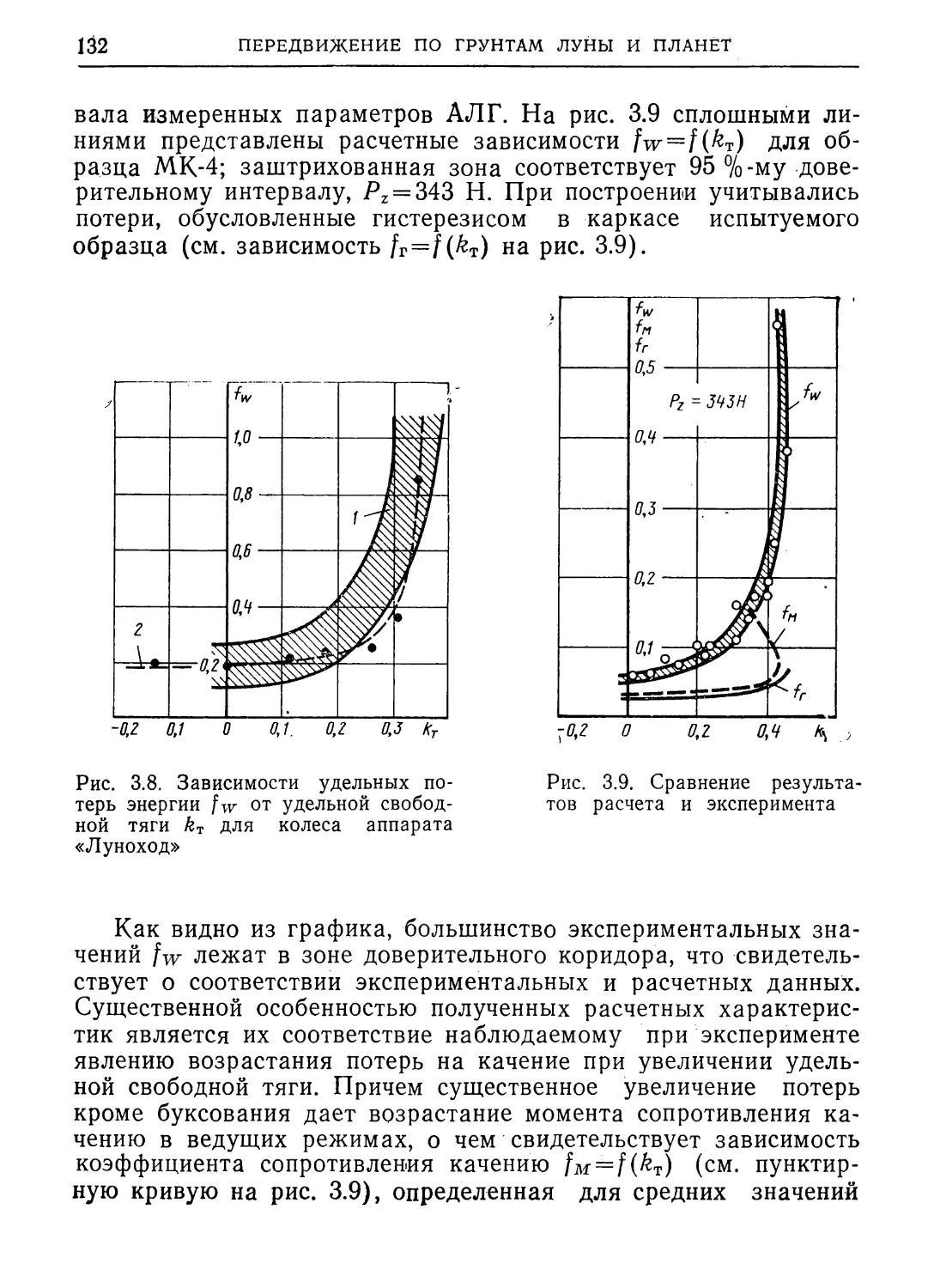
/









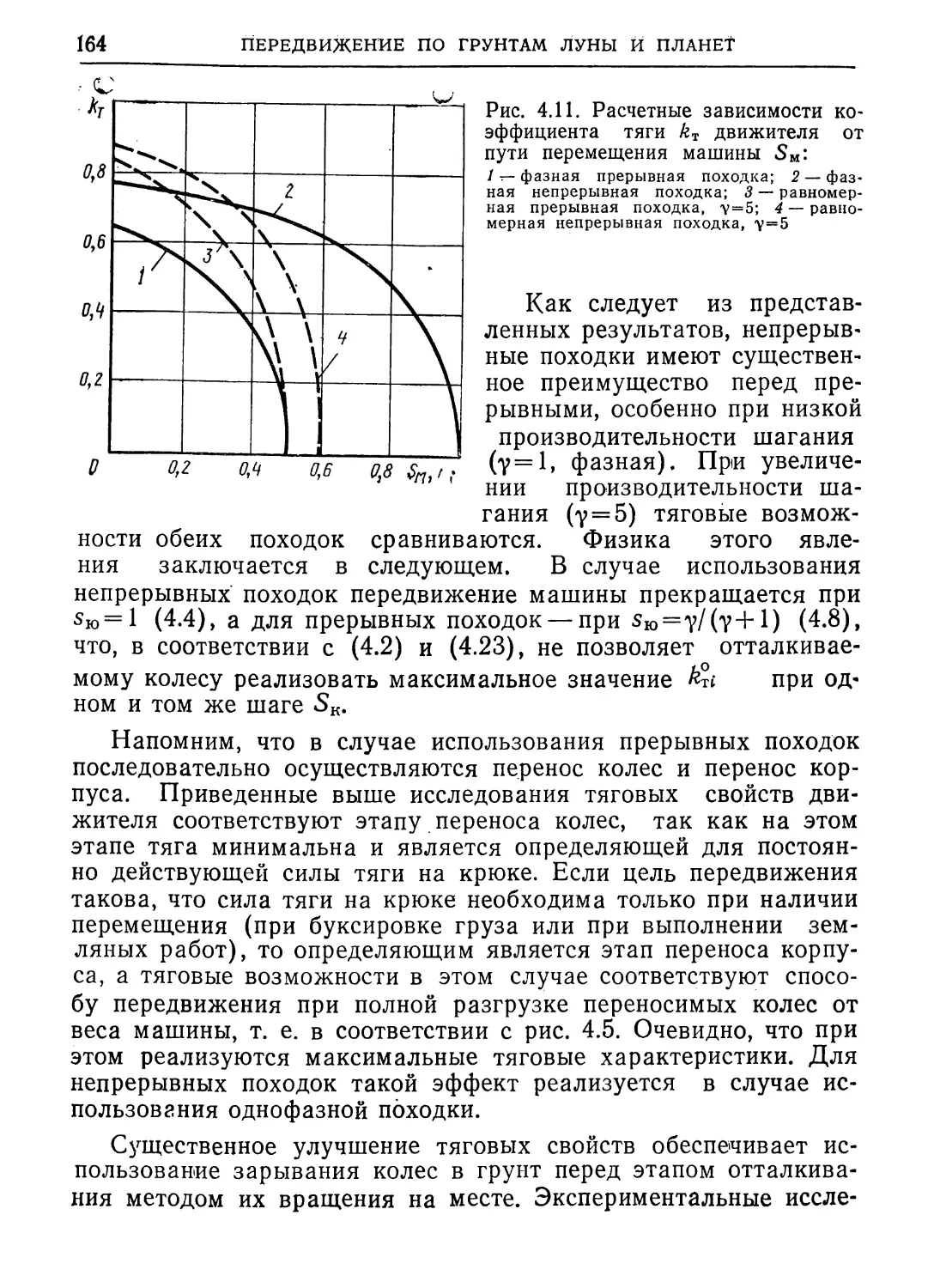





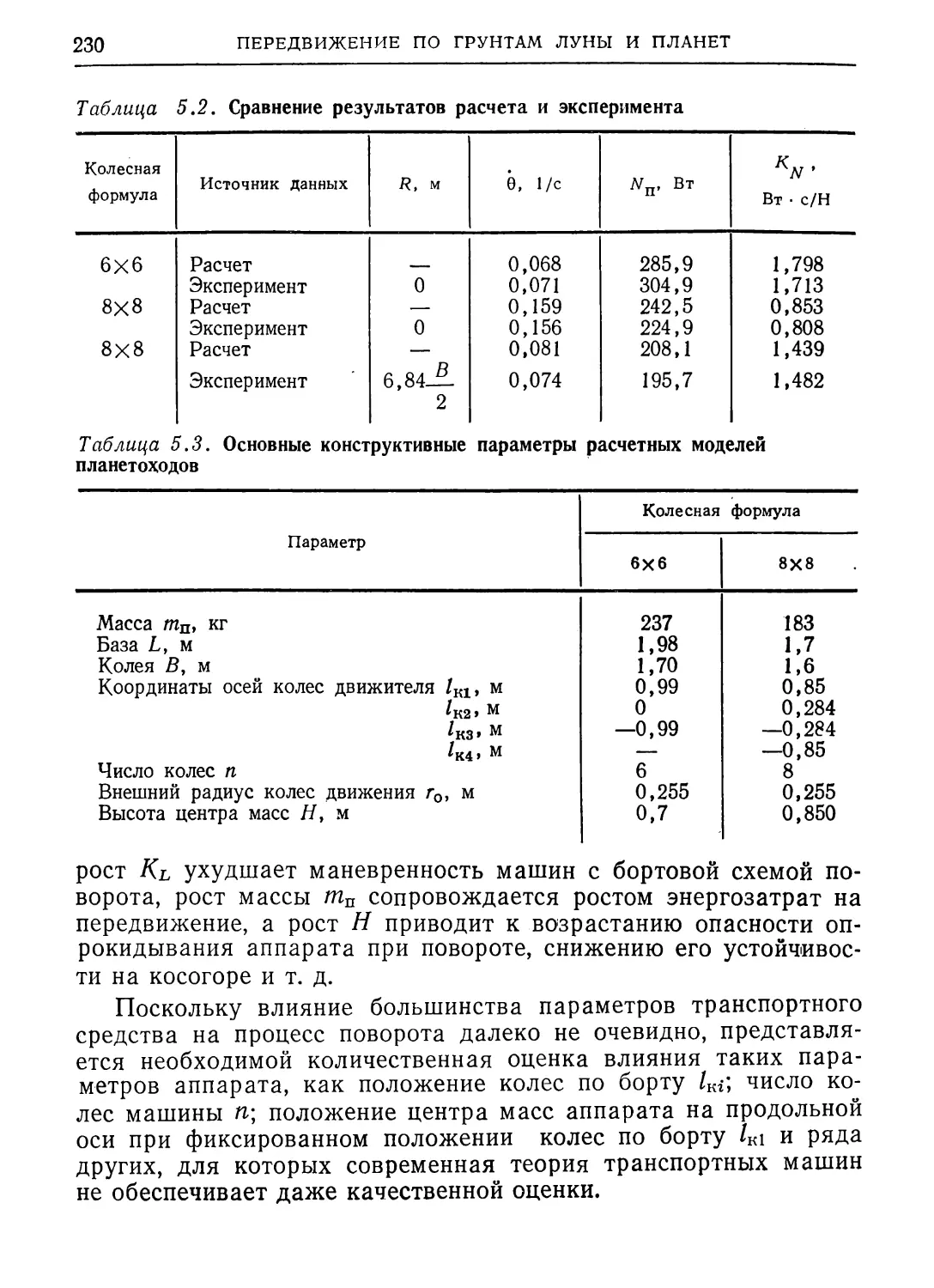
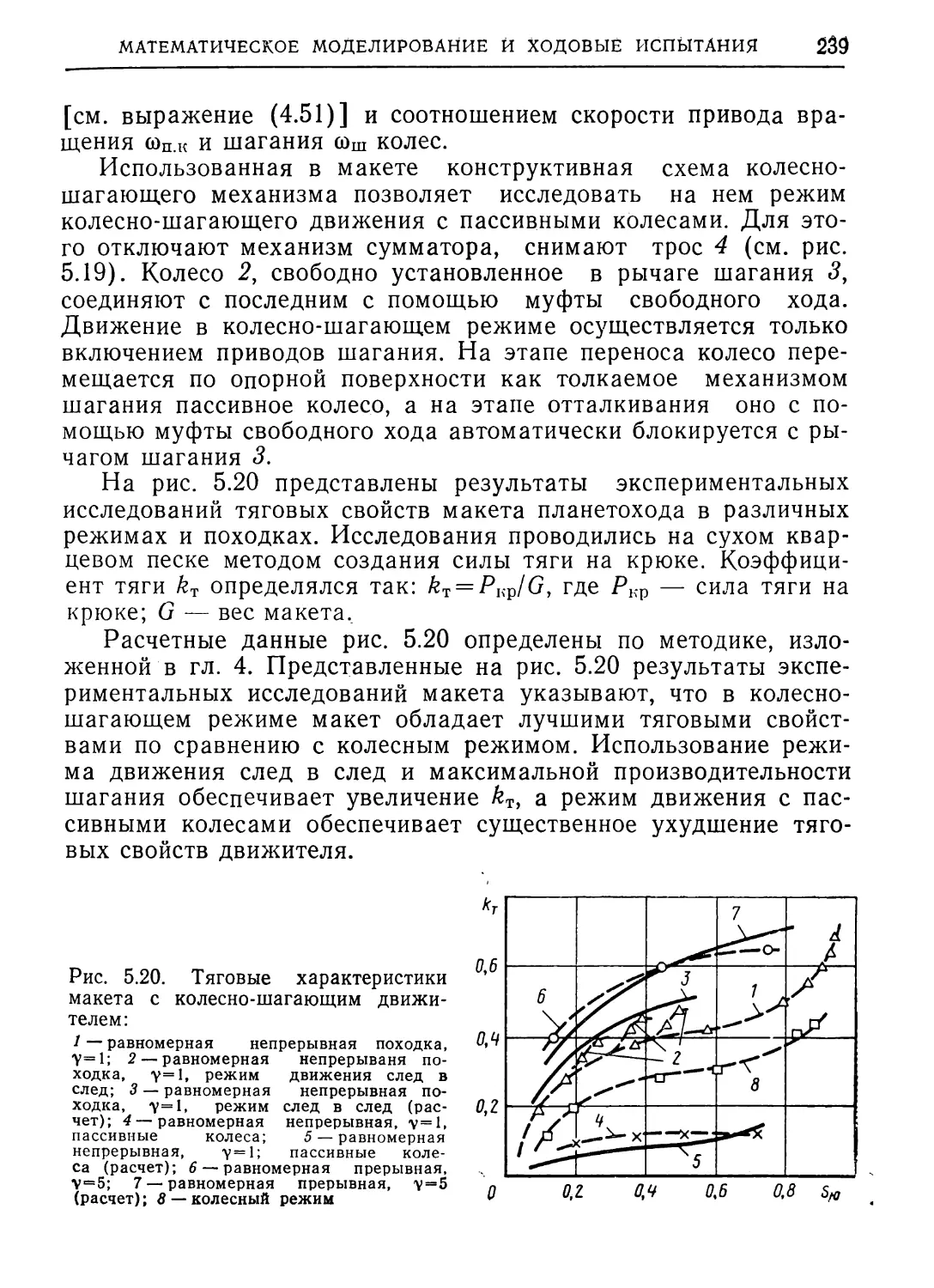

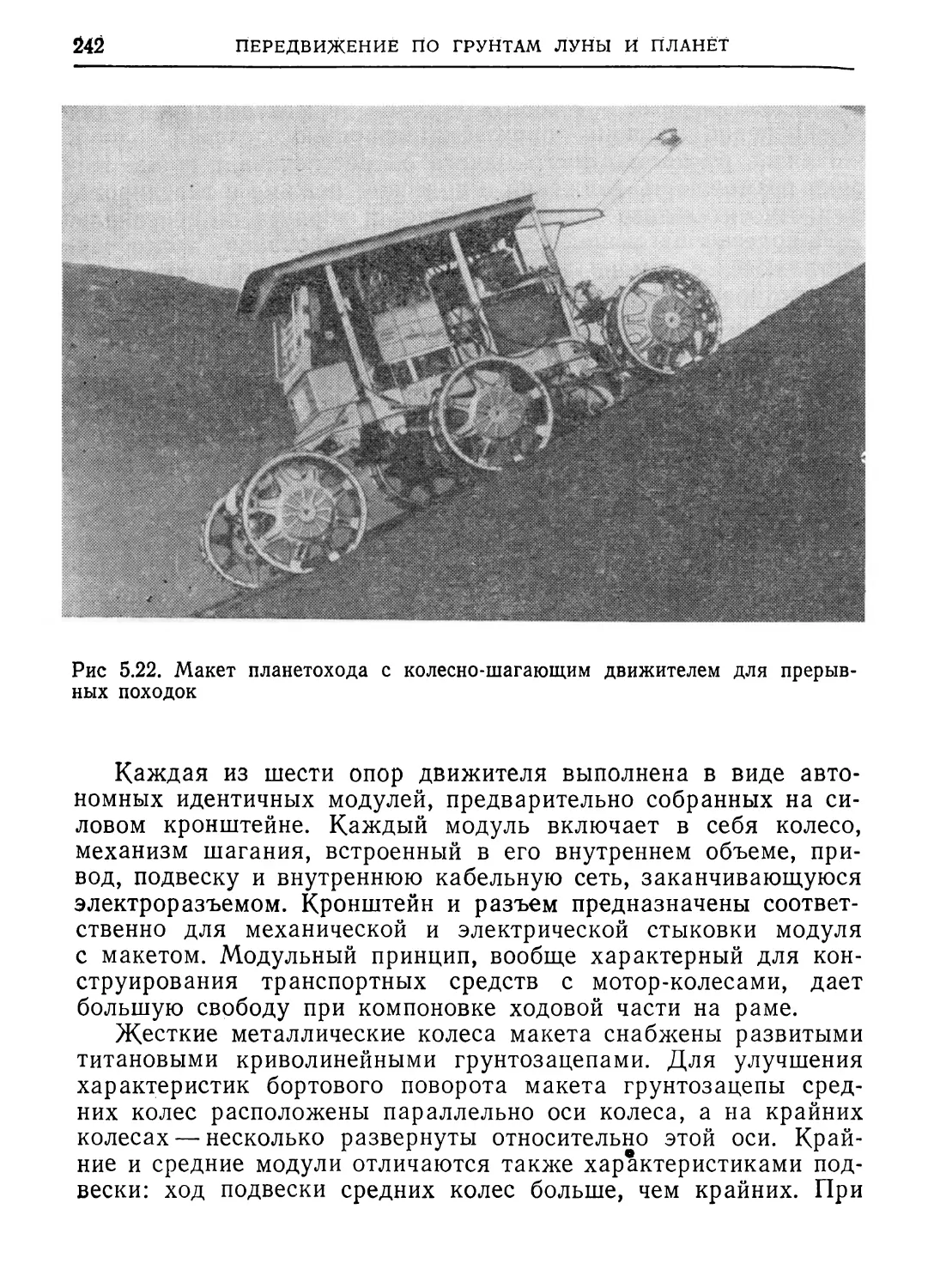
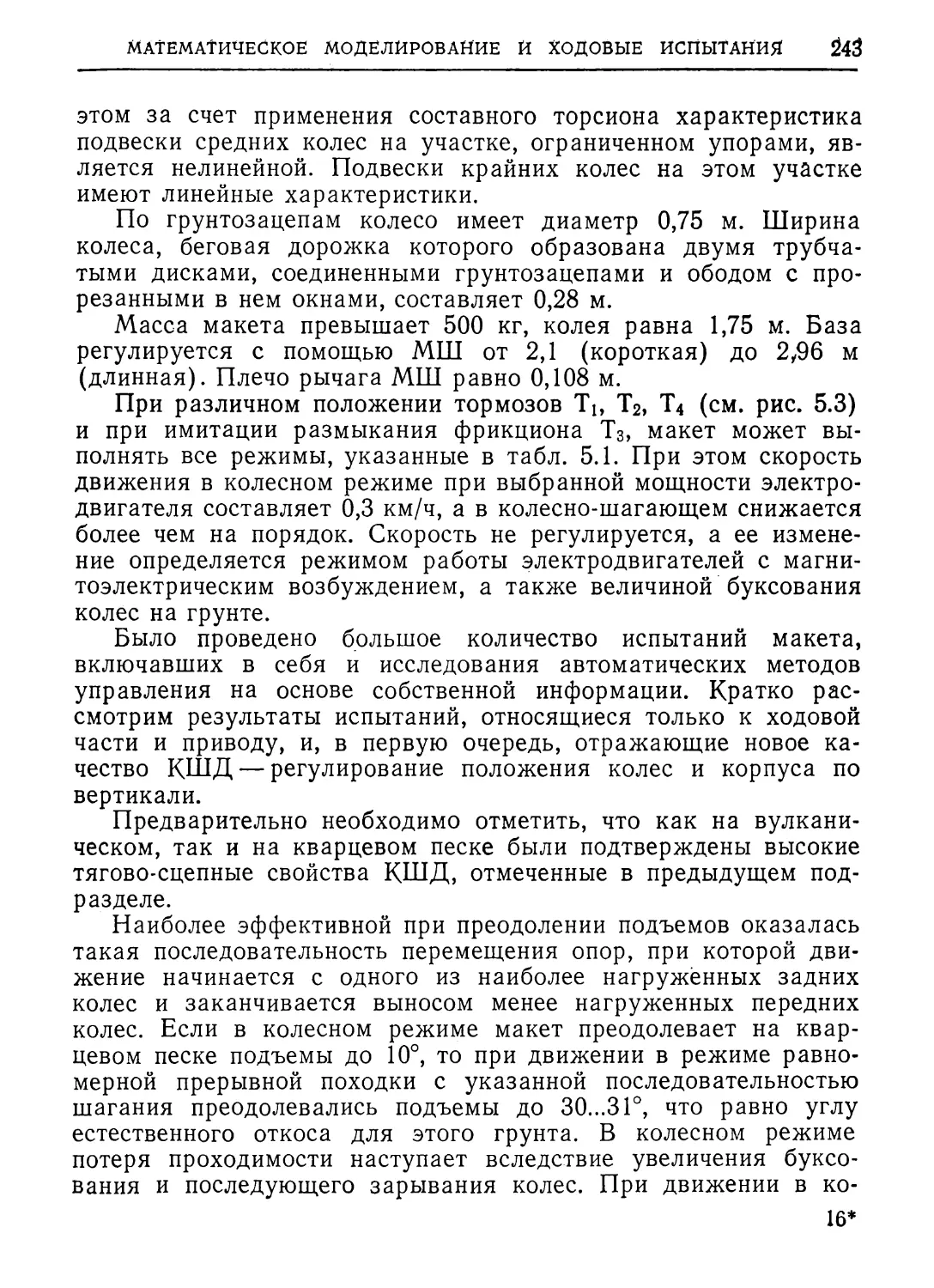

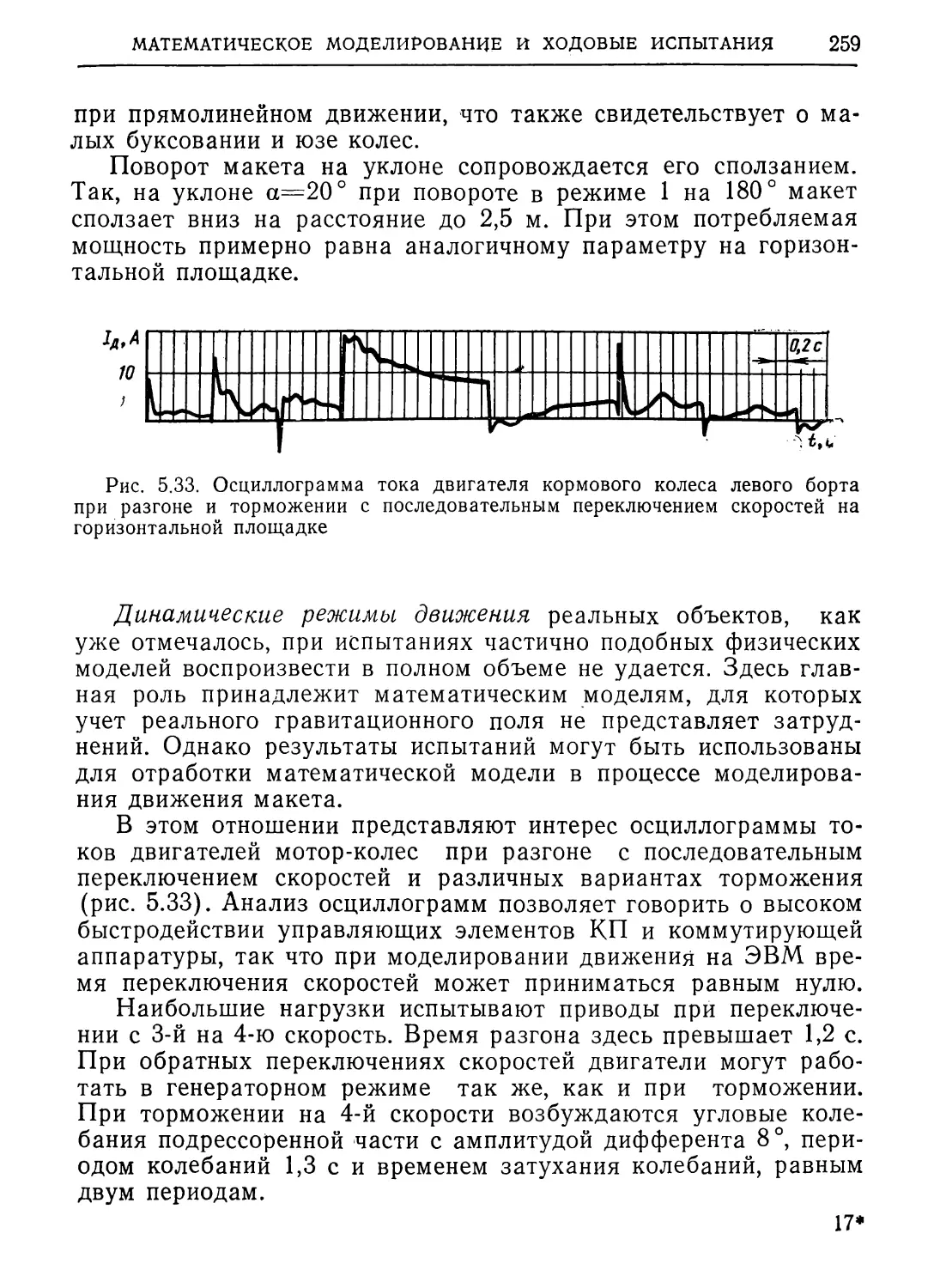
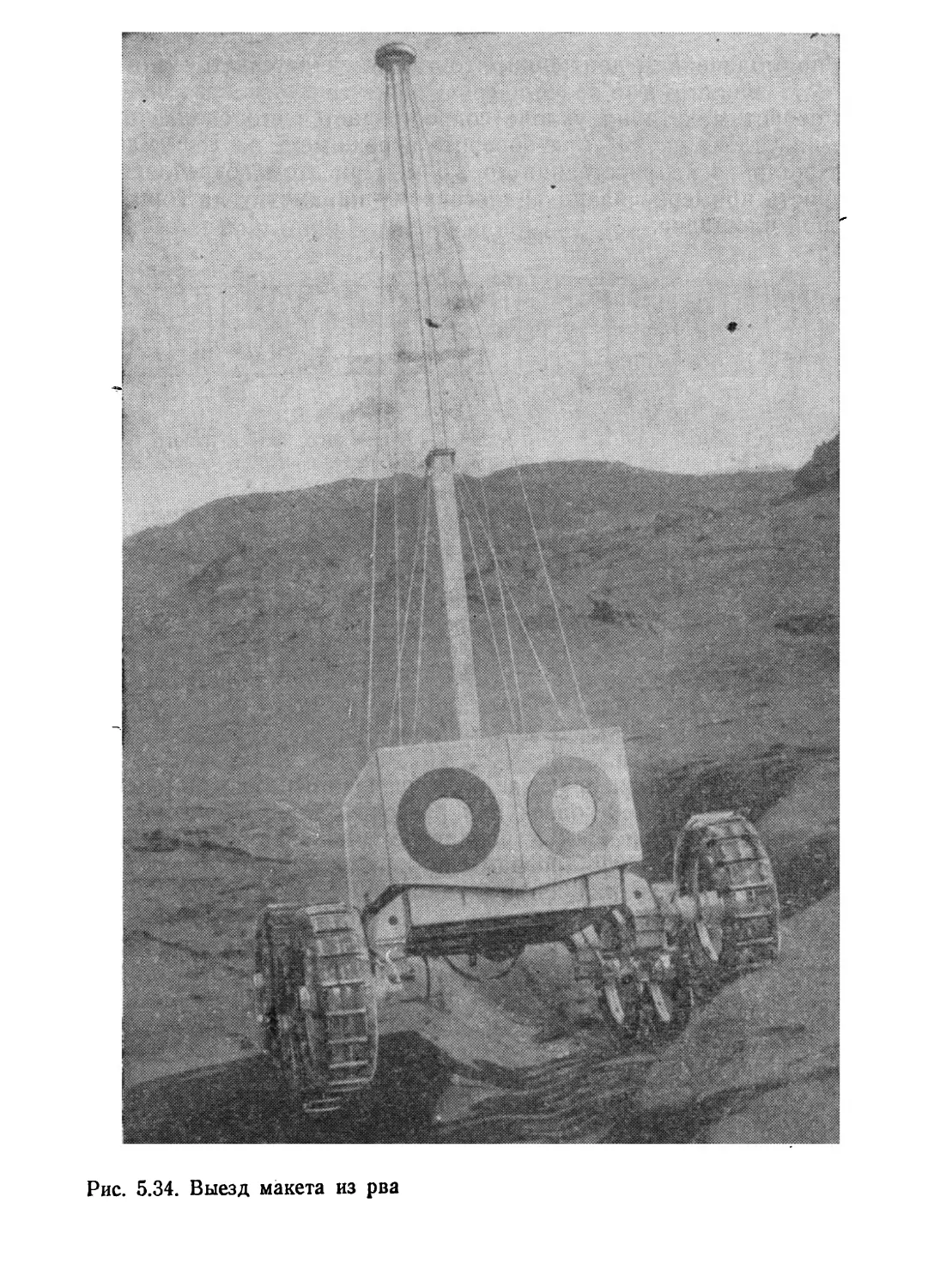





Текст
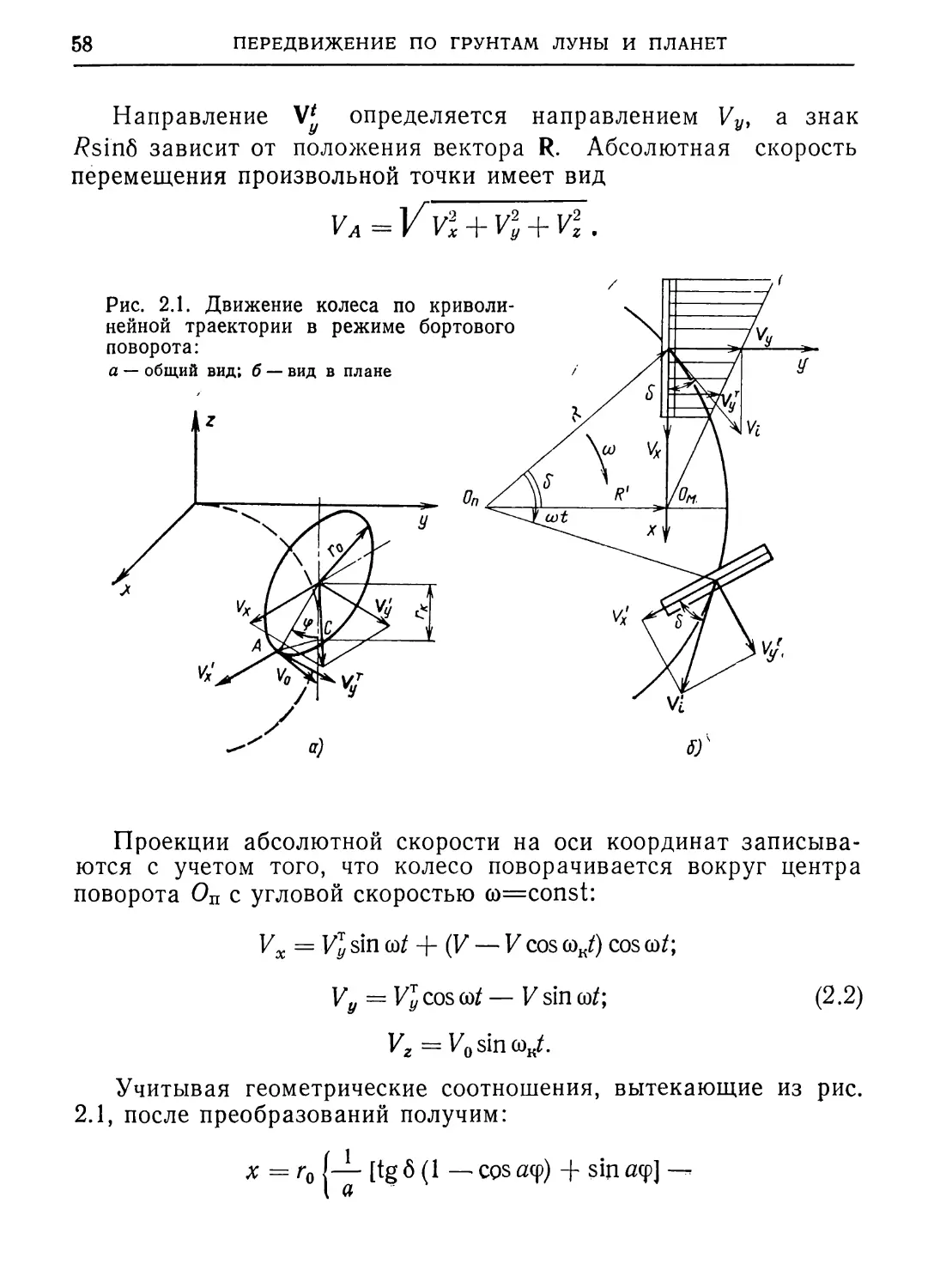
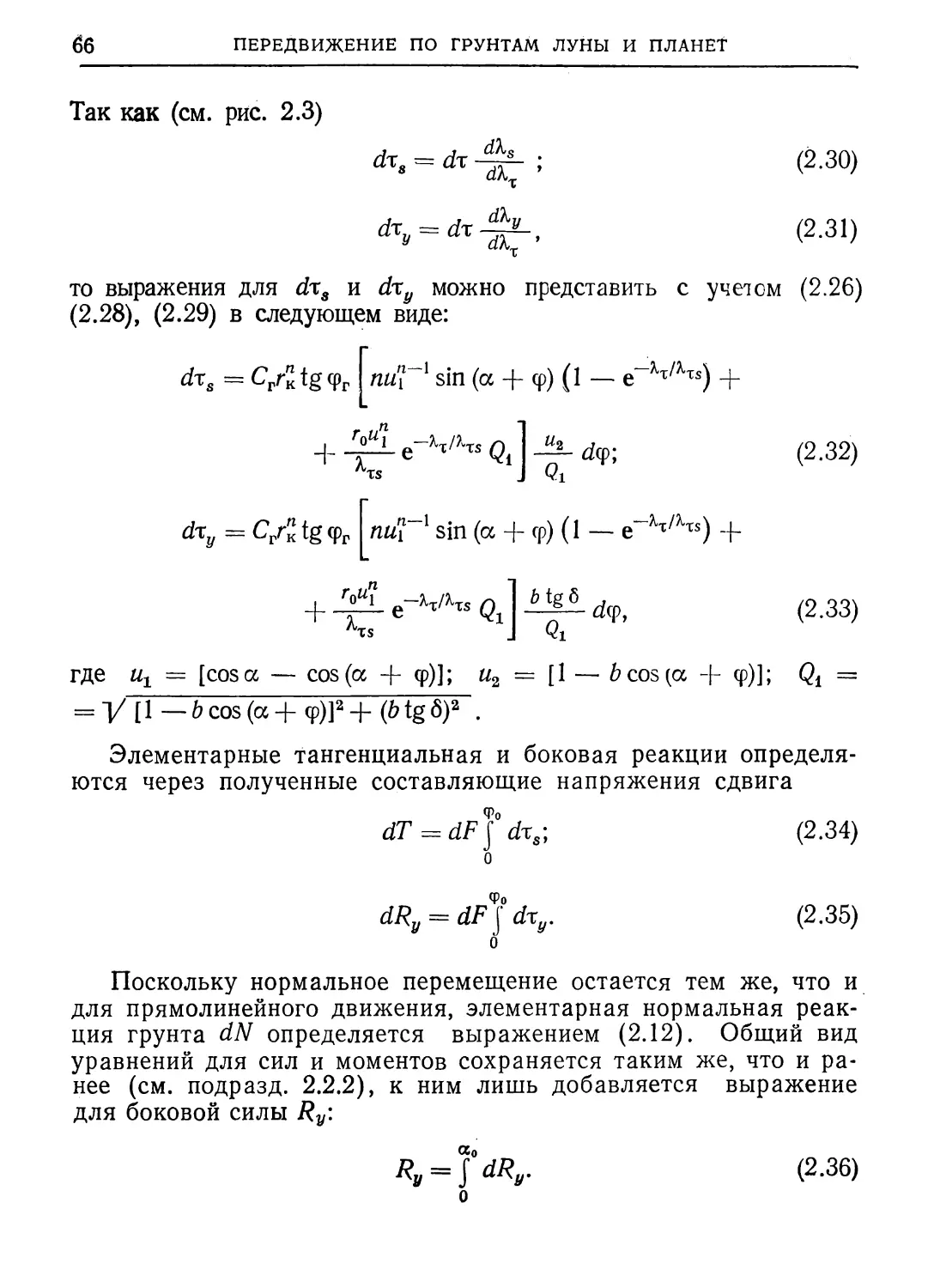
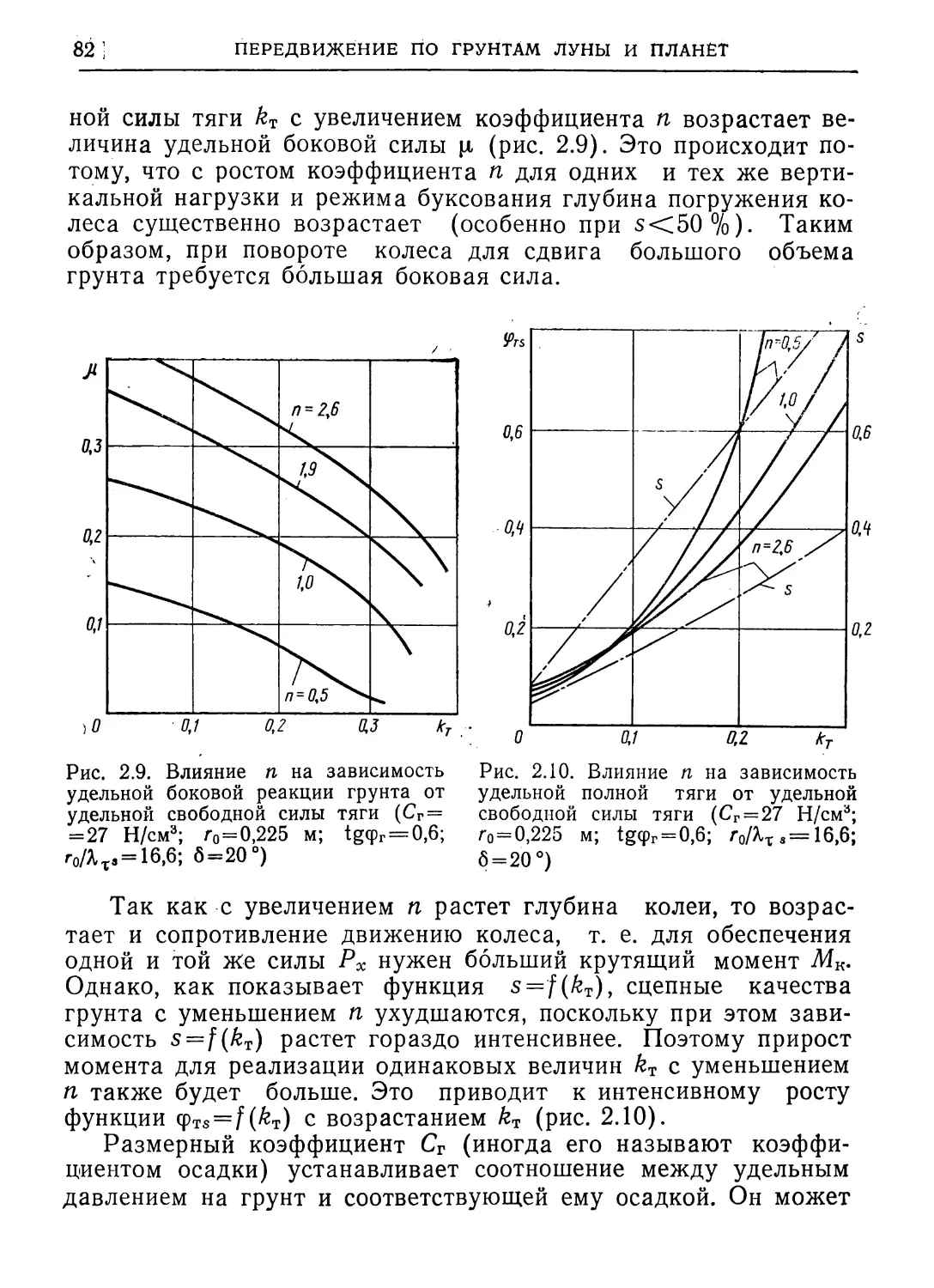
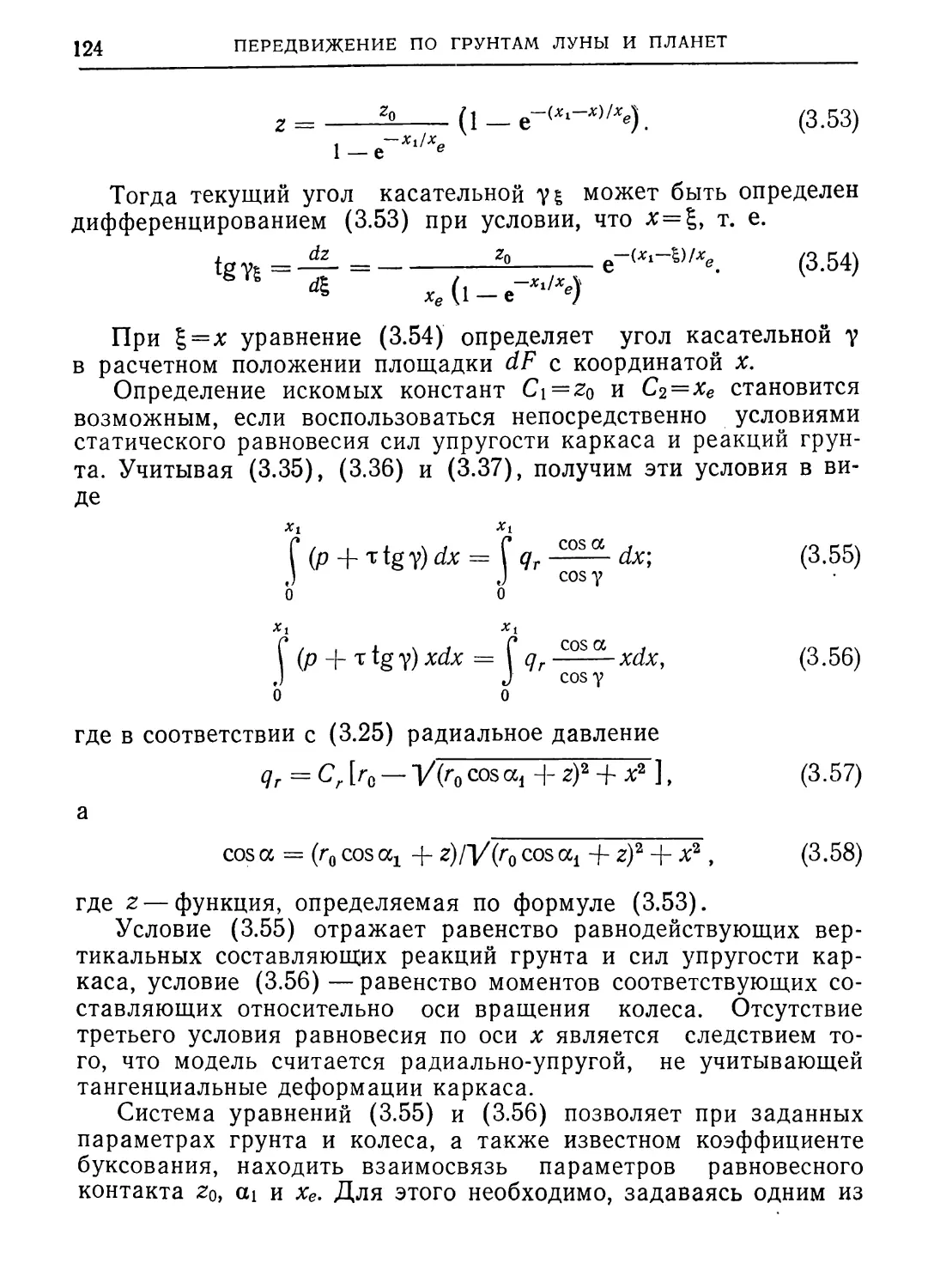
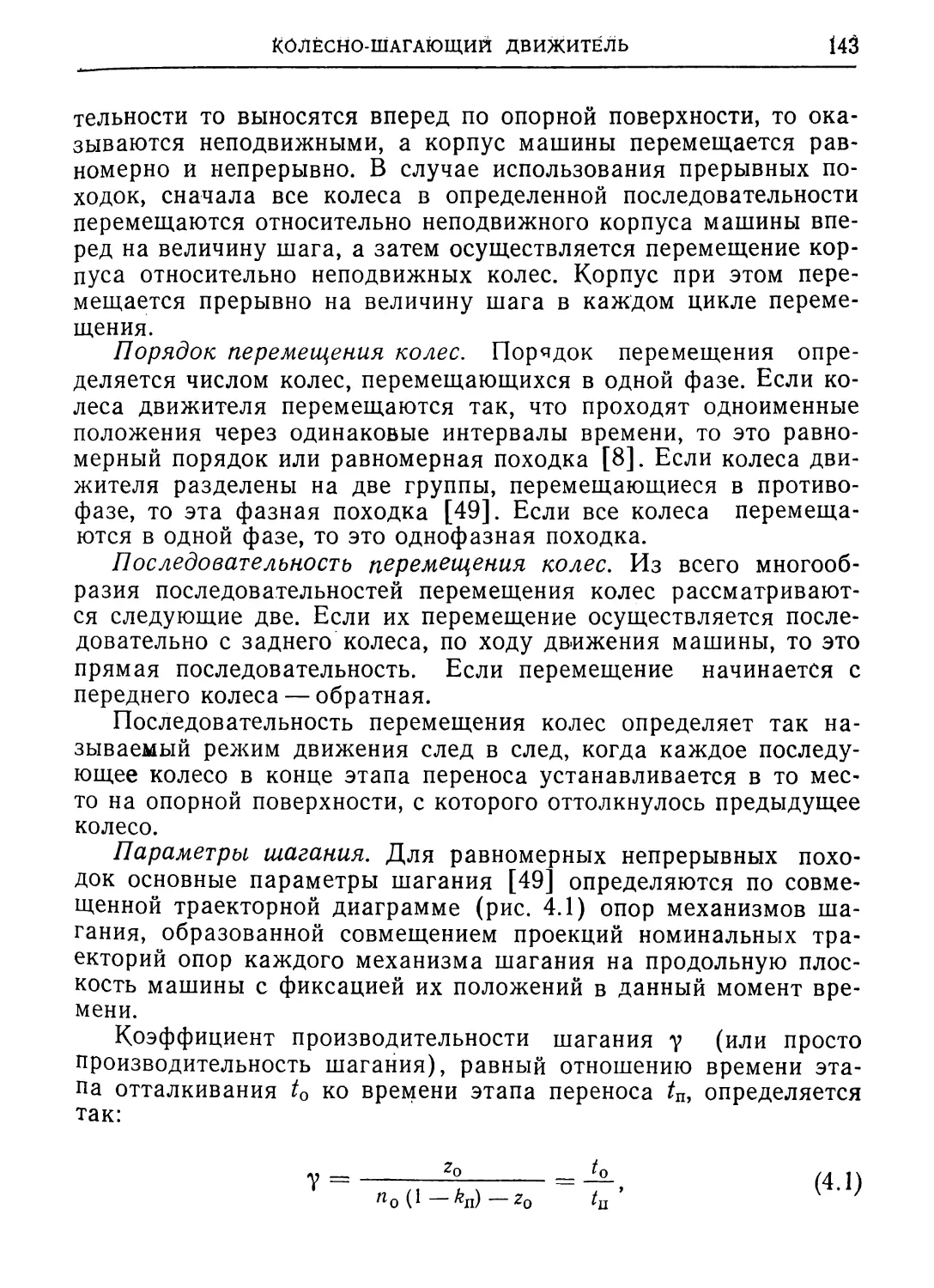
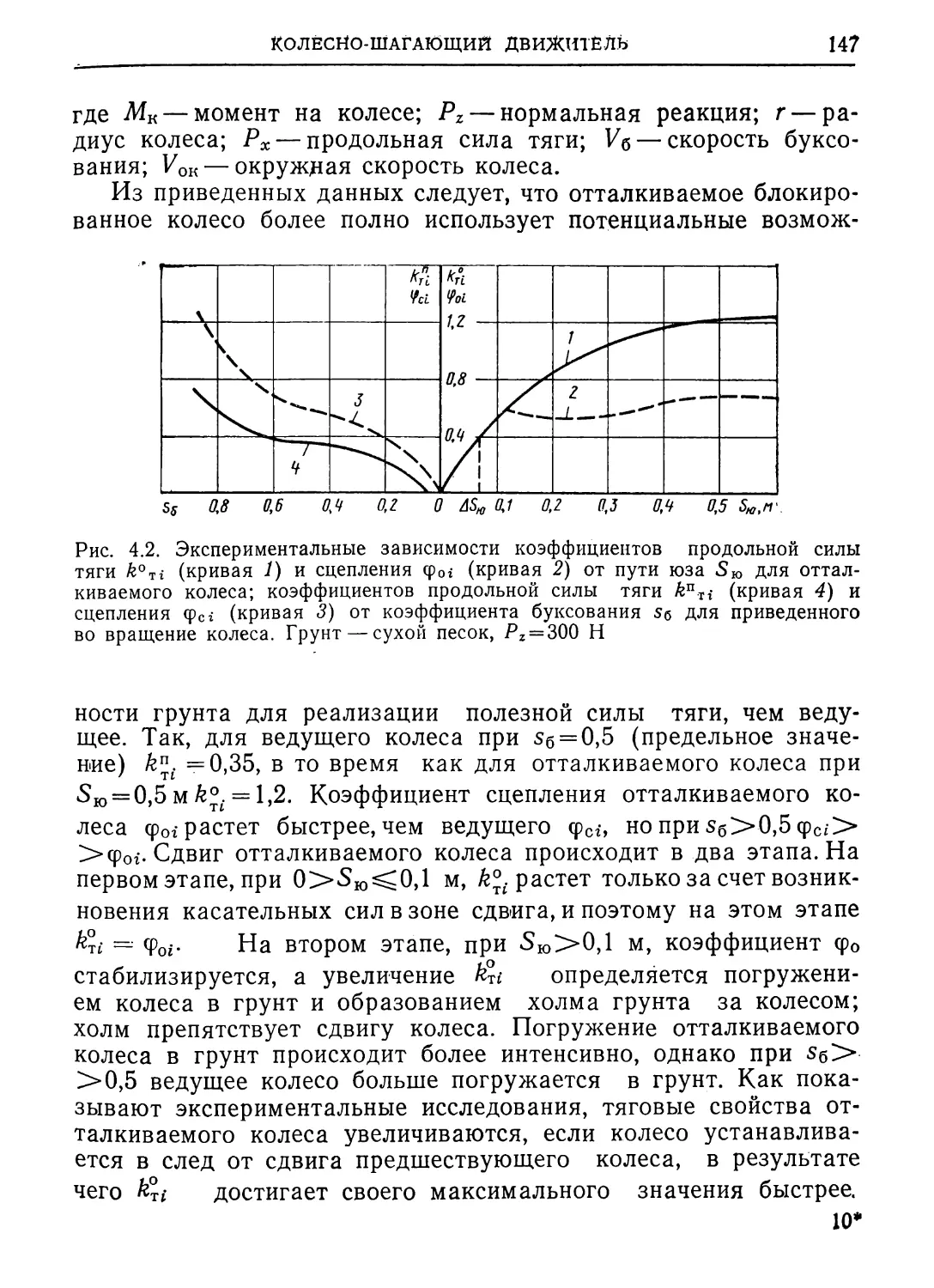
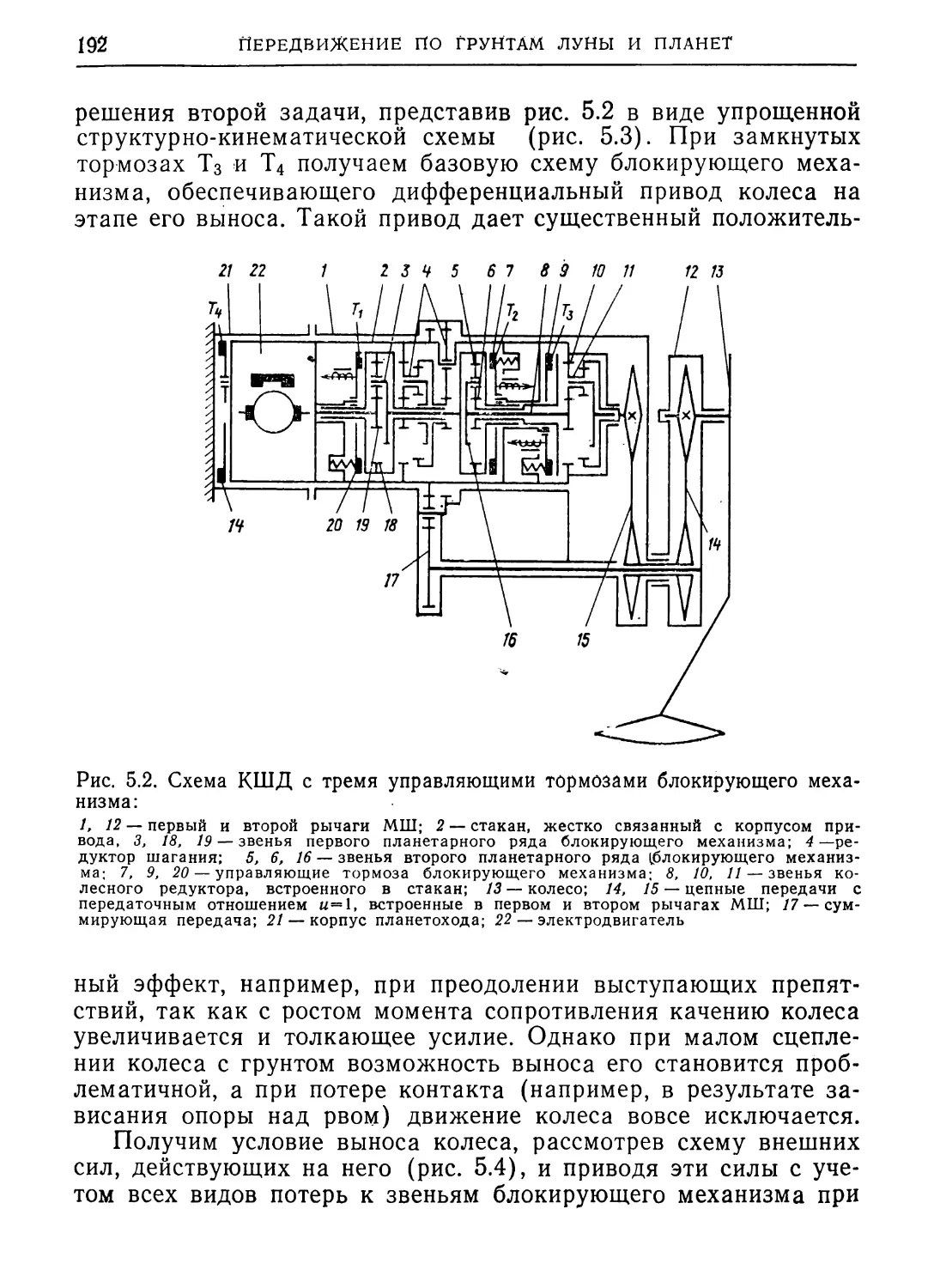
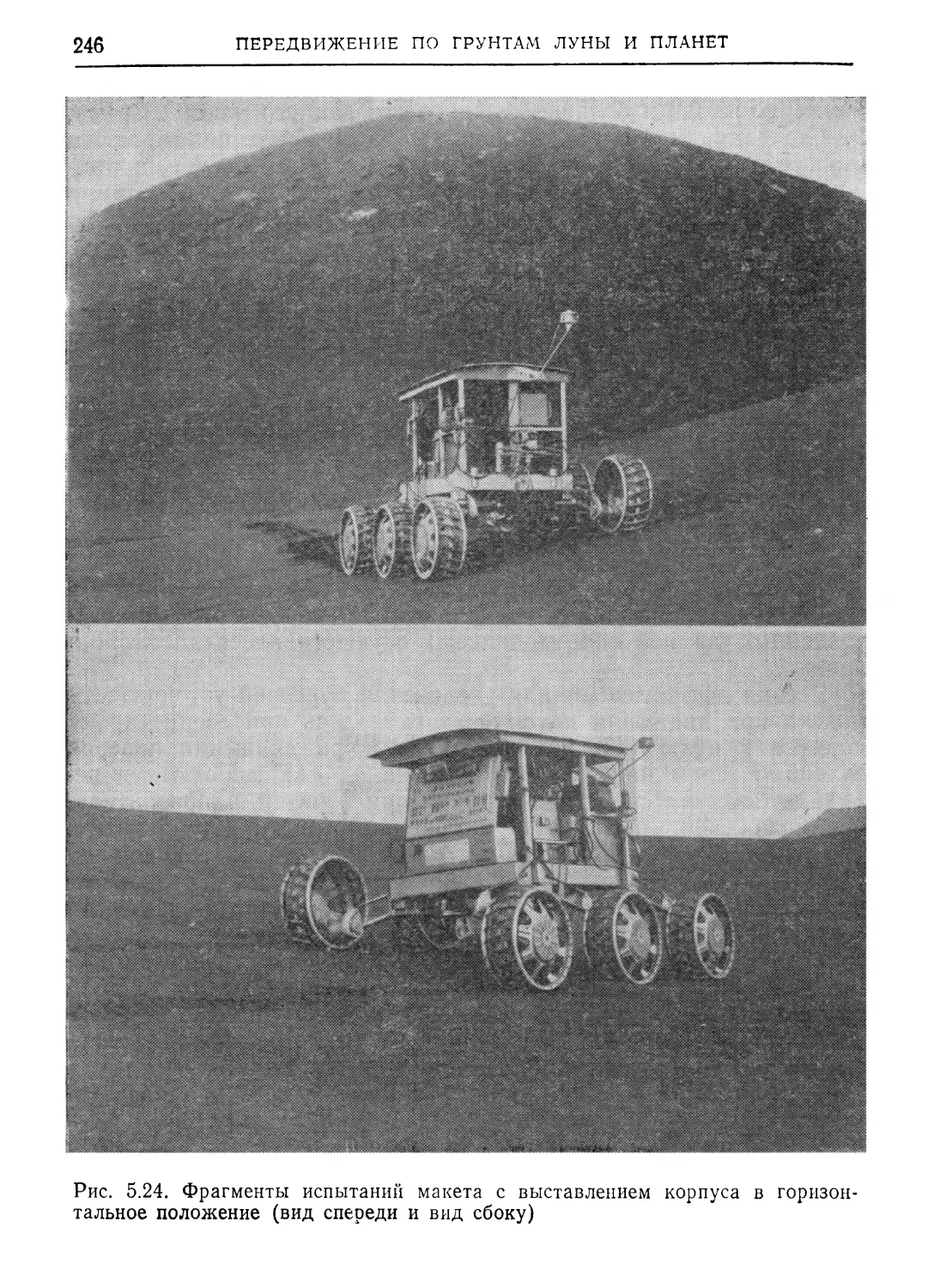
Передвижение
по грунтам
ЛУНЫиППАНЕГ
Передвижение
по грунтом
ЛУНЫиПЛАНЕТ
Под редакцией
профессора А.Л. Кемурджиана
МОСКВА
«МАШИНОСТРОЕНИЕ»
1986
ББК 39.62
П27
УДК 629.787.523
В. В. Г ромов, Н. А. Забавников, А. Л. Кемурджиан, И. Ф. Кажукало,
М. И. Маленков, В. Н. Наумов, Б. П. Назаренко, Ю. Л. Рождественский
Редактор д-р техн, наук проф. А. Л. Кемурджиан
Рецензент д-р техн, наук проф. В. В. Тарасов
Передвижение по грунтам Луны и планет/Под ред.
П27 А. Л. Кемурджиана. — М.: Машиностроение 1986. — 272 с.,
ил.
(В пер.): 1 р. 30 к.
Исследованы процессы взаимодействия движителей транспортных машин
космической техники с поверхностью грунта. Приведены методы оценки про-
ходимости существующих планетоходных движителей и даны рекомендации для
новых видов движителей. Впервые систематизирован материал, посвященный
сложным вопросам взаимодействия колесных движителей планетоходов с несу-
щей поверхностью. Дан анализ экспериментальных методов исследования раз-
личных видов движителей.
Для инженерно-технических работников, занимающихся разработкой кос-
мической техники, а также проблемами проходимости колесных машин назем-
ного транспорта.
3607000000-141 (4 j 86
*038(01)-86
ББК 39.62
6Т6
© Издательство «Машиностроение», 1986 г.
ПРЕДИСЛОВИЕ
Более 20 лет назад основоположником практи-
ческой космонавтики академиком С. П. Королевым была постав-
лена задача создания транспортного средства для передвижения
по поверхности Луны. Задача эта, казавшаяся в то время фан-
тастической, приобрела вскоре инженерные формы, определи-
лись конкретные научно-технические проблемы, подлежащие ре-
шению. Большой коллектив советских ученых и инженеров под
руководством С. П. Королева, а впоследствии его преемника —
выдающегося ученого и конструктора члена-корреспондента
АН СССР Г. Н. Бабакина, за несколько лет решил эту задачу.
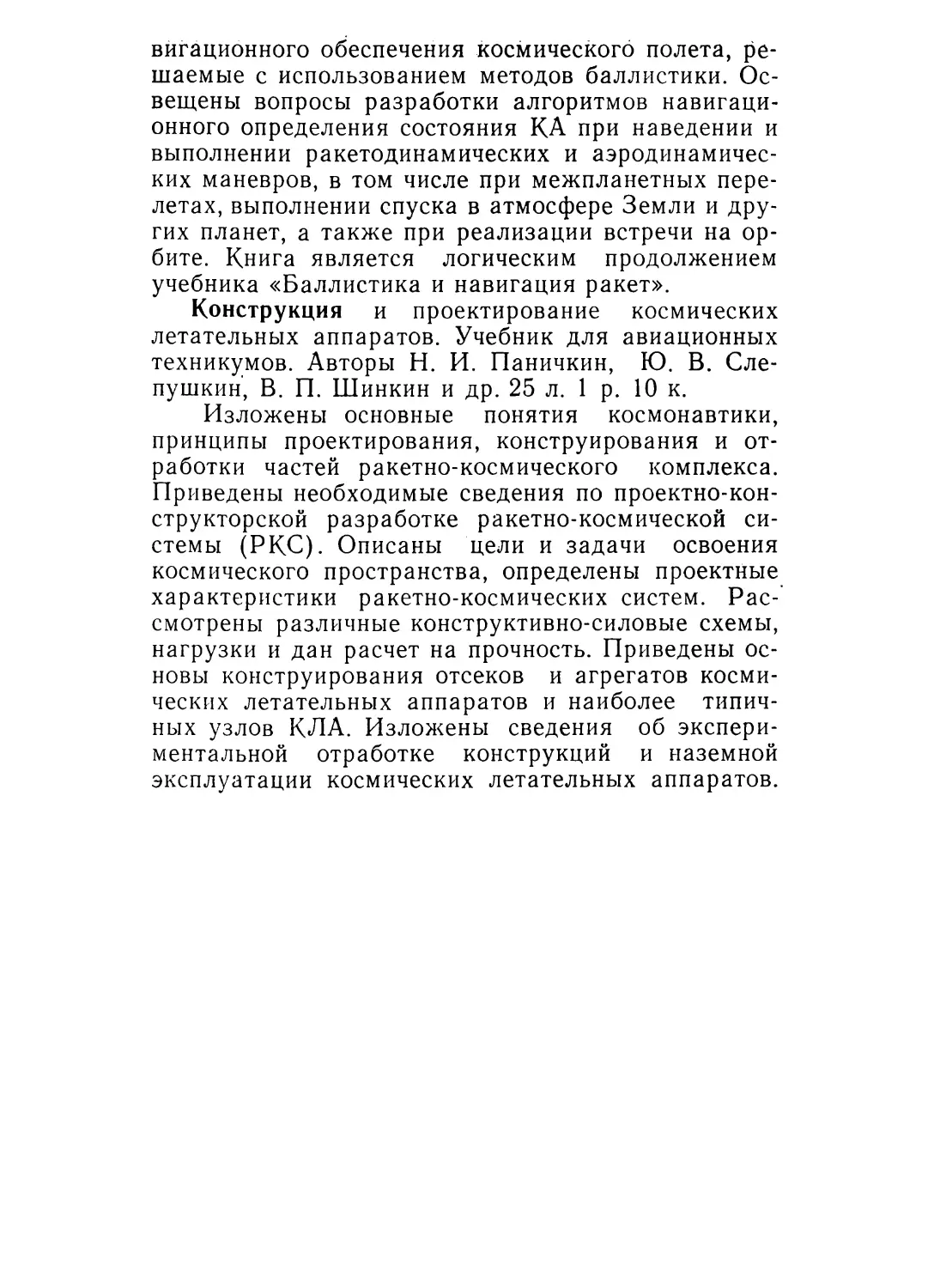
17 ноября 1970 г. советская передвижная лаборатория «Луноход-
1» (рис. П. 1) начала свою успешную работу на поверхности
Луны.
В числе главных проблем, от решения которых зависел успех
работы по созданию лунохода, была проблема надежного перед-
вижения по поверхности Луны. Положение дел осложнялось от-
сутствием достоверной информации о характере грунта, его фи-
зико-механических свойствах, несущей способности, о рельефе
поверхности, о влиянии гравитационного поля на процесс взаи-
модействия подвижного аппарата с грунтом. Это решающим об-
разом влияло на выбор принципа движения, схемы и конст-
рукции ходовой части, материалов и, наконец, методов и прие-
мов управления движением.
Первое представление о прочности поверхностного покрова
Луны было получено после посадки советской автоматической
станции «Луна-9». Ею же были переданы на Землю и первые
телевизионные панорамы лунной поверхности. Первая оценка
физико-механических свойств грунта Луны была выполнена с
помощью прибора, установленного на автоматической станции
«Луна-13».
Большое значение в изучении свойств лунного грунта имела
доставка его на Землю. Анализ грунта позволил окончательно
выбрать рабочую гипотезу о его свойствах применительно к за-
даче передвижения и уточнить его аналоги — модели для назем-
ных испытаний макетов лунохода.
4
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Обширная информация об условиях передвижения по поверх-
ности Луны была получена во время выполнения программы ап-
паратами «Луноход-1» и «Луноход-2». Как известно, были опре-
делены физико-механические свойства грунта более чем в 1000
точках поверхности Луны, передано на Землю множество пано-
рам и, что особенно важно, телеметрическая информация о тяго-
во-сцепных свойствах системы движитель лунохода — лунный
грунт на всей трассе.
Все, что стало в результате этого известно о Луне, представ-
ляет собой обширный материал, необходимый разработчикам
будущих транспортных средств для передвижения по поверх-
ности Луны.
Но перспективы освоения космического пространства связа-
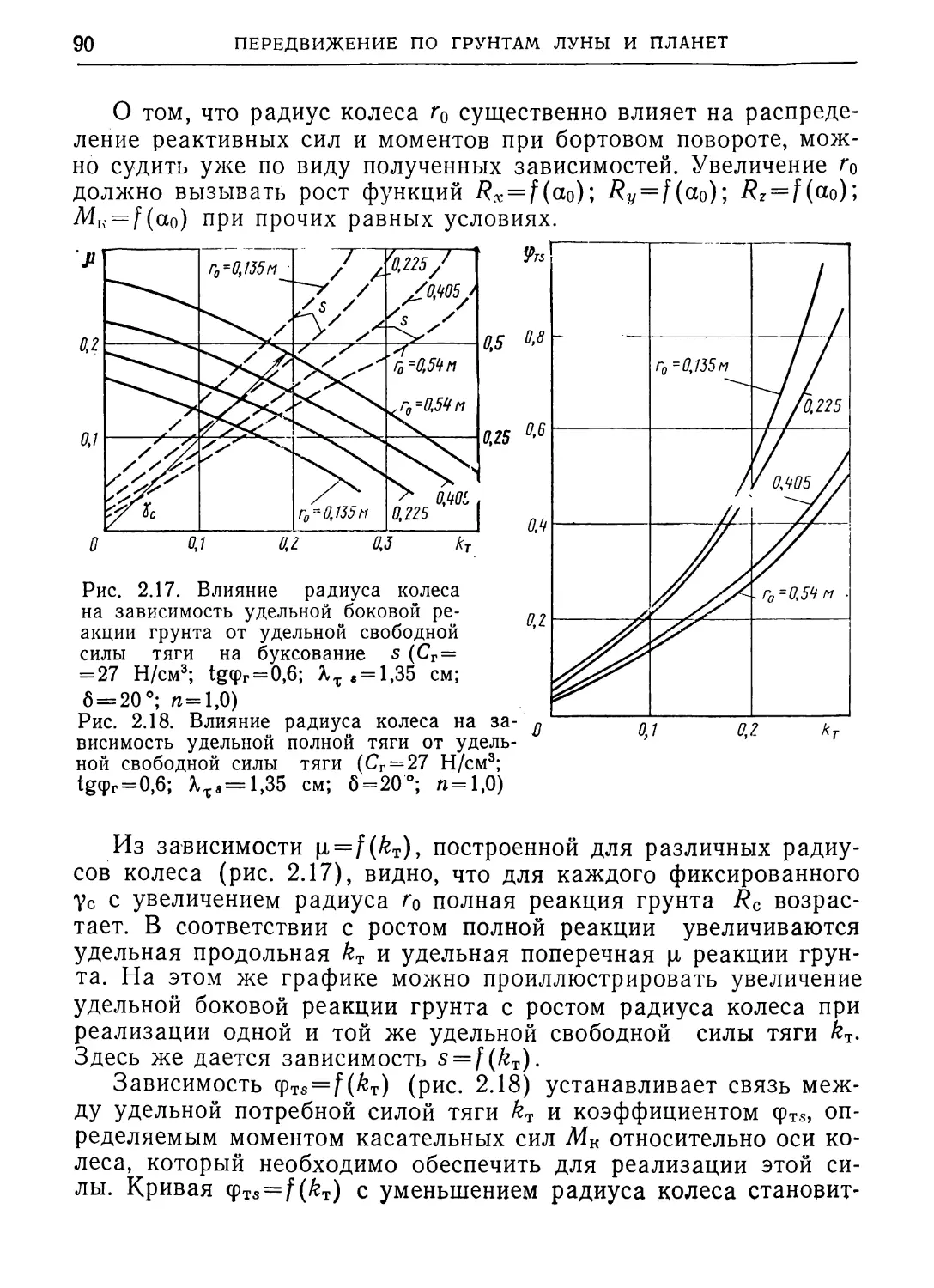
ны и с необходимостью передвижения по другим планетам и их
спутникам. Планеты земной группы (Марс, Меркурий, Венера)
имеют много общего с Луной в строении поверхности. Однако
Рис. П. 1. «Луноход-1»
ПРЕДИСЛОВИЕ
5
наличие атмосферы на Марсе и Венере, различия процессов,
протекающих в ней, температуры и состава атмосферы и приво-
дят к существенным различиям свойств поверхностного слоя
грунта. Большое влияние на выбор принципа передвижения и
конструкции аппарата оказывает гравитационное поле (к приме-
ру, на Фобосе ускорение свободного падения более чем в 300
раз меньше, чем на Луне) и рельеф (например, барханные обра-
зования на Марсе).
Естественно поэтому, что после создания «Луноходов-1 и -2»
усилия советских специалистов были направлены на разработку
научных приборов и изучение с их помощью условий передвиже-
ния по поверхности планет, дальнейшее развитие теории и инже-
нерных аспектов передвижения по планетам, поиск путей повы-
шения проходимости в различных условиях передвижения, раз-
работку эффективных методов конструирования и испытаний
планетоходов в наземных условиях. Ряд материалов был уже
опубликован в предыдущих работах авторов («Автоматические
станции для изучения поверхностного покрова Луны», «Динами-
ка планетохода», «Планетоходы» и др.).
Создание новой транспортной машины или подвижного при-
бора начинается с анализа условий передвижения. Поэтому в
книге проведен анализ физических условий на Луне и планетах
применительно к задаче передвижения и методам оценки этих
условий, а также приборам и установкам для их изучения. При-
ведены результаты соответствующих экспериментальных иссле-
дований на Луне, Марсе, Венере. Следующий шаг при создании
планетохода — это выбор движителя, предварительная оценка
его тяговых возможностей, проходимости в реальных условиях
эксплуатации. Метод оценки проходимости транспортного сред-
ства путем исследования взаимодействия с грунтом одиночного
колеса позволяет расчетным путем определить оптимальные (по
взаимодействию с грунтом) параметры жесткого колеса как для
прямолинейного движения, так и для случая поворота транспорт-
ного средства. Методика экспериментальных исследований, из-
ложенная в книге, позволяет в процессе испытаний одиночного
колеса в грунтовом канале оценить тягово-сцепные свойства мно-
гоколесного движителя планетохода и опорную проходимость
проектируемой машины.
Однако жесткие колеса не всегда могут обеспечить достаточ-
но высокую проходимость во всех многообразных условиях дви-
жения на планетах. Поэтому определенный интерес представля-
6
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ют металлоупругие колеса, анализ которых дан для случая пря-
молинейного движения.
Повышение проходимости планетохода может быть достигну-
то использованием более эффективного колесно-шагающего прин-
ципа передвижения. Теория этого принципа передвижения полу-
чила в книге дальнейшее развитие.
При создании конструкции разработчикам необходимо оце-
нить машину в целом, в первую очередь, ее тягово-динамические
свойства, поворотливость, энергозатраты и т. д. Сделать это мож-
но с помощью математических и физических моделей. Матема-
тические модели дают возможность оперативно, без больших про-
изводственных затрат и, что особенно важно, при широком варь-
ировании параметрами машины и местности, по которой она дви-
жется, провести эту оценку. В книге приведена математическая
(динамическая) плоская модель транспортного средства с ко-
лесно-шагающим движителем для прерывных походок, а также
модель многоколесного планетохода, предназначенная для ана-
лиза бортового поворота на ровной горизонтальной площадке:
Завершается книга кратким изложением некоторых результатов
ходовых испытаний макетов планетоходов.
Авторский коллектив возглавил А. Л. Кемурджиан, опреде-
ливший структуру книги. Гл. 1 написана В. В. Громовым и
А. Л. Кемурджианом; гл. 2 — В. Н. Наумовым и Н. А. Забавни-
ковым; гл. 3 — Ю. Л. Рождественским и Н. А. Забавниковым;
гл. 4 — И. Ф. Кажукало; разд. 5.1, 5.2 и подразделы 5.4.2,
5.4.3 — М. И. Маленковым и А. Л. Кемурджианом; разд. 5.3 —
Б. П. Назаренко и Н. А. Забавниковым; подразд. 5.4.1—И. Ф.
Кажукало.
Авторы благодарят конструкторов и испытателей, способст-
вовавших получению материалов, использованных в этой книге.
Авторы приносят также свою благодарность профессору
В. В. Тарасову, сделавшему ряд ценных замечаний, учтенных
при окончательном редактировании книги.
1 МЕТОДЫ И УСТРОЙСТВА ДЛЯ ОЦЕНКИ
УСЛОВИЙ ПЕРЕДВИЖЕНИЯ
ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Изучение физико-механический свойств (ФМС)
грунтов является одним из разделов механики грунтов и в нас-
тоящее время ведется с учетом основных особенностей решае-
мых инженерно-технических задач [59, 61].
Количественная оценка ФМС грунта необходима для выбо-
ра и обоснования типа движителя разрабатываемой машины,
сравнения результатов ходовых и стендовых испытаний, разра^
ботки методов моделирования процессов взаимодействия. Вводи-
мые при этом характеристики являются достаточно универсаль-
ными и могут быть использованы для оценки различных случаев
взаимодействия с грунтом (передвижение человека, внедрение
различных устройств в грунт, посадка аппаратов, движение ма-
шины и др.).
1.1. Методы изучения свойств грунта
В зависимости от поставленных задач можно
выделить следующие направления изучения ФМС грунта приме-
нительно к проблеме передвижения:
классификация и количественная оценка грунта как механи-
ческой системы [61];
изучение общих закономерностей прочностных и деформаци-
онных свойств грунта [59, 61];
определение обобщенных механических характеристик грун-
тового массива при воздействии сил, имитирующих процессы
взаимодействия машин с грунтом [3, 25, 26, 32].
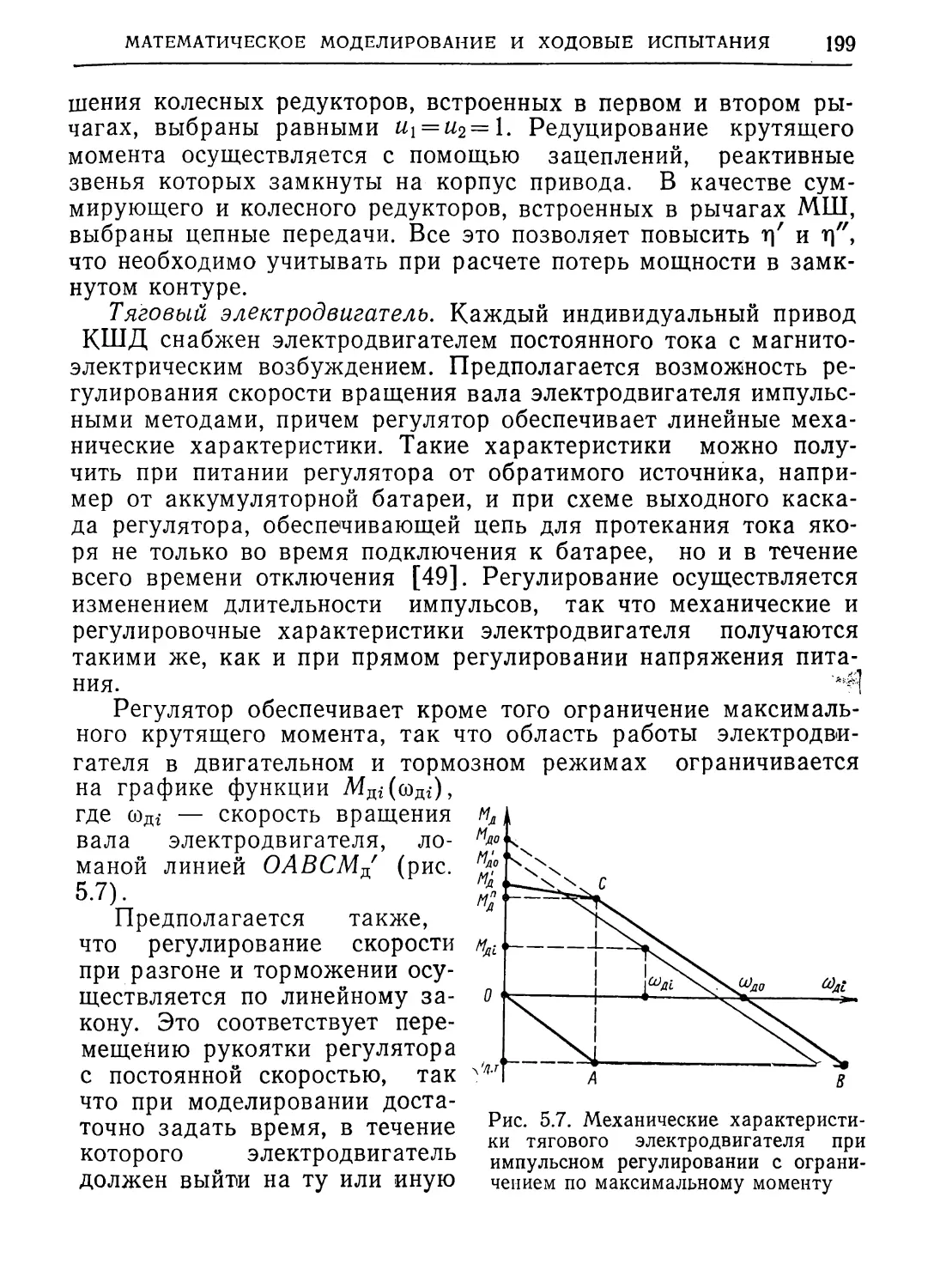
Изучение строения грунта как механической системы дает
представление о его типе и разновидности, структурных особен-
ностях, позволяет учесть его состояние в естественном залега-
нии, определить в конечном счете его важнейшие механические
свойства.
Применительно к задаче передвижения грунт можно рассмат-
ривать как механическую систему, состоящую из минеральных
частиц различного размера и агрегатов из них, взаимодействую-
щих между собой в точках контакта. Пустоты между частицами
8
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
и агрегатами могут быть заполнены жидкостью и газом. Опреде-
ляющими параметрами в этом случае являются гранулометри-
ческий и минералогический состав грунта, форма частиц, удель-
ная и объемная плотность, влажность.
Большое влияние на свойства грунта оказывают особенности
природных процессов его формирования как механической си-
стемы.
Исследования ФМС позволяют установить физическую при-
роду деформации грунтов, определить основные механизмы, про-
исходящие в них при воздействии внешней нагрузки, разработать
механические модели, на основе которых могут быть построены
различные расчетные схемы, выведены зависимости для оценки
прочностных и деформационных характеристик грунта. При их
определении на отдельных образцах необходимо учитывать на-
иболее характерные особенности воздействия движителя машин
на грунт. Главными из них являются: малое время воздействия,
цикличность нагружения из-за последовательного прохождения
опорных элементов, величина удельных давлений, обоснованный
выбор размеров образцов отобранных для исследований проб
грунта.
Для оценки наиболее важных параметров, характеризующих
прочностные свойства грунта, широкое распространение полу-
чили методы, основанные на вдавливании в исследуемый грунт
конусных и конусно-лопастных штампов (пенетрационные испы-
тания). В ряде работ получены теоретические зависимости, оп-
ределяющие параметры сопротивления сдвигу по результатам
пенетрационных испытаний [25, 26, 28, 53]. При этом отмечает-
ся независимость получаемых данных от технологических осо-
бенностей проведения испытаний.
Использование поворотного конусно-лопастного штампа зна-
чительно расширяет возможности пенетрационных испытаний и
является в настоящее время одним из перспективных методов
исследования ФМС грунта в его естественном залегании.
Для расчетной оценки параметров взаимодействия движите-
лей машин с грунтом получили распространение свои специфи-
ческие методы оценки ФМС последнего. Основной принцип этих
методов состоит в том, что оценка проводится в условиях, вос-
производящих процесс взаимодействия движителя машины с
грунтом. При этом рассматривается не отдельный, как при оцен-
ке общих прочностных и деформационных свойств, его элемент,
а полупространство грунта в естественном залегании, нагруж;а-
емое через некоторую площадку (штамп). При этом определяют-
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
9
ся следующие основные зависимости: нормальной нагрузки на
штамп от его погружения в грунт; горизонтальной сдвигающей
нагрузи от нормального давления на штамп; горизонтальной
сдвигающей нагрузки от горизонтального смещения штампа.
Широкое распространение для описания этих закономернос-
тей получили эмпирические зависимости вида
P=cXv; (1.1)
т = (с -|-ptg(pr) (1 — (1.2)
где р — давление; Сг и п — параметры уплотнения грунта —
деформация уплотнения; т — напряжение сдвига; с — сцепление;
Фг — угол внутреннего трения; —деформация сдвига; XTS —
параметр сдвига грунта.
Рассмотренные зависимости, используемые для оценки взаи-
модействия движителей машин с грунтом, определяются опыт-
ным путем для различных грунтов. При их практическом исполь-
зовании необходимо иметь четкое представление о величинах тех
нагрузок и размеров опорных элементов, для которых эти зави-
симости не теряют своего смысла. Это объясняется тем, что по
своей сущности они являются эмпирическими и их близость к
реальным процессам достигается лишь в определенных интерва-
лах изменения нагрузок и геометрических размеров.
Таким образом, зависимости (1.1), (1.2) нельзя считать уни-
версальными, так как они зависят не только от свойств грунта,
но и от условий его нагружения, которые в каждом конкретном
случае соответствуют некоторому определенному диапазону
внешних нагрузок, геометрии опорных элементов, скорости при-
ложения нагрузки и ряду других факторов, связанных с конст-
руктивными и эксплуатационными параметрами машин опреде-
ленного типа и класса.
Несмотря на эти ограничения, подобный подход к оценке
ФМС грунта для решения рассматриваемого класса задач на-
шел широкое применение в теории движения машин.
Рассмотренные методы оценок свойств грунта могут быть ос-
новой для решения вопросов передвижения по грунтам Луны и
планет. Однако при этом необходимо отметить следующие об-
стоятельства:
информация о свойствах лунного грунта, и особенно о грунте
планет, в настоящее время получена для отдельных участков и
не дает полного представления о возможном многообразии ус-
ловий передвижения;
10
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
проведение прямых исследований грунтов Луны и планет
связано с применением сложных космических систем доставки и
обеспечения работы специальных научных приборов;
возможности доставки на Землю образцов грунтов Луны и
планет весьма ограничены.
Все это привело к формированию специфических направле-
ний получения информации об условиях передвижения по грун-
там Луны и планет. К ним относятся прямые исследования фи-
зико-механических свойств грунта с помощью специальных при-
боров, выявление общих закономерностей в формировании верх-
них слоев грунта на планетах, подбор и разработка имитато-
ров грунта для проведения в земных условиях эксперименталь-
ной отработки процессов передвижения по поверхности Луны и
планет.
1.2. Физические условия и процессы на Луне
и планетах, их влияние на передвижение
по поверхности
Луна и планеты земной группы (Марс, Венера, Меркурий),
несмотря на существенные различия в их размерах, массах, параметрах ор-
бит, физических условиях на поверхности, имеют достаточно много общих
черт в строении поверхности, что позволяет проводить некоторые обобщения
и использовать результаты исследований свойств грунта, например Луны, для
суждения о свойствах грунта Меркурия. Предпосылкой для этого служат
общие механизмы формирования поверхности планет или их отдельных наи-
более типичных участков [35, 47].
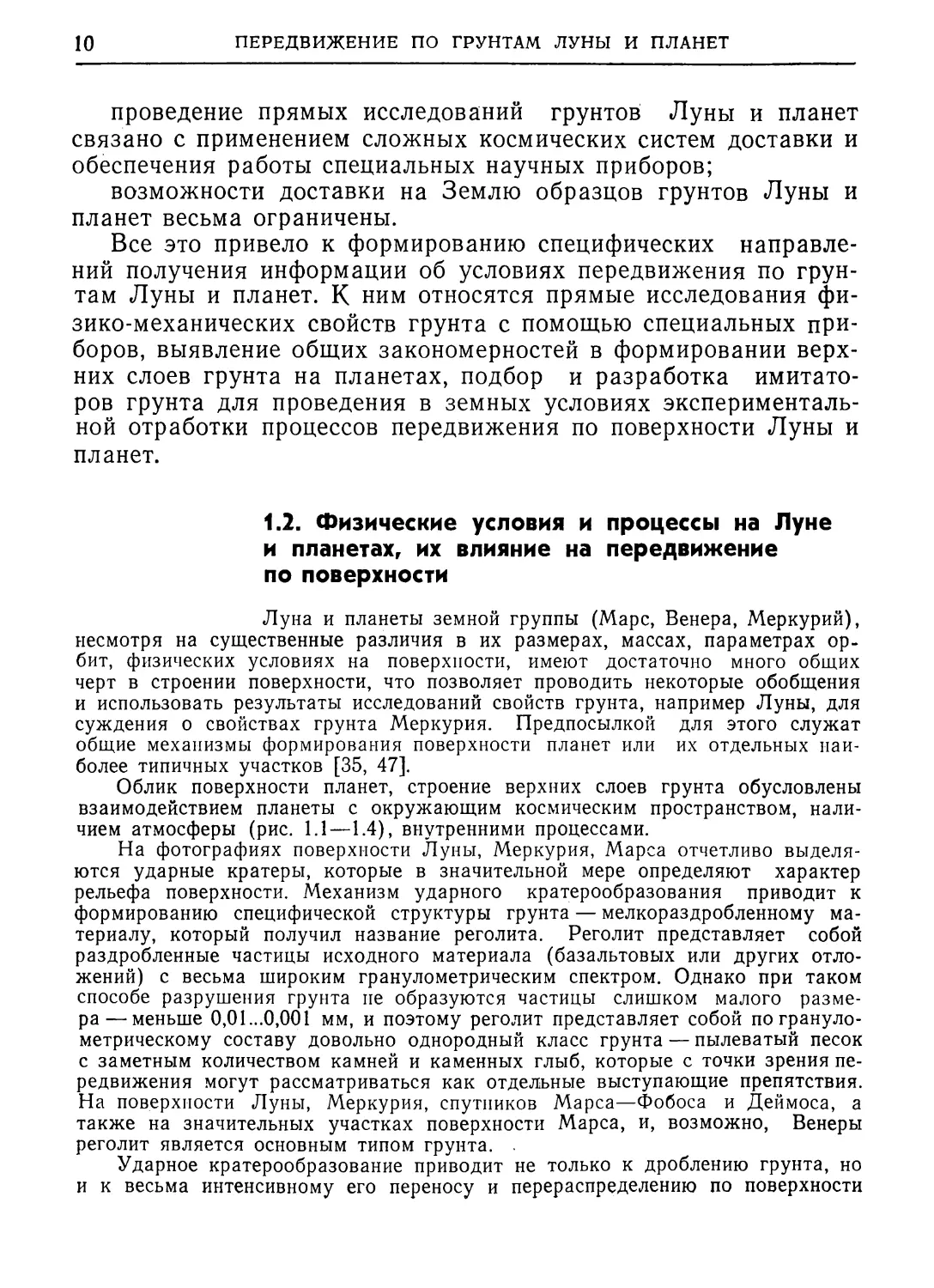
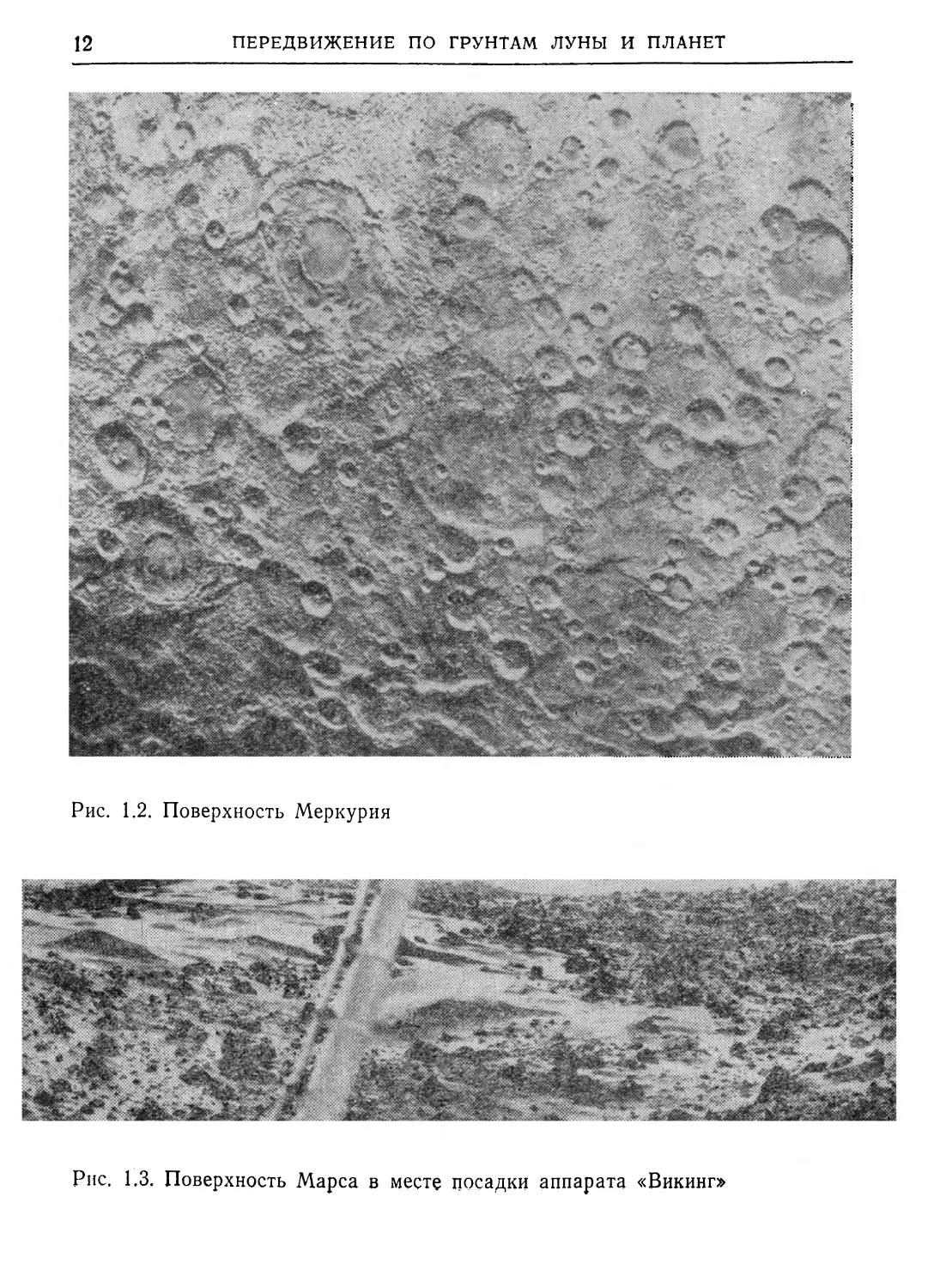
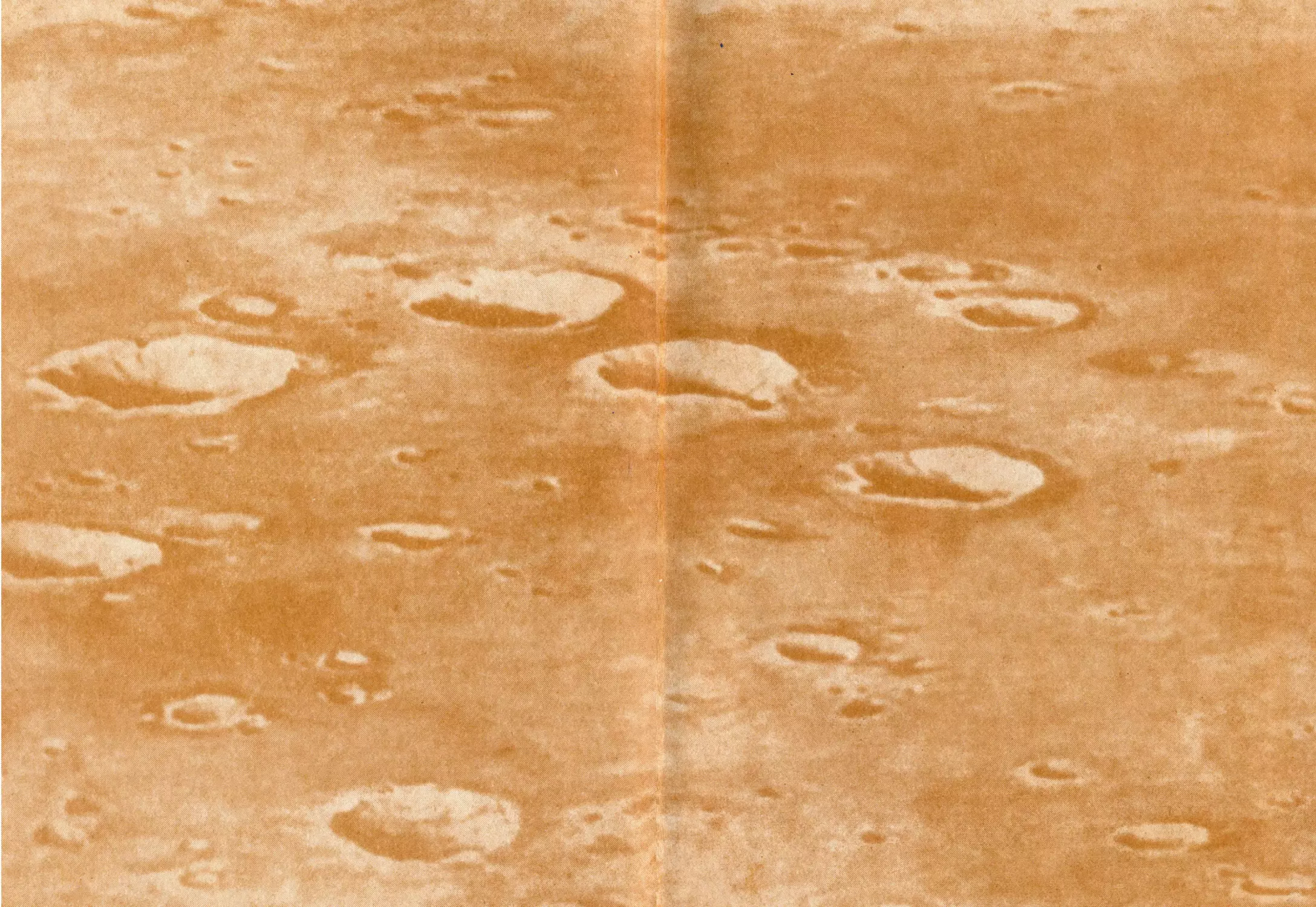
Облик поверхности планет, строение верхних слоев грунта обусловлены
взаимодействием планеты с окружающим космическим пространством, нали-
чием атмосферы (рис. 1.1—1.4), внутренними процессами.
На фотографиях поверхности Луны, Меркурия, Марса отчетливо выделя-
ются ударные кратеры, которые в значительной мере определяют характер
рельефа поверхности. Механизм ударного кратерообразования приводит к
формированию специфической структуры грунта — мелкораздробленному ма-
териалу, который получил название реголита. Реголит представляет собой
раздробленные частицы исходного материала (базальтовых или других отло-
жений) с весьма широким гранулометрическим спектром. Однако при таком
способе разрушения грунта не образуются частицы слишком малого разме-
ра— меньше 0,01...0,001 мм, и поэтому реголит представляет собой по грануло-
метрическому составу довольно однородный класс грунта — пылеватый песок
с заметным количеством камней и каменных глыб, которые с точки зрения пе-
редвижения могут рассматриваться как отдельные выступающие препятствия.
На поверхности Луны, Меркурия, спутников Марса—Фобоса и Деймоса, а
также на значительных участках поверхности Марса, и, возможно, Венеры
реголит является основным типом грунта.
Ударное кратерообразование приводит не только к дроблению грунта, но
и к весьма интенсивному его переносу и перераспределению по поверхности
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
11
Рис. 1.1. Поверхность Луны в районе работы «Лунохода-2»
12
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис. 1.2. Поверхность Меркурия
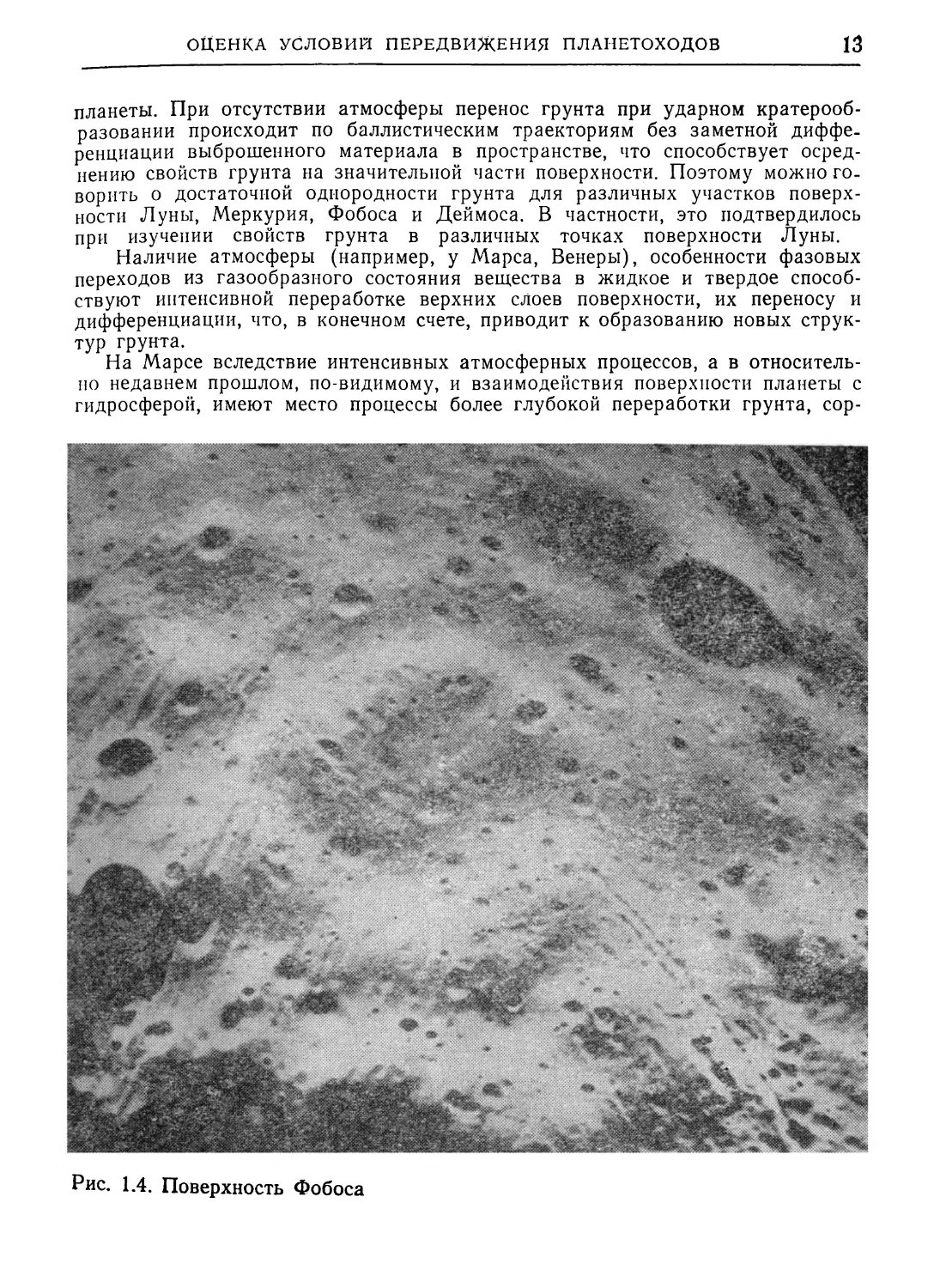
Рис. 1.3. Поверхность Марса в месте посадки аппарата «Викинг»
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
13
планеты. При отсутствии атмосферы перенос грунта при ударном кратерооб-
разовании происходит по баллистическим траекториям без заметной диффе-
ренциации выброшенного материала в пространстве, что способствует осред-
нению свойств грунта на значительной части поверхности. Поэтому можно го-
ворить о достаточной однородности грунта для различных участков поверх-
ности Луны, Меркурия, Фобоса и Деймоса. В частности, это подтвердилось
при изучении свойств грунта в различных точках поверхности Луны.
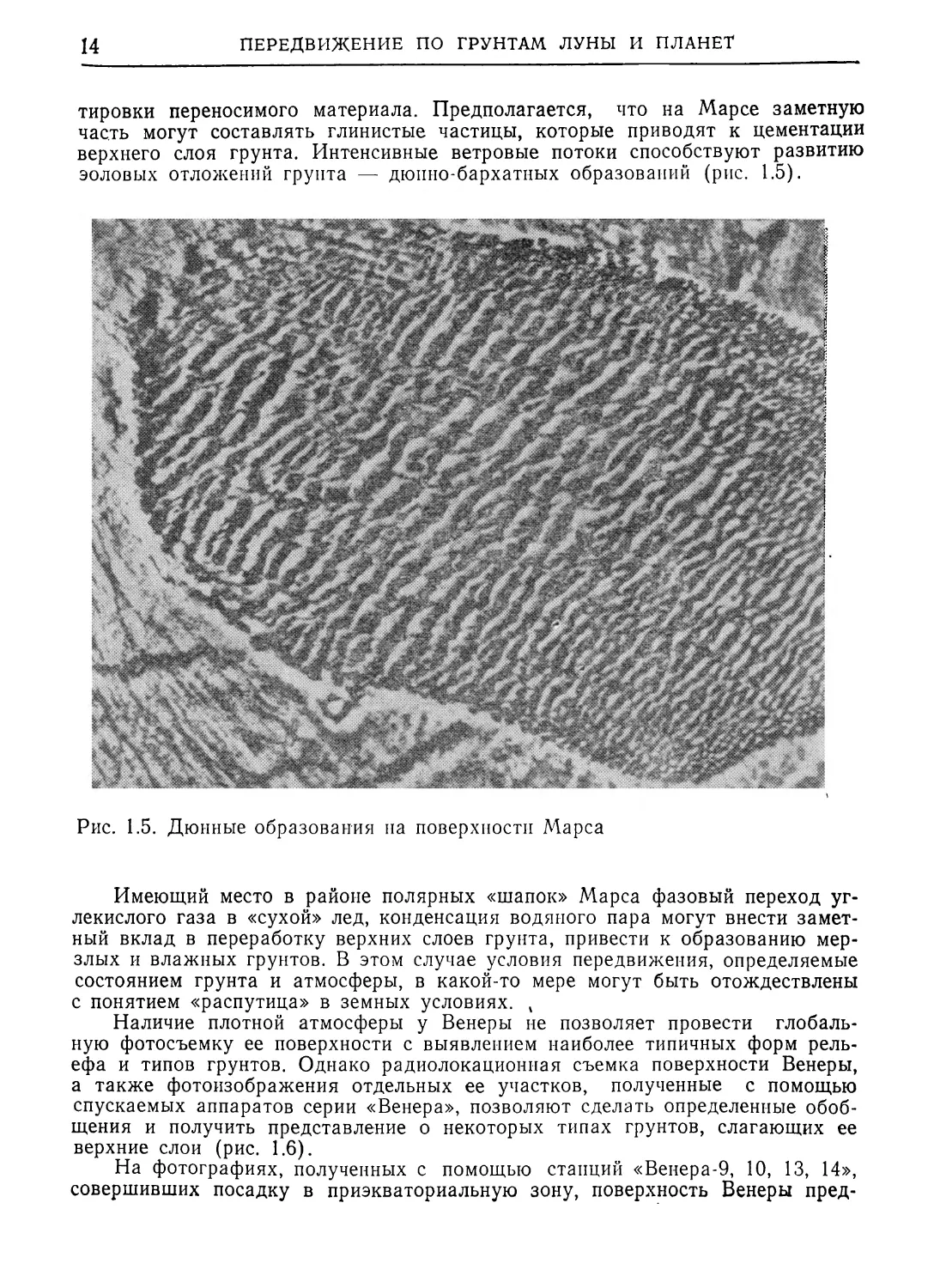
Наличие атмосферы (например, у Марса, Венеры), особенности фазовых
переходов из газообразного состояния вещества в жидкое и твердое способ-
ствуют интенсивной переработке верхних слоев поверхности, их переносу и
дифференциации, что, в конечном счете, приводит к образованию новых струк-
тур грунта.
На Марсе вследствие интенсивных атмосферных процессов, а в относитель-
но недавнем прошлом, по-видимому, и взаимодействия поверхности планеты с
гидросферой, имеют место процессы более глубокой переработки грунта, сор-
Рис. 1.4. Поверхность Фобоса
14
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
тировки переносимого материала. Предполагается, что на Марсе заметную
часть могут составлять глинистые частицы, которые приводят к цементации
верхнего слоя грунта. Интенсивные ветровые потоки способствуют развитию
эоловых отложений грунта — дюнно-бархатных образований (рис. 1.5).
Рис. 1.5. Дюнные образования на поверхности Марса
Имеющий место в районе полярных «шапок» Марса фазовый переход уг-
лекислого газа в «сухой» лед, конденсация водяного пара могут внести замет-
ный вклад в переработку верхних слоев грунта, привести к образованию мер-
злых и влажных грунтов. В этом случае условия передвижения, определяемые
состоянием грунта и атмосферы, в какой-то мере могут быть отождествлены
с понятием «распутица» в земных условиях. ,
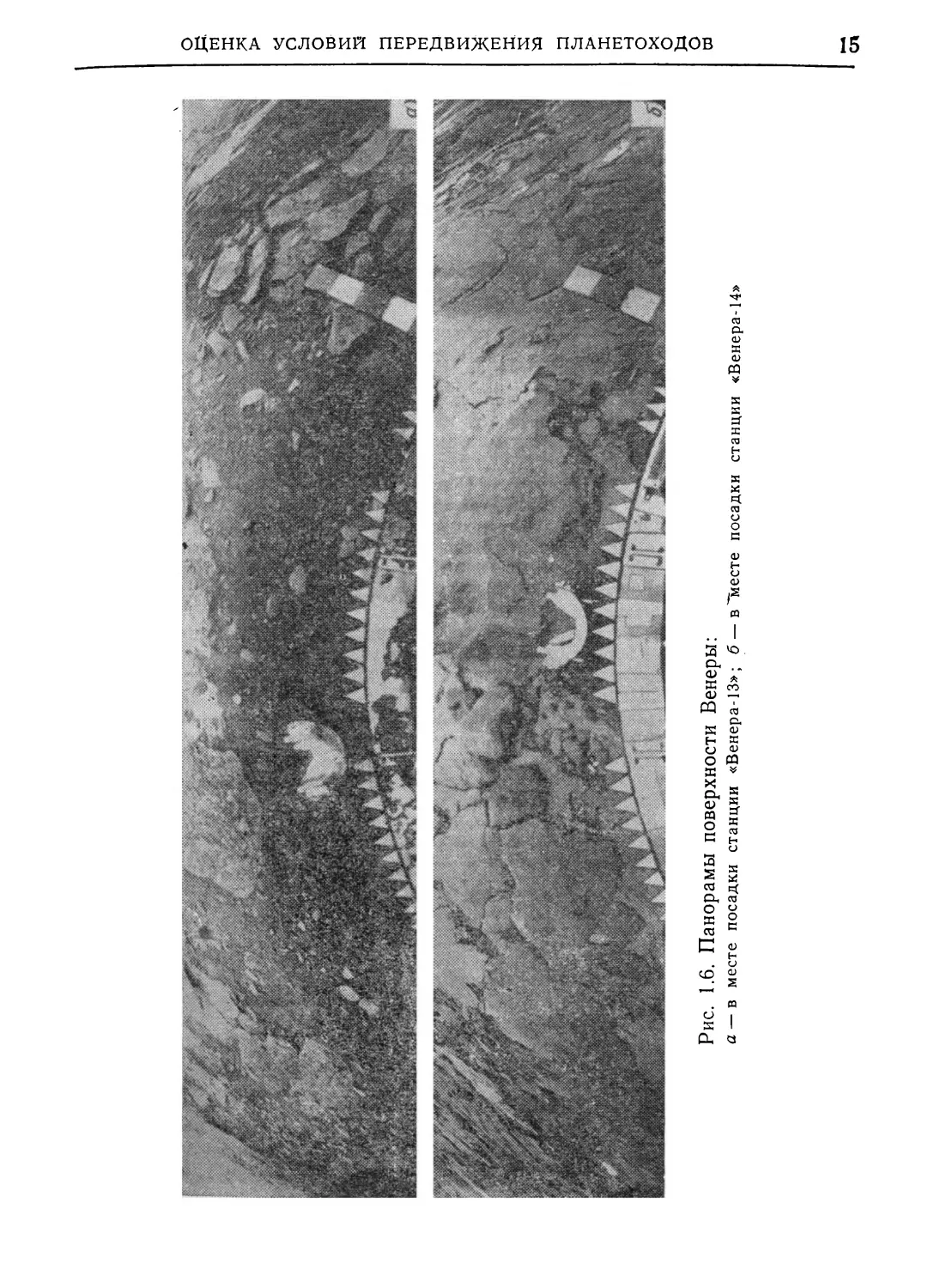
Наличие плотной атмосферы у Венеры не позволяет провести глобаль-
ную фотосъемку ее поверхности с выявлением наиболее типичных форм рель-
ефа и типов грунтов. Однако радиолокационная съемка поверхности Венеры,
а также фотоизображения отдельных ее участков, полученные с помощью
спускаемых аппаратов серии «Венера», позволяют сделать определенные обоб-
щения и получить представление о некоторых типах грунтов, слагающих ее
верхние слои (рис. 1.6).
На фотографиях, полученных с помощью станций «Венера-9, 10, 13, 14»,
совершивших посадку в приэкваториальную зону, поверхность Венеры пред-
Рис. 1.6. Панорамы поверхности Венеры:
а — в месте посадки станции «Венера-13»; б — в "месте посадки станции «Венера-14»
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
16
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ставляется в виде каменистой пустыни, представляющей собой выходы каме-
нистых пород (плит) в сочетании с раздробленным относительно крупнозер-
нистым материалом типа гравелистого (крупнозернистого) грунта. Отложе-
ний мелкозернистого грунта типа лунного реголита в значительных количест-
вах не обнаружено. Это свидетельствует о том, что на поверхности Венеры
имеют место специфические процессы формирования верхних слоев грунта.
Среди возможных механизмов следует отметить процессы химического вы-
ветривания и в какой-то мере эоловый перенос и дробление частиц грунта.
Рассмотренные типичные процессы формирования поверхности Луны и
планет позволяют сделать некоторые выводы относительно условий передви-
жения.
Несмотря на разнообразие грунтовых условий Луны и планет, представ-
ляющих собой сложное сочетание геометрических очертаний (рельефа) и фи-
зико-механических свойств грунта, можно выделить некоторые наиболее ти-
пичные ситуации возможных условий передвижения, исходя из того, что не-
зависимо от природы образования тех или иных форм рельефа процесс дви-
жения определяется в основном геометрической формой и физико-механичес-
кими свойствами верхнего слоя грунта толщиной порядка нескольких десят-
ков сантиметров. При этом имеют значение не столько абсолютные размеры
форм рельефа, сколько их соотношение с размерами движителя транспортно-
го средства. Это означает, что многие формы рельефа могут быть представ-
лены в виде отдельных идеализированных препятствий и их сочетаний. На-
пример, кратеры, имеющие размеры, существенно больше размеров транспорт-
ного средства, могут быть представлены в виде чередующихся уклонов, спус-
ков, косогоров и относительно ровных участков.
То же самое может быть отнесено и к различным характерным линей-
ным образованиям — бороздам каньонам. При этом основной характеристикой
всех этих форм рельефа может служить величина преодолеваемого уклона.
Камии и обломки горных пород могут быть разделены на две основные
категории — преодолеваемые и непреодолеваемые. Преодолеваемыми следует
считать такие, размеры которых не превышают клиренса машины или, в пер-
вом приближении, радиуса колеса. Особое внимание следует уделить такому
препятствию, как трещина, ширина которой соизмерима с размерами машины.
Для наземных транспортных средств такой вид препятствия является одним
из наиболее часто встречающихся. Однако для Луны и планет такие препят-
ствия, по всей видимости, следует отнести к числу редких, которые характер-
ны лишь для относительно небольших участков поверхности. Свидетельством
этому является то, что в процессе работы «Лунохода-1 и 2», а также на
снимках поверхности, выполненных с помощью посадочных аппаратов, тре-
щин на поверхности Луны не зафиксировано. ♦
Выделение типичных ситуаций условий передвижения по поверхности Лу-
ны и планет позволяет конкретизировать исходные данные и требования к
конструкции планетохода, существенно облегчить отработку и испытания
последнего. Все многообразие условий движения по реальной поверхнсти мо-
жет быть при этом представлено как статистическая совокупность типовых
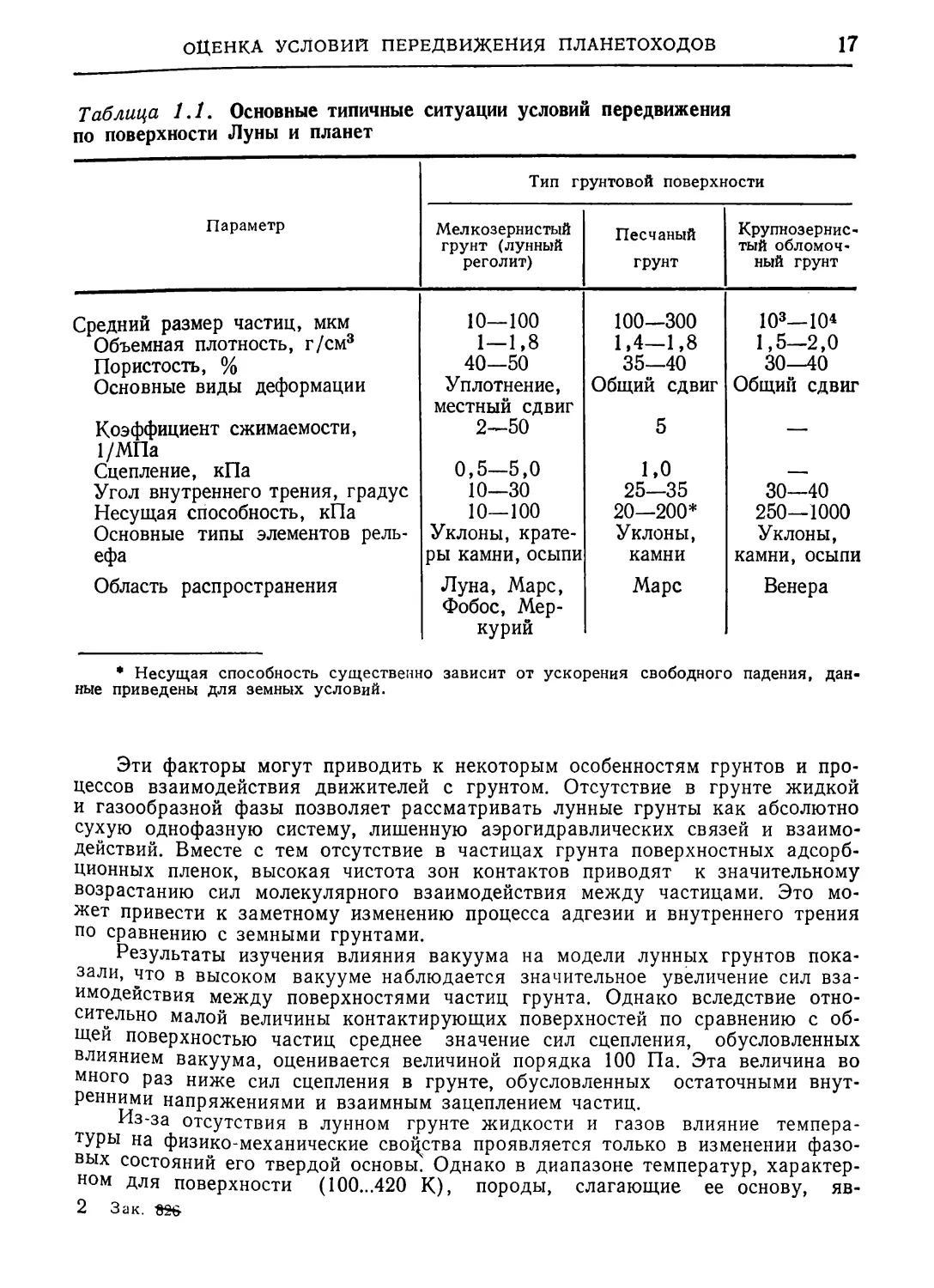
ситуаций. При этом в табл. 1.1 приведены обобщенные параметры типичных
ситуаций условий передвижения на основе данных изучения Луны и планет,
приведенных в работах [2, 47, 49, 59].
Отличие физических условий на Луне и планетах от условий на Земле
объясняется различными ускорениями свободного падения, особенностями
строения атмосферы, широким диапазоном изменения температуры поверхно-
сти.
ОЦЕНКА УСЛОВИЙ передвижения планетоходов
17
Таблица 1.1. Основные типичные ситуации условий передвижения
по поверхности Луны и планет
Параметр Тип грунтовой поверхности
Мелкозернистый грунт (лунный реголит) Песчаный грунт Крупнозернис- тый обломоч- ный грунт
Средний размер частиц, мкм 10—100 100—300 10»—10*
Объемная плотность, г/см3 1—1,8 1,4—1,8 1,5—2,0
Пористость, % 40—50 35—40 30—40
Основные виды деформации Уплотнение, местный сдвиг Общий сдвиг Общий сдвиг
Коэффициент сжимаемости, 1/МПа 2—50 5 —
Сцепление, кПа 0,5—5,0 1,0 —
Угол внутреннего трения, градус 10—30 25—35 30—40
Несущая способность, кПа 10—100 20—200* 250—1000
Основные типы элементов рель- Уклоны, крате- Уклоны, Уклоны,
ефа ры камни, осыпи камни камни, осыпи
Область распространения Луна, Марс, Фобос, Мер- курий Марс Венера
• Несущая способность существенно зависит от ускорения свободного падения, дан-
ные приведены для земных условий.
Эти факторы могут приводить к некоторым особенностям грунтов и про-
цессов взаимодействия движителей с грунтом. Отсутствие в грунте жидкой
и газообразной фазы позволяет рассматривать лунные грунты как абсолютно
сухую однофазную систему, лишенную аэрогидравлических связей и взаимо-
действий. Вместе с тем отсутствие в частицах грунта поверхностных адсорб-
ционных пленок, высокая чистота зон контактов приводят к значительному
возрастанию сил молекулярного взаимодействия между частицами. Это мо-
жет привести к заметному изменению процесса адгезии и внутреннего трения
по сравнению с земными грунтами.
Результаты изучения влияния вакуума на модели лунных грунтов пока-
зали, что в высоком вакууме наблюдается значительное увеличение сил вза-
имодействия между поверхностями частиц грунта. Однако вследствие отно-
сительно малой величины контактирующих поверхностей по сравнению с об-
щей поверхностью частиц среднее значение сил сцепления, обусловленных
влиянием вакуума, оценивается величиной порядка 100 Па. Эта величина во
много раз ниже сил сцепления в грунте, обусловленных остаточными внут-
ренними напряжениями и взаимным зацеплением частиц.
Из-за отсутствия в лунном грунте жидкости и газов влияние темпера-
туры на физико-механические свойства проявляется только в изменении фазо-
вых состояний его твердой основы. Однако в диапазоне температур, характер-
ном для поверхности (100...420 К), породы, слагающие ее основу, яв-
2 Зак.
18
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕ!*
ляются термоустойчивыми, что позволяет сделать вывод об отсутствии за-
метного изменения физических свойств лунного грунта.
Влияние уменьшенной силы тяжести на механические свойства грунта оп-
ределяется механизмами его деформации и проявляется в наибольшей степе-
ни там, где основным фактором, определяющим этот процесс, являются силы
веса.
При движении транспортных средств можно выделить два основных ви-
да деформации грунта: уплотнение и выпирание в стороны. Из-за различной
физической природы этих видов деформаций влияние ускорения свободного
падения на них неоднозначно. Выпирание грунта под движителем машины
происходит вследствие возникновения в нем зон, для которых касательные
напряжения превышают сопротивление сдвигу. Такие процессы рассматрива-
ются теорией предельного равновесия. Уплотнение грунта приводит к сбли-
жению частиц без образования линий скольжения и нарушения сплошности
грунтового массива.
Анализ влияния ускорения свободного падения на деформацию грунта для
случая предельного равновесия может быть выполнен на основе следующего
обобщенного уравнения [61]:
Рк= + + (1.3)
где рк—критическое давление; р — объемная плотность грунта; g— ускоре-
ние свободного падения; q — пригрузка на свободной поверхности грунта;
с — сцепление; Вш — размер штампа; JVi, N2t N3 — коэффициенты, зависящие
от угла внутреннего трения и формы штампа.
При описании процесса вдавливания штампа с использованием зависи-
мости (1.3) предполагается, что величина пригрузки равна
<7=pgft, (1.4)
где h — глубина погружения штампа в грунт.
Если давление на штампе р
Р < А\Р£вш + N3c, (1.5)
то внедрения штампа в грунт не происходит (осадка равна нулю).
Для несвязного грунта (с = 0) уравнение (1.3) примет следующий вид:
Рк = Р^(^1Вш + ^). (1-6)
Из этого выражения следует, что давление, необходимое для погружения
штампа на заданную глубину h, прямопропорционально ускорению свобод-
ного падения.
Для связного грунта (с>0) влияние ускорения свободного падения на
величину давления (при заданной величине осадки) проявляется в меньшей
степени, и при достаточно большом сцеплении грунта это влияние становится
практически незаметным. Аналогичные результаты были получены также в
работах [58, 59].
В условиях невесомости (g=0) при достижении некоторого давления (пре-
дела несущей способности) происходит резкий провал штампа, а в случае
несвязного грунта наблюдается полная потеря несущей способности.
Если определять величину осадки штампа под воздействием заданной
величины давления, то при выполнении неравенства (1.5) ускорение свобод-
ного падения не оказывает влияния. Если неравенство (1.5) не выполняется,
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
19
величина осадки при лунной силе тяжести может быть определена из урав-
нения (1.3) и будет равна
hji = Ч U-7)
N2 \ ёл J ёл
Из этого уравнения следует, что осадка увеличивается в большей степе-
ни, чем изменяется ускорение свободного падения.
Для решения практических задач взаимодействия движителя с грунтом
применяются эмпирические зависимости нагрузки на грунт от его деформа-
ций (уравнение Бернштейна—Летошнева, Беккера и др.) [3, 25, 26]. Эти
уравнения являются исходными для определения основных параметров взаи-
модействия движителя машины с грунтом. Возможность применения первого
из упомянутых уравнений для описания процессов деформации моделей лун-
ного грунта проверялась построением результатов экспериментов в логариф-
мических координатах.
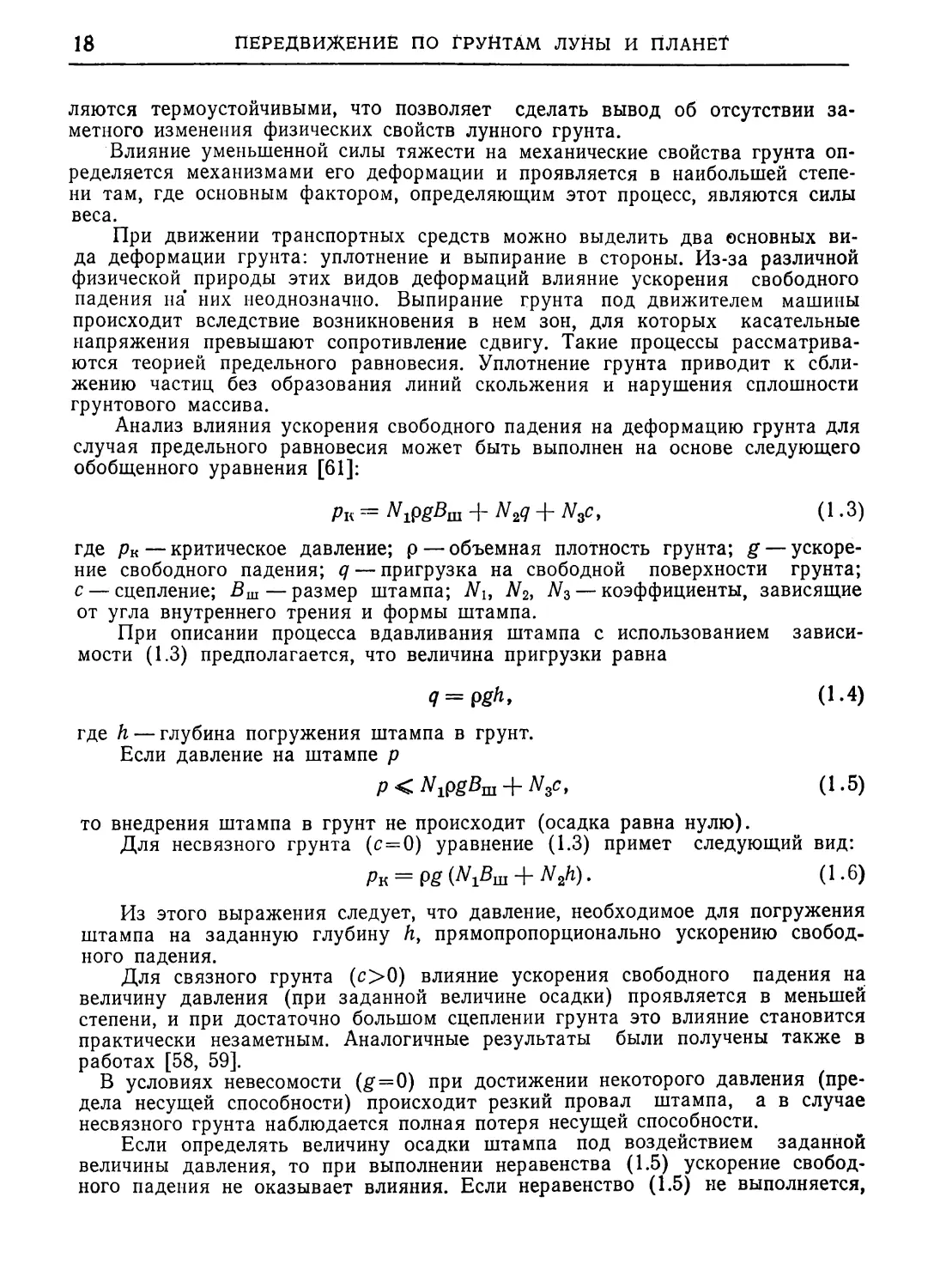
В табл. 1.2 приведены экспериментальные данные по вдавливанию в квар-
цевый песок плоского штампа диаметром 7,5 см и колесного штампа диамет-
ром Z)K = 36,5 см и шириной В=7,5 см в условиях lg3 и 0,27 g3.
Таблица 1.2. Параметры графиков внедрения штампов
Тип штампа Ускорение свободного падения, м/с2 Коэффициены уравнения (1.1)
п Сг, Н-см2-«
Плоский диаметр 7,5 см 9,8 0,58 2,9
2,6 0,96 0,38
Колесный, диаметр 36,5 см, ширина 9,8 0,49 2,4
7,5 см 2,6 1,04 0,53
Экспериментальные данные достаточно хорошо могут быть осреднены
прямыми линиями, что подтверждает возможность использования уравнения
(1-1) для описания процессов осадки.
При изменении ускорения свободного падения меняются и коэффициен-
ты уравнения (1.1) Сг и п.
Различие коэффициентов Ст и и, определенных с помощью плоского и ко-
лесного штампов, составляет 25...30 %.
Изменение ускорения свободного падения приводит к изменению обоих
параметров в уравнении (1.1). Это можно объяснить тем, что происходит
изменение соотношений между деформациями уплотнения и деформациями
предельного равновесия.
Зависимости типа (1.1) не учитывают влияния на осадку сдвигающей
нагрузки. В связи с этим представляет интерес определение полной осадки
при приложении к нагружающей площадке (штампу) как нормальной, так и
боковой нагрузок.
„ На рис. 1.7 приведены экспериментальные данные взаимодействия плос-
кой опоры с моделью лунного грунта, изготовленной из молотого базальта.
Из приведенных зависимостей видно, что по мере приложения боковой наг-
2*
20
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
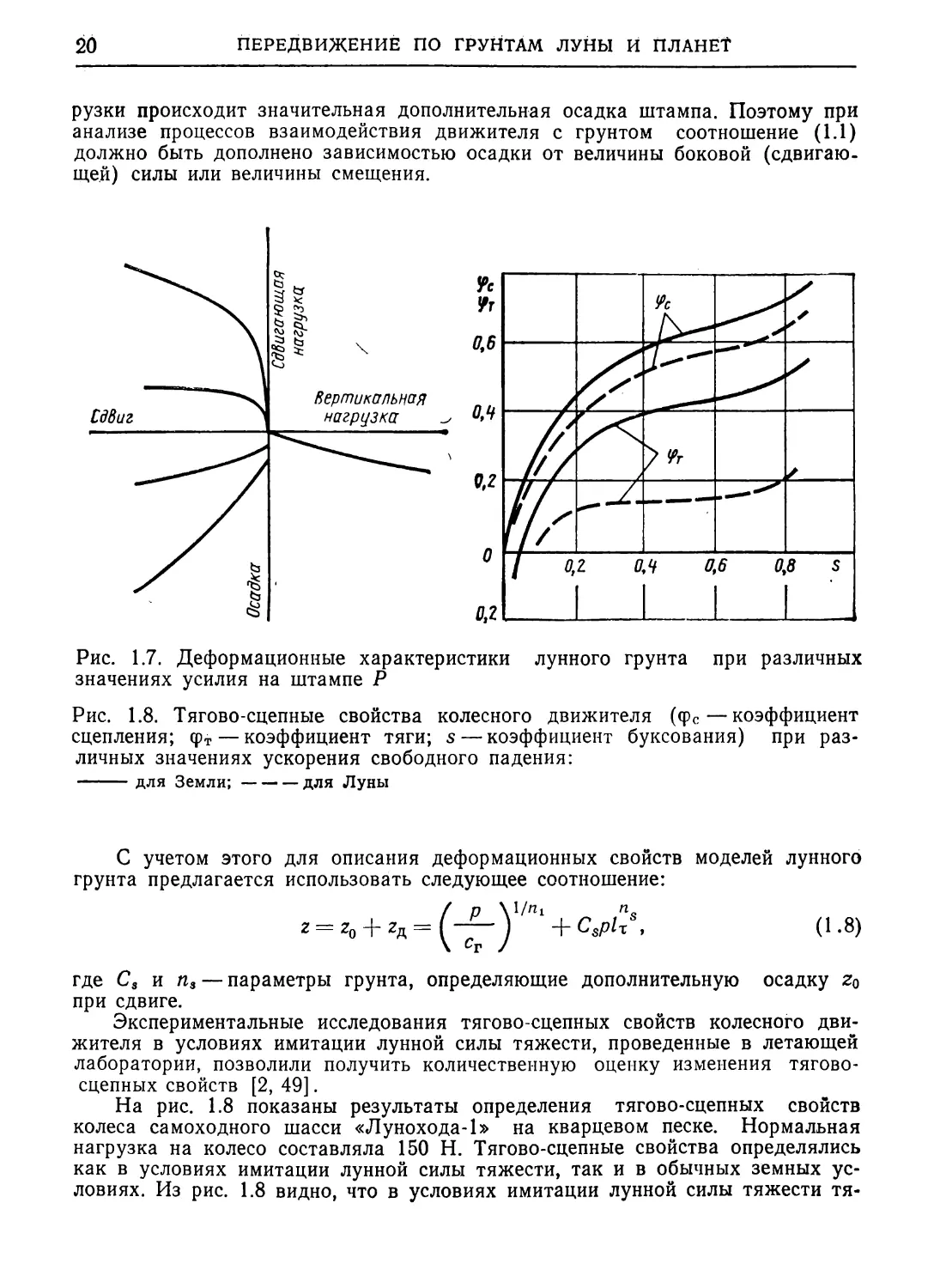
рузки происходит значительная дополнительная осадка штампа. Поэтому при
анализе процессов взаимодействия движителя с грунтом соотношение (1.1)
должно быть дополнено зависимостью осадки от величины боковой (сдвигаю-
щей) силы или величины смещения.
Рис. 1.7. Деформационные характеристики лунного грунта при различных
значениях усилия на штампе Р
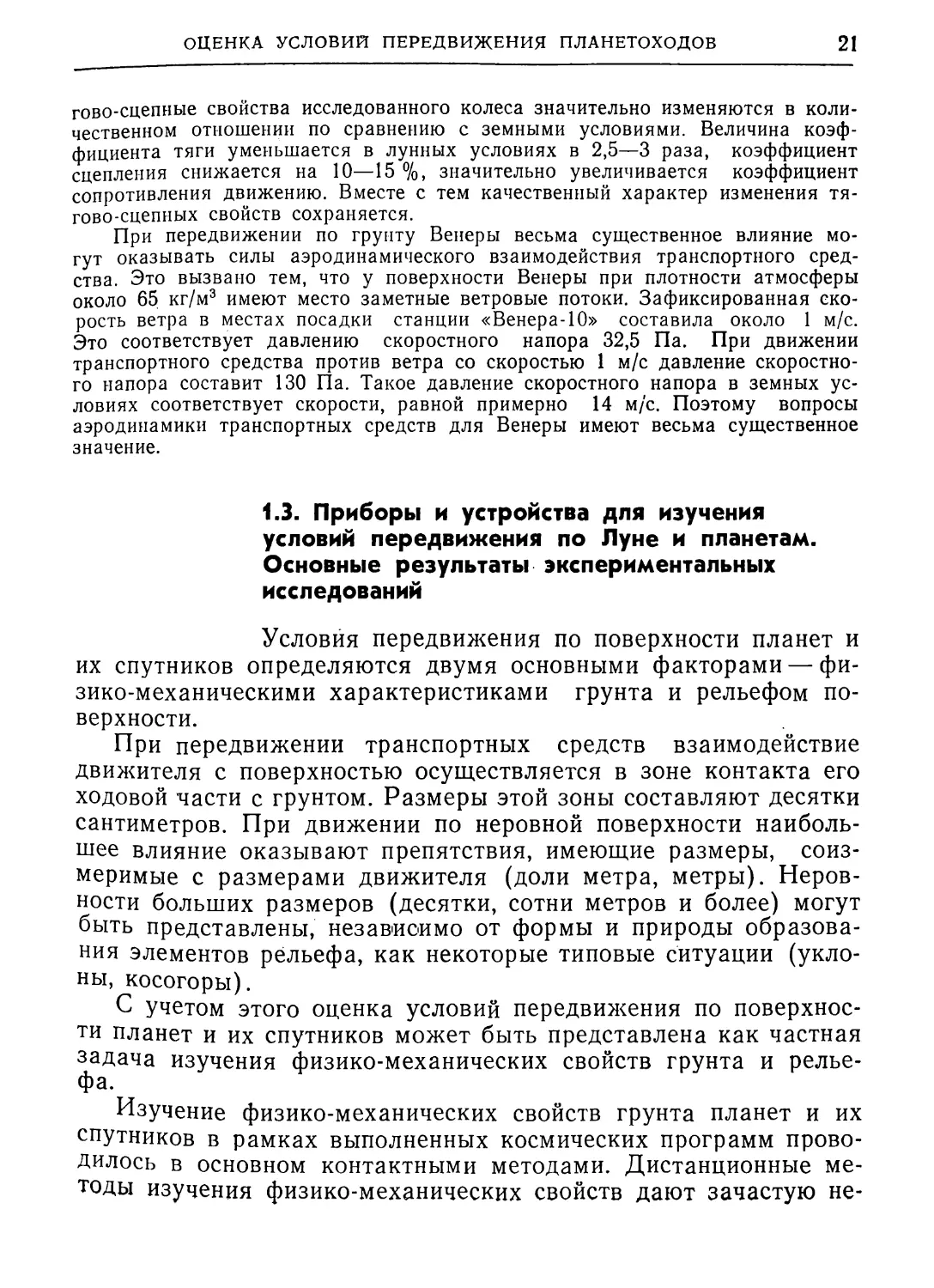
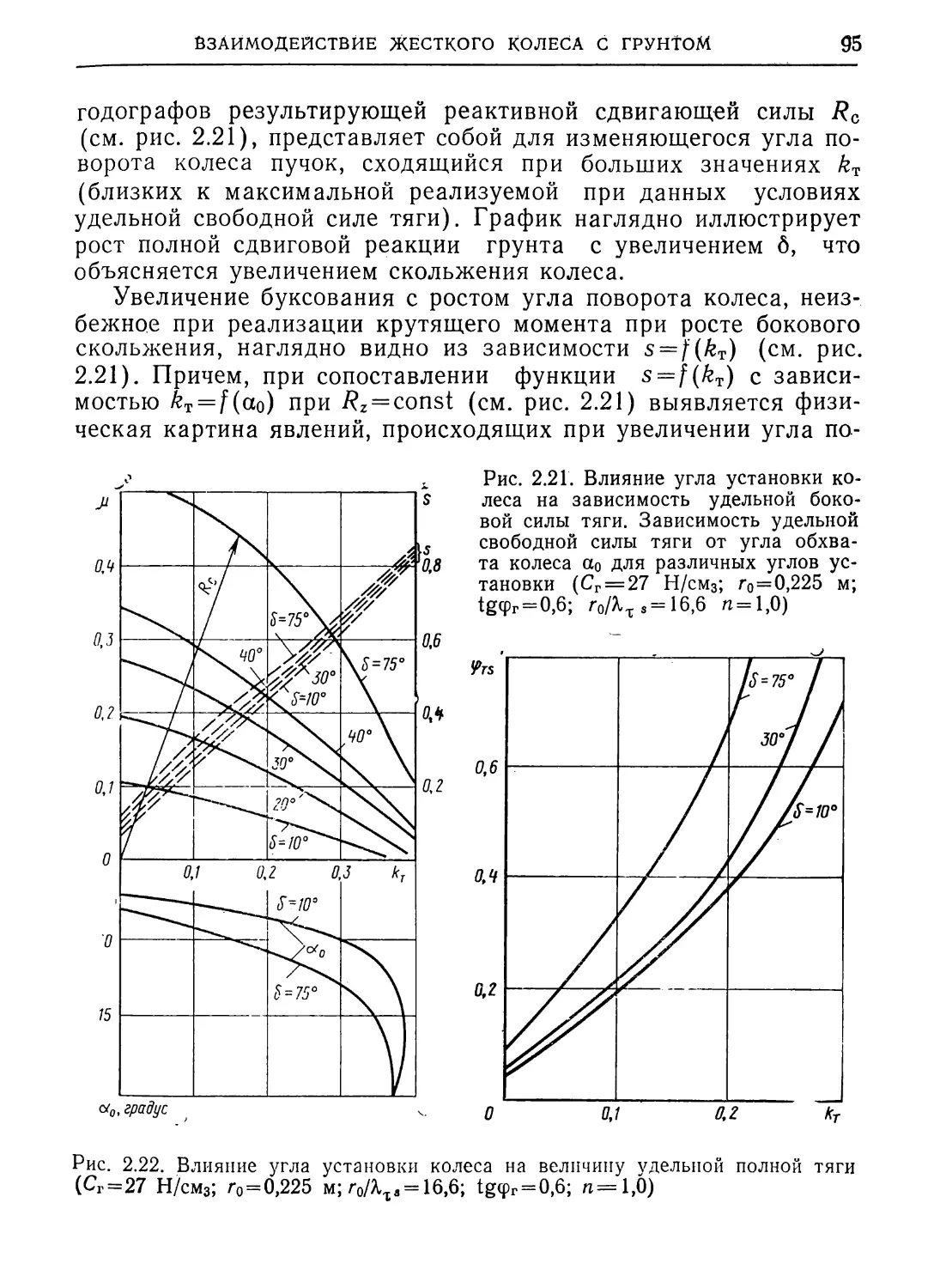
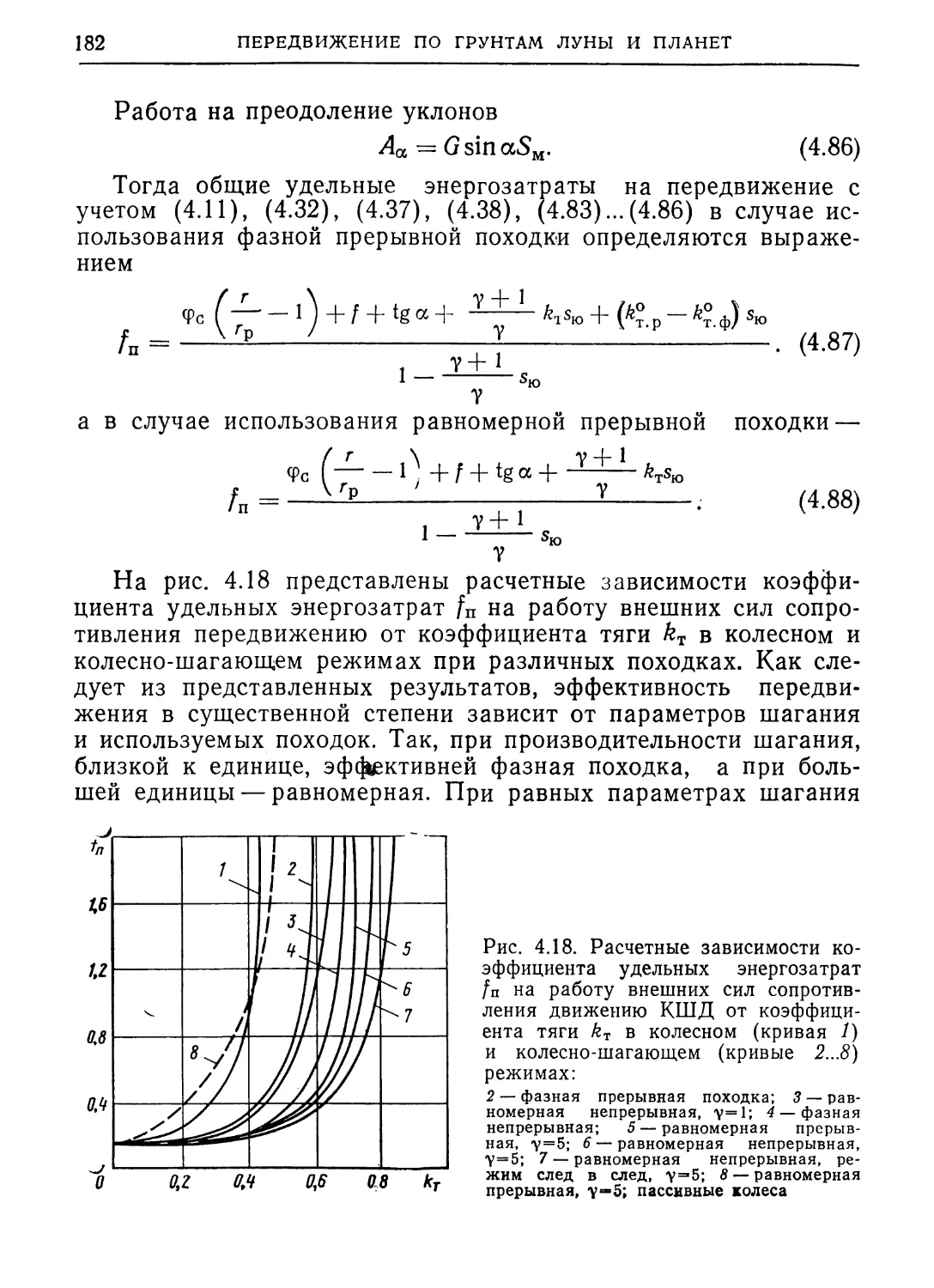
Рис. 1.8. Тягово-сцепные свойства колесного движителя (фс—коэффициент
сцепления; фт— коэффициент тяги; s — коэффициент буксования) при раз-
личных значениях ускорения свободного падения:
----для Земли;-----для Луны
С учетом этого для описания деформационных свойств моделей лунного
грунта предлагается использовать следующее соотношение:
(л \1/П1 п
— ) +Cspl^St (1.8)
сг J
где Cs и п3 — параметры грунта, определяющие дополнительную осадку zQ
при сдвиге.
Экспериментальные исследования тягово-сцепных свойств колесного дви-
жителя в условиях имитации лунной силы тяжести, проведенные в летающей
лаборатории, позволили получить количественную оценку изменения тягово-
сцепных свойств [2, 49].
На рис. 1.8 показаны результаты определения тягово-сцепных свойств
колеса самоходного шасси «Лунохода-1» на кварцевом песке. Нормальная
нагрузка на колесо составляла 150 Н. Тягово-сцепные свойства определялись
как в условиях имитации лунной силы тяжести, так и в обычных земных ус-
ловиях. Из рис. 1.8 видно, что в условиях имитации лунной силы тяжести тя-
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
21
гово-сцепные свойства исследованного колеса значительно изменяются в коли-
чественном отношении по сравнению с земными условиями. Величина коэф-
фициента тяги уменьшается в лунных условиях в 2,5—3 раза, коэффициент
сцепления снижается на 10—15 %, значительно увеличивается коэффициент
сопротивления движению. Вместе с тем качественный характер изменения тя-
гово-сцепных свойств сохраняется.
При передвижении по грунту Венеры весьма существенное влияние мо-
гут оказывать силы аэродинамического взаимодействия транспортного сред-
ства. Это вызвано тем, что у поверхности Венеры при плотности атмосферы
около 65 кг/м3 имеют место заметные ветровые потоки. Зафиксированная ско-
рость ветра в местах посадки станции «Венера-10» составила около 1 м/с.
Это соответствует давлению скоростного напора 32,5 Па. При движении
транспортного средства против ветра со скоростью 1 м/с давление скоростно-
го напора составит 130 Па. Такое давление скоростного напора в земных ус-
ловиях соответствует скорости, равной примерно 14 м/с. Поэтому вопросы
аэродинамики транспортных средств для Венеры имеют весьма существенное
значение.
1.3. Приборы и устройства для изучения
условий передвижения по Луне и планетам.
Основные результаты экспериментальных
исследований
Условия передвижения по поверхности планет и
их спутников определяются двумя основными факторами — фи-
зико-механическими характеристиками грунта и рельефом по-
верхности.
При передвижении транспортных средств взаимодействие
движителя с поверхностью осуществляется в зоне контакта его
ходовой части с грунтом. Размеры этой зоны составляют десятки
сантиметров. При движении по неровной поверхности наиболь-
шее влияние оказывают препятствия, имеющие размеры, соиз-
меримые с размерами движителя (доли метра, метры). Неров-
ности больших размеров (десятки, сотни метров и более) могут
быть представлены, независимо от формы и природы образова-
ния элементов рельефа, как некоторые типовые ситуации (укло-
ны, косогоры).
С учетом этого оценка условий передвижения по поверхнос-
ти планет и их спутников может быть представлена как частная
задача изучения физико-механических свойств грунта и релье-
фа.
Изучение физико-механических свойств грунта планет и их
спутников в рамках выполненных космических программ прово-
дилось в основном контактными методами. Дистанционные ме-
тоды изучения физико-механических свойств дают зачастую не-
22
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
однозначный результат, а многие параметры пока еще не могут
быть ими определены. Кроме того, осреднение измерений на
большой площади дает обобщенные данные, тогда как именно
вариации физико-механических свойств во взаимосвязи с эле-
ментами рельефа определяют главный смысл и цель исследо-
ваний условий передвижения.
В наибольшей степени исследованы физико-механические
свойства лунного грунта. В СССР впервые контактными метода-
ми были оценены физико-механические свойства грунта при мяг-
кой посадке станций «Луна-9 и 13», станций «Венера-8, 9, 10, 13,
14». Подвижные станции «Луноход-1, 2» позволили выполнить
около 1000 измерений физико-механических свойств на трассе
общей длиной 47 км [35, 52].
При передвижении «Луноходов» физико-механические свой-
ства основания оценивались также и по взаимодействию движи-
теля с грунтом, что позволяло проводить непрерывную оценку
свойств поверхности. Телеметрическая информация о взаимо-
действии с грунтом была получена по всей трассе движения
«Лунохода-1, 2».
Конструкция приборов для определения структурно-механи-
ческих свойств грунта предусматривает прямое их взаимодей-
ствие с основанием — внедрение рабочей части, отбор проб, ме-
ханическую деформацию отобранной пробы. Основной рабочей
частью таких приборов является штамп, который и деформирует
грунт. Мерой оценки упомянутых свойств является глубина
внедрения штампа в зависимости от приложенного к нему уси-
лия или энергии, затраченной на деформацию грунта.
При смещении (развороте) заглубленного в грунт штампа
определяются характеристики среза. Для этого необходимо знать
сдвигающее усилие (крутящий момент) на штампе и соответст-
вующее ему смещение.
Основным рабочим органом грунтомера-пенетрометра авто-
матической лунной станции «Луна-13» являлся цилиндрический
штамп диаметром 35 мм с конусным наконечником, угол конуса
которого составлял 103°, а ход — 50 мм. Внутри штампа распо-
лагался реактивный двигатель твердого топлива, с помощью ко-
торого создавалось усилие, необходимое для внедрения штампа
в грунт. Глубина погружения измерялась по отношению к на-
ружному кольцевому штампу, связанному с корпусом прибора.
Для того чтобы измерения были проведены за зоной разруше-
ния и деформации грунта, вызванных соударением корпуса
станции с лунной поверхностью, грунтомер-пенетрометр с по-
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
23
мощью раскладного рычажного механизма выносился за преде-
лы станции на расстояние около 1,5 м. После его выноса на
грунт и ориентирования относительно поверхности последнего с
помощью наружного кольцевого штампа производился запуск ре-
активного двигателя, обеспечивающего внедрение штампа в
грунт. Необходимо отметить, что использование других методов
создания усилия на штампе, например путем передачи усилия
через выносной рычажный механизм, привело бы к перемеще-
нию всей станции под воздействием реактивных усилий.
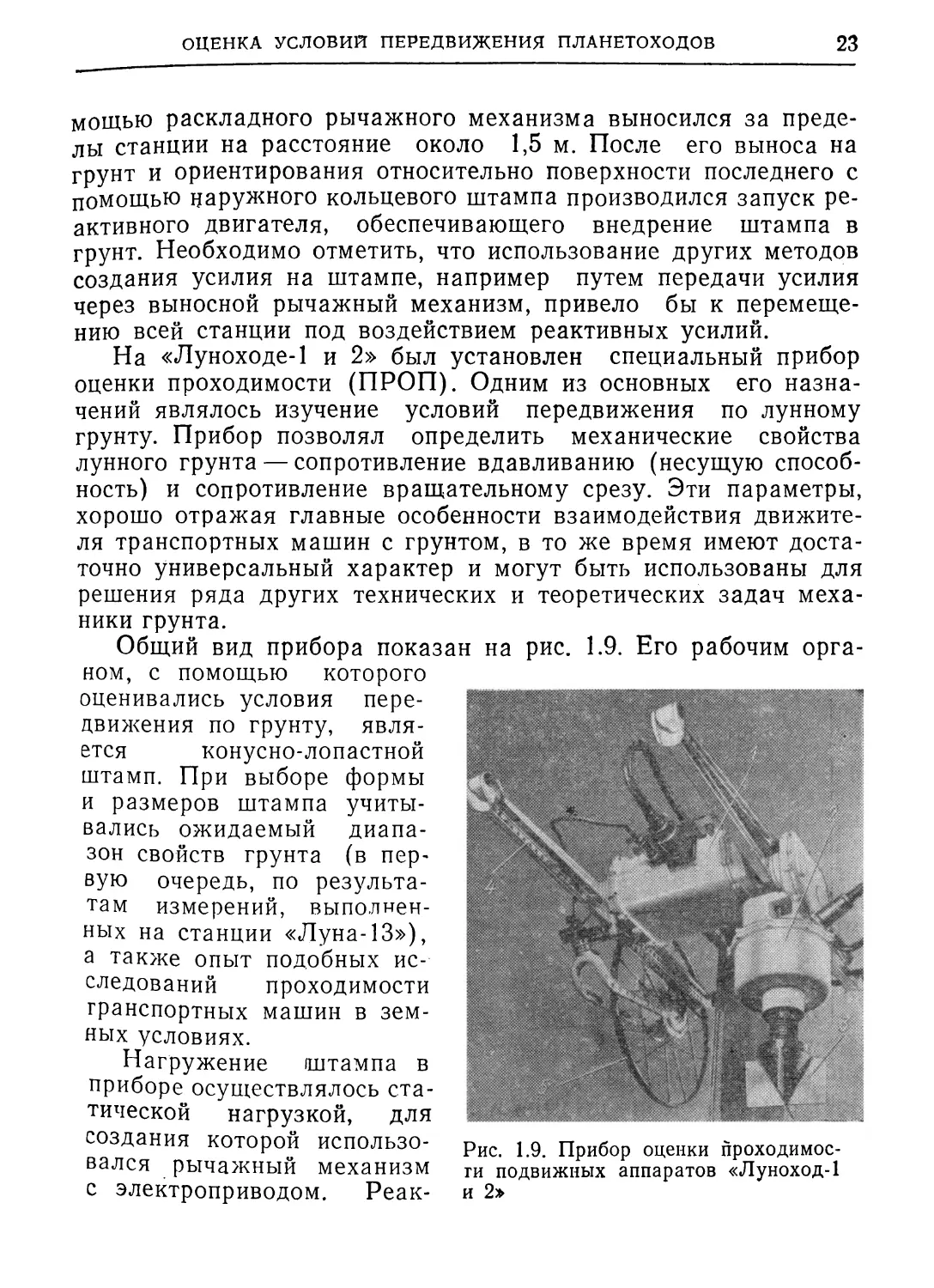
На «Луноходе-1 и 2» был установлен специальный прибор
оценки проходимости (ПРОП). Одним из основных его назна-
чений являлось изучение условий передвижения по лунному
грунту. Прибор позволял определить механические свойства
лунного грунта — сопротивление вдавливанию (несущую способ-
ность) и сопротивление вращательному срезу. Эти параметры,
хорошо отражая главные особенности взаимодействия движите-
ля транспортных машин с грунтом, в то же время имеют доста-
точно универсальный характер и могут быть использованы для
решения ряда других технических и теоретических задач меха-
ники грунта.
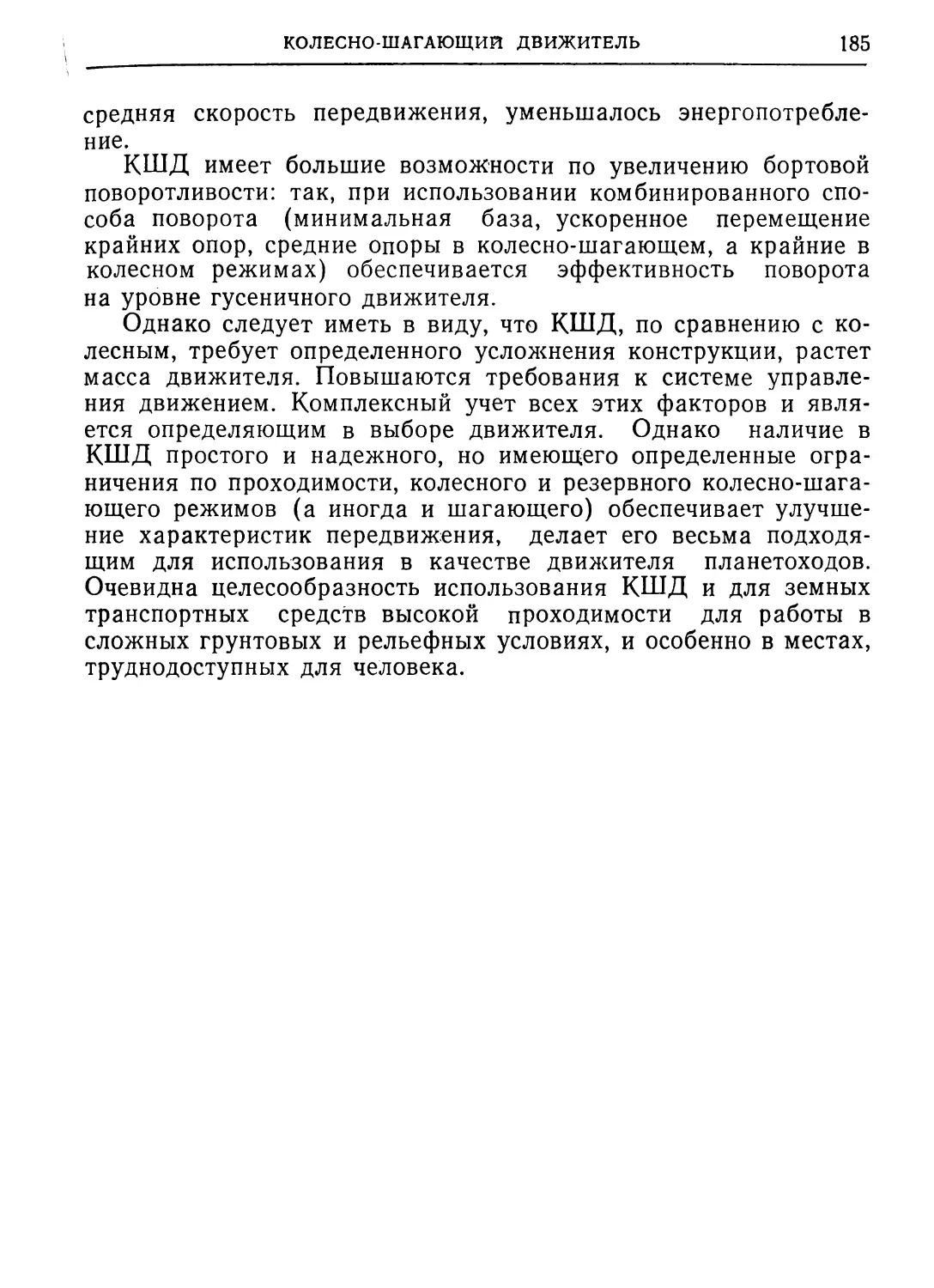
Общий вид прибора показан на рис. 1.9. Его рабочим орга-
ном, с помощью которого
оценивались условия пере-
движения по грунту, явля-
ется конусно-лопастной
штамп. При выборе формы
и размеров штампа учиты-
вались ожидаемый диапа-
зон свойств грунта (в пер-
вую очередь, по результа-
там измерений, выполнен-
ных на станции «Луна-13»),
а также опыт подобных ис-
следований проходимости
транспортных машин в зем-
ных условиях.
Нагружение (штампа в
приборе осуществлялось ста-
тической нагрузкой, для
создания которой использо-
вался рычажный механизм
с электроприводом. Реак-
Рис. 1.9. Прибор оценки проходимос-
ти подвижных аппаратов «Луноход-1
и 2»
24
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ции от усилия внедрения штампа воспринимались корпусом
лунохода.
При достижении предельного усилия или максимального хо-
да штампа процесс внедрения штампа прекращался и происхо-
дило вращение штампа, в результате которого осуществлялся
срез грунта лопастями штампа. После его поворота на угол 90°
или при достижении максимального крутящего момента штамп
возвращался в исходное положение. Выполнение этих операций
осуществлялось автоматически.
Рассмотрим более подробно методику измерений сопротивле-
ний вдавливанию штампа и его вращательному срезу. В качест-
ве оценочных параметров механических свойств грунта опреде-
лялись несущая способность и сопротивление вращательному
срезу. Несущая способность оценивалась как среднее удельное
давление, приходящееся на основание штампа при погружении
последнего на глубину, равную его высоте. Если штамп внедрял-
ся на глубину, меньшую его высоты, несущая способность опре-
делялась как величина удельного давления, приведенного к пло-
щади сечения конуса поверхностью грунта. Возможность такого
метода определения несущей способности вытекает из инвариант-
ности пенетрационных испытаний грунтов конусным штампом
[28, 53].
Сопротивление вращательному срезу определялось как от-
ношение максимального крутящего момента поворота штампа в
грунте к статическому моменту поверхностей среза. Для изуче-
ния особенностей работы ПРОПа на различных моделях грун-
тов, отражающих возможное многообразие условий Луны, про-
водились его тарировочные испытания.
Эти испытания позволили установить, что характеристика
внедрения штампа ПРОПа в пределах высоты конусной части
имеет нелинейный характер и описывается степенным уравнени-
ем:
P = k^h\ (1.9)
где Р — усилие на штампе; h — глубина погружения конусной
части штампа; k$ —коэффициент пропорциональности, завися-
щий от свойств грунта.
Площадь сечения штампа поверхностью грунта
S = nA2tg2(p/2), (1.10)
где р — угол при вершине конуса.
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
Среднее удельное давление по сечению конуса уровнем по-
верхности грунта
р
7 = 4=^-tg4₽/2). (1.11)
о л
Согласно работе [28],
= cMp/tg2 Р/2,
где с — сцепление; Мф—коэффициент, зависящий от угла внут-
реннего трения грунта.
С учетом этого
q=cN^.TC. (1-12)
Следовательно, среднее удельное давление q постоянно и не
зависит от величины погружения штампа в грунт.
Физический смысл рассмотренной методики определения свой-
ств грунта состоит в том, что внедрение конусной части штампа
происходит при постоянном давлении, которое характеризует
прочностные характеристики грунта. Среднее давление на осно-
вание штампа при погружении последнего на глубину, равную
его высоте, служило основной характеристикой механических
свойств грунта.
При погружении штампа на глубину больше его высоты на-
блюдалась практически линейная зависимость между усилием
внедрения и погружением штампа в грунт.
Физико-механические свойства грунта зависят от геолого-
морфологических ситуаций, что позволяет выявить их зависи-
мость от морфологии рельефа Луны [2, 33, 35].
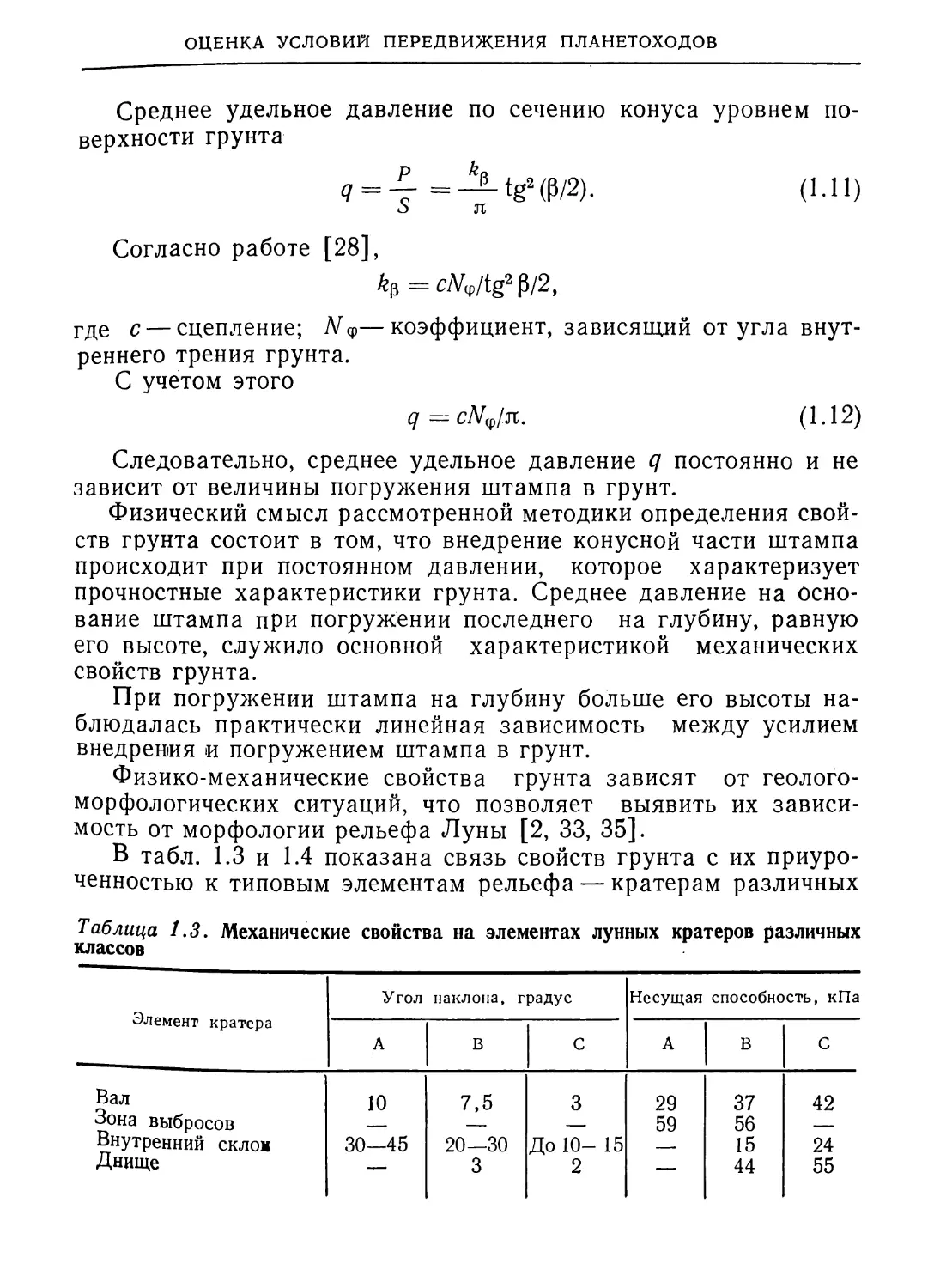
В табл. 1.3 и 1.4 показана связь свойств грунта с их приуро-
ченностью к типовым элементам рельефа — кратерам различных
Таблица 1.3. Механические свойства на элементах лунных кратеров различных
классов
Элемент кратера Угол наклона, градус Несущая способность, кПа
А В с А в с
Вал 10 7,5 3 29 37 42
Зона выбросов — — 59 56
Внутренний склом 30—45 20—30 До 10- 15 15 24
Днище — 3 2 — 44 55
26
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
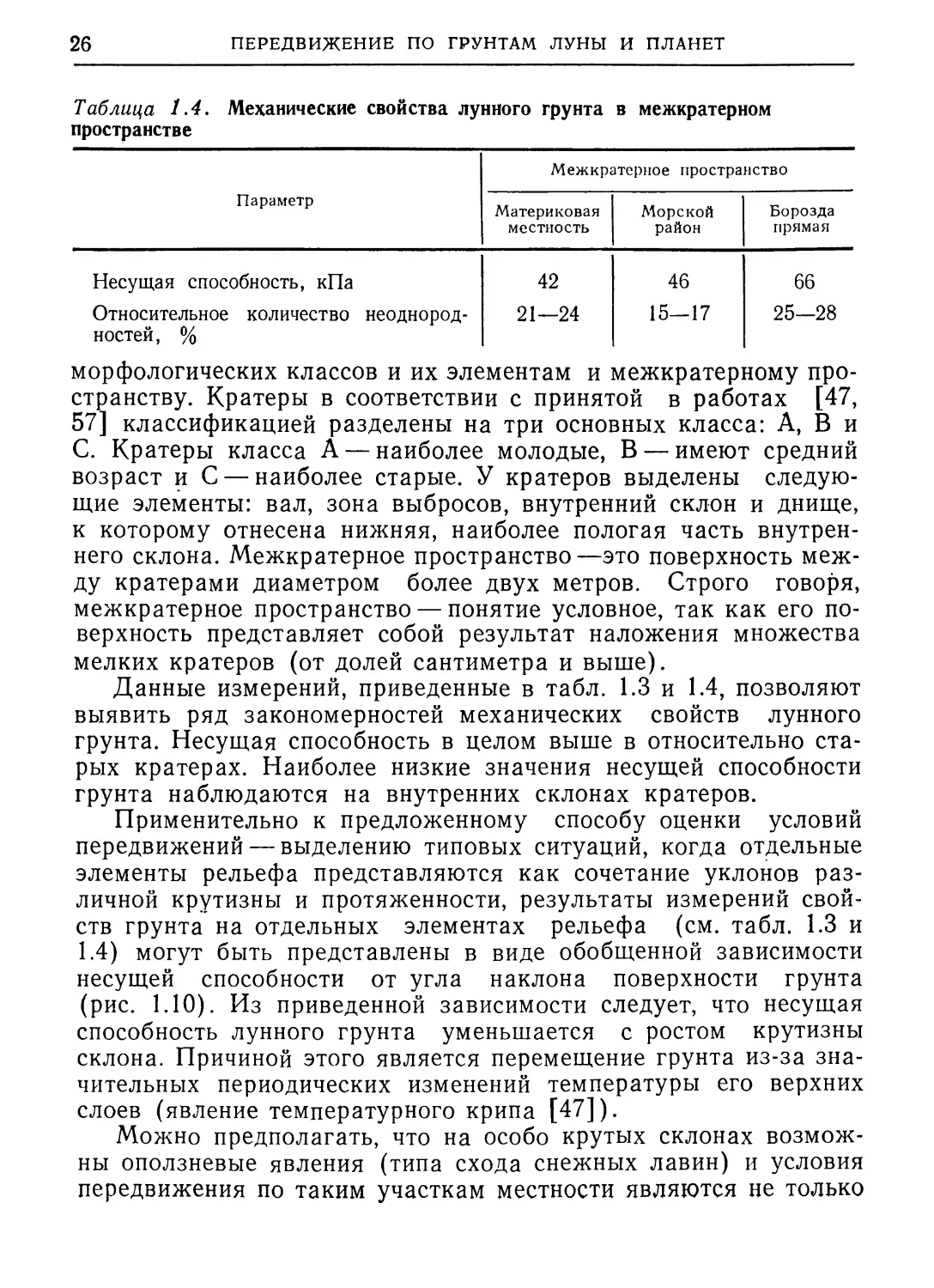
Таблица 1.4. Механические свойства лунного грунта в межкратерном
пространстве
Параметр Межкратерное пространство
Материковая местность Морской район Борозда прямая
Несущая способность, кПа 42 46 66
Относительное количество неоднород- ностей , % 21—24 15—17 25—28
морфологических классов и их элементам и межкратерному про-
странству. Кратеры в соответствии с принятой в работах [47,
57] классификацией разделены на три основных класса: А, В и
С. Кратеры класса А — наиболее молодые, В — имеют средний
возраст и С — наиболее старые. У кратеров выделены следую-
щие элементы: вал, зона выбросов, внутренний склон и днище,
к которому отнесена нижняя, наиболее пологая часть внутрен-
него склона. Межкратерное пространство—это поверхность меж-
ду кратерами диаметром более двух метров. Строго говоря,
межкратерное пространство — понятие условное, так как его по-
верхность представляет собой результат наложения множества
мелких кратеров (от долей сантиметра и выше).
Данные измерений, приведенные в табл. 1.3 и 1.4, позволяют
выявить ряд закономерностей механических свойств лунного
грунта. Несущая способность в целом выше в относительно ста-
рых кратерах. Наиболее низкие значения несущей способности
грунта наблюдаются на внутренних склонах кратеров.
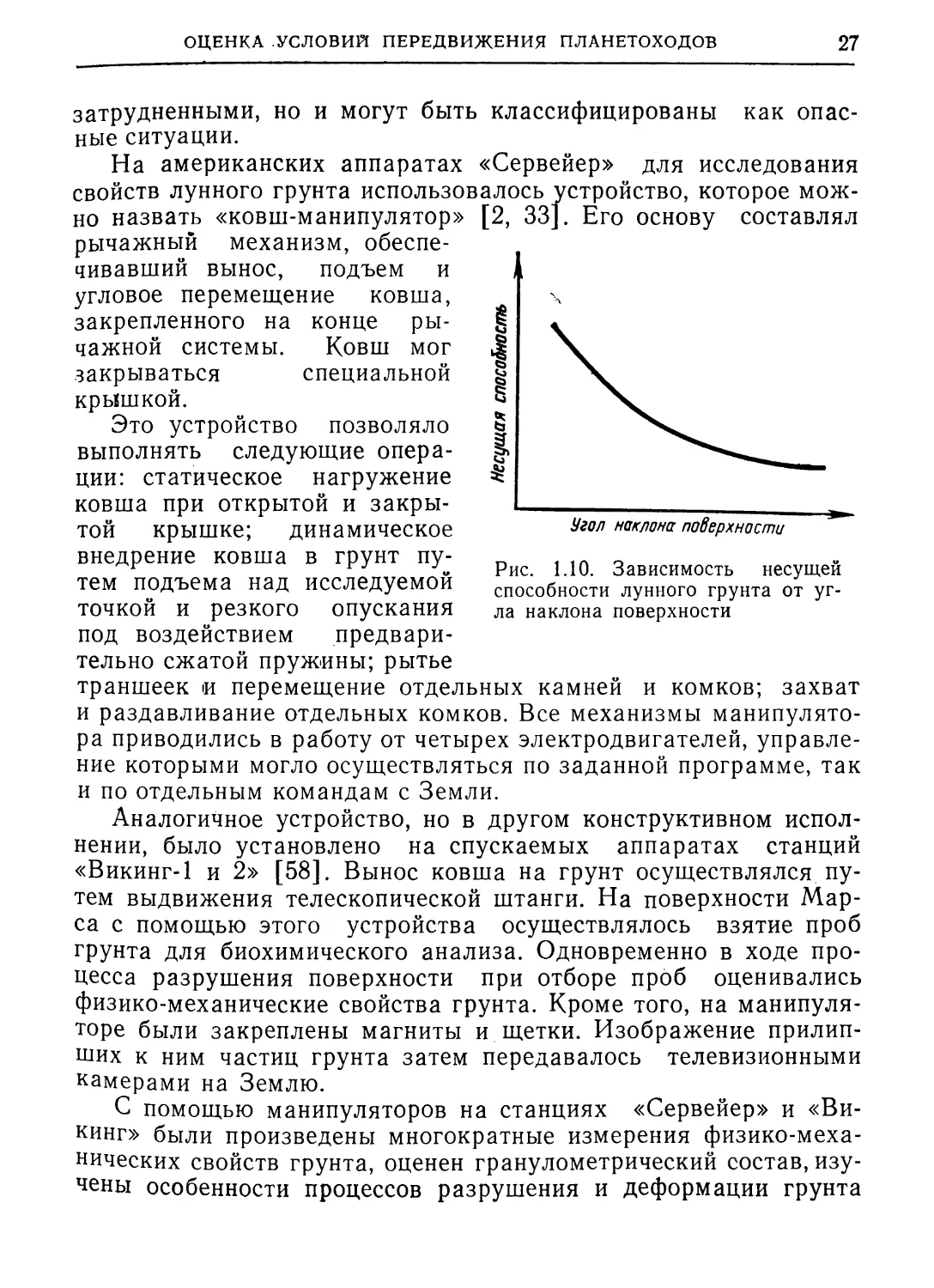
Применительно к предложенному способу оценки условий
передвижений — выделению типовых ситуаций, когда отдельные
элементы рельефа представляются как сочетание уклонов раз-
личной крутизны и протяженности, результаты измерений свой-
ств грунта на отдельных элементах рельефа (см. табл. 1.3 и
1.4) могут быть представлены в виде обобщенной зависимости
несущей способности от угла наклона поверхности грунта
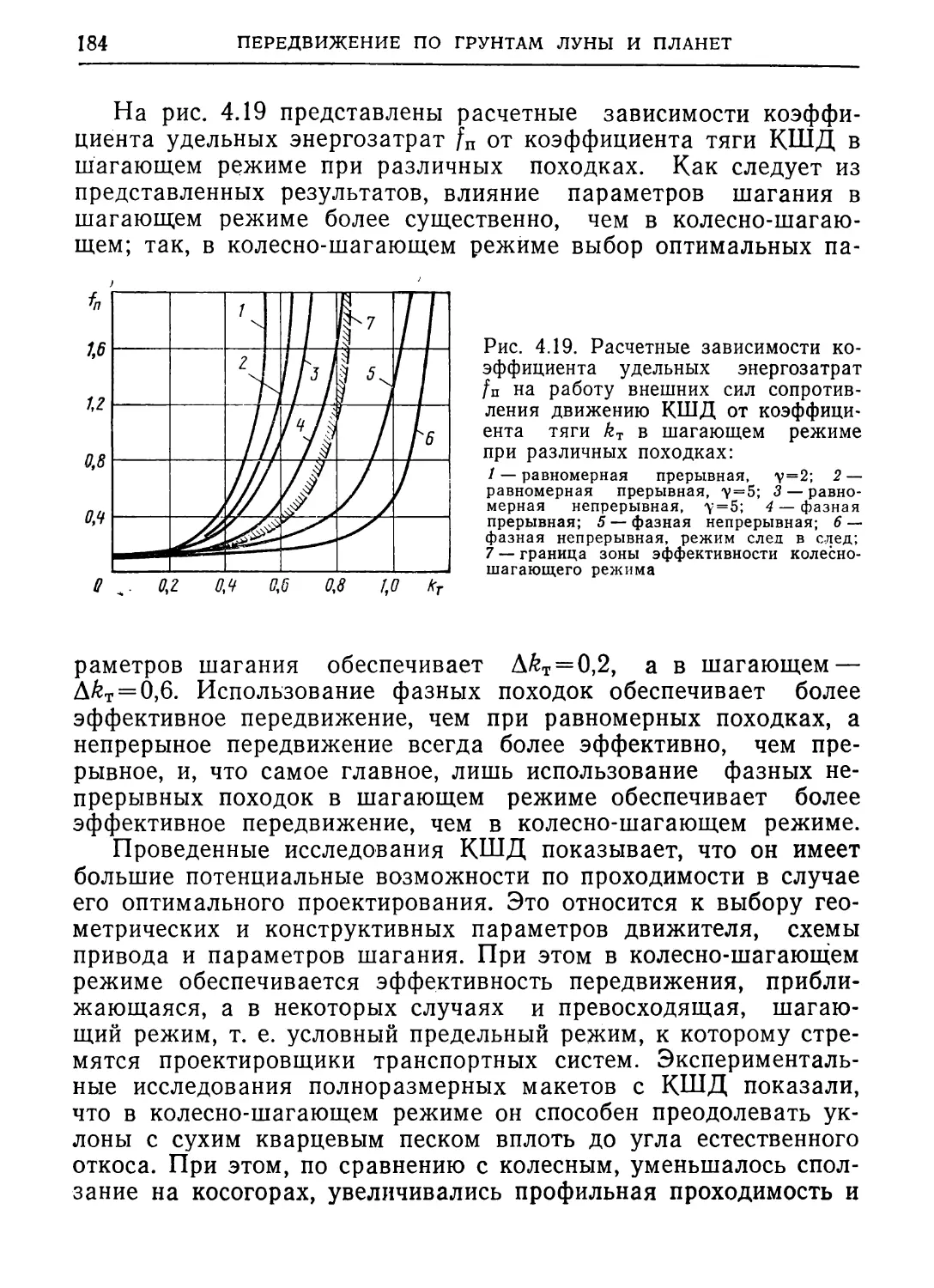
(рис. 1.10). Из приведенной зависимости следует, что несущая
способность лунного грунта уменьшается с ростом крутизны
склона. Причиной этого является перемещение грунта из-за зна-
чительных периодических изменений температуры его верхних
слоев (явление температурного крипа [47]).
Можно предполагать, что на особо крутых склонах возмож-
ны оползневые явления (типа схода снежных лавин) и условия
передвижения по таким участкам местности являются не только
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
27
основу составлял
Рис. 1.10. Зависимость несущей
способности лунного грунта от уг-
ла наклона поверхности
затрудненными, но и могут быть классифицированы как опас-
ные ситуации.
На американских аппаратах «Сервейер» для исследования
свойств лунного грунта использовалось устройство, которое мож-
но назвать «ковш-манипулятор»
рычажный механизм, обеспе-
чивавший вынос, подъем и
угловое перемещение ковша,
закрепленного на конце ры-
чажной системы. Ковш мог
закрываться специальной
крышкой.
Это устройство позволяло
выполнять следующие опера-
ции: статическое нагружение
ковша при открытой и закры-
той крышке; динамическое
внедрение ковша в грунт пу-
тем подъема над исследуемой
точкой и резкого опускания
под воздействием предвари-
тельно сжатой пружины; рытье
траншеек и перемещение отдельных камней и комков; захват
и раздавливание отдельных комков. Все механизмы манипулято-
ра приводились в работу от четырех электродвигателей, управле-
ние которыми могло осуществляться по заданной программе, так
и по отдельным командам с Земли.
Аналогичное устройство, но в другом конструктивном испол-
нении, было установлено на спускаемых аппаратах станций
«Викинг-1 и 2» [58]. Вынос ковша на грунт осуществлялся пу-
тем выдвижения телескопической штанги. На поверхности Мар-
са с помощью этого устройства осуществлялось взятие проб
грунта для биохимического анализа. Одновременно в ходе про-
цесса разрушения поверхности при отборе проб оценивались
физико-механические свойства грунта. Кроме того, на манипуля-
торе были закреплены магниты и щетки. Изображение прилип-
ших к ним частиц грунта затем передавалось телевизионными
камерами на Землю.
С помощью манипуляторов на станциях «Сервейер» и «Ви-
кинг» были произведены многократные измерения физико-меха-
нических свойств грунта, оценен гранулометрический состав, изу-
чены особенности процессов разрушения и деформации грунта
28
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
под воздействием нормальных и сдвигающих усилий. Однако из-
мерения могли проводиться только вблизи мест посадок.
Изучение условий передвижения по поверхности Венеры про-
водилось с помощью приборов, установленных на спускаемых
аппаратах «Венера-9, 10, 13, 14».
На спускаемых аппаратах станций «Венера-9, 10» был уста-
новлен радиационный плотномер. В выносном цилиндрическом
блоке плотномера, представлявшем собой титановую трубку с
наружным диаметром 40 и длиной 360 мм, были расположены
радиоизотопный источник и счетчики гамма-излучения, сигналы
с которых передавались по проводам в электронный блок, рас-
положенный в гермоотсеке. Измерения плотности камней дали
величину порядка 2,8 г/см3..
Плотномер на станциях «Венера-9 и 10» позволил также оце-
нить прочность грунта. Это удалось сделать на основе анализа
процесса соударения с грунтом корпуса выносной части плотно-
мера в момент его выноса. Таким образом было установлено, что
прочность камней в зоне посадки станции «Венера-9» не менее
19 МПа [35].
Одной из основных задач исследования поверхности Венеры
с помощью советских автоматических станций «Венера-13 и 14»
являлось проведение прямых измерений физико-механических
свойств поверхностного слоя грунта в естественном залегании.
С этой целью на станциях были установлены выносные прибо-
ры, предназначенные для определения механических свойств и
электрического сопротивления грунта на некотором удалении от
посадочного устройства за зоной возможной деформации грун-
та, вызванных соударением последнего с поверхностью планеты
при посадке.
Определение механических свойств грунта основано на мето-
де динамического пенетрирования и вращательного среза (рис.
1.11) [52]. В качестве основной рабочей части выносного при-
бора используется конусно-лопастной штамп. Внедрение штампа
в грунт осуществляется за счет заданной кинетической энергии.
Несущая способность при динамическом внедрении определя-
ется из условия, что кинетическая энергия штампа расходуется,
в основном, на деформацию грунта и оценивается соотношением:
-------ЗЕ„----0 13)
4 n/i3tg2(P/2)
где <7 — несущая способность грунта; Ек— кинетическая энергия
штампа перед внедрением в грунт; ka — коэффициент, учитыва-
оценка .УСЛОВИЙ ПЕРЕДВИЖЕНИЯ планетоходов
29
ющий потери энергии на трение, аэродинамическое сопротивле-
ние, деформацию элементов конструкции прибора; h — глубина
внедрения штампа; 0 — угол при вершине штампа.
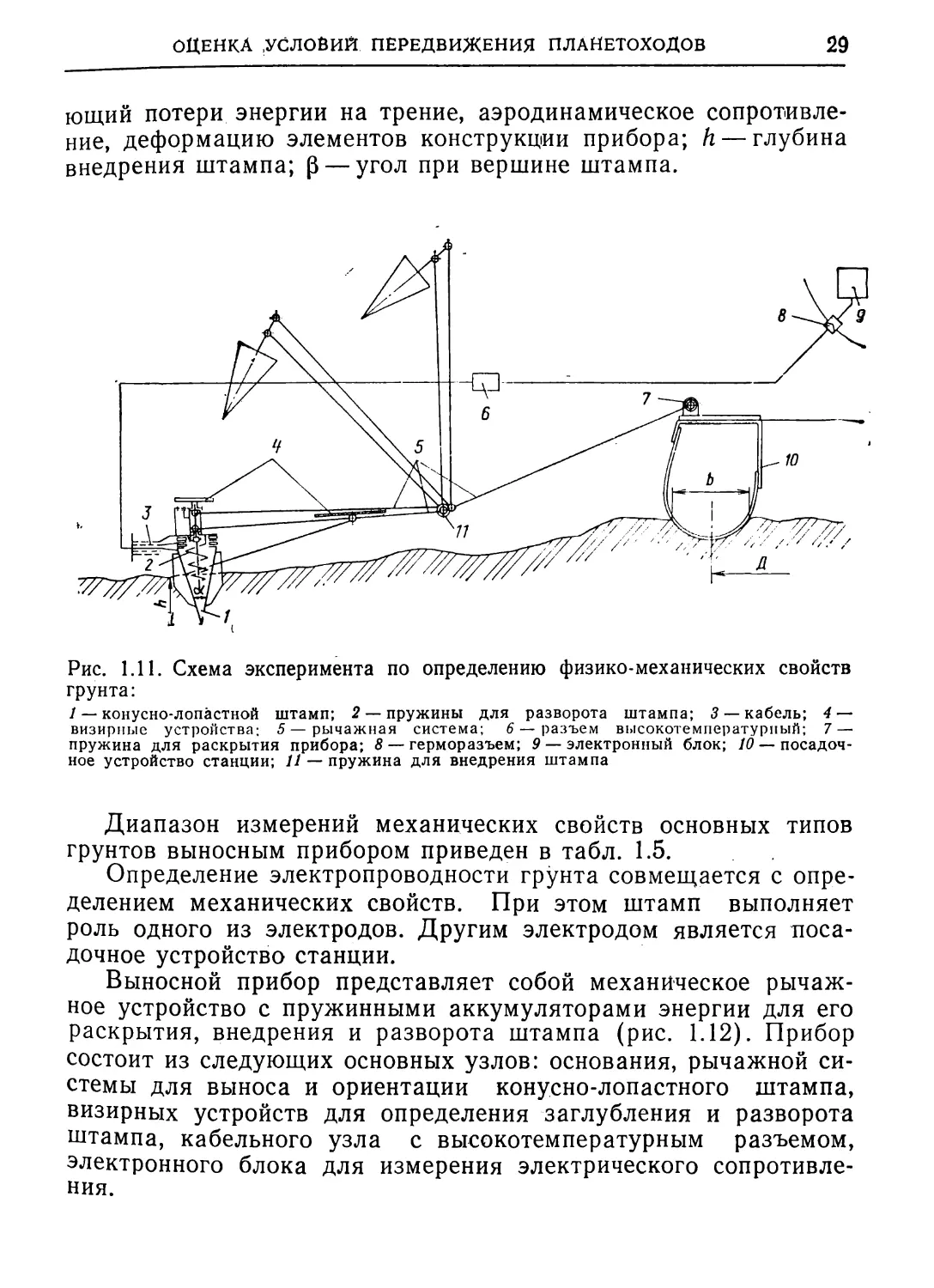
Рис. 1.11. Схема эксперимента по определению физико-механических свойств
грунта:
/-конусно-лопастной штамп; 2 — пружины для разворота штампа; 3 — кабель; 4 —
визирные устройства; 5 — рычажная система; 6 — разъем высокотемпературный; 7 —
пружина для раскрытия прибора; 8 — герморазъем; 9 — электронный блок; 10 — посадоч-
ное устройство станции; 11 — пружина для внедрения штампа
Диапазон измерений механических свойств основных типов
грунтов выносным прибором приведен в табл. 1.5.
Определение электропроводности грунта совмещается с опре-
делением механических свойств. При этом штамп выполняет
роль одного из электродов. Другим электродом является поса-
дочное устройство станции.
Выносной прибор представляет собой механическое рычаж-
ное устройство с пружинными аккумуляторами энергии для его
раскрытия, внедрения и разворота штампа (рис. 1.12). Прибор
состоит из следующих основных узлов: основания, рычажной си-
стемы для выноса и ориентации конусно-лопастного штампа,
визирных устройств для определения заглубления и разворота
штампа, кабельного узла с высокотемпературным разъемом,
электронного блока для измерения электрического сопротивле-
ния.
30
ПЕРЕДВИЖЕНИЕ по ГРУНТАМ луны и планет
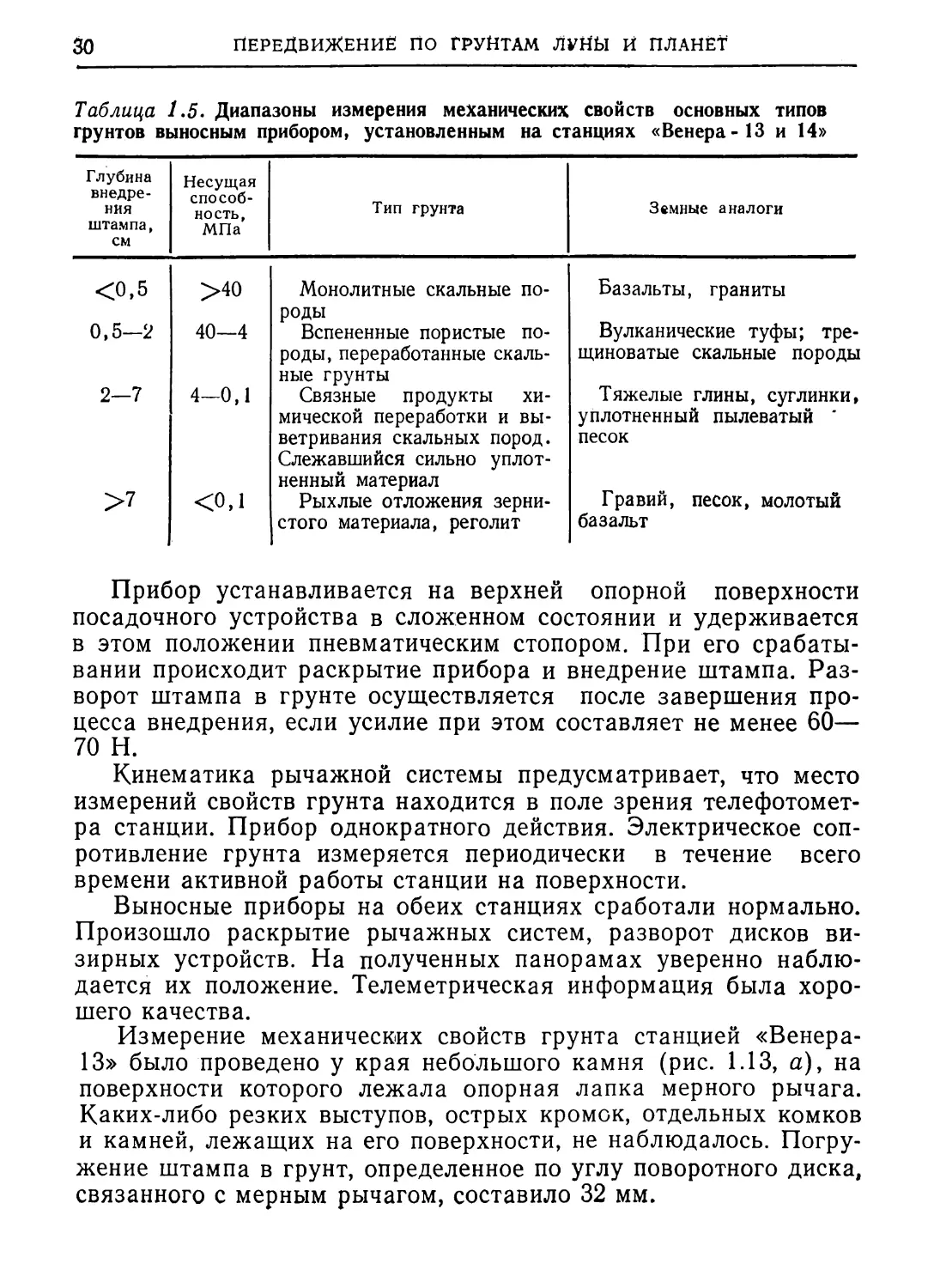
Таблица 1.5. Диапазоны измерения механических свойств основных типов
грунтов выносным прибором, установленным на станциях «Венера-13 и 14»
Глубина внедре- ния штампа, см Несущая способ- ность, МПа Тип грунта Земные аналоги
<0,5 >40 Монолитные скальные по- роды Базальты, граниты
0,5—2 40—4 Вспененные пористые по- роды, переработанные скаль- ные грунты Вулканические туфы; тре- щиноватые скальные породы
2—7 4—0,1 Связные продукты хи- мической переработки и вы- ветривания скальных пород. Слежавшийся сильно уплот- ненный материал Тяжелые глины, суглинки, уплотненный пылеватый ' песок
>7 <0,1 Рыхлые отложения зерни- стого материала, реголит Гравий, песок, молотый базальт
Прибор устанавливается на верхней опорной поверхности
посадочного устройства в сложенном состоянии и удерживается
в этом положении пневматическим стопором. При его срабаты-
вании происходит раскрытие прибора и внедрение штампа. Раз-
ворот штампа в грунте осуществляется после завершения про-
цесса внедрения, если усилие при этом составляет не менее 60—
70 Н.
Кинематика рычажной системы предусматривает, что место
измерений свойств грунта находится в поле зрения телефотомет-
ра станции. Прибор однократного действия. Электрическое соп-
ротивление грунта измеряется периодически в течение всего
времени активной работы станции на поверхности.
Выносные приборы на обеих станциях сработали нормально.
Произошло раскрытие рычажных систем, разворот дисков ви-
зирных устройств. На полученных панорамах уверенно наблю-
дается их положение. Телеметрическая информация была хоро-
шего качества.
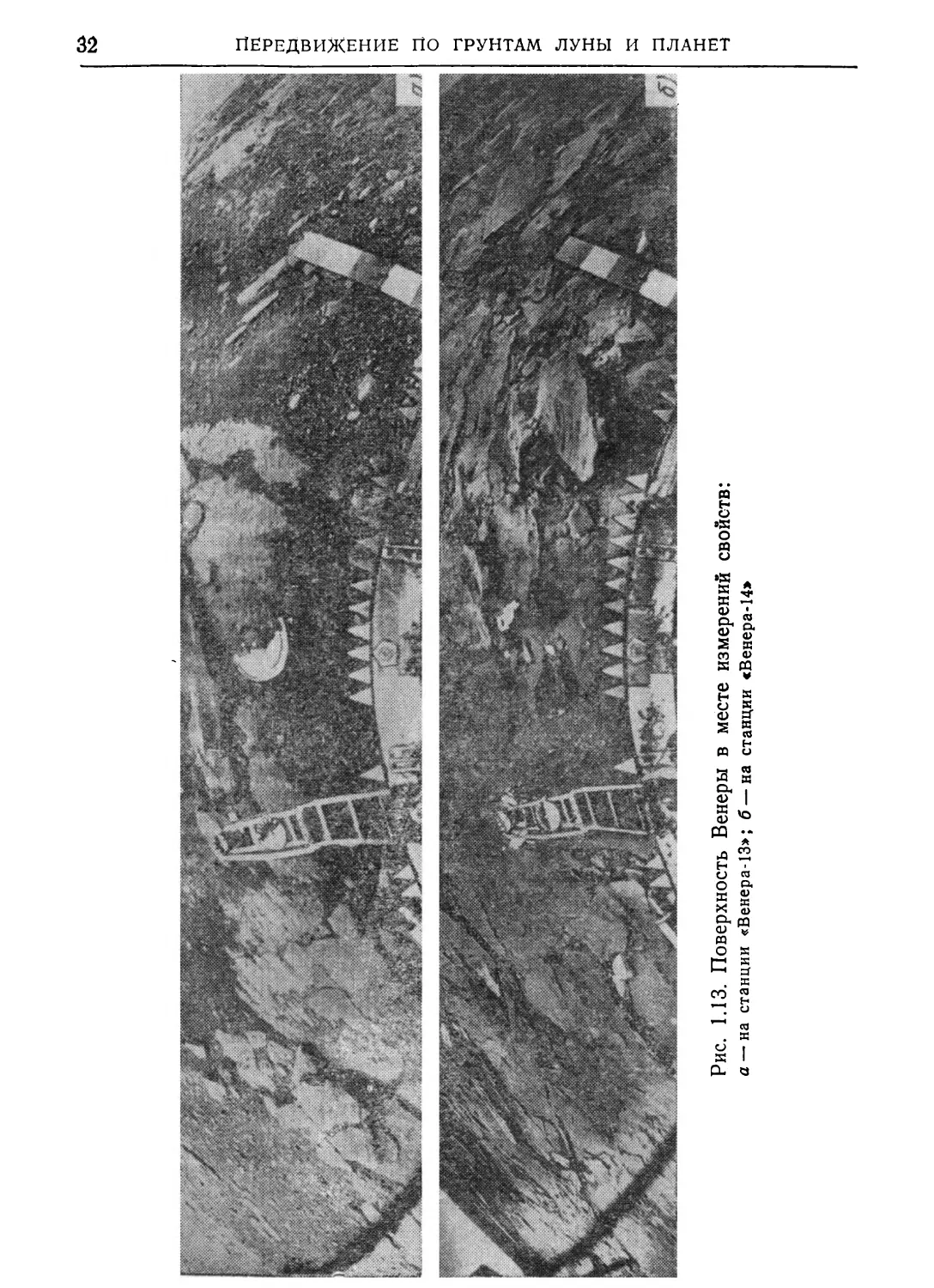
Измерение механических свойств грунта станцией «Венера-
13» было проведено у края небольшого камня (рис. 1.13, а), на
поверхности которого лежала опорная лапка мерного рычага.
Каких-либо резких выступов, острых кромок, отдельных комков
и камней, лежащих на его поверхности, не наблюдалось. Погру-
жение штампа в грунт, определенное по углу поворотного диска,
связанного с мерным рычагом, составило 32 мм.
ОЦЕНКА условий передвижения плайетоходов
31
Рис. 1.12. Выносной прибор для определения физико-ме-
ханических свойств грунта:
а — в развернутом положении; б — в исходном состоянии
Рис. 1.13. Поверхность Венеры в месте измерений свойств:
а — на станции «Венера-13»; б — на станции «Венера-14»
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
33
Оценка механических свойств проводилась для двух случаев
условий внедрения штампа. В первом случае принималось, что
вся энергия прибора пошла на внедрение штампа. Несущая спо-
собность грунта при этом определяется по глубине внедре-
ния по формуле (1.13) и характеризует верхний предел проч-
ности.
Во втором случае механические свойства грунта оценивались
по величине усилия, при котором происходило срабатывание
стопора поворотного механизма штампа и таким образом опре-
делялся нижний предел прочностных свойств грунта. Измерения
показали, что несущая способность грунта в месте измерений
на станции «Венера-13» лежит в пределах 0,26...1,0 МПа.
На станции «Венера-14» измерения были проведены на по-
верхности массивного выхода консолидированной породы (рис.
1.13, б). Ориентировочные пределы несущей способности грун-
та в месте посадки станции «Венера-14» составляют 6,5...
25 МПа [52].
Полученные данные о физико-механических свойствах грун-
та Венеры позволяют сделать некоторые обобщения и выводы
о строении и природе поверхностных слоев грунта в местах по-
садки станций «Венера-13 и 14» для оценки условий передвиже-
ния.
В первую очередь необходимо рассмотреть вопрос о том,
насколько точки непосредственных измерений свойств грунта
увязаны с общей геологической обстановкой в районах посадки,
т. е. насколько проведенные измерения являются представитель-
ными с точки зрения проведения каких-либо обобщений. Это
особенно важно, так как измерение проводилось однократно на
каждой станции.
Станция «Венера-13» опустилась на участок, покрытый рых-
лым материалом в сочетании с выходами каменистых плит. Ви-
зуальный анализ панорамы показал, что место измерения явля-
ется типичным для участка поверхности, находящегося в поле
зрения. На поверхности имеется значительное количество ка-
менных гряд, консолидированных пород, отдельно лежащих кам-
ней, а также их скоплений. По внешнему виду поверхности зер-
нистого материала видно, что в нем содержится большое коли-
чество частиц с размерами как больше, так и меньше разреша-
ющей способности телефотометра, т. е. нескольких миллиметров,
что позволяет отнести грунт к типу гравелистых с заметной до-
лей песчаной и, возможно, пылевой фракции. На основании это-
го можно сделать вывод о наличии на поверхности в районе по-
3 Зак. 826
54
ПЕРЕДВИЖЕНИЕ по грунтам луны И ПЛАНЕТ
садки «Венеры-13» условий для образования частиц с достаточ-
но широким гранулометрическим спектром.
Полученные оценки несущей способности (0,26...1,0 МПа)
достаточно хорошо отражают категорию грунта как механичес-
кой системы и свидетельствуют о его рыхлом строении, связан-
ным, возможно, с высокой пористостью (см. табл. 1.5).
Участок поверхности в районе посадки станции «Венера-14»
почти целиком покрыт выходами каменных образований, разде-
ленных трещинами и границами выраженной слоистости.
Раздробленного материала в значительных количествах вбли-
зи станции нет. Это свидетельствует о том, что по возрасту и ме-
ханизму образования этот участок существенно отличается от
участка местности, где опустилась «Венера-13».
Характерно, что грунт вокруг посадочного устройства стан-
ции не разрушен. Не наблюдается и значительной осадки стан-
ции в грунт. В этой ситуации наибольший интерес, представляет
определение свойств твердой поверхности, на которой нет явных
границ слоистости и трещин, так как эти факторы могут сущест-
венно повлиять случайным образом на результаты измерений.
Результаты определения свойств таких образований позволяют
сделать вывод о типе и степени зрелости пород в этом районе
поверхности Венеры и о природе их образования.
«Венера-14» находится на относительно ровном с чистой по-
верхностью каменистом образовании, несколько выступающем
над близлежащими образованиями. Размеры целиковой части
этого каменного выхода порядка одного метра. Таким образом,
место посадки станции «Венера-14» находится в достаточно ин-
тересной и представительной точке видимого участка поверхно-
сти Венеры.
Полученные выше оценки несущей способности в этом месте
в наибольшей мере соответствуют туфообразным породам (см.
табл. 1.5). По внешнему облику поверхности можно сделать вы-
вод о том, что основным фактором в этом районе Венеры по
формированию поверхности являются процессы осадконакопле-
ния. По-видимому, полученные оценки несущей способности свя-
заны, главным образом, со структурой самого верхнего слоя
поверхности.
Удельное электрическое сопротивление грунта в местах ра-
боты станций «Венера-13 и 14» оказалось примерно одинаковым
и составило около 100 Ом-м, т. е. оказалось аномально низким
по сравнению с горными породами базальтового типа при тем-
пературах, близких к температуре атмосферы Венеры. Столь не-
ОЦЕНКА УСЛОВИИ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
35
ожиданно низкое электрическое сопротивление грунта требует
разработки новых гипотез о физике поверхности и, возможно,
атмосферы планеты. В частности, можно предполагать наличие
заметного количества электропроводящих минералов, активного
взаимодействия атмосферы с поверхностью грунта, круговорота
компонентов атмосферы и грунта с температурой фазовых пере-
ходов, близких к температуре атмосферы. Возможны и другие
гипотезы.
На основе вышеизложенных исследований свойств грунта по-
верхности Венеры можно сделать вывод о том, что значительные
участки ее поверхности представляют собой каменистую пусты-
ню, покрытую плоскими каменистыми плитами и блоками. На
отдельных участках наблюдаются скопления крупнозернистого
обломочного материала. Заметных скоплений мелкораздроблен-
ного грунта типа лунного реголита на поверхности Венеры пока
не обнаружено.
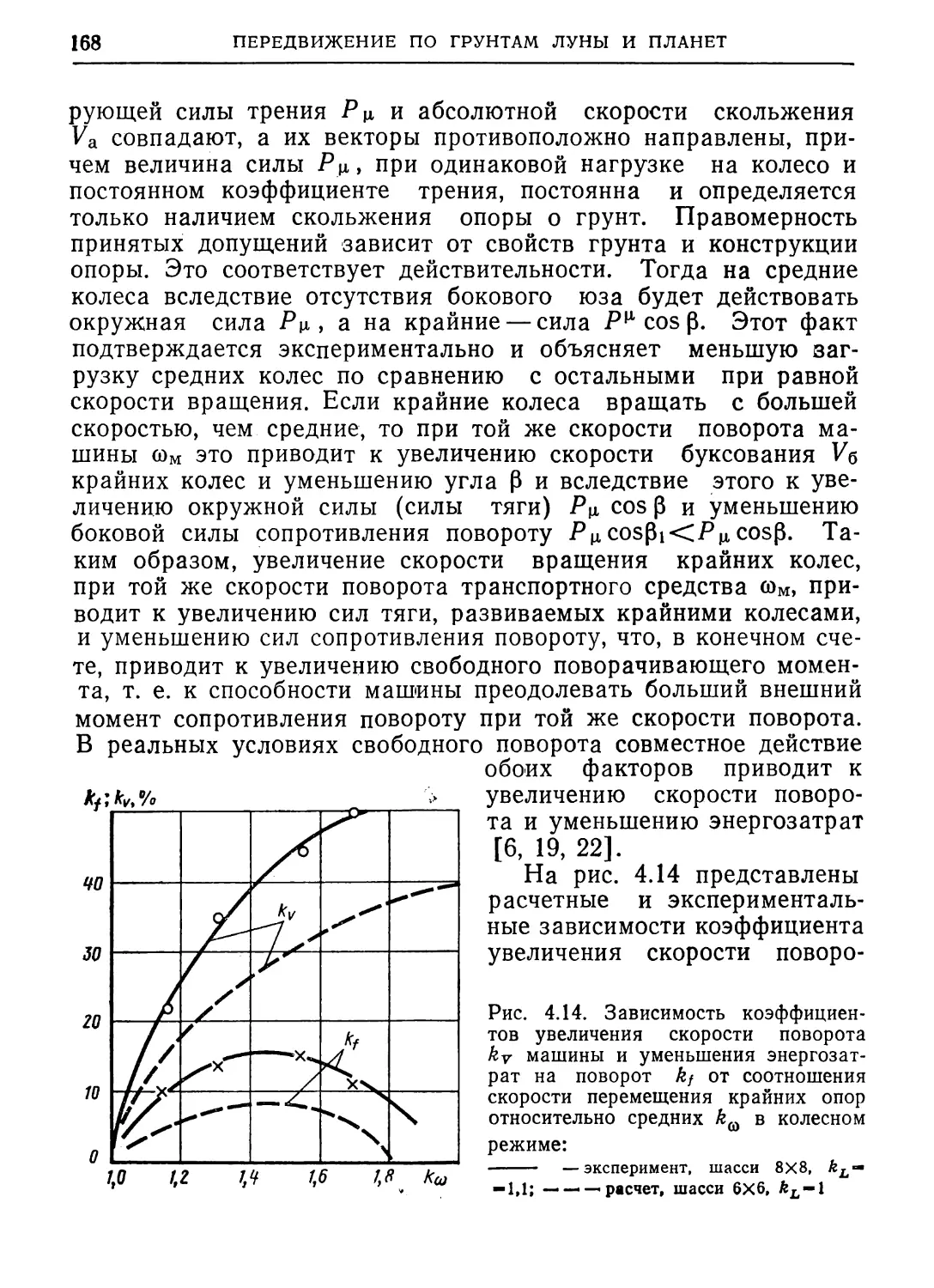
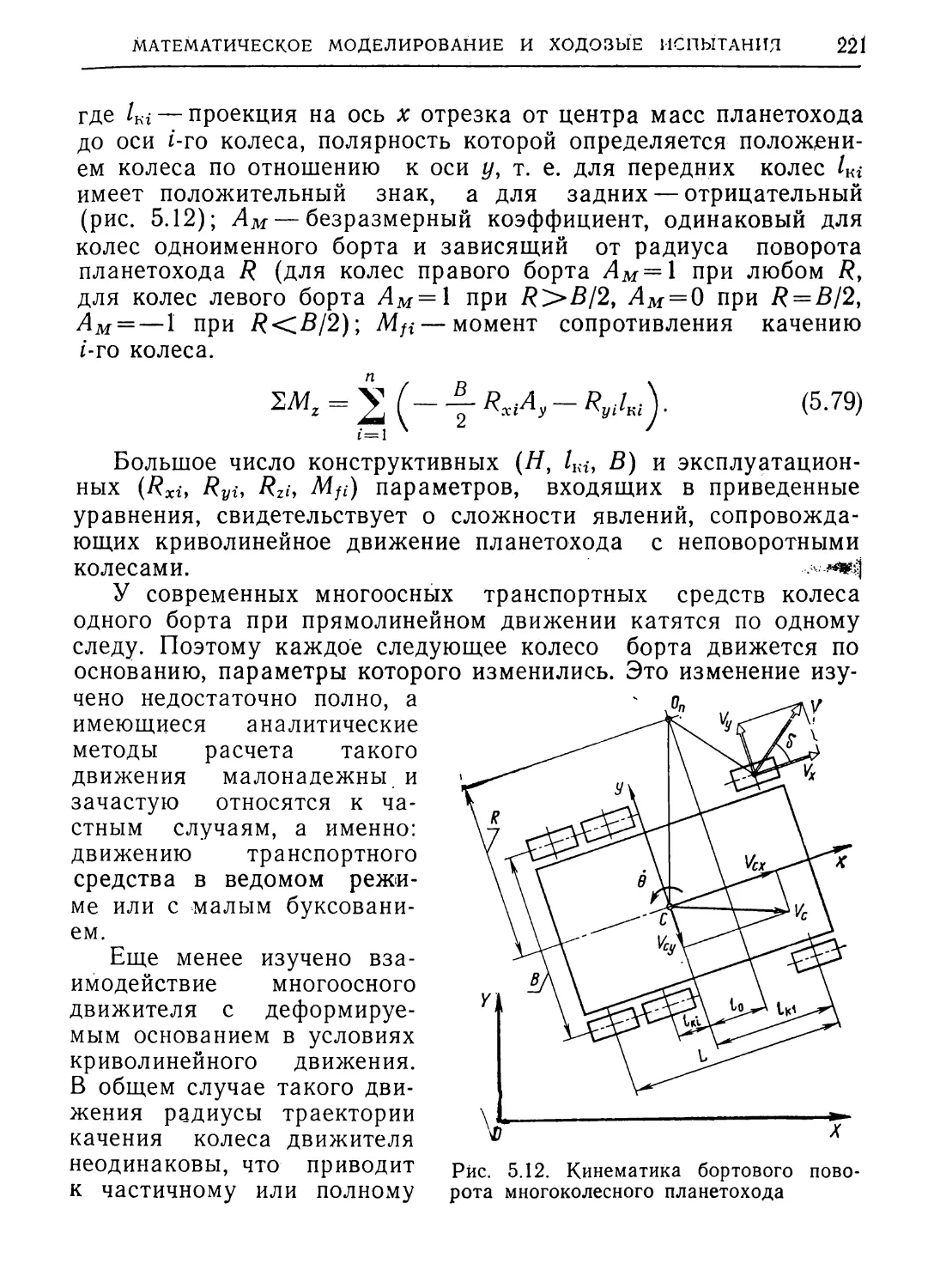
1.4. Методы оценки условий передвижения'
по процессу взаимодействия аппаратов
с поверхностью
Одним из весьма информативных методов оцен-
ки прочностных свойств грунта является взаимодействие с ним
подвижных устройств. Это позволяет использовать технические
средства, предназначенные для посадки и передвижения по по-
верхности, в качестве своеобразного инструмента для исследо-
вания свойств грунта. Подобный подход уже нашел применение
в практике изучения свойств грунта. Например, аппаратура для
изучения динамики соударения была установлена на станции
«Луна-13», аппаратах типа «Сервейер» [2, 58], на станциях
«Венера-13 и 14» [48]. Однако для получения надежной инфор-
мации требуется дальнейшее совершенствование методических
основ эксперимента по динамике соударения, определению тре-
бований к самому аппарату и выявлению наиболее представи-
тельных и удобных для измерения параметров. В качестве при-
мера отметим, что результаты измерений динамики соударения
на станции «Луна-13» были осложнены тем, что станция имела
амортизирующую оболочку, деформация которой могла быть
значительно больше величины деформации грунта. Неоднознач-
ные результаты могут быть получены также, если не учитывать
неровности рельефа в зоне контакта при соударении.
3*
36 передвижение по грунтам луны И ПЛАНЁТ
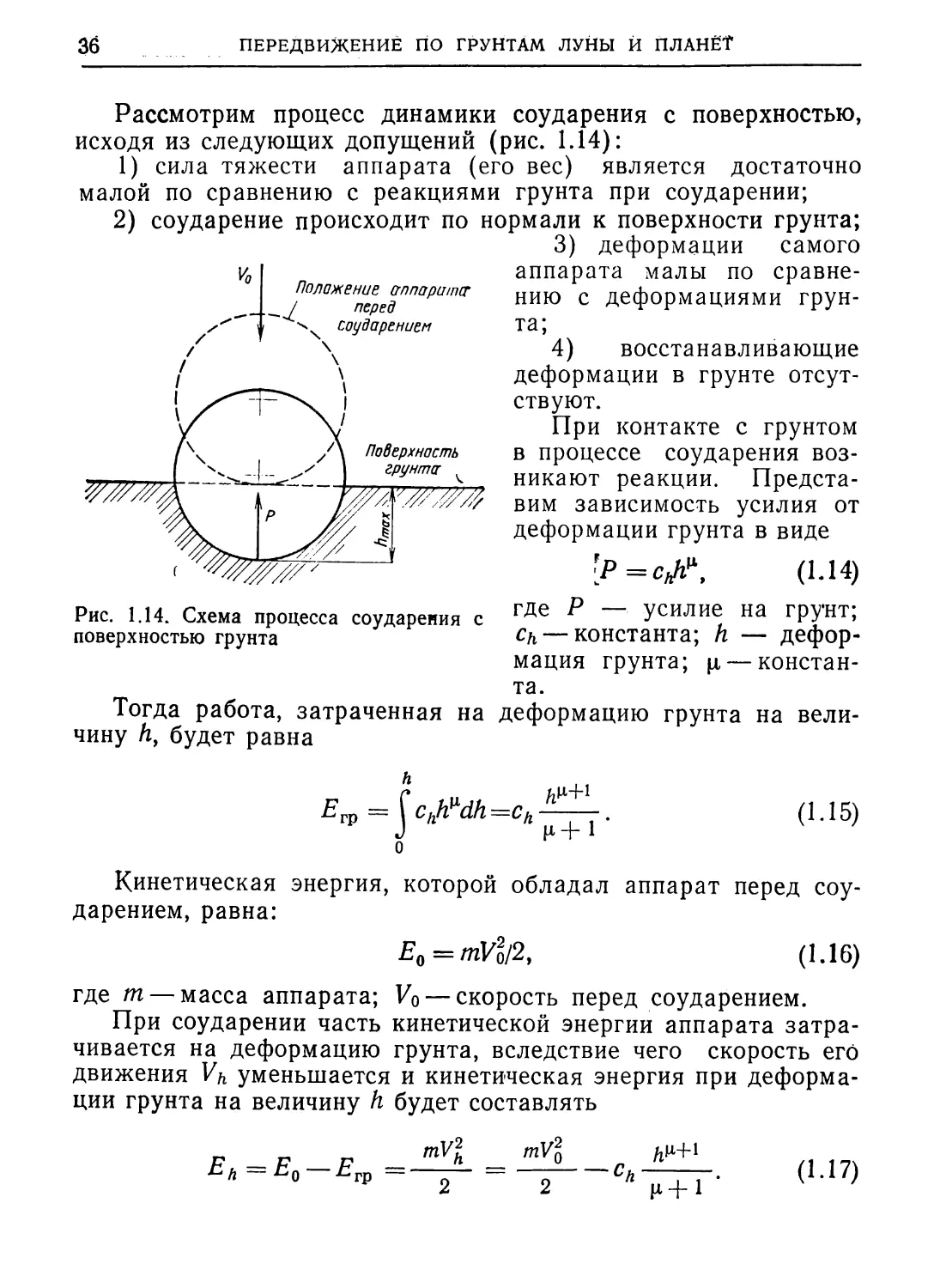
Рассмотрим процесс динамики соударения с поверхностью,
исходя из следующих допущений (рис. 1.14):
1) сила тяжести аппарата (его вес) является достаточно
малой по сравнению с реакциями грунта при соударении;
2) соударение происходит по нормали к поверхности грунта;
3) деформации самого
Рис. 1.14. Схема процесса соударения с
поверхностью грунта
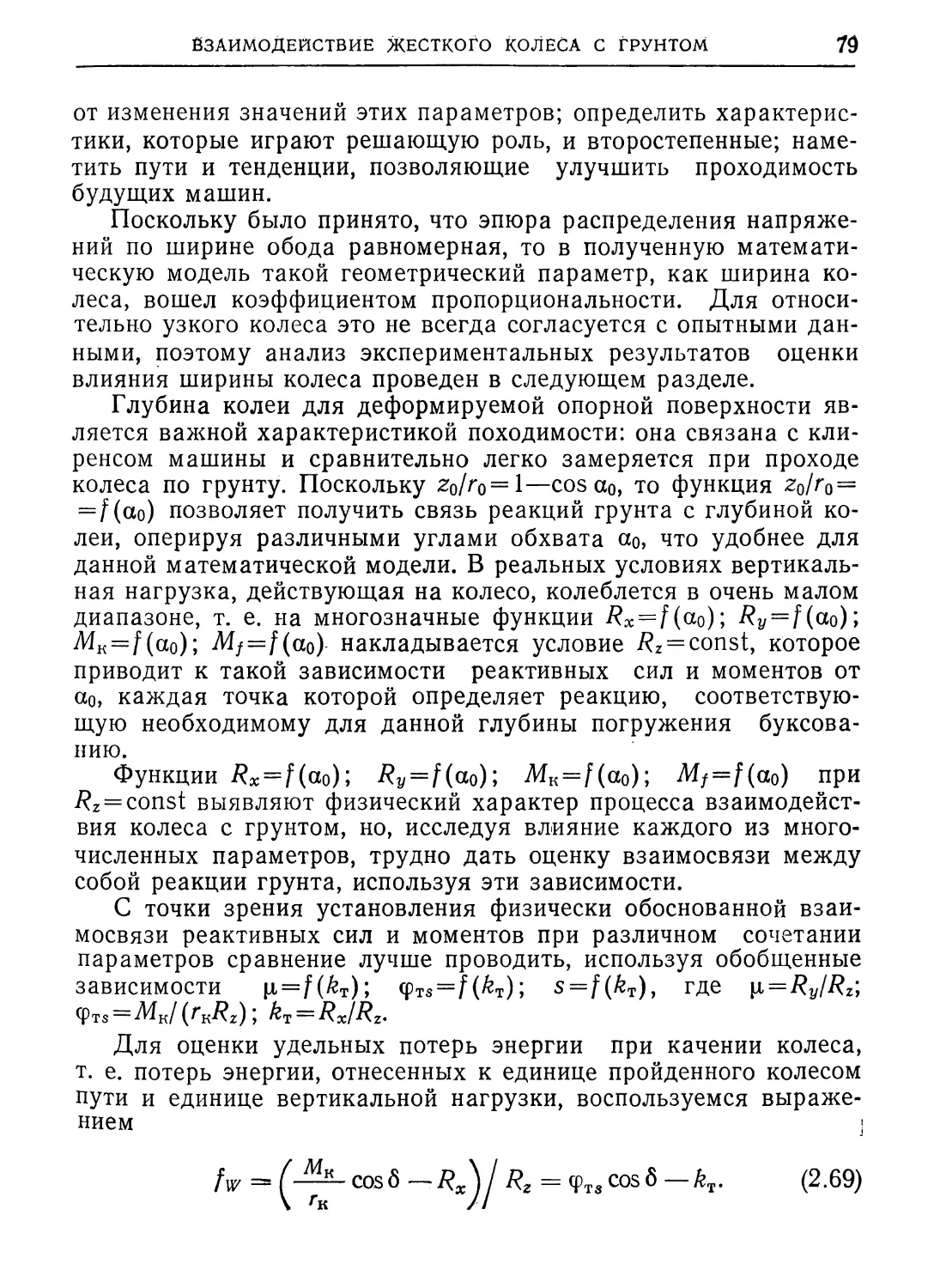
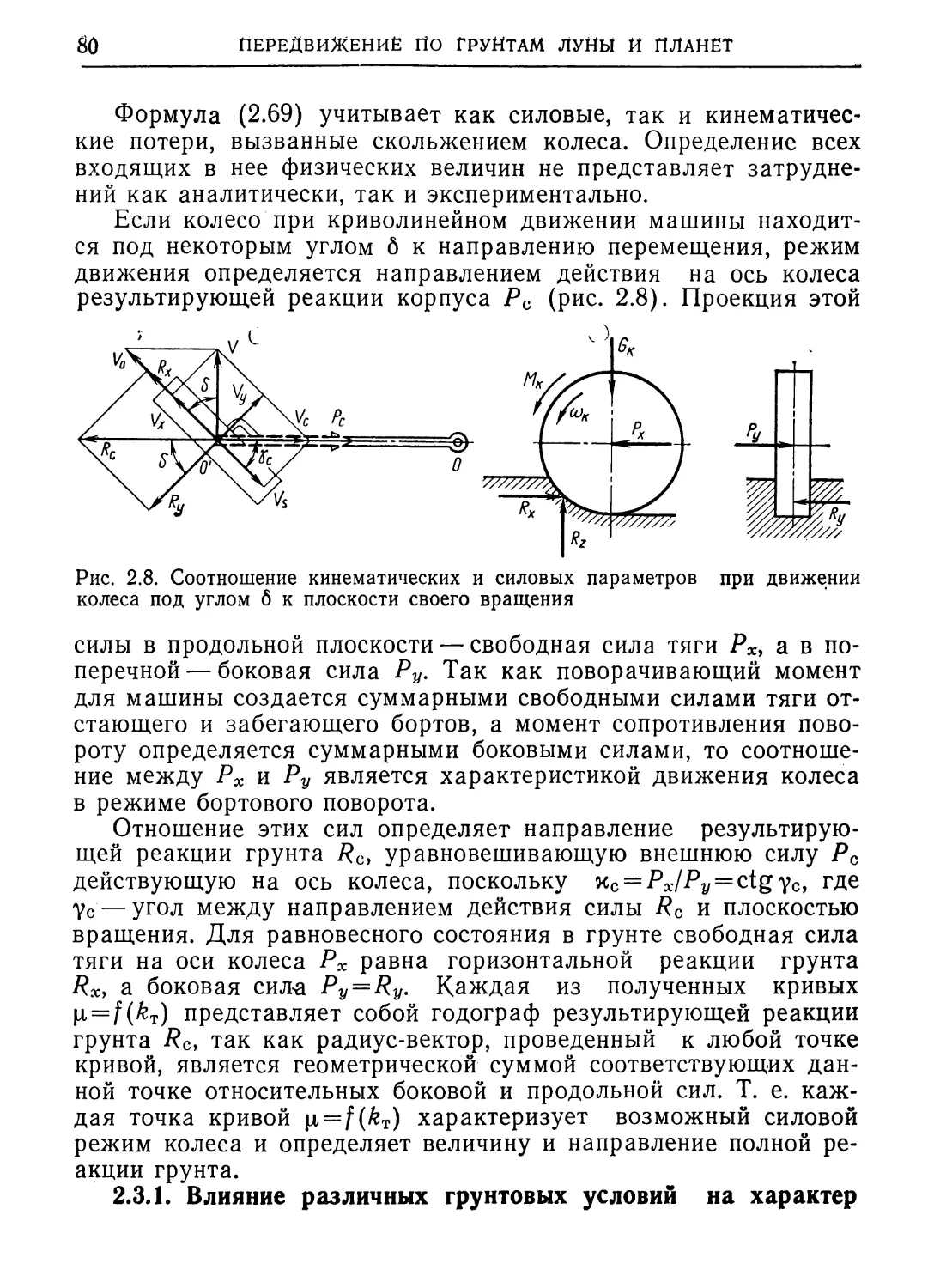
Тогда работа, затраченная на
чину Л, будет равна
аппарата малы по сравне-
нию с деформациями грун-
та;
4) восстанавливающие
деформации в грунте отсут-
ствуют.
При контакте с грунтом
в процессе соударения воз-
никают реакции. Предста-
вим зависимость усилия от
деформации грунта в виде
[Р=с^9 (1.14)
где Р — усилие на грунт;
Ch — константа; h — дефор-
мация грунта; ц— констан-
та.
деформацию грунта на вели-
^гр — f cflh dh ~ch —-.
J н + 1
о
(1.15)
Кинетическая энергия, которой обладал аппарат перед соу-
дарением, равна:
E0 = mV20/2, (1.16)
где т — масса аппарата; Ко — скорость перед соударением.
При соударении часть кинетической энергии аппарата затра-
чивается на деформацию грунта, вследствие чего скорость его
движения Vh уменьшается и кинетическая энергия при деформа-
ции грунта на величину h будет составлять
-- Eq Егр
mV2h mV2Q
2 2 п p+1
(1-17)
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
37
Тогда для скорости аппарата имеем следующее выражение:
„2 2 ( mV20 hn+i
— I ~ Ch
tn \ 2 H + 1
(1.18)
Очевидно, что при достижении некоторой величины деформа-
ции грунта ftmax произойдет полная остановка аппарата. Поэто-
му определение /im'ax представляет особый интерес. В дальней-
шем удобно рассматривать для анализа процесса соударения от-
носительную (безразмерную) величину деформации грунта h,
которая определяется соотношением:
h = h/hmaT1 или h = ЛЛтах. (1*19)
Величину Атах можно определить из условия, что кинетичес-
кая энергия аппарата перед соударением будет полностью из-
расходована на деформацию грунта, т. е.
£0=Вгр=^-Тг. (1-20)
ц+ 1
Тогда
ГМ 1/2
= —5-(ц+1). (1.21)
2сд
Подставляя уравнения (1.19) и (1.21) в уравнение (1.18),
после преобразования получим следующее уравнение для ско-
рости аппарата при деформации грунта:
УА = У0^ 1—^+* . (1.22)
С другой стороны, рассматривая только кинематику дефор-
мации грунта, имеем
dh=Vhdt, (1.23)
где dh — приращение перемещения за элементарный интервал
времени dt.
Используя соотношение (1.19), получим
dh=d (hhmax) = hmaxdh. (1.24)
Подставив уравнения (1.22) и (1.24) в уравнение (1.23) и
проведя простые преобразования, получим
38
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
& ^тах dh
Vo Vl-^+1
(1.25)
Изменение Л лежит в пределах от 0 до 1. Интегрирование
правой части уравнения в этих пределах позволит определить
длительность времени соударения t (длительность ударного им-
пульса), т. е.
t
^max С dh.
V0 ft Д/1—
(1-26)
Проведем интегрирование уравнения (1.26) и получим следу-
ющее уравнение для длительности ударного импульса:
^тах ~\/п
V0(n+l)
(1.27)
где Г — гамма-функция.
Важной особенностью уравнения (1.27)’ является то, что в
него не входят такие параметры аппарата, как масса, размеры,
а также коэффициент Ch из уравнения (1.14). Это придает урав-
нению большую общность и позволяет определять деформацию
грунта по длительности ударного импульса.
Введем дополнительное обозначение
и тогда
_ ^max t.
(1.28)
(1.29)
Коэффициент kt, связывая между собой длительность удар-
ного импульса, скорость соударения и деформацию грунта, поз-
воляет оценить степень нелинейности зависимости усилия от
деформации.
ОЦЕНКА УСЛОВИИ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
39
Для оценки прочностных свойств грунта необходимо опреде-
лить константы си и ц уравнения (1.14). Очевидно, что для их
определения необходимо измерить не менее двух параметров,
характеризующих процесс соударения.
Рассмотрим способ определения прочностных свойств на ос-
нове измерения длительности нарастания ударного импульса t
и максимальной величины ускорений (перегрузок) в процессе
соударений. Измерения этих параметров достаточно хорошо от-
работаны.
Силы, действующие на грунт при замедлении аппарата Ра,
будут равны:
(1.30)
где а — ускорение замедления; т — масса аппарата.
Максимальное усилие Ратах будет соответствовать макси-
мальному значению перегрузок (атах)
^тах “ ^тах 0*31)
С другой стороны,
Рmax = ^/г^тах. (I -32)
Рассмотрим следующее соотношение:
—= ^- (1.33)
/nV0
Учитывая равенство (1.31), получим
*а = -^. (1.34)
* о
В это выражение входят величины, измеренные в процессе
соударения, и начальные условия Уо.
Подставив в соотношение (1.33) уравнения (1.32), (1.33), а
также (1.21), после преобразования получим
Vя X р. + 1 7 „ Ятах<
2 гГ—+-)
к И+1 2 J
Отличительной особенностью соотношения (1.35) является то,
что его значение определяется только константой р. и не зави-
сит от других параметров.
40
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Коэффициент ch (показатель деформационных свойств) мож-
но определить, преобразовав и подставив уравнение (1.27) в
уравнение (1.32).
Тогда получим:
Поскольку выражение, стоящее в квадратных скобках урав-
нения (1.36), зависит только от ц, то целесообразно его выра-
зить в виде отдельного коэффициента т. е.
(1-37)
С учетом этого
gmax/n . >38)
Таким образом, уравнения (1.35) и (1.38) позволяют опреде-
лить по параметрам процесса соударения прочностные показа-
тели грунта. Общепринятые показатели прочности грунта (мо-
дуль деформации, несущая способность и др.) можно определять
с помощью существующих расчетных методик [59, 61]. При этом
важное значение имеет геометрическая форма аппарата в зоне
контакта с грунтом. Отметим, что особый интерес представляет
аппарат шарообразной формы, так как в этом случае нет необ-
ходимости ориентировать его в пространстве. В других случаях
рабочая часть аппарата, предназначенная для взаимодействия с
грунтом, должна быть ориентирована по отношению к его по-
верхности, что требует применения специальных направляющих
или стабилизирующих устройств.
В ряде случаев в качестве параметров, характеризующих ди-
намику соударения аппарата с грунтом, целесообразно исполь-
зовать длительность ударного импульса t и максимальную вели-
чину деформации грунта йШах. Тогда показатели прочностных
свойств грунта определяются по следующим уравнениям:
k __ fimax
vot
(1.39)
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
41
тУ20(р+ 1)
Л 2/1^1
z/1max
(1.40)
По уравнению (1.39), используя соотношение (1.28), нахо-
дим значение ц, а затем по формуле (1.40) вычисляем Ch. По-
лученные соотношения позволяют также оценить и восстанавли-
вающиеся деформации грунта. Для их характеристики можно
использовать уравнение типа (1.14). В этом случае для вычисле-
ния коэффициентов р,в и св, соответствующих зависимости между
восстанавливающими силами и деформациями, необходимо оп-
ределить время от достижения максимальной перегрузки до ее
спада и скорость отскока аппарата V'Q от грунта. Определение
коэффициентов св и цв проводится по той же методике по урав-
нениям (1.35) и (1.38).
Необходимость повышения эффективности изучения свойств
грунта Луны и планет по динамике соударения с поверхностью
в процессе посадки естественно ставит вопрос о проведении мно-
гократных измерений параметров этого процесса на различных
участках поверхности.
Это может быть достигнуто различными методами. Например,
при посадке автоматических станций «Луна-9, 13» конструкцией
посадочного устройства, выполненного в виде эластичной надув-
ной оболочки, обеспечивалась возможность многократных отско-
ков аппарата от поверхности [2]. На панорамах, переданных
этими станциями, не видно отброшенных амортизирующих эле-
ментов станции, что свидетельствует о том, что станция перемес-
тилась на значительное расстояние от первоначального места
посадки. Это можно было рассматривать как первый случай пе-
редвижения по другому небесному телу. Однако это передвиже-
ние было неуправляемым, и его параметры не фиксировались.
Попытка управляемого перемещения по поверхности Луны
была предпринята на аппарате «Сервейер-6», когда через неко-
торое время после посадки были повторно включены реактивные
двигатели. Аппарат совершил небольшой прыжок длиной 4 и
высотой 3 м [58].
В работе [1] предложен способ изучения свойств поверхно-
сти с помощью относительно небольшого автономного аппарата,
который отбрасывается от основного посадочного аппарата и со-
вершает полет по баллистической траектории. После этого аппа-
рат ориентируется относительно поверхности грунта с помощью
специальных устройств. В этой же работе рассмотрена возмож-
42
передвижение по грунтам луны и планет
ность сброса автономного аппарата с базового, зависшего на
некоторой высоте над поверхностью.
На Луне, планетах и их спутниках с пониженной гравитаци-
ей значительно увеличивается дальность полета по баллистичес-
кой траектории при заданной начальной скорости. Поэтому в ря-
де работ [1, 63] рассматривают способ передвижения с помощью
прыжков. Особый интерес представляет то обстоятельство, что
возможно преодоление препятствий, существенно превышающих
размеры самого аппарата. Преодоление таких препятствий при
других способах передвижения (например с помощью колесного,
шагающего, гусеничного движителей) невозможно. Кроме того,
при прыгающем способе передвижения могут быть использова-
ны те же конструктивные элементы аппарата, которые необходи-
мы для посадки на поверхность (посадочные опоры, устройства
ориентирования и др.). При оценке прыгающего способа пере-
движения необходимо рассмотреть следующие основные фазы:
разгон до некоторой скорости, движение по баллистической тра-
ектории, соударение с поверхностью. При рассмотрении всех этих
фаз необходимо найти такое их сочетание, чтобы обеспечить с
одной стороны эффективное передвижение по поверхности, а с
другой стороны, наиболее оптимальные условия для изучения
свойств грунта по динамике соударения.
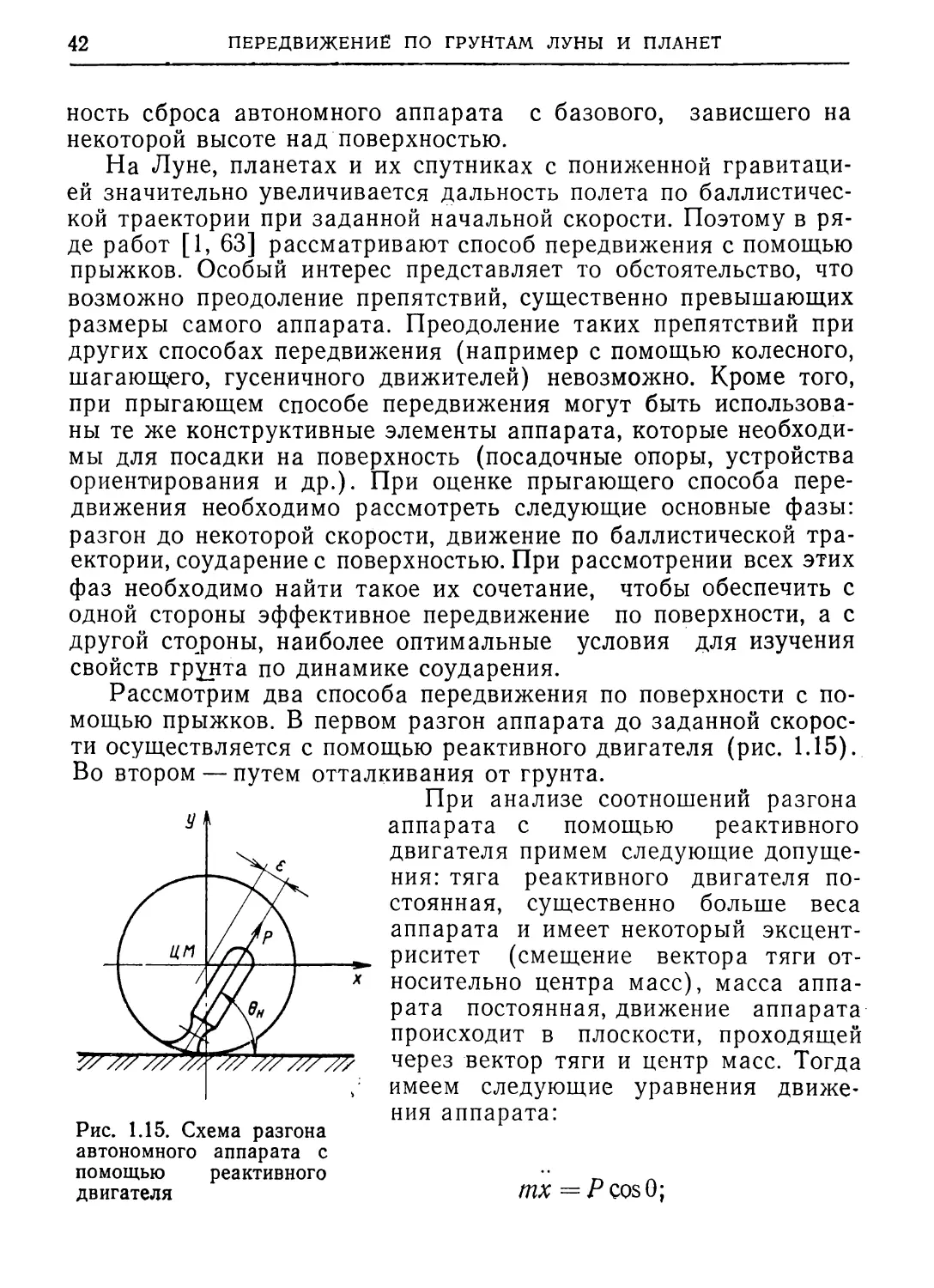
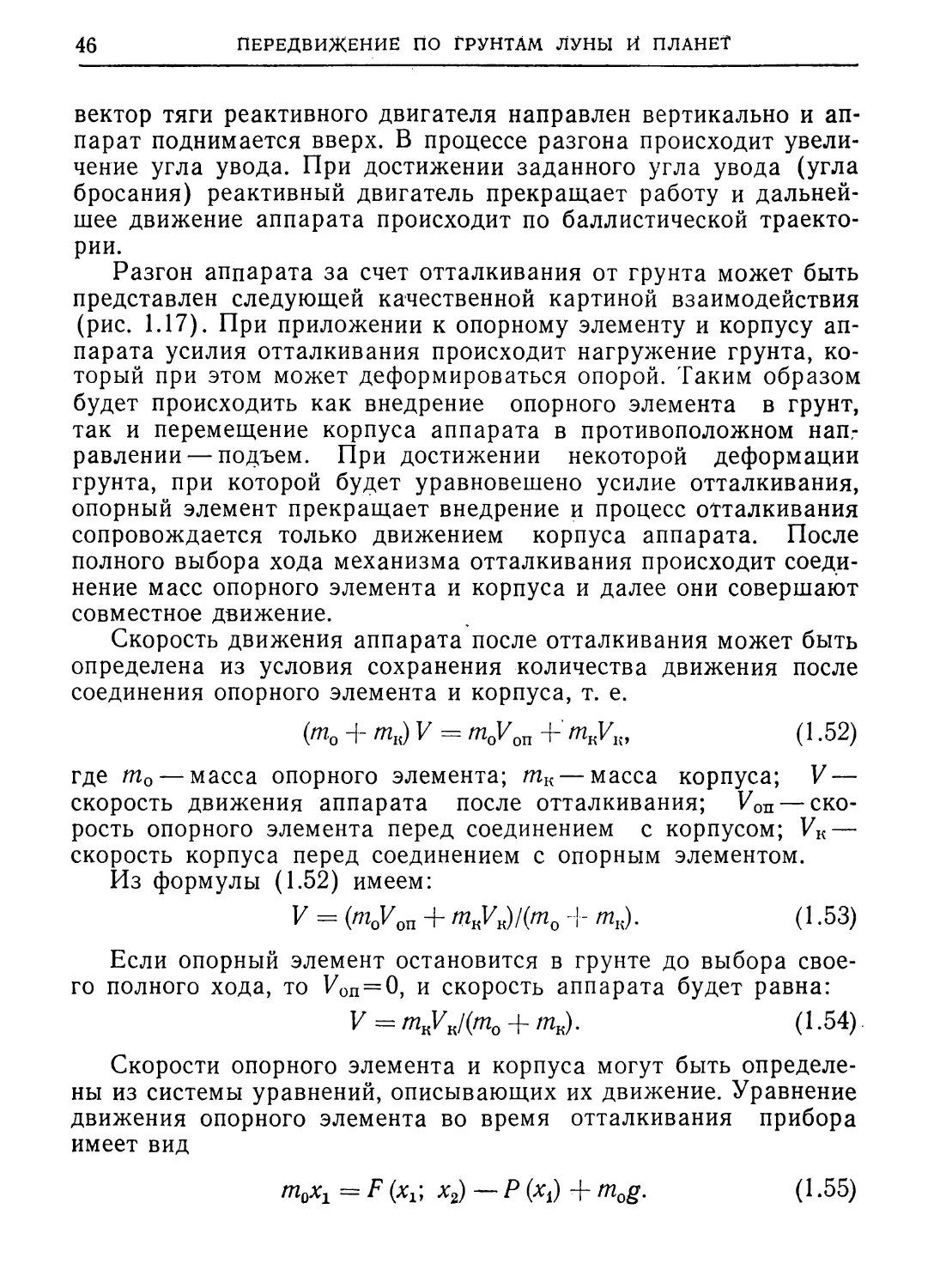
Рассмотрим два способа передвижения по поверхности с по-
мощью прыжков. В первом разгон аппарата до заданной скорос-
ти осуществляется с помощью реактивного двигателя (рис. 1.15).
Во втором — путем отталкивания от грунта.
При анализе соотношений разгона
аппарата с помощью реактивного
двигателя примем следующие допуще-
ния: тяга реактивного двигателя по-
стоянная, существенно больше веса
аппарата и имеет некоторый эксцент-
риситет (смещение вектора тяги от-
носительно центра масс), масса аппа-
рата постоянная, движение аппарата
происходит в плоскости, проходящей
через вектор тяги и центр масс. Тогда
имеем следующие уравнения движе-
ние. 1.15. Схема разгона
автономного аппарата с
помощью реактивного
двигателя
ния аппарата:
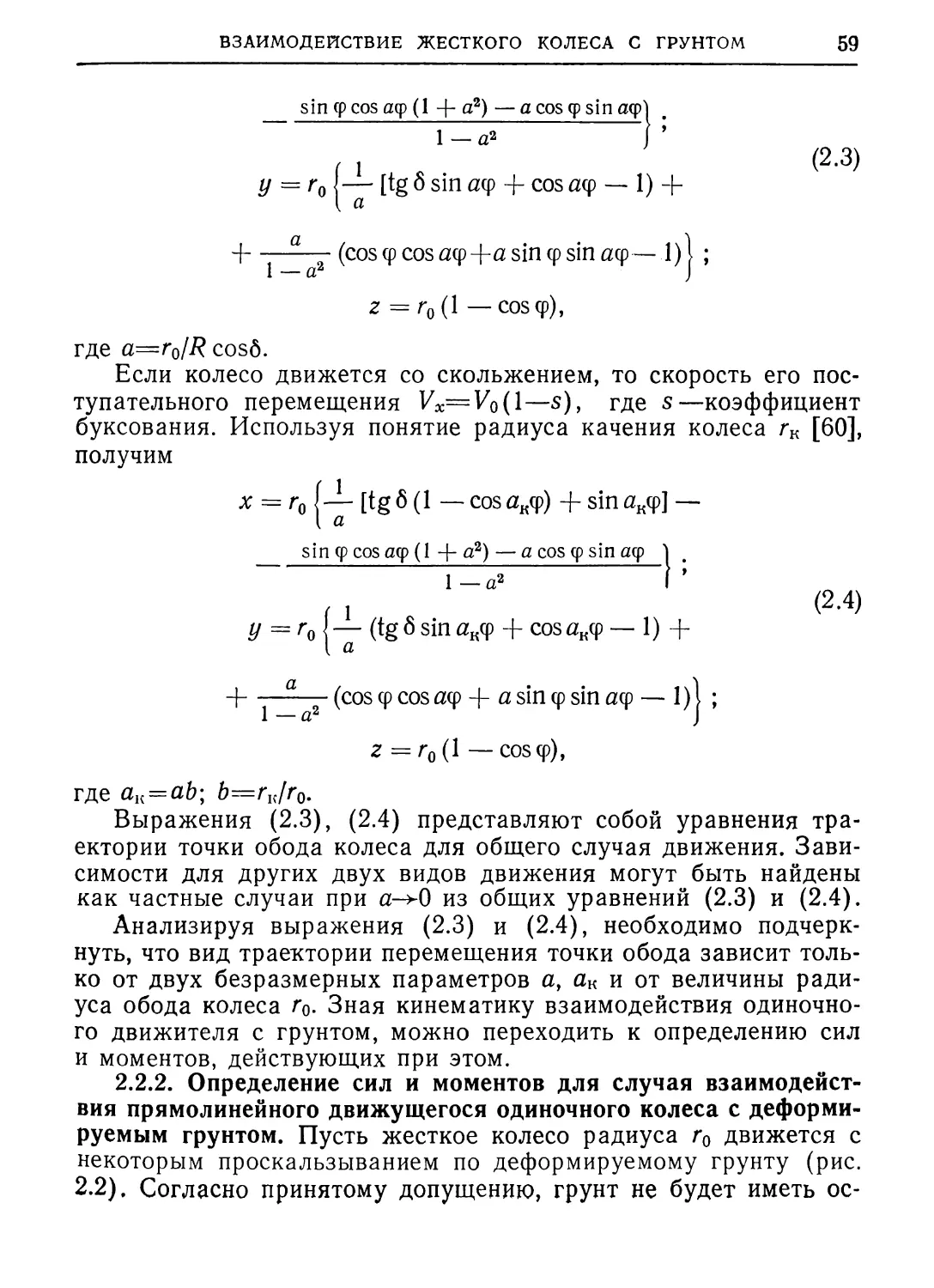
тх =Р cos О
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
43
ту = PsinO — mg\
(1-41)
70 = еР,
где т— масса аппарата; Р — сила тяги реактивного двигателя;
0 — текущий угол вектора тяги; J — момент инерции относитель-
но оси перпендикулярной плоскости ху; е — смещение вектора
тяги относительно центра масс аппарата (эксцентриситет тяги);
g—ускорение свободного падения.
Интегрируем третье уравнение системы (1.41)
70 = еР/ + Cj;
70 = еРР/2 + CJ + С2. (1’42)
Начальными условиями при / = 0 будут 0 = 0 и 0 = 0Н. Из этих
условий следует Ci = 0 и С2 = 0ц7, где 0И — угол вектора тяги к
горизонтали в исходном положении аппарата. Из уравнения
(1.42) получим
0=0н + -5^-; 0 = -^-. (1.43)
Подставим полученные значения в уравнения системы (1.41)
” П / еР/2 I а \
тх = Р cos (------р 0Н 1 ;
\ 2J J
(грр \ (I-44)
ту =Psin(——— + 0Н)— mg.
Проведем их преобразование
/ ер/2 еР/а \
тх = Р I cos------cos 0Н — sin----sin 0„ ) ;
\ 2J 2J J
/ ePt2 ePt2 \ 0*45)
my =P (sin cos0H + cos --sin0H} — mg.
Интегрирование этих уравнений приводит к уравнениям следую-
щего вида:
р
X - --
т
еР
44
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
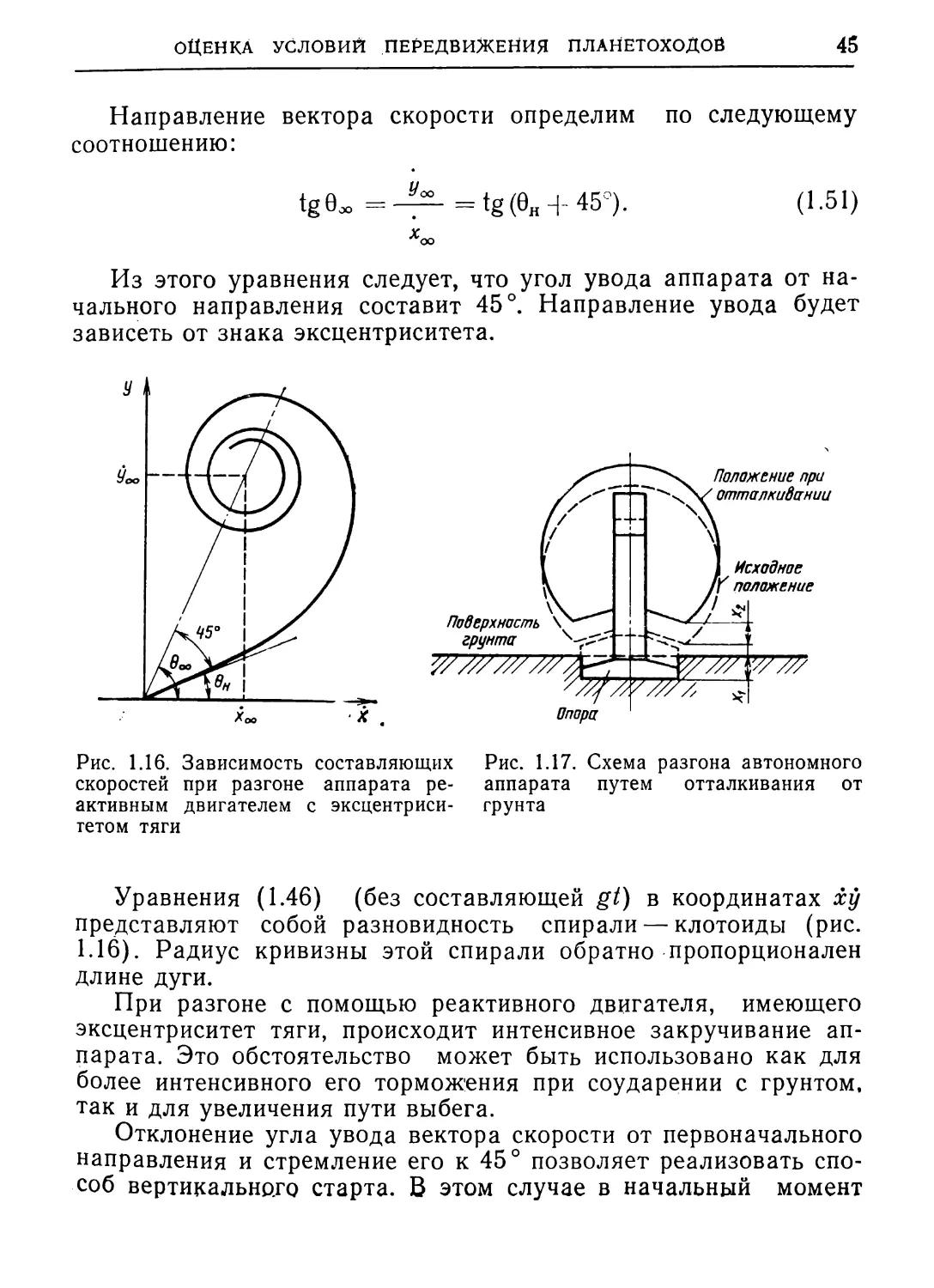
(1.46)
где S ( I / 1) и С ( 1 /
\ |/ nJ J \ у nJ J
Френеля.
— интегральные синус и косинус
Из условия / = 0; х = 0 и г/ = 0 получим, что C,i=C,2 = 0.
При достаточно большом времени работы реактивного дви-
гателя (при /~>оо), учитывая, что согласно [54]
limsfl/— /)=—; limcf 1/ — =—, (1.47)
/->оо \ V nJ J 2 t->ao \ V nJ / 2
получим следующие уравнения для вертикальной и горизонталь-
ной составляющих скорости аппарата (без учета вертикальной
составляющей скорости от воздействия ускорения свободного па-
дения)
Хсо = 1/ (css е„ — sin 0„);
2m у гР
У со
}/ПГ <cos 0п + sin 0п)-
2m у еР
(1-48)
(1-49)
Модуль скорости равен
(1.50)
Из этой формулы следует, что при разгоне аппарата с по-
мощью реактивного двигателя, связанного с аппаратом и имею-
щего эксцентриситет тяги, аппарат можно разогнать лишь до оп-
ределенной скорости. Величина ее уменьшается с увеличением
эксцентриситета.
ОЦЕНКА условий передвижения ПЛАНЕТОХОДОВ
45
Направление вектора скорости определим по следующему
соотношению:
tgO~ = —^-= tg (0Н45°).
(1-51)
Из этого уравнения следует, что угол увода аппарата от на-
чального направления составит 45°. Направление увода будет
зависеть от знака эксцентриситета.
Рис. 1.16. Зависимость составляющих
скоростей при разгоне аппарата ре-
активным двигателем с эксцентриси-
тетом тяги
Рис. 1.17. Схема разгона автономного
аппарата путем отталкивания от
грунта
Уравнения (1.46) (без составляющей gt) в координатах ху
представляют собой разновидность спирали — клотоиды (рис.
1.16). Радиус кривизны этой спирали обратно пропорционален
длине дуги.
При разгоне с помощью реактивного двигателя, имеющего
эксцентриситет тяги, происходит интенсивное закручивание ап-
парата. Это обстоятельство может быть использовано как для
более интенсивного его торможения при соударении с грунтом,
так и для увеличения пути выбега.
Отклонение угла увода вектора скорости от первоначального
направления и стремление его к 45° позволяет реализовать спо-
соб вертикального старта. В этом случае в начальный момент
46
передвижение по грунтам луны и планет
вектор тяги реактивного двигателя направлен вертикально и ап-
парат поднимается вверх. В процессе разгона происходит увели-
чение угла увода. При достижении заданного угла увода (угла
бросания) реактивный двигатель прекращает работу и дальней-
шее движение аппарата происходит по баллистической траекто-
рии.
Разгон аппарата за счет отталкивания от грунта может быть
представлен следующей качественной картиной взаимодействия
(рис. 1.17). При приложении к опорному элементу и корпусу ап-
парата усилия отталкивания происходит нагружение грунта, ко-
торый при этом может деформироваться опорой. Таким образом
будет происходить как внедрение опорного элемента в грунт,
так и перемещение корпуса аппарата в противоположном нап-
равлении — подъем. При достижении некоторой деформации
грунта, при которой будет уравновешено усилие отталкивания,
опорный элемент прекращает внедрение и процесс отталкивания
сопровождается только движением корпуса аппарата. После
полного выбора хода механизма отталкивания происходит соеди-
нение масс опорного элемента и корпуса и далее они совершают
совместное движение.
Скорость движения аппарата после отталкивания может быть
определена из условия сохранения количества движения после
соединения опорного элемента и корпуса, т. е.
(/77О + тк) ~ moVon к, (1.52)
где пг0 — масса опорного элемента; тк — масса корпуса; V —
скорость движения аппарата после отталкивания; Von— ско-
рость опорного элемента перед соединением с корпусом; VK—
скорость корпуса перед соединением с опорным элементом.
Из формулы (1.52) имеем:
V = Н^оп + тнУк)/(т0 4- mJ. (1.53)
Если опорный элемент остановится в грунте до выбора свое-
го полного хода, то Von = 0, и скорость аппарата будет равна:
JZ = mK7K/(/n0 + mJ. (1.54)
Скорости опорного элемента и корпуса могут быть определе-
ны из системы уравнений, описывающих их движение. Уравнение
движения опорного элемента во время отталкивания прибора
имеет вид
moXi = F (*п хг) — Р (*1) 4- tnQg. (1.55)
оценка условий передвижения планетоходов
47
Уравнение движения корпуса
ткх2 — F (х^, x2)—mKg,
(1.56)
где Xi—перемещение опорного элемента; х%— перемещение кор-
пуса; F(Xi; х2) — зависимость усилия отталкивания от переме-
щений; Р(хх)—зависимость деформации грунта от усилия.
К уравнениям (1.55) и (1.56) необходимо добавить уравне-
ние кинематической связи:
Х! + х2=х0, (1.57)
где х0— полный ход опорного элемента относительно корпуса.
Уравнения (1.55)...(1.57) получены для отталкивания от го-
ризонтальной поверхности. Для их решения необходимо знать
вид зависимостей Р(х\) и F(хг, х2). Зададим эти зависимости в
виде простых соотношений, чтобы выявить основные закономер-
ности процесса отталкивания. Кроме того, не будем пока учиты-
вать влияние сил тяжести на процесс отталкивания, так как си-
лы взаимодействия с грунтом при передвижении прибора мето-
дом прыгания должны быть существенно больше сил тяжести.
Примем, что усилие отталкивания F является постоянным,
не зависящим от величины выдвижения опорного элемента, а де-
формационные свойства грунта характеризуются линейной зави-
симостью между действующим усилием и величиной его просад-
ки. Тогда получим следующие уравнения:
mQxx=F—kx^ mnx2=-F\ х^-\-х2=х0, (1.58)
где k — коэффициент пропорциональности между Р и хь
Тогда решение уравнения (1.58) может быть представлено в
следующем виде:
где t0 — время отталкивания аппарата.
Исходя из начальных условий /о = О, Xi = 0 и xi = 0, получим
следующие значения для постоянных: Ci=—F/k\ С2 = 0.
48
Передвижение по грунтам луны и планет
Тогда для Xi получим
F
Xi ~ k
1 — cos
(1.60)
Для Xz путем прямого интегрирования найдем
F to .
2 ~ тк 2 ’
(1-61)
Суть решения приведенных выше уравнений состоит в опре-
делении момента времени /0, при котором происходит выбор
полного хода опорного элемента. Значения скоростей опорного
элемента и корпуса, соответствующих этому времени, позволя-
ют определить скорость аппарата V. При этом необходимо учи-
тывать, что восстанавливающиеся деформации в грунте практи-
чески отсутствуют, и поэтому перемещение опорного элемента,
при котором заканчивается деформация грунта, может лежать
в пределах, соответствующих следующим значениям t0:
Зависимость перемещения корпуса аппарата и опорной пяты
от времени отталкивания при различной податливости грунта
приведена на рис. 1.18. Из рисунка видно, что характер разгона
корпуса не меняется с изменением условий взаимодействия опо-
ры с грунтом. Путь разгона корпуса зависит от времени цикла
отталкивания, т. е. от времени, за которое будет выбран полный
ход опоры.
Наиболее интенсивный разгон корпуса происходит при от-
сутствии перемещения опорной пяты (отсутствует деформация
грунта — твердый грунт) (линия 1). При податливом грунте
(кривые 2, 3, 4) происходит процесс деформации, который закан-
чивается до выбора полного хода механизма отталкивания. При
этом время отталкивания сокращается, уменьшается также ско-
рость, сообщаемая аппарату. Отталкивание от грунта возможно
только тогда, когда скорость, сообщаемая аппарату, будет дос-
таточна, чтобы обеспечить прыжок на высоту, превышающую
погружение опорной пяты в грунт.
Особый практический интерес представляет закономерность
изменения хода опорной пяты относительно корпуса аппарата в
процессе отталкивания. Характер изменения хода опорного эле-
ОЦЕНКА условий передвижения планетоходов
49
мента So относительно корпуса в процессе отталкивания аппа-
рата от грунтов с различной податливостью показан на рис. 1.19.
Кривая 1 соответствует отталкиванию от твердой (недеформи-
руемой) поверхности; кривая 5 — случаю, когда под опорной пя-
той находится пустое пространство (нет прыжка). Промежуточ-
ные кривые 2 и 4 соответствуют грунтам с различной податли-
Рис. 1.18. Зависимость между пере-
мещением корпуса и опорным элемен-
том при отталкивании от грунта раз-
личной податливости
Рис. 1.19. Изменение хода опорного
элемента относительно корпуса в про-
цессе разгона
востью; кривая 3 соответствует случаю, когда корпус аппарата
лежал на грунте, а опорная пята была расположена с некоторым
зазором относительно твердой поверхности, т. е. сначала был
выбран этот зазор, а затем происходило отталкивание от грун-
та.
Анализ графических зависимостей, представленных на рис.
1.19, показывает, что если установить зависимость хода опорной
пяты относительно корпуса от времени, то этого будет достаточ-
но, для того чтобы оценить наличие и характер деформации
грунтовой поверхности под воздействием усилия отталкивания,
т. е. определить прочностные свойства грунта. Оценка прочност-
ных свойств грунта в первом приближении проводится с исполь-
зованием приведенных выше зависимостей.
Основное перемещение аппарата при прыгающем способе оп-
ределяется фазой движения по баллистической траектории.
Главными факторами, влияющими на параметры баллистической
4 Зак. 826
50
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
траектории, являются: величина скорости аппарата в конце про-
цесса отталкивания, ее направление относительно местной вер-
тикали и ускорение свободного падения [1]. В качестве наибо-
лее характерных параметров баллистической траектории можно
принять максимальную высоту и горизонтальную дальность до
встречи с поверхностью грунта.
При отталкивании от грунта необходимо учитывать некото-
рые дополнительные обстоятельства. Во-первых, угол отталкива-
ния аппарата от грунта, что в первом приближении соответству-
ет направлению его начальной скорости на баллистическом уча-
стке движения, должен быть выбран таким, чтобы свести к ми-
нимуму боковое проскальзывание опорной пяты по грунту при
ее выдвижении. В противном случае может значительно снизить-
ся эффективность отталкивания. Во-вторых, необходимо учиты-
вать возможность наличия вблизи аппарата достаточно высоких
препятствий, так как при слишком пологой баллистической тра-
ектории может произойти удар о них, что нежелательно. Кроме
того, при выборе параметров баллистической траектории необ-
ходимо также учитывать возможность оценки свойств грунта по
динамике соударения аппарата с грунтом в конце полета. В
этом отношении более предпочтительными следует считать кру-
тые траектории, когда горизонтальная составляющая скорости
относительно невелика.
Наиболее просто решается вопрос о выборе угла отталкива-
ния для твердой поверхности. В этом случае он должен быть
меньше угла трения опорного элемента о поверхность. При отсут-
ствии развитых грунтозацепов коэффициент сцепления с грунтом
(угол трения) составляет порядка 0,4...0,5, что соответствует
предельному допустимому углу отталкивания около 22...27 °.
При отталкивании от деформируемой поверхности необходи-
мо учитывать изменение величины работы на деформацию грун-
та при различных сочетаниях горизонтальной и вертикальной
составляющих сил. От их соотношения зависит угол отталкива-
ния аппарата.
Зависимость энергозатрат на деформацию песчаного грунта
от угла отталкивания приведена на рис. 1.20. Из приведенного
графика следует, что при углах отталкивания больше 15...20 °
наблюдается резкое возрастание энергозатрат на деформацию
грунта. С учетом этого можно рекомендовать угол отталкивания
от грунта при прыгающем способе передвижения не более 15...
20°.
Поскольку при полете по баллистической траектории угол
ОЦЕНКА УСЛОВИЙ ПЕРЕДВИЖЕНИЯ ПЛАНЕТОХОДОВ
51
отталкивания будет равен углу падения (при одинаковой высоте
точек отталкивания и падения), то оптимальный угол отталкива-
ния может быть также оценен по допустимому углу падения при
соударении с поверхностью. При этом можно исходить из того,
что доля кинетической энергии при падении должна быть связа-
на с вертикальной компонентой скорости, так как при наличии
значительной горизонтальной
составляющей происходит косой
удар — зачастую с последующим
отскоком), при котором оценка
свойств грунта весьма затрудни-
тельна. Поэтому необходимо
обеспечить такие условия паде-
ния, когда доля кинетической
энергии, обусловленной наличи-
ем горизонтальной составляющей
скорости, будет порядка 0,1 и
менее.
Это можно записать в следу-
ющем виде:
0 10 ZO JO W
Угол отталкивания, градус
V2/V2<6 0 1 Рис. Зависимость энергозат-
г/ в *4 , 9 рат на деформацию грунта от уг-
где VT/ VB — горизонтальная и ла отталкивания
вертикальная составляющие. По-
скольку Vr=VBtgan, получим tg2an<0,l. Исходя из этого усло-
вия угол падения ап должен быть не более 17,5°. Таким обра-
зом, анализ различных факторов показывает, что предпочти-
тельными следует считать траектории с углом отталкивания не
более 15—20°.
Рассмотрим еще один оригинальный способ передвижения по
поверхности Венеры, детальное описание которого приведено в
работе [38]. Суть его — использование энергии атмосферы для
обеспечения циклических перемещений по поверхности. Такой
аппарат представляет собой своеобразный аэростат, в котором
попеременно создается положительная и отрицательная пла-
вучесть. Оболочка аэростата наполняется двумя компонентами.
Одна компонента все время находится в газообразном состоя-
нии. Другая — периодически переходит из газообразного состо-
яния в жидкое. Для совершения этого фазового перехода ис-
пользуется тепловая энергия нижележащих слоев атмосферы Ве-
неры, температура которых выше, чем в более высоких слояЯ.
При подъеме аэростата его оболочка охлаждается, что сопровож-
4*
52 передвижение по грунтам луны и ПЛАНЕТ
дается конденсацией одной из компонент заполнителя и сбором
ее в специальную емкость. При этом подъемная сила уменьша-
ется и аэростат начинает спускаться. По достижении поверхно-
сти Венеры происходит испарение собранного конденсата и по-
полнение оболочки. Вследствие этого аэростат начинает подъем
вверх. Так обеспечиваются циклические спуски и подъемы.
В процессе спуска и подъема вступают в действие ветродви-
гатели, обеспечивающие получение электроэнергии для работы
бортовых систем и научной аппаратуры. Горизонтальное пере-
мещение аэростата осуществляется под воздействием ветровых
потоков, которые особенно интенсивно проявляются на высотах в
несколько десятков километров над поверхностью. Изучение
свойств поверхности Венеры с помощью такого аппарата можно
проводить в местах посадок, как по параметрам, характеризую-
щим динамику его соударения с поверхностью (1.4), так и с по-
мощью специальных научных приборов (1.3).
ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ
ОДИНОЧНОГО КОЛЕСА С ГРУНТОМ
ПРИМЕНИТЕЛЬНО К ЗАДАЧЕ ОЦЕНКИ
ПРОХОДИМОСТИ ТРАНСПОРТНОГО
СРЕДСТВА
Подвижность транспортного средства зависит от
эффективности взаимодействия движителя с деформируемой
опорной поверхностью грунта и определяется параметрами, фи-
зическая сущность которых выявляется лишь при детальном его
исследовании. Сложность проблемы усугубляется необходи-
мостью ее решения на «стыке» двух наук: теории движения
транспортных машин и механики грунтов. Предварительная
оценка проходимости особенно важна для машин, работающих
в экстремальных условиях, представителями которых являются
планетоходы.
2.1. Параметры, определяющие
проходимость планетоходов
Основным критерием возможности применения
транспортных средств для грунтов с малой несущей способно-
стью является проходимость, т. е. способность передвигаться на
грунтах различных категорий и состояний с достаточной ско-
ростью. Достижение желаемых результатов по этому критерию
делает все остальные эксплуатационные качества машин второ-
степенными.
Под проходимостью обычно подразумеваются эксплуатаци-
онные свойства [55, 50], характеризующие надежность передви-
жения машины по опорной поверхности переменного профиля с
меняющейся несущей способностью грунта при различных ско-
ростях и нагрузочных режимах движения. В связи с этим рас-
сматривают так называемую профильную проходимость, обус-
ловленную количеством, размерами и видом преодолеваемых
препятствий, и опорную проходимость, связанную с особеннос-
тями процесса взаимодействия движителя транспортного сред-
ства с опорной поверхностью, т. е., как правило, деформируемым
грунтом. Таким образом, тягово-сцепные свойства движителя,
определяемые характеристиками его взаимодействия с деформи-
руемой опорной поверхностью, сопротивление грунта движению
54
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
по нему транспортной системы и совокупность энергозатрат, не-
обходимых для надежного функционирования данной машины и
выполнения ею поставленных эксплуатационных задач, являют-
ся параметрами, определяющими опорную проходимость везде-
хода. Если не касаться вопросов, связанных с преодолением от-
дельных препятствий, возникающих на пути автоматического
транспортного средства в условиях неземной поверхности, что в
большой мере обусловлено способом управления (а с точки зре-
ния надежности функционирования планетохода целесообразно
уклоняться от преодоления крупных каменных образований или
рвов), наиболее актуальной для передвижения планетохода по
грунтам Луны и планет является оценка его опорной проходи-
мости.
Во многих случаях потеря проходимости наземного вездехо-
да связана с ограниченностью тягово-сцепных свойств его дви-
жителя. Отсюда и большинство конструктивных решений при
проектировании и создании, например, многоприводных автомо-
билей направлено, в первую очередь, на улучшение тягово-сцеп-
ных свойств, на снижение сопротивления движению. Однако оп-
ределить влияние различных факторов на тягово-сцепные воз-
можности движителей невозможно без детального рассмотрения
процесса их взаимодействия с опорной поверхностью. Как пра-
вило, для оценки эффективности каких-либо конструктивных из-
менений в транспортных средствах высокой проходимости про-
водятся дорогостоящие сравнительные испытания, связанные с
затратой большого друда, времени и средств. Но и эти испыта-
ния не могут охватить всех многообразных дорожно-грунтовых
условий. Кроме того, с их помощью можно оценить лишь неко-
торые конструктивные варианты [4]. Всестороннюю оценку про-
ходимости проектируемой машины во всем диапазоне предпола-
гаемых условий эксплуатации, а также оптимизацию ее конст-
руктивных параметров возможно провести только путем разум-
ного сочетания теоретических методов и результатов научно
обоснованных экспериментов.
Для разработки методов оценки опорной проходимости пла-
нетохода необходимо знать механические свойства грунтов, фи-
зические процессы, происходящие при взаимодействии с грунтом
движителя транспортного средства и построить математические
модели этих процессов, позволяющие определить параметры дви-
жения в зависимости от механических свойств грунтовых осно-
ваний и конструктивных особенностей проектируемых машин.
На ранней стадии развития теории проходимость грунтовых
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
55
поверхностей оценивалась по глубине колеи и коэффициенту со-
противления качению, получаемых при прокатывании по поверх-
ности эталонного колеса, причем деформируемость грунта ха-
рактеризовалась его прессованием в соответствии с широко из-
вестным уравнением Бернштейна—Летошнева (1.1). Однако по-
казатели грунта, входящие в уравнение, как выяснилось при бо-
лее детальном исследовании процесса взаимодействия, изменя-
ются в зависимости от величины, направления и времени дейст-
вия нагрузки, от площади и формы прессующей поверхности,
т. е. характеризуют не само грунтовое основание, а всю систему
прессующее устройство — грунт. Это требовало накопления
большого статистического массива данных, получаемых при про-
катывании колес на различных грунтах. В результате многочис-
ленных экспериментов было установлено, что грунт под колесом
не только проседает, образуя колею, но и сдвигается в горизон-
тальном направлении, а траектория частиц зависит от буксова-
ния колеса. Поэтому при оценке взаимодействия колеса с де-
формируемой поверхностью потребовалось уточнить траекторию
смятия грунта, а в формулу Летошнева вместо глубины колеи
ввести длину пути, проходимого частицей грунта (т. е. выраже-
ние. укороченной или удлиненной циклоиды в зависимости от
буксования) [51]. Однако расчет прессования опорной поверх-
ности по траектории частиц лишь косвенно учитывает сдвиг
грунта.
Поворот машины сразу усложняет процесс, так как колеса?,
движущиеся в колее, должны воздействовать на грунт в боковом
направлении. Это привело к необходимости учета взаимосвязан-
ных деформаций, обусловленных как прессованием, так и сдви-
гом грунта. Такая связь устанавливается законом Джаноси—
Ханамото (1.2).
С появлением эластичных типов колес резко усложнились
процессы взаимодействия движителя с грунтом, так как оба
контактирующих тела обладают сложным характером деформи-
руемости. Однако стремление получить практические результа-
ты привело к тому, что большинство исследователей пошло по
пути подбора математических выражений для описания зависи-
мостей, полученных при экспериментальном исследовании взаи-
модействия с грунтом колес с различными шинами. В результа-
те получены формулы с большим числом эмпирических коэффи-
циентов, зависящих как от вида и состояния грунта, так и от
конструкции колеса. Для оценки проходимости колес другого
типа требуется вновь определять экспериментально многие ко-
56
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
эффициенты, зависящие от движителя и грунта, что приводит к
необходимости проведения большего количества эксперименталь-
ных работ.
Развивается и другое направление, основанное на использо-
вании независимых параметров, характеризующих только грунт
и только движитель транспортного средства.
Для планетоходов, призванных работать на поверхностях, ха-
рактеристики которых сложно определить (см. гл. 1), особенно
важными параметрами проходимости становятся тягово-сцепные
свойства движителя, вытекающие из физического процесса его
взаимодействия с грунтом, и показатель энергетических затрат.
Как указывалось выше, колесный движитель оказался наибо-
лее подходящим для планетоходов. Поэтому целесообразно
уметь прогнозировать проходимость колесного планетохода пу-
тем экспериментально-теоретического исследования единичного,
отдельно взятого колеса. Тяговые характеристики колеса, необ-
ходимые для оценки опорной проходимости машины по дефор-
мируемому основанию, можно получить расчетным путем, фор-
мируя математическую модель процесса взаимодействия колеса
с грунтом. Начнем с кинематики этого процесса, сделав при этом
следующие допущения:
1) поверхность грунтового основания ровная и горизонталь-
ная;
2) грунт — однородный материал, состоящий из элементар-
ных частиц;
3) усилия в грунте передаются от поверхности в глубь непре-
рывно;
4) упругие деформации при колееобразовании не учитывают-
ся;
5) грунт деформируется по схеме местного уплотнения;
6) процесс качения — установившийся; влиянием реологичес-
ких и динамических факторов пренебрегаем;
Дополнительные допущения оговорены в процессе изложе-
ния.
2.2. Метод математического моделирования
процесса взаимодействия жесткого колеса
с опорной поверхностью
2.2.1. Уравнения перемещения точки обода одиночного колеса,
движущегося по прямолинейной и криволинейной траекториям.
Траектория движения любой транспортной машины, в принци-
пе, всегда представляет собой линию с меняющейся во
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
57
времени кривизной. Это особенно характерно для ма-
шины высокой проходимости при движении по бездорожью. Од-
нако есть участки, на которых пределы изменения кривизны
траекторий небольшие, а сам радиус поворота достаточно велик,
что позволяет говорить о прямолинейном движении машины.
Тем более, что изучение прямолинейного движения, как наибо-
лее простого, позволяет правильнее оценить компоненты пово-
рота. Как известно, на автоматических аппаратах «Луноход-1 и
2» была принята так называемая бортовая схема поворота, ког-
да поворот осуществляется путем изменения скоростей вращения
неповоротных колес левого и правого бортов. При этом возмо-
жен вариант, когда колеса будут двигаться под углом к плоско-
сти своего вращения. Поэтому будем рассматривать три основ-
ных случая: 1) общий случай криволинейного движения колеса;
2) движение колеса в направлении, составляющем угол с плос-
костью его вращения; 3) прямолинейное качение колеса.
Для установления законов взаимодействия колеса с грунтом
необходимо знать законы движения точек соприкосновения ко-
леса с опорной поверхностью — точек обода.
Наиболее сложный случай — движение колеса по криволи-
нейной траектории в режиме бортового поворота. При этом ко-
лесо, вращаясь с угловой скоростью coK=const, перемещается по
кривой, сохраняя постоянным угол б между плоскостью, каса-
тельной к цилиндрической поверхности радиуса, равного радиу-
су поворота 7? (рис. 2.1). Точки обода в этом случае будут опи-
сывать еще более сложную пространственную траекторию.
Так как сложное движение колеса является суммой беско-
нечно малых перемещений в плоскости его вращения со ско-
ростью V и бесконечно малых поворотов этой плоскости вокруг
мгновенного центра поворота Ом (рис. 2.1), то скорость любой
точки обода в направлении, перпендикулярном плоскости вра-
щения колеса, VTy определяют, исходя из плана скоростей, по-
казанного на чертеже.
Однако поскольку радиус поворота колеса есть величина
векторная, скорость точки зависит как от величины, так и от
направления вектора R. Различные варианты расположения
центра поворота колеса Оп на машине зависят от направления
радиуса-вектора R.
Тогда
r0 sin ф
Rs in б
(2-1)
58
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Направление V* определяется направлением Vy, а знак
/?sin6 зависит от положения вектора R. Абсолютная скорость
перемещения произвольной точки имеет вид
+ +
Проекции абсолютной скорости на оси координат записыва-
ются с учетом того, что колесо поворачивается вокруг центра
поворота Оп с угловой скоростью co=const:
Vx = VTy sin со/ + (У — V cos coK/) cos coZ;
Vy = J/J cos co/ — V sin co/; (2.2)
Vz = K, sin
Учитывая геометрические соотношения, вытекающие из рис.
2.1, после преобразований получим:
х =г0 /— [tg 6(1— cqs аср) -J- sin жр] —
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
59
sin ср cos аср (1 + а2) — a cos ф sin аф]
1 — a2 j
у = r0!— [tg 6 sin 6zcp 4- cos acp — 1) +
(2.3)
4- i a 2- (coscpcosa(p4-tfsin(psina(p— 1)1 ;
z = г0 (1 — cos<p),
где a=r0/R cosfi.
Если колесо движется со скольжением, то скорость его пос-
тупательного перемещения V'x=Vo(l—4 s), где s—коэффициент
буксования. Используя понятие радиуса качения колеса гк [60],
получим
х = г0 [— [tg S (1 — cos акф) + sin ак<р] —
I а
sin ф cos аср (1 + а2) — я cos ф sin сир 1
1 — а2 I
У = Гй f — (tg 6 sin акф + cos акф — 1) +
I CL
(2.4)
4-----— (cos cp cos acp 4~ я sin cp sin acp — 1)1 ;
1 — a2 J
z = rQ (1 — coscp),
где aR = ab\ b=r^rQ.
Выражения (2.3), (2.4) представляют собой уравнения тра-
ектории точки обода колеса для общего случая движения. Зави-
симости для других двух видов движения могут быть найдены
как частные случаи при а->0 из общих уравнений (2.3) и (2.4).
Анализируя выражения (2.3) и (2.4), необходимо подчерк-
нуть, что вид траектории перемещения точки обода зависит толь-
ко от двух безразмерных параметров а, ак и от величины ради-
уса обода колеса г0. Зная кинематику взаимодействия одиночно-
го движителя с грунтом, можно переходить к определению сил
и моментов, действующих при этом.
2.2.2. Определение сил и моментов для случая взаимодейст-
вия прямолинейного движущегося одиночного колеса с деформи-
руемым грунтом. Пусть жесткое колесо радиуса г0 движется с
некоторым проскальзыванием по деформируемому грунту (рис.
2.2), Согласно принятому допущению, грунт не будет иметь ос-
60
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
таточных упругих деформаций, и колесо погружается на глуби-
ну z0, оставляя за собой колею той же глубины. Выделим на
ободе колеса элементарную площадку dF в произвольном поло-
жении А, так что радиус-вектор, проведенный из центра колеса
в точку Д, составляет с вертикалью угол а. Поскольку все точ-
Рис. 2.2. Движение жесткого колеса по деформируемому грунту:
а — общий вид; б — элементарное перемещение площадки dF при повороте колеса на
угол dqp
ки обода рассматриваемого колеса описывают укороченную
циклоиду, то можно утверждать, что элементарная площадка
dF за время dt прошла в грунте по этой траектории путь А\А.
Центр колеса за это время поступательно переместился на ве-
личину гкф, а радиус-вектор точки повернулся за счет вращения
колеса на угол ф.
Выделим элементарное перемещение площадки dF при пово-
роте колеса на угол dq (см. рис. 2.2, б). Путь, пройденный пло-
щадкой dF при этом, равен dK, Тогда, принимая во внимание,
что dK= (С1А1)б/ф, найдем величину элементарного перемещения
используя треугольник AjOiCi:
dk = di + го — 2rKr0 cos (а + ф) Лр. (2.5)
Элементарное перемещение dk площади dF происходит под
углом р к ее нормали, поэтому его можно представить как гео-
метрическую сумму двух элементарных перемещений: dhv , нор-
мального к поверхности площадки, и dhT вдоль плоскости пло-
щадки. Тогда, определяя реакции в грунте как силы, действу-
ющие противоположно соответствующим перемещениям, нужно
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
61
учитывать следующие составляющие: нормальную реакцию грун-
та, обусловленную его прессованием и возникающую в резуль-
тате перемещения на величину d\v; тангенциальную (касатель-
ную) реакцию, обусловленную деформацией сдвига и возника-
ющую в результате перемещения площадки обода в направле-
нии dKx .
Элементарное перемещение за счет прессования грунта, ис-
ходя из dk и геометрических соотношений (см. рис. 2.2), будет
определяться так:
d\v = rK sin (а + ф) dtp. (2.6)
Общая величина нормального перемещения площадки dF
при ее движении от положения Ло до А (см. рис. 2.2) равна
%v = rK [cos а — cos (а + <р0)]»
где фо—угол, на который поворачивается колесо при движении
площадки dF по кривой Л0А.
Обозначив а + фо = ао — угол сектора колеса, находящегося в
контакте с грунтом (так называемый угол обхвата), получим
= rK (cos а — cos а0). (2.7)
Величина элементарного сдвига площадки dF равна
dXt == [г0 — rK cos (а + ф)] йф. (2.8)
Соответственно, суммарный сдвиг площадки dF
= rQ [(а0 — а) + b (sin а — sin а0)]. (2.9)
Элементарную нормальную реакцию грунта, действующую
на выбранную площадку dF, можно представить в веде
dN=pdF, (2.10)
где р —удельное нормальное давление.
Зависимость напряжения в грунте от деформации прессова-
ния принимается, согласно закону Бернштейна—Летошнева
(1.1),
р = С1АС = Cr[rK(cosa— cosa0)]n. (2.11)
Так как распределение напряжений по ширине колеса счита-
ется равномерным, то элементарную площадку dF можно пред-
ставить в виде dF—bKroda, где Ьк — ширина колеса. Учитывая
62
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
(2.11), получим выражение для элементарной нормальной реак-
ции
dN ~ Сгг” (cosа — cos а0)п bKroda. (2.12)
Принимая во внимание, что для сыпучих грунтов с— 0, запи-
шем связь между касательным напряжением, действующим на
элементарную площадку, и деформацией сдвига грунта, проис-
ходящей при перемещении этой площадки, в соответствии с фор-
мулой (1.2) в виде
т = р tg фр (1 — е-Хт/Хт5). (2.13)
Тогда элементарная касательная реакция грунта, равная
dT=xdF, определяется следующим образом:
dT = р tg фг (1 — bKroda. (2.14)
Зная элементарные реакции dT и dN, действующие на пло-
щадку dF колеса, можно определить вертикальную и горизон-
тальную реакции грунта. На площадку колеса dF действует
элементарная вертикальная реакция dRz
dRz = dN cos a + dT sin a . (2.15)
Суммарная вертикальная реакция грунта Rz определяется в
результате интегрирования элементарных реакций dRz по дуге
обхвата ао:
а0
Rz = f (dN cos а + dT sin a). (2.16)
о
Подставив значения реакций dN и dT в выражения (2.12) и
(2.14), получим
Rz = 1 (cos a — cos a0)n tg Фг (1 — е“?’т/Хт5) sin uda -f-
l о
«о )
+ J (cos a — cos a0)n cos ada . (2.17)
о J
Суммарная вертикальная реакция грунта является одним из
основных показателей процесса взаимодействия одиночного
движителя с опорной поверхностью. Из формулы (2.17) виден
сложный характер зависимости Rz от характеристик грунта
(Сг, п, tgq?r, Xts)» геометрических параметров колеса (Ьк, го)>
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЁСА С ГРУНТОМ
63
глубины погружения (ао) режимов движения колеса (гк). Од-
нако вертикальная составляющая — не единственный «отклик»
грунта на воздействие колеса. Очевидно, общая реактивная сила
в плоскости вращения колеса даст и горизонтальную составля-
ющую, которую можно определить, рассуждая аналогично:
Rx = j* (dT cos а— cWsina). (2.18)
b
Используя разложение подынтегральных функций в ряд и
проведя интегрирование, получим
Rx = IJ (cos а — cos а0)п tg ср2 (1 — е-Ат/Хтз) cos ada —
I о
«о ]
— J (cos а — cos а0)п sin ada L (2.19)
о J
Крутящий момент на колесе, равный моменту реакций грун-
та относительно оси вращения, является суммой элементарных
моментов по углу обхвата
а0
MK = r0\dT. (2.20)
о
После интегрирования получим выражение для определения
крутящего момента
= СДгоГкtgфгJ (coscz — cosa0)2(l — е”Хт/Хт5)da. (2.21)
о
Одиночное колесо, двигаясь по опорной поверхности, преодо-
левает сопротивление движению. Момент сопротивления движе-
нию есть сумма элементарных моментов, каждый из которых оп-
ределяется как действие элементарной вертикальной силы на
плече, равном расстоянию от прямой, совпадающей с направле-
нием силы, до вертикальной оси колеса, т. е.
dMf = xMdRz = rQ sin adRz. (2.22)
Тогда суммарный момент сопротивления равен:
\ rQs\nadR2. (2.23)
о
64
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Подставив соответствующие выражения, получим
Mf = Сг6кгог* J J sin a [tg <рг (cos а — cos а0)" (1 — sin а +
I и
+ (cos а — cos а0)'2 cos а] da
(2.24)
Соотношения (2.17), (2.19), (2.21), (2.24) образуют компак-
тную систему, решаемую с помощью ЭВМ, что дает возможность
получить близкую к реальной (в пределах принятых допуще-
ний) картину взаимодействия одиночного колесного движителя с
деформируемым основанием, пригодную для предварительной
оценки опорной проходимости такого движителя на стадии про-
ектирования или доводки.
2.2.3. Определение сил и моментов для случая взаимодейст-
вия с деформируемым грунтом одиночного колеса, движущегося
под углом к плоскости вращения. Пусть колесо движется со
скольжением под углом б к плоскости его вращения (рис. 2.3).
Исследуя процесс качения колеса в этом режиме с точки зре-
ния силовых параметров, возникающих при взаимодействии с
деформируемым грунтом, будем, как и ранее (см. подразд. 2.2.2),
рассматривать элементарное суммарное перемещение dk пло-
щадки обода dF. Это перемещение представляет собой отрезок
пространственной траектории. Оно складывается из геометри-
Рис. 2.3. Элементарные перемещения площадки обода колеса, движущегося в
направлении, составляющем угол с плоскостью своего вращения
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
65
ческой суммы трех элементарных перемещений: нормального
dKv и касательного dKs к площадке dF и перемещения dky, пер-
пендикулярного к плоскости вращения колеса. В итоге образу-
ется плоскость, в которой происходит сдвиг грунта. Поэтому, ес-
ли нормальная реакция грунта, обусловленная его прессовани-
ем, возникает за счет перемещения площадки на dkv, то тан-
генциальная реакция, вызываемая сдвигом, зависит от полного
перемещения в плоскости сдвига, т. е. от d^ = V(d%s)2 4- (dX^)2.
В процессе перемещения площадки в касательной плоскости в
направлении dkx будет происходить приращение напряжения
сдвига dr, причем, поскольку перемещения происходят в направ-
лениях dKs и dhy, то и приращение dx можно представить как
геометрическую сумму
dx = Wxsy + (dxy)*. (2.25)
Так как тангенциальная Т и боковая Rv реакции грунта за-
висят соответственно от напряжений и Ту, то целесообразно
рассмотреть составляющие приращения напряжения сдвига
dxs и dxy по отдельности. Необходимо отметить, что ориентация
напряжения сдвига, зависящая от направления сдвига dXT , бу-
дет изменяться по мере погружения площадки dF (т. е. по мере
поворота колеса на угол 6), а потому будем оперировать с эле-
ментарными напряжениями.
Исходя из уравнения траектории точки, можно записать эле-
ментарное боковое перемещение площадки dF в виде
dky = tg Sd(p. (2.26)
Тогда полное элементарное перемещение в плоскости сдвига
dXx будет равно:
d^ = V[r0 — rtt cos (а + <р)]2 +(rK tg6)2 dtp. (2.27)
При повороте колеса на угол dtp приращение напряжения
сдвига определяется выражением
dx = tg фг (1 - dp + tg Trp/WV4s d^. (2.28)
Учитывая соотношение (2.11), закон нормальных напряже-
ний можно записать в виде
Р = СгГк [cos а — cos (а + ф)р. (2.29)
5 Зак. 826
66
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Так как (см. рис. 2.3)
dxs = dx ; (2.30)
то выражения для dx3 и dxy можно представить с учетом (2.26)
(2.28), (2.29) в следующем виде:
<fts = Сгг” tg <рг пи" 1 sin (а + q>) (I — е 4-
L
+ Qi ] d<p; (2.32)
dxy = Сгг" tg фг пи"~х sin (а + ф) (1 — e“Xx/%TS) +
+ e~Kx/Kxs Qi d(p, (2.33)
где мх = [cos а — cos (а + ф)]; «2 = [1 — b cos (а + ф)[; Qt =
= У [1 — b cos (а 4- ф)]2 (b tg 6)2 .
Элементарные тангенциальная и боковая реакции определя-
ются через полученные составляющие напряжения сдвига
Фо
dT =dF§ dxs\
о
Фо
dRy = dF J dry.
о
(2.34)
(2.35)
Поскольку нормальное перемещение остается тем же, что и
для прямолинейного движения, элементарная нормальная реак-
ция грунта dN определяется выражением (2.12). Общий вид
уравнений для сил и моментов сохраняется таким же, что и ра-
нее (см. подразд. 2.2.2), к ним лишь добавляется выражение
для боковой силы Ry\
а0
Ry = $ dRy. (2.36)
о
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
67
Подставляя в эти соотношения зависимости (2.32), (2.33),
(2.34), (2.35) и произведя необходимые преобразования, полу-
чим общие выражения сил и моментов, действующих при взаимо-
действии с грунтом колеса, движущегося под углом 6 к плоско-
сти вращения
Rx = CM+lbn
а0 а0— а
С cos а I tgq>r[n«i~1sin(a+<р)-^-(1—е-жХт/Хт!!) +
J J L Qi
о о
«0
-|—dcpda— f sin a (cos а — cosa0)ndal ; (2.37)
ATS J J
о )
= crVo+16"H
a0—a
^sAts
Ui +
о о
+ nuni sin (a + ф)----------------------
Qi
{ac a0—a
j sin a J
о и
+ u2u^~Kx/Kxs
d<pda;
(2.38)
ц2 sin (a-j- (p)
Qi
cos a (cos a — cos a0)n da\ ; (2.39)
6 J
a0 a0—a
MK -= CrbKrn0+2bn tg<pr f f \nunrl (1 - “-2Sin(a + ,p) +
oJ b’ L Q1
+ 1 dcpda;
^TS J
/ a0 a0—a
(2.40)
Mf=C^nrn+2\ |
l о
-Ч/M 4sin(« + <P)
2 Qx
+ u2«?e-Xi:/4s
где
a0 \
J sin2a (cosa — cosa0)nda I, (2.41)
о '
Ф r________________________________
К = Го ]V [1 —b cos (a + ip)]2 + (6tg6)2 dip.
о
о
(2.42)
5*
68
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Полученные выражения для искомых величин имеют доста-
точно сложный характер и прямое интегрирование их не пред-
ставляется возможным, поэтому решение было получено с при-
менением вычислительной техники. Решение устанавливает со-
отношения между силовыми реакциями грунта, вызванными
движением одиночного колеса под углом к плоскости своего вра-
щения, и параметрами колеса и грунта.
Рис. 2.4. Элементарные перемещения площадки обода криволинейно движуще-
гося колеса
2.2.4. Определение сил и моментов для случая взаимодейст-
вия криволинейно движущегося колеса с деформируемым грун-
том. Общий случай бортового поворота произвольного колеса
машины представляет собой еще более сложное движение.
Пусть колесо радиуса rQ движется с проскальзыванием по
криволинейной траектории в режиме бортового поворота
(рис. 2.4). Элементарное суммарное перемещение dK площадки
обода колеса dF в деформируемом грунте представляет собой от-
резок сложной пространственной траектории (2.4) и, как и в
предыдущем случае, может быть определено как геометрическая
сумма трех элементарных перемещений: нормального dkx и ка-
сательного dhs к площадке dF и dky, перпендикулярного к плос-
кости вращения колеса. Тогда полное элементарное перемещение
в плоскости сдвига имеет вид
(2.43)
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
69
Элементарное перемещение, перпендикулярное к плоскости
вращения колеса, определяется так:
d\ = г к tg 8d(p — rKa sin (a + ф) dq. (2.44)
Полное перемещение в плоскости сдвига с учетом (2.32) равно
ф ___________________________________________________
Хт = г0 [ У [1 — b cos (a + Я9)]2 + [tg S —a sin (a + гр)]2 dtp. (2.45)
о
Рассуждая аналогично предыдущему случаю, составляющие напря-
жения сдвига drs и dxy можно определить так:
dxs = СгГк tg Фг sin (a + ф) (1 — +
+ u"Q2e~K^s 1 ^2- ; (2.46)
\s J Q2
dXy = tg срг \пипГ1 sin (a + <p) (1 — e-?4/?'xs) +
+ _2<L_U4Q^IK^} Mtg6-asin(a + <P)l (2.47)
4s J q2
где Q2 = V[1 —6 cos (a + ф)]2 + b2 [tg 6 —a sin fa+ф)]2.
Как и в случае движения колеса под углом б к плоскости
вращения, считаем Rx равнодействующей горизонтальных реак-
ций грунта в плоскости вращения колеса; Rz— суммарной вер-
тикальной реакцией; Ry — равнодействующей боковых реакций,
направленных перпендикулярно плоскости вращения. Поэтому
общий вид выражений для соответствующих сил и моментов со-
храняется таким же, что и в случае 2 (см. подразд. 2.2.1), с уче-
Фо
том того, что dRy = dF^ dxy. Тогда для общего случая движе-
о
ния колеса в режиме бортового поворота получим следующие
выражения для сил и моментов:
Rx = СгЬкЬ,гГо+1 I ( cos a f tg фг I nu2 (1 — e-4/4$) S—— +
U 0J L
a0
+ u2u?e_’4/ZTS j dqda — § sin a (cos a — cos a0)ra da
о ?
(2.48)
70
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Ry =Cri>Kro+'6"tg<pr J J ^пи" 1 sin (<x<p) (1 — e Xt/Xxs) +
о 0
ь Пь Htg6-asin(a + <p)I {2
ATS J Q2
Rz = WVS+I
a0 a0—a
sin a j tg <pr |^nwa (1 — e~V4s)
b о
sin (a -I- <p) 4 1 ।
<?2 +
+ и"и2е~Кх/Кхя dq>da 4- C cos a (cos a — cosa0)"da
ATS J J
0
(2.50)
MK = Cr&#r3+2 tg <pr | j* [ пиГ1 (1 -
0 0
u2 sin (a + cp)
Q2
+ u2ui& %x/Xts j dqda;
= CrbKbnro+21J sin2 a tg<pr£ntt" 1 (1 —
10 6
e-xt/xTS) »2sin(« + <p)
Q2
a. ]
-у2- uau?e“Xx/Xxs1 dqda + — ( sin 2a (cos a — cos a0),J da I, (2.52)
\s J 2 J
0 >
где —определяется из выражения (2.45). Несмотря на слож-
ный характер соотношений (2.48)... (2.52), решение которых воз-
можно лишь с помощью ЭВМ, общий подход к взаимодействию
одиночного движителя с деформируемым основанием сохраня-
ется неизменным как для прямолинейного, так и для криволиней-
ного движения колеса, что позволяет оценить влияние различ-
ных режимов, конструктивных параметров движителя, характе-
ристик грунта на общую картину взаимодействия и выявить
аналитическим путем возможности данной конструкции единич-
ного колеса по опорной проходимости.
2.2.5. Определение сил и моментов при взаимодействии коле-
са с деформируемым грунтом в случае движения со скольжени-
ем. По характеру движения колесо обычно бывает буксующим
или проскальзывающим по отношению к опорной поверхности,
поскольку так называемое «чистое качение» колеса, особенно по
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
71
деформируемому грунту, есть единичная точка в общем диапазо-
не режимов. До сих пор рассматривалось ведущее колесо, для
которого характерным является движение с буксованием, т. е.
гк<Уо (рис. 2.5, а). В этом случае движение точки обода по
траектории вызывает сдвиг, направленный в одну сторону для
любой точки интервала О^а^ссо (против вращения колеса).
Если же колесо катится с проскальзыванием (с юзом), т. е.
гк>^о, то на поверхности взаимодействия колеса с грунтом нуж-
но рассматривать две зоны, в которых напряжения сдвига т
имеют противоположное направление (рис. 2.5, б). Границу этих
зон обозначим углом а*, причем
cos а* = r0/rK = 1/Ь. (2.53)
Отсюда пограничный угол определяется так:
а* = arc cos (1/Ь). (2.54)
Как показывает опыт исследований, наибольший угол обхва-
та обычно не превышает аотах = 4О°. Поэтому 1 ^cos а*^0,766.
Тогда 1 1,3. Следовательно, две зоны сдвига могут состав-
лять в случае юза не более 30 % при определенном соотношении
глубины погружения (или угла обхвата, так как ao = f(zo)- Если
юз колеса более 30 % или глубина погружения такая, что а0^
=^а*, то имеется одна зона сдвига, где напряжение т направлено
по вращению колеса.
Остановимся на случае, когда поверхность взаимодействия
прямолинейно движущегося колеса с грунтом разделяется на
72
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
две зоны сдвига: I — на участке 0<a<a*; II — на участке
а*^а^ао. Для произвольной элементарной площадки dF в
этом случае (рис. 2.6), рассуждая аналогично вышеизложенно-
му, получим выражения элементарных нормального dhv и тан-
генциального dKr перемещений на участке I
dXv = rH sin (а + <р) dcp; (2.55)
d\x = — [r0 — rK cos (а + ф)] dq. * (2.56)
Рис. 2.6. Перемещение элементарной площадки на участках I и II
Сравнивая выражения (2.55) и (2.56) с ранее полученными
выражениями (2.6) и (2.8), заметим, что зависимости, получен-
ные для нормальных перемещений dXv одинаковые, а для тан-
генциальных —отличаются только знаками. Следовательно,
элементарная нормальная реакция грунта dN определяется, как
и ранее, лишь вместо ао подставляется а*
dN\ — вгГк (cos а — cos а*)п bKrada.
А элементарная тангенциальная реакция dT имеет вид
dT = СДг" tg фг (cos а — cos а*)" (1 — exp I-[(а — а*) 4-
\ ( ATS
+ b (sin а* — sina)]}^ da. (2.57)
Так как направление сдвига в рассматриваемой зоне изменя-
ется, то изменится по сравнению с ранее полученными [см.
взаимодействие жесткого колеса с грунтом
73
(2.15), (2.18)] и вид соотношений для элементарных вертикаль-
ной и горизонтальной составляющих реакций грунта dRx\ и
dRzi.
dRXi = — (dT cos a + dJV sin a); (2.58)
dRzi = dN cos a — dT sin a. (2.59)
Общий вид выражений для момента на колесе AfK и момен-
та сопротивления движению остается тем же, что и ранее [см.
(2.20) и (2.22)]. Необходимо только заметить, что момент Мк
будет теперь направлен против вращения колеса и является тор-
мозящим.
В итоге для зоны I получим
а*
Rxi = — [ (dTi cos а + dNi sin a); (2.60)
b
Rzi = f (JTVjcosa — d7\sina); (2.61)
b
MKi = -rof dTr, (2.62)
b
Мц = j rosinad/?zi. (2.63)
oJ
На участке II (см. рис. 2.6) направление сдвига будет таким
же, как и в схеме, рассмотренной в подразд. 2.2.2, а потому вы-
ражения для элементарных сил dT и dN остаются без измене-
ний. Тогда зависимости для сил и моментов в зоне II будут от-
личаться от ранее полученных (2.17), (2.19), (2.21), (2.24) лишь
нижним пределом интегрирования.
Полные величины реакций и моментов для всей поверхности
колеса (O^a^ao) будут складываться из соотношений, получен-
ных для I и II зон:
Rx = Rxi + Rxh; Rz = Rzi + Rzn\
Мк'= МК1 + МкП; М;= Мп + % ( }
Рассуждая аналогичным образом, можно получить соотноше-
ния для сил и моментов в общем случае криволинейного движе-
ния колеса, когда поверхность взаимодействия его с грунтом
подразделяется на две зоны.
Зона I. Выражение для полного перемещения в плоскости
сдвига практически не меняется:
74
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ф _________________________________________
XTi = г0 [ "|/[1 — b cos (a -|-ф)]2 + &2 [tg 6 — a sin (а + ф)]2 ^Ф-
о
Составляющая приращения напряжения сдвига dxs меняет
знак. Выражение для dxy (2.47) остается неизменным. Общий
вид соотношений для соответствующих сил и моментов сохра-
няется таким же, как и для прямолинейного движения (2.58),
(2.59), (2.62), (2.63). Тогда с учетом того, что dRyi =dF J dxyy
о
для зоны I получим выражения, аналогичные по внутренней
структуре (2.48) ... (2.52), отличаться будут знаки перед двойны-
ми интегралами в соответствии со знаками (2.58), (2.59), (2.62),
а также пределы интегрирования: а* вместо ао.
Зона II. В зоне II направления всех элементарных переме-
щений совпадают с картиной, рассмотренной в подразд. 2.2.4,
следовательно, элементарные напряжения dxsn и dxyn опреде-
ляются выражениями (2.46) и (2.47). Без изменений останутся
и соотношения для элементарных сил. Таким образом, реакции
грунта и моментыRzu, AfKn, /??уп, Л4/ц... можно определить,
подставляя в зависимости (2.48) ...(2.52) в качестве нижнего пре-
дела интегрирования а*.
Результирующие силы и моменты для всего колеса опреде-
ляются алгебраическим сложением составляющих, полученных
для зон I и II согласно выражениям (2.64).
Полученные соотношения, хотя и несколько усложняют рас-
чет, принципиально не отличаются от системы для общего случая
движения колеса в ведущем режиме. Таким образом, сформиро-
ванная математическая модель взаимодействия одиночного ко-
леса с деформируемым основанием позволяет аналитически оце-
нить данный процесс для всех режимов движения колеса.
2.2.6. Определение области применения математической мо-
дели движения колеса под углом 6 к плоскости своего враще-
ния к общему случаю бортового поворота. Анализируя выраже-
ния (2.48)...(2.52), полученные для общего случая криволиней-
ного движения колеса в режиме бортового поворота, и формулы
(2.37)...(2.41) движения колеса под углом б к плоскости своего
вращения отметим незначительные отличия при общности струк-
туры тех и других соотношений. Эти отличия заключатся в появ-
лении в формулах (2.48)...(2.52) выражений, содержащих а.
Поскольку R' = R cos б (см. рис. 2.1) представляет собой ра-
диус поворота борта машины и остается постоянной величиной
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
75
для любого колеса этого борта, то при анализе этих выражений
целесообразно оперировать параметром /?'.
Установление области применения «приближенных» формул
(2.37)...(2.41) дает возможность использовать для изучения бор-
тового поворота схему движения колеса под углом б, что облег-
чает как теоретическое, так и экспериментальное (что особенно
важно) исследование процесса. Для определения границ этой
области было проведено сравнение результатов расчетов, выпол-
ненных по тем и другим формулам при одних и тех же парамет-
рах процесса и определена относительная погрешность вычисле-
ний 8. Погрешность 8^15% считалась удовлетворительной для
практических расчетов.
Качественный анализ проведенных расчетов показал, что от-
носительные погрешности 8мк растут с увеличени-
ем угла установки колеса б и величины b (уменьшением буксо-
вания), а относительная погрешность с ростом б и b
уменьшается. При работе колеса с малым буксованием в нейт-
ральном режиме (Ях<0) погрешность с ростом б также
уменьшается. Количественное исследование вышеупомянутых
формул проводилось для различных глубин погружения колеса,
буксования и углов поворота б в диапазоне от 0 до 45°.
Поскольку изменения относительных погрешностей 8/?*, 8мн
и имеют сходный характер, но существенно отличаются
от вида погрешности 8^, то анализ формул проведен
отдельно для 7?х; Л4К; RZi а затем для Ry.
Расчет по обеим формулам для вертикальной нагрузки в ра-
нее установленном диапазоне величин показал, что относитель-
ная погрешность £rz не превышает 1 %, т. е. практически для
нахождения Rz можно применять «приближенную» формулу.
Расхождение в определении и Rx более существенно и за-
висит от нескольких величин (б; &; а; ао), поэтому было бы
удобнее подобрать такой безразмерный параметр, который поз-
волил бы уловить влияние соотношения этих величин на отно-
сительную погрешность (е/?х, Ьмк)-
Анализируя общую (2.48) и приближенную (2.37) зависи-
мости, заметим, что отличаются лишь выражения, стоящие под
знаком радикала, т. е. У1—cos (а + ф)]2 + fr2 tg 6 для прибли-
женной иУ[1—b cos (а + ср)]2 + b2 [tg б — а81п(а+ф)]2 для общей
формулы. Поэтому задача сводится к оценке члена
76
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
_ о , Га sin (а 4-ср) 3
2 tg 662а sin (а + ср) -----—---------— 1
_______________________L 2 tg б_____________[
[1 — b cos (а + ф)]2 + b2 tg2 6
(2.65)
После преобразования получим для оценки параметр L
г 2£(l-j-£/2) г
l + (l/z>-l)2ctg26 тек’
(2.66)
Следовательно, когда £->0, относительные погрешности
ИЕлгк->0. Например, при L^0,l погрешности е^<4%, а
бд1к< 3 %, причем функции *8^ и 8мк данной области прак-
тически однозначно определяются по L. Поэтому целесообразно
оценивать относительные погрешности 8^ и ем* в зависимо-
сти от параметра А, а не от каждой из величин (ао, а, Ь, 6) в
отдельности.
Статистическая обработка результатов численных расчетов
для различных диапазонов величин как по общим, так и по при-
ближенным формулам дала возможность^установить многознач-
ный характер функций е,^х=- f (L)^ и] ю Получен-
ная неоднозначность определяется характером зависи-
мости L от б. Действительно, на участке 0^б^л/2, существует
экстремальная точка бЭкс, которая определяется из условия
dLjdb = Q и имеет вид
*§бЭкс=—4" 4^sina° +у sin2a° 4(т—1У-
(2.67)
Функция Л (б) в этой точке достигает максимума, причем при
Ь^-0 (полное буксование) tg63Kc-^o°, а бЭкс-^л/2, а при
(буксование отсутствует) tg63Kc~>0 и бЭкс->0.
Таким образом, зависимость L = f(6), поскольку она одноз-
начно определена для каждого &, при различном буксовании бу-
дет иметь вид семейства кривых, расположенных внутри облас-
ти, заключенной между осями координат и кривой, соответству-
ющей движению без буксования (Ь = 1) (рис. 2.7). Причем с
увеличением буксования экспериментальная точка смещается в
область больших значений б. Сама же величина бэкс определяет-
ся конкретным соотношением а, Ь, а0 [см. (2.67)].
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
11
Таким образом, задаваясь относительной погрешностью вы-
числения в в широком диапазоне исходных параметров, можно
определить для каких радиусов поворота R' допустимо примене-
ние упрощенной схемы бортового поворота, и следовательно,
расчета по приближенным формулам. Проиллюстрируем это на
конкретном примере примени-
тельно к машине типа «Луно-
ход-1», имеющей гладкие ме-
таллические колеса с 7)к = 0,45м.
Для наиболее тяжелого слу-
чая разворота на месте —
минимальный радиус поворота
/?' = (),8 м. В этом случае, как
показывает эксперимент, колеса
машины из-за сильного бокового
скольжения двигаются с буксо-
ванием свыше 55 % и погружа-
ются в сыпучий грунт на глуби-
ну, соответствующую углу об-
хвата колеса ао^4О°. Тогда по
формуле (2.67), tg63Kc=0,134,
т. е. 6экс = 48°36', а величина
Дпах, соответствующая данному
6ЭКС, равна 0,158. Тогда для
^45° получим <4,7%, а
емк^4,5 %.
о л/2 8'
Рис. 2.7. Графики функций L (6)
Анализируя соотношения (2.38) и (2.49), полученные для оп-
ределения Ry, заметим, что отличие общей формулы от прибли-
b tg 6
женнои заключено в выражениях гут , - „
F У[1 — b cos (а + ср)]2-|-62 tg2 6
/ ч 6[tg6—Pasin(a4-(p)l
(приближенная) и —- ' \о
У [ 1 — b cos (а +.ф)]2 + № [tg 6 — a sin (a | cp)]2
(общая).
Выделим первое выражение из второго с учетом знаков.
Тогда после преобразований получим
(2.68)
78
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Из полученного соотношения (2.68) видно, что относительная
погрешность вычисления заведомо мала, т. е. zRy -И), если k =
= а sin ao/tgd->O.
Анализ зависимости = f (k) показал, что характер не-
однозначности ее, в основном, определяется параметрами а и bt
причем при достаточно больших величинах R' колебания значе-
ний функции &Ry происходят в сравнительно узком диапазоне и
зависят практически только от величины Ь.
Возвращаясь к случаю оценки формул для разворота маши-
ны на месте, получим йтах^0,18, т. е. даже при 95 % буксова-
нии относительная погрешность < 13 %. С увеличением ра-
диуса поворота и с уменьшением глубины погружения относи-
тельная погрешность становится еще меньше.
Поскольку численный анализ проведен для грунта с п=1,0 и
tg<pr = 0,6, а практически вездеходные машины работают на бо-
лее слабом грунте, относительная погрешность при этом сущест-
венно уменьшается.
Так, в результате численного анализа схем движения коле-
са и полученных формул можно заключить, что в случае криво-
линейного движения колеса машины с погрешностью менее 15 %
можно использовать формулы для прямолинейного движения,
выбрав соответствующий угол S к плоскости вращения колеса.
2.3. Влияние различных условий движения,
нагрузочных режимов и геометрических ,
параметров колеса на характер его
взаимодействия с деформируемым основанием
Изложенный метод математического моделиро-
вания процесса взаимодействия жесткого колеса с деформируе-
мой поверхностью позволяет оценить тягово-сцепные свойства
колеса в зависимости от характеристик грунта, разилчных кине-
матических режимов движения, конструктивных параметров ко-
леса, нагрузки на колесо и его местоположения на многопривод-
ной машине. Это дает возможность уже на стадии проектиро-
вания и доводки проработать различные конструктивные вари-
анты с учетом функционального назначения машины и ее прохо-
димости в условиях бездорожья.
Анализ влияния различных параметров на характер взаимо-
действия колеса с деформируемым основанием позволяет выя-
вить диапазон колебаний тягово-сцепных свойств в зависимости
Взаимодействие жесткого колеса с грунтом
73
от изменения значений этих параметров; определить характерис-
тики, которые играют решающую роль, и второстепенные; наме-
тить пути и тенденции, позволяющие улучшить проходимость
будущих машин.
Поскольку было принято, что эпюра распределения напряже-
ний по ширине обода равномерная, то в полученную математи-
ческую модель такой геометрический параметр, как ширина ко-
леса, вошел коэффициентом пропорциональности. Для относи-
тельно узкого колеса это не всегда согласуется с опытными дан-
ными, поэтому анализ экспериментальных результатов оценки
влияния ширины колеса проведен в следующем разделе.
Глубина колеи для деформируемой опорной поверхности яв-
ляется важной характеристикой походимости: она связана с кли-
ренсом машины и сравнительно легко замеряется при проходе
колеса по грунту. Поскольку го/го = 1—cos а0, то функция £о/го =
= /(ао) позволяет получить связь реакций грунта с глубиной ко-
леи, оперируя различными углами обхвата а0, что удобнее для
данной математической модели. В реальных условиях вертикаль-
ная нагрузка, действующая на колесо, колеблется в очень малом
диапазоне, т. е. на многозначные функции ^x==f(ao); #7/ = f(«o);
MK=f(a0); Alf=f (ао) накладывается условие /?z = const, которое
приводит к такой зависимости реактивных сил и моментов от
ао, каждая точка которой определяет реакцию, соответствую-
щую необходимому для данной глубины погружения буксова-
нию.
Функции 7?x = f(a0); Ry = f(ao)\ MK=f(a0); Mf=f(a0) при
Rz = const выявляют физический характер процесса взаимодейст-
вия колеса с грунтом, но, исследуя влияние каждого из много-
численных параметров, трудно дать оценку взаимосвязи между
собой реакции грунта, используя эти зависимости.
С точки зрения установления физически обоснованной взаи-
мосвязи реактивных сил и моментов при различном сочетании
параметров сравнение лучше проводить, используя обобщенные
зависимости |x = f(^T); фтз=/(^т); 5 = f(feT), где p,=/?y//?z;
<pTS = 7ИК/(rK7?z); kT = RxIRz,
Для оценки удельных потерь энергии при качении колеса,
т. е. потерь энергии, отнесенных к единице пройденного колесом
пути и единице вертикальной нагрузки, воспользуемся выраже-
нием ]
^ = (^rC0sS“7?x)/7?z = <PTsC0sfi~^’ (2,69)
80
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Формула (2.69) учитывает как силовые, так и кинематичес-
кие потери, вызванные скольжением колеса. Определение всех
входящих в нее физических величин не представляет затрудне-
ний как аналитически, так и экспериментально.
Если колесо при криволинейном движении машины находит-
ся под некоторым углом б к направлению перемещения, режим
движения определяется направлением действия на ось колеса
результирующей реакции корпуса Рс (рис. 2.8). Проекция этой
Рис. 2.8. Соотношение кинематических и силовых параметров при движении
колеса под углом 6 к плоскости своего вращения
силы в продольной плоскости — свободная сила тяги Рх, а в по-
перечной— боковая сила Ру. Так как поворачивающий момент
для машины создается суммарными свободными силами тяги от-
стающего и забегающего бортов, а момент сопротивления пово-
роту определяется суммарными боковыми силами, то соотноше-
ние между Рх и Ру является характеристикой движения колеса
в режиме бортового поворота.
Отношение этих сил определяет направление результирую-
щей реакции грунта 7?с, уравновешивающую внешнюю силу Рс
действующую на ось колеса, поскольку Hc = Px/Py = ctg ус, где
ус — угол между направлением действия силы Rc и плоскостью
вращения. Для равновесного состояния в грунте свободная сила
тяги на оси колеса Рх равна горизонтальной реакции грунта
/?х, а боковая сил>а Py = Ry. Каждая из полученных кривых
Н=:П^т) представляет собой годограф результирующей реакции
грунта Rc, так как радиус-вектор, проведенный к любой точке
кривой, является геометрической суммой соответствующих дан-
ной точке относительных боковой и продольной сил. Т. е. каж-
дая точка кривой H = f(&T) характеризует возможный силовой
режим колеса и определяет величину и направление полной ре-
акции грунта.
2.3.1. Влияние различных грунтовых условий на характер
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
81
взаимодействия жесткого колеса с деформируемым грунтом. За-
висимости для определения сил и моментов, действующих на
одиночное жесткое колесо, движущееся в различных режимах
прямолинейно и криволинейно, содержат параметры грунтовой
поверхности, с которой взаимодействует колесо при движении:
Сг, ft, tg(pr и Эти параметры отражают основные свойства
заданного грунта: прессование (пластичность), сдвиг, внутрен-
нее трение, в зависимости от которых меняется характер взаи-
модействия движущегося колеса с опорной поверхностью. Спе-
циальные эксперименты, проведенные для различных грунтов
[25], показали, что эти параметры могут изменяться в весьма
широких пределах в зависимости от состояния, влажности, гра-
нулометрического состава грунта и т. д.
Исследования, выполненные на поверхности Луны аппарата-
ми «Луноход-1 и 2», подтвердили (см. гл. 1), что по мере движе-
ния машины лунный грунт изменял свои характеристики. Поэто-
му актуальнейшей задачей теории движения планетоходов яв-
ляется определение параметров грунта по результатам анализа
процесса взаимодействия движителя с опорной поверхностью.
Характеристики реальных опорных поверхностей, встречаю-
щихся при эксплуатации (для случая движения колеса под уг-
лом к плоскости его вращения), таковы: Сг= 1,75...3,5 Н/см3,
n = 0,5...2,6; tgcpr = 0,3...0,6; Zts = 0,05...4,5 см. Величина коэффи-
циентов ft и Сг обусловлена состоянием и физико-механическими
свойствами грунта при его прессовании (сжатии). Интенсив-
ность сопротивления грунтов прессованию определяется коэф-
фициентом ft.
Как известно, при ft>l грунт, главным образом, уплотняет-
ся, а приращение осадки с увеличением нагрузки уменьшается;
при п<1 для грунта характерны преимущественно пластичес-
кие деформации, приращение осадки с ростом нагрузки при этом
увеличивается.
Естественно, что наиболее заметно влияние ft на составляю-
щие сил и моментов, связанных только с прессованием грунта.
Однако поскольку напряжение сдвига зависит от удельного дав-
ления на грунт, то величина ft будет оказывать влияние и на на-
пряжения сдвига, а следовательно, на все реактивные силы и
моменты, возникающие при взаимодействии колеса с грунтом.
Взаимное влияние сдвига и прессования грунта наблюдалось и
при передвижении лунохода по лунной поверхности (см. гл. 1).
С увеличением п глубина колеи растет, а это приводит к росту
всех силовых параметров. Для одной и той же удельной свобод-
6 Зак. 826
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ной силы тяги kT с увеличением коэффициента п возрастает ве-
личина удельной боковой силы ц (рис. 2.9). Это происходит по-
тому, что с ростом коэффициента п для одних и тех же верти-
кальной нагрузки и режима буксования глубина погружения ко-
леса существенно возрастает (особенно при s<50%). Таким
образом, при повороте колеса для сдвига большого объема
грунта требуется большая боковая сила.
удельной боковой реакции грунта от удельной полной тяги от удельной
удельной свободной силы тяги (Сг= свободной силы тяги (Сг = 27 Н/см3;
=27 Н/см3; го=О,225 м; tgcpr = 0,6; го = О,225 м; tg(pr = 0,6; г0/Хг s= 16,6;
г0Дтз = 16,6; 6=20°) 6 = 20°)
Так как с увеличением п растет глубина колеи, то возрас-
тает и сопротивление движению колеса, т. е. для обеспечения
одной и той же силы Рх нужен больший крутящий момент Л4К.
Однако, как показывает функция s=f(6T), сцепные качества
грунта с уменьшением п ухудшаются, поскольку при этом зави-
симость s = f(kT) растет гораздо интенсивнее. Поэтому прирост
момента для реализации одинаковых величин kT с уменьшением
п также будет больше. Это приводит к интенсивному росту
функции фт8 = /(^т) с возрастанием £т (рис. 2.10).
Размерный коэффициент Сг (иногда его называют коэффи-
циентом осадки) устанавливает соотношение между удельным
давлением на грунт и соответствующей ему осадкой. Он может
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
83
быть представлен как удельное сопротивление грунта прессова-
нию при единичном погружении, зависит от влажности и порис-
тости грунта и меняется в весьма широких пределах. Сложность
использования коэффициента Сг в теории заключается в зави-
симости его размерности от величины п, а сложность определе-
ния с помощью штампов — в его зависимости от размеров штам-
па и диапазона нагрузок при прессовании. Однако, ввиду срав-
нительной простоты уравнения Летошнева—Бернштейна (1.1) и
вполне удовлетворительного отображения во многих случаях с
его помощью физической картины прессования грунта под дей-
ствием катящегося колеса, большинство ученых используют это
уравнение в своих исследованиях, стараясь при определении ве-
личины Сг избежать субъективной оценки. Основываясь на этом,
полагаем, что коэффициент Сг — одна из физических констант
грунта.
На первый взгляд, влияние Сг легко определить из непосред-
ственного анализа выражений (2.37)...(2.41). Сразу можно ска-
зать, что увеличение Сг приводит к тому, что при воздействии
одной и той же вертикальной нагрузки и для одного и того же
буксования погружение существенно уменьшается. Поскольку и
для зависимостей /?x = f(ao); Ry=f(ao) и AfK=f(a0) с увеличе-
нием Сг погружение уменьшается при прочих равных условиях,
то, казалось бы, соотношения между силами и моментами дол-
жны оставаться неизменными. Однако этого не происходит, фи-
зически увеличение Сг, например, в 5 раз означает, что при прес-
совании для того, чтобы погрузиться в данный грунт на ту же
глубину, что и в первоначальный, требуется (при прочих равных
условиях) приложить давление прессования в 5 раз большее.
Поэтому естественно уменьшение погружения при постоянной
Rz. Однако такой грунт обладает большим сцеплением, а потому
обеспечивает такую же силу тяги уже при меньшей глубине пог-
ружения, и хотя напряжение сдвига при этом тоже несколько
возрастает, уменьшение глубины погружения будет настолько
существенным, что это приведет к уменьшению удельной боко-
вой силы ц, необходимой для поворота колеса (рис. 2.11). Лишь
тогда, когда для обеспечения необходимой величины kT требует-
ся весьма интенсивное буксование колеса (свыше 50%), а глу-
бина погружения в связи с этим начинает резко увеличиваться,
влияние возрастающего напряжения сдвига становится более
существенным, и это приводит к относительному увеличению
потребной удельной боковой силы ц. Это иллюстрируется тем,
что с ростом kT кривые p,=f(feT) для различных Сг сближаются
6Ф
84
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
и даже пересекаются (см. рис. 2.11). При реализации большой
силы тяги буксование в грунте со слабыми сцепными свойства-
ми возрастает так резко, что устойчивое движение колеса прак-
тически прекращается. В то же время на грунте, имеющем боль-
шую величину коэффициента Сг, возможно обеспечить большую
тягу (см. рис. 2.11).
Рис. 2.11. Влияние коэффициента
грунта Сг на зависимость удельной
боковой реакции грунта от удельной
свободной силы тяги (п=1,0; г0 =
=0,225 м; tgcpr = 0,35; r0ATs =90;
6 = 20 °)
Рис. 2.12. Влияние коэфициента грун-
та Сг на зависимость удельной пол-
ной тяги от удельной свободной си-
лы тяги (г0 = 0,225 м; r0/KxS =90;
tgq?r = 0,35; 6 = 20°; n=l,0)
Значительный рост глубины колеи с уменьшением Сг приво-
дит к повышению сопротивления движению колеса, благодаря
чему уже в свободном режиме (&т = 0) увеличивается потребный
крутящий момент Л4К и удельная полная тяга с учетом буксова-
ния (pTS (рис. 2.12). Такой рост момента характерен и для других
нагрузочных режимов, пока буксование не превышает 50 %. Да-
лее (pTS резко возрастает.
Коэффициент внутреннего трения в грунте tg<pr характеризу-
ет трение между отдельными частицами грунта, он тем больше,
чем более связным становится грунт. Из структуры самих фор-
мул (2.37)...(2.41) видно, что с увеличением tg<pr должны воз-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
85
растать все силы и моменты, действующие на колесо, причем в
разной мере, так как иногда коэффициент внутреннего трения
входит в выражение либо как общий множитель, либо как мно-
житель одного из слагаемых. Это объясняется тем, что боковая
сила Ry (2.38) и момент на колесе (2.40) обусловлены исключи-
тельно сдвиговыми напряжениями, а потому изменение коэффи-
Рис. 2.13. Влияние коэффициента
внутреннего трения грунта на зави-
симость удельной боковой реакции
грунта от удельной свободной силы
тяги (Сг = 27 Н/см3; г0=0,225 м;
г0Дх8 = 16,6; 6 = 20°; п=1,0)
циента трения в плоскостях сдвига вызывает пропорциональное
изменение этих величин (Ry] 7ИК). В то же время силы Rx и Rz
и момент Mf связаны как со сдвигом, так и с прессованием грун-
та, а потому влияние срг на эти величины зависит от доли напря-
жений сдвига. Вертикальная реакция грунта Rz при сравнитель-
но небольших погружениях колеса (которые в данном случае и
рассматриваются) формируется, главным образом, за счет прес-
сования грунта, на которое изменение фг влияния не оказывает.
При больших погружениях (с ростом ао) доля сдвига в образо-
вании силы Rz становится более существенной, а потому начина-
ет ощущаться изменение коэффициента tgcpr.
С увеличением фг удельная боковая сила ц при той же kT
существенно возрастает, причем функция [i = f(kT) меняет свою
кривизну (становится более пологой) (рис. 2.13).
Таким образом, увеличение внутреннего трения между части-
цами грунта позволяет получить несколько большую силу тяги
при том же подаваемом на ось колеса моменте, но при этом по-
ворот колеса значительно ухудшается, так как возрастает боко-
вая сила.
86
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
— постоянная сдвига, или постоянная перемещения при
сдвиге. Величина коэффициента XTS связана с зависимостью си-
лы сцепления от перемещения колеса вдоль плоскостей сдвига.
Как показывают эксперименты, чем быстрее растет сила сцепле-
ния при перемещении исследуемого объекта вдоль плоскостей
сдвига, тем меньше величина Xts. Анализ формул (2.37)...(2.41)
показывает сложный характер влияния s на реактивные силы
и моменты, а из структуры этих формул можно заметить, что из-
менение Хт s оказывает влияние на те их составляющие, которые
образуются за счет сдвига грунта.
При значительном уменьшении Xts характер зависимости
Rz=f(ao) меняется весьма незначительно, поскольку, как уже
отмечалось, вертикальная реакция грунта Rz формируется, глав-
ным образом, за счет прессования. В то же время боковая сила
Ry, обусловленная напряжениями сдвига, меняется весьма су-
щественно. Для одной и той же удельной силы тяги kT с умень-
шением Xts удельная боковая сила заметно возрастает (рис. 2.14),
причем кривые p = f(&T) при различных расположены так,
что практически равноудалены друг от друга. Дальнейшее умень-
Рис. 2.14. Влияние постоянной сдви-
га грунта на зависимость удельной
боковой реакции грунта от удельной
свободной силы тяги (Сг = 27 Н/см3;
го=Р,225 м; tgq)r = 0,6; 6=20°; п=
= 1,0)
Рис. 2.15. Влияние постоянной сдвига
грунта на зависимость удельной пол-
ной тяги от удельной свободной си-
лы тяги (Сг = 27 Н/см3; г0 = 0,225 м;
tg(pr=0,6; 6=20°; п=1,0)
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
87
шение мм) приводит к тому, что влияние коэффици-
ента на величину боковой силы снижается (особенно при
малых значениях tgcpr). С увеличением hx s для обеспечения од-
ной и той же силы тяги Rx, нужен больший момент на колесе
7ИК, а значит, и удельная полная тяга с учетом буксования фТ5
(рис. 2.15), причем для больших величин kT эта разница стано-
вится еще более заметной. Это объясняется тем, что уменьшение
постоянной перемещения при сдвиге Атз характеризует собой
упрочнение грунта (при A,rs->0 — твердый грунт, при —
жидкое болото). При этом увеличивается сила сцепления, а сле-
довательно, возрастает максимальная сила тяги на крюке, ко-
торую можно реализовать на данном грунте, т. е. растет kTi но
соответственно увеличивается и момент AfK, который необходи-
мо приложить к колесу для реализации этой силы. Причем для
обеспечения больших величин &т, которые реализуются в режи-
мах интенсивного буксования колеса (свыше 60%), потребный
момент AfK с упрочнением грунта (уменьшением Ат s) возраста-
ет еще более резко. Естественно, с уменьшением Ат s растет и
потребная удельная боковая сила |1, которую необходимо прило-
жить к колесу для обеспечения его поворота. Для весьма малых
Ат з (Атз<1 мм) грунт уже настолько прочен, что даже мини-
мальное перемещение при его сдвиге достигается прикладывани-
ем весьма большой силы, близкой к срезывающей, а потому рост
ц, происходящий только за счет приближения его к максималь-
ной величине, замедляется.
Подытоживая влияние всех этих коэффициентов на движение
колеса в различных режимах, можно сделать следующие выво-
ды:
1. С увеличением коэффициента п возрастает глубина колеи,
в связи с чем увеличивается боковая реакция, определяющая
сопротивление бортовому повороту, а для обеспечения одной и
той же силы тяги требуется больший момент
2. С увеличением коэффициента Сг глубина колеи уменьша-
ется, что приводит к уменьшению момента сопротивления дви-
жению колеса и боковой реакции грунта. При больших реализу-
емых силах тяги ввиду срыва грунта для малых Сг соотношение
между боковыми силами меняется.
3. С увеличением коэффициента tgcpr ощутимо возрастает
боковая реакция, в связи с чем сопротивление повороту увели-
чивается. Однако возросшее внутреннее трение между частицами
грунта несколько снижает момент сопротивления движению ко-
леса.
88
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
4. С увеличением постоянной сдвига %rs податливость грунта
увеличивается, в связи с чем уменьшается боковая реакция грун-
та, однако для реализации одной и той же силы тяги к колесу
нужно приложить больший крутящий момент.
2.3.2. Влияние буксования на характер взаимодействия жест-
кого колеса с деформируемым грунтом. Движение колеса по де-
формируемому основанию, как правило, сопровождается буксо-
ванием, или проскальзыванием, поскольку колесо, установленное
на машине, должно передавать толкающую силу корпусу для
осуществления движения. В результате в грунте возникает реак-
тивная сила Rx, которая может быть реализована только при
некоторой пробуксовке ведущего колеса. Тогда часть энергии,
переданной колесу путем создания на его оси крутящего момен-
та, затрачивается на потери буксования. Естественно, что при
бортовом повороте колеса потери энергии на буксование стано-
вятся еще более значительными. Немонотонный характер изме-
нения функций /?х = Пао); Л4к = /(а0) по буксованию объясняет-
ся тем, что сначала увеличение буксования вызывает некоторое
увеличение сдвига, а потому и рост величин /?х; Л4к, однако для
данной глубины погружения несущие способности грунта при не-
котором буксовании исчерпываются, что приводит с дальнейшим
ростом буксования к уменьшению 7?х; АГК. Причем значение бук-
сования, когда сила и моменты достигают максимума, при фик-
сировании ао для каждой из этих величин свое и зависит от глу-
бины погружения, свойств грунта, геометрических размеров ко-
леса. Особенно сильное влияние оказывают свойства грунта п\
К s; Сг; tgcpr. Действительно, с увеличением постоянной сдвига
грунта s вышеупомянутый максимум смещается в область
большего буксования (рис. 2.16). Такое же смещение максиму-
ма наблюдается с уменьшением коэффициента п. Это хорошо
согласуется с ранее рассмотренной картиной, поскольку умень-
шение п характеризует менее прочный, более пластичный грунт,
деформации прессования которого возрастают, а увеличение
означает уменьшение сцепления между частицами. Поэтому, ес-
ли на более прочном грунте обеспечивалось достижение макси-
мальной силы или момента при данной глубине погружения за
счет некоторого буксования, то с уменьшением пи увели-
чением XTs то же самое потребует увеличения пробуксовки
колеса.
Важной характеристикой движения колеса, оценивающей его
сцепные качества на данном грунте, является зависимость бук-
сования от коэффициента свободной силы тяги s=f(&T)—тяго-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
89
во-сцепная характеристика. С помощью этой функции анализи-
руется влияние свойств грунта и параметров колеса на величи-
ну реализованной силы тяги и необходимого при этом буксова-
нии колеса. Тягово-сцепная характеристика широко использует-
ся при оценке влияния параметров колеса на процесс его взаи-
модействия с грунтом.
2.3.3. Влияние радиуса колеса на характер его взаимодейст-
вия с грунтом. Работы, касающиеся исследования влияния ра-
диуса колеса на сопротивление
движению, посвящены, в ос-
новном, прямолинейному дви-
жению по несминаемому грун-
ту. Кроме того, чаще рассмат-
ривается ведомый режим дви-
жения колес, как более про-
стой для изучения. В. А. Кузь-
менко предложил номограмму
для определения размеров
ведомого колеса, полученную
в процессе эксперименталь-
ных исследований. У. И. Аус-
мээс, Л. В. Грамолин,
В. М. Овсюков нашли в ре-
зультате анализа эксперимен-
тальных данных оптимальные
величины диаметра колеса, со-
Рис. 2.16. Влияние свойств грунта на
буксование колеса (Сг = 27 Н/сма;
го = О,225 м; tg<pr = 0,6; 6 = 20°; а =
= 10°)
ответствующие типу иссле-
дованных ими машин. Иссле-
дуя бортовой поворот четырех-
колесного тягача, Ю. А. Брян-
ский отметил влияние диамет-
ра колеса на параметры движения, но никаких зависимостей
не получил. В. И. Кнороз, рассматривая работу автомобильной
шины, подчеркивает, что большое влияние на деформацию
грунта оказывает величина удельного давления в контакте ко-
леса с грунтом, зависящая от диаметра колеса.
Исследования влияния размеров одиночного колеса на ха-
рактер его взаимодействия с грунтом дают возможность подби-
рать такие колеса, которые обеспечивали бы на данном грунте
те или иные свойства машины (например, лучшую проходимость
по сыпучему грунту, или возможность получения максимальной
силы тяги на крюке и т. д.). *
90
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
О том, что радиус колеса г0 существенно влияет на распреде-
ление реактивных сил и моментов при бортовом повороте, мож-
но судить уже по виду полученных зависимостей. Увеличение г0
должно вызывать рост функций Rx = f(^o)\ Ry=f(ao)', 7?z = f(ao);
= при прочих равных условиях.
Рис. 2.17. Влияние радиуса колеса
на зависимость удельной боковой ре-
акции грунта от удельной свободной
силы тяги на буксование s (Сг =
= 27 Н/см3; tg(pr = 0,6; « = 1,35 см;
6 = 20°; п=1,0)
Рис. 2.18. Влияние радиуса колеса на за-
висимость удельной полной тяги от удель-
ной свободной силы тяги (Сг = 27 Н/см3;
tg(pr = 0,6; %ха=1,35 см; 6=20°; п=1,0)
Из зависимости yb = f(kT), построенной для различных радиу-
сов колеса (рис. 2.17), видно, что для каждого фиксированного
Ус с увеличением радиуса г0 полная реакция грунта Rc возрас-
тает. В соответствии с ростом полной реакции увеличиваются
удельная продольная kT и удельная поперечная р реакции грун-
та. На этом же графике можно проиллюстрировать увеличение
удельной боковой реакции грунта с ростом радиуса колеса при
реализации одной и той же удельной свободной силы тяги &т-
Здесь же дается зависимость s = f(kT).
Зависимость cpTS = f(kT) (рис. 2.18) устанавливает связь меж-
ду удельной потребной силой тяги kT и коэффициентом <pTS, оп-
ределяемым моментом касательных сил 7ИК относительно оси ко-
леса, который необходимо обеспечить для реализации этой си-
лы. Кривая q)TS=f(kT) с уменьшением радиуса колеса становит-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
91
ся более крутой, и для обеспечения одной и той же силы тяги
(&т = const) необходимо приложить больший крутящий момент.
Взаимосвязь удельной силы тяги &т, реализуемой в данном
грунте, и коэффициента буксования, характеризующего ту про-
буксовку колеса, которая необходима при движении в данном
силовом режиме, показывает график функции s = f(&T), постро-
енный для r0 = var (см. рис. 2.17). В начальной зоне зависимость
практически линейная.
С изменением радиуса колеса изменяется и величина началь-
ного радиуса качения, что иллюстрирует сдвиг графиков даже
при 6т = 0 (см. рис. 2.17). Пока не достигнуто максимальное на-
пряжение сдвига, глубина погружения меняется незначительно, и
буксование растет почти пропорционально удельной силе тяги
kT, С ростом нагрузки на крюке начинает увеличиваться сдвиг
грунта, растет глубина погружения, становится более интенсив-
ным буксование.
При значениях kTy близких к пределу сцепления, происходит
срыв грунта, стремительное заглубление колеса и резкое увели-
чение буксования (кривая устремляется вверх) (см. рис. 2.17).
Поскольку у колеса с меньшим радиусом хуже сцепление с грун-
том, то для достижения одной и той ж'е силы тяги ему необходи-
мо погрузиться глубже и двигаться с большим буксованием.
Итак, с увеличением радиуса колеса:
1) при одном и том же буксовании можно реализовать боль-
шую силу тяги;
2) возрастает полная реакция грунта, в связи с чем для од-
ной и той же тяги увеличивается боковая реакция;
3) глубина колеи существенно уменьшается, и уменьшается
необходимый для движения колеса крутящий момент.
Следовательно, при необходимости реализации больших сил
тяги нужно увеличивать радиус колеса. Однако при криволи-
нейном движении в деформируемом грунте уменьшение радиуса
колеса приводит к снижению потерь на поворот машины. Поэ-
тому оптимизацию радиуса колеса нужно проводить, исходя из
условий движения и характерных для данной машины нагрузоч-
ных режимов.
2.3.4. Влияние различной вертикальной нагрузки на характер
взаимодействия колеса с грунтом. Как указывают многие иссле-
дователи, в процессе формирования тягово-сцепных качеств оди-
ночного колеса большое значение имеет то, какое удельное дав-
ление оно оказывает на грунт. При постоянных геометрических
размерах движителя главную роль в изменении этого давления
92
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
приобретает величина вертикальной нагрузки, приложенной к
оси, т. е. вес, приходящийся на данное колесо. Вес, воспринима-
емый колесом, есть сила внешняя, которая не зависит от режи-
ма движения колеса и остается постоянной при изменяющемся
буксовании и глубине колеи. А потому, оценивая влияние верти-
кальной нагрузки на характер взаимодействия колеса с грунтом,
будем рассматривать, как меняются реактивные силы и моменты
для различных фиксированных значений RZ = GK.
Известно, что с увеличением вертикальной нагрузки колесо
при одних и тех же режимах буксования глубже погружается в
грунт. Возрастающая нормальная нагрузка приводит к резкому
увеличению удельного давления, вследствие чего связи между
частицами грунта нарушаются, увеличивается поверхность кон-
такта, и равновесие внешних и реактивных сил грунта устанав-
ливается при новом соотношении вертикальной нагрузки и глу-
бины погружения колеса. В связи с этим увеличивается объем
сдвигаемого при повороте грунта, а потому возрастают напряже-
ния сдвига, зависящие от деформации. В результате увеличива-
ется полная сдвигающая реакция грунта Rc, что иллюстрирует
график зависимости Ry = f(Rx) (рис. 2.19). Интересно, что наб-
людается почти прямая пропорциональная зависимость между
нормальной нагрузкой и полной силой сопротивления сдвигу.
В связи с этим по аналогии с силой трения можно ввести поня-
тие коэффициента сопротивления сдвигу, определяемого следую-
щих образом: \xc = Rc/Rz- Физически коэффициент сопротивления
сдвигу учитывает трение обода о грунт и сопротивление сдвигу
некоторой массы грунта.
Зависимость удельной боковой силы на оси колеса от удель-
ной свободной силы тяги колеса = для различных верти-
кальных нагрузок представлена на рис. 2.20. Коэффициент бо-
ковой силы ц почти не зависит от нормальной нагрузки в облас-
ти малых ^т(^т<0,1), но с ростом kT зависимость ц от вертикаль-
ной нагрузки все более ощутима.
Если на рис. 2.19 соединить (пунктиром) точки различных
кривых, построенных для GK = var, полученные при одних и тех
же режимах буксования s, то получим сетку линий равного бук-
сования. Благодаря этому график, представленный на рис. 2.19,
приобретает качества своего рода топографической характерис-
тики, поскольку каждая его точка однозначно определяет ре-
жим движения колеса: нормальную нагрузку, боковую и про-
дольную реакции грунта и буксование.
Рост буксования колеса, соответствующий его дальнейшему
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
93
заглублению, приводит к уменьшению угла скольжения, т. е. со-
отношение между продольной и боковой реакциями хс меняется.
С ростом нормальной нагрузки увеличивается сила сцепления,
а изменение боковой составляющей результирующей реакции
сдвига становится менее существенным.
Рис. 2.19. Увеличение полной реакции
сдвига грунта с ростом вертикаль-
ной нагрузки на колесо (Сг=27Н/см3;
го = О,225 м; Xx.s =16,6; 6 = 20°; п =
= 1,0)
Рис. 2.20. Влияние вертикальной наг-
рузки на буксование s (пунктир) и на
функцию ц = /(6т) (Сг = 27 Н/см3;
го = О,225 м; ro/XxS = 9O; tgcpr = 0,3;
6 = 20°; и=1,0)
Сцепные качества колеса с грунтом хорошо иллюстрирует гра-
фик функции буксования s от коэффициента kT (см. рис. 2.20),
построенный для GK = var. В функции буксования s = f(kT) мож-
но выделить две зоны: зону пропорциональности между буксо-
ванием и реализуемой удельной силой тяги, равной коэффициен-
ту &т, и зону интенсивного буксования. В зоне пропорциональнос-
ти происходят упругие деформации грунта, но сцепление между
поверхностью колеса и верхним слоем грунта еще не нарушено.
В зоне интенсивного буксования даже незначительное увеличе-
ние силы тяги приводит к резкому увеличению коэффициента
буксования $. Из графика (см. рис. 2.20) можно, определить,
с какими потерями на буксование будет двигаться колесо в
94
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
заданном тяговом режиме и какова максимальная реализуемая
в грунте свободная сила тяги при различных вертикальных
нагрузках. Итак, с увеличением вертикальной нагрузки:
1) растет глубина погружения колеса;
2) возрастает полная сила сопротивления грунта;
3) в одном и том же тяговом режиме колесо больше буксует,
причем величина максимальной реализуемой в грунте удельной
свободной тяги существенно уменьшается.
2.3.5. Влияние угла установки колеса б на характер взаимо-
действия колеса с грунтом. Исследование движения одиночного
колеса в направлении, составляющем угол б с плоскостью его
вращения, обычно производится при фиксированном угле б. Это
дает возможность оценить влияние каждого из рассмотренных
параметров, провести сравнение и сопоставление, не наклады-
вая дополнительных ограничений, возникающих с изменением
угла установки колеса.
Угол разворота для режима бортового поворота — весьма
важная характеристика, так как определяет при указании место-
положения колеса на машине радиус поворота колеса Поэто-
му нельзя ограничиться рассмотрением взаимосвязи силовых и
кинематических параметров, полученной для одного угла разво-
рота колеса. Необходимо оценить влияние б на предложенную
математическую модель в широком диапазоне углов разворота.
Анализируя формулы (2.37)...(2.41) с точки зрения влияния
угла б, трудно сразу выявить закономерность изменения сил и
моментов от б. Можно лишь утверждать, что с ростом угла по-
ворота колеса должна увеличиваться боковая сила Ry, посколь-
ку увеличивается скольжение колеса в боковом направлении.
Рассмотрим изменение угла поворота колеса в диапазоне
б = 5...75 ° для заданного грунта. Увеличение б вызывает рост
скольжения колеса в боковом направлении, что неизбежно дол-
жно привести к увеличению тангенциальных перемещений в бо-
ковом направлении, а следовательно, к .росту напряжений сдви-
га. Однако перемещения и напряжения прессования при этом не
будут меняться, а поскольку вертикальная реакция Rz, главным
образом, зависит от прессования грунта, то и функция Rz = f («о)
с изменением б практически неизменна, что подтверждается ре-
зультатами численного расчета.
Обобщенными характеристиками, показывающими влияние
изменения угла поворота колеса б на взаимосвязь кинематичес-
ких и силовых параметров, являются зависимости H = f(^T);
фтз = /(^т); s = f(kT) (рис. 2.21, 2.22). Кривые, играющие роль
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
95
годографов результирующей реактивной сдвигающей силы 7?с
(см. рис. 2.21), представляет собой для изменяющегося угла по-
ворота колеса пучок, сходящийся при больших значениях k?
(близких к максимальной реализуемой при данных условиях
удельной свободной силе тяги). График наглядно иллюстрирует
рост полной сдвиговой реакции грунта с увеличением б, что
объясняется увеличением скольжения колеса.
Увеличение буксования с ростом угла поворота колеса, неиз-
бежное при реализации крутящего момента при росте бокового
скольжения, наглядно видно из зависимости s = f(kT) (см. рис.
2.21). Причем, при сопоставлении функции s = f(kT) с зависи-
мостью ^T = f(«o) при 7?z = const (см. рис. 2.21) выявляется физи-
ческая картина явлений, происходящих при увеличении угла по-
Рис. 2.22. Влияние угла установки колеса на величину удельной полной тяги
(Сг=27 Н/см3; го=О,225 м; r0/\s = 16,6; tg(pr = 0,6; п= 1,6)
96
Передвижение по грунтам луны и планет
ворота колеса. Действительно, для движения с некоторой крюко-
вой нагрузкой в связи с увеличением бокового скольжения и
ухудшением сцепления в продольном направлении из-за измене-
ния б от 10 до 75° буксование колеса увеличивается более чем
вдвое и, чтобы обеспечить ту же тягу, колесо погрузится глуб-
же, увеличивая тем самым поверхность соприкосновения с грун-
том.
При больших значениях 6Т, близких к пределу сцепления,
буксование колеса даже при 6 = 10° уже весьма интенсивное
(свыше 75%), а потому кривые s = f(kT) (см. рис. 2.21) сбли-
жаются. Это указывает на то, что движение колеса при таких
условиях практически прекращается независимо от величины
угла установки.
Поскольку грунтовые условия и геометрические размеры ко-
леса с изменением угла поворота б не меняются, то главное, что
может варьировать соотношение (pTS = f(kT), это различный мо-
мент сопротивления качению. Как было установлено, реализация
одних и тех же величин kT обеспечивается для 6 = var при раз-
личной глубине погружения. Это приводит к изменению площади
поверхности контакта колеса с грунтом, а потому к изменению
момента сопротивления качению М/ (соответствующему cpTS при
/гт = 0). Но поскольку для выбранных грунтовых условий, разме-
ров колеса и вертикальной нагрузки глубины погружений в рабо-
чих режимах движения небольшие, то и момент сопротивления
качению изменяется незначительно. Этим и объясняется малое
различие в ординатах кривых фТ8 = Н^т) при различных б.
Изменение каких-либо из перечисленных параметров (грун-
товых условий, геометрических размеров и т. п.) изменит и со-
отношение фт8 = /(^т) для различных углов разворота б, как,
впрочем, и другие зависимости. Зная влияние каждого из них на
взаимосвязь реактивных сил и моментов, можно в каждом кон-
кретном случае установить, как будет меняться характер полу-
ченных зависимостей и тем самым смоделировать конкретные
условия процесса взаимодействия одиночного колеса с деформи-
руемым грунтом.
Полученные расчетные зависимости, позволяющие, как вид-
но из анализа влияния различных конструктивных и грунтовых
параметров, оценивать проходимость одиночного колеса транс-
портной машины, дают широкую картину происходящего процес-
са, но, к сожалению, не всеобъемлющи. Это связано, главным
образом, с рядом принятых допущений, которые несколько иде-
ализируют истинную картину взаимодействия. Кроме того, не-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
97
которые конструктивные параметры, например форма обода, не
учтены в конечных формулах. Все это приводит к необходимости
проводить, хотя бы в минимальном объеме, экспериментальные
исследования с одиночным колесом, которые, в крайнем случае,
могут быть заменены испытанием моделей колеса.
В связи с этим разработан метод экспериментального иссле-
дования одиночного колеса, тесно связанный с описанным выше
расчетным методом и дополняющий его.
2.4. Оптимизация характеристик проходимости
транспортной машины на основе испытаний
единичных колес
2.4.1. Методы экспериментального исследования
взаимодействия колес с грунтом. Для экспериментального прог-
нозирования проходимости транспортных машин, оценки их ма-
невренности при движении по неподготовленной поверхности —
деформируемому грунту — возможно применение различных ме-
тодов.
Вообще говоря, можно выделить три различных тенденции в
экспериментальном исследовании взаимодействия колес с грун-
том. Одни испытатели считают, что грунт является основанием
для движения машины в различных режимах, изменяя свои па-
раметры под воздействием разнообразных условий, следователь-
но, нужно изучать свойства грунта во всем их многообразии.
При этом естественные при исследовании упрощения приводят
к статическим испытаниям различных грунтов методом внедре-
ния особого вида штампов с помощью специальных приборов.
Этот метод, широко распространенный в теории грунтоведения,
раскрывает, быть может, механику грунта, внутреннее взаимо-
действие его частиц, но не дает ясной картины динамики процес-
са взаимодействия.
Другая тенденция характерна тем, что эксперименты прово-
дят на реальных машинах в различных режимах движения. Ис-
пытания такого рода заманчивы тем, что они проводятся в ре-
альных условиях на натурных образцах и должны, казалось бы,
дать действительную картину происходящих явлений. Однако
сложность и трудоемкость таких экспериментов неоспорима.
Для того чтобы исследовать влияние различных конструктивных
параметров (например, диаметра, ширины, количества грунтоза-
цепов) необходимо либо иметь возможность переоборудовать ис-
пытуемую машину, либо испытывать несколько машин с раз-
7 Зак. 826
98
передвижение по грунтам луны и планет
личными параметрами. Причем каждая из них должна быть обо-
рудована специальными приборами и устройствами, что часто
бывает трудно осуществить. Кроме того, для сравнения резуль-
татов желательно прокатывать все машины по одному и тому
же участку грунта, свойства которого не должны меняться. В ре-
альных условиях это практически невыполнимая задача, так как
грунт в связи с погодными условиями и изменением структуры
из-за многократного прокатывания машин меняет свои пара-
метры. Следовательно, требуется непрерывный замер этих пара-
метров, что еще более усложняет эксперимент. При испытаниях
на машинах сложно также изучать собственно процесс взаимо-
действия колеса с грунтом, так как взаимное влияние колес не
дает возможности выделить этот процесс.
Однако этот метод широко применяется для ходовых испы-
таний спроектированных и изготовленных машин, что дает воз-
можность выявить особенности взаимодействия конкретной ма-
шины с грунтом, но не позволяет делать широких обобщений.
И, наконец, третья тенденция в экспериментальных исследо-
ваниях процесса взаимодействия ходовой части с грунтом^-это
проведение испытаний отдельных элементов движителя на спе-
циальных лабораторных установках. Это направление получило
особенно широкое распространение в последнее время, так как
оно дает возможность вести всесторонние исследования в лабо-
раторных условиях на специально подобранном грунте, свойст-
ва которого в процессе эксперимента практически не меняются.
Этот метод наиболее перспективен, так как он позволяет при
значительно меньших затратах провести гораздо более целенап-
равленные исследования, сделать сравнительный анализ, про,-
вести более точный эксперимент. Недостаток лабораторного ис-
следования— в идеализации реального процесса, в сложности
учета всего многообразия факторов, влияющих на процесс дви-
жения.
В истории экспериментальных исследований нашли свое от-
ражение все три тенденции.
В настоящее время метод исследования грунта для изучения
взаимодействия ходовой части машины с поверхностью применя-
ется обычно как вспомогательный в совокупности с исследова-
ниями характеристик грунта по второму или третьему направ-
лению для сравнения их с другими данными.
Существует большое количество различных лабораторных
установок для исследования колес. На этих стендах при данных
условиях в результате эксперимента можно получить тягово-сцеп-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
99
ную характеристику колеса. В. И. Кнороз и ряд других исследо-
вателей, испытывавших в НАМИ автомобильные шины на стен-
де с грунтовым каналом, утверждают, что надежное изучение
ряда вопросов, таких, например, как взаимодействие колес с
твердой дорогой и мягким грунтом, возможно лишь в лабора-
торных условиях. Для испытания криволинейно движущихся
колес обычно используют стенды, которые, как правило, не при-
способлены для экспериментов в режиме прямолинейного дви-
жения.
При рассмотрении бортового поворота многоопорных машин
(какими являлись, например, советские луноходы) необходимо
проводить испытания движителя в режиме как бортового пово-
рота, так и прямолинейного движения. Следовательно, необхо-
дима установка, позволяющая обеспечить любой режим движе-
ния колеса.
Таким образом, для исследования процесса взаимодействия
движителя вездеходной машины с деформируемым основанием
целесообразнее всего проводить эксперименты с одиночным ко-
лесом в лабораторных условиях. При этом необходимо периоди-
чески определять параметры основания (грунта), по которому
движется колесо.
2.4.2. Схема лабораторной установки. Для имитации на ла-
бораторной установке процесса движения колеса при повороте
машины требуется обеспечить жесткую связь испытуемого ко-
леса с центром поворота. Это можно осуществить на круговом
грунтовом канале, где испытуемое колесо жесткой тягой соеди-
нено с осью вращения, расположенной в центре поворота маши-
ны. Такой стенд, несмотря на максимальное приближение к ре-
альным условиям, имеет два существенных для лабораторной
установки недостатка. Во-первых, он занимает большую пло-
щадь, что обусловлено необходимостью исследования работы хо-
довой части в широком диапазоне радиусов поворота. Во-вторых,
на круговом стенде трудно создать режим поворота с большим
радиусом и невозможно имитировать прямолинейное движение.
Ранее было показано (см. подразд. 2.2.6), что в достаточно
большом диапазоне радиусов поворота колеса при реальном со-
отношении соответствующих параметров криволинейное пере-
мещение колеса в режиме бортового поворота с приемлемой
степенью точности можно заменить движением прямолинейным
в направлении, составляющем фиксированный угол разворота 6
с плоскостью вращения колеса. Из реальной картины процесса
исключаются при этом лишь реактивные силы, возникающие в
7*
loo
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
результате мгновенных проворотов колеса за счет переменной
скорости в пятне контакта его с грунтом (см. рис. 2.1). Тогда для
имитации на стенде бортового поворота достаточно перемещать
колесо поступательно в направлении, составляющем угол б с
плоскостью его вращения. Зная геометрические размеры иссле-
дуемой машины и задаваясь
Рис. 2.23. Схема поворота машины
углом Of, можно определить
величину радиуса поворота
машины (по средней точке
корпуса) (рис. 2.23) согласно
выражению
= -Л- ± <2-70)
tgfy 2
где Ц — расстояние от оси
рассматриваемого /-го колеса
до поперечной оси, проходя-
щей через центр поворота ма-
шины; В — ширина колеи;
знак плюс соответствует от-
стающему борту; минус —
забегающему.
Таким образом, меняя толь-
ко угол бг-, можно исследовать
любое из колес машины в
режиме бортового поворота в
любом диапазоне радиусов
/?м, используя прямолинейный
грунтовой канал.
Однако такая принципиальная схема может быть выполнена
в нескольких конструктивных вариантах. Наиболее приемлема
схема стенда, представленная на рис. 2.24. В этом стенде пре-
дусматривается шахтная подвеска колеса. Опытная проверка
шахтной схемы подвески колеса показала ее работоспособность
и надежность в работе. Эксперименты, проведенные в лаборатор-
ных и полевых условиях, подтвердили пригодность такого мето-
да исследования криволинейного движения колеса в режиме
бортового поворота и обоснованность принятой конструктивной
схемы.
2.4.3. Методика экспериментальных исследований взаимо-
действия движителя с грунтом. Разработанная методика экспе-
риментальных исследований одиночного колеса в грунтовом ка-
нале позволяет оценить результаты аналитического расчета,
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
101
сделанного на основе математической модели взаимодействия
колеса с деформируемым грунтом. Кроме того, такая методика
дает возможность проводить самостоятельные исследования и,
в частности, оценить влияние на характеристики проходимости
Рис. 2.24. Схема стенда для экспериментального исследования одиночных ко-
лес:
/ — грунтовой канал; 2 — несущая тележка; Зл— подвижная ферма с колесом; 4 —- про-
тивовесы; 5 — стойки
колеса таких параметров, которые или исключены из математи-
ческой модели в связи с принятыми допущениями, или нужда-
ются в экспериментальном уточнении.
Испытания ведутся на стенде (рис. 2.25) при постоянной
вертикальной нагрузке на колесо, по методу управляемого уси-
лия на крюке динамометрической тележки. В результате, зада-
ваемая свободная сила тяги на оси колеса меняется в зависи-
мости от усилия на крюке, а режим движения колеса (коэффи-
циент буксования) определяется характером взаимодействия
испытуемого объекта с грунтом. В зависимости от радиуса по-
ворота и положения колеса на машине плоскость вращения ис-
пытуемого образца (рис. 2.26) устанавливается под углом б к
направлению движения. Тензоэлементы позволяют в процессе
движ|ения колеса замерять реакции грунта Rx, Ry, момент и
глубину погружения колеса.
В итоге по экспериментальным результатам устанавливают-
ся зависимости безразмерных параметров, о которых шла речь
102
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
в разд. 2.3. Например, на рис. 2.27 приведены характеристики
р, = /(£т) и s = f(kT), полученные в результате расчета в соответ-
ствии с разработанной математической моделью, а также экспе-
риментальные точки. Эксперименты проводились на сухом мел-
козернистом однородном песке, который может быть использо-
ван как аналог лунного грунта. Гранулометрический состав пес-
ка:
Размер частиц,
мм >2 2.. .0,5 0,5. . .0,25 0,25. . .0,1 <0,1
Содержание в
песке, % 0 0,35 60 38,5 1,1
Рис. 2.25. Стенд испытания ходовой части (СИХЧ-2, МВТУ)
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
103
Рис. 2.26. Установка колеса на стенде
Характеристики прессо-
вания и сдвига грунта опре-
делялись с помощью штам-
пов.
Примером опытных ис-
следований, дополняющих
теоретические, может слу-
жить оценка влияния ши-
рины колеса и размеров
грунтозацепов на повыше-
ние эффективности про-
цесса взаимодействия жест-
кого колеса планетохода с
деформируемым основанием
в прямолинейном движе-
нии. В качестве интеграль-
ной оценки эффективности
использовалась зависимость
удельных потерь энергии
(2.69) от удельной свобод-
ной силы тяги fw = f(kT)—
тягово-энергетическая ха-
рактеристика.
Рис. 2.27. Сравнение расчетных и опыт-
ных величин буксования ( —) и
удельной боковой реакции грунта (—)
для различных углов поворота колеса
(Сг=4 Н/см3 го=О,225 м; rQ/%xS =45;
tg(pr=0,44, n=l)
104
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Влияние ширины обода. Возможность улучшения характерис-
тик взаимодействия с грунтом за счет увеличения ширины коле-
са показана на рис. 2.28. Испытывались колеса, ширина которых
варьировалась от 0,20 м до 0,28 м (увеличение на 40%). Как
видно из графиков, увеличение ширины колеса в исследуемом
Рис. 2.28. Тягово-энергетические
характеристики колес разной
ширины
диапазоне практически не улучша-
ет тягово-энергетическую характе-
ристику.
Незначительная роль поперечно-
го сечения контактной поверхности
в формировании тяги и момента
сопротивления качению подтверж-
дается и другими исследователями,
отмечающими преимущественное
влияние диаметра колеса на харак-
теристики взаимодействия его с
грунтом.
Влияние высоты грунтозацепов.
Выбор шага и высоты грунтозаце-
пов штатного колеса аппаратов
«Луноход» базировался на пред-
варительных испытаниях моделей
колес. Поэтому эксперименты, про-
веденные с 5-ю типами колес, име-
ющими грунтозацепы различной высоты, дают возможность
провести некоторую оптимизацию этих конструктивных пара-
метров.
Остановимся сначала на высоте грунтозацепов. Влияние вы-
соты оценивалось при постоянном шаге. Из характеристик
(рис. 2.29; 2.30) видно, что увеличение высоты грунтозацепов
приводит к улучшению сцепных качеств колеса, что, однако, со-
провождается существенным повышением затрат энергии на ка-
чение. Причем последнее наблюдается для области режимов с
относительно малой интенсивностью буксования (s^0,20), где
в формировании потерь энергии определяющую роль играет мо-
мент сопротивления качению. Рост момента сопротивления ка-
чению хорошо иллюстрирует график fw = f(kT) при &т = 0 (в
свободном режиме). Увеличение высоты грунтозацепов приво-
дит к практически линейному возрастанию момента сопротивле-
ния качению.
При увеличении высоты грунтозацепа его кромка вступает в
контакт с грунтом на большем плече относительно мгновенной
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ
105
оси вращения, и при дальнейшем внедрении грунтозацеп испы-
тывает большее сопротивление, деформируя увеличенный объем
грунта. Аналогичная картина, лишь с противоположным нап-
равлением усилий, наблюдается и при выходе грунтозацепов из
контакта.
Рис. 2.29. Зависимости потерь энер-
гии на качение колеса при различной
высоте грунтозацепов
Рис. 2.30. Тягово-сцепные характе-
ристики колеса при различной высоте
грунтозацепов (обозначения те же,
что и на рис. 2.29)
С ростом буксования все большую роль начинают играть в
соотношении потерь энергии сцепные качества колеса. Поэтому
меньшие потери на буксование у образцов с большей высотой
грунтозацепов (см. рис. 2.30) компенсируют увеличение затрат
энергии на внедрение грунтозацепов для режимов с повышен-
ным буксованием и в конечном счете, обусловливают реализа-
цию предельных значений тяги при меньших затратах энергии.
Интересно отметить, что гладкое колесо (без грунтозацепов)
в зоне с s^0,20 имеет лучшие тяговые качества, чем колеса с
относительно малой высотой грунтозацепов (до 20 мм) (см. рис.
2.30). Дело в том, что малые грунтозацепы нарушают сплош-
ность грунтовой массы по длине контакта, в результате чего
106
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
сдвигаемый в контакте грунт частично (в своем верхнем слое)
не может воспринимать пассивное давление грунтовой призмы
за контактной зоной и общее сопротивление сдвигу падает. Од-
нако при достижении некоторой предельной тяги (при относи-
тельно малом буксовании) гладкое колесо теряет свое преиму-
щество в результате мгновенной потери подвижности (s->oo),
тогда как колесо даже с малыми грунтозацепами имеет еще не-
которые резервы по тяге, позволяющие сохранить подвижность
ценой значительных дополнительных затрат энергии.
Действительно, на малосвязном грунте за счет увеличения
высоты грунтозацепов можно добиться улучшения тяговых ка-
честв колеса лишь в определенном диапазоне значений hr3. За-
дача эксперимента — определение этого диапазона.
Таким образом, разработанная математическая модель и
метод экспериментальных исследований бортового поворота в
грунтовом канале дают возможность сформулировать единую
методику определения тягово-сцепных свойств движителя пла-
нетохода, позволяющую оценить опорную проходимость проек-
тируемой машины по деформируемому грунту.
Известно [55], что движущие силы и силы сопротивления
колесной машины можно представить как сумму соответствую-
щих сил отдельных колес. Конечно, движение машины с много-
колесным движителем отличается от движения одиночного ко-
леса. Сказывается и влияние колесной формулы, и взаимное вли-
яние колес друг на друга, и перераспределение нормальных на-
грузок на колеса в процессе движения. Все эти факторы учиты-
ваются при составлении математической модели движения мно-
гоколесной машины (см. гл. 5). Однако главной отправной точ-
кой всегда является единичное колесо.
Для получения тягово-сцепных характеристик каждого из
колес проектируемого планетохода устанавливается требуемый
диапазон радиусов поворота машины, исходя из этого определя-
ется набор углов поворота плоскости вращения колеса б отно-
сительно направления движения его оси. Согласно распределе-
нию веса по осям устанавливается диапазон изменения верти-
кальных нагрузок на колесо. Определяются значения парамет-
ров грунта, по которому планируется движение машины. Зада-
ваясь геометрическими размерами колес, для различных режи-
мов движения в соответствии с разработанной математической
моделью с помощью ЭВМ производится расчет и определяются
характеристики p = f(£T); s = f(kT); ^s = f(kT) и, если необходи-
мо, —тягово-энергетическая характеристика. Экспери-
ВЗАИМОДЕЙСТВИЕ ЖЕСТКОГО КОЛЕСА С ГРУНТОМ Ю7
мент, проведенный в прямолинейном грунтовом канале на искус-
ственном аналоге требуемого грунта для модели колеса необхо-
димой конфигурации, позволяет получить данные, необходимые
для уточнения аналитических результатов и для последующего
расчета машины в целом (см. гл. 5).
Экспериментальный метод исследования колеса в режиме
бортового поворота на прямолинейном грунтовом канале может
быть использован также при модернизации и доводке конструк-
ции колеса для проектируемого планетохода. В этом случае
достаточно провести испытания с одним колесом в требуемом
диапазоне режимов движения, нагрузок и углов разворота ко-
леса S, чтобы прогнозировать характеристики для всей маши-
ны.
3 ОСОБЕННОСТИ ВЗАИМОДЕЙСТВИЯ
МЕТАЛЛОУПРУГОГО КОЛЕСА
С ОПОРНОЙ ПОВЕРХНОСТЬЮ
Применение на аппартах «Луноход» в качестве
движителя жестких колес обеспечило им определенный задан-
ный уровень проходимости. Для увеличения объема информа-
ции, получаемой в космических экспедициях, необходимо стре-
миться к максимальной подвижности, чтобы обеспечить доступ
к труднодоступным местам. Поэтому на последующем этапе раз-
вития автоматических и пилотируемых исследований поверхно-
сти Луны и других планет транспортные средства должны иметь
движители с оптимальными параметрами, обеспечивающими на-
илучшие тягово-сцепные характеристики при минимальных зат-
ратах энергии на движение. С этих позиций представляет инте-
рес применение в качестве движителя металлоупругих колес.
3.1. Обзор конструкций. Особенности
взаимодействия с грунтом
Примерами некоторых конструкций металлоупру-
гих колес являются колеса лунных транспортных средств (ЛТС),
разрабатывавшихся рядом фирм США по заданию НАСА на
предварительном этапе выполнения программы «Аполлон» Каж-
дая фирма, принявшая участие в конкурсе, как правило, созда-
вала целую гамму различных колес. Они отличались не только
типоразмерами, но и конструктивным оформлением.
Фирмой «Груммэн» было разработано несколько модифика-
ций упругих колесных движителей. Одна из них имела наружный
гибкий цилиндрический обод, связанный со ступицей упругой
тонкостенной оболочкой. В зависимости от желаемых характе-
ристик упругая оболочка может иметь форму полусферы, полу-
эллипсоида и сферы. Материал оболочки — пластическая мас-
са, армированная стекловолокном. На наружном ободе установ-
лены грунтозацепы. Начальная жесткость таких колес лунохода
фирмы «Груммэн» составляла 80 Н/см, при полной нагрузке —
160 Н/см. Удельное давление на грунт порядка 7 кПа.
В другой модификации связь гибкого цилиндрического обо-
да со ступицей осуществлялась с помощью спиральных упругих
спиц, изготовленных из титановой ленты. В одном варианте обод
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЁСА С ПОВЕРХНОСТЬЮ ГРУНТА 109
имел гладкую поверхность, в другом — разнесенные грунтозаце-
пы.
Наряду с вышеописанными типами колес фирма «Груммэн»
разработала так называемое «эллиптическое» колесо. Эллиптич-
ность наружного гибкого цилиндрического обода достигается за
счет наклона в поперечной вертикальной плоскости двух проти-
волежащих ступиц, соединенных с ободом спицами фиксирован-
ной длины. Благодаря этому существенно возрастают эффектив-
ная кривизна и площадь пятна контакта с грунтом. По динами-
ке эллиптическое колесо ведет себя, как жесткое.
Фирма «Бендикс» разработала металлоупругое колесо, со-
стоящее из внешнего обода, выполненного из титановой ленты
толщиной 0,4 мм, покрытой абразивным материалом, и внутрен-
него жесткого алюминиевого обода. Между внутренним и внеш-
ним ободом в продольной плоскости установлены упругие коль-
ца из титановой ленты толщиной 1,5 мм.
В качестве движителя лунных лабораторий фирма использо-
вала различные типоразмеры. Колесо лаборатории MOLAB име-
ло диаметр 7) = 2030 и ширину 6 = 305 мм. Номинальная нагруз-
ка на колесо 126 Н лунного веса при статическом прогибе 12,7 мм
и давлении на грунт 3,5 кПа. Колесо лаборатории LSSM имело
£> = 1090 и 6 = 254 мм при нагрузке 408 Н. Для луноходов LRV
были применены колеса с £> = 813 и 6 = 127 мм. Нагрузка на ко-
лесо составляла 241 Н.
Аналогичную конструкцию металлоупругих колес с титано-
выми кольцами, заключенными между внутренним жестким и
внешним гибким титановым ободом, применила фирма «Край-
слер». Диаметр наружного обода составляет 1016 мм, а шири-
на — 102 мм.
Стремление уменьшить размеры движителя в состоянии
транспортировки привело к созданию фирмой «Дженерэл . мо-
торе» колеса с изменяющейся геометрией. Оно представляет со-
бой проволочную конструкцию, которая может изменять диаметр
при изменении осевого расстояния между втулками. При транс-
портировке диаметр колеса минимален.
В результате отборочных испытаний для программ «Апол-
лон» НАСА остановило свой выбор на луноходе LRV фирмы
«Боинг». Колесо LRV имеет наружный упругий обод торообраз-
ной формы, изготовленный из стальной проволоки диаметром
0,84 мм методом бесшовного плетения. На внутреннем жест-
ком ободе установлены титановые упругие ограничители про-
гиба.
116
ПЕРЕДВИЖЕНИЙ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Для улучшения сцепления сетчатого обода с грунтом на его
внешней поверхности установлены шевронные накладки, выпол-
ненные из шарнирно соединенных алюминиевых пластин толщи-
ной не более 3 мм. Диаметр колеса в свободном состоянии
815 мм, ширина — 230.
Опубликованные зарубежные материалы не содержат теоре-
тических обобщений и не позволяют судить об оптимальности
той или иной конструкции колес, поскольку целью исследова-
ний, как правило, была лишь оценка характеристик образцов
движителей в спектре грунтовых условий Луны. Конструктивное
разнообразие опытных образцов разных фирм свидетельствует
о неоднозначной оценке роли отдельных конструктивных пара-
метров колеса в процессе взаимодействия со специфичным лун-
ным грунтом. В то же время практически нет исследований о
влиянии отдельных параметров колеса на характеристики взаи-
модействия с грунтом. Отсутствуют аналитические методы рас-
чета, а методики прогнозирования характеристик взаимодейст-
вия с грунтом базируются на испытаниях конкретных образцов
и носят эмпирико-экстраполяционный характер.
Для выяснения степени влияния отдельных конструктивных
параметров колес необходимо проводить испытания конструктив-
но подобных колес по единой методике, в одинаковых грунтовых
условиях, варьируя один параметр. Таким образом можно опре-
делить номенклатуру наиболее значимых параметров, определя-
ющих уровень характеристик взаимодействия с грунтом. Это поз-
волит установить наиболее рациональный конструктивный облик
колеса, позволяющий обеспечить в заданных грунтовых услови-
ях максимальные тяговые качества при минимальных энерго-
затратах.
Проведение экспериментальных исследований для всего диа-
пазона конструктивных параметров в вероятном спектре грунто-
вых условий практически невозможно. Поэтому необходимо со-
четание натурного эксперимента с математическим моделирова-
нием, которое позволит надежно обеспечить уже на стадии про-
ектирования высокий уровень тягово-сцепных и энергетических
характеристик.
3.2. Анализ составляющих потерь при
качении. Критерий их оценки
В обобщенном виде металлоупругое колесо мож-
но представить в виде гибкого нерастяжимого обода, связанно-
го со ступицей упругим каркасом. Рассмотрим установившийся
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЁСА С ПОВЕРХНОСТЬЮ ГРУНТА Ц
процесс качения по деформируемому грунту (рис. 3.1, а).
Пусть ось колеса нагружена силами Pz и Рх, которые уравнове-
шиваются соответствующими реакциями основания Rzи Rx. В ре-
зультате ось колеса занимает в упругом каркасе некоторое по-
ложение О', относительно которого вертикальная реакция Rz
имеет снос а, а горизонтальная реакция Rx действует на дина-
Рис. 3.1. Схема качения .металлоупругого колеса по грунту (а; и эквивалент-
ная схема нагружения (б)
мическом радиусе гд. Потребный для движения крутящий момент
AfK определяется из уравнения силового баланса
ЛГК = Rfi + Кхгл. (3.1)
Некоторые исследователи полагают, что величина Rza, вхо-
дящая в уравнение (3.1), определяет так называемый момент
сопротивления качению Mf, т. е. характеризует силовые потери
на качение. Однако данное утверждение справедливо лишь для
жесткого колеса. Для упругого колеса это неверно.
Рассмотрим формирование потерь при деформации грунта
гибким ободом. Пусть обод имеет контакт с грунтом по линии
произвольной формы AiA2 (см. рис. 3.1, а). Из условия нерас-
тяжимости гибкого обода (беговой дорожки) следует, что его
транспортировка в подвижной системе координат xOz осущест-
вляется упругим каркасом по всему периметру с постоянной от-
носительной скоростью У0 = (окго, где сок — угловая скорость вра-
щения оси; г0 — свободный радиус колеса. Тогда за элементар-
ное время dt точка Л, соответствующая точке приложения ре-
зультирующей реакции грунта R, перемещается в тангенциаль-
112
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
ном направлении на величину dl^V^dt и оказывается в поло-
жении А'. Одновременно точка А перемещается на величину
dlx=Vxdt, обусловленную поступательным движением колеса со
скоростью Ух = <окГк, где гк — радиус качения. В результате точ-
ка занимает положение А", результирующее перемещение —
dlA. Работа реакций грунта Rz и Rx на этом перемещении будет
соответственно равна:
dAz = — Rzr0 sin a^coKdZ; (3.2)
dAx = — Rx (rQ cos a# — rK) ^dt, (3.3)
где ад— угол нормали v к линии контакта в точке приложения
реакции R.
Запишем баланс элементарных работ для идеального, без-
гистерезисного колеса, т. е. без учета внутренних потерь:
dA^[ 4“ &Ав-х "Ь dAPz ^Арх ~ О’
где dAM = M^dt; dAP* = — P^^r^dt; dApz = 0.
В результате
M^dt = RzrQ sin aP(i)hdt + Rx (rQ cos— rH) aKdt + Рхгк(и^1, (3.4)
или
Ml{ = #zrosin + Rxrocos aR- (3.5)
Легко видеть, что полученное уравнение представляет собой
уравнение силового баланса жесткого колеса радиусом rQ при
условии действия реакции R в точке с углом нормали ад. Это
же уравнение вытекает из энергетического баланса жесткого
колеса. Следовательно, гибкий обод упругого колеса может быть
заменен условным (эквивалентным) жестким ободом, внутри
которого расположен упругий каркас, связывающий его с осью
(рис. 3.1, б). Причем геометрический центр С эквивалентного
жесткого обода определяет исходное ненагруженное положение
оси колеса. Нагружение ее силами Рх и Pz вызывает деформа-
цию внутреннего каркаса и смещение оси соответственно на ад
и 6Z. При этом в идеальном упругом каркасе должно выполнять-
ся равенство
ЛД=Мр (3.6)
что следует из тождественности уравнений силового и энергети-
ческого балансов эквивалентного колеса.
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЁСА С ПОВЕРХНОСТЬЮ ГРУНТА 113
Рассмотрим кинематику оси О' эквивалентного колеса при
его качении с радиусом качения гк (рис. 3.2, а). Если бы точка
О' принадлежала жесткому диску, то она имела бы по оси х
переносную скорость Vox = (fK — 6Z) <ок, а по оси z — Voz = — ад®к-
В действительности ось колеса имеет по оси х абсолютную ско-
рость VSx = (0вгк, а по оси z — VaQz = 0.
Рис. 3.2. Схема, иллюстрирующая кинематику оси металлоупругого колеса
(а) и формирование диссипативных сил в каркасе (б)
Из этого следует, что точка О' движется внутри упругого карка-
са с относительными скоростями Vox = SzwK и Vqz = адюк- Т. е.
ось колеса постоянно «догоняет» геометриечский центр С
в горизонтальном направлении и непрерывно движется вниз в
подвижной системе координат, сохраняя свое абсолютное поло-
жение на уровне гд относительно основания.
При относительном движении оси колеса в реальном упругом
каркасе будут развиваться диссипативные силы, обусловленные
конкретной конструкцией каркаса и материалом. Например, в
колесе фирмы Боинг будет происходить взаимное трение сталь-
ной проволоки в точках переплетения сетчатого тороидального
обода. Предположим, что равнодействующая диссипативных сил
^?д, приложенная к оси колеса, направлена против вектора ско-
рости Vo = Vox + Voz. Обозначим проекции этой силы на
оси х и z соответственно /?дх и (рис. 3.2, б).
8 Зак. 826
i 14
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Наличие внутренних диссипативных сил обусловливает до-
полнительные потери энергии на совершение работы при относи-
тельном движении. За время dt работа сил /?дх и /?дг будет рав-
на
~ = ^дг^д^к^- (3*7)
С учетом (3.7), обозначив rosinaR = arp и roCosaR = rKO в урав-
нении энергетического баланса (3.4), получим
AfKo)KdZ = Р-j- Rx (^ко ^к) ^iydt j- Pzcirp(A)Edt -j-
4- (#дЛ + ^дг^д) ^dt- (3*8)
Уравнение (3.8) показывает, что потери на качение реально-
го упругого колеса складываются из потерь на проскальзывание
(буксование) —^х(г1<0—rK)(DKd/, потерь на вертикальную дефор-
мацию грунта — Rzartf£)Kdt, а также гистерезисных потерь в
каркасе — (/?дхбг + /?Д2ад)сокб/Л
Очевидно, величина Rzarp = Mrp представляет собой момент
сопротивления качению, обусловленный деформацией грунта, а
величина /?дхб2 + #д?лд=Л1г — момент сопротивления качению,
обусловленный гистерезисом каркаса. Тогда общий момент соп-
ротивления качению 7И/=Л4гр+Л4г. С другой сторо-
ны, можно записать Mf = Rzaff где af — плечо сноса ре-
акции RZt определяющее момент сопротивления качению (дис-
сипативное плечо). Сравним плечо af с действительным сносом
реакции Rz, равным а = а^-\-а^.
Рассмотрим отдельно равновесие оси колеса (рис. 3.3, а) и
наружного обода (рис. 3.3, б), взаимодействующих между со-
Рис. 3.3. Равновесие оси колеса (а) и наружного обода с каркасом (б)
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 115
бой через упругий каркас. Условия равновесия имеют вид:
для оси ^х Rrx — Rx> (3.9)
Nz + Rnz = Pz'y (3.10)
(3.H)
для обода Nx Rrx = (3-12)
Nz + Rjtz = Rv (3.13)
7ИК == 7?хгн0 + + R^fiz + Rnzan + — Nxbz, (3.14)
где Nx и Nz — силы упругости сдеформированного каркаса;
М'к — реактивный момент каркаса.
В первом приближении можно представить
2УХ-Д>д; Nz = Kzb„ (3.15)
где Кх и Kz — соответственно жесткости каркаса по осям х и z.
Сравнивая правые части (3.8) и (3.14), получим
UzaK = Nx8z, (3.16)
что эквивалентно условию (3.6) для безгистерезисного колеса.
Используя условие (3.13), представим а = агр + ад
а^агр+~г + *к ая. (3.17)
К*
В свою очередь,
__ Mf __ ^4гр + ___ ^2агр 4~ (fyyA 4~ дх^д) /д 18)
f Rz ~ Rz Rz '
Сравнивая (3.17) и (3.18), с учетом (3.12) и (3.16) получим
af=a — kT8z, (3.19)
где kT = RxIRz — удельная свободная тяга колеса.
Соотношение (3.19) показывает, что диссипативное плечо df
отличается от действительного плеча т. е. является условной
физической величиной. В ведущем режиме (&т>0) а/<а, в тор-
мозном и нейтральном (йт<0) af>a. При прочих равных усло-
виях это различие уменьшается при снижении радиальной осад-
ки колеса 6Z, т. е. при увеличении жесткости каркаса. Для аб-
солютно жесткого колеса 6z = 0 и d^ = a в любом тяговом режи-
ме.
8*
116
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
В свободном режиме (&т = 0) плечо % точно соответствует
действительному сносу а. В этом случае, несмотря на равенство
нулю нагружающей силы Рх, ось колеса получает дополнитель-
ное горизонтальное смещение ад0 и возникающая при этом си-
ла упругости Nxo = Kx^o уравновешивает дисспативную силу
^дх, обусловленную относительным движением оси в горизон-
тальной плоскости со скоростью Vox = 62^к.
Несоответствие в общем случае между диссипативным и дей-
ствительным плечом реакции Rz показывает, что величина Rzay
входящая в уравнение силового баланса (3.1), не определяет со-
бой момент сопротивления качению упругого колеса, т. е. оцен-
ка потерь на качение на основе данного уравнения является
ошибочной.
Теоретически момент сопротивления качению Mf может быть
определен из уравнения энергетического баланса (3.8), в соот-
ветствии с которым
ТИу = A1K Rxrк0. (3.20)
Однако при переходе к коэффициенту сопротивления каче-
нию f, используемому для оценки силовых потерь на качение,
возникают принципиальные трудности в связи с выбором расчет-
ного плеча г/ действия силы сопротивления качению Rf=Mf!rf.
Поскольку в ведущих режимах эта сила условна: реально су-
ществует лишь то выбор точки приложения этой силы субъ-
ективен и зависит от воззрений авторов. В силу субъективности
неопределенность коэффициента f может быть значительной.
Следует учитывать и тот факт, что коэффициент f учитывает
лишь силовые потери и не может служить однозначным крите-
рием оценки движителя, так как для транспортных средств, в
конечном счете, определяющее значение имеет общий расход
энергии в транспортной экспедиции. Очевидно, что наибольшая
эффективность будет достигнута, если потери энергии в расчете
на единицу пройденного пути и единицу транспортируемого гру-
за будут минимальными.
Поэтому для оценки эффективности взаимодействия метал-
лоупругого колеса с грунтом целесообразно использовать инте-
гральный критерий — удельные потери энергии на качение, под
которыми понимаются общие потери энергии, приходящиеся на
единицу пройденного колесом пути и единицу нормальной наг-
рузки:
Л^-^7, (3-21)
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 117
где dWf — общие потери энергии при перемещении колеса на
величину dS = aKrKdt.
Используя (3.8), получим
dWj ~ (Мк —RxrK)<i>Kdt, (3.22)
тогда
fw=-^-~kT. (3.23)
В отличие от коэффициента f данный критерий имеет точный
физический смысл и все определяющие его величины могут быть
непосредственно измерены при эксперименте. Легко показать,
что критерий fw прямо связан с тяговым КПД колеса:
Л = &r/(Af/+ kT). (3.24)
Однако, в отличие от последнего, fw может быть использо-
ван во всей области тяговых режимов, в том числе и в режимах,
близких к свободному при йт->0, где ц-^0. В этих режимах доля
потерь на буксование уменьшается, и формула (3.23) определя-
ет относительные силовые потери, т. е. приближается по своему
смыслу к формуле, определяющей коэффициент сопротивления
качению f, сохраняя точный физический смысл удельных потерь
энергии. Не противоречит физическому смыслу и факт беско-
нечного увеличения fw при гк->0 в силу учета этим критерием
кинематических потерь.
3.3. Математическая модель процесса
качения металлоупругого колеса по грунту
Для обоснованного выбора геометрических и жес-
ткостных параметров проектируемых движителей с учетом веро-
ятного спектра грунтовых и нагрузочных условий необходимо
применять математическое моделирование. Учет в математичес-
кой модели требований рациональности колеса и закономернос-
тей деформации грунта позволяет обеспечить высокий уровень
тяговых качеств разрабатываемых движителей, а также прог-
нозировать тяговые характеристики в вероятном спектре грун-
товых условий на стадии проектирования.
3.3.1. Идеализированная модель металлоупругого колеса.
Металлоупругие колеса могут отличаться конструктивным раз-
нообразием. В каждом конкретном случае возможно построение
достаточно точной математической модели, учитывающей конст-
118
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
руктивные особенности каждого колеса. Однако частный харак-
тер, а также сложность таких моделей ограничивает их исполь-
зование для разработки обобщенных моделей взаимодействия с
грунтом. Очевидно, что обобщенная модель колеса должна
быть адекватна по точности и структуре взаимодействующей с
ней модели грунта.
С учетом результатов экспериментальных исследований пред-
ставим следующую идеализированную модель колеса.
1. Упругий каркас представляет собой радиально-упругую
цилиндрическую постель, локальная деформируемость которой
подчиняется зависимости
<7Г = СД, (3.25)
где qr — радиальное давление; бг — радиальная деформация;
Сг — удельная радиальная жесткость.
2. Беговая дорожка представляет собой абсолютно гибкую,
плоскую, нерастяжимую ленту, свободную от грунтозацепов и
имеющую коэффициент трения по грунту, превышающий коэф-
фициент внутреннего трения его слоев.
3. Предполагается, что радиальные сечения каркаса при кон-
такте с грунтом не испытывают тангенциальных смещений.
Последнее допущение основано на том, что при наличии не-
растяжимой беговой дорожки нагруженные упругие элементы
каркаса, находящиеся в контакте, испытывают практически оди-
наковую тангенциальную деформацию, что вызывает упругое
смещение всего контакта относительно оси колеса. Как показано
в разд. 3.2, данное смещение в упругом безгистерезисном колесе
при постоянной геометрии контакта не изменяет момента соп-
ротивления качению, что и позволяет условно полагать, что уп-
ругие элементы каркаса не испытывают в процессе нагружения
тангенциальных деформаций.
Будем полагать, что грунт деформируется по схеме местного
уплотнения, т. е. представляет собой совокупность независимых
элементов, имеющих инвариантные локальные характеристики
сжатия и сдвига. Методы получения этих характеристик основа-
ны на аппроксимации средних (на единицу поверхности) харак-
теристик сжатия и сдвига грунта штампами. Применительно к
данной модели характеристика сжатия лунного грунта по норма-
ли к деформирующей поверхности аппроксимируется модифици-
рованной зависимостью Бернштейна—Летошнева (1.1), а харак-
теристика тангенциального сдвига — зависимостью Джанози—
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 119
Ханамото (1.2). При описании взаимодействия принимаемые
допущения аналогичны допущениям гл. 2.
3.3.2. Определение нормальных и касательных реакций в зо-
не уплотнения. В рамках принятых моделей радиально-упруго-
го цилиндрического колеса и абсолютно неупругого грунта по-
верхность контакта должна состоять из двух зон: криволиней-
Рис. 3.4. Схема взаимодействия металлоупругого колеса с грунтом
ной Л Ио, представляющей собой область уплотнения грунта, и
плоской зоны разгрузки Ло^2 (рис. 3.4, а). Причем точка Л о, ле-
жащая на границе между двумя этими зонами, должна лежать
на вертикальной оси, проходящей черз ось колеса О'.
Воздействие колеса в зоне ЛИ0 сводится к уплотнению и
сдвигу грунта по цилиндрической поверхности. Геометрия про-
дольного сечения этой поверхности (продольной линии контак-
та) определяется действием, главным образом, нормального
давления грунта и заранее неизвестна. Пусть продольная линия
контакта ЛИ0 имеет произвольную выпуклую форму. Выделим
вдоль поверхности контакта цилиндрический слой бесконечно ма-
лой толщины. При отсутствии сил трения этот слой транспорти-
руется вращающимся колесом в подвижной системе координат
xOz с постоянной относительной скоростью V0 = (oKr0, где г0 —
свободный радиус ненагруженного колеса. Определим давление
и тангенциальное напряжение, действующие на элементарную
площадку dF данного слоя с координатой х, которую будем на-
зывать расчетной. Пусть площадка занимает промежуточное
(текущее) положение с координатой £. Тогда за элементарное
время dt площадка совершит относительное перемещение dlQ =
120
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
= Vodt и одновременно, вследствие поступательного движения
колеса со скоростью Vx = (oKrK, переносное перемещение dlx=
= Vxdt. В результате, площадка совершает абсолютное переме-
щение в грунте dK (см. рис. 3.4, б). При этом, очевидно, пло-
щадка dF, как элементарный штамп, осуществляет прессование
грунта на величину dKv и сдвиг на величины d\x. Из схемы
перемещений получаем
d\v = dlx sin = coKrK sin y^dt\ (3.26)
d\x = dlQ — dlx cos y% = coK (r0 — rK cos y$ dt, (3.27)
W ТВ =V(?) — текущий угол касательной к линии контакта.
Произведем замену переменной t на £. Очевидно, приращение
координаты d^ за время dt составит
d^ = dl0 cos у i = coKro cos y^dt,
откуда
dt =-----. (3.28)
coKr0cosY^ .
Вводя коэффициент буксования s=(r0—гк)/г0 и учитывая
(3.28), получим
6&v = (l-s)tgY^; (3.29)
= (3-30)
Интегрируя элементарные перемещения dkv и dKt площад-
ки dF по £ с момента входа в контакт при £=%i до расчетного
положения при £=х, получим значения нормальной и танген-
циальной деформации грунта
= j (l-s)tg^; (3.31)
Xi
<3-32>
*1
Следует заметить, что от величины коэффициента буксова-
ния зависит не только тангенциальная деформация Хт , но и
нормальная Xv .
Зная и Хт , в соответствии с (1.1) и (1.2) определим нор-
мальное и касательное напряжения, действующие на площадку
dF в расчетном положении с координатой х:
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 121
p=.CP(l-s)"
X \ п
J tgy^) ;
(3.33)
с + Сг (1 — s)n ( tg tg <рг
' *1 '
*1
(3.34)
Тогда элементарные нормальная и тангенциальная реакции,
действующие на площадку dF, будут соответственно равны
dN = pdF; (3.35)
dT = xdF. (3.36)
Элементарная площадка
dF = bdx/cos у, (3.37)
где у — угол касательной к линии контакта в расчетном положе-
нии площадки при £=%; Ь— ширина беговой дорожки.
Элементарные вертикальная и горизонтальная реакции
dR? = dN cos у + dT sin у; (3.38)
dRx = dT cos у — dN sin y. (3.39)
Результирующие реакции грунта в зоне уплотнения Л Ио по-
лучим в результате вторичного интегрирования элементарных
реакций по длине контакта
Rzt = b (р + тtgу) dx; (3.40)
о
RXi =ь (т — ptgy)dx. (3.41)
о
Момент вертикальных реакций dRz, формирующих момент
сопротивления качению, относительно оси вращения
М21 = b I’1 (р + т tgу) xdx. (3.42)
о
3.3.3. Определение реакций грунта в плоской зоне Л0Д2- В от-
личие от криволинейной зоны Др40 плоская зона Ло^2 представ-
122
передвижение по грунтам луны и планет
ляет собой участок разгрузки (см. рис. 3.4). Представим пово-
рот упругого колеса как поворот жесткого тела относительно
мгновенного центра вращения Р на элементарный угол На
абсолютно неупругом грунте это привело бы к отрыву опорной
поверхности колеса и к мгновенному падению давления на грунт.
Однако в действительности этого не происходит, так как поворот
упругого колеса не вызывает отрыва элементов его беговой до-
рожки вследствие непрерывного отслеживания контакта сила-
ми упругости каркаса. Давление на грунт в этом случае падает
не до нуля, а до значения, соответствующего текущей радиаль-
ной деформации бг.
Таким образом, давление на грунт в плоской зоне определя-
ется текущим значением радиальной деформации бг «элемен-
тарных пружин» каркаса. Уплотненный в зоне AiA0 грунт воспри-
нимает это давление как твердое основание. Учитывая (3.25),
реактивное давление грунта равно
р = Cr6rcosa, (3.43)
где 6Г = г0— cos а = r0 cos а2/г; г = “|/ (r0 cos сс2)2 + х2 (см. рис.
3.4).
Тангенциальные напряжения в плоской зоне определяются
в соответствии с зависимостью (1.2) и с учетом дополнительно-
го сдвига по мере продвижения площадки от точки До к точке А2.
Для произвольной площадки dF с координатой х в этой зоне
общий тангенциальный сдвиг грунта равен
О х
К = Ц» + <3.44)
хг ' 6
Дальнейшая процедура определения реакций идентична из-
ложенному для зоны уплотнения. При условии, что в плоской
зоне у = 0, выражения для реакций грунта RZ2, RX2, а так-
же момента вертикальных реакций относительно оси. вращения
колеса AfZ2 , получат вид
о
Rz2=b\ pdx; (3.45)
х2
0
Rx2 =ь\ xdx\ (3.46)
Х2
0
= Ь J pxdx. (3.47)
хг
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 123
Для всего контакта в целом результирующие реакции грун-
та будут равны
Rz=RZi + RZ2; (3.48)
Rx=RXi + RX2. (3.49)
Момент сопротивления качению, обусловленный необрати-
мыми деформациями грунта,
Mf=MZl + M2z. (3.50)
Здесь момент MZ2 имеет после интегрирования отрицатель-
ный знак.
3.3.4. Определение равновесной формы продольной линии
контакта. Для интегрирования выражений (3.33) и (3.34) необ-
ходимо знать закон изменения угла касательной к линии контакт-
та по длине контакта, т. е. функцию = f(x). Данная функ-
ция определяется геометрией контакта, которая, очевидно, зави-
сит от эпюр нормальных и касательных реакций. Законы изме-
нения последних, в свою очередь, могут быть определены только
при известной геометрии контакта.
Рассматривая упругий обод как систему элементарных ради-
альных пружин, связанных нерастяжимой беговой дорожкой, мы
имеем систему с бесконечным числом степеней свободы. Условие
статического равновесия упругого каркаса под действием систе-
мы сил упругости каркаса и реакций грунта требует выполнения
условия стационарности функционала потенциальной энергии.
Однако для того, чтобы составить данный функционал, необхо-
димо знать закон изменения реакций грунта в продольном сече-
нии контакта, а следовательно, и уравнение продольной линии
контакта. Воспользуемся одним из известных приемов вариаци-
онного исчисления — методом Ритца—Галеркина. Для этого за-
дадимся уравнением продольной линии контакта AiA0 в виде
экпоненциальной функции, включающей две произвольные пос-
тоянные Ci и С2:
2 = СХ(1— е-^-^). ' (3.51)
Учитывая, что при х = 0 2 = г0, т. е. максимальной глубине
погружения, получим
С, = z0/(l—e~x^Cz). (3.52)
В свою очередь, константа С2 имеет геометрический смысл
подкасательной экспоненты в точке Ai, т. е. характеризует фор-
му линии контакта. Обозначая С2 = хе, получим
124
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
2 =----------(1 — е~(*1-х)/Я. (3.53)
1-е~^
Тогда текущий угол касательной yj может быть определен
дифференцированием (3.53) при условии, что х=£, т. е.
___________h______e-(*i-£)/*e (з 54)
хе(1-е-^)'
При £ = % уравнение (3.54) определяет угол касательной у
в расчетном положении площадки dF с координатой х.
Определение искомых констант Ci = zQ и С2 = хе становится
возможным, если воспользоваться непосредственно условиями
статического равновесия сил упругости каркаса и реакций грун-
та. Учитывая (3.35), (3.36) и (3.37), получим эти условия в ви-
де
С (p + rtgy)dx= f qr J J cos у 0 0 dx; (3.55)
Xi Xi
f (P + rtgy)xdx = f J J cos у 0 0 -xdx, (3.56)
где в соответствии с (3.25) радиальное давление
qr = СДгс — V(r0cosa1 +г)2 + х2 ], (3.57)
а
cos а = (r0cosax + z)/V(r0cosa1 + z)2 + х2, (3.58)
где z— функция, определяемая по формуле (3.53).
Условие (3.55) отражает равенство равнодействующих вер-
тикальных составляющих реакций грунта и сил упругости кар-
каса, условие (3.56)—равенство моментов соответствующих со-
ставляющих относительно оси вращения колеса. Отсутствие
третьего условия равновесия по оси х является следствием то-
го, что модель считается радиально-упругой, не учитывающей
тангенциальные деформации каркаса.
Система уравнений (3.55) и (3.56) позволяет при заданных
параметрах грунта и колеса, а также известном коэффициенте
буксования, находить взаимосвязь параметров равновесного
контакта г0, си и хе. Для этого необходимо, задаваясь одним из
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 125
указанных параметров, например си, определить z0 и хе числен-
ными методами на ЭВМ. Очевидно, что изменение си приведет
к соответствующему изменению глубины z0 и параметра экспо-
ненты хе. Фактические значения параметров контакта z0, си и хе
определяются действующей на колесо вертикальной нагрузкой
Pz и могут быть найдены в результате совместного решения
уравнений (3.55) и (3.56) и уравнения вертикальной реакции
(3.48) с учетом (3.40) и (3.45).
В частности, исследования на ЭВМ показали, что в случае
линейно деформируемого грунта (п = 1) при равновесном кон-
такте относительная величина хе = хе1гц практически не зависит
от глубины г0 и коэффициента буксования и подчиняется зави-
симости
хе = 0,622ах, (3.59)
где си выражено в радианах.
3.3.5. Методика расчета тяговых характеристик металлоуп-
ругого колеса. Для интегральной оценки тяговых качеств коле-
са с учетом всех видов потерь необходимо определить зависи-
мость удельных потерь энергии от удельной свободной тяги
fw=f(kT). В то же время представляет интерес дифференциро-
ванная оценка составляющих силовых и кинематических потерь
энергии.
Примем для оценки силовых потерь относительную величину
fM = Mf/(Rzr0), (3.60)
имеющую смысл коэффициента сопротивления качению, а для
оценки кинематических потерь — коэффициент буксования
s = (r0 — гк)/г0. (3.61)
Нетрудно показать, что указанные характеристики связаны
соотношением
fw = + &ts)/U —s)- (3.62)
В соответствии с принятой математической моделью последо-
вательность расчета тяговых характеристик = =
и s = f(kT) должна быть следующая.
1. Задаются расчетные значения параметров грунта (Сг, п,
tg(pr, с, XTs) и колеса (Сг, г0, Ь), а также вертикальной нагрузки
Pz и коэффициента буксования s.
2. Для заданных параметров численными методами на ЭВМ
решается система уравненией (3.48), (3.55), (3.56) относитель-
126
передвижение По грунтам луны и планет
но неизвестных параметров равновесного контакта си, г0, хе.
В частности, для решения был использован метод поиска
минимума функции Хукка— Дживса, обладающий достаточно
быстрой сходимостью. В качестве целевой функции использова-
лось уравнение (3.48).
3. Для каждой группы найденных параметров равновесного
контакта (си, z0, хе), соответствующих заданному коэффициен-
ту буксования, на основе выражений (3.41), (3.46) и (3.49) опре-
деляются реакция грунта Rx и коэффициент свободной тяги kT,
а с помощью выражений (3.42), (3.47) и (3.50) момент сопро-
тивления качению Mf и критерии }м и fw-
Расчет повторяется для ряда значений s.
4. По результатам расчета строятся искомые тяговые харак-
теристики металлоупругого колеса с заданными жесткостью и
геометрическими размерами на конкретном грунтовом основа-
нии при фиксированной вертикальной нагрузке.
Расчет может быть проведен для ряда нагрузок.
Варьирование параметров грунта и колеса дает возможность,
с одной стороны, оценить влияние конструктивных параметров
колеса на его тяговые качества и потери энергии при качении
в заданных грунтовых условиях и, с другой стороны, позволяет
прогнозировать тяговые характеристики образцов металлоупру-
гих колес в вероятном спектре грунтовых условий.
3.4. Экспериментальные и теоретические
исследования влияния конструктивных
и экспериментальных параметров на тяговые
характеристики металлоупругих колес
3.4.1. Макетные образцы. Для исследования по-
тенциальных тяговых возможностей металлоупругих колес были
проведены испытания конструктивно подобных макетных образ-
цов, отличающихся радиальной жесткостью (рис. 3.5).
Упругий каркас макетных образцов был выполнен в виде
частых упругих элементов, установленных по периметру внут-
реннего жесткого обода радиально. Каждый элемент представ-
лял собой две упругие боковины, соединенные жесткими плас-
тинами. В тангенциальном направлении пластины элементов бы-
ли связаны гибкими стальными лентами и вместе с покрытием
из металлической сетки образовывали цилиндрическую нерастя-
жимую беговую дорожку. Такая конструкция обеспечивала не-
обходимую гибкость беговой дорожки в продольной плоскости
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 127
и равномерную деформацию грунта в поперечном сечении. При
этом беговая дорожка имела максимальную ширину в пределах
габарита колеса.
Рис. 3.5. Конструктивная схема (а) и макетный образец (б) металлоупругого
колеса:
/ — гибкая тангенциальная связь; 2 — упругий элемент; 3 — ступица; 4 — жесткий внут-
ренний обод
Различная жесткость образцов достигалась изменением тол-
щины боковин. По мере возрастания жесткости макетные образ-
цы получили индексы: МК-1, МК-2, МК-3, МК-4, МК-5. Геомет-
рические размеры (диаметр £> = 0,68, ширина 6 = 0,2 м) остава-
лись неизменными. На рис. 3.6 показаны экспериментальные за-
висимости (точки) вертикальной (радиальной) деформации 6Z
от нагрузки PZi полученные при нагружении макетных образ-
цов на твердом основании (номера кривых соответствуют индек-
сам образцов). Как видно, представленные зависимости имеют
выраженный нелинейный характер: по мере деформации образ-
ца его текущая жесткость dPJdbz существенно возрастает, что
делает невозможным использование этого параметра как срав-
нительного жесткостного критерия.
В соответствии с принятой идеализированной моделью ме-
таллоупругого колеса (см. подразд. 3.3.1) теоретическая зависи-
128
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
мость Pz=f(f>z) в простейшем случае нагружения на твердом ос-
новании имеет вид
Pz = 2crbro cos сс0
(3.63)
где ао — половина угла контакта колеса с
вестной осадке 6Z a0 = arccos [(r0—бг)Ло] •
основанием. При из-
Рис. 3.6. Зависимости
вертикальной деформа-
ции 6Z макетных образ-
цов от нагрузки Р2 (рас-
чет по формуле (3.63)
показан сплошными ли-
ниями)
Используя зависимость (3.63) и экспериментальные харак-
теристики Pz = f(f)z), можно определить удельную жесткость Сг
как эмпирический постоянный жесткостной параметр упругого
каркаса, учитывающий его реальные конструктивные отличия от
идеализированной схемы. В табл. 3.1 приведены значения удель-
ной жесткости Сг макетных образцов, найденные из условия на-
илучшей аппроксимации экспериментальных характеристик.
Таблица 3.1. Удельная жесткость макетных образцов
Образец МК-1 МК-2 мк-з МК-4 МК-5
Сг, Н/см3 0,094 0,131 0,181 0,289 0,892
Как видно из рис. 3.6, отклонение аппроксимирующих зави-
симостей (сплошные линии), построенных на основе выражения
(3.63), от экспериментальных при данных значениях жесткостей
Сг незначительно во всей области нагружения. Это подтвержда-
ет качественное соответствие зависимости (3.63) процессу наг-
рузка— осадка образцов металлоупругих колес и возможность
ВЗАИМОДЕЙСТВИЕ МЕТАЛ Л ОУ ПРУ ТОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 129
использования удельной жесткости Сг как постоянного жестко-
стного параметра каркаса.
3.4.2. Особенности формирования внутренних потерь. Для
оценки достоверности математической модели взаимодействия
металлоупругого колеса с грунтом из общих затрат энергии не-
обходимо выделить потери, обусловленные гистерезисом упруго-
го каркаса колеса.
Рис. 3.7. Зависимость удельных
гистерезисных потерь в карка-
се fT от свободной тяги Рх(Н)
(Pz=686 Н)
На рис. 3.7 приведена зависимость удельных потерь энергии
fw, полученная при испытаниях образца МК-4 на твердом осно-
вании. Поскольку в опытах проскальзывание беговой дорожки
относительно опорной поверхности исключалось (радиус качения
был точно равен свободному радиусу го = О,34 м), то указанные
потери определяют собой удельные гистерезисные потери в кар-
касе /г. Как видно из графика, величина fr линейно растет с уве-
личением тяговой силы Рх. В силу отсутствия проскальзывания
причину этого явления следует искать в механизме формирова-
ния гистерезисных потерь в каркасе.
Из уравнения (3.8) следует, что потери энергии на гистере-
зис в колесе за элементарное время dt
dWr = + /?дД) (3.64)
тогда в соответствии с определением (3.21), учитывая, что гк =
= г0, получим
/г = “Ь о)• (3.65)
Исследуем влияние тягового режима на уровень потерь fr-
В свободном режиме при 7?х = 0 ад = ад0. Тогда
/го = (^дх^г 4" ^Дг^до)/(^/о)- (3.66)
Приращение fr при наличии Рх
Ч =fr — /го = («д — «до) •
а2г0
9 Зак. 826
130
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Согласно (3.15) a^=Nx/Kx, а а^=Рдх/Кх, тогда, обозначая
^z = R^z[Rz, ПОЛУЧИМ
7r=/ro + W(^o). (3.67)
Полученное уравнение отражает наблюдаемое при испыта-
ниях увеличение потерь fr с ростом тяговой силы Rx. Сплошная
прямая на рис. 3.7 построена по формуле (3.67), коэффициенты
gz и Кх получены по результатам статических нагружений кар-
каса. Как видно из (3.67), fr пропорционально коэффициенту £z,
характеризующему внутреннее трение в каркасе при его верти-
кальных деформациях, и обратно пропорционально коэффици-
енту продольной жесткости Кх. В пределе, для жесткого в про-
дольном направлении каркаса /Q = oo и Д/г = 0.
Причиной возрастания гистерезисных потерь в металлоупру-
гих колесах в ведущих режимах является увеличение работы
вертикальной диссипативной силы /?дг, возникающей при относи-
тельном движении оси колеса внутри упругого каркаса вследст-
вие продольного ее смещения на величину ад под действием тя-
говой силы Рх.
3.4.3. Оценка достоверности математической модели. Оценка
достоверности математической модели может быть проведена
при сравнении результатов расчета с экспериментальными дан-
ными, полученными при испытаниях макетных образцов в грун-
товом канале. При этом особую важность приобретает вопрос
выбора аналога лунного грунта, адекватного по своим характе-
ристикам реальному прототипу. Широко применяемый в качест-
ве аналогов при сравнительных испытаниях сухой мелкозернис-
тый песок оказывается в этом случае мало пригодным, так как
не соответствует лунному грунту по отдельным качественным
характеристикам взаимодействия движителя с основанием. Если
для сухого песка характерны деформация по схеме общего сдви-
га с образованием вокруг штампа зон выпирания, осыпание сте-
нок колеи, то лунный грунт представляет собой связный матери-
ал, обладающий рыхлой высокопористой мелкодисперсной струк-
турой, деформируется по схеме Винклера—Фусса, уплотняется,
обладает способностью комковаться и держать вертикальную
стенку, адгезионными свойствами.
В этой связи в испытаниях был применен специально разра-
ботанный аналог лунного грунта (АЛГ) в виде двухфазной ком-
позиции песок—масло. Опыты показали, что добавка 5 % мине-
рального масла позволяет создать связную высокопористую
Взаимодействие металлоупругого колёса с поверхностью грунта 131
структуру, обладающую всеми перечисленными свойствами лун-
ного грунта.
Принятая методика подготовки АЛГ обеспечила надежное
воспроизведение грунтового основания с характеристиками, со-
ответствующими вероятным характеристикам лунного грунта в
естественном залегании. В табл. 3.2 приведены характеристики
Таблица 3.2. Характеристики аналогов лунного грунта
Аналог Характеристики
Сг, Н/СМ2+Л п фг,градус с, кПа ^TS » см
АЛГ 0,77 1,02 27 0,3 2,01
lss4 1,16 1,18 29 0,83 2,5
в | 0,81 1 1,0 35 | 1.17 1,8
сжатия и сдвига АЛГ, определенные при штамповых испытани-
ях в соответствии с зависимостями (1.1) и (1.2). Здесь же для
сравнения приведены характеристики одного из аналогов на ос-
нове молотого базальта (LSS4), применяемого в США, а также
характеристики условного гипотетического грунта В, определен-
ные расчетным путем на основе модели Беккера в работе [66].
При этом использовалась информация об истинном распределе-
нии уклонов по трассам аппарата LRV и данные о действитель-
ном расходе энергии на его движение.
Как видно, АЛГ близок по своим характеристикам аналогу
из молотого базальта и практически адекватен гипотетическому
грунту В.
Адекватность свойств АЛГ и лунного грунта была также под-
тверждена в результате испытаний колеса аппаратов «Луноход».
На рис. 3.8 заштрихованная полоса соответствует зоне разброса
значений удельных потерь энергии fw при движении «Лунохода-
1 и 2» по поверхности Луны, а пунктиром нанесена эксперимен-
тальная зависимость fw = f(kT), полученная в грунтовом канале
на АЛГ (Pz = 245 Н). Из графика следует, что применяемый ана-
лог соответствует среднестатическим расходам энергии практи-
чески во всей области тяговых режимов.
Для оценки доверительного коридора характеристик взаимо-
действия расчет проводился для 95 %-го доверительного интер-
9*
132
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
вала измеренных параметров АЛГ. На рис. 3.9 сплошными ли-
ниями представлены расчетные зависимости fw = f(kT) для об-
разца МК-4; заштрихованная зона соответствует 95 %-му дове-
рительному интервалу, Pz = 343 Н. При построении учитывались
потери, обусловленные гистерезисом в каркасе испытуемого
образца (см. зависимость /г=/(&т) на рис. 3.9).
Рис. 3.8. Зависимости удельных по-
терь энергии fw от удельной свобод-
ной тяги kT для колеса аппарата
«Луноход»
Рис. 3.9. Сравнение результа-
тов расчета и эксперимента
Как видно из графика, большинство экспериментальных зна-
чений fw лежат в зоне доверительного коридора, что свидетель-
ствует о соответствии экспериментальных и расчетных данных.
Существенной особенностью полученных расчетных характерис-
тик является их соответствие наблюдаемому при эксперименте
явлению возрастания потерь на качение при увеличении удель-
ной свободной тяги. Причем существенное увеличение потерь
кроме буксования дает возрастание момента сопротивления ка-
чению в ведущих режимах, о чем свидетельствует зависимость
коэффициента сопротивления качению = (см. пунктир-
ную кривую на рис. 3.9), определенная для средних значений
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 133
характеристик АЛГ. Так, при реализации колесом предельного
значения удельной свободной тяги kT велична коэффициента fM
более чем в два раза превосходит соответствующее значение в
свободном режиме (£т = 0), что объясняется уменьшением нор-
мальных реакций при уплотнении грунта с ростом буксования в
ведущих режимах и, как следствие, увеличением глубины погру-
жения при заданной нагрузке Pz. Величина kT достигает макси-
мума при определенном буксовании. Дальнейшее его увеличение
вызывает настолько интенсивный рост коэффициента сопротив-
ления качению fM, что этот процесс ведет к падению реализуе-
мой свободной тяги (см. рис. 3.9).
Таким образом, модель взаимодействия отражает механизм
формирования потерь в ведущих режимах, что позволяет досто-
верно оценивать потери энергии на качение и тяговые качества
ведущего колеса во всей области тяговых режимов.
3.4.4. Влияние деформируемости металлоупругого колеса на
тяговые характеристики. Деформируемость колеса при заданной
нагрузке определяется жесткостью его каркаса. Причем, если
тангенциальная жесткость обусловливает главным образом оп-
ределенное упругое смещение пятна контакта относительно оси
колеса, не изменяющее его геометрии и составляющих энергети-
ческого баланса (см. разд. 3.2), то радиальная жесткость опреде-
ляет радиальную осадку колеса и формирование его контактной
поверхности с грунтом. Уменьшение радиальной жесткости вы-
зывает при постоянной вертикальной нагрузке рост радиальной
осадки и соответствующее размера поверхности контакта в про-
дольной плоскости (длины контакта), которая, как показывает
анализ, имеет важное значение в процессе взаимодействия коле-
са с грунтом.
В соответствии с выражением (3.44) рост длины контакта
обусловливает увеличение тангенциального сдвига грунта, кото-
рое, согласно (1.2), ведет к реализации больших касательных
напряжений при неизменном коэффициенте буксования. При
этом особо важное значение приобретает соотношение между па-
раметром сдвига грунта Kxs и длиной контакта /к. В первом
приближении параметр XTS определяет тот минимальный сдвиг,
при котором достигается режим полного скольжения по грунту и
реализуются максимальные касательные напряжения, обуслов-
ленные законом Кулона. Поскольку максимально возможная ве-
личина сдвига грунта на выходе из контакта X? ~sZK, то при
AAxsCl колесо теоретически не способно реализовать макси-
мальные напряжения сдвига даже при s->1,0, так как необходи-
134
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
мые для этого размеры зоны частичного скольжения превосхо-
дят размеры зоны действительного контакта. Реализация макси-
мальных касательных напряжений возможна лишь при условии
4Дт8>1. Причем, чем больше отношение lu/hx*, тем при мень-
шем буксовании это достигается. Дальнейший прирост тяги обес-
печивается при увеличении буксования за счет сокращения раз-
мера зоны частичного скольжения до минимального, равного X ts«
Очевидно, что при увеличении /кАт5 доля напряжений в зоне
частичного скольжения уменьшается и максимальная тангенци-
альная реакция асимптотически приближается к своему предель-
ному значению, обусловленному законом Кулона.
С другой стороны, увеличение длины контакта приводит к
росту площади контакта и уменьшению среднего контактного
давления и глубины колеи. В результате уменьшаются затраты
энергии на уплотнение грунта.
Наконец, увеличение длины контакта при меньшей глубине
погружения обусловливает в среднем меньший наклон контакт-
ной линии в продольном сечении, что создает более благоприят-
ную ориентацию нормальных и касательных напряжений и, как
следует из модели взаимодействия [см. формулу (3.41)], воз-
можность реализации при неизменной степени проскальзывания
повышенной свободной тяги.
В комплексе перечисленные факторы вызывают существен-
ное влияние радиальной жесткости металлоупругих колес на их
тяговые характеристики. Экспериментальные исследования на
макетных образцах в интервале нагрузок Pz = 343...686 Н пока-
зывают, что снижение жесткости позволяет в вероятных грун-
товых условиях уменьшить потери энергии на качение более
чем в два раза, по сравнению с уровнем потерь жесткого колеса
(рис. 3.10) при значительном улучшении тягово-сцепных качеств
Как видно из рис. 3.11, при уменьшении жесткости наблюдается
уменьшение крутизны и рост протяженности относительно ли-
нейного участка зависимости s = f(£T), в пределах которого ко-
лесо имеет незначительное буксование и не теряет сцепления с
грунтом. В результате, к моменту срыва грунта, сопровожда-
ющемуся резким изменением интенсивности буксования (пере-
гиб на зависимости s = f(kT)) и дополнительным погружением ре-
ализуется большая свободная тяга. При определенной жестко-
сти упругое колесо оказывается способным реализовать практи-
чески предельное, обусловленное законом Кулона, значение си-
лы тяги при допустимом уровне буксования не более 20 %. Для
жесткого колеса реализация предельной тяги возможна лишь в
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 135
области интенсивного буксования (s->l,0), связанного с повы-
шенными затратами энергии на передвижение.
Непосредственное влияние жесткости колес на тяговые ка-
чества и потери энергии отражают зависимости 6Tmax = f(Cr) и
Рис. 3.10. Влияние жесткости
металлоупругих колес на удель-
ные потери энергии при каче-
нии (грунт АЛГ; Pz = 343...
686 Н)
Рис. 3.11. Влияние жесткости металлоупру-
гих колес на тягово-сцепные характеристи-
ки (грунт — песок, Р =167...490 Н):
1 — МК-1; МК-2; 3 — МК-4; 4 — МК-5; 5 —
жесткое колесо (£>=0,64 м, Ь=0,2 м)
fw = f(Cr) (рис. 3.12), полученные расчетным путем (сплошные
линии) и дополненные экспериментом (точки). Как видно из
графика, характерно наличие узкого диапазона удельной жест-
кости СГ} в пределах которого характеристики колеса сущест-
венно изменяются. Например, в интервале Сг= 1,0...0,05 Н/см3
максимальная удельная тяга &Ттах возрастает в 1,6 раза, при
снижении потерь fw — в 2,3 раза. Полученные результаты пока-
зывают на важность правильного выбора радиальной жесткости
металлоупругого колеса. При жесткости выше некоторого кри-
тического уровня упругое колесо имеет характеристики, практи-
Рис. 3.12. Зависимости удельных по-
терь энергии fw при 6т=0 и макси-
мальной удельной ТЯГИ max ОТ
удельной жесткости Сг (грунт —
АЛГ; £) = 0,68 м; 6 = 0,2 м; Pz =
= 343Н)
136
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
чески идентичные жесткому (см. характеристики образца МК-5
и жесткого колеса на рис. 3.11). Для вероятных грунтовых ус-
ловий Луны критическая жесткость составляет 0,8... 1,0 Н/см3,
что соответствует соотношению Сг/Сг~1.
Таким образом, радиальная жесткость является мощным
средством управления тяговыми характеристиками металлоупру-
гого колеса. Правильный выбор жесткости должен быть обеспе-
чен предварительными исследованиями математической модели
применительно к заданной нагрузке и грунтовым условиям.
3.4.5. Влияние вертикальной нагрузки на тяговые характе-
ристики образцов металлоупругих колес. Увеличение грузоподъ-
емности перспективных ЛТС требует исследования тяговых воз-
можностей образцов колес при повышенных нагрузках. С этой
целью были проведены испытания при почти пятикратном уве-
личении нагрузки на колесо по сравнению с нагрузками, имев-
шими место при эксплуатации аппаратов «Луноход» и LRV.
Некоторые результаты исследований влияния вертикальной
нагрузки для образца МК-4 и грунта АЛГ представлены на
рис. 3.13, 3.14. Анализ приведенных зависимостей s = f(kT) пока-
зывает, что вертикальная нагрузка в исследованном диапазоне
практически не влияет на тягово-сцепные характеристики испы-
танного образца независимо от их жесткости. Стабильность ха-
рактеристик образцов колес в исследованном диапазоне нагру-
Рис. 3.13. Зависимость коэффициента
буксования s от удельной свободной
тяги kT при различных нагрузках Pz
Рис. 3.14. Зависимость удельных по-
терь энергии fw от удельной сво-
бодной тяги kT при различных наг-
рузках Pz
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 137
зок может быть объяснена следующим. Рост нагрузки обуслов-
ливает увеличение глубины погружения обода. Это должно
привести к увеличению горизонтальных составляющих сил нор-
мального реактивного давления грунта, направленных против
движения колеса, и к уменьшению при постоянном уровне бук-
сования реализуемой колесом свободной тяги. В то же время с
ростом нагрузки для образцов характерно увеличение длины
контакта, положительно влияющее на тяговые качества движи-
теля. Устойчивость тягово-сцепных характеристик, очевидно,
является следствием взаимной компенсации этих процессов.
Влияние вертикальной нагрузки на удельные потери энергии
на качение fw (см. рис. 3.14) не выходит за пределы интервала,
обусловленного естественной неопределенностью характеристик
грунтового основания, и практически несущественно.
Инвариантность характеристик образцов МУК по отношению
к нагрузке указывает на потенциальные возможности повыше-
ния грузоподъемности колесного движителя ЛТС и является
несомненным преимуществом металлоупругих колес.
Отсутствие выраженного влияния нагрузки во всей области
тяговых режимов независимо от жесткости испытуемого образ-
ца подтверждается результатами исследования на математичес-
кой модели (рис. 3.15) (грунт — АЛГ).
3.4.6. Возможности улучшения характеристик металлоупру-
гих колес грунтозацепами. Для металлоупругих колес характер-
на
fw
0,3
\0,2
0,1
о
200 ООО ООО 800 1000 PZ,H ‘ >
Рис. 3.15. Влияние нагрузки Pz на удельную свободную тягу krQ 2 (удельная
тяга при s = 0,2) и удельные потери энергии fw при различных жесткос-
тях С г'.
'-0,46 Н/см3; 2 — 0,62 Н/см3; 3—1,54 Н/см3; 4-2,16 Н/см3; 5 — 2,69 Н/см3
Рис. 3.16. Влияние высоты грунтозацепов hr3 на удельную тягу kT и удель-
ные потери энергии fw (PZ = 343H; /Гз = 120 мм)
138
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
на развитая длина поверхности контакта и относительно малая
ее кривизна. При оптимальной жесткости их тягово-сцепная
характеристика достаточно близка к предельной и потенциаль-
ные возможности по сцеплению уже практически реализованы.
Поэтому трудно ожидать столь же значительного влияния пара-
метров грунтозацепов на характеристики упругих колес, как
для жестких. Следует учитывать и неизбежное увеличение по-
терь на качение, связанное со входом и выходом грунтозацепов
из контакта.
Для проверки высказанных предположений были проведены
испытания металлоупругих колес, оснащенных грунтозацепами
с различными шагом и высотой. В качестве базового был взят
образец МК-4, жесткость которого на применяемых грунтовых
аналогах практически оптимальна. Грунтозацепы из штампован-
ного алюминиевого уголка монтировались параллельно образу-
ющей его беговой дорожки.
Проведенные исследования на грунте АЛГ показывают, что
некоторое улучшение тяговых качеств металлоупругих колес
может быть достигнуто при оснащении их грунтозацепами от-
носительно малой высоты (рис. 3.16). Дальнейший рост высоты
грунтозацепов не приводит к улучшению тяговых качеств, вы-
зывая лишь интенсивное увеличение потерь энергии на качение.
Качественный анализ процесса взаимодействия указывает
на тенденцию увеличения потерь на качение по мере уменьше-
ния шага грунтозацепов из-за увеличения числа циклов внед-
рения и выхода из контакта. Однако относительно малое из-
менение потерь в исследованном диапазоне шага (рис. 3.17) сви-
детельствует о незначительной роли грунтозацепов в процессе
деформации грунта развитой контактной поверхностью метал-
лоупругих колес.
3.4.7. Сранительная оценка характеристик различных образ-
Рис. 3.17. Зависимости удельных по-
терь энергии fw от шага грунтоза-
цепов /гз (Р2 = 343 Н)
цов колес. На рис. 3.18 приве-
дены тягово-сцепные характе-
ристики некоторых образцов
колес, полученные авторами
при испытаниях в грунтовом
канале. Исключение составля-
ет лишь сетчатое металлоупру-
гое колесо фирмы «Боинг»; его
характеристика (кривая 2) по-
строена по данным [64, 66].
ВЗАИМОДЕЙСТВИЕ МЕТАЛЛОУПРУГОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ГРУНТА 139
Характеристики сравниваются при изменении вертикальной
нагрузки, так как ее влияние, как было показано, несуществен-
но.
Сравнение характеристик жесткого и упругого колес, имею-
щих грунтозацепы и примерно одинаковые габаритные размеры,
указывает на неиспользование жестким колесом потенциальных
Рис. 3.18. Тягово-сцепные характерис-
тики различных образцов колес:
1 — жесткое колесо с грунтозацепами
(£> = 0,64 м; Ь = 0,2 м; йгз = 20 мм; /гз =
—80 мм); грунт — песок; Р2 = 167 Н; 2 —
колесо LRV фирмы «Боинг»; грунт — пе-
сок; Pz=253 Н; 3 — образец МК-4; грунт-
песок; Pz—167 ... 490 Н; 4 — образец МК-4
с грунтозацепами </ггз = 20 мм; /гз =
-90 мм), грунт АЛГ, Pz = 343 Н
тяговых возможностей. Если характеристики упругого колеса с
грунтозацепами близки к предельным и обеспечивают реализа-
цию максимальной для данного грунта силы тяги в пределах
зоны сцепления (s<0,2), то жесткое колесо обеспечивает эту
возможность лишь в зоне буксования (s->l,0). При допускае-
емом буксовании s = 0,20 жесткое колесо имеет реализуемую
свободную тягу в 1,5 раза меньше потенциально возможной.
Несмотря на больший диаметр (£> = 0,81 м) и меньшую наг-
рузку (Pz = 253 Н), образец фирмы «Боинг» уступает по реали-
зуемой тяге образцу МК-4, также не имеющему грунтозацепов;
его характеристика близка к характеристике жесткого колеса с
грунтозацепами. Поскольку деформируемость образца «Боинг»
достаточно высока (при одинаковой нагрузке Pz = 253 Н отно-
сительная его осадка 2Sz/Z) = 0,088, у образца МК-4 осадка
0,079), то причину данного обстоятельства следует искать в
торообразной форме его сетчатого упругого каркаса, не поз-
воляющей при номинальной нагрузке иметь максимальный раз-
мер контакта и равномерное распределение давления по шири-
не.
В табл. 3.3 приведены значения удельной свободной тяги
^то,2» реализуемой образцами при 20 %-м буксовании. Здесь
140
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Таблица 3.3. Сравнительные характеристики колес
Образец Нагрузка Л- н kT г0,2 %’ градус fw при /ет = 0 Грунт
Жесткое колесо с грун- тозацепами } D = 0,64 м, b = 0,2 м, /ггз = 20 мм, /гз = 80 мм 167 0,35 19 0,11 Песок
Колесо LRV D = 0,815 м, b = 0,23 м 253 0,35 19 0,08 Песок
Образец МК-4 D = 0,68 м; b = 0,2 м 167—490 0,48 26 0,03—0,04 Песок
Образец МК-4 с грун- тозацепами /ir3 = 20 мм; /гз = 60 мм 343 0,52 28 0,05-0,06 АЛГ
же приведены соответствующие значения угла преодолеваемо-
го подъема ап в предположении, что )ёап = ^т0,2’ и удельные
потери энергии на качение при &т = 0.
Данная таблица показывает, что оснащение ЛТС метал-
лоупругими колесами оптимальной жесткости и конфигурации
позволит довести верхний предел уверенно преодолеваемого,
без повышенного буксования, угла подъема до 26...28 ° и сущест-
венно снизить энергозатраты. Это позволит эксплуатировать
ЛТС не только на лунных равнинах, но и в гористых районах
Луны при меньших расходах энергии.
4 КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
КАК СРЕДСТВО ПОВЫШЕНИЯ
ПРОХОДИМОСТИ
Конструкторский поиск в разработке эффектив-
ных движителей для работы в условиях Луны и планет привел
к идее создания колесно-шагающего движителя (КШД), вопло-
щающего в себя положительные качества весьма распространен-
ного колесного движителя и шагающего, великолепные возмож-
ности которого по проходимости очевидны из практики пере-
движения живых организмов.
В настоящем разделе проводится исследование показателей
проходимости планетохода с колесно-шагающим движителем и
возможностей организации наиболее эффективного передвиже-
ния. Изложенное ниже является логическим продолжением опуб-
ликованных ранее материалов [49], касающихся шагающего и
колесно-шагающего способов передвижения.
4.1. Организация движения
в колесно-шагающем движителе
В общем случае колесно-шагающий движитель
можно представить как обычный шагающий, у которого опоры
механизмов шагания выполнены в виде колес. Колеса по своему
функциональному назначению исполняют роль не только опо-
ры— элемента, воспринимающего нагрузку при взаимодействии
с опорной поверхностью, но и движителя. В соответствии с этим
при организации движения колесно-шагающего движителя не-
обходимо исходить из того, что, во-первых, в нем можно реали-
зовать несколько режимов движения и, во-вторых, для каждого
режима имеется возможность изменения некоторых параметров
движителя. Так, при реализации колесного режима форма мно-
гоугольника опор и его положение относительно центра масс
могут выбираться оптимальными в соответствии с условиями
передвижения.
Колесно-шагающий режим потенциально имеет в себе значи-
тельно больше возможностей для эффективного передвижения.
В общем случае колесно-шагающий режим осуществляется так,
что все колеса в определенной последовательности то перемеща-
142
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЁТ
ются вперед относительно корпуса машины с помощью меха-
низмов шагания (этап переноса), то становятся упором на опор-
ной поверхности (этап отталкивания) для перемещения с по-
мощью механизмов шагания корпуса машины вперед по нап-
равлению движения. Это общая характеристика способа перед-
вижения. Укажем основные детали этого способа передвижения
каким-то образом влияющие на его эффективность.
Способ переноса колеса. Перенос колеса может осущест-
вляться следующими способами: с разгрузкой переносимого ко-
леса от веса машины [12], с частичной разгрузкой от веса ма-
шины [14] и без разгрузки от веса машины [18]. Перенос коле-
са третьим способом имеет некоторые преимущества перед пер-
вым, так как при этом решается часть проблем, присущих ша-
гающему способу [49]. При полной разгрузке переносимого ко-
леса от веса машины реализуется чисто шагающий способ пе-
редвижения. Второй способ промежуточный. Очевидно, что мож-
но создать такие механизмы, в которых можно реализовать
все способы переноса, обеспечивая движение в различных режи-
мах. Поэтому в дальнейшем будем считать, что при переносе
колеса с полной разгрузкой осуществляется шагающий режим
движения, а без разгрузки или с частичной разгрузкой — колес-
но-шагающий режим.
Состояние переносимого колеса. На этапе переноса колесо
может перемещаться, во-первых, как приведенное во вращение
и толкаемое механизмом шагания, во-вторых, как пассивное и
толкаемое механизмом шагания и, в-третьих, как приведенное во
вращение с пассивным механизмом шагания. Очевидно, что
последний вариант не приемлем. В дальнейшем, в основном, рас-
сматривается КШД, переносимое колесо которого находится в
первом состоянии.
Состояние отталкиваемого колеса. Следует различать два
состояния колеса на этапе отталкивания: невращающееся (бло-
кированное) и приведенное во вращение. В дальнейшем рас-
сматривается КШД, соответствующие первому варианту, а вто-
рому— по мере необходимости.
Способ перемещения корпуса машины. В общем случае сле-
дует различать два принципиально разных по методам реализа-
ции способа передвижения: непрерывное [8], определяющее не-
прерывные походки, и прерывное передвижение корпуса маши-
ны [И], определяющее так называемые прерывные походки.
В случае использования непрерывных походок передвижение
осуществляется так, что все колеса в определенной последова-
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
143
тельности то выносятся вперед по опорной поверхности, то ока-
зываются неподвижными, а корпус машины перемещается рав-
номерно и непрерывно. В случае использования прерывных по-
ходок, сначала все колеса в определенной последовательности
перемещаются относительно неподвижного корпуса машины впе-
ред на величину шага, а затем осуществляется перемещение кор-
пуса относительно неподвижных колес. Корпус при этом пере-
мещается прерывно на величину шага в каждом цикле переме-
щения.
Порядок перемещения колес. Порядок перемещения опре-
деляется числом колес, перемещающихся в одной фазе. Если ко-
леса движителя перемещаются так, что проходят одноименные
положения через одинаковые интервалы времени, то это равно-
мерный порядок или равномерная походка [8]. Если колеса дви-
жителя разделены на две группы, перемещающиеся в противо-
фазе, то эта фазная походка [49]. Если все колеса перемеща-
ются в одной фазе, то это однофазная походка.
Последовательность перемещения колес. Из всего многооб-
разия последовательностей перемещения колес рассматривают-
ся следующие две. Если их перемещение осуществляется после-
довательно с заднего колеса, по ходу движения машины, то это
прямая последовательность. Если перемещение начинается с
переднего колеса — обратная.
Последовательность перемещения колес определяет так на-
зываемый режим движения след в след, когда каждое последу-
ющее колесо в конце этапа переноса устанавливается в то мес-
то на опорной поверхности, с которого оттолкнулось предыдущее
колесо.
Параметры шагания. Для равномерных непрерывных похо-
док основные параметры шагания [49 определяются по совме-
щенной траекторной диаграмме (рис. 4.1) опор механизмов ша-
гания, образованной совмещением проекций номинальных тра-
екторий опор каждого механизма шагания на продольную плос-
кость машины с фиксацией их положений в данный момент вре-
мени.
Коэффициент производительности шагания у (или просто
производительность шагания), равный отношению времени эта-
па отталкивания t0 ко времени этапа переноса /п, определяется
так:
(4.1)
144
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
где kn = k{ + й2 + &з— суммарный коэффициент перекрытия; п0 —
общее число опор движителя; z0— число опор находящихся на
этапе отталкивания. Заметим, что для фазной походки всегда
Рис. 4.1. Совмещенная траекторная диаграмма опор механизмов шагания:
1 — механизм шагания; 2 — опора механизма шагания; 3 — траектория опоры механиз-
ма шагания относительно опорной поверхности; 4 — траектория опоры механизма шага-
ния относительно корпуса машины; Н — высота траектории; h — высота подготовитель-
ного участка траектории отталкивания; Уп — скорость переноса опоры; Vo — скорость
отталкивания; Гв — скорость опускания опоры; SK — шаг относительно корпуса ма-
шины; 5И — используемый шаг; Son — опорный шаг; So — шаг относительно опорной
поверхности; SM — путь перемещения машины за один цикл; S]O—путь юза опоры
по грунту: z—вертикальная ось машины: х— продольная ось машины; Д1А— этап
переноса; АБВГД — этап отталкивания; kb k2, k3 — коэффициенты перекрытий
Коэффициент юза £ю — показатель проскальзывания опор
механизмов шагания относительно грунта
$Ю = ^ю/^оп* (4.2)
Шаг опоры механизма шагания относительно опорной по-
верхности So
50 = 5^1+-^^-s.o№ + ^)]. (4.3)
Путь, проходимый машиной за один цикл SM, определяется
выражением
= (I — 5ю)- (4.4)
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
145
Скорость передвижения машины Кк
HK = SK-^±i(l-Si0) -J-, (4.5)
У тц
где 7Ц — время одного цикла передвижения.
Опорный шаг Son определяется так:
«оп = 5к(1-^-^). (4.6)
Аналогичные выражения можно получить для прерывных
походок. Коэффициент производительности шагания определяет-
ся из формулы (4.1).
Шаг относительно опорной поверхности
S0 = SH(l-Sl0/Y). (4.7)
Путь машины за один цикл передвижения
SM=SKfl-^4J-S10Y (4.8)
\ У J
Средняя скорость передвижения VK в колесно-шагающем
режиме определяется зависимостью
где Vn, Vo — скорости соответственно на этапах переноса и от-
талкивания; /п, К— продолжительности этапов переноса и от-
талкивания.
Схема привода. Для обеспечения эффективного передвиже-
ния в колесно-шагающем режиме, когда колеса совершают воз-
вратно-поступательные перемещения относительно корпуса ма-
шины и перемещаются по опорной поверхности с различными
угловыми скоростями, требуется разработка специальных схем
привода, обеспечивающих оптимальные условия взаимодейст-
вия колес с грунтом. Вопросу синтеза оптимальных схем приво-
да КШД достаточно внимания уделено в работе [49]. Так, в
случае использования непрерывных походок могут быть вари-
анты несвязанной [49] и связанной (дифференциальной [13] и
интегральной [16, 18]) схем привода. При этом для всех схем
связь параметров взаимодействия колес с грунтом и параметров
шагания определяется зависимостью
slo = (V + 1) f 1 - — W — (у + 1) S6, (4.10)
\ Гр J Гр
Ю Зак. 826
146
передвижение по грунтам луны и планет
где 5б — коэффициент буксования переносимого колеса; г — ге-
ометрический радиус колеса; гр— расчетный радиус механизма
шагания. Соотношение г/гр физически означает отношение ок-
ружной скорости колеса на этапе переноса к абсолютной ско-
рости его переноса при $ю = 0. Для несвязанной и дифференци-
альной схем привода г/гр определяется соотношением скоростей
привода вращения и шагания колеса, а для интегральной схе-
мы — соответствующим значением параметров колесно-шагаю-
щего механизма [49].
В случае использования прерывных походок могут быть ис-
пользованы варианты раздельной и совмещенной схем привода
[49]. Связь параметров движителя имеет вид
«ю = 1— (1 — 8Ю)Г/Гр. (4.11)
4.2. Основные соотношения
Основной отличительной особенностью колесно-
шагающего режима по сравнению с колесным является то, что
в любой момент времени лишь часть колес (переносимые) пе-
ремещается по опорной поверхности, испытывая сопротивление
деформации грунта, а остальные колеса (отталкиваемые) упира-
ются в грунт, реализуя перемещение корпуса машины.
При этом очевидно, что, во-первых, должна уменьшаться
суммарная сила сопротивления движению из-за деформации
грунта, даже без учета влияния скорости передвижения на соп-
ротивление, и, во-вторых, отталкиваемое колесо реализует
большую силу тяги, чем приведенное во вращение [26].
На рис. 4.2 представлены экспериментальные зависимости
коэффициента тяги k?i и коэффициента сцепления <рСг от ко-
эффициента буксования 5б для приведенного во вращение (пе-
реносимого) колеса и зависимость коэффициента тяги kTt
и коэффициента сцепления <рОг от пути юза 5Ю для отталкива-
емого колеса. Значения параметров взаимодействия колес с
грунтом соответствуют условию, что продольная сила тяги при-
ложена на радиусе колеса, т. е. вышеуказанные коэффициенты
определялись так:
№ —- * СО — - Ь°- — Рх • ft1- — Рх '
Тог — п > тСг ~ п > kti — D > Кт1 ~ п ’
t'z г z
Р2г
Z1
S = Уб
6 Vox ’
(4.12)
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЁЛЬ
147
где Мк — момент на колесе; Pz — нормальная реакция; г — ра-
диус колеса; Рх — продольная сила тяги; V&— скорость буксо-
вания; Vqk — окружная скорость колеса.
Из приведенных данных следует, что отталкиваемое блокиро-
ванное колесо более полно использует потенциальные возмож-
Рис. 4.2. Экспериментальные зависимости коэффициентов продольной силы
тяги k°Ti (кривая 1) и сцепления фОг (кривая 2) от пути юза 5Ю для оттал-
киваемого колеса; коэффициентов продольной силы тяги kn.Ti (кривая 4) и
сцепления <рСг (кривая 3) от коэффициента буксования $б для приведенного
во вращение колеса. Грунт — сухой песок, Pz = 300 Н
ности грунта для реализации полезной силы тяги, чем веду-
щее. Так, для ведущего колеса при $6 = 0,5 (предельное значе-
ние) k%. =0,35, в то время как для отталкиваемого колеса при
£ю = 0,5 м&°. = 1,2. Коэффициент сцепления отталкиваемого ко-
леса фог растет быстрее, чем ведущего фСг, но при $б>0,5 фс/>
>Фог- Сдвиг отталкиваемого колеса происходит в два этапа. На
первом этапе, при 0>5ю^0,1 м, & °, растет только за счет возник-
новения касательных сил в зоне сдвига, и поэтому на этом этапе
=- ф0/. На втором этапе, при 5ю>0,1 м, коэффициент фо
стабилизируется, а увеличение k°i определяется погружени-
ем колеса в грунт и образованием холма грунта за колесом;
холм препятствует сдвигу колеса. Погружение отталкиваемого
колеса в грунт происходит более интенсивно, однако при $б>
>0,5 ведущее колесо больше погружается в грунт. Как пока-
зывают экспериментальные исследования, тяговые свойства от-
талкиваемого колеса увеличиваются, если колесо устанавлива-
ется в след от сдвига предшествующего колеса, в результате
чего ku достигает своего максимального значения быстрее.
10*
148
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Более чем в двое может быть увеличено при сдвиге коле-
са из углубления, образованного вращением колеса на месте.
Для оценки параметров передвижения запишем уравнения, описы-
вающие передвижение транспортного средства с колесно-шагающим
движителем. В соответствии с рис. 4.3 имеем
Рис. 4.3. Расчетная схе-
ма криволинейного дви-
жения машины с КШД
с неповоротными колеса-
ми
zo п %
Pzik^i + Y Pzik^i — Gx = 0;
го "о
2К = £ P2ilx0i + 2] PZi^i + Gv = 0;
<=1 t'=zo+l
(2 /2 \ z
+ s ptiknTl \ + '£pzipoi(io~ii) +
i=l 4=z0+l J iZi
"o
+ S Pz^(/o-O + GA + GA + ^ = 0;
‘=zo+'
6 (P ± 0,5B) = a>Kir (1 — s6i);
Gx = mx + G sin a cos + /’кр!
Gy = G sin a sin + my,
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
149
AMZ = /ZQ + Мс;
h = -
где п0 — общее число колес движителя; г0 — число отталкивае-
мых колес; цОг и ц;— коэффициенты сопротивления боковому
уводу соответственно отталкиваемого и переносимого колес; т —
масса машины; G — вес машины; а — угол наибольшего подъе-
ма; ау — угол между линией наибольшего подъема и продоль-
ной осью машины; РКр — сила тяги на крюке; Iz— момент инер-
ции относительно оси г; 7ИС — внешний момент сопротивления
повороту машины; /Нг— исходное номинальное расстояние от
условной поперечной оси машины до f-го колеса; Ц— текущее
расстояние; УШг — скорость шагания колеса; t — текущее время.
Колесный режим описывается при го = 0 и Vmi = 0.
Нормальные реакции PZi опор в колесно-шагающем режиме
определяются в следующей последовательности. В общем слу-
чае можно записать
Pzi = Pzoi — agCt (а — lt), (4.14)
где PZOi — нормальная реакция в статическом положении маши-
ны; Ci — жесткость подвески; а — координата полюса подвески
машины; аё — угол поворота продольной оси машины под дейст-
вием внешних сил.
по по по
Тогда из уравнения £ Pzi = £ Pzoi + (а — lt) = Gzy учи-
по
тывая, что у] Pzoi = Gzy получим
по I по
a = 2icili У] ct, (4-15)
4=1 / 4=1
где Gz — проекция результирующей силы, действующей в цент-
ре масс машины на ее вертикальную ось.
Из уравнения моментов сил относительно центра масс ма-
шины имеем
(4 16)
2 ci
1=1
где Мр — реактивный момент.
150
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Аналогично, координаты полюсов поворота подвесок каждо-
го борта определяются так:
где Пб — число колес борта. Обозначения с одним штрихом отно-
сятся к забегающему борту, с двумя — к отстающему.
Распределение нагрузок по бортам определяется так:
"б ,
В £ Pzi = Gz (0,5В + М + ОД + Мх ;
1=,’ (4.18)
"б ,
В\^Рг1 = GZ (0,5В — &ц) — Gyhn + Мх,
i=l
где йц — высота центра масс.
Для некоторых вариантов подвесок Pzoi определяется по
следующим зависимостям:
а) при отсутствии нагрузок на колеса их оси расположены на
одной линии
б) Pzoi одинаково для всех колес при у, Pzi = А (обычно А =
= 0,5G)
p;«=-+^Uis',"-4
Пх "б \ i=l /
(4.20)
2
1=1
" / пб \
\ 1 = 1 /
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
151
в) жесткости подвесок колес одинаковы, и колеса на одной
линии
"б , , „ У „ „
РzqI ~ У Pzl!^6\ Рzoi — У Pzil^C» (4.21)
i=l t=l
Из уравнений (4.15)...(4.18) и одного из выражений (4.19)...
(4.21) определяется PZi для каждого колеса.
Для упрощенных инженерных расчетов как колесного, так и
колесно-шагающего режимов со структурой подвески по вари-
анту (4.21) при условиях: It = li", tie = «б = 0,5no; /г-+1—/,=
= A/ = L/(0,5 n0—1), из уравнений (4.15)...(4.18) и (4.21), учи-
тывая, что при этом
пб
Sj2 = L2nn (п0 — 1) .
1 12(0,5no — 1) ’
1=1
5 (»-«’-
L2n0 (0,5no +1)
12 (0,5по — 1)
имеем
d' __ (0,5В + Ьц) -|- вукц + Мх
1 Г / -----------------------------
0,5/гоВ
__Gz (^ц — 0,5L) + ^х^ц + Мр Zq ££____.
п0 (0,4no+l) l2 V ’
12(0’5n°-I) (4 22)
р" 6г(0,5В-Ьц)-Оу1гд + Мх
Zl 0,5поВ
__ Ог (/ц 0,5L) @хпц + Мо Zq \
Пр (0,5no+ 1)
12 (0,5no — 1)
Экспериментальные исследования одиночного колеса в грун-
товом канале показали, что параметры взаимодействия оттал-
киваемого колеса с грунтом достаточно хорошо аппроксимиру-
ются выражениями вида:
k°Ti = k?m3X (1 - ; (4.23)
Фо 1= Фотах (4.24)
Но I = Hoi max (1 - e-s*ozM + (1 _ (4.25)
152
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
В результате обработки экспериментальных данных, кото-
рые используются в дальнейших расчетах, для одного из вари-
антов колеса на сухом кварцевом песке неизвестные коэффици-
енты в уравнениях (4.23)...(4.25) имеют значения
max = 1,2 (cos а0)0’2; kTi = cosa0(0,l ]/Pzi + O,OO5ao) ; (4.26)
Фотах = 0,72 (cosa0)0’2; kx2 -= cosa0 (0,05 VPzi + O,OO5ao) ; (4.27)
Hol max = 0,8 sin a0; kX3 = 0,045 sin 2a0;
П q (4.28)
Рогтах = (O,O18ao)2’5; kx4 = 0,01 cosa0P°;3,
где a0 = arctg (-----— tgp ), величина Pzi выражена в ньютонах,
\ SKD /
a p — в градусах. Значения аналогичных параметров переноси-
мых колес для проведения необходимых расчетов определялись
экспериментально.
4.3. Тягово-сцепные свойства
Оценим, каким образом возможные варианты
организации движения в колесно-шагающем движителе влияют
на показатели передвижения и, в частности, на показатели про-
ходимости в условиях равномерного и прямолинейного движе-
ния.
4.3.1. Колесный режим. Колесный режим в КШД имеет то
преимущество, что изменение положения колес позволяет улуч-
шить показатели передвижения. Это, во-первых, возможности
по изменению формы многоугольника опор и его положения
относительно центра тяжести машины.
Для одного из вариантов машины на рис. 4.4 представлены
расчетные зависимости коэффициентов буксования sg и удель-
Рис. 4.4. Расчетные зависимости ко-
эффициента удельной загрузки Dr и
коэффициента буксования $б заднего
колеса шестиколесного шасси от от-
носительной координаты центра тя-
жести /ц/L при преодолении уклона
<х=15°
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
153
ной загрузки заднего колеса Dr, равного отношению окружной
силы на колесе к G/пОу от величины 1Ц/Ь при преодолении подъ-
ема а=15° по линии наибольшего ската. Зависимости рассчи-
таны с помощью выражений (4.13) и (4.22) и эксперименталь-
ных данных по параметрам взаимодействия колес с грунтом для
случая установившегося прямолинейного движения.
Если положение центра масс таково, что при преодоле-
нии уклонов обеспечиваются одинаковые нормальные реакции
на колесах, то, учитывая, что при этом &nT = tg 15° = 0,27, уклон
преодолевается при S6 = 0,32, а для этого, как следует из рис. 4.4,
необходимо, чтобы l^lL = 0,35. В случае расположения центра
масс в геометрическом центре опор 5б = 0,35. Таким образом,
при преодолении подъема а=15° при соответствующем измене-
нии положения центра масс могут быть уменьшены буксова-
ние на 10 % и загрузка тяговых двигателей (при индивидуаль-
ном приводе) на 25 %.
Таким образом, с целью уменьшения энергозатрат и пере-
грузок тяговых двигателей в КШД перед осуществлением ко-
лесного режима все колеса устанавливаются в заднее по направ-
лению движения положение [15].
Возможность изменения положения центра масс, а также
нормальных реакций для каждого колеса в отдельности [20],
дает известные преимущества при движении на косогорах, пре-
одолении препятствий; при этом повышаются курсовая устойчи-
вость и поворотливость.
4.3.2. Колесно-шагающий режим. В соответствии с рис. 4.3
и системой уравнений (4.13), без учета сил инерции, проекции
внешних сил на продольную и вертикальную ось машины запи-
шутся в виде
ло
Ё P^i + У Pzi/& = Ркр + Gsina,
1
2 П (4.29)
zo по
У Pzi + У Pzi = Gcosa.
1 *0+l
Учитывая, что & = <poi + fol, a k"i = <pci — fh
где fOi и ft — коэффициенты сопротивления качению соответст-
венно отталкиваемого и переносимого колес, примем следующие
переходные обобщающие выражения для параметров взаимо-
действия с грунтом отталкиваемых и переносимых колес:
154
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
zo
Jj Pzikri
r=l
Q cos a
У| ^ггФог
G cos a
y + ^g ’
zo
pzifoi
<PoY . f=1 = foY .
Y + Geos a Y + kG
G cos a
^G
y+kG ’
no
У Pz&ci
=zo+1
G cos a
(4.30)
Pzif'
Tafy? , t'=zo^“1 f^G
Y + ^g G cos a Y + kG
где kG— коэффициент разгрузки переносимого колеса, опреде-
ляемый отношением нормальных реакций, действующих на эта-
пах переноса и отталкивания. Из этого следует, что для шага-
ющего режима kG = 0, для колесно-шагающего с частичной раз-
грузкой переносимого колеса 1>&g>0, а без разгрузки kG =
= 1.
Выражения (4.30) позволяют перейти от параметров каждо-
го колеса (йг-, фСг, ft) к обобщенным параметрам для всех от-
талкиваемых (&°т, фо, fo) и переносимых (£пт, Фс, f) колес.
Тогда из (4.29) и (4.30) общее уравнение тягового баланса
КШД в различных режимах движения определяется выражени-
ем
=—-I—£ + —k^— tf-tga. (4.31)
G cos a y + ^g Y +
Коэффициент тяги kT в колесно-шагающем режиме без раз-
грузки переносимых колес (основной исследуемый режим; kG =
= 1) имеет вид
k, = У £ + -4т knT - tg a, (4.32)
Т + 1 ?+ 1
а в колесном режиме (у = 0)
k? = ср — f — tga. (4.33)
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
155
Выигрыш в тяге, который дает колесно-шагающий режим по
сравнению с колесным, равен
А^Т = У , (<Ро — ф +/<»+/)•
? + 1
Из этого следует, что выигрыш в тяге тем значительнее, чем ху-
же грунт, чем он хуже по проходимости для колеса, т. е. чем
больше f0 и f.
При способе переноса колес с отрывом от опорной поверхно-
сти (^g = 0, шагающий режим) коэффициент тяги имеет вид
kT = k° — tg а.
(4-34)
Различные варианты организации движения в колесно-шага-
ющем режиме определяют, в основном, переход от частных к
обобщенным параметрам движителя (4.30). Для простоты вык-
ладок исследование КШД проведем для случая, когда применя-
емые режимы движения обеспечивают одинаковую или прибли-
женно одинаковую нагрузку на каждое колесо, т. е.
Pzi = G cos a/n0. (4.35)
Тогда уравнения (4.30) для отталкиваемых колес запишем в
виде
Если считать, что скорость на этапе переноса постоянная, то
частные и обобщенные параметры переносимых колес количест-
венно равны.
Влияние порядка перемещений колес на k°T. Порядок пере-
мещения колес определяет вид походки: фазная или равномер-
ная. В случае использования фазной походки все отталкивае-
мые колеса перемещаются в одной фазе, а значит, имеют оди-
наковый путь юза 5Ю и одинаковые значения частных парамет-
ров взаимодействия колес с грунтом в соответствии с характе-
ристикой ^?1=^(5Ю) (см. рис. 4.2). Тогда для фазной по-
ходки обобщенный коэффициент тяги £?.ф в соответствии с
(4.23) и (4.36) определяется выражением
£.Ф = £< = £таД1 - е"^). (4.37)
В случае использования равномерных походок это означает,
что величина для каждой опоры в соответствии с после-
156
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
довательностью перемещения колес одинакового зависит от пу-
ти юза (см. рис. 4.2). При достаточно большом г0, переходе к
другим пределам суммирования, с учетом (4.23) и (4.36) для
прямолинейного движения (0 = 0), обобщенный коэффициент
тяги &?.р для равномерных походок запишется в виде
5,о k
k°.P =-- ( MI0 = Л?тах 11 - (1 • (4.38)
о
Таким образом, для равномерной походки зависимость
^т.р = ^(5ю) определяется как среднеинтегральное ее значе-
ние в случае фазной походки.
В случае использования режима движения след в след ко-
эффициент тяги kP с1 для каждого колеса определяется так:
= £ шах (1 - (4.39)
где гг0.сг — порядковый номер колеса, перемещающегося след
в след.
В случае использования фазной походки с режимом движе-
ния след в след обобщенный коэффициент тяги определяется,
как среднее значение первого и последнего сдвига, т. е.
£.ф = ^та;(1 — — 0,5e_"o-°s»/*'1X (4-40)
где п0.с — общее число колес, перемещающихся след в след.
В случае использования равномерной походки с режимом
движения след в след
£.Р = 1 -0,5-^- (2- е“5ю/Аг1-е_"о с5,о/Ч]. (4.41)
L *^ю J
Остальные обобщенные параметры (ф0, f0) определяются
аналогично.
На рис. 4.5 представлены расчетные зависимости обобщен-
ного коэффициента тяги &°т отталкиваемых колес, полученные
с помощью уравнений (4.23), (4.26) (0 = 0 и Pzz = 300 Н), (4.37),
(4.38), (4.40) и (4.41). Из приведенных данных следует, что фаз-
ная походка обеспечивает большую тягу, причем использование
фазной походки с режимом движения след в след обеспечивает
реализацию максимального &°т.
Влияние схемы привода. В процессе передвижения машины
в колесно-шагающем режиме колеса, оказываясь последова-
КОЛЁСЙО-ШАГАЮЩИИ ДВИЖИТЕЛЬ
157
тельно то на этапе отталкивания, то на этапе переноса, взаимо-
действуют с грунтом в соответствии со связью, заложенной в
используемой схеме привода. Эта связь для непрерывных похо-
док определяется зависимостью (4.10), а для прерывных—(4.11).
На рис. 4.6 представлены расчетные зависимости коэффици-
ента тяги kT движителя от коэффициента юза $ю, полученные с
Рис. 4.5. Расчетные зависимости обоб-
щенного коэффициента тяги от-
талкиваемых колес от пути юза 5Ю
опор по грунту:
1 — фазная походка; 2 — равномерная по-
ходка; 3 — фазная походка с режимом
след в след; 4 — равномерная походка с
режимом след в след
Рис. 4.6. Расчетные зависимости ко-
эффициента тяги движителя в ко-
лесно-шагающем режиме от коэффи-
циента юза 5Ю для несвязанной схе-
мы привода:
/ — равномерная походка, y=1’» 2 — равно-
мерная походка, ^=5; 3 — фазная по-
ходка
помощью уравнений (4.1), (4.2), (4.10), (4.26), (4.32), (4.37) и
(4.38). Представленные зависимости соответствуют исходным
данным: £п = 0; (3 = 0; Pzi = 300 Н; SK=0,5 м; г=гр, значения
ктс соответствуют рис. 4.3 (кривая 4). Как следует из
рис. 4.6, при фазной походке тяга больше, чем при равномерной.
Однако, если сравнить эти результаты с подобными для колес-
ного режима (см. рис. 4.2, кривая 4), то оказывается, что при
определенных ограничениях параметров шагания (у=1) (см.
рис. 4.6, кривая 1) колесно-шагающий режим в котором каждое
отталкиваемое колесо может реализовать значительную силу
тяги (см. 4.2, кривая 7), не имеет особых преимуществ перед
колесным. Результаты расчета соответствуют КШД, у которого
юз колеса на этапе отталкивания начинается при = 0,
т. е. когда колесо свободно стоит на грунте. Это может соответ-
ствовать несвязанной схеме привода, когда в переходный (с эта-
па переноса на этап отталкивания) период происходит разрыв
кинематической цепи привода колеса.
158
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
Для связанных схем привода интегральной и дифференци-
циальной, вследствие неразрывности кинематической цепи при-
вода перед этапом отталкивания колесо всегда загружено мо-
ментом в соответствии с кинематикой его перемещения на эта-
пе переноса. Так, если колесо на этапе переноса перемещалось
с $б = 0,2 (см. рис. 4.2), то это соответствует фс = 0,4, а так как
сдвиг колеса на этапе отталкивания в первый период происхо-
дит за счет увеличения сцепления, то это означает, что в началь-
ный момент сдвига колесо имело ^?х=Фс = 0,4, что соответствует
его предварительному сдвигу на величину А5ю = 0,07 м. Оче-
видно, что чем больше значение фс, тем больше начальное зна-
чение а значит, и выше тяговые свойства движителя.
Однако эта закономерность имеет определенные ограниче-
ния по параметру $б, а значит, и по энергозатратам. Соотноше-
ние параметров $б и $ю для непрерывных походок определяется
зависимостью (4.10), а для прерывных—(4.11), причем для
непрерывных походок зависимость имеет такой характер, что
диапазон изменения коэффициента $б с увеличением у значи-
тельно меньше, чем для $ю- Для обеспечения эффективного пе-
редвижения определяют соответствующие значения $б для пе-
реносимого колеса и $ю для отталкиваемого, а также при извест-
ном у — величину гр. С другой стороны, на начальное значение
krc влияет фс, которое реализует колесо в конце этапа пере-
носа. При этом необходимо, чтобы скорость перемещения коле-
са на этапе переноса (при соответствующем у) изменялась так,
чтобы в завершающей части этапа она была достаточно мала.
При связанной схеме привода обобщенный коэффициент тяги
отталкиваемых колес определяется так:
фазная походка
£.Ф = £гаах(1 - е-(5.о + ^>о)^1) ; (4.42)
равномерная походка
k°.p = /г?тах [ 1 - -^е-(I _ e-SK>^i)l ; (4.43)
L J
фазная походка с режимом движения след в след
£.ф = k° max (1 — 0,5е“ + AS»)/^1 — 0,5е~ (по.с5ю + . (4.44)
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
159
равномерная походка с режимом движения след в след
„ - К ™.„ (1 - е- 11 - +
I L
(4.45)
На рис. 4.7 представлены расчетные зависимости коэффици-
ента тяги КШД в колесно-шагающем режиме для связанной
Рис. 4.7. Расчетные зависимости ко-
эффициента тяги k? движителя от
коэффициента юза $ю для связанной
схемы привода:
1 — фазная походка; 2 — равномерная по-
ходка, 7=1; 3 — равномерная походка,
7=5
схемы привода. Расчеты произведены с использованием урав-
нений (4.1), (4.2), (4.10), (4.26), (4.32), (4.42) и (4.43) и соот-
ветствуют исходным данным: &п = 0; [3 = 0; Зк = 0,5 м; PZi—
= 300 Н; гр соответствует оптимальным значениям sIO = s6 = 0,2
и экспериментальным данным рис. 4.2. Расчеты проводились по
следующей схеме. При оптимальных значениях 5ю = 5б = 0,2 и
известных у и г из (4.10) определяется гр. Для каждого значе-
ния из (4.10) определяется s6. Для каждого s6 определяется
£пт и АЗЮ по данным рис. 4.2. Для каждого значения £ю и со-
ответствующего ему значения АЗЮ определяется &°т. При опре-
деленных значениях £°т и £пт и соответствующем -у по урав-
нению (4.32) определяется &т движителя в колесно-шагающем
режиме. Сравнивая расчетные данные (см. рис. 4.5 и рис. 4.7),
можно заключить, что связанная схема привод обеспечивает
существенное увеличение тяговых возможностей. Так, при $ю =
= 0,2 обеспечивается увеличение тяги для фазной походки Айт =
= 0,15, а для равномерной походки при у = 5 А^т = 0,3. Кроме
того, в отличие от несвязанной схемы, максимальные тяговые
свойства реализуются при использовании равномерной поход-
ки.
Таким образом, кинематическая цепь привода перемещений
колеса должна быть неразрывной, чтобы наиболее полно ис-
160
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
пользовать деформационные свойства грунта и исключить по-
датливость элементов конструкции кинематической цепи обод
колеса — корпус машины.
Влияние параметров шагания. Производительность шагания
у (4.1) и шаг 5К (4.2) оказывают определенное влияние на тя-
Рис 4.8. Расчетные зависимости ко-
эффициента тяги k? движителя от
производительности шагания у:
1 — равномерная походка; 2 — фазная по-
ходка
Рис. 4.9. Расчетные зависимости обоб-
щенного коэффициента тяги k°^ от-
талкиваемых колес от длины шага
1 — равномерная походка; 2 — фазная по-
ходка
данных, приведенных выше. Как следует из представленных
результатов, для равномерных походок производительность ша-
гания у оказывает существенное влияние на kT. Увеличение
производительности шагания свыше пяти, что может быть реа-
лизовано в шестиопорной (п0 = 6) машине, нерационально.
Для фазной походки тяговые свойства определяются при
у=1, так как при этом всегда половина колес находится на эта-
пе переноса (без учета динамики движения), а другая — на эта-
пе отталкивания. Поэтому использование фазной походки с
большой производительностью шагания не имеет смысла. Как
следует из рис. 4.8, равномерная походка становится эффектив-
ной фазной при у>2, т. е. начиная с четырехопорной машины.
Величина шага SK влияет только на составляющую общей
тяги от отталкиваемых колес. На рис. 4.9 представлены расчет-
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
161
ные зависимости обобщенного коэффициента тяги k°T отталки-
ваемых колес от длины шага SK, определяемые по уравнениям
(4.26), (4.44) и (4.45), для вышеуказанных исходных данных.
Как следует из рис. 4.2 (кривая 1) желательно использовать
SK^0,5 м, так как при 5ю = 0,5 м k°i достигает своего мак-
симального значения. В соответствии с рис. 4.9 можно заклю-
чить, что тяговые возможности в значительной степени зависят
Рис. 4.10. Расчетные зависимости ко-
эффициента тяги от коэффициен-
та юза 5Ю:
1 — фазная походка с режимом след в
след; 2 — равномерная походка, у=5, ре-
жим движения след в след; 3 — равно-
мерная походка, “у = 5, движение с пассив-
ными колесами; 4 — выигрыш в тяге дви-
жителя при прямой последовательности
перемещения колес по сравнению с об-
ратной последовательностью
от длины шага 5К, причем особо это влияние сказывается в ди-
апазоне 0,5^SK=^l,2 м. Поэтому для исследуемых условий
движения желательно синтезировать механизмы шагания, обес-
печивающие этот диапазон SK.
Влияние последовательности перемещения колес. Различаем
прямую последовательность, обратную последовательность и
последовательность, при которой обеспечивается режим движе-
ния след в след. На рис. 4.10 (кривая 4) представлена расчет-
ная зависимость выигрыша в тяге при прямой последователь-
ности перемещения двух колес борта по сравнению с обратной
(прерывная походка). Как следует из представленных результа-
тов, разница между kT для прямой и обратной последовательно-
стей составляет А&т = 0,08. Очевидно, что с увеличением числа
опор движителя количественно выигрыш будет несколько сни-
жаться. Физически это явление объясняется следующим обра-
зом. При прямой последовательности этап переноса наиболее
загруженных нормальной реакцией колес (этот момент и опре-
деляет тяговые возможности движителя) осуществляется, ког-
11 Зак. 826
162
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
да отталкиваемые колеса воспринимают максимальное значе-
ние нормальной нагрузки, т. е. перенос колеса осуществляется,
когда оно имеет минимальную нормальную нагрузку, что соот-
ветственно требует меньших усилий на его перемещение. При
обратной последовательности все наоборот. Таким образом, яс-
но, что волна перемещений колес обоих бортов движителя дол-
жна осуществляться последовательно для одноименных колес
бортов, начиная с задних колес. Экспериментальные исследова-
ния шестиопорного макета с КШД показали, что уклон а = 31°
из сухого песка преодолевается при прямой последовательности
с $ю = 0,47, а при обратной с $ю = 0,55.
Целесообразность режима движения след в след была опре-
делена ранее (см. рис. 4.5, кривые 3 и 4). На рис. 4.10 (кри-
вые 1 и 2) представлены расчетные зависимости коэффициента
тяги kT движителя в режиме движения след в след. Расчеты
производились по выражениям (4.10), (4.26), (4.32), (4.40),
(4.41) и соответствуют исходным данным: 0 = 0; PZi = 300 Н;
SK = 0,5 м; п0 = 6. Из приведенных данных следует, что режим
движения след в след обеспечивает увеличение тяговых возмож-
ностей движителя, особенно при малых 5Ю, причем преимущест-
во имеет равномерная походка с максимальной производитель-
ностью шагания.
Рассмотрим некоторые особенности режима движения след
в след. Для определения параметров, при которых реализуется
этот режим, рассмотрим два последовательно перемещающихся
колесно-шагающих механизма, укрепленных на раме машины
на расстоянии Ц друг от друга, и определим, на каком рассто-
янии AS от следа первого колеса на опорной поверхности ока-
жется последующее колесо через £ циклов перемещения. Тог-
да для непрерывных походок имеем [49]
AS = SK Г (1 _ k) (1 _ s ) + (]_£,- k2) SJ - Lh (4.46)
L z0 J
где i0 — сдвиг по фазе;
для прерывных походок
AS=SKk-SKipo±k + 1Y| —Lf. (4.47)
L \ n0 — i /J
Значения AS определяются оптимальными условиями взаи-
модействия опор с грунтом. Тогда, как следует из (4.46) и
(4.47), при постоянных параметрах AS, SK, n0, z0, i0, ka режим
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
163
движения след в след осуществляется дискретно за счет изме-
нения числа циклов £. Поэтому кривые 1 и 2 на рис. 4.10 следу-
ет понимать как огибающие значений kT в режиме след в след.
Следует отметить, что при прерывных походках с режимом
движения след в след вид последовательности влияет на гео-
метрию движителя. Так, для обратной последовательности, учи-
тывая уравнения (4.8), а также то, что для нее t0=l, уравнение
(4.47) можно представить в виде AS = £SM-----------------
/i0 — 1
Так как в реальных условиях передвижения величина 5юг- для
каждого колеса различна, то для обеспечения режима след в
след расстояния Li между соседними механизмами шагания
должны быть различны: между передними колесно-шагающи-
ми механизмами оно должно быть больше, чем между задними.
В случае прямой последовательности f0 = l—п0. Тогда ана-
логично предыдущему имеем AS = £SM—Lif что предполагает
равномерное расположение механизмов шагания по бортам ма-
шины. В этом заключается еще одно положительное свойство
прямой последовательности перемещения колес.
Влияние состояния переносимого колеса. Все описанные ис-
следования относятся к КШД, у которого переносимое колесо
перемещается как приведенное во вращение и толкаемое меха-
низмом шагания. На рис. 4.10 (кривая 4) представлены расчет-
ные зависимости для КШД, у которого переносимые колеса пе-
ремещаются, как пассивные, т. е. только с помощью механизмов
шагания. Расчеты проводились для принятых выше общих ис-
ходных данных и по уравнению (4.32) при фс=0. Как следует
из приведенных данных, движение с пассивными колесами при-
водит более чем к двукратному уменьшению коэффициента &т,
т. е. к ухудшению тяговых свойств, особенно при малых $ю, а
поэтому такой способ передвижения можно считать нерацио-
нальным.
Влияние способа перемещения корпуса машины. До сих пор
проводились исследования тяговых возможностей КШД без уче-
та того, что походки могут быть прерывными и непрерывными.
Предполагалось, что можно обеспечить идентичность парамет-
ров взаимодействия отталкиваемых и переносимых колес с грун-
том. Отличие этих походок лежит в реализации различных па-
раметров шагания. На рис. 4.11 представлены расчетные зави-
симости коэффициента тяги kT движителя от пути SM переме-
щения машины за один цикл для принятых общих исходных
Данных по выражениям (4.4), (4.8) (Зк = 0,5 м).
11*
164
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ
Рис. 4.11. Расчетные зависимости ко-
эффициента тяги &т движителя от
пути перемещения машины SM:
1 т- фазная прерывная походка; 2 — фаз-
ная непрерывная походка; 3 — равномер-
ная прерывная походка, у=5; 4 — равно-
мерная непрерывная походка, у=5
ности обеих походок
ния заключается в
сравниваются,
следующем.
Как следует из представ-
ленных результатов, непрерыв-
ные походки имеют существен-
ное преимущество перед пре-
рывными, особенно при низкой
производительности шагания
(у=1, фазная). При увеличе-
нии производительности ша-
гания (у = 5) тяговые возмож-
Физика этого явле-
В случае использования
непрерывных походок передвижение машины прекращается при
5Ю = 1 (4.4), а для прерывных походок — при $ю=у/(у+1) (4.8),
что, в соответствии с (4.2) и (4.23), не позволяет отталкивае-
мому колесу реализовать максимальное значение k°c при од-
ном и том же шаге SK.
Напомним, что в случае использования прерывных походок
последовательно осуществляются перенос колес и перенос кор-
пуса. Приведенные выше исследования тяговых свойств дви-
жителя соответствуют этапу переноса колес, так как на этом
этапе тяга минимальна и является определяющей для постоян-
но действующей силы тяги на крюке. Если цель передвижения
такова, что сила тяги на крюке необходима только при наличии
перемещения (при буксировке груза или при выполнении зем-
ляных работ), то определяющим является этап переноса корпу-
са, а тяговые возможности в этом случае соответствуют спосо-
бу передвижения при полной разгрузке переносимых колес от
веса машины, т. е. в соответствии с рис. 4.5. Очевидно, что при
этом реализуются максимальные тяговые характеристики. Для
непрерывных походок такой эффект реализуется в случае ис-
пользования однофазной походки.
Существенное улучшение тяговых свойств обеспечивает ис-
пользование зарывания колес в грунт перед этапом отталкива-
ния методом их вращения на месте. Экспериментальные иссле-
КОЛЕСНО-ШАГАЮЩИИ ДВИЖИТЕЛЬ
165
дования показывают, что при этом обеспечивается более чем
трехкратное увеличение тяговых характеристик. Однако такой
режим требует значительных энергозатрат, поэтому его целе-
сообразно использовать только в экстремальных условиях.
Проведенные исследования тягово-сцепных свойств КШД
соответствуют условию передвижения по сухому кварцевому
песку, который сам по себе не является препятствием для пе-
редвижения приведенного во вращение колеса, т. е. в этом слу-
чае фстах>А В связи с этим на увеличение тяговых свойств в
режиме колесного шагания сказывался, в основном, фактор
увеличения тяги, реализуемой отталкиваемыми колесами. Если
сам грунт является препятствием для перемещения приведен-
ного во вращение колеса, т. е. <рСг<7, то на передвижение в ко-
лесно-шагающем режиме должен влиять, в основном, фактор
уменьшения суммарного сопротивления движению из-за дефор-
мации грунта (f/(y+1)) [см. уравнение (4.32)]. Вследствие
этого, так же как и для исследованных условий передвижения,
использование равномерных походок с максимальной произво-
дительностью шагания является наиболее эффективным спосо-
бом увеличения проходимости КШД в этих условиях [8].
Таким образом, использование в колесно-шагающем режиме
связанной схемы привода, непрерывной равномерной походки с
максимальной производительностью шагания, прямой последо-
вательности перемещения колес и режима движения след в след
обеспечивает реализацию наилучших тяговых свойств движи-
теля.
4.3.3. Шагающий режим. Основные факторы, влияющие на
тягово-сцепные свойства КШД в шагающем режиме, за некото-
рым исключением, аналогичны колесно-шагающему режиму, но
их влияние в большинстве случаев носит другой характер. Так,
в соответствии с (4.34) коэффициент тяги k? в шагающем ре-
жиме численно равен обобщенному коэффициенту тяги k°r от-
талкиваемых колес, а поэтому расчет тягово-сцепных характе-
ристик в шагающем режиме проводится так же, как и для пред-
ставленных на рис. 4.5. Ясно, что при условии (4.35) порядок
перемещения опор оказывает существенное влияние, причем
фазная походка имеет явное преимущество над равномерной.
Влияние параметров шагания несколько отлично. Так, про-
изводительность шагания у не влияет явно на kT (4.34), однако
согласно (4.23)... (4.28) величину у можно выбрать так, чтобы
реализовать оптимальные Р71- в соответствии с физико-механи-
ческими свойствами грунта. Шаг SK влияет так же, как и в ко-
166
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
лесно-шагающем режиме (см. рис. 4.9). Прямая и обратная
последовательности не влияют на &т, однако более эффективен
режим движения след в след (см. рис. 4.5).
Влияние на kr прерывного и непрерывного движений такое
же, как и в колесно-шагающем режиме, причем максимальный
kr реализуется при использовании фазной непрерывной походки.
4.4. Поворотливость
Опыт создания транспортных средств с КШД
указывает на возможность использования его в сочлененном
шасси и транспортных средствах с бортовым поворотом [49].
В настоящем разделе рассматриваются вопросы статики борто-
вого поворота (преимущественно на месте) транспортного
средства с КШД и методы улучшения параметров поворотли-
вости. Теоретические исследования проводятся в соответствии с
системой уравнений и исходными данными, приведенными в
разд. 4.2 и 4.3. Дополнительно к рассматриваемым в уравнени-
ях (4.13) коэффициент kM удельного свободного поворачиваю-
щего момента (по аналогии с kT для прямолинейного движе-
ния), определяется соотношением
где kLi=(li—/о)/(/?±0,5 В) (обозначения в соответствии с
рис. 4.3); fn — коэффициент приведенных удельных энергозат-
рат на поворот, который для переносимых колес определяется
соотношением
/ по П° \
(4-49’
\ i=l i=l J
а для отталкиваемых колес
/ ПО ПО \
/п = — У k°.pi + У Ио.рг^г , (4.50)
по \ мм 1 мм /
\ 1=1 1=1 /
где ро.рг — коэффициент поперечной силы для равномерных по-
ходок, определяемый аналогично &Т.Р{ (4.38).
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
167
4.4.1. Колесный режим. Вопросу поворотливости колесных
машин с неповоротными колесами посвящено достаточное ко-
личество работ [56, 44]. Отметим некоторые особенности пово-
рота КШД в колесном режиме.
Во-первых, наличие продольных перемещений колес относи-
тельно рамы транспортного средства дает возможность изменять
продольную базу машины. На рис. 4.12 представлены зависи-
Рис. 4.12. Расчетные зависимости коэффициента /гм свободного поворачива-
ющего момента от коэффициента буксования S6 шестиколесного КШД при
бортовом повороте на месте в колесном режиме для различных значений ко-
эффициентов базы kL
Рис. 4.13. Принципиальная схема бортового поворота:
1 — среднее колесо; 2 — крайнее колесо
мости йм(5б) для вариантов шасси с различными коэффициен-
тами базы kL = LIB в режиме бортового поворота на месте.
Расчетные данные подтверждают известную зависимость борто-
вой поворотливости от коэффициента базы. Таким образом,
увеличение поворотливости транспортного средства с КШД в
колесном режиме может быть достигнуто когда перед осущест-
влением поворота все колеса устанавливаются в положение ми-
нимальной базы [5].
Для объяснения второй особенности рассмотрим идеализиро-
ванные условия бортового поворота многоопорного транспорт-
ного средства (рис. 4.13). Для простоты допустим, что трение
опор (колес) о грунт изотропно, т. е. линии действия результи-
168
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
рующей силы трения Рц и абсолютной скорости скольжения
Уа совпадают, а их векторы противоположно направлены, при-
чем величина силы Рц, при одинаковой нагрузке на колесо и
постоянном коэффициенте трения, постоянна и определяется
только наличием скольжения опоры о грунт. Правомерность
принятых допущений зависит от свойств грунта и конструкции
опоры. Это соответствует действительности. Тогда на средние
колеса вследствие отсутствия бокового юза будет действовать
окружная сила Рц,ана крайние — сила P^cosp. Этот факт
подтверждается экспериментально и объясняет меньшую заг-
рузку средних колес по сравнению с остальными при равной
скорости вращения. Если крайние колеса вращать с большей
скоростью, чем средние, то при той же скорости поворота ма-
шины (Ом это приводит к увеличению скорости буксования Уб
крайних колес и уменьшению угла Р и вследствие этого к уве-
личению окружной силы (силы тяги) Рц, cos р и уменьшению
боковой силы сопротивления повороту РцcosPi<Р|шcosp. Та-
ким образом, увеличение скорости вращения крайних колес,
при той же скорости поворота транспортного средства сом, при-
водит к увеличению сил тяги, развиваемых крайними колесами,
и уменьшению сил сопротивления повороту, что, в конечном сче-
те, приводит к увеличению свободного поворачивающего момен-
та, т. е. к способности машины преодолевать больший внешний
момент сопротивления повороту при той же скорости поворота.
В реальных условиях свободного поворота совместное действие
обоих факторов приводит к
увеличению скорости поворо-
та и уменьшению энергозатрат
[6, 19, 22].
На рис. 4.14 представлены
расчетные и эксперименталь-
ные зависимости коэффициента
увеличения скорости поворо-
Рис. 4.14. Зависимость коэффициен-
тов увеличения скорости поворота
kv машины и уменьшения энергозат-
рат на поворот kf от соотношения
скорости перемещения крайних опор
относительно средних k® в колесном
режиме:
---- —эксперимент, шасси 8X8, kL~
— 1,1; — — — расчет, шасси 6X6,
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
169
та kv (определяемого соотношением &у=(.$бо—£бг)/1—$бо), где
s60 — коэффициент буксования средних колес при равной ско-
рости вращения средних и крайних колес; — то же при уве-
личенной скорости вращения крайних колес) и коэффициента
уменьшения энергозатрат на поворот (определяемого как
я/=(/по—где fno — коэффициент удельных энергозатрат
при равной скорости вращения колес; — то же при увеличен-
ной скорости вращения крайних колес) от коэффициента уве-
личения вращения крайних колес =(oKp/©cp» где сокр и
соСр— угловые скорости крайнего и среднего колеса.
Как показывают расчетные данные (см. рис. 4.14), при уве-
личении скорости вращения крайних колес в 1,4 раза обеспечи-
вается уменьшение энергозатрат на поворот на 8 % и увеличе-
ние скорости поворота на 25 %. Экспериментальные данные (см.
рис. 4.14) подтверждают характер зависимостей.
В общем случае оптимальные значения зависят от свой-
ств грунта, конструктивных и геометрических параметров дви-
жителя. Как показывают расчеты увеличение скорости враще-
ния крайних колес дает существенный эффект только при kL =
=0,9... 1,2. Это явление имеет следующее физическое объясне-
ние. Как известно, поперечная сила сопротивления повороту,
действующая на колесо, пропорциональна коэффициенту базы
kL и обратно пропорциональна коэффициенту буксования £б-
Тогда для шасси с малым kL, вследствие незначительных сил
сопротивления повороту, все колеса работают практически в
одном режиме с небольшим $б, и увеличение скорости враще-
ния какого-либо колеса не имеет смысла. Для шасси с большим
значением kL в режиме бортового поворота создаются значи-
тельные силы сопротивления повороту, что вызывает существен-
ное увеличение буксования колес, в том числе и крайних. В ито-
ге следует заметить, что рассматриваемый способ поворота, не
увеличивая предельную поворотливость, увеличивает лишь эф-
фективность поворота (уменьшение энергозатрат, увеличение
скорости поворота) в одних и тех же условиях.
Кроме того улучшить поворотливость можно, снабдив опоры
движителя грунтозацепами. Как известно, в режиме бортового
поворота векторы абсолютных скоростей скольжения опор дви-
жителя по опорной поверхности для каждого борта направлены
так, что координата полюса поворота расположена за предела-
ми многоугольника опор. Идея увеличения поворотливости зак-
лючается в том, что грунтозацепы на опоре движителя должны
быть расположены так, чтобы в зоне их контакта с опорной по-
170
передвижение по грунтам луны и планет
верхностью продольная ось каждого грунтозацепа совпадала с
направлением вектора абсолютного скольжения [9] или была
близка к нему, т. е. линии контакта грунтозацепа с опорной по-
верхностью должны пересекаться внутри многоугольника опор.
Это приводит к уменьшению сил бокового сдвига опор и улуч-
шает условия реализации тяги колесом. Экспериментальные
исследования подтверждают этот вывод. Кроме того, как пока-
зывает анализ, при указанном расположении грунтозацепов уве-
личивается курсовая устойчивость, т. е. транспортное средство
оказывается более чувствительным к изменению курса от внут-
ренних возмущений и менее чувствительным — к внешним, что
является весьма важцым качеством. С другой стороны, для того
чтобы транспортное средство было чувствительно к изменению
курса от внешних сил, эффективно обратное расположение грун-
тозацепов.
Если КШД содержит нечетное число осей, а колеса средней
оси, совпадающей с поперечной осью машины, в колесном режи-
ме не могут занимать среднее положение на своих траекториях
(например, как в [21]), то, как показывают исследования, для
увеличения поворотливости в колесном режиме крайние колеса
следует устанавливать в положение минимальной базы, а коле-
са средней оси — в противоположные крайние положения от-
носительно поперечной оси машины. По сравнению с установ-
кой средних колес в одноименные положения это дает выигрыш
в поворотливости до 10%. Сохранение симметричности движи-
теля относительно поперечной оси машины и распределения
нормальных нагрузок на колеса от веса машины и определяет
увеличение поворотливости при противоположной установке
средних колес.
4.4.2. Колесно-шагающий режим. Для увеличения поворот-
ливости в колесно-шагающем режиме необходимо учитывать все
его особенности, рассмотренные в разд. 4.3, обеспечивающие
увеличение тягово-сцепных свойств. Следует заметить, что в ре-
жиме бортового поворота полезная сила тяги необходима толь-
ко при наличии перемещения. Ведь сопротивление повороту
возникают только при его осуществлении. Это обстоятельство
позволяет максимально использовать тяговые свойства движи-
теля. В этом случае процесс поворота на месте в режиме пре-
рывных походок осуществляется так, что сначала все колеса
в определенной последовательности выносятся вперед в соот-
ветствии с направлением поворота, а затем осуществляется
этап отталкивания всех колес. Для непрерывных походок при
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
171
повороте все колеса перемещаются аналогично, но в одной фа-
зе. На рис. 4.15 представлены расчетные зависимости коэффи-
циента свободного поворачивающего момента kM от коэффици-
ента юза $ю для нескольких вариантов шасси, отличающихся
значением коэффициента базы kL.
По сравнению с колесным режимом (см. рис. 4.12) колесно-
шагающий обеспечивает более чем двукратное увеличение по-
воротливости. Увеличение скорости перемещения крайних опор
относительно средних в режиме бортового поворота в колесно-
шагающем режиме дает существенный выигрыш, однако осу-
ществить его в реальных условиях сложно из-за определенных
ограничений по параметрам шагания. Таким образом, колесно-
шагающий режим обеспечивает поворот в колесно-шагающем
режиме характеризуется возникновением значительных попе-
речных сил на крайних колесах, что накладывает определенные
требования на конструкции элементов колесно-шагающего ме-
ханизма и требует большей мощности на поворот. Возникнове-
ние больших поперечных сил, действующих на отталкиваемое
колесо, по сравнению с приведенным во вращение, определяет
существенное преимущество колесно-шагающего режима по
сравнению с колесным, заключающееся в том, что в колесно-
шагающем режиме значительно увеличивается устойчивость пря-
молинейного движения и уменьшается сползание при движении
на косогорах.
4.4.3. Комбинированный режим,
ных поперечных усилий на крайних
колесах при бортовом повороте в
колесно-шагающем режиме наво-
дит на мысль о реализации комби-
нированного способа поворота, ког-
да крайние колеса работают в ко-
лесном режиме, а средние — в ша-
гающем [5]. При этом, одновремен-
но с уменьшением сил сопротивле-
ния повороту, представляется воз-
можность увеличить эффективность
Рис. 4.15. Расчетные зависимости коэффи-
циента свободного поворачивающего мо-
мента k.M от коэффициента юза sI0 при бор-
товом повороте в колесно-шагающем режи-
ме
Возникновение значитель-
172
ПЕРЕДВИЖЕНИЕ по грунтам луны и планет
поворота за счет использования минимальной базы и увеличения
скорости перемещения крайних опор. На рис. 4.16 представ-
лены расчетные зависимости коэффициента момента от ко-
эффициентов 5Ю и s6 при бортовом повороте на месте варианта
с КШД при kL max =1,2 и SK = 0,5 м. Расчетные зависимости со-
ответствуют возможным для этого движителя способам поворо-
та. Как следует из представленных результатов, наименьшей
Рис. 4.16. Зависимость коэффициента удель-
ного свободного поворачивающего момента
от коэффициента юза $ю или буксова-
ния S6 колесно-шагающего движителя при
бортовом повороте на месте в различных
режимах (kL = 0,8...1,2; SK = 0,5 м):
1 — колесно-шагающий режим, = 1; 2 — колес-
ный режим, 6(0 = 1; 3 — колесный режим, 6О =
= 1,3; 4— комбинированный режим, 6^=1; 5 —
комбинированный режим, k® —1,3
поворотливостью обладает колесный режим (кривая 2), даже
с минимальной базой. Использование ускоренного вращения
крайних колес при = 1,3 (кривая 3) увеличивает эффектив-
ность поворота, однако оба способа поворота имеют одинаковое
ограничение по внешним силам сопротивления повороту &Мтах =
= 0,4. В колесно-шагающем режиме (кривая 1) поворотливость
максимальна, однако он эффективней колесного, начиная с не-
которого значения kM. Использование комбинированного способа
поворота при й(о=1 (кривая 4) эффективней колесного (кри-
вая 3) и колесно-шагающего (кривая 1) в некотором диапазоне
изменения kM. Наиболее эффективен комбинированный способ
поворота с ускоренным вращением крайних колес (кривая 5),
который уступает колесно-шагающему лишь в экстремальных
условиях поворота.
4.5. Баланс мощности
4.5.1. Непрерывные походки. Методы синтеза
КШД с непрерывным движением достаточно полно изложены в
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
173
работе [49]. Рассмотрим интегральную и дифференциальную
схемы привода.
Интегральная схема привода. Напомним, что принцип дей-
ствия интегральной схемы привода заключается в том, что при-
вод шагания и вращения колеса имеет определенную кинемати-
ческую связь (механизм сумматора), определяемую зависи-
мостью
= Л^п.н (4.51)
где соКг — угловая скорость вращения колеса; соп.к— угловая
скорость привода вращения колеса; о)Шг — угловая скорость ус-
ловного звена механизма шагания (в большинстве конструкции
[13, 16] это просто рычаг), определяющего перемещение коле-
са и входящего в состав сумматора; а, b — постоянные сумми-
рования. Тогда, вводя понятия расчетного радиуса гр механиз-
ма шагания
rp=llb. (4.52)
где I — длина условного звена механизма шагания, скорость
передвижения в колесно-шагающем режиме определяется так:
Ик — (1 ^к/^р), (4.53)
где гк — кинематический радиус колеса.
В соответствии с уравнением (4.51) для КШД с интеграль-
ной схемой привода [16, 18] и очевидной схемой сил, действую-
щих на механизм шагания на этапе переноса, имеем
Mni = MKib +’РХ1 +'AMni,
где Мщ — суммарный момент на механизме (рычаге) шагания;
Л1Кг — момент на колесе; А7ИПг — дополнительный момент, обус-
ловленный силами инерции, непрямолинейностью перемещений
и смещением нормальной реакции; Рх — продольная сила на ко-
лесе.
Суммарный момент на механизме шагания, действующий на
этапе переноса, с учетом уравнений (4.12), (4.51) и (4.52), мож-
но представить в виде
Мпг = Pzil \h - Tci (1 - r/rp)J + ДМШ, (4.54)
Учитывая, что колесно-шагающий режим должен исполь-
зоваться в сложных грунтовых условиях, т. е. при больших fi, а
колесо на этапе переноса перемещается как активное, а это сог-
ласно (4.10) реализуется при г>гр, можно сделать вывод, что
174
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУЙЫ И ПЛАНЕТ
момент на рычаге шагания Мп{, приведенный к выходному валу
двигателя привода шагания A4n.mi (или к. другому общему зве-
ну привода шагания), является тормозным и загружает привод.
Тогда у
Мп.шг = -Фсг (1 - —) 1 + AMJ (4.55)
Лш I L \ гр / J )
где uni = шплп/(0ш1 —передаточное отношение от двигателя при-
водя шагания (о)п.ш) к рычагу шагания (<0ш<) на этапе перено-
са; т]ш—КПД привода шагания.
Аналогично предыдущему, результирующий момент Moi,
действующий на механизм шагания на этапе отталкивания, оп-
ределяется выражением
Я/ - Pzil [foi + <Pof (1 - r/rp)] + AA40i. (4.56)
Предполагая, что передвижение происходит в сложных грун-
товых условиях, т. е. при больших fOi, и отталкиваемое колесо
не перемещается по грунту в направлении движения, момент
от механизма шагания, приведенный к тяговому приводу шага-
ния, можно определить следующим выражением:
Ч.ш, = {Pzit [/о/ + <Poi (1 - r/rp)] + (4.57)
Чш
где uoi = (вп>ш/сош1 —передаточное отношение от вала тягового
привода (о)п.ш) к звену механизма шагания на этапе от-
талкивания.
Ввиду непрерывности и последовательности чередования эта-
пов переноса и отталкивания результирующий момент на валу
тягового привода шагания А4Ш определяется так:
2о по
(4.58)
I — 1 i—zo+l
Если используется привод, обеспечивающий постоянную
скорость на этапе отталкивания и на этапе переноса, то с уче-
том уравнения (4.1) при йп=0 имеем
Upj = ?о
uoi Zq
Тогда с учетом (4.30), (4.35), (4.36), (4.38), (4.55), (4.58) и
(4.59) момент на тяговом приводе шагания определяется выра-
жением
(4.59)
КОЛЁСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
175
Мш = G cos а I —-—
Пш ?+1
[/о + /- (Фо-Ф) (j- - 1)] + AAV
₽ (4.60)
Мощность привода шагания Nm определяется выражением
А/ш = А1шсоп.ш. (4.61)
Тогда, учитывая, что а>п.ш=и>°ш/ио, выражение можно
записать в виде
G cos асо°/у rrt л /г \ 1
=----Г-Г7Г /о + / - (Фо - Ф) ( --1 ) I Ж.А.Ш. (4.62)
Пш(т+1) L \гр J1
либо, учитывая (4.32) и (4.51), для режима движения, когда
отталкиваемые колеса не вращаются, т. е. (0°; = 0, имеем
GcosarcOn.K Г f У \ l ( гъ 1
' о : । I ( ; г-
Лш I Y + 1 \ г у + 1
— (*т + tga — ф) ( 1 — + Д/%,
\ r J J
(4.63)
где ДМп — дополнительная мощность.
Анализируя выражение мощности привода шагания в колес-
но-шагающем режиме движения можно сделать следующие
выводы: мощность привода шагания определяется, в основном,
сопротивлением качению отталкиваемых и переносимых колес,
причем, чем больше производительность шагания у, тем больше
загрузка привода шагания; при увеличении отношения гР/г при-
вод шагания незначительно загружается моментом от переноси-
мых колес и несколько разгружается силой тяги на крюке Z?T и
составляющей веса на уклоне G sin а; составляющие, определя-
ющие АМщ, в общем случае имеют знакопеременный характер и
в сумме могут приближаться к нулю, однако в кинематической
цепи привода вызывают дополнительные потери.
Оценим загрузку привода вращения колес в колесно-шагаю-
щем режиме. Суммарный момент на колесах определяется выра-
жением
2о "о
~ Рzi^ei "Г
1 Z0+1
176
передвижение по грунтам луны и планет
Учитывая (4.1) (при &п=0), (4.32) и (4.36), имеем
Мн = G cos ar (ki + tg а--) • (4.64)
При использовании привода вращения колес с центральной
раздачей или индивидуальных приводов с жесткой характерис-
тикой мощность привода вращения колес NK определяется так:
JV, - ° (k, + tg а----. (4.65)
Т]к \ Т+1 J
Анализируя выражение (4.65), можно сделать следующие
выводы: привод вращения колес загружен в основном силой тя-
ги на крюке и составляющей веса на уклоне G sin а; при уве-
личении производительности шагания уменьшается загрузка
привода от сопротивления качению переносимых и отталкивае-
мых колес. Так, при у = 0 (колесный режим) из (4.65) имеем
АГИ = Gcosara>n.K + tga + д (4.66)
Пк
а приу->оо (шагающий режим) NK=G cos pT + tga—/0)Л1к-
Действительно, как следует из уравнения (4.10), при у->оо
«б=0 при любых Sjo, т. е. переносимые колеса перемещаются
как толкаемые от привода шагания, а силы сопротивления ка-
чению отталкиваемых колес, реализуемые приводом шагания,
обеспечивают создание полезной тяги. Все это и объясняет раз-
грузку привода вращения колес при увеличении производитель-
ности шагания.
Таким образом, из (4.63) и (4.65) следует, что мощность
привода шагания идет, в основном, на преодоление сопротивле-
ния качению колес, а мощность привода вращения колес — на
реализацию полезной силы тяги.
Общая потребная мощность в колесно-шагающем режиме с
учетом (4.63) и (4.65), если Яш—т)к=т]> запишется в виде
АГК.Ш = _G рт 4- f 4- tg'a 4- <р /2-------П 4. ДдЫ. (4.67)
П 1 \гр J J
Таким образом, в колесно-шагающем режиме (4.67), так
же как и в колесном (4.66), мощность потребляется, в основном,
на преодоление внешних сил сопротивления (&T+f+tga). Кро-
ме того, колесно-шагающему режиму присущи дополнительные
затраты энергии, вызванные несогласованностью приводов ша“
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
177
гания и вращения, а также внутренними потерями в приводе
шагания.
Дифференциальная схема привода [4]. Проводя аналогич-
ные рассуждения, мощность привода шагания определим выра-
жением
лгш = Gco^°;v (А, + % + / - Ф) + длгш. (4.68)
Т]ш (т+ 1)
Выводы по загрузке тягового привода шагания для диффе-
ренциальной схемы (4.68) такие же, как и для интегральной
(4.65). Разница в загрузке пропорциональна величине (ф—
—Фо)г/гР.
Загрузка привода вращения колес определяется выражени-
ем
лг г («о —zo)rqxa^
JvK = G cos a----------. (4.69)
«оЧк
Принимая допущение, что 'Пш=т]к=11> а также учитывая, что
₽ (у+ 1) ’
потребляемую мощность в колесно-шагающем режиме можно
записать в виде
= Geos+ Z +1 + ф + Д^ж. (4.71)
n L VP /J
Выражение (4.71) отличается от (4.67) только слагаемым
ДЛГШ.
4.5.2. Прерывные походки. Схемы привода, применяемые для
прерывных походок [49], предполагают наличие одного тяго-
вого привода, а вращение и шагание колеса осуществляются с
помощью специального блокирующего механизма, выполненно-
го в соответствии с кинематикой колесно-шагающего движите-
ля.
При использовании прерывных походок в соответствии со
способом передвижения происходит разделение функций прео-
доления сопротивления движению: на деформацию грунта и ре-
ализацию полезной силы тяги. Так, на этапе переноса колеса его
тяговый привод загружен в основном силой сопротивления пе-
ремещению колеса, соответствующей скорости Упш и кинематике
12 Зак. 826
178
ПЕРЕДВИЖЕНИЕ по грунтам луны и планет
перемещения, определяемой зависимостью (4.11). Тогда потреб-
ная мощность на перенос i-го колеса
(472)
где — дополнительная мощность, имеющая тот же физичес-
кий смысл, что и в (4.63).
На этапе отталкивания колес или переноса корпуса
No = GM cos a (kT + tg а) + ATV0, (4.73)
где GM— вес перемещающейся части машины.
Ввиду того, что 1/°ш и Упш взаимонезависимы, а этапы пере-
мещений осуществляются последовательно, потребляемая мощ-
ность может быть значительно меньше, чем в случае непрерыв-
ных походок. Однако следует иметь в виду, что при прерывных
походках средняя скорость передвижения более чем в п0 раз
меньше, чем при непрерывных походках (при тех же скоростях
перемещения колес).
На рис. 4.17 представлены расчетные зависимости коэффици-
ентов загрузки тяговых приводов kN для интегральной схемы,
которые определялись по уравнениям (4.62), (4.65)...(4.67) при
следующих исходных данных: АА7ш = 0; у=5: г = гр; а = 0 по за-
висимости kN = ^Y]/GcosaVK. Из представленных результатов
следует, что в колесно-шагающем режиме привод вращения
колес (кривая 5) менее загружен, чем в колесном (кривая 7), а
привод шагания (кривая 2) более загружен, чем колесный (кри-
вая 3). Этот факт указывает
на то, что переход на колесно-
шагающий режим должен про-
изводиться не только в слу-
чае существенного увеличения
буксования колес, но и при
перегрузке тягового привода
вращения колес в колесном
режиме.
Рис. 4.17. Расчетные зависимости ко-
эффициента мощности kN, потребля-
емой приводами КШД от коэффици-
ента тяги kT:
1 — общая потребляемая мощность; 2 —
мощность, потребляемая приводом ша-
гания; 3 — мощность, потребляемая при-
водом вращения колес
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
179
4.6. Структура энергозатрат
Эффективность любого движителя наиболее пол-
но отражается величиной энергозатрат, потребных на преодо-
ление внешних сил сопротивления движению.
Оценку эффективности проведем по коэффициенту удельных
энергозатрат fn
- —
п G cos aS
(4.74)
где Ап — работа внешних сил сопротивления по пути S.
4.6.1. Колесный режим. В колесном режиме работа тратится
на преодоление сопротивления грунта Дг, буксование Лб и пре-
одоление уклонов А а [3]:
Аг = Geos aS;
Аб = Geos aS (kT + tga + /)s6/(I — s6); (4.75)
Aa = G sin aS.
Тогда приведенный коэффициент fn удельных энергозатрат
(показатель эффективности) для колесного режима равен
f + tg a + ^т5б (4
1 — «б
4.6.2. Колесно-шагающий режим. В колесно-шагающем ре-
жиме работа затрачивается на деформацию грунта Дг, буксо-
вание переносимых колес А$, юз отталкиваемых колес Аю и на
преодоление уклонов Да. Оценку энергозатрат проведем для ре-
жима движения, когда отталкиваемые колеса не вращаются
(6п = 0) (4.1), используются механизмы шагания, обеспечиваю-
щие постоянную скорость переноса и отталкивания, а движе-
ние соответствует условию (4.35).
Непрерывные походки. Работа буксования Лб переносимых
по
колес на пути SM (4.4) определяется выражением Дб=2^21ФсЛук,
где 5буК = 5бгшттн/сп — путь буксования переносимого колеса за
один цикл; сопк — угловая скорость колеса на этапе переноса;
tn — время этапа переноса. Тогда, учитывая, что шаг относи-
тельно корпуса машины (см. рис. 4.2) 5К = /П(опш^ где шпш— уг-
ловая скорость условного звена I механизма шагания на этапе
переноса, из (4.4) и (4.70) имеем 5бУк = 5мг5б/(1—5ю)гр. Тогда
12*
180
ПЕРЕДВИЖЕНИЕ по грунтам луны и планет
работа буксования переносимых колес определяется выраже-
нием
Лб = G cos aSMcp . (4.77)
Гр (1—8Ю)
Работа юза отталкиваемых колес определяется выражением
Яю = 2 \ Pzik°tdS10. Учитывая уравнения (4.4),
1=1 'о
(4.2), (4.36), (4.38) и (4.41), имеем
Лю = GcosoSXp ---J л---------Г • (4-78)
(Y+1)(1—«ю)
Работа на деформацию грунта Лг переносимыми колесами
с учетом (4.4) и (4.2) определяется выражением
Лг = GcosaSJ-----^-1~S|°—. (4.79)
(7+l)(l_Sl0)
Работа на преодоление уклонов
Ла = G sin aSM. (4.80)
Определим суммарную работу (Лб+Лю), обусловленную
кинематическим проскальзыванием элементов движителя отно-
сительно грунта. Тогда из (4.10), (4.32), (4.77) и (4.78) имеем
Лб + Лю = GcosaSM[——2— (--------1W
L 1 — slo \ гр /
+ /ю (4 + tga+—^-)1.
1— $ю \ т+l /J
Если сравнить это выражение с подобными энергозатратами
для колесного режима (4.75), то оказывается, что в колесно-ша-
гающем режиме влияние сопротивления качению на энергозат-
раты в (у+1) раз меньше, чем в колесном.
С учетом всех составляющих (4.38), (4.77)...(4.80) коэффи-
циент удельных энергозатрат в колесно-шагающем режиме дви-
жения в случае использования фазной непрерывной походки
определяется выражением
фс ( 7“ - 0 + Мю + f + tg a + —У . — k° ф) sro
fn=------------------------------------------------, (4.81)
1 SK)
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
181
а в случае использования равномерной непрерывной походки —
Фс ( — 1 ) + ^TSfO + f + tg а
/п =----Vp-----Z---------------. (4.82)
1 —5Ю
Из (4.81) и (4.82) следует, что в колесно-шагающем режиме
на сколько меньше потери энергии на кинематическое прос-
кальзывание элементов движителя относительно грунта из-за
сопротивления качению, настолько же они увеличиваются по
сравнению с колесным режимом вследствие повторной дефор-
мации грунта переносимыми колесами на пути юза; затраты
энергии от внешних сил сопротивления определяются по фор-
муле такой же структуры, как и для колесного, однако колес-
но-шагающему способу передвижения присущи дополнительные
затраты, определяемые кинематикой привода; кроме того, энер-
гозатраты пои Фазной и равномерной походках различны.
Прерывные походки. Работа буксования Аб переносимых
колес на пути SM (4.8) определяется выражением
по
= У ^ггФсг^бук.
Д=1
Учитывая, что 5бук=5бгсопк/п, из (4.7), (4.30) и (4.80) работа
буксования определяется так:
4
ГрУ
= G cos a<pSM
/•(?+!)
Зю
У
(4.83)
Работа юза с
в виде
1 7 s‘°
учетом уравнений (4.7), (4.8) и (4.30) записывается
по
5ю
( P^Sro = Gcos<<pSM--------------------. (4.84)
J V + 1
о 5Ю
У
Работала деформацию грунта с учетом уравнений (4.7), (4.8) и
(4.30) определяется выражением
по
4 = Pztfi^o = G cos a/SM —
1
У
(4.85)
5Ю
У
182
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Работа на преодоление уклонов
Аа = G sin aSM. (4.86)
Тогда общие удельные энергозатраты на передвижение с
учетом (4.11), (4.32), (4.37), (4.38), (4.83)...(4.86) в случае ис-
пользования фазной прерывной походки определяются выраже-
нием
<Рс f — — I5) + f + tg а + 1 k,lSlo + p — 6° ф) 5Ю
/п = —Vp--------L---------------. (4.87)
I, .?+ 1 s
1 дю
V
а в случае использования равномерной прерывной походки —
/ г \ у 4- 1
Фс ( — 1 + f + tg а + ^тхю
/п = —------------------- --------1--------; (4.88)
На рис. 4.18 представлены расчетные зависимости коэффи-
циента удельных энергозатрат fn на работу внешних сил сопро-
тивления передвижению от коэффициента тяги kT в колесном и
колесно-шагающем режимах при различных походках. Как сле-
дует из представленных результатов, эффективность передви-
жения в существенной степени зависит от параметров шагания
и используемых походок. Так, при производительности шагания,
близкой к единице, эффективней фазная походка, а при боль-
шей единицы — равномерная. При равных параметрах шагания
Рис. 4.18. Расчетные зависимости ко-
эффициента удельных энергозатрат
fn на работу внешних сил сопротив-
ления движению КШД от коэффици-
ента тяги k? в колесном (кривая 1)
и колесно-шагающем (кривые 2...8)
режимах:
2 — фазная прерывная походка; 3 — рав-
номерная непрерывная, у=1; 4— фазная
непрерывная; 5 — равномерная прерыв-
ная, у=5; 6 — равномерная непрерывная,
у=5; 7 — равномерная непрерывная, ре-
жим след в след, т=5; 8 — равномерная
прерывная, у—5; пассивные колеса
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
183
непрерывные походки всегда эффективнее прерывных, особенно
при низкой производительности шагания. Неоптимальное кон-
струирование КШД, например использование несвязанной схе-
мы привода или движения с пассивными колесами (см. рис. 4.18,
кривая S), даже при максимальной производительности шагания
(у = 5), может привести к тому, что в колесно-шагающем режи-
ме передвижение менее эффективно, чем в колесном (кривая/)'.
4.6.3. Шагающий режим. Проводя аналогичные рассужде-
ния, а также учитывая, что в шагающем режиме работа тратит-
ся на юз опор, псевдоциклическое прессование грунта опорами
при каждом шаге и на преодоление уклонов, с учетом (4.1),
(4.2), (4.4), (4.8) и (4.34), удельные энергозатраты можно оп-
ределить так:
равномерная непрерывная походка
г _ /г + *?.р-М1-5ю)
/п 1
1 SIO
фазная непрерывная походка
f _ fr + А?.ф + (*?. р - *?. ф) «ю - (1 - М
/п .
1 $ю
равномерная прерывная походка
fr + *°p-*T fl — 8Ю
f ________ 4__________Y
(4.89)
(4.90)
(4.91)
фазная прерывная походка
f Л- + *°ф + 2(^.р-6°ф)з1О-М1
1—25,0
Коэффициент fr, определяющий затраты энергии на псевдо-
циклическое прессование грунта, можно определить так [49]:
fen.x" f G \1/U
SIt (p+ 1) kG G \ z0Bc J
(4-93)
где p и c — параметры грунта, &п.х и &с.с — коэффициенты, ха-
рактеризующие используемую походку; В — характеристика
опоры механизма шагания.
184
передвижение по грунтам луны и планет
На рис. 4.19 представлены расчетные зависимости коэффи-
циента удельных энергозатрат /п от коэффициента тяги КШД в
шагающем режиме при различных походках. Как следует из
представленных результатов, влияние параметров шагания в
шагающем режиме более существенно, чем в колесно-шагаю-
щем; так, в колесно-шагающем режиме выбор оптимальных па-
Рис. 4.19. Расчетные зависимости ко-
эффициента удельных энергозатрат
/п на работу внешних сил сопротив-
ления движению КШД от коэффици-
ента тяги kT в шагающем режиме
при различных походках:
/ — равномерная прерывная, у=2; 2 —
равномерная прерывная, т = 5; 3 — равно-
мерная непрерывная, “у = 5; 4 — фазная
прерывная; 5 — фазная непрерывная; 6 —
фазная непрерывная, режим след в след;
7 — граница зоны эффективности колесно-
шагающего режима
раметров шагания обеспечивает Д£т = 0,2, а в шагающем —
Д£т = 0,6. Использование фазных походок обеспечивает более
эффективное передвижение, чем при равномерных походках, а
непрерыное передвижение всегда более эффективно, чем пре-
рывное, и, что самое главное, лишь использование фазных не-
прерывных походок в шагающем режиме обеспечивает более
эффективное передвижение, чем в колесно-шагающем режиме.
Проведенные исследования КШД показывает, что он имеет
большие потенциальные возможности по проходимости в случае
его оптимального проектирования. Это относится к выбору гео-
метрических и конструктивных параметров движителя, схемы
привода и параметров шагания. При этом в колесно-шагающем
режиме обеспечивается эффективность передвижения, прибли-
жающаяся, а в некоторых случаях и превосходящая, шагаю-
щий режим, т. е. условный предельный режим, к которому стре-
мятся проектировщики транспортных систем. Эксперименталь-
ные исследования полноразмерных макетов с КШД показали,
что в колесно-шагающем режиме он способен преодолевать ук-
лоны с сухим кварцевым песком вплоть до угла естественного
откоса. При этом, по сравнению с колесным, уменьшалось спол-
зание на косогорах, увеличивались профильная проходимость и
КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
185
средняя скорость передвижения, уменьшалось энергопотребле-
ние.
КШД имеет большие возможности по увеличению бортовой
поворотливости: так, при использовании комбинированного спо-
соба поворота (минимальная база, ускоренное перемещение
крайних опор, средние опоры в колесно-шагающем, а крайние в
колесном режимах) обеспечивается эффективность поворота
на уровне гусеничного движителя.
Однако следует иметь в виду, что КШД, по сравнению с ко-
лесным, требует определенного усложнения конструкции, растет
масса движителя. Повышаются требования к системе управле-
ния движением. Комплексный учет всех этих факторов и явля-
ется определяющим в выборе движителя. Однако наличие в
КШД простого и надежного, но имеющего определенные огра-
ничения по проходимости, колесного и резервного колесно-шага-
ющего режимов (а иногда и шагающего) обеспечивает улучше-
ние характеристик передвижения, делает его весьма подходя-
щим для использования в качестве движителя планетоходов.
Очевидна целесообразность использования КШД и для земных
транспортных средств высокой проходимости для работы в
сложных грунтовых и рельефных условиях, и особенно в местах,
труднодоступных для человека.
5 МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
И ХОДОВЫЕ ИСПЫТАНИЯ
ПЛАНЕТОХОДОВ
Рассмотренные в первых трех главах книги ха-
рактеристики грунта и взаимодействия с ним одиночных колес,
имея самостоятельное значение, в то же время могут быть ис-
пользованы для разработки математических модёлей колесно-
го планетохода в целом. Для планетохода с КШД подобные
модели могут быть разработаны на базе материалов, изложен-
ных в гл. 4 и в работе [49].
5.1. Основные предпосылки
Математические модели предназначены для ре-
шения взаимосвязанных задач оптимизации свойств планетохо-
да и прогнозирования его поведения в процессе эксплуатации.
В первом случае варьируют параметры планетохода при моде-
лировании его движения на некоторых однотипных трассах.
Во втором случае выявляют особенности движения заданной
конструкции при изменении внешних условий ее эксплуатации.
При этом наиболее универсальными являются динамические
модели, позволяющие получить характеристики системы мест-
ность— машина в функции времени. Такие модели могут быть
преобразованы в более простые, предназначенные для анализа
частных режимов движения. Результаты расчетов могут быть
интерпретированы на экране дисплея в виде скелетного графи-
ческого изображения планетохода, движущегося в реальном
масштабе времени.
Работа исследователя с ЭВМ в диалоговом режиме, нагляд-
ное представление движения планетохода на экране дисплея —
все это является своеобразным аналогом ходовых испытаний
планетоходов. Сильной стороной расчетных методов исследова-
ний является отсутствие принципиальных органичений пределов
варьирования как собственных параметров машины, так и пара-
метров, характеризующих условия ее эксплуатации (гравитаци-
онное поле, физико-механические свойства грунта, рельеф мест-
ности и т. п.).
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
187
Ходовые испытания также дают широкие возможности ис-
следования влияния свойств местности на характеристики дви-
жения планетоходов. Это обеспечивается путем создания искус-
ственных трасс и выбора естественных полигонов, аналогичных
по рельефу и физико-механическим свойствам поверхностям Лу-
ны и планет. Имеются также некоторые возможности изменения
отдельных параметров планетохода, таких, например, как мас-
са, моменты инерции, база, однако в целом возможности пере-
бора вариантов конструктивного исполнения систем и их пара-
метров весьма ограничены. Сложной задачей является имитация
гравитационного поля Луны и планет.
Однако ходовые испытания незаменимы для комплексной
экспериментальной отработки конструкции планетохода, опре-
деления его тягово-сцепных характеристик и оценки корректно-
сти математических моделей. Естественно, что наиболее обшир-
ную и достоверную информацию о свойствах планетохода мож-
но получить при правильном сочетании методов физического
и математического моделирования.
Методы математического моделирования планетоходов наи-
более последовательно изложены в книге «Динамика плането-
хода» [30], где приведены результаты исследования устойчи-
вости движения, колебаний и тяговой динамики.
Главными внешними факторами, влияющими на устойчивость
и колебания планетохода, являются гравитационное поле Луны
и планет и неровности рельефа. Поэтому соответствующие мо-
дели, главным образом, используются для изучения особеннос-
тей движения с детальным учетом этих факторов, а также ха-
рактеристик подвески, скоростных и тормозных характеристик
тягового привода, геометрических и массовых параметров пла-
нетохода.
При решении задач тяговой динамики планетохода в указан-
ной книге рассматривается прямолинейное движение и борто-
вой поворот на наклонной опорной поверхности. Важнейшее
значение имеет при этом учет ее физического состояния. Допу-
щение об отсутствии проскальзывания приводных колес, обыч-
но принимаемое при моделировании движения наземных машин,
приводит к искажению реальной картины движения планетохода
на слабых грунтах [29, 30, 43]. Поэтому в работе [30] при-
нята другая физическая посылка: в общем случае движения
многоприводного планетохода работа каждого колеса характе-
ризуется индивидуальным скоростным и силовым режимами,
включая продольное и поперечное скольжение колес. При этом
188
передвижение по грунтам луны и планет
традиционное уравнение связи вращающихся масс колеса и пос-
тупательно движущейся массы машины, выражаемое формулой
V=G)KrK, оказывается непригодным. Это приводит к задаче ди-
намики системы с неголономными связями и исключает ее при-
ведение к одномассовой модели с непосредственным редуциро-
ванием тяговых усилий двигателя к корпусу планетохода. Реше-
ния дифференциальных уравнений движения получены с исполь-
зованием нелинейных функций, связывающих коэффициенты
сопротивления качению, удельной тяги и сопротивления боково-
му сдвигу с величиной относительного скольжения колес.
Разработанная на основе изложенных посылок пространст-
венная многомассовая динамическая модель планетохода позво-
лила раскрыть при моделировании особенности физической кар-
тины движения аппарата на сыпучих грунтах; оценить коли-
чественно влияние свойств грунта, уклона опорной поверхности,
гравитационного поля на разгонные, тормозные, тягово-скорост-
ные, энергетические характеристики; оценить перераспределение
тяговых усилий по колесам, искажения траектории прямолиней-
ного движения в результате курсового увода и бокового сноса.
Рассмотрена также динамика планетохода при повороте на ук-
лоне и некоторые вопросы равномерного поворота.
В развитие этих исследований ниже рассматривается дина-
мическая модель планетохода с колесно-шагающим движителем.
Модель описывает один из вариантов конструктивного испол-
нения машины, включая тяговый привод, механизм шагания и
ходовую часть, и предназначена для изучения прямолинейного
движения машины в колесном и колесно-шагающем (прерывные
походки) режимах по трассе произвольного профиля [27]. Рас-
сматривается также вариант модели колесного планетохода,
предназначенной для анализа процесса равномерного бортового
поворота на ровной горизонтальной площадке.
Вопросы физического моделирования планетоходов рассмот-
рены в книгах [2, 49], где обоснованы критерии подобия и да-
ны масштабы моделирования. В данной главе дано краткое опи-
сание и некоторые результаты ходовых испытаний частично по-
добных макетов, являющихся одним из видов физических моде-
лей. По геометрии, характеристикам привода и подвески эти
макеты соответствуют оригиналам, а их масса и координаты
центра масс выбраны из условия равенства нормальных реак-
ций на опорах планетохода в наземных условиях и при эксплу-
атации. При этом масса макета связана с массой планетохода
соотношением
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
180
/Пм ^пл^пл/^з» (5«1)
где тпл, тм— массы планетохода и его макета; £з, £пл — уско-
рения свободного падения на Земле и в месте предполагаемой
эксплуатации.
Использование таких макетов позволяет достаточно точно
воспроизвести статические режимы движения планетохода без
использования разгружающих устройств и отработать конструк-
цию штатных узлов.
5.2. Динамическая модель планетохода
с колесно-шагающим движителем
5.2.1. Описание и характеристики узлов и меха-
низмов планетохода. Физическим аналогом рассматриваемой в
настоящем подразделе динамической модели является плането-
ход с колесной формулой 6X6. Как показано в книге [30] и
разд. 5.3 настоящей книги, такая колесная формула имеет су-
щественный выигрыш по поворотливости по сравнению с четы-
рехколесной машиной. Эффективность бортового поворота мож-
но еще несколько увеличить применением восьмиколесного дви-
жителя. Однако это неизбежно связано с уменьшением диаметра
колес, так как база планетохода, определяемая условиями его
компоновки внутри спускаемого аппарата, остается неизменной.
Уменьшение диаметра колес, как известно, снижает проходи-
мость. Кроме того при этом затрудняется размещение механиз-
мов колесно-шагающего движителя во внутреннем объеме коле-
са. Имеются и другие соображения в пользу шестиопорной ша-
гающей машины.
Планетоход может двигаться в основном колесном режиме
(КР) и, при необходимости, в резервном колесно-шагающем ре-
жиме (КШР). При этом во втором случае реализуются только
прерывные походки, а в первом возможно регулирование отно-
сительного положения колес и корпуса по вертикали. И реали-
зация заданной походки, и регулирование по вертикали осу-
ществляются с помощью механизмов шагания (МШ), встроен-
ных вместе с электромеханическими проводами во внутренней
полости каждого колеса.
Механизм шагания. Схема, поясняющая работу МШ в ре-
жимах шагания и регулирования по вертикали, приведена на
рис. 5.1. Из рисунка видно, что реализация обоих режимов осу-
ществляется путем включения привода на этапе переноса кор-
190
передвижение по грунтам луны и планет
пуса, когда скорость вращения колес <оКг = О, где i=l, 2, .... и;
п — число колес движителя [34, 46]. Модуль скорости переме-
щения корпуса также определяется единой формулой
yK=2/psinp, (5.2)
где I — плечо рычагов МШ; р — угол поворота первого рыча-
га МШ.
Рис. 5.1. Схема работы механизма шагания в колесно-шагающем режиме (а)
и в режиме регулирования положения колес и корпуса по вертикали (б):
/ — корпус планетохода; 2 — реактивная тяга подвески; 3 — качающийся рычаг под-
вески; 4 — корпус тягового привода КШД; 5 — первый рычаг АШ; 6 — второй рычаг
МШ; 7 — колесо; 8 — направляющая, связывающая реактивные рычаги подвески
Для перемещения корпуса или колес по вертикали привод
вместе с рычагами МШ необходимо развернуть на 90° и зафик-
сировать в новом положении. Это может быть выполнено с по-
мощью управляемой муфты, встроенной между корпусом при-
вода и реактивным рычагом [20], а также с помощью специ-
альной конструкции подвески, схема которой приведена на
рис. 5.1. В последнем случае один из двух реактивных рычагов
подвески, связанных криволинейной направляющей, поочередно
соединяется с реактивной тягой 2, фиксируя корпус привода от-
носительно корпуса машины. При разрыве этого соединения ос-
вободившийся конец тяги удерживается направляющей, центр
дуги которой совпадает с осью вращения первого рычага МШ.
На кинематической схеме привода оба варианта устройства
фиксации могут быть представлены в виде управляемого тормо-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
191
за, связывающего привод с корпусом машины или разрываю-
щего эту связь.
Разворот привода осуществляется в автоматическом режи-
ме при стоянке транспортного средства. При этом предвари-
тельно необходимо привести рычаги МП! в положение, при ко-
тором ось колеса совпадает с осью вращения первого из них
(рычаги сложены), и выключить упомянутый тормоз, разорвав
его связь с корпусом планетохода. Если затем на привод подать
команду для работы в колесном режиме, корпус будет развора-
чиваться относительно общей оси первого рычага и колеса под
действием реактивного крутящего момента
(5*3)
где — крутящий момент на валу двигателя привода; ик —
суммарное передаточное отношение колесного редуктора. Пос-
кольку разворот осуществляется поочередно для каждого из
приводов многоколесного движителя при заторможенных (м—1)
колесах, положение машины в процессе разворота не изменяет-
ся даже при стоянке на уклоне.
Команды на регулирование относительного положения колес
и корпуса по вертикали могут быть даны либо одновременно
на все приводы движителя, либо раздельно на приводы колес
противоположных бортов, либо индивидуально на каждый из
приводов. В первом случае регулируется дорожный просвет под
днищем, во втором — крен корпуса. Комбинируя последователь-
ность включения индивидуальных приводов, полярность рабо-
ты их двигателей и углы поворота рычагов МШ, можно регу-
лировать дифферент корпуса, приподнимать отдельные колеса
для лучшего преодоления выступающих препятствий, опускать
их при съезде с них.
Кинематическая схема привода изображена на рис. 5.2.
При ее синтезе за основу принята схема колесно-шагающего
механизма с частичной блокировкой [49]. Развитие базовой
схемы осуществлялось в следующих направлениях: обеспечение
управляемого размыкания и замыкания связи корпуса привода
с корпусом машины; обеспечение возможности выноса колеса
при его малом сцеплении с грунтом или даже при отсутствии
контакта колеса с опорной поверхностью; снижение потерь
мощности в замкнутом контуре в зацеплениях и опорах механиз-
ма.
Первая задача решается путем установки управляемого тор-
моза Т4, о чем говорилось выше. Рассмотрим возможные пути
192
Передвижение по грунтам луны и планет
решения второй задачи, представив рис. 5.2 в виде упрощенной
структурно-кинематической схемы (рис. 5.3). При замкнутых
тормозах Т3 и Т4 получаем базовую схему блокирующего меха-
низма, обеспечивающего дифференциальный привод колеса на
этапе его выноса. Такой привод дает существенный положитель-
Рис. 5.2. Схема КШД с тремя управляющими тормозами блокирующего меха-
низма:
1, 12 — первый и второй рычаги МШ; 2 — стакан, жестко связанный с корпусом при-
вода, 3, 18, 19 — звенья первого планетарного ряда блокирующего механизма; 4—ре-
дуктор шагания; 5, 6, 16 — звенья второго планетарного ряда (.блокирующего механиз-
ма; 7, 9, 20 — управляющие тормоза блокирующего механизма; 8, 10, // — звенья ко-
лесного редуктора, встроенного в стакан; 13 — колесо; 14, 15 — цепные передачи с
передаточным отношением м=1, встроенные в первом и втором рычагах МШ; 17 — сум-
мирующая передача; 21 — корпус планетохода; 22 — электродвигатель
ный эффект, например, при преодолении выступающих препят-
ствий, так как с ростом момента сопротивления качению колеса
увеличивается и толкающее усилие. Однако при малом сцепле-
нии колеса с грунтом возможность выноса его становится проб-
лематичной, а при потере контакта (например, в результате за-
висания опоры над рвом) движение колеса вовсе исключается.
Получим условие выноса колеса, рассмотрев схему внешних
сил, действующих на него (рис. 5.4), и приводя эти силы с уче-
том всех видов потерь к звеньям блокирующего механизма при
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
193
Рис. 5.3. Структурно-кинематическая схема привода КШД:
/ — тяговый электродвигатель; 2 — планетарный ряд блокирующего механизма; 3 —
редуктор шагания; 4 — колесный редуктор
замкнутых Т3 и Т4. Для вращения рычагов МШ в этом случае
необходимо, чтобы выполнялось условие (см. рис. 5.3)
(5.4)
где k — внутреннее передаточное отношение планетарного ряда
блокирующего механизма; А1к?— тяговый крутящий момент
на колесе, приведенный к водилу блокирующего механизма;
Л1р? — момент сопротивления вращению первого рычага от
действия внешних сил и сил трения, приведенный к эпициклу
этого механизма.
Преобразуя это неравенство, записанное без учета незначи-
тельных потерь в самом блокирующем механизме, получим
фс >-------— (m's sin ап2/ sin ₽ + MN 4- MF), (5.5)
где иш — суммарное переда-
точное отношение редуктора
шагания; т]к, Лш—КПД ко-
лесного редуктора и редукто-
ра шагания в относительном
движении; т'— масса отдель-
ного колесно-шагающего ме-
ханизма с учетом массы коле-
са; MNi MF — моменты потерь
от замкнутой мощности, воз-
13 Зак. 826
Рис. 5.4. Схема приведения внешних
сил к механизму шагания при выно-
се колеса на подъеме
194
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
пикающие от действия на колесо соответственно нормальной
реакции и крутящего момента, приведенные к первому рычагу.
Расчеты показывают, что в зависимости от массы КШД и
его внутренних потерь величина фс, необходимая для уверенно-
го выноса колеса на подъемах, составляет 0,3...0,6, что не всег-
да может быть обеспечено в реальных условиях движения. Для
повышения проходимости планетохода в рассматриваемом режи-
ме необходимы раздельные приводы рычагов МШ и колеса, вза-
имодействующие с помощью какого-либо согласующего устрой-
ства. Краткое описание и некоторые результаты испытаний ма-
кета с подобными приводами приведены подразд. 5.4.1. Рассмат-
риваемый в настоящем разделе вариант планетохода имеет еди-
ный привод рычагов МШ и колеса. Поэтому уверенный вынос
колеса здесь можно обеспечить путем исключения одной из двух
степеней свободы блокирующего механизма.
В принципе возможны два варианта решения последней за-
дачи: привод колеса при пассивном МШ либо привод рычагов
МШ при пассивном (свободно катящемся) колесе. Однако ана-
лиз показывает, что первый вариант неприемлем, так как реали-
зация режима выноса колеса здесь также связана с наличием
сцепления колеса с грунтом. Опуская промежуточные формулы,
условие выноса колеса можно с некоторыми допущениями за-
писать в этом случае в виде неравенства
Фс > ctg Р ——
4"
2Rzil sin P
(5.6)
где mp— масса рычагов Mill co встроенными в них узлами при-
вода, приведенная к оси сочленения рычагов.
Из неравенства видно, что полное раскрытие рычагов невоз-
можна, так как при р->-0 потребная величина фс-*°°. Обратим
также внимание на то, что в неравенства (5.5) и (5.6) не входят
параметры двигателя.
Рассмотрим второй вариант получающийся замыканием тор-
мозов ?! и Т4 и размыканием тормозов Т2 и Т3 (см. рис. 5.3).
Вследствие разрыва кинематической цепи колесного редуктора
разрывается и замкнутый контур от действия крутящего момен-
та, так что А!р=0. Однако при этом необходимо учитывать мо-
мент потерь холостого хода Мкх в зацеплениях и опорах части
колесного редуктора, размещенной за фрикционом Т3. Условие
выноса колеса на ровной площадке определяется при этом
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
195
только параметрами двигателя и редуктора шагания и не зави-
сит от сцепления движителя с грунтом, т. е.
Mai > —-—(MN + + 7?zi/T2/sin р +/n'gsinan2/sin0), (5.7)
где fi — коэффициент сопротивления качению толкаемого (не-
приводного) колеса.
При отсутствии контакта колеса с грунтом MN=MX=RZ=O,
и режим работы двигателя определяется только массой КШД,
углом подъема и положением рычагов МШ
MKi > —5— m'g sin 0^2/ sin 0. (5.8)
Получим теперь выражения для определения MN и Мр и
рассмотрим пути снижения потерь мощности в замкнутом кон-
туре. Причина образования замкнутых контуров при работе в
колесно-шагающем режиме заключается в передаче через за-
цепления и опоры суммирующего редуктора, а также через часть
зацеплений и опор колесного редуктора и редуктора шагания
внутренне уравновешенных моментов от действия на колесо
нормальной и касательной реакций грунта.
Первый контур, от действия RZi, включает в себя только
суммирующий редуктор (рис. 5.5). Величина мощности в замк-
Рис. 5.5. Схема для определения мощности замкнутого контура в суммирую-
щем редукторе от действия нормальной реакции грунта:
а — схема механизма шагания; б — схема замкнутого контура; / — первый рычаг МШ;
2, 3, 4 — большая шестерня, сателлит, малая шестерня суммирующего редуктора; 5 —
второй рычаг МШ; 6 — колесо;---------замкнутая мощность; ------- мощность по-
терь
13*
196
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
нутом контуре приведенная к первому рычагу МШ, определяет-
ся в движении относительно этого рычага
АГ = /?zf/cosp (0 —02), (5.9)
где 02 — угловая скорость второго рычага МШ. Пооскольку для
рассматриваемого МШ р2 =—р, то
N' =2^f/pcosp, (5.10)
а момент потерь в этом контуре равен
MN = — (1 — if) =2/?zi/cosa(l — if), (5.11)
Р
где т)' — результирующий КПД замкнутого контура в относи-
тельном движении.
Исключить этот контур нельзя, однако величину потерь в
нем мож^о уменьшить путем уменьшения количества опор и за-
цеплений суммирующего редуктора и повышения их собствен-
ных КПД. Можно рекомендовать, в частности, применение в ка-
честве суммирующего редуктора цепной передачи, также обеспе-
чивающей условие Р2 =—Р, но исключающей паразитные за-
цепления.
Второй контур от касательной реакции упомянутой выше ба-
зовой схемы привода является разветвленным. Зацепления и
опоры базовой схемы, через которые замыкается контур, при-
ведены на рис. 5.6, а. Внутренне уравновешенный момент, пе-
редаваемый через эти зацепления и опоры, приведенный ко вто-
рому рычагу МШ, определяется выражением
M2^—i^=lLRzi^trK, (5.12)
U2
где и2 — передаточное отношение колесного редуктора второго
рычага. В базовой схеме w2=2, поэтому мощность этого контура
равна
N" = — Y ^гфтгГк (— 02 — ₽) = ЯлК (5.13)
а момент MF определяется выражением
MF = (1 _ П") = ^.Фт. (1 _ ^) гк, (5.14)
₽
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
197
Рис. .5.6. Замкнутые контуры от действия касательной реакции грунта в ба-
зовой схеме колесно-шагающего механизма (а) и во вновь синтезированной
схеме (б):
/ — первый рычаг МШ; 2—суммирующий редуктор; 3 — часть колесного редуктора,
встроенного в первом рычаге; 4 — второй рычаг МШ; 5 — колесный редуктор второго
рычага; 6 — цепные передачи колесного редуктора
где rf'— результирующий КПД замкнутого контура в относи-
тельном движении; <ртг- — коэффициент удельной тяги; <pT; =
= Tui/Rzi'
Ликвидировать этот контур также невозможно. Однако пе-
риметр контура может быть уменьшен выбором «2=1 [23].
Пренебрегая реактивным моментом на втором рычаге, обуслов-
ленном потерями в редукторе этого рычага, получаем при этом,
что Af2 = 0. Так что суммирующий редуктор оказывается исклю-
ченным из рассматриваемого замкнутого контура. Дальнейшее
уменьшение потерь в этом контуре может быть достигнуто ис-
ключением замыкания реактивных звеньев колесного редуктора
на первый рычаг. При этом все зацепления колесного редукто-
ра, опоры которых расположены в корпусе привода, а не в кор-
пусе первого рычага, также исключаются из замкнутого конту-
ра. Кроме того, для колесного редуктора, встроенного в рычаги
МШ, целесообразно применять цепные передачи. Причем пере-
даточное отношение цепной передачи, встроенной в первом ре-
дукторе «1, определяется из условия сохранения неподвижности
колеса на этапе отталкивания [49]:
1 —«х«2— 2«! = 0. (5.15)
Если выбрать «2=1, это условие выполняется при «1 = 1.
Получившаяся при этом схема механизма и его замкнутый кон-
тур (от действия /?ггфтг) приведены на рис. 5.6, б. Так же, как
198
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
и на рис. 5.6, а, здесь показаны суммирующая передача и те
звенья механизма, которые образуют замкнутый контур.
Итак, мы рассмотрели посылки, приводящие к кинемати-
ческой схеме, представленной на рис. 5.2. Если в этой схеме
разомкнуть тормоза Ti и Т2 при замкнутом Т3, то можно реа-
лизовать режим выноса колеса при дифференциальном приво-
де, как у базовой схемы. Если разомкнуты Ti и Т3 при замкну-
том Т2 вынос колеса осуществляется приводом только рычагов
МШ. Вынос корпуса осуществляется путем одновременного за-
мыкания Т2 и Тз и размыкания Ti у всех шести колесно-шага-
ющих механизмов движителя. Тормоз Т4 размыкается только
на стоянке во время поворота привода с МШ из положения, при
котором осуществляется колесно-шагающий режим в положе-
ние для перемещения колес или корпуса по вертикали.
С учетом всех возможных режимов работы каждого отдель-
но взятого механизма положение тормозов, определяющих ал-
горитмы управления, приведены в табл. 5.1, где знак « + » соот-
ветствует замыканию тормоза, а знак «—»— его размыканию.
В соответствии с предыдущими рассуждениями о замкнутых
контурах в схеме, приведенной на рис. 5.2, передаточные отно-
Таблица 5.1
Режим работы колесно-шагающего механизма Положение тормозов
Ti Т2 Т3 Т4
Колесный + — + +
Вынос корпуса в КШР — + + +
Вынос колеса в КШР при дифференциальном приводе колеса и МШ — — + +
Вынос колеса в КШР приводом рычагов МШ — + — +
Переход из КШР в режим регулирования по вертикали + — 4- —
Регулирование положения колес и корпуса по вертикали — + + +
Торможение ч ч +
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
199
шения колесных редукторов, встроенных в первом и втором ры-
чагах, выбраны равными и1 = и2=1. Редуцирование крутящего
момента осуществляется с помощью зацеплений, реактивные
звенья которых замкнуты на корпус привода. В качестве сум-
мирующего и колесного редукторов, встроенных в рычагах МШ,
выбраны цепные передачи. Все это позволяет повысить т]' и т)",
что необходимо учитывать при расчете потерь мощности в замк-
нутом контуре.
Тяговый электродвигатель. Каждый индивидуальный привод
КШД снабжен электродвигателем постоянного тока с магнито-
электрическим возбуждением. Предполагается возможность ре-
гулирования скорости вращения вала электродвигателя импульс-
ными методами, причем регулятор обеспечивает линейные меха-
нические характеристики. Такие характеристики можно полу-
чить при питании регулятора от обратимого источника, напри-
мер от аккумуляторной батареи, и при схеме выходного каска-
да регулятора, обеспечивающей цепь для протекания тока яко-
ря не только во время подключения к батарее, но и в течение
всего времени отключения [49]. Регулирование осуществляется
изменением длительности импульсов, так что механические и
регулировочные характеристики электродвигателя получаются
такими же, как и при прямом регулировании напряжения пита-
ния.
Регулятор обеспечивает кроме того ограничение максималь-
ного крутящего момента, так что область работы электродви-
гателя в двигательном и тормозном режимах ограничивается
на графике функции Л4Дг(содг-),
где <оДг- — скорость вращения
вала электродвигателя, ло-
маной линией ОАВСМ/ (рис.
5.7).
Предполагается также,
что регулирование скорости
при разгоне и торможении осу-
ществляется по линейному за-
кону. Это соответствует пере-
мещению рукоятки регулятора
с постоянной скоростью, так
что при моделировании доста-
точно задать время, в течение
которого электродвигатель
должен выйти на ту или иную
Рис. 5.7. Механические характеристи-
ки тягового электродвигателя при
импульсном регулировании с ограни-
чением по максимальному моменту
200
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
характеристику МдДсодг). В частном случае при /рег = 0 и М/=
= Л4д0 получаем нерегулируемый электродвигатель, механичес-
кая характеристика которого в двигательном режиме соответ-
ствует внешней характеристике на рис. 5.7 (линия Мд0содо).
Ходовая часть. Рассматриваемый планетоход снабжен метал-
лическими колесами с развитыми грунтозацепами. Собственная
податливость колеса при расчетах не учитывается, поскольку
для данной конструкции она оказывается на 1—2 порядка ниже
податливости подвески и грунта.
Каждый колесно-шагающий механизм снабжен независимой
рычажной подвеской с продольным качанием рычагов и упру-
гим элементом, выполненным в виде тороиона. Демпфирование
колебаний осуществляется в основном за счет сухого трения в
шарнирах подвески.
Упругая характеристика средних колес имеет три линейных
участка, определяемых жесткостью торсиона и два участка оп-
ределяемых упорами. Нелинейная характеристика среднего
участка достигается специальной составной конструкцией торсй-
она. Такая характеристика повышает профильную проходимость
планетохода.
Усложнение конструкции колесно-шагающего движителя, по
сравнению с колесным, увеличение количества управляющих
электромагнитов в составе привода КШД приводят к увеличе-
нию массы неподрессоренных частей, что необходимо учиты-
вать при динамических расчетах. Поэтому модель разрабаты-
вается в предположении о возможности независимых переме-
щений подрессоренной и неподрессоренной частей по горизонта-
ли и вертикали.
Отметим, что в принципе существуют схемы КШД, позволяю-
щие резко уменьшить неподрессоренные массы (см. например,
[17]).
Информационная система. Для реализации автоматических
алгоритмов управления рассматриваемое транспортное средство
снабжено следующими датчиками информационной системы,
встроенными в каждой опоре КШД:
дискретные датчики положения первого рычага МШ, вы-
дающие сигналы при следующих углах поворота: 0 = 0; л, 2л,
т. е. в крайних и среднем положениях первого рычага;
дискретные датчики положения корпуса привода, выдающие
сигналы в двух положениях: при работе в КШД и при работе
в режиме регулирования колес по вертикали;
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
201
аналоговые датчики угловой скорости первого рычага МШ;
аналоговые датчики буксования колес.
Кроме того, предполагается, что подрессоренная часть снаб-
жена датчиком дифферента.
Система управления. Сигналы от перечисленных датчиков
поступают в систему управления (СУ). На основе анализа по-
ступающей информации СУ формирует и выдает команды на
реализацию приводами КШД того или иного режима движения
[45, 62].
Информация от датчика положения первого рычага МШ
используется для автоматической реализации прерывной поход-
ки при движении в КШР. При этом команда на включение оче-
редного привода для выноса колеса подается после получения
информации о выполнении этого режима предыдущим приво-
дом [21]. Последовательность выноса колес, определяющая по-
ходку, может быть предварительно задана оператором. В лю-
бом случае команда на перенос корпуса автоматически выдает-
ся после окончания выноса всех колес.
Основным режимом выноса колес является режим дифферен-
циального привода рычагов МШ и колеса. Если при этом ока-
жется, что Рг = О, данный колесно-шагающий механизм автома-
тически переводится в режим выноса колеса непосредственным
приводом рычагов МШ. Возможно исследование движения и при
другом алгоритме управления в случае 0 = 0. По истечении опре-
деленного времени выдается команда на вынос очередного ко-
леса, а при переносе корпуса колесо, у которого 2л>0>О,
включается для работы в колесном режиме.
Информация от датчика буксования используется для приня-
тия решения об автоматическом переходе из колесного в колесно-
шагающий режим. Решение принимается по наиболее загружен-
ному колесу. Величина Si, при которой осуществляется смена
режимов, предварительно задается оператором. Обратный пере-
ход может быть выполнен автоматически по информации от
датчика дифферента. Этот переход осуществляется при выезде
планетохода опасного участка трассы на участок с углом
подъема, который может быть преодолен в колесном режиме.
Величина дифферента, при которой осуществляется смена ре-
жимов, также предварительно задается оператором.
Информация от датчика дифферента используется также для
реализации режима автоматической стабилизации положения
корпуса при движении на подъемах и уклонах. Приведение кор-
202
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
пуса в горизонтальное положение осуществляется при стоянке
планетохода и при наличии соответствующего сигнала датчика
положения корпуса привода. Полярность включения приводов
отдельных механизмов при регулировании положения корпуса
по вертикали и величина угла поворота рычагов определяются
СУ, исходя из требования ф = 0, где ф— угол диферента. Как
следует из описания МШ, движение со стабилизацией положения
корпуса может осуществляться только в колесном режиме.
Таким образом, СУ рассматриваемого транспортного сред-
ства обеспечивает автоматическое управление по жестким про-
граммам (реализация прерывной походки в КШР) и по отдель-
ным гибким программам, привязанным к физическому состоя-
нию и рельефу трассы движения (переход из КР в КШР и об-
ратный переход, смена режимов выноса колеса, стабилизация
корпуса). По жесткой программе осуществляется также управ-
ление регулятором тяговых электродвигателей, о чем упоминалось
выше. Возможна реализация и других жестких программ: подъем
и опускание отдельных колес, регулирование дорожного про-
света и переход из колесно-шагающего режима в режим регу-
лирования относительного положения колес и корпуса по верти-
кали. Однако команды на выполнение этих программ выдаются
непосредственно оператором.
При моделировании оператор задает информацию о профиле
трассы и выполняет часть функций СУ, принимая решение о
реализации той или иной жесткой программы.
5.2.2. Расчетная схема. Независимые координаты. Исходя из
предыдущего описания, в качестве независимых координат под-
рессоренной части (корпуса) приняты ее перемещения х, z по
осям X и Z неподвижной системы координат и угловые переме-
щения относительно поперечной оси (рис. 5.8), перпендикуляр-
ной плоскости движения и проходящей через центр масс (ЦМ)
подрессоренной части. Угол ф отсчитывается против часовой
стрелки. За начальное принято положение, при котором центр
масс находится на оси Z.
Положение всех неподрессоренных звеньев каждого отдельно
взятого КШД, в который включаются рычаги подвески, рычаги
МШ (со встроенным в них приводом) и колесо, определяется
двумя независимыми координатами &i и р^ (см. рис. 5.8), где
8г — угол качания рычагов подвески. Как уже отмечалось, по-
ложение второго рычага МШ однозначно определяется углом р,
так как для рассматриваемых схем МШ и суммирующей пере-
дачи выполняется условие р =—р2.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
203
В качестве независимой переменной интегрирования выбрана
угловая скорость вала двигателя <одг-.
Таким образом, плоская модель шестиколесного планетохода
по числу независимых координат с учетом независимой перемен-
ной интегрирования обладает двенадцатью степенями свободы.
Рис. 5.8. Схема движения транспортного средства в неподвижной системе
координат на этапе выноса колеса:
/ — корпус; 2 — рычаги подвески; 3 — рычаги механизма шагания; 4 — колесо
Зависимые координаты определяют положение ЦМ неподрес-
соренных звеньев в неподвижной системе координат. Присвоим
следующие индексы этим массам (рис. 5.9): тп — масса рычагов
подвески; та — масса первого рычага МШ; тв — масса второго
рычага МШ; тк — масса колеса. Аналогичные индексы присвоим
перемещениям этих масс в неподвижной системе координат: хп,
zn — для рычагов подвески, ха, £а— для первого рычага МШ;
хв, — для второго рычага МШ; хк, £к — для колеса. В качестве
зависимой переменной интегрирования примем скорость враще-
ния колеса сокг-, полностью определяемую значениями и <одг-.
Основные геометрические параметры: (см. рис. 5.9 и
рис. 5.10): h — расстояние от ЦМ до линии, соединяющей оси
качания рычагов подвески; гп — плечо рычагов подвески; сп —
расстояние от оси качания подвески до центра масс ее рычагов;
са — расстояние от оси вращения первого рычага до его центра
масс; съ — расстояние от оси колеса до центра масс второго
рычага.
Отметим, что соотношения длин отдельных звеньев на рис. 5.8
и рис. 5.9 искажены, а реактивный рычаг и реактивная тяга
204
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
подвески условно не показаны. Массы этих звеньев отнесены
соответственно к первому рычагу МШ и к рычагу подвески.
В общем случае движения на каждое колесо со стороны
грунта действуют результирующие нормальная Rzi и касатель-
ная Rxi реакции, направление которых определяется си— углом
Рис 5.9. Расчетная динамическая схема и основные геометрические парамет-
ры транспортного средства (массы заштрихованных звеньев рассматриваются
раздельно):
1 — подрессоренная часть; 2 — упругий элемент подвески; 3 — колесо; 4 — рычаги под-
вески; 5, 5 — второй и первый рычаги МШ; 7 — трасса движения; 8 — колея
деформированного профиля трассы под i-м колесом. Этот угол
образован осью X и касательной к колесу в мгновенном центре
его линии контакта с грунтом.
Результирующую касательную реакцию грунта, которую
называют также свободной тягой, используя ранее введенные
обозначения, можно описать одной из следущих формул:
Rxt = TKi — Pfi = Rzi{^i — fi)=Rzikr, (5.16)
где Pfi — усилие сопротивления качению колеса.
Штриховой линией на рис. 5.9 показан профиль трассы до
его деформации колесом, так что hKi — глубина колеи, отсчиты-
ваемая по перпендикуляру к касательной, проведенной к дефор-
мированному профилю.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ Й ХОДОВЫЕ ИСПЫТАНИЯ
20г;
5.2.3. Уравнения движения. Уравнения движения могут быть
получены на основе уравнений Лагранжа II рода.
Кинетическая энергия системы равна сумме кинетических
энергий каждой из выделенных масс, если на систему не нало-
жено никаких связей. Это соответствует этапу выноса колеса
при его дифференциальном приводе
if- • п
Ti = — + J0<p2 + 2 lmnx2ni + mnz2ni + Jne? +
I ' 4=3
4’ maXai + tnbXbi 4~ maZai m6Zbi “I" Ja$i АР* ^к*кг 4~ /4"
4" -/гр^гр + /д^дЛ , (5.17)
где /о — момент инерции корпуса относительно поперечной оси;
/п, Л, h — моменты инерции рычагов подвески, первого и вто-
рого рычагов МШ относительно собственных осей качания (для
подвески) и вращения (для МШ); /к, /д— моменты инерции
колеса и ротора двигателя с приведенными к ним массами при-
вода; /Гр — момент инерции масс грунта, присоединяемых к ко-
лесу при его буксовании.
Уравнения связи рычагов подвески. Координаты ЦМ подвес-
ки определяются поступательными перемещениями корпуса
транспортного средства, угловыми колебаниями корпуса с час-
тотой ф и собственными качаниями рычагов подвески с часто-
той ег-. Проекции скорости оси качания рычагов подвески вслед-
ствие угловых колебаний корпуса на оси X' и Z', параллельные
осям X и Z, равны (рис. 5.10, а):
x'ni = ф (h cos ф — 1} sin ф); (5.18)
zni = ф (Л sin ф 4- lt созф). (5.19)
Проекции скорости ЦМ рычагов подвески вследствие кача-
ния рычагов относительно собственной оси на оси X", Z" опре-
деляются выражениями
хы = — efcnsinez; (5.20)
(5.21)
coseP
206
ПЕРЕДВИЖЕНИЕ ПО ГРУЙТАМ ЛУНЫ И ПЛАНЕ?
Уравнение связи представляет собой проекцию абсолютной
скорости ЦМ рычагов подвески на неподвижные оси координат
xni = х + Ф (f1 cos Ф — Ц ф) — sin (5.22)
zni = z ~г Ф (h sin ф + lt cos (p) -J- cos ez. (5.23)
Рис. 5.10. Схемы для вывода уравне-
ний связи зависимых и независимых
координат для рычагов подвески (а),
для первого рычага МШ (б), для оси
колеса (в)
Уравнение связи первого рычага. Абсолютная скорость ЦМ
первого рычага складывается из переносной скорости конца
рычага подвески и скорости его относительного вращения. Про-
екции переносной скорости на оси X' и Z' аналогичны уравне-
ниям (5.20), (5.23) и записываются в виде
x'bi = х + ф (h cos ср — lt sin ср) — е/п sin ez; (5.24)
z'bi = z + ср (h sin cp + lL cos ср) + ezrn cos e-. (5.25)
Проекции относительной скорости ЦМ первого рычага на
оси X" и Z" равны (рис. 5.10, б)
Xai = (Р/ — ср) Са sin sin (Рг — ср — £); (5.26)
z’ai = (Рг — ср)сасоз(Рг. — ср — £), (5.27)
где | — угол, определяющий положение корпуса привода. При
g = 0 осуществляется движение в колесно-шагающем режиме,
при 5 = л осуществляется регулирование относительного положе-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОЙЫЁ ИСПЫТАНИЯ
207
ния колес и корпуса по вертикали. Движение в колесном режи-
ме может осуществляться при £ = 0 и при £ = л, однако в пер-
вом случае положение колес по вертикали не регулируется. За
положительное направление g принято направление против ча-
совой стрелки (см. рис. 5.8).
Проекции абсолютной скорости центра масс первого рычага
на оси X и Z равны
Xai = Х + Ф C0S Ф — h Sin ф) — 8irn Sin ег +
+ (Рг —ср)са5шфг —ср —р); (5.28)
zaI- = z + q> (h sin <р + /г cos ф) + е/п cos вг +
+ (Рг — Ф) са cos (pz — ф — |). (5.29)
Уравнения связи оси колеса. Абсолютная скорость оси коле-
са складывается из переносной скорости конца рычага подвес-
ки (точка В на рис. 5.10, б) и скорости перемещения конца вто-
рого рычага МШ (точка Е) относительно рычагов подвески.
Скорость точки В в проекциях на оси X' и Z' определена
выше [выражения (5.24) и (5.25)]. Относительная скорость в
проекциях на оси X и Z определяется выражениями
Xei = 2Zpz sin pz cos (ср + £) + 2/cp cos pz sin (<p + g); (5.30)
z'ei = 2/pz cos pz sin (cp + £) —2/(pcos0f cos(<p+£). (5.31)
Первые слагаемые в выражениях (5.30), (5.31) определя-
ются вращением рычагов МШ, вторые — колебаниями корпуса,
т. е. 2Zp sin0i — скорость конца второго рычага (оси колеса) при
вращении рычагов; 2Zcpcos pz— скорость конца второго рычага
при колебаниях корпуса.
С учетом изложенного проекции абсолютной скорости оси
колеса (конца второго рычага) на оси X и Z равны
Хн1 = х + Ф cos ср — sin (р) — е/п cos ez + 2Zpz sin pz cos (cp g) +
+ 2/(p cos pz sin (<p + I); (5.32)
zKZ = z + Ф (h sin ф + Zz cos ф) + 8zrn cos ez + 2Zpz sin pz sin (ф + £) —
— 2/ф cos pz cos (ф + £). (5.33)
20$
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
Уравнения связи второго рычага. Проекции абсолютной ско-
рости центра масс второго рычага на оси X и Z определяются
как сумма переносной скорости оси колеса и скорости движения
точки b (рис. 5.10, в) относительно этой оси
ХЫ = Х + Ф О1 C0S Ф — h S^n ф) — eZn cos е/ + sin cos (ф + Ю +
+ 2/<р cos sin (ср + £) — (<p + pz) cb sin (<p + | + 0г); (5.34)
zbi = z + ф cos ф — 11 sin cp) — ezrn cos ez + 2/0z sin 0Z cos (<p + £) —
— 2/ф cos pz sin (<p + Ю — (Ф + ₽/) съ sin (cp + g + ₽z). (5.35)
У равнения связи вращающихся масс привода, колеса и ры-
чагов. Исходя из схемы блокирующего механизма, приведенной
на рис. 5.3 для режима выноса колеса (Ть Т2 — выключены,
Т3 — включен), уравнение связи вращающихся масс колеса, ро-
тора двигателя и рычагов можно записать в виде
cokZ = (^д/ (5.36)
Это уравнение справедливо и для случая, когда Тз выклю-
чен. При этом в уравнении (5.36) следует условно полагать
(йкг = 0. Фактически сокг- может быть и не равна нулю, однако
вращение колеса в этом случае определяется уже не непосред-
ственно двигателем, а скоростью перемещения конца второго
рычага, условиями взаимодействия колеса с грунтом и холосты-
ми потерями колесного редуктора при его вращении со стороны
колеса.
Перемещение частиц грунта при буксовании колеса можно
определить выражением (0Гр = <0кг5г.
С учетом полученных уравнений связи выражение для кине-
тической энергии после преобразований можно записать в ви-
де
где m = m0 + n(ma+ma + mb + mE) — масса транспортного сред-
ства;
=Jp + 4l (tnK + mb) sin2pz
Математическое моделирование и ходовые испытания
209
— приведенный момент инерции всех звеньев подвески относи-
тельно оси качания ее рычагов; /р = /а + Ц + тас2а + гпьС2ь— при-
веденный момент инерции всех масс МШ и колеса относительно
оси поворота первого рычага МШ;7Ф=</ + ^ «7ф£—приведен-
i=i
ный момент инерции относительно центра масс при всех движе-
ниях; /е = Л) + 2 (Л2 + /2) *тпо — суммарный момент инерции
транспортного средства относительно ЦМ (без учета изменения
базы при работе МШ); тП'0 = тп+та + ть + т1{ — масса всех
звеньев одной подвески; = /к + /гр$2г— момент инерции коле-
са с учетом присоединенных масс грунта.
Последовательно дифференцируя выражение (5.37) по каж-
дой независимой переменной и приравнивая полученные диф-
ференциалы соответствующим обобщенным силам, получим диф-
ференциальные уравнения движения системы в виде
тх = Qx; (5.38)
mz = Qz; (5.39)
= <2Ф; (5.40)
= Qei-; (5.41)
( , ' иш\ " '
Jfr + p — = Q^, (5.42)
\ UK J UK
| /я + J кс — \ ®дг J к — Pi = Qfli, (5.43)
\ UK / UK
где i = 1, 2, 3.
Введем дополнительные обозначения
Jai=Ja + j'K±-, jKi=j'KJ*L (5.44)
Uk “к "к
С учетом этих обозначений уравнения (5.42), (5.43) записываются
в виде
•^01Р г = Q|3t> (5.45)
/цгфцг *ЛпРг = Qpj' (5.46)
14 Зак. 826
216
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Эти уравнения необходимо решить относительно старших
производных. Разделим 1-е уравнение на /Кг, второе — на /д
^рг.-<одг = -^; (5.47)
‘'кг •'Кг
®дг = ^-₽г = ^-. (5.48)
•'Д/ •'Дг
Сложив эти уравнения и проведя преобразования получим
уравнение, решенное относительно Pi
/ /2 \ .. г
--------Pi =(?₽; + 4^. (5.49)
\ JAi / ‘'Дг
Уравнение, решенное относительно (одг-, после аналогичных
преобразований запишется в виде
(hi - = <hi + Ф- • (5-50)
Уравнения (5.38)...(5.41) являются общими для всех режи-
мов движения. Уравнения (5.42), (5.43) справедливы для режи-
ма выноса колеса при его дифференциальной связи с рычагами
МШ. Рассмотрим частные случаи, при которых последние два
уравнения объединяются в связи с уменьшением количества
степеней свободы системы.
При движении в колесном режиме ₽г=рг = О, поэтому
Аг^Дг ~ Qui* (5.51)
В режимах переноса корпуса и регулирования относительно-
го положения колес и корпуса по вертикали coKi = 0; Р< = (одг-Мш,
поэтому
~Фдг “ Одг + ---- (5.52)
При выносе колеса путем привода рычагов МШ также спра-
ведливо последнее уравнение, однако отличаются выражения
для определения обобщенных сил.
5.2.4. Определение обобщенных сил. Обобщенная сила, соот-
ветствующая независимой координате дг-, определяется как от-
ношение элементарной работы действующих сил на перемеще-
нии механической системы, вызванном элементарным прираще-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
211
нием б<7, к величине этого приращения. Для рассматриваемой
расчетной схемы планетоходы обобщенные силы после преобра-
зований могут быть записаны в виде
Qx = £ Rxal; (5.53)
i^l
Qz = У Rzai — mg-, (5.54)
i=l
Q<f> = У {(h + l&i sin £) Rxvi -|- (/г — /pi cos £) Rz<fi + TKlrK + Myi —
i=i
—g[mnp(^ sin ф+5р cos p; cos cp)+sin £ (Sp cos рг sin ф—SK sin pf cos ф)]} ;
(5.55)
Qei = rn [(Rzai — mng) cos ег — Rxai sin e(] — Myi\ (5.56)
Qpi = afli {h^Rxn — g [cos I (Sp sin p; sin ф + SK cos рг cos ф) +
+ sin I (Sp sin р; cos ф — SK cos рг sin ф)]} + — TKirK (—-I H-if) —
«К \ Г)к /
— + AfM6i + I RzV I /рг (1 — T]')] sign Pi +
+ (< + йМт2)signer; (5.57)
Qni = — TKirK —--------(Л4х sign (0дг — 6,- MT2 sign содг), (5.58)
где
= Rxi COS — Rzi sin af; Rzai = Rxi sin at Rzi cos af; Rxq)i =
= Rxai COS ф -f~ Rzai sin фJ Rzyi = — Rxai sin ф -|- Rzai COS ф; Rx^i =
= Rxyi COS -]- Rzyi sin Rz^i ~ Rzyi COS — Rxqi 31П
= 2/ cos pf; h^t = 21 sin
Myi — упруго-диссипативный момент подвески, определяемый
как функция бг- по кусочно-линейным характеристикам; —
крутящий момент на валу двигателя, определяемый как функ-
ция <Одг по характеристикам, общий вид которых приведен на
рис. 5.7; Л4Т1, Л4т2, Л1тз—моменты тормозов Ть Т2, Т3; SK =
=2 са(тк + ть); Sp = maca + mbcb\ значения коэффициентов 6'г,
ar\ , определяются в зависимости от режима работы дви-
гателя. При работе в двигательном режиме (МдгЮдг^О) 6^=0;
14*
212
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ajji = 1/г)к, a\i = 1/т]Р; при работе в тормозном режиме МДг(оДг<
<0) 6'2 = 1; а*с =Пк; =Лр- Мшх и Л1кх — потери при холос-
том ходе редуктора шагания и колесного редуктора, приведен-
ные к первому рычагу и колесу.
Обобщенная сила для уравнения движения (5.52) в случае
реализации режима переноса корпуса запишется в виде
Qm + <?₽/ — = Мя( - (1 _ Т]") _
- — [Л€ + мт£' + | Rzli I /3l. (1 - n')l sign pf. (5.59)
Для режима выноса колеса путем привода рычагов правая
часть уравнения (5.59) запишется с учетом того, что Ткг=0, в
виде
<?д£ + Q₽i — = -Мд,----— 1^х + + I RzV I Zpf (1 —n') sign
(5.60)
В последнем случае учет потерь на холостом ходе колеса
осуществляется приведением их к коэффициенту сопротивления
качению в формуле (5.16)
/*=/ + Л1«/(ад. (5.61)
При этом предполагается, что колесо без скольжения катит-
ся по опорной поверхности так, что в этом случае а>кг=хкг/гк-
Определение реакций грунта. Алгоритм определения RZi ба-
зируется на использовании зависимостей (и0), получае-
мых для заданного сочетания жесткое колесо—грунт экспери-
ментальным или расчетным путем. Глубин-a колеи, равная ве-
личине нормального к профилю трассы погружению колеса в
грунт, определяется выражением (см. рис. 5.9):
г01 = (zkz — zKi) cos акг, (5.62)
гдегк1=/(х) — текущая ордината профиля заданной иссле-
дователем трассы, соответствующая текущей координате оси
колеса хкг-; аКг— угол профиля под г-м колесом, соответствую-
щий текущему значению хКг (см. рис. 5.9).
Координаты оси каждого колеса и соответствующие аКг рас-
считываются программным путем по формулам
= xlt cos ф -F h sin ф + rn cos — 21 cos 0^ cos (ф + £); (5.63)
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
213
zKf = z + lt sin ф — h cos ф + гп sin — 2/ cos sin (ф + g); (5.64)
aKi = arc tg . (5.65)
ax
Демпфирующие свойства грунта учитываются коэффициен-
том поглощения энергии фь зависящим от скорости деформации
zoi. Приближенно этот коэффициент можно определить непос-
редственно при отработке модели на ЭВМ, исходя из условия
отсутствия колебаний неподрессоренных масс при движении по
ровной площадке.
В первом приближении зависимость Rzi=f(Zoi) можно пред-
ставить в виде линейной функции. Тогда с учетом демпфирова-
ния
Rzi ^ri^oi 4“ Ф1^ог» (5.66)
где cri — коэффициент, определяемый экспериментальным пу-
тем на взрыхленном грунте, соответствующем движению перед-
него колеса по целине, и уплотненном грунте, соответствующем
движению последующих колес по колее.
Возможно использование и других более сложных зависи-
мостей. При этом можно получить более точное описание ре-
ального процесса деформации грунта, включая динамику этого
процесса, что выходит за рамки настоящей модели.
Алгоритмы определения касательных реакций грунта бази-
руются на использовании функций Tiii = Rzi(pT{si) и
Рfi = Rzifi(50 для вращающихся колес при движении в колес-
ном и колесно-шагающем режимах и функций T^=Rzi^>^.o (5ю)
для отталкиваемых колес при движении в КШР.
На базе экспериментальных данных эти зависимости упро-
щенно аппроксимируются в модели экспоненциальными функ-
циями, так что с учетом демпфирующих свойств грунта для от-
талкиваемых колес можно записать
TKi = [(1 — , (5.67)
где фт.о — максимальный для данного грунта коэффициент
удельной тяги отталкиваемого колеса; b — коэффициент, зави-
сящий от типа грунта.
Для вращающихся колес, демпфирование продольных коле-
баний которых осуществляется вследствие рассеивания энергии
при буксовании, получаем
214
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
TKi = Rlt<pc (1 — е а I М Sign (юкггк — хкг); (5.68)
Pfi^Rzitfo + ksi), (5.69)
где а — коэффициент, зависящий от свойств грунта; коэффици-
ент продольного скольжения колеса определяется по формуле
s. = 1^Гк-хкГ| s.gn[ ! Гк_ х ь
I I 'к
Модель и программа расчета позволяют учитывать накопле-
ние значений zoi по мере прохождения колес.
Определение моментов подвески и электродвигателя. Упру-
го-диссипативные моменты подвесок крайних и среднего коле-
са определяются по алгоритмам, изложенным в работе [30].
Текущее значение крутящего момента на валу электродвига-
теля определяется как функция соДг и коэффициента режима
8д по заданной характеристике А4Дг-((о<д). Коэффициент режима-
изменяется в пределах 0^ед^1. Он задается оператором и оп-
ределяет рабочую характеристику из семейства возможных ха-
рактеристик. Так, при ед=1 электродвигатель работает на внеш-
ней (предельной) характеристике, при ед=0 — на тормозной.
Полярность вращения вала электродвигателя положительная
при движении в колесном режиме вперед, при выносе вперед,
при подъеме колеса и опускании корпуса. Во всех остальных ре-
жимах движения направление вращения вала изменяется на
противоположное.
Ток, потребляемый f-м электродвигателем, определяется по
формуле
/Jf=4.r + W (5.71)
где /х.х — ток холостого хода двигателя; Ki — коэффициент то-
ко-моментной характеристики.
Мощность, потребляемая приводом i-го механизма, опреде-
ляется по формуле
(5.72)
где U — напряжение питания.
5.2.5. Техника расчетов. Для решения дифференциальных
уравнений движения планетохода разработаны алгоритмы и
программа расчетов на ЭЦВМ. Алгоритм расчета частично рас-
крыт выше. Программа разработана на языке ФОРТРАН для
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
215
машин серии ЕС. Совокупность расчетных схем, приведенных
на рис. 5.8...5.10 уравнений (5.38)...(5.52), выражений для опре-
деления обобщенных сил, включая экспериментальные зависи-
мости свободной тяги колес от продольного скольжения, алго-
ритм и программа расчета на ЭЦВМ составляют плоскую дина-
мическую модель транспортного средства с КШД, описанного
в подразд. 5.2.1.
Алгоритм и программа разработаны таким образом, что при
расчете на ЭЦВМ отдельно формируются базовые совокупнос-
ти исходных числовых параметров по подсистемам «машина»
и «местность». По каждому конкретному режиму работы фор-
мируется совокупность параметров и логических признаков, ха-
рактеризующих этот режим. Это позволяет провести последова-
тельный расчет следующих друг за другом режимов работы выб-
ранного варианта планетохода при движении по заданной трас-
се с неизменными характеристиками грунта. Время работы на
том или ином режиме задается оператором. Цри этом расчет
начальных значений переменных интегрирования производится
только для первого режима. Для всех последующих режимов
работы в качестве начальных значений принимаются данные
расчета предыдущего режима в момент его окончания.
Исходный числовой материал. Исходный материал, задавае-
мый оператором по подсистеме «машина», включает в себя:
инерционные параметры подрессоренной части, подвески,
МШ, колеса и привода — пг0, пгп, та, ть, тк, 10, /к, /д;
геометрические параметры транспортного средства — h, Ц, I,
кинематические параметры привода — wK; ^ш;
моменты трения тормозов блокирующего механизма, приве-
денные к оси колеса Мт2 и к оси вращения первого рычага
AfTi;
параметры, характеризующие потери в приводе и МШ —
Т]ш, Г]к, Т]', ц", Ж, Мкх;
параметры моментно-скоростной и токо-моментной характе-
ристики электродвигателя — (7, Мдо, содо, Л4Д, 7ИД, 7ИДТ, /х,
параметры кусочно-линейных упруго-диссипативных харак-
теристик подвесок, включая жесткости отдельных участков ха-
рактеристики сСУ сСу сс, с1У сю углы закрутки торсиона,
соответствующие точкам перелома, моменты торсионов при
ег=0 и коэффициенты эквивалентного линейного демпфирова-
ния.
216
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Исходный числовой материал по подсистеме «местность»
включает в себя:
ускорение свободного падения — g;
параметры взаимодействия одиночного колеса с грунтом при
различных видах его деформации—%, сг, f0, а, Ь, <рс, ф'ю;
параметры трассы — а0, /0, А/, Zj.
Параметры трассы нуждаются в пояснении. Предполагается,
что в начальный момент времени планетоход стоит на ровной
площадке с углом подъема а0. Трасса произвольного профиля
начинается после преодоления заданного отрезка пути /0 по ров-
ной площадке. Трасса задается массивом ординат Zj через пос-
тоянный интервал AZ (см. рис. 5.8). Как частный случай,
предусмотрено движение по ровной площадке с углом
подъема а0.
Весь исходный числовой материал размещается как минимум
на пяти перфокартах. Карты 1...4 — общие для всех вариантов
поведения машины и режимов расчета. В них отражены пара:
метры планетохода и задано ускорение свободного падения.
В карте 5 отражены характеристики грунта в виде основных
параметров взаимодействия с ним одиночного колеса. Здесь же
задается начальный угол подъема на трассе движения и на-
чальные значения угла рг-. Далее, если движение идет по трас-
се произвольного профиля, идут карты с заданием ординат про-
филя. Если моделируется движение по ровной опорной поверх-
ности, следом за картой 5 идет карта с режимным заданием.
Режимы движения. Вся исходная информация по одному ре-
жиму движения располагается на одной перфокарте. Она начи-
нается с задания варианта расположения привода и рычагов
МШ, т. е. угла g. При £=0 МШ работает параллельно, а при
£ = л — перпендикулярно опорной поверхности, т. е. в режиме
регулирования положения колес и корпуса по вертикали. Затем
указывается признак режима движения.
При £=0 предусмотрена возможность моделирования следу-
ющих режимов: колесный, колесно-шагающий с автоматичес-
кой реализацией заданной прерывной походки, движение с ав-
томатическим управлением режимами работы приводов на ос-
новании информации от датчиков буксования и дифферента.
В последнем случае при буксовании, меньшем некоторого задан-
ного значения, движение осуществляется в колесном режиме, а
при превышении этого значения машина без вмешательства опе-
ратора переводится в колесно-шагающий режим. Обратный пе-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
217
реход также осуществляется автоматически и может быть свя-
зан либо с уменьшением буксования, либо с выездом на менее
крутой подъем.
Кроме того, при 5=0 предусмотрены частные режимы, не
охватывающие машину в целом и предназначенные для более
детального исследования работы отдельных приводов: режим
выноса переднего колеса; режим переноса корпуса ограничен-
ным числом отталкиваемых колес — одним, двумя или тремя;
режим сведения рычагов в среднее положение для подготовки
к повороту привода и рычагов МШ из £=0 в 5 = л.
В число задаваемых режимных параметров входят также
признак способа выноса колеса (путем дифференциального
привода или путем прямого привода рычагов МШ), вид поход-
ки машины в режиме шагания, признак варианта автоматичес-
кого управления планетоходом при сбоях режима выноса коле-
са. Предусмотрено три варианта управления: а) при неполном
выносе колеса «дефектный» привод включается на работу в КР
в период переноса корпуса остальными приводами; б) переход в
режим прямого привода рычагов МШ; в) включение режима
переноса корпуса во всех приводах, включая «дефектный», не
обеспечивший полный вынос колеса.
При § = л предусмотрены следующие режимы: колесный с
регулированием положения колес и корпуса оператором; колес-
ный с автоматической стабилизацией горизонтального положе-
ния корпуса. Возможно также моделирование ряда частных
режимов — подъема (опускания) одного заданного колеса,
подъема (опускания) корпуса, сведение рычагов в среднее по-
ложение для подготовки к повороту привода и рычагов МШ из
£ = л в g=0.
В режимной перфокарте задается также предельный путь
движения или предельное время счета, а также требуемый ин-
тервал выдачи результатов расчета на печать.
Выдача результатов расчета. Результаты расчета печатают-
ся через заданный временной интервал реального времени дви-
жения планетохода. Эта информация раскрывает как характе-
ристики машины в целом, так и характеристики каждого приво-
да в функции от времени.
Производится распечатка следующих текущих значений:
х, z, ф, zM, х, z, ср, М, где гм — высота ЦМ над поверхностью
трассы; Nd— мощность, потребляемая от источника питания;
218
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
по каждому приводу печатаются следующие текущие значе-
ния: Pi, Pj, -^кг» ^Дг> ^эг> ^дг» ^кг> ^zb »
где /?ах —максимальное (за временной интервал распечат-
ки) значение тока двигателя; Лг-— энергозатраты привода;
NKi— мощность реализуемая Z-м колесом.
На печать выводится также текстовая информация о рассчи-
тываемом режиме движения.
Обработка алгоритмов и программы расчета осуществлялась
для модели, основные расчетные параметры которой совпадают
или близки к параметрам ходового макета планетохода с КШД,
описанного ниже, в подразд. 5.4.2. Это позволило привлечь для
обработки и проверки достоверности результатов моделирова-
ния соответствующий экспериментальный материал. Модель ус-
пешно воспроизводит все перечисленные выше режимы движе-
ния, причем результаты моделирования хорошо согласуются с
результатами испытаний ее физического аналога как с качест-'
венной стороны, так и по основным количественным показате-
лям— скорости движения на уклонах различной крутизны,
функции тока двигателей приводов КШД при подъеме и опуска-
нии корпуса и движении в КШР, высоте преодолеваемой в этом
режиме вертикальной стенки при различных схемах привода
и т. п.
Устойчивый счет всех режимов осуществляется при сравни-
тельно малом шаге интегрирования, примерно равном 0,001 с.
При таком шаге одна секунда реального времени движения
считается на ЕС-1030 примерно за 4 мин машинного времени.
5.3. Моделирование криволинейного
движения колесного планетохода
5.3.1. Модель полноприводного планетохода с
колесным движителем. Полноприводный планетоход с колес-
ным движителем, доказавший свою высокую работоспособ-
ность в лунных условиях [30], представляет собой сложную
механическую систему, состоящую из большого числа элемен-
тов, связанных между собой тем или иным способом. Поэтому
оценка опорной проходимости, тяговых качеств планетохода в
целом существенно зависит от тягово-сцепных свойств каждого
колеса движителя в отдельности и в ряде случаев не может быть
выполнена однозначно прямым анализом результатов аналити-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
219
ческого или экспериментального исследования характеристик
движения одиночного колеса (см. гл. 2,3). В связи с этим для
аналитического исследования тяговых свойств колесного движи-
теля, оценки энергозатрат на движение планетохода восполь-
зуемся некоторой расчетной схемой, в необходимой степени от-
ражающей перемещение рас-
сматриваемого транспортного
средства по грунтовому ос-
нованию.
Поскольку управляемое
движение планетохода в не-
подвижной инерциальной си-
стеме координат является
плоским [37], то, пренебрегая,
в первом приближении, откло-
нениями опорной поверхности
от горизонтали, различного ро-
да колебаниями корпуса, рас-
смотрим математическую мо-
Рис. 5.11. Расчетная схема бортового
дель, описывающую . движе-
ние планетохода ПО ГОрИЗОН- поворота многоколесного планетохода
тальной плоской опорной по-
верхности с равномерной угловой скоростью поворота (рис.
5.11). Ее уравнения найдем, воспользовавшись математической
моделью движения планетохода, предложенной в работе [30]:
+ тпёГсу = 0; ЪМХ = 0;
— тп0Гсж = О; 2М= 0;
у хж UvV ' if
= 0; SMz = 0,
(5.73)
где SFX, l£Fy, ^Fz— суммы проекций внешних сил, действую-
щих на аппарат, на оси подвижной системы координат, скреп-
ленной с планетоходом так, что ее начало совпадает с его
центром масс С, ось х направлена от кормы аппарата к носу,
ось у — к левому борту параллельно опорной поверхности, а ось
z— перпендикулярно им вверх; 27ИХ, z>My, SMZ— суммы мо-
ментов внешних сил относительно тех же осей; тп—масса пла-
нетохода; Vcx, Vcy — проекции скорости центра масс плането-
хода Vc (см. рис. 5.11) на оси х и у системы Cxyz\ 6— угло-
вая скорость равномерного поворота планетохода.
220
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Совокупность внешних сил, действующих на планетоход в
рассматриваемых условиях движения, представлена силой тя-
жести G = tnng, где g— ускорение свободного падения; силами,
действующими со стороны грунтового основания и, в общем
случае, аэродинамическими силами, влиянием которых мы пре-
небрегаем.
В общем случае криволинейного движения колесного транс-
портного средства внешние силы, действующие на каждое из
колес движителя (см. гл. 2,3), могут быть сведены к системе
состоящей из трех сил: продольной Rx, боковой Ry, нормальной
Rz реакций, приложенных в центре контакта колеса с основа-
нием; и трех моментов: сопротивления качению колеса Mf, оп-
рокидывающего Мо и сопротивления верчению Мв.
Учитывая симметричность профиля колес, перпендикуляр-
ность плоскостей их вращения горизонтальной поверхности ос-
нования, малость в сравнении с моментом сопротивления пово-
роту планетохода, момента сопротивления верчению колеса,
влиянием на процесс поворота опрокидывающего Л40 и момен-
та сопротивления верчению Мв в дальнейшем будем пренебре-
гать, полагая в расчетах, что Л40 —0, Мв— 0 [39, 41].
Учитывая это, рассмотрим левые части уравнений системы
(5.73), описывающей движению планетохода по плоской кри-
волинейной траектории. Очевидно, (см. рис. 5.11)
п ‘ п
^Рх = 2 Rxt, (5.74); SF, = £ Ryi- (5.75)
t = l 4 = 1
^-rnug, (5.76)
4=1
где Rxi, Ryi, Rzi — продольная, боковая и нормальная реакции —
основания, действующие на г-е колесо; п— число колес.
р п п
+ Н 2(5-77)
где Ау = ±\ (знак «—» относится к колесам правого, а знак
« + » к колесам левого борта); Н — высота центра масс плане-
тохода, изменением которой, обусловленным деформацией под-
вески и колес, будем пренебрегать; В — колея планетохода.
™у = у (- RzilKi - AMMfi - HRxi), (5.78)
Г=1
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
221
где — проекция на ось х отрезка от центра масс планетохода
до оси l-го колеса, полярность которой определяется положени-
ем колеса по отношению к оси у, т. е. для передних колес /Kf
имеет положительный знак, а для задних — отрицательный
(рис. 5.12); Ам — безразмерный коэффициент, одинаковый для
колес одноименного борта и зависящий от радиуса поворота
планетохода R (для колес правого борта Лм = 1 при любом /?,
для колес левого борта Ам=\ при R>B)2, Дм = 0 при R = BI2,
Ам = — 1 при /?<В/2); Mfi — момент сопротивления качению
r-го колеса.
1=1 ' 7
(5.79)
Большое число конструктивных (//, /кг-, В) и эксплуатацион-
ных (Rxi, RVi, Rzi, Mfi) параметров, входящих в приведенные
уравнения, свидетельствует о сложности явлений, сопровожда-
ющих криволинейное движение планетохода с неповоротными
колесами. л
У современных многоосных транспортных средств колеса
одного борта при прямолинейном движении катятся по одному
следу. Поэтому каждое следующее колесо борта движется по
основанию, параметры которого изменились. Это изменение изу-
чено недостаточно полно, а
имеющиеся аналитические
методы расчета такого
движения малонадежны и
зачастую относятся к ча-
стным случаям, а именно:
движению транспортного
средства в ведомом режи-
ме или с малым буксовани-
ем.
Еще менее изучено вза-
имодействие многоосного
движителя с деформируе-
мым основанием в условиях
криволинейного движения.
В общем случае такого дви-
жения радиусы траектории
качения колеса движителя
неодинаковы, что приводит
к частичному или полному
Рис. 5.12. Кинематика бортового пово-
рота многоколесного планетохода
222
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
несовпадению следов, оставляемых колесами одного борта.
Перекрытие следа, оставляемого предыдущим колесом, коле-
сом последующим зависит от многих факторов, в том числе от
радиуса кривизны траектории, габаритов транспортного средст-
ва, положения колес по борту.
С точки зрения тяговых расчетов процесса бортового пово-
рота планетохода наибольший интерес представляют собой та-
кие случаи движения, при которых перекрытие следов траекто-
рии движения колес движителя наименьшее, и каждое последу-
ющее колесо встречает на своем пути основание, минимально
деформированное предыдущими колесами.
Тогда, учитывая соотношения (5.74) ...(5.79), из (5.73) полу-
чим следующую систему уравнений, описывающих равномерное
криволинейное движение многоосного планетохода с неповорот-
ными колесами:
У Rxi + т^су = 0;
i=l
У Rvi — fnnevcx = 0;
1=1
У Rzi — mng = 0;
„1=1 (5.80)
±^AyRzi + HmaWcx = Q-,
1=1
у (- Rzki) + у + HmnQVcy = 0;
1=1 1=1
1=1 4 7 1=1
Анализ полученной системы показывает, что в условиях бор-
тового поворота планетохода существенное влияние на эффек-
тивность использования его многоколесного движителя оказы-
вает распределение вертикальных нагрузок по колесам. Одной
из основных причин перераспределения нагрузок по колесам при
движении аппарата по горизонтальному участку пути являют-
ся действующие на планетоход реактивные силы и моменты
[32, 55].
Математическое моделирование и ходовые испытания 223
Найдем нормальные реакции грунта на колесах поворачива-
ющего планетохода в зависимости от действующих на него сил
и моментов, используя схему поворота, представленную на
рис. 5.11.
Предположим, что под действием внешних сил, действующих
на аппарат при его повороте, корпус последнего наклонился на
нос на угол срп и на правый борт на угол фп (рис. 5.13).
Рис. 5.13. Расчетная схема распределения вертикальной нагрузки по колесам
планетохода
При равномерном движении в соответствии с приведенной
системой (5.84) должны выполняться следующие уравнения
моментов и проекций сил на координатные оси:
У Rzi — mng = 0;
1=1
лЛг +WKx = 0; (5.81)
t=l
- £ - S AMMfi + Hm^Vcy = 0.
1=1 i=l
Выразим нормальные реакции на колесах через деформацию
и жесткость подвески, которую для упрощения выкладок заме-
ним условной, расположенной над осью колес [30].
Принимая жесткость подвески ср всех колес одинаковой и
учитывая малость углов наклона корпуса (tg<pn — Фп, tgi|)n —
— фп), получим:
(В \
^кгФп ^j/Фпу >
(5.82)
224
передвижение по грунтам луны и планет
где z0 — вертикальное перемещение центра масс подрессорен-
ного корпуса от положения разгруженных рессор.
Подставив соотношение (5.82) в уравнения (5.81), найдем
% = 2j7mn6Vex/(«CpB2);
Учитывая соотношения, определяющие -фп> фп, z0 в (5.81),
получим после несложных преобразований
Преобразуем полученное равенство. С этой целью сумму мо-
ментов сопротивления качению поворачивающего планетохода
представим по аналогии с [55] следующим образом:
п / , «/2 „ п
У = /пГо I J] Rzi + Rzi
i = l \ 1=1 i=n/2+l
где fn — коэффициент сопротивления движению планетохода,
принимаемый в первом приближении постоянным; верхний ин-
декс относит обозначение к левому (один штрих) и правому
(два штриха) бортам. Поскольку
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ 225
то, так как Ам = 1 при любом режиме поворота, найдем
п
yj AMMfi = fnromng [о,5 + + Am (о,5 -
1=1
Подставив это соотношение в (5.83), получим
№Усу
g
2АуНВУсх
Bg
(5.84)
Полученное уравнение свидетельствует о том, что во всех режи-
мах бортового поворота происходит дополнительное перерас-
пределение (по сравнению с прямолинейным движением) нагру-
зок не только в поперечном, но и продольном направлениях. При
этом величина нормальных реакций на колесах планетохода за-
данных геометрических размеров В, 1^, Н, г0 зависит не только
от положения колес по борту /кг-, высоты центра масс Н и грун-
товых условий движения планетохода fn, но и таких эксплуата-
ционных характеристик поворота, как угловая скорость 0, ско-
рость центра масс Vcx, Vcy, ускорение свободного падения g.
Исследование соотношения (5.84), выполненное номографи-
ческими методами [12], наглядно доказало необходимость уче-
та перераспределения нормальных нагрузок по колесам движи-
теля поворачивающего планетохода.
5.3.2. Уравнения кинематических связей. Поворот многоко-
лесного транспортного средства с неповоротными колесами осу-
15 Зак. 826
226
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
ществляется за счет изменения скоростей вращения колес раз-
ных бортов [56]. Учитывая обусловленные допущением о плос-
ком движении планетохода ограничения (Vcx = 0/?, Vcy.= —0ZO),
где /0 — продольное смещение центра поворота планетохода,
полярность которого определяется положением Оп по отноше-
нию к оси у (см. рис. 5.12), найдем
Vxi=Q(R ±В/2\, Vyi=e(lKi~l0), (5.85)
где VXi, Vyi — проекции скорости i-ro колеса на оси подвижной
системы координат (знак « + » относится к колесам правого,
знак «—» к колесам левого борта).
В общем случае криволинейного движения планетохода век-
тор скорости перемещения центра каждого из колес движителя
образует (см. гл. 2) с плоскостями их вращения некоторый угол
бг (см. рис. 5.12). Величина угла отклонения бг колеса при дан-
ном радиусе поворота планетохода постоянна для каждого из
колес и однозначно определяется его положением на аппарате
tg 6, = (5.86)'
6 vxi R±B/2
Зависимости, связывающие кинематические параметры коле-
са при его качении в системе движителя планетохода, получим,
воспользовавшись соотношением Vx=cor0(l—•$). В самом деле,
учитывая его, найдем
^xi = 0 ^г)*
Тогда согласно (5.85) получим
co/0(l-sf) =0(/?±В/2). (5.87)
В общем случае бортового поворота планетохода с индиви-
дуальным приводом колес каждое колесо работает при собст-
венных значениях угловой скорости. Поэтому решающее, для
расчета криволинейного движения транспортного средства, зна-
чение приобретает аналитическое выражение закона изменения
угловой скорости колес планетохода в зависимости от величи-
ны потребного для движения колеса в данных условиях момен-
та (механическая характеристика привода).
Рассмотрим бортовой поворот колесных транспортных сред-
ств с приводом постоянного тока, который является одним из
наиболее приемлемых вариантов индивидуального привода ко-
лес планетоходов [30].
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
227
Для транспорта, оборудованного индивидуальными мотор-
колесами с двигателями независимого возбуждения, характе-
ристика привода с достаточной степенью точности может быть
записана для каждого колеса транспортного средства в виде сле-
дующего уравнения:
сог =(00 — AMKi, (5.88)
где соо — угловая скорость вращения колес планетохода, соот-
ветствующая холостому ходу двигателя (скорость холостого
хода); А — угловой коэффициент тяговой характеристики мотор-
колеса движителя, определяемый экспериментально или по пас-
портным данным; Л4кг- — момент, реализуемый i-м колесом пла-
нетохода в данных условиях движения.
Необходимым этапом создания математической модели бор-
тового поворота планетохода является определение обобщен-
ных характеристик взаимодействия одиночного колеса движите-
ля с грунтовым основанием. Такие соотношения в виде безраз-
мерных функций |i=f(feT, б); Фт=/(^т, б); s=f(kTi б); fw=f(kTi
б) могут быть получены в результате экспериментального и
аналитического исследования упомянутого процесса. Результа-
ты такого исследования представлены в предыдущих главах.
5.3.3. Критерии оценки эффективности криволинейного дви-
жения планетохода. Итак, рассмотрение общих положений ос-
нов теории бортового поворота планетохода и элемента его
движителя — колеса, анализ результатов теоретического и экс-
периментального исследования взаимодействия последнего с
грунтовым основанием позволили получить систему уравнений,
представленную в гл. 2 обобщенными характеристиками взаи-
модействия одиночного колеса с грунтовым основанием и соот-
ношениями (5.80), (5.84), (5.86) ...(5.88). Уравнения этой систе-
мы дают достаточно полное описание рассматриваемого случая
движения планетохода.
Данные, получаемые в результате решения такой математи-
ческой модели, позволяют провести оценку характеристик по-
ворачивающего планетохода в функции тех или иных его конст-
руктивных и эксплуатационных параметров. Для количествен-
ного выражения этих характеристик в теории транспортных ма-
шин применяются критерии, пользуясь которыми можно доста-
точно объективно оценить качества данного транспортного сред-
ства, определить его соответствие предъявляемым требовани-
ям, сопоставить его с другими аппаратами.
15*
228
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Объективная оценка бортового поворота такого транспорт-
ного средства, как полноприводный планетоход, является слож-
ной задачей и требует выявления и анализа возможно больше-
го числа характеризующих его параметров. Среди возможных
для оценки бортового поворота критериев в первую очередь
следует назвать момент сопротивления повороту Мс и мощность,
подводимую к движителю поворачивающего планетохода Мп,
получившие широкое распространение в теории транспортных
машин. Анализ этих параметров показал, что характеризуя ос-
новные качества поворачивающего транспортного средства, они
не обеспечивают однозначной оценки эффективности его дви-
жения в условиях бортового поворота.
В связи с этим важное значение приобретает критерий, ко-
торый позволил бы объединить параметры оценки конструктив-
ного совершенства планетохода с неповоротными колесами в
общую математическую формулу, позволяющую провести оцен-
ку конструкции при помощи одного сводного показатели. Таким
критерием оценки может служить коэффициент удельной энер-
гии, затрачиваемой планетоходом на единицу угловой скорости
его поворота,
= Nn/QG.
Чем меньше этот коэффициент, тем меньше, при прочих рав-
ных условиях, потребная на поворот энергия силовой установки
планетохода, а следовательно, дольше срок ее службы.
Наряду с названными критериями, безусловно, важным па-
раметром оценки бортового поворота планетохода является
предложенный Я. Е. Фаробиным [56] коэффициент использо-
вания сцепной силы движителя аппарата Кф который в нашем
случае будем определять как отношение среднего (по колесам
движителя забегающего борта) коэффициента свободной тяги
к коэффициенту сцепления одиночного колеса <рс:
' п/2
/СФ=2^ чЛ/пфс.
1=1
Очевидно, что чем меньше это отношение, тем выше потен-
циальная способность транспортного средства к совершению
бортового поворота, тем меньше вероятность потери этой спо-
собности.
Таким образом, бортовой поворот транспортного средства
может быть достаточно объективно оценен с помощью парамет-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
229
ров Л4С, А/п, KN, , выявленных в результате решения матема-
тической модели, описывающей установившееся движение пла-
нетохода по криволинейной траектории постоянного радиуса.
Структура предлагаемой модели, свидетельствуя о сложно-
сти описываемых ею процессов, приводит к выводу о необходи-
мости выполнения для ее решения большого объема вычисле-
ний, практическое осуществление которых в полной мере воз-
можно только с помощью ЭВМ.
5.3.4, Оценка достоверности результатов расчета. В основу
алгоритма расчета параметров бортового поворота планетохода
положен метод перебора вариантов сочетаний переменных со'0,
/о, 9 при тех или иных задаваемых значениях постоянных R и
со0, где (о0 — угловая скорость холостого хода мотор-колес ле-
вого й/о и правого <о0 бортов движителя аппарата (5.88);
10— смещение центра его поворота Оп (см. рис. 5.12); 9 — уг-
ловая скорость и R— радиус поворота.
Программа, реализующая разработанный алгоритм решения
задачи на ЭВМ, позволила осуществить комплексное исследова-
ние криволинейного движения многоосного транспортного сред-
ства с неповоротными колесами, представляющее важный теоре-
тический и практический интерес. Это не только задача анализа
того или иного аппарата, т. е. определения по заданным конст-
руктивным параметрам планетохода его оценочных критериев:
Мс, Nn, KN, Лф , но и исследования влияния на последние тех
или иных вариаций параметров транспортного средства, т. е. в
конечном счете, их оптимизация.
Достоверность программы, составленной для реализации раз-
работанной математической модели, правомерность допущений
и условий, принятых при разработке последней, могут быть
проверены лишь экспериментально. Поэтому, обращаясь к не-
которым из имеющихся в нашем распоряжении материалам ис-
пытания макетных образцов «Луноход-1 и 2» [30], рассмотрим
результаты расчета движения аппаратов с разными колесными
формулами (табл. 5.2), основные конструктивные параметры ко-
торых представлены в табл. 5.3.
Имеющиеся в технической литературе данные по теории дви-
жения транспортных средств позволяют выполнить в ряде слу-
чаев лишь качественную оценку влияния некоторых из конструк-
тивных параметров, таких как коэффициент базы Kl = LIB, мас-
са аппарата тп, высота расположения его центра масс Н и ря-
да других [32, 56] на процесс бортового поворота. Например,
230
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Таблица 5.2. Сравнение результатов расчета и эксперимента
Колесная формула Источник данных R, м 0, 1/с *п- Вт KN ’ Вт • с/Н
6X6 Расчет 0,068 285,9 1,798
Эксперимент 0 0,071 304,9 1,713
8X8 Расчет — 0,159 242,5 0,853
Эксперимент 0 0,156 224,9 0,808
8X8 Расчет — 0,081 208,1 1,439
Эксперимент 6,84— 2 0,074 195,7 1,482
Таблица 5.3. Основные конструктивные параметры расчетных моделей
планетоходов
Параметр Колесная формула
6X6 8X8
Масса /ип, кг 237 183
База L, м 1,98 1,7
Колея В, м 1,70 1,6
Координаты осей колес движителя /к1, м 0,99 0,85
ZK2, М 0 0,284
/Кз> м —0,99 —0,284
ZK4, м — —0,85
Число колес п 6 8
Внешний радиус колес движения г0, м 0,255 0,255
Высота центра масс Я, м 0,7 0,850
рост Kl ухудшает маневренность машин с бортовой схемой по-
ворота, рост массы тп сопровождается ростом энергозатрат на
передвижение, а рост Н приводит к возрастанию опасности оп-
рокидывания аппарата при повороте, снижению его устойчивос-
ти на косогоре и т. д.
Поскольку влияние большинства параметров транспортного
средства на процесс поворота далеко не очевидно, представля-
ется необходимой количественная оценка влияния таких пара-
метров аппарата, как положение колес по борту /Кг', число ко-
лес машины п; положение центра масс аппарата на продольной
оси при фиксированном положении колес по борту /К1 и ряда
других, для которых современная теория транспортных машин
не обеспечивает даже качественной оценки.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
231
5.3.5. Некоторые результаты моделирования. Создание пла-
нетохода, соответствующего предъявляемым тактико-техничес-
ким требованиям, представляет собой весьма длительный и тру-
доемкий процесс. Использование ЭВМ значительно сокращает
его. Кратко рассмотрим некоторые результаты моделирования
бортового поворота планетохода на ЭВМ, иллюстрирующие его
возможности при решении оптимизационных задач.
Колесная формула. Одним из основных вопросов, возникаю-
щих при проектировании движителя нового транспортного сред-
ства с ограниченными по соображениям компоновки габарита-
ми, является вопрос о выборе колесной формулы.
Отсутствие как экспериментальных данных, так и теоретичес-
ких исследований по этому вопросу существенным образом зат-
рудняет однозначность выбора решения. Поэтому с целью поис-
ка ответа на поставленный вопрос рассмотрим результаты рас-
чета бортового поворота планетохода на месте (/?=0), осущест-
вляемого путем реверса мотор-колес противоположных бортов.
Выбранный ряд колесных формул анализируемых вариантов
(4X4; 6X6; 8X8; 12X12) обусловил один из габаритных раз-
меров модели транспорта, а именно — базу, которая в расчетах
принималась равной 1,98 м. Для получения сопоставимых ре-
зультатов колея В рассматриваемых аппаратов выбиралась из
условия обеспечения коэффициента базы Кь, равного 1,16.
Сравнение рассчитываемых в данных условиях моделей про-
водилось с помощью предложенных выше критериев оценки
эффективности поворота. Выполненные расчеты, позволяя вы-
явить искомую связь параметров поворота планетохода на мес-
те (/? = 0) с колесной формулой его движителя, наглядно подт-
верждают сложность процесса бортового поворота, показывают,
что оценка его эффективности должна выполняться комплексно
по целому ряду показателей (рис. 5.14).
В самом деле, характеристики, приведенные на рис. 5.14, а,
связывающие потребную для поворота на месте мощность, или
мощность внешних сопротивлений, с колесной формулой движи-
теля планетохода данной массы и габаритов, свидетельствуют о
том, что минимальная ее величина соответствует модели с ко-
лесной формулой движителя 4X4. Но вывод о преимуществе та-
кой схемы был бы неоправдан. Действительно, возросшая за
счет меньшего числа опорных элементов движителя нагрузка,
приходящаяся на каждое из колес, приводит к резкому, в срав-
нении с другими вариантами колесных формул (см. рис. 5.14, б),
росту момента сопротивления повороту Мс. Ухудшение условий
232
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис. 5.14. Влияние колесной
формулы планетохода на
мощность 7УП (^) и момент
сопротивления повороту на
месте MG (б) (7? = 0)
работы колесного движителя приводит, в свою очередь, к тако-
му сильному, за счет роста буксования колес, снижению угло-
вой скорости поворота планетохода в целом, что удельные зат-
раты энергии Kn аппарата 4X4 возрастают в сравнении с пла-
нетоходом 8X8 почти на 50 % (рис. 5.15).
Комплексный анализ эффективности бортового поворота ко-
лесного планетохода в зависимости от колесной формулы его
движителя позволяет сделать вывод в пользу многоосных транс-
портных средств, имеющих высокую угловую скорость поворота
и низкие удельные затраты на ее единицу. Следует отметить,
однако, и тот факт, что значительное увеличение числа осей
транспорта с бортовой схемой поворота не обеспечивает сущест-
венного улучшения его поворотливости. Например, при увели-
чении числа осей с четырех до шести (см. рис. 5.15, б) удель-
ные затраты энергии Kn снижаются лишь на 5 %, конечно же,
не компенсируя конструктивного усложнения ходовой части ап-
парата.
Таким образом, при проектировании колесных планетоходов
с бортовой схемой поворота предпочтение должно быть отдано
Рис. 5.15. Влияние колес-
ной формулы планетохо-
да на угловую скорость
0 и коэффициент удель-
ной мощности Кн при по-
вороте на месте (Я=0)
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
233
вариантам аппаратов с числом осей, не превышающим четырех,
так как в противном случае усложнение конструкции движителя
не приводит к заметному улучшению показателей эффективно-
сти поворота.
Радиус поворота. Одним из важнейших эксплуатационных
параметров транспортного средства, определяющим в том числе
и его маневренность, является радиус поворота. Не случайно
поэтому в многочисленных теоретических и экспериментальных
работах, посвященных вопросам движения транспортных сред-
ств, их поворотливости уделяется достаточно пристальное вни-
мание.
Представленные выше материалы моделирования поворота
планетоходов на ЭВМ были посвящены изучению влияния ко-
лесной формулы движителя на процесс движения при поворо-
те транспорта на месте (7?=0). При выборе величины радиуса
поворота мы исходили из того, что планетоходы, способные по-
ворачивать на месте, конечно же, имеют наивысшую поворот-
ливость, обеспечивающую в ряде случаев и достаточно высокий
уровень проходимости. Это обстоятельство и позволило нам ос-
тановить свой выбор на повороте аппарата с /? = 0. Однако нас-
колько рационален выбор такого радиуса поворота, можно су-
дить, лишь оценив для того или иного транспортного средства
влияние величины R на критерий эффективности поворота.
Рассмотрим моделирование поворота планетохода с колес-
ной формулой 8X8, конструктивными и эксплуатационными па-
раметрами, представленными в табл. 5.3, при ряде фиксирован-
ных значений радиуса поворота R, реализуемых при работе мо-
тор-колес забегающего борта на одной и той же передаче coz,0.
Полученные данные позволяют наглядно проследить влияние
радиуса поворота на момент сопротивления Мс, угловую ско-
рость поворота 0, коэффициенты удельного расхода энергии на
единицу угловой скорости поворота Kn и использования сцеп-
ной силы движителя забегающего борта Ki (рис. 5.16).
С ростом радиуса поворота момент сопротивления Мс и уг-
ловая скорость поворота 0 падают. При этом за счет улучшения
условий работы потенциальная возможность колесного движи-
теля обеспечить выполнение поворота возрастет, приводя к
уменьшению величины коэффициента использования сцепной
силы колесного движителя забегающего борта Кф .
Увеличение радиуса поворота сопровождается естественным
снижением мощности внешних сопротивлений, т. е. мощности,
234
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
потребной на осуществление поворота планетохода — А/п. Од-
нако в сравнении с падением угловой скорости поворота 6 ин-
тенсивность снижения А/п ниже, что приводит в данных услови-
ях к такому положению, когда коэффициент удельных затрат
энергии на единицу угла поворота Kn увеличивается с ростом
радиуса поворота транспорта.
Рис. 5.16. Результаты математическо-
го моделирования бортового поворо-
та планетохода (8x8)
Рис. 5.17. Влияние положения сред-
ней оси на параметры оценки пово-
ротливости планетохода (6x6). По-
ворот на месте (2? = 0), ZKi = 0,99 м
Таким образом, привод планетохода с бортовой схемой по-
ворота должен обеспечивать возможность поворота транспорта
с минимально допустимым, по тем или иным соображениям, ра-
диусом, что позволит, несмотря на высокую потребую на поворот
мощность, снизить удельные затраты энергии на единицу угло-
вой скорости поворота, повысить эффективность движения.
Положение центра масс. Важнейшими конструктивными па-
раметрами планетохода являются координаты осей его движи-
теля /кг- и положение центра масс на продольной оси аппарата
по отношению к заданному движителю /кь
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
235
В качестве иллюстрации этого утверждения рассмотрим ре-
зультаты моделирования поворота на месте (7? = 0) планетохо-
да с колесной формулой движителя 6X6 и основными конструк-
тивными параметрами, представленными в табл. 5.3. Моделиро-
вание ставило своей целью улучшение эксплуатационных свой-
ств такого аппарата за счет выбора оптимального, с точки зре-
ния затрат энергии, положения центра масс /К1 планетохода по
отношению к средней оси его движителя.
Графическая интерпретация результатов моделирования
представлена на рис. 5.17. Анализ рисунка, свидетельствуя об
определенном влиянии положения средней оси на критерии
оценки ходовых качеств планетохода при повороте, позволяет
сделать вывод о возможности оптимизации этого параметра.
В частности, в рассматриваемом случае оптимальное положение
средней оси /К2 соответствует равномерному в продольной плос-
кости размещению осей движителя.
5.4. Описание и некоторые результаты
ходовых испытаний макетов планетоходов
5.4.1. Макет планетохода с колесно-шагающим
движителем для непрерывных походок. Макет планетохода с
КШД (рис. 5.18) * выполнен применительно к непрерывным по-
ходкам с интегральной схемой привода [7]. Несложное перео-
борудование макета позволяло исследовать на нем режимы дви-
жения с прерывными походками и с пассивными колесами.
Макет представляет собой шестиколесное шасси с механиз-
мами шагания для каждого колеса. Управление макетом — дис-
танционное. Электромеханический привод вращения выполнен
индивидуальным для каждого колеса, а привод шагания —
центральный от дополнительных электромеханических приво-
дов.
Основными узлами колесно-шагающего механизма (рис.
5.19) являются кривошипный привод шагания (прямило Чебы-
шева, звенья 10, 14, 15), мотор-колесо 2, рычаг шагания 5, ме-
ханизм сумматора (звенья /, 3, 4 и 5) и детали подвески, звенья
6, 7 и 5. Конструктивно механизм сумматора состоит из шкивов
1 и 5, шарнирно установленных на рычаге шагания 3 и связан-
ных между собой кинематической передачей — тросом 4, защем-
ленным на обеих шкивах. Шкив 1 жестко связан с корпусом мо-
* Фотографии разд. 5.4 выполнены В. К. Андреевым.
236
передвижение по грунтам луны и планет
Рис. 5.18. Макет планетохода с колесно-шагающим движителем с непрерыв-
ными походками
Рис. 5.19. Кинематическая схема колесно-шагающего механизма:
/ — первый шкив механизма сумматора; 2— мотор-колесо; 3 — рычаг шагания; 4 — трос;
5 — второй шкив механизма сумматора; 6 — балансир; 7 — реактивная штанга; 8 — уп-
ругий элемент подвески; 9 — продольный рычаг привода шагания; 10, 15,\ 14 — прямило
Чебышева; 11, 12 — цепная передача привода шагания; 13 — тяговый привод шага-
ния
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ 237
тор-редуктора 2, а шкив 5 с помощью балансира 6 и реактивной
штанги 7 связан плоскопараллельно с рамой макета. Звенья 3,
6, 9 и 10, наряду с выполнением соответствующих функций в со-
ставе механизма сумматора и привода шагания, образуют си-
стему подвески колеса. Поскольку они выполнены так, что при
любом положении колеса образуют примерно шарнирный па-
раллелограмм, то это обеспечивает разгрузку упругого элемен-
та подвески — торсиона 8 как от реактивного момента на коле-
се, так и от момента, возникающего в результате смещения
нормальной реакции опоры относительно общего шарнира ры-
чага шагания 3 и балансира 6 при продольных перемещениях
колеса относительно рамы макета. В качестве электроприводов
к механизмам шагания каждого борта используется электро-
мотор-редуктор 13. Ведущая звездочка, установленная на его
выходном валу, с помощью цепной передачи 12 связана со звез-
дочками 11, установленными неподвижно на валах кривоши-
пов 14. Электромоторы редуктора шагания установлены по обе-
им бортам макета. При необходимости синхронизации враще-
ния механизмы шагания обоих бортов могут соединяться посред-
ством соединительной муфты.
Масса макета 220 кг, продольная база Ь = 1,7...2,14 м; колея
В = 1,7 м; радиус колеса г=0,255 м; длина рычага шагания 1 =
= 0,25 м; шаг SK=0,22 м; привод шагания обеспечивает движе-
ния с производительноостью шагания у=1. В соответствии с по-
нятием интегральной схемы привода [см. уравнения (4.51)...
(4.53)] передаточное отношение механизма сумматора приме-
нительно к конкретной схеме колесно-шагающего механизма
k = djd2 = 2,02,
где d2 и d± — диаметры соответственно шкивов 1 и 5.
Величина расчетного радиуса механизма шагания
гр = 1/Ь = 0,245,
где B = k—1 = 1,02 — параметр механизма сумматора.
Связь параметров взаимодействия отталкиваемых и перено-
симых колес с грунтом из выражения (4.10) для макета опре-
деляется зависимостью
5Ю = 2,08s6 + 0,08.
В зависимости от последовательности включения тяговых
приводов макета могут реализовываться следующие режимы
движения.
238
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Колесный режим, который реализуется при включении толь-
ко привода вращения колес соп.к. В соответствии с (4.53) и с
учетом того, что при этом rf=l, (оШг = 0, скорость передвижения
определяется только скоростью привода вращения колес <оп.к.
В этом случае макет представляет собой обычное шестиколес-
ное шасси, продольная база которого может изменяться в пре-
делах двух шагов, т. е. 23к = 0,44 м.
Колесно-шагающий режим, который реализуется при одно-
временном включении приводов шагания и вращения колес.
При этом колеса совершают возвратно-поступательные переме-
щения относительно рамы макета и перекатываются по опорной
поверхности со скоростью, определяемой схемой привода, а кор-
пус макета перемещается равномерно и прямолинейно. Из (4.53)
с учетом того, что гк незначительно отличается от гр, скорость
передвижения также определяется приводом вращения колес
Условный шагающий режим (когда включается только при-
вод шагания колес) имеет чисто демонстрационный характер’.
Колеса при этом совершают возвратно-поступательные переме-
щения относительно рамы макета, перекатываясь по опорной
поверхности, а корпус макета неподвижен. Из (4.53) получаем,
что VK = 0, так как при этом соп.к = 0, а гк~гр.
Во всех режимах движения использовался бортовый способ
поворота. Цепная передача от приводов шагания к механизмам
шагания позволяет устанавливать любую последовательность
перемещения колес за счет предварительной установки соответ-
ствующего сдвига фаз между соседними механизмами шагания.
Сдвиг по фазе f0, необходимый для обеспечения нужного режи-
ма движения, определяется по (4.46).
Макет можно переоборудовать для обеспечения движения в
режиме прерывных походок. Для этого снимают цепную пере-
дачу, связывающую приводы механизмов шагания, а каждый
механизм шагания снабжают индивидуальным приводом. При
этом этап переноса колес в любой последовательности осущест-
вляется при включении только привода шагания (однако не ис-
ключается возможность включения и привода вращения). Не-
обходимое соотношение скорости шагания и вращения колеса,
соответствующее (4.51), определяется механизмом сумматора
при соп.к = 0. Этап переноса корпуса осуществляется одновремен-
ным включением приводом шагания и вращения колес. Состо-
яние колес на этапе отталкивания, в том числе и их неподвиж-
ность, определяется параметрами механизма сумматора а, b
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ Й ХОДОВЫЕ ИСПЫТАНИЯ
239
[см. выражение (4.51)] и соотношением скорости привода вра-
щения (Оп.к и шагания (ош колес.
Использованная в макете конструктивная схема колесно-
шагающего механизма позволяет исследовать на нем режим
колесно-шагающего движения с пассивными колесами. Для это-
го отключают механизм сумматора, снимают трос 4 (см. рис.
5.19). Колесо 2, свободно установленное в рычаге шагания 3,
соединяют с последним с помощью муфты свободного хода.
Движение в колесно-шагающем режиме осуществляется только
включением приводов шагания. На этапе переноса колесо пере-
мещается по опорной поверхности как толкаемое механизмом
шагания пассивное колесо, а на этапе отталкивания оно с по-
мощью муфты свободного хода автоматически блокируется с ры-
чагом шагания 3.
На рис. 5.20 представлены результаты экспериментальных
исследований тяговых свойств макета планетохода в различных
режимах и походках. Исследования проводились на сухом квар-
цевом песке методом создания силы тяги на крюке. Коэффици-
ент тяги kT определялся так: kT = Pl^/G1 где Ркр — сила тяги на
крюке; G — вес макета..
Расчетные данные рис. 5.20 определены по методике, изло-
женной в гл. 4. Представленные на рис. 5.20 результаты экспе-
риментальных исследований макета указывают, что в колесно-
шагающем режиме макет обладает лучшими тяговыми свойст-
вами по сравнению с колесным режимом. Использование режи-
ма движения след в след и максимальной производительности
шагания обеспечивает увеличение kT) а режим движения с пас-
сивными колесами обеспечивает существенное ухудшение тяго-
вых свойств движителя.
Рис. 5.20. Тяговые характеристики
макета с колесно-шагающим движи-
телем:
1 — равномерная непрерывная походка,
Y=l; 2 — равномерная непрерываня по-
ходка, у=1, режим движения след в
след; 3 — равномерная непрерывная по-
ходка, Y=I, режим след в след (рас-
чет); 4 — равномерная непрерывная, v=l,
пассивные колеса; 5 — равномерная
непрерывная, у=1; пассивные коле-
са (расчет); 6 — равномерная прерывная,
Ve5; 7 — равномерная прерывная, -у=5
(расчет); 8 — колесный режим
240
Передвижение по грунтам луны и планет
На рис. 5.21 показаны следы от колес на поверхности при
движении макета в колесно-шагающем и колесных режимах при
/?т=^0,4, откуда видно, что в колесном режиме колеса более ин-
тенсивно погружаются в грунт, чем в колесно-шагающем. След
от движения макета в колесно-шагающем режиме представля-
ет собой ряд холмов грунта, образованных отталкиваемыми ко-
лесами, которые являются хорошим упором.
Испытания показали, что макет преодалевал уклоны с грун-
тами вулканического происхождения в колесном режиме до
19°, в колесно-шагающем режиме с непрерывной походкой и
у=1—до 25°, а в колесно-шагающем режиме с прерывной по-
ходкой при у = 5 — до 28°, угол 28° практически является мак-
симальным углом естественного откоса этих грунтов.
5.4.2. Макет планетохода с колесно-шагающим двжителем
для прерывных походок. С учетом результатов испытаний (см.
подразд. 5.4.1) следующий макет планетохода с КШД был спро-
ектирован для реализации наиболее эффективных по проходи-
Рис. 5.21. Следы колес макета на опорной поверхности в различных режи-
мах при /гт = 0,4:
а — колесный режим; б — колесно-шагающий режим
Математическое моделирование и ходовые испытания 241
мости равномерных прерывных походок с максимальной для
шестиопорной машины производительностью шагания у = 5.
В отличие от предыдущего макета он обеспечивает кроме ша-
гания возможность движения в колесном режиме с регулирова-
нием относительного положения колес и корпуса по вертикали.
И колесно-шагающий режим, и регулирование колес осу-
ществляются с помощью одного механизма шагания, схема ра-
боты которого приведена на рис. 5.1. Привод вращения колеса
и его механизма шагания осуществляются с помощью одного
электродвигателя, встроенного вместе с блокирующим механиз-
мом и редукторами в рычагах механизма шагания. Структурно-
кинематическая схема привода соответствует рис. 5.3 [10] при
постоянно замкнутом фрикционе Тз. Для исследования потерь
в замкнутых контурах привода и оценки режима его работы с
пассивным колесом демонтируется одна из шестерен колесного
редуктора. Так разрывается кинематическая связь колеса с дви-
гателем, т. е. имитируется размыкание Тз. Торможение колеса
на этапе отталкивания осуществляется при этих видах ис-
пытаний с помощью искусственно создаваемого внешнего
момента.
Другой особенностью макета является наличие более слож-
ных информационной системы и системы управления, позволяю-
щих макету двигаться не только по командам от дистанционно-
го пульта, но и в автоматическом режиме. Для реализации ав-
томатических режимов управления макет снабжен техническим
зрением на основе лазерного дальномера, датчиками буксова-
ния, крена и дифферента, а также тактильными датчиками,
позволяющими избежать касания выступающих препятствий
днищем и оценивать высоту препятствий непосредственно под
колесами макета. В приводах встроены также датчики положе-
ния рычагов МШ, используемые для автоматической реализа-
ции заданной походки, и аналоговые датчики вращения рыча-
гов МШ [45, 62].
Остальные отличия макета по сравнению с ранее рассмотрен-
ной машиной носят конструктивный характер и обусловлены
увеличением как числа выполняемых функций, так и массы ап-
парата. Макет представляет собой шестиколесное самоходное
шасси (рис. 5.22), ходовая часть и другие системы которого
смонтированы на несущей раме. На ней крепится надстройка,
закрывающая аппаратуру и энергоблок от атмосферных осад-
ков и позволяющая вынести на необходимое расстояние от по-
верхности лазерный дальномер.
16 Зак. 826
242
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис 5.22. Макет планетохода с колесно-шагающим движителем для прерыв-
ных походок
Каждая из шести опор движителя выполнена в виде авто-
номных идентичных модулей, предварительно собранных на си-
ловом кронштейне. Каждый модуль включает в себя колесо,
механизм шагания, встроенный в его внутреннем объеме, при-
вод, подвеску и внутреннюю кабельную сеть, заканчивающуюся
электроразъемом. Кронштейн и разъем предназначены соответ-
ственно для механической и электрической стыковки модуля
с макетом. Модульный принцип, вообще характерный для кон-
струирования транспортных средств с мотор-колесами, дает
большую свободу при компоновке ходовой части на раме.
Жесткие металлические колеса макета снабжены развитыми
титановыми криволинейными грунтозацепами. Для улучшения
характеристик бортового поворота макета грунтозацепы сред-
них колес расположены параллельно оси колеса, а на крайних
колесах — несколько развернуты относительно этой оси. Край-
ние и средние модули отличаются также характеристиками под-
вески: ход подвески средних колес больше, чем крайних. При
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ $4$
этом за счет применения составного торсиона характеристика
подвески средних колес на участке, ограниченном упорами, яв-
ляется нелинейной. Подвески крайних колес на этом участке
имеют линейные характеристики.
По грунтозацепам колесо имеет диаметр 0,75 м. Ширина
колеса, беговая дорожка которого образована двумя трубча-
тыми дисками, соединенными грунтозацепами и ободом с про-
резанными в нем окнами, составляет 0,28 м.
Масса макета превышает 500 кг, колея равна 1,75 м. База
регулируется с помощью МШ от 2,1 (короткая) до 2,96 м
(длинная). Плечо рычага МШ равно 0,108 м.
При различном положении тормозов Ть Т2, Т4 (см. рис. 5.3)
и при имитации размыкания фрикциона Т3, макет может вы-
полнять все режимы, указанные в табл. 5.1. При этом скорость
движения в колесном режиме при выбранной мощности электро-
двигателя составляет 0,3 км/ч, а в колесно-шагающем снижается
более чем на порядок. Скорость не регулируется, а ее измене-
ние определяется режимом работы электродвигателей с магни-
тоэлектрическим возбуждением, а также величиной буксования
колес на грунте.
Было проведено большое количество испытаний макета,
включавших в себя и исследования автоматических методов
управления на основе собственной информации. Кратко рас-
смотрим результаты испытаний, относящиеся только к ходовой
части и приводу, и, в первую очередь, отражающие новое ка-
чество КШД — регулирование положения колес и корпуса по
вертикали.
Предварительно необходимо отметить, что как на вулкани-
ческом, так и на кварцевом песке были подтверждены высокие
тягово-сцепные свойства КШД, отмеченные в предыдущем под-
разделе.
Наиболее эффективной при преодолении подъемов оказалась
такая последовательность перемещения опор, при которой дви-
жение начинается с одного из наиболее нагруженных задних
колес и заканчивается выносом менее нагруженных передних
колес. Если в колесном режиме макет преодолевает на квар-
цевом песке подъемы до 10°, то при движении в режиме равно-
мерной прерывной походки с указанной последовательностью
шагания преодолевались подъемы до 30...31°, что равно углу
естественного откоса для этого грунта. В колесном режиме
потеря проходимости наступает вследствие увеличения буксо-
вания и последующего зарывания колес. При движении в ко-
16*
244
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ Й ПЛАНЕТ*
лесно-шагающем режиме предварительное заглубление колес в
грунт, напротив, приводит к увеличению тяги отталкиваемых
опор, а потеря проходимости связана с дрейфом макета.
При движении по твердому грунту, неразрушающемуся при
взаимодействии с ним движителя, преимущества КШД несуще-
ственны. В этих условиях и в колесном, и в колесно-шагающем
режимах макет преодолевает подъемы до 32...34°.
Рис. 5.23. Схемы испытаний макета
планетохода при регулировании отно-
сительного положения колес и корпу-
са по вертикали;
а, б — изменение дорожного просвета;
в, г — стабилизация горизонтального по-
ложения корпуса при движении вдоль рва
и по косогору; д — подъем среднего ко-
леса при преодолении выступающих пре-
пятствий; е — стабилизация горизонталь-
ного положения корпуса при движении на
подъем
Испытания подтвердили выводы разд. 5.2 о возможности
использования механизма шагания КШД для регулирования
положения колес и корпуса по вертикали. Некоторые из опро-
бованных вариантов регулирования приведены на рис. 5.23. От-
метим, что поочередный поворот приводов с рычагами МШ на
90° (для подготовки КШД к работе в режиме регулирования)
осуществлялся при стоянке не только на горизонтальной пло-
щадке, но и на крутых подъемах. При этом сползания макета
не наблюдалось, а энергозатраты на поворот, обусловленные
только потерями в подшипниках подвески, были незначительны.
Регулирование дорожного просвета осуществлялось однопо-
лярным включением двигателей всех мотор-колес (см. рис. 5.23,
а и б). При этом в нижнем положении обеспечивается наиболь-
шее удобство для выполнения одной из важнейших функций
планетохода — исследования свойств грунта контактными ме-
тодами. При подъеме корпуса можно проходить без маневри-
рования участки с высотой камней под днищем до 0,8 м, т. е.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ 245
примерно на 0,2 м больше обычного для данного макета. Время,
необходимое для подъема корпуса из низшего положения в
высшее, составляет 7,7 с, а в обратную сторону — 4,9 с, а мак-
симальные значения токов двигателей различных колес при
этих операциях (напряжение питания U=27 В) дано в табл. 5.4
Таблица 5.4. Токи двигателей приводов КШД при регулировании дорожного
просвета на горизонтальной площадке
Движение корпуса Ток двигателя, А
передние колеса средние колеса задние колеса
Вверх 10,6 8,4 6,0 8,2 9,75 11,6
Вниз — 2,4 —3,4 -1,5 0,7 —2,5 — 2,0
Необходимо отметить, что вследствие работы двигателей в
генераторном режиме опускание корпуса (несущей рамы с уста-
новленным на ней оборудованием) осуществлялось достаточно
плавно.
Весьма эффективным для увеличения курсовой устойчивости
макета при движении на склонах оказалось приведение крена
корпуса к нулю (см. рис. 5.23). Так, при движении поперек
склона с углом наибольшего подъема ап=11° абсолютная ве-
личина бокового сноса при выставлении корпуса в горизонталь-
ное положение уменьшается на порядок (рис. 5.24). Отметим,
что такое регулирование, осуществляемое разнополярным вклю-
чением двигателей противоположных бортов, может быть необ-
ходимо для работы отдельных приборов, установленных на
раме.
Подъем среднего колеса при переезде им выступающего пре-
пятствия (см. рис. 5.23, д') позволяет исключить отрыв от грун-
та крайних колес, что повышает профильную проходимость ма-
кета. Высота камней, выступающих из рыхлого грунта, при ис-
пользовании этого режима превышает радиус колеса.
При указанных выше величинах базы макета и длины ры-
чага МШ регулирование дифферента корпуса (см. рис. 5.22 и
рис. 5.23, е) было незначительным: в пределах 7°. Поэтому и
существенного положительного эффекта, например, в части бо-
лее благоприятного перераспределения тяговых усилий по ко-
246
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис. 5.24. Фрагменты испытаний макета с выставлением корпуса в горизон-
тальное положение (вид спереди и вид сбоку)
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
247
лесам макета выявить не удалось. Однако пределы регулиро-
вания могут быть в принципе увеличены при увеличении длины
рычагов МШ и уменьшении базы.
Ряд испытаний преследовал задачу проверки расчетных ме-
тодов оценки условий выноса колеса и величины потерь в замк-
нутых контурах при различных схемах привода. Испытания по-
казали, что вследствие рассмотренных в разд. 5.2 причин не-
полный вынос колеса при дифференциальном приводе колеса и
рычагов МШ случается достаточно часто. Принудительный при-
вод рычагов МШ с разрывом кинематической цепи колесного
редуктора (пассивное колесо) устраняет этот дефект не только
при малом сцеплении колеса с грунтом, но и при потере кон-
такта. Испытания показали, что при у=5 снижения проходи-
мости макета на слабосвязных грунтах на этапе выноса пассив-
ного колеса не отмечено. Юз макета в этом режиме при ап=25°
на песке практически отсутствует. Что касается этапа переноса
корпуса, то здесь условия взаимодействия колес с грунтом для
обеих схем привода идентичны — все колеса во время этого эта-
па заторможены.
Определенным преимуществом привода рычагов МШ с пас-
сивным колесом является существенное снижение энергозатрат
вследствие разрыва замкнутого контура колесного редуктора и
соответствующего снижения внутренних потерь. В свою очередь,
дифференциальный привод оказывается более эффективным при
преодолении выступающих препятствий. В особенности это от-
носится к препятствиям типа вертикальной стенки, не изменяю-
щим своей геометрии в процессе взаимодействия с грунтом. Так,
для варианта с дифференциальным приводом высота преодоле-
ваемой вертикальной стенки составила 0,45 м, а при отсутствии
крутящего момента на колесе (пассивное колесо) —вдвое мень-
шую величину. Таким образом, для каждой из схем привода
имеются свои условия рационального применения..
В целом, результаты испытаний, которые были использованы
также для обработки модели, показали, что соединение в одной
машине качеств, придаваемых ей КШД и регулированием по-
ложения колес и корпуса по вертикали, повышает возможности
адаптации к внешней среде (рис. 5.25). В то же время благодаря
использованию для этих целей одних и тех же исполнительных
устройств — привода и МШ, конструктивное усложнение аппа-
рата оказывается минимальным и относится, в основном, к дат-
чикам информационной системы. Усложняются и алгоритмы
управления.
248
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис. 5.25. Движение макета вдоль рва со стабилизацией горизонтального по-
ложения корпуса
Рис. 5.26. Шестиколесный ходовой макет в районе испытаний
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
249
5.4.3. Макет планетохода с металлоупругими колесами*. Ма-
кет состоит из несущей рамы, на которой смонтированы ходовая
часть со встроенным в колеса тяговым электромеханическим
приводом; система управления; информационная система; бор-
товая энергетическая установка; мачта и кабельная сеть
(рис. 5.26). Масса макета составляет около 250 кг, из которых
на неподрессоренные части приходится примерно 40%. База и
колея макета примерно равны между собой и составляют около
двух метров. Дорожный просвет (клиренс) не более 0,6 м.
Ходовая часть включает в себя шестиколесный движитель,
подвеску, кронштейны для крепления указанных узлов к раме.
Колесо представляет собой металлическую конструкцию, не-
чувствительную к большому перепаду температур и имеющую
определенные упругие качества, присущие пневматическим ре-
зинокордным колесам [40]. Практически недеформируемая же-
сткая часть колеса состоит из двух внутренних профилирован-
ных ободов, соединенных со ступицей колеса пространственным
наборо'м велосипедных спиц; На этих ободах организована упру-
гая часть колеса. Она собрана из ленточных пружин, соединен-
ных тремя упругими обручами, и имеет в поперечном сечении
форму арки. Упругая часть обтянута бесшовной металлической
сеткой, поверх которой закреплены грунтозацепы. Диаметр ко-
леса по грунтозацепам 0,75 м, максимальная ширина в сечении
0,25 м.
Каждое колесо снабжено индивидуальной независимой под-
веской с продольным качанием рычагов. Опоры балансира ры-
чажной подвески вместе с упругим элементом — торсионом —
установлены в кронштейнах. Кронштейны снабжены упорами
для ограничения хода подвески и жестко крепятся к раме. Таким
образом обеспечивается агрегатный принцип сборки ходовой
части.
Электромеханическая трансмиссия макета состоит из шести
индивидуальных приводов, соединенных электрическими кабе-
лями с коммутационно-управляющими устройствами. Каждый
привод, встроенный в ступице колеса, включает в себя тяговый
электродвигатель с возбуждением от постоянных магнитов, пла-
* По материалам доклада А. Л. Кемурджиана, Г. Н. Корепанова,
М. И. Маленкова, А. В. Мицкевича, П. С. Сологуба, С. А. Владыкина,
В. И. Комиссарова, А. И. Егорова «О некоторых направлениях развития
транспортных средств с электромотор-колесами» на Всесоюзной конференции
«Теория и расчет мобильных машин и двигателей внутреннего сгорания»,
г. Телави, 1985 г.
250
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
нетарную двухступенчатую коробку передач (КП), тяговый ре-
дуктор, выходной вал которого соединен со ступицей колеса, и
дисковый фрикционный тормоз, расположенный на валу двига-
теля. Электродвигатель имеет два коллектора и позволяет обе-
спечить два различных скоростных режима работы путем раз-
личного соединения якорных обмоток.
Управление фрикционными дисками тормоза и КП осуще-
ствляется с помощью электромагнитов. Совместное регулиро-
вание режимов работы электродвигателя и КП позволяет по-
лучить четыре номинальных скорости движения макета
(табл. 5.5).
Таблица 5.5. Регулирование скорости движения ма-
кета с помощью КП и двухскоростного электродвигателя
Скорость движения макета Схема соединения якор- ных обмоток электро- двигателя Режим работы КП
1-я Последовательное Низшая передача
2-я Параллельное Низшая передача
3-я Последовательное Высшая передача
4-я Параллельное Высшая передача
Общее передаточное отношение КП и редуктора на низшей
передаче составляет 501,2, а на высшей 123,7. Номинальная
угловая скорость вала двигателя при последовательном соеди-
нении составляет (1850+200) об/мин, при параллельном —
(4500+200) об/мин.
Система управления движением макета состоит из двух уст-
ройств: переносного дистанционного пульта и блока управления,
расположенного на раме и соединенного с пультом с помощью
кабеля. Пульт позволяет оператору подавать на блок управле-
ния команды для прямолинейного движения вперед и назад на
каждой из 4-х скоростей. При этом обеспечивается последова-
тельное переключение скоростей с низшей на высшую, а тормо-
жение и остановка макета могут быть осуществлены при произ-
вольных начальных условиях. С помощью пульта могут быть
поданы также команды на реверс мотор-колес противополож-
ных бортов (поворот на месте с 7? = 0) и на работу мотор-колес
этих бортов в различных скоростных режимах, обеспечивающих
поворот в движении с радиусами, отличными от нуля,
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
251
В состав информационной системы входят датчики оборотов
колеса, датчик крена и дифферента подрессоренной части,
электрическая схема, обеспечивающая запись напряжения пита-
ния и токов двигателя каждого мотор-колеса, а также регист-
рирующая аппаратура. Вместе с переносными средствами для
линейных и угловых измерений, пенетрометром, кино- и фото-
съемочной аппаратурой информационная система позволяет оп-
ределить несущую способность грунта и углы наклона опорной
поверхности по трассе движения, коэффициенты буксования ко-
лес, параметры угловых колебаний подрессоренной части, при-
водные моменты на колесах и другие данные. При этом для
определения крутящих моментов используются предварительно
снятые тарировочные токо-моментные характеристики мотор-
колес.
Для приближения динамических характеристик макета к
условиям движения планетохода с приборным контейнером в
ослабленном гравитационном поле на раме макета установлена
мачта с грузом, закрепленным в ее верхней части. Благодаря
этой мачте удается в какой-то мере воспроизвести влияние мас-
сы перевозимых самоходным шасси грузов на увеличение высо-
ты центра масс макета и увеличение его моментов инерции от-
носительно продольной и поперечной осей. В частности, высота
центра масс макета относительно грунта составляет примерно
0,85 м, а упомянутые моменты инерции равны 430 кг-м2. В ка-
честве энергетической установки использован бензоэлектричес-
кий агрегат с буферной аккумуляторной батареей, обеспечива-
ющий номинальное напряжение питания 27 В.
Прямолинейное движение. Испытания макета проводились
на одном из земных аналогов лунного грунта — вулканическом
шлаке, несущая способность которого при измерении методами,
изложенными в гл. 1, составляла 0,025...0,05 Па, характерный
размер частиц был равен (0,5...5) мм, а плотность 1,03...1,20 г/
/см3. На этом грунте при движении на 1-й скорости макет пре-
одолевал подъемы 22...24 ° при среднем (по всем колесам) коэф-
фициенте буксования не более 0,5 (рис. 5.27). Дифферент под-
рессоренной части при этом составлял 29°. При этом благодаря
симметричности макета тягово-сцепные и динамические харак-
теристики на прямом и обратном ходу были практически равно-
ценны.
При дальнейшем увеличении угла подъема происходило рез-
кое увеличение буксования, приводящее к энергичной эскавации
грунта из зоны его взаимодействия с колесами и затем к пол-
252
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Рис. 5.27. Преодоление макетом максимального подъема
ной остановке двигателя (рис. 5.28). Как видно из рис. 5.28,
даже при наиболее интенсивном буксовании металлосетчатая
беговая дорожка колес достаточно хорошо очищалась от грунта.
Забивания внутренней полости шины при этом не наблюда-
лось.
Особенно большой валик грунта нагревает переднее колесо,
идущее по целине и работающее с большим буксованием, чем
нагруженное большим моментом кормовое колесо. В этом один
из недостатков многоопорного движителя с индивидуальным
приводом колес. Распределение крутящих моментов по колесам
такого движителя при движении на слабосвязных грунтах про-
порционально нормальным реакциям. Поскольку приводы всех
колес выбираются одинаковой мощности, определяемой по усло-
виям работы кормового колеса, на крутых (свыше 10... 15°) подъ-
емах привод переднего колеса работает в неоптимальном ре-
жиме. Все же распределение нагрузок между колесами шести-
МАТЕМАТИЧЕСКОЕ МОДЁЛИРОВАНИЁ И ХОДОВЫЕ ИСПЫТАНИЯ 25Й
Рис. 5.28. Зарывание колес при преодолении подъемов, больших 22...24 °
колесного движителя характеризуется меньшим различием, чем
для восьмиколесного (рис. 5.29).
Движение на горизонтальных участках трассы, подъемах до
5...8 ° происходило с весьма малым буксованием, составляющим
не более 0,05. Свидетельством
этому является в частности,
то обстоятельство, что при
движении задним ходом грун-
тозацепы попадали в те же
углубления в грунте, которые
были сделаны ими на прямом
ходу. На колее, проложенной
по целине, видны отчетливые
отпечатки сетки.
Рис. 5.29. Распределение крутящих
моментов на валу двигателей мотор-
колес одного борта при движении на
подъем на 1-й скорости
254
Передвижение по грунтам луны й планёт'
В процессе неоднократных заездов на подъемы различной
крутизны получены динамические, тягово-сцепные, энергетичес-
кие характеристики макета (рис. 5.30), всесторонне характери-
зующие установившиеся режимы прямолинейного движения в
направлении угла наибольшего подъема. Штриховые линии на
этих характеристиках соответствуют режимам работы с пере-
грузками, недопустимыми при эксплуатации. При испытаниях
Рис. 5.30. Характеристики макета при прямолинейном движении в направле-
нии угла наибольшего подъема:
а — тягово-сцепные (на 1-й скорости); б — динамические
эти режимы проверялись с целью более полной оценки возмож-
ностей планетоходов, например, в аварийных ситуациях.
Исследования траектории движения макета на трассах с
различными геометрическими характеристиками рельефа пока-
зали необходимость периодической коррекции курса для ком-
пенсации курсового увода и бокового сноса. Эти явления прак-
тически отсутствовали только на горизонтальных участках пу-
ти. На участках трассы с небольшими углами подъема превали-
рующую роль в отклонениях от курса играет увод макета, т. е.
его неуправляемый поворот с большим радиусом кривизны.
Увод наблюдается и при движении в направлении угла наи-
большего подъема. Его причинами являются несимметричность
нормальных реакций колес противоположных бортов, техноло-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ Й КОДОВЫЕ ИСПЫТАНИЯ 2S5
гическое несоответствие скоростных характеристик электродви-
гателей, локальные препятствия (бугорки, камни, ямки) под ко-
лесами одного из бортов.
Условимся отсчитывать курсовой угол (ук) от линии, совпа-
дающей с направлением наибольшего подъема. Тогда наши
предыдущие рассуждения относятся к
значение уко=О. При уко> отличном от
обусловленным уводом, на
крутых подъемах добавля-
ется боковой снос, т. е. неуп-
равляемое поперечное сколь-
жение под действием состав-
ляющей веса.
Результирующую относи-
тельную погрешность траек-
тории, обусловленную уводом
и сносом, можно характеризо-
вать отношением MILT, где
LT — длина прямолинейного
отрезка пути в направлении
начального курса; Д/ — ли-
нейное отклонение макета от
случаю, когда начальное
нуля, к погрешностям,
Рис. 5.31. Влияние угла подъема и
начального курсового угла на отно-
сительную траекторную погрешность
(а=15°):
/ — движение на первой скорости; 2 —
движение на третьей скорости
как при переключении КП на
прямолинейной траектории на
отрезке LT. Функции Д/ =
=?(апУко) для отдельных ре-
жимов движения приведены
на рис. 5.31. Отметим, что
Д/ увеличивается с увеличе-
нием скорости движения, так
высшую передачу электродвигатели становятся более чувстви-
тельными к изменениям нагрузки. Максимальные значения ха-
рактеризуют движение не с уко = 9О° (движение поперек скло-
на), а с уко=(ЗО...5О°). Боковой снос визуально хорошо про-
слеживается по увеличению ширины колеи. Так, при движении
на подъем ап = 22° с уко=ЗО° ширина колеи составляла около
0,64 м при нормальной колее — примерно 0,2 м. При курсовом
уводе колея практически не увеличивается.
Профильную проходимость макета характеризуют следую-
щие данные. Макет преодолевает эскарп и контрэскарп высо-
той 0,5 м при наезде и съезде как обоими бортами, так и одним
из бортов. При этом дифферент подрессоренной части при пре-
одолении эскарпа достигает 46°, а при съезде 43°. Потребляв’
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
мая мощность при этом достигает в отдельные моменты 500 Вт.
Наиболее эффективно при преодолении эскарпа работают край-
ние колеса (табл. 5.6).
Таблица 5.6. Токи двигателей мотор-колес и суммарный ток, потребляемый
макетом в различные фазы преодоления эскарпа
Угол дифферен- та рамы, градус Суммар- ный ток, А Токи двигателей мотор-колес, А
левый борт правый борт
1 3 5 2 4 6
46 9,26 1,15 1,97 0,418 2,7 2,2 —0,921
40 21,2 3,61 0,812 4,41 7,14 1,2 2,69
При преодолении эскарпов, а также единичных камней и ка-
менных гряд базальтового происхождения главная роль в соз-
дании необходимой тяги принадлежит грунтозацепам. Благода-
ря им удается использовать микронеровности, препятствия, тре-
щины. При этом базальт частично разрушается, частично заг-
лубляется в рыхлые породы. Преодоление стенок, образован-
ных такими породами, связано с разрушением естественных
форм рельефа.
У становившиеся режимы бортового поворота. Исследования
характеристик поворота проведены на площадках, близких к го-
ризонтальным, а также на уклонах а=10 и 20°. Исследовались
повороты с R = 0 в двух режимах. В первом режиме мотор-коле-
са противоположных бортов работают на 1-й скорости в различ-
ных направлениях. Во втором режиме крайние колеса работают
на 2-й скорости, а средние — на 1-й [24].
Поворот в движении (/?У=0) выполнялся в трех режимах:
1/2; 2/3; 3/4. Здесь в числителе и знаменателе указаны номера
скоростей, с которыми работают мотор-колеса противоположных
бортов.
Основные параметры поворота на горизонтальной площадке
по результатам нескольких заездов приведены в табл. 5.7. Из
таблицы видно, что при повороте с 7? = 0 в режиме 2 поворотли-
вость существенно улучшается. И по затратам энергии на еди-
ницу углового пути этот режим оказывается экономичнее режи-
ма 1. Различие суммарных крутящих моментов мотор-колес
противоположных бортов при повороте с /? = 0, работающих, ка-
залось бы, в одинаковых условиях, объясняется, по-видимому,
17 Зак. 826
Таблица 5.7. Результаты исследования поворота макета на горизонтальной площадке
Режим Параметр Левый борт (при V 0 забегающий) Правый борт (при V отстающий)
«п- м 0» градус/с V, м/с и, в А N, Вт ^К1 кгс-м ^кз кгс-м МК5 КГС-М ^К2 кгс-м КГС-М ^кв кгс-м
рад/с Н-м Н-м Н-м Н-м Н-м Н-м
Поворот на месте режим 1 0 4,80 0,0838 0 28,8 14,2 410 9,70 95,14 13,1 128,5 11,8 115,7 9,0 88,2 11,4 111,8 8,3
81,4
Поворот на месте режим 2 0 7,74 0,1351 0 26,7 22,5 600 11,3 110,8 7,5 73,5 12,6 123,6 10,9 106,9 4,2 41,2 8,9 87,3
Поворот в движении 2/1 5,64 2,46 0,0420 0,242 27,4 12 328 9,8 96,1 8,15 79,9 4,3 42 7,1 69,6 — 1,8 —2,5
—17,6 —24,4
Поворот в движении 2/3 15—18 1,38 0,0241 0,40 26,7 15,9 425 5,3 52 5,3 52 4,5 44,1 1,65 1,2 —0,3
16,2 11,8 —2,9
Поворот в движении 3/4 11—13 3,33 0,0581 0,75 18,5 32,3 596 4,4 43,2 6,4 62,8 7,5 73,6 0 0 0 0 0 0
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
258
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
некоторой несимметричностью макета, технологическими раз-
личиями приводов, а также погрешностями измерений.
Колея макета при повороте с /? = 0 на угол 180° представ-
ляет собой окружность (рис. 5.32). Колея образуется крайними
колесами. Средние колеса катятся по внутреннему валику ко-
леи. Как видно из рис. 5.32, сетка хорошо очищается от грунта,
забивания шины при повороте не происходит.
Рис. 5.32. Колея макета при повороте с /?=0
При повороте в движении на угол 360° траектория близка
к правильной окружности только в случае поворота с малым
радиусом (режим 1/2). При поворотах в режимах 2/3 и 3/4 тра-
ектория не замыкается, представляя собой спираль. Несовпаде-
ние начальной и конечной точек траектории в различных заез-
дах составляло величину 2... 10 м. Это можно объяснить неболь-
шими уклонами поверхности, повышением чувствительности
приводов к изменению нагрузки.
Как видно из табл. 5.7., мотор-колеса отстающего борта при
повороте с /?У=0 либо не создают тягового усилия ^(2МК^О« 0),
либо создают сопротивлению движению за счет юза. При этом
колея макета практически не отличается от колеи, образуемой
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ
259
при прямолинейном движении, что также свидетельствует о ма-
лых буксовании и юзе колес.
Поворот макета на уклоне сопровождается его сползанием.
Так, на уклоне а=20° при повороте в режиме 1 на 180° макет
сползает вниз на расстояние до 2,5 м. При этом потребляемая
мощность примерно равна аналогичному параметру на горизон-
тальной площадке.
Рис. 5.33. Осциллограмма тока двигателя кормового колеса левого борта
при разгоне и торможении с последовательным переключением скоростей на
горизонтальной площадке
Динамические режимы движения реальных объектов, как
уже отмечалось, при испытаниях частично подобных физических
моделей воспроизвести в полном объеме не удается. Здесь глав-
ная роль принадлежит математическим моделям, для которых
учет реального гравитационного поля не представляет затруд-
нений. Однако результаты испытаний могут быть использованы
для отработки математической модели в процессе моделирова-
ния движения макета.
В этом отношении представляют интерес осциллограммы то-
ков двигателей мотор-колес при разгоне с последовательным
переключением скоростей и различных вариантах торможения
(рис. 5.33). Анализ осциллограмм позволяет говорить о высоком
быстродействии управляющих элементов КП и коммутирующей
аппаратуры, так что при моделировании движения на ЭВМ вре-
мя переключения скоростей может приниматься равным нулю.
Наибольшие нагрузки испытывают приводы при переключе-
нии с 3-й на 4-ю скорость. Время разгона здесь превышает 1,2 с.
При обратных переключениях скоростей двигатели могут рабо-
тать в генераторном режиме так же, как и при торможении.
При торможении на 4-й скорости возбуждаются угловые коле-
бания подрессоренной части с амплитудой дифферента 8°, пери-
одом колебаний 1,3 с и временем затухания колебаний, равным
двум периодам.
17*
Рис. 5.34. Выезд макета из рва
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ХОДОВЫЕ ИСПЫТАНИЯ 261
Макет уверенно преодолевал пересеченную местность (рис.
5.34) на каждой из 4-х скоростей движения, что свидетельству-
ет о правильном выборе параметров подвески. Даже при движе-
нии на высшей скорости отрыва колес от грунта вследствие ко-
лебаний подрессоренной части не наблюдалось.
При повороте наибольшие динамические нагрузки возника-
ли в случае входа в поворот 3/4 из прямолинейного движения на
3-й скорости.
СПИСОК ЛИТЕРАТУРЫ
1. Автоматические планетные станции/В. В. Андреянов, В. В. Артамонов,
И. Т. Атаманов и др. М.: Наука, 1973. 280 с.
2. Автоматические станции для изучения поверхностного покрова Луны/
А. Л. Кемурджиан, В. В. Громов, И. И. Черкасов, В. В. Шварев. М.: Ма-
шиностроение, 1976. 199 с.
3. Агейкин Я. С. Вездеходные колесные и комбинированные движители.
М.: Машиностроение, 1972. 182 с.
, 4. Агейкин Я. С. Расчет проходимости автомобиля при проектировании —
Сб. трудов «Теория, проектирование и испытание автомобиля», МАМИ, 1982,
вып. 1, с. 5—17.
5. А. с. № 522987 (СССР). Способ поворота многоопорногб колесно-ша-
гающего транспортного средства/И. Ф. Кажукало, В. И. Комиссаров,
Б. М. Лубенко и др. — Опубл, в БИ. 1976, № 28, М. Кл. В62Д 57/02.
6. А. с. № 562457 (СССР). Способ поворота мпогоопор<ного транспорт-
ного средства на месте/И. Ф. Кажукало, В. И. Комиссаров, В. К. Мишки-
нюк, П. С. Сологуб — Опубл, в БИ, -1977, № 23, М.чКл. В62Д 15/00,.
7. А. с. «Ns 596496 (СССР). Колесно-шагающий движитель/И. Ф. Кажу-
кало, П. С. Сологуб, В. И. Комиссаров и др. — Опубл, в БИ, 1978, № 9,
М. Кл. В62Д 57/02.
8. А. С. № 640897 (СССР). Способ непрерывного передвижения транс-
портного средства с колесно-шагающим движителем в колесно-шагающем ре-
жиме/А. Л. Кемурджиан, В». В. Громов; И. Ф. Кажукало—Опубл, в БИ,
1979, № 1, М. Кл. В62Д 57/02.
9. А. с. № 647167 (СССР). Транспортное средство с дифференциальным
приводом вращения опор каждого борта/А. Л. Кемурджиан, П. С. Сологуб,
И. Ф. Кажукало и др. — Опубл, в БИ, 1979, № 6, М. Кл. В62Д 11/02.
40. А. с. № 650877 (СССР). Колесно-шагающий движитель/И. Ф. Кажу-
кало В. В. Гринев, В. И. Комиссаров и др. — Опубл, в БИ, 1979, № 9, М.
Кл. В62Д 57/02.
И. А. с. № 698830 (СССР). Способ передвижения транспортного сред-
ства с колесно-шагающим движителем/А. Л. Кемурджиан, В. В. Громов,
И. Ф. Кажукало — Опубл, в БИ, 1979, № 43, М. Кл. В62Д 57/02.
12. А. с. № 715376 (СССР). Колесно-шагающий движитель транспорт-
ного средства/И. Ф. Кажукало, М. М. Кузьмин — Опубл, в БИ, 1980, № 6,
М. Кл. В62Д 57/02.
13. А. с. № 725941 (СССР). Транспортное средство с колесно-шагающим
движителем/И. Ф. Кажукало, М. М. Кузьмин — Опубл, в БИ, 1980, № 13,
М. Кл. В62Д 57/02.
14. А. С. № 770907 (СССР). Колесно-шагающий движитель/И. Ф. Кажу-
кало, М. М. Кузьмин — Опубл, в БИ, 1980, № 38. М. Кл. В62Д 57/02.
15. А. с. № 800008 (СССР). Способ передвижения колесно-шагающего
транспортного средства в колесном режиме/И. Ф. Кажукало, А. Л. Кемурд-
жиан, П. С. Сологуб — Опубл, в БИ, 1981, № 4, М. Кл. В62Д 57/02.
16. А. с. № 816855 (СССР). Колесно-шагающий движитель/И. Ф. Ка-
СПИСОК ЛИТЕРАТУРЫ
263
жукало, М. М. Кузьмин, В. И. Комиссаров, Р. А. Володина — Опубл, в БИ,
1981, № 42, М. Кл. В62Д 57/02.
17. А. с. № 880852 (СССР). Колесно-шагающий движитель/Н. Е. Беч-
вай, В. В. Гринев, А. И. Егоров и др. — Опубл, в БИ, 1981, № 42, М,. Кл.
В62 57/02.
18. А. с. № 880853 (СССР). Транспортное средство/И. Ф. Кажукало,
М. М. Кузьмин — Опубл, в БИ, 1981, № 42, М. Кл. В62Д 57/02.
19. А. с. № 910484 (СССР). Многоопорное транспортное средство с бор-
товым поворотом/И. Ф. Кажукало, В. Н. Петрига, А. В. Мицкевич — Опубл,
в БИ, 1982, № 9, М. Кл. В62Д 5/02.
20. А. с. № 921936 (СССР). Колесно-шагающий движитель/И. Ф. Кажу-
кало, М. М. Кузьмин, М. И. Маленков и др. — Опубл, в БИ, 1982, № 15,
М. Кл. В62Д 57/02.
21. А. с. № 948742 (СССР). Колесно-шагающий движитель/И. Ф. Кажу-
кало, В. В. Гринев, В. И. Комиссаров и др. — Опубл, в БИ, 1982, № 29, М.
Кл. В62 57/02.
22. А. с. № 976100 (СССР). Многоопорное транспортное средство с бор-
товым поворотом/А. П. Гладцын И. Ф. Кажукало, В. П. Мищенкова —
Опубл, в БИ, 1982, № 29, М. Кл. В62Д 7/14.
23. А. с. № 1000336 (СССР). Колесно-шагающий движитель/С. А. Вла-
дыкин, М. И. Маленков, В. В. Гринев и др. — Опубл, в БИ, 1983, № 8, М.
Кл. В62 57/02.
24. А. с. 1111926 (СССР). Многоопорное транспортное средство с борто-
вым поворотом/А. П. Гладцын, И. Ф. Кажукало, /Ml ; ;И. ? Маленков,
М. М. Кузьмин — Опубл, в БИ, 1984, № 33, М., Кл. В62Д 11/00.
25. Бабков В. Ф., Бируля А. К., Сиденко В. М. Проходимость колесных
машин по грунту, М.: Автотрансиздат, 1959. 190 с.
26. Беккер iM. Г. Введение в теорию систем местность — машина. М.:
Машиностроение, 1967. 507 с.
27. Белоусов Г. С., Кемурджиан А. Л., Маленков М. И. Моделирование
движения транспортного робота с колесно-шагающим движителем в режимах
автоматического управления — Доклад на IX Всесоюзном совещании по про-
блемам управления. Ереван, 1983, с. 228—229.
28. Березанцев В. Г. Предельное равновесие связной среды под сфери-
ческими и коническими штангами. — Изв. АН СССР. ОТН. 1955, № 7, с. 70.
29. Динамическая модель транспортного средства с индивидуальными
электромеханическими приводами колес/В. Н. Наумов, Г. С. Белоутов,
М. И. Маленков, Б. П. Назаренко — Изв. вузов. Сер. Машиностроение, № 7,
1975, с. 110—116.
30. Динамика планетохода/Е. В. Авотин, И. С. Болховитинов, А. Л. Ке-
мурджиан и др. М.: Наука, 1979. 440 с.
ЗВ. Забавников Н. А., Наумов В. Н. Уравнения перемещения точки обо-
да колеса машины, движущейся в режиме бортового поворота. Изв. вузов.
Сер. Машиностроение, 1974, № И, с. 118—122.
32. Забавников Н. А. Основы теории транспортных гусеничных машин.
М.: Машиностроение, 1975. 448 с.
33. Зависимость физико-механических свойств лунного грунта от осо-
бенностей рельефа и процессов в районе работ «Лунохода-2»/А. Т. Бази-
левский, Н. Н. Гребенник, В. В. Громов и др. — Космические исследования,
1984, т. XXII, вып. 2, с. 243—250.
34. Исследование колесно-шагающего способа передвижения/С. А. Вла^-
дыкин, И. Ф. Кажукало, М. И. Маленков и др. — Доклад на IV Четаевской
264
СПИСОК ЛИТЕРАТУРЫ
конференции по устойчивости движения, аналитической механике и управле-
нию движением. М.: 1982, с. 13.
35. Кемурджиан А. Л., Громов В. В., Шварев В. В. Исследование физи-
ко-механических свойств внеземных грунтов. — В кн.: Успехи Советского
Союза в исследовании космического пространства. М.: Наука, 1978, с. 352—
380.
36. Кнороз В. И. Работа автомобильной шины. М.: Автотрансиздат, 1960.
173 с.
37. Красненькое В. И. Уравнение движения транспортной гусеничной ма-
шины по недеформируемому основанию. — Изв. вузов. Сер. Машиностроение,
№ 6, 1981, с. 106—111.
38. Линкин В. М., Москаленко Г. М., Скурдин Г. А. Об одной воз-
можной схеме летательного аппарата в атмосфере Венеры. — Космические
исследования, 1982, т. XX, вып. 1, с. 128—139.
39. Литвинов А. С. Управляемость и устойчивость автомобиля М.: Ма-
шиностроение, 1971. 416 с.
40. Маленков М. И., Митин Б. В., Наумов В. Н. Оценка параметров
движения по грунту металлосетчатого колеса. — Изв. вузов. Сер. Машино-
строение, 1981, № 12, с. 67—70.
41. Назаренко Б. П., Наумов В. Н., Наумов В. Н. Оценка сопротив-
ления повороту жесткого колеса.— Изв. вузов. Сер. Машиностроение,
1983, № 4, с. 75—79.
42. Назаренко Б. П. Распределение нормальных реакций по колесам 4-х
осного самохода при его бортовом повороте. — Труды МВТУ, 1976, № 231,
вып. 1, с. 22—32.
43. Наумов В. Н., Маленков М. И. Моделирование движения многопри-
водных транспортных средств. — Изв. вузов. Сер. «Машиностроение», № 5,
1976, с. 122—126.
44. Опейко Ф. А. Колесный и гусеничный ход. Минск: АСХН БССР, 1960.
196 с.
45. Организация технического зрения транспортных роботов/В. А. Весе-
лов, О. А. Кононов, В. А. Коноплев, В. Г. Кузнецов — Доклад на IX Всесо-
юзном совещании по проблемам управления. Ереван, 1983, с. 231—232.
46. О колесно-шагающем подвижном роботе/А. Л. Кемурджиан,
И. Ф. Кажукало, М. И. (Маленков и др. — Доклад на IV Всесоюзной конфе-
ренции по оптимальному управлению в механических системах. М.: 1982,
с. 99.
47. Очерки сравнительной планетологии/К. П. Флоренский, А. Т. Бази-
левский, Г. А. Бурба и др. М.: Наука, 1981. 326 с.
48. Оценка физико-механических характеристик грунта Ренеры по изме-
рениям ударных перегрузок при посадке АМС «Венера-13» и «Венера-14»/
В. С,. Авдуевский, А. Г. Годиев, Ю. В. Захаров и др. — Космические исследо-
вания, 1983, т. XXI, вып. 3, с. 331—339..
49. Планетоходы/А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и
др. М.: Машиностроение, 1982. 319 с.
50. Платонов В. Ф. Полноприводные автомобили. М.: Машиностроение.
1981. 278 с.
51. Полетаев В. Ф. Основы теории сопротивления качению и тяги жест-
кого колеса по деформируемому основанию. М.: Машиностроение, 1971. 144 с.
52. Предварительные результаты определения физико-механических
свойств грунта Венеры на советских автоматических станциях «Венера-13»
СПИСОК ЛИТЕРАТУРЫ
265
и «Венера-14» А. Л. Кемурджиан, П. Н. Бродский, В. В. Громов и др.—
Космические исследования, 1983, т. XXI, вып. 3, с. 323—330.
53. Разоренов В. Ф. Пенетрационные испытания грунтов. М.: Стройиздат,
1968. 183 с.
54. Смирнов Г. А., Леликов О. П. Распределение крутящих моментов по
колесам четырехколесного автомобиля при движении по деформируемым
грунтам.— Автомобильная промышленность, 1970, № 4, с. 19—23.
55. Смирнов Г. А. Теория движения колесных машин. М.: Машинострое-
ние, 1981. 271 с.
56. Фаробин Я. Е. Теория поворота транспортных машин. М.: Машино-
строение, 1970. 179 с.
57. Флоренский К. П., Базилевский А. Т., Гребенник Н. Н. Морфологиче-
ская зрелость мелких лунных кратеров как функция их возврата и разме-
ра..— Космические исследования, 1971, т. IV, вып. 3, с. 459.
58. Черкасов И. И., Шварев В. В. Грунтоведение Луны. Ж.: Наука,
1979. 232 с.
59. Черкасов И. И. Механические свойства грунтов в дорожном строи-
тельстве. М.: Транспорт, 1976. 247 с.
60. Чудаков Е. А. Теория автомобиля. М.: Машгиз, 1950. 343 с.
61. Цытович Н. А. Механика грунтов;. М.: Стройиздат, 1963. 636 с.
62. Эффективность использования колесно-шагающего способа передви-
жения транспортного робота с автоматическим приводом/ А. Л. Кемурджиан,
Л. С. Абрамов, И. С. Болховитинов и др. — Доклад на II Всесоюзном сове-
щании по робототехническим системам. Минск, 1981, с. 82.
63. Kaplan М. М. and Seifert Н. S. Hopping Transporte for Lunar Explo-
ration J. Spacecraft, 1969, vol. N. 8, p. 4.
64. Costes N. C., Farmer J. E., George E. B. Mobility performance of the
lunar roving vehicle terrestrial studies — Apollo 15 results. — In: 4th Inter-
national Conference, Stockholm, Sweden, April, 1972, Proceedings Volume III,
p. 12—112.
ОГЛАВЛЕНИЕ
Введение ......................................................3
Глава 1. Методы и устройства для оценки условий передвижения по
грунтам Луны и планет . . 7
1.1. Методы изучения свойств грунта............................7
1.2. Физические условия и процессы на Луне и планетах, их
влияние на передвижение по поверхности ... 10
1.3. Приборы и устройства для изучения условий передви-
жения по Луне и планетам. Основные результаты экспери-
ментальных исследований...............................21
1.4. Методы оценки условий передвижения по процессу взаи-
модействия аппаратов с поверхностью........................35
Глава 2. Исследований взаимодействия одиночного колеса с грунтом
применительно к задаче оценки проходимости транспортного средства 53
2.1. Параметры, определяющие проходимость планетоходов . 53
2.2. Метод математического моделирования процесса взаи-
модействия жесткого колеса с опорной поверхностью . 56
2.3. Влияние различных условий движения, нагрузочных ре-
жимов и геометрических параметров колеса на харак-
тер его взаимодействия с деформируемым основанием 78
2.4. Оптимизация характеристик проходимости транспортной
машины на основе испытаний единичных колес . . 97
Глава 3. Особенности взаимодействия металлоупругого колеса с
опорной поверхностью.................................................108
3.1. Обзор конструкций. Особенности взаимодействия с грунтом 108
3.2. Анализ составляющих потерь при качении. Критерий
их оценки...................................,.........110
3.3. Математическая модель процесса качения металлоупру-
гого колеса по грунту , . . . . .117
3.4. Экспериментальные и теоретические исследования влия-
ния конструктивных и экспериментальных параметров
на тяговые характеристики металлоупругих колес . 126
Глава 4. Колесно-шагающий движитель как средство повышения
проходимости ...................................................... 141
4.1. Организация движения в колесно-шагающем движителе 141
4.2. Основные соотношения....................................146
4.3. Тягово-сцепные свойства....................... . . 152
4.4. Поворотливость , , . 166
ОГЛАВЛЕНИЕ 267
4.5. Баланс мощности . s е.................................172
4.6. Структура энергозатрат ...............................179
Глава 5. Математическое моделирование и ходовые испытания пла-
нетоходов .........................................................186
5.1. Основные предпосылки :............................186
5.2. Динамическая модель планетохода с колесно-шагающим
движителем ................................................189
5.3. Моделирование криволинейного движения колесного
планетохода.............................................ч..218
5.4. Описание и некоторые результаты ходовых испытаний
макетов планетоходов ..................................... 235
Список литературы ............................................... 262
ПРОИЗВОДСТВЕННОЕ ИЗДАНИЕ
Валерий Васильевич Громов, Николай Александрович Забавников,
Александр Леонович Кемурджиан и др.
ПЕРЕДВИЖЕНИЕ ПО ГРУНТАМ ЛУНЫ И ПЛАНЕТ
Редактор Е, И. Кравченко
Художественный редактор В. В. Лебедев
Переплет художника С. Н. Орлова
Технические редакторы Н. В. Тимофеенко, И. Н. Раченкова
Корректоры И. М. Борейша, А. М. Усачева
ИБ № 4893
Сдано в набор 10.11.85. Подписано в печать 04.02.86. Т-06709.
Формат 60X841/i6- Бумага типографская № 1.
Гарнитура литературная. Печать высокая. Усл. печ. л. 15,81.
Усл. кр.-отт. 15,81. Уч-изд. л. 15,8. Тираж 1200 экз.
Заказ 826. Цена 1 р. 30 к.
Ордена Трудового Красного Знамени издательство
«Машиностроение», 107076, Москва, Стромынский пер., 4.
Московская типография № 6 Союзполиграфпрома
при Государственном комитете СССР по делам
издательств, полиграфии и книжной торговли.
109088, Москва, Ж-88, Южнопортовая ул., 24.
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
планирует выпустить в 1986 году следующие книги:
Динамика космических аппаратов и исследо-
вание космического пространства. Сборник статей.
Под редакцией Г. А. Тюлина. 20 л. 3 р. 50 к.
Сборник посвящен памяти видного советского
ученого, лауреата Ленинской премии, д-ра физ.-мат.
наук Г. С. Нариманова. Включает четыре темати-
ческих раздела, исследование космического прост-
ранства, либрационные движения космических ап-
паратов (КА) с жидкостью при малых и немалых
колебаниях ее свободной поверхности, ротацион-
ные движения КА с жидкостью. В сборнике отра-
жены современные аналитические и численные ме-
тоды решения задач динамики сложных деформи-
руемых систем, включая широкое использование
машинной графики, а также экспериментальные
методы.
Для научных работников, занимающихся воп-
росами ракетно-космической и авиационной тех-
ники, динамики деформируемого тела, а также вы-
числительными методами математической физики.
Иванов В. А., Ситарский Ю. С. Динамика по-
лета системы гибко связанных космических объек-
тов. 15 л. 2 р. 30 к.
Впервые с общих позиций динамики несвобод-
ных механических систем рассмотрены методы ис-
ледования движения связанных космических объек-
тов, а также изложены некоторые вопросы их прак-
тического использования. Рассмотрены возможные
схемы развертывания связки в рабочее состояние и
основные характеристики ее движения при реше-
нии задач зондирования верхних слоев атмосферы,
выполнения орбитальных маневров, спуска с орби-
ты и создания искусственной тяжести.
Для научных работников, специализирующих-
ся в области космической техники.
Попов В. И. Системы ориентации и стабилиза-
ции космических аппаратов. 2-е изд., перераб. и
доп. 10 л. 1 р. 50 к.
Изложены принципы построения, основы про-
ектирования, вопросы повышения точности, а так-
же динамика систем ориентации и стабилизации
космических аппаратов (КА). Основное внимание
уделено пассивным и комбинированным системам
стабилизации вращением, с помощью давления
солнечных лучей, гравитационным и газореактив-
ным системам. При исследовании динамики систем
учтены упругость и тепловая деформация стабили-
заторов, нелинейность характеристик датчиков и
т. п. Рассмотрены способы и устройства демпфиро-
вания колебаний пассивных систем стабилизации,
вопросы управления движением спутника, стабили-
зированного вращением, и его прогнозирования.
Второе издание (1-е изд. 1977 г.) переработано и
дополнено новыми материалами.
Для научных работников и специалистов, за-
нимающихся разработкой и созданием систем уп-
равления КА.
Автоматизированные обучающие системы
профессиональной подготовки операторв летатель-
ных аппаратов. Авторы В. Е. Шукшунов, Л. С. Де-
мин, Ю. Г. Жуковский и др. Под общей редакцией
В. Е. Шукшунова. 18 л. 1 р. 40 к.
Рассмотрены вопросы разработки и проектиро-
вания автоматизированных обучающих систем
(АОС) профессиональной подготовки операторов,
методического, технического, программного, линг-
вистического, информационного и эксперименталь-
ного обеспечения АОС. На базе анализа эргатичес-
ких систем пилотируемых космических аппаратов
и современных самолетов, а также процесса обуче-
ния космонавтов и летчиков обосновывается роль
АОС как важнейшего средства интенсификации
этого процесса. Описаны основные принципы пост-
роения АОС, обеспечивающих не только теоретичес-
кую подготовку операторов, но и приобретение ими
профессиональных навыков.
Для инженерно-технических работников, спе-
циализирующихся в области подготовки операто-
ров летательных аппаратов и других сложных си-
стем.
Дегтярев Г. Л., Сиразетдинов Т. К. Теоретичес-
кие основы оптимального управления упругими ле-
тательными аппаратами. 16 л. 1 р. 20 к.
Упругий летательный аппарат (ЛА) впервые
рассматривается как объект с распределенными
параметрами. Описаны конкретные модели уравне-
ний движения и уравнений измерения состояния
ЛА. Сформулированы задачи синтеза оптимального
управления как в детерминированных, так и в сто-
хастической постановках при полной и неполной
информации. Предложены методы синтеза опти-
мального управления упругими ЛА при неполной
информации и методы оценки состояния динами-
ческих систем с распределенными параметрами.
Приведены решения ряда задач синтеза управления
и результаты численного моделирования.
Для инженерно-технических работников, специ-
ализирующихся в области управления ЛА.
Моделирование систем полуавтоматического
управления космических кораблей. Авторы Г. Т. Бе-
реговой, А. И. Яковлев, В. М. Василец и др. Под
общей редакцией А. И. Яковлева. 20 л. 1 р. 40 к.
Изложены вопросы моделирования систем по-
луавтоматического управления Приведены матема-
тические модели операторской деятельности кос-
монавтов. Описаны методы статистического и ими-
тационного моделирования систем, основанные на
использовании ЭВМ и моделирующих комплексов,
диалоговых режимов взаимодействия оператора и
ЭВМ. Предложен новый подход к решению задач
моделирования систем полуавтоматического управ-
ления, основанный на комплексной оценке систем
по техническим показателям эффективности и раз-
личным показателям операторской деятельности
космонавтов.
Для инженерно-технических работников, специ-
ализирующихся в области проектирования, испы-
таний и эксплуатации космических аппаратов.
Баллистика и навигация космических аппара-
тов. Учебник для вузов. Авторы А. И. Гузенко,
А. А. Дмитриевский, Н. М. Иванов и др. 20 л. 1 р.
Изложены теоретические основы качественно-
го анализа возмущенного и невозмущенного движе-
ний, определения траекторий и орбит космических
аппаратов (КА). Рассмотрены типовые задачи на-
вигационного обеспечения космического полета, ре-
шаемые с использованием методов баллистики. Ос-
вещены вопросы разработки алгоритмов навигаци-
онного определения состояния КА при наведении и
выполнении ракетодинамических и аэродинамичес-
ких маневров, в том числе при межпланетных пере-
летах, выполнении спуска в атмосфере Земли и дру-
гих планет, а также при реализации встречи на ор-
бите. Книга является логическим продолжением
учебника «Баллистика и навигация ракет».
Конструкция и проектирование космических
летательных аппаратов. Учебник для авиационных
техникумов. Авторы Н. И. Паничкин, Ю. В. Сле-
пушкин, В. П. Шинкин и др. 25 л. 1 р. 10 к.
Изложены основные понятия космонавтики,
принципы проектирования, конструирования и от-
работки частей ракетно-космического комплекса.
Приведены необходимые сведения по проектно-кон-
структорской разработке ракетно-космической си-
стемы (РКС). Описаны цели и задачи освоения
космического пространства, определены проектные
характеристики ракетно-космических систем. Рас-
смотрены различные конструктивно-силовые схемы,
нагрузки и дан расчет на прочность. Приведены ос-
новы конструирования отсеков и агрегатов косми-
ческих летательных аппаратов и наиболее типич-
ных узлов КЛА. Изложены сведения об экспери-
ментальной отработке конструкций и наземной
эксплуатации космических летательных аппаратов.