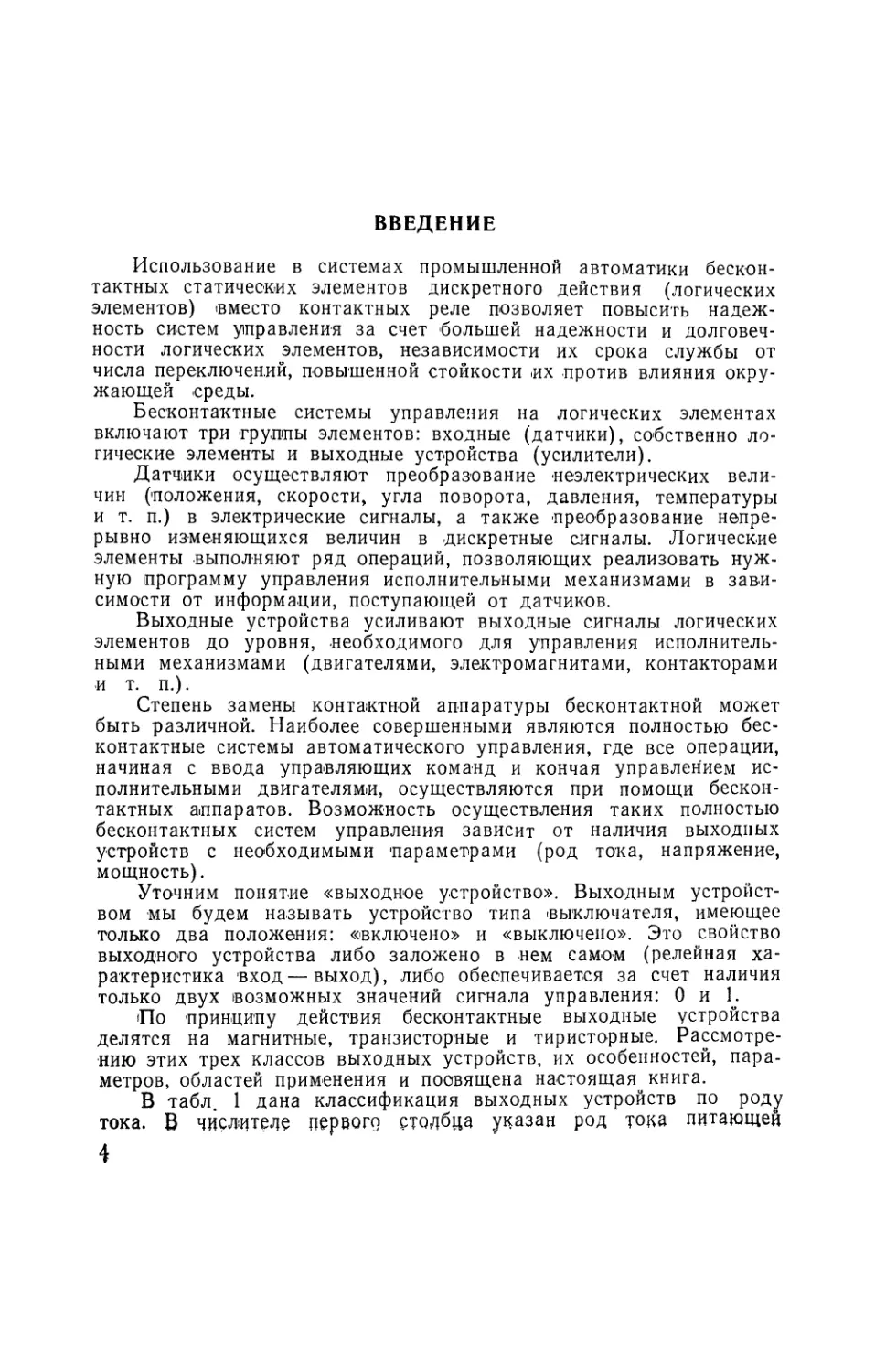
Здесь мы остановимся только на параметрах выходных сигна-
лов элементов указанных серий, так как они являются управляю-
щими для выходных устройств.
Таблица 2
Наименование серии ло-
гпческих^'элементов
1
Напряжение на выходе
логического элемента
при сигнале 1 и номи-
нальной нагрузке (сред-
нее значение), в
Напряжение на выходе
логического элемента
при сигнале 1 и холостом
ходе (среднее значе-
ние), в
Максимальное напряже-
ние на выходе логичес-
кого элемента при сигна-
ле 0 (среднее значе-
ние), в
Мощность на выходе
логического элемента, вт
Характер вы-
ходного сиг-
нала
эт
4,0
12,0
0,15
0,04
Постоянный
элм
2,8
5,3
0,3
0,078
Однополу-
периодный,
50 гц
ЭЛМ-400
4,0
6,0
1,0
0,16
Однополу-
периодный,
400 гц
ЛТ
14,0*
—
0,5
3,0
Двухполу-
периодный,
400 гц
* При напряжении питания 24 в. В более мощных элементах этой серии
применяются напряжения питания 60 и ПО в,
В табл. 2 приведены основные параметры выходных сигналов
логических элементов отечественных сер.ий. Из этой таблицы видно,
что логические элементы всех серий, за исключением ЛТ, имеют
выходные сигналы малой мощности, недостаточные для непосред-
ственного управления даже промежуточными реле. Для связи ло-
гических элементов этих серий с исполнительными аппаратами тре-
буются выходные устройства.
В серии ЛТ в качестве логических элементов используются
сравнительно .мощные магнитные усилители. Однако и <в этом слу-
чае при мощности исполнительных аппаратов свыше 20 вт тре-
буются выходные устройства.
Для управления выходными устройствами наиболее приемлемым
является сигнал постоянного напряжения. Как видно из табл. 2, та-
кой сигнал имеют только элементы серии ЭТ. Для управления вы-
ходными устройствами от логических элементов других серий тре-
буется преобразование их выходных сигналов.
6
Глава первая
ВЫХОДНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ
1-1. Требования, предъявляемые к выходным магнитным
усилителям
Магнитные усилители, работающие в режиме выходных, долж-
ны отвечать следующим требованиям:
ь При отсутствии сигнала управления усилитель должен быть
полностью заперт.
2. Колебания напряжения на выходе не должны превышать
пределов, допустимых для исполнительных механизмов, являю-
щихся нагрузкой усилителей.
Известно, что для исполнительных механизмов переменного
тока, таких, как контакторы, пускатели, реле и т. п., характерно
значительное изменение полного сопротивления катушек в зависи-
мости от положения якоря магнитной системы (магнитная система
замкнута или разомкнута). Например, полное сопротивление ка-
тушки магнитного пускателя типа ПА-400 на номинальное напря-
жение 127 в колеблется от 40 ом при разомкнутой магнитной си-
стеме до 335 ом при замкнутой магнитной системе. Сопротивление
обмоток электродвигателей переменного тока также изменяется:
у заторможенного двигателя оно в несколько раз меньше, чем
у вращающегося. Поэтому при изменениях нагрузки будет проис-
ходить перераспределение напряжений между усилителем и нагруз-
кой и, таким образом, напряжения на нагрузке при замкнутой и
разомкнутой магнитной системе 'будут неодинаковыми. Кроме того,
напряжение на катушке исполнительного механизма может изме-
няться вследствие колебаний напряжения питающей сети. В этих
условиях в зависимости от настройки можно получить один из
двух возможных режимов совместной работы магнитного усилителя
(без дополнительных обратных связей) с исполнительным механиз-
мом переменного тока:
а) Напряжение на катушке исполнительного механизма при
замкнутой магнитной системе устанавливается равным номиналь-
ному. Тогда при разомкнутой магнитной системе за счет уменьше-
ния полного сопротивления катушки напряжение окажется ниже
номинального. В результате не будет обеспечиваться необходимая
начальная втягивающая сила или вращающий момент исполни-
тельного механизма.
б) Напряжение на катушке исполнительного механизма при
разомкнутой магнитной системе устанавливается равным номиналь-
ному значению. Тогда будет обеспечиваться необходимая началь-
7
Мая втягивающая сила или момент, .но после срабатывания .испол-
нительного механизма напряжение на катушке возрастет из-за уве-
личения ее 'полного сопротивления. Это поведет к перегреву обмо-
ток исполнительного механизма.
Сопротивления катушек электромагнитных систем постоянного
тока не изменяются в процессе работы. Однако и .в этом случае
необходимо, чтобы выходной усилитель был способен работать
с нагрузками различной величины, так как при этом окажется
возможным на выход одного и того же усилителя включать раз-
личные исполнительные механизмы.
Очевидно, что применение магнитного усилителя без допол-
нительных обратных связей в качестве выходного .в общем случае
не дает возможности обеспечить нормальную работу исполнитель-
ного механизма, так как выходной усилитель должен отвечать двум
основным требованиям:
1. При минимально допустимом напряжении питающей сети
электромагнитная система управляемого выходным усилителем ме-
ханизма должна развивать начальную 'втягивающую силу или мо-
мент не ниже, чем при питании ее непосредственно от сети напря-
жением, минимально допустимым для 'данного механизма.
2. При максимально допустимом напряжении питающей сети
и питании от выходного усилителя 'перегрев обмотки и электро-
магнитной системы исполнительного механизма не должен превы-
шать допустимой величины.
Рассмотренные требования являются необходимыми, но недо-
статочными.
Через главные контакты пускателей и контакторов, катушки
которых являются нагрузкой усилителей, могут .протекать токи,
значительно превосходящие номинальные (например, при отключе-
нии заторможенного двигателя). Если учесть, что у многих совре-
менных коммутирующих аппаратов в моменты включения и отклю-
чения усилия контактных пружин останавливают на какое-то мгно-
вение движение якоря магнитной системы и главные контакты
в момент остановки соприкасаются практически без достаточного
нажатия, то становится очевидной возможность приваривания глав-
ных контактов в момент остановки якоря при недостаточно бы-
стром срабатывании выходного усилителя. Время задержки якоря
зависит от скорости изменения потока в сердечнике аппарата, а по-
следняя зависит от быстродействия выходного усилителя. Поэтому
появляется дополнительное требование*.
3. Быстродействие выходного усилителя должно обеспечить
нормальные коммутирующие свойства исполнительного аппарата.
1-2. Возможные принципы построения выходных магнитных
усилителей переменного тока
Как следует из сказанного выше, основной задачей при созда-
нии выходного магнитного усилителя переменного тока является
получение неизменной величины напряжения на нагрузке независи-
мо от изменений ее полного сопротивления.
Простейшим путем решения задачи является применение маг-
нитного усилителя с малым активным сопротивлением нагрузочных
обмоток. В этом случае при изменении сопротивления нагрузки
напряжение на ней изменяется в меньшей степени, чем в случае
магнитного усилителя с нагрузочными обмотками, выбранными по
8
допустимому нагреву. Для уменьшения кратности изменения сопро-
тивления нагрузки можно также применить шунтирование ее актив-
ным сопротивлением, однако при этом увеличиваются потери мощ-
ности.
Указанными мерами задача поддержания постоянного напря-
жения на нагрузке не решается кардинально (она может быть
решена только при нулевом сопротивлении насыщенного магнит-
ного усилителя), а габариты усилителя и расход меди растут. Ре-
шение задачи удалось получить с помощью специальных схем
магнитных усилителей с обратными связями.
-0 'V* 0
1
-h 0 Ту
о) б)
Рис. 1-1.
а — схема магнитного усилителя с отрицательной обратной связью но на-
пряжению; б — характеристики вход—выход магнитного усилителя.
Применение внешних обратных связей в схемах выходных маг-
нитных усилителей позволяет изменять угол насыщения усилителя
с изменением величины нагрузки, чем устраняется перераспределе-
ние напряжений между усилителем и нагрузкой при изменениях
последней. Внешние обратные связи могут быть как положитель-
ными (ПОС), так и отрицательными (ООС).
На рис. 1-1,а приведена полная схема выходного магнитного
усилителя с отрицательной обратной связью по напряжению, опи-
санная в [Л. 2]. Принцип действия схемы усилителя заключается
в следующем. До тех пор, пока напряжение на нагрузке после по-
дачи сигнала управления не достигнет определенной эталонной ве-
личины, ООС не будет действовать. Такая зависимость намагничи-
вающей силы (н. с.) обмотки ООС от величины напряжения на
нагрузке достигается включением двух мостов встречно, как это
показано на рис. 1-1,а. Сопротивлением R устанавливается то
эталонное напряжение на нагрузке, превышение которого должно
привести к появлению тока в обмотке оу0.о.с- Величина эталонного
напряжения выбирается равной номинальному рабочему напряже-
нию катушки данного исполнительного аппарата. Таким образом,
после подачи сигнала управления напряжение на нагрузке дости-
гает величины, необходимой для надежного срабатывания испол-
нительного аппарата. При этом начинает действовать н. с. обмотки
ООС и тем самым прекращается увеличение напряжения на на-
9
грузке, вызванное изменением сопротивления катушки исполнитель-
ного аппарата.
Параметры магнитного усилителя в рассмотренной схеме долж-
ны быть такими, чтобы после подачи 'сигнала управления усили-
тель полностью насыщался и обеспечивал требуемое рабочее
напряжение на катушке исполнительного аппарата три разомкну-
той магнитной системе.
Обмотка смещения wCM нужна для надежного запирания уси-
лителя при отсутствии сигнала управления.
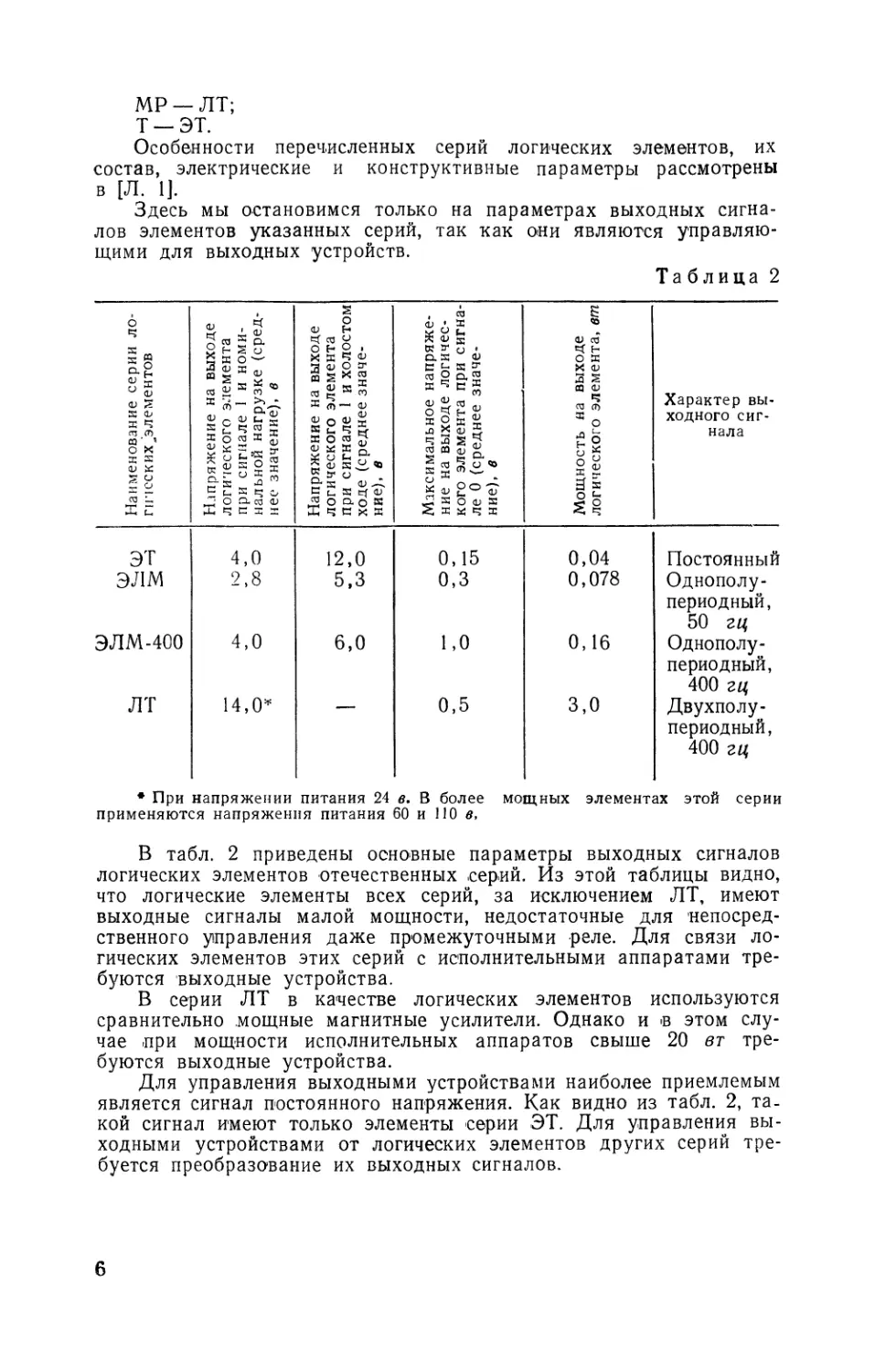
В действительности схема рис. 1-1,а не обеспечивает отсутст-
вия тока в обмотке ООС в момент включения. Объясняется это
щается (угол насыщения равен нулю), затем срабатывает исполни-
тельный аппарат и лишь после этого начинает действовать ООС.
Когда сигнала нет, состояние магнитного усилителя опреде-
ляется точкой / (рис. 1-1,6). После подачи сигнала в обмотку
управления wY ток рабочей цепи начинает расти. Сопротивление
катушки исполнительного аппарата при этом мало» так как маг-
нитная система разомкнута. Состояние магнитного усилителя в кон-
це переходного процесса будет определяться точкой 2. При этом
напряжение на катушке аппарата должно достигнуть номинальной
величины.
Затем начинается движение магнитной системы, т. е. аппарат
срабатывает. За счет увеличения сопротивления нагрузки происхо-
дит переход с одной характеристики вход — выход магнитного уси-
лителя на другую, и состояние усилителя в конце движения будет
определяться точкой 3. При этом напряжение на нагрузке ста-
новится выше, чем на эталоне напряжения, и начинает действовать
ООС. В результате -происходит переход на новую кривую вход—
выход с меньшим наклоном и состояние магнитного усилителя
окончательно определяется точкой 4, причем рабочая точка 4 нахо-
дится на прямолинейном участке кривой (усилитель не насыщен).
Известно, что на выходе ненасыщенного магнитного усилителя
при индуктивной нагрузке форма кривой напряжения имеет харак-
терный провал. На рис. 1-2 приведена осциллограмма, снятая на
выходе реального магнитного усилителя с ООС, показывающая,
что при совместной работе выходного усилителя и исполнительного
0\
40% uh
наличием цепи abcdef, по кото-
рой протекает одно по л упер йод-
ный выпрямленный ток под дей-
ствием напряжения питающей
сети Uс. Этот ток создает зна-
чительное дополнительное отри-
цательное смещение, действую-
щее постоянно. Поэтому рас-
смотренная схема требует по-
вышенной н. с. сигнала управ-
ления.
Рис. 1-2. Осциллограмма напря-
жения на выходе магнитного уси-
лителя.
Рассмотрим процессы, про-
исходящие в выходном маг-
нитном усилителе с ООС (рис.
1-1,а) при подаче на него сиг-
нала управления. Для нагляд-
ности сделаем допущение, что
после подачи сигнала магнит-
ный усилитель полностью насы-
10
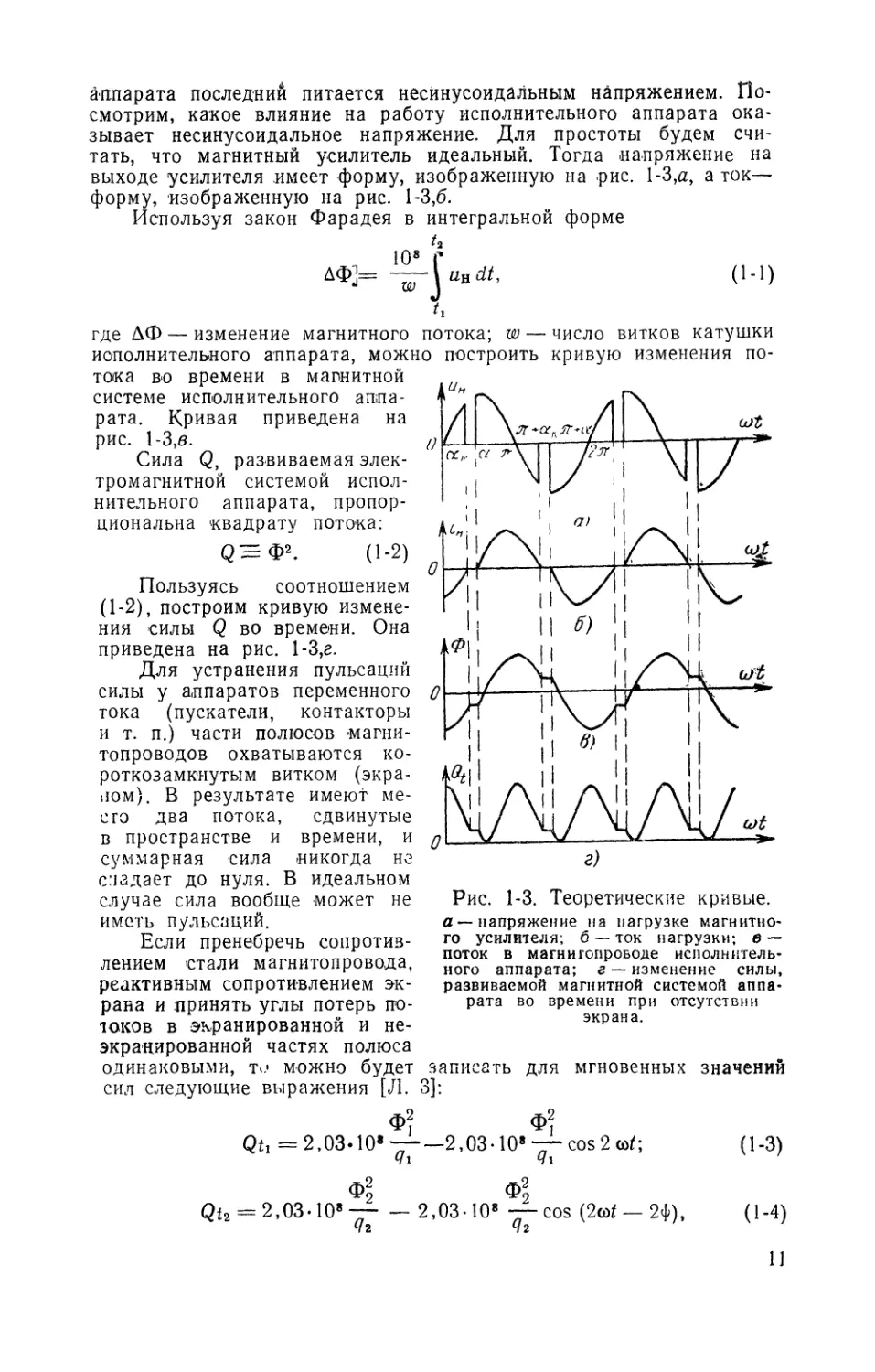
аппарата последний питается несйнусойдальным напряжением. По-
смотрим, какое влияние на работу исполнительного аппарата ока-
зывает несинусоидальное напряжение. Для простоты будем счи-
тать, что магнитный усилитель идеальный. Тогда напряжение на
выходе усилителя имеет форму, изображенную на рис. 1-3,а, а ток—
форму, изображенную на рис. 1-3,6.
Используя закон Фарадея в интегральной форме
U
108 С
где АФ — изменение магнитного потока; w — число витков катушки
исполнительного аппарата, можно построить кривую изменения по-
тока во времени в магнитной
системе исполнительного аппа-
рата. Кривая приведена на
рис. 1-3,в.
Сила Q, развиваемая элек-
тромагнитной системой испол-
нительного аппарата, пропор-
циональна квадрату потока:
Q3=<£2. (1-2)
Пользуясь соотношением
(1-2), построим кривую измене-
ния силы Q во времени. Она
приведена на рис. 1-3,г.
Для устранения пульсаций
силы у аппаратов переменного о
тока (пускатели, контакторы
и т. п.) части полюсов магни-
топроводов охватываются ко-
роткозамкнутым витком (экра-
ном). В результате имеют ме-
сто два потока, сдвинутые
в пространстве и времени, и q
суммарная сила никогда не
с.чадает до нуля. В идеальном
случае сила вообще может не
иметь пульсаций.
Если пренебречь сопротив-
лением стали магнитопровода,
реактивным сопротивлением эк-
рана и принять углы потерь по-
юков в экранированной и не-
экранированной частях полюса
одинаковыми, то можно будет записать для мгновенных значений
сил следующие выражения [Л. 3]:
ф?
(1-3)
МЛ1Л1Л1/
г)
Рис. 1-3. Теоретические кривые.
а —- напряжение на нагрузке магнитно-
го усилителя; б — ток нагрузки; в —
поток в магнигопроводе исполнитель-
ного аппарата; г — изменение силы,
развиваемой магнитной системой аппа-
рата во времени при отсутствии
экрана.
Ф?
QU =2,03-10» ——2,03-108 — cos 2 arf;
41 Ч\
Qt2 = 2,03-10»—- — 2,03-10» — cos (2cof ■
42 Чг
2ф),
(1-4)
11
где Он, 0*2 — мгновенные значения сил в неэкранированной и экра-
нированной частях полюса;
Фь Ф2 — потоки в неэкранированной и экранированной частях
полюса;
ц\ и q2 — сечения неэкранированной и экранированной частей
полюса;
*ф — угол сдвига фаз между потоками Ф1 и Ф2.
В выражениях (1-3) и (1-4) первые члены правой части урав-
нения дают постоянные составляющие силы, а вторые — перемен-
ные.
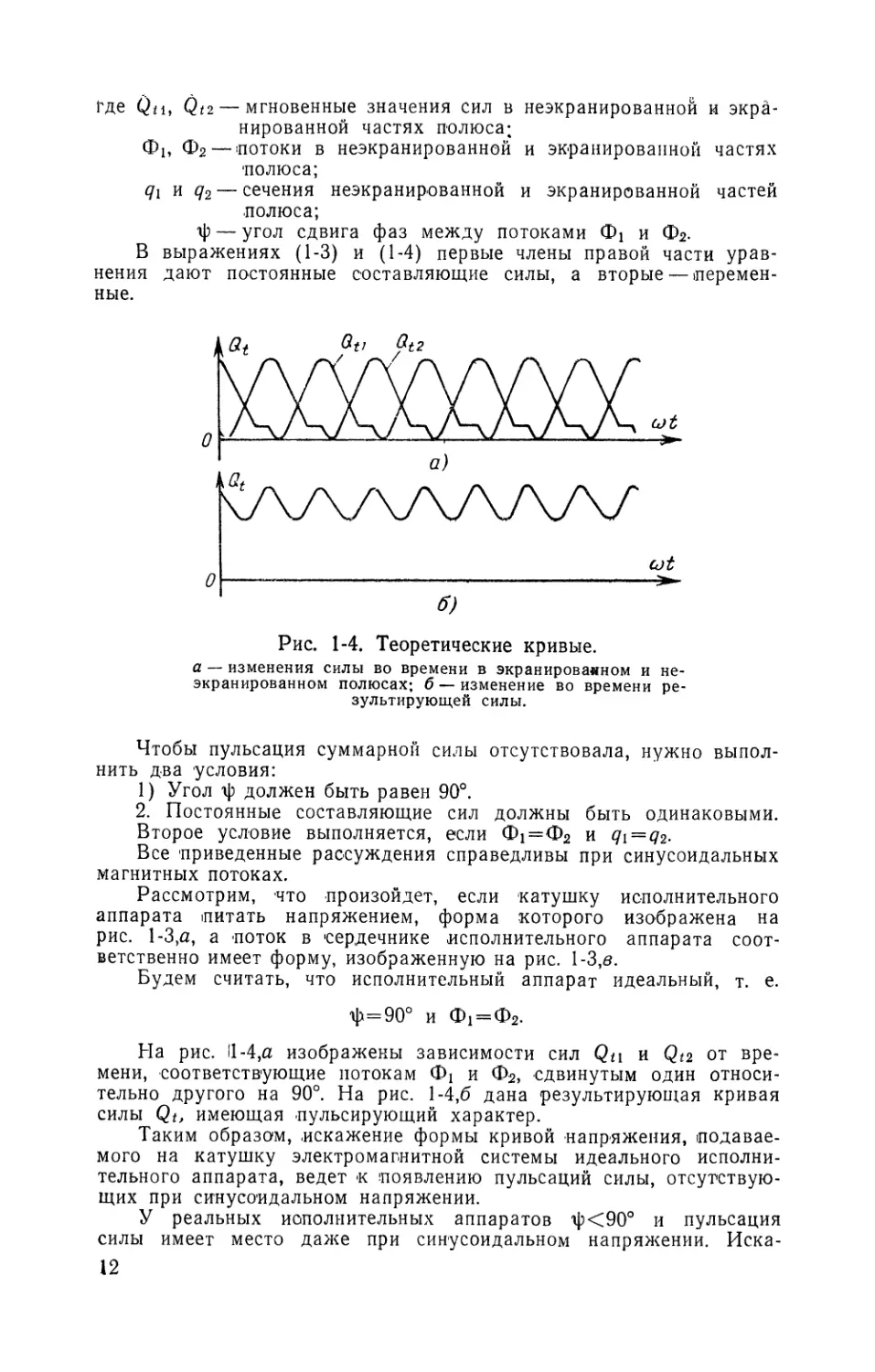
Рис. 1-4. Теоретические кривые.
а — изменения силы во времени в экранированном и не-
экранированном полюсах; б — изменение во времени ре-
зультирующей силы.
Чтобы пульсация суммарной силы отсутствовала, нужно выпол-
нить два условия:
1) Угол г|) должен быть равен 90°.
2. Постоянные составляющие сил должны быть одинаковыми.
Второе условие выполняется, если Ф!==Ф2 и q\ = q2.
Все приведенные рассуждения справедливы при синусоидальных
магнитных потоках.
Рассмотрим, что произойдет, если катушку исполнительного
аппарата питать напряжением, форма которого изображена на
рис. 1-3,й, а поток в 'сердечнике исполнительного аппарата соот-
ветственно имеет форму, изображенную на рис. 1-3,в.
Будем считать, что исполнительный аппарат идеальный, т. е.
ф=90° и Ф! = Ф2.
На рис. 11-4,а изображены зависимости сил qu и qt2 от вре-
мени, соответствующие потокам Ф1 и Ф2, сдвинутым один относи-
тельно другого на 90°. На рис. 1-4,6 дана результирующая кривая
силы qt, имеющая пульсирующий характер.
Таким образом, искажение формы кривой напряжения, подавае-
мого на катушку электромагнитной системы идеального исполни-
тельного аппарата, ведет к появлению пульсаций силы, отсутствую-
щих при синусоидальном напряжении.
У реальных исполнительных аппаратов it><90° и пульсация
силы имеет место даже при синусоидальном напряжении. Иска-
12
Жение формы кривой напряжения ведет к еще большему усилению
пульсаций, а существенные искажения ведут к дребезгу электро-
магнитной системы аппарата.
Другим нежелательным явлением при искажении синусоидаль-
ной формы кривой напряжения является уменьшение втягивающей
силы электромагнитной системы исполнительного аппарата. Втяги-
вающая сила, или момент, развиваемый электродвигателем, зави-
сят от величины магнитного потока .(индукции). А величина индук-
ции в магнитопроводе, как известно, определяется выражением
В — fc , (1-5)
где kf — коэффициент формы кривой;
.S — активное сечение магнитопровода.
Если при синусоидальной форме кривой коэффициент формы kf
равен 1,11, то для кривой, изображенной на рис. 1-2, kf будет
иметь другое значение, причем чем больше искажена форма кри-
вой, тем большее значение имеет kf. Это означает, что при одном
и том же значении эффективного напряжения un индукция в маг-
нитопроводе, а следовательно, и сила меньше для несинусоидаль-
ного напряжения.
Например, для кривой, изображенной на рис. 1-3,а, значение
kf будет 1,175. Это означает, что при искажении формы кривой
1Л752
напряжения питания втягивающая сила уменьшится в ~\~л\*~i==
= 1,12 раза.
Следует также отметить, что искажение формы кривой напря-
жения ведет к появлению гармонических составляющих потока
в магнитопроводе исполнительного аппарата, которые могут вызвать
дополнительный нагрев магнитопровода, а следовательно, и ка-
тушки.
Изложенное выше позволяет сделать следующий вывод. Изме-
няя угол насыщения усилителя, можно поддерживать нужное на-
пряжение на нагрузке при изменениях последней, однако чем боль-
ше эти изменения, тем меньше должен быть насыщен усилитель.
Это может привести к нежелательным последствиям за счет су-
щественного искажения формы кривой напряжения на выходе
усилителя.
Ломимо изменений нагрузки по величине, на выходные пара-
метры усилителя (тока или напряжения) оказывают влияние изме-
нения напряжения питающей сети, 'величин нагрузки и сопротивле-
ний рабочих обмоток в результате нагрева, величин н. с. управ-
ления и смещения. Последний фактор влияет наиболее существенно,
особенно если рабочая точка усилителя находится на прямолиней-
ном участке характеристики вход—выход, как это имеет место
у выходных усилителей с ООС.
Как уже отмечалось, для того чтобы усилитель был надежно
заперт, вводится отрицательное смещение, создающее н. с. iwcu-
Управление усилителем осуществляется дискретным сигналом с н. с.
iwy. Намагничивающие силы управления и смещения направлены
встречно.
13
Результирующая н. с. цепей управления может быть записана
в виде:
/10 = \1щ\ — \ Iwcu |.
Системы, построенные на логических элементах, для которых
предназначены выходные усилители, как правило, питаются от
общего источника. Поэтому при изменении напряжения питающей
сети на :±|Д!^УС% можно записать приращение результирующий н. с.
цепей управления:
А/^ = ±(|/шу|-|/шсм|) (1-6)
В открытом магнитном усилителе \Iwy\>\Iwcm\> поэтому поло-
жительному приращению Uc будет соответствовать положительное
приращение результирующей н. с. цепей управления. Это означает,
что отклонения напряжения на нагрузке будут (в процентном от-
ношении) превышать отклонения напряжения сети.
Для того что'бы оценить отклонения напряжения на нагрузке,
возникающие при одновременном изменении напряжения сети, со-
противления нагрузки и результирующей н. с. цепей управления
(факторы, наиболее сильно влияющие на выходные величины уси-
лителя), молено воспользоваться известной формулой приращения
функции многих переменных:
dUK dUn dUn
Относительное приращение напряжения на нагрузке (отношение
абсолютного приращения к номинальному значению) запишется
следующим образом:
К — Uk "~ + 4r "г Уд».
Здесь уи, \r, yiw — относительные приращения напряжения на
нагрузке, вызванные изменением одной переменной.
В реальных условиях суммарное относительное отклонение вы-
ходного напряжения у, вызванное различными факторами, велико
и соответственно приходится вводить настолько сильную ООС, что
нормальная работа исполнительных аппаратов полностью нару-
шается за счет искажения формы кривой напряжения на выходе
усилителя. Поэтому для того чтобы получить выходной магнитный
усилитель, обладающий положительными качествами усилителя
с ООС, и одновременно избежать свойственных этому принципу не-
достатков, нужно повысить эффективность действия ООС.
Необходимое повышение эффективности может быть достигнуто
введением в цепь ООС нелинейных элементов для получения не-
линейной отрицательной обратной связи (НООС). При этом наи-
лучшие результаты могут быть получены в том случае, если при
напряжениях на нагрузке, меньших номинального, НООС отсутст-
вует, а при напряжениях на нагрузке, близких к номинальному и
выше, степень нелинейности ООС такова, что значительное изме-
нение нагрузки, колебания напряжения питающей сети и соответ-
ствующие этим колебаниям изменения н. с. управления и смещения
14
не приводят к недопустимым отклонениям напряжения на нагрузке.
Обеспечить такой характер НООС можно с помощью дросселя
с ярко выраженной нелинейной характеристикой или полупроводни-
кового стабилитрона.
Для схем выходных магнитных усилителей переменного тока
наиболее целесообразно применить дроссель, так как напряжение
выхода таких усилителей относительно высоко и схема с дпоссе-
лем осуществляется проще.
Схема выходного магнит-
ного усилителя переменного то-
ка с НООС описана в [Л. 4] и
изображена на рис. 1-5.
Работа схемы заключается
в следующем. Дроссель Др рас-
считан таким образом, что при
номинальном напряжении на
нагрузке максимальное значе-
ние индукции в магнитопрово-
де дросселя находится вблизи
колена его кривой намагничи-
вания (дроссель не имеет зазо-
ра). При напряжениях на на-
грузке ниже номинального ток
в цепи НООС мал и обратная
связь практически не влияет на
характеристику магнитного уси-
лителя. При достижении на-
пряжением на нагрузке значе-
ний, близких к номинальному,
Рис. 1-5. Схема выходного маг-
нитного усилителя переменного
тока с нелинейной отрицательной
обратной связью.
начинает сказываться
нелиней-
ный характер полного сопротивления дросселя, т. е. незначи-
тельному увеличению напряжения на нагрузке соответствует
большое увеличение тока в цепи НООС. Этим устраняется повышение
напряжения на нагрузке, обусловленное замыканием магнитной си-
стемы исполнительного аппарата, достигается стабилизация этого
напряжения при колебаниях напряжения источника питания и
устраняется влияние изменений н. с. управления и смещения, так
как в случае, когда \Iw7\>|/доСм|, н. с. обмотки НООС действует
совместно с н. с. обмотки смещения и, изменяясь по нелинейному
закону, компенсирует преобладающее действие н. с. обмотки управ-
ления.
Иллюстрацией к сказанному служит осциллограмма, приведен-
ная на рис. 1-2.
Кривая напряжения на нагрузке имеет, как указывалось, про-
вал. С ростом напряжения питающей сети амплитуда напряжения
на нагрузке увеличивается, но растет и провал за счет увеличения
угла насыщения усилителя, чем и объясняется стабилизация сред-
него напряжения на нагрузке. При уменьшении напряжения питаю-
щей сети картина обратная: уменьшается амплитуда, уменьшается
и провал.
Сопротивление
нейности ООС. С
няющего величину
нагрузке. Цепь
R\ помогает подбирать нужную степень нели-
помощью переменного сопротивления ifo изме-
НООС, устанавливается нужное напряжение на
управления выходного усилителя шунтируется
емкостью С в том случае, если на вход усилителя подается пуль-
сирующий сигнал, например при управлении от магнитных логи-
ческих элементов типа ЭЛМ-
15
Поскольку схема выходного усилителя с НООС способна под-
держивать напряжение на нагрузке, изменяющейся в широких пре-
делах, на выход одного и того же усилителя могут включаться
различные исполнительные механизмы. Важно только, чтобы их
пусковая мощность не превосходила величины, допустимой для
данного усилителя.
Если выходной усилитель настроен для работы с одним типом
исполнительного аппарата, а на вход его включен другой аппарат,
заметно отличающийся по мощности, потребляемой при замкнутой
магнитной системе, и окажется, что установленное напряжение на
нагрузке несколько изменилось, достаточно небольшого изменения
величины переменного сопротивления r2, чтобы нужное значение
напряжения на нагрузке было восстановлено.
1-3. Выходные магнитные усилители переменного тока с нелинейной
отрицательной обратной связью
а) Переходный процесс в выходных магнитных усилителях с НООС
Полное время включения исполнительного механизма, управляе-
мого выходным магнитным усилителем, складывается из времени
нарастания напряжения на катушке исполнительного механизма до
напряжения трогания и времени движения якоря механизма. Пер-
вый отрезок времени определяется инерционностью выходного маг-
нитного усилителя, второй — главным образом конструкцией и па-
раметрами исполнительного механизма.
Рассмотрим факторы, влияющие на быстродействие выходного
магнитного усилителя. Полное время нарастания напряжения на
нагрузке при включении складывается из трех составляющих:
а) времени движения рабочей точки по нерабочему участку харак-
теристики вход — выход; б) времени задержки, определяемого не-
равенством амплитуды переменной составляющей магнитного пото-
ка усилителя потоку насыщения Фо<Фв; в) времени нарастания
напряжения на нагрузке, определяемого постоянной времени маг-
нитного усилителя. Запаздыванием, вносимым на переменном токе
индуктивностью нагрузки, можно пренебречь [Л. 5].
Первой составляющей времени в рассматриваемом случае мож-
но пренебречь, так как состояние запертого магнитного усилителя
определяется точкой 1 (см. рис. 1-1,6), которая выбирается вблизи
нижнего колена характеристики. Кроме того, постоянная времени
для этого участка очень мала.
Для определения второй составляющей времени положим, что
на вход выходного магнитного усилителя скачком приложено на-
пряжение uy. Обозначив Фо/Фз = е для рассматриваемой схемы
магнитного усилителя, (согласно [Л. 6]) получим следующее выра-
жение для времени задержки:
1 uc 1 — е wy 1
или, если выразить его в числе полупериодов питающего напряжения,
1 uc 1-е ©у
п*-—-Щ'—7-'^ (1'9)
16
где Uc и Uу—средние значения напряжений питания и управле-
ния.
Из выражения (1-9) видно, что уменьшения п3 можно достичь
путем увеличения 8 и UT Величина UY выбирается достаточно
большой, так как необходимо преодолеть действие НООС усили-
теля. Величина 8 у выходных магнитных усилителей больше, чем
у обычных магнитных усилителей. Так, например, у магнитных уси-
лителей серии ТУМ рабочая индукция принята 1,45 тл (материал
магнитопроводов — сталь Э310 при толщине ленты 0,35 мм), тогда
как у серийных выходных магнитных усилителей типа ВУМ, вы-
полненных на тех же магнитопроводах, что и усилители серии ТУМ,
Рис. 1-6. Осциллограммы включения и отключения
исполнительного аппарата с помощью выходного
магнитного усилителя.
а — при номинальном напряжении сети; б — при Ус =
-0.85 "c.hom-
принята рабочая индукция 1,6 тл. Приняв величину индукции на-
сыщения материала Э310 порядка 1,8 тл* соответственно получим:
Усилители серии ТУМ е^0,8
Выходные усилители серии ВУМ е^0,9
Такое повышение рабочей индукции, а следовательно, и вели-
чины 8 возможно, так как при разомкнутой магнитной системе
исполнительного аппарата даже существенное повышение тока хо-
лостого хода не может привести к ложному включению аппарата.
Таким образом, время задержки т3 в выходных магнитных
усилителях с НООС сведено к минимуму благодаря высокому зна-
чению 8. Иллюстрацией служат осциллограммы включения и от-
ключения исполнительного аппарата, изображенные на рис. 1-6,яиб.
Осциллограмма рис. 1-6,а показывает полное время включения и
отключения исполнительного аппарата (пускатель ПМИ-2), управ-
ляемого серийным выходным магнитным усилителем типа ВУМ
четвертого габарита при номинальном напряжении питающей сети.
2-2219 17
Верхняя кривая показывает изменение напряжения на нагрузке
с7н; средняя кривая показывает момент подачи и снятия сигнала
на входе усилителя (выходной усилитель управляется логическим
элементом типа ЭЛМ); нижняя кривая показывает момент замы-
кания и размыкания главных контактов исполнительного аппарата.
На рис. 1-6,6 показаны те же самые зависимости, снятые при по-
ниженном на 15% напряжении питающей сети. Видно, что при
пониженном напряжении питающей сети, а следовательно, и пони-
женной рабочей индукции время
6 uи
d
задержки т3 становится замет-
ным.
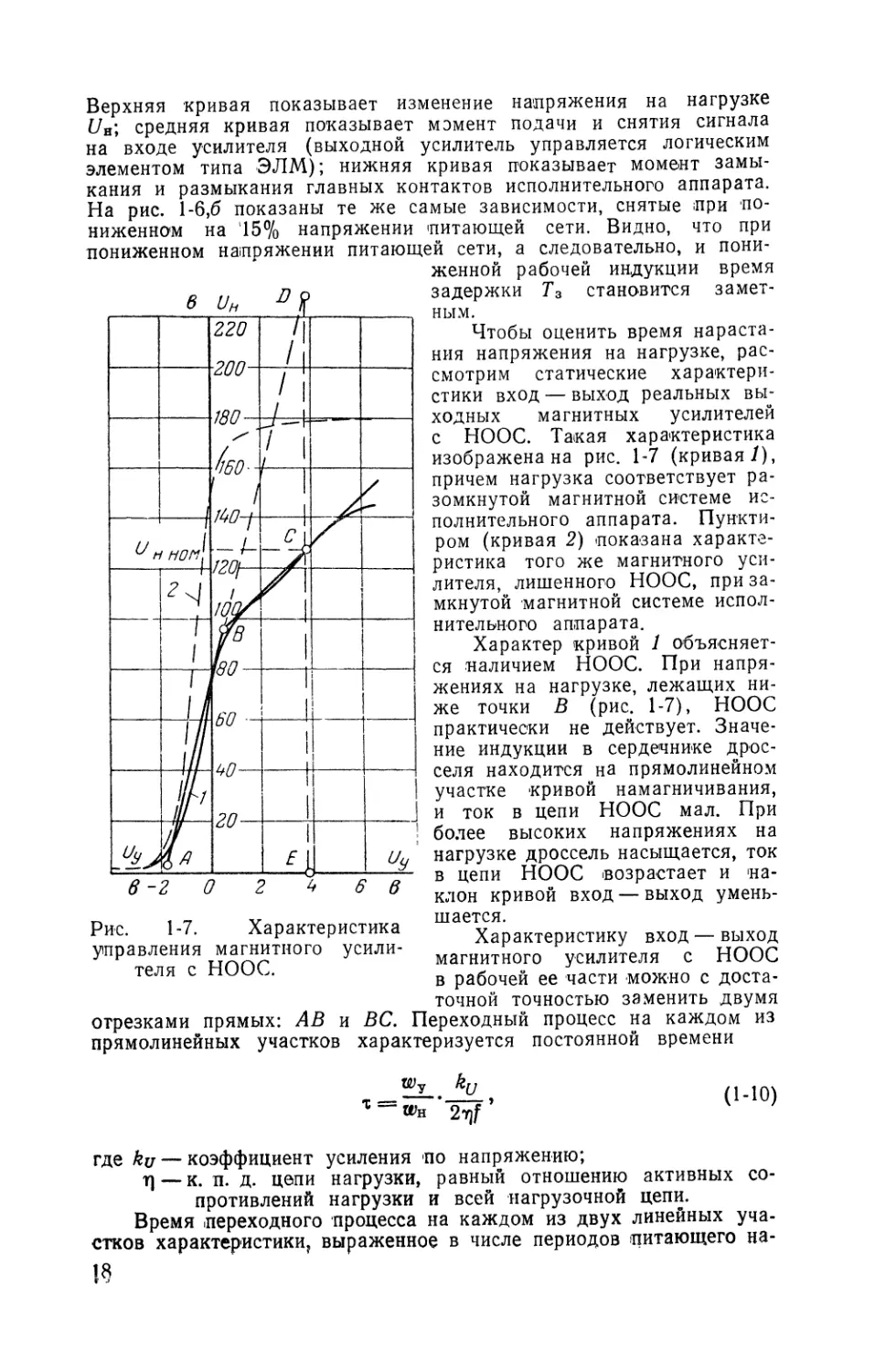
Чтобы оценить время нараста-
ния напряжения на нагрузке, рас-
смотрим статические характери-
стики вход — выход реальных вы-
ходных магнитных усилителей
с НООС. Такая характеристика
изображена на рис. 1-7 (кривая/),
причем нагрузка соответствует ра-
зомкнутой магнитной системе ис-
полнительного аппарата. Пункти-
ром (кривая 2) показана характе-
ристика того же магнитного уси-
лителя, лишенного НООС, при за-
мкнутой магнитной системе испол-
нительного аппарата.
Характер кривой 1 объясняет-
ся наличием НООС. При напря-
жениях на нагрузке, лежащих ни-
же точки В (рис. 1-7), НООС
практически не действует. Значе-
ние индукции в сердечнике дрос-
селя находится на прямолинейном
участке кривой намагничивания,
и ток в цепи НООС мал. При
более высоких напряжениях на
нагрузке дроссель насыщается, ток
в цепи НООС возрастает и на-
клон кривой вход — выход умень-
шается.
Характеристику вход — выход
магнитного усилителя с НООС
в рабочей ее части можно с доста-
точной точностью заменить двумя
отрезками прямых: ЛВ и ВС. Переходный процесс на каждом из
прямолинейных участков характеризуется постоянной времени
220
-ОПП
~т\
/
zuu
/ |
/ |
юи
у'
ибп
1 1
/
\
чои
' i
rln i
{
\
— i-
ч
—г
1
ув
11
ц
юи
СП .
ч
1
ou
" ft"
ih
1
чи
У
ч
1
6-2 о
6 6
Рис. 1-7. Характеристика
управления магнитного усили-
теля с НООС.
(1-10)
где ku — коэффициент усиления тю напряжению;
.к. п. д. цепи нагрузки, равный отношению активных со-
противлений нагрузки и всей нагрузочной цепи.
Время (Переходного процесса на каждом из двух линейных уча-
стков характеристики, выраженное в числе периодов питающего т-
Пряжения, может быть вычислено по формуле
rtK = ^T-4Vln ut-ut <и1>
где U0 и U\ — напряжения в начале и конце рассматриваемого
участка;
u2 — установившееся напряжение; его расчетная величи-
на определяется отрезком de (рис. 1-7).
На участке АВ напряжение на нагрузке вследствие форси-
ровки нарастает быстро. На участке ВС быстрое нарастание на-
пряжения на нагрузке обусловлено малым значением ku*
Время отключения выходного магнитного усилителя опреде-
ляется постоянными времени цепей управления и контура, образо-
ванного рабочими обмотками магнитного усилителя и вентилями
внутренней обратной связи Д. Что касается влияния первого фак-
тора, то здесь усилитель с НООС ничем не отличается от обычного
магнитного усилителя.
Второй фактор может существенно затянуть время отключения
магнитного усилителя.
Длительность переходного .процесса, обусловленного коротко-
замкнутым контуром, в полупериодах частоты питания опреде-
ляется из выражения [Л. 7]
. u (як)
"К = ~!£^Г' (М2)
где як — полупериод, при котором оканчивается переходный про-
цесс;
U(nK)—значение выходного напряжения к моменту пк\
U(0) — значение выходного напряжения в момент коммутации.
Выражения (1-11) и (1-12) показывают, что чем выше к. п. д.
усилителя, тем больше (время переходного процесса. Выходные
магнитные усилители с НООС при стандартном напряжении пи-
тающей сети на выходе имеют также стандартное напряжение.
Например, у серийных усилителей ВУМ с/с = 220 в, а с7н=127 е.
В этом случае отпадает требование к высокому к. п. д. усилителя
и у выходных усилителей ВУМ он равняется примерно 0,5.
Кроме того, у серийных усилителей дополнительное снижение
пк достигается за счет применения селеновых вентилей в цепи
нагрузки, имеющих повышенное прямое сопротивление по сравне-
нию с германиевыми и кремниевыми.
б) Основные расчетные соотношения для выходных магнитных
усилителей переменного тока с НООС
Основными задачами расчета «выходных магнитных усилителей
являются: определение размеров магнитопроводов, сечения прово-
дов нагрузочных обмоток, необходимой степени нелинейности ООС
и величин н. с. обмоток управления, смещения и НООС.
Очевидно, что выбор размеров магнитопроводов и сечений про-
водов нагрузочных обмоток усилителей с НООС по мощностям,
потребляемым катушками исполнительных аппаратов при разомкну-
2* 19
той магнитной системе, поведет к увеличению габаритов л непол-
ному .использованию активных материалов.
С другой стороны, если выбор размеров магпитопроводов и
сечений проводов провести по мощностям, потребляемым катуш-
ками исполнительных аппаратов при замкнутых магнитных систе-
мах, то может оказаться, что при разомкнутых магнитных систе-
мах аппаратов на катушках не будет обеспечено нужное напря-
жение в силу .значительного падения напряжения на нагрузочных
обмотках усилителя.
Рассмотрим наиболее общий случай расчета выходного маг-
нитного усилителя с НООС, когда заданными величинами
являются параметры исполнительного аппарата, напряжение и ча-
стота питающей сети и входные параметры цепей управления и
смещения.
/. Заданные величины
Sp — максимальная мощность электромагнитной системы
'исполнительных аппаратов при разомкнутой магнит-
ной системе, ва\
п — максимальная кратность изменений нагрузки;
t/н.ном — номинальное напряжение на нагрузке, в\
dzAUK — допустимые пределы колебаний напряжения на на-
грузке, %;
f/с.ном — номинальное напряжение сети;
=ЬЛ£/С— пределы колебаний напряжения сети, %;
/ — частота сети, гц\
и ток сигнала управления, вт и а\
;см и Uсм — мощность и напряжение источника питания цепи сме-
щения, вт и в.
2. Выбор напряжения питания
Особенностью выходных магнитных усилителей с ООС, как
отмечалось, является возможность при стандартном напряжении
на нагрузке использовать источник питания также со стандартным
значением напряжения. Напряжение источника питания нужно
брать таким образом, чтобы .выполнялось условие
В противном случае нужно вводить сильную ООС, что влечег
за собой искажение формы кривой напряжения на нагрузке (см.
§ 1-2). При существующей шкале стандартных напряжений (127,
220 и 380 в) указанное условие легко выполняется.
Если по каким-либо причинам расчет выходного усилителя
ведется не на стандартные величины LVhom и £/с.ном, нужно
ввести дополнительное условие выбора напряжения питания
^с.ном ^ . _
77 > 1 »Ь.
^н.ном
При отношении напряжений меньшем 1,6 приходится вводить
слабую НООС, что снижает эффективность ее действия.
20
5. Ёыбор магнитопроводов и нагрузочных обмотбк
Объем стали магнитопровода ориентировочно можно опреде-
лить по формуле, приведенной в [Л. 8], введя в нее дополнительно
•коэффициент перегрузки &п, смысл которого объяснен ниже.
Sp
Vc- 8,88ftfH.PAMA' м*> (M3)
где Ян.p — среднее значение напряженности магнитного поля на-
грузочной обмотки при токе, соответствующем мощ-
ности Sp, а\м\
В0 — индукция в магнитопроводе, тл\
ku — коэффициент использования по напряжению;
kf—коэффициент формы кривой тока.
Для усилителей переменного тока значение ЯН.Р определяется
из соотношения
и H°kp /1 ^Д\
//н.р=-^-, (1-Н)
где Но — эффективное значение напряженности магнитного
тюля нагрузочной обмотки в режиме холостого хода,
соответствующее значению В0\
&р=/н.р//х.х — коэффициент регулирования;
/н.р — ток через нагрузку, соответствующий пусковой мощ-
ности;
/х.х — ток холостого хода усилителя.
Величина коэффициента использования по напряжению опре-
деляется из выражения
Подставив в выражение (1-13) выражение (4-14), окончательно
получим:
Sp
Vc== 8,88/7/0£0£p6tA * (1'15)
Индукция Во в магнитопроводах выходных усилителей может
быть взята примерно на 10% выше, чем для обычных магнитных
усилителей.
Напряженность магнитного поля нагрузочной обмотки в режиме
холостого хода Я0, соответствующая выбранной индукции Во* опре-
деляется по кривой намагничивания B=f(H), снятой на перемен-
ном токе.
Значением коэффициента регулирования задаются [Л. 8], при-
чем его величину выбирают так же, как для обычного магнитного
усилителя с самонасыщением (без НООС).
Коэффициент перегрузки kn учитывает то обстоятельство,
что усилитель должен быть рассчитан на промежуточное значение
мощности, лежащее между Sp и SP/n. Величина коэффициента ka
зависит от п и Sp, и изменяется в широких пределах. Для тех
значений Sp, которыми характеризуется большинство современных
21
Пополнительных аппаратов, можно рекомендовать следующие зна-
чения ku:
при Sp=50 ва и /г=7 следует брать &п=1,8;
при Sp = 600 ва и п — 7 следует брать &п = 3,5;
если п>7, нужно уменьшать значение /гп, а если п<7 — уве-
личивать.
Зная объем стали, можно подобрать подходящий магнитопро-
вод из нормализованного ряда тороидальных магнитопроводов.
Число витков нагрузочной обмотки на магнитопроводе опре-
деляется по известной формуле
w* = 4A*fB0S ' О"16)
Сечение провода нагрузочных обмоток определяется по из-
вестной методике [Л. 8]. За расчетный ток нагрузки при этом
принимается /н=/н.р/&п.
Как указывалось выше, для выходных магнитных усилителей
рекомендуются селеновые выпрямители. Выбираются они, исходя
из минимального тока нагрузки /н.з, имеющего место при замкну-
той магнитной системе исполнительного аппарата. Число элементов
в плече при допустимом обратном напряжении на элемент 26 в
рекомендуется следующее: при с/с.ном = 127 в — 2; при £/с.ном =
= 220 в —4; при £/с.ном='380 в —6.
4. Намагничивающие силы обмоток управления
При расчетах магнитных усилителей оказывается удобным
использовать внешние характеристики [Л. 9], представляющие со-
бой семейство кривых, дающих зависимости напряжения на на-
грузке от тока нагрузки при различных величинах напряженности
магнитного поля обмотки управления.
Снятые на образце усилителя с выбранной при расчете индук-
цией в магнитопроводах В0 и произвольном числе витков обмотки
управления внешние характеристики позволяют просто и с доста-
точной степенью точности построить нагрузочные характеристики
усилителей различных габаритов и, в частности, найти н. с. об-
моток управления (имеются в виду обмотки управления, смеще-
ния и внешних обратных связей).
Примером внешних характеристик усилителей с выходом на
переменном токе могут служить кривые, изображенные на рис. 1-8.
Кривые сняты на усилителях, магнитопроводы которых выполнены
из стали Э310, при индукции В0=|1,6 тл.
В качестве базовых величин для внешних характеристик при-
нимаются номинальное значение напряжения питания £/с.ном и
переменный ток в нагрузке /н.р, соответствующий максимальной
мощности Sp.
Напряжение на нагрузке в относительных единицах опреде-
ляется по формуле
f/*H=m.HOM. (1-17)
Ток нагрузки в относительных единицах
22
(1-18)
Напряженность магнитного поля обмотки управления вычис-
ляется из рыражения
где wY — число витков обмотки управления, при котором снимались
внешние характеристики;
/с — средняя длина магнитной силовой линии магнитопроводов.
Рис. 1-8. Внешние характеристики тороидальных усилителей из
стали Э310 с нагрузкой на переменном токе.
Любая точка внешних характеристик соответствует напряже-
нию и току нтгрузки, абсолютные величины которых определяются
из выражегмй.
ив=и*вис.шок\ (1-20)
/и = /*н/н.р. (1-21)
В выражениях (1-2С) и (1-21) значения напряжения сЛ-.ном
и тока /н.р берутся равными заданным или полученным при
расчете выходного усилителя.
Внешние характеристики, изображенные на рис. 1-8, снима-
лись на усилителях с селеновыми выпрямителями. Падение напря-
жения в выпрямителях учтено в характеристиках и дополнительно
учитываться не должно.
ш
Используя приведенные внешние характеристики, произведем
расчет н. с. смещения, управления и НООС, а также степень не-
линейности ООС.
При отсутствии сигнала управления выходной усилитель дол-
жен быть надежно заперт. Из кривых на рис. 1-8 видно, что такому
состоянию усилителя соответствует кривая
Не м = —Ну22-
Величину н. с. смещения найдем, умножив Ясм на /с.
Будем считать, что при изменениях напряжения 'питающей се-
ти Uс в небольших пределах внешние характеристики остаются
неизменными. В действительности характеристики изменяются, так
как изменяется индукция В0. Однако при тех колебаниях сети, три
которых должно работать большинство исполнительных механизмов,
а следовательно, и выходных усилителей (порядка ±15%), сде-
ланное допущение не оказывает заметного влияния на конечные
результаты.
Рассмотрим несколько случаев расчета.
1. Найдем напряженности поля управления, поля НООС, а так-
же степень нелинейности ООС, считая, что напряжение сети не-
изменно (±Д£/С = 0), цепи управления и смещения питаются от
стабильного источника питания и напряжение на нагрузке должно
остаться неизменным (±Д£/Н = 0) при изменениях сопротивления
нагрузки в п раз.
Для определенности будем считать, что /г = 10. Тогда ток на-
грузки будет изменяться от /*Н2=1 до 7%i=-yjj-== 0,1 (рис. 1-8).
Относительное напряжение на нагрузке, соответствующее значению
f/н.ном, равно £/*н.ном = 0,58 (такое значение получается при
^с.ном = 220 в и £/н.ном=127 в).
Проведем линию параллельно оси нагрузок на расстоянии
^*н.ном от начала координат (рис. 1-8). Пересечения этой линии
с вертикалями, соответствующими нагрузкам /*Hi и /*н2, дают
точки 1 и 2. В идеальном случае в точке 2 НООС должна рав-
няться нулю. Это значит, что при максимальной нагрузке (магнит-
ная система исполнительного аппарата разомкнута) НООС не дей-
ствует и напряжение на нагрузке определяется только напряжен-
ностями полей управления и смещения. Выходной усилитель при
этом полностью используется по мощности. Намагничивающую силу
обмотки управления в этом случае находим следующим образом.
Для того чтобы при максимальной нагрузке /*Н2 напряжение рав-
нялось б^п.ном, нужна результирующая напряженность поля обмо-
ток управления, примерно равная Яу2, как это видно из внешних
характеристик (при практических расчетах точное значение напря-
женности поля в точке 2, как и во всех других точках, должно
находиться с помощью интерполяции). Намагничивающая сила об-
мотки управления действует навстречу н. с. обмотки смещения,
поэтому напряженность поля, создаваемая обмоткой управления,
необходимая для обеспечения работы магнитного усилителя
в точке 2, определяется как сумма абсолютных значений напря-
женности поля обмотки смещения НСм и найденного значения #уг:
Нщ =1\ Н^г I + I #см | = I Ну2 I + I #У22 I •
24
После изменения тока нагрузКй до значения /*Hi напряжение
На нагрузке 'при отсутствии НООС будет определяться точкой 7.
Чтобы напряжение на нагрузке осталось прежним, нужно ввести
НООС, создающую поле, напряженность которого равнялась бы
разности алгебраических значений напряженности поля управления
в точках 2 и 7:
Н 0.с\ = Ну2—#у12-
Это значение является максимальной напряженностью поля
цепи НООС, необходимой для поддержания на нагрузке требуе-
мого напряжения.
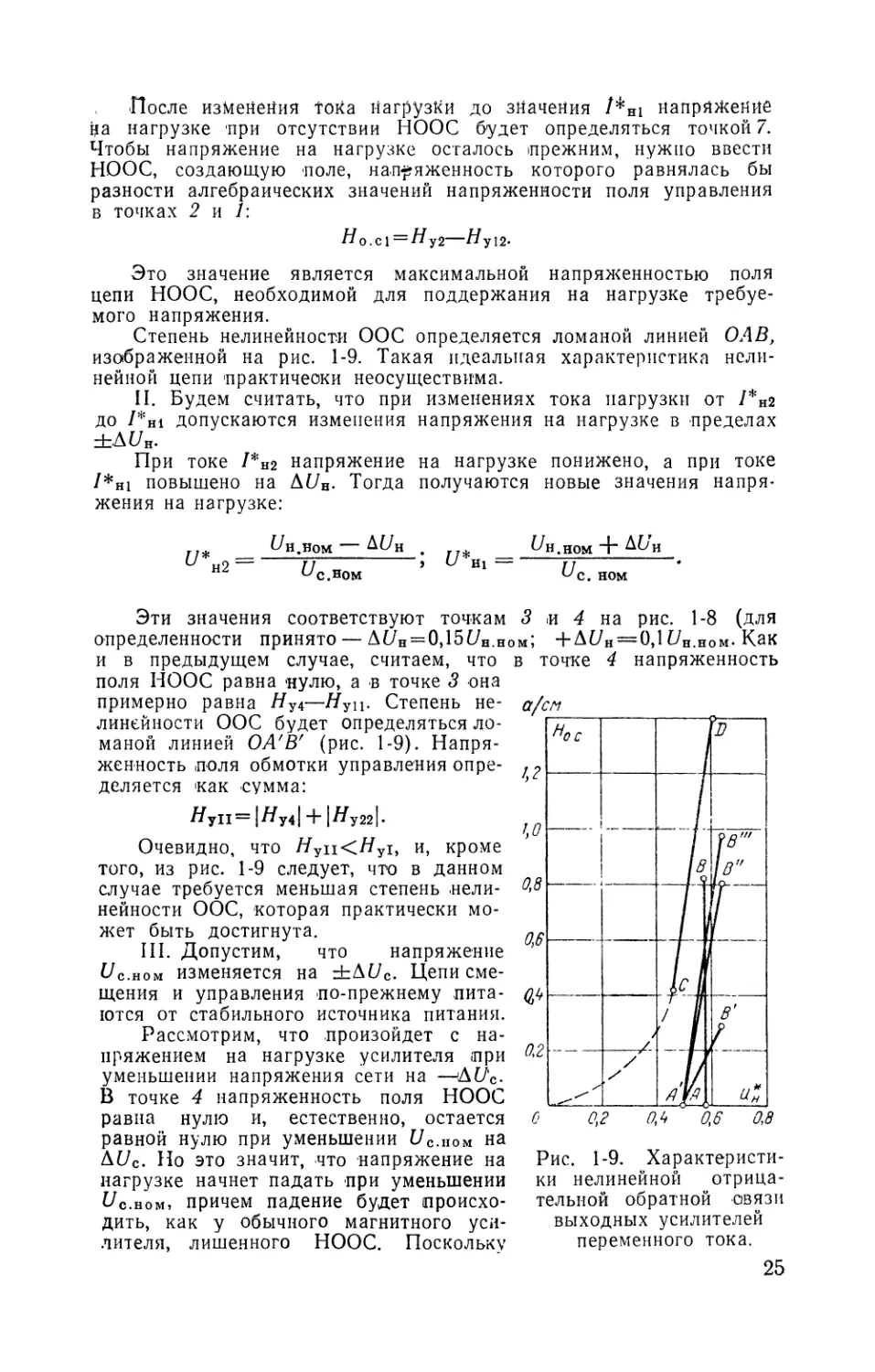
Степень нелинейности ООС определяется ломаной линией ОАВ,
изображенной на рис. 1-9. Такая идеальная характеристика нели-
нейной цепи практически неосуществима.
П. Будем считать, что при изменениях тока нагрузки от /*Н2
до /*н1 допускаются изменения напряжения на нагрузке в пределах
При токе /*н2 напряжение на нагрузке понижено, а при токе
/*н1 повышено на Ас/Н. Тогда получаются новые значения напря-
жения на нагрузке:
/7*
и н2 —
U
н.ном
и
с. ном
и*
^н.ном + А^н
и
с. ном
Эти значения соответствуют точкам
определенности принято — Ас/Н = 0,15с/Н.н
и в предыдущем случае, считаем, что
поля НООС равна нулю, а -в точке 3 она
примерно равна #у4—#уц. Степень не-
линейности ООС будет определяться ло-
маной линией OA Вг (рис. 1-9). Напря-
женность поля обмотки управления опре-
деляется >как сумма:
#yll= |Яу4| + |#У22|.
Очевидно, что #yii<#yi, и, кроме
того, из рис. 1-9 следует, что в данном
случае требуется меньшая степень нели-
нейности ООС, которая практически мо-
жет быть достигнута.
III. Допустим, что напряжение
(/с.ном изменяется на ±Д[7С. Цепи сме-
щения и управления по-прежнему пита-
ются от стабильного источника питания.
Рассмотрим, что произойдет с на-
пряжением на нагрузке усилителя при
уменьшении напряжения сети на —AUC.
В точке 4 напряженность поля НООС
равна нулю и, естественно, остается
равной нулю при уменьшении £/с.ном на
AUC. Но это значит, что напряжение на
нагрузке начнет падать при уменьшении
С/с.ном, причем падение будет происхо-
дить, как у обычного магнитного уси-
лителя, лишенного НООС. Поскольку
3 «и 4 на рис. 1-8 (для
ом; +А£/н = 0,Шн.ном. Как
в точке 4 напряженность
0,2 0,4 0,6 0,8
Рис. 1-9. Характеристи-
ки нелинейной отрица-
тельной обратной -связи
выходных усилителей
переменного тока.
25
в предыдущем случае МООС была выбрана из условия минималь-
ного напряжения на нагрузке, любое дальнейшее уменьшение напря-
жения недопустимо.
При увеличении [/с.ном на +AUC напряжение на нагрузке так-
же превысит допустимое. Нетрудно показать, что при сделанном
допущении в отношении постоянства внешних характеристик, рас-
ширением пределов изменения нагрузки и соответствующим выбо-
ром НООС можно учесть влияние колебаний напряжения питаю-
щей сети. При этом новые значения относительных токов нагрузки
запишутся в виде:
_1
+ ' 100
/*'н! = /*Н1 О"22)
/* Н2 = /*Н2 Д£/сО/0 ' (1 "23)
1
100
Проведя вертикали через новые значения токов, получим точки
5 и 6 (см. рис. 1-8). Напряженность поля обмотки управления
в этом случае будет:
ЯуЦ1 = | //У21 + |#у22|.
Напряженность поля НООС
#0.сли~#у2—^уи-
Степень нелинейности НООС определяется ломаной линией
О А'В" (рис. 1-9).
IV. Будем считать, что все цепи выходного усилителя питаются
от общего источника питания, т. е. н. с. управления и смещения
изменяются в соответствии с изменением напряжения питающей
сети.
Выше отмечалось, что у выходных магнитных усилителей пе-
ременного тока н. с. управления больше по абсолютной величине,
чем н. с. смещения. Приращение результирующей н. с. в рассма-
триваемом случае составит:
= ± (| //у | — | Ясм |) —гщ--
Полученные отклонения должны компенсироваться действием
НООС, для чего необходимо увеличить степень ее нелинейности.
Расчет максимальной напряженности поля НООС производится
следующим образом. Для заданных —AUC и +AUC подсчиты-
ваются приращения AHi и АЯ2» модули которых суммируются со
значением Я0.сш, полученным в п. III:
Яо.в1Т-Яо.ош+|АЯ1| + |АЯ2|.
Степень нелинейности ООС определяется в этом случае ло-
маной линией О А'В'" (рис. 1-9). Напряженности поля управления
и смещения остаются такими же, какие указаны в предыдущем
пункте.
После того как произведен расчет напряженностей поля управ-
ления и НООС, находят значения н. с. умножением полученных
величин на /с.
26
Приведенный метод расчета н. с. всех обмоток управления
идеализирован тем, что было принято изменение н. с. НООС от
нуля при разомкнутой магнитной системе исполнительного меха-
низма и пониженном напряжении питания. В действительности по
обмотке НООС небольшой ток протекает всегда, вследствие чего
после выбора параметров цепи НООС и определения ее минималь-
ной н. с. нужно соответственно увеличить н. с. обмотки управле-
ния.
Определение параметров цепи НООС может быть произведено
одним из известных методов расчета нелинейных цепей. Основны-
ми заданными величинами будут следующие:
Наклон характеристики НООС. Наклон должен быть тот же,
что у характеристики О А'В'" '(рис. 1-9), тогда как сама характе-
ристика сдвинута вправо за счет неравенства нулю в точке 6 тока
ООС. Примером реальной характеристики может служить кри-
вая OCD, причем пунктиром изображена нерабочая часть характе-
ристики.
Напряжение на входе цепи НООС, равное напряжению на на-
грузке.
Мощность, потребляемая цепью НООС. Этой величиной за-
даются; обычно она лежит в пределах 1—2 вт.
После того как определены н. с, находятся числа витков и
сечения проводов обмоток управления, смещения и НООС. В за-
ключение расчета производится проверка размещения обмоток
в обмоточном пространстве магнитопроводов. Если обмотки не раз-
мещаются, следует изменить размеры магнитопроводов.
1-4. Выходные магнитные усилители постоянного тока с нелинейной
отрицательной обратной связью
С точки зрения поддержания необходимого напряжения на
нагрузке выходные магнитные усилители постоянного тока осуще-
ствить значительно проще, чем усилители переменного тока, так
как нагрузка усилителей постоянного тока остается неизменной
в процессе срабатывания исполнительного механизма. Однако вы-
ходной магнитный усилитель постоянного тока должен обеспечивать
возможность изменения нагрузки в некоторых пределах при сохра-
нении заданного напряжения на выходе, чтобы иметь возможность
одним типом выходного усилителя управлять различными исполни-
тельными аппаратами.
Построить выходной магнитный усилитель постоянного тока,
отвечающий поставленным требованиям, можно, использовав прин-
цип, положенный в основу выходных усилителей переменного тока,
а именно введя в схему обычного мостового магнитного усилите-
ля НООС. Полная схема такого выходного усилителя изображена
на рис. 1-10. Поскольку на выходе имеется выпрямленное напря-
жение, в качестве нелинейного элемента использован стабили-
трон Д2. Работа схемы рис. 1-10 аналогична работе схемы выход-
ного магнитного усилителя переменного тока. Однако в силу
того, что сопротивление катушек исполнительных аппаратов
постоянного тока не изменяется в процессе срабатывания,
к усилителям постоянного тока не предъявляется требование
поддерживать напряжение на нагрузке в допустимых пределах при
многократных изменениях последней. Достаточно, чтобы усилитель
обеспечивал нужное напряжение выхода при изменениях нагрузки
27
примерно в 2 раза, что дает возможность управлять одним и тем
же габаритом усилителя исполнительными механизмами, различаю-
щимися ло мощности, потребляемой катушкой, в 2 раза. Необходи-
мая корректировка напряжения на нагрузке осуществляется со-
противлением Ri.
Рассмотрим случай расчета, когда заданными величинами
являются параметры исполнительного аппарата, питающей сети и
входные параметры цепей управления и смещения.
/. Выбор напряжения питания
К форме кривой напряжения, подаваемого на катушку испол-
нительного аппарата постоянного тока, предъявляются менее жест-
кие требования, чем при пе-
ременном токе. Кроме того,
в силу особенностей выход-
ных устройств постоянного
тока в целом следует не-
сколько изменить интервал
отношений напряжений пи-
тающей сети и нагрузки.
Можно рекомендовать сле-
дующий интервал:
2<
U
н.ном
Рис. 1-10. Схема выходного магнит-
ного усилителя постоянного тока с
нелинейной отрицательной обратной
связью.
С точки зрения сущест-
вующих шкал стандартных
напряжений переменного и
постоянного токов вы-
брать значение напряжения
питающей сети так, что-
бы -отношение напряжений
находилось в указанном ин-
тервале, не составляет тру-
да. Например: ^/с.ном =
— 220 в\ £/нном = П0 в; Uc ном=127 в; с/ННом = 48 в и т. п.
2. Выбор магнитопроводов и нагрузочных обмоток
Объем стали магнитопровода ориентировочно определяется на
основании выражения, аналогичного выражению (1-(13) (без коэф-
фициента перегрузки ka в знаменателе)
Для усилителя на постоянном токе напряженность магнитного
поля нагрузочной обмотки в номинальном режиме Ян определяется
из соотношения
Ян=Я0.ср*р, 0-24)
где Яо.ср—среднее значение напряженности магнитного поля на-
грузочной обмотки в режиме холостого хода, соответ-
ствующее значению индукции Во\
fcp — коэффициент регулирования для ередних значений токов,
29
Подставив выражение (1-24) в выражение (1-13) (без коэффи-
циента kn)t получим:
Ян
Vc== 8,88ftfo.cPWt/ ' (1*25)
Напряженность магнитного поля нагрузочной обмотки в ре-
жиме холостого хода Я0.Ср определяется для выбранной индукции
В0 по кривой намагничивания £=/(Яср).
Величина коэффициента использования по напряжению опре-
деляется из выражения
ku="^. (1.26)
В выражении (1-26) следует брать напряжение £/н.ср больше
номинального (/н.Ном, а полученный излишек напряжения £/н.ср—
—ип.яом затем устраняется введением НООС.
Значение £/н.сР может быть достаточно точно подсчитано [Л. 8]
после того, как полностью произведен расчет усилителя. В начале
расчета при определении ориентировочных размеров магнитопрово-
дов значением ku следует задаться, причем для выходных магнит-
ных усилителей постоянного тока можно рекомендовать значение
= 0,6-5-0,65. После того как закончен расчет, производится про-
верка величины ku и при необходимости корректировка расчетных
величин.
Значением коэффициента регулирования &р задаются согласно
рекомендациям, данным в [Л. 8]. Выбор величины &р производится
так же, как для обычного усилителя без НООС.
После того как найден объем стали, подбирается магнито-
провод из нормализованного ряда. Число витков нагрузочной обмот-
ки (на одном магнитопроводе) определяется из выражения (1-16).
Сечение проводов нагрузочных обмоток по заданной величине тока
/н.ном и параметры диодов определяются по методике, изложен-
ной в (Л. 8].
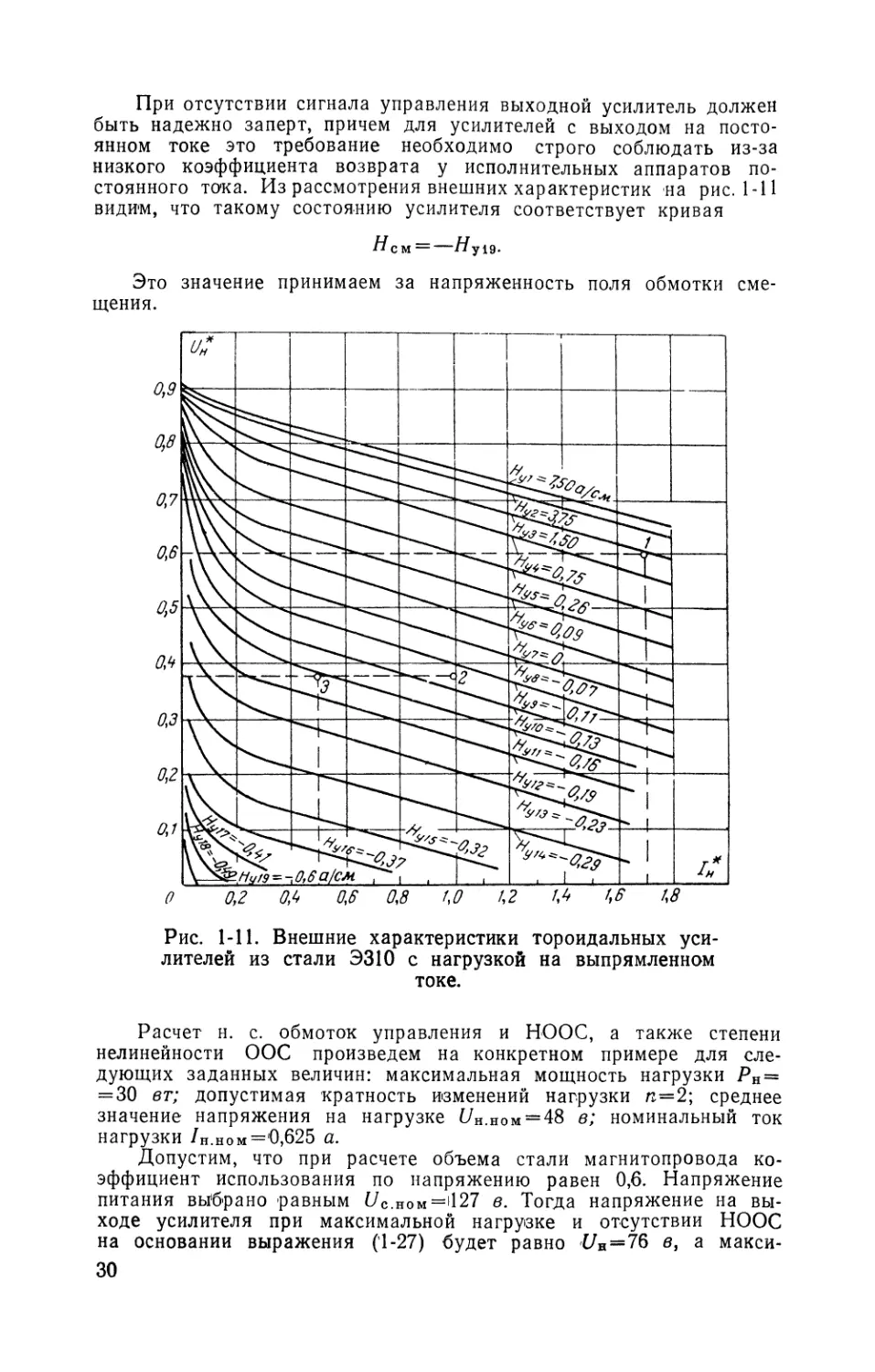
3. Намагничивающие силы обмоток управления
Расчет н. с. управления, смещения, НООС и степень нелиней-
ности ООС производятся с помощью внешних характеристик, изо-
браженных на рис. 1-11. В качестве базовых величин приняты но-
минальное напряжение питающей сети /7с.ном (эффективное зна-
чение) и номинальный ток нагрузки /н.ном (среднее значение).
Относительные напряжение на нагрузке и ток нагрузки записы-
ваются в виде:
"ь-ац (1.27)
^с.ном
/*,= ^НсР . (1-28)
'н.ном
Напряженность магнитного поля обмоток управления вычис-
ляется по выражению (1-19). Абсолютные значения напряжения и
тока нагрузки могут быть найдены на основании выражений (1-27)
и (1-28),
29
При отсутствии сигнала управления выходной усилитель должен
быть надежно заперт, причем для усилителей с выходом на посто-
янном токе это требование необходимо строго соблюдать из-за
низкого коэффициента возврата у исполнительных аппаратов по-
стоянного тока. Из рассмотрения внешних характеристик на рис. 1-11
видим, что такому состоянию усилителя соответствует кривая
Н СМ = Ну\9.
Это значение принимаем за напряженность поля обмотки сме-
щения.
и:
Рис. 1-11. Внешние характеристики тороидальных уси-
лителей из стали Э310 с нагрузкой на выпрямленном
токе.
Расчет н. с. обмоток управления и НООС, а также степени
нелинейности ООС произведем на конкретном примере для сле-
дующих заданных величин: максимальная мощность нагрузки Рп —
= 30 вт; допустимая кратность изменений нагрузки я=2; среднее
значение напряжения на нагрузке ^/н.ном^в в; номинальный ток
нагрузки /н.ном =0,625 а.
Допустим, что при расчете объема стали магнитопровода ко-
эффициент использования по напряжению равен 0,6. Напряжение
питания выбрано равным c/c.hom=i127 в. Тогда напряжение на вы-
ходе усилителя при максимальной нагрузке и отсутствии НООС
на основании выражения (1-27) будет равно £/н=76 в, а макси-
30
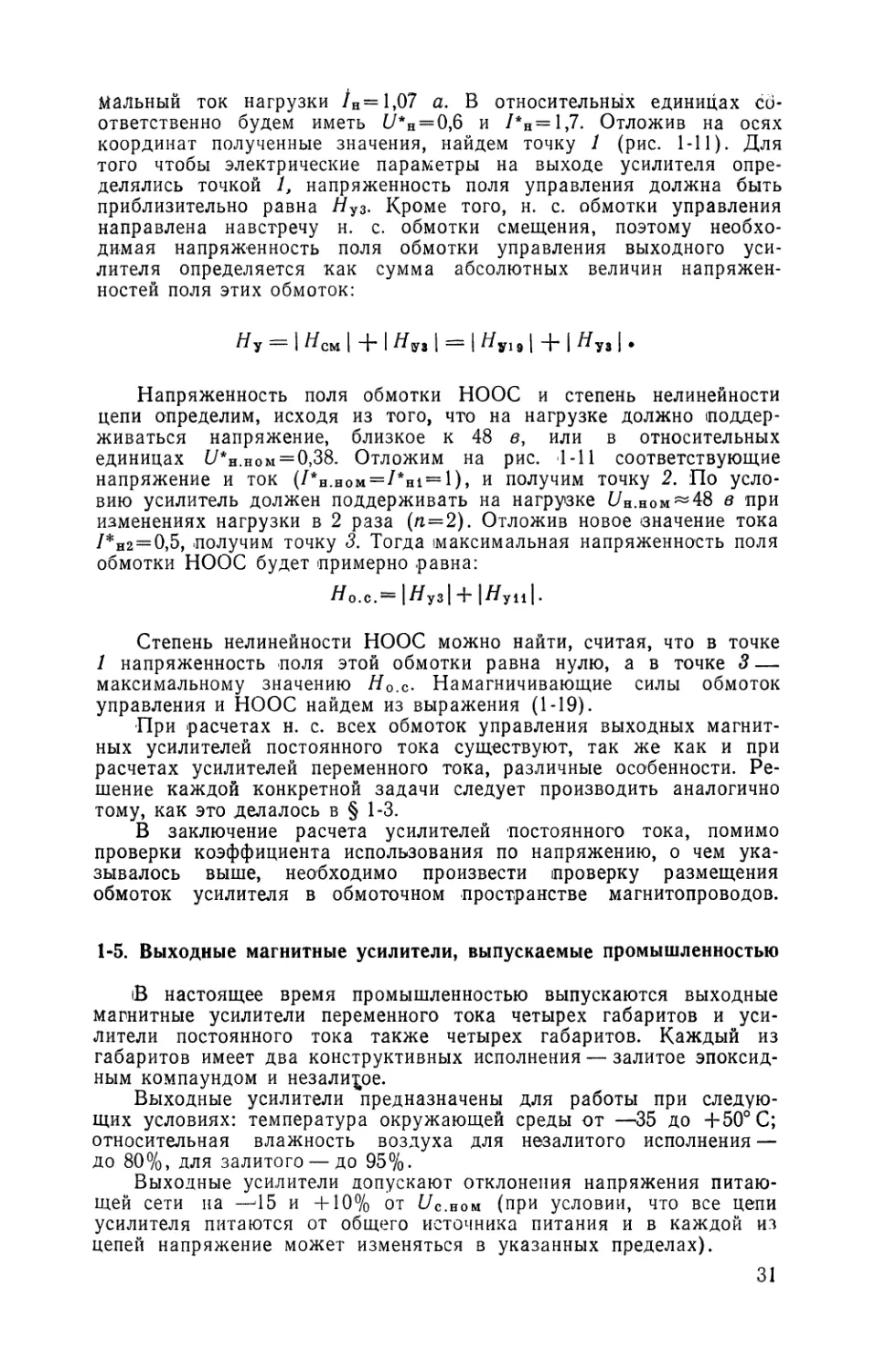
Мальный ток нагрузки /н=1,07 а. В относительных единицах со-
ответственно будем иметь £/*н = 0,6 и /*н=1,7. Отложив на, осях
координат полученные значения, найдем точку / (рис. 1-11). Для
того чтобы электрические параметры на выходе усилителя опре-
делялись точкой I, напряженность поля управления должна быть
приблизительно равна #уз. Кроме того, н. с. обмотки управления
направлена навстречу н. с. обмотки смещения, поэтому необхо-
димая напряженность поля обмотки управления выходного уси-
лителя определяется как сумма абсолютных величин напряжен-
ностей поля этих обмоток:
Напряженность поля обмотки НООС и степень нелинейности
цепи определим, исходя из того, что на нагрузке должно поддер-
живаться напряжение, близкое к 48 в, или в относительных
единицах £/*н.ном = 0,38. Отложим на рис. 1-11 соответствующие
напряжение и ток (/*h.hom=/*hi = 1), и получим точку 2. По усло-
вию усилитель должен поддерживать на нагрузке £/н.ном~48 в при
изменениях нагрузки в 2 раза (п=2). Отложив новое значение тока
/*н2 = 0,5, получим точку 3. Тогда максимальная напряженность поля
обмотки НООС будет примерно равна:
Н0.с— | //уз | + |//уц|.
Степень нелинейности НООС можно найти, считая, что в точке
1 напряженность поля этой обмотки равна нулю, а в точке 3 —
максимальному значению Н0,с. Намагничивающие силы обмоток
управления и НООС найдем из выражения (1-19).
При расчетах н. с. всех обмоток управления выходных магнит-
ных усилителей постоянного тока существуют, так же как и при
расчетах усилителей переменного тока, различные особенности. Ре-
шение каждой конкретной задачи следует производить аналогично
тому, как это делалось в § 1-3.
В заключение расчета усилителей постоянного тока, помимо
проверки коэффициента использования по напряжению, о чем ука-
зывалось выше, необходимо произвести проверку размещения
обмоток усилителя в обмоточном пространстве магнитопроводов.
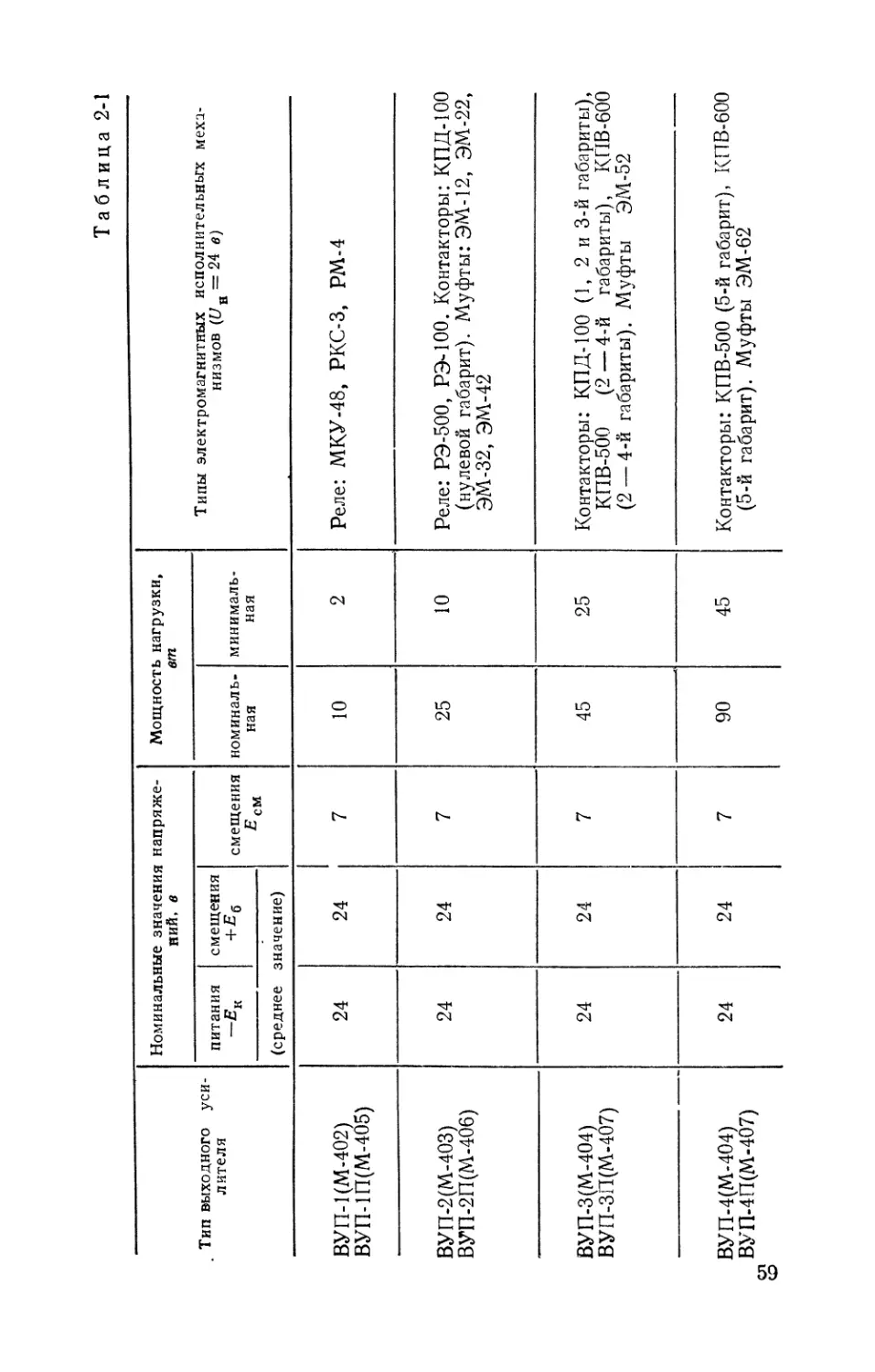
1-5. Выходные магнитные усилители, выпускаемые промышленностью
iB настоящее время промышленностью выпускаются выходные
магнитные усилители переменного тока четырех габаритов и уси-
лители постоянного тока также четырех габаритов. Каждый из
габаритов имеет два конструктивных исполнения — залитое эпоксид-
ным компаундом и незалит^ое.
Выходные усилители предназначены для работы при следую-
щих условиях: температура окружающей среды от —35 до +50° С;
относительная влажность воздуха для незалитого исполнения —
до 80%, для залитого — до 95%.
Выходные усилители допускают отклонения напряжения питаю-
щей сети на —-15 и +10% от £/с.ном (при условии, что все цепи
усилителя питаются от общего источника питания и в каждой из
цепей напряжение может изменяться в указанных пределах).
31
Основные параметры выходных магнитных усилителей перемен-
ного и постоянного токов приведены в табл. 1-1.
Таблица 1-1
Номинальные значения, в
Тип усилителя
<и га
|§
С <и к
X х х
« з w
X
Напряже-
ние на
нагрузке
Мощность
нагрузки,
вт,ва
Вес не
более, кг
ВУМ-А1-11П(М-408)
ВУМ-АЗ-21П(М-409)
36
127
20
20
12
48,55,
60
48,55,
60
48,55,
60
127
127
127
127
2—5
5—17
0,95
1,90
ВУМ-Л4-11П(М-410)
127
20
17—30
2,60
ВУМ-А5-11П(М-411)
ВУМ-АЗ-21(М-412)
ВУМ-А4-2ЦМ-413)
ВУМ-А5-21(М-414)
ВУМ-А6-ЩМ-415)
127
220
220
220
220
20
20
20
20
20
30—50
50—100
100—150
150—350
350—550
3,00ч
2,00
2,60
3,10
4,00
Наименования типов усилителей, приведенных в таблице, скла-
дываются из следующих обозначений: ВУМ — .выходной усилитель
магнитный; А — незалитое исполнение (если вместо А стоит Б, то
это залитое исполнение; в этом случае вес усилителя увеличивается
на 30—40%); первая цифра — номер габарита (1, 3, 4 и 6); вторая
цифра — исполнение рабочих обмоток; третья цифра — исполнение
обмоток управления. Выходные магнитные усилители с выходом на
постоянном токе имеют после обозначения букву П.
В системе «Логика» усилители имеют обозначения, указанные
в скобках.
В табл. 1-1 для усилителей постоянного тока 3, 4 и 5-го габа-
ритов указаны три различных напряжения нагрузки. Это означает,
что на выходе данных усилителей могут включаться исполнитель-
ные аппараты, катушки которых рассчитаны на напряжение 48,
55 или 60 в. Нужное напряжение на нагрузке устанавливается изме-
нением величины НООС (сопротивление Ru рис. 1-10).
Т а б л иЦц а 1-2
Тип усилителя
Тип исполнительного механизма,
нагрузкой
являющегося
ВУМ-А/Б1-11П
ВУМ-А/БЗ-21П
ВУМ-А/Б4-11П
ВУМ-А/Б5-11П
ВУМ-А/БЗ-21
ВУМ-А/Б4-21
ВУМ-А/Б5-21
ВУМ-А/Б6-11
Реле МКУ-48, РКС-3
Контактор КПД-100 (0)
Контакторы КПД-100(1), КПД-ЮО(П)
КПД-ЮО(Ш), КПВ-бОО(П), КПВ-бОО(Ш)
Контакторы КПВ-600(1У)
Пускатели ПМИ-0, ПМИ-1
Пускатель ПМИ-2
Пускатель ПА-300
Пускатель ПА-400
32
Выходные усилители предназначены для работы с различными
исполнительными аппаратами. В табл. 1-2 даны некоторые кон-
тактные аппараты, управлять которыми можно с помощью выход-
ных усилителей. Кроме приведенных в таблице аппаратов, могут
использоваться и другие нагрузки, соответствующие указанной
в табл. 1-1 мощности. Габаритные размеры усилителей приведены
в табл. 1-3.
Таблица 1-3
Тип усилителя
Габаритные размеры, мм
ВУМ-А/БЗ-21
ВУМ-А/Б4-21
ВУМ-А/Б5-21
ВУМ-А/Бб-11
ВУМ-А/Б1-11П
ВУМ-А/БЗ-21 П
ВУМ-А/Б4-11П
ВУМ-А/Б5-11П
116ХП6Х155
124X124X190
95X95X128
124X124X185
Внешний вид выходного магнитного усилителя переменного тока
показан на рис. 1-12,а, а выходного магнитного усилителя постоян-
ного тока —на рис. 1-12,6.
Рис. 1-12. Выходные магнитные усилители.
а — с выходом переменного тока; б — с выходом постоянного тока.
1-6. Применение выходных магнитных усилителей в схемах
автоматики и электропривода
Как отмечалось выше, выходные магнитные усилители пред-
назначены для схем логической автоматики. В основном выходные
магнитные усилители переменного и постоянного тока используются
в системах, построенных на логических элементах системы «Логика».
3—2219 33
Цепи смещения выходных усилителей рассчитаны на пйтаййе
от того же трансформатора, от которого питаются логические эле-
менты, имеющего специально для этой цели отдельную обмотку
и двухполупериодный выпрямитель.
Совершенно очевидна возможность использования выходных
магнитных усилителей в системах, построенных на любых бескон-
тактных элементах. Для этого следует лишь согласовать выход
элемента с входом усилителя и обеспечить требуемое смещение.
Питание цепи смещения усилителя и цепей бесконтактных элемен-
тов необходимо осуществить от общего источника.
а) Управление электромагнитными механизмами с катушками
переменного тока
Нагрузкой выходных магнитных усилителей переменного тока
в основном являются реле, пускатели, контакторы, электромагниты
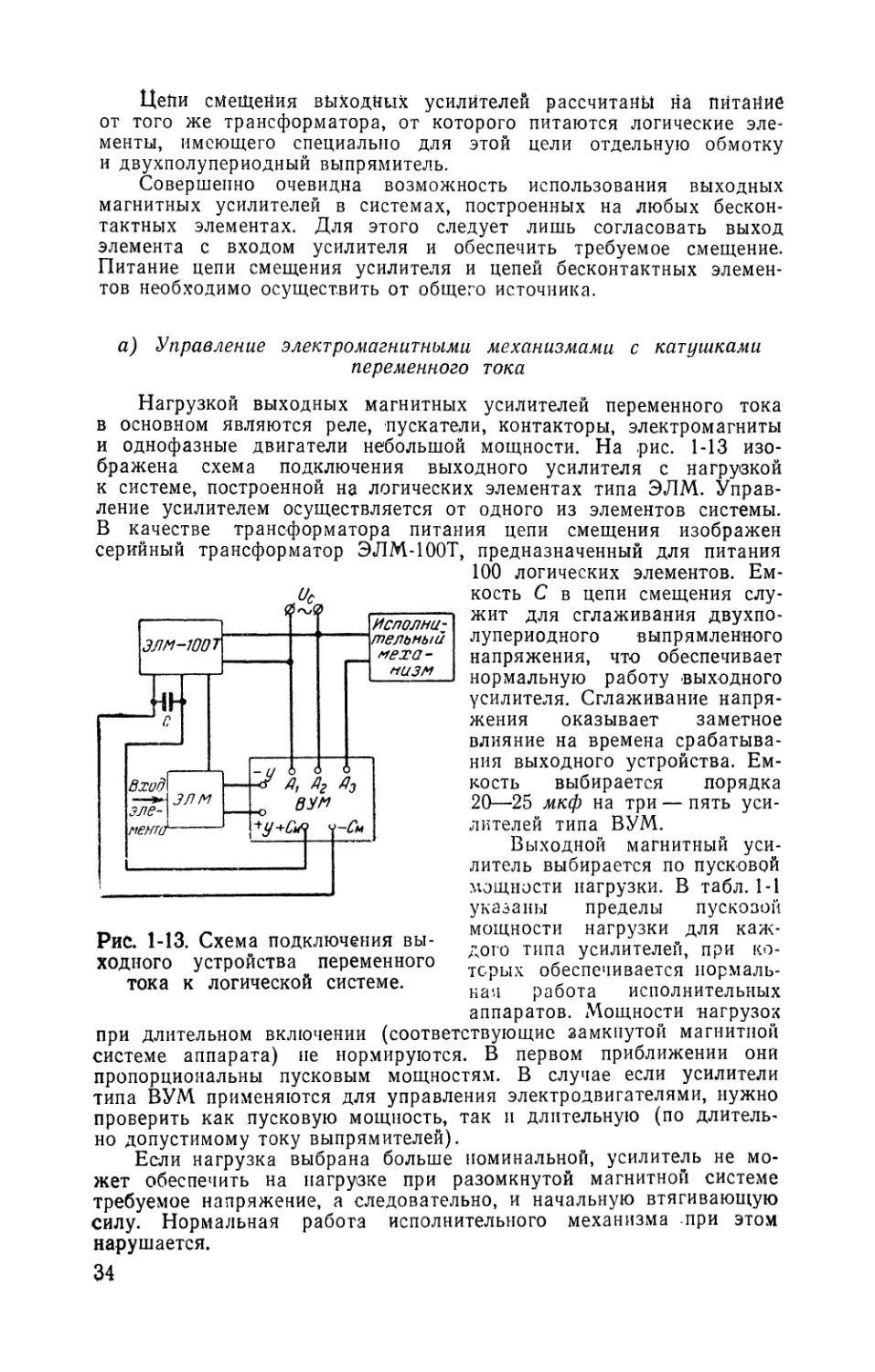
и однофазные двигатели небольшой мощности. На рис. 1-13 изо-
бражена схема подключения выходного усилителя с нагрузкой
к системе, построенной на логических элементах типа ЭЛМ. Управ-
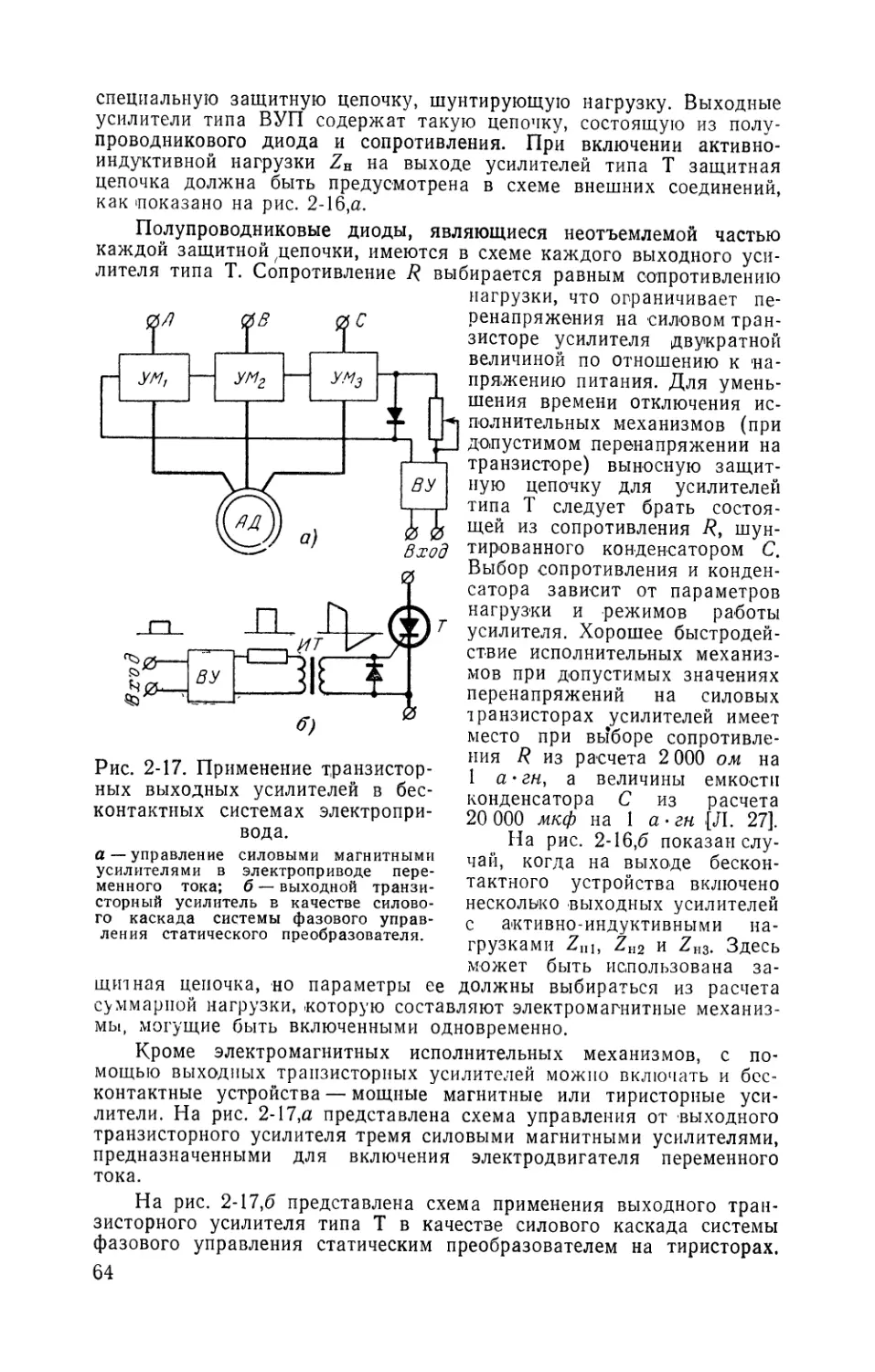
ление усилителем осуществляется от одного из элементов системы.
В качестве трансформатора питания цепи смещения изображен
серийный трансформатор ЭЛМ-100Т, предназначенный для питания
100 логических элементов. Ем-
кость С в цепи смещения слу-
жит для сглаживания двухпо-
лупериодного выпрямленного
напряжения, что обеспечивает
нормальную работу выходного
усилителя. Сглаживание напря-
жения оказывает заметное
влияние на времена срабатыва-
ния выходного устройства. Ем-
кость выбирается порядка
20—25 мкф на три — пять уси-
лителей типа ВУМ.
Выходной магнитный уси-
литель выбирается по пусковой
мощности нагрузки. В табл. 1-1
указаны пределы пусковой
мощности нагрузки для каж-
дого типа усилителей, при ко-
торых обеспечивается нормаль-
ная работа исполнительных
аппаратов. Мощности нагрузок
при длительном включении (соответствующие замкнутой магнитной
системе аппарата) не нормируются. В первом приближении они
пропорциональны пусковым мощностям. В случае если усилители
типа ВУМ применяются для управления электродвигателями, нужно
проверить как пусковую мощность, так и длительную (по длитель-
но допустимому току выпрямителей).
Если нагрузка выбрана больше номинальной, усилитель не мо-
жет обеспечить на нагрузке при разомкнутой магнитной системе
требуемое напряжение, а следовательно, и начальную втягивающую
силу. Нормальная работа исполнительного механизма -при этом
нарушается.
Рис. 1-13. Схема подключения вы-
ходного устройства переменного
тока к логической системе.
34
В случае, если нагрузка меньше номинальной, нужно усилить
НООС. Это можно сделать, уменьшая сопротивление 1r2 (см.
рис. 1-5). При подрегулировке сопротивления \R2 наблюдают ва
напряжением на включенной нагрузке. Это напряжение не должно
превышать номинальное более чем на 5—7%.
При слишком малой нагрузке действие НООС нужно усилить
очень значительно, что приведет к нарушению нормальной работы
исполнительного механизма по причинам, рассмотренным в § 1-2
'23 i 2 з
б)
Рис. >Ы4. Управление с по-мощью выход-
ных усилителей трехфазными двигателями.
а — нереверсивная схема; б —т реверсивная схема.
(дребезг электромагнитной системы, уменьшение втягивающей силы
и перегрев).
Выходные магнитные усилители переменного тока могут быть
использованы также для управления трехфазными двигателями.
В общем случае такое выходное устройство содержит три усилителя,
как это показано на рис. Ы4,а. Однако в ряде случаев можно
осуществить трехфазное выходное устройство с двумя усилителями,
включенными в две фазы.
На основе выходных магнитных усилителей переменного тока
может быть осуществлено также реверсивное трехфазное выходное
устройство, схема которого изображена на рис. 1-14,6. Если подать
сигналы управления на усилители ВУМ I, ВУМ III и ВУМ V, то
двигатель будет вращаться в одном направлении. Чтобы изменить
это направление, следует снять сигналы управления с усилителей
ВУМ I и ВУМ V и подать сигналы на усилители ВУМ II и
ВУМ IV. Усилитель ВУМ III в схеме может отсутствовать.
б) Управление электромагнитными механизмами с катушками
постоянного тока
Нагрузками выходных магнитных усилителей постоянного тока
в основном являются различные реле, контакторы и электромаг-
нитные муфты. На рис. 1-15 изображена схема подключения выход-
ного устройства постоянного тока к логической системе. Емкость
Зф 35
длм-woi
Вход\
эле-
мен-
та
ЭЛМ
Исполни-
тельный
меха-
низм
С в цепи смещения выбирается так же, как и для усилителей
переменного тока. В технической документации на серийные выход-
ные усилители постоянного то-
ка для каждого габарита дает-
ся интервал допустимых мощ-
ностей нагрузки, соблюдать ко-
торый следует так же строго,
как и у усилителей перемен-
ного тока. Последствия завы-
шенной нагрузки очевидны.
Рассмотрим, что произойдет
при заниженной нагрузке.
Через нагрузочные обмотки
запертого усилителя протекает
ток холостого хода, величина
которого в основном опреде-
ляется параметрами магнитного
усилителя. Если сопротивление
катушки исполнительного аппа-
рата велико, падение напряже-
ния, вызванное током холосто-
го хода на катушке, может ока-
заться выше напряжения отпа-
дания магнитной системы аппа-
рата. Это означает, что сработавший исполнительный аппарат не
будет отключаться при запирании выходного магнитного усилителя.
_// А А А А
-<г /}, л2 н, н2
^ ВУМ-П
Рис. 1-15. Схема подключения
выходного усилителя постоянного
тока к логической системе.
Глава вторая
ВЫХОДНЫЕ УСТРОЙСТВА НА ТРАНЗИСТОРАХ
2-1. Принципы построения выходных усилителей
на транзисторах
Транзисторные выходные усилители имеют ряд характерных осо-.
бенностей, которые отличают их от других выходных усилителей,
например магнитных.
Основной особенностью транзисторных выходных усилителей
является то, что они способны работать на нагрузку только по-
стоянного тока с напряжением питания не более 24—"27 в. Кроме
того, их выходная мощность также ограничена и составляет1 0,2—
0,3 кет. Это сужает область применения транзисторных выходных
усилителей, ограничивая ее системами автоматического управления
небольшой мощности. В таких системах в качестве нагрузки выход-
ных усилителей используются различные маломощные электромаг-
нитные механизмы постоянного тока (реле, контакторы, электромаг-
ниты, электромагнитные муфты и т. п.) и аппараты сигнализации.
Однако, несмотря на это, транзисторные выходные усилители обла-
дают рядом преимуществ по сравнению с магнитными выходными
усилителями. К таким преимуществам относятся следующие: незна-
чительные потери мощности при работе схемы в режиме ключа,
составляющие менее 1 % мощности нагрузки, что обеспечивает вы-
сокий к. п. д., большое быстродействие за счет практической
36
безынерционности самих транзисторов, а следовательно, высокая
допустимая рабочая частота 'переключений.
К преимуществам транзисторных выходных усилителей необ-
ходимо также отнести их незначительные габариты и вес. Отноше-
ние веса выходного устройства
к выходной мощности для них
в среднем составляет 0,01 кг/вт,
в то время как для выходного
магнитного усилителя такой же
выходной мощности 0,08 кг/вт.
Таким образом, получается выиг-
рыш в несколько раз в пользу
транзисторного выходного усили-
теля.
В связи с изложенным выше
транзисторные выходные усилители
оказываются в некоторых случаях
более предпочтительными, чем/?1
магнитные.
Транзисторный усилитель, как
известно, может работать в не-
скольких режимах. Особое место
среди них занимает режим пере-
ключения (режим d), позволяю-
щий создать усилитель с высоким
к. п. д., небольшой чувствитель-
ностью к изменениям температуры
и параметров схемы, а также об-
ладающий значительной помехо-
устойчивостью.
Рассматривая нагрузочную ха-
рактеристику транзисторного уси-
лителя (рис. 2-1,а), можно выде-
лить три наиболее характерных
положения рабочей точки {Л. 10].
Первое положение характери-
зует работу транзистора в состоя-
нии насыщения (точка 1), когда
гок через транзистор максимален
и ограничен в основном сопротив-
лением нагрузки |/?н. Падение на-
пряжения между коллектором и эмиттером транзистора в этом
случае мало и составляет практически 0,1—0,2 в. Поэтому при пер-
вом положении рабочей точки мощность, отдаваемая источником
питания в нагрузку, Рп, имеет максимальную величину, а мощность,
рассеиваемая транзистором, Рр, мала:
Рис. 2-1. Характеристики тран-
зисторного усилителя.
а — нагрузочная характеристика;
б — зависимость мощности, рассеи-
ваемой транзистором и нагрузкой,
от величины падения напряже-
ния
Ян, =
(ек-цкзу
Ян
р ек — ц-кэ ек
(2-1)
Второе положение рабочей точки характеризует работу транзи-
стора в состоянии отсечки (точка 2), когда ток через транзистор
37
мал и ограничивается обратным сопротивлением коллекторного пе-
рехода. Падение напряжения на транзисторе в этом случае близко
к напряжению питания ек. Таким образом, во втором положении
рабочей точки мощность, рассеиваемая транзистором, и мощность*
отдаваемая в нагрузку, составляют небольшие величины:
р$2 = Л$о (£к
:/2^°: \ (2-2)
— /ко^н) /ко£к, j
где /ко — начальный (неуправляемый) коллекторный ток.
Третье положение рабочей точки на нагрузочной характери-
стике характеризует работу транзистора в усилительном режиме
(точка 5), когда рассеиваемая транзистором мощность представляет
собой значительную величину, сравнимую с величиной мощности,
отдаваемой в нагрузку. Максимальное значение рассеиваемой мощ-
ности соответствует режиму работы, когда ток через транзистор
составляет половину тока короткого замыкания f )> а напря-
жение между коллектором и эмиттером — половину напряжения
питания.
е е2
Ярз = РНз = 0,5 -0,5£к = 0,25 (2-3)
На рис. 2-1,6 представлены зависимости мощности, рассеивае-
мой на транзисторе, и мощности, отдаваемой источником питания
в нагрузку, от напряжения ик.э.
Наиболее экономичным с точки зрения величины рассеиваемой
мощности для транзистора является режим переключения, когда
транзистор длительно находится в состоянии насыщения или от-
сечки, быстро переходя из одного состояния в другое, не задер-
живаясь в режиме усиления.
Для того чтобы транзисторный усилитель мог работать в режи-
ме переключения, на его вход должен подаваться сигнал управле-
ния, изменяющийся скачком и обеспечивающий только два устой-
чивых состояния транзистора. Такому сигналу управления соответ-
ствует выходной сигнал транзисторного логического элемента.
2-2. Основные схемы выходных усилителей на транзисторах
Наиболее простой схемой, отвечающей требованиям выходного
усилителя, является схема, приведенная на рис. 2-2,а. В этой схеме
транзистор работает в режиме переключения. При отсутствии сиг-
нала на входе транзистор находится в состоянии отсечки, так как
эмиттерный переход смещен в обратном направлении благодаря
наличию положительного постоянного смещения. Появление отри-
цательного сигнала на входе переводит транзистор в состояние
насыщения. На основе этой схемы может быть построен много-
каскадный усилитель с числом каскадов, определяемым" величиной
входного сигнала и мощностью нагрузки. В случае значительной
мощности нагрузки в выходном каскаде усилителя может быть
38
применен составной транзистор (рис. 2-2,6). Отличительная осо-
бенность двухкаскадной схемы состоит в том, что при отсутствии
входного сигнала выходной транзистор оказывается в состоянии
насыщения, а при подаче входного сигнала он переходит в состоя*
ние отсечки.
На рис. 2-2,6 приведена одна из практических схем описывае-
мого транзисторного выходного усилителя, обеспечивающего пере-
ключение мощности до 10 вт, при токе нагрузки 0,42 а (£/н = 24 в).
в)
Рис. 2-2. Схемы транзисторных усилителей.
а — однокаскадная схема; б — двухкаскадная схема с составным транзи-
стором на выходе; в — схема выходного усилителя типа Т-4.
В основу усилителя положена трехкаскадная схема, в которой все
транзисторы включены по схеме с общим эмиттером. Первые два
каскада выполнены на маломощных плоскостных транзисторах, со-
единенных реостатной связью и нагруженных на обычные активные
сопротивления. Третий (выходной) каскад собран на мощном тран-
зисторе и соединен с предыдущими с помощью диода Дь В коллек-
торную цепь транзистора Гз включается внешняя нагрузка Ra.
Диод Дг предусмотрен для использования в цепочке защиты от пе-
ренапряжений, которая устанавливается дополнительно в случае
индуктивной нагрузки (см. § 2-6). В схеме предусмотрены три
одинаковых реостатных входа, работающих параллельно. При пода-
че сигнала на любой из входов происходит включение нагрузки,
а отключение происходит только при снятии сигналов со всех трех
входов. На этом принципе промышленностью разработан и выпу-
скается в составе серии логических элементов типа ЭТ ряд выход-
39
ных усилителей с мощностью переключения до 100 вт [Л. 1]. Основ-
ные параметры их приведены в § 2-9 (см. табл. 2-3).
Любая из схем, приведенных на рис. 2-2, требует на входе
сигнала постоянного тока, что соответствует выходному сигналу
транзисторных логических элементов. В случае импульсного вход-
ного сигнала для таких схем необходимо добавление входной сгла-
живающей емкости. Последнее является нежелательным, так как
создает дополнительную за-
держку при включении и от-
ключении выходного усилителя.
Более сложной схемой уси.-
лителя, где транзисторы рабо-
тают также в режиме переклю-
чения, является схема транзи-
сторного реле, у которого ха-
рактеристика вход — выход
представляет собой релейную
петлю. Метод построения тран-
зисторных усилителей с релей-
ной характеристикой основан на
применении положительной об-
ратной связи в двухкаскадной
схеме.
Обычный двухкаскадный
усилитель имеет линейную ха-
рактеристику вход — выход
(рис. 2-3,а); ток нагрузки изме-
няется без скачков при измене-
нии входного сигнала. Если в такой усилитель введена доста-
точно глубокая положительная обратная связь, то он приобретает
свойства бесконтактного реле, т. е. его режим работы характери-
зуется двумя устойчивыми значениями тока нагрузки, которые со-
ответствуют включенному и выключенному состояниям реле. Харак-
теристика для такой схемы представлена на рис. 2-3,6.
б)
Рис. 2-3. Характеристики вход-
выход транзисторных усилителей.
а — линейная характеристика; б — ре-
лейная характеристика усилителя с
положительной обратной связью.
Рис. 2-4. Способы введения положительной обратной связи
в двухкаскадном транзисторном усилителе.
а — эмиттерная обратная связь; б — коллекторная обратная связь.
Существует несколько способов введения положительной обрат-
ной связи в двухкаскадный транзисторный усилитель. Основными
из них являются обратная связь по току (эмиттерная обратная
40
связь) и обратная связь по напряжению (коллекторная обратная
связь). На рис. 2-4 представлены оба случая использования поло-
жительной обратной связи на примере двухкаскадного транзистор-
ного усилителя, каждый каскад которого собран по схеме с общим
эмиттером.
В первой схеме (рис, 2-4,а) обратная связь осуществляется
за счет сопротивления Ro, падение напряжения на котором, зави-
сящее от тока нагрузки, прикладывается на вход первого каскада
последовательно с сигналом управления. Поэтому часто эмиттерную
обратную связь называют последовательной в отличие от парал-
лельной коллекторной обратной связи.
Работа схемы протекает следующим образом. При нулевом
входном сигнале входной транзистор находится в режиме отсечки,
а выходной — в режиме насыщения. Режим отсечки входного тран-
зистора осуществляется Ga счет положительной обратной связи,
т. е. падения напряжения на сопротивлении Ro. Через нагрузку
при этом протекает максимальный ток. Если входной сигнал пре-
высит по величине напряжение обратной связи и обеспечит ток
базы входного транзистора, достаточный для его насыщения, то
произойдет отпускание реле. Выходной транзистор окажется в ре-
жиме отсечки, а через нагрузку 'будет протекать лишь обратный ток
коллекторного перехода. Для получения в данном случае релейной
характеристики с самоблокировкой, которая приведена на рис. 2-6,
достаточно подать смещение на базу входного транзистора (пунк-
тирная цепочка на рис. 2-4,а).
Схема с коллекторной обратной связью (рис. 2-4,6) имеет
перед предыдущей ряд преимуществ, обусловленных отсутствием
сопротивления обратной связи в общей эмиттерной цепи. Это
позволяет, во-первых, управлять схемой сигналами меньшей величи-
ны и, во-вторых, не приводит к завышению напряжения источника
питания, позволяя выбирать его равным стандартному напряжению
нагрузки. Обратная связь в данной схеме осуществляется ва счет
электрической связи через сопротивление Ro коллектора выходного
транзистора с базой входного. Таким образом, на входной тран-
зистор параллельно сигналу управления подается еще сигнал
обратной связи.
Работа схемы протекает следующим образом. При отсутствии
входного сигнала, так же как и в случае с эмиттерной обратной
связью, входной транзистор будет находиться в состоянии отсечки,
а выходной — в состоянии насыщения. Если же на вход схемы
будет подан сигнал, который превысит величину Iq (см. рис. 2-3,6),
то реле сработает. При этом входной транзистор окажется насы-
щенным, а выходной — запертым. Через нагрузку будет протекать
ток холостого хода, обусловленный обратным током коллекторного
перехода выходного транзистора и током через цепочку обратной
связи.
В схеме с коллекторной обратной связью для получения релей-
ной характеристики с самоблокировкой, так же как и в предыдущем
случае, требуется подать на базу постоянное смещение. Основы
теории транзисторного усилителя, работающего в режиме переклю-
чения, и основные расчетные соотношения для выбора параметров
элементов схемы являются общеизвестными и не раз освещались
в отечественной научно-технической литературе [Л. 11, 12 и др.].
В настоящей главе мы остановимся более подробно лишь на
работе транзисторного реле.
41
2-3. Основы работы транзисторного реле с коллекторной обратной
связью и переменным смещением
При создании транзисторных выходных устройств, предназна-
ченных для работы совместно с магнитными логическими элемен-
тами, встречаются трудности, связанные с тем, что выходное на-
пряжение этих элементов имеет однополупериодную форму.
Анализ различных характеристик вход—выход усилителей по-
зволяет сделать заключение, что в случае применения усилителя,
имеющего релейную характеристику с самоблокировкой, можно
получить два устойчивых состояния реле при управлении импульса-
ми различной полярности.
Схема транзисторного реле, которая приведена на рис. 2-4,6,
имеющая при постоянном смещении на входном транзисторе релей-
ную характеристику вход—выход с самоблокировкой, для работы
от однополупериодного сигнала не может быть применена.
Рис. 2-5. Схема выходного усилителя типа ВУП
(1 и 2-го габаритов) с инверсным выходом.
Для работы транзисторного реле от однополупериодного сигна-
ла, кроме условия обеспечения необходимой релейной характери-
стики, обязательным требованием является изменение полярности
управляющих импульсов на базе входного транзистора при вклю-
чении и выключении схемы. Это может быть достигнуто введе-
нием переменного смещения, причем форма сигнала переменного
смещения должна быть одинаковой с формой входного сигнала
управления. Оба эти сигнала должны находиться в противофазе.
На рис. 2-5 представлена схема выходного усилителя с поло-
жительной коллекторной обратной связью, в которой параллельно
входному сигналу управления и сигналу обратной связи на базу
первого транзистора подаются два напряжения смещения: постоян-
ное и выпрямленное однополупериодное. Такое решение обеспечивает
в целом для выходного усилителя релейную характеристику, кото-
рая подобна характеристике реле с самоблокировкой даже при
работе от однополупериодного сигнала управления.
Работа транзисторного реле при наличии переменного смеще-
ния наглядно видна из рис. 2-6. Когда на вход усилителя посту-
пает однополупериодный сигнал управления от магнитного логи-
ческого элемента, амплитуда результирующего сигнала на базе
входного транзистора не должна быть меньше амплитуды сиг-
нала отпускания /0тп. При этом рабочая точка на характеристике
42
вхбд—выход (рис. 2-б,а) будет перемещаться в пределах точек 1—2,
сохраняя тем самым минимальный ток через нагрузку /ког. В слу-
чае отсутствия сигнала на входе результирующий сигнал изменяет
полярность (рис. 2-6,6), поскольку он является разностью пере-
менного смещения и сигнала холостого хода логического элемента.
При этом он превышает по амплитуде сигнал срабатывания /Сраб.
Рабочая точка в данном случае будет перемещаться в пределах
точек 4—5 и через нагрузку будет протекать ток /н.
Рис. 2-6. К работе выходного усилителя ВУП
с переменным смещением.
а — при наличии сигнала управления; б — при отсут-
ствии сигнала управлелия.
Таким образом, определяются условия для выбора переменного
смещения:
СМ.77 ^
^> iОтп\
^смт„ ^Х.Хт ^> /сраб.
(2-4)
(2-5)
Величины /опт и /сраб полностью определяются параметрами
элементов, из которых состоит схема транзисторного реле [Л. 12].
На рис. 2-7 показана зависимость среднего значения тока
управления транзисторного реле /у.ф, являющегося выходным сиг-
налом магнитного логического элемента (состояние /), от вели-
чины входного сопротивления транзисторного реле. Ток сигнала /у
имеет однополупериодную форму. Ток холостого хода /х.х представ-
ляет собой сигнал, отличный от однополупериодного. Здесь можно
выделить две составляющие. Первая возникает на выходе логи-
ческого элемента в его рабочий лолупериод и не превышает 10%
сигнала 1. Значительно большую долю составляет вторая состав-
43
ляющая тока холостого хода, действующая в управляющий полу-
период логического элемента. Появление ее связано с трансфор-
мацией во вторичную обмотку логического элемента излишка управ-
ляющего напряжения сверх необходимого для перемагничивания
его сердечника. Кривая 1х.х=ф{Ин) на рис. 2-7 дает среднее значе-
ние суммы обеих составляющих тока холостого хода.
Для надежной работы транзисторного выходного усилителя не-
обходимо, чтобы обеспечивалось следующее (третье) условие:
хт^^отп- (2"6)
Для выполнения последнего неравенства во многих случаях
приходится вводить постоянное смещение на базу первого тран-
зистора, которое одновременно с увеличением /0Тш уменьшает
/сраб- В связи с этим вытекает еще одно дополнительное условие:
/см==<С/сраб- (2-7)
Первые три условия с учетом постоянного смещения примут
вид:
/
' ^сыт „ > ^°тп + ^см=;
— /х.Хт ^> /сраб — /см= >
ма
20
10
1 уу-ср
ч
N4
г—
ь
о
0,8
Рис. 2-7. Зависимость выход-
ного сигнала магнитного логи-
ческого элемента типа ЭЛМ
от величины сопротивления
нагрузки.
Величины сопротивлений Ru
(2-8)
Q.mm ' л.лт ^ -ера" *Ш-> (2"9)
/х.хт</отп + /см=. (2-Ю)
Для ограничения положитель-
ного потенциала на входе реле це-
лесообразно устанавливать шунти-
рующую цепочку с полупроводни-
ковым диодом ДО, как по-
казано на рис. 2-5.
Чтобы сигнал управления /у
не превосходил требуемой величи-
ны, на входе схемы вводится де-
литель тока (сопротивления Rm и
i?c), который также уменьшает по-
мехи холостого хода. Благодаря
этому транзисторное реле имеет
входное сопротивление небольшой
величины. Для однополупериодно-
го сигнала управления справедли-
во выражение
/1т= 3,14/т.Ср-дЧ (2-11)
где /у.ср — среднее значение сиг-
нала управления (рис. 2-7).
и Rc выбираются, исходя из опти-
/,2ком
мальной выходной нагрузки логического элемента (Rui<Rc)>
2-4. Основные расчетные соотношения в схеме транзисторного реле
При расчете схемы транзисторного реле применительно к вы-
ходному устройству можно считать заданными следующие величи-
ны: напряжение источника питания ек, максимальную мощность
нагрузки Ри, а также величину сигнала управления.
44
Считая, что при насыщении выходного транзистора падение
напряжения на нем ничтожно мало по сравнению с напряжением
на нагрузке, можно записать:
Отсюда следует, что ток нагрузки
Рн
/н =
а сопротивление нагрузки
/н=^, (2-12)
/?н = т^-. (2-13)
На основании этих данных выбирается выходной транзистор
реле.
При выборе транзисторов следует учитывать не только допу-
стимую мощность рассеивания и допустимые 'значения напряжений
между электродами, но также возможный разброс коэффициентов
усиления и обратных токов. Для нормальной работы схемы требу-
ется, чтобы при всех возможных изменениях параметров обеспечи-
вались устойчивые состояния транзисторов, т. е. надежное запирание
и глубокое насыщение. При этом в первом случае эмиттерный
переход транзистора должен быть смещен в обратном направле-
нии на величину запирающего потенциала £/э.з (обычно 0,2—0,5 в),
а во втором необходимо обеспечить определенный избыточный ток
базы. Условие надежного запирания выходного транзистора можно
записать как
и9ц2>.и9Л. (2-14)
При этом ток, протекающий через коллекторный переход,
/к2 = / 62 = /к02-
Для рассмотренной в предыдущем параграфе схемы (см.
рис. 2-5) можно записать:
R, ( R2\
Uq62 = ^ _|_ д>2 ( Еб — /ког^ — ^3Ki Rl )'
Подставив последнее выражение в (2-14) и учитывая, что
обычно £б>^э.з, а в режиме насыщения транзистора с/Эб~£Лэк,
получим:
Е б Е/Э.э + Е/эб1
-щ- > + /ког. (2"15)
Условие насыщения транзистора Г2:
/62>-pf. (2-16)
При этом ток через транзистор Гь который находится в режиме
отсечки,
/к1 = /б1 = /к01-
Имея в виду, что
Ек—£/эк2 Ек
/К2= 75 ^ D ^ Н
АК2 АН
45
/б2 - Ъ + Rki { Лк1 " /ког) Ла ^
r*i ( у еб
неравенство (2-16).можно представить в следующем виде:
еб , / ек \ /н
ж<ч^-/ко0"Т' (2-17)
где Y= -[Г*/^—' коэффициент передачи между каскадами, обыч-
но равный 0,8—0,9.
На основании выражений (2-15) и (2-17) может быть опре-
делена величина сопротивления в коллекторе первого транзистора:
^э.з + уэб
*'<Т7-й ' (2"18)
При этом сопротивление связи между транзисторами опреде-
ляется как
*1==Кк1-Цр-. (2-19)
Считая заданной величину напряжения смещения еб, можно
определить и значение сопротивления r2:
#2 < // мп еб • (2'2°)
Rt + /к°2
Предварительный расчет сопротивления цепи обратной связи
реле производится из условия насыщения входного транзистора,
т. е. из условия /61>/ki/Pl
Так как
^ ^ Er Uq6i
и /ki^Ek/Rki, то можно записать следующее неравенство:
Rts.i Pi мин
В приведенных выше формулах значения коэффициентов уси-
ления транзисторов р1мин и ргмин определяются для коллекторных
46
токов iki=eifrhi и /К2=/н Значения же обратных коллекторных
токов /ко1 и /ног берутся максимальными соответственно для на-
пряжений икъ\~ек(\—у) и £/Кб2=£к. Так как на базу первого
транзистора, кфоме сигнала управления, подаются еще постоянное
и переменное смещения, то обычно в дальнейшем возникает необхо-
димость коррекции величины сопротивления i?0, ибо от него в боль-
шой степени зависит ширина рабочей петли транзисторного реле
(см. рис. 2-6).
Выбор постоянного смещения, действующего на входе реле,
производится согласно выражениям (2-7) и (2-10), которые в общем
виде могут быть представлены как
/х.хт<С/см = ^/сраб.мин. (2-22)
Величина сигнала холостого хода с некоторым завышением
может быть определена из выражения
/х. Xm ^ 3, 14/х.х д> •
Величина минимального тока срабатывания может быть опре-
делена как
/сраб.мин - R — - иэб, I R f R I,
rlMHH \ '
где ток /£j соответствует коллекторному току транзистора 7\ к
моменту выхода транзистора т2 из состояния отсечки:
7к1 /?К1 y ^i""/KeVe
Значения величин PfMHH и исэб1 в данном случае должны опреде-
ляться для тока /ki = /kj. Если же неравенство (2-22) окажется не-
удовлетворенным, то необходимо уменьшить величину R0 так,
чтобы /сраб.мин было больше /х.х m в 1,5—2 раза. Тогда ток
постоянного смещения будет равен:
т _ /х.Хтп + ^сраб. мин /(у 0
' ем= — 2 " \*-*о)
Сопротивление RCm=* определяется как
1 см=
Необходимое переменное смещение выбирается согласно нера-
венству (2-9), где величина тока срабатывания выбирается макси-
мальной, т. е.
^смт^ ^> ^срабт — /см= + /х.Хрп*, (2-25)
/ £к /С«' „г. f_L_i._L\
г!макс 4 '
47
где Ro — выбранная величина сопротивления обратной срязи;
(^макс—максимальный коэффициент усиления для тока /К1=/£1в
Сопротивление RCM^ определяется из выражения
*сы-=}Г2/Е™~ » (2-26)
СМ/72 ^
где Есм — эффективное значение напряжения источника питания
переменного смещения.
В заключение необходимо проверить, выполняется ли условие
надежного отпускания транзисторного реле [неравенство (2-8)].
При этом величина тока отпускания должна выбираться макси-
мальной, т. е.
7к1макс о /1,1
/отп. макс — r0 "Г иэб\ [Ro^Rc
г1мин \
где ток /к1макс соответствует максимально возможному коллектор-
ному току коллектора Тх к моменту выхода коллектора Т2 из состоя-
ния насыщения:
/О
' кIмакс
Е« 1 / Ек ,Е6 \
/?Ki Т V ^нр2Макс R2 J
Значения величин $Шн » ^эб1 и Ргмакс определяются для токов
/к1 =/^] И /к2 = /н.
2-5. Практические схемы транзисторных реле
а) Транзисторные реле инверсного и неинверсного типов
Особенностью транзисторного реле, построенного на базе двух-
каскадного усилителя с коллекторной обратной связью (см. рис. 2-5),
является его инверсность, т. е. оно включает нагрузку под полное
напряжение при отсутствии входного управляющего сигнала и, на-
оборот, когда сигнал управления подан, реле отключено и нагрузка
обесточена. Однако в практических схемах транзисторных реле, при-
меняемых в качестве выходных усилителей для систем логической
автоматики, наличие инверсности является неоправданным, так как
оно требует увеличения общего количества элементов. Схема релей-
ного усилителя может быть выполнена и неинверсной (рис. 2-8).
Это достигается путем введения в схему рис. 2-5 дополнительного
транзисторного каскада, работающего в режиме ключа и осущест-
вляющего еще раз инверсию в работе устройства.
Указанный дополнительный каскад в схеме рис. 2-8 является
силовым звеном, осуществляющим непосредственное включение на-
грузки, и в случае значительной мощности последней может быть
выполнен на составном транзисторе. Характеристика вход—выход
для неинверсной схемы релейного усилителя по сравнению'с изо-
браженной на рис. 2-6 располагается зеркально относительно оси
ординат. При выборе параметров элементов схемы в данном случае
45
необходимо учитывать, что напряжение на втором транзисторе
в запертом состоянии сильно отличается от Ек и составляет
Ек(\—yO- Коэффициент передачи между вторым и третьим каска-
дами Yi желательно выбирать не более 0,5, так как в противном
случае получается неустойчивая работа двух первых каскадов
Рис. 2-8. Схема выходного усилителя типа ВУП
(1 и 2-го габаритов) с прямым выходом.
транзисторного .реле. В связи с этим выражение (2-21) можно за-
писать так:
б) Мощные транзисторные реле
На практике часто нагрузкой транзисторного выходного уси-
лителя является мощный электромагнитный исполнительный меха-
низм '(контактор, электромагнитная муфта, электродвигатель и т. п.).
Как известно, коэффициент усиления транзистора сильно зави-
сит от тока коллектора, имея наибольшее значение при токе на-
много меньше допустимого для данного транзистора тока нагрузки.
Поэтому приходится часто использовать выходной транзистор с не-
догрузкой, применяя при этом наиболее мощные типы транзисто-
ров (П207—П210), что приводит к увеличению габаритов усилителя.
Наиболее правильным решением вопроса в данном случае
является использование для выходного каскада составного тран-
зистора. Схема такого транзисторного реле показана на рис. 2-9,а.
Составной транзистор, состоящий из двух транзисторов: Г2 и Г3,
имеет коэффициент усиления, во много раз превосходящий коэффи-
циент усиления одного транзистора:
Рсост~Рт2ртз-
Это позволяет использовать транзисторы для включения более
мощных нагрузок.
Работа составного транзистора протекает следующим образом.
При подаче сигнала на базу составного транзистора первым вклю-
чается транзистор Тг, а затем мгновенно включается оконечный
транзистор 7Y Через нагрузку протекают при этом коллекторные
токи обоих насыщенных транзисторов. Сопротивление /?з, включен-
ное последовательно в цепь коллектора оконечного транзистора,
4—2219 49
обеспечивает положительный потенциал на его коллекторе относи-
тельно базы, необходимый для насыщения. Так как падение напря-
жения на указанном сопротивлении уменьшает напряжение на
нагрузке, то яз не следует выбирать излишне большим, ибо это
потребует повышения напряжения питания £к. Минимальная вели-
чина яз определяется следующим неравенством:
ь*ь*в. (l—fc)>um, (2-28)
где £/ЙЭ2 нас = 0,1 -^0,2 в — напряжение между коллектором и эмит-
тером насыщенного транзистора Г2.
б)
Рис. 2-9. Схемы транзисторных реле с составным
транзистором на выходе
а — схема с общим источником питания; б — схема с раз-
дельным питанием.
При отсутствии управляющего сигнала на составном транзи-
сторе последний переходит в состояние отсечки за счет постоян-
ного положительного смещения. Для обеспечения надежного запира-
50
ния обоих транзисторов т2 и т3 требуется применение в схеме рёЛе
специального диодного делителя Д3—
Схема транзисторного реле с составным выходным транзи-
стором может быть выполнена без добавочного сопротивления
В этом случае удобнее использовать раздельное коллекторное пита-
ние, так как последнее позволяет значительно уменьшить величину
рассеиваемой мощности в коллекторных нагрузках транзисторов 7i
и Г2. Подобная схема приведена на рис. 2-9,6. Обычно напряжения
коллекторного питания выбираются неодинаковыми, причем
Ек1<Е1<2. Величина сопротивления в цепи коллектора Г2 опреде-
ляется из условия насыщения оконечного транзистора при макси-
мальном токе нагрузки:
Ртз
Ri<2 = "7 (£ki — £7бэз — ^кэ2нас)- (2-29)
iHm
Выходной каскад транзисторного реле в случае большой мощ-
ности нагрузки может состоять из трех и более транзисторов.
Принципы построения схемы при этом остаются прежними.
2-6. Работа транзисторного ключа на индуктивную нагрузку
Работа транзистора в режиме переключения на активно-индук-
тивную нагрузку имеет ряд особенностей, связанных с возникнове-
нием перенапряжений между эмиттером и коллектором. В момент
перехода из состояния насыщения в состояние отсечки, т. е. в мо-
мент выключения транзистора,
энергия, запасенная в индуктив-
ности нагрузки, рассеивается во
внешней цепи. Так как сопро-
тивление внешней цепи в этом
случае очень велико, то на за-
жимах нагрузки возникает пик
э. д. с. £ИНд, достигающий
в практических схемах 6—8-
кратной величины напряжения
питания Ек. К транзистору при-
кладывается сумма напряжений
£/Эк=£к+£инд. (2-30)
Так как эмиттерный пере-
ход запертого транзистора сме-
щен в обратном направлении,
то можно считать, что это на-
пряжение целиком приклады-
вается к коллекторному пере-
ходу, т. е. между коллектором
и базой. Если оно превзойдет
максимально допустимую для
данного транзистора величину,
то может произойти пробой
коллекторного перехода. Поэто-
му необходимо соблюдение УСЛОВИЯ Uqk<^ £/бк доп.
Наиболее распространенным способом, позволяющим уменьшить
возникающие на транзисторе перенапряжения, является применение
Рис. 2-10. Схемы защиты выход-
ных транзисторов от перенапря-
жений при активно-индуктивной
нагрузке.
4* 51
Шунтирующего защитного диода (рис. 2-10,а). Последний подклю-
чается на клеммы нагрузки в запирающем для рабочего тока на-
правлении. Когда транзистор переходит в запертое) состояние, ток
нагрузки мгновенно не исчезает, а замыкается через защитный
диод, образующий внешнюю цепь, и спадает по экспоненциальному
закону с постоянной времени x~Xb = LhIRh:
Энергия, запасенная в индуктивности нагрузки, в этом случае
почти полностью рассеивается в сопротивлении нагрузки. Напряже-
ние на нагрузке, определяющее величину перенапряжения на тран-
зисторе, не превосходит прямого падения напряжения на диоде £д.
Таким образом, максимальный пик напряжения на транзисторе
и'кв = Ек+Ел. (2-32)
Существенным недостатком указанного способа уменьшения
перенапряжений транзистора является сравнительно медленный спад
тока в нагрузке, особенно при небольших значениях RH. Это при-
водит к затягиванию времени отпускания исполнительного электро-
магнитного механизма. Так, например, собственное время работы
контакторов постоянного тока типа КПВ при размыкании цепи
катушки составляет 0,02—0,08 сек, а в случае применения шунти-
рующего диода возрастает до 1—2 сек.
Для более простого сравнения различных цепочек защиты
транзисторов от перенапряжений будем считать, что нагрузкой
является линейная индуктивность. Падением напряжения на диоде
можно пренебречь. Тогда время, в течение которого ток нагрузки
при запирании транзистора уменьшается до 5% своего полного
значения,
/н
''о.ов = ifc In 0j05/h = Зхн. (2-33)
Как видно из последнего выражения, для ускорения процесса
спада тока нагрузки необходимо иметь меньшую постоянную вре-
мени разрядного контура. Это легко достигается включением после-
довательно с защитным диодом добавочного сопротивления Яд
(рис. 2-10.6). В этом случае
_ U ^ Яя
Rh + /?д Ru + Rp, Тн>
и, следовательно, время спада тока до 0,05/ы уменьшается
Rn
В Ян + Лд Ра3' Т* е'
^.а5 = 3х=/гн + /гд тн. (2-34)
52
Однако включение добавочного сопротивления способствует
узеличению максимального пика напряжения па транзисторе
Так как для транзистора максимально допустимое напряжение
между коллектором и эмиттером UK3 макс является заданным, то
величина добавочного сопротивления должна выбираться из условия
п ^ п ^кэ макс Ек
Дд<#и ^ •
Применение в качестве добавочного сопротивления нелиней-
ного элемента, обладающего вольт-амперной характеристикой, по-
добной характеристике стабилитрона, позволяет одновременно умень-
шить время спада тока и ограничить величину перенапряжений,
возникающих на нагрузке. На рис. 2-10,в показана схема, где
защитная цепочка состоит из диода и стабилитрона с напряжением
стабилизации Ес. В этом случае величина обратного напряжения
на нагрузке будет ограничена суммой £д + £с, и, следовательно,
максимальное напряжение на транзисторе в момент его запирания
не превысит величины
с/'"кЭ = Е« + Яд + Ес ^ £к + Ес. (2-37)
Закон изменения (спада) тока в нагрузке здесь имеет более
сложный характер и, если считать, что стабилитрон обладает
идеальной характеристикой, может быть представлен следующим
выражением:
i"'H=|-^/Ta-|-(l-^). (2-38)
Время спада тока в нагрузке до 5% его начального значения
*„, 1п Е* +Ес . /9.39ч
* 0,0 5 —% "I £с+о,05£к {~ }
Энергия, запасенная в индуктивности, при наличии защитной
шунтирующей цепочки, содержащей сопротивления, рассеивается
в нагрузке и элементах этой цепочки.
Если цепочка содержит, кроме диода, только линейное сопро-
тивление :(рис. 2-10,6), то энергия, рассеиваемая в этом сопротив-
лении при отключении .нагрузки, составляет величину
t0 00 t_
О о
где tQ — время, в течение которого ток спадает до нуля.
AR~ /?2 2 Rn-\-RA 2Ra ^41>
53
Учитывая, что в практических схемах автоматики часто возни-
кает необходимость коммутировать нагрузку с определенной часто-
той Д мощность добавочного сопротивления для случая, когда
/<1/Зт, составит:
Pr~" Rb + R* 2Rk ft (2"42)
В случае применения в защитной цепочке стабилитрона
(рис. 2-10,<з) энергия, выделяемая в нем,
Ас=^-Ес(е«-ЕсЫ £^gc)- (2-43)
Так как стабилитрон имеет определенную допустимую мощ-
ность рассеивания, то частота, с которой допускается коммутиро-
вать схему,
Для того чтобы уменьшить пик тока, протекающего через ста-
билитрон, параллельно последнему включается емкость. На
рис. 2-10,г приведена такая схема. Сопротивление R введено для
создания цепи разряда емкости. В противном случае эффективность
включения последней незначительна.
2-7. Источники питания для выходных устройств на транзисторах
Питание выходных транзисторных устройств должно осущест-
вляться от источников постоянного тока или специальных выпря-
мительных установок, обеспечивающих необходимую величину вы-
ходного выпрямленного напряжения с достаточно малыми пуль-
сациями. Практически допустимой величиной коэффициента пуль-
саций является величина порядка 5—6%.
Источники питания должны иметь два независимых выхода по
постоянному току: силовой (£к), обеспечивающий питание нагрузоч-
ных цепей выходных устройств, и вспомогательный (£б), предназна-
ченный для питания цепей смещения транзисторов.
Источники питания могут быть однофазными или трехфазными.
Однофазные источники, отличаясь большей простотой, имеют на
выходе недопустимо большие пульсации выпрямленного напряже-
ния, если не предусмотреть сглаживающей емкости. Однако при
наличии емкости внешняя характеристика однофазного источника
питания получается крутопадающей. Следовательно, однофазную
схему источника питания из-за этого недостатка применять нецеле-
сообразно.
В трехфазных мостовых схемах (рис. 2-11) коэффициент пуль-
саций выпрямленного напряжения не превышает 6%, так как обе-
спечивается шестифазное выпрямление, и применение сглаживающей
емкости на Еыходе схемы не требуется. Внешняя характеристика
получается жесткой. Кроме того, еще одним преимуществом трех-
фазной схемы является лучшее использование трансформатора. Пер-
вичные обмотки силового трансформатора при подключении к пи-
54
тающей сети с различными напряжениями (220 или 380 в) можно
пересоединять со звезды на треугольник.
Обычно допустимые колебания напряжения питания типовых
нагрузок, которыми управляют выходные устройства, составляют
от +10 до —15% номинального значения. Источник питания должен
осуществлять стабилизацию выходного постоянного напряжения
при изменениях напряжения питающей сети от 0,85 до 1,1 номи-
нального значения, а также при 'изменениях нагрузки от холостого
хода до номинальной величины.
Однако применение специаль-
ных стабилизированных источ-
ников питания для выходных
транзисторных усилителей, ра-
ботающих с типовыми нагруз-
ками, оправдано только в осо-
бых случаях.
Наиболее простым вариан-
том, позволяющим осуще-
ствить требуемую точность под-
держания напряжения постоян-
ного тока на выходе источника
питания без применения специ-
альных дополнительных стаби-
лизирующих элементов, являет-
ся использование в схеме (рис.
2-11,6) силового трансформато-
ра, имеющего небольшое вну-
треннее падение напряжения
(Ик<3%).
В качестве составных эле-
ментов выпрямителей целесооб-
разно применять мощные крем-
ниевые диоды, обладающие достаточно высокой надежностью.
Источником переменного смещения £см_, которое необходимо
для питания выходных транзисторных устройств, работающих от
магнитных логических элементов, служит трансформатор питания
этих элементов. При этом используется та из отпаек вторичной
обмотки трансформатора, которая обеспечивает необходимую фазу
импульсов переменного смещения.
Для практических схем автоматики, где используются выход-
ные транзисторные усилители, были разработаны специальные блоки
питания, в основе которых используется трехфазная мостовая схема
выпрямителя. В табл. 2-2 и 2-5 приведены основные данные блоков
питания, освоенных и выпускаемых отечественной промышленностью.
Рис. 2-11. Схема источника пита-
ния для выходных транзисторных
усилителей.
2-8. Вопросы охлаждения мощных транзисторов
Как известно, мощные транзисторы для улучшения их тепло-
вого режима и более стабильной работы в условиях колебаний
температуры окружающей среды устанавливаются на радиаторах.
Максимальная мощность, которая может быть рассеяна транзи-
стором без радиатора при нормальном атмосферном давлении,
^доп = (*п-^-]Л-» (2-45)
^п.с
где Рдоп — допустимая мощность рассеяния в транзисторе;
55
/п—максимально допустимая температура коллекторного
перехода транзистора (100° С для П203, 90° С для П4);
to, — температура окружающей среды;
Rn.c—тепловое сопротивление транзистора «переход—среда»
(8О°С/0Г для П203, 36°С/вт для П4).
Тепловое сопротивление транзистора «переход — среда» можно
считать состоящим из двух составляющих:
где Rn.n—тепловое сопротивление «переход—корпус»;
Rk.c — тепловое сопротивление «корпус — среда».
Роль радиатора заключается в уменьшении теплового сопро-
тивления «корпус — среда» за счет увеличения внешней поверхности
теплоотдачи.
Для определения размеров радиатора требуется предваритель-
ное определение суммарной мощности, выделяемой в транзисторе.
Когда транзистор работает в режиме переключения, эту мощность
следует рассматривать как состоящую из трех составляющих:
Р* = Р* + Ро + Рп, (2-46)
где Рн —мощность, выделяемая в транзисторе в состоянии на-
сыщения;
Р0 — мощность, выделяемая в транзисторе в состоянии
отсечки;
Ра — мощность, выделяемая в транзисторе за время переклю-
чения (включения и выключения).
Для случая активной нагрузки средние за период значения
каждой из этих составляющих мощности, выделяемой в транзисто-
ре, могут быть определены из следующих выражений:
Рн=(/к£/кэ + /в£/бэ)^-; (2-47)
Р0 = /кос/кэо -у-; (2-48)
т
Рп = /кС/кэо Qf-у (2-49)
где Т=Тп-\-Т0 + Тп— время коммутирования транзистора;
Ги — время насыщенного состояния транзистора;
Г0 — время отсечки транзистора;
Тп — время переключения, суммарное (включение и
выключение);
/,<о — ток коллектора в режиме отсечки;
£/кэо — напряжение в режиме отсечки.
Общая поверхность радиатора в первом приближении подсчиты-
вается по формуле
^=тж4=Ш' см2> (2-50>
где kt — коэффициент теплоотдачи поверхности материала радиа-
тора; для матовой черной поверхности в спокойном воз-
духе £т = 0,0013 вт-°С/см2.
56
2000
woo
1200
800
400
Тепловое сопротивление «переход—корпус» для германие-
вых транзисторов составляет для П203—3,5 град/вт, для П4—
2 град/вт.
На рис. 2-12 показаны кривые зависимости площади охлаждаю-
щего радиатора от мощности, выделяемой в транзисторе типа П-4
при двух значениях темпера-
туры окружающей среды: 30
и 50° С и максимально до-
пустимой температуре на
переходе транзистора.
По известному значе-
нию Sp определяются разме-
ры необходимого радиатора.
Для изготовления радиато-
ров необходимо применять
только материалы, обладаю-
щие хорошей теплопровод-
ностью, например медь,
алюминий, латунь. Наиболее
часто применяются литые
радиаторы ребристой кон-
струкции. Внешний вид не-
скольких типов таких радиа-
торов, серийно выпускаемых
промышленностью, пред-
ставлен на рис. 2-13. Радиа-
тор может быть также вы-
полнен в виде плоской пла-
стины толщиной не менее 3—4 мм.
С целью улучшения теплоотвода транзисторы с радиаторами
устанавливаются з местах с повышенной конвекцией воздуха. Для
\
\50°с
\зо°с
о
12 w 20 гьвга
Рис. 2-12. Зависимость площади
охлаждающего радиатора от мощно-
сти, рассеиваемой в транзисторе
типа П-4.
Рис. 2-13. Типы охлаждающих радиаторов.
обеспечения хорошего теплового контакта транзистора с радиато-
ром применяются шлифовка поверхности радиатора, контактирую-
щей с транзистором, и специальные кремнийорганические смазки.
57
2-9. Выходные транзисторные усилители, серийно выпускаемые
промышленностью
В настоящее время отечественной промышленностью разрабо-
тано и выпускается несколько типов выходных транзисторных уси-
лителей. Основными из них являются усилители ВУП, предназна-
ченные для работы на выходе схем, собранных на магнитных логи-
ческих элементах серии ЭЛМ, и усилители ЭТ-У, входящие в состав
единой серии полупроводниковых логических элементов ЭТ.
Оба типа выходных усилителей выполняют роль связующего
звена между логическими элементами и силовыми исполнительными
устройствами. Нагрузкой для усилителей могут служить различные
электромагнитные механизмы постоянного тока (реле, контакторы,
электромагнитные муфты и т. п.) и сигнальные лампы, рассчитан-
ные на питание от напряжения 24 в.
а) Выходные усилители ВУП
Выходные усилители ВУП выпускаются промышленностью четы-
рех габаритов, каждый из которых имеет два исполнения.
Первое исполнение имеет прямой выход, т. е. при подаче сиг-
нала на вход на выходе усилителя появляется сигнал. Схема такого
усилителя для 1 и 2-го габаритов приведена на рис. 2-8.
Второе исполнение имеет инверсный выход, т. е. на выходе
сигнал исчезает при подаче сигнала на вход. Схема усилителя
этого исполнения показана на рис. 2-5 (1 и 2-й габариты) и 2-9,а
(3 и 4-й габариты). Наименование типа усилителя складывается
из следующих обозначений: ВУП — обозначение серии '(выходной
.усилитель полупроводниковый), цифра (1, 2, 3, 4) —обозначение га-
барита усилителя. Для усилителей с прямым выходом в конце
обозначения имеется буква П, а для инверсных усилителей она
отсутствует. В системе «Логика» усилители имеют обозначения,
указанные в скобках.
Основные электрические характеристики выходных усилителей
ВУП приведены в табл. 2-1, где указаны питающие напряжения
выходных усилителей, номинальные и минимальные мощности на-
грузок, а также некоторые типы исполнительных электромагнитных
механизмов, на которые работают ВУП. Кроме указанных, усили-
телями ВУП могут включаться и другие типы аппаратов, а также
сигнальные лампы соответствующей мощности, рассчитанные на
питание от постоянного напряжения 24 в.
Под номинальной мощностью нагрузки понимается наибольшая
мощность, с которой может длительно работать данный усилитель,
под минимальной — мощность, потребляемая нагрузкой, при кото-
рой обеспечивается остаточное напряжение на нагрузке не более
0,05£/н. Для работы ВУП с нагрузкой, мощность которой меньше
минимальной, необходимо параллельно выходу включать балласт-
ное сопротивление.
Выходные усилители типа ВУП рассчитаны на работу в усло-
виях пониженной (—35° С) и повышенной (+50° С) температур
и относительной влажности воздуха не более 90% (при 20°С).
Усилители ВУП выполнены на базе унифицированной конструк-
ции бесконтактных элементов с применением печатного монтажа.
Полупроводниковые приборы и другие элементы схемы смонтиро-
ваны на гетинаксовой плате с печатным монтажом, которая поме-
58
щается внутри карболитового корпуса с крышкой. Выходные тран-
зисторы размещаются на литых алюминиевых радиаторах, уста-
навливаемых с внешней стороны корпуса. Для защиты от воздейст-
вия внешней среды усилители заливаются эпоксидным компаундом.
Усилители ВУП имеют следующие габаритные размеры:
ВУП-1, ВУП-2 — 44X90x55 мм;
ВУП-1П, ВУП-2П, ВУП-3, ВУП-4, ВУП-ЗП, ВУП-4П —
54X90X55 мм.
Рис. 2-14. Выходные транзисторные усилители
типа ЭТ-У.
Конструкция усилителей ВУП полностью совпадает с унифи-
цированной конструкцией элементов серии Т (рис. 2-14).
Питание усилителей ВУП осуществляется от блока питания
типа БП-500, обеспечивающего постоянное напряжение +24 и
—24 в. Один блок может питать несколько усилителей ВУП с общей
мощностью нагрузки не более 500 вт.
Электрическая схема блока БП-500 изображена на рис. 2-11,
а основные характеристики его даны в табл. 2-2.
Таблица 2-2
Тип блока пи-
тания
Входная мощ-
ность, вт
Первичное
напряжение,
в
Вторичное
выпрямленное
напряжение,
в (ср)
Номинальная
нагрузка,
а (ср)
БП-500
(М-503)
500
380/220
—24(-£„)
+24(+£б)
20,3
0,5
Примечание. В скобках указаны обозначения блока питания в системе „Логика*.
Габаритные размеры блока 206X375X195 мм.
Источником переменного смещения Есм служит трансформатор
питания магнитных логических элементов ЭЛМ-100Т (отпайки уа
или уъ с напряжением 7 в).
б) Выходные усилители серии Т
Система логических элементов Т содержит ряд усилителей (Т-4)
следующей мощности:
60
Т-401—2X0,5 вт (конструктивно объединены два усилителя);
Т-402 — 2X3 вт (конструктивно объединены два усилителя);
Т-403 — 10 вт;
Т-404 — 30 вт;
Т-405— 100 вт.
Усилитель типа Т-401 выпущен как элемент согласования, уси-
ливающий выходной сигнал логических и других маломощных эле-
ментов системы. Его выходное напряжение в отличие от других
усилителей составляет 12 в постоянного тока. Усилители первых
двух габаритов (Т-401 и Т-402) выполнены на одном транзисторе
по схеме с общим эмиттером. В общем виде схема одного такого
усилителя показана на рис. 2-2,я. Мощные выходные усилители
(Т-403, Т-404 и Т-405) выполнены по трехкаскадной схеме, все три
транзистора в которой собраны по схеме с общим эмиттером. Толь-
ко для усилителей Т-404 и Т-405 выходной каскад выполнен на со-
ставном транзисторе. Полная схема выходного усилителя типа Т-403
представлена на рис. 2-2,в. Наименование типа усилителей в данном
случае складывается из следующих обозначений: Т — обозначение
серии (элементы транзисторные); цифры 01, 02, 03, 04, 05 — типо-
размер или габарит элемента.
Основные электрические характеристики выходных усилителей
Т-4 и перечень примерных нагрузок приведены в табл. 2-3.
Таблица 2-3
Тип вы-
ходного
Напряжение
питания, в (ср)
Мощность
нагрузки, вт
Примерная нагрузка
усилите-
ля
номи-
нальная
мини-
• маль-
ная
Т-401
Т-402
12
24,12
6
6
0,5
3,0
0,015
0,06
Сигнальные лампы
Реле, обмотки ЭМУ, МУ, сиг-
Т-403
24
6
10
0,17
нальные лампы
Реле, обмотки ЭМУ, МУ, сиг-
Т-404
24
6
30
0,29
нальные лампы, муфты
Обмотки МУ, муфты, контак-
Т-405
24
6
100
2,4
торы, электромашины пос-
тоянного тока
Обмотки МУ, муфты, мощные
контакторы, электромашины
постоянного тока
Нагрузкой выходных усилителей могут быть также аппараты
других типов, но их мощность не должна превышать указанной
в табл. 2-3 номинальной мощности нагрузки и они должны иметь
соответствующее напряжение питания. Усилители типа Т-4 обеспе-
чивают нормальную работу при температуре окружающей среды от
—40 до +50° С и относительной влажности окружающего воздуха
до 98% (при +40°С).
Конструктивно выходные усилители типа Т-4 оформлены в виде
защищенного неразборного блока (модуля). Все элементы схемы,
кроме силовых выходных транзисторов, монтируются на гетинаксо-
вой плате с печатным монтажом. Полностью смонтированная плата
61
помещается в карболитовый корпус с крышкой и для лучшей за-
щиты от воздействия внешней среды заливается эпоксидным ком-
паундом. Габаритные размеры усилителей Т-4 указаны в табл. 2-4.
Таблица 2-4
Тип выходного усилителя
Габаритные размеры
Т-401
Т-402
19X90X55 мм
Т-403
Т-404
Т-405
44X90X55 мм
54X90X55 мм
89X90X55 мм
Внешний вид усилителей Т-4 показан на рис. 2-14.
Питание усилителей Т-4 осуществляется от блоков питания типа
ЭТ-П160 или ЭТ-П500, обеспечивающих на выходе напряжение по-
стоянного тока —24, —12 и +6 в. От каждого блока питания может
работать несколько выходных усилителей с суммарной мощностью
нагрузки, не .превышающей 160 или 500 вт. Блоки питания ЭТ-П160
и ЭТ-П500 состоят из трехфазного трансформатора и трех мостовых
выпрямителей. Кроме этих типов блоков, в серии Т выпускается
стабилизированный блок питания ЭТ-ШООС, обеспечивающий на вы-
ходе напряжения —12 и +6 б (стабилизированные) и —24 в (не-
стабилизированное), рассчитанный на случай питания одновременно
выходных усилителей и логической схемы с элементами Т. Электри-
ческие характеристики блоков ЗТ-П приведены в табл. 2-5.
Габаритные размеры блоков 430X230X348 мм.
Таблица 2-5
Тип блока пи-
тания
Выходная мощ-
ность (суммар-
ная), в/п
Первичное напря-
жение, в
Напряжение и
мощность выход-
ных цепей, в
(среднее значе-
ние), вт
Пределы измене-
ний тока нагруз-
ки, %
^'Изменения напря-
жения в цепях
j+б и-12 в, %
ЭТ-ШООС
100
2?0 однофазно^
+6; —12;
20—100
±2
—24
18; 72; 8
ЭТ-П160
160
220/380 трех-
+6; —12;
0—100
фазное
—24
15; 40; 105
ЭТ-П500
500
220/380 трех-
+5; —12;
0—100
.
фазное
—24
30; 60; 410
62
2-10. Применение выходных транзисторных усилителей
На рис. 2-15 приведены блок-схемы включения выходных усили-
телей типов ВУП и Т совместно с логическими элементами типов
ЭЛМ, М и Т. В большинстве случаев нагрузкой на выходе усили-
теля является катушка электромагнитного механизма, имеющая
сеть
22.08
элм
СьРьУьОУаРаС<\
+ (&-
Вход
-0~оз элм
о5
а)
1 о
Ь
ггод
5п
9 ? 1
13 12 15 tu
•of вУП
+0-
Сеть
'20/380д
611
оз/2 15 13
т
о?
-0-
12 15 /<-
■оз т-ь
б)
у/агрузка
Рис. 2-15, Блок-схемы включения выходных транзисторных усилите-
лей совместно с логическими элементами.
а — для системы логических элементов ЭЛМ; б — для системы логических
элементов ЭТ.
активно-индуктивное сопротивление. Для защиты выходного тран-
зистора усилителя от перенапряжения необходимо предусматривать
——-—~4-~—■ г0 +£к
Рис. 2-16. Включение защитной цепочки в транзи-
сторных усилителях типа ЭТ.
а —индивидуальная защитная цепочка; б — групповая за-
щитная цепочка.
63
специальную защитную цепочку, шунтирующую нагрузку. Выходные
усилители типа ВУП содержат такую цепочку, состоящую из полу-
проводникового диода и сопротивления. При включении активно-
индуктивной нагрузки ZH на выходе усилителей типа Т защитная
цепочка должна быть предусмотрена в схеме внешних соединений,
как показано на рис. 2-16,а.
Полупроводниковые диоды, являющиеся неотъемлемой частью
каждой защитной цепочки, имеются в схеме каждого выходного уси-
лителя типа Т. Сопротивление R выбирается равным сопротивлению
нагрузки, что ограничивает пе-
ренапряжения на силовом тран-
зисторе усилителя двукратной
величиной по отношению к на-
пряжению питания. Для умень-
шения времени отключения ис-
полнительных механизмов (при
допустимом перенапряжении на
транзисторе) выносную защит-
ную цепо-чку для усилителей
типа Т следует брать состоя-
щей из сопротивления R, шун-
тированного конденсатором С.
Выбор сопротивления и конден-
сатора зависит от параметров
нагрузки и режимов работы
усилителя. Хорошее быстродей-
ствие исполнительных механиз-
мов при допустимых значениях
перенапряжений на силовых
транзисторах усилителей имеет
место при выборе сопротивле-
ния R из расчета 2 ООО ом на
1 а•гя, а величины емкости
конденсатора С из расчета
20 ООО мкф на 1 а. гн (Л. 27].
На рис. 2-16,6 показан слу-
чай, когда на выходе бескон-
тактного устройства включено
несколько выходных усилителей
с активно-индуктивными на-
грузками ZHi, Zh2 и ZH3. Здесь
может быть использована за-
щитная цепочка, но параметры ее должны выбираться из расчета
суммарной нагрузки, которую составляют электромагнитные механиз-
мы, могущие быть включенными одновременно.
Кроме электромагнитных исполнительных механизмов, с по-
мощью выходных транзисторных усилителей можно включать и бес-
контактные устройства — мощные магнитные или тиристорные уси-
лители. На рис. 2-17,а представлена схема управления от выходного
транзисторного усилителя тремя силовыми магнитными усилителями,
предназначенными для включения электродвигателя переменного
тока.
На рис. 2-17,6 представлена схема применения выходного тран-
зисторного усилителя типа Т в качестве силового каскада системы
фазового управления статическим преобразователем на тиристорах.
64
г
УМ,
умг
УМ3
0
Рис. 2-17. Применение транзистор-
ных выходных усилителей в бес-
контактных системах электропри-
вода.
а — управление силовыми магнитными
усилителями в электроприводе пере-
менного тока; б —выходной транзи-
сторный усилитель в качестве силово-
го каскада системы фазового управ-
ления статического преобразователя.
В этом случае на вход усилителя подается сформированный импульс
управления, который усиливается до необходимого уровня и через
импульсный трансформатор ИТ передается на управляющий электрод
тиристора Т.
Транзисторные выходные усилители могут применяться также
в качестве ключей, управляющих мощными выходными устройствами
на тиристорах. Описание подобных схем дано ниже в § 3-4,г.
Несколько приведенных выше примеров далеко не исчерпывает
области применения выходных транзисторных усилителей, которые
весьма многообразны.
Глава третья
ВЫХОДНЫЕ УСТРОЙСТВА НА ТИРИСТОРАХ
3-1. Силовые цепи выходных устройств на тиристорах
Выходные устройства на тиристорах предназначены для замены
контакторов в схемах электропривода и автоматики.
Хотя возможности тиристоров значительно шире, чем контакто-
ров, в частности тиристоры могут применяться как силовые регу-
лирующие элементы, здесь мы коснемся в основном тех случаев при-
менения тиристоров, в которых они эквивалентны контакторам с точ-
ки зрения воздействия на электрическую схему. Такой режим работы
тиристорных выходных устройств называется ключевым, так как
тиристоры могут быть только в двух состояниях: полностью откры-
том и полностью закрытом.
Очевидно, что любое из рассмотренных ниже тиристорных вы-
ходных устройств, будучи снабжено системой фазового управления,
т. е. такой системой управления, которая подает отпирающие им-
пульсы на тиристоры не в начале полупериодов их проводимости,
а с отставанием на угол а, являющийся функцией сигнала управ-
ления, приобретает новые свойства — свойства регулятора мощности.
В данной книге этот режим работы выходных устройств не рас-
сматривается.
Прежде чем перейти к рассмотрению конкретных схем силовых
цепей выходных устройств на тиристорах, необходимо отметить об-
щие особенности тиристорных выходных устройств по сравнению
с контакторами.
Прямое падение напряжения в открытом тиристоре составляет
0,7—1,25 в, в то время как прямое падение напряжения на замк-
нутых контактах контактора составляет всего 0,05—0,1 в на один
полюс.
Следовательно, относительная величина потерь в коммутирую-
щем устройстве в первом случае примерно в 12 раз больше, чем во
втором. Эти потери необходимо отводить в окружающую среду, для
чего нужны теплоотводящие устройства соответствующих размеров
и веса. Необходимость в таких теплоотводящих устройствах являет-
ся главной причиной того, что в настоящее время габариты тири-
сторных выходных устройств превосходят габариты соответствую-
щих по мощности контакторов.
Сопротивление между разомкнутыми контактами контактора
составляет сотни мегом (определяется сопротивлением изоляции кон-
5—2219
65
тактора). Сопротивление тиристора в запертом состоянии составляет
величину порядка 10—30 ком (ток утечки до 20 ма), т. е. на 3—4
порядка меньше, чем для контактора. Поэтому тиристорное выход-
ное устройство может считаться устройством, не полностью разры-
вающим цепь тока, а лишь ограничивающим ток очень малой вели-
чиной. Для подавляющего большинства нагрузок такое ограничение
тока эквивалентно отключению.
Перейдем к рассмотрению силовых цепей тиристорных выходных
устройств.
а) Выходные устройства на тиристорах для нагрузок
переменного тока
Рассмотрим различные варианты схем силовых цепей выходных
устройств на тиристорах. Способы управления тиристорами и схемы
цепей управления будут рассмотрены отдельно в соответствующем
разделе.
Схемы силовых цепей однофазных выходных устройств перемен-
ного юка приведены на рис. 3-1. Наиболее распространенной из этих
схем является схема, изображенная на рис. 3-1,а, которая состоит
из двух тиристоров, включенных встречно-параллельно. При подаче
на тиристоры управляющих импульсов они открываются и к на-
грузке прикладывается полное напряжение сети.
а) ф в) г)
Рис. 3-1. Силовые цепи однофазных тири-
сторных выходных устройств переменного
тока.
Каждый из тиристоров пропускает ток в течение одного полу-
периода, поэтому допустимый ток через нагрузку (эффективное зна-
чение)
Здесь /тир — допустимое среднее значение тока через тиристор.
Максимальное обратное напряжение тиристора должно быть не
меньше амплитудного значения напряжения сети (с некоторым
запасом):
где fiz — коэффициент запаса, выбираемый с учетом возможных ком-
мутационных 'перенапряжений в схеме.
Схема рие. 3-1,6 отличается от предыдущей наличием двух не-
управляемых вентилей, которые шунтируют тиристоры в обратном
направлении, снимая с них обратные напряжения. Эта схема являет-
ся более надежной, так как исключается возможность пробоя тири-
сторов обратным напряжением. Соотношение (3-1) между токами
нагрузки и тиристора остается в силе. Неуправляемые вентили вы-
бираются на тот же ток, что и тиристоры. Напряжение переключе-
ния тиристоров .и обратное напряжение неуправляемых вентилей
выбираются по формуле (3-2).
Недостатками схемы 3-1,6 являются ее большие стоимость и га-
бариты по сравнению со схемой 3-1,а.
В схеме рис. 3-1,в имеется только один тиристор, включенный
в диагональ моста из неуправляемых вентилей. Достоинством этой
схемы также является отсутствие обратного напряжения на тири-
сторе. Ввиду того что в этой схеме ток протекает по тиристору
оба полупериода, соотношение между токами нагрузки и тиристора
имеет вид:
/н<^/тир. (3-3)
Неуправляемые вентили здесь должны выбираться на номиналь-
ный ток, вдвое меньший, чем тиристор. Недостатком схемы рис. 3-1,в
является большое число элементов и, следовательно, большая стои-
мость.
В схеме рис. 3-1,г коммутация осуществляется одним симметрич-
ным тиристором.
Применение симметричных тиристоров позволяет значительно
снизить габариты и вес выходных устройств. Устройство симметрич-
ных тиристоров и их свойства описаны в [Л. 13].
Соотношение между током нагрузки и током тиристора выра-
жается формулой (3-3). Напряжение переключения симметричного
тиристора должно превышать амплитуду напряжения сети с учетом
коэффициента запаса.
Симметричный тиристор не боится кратковременных всплесков
напряжения питания. При этом он только открывается на момент
всплеска, не повреждаясь.
На рис. 3-2 показано несколько наиболее целесообразных схем
силовых цепей трехфазных выходных устройств переменного тока.
В схеме рис. 3-2,а в двух фазах имеются встречно включенные
тиристоры, аналогично описанной выше схеме рис. 3-1,а. Третья фаза
оставлена свободной для упрощения схемы. Допустимый ток через
нагрузку определяется выражением (3-1).
Максимальное обратное напряжение тиристоров должно выби-
раться по формуле (3-2). В данном случае под Uc должно под-
разумеваться линейное напряжение сети. По количеству элементов
эта схема является одной из наиболее простых. По режиму работы
тиристоров схема аналогична схеме рис. 3-1,а; к тиристорам при-
кладывается как прямое, так и обратное напряжения.
Схема рис. 3-2,6 содержит в каждой фазе тиристор, шунтиро-
ванный встречно включенным неуправляемым вентилем. В этой схе-
ме с тиристоров сняты обратные напряжения. По напряжению пере-
ключения тиристоры должны выбираться по формуле (3-2), где 0с —
5
67
линейное напряжение сети. На такое же напряжение выбираются и
неуправляемые вентили. Величина максимально допустимого тока
тиристора и неуправляемого вентиля при заданном токе нагрузки
должна соответствовать формуле (3-1). Эта схема может быть це-
лесообразна из экономических соображений, если стоимость тири-
стора значительно превышает стоимость неуправляемого вентиля.
Схема рис. 3-2,6 состоит из таких же ячеек, как и предыдущая,
Рис. 3-2. Силовые цепи
I трехфазных тиристор-
ных выходных
устройств переменного
тока.
однако здесь эти ячейки включены после нагрузки. При отпирании
тиристоров создается общая нулевая точка трехфазной нагрузки и
последняя обтекается током; при запирании тиристоров фазы на-
грузки разобщаются и ток нагрузки перестает протекать (остается
только ток запертых переходов). Очевидно, что в этой схеме нагруз-
ка может применяться только с разобщенными фазами. Применение
нагрузки, соединяемой в треугольник, здесь невозможно.
Основным преимуществом этой схемы является то, что в пей не
требуется защищать выходное устройство от 'междуфазных коротких
замыканий, так как токи этих коротких замыканий минуют его.
Дополнительным преимуществом схемы является то, что цепи управ-
ляющих электродов тиристоров имеют общую точку, что в ряде
■случаев упрощает схемы управления. Недостатком этой схемы яв-
ляется то, что при типовой схеме расположения оборудования
ввод—пускатель—нагрузка число силовых проводов, идущих к на-
грузке, удваивается. При расположении выходного устройства в не-
посредственной близости от нагрузки (например, при встраивании
его в электродвигатель) этот недостаток не имеет места.
Соотношение между токами нагрузки и тиристора, так же как
и в предыдущем случае, определяется выражением (3-1). Напряже-
ние переключения тиристора и обратное напряжение шунтирующего
вентиля должны соответствовать формуле (3-2), где под Uc подра-
зумевается линейное напряжение. Обратное напряжение с тиристо-
ров практически снято.
В схеме рис. 3-2,г тиристоры, так же как и в предыдущей схеме,
создают при отпирании общую нулевую точку нагрузки, обеспечивая
тем самым на нагрузке напряжение, равное напряжению сети. Эта
схема обладает всеми преимуществами и недостатками предыдущей.
Дополнительной ее особенностью является отсутствие трех неуправ-
ляемых вентилей. Характер тока в тиристорах в этой схеме отли-
чается от предыдущих. На рис. 3-3 показаны кривые токов фаз
нагрузки ia, h и ic. Заштрихованные площадки соответствуют токам
в тиристорах. Здесь ток в каждом тиристоре во включенном состоя-
нии продолжается в течение 240° (электрических). В интервале от
нуля до 120° ток тиристора ti равен току нагрузки фазы в с обрат-
ным знаком, в интервале от 120 до 240° — току нагрузки фазы а.
В интервале от 240 до 360° тиристор 7\ заперт.
Среднее значение тока через тиристор
2тс/3
1 с 1,5 1,5
/тир = — \ lam sin aid (со/) = — = — у 2 /а.
о
Если это выражение переписать в форме, аналогичной форме
выражения (3-1), то мы получим:
'■■-TiT?'*""- (3'4)
Из этого выражения следует, что при заданном токе нагрузки
ток в тиристорах в этой схеме в 1,5 раза больше, чем в схеме
рис. 3-2,0. Следовательно, для той же
нагрузки нужно выбирать тиристоры
на больший номинальный ток, чем
в предыдущих схемах. Напряжение
тиристоров также нужно выбирать,
исходя из амплитуды линейного на-
пряжения сети. К тиристорам здесь
прикладываются как прямое, так и
обратное напряжения. Управление ти-
ристорами возможно только от элек*
трически разобщенных источников
управляющих сигналов, что делает
схему неудобной в применении.
На рис. 3-2,5 изображена схема
включения трехфазной нагрузки через
симметричные тиристоры. Тиристоров
может быть два или три. Наличие
третьего тиристора только повышает
надежность схемы, предотвращая
включение двух фаз нагрузки при ко-
ротком замыкании одного из тиристоров. Расчетное напряжение ти-
ристоров в этом случае должно выбираться, исходя из амплитуды
линейного напряжения сети, так как в схеме с тремя симметричными
тиристорами в случае неодновременного их отпирания к тиристору,
отпирающемуся последним, может кратковременно быть приложено
линейное напряжение сети.
Оцепи пая рассмотренные схемы трехфазных тиристорных выход-
ных устройств, можно отмстить, что все. они имеют те или иные
преимущества, могущие в данном конкретном случае стать решаю-
щими и определить выбор одной из них. Чаще других применяются
схемы рис. 3-2,а, б и д,
Рис. 3-3. Форма токов
в схеме рис. 3-2,г.
69
б) выходные устройства на тиристорах для нагрузок
постоянного тока
Нагрузки постоянного (выпрямленного) тока Moryi питаться
через тиристорные выходные устройства от сетей переменного либо
постоянного тока. В первом случае выходное устройство выполняет
две функции — выпрямителя и выключателя, во втором случае оно
является только выключателем.
Рис. 3-4. Тиристорное выходное устройство
для питания нагрузки однополупериодным вы-
прямленным током.
Простейшая схема выходного устройства, питаемого от сети
переменного тока, содержит один тиристор (рис. 3-4,а). Непрерыв-
ность протекания тока через нагрузку обеспечивается шунтированием
ее конденсатором, который выполняет роль сглаживающего фильтра.
В начале проводящего полупериода, когда тиристор открыт, конден-
сатор заряжается. Заряд конденсатора продолжается до момента
времени, когда напряжение сети достигает своего амплитудного
значения. После этого конденсатор разряжается в течение всей
оставшейся части периода. При этом тиристор гаснет и продолжает
находиться в закрытом состоянии до начала следующего положи-
тельного полупериода.
На рис. 3-4,6 показаны кривые токов и напряжений в схеме при
синусоидальном питающем напряжении и активной нагрузке.
Так как в выходном устройстве ключевого типа тиристор вклю-
чается в начале проводящего полупериода, то процессы в схеме
с открытым тиристором тождественны процессам в схеме с неуправ-
ляемым вентилем, описанной в [Л. 14]. Во избежание повторений
здесь не приводятся выводы основных величин, а даются только
результаты.
Во время открытого состояния тиристора через него протекают
ток нагрузки и зарядный ток конденсатора:
и da
l-т =И« + 1с = д7 +' С -gp (3-5)
70
Угол ф зависит от коэффициента сглаживания и определяется
следующим образом:
Sin Ф = —77 > (3-6)
У т
где Um — амплитуда напряжения питания.
При этом предполагается, что во включенном состоянии ток
управляющего электрода тиристора протекает постоянно либо в виде
импульсов в начале полупериода проводимости (при со^=,ф).
Величина емкости конденсатора выбирается в зависимости от
необходимого коэффициента сглаживания (£с = £/т/мн.мин) и вели-
чины нагрузки:
С = ±3—. (3-7)
Нн.мин
Среднее значение тока в тиристоре составляет:
*/2
/тиР = -^г j* (^>С cos Ы — sin cof^ d {Ы) =
ф
^^l^v-^^-lt c0s(p]' (3"8)
Обратное напряжение тиристора выбирается по формуле
Uo6,>k3Um(\ +г~°'01/С/Ч (3-9)
где k3 — коэффициент запаса.
При снятии управляющего импульса с тиристора ток в нагруз-
ке затухает по экспоненциальному за-
кону с постоянной времени t=lRhC.
Рассмотренная схема при пра-
вильном выборе емкости конденсато-
ра позволяет получить в нагрузке до-
статочно сглаженный ток. Однако эта
схема целесообразна только для на-
грузок небольшой мощности, так как
с возрастанием мощности нагрузки
растет емкость конденсатора, что при-
водит к возрастанию общих габари-
тов устройства.
Схема рис. 3-5,а представляет со-
бой мост с двумя управляемыми и
двумя неуправляемыми плечами,
в диагональ которого включена на-
грузка. В этой схеме тиристоры вы-
бираются на половину номинального
тока нагрузки. Обратных напряжений
на тиристорах здесь не возникает.
Напряжение переключения тиристоров и обратное напряжение не-
управляемых вентилей должны выбираться по формуле (3-2).
Рис. 3-5. Тиристорные вы-
ходные устройства мосто-
вого типа для нагрузок вы-
прямленного тока.
71
Особенностью схемы является то, что при значительной постоянной
времени нагрузку нужно шунтировать дополнительно обратным вен-
тилем или конденсатором. В противном случае при снятии управ-
ляющего сигнала проводящий тиристор может не отключиться, так
как в течение непроводящего (для этого тиристора) полупериода
в нем будет протекать ток, создаваемый э. д. с. самоиндукции на-
грузки, показанный на рисунке
стрелкой. Если к концу непроводя-
щего полуперпода этот ток не спа-
дет ниже тока удержания тири-
стора, то в следующий полупериод
тиристор снова будет проводить и,
таким образом, нагрузка не отклю-
чится.
От последнего недостатка сво-
бодна схема рис. 3-5,6, где на-
грузка включена в диагональ от-
дельного выпрямительного моста.
Тиристоры здесь включены по уже
описанной встречно-параллельной
схеме.
В схемах рис. 3-б,а и б с целью
уменьшения количества тиристо-
ров и неуправляемых вентилей при-
менен трансформатор с нулевой
точкой.
В схеме рис. 3-б,а тиристоры выбираются по току на половину
номинального тока нагрузки, а по напряжению — по формуле
Рис. 3-6. Тиристорные выход-
ные устройства для нагрузок
выпрямленного тока, питаемые
от трансформатора с нулевой
точкой.
(3-10)
В схеме рис. 3-6,6 тиристор выбирается по току на номинальный
ток нагрузки, а по напряжению переключения — по формуле
и.
пер
(3-11)
Обратное напряжение к тиристору в этой схеме не приклады-
вается.
На рис. 3-7,а изображена схема выходного устройства на тири-
сторах при питании от сети постоянного тока. Здесь тиристор 7\,
включенный последовательно с нагрузкой /?н, является основным,
а тиристор 7*2, включенный последовательно с добавочным сопротив-
лением /?д, — вспомогательным (гасящим). Конденсатор С предназ-
начен для гашения основного тиристора.
При активной нагрузке схема работает следующим образом.
При подаче управляющего импульса на основной тиристор нагрузка
включается. Конденсатор С заряжается через сопротивление Rn до
напряжения питания, причем положительный потенциал будет на его
левой обкладке. Для выключения нагрузки необходимо снять управ-
ляющий сигнал с основного тиристора и подать кратковременный
управляющий импульс на тиристор Т2.
При включении тиристора т2 правая, отрицательно заряженная
вкладка конденсатора С соединяется с положительным зажимом на-
т'ения питания. Напряжение на тиристоре Ti меняет знак, и он
яется. Конденсатор С перезаряжается по цепи Rm -— источник
питания — Т2, и теперь положительный заряд появляется на его пра-
вой обкладке. После перезаряда конденсатора ток через тиристор
Т2 спадает до величины UuIRk- Сопротивление RR выбирается таким,
чтобы величина этого тока была меньше величины тока удержания.
Тиристор Т2 отключается, конденсатор С разряжается через со-
противления Rr+Rh- Схема приходит в исходное запертое состояние.
На рис. 3-7,6 приведены формы напряжений на нагрузке и ти-
ристоре Ti при включении и выключении последнего.
При активно-индуктивной нагрузке ее нужно шунтировать дио-
дом, для того чтобы при запирании тиристора Ti запасенная в на-
грузке электромагнитная энергия разряжалась через этот диод. В
противном случае на тиристоре Ti возникают опасные перенапряже-
Рис. 3-7. Тириеторное выходное устройство для питания
от сети постоянного тока.
ния. Для ускорения переходного процесса отключения нагрузки в ряде
случаев допускают определенное перенапряжение на 7V Тогда по-
следовательно с шунтирующим диодом включают активное сопро-
тивление или применяют более сложные цепи, описанные ниже
в § 3-5,5.
Определим, какую емкость должен иметь гасящий конденсатор
С для четкого выключения тока в нагрузке. На рис. 3-7,6 время
существования отрицательного напряжения на тиристоре Ti названо
временем выключения /в. Это время должно быть больше макси-
мального времени выключения тиристора. Для различных тиристоров
это время колеблется в довольно широких пределах (примерно от
10 до 100 мксек). Если за время /в тиристор не восстановил свои
запирающие свойства, то при изменении полярности напряжения он
снова откроется.
Рассмотрим процесс перезаряда конденсатора С, следующий не-
посредственно после включения тиристора Т2. Полагая, что в момент
включения Т2 / —0, мы можем записать:
(3-12)
о
73
Решив это уравнение и имея в виду, что при г=0 ис=—Un,
найдем выражение для тока:
2Un ~t/CRB
l = -^e . (3-13)
Напряжение на конденсаторе (и тиристоре 7\) имеет вид:
ис = Un - iRli = Un -2Une~~t,CRli = (/„ (1 - 2e~t/CR*). (3-14)
Найдем момент времени гв> соответствующий прохождению ис
через нуль. Приравняв (3-14) нулю, найдем:
/в = 0,69 /?НС. (3-15)
Отсюда выражение для емкости, обеспечивающей четкое выклю-
чение выходного устройства, имеет вид:
С> 1,45 j^-:= 1,45 tjf-. (3-16)
Если нагрузка носит индуктивный характер и шунтирована вен-
тилем, причем индуктивность предполагается достаточно большой и
ток в нагрузке в интервале выключения тиристора Г4 можно считать
неизменным, то можно полагать, что емкость С будет разряжаться
с постоянной скоростью, так как /с = /н. Тогда напряжение на ем-
кости будет иметь вид:
t t
Ч-^с\ l*dt +11 с (°) = Т-р-Л-^ = Т-Vn 'U~~ (3"17)
о о
Момент прохождения и с через нуль будет соответствовать ра-
венству
ип = ~/^ъ. (3-18)
Отсюда найдем выражение для минимальной емкости, обеспе-
чивающей выключение тиристора 7V
o'ir- <3-19)
v п
Из выражений (3-16) и (3-19) видно, что емкость конденсатора,
необходимая для коммутации выходного устройства, пропорцио-
нальна номинальному току нагрузки и времени выключения тири-
стора.
Для уменьшения емкости гасящего конденсатора целесообраз-
но применять тиристоры, специально разработанные для схем инвер-
торов, имеющие малое время выключения.
74
3-2. Допустимые нагрузки тиристоров и защита выходных устройств
от перегрузок
При работе тиристора как в открытом, так и в закрытом со-
стояниях в его р-п-р-п структуре выделяется тепло, которое влечет
за собой повышение температуры тиристора и отводится через его
корпус и охладитель в окружающую среду.
Температура перехода является главным параметром для опре-
деления допустимых нагрузок тиристора, так как при превышении
этой температурой определенной величины наступают отказы в ра-
боте тиристора или нарушение его нормальной работы (повышение
тока утечки, самопроизвольное включение).
Потери в тиристоре складываются из следующих компонентов:
1) потерь, выделяемых при протекании тока в прямом направ-
лении при открытом тиристоре;
2) потерь от тока утечки в прямом направлении при запертом
тиристоре;
3) потерь от обратного тока утечки;
4) потерь в цепи управляющего электрода;
5) потерь, связанных с включением и выключением тиристора.
Подробный анализ потерь в тиристорах дан в [Л. 13, 15, 16].
Здесь приведем лишь выражение для потерь от прямого тока:
где uo — пороговое напряжение тиристора;
#д — динамическое сопротивление тиристора;
i — ток нагрузки (среднее значение);
&Ф — коэффициент формы тока.
Остальные виды потерь определяют обычно с помощью эмпи-
рических коэффициентов.
Основным параметром тиристора, характеризующим отвод тепла
от р-п-р-п структуры к охлаждающей среде, является тепловое со-
противление Rr.
Тепловое сопротивление системы тиристор—охладитель—среда
равно отношению превышения температуры полупроводниковой
структуры тиристора над температурой окружающей среды к сред-
ней мощности, рассеиваемой в структуре:;
RT =—р-5-. (3-20)
По заданным величинам Rr и Т можно определить допустимую
мощность, а следовательно, и допустимый ток в тиристоре.
Поскольку тиристоры, как правило, применяются с охладите-
лями, основная часть выделяющегося в структуре тепла передается
окружающей среде через поверхность охладителя.
Таким образом, если пренебречь частью тепла, отдаваемой
в окружающую среду непосредственно корпусом тиристора, и тепло-
вым сопротивлением между корпусом тиристора и охладителем, то
можно будет записать:
i? т ^/? т. в 4"/? т. к +/? т. о,
где /?т.в — тепловое сопротивление между структурой и внешней по-
верхностью корпуса;
75
Rt.k — тепловое сопротивление контакта корпус—охладитель;
Rt.o — тепловое сопротивление между охладителем и окружаю-
щей средой.
Величина Rt.o, а следовательно, и ^т зависит от площади и
материала радиатора и интенсивности охлаждения.
Для охлаждения силовых тиристоров применяется несколько ти-
пов охладителей.
Пластинчатые охладители МП-50 и МП-100 представляют собой
медные пластины, к которым при помощи болтового соединения кре-
пятся вентили.
Ребристые охладители четырех-, шести- и десятилонастные М-4Л,
М-6Л и М-ЮЛ также изготовляются из меди и имеют развитую
поверхность охлаждения, обеспечивающую эффективный теплоотвод.
К внешним конструкциям охладители крепятся при помощи изолиро-
ванных шпилек, для которых предусмотрены отверстия. Конструктив-
ные и тепловые параметры охладителей приведены в [Л. 15]. Фор-
мула (3-20) справедлива только для установившегося теплового ре-
жима. В переходных режимах (при импульсных нагрузках или на-
грузках пульсирующим током) равенство (3-20) нарушается ввиду
наличия теплоемкости полупроводника. Тепло передается от структу-
ры к охлаждающей поверхности не мгновенно, а с задержкой, а не-
которое количество тепла рассеивается внутри полупроводника.
Для описания нагрева тиристоров в переходных процессах при-
меняется понятие переходного теплового сопротивления гт, равного
отношению приращения температуры к приращению мощности по-
терь, вызвавшей этот перегрев за определенный интервал времени:
гт< = дрГ- (3-21)
Переходное тепловое сопротивление гт является функцией вре-
мени и имеет два предельных значения; одно соответствует дли-
тельным нагрузкам и равно установившемуся тепловому сопротив-
лению RT, а другое — очень кратковременным нагрузкам и в не-
сколько раз меньше первого. При промежуточных значениях времени
перегрузки тепловое сопротивление имеет величину, лежащую между
этими крайними значениями.
Так же как установившееся, переходное тепловое сопротивление
системы тиристор—охладитель—среда складывается из отдельных
тепловых сопротивлений:
Г т = Гт.в~1"Г т.к~\~Г т.о-
По известным величинам Р и Rr (или гт) можно определить
перегрев р-п-р-п структуры в установившемся или переходном ре-
жиме при заданном токе. Прибавив к перегреву температуру окру-
жающей среды, получим абсолютный нагрев структуры.
Задачу можно решать и в ином порядке: зная допустимую тем-
пературу структуры, определить допустимый ток.
Для тиристоров допустимая температура р-п-р-п структуры
в длительном режиме 7V-=110° С; при кратковременных перегрузках
Т'п —130° С; единовременно допустимая (аварийная) температура
с возможностью приложения нормальной нагрузки 7,"Н=145°С.
Методика определения нагрева и допустимой нагрузки по току
и все необходимые справочные данные по этому вопросу приве
дены в {Л. 15, 16J.
76
Для оценки допустимых однократных перегрузок длительностью
менее 1 периода напряжения питания служит параметр 14 (защит-
ный показатель). При таких режимах тиристор может рассматривать-
ся как сопротивление с определенной теплоемкостью без рассеивания
мощности, в связи с чем его перегрузочную способность можно оце-
нивать величиной 14, где
dt
— действующее значение тока за время t.
Значения I2t для силовых тиристоров даны в табл. 3-1.
Важным показателем, характеризующим способность тиристоров
противостоять циклическому воздействию резких изменений темпера-
туры р-п-р-п структуры, является термоциклоустойчивость Ц.
Исследования [Л. 16] показали, что термоциклоустойчивость си-
ловых кремниевых вентилей и тиристоров выражается формулой
г
Ц= ~7l г>
da (ат)ь
где Ц — количество циклов до отказа (среднестатистическое);
D — диаметр вентильного элемента, мм;
Г, а, 6 — коэффициенты.
Для тиристоров типа ВКДУ Г=20 • 106-н40 • 106; а= 1,5^2,5;
5=1,8-^2,3. График зависимости циклоустойчивости этих тиристоров
от перепада температур дан на рис. 3-8.
Следует заметить, что при хорошей конструкции контактов про-
блемы циклоустойчивости не существует. Тиристор способен выдер-
живать практически неограниченное
число термоциклов. В этом отноше-
нии отечественные тиристоры еще
уступают лучшим зарубежным об-
разцам. Работа по преодолению это-
го отставания ведется.
В табл. 3-1 дан перечень основ-
ных типов тиристоров, применяе-
мых в выходных устройствах, при-
ведены величины длительно допусти-
мых нагрузок их и данные то крат-
ковременным перегрузкам.
Тиристорные выходные устрой-
ства, помимо коммутации нагрузок,
должны осуществлять их защиту от
перегрузок и коротких замыканий.
Эта защита должка одновременно
предохранять от перегрузок си-
ловые тиристоры выходного устрой-
ства.
Возможны два способа защи-
ты: «защита путем запирания тири-
сторов выходного устройства и отключения таким образом тока на-
грузки и защита путем разрыва силовой цепи при помощи дополни-
тельных аппаратов (плавкие предохранители, автоматические выклю-
чатели). При повреждениях самих тиристоров выходного устройства,
30 ■№
20-ю3
ww'
и \
50
700
Рис. 3-8. Зависимость
циклоустойчивости тири-
сторов типа ВКДУ от пе-
репада температур р-п-р-п
структуры.
77
Таблица 3-1
Номиналь-
ср
о
ное напря-
Тип тиристо-
жение
^)
ра
(напряже-
ек
«О и
ние клас-
S*
са), кв
«о
о
» 03
о £
x н
КУ-201
До 0,4
2
10
10
КУ-202
До 0,4
10
—
30
30
ВКУ-10
До 0,5
10/5
26
37
150
120
ВКУ-20
До 0,5
20/10
48
63
240
290
ВКДУ-25
До 1,0
25/12
50/25
63
73
540
1 460
ВКДУ-50
До 1,0
111
140
965
4 650
ВКДУ-100
До 1,0
100/30
248
278
2 000
20 000
ВКДУ-150
До 1,0
150/40
248
278
2 000
20 000
ВКДУ-300
До 0,7
300
400
480
3 560
6 330
ВКДУС-100
До 0,6
100/45
175
225
1 385
9 600
ТЛ-150
До 0,8
150/40
300
450
2 000
20 000
* В тиристорах типов КУ-201 и КУ-202 ток указан при естественном охлаж-
дении; в остальных типах тиристоров в числителе указан ток при обдуве со ско-
ростью 10—12 м/сек, а в знаменателе—при естественном охлаждении.
естественно, возможен только второй способ защиты. Первый способ
защиты может применяться только при ограниченных токах повреж-
дения.
Известно, что открытый тиристор может быть заперт только
после снижения тока в нем до величины, меньшей величины тока
удержания. Таким образом, в худшем случае тиристор пропускает
полуволну тока повреждения. Если эта полуволна имеет величину
772
J i2 dt, превышающую допустимую для данного вентиля, то вен.
о
тиль может быть разрушен. Поэтому защита при помощи запирания
тиристоров может быть рекомендована при ограниченных токах
повреждения (при питании цепей выходных устройств от трансфор-
маторов сравнительно небольшой мощности или применения силовой
схемы выходного устройства, изображенной на рис. 3-2,в и не до-
пускающей протекания тока короткого замыкания через тиристоры).
Запирание тиристоров также применяется для защиты (выходного
устройства от перегрузок.
В § 3-5,в описано трехфазное выходное устройство (тиристор-
ный пускатель), снабженное защитой от перегрузок и коротких за-
мыканий, действующей на запирание тиристоров.
Переходя ко второму способу защиты тиристорных выходных
устройств, нужно отметить, что наиболее подходящим защитным
средством для этой цели являются быстродействующие плавкие пре-
дохранители.
Необходимость в применении специальных быстродействующих
предохранителей вытекает из того, что полупроводниковая струк-
78
тура тиристора имеет малую теплоемкость, высокую плотность рабо-
чего тока и быстро перегревается при повышении тока сверх номи-
нального значения.
Защитная характеристика быстродействующих плавких предо-
хранителей по форме подобна перегрузочной характеристике тири-
сторов, вследствие чего они удачно сочетаются.
Для защиты полупроводниковых устройств служат предохра-
нители типа ПНБ-5, которые выпускаются на напряжения от 50 до
660 в и токи плавких вставок от 16 до 630 а.
Электрические данные и защитные характеристики предохрани-
телей типа ПНБ-5 даны в приложении 1.
Предохранители типа ПНБ-5 крепятся непосредственно к токо-
ведущим шинам или уголкам при помощи болтовых соединений.
Предохранители ПНБ-5 изготовляются одного из трех испол-
нений:
а) без сигнализационного устройства;
б) с визуальным указателем срабатывания;
в) с визуальным указателем срабатывания и блок-контактом
(замыкающим или размыкающим), фиксирующим срабатывание.
На рис. 3-9 показано
сочетание защитной харак-
теристики предохранителя
типа ПНБ-5 (кривая 2)
с перегрузочной характери-
стикой выходного устрой-
ства на двух встречно вклю-
ченных на тиристорах типа
УПВКЛ-50 (кривая 1). Как
видно из рисунка, при лю-
бых перегрузках выходного
устройства осуществляется
его защита. При этом дли-
тельно допустимый ток вы-
ходного устройства не
снижается. Недостатком
плавких предохранителей
при защите цепей с асин-
хронными двигателями яв-
ляется возможность двух-
фазной работы двигателей
при перегорании одного
предохранителя. Для устра-
нения этого явления необ-
ходимо иметь устройства,
снимающие импульсы уп-
равления с тиристоров при
перегорании одного предо-
хранителя.
Для защиты тиристор-
ных выходных устройств
в принципе могут быть применены также автоматические выключа-
тели, однако защитные характеристики современных автоматов хуже
сочетаются с перегрузочными характеристиками тиристорных выход-
ных устройств, чем характеристики быстродействующих предохрани-
телей.
сек
Рис. 3-9. Сочетание защитных харак-
теристик быстродействующих плав-
ких предохранителей типа ПНБ-5 и
автоматического выключателя типа
АК-50 с перегрузочной характеристи-
кой выходного устройства на тири-
сторах УПВКЛ-50.
79
На рис. 3-9 изображены защитные характеристики автомата
типа АК-50 с комбинированным расцепителем на номинальные токи
15 а (кривая 3) и 12,5 а (кривая 4),
Как видно из рисунка, при первой уставке автомат не -защищает
тиристорное выходное устройство при токах от 35 до 145 а. При
второй уставке автомат защищает выходное устройство при всех
токах, однако при этом допустимый ток цепи приходится снижать
вдвое (/2=10 а вместо /t=20 а), т. е. сильно недоиспользовать
тиристоры.
В настоящее время ведется разработка серии быстродействую-
щих автоматических выключателей, специально предназначенных
для защиты полупроводниковых устройств.
3-3. Перенапряжения в цепях с тиристорными выходными
устройствами и меры борьбы с ними
При работе тиристорных выходных устройств в промышленных
сетях на них возникают перенапряжения, которые при отсутствии
специальных защитных устройств могут привести к выходу из строя
тиристоров.
Перенапряжения возникают при коммутации индуктивных це-
пей и могут многократно превышать величину питающего напря-
жения.
Помимо амплитуды, импульсы перенапряжения, возникающие
в электрических цепях, характеризуются величиной энергии, кото-
рая в свою очередь зависит от мощности питающей сети. Чем
больше энергии содержится в импульсе, тем труднее подавить пе-
ренапряжение, так как защитное устройство должно воспринять
эту энергию.
Ниже рассмотрены наиболее характерные причины перенапря-
жений и меры борьбы с ними.
а) Перенапряжения, обусловленные разрывом цепи
намагничивающего тока питающего трансформатора
при его отключении
На рис. 3-10,0 изображена схема однофазного трансформатора
Тр, ко вторичной обмотке которого через тиристорные выходные
устройства ТВУ подключена нагрузка ZH.
При отключении первичной обмотки трансформатора выключа-
телем К энергия, запасенная в магнитном поле трансформатора,
должна рассеяться.
Положим, что ток первичной обмотки трансформатора разры-
вается мгновенно, дуги между контактами не образуется и энер-
гия в выключателе не рассеивается. (Это предположение утяжеляет
условия рассеивания энергии. На самом деле дуга образуется и
часть запасенной энергии рассеивается в дуге.) Положим также,
что в момент отключения тиристорное выходное устройство запер-
то и ток в нагрузке отсутствует.
Энергия, запасенная в магнитном поле трансформатора, выде-
ляется как энергия электрического поля. При отсутствии цепочки
RC на зажимах вторичной обмотки трансформатора электрическое
поле связано с емкостью обмоток трансформатора, элементов вы-
ходного устройства и других частей электрической цепи. При та-
ком обмене энергией возникают колебания и в конечном счете
энергия рассеивается в виде потерь на вихревые токи и диэлектри-
80
ческих потерь. При этом возникают большие перенапряжения, ко-
торые могут быть причиной пробоя р-п переходов тиристоров.
При наличии цепочки RC энергия магнитного поля переходит
в энергию электрического поля конденсатора; при этом перенапря-
жения имеют значительно меньшую величину.
На рис. 3-10,6 изображена кривая намагничивания сердечника
трансформатора. Максимальная энергия, запасенная в сердечнике
при достижении током намагничивания точки б, соответствует
заштрихованной площади ЛЕВ.
В [Л. 19] указывается, что на основа-
нии испытаний установлено, что не вся
энергия, соответствующая площади ЛЕВ,
переходит в энергию электрического поля
из-за потерь на вихревые токи.
С достаточной точностью энергия, пре-
образуемая в энергию электрического по-
ля, изображается площадью треугольника
АБГ, где Г Б — касательная к кривой на-
магничивания в точке Б. Эту величину
энергии в дальнейшем будем называть за-
пасенной энергией.
Из сказанного можно сделать вывод,
что величина энергии, запасенной в маг-
нитном поле трансформатора, зависит от
величины рабочей индукции, формы харак-
теристики b-f(h) и объема сердечника.
Для трансформаторной стали установ-
лено, что при В = 1,1 тл удельная запасен-
ная энергия составляет 1,2 -Ю-4 дж]см3.
С другой стороны, для того чтобы на-
пряжение на вторичной обмотке трансфор-
матора не превысило величину Uc (ампли-
тудное значение), конденсатор должен вос-
принять энергию, равную 0,5С£7~. Рассматривается наихудший
случай — разрыв цепи тока намагничивания в момент его максиму-
ма. При этом напряжение на конденсаторе в момент разрыва рав-
но нулю. Поэтому можно записать:
0,50/2= 1,2.10-4VCT,
Рис. 3-10. К опреде-
лению энергии пере-
напряжений при от-
ключении однофаз-
ного питающего
трансформатора.
где VCT — объем стали сердечника, смА.
Отсюда
г 24QVct -
с= ^ , мкф.
Для трансформаторов мощностью до 5 ква справедлива при-
мерно линейная зависимость между объемом сердечника и мощно-
стью Р, поэтому предыдущая формула может быть переписана
следующим образом:
kp
С = -^2-, мкф. (3-22)
£=340 для сердечников из трансформ аториой стали при
Р>200 ва; /=50 гц.
6—2219
81
В трансформаторах большей мощности зависимость между за-
пасенной энергией Е и типовой мощностью трансформатора изо-
бражается кривой на рис. 3-11. Следует отметить, что эта зависи-
мость является усредненной и дает несколько завышенное зна-
чение запасенной энергии. Пользуясь
этой зависимостью, емкость конденса-
тора можно определить непосредствен-
но по формуле C=QE/Ul .
ю
ю9
е
w
ква
При повышении рабочей индукции
энергия, запасенная в единице объема
трансформатора, растет примерно про-
порционально четвертой степени ин-
дукции.
При повышении частоты питания
(при заданной мощности трансформато-
ра) уменьшаются объем сердечника и
величина рабочей индукции. Запасенная
энергия резко уменьшается, что видно
из рис. 3-11.
Назначение добавочного сопротив-
ления R (см. рис. 3-10,а)—предо-
твратить колебательный процесс при
включении трансформатора. Величина R
должна быть достаточно велика, чтобы
обеспечить апериодический переходный
процесс при включении трансформато-
ра, и достаточно мала, чтобы повлиять на подавление перенапря-
жений при отключении. В [Л. 19] приводится следующая прибли-
женная формула для определения R:
Рис. 3-11. Зависимость
между запасенной энер-
гией и типовой мощ-
ностью трансформатора
для трансформаторов
мощностью от 1 до
100 ква.
ом,
(3-23)
где Zn — полное сопротивление нагрузки, ом;
С — емкость, мкф; f — частота, гц.
Эта формула справедлива как для однофазных, так и для
трехфазных цепей.
Необходимо отметить, что сопротивление R обязательно долж-
но быть безындуктивным. Мощность его должна соответствовать
потерям, выделяемым в нем при протекании переменного тока
в цепи RC.
В трехфазных трансформаторах обрыв намагничивающего тока
приводит в общем случае к перенапряжению во всех трех фазах.
Величина перенапряжения зависит от схемы соединения обмоток
трансформатора и типа сердечника.
В отличие от однофазных схем, в которых в момент макси-
мума намагничивающего тока питающее напряжение равно нулю,
в трехфазных схемах перенапряжения накладываются на питаю-
щее напряжение.
Рассмотрим трехфазный трансформатор с первичной обмоткой,
соединенной в звезду с незаземленной нейтралью, имеющий трех-
стержневой магнитопровод.
82
Максимальная энергия запасена в трансформаторе тогда, ког-
да поток в одном стержне (например, в стержне Л) максимален.
Соответственно максимальные перенапряжения индуцируются при
разрыве цепи тока намагничивания
фазы А. Предположим, что такой
ненагруженный трансформатор с ем-
костями, включенными на его пер-
вичной стороне, отключается от сети,
причем вследствие неодновременно-
сти размыкания контактов контакто-
ра первой размыкается фаза Л, об-
ладающая максимальной энергией
(рис. 3-12,а).
На рис. 3-12,6 дана векторная
диаграмма фазных напряжений и
магнитных потоков в стержнях до
момента разрыва намагничивающего
тока фазы Л, а на рис. 3-12,в — со-
ответствующая векторная диаграмма
после этого момента.
В короткий промежуток вре-
мени At после разрыва цепи на-
магничивающего тока фазы А в трех-
стержневом магнитопроводе суще-
ствует зависимость
АФ а = —2АФ в=—2АФ с.
Следовательно, для фазных на-
пряжений, индуцированных в обмотках фаз Л, В и С, будет суще-
ствовать зависимость
ua=—2ub=-2uc. (3-24)
Полная энергия, отдаваемая трансформатором конденсаторам,
равна:
1 о _ _о _о 3
мв0
01
<исо
Рис. 3-12. К определению
энергии перенапряжений
при отключении трехфазно-
го питающего трансформа-
тора.
-т = ~с т + UJR + Uzc) = — сигА.
(3-25)
С уменьшением величины магнитного потока запасенная энер-
гия резко падает. Экспериментально найдено, что если магнитно-
му потоку фт соответствует запасенная в сердечнике энергия е,
1
то магнитному потоку фт будет соответствовать энергия, при-
близительно равная 0,02 е [Л. 19]. Тогда полная энергия, запа-
сенная в трансформаторе, для рассматриваемого случая будет со-
ставлять 1,04 е дж.
Из формулы (3-25) получим:
^ = -]/1 .М--!.-!-= -1,18 |/"-
Из (3-26) и (3-24) получим:
ив = ис.
■■ 0,59
(3-26)
(3-27)
83
Величины полных фазных напряжений трансформатора, скла-
дывающиеся из величин рассмотренных выше перенапряжений и
мгновенных значений напряжений установившегося режима, будут
иметь следующие выражения:
£/Ж)^_1Л8|/*-§-; (3-28)
(/£Ю== 0,866£/фЯ1+0,59 |/ -£-'» (3-29)
Uco = - 0,866с/фш + 0,59 Y ТГ' (3-30)
где l/фт — максимальное значение фазного напряжения трансфор-
матора в установившемся режиме.
Если вторичные обмотки трансформатора соединены в звезду
и коэффициент трансформации равен единице, то для вторичных
линейных напряжений получим выражения:
и2лв = ило ~иво = ~ 0,866С/Фт - 1,77
= §- [иЯт-1,77}/-£г-*> (3-31)
^2бс ~ uво — ^со ~ * >73(/фт = илт; (3-32)
u2ca = "со' -' о = - 0,866с/ф!гп + 1,77 =
=—\г и** +1»77 $^ тг' (3"33)
Подобным же способом вычисляются напряжения при отключе-
нии трехфазных трансформаторов с другими схемами соединения
обмоток. Эти выражения сведены в табл. 3-2.
Величину Е для каждого случая можно определить по графику
рис. 3-11 (считая мощность на одну фазу). Полученную из графика
величину Е нужно умножить на коэффициент 0,7, так как энергия,
запасенная в сердечнике трехфазного трансформатора, составляет
примерно 0,7 энергии однофазного трансформатора. Это объясняется
тем, что запасенная энергия увеличивается с увеличением длины
средней силовой линии сердечника [Л. 19].
б) Меры борьбы с перенапряжениями
Прежде чем рассматривать меры борьбы с перенапряжениями,
отметим, что надежная работа тиристорных выходных устройств
может быть обеспечена только при правильном выборе тиристоров
по допустимому обратному напряжению. Необходимо, чтобы допу-
стимое обратное напряжение тиристоров было примерно в 1,5 раза
выше, чем максимальные напряжения, периодически возникающие
при переходных процессах.
64
В большинстве случаев в схемах тиристорных выходных
устройств нужно предусматривать меры для ограничения перенапря-
жений.
Выше при изучении причин перенапряжений были рассмотрены
цепочки RC, являющиеся наиболее распространенным средством
ограничения перенапряжений, и были даны формулы для их рас-
чета.
Наряду с описанным включением цепочек RC на переменное
напряжение применяется включение одной такой цепочки на вы-
прямленное напряжение [Л. 18]. Схема включения такой цепочки
дана на рис. 3-13,а. Преимущества такой схемы перед рассмотрен-
и3^
0
0
0 0 0
/Г основному
выпрямителю
Рис. 3-13. Схемы включения защитных цепочек
RC на выпрямленное напряжение.
ными выше — возможность применения более компактных электро-
литических конденсаторов и меньшие потери мощности в активном
сопротивлении, поскольку в данной схеме через активное сопротив-
ление #i проходит только переменная составляющая тока емкости.
Параллельно емкости принято ставить очень большое сопро-
тивление R2 для полного разряда емкости при выключении схемы.
Конденсаторы собираются по группам и защищаются плавкими пре-
дохранителями.
В [Л. 18] рекомендуется следующая эмпирическая формула для
выбора емкости фильтра по схеме рис. 3-13,а:
С =
31Д/;
•2 ' ф>
(3-34)
где р —- расчетная мощность трансформатора, ва\
um — допустимая амплитуда перенапряжения для каждого вен-
тильного плеча, е.
Другим примером применения конденсаторов, включаемых на
выпрямленном напряжении для защиты тиристорных выходных
устройств, является схема рис. 3-13,6 [Л. 20]. Здесь выпрямительный
мост включается не на напряжение сети, а на напряжение, при-
кладываемое к тиристорам. Назначение параллельного сопротивле-
ния то же, что и в предыдущем случае.
Помимо /?С-цепочек, для подавления пиков перенапряжений
применяются нелинейные сопротивления. Известно применение для
87
этой цели селеновых вентилей, работающих на обратной ветви своей
вольт-амперной характеристики, карборундовых сопротивлений,
а также полупроводниковых вентилей с лавинной характеристикой.
Селеновые вентили обладают нелинейной вольт-амперной харак-
теристикой, поэтому потери в защитных цепочках из селеновых вы-
прямителей в номинальном режиме весьма невелики.
На рис. 3-14,а показана обратная ветвь вольт-амперной харак-
теристики селенового вентиля типа ЗОГД. Собрав несколько венти-
лей последовательно, можно получить защитную цепочку практи-
чески на любое рабочее напряжение.
Рис. 3-14. Вольт-амперные характеристики нелинейных сопротив-
лений.
а — селеновый вентиль; б — два селеновых вентиля, включенных встреч-
но; в — карборундовое сопротивление типа жвилит».
Для защиты от перенапряжений в цепях переменного тока
применяется встречное включение соответствующего количества се-
леновых вентилей. Симметричная вольт-амперная характеристика
двух встречно включенных плеч селеновых вентилей по два вентиля
в плече приведена на рис. 3-14,6.
Селеновые вентили допускают плотность обратного тока при
одиночных импульсах до 25 ма/см2. При часто повторяющихся
импульсах обратного тока эта величина должна быть снижена.
Недостатком селеновых ограничителей является значительный
разброс (около ±70%) обратных ветвей вольт-амперных характе-
ристик селеновых выпрямителей, что вынуждает сохранять значи-
тельный коэффициент запаса при выборе класса тиристоров.
В ряде случаев селеновые ограничители перенапряжений могут
оказаться более компактными и дешевыми, чем емкостные.
В США для защиты тиристоров широко применяются специ-
альные селеновые стабилитроны «тиректоры», представляющие собой
набор селеновых вентилей [Л. 18].
Нелинейные карборундовые сопротивления (типа «вилит») мож-
но в принципе применять для защиты тиристоров от перенапряже-
ний, но их недостаток состоит в том, что степень нелинейности их
вольт-амперной характеристики (рис. 3-14,в) недостаточна. Если
такое сопротивление включить непосредственно на напряжение сети,
то потери в нем при номинальном напряжении будут велики. Это
88
делает нецелесообразным его использование для защиты тиристо-
ров.
В высоковольтных цепях карборундовые сопротивления вклю-
чаются последовательно с искровыми промежутками.
в) Полупроводниковые приборы с контролируемым
лавинооб разованием
В обычных кремниевых диодах и тиристорах мощность, рассеи-
вание которой допустимо при протекании через переход прямого
тока, превышает в сотни раз мощность, рассеивание которой допу-
стимо при протекании через переход обратного тока. Причина этого
заключается в том, что при протекании прямого тока он распре-
деляется равномерно по всей площади перехода. При этом исполь-
зуется вся теплоемкость перехода и он нагревается равномерно.
При протекании обратного тока (тока утечки) этот ток (и соот-
ветственно потери) концентрируется в микроскопически малом сла-
бом месте перехода. В этом случае мощности в доли ватта может
оказаться достаточно для расплавления слабого места и порчи всего
выпрямителя.
Диоды и тиристоры с контролируемым лавинообразованием (на-
зываемые лавинными приборами) могут рассеивать одинаковое ко-
личество тепла при протекании через переход тока как в прямом,
так и в обратном направлениях. Это объясняется наличием в этих
приборах лавинного пробоя (называемого также зенеровским пробо-
ем). Лавинный пробой не является разрушающим.
В лавинном приборе поддерживается постоянное напряжение
на переходе независимо от величины обратного тока. Если ток огра-
ничен внешним сопротивлением в соответствии с термической спо-
собностью диода, никакого повреждения перехода не произойдет.
Лавинный прибор позволяет рассеивать в сотни раз большую
энергию в запирающем направлении, чем обычный. В прямом на-
правлении разницы между свойствами лавинных и обычных прибо-
ров нет. Таким образом, лавинные диоды и тиристоры имеют как
бы свою собственную встроенную защиту от перенапряжений.
Лавинные характеристики получаются путем специальной тех-
нологии изготовления переходов, направленной на достижение боль-
шей однородности перехода и уменьшение градиента напряжения
на поверхности перехода.
Рассмотрим некоторые особенности применения лавинных полу-
проводниковых приборов.
При последовательном включении лавинных приборов в отличие
от включения обычных приборов нет необходимости применять де-
лительные сопротивления, выравнивающие обратные напряжения в
цепочке.
Рассмотрим два лавинных диода А и В, работающих последо-
вательно (рис. 3-15,а). Предположим, что эти диоды имеют неоди-
наковые обратные ветви вольт-амперных характеристик, изображен-
ные на рис. 3-15,6. При приложении к диодам обратного напряжения
оно делится между ними в зависимости от их вольт-амперных харак-
теристик, поскольку обратный ток /0бР общий. Однако при дости-
жении обратным напряжением на диоде А напряжения лавины,
оно остается неизменным, а напряжение на диоде В достигает ве-
личины U—U а.
7—2219
89
^ Пока полное обратное напряжение U меньше суммы напряже-
ний лавины обоих диодов, обратный ток мал, мала также и рас-
сеиваемая мощность и выравнивания обратных напряжений не тре-
буется.
При последовательном включении лавинных приборов не нужны
также делящие конденсаторы, которые в случае применения обыч-
ных приборов необходимы для выравнивания обратных напряжений
при _переходных процессах.
р-*
I
\!обр
в
1обр
о
1обр
При параллельной ра-
боте лавинных диодов и ти-
ристоров никаких особенно-
стей по сравнению с обыч-
ными приборами не име-
ется.
Лавинные диоды и ти-
ристоры могут применяться
в качестве рабочих элемен-
тов выходных устройств.
При этом не требуется спе-
циальных средств защиты
от перенапряжений. В на-
стоящее время серийно вы-
пускаются лавинные тиристо-
ры типа ТЛ (см. табл. 3-1).
Лавинные диоды могут применяться также в качестве приборов,
защищающих от перенапряжений при коммутации индуктивных на-
грузок, подобно стабилитронам. При этом защитные лавинные ди-
оды должны выбираться с напряжением лавины, обеспечивающим
защиту коммутирующего тиристора, а также с допустимой величи-
ной рассеиваемой «мощности, обеспечивающей гашение энергии, за-
пасенной в индуктивной нагрузке.
В тех случаях, когда лавинный диод не в состоянии рассеять
запасенную в нагрузке энергию, возможно его сочетание с парал-
лельно подключенным конденсатором.
Рис. 3-15. Последовательное включе-
ние двух диодов с контролируемым
лавинообразованием.
3-4. Способы управления выходными устройствами на тиристорах
а) требования к цепям управления выходными устройствами
на тиристорах. классификация способов управления выходными
устройствами
Первым требованием, предъявляемым к цепям управления ти-
ристорными выходными устройствами, является требование о том,
чтобы эти цепи обеспечивали сигналы управления тиристорами, ве-
личина которых достаточна для четкого включения тиристоров при
любых возможных режимах работы выходных устройств (различная
температура окружающей среды, разброс характеристик управления
тиристорами). В то же время не должна быть превышена допусти-
мая мощность рассеивания в цепи управляющего электрода тири-
стора.
Требования к величине управляющих импульсов для различных
типов тиристоров приведены в [Л. 16, 17, 21].
В табл. 3-3 приведены для справок параметры управляющих
импульсов тиристоров различных типов, применяемых в выходных
устройствах. Предполагается, что управляющий сигнал имеет форму
прямоугольного импульса с длительностью более 50 мксек.
90
При управлении тиристорами от источников напряжения в цепях
управляющих электродов должны быть включены добавочные со-
противления, ограничивающие ток на уровне допустимых значений.
Таблица 3-3
Тип тиристора
Номинатьный
ток тиристо-
ра, а
Параметры цег
при t =
/у> а
ж управления
= 20е С
иг в
Максимально
допустимый
ток управле-
ния (в им-
пульсе), а
КУ-201
2
0,35
УД-64
10
—
<10*
0,5
ВКУ-Ю
10
0,15
5
1,0
ВКУ-20
20
0,15
5
1,0
ВКДУ-50
50
0,3
7
2,0
ВКДУ-ЮО
100
0,3
7
2,0
ВКДУ-150
150
0,3
7
2,0
ТЛ-150
150
0,3
5
2,0
• Максимально допустимое значение.
Для управления тиристорными выходными устройствами приме-
няются не только прямоугольные импульсы, но и импульсы другой
формы (треугольные, синусоидальные и т. п.). Выше указывалось,
что выходные устройства работают в ключевом режиме, поэтому
во включенном состоянии напряжение на нагрузке должно иметь
форму синусоиды при нагрузке на переменном токе или полуволн
синусоиды при нагрузке на выпрямленном токе. В большинстве ре-
альных случаев напряжение на нагрузке отсутствует в течение вре-
мени, соответствующего углу а, который называется углом вклю-
чения, а затем скачком возрастает до напряжения питания минус
падение напряжения в тиристорах. Величина угла а зависит от осо-
бенностей схемы управления тиристорами. Общим требованием к це-
пям управления тиристорами выходных устройств является стрем-
ление получить угол а как можно меньшим, в пределе равным нулю.
Важным требованием к цепям управления является возможность
работы выходного устройства при широком диапазоне изменений
нагрузки от холостого хода до номинальной и изменениях коэффи-
циента мощности нагрузки в широких пределах. Как будет пока-
зано ниже, не все цепи управления удовлетворяют этому требова-
нию.
Цепь управления по возможности не должна создавать замет-
ного тока утечки при запертых тиристорах. Другими словами, если
цепи управления включены параллельно тиристорам выходного
устройства, они должны обладать высоким внутренним сопротив-
лением. Цепи управления не должны давать ложных включений при
переходных процессах в питающей сети.
Вход цепей управления должен 'быть универсальным, т. е. до-
пускать управление от любой системы бесконтактных логических
элементов; при этом в большинстве случаев требуется, чтобы низко-
вольтные цепи логических элементов не были связаны электрически
с силовыми цепями.
Наконец, цепи управления должны быть простыми и надежными
в эксплуатации.
7*
91
Известны три основных способа управления выходными устрой-
ствами ключевого типа: последовательное, параллельное и управле-
ние от напряжения, прикладываемого к выходному устройству.
При управлении по первому способу сигналы управления от
внешнего источника подаются только на один тиристор выходного
устройства, а включение остальных тиристоров обеспечивается схе-
мой вслед за включением первого тиристора без участия сигнала
внешнего источника.
При управлении по второму способу сигналы управления по-
ступают одновременно на все тиристоры выходного устройства
(при источнике питания постоянного тока) или с определенным
сдвигом по фазе (при источнике питания переменного тока) и по-
очередно включают их в начале полупериодов проводимости.
При управлении по третьему способу, применяемом при встречно-
параллельном включении тиристоров, при помощи коммутационного
устройства (контактного или бесконтактного) производится соеди-
нение управляющих электродов тиристоров с их анодами. При этом
ток в управляющем электроде каждого тиристора существует только
в течение очень малого времени — с начала полупериода проводимо-
сти соответствующего тиристора до момента его включения, после
чего ток управления спадает практически до нуля.
б) Схемы последовательного управления тиристорными выходными
устройствами
Последовательное управление тиристорными выходными устрой-
ствами может быть осуществлено как по току, так и по напряже-
нию. Схема, осуществляющая последовательное управление по току,
изображена на рис. 3-'16,а.
(Уз-
импульс а> °*
Рис. 3-16. Схемы последовательного управления ти-
ристорами по току.
Тиристор Т\ включается от внешнего сигнала, а тиристор Тг
включается в следующий полупериод от импульса, наводимого во
вторичной обмотке импульсного трансформатора ИТ, когда полу-
волна тока, проходящего через Tiy спадает до нуля. При снятии
управляющего сигнала с Ti автоматически запирается и Г2, так как
прекращается протекание тока через трансформатор ИТ.
Чтобы на управляющий электрод Т2 не попадал импульс про-
тивоположной полярности, который появляется на вторичной об-
92
мотке трансформатора в момент нарастания полуволны тока, вклю-
чают защитный диод Д.
Величина напряжения импульсов управления, получаемого со
вторичной обмотки ИТ, может быть подсчитана при следующих
допущениях:
а) Потери в вентилях и трансформаторе отсутствуют.
б) Трансформатор работает на насыщенном участке характери-
стики намагничивания:
B = Br+\iH,
где ц— значение абсолютной магнитной проницаемости сердечника
трансформатора на насыщенном участке;
Вг — остаточная индукция.
в) Ток изменяется по синусоидальному закону.
Напряжение импульсов управления на вторичной обмотке транс-
форматора ИТ можно подсчитать следующим образом:
е2 = — (t^i + w2) = — kL -—ц- = — k(uLfm cos со/,
где k = ——— — коэффициент трансформации трансформатора ИТ;
L — индуктивность трансформатора ИТ при работе его
на насыщенном участке характеристики намагничи-
вания.
Как известно, связь между L и \i выражается следующим об-
разом:
L= /с.108 '
где S — сечение сердечника трансформатора;
/с — длина его средней магнитной линии.
Способ последовательного управления по току осуществляется
также в трехфазной схеме, изображенной на рис. 3-16,6. В этой
схеме тиристоры соединены в треугольник, а нагрузка — в звезду
с разобщенной нулевой точкой. Принцип управления ясен из схемы.
Недостатком обеих схем является то, что величина импульса
управления зависит от величины тока нагрузки, как это явствует
из выражения для э. д. с. Поэтому при уменьшении тока нагрузки
ниже некоторого определенного значения схема перестает работать.
Кроме этого, в рассмотренных схемах отсутствует гальваническая
развязка управляющей и силовой цепей.
Схема последовательного управления тиристорами по напряже-
нию [Л. 22] изображена на рис, 3-17. Принцип работы этой схемы
заключается в том, что параллельно тиристору Т\, на который по-
дается внешний сигнал управления, подключается цепь управления
однополупериодного быстродействующего магнитного усилителя ЕМУ,
рабочая цепь которого питается, как правило, от понижающего
трансформатора Тр и имеет в качестве нагрузки цепь управления
тиристора Т2. При отсутствии входного сигнала управления тири-
стор Ti находится в запертом состоянии и к его зажимам прикла-
дывается полное напряжение сети. Полуволна напряжения, соответ-
ствующая проводящему для 7\ полупериоду, размагничивает ЕМУ,
и на выходе последнего протекает лишь ток намагничивания сер-
дечника, недостаточный для включения тиристора 7V
93
г,
При подаче управляющего сигнала на тиристор 7*1, последний
включается. Напряжение на его зажимах в проводящий полупериод
отсутствует, размагничивания сердечника БМУ не проиеходит. В сле-
дующий полупериод в цепи управления ти-
ристора Г2 протекает импульс тока, опре-
деляемый вторичным напряжением транс-
—у I форматора питания и суммарным актив-
\х) 1 1 (Ж/ ным сопРотивлением этои Цепи. Этот им-
«IX 3: 2 I т пульс тока включает тиристор 7Y Схема
при этом становится проводящей в оба
полупериода. К нагрузке прикладывается
практически полное напряжение сети.
Способ последовательного управления
тиристорами по напряжению может быть
применен и для схем выходных устройств,
предназначенных для включения трехфаз-
ных нагрузок. Принцип работы трехфазной
схемы аналогичен описанному выше.
Преимуществом способа последова-
тельного управления тиристорами по на-
пряжению в сравнении со способом после-
довательного управления по току являет-
ся независимость режима работы тири-
сторов от величины нагрузки. Недостатком является необходимость
в понижающем трансформаторе для питания быстродействующего
магнитного усилителя.
Рис. 3-17. Схема по-
следовательного
управления тиристо-
рами по напряже-
нию.
в) Схемы параллельного управления тиристорными выходными
устройствами
Как уже говорилось, при параллельном управлении управляю-
щие сигналы подаются параллельно на все тиристоры выходного
Рис. 3-18. Схемы управления тиристорами
с транзисторным ключом.
устройства. По форме управляющего сигнала схемы параллельного
управления можно подразделить на схемы с управляющими сигна-
лами в виде импульсов, следующих с частотой сети, и схемы
94
с управляющими сигналами в виде импульсов повышенной частоты.
Из схем первой группы рассмотрим три типа схем: с транзис-
торным ключом, с магнитным усилителем и с насыщающимся транс-
форматором.
Схема управления с транзисторным ключом для выходного
устройства с двумя тиристорами (см. рис. 3-1,6) изображена на
рис. 3-18,а.
Управление трехфазной силовой схемой (см. рис. 3-2,8) может
быть осуществлено по схеме рис. 3-18,6.
Для управления трехфазными силовыми схемами, изображенны-
ми на рис. 3-2,а, б и г, можно применять схему управления с тран-
зисторным ключом, включенным на выходе трехфазного выпрями-
Рис. 3-19. Схема управления тиристорами
с магнитным усилителем.
тельного моста, и разделительными трансформаторами, первичные
обмотки которых включены последовательно на стороне переменного
тока моста, а вторичные подключены через диоды к управляющим
электродам тиристоров.
К преимуществам схем с транзисторным ключом можно отнести
их простоту и быстродействие.
Недостатком рассмотренных схем, исключая последнюю, являет-
ся наличие гальванической связи цепи управления и силовой цепи.
Последняя схема лишена этого недостатка, однако она усложнена
введением трех разделительных трансформаторов.
Другим типом схем первой группы является схема с магнитным
усилителем (рис. 3-19), предназначенная для управления выходным
устройством по схеме рис. 3-1,6, которая обеспечивает развязку
силовой цепи от входа, но несколько сложнее схемы, построенной
на транзисторе.
При подаче на вход схемы управляющего сигнала магнитный
усилитель открывается (падение напряжения на нагрузочных об-
мотках w$ становится малым) и практически все напряжение вто-
ричной обмотки питающего трансформатора Тр прикладывается по-
очередно к двум цепям нагрузки, состоящим из добавочных сопро-
тивлений Rm и Rz2 и цепей управляющих электродов тиристоров.
Нулевая точка трансформатора соединяется с катодами тиристоров.
95
При отсутствии сигнала управлений магнитный усилитель за-
пирается обмоткой смещения шсм, питаемой выпрямленным током
от отдельной обмотки трансформатора.
Схема рис. 3-19 предназначена для управления однополупериод-
ным входным сигналом (например, сигналом магнитного логического
элемента ЭЛМ-50). Для того чтобы при таком управлении выход
магнитного усилителя был симметричным, применена однополупе-
риодная положительная обратная связь ОС. Обмотка w0c создает
необходимую для насыщения магнитного усилителя н. с. в тот по-
лупериод, когда отсутствует сигнал управления. Подобная схема
может быть создана и для
трехфазной нагрузки.
Для управления мало-
мощными тиристорами (типа
КУ-201) от логических элемен-
тов системы ЭЛМ применяется
простая схема, изображенная
на рис. 3-20.
Трансформатор Тр имеет
Рис. 3-20. Схема управления ти- сердечник с прямоугольной
ристорами с насыщающимся петлеи гистерезиса (изготовля-
трансформатором. ется на станд*р™м ^ердечни-
v ^ ^ ке элемента ЭЛМ). Он имеет
две первичные обмотки Wi и w\,
на одну из которых через диод подается переменное напряжение Ua
(от трансформатора питания ЭЛМ-ЮОТ), а на вторую—выход элемен-
та ЭЛМ, питаемого от напряжения с7в, сдвинутого на 180° по отноше-
нию к напряжению £/а. Полярность диодов и обмоток такова, что
при отсутствии сигнала на выходе элемента ЭЛМ происходит односто-
роннее намагничивание сердечника трансформатора однополупериод-
ными импульсами через обмотку Wi, а при наличии сигнала на вы-
ходе элемента ЭЛМ — периодическое перемагничивание сердечника
однополупериодными импульсами через обмотки Wi и w\. В первом
случае магнитный поток сердечника изменяется очень мало вслед-
ствие высокой прямоугольности характеристики намагничивания.
На вторичной обмотке w2 индуцируется очень небольшая э. д. с.
помехи, которая не может включить тиристор. Во втором случае
в обмотке w2 возникает э. д. с. сигнала, которая после выпрямле-
ния включает тиристор.
К схемам параллельного управления относятся также схемы,
на выходе которых генерируются прямоугольные импульсы с ча-
стотой, превосходящей в несколько раз частоту питания. Гальваниче-
ская развязка достигается здесь с помощью выходного трансформа-
тора, имеющего число выходных обмоток, равное числу тиристоров
выходного устройства. Эти схемы не требуют сдвига по фазе между
отдельными выходами и синхронизации выходных импульсов с на-
пряжением питающей сети. Частота следования управляющих им-
пульсов может быть выбрана произвольной (порядка 1—3 кгц).
Необходимо только, чтобы длительность управляющего импульса
превосходила время включения тиристора.
Источником управляющих импульсов повышенной частоты мо-
жет быть автогенератор любого типа, запускаемый при подаче
управляющего сигнала и выключаемый при его снятии. Примером
такого решения является описанный в [Л. 20] блок управления
тиристорными бесконтактными выключателями, построенный на базе
генератора Ройера (рис. 3-21).
96
Схема состоит из импульсного трансформатора Гр, имеющего
четыре выходные обмотки (для управления четырьмя тиристорами)
и коллекторную и базовую обмотки, к которым присоединены
транзисторы ti и Г2, образующие вместе с импульсным трансфор-
матором автогенератор.
Транзистор Т3 служит для запуска и остановки автогенератора.
Управляющий сигнал подается на зажимы 3 и 4. Постоянное на-
пряжение 24 в, питающее автогенератор, подается на зажимы 1 к 4.
При использовании транзистора Т3 в качестве входного на зажим 2
подается постоянное напряжение от вспомогательного источника.
Стабилитрон Дз служит для защиты от помех со стороны ис-
точника управления. Фильтр, состоящий из сопротивления R5, диода
Рис. 3-21. Схема управления тиристорами с авто-
генератором.
Дъ и емкости Ci, служит для защиты от помех со стороны источника
питания. Автогенератор работает с частотой 2 кгц.
При наличии в сети больших помех (например, по причине за-
пуска мощных асинхронных двигателей) автогенератором предпочти-
тельнее управлять через внешний ключ, подавая напряжение на за-
жимы 1 и 2.
Другой пример схемы управления подобного типа, разработан-
ной авторами и использующей для получения управляющих импуль-
сов повышенной частоты блокинг-генератор, будет рассмотрен ниже
в § 3-5.
г) Схемы управления тиристорными выходными устройствами
с использованием анодного напряжения в качестве источника
тока управления
Для выходных устройств со встречно-параллельным соединением
тиристоров (см. схему рис. 3-1,а), которые применяются наиболее
часто, простое и эффективное устройство управления может быть
получено путем соединения управляющих электродов встречно вклю-
ченных тиристоров с их анодами (или управляющих электродов
между собой, что с точки зрения происходящих процессов почти
97
эквивалентно) при помощи какого-либо ключа. При этом анодное
напряжение, прикладываемое к выходному устройству, является
источником управляющих импульсов. Принципиальная схемка такого
устройства дана на рис. 3-22. При замыкании ключа К в полупериод
проводимости тиристора 7\, под влиянием напряжения питания в це-
пи управляющего электрода этого тиристора потечет ток по цепи
Ai—Jli—К—Ri — управляющий электрод 74—А2—RB. По достижении
током в этой цепи величины, достаточной для включения тиристора
Ти последний включается. Начиная с этого момента, напряжение
между точками Ai и Л2 становится равным прямому падению на-
пряжения на тиристоре 7\, ток в цепи управляющего электрода
практически прекращается, тиристор Г4 остается проводящим до
конца полупериода.
В следующий полупериод аналогичный процесс происходит с ти-
ристором Г2.
Через ключ К протекают короткие импульсы тока, амплитуда
которых равна току управления, соответствующему точке спрямле-
ния вольт-амперной характеристики тиристора (/у.с) и длительность
которых может быть определена (для случая активной нагрузки)
мо формуле
tn = — arcsin У- —. (3-35)
нагрузки
Как видно из формулы, длительность импульсов управления
обратно пропорциональна частоте и напряжению сети и прямо про-
порциональна току управления спрямления и суммарному сопро-
тивлению в цепи: добавочному сопротивлению Ri и сопротивлению
Rn. Назначение сопротивления Ri — ограничивать ток
управления тиристоров (оно ставится не
.всегда). Назначение диодов Д\ и Д2—
предотвращать протекание обратного то-
ка через управляющие электроды тири-
сторов.
Реальные схемы выходных устройств
различаются выполнением ключа /С. На
рис. 3-23 даны две схемы ключа /С, при-
меняемые на практике.
В качестве ключа может быть при-
менен магнитный усилитель с самонасы-
щением. Такое решение может быть
применено только при сравнительно не-
большом напряжении сети, так как вы-
полнение малогабаритного магнитного
усилителя на большое напряжение сети
невозможно. Преимущества схемы: вы-
сокая надежность, возможность управлять от нескольких гальваниче-
ски не связанных сигналов. Недостатки: относительная сложность,
задержка при включении и отключении.
На рис. 3-23,а применена схема с трансформатором Тр, на вто-
ричной стороне которого через выпрямитель В включен транзистор
7\ работающий в ключевом режиме. В реальных схемах бескон-
тактной автоматики это может быть выходной транзисторный уси-
литель типа ЭТ или ВУП. Преимущества схемы: относительная
простота, быстродействие. Недостаток — необходимость в согласую-
Рис. 3-22. Схема управ-
ления тиристорами, ис-
пользующая напряже-
ние питающей сети.
98
fete-si т.^анс4юра1.ахоре, который, помимо согласований напряжений
сети и транзистора, играет роль гальванической развязки. При до-
статочно высоком напряжении сети этот трансформатор не может
быть малогабаритным.
Схема рис. 3-23,6 аналогична предыдущей, с той лишь разни-
цей, что вместо транзистора применен небольшой тиристор. Пре-
имущества и недостатки те же, что и у предыдущей схемы.
Рис. 3-23. Варианты выполнения ключа в схеме
рис. 3-22.
Роль ключа также может выполнять магнитоуправляемый кон-
такт (МУК). Магнитоуправляемый контакт (рис. 3-24,я) представ-
ляет собой^стеклянную капсулу, внутри которой создан вакуум или
имеется нейтральный газ и впаяны пластинки из ферромагнитного
материала, контактные поверхности которых имеют специальное по-
крытие, уменьшающее их износ.
Рис. 3-24. Внешний вид магнитоуправляемого
контакта.
а — магнитоуправляемый контакт; б — магнитоуправ-
ляемый контакт с управляющей катушкой.
При действии на капсулу внешнего магнитного поля, направлен-
ного вдоль контактных пластинок, последние, концентрируя в себе
магнитные силовые линии, притягиваются одна к другой и создают
электрический контакт.
Внешнее магнитное поле создается катушкой, надеваемой на
капсулу. Для предохранения от посторонних магнитных полей и
уменьшения магнитного сопротивления цепи применяется ферро-
99
ма. нитный экран. Внешний вид МУК вместе с управляющей ка-
тушкой и экраном показан на рис. 3-24,6.
Магнитоуправляемые контакты описаны в ряде статей, например
в '[Л. 23, 24]. Они допускают очень большое число> включений (до
108), работают в широком диапазоне температур окружающей среды
и обладают вибро- и ударостойкостью.
В случае когда напряжение сети превышает допустимое для
МУК напряжение, последний включается через трансформатор.
Преимущества ключа, выполненного на МУК, — чрезвычайная
простота схемы и удобство управления. На управляющую катушку
МУК можно подавать сигнал управления от любой системы логи-
ческих элементов, почти не меняя схемы входной цепи.
у "Ш D
07
tv.
0
Рис. 3-25. Схемы управления выходными
устройствами постоянного тока с примене-
нием магнитоуправляемых контактов.
Более подрсбно ключи, построенные на базе МУК, будут рас-
смотрены в § 3-5. В приложении 2 дана таблица основных харак-
теристик некоторых типов отечественных МУК.
д) Схемы управления выходными устройствами постоянного тока
Здесь будут рассмотрены две схемы управления выходными
устройствами, питаемыми от сети постоянного тока, силовая цепь
которых изображена на рис. 3-7. Случай управления всеми осталь-
ными вариантами выходных устройств с нагрузкой на постоянном
токе (см. рис. 3-5 и 3-6) ничем не отличается от рассмотренных
выше случаев управления. На рис. 3-25,а изображена схема управ-
ления выходным устройством постоянного тока, в которой исполь-
зуется МУК с переключающим контактом. Контакт а — размыкаю-
щий, контакт 6 — замыкающий.
При подаче сигнала на управляющую катушку МУК контакт б
замыкается, включается главный тиристор 7\, в нагрузке начинает
протекать ток, конденсатор С заряжается. При снятии управляюще-
го сигнала с катушки К контакт б размыкается, а контакт а замы-
кается, включая вспомогательный тиристор Т2. • Конденсатор С
разряжается через цепь главного и вспомогательного тиристоров,
выключая главный тиристор. После окончания разряда конденсатора
и его перезаряда гаснет вспомогательный тиристор и схема приходит
в исходное состояние.
Схема рис. 3-25,6 является упрощенным вариантом предыдущей.
Она пригодна для выходных устройств малой мощности. Здесь
100
гасящий тиристор вовсе исключен, а его роль исполняет размыкаю-
щий контакт МЩ. Контакты работают в легких условиях (не раз-
рывают ток в индуктивной цепи).
е) Схемы управления выходными устройствами на симметричных
тиристорах
Выпускаемые в настоящее время симметричные тиристоры типа
ВКДУС требуют однополярного управляющего сигнала, т. е. поляр-
ность управляющего сигнала относительно точки а (см. рис. 3-1 ,г)
должна быть положительной в оба полупериода питающего напря-
жения. Существуют также симметричные тиристоры с разнополяр-
ным управляющим сигналом. Здесь будут рассмотрены схемы
управления с однополяр-
8 ход
%> ® via,
ным управляющим сиг
налом. Схемы второго
типа отличаются лишь
отсутствием выпрямите-
ля на вторичной стороне тр2
трансформатора управ-
ления.
Для управления сим-
метричным тиристором в р1
цепь его управляющего
злектрода достаточно
подать постоянный или
выпрямленный ток необ-
ходимой Беличины, полу-
ченный от любого источ-
ника, однако существу
ют более простые и эф
фективные схемы, в ко-
торых для создания сиг-
нала управления используется
к тиристору. Два варианта
вход
0 #
0^
Рис. 3-26. Схемы управления выходны-
ми устройствами на симметричных ти-
ристорах.
напряжение, прикладываемое
таких схем изображены на
рис. 3-2б,а и б. По принципу действия эти схемы не отличаются
от аналогичных схем управления для обычных тиристоров, рассмот-
ренных в § 3-4,г. Разница состоит лишь в том, что в рассмотренных
выше схемах управляющий сигнал подавался поочередно к управ-
ляющим электродам различных тиристоров, а в данном случае он
подается в оба полупериода на один управляющий электрод.
В схеме рис. 3-26,а параллельно тиристору подключены первич-
ные обмотки двух малогабаритных трансформаторов Тр{ и тр2,
соединенные последовательно. Трансформатор Тр2 выполняет роль
ключа. Его вторичная обмотка через выпрямитель замыкается
транзистором Т. При отсутствии управляющего сигнала на входе
транзистора последний заперт. Практически все напряжение сети
приложено к первичной обмотке трансформатора Тр2. Управляющее
напряжение на тиристоре отсутствует.
При подаче управляющего сигнала транзистор Т переходит
в режим насыщения, закорачивая вторичную обмотку трансформа-
тора Тр2. Напряжение сети прикладывается к трансформатору Тр\.
В цепи управляющего электрода СТ начинает протекать ток, что
приводит к его открытию. После открытия тиристора СТ напряжение
на трансформаторе Tpi падает и управляющий импульс исчезает.
101
Процесс открытия тиристора повторяется в начале каждого
полупериода.
В схеме рис. 3-26,6 в качестве ключа применен контакт МУК.
В этом случае необходим только один трансформатор. В остальном
действие схемы аналогично описанному выше.
3-5. Комплектные тиристорные выходные устройства
а) Требования, предъявляемые к тиристорному пускателю для
асинхронных двигателей
При включении неподвижного асинхронного двигателя с корот-
козамкнутым ротором на симметричную трехфазную сеть ток его
статора претерпевает переходный процесс. Этот переходный процесс
можно разбить на две
части:
а) переходный про-
цесс в неподвижном дви-
гателе;
б) переходный про-
цесс, связанный с разго-
ном двигателя от со-
стояния покоя до уста-
новившейся скорости.
Для упрощения бу-
дем рассматривать ука-
занные процессы в от-
дельности. Для этого
иужно предположить,
что первый переходный
процесс заканчивается до
того, как скорость дви-
гателя претерпела суще-
ственное изменение. В
действительности это
предположение практиче-
ски всегда выполняется.
Во время первого переходного процесса ток двигателя содер-
жит периодическую /П и апериодическую /ап составляющие.
Общее выражение для мгновенного значения тока в фазе ста-
тора А следующее [Л. 25]:
Рис* 3-27. Форма пускового тока (стато-
ра) асинхронного двигателя при макси-
мальной апериодической составляющей
in + 'an = /щ sin (eM + а + <fft) — An sin (а —
hp*
(3-36)
где im — амплитуда установившегося тока к. з;
(Oi — угловая частота сети;
а — электрический угол, соответствующий моменту вклю-
чения двигателя;
фь — фазовый угол двигателя при неподвижном роторе;
Tb=xs!u>ir — постоянная времени затухания свободных токов (х8 и
r — индуктивное и активное сопротивления, приве-
денные к числу витков и фаз статора, причем принято,
что x'sv = xsc=xs] r'v = rc = r).
При вычислении тока в фазе в вместо а следует подставить
а—'120°,.а при вычислении тока в фазе с — <х+120°.
102
Максимально возможная величина апериодической составляющей
равна 1т. Это\имеет место, если фазовое положение таково, что
периодическая составляющая тока имеет максимум в момент вклю-
чения = cpft +-^г^. Ток статора двигателя, соответствующий
этому случаю, изображен на рис. 3-27. Другой крайний случай, ког-
да апериодическая составляющая тока отсутствует, соответствует
а=фл. \
Первый переходный процесс, как уже указывалось, очень крат-
ковременный. Даже для больших асинхронных двигателей Гн~
«0,03 сек. Для машин мощностью порядка нескольких киловатт
Гн = 0,008 сек, т. е. 0,4 периода.
Во время второго переходного процесса, связанного с разгоном
двигателя, ток статора двигателя уменьшается от пускового до
установившегося рабочего.
Время второго переходного процесса определяется по общеиз-
вестной формуле
GD2 с dn
tji== 375 ] Мд-Мс' (3"37)
о
где GD2 — суммарный маховый момент движущейся системы, приве-
денный к валу двигателя;
п — скорость вращения двигателя;
Мд — вращающий момент на валу двигателя;
Мс — статический момент.
Из предыдущего краткого рассмотрения переходных процессов
в асинхронном двигателе ясно, что характер первого переходного
процесса существенно зависит от момента включения двигателя
или при тиристорном управлении от момента подачи управляющего
сигнала на тиристоры.
Для ориентировки приведем характерные параметры трехфазных
короткозамкнутых асинхронных двигателей малой и средней мощ-
ности (до 50 /сет), которые нужно знать при проектировании пуска-
телей на тиристорах.
Номинальный коэффициент мощности
cos фн = 0,8-ь0,9; фн~30°.
Коэффициент мощности при пуске
со8фЛ«0,2; фь~80°
(примерно такой же коэффициент мощности имеет место при хо-
лостом ходе).
Кратность амплитуды установившегося тока к. з. по отношению
к номинальному току двигателя
Кратность амплитуды ударного пускового тока при а=фь±я/2
= П-И5.
j утл
/в
103
Как уже указывалось, ударный пусковой ток в двигателях ма-
лой и средней мощности существует практически в течение одного
полупериода, так как он весьма быстро затухает.
Время разгона двигателя до установившейся скорости зависит
от величины махового момента системы, величины статического мо-
мента на валу и вида механической характеристики двигателя.
В табл. 3-4 приведены значения времени разгона асинхронных
электродвигателей единой серии А и АО [Л. 26].
Расчет Бремени разгона сделан для случая, когда маховой мо-
мент исполнительного механизма равен маховому моменту ротора,
а момент сопротивления на валу равен номинальному моменту
двигателя.
Таблица 3-4
Мощность,
кет
Номинальный
ток при
380 в, а
Синхронная скорость
вращения, об/мин
Время разгона, сек
75
180
1 000—1 500
3 000
0,61—0,78
0,63—2,2
40
100
1 000—1 500
0,31—0,49
3 000
0,57—1,33
20
51
1 000—1 500
0,3—0,47
3 000
0,41—0,85
7
19
1 000—1 500
0,16—0,3
3 000
0,42—0,5
Эквивалентный ток за время разгона двигателя можно вычис-
лить приближенно по известному правилу трапеции
,-]/* 7" + /2р+/пУ
(3-38)
где In — пусковой ток;
/р — рабочий ток при установившемся режиме.
При реверсе асинхронного двигателя возникают еще большие
броски тока статора, чем при пуске.
Если предположить, что двигатель, вращающийся с синхронной
скоростью, отключается от исходной трехфазной сети и мгновенно
включается в трехфазную сеть с обратным чередованием фаз, то
в обмотках его статора возникают ударные токи, зависящие от фа-
зового положения в момент переключения.
Для наихудшего случая максимальный ударный ток при реверсе
выражается формулой (Л. 25]
/т---^ 2(2-о), (3-39)
где Х'8 — реактивность к. з. двигателя в относительных единицах;
а — результирующий коэффициент рассеяния двигателя.
Для рассматриваемого диапазона мощностей двигателей, если
принять Х'8 = §,2 и а=0,08, максимальная величина ударного тока
104
получается равной примерно 20-кратной амплитуде номинального
тока. \
Реально вследствие затухания апериодической составляющей
тока максимальную, амплитуду ударного тока можно оценить как
15-кратную амплитуду номинального тока.
В наиболее благоприятном случае реверса в формуле (3-39)
будет отсутствовать коэффициент 2 и, следовательно, ударный ток
при реверсе будет вдвое меньше названного выше.
Для того чтобы уменьшить величину ударного тока при ре-
версе, включение двигателя в сеть следует производить лишь по
истечении такого промежутка времени, в течение которого остаточ-
ный поток, возникший при выключении, затухнет или понизится до
достаточно малой величины. Этот промежуток времени желательно
иметь не менее 0,1 сек. Максимальная амплитуда ударного тока
при этом не превосходит (1,5-г-1,7)/т.
Время реверса асинхронного двигателя может, как и время
разгона, быть вычислено по формуле (3-37) с учетом того, что
при замедлении в знаменателе подынтегрального выражения стоит
не разность, а сумма моментов.
В первом грубом приближении время реверса можно оценить
как удвоенное время разгона (табл. 3-4). Эквивалентный ток при
реверсе можно вычислить по формуле (3-38), так как установивший-
ся ток при противовключении приблизительно равен пусковому
току.
б) Выбор тиристорного пускателя
Задача выбора тиристорного пускателя для конкретного элек-
тропривода включает выбор типа и класса тиристоров, проверку на-
грева тиристорсв в режимах пуска, длительной работы и перегруз-
ки двигателя, а также способности пускателя выдержать в течение
одного полупериода ударный ток двигателя. Последнее условие со-
стоит в выполнении неравенства
(/20доп> 0,01/2
где k3 — коэффициент запаса.
Допустимые значения 14 для силовых тиристоров приведены
в табл. 3-1.
Для проверки нагрева тиристоров необходимо связать ток фазы
пускателя с током тиристора.
Для схем встречно-параллельного включения двух тиристоров
(или тиристора с неуправляемым вентилем) ток протекает попе-
ременно через встречно включенные вентили, поэтому справедливо
равенство
где 1ф и /т — соответственно эффективное значение тока фазы пу-
скателя и среднее значение тока тиристора. Для пускателя на сим-
метричных тиристорах /ф = 1,11/т.
В качестве примера приведем выбор тиристорного пускателя
для асинхронного короткозамкнутого электродвигателя типа А2-61-4
со следующими номинальными данными:
Рн=13 кет; иц = ЗЬ0 в; /н=25 а; /п = 7/н=175 а.
8-2219 105
'Маховой момент исполнительного механизма, приведенный к ва-
лу двигателя, равен маховому моменту ротора. Статический момент
нагрузки постоянен и не зависит от скорости.
Режим работы повторно-кратковременный; цикл работы состоит
из разгона, работы с номинальным моментом на валу в течение
2 сек и паузы 5 сек. В таком режиме двигатель работает дли-
тельно.
Температура окружающего воздуха Го = +50°С.
Время разгона двигателя примем ориентировочно по табл. 3-4:
/i = 0,4 сек. (Для более точного определения t\ нужно иметь меха-
ническую характеристику двигателя и воспользоваться формулой
3-37.)
График тока двигателя изображен на рис. 3-28. Спадание тока
при разгоне условно принято прямолинейным вместо экспоненци-
ального, что утяжеляет условия нагрева.
Выбор тиристорного пускателя по току производится методом
проб. Предположим, что пускатель выполнен на симметричных
тиристорах типа ВКДУС-100.
Напряжение класса тиристоров выбираем из расчета полутора-
кратного запаса по отношению к амплитудному напряжению сети:
UKa = 1,5- 1,41 • Ua= 1,5- 1,41 • 380^800 в.
Для проверки нагрева тиристоров воспользуемся способом, из-
ложенным в [Л. 18], заключающимся в том, что импульс мощности
сложной формы можно заменить эквивалентным прямоугольным им-
пульсом.
Максимальная мощность, выделяющаяся в структуре тиристора
в первый период пуска, определяется как
ри = /пср<+ 1\ «д, (3-40)
где и0 — пороговое напряжение;
/?д — динамическое сопротивление.
Для рассматриваемого случая
475
рм==—. 0,92+ (175- /2)2. 140- 10-5 = 229 вт.
Среднюю мощность импульса тока молено определить, усред-
нив значение тока за время + /Ср = 34 а, тогда
РСр = 34.0,92+342. 140-10-5 = 33 вт.
Длительность прямоугольного импульса мощности с амплитудой
Ям, эквивалентного по его тепловому действию реально существую-
щему графику мощности,
*экв = (tx +12) = 0,336 сек.
г м
Итак, действительный график нагрузки мы заменяем бесконеч-
ной серией поямоугольных импульсов мощности Рм длительностью
/вкв с паузами, равными /ц—/Экв. Эти импульсы показаны на
рис. 3-28 заштрихованными прямоугольниками.
106
Максимальный установившийся перегрев Полупроводниковой
структуры тиристора при таком характере нагрузки определяется
формулой [Л. 17]
Д^макс = ри Rt + — ^ j Гт| — Гт2 + Гт1 j, (3-41)
где /?т — установившееся тепловое сопротивление вентиля с
охладителем;
гть г?2, гт3 — переходные тепловые сопротивления для интервалов
времени tu t2i /3=^—'fi—j2 (рис. 3-28).
Для рассматриваемого случая значения тепловых сопротивле-
ний равны [Л. 17]:
/?т=1,2 град/вт (при естественном охлаждении);
гТ1 = 0,1 град/вт; гт2 = 0,2 град/вт; гтз = 0,21 град/вт.
Щодставив в (3-41) значения переменных, получим: А7,маКс =
= 50,6° С. Максимальная абсолютная температура структуры
ГМакс = Го + А7Макс = 100,б°С.
Такая температура до-
пустима для тиристоров.
Проведем проверку пус-
кателя по величине 14.
Максимальный ударный
ток при включении может
составить 11/н (см. выше),
т. е. 275 а. Величина 14 за
полупериод составит760а2Х
X сек при допустимой для
этого тиристора величине
9 600 а2-сек.
Таким образом, выбран-
ные тиристоры типа
ВКДУС-100 8-го класса по-
зволяют получить пускатель,
удовлетворяющий требова-
ниям данного конкретного
случая,
в) Тиристорный пускатель для управления трехфазными
нагрузками
Тиристорный пускатель, помимо силовых тиристоров, осущест-
вляющих коммутацию нагрузки, содержит устройства управления и
защиты. На рис. 3-29 приведена блок-схема одного из типов пуска-
телей.
Пускатель содержит блоки силовой, управления, датчиков тока
и питания. Рассмотрим схемы и принципы действия отдельных
блоков, а также взаимодействие между блоками.
Силовой блок содержит в каждой фазе встречно включенные
тиристор и неуправляемый вентиль. Параллельно вентилям включе-
ны /?С-цепочки для защиты от перенапряжений. Параметры цепочек:
С=2 мкф; R=27 ом.
7/
1
\
\ \
\
f- t„
Рис. 3-28. График тока двигателя
в примере выбора тиристорного пу-
8*
107
сеть
V % яр-
блок
питания
блок |~
датчика8\
блок
8ь/держки\
времени
блок
силовой
тт
нсгруэка
Тиристорный пускатель разработан на тиристорах типа ЁКДУ
и неуправляемых вечтилях типа ВКД.
В зависимости от номинального тока и класса вентилей изме-
няются мощность и рабочее напряжение пускателя. В табл. 3-5 отра-
жены зависимости между этими величинами. В последней графе
таблицы даны величины номинальной мощности асинхронных элек-
тродвигателей, которые могут коммутироваться пускателем. Номи-
нальная мощность электродвигателя дана при условии, что время пу-
ска не превышает 1,5 сек, а частота включения составляет не более
5 раз в минуту. При расчете мощности заложены необходимые за-
пасы.
Блок управления предназначен
для включения и отключения сило-
вых тиристоров. На выходе блока ге-
нерируются прямоугольные импульсы,
следующие с частотой 1 700—2 ООО гц.
Электрическая развязка между систе-
мой управления и силовой цепью до-
стигается с помощью импульсного
трансформатора, имеющего несколь-
ко выходных обмоток. Длительность
импульса — около 50 мксек, длитель-
ность паузы — около 450 мксек. Ам-
плитуда импульсов 0,5 а.
Полная схема блока управления
представлена на рис. 3-30. Основным
элементом схемы является блокинг-
генератор на транзисторе Т2 и транс-
форматоре Tpi, на выходе которого
включен имульсный усилитель мощ-
ности на транзисторе Г3. Для запус-
ка генератора и срыва генера-
ции применен маломощный транзистор Т\, с помощью кото-
рого происходит закорачивание обмотки обратной связи. Тран-
зистор Ti работает в ключевом режиме с управлением от сигнала
логического элемента. При подаче входного сигнала транзистор Ti
запирается и блокинг-генератор начинает выдавать импульсы. В слу-
чае отсутствия сигнала транзистор Ti насыщен и обмотка обратной
связи закорочена.
Резистор R, включенный в цепь обратной связи, служит для
выбора режима работы блокинг-генератора.
Таблица 3-5
6лок
\управление
I вход
Рис. 3-29. Блок-схема
тиристорного пускателя.
Тип вентилей
Номинальная
(длительная)
выходная мощ-
ность пуска-
теля, ква
Напряжение
питающей се-
ти, в
Мощность
электродвига-
теля, кет
ВКДУ-50-5, ВКД-50-5
9,8
220
5,5
ВКДУ-100-5, ВКД-ЮО-5
16,6
220
10
ВКДУ-50-8, ВКД-50-8
17,0
380
10
ВКДУ-100-8, ВКД-ЮО-8
28,6
380
17
108
Ёыходной ка'скад блока управления включает мощный транзис-
тор Г3 и импульсный трансформатор Тр2. Транзистор Г3 насыщается
импульсами, поступающими па его базу. В ' промежутках между
импульсами транзистор заперт, чему способствует диод Д7, вклю-
ченный в цепь эмиттера. Импульсный трансформатор Тр2 имеет
три одинаковые выходные обмотки, импульсы с которых поступают
на управляющие электроды тиристоров.
В блоке управления предусмотрена блокировка генератора с
помощью маломощного тиристора Г, на управляющий электрод ко-
торого подается сигнал защиты. Тиристор Т, так же как транзистор
Гь закорачивает обмотку обратной связи и срывает генерацию.
При включении тиристора Т загорается сигнальная лампочка Л.
Кнопка К служит для снятия блокировки. Питание блока
управления производится от специального блока питания.
Тиристорный пускатель имеет защиту от перенапряжений, пере-
грузок и токов короткого замыкания.
Защита тиристоров от пробоя обратным напряжением осуще-
ствляется за счет шунтирования каждого тиристора встречно вклю-
ченным неуправляемым вентилем. Обратное напряжение на тири-
сторах при этом практически отсутствует. Обратное напряжение
неуправляемых вентилей выбирается, исходя из амплитуды линей-
ного напряжения сети.
От коммутационных перенапряжений тиристоры защищаются
/?С-цепочками, упомянутыми выше.
Защита тиристоров и неуправляемых вентилей от перегрузок и
токов короткого замыкания, являющаяся также защитой исполни-
тельного двигателя, ограничивает длительность возникающих пере-
грузок, а также длительность и величину тока короткого замыка-
ния.
Защита тиристорного пускателя от перегрузок и коротких за-
мыканий эффективна только тогда, когда ее ампер-секундная харак-
теристика правильно сочетается с перегрузочной характеристикой
тиристорного пускателя.
На рис. 3-31 сплошной линией показана перегрузочная харак-
теристика образцов описываемых тиристорных пускателей, построен-
ных на тиристорах типов УПВК-50 и УПВК-ЮО, а пунктирной ли-
нией — ампер-секундная характеристика защиты. Как видно из ри-
блокиробка^д?
■0
Рис. 3-30. Схема блока управления.
109
г*
I
150
10 о v
50
сунка, Последняя характеристика проходит во всех точках ниже
первой, что говори! о том, что при любой перегрузке защита тири-
сторного пускателя будет осуществлена. Для получения такой харак-
теристики защиты применена полупроводниковая схема, формирую-
щая нужную ампер-секундную характеристику.
Измерение тока в силовой части схемы и преобразование его
для управления блоком защиты производятся блоком датчиков то-
ка (рис. 3-32). В отличие от обычных трансформаторов тока при-
мененный датчик переменного то-
ка преобразует первичный ток в
пропорциональное ему вторичное
напряжение. Чтобы обеспечить
прямолинейную зависимость меж-
ду током и напряжением в широ-
ком диапазоне, в магнитопроводах
датчика имеется воздушный зазор.
Первичные обмотки каждого
датчика тока, состоящие из одно-
го или двух витков, включаются
в цепь главного тока пускателя.
Вторичные обмотки датчиков вме-
сте с диодами Д4—Дэ образуют
шестифазную нулевую схему.
На выходе этой схемы (на ре-
зисторе r\) при однофазном к. з.
получается двухполупериодный вы-
ходной сигнал, а при трехфазном
к. з. — сигнал с шестифазными
пульсациями. Разница между сред-
ними значениями выходного на-
юосек пряжения блока датчиков при за-
данном токе к. з. и различных ви-
дах к. з. (однофазное, двухфаз-
ное, трехфазное) при такой схеме
соединений составляет не более
15%.
На выходе блока датчиков
установлен сглаживающий /?С-фильтр. Потенциометр ri служит для
регулировки величины сигнала, снимаемого с блока защиты.
Для защиты тиристорного пускателя от токов к. з. датчик
имеет отдельную цепь отсечки, состоящую из трехфазного вы-
прямителя на диодах ди дг, дз, потенциометра r2 и цепи с пере-
ключающим диодом Д/7, соединяемой с одним из блокировочных
входов блока* управления. Величина сигнала отсечки устанавливает-
ся потенциометром из расчета мгновенного снятия отпирающих
импульсов с силовых тиристоров при аварийных токах, превосхо-
дящих пусковые токи нагрузки (т. е. при />8/н).
Для перечисленных выше тиристорных пускателей применяется
один блок датчиков тока с той лишь разницей, что для пускателей
на тиристорах типа ВКДУ-50 датчики имеют по два первичных вит-
ка, а для пускателей на тиристорах типа ВКДУ-ЮО — по одному
витку.
Формирование временной характеристики защиты происходит
в блоке защиты (рис. 3-33). Устройство этого блока, представляю-
щего собой полупроводниковое реле выдержки времени, в основном
ПО
Рис. 3-31. Перегрузочная и за-
щитная характеристики тири-
сторных пускателей.
аналогично устройству полупроводникового элемента выдержки вре-
мени типа ЭТ-В04 из серии логических элементов ЭТ [Л. 1].
Отличительной особенностью схемы рис. 3-33 является то, что
цепочка rc подсоединяется не к постоянному по величине напря-
жению питания ек, а к сумме напряжений ek + uc, где uc — напря-
жение сигнала, пропорциональное то-
ку нагрузки. Это дает возможность
получить величину выдержки време- ф
ни, обратно пропорциональную току 1
нагрузки.
Основными узлами схемы блока
защиты являются входной каскад на
транзисторе Т\у блокинг-генератор на
транзисторе Г2 и триггер на транзи-
сторах Г4 и 7Y
Транзистор Ti работает в режиме
входного ключа, который при отсут-
ствии напряжения сигнала находится
в запертом состоянии. Открывание
транзистора Ti происходит в том слу-
чае, когда пробивается стабилитрон
Д5, напряжение стабилизации которо-
го иСт выбирается несколько выше,
чем ек. Таким образом, величина
напряжения сигнала, от которого сра-
батывает блок -защиты, может быть
определена как
Рис. 3-32. Схема блока дат-
чиков тока.
В схеме используется принцип перезаряда емкости Ci через
высокоомные резисторы ri и r2. Перезаряд емкости с напряжения
LJL3
—0
+ ее
Рис. 3-33. Схема блока защиты.
iii
Ui происходит после того, как транзистор Т±, открываясь, подсоеди-
няет левую обкладку конденсатора к потенциалу 0. Закон перезаря-
да емкости может быть записан в виде следующего выражения:
Здесь: U±— напряжение на конденсаторе при отсутствии сиг-
нала;
U2=^EK + UC\
т—постоянная времени цепочки.
Выдержка времени схемы определяется моментом изменения
полярности на конденсаторе СА и может быть записана в виде сле-
дующего выражения:
Т = хIn -
U2
Особенностью схемы является то, что постоянная времени изме-
няет свою величину в процессе перезаряда емкости за счет шун-
тирования стабилитроном Д6 резистора Ri, входящего в цепочку RC.
Сделано это в целях лучшего совладения ампер-секундной харак-
теристики защиты и перегрузочной характеристики тиристорного
пускателя.
До возникновения перегрузки блокинг-генератор на транзисторе
Т2 не возбуждается, так как цепь его обратной связи (обмотка ОС)
разомкнута.
Перегрузка пускателя вызывает пробой стабилитрона Д5 и на-
сыщение транзистора Ti. Через диод Д2 восстанавливается цепь об-
ратной связи блокинг-генератора. Транзистор Т3 переходит из на-
сыщенного в запертое состояние, а выходной триггер остается
в первоначальном состоянии. В момент, когда потенциал обкладки
конденсатора Ci становится более отрицательным, чем потенциал
базы транзистора Г2, стабилитрон Д7 начинает проводить в прямом
направлении. Ток коллекторной цепи Т2 лавинообразно возрастает,
блокинг-генератор начинает работать. Положительный импульс с вы-
хода Т2, проходя через С2 и Д4, перебрасывает триггер. На выходе
появляется сигнал, который поступает на один из блокировочных
входов блока управления, что в свою очередь приводит к снятию
отпирающих импульсов с силовых тиристоров.
Отсечка срабатывает при токах к. з. за время 0,01 сек.
Для питания блоков управления и защиты в пускателе
применяется трехфазный блок питания, имеющий три цепи выпрям-
ленного и сглаженного напряжения с общими нулевыми точками
—Ек, +£б, —Еп (см. рис. 3-30 и 3-33). Две из них (—Ек и +£б)
стабилизированы с помощью стабилитронов.
г) Однофазное тиристорное выходное устройство переменного тока
В отличие от описанного в предыдущем разделе трехфазного
тиристорного пускателя, состоящего из нескольких блоков и осуще-
ствляющего, помимо коммутации, токовую защиту коммутируемых
цепей, однофазное выходное устройство значительно проще. Оно
состоит из двух простых узлов: силового узла и узла управления.
Три таких устройства с объединенными входами могут управлять
трехфазной нагрузкой.
112
Схема однофазного устройства изображена на рис. 3-34.
Управление тиристорами осуществляется путем замыкания
управляющих электродов с соответствующими анодами. Это выпол-
няется при помощи трансформатора Тр, первичная обмотка которого
соединяет управляющие электроды тиристоров 7\ и Т2 через рези-
стор R3, а вторичная замыкается накоротко магнитоуправляемым
контактом МУК. Диоды Ду и Д2 предохраняют управляющие элек-
троды от напряжений обратной полярности; резисторы Ri и R2 шун-
тируют цепи управляющих электродов, что требуется для обеспе-
чения надежной работы тиристоров.
нагрузка ип
г-0 ъ 0 ^
Рис. 3-34. Схема однофазного тиристорного выходного
устройства.
Включение МУК производится от специальной катушки, на ко-
торую подается сигнал с выхода логического элемента. Часть схемы,
обведенная пунктиром, представляет собой узел управления, кото-
рый является универсальным для выходных устройств любой мощ-
ности, а также для выходных устройств постоянного тока, описан-
ных ниже.
Узел управления может иметь на входе любую из выпускаемых
в настоящее время систем логической автоматики.
Рассмотрим, как производится подключение выхода различных
систем ко входу узла управления.
При применении системы ЭЛМ соединяются зажимы 3 и 4,
5 и 6, 7 и 8. Входной сигнал подается между зажимами 7, 8 ( + )
и / (—). На вход должен подаваться двухполупериодный сигнал
(с двух логических элементов, включенных в разных фазах).
Второй вход можно подать на зажимы 7, 8 и 2. При этом дио-
ды Дз и Д4 осуществляют логическую функцию «ИЛИ». Емкость Ci
сглаживает входной сигнал.
При применении системы ЭЛМ-400 соединяются зажимы 3 и 4,
5 и 6. Сигнал с выходного позторителя (ВП) подается на зажимы
113
? ( + ) и 1 (—) или 2 (—). Функции диодов и емкости те же, 4fo
и в предыдущем случае.
При применении системы ЗТ соединяются зажимы 2 и 3, 4 и 5.
Сигнал с усилительного элемента ЭТ-У02 подается на зажимы #( + )
и /(—). Диод Д5, резистор i?4 и емкость d образуют защитную
цепочку для защиты выходного транзистора элемента ЭТ-У02 от пе-
ренапряжений, могущих возникнуть при коммутации катушки К.
При применении системы ЛТ соединения аналогичны варианту
соединений с системой ЭЛМ, только зажимы 7 и 8 не соединяются,
а входной сигнал подается на зажимы 7 и /. В этом случае по-
следовательно с резистором R5 требуется включить добавочное со-
противление.
Выходное устройство переменного тока работает следующим
образом.
При подаче напряжения питания и разомкнутом МУК тиристоры
выключены и нагрузка обесточена. Трансформатор выбран с возмож-
но меньшим током холостого хода во избежание ложных включений
тиристоров. При замыкании МУК происходит короткое замыкание
вторичной обмотки трансформатора и резкое уменьшение сопро-
тивления между управляющими электродами тиристоров. В начале
каждого полупериода при запертых тиристорах через один из
диодов (Mi или Д2) и резистор Яз в цепи управляющих электродов
протекают токи, включающие тиристоры Ti и Г2.
После включения очередного тиристора ток в цепи управляю-
щих электродов полностью прекращается, так как все напряжение
питания прикладывается к нагрузке. Таким образом, токи в цепях
управляющих электродов имеют форму узких пиков. Форма напря-
жения на нагрузке практически синусоидальна. Имеются небольшие
срезы на переднем фронте синусоиды (аВкл) порядка 3° электри-
ческих, причина которых объяснена в § 3-4, а длительность может
быть вычислена по формуле (3-35).
Если сигнал на входе схемы исчезнет и МУК отключится, то
вторичная обмотка трансформатора разомкнётся и сопротивление
цепи управляющих электродов резко увеличится. Это вызовет исчез-
новение импульсов тока, а следовательно, при первой же отрица-
тельной полуволне напряжения тиристоры погаснут и ток через
нагрузку прекратится.
По описанной схеме разработан ряд выходных устройств на
номинальные напряжения от 127 до 380 в и номинальные токи
от 2,2 до 55 а.
д) тиристорное выходное устройство постоянного тока
В основе тиристорного выходного устройства постоянного тока
лежит силовая схема, описанная в § 3-1,6.
Выходное устройство (рис. 3-35) содержит два тиристора: си-
ловой Ti и вспомогательный Г2, гасящий конденсатор Ci и элементы
управления и защиты, описанные ниже.
Включение устройства происходит от магнитоуправляемого кон-
такта МУК, который управляется от стандартного узла управления,
описанного выше.
Для формирования сигналов управления, поступающих на
управляющий электрод, применена цепочка, состоящая из сопро-
тивления Rz и конденсатора Сг, к общей точке которых через огра-
ничительное сопротивление подключен анод переключающего диода
114
ДП, катод которого через ста-
билитрон Д3 соединен с управ-
ляющим электродом вспомога-
тельного тиристора, а через
МУК — с управляющим элек-
тродом силового тиристора.
Работа схемы выходно-
го устройства происходит сле-
дующим образом. Когда (пода-
ется напряжение питания, кон-
денсатор С2 * заряжается. Если
МУК разомкнут, то <в момент
достижения напряжением заря-
да критической величины, рав-
ной сумме напряжения пере-
ключения диода ДП и напря-
жения стабилизации стабили-
трона Д3, происходит пробой
переключающего диода. В цепь
управления вспомогательного
тиристора 7*2 поступает разряд-
ный импульс тока, от которого
он включается. Напряжение на
конденсаторе С2 снижается до
величины напряжения стабили-
зации стабилитрона Д3. Кон-
денсатор Ci через сопротивле-
ние нагрузки и включенный
тиристор Т2 мгновенно заря-
жается до напряжения Ua. Си-
ловой тиристор Ti и нагрузка
остаются выключенными.
Если теперь МУК замкнуть,
то произойдет полный разряд
конденсатора С2 и импульс
разрядного тока, попав в цепь
управления силового тиристора
Гь включит его. На нагрузке
окажется полное напряжение.
Так как положительно за-
ряженная обкладка конденса-
тора Ci окажется подсоединен-
ной к катоду тиристора 72, а
отрицательно заряженная — к
аноду, то через тиристор Г2
протечет ток в обратном на-
правлении, что приведет к его
отключению. Конденсатор d
при этом перезаряжается через
резистор Ri на обратную по-
лярность.
Если МУК снова будет ра-
зомкнут, то произойдет запира-
ние диода ДП, так как после-
довательно с ним включится
стабилитрон, имеющий весьма
нагрузхо On
Рис. 3-35. Схема тиристорного
выходного устройства постоянно-
го тока.
Рис. 3-36. Максимальные значе-
ния времени плавления предохра-
нителей типа ПНБ5-380 при на-
пряжениях переменного тока
420 в и постоянного тока 480 ё.
115
высокое динамическое сопротивление. Конденсатор С2 начнет заря-
жаться. При достижении напряжением заряда критической величины
диод ДП пробьется и произойдет включение тиристора Г2. Заряжен-
ный конденсатор Ci разрядится и погасит силовой тиристор Ти
обесточив нагрузку.
Для защиты силового тиристора от перенапряжений при индук-
тивной нагрузке введена защитная цепочка, состоящая из диода
Д\, последовательно с которым включен в обратном направлении
селеновый вентиль Д2, шунтированный емкостью Сз и резисто-
ром i?4. Селеновый вентиль служит нелинейным сопротивлением,
рассеивающим энергию, запасенную в индуктивности нагрузки.
Емкость С3 служит для облегчения режима работы селенового вен-
тиля, снимая первый пик тока. Резистор R4 служит для разряда
емкости С3. В выходных устройствах малой мощности элементы
С3 и Ri не применяются.
По описанной схеме разработан ряд выходных устройств на
номинальные напряжения от 48 до 220 в и номинальные токи от 1
до 25 а.
о
О
р<
■?§
Ев
о
S о
О К
н о.
к н
Й а
се о
I-
л*
ю
се
Н
Предельная отключающая
способность, ка
постоянного
тока
1
о
о
о
о
переменно-
го тока
1
06
о
ю
Время при токе
2,3/н
Срабатывает в те-
чение не более
10 мин
Время при токе
Не срабатывает
в течение 2 я
Номинальный
ток плавкой
вставки1, а
16,25,40
63,100,
160,250
25,40,63
100
160,250
40,63,100
160,250
315,400
500,630
63,100
160,250
315,400
500,630
Номинальное напря-
жение, в
постоян-
ного тока
о
о
см
см
о
о
со
со
перемен-
ного тока
о
ю
о
см
см
о
со
со
о
СО
со
Тип предохранителя
ПНБ5-50/100
ПНБ5-50/250
ПНБ5-220/100
ПНБ5-220/250
ПНБ5-380/100
ПНБ5-380/250
ПНБ5-380/440
ПНБ5-380/630
ПНБ5-660/100
ПНБ5-660/250
ПНБ5-660/400
ПНБ5-660/630
и
к
Я
я
си
*
к
си
а
оз
Я
я
Си
С
О
со
СО
ю
из
С
сЗ
С
я
»я
си
EJ
0>
н
я
я
сЗ
Си
X
о
е*
си
Си
с
К
Я
Я
си
со
сз
с
Я
ей.
ен
ч
о»
си rJ
н
Он ^
ни
*о
03
к со
О.
я^
едо:
си "
ЕГ «
о.
оЗ О
с
Я Н
к о
3 .а о
* ъ я
Я Q
° Я
_ «О
S3
ч
X
о
S
о
со &
со *
i о
СО Н
I 3 о О
Я о
Си д
R «2 си
- x S
си
Сн
си
с
117
Приложение 2
Технические данные контактов электрических
магнитоуправляемых типа КЭШ
1. Коммутируемый ток от 5 мка до 0,5 а.
2. Напряжение от 50 мв до 220 в постоянного тока или до
150 в переменного тока.
3. Максимальная мощность нагрузки 15 вт.
4. По чувствительности магнитоуправляемые контакты КЭМ1
подразделяются на группы КЭМ1-А и КЭМ1-Б. Намагничивающая
сила срабатывания и отпускания контактов при длине обмотки
управляющей катушки 42±2 мм и внутреннем диаметре обмотки
9±1 мм должны соответствовать величинам, указанным в табл. 1.
Таблица 1
Группа контакта
н. с. срабатывания, а
н. с.
отпускания, а
КЭМ1-А
55—85
Не
менее 25
КЭМ1-Б
75—110
Не
менее 30
Коэффициент возврата должен быть не более 0,85.
5. Время срабатывания при размерах катушки, указанных
в п. 4, постоянной обмотки С=75«103 и подаче в обмотку н. с.
170 а для КЭМ1-А и 220 а для КЭМ1-Б не должно быть более
3 мсек, а время отпускания не должно быть более 0,8 мсек.
Постоянная обмотки определяется формулой C—w2IR.
6. Износоустойчивость при частоте коммутации 100 срабатыва-
ний в секунду определяется табл. 2.
Таблица 2
Режимы
коммутации
Род тока
Число срабатыва-
ний
Ток, а
Напряжение, в
0,25
0,5
0,03
30
30
220
Постоянный
»
я
5-Ю7
107
10е
7. Длина КЭМ-1 с выводами 80 мм; диаметр 5,4 мм.
8. Вес не более 3 г.
ЛИТЕРАТУРА
1. Аппараты низкого напряжения, Элементы логической авто-
матики, Сводный каталог № 20, Информстандартэлектро, 1967.
2. Andress Kernick, Perkins Н. A., Magnetic output
amplifiers for digital control, Communications and Electronics, № 33,
November, 1957.
3. Ступель Ф. А., Электромеханические реле, Изд-во Харь-
ковского университета, 1956.
4. Д е р и м - О г л у Г. Н., Писарев А. Л., Выходной маг-
нитный усилитель, Авторское свидетельство № 139727, «Бюллетень
изобретений», 1961, № 14.
5. Р о з е н б л а т М. А., Магнитные усилители, изд-во «Совет-
ское радио», 1960.
6. С т о р м Г. Ф., Магнитные усилители, Изд-во иностр. лит.,
1957.
7. Л и п м а н Р. А., Н е т н е в и ц к и й И. Б., Быстродействую-
щие магнитные и магнитно-полупроводниковые усилители, Госэнерго-
издат, 1960.
8. С т е ф а н о в и ч Т. X., Магнитные усилители для автома-
тизации промышленных установок, Госэнергоиздат, 1961.
9. А ленчиков Д. А., Базовые трехфазные магнитные уси-
лители серии УМ-ЗП, «Вестник электропромышленности», 1960, № 2.
Ю.Конев Ю. И., Полупроводниковые диоды в автоматике,
изд-во «Советское радио», 1960.
11. Конев Ю. И., Транзисторные импульсные устройства управ-
ления электродвигателями и электромагнитными механизмами, изд-во
«Энергия», 1964.
12. Л и п м а н Р. А., Полупроводниковые реле, Госэнергоиздат,
1963.
13. Джентри Ф., Гутцвиллер Ф., Голоньяк Н.,
фон Застров Э., Управляемые полупроводниковые вентили,
изд-во «Мир», 1967.
14. Каганов И. Л., Электронные и ионные преобразователи,
ч. 1, Госэнергоиздат, 1950.
15. Неуправляемые кремниевые вентили ВК2, ВК2В и ВКДЛ,
Каталог № 05.03.38-67 Информстандартэлектро, 1967.
16. Управляемые кремниевые вентили ВКДУ и ВКДУС, Каталог
№ 05.03.39-67 Информстандартэлектро, 1967.
17. Силовые кремниевые управляемые вентили-тиристоры серии
ВКУ. Информация, сер. 05, разд. 03, № 1089, Информстандартэлек-
тро, 1968.
18. Кремниевые управляемые вентили-тиристоры, Технический
справочник, изд-во «Энергия», 1964.
119
19. Black I. A., The generation and suppression of volta^
surges in semiconductor rectifier circuits, AEI Engineering, v. 4, №
1964.
20. Kamenicky I., Klasna M., S chaffer I., Universal!
stavebnicovy system bezkontaktnich spinacu, Elektrotechnicky Obzc
1967, № 6.
21. Силовые кремниевые управляемые лавинные вентили-тир.
сторы типа ТЛ-150. Информация, сер. 05, разд. 03, № 1090, Информ
стандартэлектро, 1968.
22. Писарев А. Л., Зыков В. А., Ш а л а г и н о в а Т. С,
Устройство для коммутации силовых цепей с выходом на перемен-
ном токе, Авторское свидетельство № 172882. «Бюллетень изобре-
тений», 1965, № 14.
23. Атласов И. И., Баскаков Д. М., Магнитоуправляе-
мые контакты, «Приборостроение», 1966, № 12.
24. G а г у A., Lehman n, Magnetic reed switches and relays,
Electronics World, 1965, № 74, № 3.
25. Ковач К. П., P а ц И., Переходные процессы в машинах
переменного тока, Госэнергоиздат, 1963.
26. Кузнецов Р. С, Аппараты распределительных устройств
низкого напряжения, Госэнергоиздат, 1962.
27. Гиршберг В. В. и др., Типовые узлы на полупроводни-
ковых логических и функциональных элементах серии ЭТ, изд-во
«Энергия», 1966.
28. Унифицированная система логических элементов «Логика»,
Краткая техническая информация ЦБТИ электропромышленности,
Калинин, 1967.
СОДЕРЖАНИЕ
Предисловие 3
Введение : 4
Глава первая. Выходные магнитные усилители . 7
1-1. Требования, предъявляемые к выходным магнитным
усилителям 7
1-2. Возможные принципы построения выходных магнит-
пых усилителей переменного тока 8
1-3. Выходные магнитные усилители переменного тока
с нелинейной отрицательной обратной связью . . 16
1-4. Выходные магнитные усилители постоянного тока
с нелинейной отрицательной обратной связью . . 27
1-5. Выходные магнитные усилители, выпускаемые про-
мышленностью 31
1-G. Применение выходных магнитных усилителей в схе-
мах автоматики и электропривода 33
Глава вторая. Выходные устройства на транзисто-
рах 36
2-1. Принципы построения выходных усилителей на тран-
зисторах , : 36
2-2. Основные схемы выходных усилителей па транзи-
сторах 38
2-3. Основы работы трапзисторпого реле с коллекторной
обратной связью и переменным смещением ... 42
2-4. Основные расчетные соотношения в схеме транзистор-
ного реле . 44
2-5. Практические схемы транзисторных реле ... 48
2-6. Работа транзисторного ключа на индуктивную на-
грузку . : 51
2-7. Источники питания для выходных устройств па тран-
зисторах 54
2-8. Вопросы охлаждения мощных транзисторов . . 55
2-9. Выходные транзисторные усилители, серийно выпу-
скаемые промышленностью 58
2-10. Применение выходных транзисторных усилителей . 63
Глава третья. Выходные устройства на тиристорах . 65
3-1. Силовые цепи выходных устройств на тиристорах . 65
3-2. Допустимые нагрузки тиристоров и защита выход-
ных устройств от перегрузок 75
3-3. Перенапряжения в цепях с тиристорными выходными
устройствами и меры борьбы с ними .... 80
3-4. Способы управления выходными устройствами на
тиристорах 90
3-5. Комплектные тиристорные выходные устройства . 102
Приложение 1. Предохранители типа ПНБ-5 .... 117
Приложение 2. Технические данные контактов электрических
магнитоуправляемых типа КЭМ1 . . .... 118
Литература 119