/

















































































































































































Текст
ПРЕДИСЛОВИЕ
Данная книга является учебным посо-
бием по курсам «Электрические микрома-
шины» и «Электрические машины» для
студентов высших учебных заведений, об-
учающихся по специальностям «Автома-
тика и телемеханика», «Электронные вы-
числительные машины», «Информацион-
но-измерительная техника» и др.
Пособие содержит четыре раздела:
электрические машины постоянного тока,
трансформаторы, асинхронные и синхрон-
ные машины. В начале каждого раздела
освещаются сжато основы теории машин
общего применения. Затем согласно этой
теории излагаются материалы по устрой-
ству, принципу действия и физическим
основам работы электрических микро-
машин, применяемых в автоматических
системах, вычислительных и измеритель-
ных устройствах.
Для основных типов электрических
машин автоматики (исполнительных дви-
гателей, тахогенераторов, электромашин-
ных усилителей), помимо статических ха-
рактеристик, изложены и динамические
свойства.
Все разделы написаны авторами сов-
местно, на основе лекционного курса, чи-
6
Предисловие
таемого ими в течение ряда лет в Таган-
рогском и Минском радиотехнических
институтах.
Авторы выражают благодарность док-
тору технических наук Миловзорову В. П.,
кандидатам технических наук Волко-
ву Н. И., Никулину В. Б. и Ситнику Н. X.
за ценные замечания, сделанные при ре-
цензировании рукописи.
Авторы благодарят заведующего ка-
федрой МРТИ доцента Онацкого Я. И. и
доцента МЭИ Юферова Ф. М., прочитав-
ших рукопись пособия, за советы по ее
улучшению. ,
Авторы будут признательны всем чи-
тателям, которые свои замечания при-
шлют по адресу: г. Минск — ГСП,
ул. Кирова, 24, издательство «Вышэйшая
школа».
Авторы
ВВЕДЕНИЕ
§ 0.1. Назначение и классификация электрических машин
В решениях ХХШ, XXIV съездов КПСС, Пленумов ЦК
КПСС уделяется большое внимание и забота всемерному
развитию науки и техники, использованию их достижений
в народном хозяйстве, дальнейшему повышению всего
общественного производства. В ближайшие годы плани-
руется создать мощную материально-техническую базу.
Эта задача решается посредством комплексной механи-
зации и автоматизации производственных процессов, вне-
дрения в промышленность новейших достижений авто-
матики, электроники, вычислительной техники и т. д.
Большая роль в современных системах автоматичес-
кого управления и регулирования, в устройствах вычис-
лительной и измерительной техники наряду с электрон-
ными, полупроводниковыми, магнитными отводится элек-
тромашинным элементам автоматики и специальным
электрическим машинам малой мощности — микромаши-
нам. В данном пособии рассмотрены основные типы элек-
трических микромашин автоматических устройств и неко-
торые вопросы теории машин общепромышленного при-
менения.
По роду тока все электрические машины разделяют
на машины переменного и постоянного тока. К первым
относят асинхронные и синхронные машины, коллектор-
ные двигатели и преобразователи переменного тока, тран-
сформаторы. Все они выполняются одно-, двух- и чаще
всего трехфазиыми.
Электрические машины в основном применяют для
генерирования и преобразования электрической энергии,
сигналов автоматических, вычислительных и других
устройств, привода механизмов. Те из них, которые пре-
8
Введение
образуют механическую энергию в электрическую, назы-
вают генераторами, а те, что преобразуют электрическую
энергию в механическую — двигателями. Наибольшее
распространение получили синхронные генераторы трех-
фазного тока и генераторы постоянного тока. Двигатели
переменного и постоянного тока различной мощности
применяют в качестве привода различных механизмов.
Трансформаторы служат для преобразования пере-
менного тока одного напряжения в переменный ток дру-
гого— той же частоты. Они не являются машинами, так
как не имеют вращающихся частей. Однако их принято
изучать в курсе электрических машин в связи с тем, что
электромагнитные процессы, происходящие в них, имеют
много общего с процессами в электрических машинах
переменного тока.
Преобразование постоянного тока в переменный
(и наоборот), постоянного тока одного напряжения в по-
стоянный ток другого, изменение частоты и числа фаз
переменного тока осуществляют электромашинные пре-
образователи.
Различного типа специальные электрические микро-
машины выполняют самые разнообразные функции в ав-
томатических устройствах: преобразуют электрические
импульсы напряжения в дискретные угловые или линей-
ные перемещения (шаговые двигатели), электрические
сигналы в механическое вращение (исполнительные дви-
гатели) и, наоборот, механическое вращение — в электри-
ческие сигналы (тахогенераторы), создают на выходе
напряжения, пропорциональные некоторым функциям
угла поворота вала (поворотные трансформаторы), пере-
дают на расстояние угловые перемещения двух или не-
скольких валов, механически не связанных между собой
(сельсины), усиливают электрические сигналы (электро-
машинные усилители).
§ 02. Преобразование энергии в электрических машинах
Принцип действия электрических машин основан на
физических законах электромагнитной индукции и взаи-
модействия тока в проводнике с магнитным полем.
Любая электрическая машина обратима, т. е. может
§ 0.2. Преобразование энергии
9
работать в качестве генератора и в качестве двигателя.
Покажем это на элементарной модели, представленной
на рис. 0.1. Если внешней силой F перемещать проводник
в магнитном поле, например, слева направо перпендику-
лярно вектору магнитной индукции В, то в проводнике
Рис. 0.1. Наведение э. д. с.
в проводнике, движущемся
в магнитном поле.
(согласно закону электромагнитной индукции) возникнет
э. д. с.
e=Blv,
(0-1)
где В — магнитная индукция, тл;
I — активная длина проводника, т. е. та его часть,
которая пересекает магнитное поле, м;
v — скорость движения проводника, м/сек.
Направление э. д. с. в проводнике определяется пра?
видом правой руки (рис. 0.2, а): ладонь правой руки рас-
полагают к северному полюсу N, а отставленный большой
палец — по направлению движения проводника; вытяну-
тые четыре пальца указывают направление э. д. с., наве-
денной в проводнике.
Если концы проводника замкнуть на внешнее сопро-
тивление R (рис. 0.1), то в образованном замкнутом кон-
10
Введение
туре потечет ток, имеющий такое же направление, как и
э. д. с.
В результате взаимодействия тока i в проводнике
и поля возникнет электромагнитная сила
F3V=Bli.
(0.2)
Направление ее определяется правилом левой руки
(рис. 0.2,6). В данном случае (рис. 0.1) она направлена
Рис. 0.2. Правило правой
руки (а) и правило левой
руки (б).
справа налево, противоположно движению проводника.
Таким образом, F3M— сила, тормозящая по отношению
kF — силе движущей.
При равномерном движении проводника
F----/*ЭМ.
(0.3)
Если умножим обе части уравнения (0.3) на скорость V,
то получим равенство мощностей
Fv == E8Mv = Bliv=ei.
(0.4)
Отсюда следует, что механическая мощность Fv, затрачи-
ваемая на перемещение проводника в магнитном поле,
§ 0.2. Преобразование энергии
И
преобразуется в электрическую мощность el, т. е. элемен-
тарная машина работает в режиме генератора.
Мощность, отдаваемая во внешнюю цепь генератором,
может быть найдена из уравнения напряжений
и = е—iR0,
(0-5)
где и — напряжение на зажимах внешнего сопротив-
ления R\
iRo — падение напряжения в проводнике, имеющем
сопротивление Л?о-
Умножив уравнение (0.5) на i, получим
ui=ei—PRo,
(0.6)
где ui— электрическая мощность, отдаваемая генерато-
ром во внешнюю цепь;
— электрические потери в проводнике.
Данная машина будет работать в режиме двигателя,
если проводник подключить к источнику постоянного тока
напряжением и (рис. 0.2,6). От взаимодействия тока i,
протекающего по проводнику, и поля возникнет электро-
магнитная сила F9K=Bli, которая, согласно правилу ле-
вой руки, заставит проводник передвигаться влево. В дви-
жущемся проводнике появится э. д. с. е, направленная
против тока (согласно правилу правой руки) и напряже-
ния. Следовательно, напряжение и должно уравновеши-
ваться э. д. с. е и падением напряжения в проводнике iRo,
т. е.
u=e+iRo.
(0.7)
Умножив обе части уравнения (0.7) на ток i, получим
ui ~ ei 4- i2R0=Blvi-\- i2R0=F3M v -f-i2Ro.
(0.8)
12 Введение
В этом уравнении ei=F3Mv — та часть электрической
мощности ui, которая преобразуется в механическую.
Таким образом, в рассматриваемом случае происходит
преобразование электрической энергии в механическую,
т. е. элементарная машина работает в режиме двигателя.
раздел МАШИНЫ ПОСТОЯННОГО ТОКА
ПЕРВЫЙ
Глава I. ОБЩИЕ ВОПРОСЫ ТЕОРИИ МАШИН
ПОСТОЯННОГО ТОКА
§1.1. Устройство и принцип действия машин постоянного
тока
Машины постоянного тока малой мощности широко
применяются в современных устройствах автоматики
в качестве исполнительных и вспомогательных двигате-
лей. Основное достоинство дх — возможность плавного и
экономичного-регулирования скорости в широких пре-
делах.
Генераторы постоянного тока используются в автома-
тике в качестве обычных генераторов, тахогенераторов
или электромашинных усилителей. Недостатками машин
постоянного тока, ограничивающими области их примене-
ния, являются: наличие скользящих контактов — коллек-
тора и щеток, снижающих надежность работы, и слож-
ность конструкции.
Машина постоянного тока, как и всякая электрическая
машина, состоит из неподвижной (статор) и вращающей-
ся (ротор) частей, разделенных воздушным зазором.
Обычно вращающуюся часть машины постоянного тока
называют не ротором, а якорем. (Якорем принято назы-
вать ту часть, в которой индуктируется э. д. с.)
На рис. 1.1 показано устройство микромашины посто-
янного тока закрытого исполнения. Ее статор состоит из
станины 1, обычно выполняемой из цельнотянутой сталь-
ной трубы. Станина служит основанием для крепления
остальных неподвижных частей, а также является одним
из участков в магнитной цепи машины. К внутренней по-
верхности станины специальными винтами или болтами
крепятся набранные из листовой стали толщиной 0,5—
1 мм главные полюсы (рис. 1.2). Иногда станину и полю-
сы набирают из отдельных штампованных как одно целое
листов стали.
Главные полюсы, служащие для создания основного
магнитного поля, состоят из сердечников 2 и катушек воз-
буждения 3. Со стороны, обращенной к якорю, сердеч-
14
Глава I. Общие вопросы теории машин постоянного тока
ники имеют полюсные наконечники 5, которые обеспечи-
вают нужное распределение магнитной индукции в воз-
душном зазоре. Катушки всех главных полюсов соеди-
няются, образуя обмотку возбуждения, так, чтобы при
прохождении тока полярность полюсов чередовалась.
Рис. 1.1. Микромашина постоянного тока.
Иногда вместо электромагнитов для возбуждения исполь-
зуют постоянные магниты. Некоторые магнитные системы
таких машин показаны на рис. 1.3. В машинах мощностью
более 1000 вт между главными устанавливают добавоч-
ные полюсы, которые служат для улучшения коммутации.
Они, так же, как и главные, прикрепляются к станине
болтами.
Якорь состоит из сердечника 4 (рис. 1.1), набранного
из листов электротехнической стали (толщиной 0,35—
0,5 мм), покрытых перед сборкой лаком для снижения
вихревых токов, возникающих при перемагничивании
якоря во время его вращения в магнитном поле.
В изолированные пазы цилиндрической поверхности
сердечника якоря укладывают обмотку 6, которую за-
крепляют в пазах с помощью гетинаксовых или деревян-
ных клиньев. Лобовые (выступающие за сердечник) части
обмотки укрепляются на якоре с помощью специальных
бандажей.
§ 1.1. Принцип действия машин постоянного тока
15
Обмотку якоря соответствующим образом подсоеди-
няют к пластинам коллектора 1 (рис. 1.4), изготовленным
из холоднокатаной меди. Отдельные коллекторные плас-
Рис. 1.2. Магнитная система мик-
ромашины постоянного тока;
/ — станина; 2 — полюс; 3 — катушка
обмотки возбуждения; 4 — якорь; 5~
полюсный наконечник.
тины изолируют друг от друга миканитовыми проклад-
ками. Основанием коллектора служит втулка 3, на кото-
рой обычно с помощью нажимной шайбы 5 закрепляют
Рис. 1.3. Магнитные системы машин постоянного тока с постоянными
магнитами:
а — радиальная; б — скобообразиая; в —кольцевая; (/ — магнит; 2— полюс;
3 — полюсный наконечник; 4 — якорь).
пластины. Часто в микромашинах коллекторные пластины
с миканитовыми прокладками запрессовывают в пласт-
массу 2 (рис. 1.4,6). Коллектор 7 (на рис. 1.1) так же,
как и сердечник якоря, жестко закрепляется на валу 9,
на который насаживаются подшипники 8.
Внешняя цель машины имеет электрический контакт
с. коллектором посредством графитных, электрографити-
16
Глава I. Общие вопросы теории машин постоянного тока
рованных или металлографитных щеток 11, которые по-
мещаются в обоймах щеткодержателей и прижимаются
к коллектору пружинами. Щеткодержатели монтируются
на переднем подшипниковом щите 10. Передний и задний
Рис. 1.4, Коллекторы микромашин посто-
янного тока:
а — сборный с развальцованной втулкой; б —
запрессованный в пластмассу: (/ — коллектор-
ная пластина: 2 — пластмасса; 3 — стальная
втулка; 4 — миканитовая манжета; 5 — нажим-
ная шайба).
подшипниковые щиты болтами крепятся к станине. В цен-
тральной части щитов сделаны расточки. В них помещают
подшипники. В машинах малой мощности используют
обычно шариковые или роликовые подшипники.
Рис. 1.5. Простейший генератор по-
стоянного тока.
Рассмотрим принцип действия машины постоянного
тока на примере простейшего генератора, на якоре кото-
рого находится обмотка. Состоит она из одного витка
(рис. 1.5), начало и конец которого присоединены к кол-
лектору, выполненному из двух изолированных друг от
друга медных пластин в виде полуколец. Последние име-
§ 1.1. Принцип действия машин постоянного тока 17
ют контакт с неподвижными щетками, присоединенными
к внешней электрической цепи.
Коллектор механически соединен с якорем. При вра-
щении якоря в магнитном поле полюсов в проводниках
витка индуктируется э. д. с. Направление ее определяют
а
&
Рис. I.G. Выпрямленное напряже-
ние:
а — при одном витке па якоре; б— при
двух витках яа якоре.
правилом правой руки. Как видно из рис. 1.5, в верхнем
проводнике аб э. д. с. направлена к нам, в нижнем вг —
от нас. При повороте якоря с коллектором на 180° сторо-
ны витка аб и вг меняются местами и направления э. д. с.
в них изменяются на противоположные.
Таким образом, в обмотке якоря индуктируется пере-
менная электродвижущая сила, выпрямляемая с по-
мощью коллектора. Действительно, под верхней щеткой
всегда находится коллекторная пластина, соединенная
с верхней, а под нижней — пластина, соединенная с ниж-
ней стороной витка. В результате щетки снимают посто-
янное по направлению пульсирующее напряжение (рис.
1.6, а). Под действием его по внешней цепи течет постоян-
ный по направлению пульсирующий ток. С увеличением
числа витков, распределенных в пазах якоря, пульсация
напряжения на щетках уменьшается (рис. 1.6,6). В гене-
раторах малой мощности наблюдается заметная пульса-
ция напряжения, одной из причин которой является не-
большое число коллекторных пластин.
18 Г л а в a I. Общие вопросы теории машин постоянного тока
§ 1.2. Обмотки якоря
Основные определения. Обмотка якоря — наиболее
ответственная часть электрической машины. Она пред-
ставляет собой замкнутую систему проводников, в опре-
деленном порядке уложенных в пазах якоря и присоеди-
ненных к коллектору. Основной ее элемент — секция,
состоящая из одного или нескольких витков.
Рис. 1.7. Формы пазов
якоря:
а — круглый; б — трапецеи-
дальный.
Части секции, расположенные в пазах, называются
активными сторонами, вне пазов — лобовыми частями.
Обычно секции укладывают в пазах сердечника якоря
в два слоя. Причем если одну активную сторону распола-
гают в верхнем слое одного паза, то вторую — в нижнем
другого паза, отстоящего от первого на расстоянии, точно
или приблизительно равном полюсному делению. Полюс-
ным делением т называют часть окружности якоря, при-
ходящуюся на один полюс,
nD
(1-1)
где D — диаметр якоря;
2р — число полюсов машины.
Обмотки якоря подразделяют на петлевые (простые
и сложные) и волновые (простые и сложные). В машинах
постоянного тока малой мощности используют только
простые петлевые или волновые. Витки их секций обычно
укладывают через прорези в полузакрытые пазы, наибо-
лее распространенные формы которых представлены на
рис. 1.7. Такие обмотки называются всыпными.
Для того чтобы правильно соединить секции между
собой и коллекторными пластинами, нужно знать шаги
§ 1.2. Обмотки якоря 19
обмотки, обычно измеряемые числом элементарных па-
зов. Элементарным пазом называют паз, в верхнем и
нижнем слоях которого расположены две активные сто-
роны разных секций. Один реальный паз может содер-
жать один, два, три и более элементарных (рис. 1.8), все
число которых Z3 = S=K. Здесь S — число секций, К —
число коллекторных пластин.
Рис. 1.8. Реальные и элементар-
ные пазы.
На рис. 1.9. показаны секции петлевой (а) и волновой
(б) обмоток якоря с обозначением шагов обмотки.
Различают следующие шаги:
yi — первый шаг, равный ширине секции или расстоя-
нию между начальной и конечной ее сторонами;
у2 — второй шаг, равный расстоянию между конечной
стороной одной секции и начальной стороной следующей
последовательно соединенной секции;
у — результирующий шаг, равный расстоянию между
начальными сторонами двух последовательно соединен-
ных секций;
ук — шаг по коллектору, равный по его окружности
расстоянию между началом и концом секции. Измеряется
числом коллекторных пластин.
Благодаря соответствию хода обмотки по якорю и кол-
лектору результирующий шаг у и шаг по коллектору ук
выражаются одним и тем же числом, т. е. У=Ук-
Простая петлевая обмотка. В простой петлевой обмот-
ке (рис. 1.9, а) начало и конец секции присоединяют
к соседним коллекторным пластинам, поэтому t/K=l:
.ук = у = У1 —1/2=1. (1-2)
20 Г л а в a I. Общие вопросы теории машин постоянного тока
Чтобы получить наибольшую э. д. с. от секции (следо-
вательно, и от обмотки), первый шаг обмотки по якорю yi
должен быть приблизительно или точно равен полюсному
делению т== —Так как на длину окружности якоря пи
Р
приходится Z3 пазов, то .
2.р
Рис. 1.9. Секции обмотки якоря.
Но шаг yi должен быть равен целому числу элемен-
тарных пазов, поэтому
2э
У1= —— Те=целое число, (1.3)
где е — дробное число.
Если е=0, то секцию, а следовательно, и обмотй^ вы-
полняют с полным шагом и с укороченным — если е вы-
читают.
На рис. 1.10 даны таблица и развернутая схема прос-
той петлевой обмотки, имеющей
S=2<=Z3=12; 2р=4.
§ 1.2. Обмотки якоря
21
Шаги ее взяты равными
*э
У=Ук=1; г/1=~^~=3; у2=у1—у=2.
Для удобства вычерчивания схемы составляют таб-
лицу (рис. 1.10, а) соединений секционных сторон обмот-
<7
л/лазаЦЯфхний
мой/
/И секции
мпаза/шжний
слой/
d
Рис. 1.10. Простая петлевая обмотка (Za=12; 2р=4; «н=3; 1/2=2):
а — таблица обмотки; б — схема обмотки.
ки. Строят ее с начальной стороны секции 1, лежащей в
верхнем слое первого элементарного паза. В данном слу-
чае t/i=3, поэтому вторая сторона 1-й секции будет ле-
жать в нижнем слое 4-го элементарного паза, так как
14-i/1=4. Вторая секция, последовательно соединенная
с первой своей начальной стороной, будет находиться на
расстоянии второго шага Уг=2 влево от четвертого эле-
ментарного паза (4—1/2=4—2=2), т. е. в верхнем слое
22
Глава I. Общие вопросы теории машни постоянного тока
второго элементарного паза. Составление таблицы закан-
чивают повторением подобных расчетов для всех секций.
На основе полученных данных и вычерчена схема об-
мотки (рис. 1.10, б). На схеме нанесены полюса, указаны
соединения секций с коллекторными пластинами, направ-
ления э. д. с. в секционных сторонах при их движении
в заданном направлении. Щетки на коллекторе установ-
лены таким образом, чтобы получить от машины наиболь-
Рнс. 1.11. Схема параллельных ветвей петлевой обмотки.
шую э. д. с. Для этого секции, замыкаемые ими накорот-
ко, должны располагаться посередине между полюсами
на геометрической нейтрали. Последней называют линию,
проходящую через центр якоря и точки, находящиеся на
окружности якоря, посередине между соседними полю-
сами.
Щетки делят обмотку якоря на отдельные параллель-
ные ветви с одинаковым направлением э. д. с. в них.
В каждую такую ветвь входят ряд последовательно сое-
диненных секций (рис. 1.11).
Как видно из рисунка, число параллельных ветвей
(2а) простой петлевой обмотки равно числу полюсов, т. е.
2а~2р. (1.4)
§ 1.2. Обмотки якоря 23
Сложные петлевые обмотки выполняются так же, как
простые, но шаг по коллектору ук у них
Ук=у=т,
где m> 1 (2; 3 ...).
За счет этого число параллельных ветвей в сложной
петлевой обмотке увеличивается в т раз, т. е.
2а=2тр.
Петлевые обмотки применяют в машинах, рассчитан-
ных на работу при сравнительно небольших напряже-
ниях, но значительных токах.
Простая волновая обмотка. В простой волновой об-
мотке начало и конец секции присоединяются к коллек-
торным пластинам, расстояние между которыми ук^2т
(рис. 1.9, б). Второй шаг у2 делается в ту же сторону, что
и первый, поэтому шаги связаны соотношением
у=уя=у1+у2.
При выполнении простой волновой обмотки за один
обход по якорю в пазы укладывают столько секций,
сколько пар полюсов имеет машина, сдвигаясь по кол-
лектору на рук коллекторных делений. При этом послед-
няя по обходу секция присоединяется к пластине, лежа-
щей либо слева от исходной — левоходовая, либо спра-
ва — правоходовая обмотка.
Согласно условию
pyK=K=Fl,
откуда
КТ1
Результирующий шаг обмотки по якорю
24
Глава I. Общие вопросы теории машин постоянного тока
Первый шаг волновой обмотки определяется так же,
как и в петлевой по формуле (1.3), а второй уг=у—yt.
а
нпаэа f 7/3 6 /7 3' И '/ W J S 2 8 f
(Верхний
слой)
шекциц
S ><> >9281 7 13 б /2 5 11
слой)
Рнс. 1.12. Простая волновая обмотка (Za“13; 2р—4; yt=y2=3):
а — таблица обмотки; б — схема обмотки.
На рис. 1.12,6 дана развернутая схема простой вол-
новой обмотки, имеющей
S=K=Z9= 13; 2р=4. ' '
Шаги определены так: ; *
Z^‘ 13-1
У — Ук— ~--- 2 —о, ПН ; .
1з 1
0‘=~^+6=-4--------1-==3; Уг=У-У^-
§ 1.2. Обмотки якоря
25
Обмотка выполнена в соответствии с таблицей соеди-
нения секционных сторон, которая представлена на
рис. 1.12, а.
» +
Рис. 1.13. Схема параллельных ветвей волновой обмотки, изображен-
ной на рнс. 1.12.
Простая волновая обмотка независимо от числа по-
люсов всегда имеет две параллельные ветви (рис. 1.13),
т. е. 2а—2.
В случае применения волновой обмотки можно ис-
пользовать всего две щетки. Однако обычно устанавли-
вают столько же щеток, сколько и полюсов, что позволяет
уменьшить величину тока, приходящегося на одну щетку.
При выполнении сложной волновой обмотки после од-
ного обхода якоря и коллектора конец секции присоеди-
няют к коллекторной пластине, отстоящей от исходной
на т пластин, тогда
K-Pfti
Все остальные шаги рассчитываются так же, как и в про-
стой волновой обмотке. В сложной волновой обмотке
2а=2пг.
Из сравнения петлевых и волновых обмоток ясно, что
последние при р>\ имеют меньшее число параллельных
ветвей, поэтому применяются в машинах повышенного
напряжения при сравнительно небольшом номинальном
токе.
26 Г л а в a I. Общие вопросы теории машин постоянного тока
§ 1.3. Электродвижущая сила обмотки якоря
Определим э. д. с. обмотки якоря с полным шагом,
когда щетки установлены на геометрической нейтрали
(рис. 1.14, а).
В каждом проводнике обмотки в процессе работы
машины наводится э. д. с., величина которой еПр — Blv,
где В — значение индукции в месте расположения про-
водника.
Рис. 1.14. Распределение
магнитной индукции в зазо-
ре. Влияние шага обмотки
и сдвига щеток с геометри-
ческой нейтрали на вели-
чину э. д. с:
а —при б —при Pi<t;
в — при р1=т и щетках, сдвину-
тых с нейтрали.
В машинах постоянного тока магнитная индукция
в воздушном зазоре вдоль окружности якоря при холос-
том ходе распределяется по трапецеидальной кривой
АБВГ (рис. 1.14, а).
Заменив трапецеидальную площадь АБВГ равновели-
ким прямоугольником АМНГ с основанием т, получим
среднее значение индукции под полюсом.
§ 1.3. Э. д. с. обмотки якоря
27
Тогда среднее значение э. д. с. в проводнике
£пр.ср=.
Электродвижущая сила машины равна э. д. с. одной
параллельной ветви обмотки якоря.
Если обозначить полное число проводников обмотки
через N, то количество последовательно соединенных про-
водников в одной параллельной ветвн будет ——-
Следовательно, э. д. с. машины
£_Вср/о
(1-6)
Окружная скорость якоря
(1.7)
60 ’ '
где D — диаметр якоря;
п — скорость вращения якоря, об/мин.
Заменив в уравнении (1.7) nD=2px и подставив зна-
чение скорости в выражение (1.6), получим
2рхп N _ р
£“5ср/“б0" "2а” ~ а 60 5ср/
Так как Вср/т==Ф, где Ф — полезный магнитный по-
ток полюса в вб, то
о N
0-9)
а 60
р N
Величина-----— ~Се является постоянной в испол-
а 60
пенной машине, и выражение э. д. с. можно записать
в упрощенном виде:
'Е=СепФ. “ (1.10)
28 Глава I. Общие вопросы теории машин постоянного тока
Если ширина секции меньше полюсного деления
(*Л<т), то полезный поток, а следовательно, и э. д. с. бу-
дут меньше (рис. 1.14,6).
Такое же влияние на величину полезного потока и
э. д. с. оказывает сдвиг щеток с геометрической в сторону
физической нейтрали машины (рис. 1.14, а).
§ 1.4. Реакция якоря
При работе машины под нагрузкой по обмоткам воз-
буждения и якоря протекают токи, создающие намагни-
чивающие силы (н. с.) возбуждения Ев и якоря />. Эти
н. с., взаимодействуя между собой, образуют результиру-
a
JV
Рис. 1.15. Магнитное поле машины:
a — при холостом ходе; б —поле якоря; в — результирующее поле при на
грузке.
$
ющее магнитное поле. Воздействие поля якоря на основ-
ное поле машины (созданное FB) называется реакцией
якоря.
Выясним влияние реакции якоря на работу машины
в режиме генератора.
При холдетом ходе генератора в машине действует
только н. с. обмотки возбуждения Ръ, которая создает
магнитное поле, симметрично расположенное относитель-
но оси полюсов (рис. 1.15, а). График распределения ин-
дукции в воздушном зазоре представлен на рис. 1.16
§ 1.4. Реакция якоря 29
(кривая /). При вращении якоря в его обмотке наводятся
э. д. с., направление которых в проводниках на рис. 1.15, а
изображено знаками (X) и (•), но ток в обмотке якоря
отсутствует (Ея=0), так как цепь разомкнута.
На рис. 1.15,6 показана картина магнитного поля,
созданного н. с. обмотки якоря (ток в проводнике якоря
Рис. 1.16. Распределение магнитной индукции в зазоре:
/ — кривая индукции при холостом ходе; 2 — кривая н. с. якоря; 3 —
кривая индукции якоря: 4 — кривая результирующей индукции без уче-
та изменения насыщения; 5 — кривая действительной индукции при на-
грузке (nnz — геометрическая нейтраль, тт' — физическая нейтраль).
направлен так же, как и э. д. с. на рис. 1.15, а) при усло-
вии отсутствия тока в обмотке возбуждения (Ев=0).
Как видно из рисунка, якорь представляет из себя элек-
тромагнит, ось которого совпадает с линией щеток. Если
щетки расположены на геометрической нейтрали, то поле
якоря направлено по поперечной оси относительно основ-
ного поля машины. Намагничивающая сила якоря на
этой оси имеет максимальное значение, так как соответ-
ствующая магнитная линия охватывает наибольший ток.
Далее можно приближенно считать, что н. с. якоря убы-
вает по закону прямой линии (рис. 1.16, кривая 2) и под
серединой полюса становится равной нулю.
Распределение индукции якоря в зазоре совпадает
с распределением Ея лишь под полюсами. В межполюс-
ном пространстве она резко уменьшается (кривая 3 на
30
Глава I. Общие вопросы теории машин постоянного тока
рис. 1.16) вследствие того, что увеличивается воздушный
зазор, а следовательно, и магнитное сопротивление пото-
ку якоря.
На рис. 1.15, в показана картина результирующего
поля генератора при вращении якоря по часовой стрелке,
а на рис. 1.16 (кривая 4) представлен график распреде-
ления индукции результирующего поля, полученный на
основании применимого только для машин с ненасыщен-
ной магнитной системой принципа наложения.
Из сравнения рис. 1.15 (а и в) и 1.16 (кривые 1 и 4)
видно, что реакция якоря, не изменяя величины основ-
ного магнитного поля, искажает его, увеличивая под сбе-
гающей и уменьшая под набегающей половинами полюса.
Ось результирующего поля смещается, что приводит
к смещению на угол 0 в сторону вращения физической
нейтрали тт' относительно геометрической пп'. Физиче-
ская нейтраль — линия, проходящая через точки окруж-
ности якоря, где индукция равна нулю.
Однако принцип наложения не дает точных результа-
тов, так как поле в ферромагнитных цепях не является
линейной функцией тока. Обычно магнитная система ма-
шины насыщена, поэтому одна половина полюса подмаг-
ничивается в меньшей степени, чем размагничивается
другая (рис. 1.16, кривая 5). Следовательно, результиру-
ющий магнитный поток уменьшается, что приводит к по-
нижению э. д. с., индуктируемой в обмотке якоря.
Уменьшение э. д. с. якоря при положении щеток на
геометрической нейтрали вызывается также смещением
физической нейтрали, так как в параллельные ветви вхо-
дят проводники с противоположными направлениями
э. д. с. (проводники между нейтралями пп' и тт' на
рис. 1.15, в).
Равмагничивающее влияние реакции якоря усили-
вается при смещении щеток с геометрической нейтрали
в сторону смещения физической. Объясняется это тем,
что вместе с ними смещается и вектор н. с. якоря Гя
(он всегда направлен по оси щеток), который можно за-
менить намагничивающими силами FHd и Fnq, действую-
щими по продольной и поперечной осям машины
(рис. 1.17).
§ 1.4. Реакция якоря • . i %
Поперечная н. с. Faq реакции якоря действует так же,
как и Fn при положении щеток на геометрической ней-
трали, т. е. искажает поле под полюсами и несколько
уменьшает полезный поток.
Продольная намагничивающая сила Fnd реакции яко-
ря действует против намагничивающей силы обмотки
Рис. 1.17. Разложение н. с. об-
мотки якоря на составляющие.
возбуждения и, следовательно, уменьшает полезный по-
ток Ф.
Таким образом, когда щетки сдвинуты, э. д. с., полу-
чаемая от генератора, будет меньше, чем когда они уста-
новлены на геометрической нейтрали.
При работе машины в режиме двигателя ток в якоре,
как показано в § 0.2, направлен встречно по отношению
к э. д. с. Поэтому представленная на рис. 1.16 картина
результирующего поля (кривая 4) ,получается в двига-
теле при его вращении против часовой стрелки. (В гене-
раторе якорь вращался по часовой стрелке.) Это позво-
ляет сделать следующие выводы относительно реакции
якоря в двигателе:
а) при положении щеток на геометрической нейтрали
реакция якоря сдвигает физическую нейтраль против
направления вращения и искажает основное поле, ослаб-
32 Г л а в a I. Общие вопросы теории машин постоянного тока
ляя его под сбегающей и усиливая под набегающей поло-
винами полюса;
б) при сдвиге щеток с нейтрали наряду с поперечной
возникает и продольная составляющая реакции якоря.
В нереверсивных двигателях часто щетки сдвигают про-
тив направления вращения, поэтому за счет размагничи-
вающего действия продольной составляющей реакции
якоря результирующее поле уменьшается.
§ 1.5. Коммутация !
Под коммутацией в широком смысле слова понимают
все явления и процессы, возникающие под щетками рабо-
тающей машины. Коммутация считается хорошей, если
нет искрения и, наоборот, плохой, если оно есть. Искро-
образование возникает вследствие механических, потен-
циальных и коммутационных причин.
К механическим причинам относятся: плохая обработ-
ка коллектора (эллиптичность или шероховатость его
поверхности), слабое давление щеток на коллектор, за-
грязнение его поверхности и т. д. При этом в отдельные
моменты времени контакт щетки с коллектором наруша-
ется, что и приводит к искрению.
Потенциальные причины искрения могут проявляться
в тех случаях, когда из-за значительного искажения поля
машины реакцией якоря напряжение между соседними
пластинами коллектора превышает допустимые пределы.
При этих условиях искрение наиболее опасно, так как оно
вызывает появление электрических дуг иа коллекторе.
Коммутационные причины искрения вызываются электро-
магнитными процессами, связанными с изменением тока
в секции, замыкаемой накоротко щеткой.
Механические причины искрения устраняются путем
качественного выполнения коллектора и щеточного ап-
парата. Для устранения потенциального искрения необ-
ходимо ослабить реакцию якоря, для этого в некоторых
машинах (обычно крупных) применяют компенсацион-
ную обмотку, которую располагают в пазах полюсных
наконечников и соединяют последовательно с обмоткой
якоря так, чтобы ее намагничивающая сила была про-
тивоположна по направлению н. с.
§ 1.5. Коммутация 33
Наибольшие трудности в обнаружении и устранении
представляют коммутационные причины искрения. Сово-
купность явлений, связанных с изменением тока в секциях
обмотки якоря при переключении этих секций из одной
параллельной ветви в другую, и называют коммутацией.
Разберемся в физической сущности процесса комму-
тации.
Рис. 1.18. График изменения тока в секции обмотки за время ее про-
хождения под двумя полюсами машины.
При вращении якоря машины коллекторные пластины
поочередно вступают в соприкосновение со щетками. При
этом переход щетки с одной пластины на другую приво-
дит к замыканию секции, присоединенной к данным кол-
лекторным пластинам, щеткой накоротко. Такую секцию
называют коммутируемой, так как в ней в это время про-
исходит коммутация (изменение направления тока; сек-
ция переходит из одной параллельной ветви в другую).
Таким образом, пока секция находится в одной парал-
лельной ветви, за время Тп прохождения ею под одним
полюсом ток в ней сохраняет свое значение 1а= -~-
(рис. 1.18). Переходя в другую параллельную ветвь, сек-
ция в течение времени Тк, составляющего тысячные доли
3 Зак. 29
34 Г л а в a I. Общие вопросы теории машин постоянного тока
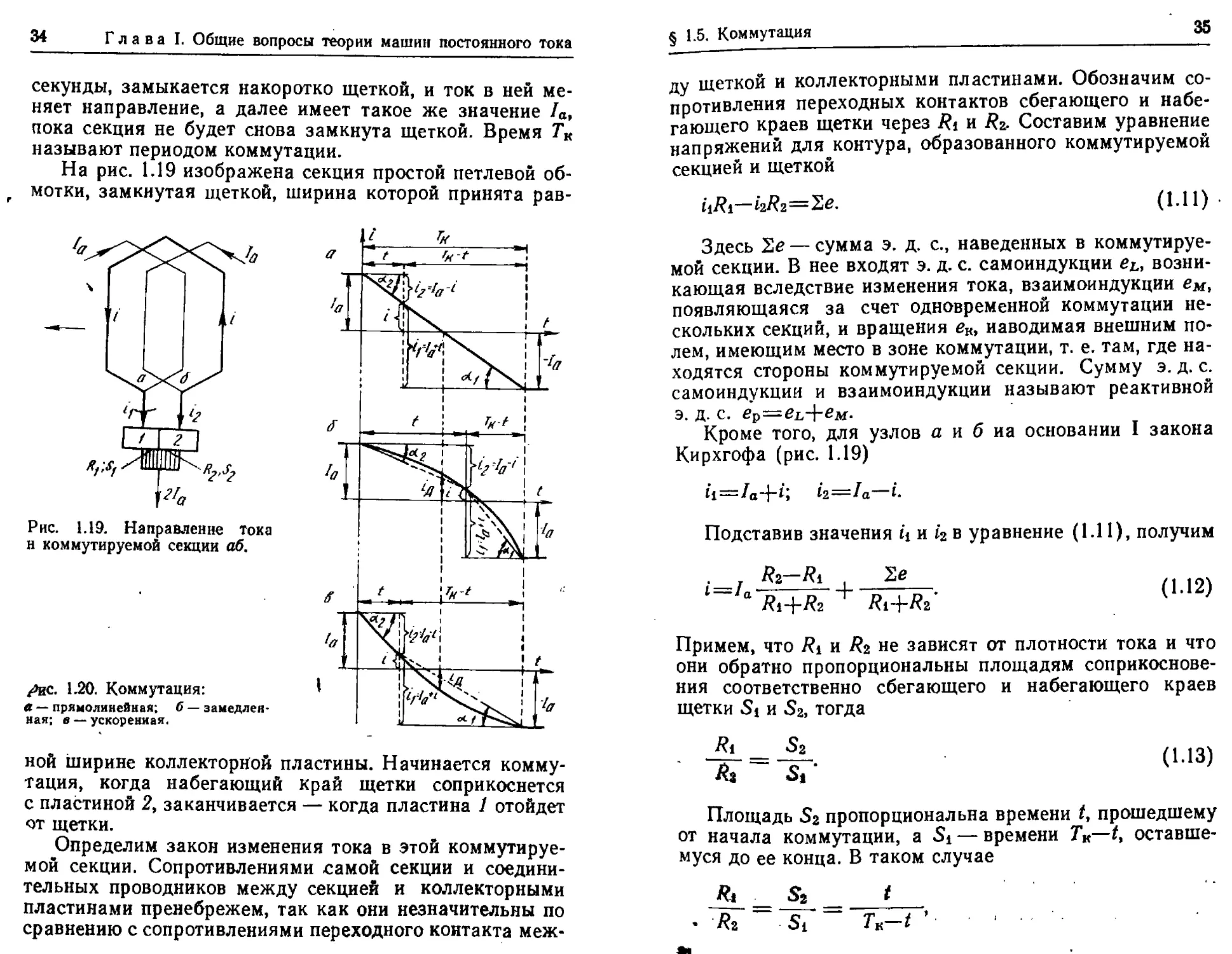
секунды, замыкается накоротко щеткой, и ток в ней ме-
няет направление, а далее имеет такое же значение 1а,
пока секция не будет снова замкнута щеткой. Время Тк
называют периодом коммутации.
На рис. 1.19 изображена секция простой петлевой об-
мотки, замкнутая щеткой, ширина которой принята рав-
Рис. 1.19. Направление тока
н коммутируемой секции аб.
/>ис. 1-20. Коммутация:
а — прямолинейная; б — замедлен*
мая; в — ускоренная.
ной ширине коллекторной пластины. Начинается комму-
тация, когда набегающий край щетки соприкоснется
с пластиной 2, заканчивается — когда пластина 1 отойдет
от щетки.
Определим закон изменения тока в этой коммутируе-
мой секции. Сопротивлениями самой секции и соедини-
тельных проводников между секцией и коллекторными
пластинами пренебрежем, так как они незначительны по
сравнению с сопротивлениями переходного контакта меж-
§ 1.5. Коммутация
35
ду щеткой и коллекторными пластинами. Обозначим со-
противления переходных контактов сбегающего и набе-
гающего краев щетки через Ri и Z?2- Составим уравнение
напряжений для контура, образованного коммутируемой
секцией и щеткой
ii/?i—i2/?2—Sc. (1.11) •
Здесь — сумма э. д. с., наведенных в коммутируе-
мой секции. В нее входят э. д. с. самоиндукции eL, возни-
кающая вследствие изменения тока, взаимоиндукции ем,
появляющаяся за счет одновременной коммутации не-
скольких секций, и вращения ек, наводимая внешним по-
лем, имеющим место в зоне коммутации, т. е. там, где на-
ходятся стороны коммутируемой секции. Сумму э. д. с.
самоиндукции и взаимоиндукции называют реактивной
э. д. с. ер—вь-]-ем-
Кроме того, для узлов а и б иа основании I закона
Кирхгофа (рис. 1.19)
Й = /а4"Й l2 = Za—I-
Подставив значения ii и г2 в уравнение (1.11), получим
Rz—Ri 2е
/?i-f- R2 Rt+Rz
(1-12)
Примем, что Ri и /?2 не зависят от плотности тока и что
они обратно пропорциональны площадям соприкоснове-
ния соответственно сбегающего и набегающего краев
щетки Si и S2, тогда
Ri S2
R» ~ s/
(1-13)
Площадь S2 пропорциональна времени t, прошедшему
от начала коммутации, a Si — времени Тк—t, оставше-
муся до ее конца. В таком случае
Ri S2 t
• Rz ~ Si “ TK—t ’••••••
36
Глава I. Общие вопросы теории машин постоянного тока
отсюда
Тк— t
Подставив значение в первое слагаемое правой
части уравнения 1.12, получим
1 ° ' 1 Г J + ’
(1-14)
П рямолинейная коммутация. Если сумма э. д. с. в ком-
мутируемой секции в любой момент времени равна нулю,
О, то уравнение (1.14) принимает вид
(1.15)
Полученное выражение показывает, что ток i в ком-
мутируемой секции является линейной функцией времени
(рис. 1.20, а). Такая коммутация называется прямоли-
нейной.
Плотности тока под набегающим краем щетки
Аг--= под сбегающим Ai= Так как Sz=t,
02 . О1
^2 1
a Si = TK—t, то Д2=^ -y-=k tg а2 и Ai=£——-=« ®i>
Г 1 к t
где k — коэффициент пропорциональности. Но ai=a2,
следовательно, А1=Аг.
Таким образом, при прямолинейной коммутации плот-
ность тока в любое время распределяется равномерно и
искрения под щеткой нет.
Замедленная коммутация. Рассмотрим случай, когда
в зоне коммутации нет внешнего поля (например, при
положении щеток на физической нейтрали), э. д. с. ек=0.
В коммутируемой секции действует только реактивная
э. д. с. ер. Согласно правилу Ленца, она задерживает из-
...... / . ер \
менение тока, вследствие чего I 1д= г. /
' Kl-f-A2 '
проходит нулевое значение позже, чем в предыдущем
§ 1.5. Коммутация
37
случае (рис. 1.20,6). Такая коммутация называется за-
медленной.
Во время ее плотность тока на сбегающем крае щетки
больше, чем на набегающем (Ai==& tg ai>A2=& tg аг),
поэтому на сбегающем крае щетки может возникнуть ис-
крение.
Ускоренная коммутация. Если в коммутируемой сек-
ции внешним полем индуктируется э. д. с. вращения ек,
направленная навстречу э. д. с. ер и ек>ер, то процесс
изменения тока i проходит быстрее (рис. 1.20, в). Такая
коммутация называется ускоренной. Плотность тока на
набегающем крае щетки во время ее будет больше, чем
на сбегающем (А2=£ tg a2>Ai=& tg ai). Следователь-
но, при значительной плотности тока А2 на набегающем
крае щетки может возникнуть искрение.
При полной компенсации ер, когда ек=ер, имеет место
прямолинейная коммутация.
Способы улучшения коммутации. Для улучшения ком-
мутации уменьшают или сводят до нуля добавочную со-
2е
ставляющую тока коммутации 1Д=- Чтобы умень-
ai+a2
шить 1д, применяют твердые щетки (обычно электрогра-
фитированные), создающие в переходных контактах
относительно большие сопротивления Rt и /?2, сокращают
до минимума число витков в секциях обмотки, укорачи-
вают ее шаг, подбирают такие щетки, ширина которых
была бы близка ширине коллекторной пластины, снижа-
ют скорость вращения якоря. Все эти способы могут быть
использованы в ограниченной степени, так как увеличи-
вают вес, габариты машины и потери на трение.
Наиболее эффективным способом улучшения комму-
тации является создание в зоне коммутации магнитного
потока такой величины и направления, чтобы в коммути-
руемой секции наводилась э. д. с. вращения ек, компен-
сирующая ер. Это можно получить путем сдвига щеток
за физическую нейтраль по вращению в генераторах и
против вращения в двигателях или установкой дополни-
тельных полюсов. Недостатком первого способа является
его непригодность для реверсивных машин и необходи-
мость при изменении нагрузки сдвигать щетки в новое
положение, так как при изменении нагрузки физическая
38 Г л а в a I. Общие вопросы теории машин постоянного тока
нейтраль перемещается. В нереверсивных микродвигате-
лях щетки иногда смещают в такое положение, в котором
при номинальном режиме работы двигателя искрение
бывает минимальным.
Установка дополнительных полюсов в зоне коммута-
ции (на линии геометрической нейтрали) — основной спо-
соб улучшения коммутации машин постоянного тока
средней и большой мощности. Для обеспечения автома-
тической компенсации реактивной э. д. с. при изменении
нагрузки машины поток дополнительных полюсов должен
изменяться пропорционально току якоря. Поэтому об-
мотку дополнительных полюсов включают последователь-
но с обмоткой якоря. Дополнительные полюсы в микро-
машинах не применяют из-за ограниченности места для
их установки.
Радиопомехи. Источниками радиопомех являются:
искрение, возникающее при коммутации коллекторных
машин, и пульсация выпрямленного напряжения. Уро-
вень радиопомех не должен превосходить уровня, уста-
новленного стандартом. Для уменьшения радиопомех
применяют экранирование машины, электрические фильт-
ры и симметрирование обмоток возбуждения, соединен-
ных последовательно с якорем.
Корпус электрической машины является экраном, по-
глощающим помехи. Обычно со стороны коллектора оде-
вают защитный металлический колпак или закрывают
металлической лентой отверстия в подшипниковом щите.
Иногда для лучшего экранирования вентиляционные от-
верстия в щитах закрывают медной или латунной сеткой,
а выступающий конец вала замыкают иа корпус специ-
альной щеткой. Проводка выполняется экранированным
проводом. Причем экран провода надежно соединяют
с заземленным корпусом фашины.
На рис. 1.21 показаны схемы защиты от радиопомех
с помощью фильтров. Наиболее простым фильтром яв-
ляется включение конденсаторов между, проводами сети
(конденсатор Ct на рис. 1.21, а) или между проводом и
корпусом (конденсаторы С2 на том же рисунке). Лучший
эффект в поглощении радиопомех создают проходные
конденсаторы С2 емкостью 0,1—1 мкф, в которых один
электрод присоединяют к корпусу, а другой, являющийся
§ 1.6. Электромагнитный момент машины
39
токоведущим проводником, соединяют последовательно
с цепью якоря машины.
Хорошие результаты в подавлении радиопомех дают
Г-образные (рис. 1.21,6) и особенно П-образные (рис.
1.21, в) режущие фильтры, которые задерживают гармо-
нические составляющие, пропуская достоянную состав-
ляющую напряжения.
Рис. 1.22. К определению элек-
тромагнитного момента.
Рис. 1.21. Схемы защиты от ра-
диопомех:
а — емкостный фильтр: б — Г-об-
разный фильтр; в — П-образиый
фильтр.
В микродвигателях последовательного возбуждения
с целью увеличения высокочастотного сопротивления
применяют симметрирование, заключающееся в том, что
обмотку возбуждения делят иа две части и соединяют ее
симметрично относительно разнополярных щеток, как по-
казано на рис. 15.5.
§1.6. Электромагнитный момент машины
Согласно закону электромагнитных сил, сила, дейст-
вующая на проводник с током (рис. 1.22),
Fx=BJJ,
где 1а= ~— ток параллельной ветви обмотки, в кото-
рую входит проводник;
» I — активная длина проводника.
40 Глава I. Общие вопросы теории машин постоянного тока
Общая сила, действующая на якорь, при числе про-
водников якоря N
Г=Вс-£-1Н. (1.16)
Искомое значение электромагнитного момента
M=F-L=bC!,AWA.. (1.17)
2рт
Подставив вместо диаметра якоря D=-и учиты-
вая, что ВСр/т=Ф, получим
М=——~1ЯФ нм, (1.18)
а 2л
или
М = См7яФ, (1.19)
где См= —• —----постоянная величина для данной Ma-
rz 2л
шины.
Направление действия электромагнитного момента
определяют правилом левой руки. В генераторах электро-
магнитный момент действует против вращения и являет-
ся, следовательно, тормозящим по отношению к моменту
приводного двигателя.
В двигателе электромагнитный момент действует в на-
правлении вращения якоря и уравновешивается момен-
том нагрузки на валу и моментом холостого хода Мо,
обусловленным механическими и магнитными потерями
двигателя,
М=М0+М2. (1.20)
§ 1.7. К. п. д. машины постоянного тока 41
§ 1.7. Потери и к.п.д. машины постоянного тока
В электрических машинах происходит процесс преоб-
разования одного вида энергии в другой. При этом
в активных материалах машины возникают потери энер-
гии, превращающиеся в тепло и, следовательно, нагрева-
ющие машину. Поэтому значения сопротивлений обмоток
машины следует приводить, согласно ГОСТу, к темпера-
туре +75° С.
Различают следующие виды потерь: электрические,
магнитные (потери в стали), механические и добавочные.
Электрические потери в цепи якоря зависят от тока
якоря /я, поэтому являются переменными потерями.
Их величина определяется по формуле
Ря=/я^оя75=+ад. (1.21)
Здесь £7щ/я — потери в переходных контактах щеток;
£Лц=ЛЛц— падение напряжения в переходном сопро-
тивлении щеток обеих полярностей; значе-
ние (Ущзависит от выбранной марки щеток;
У?оЯ75« — сопротивление обмотки якоря, приведен-
ное к температуре +75° С.
/?оя75’=/?ояе [1 + а(75°-0°)], (1.22)
где /?ояе» — сопротивление обмотки якоря при темпера-
туре окружающей среды 0°;
а — температурный коэффициент, для меди
а=0,004 l/epad.
Электрические потери в цепи возбуждения машины
Pb=Wb=Zb2/?ob75% (1.23)
где /?ов75° — сопротивление обмотки возбуждения, приве-
денное к температуре 4*75° С.
Магнитные потери обусловлены перемагничиванием
сердечника и зубцов якоря. Складываются они из потерь
от гистерезиса и от вихревых токов Рс=Л'+/’вх- Величи-
на Магнитных потерь зависит от значения магнитной ин-
ДУкции в сердечнике и зубцах якоря, толщины листов
42 Г л а в a I. Общие вопросы теории машин постоянного тока
стали, частоты перемагничивания якоря (скорости вра-
щения) и пр.
Механические потери в машине Рмех складываются из
потерь на трение щеток о коллектор, на трение в подшип-
никах и на трение вращающихся частей машины о воздух.
Зависят они лишь от скорости вращения якоря.
Сумма магнитных и механических потерь составляет
потери холостого хода
Ро = РсЧ_Рмех. (1.24)
Потери Ро мало зависят от величины тока /я, поэтому
их называют постоянными.
Кроме перечисленных потерь, в машинах имеют место
добавочные потери PR, складывающиеся из потерь в по-
люсных наконечниках, обусловленных пульсацией основ-
ного потока вследствие зубчатости якоря, потерь от вих-
ревых токов в меди обмотки якоря, коммутационных
потерь и пр. Величину добавочных потерь трудно учесть.
Поэтому, согласно ГОСТу 183—55, они принимаются рав-
ными 1 % от полезной мощности для генераторов или
1 % от подводимой мощности для двигателей.
Отношение полезной мощности Рг к подводимой Pi
представляет собой коэффициент полезного действия ма-
шины
Р2 Рг __ Р1-2Р
Pi ~ Рг+2Р “ Pi
где 2Р=РС+Рмех+Ря4-Рв+Рд — сумма потерь в ма-
шине.
В микромашинах постоянного тока к. п. д. низкий.
Так, например, в исполнительных двигателях мощностью
5—10 вт он составляет 25—30%, а в двигателях мощно-
стью 200—250 вт —40—50%. В машинах постоянного
тока средней и большой мощности к. п. д. составляет
75—95%.
Потери в машине, превращаясь в тепло, нагревают ее
части. Наиболее чувствительна к нагреву изоляция обмо-
ток, которая при чрезмерном нагреве теряет свои изоля-
ционные свойства. Поэтому допустимые температуры на-
§ 1.7. К. п. д. машины постоянного тока 43
грева частей машины в основном зависят от качества
применяемых в ней изоляционных материалов, а также
от режима работы и срока службы. Мощность, напряже-
ние, токи, скорость вращения, на которые рассчитана
машина по условиям нагрева, называются номинальными.
Номинальные величины указываются на щитке и в пас-
порте машины.
Мощность можно повысить, если использовать искус-
ственный отвод тепла при помощи специальных вентиля-
ционных устройств.
Микромашины обычно имеют естественное воздушное
охлаждение.
Глава П. ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
§2.1. Классификация генераторов
Генераторы постоянного тока большой и малой мощ-
ности имеют достаточно широкое распространение. Их ис-
пользуют в некоторых отраслях промышленности (метал-
лургической, химической и др.), на транспорте, в уста-
новках радио- и проводной связи, на самолетах и т. д.
В системах автоматического управления и регулирования,
в следящих системах широко применяют электромашин-
ные усилители и тахогенераторы постоянного тока.
В зависимости от способа создания основного магнит-
ного потока различают генераторы с электромагнитным
возбуждением и с возбуждением постоянными магнитами
Магнитоэлектрические).
В генераторах с электромагнитным возбуждением
поток создается посредством обмотки возбуждения, кото-
рая может включаться различным способом. В зависимо-
сти от схемы ее включения эти генераторы разделяются
на генераторы независимого возбуждения и генераторы
с самовозбуждением.
В свою очередь последние делятся на генераторы
с параллельным, последовательным и смешанным воз-
буждением. Практическое применение имеют генераторы
с независимым и параллельным возбуждением, а также
магнитоэлектрические.
§ 2.2. Магнитоэлектрические генераторы
Магнитоэлектрические генераторы постоянного тока
выполняются на малую мощность. Наиболее распростра-
ненные магнитные системы таких генераторов показаны
на рис. 1.3. В иих для создания потока возбуждения при-
менены постоянные магниты, изготовленные из высоко-
качественных магнитных сплавов марок АН (альни),
АНК (альниси) и АНКО (альнико, магиико). Такие маг-
§ 2.3. Генератор с независимым возбуждением 4в
ниты хорошо сохраняют свои первоначальные характери-
стики в течение длительного времени.
В связи с отсутствием обмотки возбуждения магнито-
электрические генераторы по сравнению с другими имеют
меньший расход меди, а поэтому меньший вес и габариты,
меньшие потери мощности (потери на возбуждение от-
сутствуют) и, следовательно, более высокий к. п. д.
Их недостаток — сложность регулирования потока воз-
буждения.
§ 2.3. Генератор с независимым возбуждением
В генераторе независимого возбуждения обмотка воз-
буждения получает питание от постороннего источника
постоянного тока. В схеме такого генератора (рис. 2.1)
Рнс. 2.1. Генератор
с независимым воз-
буждением.
— реостат, предназначенный для регулирования тока
возбуждения, /?н — нагрузочное сопротивление.
О свойствах генератора судят по его основным харак-
теристикам, к числу которых относят характеристику
холостого хода, внешнюю и регулировочную.
, Характеристикой холостого хода называют зависи-
мость э. д. с. генератора Во от тока возбуждения /в при
46
Глава К. Генераторы постоянного тока
токе нагрузки /=/я=О и постоянной скорости вращения
•^0==F(/b) при n = const; / = /я=0.
По саоеМу виду характеристика холостого хода ана-
логична характеристике намагничивания Ф=/(/в) мате-
риала, иа которого выполнен магнитопровод машины, так
как э. д. с. £01 равная напряжению холостого хода Uo,
пропорциональна потоку Ф (ио=Ео=СЕпФ = СЕ'Ф)•
Рис. 2.2. Характери-
стика холостого хода.
При снятии характеристики холостого хода ток воз-
буждение /в изменяют от некоторого максимума /вм, при
котором г,, д. с. Ео— (1,1 — 1,25) ия, до нуля и затем /в уве-
чивают от нуля до /вм. При этом получают нисходящую
и восходЯщу1О ветви характеристики холостого хода
(рис. 2.2) Расхождение этих ветвей объясняется нали-
чием гистерезиса в магнитной системе машины. Ветвь,
расположенную между восходящей и нисходящей ветвя-
ми, назьщают расчетной характеристикой холостого хода.
При /в=0 э. д. с. £ост индуктируется потоком оста-
точного Магнетизма. Составляет она обычно 1—4% от ия.
По характеристике холостого хода судят о степени
насыщения магнитной цепи машины. Точка, соответству-
ющая номинальному напряжению, обычно лежит на из-
гибе (колене) кривой холостого хода.
§ 2.3. Генератор с независимым возбуждением 47
—--.---' ” '
Внешней характеристикой называют зависимость на-
пряжения на зажимах генератора от тока нагрузки /=/я
при постоянной скорости и постоянном сопротивлении
цепи возбуждения
при n=const; /?nB=const.
Напряжение UB на зажимах цепи возбуждения предпо-
лагается постоянным; следовательно, = const.
Лцв
Внешнюю характеристику снимают следующим обра-
зом. Вначале устанавливают такой ток возбуждения /в
и сопротивление нагрузки /?а, чтобы при номинальном
напряжении Us протекал номинальный ток /В=/Ян. Затем
при /в= const увеличивают сопротивление RB и фикси-
руют показания амперметра и вольтметра (рис. 2.1).
Вид внешней характеристики (рис. 2.3) можно объяс-
нить, исходя из основного уравнения генератора
и=Е~1яЕя=СЕпФ—1яЕя, (2.1)
где Rn=#оя+Ящ+^дп — сопротивление цепи якоря, рав-
ное сумме сопротивлений самой
обмотки якоря, щеточного кон-
такта и обмотки дополнитель-
ных полюсов (если она имеется).
При увеличении сопротивления RB уменьшается ток
/я=/, что приводит к уменьшению падения напряжения
InRn и увеличению э. д. с. Е за счет ослабления размагни-
чивающего действия реакции якоря, поэтому напряжение
на зажимах генератора возрастает.
При переходе от режима номинальной нагрузки к ре-
жиму холостого хода напряжение генератора изменяется
на величину Uo—Un. Это изменение выражают в процен-
тах от номинального напряжения, т. е.
(2’2)
Для маломощных генераторов с независимым возбуж-
дением Дн^1О°/о. Небольшая величина Лн является до-
стоинством генератора.
48
Глава 11. Генераторы постоянного тока
Следует отметить, что для генератора с независимым
возбуждением опасно короткое замыкание цепи якоря
(7?н=0), так как ток короткого замыкания /к превышает
номинальное значение в несколько раз.
Регулировочной характеристикой называют зависи-
мость тока возбуждения от тока нагрузки
/„=/(/) при n = const; U=const.
Регулировочная характеристика (рис. 2.4) показывает,
как нужно изменять ток /в Для того, чтобы при изменении
тока нагрузки I напряжение на зажимах генератора оста-
валось неизменным.
Внешняя характеристика (рис. 2.3) показывает, что
напряжение генератора с увеличением нагрузки умень-
шается. Исходя из уравнения
U—СЕпФ—1яРя — const,
легко доказать, что при n=const поддержать его посто-
янным можно только изменением потока, для чего необ-
ходимо менять ток возбуждения.
Генераторы с независимым возбуждением применяют-
ся в тех случаях, когда необходимо регулировать напря-
жение в широких пределах.
§ 2.4. Генератор с параллельным возбуждением 49
Существенный недостаток этого генератора — необхо-
димость постороннего источника постоянного тока для
питания обмотки возбуждения.
Рис. 2.4. Регулировочная характери-
стика генератора с независимым воз-
буждением.
§ 2.4. Генератор с параллельным возбуждением
В генераторе с параллельным возбуждением (рис. 2.5)
обмотка возбуждения подключена параллельно с обмот-
кой якоря и, следовательно, питается от самого генера-
тора. Такая работа возможна благодаря самовозбужде-
нию машины, которое заключается в следующем.
В сердечниках полюсов машины обычно всегда имеется
поток остаточного магнетизма Фост. При вращении якоря
этот поток наводит в обмотке якоря небольшую э. д. с.
Еост, под действием которой в обмотке возбуждения воз-
никает небольшой ток /в. Этот ток создает н. с. возбужде-
ния и, следовательно, добавочный поток Фд. В зависимо-
сти от направления тока в обмотке возбуждения поток Фд
может быть направлен либо встречно относительно Фост,
уменьшая последний, либо согласно с ним. Самовозбуж-
дение возможно только при согласном направлении пото-
ков Фд и Фост, Ktrtjfa поток полюсов Ф=Фост+Фд воз-
растает. Увеличение потока Ф вызовет увеличение э. д. с.
генератора, отчего ток возбуждения вновь увеличится и
т- д. Процесс постепенного нарастания э. д. с. продол-
жается до тех пор, пока напряжение генератора не до-
стигнет вполне определенной, зависящей от параметров
машины, величины.
При самовозбуждении генератора в режиме холостого
хода уравнение напряжений может быть записано так:
50
Глава II. Генераторы постоянного тока
UqsUEq—/в^?цвЧ
d(L»/»)
dt
Здесь R4B и LB — сопротивление и индуктивность цепи
возбуждения.
Рис. 2.6. Самовозбуждение генератора
с параллельным возбуждением.
Рис. 2.5. Генератор с параллельным возбуж-
дением.
На рис. 2.6 показана характеристика холостого хода
генератора С/о»£‘о=Г(/в) (кривая /) и вольт-амперная
характеристика цепи возбуждения (пря-
мая 2), соответствующая сопротивлению цепи возбужде-
ния #Цв1= Rob-ЬRpi, где Rpi —сопротивление регулиро-
вочного реостата в цепи возбуждения.
Отрезки ординат между кривыми 1 и 2 определяют
значение индуктивного падения напряжения в обмотке
возбуждения ——— и служат мерой интенсивности про-
исходящего процесса самовозбуждения. Очевидно, что
этот процесс закончится тогда, когда разность ^oi~/biRubi
§ 2.4. Генератор с параллельным возбуждением $1
станет равна нулю, т. е. когда характеристики 1 и 2 пере-
секутся (точка Л).
Угол наклона прямой ОА к оси абсцисс определяют
из треугольника О А Б.
ihu . АБ-ти Uoi
—Г «1= = —г~ = Rw, (2.3)
/72/ \JD -Mj
где mv — масштаб напряжения, в!мм\
mi — масштаб тока, а/мм.
Из выражения (2.3) следует, что тангенс угла наклона
характеристики /в/?цв=/(/в) к оси абсцисс прямо пропор-
ционален сопротивлению цепи возбуждения. При увели-
чении сопротивления цепи возбуждения (реостата
угол возрастает и, когда вольт-ампериая характеристика
и прямолинейная часть характеристики холостого хода
совпадут, будет равен критическому значению акр. Соот-
ветствующее ему значение сопротивления цепи возбужде-
ния 7?цВКр называется критическим. Это сопротивление
определяет «порог самовозбуждения», так как если /?цв
будет больше #ЦВ1ф, самовозбуждение невозможно. Таким
образом, для самовозбуждения генератора необходимы
следующие условия:
1) наличие потока остаточного магнетизма в сердеч-
никах полюсов;
2) магнитный поток, создаваемый н. с. возбуждения,
должен быть направлен согласно с потоком остаточного
магнетизма;
3) сопротивление цепи возбуждения должно быть
меньше критического.
Характеристику холостого хода генератора с парал-
лельным возбуждением можно сиять только при одном
определенном направлении тока возбуждения, обеспечи-
вающем самовозбуждение генератора при заданном на-
правлении вращения якоря. Так как ток возбуждения
обычно составляет небольшую долю номинального, то
характеристика холостого хода генератора с параллель-
ным возбуждением, снятая для напряжения на зажимах,
а не для э. д. с., практически не отличается от той же
характеристики генератора с независимым возбужде-
ние'м.
52
Глава II. Генераторы постоянного тока
Внешняя характеристика U=f(T) при п=const и
/?Цв = const генератора параллельного возбуждения пред-
ставлена на рис. 2.7 (нижняя кривая). На том же рисунке
изображена характеристика U=f(T) (верхняя кривая)
генератора с независимым возбуждением. Как видно из
рис. 2.7, при увеличении нагрузки напряжение на зажи-
мах генератора с параллельным возбуждением понижает-
ся больше.
Рнс. 2.7. Внешняя характе-
ристика генератора с парал-
лельным возбуждением.
Это происходит потому, что в этом генераторе напря-
жение изменяется не только из-за реакции якоря и внут-
реннего падения напряжения 1ЯКЯ, но и вследствие умень-
шения тока возбуждения
где U—СепФ—1яЯя.
Этим же объясняется и то, что при постепенном умень-
шении сопротивления нагрузки /?н ток / увеличивается
лишь до критического /кр, а затем начинает падать. Дело
в том, что с увеличением тока I реакция якоря и умень-
шение тока возбуждения настолько размагничивают ма-
шину, что даже небольшое уменьшение сопротивления
нагрузки вызывает резкое падение э. д. с. и напряжения
генератора. В итоге напряжение генератора начинает
$ 2.5. Радиогенераторы 53
понижаться быстрее, чем сопротивление внешней цепи,
и ток нагрузки /= уменьшается.
Ли
ий~ ия
Изменение напряжения ~~—-100 у генера-
тора с параллельным возбуждением составляет 10—30%.
При установившемся коротком замыкании напряже-
ние на зажимах генератора, а следовательно, и ток воз-
буждения 1В равны нулю. Значение тока короткого замы-
кания Zlt определяется только величиной э. д. с. £ост.
, EOct
Этот ток в генераторах малой мощности меньше номи-
нального значения.
Внезапное короткое замыкание генератора с парал-
лельным возбуждением (при U—Ua) опасно, так как
магнитный поток, а следовательно, и э. д. с. мгновенно
уменьшиться не могут.
Регулировочная характеристика !в=Ц1л) (при п—
= const и f/=const) генератора с параллельным возбуж-
дением имеет такой же вид, как и у генератора независи-
мого возбуждения.
§ 2.5. Радиогенераторы
Радиогенераторы постоянного тока применяются для
питания радиопередающих устройств.
Радиогенераторы мощностью до 1000 вт строят двух-
или трехколлекторными. В первых (рис. 2.8) в одни и те
же пазы якоря укладывают две обмотки, рассчитанные
на низшее напряжение 15 в для питания цепей накала
ламп и высшее 450 или 750 в — для питания анодных и
сеточных цепей радиопередатчиков. В пазах якоря трех-
коллекторных радиогенераторов помещены три обмотки.
Все они выведены на свои коллекторы. От такого генера-
тора при последовательном соединении двух обмоток
якоря, каждая из которых рассчитана на 750 в, можно
пвлучить высшее напряжение 1500 в.
S4
Глава 11. Генераторы постоянного тока
Радиогенераторы выполняют двух- или четырехполюс-
ными с питанием обмотки возбуждения от цепи якоря
низкого напряжения. Генераторы мощностью более
1000 вт строят с двумя самостоятельными якорями и от-
дельными магнитными системами, расположенными в од-
ном корпусе. В этом случае генератор низшего напряже-
ния имеет параллельное возбуждение, высшего — полу-
чает независимое возбуждение от низковольтного якоря.
Рис. 2.8. Принципиальная
схема двухколлекториого
радиогенератора.
Напряжения обоих якорей могут регулироваться незави-
симо друг от друга реостатами в цепях возбуждения.
Радиогенераторы имеют закрытое исполнение, их обя-
зательно экранируют и снабжают защитными фильтрами
от радиопомех. Приводом радиогенераторов обычно яв-
ляется двигатель внутреннего сгорания.
Для переносных радиостанций и для питания аварий-
ной рации самолетов используют двухколлекторные ра-
диогенераторы мощностью 10—40 вт, с возбуждением
от постоянных магнитов, с ручным или ножным приводом.
§ 2.6. Тахогенераторы постоянного тока
В системах автоматического регулирования, устройст-
вах вычислительной и измерительной техники широко
применяются тахогенераторы постоянного и переменного
тока, которые служат для преобразования механического
вращения в электрический сигнал, называемый выходным
напряжением.
Основными требованиями, которые предъявляются
к тахогенераторам, являются:
§ 2.6. Тахогенераторы постоянного тока 55
. ——— ~~
а) линейность выходной характеристики — строгая
пропорциональность между выходным напряжением U
и скоростью вращения п,
U=Cm,
или
U=kQ=k
(2-4)
где k — коэффициент статического усиления;
dG лп
Q = —у- = — — угловая скорость вращения тахогене-
ДХ OV
ратора;
б) большая крутизна выходной характеристики —
большое значение отношения приращения напряжения
к приращению скорости
Ап
(2.5)
Из уравнения (2.4) видно, что тахогенераторы можно
использовать для измерения скорости вращения, для
электрического дифференцирования в счетно-решающих
устройствах, для выработки ускоряющих или успокаива-
ющих сигналов в схемах автоматической отработки.
Тахогенераторы постоянного тока выполняются мало-
мощными, с независимым возбуждением или с возбужде-
нием от постоянных магнитов. Конструктивно они подоб-
ны обычным машинам постоянного тока.
Выходная характеристика тахогенератора постоянно-
го тока. Погрешности тахогенератора и способы их умень-
шения. При холостом ходе, если поток возбуждения Фв
постоянен, э. д. с. якоря тахогенератора пропорциональна
скорости вращения
Во=СепФв=Сп,
где С=СКФВ.
56
Глава II. Генераторы постоянного тока
При нагрузке машины, если поток сохранил прежнее
значение, напряжение на зажимах тахогенератора умень-
шится на величину падения напряжения и будет
U=E0-IRa>
(2-6)
где 1= —-----ток нагрузки;
Ан
RB — сопротивление нагрузки.
Подставив значение тока / в уравнение (2.6), получим
U=E0-U-^,
Лн
откуда
, . Rx . . Rx
1+r7 i+>T
При постоянстве Rx и Ra
U=Citi.
Здесь
q___ С Cjg0sRH
. . Rx Rx+Rx
(2.7)
(2-8)
(2-9)
крутизна выходной характеристики. Чем больше СЕ, фв,
RB и меньше Rs, тем больше крутизна выходной характе-
ристики (рис. 2.9). Тахогенераторы с электромагнитным
возбуждением имеют большую крутизну выходной харак-
теристики, чем магнитоэлектрические.
Из уравнения (2.8) следует, что выходное напряжение
U и при нагрузке является линейной функцией скорости.
Однако в действительности выходная характеристика от-
клоняется от линейной, как показано на рис. 2.9, для RBi
и /?н2- Это отклонение объясняется тем, что при нагрузке
машины возникает реакция якоря, ослабляющая поток
§ 2.6. Тахогенераторы постоянного тока
возбуждения Фв. Результирующий поток цашины в этом
случае можно представить, как
Ф=ФВ—фр, (2.10)
где Фр — поток, характеризующий размагничивающее
действие реакции якоря.
В первом приближении поток Фр пропорционален току
якоря, т. е.
Фр=Сх/=Сг ——.
Ан
(2.П)
Напряжение на зажимах тахогенератора с учетом
реакции якоря
U
и=СЕпФ-1Кп=СЕпФ--~Яя, (2.12)
АН
отсюда
СЕпФ
'+¥
Ан
Обозначим
~г-=сг.
ЛЯ
(2.13)
(2.14)
Тогда, учитывая уравнения (2.10) и (2.11), получим
U— О2/2Ф= СзИФв” Сз^Фр—С^НФу ОдСг (2.15)
Ан
откуда
и=_С2ф*п .= (2.16)
l+CaC/—- 1Н-С4~—-
Ля Лн
где С3=С2ФВ; С4=С2Сх.
58
Глава II. Генераторы постоянного тока
Уравнение^. 16) показывает, что выходная характе-
ристика тахогенератора с учетом реакции якоря нели-
нейна. Она отклоняется от линейности тем больше, чем
меньше сопротивление и больше скорость вращения п.
Отклонение от линейности обусловливает погрешность
тахогенератора. Для уменьшения ее следует нагружать
Рис. 2.9. Выходные ха
рактеристики тахогенера
тора.
Рис. 2.10. Влияние пере-
ходного сопротивления в
контакте щетки — кол-
лектор на выходную ха-
рактеристику.
тахогенератор на возможно большее внешнее сопротив-
ление /?в и использовать небольшой диапазон скоростей
вращения.
Вторая существенная погрешность, возникающая при
работе тахогенератора на нагрузку, обусловлена нали-
чием переходного контакта между коллектором и щет-
ками. В уравнении выходной характеристики сопротивле-
ние переходного контакта считалось постоянным.
Однако с некоторым допущением можно считать постоян-
ным не сопротивление /?щ, а падение напряжения на нем
Тогда, если не учитывать размагничивающе-
го действия реакции якоря, вместо выражения (2.6) мож-
но написать:
U^Eq—U^—IRob.
(2-17)
Подставив в уравнение (2.17) Ей—Сп и I— ——, получим
§ 2.6. Тахогенераторы постоянного тока
и=Сп-ищ-17~ (2.18)
АН
откуда
У=—--------ищь - =C,n-At/„. (2.19)
1+ф! i + ^l
Ия ^я
Таким образом, наличие падения напряжения в кон-
такте коллектор — щетки обусловливает отрицательное
смещение выходной характеристики на постоянный от-
резок
MJB= (2.20)
вследствие чего появляется зона нечувствительности,
в пределах которой вращающийся тахогенератор не соз-
дает напряжения на зажимах (рис. 2.10).
Чтобы уменьшить ДПЩ, а следовательно, и зону нечув-
ствительности, в тахогенераторах применяют медно-гра-
фитные или серебряно-графитные щетки, а для прецизи-
онных тахогенераторов вычислительных устройств даже,
щетки с серебряными или золотыми напайками.
При неточной установке щеток на геометрической'ней-
трали, а также при их смещении в процессе эксплуатации
выходные напряжения оказываются разными при враще-
нии якоря с одинаковой скоростью в различных направ-
лениях, т. е. возникает несимметрия выходного напряже-
ния, что приводит к погрешности. Ошибка асимметрии
обычно выражается в процентах,
Ли =______-----------100
% Ь,5(и^+ияеа)
(2.21)
где Unp и Плев — напряжения соответственно при правом
и левом вращении якоря с одинаковой
скоростью.
Ошибка асимметрии в тахогенераторах составляет
1—3%.
60
Глава II. Генераторы постоянного тока
В тахогенераторах с электромагнитным возбуждением
неустойчивость выходной характеристики возникает
вследствие нагрева обмотки полюсов и колебания напря-
жения источника возбуждения. В обоих случаях поток
возбуждения будет изменяться. Для того, чтобы умень-
шить возникающую за счет этого погрешность, магнитную
Рис. 2.11. Магнитная характерис-
тика тахогенератора.
Рис. 2.12. Магнитные шунты
в магнитной системе тахо-
генератора.
систему тахогенератора выполняют с большим насыще-
нием и рабочую точку на магнитной характеристике вы-
бирают за коленом (рис. 2.11). В этом случае даже зна-
чительные изменения тока возбуждения не вызовут боль-
шого изменения магнитного потока и выходного напря-
жения.
В тахогенераторах с ненасыщенным магнитопроводом
погрешность, возникающую за счет увеличения сопротив-
ления обмотки полюсов при нагреве машины, устраняют
либо включением в цепь обмотки возбуждения независя-
щего от температуры большого добавочного сопротивле-
ния /?д, либо с помощью теплочувствительных шунтов,
изготовленных из сплава, изменяющего магнитную про-
водимость при нагреве. Схематически такие шунты пока-
заны иа рис. 2.12. При нагревании машины поток возбуж-
дения уменьшается. Но в такой же степени за счет
увеличения магнитного сопротивления шунтов МШ
уменьшается поток рассеяния Фр, ответвляющейся чере%
§ 2.6. Тахогенераторы постоянного тока
61
шунты, поэтому поток, проходящий через якорь и создаю-
щий выходное напряжение тахогенератора, не изме-
няется.
В СССР выпускают тахогенераторы постоянного тока
с электромагнитным возбуждением типов ТД, ТГ и с воз-
буждением от постоянных магнитов типов МЭТ и ЭТ.
Динамические свойства и передаточная функция тахо-
генератора. Тахогенераторы, как и другие элементы авто-
матических систем, часто работают в переходных режи-
мах, когда происходят непрерывные изменения входной
и выходной величин машины. Поведение машины в не-
установившихся режимах описывается дифференциаль-
ными уравнениями.
Для анализа автоматических систем необходима оцен-
ка каждого элемента не по устройству и назначению,
а в зависимости от вида описывающего его дифференци-
ального уравнения в переходном режиме. С этой точки
зрения введено понятие динамического звена. Динамиче-
ским звеном называется устройство любой физической
природы и любой конструкции, описываемое дифферен-
циальным уравнением определенного вида. Для характе-
ристики динамических звеньев и их классификации вме-
сто дифференциальных уравнений можно использовать
передаточную функцию.
Передаточной функцией W(p) динамического звена
называется отношение изображений по Лапласу — вы-
ходной У(р) и входной Х(р) величин при нулевых на-
чальных условиях, т. е.
Динамические свойства тахогенератора оценивают по
характеру изменения напряжения на выходе при измене-
нии на входе угловой скорести или угла поворота якоря.
При условии, если щетки стоят на геометрической ней-
трали и реакцией якоря можно пренебречь, уравнение
переходного процесса тахогенератора записывают:
di
U & iRa “77»
at
(2.22)
62
Глава П. Генераторы постоянного тока
„ , dQ
где e=Cn=«i — — э. д. с. якоря;
dt
La — индуктивность обмотки якоря.
Если на выход тахогенератора включена активная
нагрузка Ru, то ток якоря
и
(2.23)
а его производная
di 1 du
dt Ru dt'
(2.24)
Подставив уравнения (2.23), (2.24) и значение э. д. с.
е в равенство (2.22) и проведя преобразования, получим
du _ kiRB dQ
Ra-^Rs dt Rh~{~Rb dt
Ля
(2.25)
или
„du . ^9
Г -77 +Ч — К-Г,
dt dt
(2.26)
rr. Лд
где i ~ -5—7-5---постоянная времени цепи якоря;
ЯиТЛв
. kiRa , , ,
«= ——--------статический коэффициент усиления
ЛлтЛн
тахогенератора при нагрузке.
Изображение по Лапласу (при нулевых начальных
условиях) для уравнения (2.26) имеет вид
TpU(p) + U(p)=kp9(p),
отсюда передаточная функция тахогенератора
9(Р) тР+1
(2.27)
§ 2.7. Электромашинные усилители 63
Таким образом, тахогенератор представляет собою
инерционное дифференцирующее звено.
Если к тахогенератору предъявляют требование диф-
ференцирования без искажения, то постоянная времени Т
должна быть сведена к минимуму. В этом случае (если
Т«0) передаточная функция W(р) =kp, т. е. тахогенера-
тор будет являться безынерционным дифференцирующим
звеном.
При активно-индуктивной нагрузке тахогенератора
постоянная времени
т__ ^Я~Ь^Н
где Lu — индуктивность нагрузки.
§ 2.7. Электромашинные усилители (ЭМУ)
В современных системах автоматического регулирова-
ния, в автоматизированном электроприводе наряду
с электронными, магнитными, полупроводниковыми и
гидравлическими применяют и электромашинные усили-
тели (ЭМУ), являющиеся генераторами постоянного
тока. Выпускаются они мощностью от десятков вт до
100 кет. Наибольшее распространение получили машины
мощностью от 0,2 до 10 кет.
ЭМУ используют в автоматических устройствах для
регулирования и управления различными исполнитель-
ными механизмами, производственными процессами и
некоторыми специальными объектами. Назначение элек-
тромашинных усилителей — управлять относительно
большими мощностями с помощью незначительных за-
трат мощности в управляющих обмотках усилителя.
Требования, предъявляемые к электромашинным уси-
лителям.
ЭМУ дожны обладать:
1) высоким коэффициентом усиления по мощности k7.
В современных ЭМУ коэффициент усиления по мощности
лежит в пределах от 50 до 100 000 в зависимости от типа
Усилителя.
64
Глава II. Генераторы постоянного тока
, Рвых ^вых/вых , , •• ,пп„,
*у= ~б~~ = —ГГ7------=kvki, (2.28)
“вх и вх* вх
где Ряых и РВх — выходная и входная электрические мощ-
ности ЭМУ;
. ияЫх , .
ku= -jj-----коэффициент усиления по напряжению;
ki= — коэффициент усиления по току;
2) значительным быстродействием (или малой инер-
ционностью) , которое зависит от значений электромагнит-
ных постоянных времени T—L/R его цепей. В современ-
ных ЭМУ постоянная времени колеблется в диапазоне от
сотых до десятых долей секунды. Причем оказывается,
что с уменьшением Т уменьшается и коэффициент усиле-
ния #у. Поэтому для оценки ЭМУ вводят коэффициент
ky
добротности йд= Чем выше будет значение kR, тем
добротнее ЭМУ и лучше его качества;
3) перегрузочной способностью форсировочного ре-
жима, так как для ускорения переходных процессов
в системах управления цепи, содержащие ЭМУ, часто
работают в форсировочном режиме, т. е. при значитель-
ном повышении напряжений и токов.
Различают перегрузочную способность ЭМУ по напря-
жению
Фг = —н по току ф7= —,
где UM и /м — максимально допустимые значения выход-
ного напряжения и тока ЭМУ;
ии и /н — номинальные значения выходного напря-
жения и тока.
В некоторых ЭМУ коэффициенты, характеризующие
перегрузочную способность, составляют следующие зна-
чения:
Фц =Ф;= 1,5-2.
§ 2.7. Электромашинные усилители W
В настоящее время в системах автоматического регу-
лирования и управления применяют два типа электро-
машинных усилителей: ЭМУ продольного и ЭМУ попе-
речного поля.
ЭМУ продольного пом
ЭМУ независимого возбуждения представляет собой
генератор постоянного тока независимого возбуждения
с несколькими обмотками управления (возбуждения).
Такой ЭМУ может быть выполнен на базе нормальных
машин постоянного тока. Коэффициент усиления Лу по-
добного генератора можно получить порядка 10—40.
Меньшее значение йу относится к машинам малой мощ-
ности. Для получения в ЭМУ ббльшего коэффициента
усиления ky и меньшей электромагнитной постоянной вре-
мени необходимо в отличие от обычного генератора по-
стоянного тока магнитную систему ЭМУ собирать из ли-
стовой электротехнической стали и работать в ненасы-
щенном режиме; уменьшать воздушный зазор между
статором и якорем; выбирать предельно допустимые ско-
рости вращения; в цепь управления включать добавочные
сопротивления; для улучшения коммутации применять
добавочные полюса. Выполнив эти условия, у ЭМУ с не-
зависимым возбуждением при номинальной нагрузке
можно получить коэффициент усиления порядка 50—100.
Схема ЭМУ независимого продольного возбуждения
представлена на рис. 2.13.
Выясним динамические свойства ЭМУ независимого
продольного возбуждения в режиме холостого хода. При
включении обмотки управления (например, обмотки wyi)
на напряжение «у переходный процесс в цепи управления
описывается так:
ny=iy/?yl-f-Lyi . (2.29)
Изображение по Лапласу данного уравнения (при нуле-
вых начальных условиях)
ЦДр) — (Lyip-f-/?yi)Ar(p),
66
Глава И. Генераторы постоянного тока
отсюда
, , х ^у(р) (7у(р)
h = I JLP = - /Т ТпР ’ (2-30)
Lyip+^yl (TyiP+l )£yl
где Ту1= — постоянная времени обмотки управле-
Ау1
НИЯ ffijyl.
Как известно, э. д. с. якоря ЭМУ
в= Сдпфу= CEnCiiy. (2.31)
Изображение по Лапласу уравнения (2.31)
Е(р)=СвС;п7у(р), (2.32)
где Ci — коэффициент пропорциональности между пото-
ком Фу и током /у в ненасыщенном ЭМУ.
Подставляя в уравнение (2.32) значение тока /у из
равенства (2.30), получим
Е In}— CECinUy(p)
(TyiP+O^yi
Отсюда передаточная функция ЭМУ
CECjn
W(p) = \ \ , (2.33)
(р) ^У1Р +1 ^У1Р + 1
CECin
где kv= —--------- коэффициент усиления ЭМУ по на-
Ау1
пряжению.
Таким образом, передаточная функция показывает,
что рассматриваемый ЭМУ представляет собой инерцион-
ное звено I порядка.
Если ЭМУ имеет несколько обмоток управления и
если они представляют собою замкнутые контуры, то по-
стоянная времени любой обмотки управления равна сум-
ме постоянных времени обмоток.. Для усилителя, показан-
ного на рис. 2.13,
Ту=Tyi -{- Ту2.
§ 2.7. Электромашинные усилители 67
Чтобы увеличить коэффициент усиления, в системах
автоматического регулирования иногда применяют мно-
гоступенчатые ЭМУ. На рис. 2.14 представлена схема
двухступенчатого ЭМУ, где первый усилитель является
возбудителем второго.
Рис. 2.13. Схема ЭМУ неза-
висимого продольного воз-
буждения.
Рнс. 2.14. Схема двух-
машинного ЭМУ.
Коэффициент усиления такого ЭМУ равен произведе-
нию коэффициентов усиления отдельных ступеней:
ky — Zlyl * ^у2-
Передаточная функция двухступенчатого ЭМУ равна
произведению передаточных функций каждой ступени и,
следовательно, в режиме холостого хода имеет вид
kvi ku2
Тур+\ т\р+\'
68
Глава II. Генераторы постоянного тока
гг ^в2*|-£я1
™ Т'=
ЭМУ с самовозбуждением. Можно получить большой
коэффициент усиления по мощности и в одноступенчатом
ЭМУ, если выполнить его с самовозбуждением. Для этого
необходимо, помимо обмотки управления, иметь еще одну
обмотку, которая включается параллельно или последо-
вательно с якорем.
На рис. 2.15 показана схема ЭМУ с параллельной об-
моткой самовозбуждения wc. В этом ЭМУ результирую-
щая н. с. возбуждения FB складывается из суммы н. с.
обмотки независимого возбуждения (обмотки управле-
ния) Еуи н. с. обмотки самовозбужденияFc (FB = Ey-f-Fc)t
поэтому коэффициент усиления Аус самовозбуждаемого
ЭМУ больше коэффициента усиления ky независимого
ЭМУ во столько раз, во сколько н. с. Fa больше Fy, т. е.
£ус _ Fb Fy-j-Fc
ky ~ Fy ~ Fy
Для того чтобы предотвратить произвольное самовоз-
буждение и, следовательно, неуправляемость ЭМУ, необ-
ходимо, чтобы остаточное напряжение его не превосхо-
дило 0,5% (7Н и сопротивление цепи возбуждения было
несколько большим критического.
Принцип действия ЭМУ с самовозбуждением заклю-
чается в следующем. При отсутствии тока в обмотке
управления wy (рис. 2.15) ЭМУ не самовозбуждается, так
как вольт-амперная характеристика цепи обмотки само-
возбуждения (рис. 2.16) лежит выше характеристики
холостого хода (при ЯцС>#кр, а>акр).
Если подать сигнал на обмотку управления, то воз-
никнет н. с. Fy, которая создаст на зажимах якоря неко-
торую э. д. с. Под действием ее в цепи самовозбуждения
возникнет ток и в машине начнется процесс самовозбуж-
дения. Этот процесс можно представить так, как будто
вольт-амперная характеристика цепи самовозбуждения
переместится параллельно себе вправо от оси ординат на
величину Fy, и ЭМУ возбудится до величины напряжения,
определяемой точкой пересечения А этой характеристики
с характеристикой холостого хода. Чем ближе угол а
§ 2.7. Электромашинные усилители 69
к акр, тем ПРИ меньшем сигнале управления ЭМУ само-
возбуждается, а следовательно, тем больше коэффициент
усиления ЭМУ.
Но для того чтобы избежать возможности произволь-
ного самовозбуждения, в реальных усилителях выбирают
Рис. 2.15. Схема ЭМУ с са-
мовозбуждением.
Рис. 2.16. К объяс-
нению принципа
действия ЭМУ с
самовозбуждением.
угол наклона вольт-амперной характеристики цепи об-
мотки самовозбуждения на 3—5° больше акр- При таких
условиях коэффициент усиления достигает величины,
равной 400—500.
Так как ЭМУ работает в ненасыщенном режиме, про-
чесе самовозбуждения в нем протекает медленно.
В реальных усилителях постоянная времени Т в 3—4 раза
больше, чем сумма постоянных времени обмоток управле-
ния Ту= и самовозбуждения Тс= поэтому
Ду ЛСТ-^Я
эти ЭМУ применяют только в тех установках, где не тре-
буется высокого быстродействия.
70
Глава II. Генераторы постоянного тока
Передаточная функция ЭМУ с самовозбуждением
имеет такой же вид, как и у ЭМУ независимого возбуж-
дения, а именно:
kfj
ЭМУ поперечного поля
Устройство и принцип действия. ЭМУ поперечного
поля в настоящее время получили особенно большое при-
менение в системах автоматического управления и в авто-
матизированном приводе. Их выпускают как в общепро-
мышленном, так и в специальном исполнении, мощностью
от 0,2 до 60 кет и коэффициентом усиления до 10 000—
20 000.
Маломощные ЭМУ поперечного поля (мощностью до
1500 вт) выполняются в одном корпусе с приводным элек-
тродвигателем.
Якорь ЭМУ поперечного поля не отличается от якоря
обычной машины постоянного тока, но на его коллекторе
находятся две пары щеток: поперечные и продольные.
Поперечные щетки обычно замыкаются накоротко или на
подмагничивающую обмотку поперечной оси. Статор вы-
полняется неявнополюсным, в виде сердечника, набран-
ного из отдельных листов электротехнической стали тол-
щиной 0,35—0,5 мм. Применение шихтованной конструк-
ции магнитной системы ЭМУ вызывается стремлением
уменьшить вихревые токи в ней при переходных режимах
работы, что благотворно сказывается на быстродействии
усилителя. В пазах такого статора (рис. 2.17) помещают:
1) две или несколько сосредоточенных обмоток управ-
ления
2) компенсационную обмотку wK, которая должна по
возможности полно компенсировать и. с. якоря по про-
дольной оси. Выполняется она распределенной;
3) обмотку добавочных полюсов щда, предназначен-
ную для улучшения коммутации под щетками d—d;
4) подмагничивающую обмотку щп, включаемую
в ЭМУ средней н большой мощности последовательно
В поперечную цепь якоря для уменьшения тока Л этой
§ 2.7. Электромашинные усилители
71
цепи, и следовательно, для улучшения коммутации под
щетками q—q. Ток, протекающий по обмотке и>п, создает
поток, направленный по поперечной осн q—q, и компен-
сирует ослабление потока якоря из-за уменьшения
тока Л.
Рис. 2.17. Неявнополюсная конст-
рукция статора ЭМУ поперечного
ПОЛЯ.
ЭМУ поперечного поля является двухступенчатым
усилителем. Принцип его работы состоит в следующем.
Небольшой ток /у обмотки управления (рис. 2.18, а)
создает поток управления Фу в продольной оси. При вра-
щении в нем якоря в проводниках его наводится э. д. с. Ец
направление которой определяют правилом правой руки.
Эту э. д. с., как и в обычном генераторе постоянного тока,
можно снять с помощью поперечных щеток q—q (на про-
дольных щетках d—d она равна нулю).
Если замкнуть щетки q—q накоротко перемычкой, то
по ней и по проводникам якоря потечет сравнительно
большой ток /1, так как сопротивление короткозамкнутой
Цепи якоря невелико. Ток Л создаст относительно боль-
шой поток якоря Фч, действующий по поперечной оси
машины и являющийся потоком возбуждения второй сту-
пени усиления. Этот поток в проводниках вращающегося
якоря наведет э. д. с. Ег, которую снимут продольные
Щетки d—d.
Если замкнуть цепь щеток d—d на сопротивление на-
грузки Ен, то под действием э. д. с. Ег во внешнюю цепь
и по обмотке якоря потечет ток /г- Намагничивающая
14
Глава II. Генераторы постоянного тока
сила, возникающая при протекании тока /2 по обмотке
якоря, создаст поток реакции якоря Фа, направленный
против потока Фу обмотки ®у| (рис. 2.18,6). Для того
чтобы поток Фа не размагнитил машину, в выходную цепь
ЭМУ последовательно включают компенсационную об-
мотку wK. Ток /2 (или его часть), протекающий по ком-
Рис. 2.18. Схема ЭМУ попе-
речного поля.
пенсационной обмотке, создаст поток Фк, направленный
против потока Фа, компенсируя последний. Степень ком-
пенсации можно изменять путем установки необходимого
тока в обмотке wK при помощи шунтирующего ее рео-
стата R.
Таким образом, в данном ЭМУ имеем: первую ступень
усиления — цепь управления — поперечная цепь и вто-
рую — поперечная цепь — продольная цепь.
Характеристики ЭМУ. Свойства ЭМУ определяются
характеристиками холостого хода и внешними.
Зависимость E2=f (7У) при /2=0 и n=const называют
характеристикой холостого хода ЭМУ. Она имеет такой
же вид, как у генератора постоянного тока с независимым
возбуждением. Для получения линейной зависимости
между выходными и входными величинами, а также для
увеличения коэффициента усиления номинальное напря-
жение ЭМУ выбирают на прямолинейной части характе-
ристики холостого хода.
§ 2.7. Электромашиииые усилители 79
Внешняя характеристика представляет собой зависи-
мость выходного напряжения UBiJLX=U2 от тока /2, т. е.
U2=f (/2) при /y=const и n=const.
Уравнение внешней характеристики можно записать
так:
U2—E2 /г^яг, (2.35)
где Е2 = СЕпФд~,
/?я2=/?оя+^к+-^дп+/?щ — сумма сопротивлений цепи
якоря по продольной оси.
Так как ЭМУ работает в ненасыщенном режиме, то
поток Ф7=7!. В свою очередь ток Д прямо пропорциона-
лен потоку в продольной оси машины, который в общем
случае равен
Фцр-— Фу (Фд Фи)
Таким образом, можно считать, что
Ф<7=С1[Фу (Фд Фк) ].
Следовательно,
и2=С[Фу-(Фа-Фк) ]-/2^яг, (2.36)
где C=CiCEn.
Анализ уравнения (2.36) показывает, что вид внешних
характеристик будет зависеть от степени компенсации
ЭМУ. При полной компенсации, когда Фа=Фк, напряже-
ние на зажимах усилителя при изменении нагрузки изме-
няется очень мало, только за счет падения напряжения
IzRhz в продольной цепи машины (кривая 1 на рис. 2.19).
При недокомпенсации (Фд>Фк) (/2 заметно уменьшается
еще и за счет размагничивающего действия продольной
реакции якоря (кривая 2 на рис. 2.19). При перекомпен-
сации напряжение на зажимах усилителя с увеличением
тока растет (кривая 3). Режим перекомпенсации недопус-
тим, так как рост V2 вызывает увеличение h, а это в свою
очередь еще более увеличивает V2 и т. д. до полного насы-
щения ЭМУ, т. е- возникает самовозбуждение усилителя
74
Глава II. Генераторы постоянного тока
и он теряет управление. Обычно ЭМУ работают с неболь*
шой недокомпенсацией.
Коэффициент усиления. Чтобы схема автоматического
регулирования и управления с использованием ЭМУ ра-]
ботала качественно, последний должен обладать высоким
Рис. 2.19. Внешние характеристики ЭМУ.
коэффициентом усиления по мощности. Коэффициент уси-
ления ЭМУ равен произведению коэффициентов усиления
первой и второй ступеней усиления:
h —ь ь — Р2 — -- ^2 (•) 27'1
у у‘ у2 Ру /У2РУ~ /у2Ру /у2Ру ’ EiK ’ (2-37)
Э. д. с. Е2 может быть выражена уравнением
р W
Е2= -- ~ПФд=СКпФд,
а 60
(2.38)
где поперечный поток (при отсутствии подмагничиваю-
щей обмотки)
1 Ei
ф*= 77 NhXg^CtN-^- кд. (2.39)
4 и Ая1
Здесь Ря1 — сумма сопротивлений в поперечной цепи
якоря;
кд — магнитная проводимость по поперечной оси
ЭМУ.
§ 2.7. Электромашинные усилители 75
Подставив значение Фд в уравнение (2.38), получим
Е2=СС№ nXq. (2.40)
Ля1
Э. д. с. Ei пропорциональна магнитному потоку Фпр. При
полной компенсации (фа=фй) поток фщ)=фу и, следо-
вательно,
р N
Et=—-—-пФу=СЫпФу, (2.41)
а 60
где
Фу---ZyWyXd-
(2.42)
Здесь Xd — магнитная проводимость по продольной оси
ЭМУ.
Подставив значение Фу в уравнение (2.41), получим
Ei=CWyNnIyld. (2.43)
Значение Е2 из выражения (2.40) и Ei из формулы (2.43)
подставим в уравнение (2.37) и получим
C2C\N3Wyrity,qkd r t WyN3n2\q\d r
у~ l2~k ~1г’
где ^=06?!.
В неявнополюсных ЭМУ Тогда
, , wyN2n2K2 ,
(2.44)
(2.45)
Из уравнения (2.45) следует, что для получения высо-
кого коэффициента усиления необходима большая ско-
рость вращения якоря. В маломощных ЭМУ она обычно
составляет 6000—8000 об/мин. Применение более высо-
кой скорости вращения нецелесообразно, так как это
Ухудшает коммутацию машины. Для стабильности вели-
чины коэффициента усиления по мощности скорость вра-
щения якоря ЭМУ должна сохраняться неизменной.
76
Глава II. Генераторы постоянного тока
Увеличение ky достигается также повышением магнитных
проводимостей Xd и Коэффициент усиления уменьша-
ется с увеличением тока управления, а также сопротивле-
ния /?я» за счет ухудшения переходных контактов между
щетками q—q и коллектором.
Динамические характеристики ЭМУ. ЭМУ в схемах
автоматики работают все время в переходных режимах.
На характер протекания их влияют: взаимодействие об-
мотки управления и поперечной цепи якоря, обусловлен-
ное реакцией коммутационных токов поперечной цепи и
смещением щеток с геометрической нейтрали; взаимо-
связь обмоток, расположенных на статоре, с обмоткой
якоря и между собой, т. е. взаимоиндуктивность обмоток
управления с обмотками компенсационной и дополни-
тельных полюсов и т. д. Решение уравнений переходного
процесса с учетом всех взаимосвязей достаточно громозд-
ко, а их влияние на переходный процесс во многих слу-
чаях относительно невелико.
Рассмотрим процесс нарастания э. д. с. в выходной
цепи и передаточную функцию ЭМУ, работающего в ре-
жиме холостого хода, при условии, что магнитная система
не насыщена, щетки стоят на геометрической нейтрали,
скорость вращения постоянна.
Пренебрежем влиянием коммутационных процессов
и взаимоиндуктивной связью между обмотками. Тогда
нарастание э. д. с. е2 во времени можно определить, ре-
шив следующую систему уравнений:
_ diy
иу=iyRy-\- Ly
dii
=СепФу=СеС/П1у;
Й2= Сд/тфд =
(2.46)
Для определения передаточной функции запишем систе-
му уравнений (2.46) в операторной форме (по Лапласу)
при нулевых начальных условиях
^у(р)= №+^уР)^у(Р);
CECinly(p') = (2?я1+^-я1Р)Л(р);
£г(р) =СеСцп11(р') .
(2.47)
$ 2.7. Электромашинные усилители
П
После решения системы уравнений (2.47) получаем
передаточную функцию ЭМУ
m . £г(р) CECin СеСцП
-----ЙГХ
у__________J__________=_*2-------km - (2 48)
(4г',+1И-^'’+|) г,',+1 г,',+1
СеС]П
Здесь kui— —п ;
\ Яу
СеСцП
&и2= —-----—коэффициенты усиления по на-
я пряжению I и II ступеней;
jLy ZC*y2Xd
Гу= —— = -------постоянная времени цепи управ-
71— -g—— постоянная времени поперечной
Ля1
цепи якоря.
Выражение (2.48) показывает, что ЭМУ в режиме
холостого хода является динамическим инерционным зве-
ном второго порядка. На процесс нарастания выходного
напряжения влияют постоянные времени цепей управле-
ния и поперечной. Быстродействие ЭМУ будет тем боль-
ше, чем меньше эти постоянные.
Ввиду того что сопротивление Ry достаточно большое,
постоянная времени цепи управления имеет весьма малое
значение: 7\=0,005—0,025 сек. Значение 7\ лежит в пре-
делах 0,03—0,15 сек.
Если ЭМУ работает под нагрузкой, то нужно учиты-
вать еще постоянную времени выходной (рабочей) цепи
^2= ~~~. Здесь L2 и R2 соответственно равны полной ии-
А2
Дуктивности и омическому сопротивлению нагрузки и об-
моток выходной ступени ЭМУ. Величина Т2 может иметь
значения нескольких десятых секунды.
78
Глава II. Генераторы постоянного тока
Полная постоянная времени, конечно, не равна сумме
всех трех постоянных времени (Ту, П и Т2), так как про-
цессы во всех цепях протекают одновременно.
Для повышения быстродействия ЭМУ можно умень-
шить магнитные проводимости Zd и Zg, но это приведет
к понижению коэффициента усиления. В связи с этим
невозможно одновременно получить высокий коэффици-
ент усиления и малую инерционность ЭМУ.
В СССР выпускают электромашинные усилители по-
перечного поля единой серии ЭМУ общепромышленного
применения и специальные усилители типа УДМ.
В настоящее время разработана новая серия электро-
машинных усилителей ЭМУ-А с улучшенными показа-
телями.
Глава III. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
§ 3.1. Основные сведения
Двигатели постоянного тока в основном используют
для привода механизмов, требующих широкого, плавного
и экономного регулирования скорости вращения.
В зависимости от способа возбуждения двигатели по-
стоянного тока разделяют на магнитоэлектрические, воз-
буждаемые постоянными магнитами, и двигатели с элек-
тромагнитным независимым, параллельным, последова-
тельным и смешанным возбуждением.
Магнитоэлектрические микродвигатели и микродвига-
тели с электромагнитным независимым возбуждением
широко используют в качестве исполнительных двигате-
лей в современных системах автоматического регулиро-
вания.
Уравнения напряжений и моментов двигателя. Если
машину постоянного тока подключить к сети, то в ее об-
мотках (якоря и возбуждения) появятся токи. Взаимо-
действие тока якоря с полем возбуждения создаст элек-
тромагнитный вращающий момент М = См1яФ, под дей-
ствием которого якорь машины начнет вращаться.
При вращении проводники обмотки якоря начнут
пересекать магнитный поток, в результате чего в них бу-
дет наводиться э. д. с., направленная (согласно правилу
правой руки) против тока якоря. Направления э. д. с.,
тока в проводниках якоря и электромагнитного момента
показаны на рис. 3.1.
В двигательном режиме напряжение, подведенное
к машине, уравновешивается э. д. с. якоря и падением
напряжения в якорной цепи:
С=Е+1яЯя. (3.1)
Выражение (3.1) называют уравнением напряжений
при.п—const. В переходных режимах оно принимает вид
80
Глава III. Двигатели постоянного тока
, . г> , j
и---^"НяАя-Ь^Я ~п~-
at
(3.2)
Для того чтобы двигатель вращался с постоянной ско-
ростью, должно соблюдаться условие, установленное
уравнением (1.20) статического равновесия моментов,
М = Мст = Мо+Л12, (3.3)
где Л4СТ — статический момент.
Рис. 3.1. Направления тока из. д. с.
в проводниках якоря двигателя.
Если скорость вращения п двигателя изменяется, то
в выражение (3.3) добавится динамический момент Mj,
т. е.
М—A4CT-|-Alj,
(3-4)
где Mj — J—~;
dt
J — момент инерции якоря (или якоря и вращаю-
щихся частей механизма, приведенных к валу
двигателя).
Устойчиво двигатель может работать только тогда,
когда
dMc^ dM /о
an dn
§ 3.1. Основные сведения
81
Чтобы объяснить это условие, воспользуемся характери-
стиками двигателя n=f(M) и приводимого им во враще-
ние механизма n=f (Л/ст).
Условие (3.5) выполнимо при характеристиках, пока-
занных на рис. 3.2, а п невыполнимо при характеристи-
ках. приведенных на рис. 3.2, б.
Действительно, в первом случае (рис. 3.2, а) при воз-
мущении режима работы, вызвавшем увеличение скоро-
сти вращения двигателя до значения п' (положительное
приращение Ап), после прекращения возмущения двига-
тель вернется в исходную точку А, так как тормозящий
момент Л4'т больше момента двигателя М' (ЛЛ1Ст>АЛ1).
При отрицательном приращении Ап момент двигателя М"
больше тормозящего момента М" (АЛ1>АЛ1СТ), следова-
тельно, двигатель после прекращения возмущения также
вернется в исходную точку А.
Во втором случае (рнс. 3.2,6) при возмущении режи-
ма работы, вызвавшем увеличение скорости вращения
Двигателя от п до п', вращающий момент двигателя М'
будет больше ЛГ , что приведет к дальнейшему увеличе-
нию скорости. Если же произойдет ее изменение от п до
п'\ то Л1"т станет больше М" и скорость двигателя будет
Уменьшаться до пуля, т. е. работа двигателя в этом слу-
чае становится неустойчивой.
82
Глава III. Двигатели постоянного тока
§ 3.2. Характеристики двигателей постоянного тока
О свойствах всех двигателей, и в частности двигателей
постоянного тока, судят по совокупности пусковых, регу-
лировочных, рабочих и механических характеристик.
Пусковые характеристики определяют работу двига-
теля от пуска в ход до перехода к установившемуся ре-
жиму работы. Качество их зависит: от кратностей пуско-
/п Мп
вого тока —— и пускового момента -j-r—, времени пуска
<11 Мп
и расхода электрической энергии в процессе разгона дви-
гателя.
В момент включения двигателя в сеть якорь неподви-
жен, поэтому его э. д. с. £я = СЕпФ = 0. Пусковой ток,
если принять Ля=0, будет равен
, _ V
яа~ Р '
(3.6)
Так как сопротивление цепи якоря Яя мало, то пуско-
вой ток превышает номинальное значение /ян в 3—15 раз.
Большой пусковой ток может вызвать круговой огонь на
коллекторе и большой динамический момент на валу.
Все это опасно для двигателя и механизма, сочлененного
с ним. Поэтому непосредственным включением в сеть
запускают лишь двигатели малой мощности (приблизив
тельио до 0,5—1 кет), в которых благодаря повышенному
сопротивлению обмотки якоря величина пускового тока
лишь в 3—5 раз превышает номинальный.
При пуске в ход двигателей средней и большой мощ-
ности величину пускового тока ограничивают введением
в цепь якоря пускового сопротивления Rn или уменьше-
нием подводимого к двигателю напряжения.
Сопротивление пускового реостата выбирают таким,
чтобы начальный пусковой ток не превышал номиналь-
ный более чем в 2—3 раза:
Лш= р . р = (2 3)/Яи- (3-7)
ДятАп
С нарастанием скорости вращения якоря э. д. с. дви
§ 3.2. Характеристики двигателей постоянного тока
83
гателя увеличивается, а ток якоря /яп=
U—E
Ря~Ь^П
умень-
шается. Поэтому сопротивление реостата следует посте-
пенно уменьшать. Пусковые реостаты рассчитываются
на кратковременную работу во время пуска. Сопротивле-
ние Rn должно полностью выводиться по завершению
разгона двигателя.
Схема двигателя параллельного возбуждения с рео-
статным пуском представлена на рис. 3.3. Пусковой рео-
стат Rn здесь имеет три зажима (Л, Я, В). Зажим Л,
соединенный с подвижным контактом реостата, присое-
диняется к сети; Я (конец Rn) — к якорю; В — медная
пластина, по которой скользит подвижный контакт ручки
реостата, подключается к обмотке возбуждения. Конст-
рукция реостата позволяет избежать разрыва цепи воз-
буждения во время отключения двигателя.
Для того чтобы получить большой момент
(Л4п = См/япФ), сопротивление Rp в цепи возбуждения на
время пуска полностью выводят.
Для запуска двигателей большой мощности применять
пусковые реостаты нецелесообразно, так как они громозд-
ки и вызывают значительные потери энергии. В этих слу-
чаях пуск в ход осуществляют от пониженного напряже-
ния, например в схеме генератор — двигатель (рис. 3.9).
Чтобы изменить направление вращения двигателя,
т. е. осуществить его реверс, меняют направление тока
в обмотке якоря или в обмотке возбуждения.
Рабочие и механические характеристики определяют
работу двигателя в установившемся режиме. Рабочими
характеристиками называют зависимости скорости вра-
щения п, полезного момента Мч, тока / и к. п. д. т] от по-
лезной мощности двигателя P2=^Af2 при U= {/H=const,
сопротивлении в цепи возбуждения Pp=const и отсутст-
вии добавочных сопротивлений в цепи якоря (Рд=0).
Механические характеристики представляют собой
зависимость n-f(M') при U= £/H=const; Pp=const;
Яд—const.
Двигатель параллельного возбуждения, В этом дви-
гателе обмотку возбуждения включают параллельно
обмотке якоря (рис. 3.3). Ток возбуждения 1Я=1—1Я
64
Глава III. Двигатели постоянного тока
меньше тока якоря. Различие в величине токов /в и 1а
особенно велико в двигателях большой мощности, где /в
составляет 1—3% 1яа. В двигателях мощностью 150—
250 вт /в составляет 5—10% /ян, а в двигателях мощно-
стью 5—10 вт /в равно 30—50% /ян.
Рис. 3.4. Рабочие характерис-
тики двигателя параллельного
возбуждения.
Рис. 3.3. Схема двигателя па
раллельного возбуждения.
На обмотку возбуждения двигателя независимо от его
нагрузки подается одно и то же напряжение, поэтому ток
возбуждения /в = const. Это значит, что магнитный поток
двигателя при изменении нагрузки может изменяться
лишь за счет реакции якоря. В двигателях малой мощно-
сти вследствие их малого насыщения размагничивающее
действие реакции якоря незначительно, поэтому для мик-
родвигателей и с некоторым приближением для двигате-
лей большей мощности можно считать, что магнитный по-
ток в них не зависит от нагрузки (<D = const).
Рабочие характеристики двигателя параллельного
возбуждения показаны на рис. 3.4. Зависимость n = f(P2),
§ 3.2. Характеристики двигателей постоянного тока 85
называемая скоростной характеристикой, имеет вид кри-
вой, наклоненной к оси абсцисс. Чтобы объяснить данную
характеристику, из уравнения (3.1) получим значение
скорости вращения
и-1яНя
п= ——
СЕФ
При возрастании мощности Р> ток якоря 1Я двигателя
повышается. Из уравнения (3.8) видно, что при t/=const
скорость вращения изменяется вследствие падения на-
пряжения 1яРя в цепи якоря и уменьшения потока Ф из-за
реакции якоря. Двигатели проектируют так, чтобы умень-
шение скорости за счет падения напряжения IaRa было
больше, чем увеличение ее за счет уменьшения потока Ф.
Обычно при изменении нагрузки от холостого хода
(Р2—0) до номинальной (Р2н) скорость уменьшается на
2—8% от номинальной. Скоростная характеристика дви-
гателя параллельного возбуждения является жесткой.
Характер зависимости M2=f(P2) можно выяснить
с помощью выражения
Р2 _ 30-Р2
Q лп.
(3.9)
где й= — — угловая скорость, рад/сек.
Если бы скорость вращения якоря была неизменной
(n=const), то график Л12=/(Р2) имел бы вид прямой.
Из-за изменения скорости эта характеристика является
нелинейной.
Кривая Z=f(P2) не выходит нз начала координат, так
как при Р2=0 двигатель потребляет из сети ток холосто-
го хода 70.
График r\=f(P2) имеет максимум при условии равен-
ства постоянных и переменных потерь в двигателе.
Уравнение механической характеристики можно полу-
чить, если в выражение (3.8) подставить значение тока
г М
1Я =-----'
смф
86
Глава Ш. Двигатели постоянного тока
U Яя
П= ~ М-
С кФ СдСмФ2
(3.101
Механическая характеристика, полученная при отсут-
ствии добавочного сопротивления (/?д—0) в цепи якоря,
называется естественной. Она является жесткой.
Рис. 3.5. Механические n=f(M)
характеристики двигателя парал-
лельного возбуждения.
Рнс. 3.6. Схема двига-
теля последовательно-
го возбуждения.
Включая /?д в цепь якоря, получают искусственные
механические характеристики. Их жесткость снижается
тем больше, чем большее значение имеет сопротивле-
ние #д. Механические характеристики двигателя парал-
лельного возбуждения показаны на рис. 3.5. Так как при
Ф«const момент пропорционален току двигателя, харак-
теристики n=f(M) и n=f\I) могут быть изображены
одними кривыми для соответствующих сопротивлений /?д.
Благодаря линейности и жесткости механических ха-
рактеристик двигатели параллельного возбуждения при-
меняются как в силовом электроприводе, так и в авто-
матических устройствах.
Двигатель последовательного возбуждения. Схема
такого двигателя представлена на рис. 3.6. Здесь ток воз-
§ 3.2. Характеристики двигателей постоянного тока 87
буждения равен току якоря: /в=/я=А На рис. 3.7 пока-
заны рабочие характеристики двигателя. Выясним харак-
тер зависимости С изменением нагрузки на валу
двигателя меняется ток I, а следовательно, и поток ма-
шины. Вследствие этого при малых насыщениях магнит-
ной системы, когда магнитный поток пропорционален
току /, вращающий момент будет пропорционален квад-
рату тока
М=См1Ф=См'Р.
С увеличением нагрузки магнитная система машины
насыщается, пропорциональность между током и потоком
нарушается. При значительных насыщениях поток маши-
ны практически постоянен и, следовательно, Л1=/.
В соответствии с изложенным зависимость M=f(T) в на-
чальной части имеет форму параболы, затем отклоняется
от нее и в области больших нагрузок переходит в прямую.
Для анализа скоростной характеристики двигателя
исследуем уравнение
„=«±^. (3..1)
При небольших нагрузках, когда магнитная система
не насыщена и Ф=/, скоростная характеристика n=f(/)
при U=const имеет вид гиперболы. С увеличением на-
грузки машина насыщается и характеристика становится
более пологой (рис. 3.7).
В режиме холостого хода и при малых нагрузках ско-
рость вращения двигателя достигает.чрезмерно больших
значений, что ведет к «разносу». Поэтому пуск и работа
двигателя последовательного возбуждения при нагрузках
на валу менее 25% от номинальной недопустимы. Лишь
микродвигатели мощностью до 100 вт могут работать
даже в режиме холостого хода, так как их механические
потери при больших скоростях вращения становятся со-
измеримыми с номинальной мощностью двигателя.
На рис. 3.8 показаны естественная (при /?д=0) и ис-
кусственные (при различных сопротивлениях /?д в цепи
якоря) механические характеристики n=f(Af) при U=
~const двигателя. Вследствие значительного падения
83
Глава Ш. Двигатели постоянного тока!
скорости вращения при увеличении нагрузки они являют-
ся мягкими.
Двигатели последовательного возбуждения приме-
няют как тяговые в подъемно-транспортных устройствах.
Рис. 3.7. Рабочие харак-
теристики двигателя пос-
ледовательного возбуж-
дения.
Рис. 3.8. Механические
характеристики двигате-
ля последовательного
возбуждения.
Регулировочные характеристики. Качество регулиро-
вочных характеристик определяют характером (плавный
или ступенчатый), пределами и экономичностью регули-
рования.
Анализ уравнения (3.8) показывает, что регулировать
скорость вращения двигателя можно введением добавочг
ного сопротивления /?д в цепь якоря, изменением магнит-
ного потока полюсов Ф и подводимого к двигателю на-
пряжения.
С вводом добавочного сопротивления в цепь якоря
падение напряжения /п(Яя+/?д) увеличивается, умеиь-
U—/я(#я+/?я)
шается скорость п—-------—~~ (см- Рис- 3-5 и 3.8),
снижаются мощность и к. п. д. двигателя из-за потерь
в добавочном сопротивлении. Поэтому этот способ регу-
лирования неэкономичен и применяется он в основном
для двигателей небольших мощностей.
Регулирование скорости изменением потока полюсов
в двигателях параллельного возбуждения производят
§ 3.2. Характеристики двигателей постоянного тока
89
реостатом Др (рис. 3.3), а в двигателях последователь-
ного возбуждения — реостатом Rm, шунтирующим обмот-
ку возбуждения (рис. 3.6). С уменьшением потока Ф
скорость вращения двигателя возрастает. Этот способ
более экономичный, так как потери мощности в реостатах
и Rm невелики.
Рис. 3.9. Схема генератор - двигатель.
Регулирование скорости вращения изменением под-
водимого к двигателю напряжения возможно в схеме ге-
нератор-двигатель (Г—Д) (рис. 3.9). Двигатель здесь
подсоединен к отдельному генератору независимого воз-
буждения. Генератор и возбудитель (генератор парал-
лельного возбуждения небольшой мощности) приводится
во вращение двигателем переменного тока. Схема Г—Д
применяется для привода мощных механизмов (прокат-
ных станов, некоторых станков и пр.).
По капитальным затратам эта схема дорогостоящая,
так как включает три мощные машины. Но она выгодна
в эксплуатации, потому что позволяет запускать двига-
тель, без реостата путем увеличения тока возбуждения
90
Глава III. Двигатели постоянного тока
генератора. Воздействуя на цепи возбуждения генератора
и двигателя, схема Г—Д позволяет плавно н экономично
в очень широких пределах регулировать скорость враще-
ния двигателя.
§ 3.3. Исполнительные двигатели постоянного тока
Назначение и требования, предъявляемые к исполни-
тельным двигателям. В современных системах автоматики
и телемеханики, в некоторых устройствах вычислительной
техники широко применяют в качестве преобразователей
электрических сигналов в механическое вращение испол-
нительные двигатели постоянного и переменного тока
малой мощности от долей ватта до нескольких киловатт.
Наибольшее распространение имеют двигатели мощ-
ностью до 100 вт.
Исполнительные двигатели практически никогда не
работают в номинальном режиме. Для них характерны
частые пуски, остановки, реверсы. Специфика работы ис-
полнительных двигателей в автоматических схемах опре-
деляет следующие основные требования, предъявляемые
к ним:
отсутствие самохода — самоторможение двигателя
при снятии сигнала (напряжения управления);
устойчивая работа двигателя в широком диапазоне
регулирования скорости вращения;
линейность механических и регулировочных характе-
ристик;
большой пусковой момент;
малая потребляемая мощность управления при доста-
точно большой механической мощности на валу;
высокое быстродействие;
надежность в работе, малые габариты и вес.
Несмотря на некоторые существенные недостатки, свя-
занные с наличием скользящего контакта между щетками
и коллектором, специально спроектированные двигатели
постоянного тока с независимым возбуждением (часто и
с возбуждением от постоянных магнитов) широко исполь-
зуются как исполнительные.
В СССР выпускаются исполнительные двигатели по-
стоянного тока типов СЛ, МИ, ДПМ и др. Конструктивно
§ 3.3. Исполнительные двигатели постоянного тока
91
они выполнены так же, как и другие микромашины по-
стоянного тока (см. рис. 1.1). Магнитную систему у них
полностью набирают из изолированных листов электро-
технической стали.
Исполнительные двигатели (кроме магнитоэлектриче-
ских) имеют две обмотки. Одну из них, подключаемую
Рис. 3.10. Схемы испол-
нительного двигателя по-
стоянного тока с якор-
ным (а) н полюсным (6)
управлением.
постоянно к сети на напряжение UB — const, называют
обмоткой возбуждения. Другую, на которую подается
сигнал управления Uy лишь тогда, когда необходимо при-
вести во вращение вал,— обмоткой управления.
Для исполнительных двигателей постоянного тока
применяют якорное или полюсное управление. На рис.
3.10, а показана схема включения двигателя с якорным
управлением. Здесь обмоткой возбуждения является об-
мотка полюсов, а управляющей — обмотка якоря. При
подаче сигнала управления Uy на обмотку якоря создает-
ся вращающий момент ЛТ = СМ/УФВ, под действием кото-
рого якорь приходит во вращение и отрабатывает элек-
трический сигнал. Если обмотку управления отключить
или Uy уменьшить до нуля, якорь остановится. Самоход
двигателя при якорном управлении (при f7y=0) отсут-
ствует.
На рис. 3.10, б представлена схема включения двига-
теля с полюсным управлением. В этом случае обмоткой
возбуждения является обмотка якоря, длительно присое-
диненная (непосредственно или через балластное сопро-
92
Глава III. Двигатели постоянного тока
тивление) к напряжению UB. Ток якоря является здесь
током возбуждения /в. Напряжение управления на
время отработки подается на обмотку полюсов. В двига-
теле с полюсным управлением при малых нагрузках на
валу самоход возможен, так как после отключения об-
мотки управления (обмотки полюсов) вращающий мо-
мент в двигателе создается взаимодействием остаточного
потока полюсов с током /в.
Исполнительные двигатели с постоянными магнитами
позволяют применить только якорное управление.
Рассмотрим характеристики исполнительного двига-
теля при разных способах управления.
Двигатель с якорным управлением. Принимая во
внимание, что в магнитной цепи двигателя отсутствует
насыщение, и пренебрегая ничтожно малой реакцией
якоря, можно считать, что поток возбуждения пропорцио-
нален току обмотки полюсов или при постоянной вели-
чине сопротивления этой обмотки — напряжению возбуж-
дения (Фв=/в = ив):
Фв=СФив. (3.12)
Электромагнитный момент в двигателе постоянного
тока при якорном управлении
М = Сы1уФв=СыСф1уив. (3.13)
Ток якоря, согласно уравнению (3.1),
/ r Uy Еу Uy СЕСФпив
У /у=—-------- =-----, (3.14)
Ау Ау
где э. д, с. якоря
Еу=СЕпФв=СЕСфПив, (3.15)
а сопротивление /?у=/?я.
Подставив значение тока в выражение (3.13), получим
м=сысФив иу-сЕсфПив (31б)
«у
§ 3.3. Исполнительные двигатели постоянного тока
93
Для того чтобы характеристикам двигателей придать
универсальность, независимую от их мощности и конст-
руктивных особенностей, при анализе исполнительных
двигателей воспользуемся системой относительных еди-
ниц: действительные величины выразим через отношения
их к некоторым постоянным величинам, принятым за еди-
ничные.
Напряжение управления в относительных единицах
а= -ту- называется коэффициентом сигнала.
U в
Заменив в выражении (3.16) Uy через aUB, получим
„ СмСФа^й2-СвСф2Смп[7в2
М=------------R,-----------
(3-17)
Приняв за единицу момента постоянную для каждой
данной машины величину момента при неподвижном
якоре и напряжении управления, равном напряжению
возбуждения, т. е. при п=0 и а=1, и подставив эти зна-
чения в равенство (3.17), найдем
„ СМСФПВ2
Мю— 5 (3.18)
«у
Тогда выражение момента двигателя в относительных
единицах
М
т— ——— —сс—СяСфИ.
Л1п»
(3.19)
Если при Uy=UB, т. е. при а=1, полностью разгру-
зить двигатель до момента, равного нулю (иг=0), то
якорь приобретает скорость вращения «о, значение кото-
рой определяется из уравнения (3.19):
по= (3.20)
Скорость по называют скоростью теоретического холо-
стого хода, так как разгрузить двигатель до момента,
равного нулю, практически невозможно. Однако По может
94
Глава III. Двигатели постоянного тока
быть найдена экспериментально. Действительно, подста-
вив в уравнение (3.15) значение СЕСФ из равенства
(3.20), получим
Ey= — Us, (3.21)
«и
откуда
Следовательно, измерив при t/B = const и произволь-
ном [7У скорость вращения п и ток /у, легко рассчитать
и величину п0.
Скорость По является постоянной величиной для лю-
бого двигателя, поэтому ее принимают за единицу ско-
рости. Тогда действительная скорость в относительных
единицах будет равна
и
---= пСЕСФ. (3.23)
По
Подставив полученное значение м в уравнение (3.19),
найдем уравнение механической характеристики
при a = const
v = a—т. - (3.24)
Это уравнение показывает, что скорость вращения
двигателя с якорным управлением является линейной
функцией момента.
На рис. 3.11 показано семейство относительных меха-
нических характеристик для а= 1; 0,75; 0,5 и 0,25. Макси-
мальный момент двигателя имеет место при пуске (м = 0),
величина его ти в относительных единицах равна коэф-
фициенту сигнала а (тп = а). Скорость теоретического
холостого хода vx (при /и=0) также равна а (мж=а).
Регулировочная характеристика v = f(a) при ш =
= const
v = a—т
также линейная.
§ 3.3. Исполнительные двигатели постоянного тока
95
На рис. 3.12 показано семейство регулировочных ха-
рактеристик для т — 0; 0,25; 0,5 и 0,75. Коэффициент сиг-
нала остр—т, при котором якорь начинает при данном
значении момента вращаться, характеризует величину
напряжения трогания.
Рис. 3.11. Меха-
нические ха-
рактеристики
двигателя с
якорным управ-
лением.
Рис. 3.12. Регу-
лировочные ха-
рактеристики
двигателя с
якорным управ
ленпем.
Таким образом, при якорном управлении обе основные
характеристики, определяющие регулировочные свойства
двигателей, линейны, что является их весьма ценным ка-
чеством.
Мощность управления
Ру= UyIy=aUB (3.25)
«у '<У
Почти вся она потребляется двигателем из сети, за
исключением мощности возбуждения Рв = /в2/?в = -5—,
Ав
являющейся величиной постоянной, не зависящей от на-
грузки. Большая величина Ру — серьезный недостаток
исполнительных двигателей с якорным управлением, так
как в случае питания обмотки управления от усилителя
приходится значительно увеличивать габариты послед-
него. Как видно из уравнения (3.25), Ру резко возрастает
с увеличением коэффициента сигнала. Уменьшение Ру
путем снижения а не всегда приемлемо, так как это сни-
жает, механическую мощность.
96
Глава III. Двигатели постоянного тока
Механическую мощность якоря, включая механичес-
кие потери, в относительных единицах можно получить
как произведение относительного момента т = а—v и от-
носительной скорости вращения
pM = mv=av—V2.
(3.26)
Для построения графиков pM=f(v) при a=const не-
обходимо найти значение vM, при котором рм достигает
максимума. Продифференцировав уравнение (3.26) по v
и приравняв производную нулю, найдем
a—2vM=0,
откуда
a
vM— -ур
(3.27)
Подставив равенство (3.27) в выражение (3.26), найдем
рм = (3.28)
г макс 2 4 4 ' '
На рис. 3.13 представлены зависимости pM=f(v) при
a—const (для а=1; 0,75; 0,5 и 0,25). Из графика видно,
что снижение коэффициента сигнала, т. е. напряжения
управления, резко уменьшает максимальную механиче-
скую, а следовательно, и полезную мощность двигателя.
Как указывалось выше, исполнительные двигатели
с якорным управлением могут быть выполнены с возбуж-
дением от постоянных магнитов. По своим рабочим и ре-
гулировочным свойствам они практически не отличаются
от обычных двигателей с якорным управлением. Преиму-
щества их в том, что они не требуют источника питания
для обмотки возбуждения и их магнитный поток практи-
чески не зависит от изменений температуры окружающей
среды. Недостаток — старение магнитов в процессе
эксплуатации и сравнительно высокая стоимость.
В СССР выпускаются магнитоэлектрические исполни-
тельные двигатели серии ДПМ мощностью до 15 вт.
§ ,3.3. Исполнительные двигатели постоянного тока
97
Двигатель с полюсным управлением. Основным маг-
нитным потоком двигателя при полюсном управлении
является поток полюсов Фу, пропорциональный току /у
(машина не насыщена) и напряжению управления t/y:
— С ф £7 у—СфО. U
(3.29)
Вращающий момент двигателя создается за счет вза-
Рис. 3.13. Зависимости
полной механической
мощности от скорости
вращения при постоян-
ном коэффициенте сиг-
нала.
Рис. 3.14. Механиче-
ские характеристики
двигателя с полюсным
управлением.
UB-EB
имодеиствия тока якоря /в = —5----с магнитным пото-
Лв
ком полюсов
и__р
М=См1вФу=СмСфаив в в-. (3.30)
Лв
Здесь /?в=/?я;
Ев = СепФу —— СкСфип U в.
Подставив значение £в в уравнение (3.30), получим
__ СыСФа,ив2—СмСЕСФ2а,2пив2
(3.31)
98
Глава 111. Двигатели постоянного тока
За единицу момента снова примем момент Л1по при
п=0 и а—1
.. С„СфС/.’
Л'““
Тогда значение момента в относительных единицах
Л1
———= а—СкСФа2п. (3.32)
Мп0
Или, учитывая равенство (3.23), получим
т = а— a2v. (3.33)
Отсюда находим уравнение механической характери-
стики v = f(/n) при а = const, которое имеет линейный
характер:
Семейство относительных механических характерис-
тик показано на рис. 3.14. Жесткость механических харак-
теристик двигателя с полюсным управлением при изме-
нении коэффициента сигнала а не остается постоянной.
Скорость теоретического холостого хода ух обратно про-
порциональна коэффициенту сигнала (vx=l/a), и, сле-
довательно, при малых сигналах скорость вращения мо-
жет превосходить номинальную в несколько раз. Пуско-
вой момент в относительных единицах, как и у двигателей
с якорным управлением, равен коэффициенту сигнала.
Регулировочная характеристика v=f(a), определяе-
мая уравнением (3.34), при m = const для полюсного
управления является нелинейной.
При теоретическом холостом ходе (т=0) максималь-
ное значение скорости ум=°°. В действительности ско-
рость холостого хода ограничена механическими и венти-
ляционными потерями в двигателе.
На рис. 3.15 показано семейство регулировочных ха-
рактеристик v=f (а) двигателя с полюсным управлением.
§ 3.3. Исполнительные двигатели постоянного тока
99
Нелинейность этих характеристик, а также их неодно-
значность (при малых моментах нагрузки), выражаю-
щаяся в том, что одна скорость соответствует двум зна-
чениям коэффициента сигнала,— большой недостаток
двигателя. Неоднозначность исчезает и несколько повы-
Рис. 3.15. Регулиро-
вочные характеристи-
ки двигателя с полюс-
ным управлением,
Рис. 3.16. Зависимости полной ме-
ханической мощности от скорости
вращения при постоянном коэффи-
циенте сигнала.
шается линейность только тогда, когда момент сопротив-
ления на валу т^0,5. Напряжение трогания в данном
способе управления такое же, как и у двигателя с якор-
ным управлением (атр=т при v = 0).
Мощность управления расходуется лишь на покрытие
электрических потерь в обмотке полюсов:
р J, , „ Uy г
= t/у/у = и у = а2
(3.35)
Она всегда значительно меньше, чем при якорном
управлении. Даже при а=1 Ру в двигателях мощностью
5—7 вт составляет примерно 30%, а в двигателях мощ-
ностью 200—250 вт не более 5% от всей потребляемой
мощности. Это весьма ценно, так как при полюсном
управлении можно осуществить питание обмотки управ-
ления от усилителя небольшой мощности.
100
Глава III. Двигатели постоянного тока
Механическую мощность в относительных единицах
можно получить как произведение относительного момен-
та (3.33) на относительную скорость:
ры = ш\'= (а—a2v)v = av—a2v2. (3.36)
Продифференцировав рм ио v и приравняв производную
1 v.x
нулю, получим скорость вращения vM= , при
которой механическая мощность максимальна.
Таким образом, максимум механической мощности
имеет место при скорости, равной половине скорости тео-
ретического холостого хода. Подставим значение vM
в равенство (3.36) и найдем максимальное значение ме-
ханической мощности
п - J__ 2 1 _ 1
Рммакс а 2а а 4а2 4>
откуда видим, что при полюсном управлении рМу по-
стоянна, на нее не влияет напряжение управления (коэф-
фициент сигнала а). От него зависит лишь та скорость,
при которой мощность достигает максимума. Это свой-
ство двигателей с полюсным управлением весьма ценно,
так как позволяет получить значительные механические
мощности на валу двигателя при малых коэффициентах
сигнала.
На рис. 3.16 показано семейство относительных харак-
теристик механической мощности /?м=/(v) при a=const
(для сс= 1; 0,75; 0,5 и 0,25). Следует отметить, что луч-
шие характеристики имеют исполнительные двигатели
с якорным управлением, поэтому они в основном и при-
меняются в автоматических устройствах.
Динамические свойства и передаточная функция ис-
полнительного двигателя постоянного тока. Динамические
свойства двигателя оценивают по характеру изменения
скорости вращения Q или угла поворота якоря 0 при из-
менении сигнала на обмотке управления.
Переходный процесс изменения скорости вращения
двигателя при якорном управлении описывают уравне-
ниями
§ 3.3. Исполнительные двигатели постоянного тока
101
div
Uy = ey-\-iyRy-\-Ly
dQ
Л1 = MCT~l~Mj~ Mcr-j-J ~dt~'
Причем
30 30
ву = СЕПФВ == -СдФвП^ -----СеСф17вН С^фй;
л л
М—СцЬуФв'— СмСф1у U в — СМф1у,
30
где Сеф= CeCqUb', Cm® = CmC®L/b.
л
Запишем систему уравнений в операторной форме при
нулевых начальных условиях:
tfy (р) — Сеф£2 (р) -\-1 у (p)Ry-{-LypIy (р); (3.37)
СМф/у(р) =Мст(р)+УрЙ(р). (3.38)
Определив значение тока из выражения (3.37) и под-
ставив его в уравнение (3.38), получим
lpC1 W = W.
Ьур-|-/<у Lyp-\-Ky
рг ЛуР-}-/?у
после умножения на — последнее уравнение при-
обретает вид
ОмфОдф
р2+
мфСеф
UyiP)
Сеф
——р+1 ] Q(p) =
ЬмФиЕФ
ЛуР + /?у
— - Л1ст(р),
'-'МФ'-'ЕФ " ~
пли с учетом равенства
JLy
С лфС еф
^У т1 ’т’
—— = ТкТу получим
"у
102
Глава Ill. Двигатели постоянного тока
(TMTyp2+TMp+l)Q(p)=Wy(p)-
-^-(Л-Р+1)МС1(Р). (3.39)
Здесь Тм --
Т — Ъ_
С>ЕФ
JR? JR? /По
Смф^еф 30 _ _ „ .. Afno
С^СфС/вС^СфС/в
Л
электромеханическая постоянная времени
двигателя (сек), характеризующая ско-
рость протекания в двигателе механиче-
ских процессов. Величина Тм при якорном
управлении не зависит от коэффициента
сигнала ввиду одинаковой жесткости меха-
нических характеристик;
электромагнитная постоянная времени об-
мотки управления;
коэффициент усиления.
Переходные процессы системы регулирования обычно
анализируют при условии, когда А1СТ двигателя равен
нулю. Тогда уравнение (3.39) и передаточная функция
двигателя
{T„T,p*+T,p+l)Q(p)=kU,(p')-,
= -TrQr = Т Т 0+7 .-м <3'40'
^у(р) J м ' мР~Г 1
Электромеханическая постоянная времени двигателя
Тм значительно больше электромагнитной Ту, поэтому
приближенно передаточную функцию двигателя можно
представить так:
k
W(n} = = -_________.____________
W Uy(p) ТмТур2+(Тм+Ту)р+1
а
___________ ________ (3.41)
(Тмр-|-1) (Тур-|-1)
§ 3.3. Исполнительные двигатели постоянного тока 103
Таким образом, двигатель является инерционным зве-
ном второго порядка.
В тех случаях, когда индуктивностью Лу якоря можно
пренебречь (Ту«0), двигатель считают динамическим
инерционным звеном первого порядка, так как его пере-
даточная функция приобретает вид:
Г<'’ = -7^+Г (3'42)
Пренебрегать индуктивностью обмотки управления
можно только при якорном управлении, так как в этом
случае £у=£я (малая величина), при полюсном — об-
моткой управления является обмотка полюсов, индуктив-
ность которой значительно больше индуктивности Ья.
Поэтому в данном случае всегда надо учитывать электро-
магнитную постоянную времени Ту. Кроме того, вследст-
вие неодинаковой жесткости механических характеристик
(v.v= 1/ос; /пп=а), величина электромеханической посто-
янной времени Тм при разных коэффициентах сигнала а
резко изменяется, что видно из следующего равенства:
у, JQx JQo /Йо
м Мп ааМпо а2Мпо
Если за выходную величину принимать угол поворота
Г й(о) 1
якоря двигателя 0 I 0(р) =----I , то
^у(р) Р(7мР+1) (Гур+1) ’ '
и, следовательно, двигатель будет представлять собою
интегрирующее инерционное звено.
Из уравнений (3.41), (3.42) и (3.43) видно, что дина-
мические свойства исполнительного двигателя сущест-
венно зависят от величины электромеханической постоян-
ной времени Тм. Уменьшение Тм повышает его быстро-
действие, т. е. сокращает промежуток времени между
изменением сигнала на обмотке управления и достиже-
нием заданной скорости или угла поворота якорем.
104
Глава III. Двигатели постоянного тока
Значение электромеханической постоянной времени
исполнительных двигателей постоянного тока с нормаль-
ной конструкцией якоря находится в пределах 0,05—
0,15 сек.
Малоинерционные исполнительные двигатели постоян-
ного тока. В последнее время получают распространение
малоинерционные двигатели с печатными обмотками на
Рис. 3.17. Двигатель постоянного тока с печатной обмоткой на дис-
ковом якоре.
якоре и обычными обмотками, запрессованными в полом
пластмассовом цилиндре — якоре. Электромеханическая
постоянная времени Ты в них уменьшается до 0,01 —
0,02 сек за счет снижения момента инерции вращающихся
частей. Такие двигатели по исполнению бывают с диско-
вым и с полым немагнитным якорем.
Конструктивно двигатель постоянного тока с печатной
обмоткой на дисковом якоре выполняют следующим об-
разом (рис. 3.17).
Якорь представляет собой тонкий немагнитный перфо-
рированный диск 2 без пазов, (из гетинакса, текстолита,
алюминия и т. д.), установленный на валу 9 при помощи
втулок 3. Печатная обмотка 4 якоря волнового типа,
изготовленная из тонких полос меди, располагается на
противоположных сторонах диска; соединения между
проводящими элементами обмотки выполняются через
сквозные отверстия в диске одновременно с нанесением
обмотки. Проводники обмотки якоря получаются широ-
кими и тонкими.
§ 3,3. Исполнительные двигатели постоянного тока 105
В двигателях с малой скоростью вращения отсутст-
вует отдельный коллектор. Его роль выполняют активные
части проводников, находящихся на одной из поверхно-
стей диска, по которой скользят серебряно-графитовые
щетки 5. Падение напряжения в скользящем контакте
невелико. Возбуждение машины осуществляется постоян-
ными магнитами 6, имеющими полюсные наконечники 7
из магнитно-мягкой стали в форме кольцевых сегментов.
Возбуждение может быть и электромагнитным. Двига-
тели с печатными обмотками изготавливают, как правило,
шести-, восьми- и лишь в исключительных случаях четы-
рехполюсными.
Магнитный поток, создаваемый полюсами возбужде-
ния, проходит аксиально (параллельно оси вращения
якоря) через два воздушных зазора, немагнитный диск
с печатной обмоткой и замыкается по кольцам 8 и 1 из
магнитно-мягкой стали, которые выполняют роль сердеч-
ника и ярма. Таким образом, расчетный зазор машины
состоит из двух воздушных зазоров и толщины якоря.
Для того чтобы расчетный зазор был минимальным, по-
верхности сегментов 7 и кольца 1, между которыми вра-
щается якорь, тщательно отшлифовывают, а толщину
диска с обмоткой выбирают как можно меньшей.
Иногда, чтобы обеспечить самоторможение двигателя
после снятия сигнала управления, печатную обмотку вы-
полняют на алюминиевом диске. Вихревые токи, возни-
кающие в нем, будут создавать тормозной момент (внут-
реннее демпфирование).
В машинах с дисковым якорем с увеличением их мощ-
ности увеличиваются диаметр и толщина диска якоря.
Последнее приводит к увеличению расчетного воздушного
зазора, что значительно ухудшает характеристики ма-
шины.
На рис. 3.18 показана конструктивная схема мало-
инерционного двигателя с электромагнитным возбужде-
нием, в котором якорь выполнен в виде полого цилиндра 3
из изоляционного материала с расположенной на нем
обмоткой. Последняя может быть печатной на внутренней
и внешней сторонах цилиндра или обычной, расположен-
ной в полом якоре после заливки его пластмассой;
Выводы обмотки припаяны к пластинам коллектора 5,
106
Глава III. Двигатели постоянного тока
которые запрессовываются в пластмассу у дна полого
цилиндра. Полый якорь закреплен на валу 4 и вращается
в воздушном зазоре между полюсами 1 внешнего статора
и внутренним статором 2, служащим для уменьшения
магнитного сопротивления машины и выполненным в ви-
де стального цилиндра без пазов.
Л1—
Рис. 3.18. Малоииерцнонный двигатель постоянного тока
с. полым немагнитным якорем.
Двигатели с полым немагнитным якорем могут изго-
тавливаться и магнитоэлектрическими. В СССР разрабо-
таны малоинерционные исполнительные двигатели серии
ДПР мощностью от 0,35 до 15 вт, с обычной обмоткой,
запрессованной в полом пластмассовом якоре. Двигатели
этой серии возбуждаются двухполюсными цилиндриче-
скими постоянными магнитами, помещенными внутри
якоря, имеют высокие к. п. д. (30—45%) и малые значе-
ния электромеханических постоянных времени (0,015—
0,02 сек).
Недостаток малоинерционных двигателей — большой
воздушный зазор, а следовательно, увеличенные габари-
ты по сравнению с обычными машинами.
Преимущества малоинерционных двигателей:
1. Вес якоря примерно в 8 раз, а момент инерции в
5—10 раз меньше, чем у якоря обычной конструкции,
в результате чего резко снижается электромеханическая
постоянная времени.
§ 3.3. Исполнительные двигатели постоянного тока 107
2. Реактивная э. д. с. в коммутируемых секциях и ре-
акция якоря в машине незначительны вследствие того,
что якорь не содержит стали. Все эти факторы приводят
к хорошей безыскровой коммутации.
3. Теплоотдача голой поверхности печатной обмотки
велика, поэтому допустимы повышенные плотности тока
в проводниках якоря. Отсутствие изоляции обмотки яко-
ря и выполнение диска или полого цилиндра из тепло-
стойких материалов позволяют применять эти двигатели
при высоких окружающих температурах.
4. Механизированное изготовление обмотки без руч-
ной пайки удешевляет машину, делает ее надежной
в эксплуатации.
Двигатели с печатными обмотками находят примене-
ние как исполнительные в системах автоматики, требую-
щих высокого быстродействия. Особенно целесообразно
их применять в схемах управления с транзисторами или
полупроводниковыми выпрямителями.
РАЗДЕЛ
ВТОРОЙ
ТРАНСФОРМАТОРЫ
Глава IV. ТРАНСФОРМАТОРЫ ОБЩЕГО ПРИМЕНЕНИЯ
§4.1. Назначение и конструкция трансформаторов
Трансформатор представляет собой статический элек-
тромагнитный аппарат, предназначенный для преобразо-
вания переменных напряжений и токов.
Трансформаторы малой мощности (до 1000 ва) при-
меняют в автоматических, телемеханических, вычисли-
тельных, радиотехнических, импульсных и других устрой-
ствах. По назначению и выполняемым функциям разли-
чают трансформаторы: силовые, используемые в блоках
питания, измерительные, импульсные, пиковые, входные,
выходные, согласующие и др. В основном их изготовляют
маломощными однофазными двух- или многообмоточ-
ными. В различных схемах применяют также автотранс-
форматоры малой и большой мощности. В энергосисте-
мах, при передаче электроэнергии от электростанций
к потребителям применяют мощные трехфазные транс-
форматоры.
Основные части трансформатора — магнитопровод и
обмотки. Магнитопровод или сердечник служит для уси-
ления электромагнитной связи между обмотками. В зави-
симости от его конструкции трансформаторы могут быть
броневого, стержневого или тороидального типа.
На рис. 4.1 показаны сердечники таких трансформа-
торов. Для того, чтобы уменьшить потери от вихревых
токов, их выполняют пластинчатыми (рис. 4.1, а, в, д)
или ленточными (рис. 4.1,6, г, е) Ш-образной, П-образ-
ной или тороидальной формы. Первые из них набирают
из отдельных пластин, изолированных друг от друга
оксидной пленкой (при небольших индукциях) или слоем
лака. Эти пластины изготовлены из листовой электротех-
нической стали толщиной 0,2—0,5 мм путем штамповки.
Пакет сердечника может быть собран «внахлестку» или
«встык». При сборке «внахлестку» (рис. 4.1, а, в) слои,
набранные различным способом, чередуются через один.
Рис. 4.1. Сердечники маломощных однофазных трансформаторов:
а — броневой пластинчатый; б — броневой ленточный; в — стержневой пластинча-
тый; г — стержневой ленточный; д — тороидальный пластинчатый; е — тороидальный
ленточный.
по
Глава IV. Трансформаторы общего применения
Пластины в единый пакет стянуты изолированными
шпильками. Таким образом удается выполнить трансфор-
маторы с малым магнитным сопротивлением. Во втором
случае части сердечника собраны отдельно. Крепят их
друг с другом с помощью стяжных шпилек. На стыках
в магнитопроводе образуются воздушные зазоры, кото-
рые приводят к значительному увеличению магнитного
сопротивления сердечника и вследствие этого к увеличе-
нию намагничивающего тока. Сердечники мощных транс-
форматоров всегда собирают «внахлестку», маломощ-
ных — обычно «встык», так как сборка «встык» более
технологична.
Ленточные сердечники (рис. 4.1,6, г, е) изготовляют
путем навивки на металлические оправки узкой, предва-
рительно покрытой изолирующими и склеивающими
составами ленты из электротехнической стали (или спе-
циальных сплавов) толщиной 0,08—0,35 мм.
Броневые и стержневые ленточные сердечники обычно
разрезают на две половины, что позволяет надеть на них
катушки обмоток. Половинки разъемных сердечников
стягивают металлическими бандажами, прижимными
планками или стяжными лентами. Чтобы уменьшить за-
зор между половинками и повысить прочность сочлене-
ния, торцы при сборке часто склеивают специальной
пастой (например, смесью эпоксидной смолы с карбо-
нальным железом). Для сердечников малых габаритов
склейка может полностью исключить необходимость ме-
ханической стяжки половинок.
Тороидальные сердечники выполняются неразъем-
ными. Сердечники трансформаторов, используемых на
высоких частотах, изготовляют из ферритов, которые
представляют собой особый вид магнитодиэлектриков
с малыми магнитными потерями. Те части сердечника, на
которые помещают обмотки, называют стержнями, части
без обмоток — ярмами.
Обмотки маломощных трансформаторов выполняют
из изолированного медного (иногда алюминиевого) про-
вода круглого сечения. Обмотку, подключаемую к питаю-
щей сети, называют первичной, а присоединяемую к на-
грузке— вторичной (в многообмоточном трансформаторе
может быть две, три и больше вторичных обмоток). Для
§4.1. Конструкция трансформаторов 111
обеспечения лучшей взаимоиндукции их размещают воз-
можно ближе друг к другу. Они могут располагаться
одна внутри другой или в чередующемся порядке по вы-
соте стержня сердечника. В первом случае их называют
концентрическими, во втором — дисковыми.
Рис. 4.2. Общий вид од-
нофазного трансформато-
ра малой мощности бро-
невой конструкции:
/ — стяжная лента; 2 —бро-
невой ленточный разъемный
сердечник ШЛ; 3 —обмотки;
4 — выводы (латунные лепе-
стки); 5 — обойма.
В концентрических обмотках провод намотан непре-
рывно вдоль всей длины стержня сердечника в несколько
слоев до получения заданного числа витков. В разъемных
броневых и стержневых трансформаторах эти обмотки
выполняют в виде катушек, представляющих собой об-
мотку, намотанную на каркас (каркасная обмотка), вы-
полненный из пресшпана, гетинакса или текстолита, или
на гильзу (бескаркасная обмотка). Как правило, каркас-
ная обмотка более надежна в эксплуатации, а бескаркас-
ная — технологичнее в массовом производстве. Дисковые
обмотки выполняются из отдельных частей, намотанных
на самостоятельные каркасы.
Изготовленные катушки обмотки пропитывают изоля-
ционными лаками или компаундами для того, чтобы за-
полнить все пустоты в изоляции и между проводниками
и вытеснить из катушек воздух. Это приводит к повыше-
нию электрической прочности, влагостойкости и тепло-
проводности катушки. В зависимости от способа охлаж-
112
Глава IV. Трансформаторы общего применения
дения трансформаторы подразделяются на масляные и
сухие.
Мощные трансформаторы имеют масляное охлажде-
ние, у них сердечник с катушками помещен в бак с тран-
сформаторным маслом.
Трансформаторы малой мощности выполняют откры-
тыми, защищенными или закрытыми с естественным воз-
душным охлаждением, т. е. сухими. На рис. 4.2 представ-
лен общий вид броневого маломощного трансформатора
с ленточным сердечником, концентрическими обмотками,
с естественным воздушным охлаждением.
§ 4.2. Дифференциальные и комплексные уравнения
{однофазного двухобмоточного трансформатора
Принцип действия трансформатора основан на явле-
нии взаимоиндукции. Пусть к первичной обмотке транс-
форматора, работающего в режиме холостого хода (при
разомкнутой вторичной обмотке), подведено напряже-
ние «1. По первичной обмотке будет протекать ток холо-
стого хода io. В трансформаторе возникнет магнитное
поле, созданное н. с. t0Wi первичной обмотки, имеющей wj
витков. Это поле в основном замыкается по сердечнику,
так как магнитная проницаемость стали во много раз
больше магнитной проницаемости воздуха. Полю в сер-
дечнике соответствует магнитный поток Ф, сцепленный со
всеми витками обеих обмоток. Он будет наводить в пер-
вичной обмотке э. д. с.
с/Ф
el==—Wi-^, (4.1)
а во вторичной
t/Ф z .
e2=-w2—(4.2)
at
Если приемник электрической энергии подключить
к зажимам вторичной обмотки, то по ней потечет ток i2,
его н. с. z2w2 создаст свой магнитный поток Ф2, который,
согласно правилу Ленца, будет направлен навстречу по-
§ 4.2. Уравнения двухобмоточного трансформатора
113
току, созданному н. с. первичной обмотки. В сердечнике
образуется результирующий поток. Он, как будет пока-
зано ниже, по величине почти равен Ф, имевшему место
при холостом ходе. Это возможно только тогда, когда
размагничивающее действие потока Ф2 компенсируется
увеличением н. с. iiWj первичной обмотки на величину,
Рис. 4.3. Картина распре-
деления потоков в нагру-
женном трансформаторе.
равную — i2W2, т. е. в режиме нагрузки первичная обмотка
должна создать н. с.
z’iay1=ioie>i-|-(—i2w2). (4.3)
Здесь составляющая iow^ идет на создание потока
в сердечнике. Поток Ф, замыкающийся по сердечнику
(рис. 4.3), называют основным потоком, с создающей его
н. с. (Owi, а следовательно, и с током io он связан нелиней-
ной зависимостью. Таким образом, при синусоидальном
потоке Ф ток i0 будет несинусоидален. Из-за потерь в ста-
ли сердечника трансформатора поток Ф отстает по фазе
на угол магнитного запаздывания а от тока io.
Помимо основного потока, в трансформаторе всегда
существуют потоки рассеяния, которые частично или це-
ликом замыкаются по воздуху. Картина их распределе-
ния в трансформаторе очень сложна. Для упрощения
заменим действительную картину поля эквивалентной ей
упрощенной, изображенной на рис. 4.3, где линии потока
Фр1 охватывают все витки только первичной обмотки,
а линии потока Фр2 — все витки только вторичной.
Фр1 пропорционален току ii, а Фр2—i2. Хотя потоки рас-
сеяния невелики, они оказывают существенное влияние
114
Глава IV. Трансформаторы общего применения
на многие технические показатели и характеристики тран-
сформатора.
Исходя из рис. 4.3 для потокосцеплении 4ri в Ч'г с пер-
вичной и вторичной обмотками, можно написать:
4fi = 'Foi+,Fpi=0№i4-Lpiii; (4.4)
ЧГ2=:ЧГ02-(-ЧГр2=ФйУ2_|_£р212- (4-5)
Здесь Лр1 и ЛР2 — индуктивности первичной и вторичной
обмоток, обусловленные потоками рас-
сеяния.
Напряжение ut, приложенное к первичной обмотке,
уравновешивается э. д. с., наводимой изменением потоко-
сцепления 'Fi и падением напряжения на сопротивлении
ri этой обмотки, т. е.
dWj
dt
«1 = 11П—
dVi
dt
(4-6)
Э. д. с. I----— I , наводимая потокосцеплением Ч'г во
' at '
вторичной обмотке, уравновешивается падением напря-
жения на сопротивлении г2 вторичной обмотки и напря-
жением «г на зажимах приемника
dW2
dt
(4-7)
= №+112.
Подставив значения 4ri и Чг2 из выражений (4.4) и (4.5)
в равенства (4.6) и (4.7), получим уравнения напряже-
ний трансформатора в следующем виде:
dii
dt
d<D
dt ’
t/ф
dt
di2
dt
(4.8)
d(b
Здесь —w2—— —e2;
dt
§ 4.2. Уравнения двухобмоточного трансформатора
115
dO
—Wi~dT =ei — Э' С’’ индУктиРУемые основным
потоком в соответствующих об-
мотках.
Если поток Ф изменяется во времеии по синусоидаль-
ному закону, т. е. Ф = ФМ sin со/, то э. д. с. et и е2 в этом
случае будут соответственно равны:
^(ФМ8Ш(|)Л Л
6i = — W1 —--—----~ = —(0^1Фм cos ы1 —
at
= 2afwi<I)M sin
d(®Msin(o0
e2=—a>2----------
(4.9)
— 2л/щ2Фм sin ( at— .
Полученные уравнения показывают, что э. д. с. et и е2 от-
стают по фазе от потока Ф на угол
л
Т
Действующие значения этих э. д. с. соответственно
равны:
2л
£i= - ®1/Фм=4,44Ш1/Фм;
У2
(4.Ю)
£2= ^^и>2/Фм=4,44ДО2/Фм. (4.П)
У2
Отношение э. д. с. —— = —k, равное отношению
Е2 w2
чисел витков обмоток, называют коэффициентом транс-
формации.
Система (4.8) содержит два уравнения, а связывает
три переменные величины й, i2 и ф. Она должна быть
дополнена зависимостью Ф=/(нич-Н’ги’г), т. е. уравне-
нием (4.3) для н. с.
116
Глава IV. Трансформаторы общего применения
Таким образом, полная система уравнений, описываю-
щая процессы в трансформаторе, может быть записана
так:
Ui=rit'i-]-Lpi -ei;
I г diZ ,
е2—|“и2;
ioWi=iiWi-\-izW2-
(4-12)
При синусоидальном приложенном напряжении Ui поток
Ф, э. д. с. ei и е2 и токи G и t2 получаются синусоидаль-
ными функциями времени. Несинусоидальный ток to сле-
дует заменить эквивалентной синусоидой. Тогда систему
уравнений трансформатора можно записать в комплекс-
ной форме:
(4-13)
Здесь Х1 = иЛР1 — индуктивное сопротивление рассеяния
первичной обмотки;
х2=(йЛр2 — индуктивное сопротивление рассеяния
вторичной обмотки.
Так как потоки рассеяния и активные сопротивления
обмоток в трансформаторе малы, действующие значения
напряжения Ut и э. д. с. Et будут приближенно равны
(что следует из первого уравнения системы 4.13), т. е.
Ui at £1 = 4,44иУ1|Фм.
Отсюда при неизменном напряжении и частоте основ
ной поток
фм«
4,44wtf
§ 4.3. Приведение величин в трансформаторе 117
а следовательно, и создающий его ток i0 при изменении
нагрузки, т. е. тока t2, от холостого хода до номинальной
остаются почти постоянными.
§ 4.3. Приведение величин в трансформаторе
Для облегчения анализа процессов, происходящих
в трансформаторе, наглядности построения векторных,
диаграмм и возможности представления трансформатора
схемой замещения все обмотки его приводят к одинако-
вому числу витков. Обычно вторичную обмотку приводят
к числу витков первичной, т. е. заменяют реальный тран-
сформатор приведенным с числом витков во вторичной
обмотке W2,=Wi. При этом все величины вторичной об-
мотки приводят к числу витков первичной обмотки таким
образом, чтобы физические процессы в приведенном тран-
сформаторе оставались такими же, как и в реальном.
Это значит, что поток Ф в сердечнике при приведении не
должен изменяться, а, следовательно, должно сохранять-
ся следующее равенство н. с.:
I 2w2=/2^1'—h'Wi,
откуда приведенный ток вторичной обмотки
Wi I
h'=fz —- = Л> -г- (4-14)
я
Исходя из равенства вторичных мощностей приведен-
ного и реального трансформатора с учетом равенства
(4.14), получим выражение приведенного вторичного на-
пряжения и2-.
U2'I2'= Uzh;
Аналогично
£г'=£2£.
(4.16)
118
Глава IV. Трансформаторы общего применения
Исходя из равенства электрических потерь во вторич-
ных обмотках трансформаторов с учетом равенства (4.14),
получим значение приведенного активного сопротивле-
ния rz':
Л'2^/=^22/'2;
Г2 =Г2*2. (4.17)
Индуктивное сопротивление х2' приведенного транс-
, . Хг х2
форматора, исходя из постоянства отношении —у-—-------,
„ Г2 г2
будет
Xz'—Xzfi2. (4-18)
Система уравнений (4.13) для приведенного трансфор-
матора будет иметь следующий вид:
[71 — —
Ег=Ё1=г2 I2'jXz'12 172 ;
Отсюда получаем уравнение токов
/о=Л+Л/.
(4.19)
(4.20)
§ 4.4. Векторные диаграммы трансформатора
Комплексные уравнения (4.19) и (4.20) трансформа-
тора можно изобразить в виде векторной диаграммы,
которая наглядно показывает соотношения между тока-
ми, э. д. с., напряжениями обмоток и фазовые сдвиги
между ними.
Построим векторную диаграмму трансформатора для
активно-индуктивной нагрузки 2и=Гц-|-/хн (рис. 4.4, а).
Отложим вектор основного потока Фм в положитель-
ном направлении оси абсцисс. Под углом а к нему про-
ведем вектор тока холостого хода /о, который разложим
§ 4.4. Векторные диаграммы трансформатора 119
на реактивную составляющую /д, совпадающую по фазе
с Фм и активную составляющую 7оа, опережающую по
фазе Фм на угол 90° (/о=У •
Рис. 4.4. Векторные диаграммы трансформатора:
а — при активно-индуктивной нагрузке; б ~ при активно-емкостной на-
грузке.
Векторы э. д. с. £i и Д', равные по величине, отстают
по фазе от потока на угол 90°. Вектор тока Д' построим
г. . i Х2-}-Хп' с, i ,,
под углом ф2=arctg———у к вектору £2, где хи'—xak2
^2 4*ГН
и ru' = rak2 — приведенные значения индуктивного и ак-
тивного сопротивлений нагрузки.
Вектор вторичного напряжения Д' опережает ток /2'
на угол <р2= arctg Сложение векторов Д', г21г и
Г н
jxzlz' должно соответствовать второму уравнению систе-
мы (4.19).
120
Глава IV. Трансформаторы общего применения
Из уравнения (4.20) значение тока Л=/о+(—Л')-
Следовательно, вектор тока Л определяется геометриче-
ским сложением тока 70 и составляющей —1г, равной и
противоположной по фазе току //.
В соответствии с первым уравнением системы (4.19),
складывая векторы —Ё1( rji и /хЛ, получим вектор при-
ложенного напряжения и угол сдвига <р± между векто-
рами (Л и Л.
Аналогичным путем построена векторная диаграмма
трансформатора при активно-емкостной нагрузке на
рис. 4.4, б.
§ 4.5. Схема замещения
Исследуя электромагнитные процессы в магнитно свя-
занных цепях, с большим удобством для расчетов можно
использовать метод электрических схем замещения, при
котором магнитные связи между цепями заменяются
электрическими. Для этого заменим трансформатор не-
которой схемой, сопротивление которой Z3KB определим
из уравнений (4.19) и (4.20).
Представим эти уравнения в следующем виде:
t7i=ZM/o-(-ri/i-f-/Xi/i;
—z-^jxz'iz
(4.21)
Здесь £i=£2' = —A)Zm, a Uz=Za'iz'.
Так как ток —/0 и э. д. с. Ё1 сдвинуты во времени на
угол (90°—а) <90°, то сопротивление ZM, называемое
сопротивлением ветви намагничивания, должно иметь
активную составляющую, т. е. ZM=rM+/xM. Составляю-
щая гм является сопротивлением, замещающим потери
в стали трансформатора, а хи — индуктивным сопротив-
лением взаимоиндукции обмоток.
§ 4.5. Схема замещения
121
Решая систему (4.21) относительно тока Л, получим
с71=71
— / 1^экв
Структуре сопротивления Z3KB соответствует схема, пред-
ставленная на рис. 4.5.
Рис. 4.5. Схема замещения нагружен-
ного трансформатора.
if
Рис. 4.6. Векторная диаграмма для
режима холостого хода трансформа-
тора.
4-с?
Очевидно, что уравнения, составленные согласно за-
конам Кирхгофа для этой схемы будут такими же, как и
уравнения (4.21). Следовательно, все связи между то-
ками и напряжениями трансформатора можно рассчитать
при помощи так называемой схемы замещения. В ней
только ветвь намагничивания — нелинейный элемент.
Ее сопротивление ZM зависит от насыщения. Но обычно
исследуется работа трансформатора при £/i=const, поэ-
тому все параметры схемы замещения трансформатора
можно считать постоянными.
Параметры схемы замещения могут быть определены
расчетным или опытным путем. В последнем случае обра-
щаются к данным опытов холостого хода и короткого за-
мыкания.
122
Глава IV. Трансформаторы общего применения
§ 4.6. Режим холостого хода
Холостым ходом называют режим работы трансфор-
матора, при котором /г=0. В этом случае система урав-
нений (4.19) принимает вид:
Ёг = (Jja',
U=ii.
(4.22)
При холостом ходе в схеме замещения (рис. 4.5) следует
положить ZH'=oo. Векторная диаграмма для режима
Рнс. 4.7. Схема опыта холо-
стого хода трансформатора.
холостого хода изображена на рис. 4.6. Построена она
согласно уравнениям (4.22).
Исследуя работу трансформатора, проводят опыт хо-
лостого хода. Для этого собирают схему, представленную
на рис. 4.7. К первичной обмотке подводят номинальное
напряжение Uia и замеряют ток /0, мощность Ро и напря-
жение U20. При этом необходимо учитывать потери в при-
борах, так как они могут быть соизмеримы с мощностью,
потребляемой маломощным трансформатором при холо-
стом ходе.
Опыт холостого хода позволяет определить следую-
щие величины, характерные для трансформатора.
1) Коэффициент трансформации
k— Wl — Ei ~ Eiil
W2 Ег Uж :
равный приблизительно отношению первичного и вторич-
ного напряжений при холостом ходе.
§ 4.6. Режим холостого хода
123
2) Ток холостого хода /о. Обычно его выражают
в долях или процентах от номинального тока первичной
обмотки
В маломощных трансформаторах ток холостого хода
составляет 5—70% от тока Лп. Первая цифра относится
к трансформаторам с неразъемным магнитопроводом,
последняя — к трансформаторам очень малой мощности
с броневым сердечником.
3) Мощность холостого хода Ро= cos <ро, или,
исходя из схемы замещения, Ро=/о2 (п+гм). В мощных
трансформаторах гм>л, поэтому Р» идет в основном на
покрытие потерь в стали трансформатора, т. е.
Ро«Рс = /о2Гм. (4.23)
В маломощных трансформаторах потери в меди /«Vi со-
ставляют достаточно большую величину, поэтому потери
в стали Рс определяют с учетом электрических потерь
в первичной обмотке:
Рс = Ро-/о2П (4.24)
(fl измеряют обычно омметром).
4) Параметры ветви намагничивания zM, хм и гм. Для
маломощных трансформаторов
г _ Рс Ро-/о2П
М /о2 /о2 ’
%о— (г 4- (г м-|-/^м) = (г i-фг м) “Ь/ (xi4-xM).
В маломощных трансформаторах, особенно в тороидаль-
ных, потоками рассеяния обычно пренебрегают, т. е. счи-
тают Xi «0, тогда
f/1H ---------------
~ =У(п+гМ)2+*М2.
'0
124
Глава IV. Трансформаторы общего применения
откуда
а
А, — |/ Гм2ф-Хм2.
В мощных трансформаторах сопротивлениями П и х4 при
холостом ходе пренебрегают, поэтому
2м— -ц~ —У гм24-^м2
Рс ——
гм^- z 2 > ^М = у2м2 ГМ2.
/о2
§ 4.7. Режим короткого замыкания
Коротким замыканием называется такой режим рабо-
ты трансформатора, когда вторичная обмотка его замк-
нута накоротко и, следовательно, вторичное напряжение
Н2=0.
Система уравнений (4.19) для этого режима прини-
мает вид:
(7i = —
Ёг =Г2 -\-jX2i2
ib=i •
(4.25)
Короткое замыкание, происходящее при номинальном
первичном напряжении, опасно для трансформатора, так
как токи в его обмотках будут во много раз больше их
номинальных значений.
Для того, чтобы воспользоваться данными этого ре-
жима, проводят опыт короткого замыкания. С этой целью
собирают такую же схему, как на рис. 4.7, только зажимы
вторичной обмотки замыкают накоротко. К первичной
обмотке трансформатора подводят напряжение ика, при
котором токи в обмотках равны номинальным значениям,
измеряют С7КН, /Ki=/in и Ркн. Напряжение UKU называют
номинальным напряжением короткого замыкания. Его
обычно выражают в процентах от С/1н-
§ 4.7. Режим короткого замыкания
125
и
кн%
£кн
U in
100.
В мощных трансформаторах и1;п равно 4-8%, а в мало-
мощных может доходить до 10—17%.
При проведении опыта короткого замыкания э. д. с. Elt
а следовательно, и поток в сердечнике составляют не-
Рис. 4.9. Треугольник корот-
кого замыкания.
Рпс. 4.8. Схема замещения транс-
форматора, работающего в режиме
короткого замыкания.
большую величину. Для создания такого магнитного по-
тока требуется настолько малый ток Л», что его величиной
обычно пренебрегают. Тогда уравнение токов (4.20) при-
обретает вид:
1\ = 12=1\ц — —/21Л (4.26)
Схема замещения для короткого замыкания трансфор-
матора с учетом равенства (4.26) представлена на рис. 4.8.
Она отличается от схемы замещения нагруженного тран-
сформатора (рис. 4.5) лишь тем, что вторичные зажимы
замкнуты накоротко и отсутствует ветвь намагничивания.
На рис. 4.9 изображена векторная диаграмма транс-
форматора, построенная на основании схемы замещения
(рис. 4.8). Все векторы на этой диаграмме ориентированы
относительно вектора тока Лн=—Лн'-
Треугольник АБВ называют треугольником короткого
замыкания. Стороны его равны:
126
Глава IV. Трансформаторы общего применения
^4-^1Н (^”1 —Н/'2/) = /21/ (/’1Н-Г2/) =Л1/к= Uva',
Б В = / in (Х1-|-Л2 ) = 1211 (л 1-|-Л'2 ) = 1 inXu = t/Kp;
ЛВ /lljZj; =/зп <,K=t^KH-
Здесь
Гк = /’1-|-Г2/; Xlt = Xi-|-X'2/ И 2К = У Гк2-|-Хк2—
соответственно активное, индуктивное и
полное сопротивления короткого замыка-
ния;
£7ка и С/кр — активная и реактивная составляющие на-
пряжения короткого замыкания.
Опыт короткого замыкания позволяет определить:
1) Параметры схемы замещения
Б) КН Р КП , 7, п
гк= ——; гк=-—л'к= у гк2—гк2.
/in /hi
Полученные значения сопротивлений согласно ГОСТу
приводят к условной рабочей температуре 75° С. Для при-
ведения активного сопротивления гк к температуре 75° С
пользуются формулой (1.22). Индуктивное сопротивле-
ние хк от температуры обмоток практически не зависит.
Полное сопротивление zK и coscpn приводят к температуре
75° С по формулам
2'к75- = У r2Kli„ Н~Хк2;
Гк75°
COS фк = ------•
2к75°
2) Потери короткого замыкания.
Так как при опыте короткого замыкания основной по-
ток имеет малое значение, то потерями в стали, вызван-
ными им, пренебрегают. Следовательно, мощность РКн
идет почти полностью на покрытие электрических потерь
в обмотках трансформатора.
§ 4.8. Изменение напряжения трансформатора
127
Как и сопротивления, потери Рка приводят к темпера-
туре 75° С.
Ркн=/?нГн75». (4.27)
3) Напряжение короткого замыкания, приведенное
к температуре 75° С,
и = -100= —• 100 (4.28)
IiH% Uin uta '
и его активную и реактивную составляющие
^%=J^r-,100==uKH% COS(P«; (4-29)
и =-f^-.\00 = u sin фк. (4.30)
кр% (JlH КН % >
В мощных трансформаторах напряжение короткого
замыкания указывается на его щитке.
§ 4.8. Изменение вторичного напряжения трансформатора
При изменении нагрузки (тока /2) трансформатора
вторичное напряжение L/2 также изменяется. Это изме-
нение при переходе от холостого хода к нагрузке при
t7iH=const принято выражать в процентах от номиналь-
ного первичного напряжения, т. е.
Д1/ = ^.,00= 100= 100.
С/20 (Ло СЧн
(4.31)
Здесь (72о — напряжение на зажимах вторичной обмотки
трансформатора при холостом ходе;
[/2—напряжение на тех же зажимах при на-
грузке.
Для определения Д(720/ воспользуемся векторной ди-
аграммой (рис. 4.10,6), построенной для упрощенной
схемы замещения (рис. 4.10, а) нагруженного трансфор-
128
Глава IV. Трансформаторы общего применения
матора. В схеме отсутствует ветвь намагничивания, так
как при практических исследованиях нагруженного тран-
сформатора обычно пренебрегают током холостого хода
/о, который много меньше тока Ц. При построении век-
торной диаграммы вектор напряжения —02 откладыва-
ют под углом фг относительно вектора тока Л = —12.
Рис. 4.10. Упрощенная схема замещения нагруженного трансформа-
тора (а) н векторная — диаграмма (б).
Складывая вектор — С2 с векторами — г2Ч2 и —jx2'l2,
получают вектор э. д. с. —Ё2=—Ё1. Затем к концу — Et
прибавляют rji и /Х1Л и получают вектор напряжения 1Д
на первичной обмотке. Треугольник АБВ, образованный
при построении диаграммы — треугольник короткого за-
мыкания.
Сделаем следующее дополнительное построение на
векторной диаграмме (рис. 4.11). Из точки В проведем
линию ВГ, перпендикулярную продолжению вектора
— tV. С достаточной точностью можно считать, что отре-
зок АГ—арифметическая разность напряжений L/щи U2,
т. е.
UlH- и2'=АГ=АД+ДГ=АД+БК,
где
АД = Цгк1у cos фг; 5/<=/iXK sin фг.
§ 4.8. Изменение напряжения трансформатора
129
Тогда
и Ml— U2=hrKi^ cos«jp2—Лхк sin ф2.
Рис. 4.11. К опре-
делению ьи
г%
Рис. 4.12. График зависимости Л1/ =
= /’(с°8ф2) при р = const.
Процентное изменение вторичного напряжения
АП
2%
п1п-п/
н1п
100 =
Л/'ктз» лл , 1лл ) Лн
——-------100- cos <ргН—----------100 • sin фг I —,
U ill U ' /1н
или
АП = -----~^--100-cos(p2+
г‘л Лн С/1П
, Ц / 1А . лл
+ -— '—---------100-sin ф2=
Пн П1Н
= ₽ (и ко% cos ф2+«кр% Siп фг). (4.32)
э /1 ^2
одесь отношение —— = ~ "7— ~Р называется
/111 / 2н / 2п
коэффициентом нагрузки. Выражение (4.32) показывает,
130
Глава IV. Трансформаторы общего применения
что Д{/2 зависит не только от величины нагрузки, но и
от характера ее (от угла <ра) -
На рис. 4.12 представлен график Л^20/ =f(costpz) при
P = const. На нем отрицательное значение Л^20/ при ра-
боте трансформатора с емкостной нагрузкой соответст-
Рнс. 4.13, Внешние характеристики
трансформатора.
вует повышению напряжения U2 относительно напряже-
ния (J2o (см. рис. 4.4, б).
Зависимость Д(Л=ПР) при cos<pa=const представ-
ляет собой прямую линию. Нагляднее вместо зависимости
Д[/ = f (Р) представить внешнюю характеристику тран-
сформатора H2 = f(P) ИЛИ U2 = f(Jz) При COS ф2 = Const.
На рис. 4.13 изображены внешние характеристики тран-
сформатора при различном характере нагрузок. Они по-
казывают, что при активной и активно-индуктивной на-
грузках с увеличением тока /2 вторичное напряжение
падает, а при активно-емкостной — возрастает.
Чем меньше изменяется напряжение с изменением
нагрузки, тем лучше эксплуатационные характеристики
трансформатора.
§ 4.9. Потери в трансформаторе и его к.п.д.
Для оценки режима нагрузки трансформатора боль-
шое значение имеет величина его к. п. д., равная отноше-
нию активной мощности на выходе к активной первичной
мощности:
§ 4.9. К- п. д. трансформатора
131
Р2 </2/2 cos фг
11 Pi <7i/i cos cpi
(4.33)
К. п. Д. мощных трансформаторов достигает величины
0,96—0,99, маломощных 0,6- 0,92, поэтому определение
его непосредственным методом ио формуле (4.33) не
может дать точных результатов. Общесоюзный стандарт
рекомендует рассчитывать к. и. д. косвенным методом,
пользуясь формулой
Рг Uzlz cos фг
Рг-^-^Р <А<2 cos ф2~|_/>С-|_/>м
Здесь SP— суммарные потери в трансформаторе.
Магнитные потери или потери в стали принимают, как
отмечалось, в мощных трансформаторах равными поте-
рям холостого хода Ро, в маломощных определяют по
формуле (4.24). Потери в стали Рс не зависят от нагрузки
и их считают постоянными (см. § 1.6).
Электрические потери в обмотках трансформатора
пропорциональны квадрату тока (Рм = Рк=/12гК75о) и,
следовательно, являются переменными.
Можно считать, что в обычных условиях cos ср; = const
и [72н = const, тогда
</2В/2-^СО5ф2
/2Н
</211/2 cos ф2 + Рс + /12П<75 I
/2ц Ан
или
________ PS„ COS ф2
Р^н COS ф2”|_/ЭС_|_Р2/Экн
(4.34)
где Sh=</2H/2h — номинальная мощность трансформа-
тора.
Максимальное значение к. п. д. соответствует коэффи-
циенту нагрузки Ропт, при котором магнитные потери рав-
ны электрическим:
РоптР
кн — Рс,
132
Глава IV. Трансформаторы общего применения
откуда
Р<1ПТ -—
У Г
1 • КН
Максимальное значение к. п. д. трансформатора полу-
чается при нагрузках, соответствующих рОПт = 0,5—0,8.
§ 4.10. Трехфазные трансформаторы
Для трансформирования трехфазного тока применяют
или трехфазные стержневые трансформаторы или «трех-
фазные группы», состоящие из трех однофазных транс-
форматоров.
Рис. 4.14. Схема трехфазного двух-
обмоточного трансформатора.
Маломощные трансформаторы выполняют только как
трехфазные стержневые. По конструкции они представ-
ляют Ш-образный магнитопровод, на каждом стержне
которого расположена первичная и вторичная обмотки
одной фазы (рис. 4.14). Согласно действующему ГОСТу,
начала обмоток высшего напряжения обозначают боль-
шими буквами А, В, С, а концы — X, У, Z и соответствен-
но низшего напряжения — а, в, с и х, у, z.
Обмотки трехфазного трансформатора могут быть
соединены звездой (Y) или треугольником (Д). При этом
§ 4,10. Трехфазные трансформаторы
133
схемы соединения обозначают дробью, указывая в числи-
теле схему соединения обмоток высшего, а в знамена-
теле— обмоток низшего напряжения, например Y/Y
(рис. 4.14).
При исследовании работы «трехфазной группы» мож-
но каждый из трех трансформаторов рассматривать от-
дельно. Поэтому полученные выше уравнения однофаз-
ного трансформатора, его векторные диаграммы, схемы
замещения и все остальные зависимости можно полно-
стью использовать для рассмотрения процессов в каждой
фазе «трехфазной группы».
В трехфазном стержневом трансформаторе все шесть
обмоток расположены на одном сердечнике, поэтому при
составлении уравнений следует учитывать взаимное влия-
ние всех обмоток. Кроме того, этому трансформатору
свойственна некоторая магнитная несимметрия, так как
длина магнитопровода средней фазы меньше, чем каждой
из крайних. Это приводит к тому, что ток холостого хода
/ов фазы В оказывается меньше, чем токи фаз А и С, т. е.
токи холостого хода /од, /ов и /ос образуют несимметрич-
ную трехфазную систему. Несмотря на это, при опреде-
ленных условиях уравнения для каждой фазы трехфаз-
ного трансформатора могут быть сведены к уравнениям
однофазного трансформатора. Поэтому все зависимости,
полученные выше, и в этом случае могут быть использо-
ваны для исследования работы каждой фазы трехфазного
трансформатора.
Коэффициент трансформации в трехфазном трансфор-
маторе определяется как отношение линейных напряже-
ний, поэтому он зависит не только от числа витков фаз-
ных обмоток, но и от схемы их соединения.
Глава V. СПЕЦИАЛЬНЫЕ ТРАНСФОРМАТОРЫ
§ 5.1. Многообмоточные однофазные трансформаторы
Многообмоточные трансформаторы малой мощности
применяются для питания радиоустройств, электронных
и ионных приборов, схем автоматики и т. д. Такие тран-
сформаторы, называемые силовыми, мощностью от не-
скольких единиц до нескольких сотен вольт-ампер изго-
товляют на частоты 50—2000 гц. Многообмоточный тран-
сформатор заменяет несколько двухобмоточных, он де-
шевле, имеет меньшие габариты и вес. На стержне маг-
нитопровода, обычно броневого типа, размещают одну
первичную и несколько вторичных обмоток, выполненных
на разные напряжения. Часто для уменьшения помех,
проникающих из сети, между первичной и вторичной об-
мотками помещают экранирующую обмотку, один конец
которой заземляют.
В качестве примера рассмотрим работу трехобмоточ-
ного трансформатора. При изучении процессов, происхо-
дящих в нем, снова воспользуемся упрощенной картиной
поля. Будем считать, что в сердечнике трансформатора
существует поток Ф, создаваемый н. с. IqWi, и потоки рас-
сеяния ФР1, Фр2 и Фрз, сцепленные со всеми витками со-
ответствующих обмоток.
Намагничивающая сила /оОЧ равна геометрической
сумме н. с. всех обмоток:
/0ш1 = Л№1+/2®2+/з®з. (5.1)
Для облегчения анализа процессов каждую из вторичных
обмоток приведем к числу витков первичной обмотки.
Тогда уравнение (5.1) примет вид
или
/о=/1Н-/2/Н-/з/- (5-2)
§ 5.1. Многообмоточные трансформаторы
135
Здесь
_/ 1 . /<_/ _/ 1
12=12--- =12—1---, ‘3-13---- -'3*7-,
Wi kl2 W1 ki3
где ki2=---и &1з=— — коэффициенты трансформации
соответствующих пар обмоток.
По аналогии с двухобмоточным трансформатором си-
стема уравнений для напряжений трехобмоточного тран-
сформатора может быть представлена в следующем виде:
Г 2'12'“Ь/лУ/2 + 0 2'',
Ёз = Г з 1 з 1з -ф з .
(5-3)
Здесь
ЕУ = ^2^12; Г2/ = /'2^12,' ЛУ= Х2&12;
Ез =Езк\з\ Гз'=/"3^13; Хз'=Хзк1з.
В приведенном трансформаторе
(5.4)
Уравнениям (5.2), (5.3) и (5.4) соответствует векторная
диаграмма (рис. 5.1) для случая, когда ф2=0 и <рз>0.
Ее построение произведено аналогичным способом, как и
Для двухобмоточного трансформатора.
Исходя из системы уравнений (5.3) и равенства (5.4),
можно записать: г
tli—rj 1—Jxi?i = — U 2'—Гз'О'—1X2'12' =
= — Оз'—г3'73'—]Хз'1з'. (5-5)
Уравнению (5.5) соответствует электрическая схема за-
мещения трехобмогочного трансформатора (рис. 5.2).
Ее параметры определяют расчетным путем или по дан-
ным’опытов холостого хода и короткого замыкания.
136
Глава V. Специальные трансформаторы
В опыте холостого хода обе вторичные обмотки ра-
зомкнуты. Схема опыта, величины, определяемые из него,
и формулы для их нахождения те же, что и для двух-
обмоточного трансформатора (см. § 4.6).
Для того чтобы найти три
неизвестных параметра Zb Z2'
и Z3 схемы замещения, требу-
ются данные трех опытов ко-
роткого замыкания, производи-
мых по трем схемам, изобра-
женным на рис. 5.3. Результаты
измерений позволяют рассчи-
тать ГК12; Гц1з; Л-К13» Гк23 И
Л'к23-
Чтобы воспользоваться дан-
ными третьего опыта короткого
замыкания, необходимо сопро-
тивления ГК23 и ХК23 привести
Рис. 5.1. Векторная диаграмма одно-
фазного трехобмоточного трансфор-
матора.
к числу витков первичной обмотки, для чего делают сле-
дующие вычисления:
/ Wi \2 I Wi \2 / w2 \2 / wt \2 , .
Гк23 ( ----) =Г2 I ------ I Н-Гз I ---- ) I ---- I =Г2 -рЗ ;
' W2 ' ' W2 ' ' W3 ’ \ W2 >
(5.6)
/ Wi V / wi \2 / w2 \2 / wt \2 z , .
^к23 I ----) ~Х2 I ------- I -|-Хз I ) I I —х2 -ф^З •
(5.7)
Все активные сопротивления приводят к температуре
75° С. Сложив гК12 и гК1з и отняв равенство (5.6), найдем
Г1 =
Г К12“|~Г К13 Г к23^12
(5-8)
2
§ 5.1. Многообмоточные трансформаторы
137
Аналогично рассчитывают r2, rj, Xi, х2 и xj. По данным
опытов короткого замыкания определяют номинальные
напряжения короткого замыкания иК12, «юз и икгз и их
составляющие.
Рнс. 5.2. Схема замещения однофазного трехобмоточного трансфор-
матора.
Рис. 5.3. Схемы включения и схемы замещения однофазного
трехобмоточного трансформатора в опытах короткого за-
мыкания,
138
Глава V. Специальные трансформаторы
§ 5.2. Автотрансформаторы
Автотрансформатором называется такой трансформа-
тор, у которого обмотка низшего является частью обмот-
ки высшего напряжения. Выполняются автотрансформа-
торы трехфазными и однофазными (рис. 5.4), как пони-
жающими (а), так и повышающими (б).
Рис. 5.4. Схемы пониженного (а) н повышенного (о) однофазных
автотрансформаторов.
Рассмотрпм работу однофазного автотрансформатора
(рис. 5.4, о). Здесь АХ относится к первичной стороне,
имеющей ©i витков, а ах — ко вторичной с числом вит-
ков W%.
Режим холостого хода автотрансформатора (при
/:1=0) ничем не отличается от холостого хода обычного
трансформатора. Напряжение, подводимое к первичной
обмотке Ul=UAx, равномерно распределяется между ее
Ut
витками и составляет на один виток ew=-----. Зак как
1С1
вторичная обмотка содержит витков, то ее напряжение
7/ Ui Ui
и 2=----W2=
Wt ka
(5-9)
Wi
где ka=-------коэффициент трансформации автотранс-
форматора.
Если автотрансформатор включить на нагрузку, то он
будет потреблять из сети ток Л, а в его внешней (вторич-
§ 5.2. Ликирапсформаторы
139
ной) цепи потечет ток /2. Отношение этих токов, как и
в обычных трансформаторах, можно выразить через ко-
эффициент трансформации
/£
/2
пли
(5.10)
Ток /2 протекает только по нагрузке, а в части обмот-
ки ах автотрансформатора (если /о = О) будет протекать
ток
/<,л = /2-Л.
Воспользовавшись уравнением (5.10), получим
(5.11)
Ток во внешней цепи автотрансформатора можно
представить в виде /2=:/1+/ах. Он состоит из двух частей:
тока /1, который течет непосредственно из первичной це-
пи, и тока /Ох, поступающего из общей части обмотки ах
и получаемого трансформаторным путем.
Мощность S2, отдаваемая автотрансформатором во
вторичную цепь, называется проходной мощностью. Она
равна
U2I2
S2= U2I2= U2li+U2Iax= +
+ U2I2 ( 1--7-) =5a+S3M,
s2
—-----электрическая мощность, пере-
даваемая во вторичную цепь
непосредственно из первичной
цепи;
140
Глава V. Специальные трансформаторы
S3M—S2 -------—) —электромагнитная мощность, пе-
“ редаваемая во вторичную цепь
обычным электромагнитным пу-
тем.
Сечение меди и стали автотрансформатора, т. е. его
габариты, определяют исходя из электромагнитной мощ-
ности S3M, которая в ( 1-) раз меньше, чем в обыч-
ном трансформаторе. В ( 1—) раз меньше габариты,
«а
вес и магнитные и электрические потери. Применение
автотрансформаторов дает значительные преимущества
лишь при /еа= 1,2—2,5.
Наряду с преимуществами автотрансформатор имеет
и недостатки, к которым относятся: наличие электриче-
ской связи между первичной и вторичной цепями; боль-
шой ток короткого замыкания; возможность резкого по-
вышения напряжения на стороне низшего напряжения,
например при обрыве обмотки на участке ах или при ко-
ротком замыкании участка Аа.
Применяют маломощные автотрансформаторы в неко-
торых устройствах автоматики и радиотехники. В лабо-
раторных установках широко используют регулируемые
автотрансформаторы типа ЛАТР, позволяющие плавно
изменять напряжение от нуля до 250 в.
§ 5.3. Импульсные трансформаторы
Импульсным трансформатором называют трансфор-
матор специального типа, служащий для трансформации
кратковременных импульсов напряжения.
Импульсные трансформаторы широко применяются
в схемах радиотехнических и импульсных устройств
(в технике радиолокации, импульсной радиосвязи, теле-
видении, в вычислительных машинах и пр.). С их по-
мощью в указанных устройствах повышают или пони-
жают амплитуды напряжения, согласовывают нагрузки
с волновым сопротивлением кабелей, линий задержек
§ 5.3. Импульсные трансформаторы
141
и т. д., изменяют полярности импульсов, осуществляют
межкаскадную связь в усилителях, размножают импуль-
сы, создают в генераторах импульсов сильную обратную
связь.
Импульсные трансформаторы должны возможно
меньше искажать форму трансформируемых импульсов
напряжения.
Рис. 5.5. Принци-
пиальная схема
импульсного тран-
сформатора.
и2
Для того, чтобы выявить принципиальную возмож-
ность трансформации кратковременных импульсов без
искажения формы, рассмотрим идеальный трансформа-
тор (без потерь и емкостных связей), работающий в ре-
жиме холостого хода. Первичная обмотка его подключена
к генератору импульсов прямоугольной формы (рис. 5.5).
Приложенное к импульсному трансформатору напря-
жение можно записать следующим образом:
Voo(Z),
(5.12)
где ст — знак единичной функции.
Значение тока в первичной обмотке при этом меняется
по закону
(5.13)
— постоянная времени первичного контура.
142
Глава V. Специальные трансформаторы
Напряжение на вторичной обмотке
,, ^’1 ,, Uo rt М ,
и2=М -- =М---’ —е-чт=и0-=—е-^, (5.14)
at ri Li Li ' '
где М — взаимная индуктивность между обмотками.
Рнс. 5.6. Кривые
напряжений и то-
ка импульсного
трансформатора
при 7’</и; Т^ТЯ.
В зависимости от соотношений между постоянной вре-
мени Т, длительностью импульсов ta и их периодом Ти
возможны различные искажения вторичных импульсов
напряжения:
1) Пусть Т<С/И; Т<£,ТИ. При таком соотношении полу-
чаются кривые напряжений Ut, u2 и тока it, показанные
на рис. 5.6. Анализ этих кривых показывает, что при
Т трансформация импульсов напряжения без их ис-
кажения не получается. В данном случае трансформатор
работает в сущности как некоторое дифференцирующее
устройство.
2) Пусть T^tlt; Ти^>/а. На рис. 5.7 показаны кривые
напряжений Ut, и2 и тока it для этого случая.
При такой трансформации импульсов, если на выходе
поставить диод п срезать медленно меняющуюся нижнюю
часть, во вторичной обмотке получаются импульсы напря-
§ 5.3. Импульсные трансформаторы
143
женин без особых искажений. Следовательно, при tK<^T
и рассматриваемый трансформатор можно исполь-
зовать как импульсный.
Изложенная картина процессов в импульсном транс-
форматоре выявляет лишь принципиальную возможность
его построения. В действительном импульсном трансфор-
Рис. 5.7. Кривые напряжений и тока импульсного трансформатора
при Тк:»/и.
маторе электромагнитные процессы оказываются значи-
тельно более сложными из-за влияния магнитного гисте-
резиса, вихревых токов, магнитной вязкости, паразитных
емкостей и индуктивностей рассеяния обмоток.
Рассмотрим влияние магнитного гистерезиса на на-
магничивание сердечника трансформатора в импульсном
режиме. На рис. 5.8 представлена зависимость В=f(H)
для материала сердечника.
Пусть на первичную обмотку трансформатора по-
даются импульсы напряжения прямоугольной формы
с амплитудой Uo и длительностью ta.
Пренебрегая активным сопротивлением и потоками
рассеяния первичной обмотки, можно записать
d(t> dB
ui = —ei = wl—-r=wiS-—-, (5.15)
dt dt
где S — площадь сечения сердечника трансформатора.
144
Глава V. Специальные трансформаторы
Отсюда приращение магнитной индукции в сердечнике
за время импульса будет
ДВ =
1
WiS
И
( и« <
О W'S
(5.16)
Как видно из этого равенства, приращение индукции
в данном трансформаторе зависит только от амплитуды
и длительности импульса первичного напряжения.
Рис. 5.8. Влияние магнитного гистерезиса на намагничивание сердеч-
ника в импульсном режиме.
Если до подачи импульсов сердечник был размагни-
чен, то характеризующая его магнитное состояние точка
находилась в начале координат. За время первого им-
пульса индукция изменится на ДВ, и эта точка перемес-
тится по основной кривой намагничивания в точку 1.
По окончании импульса сердечник размагничивается и
характеризующая его магнитное состояние точка пере-
двигается по верхней ветви частного гистерезисного цик-
ла в точку 1' с некоторой остаточной индукцией В/.
С подачей второго импульса индукция снова возрас-
тет на величину ДВ и характеризующая точка займет
новое положение (точка 2), где
Вз=В1'-|-ДВ.
§ 5.3. Импульсные трансформаторы
145
По окончании импульса точка 2 перемещается в точ-
ку 2'. С подачей последующих импульсов напряжения
процесс будет продолжен таким же образом и до тех пор,
пока рабочая точка не попадет на такую петлю частного
цикла 5—4', на которой изменение индукции между край-
ними точками составит ту же величину Дб. Тогда при
всех последующих импульсах рабочая точка будет пере-
мещаться по петле 5—4', которая в данном случае и бу-
дет определять свойства сердечника импульсного транс-
форматора.
При некотором значении u1=V0o(Z) можно получить
приращение магнитной индукции Дб'=бм—Во. Устано-
вившийся процесс намагничивания сердечника будет
определяться ветвями петли между точками Вм и Во,
называемой предельной петлей частного цикла. С увели-
чением напряжения щ, а следовательно, и Дб намагничи-
вающий ток будет резко возрастать, поэтому допускать
\В>^' нельзя. Магнитная проницаемость на предель-
ном цикле равна
Дб' бм—б0
=tg а.
2/М 11 М
(5-17)
Отсюда видно, что цд на предельном и любом другом
частном цикле в импульсном режиме трансформатора
оказывается значительно меньше проницаемости, равной
бм
ц= , определяющей процесс намагничивания сердеч-
“ м
ника при синусоидальном напряжении. Вследствие этого
индуктивность обмоток трансформатора в импульсном
режиме уменьшается по сравнению с индуктивностью
этих же обмоток при питании от сети синусоидального
напряжения. С целью увеличения цд для сердечников им-
пульсных трансформаторов выбирают такие магнитные
материалы, которые характеризуются значительной вели-
чиной разности бм—бо.
В импульсных трансформаторах скорости нарастания
магнитного потока в сердечнике очень велики. При этом
возникают значительные вихревые токи в сердечнике,
размагничивающие его и резко снижающие магнитную
146
Глава V. Специальные трансформаторы
проницаемость цд. Для устранения влияния вихревых
токов сердечники импульсных трансформаторов нави-
вают из тонкой ферромагнитной ленты (толщиной 0,02—
0,35 мм) или делают из ферритов.
Рис. 5.9. Схема заме-
щения импульсного
трансформатора.
Существенное влияние на процессы в импульсном
трансформаторе оказывают индуктивности и емкости.
С учетом этих параметров эквивалентная схема замеще-
ния показана на рис. 5.9. Здесь Ct и С2' — емкости обмо-
ток относительно земли; С3 — емкость между обмотками.
Вследствие влияния паразитных емкостей, индуктив-
ностей рассеяния и магнитных процессов в сердечнике
напряжение и2 может иметь различную форму изменения
в функции времени t (рис. 5.10). Для выходного импульса
и2(1) (рис. 5.10, а) характерны следующие участки:
0—1 — фронт импульса, 1—2 — вершина, 2—2'— срез
и 2'—3—4 — хвост импульса. Время нарастания фронта
импульса /ф должно быть минимально возможным, что
достигается снижением значений паразитных емкостен и
индуктивностей обмоток. На изменение вершины импуль-
са влияет пропорциональная магнитной проницаемости
цд индуктивность намагничивания LM. Чем больше она,
тем меньше изменяется вершина импульса.
Колебания на хвосте импульса обусловливаются влия-
нием достаточно больших паразитных емкостей.
Таким образом, при конструировании импульсных
трансформаторов следует учитывать все причины, влияю-
щие на форму выходного импульса. Для получения тран-
сформируемых импульсов с минимальным отклонением
по форме от входных необходимо стремиться к возможно
большему уменьшению паразитных емкостей и индуктив-
§ 5.4. Пик-трансформаторы
147
постен рассеяния обмоток путем использования их надле-
жащей конструкции и применения сердечников из специ-
альных магнитных сплавов. Большое значение при этом
имеет уменьшение размеров сердечника и числа витков
обмоток.
Рис. 5.10. Формы выходного
импульса напряжения без ко-
лебаний (а) и с колебаниями
на вершине п хвосте импуль-
са (б).
§ 5.4. Пик-трансформаторы
Пик-трансформатором называется специальный тип
трансформатора, служащий для преобразования первич-
ного напряжения синусоидальной формы во вторичное
с крутым фронтом волны в виде пика. Применяются эти
трансформаторы в схемах регулирования сеточного на-
пряжения в тиратронах и ртутных выпрямителях, в мно-
гоканальной телефонной связи в качестве генераторов
гармоник, в некоторых индикаторных радиоустройствах.
Принцип получения вторичного напряжения пико-
образной формы основывается на уплощении кривой
основного потока, сцепленного со вторичной обмоткой.
На рис. 5.11 и 5.12 показаны два возможных исполне-
ния пик-трансформаторов.
148
Глава V. Специальные трансформаторы
В первом случае трансформатор подключается к сети
на синусоидальное напряжение Ui = i7iM sin at через боль-
шое активное сопротивление г и имеет сильно насыщен-
ный сердечник, выполненный из специального сплава
(например, пермаллоя). При холостом ходе ток i0 будет
близок к синусоидальному, так как в основном он опре-
Рис. 5.11. Пик-трансфор-
матор с сильно насыщен-
ным сердечником.
делается сопротивлением г. Магнитный поток в сердеч-
нике изменяется по уплощенной кривой, а э. д. с. е?=
йф
= ~W2~dF булет иметь пикообразную форму.
Во втором случае (рис. 5.12) вторичная обмотка рас-
полагается на стержне относительно малого сечеиия.
Параллельно ему устанавливается магнитный шунт с по-
чти линейной характеристикой Фга=/('о). При синусо-
идальном первичном напряжении магнитный поток
Ф=Фш4-Ф2 во времени также будет изменяться синусо-
идально. Его же составляющие Фш и Ф2 будут несинусо-
идальными. Поток Ф2 из-за насыщения стержня, на кото-
ром расположена вторичная обмотка, будет иметь упло-
§ 5.4. Пик-трансформаторы
149
щенную форму, при которой э. д. с. вторичной обмотки
с/(1)2
ео=—а>2—j— получит пикообразную форму.
at
Рис. 5.12. Пик-
трансформатор
с насыщенным
стержнем и ма-
гнитным шун-
том.
Пик-трансформатор с магнитным шунтом наиболее
распространен. Основная магнитная цепь и шунт его
выполняются из обыкновенной листовой электротехничес-
кой стали. Стержень, на котором располагается вторич-
ная обмотка, часто набирают из листов пермаллоя.
РАЗДЕЛ
ТРЕТИЙ
АСИНХРОННЫЕ МАШИНЫ
Глава VI. ОБЩИЕ СВЕДЕНИЯ
§ 6.1. Устройство и принцип действия асинхронной машины
К асинхронным машинам относятся машины перемен-
ного тока общепромышленного и специального исполне-
ния, в которых обмотки статора и ротора электрически
не связаны между собой; между ними существует только
магнитная (трансформаторная) связь.
Наиболее распространены асинхронные двигатели.
Они просты в изготовлении, надежны в эксплуатации,
относительно недороги. Асинхронные двигатели изготов-
ляют одно-, двух- и трехфазными. Наибольшее примене-
ние получили трехфазные двигатели малой, средней и
большой мощности.
Основные части асинхронной машины — статор и ро-
тор. Они разделены воздушным зазором, величина кото-
рого составляет 0,1—0,3 мм в машинах малой мощности
и 1 —1,5 мм в мощных машинах.
На рис. 6.1 изображен в разобранном виде трехфаз-
нын асинхронный двигатель типа ДТ-75-М мощностью
75 вт. Статор двигателя состоит из корпуса 3, выполняе-
мого в маломощных машинах из стали или алюминия
часто в виде трубы. В корпус запрессован сердечник 1,
набранный для уменьшения вихревых токов из штампо-
ванных изолированных листов электротехнической стали
толщиной 0,35—0,5 мм. В пазы сердечника статора поме-
щена закрепленная с помощью клиньев обмотка 2. Концы
ее фаз выводят на щиток машины.
Сердечник ротора 5 собран также из листов электро-
технической стали и закреплен на валу 7 двигателя.
Штампованные листы сердечников ротора и статора по-
казаны на рис. 6.2. Вал вращается в подшипниках 6,
запрессованных в подшипниковые щиты 4. Последние
выполнены из того же материала, что и корпус, и кре-
§ 6.1. Устройство асинхронной машины
151
пятся они к нему болтами или шпильками. В двигателях
малой мощности в основном применяются шариковые
подшипники.
В зависимости от типа обмотки ротора асинхронные
машины обычного исполнения подразделяют на машины
Рис. 6.1. Трехфазный асинхронный двигатель с ко
роткозамкнутым ротором типа ДТ-75-М.
с короткозамкнутым и фазным ротором. Асинхронные
двигатели малой мощности почти исключительно выпол-
няют с короткозамкнутым ротором. В закрытых пазах
таких роторов располагают неизолированные медные или
алюминиевые стержни, концы их с обеих сторон ротора
соединяют с медными или алюминиевыми кольцами.
Таким образом получается короткозамкнутая обмотка,
имеющая вид беличьей клетки (рис. G.3). Часто стержни
152
Глава VI. Общие сведения
и кольца вместе с вентиляционными крыльями изготов-
ляют путем заливки пакета стали ротора расплавленным
алюминием под давлением.
В тех случаях, когда необходимо получить большой
пусковой момент и широкий диапазон регулирования ско-
рости вращения, в асинхронных двигателях большой и
средней мощности применяют фазные роторы. В их изо-
лированные полузакрытые пазы укладывают трехфазные
обмотки. Концы фаз, соединенных в звезду или треуголь-
Рис. 6.2. Листы
сердечников
статора (/) и
ротора (2).
Рнс. 6.3. Ко-
роткозамк-
нутая обмот-
ка ротора в
виде беличь-
ей клетки.
ник, присоединяют к изолированным друг от друга и от
вала двигателя трем контактным кольцам. По ним сколь-
зят укрепленные в щеткодержателях щетки, с помощью
которых обмотку ротора соединяют с пусковым или регу-
лировочным реостатом.
Принцип действия трехфазного асинхронного двига-
теля заключается в следующем. Если включить обмотку
статора в трехфазную сеть, то по ее фазам потекут токи,
и. с. которых создадут вращающееся магнитное поле.
Последнее, пересекая проводники (стержни) обмотки
ротора, наводит в них э. д. с. Так как обмотка ротора
замкнута, то в ее проводниках возникают токи, которые,
взаимодействуя с вращающимся магнитным полем, со-
здают электромагнитный момент. Ротор начинает вра-
щаться в ту же сторону, что и поле, но со скоростью п,
60fi
всегда меньшей скорости вращающегося поля По=------,
Р
называемой синхронной. Таким образом, ротор вращает-
ся не синхронно (асинхронно) с полем, так как только
§ 6.2. Обмотки машин переменного тока
153
в этом случае возможно в нем наведение э. д. с., токов
и возникновение момента. Следовательно, для работы
асинхронной машины обязательно наличие разности ско-
ростей По—и, называемой скоростью скольжения. Отно-
шение этой разности к скорости поля называется сколь-
жением:
По—и
х=-------
По
(6.1)
В зависимости от величины и знака скольжения асин-
хронная машина может работать в режимах двигателя при
l^s>0, генератора при s<0 и электромагнитного тор-
моза при s>l (см. график M = f(s') на рис. 7.6).
В генераторном режиме ротор вращают со скоростью
п большей По, в ту же сторону, что и поле; в режиме элек-
тромагнитного тормоза ротор вращается против поля
машины.
Асинхронные генераторы в практике применяются
редко.
§ 6.2. Обмотки машин переменного тока и наведение
в них э.д.с.
Общие сведения. Обмотки статоров асинхронных и
синхронных машин, а также обмотки ротора асинхронных
машин с фазным ротором выполняют в принципе одина-
ково. Они представляют собой ряд катушек, определен-
ным образом соединенных между собой.
По способу расположения сторон катушек в пазах об-
мотки машин переменного тока разделяются на одно-
слойные и двухслойные, по числу фаз — на однофазные
и многофазные (чаще трехфазные и двухфазные).
Обмотки характеризуются количеством пар полю-
сов Р, на которое они выполнены, числом фаз т, числом
пазов, приходящихся на полюс и фазу:
Z
q=-----,
2рт
(6.2)
154
Глава VI. Общие сведения
где Z — полное число пазов,
числом параллельных ветвей 2 а, приходящихся на фазу,
количеством последовательно соединенных витков w в од-
ной фазе (или одной параллельной ветви фазы), шагом
(шириной) катушки t/i.
Обмотку выполняют с полным или диаметральным
шагом, когда г/1 = т, и с укороченным — при г/1<т.
При изучении схем обмоток смещение между пазами
выражают в электрических градусах. Так как смещению
на т соответствует угол 180°, то смещению на пазовое
деление (расстоянию между серединами соседних па-
зов) будет соответствовать угол
а= — 180°.
т
1
Если т измерять числом пазовых делений, то получим
т= —— пазовых делений. Тогда угол, приходящийся на
zp
одно пазовое деление (/п=1),
р-360° Л I-
а=----------- эл. град.
£
Между углами, выраженными в электрических (а°)
и геометрических (а°) градусах, существует, следователь-
но, следующее соотношение: а°=ра°.
Во время работы машины переменного тока в ее об-
мотках индуктируются переменные э. д. с., которые
характеризуются величиной, частотой и формой кривой.
Получение э. д. с. необходимой величины и частоты до-
стигается сравнительно легко, труднее создать э. д. с.
заданной формы. Обычно требуется, чтобы э. д. с. маши-
ны, предназначенной для работы в установках промыш-
ленного типа, была практически синусоидальной.
Величина э. д. с. и особенно форма ее кривой зависят
от устройства обмотки, поэтому в дальнейшем одновре-
менно рассматривается выполнение обмотки и наведение
в ней э. д. с.
§ 6.2. Обмотки машин переменного тока
155
Однослойная сосредоточенная обмотка с полным ша-
гом. Рассмотрим сначала наиболее простую обмотку —
однофазную однослойную сосредоточенную с полным
Рис. 6.4. Сосре-
доточенная од-
нофазная об-
мотка статора
(а) и кривая
распределения
индукции в воз-
душном зазоре
(б).
шагом. Сосредоточенной называют такую обмотку, в ко-
торой на полюс и фазу приходится одни паз, т. е.
Z
q= -— =1.
2pm
Для удобства рассмотрения представим круговое вра-
щающееся поле, существующее в трехфаЗном асинхрон-
ном двигателе, постоянными магнитами, вращающимися
с синхронной скоростью По внутри статора. Пусть число
полюсов постоянного магнита 2р=2 (рис. 6.4, а), а кри-
вая распределения индукции В в воздушном зазоре вдоль
внутренней окружности статора представляет собой си-
нусоиду (рис. 6.4, б).
Вращаясь, поле магнитов, эквивалентное вращающе-
муся полю машины, будет пересекать проводники обмот-
ки статора и наводить в них э. д. с.
^пр = Blv.
Так как активная длина проводника l=const и ско-
рость поля u = const, то ещ, = В. Следовательно, форма
кривой э. д. с. определяется исключительно кривой рас-
пределения магнитной индукции в зазоре.
156
Глава VI. Общие сведения
Среднее значение э. д. с. в проводнике
£др.ср = Scp/У.
Действующее значение э. д. с. проводника при синусо-
идальном распределении магнитной индукции
(6.3)
пр — ЯфСцр.ср — 1,11
Скорость v можно представить в виде:
лИпо По
где лД = 2рт;
D — внутренний диаметр статора;
, рпо
/1= —-----частота э. д. с., гц.
60
Подставляя значение скорости v в формулу
чим
Епр = 2,22) 1Фм>
где Фм — ВСр1х — магнитный поток, вб.
1
I
(6.3), полу-
(6.4)
Так как каждый виток катушки имеет 2 проводника,
расположенных под полюсами различной полярности, то
э. д. с. витка с полным шагом Eb(Vi=t) в два раза больше
э. д. с. проводника и имеет ту же форму:
£в(р1=т)=2£Пр=4,44АФм. (6.5)
В сосредоточенной обмотке с полным шагом все витки
катушки находятся в одинаковых условиях по отношению
к полюсам. Поэтому э. д. с. в ней
E(yl=i')== EB(yt^=x')^K:= 4,44wKf 1Фм,
где wK — число витков в катушке.
Форма кривой этой э. д. с. такая же, как и кривой
э. д. с. витка.
§ 6.2, Обмотки машин переменного тока
157
В действительных машинах распределение индукции
в воздушном зазоре имеет несинусоидальную форму,
поэтому э. д. с. сосредоточенной обмотки также будет
несинусоидальной.
Основные недостатки сосредоточенной обмотки: отсут-
ствие ее влияния на форму кривой э. д. с., слишком боль-
Рис. 6.5. Распределенная однофазная обмотка статора с полным ша-
гом (а) и кривые индуктированной в ней э. д. с. первой и третьей
гармоник (б).
шой объем паза. По этим причинам для машин перемен-
ного тока применяют только распределенные обмотки,
У которых число пазов на фазу и полюс q~>\.
Однослойная распределенная обмотка. На рис. 6.5, а
изображена развернутая схема однофазной однослойной
распределенной обмотки с полным шагом, которая имеет
4 катушки на пару полюсов, уложенных в восьми пазах
из 12. В этой обмотке q — 4, у1 = х=6 пазовым делениям,
а число пазов, приходящихся на полюс, Q = 6.
158
Глава VI. Общие сведения
Предположим, что кривая распределения индукции и,
следовательно, кривая э. д. с. (рис. 6.5, б) несинусоидаль-
ны и содержат первую и третью гармоники.
Для первой гармоники угол сдвига между соседними
пазами (или соседними катушками) будет
Р-360° 1-360°
“= = ~1Г~ =30 •
В рассматриваемый момент времени катушка I лежит
6 М А
Рис. 6.6. Звезда
п многоугольник
э. д. с. катушек об-
мотки, изображен-
ной на рнс. 6.5.
на нейтрали, поэтому мгновенные значения э. д. с. первой
гармоники, индуктируемых в катушках 1, 2, 3 и 4, будут
еК1=Екм Sin 0° = 0;
еК2=£'км sin а=ЕКм sin 30°;
екз=Дкм sin 2a=EIiM sin 60°;
е1;4=ЕКм sin За = Екм sin 90о=Екм.
Ha рис. 6.6, а эти э. д. с. изображены четырьмя векто-
рами, каждый из которых равен действующему значению
э. д. с. Ек катушки.
Так как все катушки соединены последовательно, то
э. д. с. всей обмотки равна геометрической сумме их э. д. с.
(рис. 6.6,6). Здесь замыкающий вектор AD части пра-
вильного многоугольника с центром в точке О является
действующим значением э. д. с. Ёр1 обмотки, изображен-
ной на рис. 6.5.
§ 6.2. Обмотки машин переменного тока
159
Выразим э. д. с. распределенной обмотки Epi=A£)
через э. д. с. одной катушки. Для этого начала и концы
всех векторов (рис. 6.6, б) соединим с центром О. Тогда
из равнобедренного треугольника АОД с углом qa при
вершине О получим
AD = 2-AK=2-OA-s\n~-. (6.6)
Из треугольника АОБ найдем значение его стороны ОА-.
— AM 2-АМ Ек
О А =------=----------------------.
sin— 2 sin— 2 sin у
Подставив значение ОА в формулу (6.6), получим
qa
____ sm~r
AD = Е р1=Ек----
а
sni-y-
Если бы рассматриваемая обмотка была сосредоточен-
ной, т. е. такой, когда все четыре катушки располагаются
в двух пазах статора, то э. д. с. отдельных катушек совпа-
дали бы по фазе, а э. д. с. всей обмотки равнялась бы
алгебраической сумме Ecl = qEK. Отношение геометриче-
ской суммы э. д. с. катушек Ер1 к алгебраической ЕС1
называется коэффициентом распределения йР1 обмотки
(для 1-й гармонической э. д. с.):
„ . qa . qa
EKsin-— sin-—
, Epi 2 2
«pi— — — =
Eci „ . a .a
Erf) sin у gsin--
(6.7)
#pi всегда меньше единицы. Он показывает, во сколько
Раз э. д. с. распределенной обмотки меньше э. д. с. сосре-
доточенной обмотки при одинаковом числе витков.
160
Глава VI. Общие сведения
Следовательно, действующее значение э. д. с. первой
гармоники для распределенной обмотки с полным шагом
равно
£pi = &pi£ci=4,44fepit0fiOMi, (6-8)
где w = qpwK — число последовательно соединенных вит-
ков обмотки;
а>к — число витков в катушке.
Определяя коэффициент распределения для высших
гармоник, следует помнить, что угол сдвига между сосед-
ними пазами для гармоники порядка v равен av. На та-
кой же угол сдвинуты по фазе и векторы индуктируемой
в обмотке э. д. с. v-ой гармоники, и, следовательно, коэф-
фициент распределения для этой э. д. с.
flav
sin-y-
kpv=------------. (6.9)
av
Я s<n -2~
Так, например, коэффициент распределения обмотки,
изображенной на рис. 6.5, а, для 3-й гармоники э. д. с.
. 4-30-3
s'n—
*м== 30^3 =0'
Физически это объясняется тем, что 4 вектора э. д. с.
третьей гармоники, сдвинутых по фазе на угол За =
= 3-30° = 90°, образуют замкнутый четырехугольник.
Следовательно, для рассматриваемой обмотки данная
гармоника в кривой э. д. с. обмотки равна нулю, хотя
в кривой распределения индукции она существует.
В общем случае выполнения распределенных обмоток
при наличии в кривой индукции высших гармонических,
в кривой индуктированной э. д. с. высшие гармоники
уменьшаются в более значительной степени, чем первая,
так как коэффициенты распределения йрз, ... kpv, как пра-
§ 6.2. Обмотки машин переменного тока
161
вило, меньше /гР1. В частном случае при ftpv = 0 в кривой
э. д. с. обмотки гармоника v отсутствует.
Таким образом, э. д. с. распределенной обмотки мень-
ше по величине э. д. с. сосредоточенной обмотки с тем же
числом витков, но имеет лучшую форму кривой.
Рис. 6.7. Концентрическая распределенная обмотка статора.
Однофазная однослойная обмотка с полным шагом
может быть уложена в пазы различными способами.
На рис. 6.5 обмотка имеет все катушки одинакового раз-
мера. Недостаток ее в том, что лобовые части катушек
перекрещиваются, а это затрудняет их укладку в пазы.
Более удобна для подобной укладки обмотка, в которой
все катушки выполнены концентрическими, неодинако-
выми по своим размерам (рис. 6.7). Э. д. с., индуктируе-
мые в обмотках, изображенных на рис. (6.5, а) и (6.7),
при одинаковом числе витков будут одинаковыми. Поэто-
му концентрическая обмотка также относится к обмоткам
с полным шагом.
Во многих маломощных машинах сердечники роторов
или статоров выполняют со скосом пазов на одно зубцо-
вое деление (рис. 6.8). Это делается для устранения зуб-
цовых гармоник поля, возникающих из-за неодинаковой
магнитной проводимости в зонах зубцов и пазов. Скос
пазов эквивалентен распределению обмотки по дуге, со-
ответствующей углу у относительно осевого направления.
Будем считать, что в формуле (6.7) да—у и q sin — ~
162
Глава VI. Общие сведения
<?а Y
~ тогда получим выражение для коэффици-
ента скоса пазов (для первой гармонической э. д. с.)
Y
2
(6.10)
Рис. 6.8. Скос пазов ротора.
Для гармонических э. д. с. порядка v коэффициент
скоса равен
. YV
sm 2
yv
~ 2
Последний всегда меньше kci, поэтому скос пазов, не-
сколько понижая э. д. с. обмотки, улучшает ее форму
так же, как и распределение обмотки.
Улучшение формы кривой э. д. с., индуктированной
в обмотке, можно получить также, если ее выполнить
с укороченным шагом.
Для примера рассмотрим виток обмотки с укорочен-
ным шагом i/i = 4/5t (рис. 6.9, а).
Предположим, что кривая распределения индукции
в воздушном зазоре содержит, кроме первой, пятую гар-
монику, которые в проводниках витка индуктируют э. д. с.
£i и £/ первой и э. д. с. £5 и £5' пятой гармоник.
§ 6.2. Обмотки машин переменного тока
163
Если бы виток был без укорочения (t/i = t), то в кри-
вой его э. д. с. содержались бы первая и пятая гармоники,
действующие значения которых Ebi=2Ei; Ев5 = 2Е5
(рис. 6.9, биг).
Рис. G.9. Э. д. с. витка с укорочением.
i/i = 4/5t Ер,5=0, потому
Для укороченного витка с £
что Е5 и Е5' в проводниках направлены друг другу на-
встречу (при обходе витка) и взаимно компенсируются
(рис. 6.9, д).
При любом укорочении витка его э. д. с. Ещ
всегда меньше 2Е1=Ев(г/1=Т), так как в этом случае сдвиг
между Е1 и Ё/ будет меньше 180°. Величину э. д. с.
^В1(У <Т) можно определить из векторной диаграммы
(рис. 6.9, в):
=2Et cos — =2Ei^yi=ET1J £yi,
Bl(i/t<T) 1 2 y В1(У,=Т) >*’
где угол p=---------- 180° соответствует укорочению витка
на Уб т
164
Глава VI. Общие сведения
В1(у <т) R X — У1
?---=cos-| = cos-^-180° (6.11)
В1(у4=т)
является коэффициентом укорочения для первой гармо-
ники э. д. с.
Для высших гармоник
Обычно kyv<Zkyi, поэтому за счет укорочения умень-
шаются или уничтожаются высшие гармоники и, следова-
тельно, улучшается форма кривой э. д. с. витка.
Таким образом, э. д. с., индуктированная в распреде-
ленной обмотке с укороченным шагом при наличии скоса
пазов, на статоре или на роторе, определяется выраже-
нием:
£ = 4,44 kptkyikct^ f =4,44 Z?ol ce/f 1Фм1, (6.12)
где = — обмоточный коэффициент.
Обычно feoi = 0,9-0,96. Обмоточный коэффициент для
высшей v гармоники &Ov=fepv^yvfecv, а э. д. с. высшей v
гармоники
^V==4,44^OV^fv^^MV'
Обмотки высокой точности. В системах автоматики и
в вычислительной технике широко применяют синусно-
косинусные поворотные трансформаторы, действующие
значения выходных напряжений которых в зависимости
от угла поворота ротора должны изменяться с достаточ-
ной точностью по синусоидальному закону. Для этого на
статоре и на роторе обмотки выполняют так, чтобы обмо-
точные коэффициенты высших гармоник для них были бы
равны нулю или имели ничтожно малую величину. С этой
целью применяют обмотки с разным числом проводников
в пазах. Наилучшая форма выходного напряжения полу-
чается от той из них, в которой на полюсном расстоянии
количество проводников в пазах изменяется по синусо-
идальному закону.
§ 6.2. Обмотки машин переменного тока
165
На рис. 6.10 показана однофазная однослойная кон-
центрическая обмотка высокой точности, имеющая 2р=2
и Z= 12. На графике распределения проводников по па-
зам (рис. 6.10, а) за единицу принято максимальное чис-
ло витков, заложенных в пазах 1—6 и 7—12.
а
Рис. 6.10. Однофазная обмотка высокой точности.
Обычно в поворотных трансформаторах на статоре и
на роторе укладывают двухфазные обмотки, представля-
ющие собой совокупность двух обмоток, смещенных одна
относительно другой на 90 электрических градусов.
На рис. 6.11 показана двухфазная двухслойная об-
мотка, имеющая 2р=2; Z=12, в которой угол, приходя-
щийся на одно пазовое деление,
р-360° _ 1-360°
Z “ 12 ) •
Следовательно, начало второй фазы отстоит от начала
первой на расстоянии =3 пазов.
Из графика запол-
166
Глава VI. Общие сведения
нения пазов (рис. 6.11, а) видно, что все пазы заполнены
равномерно.
Трехфазные обмотки представляют собой совокуп-
ность трех фазовых обмоток, смещенных одна относи-
тельно другой на угол 120 электрических градусов и сое-
Рис. 6.11. Двухфазная двухслойная обмотка высокой точности.
диненных звездой или треугольником. Как известно из
электротехники, при любом соединении трехфазной об-
мотки линейные напряжения не содержат третьи и крат-
ные им гармоники. Следовательно, при выполнении этих
обмоток необходимо ослаблять или уничтожать гармони-
ки 5-го и 7-го порядка, так как гармоники более высокого
порядка малы. Укорочение шага иа 1/5т(у1 = 4/5т = 0,8т)
полностью компенсирует пятую, а на 1/7т (У1 = 6/7т«
ж 0,86т) — седьмую гармоники э. д. с. Обычно стремятся
значительно ослабить одновременно как ту, так и другую
гармоники, выбирая шаг обмотки 0,83т.
Трехфазные обмотки выполняют распределенными,
с укладкой катушек (секций) в пазы в один или два слоя.
§ (i.2. Обмотки машин переменного тока
167
Однослойные обмотки в основном применяют в машинах
переменного тока мощностью до 5 кет, а в более мощных
наиболее распространены двухслойные, с укороченным
шагом.
Рис. 6.12. Трехфазная однослойная обмотка.
Т рехфазная однослойная обмотка проще двухслойной,
но при ее выполнении возникают трудности с размеще-
нием лобовых частей.
Рассмотрим на примере построение трехфазной одно-
слойной обмотки. Дано 2р=4; Z=24 (рис. 6.12). Число
пазов, приходящихся на полюс и фазу, равно
Z 24
о=-------==-------
2pm 2-2-3
Шаг обмотки
Если уложить начало первой катушки фазы А в пер-
вый паз, то конец ее должен располагаться в седьмом
пазу. Вторая катушка этой фазы должна занимать второй
и восьмой пазы. Выполним обмотку концентрической.
168
Глава VI. Общие сведения
Тогда первая катушка фазы А займет первый и восьмой,
вторая (внутри первой) — второй и седьмой пазы.
Начало фазы В должно быть сдвинуто на угол 120°
относительно начала фазы А. Так как угол, приходящий-
ся на одно пазовое деление,
р-360° 2-360°
24 ^3"’
то сдвиг между фазами, выраженный в пазах, составит
120°
——- =4. Следовательно, начало фазы В должно нахо-
о U
диться в пятом, а С в девятом пазах. Под второй парой
полюсов имеется еще по паре катушек, принадлежащих
каждой фазе. Начало второй катушечной группы фазы А
сдвинуто относительно начала фазы С на 120° и, следова-
тельно, располагается в (94-4) тринадцатом пазу и т. %.
Таким образом, каждая фаза состоит из двух катушечных
групп, соединенных между собой последовательно.
Катушки этих групп имеют разные размеры. Это делается
для того, чтобы их лобовые части не перекрещивались.
После укладки катушек их лобовые части отгибают к сер-
дечнику в разных плоскостях.
Т рехфазная двухслойная обмотка с укороченным ша-
гом. Основные ее достоинства в том, что улучшена форма
кривой э. д. с. путем укорочения шага, уменьшен расход
меди и изоляционных материалов, понижена их стоимость
за счет механизации изготовления катушек одинакового
размера.
На рис. 6.13,6 представлена схема размещенной в 12
пазах, двухполюсной трехфазной двухслойной с укоро-
ченным шагом обмотки. Для нее число пазов на полюс
ченным шагом обмотки. Для
и фазу
Z 12
Q 2pm 2-1-3
ГТ Z
Полюсное деление т=------
2р
12
— =6 пазовым деле-
5
ниям. Шаг обмотки У1 = 5/6т = 0,833т, или щ=—-6=Е
пазовым делениям. Укорочение обмотки составляет 1/6т.
§ 6.2. Обмотки машин переменного тока
169
Угол, приходящийся на одно пазовое деление,
р-ЗбО" 1-360"
а=-^- = -^=30.
Сдвиг между фазами, выраженный в пазовых деле-
1200
ниях, равен - - — 4. Обмотка состоит из 12 одинаковых
о U
Рис. 6.13. Трехфазная двухслойная обмотка.
по размерам катушек. Следовательно, на каждую фазу
их приходится по 4 штуки. Одной стороной катушки укла-
дывают в верхних слоях, другой — в нижних, на расстоя-
нии pi = 5 (рис. 6.13, а).
Соединяют катушки в каждой фазе так, чтобы э. д. с.,
индуктируемые в них, складывались (см. таблицу для
схемы обмотки на рис. 6.13, в). Цифры со штрихом на
этом рисунке указывают номера пазов, в которых кату-
шечные стороны уложены в нижнем слое.
Так как все катушки фазы соединены последователь-
но, то обмотка каждой фазы имеет одну параллельную
170
Глава VI. Общие сведения
ветвь. Э. д. с., индуктируемые в фазах А, В и С, равны
и сдвинуты во времени на угол 120°.
Действующее значение э. д. с.
£=4,44&о1йуЛФм1,
где w — число последовательно соединенных витков
в фазе.
§ 6.3. Намагничивающие силы обмоток переменного тока
Намагничивающая сила однофазной обмотки. На рис.
6.14, а схематично представлена асинхронная машина
с сосредоточенной однофазной, расположенной в пазах
статора, обмоткой с полным шагом, имеющей w}; витков.
Если по ней пропустить ток /К=7МК sin a>t, то под дейст-
вием н. с. iKwK=lMKwK sin mt возникнет поток взаимоин-
дукции Ф, при помощи которого электромагнитная энер-
гия передастся от статора к ротору.
Поток Ф два раза пересекает воздушный зазор ма-
шины. Пренебрегая магнитным сопротивлением стальных
участков, можно считать, что и. с., затрачиваемая на про-
ведение магнитного потока через один воздушный зазор,
будет равна
У 2 7,
у 2 IkWk
где---------- = ЕК— амплитуда н. с. катушки на полюс.
При изменении тока в катушке н. с. также будет из-
менять свою величину, не меняя своего пространствен-
ного положения и, следовательно, создаст пульсирующее
поле.
Если развернуть в прямую линию внутреннюю окруж-
ность статора, то распределение н. с. вдоль нее будет
представлено прямоугольной кривой (рис. 6.14,6).
Прямоугольную кривую н. с. сосредоточенной обмотки
можно разложить в ряд гармонических нечетного по-
рядка. На рис. 6.14,6 показаны первая (или основная),
третья и пятая гармоники.
§ 6.3. И. с. обмоток переменного тока
171
Амплитуда первой из них
FM1= — FK= 4 2 —0,9/к^к- (6.13)
п 2л
Амплитуда гармоники порядка v
F mv 1 ^м1-
V
Высшие гармонические н. с. отрицательно сказывают-
ся на работе машины, поэтому для их ослабления выпол-
няют распределенные обмотки с укороченным шагом.
Рис. 6.14. Намагничи-
вающая сила катуш-
ки.
В однофазной распределенной обмотке с полным ша-
гом кривую н. с. всех q катушек получают геометрическим
сложением кривых н. с. отдельных катушек, следователь-
но, амплитуда результирующей н. с., вычисленная по пер-
вым гармоникам н. с. каждой катушки, на один полюс
будет равна
F Mgi — F Miqkpi — 0,9^р1^7к^к,
(6-14)
где /гр1 — коэффициент распределения.
Амплитуда н. с. распределенной обмотки с укорочен-
ным шагом на один полюс определяется по формуле
— 0,9&pl&yl<?7 А
(6.15)
172
Глава VI. Общие сведения
При наличии скоса пазов необходимо учитывать коэф-
фициент скоса kct. Тогда в общем случае получим
F mqi = 0>Qkpikyikci(]IKwK^= 0,9feoi9A(^K- (6.16)
Коэффициенты fepi, kyl, kci рассчитывают так же, как при
определении э. д. с. (формулы 6.7; 6.10; 6.11).
Заменив в выражении (6.16) qwK=qwK — через
2aw qw^p Р а
, где w = •— число последовательно включен-
р--------------2а
ных витков фазы, и приняв 2а1к=1 за ток этой фазы,
получим :
Г»,=0.9/ k°'W
(6-17)
Р
При протекании синусоидального тока t=y 21 sin tot
пульсирующая по оси катушечной группы н. с. (рис. 6.15)
изменяется во времени по закону синуса, т. е.
Fu = FMql sin tot.
Значение н. с. в соответствующей точке окружности
статора, находящейся на расстоянии х относительно оси
катушечной группы (рис. 6.15), будет
Кгж1 = КМд1 sin tot cos — x. (6.18)
т
I
Пульсирующую н. с. Ftxi можно разложить на две вра-
щающиеся н. с. следующим образом: равенство (6.18)
согласно тригонометрическому преобразованию
sin a cos р= sin(a—Р) + sin(a+P)
можно записать в виде
г 1 г • / . 11 \ ,
Ftxt = — Гм71 Sin ( tot-—х J +
§ 6.3, Н. с. обмоток переменного тока
173
+ 4^ sin ( (0/4- — х) =F'+F".
Z ' т '
Здесь
с/ 1 с- I < п \
F' = — FMql sin ( ы/---— х)
и
FM,yi sin I (1)/+ — x
(6.19)
(6.20)
(6.21)
уравнения бегущих волн. Они показывают, что н. с. F'
и F" являются функциями времени t и расстояния х. Если
принять, что выражения в скобках уравнений (6.20) и
(6.21) соответственно равны постоянным величинам С'
и С" (изменение t компенсируется изменением х), то
можно определить скорости, с которыми будут переме-
щаться н. с. F' и F". Продифференцировав уравнение
( о/—— х 1 —С' по времени t, получим
отсюда скорость перемещения н. с. F'
, dx ют 2л/1Т .
v’= -г, =----' =------=2xh,
dt л л
или в об/мин
, — 60_ 6°-2-тА _ 60fi
0 n,D 2рх р
Аналогично можно получить, что скорость вращения F"
равна
60Л
Таким образом, пульсирующую н. с. Fixi однофазной
обмотки можно представить двумя в. с., вращающимися
с одинаковыми скоростями в противоположные стороны,
174
Глава VI. Общие сведения
причем каждая из этих н. с. имеет амплитуду, равную
половине амплитуды пульсирующей н. с.
Графическое разложение пульсирующей н. с. Ftxl на
две вращающиеся F' и F" представлено на рис. 6.16.
Рис. 6.15. Мгновенные
значения н. с. по оси
катушечной группы и
на расстоянии х от
этой осп.
Рис. 6.16. Разложение
пульсирующей н. с. FtXi
на две вращающиеся
F' и F".
Концы векторов F' и F", изображающих вращающиеся
н. с., описывают окружность. Такие н. с. и поля, создан-
ные ими, называют круговыми вращающимися.
Н. с. двухфазной обмотки. Для получения вращающе-
гося магнитного поля необходимо, чтобы обмотки в ма-
шине создавали несколько потоков (минимум два),
сдвинутых в пространстве и во времени.
Образование вращающегося магнитного поля двух-
фазной обмоткой возможно при условии сдвига в про-
§ 6.3. Н. с. обмоток переменного тока
175
странстве ее фаз на угол 90 электрических градусов и при
протекании по ним токов, сдвинутых во времени.
На рис. 6.17, а изображены две катушки фаз А и В
одинаковым числом витков. По ним протекают одинако-
вые по величине токи 1 а — 1в=Ц но сдвинутые по фазе
Рис. 6.17. К пояснению принципа образования вращающегося поля
при протекании токов в двухфазной обмотке.
на 90° (рис. 6.17,6). Они создают н. с. Fa и Fr. Будем
учитывать только первые гармонические этих н. с. и
в дальнейшем изображать их векторами.
Рассматривая суммарное поле в различные моменты
времени (/о, 6, /г и т. д.), можно видеть, что вектор ре-
зультирующей н. с. вращается, оставаясь постоянным но
величине. Конец вектора FM = FMql за один период изме-
нения тока при р=\ опишет окружность. Получается
круговое вращающееся поле.
Это же самое можно доказать, обращаясь к аналити-
ческим выражениям н. с. отдельных фаз. Найдем значе-
ния н. с. фаз А и В в точке К, расположенной на рас-
стоянии х относительно оси фазы А (рис. 6.17, в). Ток
фазы А создает в этой точке н. с.
FAix = FMql sin го/ cos — х. (6.22)
176
Глава VI. Общие сведения
Так как ток в фазе В относительно тока фазы А сдвинут
па 90°, а ось фазы В относительно оси фазы А сдвинута
на 90 электрических градусов в пространстве, то н. с.
фазы В в рассматриваемой точке для того же момента
времени равна
/ зх \
BBtx = FMqi sin(wZ—90°)cos (— х—90°) . (6.23)
Сложим найденные значения н. с., заменяя при этом каж-
дую пульсирующую и. с. двумя вращающимися:
Ftx— FaixA~Fbix — Fm<ji sin mt cos — x-f-
+Fm9i sin(®/—90°)cos 90°) =
(6.24)
=FMql sin I at-------x ) .
' T '
Здесь
“7“ FMqi sin ( o)/-]-x) +
2 ' т '
+ sin ( ю/ф- — x—180°) =0.
Таким образом, для получения кругового вращающе-
гося поля в двухфазной машине необходимо выполнить
три условия: осуществить сдвиг фаз обмотки на 90 элек-
трических градусов и токов в фазах обмотки во времени
на четверть периода, добиться равенства величин н. с.
Fa, Fb и потоков, созданных ими. Если этого не выпол-
§ 6.3, Н. с. обмоток переменного тока
177
нить, то поле из кругового превращается в эллиптическое,
при котором вектор результирующего поля при вращении
описывает не окружность, а эллипс. Чем больше отклоне-
ние от указанных условии, тем в большей степени поле
будет отличаться от кругового. Эллиптическое поле мож-
но рассматривать как сумму двух неравных по величине
круговых полей, вращающихся в противоположные сто-
роны с одинаковой скоростью п0. Обратно вращающееся
поле в двухфазных машинах ухудшает рабочие свойства
машины.
Н. с. трехфазной обмотки. Каждая фаза обмотки при
наличии трехфазного тока создает пульсирующие н. с.,
сдвинутые в пространстве и во времени одна относитель-
но другой на 120°.
Аналитическое выражение результирующей н. с. трех-
фазной обмотки определяют следующим образом. Най-
дем н. с. фаз А, В, С з точке, сдвинутой на х относительно
оси фазы А.
FAix = FMqi sin wZ cos — x;
T
Fbix = Fuqi sin (wZ— 120°) cos ( X— 120° ) ;
Fctx=Fltlgi sin(wZ—240°) cos ( ~x~240°) .
(6.25)
Если сложить найденные значения н. с., заменив при
этом каждую пульсирующую н. с. двумя вращающимися
в разные стороны
Р * M<jl . / , Л- \ .
= —-— Sin (dt----------* / +
ж- т
+ f-,91sin( 0)Z+-n х—240°) ;
• 2 ' т '
(6.26)
178
Глава VI. Общие сведения
г. F
Fctx= - sin
, F Mgi . /
4—^~sin\
F MQl . /
= —— Sin ( (dt
+ - •—-Sin( (dt
л.
at-----X
т
л
— х—481
т
л \
X ) +
т '
л
— х—121
(6.26)
то получим результирующую и. с.
3
Ftx — FА1х-\-РBtx-^-FCtX = FMq(
Л \
(dt----XI.
(6.27)
Сумма вторых слагаемых уравнений (6.26) равна нулю,
так как они представляют синусоиды с одинаковыми
амплитудами, сдвинутыми друг относительно друга
на 120°.
Таким образом, трехфазная обмотка при наличии
в ней трехфазного тока создает круговое вращающееся
60ft .
поле, скорость которого п0= —-—. Амплитудное значе-
ние н. с. FM= FMqi совпадает с осью той фазы, ток
которой в данный момент имеет максимальное значение.
Анализируя выражения (6.24) и (6.27), можно отме-
тить, что в общем случае симметричная m-фазная обмот-
ка при наличии в ней симметричного m-фазного тока
создает вращающуюся н. с. с постоянной амплитудой:
г т с п яг z
Fm— F — 0,4ош7
2 р
Глава VII. ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
§ 7.1. Асинхронный двигатель при неподвижном роторе
Между обмотками статора и ротора асинхронной ма-
шины, как н в трансформаторе между первичной и вто-
ричной обмотками, существует только магнитная связь.
Электромагнитные процессы в асинхронной машине по-
добны процессам, происходящим в трансформаторе.
Такая аналогия особенно очевидна в режимах работы
асинхронной машины с неподвижным ротором, отличаю-
щейся от трансформатора нормального исполнения лишь
конструктивно (наличие воздушного зазора, распределен-
ные обмотки на статоре и роторе и пр.). В этом случае
возможны два предельных режима работы — холостой
ход и короткое замыкание. Первый может быть получен
только для машины с фазным ротором при разомкнутой
обмотке ротора и включенной обмотке статора в трех-
фазную сеть напряжением Ui и частотой fi.
В этом случае асинхронная машина представляет
трансформатор при холостом ходе. Первичной будет об-
мотка статора, вторичной — обмотка ротора.
Под действием Ui по каждой фазе обмотки статора
потечет ток холостого хода 7о- Образованная им и. с. Fo
создает поток, одна часть которого Ф (основной поток)
сцепляется с обеими обмотками, другая Opt (поток рас-
сеяния)— только с обмоткой статора (рис. 7.1). Основной
л. 60ft
поток Ф, вращаясь со скоростью «о= ——, наводит в об-
мотках статора и ротора э. д. с., которые соответственно
равны:
= (7.1)
£2=4,44fe()2w2fi®M, (7.2)
гДе ау4 и w2 — числа последовательно соединенных витков
одной фазы обмоток статора и ротора;
180
Глава VII. Трехфа.шый асинхронный двигатель
koi и k02 — обмоточные коэффициенты обмоток стато-
ра и ротора;
Фм — максимальное значение основного потока.
Поток рассеяния Фр1 наводит в обмотке статора э. д. с.
рассеяния Ёг1 — — jxJo, где xi = 2jtfiLpl — индуктивное
сопротивление рассеяния одной фазы статорной обмотки.
Рис. 7.1. Потоки статора при
разомкнутом роторе.
Для обмотки статора, как и для первичной обмотки
трансформатора, напишем уравнение напряжений
i?i = —Ё[ -|-г (7.3)
где Г1 и Zi — активное и полное сопротивления фазы об-
мотки статора.
В соответствии с уравнением (7.3) может быть постро-
ена векторная диаграмма, отличающаяся от диаграммы
холостого хода трансформатора лишь значениями паде-
ний напряжений rJo и /хДо, которые в асинхронной ма-
шине больше, чем в трансформаторе, ввиду сравнительно
большого значения тока холостого хода и относительно
больших сопротивлений п и хь Ток холостого хода асин-
хронной машины из-за наличия воздушного зазора со-
ставляет 25—50% от 71Н.
Коэффициент трансформации э. д. с. асинхронной
машины
kn—
Ej
Е2
koiWj
k„2W2
(7.4)
§7.1. Двигатель при неподвижном роторе
181
отличается от коэффициента трансформации трансфор-
матора только отношением обмоточных коэффициентов.
В режиме холостого хода (при п=0) в машине необ-
ходимо учитывать, кроме потерь в стали статора и ротора
Рс1+^с2, и потери в меди статора miAM, где mi — число
фаз обмотки статора. На их покрытие расходуется мощ-
ность Ро, потребляемая машиной из сети.
Таким образом,
Ро=/н1/о2Г1+/5с1+/’е2. (7.5)
Если ротор асинхронного двигателя замкнут накорот-
ко и заторможен, то имеет место режим короткого замы-
кания, при котором (когда Ul=Uin') ток в обмотках
машины общего применения превышает номинальные
значения в 4—7 раз.
Обычно для определения параметров rK, хк, costpn
производят опыт короткого замыкания. Во время него
к обмотке статора подают такое пониженное напряжение
Укн= (0,15-0,25) С/1П, чтобы токи короткого замыкания
были равны номинальным. Все, что относится к опытному
короткому замыканию трансформатора (см. § 4.7), может
быть применено к асинхронному двигателю. Условия же
приведения роторной обмотки к статорной сложнее, чем
приведение вторичной обмотки трансформатора к первич-
ной. Это объясняется тем, что конструктивно обмотка
ротора может значительно отличаться от обмотки ста-
тора.
Под приведенной обмоткой ротора понимают такую
обмотку, которая имеет то же число фаз и витков и такой
же обмоточный коэффициент, что и обмотка статора.
В опыте короткого замыкания асинхронного двигателя
можно пренебречь н. с. Ео и током 70, так как основной
поток Ф мал. Тогда, согласно закону равновесия, н. с.
статора и ротора равны, т. е.
0A5m.il1------- = 0.45/П2/2---,
Р Р
или
mik^liW^mik^hWi. (7.6)
182
Глава VII. Трехфазпып асинхронный двигатель
Отсюда
m2ko2w2 . 1 . .,
‘i = ----7-----/2= ~Г~ 12 — 12 ,
mikoiWi ki
(7-7)
где kt=—---------коэффициент трансформации токов;
m2ko2w2
tn2 — число фаз обмотки ротора.
Согласно уравнению (7.4), э. д. с. приведенной обмот-
ки ротора будет равна
E2=kEE2=Ei.
(7-8)
Определяя г/, исходят из равенства т21^г2=т^22г2',
откуда
, т2
Г2 =г2----
nil
2 mi / kolWi \2
— Г2---I т----I =r2kEki = r2k.
т2 ' kt)2w2 ’
(7-9)
Здесь k=kEki— коэффициент приведения сопротивлений.
При определении х2 можно исходить из условия, что
угол сдвига между э. д. с. Е2 и током 12 должен остаться
без изменения. Тогда
откуда
Х2 = ----x2 = x2k.
Г2
(7.10)
§ 7.2. Трехфазный асинхронный двигатель с вращающимся
ротором
Асинхронный двигатель при вращении ротора можно
также рассматривать как трансформатор обобщенного
типа, в котором преобразуются не только напряжения,
токи и число фаз, но и частота и род энергии.
§ 7.2. Двигатель с вращающимся ротором
183
Если включить обмотку статора в сеть напряжением
Ui и замкнуть обмотку ротора, ротор будет вращаться со
_ 60Л
скоростью П<По~ —-—.
Основное магнитное поле пересекает обмотки статора
и ротора с разными скоростями и частотами: относитель-
но статора со скоростью По и частотой /ч= -—г-, относи-
60
тельно ротора со скоростью скольжения п0—п и частотой
р(п0—п) _ рп0 (по—п)
‘2~ ео “ 60 «о — tlS'
(7.Н)
Основной поток во вращающемся двигателе так же,
как и при неподвижном роторе, создается совместным
действием н. с. статора и ротора. Следовательно, уравне-
ние н. с. для вращающегося двигателя будет иметь вид
/\+Ё2=Ё0,
или
mikoiWiIl-\-m2ku2W2i2=mikOiWiifl.
(7-12)
Намагничивающая сила ротора вращается относительно
него со скоростью
, 6O/2 60fiS п0—п
п —------- =----=П0'-------= п0—п,
р р По
а так как сам ротор вращается со скоростью п, то ско-
рость вращения н. с. ротора относительно неподвижной
точки на статоре равна п-\-п'=п-\-пй—п = пй.
Таким образом, н. с. ротора вращается в пространстве
всегда с той же скоростью и в том же направлении, что
и н. с. статора. Разделив уравнение (7.12) на ntikotWi,
получим уравнение токов такого же вида, что и для на-
труженного трансформатора:
71Т_/2,=/о.
(7.13)
184
Глава VII. Трехфазный асинхронный двигатель
Основной поток во вращающемся роторе индуктирует
•Э. д. с.
£2в — 4,44^о2^2/2Фм=E2S, (7.14)
где £2=4,44^02^2)10.4 — э. д. с., наводимая потоком ф
• в обмотке неподвижного ротора.
Э. д. с. £гв имеет максимальное значение при s=l,
т. е. при неподвижном роторе, и минимальное при враще-
нии двигателя без нагрузки на валу, когда скорость ро-
тора п близка к синхронной, а скольжение s минимально.
Потоки рассеяния статора Фр4 и ротора Фр2 наводят
в соответствующих обмотках э. д. с. рассеяния
£р1 = —= —/2л)1£Р1Л; (7.15)
Ёрг— —М'2вЛ= —j2nf 2^2/2= —j2jlflS£p272 =
= ~jX2si2- (7-16)
Здесь X2V — X2S — индуктивное сопротивление рассеяния
фазы вращающегося ротора, равное ин-
дуктивному сопротивлению рассеяния
х2 фазы неподвижного ротора, умно-
женного на скольжение.
Пренебрегая поверхностным эффектом, активное со-
противление фазы обмотки ротора будем считать незави-
сящим от частоты.
На основании II закона Кирхгофа уравнения напря-
жений для фазы статора и фазы ротора
6\ = —£"1—Г1/1—(7.17)
£2В=г2/2-|-/Х2в/2=22в72 , (7-18)
• или для приведенного ротора
Eili — Г'/12 (7-19)
Перепишем уравнение (7.19) с учетом того, что Е2ъ —E2s
и х2в'=х2'з
Ё2 Г2 f 2 ~EjX2 s'l 2 . (7.20)
§ 7.2. Двигатель с вращающимся ротором
185
Разделив все члены формулы (7.20) на s, найдем
-\-jx2 i2.
s
(7.21)
В этом уравнении Е2 и х2 изменяются с частотой сети,
так как они представляют значения, получаемые при не-
подвижном роторе.
Рис. 7.2. Схемы замещения вращаю-
щегося асинхронного двигателя.
Рис. 7.3. Векторная диаграм.
ма вращающегося асинхрон
пого двигателя.
Таким образом, вращающийся ротор машины с пере-
менной Е2в' можно привести к неподвижному с постоян-
ной Е2, если вместо сопротивления х2в' включить х2,
а вместо г2—r2 /s.
Уравнения токов (7.13) и напряжений (7.17) и (7.21)
аналогичны соответствующим уравнениям трансформа-
тора. Следовательно, для вращающегося асинхронного
двигателя можно построить, как и для трансформатора,
Т-образную электрическую схему замещения (рис. 7.2, а).
Сопротивление —— представим в другом виде:
5
-----------------• (7.22)
s $
186
Глава VII. Трехфазнып асинхронный двигатель
В соответствии с этим преобразованием в цепи ротора
схемы замещения выделим два активных сопротивления
1 —S
г2 и г2—-— (см. рис. 7.2,6). Тогда, если mJSrzfs—
электромагнитная мощность, передаваемая полем со ста-
, , , , , , 1—s
тора в ротор, то ее составляющие m.il2 г2 и mil2'г2 —-—
представляют потери в меди ротора и электрическую
мощность, преобразованную в механическую, развивае-
мую ротором.
Соответственно уравнениям токов (7.13) и напряже-
ний (7.17) и (7.21) на рис. 7.3 построена векторная диа-
грамма вращающегося асинхронного двигателя. Она по-
добна диаграмме трансформатора, нагруженного сопро-
, 1—з
тивлением г2-----.
s
Т-образную схему замещения асинхронного двигателя
(рис. 7.2, а) можно представить для удобства изучения
процессов работы машины в виде Г-образной.
Для перехода от Т-образной к Г-образной схеме заме-
щения воспользуемся понятием о взаимном сопротивле-
нии, согласно которому ток, протекающий в какой-то вет-
ви простой электрической, схемы, связан с напряжением
в другой ветви этим взаимным сопротивлением.
Так, в схеме замещения (рис. 7.2, а) ток ротора Д'
можно определить через напряжение на зажимах статора
и взаимное сопротивление Zl2 между ветвями Z1 = r1-|-/x1
и г2ъ=г2 /s+jx2';
h Z12'’
где
z12'=z1+z2B'+ Z‘Z2B'
Zm
= Z1+Z2B/ ( 1+ ) =Zt+CZ2B'.
(7.23)
§ 7.2. Двигатель с вращающимся ротором
187
Здесь
С=1+-ф- =Се*-
(7.24)
Углом у обычно пренебрегают, так как он мал, поэто-
му в расчетах учитывают только модуль С.
Тогда взаимное сопротивление
Z12' — Zi~\-CZ2b',
(7.25)
а ток
if °*
—12 =-------:---
Zi+CZze'
(7.26)
Определим ток /0 из уравнения, составленного для
первого контура схемы замещения, изображенной на
рис. 7.2, а:
— / iZi-|-/oZm,
откуда
; i/l-AZ,
/°=----£-----.
Ток Л, потребляемый двигателем из сети, равен
ZM Z1+CZ2b/
или
- - + Л
• Zm Z^ Хц Zi-j-CZzp
188
Глава VII. Трехфазный асинхронный двигатель
откуда
Zi~f—ZM
+-------?----= 7оо+ (-М).
CZi+C2Z2B'
(7.27)
Рис. 7.5. Энергетическая диаграм-
ма асинхронного двигателя.
Рис. 7.4. Г-образпая схема
замещения асинхронного
двигателя.
Уравнению (7.27) соответствует Г-образная схема
замещения, изображенная на рис. 7.4. В этой схеме
; й*
замещения /оо= - ---ток синхронного холостого
//
хода при s=0, Iz"=-------ток главной цепи.
С
Значение коэффициента С в реальных машинах неве-
лико: С= 1,03—1,08, поэтому часто в расчетах принимают
С=1.
В рассмотренных схемах замещения (рис. 7.2 и 7.4)
все параметры с некоторым допущением можно считать
постоянными, независящими от нагрузки двигателя.
Единственной переменной величиной в них при изменении
нагрузки двигателя является скольжение s.
§ 7.3. К- п. д. асинхронного двигателя
189
§ 7.3. Энергетическая диаграмма, потери и к.п.д.
асинхронного двигателя
Процесс преобразования электрической мощности
в механическую в асинхронном двигателе сопровождает-
ся потерями мощности. Энергетическая диаграмма та-
кого преобразования изображена на рис. 7.5. На ней
Pi = mlUill cos(fi — потребляемая двигателем активная
мощность. Часть ее PMt = ttiilizri тратится на потери в ме-
ди статора, остальная преобразуется в мощность враща-
ющегося потока. Но при этом возникают потери в стали
машины. Практически учитывают только потери в стали
статора Pct, так как частота перемагничивания ротора
в рабочем режиме невелика (|г= 1-^3 гц) и поэтому по-
тери в стали ротора малы.
Электромагнитная мощность PM=Pi—P№i—Pct пере-
дается через воздушный зазор в ротор. В нем имеют мес-
то потери в меди ротора
1\12=1112{22Г2=И1112'?Г2', (7.28)
механические Рмех и добавочные РДОб потери. Последние
обусловлены зубчатостью сердечников статора и ротора,
влиянием несинусоидального распределения н. с. в про-
странстве и пр. Полная механическая мощность, разви-
ваемая двигателем, Рмх = Рэм—Рм2- Полезная мощность
на валу двигателя PZ=PMX— (Рмсх+РДОб).
Коэффициент полезного действия двигателя равен
___ Рг Pi—(Рм1+Рмг+Рci+Р мех 4-Рдоб) /7 00'1
п— — Pi . (Л29)
Трехфазные двигатели мощностью до 100 вт имеют
п. д., равный 0,4—0,6, и соответственно от 100 до
600 вт — 0,6—0,75. В мощных асинхронных двигателях
к- п. д. достигает 0,9—0,94.
190
Глава VII. Трехфазный асинхронный двигатель
§ 7 4. Электромагнитный вращающий момент асинхронного
двигателя
Электромагнитный вращающий момент асинхронного
двигателя создается взаимодействием вращающегося но-
ля машины с током ротора. Величина этого момента
может быть определена через электромагнитную мощ-
. „ Р эм
посты Л1=—, где Йо— угловая синхронная скорость.
Йо
Как известно из уравнения (3.3), при n=const
М = Мо+^2=Л1ст. Полезная мощность двигателя
Р2=М2Й, (7.30)
где Й — угловая скорость вращения ротора.
Мощность, соответствующая моменту холостого хода,
Ро=Рмех+Рдоб = М)Й. (7-31)
Полная механическая мощность, развиваемая ротором,
Рмх=Р0-|-Р2= (Л1о+М2)Й=ЛШ. (7.32)
Мощность потерь в меди ротора, как видно из энергети-
ческой диаграммы (рис. 7.5),
Рм2=Рэм—Рмх=МЙ0—Л1й=Л1(Йо—й) =
= MQo--°~Q = Рэм$=МЙо$. (7.33)
а2о
Принимая во внимание равенство (7.28), можем записать
M£2oS=mi/2'>2/, (7.34)
откуда
. (7.35)
Для того, чтобы получить зависимость момента от
напряжения на зажимах статора и параметров двигателя,
§ 7.4. Электромагнитный момент двигателя
191
воспользуемся Г-образной схемой замещения (рис. 7.4),
из которой значение тока
/z_ /2'___________Щ
2 ~~С~ 1(СГ1+&r2'/s)2+ (Сх,+С2%2') г ’
отсюда
1.7=Ц'С^ -- ____£* (7.36)
У (/ /s)2-)- (-С1_рб'Х2/)“
Подставляя в формулу момента (7.35) значение W
из равенства (7.36) и значение
Л 2л«о п ptio 1 2nfi
йо= гг~ =2л—-----=------,
60 60 р р
получим
М = 2л^ [ (r.+W^^WFT М' (7’37)
Это выражение момента удобно для анализа работы дви-
гателя, так как оно содержит при Z7i = const практически
только одну переменную величину — скольжение s.
Из уравнения (7.37) следует, что при s = const вели-
чина электромагнитного вращающего момента пропорци-
ональна квадрату приложенного к двигателю напряжения
(M=Ui2), поэтому асинхронные двигатели весьма чув-
ствительны к изменению напряжения.
Зависимость M = f(s') при 771=const и fi=const гра-
фически изображена на рис. 7.6. Из графика видно, что
при пуске в ход (при $=1; п = 0) двигатель развивает
пусковой момент Мп, величину которого можно получить
путем подстановки в выражение (7.37) значения $=1.
Если Мп будет больше статического момента, то двига-
тель придет во вращение. При этом с увеличением скоро-
сти вращения (с уменьшением s) электромагнитный мо-
мент растет и достигает максимальной величины Мм при
некотором скольжении sK, называемом критическим, за-
тем момент уменьшается до тех пор, пока не уравнове-
сит Л4СТ.
192
Глава VII. Трехфазный асинхронный двигатель
Величину критического скольжения sK можно найти,
взяв производную от выражения момента (7.37) по $
Рнс. 7.6. График зависимости вращающегося момента М от скольже-
ния S для трсхфазиого асинхронного двигателя.
/ dM \
и приравняв ее нулю - = 0 / • Затем после преобра-
зовании получим
—
________Г2
У Г12-^(Х1^Сх2')2
(7.38)
Подставив значение sK в уравнение (7.37), найдем макси-
мальный вращающий момент
т1рС\2
Мм= г _____________
(7.39)
Анализируя равенства (7.38) и (7.39), можно сделать
выводы: критическое скольжение sK пропорционально
активному сопротивлению ротора и не зависит от напря-
жения Z7i, величина максимального момента пропорцио-
нальна квадрату напряжения и не зависит от актив-
ного сопротивления ротора.
§ 7.4. Электромагнитный момент двигателя
193
Таким образом, если увеличивать активное сопротив-
ление в цепи ротора (что возможно в асинхронном дви-
гателе с фазным ротором путем включения в цепь ротора
добавочного активного сопротивления), то максимум
характеристики M-f(s'), ие изменяя своей величины,
будет смещаться в сторону больших скольжений.
Рис. 7.7. Кривые М—
=[($) при различных
добавочных активных со-
противлениях в цепи ро-
тора: Гд1<Гд2 < Гдз <
<Гд4<Гд5.
Па рис. 7.7 показаны характеристики A1=f(s) при раз-
личных активных сопротивлениях в цепи ротора. Как вид-
но, с увеличением активного добавочного сопротивления
в цепи ротора в определенных пределах можно достиг-
нуть увеличения пускового момента двигателя.
Основным моментом двигателя является номинальный
момент Л1П, развиваемый в обычном силовом асинхрон-
ном двигателе при sH=0,01—0,08. Отношение Л1М к номи-
нальному называется перегрузочной способностью двига-
теля Л. Для двигателей широкого применения перегру-
зочная способность
Значение электромагнитного момента, выраженное
через поток и ток ротора, можно получить, если из век-
торной диаграммы двигателя (рис. 7.3) пандем
IzTz/s = Е2 со s ф’2.
194
Глава VII. Трехфазный асинхронный двигатель
Подставив значение Iz'rz'/s в выражение (7.35), по-
лучим
mih'Ez'
т —------------cos фг-
Qo
Так как £,2,=4,44feoi^ifi®M и Qo= ——, то
Р
.. 4,44m1fe0iwJipOM .,
--------------г-------/2 cos ф2=
ZJI/1
= —Lr cos ф2=С‘м/2/Фм cos ф2, (7-40)
4'2
где См = -Lt- tntkoiWip.
Формула (7.40) показывает, что Л1 зависит от вели-
чин Ф, h и cos фг, которые в свою очередь являются функ-
циями скольжения, и помогает уяснить физическую кар-
тину образования электромагнитного момента.
§ 7.5. Механические и рабочие характеристики
асинхронного двигателя
Механические характеристики, представляющие зави-
симость n=f(M) при t71 = const, fi = const и Гд=сопз1,
можно получить из характеристики определяя
По—п .
значение п через скольжение s. 1ак как s= -------------,
мр
то П = По(1— $)•
На рис. 7.8 показаны механические характеристики:
естественная, полученная без добавочного активного со-
противления гд в цепи ротора, и искусственные, снятые
с гд в тон же цепи. Причем Гд1</'дг</'дз. Как видно из
гШ п
графиков, зона устойчивой работы двигателя, где—— <0,
на искусственных характеристиках больше, чем на есте-
ственной.
§ 7.5. Характеристики асинхронного двигателя 195
На рис. 7.9 показаны рабочие характеристики двига-
теля при (7i=const и ft = const.
Скоростная характеристика п=/(Рг) представляет
собой кривую с малым наклоном к оси абсцисс. Это объ-
ясняется тем, что даже при номинальной мощности сколь-
Рис. 7.8. Механические характеристики
асинхронного двигателя с фазным рото-
ром.
жение не превышает 0,01—0,08, так как для получения
высокого к. п. д. потери в меди ротора (Рм2=Рэм$), про-
порциональные скольжению, должны быть небольшими.
Зависимость М2=^(Рг) определяется соотношением
„ 30 Р2
Мг=---------. Так как п изменяется незначительно, то и
л п
характеристика М2=/(Рг) почти прямолинейна.
Характеристика Л=/(Рг) не выходит из начала ко-
ординат, так как двигатель в режиме холостого хода
(Рг=0) потребляет из сети ток холостого хода /о, кото-
рый может достигать 20—50% и даже больше от Ли.
Ток /0 имеет значительную реактивную составляющую,
поэтому коэффициент мощности cos<pt в режиме холосто-
го хода имеет низкое значение. С возрастанием нагрузки
двигателя ток Л увеличивается за счет роста его активной
составляющей. Коэффициент мощности также повышает-
196
Глава VII. Трехфазный асинхронный двигатель
ся, достигая максимума (0,75—0,85) при нагрузке, близ-
кой к номинальной.
Рис. 7.9. Рабочие характеристики трехфазного
асинхронного двигателя типа АОЛ 12-4, Ргн =
= 180 вт; От =220/127 в; ин=1400 об/мин.
Зависимость i)=f(P2) имеет вид, обычный для всех
электрических машин.
§ 7.6. Пуск в ход асинхронных двигателей
При пуске асинхронного двигателя в нем, как и в лю-
бом другом, стремятся уменьшить пусковой ток и увели-
чить пусковой момент.
Хорошими пусковыми свойствами обладают асинхрон-
ные двигатели с фазным ротором, в которых при пуске
в ход в каждую фазу обмотки ротора через контактные
кольца и щетки включаются активные сопротивления пус-
кового реостата. С увеличением активного сопротивления
в цепи ротора в нем и в обмотке статора уменьшаются
пусковые токи. При этом увеличивается пусковой момент,
так как возрастает активная составляющая тока в роторе.
Таким образом можно довести пусковой момент даже до
величины максимального момента. На рис. 7.7 приведена
пусковая диаграмма двигателя с фазным ротором, в кото-
ром пусковые сопротивления при разгоне двигателя вы-
водятся ступенями. В конце разгона такой двигатель
работает с замкнутой накоротко обмоткой ротора.
§ 7.7. Регулирование скорости вращения
197
Трехфазные асинхронные двигатели с короткозамкну-
тым ротором любой мощности часто пускают в ход пря-
мым включением обмотки статора на номинальное напря-
жение. При этом у двигателей нормального исполнения
кратность пускового тока &г = /п/Лн лежит в пределах
3—7, а кратность пускового момента kK=Mn/Mn —
в пределах 1,1 —1,4. Для маломощных трехфазных двига-
телей всегда применяется пуск прямым включением, так
как из-за повышенного сопротивления обмоток ki умень-
шается, a увеличивается (у специальных двигателей
мощностью до 600 вт kM может достигать значения, рав-
ного 2,2).
Иногда для мощных двигателей с короткозамкнутым
ротором с целью ограничения пускового тока применяют
пуск при пониженном напряжении, но при этом значи-
тельно уменьшается пусковой момент, который пропор-
ционален квадрату напряжения.
§ 7.7. Регулирование скорости вращения
Как было установлено выше, скорость вращения асин-
хронного двигателя n—n0(l~s) =-------(1— $).
Из этого равенства видно, что скорость п можно регу-
лировать изменением частоты ft, числа пар полюсов р
и скольжения s.
Регулирование скорости изменением частоты ft, осно-
ванное на изменении скорости вращения поля статора
60ft
, получается плавным и в широких пределах.
Однако этот способ регулирования широкого распростра-
нения не получил, так как для изменения ft требуется
специальный преобразователь частоты (тиристорный или
электромашинный), к которому подключают один или
несколько одновременно регулируемых асинхронных
двигателей.
Регулирование скорости вращения изменением числа
полюсов обмотки статора является ступенчатым. Изме-
нять число пар полюсов в обмотке статора двигателя
можно либо укладкой в пазах статора двух обмоток
198
Глава VII. Трехфазный асинхронный двигатель
с разным числом пар полюсов, либо одной обмотки,
позволяющей получить в двигателе различное число по-
люсов.
На рис. 7.10 показана одна из возможных схем одной
фазы статорной обмотки (для двух других фаз схемы
Рис. 7.10. Схема переключения фазной обмоткн статора
иа разное число полюсов.
аналогичны), позволяющая с помощью переключателя
изменять число пар полюсов машины. В левом положении
переключателя число р=4, а синхронная скорость
60ft 60-50
По=------= ------—750 об/мин, в правом — р=2,
Р 4
а по = 1500 об/мин.
Асинхронные двигатели, допускающие переключение
обмоток на разное число полюсов, называются многоско-
ростными. Они выпускаются с 2, 3 и 4 ступенями скорости
вращения. Ротор многоскоростных двигателей делается
короткозамкнутым.
Недостатки многоскоростных двигателей: большие
габариты, повышенная стоимость, сложность конструкции
переключателя обмоток статора и ступенчатое регулиро-
вание скорости вращения.
Скорость вращения короткозамкнутых асинхронных
двигателей можно регулировать изменением напряжения
питания U\. В основе этого способа лежит зависимость
§ 7.7. Регулирование скорости вращения
199 .
электромагнитного момента от квадрата напряжения Ut.
На рис. 7.11 показаны механические характеристики,
полученные при разных напряжениях Ui, причем 1\п>
Если не изменен статический момент, ско-
рость вращения п1’>п2>п3.
Рнс. 7.11. К вопросу о регулировании
скорости вращения изменением напря-
жения Ui.
Недостаток этого способа — малый диапазон регули-
рования скорости вращения и необходимость иметь трех-
фазный регулятор напряжения (автотрансформатор или
индукционный регулятор).
В последнее время для регулирования скорости вра-
щения асинхронных двигателей малой мощности иногда
применяют импульсно-инерционный способ. При нем дви-
гатель после завершения пуска периодически кратковре-
менно отключается от сети с помощью контактной или
бесконтактной аппаратуры.
Если через tp обозначить продолжительность включе-
ния двигателя, а через /п — продолжительность отключе-
ния, то относительная продолжительность включения
^отп= . Величину /отн можно автоматически регу-
‘ГÑП
лировать в широких пределах с помощью, например,
электронных реле времени. Если уменьшить /Оти, средняя
скорость двигателя снизится, так как ротор более дли-
тельные периоды времени будет вращаться по инерции,
теряя свою скорость.
Недостатки этого способа — увеличенные потери и
пониженный к. п. д. двигателя, относительная сложность
аппаратуры управления.
200 Глава VII. Трехфазный асинхронный двигатель
В асинхронных двигателях с фазным ротором скорость
вращения регулируется введением активного сопротивле-
ния регулировочного реостата в цепь ротора. Механиче-
ские характеристики двигателя, построенные для различ-
ных значений активного сопротивления в цепи ротора
(см. рис. 7.8), показывают, что с возрастанием гд при
MCT = const скольжение двигателя увеличивается, а ско-
рость вращения понижается. При этом возрастают потери
энергии в регулировочном реостате, что неэкономично.
Анализ различных способов регулирования скорости
вращения асинхронных двигателей показывает, что каж-
дый из них не лишен отрицательных качеств.
Асинхронные трехфазные двигатели малой мощности
в автоматических устройствах почти всегда выполняют
вспомогательные функции, не требующие регулирования
скорости вращения.
В СССР выпускаются трехфазные асинхронные дви-
гатели малой мощности (от 50 до 600 вт) серий АОЛ, АВ,
АПН и др. В эти серии входят двигатели, рассчитанные
на различные напряжения (127, 220 и 380 в) и синхрон-
ные скорости вращения н0= 1500 н 3000 об/мин.
Глава VIII. ОДНОФАЗНЫЕ И КОНДЕНСАТОРНЫЕ ДВИГАТЕЛИ
§ 8.1. Устройство, принцип действия и способы пуска в ход
однофазных асинхронных двигателей
Однофазные асинхронные двигатели обычно выпол-
няют маломощными, редко превышающими 600 вт.
По своему устройству они отличаются от маломощных
трехфазных двигателей лишь тем, что на статоре поме-
щена однофазная обмотка, занимающая 2/3 пазов.
Переменный ток, протекая по однофазной обмотке
статора, создает пульсирующее магнитное поле (рис. 8.1),
которое, как было установлено в VI главе, может быть
разложено на два одинаковых круговых поля, вращаю-
щихся с синхронной скоростью п0 в противоположные сто-
роны (рис. 6.16).
При неподвижном роторе оба поля вращаются отно-
сительно ротора с одной и той же скоростью /г0. Каждое
из них наводит в обмотке ротора равные по величине
токи. От взаимодействия с наводящими их потоками воз-
никнут два одинаковых, но противоположно направлен-
ных момента. Результирующий момент будет равен нулю
и поэтому ротор не придет во вращение. Отсутствие пус-
кового момента — характерная особенность и основной
недостаток однофазного двигателя.
Если начать вращать ротор в какую-либо сторону,
момент М' от прямого поля, вращающегося в том же
направлении, что и ротор, станет больше, чем от обрат-
ного поля М". Результирующий момент двигателя уже не
будет равен нулю. Уменьшение момента от обратного
поля объясняется тем, что во вращающемся роторе час-
тоты токов от прямого и обратного полей неодинаковы.
Действительно, скольжение ротора относительно прямого
По—п
поля $Пр=-------=$, а частота тока ротора, наведен-
По
ного этим полем, f2np=fiS. Скольжение ротора относи-
тельно обратного поля равно
202 Глава VIII. Однофазные » конденсаторные двигатели
П0—(—П) По-{-П Яо4-По(1—s)
$обр—------------- — — —2 s,
По По По
(8-1)
а частота тока
f2o6p=fiSo6p=fi (2 s). (8-2)
Так как скольжение s лежит в пределах 0,04—0,1, то
частота /2обр оказывается значительно больше /гпр, сле-
Рис. 8.1. Действие элек-
тромагнитных сил на не-
подвижный ротор одно-
фазного двигателя при
наличии пульсирующего
поля, созданного током
в статорной обмотке.
Рнс. 8.2. Графики зависимостей
M = !(S) для однофазного асин-
хронного двигателя.
довательно, индуктивное сопротивление ротора для тока,
созданного обратным полем, будет во много раз больше
его активного сопротивления. Этот ток (почти чисто реак-
тивный), оказывая сильное размагничивающее действие
на обратное поле, ослабляет его, что и приводит к умень-
шению тормозящего момента ЛГ'^СмЛобрФобр cos 1робр.
Кроме того, М" уменьшается за счет понижения cos t|>2o6p.
§8.1. Устройство н пуск однофазных двигателей
203
На рис. 8.2 показаны зависимости моментов М' и М"
от скольжения. Здесь же показана зависимость от сколь-
жения результирующего момента М, равного сумме
М'+М".
Вследствие наличия обратного поля к. п. д. cos<pi и
максимальный момент однофазного двигателя меньше,
чем в трехфазном двигателе одинаковой мощности.
Как показано выше, пусковой момент однофазного
двигателя равен нулю. Для создания его необходимо, что-
бы в период пуска двигателя магнитное поле было не
Рис. 8.3. Схема однофаз-
ного двигателя с пуско-
вой обмоткой.
Рис. 8.4. График зависимо-
сти M = f(S) для однофаз-
ного двигателя, имеющего
Пусковую обмотку.
пульсирующим, а вращающимся. Это можно осуществить
с помощью вспомогательной (пусковой) обмотки, кото-
рая так же, как и главная, размещена в пазах статора
и сдвинута в пространстве относительно нее обычно на
90 электрических градусов. Ток во вспомогательной об-
мотке должен быть сдвинут по фазе относительно тока
главной обмотки.
Обе обмотки питаются от одной сети, поэтому для по-
лучения сдвига токов по фазе в цепь пусковой обмотки
включают какой-либо фазосдвигающий элемент: ем-
кость С, индуктивность L или активное сопротивление г
(рнс. 8.3). Когда двигатель достигнет некоторой скорости
вращения, приблизительно 80—90% от па, вспомогатель-
ная обмотка отключается, так как она рассчитывается
на кратковременное включение. Следовательно, при пуске
двигатель работает как двухфазный, а при нормальной
скорости вращения как однофазный. Зависимость момен-
204
Глава VIII. Однофазные н конденсаторные двигатели
та от скольжения для этого двигателя представлена на
рис. 8.4. Здесь кривая 1 — зависимость М—f (s) для одно-
фазного двигателя, кривая 2 — та же зависимость для
двигателя с пусковой обмоткой.
Наибольший пусковой момент получается тогда, ког-
да поле статора при пуске будет круговым. Для этого
необходимо, чтобы токи в главной А и пусковой В обмот-
ках были сдвинуты по фазе на 90°, а их н. с. были равны
(см. § 6.3). Указанные условия выполняются только
включением в цепь пусковой обмотки конденсатора
с вполне определенной для данного двигателя емкостью.
Эта емкость, а следовательно, габариты конденсаторов
получаются весьма значительными (например, для дви-
гателей мощностью 50—200 вт требуется емкость 20—
30 мкф), что ограничивает широкое распространение
однофазных двигателей с пусковой емкостью.
В настоящее время широко применяются однофазные
двигатели с пусковой обмоткой, занимающей 1/3 пазов
статора и обладающей по сравнению с главной повышен-
ным активным и малым индуктивным сопротивлениями.
Различие в сопротивлениях обмоток обеспечивает сдвиг
н. с. по фазе, что приводит к возникновению пускового
момента Мп= (1 — 1,5)Л4П.
В СССР наиболее распространены однофазные асин-
хронные двигатели серии АОДБ мощностью от 18 до
600 вт.
§ 8.2. Однофазный двигатель с экранированными
(расщепленными) полюсами
Однофазный асинхронный двигатель с экранирован-
ными (расщепленными) полюсами (рис. 8.5, а) состоит
из короткозамкнутого ротора и статора и расположенных
на его явно выраженных полюсах катушек однофазной
обмотки возбуждения В. Каждый полюс статора разде-
лен на две неравные части аксиальным пазом. Одну из
них, меньшую, охватывает короткозамкнутый виток К.
Вращающееся поле в этом двигателе получается сле-
дующим образом.
Ток 1В, протекающий по обмотке возбуждения, со-
здает пульсирующий магнитный поток Фв (рис. 8.5,6).
§ 8.2. Однофазный двигатель с экранированными полюсами
205
Одна часть его Фв' проходит по неэкранированной части
полюса, а другая Фв"—по экранированной. Поток Фв"
создает, как и в трансформаторе, поле Фк короткозамк-
нутого витка. Поэтому в экранированной части полюса
Рис. 8.5. Устройст-
во н векторная
диаграмма магнит-
ных потоков дви-
гателя с экрани-
рованными полю-
сами.
действует результирующий поток Фэ=Фв"+Фк. Он ин-
дуктирует э. д. с. Ёк в короткозамкнутом витке
(рис. 8.5,в), под действием которой возникает ток 1к-
Он из-за индуктивности витка отстает от Ек по фазе на
угол фК. Ток 1к и создает поток Фк, совпадающий с ним
по фазе (если пренебречь потерями в стали).
Таким образом, в двигателе потоки экранированной
Фэ и неэкранированной Фв' частей полюса сдвинуты во
времени на некоторый угол ф (рис. 8.5, в) и в простран-
стве на угол 0 (рис. 8.5, а). Вследствие недостаточного
сдвига потоков Фэ и Фв' во времени и в пространстве и
их неравенства результирующее поле двигателя будет
эллиптическим. Однако этого вполне достаточно, чтобы
двигатель создавал пусковой момент, составляющий 20 —
40%.от /Ип.
206
Глава VIII. Однофазные п конденсаторные двигатели
Для некоторого выравнивания потоков Фл' и Фэ путем
уменьшения Ф/ воздушный зазор под неэкранированной
частью полюса обычно увеличивают, а в некоторых дви-
гателях (для увеличения Фэ) между наконечниками по-
люсов помещают магнитные шунты в виде стальных
пластин (рис. 8.5, а). Несмотря на это, кратность пуско-
вого момента kM=Ma/Mu в таких двигателях не превы-
шает 0,6.
Двигатели с экранированными полюсами изготовля-
ются мощностью от долей ватта до 300 вт при напряже-
нии 115, 127 и 220 в. Применяются эти машины для
привода вентиляторов, электропроигрывателей, магнито-
фонов и пр. Длительное время они могут находиться под
напряжением и при неподвижном роторе. Для них не
опасны частые пуски. Недостатки их — отсутствие ревер-
са, низкие к. п. д. (до 10—40%), costp (0,4—0,6) и малая
перегрузочная способность Л=Л1Ы/Л1Н= 1,1—1,3.
§ 8.3. Асинхронные конденсаторные двигатели
Асинхронный конденсаторный двигатель выполняется
с короткозамкнутым ротором. В пазах его статора укла-
дывают двухфазную обмотку, одна фаза (А) которой
включается в сеть непосредственно, другая (В) подклю-
чается к топ же сети через конденсатор Ср (рис. 8.6).
Конденсаторный двигатель хотя и питается от однофаз-
ной сети, но по существу является двухфазным. Вращаю-
щееся поле в нем может быть круговым или эллиптиче-
ским. Круговое поле получается при условии равенства
ц. с. Fa и Fb обмоток А и В и сдвига этих н. с. на 90°
в пространстве и во времени, т. е.
Вц = ]Рл, или koBwBlB = ikaAwAIА,
откуда
V . koA^A
1в = 1-7---
«ОВ^В
(8.3)
koB^B
где ------=« — коэффициент трансформации для об-
Коа^А
моток статора двигателя.
§ 8.3. Асинхронные конденсаторные двигатели 207
Для получения равенства (8.3) необходимо, чтобы
напряжения 0А и UB были сдвинуты по фазе на 90°,
а приведенное к числу витков обмотки В напряжение UAk
равнялось Uв, т. е.
UB=iVAk. (8.4)
Исходя из уравнения для токов 1 = 1А-{-1в и напряже-
ний U=Ua=Ub+Uc двигателя (рис. 8.6) с учетом урав-
нений (8.3) и (8.4), на рис. 8.7 построена векторная
Рис. 8.6. Схема включения конден-
саторного двигателя.
Рис. 8.7. Векторная
диаграмма конденса-
торного двигателя при
круговом поле.
диаграмма конденсаторного двигателя при круговом
поле. На ней вектор 1В отложен перпендикулярно век-
тору Uc на конденсаторе (потерями в конденсаторе пре-
небрегаем), фд = фв-
Воспользовавшись диаграммой, определим рабочую
емкость Ср, необходимую для создания в двигателе кру-
гового вращающегося поля.
Се =-------; U с — 1вхс = 1 в ——
» созфд о)Ср
(8.5)
208
Глава VIII. Однофазные и конденсаторные двигатели
Отсюда
~ hi 1в /о/?\
Ср=—— = —— C0S(Pa=^2F7TC0S(Pb. (8.6)
(bUc <&Ua 2TtfiU
Из векторной диаграммы также можно получить выра-
жение для коэффициента трансформации
~^g(fA=~k-=k, (8.7)
т. е. £={5фд.
Таким образом, для получения кругового вращающе-
гося поля в конденсаторном двигателе необходимо, чтобы
двигатель имел вполне определенные рабочую емкость Ср
конденсатора и коэффициент трансформации k=tg(pA-
При изменении нагрузки асинхронного двигателя
токи /д, /в и углы фд, фв изменяются, вращающееся поле
двигателя становится эллиптическим.
Таким образом, с помощью конденсатора в таком дви-
гателе можно получить круговое вращающееся поле
только для какого-нибудь одного, вполне определенного
режима.
Выбирая конденсатор, имеют в виду, что напряжение
на нем Uc = i U2-\-Ub2=U У 1+&2 может быть выше на-
пряжения сети U.
Во время пуска конденсаторного двигателя с включен-
ной рабочей емкостью поле получается весьма далеким
от кругового. Пусковой момент в данном случае не пре-
восходит 30% от Мн, поэтому такие двигатели применяют
для приводов с легкими условиями пуска.
Для улучшения пусковых характеристик конденсатор-
ного двигателя параллельно с рабочей емкостью в цепь
конденсаторной фазы на период пуска включают значи-
тельную по величине пусковую емкость Сп (рис. 8.6).
Емкость пускового конденсатора рассчитывают исходя
из условия получения достаточного пускового момента
Мп= (1,5—3)МН. В конце пускового процесса конденсатор
Сп отключают и двигатель работает только с рабочей ем-
костью. На рис. 8.8 показаны характеристики Л1=/(«)
§ 8.4. Включение трехфазиых двигателей в однофазную сеть
209
двигателя с рабочей (кривая 1) и рабочей и пусковой
(кривая 2) емкостями.
Конденсаторные двигатели с пусковой и рабочей ем-
костью применяют для приводов с тяжелыми условиями
Рис. 8.8. Характеристики M = f(S)
кондеисаториого двигателя с рабо-
чей (/) п пусковой (2) емкостью.
пуска. Их недостаток — удорожание стоимости за счет
наличия конденсаторных батарей. Рабочие характеристи-
ки конденсаторного двигателя значительно лучше, чем у
однофазного. Коэффициент мощности может быть равен
0,8—0,95, а к. п. д. 0,6—0,7.
§ 8.4. Включение трехфазных асинхронных двигателей для
работы от однофазной сети
Маломощные трехфазные асинхронные двигатели мо-
гут работать от однофазной сети. Наиболее распростра-
ненные схемы их включения в эту сеть показаны на
рис. 8.9. На нем в схеме а две фазы обмотки статора
включены последовательно и являются главной обмот-
кой А, третья — В служит пусковой (вспомогательной),
если она после пуска двигателя вместе с конденсатором
Сп отключается. Мощность двигателя в однофазном ре-
жиме в этом случае составляет около 50% номинальной
мощности трехфазного режима.
Если же после пуска часть конденсаторов ем-
костью Сп отключить, оставив только Ср в цепи обмотки В
(рис. 8.9,6), то двигатель будет работать как конденса-
торный, развивая мощность, равную 75—80% от номи-
нальной мощности трехфазного режима.
Промышленность выпускает универсальные трехфаз-
ные Двигатели серии УАД, применяемые в автоматиче-
210
Глава VIII. Однофазные и конденсаторные двигатели
ских устройствах. Они рассчитываются так, чтобы в слу-
чае правильного выбора схемы включения обмоток и кон-
I/
Рис. 8.9. Схемы включения трехфазных асинхронных двигателей в од-
нофазную сеть.
деисаторов можно было обеспечить достаточно хорошие
характеристики и при работе от однофазной сети. В этих
двигателях на щиток выводятся начала и концы всех
трех фаз обмотки статора.
Глава IX. АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
§ 9.1. Требования, предъявляемые к асинхронным
исполнительным двигателям. Устройство и принцип
действия
В настоящее время и качестве исполнительных двига-
телей переменного тока используются преимущественно
асинхронные двухфазные двигатели с короткозамкнутым
ротором.
Асинхронные исполнительные двигатели в зависимо-
сти от конструкции короткозамкнутого ротора бывают:
1) с полым немагнитным ротором,
2) с обычным ротором, имеющим обмотку в виде бе-
личьей клетки,
3) с полым ферромагнитным ротором,
4) с массивным ферромагнитным ротором.
На статоре исполнительного двигателя уложены две
обмотки, сдвинутые в пространстве на 90 электрических
градусов (рис. 9.1). Одна из них (В) —обмотка возбуж-
дения, другая (У) — управления, на нее подается сигнал
управления (7У.
Сдвиг по фазе между напряжениями U? и 1/в, необхо-
димый для создания вращающегося поля, задают либо
схемой, в которой работает двшатель, либо включением
в цепь обмоток конденсаторов.
Регулируют скорость вращения асинхронных исполни-
тельных двигателей, управляют ими путем изменения
величины напряжения управления при постоянстве его
фазы (амплитудное) или изменением фазы постоянного
по величине напряжения Uy (фазовое управление). Воз-
можно также и амплитудно-фазовое управление двига-
телем при одновременном изменении величины и фазы
напряжения управления относительно напряжения воз-
буждения.
Направление вращения ротора исполнительного дви-
гателя зависит от того, какое из двух напряжений
(Г^в н.Г/у) является опережающим по фазе.
212
Глава IX. Асинхронные исполнительные двигатели
Рассмотрим, как в асинхронных исполнительных дви-
гателях удовлетворяются основные требования, изложен-
ные в § 3.3.
Если отключить пусковую обмотку в обычном одно-
фазном двигателе, он продолжает вращение. Такой
Рис. 9.1. Схема включения асин-
хронного исполнительного двига-
теля.
самоход для асинхронных исполнительных двигателей
недопустим в связи с тем, что теряется управляемость.
Со снятием сигнала управления они должны останавли-
ваться. Чтобы устранить самоход, их выполняют с повы-
шенным активным сопротивлением ротора. А это, как
известно, смещает максимум механической характе-
ристики M — в сторону больших скольжений
(рис. 7.7), в результате чего момент двигателя в од-
нофазном режиме, являющийся суммой моментов от пря-
мого и обратного полей, уменьшается. Если же критиче-
ское скольжение (при нем момент прямого поля достигает
максимума) по величине близко к единице или больше
ее, то Л1 становится даже отрицательным, т. е. тормозя-
щим, что приведет к остановке двигателя (рис. 9.2,6).
Для сравнения на рис. 9.2, а показаны графики моментов
от прямого и обратного полей, а также график результи-
рующего момента для обычного однофазного двигателя,
имеющего малое активное сопротивление ротора.
Для надежного устранения самоходов в реальных
асинхронных исполнительных двигателях активное сопро-
тивление ротора выбирают таким, чтобы критическое
скольжение sK=2—5.
§9.1. Требования к исполнительным двигателям
213
Помимо самохода, вызванного недостаточной величи-
ной критического скольжения $к, наблюдается и так на-
зываемый технологический самоход, при котором ротор
начинает вращаться при включении только обмотки воз-
буждения. Причина этого явления — в возникновении
Рис. 9.2. Характеристики M=f(S) асинхронного двигателя в одно-
фазном режиме при различных активных сопротивлениях ротора.
слабого эллиптического поля из-за некачественного изго-
товления двигателя: наличия короткозамкнутых витков
в обмотке статора, неодинаковой магнитной проводимо-
сти в различных радиальных направлениях листов ста-
торного пакета, замыкание этих листов между собой
и т. п. Чтобы устранить технологический самоход, необ-
ходимо тщательно изолировать обмотки, листы стали,
собирать пакет статора веером.
Асинхронный исполнительный двигатель должен ра-
ботать на устойчивой части механической характеристики
во всем диапазоне скоростей от нуля до максимальной.
Этого можно добиться, выполнив ротор с большим актив-
ным сопротивлением, при котором максимум момента
смещается в область отрицательных скоростей вращения
(рис. 9.3, кривая 3). Для сравнения на том же рисунке
показана механическая характеристика (/) обычного
асинхронного двигателя, имеющего участок аб устойчи-
вой работы, составляющий 10—20% всего диапазона
возможных скоростей вращения.
Следовательно, увеличением активного сопротивления
ротора обеспечивается работа двигателя в широких пре-
дела.гизменения скорости вращения на устойчивой части
214
Глава IX. Асинхронные исполнительные двигатели
механической характеристики, ее линейность и отсутствие
самохода в однофазном режиме.
Высокое быстродействие асинхронных исполнитель-
ных двигателей можно получить, выполнив их с малым
моментом инерции вращающихся частей.
Рис. 9.3. Механические характери-
стики асинхронного двигателя с
различным активным сопротивле-
нием ротора.
Асинхронный исполнительный двигатель с полым не-
магнитным ротором (рис. 9.4) обладает наиболее высо-
ким быстродействием.
Внешний статор 1 этого двигателя ничем не отличает-
ся от статора обычного асинхронного двигателя. Обмотки
2 управления и возбуждения, расположенные в пазах ста-
тора, выполняются двухслойными с укороченным шагом.
Их всыпные мягкие секции наматывают проводом круг-
лого сечения, покрытого эмалью.
Внутренний статор 3, набираемый из листов электро-
технической стали на цилиндрическом выступе одного из
щитов, служит для уменьшения магнитного сопротивле-
ния на пути основного магнитного потока, проходящего
через воздушный зазор.
Полый ротор 4 выполняется в виде тонкостенного ста-
кана из немагнитного материала (чаще всего из сплавов
алюминия). Своим дном он жестко укрепляется на валу5,
свободно вращающемся в подшипниках, расположенных
в подшипниковых щитах. Толщина стенок ротора зависит
от мощности п колеблется в пределах от 0,2 до 1 мм.
§ 9.1. Требования к исполнительным двигателям
215
В двигателях мощностью менее 1,5 вт обмотки воз-
буждения и управления часто размещают в пазах внут-
реннего статора, внешний же статор не имеет пазов и
служит для уменьшения магнитного сопротивления.
Иногда одну из обмоток размещают на внутреннем,
а другую — на наружном статоре.
Рис. 9.4. Конструктивное устрой-
ство двигателя с полым немагнит-
ным ротором.
Между полым ротором и статорами (внешним и внут-
ренним) имеются воздушные зазоры, величина которых
не превосходит 0,15—0,25 мм. Кроме того, ротор, будучи
немагнитным, тоже является как бы зазором. Таким об-
разом, общая величина зазора между внешним и внут-
ренним статорами составляет 0,5—1,5 мм.
Вследствие большого воздушного зазора двигатели
с полым немагнитным ротором имеют большой намагни-
чивающий ток, составляющий до 90% от номинального,
низкие коэффициент мощности и к. п. д. Из-за значитель-
ного намагничивающего тока приходится увеличивать
сечение провода обмоток и объем паза статора, а следо-
вательно, размеры и вес машины.
Исполнительные двигатели с полым немагнитным
ротором изготовляются мощностью от долей до сотен
ватт на частоты 50, 400, 500, 800 и 1000 гц.
Асинхронный двухфазный двигатель с короткозамкну-
той обмоткой на роторе, выполняемой из материала с по-
вышенным удельным сопротивлением (сплавы алюминия,
латунь, бронза), может быть использован в системах
автоматики, где быстродействие не играет существенной
роли. В таком двигателе для увеличения зоны устойчивой
работы, линейности регулирования и устранения само-
216
Глава IX. Асинхронные исполнительные двигатели
хода при снятии сигнала управления величину активного
сопротивления ротора выбирают такой, чтобы обеспечить
критическое скольжение $к, равное 3—4.
Асинхронный исполнительный двигатель с коротко-
замкнутым ротором может быть выполнен с малым воз-
душным зазором (до 0,15 мм).
Еще меньший воздушный зазор (до 0,03—0,05 мм)
бывает в двигателях «сквозной» конструкции, у которых
внутренний диаметр статора равен наружному диаметру
подшипников. Такое устройство позволяет производить
окончательную обработку внутренней поверхности сер-
дечника статора и отверстий под подшипники после сбор-
ки статора с одного установа на станке.
Снижение воздушного зазора резко уменьшает намаг-
ничивающий ток, что увеличивает к. п. д., costp, вращаю-
щий момент и, следовательно, повышает быстродействие
двигателя. Электромеханическая постоянная времени
специальных двигателей с минимальным воздушным за-
зором и малым диаметром ротора не намного превышает
Тм двигателей с полым ротором.
Асинхронный двигатель с полым ферромагнитным ро-
тором применяют в схемах автоматики в качестве испол-
нительного и вспомогательного. У него ротор в виде
полого стального цилиндра с толщиной стенки 0,5—3 мм
укрепляется на валу с помощью двух торцевых или од-
ной, запрессованной внутрь цилиндра, металлических
пробок. Внутреннего статора нет, так как магнитный по-
ток замыкается через ротор. Вследствие малой толщины
стенок и эффекта вытеснения потока магнитное сопротив-
ление ротора весьма значительно и поэтому, несмотря на
то, что воздушный зазор небольшой (0,2—0,3 мм), намаг-
ничивающий ток и cos <р (0,3—0,5) примерно такие же,
как и у двигателей с полым немагнитным ротором. Повы-
шенное активное сопротивление полого ферромагнитного
ротора (из-за большого удельного сопротивления стали
и эффекта вытеснения тока) устраняет самоход, обеспе-
чивает устойчивую работу двигателя во всем диапазоне
скоростей вращения и приближает механические и регу-
лировочные характеристики к линейным.
Двигатель с полым ферромагнитным ротором имеет
большой момент инерции и небольшой пусковой момент,
§9.1. Требования к исполнительным двигателям
217
что значительно снижает его быстродействие. Чтобы уве-
личить пусковой момент и мощность, в некоторых двига-
телях цилиндрическую поверхность ротора покрывают
слоем меди толщиной 0,05—0,1 мм, а торцевые поверхно-
сти — слоем меди до 1 мм. При этом омеднение цилинд-
рической поверхности менее эффективно, так как оно
вместе с увеличением момента и мощности способствует
возрастанию потерь в роторе и в обмотке статора вслед-
ствие увеличения зазора, а соответственно и намагничи-
вающего тока.
Двигатели с полым ферромагнитным ротором по свое-
му быстродействию значительно уступают двигателям
с полым немагнитным ротором, поэтому как исполнитель-
ные они широкого распространения не получили.
Исполнительный двигатель с полым ферромагнитным
ротором можно выполнить двухстаторным или, как его
называют, суммирующим. По конструкции он похож на
двигатель с полым немагнитным ротором и, следователь-
но, имеет два статора — внешний и внутренний. В пазах
каждого из них укладывают свои обмотки возбуждения
и управления.
Таким образом, в одной машине как бы объединено
два исполнительных двигателя. Принцип такого совмеще-
ния основан на экранирующем свойстве ферромагнитного
ротора. При подаче различных сигналов управления на
обмотки внешнего и внутреннего статоров магнитные по-
токи, созданные ими, не влияют друг на друга, так как
глубина проникновения каждого потока в тело ротора
составляет 0,2—0,3 мм, а толщина самого ротора 1—2 мм.
Взаимодействие потоков с соответствующими токами со-
здает два момента. Результирующий момент, действую-
щий на ротор,
М=Л11+Л12,
где Mi—момент, создаваемый взаимодействием потока
внешнего статора с вихревыми токами, индукти-
рованными на внешней поверхности ротора;
Л12 —момент, создаваемый взаимодействием потока
внутреннего статора с вихревыми токами, ин-
дуктированными на внутренней поверхности
ротора.
218
Глава IX. Асинхронные исполнительные двигатели
Достоинства двухстаторного исполнительного двига-
теля с полым ферромагнитным ротором в том, что пред-
ставляется возможность увеличить активную поверхность
ротора в два раза и таким образом суммировать два
сигнала.
Двигатель с массивным ферромагнитным ротором
используется в некоторых маломощных установках, рабо-
тающих на высоких скоростях. Ротор двигателя не имеет
обмотки. Он выполнен в виде массивного цилиндра из
стали или чугуна и, следовательно, обладает большим
моментом инерции. Быстродействие двигателя невелико.
Для улучшения характеристик здесь также поверхности
ротора омедняют.
Принцип действия асинхронного исполнительного дви-
гателя состоит в следующем. При подаче на обмотку У
напряжения Ду, сдвинутого по фазе относительно напря-
жения UB, токи, протекающие по обмоткам, создадут
двухфазное вращающееся (в общем случае эллиптиче-
ское) магнитное поле, которое, пересекая полый ротор
(или проводники короткозамкнутого ротора), индукти-
руют в нем токи. В результате взаимодействия этих
токов с вращающимся магнитным полем двигателя воз-
никает момент, который, действуя на ротор, увлекает его
в сторону вращения поля.
§ 9.2. Уравнение токов и схемы замещения асинхронных
исполнительных двигателей
Работа исполнительного двигателя характеризуется,
как правило, тем, что приложенные к нему напряжения
и протекающие по его обмоткам токи являются несиммет-
ричными двухфазными системами напряжений и токов.
При этом создаваемое н. с. Fy и FB вращающееся магнит-
ное поле оказывается не круговым, а эллиптическим.
Для исследования работы двигателя можно восполь-
зоваться методом симметричных составляющих, согласно
которому любая несимметричная двухфазная система
временных векторов, например н. с. (рис. 9.5), может
быть разложена на две симметричные, каждая из кото-
рых состоит из двух векторов, одинаковых по величине
и сдвинутых между собой на угол 90°. Одна из них —
§ 9.2. Уравнение токов
219
система векторов н. с. прямой последовательности
Ayi и АВ1 — имеет чередование фаз такое же, как у исход-
ной несимметричной системы, а другая — система векто-
ров н. с. обратной последовательности Ау2 и Ав2—имеет
противоположное чередование фаз.
Рис. 9.5. Несимметричная система векто-
ров и ее симметричные составляющие.
Таким образом, согласно рис. 9.5, можно записать
следующие уравнения для н. с. обмоток:
АУ=АУ1+Ау2; Ab=/'bi+Ab2
или
Л—iyi^y'T-^ у2^уЛ;
—/в!^в Т'/в2^в/,
(9.1)
(9.2)
где w/ — Wykoy; wB'=wBkOB — эффективные числа витков,
равные произведениям дей-
ствительных чисел витков
на соответствующие обмо-
точные коэффициенты.
Из векторной диаграммы (рис. 9.5) следует:
Ав1=/ТУ1 или iBiwB=jf7lWi; (9.3)
Ай2=— /Ху2 или IB2Wn'=— //уг^у'. (9.4)
220
Глава IX. Асинхронные исполнительные двигатели
Разделив уравнения (9.3) и (9.4) на Wy, получим
7BiWB . /yi , =//У1, откуда Ли—/ t ; Wy k (9-5)
1в2^в' : . 7y2 , = Руг, откуда /в2— ! . , Wy к (9-6)
Wb' &ов^в , , ,
где k— —-=—--------— коэффициент трансформации.
Wy kOyWy
Разложение н. с. Fy и Лв или пропорциональных им
токов /у и kla на две симметричные системы дает возмож-
ность рассматривать возникающее в машине в общем
случае эллиптическое поле как результат наложения двух
круговых полей, из которых одно (прямое) создается
токами прямой последовательности /У1 и а другое
(обратное) — токами обратной последовательности /У2
и &/в2. В соответствии с различным чередованием фаз
в системах прямой и обратной последовательностей
созданные ими поля вращаются в противоположные
стороны.
Несимметричные в общем случае двухфазные напря-
жения Оу и Ов на обмотках двигателя также можно раз-
ложить на симметричные составляющие прямой и обрат-
ной последовательностей.
Напряжение на обмотке управления
t7y = i>yi+i>y2=/y1Zy1+7y2Zy2; (9-7)
напряжение на обмотке возбуждения
(9.8)
В этих уравнениях Zyl и Zy2 — комплексы полных сопро-
§ 9.2. Уравнение токов 921
тивлений прямой и обратной последовательностей обмот-
ки У, a и ZB2 — то же для обмотки В.
Решив совместно уравнения (9.7) и (9.8) относительно
токов /У1 и /У2, получим
/у1---
UyZB2—jkUBZy2
ZyiZB2~j~Zy2ZBi
(9-9)
I L/\Zai-^jkUsZyi
ZylZB2~|_Zy2ZBl
(9.10)
Схемы замещения для полных сопротивлений прямой
и обратной последовательностей обмотки В ZB1 и ZB2
аналогичны схемам замещения обмотки У, изображенным
на рис. 9.6, причем параметры для схем замещения об-
мотки В могут быть выражены через сопротивления
обмотки У и коэффициент трансформации k следующим
обрааом: ZBi = £2Zyi; ZB2=k2Zy2.
222
Глава IX. Асинхронные исполнительные двигатели
§ 9.3. Характеристики асинхронного исполнительного
двигателя
Свойства и поведение исполнительных двигателей
в схемах автоматики определяются характеристиками,
аналитические выражения которых для реального двига-
теля получаются громоздкими. Рассмотрим теорию «иде-
ального» двигателя, в котором пренебрегают всеми паде-
ниями напряжения и потерями мощности (т. е. считают,
Рис. 9.7. Схемы замещения Zyi и Zy2 для «идеального» двигателя.
что r<y= rMy=xcy = xPy = 0), за исключением падения
напряжения и потерь в активном сопротивлении ротора,
и принимают ,ГмУ=оо.
На рис. 9.7 представлены схемы замещения прямой и
обратной последовательностей «идеального» двигателя.
Для построения его характеристик в относительных
единицах выразим скольжение s через относительную
п
скорость v=----. Здесь за единицу скорости принимается
П° 60/
синхронная скорость п0=
Тогда
п0—п
s=-------=1— v;
По
2-s = l+v.
(9.И)
(9.12)
Механические и регулировочные характеристики.
Рассмотрим характеристики для амплитудного управле-
ния двигателем. В этом случае напряжения Uy и UB сдви-
§ 9.3. Характеристики двигателя
223
нуты по фазе на 90°, а величина напряжения управления
изменяется.
Uy
Используя коэффициент сигнала а= и эффектив-
С/в
ный коэффициент сигнала ссе=£сс} можно записать
йу = айие z=-jaUB = -j^kUB = -jae~-B-. (9.13)
R R
Найдем значения токов прямой и обратной последова-
тельностей для обмотки управления, подставив в уравне-
ния (9.9) и (9.10) вместо t/y его значение, выраженное
через йв, и заменив сопротивления соответствующими
значениями их для «идеального» двигателя:
j __ UyZB2—jkUBZy2 ____
S ZyiZB2-i-Zy2ZBt
__ l-f-v l+v __________
ГРУ k2 Г|'у I ГРУ & ГрУ
1—v 1-pv 1+v 1—v
=н-ЖГ(1_у)(1+ае)- (9-14)
Модуль тока прямой последовательности
о-'') (!+«<); (9-15)
£КГ ру
UyZBi-^-jkl)BZyi
У ZyiZB2~\-Zy2ZBi
1 —V 1 —V _
2гРу /,?. ГРУ
1—V 1-j-v
224
Глава IX. Асинхронные исполнительные двигатели
ив
=1 — (14-v) (1—ае).
ру
Модуль тока обратной последовательности
7у2= ~<>br ' 1 0 — ар) •
Zrv/ру
(9.16)
(9-17)
Результирующая электромагнитная мощность, пере-
даваемая из статора в ротор, представляет собой сумму
электромагнитных мощностей прямой и обратной после-
довательностей
Рэм = Рэм1 + Рэм2= ( 7yl2 -
' 1—V
Г рв
1—V
2 ГРУ I г 9 ГРВ \
у22 -7-г- +'в22 -г— ) =
l-j-v 1+v '
2^Гру
2 ГРУ
1-v
1—v
2
У 2—
/у2 \2£2Гру
=2/,,’-^+2/,^
1—V 1-J-V
(9.18)
Так как по отношению к полю прямой последователь-
ности машина работает в режиме двигателя, а по отно-
шению к полю обратной последовательности — в режиме
электромагнитного тормоза, то результирующий момент
М равен
1. 1. , 1. Р»М1 , Рэм2 Р :)М1 Р эм2
—— Н------
ь2о —Ьйо
Qo
— 9/ 2 ГРУ _97 2 ГРУ
2/yl Qo(l-v) 2 у S2o(l+v)
(9.19)
§ 9.3. Характеристики двигателя
225
Подставив модули токов /У1 и /У2 из равенств (9.15)
и (9.17) в уравнение (9.19), получим значение момента
«идеального» двигателя в таком виде:
/7 2
= 4^— [2«,-(l + «,")v]. (9.20)
ЛЯ2/1оГру
За единицу момента примем пусковой момент Мпо,
развиваемый двигателем при круговом поле (ае=1;
v=0):
30-2Z7B2
по” л^погру ’
Тогда момент в относительных единицах
М 1 + а?
,П= -- = ае— ---Д---V.
Л1по 2
(9.21)
Уравнение механической характеристики «идеального»
двигателя v = f(m) при aP=const можно получить из
выражения (9.21):
2(ае—т)
1 + а.2
(9.22)
Уравнение (9.22) показывает, что скорость v в этом
двигателе является линейной функцией момента т.
На рис. 9.8 представлено семейство механических ха-
рактеристик v=f(m) при различных коэффициентах
сигнала.
Как видно из характеристик, максимальный момент
развивается двигателем при пуске. Величина этого мо-
мента в относительных единицах равна эффективному
коэффициенту сигнала, т. е. тп=ае при у=0.
2ae
l + ae2
Значение vx=
при котором m=0, характери-
зует так называемый теоретический холостой ход.
226
Глава IX. Асинхронные исполнительные двигатели
То обстоятельство, что при скорость теоретиче-
ского холостого хода всегда ниже синхронной, обуслов-
лено влиянием токов обратной последовательности, кото-
рые создают момент, оказывающий тормозящее действие
на ротор. Лишь при круговом поле, т. е. при ae=l, ско-
Рис. 9.8. Механические ха-
рактеристики двигателя при
амплитудном управлении.
рость теоретического холостого хода становится равной
синхронной, т. е. vx=vo=l. На рис. 9.8 представлены
пунктиром механические характеристики реального дви-
гателя с полым немагнитным ротором (для ае=1
и ае=0,5). Они показывают, что между скоростью вра-
щения и моментом реального двигателя уже нет пропор-
циональности (характеристики нелинейны) и скорость
теоретического холостого хода реального двигателя при
1 выше, так как сопротивления в цепи статора, кото-
рые необходимо учесть в реальном двигателе, уменьшают
величину тока обратной последовательности, а следова-
тельно, и момента обратной последовательности.
Отклонение механических характеристик реального
двигателя от характеристик «идеального» тем больше
(линейность характеристик тем хуже), чем меньше актив-
ное сопротивление ротора.
На характеристиках y=f(/n) (рис. 9.8) моменты ре-
ального двигателя больше, чем «идеального», при одних
и тех же скоростях вращения. В действительности же
моменты реального двигателя всегда меньше, чем у «иде-
ального», при одинаковых значениях v и ае. Такое рас-
§ 9.3. Характеристики двигателя
227
хождение объясняется тем, что на графиках показаны
относительные значения моментов, т. е. значения, отне-
сенные к пусковым моментам Л1п0, которые для обоих
случаев отличаются по величине.
Для построения регулировочных характеристик
v=f(ae) при m = const «идеального» двигателя восполь-
Рис. 9.9. Регулировочные
характеристики двигате-
ля при амплитудном
управлении.
зуемся тем же уравнением (9.22), которое показывает,
что даже для «идеального» двигателя зависимость ско-
рости вращения от напряжения управления имеет нели-
нейный характер. На рис. 9.9 показано семейство регули-
ровочных характеристик, полученных для различных зна-
чений т.
Отрезки оси абсцисс от нуля до точки ее пересечения
с соответствующей регулировочной характеристикой
определяют то минимальное напряжение управления, при
котором ротор, имея заданную нагрузку, приходит во
вращение. Это напряжение называют напряжением тро-
гания.
Пунктиром показаны регулировочные характеристики
реального двигателя с полым немагнитным ротором, ко-
торый имеет несколько более высокую скорость вращения
по сравнению с «идеальным» двигателем при одинаковых
значениях ае и т.
Во многих случаях одним из существенных условий
точности работы автоматических устройств является как
можно более высокая степень линейности регулирования.
228
Глава IX. Асинхронные исполнительные двигатели
Анализ регулировочных характеристик показывает,
что диапазон линейного регулирования тем меньше, чем
больше нагрузка двигателя и коэффициент сигнала.
Нелинейность регулировочных характеристик являет-
ся весьма существенным недостатком асинхронных испол-
нительных двигателей.
Характеристики мощности. Полная мощность обмотки
управления
ив
Sy=UyIy = aUwly — ae -, /у. (9.23)
rv
Подставив в уравнение токов управления /у = /у1-|-/у2
значения токов /у1 и /У2 из равенств (9.14) и (9.16), полу-
чим
h=—j X* [(1—v) (1+а₽) —(1+v) (1 — ае)] =
Z/vf ру
= -/ -^" -(ae-v). (9.24)
Модуль тока управления
/у==-^-(««“*)• (9.25)
/гг ру
Тогда полная мощность обмотки управления
Sy = ac (ае—v) = (ае2—aev). (9.26)
k krpy k2Tpy
За единицу мощности в асинхронных исполнительных
двигателях принимают электромагнитную мощность РЭмо
при ае= Г, v = 0:
РЭмо=МпоЙо-Мпо = 4г5-’ (9-27)
Oil ру
Тогда относительное значение мощности обмотки управ-
ления
§ 9.3. Характеристики двигателя
229
Ру =
Sy
Р эмО
= — (ае2—aev).
(9.28)
На рис. 9.10 показаны построенные по уравнению
(9.28) зависимости py=f(ae) при v = const.
Рис. 9.10. Зависимость мощности управления
ОТ cte при V = const.
Кривые показывают, что мощность управления резко
увеличивается при увеличении ае. В этом отношении
работа с малым коэффициентом сигнала выгоднее, так
как мощность управления ограничивается обычно мощ-
ностью усилительного устройства. Однако уменьшение
коэффициента сигнала увеличивает токи обратной после-
довательности (увеличивается эллиптичность поля) и
ухудшает использование машины.
Характеристики мощности управления для реального
двигателя имеют такой же закон изменения, как и для
«идеального» двигателя.
Полная механическая мощность в относительных еди-
ницах
Рмх=vm=v ( ае-v ) —- aev-~v2. (9.29)
230
Глава IX. Асинхронные исполнительные двигатели
По этому уравнению на рис. 9.11 построены кривые
Pmx=|(v) при ае=const. Относительная скорость vM,
при которой мощность рМх достигает максимальной вели-
Рис. 9.11. Зависимость полной меха-
нической мощности от скорости вра-
щения при ае = const.
чины, определяется путем дифференцирования уравнения
(9.29) по v и приравнивания производной нулю
ае—(1 + ае2)Ум=0,
откуда
ССе Vx
Vm~ Т+а? _ ~Т'
(9.30)
Подставив равенство (9.30) в уравнение (9.29), находим
максимальное значение полной механической мощности
Рмх =-----------(9-31)
^мхмакс 2 1+ае2
Из анализа кривых, показанных на рис. 9.11, видно, что
чем больше коэффициент сигнала, тем большую полез-
ную мощность можно получить от двигателя. В реальном
двигателе характер зависимости pMx=f(v) сохраняется
таким же, как и в «идеальном».
§ 9.4. Сравнение характеристик двигателя
231
§ 9.4. Сравнение характеристик двигателя с полым
немагнитным ротором при различных способах
управления
Механические характеристики исполнительного дви-
гателя (сравниваются характеристики реального двига-
теля) с полым немагнитным ротором при амплитудном,
фазовом и амплитудно-фазовом управлениях, представ-
ленные на рис. 9.12, а, б, в, нелинейны.
Рис. 9.12. Механические характеристики двигателя с полым не-
магнитным ротором:
а — при амплитудном управлении; б — при фазовом управлении; в — при
амплитудно-фазовом управлении.
Наибольшей нелинейностью обладают характеристики
конденсаторного двигателя, у которого управление ам-
плитудно-фазовое. В этом двигателе обычно включают
в цепь обмотки возбуждения конденсатор с такой емко-
стью, чтобы при номинальном напряжении управления
С7уН получить в режиме пуска (при n — Q) круговое вра-
щающееся поле. Тогда напряжение на обмотке возбуж-
дения UR (Us=U—Uc=jkiJyH, где {/ — напряжение сети,
С7с — напряжение на конденсаторе) равно приведенному
к обмотке возбуждения напряжению управления
и сдвинуто относительно него на 90°. При этом коэффи-
С/ун
циент сигнала управления ао=—у— считается номиналь-
ным. Напряжение UB при снятии механической характе-
ристики изменяется по величине и фазе (по сравнению
232
Глава IX. Асинхронные исполнительные двигатели
с этим же напряжением при пуске), поэтому вращаю-
щееся поле из кругового (при п=0; а = ао) превращает-
ся в эллиптическое (при п#=0 и даже при а = ао).
Наличие обратно вращающегося поля уменьшает скоро-
сти холостого хода конденсаторного двигателя. При ма-
Рис. 9.13. Регулировочные характеристики двигателя с полым не-
магнитным ротором:
а — при амплитудном управлении; б — при фазовом управлении; в —при
амплитудно-фазовом управлении.
лых и средних скоростях вращения момент конденсатор-
ного двигателя имеет большее значение, чем в двигателях
с амплитудным и фазовым управлениями, что объясняет-
ся возрастанием напряжения Пв. Рост UB вызывает уве-
личение магнитного потока машины, а следовательно,
и вращающего момента.
Наиболее близки к линейным механические характе-
ристики двигателя с фазовым управлением. Они при раз-
личных коэффициентах сигнала (коэффициентом сигнала
здесь является синус угла сдвига р между напряжениями
Us и Uy) почти параллельны, т. е. имеют практически
одинаковую жесткость. При номинальных коэффициентах
сигнала (sin р = 1; ае=1) характеристики v=f(m) для
фазового и амплитудного управлений получаются одина-
ковыми.
На рис. 9.13 показаны регулировочные характеристики
двигателя для различных способов управления. Из их
анализа видно, что наибольшую линейность имеют харак-
теристики при фазовом управлении, наименьшую — при
§ 9.4. Сравнение характеристик двигателя
233
амплитудно-фазовом. Начальные участки регулировоч-
ных характеристик (при малых относительных скоростях
вращения) для всех способов управления весьма близки
к линейным. Поэтому на практике стараются работать
Рис. 9.14. Зависимость полной
с полым немагнитным ротором
а — при амплитудном управлении;
амплитудно-фазовом управлении.
механической мощности двигателя
от скорости вращения:
б — при фазовом управлении; в — при
для чего применяют двигатели, рассчитанные на включе-
ние в сеть повышенной частоты (400, 500 гц).
Напряжение трогания в относительных единицах
(коэффициенты сигнала аР; sin 0; а/ао) равно моменту
сопротивления т.
Характеристики полной механической мощности для
различных способов управления показаны на рис. 9.14.
Из анализа этих характеристик видно, что они во всех
случаях по своему виду подобны. Максимальные значе-
ния механической мощности получаются при скоростях,
составляющих 52—58% от скоростей холостого хода.
Наибольшую мощность развивают двигатели при ампли-
тудно-фазовом управлении, наименьшую — при фазовом.
За номинальную мощность исполнительного двига-
теля обычно принимают максимальное значение полезной
механической мощности, а за номинальную скорость —
скорость, соответствующую этой мощности.
В заключение следует отметить, что в системах авто-
матики чаще применяется конденсаторный асинхронный
исполнительный двигатель с полым немагнитным рото-
ром* имеющий сравнительно простую схему и более высо-
234 Глава IX. Асинхронные исполнительные двигатели
кий коэффициент мощности (cosq)=0,8—0,95). Однако
в каждом конкретном случае выбор способа управления
определяют условиями работы системы и требованиями,
предъявленными к исполнительному двигателю.
§ 9.5. Динамические свойства асинхронных исполнительных
двигателей
Точное выражение передаточной функции для асин-
хронного исполнительного двигателя получить трудно,
так как механические характеристики Q=f(M) нелиней-
ны и к тому же наклон их меняется с изменением напря-
жения управления (или коэффициента сигнала).
В практических расчетах применяют приближенное
значение передаточной функции, полученной при лине-
аризации характеристик и пренебрежении электромагнит-
ной постоянной времени. В этом случае передаточная
функция асинхронного исполнительного двигателя имеет
такой же вид, как и для исполнительного двигателя
постоянного тока, т. е.
w/(„х _ Q(P) _ k
р) Щ(Р') ^мР+1’
Qo
где k= —-----коэффициент усиления.
Такое же выражение W(p) получается и для «идеаль-
ного» двигателя,у которого механические характеристики
линейны.
Тогда, имея в виду полученные в § 9.3 значения та
/ АГц Пх 2(Ze \
И Vx. \тп=т.— =ас; Vx—----------= 7.— — 7——г/,
' Д'! ПО По Qo 14“ ОСе^
электромеханическую постоянную времени Тм при любом
коэффициенте сигнала можно определить так:
7 Qx 2/Qo
М Мпо(1+ае2)
(9.32)
В выражение (9.32) входит значение угловой син-
§ 9.5. Динамические свойства двигателей 235
хроннои скорости £2о= —-—, следовательно, на величину
Тм влияют частота питающей сети и число пар полюсов
двигателя. Определяя электромеханическую постоянную
времени Тм, пользуются тем же выражением (9.32) и для
реального двигателя, так как время его разгона такое же,
как у «идеального».
Значения для большинства асинхронных исполни-
тельных двигателей с обычным короткозамкнутым рото-
ром мощностью 15—20 вт при круговом поле лежит
в пределах: при частоте 50 гц— 0,2—1,0 сек; 400 гц—
0,3—1,5 сек.
Для двигателей с полым немагнитным ротором в тех
же условиях значения Ты при частоте 50 гц — 0,01 —
0,1 сек; 400 гц — 0,02—0,15 сек.
Глава X. АСИНХРОННЫЙ ТАХОГЕНЕРАТОР
§ 10.1. Устройство, принцип действия
Асинхронный тахогенератор с полым немагнитным
ротором широко применяют в системах автоматики и вы-
числительной технике. Его устройство ничем не отличает-
ся от конструкции исполнительного двигателя с полым
немагнитным ротором (см. рис. 9.4). По своим рабочим
свойствам он практически удовлетворяет всем требова-
ниям, перечисленным в § 2.6, и может быть доведен до
высокой точности.
Схема асинхронного тахогенератора показана на
рис. 10.1, К обмотке возбуждения В подводится постоян-
ное по амплитуде и частоте напряжение UB. Вторая об-
мотка Г статора — генераторная, замкнута на внешнее
нагрузочное сопротивление ZH, которым обычно является
либо измерительный прибор, либо вход усилителя с со-
противлением порядка 2000—4000 ом и более.
Рассматривая процессы в тахогенераторе, представим
тонкостенный стакан ротора в виде равномерно распре-
деленной короткозамкнутой обмотки, имеющей большое
число проводников.
Допустим, что ротор неподвижен, а к обмотке возбуж-
дения подведено напряжение сети Us- Тогда магнитный
поток, созданный током обмотки В, будет пронизывать
ротор и индуктировать в нем, как во вторичной обмотке
трансформатора, э. д. с., называемую трансформаторной.
Под действием ее по ротору потечет ток, н. с. которого,
согласно правилу Ленца, вызовет поток, направленный
против потока обмотки В. Таким образом, по продольной
оси машины будет действовать результирующий магнит-
ный поток Фа, пульсирующий с частотой сети (рис.
10.1, а). Так как ось генераторной обмотки перпендику-
лярна результирующему потоку, то в этом случае в ней
э. д. с. не возникает.
Если ротор привести во вращение, то, помимо транс-
форматорной э. д. с., в нем наведется э. д. с. вращения за
§ 10.1. Устройство, принцип действия
237
счет пересечения проводниками ротора потока Фа-
Направление ее определяется правилом правой руки
(рис. 10.1,6), а действующее значение—в соответствии
с теорией машин постоянного тока:
£вР=Се'пФ</. (10.1)
Таким образом, величина э. д. с. вращения Евр при по-
стоянном значении Ф<; определяется скоростью враще-
Рис. 10.1. К объяснению принципа действия асинхронного
тахогенератора.
ния и, а ее частота — частотой напряжения возбужде-
ния t/B.
Под действием этой э. д. с. потечет ток /д, н. с. кото-
рого создает поток Фд, направленный по поперечной оси
машины. Величина Фд так же, как и Евр и lq, пропорцио-
нальна и. Поток Фд, пульсируя с частотой вызвавшего его
тока т. е. с частотой напряжения UB, пересекая витки
статорной обмотки Г, наведет в ней трансформаторную
э. д. с. Ег той же частоты ft. Действующее значение этой
э. д. с.
Z?r—4,44&ог^г/\Фум, (Ю-2)
где kor и wr— обмоточный коэффициент и число витков
обмотки Г.
2.38
Глава X. Асинхронный тахогенератор
В уравнении (10.2) 4,44korwrft = const, а поток Фд про-
порционален скорости вращения ротора, поэтому
£’r=C'n=feiQ.
(10.3)
Таким образом, величина выходной э. д. с. тахогене-
ратора при d)B=const прямо пропорциональна скорости
вращения ротора тахогенератора, а частота ее, равная Д,
не зависит от этой скорости. В этом заключается суще-
ственное достоинство асинхронного тахогенератора.
§ 10.2. Уравнение выходной характеристики асинхронного
тахогенератора. Погрешности и способы
их уменьшения
Рассматривая выходную характеристику асинхронно-
го тахогенератора, применим ту же методику, что и при
анализе асинхронного исполнительного двигателя, так
как эти машины одинаковы по конструкции и подобны
по схемам включения.
Выходным напряжением тахогенератора является
напряжение на нагрузке, подключенной к обмотке Г.
Ог=1^=(1л+1^, (Ю.4)
где /Г1 и /г2 — симметричные составляющие прямой и об-
ратной последовательностей тока /г-
Для определения токов Zri и /г2 воспользуемся выве-
денными в § 9.2 уравнениями. При этом будем считать,
что обмотке возбуждения тахогенератора соответствует
обмотка управления, а генераторной обмотке — обмотка
В двигателя.
Тогда уравнения (9.5) и (9.6) для тахогенератора:
; . I ъ'1
k
(10.5)
(10.6)
§ 10.2. Уравнение выходной характеристики. Погрешности
239
korWr
где«=—-------—коэффициент трансформации обмоток
«ов^в
тахогенератора.
Ввиду того, что подводимое извне к генераторной об-
мотке напряжение равно нулю, уравнения (9.9) и (9.10)
для тахогенератора примут такой вид:
(Ю-7)
(10.8)
В выражениях (10.7), (10.8) сопротивления ZB1) Zb2,
а также Zrl и Zr2 с учетом ZH выразим через параметры
соответствующих схем замещения. Затем значения токов
/в1 и /в2, используя равенства (10.5) и (10.6), подставим
в уравнение (10.4). После преобразований уравнение
(10.4) выходной характеристики тахогенератора получа-
ется в виде
—jkU ву
fe2 / ZCB2C1U,^
ZH f рв
+2ZcuCpB4-rpB j +
7 Г1 2
^-свЬрв
Г рв
--------= t/r e
A—v2B
(10.9)
где
H
7 2f 2 \ 7 Г 2
+2Ze,Cp.+rp,'
' /"рв
Г рв
B= fe2Zl
Zh^ рвЛ Г рн
п ^мв_)_ГрВ/
<*рв = у •
^-мв
240
Глава X. Асинхронный тахогенератор
Как видно из уравнения (10.9), выходная характери-
стика тахогенератора нелинейна из-за наличия в знамена-
теле члена, содержащего квадрат относительной скоро-
сти v. Нелинейна она даже при холостом ходе (ZH=oo).
Последнее физически объясняется тем, что магнитный
поток Фй уменьшается с увеличением скорости вращения.
Изменяется Фй за счет того, что поток Фд во вращающем-
ся роторе наводит э. д. с. вращения EBpq, которая по на-
правлению совпадает с трансформаторной э. д. с. Так как
Фд пропорционален скорости вращения, то EBpq пропор-
циональна квадрату этой скорости. Ток в роторе, создан-
ный этой э. д. с., вызывает поток, ослабляющий Ф<ь
В нагруженной машине поток Фд будет создаваться
геометрической суммой н. с. ротора и генераторной об-
мотки, что скажется на величине выходного напряжения.
В идеальном случае, если в знаменателе уравнения
(10.9) принять v2=0, выходная характеристика приобре-
тает линейный характер.
—jkUuv
—jkUBV ^ri
— t/ri s
(10.10)
Определяемая этим уравнением прямая является ка-
сательной к кривой, описываемой уравнением (10.9),
в точке v=0.
На рис. 10.2 показаны выходные характеристики тахо-
генератора при холостом ходе и некоторой активно-ин-
дуктивной нагрузке. Пунктиром изображены идеальные
характеристики. Как видно из графиков, действительные
значения выходных напряжений по величине отличаются
от напряжений, определяемых идеальными характеристи-
ками. Разность этих напряжений, отнесенная к С/Г{ и рав-
грешность тахогенератора. Но есть еще и фазовая
§ 10.2. Уравнение выходной характеристики. Погрешности
241
погрешность. Обусловливается она изменением фазы
выходного напряжения Ur. Определяется углом сдвига
по фазе между векторами напряжений Uri и Ur, т. е.
Лфг = фг( фг
Рис. 10.2. Выходные харак-
теристики тахогенератора.
Рис. 10.3. Зависимость выход-
ного напряжения от величины
и характера нагрузки.
Из изложенного следует, что амплитудная и фазовая
« о / ^2Zcb . ZcB
погрешности обусловлены членом v21 —------------— -J----т
L-,\f рв Г рв
в знаменателе уравнения (10.9). Поэтому уменьшение
погрешностей при заданной нагрузке может быть достиг-
нуто снижением относительной скорости v=-----и отно-
Z св
шения-----
Г рв
Для этого выбирают тахогенераторы с такой синхрон-
60/1 „ Л
нои скоростью п0———, при которой v не превышало бы
значений 0,2—0,3. Тогда выходная характеристика на
рабочем участке v=0—0,3 будет практически линейной
(рис. 10.2). С этой целью применяют тахогенераторы,
напряжение возбуждения которых рассчитывается на по-
вышенную частоту.
Отношение уменьшают увеличением активно-
го сопротивления грв', для чего ротор выполняют из фос-
242
Глава X. Асинхронный тахогенератор
фористой или марганцовистой бронзы, имеющей удельное
сопротивление примерно в 2 раза больше, чем сплавы
алюминия. Однако с увеличением активного сопротивле-
ния ротора крутизна выходной характеристики снижа-
ется.
Существенно влияет на точность работы тахогенера-
тора изменение активного сопротивления ротора машины
при ее нагреве. Увеличиваясь, сопротивление изменяет
крутизну выходной характеристики, создает ее нестабиль-
ность и, следовательно, повышает величины амплитудной
и фазовой погрешностей. Чтобы в прецизионных тахоге-
нераторах ослабить влияние нагрева ротора, последний
выполняют из сплавов, имеющих весьма низкие темпера-
турные коэффициенты сопротивления (манганин, ней-
зильбер).
Наконец, из анализа уравнения (10.9) следует, что на
величину Ur и его фазу влияет изменение величины и
характер нагрузки (см. графики на рис. 10.3 и 10.4).
Эти графики построены при некоторой постоянной отно-
сительной скорости V.
Из рис. 10.3 видно, что при активной и чисто-индук-
тивной нагрузках выходное напряжение снижается
с уменьшением сопротивлений. Если нагрузка чисто-емко-
стная, то при определенном значении Л'Сн в цепи генера-
торной обмотки имеет место резонанс напряжений, что
приводит к повышению Ur. Таким образом, с включением
определенной по величине активно-емкостной нагрузки
осуществляется компаундирование, снижающее ампли-
тудную погрешность тахогенератора.
Изменение фазы выходного напряжения (рис. 10.4)
имеет одинаковый характер при активной н чисто-емко-
стной нагрузках. При уменьшении ги и Хса угол фг° уве-
личивается. Противоположный характер изменения фг°
происходит при чисто-индуктивной нагрузке. Таким обра-
зом, для уменьшения фазовой погрешности необходимо
включать активно-индуктивную нагрузку, т. е. компаун-
дировать тахогенератор по фазовому углу, что увеличи-
вает амплитудную погрешность. П наоборот, при компа-
ундировании по амплитуде растет фазовая погрешность.
Практически, если на выходные зажимы тахогенератора
включают нагрузку Zsl=ru+jxsi, целесообразно произво-
§ 10.2. Уравнение выходной характеристики. Погрешности
243
дить компаундирование по той величине, постоянство
которой для данной схемы наиболее существенно.
В прецизионных тахогенераторах амплитудная по-
грешность Аиг0/=0,05—0,1, а фазовая — в пределах не-
скольких минут. В тахогенераторах следящих систем и
Рис. 10.4. Зависимость фазы вы-
ходного напряжения от величины
и характера нагрузки.
измерительных устройств Ди =0,2—2,5, а фазовая
погрешность достигает нескольких градусов.
Чтобы обеспечить более точную работу автоматиче-
ских систем, содержащих тахогенераторы, вместе
с уменьшением погрешностей последних необходимо
иметь более высокую крутизну k
\Ur
AQ
выходных харак-
теристик. Однако увеличение ее, как отмечалось выше,
сопровождается ростом А«г% и Афг°. Поэтому получить
большую крутизну выходной характеристики и малые
погрешности одновременно не удается.
Одним из недостатков асинхронного тахогенератора
является изменение крутизны выходной характеристики,
особенно в начальной ее части при вращении ротора
в различных направлениях. Такая зависимость Ur от
направления вращения делает выходную характеристику
несимметричной. Большое влияние на несимметрию ока-
зывает нулевая э. д. с. (нулевой сигнал) Е&, наводимая
в обмотке Г при неподвижном роторе. Возникновение /Тщ
связано с технологической неточностью сдвига обмоток В
и Г на 90 электрических градусов, несимметриен магнит-
ной цёпи, неодинаковой толщиной стенок стакана ротора.
244
Глава X. Асинхронный тахогенератор
Э. д. с. Его можно разделить на постоянную и перемен-
ную составляющие. Причем последняя зависит в основ-
ном от неодинаковой толщины стенок ротора, который
для уменьшения переменной составляющей тщательно
обрабатывают. Постоянная составляющая Ег0 может
быть существенно ослаблена, если обмотки В и Г раз-
местить раздельно на внешнем и внутреннем статорах.
Изготовив такой тахогенератор, к нему подводят при
п = 0 напряжение Ев и поворачивают внутренний статор
до тех пор, пока нулевой сигнал не будет иметь наимень-
шую величину. Затем внутренний статор закрепляют
в найденном положении стопорным винтом.
В заключение следует отметить, что по сравнению
с тахогенератором постоянного тока асинхронный имеет
следующие преимущества: бесконтактность, отсутствие
радиопомех, малую инерционность, высокую надежность,
бесшумность работы, простоту конструкции. К недостат-
кам относятся: худшая линейность выходной характери-
стики, наличие фазовой погрешности и нулевого сигнала,
зависимость выходного напряжения от характера на-
грузки.
Передаточная функция асинхронного тахогенератора
имеет такой же вид, что и для тахогенератора постоян-
ного тока (см. § 2.6).
Глава XI. ПОВОРОТНЫЕ ТРАНСФОРМАТОРЫ
§ 11.1. Назначение, устройство и принцип действия
Поворотные трансформаторы (ПТ) применяются
в автоматических устройствах, маломощных следящих
системах, в вычислительной технике, схемах разверток
радиолокационных установок и т. д. для получения на
выходе напряжений, находящихся в функциональной
зависимости от угла поворота ротора. В некоторых слу-
чаях ПТ используют в качестве так называемых построи-
телей для решения геометрических и тригонометрических
задач.
В зависимости от назначения ПТ в автоматических
устройствах они могут работать как в режиме поворота
ротора в пределах определенного ограниченного угла,
так и при непрерывном вращении со скоростью до
3000 об/мин и более.
Поворотные трансформаторы — малогабаритные ма-
шины. Потребляемая ими мощность — несколько вольт-
ампер при напряжении до 115 в и частотах 50 и 400—
2500 гц.
Конструктивно ПТ выполняется так же, как асинхрон-
ный двигатель с фазным ротором. В пазах сердечника
статора, набранного из листов электротехнической стали,
как правило, размещены две одинаковые распределенные
обмотки, сдвинутые между собой на угол 90 электриче-
ских градусов (рис. 11.1). Одна из обмоток статора
(/—Г), подключаемая к сети переменного тока, называ-
ется обмоткой возбуждения, другая (2—2') — компенса-
ционной (она обычно замыкается накоротко или на неко-
торое сопротивление). В пазах ротора, набранного также
из листов электротехнической стали, расположены две
одинаковые взаимно перпендикулярные обмотки. Одна
из них (3—3') — синусная, другая (обмотка 4—4') —
косинусная. Концы обмоток выведены на контактные
кольца, к которым прижимаются металлические щетки,
соединенные с неподвижными зажимами. Иногда при
ограниченном угле поворота концы роторных обмоток
246
Глава XI. Поворотные трансформаторы
соединяют с зажимами непосредственно при помощи гиб-
ких проводников в виде лент.
Поворот ротора осуществляется с помощью точного
редукторного механизма. Условимся в дальнейшем от-
считывать угол а от оси компенсационной до оси синус-
ной обмотки 3—3'.
/
Рис. 11.1. Схема поворотного трансформатора.
Принцип действия поворотного трансформатора осно-
ван на том, что при повороте ротора взаимная индуктив-
ность между обмотками статора и ротора, а следователь-
но, и э. д. с. в обмотках последнего, наведенные пульси-
рующим потоком возбуждения, должны изменяться по
строго синусоидальному закону от угла а. Для этого
необходимо получить в воздушном зазоре машины рас-
пределение индукции по закону, близкому к идеальной
синусоиде. Однако наличие зубцов статора и ротора
обусловливает ступенчатое распределение н. с. обмоток
и, следовательно, неизбежное содержание в них высших
обмоточных гармоник. Вследствие зубчатого строения
сердечников статора и ротора периодически изменяется
проводимость магнитной цепи машины, что вызывает
появление зубцовых гармоник. Кроме того, из-за нели-
нейности кривой намагничивания возникают гармоники
насыщения. Все эти факторы приводят к отступлениям
от синусоидального пространственного распределения
индукции, что вызывает погрешности в кривой зависимо-
сти э. д. с. ротора от угла поворота.
§ 11.2. Поворотный трансформатор 247
Для повышения точности ПТ высшие гармоники по
возможности уничтожают или ослабляют.
Выполнение на статоре и роторе обмоток высокой
точности с укороченным шагом позволяет уничтожить
или ослабить обмоточные гармоники. Обычно на роторе
помещают обмотки с укорочением шага на 1/3 полюсного
деления т, а на статоре — на 1/5 т, что устраняет 3-ю и
5-ю гармоники.
Зубцовые гармоники ослабляют применением скоса
пазов статора или ротора. По технологическим соображе-
ниям более удобно применять этот скос на роторе, при-
чем следует брать его равным одному зубцовому делению
статора. В этом случае магнитная проводимость воздуш-
ного зазора вдоль окружности остается постоянной.
Во избежание появления погрешностей от гармоник
насыщения для изготовления статорных и роторных сер-
дечников рекомендуется применять листы пермаллоя,
работать при малых насыщениях в магнитной цепи и из-
готовлять ПТ с достаточно большим воздушным зазором.
Все это при тщательной технологии изготовления позво-
ляет создавать поворотные трансформаторы высокого
класса точности.
Класс точности ПТ определяется относительной по-
грешностью т. е. разностью ординат в любой точке
действительной кривой U=f(a) и идеальной синусо-
идальной кривой l/,=f(a), отнесенной к амплитуде C7Mi.
Поворотные трансформаторы разделяются на четыре
класса точности: нулевой (А«о/ до 0,05); первый (\и^ —
= 0,05—0,1); второй (А« =0,1— 0,25); третий (А«„ бо-
лее 0,25).
В зависимости от режима работы ПТ разделяют на
следующие типы: синусно-косинусные, линейные и ПТ-
построители.
§ 11.2. Синусно-косинусный поворотный трансформатор
Рассмотрим принцип действия и поведение машины,
используемой в качестве синусного ПТ. В этом режиме
обмотка возбуждения 1—Г присоединена к источнику
переменного тока с действующим значением напряжения
U неизменной величины. К синусной обмотке ротора <3—3'
248
Глава XI. Поворотные трансформаторы
подключено сопротивление нагрузки ZuS (рис. 11.2, а).
Компенсационная 2—2' и косинусная 4—4' обмотки ра-
зомкнуты и на рисунке не показаны.
Рис. 11.2. Принципиальная (а), преобразованные (эквивалентные)
(б и в) схемы и диаграмма потоков (г) синусного ПТ.
Допустим, что в машине обеспечивается строгая сину-
соидальная зависимость взаимоиндуктивности между
обмотками 1 и 3 от угла поворота ротора а, т. е.
М1з=М13м sin a=ZWi.'w3' sin а, (11.1)
где Af13M= \W1W3 —максимальное значение взаимо-
индуктивности, соответствую-
щее углу поворота ротора
а = 90°, при котором оси обмо-
ток 1 и 3 совпадают;
Z — магнитная проводимость, не за-
висящая от угла поворота
вследствие равномерного воз-
душного зазора;
Wi=kMWi\ w3 =ko3w3— эффективные числа витков об-
моток 1 и <3.
Анализ уравнения (11.1) показывает, что характер
изменения взаимоиндуктивности останется прежним, если
§ 11.2. Синусно-косинусный ПТ
249
принять, что оси обмоток 1 и 3 совпадают, а число витков
обмотки 3 изменяется по закону w3 sin а.
Тогда полное число витков w3 можно рассматривать
как геометрическую сумму «продольных витков» w3 sin а,
ось которых совпадает с осью обмотки 1, и «поперечных
витков» w3 cos а, ось которых перпендикулярна оси об-
мотки 1. Следовательно, действительная схема (рис.
11.2, а) может быть заменена эквивалентной ей, изобра-
женной на рис. 11.2, б.
При холостом ходе ПТ (когда ZH3=°o) ток по обмотке
ротора не протекает, следовательно, э. д. с. ротора Е3
определяется только потоком статора Ф1, который будет
пересекать «продольные витки» w3 sin а и индуктировать
в них э. д. с.
£.!=4,44к?,!7Ф1м sin а. (11.2)
Можно выразить э. д. с. Ея через э. д. с. статорной об-
мотки. Так как
£'1=4,44да17Ф1м, (Н-3)
то из уравнений (11.2) и (11.3) получим
Е3 __ w3 sin а
Ei wi
откуда
E3=kEi sin a, (П-4)
где k= — коэффициент трансформации.
Итак, в рассматриваемом случае э. д. с. ротора Е3 яв-
ляется синусоидальной функцией угла поворота ротора а.
При включении роторной обмотки на сопротивление
ZIl3 (см. эквивалентную схему на рис. 11.2, в) по ней про-
текает ток Л, который создает поток ротора Фз, направ-
ленный по оси обмотки ротора. Ф3 можно разложить на
составляющие — продольную Фз' и поперечную Фз"
(рис. 11.2, г). Фз' направлена против потока статора и
размагничивает ПТ. Размагничивающее влияние Фз'
250
Глава XI. Поворотные трансформаторы
уравновешивается увеличением тока Л в обмотке возбуж-
дения. Таким образом, по продольной оси машины дей-
ствует результирующий поток Фа, который в «продольных
витках» w3 sin а по-прежнему индуктирует э. д. с. вза-
имоиндукции
£зм = /гЁ15ша. (11.5)
Поперечная составляющая Фз" потока Фз пронизывает
«поперечные витки» w3 cos а обмотки ротора и индукти-
рует в них э. д. с. самоиндукции
Ёзъ=—jaL3i3, (Н.6)
где индуктивность L3= (w3 cos а)2 X.
Полная э. д. с., индуктируемая в обмотке 3, представ-
ляет собой сумму э. д. с. Езм и E3L, т. е.
E3=E3M-]-E3i.~kEi sin a—j(ni3(w3 cos а)27. (П-7)
Ток
j _ Ъ
2з~|-2пз
где Z3=r3-\-jx3 — сопротивление обмотки <3.
Тогда
Ё3
E3=kEi sin а—„—-ХаУз'2 cos2 a=
^з+^нз
= &Eisina—b cos2 a. (H-8)
Из уравнения (11.8) находим
Ё (Ц.9)
1 -j-b cos2 a
где постоянный комплексный множитель
. cow3'! Z
Z3+Zu3
§ 11.3. Симметрирование синусио-косииусного ПТ
251
Из уравнения (11.9) следует, что при нагрузке пово-
ротного трансформатора из-за наличия в знаменателе
члена b cos2 а искажается синусоидальный характер за-
висимости Ез от угла а. Физически это искажение об-
условлено появлением при нагрузке поперечного пото-
ка Фз".
В косинусном поворотном трансформаторе, в котором
рабочей обмоткой ротора является обмотка 4 (обмотка <3
разомкнута), взаимоиндуктивность между обмотками 1
и 4 будет:
(11.10)
М14=М14М cos а.
Тогда прн холостом ходе обмотки 4 э. д. с.
Е^=Е^ cos а,
т. е. машина превращается в косинусный ПТ.
При нагрузке обмотки, рассуждая так же, как в пре-
дыдущем случае, получаем
kEi cos а
£*= Ti д -У'
1+» sin2 а
(11-Н)
(11.12)
Здесь искажение косинусоидальной зависимости обуслов-
лено членом знаменателя, содержащим sin2 а. Так как
выходные напряжения поворотных трансформаторов
должны изменяться по закону синуса или косинуса
угла а, то необходимо устранять погрешности, возникаю-
щие от поперечной реакции ротора путем ее компенсации.
С этой целью прибегают к так называемому симметриро-
ванию ПТ.
§ 11.3. Симметрирование синусно-косинусного поворотного
трансформатора
Симметрирование поворотного трансформатора может
быть первичным и вторичным.
Первичное симметрирование осуществляется со сторо-
ны статора путем использования компенсационной обмот-
ки 2, имеющей эффективное число витков w2 (см. рис,
11.3, п). Как видно из схемы, обмотка возбуждения вклю-
252
Глава XI. Поворотные трансформаторы
чена на напряжение U сети, компенсационная замкнута
на сопротивление Zh2, синусная нагружена сопротивле-
нием ZH?„ а косинусная разомкнута (в этом случае полу-
чается самый неблагоприятный режим работы ПТ), поэ-
тому она на схеме не показана.
Рис. 11.3. Принципиальная (а), преобразованная (б)
схемы и диаграмма потоков (в) синусного поворот-
ного трансформатора с первичным симметрированием.
Так как оси обмоток 1 и 2 перпендикулярны, то при
работе поворотного трансформатора (когда ток /3=/=0)
в компенсационной обмотке 2 может наводиться э. д. с.
только поперечной составляющей Фз" потока ротора
(рис. 11.3, в). Таким образом, можно считать, что ком-
пенсационная — вторичная обмотка трансформатора,
первичной обмоткой которого являются «поперечные вит-
ки» w-з cos а ротора (рис. 11.3, б).
Если сопротивление Z|l2 мало, т. е. режим трансформа-
тора близок к режиму короткого замыкания, то Фг^Фз"
и поперечный поток машины Ф7 = Фг-]-Фз" практически
приближается к нулю.
Можно доказать, что влияние поперечной реакции
ротора исчезает, если при одинаковых параметрах обмо-
ток 1 и 2 подключить к зажимам последней Zh2=Zhi,
где ZHi — внешнее сопротивление цепи обмотки 1, т. е.
внутреннее сопротивление источника питания. Так как
§ 11.3. Симметрирование синусно-косинусного ПТ
253
обычно ZH1 весьма мало, то Zh2 мало отличается от нуля
При наличии источника «бесконечно большой мощности»,
в котором напряжение остается неизменным независимо
от режима работы поворотного трансформатора, Zni = 0.
При этом ZH2 также должно быть равно нулю, т. е. об-
мотку 2 замыкают накоротко.
Таким образом, в машине с первичным симметрирова-
нием действует только результирующий продольный по-
ток Фй = Ф1~|-Ф/, который, пронизывая «продольные
витки» w/ sin а роторной обмотки, наведет в них э. д. с.
E3=kEi sin а.
Недостаток этого симметрирования — зависимость
U
входного сопротивления zBX = —— от угла а, так как при
Л
постоянном U величина тока Л изменяется при повороте
ротора. Действительно, если пренебречь намагничиваю-
щим током, условие равновесия продольных н. с.
Ewi -\-i3W3 sin а = 0,
отсюда
Lsin а.
Wi
Подставив в это уравнение значение тока
• kEi sin а
Zs-|-ZH?,
получим
Л
kEi sin а Wz . Ё1
„ , „---------sin а= —«2 —у— sin2 а.
/з-ф/нз Wi Zj~|-Zh3
(11.13)
Таким образом, ток /1( а следовательно, и zBX изменя-
ются лропорционально sin2 а.
254
Глава XI. Поворотные трансформаторы
Вторичное симметрирование осуществляется со сторо-
ны ротора. Схема синусно-косинусного поворотного тран-
сформатора со вторичным симметрированием представ-
лена на рис. 11.4. я. Как видно, в этом случае обмотка
возбуждения присоединена к сети, компенсационная ра-
Рис. 11.4. Принципиальная
(а), преобразованная (б)
схемы и диаграмма потоков
(в) синусно-косинусного по-
воротного трансформатора
со вторичным симметрирова-
нием.
зомкнута (или отсутствует), а обе роторные замкнуты
на внешние нагрузочные сопротивления ZHs и ZBi. Разде-
лив витки обмоток 3 и 4 на «продольные» и «поперечные»,
получаем схему (рис. 11.4, б), из которой видно, что токи
h и Л, протекая по своим «поперечным» виткам Wz cos а
и Wi sin а в противоположных направлениях, создают
потоки, также направленные в противоположные сто-
роны, т. е. взаимно ослабляющие друг друга (рис. 11.4, в).
Для того, чтобы в ПТ полностью отсутствовала попереч-
ная реакция ротора, т. е. чтобы Фд = Фз"—Ф4"=0, необ-
ходимо получить полную компенсацию н. с. в поперечной
оси
/Зау/ cos а= — liWi sin а. (11.14)
§ 11.3. Симметрирование сннуспо-коспнусного ПТ
255
В этом случае на выходе синусной и косинусной обмо-
ток получим
£3=йЁ1 sin a; £4 = ££icosa.
Токи, протекающие но обмоткам ротора,
Подставив полученные выражения для токов в уравнение
н. с. (11.14), получим
k£i sin a , kEt cos a ,
—7 - „— аУз cos a=-----• -------оу4 sm a,
^зТ'^нЗ ^4-Г-^н4
откуда, имея в виду равенство эффективных чисел витков
роторных обмоток , следует, что это равенство
соблюдается, когда Z3-|-ZH3=Z4-(-Zh4. Но Zs=Z4, следова-
тельно, равенство нагрузочных сопротивлений ZI13 и Zn4
является условием вторичного симметрирования ПТ, при
котором каждая из роторных обмоток является компен-
сирующей по отношению ко второй роторной обмотке.
Можно показать, что при вторичном симметрировании
роторных обмоток входное сопротивление машины не за-
висит от угла поворота ротора. Действительно, исходя из
условия равновесия продольных и. с., можно записать
I3W3' sin cos a-j-A®/=0.
Подставив в это уравнение значения токов /3 и /4 и приняв
во внимание, что W3'/Wi =k, получим
• _ k2Ei sin2 a k2Et cos2 a
Z3-[-ZH3 Z4-j-ZI14
Так как условием вторичного симметрирования явля-
ется равенство
Zs^-Zhs—Z4-j-Zu4 — ZP+Z„,
256
Глава XI. Поворотные трансформаторы
ТО
• =
1 Zp+ZH ’
(11.15)
т. е. ток Л, а следовательно, и zBX при постоянстве нагру-
зок не зависят от угла поворота ротора.
Применение вторичного симметрирования затруднено
при переменной внешней нагрузке поворотного трансфор-
матора. В этом случае целесообразнее выполнять первич-
ное симметрирование.
Наилучшие результаты (с меньшими погрешностями)
получают, если обмотки симметрируют одновременно как
со вторичной, так и с первичной стороны. В этом случае
используются все четыре обмотки поворотного трансфор-
матора.
§ 11.4. Линейный поворотный трансформатор
Линейный поворотный трансформатор применяется
для получения выходного напряжения, пропорциональ-
ного углу а.
С помощью синусно-косинусного ПТ со вторичным
симметрированием можно получить линейную зависи-
мость выходного напряжения лишь при малых измене-
ниях угла а (около 4,5° в обе стороны от нуля). Однако
при соответствующем включении обмоток четырехобмо-
точного поворотного трансформатора эти пределы можно
значительно расширить. Если выполнить соединение так,
чтобы на выходе было напряжение в виде функции
1 -С/ cos сс
то при С = 0,52 линейность выходного напряжения с точ-
ностью до 0,1 % будет в пределах углов от —55 до -)-55о.
Для получения такой зависимости могут быть исполь-
зованы две схемы линейных поворотных трансформато-
ров: с первичным и с вторичным симметрированием.
Линейный поворотный трансформатор с первичным
симметрированием имеет схему включения обмоток, пока-
§ 11.4. Линейный поворотный трансформатор
257
занную на рис. 11.5, а. Обмотки возбуждения и косинус-
ная в нем соединены последовательно и включены в сеть.
Сопротивление компенсационной обмотки подбирается
так, чтобы поперечный поток Ф9 стал равным нулю
(практически ZH2=0). Тогда и э. д. с., наводимые во всех
«поперечных» обмотках (см. рис. 11.5,6), также стано-
Рис. 11-5. Принципиальная (а) н преобразованная (б)
схемы линейного поворотного трансформатора с пер-
вичным симметрированием.
вятся равными нулю (если пренебречь потоками рас-
сеяния) .
Синусная обмотка 3, нагруженная на внешнее сопро-
тивление 2н3, является выходной. Э. д. с. Е3, индуктируе-
мая в ней, должна линейно зависеть от угла поворота
ротора.
Пренебрегая активным сопротивлением обмоток и по-
токами рассеяния, можно записать:
Ui—Ei-\-kEi cos a=£i(1 -\-k cos a); (11.17)
U3=E3=kElsin a. (11.18)
Определим значение £i из уравнения (11.17):
1 -ф-Л cos а
258
Глава XI. Поворотные трансформаторы
Подставив значение в уравнение (11.18), получим
равенство
kUi sin а
(у з ,
1 -|-Л cos а
(11.19)
аналогичное по своей функциональной зависимости вы-
ражению (11.16). Но коэффициент трансформации
Рис. 11.6. Принципиальная (а) и преобразованная
(б) схемы линейного поворотного трансформатора
со вторичным симметрированием.
k = w3'/wi должен несколько отличаться от значения С
в выражении (11.16), так как при выводе равенства
(11.19) не учитывалось влияние сопротивления обмоток.
Практически обычно берут k = 0,565. Тогда выходная ха-
рактеристика поворотного трансформатора, включенного
по описанной схеме, линейна в указанных ранее пределах.
Так как рассмотренная схема симметрирована с пер-
вичной стороны, то входное сопротивление не будет
постоянным при изменении угла а. Но это обстоятельство
не является существенным, так как линейный ПТ обычно
устанавливается в начале счетно-решающего каскада и
возбуждается непосредственно от сети.
В тех случаях, когда требуется постоянство входного
сопротивления, используют линейный поворотный транс-
форматор со вторичным симметрированием (рис. 11.6, п).
§ 11.5. Поворотный трансформатор-построитель
259
В этой схеме на обмотку возбуждения подается напряже-
ние сети, а компенсационная и синусная соединяются по-
следовательно, образуя общую цепь, на зажимы которой
включено нагрузочное сопротивление ZM. Напряжение,
снимаемое с него, выходное. Сопротивление ZH4 косинус-
ной обмотки должно быть подобрано так, чтобы машина
была полностью симметрирована, т. е. чтобы ее входное
сопротивление было постоянным.
Так как схема линейного ПТ со вторичным симметри-
рованием является взаимной по отношению к схеме ли-
нейного ПТ с первичным симметрированием, то, согласно
теореме взаимности, сформулированной применительно
к четырехполюсникам, для неё имеют место аналогичные
соотношения. Уравнение (11.19) оказывается справедли-
вым в обоих случаях.
Недостатком ЛПТ со вторичным симметрированием
является то, что он не может быть использован в тех
устройствах, где нагрузка Za3 переменная. Поэтому
в практике применяются главным образом ЛПТ с первич-
ным симметрированием.
Как было указано, рассмотренные схемы дают линей-
ную зависимость выходного напряжения при изменениях
угла в пределах 55° в обе стороны от нулевого положения
ротора. Однако, если изменения фазы напряжения на
угол 180° не требуется, то, вводя в схему смещение напря-
жения от отдельного трансформатора или автотрансфор-
матора, можно увеличить предел линейного изменения
напряжения вдвое.
§ 11.5. Поворотный трансформатор-построитель
Поворотный трансформатор-построитель применяют
для решения геометрических задач. Так, с его помощью
можно определить гипотенузу и угол прямоугольного
треугольника по двум заданным катетам.
На рис. 11.7 показана схема ПТ-построителя. Обмотки
возбуждения и компенсационную присоединяют к одной
и той же однофазной сети через потенциометры (или ре-
гулируемые автотрансформаторы), позволяющие устано-
вить на входе обмоток требуемые напряжения Ut и
пропорциональные катетам решаемого треугольника.
Роторная обмотка 3 включена на прибор, который может
260
Глава XI. Поворотные трансформаторы
быть отградуирован в линейных мерах. Вторая роторная
обмотка 4 питает (если нужно — через усилитель) обмот-
ку управления исполнительного двигателя, обмотка воз-
буждения которого через конденсатор присоединяется
к той же сети, что и статорные обмотки ПТ. Роторы по-
строителя.
полнительного двигателя и ПТ связаны механически че-
рез редуктор.
Схема работает следующим образом. Допустим, что
известны катеты а и b (см. рис. 11.7). В определенном
масштабе их величины могут быть выражены через СД
и Hz, которые подаются посредством потенциометров на
обмотки 1 и 2 статора. Токи в них Л и /2 создают в не-
насыщенной магнитной системе машины взаимно перпен-
дикулярные потоки и Ф2, пропорциональные заданным
значениям напряжений Ui и Uz. Геометрическое сложение
этих потоков дает результирующий магнитный поток Ф,
величина которого пропорциональна гипотенузе решае-
мого треугольника, а пространственное расположение
такое же, как и гипотенузы относительно катетов а и Ь.
Пронизывая обмотки ротора, поток наведет в них элек-
тродвижущие силы. Э. д. с. обмотки 4 создает на зажимах
обмотки управления исполнительного двигателя напря-
жение, под действием которого ротор двигателя придет
во вращение и начнет поворачивать ротор ПТ. Когда об-
§ 11.5. Поворотный трансформатор-построитель 261
мотка 4 займет положение, при котором ее ось будет пер-
пендикулярна результирующему потоку Ф, э. д. с. этой
обмотки станет равной нулю и ротор исполнительного
двигателя остановится. При этом ось обмотки 3 совпадет
с осью результирующего потока Ф, который будет индук-
тировать в ней э. д. с., пропорциональную гипотенузе ре-
шаемого треугольника, что и покажет измерительный
прибор.
Угол треугольника отсчитывается по шкале измери-
теля углов.
Глава ХП. СЕЛЬСИНЫ
§ 12.1. Общие сведения
В настоящее время в схемах автоматического управ-
ления и регулирования, в следящих системах получили
широкое применение электрические системы синхронной
связи (передачи), под которыми понимают совокупность
устройств, служащих для измерения или передачи на рас-
стояние угловых перемещений двух или нескольких ва-
лов, не связанных механически между собой.
Основные элементы системы синхронной связи — дат-
чик и приемник (один или несколько). Они соединены
между собой линией связи либо непосредственно, либо
через промежуточные звенья: усилители, реле и пр.
В качестве датчика и приемника могут применяться раз-
личные типы электрических машин.
Однако в системах малой мощности наиболее распро-
странены индукционные машины, которые за свою спо-
собность при определенных соединениях самосинхрони-
зироваться называют сельсинами.
Применяют два основных вида индукционных систем
синхронной связи: трехфазную и однофазную. Первые
распространены лишь при относительно больших мощно-
стях (в так называемых системах «электрического вала»),
применяемых в тех случаях, когда требуется строго син-
хронное вращение двух двигателей, удаленных друг от
друга (в приводах разводных мостов, затворов шлюзов,
бумагоделательных машин и т. д.).
Вторые широко применяются для индикаторных или
измерительных целей (в этом случае на валу приемника
системы находится только сбалансированная стрелка или
шкала); для целей управления, когда приемник системы
воздействует на какой-либо управляющий орган, напри-
мер на движок реостата, контакты следящей системы
и пр.; для дистанционного управления следящим приво-
дом, когда приемник системы работает в трансформатор-
ном режиме, воздействуя на усилительную схему привода.
§ 12.2. Сельсины в трехфазпоп системе синхронной связи
263
§ 12.2. Сельсины в трехфазной системе синхронной связи
В трехфазной системе синхронной связи применяют
сельсины, конструктивно подобные трехфазным асинхрон-
ным машинам с фазным ротором. На рис. 12.1 представ-
лена трехфазная система синхронной связи, состоящая
из двух совершенно одинаковых сельсинов: датчика Д
Д
Рис. 12.1. Трехфазные сельсины в системе синхронной
связи.
и приемника П. Трехфазные обмотки статоров этих ма-
шин включаются в сеть и создают круговые вращающие-
ся поля. Роторные обмотки, называемые в сельсинах
обмотками синхронизации, с помощью линии связи сое-
диняются между собой таким образом, чтобы э. д. с. £2д
и £2л, индуктируемые в каждой их фазе, были направлены
навстречу друг другу.
Когда углы поворота роторов датчика 6Д и приемника
0п между соответствующими фазами статора и ротора
одинаковы, т. е. угол рассогласования 0 = 0Д—0П равен
нулю, геометрическая сумма £гд и (рис. 12.2, а) тоже
равна нулю, т. е.
£гд-(-£2п=0-
При появлении угла рассогласования между роторами
датчйка и приемника (0 = 0Д—0пэ^0) геометрическая
264
Глава XII. Сельсины
сумма э. д. с. £,2д+^2п=А£,2 вызовет уравнительный ток,
протекающий по обмоткам роторов и проводам линии
D г
связи. Величина его равна /2= ——,
где Z — сопротив-
Рис. 12.2. Векторные диаграммы системы,
состоящей из двух трехфазных сельсинов.
ление фазы ротора одной машины (сопротивлением про-
вода линии связи пренебрегаем).
Если считать, что сопротивления обмоток роторов дат-
чика и приемника носят индуктивный характер (т. е. пре-
небречь активными сопротивлениями обмоток), то ток /2
будет отставать от э. д. с. ДЁ2 на 90°.
На рис. 12.2, б представлена векторная диаграмма для
случая, когда ротор приемника заторможен, а ротор дат-
чика повернут в сторону вращения поля его статора на
угол 0. Здесь ток /2 почти совпадает по фазе с э. д. с. Ё2а
и сдвинут относительно э. д. с. £2д на угол, больший 90°.
Это означает, что ротор приемника в данном случае на-
ходится в генераторном режиме, а датчика — в режиме
двигателя. Взаимодействие тока h с соответствующими
вращающимися полями вызывает электромагнитные син-
хронизирующие моменты разных знаков. Электромагнит-
ный момент в приемнике стремится повернуть ротор
в сторону вращения поля, а электромагнитный момент
в датчике — против вращения его поля, до наступления
нового согласованного положения. Синхронизирующий
момент приемника в исследуемом случае по величине
§ 12.2. Сельсины в трехфазной системе синхронной связи
265
больше момента датчика (рис. 12.3). Степень различия
в моментах определяется величиной потерь в роторах
обеих машин и линии связи. Если повернуть ротор дат-
чика против направления вращения поля, то Мя стано-
вится больше Ма, так как машины в отношении передачи
Рис. 12.3. Характеристики син-
хронизирующих моментов трех-
фазных сельсинов при повороте
датчика в направлении поля и
против поля статора.
Рис. 12.4. Схема «электрического
вала».
энергии через систему меняются местами. Но, как и преж-
де, ротор датчика испытывает момент против направле-
ния поворота, а приемника — по направлению. В случае
непрерывного вращения ротора датчика ротор приемника
будет синхронно следовать за ним с некоторым углом рас-
согласования 0, зависящим от нагрузки на валу. Величи-
на 0 определяет динамическую ошибку системы.
Неодинаковость значений моментов при вращении
ротора датчика в разных направлениях относительно
поля статора обусловливает различную точность син-
хронной передачи угла при заданном моменте нагрузки,
что является существенным недостатком этой системы.
Для осуществления синхронного и синфазного враще-
ния мощных асинхронных двигателей, механически не
связанных между собой, используют систему «электриче-
ского вала». На рис. 12.4 показан один из вариантов та-
кой системы. Состоит она из двух главных асинхронных
двигателей А и В и двух спаренных с ними трехфазных
сельсинов At и Bi, соединенных между собой линией
связи. При синхронном и синфазном вращении главных
двигателей угол рассогласования сельсинов равен нулю
и, следовательно, их синхронизирующие моменты отсут-
266
Глава XII. Сельсины
ствуют. Если сельсины At и Bi рассогласованы, возникают
моменты вращения, увеличивающие момент на валу от-
ставшего главного двигателя и уменьшающие момент на
валу другого главного двигателя, забежавшего вперед,
пока система снова не придет в согласованное состояние.
§ 12.3. Устройство однофазных контактных
и бесконтактных сельсинов
В системах синхронной связи на однофазном перемен-
ном токе применяют контактные и бесконтактные сель-
сины с однофазными обмотками возбуждения и обмот-
ками синхронизации, выполненными по типу трехфазных.
Магнитная система сельсинов набирается из листов элек-
тротехнической стали. В зависимости от выполнения ее
контактные сельсины разделяются на неявнополюсные и
явнополюсные.
В сельсинах с неявнополюсной магнитной системой
(с равномерным воздушным зазором) в пазах ротора
укладывают распределенную обмотку возбуждения,
а в пазах статора — распределенную трехфазную обмотку
синхронизации. Для гашения колебаний ротора при отра-
ботке угла иногда в пазах ротора сельсина приемника
такой конструкции укладывают дополнительную коротко-
замкнутую обмотку, сдвинутую относительно обмотки
возбуждения на угол 90°. Это усложняет и удорожает
конструкцию. Недостаток таких сельсинов — небольшая
крутизна характеристики момента в начальной части, что
в случае индикаторной передачи вызывает увеличенную
погрешность при отработке угла. Поэтому сельсины эти
применяют как приемники в системах, работающих в
трансформаторном режиме.
Наибольшее распространение получили контактные
сельсины с явнополюсной магнитной системой. Обмотка
возбуждения у них выполняется сосредоточенной и может
располагаться как на полюсах статора (рис. 12.5), так и
на полюсах ротора (рис. 12.6). В соответствии с этим раз-
личное расположение имеет и обмотка синхронизации,
которая выполняется распределенной.
Для возможности самосинхронизации в пределах од-
ного оборота сельсины всегда выполняются двухполюс-
§ 12.3. Устройство однофазных сельсинов
267
ными. Полюсы имеют полюсные наконечники с углом
охвата ротора около 120°. Чтобы приблизить форму кри-
вой распределения поля к синусоиде, воздушный зазор
делается неравномерным, он увеличивается к краям по-
люсного наконечника.
Рис. 12.5. Конструктивное
устройство сельсина с обмоткой
возбуждения на явнополюсном
статоре.
Рис. 12.6. Конструктивное
устройство сельсина с обмоткой
возбуждения на явнополюсном
роторе.
С точки зрения характеристик системы безразлично,
где расположена обмотка возбуждения: на статоре или
на роторе. Однако в сельсинах с обмоткой возбуждения
на статоре в цепи обмотки синхронизации будет три
скользящих контакта, снижающих точность и надежность
работы системы. Достоинство такой конструкции заклю-
чается в том, что ток через скользящие контакты в инди-
каторном режиме работы протекает только при наличии
угла рассогласования. Кроме того, создаются лучшие
условия для балансировки ротора.
В сельсинах с обмоткой возбуждения на роторе число
скользящих контактов уменьшается до двух. Однако при
этом через щетки и кольца будет непрерывно проходить
ток возбуждения, что при длительном нахождении систе-
мы в состоянии покоя может вызвать подгорание щеточ-
ных контактов. Но ввиду малой величины тока возбуж-
дения это явление наблюдается довольно редко.
Существенный недостаток контактных сельсинов —
наличие скользящих контактов, снижающих их надеж-
ность. При слабом нажатии на щетки переходные сопро-
268
Глава XII. Сельсины
тивления контактов получаются большими и неодинако-
выми, контакт не надежен, что приводит к увеличению
погрешности передачи. Если повышать нажатие на щет-
ки, контакт улучшается, но зато растет момент трения,
что в свою очередь ведет к увеличению погрешности пере-
дачи, к быстрому износу контактов. Чтобы уменьшить
Рис. 12.7. Схема устройства бесконтактного сельсина.
переходное сопротивление и увеличить надежность рабо-
ты сельсинов, кольца и щетки обычно выполняют из спла-
вов серебра.
Однако и это не может полностью избавить контакт-
ный сельсин от присущих ему недостатков. Поэтому в на-
стоящее время широко распространены бесконтактные
сельсины. Отсутствие у них скользящих контактов позво-
ляет получить лучшую устойчивость характеристик и
длительно сохранить класс точности.
Устройство современного бесконтактного сельсина
показано на рис. 12.7. В нем ротор 6 состоит из двух па-
кетов, разделенных немагнитным промежутком 7. Каж-
дый пакет собран из изолированных листов электротехни-
ческой стали, причем плоскости листов расположены па-
раллельно оси вала. Пакеты либо запрессованы в пласт-
массу, либо залиты силумином и затем обработаны в виде
цилиндра.
На статоре расположен пакет основного магнитопро-
вода 1, в пазах которого находится трехфазная распре-
деленная обмотка синхронизации <3, соединенная звездой.
Однофазная обмотка возбуждения, выполненная в виде
двух последовательно соединенных кольцевых катушек,
§ 12.4. Индикаторный режим сельсинов
269
размещена на статоре между основным пакетом 1 и торо-
идальными магнитопроводами 5. Основной и тороидаль-
ные магнитопроводы набраны из листов стали, причем
плоскости листов, как обычно, перпендикулярны оси вала.
К тороидам 5 примыкают шихтованные стержни внеш-
него магнитопровода 2, которые располагаются в акси-
альных пазах отлитого из силумина корпуса 8.
Принцип работы бесконтактного сельсина можно вы-
яснить, проследив путь магнитного потока, созданного
обмоткой возбуждения. Пусть в данный момент времени
направления тока в обмотке возбуждения и созданного
им потока будут такими, как показано на рис. 12.7.
Здесь, как видно, магнитный поток, замыкаясь вокруг ка-
тушек обмотки возбуждения, проходит по стержням
внешнего магнитопровода 2, тороидам 5 и попадает в ро-
тор, где встречает большое сопротивление немагнитного
промежутка 7. Это заставляет изменить его направление
и идти из одного пакета ротора в другой по зубцам и
спинке статора /, минуя немагнитный промежуток.
Таким образом, проходя по основному статорному
пакету 1, поток сцепляется с обмоткой синхронизации.
Если поворачивать ротор, то вместе с ним будет повора-
чиваться и поток, а так как обмотка синхронизации не-
подвижна, то потокосцепление будет изменяться по тако-
му же закону, как и в контактном сельсине. Поэтому
работа бесконтактных сельсинов в системах синхронной
связи аналогична работе контактных.
§ 12.4. Работа однофазных сельсинов в индикаторном
режиме
Принцип действия однофазной системы синхронной
передачи в индикаторном режиме основывается на изме-
нении при рассогласовании по величине вторичной э. л. с.
датчика по отношению к той же э. д. с. приемника. Про-
анализируем работу однофазных сельсинов в индикатор-
ном режиме для случая, когда от одного датчика рабо-
тает только один приемник и оба сельсина одинаковы.
Схема индикаторной системы связи показана на рис. 12.8.
Обйотки возбуждения датчика ВЛ и приемника Вп вклю-
270
Глава ХП. Сельсины
чены в общую сеть. Обмотки синхронизации Сд и Сп сое-
динены между собой линией связи.
Однофазный переменный ток, проходя по обмотке воз-
буждения каждого сельсина, создает пульсирующий маг-
нитный поток, который индуктирует в обмотках синхрони-
Д г
±2 Рис. 12.8. Схема индикаторного режи-
ма однофазных сельсинов.
зации сельсинов электродвижущие силы. При этом во
всех фазах обмотки синхронизации индуктируются э. д. с.,
одинаковые по фазе, но различные по величине. Величина
э. д. с. зависит от положения данной фазы относительно
оси обмотки возбуждения.
Если распределение индукции вдоль зазора синусо-
идально, машина не насыщена, реакция обмотки синхро-
низации отсутствует, то действующие значения э. д. с. для
датчика и приемника в зависимости от угла поворота их
роторов определяются следующими выражениями.
Для датчика:
Ед1 = Ем cos 0д1
ЕД2=Ем cos (0д—120°);
Едз=Емсо5(0д+12О°).
Для приемника:
Дт!— Ем cos 0п,’
Еп2=Ем cos (0п—120°);
Епз=Ем cos (0п~Н120°),
(12.1)
(12.2)
где Ем = 4,44^ос^с/1Фм - наибольшее действующее значе-
ние фазной э. д. с. обмотки син-
§ 12.4. Индикаторный режим сельсинов
271
хронизации, одинаковое для
датчика и приемника в силу их
идентичности;
Лос и wc — обмоточный коэффициент и чис-
ло витков фазы обмотки синхро-
низации;
Фм — амплитуда магнитного потока
обмотки возбуждения сельсина.
Ввиду того, что одинаковые фазы обмоток синхрони-
зации датчика и приемника включены навстречу друг
другу, между одноименными концами обмоток будут дей-
ствовать э. д. с., равные разности соответствующих э. д. с.
Ди П:
Е1=ЕД1—Eni=EM (cos 0д—cos 0П) =
= 2ЕМ sin
Од'^Оп . 0Д 0П
--------Sin'----—
2 2
Е2 — Д(2—ЕН2 — Ем [cos (Од I 20°)
-cos (0п-120°) ] =
= 2ЕМ sin
0д+0„-24О° . 0д-0п
2 S‘n 2
(12.3)
E3=EjS?~ETs3=EK [cos (0д+120°) —
- cos(0n+12O°) ] =
= 2ЕМ sin
0д+0п+24О° . 0д-0п
------~------ sin-------.
Подставив в найденные уравнения значение угла рас-
согласования 0 = 0Д—0П и учитывая, что 0ц=0д—0, по-
лучим
El=2EM sin ( 0Д---- ) sin -у;
Е2=2Ем sin ( 0д— -120° ) sin
(12.4)
Е3=2Е1Л sin ( 0Д-+120° ) sin
272
Глава XII. Сельсины
Токи, протекающие в линии связи и в отдельных фазах
обмоток синхронизации датчика и приемника, будут
равны:
=1Ы sin
A=Ai sin ( Од— -120° ) sin-у;
/3=/м sin (бд-у+120°) sin
(12.5)
где Im— —----наибольшее действующее значение тока;
г—сопротивление фазы обмотки синхрони-
зации одного сельсина (сопротивлением
проводов линии связи пренебрегаем).
Алгебраическая сумма токов при любом угле рассог-
ласования равна нулю:
Л+ЛЧ-А —/м [ sin ( 0д-- ) -f-
+sin (ед-120°) +
-J-sin ( Од-+ 120°) ] sin~ =0.
(12.6)
Из полученных уравнений (12.5) видно, что если углы
поворота роторов датчика и приемника одинаковы, т. е.
0 = 0, то равны нулю и токи в обмотках синхронизации
сельсинов. При рассогласовании же обоих роторов
(9^=0) токи, протекающие по обмоткам синхронизации,
взаимодействуя с потоками возбуждения, вызовут враща-
ющие моменты, называемые синхронизирующими момен-
тами. Ротор датчика обычно связан с задающим механиз-
мом и не обладает свободой вращения. Поэтому при на-
§ 12.4. Индикаторный режим сельсинов
273
личии рассогласования под действием синхронизирующе-
го момента ротор приемника будет поворачиваться до
тех пор, пока приемник снова не окажется в новом согла-
сованном положении с датчиком.
Воспользовавшись методом двух реакций, определим
величину синхронизирующего момента сельсина-прием-
ника. Токи, протекая по трем фазам обмотки синхрониза-
ции, создают н. с. Fni, Fm и Fns, совпадающие по направ-
лению с осями своих фаз. Складываясь геометрически,
эти отдельные н. с. дают результирующую, пространст-
венное направление которой зависит от положения ро-
тора. Результирующую н. с. Fn разложим на две состав-
ляющие: продольную Fad, направленную по оси обмотки
возбуждения, и поперечную Fnq, составляющую с Fad
угол 90°. Очевидно, н. с. Fad и равны суммам проекций
пространственных векторов н. с. отдельных обмоток на
продольную и поперечную оси машины:
Fnd = Faid~\~FU2d-\-Fa3d — Fat COS 0п4“
4-Fn2 cos(0ц—120°) -pFns cos(бпЧ-120°);
Fng = Fnlg4-Fn2g4-Fn3y = Fnl sin 0ц-ф
+Fii2 sin (0„-120°) +F„3 sin (0п-ф120°) •
H. с. обмоток синхронизации приемника на пару полю-
сов, согласно уравнению (6.17):
Fat—1 1,8£ос^сЛ;
Fгг2^— 1,8kocWcl 21
Fa3~~ 1,8&oc^c7 з-
(12.8)
Подставив в уравнения (12.8) значения токов из ра-
венств (12.5) и принимая во внимание, что 0П=0Д—0,
уравнения (12.7) можно записать в виде
Fnd=l,8/fOc^c/Msin~[ sin ( 0д-у) cos(0д—0)4-
-Fsin (бд-у-120°) cos (Од-0-120°) 4-
274
Глава XII. Сельсины
+sin ( 0д- у +120°) cos (0д—0+120°) ] =
= — 1,35^ос^с/м (1—cos 0); (12.9)
Fng I t8kocWcIм sin [ sin 0д ~ ) sin (0Д—0) -р
+sin ( Од-у-120°) sin(0fl—0—120°) +
+sin (ед-у+120°) sin(0fl-0+120°) ] =
= —1,35£OcWm sin 0, (12.10)
или
Fud =--у-Fm (1 —cos 0); (12.11)
Fng=-y FMsin 0, (12.12)
где FM= l,8£ocйУсЛи — наибольшее значение н. с. одной
фазы обмотки синхронизации.
Так как в обмотках синхронизации приемника и дат-
чика токи протекают в противоположных направлениях,
то н. с. приемника и датчика будут равными по величине,
но различными по знаку:
F д1= Tnf, F д2= Fn2-, Рдз= T\i3.
С учетом знака аналогично можно определить значе-
ния н. с. Fnd и Fnq для датчика, которые составляют
F„d=-yFM(l-cos0); (12.13)
Fw=yFMsin0. (12.14)
§ 12.4. Индикаторный режим сельсинов
275
Из полученных уравнений (12.11) и (12.13) видно, что
продольные составляющие н. с. как приемника, так и дат-
чика, характеризующие продольную реакцию обмотки
синхронизации, имея отрицательный знак, действуют раз-
магничивающим образом на основное поле FB машины,
создаваемое обмоткой возбуждения. Следовательно, маг-
нитный поток по продольной оси приемника равен
®nd=(FB Fnd)hd, (12.15)
где Zd — магнитная проводимость по продольной оси.
Однако размагничивающее действие продольной со-
ставляющей Fnd невелико даже при сравнительно боль-
ших углах рассогласования. Так, например, при 0 = 20°
Fnd=Fnd = —^-FM(1—cos 20°) = —0,045 FM.
Противодействующая н. с. составляет менее 5% от FM,
поэтому при расчетах ею пренебрегают.
В отличие от продольной поперечная н. с. обмотки
синхронизации не компенсируется и создает поток попе-
речной реакции обмотки синхронизации
&nq==F nqkq,
где кд — магнитная проводимость по поперечной оси ма-
шины.
Магнитный поток ФП7, взаимодействуя с потоком воз-
буждения Фв = Фл, образует электромагнитный синхро-
низирующий момент в приемнике. Такой же по величине
момент, но направленный в противоположную сторону,
будет создаваться и в датчике.
Учитывая, что Od = ®B и н. с. обмотки синхронизации
FM, а следовательно, и Ф7 сдвинуты во времени на угол "фг
(рис. 12.9), выражение для синхронизирующего момента
сельсина можно записать в виде
М = C®BF4 cos "фг- (12.16)
Из векторной диаграммы (рис. 12.9) следует, что
cos ip2 = sin фг, тогда
276
Глава ХП. Сельсины
з
М— — СФВЕМ sin ф2 sin 0. (12.17)
Полагая, что q)2=const,
Л1=Л1М sin 0, (12.18)
где максимальный момент
3
Мм= — CQdFM sin ф2
наступает при 0=90°.
Рис. 12.10. Зависимость
синхронизирующего мо-
мента от угла рассогла-
сования.
Рис. 12.9. Век-
торная дна-
грамма обмотки
синхронизации
сельсина.
На рис. 12.10 показан график синхронизирующего мо-
мента M=f(Q').
При изменении угла рассогласования на 360° синхро-
низирующий момент дважды проходит через нулевое зна-
чение (0=0 и 0=180°), т. е. ротор дважды находится
в равновесии. Однако при 0=180° равновесие неустойчи-
во («ложный нуль»). Достаточно ничтожного толчка в ту
или иную сторону, чтобы ротор повернулся и перешел
в устойчивое равновесие при 0 = 0.
Если сельсин работает в режиме вращения ротора со
скоростью п об/мин, то динамический синхронизирующий
момент обычно определяют по эмпирической формуле
Эйлера.
,, .. ппр „ „ ппр
МЯ=М cos—— =Мм sin 0 cos Д7-. (12.20)
1 £\Jf 1 £\JJ
§ 12.4. Индикаторный режим сельсинов
277
При работе сельсинов без нагрузки на валу приемника
угол рассогласования в режиме поворота теоретически
должен быть равен нулю. Однако в действительности
всегда имеется какой-то небольшой угол рассогласова-
ния, называемый углом статической ошибки 0Ош. Под
этой ошибкой 0ош понимают разность угловых положений
овей роторов датчика и приемника в состоянии покоя пос-
ле отработки заданного угла:
0ош=0п-0д. (12.21)
Возникновение 0ОШ объясняется тем, что при отработке
угла на ротор приемника, кроме синхронизирующего
(вращающего), действуют и тормозящие моменты. Воз-
никают они вследствие трения в подшипниках и щетках,
неточной балансировки ротора приемника, зубчатости его
строения и т. п. Статическая погрешность Д0 сельсина-
приемника определяется как полусумма абсолютных зна-
чений двух наибольших ошибок 0ош.м, полученных при
противоположных направлениях поворота ротора датчи-
ка от 0 до 360° через каждые 10—30° при отсутствии на-
грузки на валу ротора приемника:
Л0=
,ош..м.пр4_0ош..м.обр
2
град.
(12.22)
В зависимости от величины статической погрешности
сельсины-приемники подразделяются на три класса точ-
ности, в которых ДО бывает не более: I класс — ±0,75°;
П —±1,5°; III —±2,5°.
Точность передачи заданного датчиком угла зависит
от удельного синхронизирующего момента Л4УД, под кото-
рым понимают величину статического синхронизирующе-
го момента при угле рассогласования 0=1°. Значение
Л4уД зависит от крутизны характеристики Л4=)(0) в на-
чальной ее части, поэтому часто за удельный синхронизи-
рующий момент принимают
(12.23)
278
Глава XII. Сельсины
Чем больше Л1уд, тем выше точность работы сельсинов.
Синхронизирующий момент Л1 в сельсине, как и в любой
индукционной машине, пропорционален квадрату напря-
жения возбуждения UB. Поэтому с уменьшением UB резко
снижается М, а следовательно, и ЛГУД, что приводит к уве-
личению погрешности сельсина и может вызвать переход
его в более низкий класс точности. Уменьшение момента
также происходит при повышении частоты напряже-
ния ив.
Большое влияние на точность индикаторной передачи
угла оказывает момент сопротивления Л4СТ на валу сель-
сина-приемника. Обычно в этом режиме Л42=0, а следо-
вательно, Мст=М0— моменту трения самого приемника.
Отношение удельного синхронизирующего момента к Мо
Л4у„
определяет добротность сельсина D= ——. Чем больше
D, тем точнее работает приемник. Наконец, точность ра-
боты сельсинов зависит от сопротивления (длины) прово-
дов линии связи.
В схемах автоматики часто от одного датчика рабо-
тает несколько приемников, обеспечивающих синхронный
поворот или синхронное вращение индикатора в несколь-
ких пунктах. Для того, чтобы все п сельсинов-приемников,
включенных параллельно, могли нормально работать, не
выходя за пределы заданного класса точности, необхо-
димо для их питания применить датчик большей мощ-
ности.
В этом случае удельный синхронизирующий момент
каждого приемника будет таким же, как и при питании
от отдельного датчика, если все приемники будут одина-
ковыми (иметь одинаковую конструкцию и принадлеж-
ность к одному и тому же классу точности) и одинаково
нагруженными.
Для обеспечения динамической устойчивости — пред-
отвращения произвольного вращения ротора при резких
изменениях угла рассогласования и уменьшения времени
успокоения все сельсины-приемники обязательно снаб-
жаются электрическими или механическими успокоите-
лями (демпферами).
§ 12.5. Трансформаторный режим сельсинов
279
§ 12.5. Работа однофазных сельсинов в трансформаторном
режиме
Если на выходном валу синхронной передачи необхо-
димо получить относительно большой момент или высо-
кую точность передачи, то применяют следящие системы,
в которых используют однофазные сельсины, работающие
в трансформаторном режиме.
Рис. 12.11. Схема ра-
боты сельсинов в
трансформаторном
режиме.
В этом режиме обмотка возбуждения датчика присое-
диняется к сети, а обмотка возбуждения приемника вклю-
чается как источник переменного напряжения к обмотке
управления исполнительного двигателя обычно через уси-
литель (см. схему на рис. 12.11). Напряжение на обмотке
возбуждения приемника (электрический сигнал) должно
быть функцией угла поворота ротора датчика. В системе
следящего привода между сельсином-приемником и ис-
полнительным двигателем должна существовать обрат-
ная связь, приводящая по окончании отработки ротор
приемника в согласованное положение или положение
нулевого сигнала.
Проанализируем работу двух одинаковых сельсинов
в трансформаторном режиме.
Пульсирующий поток возбуждения датчика индукти-
рует в фазах его обмотки синхронизации э. д. с., величины
которых зависят от угла 0Д поворота ротора относительно
продольной оси, т. е.
ЕД1— Ем cos 0Д;
ЕД2=Ем соз(0д— 120°);
Едз = Ем соз(0д4-12О°).
(12.24)
280
Глава XII. Сельсины
Эти э. д. с. создают токи в цепи обмоток синхронизации
датчика и приемника и линии связи, равные (если прене-
бречь сопротивлением линии связи):
Л = —— = —— cos 0д=/м COS 0Д;
2г 2г
/2= cos (0 д-120°) =
=/м cos (0д—120°);
/>=-fr = -BLcos(e«+l20°) =
cos(0„+12O°).
(12.25)
Проходя по обмоткам синхронизации приемника, эти
токи создают н. с., величины которых (на пару полюсов)
равны:
Fni = l,8^Oc^cA = FM cos 0д;
Fn2=l,8kocwcl2=FM соз(0д—120°);
Fn3= ,8kOcW з—F м cos (0д+120°),
(12.26)
где FM= 1,8^oc®cAi.
Складываясь геометрически (пространственно), они
дают результирующую н. с. Fn, которую, в соответствии
с методом двух реакций, можно представить, как
Fn=y F2 4-F2 ,
' nd 1 ng
где Fn(j и Fng — ее продольная и поперечная составляю-
щие.
Продольная составляющая Fnd результирующей н. с.
равна сумме проекций па продольную ось машины и. с.
отдельных обмоток, т. е.
Fnd — FnId4_FU2d_(_Fn3d==Fnl COS 0n4"Fn2 cos(0n 120 ) +
-f-Fn3 cos(0n+120°) =FM[cos 0Д cos 0n-|-
4-COS (0д-120°) cos (0n-120°) +
+cos(0A+12O°)cos(0n4-12O°)]= -j-FM cos 0, (12.27)
§ 12.5. Трансформаторный режим сельсинов
281
где 0=0д—0п — угол рассогласования между роторами
датчика и приемника.
Аналогично поперечная составляющая Fnq результи-
рующей н. с. равна
= Sin 0n~|-Fn2 Sin (0П—1 20°)
4-Гпз sin (0n-f-120°) = FM[cos 0Д sin 0п-{-
+cos (0Д-120°) sin (0П-120°) +
4-cos (0д+120°) si п (0п+120°) ] =
3 3
= ~ Лл sin (0П—0д) =-----— Fm sin (0д—0п) =
3
=----— FMsin0. (12.28)
&
Тогда результирующая н. с.
Fn=VF2 -(-F2" =
-ij/ a \2 7 з \2 з
= |/( — FM cos 0) 4- (---— FM sin 0 ) = — FM.
(12.29)
Это равенство показывает, что величина результирую-
щей н. с. Fn приемника не зависит от угла рассогласова-
ния 0. От него зависит лишь направление н. с. Fn. Причем,
как видно из уравнения (12.28), угол 0 отрицательный.
Следовательно, если затормозить ротор приемника и по-
вернуть ротор датчика, например по часовой стрелке на
угол 0Д=0, то вектор н. с. Fn, оставаясь постоянным по
величине, повернется на такой же угол, но в противо-
положную сторону (рис. 12.12).
Продольная составляющая Fnrf создает магнитный по-
ток ФПй, пронизывающий выходную обмотку приемника,
и индуктирует в ней э. д. с. FBbix, равную
^ВЫХ = Евых.м COS 0. (12.30)
Полученной зависимостью практически пользоваться
неудобно, так как при отсутствии угла рассогласования
282
Глава XII. Сельсины
э. д. с. на выходе максимальна. Поэтому согласованным
положением сельсинов в трансформаторном режиме счи-
тают такое положение роторов Д и П, когда оси их обмо-
ток сдвинуты на 90°.
В этом случае
Евых= Епых.м cos (0-J-9O°) =Евы1.м sin 0. (12.31)
Таким образом, при согласованном положении рото-
ров (0 = 0) и ЕВых также равна нулю. Зависимость выход-
Рис. 12.12. Положение про-
странственного вектора н. с.
приемника в трансформа-
торном режиме.
Рис. 12.13. Зависимость вы-
ходного напряжения сель-
сина - трансформатора от
угла рассогласования.
ного напряжения от угла рассогласования 0 пока-
зана на рис. 12.13.
Для получения строгой синусоидальной зависимости
(Лых от 0 необходимо, чтобы кривая пространственного
распределения индукции вдоль воздушного зазора также
была синусоидой, т. е. в сельсине следует применять те же
меры, что и в поворотных трансформаторах. Сельсины,
работающие в трансформаторном режиме, обычно выпол-
няют неявнополюсной конструкции.
Качество работы сельсинов в трансформаторном ре-
жиме определяют:
1) удельным выходным напряжением или чувстви-
тельностью 6= (—вых ) . Чем больше крутизна ха-
' aQ ' е=о
рактеристики t7BMx=f(0), тем точнее работает система;
§ 12.6. Сельсин-двигатель
283
2) удельной выходной мощностью, т. е. мощностью на
выходе, приходящейся на Г угла рассогласования. Наи-
меньшее значение удельной мощности представляет собой
такую минимальную мощность, при которой начинает
работать усилитель;
3) сопротивлением проводов линии связи. При
большом 2Л уменьшается £7ВЫХ и, следовательно, крутизна
выходной характеристики;
4) остаточным напряжением, т. е. напряжением на
выходной обмотке приемника в исходном положении,
когда угол между осями роторов датчика и приемника
равен 90° (0=0 — для синусной характеристики). Обыч-
но U0Ct= (0,2—0,5) в. Усилитель должен быть подобран
так, чтобы его выход не реагировал на остаточное напря-
жение сельсина-приемника.
Для уменьшения влияния реакции выходной обмотки
на работу сельсина необходимо, чтобы вход усилителя,
подключаемый к ней, имел большое сопротивление.
§ 12.6. Сельсин-двигатель
Как отмечалось в предыдущем параграфе, сельсины,
работающие в трансформаторном режиме, применяются
для обеспечения поворота на заданный угол механизма,
обладающего значительным моментом сопротивления.
Дистанционное управление сравнительно мощными
механизмами без дополнительных усилителей можно осу-
ществлять по индикаторной схеме (рис. 12.14, о), если
использовать сельсин-двигатель. Эта машина совмещает
в себе функции сельсина-приемника и исполнительного
двигателя.
Конструктивно сельсин-двигатель представляет собой
контактный (или бесконтактный) сельсин. В его увели-
ченном воздушном зазоре между статором 1 и ротором 3
помещен полый немагнитный стакан 4 (рис. 12.14,6),
являющийся ротором двигателя. Последний соединен
с выходным валом 7 сельсина-приемника через понижаю-
щий редуктор 5—9—8—6.
Обмотка возбуждения сельсина-двигателя подключена
через конденсатор С, щетки и контактные кольца 10 к той
же тети, что и обмотка возбуждения датчика. Токи Л, /г
284
Глава XII. Сельсины
и /3, протекающие по обмотке синхронизации 2, располо-
женной на статоре, создают пульсирующее магнитное
поле, ось которого определяется положением ротора сель-
сина-датчика и в состоянии рассогласования системы не
совпадает с осью обмотки ротора сельсина-приемника.
а
Сеть
Рис. 12.14. Сельсин-двигатель:
а — схема включения; б — конструктивная схема.
При этом н. с. и магнитные потоки ФСп и Фвп обмоток син-
хронизации и возбуждения оказываются смещенными
в пространстве и во времени (с помощью конденсатора),
благодаря чему в сельсине-двигателе возникает вращаю-
§ 12.7. Дифференциальные сельсины
285
щееся поле. Это поле наводит вихревые токи в полом ро-
торе и, взаимодействуя с ними, образует вращающий
момент Л1ИД. Под его действием полый ротор вращается
со скольжением вслед за полем, поворачивая через пони-
жающий редуктор управляемый вал и вместе с ним ро-
тор 3 сельсина-приемника до наступления согласованного
состояния системы.
Момент, действующий на вал сельсина-двигателя,
М= (Л1с+гт)Л1ид)sin 0, (12.32)
где Мс — синхронизирующий момент сельсина-прием-
ника;
Мид — вращающий момент исполнительного двига-
теля;
i; т] — передаточное число и к. п. д. редуктора;
0 — пространственный угол сдвига между потоками
Фсп И Фвп-
Обычно Мс значительно меньше Мид после редуктора,
так как передаточное число составляет несколько сотен.
С помощью сельсина-двигателя производится значитель-
ное усиление момента (в сотни раз и более, в зависимо-
сти от величины i редуктора).
Сельсин-двигатель заменяет, таким образом, исполни-
тельный двигатель и сельсин, не требуя промежуточного
усиления в цепи управления.
В СССР изготовляются сельсины-двигатели типа
СДС-1, СДС-2, СДС-3.
§ 12.7. Дифференциальные сельсины
Система синхронной связи, использующая в качестве
одного из элементов дифференциальный сельсин, приме-
няется в тех случаях, когда индикаторная схема или сле-
дящий привод должны отрабатывать угол, равный сумме
или разности двух задаваемых углов.
По конструкции дифференциальный сельсин аналоги-
чен трехфазному асинхронному двигателю с фазным ро-
тором. Трехфазные обмотки статора и ротора, идентично
выполненные, соединены звездой. Концы фаз роторной
285
Глава ХП. Сельсины
обмотки выведены через контактные кольца на зажимы
машины.
В схемах синхронной связи дифференциальные сель-
сины используются как приемники, работающие от двух
датчиков, или как вторые датчики.
Индикаторная схема, в которой дифференциальный
сельсин ДС работает в качестве приемника от двух оди-
Рис. 12.15. Схема индикатор-
ной передачи с дифференци-
альным сельсином, работаю-
щим в качестве приемника
от двух датчиков.
паковых сельсинов-датчиков Д1 и Д2, показана на рис.
12.15. Из нее видно, что обмотки возбуждения датчиков
подключены к напряжению однофазной сети, а обмотки
синхронизации линиями связи соединены с обмотками
дифференциального сельсина.
Для объяснения принципа действия схемы (рис. 12.15)
предположим сначала, что ротор дифференциального
сельсина заторможен. Поток обмотки возбуждения дат-
чика Д1 наводит электродвижущие силы в фазах его об-
мотки синхронизации. Под действием этих э. д. с. по об-
мотке синхронизации датчика Д1 и обмотке статора ДС
потекут токи, которые создадут результирующий поток
ФДс в дифференциальном сельсине, как в приемнике тран-
сформаторной передачи (см. § 12.5). При повороте ротора
Д1 на угол 01 вектор результирующего потока Фдс повер-
нется на тот же угол 01 относительно статора, но в сторо-
ну, противоположную направлению, заданному Д1. Ана-
логичные процессы происходят в цепи Д2 и ротора диф-
ференциального сельсина. Поэтому при повороте ротора
датчика Д2 на угол 02, например в ту же сторону, в кото-
рую повернут ротор датчика Д1, вектор результирующего
потока Фдр в приемнике повернется на тот же угол 02
§ 12.8. Магнесины
287
относительно его ротора, но в сторону, противоположную
направлению, заданному Д2. Между осями потоков фдс
и ФдР образуется угол 02—01 (рис. 12.16, а). Если растор-
мозить вал дифференциального сельсина, то ротор его
повернется на угол 02—01 так, чтобы потоки Фдс и Фдр
Рис. 12.16. Пространствен-
ные диаграммы магнитных
потоков статора и ротора
дифференциального сельси-
на при отработке разности
(а) и суммы (б) углов.
(f
совпали по направлению. Если ротор датчика Д2 повер-
нуть на угол 02 в сторону, противоположную направлению
поворота ротора датчика Д1, то вектор потока Фдр также
повернется в противоположную сторону. При этом Фдс
и Фдр окажутся сдвинутыми на угол Oa-f-Oi (рис. 12.16,6),
в результате чего и ротор дифференциального сельсина
также повернется на этот же угол.
Таким образом, при помощи дифференциального сель-
сина суммируются или вычитаются два угловых переме-
щения (0 = 02±0i) или две угловые скорости (Q = Q2±
±Qi).
§ 12.8. Магнесины
В индикаторных системах синхронной связи при пере-
даче заданного угла на небольшие расстояния и при
весьма малом значении момента сопротивления на валу
приемника, когда размеры и вес машин должны быть
минимальными, вместо сельсинов применяют магнесины.
Магнесин — бесконтактная микромашина очень про-
стой конструкции. На сердечнике ее статора, набранном
288
Глава XII. Сельсины
из листового пермаллоя в виде тороида, выполнена спи-
ральная обмотка. Ротор представляет собой постоянный
магнит цилиндрической формы, намагниченный по диа-
метру.
В схеме магнесинной системы синхронной связи
(рис. 12.17) датчик Д и приемник П имеют одинаковую
п
0-
О 0-
1
1
12.17. Схема магнесин-
Рис.
ной синхронной связи.
конструкцию. Обмотки их статоров питаются от общей
сети с напряжением возбуждения UB. Кроме того, они
имеют по два отвода 1 и 2, расположенные под углом 120°
друг относительно друга и относительно точки 3 присое-
динения к сети питания. Одноименные точки обмоток ста-
торов датчика и приемника соединены линией связи, од-
ним из каналов которой является сеть питания.
Принцип действия магнесинной синхронной связи за-
ключается в следующем. Если обмотку статора магнесина
питать переменным током с частотой Д, в сердечнике ста-
тора возникнет переменный магнитный поток Фв той же
частоты. При синусоидальном напряжении возбуждения
индукция Вв в сердечнике статора, созданная пото-
ком Фв, изменяется в функции времени синусоидально
(рис. 12.18, а). Пермаллой, из которого изготовлен ста-
тор, обладает свойством резко изменять магнитную про-
Вв
ницаемость ц= —— (при Вв = 0 ц достигает максимума,
п
уменьшаясь до минимума при возрастании индукции до
±Ввм). Следовательно, магнитная проницаемость ц
(и магнитная проводимость X) сердечника статора будет
дважды за один период изменения индукции Вв достигать
своих наибольших и наименьших значений, как показано
на рис. 12.18, б.
§ Г2.8. Магнесины
289
Так как поток Фр, созданный постоянным магнитом-
ротором, замыкается через статор, то вследствие измене-
ния магнитной проводимости X сердечника статора он
также будет изменять свою величину (рис. 12.18, а).
Рис. 12.18. К теории магнесина.
Пульсация потока Фр вызовет появление в статорной об-
мотке э. д. с. (?<, изменяющуюся с двойной частотой по
сравнению с частотой сети (рис. 12.18, г). Таким образом,
в обмотке статора каждого магнесина индуктируется
э. д. с. основной частоты потоком Фв и э. д. с. двойной
частоты потоком Фр. Потенциалы точек 1—1, 2—2 и 3—3
статорных обмоток машин будут одинаковыми по отноше-
нию к э. д. с. основной частоты как в согласованном по-
ложении системы, когда магнитные оси датчика и прием-
ника занимают одинаковое положение, так и при любых
положениях роторов. Поэтому токи основной частоты
протекать по проводам линии связи не будут (за исклю-
чением намагничивающих, проходящих по проводам пи-
тания) .
В рассогласованном положении роторов в проводах
линии связи и в обмотках статоров магнесинов появятся
токи’двойной частоты, так как по отношению к э. д. с.
290 Глава XII. Сельсины
этой частоты одинаково обозначенные точки будут иметь
разные потенциалы из-за разного потокосцепления обмо-
ток статоров со своими потоками роторов. Созданные то-
ками двойной частоты н. с. будут взаимодействовать с по-
током Фр и создавать вращающие моменты, стремящиеся
повернуть роторы датчика и приемника в согласованное
положение, достигнув которого, токи в линии связи исчез-
нут, и синхронизирующий момент станет равным нулю.
Магнесин, как и сельсин, обладает свойством синхро-
низации в пределах одного оборота, так как ротор его
намагничен. Удельный синхронизирующий момент магне-
сина весьма мал, но угол ошибки магнесинной передачи
невелик вследствие малого момента инерции и веса ро-
тора. Если ротор тщательно отцентрирован и остаточный
магнетизм в статоре отсутствует, угол ошибки составляет
всего 1—2,5°.
РАЗДЕЛ
ЧЕТВЕРТЫЙ
СИНХРОННЫЕ МАШИНЫ
Глава XIII. СИНХРОННЫЕ ГЕНЕРАТОРЫ
§ 13.1. Синхронные генераторы промышленной частоты
Области применения и устройство синхронных генера-
торов промышленной частоты. Синхронной называется
такая машина переменного тока, ротор которой вращает-
ся с такой же скоростью п0, что и магнитное поле, создан-
ное статорной обмоткой переменного тока, т. е. с синхрон-
ной скоростью
60/
П = По= ---,
р
где п — скорость вращения ротора.
Синхронные машины могут работать в режиме гене-
ратора и двигателя. Их изготовляют различной мощности
от долей и нескольких ватт (тахогенераторы, двигатели
автоматических устройств) до сотен тысяч киловатт
(турбо- и гидрогенераторы).
Синхронные генераторы в зависимости от их назначе-
ния разделяются на генераторы промышленной и повы-
шенной частоты, синхронные тахогенераторы.
Для производства электрической энергии переменного
тока промышленной частоты 50 гц применяют трехфаз-
ные синхронные генераторы, работающие на тепловых,
атомных и гидравлических электростанциях. В СССР вы-
пускают различные по мощности, в том числе самые боль-
шие в мире синхронные генераторы по 300, 500, 600 тысяч
киловатт в одной машине.
Статор синхронного генератора промышленной часто-
ты по своему устройству в принципе не отличается от ста-
тора асинхронной машины. Его сердечник набирают из
штампованных изолированных листов электротехничес-
кой стали, в пазах сердечника укладывают трехфазную
обмотку. Роторы выполняют неявнополюсными или явно-
полюсными. Первые вытачивают из массивной поковки и
придают ей вид цилиндра с профрезерованными продоль-
292
Глава XIII. Синхронные генераторы
ними пазами для укладки обмотки возбуждения (рис.
13.1, а). Концы обмотки возбуждения выводят к двум
контактным кольцам, расположенным на валу и изолиро-
ванным от него и друг от друга. С помощью щеток, сколь-
зящих при вращении ротора по кольцам, к обмотке воз-
буждения подводят постоянный ток, который создает поле
возбуждения.
Рис. 13.1. Конструкции роторов синхронных генера-
торов:
а — ротор неявнополюсный; б — ротор явпополюсный.
Неявнополюсными роторами оборудуются быстроход-
ные синхронные генераторы — турбогенераторы, вращае-
мые обычно со скоростью 3000 об/мин паровыми турби-
нами.
В синхронных генераторах, скорость вращения кото-
рых не превышает 1500 об/мин, используют явнополюс-
ные роторы (рис. 13.1,6).
На полюсах таких роторов размещают катушки 3 об-
мотки возбуждения, присоединенной к контактным коль-
цам. Сердечник 1 каждого полюса выполняют массивным
или в виде пакета, набранного из листов электротехниче-
ской стали. Он имеет с одной стороны шихтованный по-
люсный наконечник 2, а другой стороной прочно закреп-
лен на ободе ротора 4. Полюсный наконечник обрабаты-
вают таким образом, что воздушный зазор между ним и
статором получается неравномерным. Он минимален под
серединой полюса и максимален у его краев. Неравномер-
ный воздушный зазор позволяет приблизить к синусоиде
распределение индукции в зазоре.
§ 13.1. Генераторы промышленной частоты
293
Явнополюсные синхронные генераторы вращают тихо-
ходными гидравлическими турбинами, поэтому они назы-
ваются гидрогенераторами. Роторы изготовляются много-
полюсными, чтобы при малых скоростях вращения
(и = 60—500 об/мин) можно было получить переменный
ток промышленной частоты.
Мощные синхронные машины бывают с независимым
возбуждением и самовозбуждением. Для получения по-
стоянного тока при независимом возбуждении применяют
возбудитель-генератор постоянного тока небольшой мощ-
ности, располагаемый на одном валу с синхронной маши-
ной. В самовозбуждаемых машинах для питания обмотки
возбуждения используют выпрямители. Для возбуждения
синхронных генераторов малой мощности (до сотен ватт)
обычно вместо электромагнитов ротора используют по-
стоянные магниты.
Принцип действия трехфазного синхронного генера-
тора. Посредством первичного двигателя (обычно турби-
ны) ротор генератора приводится во вращение со ско-
ростью п=п0. К обмотке возбуждения подают постоян-
ный ток, который создает н. с. возбуждения Ев и, следо-
вательно, магнитное поле Фв ротора. Вращаясь вместе
с ротором, это поле пересекает проводники трехфазной
обмотки статора и наводит в каждой фазе э. д. с.
Л'д ==/:]>,== £'с = £'о=4,44Ло&у/ФВм одинаковой величины и
частоты, но сдвинутые по фазе друг относительно друга
на 120°. Так как принято считать якорем ту часть ма-
шины, в обмотке которой наводится э. д. с., в синхронной
машине якорем является статор.
Если синхронный генератор работает в режиме холо-
стого хода, то ток в обмотке статора отсутствует и в гене-
раторе действует лишь одна н. с. возбуждения Ев.
При подключении к генератору симметричной нагруз-
ки ZH в каждой фазе обмотки статора возникают пере-
менные токи /д = /в=/с = Л которые создают н. с. якоря
(статора) Ея и, следовательно, магнитное поле статора
Фя, вращающееся с синхронной скоростью п0 в ту же сто-
рону, что и ротор.
Таким образом, при работе синхронного генератора
под нагрузкой в нем действуют две н. с., которые создают
два магнитных поля: возбуждения и якоря (статора).
294
Глава XIII. Синхронные генераторы
Реакция якоря. Воздействие поля якоря на поле воз-
буждения называется реакцией якоря. Влияние реакции
якоря на рабочие свойства синхронной машины зависит
не только от величины тока нагрузки, как это имело место
в машинах постоянного тока (см. § 1.4), но н от характера
нагрузки, т. е. от угла сдвига ф между э. д. с. Ео и током /
статора. Чтобы выяснить это влияние, рассмотрим работу
генератора при активной, индуктивной и емкостной на^
грузках.
Активная нагрузка (ф = 0). Ток совпадает по фазе
с э. д. с. статора, т. е. угол ф между ними равен нулю.
На рис. 13.2, а изображен простейший синхронный гене-
ратор с явнополюсным ротором и трехфазной сосредото-
ченной обмоткой с полным шагом на статоре. В изобра-
женном положении ротора максимальное значение наве-
денной э. д. с. будет в фазе А, так как поток полюсов,
пронизывающий катушку этой фазы, в данный момент
проходит через нулевое значение. Направление э. д. с.
определено правилом правой руки. Максимальное значе-
ние тока в этот же момент времени будет также в фазе А,
так как угол ф = 0.
Как было отмечено в § 6.3, амплитуда результирую-
щей н. с. трехфазной обмотки статора (якоря) совпадает
с осью той фазы, ток в которой в данный момент равен
максимальному значению. Следовательно, при активной
нагрузке н. с. якоря Тя направлена относительно полюсов
ротора по поперечной оси q. Такое направление сохраня-
ется постоянно, так как поле полюсов и поле якоря вра-
щаются синхронно.
Результирующее значение н. с. ЛЛ, соответствующее
результирующему значению потока машины, равно гео-
метрической сумме векторов FB и FH, т. е. F6 = Fb+Fh.
Поперечная реакция якоря в генераторном режиме сме-
щает н. с. Ге по отношению к н. с. FB в сторону, противо-
положную вращению ротора. В результате этого попереч-
ная реакция якоря ослабляет поток на набегающем крае
полюсного наконечника и усиливает его на сбегающем.
Вследствие насыщения магнитной цепи результирующее
поле машины несколько ослабляется. Такое взаимодейст-
§ 13.1. Генераторы промышленной частоты
295
вие н. с. Ря и FB аналогично реакции якоря в генераторе
постоянного тока при расположении щеток на геометри-
ческой нейтрали.
Рис. 13.2. Реакция якоря синхронного генератора
при активной (а), индуктивной (б), емкостной (в)
и смешанной (г) нагрузках.
Индуктивная нагрузка (ф = 90°). Ток I отстает по фа-
зе от э. д. с. на угол ф=90°. Поэтому он достигает макси-
мального значения в фазе А лишь после поворота ротора
вперед на 90° относительно его положения, соответствую-
296
Глава Х111. Синхронные генераторы
щего максимуму э. д. с. Ео (рис. 13.2,6). При этом н. с.
якоря F„ направлена по продольной оси d полюсов на-
встречу н. с. возбуждения FB. Таким образом, при чисто-
индуктивной нагрузке реакция якоря в генераторе оказы-
вает продольно-размагничивающее действие.
Емкостная нагрузка (ф = — 90°). Так как ток статора
во времени опережает по фазе э. д. с. на 90°, то макси-
мального значения в фазе А он достигнет раньше, чем
э. д. с., т. е. когда ротор займет положение, показанное
на рис. 13.2, в.
Из этого рисунка видно, что чисто-емкостный ток со-
здает н. с. якоря F„, также действующую по продольной
оси полюсов, но уже согласно с н. с. возбуждения FB.
Следовательно, реакция якоря в генераторе оказывает
продольно-намагничивающее действие.
Смешанная нагрузка. Чаще всего генератор работает
на смешанную нагрузку. В этом случае ток 1 сдвинут по
фазе относительно э. д. с. Ео на угол ф, который больше
нуля, но меньше ±90°.
На рис. 13.2, г показана векторная диаграмма для
случая активно-индуктивной нагрузки. Максимальное
значение тока в фазе А отстает по фазе от максимума
э. д. с. на угол ф<90°. Воспользовавшись методом двух
реакций, разложим вектор н. с. якоря F„ на две составля-
ющие: FHd = Fn sin ф— продольную (оказывающую раз-
магничивающее действие при активно-индуктивной и под-
магничивающее действие при активно-емкостной нагруз-
ках) и FBq = Fa cos ф — поперечную.
Намагничивающие силы FHq и F„rl создаются состав-
ляющими Iq и Ci тока I нагрузки:
Iq = I cos ф;
Ij — I sin ф.
(13.1)
(13.2)
Таким образом, можно считать, что в работающем на
нагрузку ненасыщенном синхронном генераторе сущест-
вует два магнитных потока: поток возбуждения Фв и по-
ток якоря Фя, который может быть разложен на состав-
ляющие Ф(„; п ФП(у. Кроме этих основных потоков, при
нагрузке еще имеется поток рассеяния Фр обмотки якоря.
§ 13.1. Генераторы промышленной частоты
297
Векторные диаграммы синхронного генератора. В ре-
жиме холостого хода синхронного генератора напряже-
ние на зажимах каждой фазы обмотки статора равно
э. д. с., индуктируемой потоком возбуждения.
Напряжение нагруженного синхронного генератора
из-за влияния реакции якоря, магнитного потока рассея-
ния и активного падения напряжения в обмотке статора
отличается от напряжения этого генератора в режиме хо-
лостого хода.
Результирующий магнитный поток нагруженного ге-
нератора, как было установлено, создается результирую-
щей н. с.
F 6=F в~\~ F я=F F Я4~\- F nq.
В ненасыщенном синхронном генераторе каждую со-
ставляющую н. с. можно рассматривать как отдельно
действующую и создающую свой магнитный поток, индук-
тирующий соответствующую э. д. с.
Таким образом, в обмотке якоря (статора) явнополюс-
ного ненасыщенного генератора наводятся следующие
э. д. с.:
Ео=4,44^о®/:Фв>1, индуктируемая потоком возбужде-
ния Фв, созданным н. с, FB;
Ёял=—}1йХя<1, индуктируемая потоком реакции якоря
Фял по продольной оси, созданным н. с.
ЁЯд —---/7 дхяч, индуктируемая потоком реакции якоря
Фяд по поперечной оси, созданным н. с. ТЯ(?;
£р = — jixp, индуктируемая потоком рассеяния обмот-
ки статора.
Сопротивления хЯ(/ и xaq в формулах для £я<г и ЕЯд на-
зываются индуктивными сопротивлениями обмотки якоря
по продольной и поперечной осям машины.
Напряжение U на зажимах генератора равно сумме
наведенных в обмотке статора э. д. с. за вычетом падения
напряжения 1г на активном сопротивлении г статорной
обмотки:
^7 = £о-|-ЁЯ(;-|-£яд_|_£'р 1г~
*=Ё(> jj,/ХЯ11 ]1дХЯд ]1Хр 1г (13.3)
298
Глава XIII. Синхронные генераторы
На основании уравнения (13.3) на рис. 13.3 построена
векторная диаграмма для явнополюсного ненасыщенного
синхронного генератора, работающего с активно-индук-
тивной нагрузкой. На рисунке вектор э. д. с. Ео отстает
от потока Фв на 90°, а 7 от Ёо — на угол ф. Вектор тока 7
Рис. 13.3. Векторная диаграмма явно-
полюсного синхронного генератора
при активно-индуктивной нагрузке.
Рис. 13.4. Построение
упрощенной вектор-
ной диаграммы явно-
полюсного синхронно-
го генератора.
разложен на составляющие — продольную 7rf и попереч-
ную /д. Векторы Фяп и Фяд продольной и поперечной со-
ставляющих потока реакции якоря на диаграмме совпа-
дают по фазе с соответствующими токами, так как поте-
рями в стали пренебрегаем. Э. д. с. Епа и ЕЯд, индуктируе-
мые Фяй и Фяд, отстают от них на 90°. Э. д. с. рассеяния,
индуктированная потоком рассеяния Фр, отстает от него
на 90°. Вектор напряжения U на зажимах генератора при
данной нагрузке опережает по фазе 7 на угол ср, который
определяет величину активной мощности P — tnUl cos ср
генератора.
§ 13.1. Генераторы промышленной частоты
299
Угол сдвига между Ёа и U обозначен через 0. Он имеет
важное значение для анализа работы синхронной ма-
шины, так как определяет пространственный сдвиг между
положением оси полюсов и результирующим потоком
машины. Угол 0 называют внутренним углом машины.
Складывая потоки возбуждения и якоря, получим резуль-
тирующий поток Фе в зазоре синхронной машины, кото-
рый создает э. д. с. Ё^—ЁоА-ЁяйА-Ёяа- Э. д. с. Ё& отстает
от потока Фе на угол 90°.
Вектор э. д. с. рассеяния Ёр =—jfxp можно разложить
на составляющие. Одна из них совпадает по направлению
с э. д. с. ЁЯ11, другая перпендикулярна ей. Тогда из диа-
граммы (рис. 13.4) значения отрезков
DF=EP sin гр — /хр sin гр = /rfxp;
ГК —Ер cos гр = /хр cos xp = /Qxp;
ВЛ = ВВ-|- БА = /(/хЯ(/-)-/(гХр = /с/ (хя</-|-хр) = /
_______________ (13.4)
А/С = АВ-|-Т'7^= /уХЯг/-|-/ГуХр = /д (Хяд-j-Xp) =/gA'g =В9.
(13.5)
Сопротивления = и xQ = xHfy-|-xp называют
соответственно продольным и поперечным синхронными
сопротивлениями обмотки якоря. Значения Xd и xq зави-
сят главным образом от величины воздушного зазора
машины. В явнополюсной машине Xd>xq, в неявнополюс-
ной с ненасыщенной магнитной цепью синхронное сопро-
тивление xc — Xd=xq. В синхронной машине, возбуждае-
мой постоянными магнитами и имеющей сильно развитые
полюсные наконечники, x,.>x,i.
Преобразованная упрощенная векторная диаграмма
для генератора с явновыраженными полюсами на роторе
в случае активно-индуктивной нагрузки с учетом выра-
жений (13.4) и (13.5) показана на рис. 13.5. Для генера-
тора с неявнополюсным ротором и с ненасыщенной маг-
нитной системой векторная диаграмма при аналогичном
300
Глава XIII. Синхронные генераторы
характере нагрузки показана на рис. 13.6. В данном слу-
чае поток реакции якоря нет необходимости расклады-
вать на составляющие.
В насыщенном синхронном генераторе магнитные по-
токи не пропорциональны соответствующим токам. Поэ-
Рис. 13.5. Упрощенная вектор-
ная диаграмма явнополюсного
синхронного генератора.
Рис. 13.6. Векторная ди-
аграмма неявнополюсно-
го ненасыщенного син-
хронного генератора.
тому выделить поток якоря Фя из общего потока машины,
а следовательно, и определить величину э. д. с. якоря
практически невозможно. В этом случае определяют
э. д. с. Е6, наводимую результирующим потоком Фе, со-
зданным н. с. Fe. Уравнение напряжений насыщенного
синхронного генератора будет иметь следующий вид:
U=Ee~jlxv—ir.
Характеристики синхронного генератора. Рабочие
свойства синхронного генератора определяются его ха-
рактеристиками. Характеристика холостого хода, пред-
ставляющая зависимость Uo—Eo=f(/в) при По=ни=
= const и /=0, определяет свойства магнитной цепи
машины. Она имеет такой же вид, что и аналогичная ха-
§ 13.1. Генераторы промышленной частоты
301
рактеристпка генератора постоянного тока (см. рис. 2.2).
При малых токах возбуждения /в характеристика холо-
стого хода из-за отсутствия насыщения магнитной цепи
генератора имеет прямолинейный участок, который бы-
вает тем больше, чем больше воздушный зазор в машине.
Рис. 13.7. Внешние (о) и регулировочные (б^ характе-
ристики синхронного генератора.
К другим основным характеристикам синхронного ге-
нератора относятся внешние и регулировочные.
Внешние характеристики представляют собой зависи-
мость напряжения U на зажимах обмотки статора от то-
ка / нагрузки при n0=nH=const; 7B = const и coscp=
= const.
На рис. 13.7, а показаны внешние характеристики для
различного характера (costp) нагрузки генератора. При
их снятии генератор нагружают до номинального тока
/ = /н. После этого устанавливают такой ток возбуждения
/в, чтобы напряжение U стало номинальным (при задан-
ном cos <р). Затем, не меняя /в, генератор разгружают.
При активной нагрузке (кривая 1) с уменьшением тока I
напряжение растет, что объясняется уменьшением паде-
ния напряжения в обмотке статора и ослаблением попе-
речной реакции якоря. При активно-индуктивной нагруз-
ке (кривая 2) с уменьшением тока из-за ослабления раз-
магничивающего действия реакции якоря напряжение
значительно увеличивается. В случае активно-емкостной
наг"рузки (кривая 3) напряжение U уменьшается при
302
Глава XIII. Синхронные генераторы
сбросе нагрузки. Последнее объясняется ослаблением
подмагничивающего действия реакции якоря.
Регулировочные характеристики 7B = f(7) при По=
= const; t/ = const; cos<p=const показывают, как нужно
изменять возбуждение, чтобы при изменении тока на-
грузки напряжение на зажимах генератора осталось по-
стоянным по величине и равным номинальному значению
U„. Для этого изменение регулировочных характеристик
должно быть обратным по сравнению с внешними харак-
теристиками. На рис. 13.7,6 показаны регулировочные
характеристики для различных cos ср нагрузки генератора
(кривые 1, 2, 3 построены соответственно для активной,
активно-индуктивной и активно-емкостной нагрузок).
§ 13.2. Генераторы повышенной частоты
Области применения и классификация. К синхронным
генераторам повышенной частоты относятся генераторы
с частотой напряжения свыше 50 и до 20000 гц. Эти ма-
шины применяют в авиации, ультразвуковой технике,
высокоскоростном приводе и т. д.
Использование электроэнергии повышенн<|й частоты
позволяет уменьшить габариты и вес электрических ма-
шин и трансформаторов, применить высокоскоростные
асинхронные двигатели.
Однако применение повышенной частоты связано
с некоторым увеличением потерь и необходимостью ис-
пользования специальных электротехнических сталей.
Генераторы с частотой напряжения в 400—800 гц об-
ладают лучшими технико-экономическими показателями
с точки зрения габаритов и рабочих свойств. Поэтому они
в основном используются в электрооборудовании самоле-
тов и радиотехнических устройствах.
Генераторы с частотой напряжения 200 гц применяют-
ся для электроснабжения высокоскоростных электропри-
водов, а 1000, 2000 гц и выше - для индукционного на-
грева металлических деталей.
Трудность конструирования названных генераторов
г Рп «
в том. что с повышением их частоты /= --— необходимо
60
§ 13.2. Генераторы повышенной частоты
303
увеличивать и скорость вращения п, и число пар полю-
сов р.
Однако повышение скорости вращения генератора и,
соответственно, окружной скорости v ограничивается до-
пустимыми напряжениями, возникающими в металле
ротора, а также влиянием возрастающих потерь на тре-
ние и вентиляцию.
Увеличение числа пар полюсов также ограничено, так
как оно приводит к уменьшению величины полюсного де-
ления, которое не может быть очень малым.
Можно получить следующую зависимость полюсного
деления т от окружной скорости v на поверхности ротора
и частоты
nDn 2рхп п .
v =------=--------= 2т/,
60 60
откуда
v
X== 2f Л1'
(13.6)
По соображениям механической прочности ротора
скорость не должна превышать 150 м/сек. Тогда наи-
большее возможное значение полюсного деления
(13.7)
150 75 7500
Тмакс— 2^ — J М— f СМ-
Из уравнения (13.7) следует, что при частоте 2500 гц
полюсное деление не может быть больше 3 см. Столь ма-
лая величина т усложняет выполнение обмотки возбуж-
дения. Кроме того, исходя из условия ограничения пото-
ков рассеяния, воздушный зазор должен быть незначи-
тельным, в десятки раз меньше т, но его нельзя взять ме-
нее 0,25—1 мм.
Необходимо отметить, что в нормальной конструкции
генератора при небольших т выполнить статор и его об-
мотки также затруднительно.
Таким образом, построение генераторов повышенной
и тем более высокой частоты (20000 гц и выше) — слож-
на» задача, требующая особых конструктивных решений.
304
Глава XIII. Синхронные генераторы
В зависимости от конструкции эти генераторы разде-
ляются на генераторы нормального и специального ис-
полнения.
Генераторы повышенной частоты нормального испол-
нения имеют многополюсный ротор и выполняются на
частоты до 200—400 гц при скоростях вращения до
3000 об/мин. Их конструкция отличается от обычных син-
хронных генераторов лишь устройством ротора, сердеч-
Рис. 13.8. Конструктивное устрой-
ство клювообразных полюсов на
роторе.
ник которого, набранный из листов электротехнической
стали, имеет большое число явно выраженных полюсов
с катушками обмотки возбуждения. Последние прочно
крепятся в пазах между полюсами текстолитовыми или
бронзовыми клиньями. Ротор по своему внешнему виду
похож на ротор асинхронной машины с фазной обмоткой.
При более высоких частотах (400—800 гц) и небольших
мощностях иногда применяют генераторы с клювообраз-
ными полюсами на роторе и одной общей для всех полю-
сов обмоткой возбуждения, уложенной по окружности
ротора под полюсами (рис. 13.8).
Клювообразные полюсы крепятся поочередно на тор-
цевых сторонах ротора (с одной стороны — северной,
с другой — южной полярностей). Магнитный поток воз-
буждения замыкается через сердечник статора от полюса
северной полярности к соседним полюсам южной поляр-
ности. В некоторых конструкциях вместо обмотки возбуж-
дения применяют цилиндрический постоянный магнит,
закрепленный между клювообразными полюсами.
Генераторы повышенной частоты нормального испол-
нения выпускаются с однофазными и трехфазными об-
§ 13.2. Генераторы повышенной частоты
305
мотками на статоре. Принцип их действия такой же, как
и обычных синхронных генераторов.
Генераторы повышенной частоты специального испол-
нения (индукторные). В этих генераторах, выполняемых
на частоты от 300 до 60 000 гц, обмотки возбуждения и
рабочую (якорную) выполняют неподвижными. Их укла-
дывают в пазы статора. Магнитный поток возбуждения
в воздушном зазоре периодически изменяется только по
величине, что происходит за счет наличия зубцов на ста-
торе и роторе и изменения проводимости магнитной цепи
при вращении последнего.
Различают два типа индукторных генераторов: разно-
именнополюсные и одноименнополюсные. На рис. 13.9
показано устройство одного из существующих типоводно-
фазного разноименнополюсного индукторного генератора.
Сердечник его статора набран из листовой электротехни-
ческой стали и имеет пазы. Обмотки возбуждения и рабо-
чую укладывают в большие пазы статора, ширина кото-
рых равна зубцовому делению незаполненных пазов.
Обмотка возбуждения охватывает в два раза большую
дугу по расточке статора, чем рабочая. Намагничиваю-
щая сила каждой катушки обмотки возбуждения создает
магнитный поток, направленный перпендикулярно к оси
вала. Полярность полюсов возбуждения чередуется, поэ-
тому такой генератор и называется разноименнополюс-
ным.
Ротор (индуктор) для снижения потерь в стали также
набирается из листовой электротехнической стали и име-
ет пазы и зубцы такого же размера, как зубцы и узкие
пазы статора. Рабочая обмотка охватывает одну часть
зубцов статора одноименной полярности, расположенных
между широкими пазами. При вращении ротора под эту
часть зубцов статора будут подходить то зубцы, то пазы
ротора. Магнитное сопротивление и, следовательно, маг-
нитный поток, пронизывающий катушку рабочей обмотки,
будут периодически изменяться. Причем поток изменяет-
ся только по величине от Фмакс, когда зубцы ротора будут
находиться против зубцов статора, до ФмПп, когда они
окажутся против пазов статора. Обычно ФМИц составляет
(0,1»— 0,4) Фмакс-
306
Глава XIII. Синхронные генераторы
При таком периодическом изменении в рабочей обмот-
ке при вращении ротора индуктируется переменная
э. д. с., частота которой определяется скоростью враще-
ния п и числом зубцов ротора Z2:
Переменная э. д. с. в катушках обмотки возбуждения
при вращении ротора индуктироваться не должна. Это
Ротор
Рис. 13.9. Конструктивная схе-
ма разнонменнополюсного ин-
дукторного генератора.
достигается тем, что зубцы одноименной полярности раз-
делены на две части таким образом, что против зубцов
статора в одной части приходятся зубцы, а в другой —
пазы ротора. При повороте ротора на один зубец взаим-
ное расположение пазов и зубцов в обеих частях меняет-
ся, но их общее магнитное сопротивление и, следователь-
но, поток, пронизывающий катушку обмотки возбужде-
ния, остаются постоянными.
Ротор разноименнополюсных индукторных генерато-
ров при вращении перемагничивается. В нем возникают
цпотери в стали, что уменьшает к. п. д. машины.
В одноименнополюсном индукторном генераторе (рис.
13.10) ротор не перемагничивается. В таком генераторе
в корпус 1 запрессовано два пакета 2 статора, набранных
из листовой стали. В их пазах уложены рабочие обмотки
3, состоящие из катушек, охватывающих по одному зубцу
пакета статора. Обмотка возбуждения 4, выполненная
в виде цилиндрической катушки, закреплена в централь-
ной части корпуса между пакетами статора таким обра-
зом, что ее ось совпадает с осью ротора. Ротор 5 — сталь-
ной, массивный, с профрезерованными вдоль оси пазами.
§ 13.2. Генераторы повышенной частоты
307
Его число зубцов Z2 вдвое меньше числа зубцов одного
пакета статора. Направление магнитного поля возбужде-
ния показано стрелками. Как видно, один пакет статора
северной полярности, другой — южной.
При вращении ротора под зубцы статора подходят то
зубцы ротора, то его пазы. Магнитное сопротивление
Рис. 13.10. Конструк-
тивная схема одно-
именнополюсного ин-
дукторного генера-
тора.
участков магнитопровода, охватываемых катушками ра-
бочей обмотки, периодически меняется. Изменяется от
Фмакс до Фмип и поток, сцепленный с рабочей обмоткой.
Он же индуктирует в ней э. д. с. повышенной частоты
Z2n
60 ’
Зубцы одного пакета статора смещены относительно
зубцов другого пакета на половину зубцового деления,
что обеспечивает постоянное магнитное сопротивление
потоку возбуждения при вращении ротора. Благодаря
этому в обмотке возбуждения переменная э. д. с. не ин-
дуктируется.
Преимущества индукторных генераторов: простота п
надежность конструкции (отсутствие обмотки на роторе
и скользящих контактов); возможность повышения
окружной скорости ротора до 150 м/сек и больше; более
высокий к. п. д. вследствие малой мощности возбуждения,
отсутствия потерь в скользящем контакте и от перемаг-
ничивания ротора. Недостатки: относительно невысокая
степень использования объема машины (вследствие изме-
308
Глава XIII. Синхронные генераторы
нения потока возбуждения от +Фмакс до +ФМ1Ш, а не от
+Фмакс До —Ф.макс); зависимость формы кривой э. д. с.
от величины и характера нагрузки; повышенное значение
реактивного сопротивления рабочей обмотки.
§ 13.3. Синхронный тахогенератор
Синхронный тахогенератор является простейшим та-
хогенератором переменного тока. На рис. 13.11 показана
конструктивная схема четырехполюсного тахогенератора.
Рис. 13.11. Конструктивная схема четы-
рехполюсного синхронного тахогенера-
тора.
В пазах статора /, набранного из листовой электро-
технической стали, уложена однофазная распределенная
обмотка. Внутри статора находится ротор 2, представля-
ющий собой дискообразный постоянный магнит с полю-
сами чередующейся полярности. При вращении ротора
в статорной обмотке индуктируется э. д. с., действующее
значение которой
£о=4,44^ои’/Фвм = 4,44^0» Фы = Сп, (13.9)
60
. Рп „ k0
где с = 4,44—-щрФим.
60 60
Таким образом, при холостом ходе тахогенератора
получаем напряжение t70 = £’(), пропорциональное скоро-
сти вращения. Однако его частота — функция скорости
вращения. Следовательно, в нагруженном тахогенераторе
реактивная (индуктивная и емкостная) составляющая Z„
и индуктивное сопротивление обмотки самой машины бу-
§ 13.3. Синхронный тахогенератор 309
дут изменяться с изменением частоты, что вызовет пере-
ход на другую выходную характеристику U=j(n). Эта
характеристика в данном случае нелинейна.
Зависимость частоты выходного напряжения от скоро-
сти вращения и нелинейность выходной характеристики
значительно снижают точность работы синхронных тахо-
генераторов. Поэтому, несмотря на простоту устройства
и отсутствие скользящих контактов, эти тахогенераторы
в автоматических системах применяют редко. Используют
их в основном для измерения скорости вращения различ-
ных механизмов и машин, подключая непосредственно на
вольтметр со шкалой, отградуированной в об/мин.
Глава XIV. СИНХРОННЫЕ ДВИГАТЕЛИ
§ 14.1. Классификация синхронных двигателей
Основной особенностью синхронных двигателей явля-
ется постоянство скорости вращения при неизменной час-
тоте питающей сети. Скорость вращения ротора синхрон-
ного двигателя равна скорости вращающегося магнитно-
/ 60/1 )
го поля ( п0= —— J , называемой синхронной.
Широкое распространение получили синхронные дви-
гатели малой мощности (от долей ватта до сотен ватт).
Они применяются в системах автоматики и телемеханики,
в установках проводной и радиосвязи, в самопишущих
приборах, электрических часах, приборах звукозаписи и
звуковоспроизведения, киноустановках и т. п.
Синхронные двигатели малой мощности подразделя-
ются на двигатели с электромагнитным возбуждением,
магнитоэлектрические, реактивные, гистерезисные, шаго-
вые. К ним также относится двигатель с катящимся ро-
тором.
Для промышленных установок, работающих с посто-
янной скоростью вращения (вентиляторы, компрессоры,
насосы, нерегулируемые прокатные станы и др.), широко
применяют в качестве привода синхронные двигатели
с электромагнитным возбуждением, мощностью в десят-
ки, сотни и даже тысячи киловатт.
§ 14.2. Синхронные двигатели с электромагнитным
возбуждением
По конструкции синхронные двигатели с электромаг-
нитным возбуждением аналогичны обычным синхронным
генераторам.
Обмотка статора такого двигателя выполняется трех-
фазной (редко двух- и однофазной). Ротор обычно имеет
явно выраженные полюсы (рис. 13.1,6). На них разме-
§ 14.2. Двигатели с электромагнитным возбуждением
311
щены катушки обмотки возбуждения, соединенные с ис-
точником постоянного тока посредством контактных ко
лец и щеток. Для пуска в ход в пазах полюсных наконеч
ников укладывается специальная короткозамкнутая об
мотка, называемая пусковой.
Рис. 14.1. Схема асинхронного пус-
ка трехфазного синхронного дви-
гателя.
Синхронные двигатели с электромагнитным возбужде-
нием (а также магнитоэлектрические и реактивные) без
пусковой обмотки не имеют начального пускового момен-
та, так как ротор из-за своей инерционности не может
быть увлечен вращающимся полем, синхронная скорость
которого устанавливается мгновенно после включения
обмотки статора в сеть переменного тока.
Синхронный двигатель с короткозамкнутой пусковой
обмоткой на роторе пускается в ход как асинхронный
(рис. 14.1). Обмотка возбуждения этого двигателя в на-
чальный момент пуска включается на активное сопротив-
ление, в 8—10 раз превосходящее собственное. Когда ро-
тор разовьет скорость, близкую к синхронной [п — (0,95—
0,97) п0], обмотку возбуждения отключают от сопротивле-
ния и подключают к источнику постоянного тока. В ре-
зультате взаимодействия возбужденных полюсов ротора
312
Глава XIV. Синхронные двигатели
с вращающимся полем статора ротор втягивается в син-
хронизм.
Изучая электромагнитные процессы в синхронном дви-
гателе, пользуются теми же методами, которые применя-
лись при исследовании генератора.
Под действием приложенного напряжения V в обмот-
ках статора вращающегося синхронного двигателя про-
текает ток 1, который в зависимости от величины тока
возбуждения /в может опережать, отставать или совпа-
дать по фазе с напряжением U. Ток статора 1 расклады-
вают на продольную / sin ф и поперечную / cos ф со-
ставляющие, создающие соответствующие потоки и э. д. с.
якоря. Таким образом, в обмотке статора создаются те же
э. д. с., что и в генераторе. Так как по обмотке статора
двигателя ток протекает под действием приложенного на-
пряжения, а э. д. с. Ео— составляющая напряжения, то
ток 1 и э. д. с. Ео сдвинуты по фазе на угол больше 90°.
Уравнение напряжений синхронного двигателя запи-
сывается так:
0= — (Ёо4-£ж;4-£я^4"^р) Ёо Ed
(14.1)
ГДе Ё<1 = E)ld-\-Ep(l't Ёд=^ Ёпд-]-Ёрд',
Epd и Eptl — продольная и поперечная составляющие
э. д. с. рассеяния Ер.
Уравнению (14.1) соответствуют векторные диаграм-
мы (рис. 14.2,о,б), построенные для недовозбужденного
и перевозбужденного двигателя.
Анализ векторных диаграмм синхронной машины
в двигательном (рис. 14.2) и генераторном (рис. 13.3—
13.5) режимах показывает, что в двигательном режиме
вектор напряжения U опережает вектор э. д. с. Ёо, а в ге-
нераторном отстает от вектора Ёо на угол 9; действия
реакции якоря в генераторе и в двигателе противопо-
ложны. Реакция якоря в двигателе при отстающем токе I
статора оказывает подмагничивающее, а при опережаю-
щем — размагничивающее действие на поток возбужде-
ния; синхронная машина с электромагнитным возбужде-
§ 14.2. Двигатели с электромагнитным возбуждением
313
нием может работать с различным коэффициентом мощ-
ности.
Последнее обстоятельство — основное достоинство
синхронного двигателя. Величина cos ф в нем зависит от
тока возбуждения. Можно установить такой ток возбуж-
Рис. 14.2. Векторные диаграммы недовозбуж-
деиного (а) и перевозбужденного (б) синхрон-
ного двигателя.
дения /Вн, при котором двигатель будет потреблять из
сети только активный ток I (cos <р= 1). Если уменьшить
/в (/в</вн), или, как говорят, недовозбудить двигатель,
то он начнет потреблять вместе с активной составляющей
и индуктивную составляющую тока сети. Ток будет от-
ставать по фазе от напряжения сети на угол ф. При уве-
личении /в (/в>/ян) (перевозбуждении) двигатель нач-
нет потреблять ток, опережающий по фазе напряжение
на угол ф и, следовательно, отдавать в сеть реактивную
мощность. Это свойство синхронных двигателей с элек-
тромагнитным возбуждением широко используется в про-
мышленности для улучшения коэффициента мощности.
Зависимость тока / от тока возбуждения при постоянном
314
Глава XIV. Синхронные двигатели
нагрузочном моменте на валу двигателя называется U-
образной характеристикой (рис. 14.3).
Пользуясь векторной диаграммой синхронного двига-
теля (рис. 14.2,6), выведем уравнение для электромаг-
нитной мощности. Если пренебречь активным сопротивле-
Рис. 14.4. Угловая характерис-
тика Af = f(O) явнополюсного
синхронного двигателя.
ние. 14.3. У-образные характерис-
тики синхронного двигателя.
нием обмотки статора, то потребляемая двигателем из
сети активная мощность Pi = mU/cos<f будет прибли-
женно оавна электромагнитной мощности Рэм, т. е.
Pr,M as Pi = т UI cos ф.
(14-2)
Из диаграммы имеем
Ф='ф—0;
lq = l COS 1(7=-
Г I '
Id = l Sin -----------
Xd
U sin 0
Eq—LI cos 0
xd
§ 14.2. Двигатели с электромагнитным возбуждением
315
Подставив эти выражения в уравнение (14.2), полу-
чим
Pm — mUI cos ц—mUl cos(ip—0) =mUl cos ip cos 0-]-
... . . n ,, U sin 0
sin ip sin Q=mU------cos 0-]-
x<i
r, Eo—U cos 0 mUE0
-\-tnU------------sin 0=---------sin 0-]-
Xd xd
~ “ ) sin 20=РУмс4-/5змр. (14.3)
2 X„ Xd
Зависимость Рзм от угла 0 называется угловой характе-
ристикой синхронной машины (для мощности).
Электромагнитный момент синхронного двигателя
,, Р-М1
м=------
По
tnUEn . п
mU2
2П0
( ~~ ) sin 20 — Мэм-|-Л1р.
X q %d
(14.4)
Угловая характеристика Af = f(0) явнополюсного дви-
гателя, построенная по уравнению (14.4), показана на
рис. 14.4. Она складывается из двух составляющих элек-
тромагнитного момента. Взаимодействие поля ротора
с полем статора создает основную составляющую
44ум—
т UE0
sin 0.
(14.5)
Дополнительная составляющая момента Л1р возникает
(при X/j^Xd) вследствие искривления поля реакции
якоря. Эту составляющую момента называют реактивным
моментом, так как в его создании поток ротора не участ-
вует. Величина реактивного момента равна
.. mU2 / J
. 2Q0 ' х
— ) sin 20—
Xd '
316
Глава XIV. Синхронные двигатели
mil1 /1 1 \
2Йо ' (0®2л7 ~ ' 81П 26
mJ2 / 1 1 \
-г—Т- ( ------— I sin 20 =
4n/iiw2Q0' Л7 Zd '
mlP
(^м? #Ma)sin 20,
4nfi®2fi0
(14.6)
где x,. = otL,y = oj®2X,y; — =/?Mg; xd = way2Xd; — =RMd;
hq Л(/
По — угловая синхронная скорость;
co — угловая частота сети;
w — число витков одной фазы обмотки ста-
тора;
Xg, /.,/ и RMq, Rnd — магнитные проводимости и магнитные
сопротивления по поперечной и про-
дольной осям машины.
Для объяснения существа реактивного момента пред-
ставим вращающееся поле двигателя в виде двух полюсов
и рассмотрим вначале явления в статике, т. е. будем счи-
тать, что магнитное поле и ротор с невозбужденными по-
люсами не вращаются. На рис. 14.5, а изображено поло-
жение устойчивого равновесия ротора (угол 0=0). Здесь
поток машины замыкается по пути с наименьшим магнит-
ным сопротивлением. Поворот ротора относительно оси
полюсов на угол 0 вызывает деформацию потока и вместе
с этим появление тангенциальных сил Qt магнитного при-
тяжения и созданного ими реактивного момента. Величи-
на последнего пропорциональна синусу угла 20. Таким
образом, реактивный момент имеет положительное мак-
симальное значение, когда 0=45° (рис. 14.5,6) и отри-
цательное, когда 0=135°. Если 0 = 90° (Л1р = 0), будет
положение неустойчивого равновесия ротора (рис. 14.5, в).
При вращении поля статора и ротора с синхронной ско-
—►
ростью зависимость реактивного момента от угла 0 будет
точно такой же, как в рассмотренном случае.
Амплитуда реактивного момента обычно не превыша-
ет 25—30% от Мэм.м.
§ 14.2. Двигатели с электромагнитным возбуждением
317
Изменение нагрузки на валу двигателя сопровождает-
ся изменением электромагнитного момента М и угла 0
на величины ДМ и Л0. При этом ротор кратковременно
вращается асинхронно и в его обмотках и сердечнике за
счет их пересечения полем статора наводятся токи. В ре-
зультате взаимодействия этих токов с полем статора воз-
Рис. 14.5. Схематическое
изображение магнитного по-
ля н условия возникновения
реактивного момента.
никает синхронизирующий момент, действующий на ро-
тор и стремящийся удержать его в синхронном вращении
при новой нагрузке.
ДМ
АО
Отношение
характеризует степень изменения мо-
мента М. Предельное значение этого отношения, когда
приращение угла 0 стремится к нулю, называется коэф-
фициентом синхронизирующего момента Мс.
Для явнополюсной машины
Мс =
dM
mE0U
-С/По
cos 0-|-
+
mil2
2По
— ) cos 20.
Xd '
(14.7)
График зависимости коэффициента синхронизирующе-
го момента Мс от угла 0, построенный по уравнению
(14.7), показан на рис. 14.4 пунктирной линией. Из этого
графика следует, что при М = Мм (0=70—90°) Мг = 0,
а при М = 0 (0=0°) Мс=Мсм. Устойчивая работа двига-
теля возможна в пределах угла 0 от нуля до 70—90°,
318
Глава XIV. Синхронные двигатели
когда Мс имеет положительные значения (М,;
dM
dQ
>0).
Если значения Мс отрицательные (Л4с<0; 0>7О—90°),
двигатель выпадает из синхронизма.
Обычно при номинальной нагрузке двигателя номи-
нальному значению электромагнитного момента Мп со-
ответствует угол 0Н = 2О—30°. Отношение максимального
момента Л4М к номинальному Mti называется перегрузоч-
ной способностью синхронного двигателя:
Мм
Мн
= 2-3.
Синхронные двигатели с электромагнитным возбужде-
нием устойчивы при резко меняющихся нагрузках, имеют
высокий к. п. д„ могут работать с cos <р= 1. Но они срав-
нительно сложной конструкции и требуют два источника
питания. Широко распространены синхронные двигатели
с электромагнитным возбуждением только средней и
большой мощности. Маломощные с электромагнитным
возбуждением применяются редко и только там, где тре-
бования высоких энергетических показателей преоблада-
ют над требованиями простоты конструкции, стоимости
установки и пр.
14.3. Магнитоэлектрические синхронные двигатели
Магнитоэлектрические синхронные двигатели возбуж-
даются постоянными магнитами, расположенными на ро-
торе, и, следовательно, им не нужен источник постоян-
ного тока.
Для них применимы те же уравнения напряжений,
векторные диаграммы и выражение электромагнитного
момента, что и для двигателей с электромагнитным воз-
буждением. Последним двигатели с постоянными магни-
тами по своим рабочим свойствам уступают незначи-
тельно.
Выполняют магнитоэлектрические синхронные двига-
тели на малые мощности (до сотен ватт) с трех- или двух-
фазными (в конденсаторном исполнении) обмотками на
статоре. Ротор сочетает в себе элементы синхронного
§ 14..3. Магнитоэлектрические синхронные двигатели
319
(постоянные магниты) и асинхронного (короткозамкну-
тая обмотка в виде беличьей клетки) двигателей. На рис.
14.6 и 14.7 показаны наиболее распространенные конст-
рукции магнитоэлектрических двигателей. Ротор 1 маши-
ны, изображенной на рис. 14.6, по существу обычный
короткозамкнутый. Он зажат с торцов двумя дисками —
Рис. 14.6. Конструктивное
устройство синхронного дви-
гателя с постоянными магнита-
ми в виде дисков.
постоянными магнитами 2. На рис. 14.7, «, б показаны
конструкции магнитоэлектрических двигателей, роторы
которых выполнены из постоянных магнитов прямоуголь-
ной (для больших диаметров и мощности больше 100 вт)
Рис. 14.7. Конструк-
тивные варианты маг-
нитоэлектрических
синхронных двигате-
лей.
и цилиндрической (для малых диаметров и мощности
меньше 100 вт) формы. На полюсах магнитов этих рото-
ров устраиваются шихтованные полюсные наконечники,
скрепленные стержнями короткозамкнутой обмотки.
320
Глава XIV. Синхронные двигатели
Короткозамкнутые обмотки ротора необходимы для
осуществления пуска в ход двигателя.
При пуске в ход двигатель работает как асинхронный:
его момент создается взаимодействием вращающегося
поля с наведенными им токами в короткозамкнутой об-
мотке. Достигнув скорости, близкой к синхронной, ротор
за счет взаимодействия поля постоянных магнитов с вра-
Рпс. 14.8. Пусковые характе-
ристики магнитоэлектрического
синхронного двигателя.
щающимся полем статора втягивается в синхронизм и
затем вращается с синхронной скоростью. В период асин-
хронного пуска поток постоянных магнитов наводит
э. д. с. в замкнутой на сеть питания обмотке статора. Ток,
вызванный этой э. д. с., взаимодействуя с потоком ротора,
образует тормозной момент, который вызывает провал
в кривой результирующего момента в области больших
скольжений (рис. 14.8). Кроме того, в процессе разгона
большие пусковые токи статора действуют размагничива-
ющим образом на магниты ротора. Указанные явления
несколько ухудшают пусковые свойства этих двигателей.
Достоинства магнитоэлектрических синхронных дви-
гателей — надежность в работе, сравнительно высокие
значения к. п. д. и cos ф. Эти машины получают все боль-
шее распространение, несмотря на некоторую сложность
изготовления ротора.
§ 14.4. Синхронные реактивные двигатели
321
§ 14.4. Синхронные реактивные двигатели
Трехфазные реактивные двигатели. Под реактивным
двигателем понимается синхронный двигатель с явно вы-
раженными полюсами на роторе без обмотки возбужде-
ния (и без постоянных магнитов). Магнитное поле в нем
создается только н. с. статора. Благодаря простоте кон-
струкции, малой стоимости и необходимости лишь одного
Рнс. 14.9. Различ-
ные конструкции
роторов синхрон-
ных реактивных
двигателей.
источника питания, реактивные двигатели малой мощно-
сти получили широкое распространение.
Конструкция трехфазного реактивного двигателя мало
отличается от асинхронного с короткозамкнутым рото-
ром. Его статор аналогичен статору обычного асинхрон-
ного двигателя. Роторы имеют различное устройство.
Наиболее распространенная конструкция отличается от
короткозамкнутого ротора обычного асинхронного двига-
теля лишь наличием впадин (вырезов) на цилиндричес-
кой поверхности, с помощью которых образуются явно
выраженные полюсы (рис. 14.9, а). Роторы, изображен-
ные на рис. 14.9,6, в, представляют собою цилиндры,
в которых стальные полосы, залитые алюминием, как бы
образуют явно выраженные полюсы. За счет выполнения
таких роторов из разнородных по магнитным свойствам
материалов достигается неравенство магнитных проводи-
мостей по продольной и поперечной осям машины, что не-
обходимо для создания реактивного момента.
Реактивные двигатели не имеют пускового момента.
Они пускаются в ход как асинхронные. Величина пуско-
вого асинхронного момента Мп зависит от активного со-
322
Глава XIV. Синхронные двигатели
противления пусковой короткозамкнутой обмотки или
тела массивного алюминиевого ротора в конструкциях,
изображенных на рис. 14.9, б, в.
Помимо пускового, рабочие качества реактивного дви-
гателя определяются моментами входа в синхронизм Мвх
и выхода из него Л1ВЬ1Х (рис. 14.10).
Рис. 14.10. Механическая
характеристика реактив-
ного двигателя.
Рис. 14.11. Векторная
диаграмма трехфазно-
го реактивного двига-
теля.
Моментом входа Л1ВХ называется тот максимальный
момент сопротивления, при котором двигатель еще втяги-
вается в синхронизм. Величина Л1ВХ зависит от макси-
мальной скорости, которую двигатель при данном момен-
те сопротивления на валу развивает в асинхронном (пус-
ковом) режиме, значения реактивного момента при ука-
занной скорости вращения и момента инерции вращаю-
щихся частей.
Моментом выхода из синхронизма называется макси-
мальный реактивный момент, который может развивать
двигатель при синхронном вращении. На ротор, вращаю-
щийся с синхронной скоростью, действует только реактив-
ный момент, сущность которого объяснена в § 14.2. Значе-
ние реактивного момента приводится в уравнении (14.6).
Это значение получили, пренебрегая активным сопротив-
лением обмотки статора. Однако в двигателях малой
мощности такое сопротивление весьма значительно, что
§ 14.4. Синхронные реактивные двигатели
323
сказывается на характере зависимости Л1р=/(0): вели-
чина Л1рм уменьшается и смещается в сторону меньших
углов 0, равных 30—40°.
Из анализа уравнения (14.6) видно, что реактивный
момент (в том числе и Л1вых) пропорционален разности
магнитных сопротивлений /?м</—RVli. Экспериментально
установлено, что наибольший реактивный момент при
сравнительно небольшой потребляемой двигателем мощ-
ности получается при следующих соотношениях основных
размеров (рис. 14.9, а) в двигателе:
— =0,5-0,6; -^-=10-12,
т о
где йп— ширина полюсной дуги ротора;
т — полюсное деление;
бм — максимальная глубина впадины;
б — величина воздушного зазора под полюсами.
Уравнение напряжений реактивного двигателя имеет
такой же вид, как и для синхронного с электромагнитным
возбуждением, только ввиду отсутствия потока ротора
э. д. с. £'о=О. Следовательно,
0 = — (ЁЯС1~\-Ёяд-\-Ёр) (14-8)
На рис. 14.11 построена векторная диаграмма реактив-
ного двигателя, соответствующая уравнению (14.8). Как
видно из нее, угол сдвига по фазе между напряжением
U и током 1 сравнительно большой, a cos ф мал. Низкое
значение коэффициента мощности, объясняющееся боль-
шой величиной намагничивающего тока статора,— суще-
ственный недостаток реактивных двигателей.
Другой недостаток — низкий к. п. д. В двигателях
мощностью в несколько десятков ватт он не превышает
30—40%, а от долей ватта до нескольких ватт составляет
всего от 5 до 25%.
Синхронный трехфазный реактивный двигатель раз-
вивает на валу в 2—3 раза меньшую механическую мощ-
ность, чем асинхронный при одинаковых габаритах.
324
Глава XIV. Синхронные двигатели
Конденсаторные реактивные двигатели. В отличие от
трехфазных в конденсаторном реактивном двигателе на
статоре укладывается двухфазная обмотка. Одна из фаз
ее (главная) включается в однофазную сеть непосредст-
венно, а другая (вспомогательная) — в ту же сеть через
конденсатор. Обе фазы сдвинуты в пространстве на 90
электрических градусов относительно друг друга и могут
в общем случае иметь различное число витков.
Конденсаторные двигатели, работающие от однофаз-
ной сети, применяются в схемах автоматики, телемеха-
ники, в приборах звукозаписи, в бытовых приборах и пр.
Принцип действия конденсаторного реактивного дви-
гателя аналогичен принципу действия трехфазного реак-
тивного. Отличие лишь в том, что в первом вращающееся
поле в общем случае не круговое, а эллиптическое. Значе-
ния моментов: Мп— пускового, Л1вх — входа в синхро-
низм и Мзых—выхода из синхронизма определяются не
только параметрами ротора и статора, но и характером
вращающегося поля, которое зависит от параметров дви-
гателя и емкости конденсатора.
Как известно, круговое вращающееся поле с помощью
конденсатора можно создать лишь для какого-нибудь од-
ного вполне определенного режима работы двигателя.
Качество же работы конденсаторного двигателя зависит
от того, в каком его режиме возникает круговое вращаю-
щееся поле. Если круговое поле статора имеет место
в асинхронном режиме при больших скольжениях, то дви-
гатель будет иметь достаточно высокий момент Ма, но
малые и Л111ЫХ; если в синхронном, то Л1Вх и Л1Вых воз-
растают, а Мп снижается. Чтобы увеличить Л1П, на время
пуска параллельно с рабочим конденсатором можно
включать дополнительный пусковой конденсатор (см. схе-
му на рис. 8.6).
Конденсаторные синхронные реактивные двигатели
вследствие того, что их поле в общем случае эллиптиче-
ское, по своим рабочим свойствам уступают трехфазным
реактивным двигателям: они имеют меньшие к. п. д.,
моменты Л1ВХ, Л1ВЬ1Х и Л1п. Положительное их качество —
высокое значение cos <р.
Редукторный реактивный двигатель. Эта машина обе-
спечивает без всяких механических приспособлений
§ 14.4. Синхронные реактивные двигатели
325
(редукторов) сколь угодно малую скорость вращения при
питании от сети стандартной частоты. Такой двигатель
имеет простое устройство (рис. 14.12). Статор и ротор
набираются из листовой электротехнической стали и име-
ют пазы и зубцы. Числа зубцов статора Zj и ротора Z2
Рис. 14.12. Схема устройства редук-
торного реактивного двигателя.
различны. Разность Z2—Zb определяющая скорость вра-
щения ротора, должна быть четным числом. В пазах ста-
тора располагается двухфазная или трехфазная спираль-
ная обмотка, которая при подключении к сети обеспечи-
вает круговое вращающееся магнитное поле.
В трехфазной обмотке делаются отпайки в трех точ-
ках, сдвинутых друг от друга на 120°. Если же машина
рассчитана на работу от однофазной сети, то от спираль-
ной обмотки статора делают четыре равноудаленные от-
пайки, присоединяемые к сети по схеме моста, причем для
получения вращающегося поля в одно из плеч включают
конденсатор.
Для объяснения принципа действия обратимся к рис.
14.12, на котором изображен двигатель, имеющий на ста-
торе 16 и на роторе 18 зубцов (Zj=16; Z2=18).
Допустим, что поток статора вращается по часовой
стрелке и в рассматриваемый момент времени направлен
по оси А, проходящей через зубцы статора 1 и 9. Ротор
при этом расположится так, чтобы магнитное сопротивле-
326
Глава XIV. Синхронные двигатели
ние на пути потока было минимальным; его зубцы Г и 10'
установятся против зубцов 1 и 9 статора. Когда ось поля
переместится в положение В, сдвинувшись на одно зубцо-
360°
вое деление статора, соответствующее углу =22,5°,
ротор повернется лишь на такой угол, при котором маг-
нитное сопротивление потоку снова станет минимальным.
При этом против зубцов 2 и 10 статора расположатся
360°
зубцы 2 и 1г ротора, а угол поворота составит —-----
360°
-------------- —2,5° и, следовательно, будет в 9 раз меньше угла
18-----.
поворота поля.
Таким образом, при повороте поля статора на 360°
ротор повернется на 16-2,5°=40°, т. е. будет вращаться
со скоростью в 360/40 = 9 раз меньшей скорости поля
статора.
В общем случае при различном числе зубцов статора
и ротора и произвольном числе пар полюсов р поля ста-
тора скорость вращения ротора
Z2-Z1 60fi Z2-Zi
п = п0------=-----------z---.
z2 P z2
(14.9)
Значительно снизить ее можно увеличением чисел зуб-
цов Zi и Z2 при их разности (Z2—Zi), равной двум. Так,
при fi = 50 гц; 2р = 2; Zi=198; Z2=200 она составит
60-50
п_——
200-198 s,
--------=30 об мин.
200 1
§ 14.5. Синхронные гистерезисные двигатели
Существенные недостатки синхронных реактивных
двигателей — большие габариты и вес на единицу полез-
ной мощности, низкие значения к. п. д. и коэффициента
мощности — ограничивают их применение в схемах авто-
матики. Поэтому в последнее время их часто заменяют
синхронными гистерезисными двигателями. Под гистере-
зисным двигателем понимают двигатель с цилиндричес-
§ 14.5. Синхронные гистерезисные двигатели
327
ким или дисковым ротором, выполненным из магнитно-
твердого материала, без обмотки. Вращающий момент,
возникающий в нем вследствие гистерезиса при перемаг-
ничивании стали ротора, называется гистерезисным.
По своему устройству эти двигатели мало отличаются
от асинхронных с массивным ферромагнитным ротором.
Рис. 14.13. Сборный ро-
тор гистерезисного дви-
гателя.
В закрытых или полузакрытых пазах статора укладыва-
ется трехфазная или двухфазная (в конденсаторном ис-
полнении) обмотка. Ротор выполняется массивным или
шихтованным (набранным из листов) из магнитнотвердо-
го материала, обладающего большой остаточной индук-
цией и широкой петлей гистерезиса. С целью экономии
дорогостоящего магнитнотвердого материала роторы час-
то делают сборными, состоящими из втулки 1 (рис. 14.13)
и наружного массивного или шихтованного кольца 2 из
магнитнотвердого материала.
Воздушный зазор между статором и ротором равно-
мерен и выбирается минимально возможным с целью
снижения намагничивающего тока.
Возникновение гистерезисного момента можно объяс-
нить следующим образом. Представим поле статора в ви-
де двух неподвижных полюсов магнита (рис. 14.14).
Ферромагнитный ротор, помещенный в это поле, намаг-
нитится. Все элементарные магнитики намагниченного
ротора будут ориентированы по полю статора (на рнс.
14.14, а показаны для наглядности только два элементар-
ных магнитика: 1 и 2, расположенных по оси полюсов
статора). В результате взаимодействия поля полюсов
статора с элементарными магнитиками ротора возникнут
только радиальные силы притяжения ротора к полюсам
статора, которые не создают вращающего момента.
Если теперь начать поворачивать постоянные магниты,
например, в направлении движения часовой стрелки, то
328
Глава XIV. Синхронные двигатели
в том же направлении будут поворачиваться и элемен-
тарные магнитики ротора. Однако вследствие молекуляр-
ного трения, которое у материалов с широкой петлей гис-
терезиса велико, они будут несколько отставать от поля
вращающихся полюсов статора. Поле ротора, являющее-
Рис. 14.14. К объяснению при-
роды гистерезисного момента.
ся суммарным для всех элементарных магнитиков, будет
повернуто относительно полюсов статора на угол 0
(рис. 14.14,6), что вызывает появление, кроме радиаль-
ных составляющих Q„ = Q cos 0 сил взаимодействия меж-
ду элементарными магнитиками и полем статора, танген-
циальных составляющих
Qt = Q sin 0.
Тангенциальные составляющие создают вращающий
гистерезисный момент
Л4г = СФ2/?1 sin 0, (14.10)
где Ft — н. с. статора;
Ф2 — результирующий поток ротора.
При асинхронном вращении ротора в нем вследствие
перемагничивания имеют место потери от гистерезиса и
вихревых токов. Так как потери от гистерезиса пропор-
циональны частоте перемагничивания fz — fis, а от вихре-
вых токов — квадрату этой частоты, то
§ 14.5. Синхронные гистерезисные двигатели 329
Рга = Pr~P Pli — SPг(8=1)~Р$2Рb(s=1), (14.11)
где 7эг(.ч=1) и РВ(8=1) — потери от гистерезиса и вихревых
токов при неподвижном роторе.
Как известно, электромагнитная мощность Рэм, пере-
данная от статора к ротору, в асинхронном режиме дви-
гателя равна
р
Pgyi^^ ~ = Pr(s=l)~{S Р в(в=Цг (14.12)
а электромагнитный момент двигателя
= (14.13)
Ьго
где Л1г= —----------гистерезисный момент;
, , $Рв(з=1)
Л1В= —— — момент от вихревых токов.
ь2о
Природа момента Мв такая же, как у асинхронного
двигателя с массивным ферромагнитным ротором. Он во-
зникает за счет взаимодействия поля машины с вихревы-
ми токами ротора. При синхронной скорости вращения
ротора (s = 0) этот момент равен нулю. Самое большое
значение Мв вследствие большого активного сопротивле-
ния ротора будет в начальный период пуска (когда s=l).
Из уравнения (14.13) видно, что величина гистерезис-
ного момента не зависит от скольжения s и, следователь-
но, скорости вращения ротора, и когда последний непод-
вижен, определяется величиной потерь на гистерезис.
Наибольшую величину гистерезисного момента получают
при изготовлении роторов, магнитнотвердый материал
которых имеет широкую петлю гистерезиса. У современ-
ных сплавов типа «викаллой» она (рис. 14.15, кривая 2)
близка к идеальной — прямоугольной (кривая 1). Узкую
петлю гистерезиса (кривая 3) имеют обычные электро-
технические стали, поэтому применение их для изготов-
ления сердечника ротора не обеспечивает получение гис-
терезисного момента достаточной величины.
330
Глава XIV. Синхронные двигатели
В синхронном режиме гистерезисного двигателя дей-
ствует только момент Мг, так как осуществляемая полем
статора намагниченность ротора сохраняется вследствие
большой остаточной индукции. Поэтому гистерезисный
двигатель подобен обычному синхронному с постоянными
магнитами.
Рис. 14.15. Пет-
ли гистерезиса
различных ма-
териалов:
1 — идеальная
(прямоугольная);
2 — викаллоя;
3 — обычной элек-
тротехнической
стали.
Рис. 14.16. Механические характе-
ристики гистерезисного двигателя.
На рис. 14.16 показана механическая характеристика
п=/(Л1г+Л1в) гистерезисного двигателя с массивным ро-
тором. Она показывает, что такие двигатели могут рабо-
тать как в синхронном, так и в асинхронном режимах.
Однако работа двигателя с асинхронной скоростью не-
экономична, так как возникают значительные потери в
стали ротора вследствие перемагничивания. У гистерезис-
ных двигателей с шихтованными роторами момент от вих-
ревых токов практически равен нулю, они разгоняются и
работают только под действием гистерезисного момента.
Положительные качества синхронных гистерезисных
двигателей: простота конструкции и надежность в работе,
большой пусковой момент и момент входа в синхронизм,
сравнительно высокий к. п. д. (до 60%), небольшая крат-
§ 14.6. Реактивно-гистерезисные двигатели
331
ность пускового тока (/П/Л1= 1,3—1,4), бесшумность в ра-
боте. Большое их преимущество — способность одного и
того же ротора работать при различном числе полюсов
вращающегося магнитного поля, т. е. полисинхронизм.
Это позволяет создавать многоскоростные синхронные
гистерезисные двигатели с хорошими пусковыми и рабо-
чими характеристиками на различных ступенях скорости.
Недостатки: низкий коэффициент мощности (cos<p=
= 0,4—0,5), сравнительно высокая стоимость и склон-
ность ротора к колебаниям (качаниям) при изменяющем-
ся моменте сопротивления на валу. Такие колебания бы-
вают значительными, так как на роторе отсутствует ко-
роткозамкнутая обмотка, являющаяся их успокоителем.
Улучшить энергетические показатели (cos ср, к. п. д.,
Pz) гистерезисных двигателей можно путем кратковре-
менного (на 2—3 периода тока) увеличения напряжения
статора. Это повышает намагниченность ротора, что спо-
собствует уменьшению реактивного тока статора.
В настоящее время гистерезисные двигатели строятся
мощностью до 200 вт как в трехфазном, так и в двухфаз-
ном (конденсаторном) исполнении на частоты 50, 400 и
500 гц. Особенно распространены маломощные (от долей
ватта до нескольких ватт).
§ 14.6. Реактивно-гистерезисные двигатели
В СССР широко распространен для привода програм-
мных механизмов, временных разверток в самопишущих
приборах, электрических часов, реле времени и т. п. одно-
фазный реактивно-гистерезисный двигатель типа ДСД.
Конструктивное устройство этого двигателя показано
на рис. 14.17. Магнитопровод статора 1 состоит из двух
симметричных пакетов, набранных из листов электротех-
нической стали. Однофазная обмотка возбуждения 3, на-
мотанная на каркас 2, помещена на магнитопровод ста-
тора со стороны стыка его пакетов, противоположные
концы которых, имеющие форму полюсов, образуют рас-
точку статора. Каждый полюс последнего разделен на
две равные части продольным пазом, в который заклады-
вается одна из сторон экранирующих короткозамкнутых
витков 4. Ротор двигателя состоит из 6—7 пластин, на-
332
Глава XIV, Синхронные двигатели
саженных на вал и имеющих форму колец с перемыч-
ками, Пластины, выполненные из магнитнотвердой стали,
имеют толщину 0,4 мм. Вал ротора с пластинами, соеди-
ненный с часовым шестеренчатым редуктором, заключен
в общий герметичный латунный корпус. Своей узкой
Конструктивное
реактивно-гисте-
двигателя типа
частью, в которой располагается ротор, корпус плотно
входит в расточку статора.
Если обмотку возбуждения включить на напряжение
сети, в воздушном зазоре машины благодаря экранирую-
щему действию короткозамкнутых витков создается
эллиптическое вращающееся поле. В двигателе возника-
ют моменты: асинхронный (от вихревых токов), гистере-
зисный и реактивный. При пуске действуют первые два,
а при вращении с синхронной скоростью — гистерезисный
и реактивный. Возникновение последнего обусловлено
наличием перемычек на пластинах ротора. Этот момент
при синхронном вращении основной, он в 2—3 раза боль-
ше гистерезисного.
Двигатели описанной конструкции нереверсивные.
Кроме них, выпускают и реверсивные — типа ДСДР,
у которых короткозамкнутые витки заменены катушками
с выведенными концами. Всего катушек четыре. Распола-
гаются они на обеих частях каждого из полюсов, охваты-
вая половину полюса. Замыкая то одну, то другую пару
катушек, можно экранировать то одни, то другие части
§ 14.7. Шаговые двигатели
333
полюсов, изменяя таким образом направление вращения
магнитного поля, а вместе с ним и вращение ротора.
Двигатели типов ДСД и ДСДР имеют низкие коэф-
фициенты мощности и к. п. д. Они рассчитаны для работы
от сети 50 гц с напряжением 12, 24, 36, 127 и 220 в.
§ 14.7. Шаговые двигатели
Области применения, классификация и требования,
предъявляемые к шаговым двигателям. Шаговые (им-
пульсные двигатели) служат для преобразования элек-
трических импульсов в дискретные угловые или линейные
перемещения — «шаги». Преобразуя цифровую информа-
цию в форме электрических импульсов в соответствующее
перемещение, т. е. выполняя функции выходного декоди-
рующего звена, шаговые двигатели позволяют создать
системы автоматического регулирования, не нуждающие-
ся в обратных связях. Последнее обстоятельство упро-
щает систему управления механизмом и увеличивает ее
надежность.
Шаговые двигатели (ШД) применяют в автоматиче-
ских устройствах дискретного действия совместно с элек-
тронными коммутаторами, которые предназначаются для
переключения обмоток управления ШД с последователь-
ностью и частотой, соответствующими заданной команде.
Тип электронного коммутатора во многом определяет па-
раметры и характеристики двигателя.
В общем случае шаговый двигатель с управляющим
электронным коммутатором можно рассматривать как
систему частотного регулирования синхронного двигателя
с возможностью фиксации углового положения ротора,
т. е. с изменением частоты до нуля.
Шаговые двигатели в последнее время все более при-
меняются в системах регулирования и управления (про-
граммное управление электроприводами, устройства вы-
числительной техники и т. д.). Эти системы могут быть
построены по-разному. В одних шаговый двигатель не-
посредственно или через усилитель момента выполняет
функцию исполнительного двигателя, в других он являет-
ся вспомогательным элементом и служит для задания
входного сигнала какой-либо следящей системе.
334
Глава XIV. Синхронные двигатели
В зависимости от конструктивного выполнения шаго-
вые двигатели разделяются на индикаторные и силовые,,
реверсивные и нереверсивные, одностаторные и многоста-
торные, с одной или несколькими сосредоточенными или
распределенными обмотками управления, с реактивным
или активным ротором, с жесткой механической или гиб-
кой электромагнитной связью с валом.
Ко всем им предъявляются следующие требования:
1) возможность получения малого шага (иногда по-
рядка нескольких градусов или даже доли градуса);
2) достаточно большая величина синхронизирующего
момента, обеспечивающая минимальную угловую ошибку
при отработке шага;
3) недопустимость накопления ошибки с увеличением
числа шагов;
4) отсутствие свободных колебаний при отработке
шага;
5) высокое быстродействие;
6) надежность в работе при минимальном числе обмо-
ток управления;
7) простота конструкций двигателя и блока его управ-
ления.
Покажем, как при рассмотрении основных характери-
стик и параметров шагового двигателя могут быть удов-
летворены перечисленные требования.
Цена шага аГ — величина шага в геометрических гра-
дусах или радианах;
360° л
аг= —----=----->
2рт рт
где т — число обмоток управления, пространственно сме-
щенных одна относительно другой.
Если число полюсов 2р статора и ротора различно, то
в формулу (14.14) следует подставлять большее из двух
чисел. В ШД реактивного типа, т. е. без возбуждения на
роторе, число полюсов 2р равно числу зубцов ротора Z?,
и в этом случае
аг=
360°
Z2m
2л
Z-pn
(14.15)
§ 14.7. Шаговые двигатели
335
Из формул (14.14) и (14.15) видно, что уменьшения
шага можно достигнуть увеличением числа полюсов и об-
моток управления.
Двигатели с активным ротором (с обмоткой возбуж-
дения или постоянными магнитами на нем) по технологи-
ческим соображениям не могут выполняться с большим
числом полюсов и, следовательно, при ограниченном чис-
Рис. 14.18. Зависимость среднего син-
хронизирующего момента шагового
двигателя от частоты управляющих
импульсов.
ле обмоток управления не позволяют получить малой це-
ны шага.
Шаговые двигатели реактивного типа могут быть вы-
полнены с зубцовым делением до 2 мм. При этом на ро-
торе небольшого диаметра выполняют достаточное число
зубцов и получают шаг порядка нескольких градусов или
долей градуса.
Статический синхронизирующий момент М — момент,
устанавливающий ось ротора в согласованное положение
с направлением вектора н. с. статора при установившихся
токах в обмотках управления. Величина его для двигате-
ля с активным ротором и ненасыщенной симметричной
магнитной системой (если пренебрегают высшими гармо-
никами) определяется уравнением, аналогичным равен-
ству (14.5). Для реактивного ШД при тех же условиях
применимо уравнение, аналогичное равенству (14.6).
С увеличением частоты следования управляющих им-
пульсов среднее значение синхронизирующего момента
на валу ШД падает. На рис. 14.18 показана зависимость
A1cp=f(f). Мягкость этой характеристики в основном
определяется электромагнитной постоянной времени Т
обмоток управления. Чем больше Т, тем до меньшей ве-
336
Глава XIV. Синхронные двигатели
личины за время импульса напряжения нарастает ток,
а следовательно, и поток обмоток управления, что и сни-
жает Л1ср. Для уменьшения Т в цепь обмоток управления
часто включают балластные сопротивления г.
Пусковой момент. В шаговом двигателе при подаче
управляющего импульса ось результирующей н. с. стато-
Рис. 14.19. Характеристики статического синхронизирующего мо-
мента шаговых двигателей с ненасыщенными симметричными маг-
нитными системами:
я —с активным ротором и двумя обмотками управления; о —с реактивным
ротором и тремя обмотками управления.
ра, а затем и ротор должны переместиться на шаг. Вра-
щение двигателя возможно, если он имеет пусковой мо-
мент Л4П. Этот момент определяется точкой пересечения
исходной характеристики статического синхронизирую-
щего момента (сплошные линии) с той же характеристи-
кой, сдвинутой (пунктирные линии) на шаг а в электри-
ческих градусах (см. рис. 14.19,0, б). Причем а = агр =
Z2 л
= аг----=------.
р m
На рис. 14.19, а построен график для симмет-
ричного шагового двигателя с двумя обмотками управле-
§ 14.7. Шаговые двигатели
337
ния и активным ротором, а на рис. 14.19, б— график для
реактивного ШД с симметричной магнитной системой и
тремя обмотками управления. Как видно из этих рисун-
ков, в обоих рассматриваемых случаях пусковой момент
отличен от нуля.
Производя аналогичные построения для двигателей
с несимметричной и симметричной магнитными системами
при различных числах обмоток управления, можно убе-
диться, что для обеспечения отличного от нуля пускового
момента необходимо иметь минимум одну обмотку управ-
ления у ШД с несимметричным активным ротором и две
обмотки у ШД с симметричным активным или несиммет-
ричным реактивным ротором. Для ШД с симметричным
реактивным ротором необходимо иметь минимум три об-
мотки управления.
Устойчивость. Под устойчивостью ШД понимают его
способность работать без потерь шагов, т. е. способность
ротора занимать устойчивое положение, соответствующее
положению вектора результирующей н. с. при каждом
шаге. Различают статическую и динамическую устойчи-
вость шагового двигателя.
Зоной статической устойчивости является окрестность
точки О устойчивого равновесия на характеристике М =
= f(0), из любой точки которой после снятия возмущаю-
щего воздействия ротор возвращается в устойчивое состо-
яние (точку О), не проходя положений (точек А и В)
неустойчивого равновесия (рис. 14.19, а, б). Зона стати-
ческой устойчивости ШД с симметричной магнитной си-
стемой симметрична точке О и равна отрезку АВ. При
„ л
этом для реактивного двигателя ВСу=±-у, а для дви-
гателя с активным ротором 0Су = ±л.
Если машина имеет несимметричную магнитную си-
стему, зона статической устойчивости также несиммет-
рична относительно точки О.
Зоной динамической устойчивости является окрест-
ность той же точки О на исходной характеристике стати-
ческого синхронизирующего момента, из любой точки
которой ротор после окончания переключения попадает
в точку устойчивого равновесия О' характеристики, сме-
щенной на шаг, не проходя точек неустойчивого равнове-
22 Зак. 29
338
Глава XIV. Синхронные двигатели
сия А' и В' (рис. 14.19, а, б). Ротор ШД при отработке
шага некоторое время качается (как и все синхронные
машины) около нового положения равновесия. Так, если
управляющий импульс переключит обмотки управления
в тот момент, когда ротор в процессе качания отклонится,
например, в сторону, обратную направлению вращения
(за точку Д')> то ротор окажется вне зоны динамической
устойчивости и переместится в прежнюю точку устойчи-
вого равновесия, произойдет сбой ШД. Последнее явле-
ние наиболее часто бывает в режиме холостого хода дви-
гателя, когда амплитуда свободных колебаний ротора
максимальна.
Как видно из рис. 14.19, зона динамической устойчи-
вости 0ду несимметрична относительно исходной точки
устойчивого равновесия О. Ее отрицательная часть ОА'=
= ОА—А'А всегда меньше положительной ОВ'=ОВ-\-
А-ВВ'. Здесь все отрезки в угловом измерении соответ-
ствуют: ОА — отрицательной, ОВ — положительной ча-
стям зоны статической устойчивости, А'А = ВВ' — цене
шага в электрических градусах. Зона динамической
устойчивости для реактивного ШД с симметричной маг-
нитной системой
0ду= (- у +а ) - ( у +а) -
а для ШД с активным ротором с такой же магнитной
системой
0ду— (—л+а) — (л-(-а).
Приведенные выражения показывают, что в направ-
лении вращения ротора все шаговые двигатели с любым
числом обмоток управления имеют запас устойчивости,
превышающий величину шага. В реактивном двигателе
запас устойчивости в обратном направлении вращения
ротора может быть меньше шага. Так, например, для ре-
активного ШД с симметричной магнитной системой с
тремя обмотками управления отрицательная часть зоны
динамической устойчивости
§ 14.7. Шаговые двигатели
339
л
Л
6
Одуотр---
= -30°
равна половине шага а=
= 60°.
л
Как следует из предыдущих рассуждений, работа ШД
без сбоя во всех режимах, включая холостой ход, обеспе-
чивается при условии, когда 0яу^а. Это требование со-
блюдается в ШД с активным ротором с числом обмоток
управления не менее двух и реактивных двигателях с тре-
мя (при шеститактной схеме управления) и более управ-
ляющими обмотками.
Чтобы повысить динамическую устойчивость, для
демпфирования свободных колебаний ротора иногда ис-
пользуют электромагнитные тормоза, обгонные муфты
и пр.
Частотой приемистости ШД называют максимальную
частоту следования управляющих импульсов, при кото-
рой ротор втягивается в синхронизм с места без потери
шага. Частота приемистости тем больше, чем выше дина-
мическая добротность ШД (отношение максимального
синхронизирующего момента к моменту инерции ротора,
и чем меньше цена шага. При одних и тех же
значениях Оя и аг частота приемистости растет с увеличе-
нием зоны динамической устойчивости (с увеличением
обмоток управления).
Однако при этом увеличиваются статическая и дина-
мическая ошибки двигателя. Статической ошибкой назы-
вают угол рассогласования оси ротора нагруженного ШД
по отношению к направлению вектора результирующей
н. с. статора в режиме фиксированного останова под то-
ком. Динамическая ошибка определяется мгновенным
значением угла рассогласования движущихся вектора
н. с. статора и оси ротора, обусловленного нагрузкой и
свободными колебаниями ротора. В пределе динамичес-
кая ошибка может быть равна отрицательной части зоны
динамической устойчивости. Поэтому, если эта зона зна-
чительно больше шага, то динамическая ошибка ШД мо-
жет превышать цену шага, что нежелательно. Для обеспе-
чения точности работы и упрощения схемы управления
340
Глава XIV. Синхронные двигатели
IJUI обычно используют двигатели с минимальным чис-
лом обмоток управления, при котором гарантируется
устойчивая работа.
С увеличением частоты приемистости возрастает бы-
стродействие ШД. Некоторые типы отечественных и зару-
бежных двигателей в определенном режиме управления
отрабатывают до 4—6 тысяч шагов в секунду.
Принцип действия и особенности конструкций шаго-
вых двигателей. Разработанные и выпускаемые в настоя-
Рис. 14.20. Схема магнитной системы
шагового двигателя с несимметрич-
ным реактивным ротором и подмагни-
чивающими полюсами на статоре.
щее время шаговые двигатели охватывают широкий диа-
пазон угловых шагов и вращающих моментов. Они выпол-
нены в виде серий и единичных исполнений. Для их
питания изготовляют различные электронные коммута-
торы.
Как отмечалось выше, рабочие свойства шаговых дви-
гателей в основном определяются количеством независи-
мо коммутируемых обмоток управления. Наиболее рас-
пространены двигатели с двумя и тремя обмотками
управления. Для примера рассмотрим по одной модифи-
кации ШД с одной, двумя и тремя управляющими обмот-
ками.
На рис. 14.20 изображена схема магнитной системы
ШД с несимметричным реактивным ротором и подмагни-
чивающими полюсами на статоре. Такой ШД имеет четы-
рехполюсный статор и явно выраженный двухполюсный
реактивный ротор с клювообразными выступами, опреде-
ляющими направление вращения ШД. Одна пара полю-
§ 14.7. Шаговые двигатели
341
сов статора выполнена из постоянных магнитов, а на дру-
гой размещена достаточно мощная обмотка управления.
Если сигнал управления отсутствует, то продольная
ось ротора ориентирована вдоль полюсов постоянных
магнитов. При подаче управляющего импульса под дей-
ствием поля, созданного обмоткой управления, ротор,
преодолевая сопротивление нагрузки и притяжение посто-
янно подмагниченных полюсов, поворачивается на 90°
в направлении клювообразных полюсов, стремясь занять
положение, соосное с полюсами обмотки управления.
В следующий момент обмотка управления отключает-
ся и ротор под действием поля постоянно подмагниченных
полюсов статора отрабатывает следующий шаг, равный
90°, в том же направлении. Наибольший момент сопро-
тивления нагрузки ЛГн, с которым может работать ШД
такого типа, ограничен величиной синхронизирующего
момента М, возникающего при взаимодействии ротора
с постоянно подмагниченными полюсами статора.
Описанная конструкция выполнима с любым числом
полюсов статора, кратным 4. Число полюсов реактивного
ротора должно быть вдвое меньшим.
Наиболее распространенным ШД с двумя обмотками
управления является двигатель с активным ротором, вы-
полненным в виде звездочки из постоянных магнитов.
Число его полюсов равно половине числа зубцов статора,
количество которых кратное 4.
Катушки обмоток управления, уложенные в пазах
статора, как показано на рис. 14.21, сдвинуты между со-
бой на одно зубцовое деление, что соответствует 90 элек-
трическим градусам. Такое размещение обмоток управле-
ния при определенной полярности их совместного вклю-
чения обеспечивает возбуждение зубцов статора через
один с чередующейся полярностью. Причем результирую-
щая н. с., действующая вдоль осей возбужденных зубцов,
равна сумме н. с. обмоток (графики н. с. показаны на
том же рисунке).
ШД работает следующим образом. В каждый момент
времени на напряжение источника постоянного тока одно-
временно включены обе обмотки управления. При поступ-
лении управляющего импульса полярность включения од-
ной из обмоток управления изменяется на обратную, что
342
Глава XIV. Синхронные двигатели
вызывает поворот оси результирующей н. с. и ротора на
одно зубцовое деление статора в каком-либо направлении
в зависимости от того, какая из обмоток была переклю-
чена. Реверс ШД осуществляется путем изменения оче-
редности коммутации обмоток. При реверсе одна из об-
моток управления коммутируется 2 раза подряд.
Рис. [4.21. Развертка магнитной системы реверсивного двухобмоточ-
ного двигателя с активным ротором.
По технологическим причинам ротор с постоянными
магнитами при малой мощности двигателя не удается
выполнить с числом полюсов больше 12. Поэтому ШД
этого типа практически могут иметь шаг до 15°. Они име-
ют хорошую динамическую добротность, широкую зону
устойчивости и благодаря этому работают без сбоев ша-
га, что является их важным достоинством. Синхронизиру-
ющий момент высок, благодаря чему собственная ошиб-
ка, вносимая таким ШД в работу системы, не превышает
половины шага.
Управление знакопеременными импульсами рассмот-
ренного двигателя усложняет конструкцию электронного
коммутатора. Для упрощения схемы последнего обмотки
§ 14.7. Шаговые двигатели
343
ШД выполняют с дополнительными выводами от средней
точки. Таким образом, каждая управляющая обмотка
разделяется на две половинки и ШД по существу стано-
вится 4-обмоточным. Благодаря пространственному сдви-
гу половинок обмоток на 180 электрических градусов по-
очередное питание их однополярными импульсами обес-
Рис. 14.22. Магнитная си-
стема и схема соединения
обмоток трехобмоточного
редукторного шагового
двигателя (к зажимам
Нц Н2; Н3 и Ки Кг; Кз
присоединены начала и
концы обмоток управле-
ния. Цифры /; 2; 3 ука-
зывают номера обмоток
управления, размещен-
ных на полюсах статора).
печивает такую же отработку шага, как и в описанном
ШД с двумя обмотками управления.
Рассмотрим устройство и работу наиболее распрост-
раненного реактивного шагового двигателя редукторного
типа с тремя обмотками управления, магнитная система
которого состоит из ротора с большим числом зубцов и
статора с шестью явно выраженными полюсами. На по-
люсных наконечниках последних также имеются зубцы
(рис. 14.22). Каждая обмотка управления состоит из ка-
тушек, расположенных на четырех полюсных выступах
статора. Между собой обмотки управления сдвинуты на
один полюс так, что каждый полюс статора охватывается
катушками двух смежных обмоток управления. Благода-
ря этому при отключении одной из них энергия сцеплен-
ного с ней магнитного поля трансформируется во вклю-
чаемую обмотку.
344
Глава XIV. Синхронные двигатели
Каждому переключению обмоток управления соответ-
ствует возбуждение последовательно расположенных по-
люсов статора, т. е. поворот оси н. с. в воздушном зазоре.
Зубцы ротора соосны с зубцами одной диаметрально рас-
положенной пары полюсов статора и смещены на 1/3 зуб-
цового деления соответственно по часовой стрелке и про-
тив нее по отношению к зубцам двух других пар полюсов.
При подаче импульсов поочередно на первую, вторую
и третью обмотки управления двигатель каждый раз бу-
дет поворачиваться до тех пор, пока зубцы ротора не сов-
падут с зубцами возбужденного полюса статора, т. е. при
каждом импульсе будет отрабатываться шаг, равный 1/3
зубцового деления статора.
Для осуществления реверса ШД достаточно изменить
порядок импульсов, т. е. подавать их последовательно на
первую, третью и вторую обмотки управления. Управле-
ние таким двигателем, помимо трехтактной схемы, может
быть шеститактным, когда в определенной последователь-
ности включаются то одна, то две обмотки. Шеститактное
управление увеличивает зону динамической устойчивости.
К шаговым двигателям с тремя обмотками управле-
ния и реактивным ротором относятся распространенные
в СССР шаговые двигатели типов ШД-4, ШД-4Б, ШД-5,
имеющие цену шага, равную 1,5—3°.
§ 14.8. Синхронный двигатель с катящимся ротором (ДКР)
Синхронные электрические машины с катящимся рото-
ром, опытные образцы которых сконструированы в СССР,
несомненно найдут широкое применение в системах авто-
матики в качестве шаговых и безредукторных тихоходных
малоинерционных исполнительных двигателей.
На рис. 14.23 показана конструктивная схема ДКР.
В стальной корпус 1 запрессованы пакет сердечника ста-
тора 2 с трех- или двухфазной (в конденсаторном испол-
нении) обмоткой 4, ферромагнитные тороиды 6 и катки
статора 7. Между тороидами и сердечником статора по-
мещены две тороидальные катушки 5 обмотки постоян-
ного тока.
Ротор в отличие от обычных машин относительно рас-
точки статора расположен эксцентрически, т. е. его ось
§ 14.8. Двигатель с катящимся ротором
345
и ось расточки статора не совпадают. На валу 10 ротора
закреплены шихтованный пакет стали сердечника 3 ро-
тора без обмотки, два пакета магнитопровода 8 унипо-
лярного потока и два катка 9.
Конструкция двигателя выполнена таким образом, что
ротор не имеет непосредственного соприкосновения с по-
Рис. 14.23. Конструктивная схема синхронного двигателя с катящимся
ротором.
верхностью расточки пакета статора. Между ними благо-
даря устройству катков на статоре и роторе обеспечива-
ется минимальный воздушный зазор 6.
Принцип действия двигателя заключается в следую-
щем. При включении обмотки постоянного тока на напря-
жение возникает униполярное поле (направление потока
Ф= этого поля показано стрелками на рис. 14.23), созда-
ющее вследствие эксцентриситета одностороннее магнит-
ное притяжение сердечников ротора и статора в стороне
минимального воздушного зазора. Если затем включить
двухполюсную двух- или трехфазную обмотку статора на
соответствующую сеть переменного тока, то возникнет
вращающееся магнитное поле статора, которое будет
складываться в зазоре с униполярным полем.
На рис. 14.24 показаны графики B6i = f(x) униполяр-
ного, Bfl2—f(x) двухполюсного вращающегося и Ввх=
= Вм-|-Вб2=/(х) результирующего полей. Результирую-
346
Глава XIV. Синхронные двигатели
щее поле оказывается несимметричным, и поэтому появ-
ляется сила одностороннего магнитного притяжения, век-
тор которой совпадает с максимумом В^х и вращается
синхронно со скоростью вращения поля обмотки перемен-
ного тока.
Допустим, что в рассматриваемый момент времени
максимум магнитного поля совпадает с точкой А на ста-
Рис. 14.24. Распределение вдоль воздуш-
ного зазора ДКР несимметричного маг-
нитного поля, полученного при наложе-
нии униполярного поля иа вращающееся
поле обмотки с 2р=2.
торе (рис. 14.25, а). В этом случае под действием силы Q
ротор притягивается к точке А статора. Если теперь ре-
зультирующее магнитное поле повернется в пространстве
на некоторый угол а, то сила магнитного притяжения Q
повернется на такой же угол (рис. 14.25,6). Разложив
силу Q на составляющие Qx и Qv, видим, что Qx, притяги-
вая ротор к статору, стремится повернуть его. Под дей-
ствием Qx ротор и его катки повернутся на угол а и
минимальный воздушный зазор окажется у точки В.
Таким образом, при вращении результирующего не-
симметричного поля точка А минимального зазора будет
перемещаться с синхронной скоростью Йо. Ротор же на
своих катках будет поворачиваться вокруг своей оси со
скоростью й, значительно меньшей Йо, в направлении,
противоположном вращению поля. При этом синхронно
с полем, но с малой скоростью по окружности с центром
в точке О, будет перемещаться и центр ротора О'.
Действительно, при повороте магнитного поля в про-
странстве на один оборот (на угол 2л рад) ротор, пере-
мещаясь своими катками по каткам статора, повернется
§ 14.8. Двигатель е катящимся ротором
347
вокруг своей оси в обратную сторону на угол р, равный
разности длин окружностей катков статора и ротора, де-
ленной на радиус катка ротора, т. е.
2л/?с—2л/?р
Р =------ ----
Ар
где /?с и /?р — радиусы катков статора и ротора.
(14.16)
Рис. 14.25. К объяснению принципа действия дви-
гателя с катящимся ротором.
Соответственно выражению (14.16) угловая скорость
вращения вала ротора составит
Q — Qo ^CD рад/сек (14.17)
Ар
или
лп то Rc—Rp
~ 3(Г = ^30 Rp~’
откуда
п — «0 —с -^-р- — 60/1 --с об/мин. (14.18)
Ар Ар
Здесь по=6О/1, так как р= 1.
348
Глава XIV. Синхронные двигатели
д Rp
величина —------ значительно меньше единицы, по-
Лр
этому скорость вращения п ротора значительно меньше
синхронной по. При частоте сети 50 гц п может достигать
2—200 об/мин.
Таким образом, в двигателях с катящимся ротором
могут быть получены весьма значительные коэффициенты
редукции без применения специальных редукторов.
В ДКР с гладкими поверхностями катков статора и
ротора при значительном нагрузочном моменте на валу
качение происходит с проскальзыванием и двигатель
работает как асинхронный. Механическая характеристи-
ка при этом будет подобна характеристике гистерезис-
ного двигателя (рис. 14.16). В синхронных ДКР поверх-
ности катков выполняют зубчатыми, что устраняет про-
скальзывание.
Основные достоинства синхронного двигателя с катя-
щимся ротором: возможность получения без редуктора
значительного снижения скорости вращения; большой
вращающий момент (номинальный и пусковой); малая
инерционность; возможность работы на упор (при п = 0)
без заметного увеличения токов и мощности. Недостатки:
необходимость специальных кинематических устройств
для передачи вращения с вала катящегося ротора на вы-
ходной вал двигателя; необходимость двойного питания;
значительные вибрации, обусловленные центробежными
силами.
Глава XV. КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО
ТОКА МАЛОЙ МОЩНОСТИ
§ 15.1. Однофазный коллекторный двигатель
Однофазные коллекторные двигатели малой мощности
(до 600 вт) применяются в некоторых устройствах авто-
матики (в качестве вспомогательных), для привода высо-
коскоростных механизмов и машин.
По своему устройству они отличаются от двигателей
постоянного тока лишь тем, что станина и полюсы
с целью уменьшения потерь на вихревые токи выполня-
ются шихтованными из листовой электротехнической
стали.
Однофазные коллекторные двигатели имеют последо-
вательное возбуждение, поэтому ток якоря (ia=i) и н. с.
FB обмотки возбуждения совпадают по фазе. Но поток
полюсов Фв, создаваемый н. с. FB, отстает от тока i на
угол а из-за влияния потерь в стали и токов в секциях,
замкнутых накоротко при коммутации. Будем считать,
что ток i и поток Фв изменяются во времени синусоидаль-
но, т. е. t=7M sin(<o/-{-a); Фв = Фвмзт®Л
Вращающий электромагнитный момент однофазного
коллекторного двигателя создается, как и в двигателях
постоянного тока, взаимодействием тока якоря с магнит-
ным потоком полюсов. Мгновенное значение этого мо-
мента
т = Смг'Фв = См/мФвм sin(wf+a)sin (15-1)
График зависимости m=f(f) представлен на рис. 15.1.
Анализ его показывает, что электромагнитный момент m
изменяется в течение каждого периода, достигая макси-
мальной величины (когда произведение i на Фв макси-
мально), становясь равным нулю (при прохождении тока
i или потока Фв через нуль) и приобретая отрицательные
значения (когда мгновенные значения тока i и потока Фв
имеют разные знаки). Причиной некоторых отрицатель-
ных значений m является фазовый угол сдвига а. На ра-
350
Глава XV. Коллекторные двигатели малой мощности
боту двигателя непостоянство момента практически влия-
ния не оказывает вследствие большой частоты изменения
т во времени и значительной инерции вращающихся
частей.
Рис. 15.1. Кривые тока, магнит-
ного потока и вращающего мо-
мента однофазного коллектор-
ного двигателя.
Среднее значение вращающего момента двигателя
равно
п п
Л1Ср= mdt = См/мФвм sin <%) sin (atdt=
Я о л о
См^мФвм COS ОС — Сэд/Фв COS ОС.
(15.2)
Выражение (15.2) показывает, что Мср однофазного
коллекторного двигателя определяется не только величи-
ной тока и потока возбуждения, но и сдвигом по фазе
между ними.
При работе двигателя потребляемый им ток / создает
поток возбуждения Фв, пульсирующий по оси полюсов, и
поток реакции якоря Фя, пульсирующий по оси щеток.
Каждый из них индуктирует соответствующие э. д. с. в об-
мотках возбуждения и якоря.
Поток Фв индуктирует трансформаторную э. д. с. ЕтВВ
в обмотке возбуждения:
£твв=4,44аУвЬФвм (15.3)
и трансформаторную э. д. с. ЕТяв в обмотке якоря, как
во вторичной обмотке трансформатора. Направление £\яв
§ 15.1. Однофазный коллекторный двигатель
351
в проводниках якоря показано на рис. 15.2, а. На щетках,
установленных на линии геометрической нейтрали, эта
э. д. с. равна нулю как в неподвижном, так и во вращаю-
щемся якоре.
Рис. 15.2. Направления э. д. с., ин-
дуктированных в проводниках об-
мотан якоря однофазного коллек-
торного двигателя.
В проводниках обмотки вращающегося якоря наво-
дится также э. д. с. вращения Евяв зя счет пересечения
этих проводников потоком возбуждения. Величина ее
Е вяв —— СеДФв,
а направление соответствует правилу правой руки (рис.
15.2, б). Э. д. с. Ёвяв находится в противофазе с потоком
Фв, так как при работе машины в режиме двигателя она
противодействует протеканию тока /.
Пульсирующий поток реакции якоря Фя индуктирует
в обмотке якоря трансформаторную э. д. с. Направление
ее в проводниках якоря показано на рис. 15.2,6, а дей-
ствующее значение
Етяя — 4,44koaWнftФям.
(15-4)
352
Глава XV. Коллекторные двигатели малой мощности
Здесь wlt = --число витков одноп параллельной ветви
4а
обмотки якоря;
k0H—обмоточный коэффициент обмотки
якоря.
Э. д. с. ЕТяя снимается щетками.
Поле якоря в проводниках вращающегося якоря ин-
дуктирует э. д. с. Едяя (на рис. 15.2, г показано ее направ-
Рпс. 15.3. Векторная диаграмма
однофазного коллекторного двига-
теля.
ление). На щетках эта э. д. с. равна нулю. Приложенное
к зажимам двигателя напряжение Ё уравновешивает
э. д. с. Етпв, Евяв и Етяя. Кроме этого, часть напряжения U
затрачивается на покрытие падении напряжения/(гя4-гв)
и /(x;l-|-xD) в активных и индуктивных сопротивлениях
обмоток якоря и возбуждения.
Таким образом,
0= (ЁТВв4'^тяяН"Евяв) 4*/(гя4“Гв) +Ё (хя-|-хв). (15.5)
На основании уравнения (15.5) на рис. 15.3 представлена
векторная диаграмма напряжений вращающегося кол-
лекторного двигателя.
Анализ ее показывает, что для повышения cos гр дви-
гателя следует стремиться получить как можно малые
§ 15.1. Однофазный коллекторный двигатель
353
значения э. д. с. £твв и £тяя и падения напряжения 7(хя+
+%в) при возможно большей величине £вяв. Уменьшение
£твв возможно за счет уменьшения числа витков wB и
потока Фв.
Выбирая минимально допустимый воздушный зазор,
можно снизить потоки рассеяния обмоток двигателя, а
следовательно, и падения напряжения 1(хя-\-хв). Э. д. с.
£вяв с увеличением скорости вращения растет, а угол
сдвига между током и напряжением двигателя умень-
шается.
Недостатки однофазных коллекторных двигателей:
плохая коммутация, являющаяся источником радио-
помех, сравнительно большая шумность, возникающая
при трении щеток о коллектор, невысокий коэффициент
мощности.
Причиной плохой коммутации является то, что в ком-
мутируемой секции, замкнутой щеткой накоротко, кроме
реактивной э. д. с. и э. д. с. вращения, наводится еще
трансформаторная £т. Создает ее пульсирующий поток
полюсов, с осью которых совпадает ось коммутируемой
секции, являющейся как бы замкнутой накоротко вторич-
ной обмоткой трансформатора. Для улучшения коммута-
ции в коллекторных двигателях переменного тока увели-
чивают число секций (и коллекторных пластин), а число
витков в секциях сокращают; выбирают щетки с повы-
шенным удельным сопротивлением; в нереверсивных дви-
гателях смещают щетки с геометрической нейтрали.
Однако все это не устраняет полностью искрение под
щетками.
Рабочие характеристики однофазного коллекторного
двигателя примерно такие же, как и у двигателя постоян-
ного тока с последовательным возбуждением.
Скорость вращения регулируют такими же способами,
как и у двигателей постоянного тока. Но наиболее эконо-
мичный способ регулирования — путем изменения напря-
жения с помощью автотрансформатора типа ЛАТР.
Простота плавного регулирования в широких пределах
и возможность получения при промышленной частоте
50 гц очень высоких скоростей вращения (до 20000
об/мин) — положительные качества этого двигателя.
354
Глава XV. Коллекторные двигатели малой мощности
§ 15.2. Универсальный коллекторный двигатель
Универсальные коллекторные двигатели, применяемые
в некоторых устройствах автоматики и телемеханики,
могут работать как от сети постоянного, так и от сети
переменного тока. Они выполняются маломощными, с по-
следовательным возбуждением.
Рабочий процесс универсального коллекторного дви-
гателя, питаемого постоянным током, ничем не отличает-
Рис. 15.4. Механические ха-
рактеристики универсально-
го коллекторного двигателя.
Рис. 15.5. Схема
универсального
коллекторного дви-
гателя.
ся от рабочего процесса двигателя постоянного тока с по-
следовательным возбуждением.
Однако его характеристики из-за влияния индуктив-
ных сопротивлений обмоток якоря и возбуждения на ве-
личину и фазу тока при питании от сети переменного тока
несколько хуже, чем при работе от сети постоянного тока.
Механическая характеристика двигателя, включенного на
переменное напряжение, несколько мягче, особенно при
больших моментах нагрузки. На рис. 15.4 сплошными
линиями показаны механические характеристики при пи-
тании двигателя от сети постоянного и переменного тока.
§ 15.2. Универсальный коллекторный двигатель
355
Чтобы получить примерно одинаковые номинальные
скорости вращения при номинальном моменте, как при
работе на постоянном, так и на переменном токе, обмотку
возбуждения выполняют секционированной. Это позво-
ляет включать в сеть переменного тока не всю ее, а только
часть по схеме, изображенной на рис. 15.5. Уменьшение
числа витков этой обмотки вызывает уменьшение магнит-
ного потока, что повышает скорость вращения двигателя.
Механическая характеристика приподнимается, не меняя
своей жесткости (пунктирная линия па рис. 15.4).
Величина тока, потребляемая одинаково нагруженным
универсальным коллекторным двигателем, отличается,
если питание осуществляется от разных сетей. Она будет
больше, если машина работает на переменном токе, так
как он, помимо активной, имеет и реактивную составляю-
щую. Повышенные электрические и магнитные потери
двигателя в данном случае снижают к. п. д., который бу-
дет меньше, чем при работе того же двигателя от сети
постоянного тока.
Условия коммутации при переменном токе также хуже
из-за возникновения в коммутируемых секциях трансфор-
маторной э. д. с. По этой причине искрение под щетками
и, следовательно, радиопомехи более значительны.
Чтобы подавить радиопомехи в универсальных кол-
лекторных двигателях, помимо симметрирования обмотки
возбуждения (разделения ее на две части и соединения
симметрично относительно разнополярных щеток), часто
применяют фильтры.
В СССР выпускаются универсальные коллекторные
двигатели серий УЛ, МУН, УМТ.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 5
Введение 7
§0.1, Назначение и классификация электрических машин 7
§ 0.2. Преобразование энергии в электрических машинах 8
РАЗДЕЛ МАШИНЫ ПОСТОЯННОГО ТОКА
ПЕРВЫЙ
Глава I. Общие вопросы теории машин постоянного тока 13
§ 1.1. Устройство и принцип действия машин постоянного тока 13
§ 1.2. Обмотки якоря 18
§ 1.3, Электродвижущая сила обмотки якоря 26
§ 1.4. Реакция якоря 28
§ 1.5, Коммутация 32
§ 1.6. Электромагнитный момент машины 39
§ 1.7. Потери и к. п. д. машины постоянного тока 41
Глава II. Генераторы постоянного тока 44
§ 2.1. Классификация генераторов 44
§ 2.2. Магнитоэлектрические генераторы 44
§ 2.3. Генератор с независимым возбуждением 45
§ 2.4. Генератор с параллельным возбуждением 49
§ 2.5. Радпогенераторы 53
§ 2.6. Тахогенераторы постоянного тока 54
§ 2.7. Электромашинные усилители (ЭМУ) 63
Глава III. Двигатели постоянного тока 79
§ 3.1. Основные сведения 79
Оглавление
363
§ 3.2. Характеристики двигателей постоянного тока 82
§ 3.3. Исполнительные двигатели постоянного тока 90
РАЗДЕЛ ТРАНСФОРМАТОРЫ
ВТОРОЙ
Глава IV. Трансформаторы общего применения 108
§4.1. Назначение и конструкция трансформаторов I0S
§ 4.2. Дифференциальные и комплексные уравнения однофаз-
ного двухобмоточного трансформатора 112
§ 4.3. Приведение величин в трансформаторе 117
§ 4.4. Векторные диаграммы трансформатора 118
§ 4.5. Схема замещения 120
§ 4.6. Режим холостого хода 122
§ 4.7. Режим короткого замыкания 124
§ 4.8. Изменение вторичного напряжения трансформатора 127
§ 4.9. Потери в трансформаторе и его к. п. д. 130
§ 4.10. Трехфазные трансформаторы 133
Глава V. Специальные трансформаторы 134
§ 5.1. Многообмоточные однофазные трансформаторы 134
§ 5.2. Автотрансформаторы 133
§ 5.3. Импульсные трансформаторы 140
§ 5.4. Пик-трансформаторы 147
раздел асинхронные машины
ТРЕТИЙ
Глава VI. Общие сведения 150
§ 6.1. Устройство и принцип действия асинхронной машины 150
§ 6.2. Обмотки машин переменного тока и наведение в них
э. д. с. 153
§ 6.3. Намагничивающие силы обмоток переменного тока 170
Глава VII. Трехфазный асинхронный двигатель 179
§ 7.1. Асинхронный двигатель при неподвижном роторе 179
§ 7.2. Трехфазный асинхронный двигатель с вращающимся ро-
тором 182
364
Оглавление
§ 7.3. Энергетическая диаграмма, потери и к. п. д. асинхрон-
ного двигателя 189
§ 7.4. Электромагнитный вращающий момент асинхронного
двигателя 190
§ 7.5. Механические и рабочие характеристики асинхронного
двигателя 194
§ 7.6. Пуск в ход асинхронных двигателей 196
§ 7.7. Регулирование скорости вращения 197
Глава VIII. Однофазные и конденсаторные двигатели 201
§ 8.1. Устройство, принцип действия и способы пуска в ход
однофазных асинхронных двигателей 201
§ 8.2. Однофазный двигатель с экранированными (расщеплен-
ными) полюсами 204
§ 8.3. Асинхронные конденсаторные двигатели 206
§ 8.4. Включение трехфазных асинхронных двигателей для ра-
боты от однофазной сети 209
Глава IX. Асинхронные исполнительные двигатели 211
§ 9.1. Требования, предъявляемые к асинхронным исполни-
тельным двигателям. Устройство и принцип действия 211
§ 9.2. Уравнение токов и схемы замещения асинхронных ис-
полнительных двигателей 218
§ 9.3. Характеристики асинхронного исполнительного двига-
теля 222
§ 9.4. Сравнение характеристик двигателя с полым немагнит-
ным ротором при различных способах управления 231
§ 9.5. Динамические свойства асинхронных исполнительных
двигателей 234
Глава X. Асинхронный тахогенератор 236
§ 10.1. Устройство, принцип действия 236
§ 10.2. Уравнение выходной характеристики асинхронного тахо-
генератора. Погрешности и способы их уменьшения 238
Глава XI. Поворотные трансформаторы 245
§ 11.1. Назначение, устройство и принцип действия 24!»
§ 11.2. Синусно-косинусный поворотный трансформатор 247
§ 11.3. Симметрирование синусно-косинусного поворотного
трансформатора 251
Оглавление
365
§ 11.4. Линейный поворотный трансформатор 256
§ 11.5. Поворотный трансформатор-построитель 259
Глава XII. Сельсины 262
§ 12.1. Общие сведения 262
§ 12.2. Сельсины в трехфазиой системе синхронной связи 263
§ 12.3. Устройство однофазных контактных и бесконтактных
сельсинов 266
§ 12.4. Работа однофазных сельсинов в индикаторном режиме 269
§ 12.5. Работа однофазных сельсинов в трансформаторном ре-
жиме 279
§ 12.6. Сельсин-двнгатель 283
§ 12.7. Дифференциальные сельсины 285
§ 12.8. Магнесины 287
РАЗДЕЛ СИНХРОННЫЕ МАШИНЫ
ЧЕТВЕРТЫЙ
Глава XIII. Синхронные генераторы 291
§ 13.1. Синхронные генераторы промышленной частоты 291
§ 13.2. Генераторы повышенной частоты 302
§ 13.3. Синхронный тахогенератор 308
Глава XIV. Синхронные двигатели 310
§ 14.1. Классификация синхронных двигателей 310
§ 14.2. Синхронные двигатели с электромагнитным возбужде-
нием 310
§ 14.3. Магнитоэлектрические синхронные двигатели 318
§ 14.4. Синхронные реактивные двигатели 321
§ 14.5. Синхронные гистерезисные двигатели 326
§ 14.6. Реактивно-гистерезисные двигатели 331
§ 14.7. Шаговые двигатели 333
§ 14.8. Синхронный двигатель с катящимся ротором (ДКР) 344
366 Оглавление
Глава XV. Коллекторные двигатели переменного тока малой
мощности 349
§ 15.1. Однофазный коллекторный двигатель 349
§ 15.2. Универсальный коллекторный двигатель 354
Литература 386
Предметный указатель 357
Каляева Ангелина Александровна
Мазур Алексей Яковлевич
ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
Редактор В. П. Тимошенков
Обложка худ. В. П. Максимова
Худ. редактор Г. Г. М а л ы ше в
Техн, редактор Г. М. Р о м а и ч у к
Корректор С. С. Голод
АТ 04069. Сдано в набор 21/1-1971 г. Подписано к печати 1/VI-1971 г.
Бумага 84Х108’/зз типогр. № 2. Печ. л. 11,5 (19,32). Уч.-изд. л. 19,22.
Изд. № 68—144. Тип. зак. 29. Тираж 8000 экз. Цена 80 коп.
Издательство «Вышэйшая школа» Государственного комитета Совета Мини-
стров БССР по печати. Редакция технической литературы. Минск, ул. Ки-
рова, 24.
Ордена Трудового Красного Знамени типография издательства ЦК КПБ.
Минск, Ленинский пр., 79.