/















































































































































































Автор: Распопов В.Я.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника микрорадиоэлектронная аппаратура микроэлектроника беспилотные летательные аппараты
ISBN: 978-5-94275-616-1
Год: 2011
Похожие




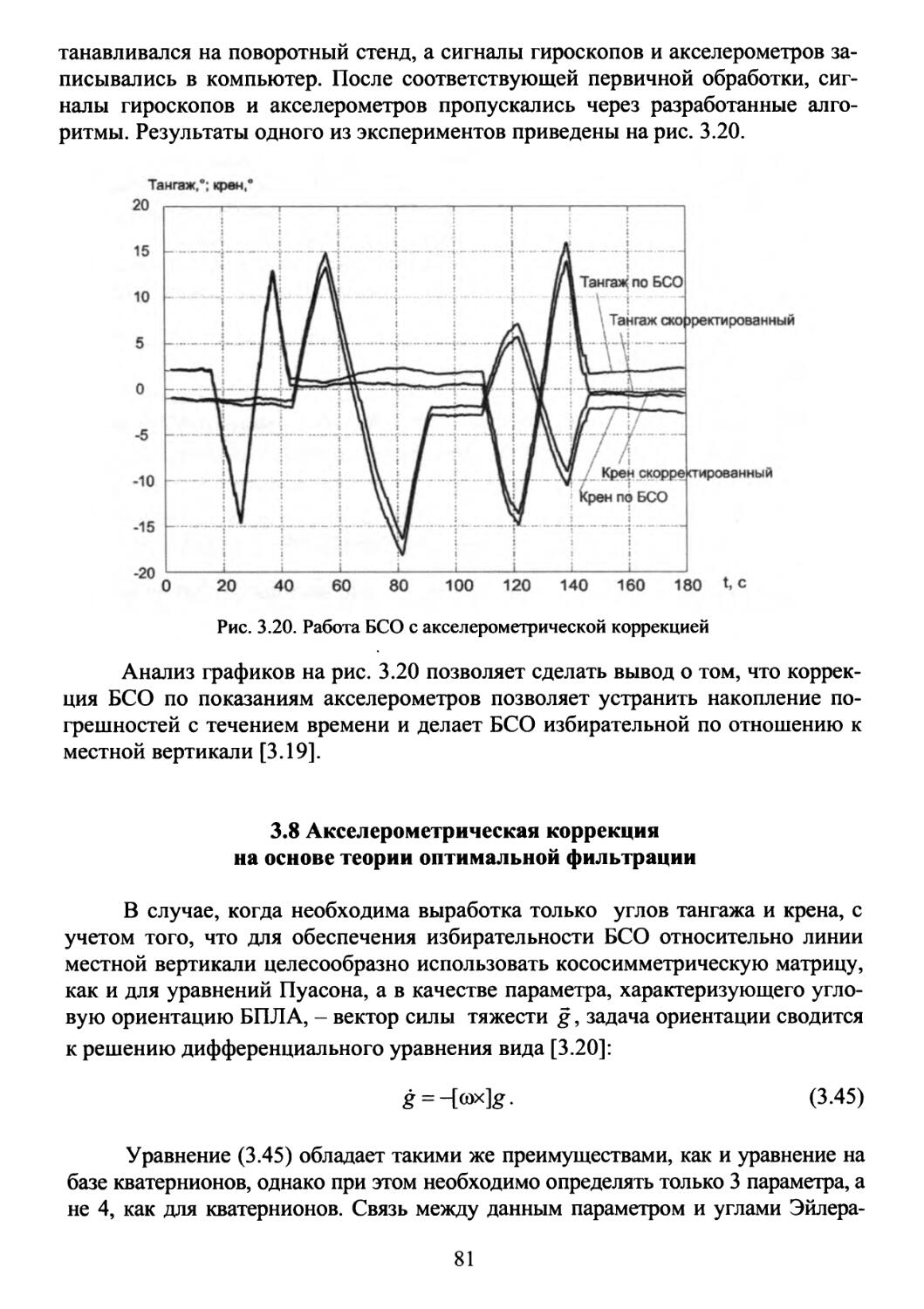
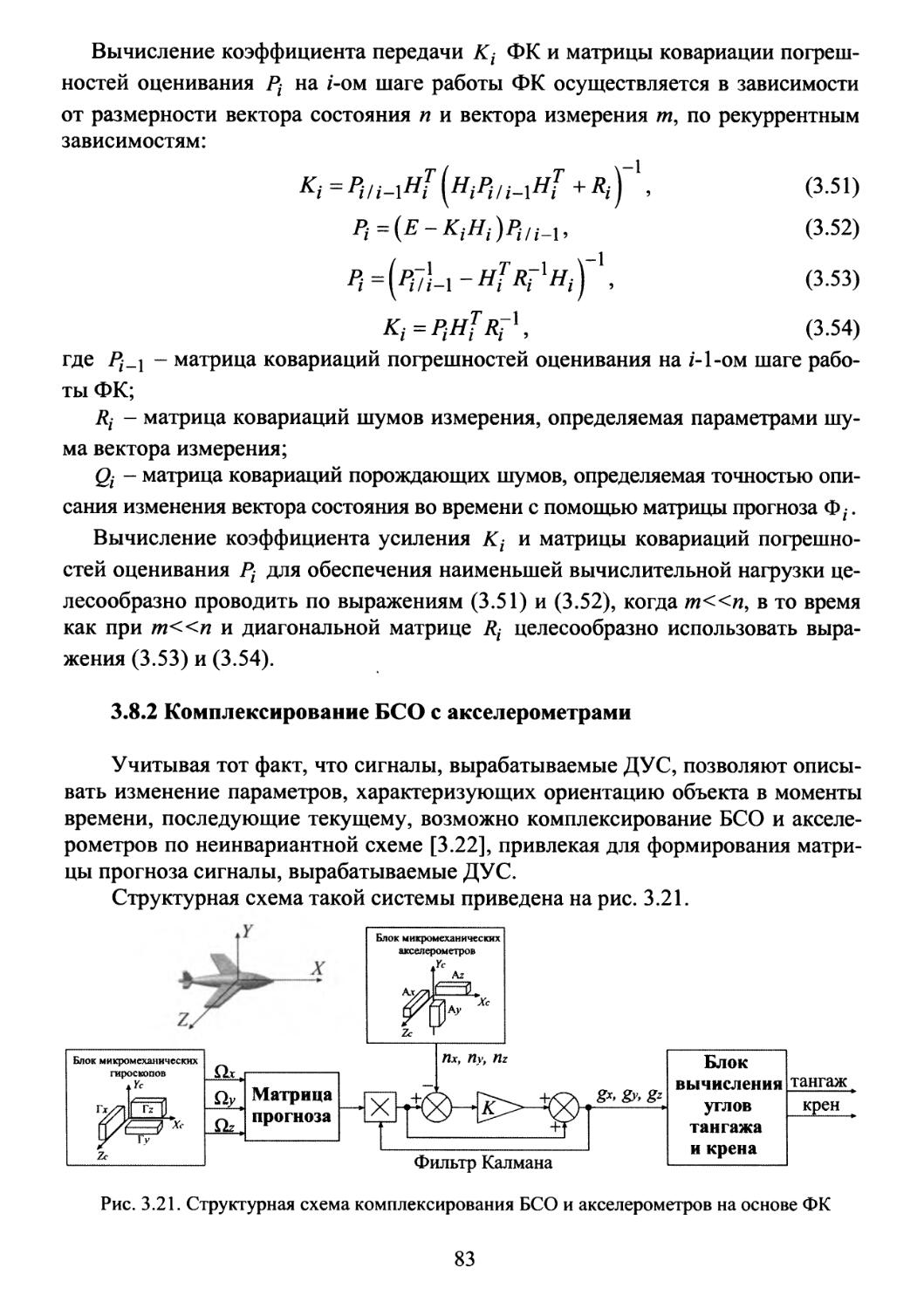
Текст
Посвящается 80-летию
Тульского государственного университета
и 50-летию кафедры «Приборы управления»
МИКРОСИСТЕМЫ ОРИЕНТАЦИИ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Под редакцией В.Я. Распопова
] МОСКВА
«Машиностроение»
2011
УДК 629.7.05
ББК 32.844.1
М59
Рецензенты:
кафедра «Автоматизированные комплексы систем ориентации и навигации»
национального исследовательского университета «Московский авиационный институт»,
зав. каф. чл-кор. РАН, д-р техн. наук, проф. Б.С. Алешин;
д-р техн. наук, проф. В.М. Солдаткин, зав. каф. «Приборы и информационно-
измерительные системы» Казанского государственного технического университета
им. А.Н. Туполева
Авторский коллектив:
Р.В. Алалуев, А.В. Ладонкин, Д.М. Малютин, В.В. Матвеев, М.Н. Машнин,
П.П. Парамонов, М.Г. Погорелов, В.Я. Распопов, Ю.И. Сабо, СВ. Телухин, СЕ. Тов-
кач, А.П. Шведов, А.В. Шукалов.
М 59 Микросистемы ориентации беспилотных летательных аппаратов / Под. ред.
В.Я. Распопова. - М.: Машиностроение, 2011. - 184 с: ил.
ISBN 978-5-94275-616-1
Приведены сведения о беспилотных летательных аппаратах как объектах
управления и о законах управления, реализуемых автопилотами. Рассмотрены принципы,
особенности построения на микросистемной элементной базе и теория систем
ориентации беспилотных летательных аппаратов: инерциальной бесплатформенной,
магнитометрических, видеосистем и пирометрической. Приведены результаты
лабораторных и летных испытаний микросистем ориентации различных типов.
Для разработчиков бортовых систем летательных аппаратов, аспирантов и
студентов авиационных вузов, а также других вузов, обучающихся по направлению
«Системы управления движением и навигация».
УДК 629.7.05
ББК 32.844.1
© Авторский коллектив, 2011
ISBN 978-5-94275-616-1 © Издательство «Машиностроение», оригинал-макет, 2011
ОГЛАВЛЕНИЕ
Принятые сокращения 5
Предисловие 6
Введение. Беспилотные летательные аппараты и микросистемная авионика 10
8.1 Малоразмерные беспилотные летательные аппараты 10
8.2 Микросистемная авионика 19
Список литературы к введению 26
Глава 1. БПЛА - объект управления 27
1.1 Системы координат и пространственное положение БПЛА 27
1.2 Уравнения движения БПЛА 28
1.3 Передаточные функции БПЛА 35
1.4 Аэродинамические коэффициенты 39
Список литературы к главе 1 44
Глава 2. Автопилоты 45
2.1 Принципы действия автопилотов 45
2.2 Моделирование работы системы «автопилот-БПЛА» 54
Список литературы к главе 2 58
Глава 3. Бесплатформенная система ориентации 59
3.1 Инерциальное управление БПЛА 59
3.2 Задача ориентации БПЛА 60
3.3 Инерциальный измерительный модуль 61
3.4 Алгоритмы бесплатформенной системы ориентации БПЛА 62
3.5 Численная реализация алгоритмов ориентации БПЛА 69
3.6 Погрешности БСО 70
3.6.1 Погрешность усечения 70
3.6.2 Кинематическая погрешность, вызванная коническим движением... 72
3.6.3 Влияние случайных погрешностей гироскопов 74
3.7 Принципы акселерометрической коррекции БСО 78
3.8 Акселерометрическая коррекция на основе теории оптимальной
фильтрации 81
3.8.1 Дискретный фильтр Калмана 82
3.8.2 Комплексирование БСО с акселерометрами 83
Список литературы к главе 3 103
Глава 4. Магнитометрические системы ориентации 105
4.1 Принцип работы магнитометрических систем ориентации 105
4.2 Неопределенность определения параметров ориентации БПЛА по
показаниям магнитных датчиков 106
4.3 Электронный компас 108
4.3.1 Структура и конструкции 108
3
4.3.2 Математическая модель 112
4.3.3 Анализ точности 113
4.4 Магнитометрическая система определения вертикали места 115
4.4.1 Структура магнитометрической системы определения
вертикали места 115
4.4.2 Определение угла тангажа 116
4.4.3 Определение угла крена 119
4.4.4 Анализ точности 120
Список литературы к главе 4 125
Глава 5. Видеосистемы ориентации 126
5.1 Центральнопроективная система 127
5.2 Катадиоптрическая система 129
5.2.1 Состав и алгоритмы функционирования 129
5.2.2 Моделирование видеосистемы 135
5.2.3 Алгоритм распознавания неба и земли 139
Список литературы к главе 5 144
Глава 6. Пирометрическая система ориентации..... 145
6.1 Принцип действия пировертикали 145
6.2 Определение требований к элементному составу пировертикали
и технических ограничений 146
6.3 Определение углов ориентации пировертикалью с четырьмя
пирометрами 150
6.4 Определение углов ориентации пировертикалью с шестью
пирометрами 154
6.5 Устранение взаимовлияния углов крена и тангажа
в пировертикали с шестью пирометрами 157
6.6 Оценка погрешности пировертикали 159
6.6.1 Определение рабочих характеристик пирометра
и пировертикали 159
6.6.2 Математическая модель пировертикали и коррекция
ее рабочей характеристики 160
6.7 Экспериментальное исследование пировертикали 163
6.8 Цифровая обработка сигналов пировертикали
(компенсация шума) 167
Список литературы к главе 6 172
Заключение 174
Предметный указатель 175
Приложение 178
ПРИНЯТЫЕ СОКРАЩЕНИЯ
АП - автопилот
БАС - беспилотная авиационная система
БАУ - бортовая аппаратура управления
БИНС - бесплатформенная инерциальная навигационная система
БПЛА - беспилотный летательный аппарат
БСО - бесплатформенная система ориентации
БЦВМ - бортовая цифровая вычислительная машина
ВБ - вычислительный блок
ДУС - датчик угловой скорости
ИК - инфракрасный
ЛА - летательный аппарат
МБПЛА - малоразмерный БПЛА
ММА - микромеханический акселерометр
ММГ - микромеханический гироскоп
МД — магнитный датчик
МСО - магнитометрическая система ориентации
МСТ - микросистемная техника
НАУ - наземная аппаратура управления
ПВ - пировертикаль
ПСО - пирометрическая система ориентации
ПВС - панорамная видеосистема
САУ - система автоматического управления
СНС - спутниковая навигационная система
ФВ - фильтр Винера
ФК - фильтр Калмана
5
ПРЕДИСЛОВИЕ
В настоящее время как за рубежом, так и в России стремительно
развивается новое научно-техническое направление - беспилотные авиационные
системы (БАС), в состав которых входят беспилотные летательные аппараты
(БПЛА).
Новые технологии ведения боевых действий базируются в значительной
мере на идее создания единой информационно-управляющей и ударной среды.
Одним из классов БПЛА, участвующих в создании информационно-
управляющей среды, является класс малоразмерных БПЛА (МБПЛА) - мини- и
микро-БПЛА.
Повышенный интерес к МБПЛА, согласно данным Управления
перспективных исследований и разработок министерства обороны США (DARPA),
обусловлен появлением новых достижений в области микросистемных
компонентов МБПЛА и военно-технических концепций применения таких аппаратов.
Одним из главных достоинств МБПЛА является независимость от
взлетных полос. Такие БПЛА запускаются «с руки» или изредка с легкой
катапульты, включая устройство типа резиновой рогатки. Посадка осуществляется на
неподготовленную поверхность, а в разобранном виде они могут переноситься
в укладках одним-двумя бойцами.
МБПЛА приобретают популярность в гражданских применениях, где
большие БПЛА в значительной мере недоступны из-за финансовых и
юридических трудностей. МБПЛА могут использоваться для охраны сельхозугодий,
картографии, дистанционного химико-физического анализа, контроля вспашки
почвы, всхожести и спелости урожая и т.д.
Активно развивающееся направление МБПЛА требует разработки
информационно-измерительных систем, необходимых для определения параметров
угловой ориентации БПЛА в пространстве.
Вместе с уменьшением взлетной массы БПЛА ужесточаются требования к
таким системам по массе, габаритам, энергопотреблению и др.
Развитие микросистемной техники привело к созданию миниатюрных
датчиков первичной информации, работающих на различных физических
принципах (гироскопы, акселерометры, датчики давления, магниторезисторы,
пирометры и др.), микроконтроллеров, компонентов радиосвязи между БПЛА и
землей, модулей спутниковых навигационных систем и т.д. Наличие подобной
элементной базы обусловило создание информационно-измерительных и
управляющих микросистем, в частности, автопилотов, являющихся важнейшей
компонентой системы автоматического управления БПЛА. Базовым модулем
автопилота является система ориентации БПЛА.
В отечественной и известной зарубежной литературе отсутствуют
публикации, в которых излагалась бы теория построения микросистем угловой
ориентации БПЛА, выполненных на датчиках различной физической природы.
Предлагаемая читателям монография подготовлена на основе публикаций ее
6
авторов в виде журнальных статей, учебных пособий и патентов, а также
результатах экспериментальных исследований, выполненных на микросистемах
ориентации различных типов. По мнению авторов, монография является
комплексным изложением теоретических основ построения микросистем
ориентации БПЛА. Материал в монографии распределен следующим образом.
Введение содержит краткие сведения о малоразмерных беспилотных
летательных аппаратах и микросистемной авионике.
Первая глава посвящена БПЛА как объекту управления. Приведены
уравнения движения и передаточные функции БПЛА, входными параметрами
которых являются управляющие и возмущающие воздействия, а выходными -
параметры движения. Приведены значения аэродинамических коэффициентов,
полученные методом виртуальной продувки 3D моделей МБП Л А, роль
которых выполняли авиамодели, по своим размерам идентичные некоторым
реальным образцам МБПЛА.
Вторая глава содержит сведения о законах управления БПЛА,
реализуемых автопилотами. Приведены комментарии относительно различных законов
управления БПЛА. Приведены примеры моделирования системы «автопилот-
БПЛА» с рулевым приводом, имеющим жесткую или изодромную обратную
связь.
Третья глава содержит изложение теории построения бесплатформенной
системы ориентации и некоторые результаты экспериментальных
исследований, включая летные испытания. Описаны алгоритмы БСО для различных
способов их реализации (с углами Эйлера-Крылова, с уравнением Пуассона, с
параметрами Родрига-Гамильтона) и их численная реализация. Рассмотрены
погрешности БСО, характерные для ее применения в авионике МБПЛА.
Обработка экспериментальных данных работы микросистемной БСО выполнена
с использованием вариаций Аллана. Рассмотрены принципы акселерометри-
ческой коррекции на основе оптимальной фильтрации. Приведены результаты
летных испытаний экспериментальной комплексированной микросистемной
БСО.
Четвертая глава посвящена магнитометрическим системам ориентации, в
ней изложены принципы и структуры их построения по схемам электронного
компаса и системы определения вертикали места. Отмечено, что
магнитометрические системы ориентации являются комплексированными: в первом
случае- с акселерометрами, во втором - с приемником сигналов спутниковых
навигационных систем. Приведены алгоритмы определения углов крена и
тангажа, а также выполнен анализ ошибок их вычисления. Исследование
экспериментальной магнитометрической системы определения углов тангажа и
крена выполнено в лабораторных условиях. Приведены результаты
математического моделирования полета БПЛА с магнитометрической системой
ориентации в контуре автопилота.
Пятая глава содержит теоретические основы построения видеосистем
ориентации. Кратко описан принцип определения углов тангажа и крена в широко
известной центральнопроективной системе, основными недостатками которой
считаются ограничения по измеряемым углам тангажа и крена и зависимость
7
измеряемых углов от высоты полета БПЛА. Описаны состав и алгоритмы
функционирования катадиоптрической системы ориентации, которая
потенциально обладает лучшими измерительными свойствами по сравнению с цен-
тральнопроективной системой. Приведены результаты математического
моделирования работы катадиоптрической видеосистемы ориентации, а также
параметры реализованного вычислительного блока, обрабатывающего
информацию, получаемую с катадиоптрического датчика.
Шестая глава дает представление о физической реализуемости построения
вертикали на борту БПЛА с использованием градиента температуры между
небосводом и землей, на основании показаний пирометров, ориентированных
определенным образом относительно связанной системы координат БПЛА. Определены
технические требования к пирометрам. Приведены алгоритмы определения углов
тангажа и крена пировертикали с четырьмя, либо с шестью пирометрами.
Определены погрешности пировертикали и предлагаются способы их устранения.
Приведены результаты экспериментальных исследований пирометрической системы
ориентации в статическом режиме для определения рабочих характеристик, а
также на борту БПЛА в составе автопилота.
Списки литературы содержат только те источники, которые
непосредственно использовались при написании соответствующих глав. Такой подход к
цитированию первоисточников, включая собственные публикации авторов, в
какой-то мере позволяет оценить оригинальность материалов книги.
Материалы книги являются результатом совместной работы авторов по
авионике БПЛА, начиная с 2005 г. Работа выполнялась не только в
инициативном порядке, но и по грантам РФФИ №09-08-050196 «Развитие МТБ для
проведения исследований по области знаний 08-606: влияние климатических факторов
на работу авионики малогабаритных беспилотных летательных аппаратов
различного назначения», РФФИ №10-08-00230а «Научные основы построения
малогабаритных систем ориентации и навигации для беспилотных вращающихся
по крену летательных аппаратов», РФФИ №10-08-050236 «Развитие МТБ для
проведения исследований по области знаний 08-606: компенсация
инструментальных погрешностей инерциальных датчиков для систем ориентации
малогабаритных летательных аппаратов», по хоздоговорам с ОАО «Концерн «ЦНИИ
«Электроприбор» и ОАО «ОКБ «Электроавтоматика им. П.А. Ефимова»
(научный руководитель В .Я. Распопов).
Теоретические и практические работы в области авионики пилотируемых
самолетов д.т.н., профессора П.П. Парамонова, д.т.н., профессора Ю.И. Сабо и
А.В. Шукалова позволили выполнить анализ применимости передаточных
функций и законов управления пилотируемых самолетов к описанию
автопилотов БПЛА (гл. 1, 2). Ими же выполнена оценка практической применимости
аэродинамических коэффициентов, определенных методом «виртуальной продувки»
(гл. 1), к.т.н., доц. СВ. Телухиным и аспирантом М.Н. Машинным (научн. рук.
В.Я. Распопов), а также выработаны рекомендации по практической реализации
интегрированной инерциальной БСО (гл. 3). Решающий вклад в написание гл. 3
принадлежит к.т.н., доц. В.В. Матвееву и к.т.н., доц. А.П. Шведову, частично
поместившему в нее результаты своей диссертационной работы (научн. рук. -
8
д.т.н., проф. кафедры Ю.В. Иванов), которые являются оригинальными. Глава 4,
помимо известного материала по электронному компасу, содержит
оригинальные результаты, полученные к.т.н., доц. М. Г. Погореловым в кандидатской
диссертации (научн. рук. - к.т.н., доц., профессор кафедры Д.М. Малютин).
Глава 5, за исключением самой идеи применения катадиоптрического
датчика в видеосистеме ориентации, является оригинальной и подготовлена асп.
А.В. Ладонкиным (научн. рук. В.Я. Распопов). Следует отметить, что к моменту
написания главы катадиоптрическая видеосистема ориентации не применялась
в летных испытаниях.
Глава 6 подготовлена по материалам кандидатской диссертации СЕ. Тов-
кача (научный руководитель В.Я. Распопов), который во время работы над
книгой находился за границей в командировке, но при этом имелась возможность
«электронного» общения. Материалы главы оригинальны, за исключением
идеи пирометрического автопилота.
Практическая реализация всех без исключения систем ориентации,
рассмотренных в книге (гл. 3-6), включая разработку схемотехники, подбор
элементной базы и т.д., проводилась под руководством и при непосредственном
участии к.т.н., доц. Р.В. Алалуева. Ему же принадлежит определяющая роль в
организации и проведении всех летных испытаний, в которых также принимали
участие СЕ. Товкач, А.П. Шведов, А.В. Ладонкин, М.Н. Машнин.
Материалы, вошедшие в книгу, в различных комбинациях были
представлены на XV, XVI, XVII, XVIII (2008-2011 гг.) Международных конференциях
по интегрированным навигационным системам (г. Санкт-Петербург),
проводимых под руководством академика РАН В.Г. Пешехонова, который счел
возможным некоторые из них заслушать на пленарных заседаниях.
Работы авторов книги по авионике БПЛА были представлены на 2-м и 3-м
Московских международных форумах-выставках «Беспилотные многоцелевые
комплексы в интересах ТЭК» (2008, 2009 гг.), 4-м и 5-м Московских
международных форумах-выставках «Беспилотные многоцелевые комплексы» (2010,
2011 гг.) и на XV юбилейной Международной выставке средств обеспечения
безопасности государств «ИНТЕРПОЛИТЕХ-2011» (г. Москва).
Авторы считают своим долгом поблагодарить ректора Тульского
государственного университета М.В. Грязева, проректоров И.В. Григорова, В.Д.
Кухаря, А.Ю. Чадаева за поддержку работ в области авионики БПЛА и возможность
их представления на выставках в виде экспозиций ТулГУ.
Книга предназначена для специалистов промышленности, КБ и НИИ,
работающих в области беспилотной авиации. В большей мере она предназначена
для разработчиков бортовых систем управления БПЛА. Книга может быть
полезной для студентов и аспирантов, обучающихся по направлению «Системы
управления движением и навигация», а также и по другим направлениям
подготовки будущих работников авиакосмической отрасли.
ВВЕДЕНИЕ
БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
И МИКРОСИСТЕМНАЯ АВИОНИКА
В.1 Малоразмерные беспилотные летательные аппараты
Беспилотный летательный аппарат (БПЛА) - это разновидность
летательного аппарата, управление которым осуществляется при отсутствии пилота на
его борту. Чаще всего под БПЛА понимают дистанционно управляемый
(пилотируемый) летательный аппарат, способный совершать полет и в
автоматическом режиме. БПЛА является частью комплекса, в который входит наземный
пункт управления с его центральным звеном - человеком-оператором.
В документах Министерства обороны США употребляется термин
«беспилотные авиационные системы» (БАС) или «системы беспилотного управления
летательными аппаратами» - UAS (Unmanned Aircraft Systems). БПЛА
подразумевается только как часть системы. Они могут быть самолетного,
вертолетного типа, а также легче воздуха. Распределение количества БАС по категориям
показано на рис. В.1 [В.1].
Nano - Нано
Micro - Микро
Mini - Мини
CR - близкого радиуса
SR - короткого радиуса
MR - среднего радиуса
MRE - среднего радиуса с
продолжительным полетом
LADP - низковысотные глубокого
проникновения
LALE - низковысотные с
продолжительным полетом
MALE - средневысотные с
продолжительным полетом
HALE - высотные с продолжительным
полетом
UCAV- боевые БПЛА
STR А - стратосферные
ЕХО - экзоссЬеоные
Рис. В. 1. Распределение количества БАС по категориям
Основные технические характеристики БПЛА, соответствующих БАС
различных категорий (рис. В.1), приведены в табл. В.1 [В.1].
10
Размеры и масса БПЛА, относящихся к БАС различных категорий,
различаются на порядки. Значительный интерес представляют БПЛА категорий
Nano, Micro, Mini с взлетной массой от десятка грамм до килограммов, которые
можно определить как малоразмерные БПЛА (МБП Л А). Их количество
приближается к 40% от общего количества БПЛА всех категорий.
Облик БПЛА определяется аэродинамической схемой и внутренней
компоновкой двигателя, органов управления, оборудования и увязкой этих
агрегатов с элементами конструкции планера БПЛА.
Аэродинамическая схема БПЛА характеризуется способом создания
управляющих сил и управляющих моментов, а также взаимным расположением
устройств, создающих эти силы и моменты. Схема обеспечивает возможность
управления полетом, что необходимо для выполнения целевой задачи.
Аэродинамические схемы разделяют на самолетную и вертолетную [В.2].
В самолетной схеме выделяют нормальную аэродинамическую схему с верх-
11
ним, нижним и средним расположением крыла, а также аэродинамические
схемы «утка» и «летающее крыло». Выбор аэродинамической схемы
осуществляется в зависимости от целевой задачи.
Главное положительное свойство нормальной аэродинамической схемы
заключается в том, что расположенное за крылом горизонтальное оперение
позволяет без особых трудностей обеспечить продольную статическую
устойчивость на больших углах атаки самолёта. Объясняется это тем, что
горизонтальное оперение находится в скосе потока от крыла и угол атаки горизонтального
оперения всегда меньше, чем угол атаки крыла, на величину угла скоса потока.
Несмотря на то, что горизонтальное оперение обтекается заторможенным
потоком, всё-таки удаётся обеспечить нормальные запасы продольной
статической устойчивости самолёта, так как срыв потока в первую очередь наступает
на крыле.
Основным недостатком нормальной аэродинамической схемы является
наличие так называемых потерь на балансировку, когда центр масс крыла
смещается вперед на больших углах атаки.
Для выполнения условий безопасности полёта центровка самолёта
определяется, исходя из необходимости обеспечения продольной статической
устойчивости со свободным рулём высоты.
Наиболее распространенным вариантом нормальной аэродинамической
схемы является «верхнеплан» - летательный аппарат с крылом,
расположенным в верхней части фюзеляжа. К достоинствам верхнепланов можно отнести
улучшение продольной устойчивость самолёта на больших углах атаки,
обеспечение возможности установки двигателей на крыле.
К недостаткам верхнего расположения крыла можно отнести уменьшение
эффективности вертикального оперения на больших углах атаки крыла, когда
оперение попадает в спутную струю от крыла.
Расположение и количество двигателей, стреловидность и V-образность, а
также вид хвостового оперения могут отличаться у различных БПЛА (рис. В.2).
МБПЛА с типами расположения крыла «среднеплан» и «низкоплан»
используются значительно реже из-за снижения статической устойчивости и
возникновения сложностей при посадке; решение этих проблем приведет к
усложнению конструкции в целом.
Аэродинамическая схема, при которой у летательного аппарата органы
продольного управления расположены впереди крыла, называется «утка».
Названа так из-за схожести первых самолетов («Флайер» братьев Райт) с
одноименной птицей.
Главным преимуществом схемы является то, что заднее размещение
крыла лучше соответствует аэродинамике высоких скоростей, при которой центр
аэродинамического давления смещается назад. Также появляется возможность
уменьшить вес планера, так как отпадает необходимость вынесения рулей ещё
дальше назад. Схема «утка» хороша ещё тем, что позволяет увеличить
критические углы атаки и тем самым повысить маневренность.
12
Рис. В.2. МБПЛА, выполненные по схеме «верхнеплан»:
а) «Орлан-10» (Россия, СТЦ); б) «Aladin» (Германия, ЕМТ);
в) «Aerosonde» (США, AAI); г) RQ-11 «Raven» (США, AeroVironment)
Как и у «верхнепланов», вид и расположение отдельных элементов
конструкции могут варьироваться (рис. В.З).
Рис. В.З. МБПЛА, выполненные по схеме «утка»:
а) А-2 «Синица» (Украина, КБ «Взлет»);
б) А-3 «Ремез» (Украина, КБ «Взлет»)
Распространенной аэродинамической схемой БПЛА является «летающее
крыло», или иначе - «бесхвостка». Это аэродинамическая схема, в которой
отсутствуют отдельные плоскости вертикального управления, а используются
только плоскости, установленные на задней кромке крыла (рис. В.4).
13
Рис. В.4. МБПЛА, выполненные по схеме «летающее крыло»:
a) «Black Widow» (США, AeroVironment); б) RQ-14 «Dragon Eye»
(США, NRL, MCWL); в) «Boomerang» (Израиль, BlueBird Aero Systems);
r) «ZALA 421-08» (Россия, ZALA AERO); д) «Инспектор-201»
(Россия, Аэрокон); е) «Инспектор-101» (Россия, Аэрокон)
Преимуществом такой схемы является меньший вес планера и меньшее
сопротивление, однако, меньшее плечо органов вертикального управления приводит
к меньшей эффективности управления по каналу тангажа. Внедрение
электродистанционных систем управления позволяет нивелировать этот недостаток. Кроме
того, вследствие меньшей инерционности повышается маневренность аппарата.
Для военного применения очень важно, что формы такого самолета очень легко
оптимизировать для снижения радиолокационной заметности самолета.
Существует несколько способов взлета и посадки МБПЛА [В.З]. Их выбор
зависит от массы беспилотника, его размеров, прочности и необходимого
значения стартовой скорости.
Для легких МБПЛА подходит запуск с помощью ручной катапульты
(рис. В.5, а) или с руки (рис. В.5, б). Для более тяжелых МБПЛА с высокими
стартовыми скоростями применяются катапульты (рис. В.5, в, г). Также существуют
МБПЛА, осуществляющие взлет со взлетно-посадочных полос («по самолетному»).
14
Рис. В.5. Некоторые способы взлета МБПЛА:
а) запуск с ручной катапульты; б) запуск «с руки»;
в, г) запуск с катапульты
Посадка МБПЛА также возможна «по-самолетному», с применением
парашюта (рис. В.6, а), с применением сети (рис. В.6, б), применяется также посадка
«на брюхо». Возможна посадка с применением нестандартных технологий,
например, перевод БПЛА в плоский штопор и приземление на надувную емкость.
Рис. В.6. Некоторые типовые способы посадки МБПЛА:
а) с парашютом; б) в сеть
Главным достоинством МБПЛА, выполненных по вертолётной схеме,
является манёвренность: они способны к вертикальному взлёту, вертикальной
посадке, зависанию в воздухе и даже к полёту «задом наперёд». Вертолёт может
приземлиться (и взлететь) в любом месте, где есть ровная площадка размером в
полтора диаметра винта.
15
Можно выделить два основных типа МБП Л А вертолетной схемы:
«классический» вертолет и мультикоптер (рис. В.7).
Рис. В.7. Российские МБПЛА, выполненные по вертолетной схеме:
а) МБПЛА фирмы «RADAR MMS»; б) МБПЛА фирмы «ZALA»;
в) мультикоптер МАИ; г) мультикоптер фирмы «НЕЛК»
Наличие нескольких винтов у мультикоптеров позволяет создать
необходимую подъемную силу. Раздельное управление тягой двигателей позволяет
добиться высокой маневренности аппарата. Однако подобная схема приводит к
усложнению алгоритмов управления, увеличению веса аппарата и увеличению
его энергопотребления.
Многообразие типов и конструкций МБПЛА позволяет решать широкий
спектр задач [В.4].
В гражданских целях МБПЛА могут решать следующие задачи:
1) аэрофотосъемка и контроль земной поверхности: аэрофотосъемка
(картография), инспекция соблюдения договорных обязательств (режим «открытого
неба»), контроль гидро-, метеообстановки, контроль активно излучающих объектов;
2) контроль экологической обстановки: радиационный, газохимический,
опрос сейсмических датчиков;
3) развитие региональных и межрегиональных телекоммуникационных
сетей: системы связи, в том числе мобильные, телерадиовещание, ретрансляция,
навигационные системы;
4) контроль морского судоходства: поиск и обнаружение судов,
предупреждение аварийных ситуаций в портах, контроль морских границ, контроль
правил рыболовства;
16
5) океанология: разведка ледовой обстановки, слежение за волнением
моря, поиск косяков рыбы;
6) обеспечение сельскохозяйственных работ и геологоразведки:
определение характеристик почвы, разведка полезных ископаемых, подповерхностное
зондирование Земли.
В задачи, решаемые БПЛА в военных целях, входят:
1) ведение разведывательных полетов общего характера в горах или над
водой; разведка и обнаружение на территории противника малоразмерных целей;
определение дислокации войсковых соединений и оказание помощи командирам
в руководстве боевыми действиями; выполнение полетов над позициями своих
войск для получения информации об их дислокации (в труднодоступных
районах);
2) разведка и наблюдение за полем боя и корректировка артиллерийского
огня;
3) лазерное целеуказание местоположения цели;
4) ведение радиоэлектронной борьбы (электронная разведка,
радиотехническая разведка, разведка средств связи, радиоэлектронное противодействие,
подавление радиоэлектронных средств);
5) обеспечение радиорелейной связи;
6) участие в учебных операциях в качестве воздушной мишени;
7) охрана важных объектов;
8) поражение наземных целей в зонах с сильной ПВО, где потери
пилотируемых самолетов недопустимо велики;
9) ведение воздушных боев и поражение воздушных целей.
Столь широкое применение МБПЛА обусловило большой интерес
различных стран к разработкам в этой области. Технические характеристики МБПЛА
отечественных и зарубежных разработчиков приведены в таблицах В.2 и В.З.
Проектирование и производство МБПЛА является одним из наиболее
перспективных направлений развития современной беспилотной авиации. Широкий
диапазон применения в сочетании с относительно невысокой себестоимостью
изделий такого типа также делает их разработку достаточно привлекательной в
коммерческом плане.
Для повышения качества и надежности МБПЛА необходимо проводить
множество испытаний для определения их аэродинамических и тяговых
характеристик. Для МБПЛА они могут значительно отличаться от образца к образцу
или в процессе эксплуатации, что не позволяет переложить уже существующие
разработки систем управления более габаритных ЛА на МБПЛА.
Определить влияние на поведение МБПЛА изменения его характеристик
можно по результатам летных испытаний или путем моделирования на
компьютерах. Последнее более универсально, т.к. позволяет проверить поведение
МБПЛА на критических и закритических параметрах полета.
17
PQ
О
S
ST
азработ
u
X
ежны
ю
>->
cd
CO
<
иМБПЛ
к
н
о
к
P
0>
H
W
cd
P.
cd
X
tt
IS
x
X
<L>
H
(N
PQ
cd
блиц
сз
s
«
СТИ
s
a,
e характе
s
хническ
H
J
итель-
лета,
Продолж]
ность по
ть,
О <
Скор
км
ысота
олета,
ffl с
Радиус
действия
у
2
5
ина,
Размах
крыла,
«
л о
о х
О СО
Cd <L>
S §
X
S -г
а с«
н Ч
LS2 s
s
с
к
X
cd
Назв
2
£а
КИ,
со
cd
Я
а
°°J
0,7-0
1
i
5,0
|
0,735
1
Ь>"
in
0,4
1 *~"1
CU
WAS
о
in
ЧО
О
0-15
ON
<5,0
ON
о"
1Л
1
г^
of
hf
i
О
Г*
1
чО
*Ч
СП
о
0-15
СП
15,0
I
1,5
1
(N
си"
е
ladi
|<
cnI
1,0-1
in
ON
5000
10,0
ЧО
ON
о
1П^
1
Г^
\
,_
i
о
Г*
°J
2,0-3
1
о
►500
/\
15-50
о
2,2
1
in
ю
*-<
<1>
№
О
1 2,5
О
^
_ 5fb
_500
15,0
|
_2,75_
<Ч
i—Г
о
ГЧ
ад
cd
oomer
PQ
ков
к
разработч
X
3
X
X
«
ств
ече
н
о
<
е
[-0
S
S
К
(-1
терис
«
cd
Р.
cd
X
еские
ЕГ
S
Я
X
го
PQ
cd
Таблиц
К
Я
и
характерис
«
к
<и
F
ХНИ
н
i
Продолжи
ность по.
ть,
о аг
С* "£а
о* S
о «
сота
ета,
hJQ О
СП С
Радиус
ействия,
п
ST
2
а
дна,
vi
U
И
S3 &
Он *
ж
Масса
олезно
с
летная
tacca,
со ^
PQ
<j
1 ^
(j
w
к
ван
Наз
2
b
грузки,
cd
X
k
О
71
in
о"
in
Т
СП
о
О
1
in
S'l
1
СП
о
0,05
0,25
л
о
а
Р
Й
ПС
5
0,5
°
СП
м
чо
О
О
in
V
5,0
^i-
сГ
^t
о
0,1
0,79
УЧ
*—i
1—4
IfN
И"
<
<
N
ЧО
0,5-0,
°
ON
1
in
СП
1000
50-
5,0
|
00
о
0,15
1,3
*
о
KN
а
Р
Й
CD
О
X
К
in
о
СП
1
in
чо
3600
50-
<15
0,425
оо
о
0,2
7-2,1
*—'
Я
ОО
О
IfN
И"
<
<
N
in
*Ч
in
о
1
in
чо
О
О
О
СП
V
10-30
in
о
г-
1
2,8
>ч
X
о
о.
«Эле
СП
CN
Г
04
о
ON
о
о
о
in
V
О
о
о
(N
0,3
3,0
>"Ч
РАТ>
W
*
i/H
V
in
°
1
in
чо
о
о
300-30
о
(N
in
О
in
*-*
0,3
3,0
УЧ
S
(Ч
ь
Он
S
*
1,0
°
CN
il
ЧО
3000
50-
<25
in
ON
О
О
CN
чо
о4
3,5
>ч
К
и
«
и
н
2,0
о
CN
1
Ш
ЧО
о
о
ЧО
сп
V
<40
CN
чо
О
Ь°-
Г"1
<1,0
3,9
А
CN
^Т
т-Н
гч
И"
\<
<
N
in
3
О
CN
^
ЧО
1
<25
г-
о"
оо
^
1
5,0
СП
Г
in^
0,75 1
о
in
1
in
in
°
о
V
in
I
inl
^н
0,4
—sT
*
°
сп
Он
Й
о
X
S
18
Опыт работы кафедры «Приборы управления» ТулГУ по
экспериментальной отработке авионики для МБПЛА показал, что вполне допустимо
использование готовых авиамоделей, по своим техническим характеристикам
ориентировочно совпадающих с требованиями технического задания на проектирование
реального МБПЛА.
Размеры МБПЛА накладывают серьезные ограничения на бортовую
аппаратуру управления. Основные требования, предъявляемые к авионике МБПЛА:
высокие точность, качество и производительность; малые размеры и простая
схемотехника; низкое энергопотребление; высокие надежность и
отказоустойчивость; низкая цена.
Так как требования к авионике МБПЛА противоречивы, то необходимы
приемлемые компромиссы, но с выполнением основных требований
технического задания.
В.2 Микросистемная авионика
Авионика БПЛА представляет собой комплекс аппаратных и программных
средств - бортовую аппаратуру управления (БАУ), которая через радиоканал
связи взаимодействует с наземной аппаратурой управления (НАУ). Авионика
является частью системы автоматического управления (САУ) БПЛА и
функционально объединяет планер БПЛА (объект управления) и рулевой привод
(исполнительный орган). Она обеспечивает управление двигателем и рулевыми
приводами для всех режимов полета БПЛА. Авионика управляет также работой
полезной нагрузки: стабилизация аппаратуры наблюдения, синхронизация по
времени и координатам БПЛА и места съемки срабатывания затвора
фотоаппарата, срабатывание системы спасения и т.д.
Основными задачами, решаемыми САУ, являются управление движением
центра масс (три канала управления) и угловыми движениями БПЛА
относительно центра масс (три канала управления). Для БПЛА, движущихся в пределах
атмосферы, число каналов управления сокращается до четырех. Это объясняется
наличием определенной связи между поступательными и вращательными
движениями ЛА. Таким образом, управление полетом БПЛА сводится к управлению
параметрами его движения: угловыми координатами, угловыми скоростями и
ускорениями, линейными координатами (дальностью, высотой, боковым
перемещением), линейными скоростями и ускорениями.
Так как МБПЛА должен выполнять целевые задачи в условиях
автономного полета, а его малые размеры и масса приводят к усилению влияния внешних
воздействий по сравнению с ЛА больших размеров, САУ должна решать
следующие задачи:
- контроль правильности траектории полета и коррекция ее изменений
бортовыми средствами;
- стабилизация параметров движения МБПЛА (высота, скорость полета и
т.д.) при противодействии возмущениям различной природы;
19
- расчет оптимальной траектории полета с целью уменьшения его времени
и расхода запасов энергии на борту;
- анализ данных, поступающих от различных информационных
источников, с целью выбора наиболее достоверных для реализации полетного задания;
- выполнение вычислений большого объема в реальном масштабе времени
для реализации алгоритмов управления МБПЛА.
Измерительные и вычислительные функции из перечня задач, решаемых
САУ в автономном полете МБПЛА, выполняет БАУ - авионика. Аппаратно-
программную часть авионики, выполняющей функции регулятора САУ,
называют автопилотом (АП), который содержит измерительную и вычислительную
подсистемы.
Основной частью измерительной системы является система ориентации.
Она служит для определения углового положения летательного аппарата
относительно выбранной системы координат. В БПЛА могут применяться следующие
типы систем ориентации: бесплатформенная, магнитометрическая, видеосистема,
пирометрическая, и др. Чувствительными элементами бесплатформенной системы
ориентации (БСО) являются гироскопы - датчики абсолютных угловых скоростей
вращения (ДУС).
В магнитометрической системе ориентации (МСО) в качестве
чувствительных элементов применяются магнитометры магниторезистивного типа
(магниторезисторы).
В видеосистемах информация об угловом положении БПЛА может быть
получена с помощью обычной перспективной видеокамеры по положению в
кадре линии видимого горизонта. Другим источником информации в
видеосистемах может быть катадиоптрический датчик, который представляет
объединение сферического зеркала с видеокамерой, оптические оси которых совмещены.
Пирометрические системы ориентации (ПСО) в качестве чувствительных
элементов используют пирометры, которые реагируют на разность температур
между небосводом и земной поверхностью.
Каждая из перечисленных систем ориентации имеет свои достоинства и
недостатки. Для получения наилучшего результата, прежде всего с точки
зрения обеспечения долговременной точности для различных условий
эксплуатации БПЛА, применяется объединение (комплексирование) систем ориентации
различных типов.
Создание авионики с малыми массой, габаритами и энергопотреблением
стало возможным только благодаря достижениям микросистемной техники
(МСТ).
Микросистемная техника (МСТ) - научно-техническое направление,
имеющее целью создание в ограниченном объеме твердого тела микросистем с
линейными размерами от микрометров до миллиметров, которые могут
выполнять функции генерирования, преобразования и передачи энергии, восприятия
физических величин в различных энергетических областях (механическая,
тепловая, химическая, оптическая, магнитная, электрическая) в интеграции с
процессами их обработки, хранения и трансляции. Различные комбинации
микросистем, например, электроники, механики и оптики, позволяют создавать
20
подмножества МСТ: микроэлектромеханические системы (МЭМС), микрооп-
томеханические системы (МОМС), микрооптоэлектромеханические системы
(МОЭМС). В более узкой трактовке МСТ - это специальные технологии и
изделия, создаваемые на их базе.
По технологиям МСТ выпускают акселерометры (датчики для измерения
ускорений) (рис. В.8, а); гироскопы (датчики для измерения угловых скоростей)
(рис. В.8, б); датчики давления (рис. В.8, в), пирометры (рис. В.8, г) и др.
Крупнейшими производителями датчиков являются фирмы Analog Devices,
Motorola, Bosch, The Charles Stark Draper Laboratory, Samsung Electronics,
Honeywell и др.
Рис. В.8. Микросистемные датчики:
а) акселерометр; б) гироскоп; в) датчик давления; г) пирометр
Авионика может быть простейшей в случае, если управление БПЛА
осуществляется оператором. Например, на БПЛА FIU-301 (рис. В.9) (взлетная
масса менее 4 кг, размах крыла - 1,9м) установлен «инфракрасный автопилот»,
помогающий оператору выдерживать заданное положение планера во время
выполнения маневра, например, набора высоты. Данный автопилот основан на
применении пирометров - датчиков, определяющих температуру объектов,
излучающих тепло.
Рис. В.9. БПЛА FIU-301 для полицейских целей
с «инфракрасным автопилотом»
21
Комплекс был разработан с единственной целью: быстрое получение
высококачественных цифровых фотографий для большинства типов местностей.
В качестве полезной нагрузки используются 2 камеры. Одна из них -
небольшая видеокамера, установленная в носовой части БПЛА, предназначена для
обеспечения оператора информацией об ориентации летательного аппарата и
для целей наведения. Вторая камера - 8-мегапиксельная фотокамера,
установленная на вращающемся подвесе. В комплексе используются два радиоканала:
один канал с частотой 2,4 ГГц предназначен для управления БПЛА, второй
канал с частотой 72 МГц - для управления фотокамерой.
Аналогичный «инфракрасный автопилот» («пировертикаль») разработан
на кафедре «Приборы управления» Тульского государственного университета и
смонтирован на авиамодели EASYCUB. Этот комплекс МБПЛА применялся для
фотосъемки опытного сада Мичуринского агротехнического университета. При
порывах ветра со скоростью (7-НО) м/с автопилот с «пировертикалью» вполне
успешно справился с угловой стабилизацией МБПЛА.
На базе микроакселерометров и микрогироскопов могут быть построены
модули измерительных подсистем авионики. В качестве примера можно указать на
автопилот (АЛ) АР04 (рис. В. 10, а), разработанный компанией UAVNAVIGATION,
который может использоваться на микроБПЛА с размахом крыла менее одного
метра, на средних БПЛА с размахом крыла 4 метра, а также для вертолетов. АП
подходит для использования на БПЛА, оснащенных двигателями внутреннего
сгорания, электрическими и реактивными двигателями. В состав АП входит
бесплатформенная система ориентации (БСО).
Рис. В. 10. Общий вид автопилота АР04 (а) и укомплектованный им МБПЛА (б)
АР04 - это полный интегрированный автопилот с возможностью ручного
управления БПЛА, встроенным радиоканалом и возможностью управления
полезной нагрузкой. Данный автопилот обеспечивает автоматический взлет,
полет по заданному маршруту и автоматическое приземление. Автопилот может
конфигурироваться во время полета. Встроенный радиоканал позволяет
передавать данные на расстояние до 100 км. Механизм ручного управления
позволяет оператору, находящемуся на земле, полностью управлять БПЛА при
помощи стандартного джойстика или стандартной аппаратуры управления,
предназначенной для авиамоделей. АР04 содержит дублирующий микропро-
22
цессор, что обеспечивает высокий уровень безопасности и отказоустойчивости.
АР04 позволяет управлять полезной нагрузкой в виде парашюта, гиростабили-
зированной видеокамеры и т.д. АР04 может быть единственной аппаратурой
управления на борту для большинства БПЛА. Включенный в конструкцию
порт RS232 может использоваться для связи с наземной станцией. АР04 имеет
интерфейс для управления двигателем, а также для слежения за параметрами
его работы. Информация об этих параметрах может быть передана на наземную
станцию управления. Автопилот позволяет управлять 16-тью рулевыми
машинками или другой периферией.
АП обеспечивает автоматический полет по маршруту в виде контрольных
точек, имеющих три измерения (широта, долгота, высота). АП может
использоваться на БПЛА, имеющих следующие диапазоны воздушных скоростей (км/ч):
нижний 25... 150; нормальный 35...250; верхний 45...450.
На базе микросистемных датчиков создаются и полноценные
бесплатформенные инерциальные навигационные системы (БИНС), которые
вырабатывают также навигационные параметры БПЛА (пройденный путь, а также
географическую широту и долготу).
БСО и БИНС, построенные на микрогироскопах и микроакселерометрах,
имеют низкую долговременную точность. Поэтому необходимы сложные
алгоритмы выработки навигационных параметров и их корректировки.
Применение таких алгоритмов возможно при использовании информации,
полученной со спутниковых навигационных систем GPS/ГЛОНАСС и др. Например, в
качестве приемников сигналов СНС могут быть использованы модули
производства фирм Qualcomm и Ublox на базе чипсета Sir/Star III производства
компании Sirflnc, а также производства НТЛаб (Беларусь).
Приемники содержат узлы дополнительных расчетов и помимо
географических координат местоположения вырабатывают информацию о высоте,
скорости и ориентации по курсу ЛА.
Для обмена информацией между БПЛА и командным пунктом или между
несколькими БПЛА применяются радиомодемы, которые выпускаются в виде
готовых модулей и отличаются выходной мощностью (передатчики),
чувствительностью (приемники), рабочим диапазоном частот, потребляемой
мощностью и скоростью передачи данных. Эти параметры подбираются исходя из
назначения и устройства МБПЛА. Наиболее употребительными являются
диапазоны 433 МГц и 2,4 ГГц.
Вычислительные функции авионики БПЛА выполняют микроконтроллеры
(МК). Производительность некоторых серий МК весьма велика при
приемлемом энергопотреблении и весьма малых размерах. Кроме того, многие из
современных МК способны работать в широком диапазоне температур, оснащены
встроенными ЦАП-АЦП и стандартными портами ввода-вывода, в том числе и
для взаимодействия с радиомодемами. Кроме того, оснащены системами
энергосбережения, основанными на изменении тактовых частот ядра,
автоматическом переходе в спящий режим, и адаптивным включением отдельных узлов и
флеш-памятью большого объема.
23
Основными поставщиками микроконтроллеров являются такие компании,
как Motorola, Intel, Atmel, Renesas, Zilog, NEC и Microchip Technologies.
В составе полезной нагрузки практически любого БПЛА гражданского или
военного применений находятся системы видеонаблюдения, которые
предназначены для аэрофотосъемки и аэровидеосъемки в оптическом и инфракрасном
диапазонах. Наибольшее распространение получили камеры производства
Samsung, Sony, и Pentax. В зависимости от размеров МБПЛА, его грузоподъемности
и назначения можно подобрать камеры массой от нескольких граммов
(широкоугольные с объективом типа пинхол) (рис. В.И) до трансфокаторов с мони-
торным приводом массой до десятков граммов (рис. В. 12).
Рис. В. 11. Аналоговая видеокамера - Рис. В. 12. Трансфокатор Pentax C070509HK
представитель VGA-камер (фокус 5-50 мм, масса 140 г)
В качестве примера камеры для съемки в инфракрасном диапазоне можно
указать на термограф Flir Photon - неохлаждаемую микроболометрическую
камеру массой 97 г (без объектива) и потребляемой мощностью 1,5 Вт. Для
записи информации с видеокамер применяются регистраторы.
В роли носителя информации чаще всего выступает флеш-память типа
NAND. Наиболее подходящим из промышленных устройств для применения в
МБПЛА является рекордер mAVR производства российской фирмы
«Телесистемы» (рис. В. 13). При массе 35 г и размерах 53x55x10 мм он обеспечивает до
7,5 часов записи на карту формата CompactFlash объемом 2 Гб.
Рис. В. 13. тА VR - видеорекордер
(регистратор полетной видеоинформации)
24
Таким образом, современные технологии позволяют создавать
микросистемную авионику, включающую гироскопы, акселерометры, датчики давления,
приёмники спутниковой навигации; импульсные приёмопередатчики, схемы
управления с широтно-импульсной модуляцией для РМ и других
исполнительных устройств; микроконтроллеры с энергонезависимой памятью.
Кроме того, в связи с тем, что в последнее время энергопотребление и
размеры компьютерных embedded-платформ достигли соответственно
единиц ватт и размеров приблизительно 100x70 мм (mini-ITX), а
производительность - миллиарды операций в секунду, представляется возможность
оснащать ими МБПЛА, организовывая микрокомпьютерное управление на базе
платформ Windows, Linux, QNXn т.д., что дает возможности достичь легкого
программирования, оперативного вмешательства в алгоритм работы МБПЛА,
а в случае необходимости - и полной автономности работы МБПЛА с
элементами искусственного интеллекта, т.е. возможностью самообучения и
принятия решений.
В перспективе вся авионика, а также система регистрации данных и
управления полезной нагрузкой, например видеокамерой, могут быть
выполнены на одной плате.
Следует отметить, что несмотря на высокий уровень надежности
микросистемной авионики и всех агрегатов БПЛА, эксплуатация комплексов с их
применением сопровождается потерями БПЛА.
На рис. В. 14 [В.1] показаны основные причины потерь БПЛА и степень их
приоритетности по мере убывания: проблемы с двигательной установкой,
ошибки системы управления, ошибки операторов, проблемы со связью и
прочие (система спасения, санкционированное повреждение БПЛА и т.д.).
Рис. В.14. Основные причины потерь БПЛА
В заключение отметим, что построение качественной авионики является
трудной задачей, требующей комплексного подхода, учитывающего
особенности измерительных и вычислительных систем, а также аэродинамические
характеристики конкретного БПЛА.
25
Список литературы к введению
B.l.UAS. The Global Perspective 2008/2009. [Электронный ресурс]. -
Режим доступа: URL: http://www.uvs-info.com/
B.2.DARPA [Электронный ресурс]. - Режим доступа: URL:
http://www.darpa.mil/
8.3. Unmanned Aircraft Systems. The Global Perspective. 2008/2009.
[Электронный ресурс]. - Режим доступа: URL: http://www.uvs-info.com/
8.4. Вежновец А. Иллюзии и реальность беспилотного полета / А. Вежно-
вец // Вертолетная индустрия. - 2010. - № 2. - С. 14-17.
ГЛАВА 1
БПЛА - ОБЪЕКТ УПРАВЛЕНИЯ
1.1 Системы координат и пространственное
положение БПЛА
При исследовании динамики ЛА, в том числе и БПЛА, применяют
следующие системы координат (СК) (рис. 1.1) [ГОСТ 20058-80]:
- OXgYgZg - нормальная СК, начало которой (т. О) помещено в центр
масс ЛА. Ось OYg направлена вверх по линии местной вертикали, а оси OXg и
OZg расположены в плоскости местного горизонта таким образом, что ось
OXg направлена по касательной, а ось OZg - по нормали к траектории полёта;
- OXYZ - связанная СК, начало которой (т. О) также совпадает с
центром масс ЛА. Ось ОХ направлена по продольной оси к носу ЛА, ось OZ
совпадает с его поперечной осью и направлена в сторону правого крыла
(поперечная ось), а ось OY перпендикулярна плоскости поперечной симметрии ЛА
(нормальная ось) и направлена вверх. Положение строительных осей Л А
связанной СК определяется углами рыскания \j/, тангажа S и крена у. Эти углы
ориентации Л А называют углами Эйлера (Эйлера-Крылова);
- OXaYaZa - скоростная СК с началом (т. О), помещенным в центр масс
ЛА и связанная с вектором V линейной скорости ЛА таким образом, что ось
ОХа направлена по вектору V, ось OYa направлена вверх и лежит в
продольной плоскости симметрии ЛА, а ось OZa дополняет две предыдущие до
правого трёхгранника осей. Положение связанной СК относительно скоростной
определяется углами скольжения |3 и атаки а. Угол [3 образован осью ОХа и её
проекцией на продольную плоскость симметрии ЛА, а угол а образован осью
ОХ и проекцией вектора V на плоскость симметрии ЛА.
* 7
Z
Рис. 1.1. Системы координат: а - нормальная и связанная; б - связанная и скоростная
27
Движение ЛА как твердого тела в связанной системе координат
описывается уравнениями Эйлера (шесть нелинейных дифференциальных уравнений
второго порядка). Силы и моменты, входящие в эти уравнения, сложным
образом зависят от высоты, скорости и режима полёта и меняются во времени, т. к.
изменяются условия полёта, например из-за изменения массы и момента
инерции ЛА в результате расхода топлива или сброса груза.
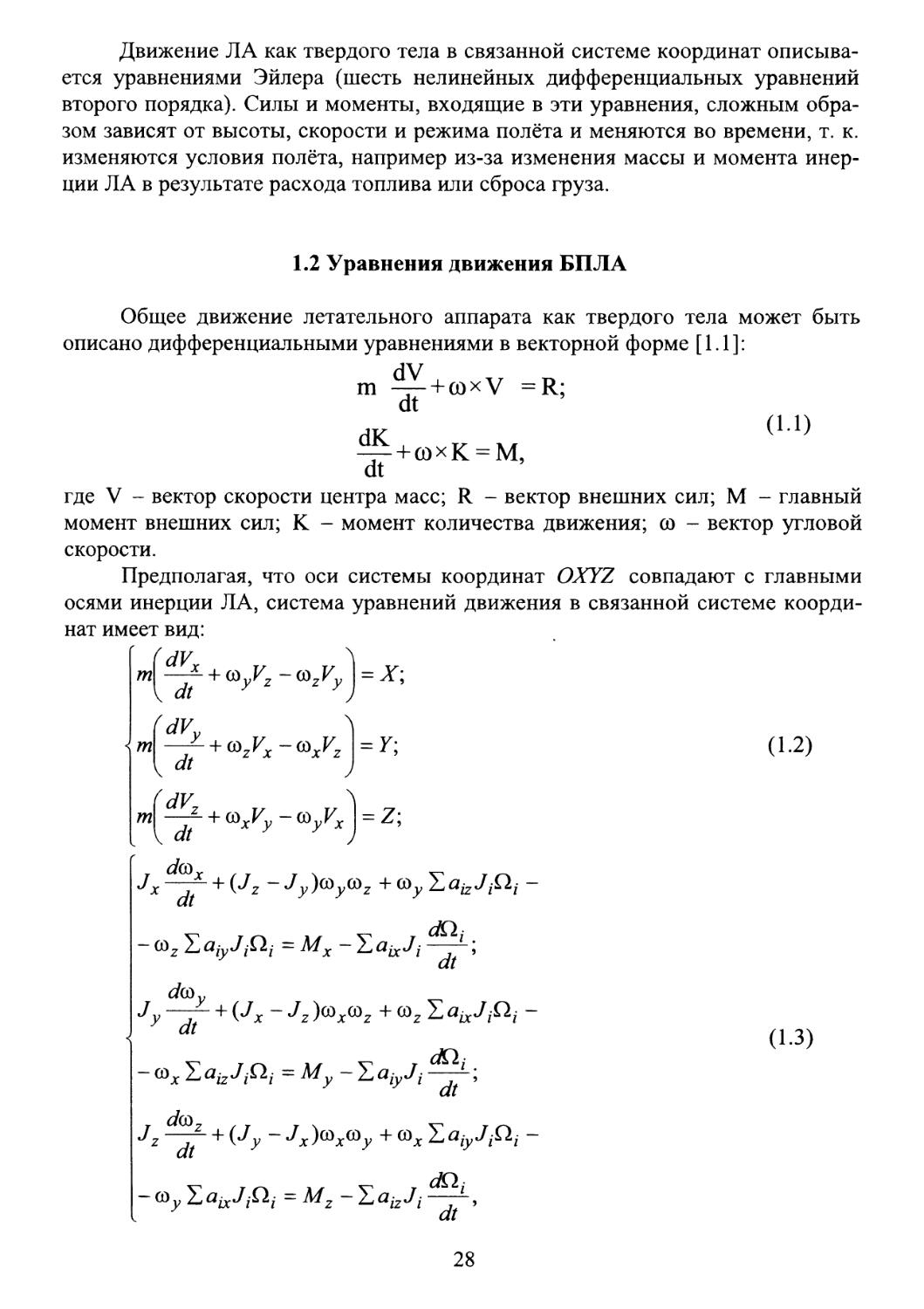
1.2 Уравнения движения БПЛА
Общее движение летательного аппарата как твердого тела может быть
описано дифференциальными уравнениями в векторной форме [1.1]:
dV
+ cdxV =R;
m
dK
dt
dt
+ coxK = M,
(1.1)
где V - вектор скорости центра масс; R - вектор внешних сил; М - главный
момент внешних сил; К - момент количества движения; со - вектор угловой
скорости.
Предполагая, что оси системы координат OXYZ совпадают с главными
осями инерции ЛА, система уравнений движения в связанной системе
координат имеет вид:
т\
dK
± + (byVz-azVy
(dVv
= х-
= Y;
{ dt
ml —- + (nrVv-(uvVx =Z;
dt
- coz 'ZajyJjfi.i = Mx - Y,aixJl■.—-1-;
(1.2)
dt
da>,
Jv —¥- + (Jx - Jz )cojCcoz + coz Z aixJfii -
dt
<Kl,
(1.3)
- co^ la^jPi = My- ZaiyJ,-^;
Jz —^- + (Jy - Jx )®х(йу +озхТ aiyjp.i -
-co Y.aixJiQ.i = Mz -Ta^Ji
dt
28
где J, 7, Z, MX9 My, Mz, Vx, Vy9 V29 &x, coy9 coz - проекции вектора сил,
моментов, скорости центра масс и угловой скорости соответственно на оси
связанной системы координат;
т9 JX9 Jy9 J z- масса и главные моменты инерции;
Jt, Clj, aix, aiy, aiz - момент инерции, угловая скорость и направляющие
косинусы / -го вращающегося тела на борту ЛА.
Проекции вектора сил определяются выражениями:
\Х = Рх -cxqS-GsinО;
у =Ру +cyqS -G cos & cosy; (1.4)
[Z = Pz + czqS + GcosSsiny,
где G = mg - сила тяжести, Р - сила тяги, сх, cy, cz - аэродинамические
коэффициенты сил, g - ускорение силы тяжести.
Будем предполагать, что погрешности установки двигателя отсутствуют,
тогда вектор силы тяги совпадает с направлением продольной оси, поэтому
Р =Р Р =Р =0
Проекции главного момента внешних сил могут быть представлены в виде:
Mx=mxqSlx+Mex;
My=myqSly + Mey\
[Mz=mzqSlz+Mez9
(1.5)
1 2
где q = — pV - скоростной напор, р - массовая плотность воздуха, V -
скорость набегающего потока, тХ9 ту, mz - аэродинамические коэффициенты
моментов, Мв - возмущающий момент, lX9 ly9 lz - характерные длины.
Проекции вектора скорости центра масс на оси системы OXYZ
определяются соотношениями:
\VX =FcosacosP;
\Vy =-FsinacosP; (1.6)
{Vz=Vsm$.
Соотношения между проекциями угловой скорости со и первыми
производными по времени углов \|/, 9иу имеют вид:
cor =—L + —^sintf;
х dt dt
ch\f
d& .
cov =—-cos$cosy +—siny;
dt
d&
dt
(1.7)
ch\f
coz =—cosy——cosSsiny.
dt
dt
29
Аэродинамические коэффициенты сил и моментов являются функциями
параметров а, Р, V, ых, со^, coz, 8в, Ън, 5Э, где Ъв, Ън, 8Э - углы отклонения
рулей высоты, направления и элеронов соответственно. Графики зависимостей
этих коэффициентов, кроме коэффициента подъемной силы, близки к
линейным, поэтому зависимости коэффициентов сил и моментов линеаризуют,
представляя в виде сумм:
где ci, W/ - аэродинамические коэффициенты сил и моментов соответственно,
/ dct j dmt
cf = —lT, mf = —7- - частные производные аэродинамических
коэффициентов по параметру j в окрестности установившегося движения.
Коэффициенты с/, т{ связывают с осью /, вдоль которой действует сила
или относительно которой действует момент, и по параметру, вызывающему
возникновение силы или момента. Аэродинамические коэффициенты с/, т{
рассчитываются в связанной системе координат. Этими коэффициентами
являются:
сха - коэффициент силы лобового сопротивления (в скоростной системе
координат);
cta - коэффициент подъемной силы (в скоростной системе координат);
mf - коэффициент продольного момента от угла атаки (коэффициент
статической устойчивости);
mf - коэффициент продольного демпфирующего момента угловой
скорости угла атаки;
mfz - коэффициент продольного демпфирующего момента угловой
скорости тангажа, обусловленного запаздыванием потока;
mz - коэффициент продольного момента рулей высоты;
с% - коэффициент боковой силы угла скольжения;
czH - коэффициент боковой силы руля направления;
с/ - коэффициент боковой силы элеронов;
т®х - коэффициент демпфирующего момента угловой скорости крена;
тхэ - коэффициент момента элеронов;
тГу - коэффициент бокового момента угла скольжения (коэффициент
курсовой устойчивости);
т®у - коэффициент демпфирующего момента угловой скорости рыскания;
ту - коэффициент бокового момента руля направления;
mf, т£у 9 т®х, тхн, туэ - перекрестные коэффициенты.
30
Согласно этому, аэродинамический коэффициент, например продольного
момента mz, представляется в виде:
mz = т\ вЪв + mfa + mfd + mfz(oz.
Уравнения (1.2), (1.3) связывают переменные V9 а, р, со^, toy9 coz,
определяющие движение ЛА в связанной системе координат, с координатами
управляющих органов 8в, 8Н, 8Э и тягой Р и описывают движение ЛА в
связанной системе координат. Матрица перехода от связанной к нормальной
системе координат имеет вид:
( cos v[/ cos 3 sin у sin у - cos у cos V|/ sin & sin у cos у sin & 4- cos у sin \|Л
C = sinO cosycosd -sinycosd
^- sin \|/ cos $ sin у cos \|/ + cos у sin i|/ sin d cos у cos \j/ - sin у sin \|/ sin &y
Из уравнений (1.2), (1.3) следует, что продольное движение ЛА связано с
его боковым движением посредством аэродинамических и гироскопических
моментов. Аэродинамическая связь продольного и бокового движений
обусловлена зависимостью аэродинамических коэффициентов от параметров этих
движений. Разделение общего движения ЛА на продольное и боковое
возможно, если инерционные, аэродинамические и гироскопические связи между
этими движениями пренебрежимо малы, так как перекрестные связи между
продольным и боковым движениями особенно значительны в том случае, когда
движение совершается с большой угловой скоростью. При малых угловых
скоростях и малых разностях моментов инерции гироскопические моменты типа
(Jz -Jy)(dy(dz пренебрежимо малы, и при аналитическом исследовании
процессов управления ЛА его уравнения движения, как правило, упрощают и
рассматривают два независимых друг от друга движения: продольное и боковое.
К продольному относят поступательные движения Л А вдоль осей ОХ и OF и
вращательное движение вокруг оси OZ. К боковому движению относят
поступательное движение вдоль оси OZ и вращательные движения вокруг осей ОХ
и OY [1.1].
Кроме этого, при аналитическом исследовании движения ЛА вместо
нелинейных используют линеаризованные уравнения. При линеаризации
полагают, что БПЛА совершает равномерное прямолинейное движение
(невозмущенное движение), которое характеризуется установившимися значениями Vq, a0,
Ро, \|/о, &о' То и Т-Д- Тогда для возмущенного движения:
V = V0+AV; а = а0+Да; р = р0+ДР; 9 = 30+Д3;
\|/ = \|/0+Д\|/; у = у0+Ду,...,
где AV, Да, Др, Д&, Д\|/, Ду - малые приращения указанных параметров.
Далее слагаемые исходной системы уравнений разлагают в ряды Тэйлора и
оставляют только линейные члены.
При продольном движении ЛА вектор V линейной скорости его центра
масс находится в вертикальной плоскости. Внешние силы, действующие на ЛА
31
(рис. 1.2): Р - сила тяги двигателей, вектор которой направлен вдоль оси ОХ;
Ха - сила лобового сопротивления, вектор которой направлен против
вектора V, т.е. в отрицательную сторону оси ОХа; Ya - подъёмная сила, вектор
которой перпендикулярен вектору V; mg - вес ЛА (т - масса ЛА, g -
ускорение свободного падения). Вращение ЛА в плоскости XaYa возможно под
действием момента Mz, действующего вокруг оси OZa, который называется
аэродинамическим моментом тангажа.
Рис. 1.2. Внешние силы, действующие на ЛА в продольном движении
(1.8)
В результате процедур линеаризации могут быть получены простейшие
уравнения продольного движения БПЛА:
[ JZA3 = Mza0Aa + Af^A» + М^Д6в + Mez;
lmV0(A$-Ad) = Y£Aa + Fe)n
где Mez, Fey - возмущающие момент и сила, действующие соответственно
вдоль оси OZa и вдоль оси OYa.
Постоянные коэффициенты, соответствующие невозмущённому
движению, определяются следующим образом:
М% = mfqSba; М% = mfqSba; М% = m8zeqSba; F0a = c*qS, (1.9)
где Ъа - хорда крыла.
При исследовании систем используют также безразмерную форму
представления уравнений движения. Тогда система (1.8) примет вид:
< „2
(п0р + «22 )а + (р + п23р)& = -пвЪв + f2,
(1.10)
_ d _ t
где р = —, /= —
di xa
возмущения,
. *а =
т
pSV
аэродинамическая постоянная времени, f\, /2 -
32
1 a coz
«12 = т(^ " Сх0) , П0 = -|1^-, «22 = -M"*zO > «23 = -Ц^2-. «в = -M^z >
Кт РГ f ->^OcosaO т
ц = —Ч:—, rz -1 ' cjcO ~ cjcO ~ 2— z-^-; Jz - момент инерции относитель-
2r/pS V m pSV1
но оси z; а0, cxq - значения угла атаки и коэффициента лобового сопротивле-
п 15N
ния при установившемся полете; Р$ = тяга двигателя; N - мощность
двигателя в л.с.
Боковое движение БПЛА включает вращение вокруг продольной оси ОХ,
нормальной оси О Y и линейное перемещение вдоль оси OZ. Если БПЛА
управляется автопилотом и совершает горизонтальный полет с постоянной
скоростью, уравнение движения относительно продольной оси ОХ в общем
виде представляет равенство
где Jх - момент инерции БПЛА относительно оси ОХ;
Мх = Мх(сох,соу, V,5Э,8Н,Я,Р) - аэродинамический момент крена.
Линеаризованное уравнение движения крена для тех же ограничений, что
и для продольного движения БПЛА, может быть приведено к виду:
JxAr+M™Ay=-MfoAS3 + Mex, (1.11)
где А } - приращение (возмущение) угла; А5Э - угол отклонения элеронов;
Мвх - возмущающий момент;
М%х = (-f^-)o = mTqSl; M% = "(^)о = m*>qSl; (1.12)
д(ох доэ
m®x, mx - аэродинамические коэффициенты момента крена, зависящие от
угла отклонения элеронов и угловой скорости крена.
Уравнения движения по рысканию записывают для БПЛА, управляемого
автопилотом и совершающего горизонтальный полет с постоянной
скоростью V, вектор которой направлен по оси ОХа, касательной к траектории
полета (рис. 1.3), и которой препятствует сила любого сопротивления Ха.
Изменение угла траектории *Р происходит с угловой скоростью 0)у разворота
БПЛА относительно оси ОY (скорость рыскания), которому препятствует
аэродинамический момент рыскания Му. Тогда уравнения движения имеют вид:
wF4/ = Z + Psinp;
Jyd)y = My; (1.13)
где Z - боковая аэродинамическая сила; Р - сила тяги двигателя; Jy - момент
инерции БПЛА относительно оси OYc; \|/, р - углы рыскания и скольжения.
33
Рис. 1.3. К выводу уравнений движения рыскания
Уравнения системы (1.13) запишем в переменных приращений углов курса
Alp и скольжения Ар:
J Ау + лА Ap + M^A\jf = -M^A8 +M ;
у т уО г уО т j>0 w ву
(1.14)
где Me>;, Fez возмущающий момент и сила, действующие соответственно
относительно оси OYa и вдоль оси OZa;
М$ =m»yqSl; M^=m^yqSl; M%=mfqSl; Z§=4qS, (1.15)
где q - скоростной напор; 5 - площадь и размах крыльев соответственно.
В безразмерной форме боковое движение БПЛА описывается следующей
системой линеаризованных уравнений:
(Р + "31 )Р + "32 ®х + "33 «у + "34Y = "3 А + "Зэ5э + /з i
"4lP + (Р + "42 Me + "43«у = -"4н5н - "э8э + U\
"5 lP + "52 «х + (Р + "53 )®у = ""А - "5эбэ + h \
-йх + п637оу + ру = 0,
coy =p\\i cos Э,
(1.16)
1 „бн
где n3l=--c%, »32=-sina0, H33=-cosao> "34 =-^-cos00, "3« = 2Сг
1 8э
2 '
"Зэ - ~ "г '
л41=-щ1и£;
(ОХ
"42 = "Hl^x >
"43 = -^l"1^ J
пэ=-щт^э;
34
п4н = -\ixmlH; n5l = -\i2rrPy; n52 = -\i2m™x; n53 = -\x2m™y \ nH = -\x2mf;
5э л ImV ImV _ z
"5э = -Р2ту ; "63 ='£9о; щ =—— = ; Ц2 =^~; z =—77; z" смещение от за-
2Л 2^ ^
данной траектории, (Од. = ТдСОд., coy = т^со^, со, - проекции угловой скорости
летательного аппарата на оси связанной системы координат; Jx, Jy - моменты
инерции; Э0 - значение угла тангажа при установившемся полете
(невозмущенном движении); fh vz = —Z- - возмущения.
1.3 Передаточные функции БПЛА
Передаточные функции БПЛА для продольного и бокового движений
получают на основании уравнений систем (1.10), (1.16). В дальнейшем в
уравнениях движения для сокращения записей будем опускать знак приращения
координат А, оставляя за ними прежний физический смысл, т.е. Да эквивалентно
а и т.д.
В соответствии с (1.10) передаточные функции БПЛА по каналу тангажа
по управляющему воздействию и возмущению имеют вид:
гЬв,^_ &(Р) = К&лРър + У)
5в(Р) р(т1р2+2$аТар + 1)
КЛР) р(т1р2+2$аТаР + 1)
Выделяют также передаточные функции угла атаки по управляющему
воздействию (рулю высоты) и угла тангажа по углу атаки:
wbe{p)=<P)_= Kbea . wa(p)^Ka&(T&P + l)
&в(Р) Tlp2+2$aTap + l P
*sV)=f^= ST*. - ^ <1Л7>
Параметры передаточных функций определяются следующими
зависимостями:
^5в$ - ^бва^аЗ ~ коэффициент передачи от управляющего
воздействия к углу тангажа,
К^а = - - коэффициент передачи от управляющего воз-
«22 + п\2пгъ действия к углу атаки,
Та = i a - постоянная времени, равная периоду собствен-
Vw22 + ^12^23 ных, колебаний по тангажу,
^а = —Q 12 _23_ _ относительный коэффициент демпфирования
2vw22 + W12W23 собственных колебаний по тангажу,
35
^<хЭ
*» =
= Щ2
"12
КМвд = —
пв
- коэффициент передачи от угла атаки к углу
тангажа,
- постоянная времени, характеризующая
маневренность по углу тангажа,
- коэффициент передачи от возмущающего
воздействия к углу тангажа.
Имея в виду равенство О = 6 + а, передаточная функция изменения угла
наклона траектории БПЛА по управляющему воздействию имеет вид:
гЪв / . .ч 9(р) _ Кш
8е(Р) р(т1р2+2$аТар + \)
Щдв(р)=^= , , ™ • 0.19)
При перемещении БПЛА по искривленной траектории на него действует
центробежная сила mVQ и, следовательно, он испытывает нормальные
перегрузки пу = VQ/g (g - ускорение силы тяжести), возникающие при действии на
БПЛА управляющего воздействия. Величину пу необходимо контролировать и
в случае необходимости ограничивать.
Передаточную функцию изменения перегрузки от управляющего
воздействия представляют следующей зависимостью:
о п (р) п (р) m л п (р)
у&(р) = .2_= У у> =JL—w5a\p).
V Se{p) °^р) Se(p) °^р)
V
Так как nv(p) = pQ(p)—, то получаем:
g
W*e(p) = p-W$e(pl (1.20)
у g
где Щв(р) определяется выражением (1.19).
Передаточную функцию изменения угловой скорости тангажа от
управляющего воздействия получают, имея в виду, что coz = О:
^ЛР) = ^ = ^ = Р^«(Р), (1.21)
где W§e(p) определяется из (1.17).
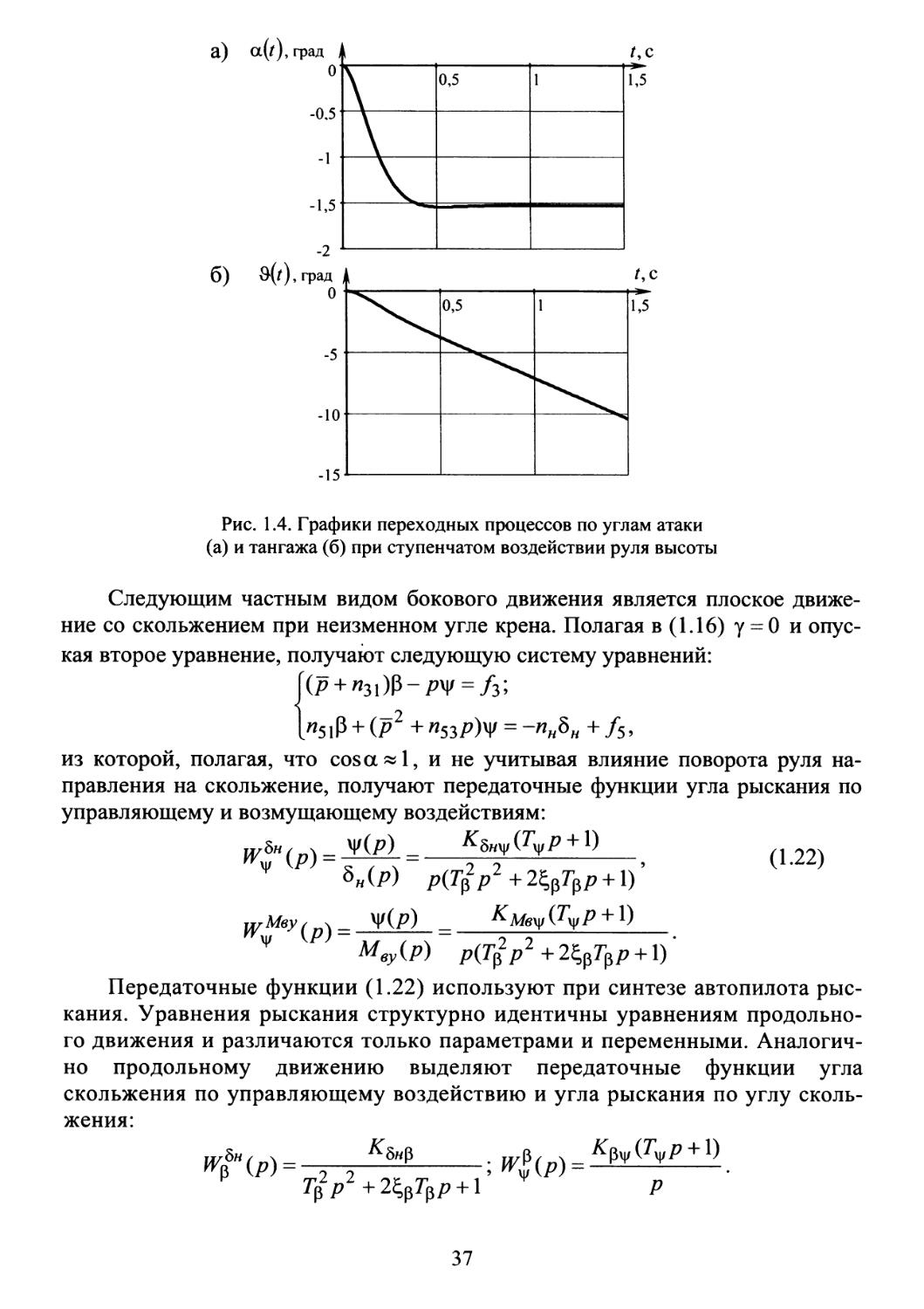
Графики переходных процессов по углам атаки и тангажа на ступенчатое
входное воздействие отклонения руля высоты в 1° для планера «Як-54» (см.
табл. 1.2) имеют вид, представленный на рис. 1.4.
36
a) a(t).
град |
0
-0,5
-1
-1,5
\
\
V
0,5
1
',с
1,5
б) Э(/),градА
ад j
0
-5
-10
1 <
i
0,5
1
t,c
1,5
Рис. 1.4. Графики переходных процессов по углам атаки
(а) и тангажа (б) при ступенчатом воздействии руля высоты
Следующим частным видом бокового движения является плоское
движение со скольжением при неизменном угле крена. Полагая в (1.16) у = 0 и
опуская второе уравнение, получают следующую систему уравнений:
\п5$ + (р2 +n53p)\\f = -nH8H+f5,
из которой, полагая, что cosa«l, и не учитывая влияние поворота руля
направления на скольжение, получают передаточные функции угла рыскания по
управляющему и возмущающему воздействиям:
W*H(p) =
V(p) _ Кдну(ТуР + ])
V
wMey
rr\\f
(Р) =
*н(Р) р(т£р2+2^Трр + \У
\|/(/7) _ Кмв\у(ТуР +1)
(1.22)
-2 2
>вуку, /*rpV+2$p7p/> + l)
Передаточные функции (1.22) используют при синтезе автопилота
рыскания. Уравнения рыскания структурно идентичны уравнениям
продольного движения и различаются только параметрами и переменными.
Аналогично продольному движению выделяют передаточные функции угла
скольжения по управляющему воздействию и угла рыскания по углу
скольжения:
wiH{P)=
к,
5/ф
rpV+2^pV + 1
w$(p) = K^iT*p + l)
37
Параметры передаточных функций, описывающих движение по рысканию,
определяются зависимостями:
КЬну ~ К5н$КРу
^8кР - _
«51+"31«53
V"51+"31"53
_ "31+"53
Р 2V"51+"31»53
Л- -"31
Apv- —
Т — ТД
"31
а:
к
Мву
8«v|/
- коэффициент передачи от управляющего
воздействия к углу рыскания,
- коэффициент передачи от управляющего
воздействия к углу скольжения,
- постоянная времени, равная периоду
собственных колебаний по рысканию,
- относительный коэффициент демпфирования
собственных колебаний по рысканию,
- коэффициент передачи от угла скольжения к
углу рыскания,
- постоянная времени, характеризующая
маневренность по углу рыскания,
- коэффициент передачи от возмущающего
воздействия к углу рыскания.
Имея в виду, что ц/ = Ч? + Р, получаем передаточные функции путевого
угла и угловой скорости рыскания:
w*»(P)=np)
к.
бну
8н(Р) />(ГрУ+2$рГр/> + 1)'
(1.23)
туКЮ 8H(p) SH(p) F v УЮ
При боковом движении перегрузка равна
nz=VV/g,
отсюда аналогично получают передаточную функцию БПЛА по боковой
перегрузке от управляющего воздействия:
г&»,_ч_ "z(P) = V пгЬн,
g
К™{р) = ^- = р-\¥$"{р).
(1.24)
К(Р)
Движение по крену без скольжения при пренебрежении моментом
рыскания описывается следующей системой уравнений:
Гр\|/ = л34у;
<^i
[(р +п42р)у + п43ру = -пэдэ+/4,
отсюда получают передаточные функции по углу крена и углу рыскания
Ту2р2+2^уТур + \
38
р(Ту2р2+2^Тур + \)
гпе k "э • Т - . 1 £ - "42 . £ "э
"34"43 V"34"43 2V"34"43 Ta«43
Слагаемое «34"43У > как правило, мало, поэтому используют уравнения, в
которых учитывается только момент, создаваемый элеронами, и момент
демпфирования. Этим уравнениям соответствуют передаточные функции
угла крена по управляющему воздействию и возмущающему моменту:
гЬэ,„^_ У(р) = КЬзу JVMx, ч У(Р) = КМщ
5э(/>) р(Тур + \У у УЮ Мвх(р) р(Тур + \)
ъг _ ~ пэ т — ^а is _ 5эу
где А5эу , 1у , А§эу .
п42ха п42 пэ
Таким образом, БПЛА, как любой ЛА, можно представить в виде
динамического звена с передаточными функциями, входными параметрами которых
являются управляющие воздействия 5e, 8W, 5Э и возмущающие воздействия
Мвх, Мву, Mez, а выходными - параметры движения: &,a,0,P,y,\|/,vF,
сох, cov, coz, nv, nz, H.
1.4 Аэродинамические коэффициенты
В литературе имеется очень мало данных по числовым значениям
аэродинамических коэффициентов малоразмерных БПЛА, а имеющиеся относятся
по большей части к продольному движению. Существуют следующие способы
определения аэродинамических коэффициентов:
1. Аналитический. Расчет коэффициентов ведется по эмпирико-
аналитическим зависимостям.
2. Экспериментальный. Расчет коэффициентов ведется по результатам
экспериментов, проводимых как с масштабными моделями, так и
полноразмерными образцами.
Экспериментальные способы, в свою очередь, можно разделить на
натурные и численные.
Численные эксперименты выполняются с применением программных
продуктов. С появлением все более мощных компьютеров такой способ
становится все более перспективным. В качестве таких программных продуктов
можно указать, например, пакеты Solidworks и ANSYS. Численный метод
определения коэффициентов представляется целесообразным применять на этапе
проектирования БПЛА.
Методика виртуальной продувки включает в себя три этапа: 1 -
создание ЗЭ-модели; 2 - моделирование обтекания ЗО-модели; 3 - анализ
результатов.
39
Первый этап можно выполнить в указанных выше программных
продуктах. На рис. 1.5 показаны реальные образцы БПЛА, в качестве которых
использовались модели самолетов и их ЗО-модели, для которых методом виртуальной
продувки определены аэродинамические коэффициенты. Оси систем координат
ЗБ-моделей совпадают с соответствующими осями связанной системы
координат по ГОСТ 20058-80.
40
Рис. 1.5. БПЛА: а - реальный образец (Як-54), б - ЗО-модель; в - реальный образец (Ripmax),
г - ЗО-модель; д - реальный образец (ENTR40), е - ЗО-модель;
ж - реальный образец (EASYCUB), з - ЗО-модель,
и - реальный образец (DEBAM), к - ЗО-модель
Характерные размеры БПЛА приведены на рис. 1.6.
Рис. 1.6. Вид на БПЛА сверху
41
Геометрические параметры моделей приведены в таблице 1.1.
Таблица 1.1. Геометрические параметры
Параметр
S,m2
Vм
/,м
К, м/с
ЯК-54
0,369
0,35
1,38
18
ENTR40
0,448
0,28
1,23
18
Значение
Модель
Ripmax
0,386
0,25
1,25
15
DEBAM
0,365
0,25
1,63
15
EASYCUB
0,365
0,227
1,4
12
>г
В таблице 1.1 ЪА- —
b0+br -
Ъ*Ъ
ъик
b0+bK
(см. рис. 1.6). Массо-инерционные
параметры моделей приведены в таблице 1.2.
Таблица 1.2. Массо-инерционные параметры
Параметр
Jх, кгм2
Jу, кг-м2
2
Jz, кг-м
| т, кг
ЯК-54
0,0841
0,2883
0,2225
2,6
ENTR40
0,2351
0,421
0,2173
3,8
Значение
Модель
Ripmax
0,1087
0,2138
0,1233 .
2,7
DEBAM
0,1462
0,2639
0,1501
2,4
EASYCUB
0,03586
0,12285
0,1004
1,5
На втором этапе при определении коэффициентов используется модуль
Floworks пакета Solidworks. Коэффициенты сил и моментов определяются в
связанной системе координат. В связи с этим оси ЗО-модели связываются с
осями координат области вычислений, для ячеек которой рассчитываются
параметры потока, обтекающего модель. Для изменения угла между продольной
осью БПЛА и вектором скорости набегающего потока изменяются проекции
скорости потока на координатные оси области вычислений.
Для увеличения точности результатов моделирования необходимо
увеличивать количество конечномерных элементов в области вычислений, что
приводит к увеличению времени моделирования. Сократить время
моделирования, не ухудшая точность, можно следующим образом: уменьшить размер
конечных элементов в области, ближайшей к ЗЭ-модели (подобласть), оставив
неизменным размер элементов вне этой подобласти (рис. 1.7) [1.2].
В таблице 1.3 приведены результаты определения аэродинамических
коэффициентов методом виртуальной продувки для БПЛА по рис. 1.5.
Результаты продувки планера «EASYCUB» были использованы авторами
при проектировании системы управления созданного на его основе БПЛА,
который успешно прошел летные испытания.
42
Рис. 1.7. 30-модель с подобластью
Таблица 1.3. Значения аэродинамических коэффициентов БПЛА.
Коэффициент
сха(а)
Суа(<*)
2
8в
mz
<
mz
5э
У
к
Ur
У
1 т1
>"х
2
™6w
У
U*
4"
да7
<-v
i
0,058 +3,775а2 1
-0,023 + 2,52а
-0,501
-1,375
-0,014
-0,092
-0,241
0,009
0,064
-0,0102
-0,00039
-0,0785
-0,0096
-0,3343
-0,0837
-0,008
-0,1726
-0,006
0,00147
0,0531 +0,047а +
+ 3,349а2
0,237 +3,329а
-0,888
-0,974
-0,083
-0,061
-0,186
-0,0273
-0,035
-0,0229
-0,00229
-0,0188
-0,0852
-0,253
-0,0164
-0,00169
-0,0365
-0,00691
-0,00296
Значение
Модель
3
о.
5
0,0485 +0,0388а +
+ 1,45а2
0,26+2,358а
-2,42
-0,924
-0,115
-0,065
-0,184
-0,0116
-0,067
-0,012
-0,000537
-0,0368
-0,0748
-0,295
-0,033
-0,001
-0,0737
-0,01
-0,005
m
ы
Q
0,0785 +0,0677а +
+ 2,8а2
0,2813+3,4179а
-1,21
-0,8233
-0,1
-0,04376
-0,1888
-0,00812
-0,03212
-0,02054
0,00161
-0,03613
-0,07173
-0,5108
-0,03327
-0,00409
-0,08655
-0,01212
-0,00786
QQ
ел
<
0,09+0,6789а +
+ 1,53а2
0,2286 +2,434а
-0,88 |
-0,555 1
-0,0396 1
-0,0627 |
-0,053 1
-0,0011
-0,0014 1
-0,0605
-0,00025
-0,01
-0,0755
-0,2848
1-0,013
-0,00018
-0,03185
-0,003
-0,00602
43
Список литературы к главе 1
1.1. Боднер В.А. Системы управления летательными аппаратами /
В.А. Боднер. - М.: Машиностроение, 1973. - 506 с.
1.2. Телухин СВ. Определение аэродинамических коэффициентов планера
беспилотного летательного аппарата методом виртуальной продувки / СВ.
Телухин, В.Я. Распопов, М.Н. Машнин // Вестник компьютерных и
информационных технологий. - 2010. - №2. - С. 17-22.
ГЛАВА 2
АВТОПИЛОТЫ
2.1 Принципы действия автопилотов
Автопилотом называется автоматический регулятор для управления
угловыми координатами и координатами центра масс ЛА.
Автопилот состоит из чувствительных элементов (датчиков) для
измерения регулируемых величин, вычислительного устройства для формирования
сигналов управления, усилительных устройств для преобразования и усиления
сигналов. Датчики могут быть аппаратно и программно объединены в блок,
который выполняет функции системы угловой ориентации ЛА
(бесплатформенная, магнитометрическая и других типов) или, в общем случае,
интегрированной навигационной системы, измеряющей не только угловые координаты ЛА,
но и параметры положения его центра масс в выбранной системе координат.
Системы ориентации и навигации различных типов могут объединяться (ком-
плексироваться) между собой.
Помимо перечисленных могут быть и другие устройства, например,
программное, согласующее и другие. Так как ЛА имеют три угловые степени
свободы, должно быть не менее трех каналов управления, которые, в общем
случае, связаны между собой. Это каналы тангажа, рыскания и крена.
Обобщенная блок-схема системы «автопилот-БПЛА» для одного из
каналов управления угловыми параметрами приведена на рис. 2.1.
<Р3
П
V •"
»ф-»ф-»ф I >
ДВ
МП
ОС
БПЛА
Ф
Ф
БД
Рис. 2.1. Обобщенная блок-схема системы «автопилот-БПЛА»:
П - преобразователь; У - усилитель; ДВ - двигатель; МП - механическая передача;
ОС - обратная связь; БД - блок датчиков; £ - сумматор
Задача автопилота - поддерживать заданное значение углового параметра
ориентации ф3. Для этого заданное значение преобразуется преобразователем в
напряжение мфз, сравнивается с поступающими с блока датчиков сигналами мф
и Мф, пропорциональными соответственно углу и угловой скорости, и сигналом
обратной связи иос, несущим информацию о положении регулирующего
органа 8, связанного посредством механической передачи с выходным валом дви-
45
гателя. Ненулевое значение разностного сигнала указывает на наличие
рассогласования (ошибки), которое может возникнуть при действии на БПЛА
возмущающих моментов, либо при смене заданного значения углового параметра.
Далее полученный сигнал усиливается и подается на рулевую машинку,
которая перемещает регулирующий орган. Отклонение регулирующих
аэродинамических органов приводит к появлению моментов, вызывающих вращение
БПЛА с целью восстановления заданного значения угловой ориентации. На
рис. 2.2 приведен пример устранения отклонения по крену у0.
kY,Y>Y
Рис. 2.2. Устранение отклонения по крену
В начальный момент времени под действием момента, создаваемого
элеронами, появляется угловое ускорение у и нарастает угловая скорость у, а угол
крена у начинает уменьшаться. В момент времени t\ момент демпфирования,
обусловленный угловой скоростью у, достигает значения равного моменту
элеронов, а затем начинает его превышать. Результирующий момент изменяет
свой знак, а следовательно изменяет свой знак и ускорение у. И с момента
времени t\ угловая скорость у начинает уменьшается. Постепенно величины у, у,
у приближаются к нулевому значению.
В БПЛА в качестве исполнительных устройств применяются рулевые
машинки, которые объединяют в себе усилитель, двигатель и датчик и
усилительно-преобразующее устройство обратной связи. Тогда блок-схему системы
«автопилот-БПЛА» можно представить в виде, изображенном на рис. 2.3, при
этом выходной вал двигателя 8д по-прежнему связан с регулирующим
органом 8 посредством механической передачи.
Фз
П
г
Кх 1
фЗ \
*Q
W(D
Ф
i
i
i
П >
Xunc
L OC
У
>
ОС
БД
PM j
ДВ
\°д
11 >
МП
О
>
j
БПЛА
Ф
i >
Y
^
*
Рис. 2.3. Блок-схема системы «автопилот - БПЛА» с рулевой машинкой
46
В автопилотах применяются различные законы управления БПЛА [2.1,
2.2]. Это статические и астатические законы управления. Статические законы
характеризуются наличием ошибки при действии постоянных возмущающих
моментов, в астатических законах такие ошибки равны нулю. Статический
закон управления в самом простом случае имеет вид [2.1]:
5ро-^(Ф3-ф) = ^-(ф3-ф) = -^-(«<|»-мЧ.)' (2Л)
где 8ро - отклонение регулирующего органа, К^0 =Кц>/Кос - передаточный
коэффициент автопилота с жесткой обратной связью, Кос - передаточный
коэффициент обратной связи (коэффициент пропорциональности между
отклонением регулирующих органов и сигналом обратной связи), К^ - передаточный
коэффициент блока чувствительных элементов по углу.
Если собственное демпфирование БПЛА мало, то он может пройти
положение равновесия, т.е. процесс устранения начального отклонения будет
происходить с перерегулированием и иметь колебательный характер. Для устранения
колебательности можно уменьшить передаточный коэффициент
автопилота К^0, тогда уменьшится момент, создаваемый регулирующим органом и
произойдёт замедление возвращения БПЛА к положению равновесия. Угловая
скорость ф также будет нарастать медленнее и достигать меньших значений,
торможение движения БПЛА начнется дальше от положения равновесия, и
процесс устранения начального отклонения будет происходить без
перерегулирования. Однако устранение колебательности переходного процесса путем
уменьшения передаточного коэффициента автопилота приводит к увеличению времени
переходного процесса.
При больших передаточных коэффициентах колебательность переходного
процесса устраняют введением в автопилот сигнала и^, пропорционального
угловой скорости ф:
*/ф=-Кфф. (2.2)
Этот сигнал создаёт дополнительное отклонение регулирующего органа,
которое вызывает момент, направленный против вращения БПЛА и
пропорциональный угловой скорости. Таким образом, данный сигнал создает момент,
аналогичный моменту собственного демпфирования БПЛА.
С учетом (2.1), (2.2) закон управления автопилота имеет вид [2.2]:
8/ю=^(Фз-ф) + А:*,ф = -^-(ичя-иф)--р-иф, (2.3)
откуда следует выражение для управляющего напряжения рулевой машинки:
Ивг=*ф(ф*-ф)-*фФ>
или в операторной форме:
ивх(Р) = КуЧ>з(Р) ~ (К<?Р + *Ф)ф(р)-
Тогда передаточная функция системы «автопилот-БПЛА» для данного
закона управления будет иметь вид [2.1]:
47
wM-MeL. ^-WW , (2.4)
где Wy(p) - передаточная функция канала БПЛА по каналу управления,
Wnp (p) - передаточная функция контура рулевой машинки (совместно с
обратной связью).
Для улучшения качества переходных процессов кроме скоростного
сигнала в закон управления автопилота (2.3) также может вводиться сигнал,
пропорциональный угловому ускорению.
В приведенных выше выражениях предполагалось, что связь между
сигналом обратной связи и положением регулирующего органа прямо
пропорциональная:
иос ~ ^ос^ро •
Такая обратная связь называется жесткой. Автопилот с жесткой обратной
связью при статическом законе управления характеризуется наличием ошибки
в установившемся режиме при действии постоянного возмущения. Пусть,
например, на БПЛА действует возмущающий момент по крену Мвх. Тогда в
установившемся режиме он будет компенсироваться моментом, создаваемым
элеронами:
или, с учетом (1.12):
мхэ = мх18эуст = ~мвх >
мхэ = тх яЯМ>эуст>
где дЭуСт - Кэ УуСт.
Из приведенных равенств получаем величину установившегося угла крена:
у =-_L м™ (25)
Величина Yycm является статической ошибкой регулирования,
возникающей под действием постоянного возмущающего момента крена Мхв. Таким
образом, если на БПЛА воздействует ступенчатый момент, который в
установившемся режиме может быть скомпенсирован лишь постоянным отклонением
регулирующего органа, то в автопилоте с жесткой обратной связью сам БПЛА
будет отклонен на угол <руст. Для рассматриваемого случая ц>уст - ууст.
Статические ошибки регулирования <руст являются следствием жесткой обратной
связи, устанавливающей пропорциональность между отклонением угловой
координаты БПЛА и отклонением регулирующего органа.
Для устранения статических ошибок применяются автопилоты с рулевым
приводом с изодромной или скоростной обратной связью. Для реализации
скоростной обратной связи применяются рулевые машинки со встроенным тахоге-
нератором, вырабатывающим сигнал, пропорциональный угловой скорости
выходного вала рулевой машинки.
48
Закон управления автопилота со скоростной обратной связью имеет вид
[2.2]:
Ьро = К% (ф3 - <р) + АГ*> + К%ц>, (2.6)
где К^0 = К^/Ктг - передаточный коэффициент АП по крену;
К^0 = К^/Ктг - передаточный коэффициент АП по угловой скорости крена;
К^0 =Ку/Ктг - передаточный коэффициент АП по угловому ускорению
крена;
Ктг = Кос - коэффициент передачи обратной связи (тахогенератора).
Переходя к выражению для Ъро, получаем:
Ъро = К% |(Фз - Ф)Л + К%у + К%ц>. (2.7)
По окончании переходных процессов интегральная составляющая примет
конечное значение, и наступит равенство
Ф уст = Фз>
из которого следует, что установившаяся ошибка равна нулю.
Таким образом, в автопилоте со скоростной обратной связью: сигнал,
пропорциональный углу, обеспечивает астатическое регулирование при
воздействии постоянных внешних возмущающих моментов; сигнал,
пропорциональный угловой скорости, обеспечивает составляющую отклонения
регулирующих органов, пропорциональную отклонению; сигнал, пропорциональный
угловому ускорению, является демпфирующим сигналом, компенсирующим
недостаточное собственное демпфирование БПЛА, и обеспечивает отклонение
рулевого органа, предотвращающее перерегулирование.
Из (2.7) также видно, что еще одним способом астатического
регулирования является введение в сигнал, подаваемый на рулевую машинку, интеграла
разности ф5 -ф.
Изодромная обратная связь реализуется введением в обратную связь по
положению регулирующего органа звена с передаточной функцией
7/7 + 1
Тогда функциональная связь между отклонением регулирующего органа и
сигналом обратной связи в операторном виде приобретает вид:
^ = ^ф-^-> (2.8)
8^ ф7> + 1
где Т - постоянная времени изодромной связи.
Считая, что сигнал на входе ивх равен сигналу обратной связи иос, после
подстановки (2.8) в закон управления (2.3) в операторном виде получим выражение
7> + l|
8 п0 (/>) = -
Тр
тгЧф3-ф) + —-РЧ
кпг к,
ос
которое преобразуется к виду [2.2]
49
ЬР0(Р) = (-«%, + ^)Ф + К>з + К%ю + ^^. (2.9)
Из сравнения закона управления автопилота с изодромной обратной
связью (2.9) с законом управления автопилота с жесткой обратной связью (2.3)
следует, что в законе (2.9) (как и в (2.7)) имеется дополнительный
интегральный член
Т р Т
который и обеспечивает астатическую стабилизацию крена. Физически это
обозначает следующее. При появлении возмущающего ступенчатого момента
происходит отклонение ЛА. Интеграл отклонения по времени создает отклонение
регулирующего органа, момент которого уравновешивает постоянный
возмущающий момент.
Закон управления вида (2.3) справедлив для всех каналов управления
БПЛА. Однако для стабилизации курса может применяться одновременное
управление рулем направления и элеронами. В этом случае в канал крена
(канал управления элеронами) одновременно с сигналами крена и угловой
скорости крена поступает сигнал, пропорциональный углу отклонения продольной
оси БПЛА от заданного курса. Закон управления элеронами имеет вид:
Зэ = к¥(¥з-¥) + кГу+4у, (2.10)
где К^ - передаточный коэффициент с курса на элероны.
В общем случае канал руля направления может использоваться для
предотвращения колебаний БПЛА по рысканию и для уменьшения угла
скольжения. Но управление рулем направления может и отсутствовать. Для
рассматриваемого случая закон управления рулем направления имеет вид:
SH=Kgfi+Kfc9 (2.11)
где К% - передаточный коэффициент с угла скольжения на руль поворота.
При действии вертикального и бокового ветров происходит
соответственно изменение высоты полета БПЛА и смещение относительно траектории.
Для компенсации этих отклонений используются автопилоты высоты и
бокового смещения. Эти автопилоты строятся соответственно на основе автопилотов
тангажа и курса.
Блок-схема системы стабилизации высоты полета БПЛА показана на рис. 2.4.
Отклонение от заданной высоты измеряется высотомером В, сигнал с
которого подается в суммирующее устройство Е канала руля высоты, под
действием которого двигатель отклоняет руль высоты на величину 5g, вследствие
чего происходит разворот продольной оси БПЛА, что ведет к появлению
сигнала тангажа и изменению угла атаки. Как следствие, изменяется подъемная
сила и появляется вертикальная скорость, за счет которой изменяется высота.
Таким образом, для стабилизации высоты полета обязательным является
наличие двух сигналов: тангажа и отклонения от заданной высоты.
50
я,
п
и Г "*
ws# 1
'>rS
i*4
i >
ин
У\ ъ/ф\ ^/0\ ^/0\ 1
ч
Г\
J
иос
У
ос
БД
п
^
ДВ
?
*•
МП
и«
БПЛА
Н
»
в
Рис. 2.4. Блок-схема системы стабилизации высоты полета:
У - усилитель, ДВ - двигатель, МП - механическая передача, ОС - обратная связь,
БД - блок гироскопических датчиков, В - высотомер
Закон регулирования для системы стабилизации высоты полета имеет
вид:
5в=К?(&3-$) + к!$ + К?АН..
гН
(2.12)
где АН - отклонение от заданной высоты; К™ - передаточный коэффициент с
высоты на руль высоты, равный отношению приращения высоты к
вызываемому им отклонению руля.
Как видно, первые два слагаемых правой части совпадают с (2.3), сигнал
по угловой скорости способствует демпфированию колебаний БПЛА по
тангажу и принципиального значения для стабилизации высоты полета не имеет.
Вместо сигнала по углу тангажа можно использовать сигнал
вертикальной скорости - они эквивалентны. Сигнал вертикальной скорости может быть
получен с помощью дифференцирования сигнала с датчика высоты. Из рис. 2.5
следует:
Ve=Vsme=Vsm(#-a),
где V, Ve - скорость полета и вертикальная скорость БПЛА соответственно.
Горизонт
Рис, 2.5. Треугольник скоростей
Величина статической ошибки регулирования высоты АНуст
определяется из равенства:
5 в = Кв §уст + Кв ЬНуст = ° >
51
откуда
Lyilycm H ^уст н у > ^-1J;
где ATg - передаточный коэффициент сигнала по каналу стабилизации высоты,
U - скорость вертикального возмущающего потока.
Из условия 5в = 0 следует, что статическая ошибка будет иметь место для
любого типа обратной связи. Для сведения статической ошибки к нулю при
действии вертикального потока сигнал тангажа необходимо заменять сигналом
вертикальной скорости. Тогда в установившемся режиме будем иметь:
отсюда
&в ~ ^в &Нуст + Кв АНуст - Кв ЬНуст - О,
ЬНуст = ° •
Воздействие постоянного возмущающего момента Мв2 также вызывает
ошибку АНуст, которую можно определить из равенства момента руля высоты
и возмущающего момента:
Mez=-m\eqSbbeycm. (2.14)
Установившееся отклонение руля высоты Seycm равно
&вуст = кв ЬНуст. (2.15)
Из (2.14), (2.15) следует, что статическая ошибка стабилизации высоты
равна:
^vcm=-M6Z J zj- (2-16)
уст Фт3вкн
Устранения статической ошибки стабилизации высоты полета можно
достичь введением сигнала, пропорционального интегралу отклонения высоты.
Для стабилизации центра масс БПЛА на траектории необходимо измерять
отклонение ЦМ от заданной траектории, что можно выполнить с помощью
инерциальной или спутниковой системы навигации. Обычно этот сигнал
рассогласования подается в канал управления элеронами, закон управления
которыми имеет вид:
8Э = K%y+ 4f+ Kf(V3 ~ V) + кэ^ , (2.17)
где Кэ - передаточный коэффициент с бокового отклонения Az ЦМ от
заданной траектории на элероны.
Как видно, первые три слагаемых правой части (2.17) совпадают с (2.10).
Блок-схема системы стабилизации боковым движением центра масс аналогична
системе стабилизации высоты. Демпфирование движений ЦМ создается за счет
сигнала по углу рыскания, однако при боковом ступенчатом воздействии ветра
возникает статическая ошибка. Для установившегося режима справедливы
равенства:
52
и z
Y = 0; V^m= —J КУУуст+Кэ AZycm=0,
откуда следует статическая ошибка стабилизации центра масс:
К% U
^Уст = —у-— > (2.18)
где U - скорость бокового возмущающего потока.
Ошибка (2.18) будет отсутствовать, если сигнал демпфирования движения
центра масс (аналогично высоте) осуществляется за счет введения сигнала,
пропорционального производной от перемещения центра масс:
z = Vsm{y/-p)U.
Если на БПЛА действует ступенчатый кренящий момент Мвх, то в
автопилоте с жесткой обратной связью возникает ошибка £±zycm. Возмущающий
момент приводит к крену БПЛА и к отклонению элеронов, момент которых
будет уравновешивать Мвх:
M^^-mfslqb^ (2.19)
где отклонение элеронов определяется равенством:
у
°эуст ~ ^э ^уст-
Следовательно, величина статической ошибки отклонения центра масс
БПЛА от заданной траектории при действии постоянного возмущающего
момента по крену будет определяться зависимостью:
^ycrn^-^-shz- (2-20)
Для устранения статической ошибки Azycm необходимо использовать
автопилоты с изодромной или скоростной обратной связью либо вводить сигнал,
пропорциональный интегралу отклонению центра масс.
Необходимо напомнить, что передаточные функции БПЛА были
получены путем линеаризации относительно невозмущенного движения, которое
характеризуется некоторыми постоянными значениями параметров #0, 1|/0,
&о, у0, которым соответствуют некоторые значения 8я0, 5в0, 5э0.
Следовательно, в законах управления автопилотов и выражениях для ошибок под
переменными подразумевается их отклонение от установившихся значений.
Поэтому в установившемся (прямолинейном) режиме полета задающие
воздействия в каналах тангажа, рыскания и крена равны v|/0, S0, y0
соответственно.
Тогда в системах стабилизации высоты и бокового смещения сигналы в
автопилоты тангажа, рыскания и крена необходимо подавать в виде,
показанном на рис. 2.6, где ф0 - значение параметра ориентации, соответствующее
невозмущенному движению по траектории, Аф3 - сигнал, формируемый
законами управления систем стабилизации высоты, бокового смещения и автопилота
координированного разворота.
53
Фо
) т
п
-фз
Аф5
Рис. 2.6. Задающее воздействие канала автопилота
Следовательно, при прямолинейном движении на постоянной высоте в
автопилоты необходимо дополнительно подавать:
а) в канал тангажа - сигнал &0, равный углу атаки, при котором
подъемная сила равна весу БПЛА;
б) в канал рыскания - сигнал *¥$, равный заданному направлению полета;
в) в канал крена - сигнал у0 = 0.
2.2 Моделирование работы системы «автопилот-БПЛА»
Современные автопилоты, предназначенные для БПЛА, могут быть более
сложными по сравнению с автопилотами пилотируемых ЛА. Это связанно с
тем, что список задач для автоматического решения, лежащих на БПЛА,
намного шире, чем на пилотируемых летательных аппаратах. Однако современные
технологии и элементная база позволяют успешно решать поставленные перед
БПЛА задачи. Для определения координат и скорости современные БПЛА, как
правило, используют спутниковые навигационные приемники (GPS или
ГЛОНАСС). Углы ориентации и перегрузки определяются с использованием
гироскопов и акселерометров. Программное обеспечение пишется обычно на
языках высоко уровня, таких как Си, Си++, Модула-2, Oberon SA, Ада 95 или
VxWorks/Eclipse. В качестве аппаратного обеспечения, как правило,
используются специализированные вычислители на базе цифровых сигнальных
процессоров и микроконтроллеров или компьютеры формата PC/104, MicroPC. Также
могут применяться операционные системы реального времени, такие как QNX,
VME, XOberon.
Обобщенная структурная схема системы «автопилот-БПЛА»,
соответствующая закону управления (2.3), приведена на рис. 2.7. Соответствующая ей
передаточная функция имеет вид (2.4) [2.3-2.5].
Для малоразмерных БПЛА или их прототипов на этапе проектирования в
качестве рулевых приводов могут использоваться стандартные рулевые
машинки, например типа «SRM-102» [2.3, 2.5]. В первом приближении для
определения коэффициентов автопилота рулевая машинка может быть описана
передаточной функцией второго порядка, а при моделировании процессов в
системе «автопилот-БПЛА» необходимо использовать ее полную нелинейную
модель, учитывающую нелинейности, обусловленные сухим трением и
ограничениями на угол поворота рулей и напряжение питания рулевой машинки.
54
Ч>3
Zt
л
J
Иф
—<
ф Г
^ ">г
J Ч
1
мф
^пЫ
■]*ФР
5
^0>)
Ф
Рис. 2.7. Обобщенная структурная схема статического автопилота:
W\p) - передаточная функция БПЛА по одному из каналов управления, Wn \p) -
передаточная функция рулевого привода, 8 - отклонение соответствующего управляющего органа,
&ф, кф - коэффициенты передачи по регулируемому параметру и скорости его изменения
Приведем пример моделирования процессов в системе «автопилот-
БПЛА». Пусть имеется БПЛА, динамика которого по каналам тангажа и
рыскания описывается соответственно передаточными функциями:
дв(р) р(Т^р2+ 2^7^/7 + 1)
= —// ,
где Кд = -1,525; ^а = 0,805; Та = 0,1 с; К$ = 4,365 1/с; Г0 = 0,229 с,
Ц = -1,022; Гр = 0,0918 с; ^р = 0,427; К^ = 0,57; Т^ = 1,753 с.
Передаточная функция рулевой машинки с жесткой обратной связью
имеет вид:
S(P) _ К
Ws
б\[/\
W (s) = -
п и(р)
Т2р2 + 2%Гр + \
где для канала тангажа: Кт = 0,988; Тт = 0,0017 с; £т = 3,05, а для канала
рыскания: Кр = 0,991; Гр = 0,0025 с; ^р = 2,08.
Для исследуемого БПЛА коэффициенты передач автопилотов имеют
значения:
- по тангажу: к§ = -5 В/рад, к§ = -0,5 Вс/рад;
- по рысканию: ку = -5 В/рад, к^ - -0,5 Вс/рад;
Для данных коэффициентов запасы устойчивости системы «автопилот-
БПЛА» равны: по каналу тангажа - по амплитуде 33,6 дБ, по фазе - 57,9°; по
каналу курса - по амплитуде 28,1 дБ; фазе - 58,7°.
На рис. 2.8 приведены графики переходных процессов по углам курса
(рыскания) и скольжения, как реакция на ступенчатое воздействие угла
отклонения руля направления.
На рис. 2.9 приведены переходные процессы в канале тангажа как
реакция на ступенчатое управляющее воздействие в 1 рад для линейной и
нелинейной моделей рулевой машинки.
55
K'M').oi
0
-05 .
-1 .
-1,5 .
-2
{
0,5
u^
V
1
t,c
1,5
Рис. 2.8. Переходные процессы по углам рыскания и скольжения
&,рад I
1,4
1,2
1
0,8
0,6
0,4
0,2
0
/,С
0,2 0,4 0,6 0,8
1,2 1,4 1,6 1,8
Рис. 2.9. Переходные процессы в системе «автопилот-БПЛА» по каналу тангажа
1 - линейная модель привода, 2 - нелинейная модель привода
J
З.радЧО"3
0
-1
-3
-4
-5
-6
1
л
3
1
/
/
А
1
5
t
8
1 $
> 1
0 U
Рис. 2.10. Ошибка по углу тангажа:
1 - с жесткой обратной связью, 2-е изодромной обратной связью (Т = 1 с)
56
На рис. 2.10 приведена ошибка по углу тангажа как реакция на
ступенчатое возмущающее воздействие в 1 Н-м для рулевой машинки с жесткой и изо-
дромной обратными связями.
Из графика видно, что система «автопилот-БПЛА» с рулевым приводом с
изодромной обратной связью обладает большей точностью по сравнению с
жесткой обратной связью, но переходные процессы обладают большей
длительностью.
Производством систем автоматического управления для БПЛА
занимаются, например, ООО «ТекНол» и компания ЗАО «НТЦ Рисса» (Москва).
Последняя позиционирует себя как разработчика авионики и серийно выпускает
системы автоматического управления STA-32, которые возможно
самостоятельно адаптировать под конкретный вид БПЛА [2.6, 2.7]. При размере корпуса
115x65x40 мм (возможен бескорпусный вариант) система автоматического
управления включает: блок инерциальных датчиков, блок автопилота, датчики
высоты и скорости полета, трехосный магнитный датчик и навигационный
GPS-модуль.
Компания «Беспилотные системы» (г. Ижевск) рекламирует автопилот
массой 22,8 г с размерами (105x25x18) мм, обладающий техническими
характеристиками, практически одинаковыми с системой разработки ООО «ТекНол», в
нем навигация БПЛА осуществляется с помощью CHC-GPS с частотой
обновления данных до 4 Гц.
Достаточно широкую номенклатуру автопилотов предлагают и
иностранные разработчики. Одними из наиболее рекомендуемых являются автопилоты
типа Kestrel V2.22 (рис. 2.11а), построенные на микроконтроллере
Rabbit 3000 Series, и АП типа МР2128 (рис. 2.116), оба производства фирмы Micro-
pilot (Канада).
Рис. 2.11. Автопилоты:
а - Kestrel V2.22; б - МР2128
В составе АП Kestrel V2.22 имеются три акселерометра, три
гироскопических датчика угловых скоростей, трехосевой магнитометр и GPS-декодер.
Стабильная работа модуля обеспечивается встроенными двадцатиуровневым
термокомпенсатором и импульсным стабилизатором напряжения (3,3 и 5 В;
500 мА). Процессор работает на частоте 29 МГц и имеет 512 Кбайт ОЗУ. Име-
57
ется четыре последовательных порта, четыре встроенных и восемь внешних
сервоконтроллеров, три аналоговых 12-битных входов и двенадцать цифровых
каналов информационного обмена (6 двунаправленных, 3 входа, 3 выхода).
Предусмотрены контроль напряжения и тока, автоподстройка, дублирование
системы передачи данных с коррекцией ошибок, стабилизация и управление
видеокамерой и другие опции.
Автопилот МР2128 содержит трехосевые микромеханический гироскоп и
акселерометр, барометрический датчик высоты, датчик воздушной скорости,
модуль спутниковой навигации GPS, а также систему сбора и хранения данных.
Вычислительным ядром является RISC-микропроцессор, способный выполнять
150 миллионов операций в секунду. При физических размерах модуля 10x4 см,
его масса составляет всего 28 г. МР2128 обеспечивает полное управление
БПЛА, начиная с момента взлета и заканчивая посадкой.
Список литературы к главе 2
2.1. Бесекерский В.А. Теория автоматического управления / В.А. Бесекер-
ский, Е.П. Попов. - СПб.: Профессия, 2003. - 750 с.
2.2. Боднер В.А. Системы управления летательными аппаратами /
В.А. Боднер. - М.: Машиностроение, 1973. - 506 с.
2.3. Малютин Д.М. Исследование динамики рулевого привода
беспилотного малоразмерного летательного аппарата / Д.М. Малютин // Мехатроника,
автоматизация, управление. Приложение №10 (91). - М.: Новые технологии. -
2008.-№10.-С. 10-14.
2.4. Распопов В.Я. Автопилот мини-беспилотного летательного аппарата /
В.Я. Распопов, Д.М. Малютин, СВ. Телухин, Р.В. Алалуев, Я.С. Кузнецов,
А.В. Ладонкин // Мехатроника, автоматизация, управление. Приложение № 10
(91). - М.: Новые технологии. - 2008. - № 10. - С. 19-24.
2.5. Телухин СВ. Автопилоты / СВ. Телухин, Д.М. Малютин, М.Г. Пого-
релов // Инженерный журнал «Справочник» с приложением. Приложение №1 -
М.: Машиностроение. - 2010. - № 11. - С. 20-24.
2.6. Топехин А. Беспилотные системы «НТЦ Рисса» / А. Топехин //
Аэрокосмический курьер. - 2006. - № 6 (48). - С. 67.
2.7. Топехин А. Система управления БЛА STA 32 / А. Топехин // UAV.ru.
Беспилотная авиация. Спецвыпуск. - UVS-TECH 2009. - С. 29.
ГЛАВА 3
БЕСПЛАТФОРМЕННАЯ СИСТЕМА ОРИЕНТАЦИИ
3.1 Инерциальное управление БПЛА
Управление беспилотным летательным аппаратом с помощью
бесплатформенной инерциальной системы ориентации и навигации рассматривается как
взаимодействие двух процессов: решения задач ориентации и навигации и решения
задачи стабилизации. Первая задача заключается в определении требуемой
траектории БПЛА и в вычислении фактической траектории на основе информации,
полученной бесплатформенной системой ориентации и навигации. Вторая
заключается в управлении БПЛА на основе данных, полученных в результате решения
первой задачи. При автоматическом управлении БПЛА вторую задачу называют
задачей стабилизации аппарата относительно заданной траектории полета [3.1].
Измерительной частью бесплатформенной системы ориентации и навигации
является инерциальный измерительный модуль (ИИМ) (inertial measurement unit
(УМУ)), содержащий датчики линейных ускорений (акселерометры) и датчики
угловой скорости (гироскопы). Бесплатформенная система ориентации и навигации
по измерениям ИИМ, показаниям бортовых часов и модели гравитационного поля
Земли оценивает координаты, местоположения, скорости и угловую ориентацию
БПЛА путем интегрирования кинематических и навигационных уравнений в
бортовой цифровой вычислительной машине (БЦВМ) (рис. 3.1) [3.2, 3.3].
Беспилотный
летательный
аппарат
Исполнительные
органы
Инерциальный
измерительный
модуль (ИИМ)
Бортовая
цифровая
вычислительная
система
Усилительно
преобразующие]
устройства
Рис. 3.1. Система бесплатформенного инерциального управления
Помимо интегрирования кинематических и навигационных уравнений в
БЦВМ осуществляется первичная обработка информации инерциальных
датчиков, начальная выставка, реализуются алгоритмы управления и др.
Следуя работе [3.2], синтез системы бесплатформенного инерциального
управления сводится к последовательному решению трех задач: синтез
алгоритмов управления; синтез алгоритмов вычисления параметров движения
БПЛА; разработка требований к техническим средствам системы
инерциального управления (рис. 3.2).
59
Беспилотный
летательный
аппарат
Алгоритмы
управления
К2^
К1
#:
Бесплатформенная
система
ориентации и
навигации
Рис. 3.2. Этапы синтеза бесплатформенной системы управления
На первом этапе (замкнут ключ К1 в положении 1, ключ К2 разомкнут)
разрабатывается математическая модель движения БПЛА и определяются ее
параметры, синтезируются и исследуются алгоритмы управления,
формируются требования к бесплатформенной системе ориентации и навигации по
составу, точности и частоте обновления параметров движения БПЛА.
На втором этапе (замкнут ключ К2) выбираются алгоритмы вычисления
параметров движения БПЛА. Определяются параметры квантования первичной
информации по времени и по уровню, проводится оптимизация алгоритмов
бесплатформенной системы ориентации и навигации с целью сокращения
загрузки БЦВМ. Подбираются инерциальные чувствительные элементы, исходя
из оценки погрешностей бесплатформенной системы ориентации и навигации.
Выбираются датчики и системы дополнительной навигационной информации и
разрабатываются алгоритмы коррекции. В соответствии со схемой на рис. 3.2
исследование алгоритмов осуществляется в индикаторном режиме.
На третьем этапе (замкнут ключ 2, а ключ К1 в положении 2)
бесплатформенная система ориентации и навигации включается в замкнутый контур
управления БПЛА. На этом этапе уточняются параметры как алгоритмов
управления, так и алгоритмов интегрирования кинематических и
навигационных уравнений бесплатформенной системы ориентации и навигации.
Исследуется влияние на функционирование системы малых возмущающих факторов,
погрешностей алгоритмов бесплатформенной системы ориентации и
навигации, погрешностей ИИМ и т.д.
3.2 Задача ориентации БПЛА
Под задачей ориентации понимается определение углового положения
БПЛА относительно некоторой опорной системы координат. В качестве такой
опорной системы координат чаще всего используется нормальная система
координат OXgYgZg (рис. 1.1, а) с географической ориентацией осей.
Проекции вектора абсолютной угловой скорости географической системы
координат на свои оси определяются равенствами
60
(ox =(U+ X)cos(p = Ucos(p + —-;
zg .
R
V-
zg
Oy =(U + X)sin(p = £/sin(pH tg<p;f
«zg = "Ф.
R
(3.1)
где Vz - восточная составляющая линейной скорости БПЛА относительно
Земли, ф - широта, X - долгота, U - угловая скорость суточного вращения
Земли, R - радиус Земли.
Переход от нормальной системы координат OXgYgZg к связанной OXYZ
задается с помощью матрицы направляющих косинусов
cos9cos\|/ sin& -cos&siny
-cosycos\|/sin& + sinysini|/ cosycos& cosysini|/sin& + sinycos\|/
sin у cos \|/ sin & + cos у sin \\f - sin у cos 0 - sin у sin у sin $ + cos у cos \|/||
С учетом матрицы (3.2) проекции вектора абсолютной угловой скорости
связанной системы координат на свои оси представляются в виде
А =
. (3.2)
к
СОу
Pz
= А
№Ag
к
W
\+\
sin О 0 1|
cos $ cos у sin у О
- cos dsin у cosy 0|
(3.3)
Таким образом, абсолютная угловая скорость БПЛА складывается из
переносной угловой скорости, вызванной угловой скоростью вращения Земли и
облетом ее поверхности, и угловой скорости вращения БПЛА вокруг своего центра
масс. При непродолжительном времени полета БПЛА первой составляющей
можно пренебречь.
3.3 Инерциальный измерительный модуль
В состав БСО входит инерциальный измерительный модуль (ИИМ)
(inertia! measurement unit (IMU)) - система измерения линейного и углового
пространственного движения Л А без связи с внешней средой. Инерциальный
измерительный модуль, как правило, содержит три гироскопических датчика
угловой скорости (ДУС) и три акселерометра с взаимноортогональными
измерительными осями.
Три датчика угловой скорости измеряют три проекции вектора абсолютной
угловой скорости летательного аппарата на связанные с ним оси и
вырабатывают сигналы, являющиеся первичными для решения задачи ориентации БСО.
Чаще всего в качестве гироскопических ДУС в инерциальных измерительных
модулях БПЛА используются микромеханические гироскопы (ММГ) (так
называемые микро-электро-механические системы (МЭМС)), обладающие малой
61
массой, габаритами и энергопотреблением. Сигналы с выходов отдельных
ММГ поступают на вход бортовой цифровой вычислительной машины (БЦВМ)
(рис. 3.3), где численно интегрируется уравнения относительно
соответствующих кинематических параметров. Характеристики некоторых ММГ
представлены в таблице 3.1.
Таблица 3.1 - Характеристики ММГ
ММГ
HG\900 (Honeywell)
ADIS16130 (Analog Devices)
ADXRS-150 (Analog Devices)
CRS09 (Silicon Sensing)
QRS\ 16 (Systron Donner)
ММГ-2 (ЦНИИ «Электроприбор»)
Нестабильность
нуля, °/ч
7
6
36(0,01 °/с)
3
3
-
Шум, °/V^
0,09
0,56
3
0,1
0,12
3
Разрешение, °/ч
24
150
-
27
32
-
I
I
I
ММГ*. ММГУ ММГ2 MMAJ. ММАУ MMAz
I
I
I
БЦВМ
п~т
V О У
Рис. 3.3. Блок-схема бесплатформенной системы ориентации
Акселерометры соответственно измеряют три проекции кажущегося
ускорения также на оси связанной с летательным аппаратом системы координат, и
полученные ими сигналы используются для решения задачи навигации и
коррекции алгоритмов БСО.
3.4 Алгоритмы бесплатформенной системы ориентации БПЛА
Углы Эйлера-Крылова являются одним из распространенных
параметров, характеризующих ориентацию БПЛА. Разрешая уравнение (3.3)
относительно угловых скоростей \j/, &, у, получим совокупность
дифференциальных уравнений, называемых алгоритмом ориентации с углами Эйлера-
Крылова
siny I
cosy
COS&
siny
cos&
cosy
1 - cos ytgQ sin ytg9\
со,
C0V
CO,
-A
CO
CO
CO,
(3.4)
62
Вводя в рассмотрение векторы со = |со^ со7 coz| и cog=|co
уравнения (3.4) представим в виде
Xg
со
Yg
СО
т
cosy
sin у
cos& cos&
0 sin у cosy
1 - cos y/g& sin ytg§\
(co-Aco_).
(3.5)
Блок-схема реализации уравнения (3.5) приведена на рис. 3.4.
Ключ:
1Е:Н: 3) - матричное
произведение,
- блок
интегрирования,
(££) - сумматор.
ш
;|<*>*|
юг
|®z|
Г* С
*\
Уо.^о.Уо
"i
А-ншр
со»
4
V,3,y
cosy
cos$
siny
smy
cosS
cosy
1 - cosytg& siny/gO
Рис. З.4. Блок-схема алгоритма ориентации
с углами Эйлера-Крылова
При параметрах полета БПЛА, когда можно пренебречь вращением
нормальной системы координат, с достаточно высокой степенью точности можно
интегрировать систему вида
(3.6)
Использование алгоритма ориентации (3.6) с углами Эйлера-Крылова имеет
определенные неудобства при численной реализации. Это связано с вырождением
параметров ориентации при угле тангажа & = я/2, так как система углов Эйлера-
Крылова, по существу, моделирует некоторый карданов подвес. Кроме того,
нелинейность по всем трем углам, связанная с наличием тригонометрических
функций, снижает эффективность применения вычислительной техники [3.2, 3.4].
Другой способ реализации алгоритма ориентации бесплатформенной
системы ориентации связан с интегрированием уравнения Пуассона
м
»:
Y
«
О
о
1
cosy
cosO
smy
- cosytgQ
siny 1
cos$
cosy
sin ytgS\
M
coJ
|<*>z|
63
А = -[сох]А + А[оо х],
(3.7)
где [сох] =
О
|-(JL)V
-°>2
О
СОу
-со,
о
- кососимметрическая матрица, составленная из
проекций вектора абсолютной угловой скорости БПЛА на оси связанной
системы координат, являющаяся матричным эквивалентом векторного
произведения. Аналогично в уравнении (3.7) обозначена матрица
О - coZg coy
О
Кх] =
со2
-СОу
JYg
-со
Xg
со,
о
JYg ™Xg
составленная из проекций вектора абсолютной угловой скорости нормальной
системы координат на ее оси.
Уравнение (3.7) приводится к виду
А = -{[сох]-[^х]}А, (3.8)
где [<о^х] - кососимметрическая матрица, составленная из проекций вектора
абсолютной угловой скорости нормальной системы координат на оси связанной
системы координат.
Результатом решения уравнения Пуассона является матрица
направляющих косинусов А между нормальной и связанной системами координат.
Определение углов рыскания, тангажа и крена по элементам матрицы
направляющих косинусов осуществляется следующим образом:
\|/ = arctg-
-tfi
13
а.
0 = arcsin#12;
(3.9)
у = arctg-
-a
32
a
22
Блок-схема алгоритма ориентации с направляющими косинусами
приведена на рис. 3.5.
Ключ:
формирование кососимметрической
матрицы из вектора
COv
toy
со7
j-^-^Hilll^H}!^^^^—HT|
co„
у:
3 =
Y =
= arctg
-*13
= arcsina12
= arctg -
'^32
a22
*Y
Рис. З.5. Блок-схема алгоритма ориентации
с направляющими косинусами
64
Уравнения бесплатформенной системы ориентации и навигации,
записанные с использованием уравнения Пуассона - линейные, не имеют особых
точек, поэтому не вырождаются. Результатом решения уравнения Пуассона
является матрица направляющих косинусов, поэтому нет необходимости
производить дополнительные операции по ее формированию. Однако в отличие от
алгоритма с углами Эйлера-Крылова, уравнений Пуассона девять, которые к
тому же необходимо дополнять уравнениями связи AAr =E (E - единичная
матрица). Это обстоятельство ограничивает применение кинематического
уравнения с направляющими косинусами [3.5].
В этом отношении более удобен вектор ориентации, широко развиваемый
в работах [3.6-3.10]:
ф = фе, ф = |фх уу ф2| , (ЗЛО)
II \\т
где е = \\ех е ел - орт эйлеровой оси вращения; ф - угол, на который
необходимо повернуть относительно е систему координат до совмещения ее с
опорным трехгранником. Вектор ориентации ф подчиняется кинематическому
уравнению Бортца (Bortz) [3.6]:
фБШф
л _ 1^ _ 1
ф = С0 + — фХС0 + —
2 ф
1--
фх(фхсо),
(3.11)
2(1-С08ф)/
где со - вектор относительного вращения базисов.
Множитель при векторном произведении ф х (ф х со) приближенно можно
представить следующим образом [3.8]:
1
1--
(psincp 1 1 (л 1 2 1 1
' = — 1 +—ф2 + ...« — ,
12 V 60 1 12
ф" ^ 2(1 - cos ф)
тогда уравнение (3.11) принимает вид
ф »со + —ф х со + —(px((px(b). (3.12)
Уравнение (3.11) называется алгоритмом второго порядка [3.9].
Матрица направляющих косинусов, вычисленная по элементам вектора
ориентации, определяется следующим соотношением [3.6]:
- _ sincpr _ l-cos(pr о
С = Е +—-[<рх] + 2"^[фх]2, (злз)
ф ф2
где С = Аг, Е - единичная матрица размера 3x3,
I ° -ф* ь I
[фх]= ф2 0 -ф1.
Г^у ф* ° II
Использование вектора ориентации ф вместо направляющих косинусов приводит
к уменьшению объема вычислений, поскольку вычисляется не девять элементов
матрицы направляющих косинусов, а всего три проекции вектора ориентации на
измерительные оси [3.5]. К тому же отпадает необходимость в нормировке состав-
65
ляющих вектора ориентации в отличие от направляющих косинусов. При наличии
в векторе угловой скорости высокочастотной составляющей уравнение Бортца
является более эффективным, чем уравнение Пуассона, дает лучшую полосу
пропускания и более высокую точность [3.6]. Однако, несмотря на отмеченные
преимущества, кинематическое уравнение Бортца нелинейно по ф и вырождается при
ф = тш, л = ±1, ±2,... . (3.14)
Особенно эффективны в системах ориентации и навигации параметры
Родрига-Гамильтона А0, \}, А2, А3, рассматриваемые как элементы кватерниона:
ИА0
АЛ \\S(A)\\
И'Л)
Л =
(3.15)
,Ф
где S(A) = А0 = cos— - скалярная часть кватерниона,
К(Л) = А =
2
к
=
Ф^втф!
ф 1
Фу sin ф
Ф 1
Фгвтф
Ф 1
векторная часть кватерниона.
Параметры Родрига-Гамильтона, характеризующие ориентацию
связанной системы координат по отношению к нормальной, имеют вид [3.12]:
Ал =cos—cos—cos—
0 2 2 2
. vi/ . d . у
■sin- sin — sm—.
2 2 2'
. у 0 . у . v|/ . S y
A, = cos—cos—sm— + sm—sin—cos—,
4>
0
\|/ . 0 . Y
(3.16)
A2 =sin — cos—cos— + cos—sin—sin —,
л \|/ . 0 y • V & • Y
Ao =cos—sm—cos—sm —cos—sin—.
3 2 2 2 2 2 2
Кватернион ориентации Л удовлетворяет кинематическому уравнению,
являющемуся аналогом уравнения Пуассона (3.8):
2Л = (а-о^)л,
(3.17)
где
П =
1 °
кг
СОу
|<°z
-<*х
0
-coz
СОу
-СОу
coz
0
-в>х
-<°z\
-СОу
<»х
0
- кососимметрическая матрица размера 4x4,
составленная из проекций вектора абсолютной угловой скорости БПЛА;
66
"«=
0
К*
К
К
-<°*
0
-<°zg
«>*
-cocrg
«4
0
-®*
"^zJ
-co J
и*
о 1
- кососимметрическая матрица (3.18)
размера 4x4, составленная из проекций вектора абсолютной скорости
нормальной системы координат на оси связанной системы координат.
Матрица направляющих косинусов, выраженная через параметры
Родрига-Гамильтона, имеет вид [3.11, 3.12]:
\2 , оч2
А =
2a,j 4- 2a,q
1
2*КлК,2 — 2A/qA/-3
2A/q + 2A>2 — 1
zA/jA^ 4- ZA-qA^ ZA2A3 — 2AqAj
2A2A3 + 2AqA|
24 + 2Х2з -1
(3.19)
Так как матрица (3.19) аналогична матрице (3.2), то для того, чтобы найти
углы Эйлера-Крылова по параметрам Родрига-Гамильтона, необходимо
воспользоваться следующими равенствами [3.12]:
\|/ = arcta -
tfi
13
л\\;
= arctd -
2AjA^ — 2AqA/2
2Aj + 2Aq — 1
& = arcsin(tf12) = arcsin(2A,1^2 + 2^0^3)
f ~ \ (
(3.20)
у = arctd
*32
'22,
i = arctd
2A2A3 — 2AqAj
2Aq + 2A2 ~~ 1
Блок-схема алгоритма ориентации с параметрами Родрига-Гамильтона
приведена на рис. 3.6.
Ключ:
• формирование матрицы 4x4
1ЕЗ
в
1 <
ш
Q-Q
^ |U .II. J| ^
0Д>
F «^
>ш £
*Ш
arCt8l4~ 2A,2 + 2A.2 -1 J
arcsin(2A,jA,2 + 2^0A,3)
arctgf-2Xf3"22Xo^l
^ 2A,20 + 2A,2 -1 J
-►V
~~^
-►Y
Рис. З.6. Блок-схема алгоритма ориентации
с параметрами Родрига-Гамильтона
67
При полете БПЛА, когда можно пренебречь угловой скоростью вращения
нормальной системы координат, уравнение (3.17) можно приближенно представить
в следующем виде
2A-QA. (3.21)
Кинематическое уравнение в параметрах Родрига-Гамильтона не
вырождается при любом положении объекта и является линейным. К тому же
параметров Родрига-Гамильтона всего четыре, в отличие от матрицы направляющих
косинусов, и подчиняются они одному уравнению связи [3.11]:
к
= 1.
(3.22)
Однако, следует отметить, что переход от параметров Родрига-Гамильтона к
углам Эйлера-Крылова либо к матрице направляющих косинусов А достаточно
громоздкий, и выигрыш от применения параметров Родрига-Гамильтона
несколько снижается. Если же организовать задачу стабилизации БПЛА не по
углам Эйлера-Крылова, а непосредственно по параметрам Родрига-Гамильтона
(кватернионам), то эффективность применения последних неоспорима [3.5].
Применение параметров Родрига-Гамильтона (кватернионов) как сигналов
управления позволяет получить не только устойчивое управление угловым
движением БПЛА, но и в ряде случаев достаточно близкое к оптимальному
управление [3.4]. Блок-схема системы управления для случая кинематического
уравнения (3.21) приведена на рис. 3.7.
ь
Датчики
угловой
скорости
П
w
^
2А = ПЛ
БПЛА
л
^
Формирование
управления
h^
Рис. 3.7. Блок-схема системы управления БПЛА
по параметрам Родрига-Гамильтона
При малом отклонении БПЛА от нормальной системы координат
управление, пропорциональное углам Эйлера-Крылова, может быть построено с
учетом величин только первого порядка малости следующим образом [3.3]:
1|/ в zAqA^, \j & ZAt^Q, у ~ ^AjAq.
(3.23)
68
Соотношения (3.23) показывают, что для управления БПЛА, наряду с
традиционно используемыми углами \|/, О, у, могут использоваться параметры
X0Xt (i=l, 2, 3). В случае применения соотношений вида (3.23) нет
необходимости предварительно вырабатывать углы Эйлера-Крылова по формулам (3.20).
3.5 Численная реализация алгоритмов ориентации БПЛА
Обновление информации об угловой ориентации БПЛА осуществляется в
результате интегрирования кинематического уравнения в кватернионах на
основании измерений, полученных инерциальным измерительным модулем.
Интегрирование кинематического уравнения, характеризующего ориентацию
БПЛА относительно нормальной системы координат, является одним из
наиболее ответственных вопросов вычислительного процесса. От точности
вычисления параметров ориентации существенно зависит точность стабилизации
БПЛА. Так как измеряемые составляющие угловой скорости БПЛА,
находящиеся в правых частях кинематических уравнений, часто являются
быстроменяющимися функциями времени, то для обеспечения высокой точности
ориентации объекта приходиться интегрировать уравнения с весьма малым шагом,
либо использовать сложные формулы высоких порядков точности. Обе эти
меры приводят к значительной загрузке вычислительного устройства БПЛА.
Поэтому при выборе кинематических уравнений, а также алгоритма и шага
интегрирования, важным является вопрос о достижении приемлемого компромисса
между точностью и объемом вычислений [3.2].
Так как выше было показано, что в алгоритмах БСО предпочтительнее
использовать параметры Родрига-Гамильтона, то в дальнейшем будет
рассматриваться кинематическое уравнение именно в этих параметрах. Рассмотрим
кинематическое уравнение в параметрах Родрига-Гамильтона (кватернионах)
А = -ПА. (3.24)
Подобно тому, как решается скалярное дифференциальное уравнение
первого порядка, решение уравнения (3.24) на (£+1)-шаге интегрирования
представим в виде
А(к +1) = ехр[О,50(А:)]Л(А;), (3.25)
где Т0 - период дискретизации,
<*+1)Г0
в(к)= Q(t)dt = \
о -*,(*) -*,(*)
Шк) 0 вж(к)
Шк) -em о
\ez{k) 9y{k) -вх(к)
>=£utffl4fit.,i«l,
4x4 2 2! 4 и! 2"
'4><4 - единичная матрица размера
4x4.
-ОМ
-ву(к)\
вх(к)
0
** ?
(3.26)
69
Если принять, что за время, равное периоду дискретизации Г0, угловая
скорость Q изменяется незначительно, то имеет место приближенное равенство
Ж*)»Г0О(*) (3.27)
и ряд (3.26) принимает вид
>^4+5ШД^+... . (3.28)
Тогда алгоритм (3.25) можно представить в виде
Т0П(к)
»=o"!L 2
Л(*). (3.29)
Понятно, что при реализации алгоритма (3.29) невозможно привлекать
бесчисленное множество членов суммы, поэтому следует «усекать» ряд (3.28).
При значительном упрощении алгоритма (3.29) необходимо заботиться об
уменьшении периода дискретизации, чтобы сохранить точность вычислений.
При относительно большом периоде дискретизации необходимо усложнять
алгоритм удержанием значительного числа членов степенного ряда.
3.6 Погрешности БСО
3.6.1 Погрешность усечения
Оценка погрешности усечения позволяет ответить на вопрос о
рациональном выборе числа членов в степенном ряде (3.28). Воспользуемся
формулой для остаточного члена разложения в ряд Тейлора показательной функции
D (0,5Г0Д)Я+1 i*oO
R„ = -—^-^—е (ъ зо)
(л + 1)! ' К }
где п - номер последнего члена в разложении (2.28), 0 < <1.
Следует отметить, что остаточный член R„ в (3.30) представляет собой также
матрицу размера 4x4. Не конкретизируя, о какой компоненте матрицы Rw идет
речь, оценим величину остаточного члена для различной угловой скорости
БПЛА и шага дискретизации на основе скалярной зависимости
(0,5^)-^ 3
(и + 1)!
где m = x,y,zn положено % = 1/2.
Результаты расчетов остаточных членов для различного порядка
алгоритма и угловой скорости БПЛА приведены на рис. 3.8-3.10.
70
Гп
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
6
8
10
12
14
16
18
20
22
24
(Ъ
'\
<» \
*•*...
<*
\
\
<1 >
■*
\
л
\
»
(к
ч
ib '#
>
4
"*
ч
*
То=0,1 с
• • То=0,01 с
#-• То=0,001 с
Рис. 3.8. Оценка величины остаточных членов при (хУт = ОД рад/с
Гп
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
1x10
3
5
7
9
11
13
15
17
19
(
{
i
*^
|
ь
>
i
-
i
^■^
1
ь '(
\
\
<
и
>
^
<
X
%
1
>
9
►
То=0,1 с
• • То=0,01 с
•-• То=0,001 с
Рис. 3.9. Оценка величины остаточных членов при (От = 1 рад/с
71
Гп
0.01
4
1x10
1x10
1x10
1x10
10
1x10
1x10
14
1x10
f.""4-, Г"|
i—ч——~^~'— и
J %-^\ Ж L
I ф Г •-..
| | ч | ' Т
J * L
н %-+
7о=0,1 с
• • 7о=0,01 с
•-• 7о=0,001 с
Рис. ЗЛО. Оценка величины остаточных членов при COw = 5 рад/с
Оценка остаточных членов, а следовательно, и погрешности усечения
позволяет сделать следующие выводы:
1. Нелинейные члены (при п > 2) вносят вклад в суммарную погрешность
с точностью не более единиц процентов.
2. Реальное число членов ряда, которое необходимо привлекать,
соответствует п = 2, так как при большем числе членов погрешность на два порядка
меньше, чем погрешности остальных групп. Для маломаневренных БПЛА
достаточным является привлечение только двух первых членов.
3.6.2 Кинематическая погрешность, вызванная коническим движением
Коническое движение является проблемой при решении задачи
ориентации путем интегрирования составляющих угловой скорости, когда частота
движения лежит около или выше частоты дискретизации. Обычно коническое
движение является следствием совокупности вибраций подвижного объекта, на
котором устанавливается ИИМ.
Вектор ориентации при коническом движении имеет вид
II© sin oo^H
ф(7) = ||6cOSCDf||
о
где 0 - угол раствора конуса, со - частота вращения.
(3.32)
72
В соответствии с (3.32) проекции вектора угловой скорости определяются
следующим образом
II со sin 9 cos cor II
со = -со sin 0 sin cor e (3.33)
I co(l-cos0) ||
Матрица направляющих косинусов для конического движения имеет вид
л 1
А =
cos6 + (l-cos6)sin cor
—(l-cos0)sin2cor
2
- sin 0 cos cor
- (1 - cos 0) sin 2cor sin 0sin cor
cos0+(l-cos0)cos2cor sin0sincor|
- sin 0 sin cor cos0
(3.34)
Сведения о проекциях вектора угловой скорости в связанной системе
координат (3.33) и точное значение матрицы направляющих косинусов (3.34)
позволяет оценить эффект конического движения. На рис. 3.11-3.12 приведены
графики изменения углов рыскания, тангажа и крена для случая конического
движения с углом 6 = 1° и частотой со = 500Гц, полученные на основе
матрицы направляющих косинусов (3.34) и в результате интегрирования
кинематического уравнения в параметрах Родрига-Гамильтона. Как видно из результатов
моделирования, по углу тангажа наблюдается накапливание погрешности с
течением времени, что и является следствием конического движения.
Время, с
- Расчетный угол
- Истинный угол
0,01
а.
-3 -3 -3 -3
2>40 4x10 6x10 8x10 0,01
Время , с
"" Расчетный угол
"" Истинный угол
Рис. 3.11. Изменение углов рыскания и крена при коническом движении
73
Рис. 3.12. Изменение угла тангажа при коническом движении
Дрейф БСО по углу тангажа при данных параметрах конического
движения составляет 5 • 1 (Г4 град/с = 1,8 град/ч. В большинстве случаев коническая
погрешность (coning error) возникает, когда фаза между двумя ортогональными
движениями (вибрациями) составляет величину, отличную от 0°. Тогда
коническую погрешность можно оценить по формуле
где р - фаза колебаний; а^, а^ амплитуды колебаний, v - частота колебаний.
Из соотношения (3.35) следует, что коническая погрешность уменьшается,
когда фаза р стремится к нулю. Эффективным способом устранения конической
погрешности является фильтрация выходных сигналов гироскопов.
3.6.3 Влияние случайных погрешностей гироскопов
Случайные погрешности гироскопов изменяются случайным образом при
повторных измерениях и преобразовании угловой скорости. Для анализа
случайных погрешностей гироскопов широко применяют метод вариаций Аллана
(Allan Variance (AVAR)). Вариация Аллана - это метод анализа временных по-
74
следовательностей для определения характеристик шумов в функции
усредненного времени. Метод, развитый для оценки нестабильности часов в
спутниковых навигационных системах, с успехом применяется с целью анализа шума
для других систем, в том числе и для микромеханических гироскопов.
Вариация Аллана определяется следующим образом. Берется запись
выходного сигнала гироскопа со(0, включающая М отсчетов, каждый из которых
имеет длительность Т0, т.е. длина записи равна МТ0. Далее определяется угол,
накопленный в результате интегрирования выходного сигнала гироскопа ю(/) в
течение m отсчетов
ew= |ш(оа. (3.36)
Вариация Аллана рассчитывается по следующей формуле [3.14]
М-2п
а2(пТ0) =
1
2(М-2п)(пТ0У
2>
ет=1
т+2п ^т+п
+ отГ
(3.37)
для п = 192,3,...9птяк<(М-1)/2.
Чаще определяется не вариация Аллана, а отклонение Аллана (Allan
Deviation (AD)) ъ(пТ0) как корень квадратный из вариации Аллана. Затем
строится график отклонения Аллана, причем по оси абсцисс откладывается
десятичный логарифм среднего времени т = пТ09 а по оси ординат - десятичный
логарифм отклонения Аллана. Далее осуществляется анализ наклонов различных
участков кривой отклонения Аллана, по которым судят о присутствии
всевозможных составляющих погрешности ММГ (рис. 3.13).
о(х)\
i
1
Экспоне
коррелиро
L_
нциально-
ганный шум
Случайное
Синусоидальный блуждание
шум скорости
-»^ * Нестабильность \уУ^
^А^ нуля ^1ь
0
1 1
-J ►
Рис. 3.13. Общий вид кривой вариации Аллана
Выполнены исследования инерциального измерительного модуля на
микромеханических гироскопах и акселерометрах (ММА) компании Analog
Devices, макет которого приведен на рисунке 3.14 [3.15].
75
Рис. 3.14. Макет микросистемного измерительного модуля:
1 - микромеханические гироскопы ADXRS 150, 2 - микромеханические акселерометры
ADXL 203, 3 - 16-разрядная АЦП, 4 - переключатель каналов, 5 - разъем для шины данных,
6 - прецизионный линейный стабилизатор напряжения
В исследовании осуществлялась запись выходных сигналов гироскопов
на неподвижном основании и рассчитывались отклонения Аллана в
соответствии с соотношениями (3.36), (3.37) (рис. 3.15).
и
I
е-
of
X
&>
5
X
<D
X
о
1 1
0,1
0,01
10"'о
' • ■ • •
,1
» ^
^
*^
^^
щ
>1
Г т**
TtW
1
**
**
ч1]
11
н*и
ife
10
• • -
• •
• •
И1
• Г 1
•л \jff\\
^ш^\ 1 Ml
и
Усредненное время, с
Гироскопе
- - - Гироскоп Y
• • • • Гироскоп Z
Рис. 3.15. Отклонения Аллана трех микромеханических гироскопов ADXRS-150
76
Анализ кривых отклонения Аллана позволяет сделать следующие выводы:
а) прямолинейный участок с отрицательным наклоном при малых
значениях усредненного времени г характеризует белый шум в выходном сигнале
гироскопов. Для определения случайного блуждания угла ARW {Angle Random
Walk) определяются значение AD при т = 1 с;
б) нестабильность нуля гироскопов определялась в области кривой
отклонения Аллана с нулевым наклоном.
Полученные с помощью отклонений Аллана характеристики шума
гироскопов приведены в таблице 3.2.
Таблица 3.2 - Характеристики шума гироскопов
Гироскоп X
Гироскоп Y
Гироскоп Z
ARW, °/л/с
(шум)
0,038
0,058
0,039
Нестабильность
нуля, 7с
0,0097659
0,015448
0,012945
Значения характеристик шума гироскопов позволяют оценить точность
инерциального модуля в определении параметров ориентации. СКО
погрешности в определении угла, вызванная белым шумом (рис. 3.16), определяется по
формуле [3.14]
o(t) = ARW4t, [°], (3.38)
где o(t) - СКО погрешности в определении параметров ориентации.
1
0,8
| 0,6|
о 0,41
0,2
0
1 т9
■ ■ ■ - -!- " " --#**■> - - -
I *
\S_ _ I _ _-^TL
•_ \*s?__ I
/ *r
0
100
200
300
Время, с
Гироскоп X
Гироскоп Y
Гироскоп Z
Рис. 3.16. СКО погрешности в определении угла,
вызванные шумом гироскопов
77
Из рис. 3.16 следует, что за время 300 секунд СКО погрешности в
определении угла бесплатформенной системой ориентации, вызванной шумом
гироскопов, составит 0,6-1°.
Проведенный анализ позволяет заключить, что случайные погрешности
ММГ приводят к накоплению (дрейфу) показаний БСО с течением времени,
поэтому необходимо корректировать БСО с помощью других измерительных
систем. Кроме того, БСО не обладает свойством избирательности, т.е. она не
способна самостоятельно отыскивать плоскость горизонта. Как известно, для
придания нужной избирательности в классические гироскопические системы
вводят системы коррекции. Так, например, для придания избирательности в
вертикальном направлении в гироскопических вертикалях используется обычный
маятник, заставляющий систему ориентации следить за истинной вертикалью.
3.7 Принципы акселерометрической коррекции БСО
Для коррекции БСО на микромеханических гироскопах целесообразно
привлекать сигналы акселерометров, которые являются аналогом маятников в
классической гировертикали. На рис. 3.17 приведена нормальная система координат
OXgYgZg и связанная с БПЛА система координат OXYZ, которая получена из
OX Y Z последовательным разворотом на углы рыскания \|/, тангажа $ и крена у.
Рис. 3.17. Системы координат и измерительные оси акселерометров
78
Вдоль осей связанной системы координат расположены три
микромеханических акселерометра Ах, Ау, А2. При полете БПЛА с постоянной скоростью
акселерометры будут иметь следующие показания [3.12]:
gx =gsin$,gr = gcosycos&, gz = -gsinycosS, (3.39)
где g - ускорение силы тяжести.
В соответствии с формулами (3.39) углы тангажа и крена могут быть
найдены следующим образом [3.12]:
£ = arcsin^, у = arctg^^. (3.40)
g gY
Таким образом, информация об углах тангажа и крена может быть
получена на основе показаний акселерометров. Так как соотношения (3.40) не
предполагают операции интегрирования, то параметры ориентации,
полученные по акселерометрам, не имеют тенденции к накоплению. Однако при
ускоренном движении БПЛА акселерометры могут привести к значительным
погрешностям, так как в этом режиме полета они моделируют кажущуюся
вертикаль. Для того чтобы получить аналог медленной прецессии классической
гировертикали при ускорениях БПЛА, необходимо вычисленные по показаниям
акселерометров углы тангажа и крена пропускать через фильтр нижних частот
(ФНЧ). В свою очередь, для ослабления низкочатотных погрешностей тангажа
и крена, полученных по БСО, ее выходные сигналы целесообразно пропустить
через фильтр верхних частот (ФВЧ). Блок-схема комплексирования БСО с
акселерометрами приведена на рис. 3.18.
Рис. 3.18. Блок-схема комплексирования БСО с акселерометрами
Рассмотрим работу комплексной системы на примере угла тангажа [3.19].
Две измерительные системы - БСО и блок акселерометров вырабатывают угол
тангажа в соответствии со следующими равенствами:
d*=» + v*, (3.41)
$A=$ + vA, (3.42)
где &Б, &А - тангаж, выработанный БСО и блоком акселерометров
соответственно, & - истинный угол тангажа, vB, vA - погрешности БСО и блока
акселерометров соответственно.
79
В простейшем случае в качестве ФНЧ и ФВЧ можно воспользоваться
звеньями с передаточными функциями
™ФНЧ (s) = -i-, Wm4 (,) = -^-, (3.43)
Ts +1 Г5 +1
где Т - постоянная времени фильтров. В соответствии с блок-схемой на
рис. 3.18 оценка угла тангажа на выходе комплексной системы имеет вид:
ад=-^-^(,)+_1-^(,)=
Ts + l Ts +1
Ts 1 (344)
7i +1 Ts + l
Из соотношения (3.44) следует, что фильтры не искажают истинный
сигнал угла тангажа. При этом низкочастотные погрешности БСО ослабляются с
помощью ФВЧ, что позволяет устранить их основной недостаток - накопление
погрешностей. В свою очередь, погрешности блока акселерометров
ослабляются посредством ФНЧ. Возмущения, вызванные ускоренным движением БПЛА,
содержащиеся в погрешности блока акселерометров vA, после прохождения
через ФНЧ будут медленно по экспоненциальному закону «уводить» БСО к
положению кажущейся вертикали. Если время действия ускорения невелико, то
погрешности БСО будут незначительными. Кроме того, ФНЧ пропускает
низкочастотный сигнал акселерометров, связанный с разворотом истинной
вертикали при облете Земли, что придает БСО свойство избирательности. При
длительных ускорениях необходимо отключать акселерометрическую коррекцию и
переводить БСО в автономный режим.
Другой вариант коррекции БСО - посредством блока акселерометров -
приведен на рис. 3.19. В данном способе сигналы БСО и блока акселерометров
сравниваются, и разностный сигнал подается в ФНЧ. Последний ослабляет
высокочастотные погрешности акселерометров и пропускает низкочастотную
погрешность БСО, которая впоследствии вычитается из БСО.
Рис. 3.19. Блок-схема коррекции БСО
Можно показать, что схемы комплексирования на рис. 3.18 и 3.19
эквивалентны [3.12]. Для подтверждения разработанных алгоритмов проводился
эксперимент, в котором использовался инерциальный измерительный модуль
на микромеханических гироскопах и акселерометрах (рис. 3.14). Последний ус-
80
танавливался на поворотный стенд, а сигналы гироскопов и акселерометров
записывались в компьютер. После соответствующей первичной обработки,
сигналы гироскопов и акселерометров пропускались через разработанные
алгоритмы. Результаты одного из экспериментов приведены на рис. 3.20.
Рис. 3.20. Работа БСО с акселерометрической коррекцией
Анализ графиков на рис. 3.20 позволяет сделать вывод о том, что
коррекция БСО по показаниям акселерометров позволяет устранить накопление
погрешностей с течением времени и делает БСО избирательной по отношению к
местной вертикали [3.19].
3.8 Акселерометрическая коррекция
на основе теории оптимальной фильтрации
В случае, когда необходима выработка только углов тангажа и крена, с
учетом того, что для обеспечения избирательности БСО относительно линии
местной вертикали целесообразно использовать кососимметрическую матрицу,
как и для уравнений Пуасона, а в качестве параметра, характеризующего
угловую ориентацию БПЛА, - вектор силы тяжести g, задача ориентации сводится
к решению дифференциального уравнения вида [3.20]:
g = -i(»x]g. (3.45)
Уравнение (3.45) обладает такими же преимуществами, как и уравнение на
базе кватернионов, однако при этом необходимо определять только 3 параметра, а
не 4, как для кватернионов. Связь между данным параметром и углами Эйлера-
81
Крылова легко реализуется через уравнения (3.40). Учитывая также тот факт, что
необходимо обеспечивать избирательность БСО относительно линии местной
вертикали, что, как правило, осуществляется с помощью акселерометров,
уравнения (3.45) становятся более предпочтительными по сравнению с матрицей
Пуассона и кватернионами, так как в этом случае не возникает необходимости
перехода от кватернионов или элементов матрицы Пуассона к углам Эйлера-Крылова.
В этом случае возможно осуществление коррекции БСО по вырабатываемым
проекциям вектора g с последующим вычислением углов тангажа и крена.
При этом возможно построение схем комплексирования БСО и
акселерометров с применением теории оптимальной фильтрации на основе фильтра
Калмана(ФК)[3.21].
3.8.1 Дискретный фильтр Калмана
ФК обеспечивает оценку вектора состояния, описываемого Марковской
случайной последовательностью вида (3.46) по измерениям (3.47):
Х^ФгХ^х+Гм, (3.46)
Ъ^НМ+У! (3.47)
где Xh Xi_\ - вектор состояния, содержащий оцениваемые величины, на /-ом и
/-1-ом шаге;
Фу - матрица прогноза, описывающая изменение вектора состояния во
времени;
rhWj - матрица порождающих шумов и порождающие шумы прогноза,
определяемые точностью описания динамики изменения вектора состояния с
помощью матрицы прогноза Ф7;
Yt - вектор измерения, содержащий информацию, поступающую с датчиков;
Я7 - матрица наблюдения, описывающая связь между вектором состояния и
вектором измерения;
v, - вектор шумов измерения, характеризующий шумовую составляющую в
выходных сигналах датчиков.
Структура ФК включает в себя блок оценки, непосредственно
осуществляющий оценку вектора состояния и блок ковариации, обеспечивающий
вычисление коэффициента передачи ФК Kt [3.22].
Блок оценки дискретного ФК обеспечивает вычисление рекуррентных
зависимостей:
ХШ_Х=ФГХ1_Х, (3.48)
Xt = Xilt_x + Kt. iXt - Ht. Ii/M), (3.49)
где Хц1_\ - прогноз вектора состояния на/-ом шаге работы фильтра.
Блок ковариации реализует вычисление матрицы ковариации погрешностей
прогноза ^-/i-l по зависимости:
З/^Ф^ФГ+Г^ГГ (3.50)
82
Вычисление коэффициента передачи Kt ФК и матрицы ковариации
погрешностей оценивания Pt на /-ом шаге работы ФК осуществляется в зависимости
от размерности вектора состояния п и вектора измерения т, по рекуррентным
зависимостям:
(3.51)
Ki=Pi/i-\Hi \HiPili-\Hi +Ri) >
Pi^E-KiHfiFl,^ (3.52)
/}=(/^1_1-Я^я/)"1, (353)
К;=ЦН?К[\ (3.54)
где Pt_i - матрица ковариации погрешностей оценивания на /-1-ом шаге
работы ФК;
Rj - матрица ковариации шумов измерения, определяемая параметрами
шума вектора измерения;
Qi - матрица ковариации порождающих шумов, определяемая точностью
описания изменения вектора состояния во времени с помощью матрицы прогноза Ф,.
Вычисление коэффициента усиления Kt и матрицы ковариации
погрешностей оценивания Pt для обеспечения наименьшей вычислительной нагрузки
целесообразно проводить по выражениям (3.51) и (3.52), когда т«п, в то время
как при т«п и диагональной матрице Rt целесообразно использовать
выражения (3.53) и (3.54).
3.8.2 Комплексирование БСО с акселерометрами
Учитывая тот факт, что сигналы, вырабатываемые ДУС, позволяют
описывать изменение параметров, характеризующих ориентацию объекта в моменты
времени, последующие текущему, возможно комплексирование БСО и
акселерометров по неинвариантной схеме [3.22], привлекая для формирования
матрицы прогноза сигналы, вырабатываемые ДУС.
Структурная схема такой системы приведена на рис. 3.21.
Блок микромеханических
акселерометров
Л
Ay
Хс
Блок микромеханических
гироскопов
Ус
ML
Q*
Qy
Qz
Матрица
прогноза
Пх, Пу, Hz
Нх^-^-^ь
gx> g)>> gz
Фильтр Калмана
Блок
вычисления
углов
тангажа
и крена
тангаж
крен
Рис. 3.21. Структурная схема комплексирования БСО и акселерометров на основе ФК
83
- матрица прогноза, описываю-
На основании уравнения (3.45), в дискретной БСО с шагом
дискретизации т вектор g на /-ом шаге работы системы может быть описан с помощью
рекуррентного уравнения вида:
gi = rgt_x x Qt_x + gt_x, (3.55)
где
g;_l = &-i,jc»ft-i,vJft-l,z ~ вектор проекций ускорения силы тяжести
на /-1-ом шаге;
Si -\ £i,x>£i,y>8i,z ~ вектор проекций ускорения силы тяжести на /-ом
шаге;
т
Q/_l = fi|-i,jc>^M,y-Qi-\z ~ показания трехканального блока датчиков
угловой скорости на /-ом шаге.
Выражение (3.55) представляет собой рекуррентную зависимость,
позволяющую реализовать БСО на базе ДУС, использующую в качестве параметра,
характеризующего угловую ориентацию объекта, вектор g.
Выражение (3.55) можно представить в матричном виде:
£/=фа,Г£/-Ь (3.56)
1 r'nM,z -T'ai-\,y
где Фа?/ = -г• QMjZ 1 т• QMjX
lT'Q-ly -T'Q-\,x !
щая динамику изменения вектора g по угловым скоростям, вырабатываемым
датчиками угловой скорости.
Определим параметры ФК, приняв в качестве вектора состояния
проекции вектора силы тяжести на оси связанной системы координат. Будем
считать, что в показаниях акселерометров отсутствуют составляющие,
обусловленные ускоренным движением объекта, а систематическая погрешность
датчиков блока акселерометров пренебрежимо мала. В этом случае
информация, вырабатываемая акселерометрами, может быть описана вектором
измерения Ya по выражению:
ya,i = Ha,i-XaJ + vaJ, (3.57)
а выражения (3.48) и (3.49) для блока оценки ФК примут вид:
*а,;=Фа,Г*а,/-1; <3-58)
Хг,i = Xa,i/i-l+ Ka,i' (Ya,/' - Ня,i- Xa,ilЫ)' (3.59)
т
где Y^i =\n^x>ni,y>ni,z\ ~ вектор измерения на /-ом шаге работы системы,
представляющий собой ускорения, измеренные блоком акселерометров;
т
^a,/={&,jc>ft,v>ft,zf ~~ вект0Р состояния, представляющий собой
проекции ускорения силы тяжести на оси связанной системы координат;
84
я
а,/
"1
0
0
0
1
0
0"
0
1
матрица наблюдений, определяющая связь между векто-
^а,0 =
ром состояния и вектором измерения;
va ,— шумовая составляющая в выходном сигнале блока акселерометров;
Ка i - коэффициент передачи ФК.
Для реализации рекуррентного фильтра Калмана необходимо определить
начальные значения вектора состояния Хг 0, матрицы ковариаций
погрешностей оценивания Ра q , значения матриц ковариаций порождающих шумов ga i
и шумов измерения /?а,, а также вид матрицы порождающих шумов Га t.
Начальное значение вектора состояния примем равным 0. Начальное
значение матрицы ковариаций погрешностей оценивания определяет степень
точности отражения истинного значения оцениваемых величин начальными
значениями вектора состояния. При использовании показаний акселерометров
в единицах g разница между истинными значениями проекций ускорения
силы тяжести и нулевым значением вектора состояния не превышает единицы.
Таким образом, начальное значение матрицы ковариаций погрешностей
оценивания примем равным:
'1 0 (Г
0 1 0
0 0 1
Матрица ковариаций шумов измерения определяет достоверность
информации, поступающей с блока акселерометров. При этом, чем больше ее
значение, тем менее достоверными являются измерения. Минимальное
значение матрицы ковариаций шумов измерения Rt определяется шумовой
составляющей блока акселерометров, включая как шумовую составляющую датчика
линейного ускорения, так и электронного тракта согласующей цепи, начиная с
согласующего каскада усиления и заканчивая аналогово-цифровым
преобразователем.
Данные параметры могут быть получены расчетным путем на
основании технических характеристик датчиков и элементов электронного тракта
измерительной цепи с учетом параметров напряжения питания или
определены экспериментально по записи сигналов акселерометров в режиме покоя
(рис. 3.22).
По данной выборке сигналов акселерометров можно получить среднеквад-
ратическое отклонение (СКО) шумов акселерометров одним из известных
способов [3.21]. В данном случае СКО шумов акселерометров для трех датчиков
составляет 0,068g. Следует заметить, что шумовая составляющая показаний
акселерометров, как правило, носит нормальное распределение (рис. 3.23),
поэтому величина СКО может быть определена согласно правилу трех а [3.21].
85
Рис. 3.22. Показания акселерометров LIS3L06AL производства
компании STMicroelectronics при нулевых углах тангажа и крена: 1 -
показание акселерометра с ориентацией оси чувствительности вдоль вектора
ускорения силы тяжести; 2, 3 - показания акселерометров с ориентацией
оси чувствительности перпендикулярно вектору ускорения силы тяжести
Рис. 3.23. Гистограмма распределения шумовой составляющей
микромеханического акселерометра LJS3L06AL производства
компании STMicroelectronics
Исследования показали, что шумы акселерометров - некоррелированные
или слабо коррелированные, поэтому матрица ковариаций шумов измерения
имеет диагональный вид и ее минимальное значение определяется матрицей:
Ла,У ~
О
О
О О
(Уп
(3.60)
86
где аа - среднеквадратическое отклонение шумовой составляющей показаний
акселерометров.
Определить матрицы порождающих шумов и матрицы ковариаций
порождающих шумов можно на основании натурного моделирования погрешностей
прогноза в соответствии со структурной схемой на рис. 3.24.
Блок выработки
углов Эйлера и
их производных
[*.*
ЛУ
[у,>в
iY,j-
Формироваель
сигналов ДУС
[Q^QivAJ1
Блок выработки
проекций вектора
g на оси связанной
системы координат
Блок
задержки
Igxi.Xyi&tY
[ПХ1,Яу,,&;,Х
1 Блок 1
задержки
Блок
формирования матрицы
прогноза
\gxi->*gyt-;&,-i][
ф,
X
-6>
1
R>±-
Рис. 3.24. Структурная схема определения погрешностей прогноза Дп
Система, представленная на рис. 3.24, работает следующим образом. По
сформированным углам Эйлера и их производным формируются показания
ДУС без погрешностей в соответствии с выражениями (3.8).
После формирования эталонных сигналов к ним добавляются
погрешности датчиков, определяемые в соответствии с паспортом датчика и записями
сигналов ДУС в режиме покоя.
Далее формируется прогноз проекций вектора g на оси связанной
системы координат по выражению (3.56) и вычисляется разница между
спрогнозированными и истинными проекциями, которые формируются в блоке
выработки проекций вектора g, в соответствии с выражениями (3.42).
Реализация погрешностей прогноза приведена на рис. 3.25.
Погрешность прогноза в этом случае носит нормальное распределение и
может считаться нормально распределенной центрированной случайной
величиной (рис. 3.26), а корреляцией по различным проекциям можно пренебречь.
Рис. 3.25. Погрешность прогноза при шаге дискретизации фильтра г = 0,01с
для ДУС ADXRS610 производства компании Analog Devices
87
Рис. 3.26. Гистограмма погрешности прогноза
Таким образом, матрица порождающих шумов Га, может быть принята
равной единичной матрице третьего порядка:
Га,/ =
"1
0
0
0
1
0
01
0
1
Матрица ковариаций порождающих шумов Qai является диагональной
матрицей и определяется выражением:
Ом =
Ядп
0
0
0
£»Дп
0
0
0
£>Дп
где £)Дп - дисперсия погрешности прогноза, полученная по результатам
натурного моделирования.
В ряде случаев точность прогноза может быть повышена за счет более
точного описания изменения проекций вектора g на оси связанной системы
координат. Уточненная матрица прогноза может быть получена на основании
теории конечного поворота твердого тела.
Будем считать что с момента времени М до i шага работы системы, т.е. в
течение времени т угловая скорость Q вращения связанной системы координат
относительно нормальной постоянна, тогда в связанной системе координат
вектор g повернется на угол -г • Q. Данному повороту вектора может быть
сопоставлен кватернион AJAo;^;^;^}' который может быть определен как [3.3]:
88
л =
Зная кватернион поворота, несложно определить преобразование вектора
£,-_! в вектор gt [3.3]:
Aq + Я] — Л2 — Яз 21Л[Л2 + Я0Я3) 2 (Я|Яз — Я0Я2)
где5(Л)= 2(Л1Я2-Я()Л3) Л\-Л\ + Л\-Л\ 2(^4} +4)4) •
2(4^з+4)^2) 2(^2^-4)4) 4)~4-42+4з
Подставляя значения кватерниона поворота, найдем уточненную матрицу
прогноза Фа Л/-, определяемую выражениями:
n?_u+(n?_1>y + nf_u)cos(r-|nM|)
фО) =
а,Л/
а
/-1
п/-1,Л-1,у (г" cos(r • |Ц-11)) " Ц-1,2 |*Vl |sin (T ■ fii-l |)
(3.61)
89
ф
<2> _
a,Ai
Ц-1, jA-1, у (l - cos(r • |ЙМ I)) + QM;Z |ЙМ |sin (r ■ |QM I)
Q,-
i-l
Qlx,y +(o?-U +Q?_1,z)cos(r -|ЙМ|)
Рм
"/-ljA-U (l ~ cos(T ■ pi-\ I)) ~ Q/-U |ЙМ |sin (r • |ЙМ |)
P/-1
(3.62)
Ф
(3) _
а,Л/
nM,jA-l,z (l - cos(r - |ЙМ J)) - QM>>, |QM |sin (r ■ |QM J)
P/-1
Цч^Ач^-ЦЧМ^^^
Pm
P?-U+(Q?-U+ ^-i^)cos(r>|QM|)
Q
(3.63)
■1-1
гдеФа д/,Фа д/>фа Ai ~~ пеРвый, второй и третий столбцы матрицы Фад; •
Нетрудно показать, что матрицу Фа t можно получить из матрицы Фа д/,
считая т • Q/_i величиной первого порядка малости и пренебрегая
величинами второго порядка малости.
Таким образом, Фа Л/ является более точной записью матрицы Фа ,.
Можно показать также, что матрица Фа Л/ не изменяет длину вектора g и является
эрмитовой матрицей, то есть Фа Л/ обладает свойствами:
Кл*Н (364)
(3.65)
фГ,Л/=фа,Л/>
Ф,
^фа,Л/=4
(3.66)
• а,Л/" -
где А = аЕ - диагональная матрица;
а - любое число.
Для некоторых ФК в зависимости от значения матриц прогноза,
наблюдения, матрицы порождающих шумов, а также матриц ковариации порождающих
шумов, измерения, прогноза и оценки возможно существование
установившегося режима ФК [3.22], то есть существует такое N, при котором для всех /,
больших N, выполняются условия:
90
Р . = р . = Р
1 a,z 7a,/+m ia'
где /и - натуральное число;
К^ - коэффициент передачи фильтра Калмана в установившемся режиме;
Ра - матрицы ковариаций погрешностей оценивания в установившемся
режиме.
Существование установившегося режима возможно только в том случае,
если матрица ковариаций погрешностей оценивания и коэффициента передачи
ФК определяются только шагом работы фильтра i [3.22].
Определим возможность существования установившегося режима для
рассматриваемого случая и определим параметры ФК в установившемся режиме.
Для исследования установившегося режима фильтра Калмана проследим
динамику изменения коэффициента передачи и матрицы ковариаций
погрешностей оценивания.
В соответствии с выражением (3.50) для блока ковариаций ФК получим
матрицу ковариаций погрешностей прогноза на первом шаге:
1,1/0 =Фа,Л,оФТ,1 +Га,10дГ[1. (3.67)
Учитывая свойство (3.66) матрицы прогноза и вид матрицы Ра q, а также
значения матриц Га ,• и £>а /5 выражение (3.67) может быть записано в виде:
^1/0=СРа,0+4а)£> (3.66)
где ра q - значение диагонального элемента матрицы Рг 0;
<7а - значение диагонального элемента матрицы £>а i;
Е - единичная матрица третьего порядка.
По выражениям (3.66), (3.51) и (3.52), учитывая вид матриц Ра 1/0, Яа i и
i?a i, определим значение коэффициента передачи Ка \, матрицы ковариаций
погрешностей оценивания Ра j на первом шаге:
Aa,i ; ;—ь > ^а,1 ; ;—ь >
/>а,О+0а+га Ра,О+0а+га
где га - значение диагонального элемента матрицы i?a z.
Таким образом, матрица ковариаций погрешностей оценивания на первом
шаге может быть представлена в виде:
рл,\ = Р&,\Е >
(/VO+tfaH
гДе Ра,\=- 7 Г-"
Ра,0+?а+>а
Аналогичным образом можно показать, что если матрица ковариаций
погрешностей прогноза на z-1-ом шаге имеет вид Pt_x = Pj_\E, то матрица кова-
91
риаций погрешностей оценивания на /-ом шаге может быть представлена в
виде Pt=PiE.
Таким образом, выражение (3.50) для вычисления матрицы ковариаций
погрешностей прогноза Рг z/z_] может быть записано в виде:
fkj/i-l =\i-\ +0м =(#М-1 +1а)Е> (3-67)
а выражения (3.51) и (3.52) для блока ковариаций фильтра Калмана в виде:
Ка i = W-1+gaj Е ? (3 68)
' /7а,Ы+?а+>а
Ра. = (^М^аКДи (369)
' Pa^-l+^a+^a
Так как матрица Фа 7- не оказывает влияние на значение коэффициента
передачи ФК и матрицы ковариаций погрешностей оценивания, а
коэффициенты qa, ra постоянны, то имеет место установившийся режим ФК [3.22], то есть
существует такое N, при котором для всех / >N выполняются условия
^а,/ ~ ^а,/+/и = ^а » ^slJ = 'aj+m = *а >
где т - натуральное число;
К% - коэффициент передачи фильтра Калмана в установившемся режиме;
Ра - матрицы ковариаций погрешностей оценивания в установившемся
режиме.
В данном случае фильтр Калмана может быть заменен дискретным
фильтром Винера (ФВ), который содержит только канал оценки и описывается
следующим уравнением:
Xt = Ф7- • *,._, +K(Yt- Ф7. • Xt_x). (3.70)
При этом точность оценки будет определяться значением матрицы
ковариаций погрешностей оценивания в установившемся режиме Ра .
Таким образом, при оценке проекций ускорения силы тяжести на оси
связанной системы координат указанным способом целесообразно использование
дискретного ФВ, так как он обеспечивает меньшую вычислительную нагрузку,
по сравнению с ФК, при сохранении точности.
Определим значения коэффициента передачи и матрицы ковариаций
погрешностей оценки для установившегося режима ФК. Эти значения можно
определить из следующих уравнений [3.22]:
'Тх
-1 , .> (3-71)
р = Ф;РФ? + r&rj - (<V4>f + r^rf )н]
*((ф^фГ + r,6,rf )hJ + Rt Y Ht (ф.рфГ + r^if)
K( = (Ф,-РФГ + Пй-rf )н[ (я, (Ф1РФ{ + TiQiTf )hJ + Rt)"'. (3.72)
92
С учетом свойства матрицы Фа ,- (3.66) и вида матриц Яа ,-, Га i9 ga,- и
R^ i уравнения (3.71) и (3.74) могут быть преобразованы к виду:
^а=(Ра+?а)£-(Ра+?а)(/?а+?а+га)" (Р&+%)Е, (3.73)
^а=(Ра+^а)(Ра+^а+^аГ1^5 (3-74)
где /?а- значение диагонального элемента матрицы Рг.
Так как из выражений (3.73) и (3.74) видно, что матрицы Ка и Ра
диагональные и полностью определяются значениями элементов ра, qa и га , то от
матричных уравнений (3.73) и (3.74) можно перейти к алгебраическим уравнениям:
р& (/>.+?.>. (3.75)
^ejA±*) (3.76)
(Ра+Ял+Ь)
где ка - диагональный элемент коэффициента передачи ФВ Ка.
Решая уравнение (3.54) относительно рг и учитывая, что ра > О [3.22],
найдем значение диагонального элемента матрицы ковариаций погрешностей
оценивания в установившемся режиме:
Л.,Ы**4г.)-Ч_ (377)
При этом значение диагонального элемента коэффициента передачи
дискретного ФВ определяется выражением (3.76) с учетом выражения (3.77).
Таким образом, параметры ФВ, а следовательно, и точность вычисления
проекций ускорения силы тяжести на оси связанной системы координат зависят
только от шумов измерения га и погрешностей прогноза #а.
Структура и параметры фильтра были получены в предположении, что в
показаниях акселерометров отсутствуют составляющие, обусловленные
ускоренным движением объекта. Рассмотрим динамику изменения погрешности ФВ
при ускоренном движении объекта.
Значение погрешности оценки £а t на /-ом шаге определяется выражением:
e'a,i = Xa,i-Si- (3-78)
В соответствии с выражением (3.70), определим значение вектора
состояния Ха на /+ 1-ом шаге:
*а,/+1 = фа,/+1' ft + фа,/+1^а,/ +
+^-(Фа,/+1 -ft + Аа,/+1 -фа,Ж Si -Фа,/+АД
где Аа /+| - сумма векторов ускоренного движения объекта и шумовой
составляющей показаний акселерометров на /+1-ом шаге.
Погрешность оценки на /+1-ом шаге в соответствии с выражением (3.78)
будет равна:
*a,i+l = *a,i+l*a,/ + ^а * (Аа,/+1 " фа,/+1^а,/) > (3.79)
93
где gM = Фа i+i • gt - вектор ускорения силы тяжести в связанной системе
координат на /+1-ОМ шаге.
Рассмотрим случай прямолинейного движения объекта, то есть Фу = Е.
Тогда выражение (3.79) принимает вид:
^а,й-1 = eaj + ^а * (Аа,й-1 ~ ^а,/) •
При этом скорость изменения погрешности оценки А€г f / т на z-ом шаге
за период т, где Аеа t = £a i+\ - ег ,-, может быть определена по выражению:
Л£а i Kai \
Считая шаг дискретизации системы достаточно малой величиной, можно
считать, что скорость изменения погрешности оценки на /-ом шаге за период т
приблизительно равна ее производной. Тогда изменение погрешности оценки
во времени может быть описано с помощью уравнения:
^ = ^(Да-*а), (3.80)
dt Tv 7
где t - текущее время.
Уравнение (3.80) представляет собой дифференциальное уравнение
апериодического звена для которого входным воздействием является Аа, а
выходной величиной - погрешность оценки ФВ £а. Постоянная времени Т звена
определяется выражением:
Т=т/К. (3.81)
При прямолинейном ускоренном движении объекта погрешность
системы будет изменяться по апериодическому закону с постоянной времени Т.
При наличии углового движения нарастание погрешности будет
происходить медленнее за счет вращения вектора погрешности оценки е (рис. 3.27).
Таким образом, БСО на базе ДУС, комплексированную с блоком
акселерометров на основе ФК (ФВ), можно условно описать физическим маятником с
постоянной времени Г. При этом для обеспечения более качественной работы
системы в условиях наличия ускорений объекта необходимо обеспечивать как
можно большую постоянную времени. Для объектов, движущихся вблизи
поверхности Земли, при достижении постоянной времени Т «84 минуты система
будет невосприимчива к линейным ускорениям, обусловленным динамикой
движения объекта.
/ а
/
l
1
\
\
/
б/ /
//KAi+i(<b=E)
Рис. 3.27. Динамика изменения погрешности
оценки фильтра Калмана: а - угол поворота
связанной системы координат за время т
94
Согласно выражению (3.81), максимальное значение постоянной
времени Т будет соответствовать минимальному значению коэффициента передачи
фильтра в установившемся режиме при фиксированном шаге дискретизации
системы, значение которого ограничивается характеристиками
вычислительного устройства и аналогово-цифровых преобразователей измерительной цепи
комплексированной БСО.
Анализ выражений (3.76) и (3.77) показывает, что минимальное
значение ка обеспечивается при минимальном значении дисперсии погрешности
прогноза qa и максимальном значении дисперсии погрешности измерения га
(рис. 3.28).
Рис. 3.28. Зависимость коэффициента передачи
фильтра ка от дисперсии погрешностей прогноза
qa и дисперсии погрешности измерения га
С другой стороны, увеличение дисперсии погрешности измерения
приводит к увеличению погрешности оценивания проекций вектора ускорения силы
тяжести на оси связанной системы координат ра (рис. 3.29).
Рис. 3.29. Зависимость дисперсии погрешности
оценивания ра от дисперсии погрешностей
прогноза qa и дисперсии погрешности измерения га
95
Таким образом, значение коэффициента передачи ка необходимо
выбирать исходя из минимального значения дисперсии погрешности прогноза qa и
максимально допустимого значения дисперсии погрешности измерения га, при
котором обеспечивается допустимое значение дисперсии погрешностей
оценивания ра.
Определим максимально допустимое значение дисперсии погрешности
измерения rmax. Из выражения (3.77) получим:
_ Pjxsm [Рдоп + tfmin j (~ ООЛ
rmax > K53SL)
#min
где рдоп - допустимое значение дисперсии погрешности оценки ра;
Qmm ~~ минимальное значение дисперсии погрешности прогноза qa.
Проведенный анализ показывает, что дисперсия погрешности
прогноза qa пропорциональна величине шумовой составляющей ДУС и квадрату шага
дискретизации БСО т, то есть при уменьшении шума ДУС в п раз дисперсия
погрешности прогноза также снижается в п раз, а при уменьшении шага
дискретизации в п раз дисперсия уменьшается в п раз.
Таким образом, погрешность прогноза определяется погрешностью
используемых ДУС и шагом дискретизации системы т. В свою очередь,
максимальное значение дисперсии погрешности измерения rmax определяется только
минимальным значением дисперсии погрешности прогноза qm[n и допустимым
значением дисперсии погрешности оценивания. При этом коэффициент
передачи ФВ ка является функцией трех параметров: рдоп, qm{n, rmax .
Следовательно, постоянная времени Т определяется СКО погрешности
применяемых ДУС, шагом дискретизации системы т и допустимым значением
дисперсии погрешности оценивания рдоп.
При допустимой амплитуде шума по углам тангажа и крена 0,5 градуса,
—5 2
допустимое значение дисперсии погрешности оценивания составляет 10 g
[3.23]. На рис. 3.30 приведен график зависимости постоянной времени Гот
шага дискретизации т и СКО погрешности ДУС а, при допустимом значении дис-
—5 2
персии погрешности оценивания рдоп, равном 10 g .
Из рис. 3.30 видно, что для обеспечения максимального значения
постоянной времени необходимо использовать ДУС с как можно меньшим уровнем
шума и обеспечивать минимальное значение шага дискретизации т.
—5 2
Определим величину постоянной времени Г для значения /?доп =10 g ,
при использовании микромеханических датчиков угловой скорости ADXRS610
производства компании Analog Devices и шаге дискретизации системы т = 0,01.
В этом случае минимальное значение дисперсии погрешности прогноза
составляет 10"8g2.
96
Рис. 3.30. Постоянная времени Т БСО
на базе ДУС и блока акселерометров
в зависимости от шага дискретизации х
и СКО ДУС о при дисперсии погрешности
—5 2
оценивания рдои =10 g
Таким образом, максимально допустимое значение дисперсии погрешности
измерения rmax равно:
1(Г5(1(Г5+1(Г8)
w=—-^ и°>01*-
При этом коэффициент передачи ка в установившемся режиме и постоянная
времени Г примут следующие значения:
(1(Г5+1(Г8) ^ 10-2
k=\^ L-«10-3; 7-l°- = 10c.
fio-5+io-8+io-2) ю3
Минимальное значение га определяется шумовой составляющей выходного
сигнала акселерометров и для микромеханического акселерометра LIS3L06AL
—3 2
производства компании STMicroelectronics приблизительно составляет 5 10 g .
При этом дисперсия погрешности прогноза ра:
Jl0~8(l0~8+4-5-10~3) -10"8
что соответствует амплитуде шума в 0,35 градуса. При этом коэффициент
передачи ка в установившемся режиме и постоянная времени Т примут
следующие значения:
(7-10"6 + 1(Г8) , 1П-2
к = <! i Нх-М-Ю-3; т= «7с.
17-10~ъ + НГ* + 5-1(Г3) 1,41(Г3
97
Таким образом, БСО на базе ДУС и блока акселерометров обладает
относительно малой постоянной времени, однако, при наличии ускорений объекта
контур коррекции может быть разорван. То есть при появлении больших
ускорений коэффициент передачи может быть принят равным нулю, тем самым
можно избежать появления погрешности комплексированной БСО,
обусловленной линейными ускорениями объекта, на участках разгона/торможения и на
виражах.
Для исследования комплексированной БСО был реализован
экспериментальный модуль для БПЛА (рис. 3.31).
Рис. 3.31. Внешний вид экспериментального модуля
Данный модуль позволяет обеспечивать все основные функции бортовой
аппаратуры управления. Конструктивно модуль состоит из трех основных
частей, каждая из которых обеспечивает выполнение конкретных задач
управления, измерения параметров движения и передачи телеметрических данных на
наземную систему управления.
Первая часть выполняет функцию измерения угловых параметров
движения, т.е. представляет собой комплексированную БСО на основе ФК.
БСО реализована на следующем наборе датчиков: два двухосевых
микромеханических ДУС LPY510AL производства компании STMicroelectronics,
трехосевой микромеханический акселерометр LIS344ALH производства
компании STMicroelectronics, трехосевой датчик магнитного поля НМС1043
производства компании Honeywell.
Данный набор датчиков обеспечивает выработку углов тангажа и крена
БПЛА. Наличие датчика магнитного поля позволяет также вырабатывать
магнитный курс БПЛА.
Вторая часть содержит модуль GPS EB240TD2, использующий протокол
передачи данных NMEA203, и отвечает за выработку географических координат
98
и высоты БПЛА в процессе полета, а также определяет требуемое направление
движения согласно полетному заданию в режиме автопилотирования.
Третья часть обеспечивает непосредственное управление рулевыми
приводами МБПЛА, а также отвечает за связь с наземной системой управления.
Примененная конфигурация системы позволяет использовать при
управлении различные режимы пилотирования:
- ручной, когда оператор с помощью наземной аппаратуры управления
непосредственно формирует и передает команды управления на рулевые
органы планера;
- полуавтоматический, когда оператор задает требуемую угловую
ориентацию планера, а контур САУ стабилизирует планер в воздушном пространстве
относительно этих углов;
- автоматический, когда пилотирование планера осуществляется
согласно полетному заданию без команд с наземной станции управления.
Модуль обеспечивает передачу телеметрических данных о параметрах
движения БПЛА и позволяет реализовывать контуры управления планера как
по углам, так и по географическим координатам.
С целью исследования работы БСО в составе САУ БПЛА были
произведены экспериментальные полеты на территории Тульской области на авиомо-
дели летательного аппарата TwinStarll (рис. 3.32).
В задачу экспериментальных исследований входило изучение полета
планера в полуавтоматическом режиме пилотирования при прямолинейном
полете с элементами координированного разворота с целью подтверждения
данных моделирования и проверки работоспособности БСО и контура САУ в
целом.
Результаты экспериментального полета приведены на рис. 3.33-3.36.
99
а)
б)
Рис. 3.32. Беспилотный летательный аппарат TwinStarll:
а - ручной запуск; б - БПЛА в полете
100
Рис. 3.33. График отработки сигнала по каналу тангажа:
1 - заданный угол, 2 - показания БСО
Рис. 3.34. График отработки сигнала по каналу тангажа (увеличенный):
1 - заданный угол, 2 - показания БСО
101
Рис. 3.35. График отработки сигнала по каналу крена:
1 - заданный угол, 2 - показания БСО
Рис. 3.36. График отработки сигнала по каналу крена (увеличенный):
1 - заданный угол, 2 - показания БСО
102
Из графиков видно, что по каналам тангажа и крена контур САУ
обеспечивает отработку команд управления (графики 2) относительно задаваемых
углов (графики 1).
При этом присутствует рассогласование при угловой стабилизации
планера 2°. Это объясняется неточной центровкой планера, а также неточностью
выставки нулевого уровня рулевых органов.
В целом исследуемая БСО и контур САУ показали свою
работоспособность и обеспечили требуемое безаварийное пилотирование БПЛА.
Список литературы к главе 3
3.1. Лебедев Р.К. Стабилизация летательного аппарата бесплатформенной
инерциальной системой / Р.К. Лебедев - М.: Машиностроение, 1977. - 144 с.
3.2. Лебедев Д.В. Системы инерциального управления. Алгоритмические
аспекты / Д.В. Лебедев, А.И. Ткаченко - Киев: Наук, думка, 1991. - 208 с.
3.3. Бранец В.Н. Введение в теорию бесплатформенных инерциальных
навигационных систем / В.Н. Бранец, И.П. Шмыглевский - М.: Наука, гл. ред.
физ.-мат. лит., 1992. - 280 с.
3.4. Бранец В.Н. Применение кватернионов в задачах ориентации твердого
тела / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - 320 с.
3.5. Онищенко СМ. Применение гиперкомплексных чисел в теории
инерциальной навигации / СМ. Онищенко. - Киев: Наук, думка, 1983. - 208 с.
3.6. Bortz, J.E., A New Mathematical Formulation for Strapdown Inertial
Navigation / Bortz, J.E. // IEEE Aerospace and Electronic Systems Magazine, Vol AES-7,
No. l,Jan. 1971, pp. 61-66.
3.7. Jordan, J.W. An Accurate Strapdown Direction Cosine Algorithm /
Jordan, J.W. /NASATN-D-5384, September 1969.
3.8. Paul G. Savage "Coning Algorithm Design by Explicit Frequency Shaping,
Journal of Guidance / Paul G. Savage // Control and Dynamics. Vol. 33, No. 4, July-
August 2010, pp. 1123-1132.
3.9. Savage, P.G. Strapdown Inertial Navigation System Integration Algorithm
Design Part 1 - Attitude Algorithms / Savage, P.G. // Journal of Guidance, Control
and Dynamics, Vol. 21, No. 1, Jan.-Feb. 1998, pp. 19-28.
3.10. Kelly M. Roscoe. Equivalency Between Strapdown Inertial Navigation
Coning and Sculling Integrals / Kelly M. Roscoe // Algorithms, Journal of Guidance,
Control and Dynamics, Vol. 24, No. 2, March-April 2001.
3.11. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная
навигация / А.Ю. Ишлинский - М.: Наука, 1976. - 672 с.
3.12. Матвеев В.В. Основы построения бесплатформенных инерциальных
навигационных систем / В.В. Матвеев, В.Я. Распопов. Под ред. В.Я. Распопо-
ва. - СПб.: ОАО «Концерн «ЦНИИ Электроприбор», 2009. - 280 с.
3.13. Боднер В.А. Системы управления летательными аппаратами /
В.А. Боднер - М.: Машиностроение, 1973. - 506 с.
103
З.Н.Матвеев В.В. Погрешности микромеханических гироскопов/
В.В.Матвеев // Приложение. Справочник. Инженерный журнал №11, 2010.
С. 15-20.
3.15. Алалуев Р.В. Измерительный модуль микросистемной
бесплатформенной инерциальной навигационной системы / Р.В. Алалуев, В.В. Матвеев,
Ю.В. Иванов, В.А. Орлов, В.Я. Распопов // Нано- и микросистемная техника. -
2007. №9. С. 61-64.
3.16. Алалуев Р.В. Бесплатформенная система ориентации и навигации
мини-беспилотного летательного аппарата / Р.В. Алалуев, Ю.В. Иванов,
В.В. Матвеев, В.Я. Распопов, А.П. Шведов // Мехатроника, автоматизация,
управление. 2008. № 10. С. 54-54.
3.17. Матвеев В.В. Акселерометры в инерциальной навигации /
В.В.Матвеев // Приложение к журналу «Справочник». - 2009. - №7. - С. 10-14.
3.18. Матвеев В.В. Гироскопы в системах ориентации / В.В. Матвеев//
Приложение к журналу «Справочник» 2009, №8. С.20-24.
3.19. Матвеев В.В. Бесплатформенная система ориентации с акселеромет-
рической коррекцией / В.В.Матвеев // Датчики и системы. 2011. - С. 12-15.
3.20. Управление и наведение беспилотных маневренных летательных
аппаратов на основе современных информационных технологий / Под. ред.
М.Н. Красилыцикова и Г.Г. Серебрякова. - М.: ФИЗМАТЛИТ, 2003. - 280с.
3.21. Шведов А.П. Способы повышения точности информационно-
измерительных систем ориентации подвижных объектов: Дисс... к.т.н.:
05.11.16/ А.П. Шведов. ГОУ ВПО «Тульский государственный университет» -
Тула: Изд. ТулГУ, 2010.-172 с.
3.22. Степанов О.А. Основы теории оценивания с приложениями к
задачам обработки навигационной информации / О.А. Степанов. - СПб.: ГНЦ РФ
ЦНИИ «Электроприбор», 2009. - 496 с.
3.23. Погорелов М.Г. Информационно-измерительные системы
магнитометрического типа для стационарных и подвижных объектов: Дисс... к.т.н.:
05.11.16/ М.Г. Погорелов. ГОУ ВПО «Тульский государственный университет» -
Тула: Изд. ТулГУ, 2009. - 165 с.
ГЛАВА 4
МАГНИТОМЕТРИЧЕСКИЕ СИСТЕМЫ ОРИЕНТАЦИИ
4.1 Принцип работы магнитометрических систем ориентации
Магнитометрические системы ориентации (МСО) предназначены для
определения углового положения стационарных и подвижных объектов в пространстве.
Восстанавливая по сигналам первичных измерителей горизонтальную или
вертикальную проекции вектора напряженности магнитного поля Земли можно
определить угловое рассогласование объекта относительно системы координат
магнитного севера. Взаимосвязь различных систем координат показана на рис. 4.1.
Рис. 4.1. Системы координат: OXYZ- связанная система координат;
О^цХ - нормальная система координат; 0£п£ - система координат, определяемая
направлением магнитного севера; Т - вектор напряженности магнитного поля Земли;
/ - магнитное наклонение; L, В - горизонтальная и вертикальная проекции Т
в системе координат 0^г£; \|/,0,у - углы курса, тангажа и крена соответственно
Главной измерительной частью магнитометрической системы ориентации
являются датчики магнитного поля (магнитометры), представляющие собой
особый класс магнитных микроэлектронных устройств. Принцип действия
таких датчиков основан на изменении их выходных параметров при воздействии
магнитного поля.
105
В любой точке пространства вектор геомагнитного поля f определяется
следующими параметрами: горизонтальными компонентами Тс (северная
интенсивность), Те (восточная интенсивность) и вертикальной составляющей В
(вертикальная интенсивность, положительная при направлении вверх), а также
полной интенсивностью вектора напряженности магнитного поля Земли Г,
углом магнитного наклонения / (угол между горизонтальной плоскостью
и полным вектором 7) и углом магнитного склонения D (угол между
направлениями на географический и магнитный север) (рис. 4.2). Эти составляющие
измеряются в эрстедах (Э), но традиционно представляются в нанотеслах (нТ)
(1 Э = 105 нТ). Напряженность магнитного поля Земли составляет примерно от
25 000 до 70 000 нТ (0,25-0,7 Э).
Направление на
географический север
Направление на
магнитный север
Рис. 4.2. Параметры геомагнитного поля
Наиболее часто применяемыми в современных системах ориентации
являются датчики Холла, тонкопленочные магниторезисторы, магнитодиоды
и феррозонды. Принципы действия, характеристики и номенклатура более
подробно рассмотрены в специализированной технической литературе,
например [4.1]. Для регистрации слабых магнитных полей (до 10...30 мТл),
иногда близких к пороговым значениям, к которым относят и магнитное поле
Земли, больше подходят тонкопленочные магниторезисторы, в силу их
компактности и высокой надежности, высокой магнитной чувствительности,
малой постоянной времени, хорошей ориентационной характеристике,
широкому диапазону рабочих температур (от -40 до +150 градусов Цельсия),
низкой стоимости.
4.2 Неопределенность определения параметров ориентации БПЛА
по показаниям магнитных датчиков
Определение полной угловой ориентации БПЛА (углов курса, тангажа
и крена) по сигналам магнитных датчиков (МД) без использования внешней
106
информации невозможно, так как возникает неопределенность, физический
смысл которой поясним с помощью рис. 4.3.
Рис. 4.3. Ориентация объекта относительно вектора Т
При повороте объекта вокруг вектора напряженности магнитного поля Земли
возникает «конус неопределенности», для которого одним и тем же показаниям
магнитных датчиков соответствуют разные параметры ориентации.
При привлечении информации об угле тангажа «конус
неопределенности» вырождается в две точки, например значению курса \|/i соответствуют
значения тангажа 0,, 32 и соответствующие им значения крена у\ и у2
(рис. 4.3). Привлечение информации об углах тангажа и крена позволяет
однозначно определить угол курса. Поэтому можно выделить два вида
магнитометрических систем ориентации - системы определения направления на
северный магнитный полюс (электронные компасы, где привлекается
внешняя информация об углах тангажа и крена, и по сигналам магнитных
датчиков вычисляется угол курса) и системы определения вертикали места (т.к.
вертикальная проекция вектора Гсоосна с вектором ускорения свободного
падения Земли), где решается обратная задача - по известным значениям
углов курса вычисляются углы тангажа и крена.
107
4.3 Электронный компас
4.3.1 Структура и конструкции
Конструктивно электронный компас состоит из измерительного
модуля (ИМ), аналого-цифрового преобразователя, микроконтроллера и блока
электроники (рис.4.4).
Акселерометры Г
1
Магнитные 1
датчики г
крен
тангаж
1 Х *
Y ^
н—-—►
Аналогово-
цифровой
преобразователь
SPI
<4 1*
Микроконтроллер
Рис. 4.4. Структурная схема электронного компаса
с программируемой системой горизонтирования
Измерительный модуль выполняет задачу определения угловых
отклонений подвижного объекта в связанной с ним системе координат относительно
географической системы координат. В результате алгоритмической обработки
микроконтроллером сигналов, вырабатываемых ИМ, формируются сигналы, в
которых содержится информация о параметрах угловой ориентации объекта -
углах курса, крена и тангажа. В состав измерительного блока входят, таким
образом, магнитные датчики и акселерометры, оси чувствительности которых
ориентированы вдоль осей OX, OY, OZ прямоугольной системы координат
OXYZ (см. рис. 4.1). При изменении углового положения объекта происходят
изменения проекций вектора напряженности магнитного поля Земли (Г) и
вектора ускорения свободного падения Земли (g) на оси ОХ, 07и OZ,
вследствие чего датчики вырабатывают соответствующие сигналы, являющиеся
первичными для решения задачи ориентации.
Производством электронных компасов занимаются такие фирмы и
организации, как «Philips Semiconductors» (Голландия), «Honeywell», «Space
Electronic», «Crossbow Technology Inc.», «Precision Navigation Inc.», «Advanced
Orientation Systems Inc. (AOSI)» (США), НТЦ «Рисса», ФГУП ГНПП «Электроприбор»,
ОАО «Научно-производственный комплекс «ЭЛАРА» имени Г.А. Ильенко»
(Россия) и др.
Приведем несколько примеров существующих отечественных и
зарубежных систем ориентации типа «электронный компас».
Внешний вид системы компании НТЦ «Рисса» (Россия) СМР41
и основные характеристики приведены на рис. 4.5 и в табл. 4.1 [4.2].
108
Габлица1
№
1
2
3
1 4
Рис. 4.5. Внешний вид системы СМР41 компании НТЦ «Рисса»
kl. Основные характеристики системы СМР41
Параметр
Разрешающая способность измерения угла курса (градус)
Разрешающая способность измерения углов наклона (градус)
Максимальная погрешность корректировки угла курса в
диапазоне углов наклона (-80...+80 градусов), (градус)
Диапазон рабочих температур (°Q
Значение
±0,1
±1
±15
-5...+70
Система СМР41 представляет собой электронный компас с
автокоррекцией. Основная функция - определение азимута. Дополнительно имеется
возможность измерения углов положения относительно горизонта (крен,
тангаж), а также позволяет учитывать магнитное склонение. Есть встроенная
функция перекалибровки, позволяющая снизить погрешности от источников
постоянного магнитного поля. Конструктивно исполняется либо в виде
электронной платы, либо в герметичном корпусе.
Одним из мировых лидеров в области разработок и производства магни-
тоэлектронной аппаратуры является компания «Honeywell», США. Внешний
вид одной из систем компании «Honeywell» - HMR3000 и ее основные
характеристики приведены на рис. 4.6 и в табл. 4.2 [4.3].
Рис.4.6. Внешний вид системы HMR3000 компании «Honeywell»
109
Габлица 4.2. Основные характеристики системы
№
1
3
4
Параметр
Точность определения угла курса (градус)
Точность определения углов места и крена
(градус)
Диапазон рабочих температур (°С)
HMR3000
Условия
эксплуатации (градус)
/<50у,»<20
/<75у,Э<±20
у,Э<±40
Значение
<0,5(а)
<1,5(а)
±0,6
-40...+85
Система HMR3000 представляет собой законченный электронный
компасный модуль с частотой выдачи информации 20 Гц. Обладает возможностью
перепрограммирования с учетом пользовательских настроек по скорости
передачи данных, выходному формату, единиц измерения. Встроена система
предупреждения с опцией записи информации в энергонезависимой памяти.
Основное назначение - корабельные навигационные системы, позиционирование
спутниковых антенн, может применяться в составе авионики БПЛА.
Другим вариантом электронного компаса компании «Honeywell», более
универсальным с точки зрения области применимости, является система
HMR3500 {TruePoin?1"). Внешний вид и точностные характеристики приведены
на рис. 4.7 и в табл. 4.3 [4.3].
^~*тм.
Рис. 4.7. Внешний вид системы компании «Honeywell»
аблица 4.3. Основные характеристики системы TruePoint™
№
Параметр
Условия
эксплуатации
Значение
Точность определения угла курса
(градус)
\{RMS)
Точность определения углов места и крена
(градус)
\(RMS)
Диапазон рабочих температур (°С)
Стандарт
Настраиваемый
0...+70
-40...+85
110
Отличительной особенностью данного компасного модуля является
возможность вычисления как магнитного, так и истинного севера, благодаря
наличию установленной Мировой Модели Магнитного поля Земли. Изделие
способно выдержать удар полусинусоидальной формы длительностью
0,5 миллисекунды с амплитудой 500 g. Частота выдачи 50 Гц. Может
применяться также в сухопутной навигации в составе системы мониторинга
движения человека, в качестве системы курсоуказания стрелкового оружия.
Примерами подобных систем являются также разработки компании
«Crossbow Technology, Inc»-AHRS510GA и СХМ543 (рис. 4.8) [4.4].
Рис.4.8. Образцы продукции компании «Crossbow Technology»:
а - AHRS510GA, б - СХМ543
В табл. 4.4 приведены характеристики указанных систем.
Таблица 4.4. Характеристики систем компании «Crossbow Technology»
Наименование
системы
СХМ543
AHRS510GA
Точность
определения угла
курса (градус)
±1,5
±2(2о)
Условия
эксплуатации
(градус)
y,fl=±90
у,О=±90
Точность
определения углов места
и крена (градус)
±0,5
±1(2о)
Диапазон
рабочих температур
(°Q
0...+50
-40...+85
В состав системы СХМ543 входят 3-осевой микромеханический
акселерометр и 3-осевой магнитоиндукционный датчик. Система обладает функцией
компенсации влияния магнитотвердых материалов. В качестве выходных параметров
может настраиваться либо на угловые параметры ориентации, либо на сигналы
соответствующих датчиков. Обладает возможностью перепрограммирования с
учетом пользовательских настроек по скорости передачи данных, единиц измерения.
AHRS510GA - более сложная система, предназначенная в первую очередь
для использования в составе авионики воздушных судов. Может также
использоваться для позиционирования радиолокационных систем на борту подвижных
объектов. В состав входят микромеханические гироскопы и акселерометры, а
также магнитоиндукционный датчик типа CRM. Поддерживает интерфейс
ARINC-429 и RS-422. Обладает возможностью учета информации, поступающей
от приемника GPS или от датчиков воздушной скорости. Выдает углы, угловые
скорости и линейные ускорения. Потребляемая мощность не превышает 10 Вт.
111
В целом, анализируя рекламную продукцию электронных компасов,
можно отметить, что не все производители указывают, являются ли
приведенные уровни точности среднеквадратическими значениями погрешностей
определения углов, или их максимальными значениями. Также важным фактом, не
всегда отмечаемым в паспортах на изделия или рекламных каталогах, является
зависимость точности определения угла курса от магнитного наклонения (/),
что не позволяет потребителю оценить реальную точность выдачи угла курса.
4.3.2 Математическая модель
Предположим, что в начальный момент времени системы координат
OXYZ и §г|£ совпадают (см. рис. 4.1). Произвольное положение системы
координат OXYZ относительно £п£ определяется углами тангажа ($), крена (у) и
курса (у). Обозначим X, У ZKaK показания магнитных датчиков, a Xa,Ya,Za -
как показания акселерометров, направленных вдоль соответствующих осей
связанной системы координат.
Определим проекции ZMnc, -Умпс горизонтальной составляющей вектора
напряженности магнитного поля Земли (L) на оси Оц' и О^' нормальной
системы координат 0£'г|'£', используя нормированные показания МД,
расположенных вдоль осей нормальной системы координат
ZAf77c=ZcosY + Fsiny,
Хмпс = Xcos$ + Z sinysin & - Y cosysin Э.
Использование трехосного МД позволяет избавиться от ошибки,
обусловленной неточностью измерения напряженности магнитного поля путем
нормирования показаний МД и использования нормы вектора напряженности
магнитного поля Земли Т.
Горизонтальная (L) и вертикальная (В) проекции нормы вектора f в
этом случае записываются через величину угла магнитного наклонения (/) в
следующем виде В = sin/, L- cos/.
Нормированные показания МД X,7,Z, определяются зависимостями
Х= . Х ,7 = -, L _,z=- Z
Vx2 + 72+Z2' Jx2 + Y2+Z2' ylx2+Y2+Z2'
Имея значения ХМпс и ZMnc, легко вычислить угол курса по известному
соотношению
v)/ = arctan |-?Ш£-|. (4.2)
В зависимости от взаимного расположения осей Ог|', О^' и
горизонтальной составляющей вектора f, формула (4.2) трансформируется к виду
1. Если Хмпс>0, ZMnc<0, то
(Z }
vi/ = arctan —УП£-
\ у \
\лмпс )
112
2. Если ХМпс <0, ZMnc <0, то
y = 180-arctan -=^£
Ч^А477СУ
3. Если Хмпс <0, Za/яс >0, то
\|/ = 180 + arctan \—Ш£-
Л
Vх
4. Если Хмяс >0, Zm^c >0, то
\|/ = 360-arctan|
МПС J
\ХШС J
5. Если Хмпс =0, ZMnc <0, то \|/=+90°.
6. Если Хм#с =0, Za/яс >0> то \|/=+270°.
Углы крена и тангажа, используемые в выражении (4.1) вычисляются на
основании сигналов акселерометров (в единицах ускорения силы тяжести)
следующими возможными зависимостями (в случае использования трехосного
блока акселерометров)
И>= arctan
№+za2j
у = -arctan
K?a
(4.3)
(4.4)
4.3.3 Анализ точности
Для проведения оценки точностных характеристик электронного компаса
необходимо получить уравнения погрешностей и провести их анализ.
Основываясь на положениях теории многопараметровых измерений, погрешность
измерения Wi может быть оценена через известную функциональную модель объекта F,.
Пренебрегая корреляционными связями между первичными измеряемыми
параметрами, результирующая погрешность оценки W, может быть представлена в
виде соотношения:
ТТ7 dF ,A ч dF dF dF
Wi = — (Да) + —- (Afo) + — (Ac) + ... + — (Av);
da ab oc dv
(4.5)
dF dF dF dF
где —-, —, —... — частные производные функции связи, являющиеся ве-
da db dc dv
совыми коэффициентами частных погрешностей; Лау ЛЪУ Ас, ..., Av - частные
погрешности измерения первичных измеряемых параметров.
Получим зависимость, описывающую показания МД в связанной системе
координат через проекции вектора f в системе координат магнитного севера.
Горизонтальная и вертикальная проекции нормы вектора f определяются как
L = cos/,5 = sin/.
Показания МД в системе координат О^'ц'С,' запишем в виде
113
X = Lcos\\f, Y -B,Z =Lsm\\f.
Зададим поворот на угол тангажа Э и получим
X -L cos \|/ cos 3 + 5 sin О,
У = l?cos&-Z,cosi|/sind,
Z =Z,sin\|/.
Зададим поворот на угол крена у и получим
X = Z,cos\|/cos$ + 2?sin&,
Y - L sin \|/ sin у + [i? cos S - Z, cos V|/ sin &] cos y, (4.6)
Z = Lsin\|/cosy-[i? cos Э-L cos i|/sin &]siny.
Для выражения (4.2) уравнение погрешностей запишется в виде
дУ А7 ,_^Laf _ Хмпс^мпс ~^мпс^мпс
OZM7C 0ЛМПС ХМПС +ZM1C
Погрешности определения проекций горизонтальной составляющей
вектора f на оси OX, OZ запишем на основании (4.1)
шс дХ dY dZ 50 #У
где
,М7С = cos г?, ^Д7С = -sin tfcos У, ^с = sin tfcos у,
ЭХ ЭУ ' dZ '
—-^- = -Xsin г?- У cos tf cos ^+ Zcos tfsin у,—^^- = У sin tfsin y+ Z sin tfcos у
Эг? Э^
*^W = %^ ДГ + %^ AZ + %^ Ду,
5У dZ ду
Где ^Mic =sin ^Z^c = SZ^c =f co Jsiny.
ar ' dz 'ay J '
Для выражения (4.3) уравнение погрешностей запишется в виде
AQ аэ AV аэ .v аз д_
ДЭ= ДХ„ + ДУ. + AZ„ =
дха а dYa a dza a
JyJW .„ х. «*>
*а +Ya +Za (Xa2 + Ya2+Za2yYa2+Za2
где АХа, AYa, AZa - погрешности акселерометров, ориентированных вдоль
осей OX, OY, OZ; Ag - абсолютная погрешность величины ускорения
свободного падения Земли.
Для выражения (4.4) уравнение погрешностей примет вид
*-$г.йГ-+-£лг-=7&г*г'-7&*лг- (49)
а а *а т '-'а ха т '-'а
114
Анализируя выражение (4.7), можно также получить зависимость точности
вычисления угла курса от магнитного наклонения, значения которого тесно
связаны с широтой места. Числитель указанного выражения не зависит от текущего
магнитного наклонения и может быть принят постоянной величиной;
знаменатель представляет собой параметр cos/. Таким образом, зависимость
погрешности определения угла курса от магнитного наклонения принимает вид
cos^
Mi2)~^-Mh),
cos/
(4.10)
где 11 - магнитное наклонение; Av|/(//) - погрешность определения угла курса
в зависимости от текущего магнитного наклонения.
Приведенные уравнения позволяют на стадии проектирования проводить
оценку влияния различных параметров на точность как отдельных датчиков
(влияние температуры, перекрестных связей, нелинейности и т.д.), так и на итоговую
точность системы в целом. Это позволяет выбирать элементную базу в зависимости
от предъявляемых требований по точности, условиям эксплуатации и стоимости.
В силу инерционности акселерометров широкое применение такие
устройства получили, как правило, для ориентирования стационарных объектов
и объектов с низкой динамикой.
4.4 Магнитометрическая система определения вертикали места
4.4.1 Структура магнитометрической системы определения вертикали
места
Структурная схема рассматриваемой системы ориентации представлена
на рис. 4.9.
Рис. 4.9. Структурная схема магнитометрической системы
определения вертикали места
Для подвижных объектов угол курса представляется возможным
привлекать, например, от модуля приемника спутниковой навигационной системы.
Путевой угол, выдаваемый модулем GPS, в случае малоразмерного БПЛА можно
115
принять в качестве угла курса, ввиду малых значений углов скольжения объекта.
Полученные от модуля GPS значения координат места (ф, Л) используются для
расчета текущих значений углов магнитного наклонения (7) по известной карте
магнитного поля Земли, составленной по модели IGRF эпохи 2010 и сведенной в
таблицу значений параметров с шагом 0,5 градуса по координате [4.5, 4.6]. Далее
информация, совместно с сигналами магнитных датчиков по каналам X, Y, Z,
поступает в микропроцессорное устройство, где с учетом операции нормирования
происходит расчет углов тангажа и крена объекта.
Отметим, что существенными достоинствами представленной системы по
сравнению с инерциальными системами, решающими аналогичные задачи,
являются отсутствие накапливаемой со временем ошибки (ввиду отсутствия
операции интегрирования) и возможность функционирования в широком
диапазоне угловых скоростей движения объекта в пространстве без снижения точности
(ввиду безынерционное™ магнитных датчиков).
4.4.2 Определение угла тангажа
Анализируя выражение (4.6), представляющее собой показания МД
в связанной системе координат, можно заметить, что, применив известные
соотношений тригонометрических функций
Lcos\\f
V
y]I?COS2\\f + B
для канала X, получим
Lcos\|/
<>]l?cos2\\f + B2
В
+
В
у
= sin
>/l2cos2v|/ + 52
Lcos\|/
= 1,
arcsin
(
yjF cos2 y + B:
• = ±cos
arcsin
jl? cos2 \\r + B2
Lcos\|/
V
y]Fcos2\\f + B2
откуда
yJL1 cos2 у + B1
X
y]P COS2 \|/ + F
- = sin
arcsin
Lcosv|/
Л
r = sin
arcsin
л]Р cos2 у + B2
Lcos\|/
л]Р cos2 \\f + B2
cos 9 +cos
arcsin
Lcos\|/
cos $-cos
arcsin
yj I? cos2 \\f + B2
Lcos\\f
yJP cos2 у+ B2
sin$,
sind.
Полученное выражение запишем в виде
f Т ^
„ Zcosii/
sinl v + arcsin
X
yjF cos2 \\f +В2 J у/Р cos2 y + B2 '
sin
arcsin
Lcosy
(4.11)
y]P cos2 \\i + B:
-d
X
■]!} cos2 \\i + B2
116
Разрешая это выражение относительно угла Э, получим следующие
возможные решения для определения угла тангажа объекта
О] = arcsin
i
—2
L cos у + В
- arcsin
Lcos\\f
/т2 2 ^2"
\JL cos \|/ + 2?
&2 = л - arcsin
$3 = arcsin
.i
t2 2 i;2
L cos у+ 5
I - arcsin
Lcosy
/t2 2 ^2
yZ, cos у+ 5
(4.12)
Lcos\\f
$*
■ arcsin
yjb cos2 у+ 5
X
/t2 2 ЧЛ
yL cos \|/ + 5
- arcsin
^
-2
+ arcsin
L cos vj/ + i?
Z,cos\|/
V
Z, cos \|/ + 5
-71.
Таким образом, зная показания магнитного датчика, установленного по
продольной оси ОХ объекта, текущий угол курса, а также угол магнитного
наклонения в точке местности, можно найти систему уравнений для определения угла
тангажа. Причем все полученные решения верны для различных условий и могут
меняться в процессе полета, однако для конкретной точки местности и угловой
ориентации верным может быть только одно решение. Вывод условий для выбора
решения, соответствующего истинной угловой ориентации изделия, ввиду его
объемности здесь не приводится.
В ходе исследования было установлено, что переход от одного решения
к другому происходит при переходе угла тангажа через угол, являющийся
углом между проекцией вектора f на вертикальную плоскость £'Ог|' и
плоскостью горизонта (см. рис. 4.1), определяемый следующими соотношениями
S\ = arcsin
Z,cos\|/
1
-2
S'2 = arcsin
L cos \\f + B
Lcos\\f
Ft2 2 ^2"
yjL cos \\f + B
n
2'
71
+ 2'
/
{ь = arcsin
3 2
Zcosv|/
/t2 9 ^2
yjL cos \\r + B
f
&Л = arcsin
4 2
Z,cos\|/
/t2 2 1$
yjL cos \\f + B
(4.13)
117
Конкретное решение (dj.-.d^) B каждый момент времени зависит от
ориентации угла магнитного наклонения относительно горизонта и текущего
значения угла курса, в соответствии с условиями, приведенными в табл. 4.5.
Таблица 4.5. Условия выбора угла dj...^
Условия выбора решения
/>0
/<0
Н < 90°
щ
<Н
М > 90°
п
*2
Зная характерный угол ^...Ф^ условия выбора текущего утла тангажа
объекта можно свести в таблицу (см. табл. 4.6).
Таблица 4.6. Условия выбора решения для определения угла тангажа
Условия выбора
решения
/>0
/<0
д>д'
|\|/| < 90°
$2
*3
\у\ > 90°
Ь
*4
$<■&'
|\|/| < 90°
ь
ъ4
|v|/| > 90°
*2
*3
Алгоритм работы магнитной системы ориентации может выглядеть
следующим образом:
- в начальный момент времени (предстартовая калибровка) по известным
значениям углов \|/и/в соответствии с таблицей 4.5 и выражением (4.13)
рассчитывается угол в';
- по рассчитанному углу &' и начальному углу тангажа в соответствии с
таблицей 4.6 определяется текущее решение;
- в процессе полета, зная текущее решение 9,, рассчитывается угол
тангажа (4.12) и пересчитывается угол О', т.к. его значение зависит от угла курса и
в процессе полета может изменяться.
Также могут возникать случаи смены решения, обусловленные
прохождением угла тангажа объекта через угол О', т.е. продольная ось ОХ объекта
пересечет линию проекции вектора Т на плоскость ^Ох\ . При этом возникает
неопределенность в выборе решения, описанная выше.
Эта неопределенность может быть преодолена привлечением
информации с датчиков угловой скорости (ДУС) путем сравнения знака изменения
вычисленного угла тангажа по двум возможным решениям, например в1 и &2
(одно из которых соответствует увеличению угла тангажа, а второе - его
уменьшению), со знаком угловой скорости тангажа, определяемой по ДУС.
118
При априорно известном характере изменения траектории в алгоритм
вычислений заранее может быть заложена последовательность выбора решений, и
применение ДУС не обязательно.
Однако здесь следует отметить следующий важный момент - для
подвижных объектов с малыми углами тангажа (не превышающими 40 градусов) в
средних широтах (от 30 градусов северной широты) смены решений
происходить не будет, т.е. никакой неопределенности в вычислении угла тангажа
происходить не будет и, как следствие, наличие ДУС в системе не требуется.
4.4.3 Определение угла крена
Преобразуем выражения, описывающие показания МД по каналам Y и Z
в связанной системе координат, (4.6)
Y = Lsin\|/siny + [2?cos9—Lcosi|/sin&]cosy,
Z = L sin\|/cosy - [i?cosd - L cos\|/sin djsiny,
к виду
Y - — -
- - L sin \\ftgy = В cos d - L cos \|/ sin &,
cosy
Z = -{B cos 0 - L cos \|/ sin Э) sin у + L sin \|/ cos y.
(4.18)
Решая (4.18), получим
L • sin\|/ = Z • cosy - Y • siny.
Разрешая полученное выражение относительно у, аналогично как это
было сделано для &, получим следующие решения для определения угла крена
у, = arcsin
г 7 • ^
Lsin\|/
\IY +Z
- arcsin
< z ^
.vF+7
y2 = к - arcsin
( 7 • ^
x,sinv|/
W7¥
• arcsin
' z ^
VF7F
f
y3 = arcsin
y4 = arcsin
л/FTFJ
' z ^
arcsin
W7?
+ arcsin
' 7 • ^
Lsin\|/
У + Z
f 7 • Л
Lsin\|/
V:
.V5
'—2 —2
Wr + z
-я.
(4.19)
Вывод условий для выбора решения, соответствующего истинной
угловой ориентации изделия, ввиду его объемности не приводится.
119
Установлено, что выбор решения, соответствующего истинной угловой
ориентации объекта, определяется в соответствии с условиями, приведенными
в таблице 4.7.
Таблица 4.7. Выбор решения для угла крена
Условия выбора
решения
У>0
• г<о
$>$'
Y2
Уз
Ъ<Ъ'
У\
Y4
4.4.4 Анализ точности
Запишем по аналогии, как и для электронного компаса, уравнения
погрешностей в виде ряда Тейлора с сохранением членов первого порядка. Тогда
на основании уравнений (4.12) и (4.19) в общем виде получим
Д$ « —А\1/ + АХ + —А У + —AZ,
ду дХ dY dZ
Ду « К д¥ + *!_ дх + iL AY + *L AZ.
flv af ay az
Уравнения погрешностей по углам тангажа и крена примут вид
AS*
Lsin\|/
PcosV + .B2
AXcos\|/
Jj?cos2y + B2-X2
+ 5
Д\|/ +
Ду «
yjl? cos2 у + В2-X2
- - f
L cos vi/ . У
ДХ;
<JY2+Z2-1? sin2 у
Y2+Z2
Lsin\|/
>/y2+Z2-Z2sin2\|r
Z
Ш
ДУ +
y2+z2
LZ sin \|/
>/y2+z2_psin2X)/
+ У
AZ.
(4.20)
Выражения (4.20) довольно сложны для анализа влияния отдельных
параметров на точность системы. Учитывая, что рассматриваемая система
применяется в составе малогабаритного беспилотного летательного аппарата, можно
упростить полученные выражения, приняв углы тангажа и крена равными
нулю, что правомерно для частного случая - горизонтального полета
120
AS « —(/, sin \|/Av|/ + AX),
f . - (421)
Ay « —(Z cos\|/Av|/ + AZ).
Анализ выражений (4.21) позволяет сделать следующие выводы:
1) точность системы существенно зависит от вертикальной составляющей
вектора Т (В = sin/), т.е. при увеличении угла 7, точность системы возрастает,
и наоборот;
2) при увеличении угла / параметр L = cos/ уменьшается и, следовательно,
погрешность угла курса Ai|/ не оказывает существенного влияния на точность
системы.
В большинстве случаев измеряемое магнитными датчиками магнитное
поле представляет собой суперпозицию собственно магнитного поля Земли
с другими магнитными полями, например, от намагниченных материалов
и проводников с током, что вносит искажения в их показания.
Магнитные искажения, наводимые на объекте, могут быть разделены на два
типа - вызванные тяжелыми и легкими металлами. Искажения, вызванные
тяжелыми металлами, возникают от постоянных магнитов и намагниченного железа
или стали. Они остаются постоянными по отношению к системе при всех
направлениях. Это добавляет постоянную составляющую магнитного поля вдоль каждой
оси выходных данных датчика, что проявляется как сдвиг центра круга.
Индуцированный магнетизм возникает при взаимодействии магнитного поля Земли и
любого магнетически легкого материала, находящегося рядом с магнитным
датчиком. Подобно материалам из тяжелого металла, легкие металлы также искажают
линии магнитного поля Земли. Различие в том, что появляется переменная
составляющая, которая зависит от пространственного положения системы.
Применяемые способы калибровки магнитных датчиков и компенсации
магнитных девиаций подразумевают вращение объекта с жестко установленными
на нем магнитными датчиками в различных плоскостях. Определение
поправочных коэффициентов дает возможность в дальнейшем алгоритмически
«поправлять» показания магнитных датчиков. Недостатками данного способа являются
относительно низкая точность и высокая трудоемкость проведения работ.
В последние годы активно развивается направление автоматического
списания девиаций. Сущность способа заключается в комплексировании
показаний магнитных датчиков с угловыми скоростями, вырабатываемыми инерци-
альными датчиками, с последующей оценкой и компенсацией магнитных
девиаций [4.7]. При этом параметры магнитного поля объекта считаются
постоянными и сохраняющимися на протяжении длительного времени.
При данном подходе задача оценивания показаний магнитных датчиков
непосредственно решается фильтром Калмана (ФК), где матрица прогноза
формируется по информации об угловых скоростях объекта. Реализация
данного подхода позволяет скомпенсировать не только влияние сторонних
магнитных полей, но и постоянные типовые погрешности самих МД.
121
Также минимизация указанных погрешностей возможна за счет
проведения экспериментальных работ по топографированию магнитных полей
объектов и определения оптимального места установки на них магнитометрической
системы. Данные работы позволяют выделить область, в которой силовые
линии магнитного поля Земли искажаются в наименьшей степени.
Точность магнитометрической системы определения вертикали места,
таким образом, зависит от следующих параметров:
- величины вертикальной составляющей вектора f (чем выше широта,
тем точнее будет работать система);
- погрешности задания угла курса;
- величины типовых погрешностей магнитных датчиков (нелинейность,
перекрестная связь, температурное смещение нуля, гистерезис);
- влияния окружающих магнитных полей, искажающих силовые линии
МПЗ и ухудшающих точность определения углов тангажа и крена.
Изложенный принцип построения магнитометрической системы
определения вертикали места является авторским [4.8, 4.9].
На рис. 4. 10 приведен внешний вид экспериментальной
магнитометрической системы определения вертикали места.
Рис. 4.10. Внешний вид экспериментальной МСО
Конструктивно МСО состоит из нескольких частей, осуществляющих
измерение параметров движения БПЛА, решение задач управления движением,
передачу телеметрических данных на наземную систему управления.
Магнитометрическая система определения вертикали места реализована на трехосевом
магнитном датчике НМС 1053, производства компании «Honeywell», и модуле
GPSEB240TD2.
На рис. 4.11 приведены результаты определения погрешностей углов
тангажа и крена. Испытания проводились на двухкомпонентном поворотном стен-
122
де. Выставка углов осуществлялась по оптическому квадранту с погрешностью
выставки не хуже Г. В процессе съема показаний система ориентировалась в
направлении магнитного севера по показаниям датчика, установленного вдоль
оси OZ связанной системы координат, т.е. из условия равенства показаний
этого датчика нулю. Измерения проводились для диапазона углов тангажа и крена
± 40° с дискретом угла поворота в 10°. Графики 1 и 2, приведенные на рис. 4.11,
соответствуют ориентации системы + 40° тангажа и + 40° крена.
Рис. 4.11. Погрешности определения углов: 1 - тангажа и 2 - крена
Полученные экспериментальные результаты подтверждают возможность
определения углов тангажа и крена БПЛА по показаниям магнитных датчиков
с привлечением априорной информации об углах курса и углах магнитного
наклонения в точке местности.
На основании математических зависимостей (4.12), (4.19) разработана
имитационная модель системы и проведено исследование ее работы на борту
беспилотного летательного аппарата самолетной аэродинамической схемы
в среде MATLAB с использованием модели показаний трехосевого магнитного
датчика НМС1053.
Траектория движения БПЛА при моделировании представлена на
рис. 4.12. Началу координат соответствует точка местности с северной широтой
54,14°, восточной долготой 37,35° и магнитным наклонением, равным -70°, что
примерно соответствует местоположению г. Тула.
Погрешность определения угла курса модулем GPS принята в виде
случайной величины, не превышающей ±1°. Погрешность определения магнитного
наклонения смоделирована с помощью блока World Magnetic Model 2005 с
учетом невязки высоты, координат объекта и ошибки экстраполяции [4.5, 4.6].
Модель погрешностей магнитных датчиков составлялась в соответствии с
типовыми погрешностями, указанными в их паспортах.
123
На рис. 4.13 представлены графики погрешностей определения углов
тангажа и крена имитационной моделью магнитометрической системы
определения вертикали места для рассмотренного случая.
Рис. 4.12. Траектория движения БПЛА
(X - дальность, Y - высота, Z - боковое смещение)
а)
б)
Рис.4.13. Погрешности определения углов: а - тангажа, б - крена
124
В целом отметим, что магнитометрическая система определения
вертикали может применяться самостоятельно, однако целесообразно ее
интегрирование с системами основанными на датчиках другой физической природы.
Список литературы к главе 4
4.1. Бараночников М.Л. Микромагнитоэлектроника: В 2 т. / М.Л.
Бараночников - М.: ДМК Пресс, 2001. - Т. 1. - 544 с: ил.
4.2. Сайт компании ЗАО «НТЦ «Рисса» [Электронный ресурс] - Режим
доступа: www.rissa.ru.
4.3. Сайт компании «Honeywell» [Электронный ресурс] - Режим доступа:
www.magneticsensors.com.
4.4. CHS Series. User's Manual [Электронный ресурс] / Crossbow
Technology Inc. - Режим доступа: www.xbow.com.
4.5. The US/UK World Magnetic Model for 2005-2010, NOAA Technical
Report NESDIS/NGDC-1 [Электронный ресурс] / McLean, S., S. Macmillan,
S. Maus, V. Lesur, A.Thomson, D. Dater. - December 2004. - 79 p. - Режим
доступа: http://www.ngdc.noaa.gov/seg/WMM.
4.6. Kenneth S.Rukstales, Jeffrey J.Love. The International Geomagnetic
Reference Field, 2005 [Электронный ресурс] / U.S. Department of the Interior, U.S.
Geological Survey. - 2007. - Режим доступа: http://www.ngdc.noaa.gov/seg/WMM.
4.7. Шведов А.П. Комплексирование магнитометрической и инерциаль-
ной систем ориентации / А.П. Шведов // Справочник. Инженерный журнал.
Приложение. - 2010. - № 6. - С. 15-19.
4.8. Малютин Д.М. Системы ориентации магнитометрического типа для
подвижных объектов / Д.М. Малютин, М.Г. Погорелов, А.П. Шведов // Справочник.
Инженерный журнал. Приложение. - 2010. - № 6. - С. 10-14.
4.9. Распопов В.Я. Информационно-измерительные микросистемы для
подвижных объектов / В.Я. Распопов, М.Г. Погорелов, А.П. Шведов, Ю.В.
Иванов, Д.М. Малютин, Р.В. Алалуев, В.В. Лихошерст, СЕ. Товкач // Нано-
и микросистемная техника. - 2010. - № 1.- С. 27-34.
ГЛАВА 5
ВИДЕОСИСТЕМЫ ОРИЕНТАЦИИ
- Как известно, основной целевой задачей БПЛА является обзор местности и
наблюдение за обстановкой на ней или получение детального изображения
участков местности. Технически эта задача решается с помощью оптических устройств,
размещаемых либо непосредственно на корпусе БПЛА, либо с помощью гироста-
билизированных платформ, обеспечивающих поворот оптических осей устройств
в любую сторону с заданной скоростью. В случае установки видеокамеры на борту
БПЛА существует принципиальная возможность использования видеоинформации
для вычисления углов тангажа и крена БПЛА. Применяют следующие варианты
определения угловой ориентации с помощью канала видеонаблюдения. В первом
варианте оптическая ось обычной видеокамеры располагается параллельно
продольной оси БПЛА или составляет с ней некоторый угол (рис. 5.1, а). Для
определения углового положения БПЛА служит линия горизонта, которая является
источником информации об углах тангажа и крена (рис. 5.1, б) [5.1]. Недостатками
алгоритма является то, что горизонт наблюдаем только в определенных интервалах
углов тангажа, и если БПЛА выходит из этого интервала, то результирующее
изображение строится исключительно из неба или земли. Наконец, центральнопроек-
тивная камера позволяет вычислить угол крена, а угол тангажа может быть
вычислен только при наличии информации о высоте полета БПЛА.
Рис. 5.1. Получение информации об угловой ориентации БПЛА:
а, б - с помощью центральнопроективной видеосистемы;
в, г - с помощью катадиоптрического датчика
Другим вариантом определения параметров угловой ориентации за счет
средств видеонаблюдения является использование катадиоптрического датчика
[5.2]. Катадиоптрический датчик представляет собой объединение выпуклого
зеркала с проецирующей камерой, оптическая ось которой совмещается с опти-
126
ческой осью зеркала (рис. 5.1, в). Основное преимущество такого датчика
заключается в получении панорамного изображения в одном кадре (рис. 5.1, г),
которое имеет следующие достоинства: во-первых, возможность полного
охвата окружающей среды и полный обзор горизонта; во-вторых, при любой
ориентации БПЛА горизонт будет всегда присутствовать на изображении и, таким
образом, углы тангажа и крена всегда могут быть определены; в-третьих,
система позволяет рассчитывать крен и тангаж без каких-либо дополнительных
предлагаемых данных, в отличие от систем, базирующихся на центральнопро-
ективной видеокамере. Тем не менее панорамный обзор имеет некоторые
недостатки. Панорамное изображение содержит значительные деформации,
вызванные геометрией зеркала и определенной погрешностью камеры [5.2]. Эти
деформации вносят существенные трудности при обработке изображений.
Схема с катадиоптрическим датчиком требует значительной доработки канала
видеонаблюдения, связанной с установкой полусферического зеркала, и
характеризуется более сложными алгоритмами обработки информации.
5.1 Центральнопроективная система
Линия горизонта проецируется в поле зрения видеокамеры в зависимости
от углов тангажа и крена БПЛА. Изображение линии горизонта при повороте
БПЛА на угол крена приведено на рис. 5.2.
Рис. 5.2. Изображение линии горизонта в поле зрения
центральнопроективной видеокамеры
Если аппроксимировать линию горизонта в виде прямой, то угол крена □
может быть определен по формуле:
y = arctg-L—S [рад] (5.1)
где ll9 /2, X - геометрические параметры, приведенные на рис. 5.2. Так как в
процессе съемки один кадр видеосигнала представляет собой совокупность
127
пикселей, то lx, /2, X выражаются в пикселах. Точность определения угла крена
по формуле (5.1) будет определяться погрешностями аппроксимации линии
горизонта.
Информацию об угле тангажа дают вертикальные смещения линии
горизонта в поле зрения видеокамеры (рис. 5.3).
Рис. 5.3. Определение угла тангажа по вертикальному смещению
линии горизонта
Имеет место следующее соотношение
—- = tgw, (5.2)
где/- фокусное расстояние объектива видеокамеры, w - поле зрения
видеокамеры, соответствующее стороне Y матрицы.
Аналогичное равенство можно записать для смещения линии горизонта Ь,
вызванного изменением угла тангажа 3
—-«г- <">
Комбинируя соотношения (5.2) и (5.3) получаем следующую формулу для
вычисления угла тангажа
(ъ Л
» = 2arctg — tgw, [рад]. (5.4)
V* )
Следует отметить, что угол тангажа необходимо корректировать величиной
некоторого угла |i, зависящего от высоты подъема h БПЛА, так как горизонт
перемещается в поле зрения видеокамеры с изменением высоты.
Соответствующий угол ц равен 0° на нулевой высоте. Аппроксимируя поверхность Земли под
текущим местоположением БПЛА сферой радиуса R [5.1], имеем:
R
u = arccos ,
R + h
128
А формула (5.4) принимает вид
3 = 2arctg I — tgw j-ц.
Основными достоинствами центральнопроективных систем являются
простота конструкции и вычислительных алгоритмов. Однако недостаток,
связанный с потерей линии горизонта при больших углах тангажа, ограничивает
применение данных систем только в качестве корректирующих, в сочетании с
другими системами ориентации.
5.2 Катадиоптрическая система
5.2.1 Состав и алгоритмы функционирования
Способ определения углов ориентации в катадиоптрической системе во
многом напоминает способ, применяемый в центральнопроективных системах,
а именно: анализ взаиморасположения неба и земли в кадре изображения.
Ключевым отличием является увеличенный по сравнению с центральнопроектив-
ными системами угол обзора.
Один из методов увеличения угла обзора минивидеокамеры был описан в
статье [5.1]. Он основан на применении зеркала сферической формы. На рис.
5.4 представлен схематический вид катадиоптрической системы.
в
/ Видеокамера \
А
\/ Сферическое Y/
/1 зеркало \ \^
Рис. 5.4. Схематический вид оптической системы
для увеличения угла обзора минивидеокамеры
Как видно, камера установлена над сферическим зеркалом и за счет
отражения от него лучей света первичный угол обзора А расширяется до угла В.
Недостатком такой системы является наличие на изображении элементов
крепления видеокамеры, а также сигнальных и питающих проводов, что приводит к
необходимости применения сложных вычислительных алгоритмов. На рис. 5.5
представлен схематический вид другой конструкции [5.3], лишенной этих
недостатков (будем называть данную конструкцию оптической головкой).
129
в
Рис. 5.5. Схематический вид конструкции катадиоптрической системы (оптическая головка):
1 - видеокамера; 2 - сферическое зеркало; 3 - отверстие; 4 - плоское зеркало;
5 - свегопрозрачный корпус
Видеокамера 1 расположена внутри зеркальной полусферы 2, имеющей
небольшое отверстие 3. Над этим отверстием расположено плоское зеркало 4,
закрепленное на светопрозрачном корпусе 5. Лучи света сначала проходят
через корпус 5, затем последовательно отражаются от зеркал 2 и 4, и через
отверстие 3 попадают в объектив видеокамеры 1. Таким образом, первичный угол
обзора А расширяется до угла В и на изображении не присутствуют
искусственные помехи (элементы крепления, системы электропитания и т.д.). Размеры
зеркал 2 и 4 и отверстия 3 определяются в зависимости от начального и
требуемого углов обзора А и В. Так как угол обзора оптической головки
превышает 180°, она может крепиться на корпус МБПЛА несколькими способами: в
верхней, нижней и носовой частях. Основным требованием, налагаемым при
выборе способа крепления оптической головки, является отсутствие различных
частей корпуса ЛА в пределах её угла обзора В.
Примеры получаемых изображений представлены на рис. 5.6.
Рис. 5.6. Примеры изображений, получаемых с оптической головки:
а - ось видеокамеры направлена вертикально вверх;
б - ось видеокамеры направлена на горизонт
Для обеспечения модульности (взаимозаменяемости) и удобства
использования, панорамная видеосистема (ПВС) может быть разделена на две
независимые части: оптическая головка и вычислительный блок (ВБ).
130
Структура ПВС приведена на рис. 5.7.
Окружающее пространство
Световое излучение
видимого диапазона
Г"
Оптическая головка
ПВС.
Аналоговый видеосигнал I
I
Вычислительный блок
L.
Углы крена и тангажа
Приемное оборудование
Рис. 5.7. Структурная схема ПВС
На оптическую головку возлагаются функции получения
видеоизображения окружающего пространства и передачи аналогового видеосигнала на
вычислительный блок.
Исходя из характера входных данных для данного блока (аналоговый
видеосигнал) и методов определения углов ориентации (на основе кластеризации
неба и земли на изображении), вычислительный блок (ВБ) должен выполнять
следующие функции:
1. Оцифровка аналогового видеосигнала.
2. Разделение неба и земли на изображении.
3. Вычисление углов крена и тангажа.
Для этих целей требуются различные аппаратные средства. На рис. 5.8.
приведена структурная схема ВБ.
Оптическая головка
Аналоговый видеосигнал
Г'
'ю"1
Аппаратный видеодекодер
(оцифровка видеосигнала)
Цифровые данные
DSP-процессор, ПЛИС,
(распознавание неба и земли
вычисление углов ориентации)!
I
Углы крена и тангажа
V
Приемное оборудование
Рис. 5.8. Структурная схема ВБ
131
Входными данными для вычислительных алгоритмов является матрица
изображения, на котором небо и земля уже распознаны. На рис. 5.9. приведены
примеры таких изображений, полученных при различных углах крена и
тангажа БПЛА. Принято, что оптическая головка установлена в верхней части БПЛА
и ось видеокамеры направлена параллельно оси У планера.
Рис. 5.9. Примеры изображений, получаемых с оптической головки
после распознавания неба и земли:
а) нулевые углы тангажа и крена; б) тангаж 15°
Для определения способа вычисления углов ориентации воспользуемся
тем фактом, что предлагаемая оптическая система является центральносиммет-
ричной. Т.е. изображения, получаемые при различных углах крена и тангажа,
но при одинаковых углах между осью Y и местной вертикалью будут
отличаться лишь углом поворота относительно центра кадра. Поясним это на примере.
На рис. 5.10 показаны изображения, получаемые при различных углах крена у и
тангажа G.
а) б) в)
Рис. 5.10. Примеры изображений:
а) 9=45°, у=0°; б) 9=31°, у=35°; в) 9=0°, у=45°
Как видно, все три изображения практически одинаковы и отличаются
только углом поворота а. Во всех трех случаях угол между осью Y БПЛА и
местной вертикалью (угол/?) составляет 45°. Пояснение приведено на рис. 5.11.
132
Рис. 5.11. Ориентация планера: а) 9=45°, у=0°; б) 0=31°, у=35°; в) 9=0°, у=45°
Ясно, что углы крена и тангажа могут быть определены на основе углов р
и а. Однако, не известен угол/?. На рис. 5.10 обозначен отрезок Р9 длина
которого одинакова во всех трех случаях. Этот отрезок характеризует собой
расстояние центра яркости неба от центра изображения. То есть, каждому углу р
соответствует своя длина отрезка Р. Обозначим эту зависимость как p=f(P).
Данную зависимость трудно получить аналитически, однако она может быть
получена при помощи моделирования панорамной видеосистемы. Если
смоделировать множество изображений, получаемых с оптической головки при
известных углах /?, и для каждого изображения вычислить длину отрезка Р, то
можно построить график, представленный на рис. 5.12.
о
3*
U
«с
90 г
80
60
50
40
30
20
10
0
0 20 40 60 S0 100 120
Р, пиксель
Рис. 5.12. Графический пример зависимости p~f(P). При построении угол обзора видеокамеры
равен 45°, радиус сферического зеркала - 20 мм, разрешение изображения - 6401J480 пикселей
133
Как видно, зависимость практически линейна до значения;? = 45°.
Наиболее целесообразным представляется аппроксимация данного графика
полиномами 3-го и 4-го порядков. Полиномом 3-го порядка была аппроксимирована
первая часть графика на рис. 5.12. Полиномом 4-го - вторая часть. Графическая
зависимость ошибки определения параметра/? приведена на рис. 5.13.
а)
б)
1
0
1-з
о.
-6
-8
0
0 5
0
2,-0.5
<
V
\
\
\
\
\
10 20 30 40 50 60 70 80 90
Р, градус
4J
70 75
Руградус
Рис. 5.13. Полиномиальная аппроксимация:
а)/7 = 0,0002235Р3-0,0009855 Ао,65256Р;
6)р = 0,00003/>4-0,00829/>3+0,7515/>2-22Р
Углы крена и тангажа вычисляются по формулам
в = ^т • arctg
|cos(tf)|
sin(tf)
sin(p)
arccos
>Jcos2(p) + tg2(a)
cos(p)
in(^)| *Jsm2(a) + cos2(a)cos2(p)
sin
134
Как видно, приведенные вычисления весьма просты и не требуют
больших аппаратных затрат. Однако приведенный алгоритм не учитывает многих
факторов, возникающих во время реальных полетов («смазанность»
изображения, особенности рельефа, точность кластеризации неба и земли и т.д.).
5.2.2 Моделирование видеосистемы
Для приближений геометрической оптики стандартная минивидеокамера
характеризуется тремя параметрами: углом обзора ю, горизонтальным
разрешением (количеством пикселей) Width, вертикальным разрешением Height. Центр
изображения имеет координаты (Сх, Су) = (Width/2 + 0,5, Height/2 + 0,5). Размер
диагонали кадра в пикселях обозначим Length:
Length = yj Height2 + Width2.
Угол обзора обычно дается для диагонали кадра, и из его значения можно
без труда получить углы обзора для вертикальной и горизонтальной плоскостей
изображения со х и со у по следующим формулам:
( , у. Width ^
ых =arctan tg(coj-
coY = arctan
tg(co)
Length
Height
Length
Каждый пиксель изображения соответствует одному лучу, который
можно описать двумя углами: углом а между прямой, соединяющей пиксель с
центром изображения и вертикальной осью изображения, и углом Р между лучом и
оптической осью камеры. На рис. 5.14 приведено пояснение.
а)
Сх, Су
X
~""~\г'
^
б)
Кадр изображения
Кадр изображения
Рис. 5.14. К вопросу описания пикселей изображения:
а) определение угла а; б) определение угла р
Угол а измеряется по направлению часовой стрелки, и его значения
лежат в диапазоне (0° ... 360°), угол р может принимать значения (0 ... со/2).
Ниже приведены формулы вычисления данных углов для пикселя с коорди-
135
натами (х, у). Координаты пикселя отсчитываются относительно левого
верхнего угла кадра.
г х-Сх^
а = arctan
\Cy-y)
Р = arctan
tg(co)
2.yl(x-Cx)2+(Cy-yy
Л
Length
С помощью данных зависимостей можно произвести трассировку лучей,
описывающих весь кадр изображения. Однако зеркальная оптическая система,
дополняющая видеокамеру, вносит свои искажения, и их необходимо учесть.
Для создания математической модели оптической головки можно
заменить её конструкцию на эквивалентную, как показано на рис. 5.15.
а)
б)
Сферическое
зеркало
Плоское
зеркало
Свегопрозрачный
корпус
~7
Минивидеокамера
Минивидеокамера
Сферическое
зеркало
Рис. 5.15. Замена оптической головки эквивалентной конструкцией:
а - исходная конструкция; б - эквивалентная конструкция
Т.к. данная зеркальная система симметрична относительно оптической
оси минивидеокамеры, она будет изменять только значение углов р, сохраняя
значение углов а. Исходный угол Pi будет преобразовываться в угол р2 по
следующей зависимости:
P2=P + Pi-2sin sinfft)—— .
V К )
В дальнейшем под углом Р будет подразумеваться угол р2, полученный
после преобразования зеркальной оптической системой.
Таким образом, каждый пиксель изображения характеризуется парой
конечных угловых параметров (а, Р). Для удобства моделирования сопоставим
каждому пикселю единичный вектор с такими же угловыми координатами (а,
Р) и найдем его проекции на оси X, У, Z БПЛА. Обозначим эти проекции х, у, z.
136
Учтем, что оптическая ось видеокамеры направлена параллельно оси Y БПЛА,
и получим.
х = sin(/?)cos(a), у = -cos(/?), z = sin(/?)sin(a).
Переход от старых координат (х, у, z) к новым (х„, уП9 zn\ получающимся
при повороте оптической головки на угол тангажа 0 и угол крена у,
описывается следующими формулами:
zn - cos
f f
arctan
V
r
yx = sin
arctan
xn = cos
arctan
JV*=sin
.)+e)J
*W.
(y
*w,
Й
\x2+yx2,
arctan
feM^ra
Полученные значения можно использовать для трассировки лучей с целью
визуализации получаемых с помощью оптической головки кадров изображения.
После данного преобразования надо лишь узнать, куда «указывает» этот луч: на
землю, или на небо. Для этого можно воспользоваться следующим условием:
(
arctan
У
4x^72j
*ч,
(5.5)
где % - граничный угол, под которым видна линия горизонта (рис. 5.16).
Земля
Рис. 5.16. К вопросу о вычислении угла %
Если условие (5.5) выполняется, то данный луч указывает на небо,
иначе - на землю. Угол £ зависит от высоты полета Н и вычисляется по следующей
формуле:
t я . ( R л
с = arcsin
ъ 2 \
R + H
где R - радиус земли.
137
На полученных с оптической головки кадрах изображения будут
присутствовать так называемые, «мертвые зоны» т.е. зоны, не несущие полезной
информации. Они возникают в результате следующих факторов:
1. Лучи не попадают на сферическое зеркало (краевые зоны);
2. Многократное отражение от плоского и сферического зеркала
(центральная зона, характеризуется углом о, рис. 5.17).
Рис. 5.17. Пример формирования центральной «мертвой зоны»
Так как положение «мертвых зон» заранее известно, они никак не
повлияют на функционирование системы. На получаемых изображениях
(рис. 5.18) мертвые зоны обозначены черным цветом.
Рис. 5.18. «Мертвые зоны» на получаемых изображениях
Описанные в данном пункте аналитические зависимости позволяют
проводить полное моделирование панорамной видеосистемы [5.4, 5.5] и оценить
точность вычисления углов ориентации.
138
5.23 Алгоритм распознавания неба и земли
Процесс распознавания является ключевым во всей системе [5.6], так как
вычисление углов крена и тангажа происходит целиком на основе результатов
распознавания. Катадиоптрическая система ориентации обязана
функционировать в некотором диапазоне погодных условий, включая облачность.
Следовательно, алгоритм распознавания должен функционировать при любых
метеоусловиях из данного диапазона.
Крайне желательной характеристикой алгоритма распознавания является
его невысокая требовательность к вычислительным ресурсам и малое время
работы. Это позволит снизить стоимость аппаратной части, значительно понизить
энергопотребление. Малое время работы алгоритма позволяет минимизировать
запаздывание вычисленных значений углов крена и тангажа от реальных и тем
самым повысить точность системы.
В панорамной видеосистеме может использоваться цветная минивидео-
камера стандарта PAL/NTSC. Выход видеокамеры подключается к аппаратному
видеодекодеру, который выдает оцифрованный сигнал о каждом пикселе
изображения. Большинство распространенных видеодекодеров выдают
оцифрованную информацию в формате YCbCr. Данные выдаются последовательно,
начиная с компоненты Y и заканчивая О. Начало каждого кадра сигнализируется
импульсом кадровой развертки. Для удобства использования алгоритмом
распознавания данных о пикселе их следует преобразовать из исходного формата
YCbCr в формат RGB.
При моделировании оптической головки было отмечено, что часть
изображения, получаемая без отражения от сферического зеркала, не несет в себе
полезной информации («мертвые зоны»). Следовательно, прежде чем применять к
данным о пикселе формулы преобразования форматов, необходимо определить,
принадлежит ли данный пиксель к полезной зоне изображения (рис. 5.19).
Рис. 5.19. Пример смоделированного изображения, получаемого с оптической головки:
Rmin - внутренний радиус полезной зоны (в пикселях);
Rmax - внешний радиус полезной зоны (в пикселях)
139
Если обозначить координаты пикселя относительно центра изображения
как Рх и Ру, то формула для определения принадлежности данного пикселя к
полезной зоне будет иметь следующий вид:
Rmin2 < Рх2 + Ру2 < Rmax2. (5.6)
Точные значения радиусов Rmin и Rmax могут быть определены
аналитическим путем или практически при помощи анализа тестовых изображений
готовой оптической головки.
Таким образом, информация о значении каждого пикселя изображения
кодируется тремя параметрами (У, О, СЬ) и предварительная обработка
заключается в применении к координатам пикселя формулы (5.6), а затем, в случае
необходимости, преобразовании к формату RGB, так как на вход алгоритма
распознавания поступают последовательные данные о каждом пикселе в
формате RGB.
Наиболее приемлемым вариантом алгоритма распознавания с точки
зрения скорости работы и аппаратной затратности является тот, который сможет
отнести пиксель к небу или земле только на основе данных о его цвете и
интенсивности, то есть исключительно на компонентах RGB. Это позволит не
хранить в памяти различные области изображений и обрабатывать пиксели
последовательно по мере их поступления, полностью исключив задержку из-за
обработки.
В результате исследования статистических свойств большого количества
изображений выявлены следующие общие характеристики:
1. Средняя яркость пикселей неба превышает среднюю яркость пикселей
всего изображения.
2. Значение компоненты В пикселя неба превышает среднее значение
компонент R и G того же пикселя.
3. Значение компоненты R пикселя неба меньше значений компоненты G
того же пикселя.
Данные закономерности проявлялись у подавляющего большинства
рассмотренных изображений (около 95%), что говорит об их высокой
статистической достоверности. На основании данных статистических характеристик
можно составить алгоритм распознавания, структурная схема которого показана на
рис. 5.20.
Как видно из структуры предлагаемого алгоритма, значение 57? должно
быть известно уже к началу приема данных изображения. Эту проблему можно
решить, если принять во внимание тот факт, что следующие друг за другом
кадры изображения мало отличаются. То есть мы можем использовать в
качестве SR для текущей картинки значение, которое параллельно вычислялось на
этапе обработки предыдущего кадра.
Яркость пикселей PixelSR может быть взята как значение параметра Y
формата YCbCr.
Подстроечные коэффициенты VI и V2 характеризуют особенности
цветопередачи минивидеокамеры и видеодекодера.
140
RGB
Небо Земля
Рис. 5.20. Структурная схема алгоритма распознавания неба и земли:
SR - среднее значение яркости всех пикселей изображения;
PixelSR - яркость проверяемого пикселя;
VI, V2- небольшие подстроенные коэффициенты, зависящие
от характеристик минивидеокамеры и видеодекодера
На рис. 5.21 приведены примеры обработанных с помощью данного
алгоритма изображений.
На основе приведенных данных можно говорить о том, что
разработанный алгоритм функционирует корректно. Небольшие локальные ошибки не
должны влиять на точность системы, так как они практически не будут менять
положение центра яркости неба на изображении.
На рис. 5.22 приведен внешний вид вычислительного блока катадиоптри-
ческой системы ориентации, состоящий из оцифровщика аналогового
видеосигнала (видеодекодер), цифровых вычислителей и интерфейсных разъемов.
Основные технические характеристики приведены в таблице 5.1.
141
Рис. 5.21. Результаты функционирования алгоритма распознавания:
а) исходные изображения; б) обработанные изображения
142
Рис. 5.22. Вычислительный блок катадиоптрической системы ориентации
Таблица 5 Л. Основные технические характеристики вычислительного блока
Параметр
Диапазон измерения углов
Погрешность измерения углов
Частота выдачи информации
1 Масса
Габаритные размеры
1 Напряжение питания
Потребляемая мощность
Значение
тангаж ±90 град,
крен ±180 град.
1,5 град. 1
60 Гц
50 г
75 П60U15 мм
5...7В
1 Вт
Катадиоптрическая система ориентации может применяться как в
качестве основной системы, так и в качестве корректирующей, совместно с другими
системами ориентации. Небольшие масса и габариты позволяют применять
данную систему на МБПЛА с малой нагрузочной способностью.
143
Список литературы к главе 5
5.1. Винклер С. Дешевая интегрированная инерциально-спутниковая
навигационная система для малого летательного аппарата, дополненная каналом
видеонаблюдения / Винклер С, Шульц Х.-В., Бушманн М., Кордес Т.,
Ферсман П. // Гироскопия и навигация, 2004, №4, с. 36-48.
5.2. Pascal Vasseur. MesurecTAttitude pour les Drones par Vision Catadioptri-
que Centrale / Pascal Vasseur, Cedric1 Demonceaux [Электронный ресурс] //
C.R.E.A (Centre de Robotique, d' Electrotechnique et d' Automatique) - EA3299.
Universite' de Picardie Jules Verne 7, Rue du Moulin Neuf 80000 Amiens. - Режим
доступа: URL: http://www.crea.u-picardie.fr/-vasseur.
5.3. Ладонкин А.В. Панорамная видеосистема для определения углов крена
и тангажа летательного аппарата // Навигация и управление движением.
Материалы XI конференции молодых ученых. - СПб.: ГНЦ РФ ОАО «Концерн
«ЦНИИ «Электроприбор», 2009. - С. 190-195.
5.4. Ладонкин А.В. Лабораторное моделирование панорамной
видеосистемы для определения углов ориентации беспилотного летательного аппарата //
Сборник трудов конференции «Оптика и образование-2010». - СПб: СПбГУ
ИТМО,2010.-С. 138.
5.5. Расчетный и лабораторный практикум по микросистемной авионике:
Учебное пособие для вузов / Под ред. проф., д-ра техн. наук В.Я. Распопова. -
Тула: Изд-во ТулГУ, 2011. - 211 с.
5.6. Mitch Bryson. Bearing-Only SLAM for an Airborne Vehicle / Mitch Bryson,
Salah Sukkarieh [Электронный ресурс] // ARC Centre for Excellence in Autonomous
Systems, Australian Centre for Field Robotics, The Rose St. Building, J04 University of
Sydney. - Режим доступа: URL: http://www.cse.unsw.edu.au/~acra2005/proceedings/
papers/biyson.pdf.
ГЛАВА6
ПИРОМЕТРИЧЕСКАЯ СИСТЕМА ОРИЕНТАЦИИ
6.1 Принцип действия пировертикали
Пировертикаль (ПВ) предназначена для определения углов крена и
тангажа МБПЛА путем обработки показаний четырех горизонтально расположенных
под углом 90 градусов друг к другу пирометров, размещенных вдоль
строительных осей ЛА (рис. 6.1).
Достоинствами системы, отличающими ее от микромеханических инерци-
альных систем ориентации, является отсутствие накапливаемой со временем
погрешности, отсутствие восприимчивости к вибрациям и перегрузкам,
минимальные габариты и вес (менее 30 г).
б)
X
Рис. 6.1. Принцип работы пирометрической вертикали: а) полет БПЛА на уровне горизонта,
б) принципиальная схема размещения пирометров
Принцип действия ПВ основан на измерении вертикального распределения
разности температур небосвода и земли, имеющей минимум в зените и
максимум в надире. Разница минимума и максимума является температурным
градиентом, не постоянным во времени и зависящим от погодных условий
(рис. 6.1, а). В ясные дни значение градиента достигает 40 °С, а в пасмурные
может снижаться до 1 °С. Зная значение текущего градиента и используя
разность показаний двух диаметрально противоположно направленных
пирометров, возможно вычислять углы крена и тангажа БПЛА.
Если БПЛА летит горизонтально, все датчики находятся в плоскости
горизонта, «видят» одинаковую тепловую картину и выходные напряжения
диаметрально противоположных датчиков равны, то есть, согласно рис. 6.1, б:
Uoatl - Uoat3 = 0> Upat2 ~ Upat4 = 0,
где Uoatx- выходные напряжения датчиков соответственно.
145
Если БПЛА накренить, датчик Datl будет «видеть» А% земли и Б% неба
(отношение зависит от высоты), а датчик Dat3 - наоборот, А% неба и Б% земли
(рис. 6.1, а). Средняя температура области зрения каждого датчика будет
отличаться, что приведет к рассогласованию выходных напряжений пары датчиков
Datl и Dat3, которое преобразуется в сигнал угла поворота БПЛА относительно
поперечной оси. Аналогично рассогласование выходных сигналов пары
датчиков Dat2 и Dat4 преобразуется в сигнал угла поворота БПЛА относительно
продольной оси.
Используя два связанных инфракрасных термометра (построенных на
основе пирометров), находящихся на одной оси и направленных в диаметрально
противоположных направлениях, возможно вычислить угол наклона
термометров к горизонту, приняв характеристики и погрешности термометров
идентичными. Для этого необходимо поле зрения каждого термометра, куда попадают
элементы земли и небосвода, принять за 100%. Когда оба термометра
направлены на горизонт, в поле зрения каждого датчика попадает 50% неба и 50%
земли. Показания термометров будут равны. Если теперь повернуть
термометры на 30 градусов вокруг оси симметрии, то нижний датчик будет «видеть»
80% земли и 20% неба, а верхний наоборот. Отображаемая каждым
термометром температура может быть получена через пропорцию [6.1]:
((видимая часть неба)(гзенита)+(видимая часть земли)(гнадИра))
Т= T7Z777Z — • (6.1)
100% v '
Показания нижнего термометра (для температуры зенита -25°С и надира
+10°С, типичных для летнего дня) будут равны:
т = ((20%)(-25°С) + (80%)(+10°С)) = зос
100%
Верхний термометр покажет:
т = ((20%)(+10°С) + (80%)(-25°С)) = 1 goc
100%
Разница показаний датчиков составляет 21 градус Цельсия.
6.2 Определение требований к элементному составу пировертикали
и технических ограничений
Любое нагретое выше 0,058 градусов Кельвина (нижняя граница
излучаемости фотонов) тело, согласно закону Планка, обладает эмиссией.
Интенсивность излучения абсолютно черного тела (АЧТ) в зависимости от температуры
и частоты определяется законом Планка. Таким образом, и поверхность земли,
146
и находящееся в космосе вещество будут всегда обладать инфракрасным (ИК)
излучением. Длина волны, при которой энергия излучения АЧТ максимальна,
определяется законом смещения Вина. Причем формула Вина дает длину
волны максимальной плотности фотонов, формирующих температуру АЧТ, и не
исключает наличия фотонов с другой длиной волны в излучаемом спектре [6.2].
Расчет по формуле Вина показывает, что температуру в интервале от -65 до
+ 100 градусов Цельсия формируют фотоны инфракрасного диапазона с длиной
волны в диапазоне от 14 до 8 мкм соответственно.
Атмосфера обладает свойством прозрачности для нескольких диапазонов
частот, открывая для них «окна» (рис. 6.2) [6.3-6.6].
Рис. 6.2. Распределение поглощения волн атмосферными газами
Такое «окно» существует и для средней области ИК излучения в диапазоне
6-14 мкм [6.6]. В области длин волн 9,3-10,2 мкм расположена слабая полоса
поглощения, главным образом озона, с небольшим участием С02. В районе
длин волн 11,8 мкм и 12,75 мкм находятся полосы поглощения Н20 и С02
соответственно. Диапазон ниже 7,5 мкм занимает обширная полоса поглощения
Н20, а диапазон выше 14 мкм - полоса поглощения С02.
Диапазон 6-14 мкм интересен тем, что температуры от -65 до 4-100
градусов обычны для Земли и в нем находится область чувствительности
пирометров, выпускаемых серийно промышленностью многих стран для
дистанционного измерения температуры, что облегчает задачу построения ПВ. Таким
образом, диапазон ИК волн в периоде от 14 до 8 мкм удобно использовать для
определения углов крена и тангажа сразу с двух позиций - наличия окна
пропускания атмосферы и наличия широкого спектра выпускаемых на этот
диапазон датчиков.
Солнце не оказывает влияния на работу ПВ. Наибольшую интенсивность его
спектр имеет в области длин волн 430-500 нм. В видимой и инфракрасной
областях спектр электромагнитного излучения Солнца близок к спектру излучения АЧТ
с температурой 6000 К. Около 9% энергии в солнечном спектре приходится на
ультрафиолетовое излучение с длинами волн от 100 до 400 нм. Остальная энергия
147
разделена приблизительно поровну между видимой (400-760 нм) и инфракрасной
(760-5000 нм) областями спектра. Небольшая часть энергии преобразуется также
в рентгеновское и радиоизлучение [6.7]. Таким образом, Солнце не излучает в
диапазоне 8-14 мкм и не оказывает (напрямую) влияние на работу ПВ, что было
проверено экспериментально при полетах на закате и при ярком солнце в зените.
В зарубежной литературе часто встречается ошибочное мнение, что
подобные пирометрические системы фиксируют разницу эмиссии углекислого
газа в атмосфере и вне ее, корни которого уходят в применение пирометров в
космонавтике. Пирометры, применяемые в ПВ, должны быть
широкополосными, захватывая диапазон 8-14 мкм и не выходя за его рамки. Захват участка
длин волн более 14 мкм приведет к росту в сигнале пирометра систематической
погрешности от излучения С02, а захват участка ниже 7,5 мкм приведет к росту
случайной погрешности от излучения переменчивой по свойствам воды.
В таблице 6.1 приведены представленные на мировом рынке пирометры
(на момент написания работы). Наиболее оптимальной для ПВ, с точки зрения
диапазона, является модель ТР297А.
Таблица 6.
Модель
MLX90614
MLX90615
MLX90247
TPS333
ТР297А
ТР336
ТР337
ТР338х
ТР339х
. Параметры пирометров
Тип
Цифр.
Цифр.
Аналог.
Аналог.
Анадог.
Аналог.
Аналог.
Аналог.
Аналог.
Диапазон,
мкм
5,5-15
5,5-15
5,5-15
5,5-12
7-14
5-15
5-15
5-15
5-15
Угол обзора,
град
±88
±88
±88
±80
±45
±45
±45
±50
±45
Вес,
гр
4
2
4
2
4
4
4
4
4
ипит,
В
2,6-7
2,6-7
2,6-7
1,2-12
1,2-12
1,2-12
1,2-12
1,2-12
1,2-12
Производитель
Melexis
Melexis
Melexis
PerkinElmer
ROITHNER
LASERTECHNIK
ROITHNER
LASERTECHNIK
ROITHNER
LASERTECHNIK
ROITHNER
LASERTECHNIK
ROITHNER
LASERTECHNIK
Как следует из вышесказанного, точность определения углов крена и
тангажа заметно зависит от разницы температур между зенитом и надиром
(градиента). При разрешающей способности пирометров по измеряемой температуре
0,1 °С и градиенте зенит/надир 40 °С точность определения углов крена и
тангажа составляет:
180 7(40 70,1°) = 0,45°,
или ±0,225 градуса, а при градиенте 2 °С - уже ±4,5 градуса.
148
В таблице 6.2 [6.8] приведены типичные разницы температур зенит/надир
для разных погодных условий, полученные в ходе замеров в разные времена
года цифровым бесконтактным термометром MLX90614 с диапазоном
измерения -70...+380°С, разрешением 0Д°С и точностью ±1%.
Таблица 6.2. Влияние погоды на температурный градиент
Погодные условия
Ясная зимняя ночь, нулевая
облачность
Солнечный зимний день, нулевая
облачность
Пасмурный зимний день, низкая
снеговая облачность
Пасмурный зимний день, туман,
низкая облачность
Солнечный летний день, нулевая
облачность
Начало ноября, солнечный день,
легкая облачность
Температура
воздуха, °С
-15
-10
-2
0
+25
+5
Разница
температур
земля/зенит, °С
32
20
1,5
1
40
19
Точность
работы ПВ
Высокая
Высокая
Низкая
Не работает
Очень высокая
Средняя
Примечательно, что при одинаковых погодных условиях (например, в
ясный день или ясную ночь) градиент зенит/надир примерно одинаков и
стабильно велик во все времена года, как летом, так и зимой, и практически не зависит
от температуры воздуха. Например, градиенты зимней ночи и летнего дня,
согласно табл. 6.2, отличаются всего на 8 градусов, тогда как температура воздуха
отличается на 40 градусов.
Данное заявление подкрепляет запись температуры воздуха и излучаемой
ИК температуры, полученная с направленного в зенит пирометра MLX90614
16 сентября 2008 года (рис. 6.3). Запись велась примерно с часа ночи до
полудня следующего дня с минутным интервалом.
Вверху рис. 6.3 отображены графики 1-3 трех независимых датчиков
температуры воздуха, которые практически совпадают. Внизу показан график 4
колебаний ИК температуры зенита. В начале измерения и в период с 3.00 до
4.30 часов небо было чистым, и космический холод беспрепятственно проходил
к датчику. Начиная с 4.30 небо стало затягиваться тучами, и ИК температура
стремительно возросла и продолжала рост вплоть до конца измерений по мере
прогревания облаков солнцем. Это также сопровождалось небольшим ростом
температуры воздуха. По графику видно, что показания пирометров в большей
мере зависят от облачности и содержания в верхних слоях атмосферы воды,
чем от температуры окружающего воздуха. Столь сильное влияние
атмосферной воды на показания обусловлено захватом датчиком MLX90614 диапазона
5,5. ..7,5 мкм (см. рис. 6.2 и табл. 6.1).
149
Рис. 6.3. Запись температуры воздуха (1-3) и ИК температуры зенита (4)
в течение сентябрьской ночи
6.3 Определение углов ориентации пировертикалью
с четырьмя пирометрами
Определить углы крена и тангажа можно несколькими способами. Самый
простой из них - пропорциональный. Зная, что рассогласование датчиков при
горизонтальном полете равно нулю, а при вертикальном (когда один направлен
строго в зенит, другой - строго в надир) рассогласование соответствует
градиенту и максимально, возможно обозначить рассогласование зенит/надир как
100%, а рассогласование при горизонтальном полете - как 0%.
Для определения 100% рассогласования необходимо на земле перед вылетом
разместить БПЛА вертикально по крену и по тангажу и зафиксировать показания
датчиков в этих положениях. Приняв 100% за угол крена или тангажа, равный
90 градусов, и преобразуя пропорцию (6.1) от процентов к градусам, получим
[6.8-6.11,6.12]:
угг(УРаЦ-ир«зУХГ9 Q_{UDat2-UDatA)^\ (6 4)
^'Imax ~~ UOat3max UDat2max " UDat4max
где UDatx - текущее выходное напряжение датчиков, UDatx max - напряжения
датчиков при расположении их вертикально (значение градиента), 90° - диапазон
допустимых углов крена/тангажа, у - угол крена, 0 - угол тангажа.
Нетрудно посчитать, что при условии равенства UDatx соответствующим
UDatx max формула «вернет» ±90 градусов, а при условии равности показаний
150
диаметрально противоположных датчиков «вернет» ноль. Это свойство очень
важно, т.к. с увеличением высоты процентное соотношение видимой части
земли и неба смещается в сторону неба, снижается влияние фоновых засветок от
зданий и деревьев, в итоге температура уровня горизонта (при горизонтальном
полете) также будет меняться. Приведенная формула нечувствительна к этому
и позволяет вычислять углы крена БПЛА на любой высоте. При этом в
знаменателе ноль исключен, т.к. даже в плотном тумане температуры зенита и
надира немного отличаются.
Угол крена ограничен значением ±90 градусов из-за того, что в
пирометрической вертикали, состоящей из 4 датчиков, невозможно определить угол крена в
диапазоне ±180 градусов. Показания противоположно направленных пирометров
при нахождении с одинаковым углом относительно истинной географической
вертикали в 1-3 и 2-4 квадрантах будут одинаковы. Такая пирометрическая
вертикаль работоспособна в диапазоне показаний пирометров от 0 до
калибровочного значения градиента зенит/надир, а это соответствует диапазону ±90 градусов.
Приведенный состав ПВ является простейшим и не лишен недостатков. Во-
первых, не все БПЛА можно поставить вертикально для проведения калибровки.
Во-вторых, размещение пирометров по осям симметрии БПЛА неудобно, т.к.
хотя бы один из датчиков окажется заслонен винтом, двигателем, хвостовым
оперением и т.п. конструктивными элементами БПЛА. Для устранения этих
недостатков горизонтальные датчики пирометрической вертикали следует разместить
диагонально, под углом 45 градусов к осям симметрии БПЛА [6.8-6.11, 6.12].
Для стартовой калибровки пирометрическая вертикаль может быть снабжена
двумя дополнительными вертикально расположенными пирометрами. Для
вычисления углов крена и тангажа по показаниям диагонально расположенных
пирометров необходимо повернуть связанную с пирометрами систему координат
на угол 45 градусов относительно системы координат, связанной с БПЛА.
Сделать это можно разными способами - через углы Эйлера, кватернионы и
матрицы. Наиболее удобным представляется именно матричный поворот.
Значения разности показаний диаметрально противоположных датчиков
удобно обозначить как векторы напряжений AU$ и AUyi
AUy = AUDatl - AUDat3, AUq = AUDat2 - AU DatA.
Т.к. направление максимума энергии излучения зенит/надир,
определяющего градиент, совпадает с направлением истинной географической вертикали,
для поворота связанной с пирометрами системы координат удобно
использовать матрицу поворота вокруг оси Z, согласно расположению осей в ГОСТ
20058-80. В случае изначального размещения пирометрической вертикали
одной осью чувствительности параллельно вектору градиента Y' (рис. 6.4, а), а
другой - перпендикулярно ему AU$ формируется только разностью показаний
пары датчиков Dat2 и Dat4 и равняется градиенту, a AUy формируется только
разностью показаний пары датчиков Datl и Dat3 и равняется нулю. После
поворота на 45 градусов (рис. 6.4, б) AUq и AUy уже не совпадают с осями Ху и
Y' и их модули будут отличны от таковых на рис. 6.4, а. Первоначальные на-
151
правления векторов напряжений AU$ и AUy обозначим как AU'$ и AUy
(рис. 6.4, б). Для вычисления их модулей на плоскости 0XT' (рис 6.5)
обозначим точку М' с координатами, определенными векторами AUq и AUy:
М' =
АЩХ
Рис, 6.4. Иллюстрация работы пирометрической вертикали:
а - исходное положение; б - разворот
Z\Z
Рис. 6.5. Поворот системы OX'Y' на угол 9
Матрица поворота вокруг оси Z в трехмерном пространстве, согласно
ГОСТ 20058-80, имеет вид:
cos(0) sin(0) 0|
|-sin(0) cos(0) o|,
0 0 1
152
После поворота на угол 9 точка М перейдет в точку М" с координатами:
cos(0) sin(0) 01
-sin(0) cos(0) o|
0 0 1
AUe
AUV
1
AUecos(e) + AUYsin(0)
-AUesin(ff) + AUrcos(0)\
1
откуда могут быть выделены значения Д£/9' и Д£//:
AUe' = AUecos(0) + AUr sin(0), At/y' = -AUesm{6) + AUycos(0).
_1_
A*V =—br—-;AUy=-
Учитывая, что cos(45) = sin(45) = -^=, получим:
AUe+AUv -AUff+AUy
•'--V^^= t/2 • (65)
Подставляя A(/q и Af/y из (6.5) в (6.4) вместо разностей показаний датчиков,
получим формулы для вычисления углов крена и тангажа по показаниям
датчиков, развернутых на угол 45 градусов к осям симметрии БПЛА [6.9-6.11,6.12]:
(AUe'+ Д U у') • 90 (- Д Ue'+ Д U у *) • 90
г=_±—± г±—в=^—1 ц—, (6.6)
Ы1в 'max + А^Г max ~ДUe'max +AUy 'max
где: Дзетах и Акутах ~~ значения векторов AU'q и Д£/у при совмещении их с
вертикалью (направлением вектора градиента) во время калибровки.
Пирометрическая вертикаль с четырьмя перпендикулярными,
развернутыми на 45 градусов относительно строительных осей БПЛА пирометрами
MLX90614 показана на рис. 6.6.
Рис. 6.6. Пирометрическая вертикаль:
а - общий вид; б - размещение пировертикали на БПЛА
Основные характеристики пировертикали с четырьмя пирометрами
представлены в таблице 6.3.
153
Таблица 6.3. Основные характеристики
Параметр
1 Диапазон измерения углов
Погрешность измерения углов
Частота выдачи информации
Масса
Габаритные размеры
Напряжение питания
Потребляемая мощность
пировертикали с четырьмя пирометрами
Значение
±30 град.
1 град.
50 Гц
25 г
35x35x7 мм 1
5В
0,25 Вт |
6.4 Определение углов ориентации пировертикалью
с шестью пирометрами
В качестве значений Дзетах и Акутах могут быть приняты также
показания дополнительной вертикально расположенной пары пирометров Dat6 и
Dat5 (рис. 6.7), зафиксированные на этапе взлета, что избавляет от
необходимости переворачивать БПЛА перед стартом. Эти показания также могут быть
использованы для непрерывной калибровки в полете. Непрерывная калибровка
позволяет не только сохранять точность вычисления углового положения
БПЛА в изменяющихся погодных условиях, но и осуществлять полеты над
облаками, морями и иными поверхностями, своими тепловыми свойствами
сильно отличающимися от свойств поверхностей места взлета. Рассмотрим аспекты
получения углов ориентации по показаниям шести пирометров.
Очевидно, что формулы (6.4) и (6.6) при введении в них UDat6 и UDat5
вместо Umax горизонтальных датчиков будут работоспособны только при строго
горизонтальном полете БПЛА, когда показания вертикальной пары пирометров
Dat6 и Dat5 строго соответствуют текущему градиенту. При наличии крена или
тангажа показания Dat6 и Dat5 будут отличны от действительного значения
градиента (рис. 6.7).
Способ определения углов крена и тангажа по показаниям шести
пирометров основан на характере рабочей характеристики пирометров. Поверхность
Земли можно считать матовой [6.13-6.16], следовательно, сила ее излучения
подчиняется закону Ламберта:
Ia = I cos(oc), (6.7)
где: / - сила излучения в направлении перпендикуляра к поверхности Земли, а -
угол наклонения пирометра, /а - сила излучения, принимаемая пирометром.
Следовательно, нелинейна и реакция ПВ на наклон относительно линии
горизонта. Если полный угол обзора пирометров в составе ПВ равен 180
градусам и атмосфера (рис. 6.2) считается прозрачной, согласно (6.7) имеет место
синусоидальная зависимость значений А£/^ и AUy (равно как At/# и AUy) от
угла наклона соответствующей оси ПВ к поверхности Земли.
154
Рис. 6.7. Иллюстрация погрешности измерения градиента
вертикальной парой пирометров
Далеко не все пирометры имеют угол обзора 180 градусов. Лишь
несколько моделей имеют угол обзора, приближающийся к 180 градусам (см.
таблицу 6.1). Таким образом, к параметру диапазона добавляется параметр угла
обзора, который необходимо учитывать при разработке ПВ и вычислении по ее
показаниям углов ориентации.
Для вычисления углов крена и тангажа по показаниям шести пирометров
введем правый ортогональный трехгранник OXgYgZg с вершиной,
совмещенной с центром масс объекта (рис. 6.8), ось OZg которого направлена на восток
по касательной к параллели, ось OXg - по касательной к меридиану на север, а
ось OYg - вдоль вертикали места вверх, от надира до зенита. Данный
трехгранник является нормальной земной системой координат по ГОСТ 20058-80 (см.
рис. 1.1, а) и известен как географический сопровождающий трехгранник.
Введем связанный трехгранник OXYZ, ребра которого направим вдоль
строительных осей БПЛА. Углы у, д, \|/, образованные трехгранниками, являются углами
ориентации (Эйлера-Крылова) БПЛА.
Рассмотрим ситуацию горизонтального полета (рис. 6.9, а) в рамках канала
крена, когда ось чувствительности датчиков Dat3 и Datl находится в
горизонтальной плоскости OXgZg и разность их выходных напряжений A(/Y равна 0, а
направление оси чувствительности датчиков Dat6 и Dat5 совпадает с
направлением истинной вертикали Yg и разность их показаний A£/g будет равна
максимальному градиенту, который можно принять равным 1. При вращении ПВ по
крену на угол у (рис. 6.96), согласно (6.7), сила излучения, воздействующая на
пирометры Dat6 и Dat5 (765), будет уменьшаться, и Af/g будет изменяться от 1
до 0 с косинусоидальной зависимостью, в то время как сила излучения,
воздействующая на пирометры Dat3 и Datl (73i), будет увеличиваться, и AUy будет
155
изменяться от 0 до 1 с синусоидальной зависимостью, в силу их разворота на 90
градусов относительно датчиков Dat6 и Dat5.
Рис. 6.8. Положение вектора градиента (grad) относительно связанной
и нормальной систем координат
Рис. 6.9. Положение пирометров:
а) горизонтальный полет; б) полет с креном
Тогда справедливо соотношение:
откуда углы крена и тангажа могут быть получены из следующих выражений:
Y=arctg -£jj- ,e=arctg —
в
(6.8)
g
g
156
6.5 Устранение взаимовлияния углов крена и тангажа
в пировертикали с шестью пирометрами
Важным недостатком полученных формул является зависимость углов крена
и тангажа друг от друга. Пусть БПЛА занимает некоторое положение в
пространстве и граница земли и неба (линия горизонта) проходит в поле зрения переднего
датчика (Dat29 согласно рис. 6.1) по линии 1 (см. рис. 6.10). И пусть на этой линии
зафиксирована точка А. При наклоне по тангажу, при нулевом угле крена, точка А
переместится в точку В, а линия горизонта совместится с линией 2. При
последовательном наклоне по крену на угол у и тангажу на угол д (рис. 6.11) точка А
переместится в точку С, а линия 1 совместится с линией 3. Как видно из рисунка,
площадь, занимаемая землей и небом в поле зрения датчика в этих случаях разная,
а значит и показания датчика будут разными. Это приводит к погрешностям
вычисления углов крена и тангажа. Для нейтрализации этого эффекта необходимо
применение шести взаимно перпендикулярных пирометров с пересекающимися
областями обзора размахом 180 градусов, где четыре датчика расположены в
горизонтальной плоскости, а два - в вертикальной, и одновременный учет
показаний всех шести датчиков при вычислении углов крена и тангажа. Причем шесть
пирометров необходимо рассматривать как три перпендикулярные оси
чувствительности Д£/#, AUyy AUg , на которые проецируется вертикаль, как вектор
«зенит/надир» с максимальным градиентом (grad) (см. (6.7) и рис. 6.8).
Рис. 6.10. Область зрения датчика Рис. 6.11. Поворот системы координат
Расчет углов крена и тангажа при такой организации ПВ может быть
произведен следующим образом. Векторы Д£/#, Af/y, AUg совмещаются с осями
связанного трехгранника OXYZ (см. рис. 6.8). Тогда действительный модуль
вектора градиента при любом положении БПЛА может быть определен как
grad = yJAUr2 + AC// + AUg2 .
157
При расположении оси ОХ (см. рис 6.8) вдоль направления движения
БПЛА углы крена и тангажа вычисляются по известным формулам:
AUy . AU
r=arctan — ,t7 = arcsin
' AUC
г?
g grad
В случае разворота горизонтальных датчиков ПВ на 45 градусов значения
Д(/# и AUy заменяются на AU$ и At/y.
На рис. 6.12 (а - вид снизу, б - вид сверху) показана ПВ, которая содержит
четыре горизонтальных пирометра и один вертикальный, установленные на
плате. Нижний пирометр, направленный в надир, для удобства размещения на
БПЛА, смонтирован на гибком проводе, подключаемом к вертикали через
разъем. Дополнительно, на плате ПВ установлены трехосевые ДУС и магнитометр,
необходимый для определения угла курса \|/, а также МК для вычисления
параметров ориентации.
Рис. 6.12. ПВ с шестью пирометрами; а) вид снизу, б) вид сверху
Основные характеристики пировертикали с шестью пирометрами
представлены в таблице 6.4.
Таблица 6.4. Основные характеристики пировертикали с шестью пирометрами
Параметр
Диапазон измерения углов
Погрешность измерения углов
Частота выдачи информации
Масса
Габаритные размеры
Напряжение питания
Потребляемая мощность
Значение
тангаж ±90 град,
крен ±180 град.
1,6 град.
50 Гц
40 г
40x40x10 мм
5В
0,4 Вт
158
6.6 Оценка погрешности пировертикали
Рабочая характеристика реального пирометра в составе ПВ не является
строго косинусоидальной и имеет расхождение с идеальным косинусом
(см. рис. 6.13). Это обусловлено конструктивными особенностями датчиков, а
также ограничениями на применимость закона Ламберта в реальных условиях.
Данное расхождение приводит к ошибкам вычисления углов ориентации по
формулам (6.8) и (6.9).
6.6.1 Определение рабочих характеристик пирометра и пировертикали
На рис. 6.13 приведена нормированная до 100% рабочая характеристика
U(a) пирометра MLX90614, снятая экспериментально. MLX90614 является
пирометром с цифровым выходом, возвращающим среднюю температуру
видимой области в Кельвинах, умноженную на 100. На графике отчетливо видна
нелинейность рабочей характеристики датчика и резкий спад сигнала при
переходе источника излучения за угол 45 градусов.
Натурные испытания ПВ в городских условиях показали аналогичную
характеристику изменения A£/q, AUy и AUg при наклоне ПВ по крену и тангажу (см.
рис. 6.14). График 1 на рис. 6.14 для удобства сравнения снят по каналу AUg
(косинусоид альная зависимость) при наклоне по крену на угол -80.. .0.. .+80 градусов
и нормирован до значения градиента на момент проведения эксперимента,
принятого за 100%.
Наложение на рабочую характеристику ПВ графика косинуса утла крена
показывает почти полное совпадение до значения 40 градусов, после которого
наблюдается расхождение графиков. Это расхождение приводит к ошибкам
вычисления углов крена и тангажа на значениях, превышающих 40 градусов.
До 40 градусов рабочую характеристику ПВ справедливо считать
косинусоидальной по каналу AUg и синусоидальной по каналам AU$ и AUy.
100
3,
р
2
V
ч
\
\|
\
\\
\\
\
К
К
—1—
-чч
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90
Угол падения излучения, а град.
Рис. 6.13. Рабочая характеристика U(a) пирометра MLX90247
159
2
у
/
/
/ У
л
Д
_,-;
!в^.
/
^\2
к
90
80
70
.с 60
в4
00 50
Р
^ 40
30
20
10
0
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 SO
Угол крена у, град.
Рис. 6.14. Рабочая характеристика ПВ по каналу AUg (1),
совмещенная с графиком cos(y) (2)
6.6.2 Математическая модель пировертикали и коррекция ее рабочей
характеристики
Модель ПВ (по каналу AUg) может быть записана в виде:
U (а) = /T(cos(oc) - F(a)) + Ъинс + AG + An, (6.10)
где К - масштабный коэффициент, зависимый от градиента, F(a) - функция,
определяющая расхождение U(a) и ATcos(a), динс - инструментальная
погрешность, А0 - погрешность от засветки, An - шумовая погрешность, a - угол
наклона.
По остальным каналам модель аналогична при условии замены cos(a) на
sin(a).
Инструментальная погрешность (димс) пирометра мала (указана в
документации производителя и составляет обычно менее 1%) и может не учитываться.
Кроме того, т.к. в вычислении углов ориентации участвуют не сами сигналы
пирометров, а разности сигналов противоположных датчиков, динс в
значительной мере взаимоуничтожаются. Погрешность А0 обусловлена засветкой от
конструктивных элементов БПЛА и при правильном размещении ПВ на БПЛА (с
симметричными областями обзора противоположных датчиков) разности
показаний датчиков также взаимоуничтожаются. Шумовая погрешность An зависит
от погодных условий (градиента) и может быть подавлена одним из известных
способов фильтрации.
Таким образом, погрешность определения углов ориентации в большей
мере зависит от величины расхождения (cos(a) - F(a)). Отступление от косину-
соидальной формы рабочей характеристики ПВ может быть устранено путем
составления таблицы поправок для U(a) с определенным шагом и
интерполяцией между соседними узлами или аппроксимацией F(a) до подобной функции
^(оОаппр и введению ее в модель как противовеса F(a). Выбор решения зависит
160
от расположения ресурсами вычислителя ПВ в каждом конкретном случае
реализации ПВ. В случае избытка ПЗУ предпочтителен первый вариант, тогда как
при избытке вычислительного времени предпочтительно введение противовес-
ной функции F(a)annP- Разработанные ПВ имеют избыток вычислительного
времени.
Для получения F(a)mnp по известной F(a) применяется один из известных
математических методов, например, метод генетического программирования
(ГП) [6.17-6.21].
Генетические алгоритмы (ГА) представляют собой новое направление в
алгоритмике. Они способны не только сокращать перебор в сложных задачах,
но и легко адаптироваться к изменению проблемы. Правильно
запрограммированные генетические алгоритмы могут быть очень эффективны.
Последовательность примененного генетического алгоритма можно
разделить на этапы:
1. Генерация случайного начального состояния. Первое поколение
создается из произвольно выбранных решений (хромосом). Это отличается от
стандартных методов, когда начальное состояние всегда одно и то же.
2. Вычисление коэффициента выживаемости (fitness). Каждому решению
(хромосоме) сопоставляется некое численное значение, зависящее от
его близости к ответу.
3. Воспроизводство. Хромосомы, имеющие большую выживаемость
(fitness), попадают к потомкам (которые затем могут мутировать) с
большей вероятностью. Потомок, результат слияния «отца» и «матери»,
является комбинацией их генов. Этот процесс называется «кроссинго-
вер» (crossing over).
4. Следующее поколение. Если новое поколение содержит решение,
достаточно близкое к ответу, то задача решена. В противоположном случае
оно проходит через тот же процесс. Это продолжается до достижения
решения.
В отличие от других методов (например, метода наименьших квадратов),
перебор решений в ГП последовательный и «осмысленный», подчиненный
достижению вполне определенных целей. Это не только сокращает время
вычисления и число переборов решений, но и упрощает задачу формирования
конечных условий аппроксимации (достижения решения). Данное свойство ГП
может оказаться полезным при серийном производстве ПВ с автоматической
юстировкой на стенде и вычислении аппроксимирующей функции
индивидуально для каждой ПВ. ГП наилучшим образом приспособлены для задачи
аппроксимации кривых без участия человека, т.к. вероятность ошибки (принятия
неверного решения) в ГП ниже, чем в других методах [6.18].
Для получения F(a)annp использован математический пакет «Easy NP 2.0 NET»
кампании «NP Soft», где задано допустимое отклонение F(a)annp от F(a) на уровне
5% и ограничены допустимые в искомом уравнении функции математические
операции основными арифметическими операциями (+, -, *, /) для снижения
вычислительной нагрузки на МК ПВ. В итоге получено уравнение:
161
^("W = 9,574454271 +
-9,11331 + 0,027871 la + 6,15585761 10"W
+
1-4,42955 Ю^-б, 4038-10"4 a2 + 3,126054-10"7 a3 +1,31497 10~7 a4
-9,113+ 0,028^+6,156 10"W
= 9,574 +
l-4,43010"4a-6,40410~4^2 + 3,12610"7^3 + l,31510"7a4
На рис. 6.15 представлены результаты аппроксимации в графическом
виде.
Рис. 6.15. Функции погрешностей:
1 - ДоОаппр = F(a)±A; 2- F(a) = #(cos(a) - £/(a)); 3 - Л = F(a) - F(a)annp
Как видно из графика 3 на рис. 6.15, расхождение исходного F(a) и
аппроксимированного i^oOannp графиков не превышает 4В, что составляет 4% от
полного 100-процентного размаха сигнала и укладывается в заданное ГА
отклонение в 5%. Рабочая характеристика 1, изображенная на рис. 6.14, теперь
может быть приведена к форме косинуса следующим образом:
KU(a)mnp = K(U(a) + F(a)annp);
На рис. 6.16 показан результат наложения данного выражения на график
идеального косинуса.
162
Рис. 6.16. Рабочая характеристика ПВ £/(а)аппр ОХ совмещенная с графиком cos(a) (2)
Таким образом, очевидна эффективность ГП в задачах аппроксимации
сигналов каналов ПВ.
6.7 Экспериментальное исследование пировертикали
На рис. 6.17 изображен график ступенчатого наклона по крену ПВ,
представленной на рис. 6.6, на угол 50 градусов с шагом 10 градусов. Вычисление
угла крена производилось по пропорциональному алгоритму (6.4) без
коррекции рабочей характеристики.
"Г T~T~I I I I I I ТЩ I I II I ITT ТГГ
31 37 43 49 /
н-н{ i-fH+f^ w-i-ич f н-н++т-1 ьн-и-н-и-+-н-1 мм i-м i<i i i i i i i i i
7 13 19 25 31 37 43 49 / 55 6\
Время, сек.
Рис. 6.17. Результат наклона пирометрической вертикали
на угол 50 градусов
163
На графике видно, что погрешность определения угла возрастает по мере
приближения к значению 45 градусов и за этим значением становится
неконтролируемой. Это ограничивает область применения пирометрических вертикалей с
четырьмя пирометрами только на тех типах БПЛА, штатные углы крена и тангажа
которых не должны превышать 30 градусов (после чего остается еще 10-15
градусов запаса для нештатных ситуаций). К таким БПЛА относятся наблюдатели,
постановщики радиопомех, наводчики и ретрансляторы - то есть, подавляющее
число типов БПЛА, производимых в настоящее время. Таким образом,
работоспособность пирогоризонта в диапазоне 0...30 градусов является
достаточным условием для обеспечения стабилизации большинства типов БПЛА в полете.
Экспериментальная статическая характеристика точности определения
пирометрической вертикалью с 4 пирометрами угла крена, полученная по
усредненному результату пяти измерений, проведенных в условиях городской
местности для ясного дня со средним значением градиента зенит/надир 25 градусов
по Цельсию, приведена на рис. 6.18.
5 0,4
а
е
| °>2
|
0
0 5 10 15 20 25 30
Истинный угол крена у, град.
Рис. 6.18. Экспериментальная статическая характеристика точности определения
пирометрической вертикалью угла крена в диапазоне 0...30 градусов
Как видно из рис. 6.18, при горизонтальном положении в показаниях ПВ
практически отсутствует систематическая составляющая и погрешность
определения угла определяется шумовой составляющей. При росте угла крена или
тангажа к шумовой составляющей прибавляется погрешность, вызванная
нелинейностью характеристики датчика. Эта погрешность достигает значения
10 градусов на отметке 50 градусов и на данном графике не показана для
лучшей детализации участка 0...30 град.
Для угла тангажа характеристика аналогична.
Экспериментальная статическая характеристика точности определения
пирометрической вертикалью с шестью пирометрами угла крена, полученная по
усредненному результату пяти измерений, проведенных в условиях городской
местности для ясного дня со средним значением разницы температур между зенитом и
надиром порядка 25 градусов по Цельсию, приведена на рис. 6.19. Вычисление
угла крена производилось по (6.9) с введением коррекции по аппроксимированной
164
функции погрешности F(a)annP. Погрешность не превышает 1,6 градуса на отметке
50 градусов, а на отметке 30 градусов - 0,9 градуса, что меньше таковой на
рис. 6.18. Причина такого результата кроется не только в большей точности
тригонометрических формул и введении коррекции по F(a)annp, но и в
пересекающихся областях зрения всех 6 датчиков, образующих единое сферическое поле зрения
с локальными минимумами в районе 45 градусов (см. рис. 6.20).
5» 1, о
S
9-1,2
2 0,4
i 1 i \ Т
—! 1 1 ^Ч—
i ; ; ! >^
~\ 1 1 1 p-v.
30 40 50 60
Истинный угол крена у, град.
Рис. 6.19. Экспериментальная статическая характеристика точности определения
пирометрической вертикалью угла крена в диапазоне 0.. .90 градусов
Общий анализ графиков на рис. 6.18 и рис. 6.19 показывает, что в диапазоне
углов крена и тангажа 0...30 град, пропорциональный метод вычисления
незначительно проигрывает тригонометрическому в точности при существенно
меньших необходимых вычислительных ресурсах для своей реализации. Основное
преимущество тригонометрического метода остается в снятии ограничения
допустимых углов крена/тангажа значением 30 град, и расширении возможностей
пирометрической вертикали в части определения угла крена в диапазоне
±180 градусов. Экспериментальная статическая характеристика точности
определения угла крена в оставшихся трех квадрантах, а также точности определения
угла тангажа, аналогична представленной на рис. 6.19.
Самостабилизирующиеся планеры летательных аппаратов способны
сохранять горизонтальный полет при погрешностях определения углового
положения до 5° и даже более, имея при этом лишь небольшое скольжение, легко
корректируемое рулем направления (курса). Скольжение легко выявляется по
смещению траектории БПЛА, вызываемому в большей мере ветром, по
показаниям, например, СНС (GPS/Глонасс) приемника, и не сказывается значительно
на высоте и траектории полета. Таким образом, пирометрические вертикали с
четырьмя и шестью пирометрами могут быть использованы на БПЛА
большинства аэродинамических схем. Согласно [6.22] стандартный разворот,
используемый при управлении самолетом, составляет 15 градусов. Крен в 30
градусов соответствует уже глубокому развороту. Все маневры, совершаемые со
165
Рис. 6.20. Пересечение областей обзора четырех
перпендикулярных пирометров
значениями углов крена/тангажа, превышающими
45 градусов, относятся уже к сложному пилотажу.
Мини-БПЛА незачем совершать такие маневры.
Согласно рис. 6.18 и рис. 6.20, погрешность
определения углов в диапазоне 0...30 градусов не превышает
1 градуса для обеих систем. Для БПЛА-наблюдате-
ля, БПЛА-наводчика или БПЛА-постановщика
радиопомех точное знание углового положения не
является необходимым. Достаточным является знание
углового положения с точностью, обеспечивающей
устойчивый полет. Гораздо важнее качество
стабилизации (во избежание дрожания кадра видеосъемки
или луча наводчика) и стоимость БПЛА. Знание
точного углового положения может оказаться по- Рис. 6.21. Погрешность
лезным при аэрофотосъемке с привязкой кадра к ко- смещения кадра при крене
ординатам, однако простое графическое построение на рис. 6.21 показывает, что
при высоте Н = 200 м и крене у = 1,5 градуса погрешность смещения кадра AL
равняется 5,24 м. При крене 30 градусов± 1,5 градуса, погрешность смещения
кадра составляет ±7 м. Заявленная погрешность определения положения GPS
приемника LEA-5H, например, составляет ±5 м в плоскости и ±10 м по высоте.
166
Таким образом, погрешность смещения кадра, вызванная погрешностью
определения углового положения, не сказывается значительно на точности
географической привязки кадров аэрофотосъемки.
6.8 Цифровая обработка сигналов пировертикали (компенсация шума)
Шумовая составляющая сигнала пирометра An может принимать
значительную величину при малых значениях градиента. На рис. 6.22 приведена
запись углового положения БПЛА во время выполнения маневра «змейка» при
градиенте 4,8 °С. На графике виден шум, который приводит к погрешностям
вычисления углов ориентации и дрожанию сервоприводов управления. На
качество стабилизации это почти не влияет в силу инертности БПЛА и частоты
шума, но приводит к повышенному износу сервоприводов и повышенному
потреблению электроэнергии.
Рис. 6.22. Рассчитанный по сигналу датчиков угол крена
Для удаления An оптимальным с точки зрения программной
реализации, представляется фильтр скользящего среднего (ФСС). Данный фильтр
усредняет п последних измерений, причем самое старое заменяется самым
последним перед каждым усреднением. Особенностью данного фильтра по
сравнению с обычным усреднением является уменьшение задержки
прохождения сигнала на выход, т.к. не происходит накопления выборок перед
усреднением, а также простота реализации в микроконтроллере и малый
требуемый вычислительный ресурс. Недостатком является снижение скорости
реакции на возмущение при больших значениях глубины фильтрации (п).
Реализация фильтра ограничивается созданием буфера на п выборок, а
вычисления сводятся к п последовательным сложениям и делению результата
на п. Причем если п=2х (где 0 < дс < оо), деление можно заменить сдвигом на х
бит вправо, что существенно ускоряет вычисления на микроконтроллерах без
167
аппаратного делителя. ФСС при я=64 обсчитывается микроконтроллером
AVR серии Atmega за 38 тактов, что при тактовой частоте 16 МГц не
превышает 3 мкс.
Размах колебаний шума зависит прежде всего от погодных условий.
При градиенте в два градуса Цельсия, который может быть зимой, в
облачность над снеговым настом, размах шума может достигать 15% от значения
градиента. Кроме того, при малом градиенте увеличивается влияние
посторонних засветок. Разогретая труба котельной или капот прогретого
автомобиля на земле могут привести к погрешности определения угла на десятки
градусов в пасмурную погоду, тогда как в ясный день пирометрическая
вертикаль на них совершенно не среагирует. Однако у этой особенности есть
положительный эффект при использовании на БПЛА-вертолетах. Вертолет
автоматически отлетает от людей (средняя температура со стороны человека
увеличивается, автопилот воспринимает это как рост крена к земле и
отворачивает), что повышает безопасность. Также в плохую погоду сильнее
проявляются погрешности, создаваемые самими датчиками, т.к. датчики даже из
одной партии все равно имеют некоторый разброс в показаниях
(инструментальную погрешность).
Определить погодные условия с достаточной точностью можно, измерив
градиент при стартовой калибровке, или по вертикальной паре пирометров.
Экспериментально были составлены следующие зависимости шума ПВ от
градиента grad и необходимой глубины фильтрации ФСС (табл.6.5).
Таблица 6.5. Шумовая характеристика ПВ
Размер фильтра,
1 выборки
8
16
32
64
лететь нельзя
Градиент,
°С
grad > 20
10 < grad < 20
5<grad< 10
1,5 < grad < 5
grad< 1,5
Шум ПВ от полной шкалы
(градиента)
<1%
1%
5%
10%
>15%
На рис. 6.23 показан результат сглаживания графика (рис. 6.22) ФСС из 64-х
выборок, а на рис. 6.24 - совмещение графиков.
168
Рис. 6.23. Сглаженный ФСС из 64-х выборок
Рис. 6.24. Совмещенные исходный и фильтрованный сигналы
Таким образом, проектируя пирометрическую вертикаль, необходимо
разрабатывать адаптивный математический аппарат подавления шума,
подстраивающийся под погодные условия. Пирометры должны проходить калибровку
после сборки устройства для минимизации относительной инструментальной
погрешности.
Исследование работы пировертикали в полетных условиях выполнялось на
авиамодели «Coota» (рис. 6.25).
169
Рис. 6.25. Авиамодель «Coota»,
оснащенная пировертикалью
Цель исследования заключалась в определении точности стабилизации
углов крена и тангажа для различных режимов полета и управления. На рис. 6.26
приведены фрагменты записи горизонтального полета БПЛА для режима
автоматического управления. Условия полета: высота ~ 50 м, порывы ветра до 7 м/с.
а)
б)
Рис. 6.26. Стабилизация углов тангажа (а) и крена
(б) автопилотом с пировертикалью (четыре пирометра)
170
Летные исследования пировертикали, комплексированной с МСО
(рис. 4.10), проводились на авиамодели «EasyCub» (рис. 6.27).
Рис. 6.27. Авиамодель «EasyCub», оснащенная автопилотом
с комплексированной системой ориентации
На рис. 6.28 приведены фрагменты записи горизонтального полета БПЛА
для режима автоматического .управления при использовании
комплексированной системы ориентации.
Рис. 6.28. Стабилизация углов тангажа (а) и крена (б) автопилотом
с комплексированной системой ориентации
В ходе испытаний системы показали устойчивое функционирование и
обеспечение выработки углов тангажа и крена с необходимой точностью.
171
Список литературы к главе 6
6.1. В. Taylor, С. Bil, S. Watkins, G. Egan. Horizon Sensing Attitude Sta-
bilistion: A VMC Autopilot [Электронный ресурс]. - Режим доступа: URL:
http://www.ctie.monash.edu.au/hargrave/horison_sensing__autopilot.pdf/.
6.2. Канарев Ф.М. Термодинамика микромира [Электронный ресурс] //
Агентство научно-технической информации. Научно-техническая библиотека
(Свид. ФС77-20137 от 23.11.2004) «SciTecLibrary»: сайт. - URL:
http://www.sciteclibrary.ru/rus/catalog/pages/10015.html.
6.3. John S., Solomon D., Solomon S., Henrik G., P. Schofield K., P. Schofield
D. Atmospheric water vapour complexes and the continuum [Электронный ресурс] //
Geophysical Research Letters, 31: L06118.: сайт. - URL: http://patarnott.com/
atms749/pdf/WaterComplexesContinuum.pdf.
6.4. Meyers-Rice B.A. Atmospheric windows [Электронный ресурс]. - Режим
доступа: URL: http://www.sarracenia.com/astronomy/remotesensing/physics060.html
6.5. Houghton J.T. The Physics of Atmospheres, 3rd edition. / J.T. Houghton //
Cambridge University Press ISBN 0521804566. - Cambridge UK, 2002. - 343 с, ил.
6.6. Infrared Atmospheric Transmission Spectra [Электронный ресурс]. -
Режим доступа: URL: http://www.astro.virginia.edu/~mfs4n/ir/atmtrans.html.
6.7. Солнечный спектр [Электронный ресурс] // «astrolab.ru»: сайт. - URL:
http://www.astrolab.ru/cgi-bin/manager2.cgi ?id=0&num= 1009.
6.8. Товкач СЕ. Автопилот пирометрического типа для БПЛА / СЕ. Тов-
кач, А.В. Ладонкин, В.Я. Распопов // Мир авионики. - 2009. - №5. - С. 29-34.
6.9. Товкач СЕ. Микросистемная авионика современных мини-БПЛА /
СЕ. Товкач, В.Я. Распопов // Справочник. Инженерный журнал. Приложение. -
2007. - №10.-С.21-24.
6.10. Товкач СЕ. Авионика малоразмерных беспилотных летательных
аппаратов / СЕ. Товкач, В.Я. Распопов // Мир авионики. - 2009. - № 3. - С. 39-47.
6.11. Товкач СЕ. Термометр-автопилот / СЕ. Товкач, А.В. Ладонкин //
Наука и жизнь. - 2009. - № 6. - С. 68-69.
6.12. Товкач СЕ. Информационно-измерительные микросистемы для
подвижных объектов / В.Я. Распопов, Ю.В. Иванов, Д.М. Малютин, Р.В. Ала-
луев, М.Г. Погорелов, А.П. Шведов, В.В. Лихошерст, СЕ. Товкач // Нано- и
микросистемная техника. - 2010 г. - №1. - С 27-34.
6.13. Сушкевич Т.А. О задаче дистанционного зондирования
поверхности Земли через ее атмосферу / Т.А. Сушкевич // Препринт № 38. М.: ИПМ им.
М.В. Келдыша РАН, 1999 г. 32 с.
6.14. Сушкевич Т.А. Математические модели переноса излучения /
Т.А. Сушкевич. - М.: БИНОМ. Лаборатория знаний, 2005. - 601 с.
6.15. Лазарев А.И. Исследование Земли с пилотируемых космических
кораблей / А.И. Лазарев, В.В. Коваленок, СВ. Авакян. - Л.: Гидрометеоиздат,
1987.-400 с.
6.16. Lenoble J. Equation of radiative transfer in a planetary spherical
atmosphere / J. Lenoble, Z. Sekera // Proc. Nat. Acad. Sci. USA. Vol. 47. № 3 - 1961 r. -
p. 372-378.
172
6.17. Koza J.R. Genetic Programming / J.R. Koza // MA.: MIT Press,
Cambridge, 1992.
6.18. Koza J.R. Genetic Programming 2 J.R. Koza // MA.: МГГ Press,
Cambridge, 1994.
6.19. Гладков Л.А. Генетические алгоритмы / Л.А. Гладков, В.В. Курей-
чик, В.М. Курейчик. - М.: Физматлит, 2006. - 402 с.
6.20. Рутковская Д. Нейронные сети, генетические алгоритмы и нечеткие
системы / Д. Рутковская, М. Пилиньский, Л. Рутковский. - М.: Горячая Линия -
Телеком, 2006.-452 с.
6.21. Введение в ГА и генетическое программирование [Электронный
ресурс] / Пер. Кантор И.А. // «algolist.manual.ru»: сайт. - URL: http://algolist.
manual .ru/ai/ga/intro.php.
ЗАКЛЮЧЕНИЕ
Разработка малоразмерных БПЛА является сложной инженерной задачей,
включающей одну из ключевых проблем - создание системы ориентации
относительно дешевой, малых массы, габаритов, энергопотребления, но
отвечающей требованиям технического задания по точности. Использование
технологий микросистемной техники способствует решению этой проблемы.
Микросистемы ориентации являются неотъемлемой частью автопилота системы
автоматического управления БПЛА. Существует обширный перечень БПЛА
зарубежных и отечественных компаний, успешно применяемых в военной и
гражданской сферах. Однако любой БПЛА, за исключением, пожалуй, его
внешнего вида, представляет коммерческую тайну.
Разработчики вовсе не спешат поделиться информацией об особенностях
реализации системы управления БПЛА.
Авторы надеются, что книга приоткрыла «тайну» создания систем угловой
ориентации БПЛА, реализованных на датчиках различной физической природы.
Книга не является инструкцией или методикой по проектированию систем
ориентации для БПЛА, но она показывает основные трудности при создании
систем ориентации и пути их преодоления.
Авторы понимают, что в книге имеются недостатки, над устранением
которых необходимо работать, и будут признательны всем, кто найдет желание и
время сообщить свое мнение о книге.
174
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Авионика 19,20,21,25
Автопилот 21, 22, 45, 47, 55, 57, 58
- с жесткой обратной связью 47, 48
- со скоростной и изодромной обратными связями 48, 49, 50, 53
- по каналу крена 50, 54
- по каналу курса 50, 54
- по каналу тангажа 50, 54
- управления боковым движением центра масс 50, 53
- управления высотой полета 50, 51
Алгоритм
- ориентации с углами Эйлера-Крылова 62
- ориентации с направляющими косинусами 64
- ориентации с параметрами Родрига-Гамильтона 66, 67, 68
- распознавания неба и земли 139, 141, 142
Акселерометр 21, 79, 80, 84, 86, 87, 98
Аппаратура управления 19
-бортовая 19
-наземная 19
Бесплатформенная система ориентации 20, 22, 59, 60, 61, 62, 84
Видеосистема ориентации 126, 135, 139
- центральнопроективная 127
- катадиоптрическая 129, 130, 143
Гироскоп 20, 21, 76, 77, 78
Датчик
- катадиоптрический 126
- магнитный (электронный компас) 20, 105, 106, 107, 108 109, 110, 112
- пирометрический 20, 21, 147, 150
Движение летательного аппарата 28
-боковое 31, 33, 34
- продольное 31,32
175
Исследования (эксперименты)
-лабораторные 75, 76, 99, 164
-летные 100, 169, 170, 171
Коэффициенты
- аэродинамических сил и моментов 29, 30, 31, 39
Летательный аппарат 27, 28
-беспилотный 6, 7, 10, И, 12, 14, 15, 19, 22, 24, 25, 25, 27, 40, 41, 42, 43, 55
-малоразмерный беспилотный 6, 7, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 24, 25
Комплексирование 83, 98, 171
Коррекция 78, 81,82, 160
Магнитное поле Земли 105, 106, 107
Магнитометрическая система ориентации 105, 115, 122
Математическая модель
- бокового движения летательного аппарата 33, 34
- продольного движения летательного аппарата 32
- погрешностей бесплатформенной системы ориентации 70, 72, 74
-погрешностей магнитометрической системы ориентации 120, 123, 124
- погрешностей пировертикали 159, 162
Микросистемная техника 20
Передаточная функция летательного аппарата 35, 36, 37, 38, 39, 53, 55
Пирометрическая система ориентации 145
Режим управления 99
Рулевая машинка 55
Рулевой привод 55, 57
Система
- автоматического управления летательного аппарата 19, 20, 57
- координат 27, 60, 61, 78, 79, 156, 157
- ориентации 20, 22
Угол
- атаки 27, 35, 37
176
- крена 27, 33, 53, 73, 79, 102, 119,123, 124,132,133, 150
- курса 27, 38, 73
- скольжения 27, 38
-тангажа27, 35, 37, 56, 79, 101, 116, 123,124, 128, 132, 133,150
Фильтр
- Винера 93, 94, 96
- Калмана 83, 84, 85, 92, 94,121
ПРИЛОЖЕНИЕ
Разработки инновационного и научно-образовательного центра
«Микросистемная техника» ТулГУ (кафедра «Приборы управления»)
Комплексированная БСО
Малогабаритная БСО - ядро системы управления МБПЛА (рис. П.1).
Реализована комплексная обработка информации с инерциальных,
магнитометрических и спутниковых навигационных систем.
Технические характеристики
Диапазон измеряемых углов:
крена - ±180 градусов
рыскания - ±180 градусов
тангажа - ±90 градусов
Погрешность измерения углов:
по углам тангажа и крена - 1,5 градуса
погрешность по углу рыскания - 3 градуса
Погрешность измерения координат:
по широте и долготе -10 м
измерение высоты погрешность 15 м
Диапазон линейных ускорений: ±5g
Диапазон угловых скоростей: 300 градусов/с
Частота выдачи данных:
по угловой ориентации - 100 Гц
по координатам и высоте - 1 Гц
Рабочий температурный диапазон: -15...+60 °С
Рис. П.1. Общий вид БСО Напряжение питания: 7... 12 В
Габариты: 50x50x50 мм
Масса: 150 г
Возможность подключения до 5-ти стандартных
рулевых машинок
Катадиоптрическая система ориентации
Видеосистема ориентации представляет собой миниатюрную
видеокамеру, дополненную сферическим зеркалом и вычислительным модулем (рис. П.2).
Технические характеристики
Диапазон измеряемых углов:
крена — ±180 градусов
тангажа - ±90 градусов
Погрешность измерения углов: 1,5 градуса
Частота выдачи данных: 30 Гц
Рабочий температурный диапазон: -15...+60 °С
Габариты оптической головки: 60x60x60 мм
Масса оптической головки: 50 г
Напряжение питания: 5... 12 В
Потребляемая мощность: 1,5 Вт
Рис. П.2. Плата вычислительного модуля
178
Пирометрическая система ориентации
Система может быть построена на четырех или шести пирометрах
(рис. П.З).
Технические характеристики
Диапазон измеряемых углов тангажа и крена:
4 пирометра - ±30 градусов
6 пирометров - ±90 градусов
Погрешность вычисления углов тангажа и крена:
4 пирометра -1,5 градуса
6 пирометров - 0,5...2,5 градуса
Рис. П.З. Платы пирометрической Частота выдачи данных: 10 Гц
системы ориентации (справа виден Рабочий температурный диапазон: -15...60 °С
пирометр, направленный в зенит) Габариты: 60x60x25 мм
Масса: 60 г
Напряжение питания: 5 В
Комплексированная магнитометрическая система ориентации
В МСО (рис. П.4) используется информация, поступающая с
магнитных датчиков и приемника СНС (модуль GPS), вырабатывающего
информацию о путевом угле, величине магнитного склонения, географических
координатах объекта, а также карте магнитных наклонений.
Технические характеристики
Диапазон измеряемых углов:
крена - ±180 градусов
тангажа - ±90 градусов
курса - ±180 градусов
Погрешность вычисления углов:
крена и тангажа - 1 градус
курса - 3 градуса
Рис. П.4. Плата магнитометрической Частота выдачи данных: 20 Гц
системы ориентации Рабочий температурный диапазон: -15...60 °С
Габариты: 50x90x25 мм
Масса: < 100 г
Напряжение питания: 5... 12 В
179
Инновационный и научно-образовательный центр «Микросистемная
техника» ТулГУ обладает интеллектуальными и техническими ресурсами
(рис. П.5), необходимыми для разработки микросистемной авионики МБПЛА
по техническим требованиям заказчика.
Рис. П.5. Ресурсное обеспечение разработок микросистемной авионики
180
ФГБОУ ВПО «Тульский государственный университет»
Институт высокоточных систем им. В.П. Грязева
Кафедра «Приборы управления»
Инновационный и научно-образовательный центр
«Микросистемная техника»
200600, Тула, пр-т Ленина, 92.
Тел.: 8 (4872) 35-19-59
E-mail: TGUPU@YANDEX.RU
Научное издание
Алалуев Роман Владимирович
Ладонкин Александр Валериевич
Малютин Дмитрий Михайлович
Матвеев Валерий Владимирович
Машнин Максим Николаевич
Парамонов Павел Павлович
Погорелое Максим Георгиевич
Распопов Владимир Яковлевич
Сабо Юрий Иванович
Телухин Сергей Владимирович
Товкач Сергей Евгеньевич
Шведов Антон Павлович
Шукалов Анатолий Владимирович
МИКРОСИСТЕМЫ ОРИЕНТАЦИИ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Под редакцией д.т.н., профессора В.Я. Распопова
Редактор З.М. Рябкова
Корректор М.Я. Барская
Технический редактор Г.Ю. Корабелъникова
Сдано в набор 17.11.2011 г. Подписано в печать 8.12.2011 г.
Формат 70x100/16. Бумага офсетная. Гарнитура Time New Roman.
Печать офсетная. Усл. печ. л. 11,5. Тираж 400 экз. Заказ № 430.
ООО «Издательство «Машиностроение»,
107076, Москва, Стромынский пер., 4
Отпечатано в ЗАО «Гриф и К»
300062, г. Тула, ул. Октябрьская, 81-а.
Тел.: +7 (4872) 47-08-71, тел./факс: +7 (4872) 49-76-96
grif-tula@mail.ru, www.grif-tula.ru