/
































































































Текст
Л .С. БАЙРЫЕВА, В. В. ШЕВЧЕНКО
Электрическая
тяга
ОРОДСНОЙ НАЗЕМНЫЙ ТРАНСПОРТ
11.С.БАЙРЫЕВА, В.В.ШЕВЧЕНКО
электрическая
тяга
ГОРОДСКОЙ НАЗЕМНЫЙ ТРАНСПОРТ
Допущено
Управлением кадров и учебных
заведений Министерства
жилищно-коммунального хозяйства РСФСР
в качестве учебника для учащихся техникумов
по специальности «Эксплуатация,
ремонт и энергоснабжение городского
электрического транспорта»
МОСКВА ''ТРАНСПОРТ" 1986
УДК 621.33(076)
Байрыева Л. С., Шевченко В. В. Электрическая тяга:
Городской наземный транспорт: Учебник для технику-
мов. -М.: Транспорт, 1986.—206 с.
Подробно изложена теория движения подвижного сос-
тава применительно к условиям работы наземного город-
ского электрического транспорта, рассмотрены силы сопро-
тивления движению, приведены характеристики тягового
и тормозного режимов, расчет и построение кривых движе-
ния. Изложены, методы определения расхода электричес-
кой энергии и нагревания тяговых двигателей.
Книга предназначена в качестве учебника для специ-
альности «Эксплуатация, ремонт и энергоснабжение
городского электрического транспорта».
Она может быть полезна инженерно-техническому пер-
соналу, занятому вопросами эксплуатации трамвая и трол-
лейбуса.
Ил. 108, табл. II, библиогр. 4 назв.
Р е ц е н з е н т ы : канд. техн, наук Л. 11. Максимов и инж.
Э. Н. Рахманин
Заведующий редакцией II. В. Зепькович
Редакторы Р. М. Майорова, Т. В. Шерстина
3604000000-203
Б --------------- 182-86
049(01 )-86
© Издательство «Транспорт»,
От авторов
(В связи с ростом населения современных городов
постоянно увеличивается объем городских пассажирских
перевозок. Поэтому в «Основных направлениях эконо-
мического и социального развития СССР на 1986—
1990 годы и на период до 2000 года» записано: «Улучшать
обслуживание населения всеми видами транспорта.
Полнее учитывать требования к комфортности пере-
возок, повысить культуру обслуживания». Также важ-
ное значение придается вопросам рационального ис-
пользования материальных и топливно-энергетических
ресурсов страны.
Наиболее совершенным видом городского транспорта
является электрический транспорт (трамвай, троллейбус,
электромобиль, метрополитен), который использует для
тяги электрическую энергию и не оказывает вредного
воздействия на окружающую среду/
Известно, что городской электрический транспорт
является одним из крупных потребителей электрической
энергии. Поэтому знание теории электрической тяги
способствует правильному выбору рациональной конст-
рукции электроподвижного состава и эффективной его
эксплуатации.
Данный учебник составлен в соответствии с програм-
мой курса, читаемого в техникумах, выпускающих спе-
циалистов в области городского электрического транс-
порта.
Более подробно изложены вопросы, связанные с
эксплуатацией современных типов городского электри-
ческого транспорта и рациональным использованием
электрической энергии на электроподвижном составе.
Учебник написан на основе опыта преподавания
курса «Основы электрической тяги», читаемого в МЭИ и
Московском электромеханическом техникуме. Авторы на-
деются, что данное издание учебника будет полезно
3
не только учащимся техникумов, но и широкому кругу
инженерно-технических работников городского электри-
ческого транспорта.
Авторы выражают глубокую признательность заслу-
женному деятелю науки и техники РСФСР, д-ру техн,
наук, профессору И. С. Ефремову за ценные советы,
данные авторам при написании учебника, канд.
техн, наук А. Н. Максимову и преподавателю Воронеж-
ского энергетического техникума Э. Н. Рахманину за
тщательное рецензирование рукописи учебника и ценные
замечания при подготовке ее к печати.
Все отзывы и замечания по учебнику будут приняты
авторами с благодарностью. Просим направлять их по
адресу: 103064, Москва, Басманный тупик, 6а, издательст-
во «Транспорт».
1
1
ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРИЧЕСКОМ
ТРАНСПОРТЕ
1.1. Классификация электрической тяги и ее системы
Электрический транспорт широко применяется в на-
родном хозяйстве. В зависимости от назначения он
может быть подразделен на магистральный, городской
и промышленный.
Магистральный— это в основном железнодорожный
транспорт, который осуществляет перевозку грузов и пас-
сажиров на дальние расстояния. Электрические железные
дороги используются также для пассажирских перевозок
на небольшие расстояния (пригородное движение). На
железных дорогах применяются электровозы, т. е. локомо-
тивы, в которых установлены электрические двигатели,
получающие электрическую энергию от контактной сети
и передающие вращающий момент на тяговые оси. С
помощью электровозов приводятся в движение пассажир-
ские и грузовые поезда. На железных дорогах также
применяются тепловозы — локомотивы, на которых в
качестве источника электрической энергии используются
дизель-генераторы. Для пригородного движения исполь-
зуются электропоезда и дизель-поезда, в которых тяговые
электрические двигатели и другое электрооборудо-
вание установлены непосредственно на пассажирских
вагонах. Электропоезда получают энергию непосред-
ственно от контактной сети, а дизель-поезда — от ди-
зель-генераторов, установленных на вагонах.
Промышленный электрический транспорт осуществля-
ет перевозку разнообразных грузов по территории про-
изводственных предприятий. Этот транспорт весьма раз-
нообразен, и его особенности зависят от вида производ-
ства, где он применяется. Если это открытая добыча
полезных ископаемых, то такой транспорт близок к желез-
нодорожному (промышленные электровозы, самоходные
думпкары); если же, например, машиностроительный
завод, где применяется напольный транспорт (электрока-
ры, электропогрузчики), то он близок к городскому
электрическому транспорту.
5
Городской электрический транспорт служит для
перевозки пассажиров в городах на относительно неболь-
шие расстояния. Наиболее распространенным видом
городского электротранспорта являются трамвай и
троллейбус. В крупных городах, где необходима пере-
возка большого числа пассажиров, предусматривает-
ся метрополитен, т. е. подземные электрифицирован-
ные железные дороги.
В последнее время в городах начали применяться
электробусы (автобусы с дизельным двигателем, в которых
используется электропередача) и электромобили (в ка-
честве двигателя в которых применяется электрический
двигатель, получающий питание от аккумуляторной
батареи).
Электрический транспорт может быть выполнен ав-
тономным', в этом случае источник электрической энер-
гии (дизель-генератор, аккумулятор, топливные эле-
менты) устанавливается непосредственно на подвиж-
ном составе. В качестве примера можно назвать
электробусы, электромобили, тепловозы. Основное преиму-
щество автономного транспорта в том, что он не нуждает-
ся в контактной сети. Недостатком его является большая
масса источников питания и их ограниченная мощность.
Это снижает эффективность автономного транспорта,
так как у него ограничена либо мощность, которая
определяет провозную способность транспорта, либо
радиус действия.
В отличие от автономного электрического транспор-
та контактный транспорт, получающий электроэнергию
от кош iKTiioii сети, лишен этих недостатков, по он
не может работать гам, где отсутствует контактная
сеть. В этом отношении, казалось бы, наиболее хорошие
показатели должен иметь комбинированный транспорт,
который может получать питание как от контактной
сети, так и от автономного источника электрической
энергии, установленного на подвижном составе (дизель-
геператор, аккумуляторная батарея). Однако оборудова-
ние такого подвижного состава характеризуется большой
массой и сложностью, поэтому он не получил широкоп
распространения на городском транспорте.
Электрический транспорт может выполняться рельсо-
вым и безрельсовым (напольным). Последний более
маневренный, но требует наличия дорог с качественным
покрытием и расходует больше энергии. В условиях
города целесообразно применение рельсового транспор-
И) | Электрический транспорт^
Cjl Электрический транспорт^
В)
______СГТТ.'.. —f- 1
Эвтононный\ ЭомВинированньй^ Эонтактны(\
I Рельсовый.
Безрельсовый
(напольный)
Электрический транспорп^
________Г"' " ' ! ,
| Постоянного тока |
—I______________
Эвносразного леременного /т/с/гс]
С Ввигателями
постоянного
тока
С асинхроннымщ ^SSH* 1 С Вентильными с асинхронными
Ввигателями „„„„ ввигателями Ввигателями
[ lilUfxll
| Городской электрический транспорт\
[ Трамвай I [ Троллейбус |
I —| Скоростной |
| Метрополитен |
| Обычный }•
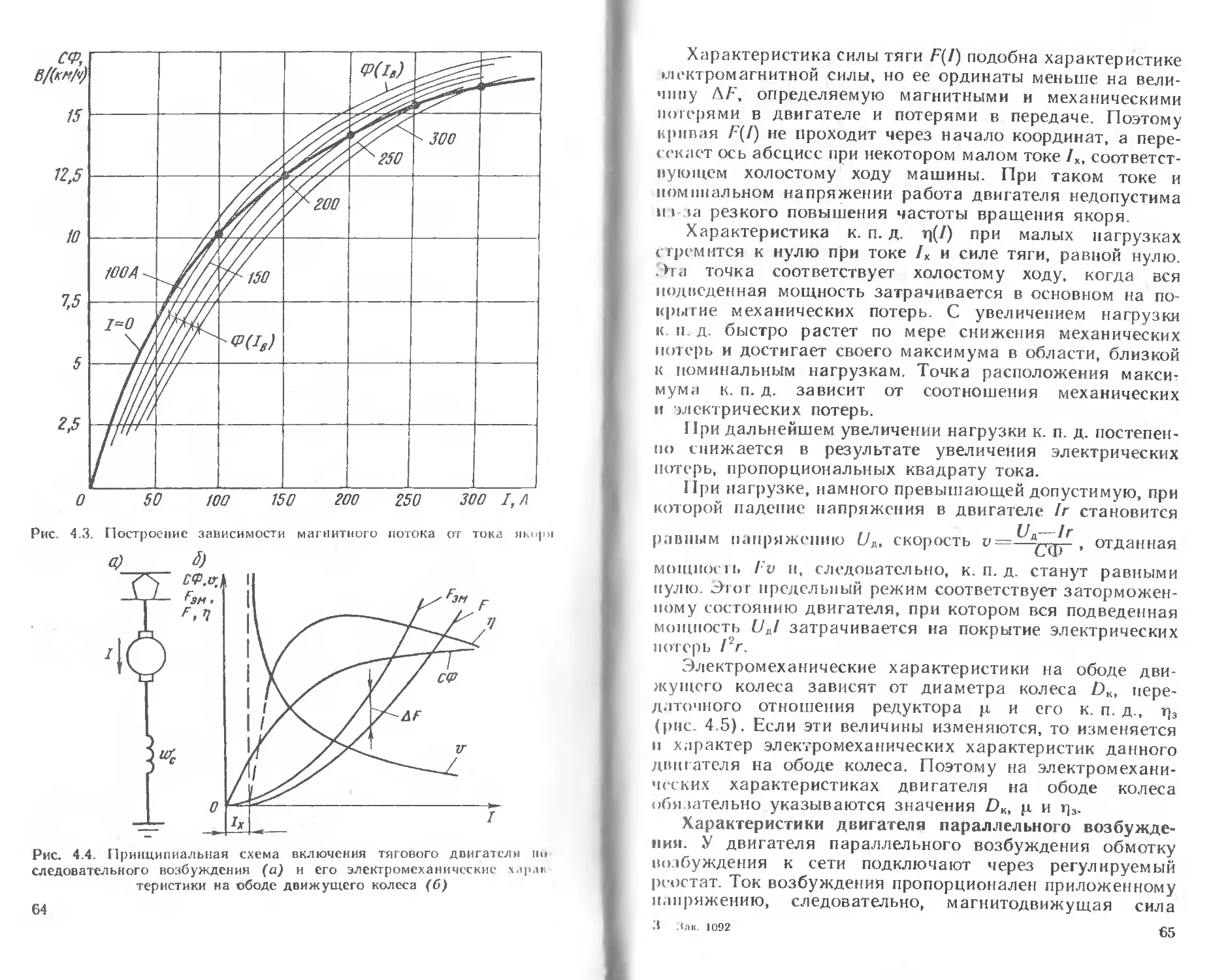
Рис. 1.1. Классификация электрического транспорта
та для скоростного трамвая или метрополитена, так
как в этом случае рельсовый путь не занимает проез-
жую часть улицы и не ограничивает движение автомо-
бильного транспорта.
Контактный электрический транспорт может быть вы-
полнен с питанием как на постоянном токе, так и на пере-
менном токе промышленной частоты. Последний приме-
няется только на магистральных железных дорогах с
напряжением в контактной сети 25 кВ. В условиях
города по соображениям электробезопасности примене-
ние напряжения свыше 1000 В в воздушной контакт-
ной сети не разрешается. А при таком уровне нап-
ряжения применение переменного тока неэффективно из-за
высокой индуктивности контактной сети.
В Советском Союзе на городском транспорте приме-
няется только постоянный ток напряжением 600 В для
трамваев и троллейбусов и 750 В для метрополитена; за
рубежом — в основном постоянный ток напряжением
550— 750 В для трамваев и 750—1050 В для метрополи-
тена.
На электрическом подвижном составе могут применя-
ться тяговые электрические двигатели как постоянного
тока, так и бесколлекторные двигатели переменного
тока (асинхронные или синхронные). При применении
бесколлекторных двигателей на подвижном составе уста-
7
6
навливаются статические преобразователи постоянного
тока и регуляторы частоты. В последнее время та-
кая система находит широкое распространение в электро-
мобилях. Она также целесообразна при применении при-
вода в виде мотор-колеса, т. е. устройства, когда
электрический двигатель с редуктором выполнен как еди-
ное целое с колесом.
На основании вышеизложенного может быть представ-
лена классификация электрического транспорта по назна-
чению (рис. 1.1, а), конструктивному исполнению (рис.
1.1, б), системе тока, применяемой в электрической тяге
(рис. 1.1, в). На рис. 1.1, г приведена классификация
городского электрического транспорта.
1.2. Электрическая тяга на городском электрическом
транспорте
Применение электрического транспорта является наи-
более целесообразным в условиях города, так как он почти
не загрязняет воздух и обеспечивает перевозку больших
пассажиропотоков с относительно высокой скоростью
движения.
Наибольшее распространение в городах получил
трамвай, рельсовый электрический транспорт, выполнен-
ный в виде элсктровагонов с прицепом или без прице-
пов. Если трамвай выпускается в виде отдельных электро-
вагонов, то их система управления выполняется таким
образом, чтобы управление подвижным составом мог осу-
ществлять один водитель с головного вагона.
Трамвайные вагоны характеризуются вместимостью,
т. е. числом пассажиров, которые в нормальных условиях
могут находиться в салоне трамвая, мощностью тяговых
двигателей, шириной рельсовой колеи, наибольшей ско-
ростью движения и другими показателями, среди которых
важное место занимает масса тары вагона. Чем ниже
эта величина, приходящаяся на единицу пассажиров,
тем больше эффективность трамвая.
В настоящее время в СССР широко эксплуатируют-
ся трамвайные вагоны Усть-Катавского и Рижского
вагоностроительных заводов типов КТМ-5МЗ и РВЗ-6М2
с возможностью работы их по системе многих единиц.
Также находятся в эксплуатации трамваи КТМ-2 и
РВЗ-5. В Ленинграде эксплуатируются современные
трамваи типов ЛМ-68М и ЛМ-57, изготовляемые на
предприятиях города. Помимо перечисленных трамвай-
8
Таблица 1.1
Параметры т-з РВЗ-6М2 КТМ-5М ДМ-68
Длина кузова, мм 14 000 14 080 15 140 1S350
Ширина кузова, мм 2 500 2 660 2 650 2 550
Диаметр колеса, мм 700 700 700 700
Передаточное число 7,43/7,36 7,17 7,143 7,17
Масса вагона (без 17 16 18 19
пассажиров), т Число мест для 38 37 32 35
сидения Вместимость при 115 119 140 115
наполнении 5 чел./м2 Часовой режим: мощность, кВт 180 160 180 180
ток, А 380 324 380 380
сила тяги, кН — 32.8 36,6 —
скорость, км/ч — 16,5 17,5 14
Конструкционная 65 65 65 65
(наибольшая) ско- рость, км/ч Тип тяговых двига- ТЕ-022 ДК-259А Д К-259 Б ДК-259Г-7
телей Число двигателей 4 4 4 4
Примечания. I Для вагона РВЗ-6М2 сила тяги и скорость приведены для уси-
ленного возбуждения двигателей (/Ш=Н,8 Л).
2. Все вагоны выпускаются для колеи шириной J524 мм и на номинальное напряжение
600 В.
3. Для трамвая Т-3 в числителе приведено передаточное число для одноступенчатого
редуктора, а в знаменателе для двухступенчатого.
ных вагонов производства СССР, в нашей стране ши-
роко эксплуатируются трамвайные вагоны типа Т-3
(«Татра») производства ЧССР.
Технические данные основных типов трамвайных ваго-
нов приведены в табл. 1.1.
В Советском Союзе специально не выпускается ско-
ростной трамвай, но вагоны типов КТМ-5МЗ и «Татра»,
обладающие большой мощностью тяговых двигателей
и высокой конструкционной скоростью, могут быть исполь-
зованы в качестве скоростных.
В последнее время в городах бурно развивается трол-
лейбусный транспорт. Это обусловливается его бесшум-
ностью и большей маневренностью. Применение троллей-
буса вызывает меньшие капитальные затраты, так как пре-
дусматривает монтаж только контактной сети. В настоя-
щее время в СССР широко эксплуатируются троллейбусы
9
Таблица 1.2
Параметры ЗИУ-5Г ЗИУ-9 TR-9
Габаритные размеры, мм:
длина кузова (но буферам) 11 870 11 950 11 000
ширина кузова (по обтека- телям колее) 2 680 2 500 2 500
высота незагруженного трол- лейбуса с опущенными токо- 3 530 3 606 3 240
приемниками Диаметр ведущего колеса, мм 1 070 1 070
Передаточное число 11,3 н,з
Масса троллейбуса без пасса- жиров, т 9,6 9,5 8,99
Сцепной вес (без нагрузки), кН 53 57 —
Число пассажирских мест для сидения 35 32 24/41
Вместимость при максимальном наполнении, 8 чел./м2 1 17 125 70/70
Напряжение сети, В Часовой режим: 600 600 600
мощность, кВт 1 10 ПО 115
ток, Л 200 200 208
сила тяги, кН 14,2- 14,2 —
скорость, км/ч 21,0 21.0
Конструкционная скорость 70 70 60
Тип тяговых двигателей Число тяговых двигателей ДК 207ГЗ 1 Д К-210 АЗ 1 AL-2943rN 1
ЗИУ-5Г, ЗИУ 9 (682Б) производства троллейбусного за-
вода в г. Энгельсе, троллейбусы TR-9 и TR-14 производ-
ства ЧССР.
Технические данные основных типов троллейбусов
приведены в табл. 1.2.
В крупных городах также эксплуатируется метро-
политен. Это наиболее современный вид транспорта,
обеспечивающий максимальный объем пассажирских
перевозок. Общая протяженность метрополитена в Со-
ветском Союзе достигла около 500 км.
Контрольные вопросы
1 Почему электрический транспорт является наиболее «чистым»
в экологическом отношении?
2. Почему электрическая энергия к городскому транспорту подво-
дится только на постоянном токе?
3. Чем отличается троллейбус от трамвая?
4. Каковы преимущества и недостатки автономного электричес-
кого транспорта?
10
2
ТЕОРИЯ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА
2.1. Механика движения подвижного состава
Общие сведения. Движение подвижного состава по
рельсовым путям или дорогам имеет сложный характер.
Поступательное движение поезда вдоль оси пути нераз-
рывно связано с вращением колесных пар^якорей
тяговых двигателей. На это полезное поступательное
перемещение подвижного состава накладываются коле-
бательные движения экипажа, которые возникают как из-
за внешних воздействий на подвижной состав со
стороны пути и окружающей среды, так и—-в—р.езуль-
тате взаимодействия межТЗу^отДельными вагонами подвиж-
ного состава и их частями, имеющими между собой
упругие и жесткие связиД
В данном разделе будем рассматривать только полез-
ное движение подвижного состава. Расход энергии на
паразитные колебательные движения учитывается в целом
путем увеличения сопротивления движению подвижного
состава.
, ) Различают три основных режима движения подвижно-
го состава: под током (режим тяги), выбег (движение
без тока) и торможение. Во всех вышеперечисленных
режимах на подвижной состав действует сила тяжести
и сила сопротивления движению. У
В режиме тяги к подвижному составу приложена
сила тяги, развиваемая тяговыми электродвигателями.
В режиме выбега тяговые двигатели отключаются от
контактной сети и подвижной состав движется по инер-
ции под действием сил сопротивления движению, нап-
равленных против движения. В режиме торможе-
ния на подвижной состав действует направленная
против движения тормозная сила.
Движение подвижного состава по рельсовому и без-
рельсовому пути характеризуется зависимостями ско-
рости от пройденного пути v (/), скорости от времени
v (/) и пути от времени I (I), называемых кривыми движе-
ния.
И
Расчет этих зависимостей производится с помощью
уравнения движения подвижного состава, которое уста-
навливает в дифференциальной форме связь между
скоростью V, временем t и пройденным путем I и дасг
возможность построить кривые движения.
Уравнения движения подвижного состава. При рас-
смотрении движения подвижного состава и выводе основ-
ного уравнения движения принимаем следующие допу-
щения:
подвижной состав принимают за материальную точку,
которая расположена условно в центре тяжести подвиж-
ного состава;
эта материальная точка движется поступательно под
воздействием равнодействующей от всех сил Fл, действую-
щих на подвижной состав. Сила FK направлена по движе-
нию подвижного состава и может быть как положительной,
так и отрицательной.
Для вывода уравнения движения подвижного состава
исходим из баланса всей кинетической энергии системы.
Если подвижной состав изменяет свою поступательную
скорость v, то одновременно меняется и частота
вращения колесных пар зубчатых колес редуктора и
якорей тяговых двигателей, т. е. изменяется их кинети-
ческая энергия. Поэтому при составлении баланса кине-
тической энергии подвижного состава в целом необхо
димо учитывать не только кинетическую энергию, накоп
ленную в физической массе при поступательном движении
mv" 1'1, но и кинетическую энергию, накопленную во враща-
ющихся частях. Эта энергия, как известно из механики,
для любой вращающейся массы пропорциональна ее мо-
менту инерции J, угловой скорости <о и равна /со2/2
Следовательно, кинетическая энергия подвижного состава,
движущегося со скоростью v.
где ш„ — соответственно момент инерции и угловая скорость движу-
щих колесных пар и ведущих мостов троллейбуса, т. е. ко-
лесных пар и мостов, соединенных с якорями тяговых
двигателей передаточными механизмами;
1ъ, — соответственно момент инерции и угловая скорость ко-
лесных пар прицепных вагонов и ведомых мостов трол-
лейбуса;
Л, соя — соответственно момент инерции и угловая скорость враще-
ния якорей тяговых двигателей, включая части передачи,
жестко связанные с валом двигателя.
12
Знаки суммы S указывают на то, что суммирование
энергии распространяется на все колесные пары и якоря
гиговых двигателей подвижного состава, которые могут
быть разных типов.
Выражая угловые скорости вращающихся частей через
скорость поступательного движения подвижного состава
н радиусы колес, запишем:
Шл = г/Лл; a>„=v/R„,
где R.i — радиус движущих колес;
R, радиус колес прицепного вагона и ведомых мостов троллейбуса;
И — передаточное число редуктора.
Подставив значения угловых скоростей в выражение
(2.1) и вынеся за скобку о2/2, получим
А =
(2.2)
ИЛИ
2
v
Л = у ["' +
(2.3)
здесь
m 5
(2.4)
имеет размерность массы и называется эквивалентной
массой вращающихся частей. Обозначив отношение экви-
валентной массы к физической массе rrujm через у и
подставив -у в выражение (2.3), получим
(2.5)
Величину (1 фу) называют коэффициентом инерции
вращающихся частей, а произведение физической массы
m на этот коэффициент — приведенной массой подвижно-
го состава Таким образом, подвижной состав с мас-
сой т эквивалентен телу, не имеющему вращающихся
частей, но с массой, равной приведенной mnp = m (1+у),
и движущемуся со скоростью v поступательного движения
подвижного состава.
Изменение кинетической энергии подвижного состава
на любом участке пути равно работе действующих сил на
этом участке пути, т. е. произведению силы на прой-
денный путь. Следовательно, если равнодействующую
13
всех сил сопротивления движению, тяги и торможения
(так называемую действующую силу) обозначить через
Fa, то для бесконечно малого перемещения dl подвиж-
ного состава получим приращение кинетической энергии
dA=Frdl. (2.6)
Используя выражение (2.5), получим
[т (1 4- у 2 ~|
- 2 (27)
Продифференцировав выражение (2.7) и разделив обе
части равенства на dl, получим в дифференциальной
форме зависимость между скоростью движения v и прой-
денным путем I:
"1И = (2.8)
Уравнение (2.8) называют второй формой уравнения
движения.
Для получения зависимости между скоростью v
и временем / нужно подставить в уравнение (2.8) значение
v = и сократить па величину dl, тогда
т (1 Ч-у ) = 1 или т — F (2.9)
' 1 ' dt * "Г dl 2
В результате получается выражение, аналогичное вто-
рому закону Ньютона, в которое вместо физической
массы входит приведенная масса т(1+у). Уравнение
(2.9) называют первой формой уравнения движения.
Размерности величин, входящих в уравнение движе-
ния. Гак как произвольно можно выбрать единицы
измерения только для трех, входящих в уравнения
величин, то в правые части уравнений (2.8) и (2.9)
необходимо ввести переводные коэффициенты £ и £'•.
m(l + y)v~r = £' Ад; (2.Ю)
di<
"* (’ + V) =
(2.11)
Тяговые расчеты удобнее выполнять, используя удель-
ные значения действующей силы и ее составляющих.
14
Для этого делят правую часть уравнений (2.10) и
(2.11) на вес подвижного состава и тогда эти уравнения
принимают следующий вид:
ечд = (1 + т)^ (2.12)
(Л = (' + ?)$ •
(2.13)
где — удельная действующая сила:
K=F„/mg,
здесь т — масса подвижного состава;
g — ускорение свободного падения.
Выражения (2.12) и (2.13) будем называть уравне-
ниями движения в удельной форме.
В табл. 2.1 приведены значения коэффициентов
£ и для разных единиц измерения. Первые четыре
строки соответствуют рекомендуемым размерностям, со-
держащим в своей основе СИ. Пятые строки соответст-
вуют размерностям технической системы единиц, которые
нередко используются в тяговых расчетах.
Таблица 2.1
Урав- нения движе- ния № п/п Единицы измерения Переводные коэффициенты
мас- сы т си- лы удель- ной с иль /д вре- мени / ско- рос- V ускоре- ния dv dl с I
1 т кН — с м/с м/с2 1 1
(2.11) 2 т кН — С км/ч км/(ч-с) 3,6 0,278
И 3 — — Н/кН С м/с м/с2 0,00981 102
(2.13) 4 — — Н/кН с км/ч км/(ч-с) 0,0353 28,3
5 — — кге/т с км/ч км/(ч-с) 0,0353 28,3
Пути Величины
dv 1
/ —
dl г
1 т кН — м м/с 1/с 1 1
(2.10) 2 т кН — км км/ч 1/4 12,96- 103 0,77- 105
И 3 — — Н/кН м м/с 1/с 0,00981 102
(2.12) 4 — — Н/кН км км/ч 1/ч 127 0,00787
5 — — кгс/т м км/ч ЮОО/ч 0,127 7,87
15
„Коэффициент инерции вращающихся частей. Входя-
щий в уравнения движения коэффициент инерции вращаю-
щихся частей (! -|-у) можно определить как эксперимен-
тальным, так и расчетным путем. На практике числен-
ное значение у можно определить, воспользовавшись
выражением (2.4).
Момент.инерции J каждого тела, входящий в выраже-
ние (2.4), представим в виде произведения
(2.14)
где — масса вращающейся части;
р«“ ее радиус инерции.
Тогда эквивалентная масса
S'"дS "’.“У + 2 (2.15)
К , 1\ IX
Л В д
а значение у = щэ/щ.
При вычислении т, можно исходить из средних
значений отношений радиусов инерции р к радиусам
R внешних окружностей вращающихся частей Для дви-
жущих и поддерживающих колесных пар и колес
p/R равно 0,75—0,80, для зубчатых колес 0,8; для якорей
тяговых двигателей 0,65—0,75.
При расчетах достаточную точность дают следующие
значения (1 -фу) для подвижного состава различных
типов:
Тил подвижного состава
1. Трамвай:
моторные вагоны
прицепные вагоны
2. Троллейбусы
Коэффициент
(1 + ?)*
1,09-1.15
1.05— 1.08
1.15—1,20
• Большие значения (( -фу) справедливы для подвижного состава с
двигателями повышенной частоты вращения.
Величину (1 +у) для подвижного состава, состоящего
из моторных и прицепных вагонов, определяют как
средневзвешенное значение по выражению
k k
1+y=i + 2 "’'V-/ У, (2.16)
i=i <=i
где т, — масса 1-го однотипного вагона, у которого msl=/= т,,= у,;
k — число типов вагонов подвижного состава.
16
Коэффициент инер-
ции вращающихся час-
тей тем больше, чем
меньше масса подвиж-
ного состава и больше
число вращающихся
частей, а также их раз-
меры и, следовательно,
масса. Коэффициент Рис. 2.1. К определению величины
инерции двухосных ва- (1 + у)
гонов меньше, чем че-
тырехосных. Коэффици-
ент инерции для любого подвижного состава с пассажира-
ми меньше, чем без пассажиров.
Экспериментальное определение коэффициента вра-
щающихся частей (1 -фу) производят, как правило, ме-
тодом выбега на горизонтальном участке пути при усло-
вии, что известно сопротивление движению W и масса
подвижного состава т. Для режима выбега уравнение
движения запишется в виде
т (1 + у )-— = —£№'.
Ьткуда (
С +v)= - ~dvTdT
С помощью самописца записывается часть кривой
выбега v(t) (рис. 2.1). Проведя касательную к кривой вы-
dv Ад
бега в точке vt, определяют значения 777-=757—
Пример 1. Определить коэффициент инерции вращающихся
частей прицепного четырехосного вагона, если его масса гп = 13.8 т,
а масса одной колесной пары тъ = 0.45 т.
Решение. Отношение p/R принимаем равным 0,75. Эквива-
лентную массу четырех колесных пар т, определяем по формуле
(2 15) т, = 4т„р2//?2 = 4 0,45 0,752 = 1.008 т.
Коэффициент инерции вращающихся частей
1 у = 1 rn,/m = l -|-1.008/13,8 = 1.073.
Пример 2. Определить коэффициент инерции вращающихся
частей трамвайного поезда, состоящего из моторного вагона мас-
сой 16 1 и двух прицепных вагонов, каждый из которых имеет массу
10 т.
Решение. Принимаем коэффициент инерции для моторного ва-
гона, равным 1,12 и для прицепного вагона 1.08 (см с. 16). Коэффи-
17
циент инерции вращающихся частей трамвайного поезда определяем
по формуле (2 16).
(1+у) = 1 + (0,12 16 + 2-0,08-10):(16ф 2-10) =1,098.
Пример 3. Определить, какую необходимо приложить действующую
силу Fn к троллейбусу типа TR-9 для получения ускорения 1 м/с2, если его
физическая масса т = 8,89 т.
Р е ш е н и е. Принимаем коэффициент инерции вращающихся частей
троллейбуса 1,17 (см. с. 16) и определяем приведенную массу для
троллейбуса
m„p = m(l+T)=8>89-1,17= 10,4 т.
Действующую силу Л..; определим по формуле (2.9)
civ
= |0-4- 1-°=10>4кн-
Применение уравнения движения. Рассмотрим уравне-
ние движения применительно к различным видам движе-
ния подвижного состава. Чтобы привести подвижной
состав в движение, к нему нужно приложить силу тяги.
Сила тяги подвижного состава F создается установлен-
ными на нем тяговыми двигателями. Однако наличие
только силы тяги недостаточно для управления подвиж-
ным составом, так как она всегда действует в направ-
лении его движения или равна нулю. Для остановки
подвижного состава к нему необходимо приложить
силу, направленную в сторону, противоположную дви-
жению. Она создается тормозными средствами и назы-
вается тормозной силой В. Сила тяги F и тормозная
сила В являются управляемыми (их может регулиро-
вать водитель через аппараты управления). Существуют
еще неуправляемые силы. К ним относятся сила тя-
жести подвижного состава G = mg и все остальные
внешние силы (не поддающиеся регулированию), дей-
ствующие на подвижной состав в направлении его
движения или в обратном направлении. Они состав-
ляют силы сопротивления движению W.
Положительным направлением для силы тяги F
является направление движения подвижного состава,
а для тормозной силы В и силы сопротивления движению
W— направление, противоположное движению. Равно-
действующей всех сил, одновременно приложенных
к подвижному составу, является действующая сила
Fa = F— W — В (2.17)
или в удельных величинах
w —6, (2 18)
где f = F/ (nig) удельная сила тяги, Н/кН.
w—W/(mg) — удельное сопротивление движению, Н/кН;
Ь — В/ (mg) — удельная тормозная сипа, Н/кН;
fa = Fn/(mg) — удельная действующая сила, Н/кН.
Различают три основных режима движения подвижно-
го состава: тяга, выбег и торможение. В режиме тяги к
подвижному составу приложены сила тяги F и силы
сопротивления движению W:
F^F--W (2.19)
В режиме выбега на подвижной состав действуют
только силы сопротивления движению W:
Fa=-W (2.20)
В режиме торможения к подвижному составу при-
ложены тормозная сила В и силы сопротивления движению
W, тогда действующая сила
ЛД=-(В+1Г). (2.2!)
На рис. 2.2,а показаны силы, которые приложены
к четырехосному вагону в режиме тяги (точка 0 соответ-
ствует центру тяжести вагона).
Интегрируя уравнение движения, можно получить за-
висимости скорости от пути п(/), скорости от времени v(f)
и времени от пути /(/), которые называются кривыми
движения подвижного состава. На рис. 2.2,6 приведе-
ны кривые движения и(() и и(/) для перегона с неизмен-
ным профилем пути. Рассмотрим зависимости п(/), рас-
положенную слева от оси ординат, и и(/), расположен-
ную справа от оси ординат, при движении по харак-
терным участкам.
Режим тяги. Период тяги разделяется на периоды
пуска подвижного состава ОА и ОА' и движения по авто-
матической характеристике АБ и А'Б'. При пуске тяговые
двигатели развивают наибольшую силу тяги, которую
при неавтоматическом пуске регулирует водитель. Ее
следует поддерживать в среднем постоянной. Тангенс
угла наклона кривой движения и (/) к оси времени
определяет ускорение подвижного состава в данный мо-
мент. Если угол наклона отрезка ОА' к оси времени неиз-
менен, то ускорение подвижного состава в момент пуска
будет постоянным, а движение равномерно ускоренным.
В момент пуска сила тяги всегда больше сопротивления
движению (F„ > VF), а действующая сила W
положительна. Точки А и А' на кривой движения соответ-
18
19
Рис. 2.2. Силы, приложенные к четырехосному моторному вагону
при его движении на прямом горизонтальном участке пути (с) и
кривые движения (6):
I — IV— тяговые электродвигатели; G — сила т я ж сети вагона, I — сила тит; 0о.~
Go/p — силы нажатия колесных пар на рельсы; W — сила сопротивления движению
ствуют моменту окончания пуска и выхода на автома-
тическую характеристику со скоростью t?n.
В период движения по автоматической характеристи-
ке (участки АБ и А'Б') характер изменения скорости
подвижного состава зависит от значения и направления
действующей силы. Если действующая сила положи-
тельна F, > О (F > W), скорость движения будет воз-
растать, но медленнее, чем при пуске, так как сила
тяги с увеличением скорости уменьшается, а сопротив-
ление движению возрастает. Поэтому на участке АБ
{А'Б') скорость возрастает медленнее, чем на участке
О А {ОА'). Точки Б и Б' соответствуют моменту выклю-
чения двигателей (тока) и началу выбега.
Режим выбега. В период выбега подвижной
состав движется по инерции, так как тяговые двигатели
20
отключены, следовательно, ток и сила тяги отсутствуют
(/ = 0 и F — 0). Кинетическая энергия подвижного
состава, накопленная в период движения под током,
расходуется на преодоление сил сопротивления движе-
нию. Скорость подвижного состава при движении иа
горизонтальном участке, подъеме и малых спусках посте-
пенно уменьшается (участки БВ и Б'В'), ускорение при
>том становится отрицательным. Действующая сила в
период выбега будет определяться силой сопротивления
движению Кд= — U7. Точки В и В' соответствуют моменту
окончания выбега и началу режима торможения.
Режим торможения. В период торможения соз-
дается значительная тормозная сила В, направленная
против движения подвижного состава. В результате
скорость подвижного состава быстро уменьшается,
отрицательное ускорение (тормозное замедление ат)
но абсолютному значению велико. На кривых движения
режим торможения определяется отрезками ВГ и B'F'.
движение при этом равномерно замедленное, сч — ско-
рость начала торможения. Тормозное замедление харак-
теризуется тангенсом наклона отрезка В'Г' к оси времени.
Действующая сила при этом будет замедляющей и
будет определяться суммой тормозной силы и силы
сопротивления движению.
2.2. Реализация сил тяги и торможения
Образование силы тяги. Сила тяги реализуется дви-
жущими колесными парами трамвайного вагона или
движущими колесами троллейбуса. Движущими назы-
ваются колесные пары или колеса, которые приво-
дятся во вращение тяговыми электродвигателями.
Из механики известно, что нарушение состояния
покоя или изменение скорости движения центра тяжести
гола можно совершить только под влиянием внешних
сил, действующих на это тело. Следовательно, вращаю-
щий момент, развиваемый тяговым двигателем, не может
вызвать поступательного движения подвижного состава,
гак как он обусловлен внутренними силами. Если бы
движущее колесо не опиралось на рельсы или на дорогу,
оно под воздействием только внутреннего момента не
могло бы вызвать поступательного движения подвижного
состава. В этом случае движущее колесо вращалось
бы около своей геометрической оси, не вызывая посту-
21
нательного движения по-
движного состава.
Для поступательного
движения подвижного соста-
ва необходимо наличие внеш-
них сил Такая внешняя сила
возникает в результате сцеп
ления движущих колес с
рельсами или дорожным по-
крытием.
Рассмотрим возникнове-
ние силы сцепления отдель-
ного колеса (рис. 2.3). При-
мем, что точка А является
Рис. 2.3. Реализация силы тяги
колесом
точкой опоры колеса на рельс. К колесу будет приложен
момент Мп, развиваемый тяговым двигателем, увеличен-
ный за счет редуктора тяговой передачи в р раз за вычетом
момента сил трения /Итр в подшипниках и передаче
и момента вращения Мh определяемого инерциями ко-
леса и связанных с ним вращающихся частей. Тогда мо
мент, приложенный к колесу,
= — М,„- М,, (2.22)
где Л1,р— llZoc/?,
здесь R — радиус колеса;
Ц7об — сопротивление движению от трения в подшипниках;
здесь J — момент инерции вращающихся частей;
—— угловое ускорение.
Направление движения указано стрелкой v. Пред-
ставим момент Мк в виде пары сил /',< с плечом,
равным радиусу колеса 7?. Одна из этих сил приложена
в точке А от колеса к рельсу и направлена против
движения. Она стремится создать скольжение опорной
точки колеса относительно рельса в сторону, противопо-
ложную поступательному движению. Однако как реакция
на эту силу под действием нормального нажатия колеса
GK в опорной точке А возникает благодаря наличию
сцепления (трения) с рельсом или дорожным покрытием
сила сцепления Тк. Эта сила Тк является реактивной,
внешней по отношению к колесу и согласно третьему
закону Ньютона равна и противоположна силе F,,
т. е. TK=FK.
Если сила сцепления Тк не превысит предельной вели-
чины Тк Пр, то точка А колеса, соприкасающаяся с рельсом
или дорогой, окажется как бы неподвижной, т е мгновен
ным центром вращения. Вокруг этой точки под действием
вращающего момента начнут поворачиваться все осталь-
ные точки колеса. Сила сцепления Тк будет непрерыв-
но перемещать мгновенный центр вращения, а вместе с
ним и колесо вдоль пути. В последующие моменты
в соприкосновение с рельсом или дорогой будут прихо
дить все новые и новые точки окружности колеса,
оказывающиеся мгновенным центром его вращения.
Таким образом, в результате возникновения в опорной
точке А колеса на рельс или путь внешней силы
Тк, направленной по касательной к окружности колеса,
мгновенный центр его вращения непрерывно перемещается
вдоль пути, а геометрический центр 0 получает поступа-
тельную скорость и. Приложенная к колесу внешняя
сила Т, представляет собой силу сцепления, направленную
по касательной к окружности колеса в точке его касания с
поверхностью пути, и является силой тяги, вызывающей
поступательное движение подвижного состава. Поэтому
силу сцепления Тк называют касательной силой тяги
на ободе движущего колеса. Силу FK, которая обуслов-
лена вращающим моментом тягового двигателя, называют
силой тяги.
При равномерном движении подвижного состава, чему
соответствует равномерное вращение колеса (угловая
скорость со = const), при отсутствии трения в подшипни-
ках и передаче можно принять FK = TK.
При ускоренном или замедленном вращении колеса
с учетом трения в подшипниках силы FK и Тк не будут
равны (Fk=/(=Tk), так как действующий на колесо ре-
зультирующий момент Мк согласно .выражению (2.22)
равен алгебраической сумме моментов, действующих
на колесную пару. Следовательно, соотношение между
силами Ек и Тк будет иметь вид
Т = F - Z--“ - W , . (2.23)
К К р di Об
Это соотношение справедливо для одного колеса.
Для подвижного состава соотношение между силой тяги
F и силой сцепления Т будет Иметь вид
<2-24>
23
22
Ограничение силы тяги. Сила тяги ограничивается
предельно допустимой силой сцепления, имеющей природу
сил трения. Если этот предел будет превышен, произой-
дет срыв сцепления. Движущие колеса начнут скользить
относительно пути в точке касания А. При этом их угло-
вая скорость со' будет больше угловой скорости со,
соответствующей поступательной скорости v, на значение
угловой скорости скольжения соск колес по рельсам
со'= со-|-соск. Начнется боксование колёс, при котором
происходит повышенный износ бандажей (или шин) и
пути.
По мере увеличения скорости скольжения сила сцеп-
ления колеса с поверхностью качения резко уменьша
ется, что приводит к чрезмерному увеличению частоты
вращения двигателя. Это в свою очередь вызывает
дальнейший рост скорости скольжения и соответствен
но снижение силы сцепления. Нормальное качение колеса
становится невозможным. Поэтому при боксованни под-
вижного состава на тяжелых подъемах или скользкой
дороге он останавливается и иногда не может тронуться
с места вследствие вновь возникающего боксования. В
этом случае нарушение сцепления может вызвать за-
держку движения. Восстановить сцепление колес с рель-
сами можно, увеличив силу сцепления, например,
путем подсыпки песка.
Следовательно, для предельной силы сцепления всего
подвижного состава по выражению (2.24) получим
следующее ограничение:
- 2 < Л.Р • <225>
откуда наибольшая допустимая по условию сцепления
сила тяги
F т + У + У IV,. (2.26)
Величины £1Гое и £ ^2— малы по сравнению с вели-
чиной Г11р. Так, для трамвая типа РВЗ-6 при силе тяги
Етах = 25 кН значение + £^оо не превышает 1 кН.
Приближенно можно принять для подвижного состава
fmax < Гор. (2.27)
24
Силу сцепления определяют, как произведение силы
нажатия GK колеса на рельс и коэффициента сцепления
фк колеса с рельсом, т. е.
Л = 6к-фк. (2.28)
Если измерять нажатие колеса на рельс GK в килоньютонах
то чтобы получить силу сцепления Тк в ньютонах,
в правую часть выражения (2.28) необходимо ввести коэф-
фициент, равный 1000. Следовательно, сила сцепления, И,
Тк = 1000С„фк. (2.29)
Тогда для всего подвижного состава выражение (2.27)
примет вид:
И)0(Юс„1|: или /•',11ах < 1000тгц£ф, (2 30)
где — наибольшая допустимая по условиям сцепления сила
тяги подвижного состава, Н;
Gcu=mcug —сцепной вес (сумма сил нажатия всех движущих осей
подвижного состава), кН;
ф — коэффициент сцепления;
тсц — сцепная масса подвижного состава, т;
g — ускорение свободного падения, м/с2.
При движении на горизонтальном участке сцепной вес
Z
G =У G
сц J octi ’
или 1
Gcu — гGоси» если GOi==G(,2:== j==Go?=±Gocu,
где г — число движущих осей подвижного состава;
Ооп, — вес, приходящийся на одну движущую ось.
Например, для двухосных троллейбусов сцепной вес—
это вес, приходящийся на задние колеса. На уклонах
сцепной вес подвижного состава уменьшается, так как
сила нажатия движущих осей на путь будет опреде-
ляться равенством
Gcu = Gcoscc,
где а, — угол уклона.
Пример 1. Определить ограничение по сцеплению (наибольшую
силу тяги), которую может развить трамвайный вагон типа КТМ-5М.
Решение. В соответствии с табл. 1.1 масса тары вагона КТМ-5М
то=18 т. Определяем массу пассажиров. Принимая среднюю массу
пассажира 75 кг, при наполнении вагона 140 чел. т„= 140-75 = 10,5 т.
Полная масса трамвая с пассажирами tn =m, + пг„= 18 10,5 = 28,5 т.
Коэффициент сцепления для трамвайного вагона без отдельного
полотна принимаем ф=0,16. В соответствии с выражением (2.30)
25
наибольшее значение силы тяги Fmax^ 1000mcugip. Так как у трамвая
КТМ-5М все оси обмоторенные (сцепная масса равна полной),
т. е. гПсп — т, то наибольшая сила тяги для трамвайного вагона
с пассажирами
f.n.ivSC 1000-28,5-9,8-0,16 = 44 688 Н»44,7 кН
и при отсутствии пассажиров
/•'„^<1000-18-9,8-0,16 = 28 224 Н»28,2 кН.
Пример 2. Определить ограничение по сцеплению (наибольшую силу
тяги), которую может развить троллейбус типа ЗИУ-9.
Решение. В соответствии с табл. 1.2 масса тары троллейбус;
ЗИУ-9 тв = 9,5 т Определяем массу пассажиров при наполнении 125
чел. и средней массе одного пассажира 75 кг:
т„= 125-75=9375 кг = 9,375 т
Коэффициент сцепления для троллейбуса ф = 0,3.
У троллейбуса ЗИУ-9 сцепная масса составляет 60% общей массы,
так как ведущим является только задний мост троллейбуса
Следовательно, сцепная масса троллейбуса при отсутствии пассажиров
тс,| = 9,5-0,6=5,7 т.
Сцепная масса троллейбуса с пассажирами
mm= (9,5 + 9,375)0,6= 1 М т-
В соответствии с выражением (2.30) наибольшее значение силы
тя1 и по сцеплению для вагона с пассажирами
Fmax=-1000-11,3-0,3-9,8= 33 200 Н = 33,2 кН
и отсутствии пассажиров
Flna. = 1000-5,7-0,3-9,8= 16 758 Н» 16,76 кН.
Пример 3. При движении трамвайного вагона КТМ-5МЗ без
пассажиров па затяжном подъеме сила тяги трамвая возросла до
/•' = 25 000 Н, а коэффициент сцепления на данном участке пути
ф==0,1. Определить, при каком коэффициенте сцепления возможно
поступательное движение трамвая?
Реше н и е. Сцепная масса трамвая КТМ-5М без пассажиров по
табл. 1.1 тсц=18 т. Предельное значение силы сцепления в этом случае
Г„р=1000 тсц£ф = 1000-18-9,8 -0,1 = 17 640 Н
будет меньше силы тяги F, т. е. 7’„р=17 640 H<F = 25000 Н. Сле-
довательно, произойдет боксование колесных пар. Для того чтобы
поступательное движение трамвая было возможным, необходимо увс
личить коэффициент сцепления, посыпая песок на рельсы.
Пользуясь выражением (2.30), определим коэффициент сцепления,
при котором боксование прекратится и возможно будет поступа-
тельное движение трамвайного вагона:
F 25 000 , л
чЬ= - - - — -=0141
1 1 000 т g 1 000 • 18 • 9.8
Рис. 2.4. Реализация тор-
мозной силы колесом
v Образование тормозной силы.
‘Определим условие нормального
качения колеса при торможении.
В период торможения к поезду
приложена тормозная сила. Рас-
смотрим процесс образования этой
силы на примере одного ко-
леса (рис. 2.4).
В тормозном режиме на каж-
дую колесную пару вагона, дви-
жущегося в направлении, указан-
ном стрелкой v, действует тормоз-
ной момент Л4Т, направленный про-
тив часовой стрелки. В этом же направлении будет прило-
жен момент Л4тр, определяемый внутренним сопротивлени-
ем в подшипниках. Момент М,, определяемый инерциями
колеса и связанных с ним вращающихся частей, будет
направлен по часовой стрелке. Результирующий момент
М будет равен алгебраической сумме моментов, дейст-
вующих на колесную пару,
/И = Л1Г — Л4, + Л4тр. (2.31)
Представим тормозной момент парой сил Вк, прило-
женных соответственно в точках О и А. Если бы
колеса вращались свободно, не касаясь рельсов или
дороги, т. е. были приподняты над уровнем пути, то под
действием тормозного момента они бы остановились. В
действительности колеса опираются на рельсы или путь,
следовательно, в точке соприкосновения А возникает сила
сцепления Тк. Поэтому колеса не останавливаются, а
продолжают катиться по пути, одновременно как бы упи-
раясь в него под действием тормозного момента.
Таким образом, под действием тормозной силы Вк в
результате сцепления колеса с рельсом в точке А образу-
ется внешняя сила Гк, направленная противоположно силе
Вк. Точка А в каждый момент является как бы неподвиж-
ной, т. е. мгновенным центром вращения.
В целом на подвижной состав действует сумма тор-
мозных сил всех колес, которые можно заменить их равно-
действующей. Условно эту .равнодействующую можно счи-
тать приложенной к центру тяжести подвижного состава.
При движении колеса силы Вк и Тк не будут равны, так как
действующий на колеса результирующий момент М равен
согласно выражению (2.31) алгебраической сумме момен-
27
26
тов. Следовательно, соотношение mi ж ну hihii ii II и l\
для одной оси будет иметь вид
Г If ' I II , Г’32)
- « R dl "ri
и для всего подвижного состава
г = д- S/J J «... (*33)
Ограничение тормозной силы I . пн в р. i нм тор-
можения тормозная сила В прении in пр< /о и.но допус-
тимую силу сцепления /пр, ирон wiinri i.hv'iiiiiiib.iiiiic
колес. Тормозные колеса начнут скользни. oi погнгель-
по пути в точке А. Это явление называется /о.юя. При
юзе резко уменьшается тормозная сила, так как она
определяется коэффициентом трения качения между
колесом и рельсом при скольжении их относительно
дру| дру! а Л коэффициент скольжения всегда мень-
ше ко/ффнцнен га сцепления, соответствующего нор-
мальному юрможению Юз - опасное явление для
безопасности движения, гак как во время юза увели-
чиваются время торможения и тормозной путь. Кроме
того, во время юза при скольжении колес происходит
сильное истирание бандажей колесных пар или шин
троллейбуса. Таким образом, предельная сила сцепле-
ния всего подвижного состава будет иметь следующие
ограничения:
т > В' - У ' — 4- У Г (2 34)
up max Z-J /,- 1 . nfi И-аЧ)
откуда наибольшая допустимая но условиям сцепле-
ния тормозная сила
riip- £ 'R - У 1Г1Л (235)
Величины £1КО6 и значительно меньше вели-
чины Тир, поэтому приближенно можно прпняы., что
к • / (2.36)
Предельная сила сцепления ih./ibii.i hoi о состава
при торможении равна проц ше/кчнпо цммн нажатий
всех тормозных колес <7, на ко b|h|>iiiiiiciii < ik ii'н нип i|>, г. е.
7пр= lOOOG.S 1(1<и1„,./.,|. (2.37)
28
Выражение (2.37) соответствует нажатию тормозных
колес на рельс G-, в килоньютонах, при этом сила сцеп-
ления Л|Р получается в ньютонах. С учетом выражения
(2.37) выражение (2.36) примет вид
BmaxSj IOOOmTgip. (2.38)
Тормозная сила поезда
2
в =S SK • (2.39)
I
где z — число тормозных осей подвижного состава;
£?к — сила, развиваемая одной тормозной осью.
Если Вк1 —ВК2 — ... = Вкг, то B = zBK.
Как было отмечено выше, нарушение сцепления
при торможении вызывает явление юза. Юз при тор-
можении представляет гораздо большую опасность, не-
жели боксование при тяге, так как может быть авария.
Законы сцепления приближенно можно сформулиро-
вать так:
1) наибольшая сила тяги подвижного состава не
должна превосходить предельной силы сцепления:
^тахС^пр или B,nax< 1000mcllgX|),
где /?тах — наибольшая допустимая сила тяги подвижного сос-
тава, не вызывающая скольжения ни одной из движущих осей;
2) наибольшая тормозная сила подвижного состава не
должна превосходить предельной силы сцепления:
или Втах< 1000тт£ф,
где fimax — наибольшая допустимая суммарная тормозная сила под-
вижного состава, не вызывающая скольжения ни одной из
тормозных осей;
3) если сила тяги подвижного состава F или тормозная
сила В больше предельной силы сцепления Л1р, Нормальное
движение подвижного состава невозможно (в режиме тяги
возникает боксование, в режиме торможения — юз).
Пример 1. Определить ограничение по сцеплению (наибольшую до-
пустимую по сцеплению тормозную силу) трамвайного вагона КТМ-5М.
Решение. Масса тары трамвая согласно табл. 1.1 равна 18 т, а
масса трамвая с пассажирами при наполнении 140 чел. при средней массе
пассажира 75 кг Л4 = 0,075 140-р 18 = 28.5 т. Коэффициент сцепления
принимаем ф = 0.16. Предельная сила сцепления при торможении со-
гласно выражению (2.38) при отсутствии пассажиров
7„р = '1000-18,0-9,8-0,16 = 28 224 Н«28,2 кН
и с пассажирами
7"„р= 1000-28,5-9,8-0,16 = 44 688 Нж44,7 кН.
29
Следовательно, наибольшая допустимая по сцеплению тормоз-
ная сила при отсутствии пассажиров В11мх = 28,2 кН и с пассажирами
В1МХ = 44,7 кн. Юз возникает в первом случае, если Втах> 28,2 кН.
во втором, если BIndx> 44,7 кН.
Пример 2. Определить наибольшую допустимую по сцеплению
тормозную силу |роллейбуса TR-9.
Решение. Так как тормозными средствами оборудованы все оси
троллейбуса, поэтому при расчете в качестве тормозной массы
берем полную массу троллейбуса (см. табл. 1.2):
mas9 т.
Если коэффициент сцепления троллейбуса принять равным 0,4, то
предельная сила сцепления при торможении
7^,= 1000-0,4-9-9,8 = 35 280 Н = 35,28 кН.
рассмотрено выше, а
поверхность соприкось
опорной площадкой.
ло
Эту
или
Зона
качения (покоя)
Рис. 2.5. Образование контакт-
ной площадки
Следовательно, наибольшая допустимая по сцеплению тормозная
сила должна быть В1лах = 35,28 кН. Юз возникает, если В> 35.28 кН
Физические процессы образования силы сцепления.
Рассмотрим физические процессы возникновения силы
сцепления применительно к рельсовому транспорту.
Аналогичные процессы происходят и при взаимодей-
ствии колес с дорожным покрытием.
Под воздействием силы нажатия колеса в месте его
опоры на рельсе образуются кошактные напряжения.
Вследствие упругости материалов, из которых изготов-
лены колесо и рельсы, сила, действующая от колеса на
рельс, вызывает деформацию бандажа и рельса. Поэ-
тому колесо опирается на рельс не в одной точке, как бы-
ло некоторой поверхности.
)вения называют контактной
Для цилиндрического ко-
леса, катящегося по рель-
су, головка которого за-
круглена по некоторому ра-
диусу, контактная площадка
образуется в форме эллип-
са (рис. 2.5).
Упрощенно можно при-
нять, что упругой деформа-
ции подвержено только ко-
лесо. Если колесо катится
только под действием вра-
щающего момента Мк, то
волокна поверхности колеса
перед тем, как вступить в
переднюю часть контактной
Зона
скольжения
30
площадки, предварительно сжимаются и сохраняют как бы
неподвижное сцепление с поверхностью пути. При этом
они не совершают какого-либо перемещения по отношению
к поверхности пути. Эту зону называют зоной качения или
покоя. По мере перекатывания колеса будет перемещаться
и контактная площадка, а сжатые волокна колеса будут
переходить в заднюю часть площадки. Здесь нормальное
нажатие постепенно уменьшается, сжатые волокна
колеса, преодолевая трение, начинают разжиматься,
т. е. начинается проскальзывание разжимающихся
волокон колеса относительно поверхности пути в зад-
ней части контактной площадки. Эту часть контакт-
ной площадки называют зоной скольжения.
Таким образом, в передней части контактной пло-
щадки совершается качение без относительного пере-
мещения поверхности колеса вдоль пути, а в задней
части происходит проскальзывание сжатых волокон
колеса относительно пути с некоторой средней ско-
ростью цск.
Силу сцепления Тси в контактной площадке можно
представить в виде двух составляющих, одна из ко-
торых Т„ является силой трения покоя в передней части
контактной площадки, другая Тск — сила трения сколь-
жения в задней части контактной площадки. Чем боль-
ше момент Мк, действующий на колесо, тем более будут
сжаты волокна поверхности колеса, вступающие в зону
качения и тем раньше они будут разжиматься, т. е.
проскальзывать относительно поверхности пути.
Зона скольжения в контактной площадке будет увели-
чиваться и одновременно будет расти средняя скорость
скольжения иск, т. е. чем быстрее будет происходить
смена точек поверхности колеса, которые попадают в
область контактной площадки, тем больше будет ско-
рость скольжения иск- А это в свою очередь означает, что
при постоянном значении момента MK = const, приложен-
ного к колесу, скорость скольжения иск в контактной
площадке будет пропорциональна поступательной ско-
рости колеса. Эта пропорциональность сохраняется
до тех пор, пока момент Мк не превзойдет допустимого
по сцеплению значения, которое соответствует предель-
ному значению силы сцепления 7\1Г!р.
С увеличением вращающего момента Мк, приложен-
ного к колесу, соответствующим образом растет ско-
рость скольжения vCK, поэтому сила трения покоя Тп
31
будет уменьшаться, а сила трения скольжения 7'ск — уве-
личиваться. Когда зона образования силы трения по-
коя Тп в контактной площадке уменьшится до нуля,
сила сцепления Тси будет создаваться только за счет
силы трения скольжения 7’ск и достигнет своего наиболь-
шего значения 7'cunp при скорости скольжения, соот-
ветствующей предельному значению vCK = vCKnp.
В этом состоянии каждая точка поверхности колеса, по-
падая в область контактной площадки, оказывается непо-
движной лишь мгновение. После этого сразу начинается
процесс скольжения этой точки поверхности колеса
вдоль пути. Таким образом, с увеличением вращающего
момента Мк и ростом скорости скольжения цск соответст-
венно увеличивается сила сцепления 7'сц.
При дальнейшей скорости скольжения выше пре-
дельной иск> Пск пр. сила сцепления Тсц будет умень-
шаться, так как в этом случае она будет целиком со-
здаваться за счет силы трения скольжения Тск. Сколь-
жение колеса со скоростью выше предельной скорости
скольжения иск> иСкпР называется боксованием.
Примерный вид зависимости 7’ru(ulK) для стальных
колес и рельсов представлен на рис. 2.6. Здесь же
показан примерный вид зависимостей сил трения по-
коя Т„ и скольжения Тск от скорости скольжения.
Для стальных колес и рельсов предельное значе-
ние скорости скольжения может составлять 0,25% по-
ступательной скорости и. Следовательно, даже для вы-
соких значений поступательной скорости и=150 км/ч
предельное значение скорости скольжения гл,(1|р дости-
гает 0,1 м/с, т. е. очень мало. Такое скольжение очень
трудно измерить. Чтобы показать, что образование сил
тяги и торможения связано с проскальзыванием ко-
леса относительно рельса, был проделан следующий
опыт. На колесо и рельс в месте соприкосновения на-
клеивали иолоску бумаги и разрезали ее. Далее без
приложения момента к колесу прокатывали его по рельсу
на 10 оборотов и отмечали пройденный путь /0 (рис. 2.7).
Затем прокатывали колесо от той же самой начальной
точки, но под воздействием момента Л4К|> 0, и снова
замеряли путь пройденный колесом за 10 оборотов.
Этот путь Л оказывался меньше /о за счет проскаль-
зывания колеса, вызванного реализацией силы тяги.
Отношение пути /0 к отрезку /0 — h пропорционально ско-
рости скольжения цСК|. Затем к колесу прикладывали
32
Рис. 2.6. Зависимости сил сцепления Рис. 2.7. К определению про-
ст скорости скальзывапия колеса
момент /ИК2> МК|, замеряли путь /2, пройденный коле-
сом за 10 оборотов и определяли скорость скольжения
Рск2- Сделав несколько замеров для различных значений
момента, приложенного к колосу, строили зависимость
Т'сц(Рск)- Как показали проведенные эксперименты при
скорости скольжения, превышающей на 1-2% пре-
дельное значение скорости скольжения иСК111„ возникает
устойчивое боксование. Этот опыт был впервые проделан
канд. техн, наук В. М. Кобозевым.
Коэффициент сцепления. При нормальном качении
колеса, когда относительная скорость в точке касания
колеса с путем теоретически равна нулю, коэффициент
сцепления физически соответствует коэффициенту тре-
ния покоя.
Трение покоя является частным случаем трения
скольжения при относительной скорости трущихся тел,
равной нулю. В эксплуатационных условиях коэффи-
циент сцепления не тождественен физическому коэф-
фициенту трения покоя, так как в процессе качения
колеса возникает проскальзывание, т. е. скорость по-
ступательного движения подвижного состава ниже
поступательной скорости на ободе колеса.
Коэффициент сцепления является одним из основ-
ных факторов, влияющих на эксплуатационные и тех-
нико-экономические показатели электрического транс-
порта. Поэтому его определение имеет исключитель-
но важное значение. От коэффициента сцепления зависит
выбор массы подвижного состава, допустимой скорос-
ти движения, наибольшего допустимого подъема, ускоре-
2 Зак. 1092
33
ния и замедления. При данном сцепном весе 6’сц зил
чение коэффициента сцепления определяет наибеип,
шие допустимые силы тяги и торможения подвижно
го состава, которые могут быть реализованы по уело
вию сцепления, т. е. коэффициент сцепления показывает,
какой части сцепного или тормозного веса подвнж
ного состава может быть равна предельная сила сцеп
ления. Например, при коэффициенте сцепления ф = (),?
наибольшее допустимое значение силы тяги
= 200 Н на 1 кН сцепного веса Gcu.
На подвижном составе, как правило, имеется несколько
колесных пар. Коэффициент сцепления подвижного сое
тава ф в целом всегда меньше коэффициента сцепле
ния колеса фк. Это обусловлено рядом причин, основные и i
которых следующие: а) неравенство силы тяги или тормо ।
ной силы отдельных осей вследствие неодинаковости дна
метров движущих колес и электромеханических ха
рактеристик двигателей; б) разный вес, приходящий
ся на движущие и тормозные оси; в) загрязнение
рельсов и бандажей колес (на безрельсовом транспорте
дорожного покрытия и шин). Коэффициент сцепления
подвижного состава определяется коэффициентом сцеп
ления наиболее разгруженной оси. В результате нышс
указанных обстоятельств значение расчетного коэф
фициента сцепления подвижного состава необходимо
принимать меньше значения коэффициента сцепления од
ной колесной пары, так как при реализации силы тяги
ни одна из движущих осей не должна боксовать, г. о
Ф ==Фк1|<чатЯдия, (2 40)
где цстат. Чд»» — соответственно статический и динамический коэ<|»|>н
циенты уменьшения сцепления.
Коэффициентом Т]стат учитывается разная развески
по осям, расхождение в электромеханических хараме
ристиках двигателей, различие в диаметрах бандажей
отдельных колес, несоосность силы тяги и силы сопро
тивления. Так, несоосность сил тяги и сопротивления
приводит к тому, что одна колесная пара будет имен,
большее значение Gcu и реализовывать большую силу
тяги, а другая—меньшее значение Gcu и реали.зовы
вать меньшую силу тяги. При нормальной эксплуата
ции подвижного состава значение т]стат может поддер
живаться на некотором определенном уровне, близком к
единице.
34
Коэффициент т)ди1| в основном зависит от динамических
свойств подвижного состава и колеблется в широких
пределах. Большое влияние на него оказывают коле-
бания подвижного состава. В результате этого изме-
няется нажатие на колесные пары и появляется возмож-
ность возникновения боксования. Возникновение инер-
ционного момента вызывает перераспределение нажа-
тий на колесные пары, что также уменьшает коэффи-
циент сцепления. Поэтому для проведения тяговых рас-
четов используют расчетный коэффициент сцепления фр.
Расчетный коэффициент сцепления. Расчетным ко-
эффициентом сцепления фр называют такой коэф-
фициент, который по тол я ст развить наибольшую тя-
говую или тормозную силу при данной конструкции под-
вижного состава.
Расчетный коэффициент сц< пения фр можно оп-
ределять экспериментальным путем Измеряя скорость
вращения осей, определяют момент начала боксова-
ния. Замеренная для этого момента сила (например,
по току тяговых двигателей) позволяет получить зна-
чение наибольшего реализуемого коэффициента сцеп-
ления для данного режима. Проделав этот эксперимент
большое число раз для различных значений ско-
ростей и обработав результаты, получают наиболее
вероятные значения коэффициента сцепления ф от ско-
рости v для данного подвижного состава (рис. 2.8).
Это значение принимают за расчетное. Значение коэф-
фициента сцепления уменьшается с увеличением скорости
движения. При очень больших скоростях движения его
значение будет приближаться к значению коэффи-
циента скольжения. В условиях городского транспорта,
где скорость движения относительно низкая (не более
60 км/ч) и имеется много факторов, влияющих более
сильно на сцепление, как-то: наполнение салона пас-
сажирами, загрязнение рель-
совых и дорожных путей,
динамические воздействия,
коэффициент сцепления фр
принимают не зависящим от
скорости V.
.Для наземного рельсо-
вого городского транспорта
(трамвай) без индивидуаль-
ного полотна на основа-
Рис. 2.8. Зависимость коэффи-
циента сцепления от скорости
2*
35
нии опытов получены значения коэффициента сцеп
ления 0,16—0,18, для загрязненных рельсов — 0,12—0,1 1
Для трамвая с индивидуальным полотном можно при
пять более высокие значения — 0,18—0,20. В nc6./i.i
гоприятных условиях, например при листопаде, кол|>
фициент сцепления трамвайных вагонов уменьшатся
до 0,06—0,08. В среднем расчетный коэффициент сцен
ления трамвая без индивидуального полотна за исключи
нием дней листопада и гололеда принимается фр = 0,1.г>
Коэффициент сцепления троллейбуса колебли гея
в широких пределах в зависимости от метеорологпчи
ских условий и состояния дорожного покрытия. При
чистом, сухом усовершенствованном покрытии доро
ги он достигает 0,9—1,0. При загрязненной дороге,
гололеде коэффициент сцепления уменьшается до 0,1.'»
и даже до 0,1. В средних условиях для тяговых расче
тов можно принимать расчетный коэффициент сцен
ления троллейбуса фр = 0,3 4- 0,35.
На основании эксплуатационных данных pacuci
ные значения коэффициента сцепления электропоездов
метрополитена могут быть приняты в пределах 0,20 -0,22.
Учитывая, что нарушение сцепления в режиме тор-
можения (юз) значительно опаснее, чем боксование
при тяге, целесообразно выбирать значение коэффп
циента сцепления при торможении на 15—20% меньше,
чем при тяге.
Контрольные вопросы
1. Что такое приведенная масса тпр?
2. Что учитывает коэффициент инерции вращающихся частей?
3. Как влияет на значение коэффициента инерции вращающих! и
частей передаточное отношение редуктора?
4. Почему у моторного вагона коэффициент инерции вращающими
частей больше, чем у прицепного?
5. Почему коэффициент инерции вращающихся частей у подвпж.о
состава с пассажирами меньше, чем у подвижного состав.! Сим
пассажиров?
6. Почему в первой и второй форме уравнений движении ши-щи
различные коэффициенты £ и ?'?
7. Что понимают под удельной силой?
8. Какие зависимости называются кривыми движения?
9. Какая разница между 'сцепным, тормозным и полным несом
подвижного состава?
10. Почему у трамвая коэффициент сцепления ф не превышает 0.2, л
у троллейбуса может достигать 1,0?
II. Почему в режиме торможения выбирают меньшее зпачгнне
коэффициента сцепления, нежели в режиме тяги?
36
3
СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ ПОДВИЖНОГО
СОСТАВА
3.1. Силы сопротивления движению и их учет
Природа сил сопротивления движению. При движе-
нии подвижного состава возникают силы трения в его
элементах, между колесами и рельсами или путем, между
наружными поверхностями подвижного состава и окружа-
ющим воздухом. При движении на подъеме или уклоне
особое значение приобретает составляющая сила тя-
жести.
Все эти силы представляют собой силы сопротив-
ления движению подвижного состава. Результирую-
щая сил сопротивления движению действует против
направления движения подвижного состава. На крутых
спусках она может принимать отрицательное значе-
ние, т. е. совпадать с направлением движения.
На преодоление сил сопротивления затрачивает-
ся работа, совершаемая тяговыми двигателями. Силы
сопротивления приложены в различных точках под-
вижного состава. Они зависят от скорости и месторас-
положения подвижного состава, от его конструкции и
верхнего строения пути, профиля и плана пути, от внеш-
них условий.
Даже когда подвижной состав движется с постоянной
скоростью и на неизменном уклоне, сопротивление
движению не остается постоянным, так как непрерывно
меняются внешние условия: подвижной состав прохо-
дит по неровностям пути или стыкам, в результате чего
возникают колебания в подвижном составе, меняется
сопротивление движению от трения наружных поверх-
ностей подвижного состава и окружающего воздуха.
Под полным сопротивлением движению понимают экви-
валентную силу, приведенную к ободам колес, на прео-
доление которой затрачивается такая же работа, как
и на преодоление всех действительных сил, противо-
действующих движению.
Энергия, которая затрачивается на преодоление
сил сопротивления, связанных с различными видами
37
трения, невозвратима, так как тратится на истирание
пути и деталей подвижного состава и превращается в
тепло, рассеиваемое в окружающую среду. Эверит,
которая затрачивается на преодоление подъемов, м<>
жет быть возвращена, так как подвижной состав в лом
случае накапливает потенциальную энергию, которую
можно использовать на последующих участках ну hi
или при движении в обратную сторону.
Полное сопротивление движению. Полное сопрогпп
ление движению поезда делят на следующие сое га и
ляющие.
1. Основное сопротивление движению U/o, которое обус
ловлено внутренним трением в подвижном составе, сонро
тивлением от взаимодействия подвижного состава и пути
на прямом и горизонтальном участках и сопротивлением
от взаимодействия подвижного состава и воздуха (при
отсутствии ветра).
2. Сопротивление движению от уклонов W7,.
3. Сопротивление движению поезда от кривых участков
пути И?кр.
4 Дополнительное воздушное сопротивление U7„.
Таким образом, полное сопротивление движению
представляют в виде суммы
iV'=iV'o+iV', + ii7Kp+iV'n. (3D
Если подвижной состав содержит несколько раз
личных подвижных единиц, то при расчетах полное
сопротивление движению представляют в виде суммы
сопротивления движению моторных вагонов X W'„ и со
противления движению прицепных вагонов 2Ц/В, г. е.
IV' = XIV'„ + EIV'„. (.к-.
Такое разделение является условным, так как силы сон
ротивления движению физически неотделимы и при
сущи подвижному составу в целом.
Для удобства выполнения тяговых расчетов сопрогпп
ление движению выражают в удельных единицах, or
несенных к единице веса, Н/кН:
и? + IV. + IV + uz
w = .ур. ° , (3.3)
mg
где mg — пес подвижного состава.
38
3.2. Основное сопротивление движению
Основное сопротивление движению зависит от многих
факторов, поэтому теоретическим путем определить
значение основного сопротивления движению очень
сложно. Представим его в виде двух составляющих:
М7О= И"„,P+U7„ (3.4)
где IV'cp — составляющая оснонпого сопротивления движению,
обусловленная i рением в иод..............пинках подвижного
состава, трением качения и скольжения колес по
рельсам пли дорою, деформацией пути;
IV', сопротивление во щуп....п среды при отсутствии ветра.
Сопротивление движению от трения V7U ,,,. Наиболее су-
щественной является величина 117., ,,,, состоящая из суммы
отдельных компонентов:
IV О TP— Ч'|, -| lV',f | И'лгф 1 Ч < к, (3.5)
где IV-'.), U7,:, IV'.k сопротивление движению от трения стхпветсгвен-
н<> в подшипниках подвижно! о состава, качения
и скольжения колес по рельсам или дороге;
Ч'дрф — сопротивление движению от деформации пути.
Сопротивление трения в подшипни-
ках IV'n- Силы трения в буксах колесных пар, в под-
шипниках тяговых электродвигателей и передаточных
механизмах зависят от коэффициентов трения и давления
между трущимися поверхностями.
В момент трогания подвижного состава сопротивление
воздушной среды, сопротивление движению со стороны
пути будут равны нулю и все сопротивление движению
будет сосредоточено в подшипниках. Особенно суще-
ственна эта величина в подшипниках скольжения, так
как в состоянии покоя между шейкой и вкладышем
отсутствует жидкостная пленка, особенно после длитель-
ной стоянки. В этом случае в момент трогания поезда
движение шейки в подшипнике скольжения начинается
при сухом трении, которому соответствует наибольшее
значение коэффициента трения.
Затем, когда шейка оси приходит во вращение, она
захватывает смазку. Начинается образование жидкостной
пленки между вкладышем и шейкой и появление так назы-
ваемого масляного клина, что способствует уменьшению
коэффициента трения.
Коэффициент трения зависит также от температу-
ры окружающего воздуха. При низкой температуре
вязкость смазки увеличивается, что приводит к уве-
39
Рис. 3.1 Зависимость коэффи
циента трения от скорости для
подшипников скольжения (I, 2)
и роликовых (3, 4)
трогании подвижного
выми подшипниками,
чения коэффициента
тивления движению.
личению коэффициента тр»
ния и соответственно сопри
тивления движению в момент
трогания поезда после дли
тельной стоянки. При вы» о
кой температуре вязкоеп
смазки уменьшается. Поэто
му в зимнее время следует
применять менее вязкие сма
зочные материалы, в лег
нее время — наоборот.
При роликовых подтип
никах составляющая сопро-
тивления от трения будет
меньше, так как коэффици
ент трения роликовых под
шипников значительно мош.
ше, чем у подшипников
скольжения. Кроме того, при
оборудованного ролико
происходит заметного увели
и, следовательно, сопро
состава,
не
трения
При трогании с места сопротивление от трения в
роликовых буксах составляет около 10% соответствую
щего сопротивления букс со скользящими подшииии
ками и в меньшей степени зависит от продолжитель
ности стоянки поезда Это является важным преиму
ществом роликовых подшипников.
На рис. 3.1 показана зависимость коэффициента
трения в буксах от скорости движения для роликовых
подшипников и подшипников скольжения. Здесь кривы»
I и 3 соответствуют густым смазкам, а кривые 2 и 4
жидким
Сопротивление от трения в буксах вагонов, осевых
подшипниках колес троллейбуса зависит от отношения
внутреннего диаметра подшипника к диаметру круга
качения колеса, нажатия на шейку оси, коэффициента
трения.
Коэффициент трения зависит от материалов, из ко
торых изготовлены шейки и подшипники, способа пода-
чи масла к трущимся поверхностям, смазки, темпера
туры окружающего воздуха.
40
В пределах эксплуатационных скоростей коэффициент
трения <р для подшипников скольжения в среднем равен
0,005—0,01 и для роликовых подшипников — 0,001—0,002.
Этим ориентировочным значениям коэффициента трения
соответствуют удельные значения основного сопротивле-
ния движения от трения подвижного состава с подшипни-
ками скольжения равные 0,5 — 1 0 Н/кН, и с роликовыми
подшипниками, равные 0,1—0,2 Н/кН.
Сопротивление от трения качения Ц7К.
При качении колеса вдоль рельса или дороги под дейст-
вием силы нажатия колеса на рельс происходит упругая
деформация бандажа и рельса или колеса и дороги. Ко-
лесо и рельс непрерывно меняют свои} форму и снова ее
восстанавливают Сопротивление от гр пня качения коле-
са зависит от нажатия колеса па рельс или дорогу, ра-
диуса круга качения колеса, а также площади опорной
поверхности колеса, причем чем больше эта площадь, тем
выше потеря энергии н, следовательно, значение сопротив-
ления движению
Для рельсового транспорта площадь опорной поверх-
ности определяется твердостью материала, из которого
изготовлены бандажи колес и рельсы, профилем бандажа
и головки рельса. Для безрельсового электрического
транспорта с резиновыми колесами (пневматическими
баллонами) площадь опорной поверхности колеса зависит
от давления в баллонах, формы и состояния поверхности
колес, а также от материала покрытия дороги Удельное
сопротивление движению от трения качения на рельсовом
транспорте равно 0,2—0,4 Н/кН. На безрельсовом транс-
порте оно значительно выше.
Сопротивление от трения скольжения
Ц/ск. В процессе движения подвижного состава одновре-
менно с качением неизбежно и проскальзывание колес
относительно рельсов. Это трение обусловлено различием
диаметров кругов качения колес, закрепленных жестко
на одной оси, конусностью бандажей, а также неровностью
пути. Поэтому колесная пара при своем движении прос-
кальзывает как вдоль, так и поперек рельса. На безрель-
совом транспорте также происходит проскальзывание ко-
лес относительно пути.
На преодоление сил трения при проскальзывании
затрачивается энергия, которая и определяет составляю-
щую сопротивления движению от скольжения WCK.
Подсчитать эту энергию сложно, так как при этом необ-
ходимо учесть множество факторов.
41
Основными ИЗ НИХ ЯВЛЯ
Рис. 3.2. Зависимость
ются скорость движения,
конструкция подвижного со
става, износ бандажей и
рельсов. На рельсовом транс
порте составляющая удели
ного сопротивления движе-
нию от скольжения колес не
превышает 0,2—0,4 Н/кП
Сопротивление движению
от деформации пути 1ГЛ(1|„
Так как строение пути не-
однородно и обладает пере-
менной упругостью, то при
движении подвижного состава имеют место его де-
формация и просадка. В свою очередь эти неров
ности пути вызывают колебания в отдельных эле-
ментах подвижного состава, которые усиливают деформа
цию пути. Сопротивление движению от неровностей!
пути для рельсового транспорта при сварных стыках и
лорошем состоянии пути незначительно. При плохом сое
тоянии и содержании пути эта составляющая сопро-
тивления движению значительно увеличивается. На без
рельсовом транспорте это сопротивление зависит от не-
ровностей пути по траектории качения колеса, от скорости
движения.
Зависимость W'o тр от скорости движения. В резуль
тате экспериментальных исследований была установлена
зависимость составляющей основного сопротивления дни
жению, обусловленной силами трения IVZ„ тр от скорости
движения v (рис. 3.2). которую можно представить в виде
IV'o тР = *4 + йп, (.1.1*1
где А и й постоянные. которые зависят от конструкции буксы, коне*
рукции пути и типа колесной пары.
Если движение начинается с нулевой скорости, то при
низких скоростях наблюдаются высокие значения основ
ного сопротивления движению от трения, это явление
объясняется выдавливанием смазки как в буксах с под
шипниками качения, так и в буксах с подшипниками
скольжения. В последних начальное значение сопротнв
ления движению от трения значительно выше.
При расчетах увеличением основного сопротивления
движению при v = 0 пренебрегают, так как в эксплуа-
42
тации оно преодолевается за счет значительного запаса
силы тяги, которым обладает, как правило, подвижной
состав городского электрического транспорта (ГЭТ).
Сопротивление воздушной среды 1К„ аэр. При движе-
нии подвижной состав испытывает сопротивление воз-
душной среды. При этом, с одной стороны, происходит
непосредственное трение воздуха о наружные поверхности
подвижного состава. С другой стороны, воздушные массы
получают ускорение от лобовой и хвостовой поверхностей
поезда, а также от неровностей eii > боковых поверхностей.
Массы воздуха получают ускорение и накапливают ки-
нетическую энергию, которая в дальнейшем расходуется
на трение между отдельными слоями воздуха.
Аэродинамическими исследованиями движения тела
неизменяемой формы в воздухе установлено, что при пос-
тоянной скорости движения составляющая основного соп-
ротивления №оаэр приблизительно пропорциональна произ-
ведению квадрата скорости на площадь поперечного се-
чения подвижного состава S:
^оа,р = Сл^2. (3.7)
где Сх — коэффициент обтекаемости, который определяется, как правило,
опытным путем.
Для подвижного состава небольшой длины характер-
ным размером S является наибольшая площадь попе-
речного сечения кузова головного вагона.
Как показали проведенные исследования, от формы
движущегося тела при одной и той же площади его
поперечного сечения существенно зависит сопротивление
воздушной среды. Путем изменения формы кузова можно
в значительной степени снизить коэффициент обтекаемос-
ти. Этим самым можно уменьшить сопротивление движе-
нию и, следовательно, расход электрической энергии.
Следует отметить, что составляющая аэр при отно-
сительно низких скоростях движения (до 40—50 км/ч)
мала по сравнению с И7О тр. Поэтому на городском транс-
порте обтекаемые формы (с хорошей аэродинамикой)
придают только скоростному подвижному составу.
Для подземных линий метрополитена условия взаимо-
действия подвижного состава и воздушной среды отли-
чаются от условий для наземного транспорта. Двигаясь
в тоннеле, поезд выталкивает воздух подобно поршню в
насосе. При этом перед поездом возрастает давление воз-
духа, а позади сто образуется разрежение. Одновременно
43
Рис. 3.3. Зависимости UJoa,p(w) для
трамвая (/) и троллейбуса (2)
воздух перемещается
навстречу движению
поезда по зазору межч\
ним и стенками тоннеля,
что создает относится!,
но большое сопротивле
ние движению, даже
при низких скоростях
движения.
Для подземных ли
ний метрополитена со
противление от взаимо
действия поезда и во»
душной среды в тоннеле является составляющей ос
новного сопротивления движению. Для наземною
городского транспорта сопротивление воздуха в тон
неле относится к дополнительному сопротивлению дни
жения.
На рис. 3.3 представлена зависимость сопротивления
воздушной среды от скорости движения U'/o asp (а) для
трамвайного вагона и троллейбуса.
3.3. Формулы для определения основного сопротивления
движению
Структура расчетных зависимостей основного сонро
тивления движению. На основное сопротивление движе-
нию влияют многие разнообразные постоянные и пере-
менные факторы, взаимосвязанные и зависящие друг <*»
друга. Поэтому определение основного сопротивления
движению аналитическим путем очень сложно и вес»,ми
неточно. В результате экспериментальных исследований
установлено, что определяющее влияние на основное
сопротивление движению рельсового транспорта оказии.।
ют два фактора: скорость движения и сила нажашя
колесной пары на рельсы. С увеличением скорости основ
ное удельное сопротивление движению растет, с увелнче
нием силы нажатия колесной пары на рельсы оно умснь
шается.
При практических расчетах основного удельного сои
ротивления движению применяют эмпирические формулы
вида
—а + bu -f-cv2. (3 H)
44
где а, b и с — постоянные числовые коэффициенты, получаемые
опытным путем и отражающие влияние различных
факторов иа основное сопротивление движению.
Коэффициенты а и b характеризуют силы трения,
определяемые конструкцией подвижного состава, коэф-
фициент с — сопротивление воздушной среды. Каждому
типу подвижного состава соответствуют разные значения
коэффициентов a, h и с. Для подвижного состава не-
большой длины коэффициент /> можно принять равным
нулю.
Сопротивление движению в режимах тяги, выбега и
торможения. Для моторных вагонов рассматривают за-
висимости основного сопротивления движению в режиме
тяги или электрического торможения, т. е. движении, когда
тяговые двигатели обтекаются током (движение под то-
ком) и в режиме выбега.
При движении под током силы сопротивления движе-
нию, обусловленные механическими потерями в тяговых
двигателях, тяговой передаче, моторно-осевых подшипни-
ках, учтены в электромеханических характеристиках тя-
говых двигателей. Поэтому при движении под током
расчетное сопротивление движению меньше, чем в режиме
выбега и механического торможения на значение сил, ко-
торые вызываются этими потерями.
В реальных условиях эта разница вызвана тем, что
при движении под током потери энергии в тяговых дви-
гателях, тяговой передаче, подшипниках, которые учи-
тываются в характеристиках двигателей, покрываются
энергией, потребляемой из контактной сети. При движении
в режиме выбега на покрытие этих потерь расходуется
кинетическая энергия, на-
копленная подвижным сос-
тавом, и эти потери учитыва-
ются увеличением сопротив-
ления движению на значе-
ние &wo.
На рис. 3.4 приведены
зависимости основного удель-
ного сопротивления при дви-
жении под током w0T и без
тока (при выбеге) ьуох от
скорости движения.
Расчетные значения ос-
новного сопротивления дви-
Рис. 3.4. Зависимость основного
удельного сопротивления движе-
нию под током и без тока
от скорости
45
Таблица 3.1
Тип подвижного состава Удельное сопротивление движению, Н/кН
Движение под током Движение без тока
1. Трамвай КТМ-5М 2. Трамвай РВЗ 3. Трамвай МТБ 4. Троллейбус 5. Вагоны метрополи- тена и) от = 5,0 + 0,005ц2 WoT = 0.45 + 0,0028 ц2 , г 8 + 0,0381? Wot — 1,5 + mg w„ = 12 + 0,0041? Wot= 1,1 +(0,09 + v2 + 0,022 я)— mg + -L g § Г' 1 1 О О X О’О’ о О х х и * * о о II II ' II II К - - слю 1 S’ ? о ф =" оо зТе + + i + 'Ь+' 24 Р 2 ело & о? 8 +§§ 4- s 5^ о — е ьо
Примечание. Здесь п — число вагонов в подо и ж пом состаре.
жению. При выполнении тяговых расчетов удельное основ
ное сопротивление движению вычисляют по эмпирическим
формулам. Для современных отечественных типов подннж
ного состава ГЭТ эти формулы приведены в табл. 3.1
3.4. Сопротивление движению от уклона
Когда подвижной состав движется по прямолинейному
уклону, то, помимо горизонтального, он совершает вер
тикальное перемещение. Составляющая силы тяжести,
направленная по движению подвижного состава, записиi
от крутизны пути и является силой сопротивления дни
жению от уклона IF, (рис. 3.5).
Уклон профиля пути, выраженный в тысячных долях
(%о).
1 = lOOOtga, (3 4)
где согласно (рис. 3.5)
RC ft — h
*^=дс=^7^- (JI(”
здесь hK и h„ — высоты соответственно в конце и начале уклона, м.
/ — длина рассматриваемого участка пути с уклоном, м
Подставляя выражение (3.10) в выражение (3.9), по-
лучим, %0,
h — ft
(=1000———- (3.11)
4о
Следовательно, ук-
лон, выраженный в
%0> — это число метров
высоты, приходящихся
на I км горизонтальной
длины пути. Сопротив-
ление движению по-
движного состава ог
уклона, кН,
UZ^wgslna (3.12)
где т — масса поезда, т,
g — ускор< пне свобод-
ного падения, м/с2.
На реальном профиле пути подъемы не превышают
2—2,5°, поэтому можно принять, что sina^stga. Тогда со-
противление движению от уклона, кН,
= mg tg а = ' <313)
или, Н,
W' — mgr. (3.14)
Рис. 3.5. Определение сопротивления
движению от уклона HZ,
Удельное сопротивление движению от уклона, Н/кН,
wi= —i. (3.15)
Как следует из выражения (3.15), удельное сопротив-
ление движению от уклона численно равно уклону в
тысячных долях и не зависит ни от скорости, ни от типа
подвижного состава. Формула (3.15) выведена при дви-
жении на подъеме. Но она будет справедлива и для дви-
жения на спуске. На спуске составляющая силы тяжести
направлена по движению подвижного состава и является
ускоряющей силой. Это учитывается в формуле (3.15) тем,
что на спусках значение уклона i является отрицатель-
ным.
Если подвижной состав движется на подъеме с
/=10%о, то г0,= 1О Н/кН, на спуске такой же крутизны
(i —— 10%о) w,= — 10 Н/кН. Таким образом, в формуле
(3.15) под i понимается не абсолютное, а алгебраическое
значение крутизны уклона.
На городском рельсовом транспорте уклоны достигают
20—40 %0. На маршрутах безрельсового транспорта
встречаются уклоны до 80 %о-
47
3.5. Сопротивление движению от кривой
На рельсовом транспорте колеса на одной оси жестко
связаны между собой. Поэтому при движении в кривых
колеса, закрепленные на одной оси, совершают неодина-
ковый путь. Чем меньше радиус кривизны, тем больше
разность путей, проходимых колесами одной оси.
Однако жестко спаренные колеса вращаются с одина-
ковой скоростью. Вследствие этого скорости колес по кру-
гам качения оказываются не равными скоростям их
перемещения вдоль рельсов, т. е. возникает проскальзы-
вание колес относительно рельсов, поэтому колеса с
внутренней стороны кривой окажутся в режиме боксова-
ния или наружные колеса — в режиме юза.
При прохождении подвижным составом кривых участ
ков, помимо вышеназванного явления, возникает много
дополнительных, имеющих сложный характер и увели
чивающих сопротивление движению.
Например, наиболее значительным является гренне
реборды о боковую поверхность головки реЛьса. В про-
цессе эксплуатации для уменьшения износа рельса и
реборд колесных пар боковые поверхпосгн рельсов на
кривых участках пути смазывают.
В результате экспериментальных исследований были
получены выражения, которые учитывают основные фак
торы, влияющие на значение удельного сопротивления
движению от кривых. Наиболее распространенное выра
жение имеет вид: ______
WKP=!2gL.[D+ /z„+d2], (ЛК.)
кр
где <р— коэффициент трения скольжения между колесом и рельсом;
D — диаметр колеса, м;
/„ — длина жесткой базы, м;
d — ширина колеи, м;
/?кр — радиус кривой, м.
На практике пользуются усредненными величинами.
В этом случае для трамвайных вагонов удельное сопро-
тивление движению от кривой, Н/кН,
и,кр = 450/Лкр. (3.17)
На безрельсовом транспорте сопротивление движению
на кривых участках увеличивается незначительно благо-
даря тому, что колеса не связаны жестко между собой,
и этой величиной практически можно пренебречь.
48
3.6. Дополнительное сопротивление движению
Дополнительное сопротивление движению И7Д возни-
кает под воздействием ветра, при движении подвижного
состава в тоннеле, при низкой температуре окружающего
воздуха.
Сопротивление движению при ветре отличается от
сопротивления движепиюу|ри безветренной погоде. Нап-
равление ветра может совпадать или быть противополож-
ным направлению движения подвижного состава. Когда
ветер направлен по движению подвижного состава,
результирующая скорость воздуха равна разности ско-
ростей подвижного состава v и ветра ов. Если ветер нап-
равлен против движения, результирующая скорость под-
вижного состава относительно воздуха будет равна сум-
ме скоростей подвижного состава и ветра. Это обстоя-
тельство можно приближенно учесть непосредственно в
формулах для определения основного сопротивления дви-
жению путем подстановки в член, содержащий v2 вместо
v величину и±Ув.
В условиях города из-за экранирующего действия
домов ветра с большой скоростью практически не бывает,
поэтому увеличение сопротивления движению от ветра
в городском электрическом транспорте сказывается незна-
чительно, и в тяговых расчетах его не учитывают.
Дополнительное сопротивление движению подвижного
состава в тоннелях возникает за счет увеличения со-
противления воздуха. Двигаясь в тоннеле, подвижной
состав выталкивает воздух подобно воздушному поршню.
При этом перед подвижным составом возрастает дав-
ление воздуха, а позади образуется разряжение. Для
наземного городского электрического транспорта сопро-
,тивление воздуха в тоннелях в тяговых расчетах не учи-
тывается, так как тоннели встречаются крайне редко и
имеют небольшую длину.
Дополнительное сопротивление движению -при трога-
нии подвижного состава с места возникает в момент
перехода из состояния покоя в состояние движения.
Оно обусловлено главным образом увеличением сил тре-
ния в буксах, которые зависят при определенном качестве
смазки от температуры окружающего воздуха и длитель-
ности стоянки, массы подвижного состава, типа подшип-
ников. Как уже указывалось ранее, на городском электри-
ческом транспорте дополнительное сопротивление движе-
нию при трогании с места не учитывается.
49
На сопротивление движению оказывает влияние тем-
пература окружающего воздуха. В холодное время уве-
личивается плотность воздуха, в результате чего возрас-
тает сопротивление воздушной среды и, следовательно,
основное сопротивление движению. Температура воздуха
оказывает большое влияние на силы трения в подшип-
никах. В холодное время смазка в буксах загустевает,
увеличиваются силы внутреннего трения в подшипниках.
Влияние этого обстоятельства можно уменьшить путем
применения в зимнее время менее вязких смазочных
материалов.
3.7. Пути уменьшения сопротивления движению
Сопротивление движению подвижного состава ока-
зывает существенное влияние на расход электрической
энергии. Следовательно, вопрос о снижении сопротивле-
ния движению имеет большое практическое значение
Все способы уменьшения сопротивления движению
можно разделить на две основные группы: конструк-
тивные и эксплуатационные. К конструктивным мерам
относятся:
уменьшение массы тары подвижного состава;
увеличение радиуса кривых, создание бесстыковых
(«бархатных») путей;
широкое применение современных типов роликовых
подшипников.
К эксплуатационным мерам относятся:
надлежащее содержание верхнего строения путей, шс
тематическое регулирование тормозов, устраняющее тре-
ние колодок о бандажи при отпущенных тормозах;
своевременное добавление смазки в подшипники, при-
менение качественной смазки, тщательный подбор ио
сезонам оптимальных сортов смазочных материалов для
уменьшения потерь энергии в редукторах и буксовых
подшипниках;
смазывание реборд рельсов на кривых участках пути;
поддержание необходимого давления в пневматических
колесах, регулирование углов развала и схождения колес
для троллейбуса;
сокращение времени стоянок с целью облегчения ус-
ловий трогания подвижного состава, особенно в зимнее
время.
50
На городском электрическом транспорте осуществля-
ется регулярная проверка основного удельного сопротив-
ления движению. Такую проверку можно проводить не-
посредственно па деповских путях.
3.8. Методы определения основного сопротивления
движению
Наиболее точно ociioniioi сопротивление движению
определяется экеперименгаль!о. Рассмотрим три способа
определения основного сопротивления движению экспе-
риментальным путем: метод выбега, метод установивше-
гося тока и метод записи кривых движения.
Метод выбега. При испытаниях выбирают ровный и
горизонтальный участок пути или с небольшим и постоян-
ным ио значению уклоном (до 2 %о). Подвижной состав
разгоняют до небольшой скорости v и, начиная с этой
скорости, осуществляют выбег. До полной остановки под-
вижной состав пройдет путь, равный I. Для упрощения
расчетов в-условиях депо при малых скоростях движение
подвижного состава в период выбега считают равномер-
но замедленным и удельное сопротивление движению от-
носят к средней скорости. Тогда замедление подвижного
состава, м/с2,
rfu _ 2/
~<И ~ '
где I — путь, пройденный выбегом, м;
I — время движения в режиме выбега, с.
Удельное сопротивление движению определяют из ос-
новного уравнения движению в режиме выбега по фор-
муле (2.13):
ЬУ = (I -|- Y )—~~ / К> ± -
ОХ \ Г 7 J/ Z Ъ — 1
dv 21
Подставляя значение ^7= и определив значение
1 /^ = 102 из табл. 2.1, получим, Н/кН,
2/
w == 102 (1 4- у ) — Jr w •
ох ' 1 1 ' ^2 i
Замерив секундомером время выбега и путь, пройден-
ный при выбеге, подсчитывают среднее значение удель-
ного сопротивления движению. Если рассчитанное зна-
51
чение сопротивления движению окажется больше норми-
рованного для данного типа подвижного состава, то
подвижной состав подвергают осмотру и ремонту. Метод
выбега получил широкое применение для контроля тех-
нического состояния подвижного состава в условиях депо.
Метод установившегося тока. Выбирают ровный и
горизонтальный участок пути и осуществляют на нем дви-
жение подвижного состава с постоянной скоростью v. Все
двигатели в этом случае подключают к тяговой сети через
балластный резистор.
При достижении подвижным составом установившейся
скорости измеряют потребляемый им ток /. Затем, зная
значение потребляемого тока, по электромеханическим
характеристикам двигателя F(J) находят силу тяги F.
При установившемся режиме движения сила тяги под
вижного состава равна сопротивлению движения, т. е.
Лл=и/От. Зная массу подвижного состава, можно опре-
делить удельное сопротивление движению г£>о1 = Wm/mg.
Метод записи кривых движения. Этот метод является
наиболее точным. На подвижном составе устанавливают
тахогенератор и самопишущий прибор для записи зави-
симости скорости подвижного состава от времени
о(/). Подвижной состав на ровном и горизонтальном
участке пути разгоняется и затем с какой-то скоростью v
начинает двигаться в режиме выбега. На ленте само
пишущего прибора получаем записанную кривую выбега.
По этой кривой для отдельных точек скорости опреде
ляем значения замедлений До/Д/, которым будут со
ответствовать значения основного сопротивления движе-
нию. Используя основное уравнение движения в режиме
выбега (2.13), при котором [а—шох, удельное сопротивле
ние движению, Н/кН,
Ас. т
где mv и т, — масштабы соответственно скорости и времени.
Метод непосредственного измерения. Этот метод не-
совершенный, но дает, прямо в условиях цеха техничес-
кого обслуживания, быстрый ответ на вопрос, находится
ли основное сопротивление движению Wo в пределах
нормы или нет. Сущность метода состоит в том, что
подвижному составу сообщают равномерное движение
путем воздействия на него постоянной внешней силы.
52
Для этого можно использовать лебедки с ручным или
электрическим приводом, аккумуляторную тягу или вагон-
лабораторию. Во всех случаях силу тяги F измеряют
динамометром, который при равномерном движении трам-
вая или троллейбуса показывает величину, равную сопро-
тивлению движения W'n.
Пример 1. Дли трамвайного и.иона гассой т— 24 г определить
полное сопротивление движению or нодьц»-.| i - 50 %0,
Решение Нолыуяы, выражением (3.15), определяем удельное
сопротивление движению or уклона w,=r = 50 Н/кН. Тогда полное
сопротивление движению or нодг.ема
IP, -uyng =50-24-9,8= 11 760 11.
Пример 2. Определить сопротивление движению трамвайного ваго-
на массой «1 = 24 т при движении в кривой радиусом /?кр = 50 м.
Реше н и с. Удельное сопротивление движению от кривой для трам-
вайного вагона по формуле (3.17)
wKp = 450/AKp = 450/50 = 9.0 K/кН.
Полное сопротивление движению от кривой
llZK|,= ®Kp«ig = 9-24-9.8 = 2116.8 Н.
Пример 3. Определить полное сопротивление движению 07 для трам-
вая типа КТМ-5М массой т =28,5 т при движении под током по спуску
1 = — 20 %0 па кривой радиусом /?„Р=75 м со скоростью н=*20 км/ч.
Решение. Согласно уравнению (3.1) полное сопротивление дви-
жению W = IV'o-j- U7.-|~ U7Kp + 11^,. Определим слагаемые этого уравнения.
Основное удельное сопротивление движению для трамвайного
вагона КТМ-5М при движении под током определяем по формуле,
приведенной в табл. 3.1:
= 5 + 0.005 - 202 = 7 И/кН.
Основное сопротивление движению
= w„mg = 7 28,5 • 9.8 = 1960 Н.
Удельное сопротивление движению от уклона согласно выражению
(3.15)
u>, = i = -20 Н/кН.
Сопротивление движению от уклона
U7,.= ui,mg= —20-28,5-9,8= -5586 Н.
Удельное сопротивление движению от кривой по формуле (3.17)
= 450/А’,р = 450/75 = 6 Н/кН.
Сопротивление движению от кривой
28.5-9.8= 1670 Н.
53
Принимаем, что дополнительное сопротивление движению 117л = 0.
Тогда полное сопротивление движению трамвайного вагона
lV=I960 + (-5586) +1670 + 0= -1956 Н.
Контрольные вопросы
I. Может ли основное сопротивление движению иметь отрица-
тельное значение?
2. Почему основное сопротивление движению под током меньше,
чем при выбеге?
3. Почему у троллейбуса нс учитывается сопротивление движению
от кривой?
4. Почему у троллейбуса самое большое значение основного сопро
тивления движению?
5. Почему при трогании с места после длительной стоянки под
вижной состав испытывает дополнительное сопротивление?
6. Что означают знаки %о и %?
7. Почему нельзя определить методом установившегося тока сопро
тивление движению подвижного состава при выбеге?
54
4
ХАРАКТЕРИСТИКИ ТЙГОВЫХ
ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
4.1. Электромеханические характеристики на валу
тяговых двигателей постоянного тока
Основные положения. И i уравнения движения подвиж-
ного состава следую, чго при / впжспип под током режим
его работы онредсляепя действующими на него силами
тяги F и сонрогнвлепня движению W. Из этих двух сил
управляемой является только сила тяги F, которая созда-
ется за снег сцепления колес с рельсами при реализации
вращающих моментов, развиваемых тяговыми двигате-
лями. Поэтому для изучения движения подвижного
состава необходимо предварительно ознакомиться с ха-
рактеристиками тяговых двигателей.
Электромеханическими характеристиками на валу
электрического двигателя называются зависимости часто-
ты вращения двигателя от тока n(f), вращающего
момента от тока M(F) и коэффициента полезного действия
(к. п. д.) от тока т)д(/) пРи напряжении питания, равном
номинальному. В электроподвижном составе ГЭТ в основ-
ном применяются двигатели постоянного тока. Они могут
иметь следующие возбуждения: последовательное, парал-
лельное, смешанное и независимое. Каждая система
возбуждения обладает своими характерными особеннос-
тями, которые и определяют степень пригодности
двигателя для той или другой цели.
Расчет электромеханических характеристик на валу
тягового двигателя. Электродвижущая сила (э. д. с.) Е,
индуктируемая в обмотке якоря машины постоянного тока,
выражается как
£ = С'Фп, (4.1)
где С — конструктивная постоянная тягового двигателя;
Ф — магнитный поток;
п — частота вращения якоря.
В режиме тяги в двигателе происходит преобразование
электрической энергии в механическую. Напряжение
f/д, приложенное к двигателю, больше его электродвижу-
щей силы, т. е. ил> Е. Уравнение электрического
55
равновесия между приложенным к двигателю напряже-
нием, электродвижущей силой и падением напряжения
1г в силовой цепи будет иметь вид:
<Л=£ + /г + Д£ш, (4.2)
где Л£,„ — падение напряжения под щетками двигателя.
Величина Д/7Щ= 1,04-2,0 В, поэтому в практических
расчетах этой составляющей напряжения пренебрегают.
На основании уравнений (4.1) и (4.2) получаем
выражение для частоты вращения якоря
где / — ток якоря двигателя. Л;
г — активное сопротивление внутренней цепи двигателя. Ом;
С'Ф — магнитный поток главных полюсов двигателя. В/(об/мин).
Вращающий момент М является одним из основных
параметров двигателя, так как он определяет ток,
потребляемый двигателем, а следовательно, и его мощ-
ность. Вращающий момент двигателя может быть рас-
считан из условия равенства полезной механической
мощности Р,л и подведенной электрической мощности,
умноженной на к. п. д. двигателя. Полезная механическая
мощность
Рм = Ми>, (4.4)
где со = 2лп/60 = лп/30— угловая скорость якоря, рад/с.
Следовательно, полезную механическую мощность,
Вт, можно выразить так:
Ри лпМ/М (4.5)
Полезная электрическая мощность, Вт,
/’ С,/ч„ (-1 б)
Приравняв левые части выражений (4.5) и (4.6), но
луч им
л/1А1/30= (4 7)
откуда вращающий момент, Н-м,
зо и /
И 8)
В уравнении (4.8) величины выражены {7Д в вольтах,
/ в амперах, п в оборотах в минуту.
56
Рис. 4.1. Электромеханиче-
ские характеристики на
валу тягового двигателя
ДК 254 Ь
Вращающий момент М можно также определить по
электромагнитному вращающему моменту Мэм> т. е.
моменту, который развивал бы двигатель при отсутствии
механических и магнитных потерь.
М = М,„-ДМ, (4.9)
30
где Af3M=—С'Ф/— электромагнитный момент, создаваемый электро-
л магнитной мощностью Рзи — Е/-,
/\М — момент, создаваемый магнитными и механическими
потерями ДР„ — —-ДЛ4.
Следовательно, вращающий момент, Н-м,
40 /' АР х
М = — ( С'Ф/ - - ” ) (4.10)
л \ п /
В выражении (4.10) С'Ф имеет размерность
В/(об/мин); остальные члены имеют размерности как
в выражении (4.8)
Коэффициент полезного действия двигателя т]д пред-
ставляет собой отношение полезной мощности к подве-
денной. При тяговом режиме это будет отношение
полезной механической мощности Ры к электрической:
р р
где £ДР = /!г-|-ДЛ, -рАРс — сумма соответственно электрических, ме-
ханических и магнитных потерь в двигателе
На рис. 4.1 представлены электромеханические харак-
теристики на валу якоря тягового двигателя ДК-254Б:
скоростная п(/), вращающего момента М(/), к. п. д. г]д(/).
57
4.2. Электромеханические характеристики на ободе
движущего колеса
Основные положения. Для изучения работы подвижно-
го состава на линии необходимо перейти от характеристик
на валу тягового двигателя к электромеханическим
характеристикам на ободе движущего колеса. Зависимос-
ти скорости и, силы тяги F и к. п. д. двигателя с учетом
потерь энергии в передаче от тока двигателя называют-
ся электромеханическими характеристиками на ободе
движущего колеса. Эти характеристики определяются не
только свойствами тяговых двигателей, но и отдельными
параметрами подвижного состава — диаметром движуще-
го колеса £>„, м, передаточным числом ц передачи
от вала двигателя к движущей оси и коэффициентом
полезного действия этой передачи ц:1.
Расчетные выражения для определения электро-
механических характеристик иа ободе движущего колеса.
Для перехода от электромеханических характеристик
на валу тягового двигателя к характерце гикам па ободе
колеса используются следующие соотношения:
скорость, км/ч,
яп 1 3 600 1)„ п
v .30 -2 Iooo-=(,J885 ir- <“’*
где коэффициент 3600/1000 введен для перевода метров в секунду
в километры в час;
сила ТЯГИ, Н,
К. п. д.
П = 'ЪЛ)з. (41-1)
В тяговых расчетах удобнее использовать относитель-
ные потери мощности в передаче Ар3 вместо значения
к. п. д. ip. Относительные потери мощности в передаче
выражают в процентах от подведенной мощности:
(4.15)
где ДР, — потери мощности в передаточных механизмах, Вт.
58
ДР
ЛР>= j—- ЮО,
U /|| — \Р
Д 1 I «
(4.16)
мощности в передаточных механнз-
К. п. д. передачи
ч, =
Выражая потери
мах ЛР3 через относительные потери Ар3, получим
ч. 1 Лр,/(Ю0ч„). (4.17)
Подстанин к. н. д. передачи из выражения (4.17) в
выражение (4.14), получим
Ч - Ча — Лр3/100. (4.18)
Величина Ар, зависит от типа передачи.
В табл. 4.1 приведены численные значения относи-
тельных потерь в механической передаче в зависимости
от отношения тока двигателя / к его часовому току /ч,
выраженного в процентах, для разных типов редукторов.
Рассмотрим соотношения, по которым следует вести
расчет характеристик на ободе колеса.
Выражая на основании формулы (4.12) частоту
вращения вала якоря п, об/мин, через поступательную
скорость и, км/ч, и подставляя в выражение (4.3), получим
/? = СФи, (4.19)
где С = С'-0,1885DK/|i.
Подставляя значение £ в формулу (4.2), определим
скорость поступательного движения подвижного состава
При напряжении на двигателе UR и токе силовой
цепи /, подведенная к нему мощность равна UR1. При
Таблица 4.1
Тип передачи Относительные потери Лрэ в механической передаче при относительном токе (//Л) 100%
200 150 125 100 75 60 50 40 30 25
С карданной муфтой или карданным валом 4,2 3.6 3,2 3,0 3,0 3,2 3,8 5,3 8,0 10,1
Двухступенчатая зубчатая с карданным валом или муфтой 6,5 6,3 6,1 6,0 6,1 6,4 6,9 7,5 10,0 11,5
59
этом считаем, что цепи параллельного и независимого
возбуждения отсутствуют. С одной стороны, полезная
электрическая мощность Р будет меньше подведенной
на потери ДР в двигателе и передаче
Р=ид1 — ЛР. (4.21)
Потери ДР складываются из электрических ДРЭ,
магнитных ДРС, механических ДРМ и потерь в переда-
че ДР3:
1\Р = ЬР, + ЬРс + ЛРи+ЬРа. (4.22)
Электрические потери состоят из потерь в силовой
цепи 12г и электрических потерь в щетках /Д(7,„.
Электрическими потерями в щетках /Д(7Ш для упрощения
расчетов пренебрегаем, тогда
КР, — 1‘г. (4.23)
Подведенная к двигателю мощность за вычетом
электрических потерь называется электромагнитной мощ-
ностью Рзм.
С другой стороны, полезная мощность Р, Вт, отне-
сенная к ободу движущего колеса, равна произведению
силы тяги F двигателя на скорость и поступательного
движения:
Р=/ч?/3,6. (4 21)
здесь коэффициент 1/3,6 введен для перевода пыотоп
километров в ватты.
С учетом выражений (4.21) и (4.24) можно записать:
/ч</3.6 = UJ ЛР. (4.25)
P,. = UJ- Рг (42С>)
Используя выражения (4.2), (4.19) и (4.26), можно
написать
/}эм=СФр/. (4.27)
Если бы в двигателе отсутствовали магнитные
и механические потери, вся электромагнитная мощность
преобразовалась бы в полезную механическую мощность
и двигатель развивал бы так называемую электромагнит-
ную силу тяги, Н,
Г„,=3.6(бл/-/гг)/е. (4.28)'
или, используя выражения (4.26) — (4.28),
F„ = 3.bC4>l.
(4.29)
60
Из уравнения (4.25) получим выражение для силы
тяги двигателя
/ {.(•>(. ,/ .\P)/v. (4.30)
Используя выражения (4 22), (4.28) и (4.30), получим
Г /3.6(5/', Ч-Л/УН (4.31)
Второе слагаемое в правой части уравнения (4.31)
представлж г собой потерю силы тяги, вызванную магнит-
ными и мех unmet кнми потерями, которую обозначим AF:
А/' 3,(>(\/\ + ЛР„ + &P,)/v. (4.32)
Следовательно, сила тяги на ободе Движущего
колеса / меньше электромагнитной силы F3K на значение
потерь Л/;
/• = Р.м- АН. (4.33)
или с учетом выражения (4.29)
Л = 3,6О'П/ -ЛЛ. (4.34)
Коэффициент полезного действия двигателя 1) равен
отношению полезной мощности на ободе колеса Р к полной
подведенной мощности Ual. С учетом выражений
(4.21) и (4.22) получим
П = —= 1------------------------- (4.35)
Расчет электромеханических характеристик. Электро-
механические характеристики двигателя постоянного тока
на ободе движущего колеса и(/), Сэм(/), F(J) и т)(0 рас-
считывают по выражениям (4.20), (4.29), (4.31) и (4.35).
Для того чтобы построить характеристики v(j) и F3M(/)
при заданном напряжении на двигателе, должна быть
предварительно определена зависимость СФ(/).
Величина СФ, пропорциональная магнитному пото-
ку Ф, имеет размерность В/(км/ч) и представляет э. д. с.
двигателя, возбуждаемую при потоке Ф и скорости v,
равной 1 км/ч. Форма кривой СФ(/) зависит как от магнит-
ной характеристики Ф(Х/„шв) (где /в и шв соответственно
ток и число витков обмоток возбуждения на один полюс
двигателя), гак и от способа включения обмоток возбуж-
дения двигатели.
Характеристику силы тяги /•’(/) и к и. д. 1](/) рас-
считывают по формулам (4 И) и (4.35) Для определения
61
Рис. 4.2. Зависимости
магнитного потока от
магнитодвижущей си-
лы !•„, возбуждения,
механических и маг-
нитных потерь от час-
тоты вращения якоря
тягового двигателя
ДК-254Б
силы тяги двигателя F=FaM— AF необходимо найти
AF по сумме магнитных и механических потерь в двигателе
и передаче.
Механические потери АР,., в двигателе прямо пропор-
циональны частоте вращения. Магнитные потери АРС скла
дываются из потерь на гистерезис и потерь, вызванных
вихревыми токами, и зависят от частоты вращения
двигателя и его магнитного потока, который определяется
током возбуждения. Сумму механических и магнитных
потерь обычно представляют в виде семейства кривых
в зависимости от частоты вращения якоря (Л/’м | Д/< ) =
==f(n) при различных значениях тока возбуждения
На рис. 4.2 представлены зависимости СФ от магнито-
движущей силы F,„ при различных значениях тока якоря
и зависимость механических и магнитных потерь от
частоты вращения якоря (АРМ + АРс) = /(н) при различных
значениях магнитодвижущей силы для трамвайного
двигателя ДК-254Б. При этом кривая АР„ + APc = /(/i)
при /в = 0 соответствует одним лишь механическим поте-
рям АРМ, а разность ординат между кривыми при Fm =
= 2780 А и /„ — 0 представляет собой магнитные потерй
холостого хода, или, как их называют, основные магнитные
потери АРС.
62
Наряду с основными магнитными потерями, соответст-
вующими холостому ходу элекгрпческой машины, при
нагрузке возникают добавочные магнитные потери. Их
приближенно учитывают умножением основных магнитных
потерь на некоторый поправочный коэффициент. Характе-
ристику i|(/) рассчитывают но формуле (4.35) после того,
как определены все величины, входящие в нее.
Характеристики двигателей последовательного воз-
буждения. У двигателей последовательного возбуждения
магнитодвижущая сила (м. д. с.) пропорциональна току
якоря /. Поэтому зависимость СФ(/) для двигателя
последовательного возбуждения близка по форме к зави-
симости магнитного потока Ф от тока возбуждения /в,
снятой при независимом возбуждении и отсутствии
нагрузки.
Чтобы построить зависимость СФ(/), необходимо вос-
пользоваться нагрузочными характеристиками Ф(/в),
снятыми при различных токах якоря. На каждой из
кривых Ф(/в) следует отметить точку, соответствующую
току возбуждения /в, равному току якоря /, для которого
построена эта кривая. Соединив полученные точки,
найдем зависимость СФ(/) (на рис. 4.3 жирная линия).
В данном случае кривая СФ(/) будет соответствовать
не холостому ходу возбужденной машины, а нагрузочному
режиму с токами якоря /, равными в любой точке кривой
токам возбуждения /в. На основе этой зависимости
можно построить скоростные характеристики двигателя
последовательного возбуждения v(l) и электромагнитной
силы FiM(l).
Скорость двигателя и, приведенная к ободу движущего
колеса, приблизительно обратно пропорциональна потоку;
при токе, близком к нулю, она стремится к бесконечности.
С увеличением тока скорость вначале резко падает, что
соответствует прямолинейной части характеристики
СФ(/). При дальнейшем увеличении тока по мере насыще-
ния магнитной цепи машины скорость снижается в мень-
шей степени, как это показано на рис. 4.4.
Электромагнитная сила /?ЭМ = 3,6СФ/ при малых на-
грузках, когда магнитный поток прямо пропорционален
току, растет от нуля приблизительно пропорционально
квадрату тока, т. е. по параболической зависимости.
При дальнейшем увеличении нагрузки но мере насыщения
машины кривая F,M(I) отклоняется от параболы и при-
ближается к прямой, т. е. изменяется прямо пропорцио-
нально току.
63
Рис. 4.4. Принципиальная схема включения тягового двигателя но
следовательного возбуждения (а) и его электромеханические x.ip.iK
теристики на ободе движущего колеса (б)
64
Характеристика силы тяги А(/) подобна характеристике
•лектромагнитной силы, но ее ординаты меньше на вели-
чину ЛА, определяемую магнитными и механическими
погерями в двигателе и потерями в передаче. Поэтому
кривая А(/) не проходит через начало координат, а пере-
секает ось абсцисс при некотором малом токе /х, соответст-
вующем холостому ходу машины. При таком токе и
поминальном напряжении работа двигателя недопустима
и । за резкого повышения частоты вращения якоря.
Характеристика к. п. д. »](/) при малых нагрузках
стремится к нулю при токе /х и силе тяги, равной нулю.
Эта точка соответствует холостому ходу, когда вся
подведенная мощность затрачивается в основном на по-
крытие механических потерь. С увеличением нагрузки
к. и. д. быстро растет по мере снижения механических
потерь и достигает своего максимума в области, близкой
к поминальным нагрузкам. Точка расположения макси-
мума к. п. д. зависит от соотношения механических
и электрических потерь.
При дальнейшем увеличении нагрузки к. п. д. постепен-
но снижается в результате увеличения электрических
потерь, пропорциональных квадрату тока.
При нагрузке, намного превышающей допустимую, при
которой падение напряжения в двигателе 1г становится
U —1г
равным напряжению Ur„ скорость v =—, отданная
мощность I'v и, следовательно, к. п. д. станут равными
нулю. Этот предельный режим соответствует заторможен-
ному состоянию двигателя, при котором вся подведенная
мощность UJ затрачивается на покрытие электрических
потерь /2г.
Электромеханические характеристики на ободе дви-
жущего колеса зависят от диаметра колеса DK, пере-
даточного отношения редуктора ji и его к. п. д., т]3
(рис. 4.5). Если эти величины изменяются, то изменяется
и характер электромеханических характеристик данного
двигателя на ободе колеса. Поэтому на электромехани-
ческих характеристиках двигателя на ободе колеса
обязательно указываются значения DK, ji и г]3.
Характеристики двигателя параллельного возбужде-
ния. У двигателя параллельного возбуждения обмотку
возбуждения к сети подключают через регулируемый
реостат. Ток возбуждения пропорционален приложенному
напряжению, следовательно, магнитодвижущая сила
.1 Зак. 1092
65
Pud 4.5. Электромеханиче-
ские характеристики на
ободе движущего колеса
тягового двигателя после-
довательного возбужде-
ния при = 780 мм,
И = 7,98, Пз = 0,97
(м. д. с.) не зависит от тока якоря. С увеличением тока
якоря / магнитный поток СФ незначительно уменьшается
из-за размагничивающего действия реакции якоря
(рис. 4.6). Скоростная характеристика v(T) жесткая, т. е.
скорость почти не зависит от нагрузки. С увеличением
нагрузки скорость только незначительно уменьшается
вследствие увеличения падения напряжения в цепи дви-
гателя 1г.
Рис. 4'.6. Принципиальная схема включения тягового' двигателя
параллельного возбуждения (а) и его электромеханические харак-
. теристикн па ободе движущего колеса. (6)
66
Характеристика электромагнитной силы тяги Еэм(/)
в юбражается прямой линией, проходящей через начало
координат, так как магнитный поток практически постоя-
нен. Сила тяги F отличается от электромагнитной
силы на значение потерь А/7 и пересекает ось абсцисс
при токе холостого хода /к.
Если приложить к подвижному составу внешнюю
силу, направленную по движению (например, при движе-
нии па крутом спуске), то скорость подвижного состава
о и э. д. с. Е=СФв начнут увеличиваться. При некоторой
скорости, равной vo, э д. с. двигателя станет равной
приложенному напряжению Ua. Ток двигателя в соответст-
вии с выражением (4.2) станет равным нулю. При даль-
нейшем увеличении скорости э. д. с. станет больше прило-
женного напряжения, и ток в двигателе изменит свое
направление.
Гак как направление магнитного потока при этом не
изменится, то сила тяги тоже изменит свой знак и будет
направлена против движения, следовательно, станет
тормозной силой. Тяговый двигатель при этом автомати-
чески перейдет в генераторный режим и будет отдавать
»пергию в тяговую сеть.
Такой режим называется рекуперативным торможе-
нием. При этом двигатели будут тормозить подвижной
состав, одновременно возвращая электрическую энергию
в пи тающую сеть.
Скоростная характеристика двигателя параллельного
побуждения (ем. рис. 4.6) в генераторном режиме
расположена во втором квадранте, а характеристики
«лсктромагпитной силы и силы тяги (в данном режиме
триозные силы) расположены в третьем квадранте
и являются продолжением соответствующих характерис-
тик двигательного режима.
Кривая к. п. д. т](/) двигателя параллельного возбужде-
ния в тяговом режиме имеет такой же вид, как у двигателя
последовательного вбзбуждения. В генераторном режиме
к. и. д. представляет отношение отданной электрической
мощности к подведенной механической мощности. Он ра-
вен пулю при токе якоря, равном току параллельных
цепей затем, увеличиваясь, достигает максимума при
отрицательных нагрузках, близких к номинальным, и вновь
начинает уменьшаться по мере дальнейшего увеличения
нагрузки.
г
67
Характеристики двигателя согласно-смешанного воз-
буждения. Двигатели ^смешанного возбуждения имеют две
обмотки возбуждения: последовательную и параллельную.
У двигателя согласно-смешанного возбуждения м. д. с.
обеих обмоток складывается. Следовательно, суммарная
магнитодвижущая сила
/.- ! / = + (4.36)
где / и wc— соотв иснпо.ток якоря и число витков последователи-
ной > • пки возбуждения;
/ш п Юш— сот пенно ток п число витков параллельной обмотки
шпб'.н ления.
' Если в выражении (4.36) обозначить величину
7„,цуш/кд через I го м. д. с. машины согласно-смешанного
возбуждения буД?т равна Таким образом,
двигатель согласно-смешанного возбуждения можно пред-
ставить как машину с одной последовательной обмоткой
возбуждения, по которой протекает ток якоря / и некото-
рый дополнительный ток /о- Зависимость СФ{1) двигателя
согласно-смешанного возбуждения имеет такой же вид,
как и у двигателя последовательного возбуждения, с той
лишь разницей, что кривая СФ сдвинута влево от начала
координат на значение тока /о, как это показано на
рис. 4.7. Таким образом, при токе якоря, равном пулю,
Рис. 4.7. Принципиальная схема включения тягового двигателя со-
гласно-смешанного возбуждения (а) н его электромеханические
характеристики на ободе движущего колеса (б)
68
м п е. и поток не равны нулю, а создаются током Го,
। <•. м. д. с. параллельной обмотки.
Скоростная характеристика двигателя и(/) имеет при-
мерно такой же вид, как и у двигателя последовательного
по суждения, но сдвинута влево на ток /0. В действитель-
ное in скоростные характеристики двигателя согласно-
i мешанного и последовательного возбуждения несколько
отличаются по форме, так как при одинаковых м. д. с. токи
якоря, а следовательно, и падение напряжения в силовой
пеня двигателя будут различны.
11ри токе якоря, равном нулю, в двигателе согласно-
< мешанного возбуждения остается м. д. с. параллельной
обмотки Это обеспечивает автоматический переход
и генераторный режим (режим рекуперативного торможе-
ния). При этом ток якоря изменяет свое направление,
и ток в параллельной обмотке протекает в том же направ-
лении, что и в двигательном режиме, поэтому в режиме
рекуперативного торможения машина работает, как гене-
ри гор встречно-смешанного возбуждения. При этом
м. д. с. последовательной обмотки вычитается из м. д. с.
параллельной обмотки. Поэтому с увеличением тока
рекуперации магнитный поток в машине будет уменьшать-
ся, скорость сильно возрастет и будет стремиться
к бесконечности при токе рекуперации, равном 70-
Характеристика электромагнитной силы тяги F3M(J)
в двигательном режиме практически прямолинейна,
вследствие того, что машина работает в насыщенной
области магнитной характеристики. При переходе в гене-
раторный режим электромагнитная сила тяги меняет
шак и становится тормозной силой, препятствующей
движению подвижного состава. По мере увеличения
кжа рекуперации электромагнитная сила /?ЭМ = 3,6СФ/
< начала возрастает по абсолютному значению. При
больших токах рекуперации абсолютное значение FM
уменьшается и при токе рекуперации /0 падает до нуля,
так как намагничивающая сила становится равной
пулю.
Сила тяги F меньше электромагнитной силы на значе-
ние потерь А/7. При этом в двигательном режиме сила
вин /•’ по абсолютному значению меньше, а в генераторном
режиме больше электромагнитной силы F3K.
Характеристики r](Z) как в двигательном, так и тор-
мошим режиме имеют такой же вид, как и у двигателя
параллельного возбуждения. К. п. д. равен нулю в тяговом
69
Рис. 4.8. Принципиальная схема включения тягового двигателя встреч-
но-смешанного возбуждения (а) и его электромеханические харак-
теристики на ободе движущего колеса (б)
режиме при токе холостого хода /х, а в генераторном
режиме — при токе якоря /ш.
Характеристики двигателя встречно-смешанного воз-
буждения. У двигателя встречно-смешанного возбужде-
ния м. д. с. обеих обмоток не складывается, а вычитается
при двигательном режиме. Двигатель встречно-смешанно-
го возбуждения, у которого м. д. с. параллельной обмотки
больше м. д. с. последовательной обмотки, непригоден
для электрической тяги из-за его электрической неустойчи-
вости (это будет показано ниже).
Двигатель встречно-смешанного возбуждения, у кото-
рого м. д. с. последовательной обмотки больше м. д. с.
параллельной обмотки, обладает практически такими же
характеристиками, как и двигатель последовательного
возбуждения. Отличие заключается в том, что начало
кривой СФ(/) сдвигается от начала координат вправо на
значение тока /0 = /шшш/к’с. Поэтому на это же значение
тока сдвигаются вправо все электромеханические характе-
ристики (рис. 4.8).
4.3. Тяговые характеристики электроподвйжного состава
Понятие о тяговых характеристиках. В тяговых рас-
четах удобно пользоваться тяговой характеристикой
подвижного состава. Зависимость между силой тяги
подвижного состава и его скоростью Рл(у) на той или иной
70
ступени регулирования и соответствующих ей параметрах
схемы включения двигателя называется тяговой характе-
ристикой подвижного состава.
Построение тяговых характеристик. Тяговую характе-
ристику FXv) (рис. 4.9) строят на основании электромеха-
нических характеристик двигателя на ободе колеса
и(1) и F(I). Скорость переносят без изменения, а силу
гиги подвижного состава определяют по формуле
F,=Fz,
(4.37)
где — число ведущих осей в подвижном составе.
Необходимо строить эти характеристики для всех сту-
пеней регулирования, применяемых на данном подвижном
составе.
Тяговые характеристики могут иметь различный вид
в зависимости от типа двигателей и системы тяги.
На практике в основном используются падающие тяговые
характеристики, т. е. с увеличением скорости сила тяги
снижается. Но степень ее снижения может быть различна
у разных двигателей. Она характеризуется коэффициен-
том жесткости
(4.38)
dv
Знак минус введен потому, что падающая характернс-
dF
тка удовлетворяет неравенству — <0.
Характеристики, у которых сила тяги резко снижается
с увеличением скорости, т. е. с
, J/- .
жесткости (— — оо), называют-
аи
ся жесткими. Жесткой харак-
теристикой обладает двигатель
постоянного тока параллель-
ного возбуждения. Характерис-
тики, у которых скорость резко
изменяется с изменением, силы
тяги, т. е. с низким коэффици-
dF
оптом жесткости — -«-о, называ-
dv
ются мягкими. К ним относятся
характеристики двигателя пос-
тоянного тока последователь-
ного возбуждения. Как бу-
высоким коэффициентом
Рис. 4.9. Тяговая характерис-
тика подвижного состава
71
Рис. 4.10. Тяговые характерис-
тики двигателей различных сис-
тем возбуждения
ответствует максимальная
дет показано далее, в оолъ-
шннстве случаев для целей
тяги наиболее благоприят-
ными являются мягкие тяго-
вые характеристики.
Наибольшая допустимая
нагрузка тягового двигателя
ограничивается его механи-
ческой прочностью, устойчи-
вой коммутацией и опроки-
дывающим моментом. Для
каждого двигателя при опре-
деленной схеме его включе-
ния установлен наибольший
допустимый ток 1„ выше
которого двигатель нагру-
жать нельзя. Этому току со-
сила тяги т„. Ограничение
тяговой характеристики по условию максимальной на
грузки двигателя представлено на рис. 4.9 линией 1.
Наибольшая допустимая сила тяги по условиям
сцеплен ня
/'» I0O0zii,„^4^„ (4.39)
Ограничение силы тяги по сцеплению изображено
линией 2 па рис. 4.9.
Наивысшая точка тяговой характеристики (точка О')
будет соответствовать тому из рассмотренных ограниче-
ний, которое дает ...ыпую силу тяги. Для рельсового
транспорта в большинстве случаев наибольшая допусти-
мая сила тяги определяется условиями сцепления. При
этом боксовапис колес является как бы своеобразной
защитой тяговых двигателей, нс допускающей их пере-
грузки.
Тяговые характеристики имеют ограничение также по
наибольшей допустимой скорости движения, которая явля-
ется конструкционной скоростью щонстр. Эта скорость
определяется прочностью тягового двигателя и конструк-
тивными качествами всего подвижного состава. На
рис. 4.9 ограничение по наибольшей допустимой скорости
представлено линией 3.
Тяговые характеристики двигателей различных систем
возбуждения. Тяговые характеристики двигателей различ-
ных систем возбуждения представлены па рис. 4.10.
72
Как видно из тяговой характеристики двигателя последо-
п.цельного возбуждения (кривая /) в зоне малых
скоростей сила тяги при увеличении скорости резко
издаст. При дальнейшем увеличении скорости сила тяги
и1меияется незначительно, т. е. тяговая характеристика
< 1.ИЮВИТСЯ мягкой.
Тяговая характеристика двигателя параллельного воз-
буждения (кривая 2) жесткая и близка к прямой линии.
При некоторой скорости она пересекает ось абсцисс
н продолжается в область отрицательных (тормозных)
сил. Кривая 3 изображает тяговую характеристику
двигателя согласно-смешанного возбуждения.
4.4. Сравнение двигателей различных систем
возбуждения
Требования, предъявляемые к тяговым двигателям.
Основными требованиями, которым должны удовлетво-
рять тяговые двигатели, являются:
электрическая устойчивость, т. е. способность автома-
1ПЧССКН стремиться к состоянию электрического равно-
весия при переходе с одного режима на другой;
механическая устойчивость, т. е. способность автомати-
чески приближаться к состоянию динамического равно-
весия,
равномерное распределение нагрузок между парал-
ичи.по р,1б<н .IIOI11HMII дни га геля ми;
максимальное использование сцепного веса;
ус|опчиное Iь коммутации,
наименьшее воздействие на энергосистему;
возможность плавного регулирования скорости и при-
менения рекуперации;
простота конструкции.
Электрическая устойчивость. Анализ электрической
yi юйчивости работы тяговых двигателей проводится при
< ледующих допущениях:
пренебрегаем вихревыми токами, возникающими в
шнгателе;
рассматриваем только силовую цепь двигателя и счи-
i.icM, что при случайных отклонениях от состояния
равновесия в силовой цепи токи в параллельных ветвях
остаются неизменными.
73
Для силовой цепи двигателя постоянного тока уравне-
ние переходного процесса можно представить в виде
.11 = СФи +'lr + L-1'- . (4.40)
A (it
где Uя — напряженке, приложенное к двигателю;
СФи — э. д. с. двигателя;
/ — ток якоря двигателя;
г — сопротивление цепи двигателя;
L - индуктивность силовой цепи двигателя.
Если по каким-либо причинам произойдет увеличение
тока, электрически устойчивая система будет стремится
вернуться к положению равновесия, т. е. уменьшить ток.
При этом производная будет отрицательной. Если же
произойдет случайное уменьшение тока, возврат к поло-
жению электрического равновесия должен сопровождать-
ся увеличением тока. Отсюда следует, что в электрически
устойчивой системе знаки отклонения тока и производ-
ной противоположны. Условие электрической устойчивос-
ти системы в данном случае может быть записано в виде
Из выражения (4.40) следует
/. f/V= и - СФу - 1г (4.42)
dt л
Следовательно, условие электрического равновесия
запишется в виде
di (ия~ ~ 1г)<° (4-43»
или
<0| (444)
dl dl
откуда следует, что
d(СФу) (4 45)
dl dl
Как следует из полученного соотношения, для того,
чтобы система находилась в состоянии электрического
равновесия, необходимо, чтобы при увеличении тока /
э. д. с. двигателя СФо, которая уравновешивается раз-
74
устойчивости двигателя последо-
Рнс. 4.11. К анализу электрической
М1МЫЮГО возбуждения (а), параллельного (б), согласно-смешанного
(в) и встречно-смешанного (г)
постно приложенного напряжения [7Д и падением напря-
жения /г, возрастала бы в большей степени, чем эта
разность.
На pm1. 4.11 представлены диаграммы напряжений
Un, >. д. с С<1Ш и падений напряжения для двигателей
поеледошпельпого (рис. 4.11,а), параллельного (рис.
1 11,6), согласно-смешанного (рис. 4.11,в) и встречно-
смешанного (рис. 4.11,г) возбуждения.
Па приведенных диаграммах кривые э. д. с. СФи
подобны кривым СФ(/) для каждой системы возбуждения
двигателей. Напряжение Un, приложенное к двигателю,
пр..тмается постоянным, а линии ((7д-^-/г) представ-
ляют разность между приложенным к двигателю напря-
жением [7Д и падением напряжения в цепи двигателя.
Ординаты заштрихованных площадей представляют собой
значения и характеризуют знак и скорость изменения
гока,. Точки пересечения О являются точками электриче-
ского равновесия, так как в этих точках ,СФи= (7д— 1г и
/‘"=0.
lit
75
Как следует из приведенных диаграмм, электрически
устойчивыми являются двигатели последовательного,
согласно-смешанного и параллельного возбуждения.
Причем у двигателя параллельного возбуждения характе-
ристика СФе(/) дважды пересекается с прямой 0а — 1г
в точках О и О'. Но условие устойчивого электрического
равновесия (4.45) соблюдается только в точке О. Двигате-
ли встречно-смешанного возбуждения в точке О и парал-
лельного в точке О', которые соответствуют значитель-1
ным нагрузкам, неустойчивы, так как
d(Un~,r) > d(Cd>v)
dl dl '
Проанализируем электрическую устойчивость на примере
двигателя последовательного возбуждения (см. рис. 4.11,а).
Если в точке О электрического равновесия произойдет
случайное увеличение тока на некоторое значение А/,
то разность U„— 1г станет меньше э. д. с. СФи. Э. д. с.
,d!
самоиндукции L— станет отрицательной, а это приведет
к тому, что ток станет убывать. Ток будет уменьшаться
до тех нор, пока(Дл — 1г) не сравняется с СФп, т. е. система
возвргпится в положение электрического равновесия.
И наоборот, при случайном уменьшении тока на некоторое
значение А/ от точки О электрического равновесия, СФи
станет меньше (<7Л — 1г). Э. д. с. самоиндукции L—
станет положительной, что приведет к возрастанию тока.
Таким образом, подтверждается электрическая устойчи-
вость двигателя последовательного возбуждения.
Механическая устойчивость. Из уравнения движения
подвижного состава в режиме тяги (2.11)
m(l = ~ W
следует, что динамическое равновесие будет определяться
равенством
F.-117 = 0. (4.47)
Характеристика двигателя будет механически устойчи-
ва, если справедливо соотношение
(4.48)
76
<»гсюда в соответствии с выражением (2.19)
uni
~j~(F - W)<0
dv v •’ )
dF d\V
du dv
(4.49)
(4.50)
Производная силы тяги по скорости должна быть
меньше производной противодействующей силы. На
1>пе 4.12 представлены тяговые характеристики
кривые сопротивления движению для двигателей
последовательного (рис. 4.12, а), параллельного (рис.
I 12.6), согласно-смешанного (рис. 4.12,п) и встречно-
смешанного (рис. 4.12,г) возбуждения. Точки пересече-
ния О кривых F и IV' соответствуют установившимся ско-
ростям и', так как в них /7.,= У7 и 57=0. Ординаты
1.1ШIрихованных площадей
представляют величины, про-
Рнс 4.12. К анализу механической устойчивости двигателя послсдо-
п.। ie.ii.Horo возбуждения (а), параллельного (б), согласно-смешан-
ного (в) и встречно-смешанного (г)
77
dv
порциональные ускорению — с соответствующими
знаками.
Устойчивым динамическим равновесием обладают дви-
гатели последовательного (см. рис. 4.12,а) и согласно-
смешанного возбуждения (см. рис. 4.12,в), поскольку
сила тяги Fn падает, а сила сопротивления движению W
растет с увеличением скорости v. Так, при случайном
увеличении скорости на некоторое значение Ду сила тяги
Fj, станет меньше силы сопротивления W. Ускорение
dv
— становится отрицательным, это приведет к тому, что
скорость поезда будет уменьшаться, пока не достигнет
прежней скорости v'. Двигатель параллельного возбужде-
ния (см. рис. 4.12,6) устойчив только при небольших
нагрузках (точка О). При больших нагрузках (точка О'),
чему соответствует большее сопротивление движению
W', двигатель параллельного возбуждения становится
механически неустойчивым, так как при случайном увели-
чении скорости сила тяги F„ становится больше силы
сопротивления W.
Двигатель встречно-смешанного возбуждения с пре-
обладающей параллельной обмоткой (см. рис. 4.12,г)
механически неустойчив 'поэтому он не применяется в
электрической тяге.
Распределение нагрузок. Разница электромеханиче-
ских характеристик двигателей одного и того же типа
приводит к тому, что скорости двигателей при одном
и том же значении момента неодинаковы. Действующий
стандарт на тяговые двигатели допускает отклонение
частот вращения отдельных двигателей до ±4% от
типовой характеристики в номинальном режиме.
Различие характеристик двигателей, установленных на
одном и том же подвижном составе, приводит к неравно-
мерному распределению нагрузок между ними и, как
следствие этого, неодинаковому потреблению токов.
Рассмотрим тяговые характеристики двух двигателей
последовательного (рис.
(рис. 4.13,6) возбуждения,
установлены на одном и
и работают параллельно,
их колес должны быть одинаковы. Пусть они равны
v'. Как следует из рис. 4.13, неравномерность в распределе-
нии нагрузок у двигателей последовательного возбужде-
4.13,а) и параллельного
Оба двигателя каждого типа
том же подвижном составе
поэтому скорости на ободах
78
I'ue. 4.13. Определение расхождения сил тяги при двигателях после-
довательного возбуждения (а) и параллельного (6)
пня меньше, чем у двигателей параллельного возбужде-
ния. Следовательно, чем мягче характеристики, тем
меньше расхождение нагрузок параллельно работающих
двигателей.
Из рис. 4.13,а видно, что расхождение в силах тяги
двух отличающихся тяговых характеристик при скорос-
ти и' можно принять
ЛД=-Ло—(4.51)
dv
<IF
где —-уи>л наклона спрямленной части тяговой характеристики.
Ра |делпп обе части выражения (4.51) на F, получим
До dF v
те величина----— —-----коэффициент относительной жесткости.
о dv F
Следовательно, если то получаем абсолютно
tiV dF п
жесткую характеристику; если — ->(), то получаем абсо-
лютно мягкую характеристику.
Рассмотрим скоростные характеристики двух двигате-
лей последовательного (рис. 4.14,6) и параллельного
(рис. 4.14,6) возбуждения. Различие в характеристиках
двигателей приводит к тому, что при одной И той же
скорости vo двигатели потребляют различные Токи, и это
различие очень существенно у двигателей с жесткими
79
Рис. 4.14. Определение расхождения нагрузок двигателей последо-
вательного возбуждения (а) и параллельного (б)
характеристиками (см. на рис. 4.14,6, токи Л и /2). Более
того, при скорости vi может получиться так, что один
двигатель работает в двигательном режиме и потребляет
ток /4, а другой — в генераторном и рекуперирует ток /3.
Склонность к возникновению боксования. Проведем
упрощенный анализ прс/ссса боксования в случае
мягких и жестких характеристик тяговых двигателей.
На рис. 4.15 представлены тяговые характеристики
F(v) (кривая /) и зависимости силы сцепления Тсц =
= 1000СОсц'ф в функции скорости (линия 2) при нормаль-
ном качении колеса электроподвижного состава соот-
ветственно для двигателей параллельного и последова-
тельного возбуждения. Пусть в точке О началось
проскальзывание колесной пары при скорости скольжения
Иск, т. е. возникает боксование. Тогда зависимость силы
Рис. 4.15. Процесс возникновения боксования у двигателя параллель-
ного возбуждения (а) и последовательного (б)
80
I рения скольжения В функцйи скорости Гек—1000 боецфек
при скольжении колеса от скорости v™ изобразится
кривой 3. При возникновении боксования угловое уско-
рение. с которым колесная пара проскальзывает относи-
тельно пути, может быть определено из выражения
da> F — I 000 G lb
—=-------------—осц ск R (4,53)
at J к
где J — момент инерций колесной пары и связанных с ней вращаю-
щихся частей;
/?к — радиус колеса.
Из этого выражения следует, что при F> 1000GOCu*Kk
угловое ускорение, а следовательно, и скорость скольже-
ния растут, т. е. процесс боксования продолжает разви-
внться И при F -^221000G<,cl?l- ск скорость скольжения г^ск
падает, и процесс боксования затухает.
Рассмотрим, как будет протекать процесс боксования
у двигателей с жесткими характеристиками (см.
рис. 4.15,а). Пусть в точке О начался процесс боксования,
вызванный уменьшением силы сцепления (линия 2').
Пила сцепления при этом уменьшится со значения ОС
до значения OD. Зависимость ЮбООосцфск от скорости
изобразится кривой 3'. Начнется проскальзывание колес
относительно пути со скорости скольжения ц£к. Процесс
боксования будет развиваться, скорость скольжения уве-
личиваться. но уже при небольшой скорости скольжения
п", ускорение вращения колесной пары прекратится и
будгз наблюдаться незначительная непрерывная пробок-
(oiiK.i колесной нары, так как в этой точке сила тяги
равн 1 силе трепня скольжения и соответствует отрезку
О'А'. Следовательно, эта точка соответствует условию
механической устойчивости. Если восстановить нормаль-
ные условия сцепления, сила тяги F" (отрезок О'А') станет
меньше силы трения скольжения IOOOGocu'Q’ck (отрезок
(>'(.'). Угловое ускорение, а следовательно, скорость
скольжения будут уменьшаться, что ведет к прекращению
процесса боксования. Таким образом, при жесткой тяговой
характеристике возникший процесс боксования быстро
прекращается,
V двигателей с мягкими характеристиками (см.
рис. 4.15,6) начавшийся процесс боксования со скорости
v'lK продолжает развиваться, так как сила тяги F"
(ордината АВ) становится больше силы сцепления
lOOOGcuipcK (ордината АЕ) при любой скорости скольже-
81
ния (например, v"K), в результате чего увеличивается
скольжение и происходит дальнейшее падение силы тяги.
На подвижном составе, как правило, установлено
несколько двигателей. Рассмотрим, как развивается про-
цесс боксования в зависимости от способа соединения
двигателей. Пусть z двигателей соединены последователь-
но и включены на напряжение сети UKC. Если начнется
проскальзывание одной из колесных пар, то характеристи-
ка двигателя, связанного с ней, станет более мягкой,
так как напряжение на этом двигателе увеличивается
и соответственно возрастает частота его вращения.
Скорость скольжения уск этой колесной пары можно
определить из выражения
Р«с —/гх = СФ(ги4-ис«), (4.54)
откуда
Ю / 2 — 1г — СФи
КС z
(4.55)
Если все двигатели соединены параллельно на напря-
жение UKC/z, то скорость скольжения боксующей колесной
пары цск можно определить из выражения
(/>с/г-/г=СФ'о + 1>;,), (4.56)
откуда
Сопоставляя выражения (4.56) и (4.57), можно запи-
сать, что
vtr=-zv'tr, (4.58)
т. е. при последовательном соединении двигателей
скорость скольжения цСк увеличивается в z раз по срав-
нению со скоростью скольжения v'QK у двигателя, включен-
ного непосредственно на постоянное напряжение. Со»
ответственно в z раз жесткость тяговой характеристики
такого двигателя будет меньше.
Устойчивость коммутации. Тяговые двигатели, как
правило, получают питание от тяговой сети. Следова-
тельно, при резких изменениях напряжений в тяговой
сети изменяется напряжение на зажимах тяговых двигате-
лей. Так, скачкообразное повышение напряжения имеет
место, если рядом с потребляющим энергию подвижным
•82
составом произойдет
отключение другого по-
движного состава. При
ном толчок напряже-
нии тем выше, чем
(ншее удален подвиж-
ной состав от тяговой
подстанции.
Естественно, что
частота вращения дви-
i а геля при повышении
Рис. 4.16. Определенно увеличения тока
при повышении напряжения в контакт-
ной сети
напряжения не может
мгновенно измениться.
Полому при повыше-
нии питающего напря-
женин, как следует из
выражения (4.20), возрастает ток двигателя. При-
Hi м это возрастание тем выше, чем более жесткая
характеристика двигателя. Как следует из рис. 4.16,
даже при небольшом повышении напряжения с U" до
I)'! при жестких характеристиках мы имеем весьма боль-
шое увеличение тока (А/")-
При таком же увеличении напряжения (с U\ до
и I двигателях с мягкими характеристиками увеличение
тока Л/' будет незначительно и намного меньше, чем
у двигателей с жесткими характеристиками (АЛ<А/").
При увеличении тока свыше двойного часового нарушает-
ся коммутация двигателя, так как он не рассчитан на
paooiy с такими токами.
Кроме лого, для нормальной коммутации необходимо,
чтобы магнитный поток дополнительного полюса в опре-
деленных пределах был пропорционален току якоря.
Гели и двигателе происходит чрезмерный толчок тока,
на пропорциональность нарушается из-за отставания
магнитного потока дополнительного полюса, вызванного
наличием вихревых токов. Следовательно, с точки зрения
надежности коммутации для электрической тяги, которая
не может работать без толчков напряжения, наиболее
приемлемым является двигатель последовательного воз-
буждения, имеющий мягкие характеристики.
Воздействие на энергосистему. Мощность тяговой
подстанции постоянна (P = const), поэтому желательно,
чтобы подвижной состав потреблял постоянную мощ-
ность
l‘=r.-v~ const.
83
, Если двигатель обладает жесткими характеристиками
(двигатель параллельного возбуждения), то при увеличе-
нии силы тяги скорость практически не меняется.
Следовательно, потребляемая мощность (Елу) увеличива-
ется пропорционально увеличению силы тяги.
У двигателей с мягкими характеристиками (двигатель
последовательного возбуждения) увеличение силы тяги
сопровождается почти пропорциональным уменьшением,,
скорости, вследствие чего потребляемая мощность увели-'।
чивается в меньшей степени, чем у двигателей парал-i'1
дельного возбуждения. В пределе, если двигатель обладает'
чисто гиперболической характеристикой, которая опреде-
ляется выражением F.1v = const, нагрузка двигателя по-
стоянна при любых условиях движения.
Следовательно, с точки зрения системы электро-
снабжения наиболее предпочтительными являются мягкие
характеристики. Как показывают расчеты, мощность
тяговой подстанции при мягких характеристиках может
не превышать 1,5 средней потребляемой, в то время как
при применении двигателей параллельного возбуждения
мощность гиговой подстанции должна превышать эту
мощность в 3 1 раза.
Регулирование скороеiу и рекуперация. С этой точки
зрения двигатели параллельного и согласно-смешанного
возбуждения iimcioi преимущества по сравнению с дви-
гателем последовательного возбуждения. Изменяя магнит-
ный поток параллельной обмотки возбуждения, мы тем
самым можем регулировать скорость в широких пределах.
Одним из основных преимуществ этих двигателей
является автоматический переход в генераторный режим,
что позволяет легко осуществлять рекуперативное тормо-
жение.
Конструктивные показатели и оценка двигателей.
В этом отношении двигатели последовательного возбуж-
дения, имеющие простую обмотку возбуждения из
обмоточной меди с большой площадью сечения, обладают
значительными преимуществами по сравнению с двигате-
лями параллельного и согласно-смешанного возбуждения,
у которых параллельная обмотка, имеющая много витков
из провода малой площади сечения, ненадежна как в
механическом, так н в электрическом отношении. Наличие
параллельной обмотки в свою очередь приводит к увеличе-
нию габаритов и усложнению конструкции двигателя.
84
Таблица 4.2
1 рсбовапия. предъявляемые к тяговым двигателям Двигатель с возбуждением
последова- тельным параллель- ным согласно-сме- шанным
> к кгрическая устойчивость + + +
М<* химическая устойчивость + + +
Р.ишомсрное распределение на- + — +
I I»у ИЖ | Итутствие склонности к возник- — + +
1ним'пию боксования Устойчивость к коммутации + — +
1 l.niMciibiuee воздействие на + — +
•игр» «систему Вемможность регулирования ско- — + +
роста в широких пределах Возможность применения реку- — 4~ +
пгрлции 11 рос юга конструкции + — —
II р и м с ч .1 п и с. В колонках знаки «4-» означают, что двигатели удовлетворяют данным
।|ii-f»«iHjiiiinM. .1 знаки «—»—нет.
I’.iKiiM образом, можно сделать вывод, что в результа-
те cp.iHiieiniH двигателей различных систем возбуждения
наиболее полно удовлетворяют условиям электрической
мин /инн пели последовательного возбуждения. На го-
родском viceгрнческом транспорте (трамвай и троллей-
бус) н.пплн применение двигатели согласно-смешанного
возбуждения благодаря возможности простого регулиро-
вания скорости в широких пределах, а также простоте
осуществления рекуперативного торможения. Двигатели
параллельного возбуждения в электрической тяге не
in пользуются. Сравнение двигателей различных систем
возбуждения по всем показателям представлено в
I абл. 4.2.
При применении двигателей независимого возбужде-
нии. получающих питание от управляемого тиристорного
преобразователя, возможно получение любых характерис-
И1К - мягких или жестких. Недостатком такой системы
является установка относительно мощного тиристорного
преобразователя, обеспечивающего необходимую форси-
ровку по току двигателя в переходных режимах.
85
4.5. Пример расчета электромеханических характеристик
Расчет проведен для двигателя типа ДК-259А,
применяемого на трамвайном вагоне КТМ-5. Данные
двигателя следующие:-
Номинальное напряжение, В . 550
Мощность часбвая, кВт ... . 50
Ток часовбй, А............... . 105
Частота вращения, об/мин . . 1530
К- п. д., %............................. . 88,5
Класс изоляции обмоток ... . В
Число витков главного полюса ... 34
Активное сопротивление обмоток при /=100°С,
Ом:
якоря г„ . ... . ... 0,195
главных полюсов гв . . .... 0,085
добавочных полюсов гдп . . . 0,080
Передаточное число редуктора . 7,98
Диаметр ведущего колеса, мм ... . 780
Магнитные характеристики и характеристики механических и маг-
нитных потерь представлены на рис. 4.17.
Расчет ведется в зависимости 1от тока якоря двигателя, данные
расчета сведены в табл. 4.3. /
По значениям м д с. и тока якоря, пользуясь характеристиками
рис. 4.17, находим значения СФ. Потери напряжения на активном
Таблица 4.3
Г. А 30 50 70 100 150 200
М.д.с. А 1020 1700 2470 3400 5100 6800
СФ, В/ (об мни) 0,145 0,225 0,285 0,335 0,385 0,430
/г. В 10,8 18,0 25,2 36,0 54,0 72,0
п, об/ мин 3720 2370 1840 1540 1290 1110
/’г, Вт 325 900 1760 3600 8100 14400
ДРм + |Л/< Вт 4500 3700 2600 2100 2050 1900
£ЛЛ>, кВт 4,83 4,6 4,36 5,7 10,15 16,3
UJ, кВт 16,5 27,5 38,4 55,0 82,3 110,0
86
Окончание табл. 4.3
I’m 4.17 Зависимость магнитных и механических потерь тягового
двигателя ДК-259А
87
Рис. 4.18. Электромеханические харак-
теристики тягового двигателя ДК-259Л
на валу якоря (а) и ободе движу
щего колеса (б)
Рассчитанные электромеханические
и ободе колеса приведены на рис. 4.18.
сопротивлении обмоток дви-
гателя 1г = /(гя 4- гм -Ь г.) Ча-
стоту вращения якоря рас-
считываем но формуле (4.3).
Для определения к. н. д, дви-
гателя рассчитываем электри-
ческие потери 12г ~ 1\гл 4-
+ гдп4-ге) Нехарактеристи-
кам рис. 4.17 для определе-
ния значений частоты вра-
щения и м. д.-с. находим сум-
му механических н магнитных
потерь ЛР„ 4-А/?с. Затем по
выражению (4.11) определя-
ем к. п. д. двигателя и по
выражению (4.8) момент дви-
гателя. Таким образом полу-
чены электромеханические ха-
рактеристики на валу дви-
гателя.
Для получения электро-
механических характеристик
на ободе колеса определяем
скорость на ободе колеса по
выражению (4.12). К. п. д.
двигателя определяем по вы-
ражению (4.14), приняв
к. п д. редуктора для трам-
вая КТМ-5 равным 0,95, что
соответствует зубчатой пере-
даче с карданным валом.
Силу тяги на ободе колеса
определяем по форму-
ле (4.13)
характеристики на валу якоря
Контрольные вопросы
1. Почему для одного и того же тягового двигателя возможны раз-
личные электромеханические характеристики па ободе колеса?
2. Какой тип двигателя имеет жесткие тяговые характеристики?
3. Какой тяговой характеристикой должен обладать двигатель,
чтобы подвижной состав не боксовал?
4. Какими тяговыми характеристиками должны обладать тяговые
двигатели, если их установлено на подвижном составе несколько?
5. С какой системой возбуждения двигатель обладает неустойчи-
вой механической характеристикой?
6. Как определяется к. п. д. двигателя?
7. Двигатель какого возбуждения может автоматически переходить
в генераторный режим?
88
5
ПУСК И РЕГУЛ ИРОВАНИЕ СКОРОСТИ
ПОДВИЖНОГО СОСТАВА
5.1. Способы пуска
Условия пуска. Учитывая, что для электрического
юродского подвижного состава характерны частые оста-
новки с последующими пусками, параметры пускового
периода необходимо выбирать так, чтобы обеспечивались
||,|иболее экономичные и безопасные условия его работы.
В момент трогания подвижного состава, когда о = 0,
» д. с. Е=СФи тяговых двигателей также равна нулю.
I ели двигатель включить на номинальное напряжение,
к» его ток определяется отношением приложенного напря-
жения к сопротивлению силовой цепи и будет равен току
короткого замыкания 1КЗ— U„o„/r, который может привести
к нежелательным явлениям: нарушению коммутации тяго-
вых двигателей, созданию больших механических нагрузок
и передаче, возникновению боксовапия.
Для предотвращения вышеназванных явлений и огра-
ничения пускового тока необходимо либо прикладывать
к двигателю пониженное напряжение, либо последова-
k ii.iio с тяговыми двигателями включать регулируемые
пусковые резисторы (реостаты). Постепенно выключая
< ।уцени реостата от скорости, равной пулю, до скорости
окончания пуска щ, производят реостатный nycbj
Д ног период э. д. с. двигателей возрастает настолько,
переход при
на характеристики
определенном
двигателя при
з пачении
... возможен
пускового тока /„ ____ ....,___г.._........... г..
выключенных реостатах. цПри движении подвижного со-
ii.iii.i желательно осуществлять его пуск с наибольшим
оком /„ maJ1. В этом случае увеличивается пусковая сила
ihiii п пусковое ускорение, повышается средняя скорость
движения н уменьшаются потери в пусковых реостатах.
Но несмотря на эти преимущества, нельзя выбирать
пусковой ток произвольно большим. Его значение
<п рлппчпвается условиями сцепления и мощностью тяго-
вых дни । атслей. Желательно поддерживать пусковой ток
но. 1ОЯППЫМ /„ = const. Этому соответствует практически
89
неизменная пусковая сила тяги F„ и постоянное пусковое
ускорение йц. Таким образом, пусковой процесс желатель-
но вести при
/„ = const, F„ — const н а„ = const}
Необходимо также отметить, что при трогании подвиж-
ного состава в момент включения тяговых двигателей
ток и сила тяги должны быть немного снижены, так как
быстрое увеличение тока и вращающего момента могут
вызвать удары в передаче от вала двигателя к движущим
осям. Резкое увеличение силы тяги может привести
к обрыву сцепных приборов, а также вызвать неприятные
ощущения у пассажиров.
Поэтому в самом начале пуска следует несколько
ограничить пусковой ток и силу тяги и постепенно
увеличивать их до значений /п и F„.
Пусковой ток
/»=(1/д—СФо)/г=const ' (5.1)
или
4Л = /„г+СФп. (5.2)
Так как /„ = const, выражение (5.2) можно представить
в виде
= СФц=Л' + В'в. (5.3)
Из выражения (5.3) следует, что напряжение на
двигателях пропорционально скорости v (рис. 5.1).
В настоящее время применяют следующие системы
пуска:
плавный реостатный пуск, при котором в течение
всего времени пуска поддерживается неизменный пусковой
Рис. 5.1. Процесс пуска тягового
двигателя
ток;
ступенчатый реостатный
пуск;
безреостатный пуск, ко-
торый осуществляется с по-
мощью импульсных преобра-
зов ателей^
Плавный реостатный
пуск. При плавном реостат-
ном пуске последовательно
с двигателем включается
пусковой реостат. Для под-
держания неизменным пуско-
90
iiiiro тока необходимо плавно выводить пусковой реостат
по мере увеличения скорости.
Гок двигателя при включении последовательно с ним
пускового реостата /?п
Из выражения (5.4) можно определить зависимость
<опротивления пускового реостата от скорости
R„=U/lu-ca>v/l„-r. (5.5)
В момент трогания поезда, когда и = 0, начальное
шачение сопротивления пускового реостата
Rrt> = U/In—r (5.6)
Пли
f RM + r=U/In.^ (5.7)
После включения тягового двигателя скорость поезда
начинает увеличиваться. Возникает 3. д. с., равная СФа,
которая также увеличивается с ростом скорости. Если
сопротивление пускового реостата /?„о в цепи двигателя
будет неизменным, то согласно выражению (5.4) начнет
уменьшаться пусковой ток. Для того чтобы поддерживать
ci о постоянным, необходимо выводить пусковой реостат
но мере увеличения скорости^ Закон изменения сопротив-
ления пускового реостата можно получить, если решить
уравнение (5.4) относительно считая 1 = 1П и Ф=*=ФП:
/?„ = и//„-г-СФг)//п (5.8)
«ТЛИ
Rn + r=U/l„— СФе//п. (5-9)
I |рн 1П = const магнитный поток также будет постоянен,
। е. Ф„ = const.
Обозначив в уравнении (5.9) постоянную величину
////„ через А, а СФ//„ через В, получим
R„+r = A — B^ (5.10)
11 юбразим графически зависимость сопротивления
пускового реостата от скорости R„(v) при /n = const.
Па рис. 5.2 отложим по оси ординат скорость, по оси
нГи цнес— вправо ток двигателя, влево — полное сопро-
।пиление силовой цепи двигателя /?п-|-г. В правом коорди-
91
Рис. 5.2. Построение зависимости сопротивления пускового реостата
от скорости при /„ = const
натном углу построим скоростную характеристику v(J) при
полностью выведенном пусковом реостате. Так как зависи-
мость Rn(v) согласно выражению (5.10) при /п = const
является прямолинейной, то график ее может быть
построен по двум точкам. Одну из этих точек а получим
в момент трогания подвижного состава, когда г» = 0 и
/?п + г— Uд//п. Другую точку b можно получить при пол-
ностью выведенном пусковом реостате, т. е. при /?п = 0
И Rn + r — r, так как при этом v = vn. Пусковая скорость
vn может быть найдена по скоростной характеристике v(J)
при токе /п. Точка с соответствует моменту полного выведе-
ния пускового реостата, т. е. выхода на автоматическую
естественную характеристику. Если эту точку перенести
на ось, отстоящую от ,оси ординат на величину г, то
получится точка Ь. Соединив прямой линией точки а и Ь,
получим закон, по которому необходимо непрерывно
уменьшать сопротивление реостата Rn, чтобы пусковой
ток на всем протяжении пуска оставался постоянным.
По мере увеличения скорости подвижного состава
сопротивление пускового реостата уменьшается по закону
прямой линии (прямая ab). Точка b соответствует
моменту выхода на автоматическую характеристику, при
этом пусковой реостат полностью выведен (/?п = 0),
после чего двигатель работает по автоматической характе-
ристике, и скорость изменяется в зависимости от тока
подвижного состава и сил сопротивления движению.
Плавным регулированием сопротивления пускового
реостата обладают системы пуска с многокулачковыми или
коллекторными контроллерами (трамвай «Татра»), с
угольными реостатами.
92
Вышеназванные системы пуска относительно сложны,
лк как плавное регулирование пускового реостата свя-
i.iiio с усложнением системы управления. Поэтому на
। к кгроподвижном составе до настоящего времени в
<>< пивном применяется ступенчатое выведение пускового
|н<>с гата;
Ступенчатый реостатный пуск. Пусковой реостат разде-
r.n icu на отдельные секции. Отпайки от каждой секции
присоединяют к контакторам контроллера (система не-
цчсродственного управления) или к электромагнитным
। инiакторам.
В настоящее время электромагнитные контакторы
ымсняются реостатным контроллером с групповым при-
но 1<>м, приводимым в действие серводвигателем (система
। огненного управления). По мере разгона подвижного
oi'i.ina постепенно закорачиваются отдельные секции
пу> нового реостата, уменьшается его сопротивление.
11ри этом получается ступенчатое выведение пускового
р< о< i.iга отдельными секциями.
I1рп ступенчатом реостатном способе пуска уже не-
11<|'Можно поддерживать постоянным пусковой ток /„, а
। и-|оиатслыю, пусковое ускорение а„ и пусковую силу
г,и и Опп будут изменяться в некоторых пределах
hi максимума до минимума. Во время разгона подвижного
iiu i.iii.T на какой либо ступени реостата с неизменным
। oiipoi нвленпем гок начнет уменьшаться, так как будет
по ip.ii । a I к > д ' по х.11>.1 к 1<*ристине, соответствующей
। шпон < lyneini iip Koitoio реостата. В момент выключения
< lyiiriin peoi i.н.। происходит переход с одной скоростной
\арак 11 piici пки н.। другую, которая соответствует мень-
шему пычепню сопротивления пускового реостата.
В ре'улы.1тс этого резко возрастает ток двигателя.
Выбор пускового тока. В случае ступенчатого пус-
। । стараются ограничить колебания пускового тока.
I lyi к производят при каком-то среднем значении пускового
HiK.i /„,,,, который не должен быть выше максимального
iiiK.i /„ „13„ соответствующего наибольшей допустимой
н.прузке двигателя и условиям сцепления, и не меньше
минимального тока /„ lnin, т. е.,
/ncP=(/„„,a, + /nmJ/2. (5.11)
Неравномерность пускового тока характеризуется
in। 1||>||>п11иситом неравномерности
к, = А/„//„ ,Р. (5.12)
'A. (А,.....J/2- (5.13)
93
Колебания пускового тока вызывают колебания пуско-
вой силы тяги и пускового ускорения. Таким образом,
плавность пуска характеризуется коэффициентами не-
равномерности по току К/=А/„//пср, по силе тяги
кГ5= AF„/F„ сР и по ускорению к0 = Аа/апср, где /п ср,
Т'п сР и ап ср — средние значения тока, силы тяги и ускоре-
ния в процессе пуска. Соотношение этих коэффициентов
ддя одного и того же расчетного режима таково:
к,<Кр<Ка- Чем больше коэффициент неравномерности,
тем больше колебание соответствующих величин от макси-
мума до минимума, тем менее плавный разгон подвижного
состава в период пуска. Поэтому, чтобы обеспечить
плавность пуска, необходимо выбирать возможно меньший
коэффициент неравномерности. С другой стороны, чем
меньше коэффициент неравномерности, тем больше
требуется ступеней пускового реостата. Увеличение
ступеней пускового реостата и позиций контроллера
усложняет систему пуска.
Как выбрать значение расчетного пускового тока?
С одной стороны, значение расчетного пускового тока
In должно быть меньше наибольшего допустимого
тока по коммутации /ком, с другой — пусковой режим
должен быть ограничен по сцеплению:
Ц нт,Л«>м = 2/ч, (5.14)
(5.15)
Выражения (5.14) и (5.15) определяют наибольшее
допустимое значение пускового тока. Пользуясь электро-
механическими характеристиками, по значению Fn гаак
находят наибольшее допустимое значение пускового тока
по сцеплению /сц 1МК. За максимальное значение пускового
тока принимают наименьшее по значению одно из следую-
щих ограничений по току:
'ПП,ах< { /К°М (5.16)
' сц max
Как правило, для существующего подвижного состава
лимитирующим является ограничение по сцеплению.
На современном полностью обмоторенном подвижном
составе, работающем по системе многих единиц, возможно
ограничение пускового тока по коммутации. Примером
этого являются вагоны метрополитена.
94
максимального пус-
пусковой
от системы
энном типе
ток. Для
(5.17)
т
управления
подвижного
После установления ограничений
нового тока определяют расчетный
I । ш татного пуска
/
_ n max
"<₽- (1+К/)кз
1 ««’ 1 - коэффициент запаса, зависящий
(pviiioii или автоматической), принятой на ,
। и» । ава/
При эксплуатации подвижного состава колебания
пускового тока могут оказаться больше расчетных,
но вызывается колебаниями напряжения в сети,
р.иличием в характеристиках тяговых двигателей и неДо-
< । ।точной квалификацией водителя (при неавтоматиче-
(ком пуске). Переводя рукоятку контроллера с одной
ПОПЩИИ на другую, водитель выключает ступени пускового
реостата. Слишком быстрый перевод контроллера и вы-
ii.in.-ieT резкое повышение тока.
Для трамвайных вагонов и троллейбусов с автомати-
шрованной системой управления и при многоступенчатом
пуске к3=1, при малом числе ступеней и неавтомати-
ческом пуске к3= 1,20.
Диаграмма ступенчатого пуска. Рассмотрим процесс
i 1уиснчатого пуска с заданными пределами токов от
....<> ДО /п тах для случая пуска одного двигателя.
Пусковой реостат состоит из трех секций Ri—/?з для
чшырех пусковых позиций (рис. 5.3,а). Па рис. 5.3,6
и левом координатном углу построим зависимости
А’„ | г = [(и) для трех неизменных значений пускового
кжа /„ mln, Лер и /п 1пах. Построение ведется так же, как
ти.иц) проведено выше. Прямая a,bi соответствует
максимальному пусковому току /п ,„ях, прямая —
среднему значению пускового тока /п ср и прямая’озбз—
....гадальному значению пускового тока I„ min.
Рассмотрим процесс постепенного разгона двигателя.
Примем, что ток в момент трогания равен /п тах, хотя
и /и асгвительности пусковой ток желательно увеличивать
п<>< к пенно, вводя несколько дополнительных ступеней
ну»нового реостата.
I ели в момент пуска ток равен /„ тах, то началом
пусковой диаграммы будет точка а, при скорости а = 0
и । прямой П|6|. Сопротивление реостата в этом момент
mini равно Rni и изобразится отрезком O'ai. Этому
95
Рис. 5.3. Принципиальная схема (а) и диаграмма (б) ступенчатого
реостатного пуска одного двигателя
сопротивлению будет соответствовать скоростная характе-
ристика v(J) При /?П|.
После включения тока скорость подвижного состава
начнет увеличиваться. Так как сопротивление пускового
реостата Rnt остается на данной ступени постоянным,
то процесс пуска в левой части диаграммы изобразится
отрезком Q|C, параллельным оси ординат. По мере
увеличения скорости растет э. д. с. двигателя, что приведет
к уменьшению тока до /п min, чему соответствует точка с
на диаграмме /?п-|-r=f(v). Чтобы предотвратить даль-
нейшее уменьшение тока, необходимо вывести часть
сопротивления пускового реостата в точке с.
Выключение ступени пускового реостата изобразится
отрезком cd, параллельным оси абсцисс. При этом
скорость не успевает заметно измениться и ее можно
принять постоянной v—const, а ток увеличивается до
своего максимального значения /„ тах (точка d). Отрезок
cd представляет соответствующую ступень пускового
реостата, которую необходимо вывести, т. е. разность
между сопротивлением первой ступени /?„| и второй Rnz.
Далее двигатель продолжает разгоняться при включен-
ном в его цепь сопротивлении пускового реостата
Дп2- Процесс пуска на этой ступени изображается
прямой de. По мере возрастания скорости от точки d до
точки е пусковой ток уменьшается от In тах до /„ min,
и в точке с необходимо вывести очередную ступень
сопротивления пускового реостата.
96
В i.ikom порядке производится постепенное ступенчатое
т.п ночевие ступеней пускового реостата по ломаной
...... atcdefglkbt, вписанной между прямыми сцЬ] и
iiji/'i Причем на каждой ступени пускового реостата ток
ji (меняется от /п тах до /„ mjn.
В точке Ь\ все сопротивление пускового реостата
тин-юно Rn — 0, и двигатель выходит на автоматическую
Iд пр.1к герметику При движении по автоматической
чирик герметике скорость двигателя возрастает, а ток
уменьшается до достижения поездом установившейся
I КоросТИ.
11<>сле того как были определены ступени пускового
рпк ыпа из диаграммы Rn-\-r = f(v), необходимо в правом
I пирдппатном углу построить характеристики v(/) для
in ex ступеней пускового реостата Rnt, Rn?, Rn3 и R,^.
II шести на эти характеристики ограничения по /п тах
" I...
Моменты перехода от одной скоростной характеристи-
ки на другую устанавливаются путем переноса точек
«/, /. /, bt на кривые v(J) при соответствующих сопротивле-
ниях Г очке с на диаграмме Rn + r —[(/) будет соответство-
II.hi. гонка с' при /„ min на кривой v(J), точке d будет
Oto m iствовать точка d' и т. д. Весь процесс изменения
। ixopoi гн во время пуска изображен на диаграмме
<'(/) на рис. 5.3,6.
Hi рис. 5.4 представлены диаграммы Rn-\-r — f(v) и
р(/) иля последовательно-параллельного пуска двух дви-
। лк и II с применением ослабления возбуждения.
В момент начала пуска на последовательном соедине-
нии должно быть включено полное сопротивление
ну» нового реостата R„. При езде на каждой пусковой
ш>iiiiiiin скорость подвижного состава увеличивается,
। । уменьшается, а сопротивление остается постоянным.
При переходе с одной позиции на другую выключается
чип. i опротивления. Ток мгновенно увеличивается от
до Л1 а скорость подвижного состава практически
111 l ieu И ПОСТОЯННОЙ.
К |к следует из рис. 5.4, двигатели разгоняются
। ini'i.1Л.1 до скорости, допускающей работу по без-
pi н>< 1.11 ной характеристике при последовательном соедине-
нии (кривая Vi). Когда при разгоне по этой характеристике
н>н yui'ier до /п min (точка а), можно либо продолжать
piK'inv по кривой U|, но уже с токами, меньшими /п lnj„,
iiKio перейти па кривую v'i при ослабленном возбуждении
< Ian III’J?
97
Рис. 5.4. Диаграмма ступенчатого реостатного пуска двух двигателей
три последовательно-и ар аллельной перегруппировке с применением
ослабления возбуждения
и последовательном соединении двигателей. Этому со-
ответствует сопротивление двигателя при ослабленном
возбуждении г'.
Для дальнейшего разгона и< 'Езда двигатели переклю
чаются в точке b на параллельное соединение. Вс
избежание толчков тока снова вводится реостат. Чтобы
ток в момент перехода па параллельное соединения
был равен /„ та„ необходимо ввести сопротивление, пн
значению пропорциональное отрезку Ь'с'. К концу пуска
(точка d) подвижной состав достигает скорости, до-
пускающей переход на характеристику v при полном
напряжении, нормальном возбуждении и выведенных
пусковых реостатах.
Энергетика пуска. Рассмотрим процесс пуска для одно
го двигателя при постоянном пусковом токе и следующих
допущениях:
магнитные и механические потери в двигателе малы
и ими можно пренебречь;
сопротивление движению при пуске постоянно.
В этом случае пусковая сила тяги F„, поток СФП
и ускорение ап будут постоянными. Так как ап = const,
скорость будет пропорциональна времени
(5.18)
58
пн 10Д.1 общее время пуска
t,. = v/a„. (5.19)
) ц с. Е = СФлп с учетом выражения (5.18) запишется
£ = СФ„о„/п (5.20)
II и юбразится в функции времени t прямой линией 1
(рп< 5.5).
Напряжение на двигателе больше э. д. с. на величину
и । к ипя напряжения
ил = Е+1„г. (5.21)
п н поразится прямой 2, но сдвинутой от начала координат
и.। величину 1пг. Двигатель в точке а, соответствующей
I .»iiiiv пуска, работает с полностью выведенными реоста-
i.iMii, и приложенное к нему напряжение равно напряже-
нию сети. Разность ординат Uc и напряжения на двигателе
I1 представляет собой потери в пусковом реостате
/,./<, В первый момент пуска, когда v — О, падение напря-
А1Н11Я в пусковых реостатах почти полностью равно
11.ц|ряжению сети, а в конце пуска равно нулю.
I < in все ординаты диаграммы напряжений умножить
и । пусковой ток /п, получим диаграмму распределения
мощностей при пуске (рис. 5.6). Прямая 1 изображает
миг । ром агнитную мощность двигателя Е1„ = СФпи/п,
। сгорая при принятых выше допущениях равна полезной
Мощности двигателя в период пуска. Прямая 2 соответст-
н\| 1 подведенной к двигателю мощности СФ„у/п+ 1„г.
। ра чюсть ординат подведеи-
нон и полезной мощностей —
нок рям мощности в двига-
п и и передаче. Ординаты
пиши UcIn соответствуют
.....ости, потребляемой из
!• in, следовательно, раз-
ИО1 и. ординат (>с/п и линии 2
рпип.। потерям мощности в
ini । оных реостатах. Энер-
iiiii ио интеграл мощнос-
III по времени, определяется
но пн.прамме рис. 5.6 пло-
щ iTiiMii, ограниченными ли-
ниями мощностей и осями
координат: полезная работа
<•
Рис. 5.5. Диаграмма распределе-
ния напряжения в цепйэ. п. с.
в процессе пуска
99
Рис. 5.6. /Диаграмма распределения
мощности одного двигателя при пуске
Рис. 5.7. Диаграмма распределения
мощности и-'П последовательно-парал-
лельной перегруппировке двигателей
в процессе пуска
двигателя за время пус-
ка — площадью S3;
энергия, подведенная к
двигателю — площадью
•S2 + S3, потери энергии
в двигателе —- пло-
щадью S2, энергия, по-
требляемая из сети,
площадью S1+S2 +
+ S3. Отсюда следует,
что потери в пусковых
реостатах равны энер-
гии, переработанной тя-
гов ы м и эл е кт р од в и г а -
гелями.
Чтобы уменьшить
эги потери, на практике
применяют перегруппи-
ровку двигателей, сое-
диняя их вначале после-
довательно, а затем—
параллельно.
Диаграмма распре-
деления мощностей при
таком' пуске представ-
лена на рис. 5.7.
Здесь полезные
мощности изображают-
ся прямой линией Od,
проходящей через нача-
ло координат, а мощ-
ность, потребляемая из
сети, линией Oabcd. При
пуске с двумя группи-
ровками двигателей
подведенная мощность
вначале равна UJ„, а затем удваивается. Потери в
пусковых реостатах представляют собой заштрихованные
площади. Эти потери уменьшились в 2 раза по сравде,-
нию с потерями, представленными на рис. 5.6. Для
простоты здесь не учитывались не только магнитные
и механические потери, ио и электрические.
Отношение энергии потерь к полезно затраченной
энергии на пуск подвижного состава называют коэффи-
100
циентом пуска к„. Так, в случае, приведенном на рис. 5.7,
коэффициент пуска будет равен отношению площадей
суммы треугольников ОаЬ и bed. к площади треугольника
Ode или
к„=(SAOab 4- S\bcd)/S\Ode — 0,5.
5.2. Регулирование скорости
Способы регулирования скорости. В условиях эксплуа-
тации у водителя возникает необходимость в регулиро-
вании скорости подвижного состава в широких пределах:
и — 1г
(522)
Из выражения (5.22) следует, что скорость двигателя
можно регулировать тремя способами:
1) изменением напряжения на зажимах двигателя [7Д;
2) включением последовательно с двигателями регу-
лируемого резистора сопротивлением /?;
3) изменением магнитного потока СФ.
Изменение напряжения на зажимах тягового двигателя
при заданном напряжении контактной сети можно
осуществить различными путями. На городском электри-
ческом транспорте нашли применение переключения тяго-
вых двигателей с последовательного на параллельное
соединение; использование импульсного регулирования.
Последовательно-параллельное переключение тяговых
двигателей — достаточ-
но экономичный спо-
соб и не требует слож-
ного дополнительного
оборудования. На
рис. 5.8 показаны схемы
переключения четырех
тяговых двигателей.
Вначале двигатели сое-
диняют последователь-
но (рис. 5.8,а), при этом
к каждому двигателю
прикладывается напря-
жение Uc/4. При по-
следовательно- парал-
Рис. 5.8. Схемы переключения четырех
тяговых двигателей
лельном соединении
двигателей (рис. 5.8,6)
напряжение, приложен-
101
Рис. 5.9. Схема э. п. с. с импульсным
регулятором
ное к двигателю, уве-
личивается и становит-
ся равным (7с/2. Не-
достатком такого спосо-
ба является отсутствие
плавного регулирова-
ния скорости, наличие
значительного числа
коммутационной аппа-
ратуры, при последо-
вательном соединении
двигателей имеем мяг-
кие тяговые характе-
ристики, что способст-
вует боксованию.
В настоящее время
широкое применение
находят способы регулирования напряжения с помощью
статических полупроводниковых преобразователей на по-
движном составе. Наиболее целесообразным является
использование тиристорных импульсных регуляторов. В
этом случае напряжение контактной сти прикладывается
к импульсному регулятору ИР (рис. 5.9), на выходе кото-
рого получаем регулируемое в широких пределах напряже-
ние, которое подводится к тяговым двигателям.
5.3. Характеристики двигателей при изменении
напряжения
Расчет характеристик двигателей последовательного
возбуждения. Если для двигателей данного типа имеются
характеристики при номинальном напряжении, их можно
пересчитать на другое напряжение.
Скоростная характеристика тягового двигателя у(/)
при любом напряжении может быть рассчитана на осно-
вании выражения (5.22). Для этого необходимо иметь
характеристику СФ(/) данного двигателя. Если эта
характеристика не задана, ее можно определить на
основании заданной скоростной характеристики v(I)
при напряжении 1/л, пользуясь выражением (5.22):
СФ=(У*-/г)/е.
Для двигателей последовательного возбуждения более
удобен непосредственный пересчет скоростной характерис-
102
тики с одйого напряжения на другое без построения
промежуточной кривой СФ(/).
Скорость двигателя при напряжении ил\ определяет-
ся соотношением
И1 = 1/д|-/г/(СФ). (5.23)
Скорость v при напряжении 1)л
v = U„-lr/(C<D). (5.24)
Так как магнитный поток СФ двигателя последова-
тельного возбуждения зависит только от тока нагрузки /,
то при данном токе магнитный поток будет иметь одно
и то же значение при любых уровнях напряжения
па двигателе.
Разделив выражение (5.23) па выражение (5.24),
получим
Отсюда скорость подвижного состава па ободе колеса
при напряжении
и - /г
= (526)
д
Электромеханические характеристики при различных
уровнях напряжения UAi и (7Д построены на рис. 5.10.
Характеристика к. п. д. i)(/) при любом значении напряже-
ния на двигателе может
быть рассчитана на
основании выражения
(4.36), если имеется
зависимость магнитных
н механических потерь
от скорости и тока
возбуждения. Возмож-
но приближенное опре-
деление к. п. д. i)i при
напряжении Uni и к. п. д.
1)| при напряжении (7Д.
При этом считаем, что
при одинаковых токах
сумма магнитных и ме-
ханических потерь,
включая потери в пере-
Рнс. 5.10. Электромеханические харак-
теристики на ободе движущего колеса
при изменении напряжения на двига-
теле
103
даче, пропорциональна квадрату скорости, а следователь-
но, и квадрату напряжения, т. с.
+ Л/’.„ А,
Xbv-. + v; -* а1 ( ’
отсюда
л/\, + Л/’в1 + л/\, =(\л. 1 л/’„ + л/>3)^,/</«. (5.28)
Электрические потери /2г при одном и том одинаковы при любых уровнях напряжения. же токе
Если полные потери при напряжении UR
ЛР = (ЛРС + ЛР„ ) Л/’J | Г г. (5.29)
то при напряжении U R\ полные погори
ЛР, =(ЛЛ< + АР., + Л/’,,) | /’г (5.30)
Подставляя выражение (5.28) в выражение (5.30),
получим
и2 лр, = (лрс + ЛР„ + л/>з) р А- д
и2 ' „(ЛР-А)-^ + А д (5.31)
Из формулы (4.36)
ЛР = VJ(\ -П). (5.32)
Соответственно
ЛР, = 1/„/(!-»),) (5.33)
Используя выражения (5.31), (5.32) и (5.33), получим
"„/с -’>,) = K'o-’i)-'2'] ~+1"г, (5.34) 1 и2 д
откуда
и . 1г . и2, ч
(5.35)
д д! ' ил 7
При понижении напряжения к. и. д. в области малых
нагрузок увеличивается благодаря уменьшению магнит-
ных и механических потерь (см. рис. 5.10). В области
средних и больших нагрузок к. и. д. при понижении
напряжения уменьшается в результате роста удельного
104
веса электрических потерь /2г/(17а1/)> /2г/(UЛГ). Характе-
ристика силы тяги Р(Г) определяется на основании
электромагнитной силы /7ЭМ и потерь Д/7. Характеристика
электромагнитной силы двигателя последовательного воз-
буждения /7ЭМ = 3,6СФ/ не зависит от приложенного
напряжения. Потери силы тяги Д/7, которые определяются
магнитными и механическими потерями, при понижении
напряжения уменьшаются. Следовательно, сила тяги при
уменьшении напряжения несколько увеличится. Величина
Л/7 настолько мала по сравнению с силой тяги /•’, что
в тяговых расчетах ее не учитывают и принимают, что
при изменении питающего напряжения сила тяги не
изменяется. Следовательно, изображенная на рис. 5.10
характеристика /7(/) при напряжении Un может быть
принята и для любого другого напряжения.
При регулировании напряжения на зажимах двигателя
смешанного возбуждения пересчет характеристик про-
изводится таким же способом, как и у двигателей
последовательного возбуждения, если ток в параллельной
обмотке возбуждения не изменяется. Если одновременно
изменяется напряжение на двигателе и ток в параллель-
ной обмотке возбуждения, что может иметь место при
колебании напряжения в контактной сети, пересчет
характеристик необходимо проводить в два этапа.
Сначала характеристики пересчитывают на измененное
напряжение, считая, что ток в параллельной обмотке оста-
ется неизменным. Затем полученные характеристики пере-
считывают на изменившийся ток в параллельной обмотке
возбуждения. Методика этого пересчета будет рассмотре-
на ниже.
Расчет характеристик при изменении сопротивления
реостата. Рассмотрим, как влияет на регулирование ско-
рости включение последовательно с тяговым двигателем
регулируемого реостата R. В этом случае скоростную
характеристику можно рассчитать по характеристике
пользуясь выражением
„ _ 67 - Z (f + (5.361
v« СФ
скорость при введенном в цепь двигателя сопротивлении
реостата;
общее напряжение, приложенное к последовательно соеди-
ненным двигателю и реостату /? Напряжение на зажимах
двигателя будет определяться величиной U — 1R
105
Рис. 5.11. Скоростные характеристики
при изменении сопротивления в цепи
дп иг ателя
Поделив выражение
(5.36) на (5.24) и
выразив иь получим
Как уже указыва-
лось выше, характерис-
тика силы тяги F(I)
практически не зависит
от напряжения и, сле-
довательно, не изменя-
ется при включении
реостата в цепь дви-
гателя.
На рис. 5.11 пред-
ставлены скоростные
характеристики двигателя при полном напряжении и при
введенных в цепь двигателя двух значений сопротивлений
реостата Rt и /?2, причем /?2> R\. Как следует из этих ха-
рактеристик, скорости vi и V2 мало отличаются от скорос-
тей v в зоне малых нагрузок 1 • мерс возрастания
нагрузки увеличивается падение напряжения на сопротив-
лении реостата //?, и различие скоростей становится
значительным. Но чем больше сопротивление, включен-
ное в цепь двигателя, тем круче падает скоростная
характеристика.
Такой способ для длительного регулирования скорости
применяется редко, так как он обладает существенными
недостатками: значительные потери энергии в реостате;
скоростные характеристики получаются мягкими, что
увеличивает вероятность возникновения боксования.
Как правило, такой способ регулирования применяется
в сочетании с перегруппировкой двигателей.
5.4. Характеристики двигателей при изменении
возбуждения
Способы изменения возбуждения. У двигателей
последовательного возбуждения изменение возбуждения
можно осуществить различными способами:
шунтированием обмотки возбуждения;
секционированием обмотки возбуждения; г,
регулированием возбуждения с помощью специального
возбудителя;
импульсным регулированием возбуждения.
106
1’ис. 5.12. Схема шунти-
рования обмотки возбуж-
дения двигателя
Рис. 5.13. Схема секцио-
нирования обмотки воз-
буждения
Принципиальная схема шунтирования обмотки воз-
буждения представлена на рис. 5.12. В этом случае
параллельно обмотке возбуждения ОВ подключается
регулируемый реостат /?ш- Индуктивный шунт ИШ служит
для сглаживания бросков тока при резком изменении
напряжения в контактной сети. Если правильно подобран
шунтирующий контур, то всегда сохраняется равенство:
Еое/бОВ ~
При нормальном возбуждении контактор Р разомкнут,
и ток якоря 1 равен току возбуждения /в. Для ослабления
возбуждения контактор Р замыкается, и через обмотку
возбуждения ОВ будет протекать только часть тока
якоря /в = /—/ш- Следовательно, уменьшится магнитный
поток СФ и увеличится скорость. Этим способом можно
получить необходимое число ступеней ослабления возбуж-
дения.
При секционировании обмотки возбуждения изменение
возбуждения осуществляется отключением части обмотки
возбуждения путем включения контактора Р2 (рис. 5.13).
Этот способ не получил распространения, так как имеет
ряд существенных недостатков. Основными из них являют-
ся: усложнение конструкции тягового двигателя, связан-
ное с изготовлением отпаек на обмотке возбуждения;
наличие такого переходного момента, когда замкнуты
оба контакта Р1 и Р2, т. е. часть обмотки возбуждения
ОВ практически замкнута накоротко, что может привести
107
к нарушению коммутации и
возникновению кругового огня.
Система регулирования воз-
буждения с помощью специаль-
ного возбудителя (рис. 5.14) со-
стоит в том, что параллельно
обмотке возбуждения ОВ через
разделительный резистор R
подключается специальный воз-
будитель В. Изменяя возбужде-
ние возбудителя, т. е. напряже-
ние на нем, можно изменять в
широких пределах ток возбуж-
дения двигателя ЛЕ Такой воз-
будитель может быть как
электромашинный, так и ти-
ристорный. Эта схема нашла
Рис. 5.14. Регулирование воз-
буждения с помощью возбу-
дителя
применение при необходимости изменения возбуждения
двигателей последовательного возбуждения в режиме
рекуперации. Резистор R необходим, чтобы от одного
возбудителя возможно было осуществлять питание не-
скольких обмоток возбуждения параллельно соединенных
двигателей.
При импульсном регулировании возбуждения парал-
лельно обмотке возбуждения подключается импульсный
тиристорный регулятор, который действует как шунти-
рующее сопротивление. Благодаря своему быстродейст-
вию импульсный регулятор позволяет сохранить четкое
деление тока якоря между обмоткой возбуждения и регу-
лятором в переходных режимах, что важно для хорошей
коммутации двигателя.
Степень изменения возбуждения в двигателях после-
довательного возбуждения характеризуется коэффициен-
том регулирования возбуждения (3, который выражается
отношением м. д. с. при измененном возбуждении, к
м. д с. при полном возбуждении. Если изменение воз-
буждения осуществляется шунтированием обмотки воз-
буждения ОВ (см. рис. 5.12), то
₽ = /»и'с/(/и’е)=/»//, (5.36)
где /, — ток возбуждения при измененном возбуждении;
/ — ток возбуждения при полном возбуждении.
Если изменение возбуждения осуществляется сек-
ционированием обмотки возбуждения (см. рис. 5.13),
108
гок возбуждения остается неизменным и равен току якоря,
но число витков обмотки возбуждения ОВ изменяется.
I? этом случае коэффициент регулирования возбуждения
Р = /u?<„/(/wc)= wc„/wc, (5.39)
где к’с„ — число витков обмотки возбуждения при измененном воз-
буждении;
о>с — число витков обмотки возбуждения при полном возбуждении.
Сопротивление цепи возбуждения при измененном
возбуждении
Г и == Т'Г||.
При р< 1 получаем ослабленное возбуждение, а при
р> I —усиленное.
Расчет скоростной характеристики при регулировании
возбуждения производится но формуле
U - 1г’
v‘ = —, — . (5.40)
С<1>
। де у' — скорость при измененном возбуждении н токе якоря /;
г' — полное сопротивление двигателя при измененном возбуж-
дении: г'= г» + гл» + ₽г»;
г„, гд„, £г„—сопротивления обмоток якоря, дополнительных полюсов
и обмотки возбуждения при измененном возбуждении;
(?<]>'— магнитный поток при токе якоря / н м. д. с., соответствующей
току возбуждения (1,.
Для расчета скоростной характеристики при изме-
ненном возбуждении должна быть известна зависимость
<?Ф'= /(/„) для различных токов якоря. Если таких зависи-
мостей нет, расчет скоростной характеристики можно
произвести приближенным способом на основании ско-
ростной характеристики гз(/) для режима полного возбуж-
дения.
Предположим, что в режиме полного возбуждения
гок якоря равен {5/, очевидно, такой же ток р/ будет
протекать и по обмотке возбуждения. Рассмотрим режим
измененного возбуждения, при котором ток возбуждения
будет р/, но в этом случае ток якоря будет равен /.
Тогда скорость подвижного состава при полном возбужде-
нии и токе якоря р/
Р - р/ (г + г + г )
Д 1 \ Я 1 ДП В 7
109
а скорость подвижного состава при измененном возбужде-
нии, когда через якорь протекает ток /, а через обмотку
возбуждения р/.
U — I (I + г +₽/•')
Л \ Я лп 1 Г В 7
СФ’
(5.42)
Разделив выражение (5.42) на выражение (5.41), получим
г’ = СФ_ с'д-/('я + гд„ + Р'-в)_
v - СФ' Сд-₽/(ля+гдп + г,) •
(5.43)
Это выражение можно упростить. По условию потоки
СФ и СФ7 создаются одними и теми же токами р/, но
вследствие различной реакции якоря поток СФ будет
несколько больше потока СФ'. Таким образом, первая
дробь СФ/(СФ') в правой части формулы (5.43) будет
немного больше единицы. Числитель и знаменатель
второй дроби будут отличаться на значение падения
напряжения в двигателе.
Но так как падение напряжения мало по сравнению
с приложенным напряжением Пд, им можно пренебречь
и приближенно считать правую часть формулы (5.43)
равной единице, т. е.
v'=v. (5.44)
Следовательно, скорость подвижного состава v при из-
мененном возбуждении и токе якоря / двигателя приблизи-
тельно равна скорости v при полном возбуждении и токе
Рис. 5.15 Построение скоростной
характеристики при ослабле-
нии возбуждения
якоря р/.
Имея скоростную харак-
теристику v(T) при полном
возбуждении, можно графи-
ческим методом построить
скоростные характеристики
при измененном возбужде-
нии. Как видно из рис. 5.15,
построение характеристики
при ослабленном возбужде-
нии О В сводится по существу
к увеличению абсцисс кри-
вой и(Г) при полном возбуж-
дении ПВ в 1/р раз.
U0
Построение характеристики к. п. д. »]'(/) при изменен-
ном возбуждении можно произвести по выражению
UI- ЬР' и I -(ДР' + ДР' + АР' ) - 12г'
— / _ Л.________ Д____\__С_____М_____3 /_ /г л г 1
где ДР£, ДР!,, др;—соответственно магнитные, механические потери
и потери в передаче при токе якоря I и измененном
возбуждении.
\Р'с и ДРм определяются по соответствующему току
возбуждения р/ и скорости v' по кривым потерь холостого
хода при различных токах возбуждения и скоростях.
Если таких кривых пет, то потери при измененном воз-
буждении АР' могут быть найдены приближенно по
потерям при полном возбуждении АР и токе якоря р/:
ДР = ДРс + ДР„ + ДР3+(р/)2г. (5 46)
Допустим, что в обоих режимах магнитные и механи-
ческие потери одинаковы АРС4~ АРМ = АР^Д-АР'М (так как
одинаковы скорости и магнитные потоки), следовательно,
потери при измененном возбуждении можно выразить
ЬР' = ЬР'+ЬРи + ЬР'3+Рг'. (5.47)
Вычитая уравнение (5.46) из уравнения (5.47), получим
ДР' —Д/ =Г'(Г'—Р2Г) + (ДР'_ДР3). (5.48)
При одинаковых скоростях (v=v') потери в передаче
ЛРз пропорциональны силе тяги и току якоря. При
полном возбуждении ток якоря равен р/, тогда потери
в передаче АР3 = р/.
При измененном возбуждении ток якоря равен 7,
следовательно, АРз = /.
Разделив правые и левые части друг на друга, получим
др; = дра/р. (5.49)
Вычтем из обеих частей выражения (5.49) &Р3:
ДР'э-ДРа = ДДэ(1-Р)/Р’ (5.50)
Выразив полные потери в зубчатой передаче &Р3
через относительные Ар3 из формулы (4.15), получим
Др
др;_дрз = (1-р)(/я/ (5.51)
ш
Подставив выражение (5.51) в выражение (5.48)
и учитывая, что при полном возбуждении и токе якоря
U&J-&P
и^1
р/ к. п. д. ч =
, получим
др' = (1 -ч)Р^д/-/2(г'-₽2г)+(1 -₽)^я/ ~
(5.52)
Теперь по формулам (5.45) и (5.52) определим
к. п. д. при измененном возбуждении
• ф=1_₽(1_^)_1Е_₽_г) __L^Ap? (5.53)
д
Характеристику силы тяги при измененном возбужде-
нии F'(F) рассчитывают после того, как получены кривые
v'(T) и !]'(/) при измененном возбуждении по формуле
F'=3,6U1J'r\'/и’. (5.54)
На рис. 5.16 представлены характеристики на ободе
движущего колеса двигателя последовательного возбуж-
дения при номинальном напряжении на двигателе
t/д и полном и ослабленном возбуждениях. Кривая к. п. д.
при ослабленном возбуждении проходит ниже, чем при
полном в области малых нагрузок, вследствие увеличения
магнитных и механических потерь. В области средних
и больших нагрузок и. П. д. if увеличивается вследствие
уменьшения сопротивления цепи возбуждения двигателя.
Сила тяги F' при ослабленном возбуждении уменьшается,
так как уменьшается магнитодвижущая сила.
Характеристики двигателя смешанного возбуждения
при изменении возбуждения. У двигателей смешанного
возбуждения регулирование возбуждения осуществляется
изменением тока возбуждения /ш параллельной обмотки
(см. рис. 4.7), Коэффициентом регулирования возбужде-
ния этой обмотки называется отношение магнитодвижу-
щешсилы при определенной ступени регулирования к маг-
нитодвижущей силе при наибольшем токе возбуждения:
Р = luiWui/Uw п,ахи,ш)= Ли/С max* (5.55)
Отношение м. д. с. параллельной обмотки при наиболь-
шем токе возбуждения к м.’д. с. последовательной
обмотки при часовом токе называется коэффициентом
компаундирования:
Р' = Л» тск^ш/(1чи>с).
(5.56)
112
Рис. 5.16. Электромеханические
характеристики на ободе движу-
щего колеса двигателя последо-
вательного возбуждения при
полном и ослабленном возбуж
дениях
Рис. 5.17. Характеристики дви-
гателя согласно-смешанного воз-
буждения:
и. СФ н Г — при коэффициенте регу-
лирования fl; v', СФ' и /•' - при коэф*
фпинснтс регулирования fh
Суммарная м. д. с. при токе якоря / Fm = lUIwul-]-IWc,
а с учетом выражения (5.55)
Г„р = ₽7Штах№и + /№с. (5.57)
Вынесем за скобку wc и, воспользовавшись выражени-
ем (5.56), получим
/ши’ш-|-/Ис = а’с (₽₽7ч + /), (5.58)
т. е. суммарная м. д. с. в двигателе смешанного возбужде-
ния при коэффициенте регулирования возбуждения р
равна м. д. с., которая имела бы место только при одной
последовательной обмотке возбуждения, по которой проте-
кает некоторый эквивалентный ток, равный -J-/.
Так как для любого значения р по формуле (5.58)
можно определить магнитодвижущую силу для различ-
ных токов якоря, то при заданной зависимости СФ
от м. д. с. для различных токов якоря характеристики
о(/) и F(T) могут быть рассчитаны по общим для всех
двигателей постоянного тока выражениям. При этом
значения АС следует определять по кривым зависимости
магнитных и механических потерь от м. д. с. при различных
скоростях.
На рис. 5.17 представлены характеристики двигателя
смешанного возбуждения для коэффициентов регулирова-
ния р и Pi, причем Pi <р.
113
5.5. Тиристорно-импульсное управление тяговыми
двигателями
Принцип импульсного управления. При импульсном
управлении энергия подводится к тяговым двигателям
и накопительным элементам в виде отдельных импульсов.
В промежуток времени между импульсами энергия в тя-
говые двигатели поступает от накопительных элементов,
в качестве которых используются катушки индуктивности
и конденсаторы. Рассмотрим простой случай импульсного
управления (рис. 5.18).
В период времени 0—1\ ключ К замкнут и через тяго-
вый двигатель протекает ток iz=h- Нарастание тока
определяется индуктивностью цепи L и разностью напря-
жений U\—Еа:
£2 _ и'~Е*
dt L
(5.59)
Здесь мы пренебрегаем активными потерями в элемен-
тах схемы. За счет увеличения тока <2 происходит
увеличение энергии, накопленной в индуктивности Л,
которая включает в себя и индуктивность тягового
двигателя.
В период времени ti —1% ключ ft разомкнут, ток
(1 = 0. Через тяговый двигатель протекает ток /2, который
замыкается через вспомогательный диод V и поддержи-
вается за счет энергии, накопленной в индуктивности L.
В момент /г снова замыкается ключ К, и энергия
к тяговому двигателю поступает от источника энергии.
Рис. 5.18. Принципиальная схема (а) и диаграмма (б) импульсного
регулиропания
114
Напряжение на двигателе
определится как среднее за
период Т:
т
ил=т\и°»а‘' (560)
о
где Uаь — напряжение между точ-
ками а и Ь.
При замкнутом ключе К
напряжение Uab—Ui, тогда
можно записать
1 (
Рис. 5.19. Зависимость напряже-
ния на двигателе or коэффи-
циента заполнения импульсов
О
Отношение времени проводящего состояния ключа
Zi к периоду Т называют коэффициентом заполнения
импульсов
к=р/т. (561)
Следовательно, изменяя значение коэффициента X,
можно менять напряжение Ua на тяговом двигателе
(рис. 5. 19).
Возможны следующие варианты импульсного управле-
ния:
а) период r==const, изменяется время проводящего
состояния ключа. Такое управление называется широтно-
импульсным;
б) время проводящего состояния ключа остается пос-
тоянным (<i = const), изменяется период Т. Такое управле-
ние называется частотно-импульсным;
в) изменяются время t\ проводящего состояния ключа и
период Т. Такое управление называется смешанным.
Для обеспечения работоспособности рассмотренных
схем импульсного управления необходимо, чтобы:
1) источник питания был безындуктивпым;
2) ключ работал с большой частотой (при низкой часто-
го необходима большая индуктивность L, т. е. реактор бу-
дет громоздким, что нежелательно);
3) ключ К обладал способностью коммутировать боль-
шие токи.
Для соблюдения первого условия необходимо источник
питания, т. е. контактную сеть, обладающую относительно
большой индуктивностью, шунтировать конденсатором с
115
большой емкостью. Это достигается установкой на входе
импульсного преобразователя фильтра, состоящего из
реактора и конденсатора.
В качестве ключа А' применяют электронный ключ.
Наибольшее распространение получили тиристорные клю-
чи, которые накладывают па импульсное управление ряд
особенностей. Тиристор — прибор, обладающий односто-
ронней управляемостью. Можно управлять моментом от-
крытия прибора. Для восстановления тиристору своих уп-
равляющих свойств необходимо, чтобы через него перестал
протекать ток. Это достигается за счет приложения к ти-
ристору обратного напряжения, что требует создания спе-
циальных схем ключей.
Широтно-импульсный ключ. Рассмотрим принцип рабо-
ты широтно-импульсного ключа (рис. 5.20). Ключ состоит
из главного тиристора VI (рис. 5.20, а), вспомогательного
тиристора V2, коммутирующего конденсатора Ск и переза-
рядной цепи, состоящей из катушки индуктивности LK и
диода К-
Пренебрегаем активными потерями в элементах ключа
и принимаем, что в момент времени / = 0 конденсатор Ск
заряжен до напряжения тяговой сети с полярностью,
указанной на рис. 5. 20, а (без скобок). На рис. 5. 20, б при-
ведены диаграммы, поясняющие работу этого ключа.
по
В период времени 0 — ti открыт главный тиристор VI
(см. рис. 5.20, а, б), при этом через него протекает ток и
происходит накопление энергии в индуктивности L. Одно-
временно через открытый главный тиристор VI и переза-
рядную цепь происходит колебательный разряд конден-
сатора Ск, который перезаряжается до напряжения U\ с
полярностью, указанной в скобках (интервал О — t'),u это
напряжение остается на конденсаторе до открытия тири-
стора V2. В момент h открывается вспомогательный тири-
стор V2. К тиристору VI прикладывается отрицательное
напряжение конденсатора Ск, при этом прекращается про-
текание тока через тиристор VI, и таким образом соз-
даются условия для восстановления его управляющих
свойств. Одновременно через тиристор V2, индуктивность
1. происходит перезаряд конденсатора Ск током тягового
двигателя 1%. В момент t" напряжение на коммутирующем
конденсаторе изменяет знак, и к тиристору VI приклады-
вается положительное напряжение. Следовательно, в тече-
ние времени t" — ктиристору VI приложено отри-
цательное напряжение. К моменту ti конденсатор Ск заря-
жается до напряжения тяговой сети Ui, открывается диод
V3, и через него начинает протекать ток двигателя. Тири-
стор V2 закрывается, и создаются условия для восстанов-
ления его управляющих свойств.
В момент /3 снова открывается главный тиристор VI, и
процесс повторяется. Учитывая, что индуктивность цепи
достаточно велика, можно принять, что /2 = const и
<2 = li. Напряжение на двигателе
т
U = 4г [и .dt =
А '£ J аь
0
G *2
1 Г Г Г ^2
= J 77^7 dt] (5-62)
° 'i
Следовательно, коэффициент заполнения в этом случае
Л =(/( + М)/т, (5.63)
где &t = 2UiC*/ti. (5.64)
Из выражений (5.62) и (5.64) следует, что напряже-
ние на двигателе
117
Таким образом, напряжение на двигателе будет зави-
сеть не только от работы системы управления тиристорами,
но и от тока двигателя.
Внешние характеристики преобразователя достаточно
жесткие в области больших токов и весьма мягкие в обла-
сти малых токов нагрузки.
Так как всегда должен произойти заряд конденсатора
Ск, то существует какой-то минимальный ток нагрузки
/2тге меньше которого при данной частоте, т. е. данном
значении Т, нельзя производить регулирование.
При рассмотрении процессов в преобразователе мы
пренебрегали потерями в его элементах. Действительно,
к. п. д. преобразователя достаточно высок (0,95—0,97).
Объясняется это применением элементов, которые имеют
относительно малые потери энергии: конденсаторов, реак-
торов, тиристоров и диодов. В зависимости от режима
работы преобразователя потери энергии в его элементах
будут изменяться по разным законам.
В широтно-импульсном преобразователе в режиме пус-
ка, т. е. при работе с постоянным током нагрузки
/2 = 2/ч = const и V = var, с уменьшением мощности умень-
шается и к. п. д. преобразователя. Объясняется это нали-
чием постоянных потерь энергии в индуктивности L.
Возможны два способа включения преобразователей на
электроподвижном составе. Первый способ — преобразо-
ватель включается только на период пуска и торможения
тяговых двигателей. По окончании пуска он шунтируется
контактором. Тяговые двигатели должны обеспечить рабо-
ту при напряжении тяговой сети. В этом случае преобра-
зователь рассчитывается на кратковременный режим ра-
боты. Такое включение нашло применение на городском
электрическом транспорте. Второй способ — преобразова-
тель включается на все время работы тяговых двигателей.
В этом случае номинальное напряжение на тяговых дви-
гателях может быть ниже, чем напряжение тяговой сети.
Естественно, что преобразователь здесь должен быть рас-
считан на продолжительный режим работы. Поэтому он
обладает большей массой и габаритами, чем преобразо-
ватель для первого способа включения.
Для широтно-импульсного преобразователя вследствие
жесткости его выходных характеристик приходится при-
нимать специальные меры для улучшения распределения
нагрузки между ключами. Одной из таких мер является
работа каждого ключа на свой двигатель (рис. 5.21).
118
Рис. 5.21. Схема э. и. с. с широтно-импульсными тиристорными ключами
ТП1 и ТП2
Как уже указывалось ранее, тиристорные прсобразова-
ic.iii потребляют ток от источника в виде импульсов.
Поэтому требуется установка на входе преобразователя
мощных фильтров, обладающих большой емкостью Сф и
индуктивностью /_ф. Мощность фильтра может быть значи-
1елыю уменьшена, если выполнять преобразователи мно-
юфазными, т. е. из нескольких тиристорных ключей, рабо-
1.ИОЩИХ со сдвигом в 360°/и, где п — число ключей (фаз)
преобразователя.
Тиристорный преобразователь имеет практически бес-
конечно большое число внешних характеристик в режиме
turn Следовательно, подвижной состав может иметь такое
же число тяговых ха-
рактеристик. Реальное
их число будет опреде-
ыться системой управ-
1енпя э.п.с. В общем
лучае на эти характе-
ристики наложены ог-
раничения: по сцепле-
нию, максимальной
мощности преобразова-
и'ля, наибольшему до-
пустимому ослаблению
нозбуждения тягового
двигателя при номи-
нальном напряжении на
его зажимах и кон-
< грукционной скорости
(рис. 5.22).
Рис. 5.22 Тяговые характеристики
э. п. с. при применении импульсного
регулятора при Ut— const
119
Характеристики регулирования, т. е. изменение вели-
чины Ц/Т в функции того или иного параметра, определя-
ют путем расчета их по отдельным точкам тяговых харак-
теристик. По данной точке заданной тяговой характерис-
тики, используя электромеханические характеристики дви-
гателя, находят значение тока двигателя. Напряжение на
двигателе определяется в соответствии с выражением
1/д=СФр + /г, (5.66)
где v — скорость движения э. п. с.
Величину СФ определяют по нагрузочным характе-
ристикам двигателя для тока 1 в двигательном режи-
ме. Далее по значениям 77д и 7, используя выражение
(5.65) для широтно-импульсного преобразователя,
определяют значение Ц/Т.
Расчет лучше вести табличным методом. При этом для
конкретной схемы э.п.с. необходимо находить соотношение
между токами /г и / по формуле
/2=/'1а/«Ф. (5.67
где Нд — число параллельных ветвей тяговых двигателей;
/1ф — число фаз регулятора.
Ток, потребляемый э. и. с. из тяговой сети,
71 = Дд/нл/(^1ПР), <5.68)
где т)р — к. и. д. преобразователя.
Контрольные вопросы
1. Почему необходимо включать пусковой реостат?
2. Какие способы уменьшения потерь в пусковых реостатах вы
зн астс?
3. Можно ли путем изменения магнитного потока осуществлять
пуск тяговых двигателей?
4. Что определяет коэффициент регулирования возбуждения £?
5. Почему сила тяги при изменении напряжения не изменяется?
6. Что такое коэффициент заполнения импульсов?
7. Для чего служит вспомогательный тиристор в схеме широтно-им-
пульсного тиристорного ключа?
6
ТОРМОЖЕНИЕ ПОДВИЖНОГО СОСТАВА
6.1. Системы торможения
Сущность и значение торможения. Торможение при-
меняется для остановки подвижного состава н ограниче-
ния его скорости на спусках, перед кривыми участками и
соответствующими путевыми знаками. По характеру ис-
пользования тормозной силы различают служебное тор-
можение и экстренное. Служебное торможение применя-
ется в нормальных условиях работы, экстренное — для
предупреждения несчастных случаев и аварий. Оно обеспе-
чивает наибольшее замедлен нс и наименьший тормозной
путь, поэтому машинист должен использовать наибольшую
юрмозиую силу.
Процесс торможения определяется тормозными .харак-
юристиками, т. е. зависимостями тормозной силы подвиж-
ного состава от его скорости B(v). Для проведения тяго-
вых расчетов удобнее пользоваться характеристиками
дельной тормозной силы b{v), где b — B/(mg), Н/ЕН.
При торможении на подвижной состав действует тор-
мозная сила В, сила основного сопротивления движению
Uzo и сила от уклона rngi. Поэтому действующая замед-
ляющая сила Вл будет равна сумме этих сил:
В. = В + ± nigi. (6.1)
или в удельных величинах
i„ = b + а'о + I, (6.2)
IH.3K « + » относится к подъемам, а «—»—к спускам.
На рис. 6.1 изображены зависимости удельных дейст-
вующих тормозных сил b(v)\ що(с) и й + шо = /(с).
Чтобы получить замедляющую силу, нужно относительно
1авпсимости t + — сдвинуть ось абсцисс па величи-
ну i вниз при подъеме и вверх при спуске, как это показано
на рис. 6.1.
Системы торможения. По способу создания тормоз-
ной силы различают системы механического и электричес-
кого торможения. При механическом торможении тормоз-
121
пая сила создастся в
Рис. 6.!. Зависимость удельных дей-
ствующих тормозных сил
результате сил трения
между соприкасающи-
мися взаимно сколь-
зящими поверхностями.
По роду трущихся
поверхностей различа-
ют вращательно-фрик-
ционные и рельсовые
механические тормоза.
У вращательно-фрик-
ционных тормозов сила
трения создается на
поверхностях вращаю-
щихся частей колесных
или движущих систем
подвижного состава. К
этой группе относится
колесно-колодочный
тормоз, дисковые и барабанные тормоза со специальными
вращающимися поверхностями трепня, связанными либо
с колесными парами, либо с валами редукторов или тяго-
вых двигателей У рельсовых тормозов сила создается за
счет трения между рельсом и прижимаемым к нему
специальным тормозным башмаком.
При электрическом торможении тяговые двигатели пе-
реводятся в генераторный режим. Момент, который требу-
ется для вращения генератора, реализуется на ободе дви-
жущего колеса в виде тормозной силы. Различают электри-
ческое рекуперативное и реостатное торможения.
Как при механическом, так и при реостатном торможе-
нии кинетическая или потенциальная энергия подвижного
состава преобразуется в тепловую энергию. При механи-
ческом торможении тепловая энергия выделяется непос-
редственно в месте трущихся поверхностей, что приводит к
их чрезмерному нагреву и возникает задача охлаждения
этих поверхностей. При реостатном торможении кинети-
ческая или потенциальная энергия превращается сначала
в электрическую и далее в тормозных реостатах — в тепло-
вую, т. е. тепловая энергия выделяется в специальных
предназначенных для этого аппаратах.
При рекуперативном торможении полученная электри-
ческая энергия отдается в тяговую сеть и может быть по-
лезно использована другим подвижным составом.
12?
Процесс торможения должен быть очень надежным.
Ведь если своевременно не остановить подвижной сос-
тав, произойдет авария. Поэтому каждый тип подвиж-
ного состава, в том числе и электрический, оборудует-
ся, как минимум, двумя независимыми друг от друга
системами тормозов. На электроподвижном составе
городского транспорта это электрическое торможение,
которое используется как рабочее, и механическое тор-
можение, которое используется и как аварийное, и как
рабочее (для торможения при низких скоростях дви-
жения, когда электрическое торможение становится
неэффективным).
6.2. Механическое торможение
Вращательно-фрикционные тормоза. Колес ио-колодоч-
ный тормоз, который широко применяется на магистраль-
ном железнодорожном подвижном составе и на метрополи-
тене, в настоящее время не применяется на наземном го-
родском электрическом транспорте. В этом типе тормоза
тормозные колодки прижимаются непосредственно к бан-
дажам колес.
Для уменьшения шума на трамвае в настоящее время
применяется подрессоривание бандажей через специ-
альные резиновые прокладки, которые затрудняют отвод
тепла от бандажей. Бандажи в процессе торможения могут
перегреться и произойдет авария. Поэтому как на трамвае,
гак и на троллейбусе устанавливают специальные тормоз-
ные барабаны, связанные с колесами, на которые и давят
при торможении колодки (рис. 6.2, а).
Рис. 6.2. Образование тормозной силы прн механическом торможении
(а) и барабанном тормозе (6)
123
Рис. 6.3. Зависимость коэффициента трения от скорости при чугунных
колодках (1) и композиционных (2)
Тормозной момент, возникающий в этом случае, кН-м,
M-, = R6K<fK. (6.3)
где Re — радиус тормозного барабана, м;
К — нажатие на колодку, кН;
<р„ — коэффициент трения между поверхностью тормозного бара-
бана и колодкой.
Для того чтобы нажатие от колодок на тормозной
барабан уравновешивалось, т. е. вал барабана не ис-
пытывал изгибающий момент, тормозных колодок бы-
вает несколько и их располагают симметрично (рис. 6.2,
б). В этом случае тормозной момент, кН-м,
M, = nReKffK. (6.4)
где п — число тормозных колодок.
Тормозная сила, Н, в общем случае в соответствии с
рис. 6.3
tinR
В — -----L—JL 1 000 . (6.5)
к Л °
1 р к
где pt — передаточное отношение редуктора;
т]р — коэффициент полезного действия редуктора;
RK — радиус колеса подвижнего состава, м.
Выражение (6.5) справедливо в том случае, если тор-
мозной барабан укреплен либо на валу двигателя, либо на
горловине редуктора, как это имеет место на трамвайных
вагонах. На- троллейбусах тормозные барабаны крепят
124
непосредственно к ступицам
и Пр = I, и выражение (6.5)
ведущих колес. Тогда ц=1
примет вид:
nR Kw
В к= R 1 000.
(G.G)
Коэффициент 1000 в выражениях (6.5) и (6.6) служит
для перевода килоньютонов в ньютоны.
При данном нажатии К на тормозные колодки тормоз-
ная сила будет зависеть от коэффициента трения <рк. Иссле-
дования показали, что величина <рк определяется материа-
лами трущихся поверхностей, скоростью поверхности тор-
мозного барабана, нажатием на тормозную колодку К.
Тормозные барабаны, как правило, изготовляю! из ста-
in. тормозные колодки —из различных материалов Паи-
Oiuiee дешевым является изготовление гормозных колодок
из чугуна, но такие колодки обладают тем недостатком,
что относительно быстро изнашиваются и, превращаясь в
чугунную пыл)., засоряют тормозное устройство и окружа-
ющую среду. Лучшие показатели имеют тормозные колод-
ки, изготовляемые из специальных материалов, так назы-
ваемых композиционных составов. В такие композиции
входят составными частями асбест, бакелит, древесные
опилки. Эти колодки в процессе торможения сгорают, т. е.
превращаются в основном в газы и улетучиваются.
На основании экспериментов для этих материалов вы-
ведены следующие зависимости:
для чугунных колодок и стального колеса
„ „ 1.63 К + 100 3,6 v + 100
w == 0,6-------------------- (6 7}
8,15 К + 100 18 г» + 100 ' ’
и для композиционных колодок и стального колеса
0,102ft+ 20 3,6 и+150
0,41 К -р20~ 7,2 и 4^150 '
(6.8)
В этих выражениях нажатие К имеет размерность ки-
1ЧНЫОТОНЫ, а скорость v— метр в секунду. На рис. 6.3
представлены эти зависимости при нажатии па тормозные
солодки /<==20 кН.
Из выражений (6.7) и (6.8) следует, что с увеличением
нажатия К на колодку коэффициент трения падает, так-
кв он уменьшается и при увеличении скорости. При более
высоких скоростях v, особенно для композиционных
юрмозных колодок, коэффициент трения <|к становится
125
Рис. 6.4. Схема центрального барабанного тормоза:
Dq, DK — диаметры барабана и ведущего колеса
практически постоянным. Поэтому для получения надежно
работающего тормозного устройства целесообразно при-
менение большего числа колодок с меньшим усилием К
на колодку и с большей скоростью на поверхности тормоз-
ного барабана, т. е. тормозной барабан следует устанав-
ливать на валу двигателя или входного вала редуктора
(рис. 6.4).
Расчет тормозной силы. Тормозная сила электропод-
вижного состава В будет равна сумме тормозных сил,
развиваемых тормозными устройствами:
k
(69)
I
здесь k — число тормозных барабанов на подвижном составе.
С учетом выражения (6.5)
Для двухосного троллейбуса, где на каждом движу-
щемся колесе имеется тормозной барабан, k = 2, а для
четырехосного трамвая k = 4.
Если в выражении (6.10) коэффициент трения <рк при-
нять постоянным, т. е. можно вынести за знак суммы, то
получим
k
В = 1 000 <рк 2
1
(6.11)
126
Выражение под знаком суммы называют приведенным
к ободу колеса нажатием тормозных колодок, т.е.
2^=2 (6.12)
J ’р к
Тогда тормозная сила
Я=1ООО(рк х/<п, (6.13)
или в у дельных единицах
b = 1 000 <Р ----. (6.1-1)
к ”>В
Для удобства построения тормозных характеристик
вводится понятие тормозного коэффициента подвижного
состава 0, который .характеризует мощность тормозных
средств и равен отношению суммы приведенных нажатий
колодок на вес подвижного состава
О -
(6.15)
Тогда выражение (6.14) примет вид
Ь = 1000<р„0.
(6.16)
Значения расчетных коэффициентов трения <рк для раз-
личных типов тормозов следующие:
Тип тормозной
колодки
Коэффициент
трения <рк
Чугунные колодки . ..... 0,27
Дисковые и барабанные тормоза с позици-
онными колодками . 0,35
Рельсовые электромагнитные тормоза ... 0,18
Пользуясь выражением (6.16), можно построить тор-
мозную характеристику подвижного состава Ь(и).
Ограничение тормозной силы. Как видно из выражения
(6.12), с увеличением нажатия на колодки тормозная сила
увеличивается. Но она не может расти беспредельно. Наи-
большее значение тормозной силы ограничено силой сцеп-
ления колеса с рельсом, которая определяется по следу-
ющему выражению
ВтахЮООЖтйЧ’, (6.17)
|ДС rn,g— тормозной вес поезда;
ф — коэффициент сцепления колеса с рельсом.
При превышении этой величины нарушается сцепление
колеса с рельсом или полотном дороги и возникает юз. Для
избежания юза необходимо, чтобы общая тормозная сила
127
любой колесной пары не превосходила наибольшей по
сцеплению тормозной силы
В<Втах=,000тт£ф. (6.18)
С учетом выражения (6.14) получим
1000<f K 1000т,^ф, (6.19)
или (рк (6.20)
откуда следует (6.21)
Отношение наибольшего суммарного нажатия колодок
к силе нажатия на рельсы или полотно дороги
mTg называется коэффициентом нажатия тормозных коло-
док б
(6.22)
Из неравенства (6.21) следует,
(6.23)
т. е. сила нажатия ограничена условиями сцепления коле-
са и рельса или колеса и дороги.
При условии, что все оси подвижного состава тормоз-
ные наибольший тормозной коэффициент будет
равен коэффициенту нажатия 0тах = 6. Такое значение
тормозного коэффициента следует выбирать при тормо-
жении с наибольшим нажатием колодок, т. е. при экстрен-
ном торможении.
При рабочем торможении тормозной коэффициент
подвижного состава составляет 0,6—0,7 от наибольшего
значения. Значения коэффициентов нажатия для различ-
ных видов подвижного состава городского электрического
транспорта (ТЭТ) следующие:
Вид подвижного
состава
Трамвайные, вагоны (моторные)
Вагоны метрополитена . .
Вагоны с дисковыми и барабанными тор-
мозами . ...........
Троллейбус . ..................
Трамвайные вагоны с рельсовым электро-
магнитным тормозом.............
Коэффициент
нажатия С
0,85—1,2
0,5—0,6
0,6—0,7
1,5—2
2,0
128
Рис. 6.5. К определению механической устойчивоеги колодочно-бап-
щжного тормоза с чугунными (а) и композиционными (б) колод-
ками при торможении на спуске
Механическая устойчивость. Рассмотрим тормозную
характеристику подвижного состава В(о) для тормоза с
чугунными и композиционными колодками (рис. 6.5). При
юрможении на спуске силой, вызывающей ускорение,
является направленная по движению подвижного состава
сила от уклона mgi. Ускорению подвижного состава будет
противодействовать сумма сил торможения и основного
сопротивления движению /> + Следовательно, тормоз-
ная характеристика будет устойчива в том случае, если
сумма сил В-j-IFo возрастает с увеличением скорости.
Условие механической устойчивости при торможении на
• пуске запишется в виде
d (mgi) d(B + ^о) ,6 2 .
dv dv
Как следует из рис. 6.5, при движении по спуску.уста-
новившаяся скорость будет иметь место в точке а, в ко-
lopoii В Wo= mgi. Согласно основному уравнению дви-
/ьеиня справа от точки а ускорение будет положительно,
а слева — отрицательно.
Для тормоза с чугунными колодками (рис. 6.5, а) при
случайном увеличении скорости на значение Ац замед-
внснцая сила В + 1С0 будет меньше силы от уклона
В I и произойдет дальнейшее увеличение
। корости. При уменьшении скорости на значение Ац
I3+Wo>mgi. (6.25)
и с корость будет уменьшаться.
c.ib. 1092
129
Таким образом, тормоз с чугунными колодками обла-
дает механической неустойчивостью при торможении на
спуске, так как тормозная сила при увеличении скорости
падает резче, чем растет основное сопротивление дви-
жению.
В случае применения композиционных колодок
(рис. 6.5, б) в зоне рабочих скоростей получаем устойчи-
вое механическое торможение.
По типу привода механические тормоза разделяются
на ручные, пневматические, гидравлические. На мощных
типах подвижного состава применяются, только пневмати-
ческий и гидравлический приводы. Пневматический привод
применяется на трамвайных вагонах РВЗ-6М2, ЛМ-68 и
троллейбусе ЗИУ-682. На городском электрическом транс-
порте для упрощения схемы подвижного состава пневма-
тический привод заменяют соленоидным. Соленоидный
привод применяется на трамвайных вагонах КТМ-5МЗ и
Т-3 (ЧССР).
Дисковый тормоз. Основное их.отличие заключается
в том, что тормозная сила создается в результате трения
колодки о вращающиеся фрикционные диски, которые
связаны с колесными парами или с валами тяговых дви-
гателей. Если вращающиеся элементы тормоза имеют
плоскую поверхность, то такие тормоза называются диско-
выми.
Дисковые тормоза обладают следующими преиму-
ществами:
коэффициент трения дисковых тормозов относительно
высок (0,25—0,35), так как колодки для такого тормоза
изготовляют из смеси асбестового волокна с металли-
ческими стружками и древесными опилками, пропитан-
ными бакелитом;
механически устойчив, так как в рабочей зоне коэф-
фициент трения практически не зависит от скорости.
При механическом торможении вся кинетическая энер-
гия превращается в тепло и выделяется в диске. Диск
нагревается и, если процесс торможения длительный,
плавится. Поэтому дисковые тормоза применяются при
торможении с малых скоростей и как аварийные. Меха-
ническое торможение сочетают с реостатным либо с реку-
перативным торможением.
Общим недостатком рассмотренных видов механи-
ческих тормозов является то, что наибольшее нажатие
колодок ограничено условиями сцепления колес с рель-
130 'I
<1ми или дорогой.' Тем самым ограничиваются макси-
мально возможные тормозные силы н замедления. Наи-
полыпие замедления при торможении в этих системах
не превосходят 1,5 2 м/с. Между тем при экстренном
юрможении такие замедления недостаточны, поэтому при
наличии только механического тормоза небезопасно раз-
вивать высокие скорости движения. Особенно это отно-
сится к тому виду городского электрического транспорта,
у которого нет индивидуального полотна, изолированного
от пешеходов и других видов транспорта.
Рельсовый тормоз. Рельсовые тормоза позволяют раз-
вивать тормозные силы, не ограниченные сцеплением
колес с рельсами. Сущность рельсового тормоза заклю-
чается в том, что подвешенные на пружинах к тележке
паи раме вагона стальные электромагнитные рельсовые
башмаки, свободно перемещающиеся в вертикальном
направлении в специальных направляющих, притяги-
ваются к рельсам при возбуждении их током. Сила трения,
вотникающая между башмаками и рельсами, является
юрмозной силой рельсового тормоза и определяется так:
йг = 1ООО2Кр<гг, (6.26)
। це /<р сила притяжения башмака к рельсу;
<р коэффициент трения башмака о рельс.
('ила притяжения /(,, прямо пропорциональна квадрату
магнитного потока Ф, который зависит от тока /, проте-
кающего по катушке рельсового тормоза, и обратно про-
порциональна значению воздушного зазора 5 между рель-
ч1М и башмаком.
Гак как магнитный поток замыкается через рельсы,
»<> воздушный зазор резко снижает магнитный поток и силу
Притяжения /\Р. В результате загрязнения рельса и неров-
ное гей башмак прилегает к рельсу не всей поверхностью.
Полому при расчете рельсового торможения следует учп-
ii.iu.iTb некоторый эквивалентный зазор. Чем больше
ьпрязнен рельс, тем большим должен быть приведенный
i.i юр. В целях быстрого введения в действие тормозов
। । юр должен быть невелик и при отсутствии торможения
(порядка 10-12 мм), что предъявляет весьма жесткие
(ребования к состоянию пути.
Так как коэффициент трения стали о сталь резко па-
...ici с увеличением скорости, то и тормозная сила рсль-
i оною тормоза резко уменьшается с увеличением ско-
рое tn.
131
В связи с такими неопределенными характеристиками
рельсового тормоза он нашел применение в основном как
аварийный тормоз и для удержания подвижного состава
на остановке.
6.3. Рекуперативное торможение
Общие сведения. При рекуперативном торможении
тяговые двигатели работают в генераторном режиме, при
этом вырабатываемая ими энергия отдается обратно в
тяговую сеть. Эта энергия может быть использована
поездами, находящимися на линии, или возвращена в пер-
вичную сеть. Рекуперативное торможение применяется как
для торможения на спусках, так и для остановки подвиж-
ного состава, хотя последнее связано с определенными
техническими трудностями.
Для осуществления рекуперативного торможения необ-
ходимо, чтобы сумма э. д. с. тяговых двигателей в гене-
раторном режиме при последовательном их соединении
была выше напряжения контактной сети, т. е.
СФГГ = U «с + 1рГ.
(6.27)
подвижного состава при рекуперации
СФгУ - UКС
Ток и скорость
соответственно:
/ . . .
Р г
= Ukc + ,уг (6.29)
СФГ
Характеристики рекуперативного торможения могут
быть построены, если известна зависимость магнитного
потока от тока рекуперации СФ,=Д(/Р). Указанная зави-
симость для каждой системы возбуждения двигателей
постоянного тока (последовательной, параллельной, сог-
ласно-смешанной и встречно-смешанной) имеет свой ха-
рактер.
Рассмотрим характеристики рекуперативного тормо-
жения для тяговых двигателей различных систем возбуж-
дения.
Торможение при двигателях последовательного воз-
буждения. На рис. 6.6 представлены зависимости СФгу =
= Д/Р) при постоянной скорости n = const и суммы
4-/Рг) = Д/Р) двигателя последовательного возбуждения.
132
Рис. 6.6. К определению электрической устойчивости двигателей
последовательного возбуждения (а) и встречно-емеш innoio (б) при
рекуперативном торможении
Переходный процесс при рекуперативном торможении
описывается уравнением
di
Сфг^ = ^кс + /1/ + ^-Д7- • (6 30)
отсюда
di
£'dTL = CC”rt'-(C/Kc + V) <6-31)
|де L — индуктивность цепи рекуперативного торможения.
В режиме рекуперации действующей будет э. д. с
рекуперирующего тягового двигателя СФгн, а противо-
действующей — сумма напря?кения контактной сети и
падения напряжения в двигателе (Ас + /Рг. Следовательно,
условие в виде электрической устойчивости можно представить с!СФ v d(U + I г\ d! Г < Zu ₽ } (6 32)
ПЛИ р р с1(СФ V — I м dU ( \ ₽} < <б-зз>
На рис. 6.6, а, где представлены зависимости для дви-
I а геля последовательного возбуждения, точка соот-
ветствует электрическому равновесию, но оно неустойчиво.
I ели произойдет случайное уменьшение тока 1р1, э. д. с.
• гаиет меньше суммы (7Kc + /|Z, a L — <0, что приве-
дет к еще большему уменьшению тока /р. Этот процесс при-
133
ведет к перемагничиванию тягового двигателя. Если
произойдет случайное увеличение тока /,л. э. д. с. станет
больше суммы t/kC-(-/pr, и ток будет расти до тех пор, пока
не станет равным /Р2, т. е. система достигнет точки аг
электрического равновесия. Равновесие будет устойчивым,
но ток рекуперации /Р2 может превышать допустимый по
коммутации ток двигателя.
Чтобы система была электрически устойчивой, необ-
ходимо, чтобы внешняя характеристика рекуперирующей
машины СФгп—/рг = /(/р) была падающей. Поэтому гене-
ратор последовательного возбуждения, у которого э. д. с.
растет с увеличением тока намного быстрее, чем падение
напряжения /рг, является электрически неустойчивым. По
этой же причине электрически неустойчива в генератор-
ном режиме машина согласно-смешанного возбуждения.
Торможение при двигателях встречно-смешанного
возбуждения. В режиме рекуперативного торможения
двигатель встречно-смешанного возбуждения может ра-
ботать устойчиво, так как обладает падающей внешней
характеристикой. Точка а (рис. 6.6, б) пересечения за-
висимостей CfI>rf(/P) и Пкс-(-/Рг = /(/р) соответствует элект-
рическому равновесию. Это равновесие будет устойчиво,
так как при увеличении тока на значение +А/Р э. д. с. ма-
шины становятся меньше величины (7кс + /р^ и L
Это приведет к уменьшению тока, т. е. система возвра-
щается в точку а электрического равновесия. При любом
уменьшении тока на значение —Л/р величина
ток начинает возрастать, система стремится
электрического равновесия.
Торможение при двигателях независимого
ния. При независимом возбуждении м. д. с. не
тока рекуперации. Тормозные характеристики являютсН
жесткими, так как скорость почти не изменяется с изме(
нением нагрузки. При некоторой наименьшей скорости
цП!1П и наибольшей м. д. с. рекуперативное торможения
прекращается, так как э. д. с. становится недостаточной
для того, чтобы уравновесить напряжение сети.
Жесткость характеристик двигателя независимого
возбуждения приводит к плохому распределению нагрузоа
между параллельно работающими двигателями и их повы!
шенной чувствительности к колебаниям напряжения сети.
1 ~> О
L 7П ' и’
к точке а
возбужде-
зависит от
134
Поэтому применяют схемы, позволяющие получать более
мягкие характеристики. Одной из таких схем является
схема со стабилизирующим резистором Л?ст (рис. 6.7).
В этой схеме возбудитель В включен последовательно с
обмоткой возбуждения ОВ двигателя М и стабилизи-
рующим резистором. При увеличении тока в режиме реку-
перации будет увеличиваться падение напряжения на ста-
билизирующем резисторе и соответственно уменьшаться
напряжение на обмотке возбуждения ОВ. Этим дости-
гается уменьшение тока возбуждения и соответственно
магнитного потока при увеличении тока /р.
Таким образом, получаем мягкие характеристики, необ-
ходимые для осуществления режима рекуперативного тор-
можения. При этом могут быть использованы двигатели
последовательного возбуждения и статические возбуди-
1СЛИ.
Для схемы рис. G.7 в режиме рекуперации справедливо
выражение
И = /в(Гв “Ь Го) -р (Л1 4“ /р)^?ст. (6.34)
<>| куда
Ч1С £„— э. д. с. возбудителя;
/в. /р — соответственно ток возбуждения и рекуперации;
То — сопротивление обмотки возбуждения тягового двигателя;
г0 — внутреннее сопротивление возбудителя.
Из выражения (6.35) видно, что схема рис. 6.7 имеет
|акие же рекуперативные характеристики, что и генератор
Рис. 6.7. Схема рекуперативного
|<>рможения двигателя иезави-
। иного возбуждения со стабили-
зирующим -резистором
Рис. 6.8. Характеристики реку-
перативного торможения двига-
теля независимого возбуждения
со стабилизирующим резистором
135
встречно-смешанного возбуждения. Ток возбуждения /в
можно представить в виде разности двух токов
__ В _ ] __________ ст_______
В — R + г + г Z р Я + г 4- г
ст 1 в 1 о ст 1 в 1 о
(6.36)
Первый член выражения (6.36) не зависит от тока
нагрузки и эквивалентен м. д. с. независимой обмотки
возбуждения, второй эквивалентен м. д. с. последователь-
ной обмотки возбуждения. Регулируя э. д. с. возбудителя
Ев, можно изменять характеристики системы торможения
(рис. 6.8).
Жесткость этих характеристик зависит от сопротивле-
ния Rcr стабилизирующего резистора. Чем выше значение
/?ст, тем мягче характеристики при данных значениях
сопротивлений г0 и гв, тем лучше будет распределение
нагрузок и меньшая чувствительность к колебаниям
напряжения в контактной сети. Однако при увеличении
/?ст увеличиваются потери в нем, растут напряжение и
мощность возбудителя. Поэтому значение сопротивления
стабилизирующего резистора необходимо выбирать из
условия получения необходимого наклона тормозных ха-
рактеристик.
Расчет рекуперативных характеристик. Рекуператив-
ные характеристики определяются зависимостями тока
возбуждения от тока рекуперации /п(/р) и нагрузочными
характеристиками двигателя СФГ(/Р) при различных токах
якоря. Зависимость /в(/р) определяется схемой возбужде-
ния двигателя в режиме рекуперации и характеристиками
возбудителя. Скорость дви-
жения подвижного состава
при рекуперации определяет-
ся из выражения (6.28). Тор-
мозная сила при рекупера-
тивном торможении опреде-
ляется из выражения
й = 0,367СФг/Р + Л/?. (6.37)
Величина AF определяет-
ся так же, как и в двигатель-
ном режиме, причем механи-
ческие и магнитные потери
могут быть найдены по
значениям скорости и тока
Рис. 6.9. Тормозные характерис-
тики при различных ступенях
возбуждения возбудителя
136
возбуждения. Задаваясь различными токами рекуперации
и определяя для каждого тока значения v и В, можно
построить тормозную характеристику B(v) для разных
ступеней возбуждения возбудителя (рис. 6.9).
Характеристики будут иметь ограничения: по конструк-
ционной скорости Уконстр, наибольшей тормозной силе
/}тах и коммутации /О/7Р. Ограничение по максимальной
гормозной силе определяется, как и при реостатном тор-
можении, которое будет рассмотрено ниже.
Ограничение по коммутации предусматривает, чтобы
гок возбуждения не стал чрезмерно малым. Для сущест-
вующих двигателей, не имеющих компенсационной обмот-
ки, /В//Р^ 0,2 4-0,3. Это ограничение задается для каждого
типа двигателя. И чем меньше значение lK/lv, тем более
в широких пределах скорости возможна эффективная
рекуперация.
6.4. Реостатное торможение
При реостатном торможении тяговые двигатели отклю-
чаются от контактной сети и замыкаются на тормозные
реостаты. При этом механическая энергия движущегося
подвижного состава сначала превращается в электри-
ческую, а затем выделяется в виде тепла в тормозных
реостатах.
Торможение при двигателях последовательного воз-
буждения. Двигатели последовательного возбуждения при
реостатном торможении могут работать как генераторы
с последовательным са-
мовозбуждением или с
независимым.
Рассмотрим процесс
самовозбуждения дви-
гателя последователь-
ного возбуждения (рис.
<i.I0). В режиме тяги
(рис. 6.10, а) ток /,
протекающий через
якорь двигателя и об-
мотку возбуждения, со-
щает магнитный поток
С’Ф, под действием ко-
горого возникает э. д. с.
6’Фи. Чтобы перейти
Рис. 6.10. К процессу самовозбужде-
ния двигателя последовательного воз-
буждения
137
Рис. 6.11. Схемы самовозбуждения
двигателя последовательного возбуж-
дения в режиме реостатного торможе-
ния при переключении обмотки воз-
буждения (а) и переключении обмотки
якоря (б)
в генераторный режим,
отключим двигатель от
контактной сети и замк-
нем его на тормозной
резистор (реостат) со-
противлением Rr (рис.
6.10, б). В этом случае
под действием остаточ-
ного потока СФ0, кото-
рый совпадает по на-
правлению с потоком,
создавшимся при дви-
гательном режиме, воз-
никает э. д. с. СФои.
Под действием этой
э. д. с. в цепи начнет
протекать ток /т, кото-
рый вызовет появление
магнитного потока, на-
правленного навстречу остаточному магнитному потоку.
При этом будут уменьшаться СФоц и ток /т, поэтому
самовозбуждения двигателя не произойдет.
Таким образом, для самовозбуждения необходимо,
чтобы остаточный магнитный поток совпадал с направле-
нием основного потока. Для этого переключают либо
концы обмотки возбуждения (рис. 6.11, а). Либо концы
обмотки якоря (рис. 6.11, б). Под действием остаточного
магнитного потока возникает э. д. с. СФог.’, которая вызы-
вает протекание в цепи тока /т. Под действием тока /т
появляется магнитный поток, который совпадает с нап-
равлением остаточного магнитного потока и усиливает
его. Таким образом, происходит самовозбуждение.
Рассмотрим процессы, происходящие в двигателе
последовательного возбуждения после переключения его в
режим реостатного торможения. Пренебрегая влиянием
вихревых токов, данный процесс можно охарактеризовать
следующим уравнением
СФе = /7(г + RT) + Z.-rfZT- , (6.38)
откуда
L^- = СФо - l(r + RT) , (6.39)
al '
где L — индуктивность цепи реостатного торможения.
138
Составляющие урав-
нения (6.39) представ-
лены графически в
функции тока на рис.
6.12 при скорости у =
= const: зависимость
>. д. с. СФо(/т) — кри-
вой 1 с учетом началь-
ной э. д. с. £0 = СФоу;
сумма падений напря-
жений в двигателе и
тормозном реостате
/,(г-|-/?т)— прямой 2,
проходящей через нача-
ло координат; величина
. dly
/ ---заштрихо-
ванной разностью орди-
нат кривой 1 и пря-
мой 2.
Рис. 6.12. К определению электриче-
ской устойчивости двигателя последо-
вательного возбуждения при реостат-
ном торможении
Из графического ре-
шения уравнения (6.39) видно, что самовозбуждение ге-
нератора последовательного возбуждения возможно лишь
при наличии в момент включения остаточной э. д. с.
СФощ Благодаря наличию остаточной э. д. с. величина
, dIT
/. в момент включения положительна, и ток начинает
возрастать. По мере увеличения тока величина L сна-
чала возрастает, затем уменьшается, и при токе, равном
в точке а пересечения кривой 1 и прямой 2 становится
равной нулю. В этой точке наступает электрическое равно-
весие, т. е. э. д. с. двигателя уравновешивается суммой
падений напряжений во внутренней и внешней цепи
двигателя:
СФп = /,(г + /?т) (6.40)
Установившееся значение тормозного тока
/, = СФп/(г + Л,). (6.41)
Электрическая устойчивость. Рассмотрим, является ли
реостатное торможение генератора последовательного
возбуждения электрически устойчивым. Из рис. 6.12 видно,
что при случайном увеличении тока на Л/т э. д. с. СФц ста-
новится меньше суммы падений напряжений /,(г-[-/?т).
139
Величина L станет отрицательной, и ток уменьшится,
т. е. система будет стремиться возвратиться в точку а.
И, наоборот, при случайном уменьшении тока на АД э. д. с.
С'Ф с1 станет больше суммы падений напряжений А(г + /Д),
величина L будет положительной, и ток /т начнет
возрастать, т. е. система стремится возвратиться в точку
а. Электрическое равновесие в точке а является устойчи-
вым.
Устойчивость равновесия в точке а может быть уста-
новлена и из общего условия электрического равновесия:
производная по току действующей э. д. с. должна быть
меньше производной по току противодействующей э. д. с.
Действующей в данном случае будет э. д. с. СФу, а
противодействующей— падение напряжения Л(г + Ят).
Как следует из рис. 6.12, выполняется неравенство
^(СФу) < rf[zT(f+ М] (642)
d/r
т. е. соблюдается условие электрического равновесия.
Таким образом, реостатное торможение одного тяго-
вого двигателя последовательного возбуждения на тормоз-
ной реостат электрически устойчиво.
При самовозбуждении разность ординат СФо(Д) и
Д(г-|-/?т) характеризует скорость нарастания тока. Чем
быстрее протекает процесс самовозбуждения, тем рань-
ше начинается процесс торможения. В обычных усло-
виях тормозной ток достигает своего установившегося
значения за 0,5—2 с. Для ускорения процесса самовоз-
буждения остаточный магнитный поток может быть уве-
личен путем дополнительного подмагничивания. Уско-
рение процесса торможения может быть достигнуто за
счет предварительного введения двигателя еще при дви-
жении в режиме выбега в режим торможения с малым
тормозным током, т. е. небольшой тормозной силой.
Такая система носит название следящего выбега. Она
применяется на трамвайных вагонах типа Т-3 (ЧССР).
Зависимость процесса самовозбуждения от сопро-
тивления тормозного реостата. Представим графически
решение уравнения электрического равновесия э. д. с.
СФо(Д) и падений напряжения Д(г-|-/?т) Для различных
значений сопротивлений /?Ti, Рт2 тормозного реостата,
причем /?т2> Rti (рис. 6.13). Точки пересечения э. д. с.
140
Рис. 6.13. Зависимость процес-
са самовозбуждения от сопро-
।пиления тормозного реостата
Рис. 6.14. Зависимость процес-
са самовозбуждения от скорости
СФу с прямыми /т(г—|-/?т) определяют значения тормозных
гоков при различных сопротивлениях. С увеличением
сопротивления при одинаковой скорости v снижается ток и,
следовательно, тормозная сила.
Поэтому регулирование тормозной силы в двигателе
последовательного возбуждения можно осуществить
п (менением сопротивления Rr.
Тангенсы углов наклона прямых /т(г-|-/?Т) = /(Л) про-
порциональны сопротивлениям тормозного реостата. С
увеличением сопротивления /?т увеличивается наклон
прямой /т(г+/?т) к оси абсцисс и при некотором сопро-
। пилении /?кр прямая /т(г + /?кР) пересекает кривую СФу в
начальной ее части (точка а), где самовозбуждение ма-
шины становится практически невозможным. Предельное
сопротивление, при котором невозможно самовозбуждение
машины при данной скорости и, называется критическим.
Зависимость процесса самовозбуждения от скорости.
На рис. 6.14 представлено графическое решение уравне-
ния электрического равновесия (6.40) при различных
< коростях vi, U2 и т. д. и одном и том же значении сопро-
1 пиления /?т тормозного реостата, причем vi> Уг.
Как следует из рис. 6.14 при /?T = const с увеличением
( корости возрастают э. д. с. СФи и токи /т, а следовательно,
и тормозные силы.
При уменьшении скорости и неизменном сопротивле-
нии уменьшается тормозной ток /х, и при некоторой доста-
K14IIO низкой скорости прямая Л(г-|-/?т) пересекает кривую
('1>иКр в начальной ее части (точка а), при которой само-
шнбуждение машины становится невозможным. Скорость,
при которой самовозбуждение машины невозможно, на-
141
зывается критической пкр. Каждой ступени сопротивления
тоомозного реостата соответствует определенное значе-
ние критической скорости. Чем больше сопротивление
тормозного реостата, тем выше критическая скорость.
Расчет характеристик реостатного торможения. Из
уравнения электрического равновесия (6.40) можно по-
лучить выражение для определения скоростной характе-
ристики
v = + RlL (6.43)
СФ
Характеристики установившегося режима реостатного
торможения можно рассчитать при заданном сопротивле-
нии тормозного реостата, если известна зависимость
СФ(/). Если зависимость не задана, характеристики
реостатного торможения двигателя последовательного
возбуждения могут быть построены по скоростной характе-
ристике двигателя о(7) тягового режима, учитывая, что
СФ = (иа — Ir}/v, где v—скорость двигателя при напря-
жении Uа и токе /.
Тормозная сила определится по следующему выраже-
нию
В = 0.367СФ/т + ЛВ.
(6.44)
где — сила, вызываемая магнитными и механическими потерями
в двигателе при торможении.
Если отсутствуют данные о магнитных и механических
потерях, величина ДВ может быть принята равной ДЕ и
найдена по характеристикам
Рис. 6.15. Скоростные ха-
рактеристики с'(/,) реостатно-
го торможения при различ-
ных значениях сопротивления
R, тормозного реостата
электромагнитной силы тяги
F3M(/) и силы тяги Е(/). При дан-
ном тормозном токе Л
= = F. (6.45)
По кривым п(/т) (рис. 6.15)
и В(/т) (рис. 6.16) строят
тормозные характеристики рео-
статного торможения В(у)
(рис. 6.17) для различных
значений сопротивлений тор-
мозного реостата, причем
Rt I < Rr2 < Ri3-
Выражения (6.40), (6.41)
справедливы для схемы рео-
статного торможения с одним
142
двигателем. Если общее число
двигателей и они соединены
в zn параллельных цепей с
2С последовательно включен-
ных двигателей в каждой цепи,
то э. д. с. и падения напряжения
в двигателях увеличатся в гс
раз, а ток в тормозном реоста-
те — в 2П раз. Поэтому уравне-
ние электрического равновесия
примет вид
гсСФи=Д(ггс)+/,(/?.?„) (6.46)
или
COo = /T(r + /?Tzn/zc), (6.47)
где Rizjz<: = R— сопротивление тор-
мозного pcocr.ira,
приведенное к од-
ному двигателю.
Скоростная характеристика
будет иметь вид
!ЛГ + RrZn/ Zc)
------СФ <648)
Тормозная сила в этом слу-
чае увеличится в z& — znzc
раз и будет
В = 2д(0,367СФЛ4-ДН- (6.49)
Механическая устойчивость
при торможении на спусках.
Как известно, для. механической
устойчивости необходимо, что-
Рнс. G.16. Определение за-
висимости /?(/,)
Рис. 6.17. Тормозные ха-
рактеристики В(у) при
различных значениях со-
противления 7?, тормоз-
ного реостата
бы производная по скорости
аействующей силы была бы меньше производной по ско-
рости противодействующей силы (рис. 6.18). В данном
случае действующей силой является сила от уклона
ingi, а противодействующей — сумма сил торможения
н основного сопротивления движению B+U/o, поэтому
условие механической устойчивости запишется в виде
d(mgi) + Ч^о)
dv dv
Так как уклон i не зависит от скорости и
(6.50)
d(tngi) _ п
dv ~ и’
143
Рис. 6.18. К определению механи-
ческой устойчивости характерис-
тик реостатного торможения
то условие механической
устойчивости может быть
записано в виде
d(B + W )
_ —2±>0> (6.51)
av
т. е. тормозная характеристи-
ка устойчива, если с увели-
чением скорости тормозная
сила возрастает.
На рис. 6.18 точка пере-
сечения О зависимостей
B-\-Wo=f(v) и mgi(v) со-
ответствует установившему-
ся режиму со скоростью v,
так как в ней В-|- W7O = mgi и
dv/dt = Q.
При любом увеличении скорости от vy сила от уклона
mgi<ZB Wo, приращение скорости становится отрица-
тельным, следовательно, подвижной состав будет замед-
ляться, пока не достигнет установившейся скорости vy.
И наоборот, при любом уменьшении скорости от vy сила
от уклона mgi> приращение скорости dv/dt ста-
новится положительным, т. е. система стремится вернуться
в точку О с vy.
Таким образом, реостатное торможение двигателя
последовательного возбуждения механически устойчиво.
Ограничение тормозных характеристик. Рассмотрим
скоростные характеристики реостатного торможения для
различных ступеней тормозного реостата (см. рис. 6.15).
Они имеют ограничения:
1) по наибольшему тормозному току Лтах;
2) по наибольшей скорости цтах;
3) по наибольшему допустимому напряжению на кол-
лекторе тягового двигателя UЛОп-
Ограничение по наибольшему тормозному току опре-
деляется либо условиями коммутации двигателя, либо
сцеплением колеса и рельса:
(6.52)
Допустимой по
ствует допустимый
BIIlax<1000mTgip. (6.53)
сцеплению тормозной силе соответ-
по сцеплению ток
/т тах^ /т сц. (6.54)
144
Меньшее из этих ограничений и принимается за /ттах.
Ограничение по наибольшей скорости итах определяется
конструкционной скоростью подвижного состава.
Ограничение по наибольшему допустимому напряже-
нию вызвано тем, что при реостатном торможении дви-
гатель должен развивать наибольшую тормозную силу
при скорости большей, чем скорость выхода на автома-
тическую характеристику при пуске. Так, при равенстве
тормозного и пускового тока э. д. с. при торможении будет
равна СФпитах, где СФП— магнитный поток, соответ-
ствующий пусковому току, а и,пах — скорость начала
торможения. В конце пуска э. д. с. будет равна СФ,,оп,
где оп—скорость выхода на автоматическую характе-
ристику.
Таким образом, если /т=/„, то —' = =
Ь„ СФ„о„
V
, т. е. э. д. с. при торможении в отах/оп раз больше,
Он
чем э. д. с. в конце пуска, равная номинальному напря-
жению на двигателе.
Для современных двигателей последовательного воз-
буждения это отношение равно двум или выше. Поэтому,
чтобы обеспечить эффективность реостатного торможе-
ния при высоких скоростях, двигатель должен допускать
как минимум двукратное повышение напряжения на кол-
лекторе по отношению к поминальному.
Для двигателей городского электрического транспорта,
рассчитанных на рабочее реостатное торможение, UП1ах=
2t/HOM. Для всех прочих тяговых двигателей Uтах=
1,3£/|1ом. Это ограничение может быть построено на
характеристиках рис. 6.15 из условия, что /т = Пгаах/(/?т + г)
Выбор наибольшего сопротивления тормозного реос-
тата. При реостатном торможении в качестве тормозных
используются пусковые реостаты с добавлением дополни-
тельных ступеней. Мощность реостатов должна быть при
ном существенно увеличена. Наибольшее сопротивление
пускового реостата при одном двигателе определяется
II.I условия
Д| шах ~ min- (6.55)
Наибольшее сопротивление тормозного реостата необ-
ходимо выбирать из условия
Лттах=ЦпахД1т„,- (6.56)
145
и,
(6.57)
Поделив выражение (6.56) на (6.55) и выразив /?ТП1ах,
получим
7 U I
& __ Р max п mm
max щах JJ I
ном т min
Э. д. с. при торможении равна С’Фтотах и соответствует
максимальному напряжению на двигателе Umax, э. а. с.
во время пуска СФпоп примерно равна номинальному
напряжению на двигателе UH0M. С учетом этого выраже-
ние (6.57) примет вид
СФ v I
D _____ & т max n mm
max Лптах Л’ф v т
п п т min
(6.58)
При равенстве пускового /ПГ11Н1 и тормозного /тга|П токов
СФТ«СФП и Дттах=/?пгаах-Д^.х .
t'n
Таким образом, чтобы двигатель развивал при наи-
большей скорости тормозную силу, примерно равную пус-
ковой, он должен допускать э. д. с. в vmzJvR большую,
чем э. д. с. при номинальном напряжении сети UnoK. Для
двигателей последовательного возбуждения отах/оп~2.
Поэтому для того, чтобы реостатное торможение при
высоких скоростях было эффективно, двигатель должен
допускать примерно двукратное повышение напряжения
по отношению к номинальному, о чем было сказано выше.
Отсюда наибольшее сопротивление тормозного реос-
тата
Л1та,*2/?пиах. (6.59)
Энергия, выделяемая в сопротивлении тормозного
реостата
ЭКт=/пг??/2 = т^ах/2, (6.60)
а в сопротивлении пускового реостата
Экп=/пи,^к„/2. (6.61)
Если коэффициент пуска к„= 1, то
V2
Эхт=5кп-^- »4Л,.- (6.62)
т. е. энергия, выделяемая в сопротивлении тормозного
реостата, будет в четыре раза выше энергии, выделяемой
при пуске, что потребует значительного увеличения мощ-
146
Рис. G.I9. Схема реостат-
ного торможении при дви-
гателях смешанного воз-
буждения
двигателями
пости тормозного реостата по
сравнению с пусковым.
Торможение при двигателях
смешанного возбуждения. При
гяговых двигателях смешанного
возбуждения наибольшее распро-
странение получила схема рео-
статного торможения, представ-
ленная на рис. 6.19. В этом случае
для перехода в режим рео-
ератного торможения якорь тяго-
вого двигателя отключается от
сети и замыкается на тормозной
реостат, а параллельная обмотка
возбуждения получает питание от
контактной сети. Тяговый дви-
। а гель переходит в режим гене-
ратора со встречно-смешанным
возбуждением.
Для реостатного торможения с
смешанного возбуждения построение характеристик
производится по тем же выражениям (6.48), (6.49), что
п для двигателя последовательного возбуждения. При
пом шачения СФ необходимо брать по нагрузочным кри-
вым (,’<!>,(/) для генераторного режима. Регулирование
скорости в этом случае осуществляется путем изменения
кжа /,„ в параллельной обмотке возбуждения.
На рис. 6.20 представлены характеристики у(/,) и
/<(/,), а на рис. 6.21—тормозная характеристика B(v)
Iпитателя встречно-смешанного возбуждения при реостат-
ном торможении. Как видно из рис. 6.21, тормозная ха-
рактеристика такого двигателя имеет следующие дос-
тоинства:
при торможении в широком диапазоне скоростей тор-
мозное усилие практически постоянно, поэтому не тре-
буется большое число ступеней реостата, а следовательно,
н аппаратов управления;
обеспечивается устойчивость параллельной работы
нескольких двигателей при равномерном распределении
нагрузок между ними.
В то же время для увеличения тормозного усилия В
необходимо увеличивать ток в параллельной обмотке
шачсние которого ограничено. Поэтому схема реостатного
юрможения (см. рис. 6.19) не позволяет получить большое
147
Рис. 6.20. Зависимости о(/т)
и в(/т) при различных значе-
ниях тока в параллельной
обмотке и /?T = const
Рис. 6.21. Тормозные ха-
рактеристики при различ-
ных значениях сопротив-
ления тормозного реостата
и /ц,= const
значение тормозного усилия В, так как магнитный поток
в двигателе создается разностью м. д. с. параллельной и
последовательной обмоток двигателя. Благодаря такой
системе возбуждения двигателя его э. д. с. не превышает в
режиме реостатного торможения практически наибольше-
го напряжения, допустимого в режиме тяги.
Изменение сопротивления 7?т ведет к перемещению мак-
симума тормозной силы: при увеличении сопротивления
максимум перемещается в сторону высоких скоростей дви-
жения. На практике следует выбирать тормозное сопро-
тивление равным (0,84-0,9)/?„.
6.5. Рекуперативно-реостатное торможение
Достоинства рекуперативно-реостатного торможения.
При рекуперативном торможении с контакторными систе-
мами управления нельзя тормозить до низких скоростей
движения. Это торможение также требует наличия либо
потребителей электрической энергии в контактной сети,
либо инверторных или поглощающих устройств на тяговых
подстанциях. При чисто реостатном торможении вся тор-
мозная энергия превращается в тепло в реостатах, т. е. бес-
полезно теряется. Реостатное торможение позволяет тор-
мозить практически до полной остановки. Поэтому на
практике целесообразно объединение обеих систем в одну,
при высоких скоростях использовать рекуперативное тор-
можение, а при низких скоростях и уменьшении эффектив-
148
пости рекуперативного торможения производить переход
па реостатное торможение. Замещение рекуперативного
юрможения реостатным следует производить и при исчез-
новении потребителей энергии в тяговой сети, что увели-
чивает надежность электрического торможения. Замеще-
ние одного вида торможения другим должно происходить
без потери тормозной силы. Рассмотрим это на кон-
кретных примерах.
Торможение при двигателях смешанного возбуждения.
I лкое торможение осуществляется по схеме (рис. 6.22, а).
При замыкании контактора возбуждения РЗ увеличивает-
ся э. д. с. двигателя и происходит рекуперация. 1 (осле
ымыкания контактора Р4 ток возбуждения двигателя
постигает максимума, и при дальнейшем понижении ско-
рости рекуперацию применять невозможно. Поэтому за-
мыкается контактор Р2 и размыкается контактор Р1.
Происходит переход на реостатное торможение, причем
без потери силы торможения, так как двигатель подключен
сначала к тяговой сети, затем одновременно к тяговой
сети и тормозному реостату и далее только к тормозному
реостату. Тормозные характеристики этой системы пока-
1.Н1Ы на рис. 6.22, б. Для работы такой системы требуется
наличие напряжения в тяговой сети, если оно пропадает,
исчезает тормозной эффект. Для ликвидации этих не-
достатков возможна установка двух разделительных дио-
лов в цепи параллельного возбуждения двигателя.
Система рекуперативно-реостатного торможения при-
меняется на троллейбусах и трамвайных вагонах при дви-
возбуждения.
1.1 гелях смешанного
и)
а Режим Состояние контакта
Р! Р2 РЗ
0 Родготобите/имш
/| Рекуперация
2 Реостатное торможение с независимым Возбуждением X
3 Реостатное торможение с самовозбужде- нием X X
^-контакт замкнут
Гис. 6.22. Схема (а) и тормозные характеристики (6) рекуперативно-
реостатного торможения при двигателях смешанного возбуждения:
1.2 — режим рекуперативного торможения; 3 — режим реостатного торможения
149
§ Режим Состояние кон/пакта
Р! Р2 РЗ Ph
0 ПодготоЗительньАГ
1 Рекуперация
2 Реостатное торможение с независимым Возбуждением X
3 Реостатное торможение с самоВозйужде - наем X X
'/^-контакт зап кнут
Рис. 6.23. Схема (а) и тормозные характеристики (б) рекуперативно-
реостатного торможения при двигателях последовательного возбуж-
дения с применением возбудителя:
/ — режим рекуперативного торможении; 2 и 3 — режимы реостатного торможения
соответственно с независимым возбуждением и самовозбуждением
Торможение при двигателях последовательного воз-
буждения. Для упрощения силовой схемы и уменьшения
числа переключений все четыре двигателя моторного ва-
гона соединены последовательно (рис. 6.23, а). Для воз-
можности рекуперации в схеме предусмотрен дифферен-
циальный возбудитель В.
В начале контакторами Р2 и РЗ включается реостат-
ное торможение. При этом двигатели получают возбужде-
ние от возбудителя, напряжение которого плавно подни-
мается. Когда напряжение на двигателях становится рав-
ным напряжению сети, включается линейный контактор
Р1, далее отключается контактор Р2 и начинается реку-
перативное горможенис. Благодаря такому подготовитель-
ному реостатному торможению, включение на рекупера-
цию происходит плавно, без толчков тока в тяговых дви-
гателях. Когда процесс рекуперативного торможения за-
канчивается вследствие снижения скорости, снова вклю-
чается контактор Р2, выключается линейный контактор
Р1 и начинается реостатное торможение. Далее тяговые
двигатели переводятся с независимого возбуждения на
самовозбуждение, для чего возбудитель сначала шунти-
руется резистором /?, при включении контактора Р4 и
далее отключается при размыкании контактора РЗ. Для
торможения практически до полной остановки выводится
тормозной реостат R\. Тормозные характеристики для та-
кой системы торможения представлены па рис. 6.23, б.
150
Чем до более низкой скорости возможно рекупера-
iявное торможение, тем оно более эффективно. Рассматри-
ваемая система позволяет производить рекуперацию до
< корости 20—30 км/ч, далее идет реостатное торможе-
ние. Более эффективными являются системы с тиристор-
ным импульсным регулированием, которые позволяют
производить рекуперацию практически до полной Оста-
новки.
6.6. Электрическое торможение с помощью
тиристорно-им пул ьс н ых per ул я тор ов
Применение тиристорно-импульсных регуляторов
( ГИР) позволяет производить рекуперативное торможе-
ние при условии, что э. д. с. двигателей ниже напряжения
и контактной сети. В этом случае ТИР действует как
нольтодобавочный агрегат, включенный последовательное
гиговыми двигателями. В этом случае схема импульсного
регулирования (рис. 6.24, а) работает следующим об-
разом.
В период времени 0 —1\ (рис. 6.24, б) ключ К замкнут
и гиговый двигатель закорочен. Скорость нарастания тока
/• определяется индуктивностью L. За счет увеличения
шка /'_> происходит увеличение энергии в индуктивности L.
/(под V препятствует протеканию тока от источника энер-
|пи В период времени />—/г ключ К разомкнут, и ток от
ынового двигателя через диод V протекает в направлении
.. источнику энергии. В этом случае э. д. с. индукции, воз-
никающая в индуктивности L, суммируется с э. д. с. тяго-
Гнс. 6.24. Схема рекуперативного торможения с применением тирис-
iopiio-нмпульсного регулирования (а), диаграмма токов и напряжений
(/>), зависимость напряжения на двигателе от коэффициента запол
нения импульсов (<з)
151
Рис 6.25. Схема электрического торможения с применением широтно-
импульсного ключа (а), диаграмма токов и напряжении (б) и входная
характеристика широтно-импульсного преобразователя (е)
вого двигателя. Происходит передача в тяговую сеть энер-
гии, накопленной в индуктивности L, и соответственно
уменьшение тока /г- В момент h снова замыкается ключ
К, и тяговой двигатель закорачивается через индуктив-
ность L. Далее процесс повторяется.
Напряжение на двигателе определяется выражением в
соответствии с кривой напряжения (рис. 6.24, б)
I ‘г
О /,
Т - I.
= - = (1 - X)t/,.
(6.63)
Изменяя значение коэффициента заполнения импуль-
сов X, можно регулировать напряжение тяговых двигате-
лей в генераторном режиме (рис. 6.24, в).
Применение реальных тиристорных ключей налагает
особенности на характеристики устройств. Схема широтно-
импульсного ключа для режима электрического торможе-
ния представлена на рис. 6.25, а. Здесь же приведены
кривые токов и напряжений на отдельных элементах схе-
мы, поясняющие принцип ее работы (рис. 6.25, б).
152
Определим напряжение на двигателе в генераторном
режиме
/ 'г
ил= ~т \и=
о
‘з
/2-
at +
t, + л/
(6.64)
1 T
r2
Здесь величина AZ = 2t/|CK//2 зависит от тока двигате-
ля. Входные характеристики преобразователя приведены
на рис. 6.25, в. Если считать, что преобразователь работает
< высокой частотой, т. е. электромагнитные процессы в нем
проходят во много раз быстрее, чем в двигателе, то эти
характеристики могут быть использованы для определения
шсктрической устойчивости системы в режиме электриче-
ского торможения. На рис. 6.25, в штриховой линией пока-
чана кривая СФи двигателя. Устойчивый режим имеет
место только в зоне малых нагрузок (ток /'2), так как
»десь выполняется условие устойчивости ~^Г~'
Для получения устойчивых характеристик в зоне боль-
ших тормозных токов необходимо последовательно с дви-
гателем включить стабилизирующие резисторы. Послед-
нее ухудшает показатели рекуперации, так как часть энер-
1нн (20—30%) тратится в этих резисторах. Возможно
получение устойчивых характеристик рекуперативного
юрможения, если изменить, например, режим регулиро-
вания ТИР, применить вместо широтного регулирования
частотное.
Для перехода на режим электрического торможения не-
обходимо производить переключение в схеме э. п. с. Такой
переход осуществляется с помощью только двух контак-
н>ров (рис. 6.26, а}. Для того чтобы обеспечить самовоз-
буждение тягового двигателя, необходимо реверсировать
обмотку якоря.
В случае если система электроснабжения не может вос-
принять энергию рекуперации (отсутствуют другие потре-
бители энергии на линии), с помощью быстродействующе-
ю контактора Р2 может быть подключен тормозной ре-
актор сопротивлением RT, при этом будет осуществляться
режим реостатного торможения. При появлении потре-
бителей энергии на линии можно отключить контактор Р2,
153
"^-контакт замкнут
Рис. 6.26. Схема (а) и тормозные
характеристики (б) э.п.с. при приме-
нении тиристорно-импульсного регу-
лятора
и снова тяговые двигатели переключатся в режим рекупе-
ративного торможения.
Для устойчивой параллельной работы в генераторном
режиме нескольких двигателей возможно применение пе-
рекрестных схем, как это делается в схемах реостатного
торможения, либо можно использовать многофазность
преобразователя, заставляя тиристорные ключи выпол-
нять функции делителей нагрузки.
Как уже указывалось, тиристорный импульсный преоб-
разователь имеет практически бесконечно большое число
входных характеристик, поэтому э. п. с. может иметь такое
же число тормозных характеристик. Реальное их число
будет определяться системой управления э. п. с. На эти
характеристики будут наложены ограничения: по сцепле-
нию, наибольшей мощности преобразователя, наибольше-
му допустимому ослаблению возбуждения тягового двига-
теля при номинальном напряжении на его зажимах,
конструкционной скорости. Кроме того, в зоне низких
напряжений на .двигателе имеет место ограничение по наи-
большему допустимому значению t\/T для широтно-им-
пульсного ключа. В результате образуется область тор-
мозных характеристик (рис. 6.26, б). Каждая тормозная
характеристика, расположенная внутри области, опреде-
ляется способом управления преобразователем.
Характеристики регулирования, т. е. изменение величи-
ны t\/T в функции того или иного параметра, определяют
путем расчета их по отдельным точкам тормозных харак-
154
теристик. По значению тормозной силы В и электромехани-
ческим характеристикам двигателя определяют значение
гока /д. Далее по скорости и нагрузочным характеристикам
для генераторного режима определяют значение Ua, ко-
торое
1/п=(СФь-/,г)г(. (6.65)
Используя выражение (6.65) для широтно-импульсно-
го ключа, определяют значения ЩТ. Входной ток преобра-
зователя
/2=/nZ„/,l.|., (6.66)
где «ф — число фаз регулятора.
Ток, отдаваемый в тяговую сеть,
Л = С„/д2„»|р/С|, (667)
где к. п. д. регулятора т)р примерно па 2% ниже, чем в
режиме тяги.
Контрольные вопросы
1. Почему на э. и. с. наравне с механическим применяется
>л с кт р и чсское торм о ж ен не?
2. Почему у барабанного тормоза при применении композицион-
ных колодок лучше тормозные характеристики по сравнению с таким же
тормозом при применении чугунных колодок?
3. Почему не применяют рельсовый тормоз при рабочем тормо-
жении?
4. В чем основная причина невозможности применения двигателя
с последовательной системой возбуждения для рекуперативного тормо-
жения?
5. Сформулируйте основные условия при применении двигателей
последовательного возбуждения, чтобы возникало реостатное тормо-
жение?
6. Почему возрастает масса тормозных резисторов по сравнению с
пусковыми?
7. В чем основное преимущество применения ТИР для электри-
ческого торможения?
155
7
ТЯГОВЫЕ РАСЧЕТЫ
7.1. Построение кривых движения подвижного состава
Общие принципы и методы тяговых расчетов. Назначе-
ние тяговых расчетов состоит в определении зависимости
между основными параметрами движения подвижного сос-
тава. Это необходимо как при проектировании ГЭТ, так и
для различных поверочных расчетов работы подвижного
состава.
Основными задачами тяговых расчетов являются:
а) предварительный выбор условий движения при дан-
ном подвижном составе и профиле участка;
б) определение скорости, расхода энергии и нагревания
тяговых двигателей при движении подвижного состава на
линии, т. е. режима работы подвижного состава;
в) окончательный выбор и уточнение показателей рабо-
ты подвижного состава на линии.
Для этого требуется построение кривых движения. Рас-
чет кривых движения основан на интегрировании уравне-
ния движения.
Рассмотрим первую форму уравнения движения, уста-
навливающую в дифференциальном виде зависимость
между удельной равнодействующей приложенных к под-
вижному составу сил и ускорением
(‘ + Т)^ = t(f - wo- b - i) , (7.1)
где 1-py— коэффициент инерции вращающихся частей;
t — переводной коэффициент (см. табл. 2.1);
f — удельная сила тяги, Н/кН;
wo — удельное основное сопротивление движению, Н/кН;
b — удельная тормозная сила, Н/кН;
I — уклон, %0;
v — скорость поступательного движения подвижного соста-
ва, км/ч;
I — время движения, с.
Когда подвижной состав движется под током на пло-
щадке, на него действуют сила тяги и сила основного со-
противления движению. Следовательно, удельная действу-
ющая сила fa = f—wo. В режиме выбега действующей
156
силой будет сила основного сопротивления движению
/д= —w<>. В режиме торможения действующей будет сум-
ма тормозной силы и основного сопротивления движению
— (64-и>о).
При движении на уклоне на поезд дополнительно будет
действовать сила сопротивления от уклона i. Обозначим
/л — i = fy, где fy—удельная ускоряющая сила.
Тогда выражение (7.1) можно записать в виде
cfv
(1 + т)-аг = ^у- (7-2)
Разделив переменные в уравнении (7.2), получим
(73>
Интегрируя обе части выражения (7.3) в пределах из-
менения скорости от tn до 02, найдем соответствующее
этому процессу изменение времени
Для того чтобы найти зависимость между скоростью
подвижного состава и пройденным путем v(l), рассмотрим
вторую форму уравнения движения
(1 + Т)«^у- = £'(/— «%—6 —(7-5)
где I — пройденный подвижным составом путь, м.
Вводя понятие ускоряющей силы, получим
(,+?)и^=е7у' <7б>
Разделив переменные и интегрируя обе части выра-
жения (7.6) в пределах изменения скорости от vt до ог,
найдем соответствующее приращение пути /г —1\‘.
(I + у ) vdv
v2
(I + у) f vdv
v j ~Г
vl
(7.7)
(7.8)
157
Чтобы вычислить интегралы правых частей уравнений
(7.4) и (7.8), должна быть известна зависимость удельной
ускоряющей силы от скорости /у(п). Для этого должны
быть известны характеристики действующих и замедли
ющих сил, зависимости сопротивления движению от ско
рости на различных участках пути, определяемые условия-
ми безопасности движения и предусмотренные Правилами
технической эксплуатации. К ним относятся ограничения
скорости на крутых спусках, а также на кривых участках
пути, стрелочных переводах и т. п.
Для практических расчетов уравнение движения интег-
рируют, пользуясь методом конечных приращений. Сущ
ность этого метода заключается в том, что в уравнении
движения бесконечно малые приращения dv, dt и dl заме
няются конечными приращениями До, Д( и Д/. В каждом
интервале скорости До значение удельной ускоряющей си-
лы /у принимается постоянной и равной ее среднему зна-
чению /у ср. Согласно методу конечных приращений выра
женин (7.3) и (7.7) примут вид:
Д/ _ (1 + Т ) &v
(7.9)
у СР
Л/ =
(7.Ю)
Подставив значение До из формулы (7 9) в выражение
(7.10), получим
Л/=-|-гсрЛ/ (7.11)
Обозначим в интервале До начальную скорость через
Oi, а конечную через v->, тогда
bv = v,— v,; vcp = (vt + v2) /2.
Согласно методу конечных приращений реальная кри
вая удельной действующей силы Д(о) заменяется некото-
рой расчетной ступенчатой кривой, как это показано на
рис. 7.1 для кривых (f—wo) — f (v) и щ0(о). Среднее зна-
чение удельной действующей силы facp для любого моно-
тонно изменяющегося участка кривой Д(о) определяется
следующим образом. Выбирается достаточно малое при-
ращение скорости Ду, определяется для этого интервала
среднее значение скорости оср и для него — fa ср. Таким об-
разом каждый элемент кривой fa(v) в пределах выбранных
158
значений Av заменяется
отрезком прямой линии.
Точность такого метода
будет тем выше, чем
меньше интервал ско-
рости Av.
На рис. 7.1 реаль-
ная кривая действую-
щей силы f—wo = f(v)
заменяется ступенчатой
abcdeh, а кривая wu(v)
заменяется ступенчатой
a'b'с'd'е'h'. В зависи-
мости от приемов вы-
числения А/ и А/ спо-
собы приближенного
интегрирования разде-
Рис. 7.1. Зависимость удельной дей-
ствующей силы от скорости /n(t?)
ляют на расчетно-гра-
фические и графиче-
ские. Перед тем как проводить интегрирование,
следует провести обработку профиля пути с тем, чтобы
можно легко использовать кривые ускоряющих сил.
Обработка профиля пути. Все рельсовые и безрель-
совые дороги характеризуются продольным профилем,
который определяет их расположение на местности.
Обычно профиль содержит уклоны и горизонтальные эле-
менты пути, которые могут иметь кривые различных
радиусов.
Использовать подобный профиль для тяговых расче-
тов неудобно, так как частые изменения профиля пути
приводят к большому числу элементов расчета. Для их
уменьшения производят предварительную обработку про-
дольного профиля, сокращая число его элементов. Эта
обработка распадается на две операции: спрямление, в
результате которого элементы профиля с кривыми заме-
няются прямолинейными элементами, и приведение, в
результате которого смежные и сходные по уклону и знаку
элементы объединяются в один участок с однородным
уклоном.
Спрямление элемента профиля, содержащего кривую,
состоит в замене кривой некоторым фиктивным подъемом,
значение которого определяется сопротивлением движе-
нию от кривой. Расчет основан на принципе равенства, ра-
бот, затрачиваемых на преодоление сопротивления от
159
кривой и сопротивления от фик-
тивного подъема. Если на дан-
ном элементе профиля i длиной /
расположена кривая радиусом
R* и длиной /к, удельное сопро-
тивление движению от которой
щк(рис. 7.2), то из равенства
работ получим
— /к/, (7.12)
откуда
Рис. 7.2. Спрямление кри- K = wKl^/l, (7.13)
вого элемента профиля гдс — значение фиктивного подъема, %0.
Результирующий уклон ic, или как его называют спрям-
ленный уклон, %0,
ic-—(7.14)
В этом выражении знак фиктивного уклона iK всегда
положительный, a i меняет свой знак в зависимости от нап-
равления движения. При движении в сторону подъема
4=«-Нк, (7.15)
а в сторону спуска
<с = —(7.16)
Сумма алгебраических значений спрямленных уклонов
для хода туда и обратно всегда равна 2/„. Смежные и сход-
ные по уклону и знаку элементы объединяют в группы и
каждую такую группу заменяют одним приведенным эле-
ментом длиной, равной длине группы и с однородным
уклоном. Приведенный уклон Л>Р определяется из условия
равенства работ.
Рассмотрим группу элементов, уклоны и длины кото-
рых соответственно равны it, h, iz, lz.i„„ lm (рис. 7.3).
160
Обозначив длину и уклон приведенного элемента через I
и inp, получим
т
inVl= ^11, (7.17)
1
откуда приведенный уклон, %01
tn
Ч-( S")7'^ ,7,8>
1
где l — — суммарная длина группы из tn элементов.
Если расстояния I измеряют в километрах, то из выра-
жения (7.18) получаем высоту в метрах, преодолеваемую
па замещаемой группе элементов. Если начальная отметка
первого элемента группы равна ho, а конечная отметка пос-
леднего hm (см. рис. 7.3), то выражение (7.18) будет
иметь вид, %о,
inp=1000(n„-fto)/^ (7.19)
При приведении элементов профиля необходимо соблю-
дать следующие правила:
приводить можно элементы профиля только одного и
того же знака;
горизонтальные элементы можно присоединять к спус-
кам или подъемам, как удобнее для расчета;
длина 1п любого приводимого элемента с уклоном in
должна удовлетворять следующему условию, при котором
кривые движения, построенные на приведенном профиле,
не искажают характера движения-
2 000
I I — I I
1 п пр 1
(7.20)
где ]t«—fnp|— абсолютная разность уклона проверяемого элемента н
приведенного уклона.
Если длина проверяемого элемента профиля не удов-
летворяет условию (7.20), то объединять его в одну группу
с остальными нельзя.
Пример 1. Произвести спрямление элемента профиля длиной
/==150 м с уклоном /=1О%о, на котором расположена кривая ра-
диусом /?к=150 м, длиной 1к=100 м.
Применяя формулу (3.17), определим сопротивление движению
от кривой
450
Т®-8Н'«Н
6 .Зак. 1092
161
Подставляя полученное значение wK в формулу (7.13), получим
фиктивный подъем
£„ = и>к/к// = 3- 1ОО/15О = 2%о.
Спрямленный уклон в сторону подъема
ic = г+ i к = 10 + 2 = 12%о,
а в сторону спуска
С = — 1 + 1к = 10 4~ 2 — — 8%о.
Пример 2. Произвести приведение элементов нижеприведенного
профиля (направление движения вправо) :
№ элемента . . I 2 3 4 5
Характеристика ° 2
элемента . . /so 100 /юо юо/ so/
Произведем приведение 1—3-го элементов Профиля, так как онн
смежные и одного знака. Согласно формуле (7.17)
. _ 5 • 50 + 0 • 100 +’ 20 • 100
1"Р ~ 50 +"100 4- 100 "
Произведем проверку по формуле (7.20). Проверим возможность
спрямления этих элементов:
2000
для 1 го элемента "
для 2-го элемента
для 3-го элемента
|5 —9Г
100<——
< Ю-91
100<S .
Для 1—3-го элементов неравенство выполняется, следовательно,
эти элементы удовлетворяют условиям приведения.
Приведем 4-й и 5-й элементы профиля
10 - 100 + 5 • 50
Ч =-------ioo+^o— = 8’3%О'
Произведем проверку:
200
для 4-го элемента *00^-——- ;
| 10-0,0 |
г 2000
для 5-го элемента 50 —т-„.,
I о— 0,0 I
т. е. элементы 4-й и 5-й удовлетворяют условиям приведения.
Приведенный профиль пути следующий:
№ элемента
2
Характеристика элемента
9/250 iso/'
Расчетно-графический способ построения кривых дви-
жения. Построение кривых движения при этом способе
производят по точкам, координаты которых определяют
вычислением приращений времени А/ и пути А/ для после-
162
довательного ряда интервалов скорости Av. Расчет At и
А1 производят по выражениям (7.9) и (7.11), в которых
входящие величины выражены: скорость v — в километ-
рах в час, время t — в секундах, удельная сила тяги
f — в ньютонах на килоньютон, путь I — в метрах.
При этих размерностях 1/£ = 283 и £'/£ = 28,3/7,87.
Значения fycP отсчитывают по кривым /д(о) ущельных
действующих сил, при этом ускоряющая или замедляющая
удельная сила
(у ср —(з ср —)д ср —й (7-21)
где i — алгебраическое значение уклона (положительное для подъема
и отрицательное для спуска) участка пути, для которого строится
кривая движения;
Л ср — среднее значение удельной равнодействующей силы при средней
скорости Нср в интервале Ан.
Согласно принятому правилу знаков надо считать
положительным для режима тяги и отрицательным для
выбега и торможения.
Расчет удобно вести в следующем порядке. На диаг-
рамме (рис. 7.4) с кривыми удельных равнодействующих
6*
163
сил /д(и) в режиме тяги, основного удельного сопротивле-
ния движению при выбеге а>о(о), удельной тормозной силы
b-\-w0 = f(v) наносят ограничения скорости по тормозам и
конструкционной скорости, намечают интервалы скорости
At>i, Av2, Ауз и т. д. Интервалы скорости целесообразно
брать меньшими в зоне резкого изменения действующих
сил. Рекомендуется, чтобы точки резкого перелома кривых
действующих сил попадали на границы интервалов скоро-
сти Av. Так, интервал скорости Ау3 выбран таким образом,
чтобы учитывалось резкое изменение действующей силы fa.
Значения At> заносятся в графу 1 табл. 7.1. В графу 2
записывают скорости в конце каждого интервала; для
любого k-ro интервала Ао*=у*—Щ-ь Среднюю скорость
Оср заносят в графу 3, а соответствующую ей среднюю ус-
коряющую силу /уср = /д — I — в графу 4. После этого
вычисляют приращения времени А/ и пути А/ по выра-
жениям (7.9) и (7.11) и полученные значения заносят
в графы 5 и 7. В графе 6 указано подсчитанное общее
время /=£А/ и в графе 8—пройденный путь /=£А/.
Расчет по табл. 7.1 необходимо вести отдельно для
режимов тяги, выбега, торможения и в каждом случае
отдельно для участков профиля с разными уклонами.
Таблица 7.1
Дг>, км/ч V, км/ч Vcp, км/ч fycp — fa t, Н/кН Д/, С < = £**. С 1 д/=— 3,6 исрД/, м м
1 2 3 4 5 6 7 8
— и* — — — /о — /о
A tn VI =Оо + + Adi 11 5. = < 1 N + fy «pl АП г0 = ДО а/. 1о 4- Д/i
At>2 V2—Vi 4- + ДУ2 СЧ й <! I а?1| + /у е₽2 + + Д6 + + Д^2 &12 /о+ДЛ + +д/2
Дцц Vk = = Vk-l + -|- Ди* ^срА — = 11 Дул '~2~ fy ср k дд ^о + j_fc ди ^>4" R
164
В ряде случаев как при произвольном регулировании
силы тяги водителем, так и при переходе подвижного
состава на элемент профиля с большим подъемом -f-/i дей-
ствующая сила тяги fa ср 5 может стать отрицательной, как
это видно из рис. 7.4. В этих случаях скорость подвижного
состава будет уменьшаться, поэтому необходимо зада-
ваться отрицательными приращениями скорости Ап.
На любом участке пути скорость подвижного состава
при ее возрастании не может превышать, а при ее убыва-
нии — стать меньше установившейся скорости оу, при ко-
торой ускоряющая сила становится ранной нулю.
Предположим, что подвижной состав достиг установив-
шейся скорости vy, причем длина пути, оставшегося до
следующего перелома профиля, равна Zy. На протяжении
этого пути подвижной состав будет двигаться с постоянной
скоростью vy й время движения но нему, с,
/у = 3.6/у/1>у. (7.22)
Установившаяся скорость пу1 для элемента пути с укло-
ном + Л легко отыскивается на диаграмме удельных дейст-
вующих сил (см. рис. 7.4). Для этого проводят прямую
Oia, параллельную оси v и отстоящую от нее на расстоянии
(+Л, Н/кН). Точка пересечения этой прямой с кривой дей-
ствующей силы и определит установившуюся скорость vyi
для подъема. Установившаяся скорость иу2 для спуска
(—42, Н/кН) при выбеге определена аналогичным спосо-
бом. По данным табл. 7.1 строят кривые движения.
Построение кривых движения требует сопряжения час-
тей кривых, рассчитанных для движения под током, на
выбеге и при торможении. Координаты точек сопряжения
отыскивают по заданной скорости начала торможения vT
или скорости начала выбега vB. Иногда их определяют по
ходовому времени tx, времени /тг или пути /1г движения
под током (в режиме тяги).
Рассмотрим основные случаи сопряжения кривых дви-
жения на перегоне длиной L с постоянным уклоном 4, если
задана скорость начала торможения. Выбирают масштабы
для скорости, пути и времени и располагают систему ко-
ординат так, как показано на рис. 7.5. Справа от оси
абсцисс располагают ось пути, слева — ось времени. По
данным табл. 7.1 для каждой величины Ац или щ по осям
tul откладывают значения А/ и А/ или УЛ/ и £А/. Через
полученные точки 1, 2, 8 и Г, 2', .... 8' проводят кривые
движения для режима тяги /—I и Г — Г. Из точки g конца
165
Рис. 7.5. Сопряжение кривых движения v(f) и v{f)
перегона L по данным табл. 7.1 строят линию торможения
III— III и от произвольного начала отсчета времени g'" —
линию торможения ПГ^-НГ, а от произвольного значения
скорости (например t>, на рис. 7.5) строят линии выбега
// — //и Ц'.— П'.
Рассмотрим случай, когда задана скорость начала тор-
можения vT. Отложим ее по оси v и перенесем на линию
торможения III—III. Точка пересечения е будет соответ-
ствовать скорости начала торможения. Из этой точки стро-
им линию выбега ес путем переноса линии выбега II—II
на расстояние es вдоль оси пути /. Точка пересечения
линии выбега ес с кривой тягового режима /—I определит
скорость начала выбега vB на кривой движения v(j). Пе-
ренесем скорость начала выбега vB на кривую Г—I'. Полу-
чим точку с', которая соответствует скорости начала выбе-
га на кривой движения v(t). Из полученной точки с'
строим кривую выбега dk' путем' переноса влево вдоль оси
t линии IT—1Г на расстояние с'г. На кривую c'k' сносим
скорость начала торможения, соответствующую ординате
точки е, и получим точку е'. Из точки е' строим прямую
e'g" параллельно прямой III'—III' и получаем искомую
кривую движения Oc'e'g" с временем хода по перегону /х.
Рассмотрим второй случай, когда задана скорость на-
чала выбега vB. В этом случае кривая выбега строится из
точки с путем переноса линии II—II. Точка пересечения в
полученной линии выбега с линией торможения ///—/// оп-
166
ределит скорость начала торможения vT. Построение кри-
вой v(t) производится так же, как и в предыдущем случае.
Для построения кривых движения по заданной ходовой
скорости vK, а следовательно, и заданного времени движе-
ния на перегоне /х достаточно найти требуемую скорость
торможения и далее вести построение в указанном выше
порядке.
Если при движении по перегону не применять выбега,
а сразу с тягового режима перейти на тормозной, ходовая
скорость vK будет максимальной, а время хода по перегону
/х — минимальным. Такому режиму движения на рис. 7.5
соответствуют кривые Odg и Od'g'. Площади, ограниченные
кривыми v(t) на данном перегоне L, равны между собой, так
как они пропорциональны пройденному подвижным
составом пути. Если кривые вычерчены для скорости и
времени в масштабах mv и mt, то площадь кривой движе-
ния р(/)
S = (7.23)
Это равенство может быть использовано для проверки
правильности сделанных построений.
На основании вышесказанного следует, что для кривых
движения Od'g' и Ос'с'g" заштрихованные на рис. 7.5 пло-
щади c'd'k и kc'g'g' равны между собой.
Графический способ построения кривых движения.
Наиболее распространены два способа графического пост-
роения кривых движения: способ, рекомендованный Ми-
нистерством путей сообщения (МПС), и способ «нако-
лов». В этих способах интегрирование уравнения дви-
жения основано на методе конечных приращений и
выполняется путем геометрических построений на плос-
кости кривых движения.
Рассмотрим построение кривой v{l) по способу МПС.
Для этого задаются последовательными интервалами ско-
рости До и в пределах каждого из них принимают равно-
действующую силу равной ее значению в середине
интервала До. При таком построении кривая v(l) будет со-
стоять из отрезков, каждый из которых заключен в
принятых интервалах скорости.
Для построения кривой о(/) преобразуем выраже-
ние (7.10) и представим его в виде
д/ = -4А’
Лч
f / v
• у ср ' ср
(7.2-1)
167
Рис. 7.6. К определению соотношения масштабов при графическом
способе построения кривых движения
С геометрической точки зрения Л/ можно рассматри-
вать как катет прямоугольного треугольника, у которого
другой катет пропорционален приращению скорости Лц,
а противолежащий этому катету угол 0 имеет тангенс, рав-
ный /у ср/Цср-
Таким образом, построив прямоугольный треугольник
по катету Ли и противолежащему ему углу, можно гра-
фически определить приращение пути А/. Поскольку тан-
генс угла равен /у ср/цср, его можно определить по диаграм-
ме действующих сил fa(v). При этом необходимо соблюдать
определенное соотношение масштабов скорости mv, пути
mt и действующих сил mf-, в которых в дальнейшем будет
производиться построение кривых движения. Для просто-
ты принимаем, что движение происходит на горизонталь-
ной площадке, т. е. 1 = 0 и fy = fn-
Построим прямоугольный треугольник abc (рис. 7.6, а)
по катету bc = mv&v и противолежащему углу 0. Угол 0
определяется путем построения луча из начала координат
О в точку А на кривой Д с абсциссой, равной mvvcp в при-
нятом интервале скорости Дщ с ординатой, равной m/fa ср.
Как следует из рис. 7.6, б,
Из прямоугольного треугольника abc (рис.
принимая, что катет ac — m.t&.l, следует
т Av т Av m2v Av
tn Al = _-_= -________° = " ср-
1 tg р m.f /(т v, ) msf
/'дер' г v ср ) /'дер
(7.25)
7.6, а).
(7.26)
168
Используя выражения (7.24) и (7.26), получим
I I v m.v Av zn?,v„ Ли
1 Л- Т I ср ___ V ср 17 97.
t' f ~ '
ь 'дер Г Д ср
или после сокращений
Таким образом, получено соотношение масштабов пути
mi, скорости mv и силы mf, удовлетворяющих графичес-
кому построению кривой движения.
Как следует из выражения (7.28), произвольно можно
задаться только двумя масштабами из трех. Обычно
выбирают стандартные масштабы mv и ть а масштаб си-
лы mf вычисляют.
После определения масштабов, удовлетворяющих соот-
ношению (7.28), в левом координатном углу строят диаг-
рамму действующих сил fa(v). Справа от нее строят кри-
вую v(f), причем ось скорости v удобно расположить
параллельно оси fa, а ось I соответственно параллельно
оси v, как это показано на рис. 7.7. На оси I отмечают
Рис. 7.7. Построение кривых движения v(Z) и /(/) графическим способом
169
точки перелома профиля и указываются длины и уклоны
его элементов: 12/I2 и т. д.
Построение кривой движения t>(/) производят с момен-
та трогания подвижного состава. На диаграмме дейст-
вующих сил скорость v делим на ряд интервалов Ди,,
А 02, Л из и т. д., в пределах которых сила fa изменяется
незначительно и равна ее среднему значению fcpi,
fcp2, fcp3-
Чтобы получить ускоряющую силу для первого эле-
мента профиля с уклоном -(-/], на оси ординат отмечают
точку Oi на расстоянии 00]=mjii, которая будет являть-
ся началом координат для кривой ускоряющей силы на
всей длине 1> данного элемента профиля.
На кривой /д(г>) отмечают точки 1, 2, 3, отвечающие
значениям fcp\, fcP2, /срз- Соединяя эти точки с началом
координат Oi для элемента профиля ii, получаем углы
Рь Рг, Рз (рис. 7.7, а). Затем из точки 0' (рис. 7.7, б),
которая является началом построения кривой v(f), про-
водят луч 0'—Г под углом Pi к оси /, т. е. параллельно
лучу Oi—I в интервале скорости ДИ|. Проекция луча
О'—Г на ось / дает приращение пути Д/i в масштабе
т(. Далее проводят прямую Г—2' параллельно лучу
0i—2 в пределах интервала скорости A t>2- На оси / полу-
чаем приращение пути А /2. Из точки 2' проводят прямую
2'—3' параллельно лучу Oi—3 в пределах А v3.
При таком построении автоматически складываются
приращения пути Д/i, Д/г, Д/3, и абсцисса точки 3'
равна пути, пройденному от начала движения. Для окон-
чательного построения кривой п(/) точки Г, 2', 3' соеди-
няют хордами.
Предположим, что в точке перелома профиля 4' при
скорости Vt подвижной состав входит на более крутой
подъем +/2. Для дальнейшего построения кривой v(T)
кривую действующей силы тяги необходимо рассматри-
вать уже относительно точки Оч (см. рис. 7.7, «), проведен-
ной на расстоянии 00-2 = 171^2 от начала координат 0. При
этом установившаяся скорость иуг на подъеме -\-i? ока-
зывается меньше скорости vit достигнутой подвижным
составом на переломе профиля, поэтому для дальней-
шего построения кривой v(l) надо брать отрицательные
приращения скорости A v.
На рис. 7.7, а интервал скорости v4—и 2 разбит на два
приращения Дг>5 и Д ое- По средним скоростям с’сР5
и оСрб определяют средние ускоряющие силы /ср5 и
170
/срб (отрицательные), и
точки 5 и 6 на кривой
/д(у) соединяют лучами
с точкой Oi.
Построение кривой
у(/) от точки перелома
профиля 4' производят
аналогично вышеизло-
женному: из точки 4'
в интервале скорости
Дуб проводят прямую
4'—5' параллельно лу-
Рис. 7.8. Построение кривой движения
на переломе профиля
чу О2—5. Из точки 5'
в интервале скорости
ДУб проводят прямую
5'—6' параллельно лучу
О2—6. В точке 6' подвижной состав достигает установив-
шейся скорости и до следующего перелома профиля будет
двигаться равномерно по прямой 6'—7'.
Как правило, при построении кривой у(/) последняя
точка приращения Ду на данном элементе профиля
попадает не точно на границу перелома профиля. Если
точка легла близко от границы перелома профиля (точ-
ка 3 на рис. 7.8), то скорость Уз, которая является
начальной для элемента профиля с уклоном 12, можно
определить как точку пересечения хорды 2—3 и перпен-
дикуляра NN, восстановленного из точки перелома профи-
ля. Если же точка легла далеко от границы перелома
профиля (точка 4), то необходимо взять меньшее прира-
щение скорости Ду (например, А Уг вместо Ду3).
Аналогичным способом строят кривую у(/) для режи-
мов выбега и торможения.
При построении кривой у(/) можно повернуть диаг-
рамму действующих сил на рис. 7.7, а на 90° против ча
совой стрелки. Тогда для построения углов 0 придется
проводить прямые О'—Г, Г—2', 2'—3' не параллельно, а
перпендикулярно лучам 0t—1, 0t—2, 0t—3. Такой способ
построения менее точен, так как здесь будет влиять не-
точность изготовления прямого угла чертежного треуголь-
ника.
Для построения кривой t(J) преобразуем выражение
(7-11) относительно Д/, приняв, что t/i'
(7.29)
171
деляется его тормозными средствами. При экстренном
торможении они должны обеспечить максимально возмож
ные замедления для остановки подвижного состава на
заданном по условиям безопасности тормозном пути
Так как потребность в экстренной остановке может воз
никнуть в любой момент движения и, следовательно, и
любой точке пути, то наибольшая допустимая скорость
движения не должна превышать скорости начала экстрен
ного торможения, при которой тормозной путь получается
равным допустимому тормозному пути.
При решении тормозных задач исходят из наиболее
тяжелого случая экстренного торможения, при котором
используются,как правило, механические тормоза с на
ибольшим нажатием колодок. В связи с тем что невозмож
но предвидеть все случаи экстренного торможения, обычно
задаются определенным расчетным тормозным путем /₽|,
на котором при любых условиях тормозные средства долж
ны обеспечить остановку подвижного состава.
Тормозной путь зависит от замедляющей силы, соз
даваемой тормозными средствами подвижного состава,
уклона пути и скорости начала торможения. Для того
чтобы подвижной состав мог в любой момент времени
остановиться на протяжении расчетного тормозного пути,
необходимо найти зависимость между /рт, удельной дейст-
вующей тормозной силой b-\-wo, скоростью торможения
V? и уклоном i пути.
Возможны четыре варианта тормозных задач:
1) по заданному тормозному пути /рт> уклону I и удель
ной действующей тормозной силе Ь 4- шо определить допус-
тимую тормозную скорость начала торможения рт;
2) по тормозному пути /рт, уклону t и скорости тор
можения v-r определить удельную действующую тормозную
силу b-}-w0;
3) определить тормозной путь /рт по заданному укло
ну /, скорости торможения щ и удельной действующей
тормозной силе 6-|-&yo подвижного состава;
4) найти значение уклона i при заданных /рт. t>,
и удельной действующей тормозной силе fc + iiWo.
На практике наиболее часто встречаются задачи пер
вого и второго вариантов.
Расчетный тормозной путь /рт — это путь, проходимый
подвижным составом с момента возникновения необхо
димости торможения до полной остановки. Он состоит из
действительного тормозного пути /т, где на подвижной
174
состав действует тормозная сила, и пути подготовки
который подвижной состав проходит за время подго-
товки /п. Это время необходимо для возникновения реакции
у водителя на обнаруженную опасность, приведения им
в действие тормозов и срабатывания тормозной системы:
(7.34)
Путь подготовки может быть определен из условия,
что он проходится с постоянной скоростью VT
I = — t v (7.35)
'.1 316 'nVT ' >
Для воздушных колодочных тормозов время подготовки
/„ = /, + 0.5/2. (7.36)
где /, — промежуток времени от момента восприятия водителем опас-
ности до начала возникновения нажатия К колодки;
/з — время, в течение которого нажатие колодки достигает наиболь-
шего значения Ктах.
Приближенно можно считать процесс нарастания на-
жатия К прямолинейным и вести расчет по его наиболь-
шему значению Кта„ сдвинутому на 0,5/г от начала своего
действия. Время /2 зависит от времени наполнения тор-
мозных цилиндров сжатым воздухом.
Согласно правилам тяговых расчетов принимают время
подготовки t„ для вагонов метрополитена 2 с, для трам-
ваев и троллейбусов I с.
Рассмотрим общий вид тормозных задач, применив
вторую форму уравнения движения для режима тормо-
жения:
(1 + V = (fe + wo + i) t,'
Проинтегрируем это выражение в пределах изменения
скорости от начала торможения ц = цт до полной останов-
ки, т. е. v = 0. Этому изменению скорости будет соот-
ветствовать изменение тормозного пути от /т = 0 до
/г':= /рт
о ' -
(1 + у) = £' j wо+iydl (7.37)
»т о
ИЛИ 2 ^рт —
(I + v) °Т С
J (* + wo+i)dl. (7.38)
Л
175
Если правую часть уравнения (7.38) разделить на тор-
мозной путь /т=/р1—/п, получим среднее значение замед-
ляющей силы
Upr-'n)
(b 4- wo 4- i)cp = -—(^ + w0 + () dl ’ (7.39)
pt n J
Выразим значение интеграла правой части уравнения
(7.39) и подставим в уравнение (7.38)
2
= (" + Wo + 1 )ср (ZPT - 'п ) <7 4°)
Так как величина & + характеризует тормозные
средства, подвижного состава, а путь подготовки 1П —
_ 1
“3?6 то выражение (7.40) определяет связь между
расчетным тормозным путем /рт, скоростью торможения
vT, уклоном i и удельной действующей тормозной силой
b-i-wo и может служить исходным для решения тормоз-
ных задач любого варианта. Однако точное решение по
этому уравнению усложняется ввиду того, что коэффици-
ент трения фк и основное сопротивление движению шо за-
висят от скорости, поэтому тормозные задачи решаются
графическим или приближенным способом.
В качестве примера рассмотрим графическое решение
первой тормозной задачи, т. е. определение допустимой
скорости движения на данном уклоне. При решении этой
задачи исходим из случая экстренного торможения,
при котором используются, как правило, механические
тормоза с наибольшим нажатием колодок.
Определим допустимые скорости движения троллейбуса, если даны
расчетный тормозной путь /рт=30 м, уклоны —30 и 4-40%о-
Рассчитаем характеристику удельной тормозной силы по выраже-
нию (6.16) при наибольшем нажатии колодок:
b = 1000<рк0.
Так как торможение экстренное 0=6, то принимаем 6 = 2
(см. с. 128). Значение коэффициента трения <рк для барабанных тормозов,
применяемых на троллейбусе, принимаем <рк = 0,35 (см. с, 127).
Тогда удельная тормозная сила
6 = 1000-0,35-2 = 700 Н/кН.
Рассчитаем зависимость удельного основного сопротивления движе-
нию шо(о) при движении без тока по выражению
w„ = 160,004 ц2
и зависимость удельной действующей тормозной силы b-\-w0=f(y).
Результаты расчета сведем в табл. 7.3.
176
Таблица 7.3
V, км/ч 0 10 20 30 40 50 60
и>„, Н/кН 16 16,4 17,6 19,6 22,4 26 30,4
Л, Н/кН 700 700 700 700 700 700 700
Л |-Шо, Н/кН 716 716.4 717,6 719.6 722,4 726 730,4
Для того чтобы построить зависимость удельной действующей
|<||>мозной силы b-j-wD = f(v), выбираем масштабы скорости и пути:
m„= I мм/(км/ч), mt=l мм/м. Из табл. 2.1 и в соответствии с дан-
ными, приведенными на с. 16, принимаем £'=0,127; 14 у= 1,12. По
формуле (7.28) определяем масштаб силы:
0 127 1
= 0,113 мм /(11 / кН ) .
В выбранных масштабах строим характеристику удельной дейст-
вующей тормозной силы в зависимости от скорости b + с,, = /(о),
как это показано на рис. 7.10, а. На диаграмме v(l) (рис. 7.10, б) по оси
ибсцисс в выбранном масштабе пути откладываем расчетный тормоз-
ной путь /рт = 30 м и нз его конца 0' в обратном порядке (от о = 0)
I рафическим методом строим кривые торможения v(Z) для уклонов
( 4-40 %о, i=0 и 1= -30 %о-
Как видно из рис. 7.10, а начало координат переносится на отрезок
л/^-40 0,113-40 — 4,52 мм вниз по оси ординат в случае подъема.
В случае спуска начало координат переносится на отрезок т^-30 =
0,113-30 = 3,39 мм вверх по оси ординат. Следует помнить, что
подъем или спуск, выраженный в тысячных долях, численно равен
удельной действующей силе, выраженной в ньютонах на килоньюто-
ны. Для учета подготовительного пути достаточно для любой скорости
1> отложить от оси ординат отрезок /ц = /„п/3,6 в выбранном масштабе
нуги и соединить его прямой линией с точкой О. Для скорости
i>«=72 км/ч путь подготовки /„=1-72/3,6 = 20 м, с учетом мась. 1аба
нт,/,, = I • 20 = 20 мм.
Рис. 7.10. Определение допустимых скоростей движения троллейбуса
7 Зак 1092
177
Рис. 7.11. Определение тормозных
средств подвижного состава по за-
данным /рт, Нт и I
чениями тормозного коэффициента Gt,
Ординаты точек а, Ь, <
пересечения этой прямой <
кривыми v(l) для заданных
значений уклонов определи
ют наибольшие скорости:
vmaxI = 55 км/ч на подъеме
i= +40 %0; нтах2 =52 км/ч ihi
горизонтальном участке i
= °; итахЗ=50 ™/4 на СПус
ке I = — 30 %о-
По полученным точкам
на диаграмме действующих
сил наносят ограничение по
тормозам (см. рис. 7.4).
При решении второй тор
мозиой задачи (по задан-
ным /рт, vT и I найти удель
ную действующую тормозную
силу подвижного состава)
используют способ графиче-
ской интерполяции. Для это
го задаются несколькими зна
02 и т. д. Для каждого из
этих коэффициентов рассчитывают характеристику удельной тормоз
иой силы b(v) по формуле (6.16) и удельного основного сопро
тивления движению wo(v) для данного типа подвижного состава
Затем, как и при решении первой тормозной задачи, определяют па
заданном уклоне I допустимые скорости ti,t. цт2 и т. д.,
соответствующие тормозным коэффициентам 01, 0г и т. д. По получен-
ным значениям vTi, цт2 и т. д. строят зависимость тормозного коэф
фициента от скорости торможения (рис. 7.11). Для заданного значе
ния скорости от определяют значение искомого тормозного коэффп
циеста 0,.
Решение третьей тормозной задачи (по от, 0 и i найти тормозной
путь) выполняется на основе построения кривой движения о(/) от ско-
рое и начала торможения от до скорости и = 0.
7.2. Кривые потребляемого подвижным составом тока
Назначение кривых потребляемого тока. В задачу тя-
говых расчетов входит построение кривых потребляемого
подвижным составом тока в функции от пути /л(/), времени
/л(() и кривой изменения тока двигателя от времени /(/).
Кривые /л(/) и /л(/) необходимы для определения рас-
хода электрической энергии на движение подвижного
состава, для расчета системы электроснабжения. Кри-
вые тока двигателя необходимы для расчета нагрева-
ния тяговых двигателей.
Построение кривых потребляемого тока. Кривые /л(/) и
/д(/) строят на основании кривых движения v(J), v(t) и за-
висимости тока, потребляемого подвижным составом на
той или иной ступени регулирования от скорости /л(г>).
178
' Зависимость /л(г>) на всех ступенях регулирования
строят на основании скоростной характеристики дви-
гателя Для электроподвижного состава постоян-
ного тока с реостатным пуском и переключением дви-
гателей ток
где / — ток двигателя;
2П — число параллельно соединенных двигателей.
На рис. 7.12, а представлены электромеханические
характеристики двигателя г(/) с последовательно-па-
раллельным переключением и тремя позициями ослаб-
ления возбуждения OBI, ОВ2, ОВЗ. На / ступени, когда
двигатели соединены последовательно (z„=l), ток, по-
требляемый подвижным составом, будет равен току
двигателя. Поэтому переносим первую ступень скорост-
ной характеристики v(f) на диаграмму /„(у) (рис. 7.12, б)
без изменения. На // ступени двигатели соединены па-
раллельно (zn = 2), следовательно, /л=2/. При пе-
реходе с последовательного на параллельное соединение
гок подвижного состава изменяется скачком (в данном
случае удваивается). Скорость движения (пусковая), при
которой происходит это изменение тока, равна l>„i.
До скорости и,12 подвижной состав будет потреблять
ток 2/„.
При ступенчатом пуске пусковой ток на каждой пози-
ции меняется от до (см. рис. 7.12, а), но ввиду
7*
Рис. 7.12. Построение кривых потребляемого подвижным составом
тока 1Ау):
и — электромеханические характеристики тягового двигателя с последовательно-парал-
лельным переключением и позициями ослабления возбуждения; б — кривые G(v)
179
кратковременности периода пуска принято считать ток
двигателя постоянным и равным среднему пусковому
току /„. На рис. 7.12, б показано построение кривой /л(о)
для периода пуска при неизменном среднем пусковом
токе. При переходе с полного возбуждения на ослаб-
ленное, а также с одной ступени ослабления возбуж-
дения на другую пусковой ток изменяется от своего
наибольшего значения до наименьшего.
В случае применения ТИР для пуска тяговых двига-
телей ток подвижного состава
Л П и у,
КС 1 тир
где ид — напряжение на двигателе в процессе пуска;
UKC — напряжение контактной сети;
т]гнР — к.п.д. ТИР в процессе пуска, может быть принят постоянным,
равным 0,92 — 0,94.
Построение зависимости I„(v) для этого случая пред-
ставлено на рис. 7.13.
Построив зависимости /л(о) (рис. 7.14, а) и кривые
движения о(/), можно построить кривые тока /л(/), /„(/).
Построение производится по точкам. Для ряда значе-
ний пройденного пути />, /2,-..(рис. 7.14, б) или времени
/i, t2,... (рис. 7.14, в) находят по кривым движения о(/)
и v(f) соответствующие значения скорости щ v2,... . Для
этих скоростей по кривым /л(и) определяют значения
токов /Л1, /Л2, .... потребляемых подвижным составом.
Ось тока на кривой движения /л(1) располагается вер-
тикально, параллельно оси скорости. Найденные зна-
чения токов /П|, /п2 откладывают в соответственном
масштабе как ординаты точек искомых кривых тока.
Рис. 7.13. Построение кривых потребляемого подвижным составом
тока l.i(v) при применении тиристорно импульсного регулятора в ре'-1'
жиме пуска:
а — электромеханические характеристики тягового двигателя; б — кривые
180
абсциссы которых равны соответственно /(, или
Zi, /2, Порядок построения кривых /л(/) и /„(/) поясняется
на рис. 7.14, б, в.
Так как на кривых движения и(/) и v(t) наиболее
точными являются точки, соответствующие границам ко-
нечных приращений, по которым они рассчитывались,
то значения необходимо устанавливать именно для
этих точек. На кривой тока необходимо тщательно от-
мечать такие характерные точки, как точки перехо-
да с одного соединения двигателя на другое, точки пе-
рехода с одной ступени регулирования режима работы
двигателей на другую. Например, переход с полного
возбуждения на ослабленное.
7.3. Расход электрической энергии на движение
подвижного состава
Основные составляющие расхода электрической энер-
гии. Электрическая энергия, которую подвижной состав
потребляет при движении из контактной сети, расхо-
дуется на преодоление основного сопротивления дви-
жению, сопротивления от кривых и уклонов.
При движении на уклоне составляющая общего рас-
хода энергии затрачивается на изменение потенциаль-
181
ной энергии подвижного состава. Также энергия теряет-
ся в тормозных устройствах при остановке подвижного
состава, подтормаживании на крутом спуске, в пуско-
вых устройствах, тяговых двигателях, передаточных
механизмах, преобразовательных устройствах, в тяго-
вой сети.
При движении под током тяговые двигатели потреб-
ляют электрическую энергию и преобразуют ее в меха-
ническую, которая затрачивается на преодоление сил
сопротивления и создание кинетической энергии под-
вижного состава. После отключения тяговых дви-
гателей движение подвижного состава будет про-
должаться за счет накопленной кинетической энер-
гии. Эта энергия расходуется на преодоление сопро-
тивления движению и на потери в тормозных уст-
ройствах (при отсутствии рекуперативного торможе-
ния). Таким образом, большая часть энергии тяго-
вых двигателей превращается в кинетическую энер-
гию движущегося подвижного состава. И эта кинети-
ческая энергия, если подвижной состав проходит весь
перегон между остановками, не изменяется, так как в
момент начала движения и в его конце она равна нулю.
Часть энергии, потребляемой подвижным составом,
расходуется при движении на уклонах на изменение
его потенциальной энергии. При движении на спусках
потенциальная энергия уменьшается, на подъемах —
увеличивается. Работа, связанная с изменением потен-
циальной энергии, будет положительной, если конеч-
ная точка движения лежит выше начальной, и отрица-
тельной, если конечная точка движения будет лежать
ниже начальной.
В конечном итоге электрическая энергия, потребляемая
подвижным составом из сети, превращается в тепловую —
это потери в пусковых реостатах, тяговых двигателях,
нагревание в результате трения, возникающего в от-
дельных элементах подвижного состава при его движении.
Расход электрической энергии может быть определен
по кривым движения, либо путем расчета отдельных
составляющих по аналитическим выражениям.
Определение расхода энергии по кривым движения.
Электрическая энергия, потребляемая подвижным сос-
тавом из сети за время Т, может быть выражена интег-
ралом
182
( и I dt
1 КС л
О___________
3 600
(7.41)
где А — расход электрической энергии па движение подвижного состава,
Вт • ч;
(7КС — напряжение на токоприемнике подвижного состава. В;
/л—ток, потребляемый подвижным составом. А;
Т — время движения по перегону, с.
Напряжение на токоприемнике изменяется незна-
чительно, поэтому оно может быть принято неизмен-
ным и равным среднему значению напряжения сети и
вынесено за знак интеграла
т
U \! dt
КС I л
А = .____" -
3 600
(7.-12)
Таким образом, для определения расхода энергии необ-
т
- [lndt.
ходимо наити )
Если имеется кривая потребляемого подвижным соста-
вом тока от времени, то этот интеграл в определенном
масштабе будет равен площади, ограниченной кривой
/л(/) и осями координат:
т
\r«dt = Si(7.43)
6
где S, — площадь кривой /„(/). мм2;
Im, — масштаб тока, мм/А;
ш, — масштаб времени, мм/с.
Значение интеграла с достаточной степенью точности
может быть определено по кривым движения и кривым
тока подвижного состава /л(/). Всю кривую /л(/) разби-
вают на отдельные небольшие интервалы времени, где
ток поезда изменяется незначительно. Для каждого
интервала времени А/ по кривой /л(/) определяется
средний ток /ср. Перемножая значения /ср и А/ для каж-
дого интервала и суммируя полученные произведения,
определяют величину £/срД/, которая с достаточной
степенью точности представляет Среднее значе-
ние тока внутри каждого интервала принимается рав-
ным полусумме начального и конечного значений то-
ков на границе данного интервала. Расчет в этом слу-
183
Рис. 7.15. Определение расхода электрической энергии по кривым
потребляемого тока
чае удобно вести табличным методом. На рис. 7.15 по-
казано определение расхода электрической энергии
по кривым потребляемого тока. Расход энергии в этом
случае
л = и кс 2 1^1. <7-44)
о
Расход энергии, определенный из выражения (7.44),
не отражает полного расхода электрической энергии,
так как здесь не учтен расход энергии на собственные
нужды (работа мотор-компрессора, мотор-вентилятора,
отопление, освещение и т. д.).
Расход энергии на собственные нужды, Вт-ч,
АС„ = РС„ 7/3600, (7.45)
где Р,„ — средняя мощность, потребляемая собственными нуждами
э. п. с., Вт.
184
Величина Рсн для разных типов подвижного состава на
одну единицу следующая:
Вид подвижного
состава
Трамвай, троллейбус
Метропол итеи
Мощность нагрузки1
собственных нужд
Рсн, КВт
1,5—3,5
4,5- -6,0
Данные приведены без
отопление
учета расхода энершп на
Следует также учитывать потери электрической энер-
гии в контактной сети и в преобразователях тяговых
подстанций.
Полный расход электрической энергии
Л -I Л
л
" '|.|С’|„/СТ
(7.46)
где т]тс — средний к.п.д. тяговой сети, равный 0,93;
’1'7ст — средний к. п. д. тяговой подстанции, равный 0.95.
Для оценки эффективности работы подвижного
состава вводится понятие удельного расхода электри-
ческой энергии Вт-ч/(т-км),
Дуд -----Д |;/(Z71Z.),
(7.47)
где т — масса подвижного состава, т;
L — длина перегона, км.
Примерные значения удельного расхода электрической
энергии для разных типов подвижного состава следующие:
Вид подвижного
состава
Метрополитен . .
Трамвай . .
Троллейбус
Дуд, Вт-ч/(т-км)
40 70
35—90
120- 200
Кривая расхода электрической энергии может быть
также найдена путем графического интегрирования кри-
вой потребляемого подвижным составом тока.
Расход энергии А Л на любом элементе пути длиной
А/, который подвижной состав проходит за время А / при
средней скорости цср,
А Д — бкс/дср/\Л
(7.48)
где. /л Ср — средний ток, потребляемый подвижным составом на элементе
пути Д/.
185
Рис. 7.16. К определению соотношения масштабов при расчете рас-
хода электрической энергии
Из выражения (7.11) ы=~~ —, подставляя это зна-
Ъ ^ср
чение А/ в выражение (7.48), получим
£ М = t Д/
CU л с₽ v
3 КС ср
Примем, что Л1 cP/vcp = tg3,
тогда
(7-49)
И*-—
’ КС
(7.50)
С геометрической точки зрения выражение (7.50)
можно рассматривать как прямоугольный треугольник
£ Л/1
с одним катетом, равным р- —г , противолежащим ему
углом Р и с другим катетом, равным Д/. Чтобы полу-
чить расход энергии с помощью геометрических построе-
ний, необходимо выбрать масштабы расхода энергии
тА, мм/(Вт-ч), пути пи, мм/м, и скорости т„, мм/(км/ч).
В соответствии с рис. 7.16, а из /\АВС следует
тл ДД — intA /tgP, (7-51)
а в соответствии с кривой потребляемого подвижным сос-
тавом тока из рис. 7.16, б следует, что
lg fl— ер/(ж^Уср).
Подставляя выражение (7.52) в (7.51), получим
т I
т -АД = -------л—-т. til
А гп V' 1
(7.52)
(7.53)
186
Графическое построение будет справедливо при
условии, что выражения (7.49) и (7.53) тождественны.
Поделив выражение (7.53) на (7.49), получим соотно-
шение масштабов, удовлетворяющих условию
I ”‘лт
т, = 7Г —
' £ т
и
КС
(7.54)
Произвольно задаются масштабом тока mh в кото-
ром вычерчивают кривую потребляемого подвижным
составом тока. Масштабы mv и т, были заданы при
построении кривых движения. По выражению (7.54)
надо выбрать удобный масштаб расхода энергии тл.
Построение кривой А{[) показано па рис. 7.17. На
кривой /л(п) (рис. 7.17, а) находим точки 1, 2, 3, ..., дающие
значения токов Л, /2, /з,--- для средних скоростей движения
vi, V2, из,... на элементах пути ДЛ, Д/г, Д/з,... Начало
координат 0 диаграммы 1л(у) соединяем лучами с точками
1, 2, 3, ... и получаем углы р,, рг. р3, ...
Из точки 0' начала построения кривой и(/) (рис. 7.17, б)
проводим прямую 0'—1 под углом Pi к оси абсцисс
до пересечения с вертикальной прямой, проведенной из
конца первого элемента пути д/ь Для этого достаточно
провести прямую 0'—1 параллельно лучу 0—1 диаграммы
/.Д'), если расположить оси координат кривых v(l) и
/л(и) так, как это показано на рис. 7.17, а, б. Тогда соглас-
но доказанному выше, отрезок 1—Г в масштабе тА бу-
дет равен расходу энергии Л/li на элементе пути Л/,. Далее
из точки / проводим прямую / — // параллельно лучу
Рис. 7 17. Определение расхода электрической энергии /!(/) графиче-
ским способом
187
О—2 в пределах элемента пути Л/2; получим отрезок
//—//' = тл1\А2, который автоматически суммируется с
отрезком /—Г. Из точки 11 проводим прямую 11—III
параллельно лучу 0—3 в пределах элемента пути А/з
и т. д.
Через точки /, //, III и будет проходить искомая
кривая Л(/). Последняя ее ордината А даст полный рас-
ход энергии на всем перегоне.
7.4. Определение расхода электрической энергии
аналитическим методом
Основные составляющие расхода электрической энер-
гии. При аналитическом методе расход энергии опреде-
ляется путем расчета отдельных составляющих
А “ Aw A, 4- At-J- А„ 4- Лдв 4- Апр -]- Аси4- Лтс4- Дп^ст, (7.55)
где Аш, А.. — расход энергии соответственно на преодоление основ-
Дт Дс11 кого сопротивления движению и уклонов, на торможение
и собственные нужды подвижного состава;
Дп. Дяп. Д„г, — потери энергии соответственно в пусковых устройствах,
Дтс, Д„/„ тяговых двигателях, преобразователях, в тяговой
сети и на тяговых подстанциях.
Потери энергии в тяговых подстанциях, тяговой сети,
преобразователях э.п.с. и тяговых двигателях целесооб-
разно учитывать с помощью средних к.п.д. этих устройств
соответственно i]n/CT, Thc, Лпр, Лдв- Тогда с учетом того
обстоятельства, что тяговые двигатели и преобразова-
тели потребляют только энергию, расходуемую на прео-
доление основного сопротивления движению, уклонов
и на торможение, выражение (7.55) примет вид
, А 4- А. 4- Д„
А =( w
V Vnp
+ Ап + Лс|. )
1
^тс^п / ст
(7.56)
Расход энергии на преодоление основного сопро-
тивления движению равен работе силы сопротивления
на пройденном пути L
L L
А — \ w те dl = те I w dl.
w 1 о & ь 1 о
О О
(7.57)
Считая, что сопротивление движению изменяется
незначительно, и принимая его равным щОсР. полу-
чаем, Дж,
188
L
\ — 9.81 тиэ^ L ,
IV & О cp I о ср
или, Вт-ч,
/^«, = 2,725 • 10-3тшо гр£,
(7.58)
(7.59)
где коэффициент 2,725-10 3 = 9,81/3600 служит для перевода джоулей
в ватт-часы.
Соответственно удельный расход энергии, Вт-ч/
/(т- км),
— 2,725 wo ср-
(7.60)
С достаточной степенью точности величину цу0 ср
можно брать по зависимости wu(v) при движении без
тока для скорости 1,1 иср.
Аналогично может быть определен расход энергии
на преодоление уклонов, Дж,
L /.
/V — mgi dl = mgi3 dl = mgi3 L , (7.61)
6 о
или, Вт-ч,
Д,= 2,725 • lO~3mi,L, (7.62)
и, Вт-ч/(т-км),
Ауд = 2,725 о, (7.63)
здесь 1э — эквивалентный по расходу энергии уклон, %<>.
Эквивалентный уклон. Эквивалентным уклоном назы-
вается такой неизменный по значению уклон, при ко-
тором на движение подвижного состава затрачивает-
ся такая же энергия, как на действительном профиле,
при равной длине участка пути. Он определяется на
основании равенства механической работы, совершае-
мой тяговыми двигателями на реальном и эквивалент-
ном профилях.
Профиль пути, по которому движется подвижной сос-
тав, имеет горизонтальные участки, подъемы, безвред-
ные и вредные спуски и кривые участки. Спуски, на
которых требуется подтормаживание подвижного соста-
ва, называются вредными. На таких спусках уклон по
абсолютному значению больше основного сопротивления
движению |i|> | w0|. Чтобы подвижной состав на таком
спуске не развил чрезмерную скорость, его надо под-
тормаживать.
189
Безвредный, спуск
Рис. 7.18. Определение вредного уклс
делит наибольший спуск для
На рис. 7.18 построе-
ны характеристика дей-
ствующих сил при выбе-
ге wo(y) и ограничение
скорости по тормозам в
зависимости от уклона
v(i). Эти скорости были
Г определены выше при
решении тормозной за-
дачи. Точка пересече-
а ния а зависимостей
Ы)о(п) и пгаах(/) опре-
подвижного состава дан-
ного типа, при котором можно длительно ехать без
подтормаживания. Следовательно, в данном случае все
спуски, находящиеся правее линии а — а', будут вред-
ными, так как на них О Ро-
спуски, на которых нет необходимости подторма-
живать (при /<Ро), называются безвредными. Для
ниже приведенных выводов примем следующие обоз-
начения: iB, io, in — соответственно значения вредного,
безвредного спусков и подъема; la. If,, 1П — длины соот-
ветственно вредного, безвредного спусков и подъема;
Рк и /к — сопротивление движению от кривой и ее длина.
С учетом того, что на вредном уклоне кинетиче-
ская энергия полезно тратится только на преодоление
основного сопротивления, а остальная часть ее расхо-
дуется в тормозах, для одного направления движения
справедливо равенство
(ш0 с? 4-6)7.—Дшо ср4-6)7П4-Дср — 6)/с 4-)Д'|4и-
(7.64)
С учетом того, что L =17" + 1^б-|-£/в,
получим
7э — До7б „ р
(7.65)
Прибавим и вычтем в числителе величину £/в/в,
тогда
7»— [ДЛ Дб7в Дв7в-рД7в '-о ср)7п 4~ )^wx7k]/7.—
= 6р4-Е(й—О'» срД РХДЛ]//.. (7.66)
Выражение (7.66) наглядно показывает, что вели-
чина i3 всегда больше величины /ср на значение потерь
энергии на вредном уклоне и на прохождение кривых
участков пути.
190
При рекуперативном торможении часть энергии
торможения возвращается в сеть. Следовательно, при
рекуперации общая затрата энергии с наличием вред-
ного спуска на участке, где применяют рекуператив-
ное торможение, составляет
Св - _ у =
n n I В ocpj в 'р
Св~ WBep)ZB
ПпрПда
( 1 - Пдв
ПврПр)
(7-67)
т. е. будет равна энергии, затраченной при отсутствии
рекуперативного торможения, умноженной на коэф-
фициент (1 — Лдв'Ппр'Пр) • Здесь т]р — к.п.д. рекуператив-
ного торможения. Поэтому при наличии рекуперации
выражение (7.66) примет вид
1э —й?рЧ~[(1 —ЛлвЧврЧр) О'» К^ер)/в"{*£wK/Kl/7.. (7.68)
Если на э.п.с. отсутствует преобразователь, то
Т]пр= 1 •
Расход энергии на торможение до остановки
о
Лт = mnp v? / 2 — mg ^(« + wo) dl>
ЮТ
(7.69)
где тпр — приведенная масса подвижного состава;
vT — скорость начала торможения, км/ч.
В уравнении (7.69) первый член — кинетическая
энергия подвижного состава, а второй — расход энергии
на преодоление сопротивления движению на тормозном
участке.
Для упрощения выражения (7.69) сделаем допу-
щение, что движение в процессе торможения равно-
замедленное с замедлением аТ, м/с2. При этом условии
тормозной ’Путь, м, /т = ц?/(2-3,62ат). Основное сопро-
тивление движению йУо=йУт и уклон i=ZT. Тогда
<> 2
Г v
mg \( i + wQ) dl = + шт) -----T——-.
< 2йт •
Учитывая, что mnp=w(l + v) и подставляя
жение (7.70) в (7.69), получаем окончательно,
(7.70)
выра-
Вт-ч,
Л — 2,725 Ю--±Ц. Г - rdA-1 . (7.7D
2 . 3,62 L 9,81 ат J
191
В случае если производится подтормаживание от
скорости г?т1 до скорости оТ2, расход энергии на подтор-
маживание, Вт-ч, будет равен разности расхода энергии
на торможение до полной остановки со скоростями
vTl и от2:
А = 2,725 • 10
-зН. ~VT2)m
2 • 3.62
1 000(1 -Ь v)
9,81
Wt + ‘т Т
-ST" J ’ <7-72>
Пусковые потери энергии в реостатах также могут
быть определены через кинетическую энергию подвиж-
ного состава, получаемую в конце пуска при скорости
выхода на автоматическую характеристику оп исходя
из того, что потери в пусковом сопротивлении пропор-
циональны полезной работе тяговых двигателей при
пуске, но с учетом затраты энергии на преодоление
сопротивления движению на пусковом участке и с уче-
том коэффициента пуска кп:
г т v2 г 1
Л. = M-2P "-+ 'Hg + (7.73)
о
Принимая допущение, что движение в процессе
пуска равномерно ускоренное с ускорением а„, получим
окончательно, Вт-ч,
А = 2.725 •
п *
1 о -3 т Г юоос1 +т) а’п + 'и 1
2 • 3,62 I- 9’81 J
(7.73а)
Коэффициент кп = 1 при отсутствии переключения
двигателей, кп = 0,5 при двух группировках двигателей
и одном переключении. При наличии импульсного пре-
образователя, включаемого только на период пуска,
Кп I 7)ПР-
Расход энергии на собственные нужды Лсн был рас-
смотрен выше и определяется в соответствии с выра-
жением (7.45).
7.5. Методы снижения расхода электрической энергии
Экономия электрической энергии является важнейшей,,
юсударственной задачей, поставленной перед всеми
отраслями нашего народного хозяйства, в первую оче-
редь перед таким потребителем энергии, как электрифи-
цированный транспорт.
192
Следует различать
две группы методов сни-
жения расхода энергии:
связанные с правильной
эксплуатацией элект-
роподвижного соста-
ва и рациональной кон-
струкцией его.
Первая группа ме-
тодов предполагает сле-
дующее:
уменьшение расхода
Рис. 7.19. Кривые движения и,(/) и
Vs(t) с различными пусковыми уско-
рениями
энергии за счет сниже-
ния основного сопро-
тивления движению.
т. е. уменьшение со-
ставляющей Аш. Уменьшение основного сопротивления
движению достигается за счет применения роликовых
подшипников, высокоэффективных смазок, правиль-
ного составления поездов, уменьшения массы тары
и других мер, о которых говорилось выше;
применение экономичных способов ведения подвиж-
ного состава по перегону. Подвижной состав следует
вести таким образом, чтобы тормозные потери Ат были
наименьшими. Это особенно важно при коротких пере-
гонах, которые имеют место на городском электриче-
ском транспорте.
Рассмотрим способы уменьшения тормозных потерь.
Если произвести пуск подвижного состава с наиболь-
шим возможным ускорением, то уменьшаются тор-
мозные потери. На рис. 7.19 представлены две кривые
движения щ(/) и Гг(/) для разных значений пусковых
ускорений П|<а2. Для сравнения расхода энергии сред-
няя скорость движения, а следовательно, и общее время
хода У по перегону приняты одинаковыми. Длина пере-
гона в обоих случаях также одинакова, поэтому долж-
ны быть равными площади, ограниченные кривыми
r»i(Z) и и осью абсцисс, т. е. площади Oabc и Оа'Ь'с
равны, следовательно, равны заштрихованные площади
Gad и a'b'bd.
У кривой движения с большим значением пускового
ускорения «2 больше продолжительность выбега ab> а'Ь'
и меньше скорость начала торможения От2<ЦТ1, следо-
вательно, уменьшены тормозные потери. Увеличение пус-
193
А ип -
Рис. 7.20. Зависимость удельного расхо-
да электрической энергии от пускового
ускорения для трамвайного вагона
Рис. 7.21. Кривые движения О|(/) и
os(i) с различными тормозными замед-
лениями
кового тока, а следо-
вательно, и пускового
ускорения является бе-
зусловно выгодным с
точки зрения экономии
энергии на движение
подвижного состава.
Зависимость удельного
расхода энергии от ус-
корения (рис. 7.20) по-
казывает, что при ма-
лых ускорениях его
повышение вызывает
значительное сокраще-
ние расхода энергии
благодаря резкому воз-
растанию угла наклона
кривой v(t) в начале
движения. В дальней-
шем по мере увеличения
ускорения его влияние
на снижение расхода
энергии уменьшается,
и увеличивать ускоре-
ние свыше 1,2—1,5 м/с2
практически нецелесо-
образно.
Если производить
торможение подвижно-
го состава с наиболь-
шим допустимым тормозным замедлением, то также
будет увеличиваться доля выбега, уменьшаться скорость
начала торможения и, следовательно, тормозные потери
энергии Ат.
На рис. 7.21 представлены кривые движения vi(t)
и ог(0 для разных значений тормозных замедлений
bi < Ьг- Здесь, как и в предыдущем случае, средняя
скорость движения и общее время хода Т по перегону
длиной L приняты одинаковыми Так как кривые дви-
жения vi(/) и Vi(t) записаны на одной и той же длине
перегона L, площади, ограниченные этими кривыми
и осью абсцисс, т. е. площади Oabc и Оа'Ь'с равны. Следо-
вательно, равны заштрихованные площади aa'b'd и bed.
Увеличение тормозного замедления снижает расход энер-
194
гни в меньшей степени,
чем повышение пуско-
вого ускорения. Так
же, как и зависимость
Дуд(а), кривая Лул(Ь)
идет все более полого
при увеличении тормоз-
ного замедления (рис
7.22). Нецелесообразно
увеличивать среднее
служебное тормозное
замедление более чем
до 1,2 м/с2, так как
дальнейшее его увели
чение, мало отража-
ясь на расходе энергии,
значительно усложняет
тормозное оборудова-
ние подвижного сос-
тава.
Также уменьшаются
тормозные потери и
увеличивается доля
выбега при увеличении
пусковой скорости (рис
7.23), т. е. проведе-
ния пуска до характе-
ристики, соответствую-
щей наибольшему ос-
лаблению возбуждения
тяговых двигателей.
При одной и той
же средней скорости
движения уменьшению
расхода энергии спо-
собствует также умень-
шение продолжитель-
ности остановок. Со-
кращение времени оста-
новок to позволяет уве-
личить долю выбега,
уменьшить скорость
начала торможения
(рис. 7.24).
Рис. 7.22. Зависимость удельного рас-
хода элекгрвческой энергии от тор
молкно замедления для |р<1мвайноги
на!она
Рис. 7.23. Влияние пусковой скорости
на расход электрической энергии
Рис. 7.24. Влияние продолжительности
остановок на расход электрической
энергии
195
Все эти способы дают наибольший эффект при частых
пусках и торможениях и относительно коротких пере-
гонах, характерных для городского электротранспорта.
Вторая группа методов, связанных с рациональной
конструкцией э.п.с., предполагает следующее:
применение полностью обмоторенных осей на под-
вижном составе. Это увеличивает суммарную мощ-
ность двигателей и позволяет производить пуск с наи-
большим пусковым ускорением за счет полного исполь-
зования сцепного веса подвижного состава;
оснащение подвижного состава современными ти-
пами тормозов, что позволяет поднять ограничение
по скорости на спусках и тем самым ликвидировать
расход электроэнергии на подтормаживание, а также
увеличить тормозное замедление;
применение на пассажирском э.п.с. удобных устройств
для посадки пассажиров (достаточное число широких
дверей, подсветка ступеней и т. д.), что сокращает
время стоянки;
применение рекуперативного торможения, которое
позволяет резко сократить тормозные потери;
использование пусковых и тормозных потерь в реос-
татах для отопления салонов.
Эффективность рекуперации. Эффективность реку-
перации характеризуется отношением количества энер-
гии, возвращенной при рекуперативном торможении
А2, к энергии, которую пришлось бы затратить для ком-
пенсации потерь в тормозах при отсутствии рекупера-
ции Л(. В соответствии с выражениями (7.71) и (7.68)
v2
к = ~ (1 — Л Л Ч V (7.74)
р А у2 \ 'дв 'пр 'р/ ' '
т т
Коэффициент кр может быть значительным и пре-
вышать 0,5.
7.6. Проверка мощности тягового двигателя
Общая постановка задачи проверки мощности элек-
трооборудования на нагревание. В наиболее тяжелых
условиях работы на э.п.с. находится тяговый двигатель.
Поэтому все остальное электрооборудование выбирает-
ся таким образом, чтобы можно было обеспечить
полное использование его мощности. Допустимая же
длительность работы двигателя при той или иной на-
196
грузке определяется его нагреванием, так как потери
энергии, выделяющиеся в двигателе, не должны повы-
шать температуру его частей сверх безопасных значений,
регламентируемых соответствующими нормами.
Работоспособность тягового двигателя с точки зре-
ния нагревания при резко колеблющейся нагрузке
определяется не только его теплоотдачей, но и тепло-
емкостью. Поэтому наряду с мощностью продолжитель-
ного режима для тяговых двигателей в качестве мощ-
ности, определяющей его временную перегрузку по нагре-
ванию, принимают мощность часового режима.
Под мощностью продолжительного режима тягово-
го двигателя понимается та наибольшая мощность,
развиваемая на его валу, при которой двигатель может
неограниченно долгое время работать па неподвижной
установке без того, чтобы установившееся превыше-
ние температуры любой его части над температурой
окружающей среды превзошло допустимое по нормам.
Параметры двигателя, отвечающие этой мощности,
называются длительными и отмечаются индексом «оо».
Под мощностью часового режима тягового двига-
теля понимается та наибольшая мощность, развивае-
мая на его валу, при которой двигатель, начав работу
при температуре окружающей среды, может работать
на неподвижной установке в течение 1 ч без того, чтобы
превышение температуры какой-либо его части пре-
взошло допустимое по нормам. Параметры двигателя,
отвечающие этой мощности, называются часовыми и
отмечаются индексом «ч».
Соотношение между мощностями продолжитель-
ного и часового режимов тягового двигателя зависит
от интенсивности его охлаждения. Для двигателей с
независимой вентиляцией (имеется отдельный венти-
лятор для охлаждения) отношение Z^//., = 0,85 4-0,95;
для двигателей с самовентиляцией (вентилятор наса
жен на вал двигателя) отношение Zoo/Z4 = 0,65 4-0,8;
для двигателей закрытого исполнения (вентиляция от-
сутствует) отношение /„//,, = 0,44-0,5.
Наиболее уязвимой с точки зрения нагревания
является изоляция обмоток двигателей. Срок службы
изоляции, а следовательно, и двигателя обратно про-
порционален температуре в третьей степени. Согласно
ГОСТ 2582-81 допустимая температура обмоток для
часового режима, измеренная методом сопротивления,
приведена в табл. 7.4.
197
Таблица 7 4
Класе изоляции А Е В F н
Допустимая температура 0д<)Г, “С.- обмотки якоря обмотки возбуждения 110 120 130 140 145 155 165 180 185 205
Для продолжительного режима допустимая темпе-
ратура ниже на 20° С. Соответственно допустимое пре-
вышение температуры по отношению к температуре
окружающей среды
тдоп = е„оп — 00. (7.75)
При размещении электрооборудования (двигателя)
под кузовом э.п.с. температуру окружающей среды
(если она не задана) принимают 0о = 25° С, а при раз-
мещении в кузове — 0о = 35°С.
Уравнение нагревания однородного тела. Под од-
нородным в тяговом отношении телом понимают твер-
дое тело, обладающее бесконечной теплопроводностью
во всех направлениях (наиболее близко этому условию
удовлетворяет электролитическая медь). Тепловые про-
цессы в таком теле при неизменных теплоемкости, теплоот-
даче, температуре окружающей среды определяются
уравнением
KPdt = Ceti + Bidt. (7.76)
где ДР — тепловая энергия, выделяемая в теле, Вт;
t — время, с;
С — теплоемкость тела, Вт-с/°С:
В — теплоотдача тела, Вт/°С;
т — превышение температуры тела над температурой окру-
жающей среды, °C.
Обозначив через Т = С[В тепловую постоянную вре-
мени и т „ = АР/В установившееся превышение тем-
пературы, получаем
t^dt = Tdx xdt. {7 .Т7)
Разделяя переменные
и интегрируя, получим
t
~ = — In (т — Т ) 4- const . (7.79)
198
Постоянная интег-
рирования определяет-
ся из условия, что при
/ = 0 превышение тем-
пературы тела т = т0
(здесь то — начальное
превышение температу-
ры), тогда
1п(т„,—То)= const. (7.80)
Подставляя значе-
ние постоянной в вы-
ражение (7.79) и пре-
образуя, получаем
т = тоо(* “е (/ ) + (7.81)
+ T0C-'/7-.
Рис. 7.25. Кривые нагревания
Выражению (7.81) соответствует сумма двух экс-
понент: нагревания (рис. 7.25, кривая 1) и остывания
с начальной ординатой то (кривая 2).
Применение законов нагревания однородного тела
к нагреванию электрооборудования. Электрооборудова-
ние э.п.с. в тепловом отношении представляет сложную
систему. Получение точных законов нагревания свя-
зано с решением сложной системы дифференциальных
уравнений с переменными коэффициентами. Вследствие
этого до настоящего времени преимущественно рас-
пространена достаточно простая и в то же время доста-
точно точная методика расчета проверки на нагрева-
ние, основанная на. том, что элемент оборудования,
для которого определяется нагрев, заменяется эквива-
лентным телом с приведенными теплоемкостью Спр,
теплоотдачей Впр и потерями Рпр.
Рассмотрим эту методику на примере нагревания
обмотки якоря тягового двигателя.
Нагревание обмотки якоря будет происходить за
счет электрических потерь в ней, части потерь в стали
и дополнительных потерь
&Р„р==12гя + ксЛРс, (7.82)
где г„ — сопротивление обмотки якоря;
кс — коэффициент, учитывающий влияние магнитных потерь
в стали и дополнительных потерь на нагрев обмотки якоря;
ДРс — потери в стали и дополнительные потери.
199
Рис. 7.26. Зависимости &РГ(Г), кс(1)
и ксЛЛ(/)
Коэффициент кс с
увеличением нагрузки
двигателя, т. е. с умень-
шением частоты враще-
ния, возрастает, в то
время, как потери ДРС
с уменьшением частоты
вращения падают. По-
этому произведение
ксДРс практически по-
стоянно в рабочем диа-
пазоне (рис. 7.26). Для
современных двигате-
лей значение кс =
— 0,354-0,45, а значение Л/< следует брать для продолжи-
тельного режима.
Сопротивление обмотки якоря зависит от температуры,
следовательно,
ДРпр—-1 То -|“ 7 ГоСст-|-ксДР
(7.83)
где Го — сопротивление якоря при температуре окружающей среды;
а — температурный коэффициент электрического сопротивления
материала обмотки.
Подставляя полученные значения в дифференциаль-
ное уравнение (7.76), получим
(12г„ -|- /т<.ит + K<APc)dt = C„edt + B„pT:dt, (7.84)
или, преобразуя,
(/2го -ф Kr\Pc)dt — Cn[,dt + (В„р — l2roa)xdt. (7.85)
Введем обозначения:
72Го +КсДВс — Р3 — эквивалентные потери;
В„р — 1~гоа = В, — эквивалентная теплоотдача;
С„р/Вэ = 7'3 — эквивалентная постоянная времени;
тоо=Д/’3/В3 — установившееся значение превышения темпера-
туры нагрева.
Тогда выражение (7.85) запишется в виде
тооЛ = 7'аДт-|-тЩ (7.86)
и его решением будет
т = тоо(1 -с-'/г) + т°е ,/г.
(7.87)
200
По выражению
(7.86) можно построить
кривые нагревания об-
мотки якоря двигателя
для различных режи-
мов, используя кривые
движения и потребляе-
мого подвижным соста-
вом тока (рис. 7.27).
Для построения кривой
нагревания время ДВИ- Рис. 7.27. Построение кривой иагрева-
жения разбивается на ния тр) по кривым движения
интервалы, в пределах
каждого из которых ток /, а для двигателей с само-
вентиляцией также скорость v изменяются незначи-
тельно и могут быть заменены средними значениями
/Ср и иср на соответствующих интервалах с длитель-
ностью А/.
Более точно можно построить кривую нагревания,
если имеется сетка температурных кривых, полученных
экспериментально (рис. 7.28). В этом случае величина
Ат определяется по температурной кривой, соответ-
ствующей среднему значению тока /ср, за период време-
ни А/, начиная со значения превышения температуры
Так как в условиях городского электротранспорта
двигатели работают в повторно-кратковременных ре-
жимах, то проверка их на нагревание может произ-
водиться упрощенными способами. Наиболее распро-
страненным является метод эквивалентного тока. Если
принять допущение, что АР = /2г, то, используя урав-
нение теплового баланса и усредняя входящие в него
величины, получаем
— ( A/W = 1 ( l2rdl = -Г ( l2dt =- I2 г , (7.88)
/р о /р о ” о
где I, — средний квадратичный ток за время рейса
Обозначим
Тер-/эГср.
(7.89)
Для продолжительного режима
(7 90)
201
Рис. 7.28. Построение кривой превышения температуры нагрева по
сетке температурных кривых
Принимая за критерий проверки элемента электро-
оборудования по нагреву неравенство тср^т||ос и учи-
тывая выражения (7.89) и (7.90), получим
или
(7.91)
(7.92)
При применении этого выражения и проверке на
нагревание тягового двигателя следует учесть следую-
щие обстоятельства: двигатель может работать при
температуре окружающей среды, отличной от 25° С.
На э.п.с. у параллельно работающих тяговых двига-
телей нагрузка может быть неравномерной, условия
охлаждения двигателя на э.п.с. могут отличаться от
202
условии охлаждения на стенде, поэтому для учета это-
го в выражение (7.92) вводят поправочные коэффициенты:
/ ZJ
I > / Л/ ——к . (7.93)
со э у 0 и ср зап ' х '
э ср
здесь ко — коэффициент, учитывающий влияние температуры ок-
ружающей среды:
ко —Тц^Дхн^ J-25 { Оо); (7.94)
Кнср — коэффициент, учитывающий неравномерность распреде-
ления нагрузок для двигателей последовательного воз-
буждения, кИСр= 1,1 4-1,15;
«зап •— коэффициент, учитывающий ухудшение реальных условий
охлаждения, кзап> 1
Отношение ВЭоо/Вэч для двигателя с независимым
возбуждением может быть принято равным 1,0, а для
двигателей с самовеитиляцией v^/v,f (здесь
VcV—средняя скорость сообщения па участке).
Определение среднего квадратичного тока /э следует
производить по кривой тока, потребляемого двигателем
с учетом электрического торможения. Следует брать
кривые движения, соответствующие среднему наполнению
подвижного состава пассажирами на протяжении рей-
са в часы максимальной интенсивности движения.
Контрольные вопросы
I. Какие зависимости называются кривыми движения?
2. В каком случае кривая потребляемого подвижным составом
тока совпадает с кривой тока двигателя?
3. В каких единицах измеряется расход электрической энергии
на движение подвижного состава?
4. За счет какой составляющей расход электрической энергии
у троллейбуса выше, чем у трамвая?
5. Почему в случае реостатного пуска желательно иметь двигатели
с низколежащими скоростными характеристиками, а в случае при-
менения импульсного регулирования это не обязшельно?
6. Почему увеличение доли выбега способствует уменьшению
расхода электрической энергии?
7. Какие Вы знаете классы изоляции гиговых двигателей?
8. Что необходимо сделать, если в результате расчета эквива-
лентный ток двигателя превышает длительный?
203
список ИСПОЛЬЗОВАННОЙ
ЛИТЕРАТУРЫ
1. Материалы XXVII съезда КПСС. М.: Политиздат.
1986. 352 с.
2. Постановление ЦК КПСС «О дальнейшем улуч-
шении работы транспорта по обслуживанию пассажи-
ров».— Правда, 1984, 25 авг.
3. Кутыловский М. П. Электрическая тяга.
М.: Стройиздат, 1970. 263 с.
4. Розенфельд В. Е. , Исаев И. П., Си-
доров Н. Н. Теория электрической тяги. М.: Транспорт,
1983. 328 с.
ОГЛАВЛЕНИЕ
От авторов . . . . 3
1
Общие сведения об электрическом транспорте
1.1. Классификация электрической тяги и ее системы 5
1.2. Электрическая тяга на городском электрическом транспорте 8
2
Теория движения подвижного состава
2.1. Механика движения подвижного состава 11
2.2. Реализация сил тяги и торможения 21
3
Сопротивление движению подвижного состава
3.1. Силы сопротивления движению и их учет 37
3.2. Основное сопротивление движению .... 39
3.3. Формулы для определения основного сопротивления движе-
нию . . ... 44
3.4. Сопротивление движению от уклона 46
3.5. Сопротивление движению от кривой 48
3.6. Дополнительное сопротивление движению 49
3.7. Пути уменьшения сопротивления движению ... 50
3.8. Методы определения основного сопротивления движению 51
4
Характеристики тяговых электродвигателей постоянного тока
4.1. Электромеханические характеристики на валу тяговых дни
гателей постоянного тока . 55
4.2. Электромеханические характеристики на ободе движущегося
колеса 58
4.3. Тяговые характеристики электроподвижного состава 70
4.4. Сравнение двигателей различных систем возбуждения 73
4.5. Пример расчета электромеханических характеристик 86
5
Пуск и регулирование скорости подвижного состава
5.1. Способы пуска 89
5.2. Регулирование скорости 101
5.3. Характеристики двигателей при изменении напряжения 102
5.4. Характеристики двигателей при изменении возбуждения 106
5.5. Тиристорно-импульсное управление тяговыми двигателями 114
205
6
Торможение подвижного состава
6.1. Системы торможения . 121
6.2. Механическое торможение . .123
6.3. Рекуперативное торможение 132
6.4. Реостатное торможение . . 137
6.5. Рекуперативно-реостатное торможение . 148
6.6. Электрическое торможение с помощью тиристорно-импуль-
сных регуляторов . . . . 151
7
Тяговые расчеты
7.1. Построение кривых движения подвижного состава .156
7.2. Кривые потребляемого подвижным составом тока.............178
7.3. Расход электрической энергии на движение подвижного
состава .......... 181
7.4. Определение расхода электрической энергии аналитическим
методом .... 188
7.5. Методы снижения расхода электрической энергии 192
7.6. Проверка мощности тягового двигателя . . 196
Список использованной литературы . . ... 204
Учебник
ЛЮДМИЛА САП ЛЕВ IIА НАЙР МЕНА.
ВЛАДИМИР ВАСИЛЬЕВИЧ ШЕВЧЕНКО
ЭЛЕКТРИЧЕСКАЯ ТЯГА
ГОРОДСКОЙ НАЗЕМНЫЙ ТРАНСПОРТ
Обложка художника В. А. Сергеева
Технические редакторы Л. А. Кульбачинская,
Л. Г. Дягилева
Коррсктор-вычитчик Е. И. Белукова
Корректор М. В. Деянова
ИБ № 3216
Сдано в набор '30.09.85. Подписано в печать 21.04.86.
Т-01840. Формат 84X108/32. Бум. тип. № I.
Гарнитура литературная. Высокая печать. Усл. печ. л.
10,92. Усл. кр.-отт. 11,13. Уч.-изд. л. 11,03. Тираж
5.500 экз. Заказ 1092. Цепа 40 кон. И»д. № 1 -1-2/5 3008
Ордена «Знак Почстд» и «ди Н’.гп.г гно «ТРАНСПОРТ»,
10-1(10’1. Мое кпд, li.iv минный iyu , (м
Moi itoiHK.iu Тнп11Г|П1||>|111 №4 ч Ош iinuiitl рпфирима
при ГосуднргГШ'ННОМ KOMlll'Vir ( ( ( 1'
по делам и 1д.>гел|,г 1 в, полиграфии и книжной n>pi iiiuui.
12904 I, Movkhji, Ь 11среяглангкд>| ул., n 4b