/






























































































































































































































































































































































Текст
Оглавление
Предисловие ко второму изданию 6
Из предисловия к первому изданию g
Введение 9
Часть 1. Радиотехнические сигналы ц
Глава 1. Элементы общей теории радиотехниче-
радиотехнических сигналов 11
1.1. Классификация радиотехнических сигналов И
1.2. Динамическое представление сигналов 16
1.3. Геометрические методы в теории сигналов 23
1.4. Теория ортогональных сигналов 27
Глава 2. Спектральные представления сигналов 38
2.1. Периодические сигналы и ряды Фурье 38
2.2. Спектральный анализ непериодических сиг-
сигналов. Преобразование Фурье 43
2.3. Основные свойства преобразования Фурье 51
2.4. Спектральные плотности иеиитегрируемых
сигналов 55
2.5. Преобразование Лапласа 61
Глава 3. Энергетические спектры сигналов. Прин-
Принципы корреляционного анализа 68
3.1. Взаимная спектральная плотность сигналов.
Энергетический спектр 68
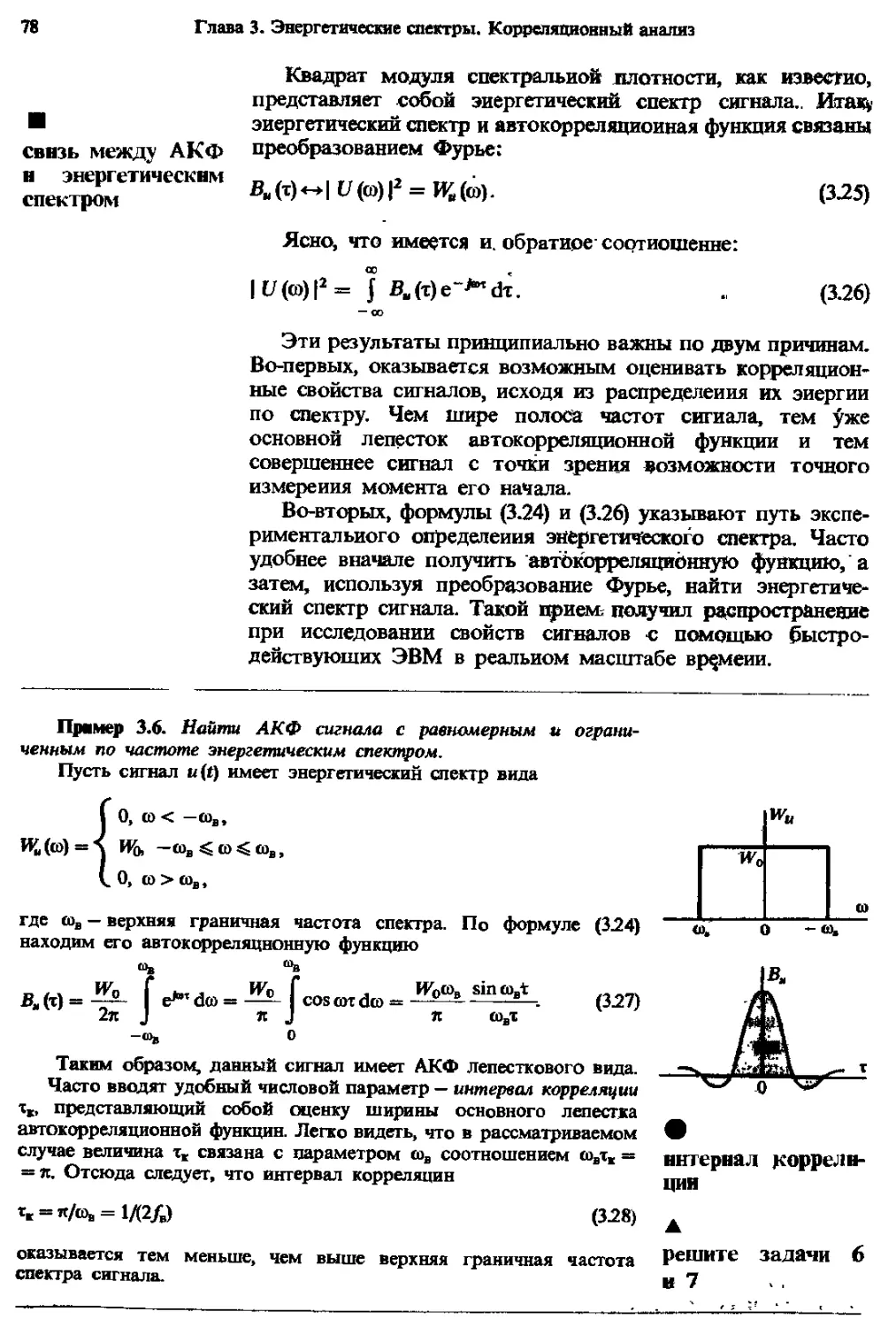
3.2. Корреляционный анализ сигналов 73
3.3. Автокорреляционная функция дискретного
сигнала 79
3.4. Взаимокорреляцнониая функция двух сигна-
сигналов 83
Глава 4. Модулированные сигналы 88
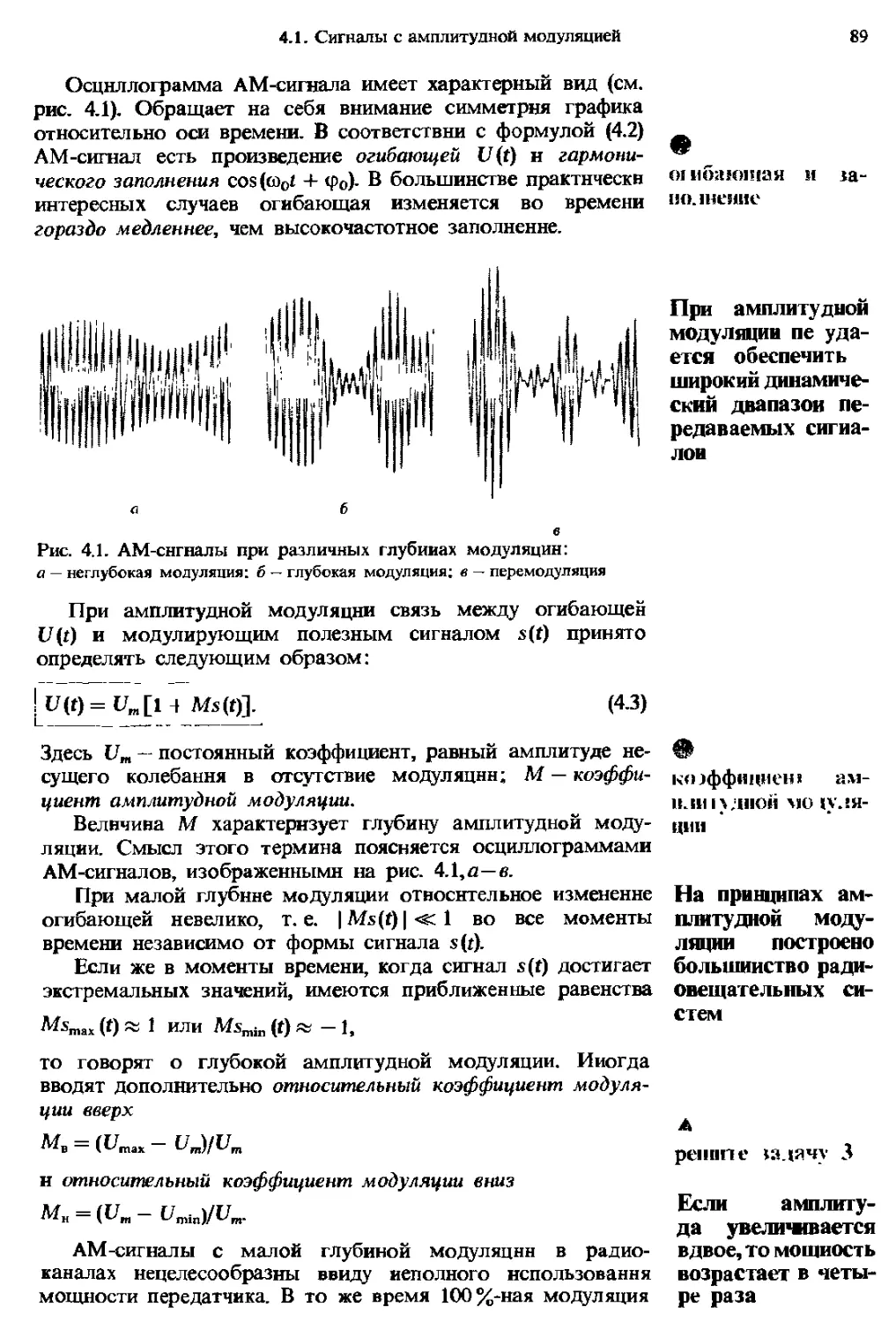
4.1. Сигналы с амплитудной модуляцией 88
4.2. Сигналы с угловой модуляцией 96
4.3. Сигналы с внутриимпульсиой частотной мо-
модуляцией 104
Глава 5. Сигналы с ограничашым спектром 113
5.1. Некоторые математические модели сигналов
с ограниченным спектром 113
5.2. Теорема Котельиикова 116
5.3. Узкополосные сигналы 121
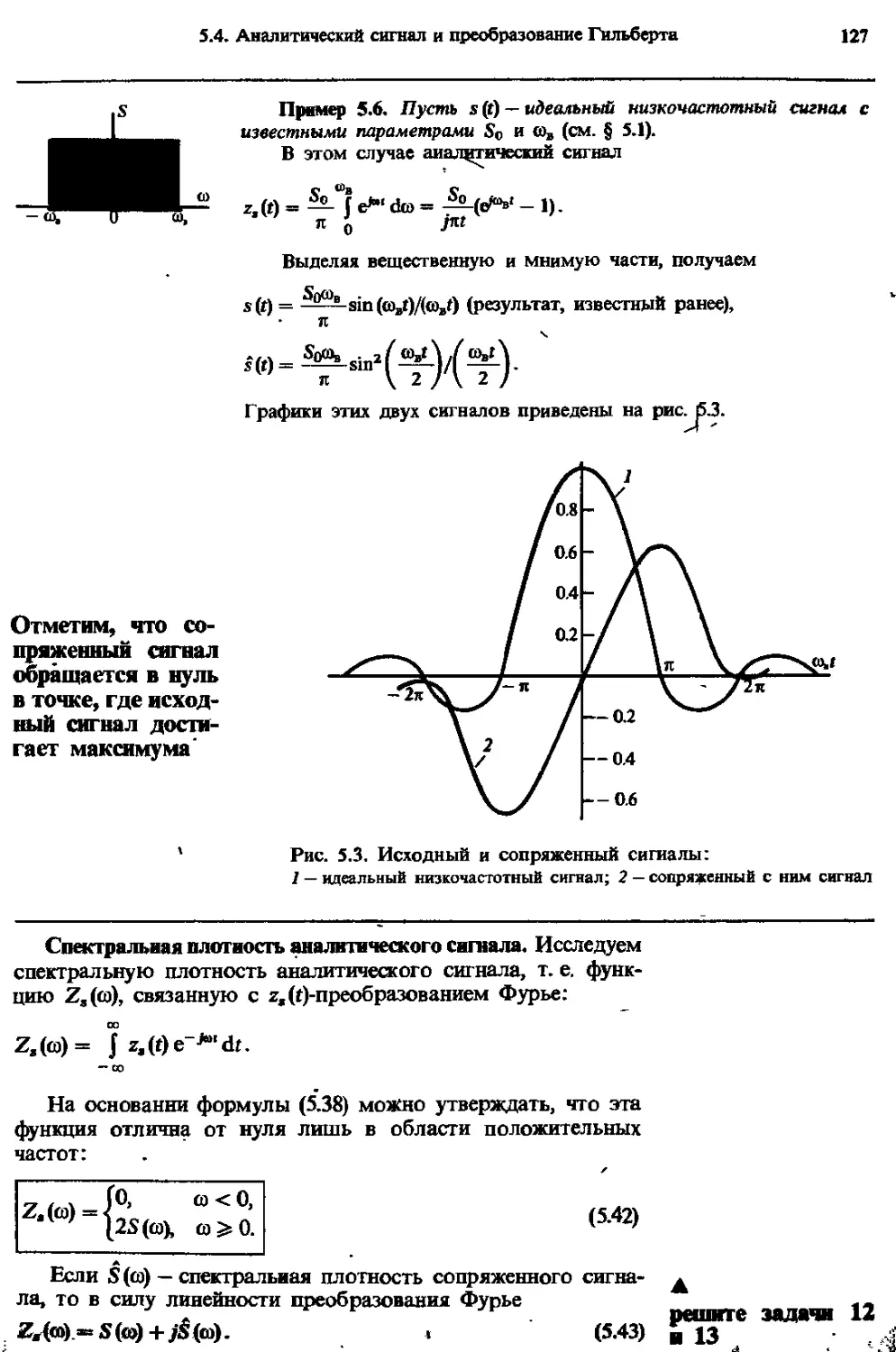
54. Аналитический сигнал и преобразование
Гильберта 125
Глава 6. Основы теории случайных сигналов 136
6.1. Случайные величины и их характеристики 136
6.2. Статистические характеристики систем слу-
случайных величии 143
6.3. Случайные процессы 149
Глава 7. Корреляционная теория случайных про-
процессов 158
7.1. Спектральные представления стационарных
случайных процессов 158
Оглавление
7.2. Дифференцирование и интегрирование слу-
случайных процессов 164
7.3. Узкополосиые случайные процессы 171
Часть 2. Радиотехнические цепи, устройства и
системы 184
Глава 8. Воздействие детерминированных сигна-
сигналов на линейные стационарные системы 184
8.1. Физические системы и их математические
модели 184
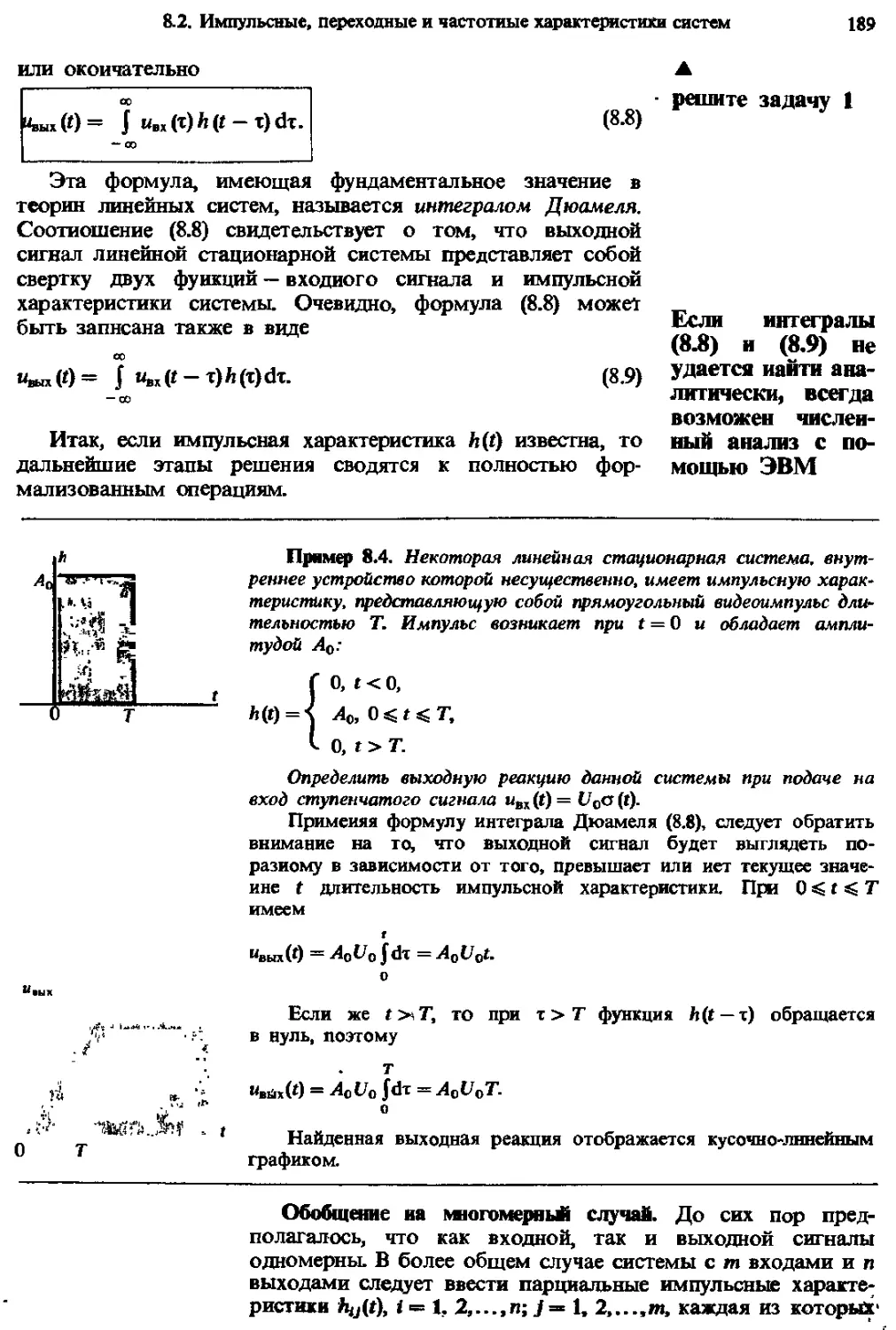
8.2 Импульсные, переходные и частотные харак-
характеристики линейных стационарных систем 187
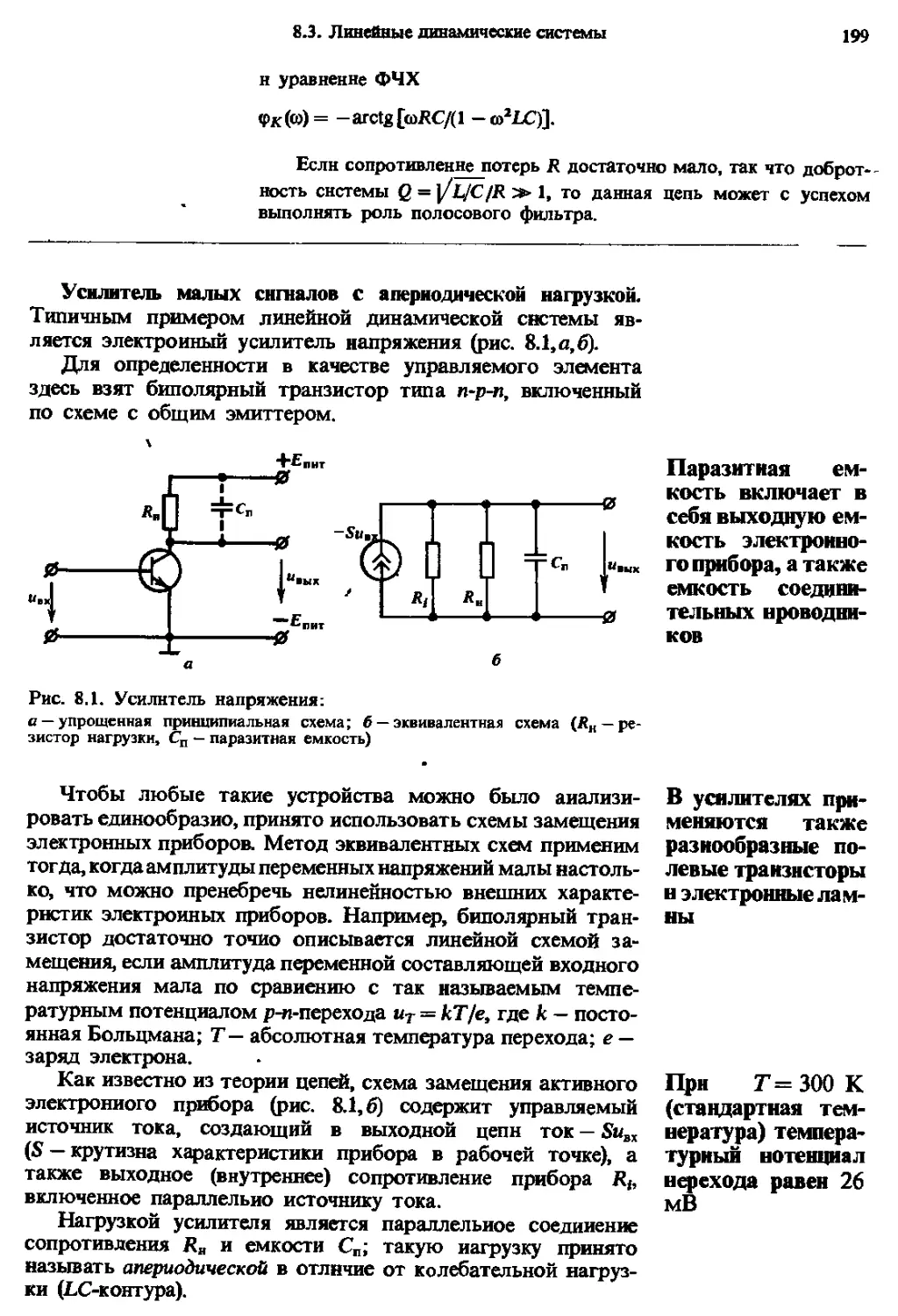
8.3. Линейные динамические системы 194
8.4. Спектральный метод 203
8.5. Операторный метод 210
Глава 9. Воздействие детерминированных сигна-
сигналов на частотно-избирательные системы 218
9.1. Некоторые модели частотно-избирательных
цепей 218
9.2 Частотно-избирательные цепи при широко-
широкополосных входных воздействиях 224
93. Частотио-избирательиые цепи при узкополос-
иых входных воздействиях 229
Глава 10. Воздействие случайных сигналов на
линейные стационарные цепи 247
10.1. Спектральный метод анализа воздействия
случайных сигналов на линейные стацио-
стационарные цепи 247
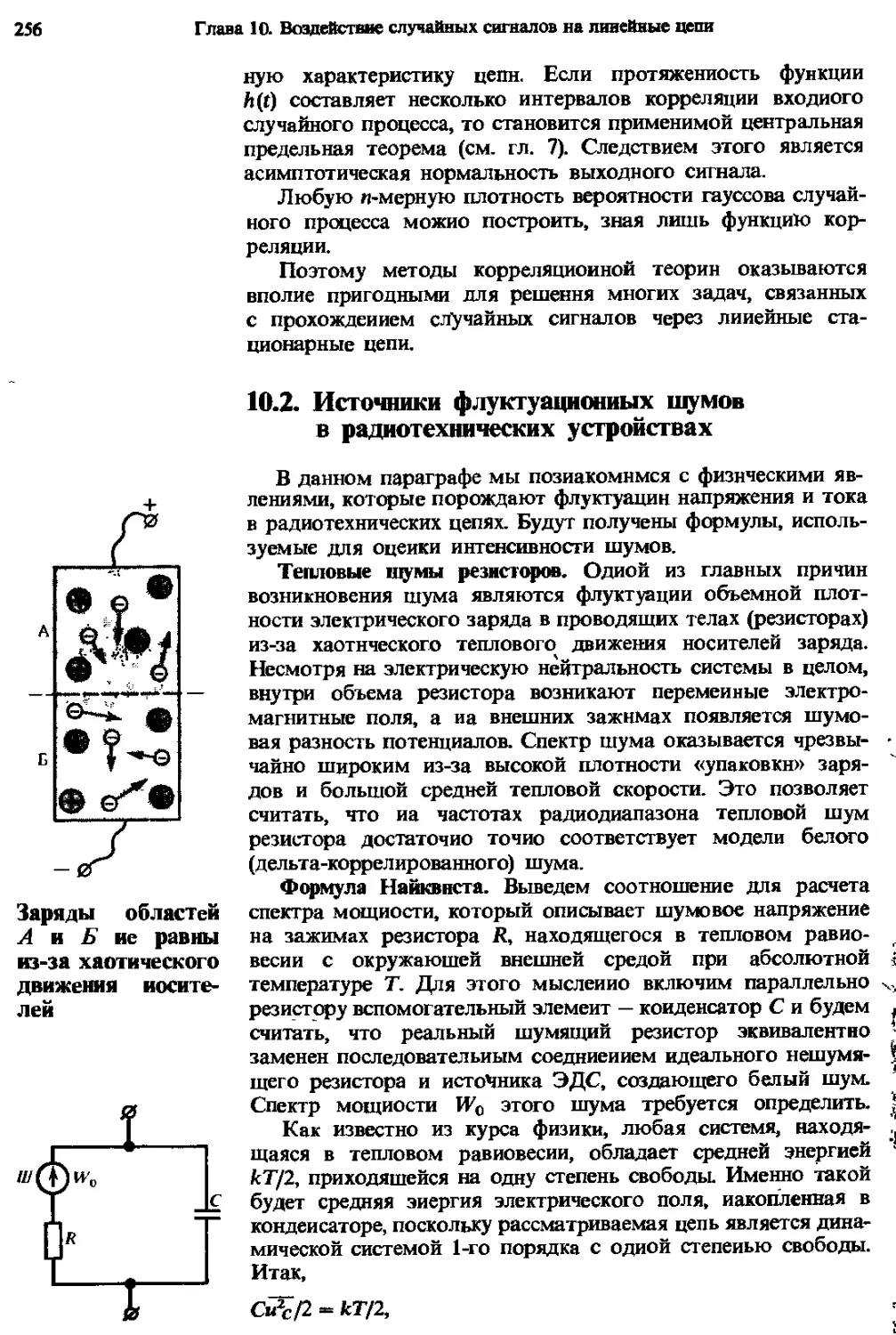
10.2. Источники флуктуациоииых шумов в ра-
радиотехнических устройствах 256
Глава 11. Преобразования сигналов в нелиней-
нелинейных радиотехнических цепях 266
11.1. Безынерционные нелинейные преобразо-
преобразования 266
11.2. Спектральный состав тока в безынерци-
безынерционном нелинейном элементе при гарыоии-
ческом внешнем воздействии 270
11.3. Нелинейные резонансные усилители и
умножители частоты 275
11.4. Безынерционные нелинейные преобразова-
преобразования суммы нескольких гармонических сиг-
сигналов 278
11.5. Получение модулированных радиосигналов 283
11.6. Амплитудное, фазовое и частотное детек-
детектирование 286
11.7. Воздействие стационарных случайных сиг-
сигналов на безынерционные нелинейные цепи 292
Глава 12. Преобразования сигналов в линейных
параметрических цепях 299
12.1. Прохождение сигналов через резистивные
параметрические цепи * 299
12.2. Энергетические соотношения в параметри-
параметрических рецктивных элемента* цеп». 307
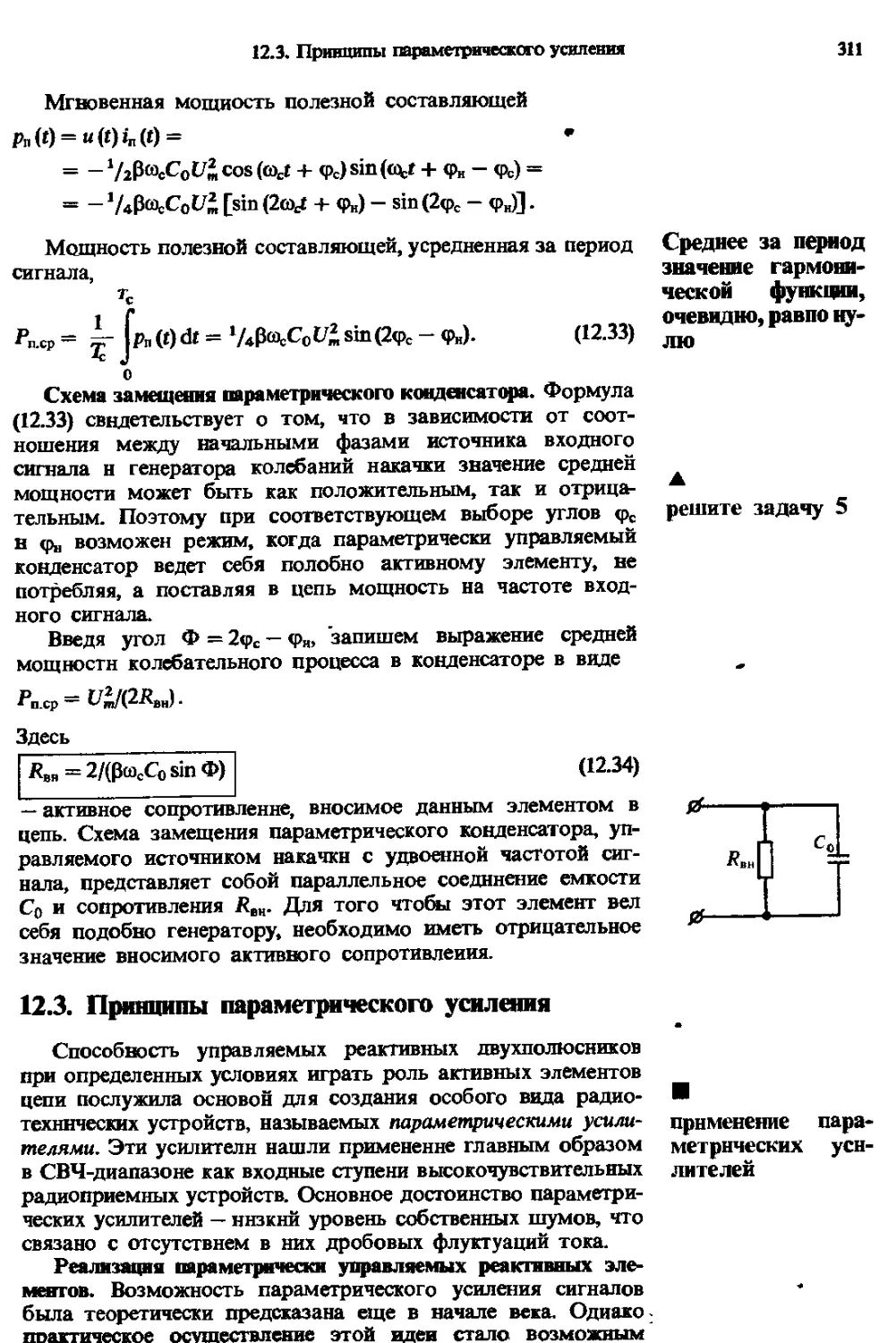
Принципы парфмаддо^ар!^ дацнмвд 311
еск рец
12.3. Принципы парфмаддо^ар!^ дацнм
12.4. Воздействие гармонических сигналов на
параметрические системы со случайными
характеристиками 318
Глава 13. Элементы теории синтеза линейных
частотных фильтров 325
13.1. Частотные характеристики четырехполюс-
четырехполюсников 325
13.2. Фильтры нижних частот 330
13.3. Реализация фильтров 335
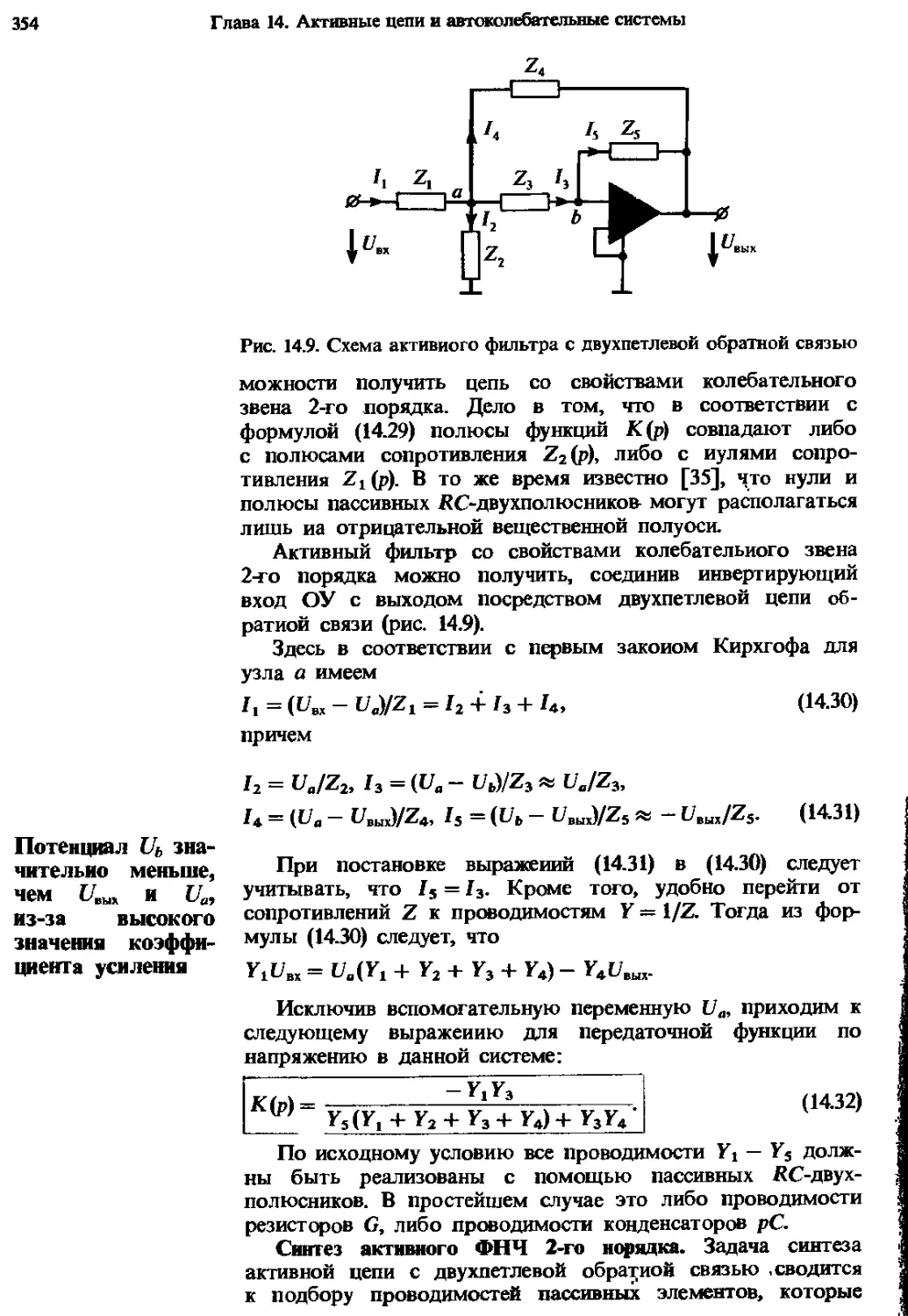
Глава 14. Активные цепи с обратной связью и
автоколебательные системы 341
14.1. Передаточная функция линейной системы
с обратной связью 341
14.2. Устойчивость цепей с обратной связью 346
14.3. Активные ЛС-фильтры \ 351
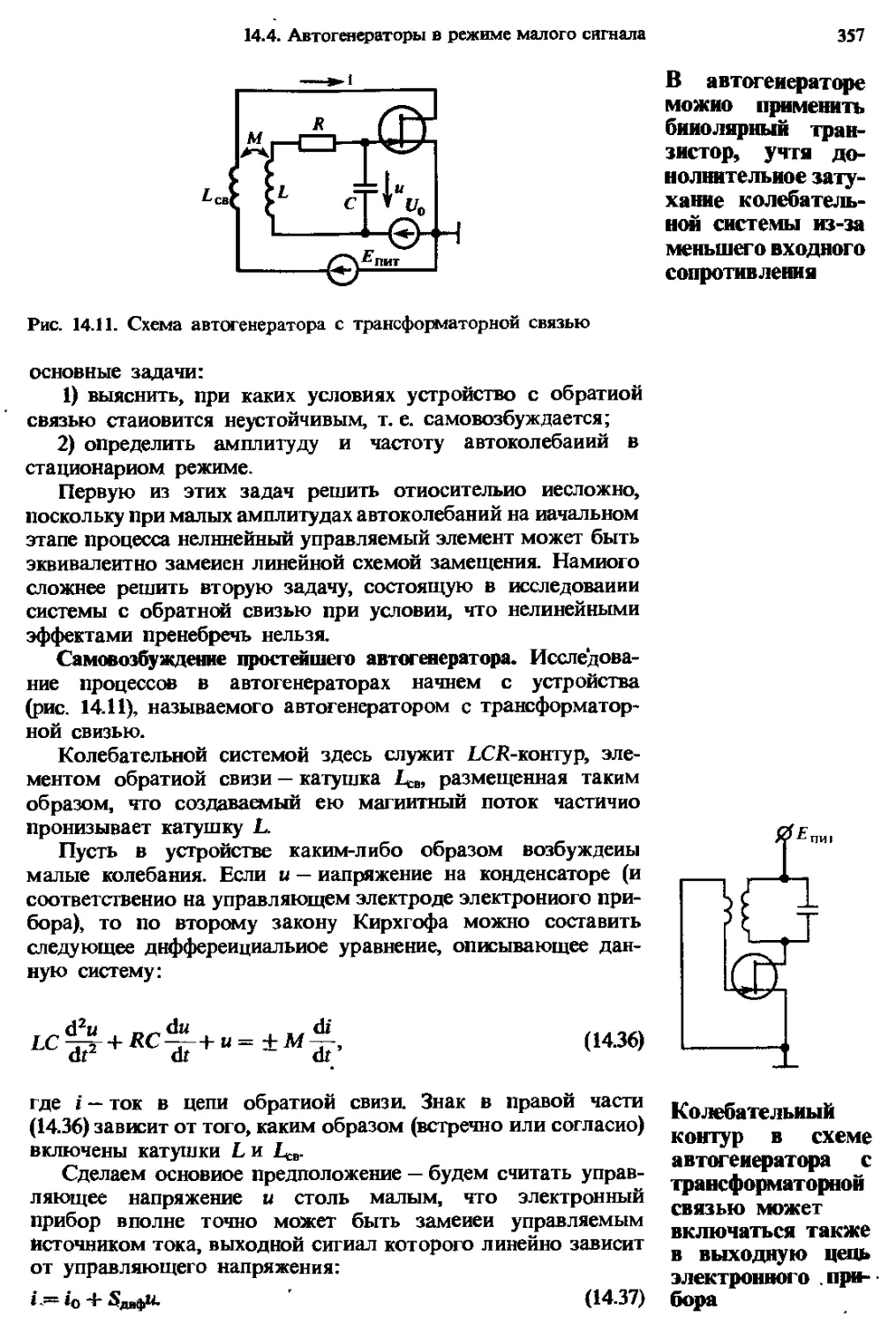
14.4. Автогенераторы гармонических колебаний.
Режим малого сигнала J • 356
14.5. Автогенераторы гармонических колебаний.
Режим большого" сигнала . 364
Глава 15. Дискретные сигналы. Принципы цифро-
цифровой фильтрации 374
15.1. Модели дискретных сигналов 374
15.2 Дискретизация периодических сигиалов 380
15.3. Теория z-преобрезоваиия -388*
15.4. Цифровые фильтры 392
15.5. Реализация алгоритмов цифровой фильт-
фильтрации 397
15.6. Синтез линейных цифровых фильтров 406
Глава 16. Некоторые вопросы теории помехоус-
помехоустойчивости радиоприема 415
16.1. Выделение полезного сигнала с помошью
линейного частотного фильтра 415
16.2. Оптимальная линейная фильтрация сигиа-
сигиалов известной формы 419
16.3. Реализация согласованных фильтров 425
16.4. Оптимальная фильтрация случайных сиг-
сигналов 432
16.5. Сравнение помехоустойчивости радио-
радиосистем с амплитудной и частотной моду-
модуляцией ' 435
Заключение . 442
Приложения 443
Список рекомендуемой литературы 445
Предметный указатель 447
Предисловие ко второму изданию
Во втором издании общий план книги и ее объем сохранены неизменными.
Некоторые главы переработаны как в научном, так и в методическом отношении.
В частности, читатель сможет познакомиться с более современной трактовкой
обобщенных функций, служащих мощным и гибким средством построения мате-
математических моделей сигналов. Расширен раздел, касающийся воздействий радио-
радиосигналов на частотно-избирательные системы. Полнее представлена теория нелиней-
нелинейных преобразований сигналов. Наконец, новую трактовку получили принципы
обработки дискретных сигналов и ряд вопросов оптимальной линейной фильтрации.
Чтобы не перегружать книгу, во втором издании опущен материал, касаю-
касающийся классического синтеза линейных пассивных двухполюсников, достаточно
подробно изложенный в ряде учебников по курсу «Основы теории цепей», которые
опубликованы за последние годы.
По сравнению с первым изданием, перечень задач и упражнений, помещенных
в конце каждой главы, пересмотрен и несколько расширен. Читатель, желающий
подробно ознакомиться с методическими принципами решения учебных задач в
области теоретических основ радиотехники, может обратиться к нашей книге
«Радиотехнические цепн и сигналы. Руководство к решению задач» («Высшая
школа», 1987).
В основу учебника положен материал лекций, читавшихся автором на радио-
радиотехническом факультете и на факультете повышения квалификации преподавателей
Московского энергетического института. Автор признателен своим коллегам, осо-
особенно проф. Г. Д. Лобову, доц. В. П. Жукову и доц. В. Г. Карташеву за творче-
творческие дискуссии и неизменную поддержку. Большую помощь при подготовке
рукописи второго издания книги оказали конструктивные критические замечания и
рекомендации, содержащиеся в рецензии кафедры теоретических основ радиотех-
радиотехники Рязанского радиотехнического института, руководимой доц. В. А. Казаковым.
За время, прошедшее с момента выхода в свет первого издания, были полу-
получены многочисленные отзывы читателей. Советы, замечания и пожелания, содер-
содержащиеся в них, существенно помогли переработать текст. Хочется выразнть
искреннюю признательность всем лицам, принявшим участие в этом коллективном
рецензировании учебника.
Москва. 1988 С. И. Баскаков
Из предисловия к первому изданию
Курс «Радиотехнические цепн й сигналы» в настоящее время занимает одно
из центральных мест среди фундаментальных дисциплин, определяющих своим
содержанием профессиональную подготовку радиоинженеров. Следуя за направле-
направлением научно-технического прогресса, отражая развитие элементной базы радио-
радиоэлектроники и ее теоретического арсенала, этот курс, объединяет и систематизи-
систематизирует наиболее важные принципы в области радиотехники.
Содержание данной книги соответствует программе курса «Радиотехнические
цепи и сигналы», утвержденной MB и ССО СССР. Предполагается, что читатель,
приступивший к изучению книги, прослушал ряд предшествующих курсов, таких,
как «Введение в специальность», «Высшая математика», «Физика» и «Основы
теории цепей». ¦ . -, '
Из предисловия к первому изданию 7
Работая над текстом, автор стремился возможно теснее сблизить излагаемый
материал с практикой учебной работы в вузе. Это в первую очередь определило
принцип отбора материала и степень детальности освещения: на страницы книги
вынесено лишь то, что, как показывает практический опыт преподавания, может
быть полностью усвоено студентами за отведенное на это время. Изучение
конкретных схемотехнических решений, их сравнительный анализ — все это относится
уже к специальным инженерным дисциплинам, изучаемым позднее.
Курс «Радиотехнические цепн и сигналы» отличается разиообразием содержания,
обилием понятий и методов, с которыми студенты сталкиваются впервые. Боль-
Большую роль в этом курсе играют математические приемы исследования. Прочное
овладение ими совершенно обязательно, поскольку они служат логическим фунда-
фундаментом построения последующих радиотехнических дисциплин. Для связи теорети-
теоретических положений и радиотехнической практики в главах книги приводится много
примеров, раскрывающих характерные приемы инженерного анализа.
Содержание и структура книги. Учебник состоит из двух частей. Первая часть
РАДИОТЕХНИЧЕСКИЕ СИГНАЛЫ знакомит читателя с методами, принятыми
в настоящее время для описания и изучения свойств сигналов. Рассматриваются
вопросы классификации сигналов, фундаментальный принцип геометрической трак-
трактовки пространства сигналов, спектральный и корреляционный анализ детермини-
детерминированных колебаний, теория модулированных радиосигналов, а также дискретное
представление непрерывных сигналов с ограниченным спектром. Подробно
излагаются методы описания и измерения характеристик случайных сиг-
сигналов.
Во второй части РАДИОТЕХНИЧЕСКИЕ ЦЕПИ, УСТРОЙСТВА И СИ-
СИСТЕМЫ дано систематическое изложение принципов анализа и расчета явле-
явлений прохождения разнообразных сигналов, как детерминированных, так и случай-
случайных, через линейные и нелинейные радиотехнические цепи. Особо подчеркнута
роль узкополосных частотно-избирательных цепей. Рассмотрены вопросы прохожде-
прохождения сигналов через линейные параметрические цепи. Опнсаны приемы синтеза линей-
линейных четырехполюсников с заданными частотными характеристиками. Изучая
безынерционные нелинейные цепи, читатель познакомится с важнейшими видами
преобразования сигналов — модуляцией, детектированием, умножением и преобразо-
преобразованием частоты. Рассмотрена теория автогенераторов гармонических колебаний.
Изложены направления, возникшие в радиотехнике сравнительно недавно под
влиянием успехов микроэлектронной технологин. Сюдв относятся активные фильтры
для обработки аналоговых сигналов и как одно из наиболее перспективных
направлений — цифровая фильтрация сигналов. Наконец, приведены элементы теорнн
оптимальной линейной фильтрации детерминированных и случайных сигналов.
Открыв эту книгу, читатель, безусловно, обратит внимание на принцип ее
оформления. На страницах наряду с основным текстом имеются поля, куда вы-
вынесена вспомогательная, дополнительная и наглядно-графическая информация. В
частности, на, полях сосредоточены:
1. НАПОМИНАНИЯ, относящиеся к ранее пройденным учебным курсам, на-
например к курсам физики и основ теории цепей.
2. СВЕДЕНИЯ СПРАВОЧНОГО ХАРАКТЕРА, такие, как значения фундамен-
фундаментальных физических констант, табличные интегралы и т. д.
3. КРАТКИЕ ЗАМЕЧАНИЯ, цель которых — показать наличие межпредметных
связей, обратить внимание на общность методоа, принятых в радиотехнике и в дру-
других, порой далеких, областях научной и прикладной деятельности.
4. ВСПОМОГАТЕЛЬНЫЕ РИСУНКИ, которые в тексте, как правило, ие упоми-
упоминаются, однако служат неотъемлемыми элементами излагаемого учебного мате-
материала. Наличие этих рисунков, помимо сокращения объема книги, дает возмож-
8 Из предисловия к первому изданию
ность в известной мере приблизить стиль книжного изложения к стилю живой
лекторской речи.
5. УКАЗАНИЯ, помогающие организовать работу читателя с текстом. На полях
книги в соответствующих местах появляются следующие сигнальные значки:
¦ — в данном месте текста описан некоторый принцип, имеющий первостепен-
первостепенное значение для радиотехники;
ф — указание иа то, что в тексте сформулировано новое понятие, которое
читателю предлагается запомнить;
А — читателю рекомендуется решить некоторую задачу (или задачи) из числа
приведенных в конце главы; задача иллюстрирует теоретическое положение, изло-
изложенное в основном тексте.
В настоящее время учебный процесс в вузе характеризуется высокой интен-
интенсивностью. Это требует от студента четкого планирования своего времени. Стре-
Стремясь помочь студентам в этом важном деле, автор уделил особое внимание опти-
оптимальной дозировке материала, предлагаемого для усвоения и повторной прора-
проработки.
Каждая глава книги отвечает отдельной большой теме лекционного курса.
Основной структурной единицей главы является параграф, приближенный по своему
объему к отдельной лекции. Самая мелкая структурная единица — пункт, в кото-
котором содержится некоторый завершенный вопрос.
В конце каждой главы помещены РЕЗУЛЬТАТЫ, прочное знание которых
является обязательным.
Следующей, более активной фазой самоконтроля являются ответы на ВОПРОСЫ.
Особенно большую пользу эта работа может принести студентам при подготовке
к экзаменам.
Желательно, чтобы читатель по мере изучения курса постоянно обращался к
разделу ЗАДАЧИ. Здесь собран материал для самостоятельной работы, по тема-
тематике и уровню сложности отвечающий содержанию той или иной главы.
В методический аппарат каждой . главы включен факультативный раздел
БОЛЕЕ СЛОЖНЫЕ ЗАДАНИЯ. Работа над этими заданиями рекомендуется
студентам, которые глубоко интересуются методами теоретической радиотехники
и имеют склонность к научным исследованиям.
Отзывы о книге просьба направлять по адресу: 101430, Москва, ГСП-4, Неглин-
Неглинная ул., 29/14, издательство «Высшая школа».
Введение
В решениях XXVII съезда КПСС и в Основных направлениях экономического
и социального развития СССР иа 1986—1990 годы и на период до 2000 года
определен стратегический курс научно-технического прогресса. К числу важных
областей наукн и техники, достижения которых непосредственно способствуют
росту материального и культурного уровня общества, принадлежит радиотехника.
Радиотехника — научно-техническая область, задачами которой являются:
1) изучение принципов генерации, усиления, излучения и приема электромаг-
электромагнитных колебаний и волн, относящихся к радиодиапазону;
2) практическое использование этих колебаний и волн для целей передачи,
хранения и преобразования информации.
На первоначальном этапе своего развития вслед за изобретением радио
(А. С. Попов, 1895 г.) радиотехника решала преимущественно проблемы электро-
электросвязи, используя электромагнитные колебания с длинами волн в несколько сотеи
или тысяч метров. В настоящее время круг применений радиотехники необычайно
расширился. Радиосвязь, телевидение, радиоуправление, радиолокация, радионавига-
радионавигация, радиотехнические методы в биологии, медицине, геофизике — таков далеко не
полный перечень отраслей радиотехники.
Науку, занимающуюся изучением физических основ радиотехники, называют
радиофизикой. Радиофизика — быстро развивающаяся ветвь прикладного естество-
естествознания, тесно связанная с такими фундаментальными областями, как квантовая
механика, физика твердого тела и др.
Проникновение радиотехники в смежные области (электронику, вычислительную
технику) обусловило возникновение широкой научно-технической области, получив-
получившей собирательное название радиоэлектроники.
Радиотехника и радиоэлектроника получили всестороннее развитие в нашей
стране. Большой общепризнанный вклад в фундаментальные основы радиотехники
внесли советские ученые — академики Л. И. Мандельштам, Н. Д. Папалекси,
В. А. Фок, А. И. Берг, В. А. Котельников и многие другие.
Как известно читателю из курса «Введение в специальность», передача сообще-
сообщения от источника к получателю с помощью радиотехнических методов осуществ-
осуществляется по радиоканалу. Основные элементы радиоканала — передатчик, приемник
и физическая среда, в которой происходит распространение электромагнитных волн. '
Средой распространения может быть как свободное пространство, так и спе- .
циальные технические устройства — волноводы, кабели и другие линии передачи.
Сигнал, поступающий от первичного источника сообщений, на передающей
стороне радиоканала с помощью микрофона, передающей телевизионной камеры
или других подобных устройств преобразуется в электрические колебания. Эти
колебания не могут быть непосредственно использованы для возбуждения электро-
электромагнитных волн ввиду их относительной низкочастотности. Поэтому в радио-
радиотехнике применяют спосЬбы передачи сигналов, основанные на том, что низкочас-
низкочастотные колебания, содержащие исходное сообщение, с помощью специальных
устройств управляют параметрами достаточно мощного несущего колебания, частота
которого лежит в раднодиапазоие. Процесс подобного преобразования сигналов
называют модуляцией несущего колебания.
Модулированный сигнал излучается антенной передатчика Возбужденные при
этом электромагнитные волны вызывают появление в антенне приемника радио-
радиосигнала, уровень которого обычно весьма мал. После частотной фильтрации и
усиления принятый сигнал должен быть подвергнут демодуляции (детектированию)—
операции, обратной по отношению к модуляции. В результате на выходе приемника
возникает колебание, являющееся копией переданного исходного сообщения.
10 Введение
Приведенное описание принципа функционирования простейшего радиоканала
подчеркивает, что передача сообщений по радиоканалу сопровождается разно-
разнообразными преобразованиями сигналов. Эти преобразования осуществляются посред-
посредством соответствующих физических систем — радиотехнических цепей. Каждая радио-
радиотехническая цепь выполняет определенную операцию над сигналами, характер
которой целиком зависит от внутренней структуры цепи. Так, принято различать
усилители, фильтрующие частотно-избирательные системы, преобразователи формы
электрических колебаний, модуляторы, детекторы и многие другие виды радио-
радиотехнических цепей, рассматриваемые в данном курсе.
В любом реальном радиоканале помимо полезного сигнала неизбежно присут-
присутствуют помехи, возникающие по многим причинам,—из-за хаотического теплового
движения электронов в элементах цепей, .несовершенства контактов в аппаратуре,
влияния соседних радиоканалов с близким^ несущими частотами, наличия в прост-
пространстве шумового космического радиоизлучения и т. д. Способность радиотехниче-
радиотехнических средств передачи информации противодействовать вредному влиянию помех
и обеспечивать высокую верность передачи называют помехоустойчивостью.
В современной радиотехнике задача создания помехоустойчивых систем является
одной из центральных. Отдельная отрасль, получившая название статистической
радиотехники и базирующаяся на вероятностных методах, занимается теорией и
практикой построения таких систем. Одним из наиболее действенных путей дости-
достижения высокой помехоустойчивости является "использование совершенных видов
модуляции сигналов и, в частности, помехоустойчивого кодирования сообщений.
Итак, в курсе «Радиотехнические цепн и сигналы» изучаются следующие
основные вопросы:
1) свойства разнообразных полезных сигналов и помех, а также принципы
их математического описания;
2) свойства физических систем, выполняющих роль радиотехнических цепей;
3) методы анализа преобразований сигналов в радиотехнических цепях, способы
построения основных видов цепей;
4) приемы синтеза радиотехнических цепей с заданными свойствами.
В наши дни радиотехника является бурно развивающейся научно-прикладной
областью. Говоря о ближайших перспективах ее развития, следует подчеркнуть
тенденцию перехода ко все более высокочастотным диапазонам электромагнитных
колебаний и волн. Так, колебания сверхвысокочастотного (СВЧ) диапазона, ранее при-
применявшиеся в основном в радиолокации, стали широко использоваться в телевизион-
телевизионных, связных и телеметрических радиоканалах. Достигнуты большие успехи в созда-
создании лазерных линий связи с несущими частотами, лежащими в. световом и
инфракрасном диапазонах.
Быстрыми темпами развивается элементная база радиотехники и радиоэлект-
радиоэлектроники. Если традиционные радиотехнические цепи представляли собой почти исклю-
исключительно комбинации линейных и нелинейных электрических цепей, то сейчас
интенсивно исследуются и внедряются в практику функциональные устройства и
системы, производящие обработку сигналов за счет специфических волиовых и коле-
колебательных явлений в твердых телах — полупроводниках, диэлектриках и магнитных
материалах. Огромную роль в современной радиотехнике играют изделия микро-
микроэлектронной технологии. Доступные, недорогие, надежные и быстродействующие
интегральные микросхемы- решающим образом изменили облик многих областей
радиотехники. Микроэлектроника обусловила широкий переход к принципиально
новым цифровым способам обработки и преобразоваиия радиотехнических сигналов.
Есть все основания ожидать, что отрасли радиотехники будут и впредь
расширяться н развиваться на базе прогресса во многих смежных областях науки
U техники.
1.Радио/
технические
сигналы
Глава 1
Элементы обшей теории
радиотехнических сигналов
Термин «сигнал» часто встречается не только в научно-
технических вопросах, но и в повседневной жизни. Иногда, ие
задумываясь о строгости терминологии, мы отождествляем
такие понятия, как сигнал, сообщение, информация. Обычно
это не приводит к недоразумениям, поскольку слово «сигнал»
происходит от латинского термина «signum» — «знак»,
имеющего широкий смысловой диапазон.
Тем не менее, приступая к систематическому изучению тео-
теоретической радиотехники, следует по возможности уточнить
содержательный смысл понятия «сигнал». В соответствии с
принятой традицией сигналом называют процесс изменения
во времени физического состояния какого-либо объекта, слу-
служащий для отображения, регистрации и передачи сообщений.
В практике человеческой деятельности сообщения неразрывно
связаны с заключенной в них информацией.
Круг вопросов, базирующихся иа понятиях «сообщение»
и «информация», весьма широк. Он является объектом при-
пристального внимания инженеров, математиков, лингвистов,
философов. В 40-х- годах К. Шеннон завершил первоначальный
этап разработки глубокого научного направления — теории
информации.
Следует сказать, что упомянутые здесь проблемы, как
правило, далеко выходят за рамки курса «Радиотехнические
цепи и сигналы». Поэтому в этой книге не будет излагаться
связь, которая существует между физическим обликом сигнала
и смыслом заключенного в нем Сообщения. Тем" более не
будет обсуждаться вопрос о ценности информации, заклю-
заключенной в сообщении и в конечном счете в сигнале.
1.1. Классификации радиотехнических сигналов
Приступая к изучению каких-либо новых объектов или
явлений, в науке всегда стремятся провести их предвари-
предварительную классификацию. Ниже такая попытка предпринята
применительно к сигналам. Основная цель — выработка кри-
Информация наря-
наряду с матерней н
энергией принадле-
принадлежит к фундамен-
фундаментальным философ-
философским категориям
естествознания
Глава 1. Элементы общей теории сигналов
математическая
модель
u(t)= 0
формула как мо-
модель детерминиро-
детерминированного сигнала
В большинстве слу-
случаев носителями
радиотехнических
сигналом являются
электромагнитные
колебания
вещественные и
комплексные сиг-
сигналы
териев классификации, а также, что очень важно для после-
последующего, установление определенной терминологии.
Описапие снгналоа посредством математических моделей.
Сигналы как физические процессы можно изучать с помощью
различных приборов и устройств — электронных осцилло-
осциллографов, вольтметров, приемников. Такой эмпирический метод
имеет существенный недостаток. Явления, наблюдаемые
экспериментатором, всегда выступают как частные, единичные
проявления, лишенные той степени обобщенности, которая
позволила бы судить об их фундаментальных свойствах, пред-
предсказывать результаты в изменившихся условиях.
Для того чтобы сделать сигналы объектами теоретиче-
теоретического изучения и расчетов,-следует указать способ их мате-
математического описания или, говоря языком современной наукн,
создать математическую модель исследуемого сигнала.
Математической моделью сигнала может быть, например,
функциональная зависимость, аргументом которой является
время. Как правило, в дальнейшем такие математические
модели сигналов будут обозначаться символами латинского
алфавита s((), u(t),f(t) и т.д.
Создание модели (в данном случае физического сигнала) —
первый существенный шаг на пути систематического изучения
свойства явления. Прежде всего математическая модель
позволяет абстрагироваться от конкретной природы носителя
сигнала. В радиотехнике одна и та же математическая
модель с равным успехом описывает ток, напряжение, напря-
напряженность электромагнитного поля и т. д.
Существенная сторона абстрактного метода, базирую-
базирующегося на понятии математической модели, заключена в том,
что мы получаем возможность описывать именно те свой-
свойства сигналов, которые объективно выступают как определяю-
ще важные. При этом игнорируется большое число второ-
второстепенных признаков. Например, в подавляющем большин-
большинстве случаев крайне затруднительно подобрать точные функ-
функциональные зависимости, которые соответствовали бы элект-
электрическим кодебаниям, наблюдаемым экспериментально.
Поэтому исследователь, руководствуясь всей совокупностью
доступных ему сведений, выбирает из наличного арсенала
математических моделей сигналов те, которые в конкретной
ситуации наилучшим и самым простым образом описывают
физический процесс. Итак, выбор модели — процесс в зна-
значительной степени творческий.
Функции, описывающие сигналы, могут принимать как
вещественные, так и комплексные значения. Поэтому в даль-
дальнейшем часто будем говорить о вещественных и комплексных
сигналах. Использование того или другого принципа — дело
математического удобства.
Зная математические модели сигналов, можно сравнивать
эти сигналы между собой, устанавливать их тождество и
различие, проводить классификацию.
Одномерные н многомерные сигналы. Типичным для радио-
радиотехники сигпалом является напряжение на зажимах какой-
1.1 Классификация радиотехнических сигналов
либо цепи или ток в ветви. Такой сигнал, описываемый
одной функцией времени, принято называть одномерным.
В этой книге чаще всего будут изучаться одномерные
сигналы. Однако иногда удобно вводить в рассмотрение
многомерные, или векторные, сигналы вида
?<*) = {»,<*), v2(t) vN(t)}, .
образованные некоторым множеством одномерных сигналов.
Целое число N называют размерностью такого сигнала (тер-
минология заимствована из линейной алгебры).
Многомерным сигналом служит, например, система напря-
напряжений на зажимах многополюсника.
Отметим, что многомерный сигнал — упорядоченная сово- .
купность одномерных сигналов. Поэтому в общем случае
сигналы с различным порядком следования компонент не
равны друг другу:
К, »2}Ф {v2, i?,}.
Многомерные модели сигналов особенно полезны в тех
случаях, когда функционирование сложных систем анализи-
анализируется с помощью ЭВМ. -
Детерминированные н случайные сигналы. Другой принцип
классификации радиотехнических сигналов основан на воз-
возможности или невозможности точного предсказания их мгно-
мгновенных значений в любые моменты времени.
Если математическая модель сигнала позволяет осущест-
осуществить такое предсказание, то сигнал называется детерминиро-
детерминированным. Способы его задания могут быть разнообразными —
математическая формула, вычислительный алгоритм, наконец,
словесное описание.
Строго говоря, детерминированных сигналов, равно как
и отвечающих им детерминированных процессов, не сущест-
существует. Неизбежное взаимодействие системы с окружающими
ее физическими объектами, наличие хаотических тепловых
флуктуации и просто неполнота знаний о начальном состоя-
состоянии системы — все это заставляет рассматривать реальные
сигналы как случайные функции времени.
В радиотехнике случайные сигналы часто проявляют себя
как помехи, препятствующие извлечению информации из
принятого колебания. Проблема борьбы с помехами, повыше-
нйе помехоустойчивости радиоприема — одна из центральных
проблем радиотехники.
Может показаться, что понятие «случайный сигнал» про-
противоречиво. Однако Зто не так. Например, сигнал на выходе
приемника радиотелескопа, направленного на источник косми-
космического излучения, представляет собой хаотические колеба-
колебания, несущие, однако, разнообразную информацию о при-
природном объекте.
Между детерминированными и случайными сигналами нет
непреодолимой границы. Очень часто в условиях, когда
уровень помех значительно меньше уровня полезного сигиала
O-r
о—
ы,
? !
—о
^о
Пример многомер-
многомерного
сигнала
Осциллограмма
типичного случай-
ного сигналя
Глава 1. Элементы общей теории сигналов
видеоимпульс и ра-
Л1ЮИМИ>.1ЬС
с известной формой, более простая детерминированная мо-
модель оказывается вполне адекватной поставленной задаче.
Методы статистической радиотехники, развитые в послед-
последние десятилетия для анализа свойств случайных сигналов,
имеют много специфических черт и базируются на математи-
математическом аппарате теории вероятностей и теории случайных
процессов. Этому кругу вопросов будет целиком посвящен
ряд глав настоящей книги.
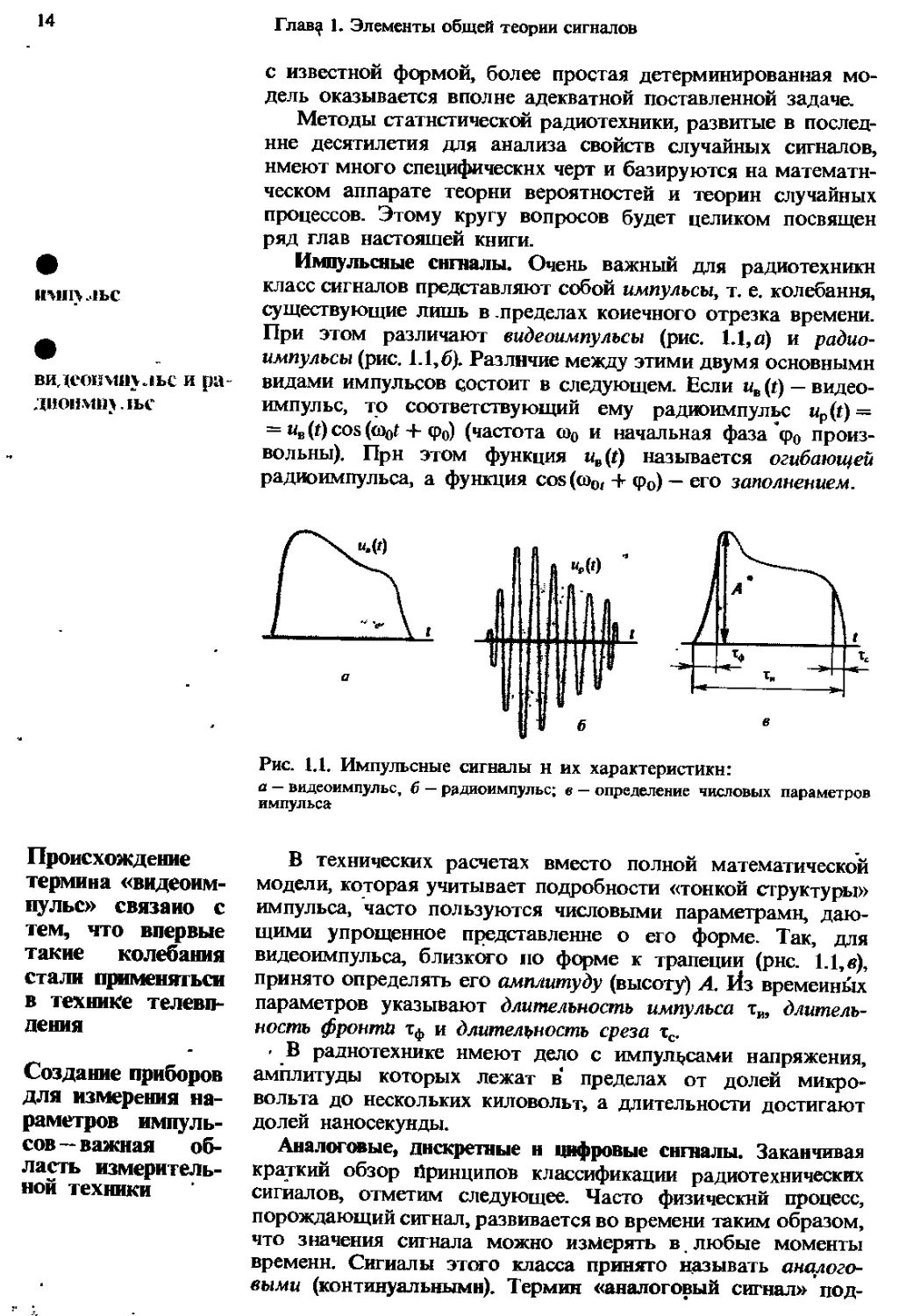
Импульсные сигналы. Очень важный для радиотехники
класс сигналов представляют собой импульсы, т. е. колебания,
существующие лишь в .пределах конечного отрезка времени.
При этом различают видеоимпульсы (рис. 1.1, а) и радио-
радиоимпульсы (рис. 1.1,6). Различие между этими двумя основными
видами импульсов состоит в следующем. Если «в (г) — видео-
видеоимпульс, то соответствующий ему радиоимпульс ир (г) =
= и„@ cos (о>оГ + Фо) (частота т0 и начальная фаза \р0 произ-
произвольны). Прн этом функция «в (г) называется огибающей
радиоимпульса, а функция cos(co0, + фо) — его заполнением.
Рис. 1.1. Импульсные сигналы н их характеристики:
а — видеоимпульс, б — радиоимпульс; е — определение числовых параметров
импульса
Происхождение В технических расчетах вместо полной математической
термина «видеоим- модели, которая учитывает подробности «тонкой структуры»
пульс» связано с импульса, "часто пользуются числовыми параметрами, даю-
тем, что впервые щими упрощенное представление о его форме. Так, для
такие колебания видеоимпульса, близкого но форме к трапеции (рнс. 1.1, в),
стали применяться принято определять его амплитуду (высоту) А. Из временных
в технике телевп- параметров указывают длительность импульса ти, длителъ-
ления ность фронта тф и длительность среза тс.
- В радиотехнике имеют дело с импульсами напряжения,
Создание приборов амплитуды которых лежат в пределах от долей микро-
для измерения на- вольта до нескольких киловольт, а длительности достигают
раметров импуль- долей наносекунды.
сов— важная об- Аналоговые, дискретные н цифровые сигналы. Заканчивая
ласть измеритель- краткий обзор йринципов классификации радиотехнических
ной техники " сигналов, отметим следующее. Часто физический процесс,
порождающий сигнал, развивается во времени таким образом,
что значения сигнала можно измерять в. любые моменты
времени. Сигналы этого класса принято называть аналого-
аналоговыми (континуальными). Термин «аналоговый сигнал» под-
L.I. Классификация радиотехнических сигналов
черкивает, что/гакой сигнал «аналогичен», полностью подобен
порождающему его физическому процессу.
Одномерный аналоговый сигнал наглядно представляется
своим графиком (осциллограммой), который может быть как
непрерывным, так и с точками разрыва.
Первоначально в радиотехнике использовались сигналы
исключительно аналогового типа. Такие сигналы позволяли
с успехом решать относительно несложные технические
задачи (радиосвязь, телевидение и т. д.). Аналоговые сигналы
было просто генерировать, принимать и обрабатывать с
помощью доступных в те годы средств.
Возросшие требования к радиотехническим системам,
разнообразие применений заставили искать новые принципы
их построения. На смену аналоговым в ряде случаев пришли
импульсные системы, работа которых основана на использо-
использовании дискретных сигналов. Простейшая математическая- мо-
модель дискретного сигнала sa (t) — это счетное множество точек
{tj} (i — целое число) на оси времени, в каждой из которых
определено отсчетное значение сигнала s,-. Как правило,
шаг дискретизации Д = ti+l — t,- для каждого сигнала
постоянен.
Одно нз преимуществ дискретных сигналов по сравнению
с аналоговыми — отсутствие необходимости воспроизводить
сигнал непрерывно во все моменты времени. За счет этого
появляется возможность по одной и той же радиолинии
передавать сообщения от" разных источников, организуя
многоканальную связь с разделением каналов по времени.
Интуитивно ясно, что быстро изменяющиеся во времени
аналоговые сигналы для их дискретизации требуют малого
шага Д. В гл. 5 этот фундаментально важный вопрос
будет подробно исследован.
Особой разновидностью дискретных сигналов являются
цифровые сигналы. Для них характерно то, что отсчетные
значения представлены в форме чисел. По соображениям
технических удобств реализации и обработки обычно исполь-
используют двоичные числа с ограниченным и, как правило, не
слишком большим числом разрядов. В последнее время
¦ наметилась тенденция к широкому внедрению систем с
цифровыми сигналами. Это связано со значительными
успехами, достигнутыми микроэлектроникой и интегральной
схемотехникой.
'Следует иметь в виду, что" в сущности любой дискрет-
дискретный или цифровой сигнал (речь идет о сигнале — физическом
процессе, а не о математической модели) является сигналом
аналоговым. Так, медленно изменяющемуся во времени ана-
аналоговому сигналу s(t) можно сопоставить его дискретный
образ, имеющий внд последовательности прямоугольных
видеоимпульсов одинаковой длительности (рис. 1.2, а); высота
этих импульсов пропорциональна значениям s (г) в отсчетных
точках. Однако можно поступить и по-ииому, сохраняя высоту
импульсов постоянной, но изменяя их длительность в
соответствни с текущими отсчетными значешшмн (рис. 1.2,6).
I Т I I,
Модель дискретно-
дискретного сигнала
111001011
101110010
010011100
100110011
Последовательные
отсчеты цифрового.
сигнала - ^
Глава 1. Элементы общей теории сигналов
Рис. 1.2. Дискретизация аналогового сигнала:
а — при переменной амплитуде; б — при переменной длительности отсчетных
импульсов
Оба представленных здесь способа дискретизации аналого-
аналогового сигнала становятся эквивалентными, если положить, что
значения аналогового сигнала в точках дискретизации
пропорциональны площади отдельных видеоимпульсов.
Фиксирование отсчетных значений в виде чисел осуществ-
П П П ляется также путем отображения последних в виде последо-
последовательности видеоимпульсов. Двоичная система счисления
идеально приспособлена для этой процедуры. Можно, напри-
например, сопоставить единице высокий, а нулю — низкий уровень
потенпиала. I Дискретные сигналы и их свойства будут
детально изучаться в гл. 15.
1.2. Динамическое представление сигналов
Многие задачи радиотехники, например вычисление откли-
отклика физической системы на известное входное воздействие,
требуют специфической формы представления сигналов:
Необходимо не только располагать информацией о мгновен-
мгновенном значении сигнала, но и знать его поведение на всей
временной оси как «в прошлом», так и в «будущем».
Принцип динамического представления. Способ получения
таких моделей сигналов состоит в следующем. Реальный
сигнал приближенно представляется суммой некоторых эле-
элементарных сигналов, возникающих в последовательные
моменты времени. Если теперь • устремить к нулю дли-
длительность отдельных элементарных сигналов, то, естественно, ¦
в пределе будет получено точное представление исходного
сигнала. Будем называть этот способ описания сигналов
динамическим представлением, подчеркивая этим развиваю-
развивающийся во времени характер процесса.
' Широкое применение нашли два способа динамического
представления. Согласно первому из них в качестве элемен-
элементарных сигналов используются ступенчатые функции, возни-
возникающие через равные промежутки времени Д (рис. 1.3, а).
Высота каждой ступеньки равна приращению сигнала иа
интервале времени Д.
При втором способе элементарными сигналами служат
прямоугольные импульсы. Эти импульсы непосредственно
примыкают друг к другу н образуют последовательность,
вписанную в кривую или описанную вокруг нее (рис. 1.3,6).
1.2. Динамическое представление сигналов
2Д ЗД 4Д
Рис. 1.3. Способы динамического представления сигналов (стрелками
показаны пути изменения во времени отдельных элементарных
слагаемых) ' ,
Рассмотрим свойства элементарного сигнала,. использу-
используемого для динамического представления по первому способу.
Функция включении. Пусть дан сигнал, математическая
модель которого задается системой равенства:
О, t< -Ъ
Такая функция описывает процесс перехода некоторого
физического объекта из «нулевого» в «единичное» состояние.
Переход совершается по линейному закону за время 2?.
Если параметр ?, устремить к нулю, то в пределе переход
из одного состояния в другое будет совершаться мгновенно.
Математическая модель этого предельного сигнала получила
название функции включения или функции Хевисайда:
a(r) =
-
A-2)
t>0.
В общем случае функция включения, может быть смещена
относительно начала отсчета времени на величину t0. Запись
смещенной функции такова:
0, t <.t0,
A.3)
Приведенный здесь способ определения функции вклю-
включения не является единственно возможным. Например, функ-
функции, образующие последовательность
U"(t)
как нетрудно проверить, с ростом номера и все более точно
аппроксимируют разрывный сигнал, претерпевающий скачок
на единицу при ( = О.
0.5 I
-(, о 4
Оливер Хевисайд
A850—1925)—анг-
A850—1925)—английский физик
В задачах практи-
практического характера
обычно допустим и
менее строгий под-
подход, когда значе-
значение функции Хеви-
Хевисайда в точке (=0
не принимается во
внимание
Глава 1. Элементы обшей теории сигналов
В теоретической радиотехнике функции включения широко
используются для описания разрывных, в частности, импульс-
импульсных сигналов. Часто это можно сделать из очевидных
соображений, не прибегая к общей методике динамического
представления.
15
0
5
г.В
¦
1
1 I, мкс
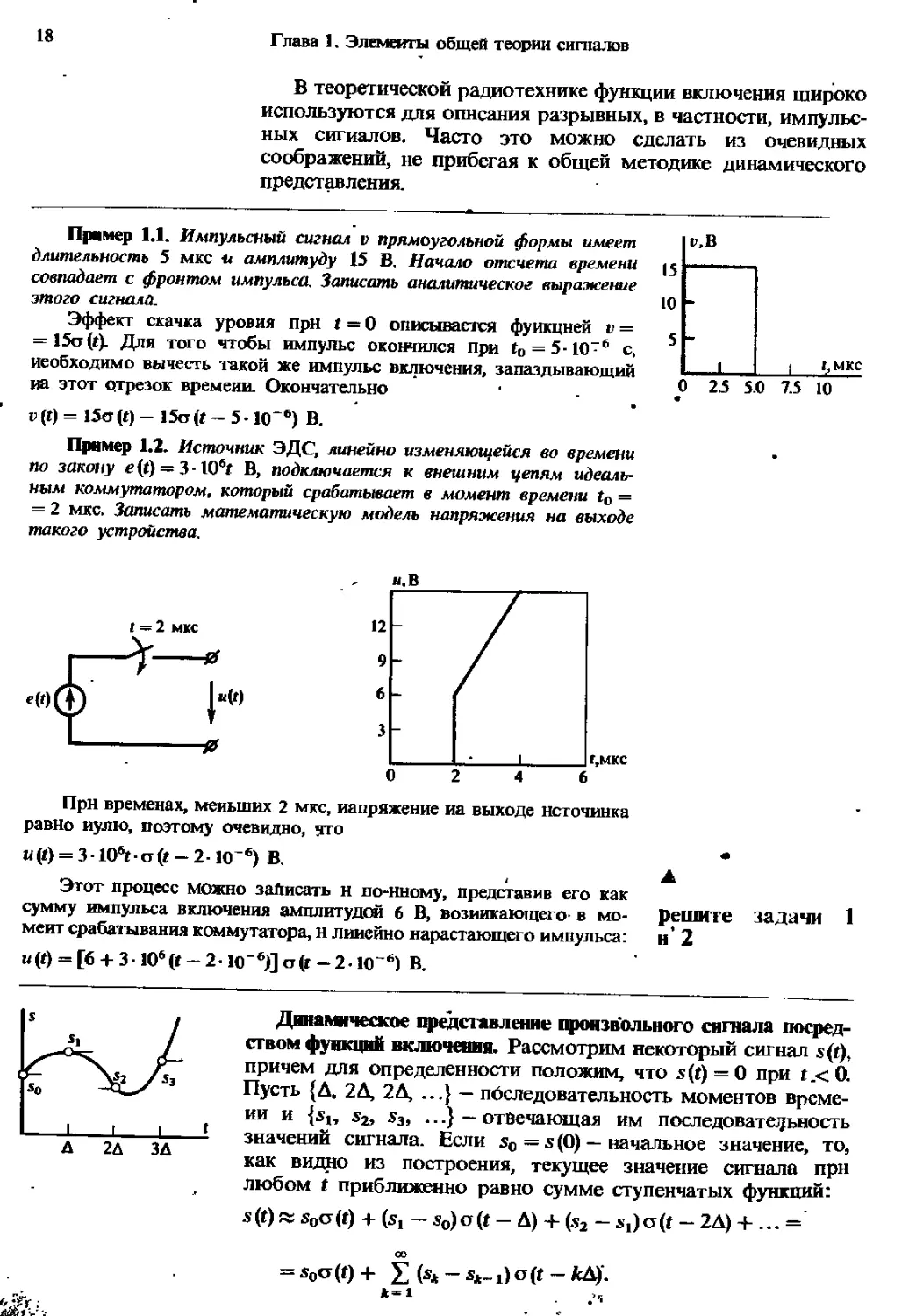
Пример 1.1. Импульсный сигнал v прямоугольной формы имеет
длительность 5 мкс -и амплитуду 15 В. Начало отсчета времени
совпадает с фронтом импульса. Записать аналитическое выражение
этого сигнала.
Эффект скачка уровня при (= 0 описывается функцией v =
= 15a(t). Для того чтобы импульс окончился при tD = 5-l076 с,
необходимо вычесть такой же импульс включения, запаздывающий
иа этот отрезок времени. Окончательно
v{t) = 15а {t) - 15а (f - 5- ИГ6) В.
Пример 1.2. Источник ЭДС, линейно изменяющейся во времени
по закону e(t) = 3-t06f В, подключается к внешним цепям идеаль-
идеальным коммутатором, который срабатывает в момент времени t0 =
= 2 мкс. Записать математическую модель напряжения на выходе
такого устройства.
О 25 5.0 7.5 10
'¦"
г,мкс
Прн временах, меньших 2 мкс, напряжение иа выходе источника
равно нулю, поэтому очевидно, что
U[t) = 3-10Vcj(* - 2- ИГ6) В.
Этот процесс можно записать н ионному, представив его как
сумму импульса включения амплитудой б В, возникающего- в мо-
момент срабатывания коммутатора, н линейно нарастающего импульса:
ы(() = [6 + 3- 106(f - 2- Ю"*)] ст(г -2- КГ6) В.
решите задач
н 2
Дннаяшческое представление произвольного сигнала посред-
посредством функций включения. Рассмотрим некоторый сигнал s(t),
причем для определенности положим, что s(f) = O при г_<&
Пусть {Д, 2А, 2Л, ...} — последовательность моментов време-
времени и {я,, 52, 53) •¦¦}— отвечающая им последовательность
значений сигнала. Если so= s @) — начальное значение, то,
как видно из построения, текущее значение сигнала прн
любом Г приближенно равно сумме ступенчатых функций:
s(t) к soa(f) + (s, - s0)o(t - Д) + (s2 - s,)a(t - 2A) + ... =
? E*-5*~х
1,2. Динамическое представление сигнвлов
Если теперь шаг Д устремить к нулю, то дискретную
переменную кА. можно заменнть непрерывной переменной т.
При этом малые приращения (sk — sfc_i) превращаются в диф-
дифференциалы ds = (ds/dx)dT, и мы получаем формулу динами-
динамического представления произвольного сигнала посредством
функций Хевисайда:
A-4)
Пример 1.3. Сигнал s{t) ра$ен &улю при ( < 0 и изменяется по
закону квадратичной параболы s{t) = At2 при г > 0. Нойти динамиче-
динамическое представление этого сигнала.
Здесь s0 = 0, dsfffc = 2Ах, поэтому
В соответствии с последней формулой высота элементарных сту-
ступеней, из которых складывается сигнал, линейно нарастает во
времени.
Переходя ко второму способу динамического' представле-
представления сигнала, когда элементами разложения служат короткие
импульсы, следует ввести новое важное понятие.
Дельта-функция. Рассмотрим импульсный сигнал пря-
прямоугольной формы, заданный следующим образом:
A.5)
При любом выборе параметра ? площадь этого импульса
равна единице: .
П„
VQl = 1.
-S/2 0 S/2
6A -<„)
Например, если v — напряжение, то П„ = 1 В • с.
Пусть теперь величина ? стремится к нулю. Импульс,
сокращаясь по длительности, сохраняет свою _ площадь,
поэтому его высота должна неограниченно возрастать. Предел
последовательности таких функций при % -* О носит название
дельта-функции, илн функции Дирака:
?-0 ' (о
Дельта-функция — интересный математический объект.
Будучи равной нулю всюду, за исключением точки г = 0 (при-
(принято говорить, что оиа сосредоточена в этой точке), дельта- Так выглядит сим-
функция тем не менее обладает единичным интегралом волическое изобра-
"аГ ~ 1 .• жение дельта-
JS(r)di = l. ¦ A.7) функции
Глава 1. Элементы общей теории сигналов
В нашем курсе будет постоянно использоваться аппарат
дельта-функций. Основная причина, делающая дельта-функ-
дельта-функцию столь удобной в физических задачах, состоит в сле-
следующем. Напомним известное положение механики: если на
материальную точку.массой т в интервале времени (i,, Г2)
действует переменная сила Fit), то изменение количества
движения точки
\Fit)it.
Здесь с ростом и
длительность им-
импульса сокращает-
си, а его высота
возрастает
Таким образом, существенно важно не сама сила, а ее
импульс, фигурирующий в правой части последнего равенства.
Дельта-функпня как раз и является математической моделью
короткого внешнего воздействия с единичным импульсом
(площадью).
В математике показано, что свойства дельта-функцнн
присущи пределам многих последовательностей обычных
классических функций. Приведем два характерных примера:
S(f)= lim]/njBn)exp(-nt2/2), A.8)
S(f)= lim [sin nt/(M)].
A.9)
Динамическое представление сигнала посредством дельта-
функций. Вернемся к задаче описания аналогового сигнала
суммой примыкающих друг к другу прямоугольных импуль-
импульсов (см. рис. 1.3,6). Если sk — значение сигнала на fc-м отсчете,
то" элементарный нмпульс с номером к представляется так:
% М = »» [? it - h) - с (j - tk - Д)]. A.10)
В соответствии с принципом динамического представ-
представления исходный сигнал 5 (г) дрлжен рассматриваться как
сумма таких элементарных слагаемых:
s(t) =
A.11)
В описываемом
здесь способе ди-
динамического пред-
представления сигнала,
для того чтобы по-
получить какое-либо
мгновенное значе-
значение, нужно распо-
располагать сведениями
о поведении сигна-
сигнала на всей оси вре-
В этой сумме отличным от нуля будет только один член,
отвечающий тому номеру к, которым удовлетворяет нера-
неравенству
tk<t<tk+1.
Если подставить A.10) в A.11), предварительно разделив
. и умножив на величину шага Д, то
sit)--
U«>-
Переходя к пределу при Д -> 0, необходимо заменить сум-
суммирование интегрированием по формальной переменной t,
дифференциал которой dt будет, отвечать величине Д.
1.2. Динамическое представление сигналов
Поскольку
lim [а (Г - т) - а (t - х - Д)] —- = 6 (г - т),
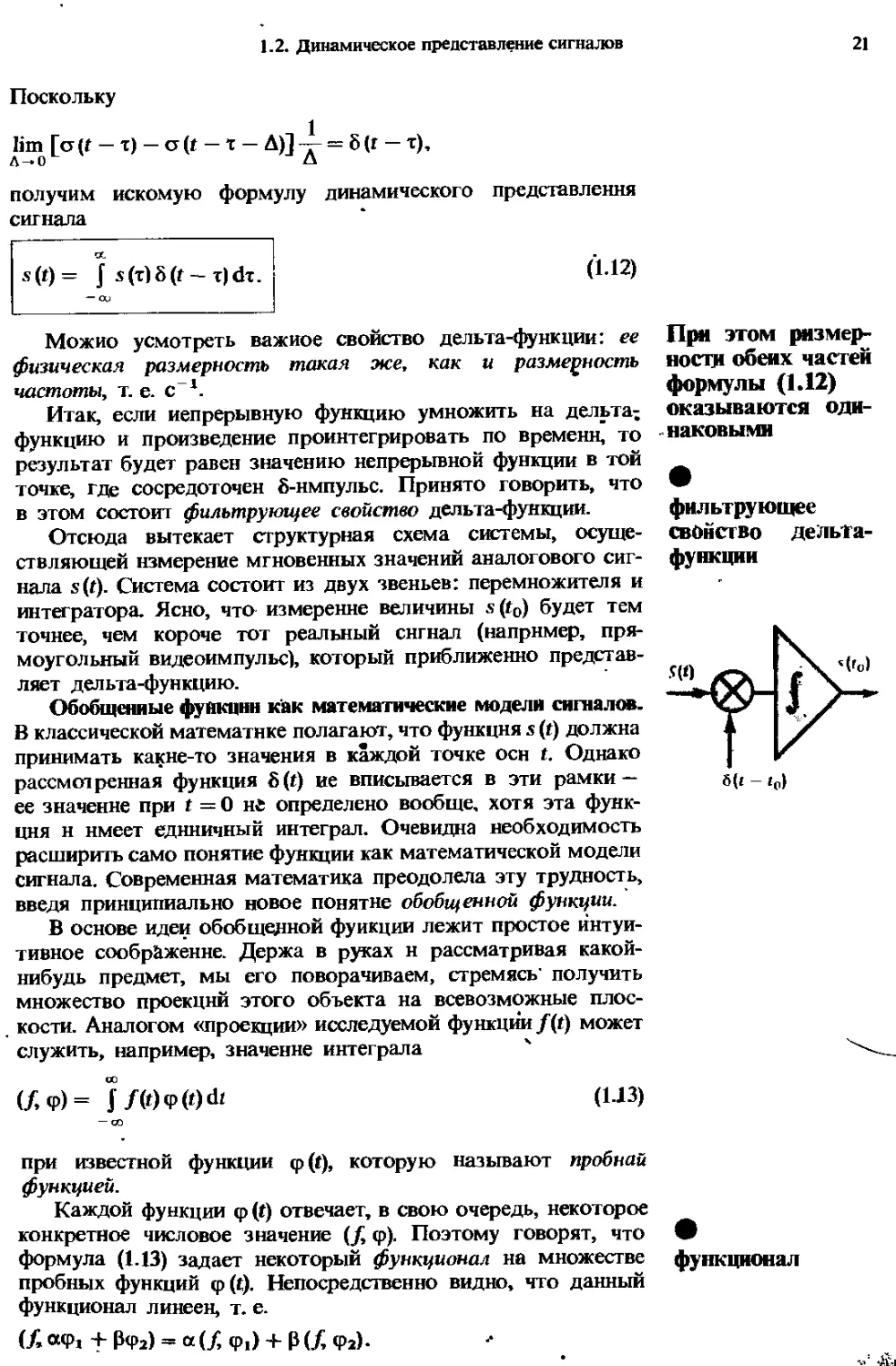
получим искомую формулу динамического представления
сигнала
s(t)= J
A.12)
Можно усмотреть важное свойство дельта-функции: ее При этом ризмер-
физическая размерность такая же, как и размерность ности обеих частей
частоты, т. е. с. формулы A.12)
Итак, если непрерывную функцию умножить на дельта- оказываются оди-
функцию и произведение проинтегрировать по времени, то -наковымн
результат будет равен значению непрерывной функции в той
точке, где сосредоточен S-нмпульс. Принято говорить, что •
в этом состоит фильтрующее свойство дельта-функции. фильтрующее
Отсюда вытекает структурная схема системы, осуще- свойство дельта-
ствляющей измерение мгновенных значений аналогового сиг- функции
нала s(t). Система состоит из двух звеньев: перемножителя и
интегратора. Ясно, что измерение величины я (t0) будет тем
точнее, чем короче тот реальный сигнал (например, пря-
прямоугольный видеоимпульс), который приближенно представ-
представляет дельта-функцию.
Обобщенные функции как математические модели сигналов.
В классической математике полагают, что функция s (t) должна
принимать какне-то значения в каждой точке осн t. Однако
рассмотренная функция S(t) ие вписывается в эти рамки— б((-(о>
ее значение при г = О и* определено вообще, хотя эта функ-
функция н имеет единичный интеграл. Очевидна необходимость
расширить само понятие функции как математической модели
сигнала. Современная математика преодолела эту трудность,
введя принципиально новое понятие обобщенной функции.'
В основе идеи обобщенной функции лежит простое интуи-
интуитивное соображение. Держа в руках и рассматривая какой-
нибудь предмет, мы его поворачиваем, стремясь" получить
множество проекций этого объекта на всевозможные плос-
плоскости. Аналогом «проекции» исследуемой функции/(t) может
служить, например, значение интеграла ч
A.13)
t v
при известной функции ф(г), которую называют пробнай
функцией.
Каждой функции ф (г) отвечает, в свою очередь, некоторое
конкретное числовое значение (/, ф). Поэтому говорят, что •
формула A.13) задает некоторый функционал на множестве функционал
пробных функций ф (t). Непосредственно видно, что данный
функционал линеен, т. е.
(/, сыр, + рФа) _ a U, <Pi) + Р (/, <р2)-
Глава 1. Элементы общей теории сигналов
Если этот функционал к тому же еще и непрерывен, то
говорят, что иа множестве пробных функций ф(г) задана
обобщенная функция f(t). Подчеркнем, что интеграл в правой
части выражения A.13) нужно понимать формально-аксиома-
формально-аксиоматически, а ие как предел соответствующих интегральных
сумм. Именно с таких позиций следует рассматривать
формулу динамического представления A.12):
Обобщенные фуик- Обобщенные функции, даже не заданные явными выраже-
выражении иногда назы- ииями, обладают многими свойствами классических функпий.
вают также рас- Так, обобщенные функции можно дифференцировать. Для
пределениями этого следует принять во внимание, что пробные функции
Ф (г) являются финитными, т. е. обращаются в нуЛь вне конеч-
конечного отрезка г( < г < г2. Тогда производная /' = d//dr
обобщенной функции /(г) задается функционалом
(/'. Ф) =/(') Ф W !!„ " I /W Ф' W Л =
= - f
В качестве примера найдем производную функции Хеви-
сайда a(f), рассматривая последнюю как обобщенную функ-
функцию. Здесь
(а', Ф) = -(а, Ф') = - J ф' (ffet = Ф (О) = E, Ф).
о
Поэтому
-p-8(t), A.14)
причем это равенство необходимо понимать именно в смысле
теории обобщенных функций, поскольку в классическом
смысле производная a' (t) прн t = О просто не существует.
Таким же образом можно определить « производную
дельта-функции:
(Й')Ф)=-E,Ф')=-Ф'(О).
Хотя явиая формула для 5'(t) отсутствует, такой матема-
математический объект существует и действует по правилу —
каждой классической функции ф (t) он сопоставляет числовое
значение ее производной в нуле с точностью до знака.
В настоящее время теория обобщенных функций получила
широкое развитие н многочисленные применения. На ее
основе созданы математические методы изучения процессов,
для которых средства классического анализа оказываются
недостаточными. ¦• -
1.3. Геометрические методы в теории сигналов 23
1.3. Геометрические методы в теории сигналов
При решении многих теоретических и прикладных задач В этой книге при
радиотехники возникают такие вопросы: 1) в каком смысле изложении методов
можно говорить о величине сигнала, утверждая, например, функционального
что одни сигнал значительно превосходит другой; 2) можно ли анализа мы будем
объективно оценивать, насколько два неодинаковых сигнала вынуждены прибе-
«похожи» друг на друга? гать в ряде случаев
В XX в. был создан функциональный анализ — раздел к качественным
математики, обобщающий наши интуитивные представления представлениям.
о геометрической структуре пространства. Оказалось, что Читателю, интере-
ндеи функционального анализа дают возможность создать сующемуси этими
стройную теорию сигналов, в основе которой лежит кон-, методами более
цепция сигнала как вектора в специальным образом скоист- ^глубоко, можно ре-
руированиом бесконечномерном пространстве. комендовать |7» 8]
Линейное пространство сигналов. Пусть М= {s^t), sa@>...} —
множество сигиалов. Причина объединения этих'объектов —
наличие некоторых свойств, общих для всех элементов мно-
множества М.
Пример 1.4. Множество М образовано всевозможными анало-
аналоговыми сигналами, отличными от нуля на интервале времени
(О, 15 мкс) и равными нулю вне этого интервала.
Пример 1.5. Множество М состоит из сигналов вида sn (/) =
= А„ cos (tont + ф„) — гармонических колебаний, отличающихся своими
амплитудами, частотами и начальными фазами.
Исследование свойств сигналов, образующих такие мно-
множества, становится особенно плодотворным*тогда, когда уда-
удается выражать одни элементы множества через другие эле-
элементы. Принято говорить, что множество сигиалов наделено
при этом определенной структурой. Выбор той или иной
структуры должеи быть продиктован физическими соображе-
ннями. Так, применительно к электрическим колебаниям из-
вестно, что они могут складываться, а гакже умножаться на
произвольный масштабный коэффициент. Это дает возмож-
возможность в множествах сигиалов ввести структуру линейного
пространства. v
Множество сигиалов М образует вещественное линейное
пространство, если справедливы следующие аксиомы:
1. Любой сигнал иеМ при любых t принимвет лишь
вещественные значения.
2. Для любых иеМ и veM существует их сумма
w = и +1?, причем w также содержится в М. Операция
суммирования коммутативна: u + v = v + u и ассоциативна:
) ( )
3. Для любого сигнала seM и любого вещественного
числа а определен сигнал /= asеМ.
4. Множество М содержит особый нулевой элемент 0,
такой, что и + 0 = и для всех ыеМ.. •¦
структура линейно-
го пространства
Приведенная здесь
система аксиом ли-
нейного нростран-
ства не" является
исчерпывающе
полной. В матема-
тике, исходи из
требовании логи-
ческой строгости,
эту систему донол-
няют рядом вспо-
могательных ут-
вержденин
24 Глава 1. Элементы общей теории сигналов
Если математические модели сигналов принимают комп-
Правило сложения лексиые значения, то, допуская в аксиоме 3 умножение иа
Напряжений иа эле- комплексное число, приходим к понятию комплексного ли-
ментах цени, непного пространства.
включенных после- Введение структуры линейного пространства является
довательно, есть первым шагом иа пути к геометрической трактовке сигналов.
следствие второго Элементы линейных пространств часто называют векторами,
закона Кирхгофа подчеркивая аналогию свойств этих объектов и обычных
трехмерных векторов.
Ограничения, налагаемые аксиомами линейного простран-
пространства, весьма жестки. Далеко не каждое множество сигналов
оказывается линейным пространством.
¦ Пример 1.6. Множество М состоит из всевозможных прямо-
прямоугольных видеоимпульсов напряжения, существующих на интервале
времени (О, 20 мкс), причем амплитуды импульсов не превышают
10 В.
Сложив, например, импульсы с амплитудами 6 и 8 В, получаем
нмпульс, не принадлежащий множеству М. Поэтому М не есть
линейное пространство.
. Понятие координатного базвса. Как и в обычном трех-
трехмерном пространстве, в линейном пространстве сигналов"
можно выделить специальное подмножество, играющее роль
координатных осей.
Говорят, что совокупность векторов {ей е2, е3, ...}, при-
принадлежащих М, является линейно независимой, если равенство
= 0
возможно лишь в случае одновременного обращения в нуль
всех числовых коэффициентов а,.
Система линейно независимых векторов образует коорди-
координатный базис в линейном пространстве. Если дано разло-
разложение некоторого сигнала s(t) в виде
то числа {сь с2» Сз, --.} являются проекциями сигнала s(t)
Какой-либо эле- относительно выбранного базиса.
мент координатно- В задачах теории сигналов число базисных векторов, как
го базиса не может правило, неограниченно велико. Такие линейные пространства
быть выражен в называют бесконечномерными. Естественно, что теория этих
виде линейной ком- пространств не может быть вложена в формальную схему
бниащш остатних- линейной алгебры, гле число базисных векторов всегда
ся элементов конечно.
1.3. Геометрические методы в теории сигналов
Пример 1.7. Линейное пространство образовано сигналами, кото-
которые описываются многочленами неограниченно высокого порядка:
(такие функции называются аналитическими).
Координатным базисом в этом пространстве служит снега
одночленов {ео = I; et = t; e2 = f2; ...}.
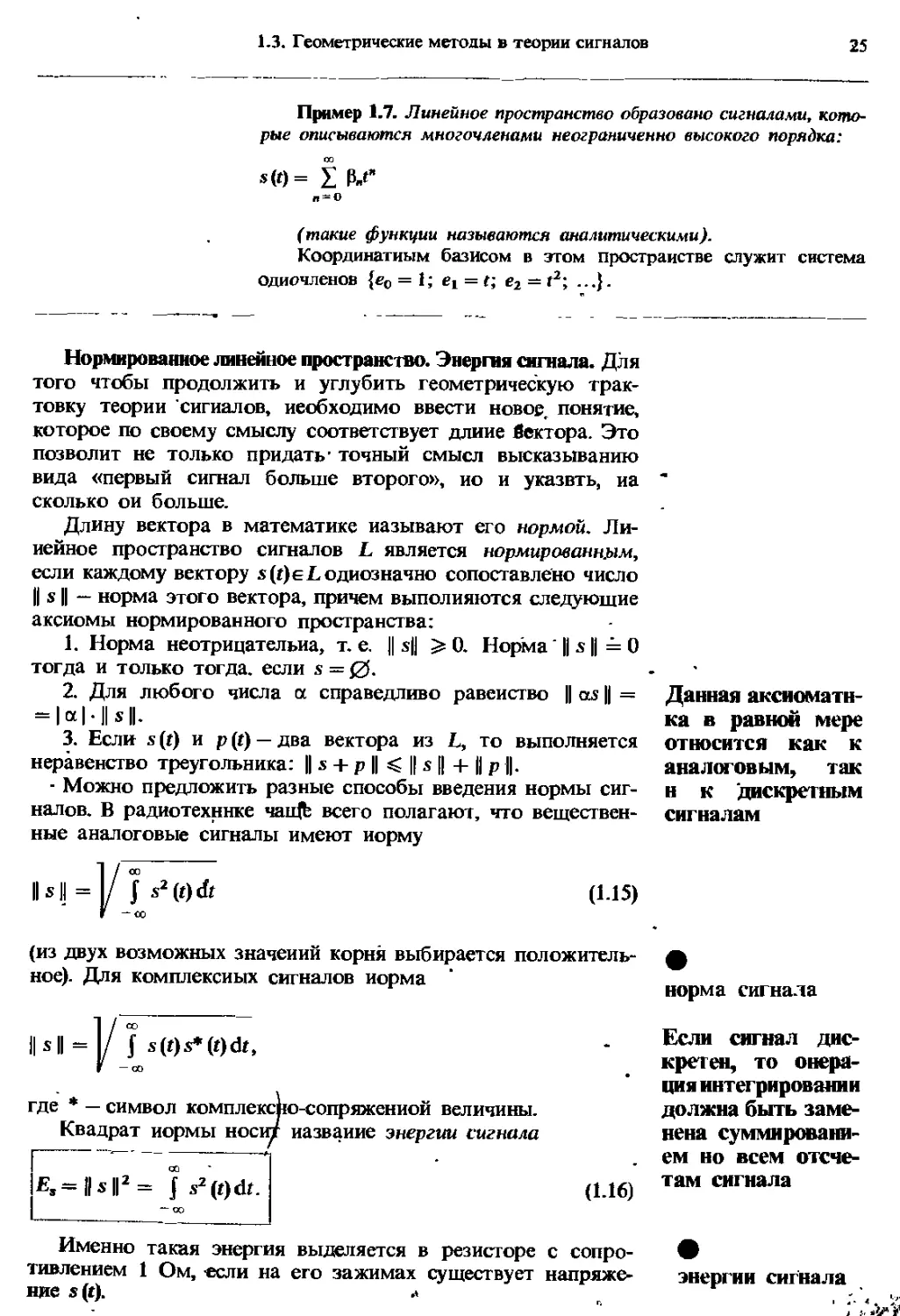
Нормированное линейное пространство. Энергия сигнала. Для
того чтобы продолжить и углубить геометрическую трак-
трактовку теории сигналов, необходимо ввести новое, понятие,
которое по своему смыслу соответствует длине вектора. Это
позволит не только придать1 точный смысл высказыванию
вида «первый сигнал больше второго», ио и указвть, иа
сколько он больше.
Длину вектора в математике называют его нормой. Ли-
Линейное пространство сигналов L является нормированным,
если каждому вектору 5(г)еЬодиозначно сопоставлено число
|| s || — норма этого вектора, причем выполняются следующие
аксиомы нормированного пространства:
1. Норма неотрицательна, т.е. j| s|] ^ 0. Норма" || s || = 0
тогда и только тогда, если s = 0.
2. Для любого числа а справедливо равенство || as || =
= |a|-||sH-
3. Если s(t) и p{t) — два вектора из L, то выполняется
неравенство треугольника: || s + р || ^ || s || + || р \\.
- Можно предложить разные способы введения нормы сиг-
сигналов. В радиотехнике чаыф всего полагают, что веществен-
вещественные аналоговые сигналы имеют норму
s^t)dt
(из двух возможных значений корня выбирается положитель-
положительное). Для комплексных сигналов норма
¦vr.
где * — символ комплекейо-сопряжениой величины.
Квадрат нормы носит название энергии сигнала
?,= IUII2 = J
A.16)
Именно такая энергия выделяется в резисторе с сопро-
сопротивлением 1 Ом, «ели на его зажимах существует напряже-
напряжение s(«). <
Данная аксиомати-
аксиоматика в равной мере
относится как к
аналоговым, так
н к дискретным
сигналам
A.15)
норма сигнала
Если сигнал дис-
дискретен, то опера-
операция интегрировании
должна быть заме-
заменена суммировани-
суммированием но всем отсче-
отсчетам сигнала
энергии сигнала
','**
Глава I. Элементы общей теории сигналов
Пример 1-8- Сигнал s(f) представляет собой треугольный им-
импульс напряжения с амплитудой V и длительностью т„. Вычислить
энергию и норму такого сигнала.
На интервале времени (О, ти) сигнал описывается функцией
Энергия сигнала
Норма сигнала
\\s\\=*\/Es=U]/:Tj\fb.
Пример 1.9. Вычислить энергию радиоимпульса с прямоугольной
формой огибающей. Импульс существует на интервале времени ^
(О, ти) и описывается функцией s(t) = Ucco$(toot + Фо)-
В соответствии с формулой A.16)
cos2 x dx.
Es = Ul fcos2 (coo( + ф0) d( = ^- I
J «o J
0 0
Выполнив интегрирование, получаем
Es = -^~ [2 (сооти + ф0) + sin 2 (соотн + ф0)].
Если внутри нмпульса содержится много периодов высокочастот-
высокочастотного заполнения, так что (ооти » I, то Es sb UotJ2 независимо от
выбора параметров со0 и ф0.
Энергии этих сиг-
сигналов отличаются
незначительно
метрика
Определять норму сигнала с помощью формулы A.15) -
целесообразно по следующим причинам:
L В радиотехнике о величине сигнала часто судят, исходя
из суммарного эиедгетического эффекта, например количества
теплоты, выделяемой в резисторе.
2. Энергетическая норма оказывается «нечувствительной»
к изменениям формы сигнала, может быть, и значительным,
но происходящим на коротких отрезках времени.
Линейное нормированное пространство с конечной вели-
величиной нормы вида A-15) носит название пространства функ-
функций с интегрируемым квадратом и^ кратко обозначается L2-
Метрнческое пространство. Теперь необходима ввести еще
одно фундаментальное понятие, которое обобщало бы наше
обычное представление о расстоянии между точками в
пространстве.
Говорят, что линейное пространство L становится метри-
метрическим пространством, если каждой паре элементов и, veL
сопоставлено неотрицательное число р (ы, и), называемое
метрикой, или расстоянием между этими элементами. Метри-
Метрика, независимо от способа ее определения, должна подчи-
подчиняться аксиомам метрического пространства:
1. р(ы* v) = p(v, и) (рефлексивность метрики).
2. р(м, и) = 0 при любых L
1.4. Теория ортогональных сигналов
3. Каков бы ни был элемент weL, всегда р(и, c)s?
Sj Р(М, И>) + р(и>, 1)).
Обычно метрику определяют как норму разности двух
сигналов:
р(и,1))=||и-^||.- A.17)
Норму, в свою очередь, можно понимать как расстояние
между выбранным элементом пространства н нулевым эле-
элементом : || и || = р (ы, 0).
Зная метрику, можно судить, например, о том, насколько
хорошо одни из сигналов аппроксимирует другой.
Пример 1.10. Сигналji{t) представляет собой отрезок синусоиды,
обращающейся в нуль на.концах отрезка [О, Г]. Высота импульса V
известна. Выбрать амплитуду А прямоугольного импульса v(t) топ
же длительности так, чтобы расстояние между этими двумя
сигналами было минимальным.
Сигнал u{t) представляется формулой
и(!) = t/sin —,
Квадрат расстояния между сигналами
То, что в точке
экстремума дейст-
действительно достига-
достигается минимум, вы^~
текает из иеложи-
' тельности второй
производной иссле-
исследуемой функции
решите задачу 8
р2(и, и) = ft/sin Ц—
Проведя интегрирование, имеем
рг (и, V) = U2T/2 - 4AUT/% + A2T.
Исследуя это выражение иа экстремум, убеждаемся, что минимум
расстояния будет достигнут, если А = 21//п к 0.6371/. При этом
Р»|„ = ?/2Г0/2 - 4/ir") х 0.09SV2T,
р„1„яг 0.308 V]/f.
Заметим, что энергия синусоидального импульса
его норма || и || = MmU]/f.
Итак, при выбранной метрике минимально достижимое рас-
расстояние между рассматриваемыми сигналами составляет 44% от
нормы синусоидального импульса.
1.4. Теория ортогональных сигналов
Введя в множестве сигналов структуру линейного про-
пространства, определив норму и метрику, мы, тем не менее,
лишены возможности вычислить такую характеристику, как
угол между двумя векторами. Это, удается сделать, сформу-
Глава I. Элементы обшей теории сигналов
В задачах физики
скалярное произве-
произведение векторов
возникает всегда
при вычислении ра-
работы сил поля при
заданном переме-
перемещении в простран-
пространстве
лнровав важное понятие скалярного произведения элементов
линейного пространства.
Скалярное произведение сигналов. Напомним, что если в
обычном трехмерном пространстве известны два вектора
А и Й, то квадрат модуля их суммы
|Л+Й|2 = |3|2 + |Й|2 + 2(Л,Й), A18)
где (Л, Й) = | Л | • | Й | cos ф — скалярное произведение этих век-
векторов, зависящее от угла \|/ между ними.
Действуя по аналогии, вычислим энергию суммы двух
сигналов и и v:
Следует отметить,
что в соответствии
с формулой A.21)
угол между диумя
сигналами должен
лежать в интерва-
интервале от 0 до 180°
Давид Гильберт
A862—1943)—из-
A862—1943)—известный немецкий
математик
Из данного нера-
неравенства вытекает,
в частности, что
косинус угла меж-
между векторами в
пространстве сиг-
сигналов не превы-
превышает единицы
Е=
]uvdt.
A.19)
В отличне от самих сигналов их энергии иеаддитивиы —
энергия суммарного сигнала содержит в себе так .называемую
взаимную энергию
?„„ = 2 J uvdt.
Сравнивая между собой формулы A.18) н A.19), определим
скалярное произведение вещественных сигналов и и v:
(и, »)= J u(t)v(t)ut.
а также косинус угла между ними:
A.20)
A21)
A.22)
v Н«1НМГ
Скалярное произведение обладает свойствами:
1. (ы, ы) ^ 0;
2. (ы, v) = {v, и);
3. {Хи, v) = X(n, v), где X — вещественное число;
4: (ы + v, w) = {и, w) + {v, w).
Линейное пространство с таким скалярным произведением,
полное в том смысле, что оно содержит в себе все пре-
предельные точки любых сходящихся последовательностей век-
векторов из этого пространства, называется вещественным
гильбертовым пространством Н. *
Справедливо фундаментальное неравенство Коши — Буня-
ковского
HMI-1 A-23)
Если снгиалы принимают комплексные значения, то можно
определить комплексное гильбертово пространство, введя в -
нем скалярное произведение по формуле
(и, и)= J n(»)u»(r)dr,
такое, что (ы, v) = (v, ы)*.
A.24)
1.4. Теория ортогональных сигналов
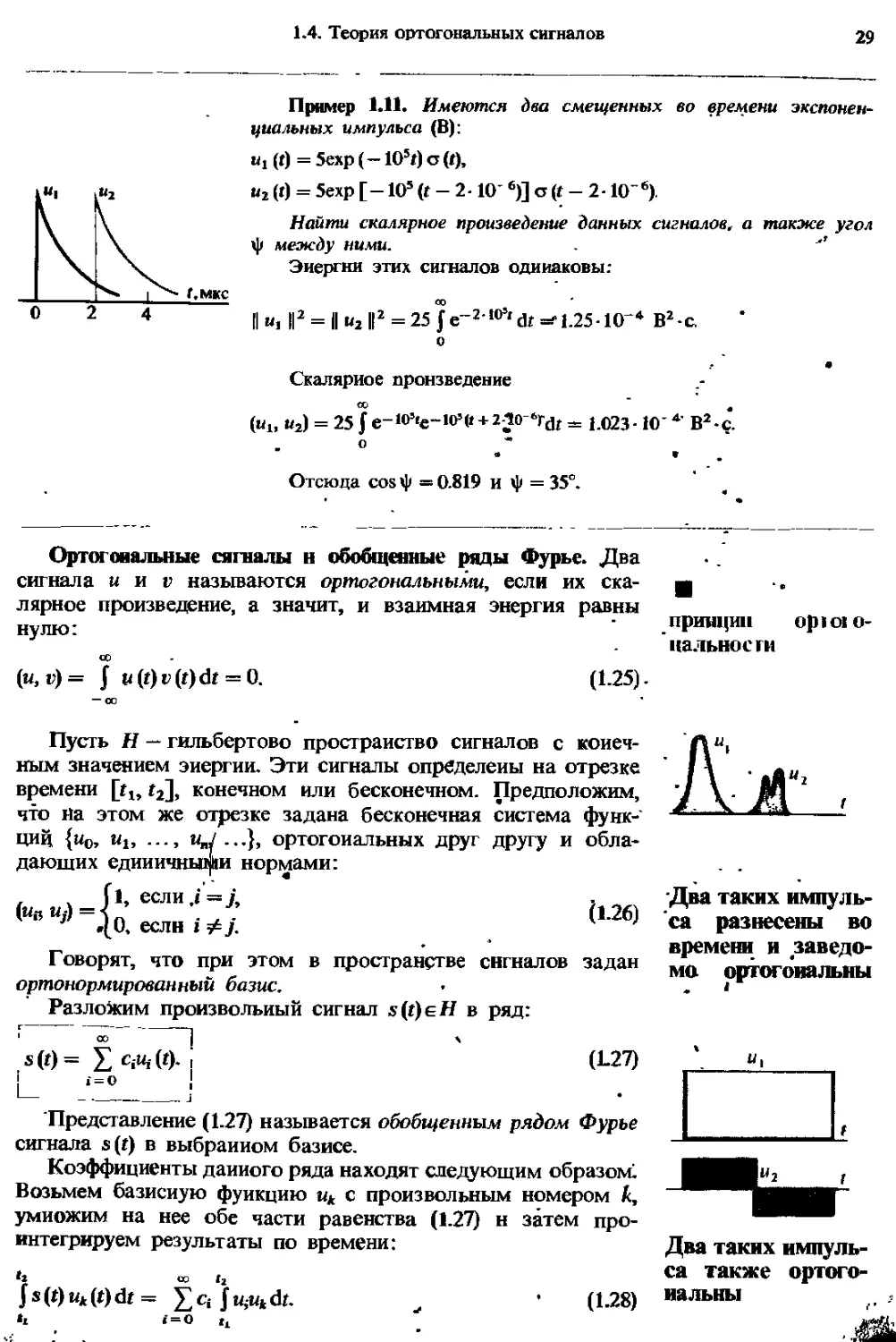
Пример 1.11. Имеются два смещенных во времени экспонен-
экспоненциальных импульса (В):
u,(r)=5exp(-105()o(f),
иг (г) = 5ехр [-105 (( - 2-10' б)] о (( - 2- ИГ6).
Найти скалярное произведение данных сигналов, а также угол
ф между ними. - *'
Энергии этих сигналов одинаковы :
ll"i ||2 = ||u2||2=25je-2'lo''dr=*4.25-l(r* B2-c
Скалярное произведение
I*!, и2) = 25 Je-M^-W^ + i-lo bTdt = 1.023-10'4 В2-с.
о
Отсюда cos^ =0.819 и ф = 35°.
Ортогональные сягналы н обобщенные ряды Фурье. Два
сигнала миг называются ортогональными, если их ска-
скалярное произведение, а значит, и взаимная энергия равны
нулю:
,i;)= J u{t)v(tNt
A.25).
Пусть И — гильбертово пространство сигналов с конеч-
конечным значением энергии. Эти сигналы определены на отрезке
времени [fb f2], конечном или бесконечном. Предположим,
что на этом же отрезке задана бесконечная система функ-"
циц (н0, щ, ..., uj ...}, ортогональных друг другу и обла-
обладающих единичными нормами:
еСЛи/=Л A.26)
если i Ф1 к }
Говорят, что при этом в пространстве сигналов задан
ортонормированный базис.
Разложим произвольиый сигнал s{t)eH в ряд:
s{t)= X С;М,(f). ; (L27)
L _/:! ¦
"Представление A.27) назьшается обобщенным рядом Фурье
сигнала s(t) в выбранном базисе.
Коэффициенты даииого ряда находят следующим образом^
Возьмем базисную функцию ык с произвольным номером k,
умножим на нее обе части равенства A.27) н затем про-
проинтегрируем результаты по времени:
js(t)n»(t)dt=
принцип
цальносги
орюю-
¦К-к-
-Два таких импуль-
импульса разнесены во
времени и заведо-
заведомо ортогональны
A.28)
Два таких импуль-
импульса также ортого-
ортогональны
Глава 1. Элементы общей теории сигналов
На геометриче-
геометрическом языке интер-
интерпретация формулы
A.29) такова: ко-
коэффициент обоб-
обобщенного ряда Фу-
Фурье есть проекция
вектора на базис-
базисное направление
Сигналы, соответ-
соответствующие функци-
функциям Уолша, легко
генерируются с по-
помощью мякроэлек-
мякроэлектронных переклю-
переключательных схем
Ввиду ортоиормированности базиса в правой части равен-
равенства A.28) останется только член суммы с номером / = fc,
поэтому
A.29)
Возможность представления сигналов посредством обоб-
обобщенных рядов Фурье является фактом большого 'принци-
'принципиального значения. Вместо того чтобы изучать функцио-
функциональную зависимость в несчетном множестве точек, мы
получаем-возможность характеризовать эти сигиалы счетной
(но, вообще говоря, бесконечной) системой коэффициентов
обобшеииого ряда Фурье ск.
Примеры ортоиормцювшшых базисов. Способы построения ¦
систем взаимно ортогональных функций подробно изучены^
в математике (см., например, [7]). Здесь в качестве примеров"
будут описаны две наиболее важные и распространенные
системы.
Ортонормированная система гармонических функций. Чи-
Читатель может самостоятельно убедиться в том, что на
отрезке [О, Т] система тригонометрических функций с крат-
кратными частотами, дополненная постоянным сигналом.
и0 = l/j/г,
щ = \/2~/Tsm 2m/T,
A.30)
m-1 = |/2/Tsin 2nmt/T,
u2m = j/2/Tcos 2nmt/T,
образует ортонормироваиный базис.
Разложение периодических' функций в ряды Фурье по
этой системе будет подробно рассмотрено в гл. 2.
Ортонормированная система функций Уолша. В последнее
время под влиянием методов обработки дискретных сигна-
сигналов большое внимание уделяют ортонормированнои системе
функций Уолша, которые иа отрезке своего существования
[— Т/2, Г/2] принимают лишь значения ±1.
Введем безразмерное время 8 = t/T и будем обозначать
fc-ю функцию Уолша, как это принято, символом wal {k, 8).
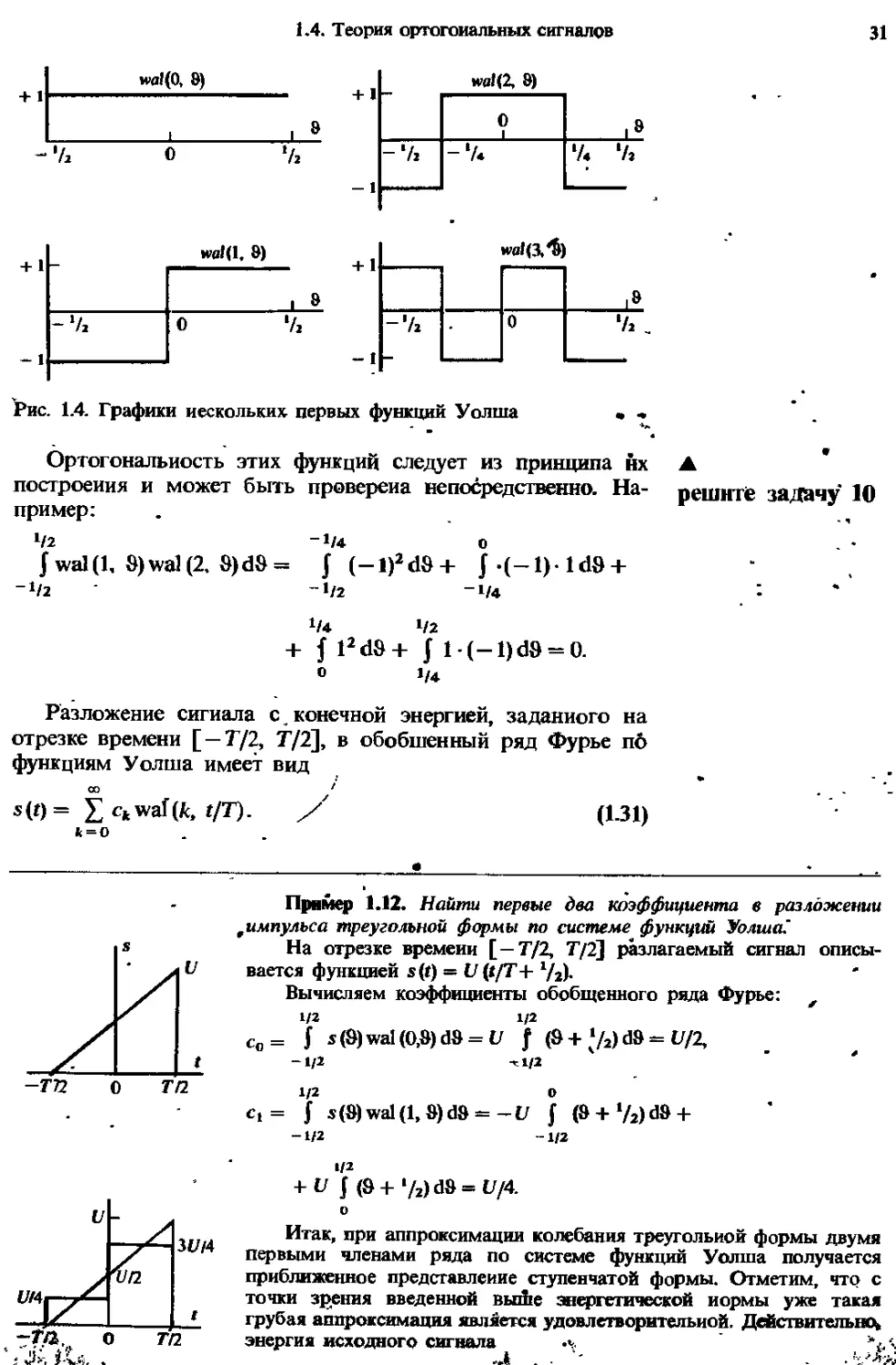
Аналитическое описание данных функций довольно сложно
(см. Приложения). Однако идею построения этой системы
легко усмотреть из рис. L4, на котором изображены
графики нескольких первых функций Уолшв.
Очевидна нормированность функций Уолша при любом
значении к:
42
I А. Теория ортогональных сигналов
wol@, 8)
О 'Д
7. Чг
-У,
¦мЮ. 8)
i 8
0 '/¦
-'/2
Рис. 1.4. Графики нескольких первых функций Уолша • *
Ортогональность этих функций следует из принципа их ^
построения и может быть проверена непосредственно. На- решите задачу 10
пример:
Jwalfl. 9)walB. 9)d9 = J(-lJd9 + J .(-l
-1/2 " "'/2 -1/4
i Чг
l2d9 + J l(-l)d9 = 0.
Разложение сигнала с конечной энергией, заданного на
отрезке времени [ — Г/2, Т/2], в обобщенный ряд Фурье пб
функциям Уолша имеет вид
«(')= 2>»waf(*:. t/T).
A31)
П|Н1Мер 1.12. Найти первые два коэффициента в разложении
гимпульса треугольной формы по системе функций Уолша.'
На отрезке времени [— Т/2, Т/2] разлагаемый сигнал описы-
описывается функцией s(«) = ?/(</Т+ '/2>-
Вычисляем коэффициенты обобщенного ряда Фурье: ,
1/2 1/2
с€= S s(9)wal@,8)d» = t/ f (9 + к'/2) d» - V/2,
-1/2 ^1/2
с,= j s(S)wal(l,S)dS = -l/ f
3(//4
+ t/ J (9 + '/2) d9 = V/4.
Итак, при аппроксимации колебания треугольной формы двумя
первыми членами ряда по системе функций Уолша получается
приближенное представление ступенчатой формы. Отметим, что с
точки зрения введенной вьпЬе энергетической нормы уже такая
грубая аппроксимация является удовлетворительной. Действительно*
энергия исходного сигнала «v. '*^\
Глава 1. Элементы общей теории сигналов
-1/2
в то время как энергия разности
1/4
|| s @) - с0 wal @, 0) - ft wal (I, Э) ||2 = 4l/2 J" x2 dx = V2/4S
о
составляет лишь '/16, или 6.25 % от энергии аппроксимируемого
сигнала.
Энергия сигнала, представленного в форме обобщенного
ряда Фурье. Рассмотрим некоторый сигнал s (t)f разложенный
в ряд по ортонормироваииой базисной системе:
Предполагается,
что онерации ин-
интегрирования и
суммирования пе-
перестановочны
Данная формула
обобщает теорему
Пифагора на слу-
случай бесконечномер-
бесконечномерных пространств -
и вычислим его энергию, непосредственио подставив, этот ряд
в соответствующий интеграл:
Es = )s2df=lfdf ? tcicjUiuJ= I icfiiiWi*- A-32»
I, (, i=0 j=O i=Oj = O I, -
Поскольку базисная система функций ортонормирована,
в сумме A.32) отличными от нуля окажутся только члены с
номерами i =j. Отсюда получается замечательный результат:
A.33)
Смысл этой формулы таков: энергия .сигнала есть сумма
энергий всех компонент, из которых складывается обобщен-
обобщенный ряд Фурье.
Оптимальвость разложения сигнала по ортогональному ба-
базису. Для сигнала s (t) введем конечномерную аппроксимацию:
с не известными пока коэффициентами ск и выберем эти
коэффициенты так, чтобы минимизировать энергию ошибки
аппроксимации:
i = || s - s ||2 = ]{s -
A.34)
Необходимое условие мииимума состоит в том, что коэф-
коэффициенты должны удовлетворять системе линейных урав-
уравнений
-^-=0, т = 0, 1, 2, .... N.
A.35)
1.4. Теория ортогональных сигналов '
В развернутой форме энергия ошибки аппроксимации
'2 Г N
ц = J s2 - Ъ ? с,к, +
r,l_ k=t>
j di.
J
Поскольку рассматриваемая базисная система функций
ортогональна, отсюда следует, что
Приняв во внимание единичную норму базисных функций,
приходим к выводу, что равенства A.35) будут выполняться,
если
что полностью совпадает с выражением A.29) для коэффи-
коэффициентов обобщенного ряда Фурье.
Более тщательный анализ (на нем здесь не останавли-
останавливаемся), когда рассматривается также вторая производная
энергии ошибки, показывает, что при разложении сигнала
в обобщенный ряд Фурье обеспечивается не просто экстремум,
а именно минимум энергии ошибки аппроксимации.
Напомним в заключение, что гильбертово пространство
сигналов, по определению, обладает важным свойством пол-
полноты: если предельное значение суммы
Следует иметь в
виду, что близость
нормы сигнала к
норме конечного
отрезка обобщен-
обобщенного ряда Фурье
вовсе ие означает
сходимость суммы
ряда к мгновенно-
мгновенному значению сиг-
сигнала в каждой
точке. В матема-
математике резкие «вспле-
«всплески» суммы ряда
Фурье . -получили
название ¦ явления
Гиббса.
В точке минимума
первая производ-
производная обращается в
нуль, а вторая про-
производная ПОЛОЖИ'
телъна '
lim
существует, то этот предел сам является некоторым эле-
элементом гильбертова пространства.. "
В полном функциональном пространстве норма ошибки
аппроксимации монотонно убывает с ростом N — числом
учитываемых членов ряда. Выбирая JV достаточно большим,
всегда можно снизить норму ошибки до любой приемлемо
малой величины.
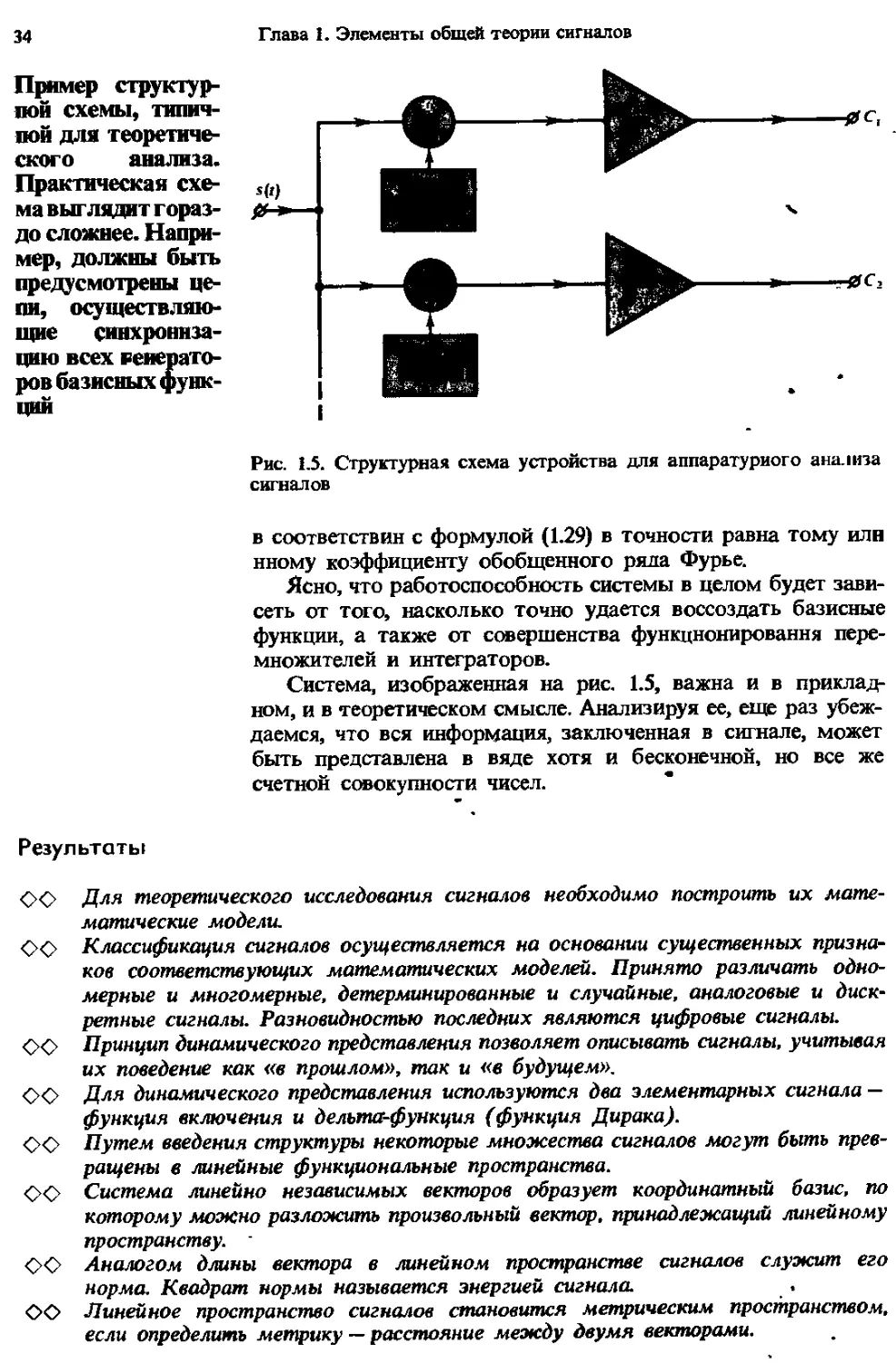
Аппаратурная реализация ортогонального разложения сиг-
сигнала. Рассмотрим структурную схему устройства для экспери-
экспериментального определения коэффициентов разложения аналого-
аналогового сигнала в обобщенный ряд Фурье по заданной
системе ортонормированных базисных функций (рис. 1.5).
Основными элементами здесь являются генераторы тех
базисных функций, по которым проводится разложение. Ана-
Анализируемый сигнал одновременно подается на совокупность
множительных звеньев, осуществляющих перемножение этого
сигнала н соответствующей базисной функции. С. выходов
перемножнтелей сигналы поступают на интеграторы. При
таком методе обработки сигнала в конце промежутка вре-
времени интегрирования на выходе каждого интегратора воз-
возникает неизменный во времени уровень, величина которого
полнота простран-
пространства
Глава I. Элементы обшей теории сигналов
Пример структур-
структурной схемы, типич-
типичной для теоретиче-
теоретического анализа.
Практическая схе-
схема выглядит гораз-
гораздо сложнее. Напри-
Например, должны быть
предусмотрены це-
цепи, осуществляю-
осуществляющие синхрониза-
синхронизацию всех реиерато-
ров базисных функ-
функций
Рис. 1.5. Структурная схема устройства для аппаратурного ана.шза
сигналов
в соответствии с формулой A.29) в точности равна тому илн
иному коэффициенту обобщенного ряда Фурье.
Ясно, что работоспособность системы в целом будет зави-
зависеть от того, насколько точно удается воссоздать базисные
функции, а также от совершенства функционирования пере-
перемножителей и интеграторов.
Система, изображенная на рис. 1.5, важна и в приклад-
прикладном, и в теоретическом смысле. Анализируя ее, еще раз убеж-
убеждаемся, что вся информация, заключенная в сигнале, может
быть представлена в вяде хотя и бесконечной, но все же
счетной совокупности чисел.
Результаты
ОО Для теоретического исследования сигналов необходимо построить их мате-
математические модели.
ОО Классификация сигналов осуществляется на основании существенных призна-
признаков соответствующих математических моделей. Принято различать одно-
одномерные и многомерные, детерминированные и случайные, аналоговые и диск-
дискретные сигналы. Разновидностью последних являются цифровые сигналы.
ОО Принцип динамического представления позволяет описывать сигналы, учитывая
их поведение как «в прошлом», так и «в будущем».
ОО Для динамического представления используются два элементарных сигнала —
функция включения и дельта-функция (функция Дирака),
ОО Путем введения структуры некоторые множества сигналов могут быть прев-
превращены в линейные функциональные пространства.
ОО Система линейно независимых векторов образует координатный базис, по
которому можно разложить произвольный вектор, принадлежащий линейному
пространству. -
ОО Аналогом длины вектора в линейном пространстве сигналов служит его
норма. Квадрат нормы называется энергией сигнала.
ОО Линейное пространство сигналов становится метрическим пространством.
если определить метрику — расстояние между двумя векторами.
Вопросы 35
QQ Чтобы найти угол между двумя элементами линейного пространства, вводят
понятие скалярного произведения, пропорционального взаимной энергии сигналов.
Если скалярное произведение равно нулю, то сигналы ортогональны.
00 Представление сигнала в виде разложения по ортонормированному базису
называют обобщенным рядом Фурье. Коэффициентами такого ряда служат
скалярные произведения разлагаемого сигнала и соответствующих базисных
векторов. . 1 • ~
00 Энергия сигнала рабна сумме энергий всех членов обобщенного ряда Фурье.
00 Разложение ^сигнала] по ортонормированному базису обеспечивает минимум
энергии ошибки мппроксимации.
00 Процесс извлечения полезной информации, содержащейся в сигнале, можно
представить себе как аппаратурное определение числовых значений коэффи-
коэффициентов обобщенного ряда Фурье этого сигнала.
Вопросы
1. Назовите два-три физических процесса,
для описания которых требуются случайные
математические модели.
2. Какие числовые характеристики при-
применяют для описания моделей импульсных
сигналов?
3. В чем состоит разница между видео-
видеоимпульсом и радиоимпульсом?
4. Почему замена аналогового сигнала
дискретным при некоторых условиях может
стать неадекватной?
5. Как формулируемся принцип динамиче-
динамического представления сигнала?
6. Каковы основные свойства дельта-
\ функции?
7. Перечислите аажиейшне аксиомы ли-
линейного пространства.
8. Каков физический смысл квадрата
нормы сигнала?
9. Как следует понимать геометрический
смысл неравенства Коши — Буняковского?
10. Изобразите графически несколько
ортогональных сигналов.
11. Какие функциональные пространства
называют гильбертовыми пространствами?
12. Почему удобно разлагать сигналы по
ортогональной системе функций Уолша?
13. Чем обобщенные функции отличаются
от классических функций?
Задачи
1, Импульс напряжения треугольной фор-
формы изображен на рисунке:
Составьте математическую модель этого
сигнала, используя комбинацию функций
включения. Убедитесь в том, что решение
данной задачи неоднозначно. * "
2. Решите задачу I применительно к сим-
симметричному треугольному импульсу, имею-
имеющему длительность т„ и амплитуду V..
т.,/2
3. Составьте математическую модель бес-
бесконечной последовательности одинаковых
импульсоа треугольной формы:
1
/
7
Т -
V.
1
/
/
/
/
/
г 2
1
t
36
Глава 1. Элементы общей теории сигналов
4. В соответствии с формулой A.4) най-
найдите динамическое представление экспонен-
экспоненциального видеоимпульса, описываемого.
функцией u(t) = exp(-ctf)c(O. v
5. Найдите динамическое представление
гауссова видеоимпульса u{t)= Uoexp{—Р*2),
определенного иа асей бесконечной оси вре-
времени. Обратите внимание на модификацию,
которой лолжиа быть подвергнута формула
A.4).
6. Найдите энергию и норму сигнала,
описываемого математической моделью вида
7. Вычислите энергию и норму импупьса
косинусоидальной формы:
s(t)
(о, tnot< -п/2;
— "S Vmcosoi0t, —п/
у О, (aot > п/2.
п/2;
8. Сигнал u(t) представляет собой сим-
симметричный треугольный импульс, сигнал
v (г) — вписанный в него импульс прямоуголь-
прямоугольной формы:
i./2
KaKofla должна быть амплитуда прямо-
прямоугольного импульса) чтобы расстояние между
этими двумя сигналами было минимальным?
9. Используя* принцип ортогональности,
на основании рнс. 1.4 постройте график
функции walC, 9).
10. Покажите, что взаимные расстояния
между любыми двумя функциями' из.сово-
из.совокупности wal@, S), wal(I, S), walB, S) оди-..
наковы и равны \/2.
1I. Проведите такой же анализ для орто-
нормированной системы тригоиометрнческих ¦
функций [см. формулы A.30)]. Сравните
результаты. Можно ли здесь провести ана-
погию с известной теоремой Пифагора?-
Более сложные задания
12. В эксперименте была зафиксирована
осциллограмма сигнала u(t):
-¦в
60
40
20
-
-
-
1 ! 1" i Т—
10 15 20 25 30
Есть предположение, что этот сигнал опи-
описывается экспоненциальной функцией вре-
времени. Предложите по возможности простой
графический способ проверки этой гипотезы.
13. Последовательный колебательный
контур возбуждается источником импульс-
импульсной ЭДС:
'¦|j|
Параметры системы: R = 5 Ом, L=
= 10 мкГн, С = 2 нФ. Длительность импул?-
са т„ = 0.5 мкс, его амплитуда Uo — J2 В.
Покажите, что в данном случае реальный
импульс можно описать математической мо-
моделью вида Ab(t). Каков должен быть при
этом коэффициент А?
Перечислите несколько простых физических •
ситуаций, относящихся к повседневному
опыту, когла воздействие на какую-либо
систему можно приближенио заменить дель- .
та-импульсом.
14. Предложите математическую модель
для аналитического описания сигнала сле-
следующего вида: --
Более сложные задания
37
15. Докажите, что дельта-функпию можно
-рассматривать как предел вида
.. / I singA
=ДшДт , )¦
16. Докажите, что если Н — вещественное
гильбертово пространство, содержащее сиг-
сигналы и и о, то имеет место равенство ,
параллелограмма:
II « + v ||2 + || и ~ v ||2 = 21| и ||2 + 2 |i v |i2.
17. Докажите, что в комплексном гиль-
гильбертовом пространстве Справедливо тож-
тождество
4(ы, v) = || и + v К2 - К и - v ||2 +
+j\iu+jvf-j\\u-jv\\2.
18. Пусть {и*(()}, fc = O, I, 2, ...-орто-
иормированный базис в некотором гиль-
гильбертовом пространстве Н. Покажите, «то для
произвольных Si, S2^H выполняется равен-
равенство Парсеваля
19. В гильбертовом пространстве сигна-
сигналов заданы произвольный вектор и и вектор v,
имеющий единичную норму. По аналогии
с геометрией обычных векторов иа плоскости
вектор w = (и, v) v называют ортогональной
проекцией вектора и иа направление v. Дока-
Докажите, что вектор у = и — w ортогонален век-
вектору в. Обобщая полученный результат, по-
покажите, что если {vi, v2, ..., vN} — система
взаимно ортогональных векторов с единич-
единичными нормами, то вектор
у = и - (ы, в,)г, - ... - (ц, vN)vN
при любом выборе и ортогонален по отно-
отношению к каждому из векторов рассматрива-
емой*системы.
20. Лусть в гильбертовом пространстве
'сигналов задана система взаимно неортого-
неортогональных векторов {#0, gu ..., gm ...}. На ее
основе постройте ортонормированную систе-
систему векторов {и0, щ, ..., ик, ...} таким обра-
образом, чтобы каждый вектор ик являлся ли-
линейной ¦ комбинацией вида
И* ** CfcQgo + Ckigl + ¦¦¦ + С*^и + ...
с постоянными коэффициентами.
21. Используя прием, найденный при
решении предыдущей задачи, вычислите три
пераых базисных вектора и0, ии и2, получа-
получаемых путем ортогоналнзации и нормировки
системы степенных функций {I, t, t2, ...} на
отрезке —l^tK 1- Получите числовые зна-
значения трех пераых коэффициентов с0, ct и с2
обобщенного ряда Фурье для сигнала /(г) =
= ехр (г) на рассматриваемом отрезке. Вычис-
Вычислите норму абсолютной ошибки аппроксима-
аппроксимации данного сигнала тремя членами ряда.
Оцените относительную ошибку аппрокси-
аппроксимации.
22. Рассмотрите предыдущую задачу в
другой постановке: найдите коэффициенты
многочлена второй степени z (t) = A + Bt +
+ Ct2 таким образом, чтобы данный много-
многочлен аппроксимировал сигнал /(г) = ехр (t) на
отрезке — 1 ^ г ^ I с наименьшей средне-
квадратической ошибкой.
•hhh.
Глава 2
Спектральные представления
сигналов
Среди разнообразных систем ортогональных функций, ко-
которые могут использоваться в качестве базнсов для пред-
представления радиотехнических сигналов, исключительное место
занимают гармонические (синусоидальные и косинусоидаль-
ные) функции. Значение гармонических сигналов для радио-
радиотехники обусловлено рядом причин.
В частности:
1. Гармонические сигналы инвариантны относительно пре-
преобразований, осуществляемых стационарными линейными
электрическими цепями. Если такая цепь возбуждена источни-
источником гармонических колебаний, то сигнал на выходе цепи
остается гармоническим с той же частотов, отличаясь от
входного сигнала лишь амплитудой* и начальной фазой.
2. Техника генерирования гармонических сигналов относи-*
тельно проста.
Если какой-либо сигнал представлен в виде суммы гар-
гармонических колебаний с различными частотами, то говорят,-
что осуществлено спектральное разложение этого сигнала.
Отдельные гармонические компоненты сигнала образуют его
спектр.
2.1. Периодические сигналы и ряды Фурье
Математической моделью процесса, повторяющегося во
времени, является периодический сигнал s(t) со следующим
свойством:
,и = 1, 2, ... B.1)
Здесь Г— период сигнала.
Ставится задача найти спектральное разложение такого
сигнала.
Рад Фурье. Зададим на отрезке времени [—Г/2, Г/2]
рассмотренный в гл. I ортонормированный базис, образо-
образованный гармоническими функциями с кратными частотами:
и„ = 1/)/г, щ = j/i/Tsin 2п1/Г,
иг = j/2/Tcos Ъа/Т, и, =]/ljl'sin Aia/T, B.2)
Примеры иериоди- и* = (/гДсов 4М/Г, и, = j/i/Tsin to/T,
ческнх сигналов
Любая функция ит из этого базиса удовлетворяет усло-
условию периодичности B.1). Поэтому,* выполнив ортогональное
разложение сигнала 5 (г) в этом базисе, т. е. вычислив коэф-
коэффициенты
C=(s, «J, . • B.3)
2.1. Периодические сигналы и ряды Фурье
39
получим спектральное разложение
s{t)=
B-4)
справедливое на всей бесконечности оси времени.
Ряд вида B.4) называется рядом Фурье данного сигнала.
Введем основную частоту coj = 2я/Г последовательности,
образующей периодический сигнал. Вычисляя коэффициенты
разложения по формуле B.3), запишем ряд Фурье для
периодического сигнала
^-+ ? fa cos гам+ ^ sin
B.5)
с коэффициентами
1 -Т/2 »
2 т'2
а„ = -= j s(i)cosra»,tdl, B.6)
' -Т/2
-2 Т
"~ Г-Т/25 Smll0)l
Итак, в общем случае периодический сигнал содержит не -
зависящую от времени постоянную составляющую и беско-
бесконечный набор гармонических колебаний, так называемых
гармоник с частотами шя = иш1 (и=1, 2, 3, ...), кратными
основной частоте последовательности.
Каждую гармонику можно описать ее амплитудой А,
и начальной фазой фи. Для этого коэффициенты ряда Фурье
следует записать в виде
о, = A,<»s<pn, (>„ = /!,, sin <р„,
Следует обратить
внимание на то, что
энергии периодиче-
периодического сигнала неог-
неограниченно велика.
Поэтому здесь
нужно говорить о
мощности сигнала,
т. е. об энергии в
единицу времени
основнаи частота
Из формул для ко-
коэффициентов ряда
Фурье следует, что
четный сигнал име-
имеет только коенцу-
соидальные, а не-
нечетный — только
синусоидальные
слагаемые
гармоники
Подставив этн выражения в B.5), получим другую, оквива-
лентную форму ряда Фурье:
которая иногда оказывается удобнее.
Спектральная диаграмма периодического сигнала. Так при-
принято называть графическое изображение коэффициентов ряда
Фурье для конкретного сигнала Различают амплитудные и
фазовые спектральные диаграммы (рис. 2.1).
Здесь по горизонтальной оси в некотором 'масштабе отло-
отложены частоты гармоник, а по вертикальной оси представлены
их амплитуды и начальные фазы.
Колебания с поме-
рами и = 2, 3, ...
обычно называют
высшими гармони-
гармониками
решите задачи 1 и 2
Глава 2. Спектральные представления сигналов
111т !¦¦><¦¦>.
1 2 3 . . „
Разные сигналы
различаются преж-
прежде нсего скоростью
убывания амили-
тудных коэффици-
коэффициентов с ростом tao-
мера гармоник
Рис. 2.1. Спектральные диаграммы некоторого периодического
сигнала:
а — амплитудная; б — фазовая
Особо интересуются амплитудной диаграммой, которая
позволяет судить о процентном содержании тех или иных
гармоник в спектре периодического сигнала.
Изучим несколько конкретных примеров.
Пример 2.1. Ряд Фурье периодической последовательности пря-
прямоугольных видеоимпульсов s(t) с известными параметрами ти, Г, А,
четной относительно точки 1 = 0.
В радиотехнике отношение q = Т/тн называют скважностью
последовательности. По формулам B.6) находим
а0 _ А
2 ~ q
скважность после-
последовательности
1A У2 ,2/1.1
а„ = J cosmoita! = sin -
2
Окончательную формулу ряда Фурье удобно записать в виде
""/в
B.8)
На рис. 2.2 представлены амплитудные диаграммы рассматри-
рассматриваемой последовательности в двух крайних случаях.
Важно отметить, что последовательность коротких импульсов,
следующих друг за другом достаточно редко (q »• 1). обладает бо-
богатым спектральным составом.
по-
последовательности
пмпульсов, исполь-
используемые, например,
в радиолокации,
имеют значения
скважности, дости-
достигающие несколы-
ких тысяч
Принято говорить,
что снектральная
р 6 диаграмма рассмо-
Рис. 2.2. Амплитудный спектр периодической последовательности тренНОГО вида ИМе-
ррямоугольиых видеоимпульсов: вт лепестковую
а-4 при большой Скважности; б —при малой скважности , Структуру
¦ \
2.1. Периодические сигналы ft ряды Фурье
41
Пример 2.2. Рлд ФурьеУхриодическои последовательности импуль-
импульсов, образованной гармоническим сигналом вида (/m cos со,{, ограни-
ограниченным на уровне Uo {предполагается, что | Vc | < Um).
Введем специальный параметр — угол отсечки 9, определяемый
из соотношения Um cos 9 = Uo, откуда 9 = arccos (U0[Um).
В соответствии с этим величина 23 равна длительности одного
импульса, выраженной в угловой мере: G)iTH = 2S.
Аналитическая "запись 'импульса, порождающего «рассматри-
«рассматриваемую последовательность, имеет вид
угол отсечки
Аксель Иванович
Берг A892-1979)—
академик,крунный
советский ученый
в области радио-
радиотехники
Функции Берга час-
часто встречаются в
инженерных расче-
расчетах. В Приложе-
Приложениях к книге даны
их таблицы, а так-
также соответствую-
пдаяирограмма для
ЭВМ на языке
ФОРТРАН
Постоянная составляющая последовательности
8'Ш1 *
^-=— f. (l/mcoso,t-l/0)d«-
2 Г _8№l
l
= — J (Km cos cu
Амплитудный коэффициент первой гармоники
1 ^ U
аг = f (Um cos Ш1Г — Uo) cos «!( d(o)it) = —^-(9 — sin 9 cos 9).
271 _g -. П
Аналогично вычисляют амплитуды а„ - гармонических состав-
.ляюших при п = 2, 3, ...:
_ 1У„ sin nS cos 9 - и cos bS sin 9
";~ п ntf-l)
Полученные результаты обычно записывают так:
Ло/2 = ишУо(9); а„ = 1/„,у,(9),
гдеуо<9), у, (9), у2(9)...-так называемые функции Берга:
Уо(9)-—(sin9-9cos9), t'
у,(9) = —(9-sin9cos9), B.9)
л
,п. 2 sin и9 cos 9 — п cos n9 sin 9 * _ ,
Y.(9) = - r-p-^ да ,-2. 3, ...
• Графики некоторых функций Берга приведены на рис. 2.3.
1.0
0.75
OS
0.25
/,
V
/
~~^\У1
0 * 45 90 135 180
Рис. 2.3. Графики нескольких первых функций Берга
Гпава 2. Спектральные представления сигналов
Комплексная форма ряда Фурье. Спектральное разложение
периодического сигнала можно выполнить и несколько по-
нному, используя систему базисных функций, состоящую из
экспонент с мнимыми показателями:
Функции из рас-
рассматриваемой си-
системы принимают
комплексные зна-
значения. Поэтому ири
вычислении ска-
скалярного произведе-
произведения используется
операция комп-
комплексного сопряже-
i. ±2,...
B.10)
Легко видеть, что функции этой системы периодичны с
периодом Г и ортонормированы на отрезке времени [— Г/2,
Г/2], так как
Ряд Фурье произвольного периодического сигнала в дан-
данном случае принимает вид
S(t)=^ ? се"-'
Положителыюй
частоте соответ-
соответствует вектор, вра-
вращающийся против
часовой стрелки, а
отрицательной час-
частоте — вектор,
вращающипси но
часовой стрелке
с коэффициентами
1 тп _jmi
|/Г-Г/2
Обычно используют следующую форму записи:
С„е»-',
• B.11)
1 Г/2
^= j
1 Г/2
Выражение B.11) представляет собой ряд Фурье в комплекс-
комплексной форме.
Спектр сигнала в соответствии с формулой B.11) содержит
компоненты на отрицательной полуоси частот, причем С~„г=
= СТ- В ряде B.11) слагаемые с положительными и отри-
отрицательными частотами объединяются в пары, например:
С„е*"»1' + С_яе-™' = | С„ | е"""' * »¦> +
+ | С„ | е--""*1' + *¦> = 21 С„ | cos (nm,f + <pj.
Итак, отрицательная частота — понятие не физическое, а
математическое, вытекающее из способа представления комп-
комплексных чисел.
Изображение периодического сигнала на комплексной плос-
плоскости. Структура ряда Фурье B.11) дает возможность изоб-
изобразить периодический сигнал посредством бесконечной суммы
вращающихся векторов на комплексной плоскости (рис. 24). ¦
Построение осуществляется следующим образом. Из на-
начала координат комплексной плоскости (точка 0) строят
вещественный вектор Со, который отображает член, с номе- •
2.2. Преобразование Фурье
Рис. 2.4. Графическое отображекие ряда Фурье в комплексной форме
ром п = 0. Затем в формуле B.11) полагают 1=0 и строят
суммы векторов
С- =С_1+С_2+С_э + ...,
отвечающие вкладу слагаемых с положительными и отрица-
отрицательными частотами. Если ряд Фурье сходится, то каждая
из сумм отображается вектором конечной длины.
Как указывалось, коэффициенты ряда Фурье с положи-
положительными и отрицательными частотами комплексно сопря-
сопряжены, поэтому вектор С+ + С_ всегда вещественный. Будучи
сложен с постоянной составляющей Со, он образует вектор,
длина которого равна s @) — значению сигнала в начальный
момент времени.
В дальнейшем картина трансформируется»— векторы Си
С2,..., соответствующие положительным частотам, вращают-
вращаются с угловыми скоростями ыи со2, ... в сторону увеличения
фазового угла, в то время как векторы C_i, C_2, ... вра-
вращаются в противоположном направлении. Конец результирую-
результирующего вектора в каждый момент времени определяет хекущее
значение сигнала.
Такая наглядная интерпретация спектрального разложения
периодического сигнала будет использована в последующем
параграфе.
2.2. Спектральный анализ непериодических
сигналов. Преобразование Фурье
Метод рядов Фурье допускает глубокое и плодотворное
обобщение, позволяющее получать спектральные характе-
характеристики непериодических сигналов. Среди последних для
радиотехники наибольший интерес представляют импульсные
сигналы.
Периодическое продолжение нмдоьса. Пусть s (t) — оди-
одиночный импульсный сигнал конечной длительности. Дополнив
его мысленно такими же сигналами, периодически следую-
следующими через некоторый интервал -времени Т, получим изу-
Для сходимости
ряда Фурье необ-
необходимо, чтобы дли-
длины символических
векторов,отвечаю-
векторов,отвечающих . высшим гар-
гармоникам, доста-
достаточно быстро
уменьшались с ро-
ростом нх номеров
Глава 2. Спектральные представления сигналов
Одиночный сигнал ченную ранее периодическую последовательность snep (r),
которая может быть представлена в виде комплексного
ряда Фурье
4
и периодическая
последователь-
последовательность
В физике принято
говорить, что нри
этом няблюдается
когерентное сложе-
сложение гармонических
колебаний
с коэффициентами
¦С. = ± J s(i)e-«
' -та
B.13)
B.14)
Для того чтобы вернуться к одиночному импульсному
сигналу, устремим к бесконечности период повторения *Г.
При этом, очевидно:
1. Частоты соседних гармоник» nojj и (и + 1) <% окажутся
сколь угодно близкими, так что в формулах B.13) и- B.14)
дискретную переменную п<ях можно заменить непрерывней
переменной со — текущей частотой.
2. Амплитудные коэффициенты С„ станут неограниченными,
малыми из-за наличия величины Т в знаменателе формулы
B14).
Наша задача состоит теперь в нахождении предельного
вида формулы B.13) при Т-> оо.
Понятие спектральной плотности сигнала. Воспользуемся
тем, что коэффициенты ряда Фурье образуют комплексно-
сопряженные пары:
сл
1", с_„
Каждой такой паре отвечает гармоническое колебание
** + ф-) = 2Л„ co
с комплексной амплитудой 2А„е№' =2СИ.
Рассмотрим малый интервал частот Дсо, образующий
окрестность некоторого выбранного значения частоты й<>.
В пределах этого интервала будет содержаться^? = Дю/со! =
= ДсоТ/Bя) отдельных пар спектральных составляющих,"л1ас-
тоты которых отличаются сколь угодно мало. Поэтому
составляющие можно складывать так, как будто все они
имеют одну и ту же частоту и характеризуются одина-
одинаковыми комплексными амплитудами
В результате находим комплексную амплитуду эквивалент-
эквивалентного гармонического сигнала, отображающего вклад всех
спектральных составляющих, содержащихся внутри интер-
интервала Дш:
ДЛч, = ~г J s(t)e->^dt = !~ j s(r)e-*wdt. B.15)
. 2.2. Преобразование Фурье
Функция
B.16)
носит название спектральной плотности сигнала s (i). Формула
B.16) осуществляет преобразование Фурье данного сигнала.
Физический смысл понятия сиектральяой плолпйги. Интер-
Интерпретацию полученных результатов удобно провести, перейдя
от угловой частоты to к циклической частоте /= со/Bя).
При этом формула B.15) приобретет вид
A^, = 2SBn/0)A/. . B.17)
Ее надо трактовать так: спектральная плотность
SBnf0) — S(w0) есть коэффициент пропорциональности между
длиной малого интервала частот Д/ и отвечающей ему
комплексной амплитудой Д^ гармонического'сигнала с час-
частотой f0. Коэффициент 2 означает, что вклад в амплитуду
дают в равной мере и/ положительные и отрицательные
частоты, образующие окрестности точек ±f0.
Принципиально важно, что спектральная плотность —
комплекснозначная функция частоты, одновременно несущая
информацию как об амплитуде, так и о фазе элементарных
синусоид. На векторной диаграмме непериодического сигнала
(рис. 2.5) длины элементарных векторов бесконечно малы,
поэтому вместо ломашЛх линий (Т конечно) получаются
гладкие кривые (Т-* оо). Если иа оси частот взять некоторую
последовательность равноотстоящих точек 0 < to, < <в2 . - -, го
модуль спектральной плотности j S (ю) | установит линейный
масштаб вдоль кривых: чем брльше модуль спектральной
плотности в заданной области. частот, тем реже будут рас-
располагаться частотные точки на векторной диаграмме.
Спектральную
плотность называ-
называют также спект-
спектральной функцией
или Фурье-образом
сигнала
Рис. 25. Векторная диаграмма непериодического сигнала (справа
изображена зависимость модулу спектральной плотаостн ьт частоты)
Глава 2. Спектральные представления сигналов i
Данная диаграмма построена для некоторого фиксирован-
фиксированного момента времени; с течением времени конфигурация
кривых будет изменяться весьма сложным образом, по-
поскольку чем выше частота, тем с большей угловой" ско-
скоростью будут вращаться соответствующие участки жривых.
Однако фактически важна не форма кривой, а лишь проекция
на горизонтальную ось, ее конечной точки (см, рисунок). * .
Обратное преобразование Фурье. Решим обратную задачу
спектральной теории сигналов: найдем сигнал по его спект-
спектральной плотности, которую будем считать заданной.
Положим вновь, что непериодический сигнал получается
. из периодической последовательности, когда ее период устрем-
устремляется к бесконечности. Воспользовавшись формулами B.13)
и B.14), запишем
S(r)= lim ? -ЫишОе*-.'.
Входящий сюда коэффициент 1/Т пропорционален раз-
разности между частотами соседних гармоник:
при любом целом п. Таким образом,
Поскольку в пределе частотные интервалы между сосед-
соседними гармониками неограниченно сокращаются, последнюю
сумму следует заменить интегралом
s(t) = ^~ i S(io)e*"idio.
B.18)
Один н тот же сиг-
сигнал допускает две
совершенно рав-
равноправные матема-
математические модели—
функцию во вре-
временной области н
функцию в частот-
частотной области
решите задачу 3
Эта важная формула называется обратным преобразова-
преобразованием Фурье для сигнала s(i).
Сформулируем окончательно фундаментальный результат:
сигнал s{t) и его спектральная плотность S(co) взаимно-
взаимнооднозначно связаны прямым и обратным преобразованиями
Фурье:
J
=2^ f
B.19)
Метод спектральных разложений чрезвычайно обогащает
теорию сигналов. Например, часто математическая модель
сигнала, представленная функцией s(l), т.е. во временной,
области, сложна и недостаточно наглядна. В то jkb время
описание этого сигнала в частотной области посредством
функции Х(ш) может оказаться простым. Однако гораздо
,2.2. Преобразование Фурье
важнее другое: спектральное представление сигналов откры-
открывает прямой путь к.анализу прохождения сигналов через
широкий класс радиотехнических цепей, устройств и систем.
Эти методы будут подробно изучены в гл. 8 и 9.
Условие существования спектральной плотности сигнала.
В математике детально исследован вопрос о том, какими
свойствами должна обладать функция s(r) для того, чтобы
ее преобразование Фурье действительно существовало.
Опуская доказательство [7], приведем окончательный ре-
результат: сигналу s(i) можно сопоставить его спектральную
плотность S(io) в том случае, если этот сигнал абсолютно
интегрируем, т. е. существует интеграл
J |S(l)|dt<cx>.
абсолютная интег-
интегрируемость сигна-
сигнала
Подобное условие значительно сужает класс допустимых
сигналов. Так, в указанном/ классическом смысле невозможно
говорить о спектральной плотности гармонического сигнала
и (г) = Um cos соог, существующего иа всей бесконечной оси
времени.
Однако в современной математике разработаны приемы,
позволяющие разумным образом вычислять спектральные
плотности иеинтегрируемьгх сигналов. Правда, при этом ока-
оказывается, что такие спектральные плотности будут уже не
обычными, классическими, а обобщенными функциями. Вопрос
о спектральном представлении иеинтегрируемых сигналов
будет рассмотрен в этой главе позднее.
А теперь на конкретных примерах изучим технику вы-
вычисления спектральных плотностей импульсных колебаний.
Спектральная плотность прямоугольного видеоимпульса.
Пусть данный сигнал s(i) имеет амплитуду U, длительность
ти и располагается симметрично относительно начала отсчета
времени. На основании формулы B.16)
S(a) = U j e~*"dr = U J (cosiot— jsintoi)d( =
V2 V2
•
S
и >;
-'./3 0 './2
Спектральная1 плотность рассматриваемого сигнала есть
веществениая фуикция частоты. Удобио ввести безразмерную
переменную % = iozJ2 и окончательно представить результат
так:
B.20)
Отметим, что значение спектральной пЛотиости на нулевой
частоте равно площади импульса: S@) = Utk. График, по-
построенный во формуле B.20J, изображен на рис. 2.6.
Глава 2. Спектральные представления сигналов
Рис. 2.6. График нормированной спектральной плотности прямо-
прямоугольного видеоимпульса как функция параметра 4 = соТц/2
определение эф-
эффективной дли-
длительности нмпуль-
са
решите задачи 5 нб
Спектральная плотность экспоненциального видеоимпульса.
Рассмотрим сигнал, описываемый функцией s(t) —
= t/exp(—at)o{t) при положительном вещественном значе-
значении параметра а.
Такой сигнал, строго говоря, лишь условно можно назвать
импульсом из-за его поведения прн г-* со. Однако условие
а > 0 обеспечивает достаток быстрое (экспоненциальное)
уменьшение мгновенных значеннй сигнала с ростом в'ремени.
Эффективную длительность!подобных импульсов в радиотех-
радиотехнике обычно определяют из условия десятикратного умень-
уменьшения уровня сигнала: ехр(—оа„) =0.1, откуда
тн = 2.3ОЗ/ос.
Спектральная плотность экспоненциального видеоим-
видеоимпульса .
U
ос +j(?>~
Подставляя пределы, имеем
S(co) =
n+ym '
B.21)
Можно отметить две принципиальные особенности, отли-
отличающие спектральную плотность экспоненциального колеба-
колебания от спектра импульса прямоугольной формы:
1. В соответствии с формулой B.21) величина S(w) не
обращается в нульмш при каком конечном значении частоты.
2. Спектральная плотность экспоненциального импульса
есть комплекснозначная функция S (со) = [ S (to) | ехр Г/1!* (со)],
имеющая модуль (амплитудный спектр) | S(со) | = V/ya2 + со2
и аргумент (фазовый спектр) <|>(ю)= —arctg(co/a).
Соответствующие графики представлены яа рис. 2.7, а, б.
Спектральная плотность гауссова видеоимпульса. Данный
сигнал описывается функцией вида s(t) = 1;ехр(-р72).
Эффективную длительность гауссова импульса определим
из,условия десятикратного уменьшения мгновенного значения
сигнала. Обратившись к чертежу, видим, что длительность
т,, должна удовлетворять соотношению ejp^^2]
2.2. Преобразование Фурье
V
Ф.град
* ' f
—*1 1 ' 1 1
|S|/S@)
\
-O.S
-8-6-4-2 0 2 4 6
_8_6_4-2\
-45
-«3
90
-45
2 4 6 8
I i i I
Рис. 2.7. Спектральная плотность экспоненциального видеоимпульса:
а — нормированный амплитудный спектр: б — фазовый спектр
преобразуя которое получаем
3.035
B.22)
Спектральная плотность рассматриваемого импульса
B.23)
Преобразуем подынтегральное выражение так, чтобы
можно было воспользоваться табличным интегралом
Для этого из показателя экспоненты в B.23) выделим
полный квадрат:
Таким образом,
f exp[-(l/pi+;a)/Bj/J5)J]dt.
Введем новую переменную ? = \/pt + jo>/B\/fS), такую, что
d( = d?u/J3. Это позволяет представить искомую спектраль-
спектральную платность в виде
Такую математи-
математическую модель ча-
часто используют в
тех случаях, когда
исследуемый им-
импульс обладает
большой степенью
«гладкости»
откуда окончательно имеем
B.24)
Итак, спектральная плотность гауссова импульса вещест-
вещественна и описывается гауссовой функцией частоты.
Спектральная плотность дельта-функцш. Пусть сигнал
s(t) представляет собой короткий импульс, сосредоточенный
в точке | = 0в имеющий площадь А. Такой 'сигнал имеет
Глава 2. Спектральные представлемия сигналов
математическую модель s(t) = Ab(t). Спектральная плотность
этого сигнала
S((o) = A*] exp(-/w()8(r)dt.
Такое неведение
спектра дельта-
функции есть след-
следствие исходной
идеализации
ISI,
OJISI
"К
решите задачу 4
На основании фильтрующего свойства дельта-функции
(см. гл. 1) входящий сюда интеграл численно равен значению
классической функции в точке, где сосредоточена обобщен-
обобщенная функция. Поэтому
B.25)
Итак, дельта-импульс имеет равномерный спектр на всех
.частотах. Интересно интерпретировать этот результат на
векторной диаграмме рис. 2.5. В момент возникновения
импульса (г = 0) все элементарные гармонические составляю-
составляющие складываются когерентно, поскольку в соответствии с
B.25) спектральная плотность вещественна. Амплитуды этих
составляющих при увеличении частоты не убывают (ср.
с предыдущими примерами). Таким образом, при г = 0
наблюдается бесконечно большое значение сигнала. Во все
другие моменты времени сигнал будет обращаться в нуль,
так как векторная сумма (см. рис. 2.5) «свертывается»
в точку.
Связь между длительностью нмгульса н инриной его
спектра. Если проанализировать частные случаи, изученные
выше, то можно сделать очень важный вывод: чем меньше
длительность импульса, тем шире его спектр.
Под шириной спектра здесь и в дальнейшем будем
понимать частотный интервал, в пределах которого модуль
спектральной плотности не меньше некоторого наперед задан-
заданного уровня, например изменяется в пределах от | S |mai
CUI
Рассмотрим прямоугольный видеоимпульс, полагая при
этом, что верхняя граничная частота спектра ш„ — это частота,
соответствующая первому нулю спектральной плотности.
Нетрудно видеть, что
Обратившись к экспоненциальному видеоимпульсу, можно
условно положить, что на верхней граничной частоте модуль
спектральной плотности уменьшается в 10 раз по отношению
к максимальному значению. Отсюда следует [см. B.20) и ниже],
что
а значит, /в =ав/Bя) = 1.584а.
Поскольку эффективная длительность экспоненциального
импульса т„ = 2.303/ос, произведение fBxu = 3.647.
Наконец, спектр дельта-импульса, имеющего бесконечно
малу*о длительность, неограниченно протяжен.
2.3. Основные свойства преобразования Фурье
Итак, произведение ширины спектра имлульса на его
длительность есть постоянное число, зависящее только от
формы импульса и, как правило, имеющее порядок единицы:
/Л, = 0A).-
Это соотношение имеет первостепенное значение для
радиотехники. Оно определяет требования к ширине полосы
пропускания радиотехнического устройства. Например, чем
короче длительность импульса, тем шире должна быть
полоса пропускания соответствующего усилителя. Короткие
имлульсные помехи имеют широкий спектр и поэтому могут
ухудшать условия радиоприема в значительной полосе
частот.
2.3. Основные свойства преобразования Фурье
Научившись вычислять спектральные плотности доста-
достаточно простых, ио часто встречающихся импульсных сиг-
сигналов, переидем к систематическому изучению свойств пре-
преобразования Фурье.
Линейность преобразования Фурье. Это важнейшее свойство
формулируется так: если имеется некоторая совокупность
сигналов «1 (г), s2 (г),..., причем Si (г) «-> St (to), s2 (!) ¦-> Sz (to),....
то взвешенная сумма сигналов преобразуется по Фурье сле-
следующим образом:
Говорят, что шири-
ширина спектра н дли-
длительность импуль-
импульса связаны соотно-
соотношением неопреде-
неопределенности (термин,
зннмствованный нз
квантовой механи-
механики)
Здесь at — произвольные числовые коэффициенты.
Для доказательства формулы B.26) следует подставить
сумму сигналов в преобразование Фурье B.16).
Свойства вещественной и мнимой частей спектральной
плотности. Пусть s (!) — сигнал, принимающий вещественные
значения. Его спектральная плотность в общем случае
является комплексной:
S(to)= J s(i)costo!d! — j J s(i)sinto!dt =
Подставам это выражение в формулу обратного преоб-
преобразования фурье B.18):
s (!) = — J [A (to) - jB (to)] (cos to! + ] sin to!) dm.
Для того чтобы сигнал, полученный путем такого дау-
кратного преобразования, оставался вещественным, необхо-
необходимо потребовать, чтобы
J j4(m)sintoidm = O,
J В (to) cos to! dm = 0.
Интеграл от нечет-
нечетной функция в сим-
симметричных преде-
пределах всегда равен
нули»
Глава 2. Спектральные представления сигналов
Это возможно лишь в том случае, если вещественная
часть A(g>) спектральной плотности ^сигнала есть четная, а
мнимая часть В (со) —. нечетная функция частоты:
— ¦ ' B.27)
Спектральная плотность сигнала, смещенного во времени.
Предположим, что для сигнала s(t) известно соответствие
s (()«-*? (со). Рассмотрим такой же сигнал, во возникающий
на t0 секунд .позднее. Принимая точку г0 за новое начало
отсчета времени, обозначим этот смещенный сигнал как
s(t — г0). Покажем, что
\s(t- to)<-»S (со) е-*°Ч| B.28)
Доказательство очень простое. Действительно,
Замена переменной s(t — io)«-> J s (i —10) e"*" d( =
t-to = x
= J s(x)e-'<'t
Исходный сигнал
Модуль комплексного числа ехр(—j<at0) при любых г0
равен единице, поэтому амплитуды элементарных гармони-
гармонических составляющих, из которых складывается сигнал, не
зависят от его положения на оси'времени. Информация об
этой характеристике сигнала заключена в частотной зависи-
зависимости аргумента его спектральной плотности (фазовом
спектре).
Зависимость спектральной плотности сигнала от выбора
масштаба измерения времени. Предположим, что исходный
сигнал s (гУ'подЖергнут изменению Масштаба времени. Это
означает, что роль времени t играет новая независимая
переменная kt (к — некоторое вещественное число). Если к > 1,
то происходит «сжатие» исходного сигнала; если же 0<fc<l,
то сигнал «растягивается» во времени.
Оказывается, что если s (r) «-> S (со), то
х (*()«-> у.
B.29)
Сжатый сигнал
Действительно,
s(to)« J s(fa)e-*»dt = -i f sMe'^'dJc,
откуда,следует формула B.29).
Итак, для того чтобы, например, сжать сигнал во
времени, сохраняя его форму, необходимо распределить те же
спектральные составляющие в более широком * интервале
частот при соответствующем пропорциональном уменьшении
их амплитуд.
К рассматриваемому здесь вопросу близко примыкает
следующая задача. Дан импульс .5 (г), отличный от нуля на
2.3. Основные свойства преобразования Фурье
отрезке [0, xj и характеризуемый спектральной плотностью
S (со). Требуется иайтн спектральную плотность S^p (со) «обра-
«обращенного во времени» сигнала s^p (О»' который представляет
собой «зеркальную копию» исходного импульсного колеба-
колебания. Поскольку очевидно, что s^p (t) — s (тн — t)? то
Выполнив замену переменной х = тн — t, находим, что
Спектральная плотность производной п неопределенного
интеграла. Пусть сигнал s(t) н его спектральная плотность
S (со) заданы. Будем изучать новый сигнал f(t) = ds/dt н по-
поставим цель найти его спектральную плотность/F (со).
По определению.
B.31)
[F(co)=j(oS(co).]
Преобразование Фурье — лниейная операция, значит, ра-
равенство B.31) справедливо н по отношению к спектральным
плотностям. Учитывая B.28), получаем
_. . ,. 1 — expt—jcor) _, . /-i,-iv
F (со) — Inn —S (со). B.32)
Представляя экспоненциальную функцию рядом Тейлора:
ехр(—jcot)= 1 — ./сот —(сотJ/2 —..., подставляя этот ряд в
B.32) н ограничиваясь первыми двумя членами, находим
B.33)
Прн дифференцировании скорость изменения сигнала во
времени возрастает. Как следствие модуль спектра произ-
производной имеет большие значения в области высоких частот
по сравнению с модулем спектра исходного сигнала.
Формула B.33) обобщается на случай спектра производ-
производной n-го порядка. Легко доказать, что если g(t) — d"s/dt", то
G(co) = (/co)*S(co). B.34)
Итак, днфференцироваине сигнала по времени эквивалент-
эквивалентно простой алгебраической операции умножения спектральной
плотности на множитель jra. Поэтому принято говорить, что
мнимое число jo> является оператором дифференцирования,
действующим в частотной области.
Рассмотренная функция s (t) = $f(t) dt является первооб-
первообразной (неопределенным интегралом) по отношению к функ-
функции /(t). Из B.33) формально следует, что спектр перво-
первообразной
S(eo) = F(co)/(;co). . B.35)
?. »-
Сигнал
п его производная
При дифференциро-
дифференцировании происходит
обострение сигвала
Глава 2. Спектральные представления сигналов
Таким образом, множитель 1/(/ш) служит оператором
интегрирования в частотной области.
Спектральная плотность «гнала на выходе интегратора.
• Во многих радиотехнических устройствах нахоЛят применеиие
так пазываемые интеграторы — физические системы, вы-
выходной сигнал которых пропорционален интегралу от вход-
входного воздействия. Рассмотрим конкретно интегратор, осуще-
осуществляющий преобразование входного сигнала sM(t) в выход-
выходной сигнал 5мыA) по следующему закону:
1 I ....
sMX(t) = — J явх(ц)а^. B.36)
* i-т
Здесь Т> 0 — фиксированный параметр.
Определенный интеграл, входящий в B.36), равен, оче-
очевидно, разности двух значений первообразной сигнала «„ (с),
На выходе инте- одно нз которых вычисляется при аргументе t, а другое —
гратора происхо- прн аргументе t — T. Используя соотношения B.28) и B.35),
дат сглаживание получаем формулу связи между спектральными плотностями
входного сигнала сигналов иа входе н выходе:
Рассмотренный ин-
интегратор называют
иногда фильтром
скользящего сред-
среднего
B37)
Сомножитель в скобках ограничен_при любых частотах,
в то же время модуль знаменателя линейно растет с уве-
увеличением частоты. Это свидетельствует о том, что рас-
рассматриваемый интегратор действует подобно фильтру нижних
частот, ослабляя высокочастотные спектральные составляю-
составляющие входного сигнала.
Спектральная плотность произведения сигналов. Как из-
известно, при суммировании сигналов их спектры склады-
складываются. Однако спектр произведения сигналов не равен про-
произведению спектров, а выражается некоторым специальным
интегральным соотношением между спектрами сомножителей.
Пусть u(t) н »(t) —два сигнала, для которых известны
соответствия u(t)«-»?/(co), v(t)*^V(in). Образуем произведение
этнх сигналов: s(t) = u(t)v(t) и вычислим его спектральную
плотность. По общему правилу
S(co)= J u(t)v(t)e~*"dt.
B.38)
Применив обратное преобразование Фурье, выразим сиг-
сигнал v(t) через его спектральную плотность и подставим
результат в B.38):
S<W)= 2jT ^ "W[^ ^©e*'dye"*'dr.
Изменив порядок интегрирования, будем иметь
2.4« Спектральные плотности неинтегглфуемых снгналов
откуда
B.39)
Интеграл, стоящий в правой части, называют сверткой
функций V н U. В дальнейшем будем символически обо-
значать операцию свертки так:
J V® U(a -
co) * f/(co).
свертка
Таким образом, спектральная плотность произведения
двух сигналов с точностью до постоянного числового мнот
жителя равна свертке спектральных плотностей сомножи-
сомножителей:
1
'2я
B40)
Нетрудно убедиться, что операция свертки коммутативна,
т. е. допускает изменение порядка следования преобразуе-
преобразуемых функций:
F(eo) * U (со) = U (ш) * V((a).
Доказанная выше теорема о свертке может быть обра-
обращена: если спектральная плотность некоторого сигнала пред-
представляется в виде произведения S(co) =Si(a>)S2(co), причем
S, (to) *->Si(t) и S2(co)«->s2@> то сигнал s(t)«->S(co) является
сверткой сигналов Sj (г) н s2 (c)> но уже не в частотной, а
во временной области:
j
B.41)
решите
и 8
залачи 7
Элементарное доказательство этой формулы читатель мо-
может провести самостоятельно.
2.4. Спектральпые плотности
пеинтегряруемых сигналов
Математические модели многих сигналов, широко приме-
пяемых в радиотехнике, не удовлетворяют условию абсо-
абсолютной интегрируемости, поэтому метод преобразований
Фурье в обычном виде к ним неприменим. Однако, как
указывалось, можно говорить о спектральных плотностях
таких сигналов, если допустить, что эти плотности описы-
описываются обобщенными функциями.
Обобщенная формула Рэлея. Докажем важное вспомога-
вспомогательное положение, касающееся спектральных свойств сигна?
лов. Пусть два сигнала и (г) и v (г), в общем случае комплексно-
эначные, определены своими обратными преобразованиями
56
Глава 2. Спектральные представления сигналов
Дж. В. Стрел-,
лорд Рэлей A842—
1919) — крупней-
крупнейший английский
физик, известный
своими работами в
области теории ко-
колебаний и волн
Фурье:
J f/(co)e*"dco.
»Ю = х-
Найдем скалярное произведение этих сигналов, выразив
один из них, например v(t), через его спектральную плот-
плотность:
»)= J u(t)i-*(t)dt =
= y- J dcoF*(co) J u(t)e">"'dt.
Здесь внутренний интеграл представляет собой, очевидно,
спектральную плотность (/(со) сигнала u(t). Поэтому
B.42)
, F).
В математике обо- Полученное соотношение представляет собой обобщенную
бщеиную формулу формулу Рэлея. Легко запоминающаяся трактовка этой фор-
Рэлея называют мулы такова: скалярное произведение двух сигналов с точ-
также равенством ностью до коэффициента пропорционально скалярному про-
Парсеваля или тео- изведению их спектральных плотностей.
ремой Планшереля Обобщение понятии спектральной плотности. Будем считать,
что сигнал v(t) представляет собой абсолютно интегриру-
интегрируемую функцию. Тогда его преобразование Фурье F(to) —
обычная классическая функция частоты. Пусть наряду с этим
сигнал u(t) не удовлетворяет условию абсолютной интегри-
интегрируемости и в обычном классическом смысле преобразо-
преобразование Фурье U (со) не существует. Однако можно расширить
понятие спектральной плотности, допустив, что t/(co) явля-
является обобщенной функцией в том смысле, который был
установлен в § 1.2. Для этого в соответствии с обоб-
обобщенной формулой Рэлея достаточно положить, что U (со) —
функционал, который, действуя на известную функцию F(co)*
дает следующий результат:
A7, V) = 2n{u,v). B.43)
Приемы вычисления спектров неинтегрируемых сигналов
целесообразно рассмотреть на конкретных примерах.
Снектральная плотность „постоянного во времени сигнала.
Простейший неинтегрируемый сигнал — это постоянная вели-
величина и (t) = А = const.- Предположим, что v (г) <- произвольный
вещественный абсолютно интегрируемый сигнал с известной
2.4. Спектральные плотности неинтегрируемых сигналов
спектральной плотностью F(co). Раскрывая формулу B.43),
имеем
(U,V) = 2nA J v(t)dt.
Но, как легко заметить,
f v(t)dt= J v(t)c-JOldt=V№).
Отсюда на основании фильтрующего свойства дельта-
функции приходим к выводу, что равенство B.43) возможно
лишь при условии, что
I
B.44)
1/A0) =
Физический смысл полученного результата нагляден —
неизменный во времени сигнал имеет спектральную состав-
составляющую только на нулевой частоте.
Спектральная плотность комплексного экспоненциального
сигнала. Пусть s(t) - exp(/coot) — комплексный экспоненциаль-
экспоненциальный сигнал с заданной вещественной частотой со0. Этот
сигнал не является абсолютно интегрируемым, поскольку
при t-»±oo функция s(t) ие стремится ни к какому пре-
пределу. Преобразование Фурье S(co) этого сигнала, рассматри-
рассматриваемое в обобщенном смысле, должно удовлетворять соот-
соотношению
f
Отсюда искомая спектральная плотность S(co) выражается
таким образом:
|s(eo) = 2no(co-co0). I B.45)
Отметим следующее:
1. Спектральная плотность комплексного экспоненциаль-
экспоненциального сигнала равна нулю всюду, кроме точки ш = ш0, где
оиа имеет дельта-особенность.
2. Спектр данного сигнала несимметричен относительно
точки со = 0 и сосредоточивается в области либо положи-
положительных, либо отрицательных частот.
Спектральная плотность гармонических колебаний. Пусть
s(r) = cosco0t. По формуле Эйлера
Найденный выше спектр комплексного экспоненциального
сигнала, а также свойство линейности преобразования Фурье
позволяют сразу записать выражение спектральной плот-
ности косинусоидального сигнала:
I B.46)
Более того, нрн
-любых (имеет мес-
место равенство UI = 1
О ш0
При ю0 > О
При <»0 < О
г 11:
-26,-4>,0
Глава 2. Спектральные представления сигналов
Читатель может легко проверить самостоятельно, что для
синусоидального сигнала справедливо соотношение
d - ш0) -1
B.47)
Следует заметить, что выражение B.46) представляет
собой четную, а выражение B.47) — нечетную функцию
частоты.
Спектральная плотность произвольного периодического сиг-
вала. Ранее периодические сигналы исследовались методами
теории рядов Фурье. Теперь можно расширить представле-
представления об их спектральных свойствах, описав периодические
сигналы с помощью преобразования Фурье.
Пусть
- периодический сигнал, заданный своим рядом Фурье в
комплексной форме. На основании формулы B.45), принимая
во внимание свойство линейности преобразования Фурье,
сразу получаем выражение спектральной плотности такого
сигнала:
B.48)
Соответствующий график спектральной плотности своей
конфигурацией повторяет обычиую спектральную диаграмму
периодического сигнала График образован дельта-импуль-
дельта-импульсами в частотной области, которые располагаются в точ-
точках с координатами ±«0»!.
Спектральная плотность функции включения. Вычислим
спектральную плотность функции включения а (г), которую
для простоты определим во всех точках, кроме точки
t = O[cp. с A.2)]:
o(t) =
, t<0,
, t>0.-
Заметим прежде всего, что функция включения получается
путем предельного перехода из экспоненциального видео-
видеоимпульса:
fO, t<0,
limexp(—at), t>0.
пьса:
"ft
1 lim
la-0
Поэтому можно попытаться получить спектральную плот-
плотность функции включения, выполнив предельный переход
при а->0 в формуле спектральной плотности экспонен-
экспоненциального колебания:
»Шп
о a+ja>'
2.4. Спектральные плотности неинтегрируемых сигналов
Непосредственный переход к пределу, согласно которому
с(г)«-»/(/ш), справедлив прн всех частотах, кроме значения
ш = 0, когда необходимо более тщательное рассмотрение.
'Прежде всего выделим в спектральной плотности экспо-
неациального сигнала вещественную н мнимую части:
1
-=- —-1 + V,*
а +jco
Можно убедиться в том, что
Действительно, предельное значение этой дроби при
любых со Ф 0 обращается в нуль, н в то же время
С ado Г
J «2+со2= J
d(co/g)
независимо от величины а, откуда и следует сделанное
утверждение.
Итак, получено взаимно однозначное соответствие функ-
функции включения н ее спектральной плотности:
B.49)
Дельта-особенность прн со — 0 свидетельствует о том, что
функция включения имеет постоянную составляющую, рав-
равную 1/2.
Спектральная плотность радноишульса. Как известно,
радиоимпульс sc(t) задается в виде произведення некоторого
видеоимпульса s. (t), играющего роль огибающей, н неннтегри-
руемого гармонического колебания: sp(t) = s,(t) cos (o)ot.+<po).
Чтобы найтн спектральную плотность радиоимпульса,
будем полагать известной функцию & (со) — спектр его оги-
огибающей. Спектр косинусоидального сигнала с произволь-
произвольной начальной фазой получается путем элементарного
обобщения формулы B.46):
cos(co0t + <ро)<-*л[8(ч' — Шо)е*° + 8 (ш + ш0) е~""].
Спектр радиоимпульса есть свертка
В литературе ино-
иногда встречаетси не-
неточная запись фор-
формулы вида B/49),
состоящая лишь из
второго слагаемо-
слагаемого
решите задачу 15
Прнияв во внимание фильтрующее свойство дельта-
функции, получаем важный результат:
Sp (ю) = у e*>S, (со - ш0) + у е-Л-S, (со + ш0).
B.50)
Рис. 2.8 иллюстрирует трансформацию спектра видеоим-
видеоимпульса при умножении его на высокочастотный гармони-
гармонический сигнал. . *
Глава 2. Спектральные представления сигналов
ISI
решите задачу 10
Рис. 2.8. Частотные зависимости модуля спектральной плотности:
а — видеоимпульса; 6 — радиоимпульса
Видно, что переход от видеоимпульса к радиоимпульсу
при спектральном подходе означает перенос спектра видео-
видеоимпульса в область высоких частот — вместо единственного
максимума спектральной плотности при со = 0 наблюдаются
два максимума при со = ±со0; абсолютные значения макси-
максимумов сокращаются вдвое.
Отметим, что графики на рис. 2.8 отвечают ситуации,
когда частота со0 значительно превышает эффективную
ширину спектра видеоимпульса (именно такой случай обычно
н реализуется на практике). Прн этом не наблюдается
ощутимого «перекрытия» спектров, отвечающих положитель-
положительным н отрицательным частотам. Однако может оказаться,
что ширина спектра видеоимпульса велика настолько (прн
коротком импульсе), что выбранное значение частоты со0 не
устраняет эффект «перекрытия». Как следствие, профили
спектров видеоимпульса и радиоимпульса перестают быть
подобными.
Пример 2,3. Спектральная плотность прямоугольного радио-
радиоимпульса.
Для простоты положим начальную фазу нулевой и запишем
математическую модель радиоимпульса в виде
sP(t) = V [o(t) - c(t -т„)]со8@ог.
Зная спектр соответствующего видеоимпульса [см. формулу B.20)],
на основании B.50) находим искомый спектр:
B.51)
На рис. 2.9 изображены результаты расчета спектральной
плотности по формуле B.51) для двух характерных случаев.
В первом случае (рнс. 2.9,а) импульс огибающей .содержит 10
периодов высокочастотного заполнения {щхв = 20л); частота щ
здесь достаточно высока для того, чтобы избежать «перекрытия».
Во втором случае (рис. 2.9, б) радиоимпульс состоит всего
лишь из одного периода заполнения («otH = 2п). Наложение
составляющих, которые соответствуют областям положительных и
отрицательных частот, приводит к характерной асимметрия лепест-
лепестковой структуры графика спектральной плотности радиоимпульса.
"fn
oil
УН
I.
т.
2.5. Преобразование Лапласа
Рис. 2,9. Графики спектральных плотностей радиоимпульса с пря-
прямоугольной огибающей: ч .
а - при (uqt,, = 20тс; 6 — при юоти = 2fc
2.5. Преобразование Лапласа
Так называется еще одни вид интегральных преобразо-
преобразований, который наряду с преобразованием Фурье широко
используется в радиотехнике для решения самых разно-
разнообразных задач, связанных с изучением сигналов.
Понятие комплексной частоты. Спектральные методы, как
уже известно, основаны на том, что исследуемый сигнал
представляется в виде суммы неограниченно большого числа
элементарных слагаемых, каждое из которых периодически
изменяется во времени по закону ехр (/cot).
Естественное обобщение этого принципа заключено в том,
что вместо комплексных экспоненциальных сигналов с чисто
мнимыми показателями вводят в рассмотрение экспонен-
экспоненциальные сигналы вида ехр(рг), где р — комплексное число:
р = о +jco, получившее название комплексной частоты.
Из двух таких комплексных сигналов можно составить
вещественный сигнал, например, по следующему правилу:
s(t) = V2(eP' + eP*0, B.52)
где р* = а — jiu — комплексно-сопряженная величина.
Действительно, при этом
- е cos cot.
B.53)
6 зависимости от выбора вещественной н мнимой частей
комплексной частоты можно получить разнообразные веще-
вещественные сигналы. Так, если с = 0, но со Ф 0, получаются
обычные гармонические колебания вида cos см. Если же со =,0,
то в зависимости от знака о получаются либо нарастающие,
либо убывающие во времени экспоненциальные колебания.
Более сложную форму такие сигналы приобретают, когда
со ф 0. Здесь множитель ехр (ot) описывает огибающую, кото-
которая экспоненциально изменяется во времени. Некоторые
типичные сигналы изображены на рнс. 2.10.
Понятие комплексной частоты оказывается весьма нолез-
ным прежде всего потому, что это дает возможность, ве
Глава 2. Спектральные представления сигналов
Рис. 2.10. Вещественные сигналы, отвечающие различным значениям
комплексной частоты *,
прибегая к обобщенным функциям, получать спектральные
представления сигналов, математическне моделн.которых не-
интегрируемы. Существенно н другое соображение: экспо-
экспоненциальные сигналы вида B.S3) служат «естественным»
средством исследования колебаний в разнообразных линей-
линейных системах. Эти вопросы будут изучены в гл. 8.
Следует обратить внимание на то, что истинная физи-
физическая частота со служит мнимой частью комплексной час-
частоты. Для вещественной части а комплексной частоты спе-
специального термина не существует.
Основные соотношения." Пусть f(t) — некоторый сигнал, ве-
вещественный или комплексный, определенный при t ^ 0 и
равный нулю при отрицательных значениях времени. Пре-
Преобразование Лапласа этого сигнала есть функция комплекс-
комплексной переменной р, задаваемая интегралом:
B.54)
Сигнал/(t) называется оригиналом, а функция F(p) —его
изображением по Лапласу (для краткости, просто изображе-
изображением).
Условие, которое обеспечивает существование интеграла
B.54), заключается в следующем: сигнал /(t) должен иметь
не более чем экспоненциальную степень роста при t > О,
т.е. должен удовлетворять неравенству \f(t)\^Aexp(at\ где
Да — положительные числа.
При выполнении этого неравенства функция F{p) сущест-
существует в том смысле, что интеграл B.54) абсолютно сходится
для всех комплексных чисел р, у которых Rep>o. Число а
называют абсциссой абсолютной сходимости.
Перемепная р в основной формуле B.54) может быть
отождествлена с комплексной частотой p = a+jo>. Действи-
Действительно, при чисто мнимой комплексной частоте, когда с = О,
формула B.54) переходит в формулу B.16), определяющую
Фурье-преобразование сигнала, который равен нулю при t<0.
Таким образом, преобразование Лапласа можно рассматри-
2.5. Преобразование Лапласа
вать как обобщение преобразования Фурье на случай
комплексных частот.
Подобно тому как это делается в теории преобразо-
преобразования Фурье, можно, зная изображение, восстановить ори-
оригинал. Для этого в формуле обратного преобразования
Фурье
= — JF(m)e>"deo
следует выполнить аналитическое продолжение, перейби от
мнимой переменной ./со к комплексному аргументу ст +ja.
На плоскости комплексной частоты интегрирование проводят
вдоль неограниченно протяженной вертикальной оси, распо-
расположенной правее абсциссы абсолютной сходимости. По-
Поскольку при с = const дифференциал dtt> = (l//)d/>, формула
обратного преобразования Лапласа приобретает вид
связь между пре-
преобразованиями Ла-
Лапласа и Фурье
B.55)
В теории функций комплексного переменного доказано,
что изображения по Лапласу обладают «хорошими» свой-
свойствами с точки зрения гладкости: такие изображения во
всех точках комплексной плоскости р, за исключением
счетного множества так называемых особых точек, являются
аналитическими функциями. Особые точки, как правило,— по-
полюсы, однократные или многократные. Поэтому для вычис-
вычисления интегралов вида B.55) можно использовать гибкие
методы теории вычетов.
На практике широко применяются таблицы преобразова-
преобразований Лапласа, в которых собраны сведения о соответствии
между оригиналами. и изображениями. Наличие таблиц
сделало метод преобразования Лапласа популярным как
в теоретических исследованиях, так и в инженерных рас-
расчетах радиотехнических устройств и систем. В Приложениях
к [6] имеется такая таблица, позволяющая решать доста-
достаточно широкий круг задач.
Примеры вычисления преобразовании Лапласа. В способах
вычисления изображений есть много общего с тем, что уже
изучалось применительно к преобразованию Фурье. Рассмот-
Рассмотрим наиболее характерные слулаи.
Пример 2.4. Изображение обобщенного экспоненциального им-
импульса.
Пусть /(() =ехр(рог)ст(г), где р0 = ст0 +ja0 — фиксированное
комплексное число. Наличие ст-функпии обусловливает равенство
/(г) = О при КО. Воспользовавшись формулой B.54), имеем
64 Глава 2. Спектральные представления сигналов
Если Rep>Oot To числитель обратится в нуль при подстановке
верхнего предела. В результате получаем соответствие
еРо'о (г)«-—-—. B.56)
Р-Ро
Как частный случай формулы B.56), можно иайти изображение
вещественного экспоненциального видеоимпульса:
о (().->-
B.57)
и комплексного экспоненциального сигнала:
B.58)
Наконец, положив в B.57) а = О, находим изображение функции
Хевисайда:
o(t)«—. B39)
Р
Пример 2.5. Изображение дельта-функции.
Если рассматриваемый импульс возникает в момент времени
г0 > О, то интеграл
Итак,
8((-го)*->е-'Ч B.60)
Это изображение определено во всех точках комплексной плос-
плоскости р и нигде ие имеет особенностей, кроме бесконечно уда-
удаленной точки.
Некоторую сложность может представлять вычисление изображе-
изображения дельта-импульса, сосредоточенного при t = 0, поскольку неясно,
как надо учитывать вклад от обобщенной функции, сосредото-
сосредоточенной на одном из концов области интегрирования. Дело в том,
что в гл. 1 дельта-функция определялась как предел последователь-
последовательности импульсов, симметричных относительно точки t = 0. Если
поступать формально, то в пределах области интегрирования ока-
окажется лишь половина такого импульса, что приведет к двукратному
уменьшению интеграла. Для того чтобы этого ие произошло,
изображение функции 8(t) определяется как предел
Iim J 5(r)e"I"dr = l,
не зависящий от параметра е. При таком подходе функция 8(t)
всегда целиком принадлежит области интегрирования, поэтому
6(t)~l. B.61)
Дельта-нмпуЛЬС
принадлежит обла-
СТИ Г>0
Изображение производных. Чтобы найтн изображение пер-
первой производной сигнала, следует выполнить интегрирование
по частям:
2.5. Преобразование Лапласа
Легко видеть, что изображение первой производной со-
содержит значение сигнала в начальной точке:
~^pF(p)-f(O). y B.62)
По индукции доказывается формула для изображения
производной л-го порядка:
^~p"F(p) - р-'ЯО) - p-2f'@) - ... \
... - р/«-2> @) -/'"- *> @). B.63)
Возможность учитывать начальное состояние сигнала прн
t = 0 позволяет применять метод преобразования Лапласа
для решения линейных дифференциальных уравнений с нзвест-
нымн начальными условиями.
Основные свойства преобразования Лапласа схожи с опи-
описанными свойствами преобразования Фурье [14].
Результаты
00 Спектральное представление сигнала представляет собой разложение его на
сумму (конечную или бесконечную) элементарных гармонических сигналов
с различными частотами.
00 Периодические сигналы представляются в виде рядов Фурье, которые обра-
образуются суммированием, вообще говоря, бесконечного числа гармоник с часто-
частотами, кратными основной частоте повторения последовательности.
00 Спектральное представление непериодических, в частности импульсных, сиг-
сигналов осуществляется путем разложения их в интеграл Фурье.
00 В частотной области непериодический сигнал характеризуется своей спект-
спектральной плотностью. Сигнал и его спектральная плотность взаимно связаны
парой преобразований Фурье.
00 Для существования спектральной плотности в классическом смысле необходи-
необходимо, чтобы сигнал был абсолютно интегрируем.
00 Спектральная плотность неинтегрируемого сигнала содержит особенность
типа дельта-функции.
00 Переход к комплексной частоте в преобразовании Фурье приводит к новому
виду линейных интегральных преобразований — преобразованию Лапласа. Сиг-
Сигналы, преобразуемые по Лапласу, должны обращаться в нуль при t <0.
Вопросы
1. Почему простое гармоническое коле- 5. В чем заключается эффект когереит-
бание cos (oi0t + <р0) играет особо важную иого сложения гармонических колеба-
роль в радиотехнике? инй?
2. Дайте определение понятия лериодиче- 6. Какими свойствами обладает спект-
ского сигнала. Назовите несколько физиче- ральная плотность вещественного сигнала?
скнх процессов, для которых модель лерио- 7. Как принято определять длительность
дического сигнала является достаточно точ- импульсных сигналов?
ным способом описания. 8. В чем состоит характерная особенность
3. Как определяется понятие угла отсечки спектра дельта-импульса?
гармонического колебания? . 9. Как по известным спектральным плот-
4. Как возникает понятие отрицательной ностям двух сигналов вычислить их скаляр-
частоты? ^ ное произведение?
66
Глава 2. Спектральные представления сигналов
10. Какова связь между длительностью
импульса и шириной его спектра?
11. Как в частотной области отобража-
отображаются операции дифференцирования и интег-
интегрирования сигнала?
12. Как связаны между собой спектраль-
спектральные плотности видеоимпульса и радио-
радиоимпульса?
13. Какой эффект оказывает «(перекрытие»
частотных областей в спектре радиоим-
радиоимпульса?
14. В чем смысл понятия комплексной
частоты?
15. К каким сигналам можно применять
метод преобразования Лапласа?
Задачи
1. Покажите, что ряд Фурье пнлообраз-
пнлообразиого колебания
имеет вид
s (г) = (А/2) - (AJn) [sin ю,г + (sin 2ш,г)/2 +'
+ (sin Зш,г)/3 + ...].
2. Найдите амплитудный коэффициент
25-й гармоники пилообразного сигнала, если
А = 30 В.
3. Покажите, что если периодическая
последовательность образована повторением
импульса So (t) с известной спектральной
плотностью So (ю), то комплексная амплитуда
п-го члена ряда Фурье
где Т— период последовательности; в»! -
основная частота.
4. Дан двусторонний экспоненциальный
видеоимпульс
s(t) = Uoexp{-a\t\).
Найдите его спектральную плотность. Опре-
Определите длительность сигнала и ширину
спектра. Оценив их, проверьте соотношение
неопределенности.
5. Вычислите спектральную плотность
экспоненциального видеоимпульса [см. B.21)]
с амплитудой 20 В и параметром <х =
= 106 с на частоте ш0 =2105 с.
6. На какой частоте спектральная плот-
плотность импульса, рассмотренного в задаче 5,
будет иметь фазовый угол —45°?
7. Убедитесь, что спектральная плотность
одиночного косинусоидалыюго-• импульса
8. Имеется группа (пачка), состоящая из
л одинаковых видеоимпульсов:
Покажите, что спектральная плотность этой
группы
где So (о) — спектр одиночного импульса.
Указание. Воспользуйтесь формулой
суммирования геометрической прогрессии:
" 1 г"
у ^=i^—.
1-г
9. Группа образована тремя одинаковы-
одинаковыми дельта-импульсамн:
Т ft
Более сложные задания
67
Покажите, что частотная зависимость мо-
модуля спектральной плотности группы такова:
I S? (и) I = [A + cos ©T+.C0S 2юГJ +
+ (sin ti)T+ sin 2tnTf]m.
10. График импульсного сигнала, образо-
образованного отрезками гармонического колеба-
колебания, приведен на рисунке:
ЛЛ
V
Покажите, что спектральная плотность
этого сигнала равна нулю как на нулевой
частоте, так и иа частоте высокочастотного
заполнения. Как изменится спектр этого сиг-
сигнала, если он приобретет такую форму:
11. Найдите сигнал, изображение кото-
которого
г(ру Up
* (Р + «) (р + р)'
Более сложные задания
12. Пусть периодический сигнал описыва-
описывается функцией времени, которая содержит
скачкообразные изменения уровня (разрывы
1-го рода). Покажите, что коэффициенты
ряда Фурье такого сигнала с ростом их
номера имеют асимптотику О A/п) независимо
от вида функции.
13. В условиях .предыдущей задачи рас-
рассмотрите сигнал, у которого разрывы нслы-
гывает первая производная, а значение функ-
функции непрерывна Покажите, что в этом слу-
случае асимптотика коэффициентов ряда Фурье
имеет вид О A/п2).
14. Обсудите следующий «парадокс»: если
ia некоторое время замкнуть коммутатор
i цепи
то на нагрузке будет наблюдаться прямо-
прямоугольный импульс uR (г). Этот импульс осла-*
дывается из гармонических составляющих,
существующих во все моменты времени, в
том числе и до начала импульса. Как это
согласуется с предположением, что импульс
может н не быть создан, хотя гармонические
составляющие уже существуют?
15. Покажите, что спектральная плотность
с-функции, будучи подставленной б обрат-
обратное преобразование Фурье, обеспечивает при
t = 0 значение сигнала с @), равное '/г-
Указание. Считая частоту о комплекс-
комплексной переменной, вычислите интеграл
методами теории вычетов.
Глава 3
Энергетические спектры сигналов.
Принципы корреляционного анализа
Представление сигналов посредством их спектральных
плотностей позволяет значительно упростить вычисление
энергии сигналов, а также создать ряд новых представле-
представлений, полезных в самых разнообразных областях радиотех-
радиотехники.
3.1. Взаимная спектральная плотность сигналов.
Энергетический снектр
В гл. 1 была введена фундаментальная характеристика
системы двух вещественных сигналов и (t) и v (i) — их ска-
скалярное произведение
(u,v)= J u(t)t>(f)d(, C.1)
пропорциональное взаимной энергии этих сигналов. Если сиг-
сигналы тождественно совпадают, то скалярное произведение
становится равным энергии
?„ = (и,«)= ?«2(r)dt. C.2)
Скалярное произведение сигналов u(t) н i?(f) можно вы-
выразить через их спектральные плотности U (со) и V(<o) с по-
помощью обобщенной формулы Рэлея B.42):
(u,v)=^- ] l/(co)K*(co)dco.
В равной мере справедливо равенство
(Ut v) = -!- ? V* (со) К(со) dco,
2Л
поскольку скалярное произведение вещественных сигналов
является вещественным числом.
Назовем взаимным энергетическим, спектром веществен-
вещественных сигналов u(t) н v(t) функцию
И?Дсо) = U(со) К* (со), C.3)
такую, что
{иг t7> = —1— 7 И?„(со)<ко, C.4)
2Л
причем
3.1. Взаимная спектральная плотность
Представив спектральные плотности сигналов и (г) и v(t)
в виде суммы вещественных и мнимых частей:
17 (со) = Аи (со) + jBu (со), Р(со) = А. (со) + jBv (со),
убеждаемся, что взаимный энергетический спектр Wuv — функ-
функция, принимающая, в общем случае, комплексные значения:
И?„ (со) = АиА„ + BUBV +у(В„Д„ - AUBV) =
= Re Wm (со) + jlia Wm (со). C.6)
Нетрудно заметить, что Re Wm — четная, a Im И?„ — не-
нечетная функция частоты. Вклад в интеграл C.4) дает только
вещественная часть, поэтому
6,4-i
C.7)
Последняя формула дает возможность проанализировать
«тонкую структуру» взаимосвязи сигналов.
Более того, обобщенная формула Рэлея, представленная
в виде C.7), указывает на принципиальный путь, позволяю-
позволяющий уменьшить степень связи между двумя сигналами, до-
добившись в пределе их ортогональности. Для этого один из
сигналов необходимо подвергнуть обработке в особой физи-
физической системе, называемой частотным фильтром. К этому
фильтру предъявляется требование: не пропускать на выход
спектральные составляющие, находящиеся в пределах частот-
частотного интервала, где вещественная часть взаимного энерге-
энергетического спектра велика. Частотная зависимость коэффи-
коэффициента передачи такого ортогонализирующего фильтра будет
обладать резко выраженным минимумом в пределах указан-
указанной области частот.
Изложенный подход к вычислению скалярного произве-
произведения, основанный на понятин взаимного энергетического
спектра, имеет прямое отношение к результатам, которые
были получены в гл. 1 при вычислении скалярного произ-
произведения сигналов, разложенных по элементам ортогональ-
ортогонального базиса. Разница, однако, состоит в том, что здесь
используется не дискретное, а непрерывное Фурье-представ-
Фурье-представление.
решите задачу 1
Наибольший вклад
во взаимную энер-
энергию дают те час-
частотные области, в
которых имеется
«перекрытие» спек-
спектров сигналов
Частотнаи зависи-
зависимость коэффициен-
коэффициента нередачи орто-
гоиа лидирующего
фильтра
Пример 3.1. Взаимный энергетический спектр двух экспонен-
экспоненциальных видеоимпульсов одинаковой формы, следующих друг за
другом с интервалом времени t0.
Положив, что оба импульса имеют единичную амплитуду, запи-
запишем выражения их спектральных плотностей:
) = e ""о (()¦"(
a +J°>'
t - to)*-»
Отсюда находим взаимный энергетический спектр
C.8)
Глава 3. Энергетические спектры. Корреляционный анализ
Рис. 3.1. Взаимный энергетический спектр двух экспоненциальных
видеоимпульсов:
а - при ato » 1; б - при crt0 ¦* *
имеющий вещественную часть
Re Wm (со) = cos Q>W(a2 + й>2) ¦
Если зафиксировать параметр ос, определяющий форму сигналов,
то частотные свойства взаимного энергетического спектра будут
целиком зависеть от временного сдвига между сигналами. На
рис. 3.1 изображены два характерных графика функции ReH?p((a).
Особый интерес представляет случай, когда произведение аг0
мало, т. е. импульсы существенно перекрываются во времени.
Формула C.8) и график рис. 3.1,6 свидетельствуют о том, что
взаимный энергетический спектр имеет при этом выраженный низко-
низкочастотный характер. Отсюда следует вывод: для того чтобы
уменьшить скалярное произведение таких сигналов и сделать их
лучше различимыми, следует воспользоваться фильтром верхних
частот (ФВЧ), который подавляет все колебания с частотами,
меньшими некоторой граничной частоты.
Быстро изменяющийся фронт импульса образуется за счет сло-
сложения высокочастотных составляющих спектра, которые беспре-
беспрепятственно проходят на выход ФВЧ. В то же время за счет
фильтрации низкочастотных составляющих длительность импульса
на выходе будет существенно сокращена. Как следствие этого,
эффект перекрытия импульсов может быть доведен до приемлемо
малой величины, так что импульсы на выходе ФВЧ оказываются
близким к ортогональным.
Ортогонялюацня
импульсов
энергетический
спектр
Энергетический спектр сигнала. Спектральное представле-
представление энергии сигнала легко получить из обобщенной формулы
Рэлеи, если в ней сигналы u{t) и v{t) считать одинаковыми.
Формула C.3), выражающая спектральную плотность энергии,
приобретает вид
i<o) = | U(o) |2. C.9)
Величина И?(о>) носит название спектральной плотности
энергии сигнала u{t), или. короче, его энергетического
спектра. Формула C.2) при этом запишется так:
C.10)
3.1. Взаимная спектральная платность
Соотношение C.10) известно в различных областях физики
как формула Рэлея (в узком смысле), которая констатирует
следующее: энергия любого сигнала есть результат суммиро-
суммирования вкладов от различных интервалов частотной оси.
Каждый малый интервал положительных частот Лео обеспе-
обеспечивает вклад в общую энергию сигнала, равный
ДЕ
формула Рэлея
где со' — некоторая внутренняя точка данного интервала.
Подход, основанный на спектральном прёдстааленин энер-
энергии сигнала, выгодно отличается относительной простотой.
Действительно, энергии, отвечающие различным областям
частотной оси, складываются так же, как вещественные
числа. В то же время метод преобразования Фурье приме-
применительно к самим сигналам основан на том, что комплексные
амплитуды, описывающие вклады малых частотных участков,
складываются как комплексные числа, характеризующиеся
модулями и фазами.
Изучая сигнал с помощью его энергетического спектра,
мы неизбежно теряем информацию, которая заключена в
фазовом спектре сигнала, поскольку в соответствии с фор-
формулой C.9) энергетический спектр есть квадрат модуля
спектральной плотности и не зависит от ее фазы.
Тем не менее понятие энергетического спектра оказы-
оказывается очень полезным для получения различных инженерных
оценок, устанавливающих реальную ширину спектра того
илн иного сигнала.
решите задачи 3
и 4
При энергетичес-
энергетическом подходе все
сигналы, одинако-
одинаковые но форме, но
различающиеся
расположением на
оси времени, вы-
стунают как со-
совершенно неразли-
неразличимые
Пример 3.2. Энергетический спектр прямоугольного видео-
видеоимпульса.
Здесь результат получается путем возведения в квадрат спект-
спектральной плотности вида B.20):
C.11)
Соответствующий график приведен на рис. 3.2.
Рисунок наглядно показывает, что энергетический спектр дан-
данного сигнала имеет наибольшую^ величину в области низких частот.
С ростом частоты вклад от соответствующих спектральных состав-
составляющих имеет немонотонный, колеблющийся характер, однако
общая тенденция — уменьшение энергетического спектра по закону
обратного квадрата:
И? (и) = О A/со2) при со -+ оо
(а ие обратно пропорционально первой степени частоты, как для
обычной спектральной плотности рассматриваемого сигнала).
Выражение C.11) позволяет проверить формулу Рэлея прямым
вычислением. Прежде всего во временной области без труда на-
находим энергию данного видеоимпульса (см. гл. 1):
Eu=U2xM. - C-12)
Глава 3. Энергетические спектры. Корреляционный анализ
. 4 ¦•
Рис. 3.2. Нормированный энергетический спектр прямоугольного
видеоимпульса как функция безразмерной частотной переменной соти
Чтобы определить энергию сигнала в частотной области, не-
необходимо вычислить интеграл
ж J (шт„/2J
C13) ^ДУ?^ положить
Несложная замена переменной сразу приаодит к формуле C.12).
Распределение энергии в спектре прямоугольного видео-
видеоимпульса. Интересно и для многих прикладных задач важно
знать, какая доля обгДей энергии содержится в пределах
одного, двух, трех н т. д. лепестков спектральной диаграммы,
изображенной на рнс. 3.2. Обозначим Е(к) долю энергии
прямоугольного видеоимпульса, которая заключена в к после-
последовательных лепестках. По формуле Рэлея,
?«,=--
C.14)
Данный интеграл вычисляется аналитически, а также
может быть легко найден численно. Ниже приводится таблица,
в которую сведены результаты расчета относительной доли
энергии в зависимости от числа учитываемых лепестков.
Таблица 3.1
0,902
0,950
0,967
Итакь если прямоугольный видеоимпульс .подать на иде-
идеальный фильтр нижних частот* равиомертк-х.без ослабления
3.2. Корреляционный анализ сигналов
пропускающий все частоты от 0 до 2я/ти с 1 (граница пер-
первого лепестка), то на выходе будет получен сигнал, энергия
которого составит 90,2% от энергии колебания на входе.
Как отмечалось, такой подход к оценке реальной ширины
спектра сигнала не раскрывает всей картины явления. Так,
неизвестной оказывается степень искажения формы сигнала
за счет действия фильтра. Однако если сведения о форме
колебания отступают на второй план, а величина энергии
приобретает первостепенное значение (изучая статистическую
радиотехнику, мы неоднократно встретимся с такой ситуа-
ситуацией), то энергетическая оценка ширины спектра становится
особенно целесообразной.^
Например, из табл. 3.1 видно, что переход от к = 1 к
значению к = 2, т. е. двукратное расширение полосы частот
устройства, через которое проходит видеоимпульс, уаеличи-
вает энергию полезного сигнала всего на 4.8 %. Наряду
с этим ясно, что помехи (если такие имеются) могут
увеличить за счет этого свою энергию, например, вдвое,
если их энергетический спектр равномерен в интересующем
диапазоне частот.
3.2. Корреляционный анализ сагналоа
На ранних этапах развития радиотехники вопрос о выборе
наилучших сигналов для тех илн иных конкретных приме-
применений не был очень острым. Это обусловливалось, с одной
стороны, относительно простой структурой передаваемых
сообщений (телеграфные посылки, радиовещание); с другой,
практическая реализация сигналов сложной формы в комп-
комплексе с оборудованием для нх кодирования, модуляции и
обратного преобразования в сообщение оказывалась трудно
осуществимой.
В настоящее время ситуация в корне изменилась. В сов-
современных радиоэлектронных комплексах выбор сигналов дик-
диктуется прежде всего не техническими удобствами нх генери-
генерирования, преобразования и приема, а возможностью опти-
оптимального решения задач, предусмотренных при проектиро-
проектировании системы. Для того чтобы понять, как возникает по-
потребность в сигналах со специально выбранными свойствами,
рассмотрим следующий пример.
Сравнение сигналов, сдвинутых во времени. Обратимся к
упрощенной идее работы импульсного радиолокатрра, пред-
предназначенного для измерения дальности до цели. Здесь инфор-
информация об объекте измерения заложена в величине т — задерж-
задержке по времени между зондирующим и принятым сигналами.
Формы зондирующего и (с) и принятого и (t — х) сигналов
одинаковы при любых задержках.
Структурная схема устройства обработки радиолокацион-
радиолокационных сигналов, предназначенного для измерения дальности,
может выглядеть так, как это изображено на рис. 33.
Система состоит из набора элементов, осуществляющих
задержку «эталонного» передаваемого сигнала иа некоторые
решите задачу 5
Неоправданное
расширение полосы
пропускания филь-
фильтра нежелательно
У/
Глава 3. Энергетические спектры. Корреляционный анализ
1
Если отличие неве-
невелико, то можно
ожидать, например,
неоднозначного от-
отсчета, когда сиг-
сигналы будут появ-
появляться одновре-
одновременно на выходе
нескольких сосед-
соседних устройств срав-
сравнения
свойства автокор-
автокорреляционной функ-
функции
"(О
u{t - т>
Рис. 3.3. Устройство для измерения времени задержки сигналов
фиксированные отрезки времени ть \ъ ..., tn. Задержанные
сигналы вместе с принятым сигналом подаются на устройства
сравнения, действующие в соответствии с принципом: сигнал
на выходе появляется лишь при условии, что оба входных
колебания являются «копиями» друг друга. Зиая номер канала,
в котором происходит указанное событие, можно измерить
задержку, а значит, и дальность до цели.
Подобное устройство будет работать тем точнее, чем
в большей степени разнятся друг от друга сигнал и его
«копия», смещенная во времени.
Таким образом, мы получили качественное «представление
о том, какие сигналы можно считать «хорошими» для
данного применения.
Перейдем к точной математической формулировке постав-
поставленной проблемы и покажем, что этот круг вопросов имеет
непосредственное отношение к теории энергетических спект-
спектров сигналов.
Автокорреляционная функция сигнала. Для количественного
определения степени отличия сигнала u(t) и его смещенной
во времени копии u(t—т.) принято вводить автокорреляцион-
автокорреляционную функцию (АКФ) сигнала и (г), равную скалярному произ-
произведению сигнала и копии:
u(t)u(t-x)dt. |
C.15)
В дальнейшем будем .предполагать, что исследуемый
сигнал имеет локализованный во времени импульсный ха-
характер, так что интеграл вида C.15) заведомо существует.
Непосредственно видно, что при т = 0 автокорреляционная
функция становится равной энергии сигнала:
Е„. C.16)
К числу простейших свойств АКФ можно отнести ее
четность:
Вв(т) = Ва(-т). C.17)
3.2. Корреляционный анализ сигналов
Действительно, если в интеграле C.15) сделать замену
переменных х = t — т, то
СО СО
J u(t)u(t~xNt= J u(x + x)u(x)dx.
Наконец, важное свойство автокорреляционной функции
состоит в следующем: при любом значении временного
сдвига т модуль АКФ не превосходит энергии сигнала:
\Bu(i)\<:Bu{0) = Eu. C.18)
Этот факт непосредственно вытекает из неравенства
Коши — Бунякоиского (см. гл. 1):
\{и,их)\^\\и\\-\\их\\=Еи. C.19)
Итак, АКФ представляется симметричной кривой с цент-
центральным максимумом, который всегда положителен. При
этом в зависимости от вида сигнала и (г) автокорреля-
автокорреляционная функция может иметь как монотонно убывающий,
так и колеблющийся характер.
Првмер 3,3. Найти АКФ прямоугольного видеоимпульса.
На рис. ЗА а изображен прямоугольный видеоимпульс с ампли-
амплитудой О и длительностью тв. Здесь же представлена его «копия»,
сдвинутая во времени в сторону запаздывания на х с. Интеграл
C.15) вычисляется ъ данном случае элементарно на основании гра-
графического построения. Действительно, произведение и (t) u(t~x)
отлично от нуля лишь в пределах интервала времени, когда
наблюдается наложение сигналов. Из рис. 3.4, а видно, что этот
Временной интервал равен тв — | т |, если сдвиг не превышает дли-
длительности импульса. Таким образом, для рассматриваемого сигнала
C-20)
О, |т|>хв.
График такой функции — треугольник, изображенный на рис. 3.4,6.
Ширина основания треугольника в два раза больше длительности
импульса.
Рис. 3.4. Нахождение АКФ прямоугольного видеоимпульса
Глава 3. Энергетические спектры. Корреляционный анализ
Пршмер 3.4. Найти АКФ прямоугольного радиоимпульса.
Будем рассматривать радиосигнал вида
fo, t< -tJ2,
(_0, f >Ти/2.
Зная заранее, что АКФ четна, вычислим интеграл C.15), полагая
О ^ т ^ ти. Прн этом
Ви (т) = U2 J cos co0r cos co0 (t — x) dt =
U2 V2 hP ( T\
= —— cosco0t-(th-t)+ . f cos2o>0 t ldr,
2 2 _Ти/2 + т V 2/
откуда легко получаем
CJI)
Естественно, что при т = 0 величина Ви @) становится равной
энергии этого импульса (см. пример 15). Формула C21) описы-
описывает АКФ прямоугольного радиоимпульса при всех сдвигах г, лежа-
лежащих в пределах -та^т^-сн. Если абсолютное значение сдвига
превышает длительность импульса, то автокорреляционная функция
будет тождественно обращаться в нуль.
Прммер 3.5. Определить АКФ последовательности прямоугольных
видеоимпульсов.
В радиолокации широко используются сигналы, представляю-
представляющие собой пачки из одинаковых по форме импульсов, следующих
друг за другом через одинаковый интервал времени. Для обнару-
обнаружения такой пачки, а также для измерения ее параметров, напри-
например положения во времени, создают устройства, которые аппара-
аппаратурным образом реализуют алгоритмы вычисления АКФ.
Рис. 3.5. АКФ пачки из трех одинаковых видеоимпульсов:
а - пачка импульсов; б - график АКФ
На рис. 3.5,0 изображена пачка, состоящая из трех одинако-
одинаковых видеоимпульсов прямоугольной формы. Здесь же представлена
ее автокорреляционная функция, вычисленная по формуле C.15)
(рис. 3.5,6).
Хорошо видно, что максимум АКФ достигается при т = 0.
Однако если задержка т оказывается кратной периоду последо-
последовательности (при т= ±7; ±2Тв нашем случае), наблюдаются по-
побочные лепестки АКФ, сравнимые по высоте с главным лепестком.
Поэтому ¦ можно говорить об известном несовершенстве корреля-
корреляционной структуры данного сигнала.
3.2. Корреляционный анализ сигналов
Автокорреляционная функция неограниченно протяженного
сигнала. Если требуется рассматривать неограниченно про-
протяженные во времени периодические последовательности, то
подход к изучению корреляционных свойств сигналов должен
быть несколько видоизменен.
Будем считать, что такая последовательность получается
нз некоторого локализованного во времени, т. е. импульсного,
сигнала, когда длительность ти последнего стремится к бес-
бесконечности. Для того чтобы избежать расходимости полу-
получаемых выражений, определим новую АКФ как среднее зна-
значение скалярного произведения сигнала н его копии:
1 bfl
= lim — J u(t)u(t — x)dt.
1 -'«/2
При таком подходе автокорреляционная функция Д, ста-
становится равной средней взаимной мощности этих даух
сигналов.
Например, желая найти АКФ для неограниченной во
времени косинусоиды u(t)= t/coSG>0t, — оо < t < оо, можно
воспользоваться формулой C.21), полученной для радио-
радиоимпульса длительностью ти, а затем перейти к пределу при
т„ -> оо, учитывая определение C.22). В результате получим
и2
C.23)
Эта АКФ сама является периодической функцией; ее зна-
значение при х — 0 равно Vг/2.
Связь между энергетическим спектром сигнала н его
автокорреляционной функцией. При изучении материала
настоящей главы читатель может подумать, что методы
корреляционного анализа выступают как некоторые особые
приемы, не имеющие связи с принципами спектральных
разложений. Однако это не так. Легко показать, что сущест-
существует тесная связь между АКФ и энергетическим спектром
сигнала. ;
Действительно, в соответствии с формулой C-Й) АКФ
есть скалярное произведение: В„(т) = (ц и,). Здесь символом
и, обозначена смещенная во времени копия сигнала u(t — х).
Обратившись к обобщенной формуле Рэлея B.42), можно
записать равенство
решите задачу 8
Подобная АКФ
имеет физическую
размерность мощ-
мощности
C.22)
Величина С/-/2 есть
средняя мощность,
которую данный
сигнал выделяет на
активное нагрузке
в I Ом
Спектральная плотность смещенного во времени сигнала
U, (ю) = U (ю) ехр (— Jen), откуда t/f (ю) = V* (ю) ехр Цап).
Таким образом, приходим к результату:
В. (т) = -i- J | и (ю) |2е*" dK. C.24)
Глава 3. Энергетические спектры. Корреляционный анализ
связь между АКФ
н энергетическим
спектром
Квадрат модуля спектральной плотности, как известно,
представляет собой энергетический спектр сигнала.. Итаку
энергетический спектр и автокорреляционная функция связаны
преобразованием Фурье:
Вы (т)«-»| С/ (о) I2 = Щ (о) - C.25)
Ясно, что имеется и. обратное соотношение:
| U (и) I2 = J Вы (т) е~*" dx. ., C.26)
Эти результаты принципиально важны по двум причинам.
Во-первых, оказывается возможным оценивать корреляцион-
корреляционные свойства сигналов, исходя из распределения их энергии
по спектру. Чем шире полоса частот сигнала, тем уже
основной лепесток автокорреляционной функции и тем
совершеннее сигнал с точки зрения возможности точного
измерения момента его начала.
Во-вторых, формулы C.24) и C.26) указывают путь экспе-
экспериментального определения энергетического спектра. Часто
удобнее вначале получить автбкорреляцибнную функцию, а
затем, используя преобразование Фурье, найти энергетиче-
энергетический спектр сигнала. Такой прием получил распространение
при исследовании свойств сигналов с помощью быстро-
быстродействующих ЭВМ в реальном масштабе времени.
Прамер 3.6- Найти АКФ сигнала с равномерным и ограни-
ограниченным по частоте энергетическим спектром.
Пусть сигнал u(t) имеет энергетический спектр вида
f 0, со< -сов,
С 0, со>сов,
где сов — верхняя граничная частота спектра. По формуле C24)
находим его автокорреляционную функцию
Таким образом, данный сигнал имеет АКФ лепесткового вида. ->
Часто вводят удобный числовой параметр — интервал корреляции
хк, представляющий собой оценку ширины основного лепестка
автокорреляционной функции. Легко видеть, что в рассматриваемом Ф
случае величина хк связана с параметром сов соотношением ш„тж
= л. Отсюда следует, что интервал корреляции
C.28)
оказывается тем меньше, чем выше верхняя граничная частота
спектра сигнала.
интервал доррелн-
ции
Решите задачи 6
н 7
3.3. ЛКФ дискретного сигнала
Ограничения, накладываемые па вид автокорреляционной
функции сигнала. Найденная связь между автокорреляцион-
автокорреляционной функцией и энергетическим спектром дает возможность
установить интересный и на первый взгляд неочевидный
критерий существования сигнала с заданными корреляцион-
корреляционными свойствами. Дело в том, что энергетический спектр
любого сигиалв, по определению, должен быть положитель-
положительным [см. формулу C.25)]. Данное условие будет выполняться
далеко не при любом выборе АКФ. Например, если взять
Г
= <
О, т<-т,
Л, ~
0, т>тк
и вычислить соответствующее преобразование Фурье, то
о
Эта знакопеременная функция не может представлять
собой энергетический спектр какого-либо сигнала.
3.3. Автокорреляционная функция
дискретного сигнала
Изучая АКФ пачки прямоугольных видеоимпульсов, чита-
читатель, безусловно, обратил внимание на то, что соответст-
соответствующий график имел специфический лепестковый вид. С прак-
практической точки зрения, имея в виду использование АКФ для
решения задачи обнаружения такого сигнала или измерения
его параметров, совершенно несущественно, что отдельные
лепестки имеют треугольную форму. Важен лишь их отно-
относительный уровень по сравнению с центральным максиму-
максимумом при т = 0.
Наша ближайшая задача — изменить определение автокор-
автокорреляционной функции таким образом, чтобы можно было
извлекать из нее полезную информацию, абстрагируясь от
второстепенных подробностей. Основой для этого служит
идея математической модели дискретного сигнала (см. гл. 1).
Описание сложных сигналов с дискретной структурой. Пачка
одинаковых прямоугольных видеоимпульсов — простейший
представитель класса сложных сигналов, построенных в
соответствии со следующим принципом. Весь интервал вре-
меии существования сигнала разделен на целое число М > 1
равных промежутков, называемых позициями. На каждой из
позиций сигнал может находиться в одном из даух состояний,
которым отвечают числа +1 и — 1.
Рис. 3.6 поясняет некоторые способы формирования мно-
многопозиционного сложного сигнала. Для определенности здесь
М=Ъ.
Видно, что физический облик дискретного сигнала может
быть различным. В случае а символу +1 соответствует
Выбор чисел + 1
не имеет принцн-
ииалыюгохаракте-
ра н продиктован
удобством анализа
Глава 3. Энергетические спектры. Корреляционный анализ
I I НИ 1 II <
II !! !!!!! !!!!
6
Рис. 3.6. Трехпозиционный сложный сигнал:
а — амплитудное кодирование; б — фазовое кодирование
¦ положительное значение Vo высоты видеоимпульса, переда-
принципы коднро- ваемого на соответствующей позиции; символу —1 отвечает
ванин дискретных отрицательное значение — Vo. Говорят, что при этом реализо-
сигналов вано амплитудное кодирование сложного сигнала. В случае б
происходит фазовое кодирование. Для передачи символа +1
на соответствующей позиции генерируется отрезок гармони-
гармонического сигнала с нулевой начальной фазой. Чтобы отобразить
символ — 1, используется отрезок синусоиды такой же дли-
длительности и с той же частотой, но его фаза получает
дополнительный сдвиг на 180°.
Несмотря на различие графиков этих даух сигналов,
между ними, в сущности, можно установить полное тожде-
тождество с точки зрения их математических моделей. Действи-
Действительно, модель любого такого сигнала — это последователь-
последовательность чисел {мь щ, ..., и-м-и им}> в которой каждый символ
щ принимает одно из даух возможных значений +1. Для
удобства договоримся в дальнейшем дополнять такую после-
последовательность нулями на «пустых» позициях, где сигнал не
определен. При этом, например, развернутая форма записи
дискретного сигнала {1 1, —1, 1} будет иметь вид
.... 0 0 0 11-110 0 ....
Важнейшая операция при обработке дискретных сигналов
состоит в сдвиге такого сигнала на некоторое число пози-
позиций относительно исходного положения без. изменения его
формы. В качестве примера ниже представлен некоторый
исходный сигнал (первая строка) н его копии (последующие
строки), сдвинутые на 1, 2 и 3 позиции в сторону запаз-
запаздывания:
... 000 1 1 1 1 0000 ...
... 00 00 1 1 1 1 000 ...
... 0 0000 1 1 1 1 00 ...
... 0 0 0 0 0 0 1 1 1 1 0 ...
Дискретная автокорреляционная функция. Постараемся так
обобщить формулу C.15), чтобы можно было вычислять диск-
дискретный аналог АКФ применительно к многопозициоиным
сигналам. Ясно, что операцию интегрирования здесь следует
заменить суммированием, а вместо переменной т использо-
использовать целое число я (положительное или отрицательное),
3.3. АКФ дискретного сигнала
указывающее, на сколько позиций сдвинута копия относи-
относительно исходного сигиала. Так как в «пустых» позициях
математическая модель сигнала содержит нули, запишем
дискретную АКФ в виде
C.29)
Эта функция целочисленного аргумента и, естественно,
обладает многими уже известными свойстнами обычной авто-
автокорреляционной функции. Так, легко видеть, что дискретная
АКФ четна:
!„(-«).
C.30)
Данная функция
представляет собой
скалярное произве-
произведение дискретного
сигнала н его копии
При нулевом сдвиге эта АКФ определяет энергию диск-
дискретного сигнала:
ДД0)=
C.31)
Некоторые примеры. Для иллюстрации сказанного вы-
вычислим днскретиую АКФ трехпозиционного сигиала с одина-
одинаковыми значениями иа каждой позиции: и = {1, 1, 1}. Выпи-
Выпишем этот сигнал вместе с копиями, сдвинутыми на 1, 2 и 3
позиции:
... 0 0 0 1 1 1 0 0 0 ...
... 0000 1 1 1 00 ...
... 00 000 1 1 1 0 ...
... 0 0 0 0 0 0 1 1 1 ...
Видно, что уже при «= 3 сигнал и копия перестают
накладываться друг на друга, так что произведения, входя-
входящие в формулу C.29), становятся равными нулю при л > 3.
Вычисляя суммы, получаем
В„@) = 1 + 1 + 1 = 3,
В„A) = 1 + 1=2,
Д,B) = 1.
Боковые лепестки автокорреляционной функции линейно
спадают с ростом номера в, подобно тому, как в случае
автокорреляционной функции трех аналоговых видеоимпуль-
видеоимпульсов.
Рассмотрим дискретный сигнал, отличающийся от преды-
предыдущего знаком отсчета на второй позиции: и*= {1, —1, 1}.
Поступая аналогичным образом, вычислим для этого
сигнала значения дискретной автокорреляционной функции:
В„@) = 1 + 1 + 1 = 3,
Д
Д,<1)
4.B)
1.
-2- 1 0
1.
Глава 3. Энергетические спектры. Корреляционный анализ
Г
1-1
' I
Можно обнаружить, что первый боковой лепесток изме-
изменяет свой знак, оставаясь неизменным по абсолютному
значению.
Наконец, рассмотрим трехпозициоиный дискретный сигнал
с математической моделью вида и = {1, 1, —1}.
Его автокорреляционная функция такова:
В„@) = 1 + 1 + 1 = 3.
Д
Исследонаиия по-
показали, что не су-
существует сигналов
Баркера с нечет-
нечетным числом пози-
позиций, большим 13.
Однако до сих пор
неизвестно, можно
ли построить сиг-
сигнал Баркера с чет-
четным М>4
Д,A)
4B)
-1.
Из трех изученных здесь дискретных сигналов именно
третий наиболее совершенен с точки зрения корреляционных
свойств, поскольку при этом реализуется наименьший уровень
боковых лепестков автокорреляционной функции.
Сигналы Баркера. Дискретные' сигналы с наилучшей
структурой автокорреляционной функции явились в 50—60-е
годы объектом интенсивных исследований специалистов в
области теоретической радиотехники и прикладной матема-
математики. Были найдены целые классы сигналов с совер-
совершенными корреляционными свойствами. Среди них большую
известность получили так называемые сигналы (коды) Бар-
Баркера. Эти сигналы обладают уникальным свойством: незави-
независимо от числа позиции М значения их автокорреляцион-
автокорреляционных функций, вычисляемые по формуле C.29), при всех и Ф 0
не превышают единицы. В то же время энергия этих
сигналов, т. е. величина В„ф), численно равна М.
Сигналы Баркера удается реализовать лишь при числе
позиций М= 2, 3, 4, 5, 7, 11 и 13. Случай М = 2 является
тривиальным. Сигнал Баркера при М = 3 был исследован
нами в конце предыдущего пункта. Математические модели
сигналов Баркера и отвечающие им автокорреляционные
функции приведены в табл. 3.2.
Таблица
м
3
4
5
7
И
13
L, 1
1, 1
1, 1
1, 1
1 1
-1,
-1,
3.2 Модели сигналов
Модель сигнала
-1
1, -1
-1, 1
1, -1, 1
1, -1. -1. 1, ^1
, Г, -1, -1, -1, 1,
-1, 1, -1
1, 1, 1, -1. -1, 1, 1,
1, -1, 1
Баркера
АКФ
3, 0, -1
4, 1, 0, -1
4, -1, 0, 1
5, 0, 1, 0, 1
7, 0, -1, 0, -1, 0, -1
11, 0, -1, 0, -1, 0, -1, 0,
-1, 0, -1
13, 0, 1, 0, 1, 0, 1, 0, 1,
0, 1, 0, 1
Для иллюстрации на рис. 3.7 приведен вид наиболее
часто используемого 13-позиционного сигнала Баркера при
двух способах кодирования, а также графическое представ-
представление его АКФ.
3.4. Взаимокоррыгяционная функция
13
гадал .
-12-10-8-4-4-2 0 2 4 6 8 1012
Рис. 3.7. Сигнал Баркера при М = 13:
а — амплитудное кодирование; б — фазовое кодирование; я — автокорреля-
автокорреляционная функция
Отметим в заключение, что исследование некоторых А
свойств дискретных сигналов и их автокорреляционных решите задачу 9
функций, проведенное в данной главе, имеет предваритель-
предварительный, "вводный характер. Систематическое изучение этого круга
вопросов будет предпринято в гл. 15.
3.4. Взаимокорреляционная функция
двух сигналов
В ряде теоретических и прикладных разделов радиотех-
радиотехники бывает удобным ввести особую характеристику сово-
совокупности двух сигналов — их взаимокорреляционную функ-
функцию (ВКФ), которая единым образом описывает как различие
в форме сигналов, так и их взаимное расположение на оси
времени.
Принцип определенна взгамокорреляшошюй функции. Обоб-
Обобщая формулу C.15), назовем взаимокорреляционной функцией
двух вещественных сигналов и (г) и с (г) скалярное произведе-
произведение вида
А,Лт)= I u(t)v(t-z)dt. C.32)
Целесообразность подобной интегральной характеристики
сигналов видна из следующего примера. Пусть, например,
сигналы и (г) и v (г) в исходном состоянии ортогональны,
так что
J u(r)i>(r)dt = O.
При прохождении этих сигналов через различные устрой-
устройства возможно, что сигнал v(t) будет сдвинут относительно
сигнала u (f) на некоторое время т. Ясно, что ВКФ служит
мерой «устойчивости» ортогонального состояния при сдвигах
сигналов во времени.
Некоторые свойства взшмокоррелшшюнвой функция. Если
в формуле C.32) заменить переменную интегрирования, введя
84
Глава 3. Энергетические спектры. Корреляционный анализ
х = t — т., так что di = dx, то, очевидно, возможна и така
запись:
Результаты расче-
расчета по формулам
C.32), C.33) совпа-
совпадают, поскольку Вт (т) = J и (х + т) v (х) dx.
одно п то же вза- -«
имное положение
сигналов будет до-
стигнуто как при
сдвиге в (г) в сто- .
рону запаздыва-
запаздывания, так п при сдви-
сдвиге u(t) и сторону
опережения
C.33)
Поэтому
В отличие от автокорреляционной функции одиночного
сигнала, ВКФ, описывающая свойства системы двух неодина-
неодинаковых сигналов, не является четной функцией аргумента т:
Если рассматриваемые сигналы имеют конечные энергии,
то их взаимокорреляционная функция ограничена. Это
утверждение следует из неравенства Коши — Буняковского:
откуда
1АДтЖИ«НМ1, C-35)
так как сдвиг сигнала во времени не влияет на значение
его нормы.
Следует обратить внимание на то, что при т = 0 значения
ВКФ вовсе не обязаны достигать максимума.
Пример 3.7. Вычислить функцию Buv (т) для случая, когда сигнал
и (t) — прямоугольный, a v (t) - треугольный видеоимпульс. Их ампли-
амплитуды V и длительности Т одинаковы; в исходном состоянии
(в отсутствие задержки) сигналы существуют на общем отрезке
времени [О, Т].
При О < t < Т рассматриваемые сигналы описываются так:
u{t)= V, v(t) = Vt/T.
Если т > О, т. е. сигнал v (t) задержан во времени относитель-
относительно u{t\ то
и2 Т
i(tx)dt
и@
Определив безразмерный параметр т\ = т/Тн проведя элементар-
элементарные выхладкн, приходим к результату:
Buv (tl) = (V2T/2) (I - 2ц + ц2). C.36)
Если же т < О, т. е. треугольный импульс опережает прямо-
прямоугольный, то
A.,W=— f (t-\x\)dt,
1 о
откуда
Д., (П) «= (V2T/2) A - Ч2) • C.37)
Функция, вычисленная по формулам C.36) и C.37), изображена
на рис. 3.8.
От Т
Асимметрия графи-
графика вызвана тем,
что площадь «пере-
«перекрытия» данных
имнульсов изменя-
изменяется ио-разному и
зависимости от на-
направления сдвига
3.4. Взаимокорреляционная функция
0.5
.-f '"'•
:ft '
1
Рис. 3.8. График вэаимокорреляпиоииой функции прямоугольного ]
треугольного видеоимпульсов
Связь ВКФ с взаимной спектральной плотностью. Выразим
ВКФ двух сигналов через их шектральиые характеристики.
Методика рассуждений полностью повторяет ту, которая при-
применялась ранее при спектральном представлении автокорре-
автокорреляционной функции одиночного сигнала. На основании обоб-
обобщенной формулы Рэлея
Вт (т) = (и, и.) = jjj- I U (со) V* (со) dco
и, поскольку спектр смещенного во времени сигнала VT (со) =
= F(co)exp(-j<ot), то
= — J U(со)V(со)е*"dco.
C.38)
Имея в виду^ что величина Wuv (ю) = U (со) V* (со) есть
взаимный энергетический спектр сигналов u(t) и v (f), опреде-
определенный в бесконечном интервале частот — оо < со < со, при-
приходим к выводу: взаимокорреляционная функция и взаимный
энергетический спектр двух сигналов связаны парой преобра-
преобразований Фурье.
Обобщение иа случай дискретных сигналов. Пусть сигналы
м(г) н v(t) заданы в двскретной форме как совокупности
отсчетов:
и = {..., и_ь и0, ии и2, ---},
V = {...,.V-и V0, VU V2*...},
следующих во времени с одинаковыми интервалами Т. По w
аналогии с автокорреляционной функцией одиночного сиг- изиимокорреляцн-
нала определим ВКФ двух дискретных сигналов по формуле оииаи функции ди-
со скретлых сигналои
Buv(")= I и^-и, C39)
где к — целое число, положительное, отрицательное или нуль.
Продемонстрируем вычисление этой функции на примере
двух четырехпозициоиных сигналов Баркера: и = {1,1, 1, —1},
i> = {1, 1, -1, 1}.
Если п > 0, то сигнал v запаздывает относительно сигна-
сигнала и. Подобно тому как это делалось в предыдущем А)'"?;.
Глава 3. Энергетические спектры. Корреляционный анализ
параграфе, составим таблицу, содержащую сигнал и н после-
последовательность сдвинутых копий сигнала и:
...00001 1
...00001 1
...000001
...000000
...000000
1 -
-1
1 -
1
0
0
0
1
-1
1
0
0
0
1
- 1
000 ...
0 00...
0 0 0...
0 0 0..
100..
А Вычисляя по формуле C.39), получаем
решите сдачу 10 Д_ @) = ft Д_ A) = 3, В„„ B) = 0, В„„ C) = -1.
Аналогично строим таблицу, отражающую сдвиги сигнала
в сторону опережения:
ТУТ.
Взаимокорреляци-
Взаимокорреляционная функция
двух сигналов Бар-
кера
1 3 »
21
X
-1
... 0 0 0
... 0 0 0
... 0 0 0
... 0 0 1
... 0 1 1
и иахопи]
0
0
1
1
— 1
м
1
1
1
-1
1
1
1
-1
1
0
1
-1
1
0
0
-1 0 0 0..
1000..
0000 ..
000 0..
0 0 0 0..
В„(-1) = 1, В.Д-2) = О, В„„(-3) = 1.
Диаграмма, представляющая ВКФ этих двух сигналов,
имеет несимметричный вид; максимум функции достигается
при сдвиге сигнала v на одну позицию.
Результаты
ОО Распределение взаимной энергии двух сигналов по частотам описывается их
взаимным энергетическим спектром.
О О Путем фильтрации соответствующих спектральных составляющих можно до-
добиться приближенной ортогонализации сигналов.
СО Распределение энергии сигнала по частотам устанавливает его энергетический
спектр, равный квадрату модуля спектральной плотности.
ОО Степень сходства сигнала и его копии, смещенной во времени, описывается
автокорреляционной функцией (АКФ) сигнала.
ОО Энергетический спектр сигнала и его автокорреляционная функция взаимно
связаны парой преобразований Фурье.
ОО Понятие автокорреляционной функции обобщается на случай многопозицион-
многопозиционных дискретных сигналов.
ОО Сигнал обладает хорошими корреляционными свойствами, если уровень боко-
боковых лепестков АКФ значительно меньше уровня центрального лепестка.
ОО Преобразованием Фурье от взаимного энергетического спектра двух сигналов
является их взаимокорреляционная функция.
Вопросы
1- Каков физический смысл взаимного
энергетического спектра двух сигналов?
2. Каким условиям должна удовлетворять
функция, описывающая взаимный энергети-
энергетический спектр двух сигналов, для того,
чтобы эти сигналы были ортогональными?
3. Может ли быть реализована ситуация,
когда спектральные плотности двух сигналов
87
перекрываются и тем ие менее эти сигналы
ортогональны?
4. Играет ли роль фаза спектральной
плотности сигнала при определении его
энергетического спектра?
5. Какая доля общей энергии прямоуголь-
прямоугольного видеоимпульса содержится в пределах
первого (основного) лепестка спектральной
диаграммы?
6. Каковы технические предпосылки вве-
введения понятия АКФ сигнала?
7. Каким должен быть энергетический
спектр сигнала, обладающего узким основ-
основным лепестком АКФ?
Задачи
1. Докажите, что если u{t) и и@ —ве-
—вещественные сигналы, то мнимая часть про-
произведения V (со) V* (со) есть нечетная функция
частоты.
2. Исследуйте зависимость взаимного
энергетического спектра двух одинаковых
прямоугольных видеоимпульсов от t0:
3. Найдите формулу, описывающую энер-
энергетический спектр экспоненциального видео-
видеоимпульса вида u{t) = t/oexp(—at)c(t).
4. Видеоимпульс гауссова типа задан
функцией u(t) = tfoexp(-6-lOi7B).
Какая доля общей энергии этого импульса
заключена в полосе частот О — 1.5 МГц?
5. Найдите эффективную ширину спектра
экспоненциального видеоимпульса (см. задачу
3), определив ее как полосу частот, в пре-
пределах которой сосредоточено 90% энергии
6. Докажите, что АКФ экспоненциального
видеоимпульса (см. задачу 3) описывается
Более сложные задания
П. Проведите экспериментальное иссле-
исследование автокорреляционной функции шести-
позицнонного дискретного сигнала, у кото-
которого значения иа каждой из позиций явля-
являются случайными числами, с равной вероят-
вероятностью принимающими значения +1 или — 1.
В качестве «датчика» случайного числа
используйте результаты бросания монеты.
Изучите полученную АКФ, сравнивая ее
с АКФ сигнала Баркера
8. Какие ограничения можно наложить иа
вид АКФ сигнала?
9. В чем заключается принцип построения
многопозиционного сложного сигнала?
18. Каким образом вводится дискретная
АКФ многопозицнонного сигнала?
11. Назовите основное свойство сигналов
Баркера. В чем заключается преимущество
этих сигналов по сравнению с другими воз-
возможными многопозицнонными сигналами?
12. Можно ли реализовать сигналы Бар-
Баркера с произвольно большим числом по-
позиций?
формулой
7. Найдите АКФ сигнала s(t), спектраль-
спектральная плотность которого вещественна и
сосредоточена в пределах области частот
[ть ?о2]:
8. Вычислите АКФ видеоимпульса тре-
треугольной формы:
9. Найдите АКФ дискретного сигнала
{1, 1, 1, -1, -1, 1, 1}. Сравните полу-
полученный результат с автокорреляционной
функцией семнпозициониого сигнала Баркера.
18. Вычислите ВКФ двух сигналов Бар-
Баркера со значениями М — 5 и М = 7.
Повторите эксперимент, взяв число пози-
позиций достаточно большим A5—20). Сделайте
вывод о возможных путях создания сложных
сигналов с хорошими корреляционными
свойствами при большом числе позиций.
12. Найдите и исследуйте ВКФ двух экс-
экспоненциальных сигналов и (f) = ехр (—o^f) с (()
и v(t) =exp(—a2t)a(t) при щф^.2-
Глава 4
Модулированные сигналы
Сигналы, поступающие из источника сообщений (микрофон,
передающая телевизионная камера, датчик телеметрической
системы), как правило, не могут быть непосредственно
переданы по радиоканалу. Дело не только в том, что
эти сигналы недостаточно велики по амплитуде. Гораздо
существеннее ях Относительная низкочаспийпнссть. Чтобы осу-
осуществить эффективную передачу сигналов в какой-либо сре-
среде, необходимо перенести спектр этик сигналов из низко-
низкочастотной области в область- достаточно высоких частот.
Данная процедура получила в радиотехнике название
модуляций.
4.1. Сигналы с амплитудной модуляцией
Прежде чем изучать этот простейший вид модулиро-
модулированных сигналов, рассмотрим кратко некоторые вопросы,
касающиеся принципов модуляции любого вида.
Понятие несущего колебания. Идея способа, позволяю-
позволяющего переносить спектр сигнала в область высоких частот,
заключается в следующем. Прежде всего в передатчике фор-
формируется вспомогательный высокочастотный сигнал, назы-
называемый несущим колебанием. Его математическая модель
uHEC(f)=/(r; alt аг, ..., а„) такова, что имеется некоторая
совокупность параметров аи а2,..., ат, определяющих форму
этого колебания. Пусть s (f) — низкочастотное сообщение, под-
подлежащее передаче по радиоканалу. Если, по крайней мере,
один из указанных параметров изменяется во времени про-
пропорционально передаваемому сообщению, то несущее колеба-
колебание приобретает новое свойство — оно несет в себе информа-
информацию, которая первоначально была заключена в сигнале s(r).
Физический процесс управления параметрами несущего
колебания и является модуляцией.
В радиотехнике широкое распространение получили систе-
системы модуляции, использующие в качестве несущего простое
гармоническое колебание
«несМ = Ucos(cot + <р), D.1)
имеющее три свободных параметра U, со и ф.
Изменяя во времени тот или иной параметр, можно
получать различные виды модуляции.
Принцип амплитудной модуляции. Если переменной ока-
оказывается амплитуда сигнала (/(г), причем остальные два
параметра со и р неизменны, то имеется амплитудная
модуляция несущего колебания. Форма записи амшгитудно-
АМ-снгнал и его модулированного, или АМ-сигнала, такова;
«amW = t/(t)eos(co0t + q>0).
1*2)
4.1. Сигналы с амплитудной модуляцией
Осциллограмма АМ-сигнала имеет характерный вид (см.
рис. 4.1). Обращает на себя внимание симметрия графика
относительно оси времени. В соответствии с формулой D.2)
АМ-сигнал есть произведение огибающей U(t) н гармони-
гармонического заполнения cos (ю0/ 4- tp0)- В большинстве практически
интересных случаев огибающая изменяется во времени
гораздо медленнее, чем высокочастотное заполнение.
oi 11шш>шан
но. темпе
При амплитудной
модуляции пе уда-
удается обеспечить
широкий динамиче-
динамический диапазон пе-
передаваемых сигна-
сигналов
Рис. 4.1. АМ-снгналы при различных глубинах модуляции:
а — неглубокая модуляция: б — глубокая модуляция; в — перемодуляция
При амплитудной модуляции связь между огибающей
U (t) и модулирующим полезным сигналом s (г) принято
определять следующим образом:
Ms(r)].
D.3)
Здесь UM — постоянный коэффициент, равный амплитуде не-
несущего колебания в отсутствие модуляции; М — коэффи-
коэффициент амплитудной модуляции.
Величина М характеризует глубину амплитудной моду-
модуляции. Смысл этого термина поясняется осциллограммами
AM-сигналов, изображенными на рис. 4.1, а—в.
При малой глубине модуляции относительное изменение
огибающей невелико, т. е. | Ms(t) | <к 1 во все моменты
времени независимо от формы сигнала s{t).
Если же в моменты времени, когда сигнал s(t) достигает
экстремальных значений, имеются приближенные равенства
Msma* (г) % 1 или Msmin (г) да - 1,
то говорят о глубокой амплитудной модуляции. Иногда
вводят дополнительно относительный коэффициент модуля-
модуляции вверх
Мв = A7тах - Um)/Um
н относительный коэффициент модуляции вниз
AM-сигналы с малой глубиной модуляции в радио-
радиоканалах нецелесообразны ввиду неполного использования
мощности передатчика. В то же время 100%-ная модуляция
в
li.iiiivuioii мо 1\.!и-
иин
На принципах ам-
амплитудной моду-
модуляции построено
большинство ради-
радиовещательных си-
систем
ремппе *а.|ячу 3
Если амплиту-
амплитуда увеличшается
вдвое, то мощность
возрастает в четы-
четыре раза
Глава 4. Модулированные сигналы
исремодуляция
вверх (JVfB = 1) в два раза повышает амплитуду колебаний
при пиковых значениях модулирующего сообщения. Дальней-
Дальнейший рост этой амплитуды, как правило, приводит к нежела-
нежелательным искажениям из-за перегрузки выходных каскадов
передатчика.
Не менее опасна слишком глубокая амплитудная моду-
ляция вниз. На рис. 4.1, в изображена так называемая
перемодуляция (М„ > 1). Здесь форма огибающей перестает
повторять форму модулирующего сигнала.
Однотональиаи амплитудная модуляция. Простейший АМ-
сигнал может быть получен в случае, когда модулирую-
модулирующим низкочастотным сигналом\является гармоническое
колебание с частотой ?1. Такой сигнал
D.4)
называется однотональным АМ-сшналом.
Выясним, можно ли такой сигнал представить как сумму
простых гармонических колебаний с различными частотами.
Используя известную тригонометрическую формулу произве-
произведения косинусов, из выражения D.4) сразу получаем
Однотопалыюя ц
модуляция снимет- иАм(г)= Uracos(<Bot + q>0) + —5—cos[(co0 + n)t + q>0 + Фо] +
ричиа, т. е. М„ '
М М
o-fItt + фо-Фо].
D.5)
Как известно,
COSXCOSJ' =
7[(
72[(
+ cos (х - у)\
рецпле задачу 1
Формула D.5) устанавливает спектральный состав одно-
однотонального АМ-сигнала. Принята следующая терминология:
0>0 — несущая частота, (йо + ?1 — верхняя боковая частота,
со0 — П — нижняя боковая частота.
Строя по формуле D.5) спектральную диаграмму одио-
тоиального АМ-сигнала, следует прежде всего обратить
внимание на равенство амплитуд верхнего и нижнего боко-
боковых колебаний, а также на симметрию расположения этих
спектральных составляющих относительно несущего коле-
колебания.
Энергетические характеристики АМ-сигнала. Рассмотрим
вопрос о соотношении мощностей несущего и боковых
колебаний. Источник одиотоиалыюго АМ-сигнала эквивален-
эквивалентен трем последовательно включенным источникам гармони-
гармонических колебаний:
«hecW = U»
"вб@ =
^
ч>0).
s [(ю0 + О) г + ро + Фо],
"нв @ =
s [(ю0 - О) t + q>o - Фо].
Положим для определенности, что это источники ЭДС,
соединенные последовательно и нагруженные на единичный
резистор. Тогдв мгновенная мощность АМ-сигнала будет
численно равна квадрату суммарного напряжения:
4.1. Сигналы с амплитудной модуляцией
91
+ 2иНЕс"нб + 2"вб«нб- D-6)
Чтобы найти среднюю мощность сигнала, величину pit)
необходимо усреднить по достаточно большому отрезку
времени Т:
1
<Рам>= lim-=Jp(t)dr.
Г-*?Ю 1 п
Легко убедиться в том, что при усреднении все взаим-
взаимные мощности дадут нулевой результат, поэтому средняя
мощность АМ-сигнала окажете» равной сумме средних
мощностей несущего и боковых колебаний: ^ч
В выражении D.6)
присутствуют как
собственные мощ-
мощности источников,
так п изаимные
мощности, пропор-
пропорциональные попар-
попарным произведе-
произведениям мгновенных
напряжений
и
<РАМ> = <ЙШС> + ?<РвБ> + <РНБ>] = "^
Отсюдв следует, что
[[<Р
и2 и2мг
D.7)
M2/2l D.8)
Так, даже при 100 %-ной модуляции (JVf = 1) доля мощ-
мощности обоих боковых колебаний составляет всего лишь
50% от мощности немодулироваиного несущего колебания.
Поскольку информация о сообщении заключена в боковых
колебаниях, можно отметить неэффективность использования
мощности при передаче АМ-снгнала.
Амплитудная модуляция при сложном модулирующем
сигнале. На практике 9днотоиальные АМ-сигиалы исполь-
используются редко. Гораздо более реален случай, когдв моду-
модулирующий низкочастотный сигнал имеет сложный спектраль-
спектральный состав. Математической моделью такого сигнала
может быть, например, тригонометрическая сумма
«@
D5)
Здесь частоты П, образуют упорядоченную возрастающую
последовательность П^ < П2 <... <ПК, в то время как
амплитуды а, и начальные фазы Ф, произвольны.
Подставив формулу D.9) в D.3), получим
идм(г)= Um[l+
D.10)
"амМ = Um [I + ? JVf, cos (Sty + Ф,)] cos (сад + p0).
1*1
D.12)
решите задачу 5
Введем совокупность парциальных (частичных) коэффициен-
коэффициентов модуляции
М, =Ма, D.11)
и запишем аналитическое выражение сложномодулирован-
ного (многотонального) АМ-сигиала в форме, которая
обобщает выражение D.4):
В отличие от ряда
Фурье частоты П,
ие обязаны быть
кратными друг
другу
парциальные коэф-
коэффициенты модуля-
модуляции
Глава 4. Модулированные сигналы
Спектральное разложение проводитсятак же, каки для одно-
тональиого АМ-сигиала:
-Ф,]. D.13)
На рис. 4.2, а изображена спектральная диаграмма
модулирующего сигнала s(f), построенная в соответствии
с формулой D.9). Рис. 4.2,6 воспроизводит спектральную
диаграмму многотональиого АМ-сигнала, отвечающего этому
модулирующему колебанию.
Ттт
о о,
о - а/
структура спектра
сигнала с ампли-
тудной модуляцией
Рис. 4.2. Спектральные диаграммы:
а — модулирующего сигнала; 6 — АМ-сигнала при многотональной модуляции
Итак, в спектре сложномодулированного АМ-снгнала,
помимо несущего колебания, содержатся группы верхних и
нижних боковых колебаний. Спектр верхних боковых колеба-
иий является масштабной копией спектра модулирующего
сигнала, сдвинутой в область высоких частот иа величину
соо. Спектр нижних боковых колебаний также повторяет
спектральную диаграмму сигнала s{t), ио располагается зер-
зеркально относительно несущей частоты ш0.
Из сказанного следует важный вывод: ширина спектра АМ-
сигнала равна удвоенному значению наивысшей частоты в
спектре модулирующего низкочастотного сигнала.
Пример 4.1. Оценить число вещательных радиоканалов, который
можно разместить в диапазоне частот от 0.5 до 1.5 МГц
(примерные границы средневолнового вещательного диапазона).
Для удовлетворительного воспроизведения сигналов радиовеща-
радиовещания необходимо воспроизводить звуковые частоты от 100 Гц до
12 кГц. Таким образом, полоса частот, отводимая одному АМ-
каналу, равна 24 кГц. Чтобы избежать перекрестных помех между
каналами, следует предусмотреть защитный интервал шириной в
1 кГц. Поэтому допустимое число каналов N = A.5 -0.5)-106/B5-103) =
= 40.
1кГц
НИ
24 кГц
4.1. Сигналы с амплитудной модуляцией
Амплитудно-манилулнрованные сигналы. Важным классом
многотональных АМ-сигналов являются так называемые
манипулированные сигналы. В простейшем случае это —
последовательности радиоимпульсов, отделенных друг от друга
паузами. Такие сигналы используются в радиотелеграфии и в
системах передачи дискретной информации по радиоканалам.
Если s(t) — функция, в каждый момент времени принимаю-
принимающая значение либо 0, либо 1, то амплитудио-манипулиро-
ванный сигнал представляется в виде
и«н(*) = ^*s(t)cos(to0t + <Ро)- D14)
Пусть, например, функция s(r) отображает периодическую
последовательность видеоимпульсов, рассмотренную в при-
примере 2.1 (см. гл. 2). Считая, что амплитуда этих импуль-
импульсов А = 1, на основании D.14) имеем при <р0 = 0:
= ——cosgw -\——
q q
-cos(co0 + m>i
sin —
D.15)
где q — скважность последовательности.
Векторная диаграмма АМ-сигнала. Иногда полезным может
оказаться графическое изображение АМ-сигнала посредством
суммы векторов, вращающихся в комплексной плоскости.
Для простоты рассмотрим одиотоиальную модуляцию.
Мгновенное значение несущего колебания «нес D =
= [/„cos(m0t+ <р0) есть проекция неподвижного во времени
вектора Uhec = Umexp(/<p0) на ось отсчета углов, которая
вращается вокруг начала координат с угловой скоростью
со0 в направлении часовой стрелки (рис. 4.3).
Верхнее боковое колебание отображается на диаграмме
вектором Urs длиной UmM/2, причем его фазовый угол при
Осциллограмма
амплитудно-мани-
пулированного сиг-
пала
Амплитудно-манн-
пулироваппому сиг-
сигналу присущи все
особенности АМ-
сигпала со слож-
сложной модуляцией.
Однако, но край-
пен мере теорети-
теоретически, спектр та-
такого сигнала про-
простирается неогра-
неограниченно широко
Рис. 4.3. Векторные диаграммы однотоиального АМ-сигнала:
в - при 1=0; б - при I > О
Глава 4. Модулированные сигналы
^
Векторные диа-
диаграммы АМ-снгна-
ла в четыре после-
последовательные мо-
момента времени
решите задачи 2 и 4
Осциллограмма
сигнала с баланс-
балансной модуляцией
t = 0 равен сумме начальных фаз несущего и модулирующе-
модулирующего сигналов [см. формулу D.5)]- Такой же вектор для
нижнего бокового колебания отличается лишь знаком в выра-
выражении для его фазового угла. Итак, на комплексной
плоскости необходимо построить сумму трех векторов
Легко видеть, что эта сумма будет ориентирована вдоль
вектора Uwec. Мгновенное значение АМ-сигнала при t = 0
окажется равным проекции конца результирующего вектора
на горизонтальную ось (рис. 4.3, а).
С течением времени, помимо отмеченного вращения оси
отсчета углов, будут наблюдаться следующие трансформа-
трансформации чертежа (рис. 4.3,6): 1) вектор 1Увб будет вращаться
вокруг точки своего приложения с угловой скоростью Q
в направлении против часовой стрелки, поскольку фаза
верхнего бокового колебания (со0 + Q)t + <р0 + Фо возрастает
быстрее фазы несущего сигнала; 2) вектор О^в будет'вра-
будет'вращаться также с угловой скоростью Q, но в противополож-
противоположном направлении.
Строя суммарный вектор Vz и проецируя его на ось
отсчета углов, можно иайти мгновенные значения uAM(r) в
любой момент времени.
Балансная амплитудная модуляция. Как было показано, зна-
значительная доля мощности обычного АМ-сигиала сосредото-
сосредоточена в несущем колебании. Для более эффективного исполь-
использования мощности передатчика можно формировать АМ-сиг-
налы с подавленным несущим колебанием, реализуя так
называемую балансную амплитудную модуляцию. На основа-
основании формулы D.4) представление одиотоиального АМ-сигнала
с балансной модуляцией таково:
«БмЮ = VJrfCOSfflt + 00)COS(COoI + <р0) =
- -cos [(ш0 + Q) t + фо + фо] +
о — ?1 ы0 ш0 + ?1
D.16)
Имеет место перемножение двух сигналов — модулирую-
модулирующего и несущего. Колебания вида D.16) с физической точки
зрения являются биениями двух гармонических сигналов с
одинаковыми амплитудами и„М}2 и* частотами, равными
верхней и нижней боковым частотам.
При многотональной балансной модуляции аналитическое
выражение сигнала принимает вид
"БМ М = 4lUm I М, COS [(С0о + ВД t + <Ро + Ф,] +
+ 7il/_ Z M, cos [(ш,, -
- Ф,].
D.17)
4.1. Сигналы с амплитудной модуляцией
95
Как и при обычной амплитудной модуляции, здесь
наблюдаются две симметричные группы верхних и нижних
боковых колебаний.
Если рассмотреть осциллограмму биений, может показать-
показаться неясным, почему в спектре этого сигнала нет несущей
частоты, хотя налицо присутствие высокочастотного запол-
заполнения, изменяющегося во времени именно с этой часто-
частотой.
Дело в том, что при переходе огибающей биений
через нуль фаза высокочастотного заполнения скачком из-
изменяется на 180°, поскольку функция cos (fit + Фо) имеет
разные знаки слева и справа от нуля. Если такой
сигнал подать на вьюокодобротиую колебательную систему
(например, LC-коитур), настроенную иа частоту со0, то
выходной эффект будет очень мал, стремясь к нулю при
возрастании добротности. Колебания в системе, возбужден-
возбужденные одним периодом биений, будут гаситься последующим
периодом. Именно так с физических позиций принято рас-
рассматривать вопрос о реальном смысле спектрального
разложения сигнала. К этой проблеме вернемся вновь в гл. 9.
Однополосная амплитудная модуляция. Еще более интерес-
интересное усовершенствование принципа обычной амплитудной
модуляции заключается в формировании сигнала с подав-
подавленной верхней или нижней боковой полосой частот.
Сигналы с одной боковой полосой (ОБП-или SSB-сигналы—
от англ. single sideband) по внешним характеристикам
напоминают обычные АМ-сигналы. Например, одиотоиаль-
ный ОБП-сигнал с подавленной нижней боковой частотой
записывается в виде
Балансная ампли-
амплитудная модуляции,
несмотря на свои
достоинства, пе на-
нашла широкого нрн-
меиения в технике
радиовещания п
связи
lib
«овп М = Um cos (co0t + <р0) + -
-cos[(co0 + il)t + <р0 + Фо].
Снектр однополос-
пого сигнала
Проводя тригонометрические преобразования, получаем
вп(Й =
(fit + <I>0)cos(co0t + <р„) -
;in(fit + Ф0)8ш(со„1 + р0) =
|cos(co0t + <р„) -
n (fit + Фо)8Ш(С0оГ + <Ро).
Два последних слагаемых представляют собой произведе-
произведение двух функций, одна из которых изменяется во вре-
времени медленно, а другая — быстро. Принимая во внимание,
что «быстрые» сомножители находятся по отношению друг
к другу во временной квадратуре, вычисляем медленно
взменяющуюся огибающую ОБП-сигиала:
Векторная диа-
диаграмма двух сиг-
сигналов, находящих-
находящихся в квадратуре
96
Глава 4. Модулированные сигналы
Основное преиму-
преимущество ОБП-сиг-
палов - двукрат-
ное сокращение по-
полосы занимаемых
частот, что оказы-
оказывается существен-
существенным для частотно-
частотного уплотнения ра-
радиоканалов, напри-
например, нрн связи на
коротких волпах в
условиях предель-
предельной загруженности
частотного диапа-
диапазона
Снектр однонолос-
ного сигнала с по-
подавленной пес j щей
частотой
полиаи фаза
фазовая модуля-
модуляция
Рис. 4.4. Огибающие однотоиальных модулированных сигналов при
I — ОБП-сигнала; 2 — обычного АМ-сигнала
V{t) =
+^cos(fi( +Ф
„)Т
ЦП1 + Ф„) =
-»-1А
+ Mcos(fi( + O0) + —.
D.18)
Графнк огибающей ОБП-сигнала, рассчитанный по фор-
формуле D.18) при М = 1, изображен на рис. 4.4. Здесь же для
сравнения построена огибающая обычного однотоиального
АМ-сигиала с тем же коэффициентом модуляции.
Сравнение приведенных кривых показывает, что непосред-
непосредственная демодуляция ОБП-сигнала по его огибающей будет
сопровождаться значительными искажениями.
Дальнейшим усовершенствованием систем ОБП является
частичное или полное подавление несущего колебания. При
этом мощность передатчика используется еше более эф-
эффективно.
4.2. Сигналы с угловой модуляцией
Будем изучать модулированные радиосигналы, которые
получаются за счет того, что в несущем гармониче-
гармоническом колебании uHEC (t) — Vm cos (cot + <p) передаваемое сооб-
сообщение s(t) изменяет либо частоту со, либо начальную фазу <р;
амплитуда Um остается неизменной. Поскольку аргумент
гармонического колебания \|/(t) = cof + <p, называемый полной
фазой, определяет текущее значение фазового угла, такие
сигналы получили название сигналов с угловой модуляцией.
Виды угловой молулщни. Предположим вначале, что пол-
полная фаза ф(с) связана с сигналом s(t) зависимостью
D.19)
где со0 — значение частоты в отсутствие полезного сигнала;
к — некоторый коэффициент пропорциональности. Модуля-
Модуляцию, отвечающую соотношению DJ9), называют фазовой
модуляцией (ФМ):
"фм W = ^m cos [со0( + ks (t)]. D.20)
4.2. Сигналы с угловой модуляцией
Рнс, 4,5. Фазовая модуляция:
I — модулирующий низкочастотный сигнал; 2 — немодулированное гармони-
гармоническое колебание; 3 — сигнал с фазовой модуляцией
Если сигнал s(t) ~ 0, то ФМ-колебание является простым
гармоническим колебанием. С увеличением значений сигнала
я (с) полная фаза ф(г) растет во времени быстрее, чем по
линейному закону. При уменьшении значений модулирующего
сигнала происходит спад скорости роста ф@ во времени.
На рис. 4.5 показано построение графика ФМ-сигнала.
В моменты времени, когда сигнал s(t) достигает экстре-
экстремальных значений, абсолютный фазовый сдвиг между ФМ-
сигналом и смодулированным гармоническим колебанием
оказывается наибольшим. Предельное значение этого фазо-
фазового сдвига называют девиацией фазы Дф. В общем случае,
когда сигнал s(t) изменяет знак, принято различать
девиацию фазы вверх Дфв = ks^ и девиацию фазы вниз
девиация фазы
На векторной диаграмме изображающий вектор постоян-
постоянной длины будет совершать вращение с непостоянной Ф
угловой скоростью. Мгновенная частота со (г) сигнала с мгновенная часто-
угловой модуляцией определяется как первая производная уа
от полной фазы по времени:
D.21)
x]/(t)= J со(т)<1т + const.
D.22)
При частотной модуляции сигнала (ЧМ) между величи- частотная модуля-
нами s(t) и со (с) имеется связь вцда цня
ю@ = со0 + ks(t). D.23)
Поэт-ому
\ s(T)dx]. D.24)
Глава 4. Модулированные сигналы
Осциллограмма
типичного сигнала
с угловой модуля-
модуляцией
индекс угловой мо-
модуляции
решите задачи б
п 7
отличие между
ЧМ- п ФМ-сигна-
лами
Естественными параметрами ЧМ-сигиала общего вида в
соответствии с формулой D.23) являются девиация частоты
вверх Лео,, = fcnux и девиация частоты вниз Дсо„ — кзтщ.
Если s (() — достаточно гладкая функция, то внешне
осциллограммы ФМ- и ЧМ-сигналов не отличаются. Однако
имеется принципиальная разница: фазовый сдвиг между ФМ-
сигналом и немодулированным колебанием пропорционален
s(r), в то время как для ЧМ-сигиала этот сдвиг про-
пропорционален интегралу от передаваемого сообщения.
Однотональвые сигналы с угловой модуляцией. Анализ
ФМ- и ЧМ-сигналов с математической точки зрения
гораздо сложнее, чем исследование АМ-колебаний. Поэтому
основное внимание будет уделено простейшим одиотоиальиым
сигналам.
В случае одиотональиого ЧМ-сигнала мгновенная частота
СО (г) = С0о + Д@СО5(П/ + Фо),
где Асо — девиация частоты сигнала. На основании формулы
D.22) полная фаза такого сигнала
<|/(t) = co0t + ~sm(Clt + Фо) + <Ро,
где <р0 — некоторый постоянный фазовый угол.
Отсюда видно, что величина
I m = Ага/а | D.25)
называемая индексом одиотональной угловой модуляции,
представляет собой девиацию фазы такого сигнала, выра-
выраженную в радианах.
Для краткости положим, что неизменные во времени
фазовые углы <р0 = Фо = О, и выразим мгновенное значе-
значение ЧМ-сигнала в виде
"чм W = и„ cos (co0t + m sin ОД. D.26)
Аналитическая форма записи одиотоиального ФМ-сигиала
будет аналогичной. Однако нужно иметь в виду следую-
следующее: ЧМ- и ФМ-сигналы ведут себя по-разному при измене-
изменении частоты модуляции и амплитуды модулирующего
сигнала.
При частотной модуляции девиация частоты Асо про-
пропорциональна амплитуде низкочастотного сигнала. В то же
время величина Асо-не зависит от частоты модулирующего
сигнала. В случае фазовой модуляции ее индекс т оказы-
оказывается пропорциональным амплитуде низкочастотного сигнала
независимо от его частоты. Как следствие этого, девиация
частоты прн фазовой модуляции в соответствии с фор-
формулой D.25) линейно увеличивается с ростом частоты.
Jp 4.2. Радиостанция, работающая в УКВ-диапазоне с
несущей частотой /0 = 80 МГц, излучает ФМ-сигкол, промодуяи-
роеанный частотой F = 15 кГц. Индекс модуляции m = 12. Найти
пределы, в которых изменяется мгновенная частота сигнала.
4.2. Сигналы с угловоВ модуляцией
99
Математическая модель сигнала имеет вид
u(i)= l/.cos[2it-8 107«+ l2sinBitl.51O*t)].
Девиация частоты составит Д/ - mF - 1.8 ¦ 10s = 180 кГц.
Таким образом, при модуляции мгновенная частота сигнала
изменяется в пределах от /„to 8008 7982 М
/™, = 80 + 0.18 =80.18 МГц.
-0.18 =79.82 МГп
Свектральное разложение ЧМ- и ФМ-сяпшлов при малых
индексах модуляции. Задачу о представлении сигналов с угло-
угловой модуляцией посредством суммы гармонических колеба-
колебаний несложно решить в случае, когда п«1. Для этого
преобразуем формулу D.26) следующим образом:
и (г) = Um cos (co0t + m sin Qt) = Um cos (m sin Qt) cos co0f —
— Un sin (m sin Qt) sin coot. D.27)
Поскольку индекс угловой модуляции мал, воспользуемся
приближенными равенствами
cos (m sin Qt) к 1; sin (m sin Qt) к msinfi/.
На основании этого из равенства D.27) получаем
u (t) a Um cos co0t +
2
s (co0 + fi) t - ^y^cos (ю0 - Q) t. D.28)
Таким образом, показано, что при т -*: 1 в спектре
сигнала ,с угловой модуляцией содержатся несущее колеба-
колебание и две боковые составляющие (верхняя и нижняя) на
частотах со0 + Q и со0 — О. Индекс т играет здесь такую же
роль, как коэффициент амплитудной модуляции М [ср. с
формулой D.5)]. Однако можно обнаружить и существенное
различие спектров АМ-сигнала и колебания с угловой моду-
модуляцией. Для спектральной диаграммы (рис. 4.6, о), построенной
по формуле D.28), характерно то, что нижнее боковое коле-
колебание имеет дополнительный фазовый сдвиг на 180°.
Как следствие этого, сумма векторов, отображающих
оба боковых колебания (рис. 4.6,6), всегда перпендикулярна
вектору ??нж> С течением времени вектор Vx будет «качать-
«качаться» вокруг центрального положения. Незначительные изме-
изменения длины этого вектора обусловлены прилиженным
характером анализа, и при очень малых т ими можно
пренебречь.
" -О.
180°
Т
Колебания, харак-
характеризуемые усло-
условием т<1, пряна-
то называть узко-
¦юлоснымн ЧМ-
нлиФМ-снгналамн
Рис. 4.6. Диаграммы сигнала с угловой модуляцией при m ¦«: 1:
о — спеггральная; 6 — веггорная
Глава 4. Модулированные сигналы
Ч'-tJ
Более точный вид
спектральной диа-
диаграммы
решите задачу 11
1
Более точный анализ спектрального состава сигналов с угло-
угловой модуляцией. Можно попытаться уточнить полученный
результат, воспользовавшись двумя членами ряда в разло-
разложении гармонических функций малого аргумента. При этом
формула D27) будет выглядеть так:
u(t)=s ^„A - Va»sin2fiOcosco0t-
Несложные тригонометрические преобразования приводят к
результату:
D.29)
спектре
помимо
"W =U»A - nr'/^coscoot + С/„тA - т2/8) х
х [cos(co0 + Q)t — cos(co0 — Q)i] + l/m(m2/8) x
x [cos(co0 + 2il)t + cos ((ofl — 2Q)t] +
+ [/„(m3/48)[cos(co0 + 3Q)t - cos(co0 - 3Q)t].
Эта формула свидетельствует о том, что i
сигнала с одиотональиой угловой модуляцией,
известных составляющих, содержатся также верхние и нижние
боковые колебания, соответствующие гармоникам частоты
модуляции. Поэтому спектр такого сигнала сложнее спектра
аналогичного АМ-сигнала. Отметим также, что возникно-
возникновение новых спектральных составляющих приводит к пере-
перераспределению энергии по спектру. Так, из формулы D.29)
видно, что с ростом т амплитуда боковых составляющих
увеличивается, в то время как' амплитуда несущего колеба-
колебания уменьшается пропорционально множителю A — т2/4).
Снекгр сигнала с угловой модуляцией при произвольном
значении индекса. Для простейшего случая одиотонального
ЧМ- или ФМ-сигнала можно найти общее выражение
спектра, справедливое при любом значении индекса модуля-
модуляции т.
В разделе курса математики, посвященном специальным
функциям, доказывается, что экспонента ехр (/m sin x) с мнимым
показателем специального вида, периодическая на отрезке
—71 < х < 71, разлагается в комплексный ряд Фурье:
е*—.=
J,
D.30)
Векторные диа-
диаграммы сигнала с
угловой модуляци-
модуляцией в четыре после-
последовательные мо-
иивта времени
где т — любое вещественное число; </&(т) — функция Бесселя
(с-го индекса от аргумента т.
Сравнивая формулы D.30) и D.27), а также подставляя
х = fit, перепишем последнюю нз указанных формул так:
D.31)
Отсюда получаем следующую математическую модель ЧМ-
или ФМ-сигиала с любым значением индекса модуляции:
D.32)
4.2. Сигналы с угловой модуляцией
101
Л
/ 1 /
|\/
У
S 10 15 20 25
Рис. 4.7. Графики функций Бесселя J2(m) и Ji6(m)
Спектр одиотонального сигнала с угловой модуляцией в
общем случае содержит бесконечное число составляющих,
характер спектра
частоты которых равны щ ± Ш; амплитуды этих составляю- однотонального сн-
щих пропорциональны значениям Jk(m). гнала с угловой
В теории функции Бесселя доказывается, что функции с модуляцией
положительными и отрицательными индексами связаны
между собой:
Поэтому начальные фазы боковых колебаний с часто-
частотами со0 + Ш н со0 — кЛ совпадают, если к — четное число,
и отличаются иа 180е, если к — нечетное.
Для детального анализа и построения спектральных
диаграмм необходимо знать поведение функций Л («О при
различных т в зависимости от к. На рис. 4.7 приведены
графики двух функций Бесселя, существенно различающихся
своими индексами.
Можно заметить следующее: чем больше индекс функции
Бесселя, тем протяженнее область аргументов, при которых
эта функция очень мала. Этот факт отображает табл. 4.1.
Табл. 4.1 совместно с формулой D.32) позволяет построить
типичные спектральные диаграммы сигнала с однотональной
угловой модуляцией при не слишком больших значениях
индекса т (рис. 4.8).
Важно отметить, что с ростом индекса модуляции расши-
расширяется полоса частот, занимаемая сигналом. Обычно пола-
полагают, что допустимо пренебречь всеми спектральными состав-
составляющими с номерами к > т + 1. Отсюда следует оценка
практической ширины спектра сигнала с угловой модуля-
модуляцией (с):
П„р,„ = 2(т + 1)а D.33)
Как правило, реальные ЧМ- н ФМ-сигиалы
ризуются условием т » 1. В этом случае
D.34)
практическая ши-
ширина спектра ЧМ- п
ФМ-сигналов
характе-
характерешите задачу 12
102
Глава 4. Модулированные сигналы
Таблица 4.1 Значения функций Бесселя J,(m)
Здесь выделена об-
область, в которой
функции Бесселя
становятся прене-
пренебрежимо малыми
0
1
2
3
4
5
б
7
1
0.765
0.440
УУ-К
-
2
0.224
0.577
0.353
*' у
3
-0.260
0.339
0.486
0.309
4
-0.397
-0.066
0.364
0.430
0.281
"""%
¦г- а
5
-0.178
-0.328
0.047
0.365
0.391
0.261
Таким образом, сигнал с угловой модуляцией занимает
Полосу частот, приблизительно равную удвоенной девиации
частоты.
Как было выяснено, для передачи амплитудио-модули-
рованного сигнала требуется полоса частот, равная 2Д
Сигналы с угловой т-е- в и раз меньшая. Большая широкополосность ЧМ-
модуляцией часто и ФМ- сигналов обусловливает их применимость для целей
пспользуются в си- радиосвязи лишь на очень высоких частотах, в диапазонах
стемах иысокока- метровых и более коротких воли. Однако именно широкополос-
чествешюго радио- ность приводит к гораздо большей помехоустойчивости
вещания УКВ-дна- сигналов с угловой модуляцией по сравнению с АМ-си-
пазона гиалами. Сравнительный анализ помехоустойчивости различ-
различных видов модуляции будет детально проведен в гл. 16.
Как отмечалось, рост индекса модуляции приводит к
перераспределению мощности в спектре модулированного
сигнала. В частности, если значение т выбрано таким, что
г(ш-(оо)/П
Рис. 4.8. Спектральные диаграммы сигнала с угловой модуляцией
при двух значениях индекса m (амплитуды представлены в отно-
относительном масштабе)
4.2. Сигналы с угловой модуляцией
103
J0(m) = 0, то несущее колебание на частоте еоо в спектре
будет стсутстствовать. Значения т, являющиеся корнями
данного уравнения, образуют бесконечную возрастающую
последовательность чисел щ, (v = l, 2,...—номер корня).
Приведем для справок табл. 4.2.
Таблица
V
JTly
4.2
1
2.405
Корни уравнения Jo(m);=0
2
5.520
8.654
П.792
14.931
18.071
21.212
ГЦммер 4.3, Однотональный ЧМ-сигнал имеет девиацию частоты
Л/ = 240 кГц. Найти частоты модуляции F, при которых несущее
колебание в спектре сигнала будет отсутствовать.
Индекс, модуляции т = Д(й/Г1 = Af/F, т. е. частота модуляции
F ='&//т Обращаясь к табл. 4.2, находим последовательность
частот, удовлетворяющую поставленному условию: Ft = 240/2.405 =
-99.792 кГц, F2 = 240/5.520 = 43.474 «Гц, F3 '= 240/8.654 -
= 27.732 кГц н т. д. .
Углова» модуляция при негармоническом модулярующем
сигнале. Интересная особенность колебаний с угловой мо-
модуляцией проявляется в случае; когда модулирующий сигнал
не является гармоническим. Рассмотрим для простоты сигнал,
промодулированный лишь двумя низкими частотами:
и(г) = [/Rcos(co0t + mi siniV + m2 sinfizr) =
= l/mcos(mi sinfiif + m2 sinn2t)cosco0t —
- [/nsin(»>i sinfi,r + m2 sinQ2t)siDC00t. D.35)
Положим, что парциальные индексы модуляции m, н тг
малы настолько, что можно пользоваться приближенными
выражениями для косинуса н синуса: cosx» I — x2/2; sinxajx.
Выполнив несколько громоздкие, но вполне элементарные
тригонометрические преобразования, представим исходный
сигнал в виде суммы
«W = ^«[1 - (mf + mi)/4]cos<o0r+ 4Im1Vn\coi(a0+a1)t -
- cos (eoo - П,) i] + 1/1m1 и„ [cos (eoo + OJ f -
- cos(co0 - П2)г] + V8m!i/m[cos(co0 + 2П,)' +
+ cos(eo0 - 2П,)Г] + Vem!l/m[cos(co0 + 2Q2)I +
+ cos(co0 - 2Я2)г] + V2m,m2l/«[cos(co0 + nt-Si^t +
+ cos(co0 - Я, + ПгI - cos(eo0 + П, + fijr -
• - cos(tuo - Я, - ад I]. D.36)
Спектральная диаграмма такого двухтональиого сигнала
изображена на рнс. 4.9.
Следует обратить внимание на то, что в спектре рас-
рассматриваемого сигнала, помимо частот га0 ± Пи <*>о i. ^з*
Глава 4. Модулированные сигналы
Ш-
а § а
cf cf з cf d
I о _= +
ddi
i + +
aid
решите задачу 17
He следует смеши-
смешивать термины «не-
«нелинейная модуля-
модуляция» и «нелинейная
электрическая
цепь»
Рнс. 4.9. Спектральная диаграмма сигнала с двухтональной угловой,
модуляцией при малых значениях парциальных индексов модуляции
«1 И И12
со0 + 2Я„ со0 + 2Я2, присутствуют так называемые комбина-
комбинационные частоты со0 + Я, + Я2 с четырьмя возможными знака-
знаками. Амплитуды этих составляющих зависят от произве-
произведения парциальных индексов модуляции.
Можно показать, что в общем случае, когда угловая
модуляция осуществляется группой низкочастотных колеба-
колебаний с частотами йь Я2,...,Я№ и парциальными индек-
индексами mlt mlt....,mN соответственно, спектральное представ-
представление сигнала таково:
u(t) =
• E
oft2= -a
E Л
,(m2)...JtK(Ид,)
. D.37)
Таким образом, прн прочих равных условиях спектр
колебания со сложной угловой модуляцией гораздо богаче
спектра аналогичного АМ-сигнала. Подчеркивая взаимодей-
взаимодействие отдельных составляющих модулирующего сигнала,
угловую модуляцию, в отличие от амплитудной, иногда
называют модуляцией нелинейного типа.
4.3. Сигналы с внутриимпульсной частотной
модуляцией
В настоящем параграфе будут изучаться спектральные и
корреляционные свойства особого класса модулированных
сигналов, получивших в последнее время широкое распро-
распространение в радиолокации. Эти сигналы отличаются от
обычных радиоимпульсов тем, что нх высокочастотное
заполнение имеет переменную частоту. Чаще всего исполь-
используется внутрнимпульсная частотная модуляция с линейным
законом изменения мгновенной частоты во времени.'
Принцнн линейной частотной модуляции (ЛЧМ). Рассмотрим
радиоимпульс с огибающей прямоугольной формы. Будем
полагать, что частота заполнения линейно нарастает от начала
импульса к его концу. Конкретизируя математическую
4.3. Сигналы с виугриимпульсной модуляцией
модель сигнала, предположим, что его длительность равна
ти, причем точка г = 0 соответствует середине импульса, а
мгновенная частота изменяется во времени по закону
D.38)
г
) =ш0 + lit.
Здесь ш0 — несущая частота; ц — параметр с размерностью
с~2, равный скорости изменения частоты во времени.
Легко видеть, что за время, равное длительности импуль-
импульса, девиация частоты
Аш = цти. D.39)
Полная фаза сигнала
*Иг) = шог + цг72. D.40)
Итак, будем называть радиоимпульсом с линейной частот-
частотной модуляцией, или ЛЧМ-импулъсом, сигнал, представляемый
следующей математической моделью:
0, г<-ти/2,
tfmcos(co0r + lit1/!), -ти/2 s? r s? т„/2,
0, t > хи/2
D.4D
К полной фазе си-
сигнала можно доба-
добавить постоянный
фазовый сдвиг ф„.
Однако наличие
этого сдвига несу-
несущественно
Замечательное свойство ЛЧМ-сигналов, определяющее нх
практическую значимость, состоит в следующем. Предполо-
Предположим, что имеется некоторое физическое устройство, осу-
осуществляющее задержку сигналов, подаваемых на его вход.
Если время задержки зависит от частоты сигналя, причем
с ростом частоты это время уменьшается то при
определенных условиях, подавая на вход такого устройства
Л ЧМ-импульс большой длительности, можно добиться сущест-
существенного «сжатия» его во времени. Этот эффект обусловлен
тем, что на выходе устройства задержки одновременно
будут появляться составляющие как более низкочастотные,
относящиеся к началу импульса, так н более высоко-
высокочастотные, наблюдаемые в его конце.
Подробный анализ устройств сжатия, позволяющий оце-
оценить количественную сторону явления, а также выяснить,
например, форму выходного сигнала, будет проведен в
гл. 16 при обсуждении методов оптимального выделения
сигналов на фойе помех.
Спектр прямоугольного ЛЧМ-нмпульса. В § 4.2 при рас-
рассмотрении спектральных характеристик ЧМ-сигнала, промоду-
лированного двумя колебаниями низкой частоты, было по-
показано, что спектр такого сигнала имеет сложную структуру
из-за перекрестного влияния отдельных спектральных состав-
составляющих. Все это в полной мере относится н к спектру
ЛЧМ-импульса. При дальнейшем изложении этого вопроса
будем придерживаться в основном обозначений, принятых
в [28].
На основании модели D.41) запишем выражение спектраль-
спектральной платности одиночного ЛЧМ-импульса:
Сигнал на входе
Устройство
сжатия
Если потерн в уст-
устройстве сжатия ма-
малы, то амилитуда
выходного сигнала
может значительно
превысить уровень
шумов. Это повы-
повышает надежность
обнаружения ра-
радиолокационным
приемником сла-
слабых отраженных
сигналов
Глава 4. Модулированные сигналы
W2
dl +
Спектр в области
отрицательных ча-
частот может быть
получен на основа-
основания свойств пре-
преобразования Фурье
для вещественных
свгналов(см.гл.2):
expj -
to) г + H^-jj dt.
D.42)
|
Анализ этого соотношения показывает, что первый
интеграл описывает часть спектральной плотности с резко
выраженным максимумом в области положительных частот,
близких к ш0. Второй интеграл соответствует части
спектральной плотности, сосредоточенной в основном при
ш < 0. На практике интересуются исключительно случаем,
когда эффект перекрытия спектров, концентрирующихся при
положительных н отрицательных частотах, пренебрежимо
мал. Это связано с тем, что полная девиация частоты
за время длительности импульса очень мала по сравнению
с несущей частотой:
Д<в = цт„ •« со0.
Поэтому в формуле D.42) следует вычислять только
первый интеграл, даюший спектральную плотность прн
ео>О.
С учетом сказанного, дополнив аргумент экспоненциаль-
экспоненциальной функции в формуле D.42) до полного квадрата,
получим
-,„/2
D.43)
Удобно перейти от переменной г к новому аргументу х,
выполнив замену переменной:
Проводя вычисления, находим
ехр(; =il
|[| | ( ) D.44)
где пределы интегрирования определяются следующим об-
образом:
4-3. Сигналы с внутриимпульснов модуляцией
-+(co-to0) ^-(to-too)
D.45)
Интеграл в выражении D.44) сводится к комбинации
хорошо изученных специальных функций — интегралов Фре-
Френеля [16]:
Г cos ^d!;; S(x) = | sin Щ-ui,.
С[х)
В результате получаем окончательную формулу для Интегралы Френе-
спектральной плотности ЛЧМ-сигнала: ля широко исиоль-
зуются в физике
при решении задач
дифракции волн
D.46)
Представив эту спектральную плотность в показатель-
показательной форме:
1/(сй) = |1/(со)|ехр[/Ф(ш)],
можно заметить, что модуль (амплитудный спектр)
!, D47)
в то время как фазовый спектр состоит нз квадратичного
слагаемого
Ф, (to) = -(со - ш„J/Bц) D.48)
н так называемого остаточного фазового члена
D.49)
ЛЧМ-сигналы с большой базой. Численный анализ
полученных выражений свидетельствует о том, что характер
частотной зависимости модуля й фазы спектральной плот-
плотности прямоугольного ЛЧМ-импульса полностью зависит от
безразмерного числа
В = Д/ти = uxi/flTt), D.50) ф
равного произведению девиации частоты на длительность база сигнала
импульса и называемого базой ЛЧМ-сигнала.
В практически важных случаях выполняется условие
S»l. Спектр таких ЛЧМ-сигналов с большой базой имеет
ряд специфических особенностей. Во-первых, модуль спектраль-
спектральной плотности здесь практически постоянен в пределах
полосы частот шириной Дсо с центром в точке too. Соот-
Соответствующие графики, рассчитанные по формулам D.47) н D.49),
представлены на рис 4.10.
Глава 4. Модулированные сигналы
В теоретической
радиотехнике поня-
понятие базы применя-
применяют но отношению к
разнообразным си-
сигналам. При В>1
снгвал называют
сложным, при Вк
я1 —простым
решите задачу 13
Рнс. 4.10. Частотные зависимости модуля н остаточного фазового
члена спектральной плотности прямоугольного ЛЧМ-импульса прн
различных значениях базы сигнала
Во-вторых, наблюдается постепенное нсчезновенне осцил-
осцилляции модуля спектральной плотности с увеличением базы
сигнала. Анализируя формулу D.47), можно убедиться, что
на центральной частоте спектра
D-51)
Таким образом, модуль спектральной плотности ЛЧМ-
сигиала с большой базой
Дш
О, ш < ш0 —,
~~ ' %-. D-52)
Дш
О, ш > ш0 + —х-.
Энергетический спектр такого сигнала
Wu (ш) = тс1/^/Bц) D.53)
также постоянен в полосе частот [ш0 — Дсо/2, е»0 + Да>/2] н
обращается в нуль вне этой полосы
Пример 4.4.- Прямоугольный ЛЧЫ-импульс имеет амплитуду
(Jm = 20 В, несущую частоту fо — 10 ГТц и длительность т„ = 2 мкс.
Девиация частоты за время импульса Д/=0.1 ГТц. Определить
основные параметры спектра такого сигнала.
4.3. Сигналы с внутриимпульснои модуляцией
109
Прежде всего иаходнм базу сигнала В = 108 ¦ 2 -10. 6 = 200. Ско-
Скорость нарастания частоты ц = 2иД//т. = 6.28-10'/B-10~6) = 3.14 х
х 101* с~2. В соответствии с формулой D.53) энергетический спектр
И? = 2-10~12 В2-с2. Поскольку база сигнала велика, его спектр
практически заключен в .пределах полосы частот от /0 — Д//2 =
= 9.95 ГТц до /„ + Д//2 = 10.05 ГГц.
Автокорреляционная функция ЛЧМ-сигнала. Для нахожде-
нахождения этой характеристики, столь важной при решении задач
обнаружения сигнала, целесообразно воспользоваться резуль-
результатами, полученными в гл. 3, где было показано, что связь
между АКФ н энергетическим спектром сигнала устанавлива-
устанавливается парой интегральных преобразований Фурье.
Пусть база ЛЧМ-сигнала достаточно велика, так что
энергетический спектр этого сигнала равномерен и сосредо-
сосредоточен лишь в полосе частот Дсо вокруг несущей частоты.
Тогда автокорреляционная функция ЛЧМ-ситнала [см. фор-
формулу D.53)]:
Вп'
cos сот dra =
co0x.
D.54)
График нормированной автокорреляционной функции
'¦лчмМ = ?лчм(т)/Влчм@) изображен на рис. 4.11. Здесь же
представлена огибающая этой функции, имеющая лепест-
лепестковую структуру.
Формула D.54) устанавливает следующее свойство ЛЧМ-
сигнала: ширина главного лепестка огибающей АКФ обратно
пропорциональна девиации частоты импульса'. Действительно,
огибающая первый раз обращается в нуль при сдвиге сигнала
относительно его копии на интервал времени т = 27г/(цт„) =
= 1/А/ Применяемые в радиолокации ЛЧМ-сигналы характе-
характеризуются значительной девиацией частоты, поэтому главный
лепесток АКФ получается весьма узким. Например, для сиг-
сигнала, изученного в примере 4.4, сдвиг, обращающий в нуль
ощая
1/Д/ 2/V
С точки зрения
уровня боковых ле-
нестков автокор-
реляционион функ-
функции ЛЧМ-снгнал
существенно усту-
уступает сигналам Бар-
кера при Л/ = 13
Рис. 4.11. Корреляционные характеристики ЛЧМ-сигнала:
в — нормированная АКФ; б— огибающая нормнрояалной АКФ
110 Глава 4. Модулированные сигналы
огибающую АКФ, составит всего 0.01 мкс, или 0.5 % от дли-
длительности импульса.
Однако с точки зрения корреляционных свойств ЛЧМ-
сигналам присущ известный недостаток: высота двух первых
симметричных боковых лепестков АКФ достаточно велика,
составляя 0.212 от высоты центрального лепестка. В небла-
неблагоприятных условиях (значительный уровень шумов) это
может привести к ошибочному определению временного
положения импульса.
Результаты
ОО Процесс модуляции связан с переносом спектра сигнала из области низких
в область высоких частот.
^^ При амплитудной модуляции (AM) огибающая сигнала связана с мгновенным
значением низкочастотного модулирующего колебания.
<^><^> Спектр АЫ-сигнала образуется несущим колебанием и двумя симметричными
группами боковых колебаний.
<^><^> Полоса частот, необходимая для передачи АЫ-сигнала, равна удвоенному
значению наивысшей частоты в спектре модулирующего колебания.
<^><^> Возможна балансная амплитудная модуляция с подавленным несущим коле-
колебанием, а также модуляция с одной боковой полосой частот.
ОО При угловой модуляции передаваемое сообщение определяет изменение во вре-
времени фазового угла несущего колебания. Различают частотную (ЧМ) и фа-
фазовую (ФМ) модуляцию.
^^ Основной параметр модулированных ЧМ- и ФМ-сигналов — индекс угловой
модуляции, равный девиации фазы.
ОС> Теоретически ширина спектра сигнала с угловой модуляцией неограниченно
велика.
ОО При малых индексах модуляции ширина спектра ЧМ (ФМ)-сигнала практи-
практически равна удвоенной верхней частоте модуляции.
^^ При больших индексах модуляции полоса частот, занимаемая сигналом,
составляет удвоенное значение девиации частоты.
^^ Сигналы с линейной частотной модуляцией (ЛЧМ) имеют практически равно-
равномерный спектр в пределах ограниченной полосы частот, если база сигнала
достаточно велика.
ОО Автокорреляционная функция ЛЧМ-сигнала имеет лепестковую структуру;
ширина главного лепестка уменьшается с ростом девиации частоты.
Вопросы
1. Какими параметрами принято харак- 6. Чем принципиально отличаются осцил-
теризовать глубину амплитудной модуляции? лограммы сигналов с балансной амплитудной
2. Какова причина искажений сообщения, модуляцией н обычных АМ-сигвалов?
наблюдаемых прн перемодуляции? 7. Почему непосредственная демодуляция
3. От чего зависит распределение мощ- ОБП-снгнала приводит к искажению переда-
иости в спектре однотональиого АМ-сигнала? ваемого сообщения?
4. В каком соотношении обычно иахо- 8. В чем заключаются сходства и разли-
дятся между собой частоты несущего н чия между сигналами с частотной н фазовой
модулирующего колебаний? модуляцией?
5. Каков принцип построения векторной 9. Как связаны между собой частота мо-
дмграммы однотонального АМ-сигнала? дуладяи, индекс в девиация частоты?
Ill
10. Каков спектральный состав ЧМ- н
ФМ-сигналов при малых индексах модуля-
модуляции?
11. В чем различие между спектрами АМ-
н ЧМ-снгналов с малым индексом модуля-
модуляции?
12. Почему полоса частот, занимаемая
сигналом с угловой модуляпией, практически
ограничена?
13. Как следует выбирать индекс угловой
модуляции, чтобы в спектре сигнала отсут-
отсутствовало несущее колебание?
Задачи
1. Амплнтудно-модулнрованное колеба-
колебание описывается формулой u{t)= 130[1 +0.25 х
х cos (Ю2г + 30°) + 0.75 cos C ¦ l02f + 45°)] x
х cos A0sr + 60°).
Изобразите спектральную диаграмму этого
сигнала, вычислив амплитуды н начальные
фазы всех спектральных составляющих.
2. Постройте векторную диаграмму сиг-
сигнала, рассмотренного в задаче 1. Построе-
Построение выполните для момента времени t = 0.
3. На экране осциллографа получено
изображение однотонального АМ-сигнала;
Предложите способ экспериментального оп-
ределення коэффициента модуляции М по
осциллограмме.
Указание. Обратите внимание на
мгновенные значения амплитуды сигнала в
экстремальных точках.
4. По спектральной диаграмме АМ-снг-
нала
45°
т
вычислите начальные фазы каждой из состав-
составляющих модулирующего колебания.
14. Чем характеризуются спектры ЧМ-
н ФМ-снгналов при негармоническом моду-
модулирующем колебании?
15. На каком физическом принципе осно-
основано сжатие ЛЧМ-нмпульса во времени?
16. Каким образом вводится понятие
базы ЛЧМ-снгиала?
17. Как выглядит график автокорреля-
автокорреляционной функции ЛЧМ-сигнала с прямо-
прямоугольной формой огибающей?
18. Почему ЛЧМ-сигнал несовершенен с
точки зрения структуры его АКФ?
5. Амплитудно-модулированный ток (А)
i(t) - 200A + 0.8cosD- 103f))cos6- 10бГ
проходит по резнстивной нагрузке сопро-
сопротивлением 75 Ом. Определите: а) пиковую
мощность источника; 6) среднюю мощность
в нагрузке; в) относительную долю мощ-
мощности, сосредоточенной в несущем коле-
колебании.
6. ЧМ-сигнал с амплитудой 2.7 В имеет
мгновенную частоту, изменяющуюся во вре-
времени по закону
ю(г)= 109A + 10-*cosB-103i)).
Найдите индекс модуляции н запишите ма-
математическую модель этого сигнала.
7. Определите индекс модуляции ЧМ-сиг-
нала, промодулнрованного низкой частотой
F = 7 кГц. Несущая частота /0 = 180 МГц,
максимальное значение частоты /„„„ =
= 182.5 МГц.
8. Изобразите спектральную и векторную
диаграммы сигнала с угловой модуляцией,
если несущая частота равна 45 МГц, де-
девиация частоты 0.3 кГц, а частота моду-
ляцнн 4.5 кГц.
9. Однотональный ФМ-сигнал имеет час-
частоту модуляции О = 10* с. • При какой
девнацнн частоты в спектре этого сигнала
будут отсутствовать составляющие на час-
готах ю0 ± Й?
10. Постройте спектральную диаграмму
ЧМ-сигнала с амплитудой 35 В и индексом
т = 3.
11. Амплитуда ЧМ-сигнала передатчика
в отсутствие модулирующего колебания
равна 250 В. Измерения показали, что при
подаче однотонального модулирующего ко-
колебания амплитуда составляющей на несущей
частоте становится равной 244 В. Определите
индекс частотной модуляции. Можно ли
полагать, что в описываемых условиях реа-
реализована узкополосная ЧМ?
112
Глава 4. Модулированные сигналы
12. Радиовещательная станция с фазовой
модуляцией имеет предельное значение ин-
индекса модуляции (прн наиболее громком
передаваемом сигнале), равное 30. Полагая,
что спектр низкочастотного модулирующего
сигнала ограничен верхней частотой 16 кГц,
определите число радиоканалов, которое
можно без перекрестных помех разместить в
УКВ-диапазоне (на частотах от 30 до
300 МГц).
Более сложные задания
14. Исследуйте эффект влияния неодина-
неодинаковых амплитуд верхнего и нижнего боковых
колебаний на характер огибающей АМ-сиг-
нала. Рассмотрите однотональный сигнал со
спектральной диаграммой вида
L
1
полагая, что коэффициент к Ф 1.
15. Проанализируйте, как сказывается на
огибающей АМ-сигнала неточное соблюде-
соблюдение условий, накладываемых на частоты
верхних и нижних боковых составляющих.
Амплитуды обонх боковых колебаний поло-
положите равными друг другу. Рассмотрите слу-
13. ЛЧМ-сигнал с огибающей прямо-
прямоугольной формы имеет амплитуду Vm = 10 В,
длительность ти = 15 мкс и девиацию часто-
частоты за время импульса Д/= 40 МГц. Опреде-
Определите: 1) базу сигнала; 2) величину квадра-
квадратичного слагаемого фазового спектра на гра-
границе полосы частот, занимаемой сигналом:
3) энергетический спектр сигнала.
чай однотонального сигнала, у которого
нижняя боковая частота о>нБ = ю0 — И, в то
время как верхняя боковая частота швб =
= ю0 + Й + 6, где 6«fi
16. Проведите спектральный анализ оги-
огибающей одиотонального ОБП-сигнала, пред-
представляемой выражением D.18). Предложите
численную оценку степени искажения оги-
огибающей такого сигнала.
17. Полная фаза ЧМ-сигнала с двухто-
двухтональной модуляпией нзменяется во времени
по закону
^ (f) = 2я ¦ 108f + 0.12 sin Bтг -10*0 +
+ 0.08 sin Dя-10*г).
Амплитуде смодулированной несущей Vn =
=75 В. На сколько изменится амплитуда не-
несущего колебания после включения модули-
руюшнх сигналов?
Глава 5
Сигналы
с ограниченным спектром
Как известно (см. гл. 2), для восстановления сигнала по его
спектру необходимо учитывать все составляющие с часто-
частотами, лежащими в интервале от нуля до бесконечности.
Однако с физической точки зрения такая процедура принци-
принципиально неосуществима К тому же вклад спектральных
составляющих при со -> оо пренебрежимо мал в силу огра-
ограниченности энергии сигналов. Наконец, любое реальное
устройство, предназначенное для передачи н обработки сиг-
сигналов, имеет конечную ширину полосы пропускания.
Поэтому вполне реалистичной представляется математи-
математическая модель сигнала, имеющая такое свойство: спектраль-
спектральная плотность колебания отлична от нуля лишь в пределах
некоторой полосы частот конечной протяженности. В радио-
радиотехнике подобный сигнал называют сигналом с ограничен-
ограниченным спектром.
5.1. Некоторые математические модели сигналов
с ограниченным спектром
Пусть R — конечный отрезок осн частот. Спектральная
плотность сигнала s(() с ограниченным спектром удовле-
удовлетворяет условиям S (со) ф 0 при to e R, S (со) = О при всех других
значениях частоты.
Математическую модель сигнала с ограниченным спект-
спектром во временной области можно Получить нз формулы
обратного преобразования Фурье:
s(f) =
1
E.1)
В зависимости от выбора отрезка R и функции S(co) воз-
возникают самые разнообразные виды сигналов с ограниченным
спектром. Изучим некоторые простейшие примеры.
Идеальный низкочастотный сигнал. Рассмотрим колебание
с постоянной вещественной спектральной плотностью в пре-
пределах отрезка оси частот от нуля до верхней граничной
частоты со,; вне этого отрезка спектральная плотность сиг-
сигнала обращается в нуль:
( О, со<
S(co) = < So, -ci
(.0, со>
со< -со,,
со, < со < со,,
>С0,-
Мгновенные значения такого сигнала
E.2)
s(t).
2я
} e*»dco = -
sinti).t
К
\
S
Sc
CO,t
(S 3) идеальный низко-
низкочастотный сигмы,.
Глава 5. Сигналы с ограниченным спектром
решите задачу 1
Предполагается,
что частотная ха-
рактеристнкаФНЧ
достаточно точно
аппроксимируется
функцией прямоу-
прямоугольной формы с
заданным значени-
значением верхней гранич-
граничной частоты
Будем называть такое колебание идеальным низкочастот-
низкочастотным сигналом (ИНС), подчеркивая этим простейший вид его
спектра по сравнению со спектрами других возможных
сигналов подобного рода.
График ИНС, построенный по формуле E.3), имеет вид
осциллирующей кривой, четной относительно начала отсчета
времени. С увеличением верхней граничной частоты спектра
возрастают как центральный максимум, так и частота
осцилляции.
ИНС более общего вида получается, если в формулу
E.2) ввести фазу спектральной плотности, линейно завися-
зависящую от частоты:
" О, (О < —сов,
j-ytttf^ —щ^ ^ о) ^ сов, E-4)
. О, со>сов.
Спектральной плотности E.4) соответствует низкочастот-
низкочастотный сигнал
SquJb sin toB (f — (о)
s
идеальный полосо-
полосовой сигнал
"™ * o>,(t-(o) !
смещенный во времени относительно сигнала E.3) на f0
секунд.
ИНС является идеализированной выходной реакцией
фильтра нижних частот (ФНЧ), возбуждаемого колебанием с
равномерной по частоте спектральной плотностью, т. е.
дельта-импульсом.
Идеальный полосовой сигнал. Исследуем математическую
модель сигнала, спектр которого ограничен полосами частот
шириной 2Д(о каждая с центрами на частотах ±соо. Если в
пределах этих полос спектральная плотность сигнала по-
постоянна:
.
—соо — Дсо < ю < — ф0 + До),
(о0 — Дсо < ю < ю0 + Дсо,
вне указанных полос,
E.5)
то по аналогии с предыдущим данный сигнал будем назы-
называть идеальным полосовым сигналом (ИПС).
Мгновенные значения ИПС найдем, используя обратное
преобразование Фурье:
) = — f cos of dco =
2S0A(i> sin До»
я До)Г
COSCOof.
E.6)
Строя график ИПС, обнаруживаем, что здесь наряду с
высокочастотными осцилллшями на частоте о)О наблюдается
изменение во времени мгновенного значения их амплитуды.
Функция sin (ДгоОДЛох) с точностью до масштабного коэф-
коэффициента 2SoAo)/ji играет роль медленной огибающей ИПС
5.1 Модели сигналов с ограниченным спектром 1
Теоретически возможный способ получения ИПС очеви- А
дсп: на вход идеального полосового фильтра, пропускающе- решите задачу 2
го лишь колебания с частотами в пределах полосы
[ю0 — Дю, ю0 + Ato], должно быть подано широкополосное
воздействие вида дельта-импульса.
Ортогональные сигналы с ограниченным спектром. Свой-
Свойство ограниченности спектра позволяет находить интересные
и важные классы ортогональных сигналов. Простейший при-
пример — два ортогональных полосовых сигнала, области суще-
существования спектра которых не пересекаются. Равенство нулю
скалярного произведения этих сигналов непосредственно сле-
следует из обобщенной формулы Рэлея. щ
Менее очевидный способ ортогонализацни сигналов с огра- Ц
ничейным спектром заключается в их временном сдвиге. Р
Рассмотрим два идеальных низкочастотных сигнала ы(г) и Ц
u(f). Оба этн сигнала имеют одинаковые параметры So *
и о,, [см. формулу E.2)], однако сигнал u(f) запаздывает по
отношению к сигналу u (f) на время f0, так что его спектраль-
спектральная плотность F(o)).= [/(со)ехр(—¦Jcat0).
Скалкрное произведение этих сигналов, вычисленное через Д
спектральные плотности, lj\
co,fo
E.7)
Скалярное произведение обращается в нуль и два одина-
одинаковых по форме ИНС оказываются ортогональными, если
временной сдвиг между ними удовлетворяет условию
шА=**я (*=±1, ±2, ...).
Минимально возможный сдвиг, приводящий к ортогона-
лизации, получается при к = ± 1:
E.8)
Принципиально важно, что удалось не просто добиться
ортогональности двух сигналов. Указан путь построения бес-
бесконечного ортогонального базиса, который может служить
координатной системой для разложения произвольного сиг-
сигнала со спектром, ограниченным частотой ю„.
Графики рассматриваемых сигналов при двух значениях
параметра Го изображены на рис. 5.1, а, б.
Рис. 5.1. Графиж двух ддеальных низкочастотных сигналов:
о - при г„ - it/»,; 6 - при >о - 2я/т.
В момент времени,
когда один из сиг-
сигналов достигает
максимума, другие
сигналы из данно-
данного семейства про-
проходит через нуль
Глава 5. Сигналы с ограниченным спектром
Владимир
Александрович
Котельников —
академик, пзвест-
ный советский уче-
ученый в области ра-
радиотехники н ра-
днофизнкн
базис
Котельникова
5.2. Теорема Котельникова
В 1933 г. В. А. Котельников доказал теорему, которая
является одним из фундаментальных положений теоретиче-
теоретической радиотехники. Эта теорема устанавливает возможность
сколь угодно точного восстановления мгновенных значений
сигнала с ограниченным спектром исходя из отсчетных
значений (выборок), взятых через равные промежутки времени.
Построение ортонормнровакного базиса. Как было показано,
любые два сигнала с ограниченным спектром, принадлежа-
принадлежащие семейству'
.. /л_ л 8Шф.(*-*л/шь)
(*=0, ±1, ±2,...),
E.9)
решите задачу 4
являются ортогональными. Путем соответствующего выбора
амплитудного множителя А можно добиться того, чтобы
норма каждого из этих сигналов стала единичной. В резуль-
результате будет построен ортонормированнын базис, позволяю-
позволяющий разложить произвольный сигнал с ограниченным спект-
спектром в обобщенный ряд Фурье.
Достаточно рассмотреть лишь функцию
ц.И-^-^У., E.10)
так как норма любого сигнала щ одинакова независимо от
сдвига во времени. Поскольку
E.11)
E.12)
E.13)
образует базис Котельникова в линейном пространстве низко-
низкочастотных сигналов со спектрами, ограниченными сверху зна-
значением сов. Отдельная функция Sck (t; ©а) называется fc-й
отсчетной функцией.
Ряд Котельникова. Если s (f) — произвольный сигнал, спек-
спектральная плотность которого отлична от нуля лишь в полосе
частот -ю, < и < (|)ю то его можно разложить в обобщенный
ряд Фурье по базису Котельникова:
в). E-14)
Коэффициентами ряда служат, как известно, скалярные
произведения разлагаемого сигнала и fc-й отсчетиоЙ функции:
с* = (s(t),ScA (*;<¦>„)). E.15)
ю,
функции ид будут ортонормированными, если
А = ]/кф.
Бесконечная совокупность функций
5.2. Теорема Котелышкова
Удобный способ вычисления этих коэффициентов заклю-
заключается в применении обобщенной формулы Рэлея. Легко
проверить, что к-я отсчетная функция в- пределах отрезка
—сов < о) < сов имеет спектральную плотность, равную
|/я/ювехр(—jcdfot/юД Это видно из сравнения формул E.3)
и E.13). Тогда, если S (to) — спектр изучаемого сигнала s(t), то
7Г1зГ J S(o>)exp[/fai(i)/o>Jdra;
f
E.16)
Величина в фигурных скобках есть не что иное, как s* —
= s (ffc), т. е. мгновенное значение сигнала s (t) в Jt-й отсчетной
точке tk = kn/ia, = */B/J.
Таким образом,
ck = \/^,sK, E.17)
откуда следует выражение ряда Котелышкова:
E.18)
Теорему Котельникова на основании последнего равен-
ства принято формулировать так: произвольный сигнал, спектр
которого не содержит частот выше fB, Гц, может быть
полностью восстановлен, если известны отсчетные значения
этого сигнала, взятые через равные промежутки времени
1/B/,) с
формулировка
теоремы
Котелышкова
Пример 5.1. Дан сигнал s (t) = cos (шо( + <р0).
Выбрав некоторый фиксированный интервал между отсчетами t0,
получаем возможность однозначно восстановить по отсчетам любой
сигнал, спектр 'которого ие содержит составляющих на частотах
выше граничной частоты оо„ = n/t0.
Если cuq < сов, то к рассматриваемому гармоническому сигналу
применима теорема Котельникова; отсчетные значения (выборки)
данного сигнала
Однозначное вос-
восстановление сигна-
сигнала возможно
В предельном
слева, *т. е.
случае, когда частота
стремится к со„
на каждый период гармонического сигнала должно приходиться
ровно две выборки.
Если же условия теоремы Котельннкова нарушаются н отсчеты
во времени берутся недостаточно часто, то однозначное восстановлен-
ние исходного сигнала принципиально невозможно. Через отсчетные
точки можно провести бесчисленное множество кривых, спектраль-
спектральные ПЛОТНОСТИ ЖОТОрЫХ ОТЛИЧНЫ ОТ НУЛЯ Вне ПОЛОСЫ -СОв^Ш^СОв.
Глава 5. Сигналы с ограниченным спектром
Рнс. 5.2. Аппаратурная реализация синтеза сигнала по ряду Котель-
Одиозначное вос-
восстановление сигна-
сигнала невозможно
решите задачу 5'
Аппаратурная реализация синтеза сигнала, представленного
рядом Котельннкова. Важная особенность'теоремы Котельни-
кова состоит в ее конструктивном характере: она не только
указывает на возможность разложения сигнала в соответст-
соответствующий ряд но н определяет способ восстановления непре-
непрерывного сигнала, заданного своими отсчетными значениями
(рис. 5.2).
Пусть имеется совокупность генераторов, создающих на
выходных зажимах отсчетные функции So* (f; сов). Генераторы
являются управляемыми — амплитуда их сигналов пропор-
пропорциональна отсчетным значениям sk. Если объединить колеба-
колебания на выходах, подав их на сумматор, то с выхода
сумматора в соответствии с формулой E.18) можно будет
снимать мгновенные значения синтезируемого сигнала s(t).
Пример 5.2. Прямоугольный видеоимпульс с единичной амплиту-
амплитудой и длительностью ти не принадлежит к числу сигналов с огра-
ограниченным спектром. Тем не менее модуль его спектральной плотности
достаточно быстро (по закону 1/т) уменьшается с ростом частоты.
Описание такого сигнала двумя отсчетами в начале и в конце
импульса будет означать замену исходного колебания сигналом со
спектром, ограниченным сверху частотой оо„ = п/гв. Математическая
модель этого сигнала такова:
s(<)=-
m/t,
E19)
Еспн же опнсать импульс тремя равноотстоящими отсчетами,
то приходим к аппроксимирующему сигналу, содержащему частоты
вплоть до со„ = 2n/tB:
2м
E.20)
Естественно, что с ростом числа учитываемых членов, т. е. с
уменьшением временного интервала между выборками, точность
аппроксимации будет повышаться.
5.2. Теорема Котепьникова
Оценка оинбки, возлагающей при аппроксимации проязволь-
ного отпала родом Котельннкова. Если s(t) — произвольный
сигнал, то его можно представить суммой stf) = Soc(t; к>,) +
+ soul ((), в которую входит сигнал sTC (t; щ^ со спектром,
ограниченным значением сов, а также сигнал ошибки аппрокси-
аппроксимации soaI(f) со спектром, занимающим в обшем случае
бесконечную полосу частот со > юв.
Спектры указанных сигналов не перекрываются, поэтому |S|
сигналы Sec и «„л ортогональны, а их энергии, т. е. квадраты . ^ч' t
норм, складываются: Д
В качестве меры ошибки аппроксимации можно принять
расстояние, равное норме сигнала ошибки. Если И, (со) —
энергетический спектр сигнала s(f), то по теореме Рэлея
A & \1/2
— ( И$(со)с1со) E.21)
71 «, /
Пример 5.3. Дан ¦ экспоненциальный видеоимпульс s(t)
ехр(--at) a (t),характеризующийся энергетическим спектром И^(ш)
^ ев2) и
|| s И = ( — f (a2 + и2)"'dm)" = 0.7071/j/^.
Эффективная длительность этого импульса (см. гл. 2) т„ =
= 2.3026/а.
Спектр рассматриваемого сигнала неограничен. Поэтому следует
предварительно подвергнуть сигнал низкочастотной фильтрации,
пропустив его через фильтр нижних частот (ФНЧ). Значение верх-
верхней частоты сов полосы пропускания фильтра следует выбирать в
зависимости от того, сколь часто берутся отсчеты сигнала на
выходе ФНЧ. Предположим, что за аремя ти измеряются 10 отсче-
тов с интервалом @ = тя/9 = 0.2558/а с. Согласно теореме Котедь1-
ннкова, это означает, что со„ = пДо = 12.279а.
Сигнал с выхода ФНЧ восстанавливается по своим отсчетным
значенням точно. Однако по отношению к исходному видеоимпульсу
неизбежна ошибка. В данном случае норма сигнала ошибки
0.1608
Относительная ошибка аппроксимации
II soni Ц/1! s И = 0.1608/0.7071 = 0.2274.
Видно, что выбранная в примере частота оо„ недостаточно
высока для достижения удовлетворительной точности воспроизве-
высока для достижения
решнте Задачу 6 дения исходного сигнала.
Глава 5. Сигналы с ограниченным спектром
Это положение в
математике дока-
доказывается строго и
в общем виде
Размерность пространства сигналов, ограниченных ио
спектру н но длительности. Примеры-вычисления спектраль-
спектральных плотностей импульсных сигналов, приведенные в гл. 2,
показывают, что любой сигнал конечной длительности тео-
теоретически имеет спектр, неограниченно протяженный по оси
частот.
Однако часто бывает удобным рассматривать идеализи-
идеализированные модели сигналов, ограниченных как по длитель-
длительности, так и по протяженности спектра. Подобные модели
могут достаточно точно описывать сигналы, применяемые
в реальных каналах связи.
Пусть Т— длительность такого сигнала, a /s- гранич-
граничная частота его спектра, выраженная в герцах. Тогдв база
сигнала (см. гл. 4) В ~ Tfv Для полного описания сигнала
нужно иметь в распоряжении N = Т/и, = 27*/„ независимых
отсчетов.
Говорят, что число
размераость про-
пространства сигналов
В теории информа-
информации размерность
пространства сиг-
сигналов служит для
оценки объема со-
сообщений
E.22)
является размерностью пространства сигналов, ограниченных
по длительности и по частоте.
Число N, как правило, достаточно велико. Например, лля
описания сигнала в канале радиовещания с граничной час-
частотой 12 кГц на протяжении 1 мнн потребуется 2>60-1.2-10* =
= 1.44-106 независимых чисел.
В свое время К. Шеннон предложил интерпретировать
любой сигнал с конечными длительностью и полосой как
точку в многомерном евклидовом пространстве с числом
измерений 27^. Отсчетное значение s& служит при этом
проекцией отображающей точки на к-ю координатную ось.
Поскольку метрика пространства евклидова -и координатные
оси взаимно ортогональны, длина вектора сигнала
E.23)
Величину гя можно выразить через энергию сигнала Es
следующим образом. Так как
E.24)
где Pep — средняя мощность сигнала. Отсюдв вытекает, что
любые сигналы с фиксированными параметрами 7; /, и со
средними мощностями, не превышающими уровня Ро, ото-
отображаются точками, лежащими внутри многомерной сферы
радиусом
5.3. Узкополосные сигналы
5.3. Узкополосные сигналы
В этом параграфе изучается особый класс радиотехни-
радиотехнических сигналов с ограниченным спектром, которые возникают
на выходе частотно-избирательных цепей и устройств. По
определению, сигнал называется узкополосным, если его спект-
спектральная плотность отлична от нуля лишь в пределах час-
частотных интервалов шириной П, образующих окрестности
точек ±ю0, причем должно выполняться условие П/ю0 <зс 1-
Как правило, можно считать что частота ю0, называемая
опорной частотой сигнала, совпадает с центральной частотой
спектра. Однако в общем случае выбор ее достаточно
произволен.
Математическая модель узкополосного сигнала. Прямой
путь к формированию математической модели узкополосиого
сигнала состоит в следующем. Известно (см. гл. 7), что если
/j (f) — низкочастотный сигнал, спектр которого сосредоточен
в окрестности нулевой частоты, то колебание st (f) =
~/i(OCOS(°o' ПРН достаточно большом значении соо будет
обладать всеми необходимыми признаками узкополосиого
сигнала, поскольку его спектр окажется сконцентрированным
в малых окрестностях точек ±ю0. Узкополосным будет и
сигнал s2@=/2@sinto0f, отличающийся фазой «быстрого»
сомножителя. Наиболее общую математическую модель
узкополосного сигнала можно получить, составив линейную
комбинацию вида
s @ = As (f) cos coof - В, (f) sin
E.25)
Предполагается,
что ш0 =f= О
опорная частота
Обе входящие сюда функции времени As(t) и Ba(f) явля-
являются низкочастотными в том смысле, что их относительные
изменения за период высокочастотных колебаний Т=2я/ю0
достаточно малы. Функцию Aa(t) принято называть синфаз-
синфазной амплитудой узкополосного сигнала s(t) при заданном
значении опорной частоты со0, а функцию Ва (() — его квадра-
квадратурной амплитудой.
Синфазную и квадратурную амплитуды можно выделить
аппаратурным способом. Действительно, пусть имеется пе-
перемножающее устройство, на одни из входов которого подан
узкополосный сигнал s (f), а на другой — вспомогательное
колебание, изменяющееся во времени по закону coswof. На
выходе перемножнтеля будет получен сигнал
"вых (О = -^s (О cos2 toof — 1/2Ba (f) sin 2o)of =
= 72-4,@ + 72-4.@cos2«ot - 72B,(Osin2(90t. E-26)
Пропустим выходной сигнал перемножнтеля через фильтр
нижних частот (ФНЧ), подавляющий составляющие с часто-
частотами порядка 2о)о. Ясно, что с выхода фильтра будет
поступать низкочастотное колебание, пропорциональное син-
синфазной амплитуде As(t).
Если иа одни из входов перемножителя подать вспомо-
вспомогательное колебание sintoof, то такая система будет выделять
синфазная н квад-
квадратурная амплиту-
амплитуды
S(t)
122
Глава 5. Сигналы с ограниченным спектром
Приставка «квази»
означает «почти»,
«похожие»
комплексная оги-
огибающая
из узкополосного сигнала s(t) его квадратурную амплитуду
Комплексное представление узкополосаых сигнал on. В тео-
теории линейных электрических цепей широко применяется метод
комплексных амплитуд, согласно которому гармоническое
колебание выражается как вещественная или мнимая часть
комплексных функций:
<7m cos (юог + <Ро) = Re (
<7„ sin (coof + <р0)
Не зависящее от времени число U = Umd*° называют комп-
комплексной амплитудой гармонического колебания.
С физической точки зрения узкополосные сигналы пред-
представляют собой квазигармонические колебания. Следует по-
попытаться так обобщить метод комплексных амплитуд, чтобы
иметь возможность в рамках этого метода описывать сиг-
сигналы вида E.25).
Введем комплексную низкочастотную функцию
| J E.27)
называемую комплексной огибающей узкополосного сигнала.
Легко непосредственно проверить, что
s @ = A, (t) cos соог - В, (г) sin wof = Re [Va (г) e**]. E.28)
Таким образом, комплексная огибающая применительно
к узкополосному сигналу играет ту же роль, что и комплекс-
комплексная амплитуда по отношению к простому гармоническому
колебанию. Однако комплексная огибающая в общем случае
зависит от времени — вектор Ua(t) совершает на комплексной
плоскости некоторое движение, изменяясь как по модулю,
так и по направлению. "
Пример 5,4. Узкополосный сигнал s (t) при (< 0 и при (> О
является гармоническим колебанием; в момент времени 1=0
частота сигнала изменяется скачком:
КО,
Ht)-
Uo cos toot,
U0cosmtt. t > 0.
. Взяв в качестве опорной частоты ев0, получим следующее выра-
выражение для комплексной огибающей данного сигнала:
t<0>
Подчеркнем, что выбор опорной частоты обычно диктуется
удобством расчета. Так, например, комплексная огибающая рас-
рассматриваемого сигнала относительно опорной частоты (ш0 + oit)/2
имеет более сложный вид:
<<0,
5.3. Узкополосные сигналы
Физическая огибающая, водная фаза и мгновенная частота.
Формулу E.27), определяющую комплексную огибающую,
можно представить также в показательной форме:
E.29)
Здесь V,(t) — вещественная неотрицательная функция времени, Ранее, при изучении
называемая физической огибающей (часто, для краткости, модулированных
просто огибающей), р,(г) — медленно изменяющаяся во време- сигналов использо-
ни начальная фаза узкополосного сигнала. валось именно это
Величины и„ фа связаны с синфазной и квадратурной понятие огибаю-
амплитудами соотношениями ' Щей
A.(t) = VMcosq>At), E30)
откуда вытекает еще одна полезная форма записи матема-
математической модели узкополосного сигнала: ^
s(t) = lUOcos[co0t + 9,@]. E.31)
Подобно тому как это делалось ранее при изучении
радиосигналов с угловой модуляцией, введем полную фазу
узкополосного колебания tyt (f) = со0г + фя @ и определим
мгновенную частоту сигнала, равную производной по времени
от полной фазы:
решите задачи
10
Л
E.32)
В соответствии с формулой E.31) узкополосный сигнал
общего вида представляет собой сложное колебание, полу-
получающееся при одновременной модуляции несущего гармони-
гармонического сигнала как по амплитуде, так и по фазовому углу.
Свойства физической огибающей узкополосного сигнала.
Используя равенства E.30), выразим физическую огибающую
U,(t) через синфазную и квадратурную амплитуды:
E.зз)
v. w =
Как отмечалось, комплексная огибающая узкополосного
сигнала определяется неоднозначно. Если вместо частоты со0,
входящей в формулу E.28), взять некоторую частоту cob =
= со0 + До, то сигнал s (j) должен быть представлен в виде
s(t) = Re^.We-^e**]
и новое значение комплексной огибающей
&'.W = &.We-J4"'. E.34)
Однако при этом физическая огибающая, являющаяся
модулем комплексной огибающей, останется неизменной, по-
поскольку выражение ехр(—j&m) имеет единичный модуль.
Другое свойство физической огибающей состоит в том, что
в каждый момент времени | s (t) | ^ (/,((). Справедливость
этого утверждения непосредственно вытекает из формулы
E.31). Знак равенства здесь соответствует моментам вре-
времени! когда co.s[G)or + ф,(гI = 1. Но при этом производные
Берется
тическое
корня
арифме-
арифмезначение
Глава 5. Сигналы с ограниченным спектром
сигналы и его огибающей совпадают:
- [со0 + р; (()] V, (г) sin [co0t + 9. @] •
Важность понятия огибающей обусловлена тем, что в
радиотехнике широко используются специальные устройства—
амплитудные детекторы (демодуляторы), способность точно
воспроизводить огибающую узкополосного сигнала.
Свойства мгновенной частоты узкополосного сигнала. Если
комплексная огибающая сигнала представляется вектором,
который вращается иа комплексной плоскости с неизменной
угловой скоростью ?1, т. е. V,(t) = U,{t)exp(±jClt), то в соот-
соответствии с выражением E.32) мгновенная частота узкополос-
иого сигнала постоянна во времени: соа = соо ± П.
Можно утверждать, что подобный сигнал представляет
собой квазигармоническое колебание, промодулированное
только по амплитуде, но не по фазовому углу. В частности,
если одна из амплитуд As или Вя тождественно обраща-
обращается в нуль, то в любой момент времени мгновенная час-
частота со3 = со0.
В общем же случае мгновенная частота изменяется во
времени по закону
E.35)
Физическая огиба-
огибающая действитель-
ио «огибает» узко-
узкополосный сигнал в
имеет смысл мгно-
мгновенной амплитуды
такого колебания
Связь между спектрами сигнала и его комплексной оги-
огибающей. Пусть Cs (со) — спектральная плотность комплексной
огибающей узкополосного сигнала s (tX который, в свою оче-
очередь, имеет спектральную плотность 5 (со). Нетрудно видеть,
что
S (со)
Re [U,
е-»1 dt =
= у Gs(co - ©о) + у G*(-co - сво).
E.36)
Таким образом, спектральная • плотность узкополосного
сигнала может быть найдена путем переноса спектра комп-
комплексной огибающей из окрестности нулевой частоты в окрест-
окрестности точек ±со0- Амплитуды всех спектральных составляю-
составляющих сокращаются вдаое; для получения спектра в области
отрицательных частот используется операция комплексного
сопряжения.
Формула E.36) полезна тем, что по известному спектру
узкополосного сигнала позволяет найти спектр его комплекс-
комплексной огибающей, которая, в свою очередь, определяет физи-
физическую огибающую и мгновенную частоту сигнала.
5.4. Аналитический сигнал и преобразование Гильберта
Пример 5.5' Узкополосный вещественный сигнал $(t) имеет при
со > 0 спектральную плотность, несимметричную относительно час-
частоты do'.
О < со < coo,
На основании формулы E.36) спектральная плотность комплекс-
комплексной огибающей
О, со < О,
Используя обратное преобразование Фурье, находим комцлекс-
ную огибающую
2%S
Синфазную и квадратурную амплитуды исследуемого сигнала
найдем, выделив вещественную н мнимую части:
Физическая огибающая рассматриваемого сигнала
Hi)"
имеет наибольшее значение, равное coq + 1/Ь, в момент времени
t = 0.
Осциллограмма колебания s(r) представляет собой симметрич-
симметричный радиоимлульс с ие постоянной во времени частотой запол-
заполнения.
5.4. Аналитический сигнал и преобразование
' Гильберта
Ниже будет описан еше один способ комплексного пред-
представления сигналов, часто применяемый в теоретических
исследованиях. Замечательная особенность данного способа
состоит в том, что он позволяет вводить понятия огибаю-
огибающей и мгновенной частоты сигнала без той степени неопре-
неопределенности, которая свойственна методу комплексной оги-
огибающей.
Аналитический сигнал. Формула Эйлера
cos cot = 7г (е** + е~*"),
представляющая гармоническое колебание в виде суммы даух
комплексно-сопряженных функций, наводит на мысль о том,
что произвольный сигнал s (г) с известной спектральной плот-
плотностью 5 (со) можно записать как сумму двух составляющих,
Глава 5. Сигналы с ограниченным спектром
Иногда говорят, каждая из которых содержит или только положительные, или
что формула E.37) только отрицательные частоты:
осуществляет про- j «> ^""
иедуру разделения s{t) = ~ J
= ~ f S(co)e*"dc» + ~J
E.37)
Назовем функцию
(t)^~]s (to)
E.38)
аналитическим сигналом, отвечающим вещественному коле-
колебанию s(I). /
Первый из интегралов в правой части формулы E.37)
путем замены переменной 1, = —ю преобразуется к виду
Поэтому формула E.37) устанавливает связь между сигна~
лами s(t) и z,(t): s(I) = '/г[г.@ + *?(<)].
или
s(t) = Re^(t). E.39)
Мнимая часть аналитического сигнала
# s(t) = Imz,(t) E.40)
СОПрвикенный сиг- называется сопряженным сигналом по отношению к исход-
нал иому колебанию s(() Итак, аналитический сигнал
E.41)
иа комплексной плоскости отображается вектором, модуль и
фазовый угол которого изменяются во времени. Проекция
аналитического сигнала иа вещественную ось в любой мо-
момент времени равна исходному сигналу s(c).
Введение аналитического и сопряженного сигналов, без-
безусловно, ие позволяет подучить каких-либо новых сведений,
которые не содержались бы в математической модели сигнала
s(t). Однако эти новые понятия открывают прямой путь
к созданию систематических методов исследования узкополос-
иых колебаний.
На конкретном примере покажем способ вычисления
аналитпческого сигнала но известному спектру исходного
сигнала. . •¦ ;
5.4. Аналитический сигнал и преобразование Гильберта
Пример 5.6. Пусть s (г) — идеальный низкочастотный сигнал с
известными параметрами Sc иш, (см. § 5.1).
В этом случае аналитический сигнал
z,(t) = ^М
" dco
- 1).
Выделяя вещественную и мнимую части, получаем
s(t) = -^-sm(cy)/((V) (результат, известный ранее),
Графики этих двух сигналов приведены на рис. 63.
1
Отметим, что со-
сопряженный сигнал
обращается в нуль
в точке, где исход-
исходный сигнал дости-
достигает максимума'
Рис. 5.3. Исходный и сопряженный сигналы:
1 - идеальный низкочастотный сигнал; 2 - сопряженный с ним сигв
Спектральиая плотность аналитического сигнала. Исследуем
спектральную плотность аналитического сигнала, т. е. функ-
функцию Zs(co), связанную с 2ж(с)-преобразованием Фурье:
Z,(to) = J z,(t)e-*"dt.
На основанни формулы C.38) можно утверждать, что эта
функция отлична от нуля лишь в области положительных
частот:
Z,(ffl) =
co<O,
2S(co), co;sO.
E.42)
Если S (со) — спектральиая плотность сопряженного сигна-
сигнала, то в силу линейности преобразования Фурье
!(m). , (S.43)
решите
¦ 13
12
Глава 5. Сигналы с ограниченным спектром
Поэтому равенство E.42) будет выполняться только в слу-
случае, когда спектральные плотности исходного и сопряженно-
сопряженного сигналов связаны между собой следующим образом:
S(to)=-7sgn(to)S(to) = {_^^' "<"• E.44)
Умножением на эк-
экспоненциальный
множитель обеспе-
обеспечиваем абсолют-
абсолютную интегрируе-
мостьфункции н су-
существование обрат-
обратного преобразова-
преобразований Фурье
Абстрактно можно представить себе такой способ полу-
получения сопряженного сигнала: исходное колебание s(t) подается
на вход некоторой системы, которая осуществляет поворот
фаз всех спектральных составляющих иа угол —§0° в области
положительных частот и иа угол 90е в области отрицатель-
отрицательных частот, не изменяя их по амплитуде. Систему, обла-
обладающую подобными свойствами, называют квадратурным
фильтром.
Преобразование Гильберта. Формула E.44) показывает, что
спектральная плотность сопряженного сигнала есть произве-
произведение спектра S(o) исходного сигнала и функции —jsgn(to).\
Поэтому сопряженный сигнал представляет собой свертку
даух функций: s(r) и /(г), которая является обратным пре-
преобразованием Фурье по отношению к функции —j'sgn(to).
Для удобства вычислений представим эту функцию в виде
предела: >
-J *п (о) = lim [ -j sgn (to) exp ( - e | to I)].
Тогда
4- f e(<+
•dtol=l
Таким образом, сопряженный сигнал связан с исходным
сигналом соотношением
E.45)
Можно поступить и по-инему, выразив сигнал s(t) через
s(t), который полагается известным Для этого достаточно
заметить, что из E.44) вытекает следующая связь между4
спектральными плотностями:
S(co)=jsgH(co)S(to).
Поэтому соответствующая формула будет отличаться от
E.45) лишь знаком:
E.46)
Формулы E.45) и E.46) известны в математике под назва-
названием прямого и обратного преобразований Гильберта. Симво-
5.4. Аналитический сигнал и преобразование Гильберта
л ячеек а я запись их такова: ^
H[s(t)]; s(f) = H[s(t)]-
E.47)
Поскольку функция l/(t — т), называемая ядром этих пре-
преобразований, имеет разрыв при т = t, интегралы E.45) и E,46)
следует понимать в смысле главного значения. Например:
решите задачи 14
Некоторые свойства преобразований Гильберта. Простейшее
свойство этнх интегральных преобразований — их линейность:
Н [аЛ (t) + a2s2 (t)] = «iH [Sl (t)] + a2H [s2 (t)] /"
при любых постоянных #1 и а2, в чем можно убедиться
непосредственно. ' ' ^
Ядро преобразования Гильберта есть нечетная функций
аргумента т относительно точки x = t, а, значит, сигнал, со-
сопряженный к константе, тождественно равен нулю:
H[conSt]=|
Важное свойство преобразования Гильберта состоит в сле-
следующем: если при каком-либо t исходный сигнал s(t) дости-
достигает экстремума (максимума или минимума), то в окрест-
окрестности этой точки сопряженный сигнал проходит через нуль.
Чтобы убедиться в этом, нужно иа одном чертеже совмес-
совместить графики s (т) и ядра l/(f — т). Пусть значение t близко
к тому х, при котором функция -s(t) экстремальна. По-
Поскольку сигнал является здесь четной функцией, а ядро нечет-
нечетной, будет наблюдаться компенсация площадей фигур, огра-
ограниченных горизонтальной осью и кривой, которая описывает
подынтегральную функцию преобразования Гильберта. Образ-
Образно говоря, если исходный сигнал изменяется во времени
«подобно косинусу», то сопряженный с иим сигнал будет
изменяться «подобно синусу».
Отметим, что преобразования Гильберта имеют нелокаль-
нелокальный характер: подаедение сопряженного сигнала в окрест-
окрестности какой-либо точки зависит от свойств исходного сиг-
сигнала иа всей оси времени, хотя наибольший вклад дает,
конечно, достаточно близкая окрестность рассматриваемой
точки.
Преобразования Гильберта для гармонических сигналов.
Вычислим сигналы, сопряженные с гармоническими колеба-,
ниями cosGrt и sinraf. Результаты можно получить ие-
яоередственно из формулы E.45). Однако проще поступить
таким образом. Пусть некоторый произвольный сигнал s(t)
задан своим Фурье-представлением:
нелокальный ха-
характер преобразо-
преобразований Гильберта
Глава 5. Сигналы с ограниченным спектром
E.48)
Здесь функция j "?¦
exp(/cot) представ- s(()=^— S(a>)[coso>r+.;sin<»r]dco.
лена но формуле J
Эйлера
На основании соотношения E.44) * находим аналогичное
представление сопряженного сигнала:
If '
s (г) = ^— —j sgn (ю) S (ю) [cos tot +,/ sin юг] dto =
решнте задачу 16
2тГ sEn(<B)s(<B)[sin<»r-.7Cos<or]dco.
Рассматривая формулы E.48) и E.49) совместно, находим
следующие законы преобразования Гильберта:
Н [cos юг] = sgn (o>) sin юг;
Н [sin юг] = — sgn (ю) cos юс.
Преобразование Гильберта для ужополосного сигнал*.
Пусть известна функция G,(o) — спектральная плотность
комплексной огибающей узкополосного сигнала s (г) с опорной
частотой со0. Согласно формуле E.36), спектр данного сигнала
S(to)=^«,(ffl-fflo) + 4<??(-ffl-0)o)- E.51)
Первое слагаемое в правой части соответствует области
частот со > 0, второе — ю < 0. Тогда иа основании формулы
E.44) спектр сопряженного сигнала
S(to)
-т -со„)е*,
E.52)
откуда видно, что спектральная плотность комплексной оги-
огибающей сопряженного сигнала
E53)
Итак, сопряженный сигнал в данном случае также явля-
егся узкополосным. Если комплексная огибающая исходного
сигнала
то в соответствии с равенством E.53) комплексная оги-
огибающая сопряженного сигнала
0,т- -jV.it) = B,(t)-jA,(t)
отличается от комплексной огибающей исходного колебания
лишь наличием постоянного фазового сдвига иа 90° в сторону
запаздывания.
Отсюда следует, что узкополосному сигналу
s (I) = Аж (t) cos to0r — В, j@ sin to0r E.54)
5.4. Аналитический сигнал и преобразование Гильберта
131
соответствует сопряженный по Гильберту сигнал
s (г) = В. (г) cos co0t + A. (г) sin to0t.
Вычисление огибающей, полной фазы н мгновенной
E.55)
В рамках метода преобразований Гильберта on
UK(t) произвольного сигнала s(r) определяется как модуль
соответствующего аналитического сигнала:
E.56)
Целесообразность такого определения можно проверить
иа примере узкополосного сигнала. Используя формулы E.54)
и E.55), находим, что огибающая такого сигнала
Согласно методу
преобразований
Гильберта,, огиба-
огибающая и мгновенная
частоты сигнала
жестко связаны .
друг с другом и
их нельзя выбирать
произвольно
В § 5.3 данная формула была получена из других сообра-
соображений. '
По определению, полная фаза любого сигнала s(f) равна
аргументу аналитического сигнала z,(t):
|i]/,(t) = argz,(f) = arctg^-. •% f5-57) Однако в случае
[_* [ s@ произвольного сиг-
Наконец, мгновенная частота ю,(г) сигнала есть произвол- нала нельзя требо-
ная полной фазы по времени: ватт», чтобы оги-
бающая и мгновен-
E.58) ная частота обла-
обладали наглядным
Рассмотрим примеры, иллюстрирующие вычисление ука- физическим смыс-
смысзанных характеристик узкополосных сигналов.
лом
Пример 5.7. Дано простое гармоническое колебание s (f) =
= Vo cos со0г.
В этом случае сопряженный сигнал S(t) = Uo smco0(. Огибающая
исходного сигнала
Скорость измене-
изменении фазы
малыш
естественно, не зависит от времени и равна его амплитуде.
Полная фаза tys(t) = etot н, наконец, мгновенная частота щ = га0.
Данный пример показывает, что определение огибающей, пол-
полной фазы и мгновенной частоты через преобразование Гильберта
приводит к результатам, согласующимся с обычными представле-
представлениями о свойствах гармонических колебаний.
Пример 5.8. Колебание s(t) является суммой двух гармоничес-
гармонических составляющих с различными амплитудами и частотами: s(t) =
= Ut COS СО,* + U2 COS 0>2*.
Поскольку
s(t) = Ut since,* + U2 sincV,
огибающая такого сигнала изменяется во времени по закону
Ua = j/t/J +UI+ 2G, U2 cos (юг - со,) t.
Полная фаза сигнала
i smco,f + U2 s
arctg
Ui cos cotr + U2 cos co2f *
Глава 5. Сигналы с ограниченным спектром
Для вычисления мгновенной частоты следует воспользоваться
формулой E.58), которая приводит к следующему результату:
ю1G?-Ью2G| + 17,1/2@I+Фа) cos (iOa-caJf
Ю" } ~ V\ + Ul+ 2G, U2 cos (Юг - со,) Г
Мгновенная частота изменяется во времени. Это связано с теу,
что в данном случае фаза результврующего вектора, отображаю-
отображающего сумму двух гармонических колебаний, изменяется с различной
скоростью в зависимости от того, как ориентированы по отноше-
отношению друг к другу векторы слагаемых.
Пример 5-9. Рассмотрим идеальный полосовой сигнал s (r), спектр
которого при ю > О отличен от нуля лишь на отрезке Ю| ^ ю ^ со2.
Соответствующий аналитический сигнал
z@=— WJ
Скорость измене-
изменения фазы макси-
максимальна
= — [(sin со2* — sin со^) — /(cos со2* — cos °>iO] ¦
Огибающая исходного полосового сигнала
U, @ = —|/(sin co2t - sin coitJ + (cos co^ - cos tajf =
S0(C02-
п
со,)
sin
©2 — &
2
оа-ю,
2
Наконец, мгновенная частота сигнала
dt L sinco2r~sinD),i
Выполнив несложные преобразования, находим, что в данном
случае со, = (ш, + ы2)/2 не зависит от времени и равна центральной
частоте интервала, в котором сосредоточен спектр.
ш
Итак, зиая аналитический сигнал, можно однозначно опре-
определять огибающую и мгновенную частоту узкополосного
колебания, ие применяя несколько искусственное иоиятие
опорной частоты. Более того, формулы E.56)—E.58) сохраняют
смысл применительно к сигналам произвольного вида, не
обязательно удовлетворяющим условиям квазигармоничности
(узкополосности).
Заключительные замечания. Теория аналитического сигнала
применительно к задачам теории колебаний и волн была
развита в 40-х годах в работах Габора [30]. Однако пре-
преобразования Гильберта появились в математике еще в начале
Денеш Габор XX в. в связи с так называемой краевой задачей теории
A900—1979) - аналитических функций [10]. Сущность этой задачи состоит
венгерский физик, в следующем.
создатель оптиче- Пусть ? = ? +р\ — комплексная перемепная,/Ю — функция,
осой голографии, аналитическая в верхней полуплоскости, т. е. при т) > 0. На
Лауреат Нобелев- вещественной оси, являющейся границей области ааалитнчно-
скон премии 1971 г. сти, функция /(?) имеет как вещественную, так и мнимую
Результаты 133
части:/(^)=/1^)+j/2^). Требуется найти закон,, связываю-
связывающий между собой функции /, (?) и f2 (?,).
Решение задачи лается преобразованиями Гильберта:
/г <S) = Н Uг <Щ /i <S) = И"! [f2 Ш
Можно показать [13], что аналй*тнческий сигнал za(t)
как раз обладает свойством аналитичности в верхней
полуплоскости, если его рассматривать как функцию комплекс-
комплексной переменной t = if +jt". Это свойство и оп-
В последнее время методы, основанные иа понятиях ределяет нроисхо-
аиалитического сигнала и преобразований Гильберта, прочно жденне термина
вошли в врсеиал теоретической радиотехники. Некоторые «аналитический
интересные проблемы в этой области описаны в [26]. сигнал»
Результаты
ОО Сигналы с ограниченным спектром бесконечно протяженны во времени.
ОО Простейшие сигналы этого класса — идеальный низкочастотный и идеаль-
идеальный полосовой — наблюдаются на выходах соответствующих идеальных
фильтров, возбуждаемых дельта-импульсами.
ОО Два идеальных низкочастотных сигнала становятся ортогональными при
соответствующем выборе сдвига во времени. ь
ОО Ряд Котелъникова представляет сабой частный случай обобщенного ряда
Фурье. Базисными функциями здесь являются идеальные низкочастотные
сигналы, сдвинутые во времени относительно друг друга на интервалы,
кратные величине л/ав.
ОО Коэффициентами ряда Котелъникова служат отсчеты разлагаемого сигнала,
взятые через равные промежутки времени.
ОО Если в спектре сигнала отсутствуют составляющие с частотами выше /„,
то ряд Котельникова дает точное (в среднеквадратическом смысле)
представление сигнала.
ОО Ширина спектра узкополосного сигнала значительно меньше центральной
частоты. Узкополосные сигналы являются квазигармоническими — их ампли-
амплитуда и частота в общем случае медленно изменяются во времени.
ОО Понятие комплексной огибающей обобщает понятие комплексной ампли-
амплитуды на случай узкополосных сигналов.
ОО Физическая огибающая равна модулю комплексной огибающей. Ее вид не
зависит от выбора опорной частоты сигнала.
ОО Мгновенная частота узкополосного сигнала есть сумма опорной частоты и
производной по времени от аргумента комплексной огибающей.
ОО Спектр узкополосного сигнала получается путем переноса спектра его
комплексной огибающей на отрезок, численно равный значению опорной
частоты.
ОО Каждому вещественному сигналу может быть сопоставлен комплексный
аналитический сигнал, имеющий спектральные составляющие лишь в области
положительных частот. s
ОО Вещественная часть аналитического сигнала равна исходному сигналу.
Мнимая часть его называется сопряженным сигналом.
ОО Связь между исходным и сопряженным сигналами устанавливается парой
интегральных преобразований Гильберта.
ОО Огибающая произвольного сигнала равна модулю соответствующего аналити-
аналитического сигнала. Мгновенная частота определяется как производная от
аргумента аналитического сигнала.
Глава 5. Сигналы с ограниченным спектром
Вопросы
1. Почему сигналы с ограниченным спект-
спектром являются подходящими математически-
математическими моделями для описания реальных коле-
колебаний в радиотехнических устройствах?
2. Каковы примерные осциллограммы
идеального низкочастотного и идеального
полосового сигналов?
3. Каковы основные свойства функций,
образующих базис Котелышкова?
4. Как формулируется теорема Котелыш-
Котелышкова?
5. Каков наглядный смысл размерности
пространства сигналов, ограниченных по
спектру и по длительности? Оцените типич-
типичную величину размерности.
6. Как выглядит характерная осцилло-
осциллограмма узкополосиого сигнала?
7. В чем состоит способ аппаратурного
нахождения синфазной н квадратурной ампли-
амплитуд узкополосиого сигнала? *
8. Каковы свойства физической огибаю-
шей узкополосного сигнала?
9. Как связаны между собой спектраль-
спектральные плотности исходного н сопряженного
сигналов?
10. Как вычисляют преобразование Гиль-
Гильберта для узкополосного сигнала?
11. Почему метод аналитического сигна-
сигнала обладает большей общностью по срав-
сравнению с методом комплексной огибающей?
Задачи
1. Идеальный низкочастотный сигнал
имеет модуль спектральной плотности, рав-
равный 5,5-Ш~* В-с в полосе частот от 0 до
25 кГц. Определите максимальное мгновен-
мгновенное значение такого сигнала.
2. Измерения показали, что идеальный
полосовой сигнал
характеризуется следующими параметрами:
9 = 20 мкс, и0 = 15 В. Найдите ширину
полосы частот этого сигнала н модуль его
спектральной плотности в пределах этой
полосы.
3. Автоматическая метеостанция передает
данные о состоянии атмосферы каждые два
часа. Какова наивысшая частота в спектре
передаваемого сообщения?
4. Сигнал с ограниченным спектром u(t)
имеет график спектральной плотности V(co)
треугольной формы:
Определите коэффициенты ряда КотеЛьнико-
ва для" этого сигнала, полагая, что отсчеты
взяты через интервалы времени ж/щ.,
5. Сигнал с ограниченным спектром точно
описывается двумя отличными от нуля от-
отсчетами:
б
3
— 4 — 2 i
Г!
2
4 i
8
г. мкс
Чему равна верхняя частота в спектре
этого сигнала? Найдите мгновенное значе-
значение сигнала в момент времени f = 17 мхе.
6. Как изменится ошибка аппроксимации
сигнала, рассмотренного в примере 5.3, если
темп выдачи отсчетов увеличить в 10 раз?
7. Сигнал s{t) как при Г<0, так и прн
t > 0 представляет собой гармоническое коле-
колебание; в момент времени f = 0 фаза сигнала
изменяется скачком на 180°:
Напишите выражение комплексной огибаю-
огибающей этого сигнала.
8. Найдите комплексную огибающую им-
импульса включения гармонической ЭДС:
БолееЛ
сложные задания
135
-uc ¦
Обратите внимание на величину начальной
фазы сигнала.
9. Определите комплексную огибающую
сигнала с однотональиоЙ угловой моду*
ляцией:
"(О = ^Ocos(co0f+msinftt).
10. Напишите выражение комплексной
огибающей прямоугольного ЛЧМ-импульса
(см. гл. 4).
11. Узкополосный сигнал в окрестности
опорной- частоты со0 имеет спектральную
плотность гауссова вида:
Определите спектр комплексной огибающей
этого сигнала. Найдите закон изменения во
времени физической огибающей. Вычислите
мгновенную частоту, сравнив результат с тем,
который получен в примере 5.5. Чем объяс-
объясняется их принципиальное различие?
12. Найдите аналитические сигналы, соот-
соответствующее гармоническим колебаниям
smco0t н cosco0t.
13. ВычнслитеаналитическиЙсигиал,соот- .
ветствующий радиоимпульсу и (г) = Uo [? (О —
— a(t — T^f]cos(o0t с прямоугольной оги-
огибающей.
14. Вычислите сигнал, сопряженный с гар-
гармоническим колебанием cosco0t неносредст-
венно, используя преобразование Гильберта
вида E.45).
15. Решите задачу, аналогичную предыду-
предыдущей, применительно к сигналу s(t) =
= sinco0f/(co0f).
16. Покажите, что синфазная н квадра-
квадратурная амплитуды узкополосиого сигнала
s(t\ связаны с компонентами аналитическо-
аналитического сигнала следующим образом:
A,(t)=s(r)cosco0t+s(t)sinco0*,
Bt(t)=s(f)costo0(—s(t)sinco0t.
Более сложные задания
Д7. Докажите теорему Котельникова в
частотном представлении, которая формули-
формулируется так: если сигнал $(t) тождественно
равен нулю вне интервала времени ij < t < t2,
то спектральная плотность S(f) однозначно
задается лоследовательпостью ее значений
в точках на оси частот, отстоящих на
l/('i - 'i) Гц друг от друга.
18. Обобщите теорему Котельиикова на
случай полосовых сигналов, спектр которых
при со > 0 отличен от нуля лишь в области
«1 ^ со ^ е>2- Найдите аналитические выра-
выражения базисных функций таких сигналов.
19. Узкополосный сигнал представлен в
виде s(t) = AM(t)cos(u()t-Bt(t)sm<1,Dt. Найдите
условия, которым должны удовлетворять
функции At(t) н В, (t) для того, чтобы
мгновенная частота сигнала оказалась по-
постоянной во времени.
20. Найдите аналитический сигнал, соот-
соответствующий колебанию, у которого спект-
спектральная плотность
i
ни
Гаг. J
t
So
t »Щ at
помимо регулярной части имеет состав-
составляющую с дельта-особенностью.
21. Методами теории аналитического сиг-
сигнала изучите огибающую н мгновенную
частоты однотональиого ОБП-сигнала. (см.
гл. 4).
22. Используя обобщенную формулу Рз-
леа, докажите, что сигнал s(t) с конечной
энергией н сопряженный по Гильберту сиг-
сигнал s(t) ортогональны.
23. Докажите, что сигналы s(t) и s{t)
имеют равные энергии н одинаковые авто-
автокорреляционные функции.
Глава 6
Основы теории
случайных сигналов
В последние десятилетия широкое развитие получила
научная область, называемая статистической радиотехникой.
Эта дисциплина изучает явления при передаче сообщений
в условиях, когда детерминированное описание сигналов
принципиально невозможно и иа смену ему приходит
вероятностное (статистическое) описание.
Как указывалось в гл. 1, отличительная черта случайного
сигнала состоит в том, что его мгновенные значения
заранее не предсказуемы. Однако, изучая такой сигнал более
пристально, можно заметить, что ряд характеристик весьма
точно описывается в вероятностном смысле. Например,
напряжение на зижимах нагретого резистора представляет
• собой последовательность малых, быстро изменяющихся во
флуктуации времени случайных отклонений, называемых флуктуациями.
Примечательно, что чаще всего наблюдаются относительно
небольшие отклонения от среднего уровня; чем больше
отклонения по абсолютному значению, тем реже они наблю-
наблюдаются. Уже в этом проявляется некоторая статистическая
закономерность. Располагая сведениями о вероятностях
флуктуации различной величины, удается создать математи-
математическую модель случайного колебания, вполне приемлемую
как в научном, так и в прикладном смысле.
Вероятные законы возникают всегда, если физическая
система, порождающая случайный сигнал, представляет собой
Большие отклоне- объединение очень большого числа более мелких подсистем,
иня редки совершающих некоторые индивидуальные движения, в боль-
большей или меньшей степени ие зависимые друг от друга.
В радиотехнике случайные сигналы часто имеют вид
шумов. Это хаотически изменяющиеся но времени электро-
электромагнитные колебания, наблюдаемые в разнообразных физи-
физических системах, где носители заряда, например электроны,
совершают беспорядочные движения.
К математической модели случайного сигнала прибегают
также в теории информации для вероятностного описания
закономерностей, присущих осмысленным сообщениям.
Наконец, статистическую природу имеют сигналы и лазер-
лазерных линиях связи. Ввиду сравнительно большой энергии
кванта электромагнитного поля (фотона) здесь принципиаль-
принципиально необходимо учитывать специфический квантовый шум.
6.1. Случайные величины
и их характеристики
В настоящем параграфе приведены основные понятия
теории вероятностей применительно к задачам статистической
радиотехники. Более полное изложение этих вопросов можно
найти в [И], [22].
6.1. Случайные величины н их характеристики
Вероятность, Современная теория вероятностен представ-
представляет собой аксиоматизированную ветвь математики, обобщив-
обобщившую обширный эмпирический материал, накопленный наукой
при изучении разнообразных случайных явлений.
В основе теории вероятностей лежит понятие полного
множества «элементарных исходов» или случайных событий
?1 = {Аи А2,...,АЯ,...}. Символы Л,- означают всевозможные
исходы некоторого случайного эксперимента. Каждому собы-
тяюAte?l сопоставлено вещественное число Р(Аг), которое
называется вероятностью этого события.
Принимаются следующие аксиомы;
1) вероятность неотрицательна и не превышает единицы:
2) если At и Aj — несовместимые события, то
3) сумма всех событий, содержащихся в П, есть досто-
достоверное событие:
P(At) + Р(А2) + ... + P(AJ + ... = 1.
Измерение вероятностей. Математическое понятие вероят-
вероятности случайного события является абстрактной характе-
характеристикой, присущей не самим интересующим иас объектам
материального мира, а их теоретико^гаожествеиным моде-
моделям. Требуется некоторое дополнительное соглашение для
того, чтобы можно было извлекать сведения о вероят-
вероятностях из экспериментальных данных.
Общепринято оценивать вероятность события относи-
относительной частотой благоприятных исходов. Если проведено N
независимых испытаний, причем в и из них наблюдалось
событие А, то эмпирическая (выборочная) оценка вероят-
вероятности Р {А), которую можно получить из этой серии,
такова:
Рэш(А) = п№. F.1)
Аксиомы теории
вероятностей были
сформулированы в
30-х годах акаде-
академиком Андреем
Николаевичем
Колмогоровым
A903—1987)
Обычно полагают,
что Рэма-*Р, если
число испытании
TV-юо
Пример 6.1. Сигнал „и" на выходе некоторого электронного
устройства может принимать лишь два значения: ut = 4.5 В
(«высокий потенциал», событие А±) и и2 = 0.5 В («низкий потен-
потенциал», событие А2). Через равные промежутки времени Т слу-
случайным образом может происходить смена состояний системы.
Эксперимент состоит в многократном измерении мгновенного зна-
значения сигнала на выходе. Моменты измерений произвольны, однако
интервал времени между ними значительно превосходит Т.
Предположим, что, проведя 100 независимых опытов, мы 43
раза наблюдали событие Ау и 57 раз— событие А2. В соответст-^
вии с F.1) эмпирические оценки вероятностей P3Mn(^!)=0.43 н
^эмп(^2)=0.57. Из данных опыта не следует, что именно такими
должны быть и теоретические вероятности этих событий. Скорее
всего, экспериментатор выскажет гипотезу о том, что эти события
равновероятны: P{At) = Р(А2) = 0.5. Однако если такие же эмпири-
эмпирические оценки получаются в серии из 100000 опытов, то эта
гипотеза, по-видимому, должна быть отвергнута.
m
—i"
I.
2 3 4 5 6 7
решите задачу 1
Глава 6. Основы теории случайных сигналов
случийная величи-
функлия распреде-
распределения
плошость вероя'1-
ности
решите задачу 2
Функция распределения и плотность вероятности. Пусть
X — случайная величина, т. е. совокупность всевозможных
вещественных чисел х, принимающих случайные значения.
Исчерпывающее описание статистических свойств X можно
получить, располагая неслучайной функцией F(x) веществен-
вещественного аргумента х, которая равна вероятности того, что
случайное число из X примет значение, равиое или меньшее
конкретного х:
Черта сверху озна-
означает операцию ус-
усреднения но множе-
множеству исходов слу-
случайных испытаний
Функция F(x) называется функцией распределения слу-
случайной величины X. Если X может принимать любые зна-
значения, то F(x) является гладкой неубывающей функцией,
значения которой лежат иа отрезке 0 « F(x) « 1. Имеют
место следующие предельные равенства: F(—oo) = 0, F(oo) = 1.
Производная от функции распределения р(х) = dF/dx есть
плотность распределения вероятности (или, короче, плотность
вероятности) данной случайной величины. Очевидно, что
p(x)dx = Р(х < X « х + 4с),
т.е. величина p(x)dx есть вероятность попадания случайной
величины X в полуинтервал (х, х + dx].
Для непрерывной случайной величины X плотность вероят-
вероятности р(х) представляет собой гладкую функцию. Если же X —
дискретная случайная величина, принимающая фиксирован-
фиксированные значения {х1,х2,...,х„...}свероятностями{Р1,Р2 Р„-.}
соответственно, то для нее плотность вероятности выра-
выражается как сумма дельта-функций:
В обоих случаях плотность вероятности должна быть
неотрицательной: р(х)?0в удовлетворять условию норми-
нормировки
f p(x)dx = 1.
Усреднение. Моменты случайной величины. Результатами
экспериментов иад случайными величинами, как правило,
служат средние значения тех или иных функций от этих
величии. Если <р(х) — известная функция от х (исхода слу-
случайного испытания), то, по определению, ее среднее значеиие
F.2)
Следует заметить следующее: наибольший вклад в сред-
среднее значение дают те участки оси х, где одновременно
велики как усредняемая функция <р(х), так и плотность
вероятности р(х).
В статистической радиотехнике широко применяются
особые числовые характеристики случайных величин, назы-
называемые их моментами. Момент л-ro порядка случайной ве-
6.1. Случайные величины я их характеристики
личины X есть среднее значение л-й степени случайной #
переменной:
х" = J x"p(x)djc.
F.3)
момент случайной
величины
Простейшим является момент первого порядка, так назы-
называемое матемотическое ожидание
xp(x)dx,
F.4)
которое служит теоретической оценкой среднего значения
случайной величины, получаемого в достаточно обширных се-
сериях испытаний.
Момент второго порядка
Математическое
ожидание обобща-
обобщает в вероятностном
смысле ионятне
среднего арифме-
арифметического
J x*p(x)dx
F.5)
является средним квадратом случайной величины.
Используются также центральные моменты случайных
величин, задаваемые следующей общей формулой:
, = (х-х)"= f (x-x)"p(x)dx.
F.6)
Важнейший центральный момент — так называемая диспер- дисперсия
Очевидно, что
F.7)
x*-(x)*. F.8)
Величина ст„ т. е. квадратный корень из дисперсии, назы-
называется средним квадратическим отклонением, которое служит
для количественного описания меры разброса результатов
отдельных случайных испытаний относительно математическо-
математического ожидания.
Равномерное распределение. Пусть некоторая случайная
величина X может принимать значения, принадлежащие лишь
отрезку xi < х <«2, причем вероятности попадания в любые
внутренние интервалы одинаковой ширины Ах равны. Тогда
плотность вероятности
Г 0, х < х,,
Х2,
О, х > х2.
Функцию распределения находят путем интегрирования:
О, х < х,,
г С, х
1, X > Х2.
средиеквадратиче-
ское отклонение
решите
и 4
заднчи 3
Следует обратить
внимание на то, что
при уменьшении а
график все более
локализуется в ок-
окрестности точки
х = т
Глава 6. Основы теории случайных сигналов
Математическое ожидание
^^\ХйХ~-
естественно, совпадает с центром отрезка [хи х2].
Как легко проверить, дисперсия случайной величины, имею-
имеющей равномерное распределение вероятности,
Гауссово (нормальное) распределение,. В теории случайных
сигналов фундаментальное значение имеет гауссова плотность
вероятности
F.9)
содержащая даа числовых параметра m и ст. График дан-
данной функции представляет собой колоколообразную кривую
с единственным максимумом в точке х = m (рис. 6.1).
Непосредственным вычислением можно убедиться, что
параметры гауссова распределения имеют смысл соответст-
соответственно математического ожидания и дисперсии: х = т;
Функция распределения гауссовой случайной величины
Замена переменной t = (? — т)/ст дает
<Х-т
[/2it
F.10)
здесь Ф — хорошо изученная иезлементариая функция, так
называемый интеграл вероятностей Г151Г
I "г
) = -^^
1/2п J
exp(-B/2)dt.
i
/ол
/ 0.4
0.2
i л*
-1
-1.5 -L0 -0.5
0,5 1.0 1.5
Рис. 6.1. График гауссовой плотности вероятности при различных
значениях параметра <7 , - ,
1
6.1
Случайные величины и их характеристики
Г
0.75-
05 p
(х — т)/в
l l l •
141
-2.0-1.5 -1.0 -0.5 0. 0.5 1.0 1.5
Рис. 6.2. График функции распределения гауссовой случайной вели-
величины
График функции F(x) (рис. 6.2). имеет вид монотонной
кривой, изменяющейся от нуля до единицы.
Плотность вероятности функции от случайной величины.
Пусть У — случайная величина, связанная с X однознач-
однозначной функциональной зависимостью вида у = fix). Попадание
случайной точки х в интервал шириной их и попадание
случайной точки у в отвечающий ему интервал шириной
|dj>| = |/'(x)|djc являются эквивалентными событиями, по-
поэтому вероятности их совпадают: р„(х)их = pyiy) | йу |. Отсюда
F.11)
где x—g(y) — функция, обратная по отношению к j>=/(x).
Если функциональная связь между X и У неоднозиична,
так что имеется несколько обратных функций x1=gl(y),
*2 —gi(А ¦¦¦, хк =gK(y), то формула F.11) обобщается сле-
следующим образом:
)= у p.w
F.12)
их
Используется то,
что вероятности
несовместимых со-
событий складыва-
складываются
Прнмер 6^. Линейное преобразование гауссовой случайной вели-
величины.
Пусть Y = аХ + Ь, прнчем плотность вероятности
реиште задачу б
Так как | djc/dy | >
У>= .^' . е1Р|
1/1 а |, то на основании F.11)
-Ь-г
Итак, гауссов характер случайной величины при линейном
преобразовании сохраняется. Величина, полученная в результате
такого преобразования, имеет математическое ожидание у = Ь + та
и дисперсию oj = ага%.
Глава 6. Основы теории случайных сигналов
Характеристическая функции. В теории вероятностей боль-
большую роль играет статистическое среднее вида
J р(х)<?"йх, F.13)
называемое характеристической функцией случайной воли-
чины X. С точностью до коэффициента функции 0(и) есть
преобразование Фурье от плотности вероятности, поэтому
F.14)
Опуская элементарные выкладки, приведем некоторые
результаты:
для случайной величины, равномерно распределенной на
отрезке 0<х^а,
©(») = [ехр(/<и>) - 1]/(/«>); F-15)
для гауссовой случайной величины с заданными пара-
параметрами т, <т
©(») = ехр(/то-<Аг/2). F.16)
Располагая характеристической функцией, легко иайти мо-
менты случайной величины. Действительно, так как
то, полагая здесь v = 0 и сравнивая результат с F.3), нахо-
находим
т. =у*(О). F.17) .
С помощью характеристической функции удобно также
находить плотность вероятности случайной величины, под-
подвергнутой функциональному преобразованию. Так, если
^ У = /М, то ©,(и) = exp(jvy) = ехрО/М]. Если УД40™1 «ч-
решите задачу 7 числить преобразование Фурье вида F.14), то поставленная
задача будет решена.
Пример 6.3. Пусть у= C/Ocosx, где VQ = const, в то время как
х — значение случайной величины, равномерно распределенной на
отрезке п ^ х ^ п
отрезке — п ^ х ^ п.
Так каж рЛх) - 1/Bя), то
где Jo — функция Бесселя первого рода с нулевым индексом.
6.2. Системы случайных
Используя табличный интеграл [15], получаем
Вид графика плотности вероятности связан с тем, что если
выполнить большую серию опытов, каждый раз случайным образом
выбирая значения х из указанной области, то величина
l/0cosx чаще будет принимать значения, близкие к i:Vo, нежели
близкие к нулю.
6.2. Статистические характеристики систем
случайных величщ
Свойства случайных сигналов привито описывать, рассмат-
рассматривая не просто те величины, которые наблюдаются в
какой-нибудь момент времени, а изучая совокупности этих
величии, относящихся к различным фиксированным моментам
времени. Займемся теорией подобных многомерных случай-
случайных величин.
Функция распределения ¦ плотность вероятности. Пусть
даны случайные величины {Xt, Х2 Х„}, образующие «-мер-
«-мерный случайный вектор л. По аналогии, с одномерным
случаем функция распределения этого вектора
F(x,, x2,...,xj = Р(Х, < х„ Xz < х2 X. < xj.
Отвечающая ей п-мерная плотность вероятности
р(хь Х2,...,Хд) удовлетворяет соотношению
p(xi, x2,.
Очевидно, функция распределения может быть найдена
путем интегрирования плотности вероятности:
J-
Любая многомерная плотность обладает свойствами,
обычными для плотности вероятности:
p(x,,x2,...,xJ>0; {
„Хг xjdx1dx2...dx,= 1.
Зиая л-мерную плотность, всегда «можно найти m-мерную а
плотность при т< и, интегрируя по «лишним» координатам: решите задачу 8
p(xbx2,...,xj= } ¦¦¦ J p(x1,x2,...,xjdx-+1...dx,.
Глава 6. Основы теории случайных сигналов
ковариационный
:г:'-'
корреляционный
Вычислите момопчж. Располагая соответствующей много-
многомерной плотностью вероятности, можно находить средние
значения любых комбинаций из рассматриваемых случайных
величин и, в частности, вычислять их моменты. Так, ограни-
ограничиваясь наиболее важным для дальнейшего случаем двумер-
двумерной случайной величины, по аналогии с F.4), F.7) находим
математические ожидания
— €0
xz— II X2p(xi, x2)dxidx2
и дисперсии
<*i = II (xi - *iJp(*i. x2)dK! dx2,
CT2 — ^ (X2 ~ X2JP(X1» X2)dXidx2.
F.18)
F.19)
Новой по сравнению с одномерным случаем является
возможность образования смешанного момента второго по-
порядка
xu х2)йх,йхг.
F.20)
называемого ковариационным моментом системы двух слу-
случайных величин.
Корреляция. Предположим, что проведена серия опытов, в
результате которых каждый раз наблюдалась двумерная
случайная величина {Х1,Х2}. Условимся исход каждого
опыта изображать точкой на декартовой плоскости.
Может оказаться, что изображающие точки в среднем
располагаются вдоль некоторой прямой, так что в каждом
отдельном испытании величины ху и х2 имеют чаще всего
одинаковый знак. Это наводит на мысль о том, что между
Ху и х2 есть статистическая связь, называемая корреляцией.
Однако возможен случай хаотического расположения
точек на плоскости. Говорят, что при этом рассматри-
рассматриваемые величины некоррелированы, т. е. между ними нет
устойчивой связи в вероятностном смысле.
Количественной характеристикой степени статистической
связи двух случайных величин служит их ковариационный
момент К12 илн, что часто удобнее, корреляционный мо-
момент Kt2, определяемый как среднее значение произведения
(х1-х,)(х2-х2):
ас
f J (Xi - Si) (хг - x2) p (xi, x2) dx, dx2 = Kl2 - x,i2.
F.21)
6.Z Системм случайных величин
Вводят также безразмерный коэффициент корреляция
'12 = ЯцЛ<Ы- F.22)
Для совпадающих случайных величин, когда х1=х1, имеют
место равенства
Rn = R12 = . Гц = r22 = 1.
Если размерность случайного вектора больше двух, то
можно построить всевозможные перекрестные корреляцион-
корреляционные моменты
R4= I ¦" I (xi-xjtxj-
, xjdx,...dx,,
коэффициент кор-
корреляции
U = 1,2,..„и,
и коэффициенты корреляции r(J = Ry/(o-jOj), которые объедн-
ияются в соответствующие матрицы
1 '¦12-.'-1„\
Г21 1 ...rj.
Г„2..1
Можно показать, что всегда |rtJ|< 1, причем равенство
возможно лишь при условии х, = ±Xj (полиостью коррели-
коррелированные величины).
Статистическая независимость случайных величин. По опре-
определению, случайные величины Хи Х2 Х„ статистически
независимы, если их многомерная плотность вероятности
может быть представлена в виде произведения соответ-
соответствующих одномерных плотностей:
F.23)
Статистически независимые случайные величины иекор-
релированы между собой. Действительно, для них
Ru= J (*i-
f (xj-
прн 1ф). Обратное утверждение в общем случае неверно:
из некоррелированности не вытекает автоматически статисти-
статистическая независимость случайных величин.
Функциональные преобразования многомерных случайных
величин. Предположим, что составляющие двух случайных
векторов Аи У связаны однозначной зависимостью
принцип
ческой
статисти-
статистииезависи-
х„),
Глава 6. Основы теории случайных сигналов
причем известны обратные функции
Якобиан служит
коэффициентом
пропорционально-
пропорциональности между эле-
элементарными объе-
объемами при функцио-
функциональном преобра-
преобразовании
х„ =
Уг y
Исходная плотность вероятности pHCX(xi, x2,...,x*) задана.
Для того чтобы обобщить формулу F.11) на многомерный
случай н вычислить плотность вероятности Pap(ylt Уг^-^У/д
преобразованного вектора, следует найти якобиан преобра-
преобразования
D =
Sy, Sy2
Тогдв искомая плотность вероятности
, Уг yj = p™,(gi,gi g.)\D\.
F.24)
F.25)
Прщмер 6.4. Пусть xt и х3 — случайные координаты конца
вектора на плоскости.
Перейдем к полярным координатам (р, <р):
х, =рсовф, f 0$ р< со.
х2 = psin ф, I 0 ^ ф < 2л.
Якобиан такого преобразования
D Jcoscp -рй
|5Шф pC
Поэтому еслн задана плотность вероятности рнсх(хь х2), то-
( ) ( )
у
J>np(p, ф) = РРни(Р cos ф, psm ф).
решите задачу \4
Многомерное гауссово распределение. Предположим, что для
и-мерной случайной величины S = {XlyXz Хп] известны
совокупности средних значений т,, т2,...,т„ я дисперсий
Gi> ^L---,^n, а также матрица коэффициентов корреляции г.
В общем случае этих сведений недостаточно для построе-
построения л-мериой плотности вероятности. Исключением является
случай, когда ^ — многомерная гауссова величина. Тогда,
по определению,
х ехр
Г 1
L 2|r|
(х,-щД (xj-
F.26)
где | г | — определитель матрицы г; Аи — алгебраическое
дополнение элемента rtJ определителя | г \.
6.2. Системы случайных величин
Важное свойство гауссова распределения заключается в
следующем. Пусть вектор X образован некоррелированными
случайными величинами, так что в матрице г отличны от
нуля лишь элементы на главной диагонали: r,j = Sy. При
этом | г | = 1, алгебраические дополнения AtJ = 8U. Представим
эти величины в F26), получим
Символ Кронекера
= p(xi)p(x2)--p(xj,
где каждое из одномерных гауссовых распределений обладает
параметрами гщ, а,-.
Итак, если гауссова совокупность образована некоррели-
некоррелированными случайными величинами, то все они статисти-
статистически независимы.
В дальнейшем часто используется двумерная гауссова
плотность вероятности
FJ27)
-2г
где г = г1г= r2i — коэффициент корреляции составляющих
х, и х2.
Эта формула упрощается, если mi = m2 = 0 и с1 = а2 = а:
1 Г 1 г
F.28)
Подобная плотность вероятности отображается гладкой
поверхностью, построенной над координатной плоскостью
(хь х2). Величина р (xi, x2) достигает максимума в начале коор-
координат. Конфигурация поверхности зависит от коэффициента
корреляции г.
Многомерная характеристическая функция. Обобщением по-
понятий характеристической функции на многомерный случай
служит л-мерное преобразование Фурье от соответствующей
плотности вероятности:
Р(х..х,)
... + x.i)J]p(x1,...>xJdx1...dx,. F.29)
Многомерная характеристическая функция описывает систе-
систему случайных величин с той же степенью полноты, как
и отвечающая ей плотность вероятности, выражаемая обрат-
Глава 6. Основы теории случайных сигналов
иым преобразованием Фурье:
' = (ЗД" I " I
Представление
функции в виде
произведения со-
сомножителей назы-
называют факториза-
факторизацией этой функции
.. 6vn. F.30)
Если {Хи...уХ^ — совокупность статистически независи-
независимых величин, то на основании F.29) многомерная характе-
характеристическая функция распадается на произведение одно-
одномерных характеристических функций отдельных случайных
величин:
в(и„1>2
F.31)
Можно^ показать, что многомерной гауссовой случайной
величине X — {Хх Х„} отвечает характеристическая функция
вA>!,1'2 О = ехр у >рвд, -у
ла1), ,
F.32)
где т, и с} — среднее значение и дисперсия случайной
величины Хк, гы — элемент корреляционной матрицы.
Плотвость вероятности суммы случайных величин. Если
в формуле F.29) положить vt — v2 =... = v, = v, то многомер-
многомерная характеристическая функция переходит в одномерную
характеристическую функцию суммы х; + х2 + ... + х„:
свойство характе-
характеристической функ-
центральная пре-
дельная теорема
Отсюда, выполнив обратное преобразование Фурье, можно
иайти плотность вероятности этой суммы. Например, если
{X,,...,Х„} — гауссовы некоррелированные (а значит, и незави-
независимые) случайные величины с параметрами mt, щ каждая,
то из F.32) следует, что
©г {v) = exp jv \тк - —v2 \ о% .
F.33)
Сравнивая этот результат с формулой F.16), убеждаемся,
что сумма нормальных случайных величии распределена
также нормально, причем математические ожидання и диспер-
дисперсии слагаемых суммируются:
.- ?
F.34)
В теорнн вероятностен доказывается гораздо более сильное
утверждение, составляющее сущность центральной предельной .
теоремы А. М. Ляпунова [21]. Согласно этой теореме,
распределеииесуммы независимых случайны» аашчнн, диспер-
6.3. Случайные процессы
син которых конечны, а распределения вероятиости произволь-
произвольны, при некоторых ограничениях, как правило, выполняемых
в физических задачах, стремится к гауссову с ростом числа
слагаемых.
6.3. Случайные процессы
Теория случайных величин изучает вероятностные яв-
явления «в статике», рассматривая их как некоторые зафикси-
зафиксированные результаты экспериментов. Для описания сигналов,
которые отображают развивающиеся во времени случайные
явления, методы классической теории вероятностей оказы-
оказываются недостаточными. Подобные задачи изучает особая
ветвь математики, получившая название теории случайных _
процессов.
По определению, случайный процесс Х(г)-это особого определение поня-
вида функция, характеризующаяся тем, что в любой момент тия случайного
времени t принимаемые ею значения являются случайными процесса
величинами.
Ансамбли реализаций. Имея дело с детерминированными
сигналами, мы отображаем их функциональными зависимос-
зависимостями или осциллограммами. Если же речь идет о случайных
процессах, то ситуация оказывается сложнее. Фиксируя на
определенном промежутке .времени мгновенные значения
случайного сигнала, получаем лишь единственную реализацию
случайного процесса. Случайный процесс представляет собой
бесконечную совокупность таких реализаций, образующих
статистический ансамбль. Например, ансамблем является
набор сигналов {xi (с), х2 (г), - • •}> которые можно одновременно
наблюдать на выходах совершенно одинаковых генераторов
шумового напряжения.
Совсем необязательно, чтобы реализации случайного про-
процесса представлялись функциями со сложным, нерегулярным
во времени поведением. Часто приходится рассматривать
случайные процессы, образованные, например, всевозможными
гармоническими сигналами V cos (cot + <р), у которых один из
трех параметров V, со, «р — случайная величина, принимаю- Ансамбль реализа-
щая определенное значение в каждой реализации. Случайный цнй
характер такого сигнала заключен в невозможности заранее,
до опыта зиать значение этого параметра.
Случайные процессы, образованные реализациями, зави-
зависящими от конечного числа параметров, принято называть
квазидетерминированными случайными процессами. _
Плотности вероятности случайных процессов. Пусть X{t)— *
случайный процесс, заданный ансамблем реализаций, a tr ¦* одномерная плот-
некоторый произвольный момент времени. Фиксируя величины иость вероятности
{xi(ti), x2(«i),...,Xft(ti),...}, получаемые в отдельных реализа-
реализациях, осуществляем одномерное сечение данного случайного
процесса н наблюдаем случайную величину X(ta). Ее плот-
плотность вероятности р(х, tt) называют одномерной плотностью
вероятности процесса X(t) в момент времени tt. Согласно
определению, величина АР = р [х, tt)Ax есть, вероятность того, , ч i
Глава 6. Основы теории случайных сигналов
многомерные плот-
ности вероятности
что реализации случайного процесса в момент времени ti
примут значения, лежащие в интервале (х, х + их).
Информация, которую можно извлечь из одномерной
плотности, недостаточна для того, чтобы судить о характере
развития реализаций случайного процесса во времени.
Гораздо больше сведений можно получить, располагая двумя
сечениями случайного процесса в несовпадающие моменты
времени с, и t2. Возникающая при таком мысленном
эксперименте двумерная случайная величина {X<fi), X(t2)}
описывается двумерной плотностью вероятности р(хь x2t tu t2).
Эта характеристика случайного процесса позволяет вычислить
вероятность события, заключающегося в том, что реализация
случайного процесса прн t = tt проходит в малой окрестности
точки х„ а при г = i2 — в малой окрестности точки х2.
Естественным обобщением является л-мерное сечение слу-
чайного процесса (л > 2), приводящее к и-мериой плотности
вероятности p(Xi, Хг,...,*^, tlt t2 О-
Многомерная плотность вероятности случайного процесса
должна удовлетворять обычным условиям, налагаемым на
плотность вероятности совокупности случайных величин (см.
§ 6.2). Помимо этого, величина p(xt, хг,...,х„ 'ь '2,.-,'J не
должна зависеть от того, в каком порядке располагаются ее
аргументы (условие симметрии).
Иногдв вместо л-мерной плотности вероятности удобно
пользоваться и-мерной характеристической функцией, которая
связана с соответствующей плотностью преобразованием
Фурье:
= f •¦¦ fp(x,,x2 х
12 ijexp|>(t>,x,
математическое
ожидание случай-
случайного процесса
+ 1>2х2 + ¦ ¦ • + адО] dxt dx2... их.. F.35)
Описание свойств случайных процессов с помощью много-
многомерных плотностей вероятности высокой размерности может
быть весьма подробным. Однако на этом пути часто
встречаются серьезные математические трудности.
Моментные функции случайных процессов. Менее деталь-
детальные, но, как правило, вполне удовлетворительные в практи-
практическом смысле характеристики случайных процессов можно
получить, вычисляя моменты тех случайных величин, которые
наблюдаются в сечениях этих процессов. Поскольку в общем
случае эти моменты зависят от временных аргументов, оии
получили название моментных функций.
Для статистической радиотехники наибольшее значение
имеют три моментные функции низших порядков, назы-
называемые математическим ожиданием, дисперсией и функцией
корреляции.
Математическое ожидание
) = x(t)= f
F.36)
6.3. Случайные процессы
есть среднее значение процесса ХЩ в текущий момент
времени г; усреднение проводится по всему ансамблю реали-
реализаций процесса.
Дисперсия
) = [x(t)-m(t)]2
F.37)
позволяет судить о степени разброса мгновенных значе-
значений, принимаемых отдельными реализациями в фиксирован-
фиксированном сечении t, относительно среднего значения.
Двумерный центральный момент
дисперсия случай-
случайного процесса
II W't) -
) - m(t2)]p(x,, xj, 1,, t2)dx, d
F38)
называется функцией корреляции случайного процесса X{t).
Эта моментная функция характеризует степень статисти-
статистической связи тех случайных величин, которые наблюдаются
при t = г, и t = t2. Сравнивая формулы F.37), F.38), заметим,
что при совмещении сечений функция корреляции численно
равна дисперсии:
К(«ь«2)|,,.,,., = <т2A). F.39)
Стационарные случайные процессы. Так принято называть
случайные процессы, статнстическне характеристики которых
одинаковы во всех сечениях.
Говорят, что случайный процесс стационарен в узком
смысле, если любая его л-мерная плотность вероятности
инвариантна относительно временного сдаига т:
р(х, х.,1, O=p(xi x,,t, +т,...,1„ + т). F.40)
Если же ограничить требования тем, чтобы математическое
ожидание т и дисперсия а2 процесса не зависели от вре-
времени, а функция корреляции зависела лишь от разности
т = 112 — ti I, т.е. R{tu t2) — R(z), то подобный случайный
процесс будет стационарен в широком смысле. Понятно, что
из стационарное™ в узком смысле следует стационарность
в широком смысле, но не наоборот.
Как следует из определения, функция корреляции ста-
стационарного случайного процесса является четной:
функция корреля-
корреляции
Случайные
лы, являющиеся
типичными реали-
реализациями стацио-
стационарных случайных
процессов, состав-
составляют широко рас-
распространенный
класс случайных
колебаний, важный
для радиотехники
С1ационариость в
широком и ужом
смыслах
Кроме того, абсолютные значеиия этой функции при любых т.
не превышают ее значения при т = 0:
|R(t)|SR@) = ct:!. F.41)
Метод доказательства таков: из очевидного неравенства
х) - m)Y > 0
Глава 6. Основы теории случайных сигналов
следует, что
[x(t)-m]2- 2 [х(() - т] [x(t + х) - т] + [х(( + х) - т]2 =
ф откуда непосредственно вытекает неравенство F.41).
нормированная Часто удобно использовать нормированную функцию кор-
функция корреля- реляции
ции г(т)=Я(т)/а2, F-42)
для которой г (О) = 1.
Чтобы проиллюстрировать понятие стационарного слу-
случайного процесса, рассмотрим два примера.
Прщмер 6.5. Случайный процесс U{t) образован реализациями
вида u(t) = t/mcos(co0t + ф), где Um и щ известны заранее, в то
время как фазовый угол , ф — случайная величина, равномерно
распределенная на отрезке —тс^ф^тс.
Так как плотность вероятности фазового угла рч = 1/Bя), то
математическое ожидание процесса
п = Umcos{a>0t + ф) = —- соб(ш0г + ф)бф = 0.
2л J
Аналогично можно иайти дисперсию:
а2 = \и- и]2 = Vl cos2 (юо1 + Ф) = U*J2.
Наконец, функция корреляции ..
ц, fj № щ решите задачу 9
R{tu t2) = l/^cos(ra0fi + Ф)со8(ю012 + Ф) =
= Vi Vl {со8[о>о(A
Итак, данный случайный процесс удовлетворяет всем условиям,
которые необходимы для того, чтобы обеспечить стационарность
в широком смысле.
Прщмер 6.6. Случайный процесс V{t) имеет реализации вида
u{t) = t/mcos(fii0f + ф), причем ю0 и ф — заданные числа. Um — слу-
случайная величина с произвольным заколом распределения.
Математическое ожидание
п = Un cos (шо( + Ф)
будет не зависимым от времени лишь при Vn = 0. Поэтому в
общем случае рассматриваемый случайный процесс будет нестацио-
нестационарным.
Свойство эргодячюстн. Стационарный случайный процесс
называют эргодическим, если при нахождении его моментных
Большинство слу- функций усреднение по статистическому ансамблю можно
чайных процессов в заменить усреднением по времени. Операция усреднения
радиотехнике ев- выполняется над единственной реализацией х (t), длительность
ляются эргодиче- Т которой теоретически может быть сколь угодно велика,
скнмш Обозначая усреднение по времени угловымя скобкамн, эайи-
6.3. Случайные процессы
153
шем математическое ожидание эргодического случайного про-
процесса:
<*(()> =
Т
= Iim-i|*(t)dt,
F.43)
которое равно постоянной составляющей выбранной реали-
реализации. .
Дисперсия подобного процесса
F.44)
Поскольку величина <х2> представляет собой среднюю
мощность реализации, а величина т2 — мощность -постоян-
-постоянной составляющей, дисперсия имеет наглядный смысл
мощности флуктуационной составляющей эргодического про-
процесса.
Аналогично находят функцию корреляции:
R(t) = <[x(t) - m] [x(t + т) - m]> = (x(t)x{t + т)> - тг =
г
= lim —
T-oo TJ
x {t) x {t + x) dt - m2.
физический смысл
дисперсии случай-
ного процесса
F.45)
Достаточным условием эргодичности случайного процесса,
стационарного в широком смысле, является стремление к нулю
функции корреляции при неограниченном росте временного
сдвига т:
IimR(T)=0.
F.46)
условия эргодич-
эргодичности случайного
процесса
В математике показано, что это требование можно
несколько ослабить. Оказывается, что случайный процесс
эргодичен, если выполнено условие Слуцкого [21]:
F.47)
Так, равенство F.47) справедливо применительно к гар-
гармоническому процессу со случайной начальной фазой (см.
пример 6.5).
Измерение характеристик случайных пршессо*. Если слу-
случайный процесс является эргодическим, "то его реализация
достаточной длины есть «типичный» представитель статисти-
статистического ансамбля. Изучая эту реализацию эксперименталь-
экспериментально, можнб получить много сведений, характеризующих
данный случайный процесс.
Глава 6. Основы теории случайных сигналов
Прибор для измерения одномерной плотности вероят-
вероятности случайного процесса может быть выполнен следую-
следующим образом. Одномерная плотность вероятности эргоди-
ческого случайного процесса есть величина, пропорциональ-
пропорциональная относительному времени пребывания его реализации на
уровне между х и х -I- Дх. Предположим, что имеется
устройство с двумя входами, на один из которых подается
исследуемая реализация х (t), а на другой — опорное постоян-
постоянное напряжение, уровень которого можно регулировать. На
выходе устройства возникают прямоугольные видеоимпульсы
постоянной амплитуды, начало и конец которых определяются
моментами времени, когда текущие значения случайного
сигнала совпадают либо с уровнем х0, либо с уровнем
х0 + Ах. Если теперь измерить, скажем, с помощью обычно-
обычного стрелочного прибора среднее значение тока, создаваемого
последовательностью видеоимпульсов, то показания этого
прибора будут пропорциональны плотности вероятности
(
Измерение плотно-
плотности вероятности
I Вольтметр I
Коррелометр
А
pciiraic 1алачу 14
стационарно свя-
связанные случайные
процессы
Любой достаточно инерционный стрелочный прибор
может быть использован для измерения математического
ожидания случайного процесса [см. формулу F.43)].
Прибор, измеряющий дисперсию случайного процесса, как
это следует из F.44), должен иметь на входе конденсатор,
отделяющий постоянную составляющую. Дальнейшие этапы
процесса измерения — возведение в квадрат и усреднение по
времени — выполняются инерционным квадратичным вольт-
вольтметром.
Принцип работы измерителя функции корреляции (корре-
(коррелометра) вытекает из формулы F.45). Здесь мгновенные
значения случайного сигнала после фильтрации постоянной
составляющей, разделяясь на даа канала, поступают на пере-
перемножитель, причем в одном из каналов сигнал задержи-
задерживается иа время т. Для получения значения функции кор-
корреляции сигнал с выхода перемножителя обрабатывается
инерционным звеном, которое осуществляет усреднение.
Взаимная функция корреляции двух случайных процессов.
Во многих случаях представляет интерес вопрос о том,
какова статистическая связь между двумя стационарными
случайными процессами X(t) и У(г). Принято вводить
взаимные функции корреляции этих процессов по формулам
) - m,\
, h) = [
F.48)
Случайные процессы называют стационарно связанными,
если функции К„(>1, t2), R^ft». '2) зависят не от самих аргу-
аргументов tj и t2, а лишь от разности т = t2 — 11. В этом
случае, очевидно,
R*»M=R,,(-t). F-49)
Предположим, что случайные процессы X{t) и У(()
статистически независимы в том смысле, что для мгновен-
6.3. Случайные процессы
ных значений х = x(t) и ух = y(t + т) независимо от величины т
двумерная совместная плотность вероятности р (х, у,) =
= Pi(x)p2(y,). Тогда
К,(т) - ? (х - mjp, (x)dx f (yt - m,)p2(y,)dyt = 0,
т. е. из статистической независимости случайных процессов
вытекает их некоррелированность. Однако в общем случае
обратное утверждение не справедливо.
Стационарные гауссовы случайные процессы. Эти математи-
математические модели случайных сигналов широко используются
в радиотехнике для описания статистических явлений,
обусловленных большим числом независимых слагаемых, т. е.
в условиях применимости центральной предельной теоремы.
По определению, л-мерная плотность вероятности стационар-
стационарного гауссова процесса следующим образом зависит от
и — 1 временных аргументов т, = tt — tlr 1 = 2, 3,...,л:
()
Современная ради-
радиотехника все шире
применяет цифро-
цифровые измерители па-
параметров случай-
случайных процессов, ра-
работа которых осно-
основана иа дискрети-
дискретизации случайного
сигнала н иосле-
дующих операциях
над числами-вы-
числами-выборками
ехр - г \ Ац[х,-m)[xj-m)\. F.50) решите задачу 10
Здесь приняты те же обозначения, что и в формуле F.26).
Элементы корреляционной матрицы этого случайного про-
процесса определяются нормированной функцией корреляции:
Гц = г (г, -xj).
В дальнейшем часто будет использоваться двумерная
гауссова плотность
р(хи х2, т) =
х ехр
i-
(х1-т)г-2г(т)(х1-И.)(х2-m) + (х2-mf
F.51)
Стационарный гауссов процесс занимает исключительное
место среди прочих случайных процессов — любая его много-
многомерная плотность вероятности определяется даумя характе-
характеристиками: математическим ожиданием и функцией корре-
корреляции.
Результаты
оо
Наибольшее число
теоретических ре-
результатов в стати-
статистической радио-
радиотехнике получено
именно примени-
применительно к стацио-
стационарным гауссовым
процессам
Вероятностные закономерности проявляются в физических системах, образо-
образованных из большого числа более мелких подсистем.
ОО Основными характеристиками случайной величины являются ее функция
распределения и плотность вероятности.
ОО Числовыми параметрами, описывающими случайную величину, служат моменты,
такие, например, как математическое ожидание и дисперсия.
156
Глава 6. Основы теории случайных сигналов
ОО Статистические связи между отдельными составляющими многомерной
случайной величины принято описывать смешанными моментами второго
порядка, называемыми коэффициентами корреляции.
ОО Некоррелированные гауссовы величины статистически независимы.
ОО Согласно центральной предельной теореме, сумма большого числа незави-
независимых случайных величин в пределе, с ростом числа слагаемых, распре-
распределена по нормальному закону.
ОО Случайный процесс задается бесконечным ансамблем своих реализаций.
ОО Важнейшими моментными функциями случайного процесса являются матема-
математическое ожидание, дисперсия и функция корреляции.
ОО Если статистические характеристики случойного процесса неизменны во
времени, то такой процесс называется стационарным.
ОО Характеристики стационарных эргадических случайных процессов можно
изучать экспериментально, анализируя единственную реализацию достаточно
большой длины.
ОО Любую многомерную плотность вероятности стационарного гауссова слу-
случайного процесса можно вычислить, зная математическое ожидание и
функцию корреляции.
Вопросы
1. Как формулируются аксиомы теории
вероятностей?
2. В чем разница между понятиями
математической и эмпирической (выбороч-
(выборочной) вероятностей?
3. Каковы освовиые свойства плотности
вероятности случайной величины?
4. Как следует находить плотность вероят-
вероятности функции от случайной величины при
однозначной и неоднозначной связях?
5. Как связаны между собой плотность
вероятности и характеристическая функция
случайной величины?
6. Каков смысл понятия корреляции двух
случайных величин?
7. Что является более жестким требова-
требованием — некоррелированность или статисти-
статистическая независимость случайных величин?
8. Каковы отличительные свойства много-
многомерной гауссовой случайной величины?
9. Как формулируется центральная пре-
предельная теорема?
10. В чем разница между двумя поня-
понятиями — «случайный процесс» и «случайная
реализация»?
11» Экспериментально получена следую-
следующая реализация случайного сигнала:
Может ли оиа в принципе принадлежать
ансамблю реализаций гауссова случайного
процесса? Правдоподобно ли такое утвержде-
утверждение?
12. Дайте определение понятия случайного
процесса, стационарного в широком и в узком
смыслах?
13. В чем заключается отлвчительное
свойство эргодического случайного процесса?
14. Каков физический смысл дисперсии
эргодического случайного процесса?
15. Как определяется понятие взаимной
функции корреляции двух случайных пропес-
сов?
Задачи
1. При передаче текста по некоторому
каналу связи в среднем 0.5 % символов
воспринимаются с ошибкой. Передан текст
длиной 120 символов. Какова вероятность
правильного воспроизведения данного сооб-
сообщения?
2. Случайная величина X имеет плотность
вероятности
р(х) = аехр(-Ъ\х\).
Найдите связь между числами а и Ъ, вы-
вытекающую из условия нормировки.
Более сложные задания
157
3. Случайная величина X равномерно рас-
распределена во внутренних точках отрезка
[О, 5]; вероятности обнаружить эту величину
иа концах отрезка одинаковы и равны 0.3.
Постройте графики функции распределения
и плотности вероятности для данной слу-
случайной величины.
4. Вычислите среднее значение и диспер-
дисперсию случайной величины, рассмотренной в
задаче 3.
5. Найдите среднее значение и дисперсию
случайной величины, имеющей плотность
( 1/(\ |)
у
вероятлости р(х) = 1/2аеяр(—а\х |
при
а>0.
6. Найдите связь между плотностью
вероятности pi{x) случайной величины X
и плотностью вероятности рг{у) случайной
величины У, которая получена путем функ-
функционального преобразования j> = exp(—х2).
7. Характеристическая функция &(v) слу-
случайной величины X имеет вид 0 (v) =
= 1/A + v2). Найдите плотность вероятности
р(х) данной случайной величины.
Более сложные задания
8. Совместная плотность вероятности
р(хи х2) двумерной случайной величины
имеет вид
Определите плотности вероятности случай-
случайных величин х,, х2, а также их математи-
математические ожидания и дисперсии.
9. Докажите, что для стационарности в
широком смысле случайного процесса X(t)
с реализациями x{t) = A cos at + В sin tat не-
необходимо и достаточно, чтобы случайные
величины А и В обладали следующими
свойствами:
а) Л = В = 0, б) а2А = ст|, в) АВ = 0.
10. Случайный процесс Z(t) является
суммой двух независимых гауссовых случай-
случайных процессов А"(г), и Y(t), имеющих пос-
постоянные во времени -математические ожида-
ожидания тх, ту и дисперсии а2, а2 соответ-
соответственно. Найдите одномерную плотность ве-
вероятности суммарного процесса.
11. Сигнал представляет собой сумму гар-
гармонических колебаний одной и той же часто-
частоты. Амплитуды слагаемых одинаковы и равны
5 В, начальные фазы могут независимо
принимать лишь два значения: 0 и 180°.
Число слагаемых равно 30. Вычислите вероят-
вероятность того, что результирующая амплитуда
сигнала окажется больше 50 В.
12. Докажите, что если случайная вели-
величина Z является суммой независимых
случайных величии X и Y, то ее плотность
вероятности есть свертка плотностей, отве-
отвечающих каждому из слагаемых:
13. Координаты х,»у случайной точки на
плоскости являются независимыми гауссо-
гауссовыми случайными величинами с параметрами
тх = ту = 0, а2, = а* = а2. Найдите плотность
вероятности длины случайного радиуса-век-
радиуса-вектора ЭТОЙ ТОЧКИ.
14. Предложите структурную схему при-
прибора для измерения двумерной плотности
вероятности эргодического случайного про>-
цесса.
Глава 7
Корреляционная теория
случайных процессов
Наряду с полным описанием свойств случайных сигналов
с помощью многомерных плотностей вероятности возможен
упрощенный подход, когда случайные процессы характери-
характеризуются своими моментными функциями- Теория случайных
Ш процессов, основанная на использовании моментных функций
корреляционная ie- ие выше второго порядка, получила название корреляцион-
ория ной теории. В данной главе будет показано, что между
корреляционными и спектральными свойствами случайных
сигналов существует глубокая и тесная связь.
7.1. Спектральные представления стационарных
случайных процессов
В гл. 2 была развита спектральная теория детерминиро-
детерминированных сигналов. Из-за вероятностного характера отдельных
реализаций прямой перенос методов спектрального анализа
в теорию случайных процессов невозможен. Однако удается
получить ряд важных спектральных характеристик случайных
колебаний, преобразуя по Фурье некоторые функции, полу-
получаемые путем усреднения реализаций.
Спектральные плотности реализации. Рассмотрим стацио-
стационарный случайный процесс X(t) с нулевым математическим
ожиданием: х = 0. Отдельно взятая реализация этого про-
процесса есть детерминированная функция, которую можно пред-
представить в виде, обратного преобразования Фурье
G.1)
В общем случае с некоторой детерминированной спектральной плотностью
реалнзапии случай- Sx (ш).
иого процесса не Для того чтобы описать весь ансамбль реализаций, обра-
являются абсолют- зующий процесс X[t), естественно допустить, что спектраль-
спектрально интегрируемыми ные плотности Sx(cu) сами являются случайными функциями
на всей оси време- частоты. Таким образом, случайный процесс во временной
ни. Поэтому к их области порождает другой случайный процесс в частотной
спектральным области. Если реализация случайного процесса представлена
плотностям следу- в форме G.1), то говорят, что осуществлено спектральное
ет относиться как представление этого процесса.
к обобщенным фун- Ключевую роль в спектральной теории случайных про-
кциям (см. гл. 2) цессов играет ответ на следующий вопрос: какими свойст-
свойствами должны обладать случайные функции Sx(cn) для того,
чтобы процесс X[t) был стационарным в широком смысле1!
Свойства случайной спектральной плотное™. Для ответа
на поставленный вопрос прежде всего усредним мгновенные
7.1. Спектральные представления стационарных случайных процессов
159
значения сигналов x(t) по ансамблю реализаций:
¦^-Js,w
Это равенство будет выполняться тождественно при лю-
бом значении t, если потребовать выполнения условия
Sx(<a) = 0. Итак, случайная спектральная плотность отдельных
реализаций стационарного случайного процесса должна иметь
нулевое математическое ожидание на всех частотах.
Теперь нужно определить, при каких условиях функция
корреляции RK (т.) зависит лишь от сдвига т между сечениями.
Воспользуемся тем, что сигнал x(t) вещественный, так что
наряду с G.1) справедливо равенство
>-5-J«
S«(fi>)e-*'da>.
G.2)
Запишем выражение функции корреляции процесса X[t),
используя спектральные разложения случайных реализаций:
R,b) = x(t)x(t + T) = x»(t)x(t + T) =
s» N si
BяJ
| dcoe*" f
G.3)
Здесь во внутреннем подынтегральном выражении содер-
содержится множитель Sj, (со) SJ (со"), имеющий смысл функции кор-
корреляции случайной спектральной плотности. Для того чтобы
функция К*(т) не зависела от времени t, необходимо, как
это видно из выражения G.3), потребовать выполнения сле-
следующей пропорциональности:
S,(o>)S*(co')~8(co-m'). G.4)
Таким образом, случайная спектральная плотность S,(m)
стационарного процесса имеет специфическую структуру: ее
значения, отвечающие любым двум несовпадающим частотам,
иекоррелированы между собой. В то же время средний
квадрат (дисперсия) случайной спектральной плотности неог-
неограниченно велик при любых частотах. Такой вид корреля-
корреляционной связи, с которым мы часто будем сталкиваться
в дальнейшем, называется дельта-коррелированностью.
Спектральная плотность мощности стацнонаруого случайно-
случайного процесса. Введем в формулу G.4) множитель пропорцио-
пропорциональности, зависящий от частоты, н запишем это равенство
таким образом:
- со'). G.5)
дельта-коррелиро-
ваниость
спектральная
плотность
мощности
Глава 7. Корреляционная теория случайных процессов
Здесь и в дальней-
дальнейшем отсутствие ин-
индексов ири функци-
функциях показывает, что
результаты спра-
справедливы по отно-
отношению к любым
случайным процес-
процессам
теорема
Вниера—Хинчииа
Функция Wx(e>), играющая фундаментальную роль в тео-
теории стационарных случайных пропессов, называется спект-
спектральной плотностью мощности процесса Jf(t). В дальнейшем
для краткости эту функцию будем называть также спектром
мощности.
Подставив G.5) в G.3), приходим к важному результату:
G.6)
Итак, функции корреляции и спектр мощности стацио-
стационарного случайного процесса связаны между собой преобра-
преобразованием Фурье. Поэтому
W(a)= J
e"** dr.
G.7)
Формулы G.6) и G.7) составляют содержание теоремы,
доказанной в 1934 г. известным советским математиком
А. Я. Хинчиным и независимо от него американским ученым
Н. Винером. Данная теорема в теории случайных процессов
получила название теоремы Винера — Хинчина.
Для того чтобы выяснить физический смысл понятия
энергетического спектра, положим в G.6) т = 0. Тогда, по-
поскольку R @) = а2, получаем
G.8)
Дисперсия а2, равная средней мощности флуктуации ста-
стационарного случайного процесса, есть, таким образом, сумма
вкладов от всех участков частотной оси.
Если случайный сп- Следует подчеркнуть различие между энергетическим
гнал является на- спектром И?(ш) детерминированного импульсного сигнала
пряжением, го его u(t) (см. гл. 3) и спектральной плотностью мощности Wx[a)
спектр мощности стационарного случайного процесса X (t). Функция И? (со) ха-
имеет размерность растеризует меру энергии, приходящуюся на единичную полосу
В2 ¦ с/рад, т. е. раз- частот. В отлйчне от этого функция Wx (со) характеризует
мерность удельной удельную меру мощности. Этот факт находит отражение н в
мощности, выделя- разных физических размерностях данных функций.
емон па единичном По своему физическому смыслу спектр мощности веще-
резисторе ствен и неотрицателен: W(cd) ^ 0. Данное свойство наклады-
накладывает весьма жесткие ограничения на вид допустимых функ-
функций корреляции (с этим мы уже сталкивались в гл. 3,
изучая корреляционные свойства детерминированных сиг-
сигналов).
А Необходимо указать также на следующее обстоятельство,
задачи 1 Спектральная плотность мощности стационарного случайного
процесса, будучи всегда вещественной, не содержит никакой
информации о фазовых соотношениях между отдельными
спектральными составляющими. Поэтому -fto спектру мощ-
решите
и 2
7.1. Спектральные представления сташюиариых случайных процессов
иости принципиально невозможно восстановить какую-либо
отдельно взятую реализацию случайного процесса.
Односторонний спектр мощности. Поскольку R (г) — четная
функция аргумента т, то соответствующий спектр мощности
W(o} представляет собой четную функцию частоты ю. Отсюда
следует, что пару преобразований Фурье G.6), G.7) можно
записать, используя лишь интегралы в полубескоиечных
пределах:
G5)
R (т) = — I W(m)cosmT dm,
G.10)
Целесообразно ввести так называемый односторонний1
спектр мощности F(co) случайного процесса, определив его
следующим образом:
Функция F(co) позволяет вычислить дисперсию стационар-
стационарного случайного процесса путем интегрирования по положи-
положительным (физическим) частотам:
G.12)
В технических расчетах часто вводят односторонний спектр
мощности N(f), представляющий собой среднюю мощность
случайного процесса, приходящуюся на интервал частот
шириной в 1 Гц:
ft /<0' G.13)
G.14)
При этом, как легко видеть,
a2=JiV(/)d/.
решите задачу 3
Если реализация
случайного процес-
процесса имеют размер-
размерность папряження
(В), то односторон-
односторонний спектр мощное- '
тн N имеет раз-
размерность В2/Гц
Теорема Винера — Хинчина является важнейшим инстру-
инструментом прикладной теории случайных процессов.
Пример 7.1. Спектр мощности случайного процесса с экспонен-
экспоненциальной функцией корреляции.
Пусть процесс X(t) имеет функцию корреляции вида
с некоторым положительным параметром ее На основании G.10)
его спектральная плотность мощности
e""™cosfflrdT =
162
Глава 7. Корреляционная теория случайных процессов
Односторонний спектр мощности
Р ш-— аа2
тс а2 + ю2 '
График данной функции указывает иа то, что спектр мощности
рассматриваемого процесса имеет выраженный низкочастотный ха-
характер — его максимум наблюдается на нулевой частоте.
Пример 7.2. Функция корреляции стационарного случайного про-
процесса со спектром мощности гауссова вида.
Здесь , --
Для нахождения функции корреляции применим формулу G5):
R* (т) = ~ f e"" cos ют dco = *^L exp [-17D0I.
- J 2^
Итак, гауссов характер спектра мощности приводит к функции
корреляции также гауссова вида. Дисперсия данного случайного
процесса
Пример 7.3. Функция корреляции стационарного случайного про-
процесса с ограниченным спектром мощности низкочастотного вида.
Пусть процесс X(t) характеризуется спектром мощности
Wo при — шв < ш < Юв,
О вне полосы [—со,, coj.
По формуле (IS) находим функцию корреляции:
—5- I cos on dco =
Дисперсия этого случайного процесса
Если воспользоваться односторонним спектром мощности
= ИЬ/тс при 0 < ш < (V
вне полосы [0, iaj,
то формула для дисперсии приобретает легко запоминающийся вид
произведения спектра мощности на полосу частот, занимаемую
сигналом: ст2 = Fqcob-
Интересно и важно отметить, что функция корреляции данного
случайного процесса знакопеременна, причем знак изменяется при
сдвигах т, кратных величине яМ». Среднее значение произведения
x(t)x(t + x) будет вначале положительным, затем с увеличением
т отрицательным, вновь положительным и т. д. Такое свойство
функции корреляции говорит о квазипериодичности любой реализа-
реализации этого случайного процесса, понимаемой, конечно, не в абсолют-
абсолютном, а в вероятностном смысле.
Квазнпернодиче-
ская реализация
7.1. Спектральные представления стационарных случайных процессов
Интервал коррелящн. Случайные процессы, изучаемые ста-
статистической радиотехникой, как правило, обладают следую-
следующим свойством: их функция корреляции стремится к нулю
с увеличением временного сдвига т. Чем быстрее убывает
функция R (i), тем меньшей оказывается статистическая связь
между мгновенными значениями случайного сигнала в два
несовпадающих момента времени.
Числовой характеристикой, служащей для оценки «ско-
«скорости изменения» реализаций случайного процесса, является
интервал корреляции т„ определяемый выражением
G.15)
Если известна информация о поведении какой-либо реали-
реализации «в прошлом», то возможен вероятностный прогноз
случайного процесса на время порядка тк. Однако попытка
прогнозирования на время, существенно превышающее интер-
интервал корреляции, окажется безрезультатной — мгновенные зна-
значения, столь далеко отстоящие во времени, практически
иекоррелированы, т. е. среднее значение произведения
х If) xlf + z) стремится к нулю.
Эффективная ишрива спектра. Пусть исследуемый случай-
случайный процесс характеризуется функцией F (со) — односторонним
спектром мощности, причем Fmu — экстремальное значение
этой функции. Заменим мысленно данный случайный про-
процесс другим процессом, у которого спектральная плотность
мощности постоянна и равна Fmx в пределах эффективной
полосы частот Дсо,ф, выбираемой из условия равенства сред-
средних мощностей обоих пропессов:
(С
Fm«uco^= jF(co)do).
Отсюда получается формула для эффективной ширины
спектра:
G.16)
Этой числовой характеристикой часто пользуются для
инженерного расчета дисперсии шумового сигнала: о2 =
= Fmu Дш,ф. Например, если известно, что Fm = 5 • 10~9 В2 • с,
Дсо,Ф = 3-1О5 с, то о2 = 1.5-10"э В2, откуда среднеквадра-
тическое значение напряжения шума <т = 39 мВ.
Эффективную ширину спектра случайного процесса можно
определить множеством способов, например, исходя из усло-
условия уменьшения значений спектра мощности на границе этого
частотного интервала до уровня 0.1FmlU(. В любом случае ве-
величины т. и Дш,ф должны быть связаны соотношением
Площади обеих фи-
фигур равновелики
решите задачу 4
Вне пределов ука-
указанной нолосы
спектральная нлот-
ность мощности
случайного процес-
процесса считается рав-
равной нулю
решите задачу 5
Чем шире спектр
случайного сигна-
сигнала, тем хаотичнее
изменяются во вре-
времени его реалнза-
Глава 7. Корреляционная теория случайных процессов
белый шум
неопределенности Aco^tk = О (Г), вытекающим из свойств пре-
преобразования Фурье (см. гл. 2).
Белы! шум. В радиотехнике так принято называть ста-
стационарный случайный процесс с постоянной на всех частотах
спектральной плотностью мощности:
Часто вводят так-
также односторонний
спектр мощности
белого шума Л'о,
такой, что Wo =
Wo/2 [см. формулу
G.13I
W(co) = Wo= const.
G.17)
Термин «белый шум» образно подчеркивает аналогию
с «белым» (естественным) светом, у которого в пределах
видимого диапазона интенсивность всех спектральных состав-
составляющих приблизительно одинакова.
По теореме Винера — Хинчина функция корреляции белого
шума
И7 *?
= -=2- e^'dm = W08(T)
равна нулю всюду, кроме точки т = 0. Средняя мощность
(дисперсия) белого шума иеограничено велика.
Белый шум является дельта-коррелированным случайным
процессом. Некоррелированность мгновенных значений такого
случайного сигнала означает бесконечно большую скорость
изменения их во времени — как бы мал ни был интервал т,
сигнал за это время может измениться на любую наперед
заданную величину.
Белый шум является абстрактной математической моделью
и отвечающий ему физический процесс в природе, безусловно,
не существует. Однако это не мешает приближенно заменять
реальные достаточно широкополосные случайные процессы
белым шумом в тех случаях, когда полоса пропускания
цепи, на которую воздействует случайный сигнал, оказыва-
оказывается существенно уже эффективной ширины спектра шума.
7.2. Дифференцирование и интегрирование
случайных процессов
В этом параграфе изучаются свойства реализаций слу-
случайных процессов, подвергнутых операциям дифференцирова-
дифференцирования и интегрирования. Показано, что дифференциальные
свойства случайного процесса определяются видом его функ-
функции корреляции.
Вероятносгнаа трактовка сходимости я непрерывности. В
теории случайных процессов приходится несколько расширить
обычное понятие сходимости последовательности чисел к
своему пределу. Так, если {хя} — случайная последователь-
последовательность, пронумерованная числами натурального ряда, то для
ее сходимости ие обязательно, чтобы при т, п -* со величина
| хш — х„ | всегда была меньше любого наперед заданного
малого числа.
7.2. Дифференцирование и интегрирование случайных процессов 165
Говорят, что случайная последовательность {х„} сходится ф
к некоторому числу х в среднеквадратическом смысле, если сходимость в сред-
,. , „ иеквадратическом
}ЧИ(х" ~х) ° • G18) смысле
Требование сходимости в среднеквадратическом смысле
является менее жестким по сравнению с классическим кри-
критерием сходимости детерминированных последовательностей.
Подобным же образом определяют понятие непрерыв-
непрерывности случайного процесса. Считают, что случайный процесс
X (I) непрерывен в точке t = fo> если справедливо предельное
равенство
lim [x(J,)-x(J0)]2 =
0.
G.19)
Производная от случайного процесса. Предположим, что
реализация x(t) случайного процесса А'(!) подается на диффе-
дифференцирующее устройство, создающее на выходе новую реали-
реализацию ylf) = ux/6t. Совокупность реализаций y{t) образует
случайный процесс УA), называемый производной процесса
X (t). Символически этот факт обозначается равенством
Y(t) = dX/dt.
Положим, что X (I) — стационарный случайный процесс с
известным математическим ожиданием х = тх. Чтобы иайти
математическое ожидание производной, проведем усреднение
по ансамблю реализаций:
. S d
6t
G.20)
Итак, при дифференцировании стационарного случайного
процесса возникает новый случайный процесс с нулевым ма-
математическим ожиданием.
Решим несколько более сложную задачу нахождения
функции корреляции производной. Без ограничения общности
положим, что математическое ожидание исходного процесса
тх = 0 (если это не так, всегда можно перейти к новому
процессу Z (J), реализации которого z(t) = x(i) - mj. Восполь-
Воспользуемся тем, что
d.x x(t + At)-x(t)
~dT ~ Л It
и представим функцию корреляции производной таким обра-
образом:
At) -
At
At
Заметим, что сред-
средине значения произ-
произведений зависят
только от модуля
разности аргумен-
аргументов сомножителей,
нескольку процесс
стационарен
- x(t + Af)x{t + т) - x{t)x(t + т + At) + x(t)x(t +т
Глава 7. Корреляционная теория случайных процессов
решите задачу 7
Все четыре слагаемых в квадратных скобках представляют
собой функции корреляции исходного процесса, вычисленные
при различных величинах задержки. Легко видеть, что
условие днффереи-
цируемости случай-
случайного процесса
решите задачу 8
Подобным свойст-
свойством обладают реа-
реализации так назы-
называемых непрерыв-
непрерывных марковских
процессов
Можно заметить, что правая часть последнего равенства
представляет собой вторую производную функции Rx (т), взя-
взятую с обратным знаком. Таким образом, приходим к фор-
формуле
Я, (т) = -«,(*)=-<#
G.21)
Дифференцируемые я веднфференцируеиые случайные про-
процессы. По определению, случайный процесс X(t) является
дифференцируемым, если его производная имеет конечную
дисперсию. В соответствии с G.21) дисперсия производной
о-2. = — R»@)= — <rJr"(O). Поэтому для дифференцируемое™
случайного процесса необходимо, чтобы вторая производная
его функции корреляции в нуле была конечной величиной,
а значит, первая производная этой функции в нуле —не-
—непрерывной.
Неднфференцируемым является случайный процесс с функ-
функцией корреляции вида с2 ехр (—а | т |), рассмотренный в при-
примере 7.1. Дифференцируя эту функцию один раз, убеждаемся,
что производная в нуле изменяется скачком на величину
-2о2а.
В радиотехнике часто рассматривают случайные процессы
с функциями корреляции вида
M). G.22)
И
в нуле непрерывна, поэтому функция корреляции G.22) отве-
отвечает дифференцируемому процессу.
Несомненно, что реализации любых случайных сигналов,
с которыми приходится встречаться в технике, всегда доста-
достаточно «гладкие» для того, чтобы быть дифференцируемыми.
Однако в теоретических исследованиях часто возникают ма-
математические модели, соответствующие иедифференцируемым
процессам. Как правило, это имеет место тогда, когда
реализации случайного процесса образуются из очень боль-
большого числа малых независимых слагаемых. Несмотря на то
что вклад одного такого слагаемого (например, импульса
тока от движения отдельно взятого электрона) ничтожен,
именно эти слагаемые определяют етонкую структуру» реа-
реализации. Как следствие, реализации такого процесса могут
приобрести вид функции, всюду непрерывной, однако ни
в одной точке не дифференцируемой.
Простое вычисление показывает, что. первая производная
этой функции
Г-<Ау2техр(-сэт), т>0,
т<0
7.2. Дифференцирование и интегрирование случайных процессов
Спектральная плотность мощности производной. Найдем
связь между спектрами мощности исходного процесса и его
производной. Пусть задано соответствие X (!)«-* Wx(ca). По
теореме Винера — Хинчина функция корреляции исходного
процесса
= -*— Wi(o))exp(/o)T)do).
На основании формулы G.21) функция корреляции произ-
производной
откуда получается искомая формула связи
W,(o>) = o>JHi(o)). G23)
Примечательно, что в спектре мощности производной
наблюдается уменьшение низкочастотных н увеличение высо-
высокочастотных составляющих. Формула G.23) позволяет судить
о дифференцируемости процесса X(t), исходя из свойств его
спектра мощности: указанный случайный процесс дифферен-
дифференцируем, если
rj=-^- mJWx(m)dm<oo.
Так, для случайного процесса со спектром мощности
иизкочастотиого вида (см. пример 7.3) дисперсия производной
w
поэтому такой процесс дифференцируем.
Корреляноыная связь между случайным процессом я его
производной. Во многих задачах статистической радиотехники
существен вопрос вероятностной связи между мгновенными
значениями случайного сигнала и его производной. Для
ответа на него вычислим функцию взаимной корреляции
Rx,(x) случайных процессов X(t) я Y(t) = dX/dt, проведя
усреднение:
Rx,C) = x(t)y(t + i) = x<f)-?-x(t + z) = 4-x(t)x(f + z),
откуда
= r;w-
G24)
Здесь принято во
внимание, что оба
рассматриваемых
случайных процес-
процесса стационарны ¦
имеют нулевые
средине зн
Глава 7. Корреляционная теория случайных процессов
некоррелнроваи-
ность случайного
процесса н его про-
нзводиой
Как известно, функция Rx (т) всегда является четной. Еслн
же процесс дифференцируем, то при т = 0 производная
Rx(x) обращается в нуль. На основании G.24) отсюда следует,
что мгновенные значения такого случайного сигнала и его
производной, взятые в один и тот же момент времени,
являются некоррелированными. Еще более сильное утверждение
справедливо применительно к гауссовым случайным про-
процессам: здесь случайный сигнал и его производная стати-
статистически независимы.
Интеграл от случайного процесса. Будем называть слу-
случайный процесс Z (i) определенным интегралом с переменным
верхним пределом от случайного процесса X A), если между
реализациями z(t) и x(t) имеется соответствие вида
G.25)
Физически это означает, что сигналы z(t) наблюдаются на
выходе идеального интегратора, причем входные сигналы
х(() начинают поступать в нулевой момент времени.
Еслн процесс X{t) стационарен и имеет постоянное сред-
среднее значение тх, то математическое ожидание сигнала на
выходе интегратора
mj. G.26)
Случайный сигнал
на входе
Таким образом, условие т* ф 0 сразу приводит к иеста-
ционарности случайного процесса Z{f).
Однако даже при нулевом математическом ожидании
входного процесса сигнал на выходе интегратора будет
представлять собой реализнцию нестационарного случайного
процесса. Чтобы убедиться в этом, вычислим функцию кор-
корреляции интеграла:
)= jjx©x(r|)d!;dT| =
Если процесс X(t) стационарен, то аргумент функции
н на выходе ин- корреляции, стоящей под знаком интеграла в последней
тегратора формуле, будет представлять собой разность т| — ?, поэтому
R,(ti,h)=
G.27)
Поскольку правая часть формулы G.27) зависит непосред-
непосредственно от i! и 1г> а ве от их разности, случайный про-
процесс на выходе интегратора является нестационарным.
Нестационариость внтеграла от случайного процесса имеет
глубокий физический смысл, свидетельствуя о безграничном
7.2. Дифференцирование и интегрирование случайных процессов
169
нарастании флуктуации на выходе идеального интегратора,
что связано с эффектом их накопления.
Сходные задачи часто встречаются в различных областях
физики. В качестве примера можно привести известную
проблему одномерного случайного блуждания точки (броунов-
(броуновского движения) [21]. Здесь материальная точка, выходя из
начала координат и получая равновероятные толчки в двух
противоположных направлениях, в среднем остается на месте,
однако величина ее отклонения от среднего положения неог-
неограниченно нарастает во времени.
Задача о выбросах случайных процессов. В статистической
радиотехнике большой интерес представляет следующая
проблема, тесно связанная с дифференциальными свойствами
случайных процессов. Предположим, что реализациями слу-
случайного процесса X A) служат достаточно «гладкие» функпии
времени. Требуется определить, сколь часто эти реализации
пересекают некоторый фиксированный уровень х0. Такая
проблема естественно возникает, например, при анализе поме-
помехоустойчивости радяотехнических устройств, находящихся под
воздействием случайных флуктуационных или импульсных
помех.
Событие, состоящее в том, что реализация хA) пересекает
заданный уровень х0 «снизу вверх», называют положительным
выбросом процесса X(i) иа уровне х0.
Решим простейшую задачу — найдем среднее число поло-
положительных выбросов, происходящих в едяницу времени. Для
этого мысленно выделим на временной оси t малый интер-
интервал длительностью At. Считая, что процесс X(t) стационарен
и непрерывен, всегда можно указать столь малое время At,
что в пределах этого интервала либо ие будет ии одного
положительного выброса, либо он будет единственным.
Найдем вначале вероятность элементарного события,
заключающегося в том, что за время At происходит один
положительный выброс. Для этого заметим, что единствен-
единственный положительный выброс возникает в том случае, если:
а) х(г)<Хо,- б) х(г + Д()>Хо. Но, поскольку хA + Дг)»
» х(г) + х'Дг, условие б) означает, что х„ — x'At < xlt). Таким
образом, едянственный положительный выброс в пределах
интервала времени Дг произойдет, если реализация случай-
случайного процесса будет иметь здесь положительную производ-
производную (х1 > 0), удовлетворяя неравенству х0 — х'Дг < х (t) < Xq.
Вероятность Р этого события легко вычислить, зиая сов-
совместную даумерную плотность вероятности р (х, У) процесса
и его производной, относящуюся к одному и тому же мо-
моменту времени:
Нестационарный
случайный процесс,
получаемый нутем
интегрирования бе-
белого шума, принято
называть случай-
случайным процессом
Положительный
выброс
_У^___.
i> = Jdx' J p(x,x-)dx = Ar JptXcxOx-dx'.
G.28)
To, что эта вероятность пропорциональна длительности
интервала At, указывает иа следующее: величина п(х0) —
среднее число положительных выбросов на уровне х„, провс-
Глава 7. Корреляционная теория случайных процессов
ходящих в 1 с, выражается формулой
G.29)
Выбросы гауссовых процессов. Вычисления по формуле
G.29) значительно упрощаются, если процесс X(t) является
гауссовым. При этом мгновенные значения реализации и ее
производной в совпадающие моменты времени статистически
независимы, поэтому
р(х„, х-) = р,(х„)р2(хг G.30)
G.31)
Объединив формулы G.29) и G.30), находим
п (хо) = pi (х0) J p2 (x") x1 dx'.
Будем полагать, что функция корреляции исходного про-
процесса Rx (т) = <*lrx (т.) известна. Тогда дисперсия производной
с*. = —с*г"@), откуда следует формула для плотности ве-
вероятности производной:
Производная, по-
получаемая путем
линейных операций
над исходным про-
процессом, также нор-
нормальна
G.32)
Элементарные выкладки приводят к результату
подстановка которого в G.31) дает окончательную формулу
для вычисления среднего числа положительных выбросов ста-
стационарного гауссова процесса:
n(xo)=J
2lt
-exp
G.33)
квазичастота
Квазичастота мо-
может быть определе-
определена только для диф-
дифференцируемого
случайного процес-
Квазичастота стационарного случайного процесса. В § 7.1
отмечалось, что реализации некоторых случайных процессов
изменяются во времени квазипериоднчески. Числовой харак-
характеристикой, отражающей темп колебаний, может служить
квазичастота, определяемая как среднее число пересечений
нулевого уровня. Согласно G.33), квазичастота гауссова
процесса
G.34)
целиком определяется поведением функции корреляции в нуле.
Поскольку — r?@) = o-J/o-J, а дисперсия производной выра-
выражается через односторонний спектр мощности процесса X(t):
o-J. = JoJFx(co)dco,
7.3. Узкополосные случайные процессы
формула для квазичастоты может быть записана в виде, ^
эквивалентном G.34): решите задачу 9
G.35)
Пример 7.4. Квазичастота стационарного гауссова процесса с
ограниченным низкочастотным спектром (см. пример 7.3).
Здесь
* (со) do =
Подставляя эти выражения в формулу G.35), получаем
Этот интересный результат нельзя усмотреть непосредственно.
§ 7.3. Узкополосные случайные процессы
В радиотехнических приложениях исключительную роль
играет особый класс случайных процессов, спектральная
плотность мощности которых имеет резко выраженный мак-
максимум вблизи некоторой частоты соо, отличной от нуля. Ниже
исследуются статистические свойства подобных узкополосных
случайных процессов. Рассмотрение ограничено случаем гаус-
гауссовых процессов, часто встречающихся на практике. К тому
же именно для гауссовых процессов удается получить ряд
важных результатов, ие выходя за рамки корреляционной
теории.
Функция корреляции узкополосного случайного процесса.
Рассмотрим стационарный случайный процесс X(t), одно-
односторонний спектр мощности которого F(o>) концентрируется
в окрестности некоторой частоты соо > 0.
По теореме Винера — Хинчина функция корреляции дан-
данного процесса
R (т) = j F (ш) cos cot dto.
G.36)
Мысленно сместим спектр процесса из окрестности часто-
частоты соо в окрестность нулевой частоты, выполнив замену пере-
переменной ш = соо + П. Тогда формула G.36) приобретает вид
К W = ] F (соо + П) cos [(соо + П) т] dft.
G.37)
Спектр мощности
узкополосного слу-
случайного процесса
В соответствии с исходным предположением об уэкопо-
лосности процесса X(t) его спектр мощности F(o)) исчезаю-
Глава 7. Корреляционная теория случайных процессов
Заметим, что функ- ще мал на частотах, близких к нулю. Поэтому в выраже-
ция о(т) четна, а иии G.37) можно заменить нижний предел интегрирования
й ф
функция Ь(х)
четна
на —со, не внося ощутимой погрешности, и записать функ-
функцию корреляции в виде
G.38)
Типичная функция
корреляции узко-
узкополосного случай-
случайного процесса
III
!
Типичная реализа-
реализация узкополосного
случайного процес-
R (т) = а (т) cos а>ох — b (x) sin шот,
где
Ь(х)= J F(o)o+fi)sinfiTdQ
— медленно меняющиеся функции аргумента т.
Особенно простой функция корреляции узкополосного
случайного процесса получается в случае, когда спектр мощ-
мощности F(co) симметричен относительно центральной частоты
ш0. При этом b (т) = 0, так что
R(x) = a(x)cose>0x. G.39)
Здесь коэффициент а(х) играет роль огибающей, которая
изменяется медленно но сравнению с множителем cosco0x.
Часто бывает удобным ввести нормированную огибающую
р (т) функции корреляции узкополосного случайного процесса,
определив ее с помощью равенства а(т) ^()
Тогда
o-;gp(T)coscivt.
G.40)
Огибающая я начальная фаза. Характерный вид функции
корреляции G.40) свидетельствует о том, что отдельные
реализации узкополосного случайного процесса представляют
собой квазигармоиические колебания:
G.41)
у которых как огибающая U(t), так и начальная фаза <р(г)
являются случайными функциями, медленно (в масштабе соо)
изменяющимися во времени.
Представим реализацию G.41) как сумму синфазной и
квадратурной составляющих (см. гл. 5):
x(i) = 4(i)cosci>0i-B(i)smoHi. G.42)
Обе амплитуды A(t) и B(t) являются низкочастотными
сигналами, тем более медленными, чем меньше эффективная
ширина спектра Лсодф по сравнению с центральной часто-
частотой соо.
Введем в рассмотрение случайный процесс Y{t), сопряжен-
сопряженный с исходным процессом X(t). Его реализацией является
преобразование Гильберта:
J-W
_± С x(t)dT
к J t-x
7.3. Узкополосные случайные процессы
Предположение о медленности синфазной A (t) и квадра-
квадратурной В (г) амплитуд позволяет весьма просто записать вы-
выражение для реализации сопряженного процесса, вынеся мед-
медленные множители за знак преобразования Гильберта:
у (г) = A (t) sin raor + В (t) cos (aot. G.43)
Отсюда получаем формулы для мгновенных значений
реализации огибающей
и начальной фазы
<p(t) = ajg[>4(«)+/BMJ.
G.44)
G.45)
Статистические свойства сопряженного процесса. Для даль-
дальнейшего анализа свойств огибающей и начальной фазы
узкополосного случайного процесса необходимо изучить связь
между статистическими характеристиками процессов X{t)
и Y(t).
Прежде всего отметим, что если х = 0, то у также рав-
равно нулю. Далее, поскольку процесс X(t) гауссов, а преоб-
преобразование Гильберта есть линейное интегральное преобразо-
преобразование, то гауссовым будет и сопряженный процесс У(г).
Как известно, если 5Ж (со) — спектральная плотность кон-
конкретной реализации х(г), то спектр сопряженной реализации
М) S) ()
Модули спектральных плотностей S, (со) и Sy (со) совпадают,
поэтому спектры мощности процессов X(t) и У(г) одина-
одинаковы: Wx (со) = Wy (to). Отсюда следует вывод о тождествен-
тождественности функций корреляции:
R, (т) = R, (т) = | Fx (со) cos сот dco
Свойство нормаль-
нормальности сохраняется
при любом линей-
линейном преобразова-
преобразовании случайного нро-
цесса
и о стационарности процесса Y{t).
Вычислим, наконец, функцию взаимной корреляции:
1 f IMi
Jl J t + 1
-I
=^J T-K-t)d4=^J 7^r7dT1-
которая оказывается равной преобразованию Гильберта от
функции корреляции процесса X(t\ Аналогично можно до-
доказать (вывод представляется читателю в качестве упраж-
упражнения), что
174
Глава 7. Корреляционная теория случайных процессов
Итак,
Rx, (т) = Н [К, (т)] = | Fx (о) sin от dm.
Процессы A(i), B(t)
линейно связаны с
гауссовым про-
процессами X(t), Y(t).
Поэтому они так-
также являются гаус-
гауссовым! н, если х=
= JL=O, то А =
Интересно заметить, что функция Rx,(i) нечетна и обраща-
обращается в нуль при т = 0. Поэтому процессы X(t) и У(г)
в совпадающие моменты времени статистически независимы.
Формуле G.46) можно придать удобный вид, выполнив
замену переменной о = еоо + О. Тогда
Rxr (т) = J F, (еоо + fi) sm (eoo + П) т dfi =
= о(т)япео0т + г>(т)со8еаот, G.47)
где функции а(т) и Ь(х) определяются в соответствии с
формулой G.38).
Корреляционные свойства синфазной и квадратурной ампли-
амплитуд. Наша конечная цель — найти и изучить статистические
характеристики огибающей U (() и начальной фазы ср (t). Для
этого удобно перейти от реализаций x(t), y(() к медленно
меняющимся во времени реализациям A (t), В (t), которые на
основании G.42) и G.43) выражаются следующим образом:
A (t) = х (t) cos (»ot + у (t) sin o0t,
В (t) = — x (t) sin taot + у (t) cos mot •
Возьмем первую формулу из системы G.48) н вычислим
функцию корреляции процесса А (г). Выполнив элементарные
тригонометрические преобразования, находим
G.48)
= [х М cos (оо( + у (t) sin coor] x
х [x(t + t)coscd0 (t + t) + y(t + T)sincoo (t + t)] ¦
Rx (t) cos (oot + Rw (t) sin ci)ot .
G.49)
Подставив сюда выражения функций Rx{i) и Rxy(i) из
GJ8) и G.47), приходим к очень простому результату:
RAr) = a(x). G.50)
Аналогично доказывается, что
G.51)
Положив в G.50) и G.51) т = 0, имеем
G.52)
G.53)
Таким образом, дисперсии синфазной и квадратурной амп-
лнтуд оказываются равными дисперсии исходного узкополос-
• решите задачу 10 ного процесса.
7.3. Узкооопосиые случайные процессы
Совместная плотность вероятности огибающей н начальной
фазы. Достоинства метода, основанного на переходе от
узкополосиого случайного процесса к его синфазной и квадра-
квадратурной составляющим, становятся очевидными, когда требу-
требуется вычислить двумерную плотность вероятности р (С/, <р).
Эта характеристика, в свою очередь, дает возможность найти
одномерную плотность вероятности огибающей
) = Jp(t/>4>)d4>
G.54)
и плотность вероятности начальной фазы
P(<P) = ?P(?/,4>)d?/.
G.55)
Мгновенные значения амплитуд A(t) и В (г) образуют
двумерный гауссов вектор, обе составляющие которого
независимы н имеют одинаковые дисперсии о2. Поэтому
двумерная плотность вероятности
1
Используется
предположение о
том, что спектр
мощности симмет-
симметричен в функция
6 (т.) обращается в
нуль
Л В) = р(А)р(В)
G.56)
Теперь, чтобы получить искомую плотность вероятности
р (Г/, ф), следует выполнить функциональное преобразование,
переводящее случайный вектор {А, В] в новую случайную
совокупность {С/, ф}:
A = Ucos(p, B = t/sin<p. G.57)
Якобиан такого преобразования [см. формулу F.24)]
совф — t/sincp
sin ф U cos ф
Поскольку в новых переменных А2 + В2 — V2, искомая
двумерная плотность вероятности
= 17.
G.58)
G.59)
Одномерная плотность вероятности начальной фазы. Вос-
Воспользовавшись формулами G.55) и G.59), найдем плотность
вероятности начальной фазы:
Замена переменной z = U/ax приводит к следующему ре-
результату:
>-м-
G.60)
Физически равно-
равномерное распределе-
распределение означает отсут-
отсутствие какого-либо
преимущественно-
преимущественного значения началь-
начальной фазы у отдель-
отдельно взятых реали-
реализаций
176
Глава 7. Корреляционная теория случайных процессов
Подчеркнем, что
здесь н в дальней-
дальнейшем />(ф) в p(U)-
разные функции
закон Рэлея
Таким образом, начальная фаза узкополосного случайного
процесса распределена равномерно на отрезке [0,2я].
Одномерная плотность вероятности огибающей. Поскольку
функция p(U, <р) не зависит от угла <р, на основании выра-
выражений G.54) и G.59) плотность вероятности огибающей
G.61)
Здесь также целесообразно перейти к безразмерной пере-
переменной г = U/ox, относительно которой
гехР(-г2/2).
G.62)
Плотность вероятности мгновенных значений огибающей
узкополосного случайного процесса, устанавливаемая выра-
выражением G.61) или G.62), известна под названием закона Рэлея.
Соответствующий график (рис. 7.1) наглядно показывает, что
наиболее вероятны некоторые средние (порядка *зх) значения
огибающей. В то же время маловероятно, чтобы огибающая
принимала значения как близкие к нулю, так и значительно
превосходящие среднеквадратичный уровень ах узкополос-
узкополосного процесса.
/
/
\
\
решите задачу 11
Рис 7.1. График плотности вероятности случайной величины, рас-
распределенной по закону Рэлея (по оси абсцисс отложен безразмер-
безразмерный аргумент г = Ufox)
Проводя усреднение с помощью плотности вероятности
G.61), находим среднее значение огибающей
G.63)
mv = U = 1/я/2стя = 1.253стх
и ее дисперсию
а% = W- (Uf = B - п/2) ст? = 0.429<j2 . G.64)
Располагая одномерной плотностью вероятности огибаю-
огибающей, можно решить ряд задач теории узкополосных слу-
случайных процессов, в частности, иайти вероятность превыше-
превышения огибающей некоторого заданного уровня.
7.3. Узкополосные случайные процессы
Пример 7.5. Узкополосный нормальный процесс имеет постоянное
значение спектра мощности Fo=1.5-10~3 В2-с в пределах полосы
частот от omio = 105 с до таах = 1.02-103 с*1. Найти вероят-
вероятность того, что огибающая этого процесса превосходит уровень
Uo = 5 В.
По условию задачи, эффективная ширина спектра процесса
Дю^ф = 2-103 с. Поэтому дисперсия ст2 = FoA<o^ = 3 В2. Согласно
определению понятия плотности вероятности, искомая величина
Событие, рассмат-
рассматриваемое в этом
примере, является
достаточно редким
РЦ7 S> Uo)
j Р(Ц)<Ш = ехрГ -™1-1 = ехр(-25/6)
= 0.0155.
Случайные величины, распределенные по закону Рэлея,
встречаются во многих физических и радиотехнических зада-
задачах. Изящный вывод формулы G.61), полученный Рэлеем из
совсем иных предпосылок, читатель может найти в класси-
классической книге [25].
Двумерная шютяость вероятности огибающей. Для того
чтобы исследовать динамику изменения огибающей во време-
времени, необходимо располагать более подробной информацией
по сравнению с той, которая может быть почерпнута из
закона Рэлея. Так, для вычисления функции корреляции
огибающей требуется знать двумерную плотность вероятности
p{U,U,).
Воспользуемся тем, что синфазные и квадратурные Здесь в далее при-
амплитуды узкополосиого нормального случайного процесса шло сокращенное
являются низкочастотными гауссовыми процессами с одина- обозначение Ux =
новыми функциями корреляции = U(t + X)
и двумерными плотностями вероятности [см. формулу F.28)]:
2ргаЛ
р») J-
20га-
Если спектральная плотность мощности процесса сим-
симметрична относительно центральной частоты ш0, то процессы
A{t), B[t) статистически независимы, так что совместная
четырехмерная плотность вероятности
р (А А„ В, В,) = р (-4, А,) р (В, В,). G.65)
Перейдем от синфазной и квадратурной амплитуд к оги-
огибающей и начальной фазе, вычисленным в различные мо-
моменты времени:
<4 = l/coscp, A, = U,cos<t>,,
B = Usin<p l '
178
Глава 7. Корреляционная теория случайных процессов
Якобиан данного преобразования
cos<p 0 sin<p О
0 cos<p, 0 sm<p, _
— t/sincp, 0 t/coscp О
О — I/,sin(p, 0 t/.coscp,
Используя этот результат, запишем плотность вероятности
G.65) в новых переменных:
G.68)
Теперь, чтобы получить искомую двумерную плотность
вероятности огибающей, следует дважды проинтегрировать
правую часть формы G.68) по угловым координатам:
, Г7„
р(Г7, Г7.)
Применяя известную в математике формулу
G.69)
Функция 10(х)
двумерный
Рэлея
где /0 — модифицированная функция Бесселя нулевого индек-
индекса, из G.68) н G.69) полулаем окончательно:
р{и-вд -
G.70)
Плотность вероятности, определяемую формулой G.70),
нногдв называют двумерным законом Рэлея. Отметим, что
если сдвиг т значительно превышает интервал корреляции тк,
свойственный функции р(т), то р-»0. Отсюда, поскольку
1О @) = 1, получаем
Р(Р, ад.
G.71)
т. е. функция p(U, [/,) приближенно равна произведению двух
одномерных рэлеевских плотностей.
Функцвя коррелшш огибающей. По определению, функ-
функция корреляции огибающей
Rv (г) = 1Ж, - (СО2.
G.72)
Квадрат среднего значения огибающей находим на осно-
основании равенства G.63): (UJ — (п/2)а^. Теперь необходимо
вычислить среднее значение произведения
Щ"- JdC J UU,p{U, UJdU,.
G.73)
7.3. Узкопопосные случайные процессы
Нахождение интеграла G.73) сопряжено с весьма гро-
моздкими вычислениями, основанными на том, что дву-
мерную плотность вероятности G.70) разлагают в бесконеч-
бесконечный ряд по многочленам Лагерра [22]. Опуская про-
межуточные выкладки, приведем окончательный результат:
г 2 гЧг
~НГ?+ У[
2
Представляя функцию корреляции в виде Rv(i)=
= <*VuM, из G.74) находим выражение для нормирован-
ной функции корреляции огибающей:
) = 0315р2М + 0.058р4(т) +...
решите задачу 12
Можно нриближеи-
до считать что
коэффициент кор-
fej^am 0П1бакь
щей нросто равен
квадрату огнбаю-
щей нормированной
функции корреля-
^^ узкополоаюго
сигнала
G.75)
Пример 7.6. Известно, что функция корреляции некоторого
случайного провеса (В2)
О.5ехр(-10*| т ))
-104).
Здесь высокочастотный сомножитель имеет период 10~? с,
амплитудный сомножитель изменяется за это время лишь в
ехр(—10~2) = 0.99 раза. Поэтому рассматриваемый случайный про-
процесс можно считать узкополосным с центральной частотой
/о = 1 МГц. Ограничиваясь первым членом ряда в формуле
G.75) и заменяя приближенно коэффициент 0.915 на единицу,
находим нормированную функцию корреляции огибающей:
rt/(t)«exp(-2-104|T|).
Дисперсия огибающей a2v = OA29al » 0.2145 В2, откуда функция
корреляции
Rv (т) да 0.21 ехр( -2 • 10* | т |).
Интервал корреляции огибающей
составляет 50 периодов гармонического колебания с частотой /0.
Наконец, односторонний спектр мощности огибающей (см. при-
пример 7.1)
„ , . 2.73 103
имеет низжочастотный характер.
Огибающая суммы гармонического сигнала н узкополосного
нормального шума. В радиотехнике часто интересуются
статистическими свойствами сигнала, наблюдаемого на выхо-
выходе некоторого частотио-избирательного устройства, например,
резонансного усилителя. Будем считать, что помимо флуктуа-
циоиного гауссова шума с центральной частотой со0, рав-
равной резонансной частоте усилителя, на выходе присутствует
Глава 7. Корреляционная теория случайных процессов
также детерминированный гармонический сигнал Umcosai6t
с известной амплитудой Um.
Простейшей задачей является нахождение одномерной
плотности вероятности огибающей суммарного колебания.
Считая, что полезный сигнал s(c) = (/„.costogt, в -то время
как шум n(t) =/f(()cosM0t - B(t)sinci)of, запишем выражение
реализации суммарного процесса X(t):
х(г) = s(t) + п(г) = [и„ + X(t)]coseo0t - ?(r)sincoor. ¦
Данный случайный процесс узкополосен,\ поэтому его
реализация может быть выражена посредством медленно
меняющихся огибающей V (г) и начальной фазы <р(г):
Очевидно, между парами {А, В}, {U, <р} имеется связь:
G.76)
Легко проверить, что якобиан D этого преобразования
равен С/. Тогда, поскольку двумерная плотность вероят-
вероятности
Типичная реали-
реализация огибающей
узконолосного шу-
шума
v
в огибающей про-
процесса вида «гармо-
«гармонический сигнал +
+ узкополосный
шум»
и
в новых переменных имеем
V
вф!
G.77)
Теперь, чтобы получить одномерную плотность вероят-
вероятности огибающей, следует проинтегрировать правую часть
формулы G.77) по угловой координате:
О
в результате чего находим
| р(Ц) = A//СТаехр[-A/2 + 1/Д/BрЭ]/0(С/С/.А1Э| G-78)
Данная формула выражает закон, получивший в радиотехни-
радиотехнике название закона Раиса. Отметим, что при им = 0, т. е. в от-
отсутствие детерминированного сигнала, закон Раиса переходит
в закон Рэлея.
На рис 7.2 представлены графики плотности вероятности
случайной величины, распределенной по закону Раиса при
различных отношениях а = и„/ах.
Отметим, что если амплитуда детерминированного
сигнала значительно превышает среднеквадратический уровень
шума, т. е. Um/ox» 1, то при U as Um можно воспользо-
воспользоваться асимптотическим представлением модифицированных
функций Бесселя с большим аргументом:
7.3. Узкополосные случайные процессы
181
Цветом выделена
кривая, отвечаю-
отвечающая закону Рэлея
Рис. 7.2. Графики плотности вероятности случайной величины, рас-
распределенной по закону Раиса
P(V)
4 Подставив это выражение в G.78), имеем
1 схрГ W-VJ]
|/&«J, L 2ст- J'
G.79)
т. е. огибающая результирующего сигнала распределена в
этом случае приближенно нормально с дисперсией ах и
математическим ожиданием Um.
Практически считают, что уже при UJax = 3 огибаю-
огибающая результирующего сигнала нормализуется. Полезио вспом-
вспомнить, что огибающая чистого шума, распределенная по закону
Рэлея, имеет дисперсию, равную 0.429а*. Таким образом,
наложение достаточно большого гармонического сигнала
приводит более чем к двукратному росту дисперсии
огибающей. Тем не менее относительные флуктуации оги-
огибающей при этом падают. Действительно, для чистого шума
величина gv/U, которую удобно принять в качестве число-
числовой оценки флуктуации, равна 0.523^ При большом детер-
мированном сигнале величина ст^/Г/ = cx/Um, стремясь к
нулю с ростом амплитуды Um.
Следует обратить
внимание на изме-
изменение среднего зна-
значения н дисперсии
вод влиянием гар-
гармонического сиг-
сигнала
Результаты
ОО Случайная спектральная плотность отдельных реализаций стационарного
случайного процесса дельта-коррелирована и имеет на всех частотах
нулевое математическое ожидание.
ОО Преобразование Фурье от функции корреляции называется спектральной
плотностью мощности стационарного случайного процесса. Чем шире этот
спектр, тем хаотичнее реализации случайного процесса.
ОО Для того чтобы случайный процесс был дифференцируемым, необходимо
существование второй производной функции корреляции при нулевом зна-
значении аргумента.
ОО Мгновенные значения реализации случайного процесса и его производной
в совпадающие моменты времени некоррелированы. . ,- ¦ *'
182
Глава 7. Корреляционная теория случайных процессов
ОО Реализации случайного сигнала на выходе идеального интегратора обра-
образуют нестационарный случайный процесс даже в том случае, если входной
случайный процесс стационарен.
ОО Реализации узкополосного случайного процесса представляют собой квазигар-
квазигармонические колебания, случайно модулированные по амплитуде и по фазовому
углу.
ОО Функция корреляции узкополосного случайного процесса представляется в
виде произведения быстрого и медленного сомножителей.
ОО Узкополосный случайный процесс и его преобразование Гильберта в совпа-
совпадающие моменты времени некоррелированы между собой.
ОО Огибающая узкополосного нормального случайного процесса распределена по
закону Рэлея; начальная фаза этого процесса имеет равномерное распре-
распределение.
ОО Нормированная функция корреляции огибающей узкополосного случайного
процесса приблизительно равна квадрату огибающей нормированной функции
корреляции самого процесса.
ОО Огибающая суммы гармонического сигнала, и узкополосного гауссова шума,
центральная частота спектра мощности которого совпадает с частотой
сигнала, распределена по закону Раиса. При больших отношениях сигнал/шум
плотность вероятности огибающей близка к нормальной.
Вопросы
1. Некоторый случайный процесс изучают
в рамках корреляционной теорнн. Какой
смысл вкладывается в это высказыванье?
2. Как формулируется теорема Вннера —
Хннчина?
3. Каковы основные свойства спектраль-
спектральной плотности мощности стационарного слу-
случайного процесса?
4. Как определяется понятие односто-
одностороннего спектра мощности? Как, зиая спектр
мощности, вычислить дисперсию стационар-
стационарного случайного процесса?
5. Почему случайный процесс типа белого
шума называют дельта-коррелированным
случайным процессом? Каковы основные
свойства белого шума? В каких случаях
реальный случайный процесс можно прибли-
приближенно заменить белым шумом?
Задачи
1. Вычислитеспектрмощиостистационар-
ного случайного пропесса, описываемого
функцией корреляции
О, |т|>*о.
2. Найдите функцию корреляции стацио-
стационарного случайного пропесса, имеющего
6. Как в теории случайных процессов
определяют понятия сходимости н непрерыв-
непрерывности?
7. Каковы отличительные свойства иеднф-
фереицируемых случайных процессов?
8. Как вычисляются дисперсия; функция
корреляции и спектр мощности для произ-
производной от стационарного случайного про-
процесса?
9. Как определяется понятие положитель-
положительного выброса случайного процесса?
10. Что такое квазнчастота стационарно-
стационарного случайного процесса?
11. Каков примерный вид реализаций
узкополосного случайного процесса?
12. Как выглядит характерная осцилло-
осциллограмма случайного сигнала с рзлеевской
плотностью вероятности мгновенных значе-
значений?
спектральную плотность мощности
3. Односторонний спектр мощности ста-
циоиарвого случайного процесса X(t) задан
формулой
где А, /0 — постоянные величины. Опреде-
Определите функцию корреляции процесса. w
Более сложные задания
183
4. Найдите интервал корреляции стацио-
стационарного случайного процесса с функцией
корреляции Я(т) = <у2ехр(—а|т|).
5. Стационарный случайный процесс
имеет эффективную ширину спектра, равную
1.5 МГц. Максимальное значение одно-
одностороннего спектра мощности составляет
3-Ю3 В2/Гц. Определите дисперсию дан-
данного процесса.
6. Полагая, что в течение месяца тем-
температура воздуха является реализацией ста-
стационарного случайного процесса, предложите
оценку для его интервала корреляции.
7. Найдите дисперсию производной слу-
случайного процесса с функцией корреляции
вида
Л(т) = а2A+о|т|)ехр(-о|т|).
8. Стационарный случайный процесс име-
имеет спектр мощности, представляемый гра-
графиком:
Докажите, что этот случайный процесс
дифференцируем и найдите дисперсию его
F
дсо а
9. Квазичастота случайного процесса с
дисперсией 8 В2 равна 0.5 МГц. Определи-
Определите дисперсию производной данного случай-
случайиого процесса.
10. СтаццоиарныйслучайныйпроцессАг(()
имеет односторонний спектр мощности
F (ш) = I F° ПрИ ш» ** ш ** ю*
( 0 при со < to,, to > Юг-
Реализации процесса представлены в виде
x(t) = A(t)cos<O(,t - B(?)sincoof, где Oq =
= (со2 - «ОД.
Найдите функции корреляции Ra(t) и Rb(t),
а также взаимную функцию корреляции
11. Найдите среднее значение и диспер-
дисперсию огибающей уэкополосного нормального
случайного процесса с функцией корреля-
корреляции
Л(т) = 25ехр(-4- 106t2)cos109t.
12. Узкополосный нормальный случайный
процесс X{t) имеет функцию корреляции
Найдите функцию корреляции и спектр
мощности огибающей этого пррцесса.
Более сложные задания
13. Исследуйте функцию корреляции про-
процесса вида «случайного телеграфного сиг-
сигнала». Его реализации являются разрывны-
разрывными функциями, принимающими с равной
вероятностью лишь два значения: +а и —о:
—1 i— +°
В случайные моменты времени знак реали-
реализации изменяется скачком. Вероятность того,
что за время Т произойдет п перемен
знака, описывается законом Пуассона:
п!
где X — параметр, определяющий скорость
изменения процесса во времени.
14. Узкополосный нормальный случайный
процесс имеет функцию корреляции
Докажите, что квадрат огибающей этого
процесса имеет функцию корреляции R(z) =
22
15. Узкополосныйиормальныйслучайный
процесс характеризуется функцией корреля-
корреляции, приведенной в задаче 14. Найдите
одномерную плотность вероятности мгно-
мгновенной частоты данного процесса.
2.Радио/
технические
цепи, устройства
и системы
Глава 8
Воздействие
детерминированных сигналов
на линейные стационарные
системы
Системы, применяемые для обработки, преобразования
и передачи сигналов, весьма разнообразны по принципам
внутреннего устройства и внешним характеристикам. Для
того чтобы их можно было сравнивать и классифи-
классифицировать, сформулируем исходные понятия.
8.1. Физические системы
и их математические модели
Радиотехническое устройство незанисимо от своего назна-
назначения и уровня сложности представляет собой систему,
т. е. совокупность физических объектов, между которыми
существуют определенные взаимодействия. В структуре систе-
системы можно выделить вход, на который подается исходный
сигнал, и выход, откуда снимается преобразованный сигнал.
Если интересуются лишь связью между сигналами на
входе и выходе и не описывают внутренние процессы
в системе, то говорят, что система представляет собой
«черный ящик».
Системнее операторы, В наиболее простом случае как
входной сигнал ивх ((), так и выходной сигнал ивых (t),
называемый также откликом или выходной реакцией систе-
системы, описываются одиночными функциями времени. В более
общем случае входной сигнал представляется в виде т-
мериого вектора
tL @ = Ка (О, Щ,г @, ¦ ¦ ¦, щ™ («)},
а выходной сигнал — в виде n-мерного вектора
йш* @ = Кы*1 it), ЫшиЛ Ц),... , ИЕЫ„ [t)} .
8.1. Фязлческнс системы и их математические модели 185
Закон связи между сигналами UBX(t) и Uuux(t) задают ^
системным оператором Т, результатом воздействия которого системный опера-
на сигнал Цвх служит сигнал ишых: тор
\ ]" I
Пример 8.1. Предположим, что некоторая система преобра-
преобразует одномерный входной сигнал по закону
uBba(t)=l5duBX{t)/dt.
В данном случае системный оператор может быть записан так:
d(
Из этого выражения непосредственно вытекает структурная схе-
схема системы, образованная каскадным соединением масштабного
звена (идеального усилителя) и дифференциатора.
Чтобы полностью определить задачу, следует указать
также область Dvs некоторого функционального пространст-
пространства, которая называется областью допустимых входных
воздействий. Задание этой области описывает характер
входных сигналов, которые, могут быть непрерывными или
дискретными, детерминированными или случайными. Подоб-
Подобным же образом должна быть указана область В^ц до-
допустимых выходных сигналов.
В настоящей главе рассматриваются только системы,
на которые воздействуют аналоговые сигналы. Преобра-
Преобразование дискретных и цифровых сигналов линейными
системами изучается в гл. 15.
Математической моделью системы называют совокупность
системного оператора Т и двук областей допустимых
сигналов D№ D№X.
Классификацию систем проводят на основании сущест-
существенных свойств их математических моделей.
Стационарные и нестационарные системы. Принято говорить,
что система стационарна, если ее выходная реакция ие
зависит от того, в какой момент времени поступает
входной сигнал. Если Т — оператор стационарной системы,
то из равенства
иаыЛ*) = Тип{1) (8.2)
следует, что
ивых {t ± t0) = Tt/BK (t ± t0) (8.3)
при любом значении t0. Стационарные системы называют
также системами с постоянными во времени параметрами.
Если же свойства системы не инвариантны относительно
выбора начала отсчета времени, то такую систему назы-
называют нестационарной (системой с переменными во времени
параметрами или параметрической системой).
186
Глава 8. Воздействие сигналов иа линейные стационарные системы
Теоретическое изу-
изучение нестационар-
нестационарных систем, как
правило, представ-
представляет гораздо более
сложную задачу,
чем исследование
стационарных си-
систем
принцип суперпози-
суперпозиции
Оба указанных класса систем широко применяются в
радиотехнике и будут изучаться в данном курсе.
Линейные и нелинейные системы. Важнейший принцип
классификации систем основан на том, что различные
системы по-разному ведут себя при подаче на вход суммы
нескольких сигналов. Если оператор системы таков, что
справедливы равенства
(8.4)
где a — произвольное число, то данная система называется
линейной. Условия (8.4) выражают фундаментальный принцип
суперпозиции.
Если эти условия ие выполняются, то говорят, что
система является нелинейной.
Пример 8.2. Некоторая система производит обработку входного
сигнала по закону
¦[*•
Непосредственной проверкой убеждаемся, что условия (8.4)
выполняются. Таким образом, данная система линейна.
Пример 8.3. Некоторая система работает как идеальный квад-
квадратор в соответствии с алгоритмом uBbra(r) =ulx(t).
Подав на вход сумму двух сигналов uMi + uM2j на выходе
получим
[2 + ««2-
Наличие перекрестного слагаемого 2ит\щхг указывает на то, что
данная система нелинейна.
Как будет показа- Строго говоря, все физические системы, с которыми
но в дальнейшем, имеет дело радиотехника, в той или иной степени нелинейны.
линейные системы Однако существует много систем, которые весьма точно
замечательны тем, описываются линейными моделями. Так, практически всегда
что, по крайней ме- можно пренебречь нелинейностью обычных резисторов, кон-
ре теоретически, денсаторов и некоторых индуктивных элементов.
можно решить лю- Нелинейные радиотехнические устройства содержат в себе
бую задачу о пре- обычно такие элементы, как полупроводниковые диоды и
образовании вход- транзисторы, имеющие вольт-амперные характеристики слож-
сложного сигнала такой ного вида.
системой Теория нелинейных систем оказывается, как правило,
довольно сложной. Далеко ие все результаты могут быть
получены здесь аналитическим путем. Однако именно с
помощью нелинейных элементов осуществляются важнейшие
преобразования радиотехнических сигналов. Методы анализа
и расчета некоторых нелинейных радиотехнических устройств
рассмотрены в гл. 11.
Сосредоточенные и распределенные системы. Другой крите-
критерий классификации радиотехнических систем основан на со-
8.2. Импульсные, переходные и частотные характеристики систем
[доставлении физических размеров системы и рабочей длины
волны. Если характерный размер системы (например, наиболь-
наибольшая длина соединительных проводников цепи) оказывается
гораздо меньше длины волны, то получается сосредоточенная
система.
В сосредоточенной электрической цепи всегда можно вы-
выделить физические области с преимущественной локализацией
энергии электрического поля (конденсаторы) и магнитного
поля (индуктивные элементы). Свойства сосредоточенных
цепей слабо зависят от конфигурации соединительных про-
проводников, поэтому для описания таких цепей принято
использовать их абстрактные модели, называемые принципиаль-
принципиальными схемами.
В радиотехнике сосредоточенные системы широко при-
применяют вплоть до рабочих частот в несколько сотен
мегагерц. Анализ и расчет сосредоточенных радиотехни-
радиотехнических систем проводят с помощью известных законоЕ
Кирхгофа
На частотах в несколько тысяч мегагерц, в так назы-
называемом сверхвысокочастотиом (СВЧ) диапазоне, физические
размеры большинства устройств оказываются сравнимыми с
длиной волны передаваемых колебаний, так что становится
необходимым учет конечного времени распространения
сигнала. Обычные электрические цепи в столь высоко-
высокочастотном диапазоне уже не могут использоваться и на
смену им приходят системы с распределенными пара-
параметрами (распределенные или волновые системы). Так, вместо
соединительных проводников применяются отрезки металли-
металлических труб — волноводы, вместо колебательных LC-конту-
ров — их распределенные аналоги, называемые объемными
резонаторами. Теория, методы анализа и проектирования
распределенных систем достаточно сложны и составляют
содержание отдельных радиотехнических дисциплин.
Закончив краткий обзор принципов классификации систем,
сконцентрируем внимание на простейшем их виде —линей-
—линейных стационарных системах с сосредоточенными пара-
параметрами.
8.2. Импульсные, переходные
и частотные характеристики
линейных стационарных систем
Замечательная особенность линейных систем — справедли-
справедливость принципа суперпозиции — открывает прямой путь к си-
систематическому решению задач о прохождении разнообраз-
разнообразных сигналов через такие системы. Способ динамического
представления (см. гл. 1) позволяет представлять сигналы
в виде сумм элементарных импульсов. Если удастся тем или
иным способом иайти реакцию иа выходе, возникающую
под воздействием элементарного импульса иа входе, то
окончательным этапом решения задачи явится суммирование
таких реакций.
Интегральные ми-
микросхемы — при-
пример сосредоточен-
сосредоточенных систем
Волновод — при-
пример распределен-
распределенной системы
Глава 8. Воздействие сигналов на линейные стационарные системы
В математике нм-
нульсную характе-
характеристику называют
функцией Грина
рассматриваемого
оператора
физический смысл
импульсной харак-
характеристики
Намеченный путь анализа основан на временном пред-
представлении свойств сигналов и систем. В равной мере при-
применим, а порой и гораздо более удобен анализ в частотной
области, когда сигналы задаются рядами или интегралами
Фурье. Свойства систем при этом описываются их частот-
частотными характеристиками, которые указывают закон преобра-
преобразования элементарных гармонических сигналов.
Импульсная характеристика. Пусть некоторая линейная
стационарная система описывается олератором Т. Для просто-
простоты будем полагать, что входной и выходной сигналы
одномерны. По определению, импульсной характеристикой
системы называется функция h(t), являющаяся откликом
системы иа входной сигнал 5 (г). Это означает, что
функция h (t) удовлетворяет уравнению
(8-5)
Мгновенное значе-
значение выходного си-
сигнала является
функционалом от
входного сигнала.
Поэтому импульс-
импульсную характеристи-
характеристику следует рас-
рассматривать, строго
говори, как обоб-
обобщенную функцию
(см. гл. 1)
Поскольку система стационарна, аналогичное уравнение
будет и в случае, если входное воздействие смещено во
времени на производную величину t0-
fc(t-fo) = T5(t-to). (8.6)
Следует ясно представить себе, что импульсная характе-
характеристика, так же как и порождающая ее дельта-функция,
есть результат разумной идеализации. С физической точки
зрения импульсная характеристика приближенно отображает
реажцию системы на входной импульсный сигнал произ-
произвольной формы с единичной площадью при условии, что
длительность этого сигнала пренебрежимо мала по срав-
сравнению с характерным временным масштабом системы,
например периодом ее собственных колебаний.
Интеграл Дюамеля. Зная импульсную характеристику
линейной стационарной системы, можно формально решить
любую задачу о прохождении детерминированного сигнала
через такую систему. Действительно, в гл. 1 было показано,
что входной сигнал всегда допускает представление вида
"«(«)= ?и„<тN(*-т)сЧ.
Отвечающая ему выходная реакция
и,»@ = Ти„М = Т f iv(tN(t-T)dT. (8.7)
Теперь примем во внимание, что интеграл есть пре-
предельное значение суммы, поэтому линейный оператор Т
на основании принципа суперпозиции может быть внесен
под знак интеграла. Далее, оператор Т «действует» лишь
на величины, зависящие от текущего времени г, но не от
переменной интегрирования т. Поэтому из выражения (8.7)
следует, что
и„и,(<)= J ".
8.2. Импульсные, переходные и частотные характеристики систем
или окончательно А
(8.8)
- решите задачу 1
Эта формула, имеющая фундаментальное значение в
теории линейных систем, называется интегралом Дюамеля.
Соотношение (8.8) свидетельствует о том, что выходной
сигнал линейной стационарной системы представляет собой
свертку двух функций — входного сигнала и импульсной
характеристики системы. Очевидно, формула (8.8) может
быть записана также в виде
| u,I(t-t)fc(x)dx. (8.9)
Итак, если импульсная характеристика h(t) известна, то
дальнейшие этапы решения сводятся к полностью фор-
формализованным операциям.
Если интегралы
(8.8) и (8.9) не
удается иайти ана-
аналитически, всегда
возможен числен-
численный анализ с по-
помощью ЭВМ
Прямер 8.4. Некоторая линейная стационарная система, внут-
внутреннее устройство которой несущественно, имеет импульсную харак-
характеристику, представляющую собой прямоугольный видеоимпульс дли-
длительностью Т. Импульс возникает при f = 0 и обладает ампли-
амплитудой Ао:
{О, ( < О,
Ао, OsSf
О, t > Т.
Определить выходную реакцию данной системы при подаче на
вход ступенчатого сигнала uBx№= Uoa(t).
Применяя формулу интеграла Дюамеля (8.8), следует обратить
внимание на то, что выходной сигнал будет выглядеть по-
разиому в зависимости от того, превышает или иет текущее значе-
значение t длительность импульсной характеристики. При 0 ^ t ^ Т
имеем
.t
А
о т
Если же о^Т, то при т>Г функция h(t — т.) обращается
в нуль, поэтому
Найденная выходная реакция отображается кусочно-линейным
графиком.
Обобщение на мюгомерньй случай. До сих пор пред-
предполагалось, что как входной, так и выходной сигналы
одномерны. В более общем случае системы с m входами и п
выходами следует ввести парциальные импульсные характе-
характеристики fty(t), * = 1. 2,...,п; ]= 1, 2,...,1и, каждая из которых1
190
Глава 8. Воздействие сигналов на линейные стационарные системы
отображает сигнал иа i-м выходе при подаче на _/-й вход
дельта-функции. Совокупность функций Ьц (t) образует матрицу
импульсных характеристик
Примеры импульс-
импульсных характеристик
реализуемых сис-
систем
(8.10)
(
/
Формула интеграла Дюамеля в многомерном случае
приобретает вид
ы @ = I h (t - т) и„ (т) di,
(8.11)
где t/дых — n-мерный вектор; UBX — m-мерный вектор.
Условие физической реализуемости. Каков .бы ни был
конкретный вид импульсной характеристики физически
осуществимой системы, всегда должен выполняться важней-
важнейший принцип: выходной сигнал, отвечающий импульсному
входному воздействию, не может возникнуть до момента
появления импульса на входе.
Отсюда вытекает очень простое ограничение иа вид до-
допустимых импульсных характеристик:
fc(r) = 0 при i<0. (8.12)
Такому условию удовлетворяет, например, имупльсная
характеристика системы, рассмотренной в примере 8.4.
Легко видеть, что для физически реализуемой системы
верхний предел в формуле интеграла Дюамеля может быть
заменен иа текущее значение времени:
ix (О = 1 и„ (т) h {f - г) их.
(8.13)
Формула (8.13) имеет ясный физический смысл: линейная
стационарная система, выполняя обработку поступающего на
вход сигнала, проводит операцию взвешенного суммиро-
суммирования всех его мгновенных значений, существовавших «в
прошлом» при — оо < т < t. Роль весовой функции выпол-
выполняет при этом импульсная характеристика системы. Принци-
Принципиально важно, что физически реализуемая система ни при
каких обстоятельствах ие способна оперировать «будущими»
значениями входного сигнала.
Физически реализуемая система должна быть, кроме
того, устойчивой. Это означает, что ее импульсная харак-
характеристика должна удовлетворять условию абсолютной ин-
интегрируемости
|*(t)|d«<oo.
(8.14)
Переходша характеристика. Пусть на входе линейной
стационарной системы действует сигнал, изображаемый
* 8.2. Импульсные, переходные и частотные характеристики систем
функцией Хевисайда er(t). Выходную реакцию
*(t> = To(t) (8.15)
принято называть переходной характеристикой системы.
Поскольку система стационарна, переходная характеристика
инвариантна относительно временного сдвига:
g (i- t0) = То (Г -to)-
Высказанные ранее соображения о физической реали-
реализуемости системы полностью переносятся иа случай, когда
система возбуждается не дельта-функцией, а единичным
скачком. Поэтому переходная характеристика физически реали-
реализуемой системы отлична от нуля лишь при t ^ 0, в то
время как g(t) = О при ( < 0.
Между импульсной и переходной характеристиками имеет-
имеется тесная связь. Действительно, так как 6(() = do/dl, то
на основании (8.5)
Оператор дифференцирования d/di и линейный стацио-
стационарный оператор Т могут меняться местами, поэтому
(8.16)
g(t) = i *ft)dtl. (8.17)
Воспользовавшись формулой динамического представления
A.4) и поступая так же, как и при выводе соотношения
(8.8), получаем еще одну форму интеграла Дюамеля:
и.» If) = К» №* If) + J ~-g If - т) dt. (8.18)
О
Частотный коэффициент передачи. При математическом
исследовании систем особый интерес представляют такие
входные сигналы, которые, будучи преобразованы системой,
остаются неизменными по форме. Если имеется равенство
«»«@ = Тц,,@ = Хип@, (8.19)
то «ахР) является собственной функцией системного опера-
тора Т, а число \ в общим случае комплексное,— его
собственным значением.
Покажем, что комплексный сигнал ubX{t) — exp(fcDJ) при
любом значении частоты ю есть собственная функция
линейного стационарного оператора. Для этого воспользуемся
интегралом Дюамеля вида (8.9) и вычислим
J е*<*-*>*(T)dT = j; J А(т)е-^ах]ехрОг). (8.20)
192
Глава 8. Воздействие сигналов на линейные стационарные системы
Здесь Xj, (/со) — ча-
частотный коэффи-
коэффициент передачи ме-
между /-М ВХОДОМ И
1-М ВЫХОДОМ
Отсюда видно, что собственным значением системного
оператора является комплексное число
Имеются приборы,
позволяющие экс-
экспериментально из-
измерять' АЧХ и
ФЧХ радиотехни-
радиотехнических устройств
л самых различных
цналазоиах частот
(8.21)
называемое частотным коэффициентом передачи системы.
Формула (8.21) устанавливает принципиально важный
факт — частотный коэффициент передачи и импульсная харак-
характеристика линейной стационарной системы связаны между
собой преобразованием Фурье. Поэтому всегда, зиая функцию
K(j(d), можно определить импульсную характеристику
(8.22)
Мы подошли к важнейшему положению теории линейных
стационарных систем — любую такую систему можно рас-
рассматривать либо во временной области с помощью ее
импульсной или переходной характеристик, либо в частотной
области, задавая частотный коэффициент передачн. Оба под-
подхода равноценны и выбор одного из них диктуется
удобствами получения исходных данных о системе и просто-
простотой вычислений.
В заключение отметим, что частотные свойства линейной
системы, имеющей m входов н п выходов, можно описать
матрицей частотных коэффициентов передачн
К(/ш) =
(8.23)
Между матрицами h(t) и КО"'») существует закон связи,
аналогичный тому, который задан формулами (8.21), (8.22).
Амплитудно-частотная и фазочастотная характеристики.
Функция K(jm) имеет простую интерпретацию: если на вход
системы поступает гармонический сигнал с известной часто-
частотой ш и комплексной амплитудой #„„ то комплексная
амплитуда выходного сигнала
#„, = К №)(!.,. (8.24)
Часто пользуются представлением частотного коэффи-
коэффициента передачн в показательной форме:
КС/«) = |КС/(о)|ехр[/Ф|?((о)]. (8.25)
Обе входящие сюда вещественные функции носят спе-
специальные названия: \ К (jfa)\ — амплитудно-частотная харак-
характеристика (АЧХ), фк (ю) — фазочастотная характеристика
(ФЧХ) системы.
8.2. Импульсные, переходные и частотные характеристики систем
Отравлен», накладываемые на частотный коэффициент
¦ередачм. Далеко не каждая функция К (/со) может являться
частотным коэффициентом передача физически реализуемой
системы. Простейшее ограничение связано с тем, что импульс-
импульсная характеристика Л (г) такой системы обязана быть ве-
вещественной. В силу свойств преобразования Фурье (см.
гл. 2) это означает, что
К(/О)) = К*(-». (8.26)
В соответствии с формулой (8.26) модуль частотного
коэффициента передачи (АЧХ) есть четная, а фазовый угол
(ФЧХ) — нечетная функция частоты.
Гораздо сложнее ответить на вопрос о том, каким
должен быть частотный коэффициент передачи для того,
чтобы выполнялись условия физической реализуемости (8.12)
и (8.14). Приведем без доказательства окончательный ре-
результат, известный под названием критерия Шли — Винера:
частотный коэффициент передачи физически реализуемой
системы должен быть таким, чтобы существовал интеграл
(8.27)
= Рассмотрим конкретный пример, иллюстрирующий свойст-
свойства частотного коэффициента передачи линейной системы.
свойства
и ФЧХ
АЧХ
критерий Пэлн—
Винера
Пример 8.5. Некоторая линейная стационарная система имеет
свойства идеального ФНЧ, т. с ее частотный коэффициент пере-
передачи задается системой равенств:
г<0
Г О, со < -«в,
)-•< Ко, -сов<со
(. О, со > «в.
[а осно
D фиЛЫ
Jia основавии выражения
такого фильтра
(820) импульсная характеристика
со,(
(878)
Симметрия графика этой функции относительно точки t = О
свидетельствует о нереалнзуемости идеального фильтра нижних
частот. Впрочем, этот вывод непосредственно вытекает из критерия
Пэли — Винера. Действительно, интеграл (8.27) расходится для любой
АЧХ, которая обращается в нуль иа некотором конечном отрезке
осн частот.
Несмотря иа нереализуемость идеального ФНЧ, эту модель
с успехом используют для приближенного описания свойств
частотных фильтров, полагая, что функция ?С(/ш) содержит фазо-
фазовый множитель, линейно зависящий от частоты:
Г
<
О, со < — cog,
) = ^ tfoexp(-juMo
О, со > сов.
-<¦>» < со < со,, ¦
Глава 8. Воздействие сигналов на линейные стационарные системы
Как нетрудно проверить, здесь импульсная характеристика
*«.
sincoB(f — fc)
(8.29)
m.(t-tc)
Параметр го> равный по модулю коэффициенту наклона ФЧХ,
определяет задержку во времени максимума функции />(;). Ясно,
что данная модель тем точнее отображает свойства реализуемой
системы, чем больше значение t0.
8.3. Линейные динамические системы
Линейными динамическими системами принято называть
устройства, характеризуемые следующим свойством: их выход-
выходной сигнал определяется не только величиной входного
сигнала в рассматриваемый момент времени, ио и «предысто-
«предысторией» этого сигнала. Иначе говоря, динамическая система
обладает некоторой конечной или бесконечной «памятью»,
от характера которой зависят особенности преобразования
входного сигнала.
Системы, описываемые дифференциальными уравнениями.
/ Среди всевозможных динамических систем большое значе-
Именно такой ока- ние для теоретической радиотехники имеют те, которые
зывается динами- описываются дифференциальными операторами. В общем
ческая связь меж- случае речь идет о системах, для которых связь между
ду мгновенными одномерными входным и выходным сигналами устанавли-
значеииями вход- вается с помощью следующего дифференциального уравнения:
ного н выходного
сигналов в элект-
электрической цени с со-
сосредоточенными
параметрами. Если
цепь линейна и ста-
стационарна, то все
коэффициенты оо,
а\, .... а„ и bo, Ь\.
..., Ьт—постоян-
Ьт—постоянные вещественные
числа
(8.30)
Предположим, что входной сигнал uBX(t) задан. Тогда
правая часть уравнения (8.30), которую можно условно
обозначить/(г), является известной функцией. Анализ поведе-
поведения системы сводится при этом к хорошо изученной
в математике проблеме решения линейного дифференциаль-
дифференциального уравнения «-го порядка с постоянными коэффициентами:
# aH-^i-+aH.1 df,.i +-+fll-5r+fl0»BIJX = /(r). (8.31)
порядок днвамнче- Порядок и этого уравнения принято называть порядком
ской системы динамической системы.
Рассмотрим несколько примеров динамических систем и
соответствующих им дифференциальных уравнений.
Примера 8.6. Дана RC-цепь вида Т-образного четырехполюсника,
возбуждаемая со стороны входа источником ЭДС uBX(t). Выходным
сигналом служит напряжение на конденсаторе.
Поскольку ток в цепн i(() = CduBbtx/dt, используя второй
закон Кирхгофа, получаем дифференциальное уравнение
RC
(8.32)
8.3. Линейные динамические системы
193
Системы нервого
порядка называют
также инерцион-
инерционными звеньями
Итак, ЛС-цепь служит примером динамической системы 1-го
порядка. Важнейший параметр этой цепн — постоянная времени
т = RC, определяющая характерный временной масштаб протекания
процессов в системе.
Пример 8.7. Дана более сложная система, образованная двумя
RC-цепями, которые разделены идеальным усилителем с коэффи-
коэффициентом усиления Ко. Входное сопротивление усилителя неограни-
неограниченно велико, а выходное сопротивление бесконечно мало, поэтому
усилитель является идеальным элементом развязки между цепями.
Вводя две постоянные времени xr = R1Cl н т2 = R2Ci, по
аналогии с предыдущим примером имеем следующие дифферен-
дифференциальные уравнения 1-го порядка:
t—-+Ut=UBli(t).
at
Исключив отсюда вспомогательную величину и%, получаем диф-
дифференциальное уравнение цепн:
ДЧы,
dl
~+ fa
(8.33)
—Vs
Рассмотренная здесь более сложная ЛС-цепь оказывается уже
системой 2-го порядка.
Пример 8,8, Найти дифференциальное уравнение параллельного
юлебательного контура с потерями, считая, что входным сигна-
служит ток i(t\ а выходным сигналом является напряжение
на контуре.
Суммируя токи
-с'
<**-*/'
получаем уравнение
с?4 ]""«¦*¦'
решите задачу 4
которое путем однократного дифференцирования по временя при-
приводится к виду
d2u . du 2 1 di
dr2 d( ° С At'
где a = \/{2RC) — коэффициент затухания контура, со0 = \\
частота собственных колебаний в контуре без потерь.
(8.34)
Глава 8. Воздействие сигналов на линейные стационарные системы
Собственные колебании дннампеских систем. Чтобы пол-
полиостью определить поведение динамической системы, опи-
описываемой уравнением (8.31), требуется учесть начальные
условия, которые характеризуют внутреннее состояние систе-
системы в некоторый фиксированный момент времени. Обычно
принято задавать искомую функцию и ее и — 1 производную
при г = 0: и„ыД0), «'.„.(О),...,^-»^).
Из теории дифференциальных уравнений известно [9], что
решением уравнения (8.31), удовлетворяющим любым началь-
начальным условиям, является сумма некоторого частного решения
неоднородного уравнения, у которого правая часть /(()
отлична от нуля, и общего решения однородного урав-
уравнения
свойство корней
характеристиче-
характеристического уравнения
Данный термин
возник в астроно-
(8-35)
Проблема решения однородного дифференциального урав-
уравнения связана с нахождением корней характеристического
уравнения системы
а„У + а„- {f~1 -\ h аху + а0 = 0. (8.36)
Данное уравнение имеет ровно и корней. Поскольку
коэффициенты уравнения вещественны, корни уь Y2,---,Yii
могут быть либо вещественными, либо комплексно-сопряжен-
комплексно-сопряженными. Если все корнн различны, то общее решение
однородного уравнения (8.35), которое описывает собствен-
собственные колебания системы, имеет вид
где Сь Сг*---,СЯ — постоянные числа, определяемые из на-
начальных условий.
Если же некоторые из корней оказываются кратными, то
составляющие общего решения однородного уравнения не-
несколько усложняются за счет появления секулярных (вековых)
множителей. Так, если у,- представляет собой /с-кратный
корень, то ему отвечает совокупность собственных колебаний
вида exp(y,r), rexp(yi(),...,tk-1exp(yir).
Рассмотрим примеры собственных колебаний в линейных
стационарных цепях.
Пример 8.9. Апериодическая разрядка конденсатора емкостью
С, предварительно заряженного до напряжения Uo и в момент
времени t = 0 замыкаемого на резистор сопротивлением R.
Цепь описывается следующим дифференциальным уравнением
относительно переменной uc ~ напряжения на конденсаторе:
Т
при единственном начальном условии ис@) = Uo.
Характеристическое уравнение ху + 1 = 0 иЬгсет корень у = — 1/т.
Отсюда находим общее решение уравнения свободных колебаний:
Постоянная време-
времени т= КС
Бщ1БннвЁ&?Ь?
В контуре с индук-
индуктивным элементом
ток не может изме-
измениться скачком
Напряжение на ре-
резисторе в началь-
начальный момент време-
времени равно нулю в си-
силу нервого условии
8.3.
Для того чтобы удовлетворить начальному условию, следует
положить А = Uo. Окончательно имеем
uc(t) = Uoexp(-t/z).
Итак, отрицательному вещественному корню характеристического
уравнения отвечает собственное колебание, экспоненциально убы-
убывающее во времени.
Постоянная времени т данной цепн есть промежуток времени,
в течение которого свободный процесс затухает в е = 2.71828... раз.
Пример 8.10. Колебательная разрядка конденсатора.
Пусть предыдущий пример усложнен тем, что в цепн имеется
также индуктивный элемент L Дифференциальное уравнение цепн
относительно тока i(t% составленное на основании второго закона
Кирхгофа, имеет вид
—5- + 2а —- + аф = О, (8.38)
Первое начальное условие i@) = 0 обусловлено наличием в кон-
контуре индуктивного элемента.
В начальный момент времени напряжение на конденсаторе
уравновешивается ЭДС самоиндукции:
°+ <Н_0~ '
откуда следует второе начальное условие:
= -V0/L
з
Характеристическое уравнение данной цели
у2 + 2ау + со2, = О
имеет комплексно-сопряженные корни
Ti.2 = -« ±j]/tal - а2 = -а ± jcoc.
где Шс — частота собственных колебании системы. Еслн потерн в кои-
туре достаточно малы, то ио » о, поэтому щ,.«соо-
Общее решение однородного уравнения
i(t) = Ci&* + C2eytt (8.39)
содержит коэффициенты Сх н С2, удовлетворяюшие системе ал-
алгебраических уравнений (см. начальные условия):
С| + Сг = 0,
Подставив эти коэффициенты в выражение (8.39), получим
окончательно
(8.40)
Глава 8. Воздействие сигналов иа линейные стационарные системы
Частотный коэффици
ередачи. Если на вход линейной
динамической системы поступает сигнал, имеющий комплекс-
комплексную математическую модель вида ивХ(() = ехр(/о>0, то сигнал
на выходе uBblx(f) = JC(^»)exp(/o>f). Подставляя этн выражения
в (8.30), после сокращения на общий множитель находим
частотный коэффициент передачи системы:
10*») + «о
(8.41)
Частотный коэф- Итак, частотный коэффициент передачи любой дниами-
фнциеит нередачи ческой системы, описьшаемой обыкновенными днффереицналъ-
раслределениой си- ными уравнениями с постоянными коэффициентами, пред-
стемы свободен; от ставляет собой дробио-рациональную функцию переменной
этого ограничении ja>; коэффициенты этой функции совпадают с коэффициента-
н может оиисы- ми дифференциального уравнения.
ваться более слож- В инженерных расчетах частотный коэффициент передачи
ными функциями линейных4систем часто находят методами теории цепей на
основании принципиальных схем, не прибегая к составлению
дифференциальных уравнений. Рассмотрим некоторые при-
примеры.
Пример. 8.11. Частотный коэффициент передачи напряжения
RC-uenu, схема которой приведена в примере 8.7.
Здесь
1/(/о>С)
R + 1/0юС)
1 +рп'
где т = ЯС-постоянная времени.
Уравнение АЧХ принимает вид
(8.42)
АЧХ
-р.
l/l + raV
ФЧХ определяется следующим образом:
ФкМ = -arctg(o>T>.
Вид АЧХ указывает иа то, что такая цепь может исполь-
использоваться в качестве фильтра нижних частот (ФНЧ).
Пример 8.12. Частотный коэффициент передачи напряжения
Т-образного четырехполюсника, собранного из элементов L, С, R:
Здесь
1/раС)
U ' R+J&L+ 1/0'оС) A - to2LC) + ;о>ЛС'
откуда следует уравнение АЧХ
1/A -
U-/LC
решите задачу 5
8.3. Линейные динамические системы 199
н уравнение ФЧХ
фк(со)= -arctg[coJ?C/(l -to2IC)].
Если сопротивленне_потерь R достаточно мало, так что доброт-
добротность системы Q = \/LJCfR » 1, то данная цепь может с успехом
выполнять роль полосового фильтра.
Усилитель малых сигналов с апериодической нагрузкой.
Типичным примером линейной динамической системы яв-
является электронный усилитель напряжения (рис. 8.1, а, б).
Для определенности в качестве управляемого элемента
здесь взят биполярный транзистор типа п-р-п, включенный
по схеме с общим эмиттером.
Рис. 8.1. Усилитель напряжения:
с —упрощенная принципиальная схема; 6 — эквш
зистор нагрузки, Сп — паразитная емкость)
глентная схема (Дн — ре-
Паразнтная ем-
емкость включает в
себя выходную ем-
емкость электронно-
электронного прибора, а также
емкость соедини-
соединительных нроводнн-
ков
Чтобы любые такие устройства можно было аиализи- В усилителях при*
ровать единообразно, принято использовать схемы замещения меняются также
электронных приборов. Метод эквивалентных схем применим разнообразные по-
тогда, когда амплитуды переменных напряжений малы настоль- левые транзисторы
ко, что можно пренебречь нелинейностью внешних характе- н электронные лам-
рнстик электронных приборов. Например, биполярный тран- ны
зистор достаточно точно описывается линейной схемой за-
замещения, если амплитуда переменной составляющей входного
напряжения мала по сравнению с так называемым темпе-
температурным потенциалом р-и-перехода «г = kT/et где к — посто-
постоянная Больцмана; Т"— абсолютная температура перехода; е —
заряд электрона.
Как известно из теории цепей, схема замещения активного Прн Т = 300 К
электронного прибора (рис. 8.1,6) содержит управляемый (стандартная тем-
источник тока, создающий в выходной цепн ток — SuB% нерагу pa) темпера-
(S — крутизна характеристики прибора в рабочей точке), а турный нотенцнал
также выходное (внутреннее) сопротивление прибора Rf, нерехода равен 26
включенное параллельно источнику тока. мВ
Нагрузкой усилителя является параллельное соединение
сопротивления R» и емкости Сп; такую нагрузку принято
называть апериодической в отлнчие от колебательной нагруз-
нагрузки (LC-контура).
Глава 8. Воздействие сигналов на линейные стационарные системы
Полная проводимость, включенная параллельно источнику
тока,
Отрицательный
знак указывает на
то, что при увеличе-
увеличении наириженин на
базе коллекторный
ток возрастает н
выходное напряже-
напряжение уменьшается
граничная частота
усиления
откуда частотный коэффициент передачи напряжения
Если на вход усилителя подан гармонический сигнал с
частотой со и комплексной амплитудой t/fcx, то комплексная
амплитуда выходного напряжения
(8.43)
Ж , II ,
Таким образом, рассмотренный усилитель напряжения с
резистивио-емкостной нагрузкой имеет частотный коэффи-
коэффициент передачи такого же вида, как и RC-цепь.
На нулевой частоте значение АЧХ максимально; модуль
коэффициента усиления Ко = SR3K. С ростом частоты уси-
усиление падает из-за шунтирующего действия паразитной
емкости. Полосу пропускания усилителя принято оценивать
граничной частотой <огр, на которой значения АЧХ умень-
уменьшаются в ]/2 раз по сравнению с уровнем К„. Из
(8.43) видно, что так как
I к О*» !
ео2К2„С2
то
<Вгр=1/(««С„).
Пример 8.13. Усилитель, собранный по схеме рис. 8.1, имеет
следующие параметры: К„ = 1.6 кОм, S = 20 мА/В, С„' = 30 пф,
R, = 15 кОм. Вычислить коэффициент усиления на нулевой частоте
и полосу пропускания усилителя.
Прежде всего находим эквивалентное сопротивление нагрузки
К„ = 1.6-15/A.6 + 15) = 1.45 кОм.
Модуль коэффициента усиления на нулевой частоте
Ко =20- НГ3-1.45- 10s = 29.
Граничная частота усилителя
шгр= 1/A.45-10' ЭКГ")» 2.3-10' с
или /ц, = 3.66 МГц.
решите задачу 10
Устойчивость дншияческих систем. По определению, линей-
ш ная динамическая система называется устойчивой, если все ее
устойчивость дн- собственные колебания затухают во времени. Необходимым
намическон сясте- и достаточным условием устойчивости системы является
мы отрицательность вещественных частей всех корней характе-
характеристического уравнения (8.36).
8.3. Линейные динамические системы
Эти кории ие должны быть также и чисто мнимыми. Хотя
при этом собственные колебания есть гармонические функ-
функции вида
««*(*)
sin,
(<
COS
небольшие случайные изменения параметров системы могут
привести к переходу ее в неустойчивый режим, когда
»соб ((> = ехр (ш) ^ (too*)
представляют собой экспоненциально нарастающие по ампли-
амплитуде колебания.
Если порядок динамической системы достаточно высок, то
прямая проверка устойчивости, основанная на поиске корней
характеристического уравнения, может оказаться весьма за-
затруднительной. Поэтому были разработаны специальные кри-
критерии устойчивости, позволяющие определять наличие корней
с положительными вещественными частями непосредственно
по виду коэффициентов, минуя само решение характе-
характеристического уравнения (см. гл. 14).
Возникновение нарастающих собственных колебаний в
электрических цепях возможно лишь тогда, когда в составе
цепи, помимо пассивных элементов L, С, R, содержатся
активные элементы, передающие в цепь часть энергии от
внешних источников. Распространенной моделью такого актив-
активного элемента служит резистор с отрицательным сопро-
сопротивлением.
Колебание в не-
неустойчивой системе
Рассматриваемая
система будет са-
монронзвольно
возбу ждатъсн, если
имеющееся в иен
отрицательное со-
сопротивление i?^ >
>¦ iVip.itp
Пример 8.14. Колебательный контур с параметрами С = 80 пф,
L = 2J5 мкГн, J? = 12 Ом содержит резистор с отрицательным
сопротивлением ROTp, включенный параллельно индуктивному элемен-
элементу. Определить критическое значение этого сопротивления, кри
котором возникает неустойчивость цепи.
Дифференциальное уравнение данной цепи, составленное отно-
относительно напряжения и иа индуктивном элементе, имеет вид
(8.44)
Корин Yi н у2 характеристического уравнения имеют ве-
вещественные части
Система переходит в неустойчивый режим, когда величина
ReYi.2 обращается в нуль. Отсюда находим критическое значение
отрицательного сопротивления:
-2.6 кОм.
202 Глава 8. Воздействие сигналов иа линейные стационарные системы
Описание линейных динамических систем в пространстве
состояний. Любое дифференциальное уравнение п-го порядка
вида (8.31) можно преобразовать в систему дифференциаль-
дифференциальных уравнений 1-го порядка. Для этого следует ввести
совокупность вспомогательных функций, построенную по пра-
•- вилу: x1(t) = uBblx{t), x2(t) = uBblx{t), .... xn{t) = d&4t)- Дан-
вектор состояния ные функции являются координатами вектора состояния
системы X(t) = {xlt x2, .... хД который принадлежит пространству
состояний рассматриваемой динамической системы.
Легко видеть, что при этом уравнение (8.31) экви-
эквивалентно следующей системе уравнений:
—г^-
at
х2 +0х3
0х, +0х2 +х3
(8.45)
.( ан х ан"- ан
В матричном виде данная система записывается так:
Здесь
(8.46)
При описании си-
системы в простран-
пространстве состояний
матричная экспо-
экспонента играет роль
импульсной харак-
характеристики
— постоянная матрица коэффициентов; F = @,0 /) — век-
тор-столбеп внешних сигналов, действующих на систему.
Если ввести матричную экспоненциальную функцию по-
посредством ряда
exp(At) = I + At + ¦¦¦ + А"г>! + •¦¦,
где I — единичная матрица размерности и х и, то решение
уравнения (8.46) запишется в виде, формально полностью
совпадающем с решением одномерного дифференциального
уравнения 1-го порядка [42]:
X (t) = exp (At) б + J ехр [A (t - -с)] Р (т) ch, (8.47)
о
где E — произвольный n-мерный вектор начальных условий.
8.4. Спектральный метод
8,4. Спектральный метод
Говоря о спектральном методе анализа прохождения
радиотехнических сигналов через линейные стационарные
системы, обычно имеют в виду целый комплекс мате-
математических приемов, в основе которых лежит использо-
использование свойств частотного коэффициента передачи системы.
Ниже на конкретных примерах показано применение спектраль-
спектрального подхода как к задаче нахождения реакции системы,
так и к проблеме числовой оценки выходного сигнала.
Основная формула. Пусть на входе некоторой линейной
стационарной системы действует детерминированный сигнал
"вх@> заданный обратным преобразованием Фурье:
Будем полагать, что известен частотный коэффициент
передачи K(jia) системы. Как было доказано, комплексный
сигнал вида expfjtat), являясь собственной функцией системно-
системного оператора, создает на выходе элементарную реакцию
К(/ш)ехр(/а>г). Суммируя эти реакции, находим представление
выходного сигнала:
(8.48)
Получена основная формула спектрального метода, сви- принцип спектраль-
детельствующая о том, что частотный коэффициент передачи него метода
системы служит множителем пропорциональности между
спектральными плотностями сигналов на входе и выходе:
(8.49)
Итак, анализ систем в частотной области отличается
замечательной чертой — эффект преобразования сигнала в
системе отображается просто алгебраической операцией
умножения.
Следует иметь в виду, что спектральный н временной
подходы полностью эквивалентны друг другу. Действи-
Действительно, интеграл Дюамеля (8.8) есть свертка функции
иа,(() н импульсной характеристики h(t) во временной об-
области: нв1„(г) = и„р)*Л(г). Значит, спектральная плотность
выходного, сигнала есть произведение спектральных плот-
плотностей функций и„(г) н h(t). Отсюда непосредственно
следует формула (8.49).
Практическая ценность спектрального метода нахождения
выходной реакции в каждом конкретном случае зависит от
того, удается ли провести интегрирование в формуле (8.48).
Вьрмслеяне импульсных характеристик. Как правило, на-
нахождение частотных коэффициентов передачи линейных систем
Глава 8. Воздействие сигналов на линейные стационарные системы
не вызывает принципиальных затруднений.^ Поэтому если
требуется вычислить импульсную характеристику h{t) систе-
системы, то целесообразно воспользоваться спектральным мето-
методом, согласно которому
фб(.) cd= U@
I 1 **
Случай t > 0
Imw
Внутри замкнутого
контура подынтег-
подынтегральная функция
пмеег единствен-
единственный простоя полюс
Случай t <О
Внутри замкнуто-
замкнутого контура подын-
тегральпая функ-
функция является ана-
аналитической "
поэтому импульсная характеристика
В качестве примера найдем импульсную характеристику
КС-цепи, для которой выходным сигналом служит напря-
напряжение на конденсаторе. Здесь
1/A +JaRQ,
(8.50)
Применим метод вычетов [14] н будем считать, что
со — комплексная переменная. Контур интегрирования в (8.50)
образован всей вещественной осью Im со = 0 н дугой Ci доста-
достаточно большого радиуса, которая может замыкаться как в
верхней, так н в нижней полуплоскостях.
Подынтегральная функция в (8.50) имеет единственный
простой полюс в точке с координатой con=j/(KC). Вычет
подынтегральной функции в этой точке
jRC
Найдем функцию h(t) прн *>0. Для этого расположим
дугу Ct в верхней полуплоскости, поскольку именно в этом
случае функция ехр(/со() будет экспоненциально стремиться
к нулю с ростом радиуса дуги. В пределе контурный
интеграл будет равен интегралу, вычисленному лишь вдоль
вещественной оси в соответствии с формулой (8.50).
По теореме Коши, контурный интеграл от функции
комплексной переменной равен числу 2л/, умноженному на
сумму вычетов подынтегральной функции во всех полюсах,
которые лежат внутри контура интегрирования. Таким обра-
образом,
е-'Л"с> при t > 0.
(8.51)
Если же требуется найти импульсную характеристику
прн t < 0, то контур интегрирования следует замкнуть
в нижней полуплоскости, где подынтегральная функция
вообще не имеет полюсов и поэтому
Ji(i!) = 0 при t < 0. (8.52)
8.4. Спектральный метод
График импульсной характеристики ЯС-цепи, построенный
по формулам (&51) и (8.52), представляет собой кривую, раз-
разрывную прн t=»= 0 (рис. 8.2).
Представление разрывных функций с помощью контурных
интегралов является математическим приемом, шнроко исполь-
используемым в теоретических исследованиях.
HtjRC
¦ \
- . - . 1.0 1J . .5 .
, Рис. 8.2. График импульсной характеристики ЛС-цепи
Вычисление сигнала на выходе системы. Как пример
использования спектрального метода решим задачу о про-
прохождении экспоненциального видеоимпульса напряжения
wjm@ = f/oexp(—at)o(t) через ЯС-цепь, рассмотренную выше.
В данном- случае спектральная плотность входного сигнала
V„(«>) = U0/(a +ja) н задача сводится к вычислению интегра-
интеграла, входящего в выражение
Uc
exppciit)d(o
Разлагая алгебраическую часть подынтегральной функ-
функции на элементарные дроби, имеем
1 1/1 aRC
A +j<a/a)(l +j<aRQ I ~ aRC \ 1 +j<a/a I +j<aRCJ
Структура слагаемых, стоящих в квадратных скобках,
позволяет непосредственно использовать результат, получен-
полученный при вычислении. импульсной характеристики ЯС-цепи,
н записать решение прн t > 0:
Естественно, что при t < 0
(t) = 0.
(8.53)
(8.54)
Соответствующий график приведен на рис. 8.3.
Коэффннент передача нюгозвеяиой системы. В радио-
радиотехнике часто используют сложные системы, отдельные звенья
решите
в 7
задачи 6
реиште задачу 8
Глава 8. Воздействие сигналов на лнвсйные стационарные системы
Следует обратить
внимание на то, что
КС-цепь сглажива-
сглаживает входной сигнал
0.5
0.4
0.3
0.2!
0.1
RC-0.5/B
¦?..
Рис. 8.3. Отклик RC-цепн на экспоненциальный видеоимпульс
которых включены каскадно, т. е. выходной сигнал предыду-
предыдущего звена служит входным сигналом для последующего
звена. Примером такой системы может служить много-
многозвенный усилитель.
Положим, что известны частотные коэффициенты передачи
отдельных звеньев К„(/ш), « = 1, 2,...,N. Возбуждая первое
звено сигналом uBX(t) = ехр(/а>?)> получим на выходе сигнал
iw (t) = К, 0со)К2 (/со) • • • К„ 0со)ехр(/ю4
откуда результирующий коэффициент передачи
(8.55)
В инженерных расчетах АЧХ систем часто выражают в
логарифмических единицах — децибелах. Если на некоторой
частоте со известен модуль частотного коэффициента передачи,
то усиление системы, выраженное в децибелах (дБ),
A = 2Olg|K0co)|. (8.56)
Если |К(/со)| < 1, то система ослабляет сигнал и усиление
оказывается отрицательным.
Легко видеть, что при каскадном соединении звеньев их
усиления суммируются алгебраически:
усиление системы Д = j Д„.
(8,57)
hi—т—«•
1 —
Дифференцирующие и интегрирующие цеш. Линейные цепи
шнроко применяют для преобразоваиня формы импульсных
радиотехнических колебаний.
Рассмотрим "КС-цепь, возбуждаемую источником ЭДС;
выходным сигналом является напряжение на резисторе.
Дифференциальное уравнение данной цепи имеет вид
т^-+н* = т%. . (8.58)
8.4. Спектральный метод
Если постоянная времени т мала настолько, что в любой
момент времени
At
(8.59)
то первым слагаемым в левой части уравнения (8.58) можно
пренебречь по сравнению со вторым н записать
(8.60) Сигнал на входе
Такая RC-цепь выполняет операцию приближенного диф-
дифференцирования сигнала. Схемотехническое применение диф-
дифференцирующих цепей — создание обострителей импульсных
сигналов.
Выполнение неравенства (8.59) зависит не только от
параметров цепи, но и от характеристик входного сигнала.
Для оценок здесь проще всего воспользоваться анализом
в частотной области. Частотный коэффициент передачи
рассматриваемой цепи K(jta)=jan/A +Jaz) будет достаточно
близок к частотному коэффициенту передачи идеального
дифференциатора: K(jia)xjen, если произведение ют пре-
пренебрежимо мало по сравнению с единицей в области
частот, где сосредоточена основная доля энергии сигнала.
Например, пусть входной сигнал — прямоугольный видео-
видеоимпульс длительностью т„. Используя грубую оценку верх-
верхней граничной частоты в спектре такого импульса: ю, =
= 271/т„, получаем условие, обеспечивающее пригодность
КС-цепи для приближенного дифференцирования данного
сигнала:
КС«т„/Bл).
(8.61)
M*)« —
(8.62)
КС-цепь с такими свойствами называется интегрирую-
интегрирующей цепью. Приближенное интегрирование выполняется тем
точнее, чем больше относительная доля высокочастотных
составляющих в спектре входного сигнала. Действительно,
поскольку здесь КЦа) = 1/A +jttri\, приближенное равенство
КЦю) х 1/(/сот), обеспечивающее интегрирующие свойства цепи,
и на выходе диф-
дифференцирующей це-
Диаметрально противоположными свойствами может обла-
обладать КС-цепь, у которой выходной сигнал, снимаемый с
конденсатора, удовлетворяет уравнению
due
Если параметры цепи и входного сигнала таковы, что
due ^ . .
решите задачу 9
Глава 8. Воздействие сигналов на лввейные стационарные системы
применение инте-
интегрирующих цепей
Как правило, функ-
функциональное про-
пространство сигналов
можно считать
гильбертовым
будет справедливо при шпт. ж-1, где ш„ — нижняя граничная
частота спектра.
Интегрирующие цепи дают возможность подавлять высоко-
высокочастотные составляющие спектра входного сигнала н поэто-
поэтому часто, используются как сглаживающие фильтры. Кроме
того, они могут преобразовывать скачкообразные перепады
входного сигнала в линейно нарастающие импульсы на вы-
выходе.
Геометрическая интерпретация процесса преобразования
сигнала в линейной системе. Спектральный метод позволяет
наглядно интерпретировать преобразования сигналов, которые
происходят при их прохождении через линейные стационар-
стационарные системы. С геометрических позиций, развитых -в гл. 1,
системный оператор Т —это правило перехода от вектора
н„р) некоторого линейного пространства к новому вектору
и,их(г). В самом общем случае можно утверждать, что
оператор Т изменяет норму вектора и,» ft), т. е.
II HbxII # || Тнм ||. Кроме того, между векторами uBxft) h
i'.ui(') возникает некоторый угол ф.
По формуле Рэлея (см. гл. 3), энергия выходного сигнала
«(««It
(8.63)
частотный коэффи-
коэффициент передачи
мощности
где WBX(fa) — энергетический спектр сигнала иа входе.
В соответствии с формулой (8.63), выходной энергети-
энергетический спектр Wm(m) = \ КЦа) |21Р„(в>).
Величину
|F1 (8.64)
называют частотным коэффициентом передачи мощности
системы на заданной частоте to. Поскольку этот коэф-
коэффициент вещественный, вычисление энергии выходного сигна-
сигнала оказывается гораздо более простой задачей по сравнению
с поиском самой формы выходного сигнала.
Пример 8.1S. На входе RC-цепи с частотным коэффициентом
передачи К (/со) = 1/A + jcor) действует идеальный низкочастотный
сигнал, энергетический спектр которого отличен от нуля и равен -ЭЯМетим, ЧТО
Wo лишь в пределах интервала частот 0 < со < Шв. Найти отношение Лр(и) i
энергий сигналов на входе и выходе. X К(—,/СО)
В данном случае КР = 1/A + со2т2). По формуле (8.63) энергия
выходного сигнала
1 + сгт2
8.4. Спектральный метод
Энергия вхолного сигнала ?^,х — Wyajx.
Видно, что отношение этих энергий
(8.65)
стремится к нулю с ростом как постоянной времени т, так
н верхней граничной частоты спектра.
Угол между векторам! входного й выходного сигналов.
В гл. 1 обсуждался способ сравнения двух сигналов,
основанный иа вычислении угла t|/, образованного векто-
векторами данных сигналов в гильбертовом пространстве. Эту
же идею можно использовать для сопоставления сигналов
на входе и выходе линейной стационарной системы.
Обобщенная формула Рэлея позволяет выразить ска-
лврное произведение этих сигналов через их спектральные
плотности:
Во многих случаях
достаточно знать
лишь изменение
энергии сигнала,
прошедшего через
линейную систему
(и.*, «.„О = -=—
1 }w
Поскольку мнимая часть коэффициента передачи есть
нечетная функция частоты, последняя формула упрошается:
(8.66)
= — Wm(m)ReKIJa>)da.
решите задачу 14
Угол t{f между векторами входного н выходного сигналов
можно найти нз соотношения
cos<Jj =
(«.,,
(8.67)
Пример 8.16. Вычислить угол ф между сигналами на входе
и выходе RC-цепи е соответствии с условиями примера 8.15.
Поскольку здесь ReA'(/to) = 1/A + eoV), в данном частном слу-
случае интеграл (8.66) численно -равен квадрату нормы выходного
сигнала. Отсюда следует, что .
(8.68)
Если произведение ч^т» 1, то со8ф-*0. Это означает, что
JRC-цепь создает на выходе сигнал, почти ортогональный по отно-
отношению к сигналу на входе. Природу этого эффекта можно
понять из качественных рассуждений, приняв во внимание, что
благодаря инерционным свойствам цепи выходной сигнал задер-
задерживается во времени.
Глава 8. Воздействие сигналов на линейные стационарные системы
Автокорреляционная характеристика системы. Заканчивая
обзор спектральных методов в теории линейных стационар-
стационарных систем, упомянем еще об одной полезной функции —
так называемой автокорреляционной характеристике системы
Ь(т). Ее принято определять как преобразование Фурье от
частотного коэффициента передачи мощности:
(8.69)
Наряду с частотным представлением (8.69) возможно н
временное представление этой функции. Чтобы осуществить
его, заметим, что КР(т) — K(jio)K*(jio). Поэтому между
функциями Кр(е>) н Ь(х) должна существовать такая же
связь, которая была найдена в гл. 3 между энергети-
энергетическим спектром и АКФ произвольного сигнала:
Ь(х) = | h(t)h(t - x)ut. (8.70)
Данная формула раскрывает смысл введенного здесь тер-
термина.
8.5. Операторный метод
К рассмотренному спектральному методу тесно примыкает
широко распространенный операторный метод, базирую-
базирующийся на представлении входных и выходных сигналов их
преобразованиями Лапласа.
Решение дифференциальных уравнений операторным ме-
методом. Преобразование Лапласа является исключительно гиб-
гибким н мощным методом, позволяющим путем стандартных
процедур находить решения линейных дифференциальных
уравнений с постоянными коэффициентами. Именно это
свойство обусловило его широкое использование в научных
исследованиях н инженерных расчетах.
Пусть дифференциальное уравнение
(8.71)
устанавливает закон соответствия между сигналами на входе
и выходе некоторой линейной стационарной системы. Нало-
Наложим некоторые ограничения. Сделаем допущение, что вход-
входной сигнал в„р) = 0 при t < 0. Кроме того, исходя
нз специфики работы радиотехнических устройств, началь-
начальные условия выберем нулевыми: н,ш @) = «¦,„« (()) = •••
¦¦• = Hf@) = 0. Наконец, примем, что область допустимых
входных сигналов не содержит в себе функций, столь
8.5. Операторный метол
быстро нарастающих во времени, что для них не суще-
существует преобразования Лапласа.
Обозначим закон соответствия между оригиналами н
изображениями следующим образом: н„(г)«-»[/„(р), н,ш(г)«-»
*-»^.ых(р). Вычислив преобразования Лапласа от обеих частей
уравнения (8.71), получим
(8.72)
Важнейшей характеристикой, на которой основан оператор-
операторный метод, является отношение изображений выходного
и входного сигналов:
(8.73)
1 -\ 1- atp + а0
Еслн эта функция известна, то поиск выходной реакции
системы на заданное входное воздействие разбивается на
три этапа:
1.
2.
3.
«.Л')
->и.
,(р),
K(P)U.«(P).
Термин «операторный метод» исторически восходит к из-
известным работам Хевисайда, который еще в конце прошлого
века предложил символический способ решения дифферен-
дифференциальных уравнений, описывающих переходные процессы в
линейных электрических цепях. Метод Хевисайда основан на
символической замене оператора дифференцирования d./df
комплексным числом р.
Свойства передаточной функции. Сравнивая формулы (8.74)
н (8.41), можно убедиться, что функция К(р) есть результат
аналитического продолжения частотного коэффициента переда-
передачи K(j<a) с мнимой осн jra на всю плоскость комплексных
частот р = а + jo). Функция К (р) аналитична на всей плоскости
р, за исключением конечного числа точек ри Pi,-..,pn,
являющихся корнями знаменателя в формуле (8.74). Данные
точки, т. е. корни уравнения
называемое передаточной функцией или операторным коэф-
коэффициентом передачи рассматриваемой системы.
В соответствии с формулой (8.72)
(8.74)
Математически ну-
нулевые начальные
условия озпачают,
что до момента
BO3I
входного
система пе содер-
содержит запасенной
энергии
передаточная
функция системы
В рамках опера-
торпого метода пе-
передаточная функ-
функция является пол-
полной математиче-
математической моделью си-
системы
О связи метода
Хевпсайда с тео-
теорией преобразова-
преобразования Лапласа см.
[14]
аналитическое
продолжение
называют полюсами передаточной функции К(р).
Глава 8. Воздействие сигналов на линейные стационарные системы
WE ..
Рис. 8.4. Характер поверхности |JC(p)| для передаточной функции,
имеющей два комплексно-сопряженных полюса р1-2 = — о +jioo и
один нуль z = О
Точки zb z2,...,zm, представляющие собой корни уравнения
Ь„г™ + Ь„_1г™'1 + ¦¦• + Ь,г + Ьо = О,
называют нулями данной передаточной функции.
Вынося общий множитель Ко, возникающий при делении
в (8.74) числителя на знаменатель, получаем так называе-
называемое нудь-полюсное представление передаточной функции:
(8.75)
Вещественность коэффициентов дифференциального урав-
j (8.72) обусловливает следующее свойство нулей н полю-
полюсов : все эти числа либо вещественны, либо образуют
комплексно-сопряженные пары.
В дальнейшем при- Часто используют наглядный прием отображения пере-
перенята такая система даточной функции с помощью карты нудей и полюсов, на
обозначений: О— которой некоторыми условными значками нанесены указаи-
нуль, * —полюс ные точки. Саму функцию К(р), принимающую комплексные
значения, нельзя непосредственно представить графически.
Поэтому поступают так: над плоскостью с декартовой
системой координат изображают трехмерную поверхность "
функции \К(р)\ (рис. 8.4).
Поверхность имеет характерный вид «горного ландшаф-
ландшафта»; бесконечно высокие вершины соответствуют полюсам,
а впадины — нулям передаточной функции. Выполнив сечение
этой поверхности с помощью плоскости, содержащей как
вертикальную ось, так и ось /ок получим профиль АЧХ
системы.
Полюсы передаточной функции линейной системы являют-
являются корнями характеристического уравнения (8.36). Поэтому
для устойчивости системы необходимо н достаточно, чтобы
эти полюсы располагались строго в левой полуплоскости
комплексной переменной р.. Нули передаточной функции
8.5. Операторный метод
в общем случае могут располагаться как в левой, так и
в правой полуплоскостях.
Формула обращения. Заключительным этапом решения зада-
задачи о прохождении сигнала через линейную стационарную
систему с помощью операторного метода является поиск
оригинала, которому отвечает изображение U»Uxip) =
)
Рассмотрим частный случай, когда функция Uaux(p)
представляет'собой отношение даух многочленов по степеням
комплексной частоты:
причем будем считать, что степень числителя т не пре-
превосходит степени знаменателя л и, кроме того, корни
знаменателя рь 1 = 1, 2 я — простые.
Способ нахождения оригинала, отвечающего такому
изображению, основывается на представлении функции
V,Ux(p) в виде суммы элементарных дробей:
Коэффициенты С,- являются вычетами функции 1/„,
точках полюсов, поэтому [14]
г, п V
tip) B решите задачу 11
Как известно, изображению 1/(р — рд) соответствует ори- •
гвнал exp(pjt). Таким образом, приходим к известной формула обраще-
формуле обращения: иия
(8.76)
Примеры нахождения выходных сигналов операторным
методом. При практическом использовании операторного
метода большую часть формальных вычислений можно
исключить, обращаясь,к широко распространенным табли-
таблицам преобразований Лапласа.
Пример 8.17. Найти переходную характеристику КС-цепи.
Здесь а(()«1/р, К(р)-1/A +рт), поэтому Е/„,„(р) = 1/1>A+рт)].
Разлагая эту функцию на элементарные дроби, имеем
Оригиналы, соответствующие обоим слагаемым в правой части
последней формулы, хорошо известны (см. [5, 6, 36]). Искомый
Глава 8. Воздействие сигналов на линейные стационарные системы
результат имеет вид
Пример 8.18. На входе RC-цепи действует прямоугольный
видеоимпульс ЭДС с заданными длительностью Т и амплитудой
Uo. Выходным сигналом служит напряжение на конденсаторе
цепи. Найти функцию, описывающую изменение во времени напря-
напряжения uc[t).
Входной сигнал имеет изображение
tf.x(p)=— A-е"*3).
Р
Множитель ехр(—рТ) свидетельствует о сдвиге во времени
на величину Т. Поэтому, используя результат, полученный в при-
примере 8.17, можно записать
Для наглядности последнюю формулу пелесообразно представить
VT) при 0</<Т,
т - 1) при г > Т.
Если выходной сигнал снимается с резистора, то прн тех же
параметрах R и С напряжение на резисторе ur = ивх — ис.
Пример 8.19. Импульсная характеристика параллельного коле-
колебательного контура.
Параллельный колебательный контур с потерями возбуждается
дельта-нмпульсом тока' в неразветвлеииой части цели. Выходным
сигналом служит напряжение на контуре. Равенство U(p) =
= Z(p)I(p) указывает на то, что передаточной функцией в данном
случае служит операторное сопротивление контура
7tn\= 2l? (877)
(8.78)
где a = 1/BKQ; mj = l/(tq.
Формулу (8.77) удобно представить в виде
(р + аJ + ю*'
где Юс = \/^о — а2 — частота собственных колебаний в контуре с по-
потерями.
Изображением дельта-импульса тока служит единица, поэтому
импульсная характеристика данной системы — это оригинал, соот-
соответствующий изображению (8.78). По таблицам преобразований Ла-
Лапласа находим
(8.79)
к соо), то формула (8.79) не-
(8.80)
Если контур высокодобротный (а
сколько упрощается:
Необходимо помнить, что' формулы (8.79) я (8Л0> соответ-
соответствуют возбуждению контура бесконечно коротким импульсом тока.
8.5. Операторный метод 215
Импульсная Ха- площадь которого тем не менее составляет 1 А-с. В реальном
рактернстнкаколе- масштабе —это очень большая величина: прямоугольный импульс
бателыюго КОНТу- длительностью 1 мкс должен иметь гигантскую амплитуду 10* А!
ра имеет характер- Неудивительно, что при -С = 1000 пФ такой импульс вызовет в
НЫЙ ВИД гармони- начальный момент времени напряжение 10я В. Реальный импульс
нлчми-Гипчлйапиа тока с амплитудой 0.01 А н длительностью 1 мкс имеет пло-
ческого колеоания щадь ю_в А с; при с=100о ПФ начальное напряжение на
С ЭКСПОНеНЦИальИО контуре составит лишь 10 В.
убывающей во вре- Итак, при t > 0 напряжение на параллельном контуре, который
мени огибаннцеи возбуждается коротким импульсом тока произвольной формы с
площадью Пимп, имеет вид
Этот ряд примеров можно было бы продолжить и А
рассмотреть, например, более сложную задачу о иключенни решите задачу 12
в колебательный контур источника гармонической ЭДС. Од-
Однако получающиеся при этом точные решения довольно
громоздки. Гораздо удобнее использовать приближенный
метод анализа нестационарных явлений в колебательных
цепях, изложенный в гл. 9.
Результаты
ОО Закон, связывающий входной и выходной сигналы в системе, называется
системным оператором.
ОО Классификация систем основана на свойствах системных операторов.
Различают линейные и нелинейные, стационарные и нестационарные,
сосредоточенные и распределенные системы.
ОО Реакция линейной системы на дельта-импульс называется импульсной
характеристикой.
ОО Сигнал на выходе есть свертка входного сигнала и импульсной
характеристики.
ОО Частотный коэффициент передачи и импульсная характеристика связаны
парой преобразований Фурье.
ОО Собственные колебания динамических систем определяются корнями характе-
характеристического уравнения.
ОО Динамическая система абсолютно устойчива, если все корни характеристи-
характеристического уравнения имеют отрицательные вещественные части.
ОО Частотный коэффициент передачи линейной стационарной системы, описы-
описываемой обыкновенным дифференциальным уравнением, есть дробно-рациональ-
дробно-рациональная функция частоты.
ОО Спектральная плотность выходного сигнала является произведением частот-
частотного коэффициента передачи и спектральной плотности колебания на входе.
Вопросы
1. Приведите несколько примеров линей- 3. Сформулируйте условие физической
ных и нелинейных, стационарных и не- реализуемости системы.
стационарных систем. 4. Что такое переходная характеристика
2. Прн каких условиях реакцию линей- системы? Как связаны между собой переход-
переходной системы на короткий входной импульс ная и импульсная характеристики?
можно представить импульсной характерце- 5. Как определяется частотный коэф-
тикой системы? фнциент передачи линейной системы?
216
Гпааа 8. Воздействие сигналов на линейные стационарные системы
6. Приведите формулировку критерия Пэ-
ли — Винера.
7. В чем заключено отличительное свойст-
свойство динамических систем?
8. Напишите формулу, определяющую
частотный коэффициент передачи усилителя
малых сигналов с апериодической нагрузкой.
Чем определяется граничная частота уси-
усиления?
9. В чем состоит сущность спектрального
метода анализа прохождения сигналов через
линейные системы?
10. В каких логарифмических единицах
измеряется усиление сигнала в системе?
11. Начертите схемы дифференцирующих
и интегрирующих цепей.
12. Как преобразуется вектор входного
сигнала, являющийся элементом гильбертова
пространства, прн прохождении через линей-
линейную цепь?
13. Что такое частотный коэффициент
передачи мощности?
14. Приведите определение понятия пере-
передаточной функции линейной системы.
15. В какой области комплексной плос-
плоскости должны располагаться полюсы переда-
передаточной функции устойчивой линейной си-
системы?
Задачи
1. Характеристика h{t) линейной стацио-
стационарной системы представляет собой импульс
треугольной формы:
На вход системы подается сигнал uBX{t) =
= ata{t).
Найдите выходную реакцию системы.
2. Вычислите импульсную характеристику
идеального интегратора, для которого
Уравнение должно быть записано относитель-
относительно неизвестной функции ЦщхСО-
5. Найдите частотные коэффициенты пере-
передачи систем, рассмотренных в задачах 3 и 4.
6. Вычислите импульсную характеристику
RL-цепи, схема которой имеет вид
16@
3. Структурная схема системы имеет вид
В ветвях А и Б помещены идеальный
элемент задержки на Т секунд и масштаб-
масштабный усилитель с коэффициентом усиления
Ко- Найдите импульсную характеристику
системы.
4. Составьте дифференциальное уравне-
уравнение, описывающее цепь:
7. Вычислите импульсную характеристику
цепи, рассмотренной в задаче 4.
8. Проведите анализ формулы (8.53) для
случая, когда а = i/(RC).
9. Исследуйте условия, при которых цепь -
вида
может осуществлять приближенное интегри-
интегрирование входного сигнала.
18. В многозвенном усилителе на поле-
полевых транзисторах применен разделительный
конденсатор Ср.
Более сложные задания
217
Его назначение — препятствовать попаданию
высокого постоянного потенциала со стока
предыдущего звена на затвор последую-
последующего.
Усилитель предназначен для усиления
прямоугольных видеоимпульсов длитель-
длительностью т„ = 1 мс. Считая, что сопротивление
резистора R = 0.5 МОм, а полевой транзистор
имеет бесконечное входное сопротивление,
определите емкость Ср, при которой за
время длительности импульса напряжение на
затворе (см. схему) падает не более чем на
5% от максимального уровня.
11. Найдите передаточную функцию уси-
усилителя с двумя одинаковыми резистивио-
емкостными ступенями. Параметры одной
ступени: S = 10 мА/В, Лн = 0.3 кОм,
R, = 7 кОм, Q, = 120 пФ. Емкость разде-
разделительного конденсатора (см. задачу 10)
столь велика, что ее влиянием на характе-
характеристики усилителя можно пренебречь.
12. В последовательный колебательный
контур с параметрами L, С и R включен
источник ЭДС uBX{t) = atu{t). Получите фор-
формулу, определяющую закон изменения напря-
напряжения иа конденсаторе.
Более сложные задания
13. Вычислите частотный коэффициент
передачи н найдите импульсную характе-
характеристику следующей цепи:
14. На входе ЛС-цепи действует источник
импульсной ЭДС
Выходной сигнал снимается с конденсатора.
Определите угол между векторами входного
и выходного сигналов в гильбертовом
пространстве.
15. Исследуйте переходную характеристи-
характеристику колебательного контура с помощью
физической модели — грузика, подвешенного
на нити. Входное воздействие на систе-
систему — скачкообразное перемещение точки под-
подвеса маятника в горизонтальном направ-
направлении. Экспериментально подберите такое
входное воздействие, которое переводило бы
систему из одного состояния покоя в другое
за конечное время. Сделайте вывод о пре-
предельно достижимом быстродействии колеба-
колебательных систем (данная задача является
частной иллюстрацией к одному из интен-
интенсивно развиваемых направлеинн соаремеиной
кибернетики — теории оптимального управле-
управления [12]).
Глава 9
Воздействие
детерминированных сигналов
на частотно-избирательные
системы
В радиотехнике с первых шагов ее становления по-
получил широкое применение способ выделения полезных
сигналов с помощью частотно-нзбирательных линейных
цепей. Такие цепи пропускают на выход лишь колебания
с частотами, которые лежат в относительно узкой полосе
вокруг некоторой центральной частоты. Частотная фильтра*
ция полезного сигнала особенно эффективна в том случае,
если обрабатываемый сигнал в достаточной степени узко-
полосен. Примерами узкополосных сигналов служат разно-
разнообразные модулированные колебания, изученные в гл. 4.
Линейные частотно-нзбнрательиые пени или, как их часто
называют, линейные полосовые фильтры, обладают рядом
специфических свойств. Для анализа прохождения сигналов
через такие цепи в радиотехнике созданы методы,
с которыми мы познакомимся в этой главе.
Эквивалентная
схема параллель-
параллельного колебатель-
колебательного контура
9.1. Некоторые модели
частотно-избирательных цепей
Простейшим полосовым фильтром является колебатель-
колебательный контур, образованный элементами L, С и R. В теории
цепей подробно изучаются последовательные и параллельные
контуры [3]. Не приводя подробных выкладок, напомним
основные положения, которыми будем пользоваться в даль-
дальнейшем.
Частотные характервстики параллельного колебательаого
контура. В окрестности резонансной частоты Юре, =
= 1/yLC данная колебательная система может быть описана
эквивалентной схемой, которая состоит из параллельного
соединения элементов L, С и активного резонансного
сопротивления
Кр*. = Р& . (9.1)
где р = у L/C — характеристическое сопротивление контура;
Q — добротность колебательной системы.
Свойства контура определяются зависимостью его вход-
входного сопротивления от частоты. В качестве аргумента
удобио использовать безразмерную обобщенную расстройку
t, = Q («в/Юр*, - Юр„/(»). (9-2)
При этом входное сопротивление
<9-3)
9.1. Некоторые модели частотно-избирательных цепей
Если Q»1, то в узкой полосе вблизи резонансной
частоты для расчета обобщенной расстройки следует поль-
пользоваться приближенной формулой
Sa^eCra-fflpJAv,. (9.4)
АЧХ параллельного колебательного контура отображается
так называемой резонансной кривой. Если добротность
достаточно высока, то резонансная кривая практически
симметрична относительно частоты Юре,. Уравнение резонаис-
иой кривой
219
|z(/»)l=-
(9.5) решите задачи 1 и 2
Интервал на оси частот (Гц) между точками, в которых
|Z| уменьшается от значения R^ до Лр„д/2 = O.WIRpa,
называют полосой пропускания контура:
ПО.7О7=/р*>/С- (9-6)
Резкое снижение модуля сопротивления параллельного
контура при расстройке относительно резонансной частоты
позволяет использовать згу цепь для частотной фильтра-
фильтрации сигналов.
Пример 9.1. Параллельный колебательный контур с параметрами
Q = 125, L = 6 мкГн настроен на частоту /ре, = 8 МГц. Контур
возбуждаетел источником гармонического тока; выходным сигналом
лвляетсл напряжение на контуре. Определить, во сколько раз
будет ослаблен сигнал на частоте 8.1 МГц по сравнению с
сигналом на резонансной частоте.
Для настройки иа требуемую резонансную частоту необхо-
необходимо использовать конденсатор емкостью С = \f{A%2Lf\^ = 66 пФ.
Резонансное сопротивление контура Лр„ =]/Z/CQ = 37.69 %38кОм.
По формуле (9.4) обобщенная расстройка на частоте 8.1 МГп
= 3.125.
Рассмотренный
колебательный
контур является
узкополослой час-
тотно-избиратель-
тотно-избирательной системой, по-
поскольку отношение
нолосы пропуска-
пропускания к резонансной
частоте П07о7/
//р~ = 1/е « i
\Z\/RPt
Л
i
in.
7.7 78 79 8
10.8
М0.6
1
¦ни
0 1
i >
? «
Л МГц
Рис. 9.1. АЧХ параллельного колебательного контура с параметрами
¦ С - 125, L- 6 шгГн, С - 66 пФ
220 Гпааа 9- Воздействие сигналов на частотно-нэбирательные системы
Амплитуда выходного сигнала в рассматриваемой цепи пропор-
пропорциональна модулю входного сопротивления контура. Поскольку
подставляя сюда найденное значение ?, убеждаемся, что амплитуда
этого сигнала на частоте 8.1 МГц составляет 0.305 от амплитуды
сигнала на резонансной частоте. Этой цифре соответствует
отрицательное усиление (ослабление) A = 2OlgO.3O5= -10.3 дБ.
Амплитудно-частотная характеристика дайной системы изобра-
изображена на рис. 9.1.
Часто используют параллельные колебательные контуры
с неполным включением. Внешние цепи могут подключаться
либо к отводу в индуктивном элементе, либо к средней
точке емкостного делителя. Входное сопротивление такого
контура вычисляют по формуле (9.3), в которую следует
подставить величину резонансного сопротивления
X,
ч:
*«.=¦
с,
'¦*
Imp
или входное сопротивление
где fcwm — коэффициент включения контура.
Нуль-полюсное представление характеристик колебатель-
колебательного контура. В рамках операторного метода динамические
свойства параллельного колебательного контура с потерями
можно описать, задав его входную проводимость
(9.7)
Заметив, что \f]flC = Юр„о есть резонансная частота кон-
контура без потерь и \KRpaC) = l/(pgC) = Юр^о/Й, перепишем
выражение (9.7) следующим образом:
zw- аЕ
Данное операторное сопротивление имеет единственный
нуль при р = 0 и два комплексно-сопряженных полюса
в точках с координатами
pi.z —
±j /i-
Полюсы расположены в левой полуплоскости (система
устойчива) и тем ближе к мнимой оси, чем выше доброт-
добротность контура. Последнее свойство является общим для
любых частотио-нзбирательных систем.
Резонансный усилитель малых колебаний. Данная узко-
узкополосная система совмещает в себе функции усилителя и
линейного частотного фильтра (рис. 9.2).
Отличие от усилителя с резистивно-емкостной нагрузкой
(см. гл. §) состоит в том, что здесь нагрузкой электронного
9.1: Некоторые модели частотно-избирательных цепей
Рис. 9.2. Резонансный усилитель малых колебаний:
а — принципиальная схема; 6 — схема замещения
прибора служит параллельный колебательный контур; включе-
включение контура в общем случае может быть неполным.
Обращаясь к эквивалентной схеме замещения, видим, что
ток с комплексной амплитудой — StlBX, поступающий от
управляемого источника, протекает по сопротивлению
и создает на ием падение напряжения, являющееся выходным
сигналом усилителя. Несложные преобразования показывают
[см. формулу (9.3)], что
1+Д»'
Здесь
(9.9)
(9.10)
— эквивалентное сопротивление контура усилителя при резо-
резонансе с учетом внутреннего сопротивления источника;
эквивалентная обобщенная расстройка
Можно считать, что влияние внутреннего сопротивления
о том. ™> добротность колебательной системы
уменьшается и становится равной эквивалентной добротности
(9.11)
Поскольку комплексная амплитуда гармонического сигнала
на выходе усилителя (?„„ = —SZjJn, частотный коэффи-
коэффициент передачи данного устройства
Согласно формуле
(9.11), для ослабле-
ослабления шунтирующего
действия электрон-
электронного прибора на
колебательпую си-
систему без расшире-
расширения полосы пропус-
пропускания усилителя
следует уменьшать
резонансное сопро-
сопротивление Rf,,, при-
применяя неполное
включение контура
решите задачу 5.
Глава 9. Воздействие сигналов на частотно-избирательные системы
Отсюда следуют соответственно уравнения АЧХ и ФЧХ
резонансного усилителя:
S* (9.13)
= тс - arctg [2B^@) - Шрез)/^,]. (9.14)
Пример 9.2. Усилитель, собранный но схеме рис. 92, имеет сле-
следующие параметры: fpa = 2S МГц, Q=95, р = 430 Ом, &вкл = 0.6,
S=20 мА/В, Л/= 15 кОм. Определить модуль коэффициента усиле-
нил на резонансной частоте и полосу пропускания усилителя.
Резонансное сопротивление колебательной системы
Лр« - *вклрС - 0.36 - 0.43 • 95 = 14.71 кОм.
Эквивалентное сопротивление контура при резонансе с учетом
шунтирующего действия транзистора
Др^ = 14.71/A + 14.71Д5) = 7.43 кОм.
При настройке усилителя в резонанс ?Эж = 0, поэтому из
(9.12) следует, что резонансный коэффициент усиления
Кр« - SRpn^ = 20- 7.43 = 148.6,
или в логарифмических единицах
з дб.
Полосу пропускания усилителя иа уровне 0.707 определяем по
формуле (9.6):
Поло?=/p«(i+Лрс/ла/е=°-58 МГц-
Многоковтурные частот но-избират?лы!ые системы. Рассмот-
Рассмотренные выше одноконтурные узкополосные цепи обладают
существенным недостатком — невысокой частотной избира-
избирательностью. Это свойство проявляется в том, что за
границами полосы пропускания значения АЧХ таких цепей
стремятся к нулю недостаточно быстро. Поэтому выходное
колебание содержит не только полезный сигнал, спектр
которого располагается иблизи максимума АЧХ, ио и некото-
некоторую, порой значительную долю мешающих сигналов, шумов
и т.д. со спектрами, лежащими на достаточном удалении
от той частоты, на которую настроен фильтр.
Стремясь повысить частотную избирательность фильт-
фильтров, прибегают к многоконтурным устройствам, в которых
удается получить форму АЧХ, близкую к идеальной
(прямоугольной).
Простейшим многоконтурным частотно-избирательным
фильтром является система двух связанных колебательных
контуров. Принцип работы такого устройства изучается в
теории цепей. На рис. 9.3, а изображена принципиальная^
схема резонансного усилителя, нагрузкой которого является
система двух одинаковых индуктивно связанных контуров.
Параметрами этой системы являются коэффициент связи
ke = M/L и так называемый фактор связи А = kcQ. Модуль
9.1. Некоторые модели частотно-избирательных цепей
З+Епи,
-6-4-2 0 2 4 6
6
Рис. 9.3. Резонансный усилитель со связанными контурами:
а — принишшиальная схема; 6 — графики АЧХ при различных факторах связи
частотного коэффициента передачи данного усилителя вы-
вычисляют по формуле
(9.15)
Графики АЧХ, построенные в соответствии с выражением
(9.15), изображены на рис. 9.3,6 при различных факторах
связи А. Отметим, что если А > 1, то резонансная кривая
в полосе пропускания имеет провал, глубина которого
возрастает с увеличением фактора связи.
Можно создавать весьма совершенные частотно-избира-
частотно-избирательные устройства, применяя фильтры с большим числом
взаимно связанных колебательных систем.
В последнее время в радиотехнике стали получать
распространение частотно-избирательные фильтры, построен-
построенные на новых схемотехнических принципах — так назы-
называемые активные фильтры (см. гл. 14). Большие успехи
достигнуты в области конструирования частотных фильтров,
работа которых основана на использовании ультразвуковых
волн в твердых телах. Новая отрасль радиотехники, по-
получившая название акустоэлектроники, сулит заманчивые
перспективы создания миниатюрных и надежных частотно-
избирательных систем.
Идеализированные модели ' частотно-избирательных уст-
устройств. При теоретическом исследовании частотно-нзбиратель-
ных узкополосных цепей часто применяют их упрощенные
модели, которые позволяют правильно описывать основные
свойства фильтроа, опуская малосущественные н к тому же
трудно анализируемые подробности.
Наиболее простой моделью служит гипотетический
идеальный полосовой фильтр, коэффициент передачи которого
постоянен и равен Ко в пределах полосы пропускания:
f
(.
Ко* ~о>о ~~ &*° ^ о ^ —coq + Дсо,
Ко* <оо — Дсо ^ со ^ соо + Дсо,
О на остальных частотах.
Сравнивая АЧХ
одно- и двухкон-
туриого усилите-
усилителей, можно заме-
заметить, что при рав-
равных добротностях
колебательных си-
систем двухконтур-
ный усилитель име-
имеет большую кру-
крутизну скатов ре-
зоиаисиой кривой,
т. е. способен обес-
обеспечить большую
частотную избира-
избирательность
(9.16)
идеальный полосо-
полосовой фильтр
Глава 9. Воздействие сигнале» на частотно-избирательные системы
гауссов
фильтр
радио-
решите задачу 6
Спектральная
плотность входно-
входного сигнала в пре-
пределах полосы про-
нускаиня системы
устанавливает мас-
масштабный уровень
выходного откли-
отклика
Другой распространенной теоретической моделью узко-
узкополосной системы является так называемый гауссов радио-
фильтр, АЧХ которого представляет собой колоколообразиую
гауссову кривую, симметричную относительно частоты а>0-
Частотный коэффициент передачи гауссова радиофильтра
К(/(о) = Коехр[-Ь(«> + ЮоJ] + Коехр[-Ь(ю - е>0П (9.17)
Здесь b — постоянная величина с размерностью с2, опреде-
определяющая частотные свойства фильтра. Первое слагаемое в
(9.17) обусловливает «всплеск» коэффициента передачи в об-
области отрицательных частот, а второе — в области положи-
положительных частот. При Ье>1» 1 фильтр узкополосен и эффект
перекрытия частотных характеристик, отвечающих отрицатель-
отрицательным и положительным частотам, ие наблюдается.
9.2. Частотно-избирательные цепи
при цироконолосвых входных воздействиях
Задача о поведении узкополосной частотно-избиратель-
частотно-избирательной цепи, возбуждаемой широкополосным входным сигналом,
представляет интерес, например, в связи с тем, что сигналы
по.мех часто представляют собой короткие импульсы. Эф-
Эффективная ширина спектра таких сигналов может значи-
значительно превышать ширину полосы пропускания частотно-
избирательной системы.
Понятие иироконолосного сигнала. Пусть К (/со) —час-
—частотный коэффициент передачи узкополосной цепи, способной
выделять спектральные составляющие входного сигнала,
сосредоточенные в малых окрестностях частот ± ю0. Входное
колебание uBX(t) со спектральной плотностью SM(a>) назы-
называют широкополосным сигналом применительно к данной
цепи, если функцию Sex((o) можно приближенно считать
постоянной в пределах полосы пропускания системы. При этом
JK(;<o)e»'d<o.
0 (9.18)
Согласно выражению (9.18), форма выходного сигнала в
данном случае определяется не характером входного колеба-
колебания, а лишь частотным коэффициентом передачи системы.
Импульсиан характеристика частотно-избирательной цепи.
Сигналом с предельно широким спектром является дельта-
импульс, для которого SM((o) = 1. Выходным сигналом в
данном случае служит импульсная характеристика
ВД = ^
(9.19)
Рассмотрим первое слагаемое в правой части выраже-
выражения (9.19) и перейдем в нем от переменной интегриро-
9.2. Цепи при широкополосных входных воздействиях
вания а> к новой частотной переменной ft в соответствии
с формулой to = — (о0 — ft Такой переход означает смещение
фуикдии К (jot) из окрестности точки — ю0 в окрестность
точки ft = 0. Таким образом,
О
— J
•Дю„ + П)]е-да<Ю. (9.20)
Поскольку рассматриваемая пепь узкополосная, модуль
частотного коэффициента передачи достаточно резко умень-
уменьшается с увеличением П. Это означает, что в последнем
интеграле (9.20) нижний предел — <о0 можно с полным осно-
основанием заменить на —со. В результате имеем
О оо
a0 + ft)]e-^da (9.21)
Аналогично, выполнив замену переменной (о = (о0 + П,
преобразуем второй интеграл в (9.19) к виду
(9.22)
Комплексно-сопряженные выражения (9.21) и (9.22) склады-
складываются, поэтому импульсная характеристика узкополосной
системы оказывается вещественной:
(9.23)
Низкочастотный эквивалент частотно-избирательной цепи.
Этим термином принято называть воображаемую систему,
частотный коэффициент передачи которой получается путем
смещения частотного коэффициента передачи реальной узко-
узкополосной цепи из окрестности частоты <% в окрестность
нулевой частоты, т. е.
|Кнч(/«) = КОК+ «)]¦! (9.24)
Интеграл в (9.23) является импульсной характеристикой
НЧ-эквивалента:
кнчЮ = ~ | Кич(/П)е"ап. (9.25)
Глава 9. Воздействие сигналов на частотно-избирательные системы
Поэтому
Л (t) = Re [2ЛНчМ <>*¦"¦•], P-26)
откуда следует, что функция 2АНЧ(«) является комплексной
огибающей импульсной характеристики реальной узкополос-
узкополосной цепи. В соответствин с формулой (9.26), в общем случае
импульсная характеристика частотно-избирательной системы
представляет собой квазигармоническое колебание, огибаю-
огибающая я начальная фаза которого медленно (в масштабе
времени Г= 2я/(Оо) изменяются во времени.
Пример 9.3. Низкочастотный эквивалент параллельного колеба-
колебательного контура.
Здесь частотным коэффициентом передачи служит входное
сопротивление
y/iVrti = fti*3 (9.27)
Коэффициент передачи НЧ-эквивалента получим, выполнив в
(9.27) замену переменной со = со^ + ft:
Zm(jCl) =
(9.28)
Эта формула с точностью до масштабного множителя Rp^,
описывает частотный коэффициент передачи динамической системы
1-го порядка (подобной КС-цепи) с постоянной времени
называемой постоянной времени колебательного контура. постоянная време-
Импульсная характеристика подобной системы была найдена ни контура
в гл. 8 при изучении свойств НС-цепи:
Отсюда импульсная характеристика параллельного контура
h (t) = (ЯрезСОро/С^ехр (—f/т») cos (ШрезГ) о @. (9.31)
Поскольку Ярез°>рез/С = 1/С, где С — емкость контура, получен-
полученный результат полностью совпадает с найденным в примере 8.19.
Пример 9.4. Импульсная характеристика идеализированной уз-
кополосной системы, частотный коэффициент передачи которой
КО'ш) = Коехр[—Ь(со — co0)]ct(cu — со0) при co>Ol
Перенеся эту функцию в окрестность нулевой частоты, получа-
получаем коэффициент передачи НЧ-эквивалента:
П)а(С1), (9.32)
Кнч(/П) =
откуда соответствующая импульсная характеристика
(9.33)
Импульсную характеристику исходной системы найдем по фор-
формуле (9.26):
Заметим, что
Лнч @ — комп-
лексвозначная
функция, поэтому
низкочастотный
эквивалент рас-
рассматриваемого
фильтра ие может
быть физически
реализуемой цепью
9.2. Цепи при широкополосных входных воздействиях
227
Здесь Ср — разде-
разделительный конден-
конденсатор, резисторы
Ri, Й2 препятст-
препятствуют накоплению
зарядов па затво-
затворах транзисторов,
резисторы Ri, R4
создают пачаль-
ные смещения ра-
рабочих точек трап-
знсторов, коцдеп-
саторы Сз, Са до-
достаточно большой
емкости препятст-
препятствуют возникнове-
возникновению отрицательной
обратной связи
Рис. 9.4. Приипипиальная схема двухконтуриого усилителя
Пример 9.5. Импульсная характеристика двухконтурного резо-
резонансного усилителя, схема которого изображена на рис. 9.4.
Положим для простоты, что обе ступени усилителя настроены
на одну н ту же резонансную частоту Юро, имеют одинаковые
резонансные коэффициенты усиления Кр^ и одинаковые постоянные
времени тк. Тогда частотный коэффициент передачи
Заменяя частотную переменную jft на комплексную частоту р,
имеем следующую передаточную функцию НЧ-эквивалеита:
В соответствии с таблицами преобразований Лапласа ей отве-
отвечает импульсная характеристика
Анч @ = (Цк^Ъ t exp (- г/тк) о (t),
откуда импульсная характеристика двухконтуриого усилителя:
Полезпо сравнить
этот результат с
импульсной харак-
характеристикой одипоч-
пого параллельно-
параллельного контура, полу-
полученной в примере
8.20. Обращает па
себя внимание «за-
«затягивание» входно-
входного импульса во
времени, происхо-
происходящее из-за боль-
большей инерционности
двухконтуриов си-
системы
9 К2 ( t\
h {t) = -=™J ±Л exp (- фк) cos (cu^t) a (t).
Соответствующий график приведен иа рис. 9.5.
(9.34)
Рис. 9.5. Импульсная характеристика даухкоитурного резонансного
усилителя
Глава 9. Воздействие сигналов на частотно-избирательные системы
решите сдачу 7
Общий случал. Предположим, что на вход некоторой час-
частотно-избирательной системы воздействует произвольный
широкополосный сигнал со спектральной плотностью
(9-35)
Считая, что ывх (t) — вещественная функция, имеем
А(т) = А(-а), В(ю)= -В(-ю).
Представим выходное колебание в виде суммы
Здесь
1М = ^уяЮ—
K(/m)e'°"d(o =
о
(936)
Аналогично,
(9.37)
Подставляя эти промежуточные результаты в (9.35), полу-
получаем окончательный результат
«.„W = 2M(@0)Re[/iH4(t:
(9.38)
Естественно, что из (9.38) вытекает как частный случай
формула (9.26), описывающая импульсную характеристику
узкополосной цепи.
Физический смысл спектрального разложения. Положим
для простоты, что Лнч (') — вещественная функция, и предста-
представим формулу (9.38) в виде
и.„ (t) = 2АНч М [А (ю„) cos (Opt -В (ю0) sin e>oi] =
- 2ЛНч @ \/Аг (ю„) + В2 (ю0) cos [root + ср (<0о)]. (9.39)
где tg ср (ю0) = В (юо)//4 (ю0).
Входящее сюда выражение [А2 {о>0\ + В2 (Оо)] пред-
представляет собой величину 15ВХ (too) |. Таким образом, как отме-
отмечалось, отклик узкополосиой системы на широкополосный
сигнал пропорционален абсолютному значению спектральной
плотности входного сигнала в той точке на оси частот, кото-
которая соответствует центральной частоте полосы пропускания
системы.
Этот результат указывает путь осуществления аппаратур-
аппаратурного спектрального анализа сигналов. На рис. 9.6 приведена
структурная схема анализатора спектра, построенного по так
называемому параллельному принципу..
9.2. Цепи при узкополосных входных воздействиях
Рис. 9.6. Структурная схема анализатора спектра сигналов (ампли-
(амплитуды выходных колебаний фильтров пропорциональны модулям
спектральной плотности)
Сформулированный здесь принцип аппаратурного спект-
спектрального анализа имеет не только прикладное, но и. большое
принципиальное значение. В частности, он позволяет уста-
установить физический смысл поведения спектров сигналов, изу-
изученных в гл. 2. Например, как было показано, спектральная
плотность прямоугольного видеоимпульса длительностью тн
обращается в нуль на всех частотах оз„ = 2тш/ти, и = 1, 2, ...
Предположим, что данный видеоимпульс воздействует на
вход узкополосной колебательной системы, настроенной на
одну из этих частот. Период собственных колебаний системы
Тп = 2тс/(оЛ = xjn находится в целократном соотношении с
длительностью импульса. Колебательная система, получив
«толчок» от фронта импульса, через время, кратное периоду
собственных колебаний, получит такой же «толчок», но в
противоположном направлении, от среза импульса. В резуль-
результате будет наблюдаться взаимное погашение этих реакций.
Именно об этом говорят нулевые значения спектральной
плотности видеоимпульса в некоторых точках оси частот.
Прекрасное изложение вопросов, связанных с физическими
аспектами спектральных разложений, читатель может найти
в [19].
9.3. Частотно-избирательные цепи
при узкополосиых входных воздействиях
В типичной ситуации, например в случае приема моду-
модулированных сигналов, ла вход частотно-нзбирательиого ли-
линейного фильтра подается полезный сигнал, спектральная
плотность которого имеет четко выражеиный максимум в пре-
пределах полосы пропускания цепи. При этом, как правило,
резонансная частота колебательной системы совпадает с час-
частотой несущего колебания (симметричная настройка).
Если спектр входного радиосигнала был бы строго огра-
ограничен областью частот, в пределах которой частотный коэф-
коэффициент передачи фильтра неизменен, то выходной сигнал
являлся бы просто масштабной копией входного воздействия.
Однако неизбежная яевдеальность АЧХ и ФЧХ частотно-
Устройство состо-
состоит яз пабора узко-
узкополосных фильт-
фильтров, полосы про-
пропускания которых
взаимно ие пере-
перекрываются. Про-
Проводя одповремен-
пое измерение амп-
амплитуд выходных
колебаний, можно
получить информа-
информацию об интенсив-
интенсивности спектраль-
спектральных сопоставляю-
сопоставляющих входного сиг-
сигнала в различных
участках оси час-
частот
физическая интер-
интерпретация спект-
спектральной плотности
сигнала
Глава 9. Воздействие сигналов на частотно-избирательные системы
избирательной системы ведет к искажениям формы выход-
выходного сигнала. Ниже излагается метод, позволяющий нахо-
находить выходные отклики частотно-избирательных цепей, воз-
возбуждаемых узкополосными колебаниями.
Основные соотношения. Рассмотрим произвольную узкопо-
лосную цепь, частотный коэффициент передачи К (;<о) которой
существенно отличен от нуля лишь в окрестностях точек +<о0
на оси частот. Предположим, что входным сигналом служит
узкополосное (квазигармоническое) колебание с центральной
частотой спектра ю0. Это означает, что в формуле
и., (I) = Re [С„ И е*"»] (9.40)
комплексная огибающая UM(t) является гораздо более мед-
медленной функцией, чем колебание cos(o0t. Обозначим соответ-
соответствие между сигналами и их спектрами: щхA)*->Бях(&),
Un(f)*->Gn(fa), причем (см. гл. 5) спектры входного сигнала
и его комплексной огибающей связаны таким образом:
5(ю)С(юсо) + С;(о)(О)
Отсюда, используя спектральный метод анализа линейных
цепей, получаем следующее выражение для выходного сиг-
сигнала:
~ | С„ (ю - @0) К Ою),е*" dm. (9.41)
Выполнив в первом интеграле замену переменной ю
= —(о0 —Я, преобразуем его:
о
~ G*,
(-<o-@0)K<;@)e*"d@ =
(9.42)
Аналогично, используя подстановку ю = ю0 + Я, преобра-
преобразуем второй интеграл в (9.41):
(9.43)
9.3. Цепи при узкополосных входных воздействиях
Заметим, что правые части выражений (9.42) и (9.43)
являются комплексно-сопряженными. Кроне того, величина
К \j (<о0 + П)] иа основании (9.24) служит частотным коэф-
коэффициентом передачи НЧ-эквнвалента узкополосной цепи.
Поэтому
¦и
Отсюда видно, что комплексной огибающей выходного
сигнала соответствует выражение
(9.44)
Итак, комплексная огибающая выходного сигнала пред-
представляет собой медленно меняющееся во времени колебание
со спектральной плотностью
С,их (П) = С„ (П) КНч ДО). (9-45)
Чтобы решить задачу о прохождении узкополосного
сигнала через частотно-избирательную систему, следует вна-
вначале найти результат воздействия входной комплексной оги-
огибающей на НЧ-эквивалент исходной системы, а затем перейти
к физическому выходному сигналу
(9.46)
Равенство (9.44) соответствует спектральному методу на-
нахождения сигнала на выходе системы. В равной мере могут
быть использованы и другие известные методы, например
операторный метод, а также метод интеграла Дюамеля,
согласно которому
= f ?вх
(9.47)
где Лнч (() — импульсная характеристика НЧ-эквивалента.
Воздействие АМ-снгнала на одноконтурный резонансный
усилитель. В качестве первого примера рассмотрим задачу
о прохождении однотонального АМ-колебания ивк (t) =
= U0(l + Mcosfit)cosco0t через одноконтурный резонансный
усилитель с частотным коэффициентом передачи
¦у*. ... ¦
Низкочастотный
эквивалент, рас-
рассматриваемый как
дняампческая си-
система, имеет более
низкий норядок, не-
нежели исходная уз-
узкополосная цепь.
Поэтому нахожде-
нахождение комплексной
огибающей па его
выходе оказыва-
оказывается более простой
задачей
Сделаем упрощающее допущение — будем считать, что ре-
резонансная частота о>р„ и частота несущего колебания <о0
совпадают. Взяв эту частоту в качестве опорной, получим
комплексную огибающую входного сигнала
U., (t) = Uo (I + Af cos fit). (9.48)
Способ решения
очень прост потому,
что входная комп-
комплексная огибаю-
огибающая есть сумма по-
постоянной составля-
составляющей и гармониче-
гармонического колебания
Глава 9. Воздействие сигналов на частотно-избирательные системы
Частотный коэффициент передачи НЧ-эквивалента уси-
усилителя
Кнч(/Й> = -Kpefll +jOxJ. (9.49)
Выходную комплексную огибающую можно найти из (9.48)
и (9.49), применив обычный метод комплексных амплитуд,
известный из теории цепей:
cos (fit -S
где фазовый сдвиг 9д = arctg fix*.
Применив формулу (9.46) и приняв во внимание, что
постоянная времени контура тк = 2Q3s/(aptS3a находим сигнал
на выходе усилителя:
ил ~\
г cos (fit - Эд) cos <aot, (9.50)
где ?q = 2Qaifl/<ofe3 — обобщенная расстройка колебательного
контура на верхней боковой частоте.
Таким образом, на выходе резонансного усилителя су-
существует колебание, которое, будучи усиленным по амплитуде,
по-прежнему является .однотональным АМ-сигналом. Однако
коэффициент модуляции на выходе меньше, чем на входе:
(9.51)
Кроме того, огибающая на выходе запаздывает относи-
относительно огибающей входного сигнала на время гЭШ| = 9д/О-
Пример 9.6. АМ-сигнал с параметрами М=0.8, шс = 5-106 с*,
П = 3 ¦ 104 с~ * проходит через усилитель, настроенный на несущую
частоту. Контур усилителя имеет эквивалентную добротность
Сэк = 75. Найти величины Мвых и ГЗШ|.
В этом случае ^ = 2-75-3-104/5-106 =05, откуда по формуле
(9.51) находим
Мвых = 0.8/j/l + 0.81 = 0.59.
Итак, наблюдается ощутимое снижение глубины модуляции.
Поскольку arctg OS = 0.733 рад, задержка огибающей 1ЗШ| соста-
составит 0.733/C -104) = 24 мкс.
Воздействие на резонансный усилитель вмпульса включения
гармонической ЭДС. Во многих радиотехнических системах
(радиолокационных, системах многоканальной связи) полезная
информация передается с помощью последовательностей пря-
прямоугольных радиоимпульсов. Проходя через резонансные
частотно-избирательные системы, являющиеся неотъемлемы-
неотъемлемыми частями радиоприемных устройств, такие импульсы не-
несколько искажаются. Чтобы оценить степень этих нежела-
нежелательных искажений, решим задачу о сигнале на выходе одно-
одноконтурного резонансного усилителя с частотным коэффя-
9.3. Цепи при узкопопосных входных воздействиях
циентом передачи (9.12) при условии, что иа входе действует
сигнал и„ (() = и„ cos (щ{) а (().
Пусть усилитель настроен иа несущую частоту, т. е.
»>ро = <"о. Тогда, выбирая эту частоту в качестве опорной,
получим следующее выражение для комплексной огибающей:
Радиоимпульс на
входе усилителя
Задача о воздействии сигиала (9.52) на линейную систему
с коэффициентом передачи вида (9.49) была рассмотрена
в гл. 8 при изучении переходной характеристики КС-цепи.
Поэтому можно воспользоваться известным результатом и
записать
(9.53)
„Л<) = -Kpc3l/m[l-exp(-(/iK)]ci(().
Тогда выходной сигнал усилителя
- exp(-tAK)]cos(raot)ci(t).
Радиоимпульсы на
выходе:
(9.54)
при (,„ < т„
при (SCT > т„
Излишне высокая
добротность конту-
контура приводит к су-
существенному иска-
искажению огибающей
импульса
Рис. 9.7. Процесс установления холебаний на выходе резонансного
усилителя, настроенного на частоту сигнала
График, построенный по формуле (9.54), представлен на
рис 9.7.
Текущая амплитуда выходного сигиала достигает уровня
0.9 от стационарного значения Кр„и„ за время установления
(9.55)
Влияние расстройки. Рассмотрим предыдущую задачу в
более общей постановке, предположив, что частота заполне-
заполнения входного сигнала отличается от резонансной частоты
контура на величину 8ш. При этом
и„ (<) = Ua cos [(шро + 6ш) (] а ((),
и„ (() = Um ехр 0'6°><) а (().
Сигнал на выходе НЧ-эквивалеита одноконтурного резо-
резонансного усилителя проще всего найти, воспользовавшись
интегралом Дюамеля, в который следует подставить выра-
выражение импульсной характеристики НЧ-эквивалента:
(9.56)
Глава 9. Воздействие сигналов на частотно-избирательные системы
По формуле (9.47) находим
т, J
(9.57)
Физическая огибающая процесса на выходе равна модулю
выходной комплексной огибающей:
- 2е-'Л« cos бои + е-2'/'«.
(9.58)
На рис. 9.8 изображены кривые, построенные по формуле
(9.58) при различных значениях безразмериого произведения
бсотк.
0.6
¦¦¦¦"Its
°-4 /
°V
0
1
Рис. 9.8. Процесс установления огибающей в резонансном усилителе
при наличии расстройки:
1 - при 8ютк = 1; 2 - при 8@Тк = 3
Сложение свобод-
свободных и вынужден-
вынужденных колебаний
Таким образом, расстройка между резонансной частотой
колебательной системы и.частотой гармонического заполиеиия
входного импульса приводит к немонотонному изменению
огибающей сигнала на выходе. Физическое объяснение этого
факта таково: выходной сигнал усилителя складывается из
вынужденных колебаний, имеющих частоту внешнего источ-
источника, и экспоиенциально затухающих во времеии свободных
колебаний с частотой, равной резонансной частоте контура.
Пользуясь языком метода комплексных амплитуд, можно
сказать, что вектор &Своб вращается с разностной частотой
ош относительно вектора ив1ш. Огибающая выходного сиг-
сигнала, пропорциональная длине суммарного вектора 6Г,
оказывается переменной во времеии, стремясь в пределе
к амплитуде вынужденных колебаний.
Поскольку вектор (Jz с течением времени изменяет свое
положение на плоскости, во время переходного процесса
9.3. Цепи при узкопалосных входных воэдейств]
233
непостоянной оказывается и мгновенная частота выходного
сигнала. Использув формулу (9-57), на основании принципа
вычисления мгновенной частоты, изложенного в гл. 5, имеем
d
ш (() = шро + -j-arg t/,m (() =
sin бои
cos Scot — exp(—</
(9.59)
Можно заметить, что при t -»оо, когда переходный про-
процесс в усилителе практически закончится, частоты сигналов
на входе и выходе становятся одинаковыми.
Воздействие фазоманипулированных сигналов ва резонанс-
резонансный усилитель. Как уже упоминалось, в современной радио-
радиотехнике часто применяются, сигналы, представляющие собой
отрезки гармонических колебаний, начальная фаза которых
изменяется скачками в дискретные моменты времени. По-
Подобные сигналы называют фазоманипулированиыми колеба-
колебаниями.
Изучая прохождение таких сигналов через частотио-
избирательные цепи, рассмотрим модельную задачу об одно-
одноконтурном резонансном усилителе, на входе которого дей-
действует сигнал со скачкообразным изменением фазы на <р0
радиан при / = 0:
(9.60)
Этому сигналу отвечает комплексная огибающая
(9.61)
Используя метод интеграла Дюамеля, находим комплекс-
комплексную огибающую на выходе:
(9.62)
(9.63)
При ( < 0 из формулы (9.62) следует, что
?Lx(<) = ~K^Um j e-«-«
фазоваи манипуля-
манипуляция
т. е. до момента скачка фазы усилитель находится в ста-
циоиариом режиме гармонического возбуждения. Если же
о 0, то
(9.64)
236
Глава 9. Воздействие сигналов на частотно-избирательные системы
Если ф0 = 180°, то
амплитуда выход-
выходного колебания
вначале плавно
уменьшается до ну-
нуля, а затем вионь
возрастает до пер-
первоначального уров-
уровня за интервал по-
порядка нескольких
постоянных време-
времени коитура
Рис. 9.9. Огибающая сигнала на выходе резонансного усилителя,
возбуждаемого фазоманипулнрованным сигналом:
I - при «р0 = 18U ; 2 - при «р0 = 90°
Отметим, что при г = 0 выражения (9.63) и (9.64) дают
одинаковый результат: ивых@) =* — KpaUm. Если гДж » 1, то
^вых(Ода — KpnUmexp{jff>o), т.е. по окончании переходного
процесса система переходит в новое стационарное состояние,
которое отличается от исходного фазовым сдвигом на
<р0 радиан.
Вычисляя модуль комплексной огибающей, находим выра-
выражение для физической огибающей выходного сигнала при
Берется положи-
положительное значение
квадратного корня
В момент времени
<о входной сигнал
окончательно «га-
«гасит» колебания, су-
существовавшие в
контуре до скачка
фазы
(9.65)
IW0 = Кг„и„ {[е-"'« + A - е-*.) cos <p0]2 +
+ (l-e-'/'«Jsm2<p0}1'2.
На практике часто используют сигналы с фазовой мани-
манипуляцией на 180°. В этом частном случае
1/,„@ = Кр„'/т|2ехр(-(Дк)-1|. (9.66)
Здесь амплитуда выходного сигнала становится равной нулю
в момент времени to, являющийся корнем уравнения
2exp(-@/tJ- 1 = 0,
откуда
@ = 0l693tk. (9.67)
Рис. 9.9 иллюстрирует зависимость физической огибаю-
огибающей выходного сигнала от безразмерного параметра гДк
при двух значениях фазового сдвига <р0: 180 и 90°.
Для проектирования приемников фазоманипулироваиных
сигналов первостепенный интерес представляет закон измене-
изменения мгновенной фазы на выходе усилителя. Записывая вы-
выходную комплексную огибаюшую в форме {/,„*(') =
= Увьи (') exp [/<pDUX (()], из формулы (9.64) имеем следующее
выражение мгновенной фазы (рад):
<р.ь„, (<) = t + arg [A - е-'"к) cos <р0 + е-'"« +
+ Д1-е"'«)8ш<рй]. (9.68)
9.3. Цепи при узкополосных входных воздейств]
/
.—
1
1 1 1 1
180= 150=
-
120°
' 90°
^ «¦
30°
1 1 1 1
*¦«.<—ISO. г
150
120
90
.60
30
0 12 3 4 5
Рис. 9.10. Зависимость мгновенной фазы сигнала на выходе усилителя
от безразмерного параметра г/т.к
Первое слагаемое в правой части дает постоянный фазо-
фазовый сдвиг, не играющий принципиальной роли. На рис. 9.10
изображены кривые, описывающие зависимость переменной
части мгновенной фазы от безразмерного времени </т„.
Случаи <р0 = 180° является вырожденным; здесь фаза вы-
выходного сигнала изменяется скачком в момент времени < = <0
[см. формулу (9.67)]. При прочих значениях <р0 фаза сигнала
на выходе изменяется во времени непрерывно.
Воздействие колебания со ска>ком частоты иа резонансную
систему. В ряде случаев для передачи сообщений исполь-
используют сигналы, представляющие собой гармонические колеба-
колебания с различными частотами. Если частота заполнения изме-
изменяется скачком, говорят о частотной манипуляции сигнала.
Рассмотрим одноконтурный резонансный усилитель, на
вход которого подан сигнал вида
х 237
Фаза колебаний ни
выходе усилителя
усганавлмваегси за
отрезок времени
порядка постоян-
постоянной времени конту-
контура
«CO80W-
Если считать, что опорная частота равна
г Т
частотиаи манипу-
липии
„ехрО'оом), 0 0.
Ясно, что при ( < 0 усилитель находится в стационарном
режиме и &„„(() = —Краи„ [см. формулу (9.63)]. Исследуя
процесс иа выходе при об, в интеграле Дюамеля (9.47) следует
по отдельности учесть вклады от полубесконечного интер-
интервала времени (—оо, 0) и от ограниченного отрезка [0, (]:
(9.69)
Глава 9. Воздействие сигналов на частотно-избирательные системы
Следует обратить
внимание ни то, что
огибающая вы-
выходного сигнала
изменяется во вре-
времени в общем слу-
случае немонотонно
\\
V
\
ХЛ
2
о
1
'/*.
Рис. 9.11. Процесс установления физической огибающей сигнала
иа выходе усилителя после скачка частоты при различных пара-
параметрах b = 8аия:
/ - при 6=1; 2 - при 6 = 3; 3 - при 6 = 5
где ? — формальная переменная интегрирования; Ъ = 6штя —
безразмерный параметр, характеризующий отношение частот-
частотной расстройки ош к полосе пропускания контура. Интегри-
Интегрируя по ?, находим, что
(9.70)
Отсюда физическая огибающая выходного сигнала при
х {cos2(btAK) + [sin(btAK) + bexp(-(A1J]2}1'2. (9.71)
Соответствующие графики изображены иа рис. 9.11.
Определенный практический интерес представляет характер
изменения мгиовеииой частоты ш,„, (') колебаний на выходе
резонансного усилителя во время переходного процесса. Здесь
следует воспользоваться общей формулой E.35), которая вы-
выражает мгновенную частоту узкополосного сигнала через
синфазную н квадратурную амплитуды. В рассматриваемом
случае иВыЛ()= Abbn{t)+jBahn(i)> где, как это следует из
(9.70),
K) + Ь2е-А«],
(9.72)
[sin(bt/TK) - Ь cos (ЫМ + Ье-"'].
Проделав несколько громоздкие, но вполне элементарные
выкладки, полушек , < ,
• 9.3. Цепи при узкополошых входных воздейств]
**<
1
1
-1
Рис. 9.12. Процесс установления мгновенной частоты на выходе
резонансного усилителя:
/ - при 6=1; 2 - при Ь = 3; 3 - при 6 = 5
«ЬыжМ =
(9.73)
На рис. 9.12 представлены три кривые, рассчитанные по
этой формуле при различных параметрах b = 5ютк. По осн
ординат отложена относительная величина мгновенного час-
частотного отклонения.
Если Ь = 1, то рассматриваемая величина с течением вре-
времени стремится к установившемуся значению, равному еди-
единице, вполне монотонно. При увеличении параметра Ъ пере-
переходный процесс приобретает более сложный характер.
Воздействие сигнала с однотонально* угловой модуляцией
иа одноконтурную резонансную систему. Предположим, что
последовательный LCR-контур находится под воздействием
источника ЭДС, создающего входной сигнал и„х@ =
= 1/„ cos (сад + т sin Й() с однотональной ЧМ- или ФМ-моду-
ляцией. Будем считать, что резонансная частота контура
ш„о и частота несущего колебания ш0 совпадают. Выходным
сигналом служит напряжение на конденсаторе ис it). Требуется
найти законы изменения во времени физической огибающей
(^вых(') и мгновенной частоты 1ОвЫГA) выходного сигнала.
Развитый выше метод НЧ-эквивалента ие позволяет ре-
решить поставленную задачу. Дело в том, что подстановка
комплексной огибающей !/„(()= l/mexp(jmsinn<) в формулу
(9.47) приводит к интегралу с переменным верхним пре-
пределом. Вычислить такой интеграл не представляется возмож-
возможным.
Поэтому обратимся непосредственно к дифференциально-
дифференциальному уравнению данной цепи, которое, будучи записанным
В некоторые мо-
моменты времени час-
частота изменяется
весьма резко. Час-
Частотное отклонение
может даже изме-
изменять свой знак,
как это видно ни
примере кривой,
соответствующей
значению Ь = 5
Глава 9. Воздействие сигналов на частотно-избирательные системы
относительно неизвестного uc{t\ принимает вид
i|?-+ 2а ^- + ю$ис = OoU^osfat + msmOt), (9.74)
где а = J?/BZ.) — коэффициент затухания контура.
Перейдем к безразмерному времени fcj = оэо'» такому, что
Л = dl/coo, dB = dtjVrao- Тогда уравнение (9.74) преобразуется
б
следующим образом:
^У^ + ^° ^ +uc= I/mcosR + msin(nV<»o)]- (975)
Введем два безразмерных параметра:
е = 2а/<во, ц = fi/Ч. (9.76)
Тогда
= I/mcostjcos(msinuy — l/nsmcjsin(msinu^). (9.77)
Для того 1ггобы иайти интересующие нас характеристики
выходного колебания, необходимо получить частное решение
этого неоднородного дифференциального уравнения в беско-.
иечном интервале — оо < tj < оо.
Метод медленно меняющихся амплитуд. С точки зрения
радиотехнических приложений основной интерес представляет
случай, когда затухание контура мало, т. е. добротность
Q» 1, а значит, параметр е = 1/Q <: 1. Из физических
соображений ясно, что любые колебания в такой системе,
как свободные, так и вынужденные, должны быть квазигар-
моиическими. Поэтому будем искать решение уравнения (9.77)
в виде [ср. с формулой E.25)]
«с © = А © cos % - В ft) sm i,, (9.78)
где A (tj) и В ft) — неизвестные пока синфазная и квадратур-
квадратурная амплитуды, изменяющиеся гораздо медленнее, чем cos^
или sincj.
Более точно условие медленного изменения амплитуд
означает, что
А'~еА; В'~еВ. (9.79)
Подставляя выражение (9.78) в уравнение (9.77) и при-
приравнивая коэффициенты при sincj и cos? в обеих частях,
получаем систему даух дифференциальных уравнений отно-
относительно неизвестных Л ft) и В ft):
В" + 2А -еА- еВ' = 1/„ sin (m sin ц9. l '
Обратим внимание на то, что здесь слагаемые в левых
частях имеют разные порядки малости. Так, например, вели-
величины А" и еА' в первом уравнении имеют порядок ?2, в то
время как В и еВ — порядок е. Пренебрегая ¦ (9.80) всеми
9.3. Цепи при узкополосных входных воздействиях
малыми величинами порядка ег, получаем два укороченных
дифференциальных уравнения:
2А' + еА = и„ sin (msin цУ.
Очевидно, эти уравнения 1-го порядка значительно проще,
чем строгие исходные уравнения (9.80). К тому же здесь
каждой неизвестной функции отвечает свое собствеиное урав-
уравнение.
Такой подход к решению задачи о колебаниях в системе
с малым затуханием является частным случаем метода мед-
медленно меняющихся амплитуд. Этот метод предложил в 20-х
годах известный голландский радиофизик Ван-дер-Поль.
Сделаем еще одно допущение: будем считать, что m ¦« 1,
т. е. глубина угловой модуляции на входе невелика. Тогда,
поступая так же, как в гл. 4, получаем упрощенную форму
укороченных уравнений:
+ Е = ~и"" (9.82)
2А' + еА = ти„ sm ц?.
Стационарным решением первого уравнения (9.82) служит,
очевидно, постоянная величина
B=-UJe=-QU». (9.83)
Второе уравнение (9.82) можно решить элементарной под-
подстановкой y4E)=csinn^ + bcosn^. Найдя неизвестные по-
постоянные а и Ь, получаем
А К) = т!/„ (е sin ц!; - 2ц cos цУ/Dц2 + ег). (9.84)
Огибающая в мгновенная частота выходного сигнала. На
основании формулы (9.78) находим физическую огибающую
выходного сигнала как функцию времени:
и,ти) = УА2 + Вг =
х cos 2fi< — 4t|i sin 2fi<
Из этой формулы следует, что при воздействии на
колебательный коитур сигнала с угловой модуляцией выход-
выходное колебание оказывается промодулированным по ампли-
амплитуде; низкая частота модуляции амплитуды в два раза
превышает частоту однотональиой угловой модуляции на
входе.. - . . ...-и,-»' --.¦¦.-.. i - ¦ :•
укороченные диф-
дифференциальные
уравнения
метод медленно
меняющихся ам-
амплитуд
+ е2J.
Данное выражение можно существенно упростить, приняв
во внимание, что по предположению m ¦« 1. Тогда, ограни-
ограничившись даумя членами разложения радикала в степенной ряд,
получим приближенное выражение огибающей
(9.85)
Глава 9. Воздействие сигналов на частотно-избирательные системы
решите задачу
Полученное решение укороченных дифференциальных
уравнений дает возможность ответить иа основной лопрос
о влиянии колебательной системы на мгновенную частоту
выходного сигнала. Учтем, что синфазная амплитуда А мала
по сравнению с неизменной во времени квадратурной
амплитудой В [см. формулы (9.83), (9.84)]. Тогда
.. В А - А'В А
о),ых(<) = о>о+
= о>о-
[ecosilt + 2цsinQt) -
(9.86)
где Ф = arctg Bц/е).
Итак, за счет инерционности контура наблюдается умень-
уменьшение девиации частоты на выходе по сравнению с девиа-
девиацией на входе:
I Am
(9.87)
о
о
где г, = 2g/<Bo — постоянная времени контура.
К тому же функция, описывающая закон угловой моду-
модуляции выходного сигнала, оказывается смещенной во време-
времени относительно входной модулирующей функции.
Роль фазовая характеристики ц«и. Заканчивая изучение
свойств и характеристик линейных узкополосных цепей,
возбуждаемых детерминированными сигиалами, рассмотрим
вопрос о том, какое влияние на выходной снгиал оказы-
оказывает ФЧХ системы.
Чтобы изучить принципиальную сторону явлений, обра-
обратимся к случаю, когда иа вход системы подается сумма
двух гармонических сигналов единичной амплитуды с час-
частотами о, и оJ, относительная разность между которыми
мала: |о>, — ш2 |/о>, « 1.
Аналитическая форма записи входного сигнала такова:
и„ (<) = cos о),( + cos оJ( =
(9.88)
узкополосные
группы
Энергия суммарного процесса локализуется во времени в
виде отдельных «порций», носящих название узкополосных
или квазигармонических групп. Чем меньше частотный про-
промежуток между составляющими, тем больше степень растя-
растянутости этих групп во времени. Низкочастотный сомножи-
сомножитель в формуле (9.88) является огибающей группы. Узкопо-
Узкополосную группу можно рассматривать как простейший эле-
элемент, из которых складывается колебание с более сложным
спектральным составом. - ¦ - -¦'
9.3. Цепи при узкополосных входных воздействиях
Пусть сигнал вида (9.88) проходит через линейную ста-
стационарную систему с частотным коэффициентом передачи
К (/со) = | К (/со) | ехр [/фк (©)]. (9.89)
Предположим, что в пределах частотного интервала
(©1, го2) модуль коэффициента передачи можно считать по-
постоянной величиной Ко. Тогда
«бых W « Ко {cos [co,t + фк (oh)] + cos [сйгГ + фк (©2)]}. (9.90)
ФЧХ системы можно разложить в ряд Тейлорв относи-
относительно ТОЧКИ СО! .
243
Удерживая в этом разложении только член, линейный
относительно Аю = а>2 — ©i, будем иметь
«.их М ~ Ко {COS [ю,( + <рк (Ю,)] +
Отсюда непосредственно видно, что огибающая киази-
гармонической группы на выходе системы смещена во време-
времени относительно огибающей входного сигнала на величину,
равную по абсолютному значению <3фк/&о. Если эта произ-
производная отрицательна, то огибающая выходного сигнала за-
запаздывает на время
(951)
называемое групповым временем запаздывания. Производная
вычисляется в некоторой произвольной точке частотного
интервала, где сконцентрирована энергия узкополосного
сигнала.
Групповое время запаздывания служит удобной характе-
характеристикой для оценки задержки узкополосных сигналов
в инерционных линейных цепях.
решите задачу 11
групповое время
Пример 9.7. Прямоугольный радиоимпульс с длительностью
т„ = 20 мкс и с частотой заполнения f$ = 10 МГц подается на вход
одноконтурного резонансного усилителя, настроенного на частоту
заполнения импульса. Эквивалентная добротность колебательной
системы <>эт = 40. Оценить время запаздывания выходного импульса
относительно колебания на входе.
Спектр входного сигнала сосредоточен в интервале частот
(/о — *Лю /о + 1Ая). т. е. в промежутке от 9.950 МГц до 10.050 МГц
(ширива спектра оценивается во нулям .первого леоеспса <
244 Глава 9. Воздействие сигналов ва частотно-избирательные системы
ной диаграммы). Полоса пропускания усилителя Пд.707 *= ./рез/См —
=¦= 250 кГц. Приближенно можно полагать, что входной импульс
в данном случае является узкополосным сигналом, задержку кото-
которого можно оценить по формуле (951). Используя уравнение ФЧХ
фК (ш) = -arctg [(ю - Юре,) х j, находим
з - 1.27 мкс.
Результаты
00 Для узкополосных частотно-избирательных систем характерно то, что отно-
отношение ширины полосы пропускания к центральной частоте этого интервала
мало. Их применяют для частотной фильтрации полезных сигналов, имею-
имеющих ограниченный спектр.
00 Физически частотно-избирательные цепи могут быть реализованы в. виде
высокодобротных колебательных систем, как одноконтурных, так и много-
многоконтурных.
00 Входной сигнал является широкополосным по отношению к частотно-изби-
частотно-избирательной системе, если его спектральную плотность можно считать постоян-
постоянной в пределах полосы пропускания.
00 Низкочастотный эквивалент узкополосной цепи — воображаемая система, час-
частотный коэффициент передачи которой получен путем переноса частотной
характеристики, исходной цепи в окрестность нулевой частоты.
00 Импульсная характеристика узкополосной цепи представляет собой узкополос-
узкополосное колебание, мгновенная частота которого близка к центральной частоте
полосы пропускания.
00 Комплексная огибающая импульсной характеристики узкополосной цепи про-
пропорциональна импульсной характеристике низкочастотного эквивалента.
00 С помощью частотно-избирательных цепей, измеряя их отклики на произволь-
произвольный широкополосный сигнал, можно экспериментально исследовать зависимость
модуля спектральной плотности сигнала от частоты (аппаратурный спект-
спектральный анализ).
00 Вместо полногб решения задачи о воздействии узкополосного сигнала на
частотно-избирательную цепь достаточно решить более простую задачу о про-
прохождении комплексной огибающей входного сигнала через низкочастотный
эквивалент системы.
0Q В результате воздействия узкополосной цепи на АМ-сигнал при условии, что
центральная частота полосы пропускания и частота несущего колебания сов-
совпадают, происходит снижение глубины модуляции.
00 При прохождении импульса включения гармонического сигнала через настроен-
настроенную одноконтурную систему огибающая выходного процесса устанавливается
до уровня 0.9 от стационарного значения за время tyei = 4.6D6Q3JGipt3-
00 Расстройка между резонансной частотой контура и частотой гармониче-
гармонического заполнения импульса включения приводит к немонотонному изменению
во времени огибающей выходного сигнала. Мгновенная частота на выходе
также оказывается непостоянной.
00 Прохождение фазоманипулированных и частотно-манипулированных сигналов
через узкополосный резонансный усилитель сопровождается изменением во
времени физической огибающей, полной фазы и мгновенной частоты выход-
выходного сигнала.
00 Задачу jo воздействии сигналов с непрерывной ЧМ или ФМ на узкополосные
цепи удается решить методом медленно меняющихся амплитуд rtpu условии.
Вопросы
245
что затухание колебательных контуров мало и индекс угловой модуляции
невелик.
Групповое время запаздывания узкополосных сигналов с точностью до знака
равно значению первой производной ФЧХ на центральной частоте спектра
сигнала.
Вопросы
1. Как принято определять широту поло-
полосы пропускания узкополосных радиотехни-
радиотехнических цепей? На сколько децибел ослабля-
ослабляется сигнал с частотой, соответствующей
границе полосы пропускания?
2. При каком условии АЧХ одноконтур-
одноконтурной резонансной системы оказывается сим-
симметричной относительно резонансной час-
частоты?
3. Каков типичный порядок величин L, С,
Rpes для параллельных колебательных кон-
контуров с резонансной частотой в несколько
десятков мегагерц?
4. Что такое абсолютная и относительная
расстройки?
5. Изобразите характерную картину рас-
расположения на комплексной плоскости полю-
полюсов передаточной функции узкополосной
системы. Можно ли по ней определить
добротность системы?
6. Как осуществляется неполное включе-
включение колебательного контура во анешнюю
цепь?
7. В чем проявляется влияние внутрен-
внутреннего сопротивления электронного прибора на
характеристики резонансного усилителя ма-
малых колебаний? Как можно ослабить воз-
внкающий здесь вредный эффект?
8. Каково преимущество усилителя со
связанными контурами по сравнению с
одноконтурным усилителем? Какую роль в
формировании АЧХ усилителя играет фактор
связи?
9. Перечислите факторы, определяющие
предельную верхнюю частоту, иа которой
резонансный усилитель еще оказыввется ра-
работоспособным.
10. Какой смысл (абсолютный или отно-
относительный) вкладывается в понятие «широко-
«широкополосный сигнал»?
11. Обязательно ли низкочастотный экви-
эквивалент узкополосной системы должен быть
физически реализуемой цепью?
12. Изобразите примерный график им-
импульсной характеристики какой-либо узкопо-
узкополосной снстемы. Обратите внимание на усло-
условие физической реализуемости.
13. Что такое постоянная времени коле-
колебательного контура?
14. Какова разница между импульсными
характеристиками одноконтурного н двухкои-
туриого усилителей?
15. Сформулируйте физический смысл
спектрального разложения сигнала.
16. Как следует выбирать полосу пропус-
пропускания резонансного усилителя для удовлетво-
удовлетворительного а техническом отношении про-
пропускания АМ-сигиалоа? В чем заключена
противоречивость требований к форме АЧХ
частотных фпльтроа?
17. Чем определяется время установления
колебаний в одноконтурном резонансном
усилителе?
18. Дайте физическую трактовку процес;
са установления колебаний в одноконтурной
резонансной системе, возбуждаемой со сторо-
стороны ахода импульсом включения гармониче-
гармонической ЭДС. Какова здесь роль собственных
колебаний контура? Почему в начальный
момент аремени выходной сигнал мал?
19. Проведите такой же внализ примени-
применительно к фазоманипулврованному входному
сигналу. Почему ао аремя переходного про-
процесса частота сигнала на выходе непостоянна?
20. В чем сущность метода медленно
меняющихся амплитуд?
21. Что такое групповое время запазды-
запаздывания? Какова должна быть ФЧХ системы
для того, чтобы проходящий через нее сигнал
испытывал минимальные искажения?
Задачи
1. При каком значении обобщенной рас-
расстройки крутизн* АЧХ резонансного контура
максимальна?
2. Параллельный колебательный коитур
на резсж|щяой частоте 20 МГц имеет актив-
активное, лмвшывлснве 30 кОм, а ва частоте
21 МГц модуль его сопротивления равен
18 кОм. Рассчитайте параметры контура.
3. Найдите частотный коэффициент пере-
передачи и импульсную характеристику низкочас-
низкочастотного эквивалента идеального полосового
фильтра- [см. формулу (946)].
246
Глава 9. Воздействие сигналов на частотно-избирательные системы
4. Решите предыдущую задачу примени-
применительно к гауссовому раднофильтру [см. фор-
формулу (9.17)].
5. В схеме резонансного усилителя малых
колебаний (см. рис. 9.2) коэффициент вклю-
включения контура в коллекторную цепь тран-
транзистора может изменяться путем перемеще-
перемещения отвода по виткам катушки. Найдите
зависимость напряжения на конденсаторе
гоитура от коэффициента включения.
6. Гвуссов раднофильтр [см. формулу
(9.17)] с параметрами Ко = 10, <о0 = 10* с,
Ь = 5-1О0 с2 возбуждается входным сиг-
сигналом, имеющим внд прямоугольного видео-
видеоимпульса с амплитудой 25 В и длитель-
длительностью 0.2 мкс. Покажите, что этот сигнал
по отношению к данному фильтру можно
считать широкополосным. Найдите сигнал на
выходе системы.
7. На входе одноконтурного резонансного
усилителя с параметрами)^ = 6 МГц, Q3K =
— 40, Кра = 35 действует экспбиенциальный
видеоимпульс напряжения и^ (t) = 0.3 ехр х
х (—4-107()c(t), В Найдите сигнал на вы-
выходе усилителя.
8. На входе последовательного колеба-
колебательного контура включен источник ЭДС
Более сложные решения
12, Решите задачу о воздействии одното-
однотонального АМ-снгнала на резонансный усили-
усилитель в условиях, когда несущая частота
сигнала <о0 ие совпадает с резонансной
частотой контура Ор&. Покажите, что расст-
расстройка между этими частотами приводит к
паразитной угловой модуляции выходного
сигнала. Считая относительную расстройку
IЩ — GV, | /щ малой, выведите формулу для
расчета параметров паразитной модуляции.
13. Миогоконтурный резонансный усили-
усилитель состоит из идентичных звеньев. Вы-
Выведите формулу, называемую в радиотехнике
формулой Агеева — Кобзарева, определяю-
определяющую время установления выходных колеба-
колебаний в дайной системе в зависимости от
числа звеньев N, постоянной времени одного
Un(t)= 5A +0.8cos4-1030cosl06r. Контур
настроен в резонанс с частотой несущего ко-
колебания. Определите добротность контура,
при которой коэффициент модуляции тока
равен 0.4.
9. Исследуйте искажения огибающей пря-
прямоугольных радиоимпульсов при прохожде-
прохождении их через одноконтурный резонансный
усилитель с эквивалентной добротностью
?эт = 60. Несущая частота входного сигнала,
равная 2 МГц, совпадает с резонансной
частотой контура.
10. Определите закон изменения во вре-
времени мгновенной частоты сигнала на выходе
одноконтурного резонансного усилителя, воз-
возбуждаемого сигналом «м@ = Ю~3 х
х cos Bя ¦ lO6* +¦ 0.1 cos2ji • lO3*), В. Контур
усилителя настроен на несущую частоту
входного колебания и имеет постоянную
времени, равную 10~s с.
11. Резонансный усилитель содержит два
контура, настроенных на одинаковую частоту
12 МГц. Добротности контуров первого
н второго звеньев равны 40 и 50 соответ-
соответственно. Определите групповое время запаз-
запаздывания узкополосного сигнала с централь-
центральной частотой 12.2 МГц.
контура тк и резонансной частоты Юр^,. Вход-
Входной сигнал — импульс включения гармониче-
гармонической ЭДС с частотой щ = Юр^.
Указание. Воспользуйтесь законом
соответствия изображений и оригиналов вида
14. На основании формулы (9.86) получи-
получите следующий член разложения мгновенной
частоты выходного сигнала по степеням ма-
малого параметра е. Докажите, что очередное
слагаемое ряда изменяется во времени с
утроенной частотой модуляции.
Глава 10
Воздействие случайных сигналов
на линейные стационарные цепи
В гл. 8, 9 излагались методы, позволяющие решать
задачи о прохождении детерминированных сигналов через
линейные стационарные системы. Последним шагом, завер-
шаюшим теорию линейных систем, является перенесение
этих методов в статистическую область.
Предположим, что на входе линейной стационарной
системы присутствует колебание x(t), представляющее собой
некоторую реализацию случайного процесса X(t). Если эта
реализация указана заранее, то никакой новой задачи не
возникает — к сигналу x(t) следует относиться как к детерми-
детерминированной, хотя, возможно, очень сложно описываемой
функции. Зная математическую модель системы, которая
определяется, например, частотным коэффициентом передачи
К (/to), можно в принципе всегда найти выходную реак-
реакцию y(t).
Однако специфика статистической теории состоит в том,
что столь полные сведения о входном сигнале недоступны —
вместо детерминированного описания входного сигнала мы
располагаем лишь сведениями об усредненных вероятност-
вероятностных характеристиках случайного процесса Jf(t). Такими
характеристиками могут явиться одномерная и многомерные
плотности вероятности, а также различные моментные
функции, прежде всего математическое ожидание н функция
корреляции. Наша цель — исследовать ту связь между ста-
статистическими характеристиками процессов X(t) и Y(t), кото-
которая может быть найдена на основе математической мо-
модели системы.
10.1. Спектральный метод анализа
ноздействия случайных сигналов
на линейные стационарные цепи
С самого начала введем ограничение — будем рассматри-
рассматривать лишь входные случайные процессы X(t), стационарные
в широком смысле. Как_ известно, это означает, что мате-
математическое, гржидание х(г) мгновенных значений реализаций
постояннщЫЬ времени, в то время как функция корреляции
К*(»ь »2) = x('i)xfe) — (хJ зависит лишь от величины |т| =
= I »i — Н I — абсолютного сдвига между точками на оси вре-
времени, в которых производится измерение мгновенных зна-
значений.
В дальнейшем всюду будем полагать х (t) = 0. Это пред-
предположение не ограничивает общности рассуждений и выво-
выводов, .Благодаря свойству линейности рассматриваемых целей
влиянии постоянной составляющей входного
выходной отклик системы может быть решена
статистический
подход к проблеме
преобразования си-
сигналов в системе
Глава 10. Воздействие случайных сигналов на линейные цепи
О возможности
слектралыюго
представления
реализаций случай-
случайного процесса см.
в,§ 7.1
независимо и, что важно, без привлечения статистических
методов.
Среднее значение выходного сигнала. Рассмотрим отдельно
взятую реализацию входного сигнала x(t) и представим ее
в виде интеграла Фурье:
Выходной сигнал системы будет найден, если известен ее
частотный коэффициент передачи К (/со):
A0.1)
Усреднение про- Переходя от отдельной реализации к статистическому
изводится по ан- ансамблю входных сигналов, следует считать, что Sx (го) —
самблю реализаций случайная функция, причем (см. гл. 7) предположение о
стационарности процесса X(t) накладывает условие: среднее
значение спектральной плотности Sx(co) = 0. Поэтому, выпол-
выполняя статистическое усреднение в обеих частях выражения
A0.1), имеем
A0.2)
Сдиигу сигнала во
времени отвечает
умножение спект-
спектральной плотности
на экспоненциаль-
экспоненциальную функцию с
мнимым показате-
показателем
Функция корреляции и спектральная плотность мощности
случайного сигнала на выходе системы. Чтобы вычислить
функцию корреляции Ry(t), необходимо, помимо спектраль-
спектрального разложения A0.1), располагать значением выходного
сигнала в момент времени t + т. Это значение можно
получить на основании известных свойств преобразования
Фурье:
y(t + т) =
2тг
S» (ш') К (/ш') е*° V» da'.
A0.3)
Небольшая (и не принципиальная) деталь, относящаяся
к технике вычислений: функция y(t) вещественна, поэтому
формула A0.3) не изменится, если в ее правой части
перейти к комплексно-сопряженным величинам:
A0.4)
у{, + х) = ^~ S?(a>')K»(/m')e-'<"e-'"'dto'.
Функцию корреляции выходного сигнала найдем, пере-
перемножая сигналы, определенные равенствами A0.1) и A0.4),
10.1. Спектральный метод анализа воздействия случайных сигналов
а затем проводя статистическое усреднение:
A0.5)
На первый взгляд, анализ этой формулы может пока-
показаться безнадежно сложным. Но следует иметь в виду, что
рассматриваемый входной случайный процесс стационарен,
поэтому (см. гл. 7) случайные спектральные плотности
его отдельных реализаций дельта-коррелированы, т. е.
Sx (со) S* (©') = 2kWx (со) 6 (со - ©'), A0.6)
где Wx(g>) — спектр мощности стационарного случайного
процесса X(t).
Эта особенность спектра входного сигнала позволяет
выяснить очень простой смысл формулы A0.5):
ад = -L Г wxmK(ja>)\2€-*"&*,
-Используется
фильтрующее
свойство дельта-
функции
или, в равной мере,
A0.7)
Формула A0.7), по сути дела, содержит полное решение по-
поставленной задачи в рамках корреляционной теории: спектр
мощности выходного случайного сигнала связан с анало-
аналогичным спектром сигнала на входе соотношением
Wy((o)=WK(m)\K{j(o)\2. A0.8)
В прикладных задачах часто приходится иметь дело с
односторонними спектрами Nx{f) и Ny(f), которые определе-
определены только прн положительных частотах /, измеряемых в
герцах. Очевидно, что
A0.9)
A0.10)
является результатом суммирования вкладов от спектра мощ-
мощности входного сигнала, умноженного иа зависящий от
частоты квадрат модуля коэффициента передачи, т. е. частот-
частотный коэффициент передачи мощности.
Технику решения конкретных задач из рассматриваемого
^ ^.дорошо известна — это всевозможные приемы
поэтому дисперсия выходного сигнала
Глава 10. Воздействие случайных сигналов на линейные цепи
вычисления интегралов Фурье. Поэтому в нижеследующих
примерах внимание будет сосредоточено ие столько иа
математической стороне дела, сколько на обсуждении физи-
физических особенностей процессов.
Пример 10.1. Динамическая система 1-го порядка, принци-
принципиальная схема которой изображается в виде интегрирующей
RC-цепи. возбуждена со стороны входа источником шумовой ЭДС
с постоянной на всех частотах спектральной плотности мощ-
мощности Wo (В2 - с). Определить дисперсию и функцию корреляции
выходного напряжения y(t).
Вычислим коэффициент передачи мощности для данной цепи:
ЦОД|2 = 1/[1+<о2 (RCJ].
Далее по формуле A0.7), положив т = 0, определим дисперсию
шума на выходе:
dco
l+a*(RC)* 2RC'
A0.11)
Функция корреляции выходного сигнала
е>"<1ю
К М W° f
'"" 2я J
решите
1 и 2
задачи
(№12)
Здесь
Последний интеграл является табличным [15], поэтому, восполь-
готовым результатом, получаем
Wo
2RC~
A0.13)
Итак, возбуждая интегрирующую RC-цепь белым шумом, по-
получаем на выходе случайный процесс с функцией корреляции
экспоненциального типа.
Существенво, что RC-цепь, обладая инерционностью, выполняет
известное «упорядочение»: если входной сигнал, будучи белым
шумом, абсолютно непрогнозируем, то выходной сигнал оказы-
оказывается сглаженным; его интервал корреляции имеет порядок по-
постоянной времени цепи.
Пример 10.2. Воздействие белого шума на одноконтурный
резонансный усилитель.
Предположим, что источник ЭДС вида белого шума с одно-
односторонним спектром мощности rV0 (В2/Гц) возбуждает вход резо-
иаисиого усилителя малых колебаний. Частотный коэффициент
передачи данной системы
Знак функции кор-
корреляции неизме-
неизменен. Это означает,
что выходной сиг-
сигнал ие является
квазипериоднче-
ским
K(j2nf) =
I+fl*(f -
10.1. Спектральный метод анализа воздействия случайных сигналов
коэффициент передачи мощности
Расчет дисперсии проводится по формуле A0.10):
Введем переменную rj = / — /^з и положим колебательный кои-
-тур усилителя столь добротным, что коэффициент передачи при
/ = 0 можно считать нулевым. Тогда
dr|
1 +¦ 4п2т}2т| 2тк
(№14)
Значение функции
корреляции в нуле
равно дисперсии
выходного сигнала
Типичная реализа-
реализация случайного сиг-
сигнала на выходе ре-
зонапепого усили-
усилителя
Наконец, функция корреляции аыходного сигнала
cosm
Icoso^t.
A0.15)
Видно, что полученная здесь функция корреляции имет вил
Ку(т) = ст^р^совюрезт, A0.16)
характерный для узкополосного случайного процесса, поскольку
огибающая р(т) = ехр(— ItI/tJ является медленной функцией по
сравнению с высокочастотным заполнением.
Любая реализация случайного сигнала на выходе узкополос-
узкополосного усилителя представляет собой квазигармоническое колебание
со случайными огибающей н мгновенной частотой; в среднем
частота заполнения равна резонансной частоте колебательной систе-
системы. Такое свойство выходного сигнала легко'-объяснить, заметив,
что этот сигнал является результатом суммирования огромного
числа элементарных откликов, каждый из которых пропорционален
импульсной характеристике системы (принцип интеграла Дюамеля).
• Для того чтобы получить представление о порядке величин,
с которыми имеет дело статистическая радиотехника, оценим
дисперсию шума иа выходе резонансного усилителя при сле-
следующих исходных данных: ЛГ0 = 10~16 ж^/Гц, ^, = 30, /^ =
= 1.59 ¦ 107 Гц, Сэк = 60. Постоянная времени контура тк =
= 2бэгМ>ез = 1.2 мке, поэтому на основании формулы A0.14) диспер-
дисперсия aJ = 106-900/B.4-10-6)=3.75.10-B В2; эффективное напряже-
напряжение шума, равное квадратному корню из дисперсии, составит
194 мкВ.
Пример 10.3. Цепь образована двумя RC-звенъями. -между
которыми включен идеальный усилитель с коэффициентом усиле-1
ния Ко:
Гяава 10. Воздействие случайных сигналов на линейные цепи
На входе цепи включен источник ЭДС вида белого шума с из-
известной спектральной плотностью мощности Wo (В2-с). Вычислить
функцию корреляции выходного напряжения.
Коэффициент передачи мощности
В соответствии с A0.7) функция корреляции выходного
пряжения
\— И^о Г exp(/toT.)dio
2я~~ J A + <о2т2)A + <о2т|)"
A0.17)
решите задачу 4
Целесообразно воспользоваться теорией вычетов, повторив этот
же путь, который был проделан в гл. 8 при анализе импульсной
характеристики КС-цепи. Подынтегральная функция в A0.17) имеет
четыре простых полюса с координатами calt2 = ±//ть <o3.4 — ±jfci-
Будем вычислять функцию К,(т) при т > 0, замыкая контур
интегрирования в верхней полуплоскости. Вычет подынтегральной
функции в точке
лежащей внутри
Аналогично находят вычет в точке <о =
контура интегрирования:
rpsl _ -Т!ехр(-т/т2)
Отсюда, применив теорему Коши, без труда находим, что при
т>0
A0.18)
Функция корреляции при т < 0 получится из этой же формулы
при замене т. на — т. Это вытекает из свойства четности функции
корреляции, однако результат может быть подтвержден прямым
расчетом.
Итак,
При t < 0 следует
замкнуть путь и«-
тегрирования дугой
бесконечно боль-
большого радиуса в
нижней полуплос-
полуплоскости комплексной
частоты со
Дисперсия выходного сигнала
ст| = К,@) =
A0.19)
А
(№Щ решите задачу 6
10.1. Спектральный, метол анализа воздействия случайных сигналов
0.75
0.5
0.25
- \ N^
Одиночная^
-
\
1 1 ^^ ¦ —
0 W 2.0 ЗЮ
Рис. 10.1. Нормированная функция корреляции случайного процесса
на выходе системы из двух КС-цепей:
/ — при т2 = Tj/2; 2 — при ti = т2
поэтому иормироваиная функиия корреляпии выхолного случайного
процесса
A0.21)
На рис. 10.1 изображены результаты расчетов по формуле
A0.21) при двух различных значениях отношения ilfx1.
К*» •* палЛ **а этом же РасУике для сравнения представлена кривая,
ЬеЛЫН Шум, ПреОО- отображающая функцию гу(х) иа выходе одиночной интегрирующей
разОВЯННЫИ ОДНОЙ ДС-цепи с постоянной времени ii- Интересно отметить не только
у'-, r*S\ POCT интеРвала корреляции, вызванный добавлением второго инер-
г^ у / ! ционного звена, но также изменение характера функции г,(т)
~3 ^\~7 двухзвенного фильтра в окрестности точки и = 0. Существование
^^^ второй производной функции корреляции в этой точке обеспе-
П двумя ПОСЛ6ДОВЯ- чнвает дифференцируемость выходного случайного процесса (см.
телЬНО ВКЛЮЧен- гл. 7). Физически днффереицируемость означает гладкость реали-
НЫМИ ЛС-ценямн зацнй сигнала, прошедшего две каскадио включенные АС-цепн.
Прохождение случайных сигналов с широким спектром
через узкополосные целя. Шумовая нолоса. Часто приходится
рассматривать воздействие на линейные частотно-избиратель-
частотно-избирательные цепи широкополосных случайных сигналов, образован-
ных, например, хаотической последовательностью коротких
импульсов. В этом случае если эффективная ширина
спектра входиого случайного процесса значительио превышает
ширину полосы пропускания системы, то реальный случай-
случайный процесс можно заменить эквивалентным ему белым
шумом с односторонним спектром мощности No = Nx (/0),
где /0 — некоторая точка в пределах полосы пропускания
цепи.
Формула A0.10), определяющая дисперсию выходного
сигнала, в этом случае упростится:
A0.22)
гамена широкопо-
широкополосного случайного
процесса эквива-
эквивалентным -"белым
шумом
Глава la Воздействие случайных сигналов на линейные цепи
шумовая полоса
пропускания
решите задачу 8
В инженерных расчетах линейную частотио-избиратель-
ную цепь, находящуюся под воздействием широкополосного
случайного сигнала, удобно характеризовать шумовой полосой
пропускания Пш (Гц). Оиа определяется как полоса пропуска-
пропускания идеального полосового фильтра с вещественным коэф-
коэффициентом передачи Кпа„ равным максимуму модуля
коэффициента передачи реальной цепи; при возбуждении
идеальной н реальной систем белым шумом со спектром мощ-
мощности No дисперсии шумовых сигналов иа выходах обеих
цепей должны совпадать:
No J \K(j2nf) \2 d/=
о
Отсюда
A0.23)
A0.24)
Например, для интегрирующей RC-цепи
Кт„ = 1, I K(j2nf)\2 = 1/[1 + <2л/КСJ],
поэтому шумовая полоса пропускания
+ Bn/RCJ ARC"
A0.25)
Заметим, что для данной системы модуль частотного
коэффициента передачи падает в |/2 раз по отношению к
максимальному значению при / = 0 иа частоте fo.icn =»
= l/BnRC). Поэтому шумовая полоса пропускания оказы-
оказывается шире полосы По 707:
Пш/Пс.707 = я/2 -= 1.571.
Аналогично находим шумовую полосу пропускания одно-
одноконтурного резонансного усилителя:
= ^-=1.571П0.707.
A0.26)
Продемонстрируем использование понятия шумовой поло-
полосы пропускания в радиотехнических расчетах.
Пример Щ4. Ни входе одноконтурного резонансного усилителя
малых колебаний с параметрами Крез = 85, Сэк = 70, /р^ = 0.7 МГц
действует источник стационарной шумовой ЭДС x(t), имеющий
функцию корреляции i?x(x) =o^exp( — Р|т|). Определить эффектив-
эффективное напряжение шума на выходе усилителя, если р = 107 с~\
J 45B2
10.1. Спектральный метод анализа воздействия случайных сигналов
Прежде всего по теореме Вииера — Хинчииа находим спектр
мощности входного случайного сигнала
) = J Лх
т = 2а2 J
Подобный спектр уже был вычислен нами в гл. 7. Восполь-
Воспользуемся полученным там результатом и запишем для данного
случая
2aifc 9 106
В2 + ш2 '
101* + ш2'
Односторонний спектр мощности (В2/Гц)
Замечая, что спектр мощности максимален на нулевой частоте,
а при ш = 107 с его значение уменьшается лишь вдвое, прн-
ходим к выводу, что в пределах полосы пропускания усилителя
входной сигнал можно заменить эквивалентным белым шумом со
спектральной плотностью мощности JV0=JVJC(/pe3)=1.508-10 В2/Гц.
Полоса пропускания усилителя по уровню 0.707
П0.707 = /цю/Gm = Ю КГц.
Шумовая полоса пропускания
Ц„=№)П.ло, = 15.7 кГц.
Подставив полученные значения в формулу A0.23), находим, что
oJ = 1.508-10-7-(8SJ-1J7-10*i«17.1 В2.
Эффективное напряжение шума на выходе <уу = [/17.1 = 4.14 В.
Нормализация случайного сигнала на выходе линейной
стационврной цепи. Все задачи, которые были рассмотрены
ранее, решались в рамках корреляционной теории, т. е. с
привлечением моментных функций не выше второго порядка.
Более полная постановка проблемы выглядит так: вход-
входной случайный процесс задается семейством своих и-мерных
плотностей вероятности д,(х„ х2,...,х„, t1; t2,...,!„). Требует-
Требуется, зная частотный коэффициент передачи К(/ш), определить
аналогичные плотности вероятности пропесса на выходе ли-
линейной системы.
Решить такую задачу в общем случае весьма сложно,
н оиа в этой книге ие рассматривается. Однако часто
можно заранее предполагать гауссов характер законов распре-
распределения выходного сигнала независимо от того, каков вид
плотностей вероятности случайного процесса на входе.
Нормализация выходного сигнала наблюдается в любой
стационарной линейной системе с достаточно сильно выра-
выраженной инерционностью. Дело в том, что на основании
формулы Дюамели мгновенное значение отклика
y(t)= J *(T)fc(t-T)dT
есть результат суммирования предшествующих значений
входного сигнала x(t), умноженных на сдвинутую импульс-
решите задачу 5
Если входной слу-
случайный процесс
пормален, то слу-
случайный процесс
па выходе будет
обладать этим
свойством пезави-
симо от дипамиче-
скнх свойств ли-
линейной системы
Глава 10. Воздействие случайных сигналов на линейные цепи
ную характеристику цепн. Если протяженность функции
ft (г) составляет несколько интервалов корреляции входного
случайного процесса, то становится применимой центральная
предельная теорема (см. гл. 7). Следствием этого является
асимптотическая нормальность выходного сигнала.
Любую и-мерную плотность вероятности гауссова случай-
случайного процесса можно построить, зная лишь функцию кор-
корреляции.
Поэтому методы корреляционной теории оказываются
вполне пригодными для решения многих задач, связанных
с прохождением случайных сигналов через линейные ста-
стационарные цепи.
Заряды областей
А и Б ие равны
из-за хаотического
движения носите-
носителей
10.2. Источники флуктуациониых шумов
в радиотехнических устройствах
В данном параграфе мы познакомимся с физическими яв-
явлениями, которые порождают флуктуации напряжения и тока
в радиотехнических цепях. Будут получены формулы, исполь-
используемые для оценки интенсивности шумов.
Тепловые шумы резисторов. Одной из главных причин
возникновения шума являются флуктуации объемной плот-
плотности электрического заряда в проводящих телах (резисторах)
из-за хаотического теплового движения носителей заряда.
Несмотря на электрическую нейтральность системы в целом,
внутри объема резистора возникают переменные электро-
электромагнитные поля, а иа внешних зажимах появляется шумо-
шумовая разность потенциалов. Спектр шума оказывается чрезвы-
чрезвычайно широким из-за высокой плотности «упаковки» заря-
зарядов и большой средней тепловой скорости. Это позволяет
считать, что иа частотах радиодиапазона тепловой шум
резистора достаточно точно соответствует модели белого
(дельта-коррелированного) шума.
Формула Найквнста. Выведем соотношение для расчета
спектра мощности, который описывает шумовое напряжение
на зажимах резистора R, находящегося в тепловом равно-
равновесии с окружающей внешней средой при абсолютной
температуре Т. Для этого мысленно включим параллельно
резистору вспомогательный элемент — конденсатор С и будем
считать, что реальный шумящий резистор эквивалентно
заменен последовательным соедниеиием идеального нешумя-
щего резистора и источника ЭДС, создающего белый шум.
Спектр мощности Wo этого шума требуется определить.
Как известно из курса физики, любая системя, находя-
находящаяся в тепловом равновесии, обладает средней энергией
кТ/2, приходящейся на одну степень свободы. Именно такой
будет средняя энергия электрического поля, накопленная в
конденсаторе, поскольку рассматриваемая цепь является дина-
динамической системой 1-го порядка с одной степенью свободы.
Итак,
кТ/2,
10.2. Источники флуктуационных шумов
257
поэтому дисперсия шумового напряжения иа конденсаторе
Теперь воспользуемся формулой A0.11), которая связывает
дисперсию со спектром мощности шумового напряжения.
Поскольку W0/BRC) = кТ/С, вспомогательная величина С
исключается и получается равенство Wo = 2kTR.
Практически удобнее пользоваться односторонним энерге-
энергетическим спектром, который задается только в области
положительных частот и имеет размерность В2/Гц:
A0.27)
Это замечательное соотношение, носящее название фор-
формулы Найкеиста, было доказано в конце 20-х годов.
Подчеркнем, что величина No имеет простой и ясный
физический смысл удельной дисперсии теплового шума ре-
резистора, которая приходитсн на полосу частот шириной
в 1 Гц.
Спектральную плотность мощности тепловых шумов
можно оценить из следующего примера: при Т = 300 К и
R = 10 кОм значение No составит 1.66-ИГ16 В2/Гц, откуда
удельное эффективное напряжение шума равно
1.29-10~8 В/у Гц. Несмотря на кажущуюся малость, эффект
тепловых шумов может явиться решающим фактором, ограни-
ограничивающим реальную чувствительность приемных устройств.
Интересно и важно отметить, что мощность шума,
которая может быть передана во внешнюю резистивную
нагрузку, не зависит от сопротивления резистора R. Для
доказательства рассмотрим систему, в которой между
шумящим резистором R и нагрузкой RH включен идеальный
фильтр с полосой пропускания 1 Гц. Как известно, мощ-
мощность, передаваемая в нагрузку, максимальна при R — К„
(условие согласования) и равна в иашем случае (Вт/Гц)
Руя = <,/DR) = kT. A0.28)
Поэтому единственным радикальным средством борьбы
с тепловыми шумами является глубокое охлаждение входных
цепей чувствительных радиоприемных устройств, применяе-
применяемых в радиолокации, радиоастрономии и системах косми-
космической связи.
Шумы приетых антенн. Источником шума в радиотехни-
радиотехническом устройстве может быть приемная антенна, на выходе
которой возникает случайное напряжение под воздействием
хаотических флуктуации электромагнитного поля.
Пусть простейшая приемная антенна (вибратор Герца)
длиной / ориентирована вдоль оси z и помещена внутри
замкнутой полости, стенки которой имеют температуру Т.
В соответствии с законом Плаика, известным читателю
из курса физики, полость заполнена равновесным электро-
электромагнитным излучением, которое характеризуется особым
спектральным1 параметром, носящим название удельной яр-
Отметим, что иде-
идеальные реактив-
реактивные элементы цепи
не являю 1 си источ-
источником шума
решите задачу 7
решите задачу 10
Постоянная Больц-
манаА:=1.38-10-и
Дж/К
Наилучшие резуль-
результаты достигаютси
при охлаждении
иходных цепей при-
приемников до темпе-
температуры жидкого ге-
гелия (Г=4.2 К)
258 Глава 10. Воздействие случайных сигналов на гашенные цепи
у.юльвая яркость
кости (Вт/(м2Гц-ср)):
2ft/3
В
Входящая сюда ве-
величина Zo =
= 120тгя;377 Ом
представляет со-
собой характеристи-
характеристическое сопротивле-
сопротивление вакуума
решите задачу 11
A0.29)
где / — частота, Гц; с — скорость света, м/с; h =
= 6.62-10" 34 Дж/Гц — постоянная Планка.
Удельная яркость представляет собой плотность потока
электромагнитного излучения, отнесенного к частотному интер-
интервалу 1 Гц и приходящего в данную точку из телесного
угла в 1 ср.
Если hf « kT, что типично для радиодиапазона, то
A0.29) превращается в приближенную формулу Рзлея —
Джинса:
В = 2кТ/12, A0.30)
где X = c/f — длина волны.
Рассмотрим величину
^¦уд = '-'хуп + ^ууд ~^~ ^гуд
— средний квадрат напряженности электрического поля Е,
приходящийся на интервал частот 1 Гц. В теории электро-
электромагнетизма доказывается, что плотность потока мощности
излучении (Вт/м2) составит при этом Е2д/A20я) = Е^уд/D0л).
Здесь учтено, что из-за полного равноправия всех
пространственных направлений Е2Д = ЗЕ|УД. Деля плотность
потока мощности на 4я, т. е. на телесный угол всего
пространства, получаем выражение удельной яркости через
полевые величины:
В = Ё!уд/A60я2). A0.31)
Приравняв правые части выражений A0.30) и A0.31), на-
находим удельный средний квадрат проекции составляющей
вектора напряженности электрического поля, которая ориен-
ориентирована вдоль аитеины:
320п2кТ/12.
A0.32)
Поскольку на выходе антенны, малой по сравнению с
длиной волны, возникает напряжение и = El, получаем удель-
удельную дисперсию выходного напряжения:
п*п = 320ж1A/1JкТ. A0.33)
Если ввести так называемое .сопротивление излучения
(Ом) вибратора Герца J?i = 80л2((ДJ, то из A0.33) получим
формулу Найквиста для элементарной приемной антенны:
4, = ЛГ„ = 4kTRz, В2/Гц. A0.34)
Здесь температура Т является параметром равновесной
среды, через которую распространяются электромагнитные
волны. В сущности это справедливо лишь для шумов косми-
космического происхождения. Измерения показали, что наиболее
«холодные» участки небесного свода имеют температуру
порядка нескольких Кельвинов. В то же время температура
10.Z Источники флуктуациониых шумов
259
в направлении радиогалактик и других космических источ-
источников шумового радиоизлучения может достигать 10000 К.
Если говорить о естественных помехах земного происхож-
происхождения, то подавляющая часть мошиости этого шума сосредо-
сосредоточена на частотах ниже 30 МГц. Для того чтобы
оставить неизменным вид формулы A0.34), вводят шумовую
температуру Тш, зависящую от частоты. Спектральный
состав земных помех таков, что на частотах порядка
1 МГц температура Тш при некоторых условиях может
достигать ЗНг4 К.
Дробовой шум. Еще одним источником шума в радио-
радиотехнических устройствах являются электронные приборы —
диоды, транзисторы и лампы. В отличие от резисторов
флуктуации возникают здесь не за счет хаотического
теплового движения электронов, а вследствие статистической
независимости их упорядоченного перемещения.
Рассмотрим, например, вакуумный диод, к которому
подключен источник постоянной ЭДС. От катода к аноду
движется поток электронов, каждый из которых переносит
электрический заряд е=1.б-10~19 Кл (по модулю). Время
пролета электрона с катода иа анод тпр имеет порядок
10~9 с. В этот интервал времени во внешних цепях
регистрируется короткий импульс так называемого конвек-
конвекционного тока, причем
Основные источни-
источники земных по-
помех — грозовые
разряды и процес-
процессы коммутации и
мощных электри-
электрических цепях
откуда следует оценка iK0H ~ 1.6-10 10 А.
В обычных режимах ток диода составляет несколько
миллиампер, поэтому импульсы конвекционного тока густо
перекрываются во времени.
Акты вылета отдельных электронов с катода являются
статистически независимыми случайными событиями. Отсюда
следует, что мгновенное значение анодного тока диода не
остается постоянным, а претерпевает некоторые флуктуации.
Любой электронный прибор служит источником шума,
который в физике и радиотехнике получил название
дробового шума.
Распределите Пувссона. Обозначим символом v среднее
число электронов, прибывающих на анод за 1 с. Экспери-
Эксперимент убедительно говорит о том, что эта числовая характе-
характеристика является статистически устойчивой, т. е. стационар-
стационарной. Постоянная составляющая анодного тока связана с
параметром v простым соотношением /0 = ev. Значение v
весьма велико: при /0 = 1 мА имеем оценку v~1016 с.
Переходя к статистическому анализу процесса, сделаем
одно упрощающее предположение, не существенное физически,
ио облегчающее расчеты: допустим, что в промежутке
катод — анод электроны следуют друг за другом «цепоч-
«цепочкой», так что вероятность парных или более сложных
приходов электронов на аиод пренебрежимо мала.
Эффект перекры-
перекрытия пмпульсои
Все рассуждения
справедливы так-
также применительно
к процессу иижек-
цнн носителей за-
заряда и полупро-
полупроводниковых прибо-
приборах
Глава 10. Воздействие случайных сигналов иа линейные цепи
Естественно, считать» что если А — событие прихода
электрона на анод в интервале времени (t, t + At), то с
точностью до малых величин порядка (AtJ вероятность
этого события
PA=\At. A0.35)
Поскольку ток дв~
ода складывается
из большого числа
независимых им-
импульсов, мгпоиеи-
ные значения этого
тока распределены
по нормальному за-
закону (см. гл. 6)
Обозначим через Po(t) вероятность не иметь ии одного
пришедшего электрона в интервале времени @, t). Тогда
P0(t + At) будет вероятностью сложного события — ни одного
электрона не должно появиться на аноде ии в интервале
времени @, г), ни в интервале времени (t, t + At). На осно-
основании свойства вероятности сложного события
Р0(Г + At) = P0(t)(l - vAt).
Переходя к пределу при At -* О, получаем дифференциаль-
дифференциальное уравнение
Поскольку v ~
~1016с, вероят-
пость пе наблю-
наблюдать ни одного
электрона за ин-
интервал иременн 1 с
составит ехр
(—1016), что можно
считать вероятнос-
вероятностью невозможного
события
с очевидным начальным условием Ро@) = 1.
Решение этой начальной задачи элементарно:
P0(t)=exp(-vt).
Найдем вероятность Pt(t) наблюдать в интервале вре-
времени @, t) ровно один пришедший электрон. На расши-
расширенном интервале @, t + At) такая вероятность будет склады-
складываться из вероятностей двух несовместимых событий:
а) электрон прибывает в интервале времени @, t),
б) электрон прибывает в интервале времени (t, t + At).
По свойству вероятностей
Р, (t + At) = Pt (t)(l - vAt) + P0(t)vAt,
откуда следует дифференциальное уравнение
dPt
dt
с начальным условием Pt @) = 0. Аналогично получается
начальная задача, решение которой описывает вероятность
прибытия на анод ровно и электронов:
ш A0.36)
Р@) = 0.
Непосредственной подстановкой можно убедиться в том,
-= -vP, +vP0
A0.37)
Формула A0.37) определяет закон распределения Пуассона,
который встречается во многих задачах статистической
радиотехники.
10.2. Источники флуктуационных шумов
Моменты нувссоновской случайной величины. Возьмем не-
некоторый интервал времени длительностью Т и подсчитаем
среднее число прибывших электронов:
r = vT.
A0.38)
Смысл згой формулы нагляден: подтверждается исходное
предположение о том, -что v — средняя интенсивность потока
электронов.
Теперь найдем средний квадрат числа прибывших за это
время электронов:
J~r^e-»T = vT + (vTJ.
A0.39)
Используя формулы A0.3?) и A0.39), вычисляем диспер-
дисперсию числа прибывших электронов
ст2 = иТ - Ы2 = vT. A0.40)
Статистические свойства тока днода. Если за время 7
на анод поступило и электронов, то гок, отнесенный к
длительности интервала наблюдения, iT=en/T.
Среднее значение наблюдаемого тока
I0=JT=(e/T)n~T=ev. A0.41)
В то же время дисперсия тока
а,2 = (е2/Г2)а2 = (е/7У„. A0.42)
Если за меру интенсивности флуктуации тока взять от-
отношение среднеквадратического отклонения к среднему зиа-
ченню, то
Если целочислен-
целочисленная величина расп-
распределена но закону
Пуассона, то и от-
отдельных испыта-
испытаниях редко наблю-
наблюдаются значитель-
значительные отклонения от
среднего значения
как и одну, так и
и другую сторону
Здесь сумма явля-
является рядом Тейло-
Тейлора для функции
ехр (уТ)
Применен искусст-
иеиный прием —
использовано тож-
тождество и2 = и(и—
1
Здесь речь идет о
режиме работы ди-
диода и отсутствие
прострапствениого
заряда
A0.43)
Вывод, следующий из формулы A0.43), таков: относи-
относительный уровень флуктуации тока диода снижается с уве-
увеличением времени наблюдения и ростом среднего значения
тока.
Пример 10.5, Пусть ток /0 = 10 2 А и время наблюдения
Т = 1 с.
17 Дисперсия тока за время наблюдения о? = 1.6-10-11 А2
I* и ток лиола можно оценить следующим образом :i = 10~2 ±4-1О~14 А.
Видно, что относительные флуктуации тока здесь очень невелики.
Если же сушестаенио сократить как среднее значение тока,_
так и время наблюдения, положив /о=10"в А и Т=Ю~8 с.
262
Глава 10. Воздействие случайных сигналов иа линейные цепи
то о? = 1.6-ИГ19 А2, так что опенка тока i= ИГ" ± 4-100 А.
Видно, что относительные флуктуации тока существенно воз-
возрастают.
Рассмотренный пример дает возможность понять, почему мы не
наблюдаем случайных колебаний стрелки магнитоэлектрического из-
измерительного прибора, включенного в цепь диода. Здесь из-за
инерционности механической системы прибора происходит усредне-
усреднение измеряемого тока на интервале времени длительностью
порядка секунды
Формула Шоткн. Чем меньше время наблюдений Т, тем
большую полосу частот в спектре процесса приходится
учитывать. По теореме Котельникова, для проведения об-
обработки сигнала за время Т регистрирующая система
должна быть способна пропускать все частоты вплоть до
частоты /в, удовлетворяющей соотношению Т = 1Д2/Д
Учтя это в формуле A0.42), имеем а? = 2eIofB, откуда
удельная дисперсия флуктуационного тока (А2/Гц), приходя-
приходящаяся иа полосу частот в 1 Гц,
|JVO = 2e/0. | A0.44)
Это соотношение получило в радиотехнике название
формулы Шотки. Согласно ей, эквивалентная шумовая схема
электронного прибора содержит в себе источник тока,
создающий белый шум со спектральной плотностью, опи-
описываемой формулой A0.44).
Эксперименты показывают, что дробовой шум электрон-
электронных приборов имеет постоянный спектр мощности вплоть до
частот в несколько сотен мегагерц, а затем начинает
уменьшаться с ростом частоты. Это связано с тем, что
на очень высоких частотах (при малых значениях Т) не-
несправедливой становится принятая модель шума, согласно
которой за время наблюдения на анод должно приходить
достаточно большое число электронов. Кроме того, начи-
начинает сказываться уменьшение модуля спектральной плотности
отдельных импульсов конвекционного тока, длительность
которых хотя и мала, но все же конечна.
Пример 10.6. Транзисторный усилитель с резистивно-емкостной
нагрузкой имеет следующие параметры: Кн = 5.1 кОм, Сп = 45 пФ,
Rt = 20 кОм. Рабочая точка на характеристике транзистора
выбрана таким образом, что постоянная составляющая тока кол-
коллектора /ок = 1-5 мА. Вычислить эффективное шумовое напря-
напряжение на выходе, обусловленное дробовым шумом транзистора.
Прежде всего по формуле Шоткн находим спектр мощности
источника шумового тока:
No - 2eI0K - 2-1.6-10"'9-1.5 -10" 3 = 4.8-10'22 А2/Гц.
Составив эквивалентную схему усилителя, замечаем, что роль
частотного коэффициента передачи системы играет комплексное
сопротивление, включенное параллельно источнику тока:
где К» =
10.2. Источники флуктуационных шумов
263
В данном случае R3K = 5.1 -20/25.1 = 4.06 кОм.
Дисперсию шумового напряжения на выходе усилителя вы-
вычисляем по формуле A0.22):
4Cn
^LOS-HP8 В2.
В расчетах предпо-
предполагается, что час-
частота гармониче-
гармонического сигнала су-
существенно ниже
граничной частоты
усилителя
Наконец, находим эффективное напряжение шума на выходе
<7В = \f<fi = 104 мкВ.
Подобные расчеты приходится выполнять каждый раз, опре-
определяя предельную чувствительность усилителей малых сигналов.
Для этого обычно поступают так: эффективное напряжение шума
приводит ко входу по формуле авх = ствых/К, где К — коэффициент
усиления напряжения на частоте сигнала. Полученную величину
принимают за минимальный уровень эффективного напряжения
полезного гармонического сигнала, который может усиливаться
данным устройством, откуда минимальная амплитуда ит\„ =
Так, в рассмотренном примере при крутизне характеристики
транзистора S = 20 мА/В коэффициент усиления напражеиия на
нулевой частоте K=SR3i: = 81.2. Поэтому овх = 108/81.2 = 1.28 мкВ,
минимальная амплитуда усиливаемого сигнала Umai = 1.28-1.41 =
= 1.81 «= 2 мкВ.
Результаты
ОО Если среднее значение стационарного случайного процесса на входе линейной
системы равно нулю, то таково же и среднее значение выходного
процесса.
ОО Спектральные плотности мощности стационарных случайных процессов на
входе и выходе стационарной линейной цепи связаны между собой квадра-
квадратом модуля частотного коэффициента передачи.
ОО Функция корреляции случайного процесса на выходе интегрирующей RC-цепи,
возбуждаемой белым шумом, имеет экспоненциальный характер.
ОО Выходной сигнал резонансного усилителя, на вход которого подан белый
шум, является узкополосным случайным процессом.
ОО Если линейная стационарная цепь достаточно инерционна, то случайный
процесс на ее выходе асимптотически нормален независимо от статисти-
статистических свойств входного случайного процесса.
ОО Тепловой шум резистора обусловлен случайными флуктуациями плотности
электрического заряда. На частотах радиодиапазона этот шум имеет практи-
практически постоянный спектр мощности.
ОО Спектр мощности теплового шума вычисляют по формуле Найквиста.
ОО Эквивалентная шумовая температура приемных антенн зависит от частот-
частотного диапазона.
ОО Дробовой шум электронных приборов связан со статистической независи-
независимостью движения носителей заряда.
О О Электронный прибор, в котором наблюдается дробовой эффект, эквивалентно
заменяется источником шумового тока с равномерной спектральной
плотностью мощности, устанавливаемой формулой Шотки. ''¦
Глава 10. Воздействие случайных сигналов на линейные цепи
Вопросы
1. Какую роль играет свойство стацио-
стационарности входного случайного процесса при
выводе формулы, определяющей спектр мощ-
мощности случайного процесса на выходе?
2. Как выглядят примерные графики функ-
функций корреляции случайных сигналов: а) на
выходе интегрирующей RC-цепи, б) на вы-
выходе одноконтурного резонансного усили-
усилителя? Входной сигнал — белый шум. Яаляют-
ся ли реализации дифференцируемыми в ста-
статистическом смысле?
3. В чем состоят характерные отличия
функцни корреляцнн случайного сигнала иа
выходе двухзвениой RC-цепи, возбуждаемой
белым шумом?
4. В каком случае случайный процесс,
действующий на входе реальной цепи, можно
заменить белым шумом?
5. Что такое шумовая полоса пропуска-
пропускания цепи?
Задачи
1. Стационарный случайный процесс X(t)
со спектром мощности
j 0, со < —сов,
( 0, со > <оя
подан на вход интегрирующей RC-цепи.
Найдите дисперсию выходного сигнала.
2. Решите задачу 1 прн условии, что
заданный сигнал подается на вход дифферен-
дифференцирующей цепи:
@ RU \*«
1 п
¦0
3. Напряжение, действующее на входе
идеального ФНЧ с частотным коэффициен-
коэффициентом передачи
О, со < —сов,
—(оя ^ со < <оя,
О, со > сов,
представляет собой реализацию стационар-
стационарного случайного процесса, функция корреля-
корреляцнн которого Rx(t) = a^e~e|Tt. Вычислите
спектр мощности, функцию корреляции и дис-
дисперсию выходного напряжения.
4. На входе последовательного колеба-
колебательного контура
переда
•¦{:
6. Каковы физические факторы, приводя-
приводящие к нормализации случайного процесса
на выходе линейной цепн?
7. Опишите механизм возникновения теп-
тепловых шумов в резисторах. Каков частот-
частотный диапазон, в пределах которого тепло-
тепловой шум можно считать белым?
8. Чем определяется шумовое напряжение
на выходе приемной антенны?
9. Опишите природу дробового шума,
возникающего в электронных приборах.
10. Напншнте формулу закона распред-
ления Пуассона и поясните физический смысл
параметра/ v.
11. Ка*к выглядит эквивалентная схема,
описывающая шумовые свойства электронно-
электронного прибора, в котором наблюдается дро-
дробовой эффект?
12. Как распределен по частоте спектр
мощности дробового шума?
действует источник ЭДС вида белого шу-
шума с параметром Wo. Определите спектр
мощности и функцию корреляции выход-
выходного напряжения >(().
5. На входе одноконтурного резонансного
усилителя включен источник ЭДС, создаю-
создающий белый гауссов шум со значением
No = 10~ls В2/Гц, Параметры усилителя:
*р(п = 100, Сэк = 110, /рез=15 МГц. Вы-
Вычислите вероятность события, состоящего в
том, что случайное шумовое напряжение иа
выходе превышает уровень 2 мВ.
6. Выведите формулу, определяющую
спектр мощности выходного сигнала двух-
звенного RC-фильтра (см. пример 10.3), иа
входе которого создано шумовое напряжение
с функцией корреляцнн R^ft) = ajjexp(— a| x|).
7. Колебательный коитур
т
с параметрами R = 8 Ом, L = 1.5 мкГн,
С = 120 пФ помещен в среду с темпера-
температурой Т = 400 К. Вычислите дисперсию шу-
шумового напряжения на индуктивном эле-
элементе.
Более сложные задания
265
8. Модуль частотного коэффициента пере-
передачи ФНЧ лииейио падает с ростом
частоты в диапазоне @,/в):
Вычислите шумовую" полосу пропускания
системы.
9. Определите шумовую полосу пропуска-
пропускания двухзвенного RC-фильтра, рассмотрен-
рассмотренного в примере 10.3.
10. Резистор сопротивлением 10 кОм,
находящийся при температуре 300 К,
включен иа вход идеального ФНЧ со сле-
следующей частотной характеристикой:
Определите дисперсию и функцию корреля-
корреляции выходного сигнала фильтра.
11. Антенна СВЧ, имеющая сопротивле-
сопротивление излучения Rz = 2.5 Ом, принимает
сигналы из области пространства с темпе-
температурой Т = 20 К. Полоса пропускания
системы равна 400 МГц. Каково эффектив-
эффективное напряжение шума на выходе антеииы?
12. Оцените дисперсию выходных показа-
показаний инерционного прибора, измеряющего ток
диода. Постоянная составляющая тока
0.3 мА, время интегрирования (постоянная
времени) прибора 2 с.
13. Резистор с сопротивлением 105 Ом,
находящийся при абсолютной температуре
Т, включен в цепь, которая содержит днод,
работающий в режиме насыщения, и источ-
источник постоянной ЭДС. В цепи протекает ток
со средним значением /0 = 1 мкА. Найдите
температуру Т, при которой удельные
дисперсии шумовых напряжений, создава-
создаваемых иа резисторе за счет случайного ха-
характера электронного потока и за счет
теплового эффекта, оказываются одинаковы-
одинаковыми. Сделайте вывод о том, кахой из двух
указанных компонентов шума более значим
на практике.
Более сложные задания
14. Случайный процесс X(t) с функцией
корреляции Rx(tlt t2) действует на входе
линейной стацноиариой системы, для которой
известна импульсная характеристика h(t).
Примым вычислением, используя формулу
Дюамеля, покажите, что функция корреляции
выходного сигнала описывается формулой
т. е. является двумерной сверткой функций
Rx(tlr t2) и й(г).
15. Исследуйте ствтистические характе-
характеристики случайного тока в системе, где
между обкладками конденсатора под воз-
воздействием сил электрического поля движет-
движется множество легких проводящих тел (на-
(например, частицы металлической пыли):
Оцените дисперсию и ширину спектра про-
процесса в зависимости от физических пара-
параметров устройства. Продумайте способ де-
демонстрации явления без применения слож-
сложного и небезопасного источника высокого
постоянного напряжения.
Глава 11
Преобразования сигналов
в нелинейных радиотехнических
цепях
Все радиотехнические цепн, рассмотренные нами ранее,
относились к классу стационарных линейных систем. За-
Замечательной особенностью линейной цепи является справед-
справедливость для нее принципа суперпозиции. Из этого
принципа и из условия стационарности вытекает простое и
важное следствие — гармонический сигнал, проходя через ли-
линейную стационарную систему, остается неизменным по
форме, приобретая лишь другие амплитуду н начальную
фазу.
Однако именно поэтому линейная стационарная система
неспособна обогатить спектральный состав колебаний, по-
поданных на ее вход. Это обстоятельство в значительной
степени сужает класс полезных преобразований сигналов,
которое осуществляются линейными цепями с постоянными
параметрами.
Гораздо большими возможностями в этом отношении
обладают нелинейные системы, в которых связь между
входным сигналом ывх@ и выходной реакцией uBbtx{t) уста-
устанавливается нелинейной функциональной зависимостью
(П.1)
В настоящей главе будут рассмотрены общие законо-
закономерности, присущие простейшим нелинейным системам,
приемы их математического исследования, а также некото-
некоторые виды преобразований сигналов, осуществляемых с по-
помощью нелинейных цепей н устройств.
11.1. Безынерционные нелинейные преобразования
Исследование нелинейной цепи в общем случае — задача
весьма сложная в том отношении, что при математи-
математическом описании функционирования такой системы мы стал-
сталкиваемся с проблемой решения нелинейных дифференциаль-
дифференциальных уравнений. Известно, -что здесь неприменимы боль-
большинство приемов н методов, которые позволяют относи-
относительно легко решать линейные дифференциальные уравне-
уравнения с постоянными коэффициентами. Тем не менее в ряде
случаев исследование нелинейных систем удается довести до
конца простыми способами. Для этого достаточно потре-
потребовать, чтобы нелинейная зависимость вида A1.1) не содер-
содержала явно времени. Физически такое требование означает
безынерционность нелинейного элемента, т. е. мгновенное
установление выходной реакции вслед за изменением внеш-
внешнего входного воздействия.
=/(«.„ О-
11.1. Безынерционные нелинейные преобразования 267
Безынерционных нелинейных элементов, строго говори, не ¦
существует. Однако эта идеализация достаточно точни, условие безынерци-
еслн характерное время изменения входного сигнала зна- онности
чнтельно превышает время установления процесса внутри
самого нелинейного элемента.
В радиотехнике нелинейные элементы — это чаще всего
полупроводниковые приборы — диоды, биполярные и полевые
транзисторы. Современные полупроводниковые приборы до-
достаточно совершенны по своим частотным свойствам.
Поэтому предположение о безынерционном характере
внутренних процессов в нелинейных радиотехнических
элементах часто бывает оправданным.
Внешние характеристики безынерционных нелинейных Равновесное (ста-
элементов. Функциональную зависимость вида A1.1) можно ционарное) состоя-
рассматривать как простейшую математическую модель не- ние в полупровод-
лнненного элемента. Особенность ее состоит в том, что никовых приборах
здесь не фигурируют процессы, происходящие внутри может устанавли-
элемента. Принято говорить, что здесь имеют дело с внешней ваться за время
характеристикой системы. порядка 10~п с
Рис. 11.1. Типичные вольт-амперные характеристики нелинейных
даухпол юсников:
а — однозначная характеристика полупроводникового днода; б — характе-
характеристика туннельного днода, отличающаяся тем, что одному и тому же
значению тока могут соответствовать три различных значения напряжения
Ниже для конкретности будут рассматриваться внешние
характеристики нелинейных двухполюсников, когда входным
сигналом служит напряжение «, а выходным — ток i в двух-
двухполюснике. Зависимость i(u) обычно принято называть
вольт-амперной характеристикой (ВАХ) нелинейного элемента.
Все методы и результаты можно перенести и на случай
нелинейного четырехполюсника, например транзистора, рабо-
работающего в нелинейном режиме при больших амплитудах
входного сигнала. Здесь выходная цепь представляется
источником тока, управляемым входным напряжением;
связь между мгновенными значениями напряжения и тока
оказывается существенно нелинейной.
Используемые на практике нелинейные элементы имеют
разнообразные внешние характеристики. Так, можно выде-
выделить класс элементов с однозначными вольт-амперными
характеристиками (рнс. ll.l,а) н класс элементов, характе-
характеристики которых содержат участки многозначности (рнс. 11.1,6).
вольт-амперная
характеристика
Глава П. Преобразования сигналов в нелинейных цепях
I/
дифференциальные
сопротивление и
крутизна
Можно получить
любую заданную
точность, выбирая
шаг таблицы дос-
достаточно малым, а
также используя
интерполяцию
Сопротивление нелинейного двухполюсника. Понятие сопро-
сопротивления для нелинейного двухполюсника можно опреде-
определить по-разному. Пусть i (и) — вольт-амперная характеристика.
Приложив к двухполюснику постоянное напряжение и = Uo,
имеем в цепи ток /0 = i{U0). Отношение
R- = VJl0 A1.2)
называют сопротивлением элемента постоянному току. В от-
отличие от обычного сопротивления линейного резистора
значение величины R не постоянно, а зависит от прило-
приложенного напряжения.
Часто приходится иметь дело с одновременным воз-
воздействием на нелинейный элемент двух источников напря-
напряжения: Uo н Ды, причем | Дм |/| Uo | <к I. Разложив вольт-
амперную характеристику в ряд Тейлора в окрестности
точки UOt находим ток i« /0 + i'{U0)Au. Отношение прн-
рш пен и я напряжения к приращению тока в выбранной рабо-
рабочей точке A/0, /0) называют дифференциальным сопротив-
сопротивлением нелинейного двухполюсника:
Кд„Ф = Аи/Ы = l/i'{U0). A1.3)
Иногда удобнее пользоваться дифференциальной крутизной
ВАХ
•^диф ^ 1/"Ч1иф ^ ' \*-^oJ» ' 1.1.4J
которая является тангенсом угла наклона касательной вольт-
амперной характеристики в данной рабочей точке.
Подчеркнем, что, вводя понятие дифференциального сопро-
сопротивления или дифференциальной крутизны, мы, по сутн дела,
линеаризуем реальную ВАХ, что справедливо лишь для ма-
малых приращений сигнала относительно рабочей точки.
Способы описания характеристик велинейных элементов.
Как правило, вольт-амперные характеристики нелинейных
элементов получают экспериментально; гораздо реже удается
найти их нз теоретического анализа. Для изучения процес-
процессов в радиотехнических цепях, содержащих такие элементы,
необходимо прежде всего отобразить вольт-амперные харак-
характеристики в математической форме, пригодной для расчетов.
Простым и весьма точным способом может явиться
представление характеристики в виде таблицы. Этот способ
особенно удобен для анализа процессов в цепях с по-
помощью ЭВМ; аргумент н функция образуют в запоми-
запоминающем устройстве двумерный массив чисел.
Если исследование должно проводиться не численными,
а аналитическими методами, то требуется подобрать такую
аппроксимирующую функцию, которая, будучи довольно
простой, отражала бы все важнейшие особенности экспе-
экспериментально снятой характеристики с достаточной степенью
точности.
В радиотехнике чаще всего используют следующие спо-
способы аппроксимации вольт-амперных характеристик нелиней-
нелинейных двухполюсников.
11.1. Безынерционные нелинейные преобразования
Кусочно-линейнвн анпрокснмацня. Данный способ основан
на приближенной замене реальной характеристики отрезками
прямых линий с различными наклонами. В качестве при-
примера на рис. 11.2 показана входная характеристика реаль-
реального транзистора, аппроксимированная двумя отрезками
прямых.
Аппроксимация определяется двумя параметрами — напря-
напряжением начала характеристики и„ и крутизной S, имеющей
размерность проводимости. Математическая форма аппрокси-
аппроксимированной ВАХ такова:
Такую аппрокси-
аппроксимацию обычно при-
применяют при расче-
расчете процессов в не-
нелинейных элемен-
элементах в случае боль-
больших амплитуд
внешних воздейст-
воздействий
о и,.
1Б.мА
A1.5)
0.75
0.5
0.25
/
аз о.б о.я
Рис. П.2. Входная характеристика транзистора КТ306 — зависимость
тока базы от напряжения промежутка база — эмиттер
Напряжение начала входных характеристик биполярных
транзисторов имеет порядок 0.2—0.8 В; крутизна характе-
характеристики тока базы is («бэ), как правило, около 10 мА/В.
Если же говорить о крутизне характеристики /к(«бэ) тока
коллектора в зависимости от напряжения база — эмиттер,
то последняя цифра должна быть умножена на Л21э —
коэффициент усиления тока базы. Поскольку Л2]Э = 100 -г- 200,
указанная крутизна имеет порядок нескольких ампер на
вольт (сименсов).
Степенная аппрокснмацвя. Этот способ основан на разло-
разложении нелинейной вольт-амперной характеристики i{u) в ряд
Тейлора, сходвщийся в окрестности рабочей точки 1/0:
Ци) = ао + ах{и- Uo) + а2(и- UoJ + ... A1.6)
Здесь коэффициенты а0, alt a2i... — некоторые числа. Коли-
Количество членов разложения зависит от заданной точности
расчетов.
Способ нахождения коэффициентов степеней аппрокси-
аппроксимации иллюстрируется следующим простым примером.
Общая формула
Пример 11.1. Экспериментально снятая входная характеристика
1Б=/(иБЭ) транзистора КТ301 задана графиком (рис. 11.3). Найти
коэффициенты а0, «i и а2, определяющие аппроксимацию вида
'Б = «о + аг(иъэ ~ Uо) + я2("бэ ~ UoJ в окрестности рабочей точки
l/o = O.7 В.
Выбираем в качестве узлов аппроксимации точки О5, 0.7 и
О.9 В. Как видно из построения, для нахождения неизвестных
270
Глава 11. Преобразования сигналов в нелинейных цепях
коэффициентов следует решить систему уравнений:
а„ - О2о, + 0.04о2 = аО5,
п0 = 0.15,
о0 + 02A! + O.CWu2 = а5,
откуда а0 = 0.15 мА, а, = 1.125 мА/В, о2 = 3.125 мА/В2.
¦б.мА I
0.5 1 i
Рис. 11.3. Степенная аппроксимация входной характеристики тран-
транзистора КТ301
Подчеркнем, что степенная аппроксимация есть способ преиму-
преимущественно локального описания характеристик; пользоваться ей
при значительных отклонениях мгновенных значений входного
сигнала от рабочей точки нецелесообразно из-за существенного
ухудшения точности.
решите задачу 1
Степенную аппрок-
аппроксимацию широко
используют при
анализе работы не-
нелинейных уст-
устройств, на которые
подаются относи-
относительно малые
внешние воздейст-
воздействия
Значение величины
/о весьма мало и
составляет обычно
несколько пикоам-
пер
Показательная аппроксимация. Из теории работы р-п-пере-
ходов следует, что вольт-амперная характеристика полупро-
полупроводникового диода в области и > 0 описывается выражением
.(и) = /0[ехр(и/Иг)-1]. A1.7)
Здесь /0 — обратный ток насыщения, ит — температурный по-
потенциал, равный 25 мВ для кремниевых приборов при
стандартной температуре 300 К.
Показательную зависимость вида A1.7) часто используют
при изучении нелинейных явлений в радиотехнических цепях,
содержащих полупроводниковые устройства. Аппроксимация
вполне точна при значениях тока, не превышающих несколь-
нескольких миллиампер. При больших токах экспоненциальная ха-
характеристика плавно переходит в прямую линию из-за влия-
влияния объемного сопротивления полупроводникового мате-
материала.
11.2. Спектральный состав тока
в безынерционном -нелинейном элементе
при гармоническом ниеинем воздействии
Рассмотрим явления в простейшей цепи, образованной
последовательным соединением источника гармонического
сигнала ис (г) = Um cos cof, источника постоянного напряжения
смещения t/0 и безынерционного нелинейного элемента.
Найдем форму тока в цепи, воспользовавшись несложными
графическими построениями, приведенными на рис. 11.4.
Легко видеть, что формы тока и напряжения оказываются
здесь различными. Причина искажения кривой тока очень
11.2. Спектральный состав -тока в пепинейном элементе
Ток в цепи имеет
несинусоидальную
форму
Рис. 11А Графическое построение кривой, отображающей изменение
тока в безынерционной нелинейной цепи
проста: одинаковым приращениям напряжения отвечают не-
неодинаковые приращения тока, поскольку Ai = S^ (ы) Дм, а диф-
дифференциальная крутизна вольт-амперной характеристики на
разных участках также различна.
Основной принцип. Подходя к описанной задаче аналити-
аналитически, будем считать известной нелинейную функцию i (ы) =
ад
Пусть к входным зажимам нелинейного двухполюсника
приложено напряжение сигнала ис(г) = l/mcos(eor + <p). Если
ввести безразмерную переменную \ = со( + <р, то функция
iK) = i(tf_coslj, Uo) A1.8)
оказывается периодической относительно аргумента fcj с пе-
периодом 2тс, поэтому она может быть представлена рядом
Фурье
Постоянное напря-
напряжение смещения
играет роль пара-
параметра данной фун-
функции
<©=
Се«
A1.9)
с коэффициентами
С"= 2тГ
Поскольку функция i(tj) четная, ряд Фурье A1.9) будет
содержать только косинусоидальные слагаемые:
'© = /о+ Ё '.cosn^. A1.10)
Амплитудные коэффициенты гармоник выражаются сле-
следующим образом:
A1.11)
Глава 11. Преобразования сигналов в нелинейных цепях
/„ = 2ReCn = - i ([/„ cos ?, Uo) cos r?, dE,,
n=l, 2, ...
спектральный со- Формулы A1.10) н A1.11) дают общее решение задачи
став тока в бе- ° спектРе тока в нелинейном безынерционном элементе при
зынецционном не- гармоническом внешнем воздействии. Оказывается, что ток
линейном двухпо-
двухполюснике
A1.12)
кроме постоянной составляющей /0, содержит бесконечную
последовательность гармоник с амплитудами /„, и = 1, 2, ...
Амплитуды гармоник в соответствии с A1.11) зависят от
параметров Um и Uo, а также от вида аппроксимирующей
функция.
Кусочно-линейная анпроксимацня. Форма> тока в цепи, со-
содержащей нелинейный элемент с характеристикой
A1.13)
и— t/,,), u3*t/H,
на который подано напряжение
и (t) =ио + и„ cos&t,
видна нз построения на рис. 11.5.
Рис. 11.5. Форма тока в цепи, содержащей нелинейный элемент с
кусочно-линейной характеристикой
График тока имеет характерный вид косинусоидальиых
импульсов с отсечкой. Спектральный состав такого периоди-
периодического процесса подробно изучался в гл. 2.
Угол отсечки импульсов тока определяется из равенства
Uо + и„ cos 8 = ?/„ откуда
У*-Ус
A114)
Постоянную составляющую и амплитуды гармоник тою
вычисляют по формулам
11.2. Спектральный состав тока в нелинейном элементе
l. = SVmy.&), 1 = 1,2,...,
в которые входят соответствующие функции Берга у„(9).
V '
Пример 11.2. Нелинейный элемент имеет кусочно-линейную ВАХ
с параметрами и„ = 0.6 В, S = 25 мА/В. К данному элементу
приложено напряжение (В) и = 0.2 + 0.8 cos cot. вычислить постоянную
составляющую 10 и первую гармонику It тока.
Так как cos 8 = @.6-0.2)/0.8 = 0.5, то 8 = 60°.
Значения функций Берга:
у0 (8) = A/71) (sin 8 - 8 cos 8) = 0.109,
r, (8) = A/и)(8 - sinScosS) = 0.196.
По формулам A1.15) находим
-25 0.8 0.196- 3.92 мА.
250*0.109 = 2.18 мА, /, =
Степепная аппроксимация. Пусть в окрестности рабочей
точки Но вольт-амперная характеристика нелинейного эле-
элемента представлена в виде
1 = ао+ а, (и - Uo) + аг (и - U0J + ...; A1.16)
приложенное к нелинейному двухполюснику напряжение
u(t) = V0 + Vmcosmt. A1.17)
Воспользовавшись известными формулами
cos2x= V2(l + cos2x),
cos3 х = '/4 C cos x + cos 3x),
cos4 x = •/» C + 4 cos 2x + cos 4x),
cos5 x — Vie A0 cos x + 5 cos 3x + cos 5.x),
путем подстановки A1.17) в A1.16) получаем
+ (Ol Vm + 3ДаЗ ^m + 5/вО5 Um + ¦ ¦ ¦) COS @Г +
+ C/2O2 Й + '/eft, Vi, + ...) cos 2ot +
+ (lUa3Vi + 5/i6Os^m + ...)cos3to( + ... A1.18)
Отсюда вытекают следующие соотношения для расчета
постоянной составляющей тока п амплитуд гармоник:
A1.19)
Общее выражение при произвольном номере гармоники п
таково: ¦
Постоянная сос-
составляющая и ам-
амплитуды четных
гармоник опреде-
определяются коэффици-
коэффициентами степенного
ряда с четными
номерами. Ампли-
Амплитуды нечетных гар-
гармоник зависят
лишь от нечетных
коэффициентов
Глава 11. Преобразования сигналов в нелинейных цепях
V
A1.20)
Показательная аппрокспмацня. В случае, когда ВАХ двух-
двухполюсника аппроксимирована выражением
для вычисления спектра тока используют формулу
exp (m cos х) ~10(т)+2 ? /„ (m) cos nx,
где Jfc (m) — модифицированная функция Бесселя fc-ro индекса.
Если к нелинейному двухполюснику с экспоненциальной
характеристикой приложена сумма напряжений смещения н
рмонического сигнала, т. е. и — Vo + Umcos&t, то
A1.21)
Нелинейные нскаженип в усилителе с резпстнвнон ва груз-
кон. Трансформация спектра входного сигнала в нелинейных
цепях является чрезвычайно важным явлением. С одной
стороны, на нем основана работа целого ряда радиотехни-
радиотехнических устройств (модуляторов, детекторов и т. д.), которые
будут рассмотрены ниже; с другой, из-за нелинейности ха-
характеристик возникают некоторые нежелательные эффекты,
которые необходимо оценивать и учитывать.
Рассмотрнм, например, транзисторный усилитель, нагруз-
нагрузкой которого служит резистор i?H. В отлнчие от усилителя
малых сигналов (см. гл. 8) будем полагать, что амплитуде
входного гармонического сигнала UmBX достаточно велика
для того, чтобы сделать обязательным учет нелинейности
проходной характеристики транзистора *к(ибэ)- Пусть в про-
простейшем случае эта характеристика при некотором выборе
рабочей точкп задается многочленом второй степени:
»к = ао + Щ («бэ ~ ^о) + а2 («бэ - VoJ •
Подав на вход усилителя напряжение
«БЭ — ^0 + VmBKCOS(Ut,
в коллекторной цепн будем иметь постоянную составляющую
тока, а также токи, отвечающие первой и второй гармоникам
частоты сигнала, причем на основании A1.19)
Ii=a1UmBK, J2=a2VlBJ2.
Эти гармоники тока, проходя через резистор нагрузки,
создают на нем падение напряжения, которое является
выходным сигналом. Для того -чтобы количественно оценить
степень искажения сигнала на выходе усилителя, вводят
11.3. Нелинейные усилители и умножители частоты
275
величину &„, называемую коэффициентом нелинейных иска- ф
жений усилителя п равную отношению среднеквадратнче- коэффИ|ме11г иеЛц.
ского уровня всех высших гармоник тока к амплитуде тока He|j,J|*Jx нсквжений
полезного сигнала:
м
A1.22)
В данном случае
Лм = lilh - '/a Wai) VmM • '11-23)
Заметим, что коэффициент нелинейных искажений увели-
увеличивается с ростом амплитуды сигнала.
11.3. Нелинейные резонансные усилители
и умножители частоты
В технике редиопередающнх устройств широко приме-
применяются резонансные усилители мошности. Их отличительная
черта — работа при больших амплитудах входных напряжений,
что делает обязательным учет нелинейного вида вольт-ам-
вольт-амперных характеристик активных элементов (транзисторов или
ламп).
Принцип работы нелинейного резонансного усилителя. Рас-
Рассмотрим транзисторный усилитель (рис. 11.6, а) с нагрузкой
в виде параллельного колебательного коитура. На вход уси-
усилителя подано напряжение и^ (Г) = Uo + VmBX cos at; колеба-
колебательный контур настроен на частоту сигнала: со,^ = со.
Предположим, что характеристика 1к(«бэ) транзистора
аппроксимирована отрезками прямых, и обратимся к рис.
11.6,6. Ток в цепи коллектора имеет форму косинусоидаль-
ных импульсов с отсечкой. Эти импульсы обладают слож-
сложным спектральным составом, однако ведущую роль в работе
устройства нграет лишь первая гармоника тока, частота ко-
которой совпадает с резопансной частотой коитура; сопро-
Рис. 11.6. Принципиальная схема резонансного усилителя (а) н
временные диаграммы его работы (б)
276
Глава 11. Преобразования сигналов в нелинейных цепях
решите задачу 2
° Ж
1 ~ недоиппряжен-
нынрежнм; 2-пе-
2-перенапряженный ре-
режим
тивление колебательной системы на частотах 2е>, Зш и т.д.
столь мало, что высшие гармоники практически не дают
вклада в выходной сигнал.
Первая гармоника коллекторного тока создает на выходе
полезное напряжение с амплитудой
Vmm = ЛКре, = ЗКреЛвхУ. (9) - (П-24)
Аналогично, используя формулу A1.19), можно записать
выражение амплитуды гармонического сигнала на выходе ре-
резонансного усилителя прн степеиион аппроксимации характе-
характеристики транзистбра:
?/„вых = ЯреЛ0!^ + 7«*Э<?« + Vs^bx + -..)¦ (П.25)
Колебательпап характеристика. Так принято называть за-
зависимость Umna =/(UmBX), вытекающую из формулы A1.24)
или A1.25). Естественное требование к колебательной характе-
характеристике — ее линейность, что особенно важно прн усилении
АМ-сигналов. Как видно, например, из выражения A1.24),
колебательная характеристика в общем случае нелинейна,
поскольку угол отсечки &, а значит, и коэффициент Берга
Yi(&) зависят от амплитуды возбуждающего напряжения
Umax. Исключение составляет случай, когдв положение рабо-
рабочей точки совпадает с началом характеристики. При этом,
как легко видеть, & = 90° независимо от VmBX.
Работа усилителя с углом отсечки 90° выгодна еще и
потому, что в отсутствие высокочастотного сигнала (режим
«молчания») постоянная составляющая коллекторного тока
обращается в нуль. Данное обстоятельство благоприятно
сказывается на КПД усилителя.
Важным параметром колебательной характеристики явля-
является ширина ее линейного учета, который определяет
динамический диапазон усиливаемых сигналов. Естественная
причина, ограничивающая рост колебательной характеристи-
характеристики, состоит в следующем: при некотором критическом
значении амплитуды входного сигнала UJJfBX колебательное
напряжение на контуре становится близким по значению
к напряжению источника питания ?пит. Дальнейший рост
амплитуды напряжения на контуре стаиовнтся невозможным,
поскольку при этом в некоторые моменты времени мгно-
мгновенное значение напряжения на коллекторе транзистора
становится малым. Как следствие, нормально запертый кол-
коллекторный переход открывается н цепь коллектор — база —
источник сигнала — источник питания резко шунтирует коле-
колебательную систему усилителя.
Если UmBX> и$вх, то говорят, что усилитель работает
в перенапряженном режиме. Этот режим непригоден для
усиления АМ-сигналов. Однако, значительио снижая напряже-
напряжение источника питания, резонансный усилитель можно пере-
перевести в перенапряженный режим, превратив его в ограни-
ограничитель амплитуды квазигармонических колебаний — полезное
устройство, ликвидирующее паразитную амплитудную моду-
модуляцию ЧМ- или ФМ-сигпалов.
Н.З.Нелинейные усилители н умножители частоты
Энергетические соотношении а нелинейном резонансном уси-
усилителе. Рассматриваемые здесь резонансные усилители — как
правило, достаточно мощные устройства, н для них немало-
немаловажен высокий коэффициент полезного действия. Чтобы вы-
вычислить КПД, необходимо знать мощность, потребляемую
от источника питания: Р„ш = Е„Ш1О н полезную активную
мощность, передаваемую колебательному контуру: Рпол =
= t/mBb,x/l/2.
В мощных усилителях обычно стремятся максимально
полно нспользовать нсточник питания, приближаясь к границе
перенапряженного режима, т. е. Um8bIX * Е„ит- Тогда
КПД = PnoJPmj = V2Y1 (&VYo(9). A1.26)
Исследуя отношение у, (&)/УоФ)> легко убедиться, что оно
максимально и равно двум при & = 0°; с ростом 9 это
отношение уменьшается, составляя я/2 = 1-57 при 90е. Поэтому
с точки зрения эффективности использования источника
питания выгоден режим с малым углом отсечки, когда
КПД усилителя приближается к единице. Прн этом электрон-
электронный прибор большую часть времени находится в запертом
состоянии н теплового рассеяния мощности на коллекторе
(аноде) не происходит. Однако прн этом резко снижается
коэффициент ух н для получения заданной полезной мощ-
мощности приходится существенно увеличивать амплитуду вход-
входного сигнала, что не всегда возможно. Принимая во внимание
требование лниейиостн колебательной характеристики, на
практике идут на некоторое снижение КПД н выбирают
угол отсечки, близкий к 90°.
Резонансное умножение частоты. Если в схеме резонанс-
резонансного усилителя, работающего с большой амплитудой вход-
входного сигнала, колебательная система будет настроена на
частоту то — частоту одной из высших гармоник входного
сигнала, то данное устройство может использоваться в ка-
качестве умножителя частоты.
Потребность в умножителях возникает, например, при
создании источников гармонических колебаний с высокой ста-
стабильностью частоты, если непосредственное генерирование
таких колебаний в заданном частотном диапазоне невоз-
невозможно, однако в распоряжении имеется весьма стабильный
низкочастотный генератор.
Расчеты умножителей частоты н нелинейных резонансных
усилителей в принципе не. отличаются. По аналогии с A1.24),
амплитуда выходного сигнала умножителя прн кусочио-
линейной аппроксимации
?^ы* == ЯгреЛвхУД»)- (П-27)
Трудность создания резонансных умножителей частоты
заключается в низких значениях у„(&) прн большой крат-
кратности умножения. Поэтому следует выбирать углы отсечки,
максимизирующие* соответствующие коэффициенты Берга.
Чем выше скважность последовательности импульсов кол-
лекторпого трка, тем богаче их спектральный состав. Отсюда
Импульсы с ма-
лым углом отсечки
278 Глава 11. Преобразования сигналов в нелинейных пенях
следует, что, желая "создать умножитель с высокой крат-
кратностью, следует выбирать малые углы отсечки. Анализ
функций у„ (&) показывает, что существует оптимальный угол
&опт. причем
&OIIT=1807n. A1.28)
Именно таким должен быть угол отсечки тока в умно-
умножителе частоты при фиксированном значении амплитуды воз-
возбуждающего напряжения.
11.4. Безынерционные нелинейные преобразования
суммы нескольких гармонических сигналов
Свойство нелинейной цепи обогащать спектр, создавая
на выходе спектральные составляющие, первоначально от-
отсутствующие на входе, ярче всего проявляется, если входной
сигнал представляет собой сумму некоторого числа гармо-
гармонических колебаний с различными частотами. Эффект воз-
возникновения большого числа новых спектральных составляю-
составляющих лежит в основе важных для радиотехники нелинейных
преобразований сигналов.
Бнгармоническое воздейстане на нелинейный элемент со сте-
иенной характеристикой. Будем изучать нелинейный двухпо-
двухполюсник, вольт-амперная характеристика которого для конкрет-
конкретности описывается многочленом 2-й степени:
i(и) = ao+ai{u- Uo) + a2(u- UoJ. A1.29)
Приложенное напряжение помимо постоянной составляю-
составляющей содержит два гармонических колебания с различными
частотами а^ н а^; амплитуды колебаний равны VMl и Um2
I I соответственно:
I | ю u=U0 + Umlcosalt+ t/m2cosco2f. A1.30)
Такой сигнал в радиотехнике принято называть бигар-
Спектр Сигармони- моническим воздействием. Он очень удобен для выяснения
ческого сигнала принципиальных особенностей преобразования спектра в не-
нелинейных цепях.
Подставим сигнал A1.30) в формулу A1.29):
i (t) = flo + «i ?/mi cos o^f + ax Vn2 cos co2f + a2 U%,x cos2 ©if +
+ 2a2 UMl Vm2 cos to,t cos o^f + a2 U?2 cos2 to2f.
Выполнив элементарные тригонометрические преобразова-
преобразования и сгруппировав члены, приходим к следующему спект-
спектральному представлению тока в нелинейном двухполюснике:
+¦ Vmi) + Oi t)mi cos ©if + ax Vm2 cos oJt +
+ V2O2 t^mi cos 2ahf + '/202 ^«2 cos 2a>2t +
+ «2 Vni Vm2 cos (tox + to2) t + a2 Vml Vm2 cos (to, — to2) f.
A ' A1.31)
решите задачу З Видно, что в составе тока присутствуют слагаемые,
встречавшиеся ранее: постоянная составляющая, а также
11.4. Нелинейные преобразования суммы гармонических сигналов
первые и вторые гармоники обоих источников входного
сигнала. Принципиально новым является появление двух
гармонических составляющих с частотами ©! + ©г и toi — со2.
Амплитуды этих колебаний, равные a2UmiUm2, в одинаковой
мере зависят от амплитуд входных сигналов и обращаются
в нуль, если один из источников на входе отсутствует.
Это свидетельствует о том, что из-за нелинейности рассмат-
рассматриваемого двухполюсника в нем происходит взаимодействие
колебаний, соответствующих отдельным гармоническим со-
составляющим входного сигнала. На рис. 11.7 изображена
полная спектральная" диаграмма тока в двухполюснике при-
применительно к выбранному виду входного сигнала.
Влияние кубичного члена вольт-амперной характеристики.
Несколько усложним задачу н будем считать, что в составе
вольт-амперной характеристики i(u) имеется кубическое сла-
слагаемое, которое обусловливает дополнительный ток
i3(t) = a3(u-V0K- A1.32)
z fo,+fo2 2со,
Рнс. 11.7. Спектральная диаграмма тока в велннейвом двухполюс-
двухполюснике с вольт-амперной характеристикой, описываемой квадратичным
мвогочленом (входной сигвал — бигармоническое колебание, спектр
которого на рисунке выделен)
Подставив сюда сигнал A1.30), получим
*з М = «з [C/4t?i + э/2 U.i Uii) cos а>,Г +
+ CUVi2 + 3/2^i^m2)costo2f + VdEfti cos3to,r +
+ 1UU*l COS 3tD2( + 3Д1/«1 Vm2 COS B0)! + tp2)( +
+ 3/t^«l^m2COSBQ)I - C02)f +
+ 3UVml Via cos Bq>2 + ©!)( +
+ %VmlUl2 cosBq>2 - ©,)(. A1.33)
Видно, что, с одной стороны, кубичное слагаемое не-
несколько изменяет уровень амплитуд первых гармоник тока,
имеющих частоты toi и со2. Существеннее, однако, появле-
появление новых спектральных составляющих с частотами Зш,, Зш2,
2o>i + со2, 2(аг — со2, 2ш2 + toi, 2о>2 — сох.
Комбинационны^ частоты. Рассмотрим общую постановку
задачи о воздействии нескольких гармонических сигналов
с разными частотами на безынерционный нелинейный эле-
элемент.
280
Глава 11. Преобразования сигналов в нелинейных пенях
Эта формула обоб-
обобщает принцип спек-
спектрального анализа
периодических сиг-
сигналов на случай
функции, завися-
зависящей от нескольких
аргументов [16]
Пусть к данному элементу приложено М напряжений
сигналов, имеющих вид
"с2 (') = V„
COS (O)!t + <р,)
«OS @>2Г + <р2)
Vmt COS ([(,
Vm2 COS ф2
"м (') = VmM COS @>Mr + <pM) = и„м COS фм .
По отношению к одному из этих источников, скажем,
с частотой со,, нелинейный элемент представляет собой двух-
двухполюсник, описываемый вольт-амперной характеристикой
i = i(Un,1cos*1, Um2cos*2, ..., U^cosiM. A1.34)
Выражение A1.34) представляет собой фуикцию М незави-
независимых аргументов ^," ^2> ¦¦-. ^м'* но каждому из них
функция перноднчиа с периодом 2л, поэтому она может быть
разложена в М-кратный ряд Фурье:
х exp [/ (П!
Коэффициенты данного ряда
A1.35)
A1.36)
Функция i (^ь ^2> •¦-. ^м) ~ четная по каждому из аргу-
аргументов, поэтому ряд A1.35) фактически имеет вид
? ?
х cos (п,
Амплитудные коэффициенты этого ряда /|п,|1и2|...|им|=
= 2ReCnini. „M не зависят от того, какие знаки (положитель-
(положительные или отрицательные) имеют индексы суммирования.
Полученное общее решение дает возможность представить
ток в рассматриваемом двухполюснике как функцию вре-
времени:
X COS [(«[0), + П2Ю2 + ... + ПмШм) t +
+ (ni<pi + И2Ф2 + ... + ям<рм)].
(Н.37)
11.4. Нелинейные преобразования суммы гармонических сигналов
Всевозможные частоты гармонических колебаний, входящие
в формулу A1.37), называют комбинационными частотами:
A1.38)
где щ, п2, ..., пм — любые целые числа, положительные и
отрицательные, включая нуль.
Таким образом, показано, что спектр тока в безынерцион-
безынерционном нелинейном двухполюснике, находящемся под воздей-
воздействием нескольких гармонических сигналов с различными
частотами, образован в общем случае бесконечной совокуп-
совокупностью комбинационных частот вида A1.38).
Комбинационные частоты принято группировать, объеди-
объединяя вместе все частоты, для которых
Число N называют порядком комбинационной частоты.
Рассмотренный ранее частный пример показывает, что
в спектре тока, проходящего через нелинейный элемент с
характеристикой, содержащей степени не выше 3-й, прн воз-
возбуждении системы суммой двух гармонических сигналов
наблюдаются комбинационные следующие частоты:
, COi — Ю2
>2, 2а)! — Ш
2а>2
Можно заметить закономерность: слагаемое со степенью
N в вольт-амперной характеристике элемента дает комбина-
комбинационные составляющие с предельным порядком, равным сте-
степени этого слагаемого. Прн этом если N — четное число,
то возникают комбинационные частоты четных порядков:
N, N — 2, N — 4, ... вплоть до N — 0 (постоянная состав-
составляющая). Если же N нечетно, то порядки комбинационных
частот также нечетны: N, N — 2, N — 4, ... вплоть до N = 1.
комбинационные
частоты
решите задачу 3
Пример 11.3. Нелинейный двухполюсник имеет кубическую ВАХ
i (и) = а3 (и — 1/0)э. Входное напряжение является суммой трех гар-
гармонических колебаний: u@=t/o + ^miCosffl1t + C/F,2cosffl2* + C/m3Cosffl3*-
Найти частоты всех комбинационных составляющих тока.
Поскольку степень ВАХ равна трем, будут наблюдаться ком-
комбинационные частоты cN=luN = 3.
Комбинационные частоты 1-го порядка: coi, <о2, юэ.
Комбинационные частоты 3-го порядка: Зга,, Зю2, Зю3,~
|±Ю! ±ша±а>3|, 1±2ш1±ш2|> | ±2т1±ш3|, I
|±2а>2±ю3|, |±2(оэ±ю1|, |
1
7
Фактически необходимо учитывать лишь различающиеся часто-
частоты. Так, выражениям 2а>! + ю2 н —2а)! — 2а>2 отвечает одна и та же
частота.
Глава 11, Преобразования сигналов в нелинейных пенях
Эффекты, сопровождающие нелинейные преобразования не-
нескольких колебаний. Возникновение комбинационных состав-
составляющих в выходном сигнале безынерционного нелинейного
преобразователя, а также зависимость амплитуд комбина-
комбинационных колебаний на выходе от амплитуд сигналов на
входе обусловливает ряд принципиально важных эффектов,
с которыми приходится сталкиваться прн построении радио-
радиотехнических устройств и систем.
К числу таких явлений относится в первую очередь перенос
модуляции с одной несущей частоты на другую.
Пусть, например, к входу нелинейного двухполюсника с
кубической ВАХ
i (и) = ао + а, (и - Uо) + а3(и~ UoK A1.40)
помимо постоянного напряжения смещения Uo приложена
сумма двух напряжений: однотонального АМ-сигнала ис1 =
= Vmi A+ М cos Qt) cos co,f и немодулированиого сигнала
«с2 = UW2C°se>2f.
На основании формулы A1.33) убеждаемся, что составляю-
составляющая тока с частотой со2 имеет при этом амплитуду
1ы2 =axVm2 + 3faa3Un2 + 3/2«3^i(') t/m2 =
lf2M2 + 2Mcosilt + l/2M2cos2Qt).
A1.41)
Видно, что рассматриваемая составляющая представляет
собой АМ-колебание, промодулированиое частотами Q и 2?1
Налицо перенос модуляции с несущей частоты tot на новую
несущую частоту со2.
Из формулы A1.33) следует, что промодулированиыми
по амплитуде окажутся также комбинационные колебания
с частотами 2o>i + со2, 2o>i — со^ 2©2 + со. и 2ю2 — Ю1 •
• Описанное здесь явление в радиотехнике называют
ннтермодуляция интермодуляцией. Следствием его может оказаться весьма
ощутимое снижение работоспособности приемного устройст-
устройства, которое содержит нелинейный элемент, возбуждаемый
' несколькими сигналами. Если даже частоты этих сигналов
существенно отличаются от номинальной рабочей частоты
приемника, одна или несколько комбинационных частот могут
попасть в полосу пропускания н быть приняты наравне с
полезным сигналом.
Ф Борьба с ннтермодуляционнымн сигналами — одна из
электромагнитная составных частей работы по обеспечению электромагнитной
сонместимость совместимости (ЭМС) радиоэлектронных средств.
К ннтермодуляции близко примыкает явление, состоящее
¦ в том, что за счет нелинейного взаимодействия происходит
усиление н подав- усиление или подавление одного сигнала другим. Проиллюст-
ление сигналов рируем это на примере нелинейного элемента с ВАХ вида
в безынерционном A1.40). Пусть на входе действуют два немодулироваиных
нелинейном эле- сигнала с различными частотами: ис1 = Uml cosco.f и ис2 =
менте = Um2cos(o2t. Амплитуда тока 1а2 в соответствии с фор-
формулой A1.41) существенным образом зависит не только от
11.5. Получение модулированных радиосигналов
«собственной» амплитуды Um2, но и от амплитуды Uml
источника с частотой ©j. Характер этой зависимости опре-
определяется знаком коэффициента ¦ аъ. Если аъ > 0, то второй
сигнал усиливается за счет энергии первого. Если же а3 < О,
то, наоборот, наблюдается подавление одного сигнала другим.
Отметим, что нелинейное подавление всегда проявляется
по отношению к более слабому сигналу. Сильная помеха может
настолько подавить слабый полезный сигнал, что дальнейшее
его усиление становится практически невозможным из-за
шумов. Однако встречается и обратная ситуация — сильный
полезный сигнал, взаимодействуя в нелинейном элементе
приемника со слабой помехой, подавляет ее, так что качество
приема улучшается.
11.5. Получение модулированных радиосигналов
Подавая на безынерционный нелинейный элемент сумму
исходных колебаний, в выходном сигнале можно наблюдать
всевозможные комбинационные составляющие. Если теперь
пропустить выходной сигнал через линейный частотный
фильтр, то можно выделить ряд полезных компонентов
преобразованного сигнала. На этом принципе основана pa-
бота большого числа радиотехнических устройств, в част-
частности модуляторов.
Принцип работы амплитудного модулятора. Амплитудным
модулятором называют устройство, создающее на выходных
зажимах АМ-сигнал вида иАм (t) = Um A + М cos Qt) cos toof
при подаче на входы цепи гармонического несущего коле-
колебания «Hec(t)= ^ЛпнесС08*1^ и низкочастотного модулирующе-
го сигнала ымод (t) = итыод cos Sit. Чаще всего амплитудные
модуляторы строят, используя эффект преобразования спектра
суммы даух сигналов в безынерционном нелинейном эле-
элементе.
Простейшим амплитудным модулятором служит нелиней-
нелинейный усилитель, у которого резонансный контур в выходной
цепи настроен на частоту несущего колебания. К входу
модулятора приложено напряжение
A1.42)
Принцип работы данного модулятора поясняется осцилло-
осциллограммами напряжений и токов, показанными на рис. 11.8.
Для определенности, считается, что проходная характе-
характеристика транзистора аппроксимирована отрезками даух пря-
прямых. За счет того, что рабочая точка перемещается в такт
с низкочастотным модулирующим колебанием, происходит
непрерывное изменение угла отсечки несущего сигнала.
Амплитуда первой гармоники последовательности импульсов
коллекторного тока оказывается не постоянной во времени,
Колебательный коетур фильтрует коллекторный ток, вьщеляя
на выходе АМ-сигнал, т. е. несущее колебание с переменной
амплитудой, пропорциональной полезному модулирующему
сигналу.
i
LiI In I
принцип работы ам-
плитудного моду-
лятора с кусочно-
линейной хардкте-
рнстнкой
Глава 11. Преобразования сигналов в нелинейных цепях
'к
У!Шш1ШШ ,
Рис. 11.8. Токи и напряжения в амплитудном модуляторе
Пример 11.4. Транзистор, используемый в амплитудном модуля-
модуляторе, имеет характеристику с изломом в точке UH = 0.6 В. Ампли-
Амплитуда несущего колебания на входе UmRK = 0.4 В, амплитуда
модулирующего сигнала UmMoa = 0.l В, начальное смещение 1/о =
= 0.6 В. Определить коэффициент амплитудной модуляции М.
В соответствии с исходными данными рабочая точка переме-
перемещается в пределах от l/0 + UmtM>A = 0.7 В до Uq — UmMoa = 0.5 В.
Отсюда находим предельные значения угла отсечки:
Эти =arccos[@.6-0.7)/0.4] = 1.823 рад,
»min = arccos [@.6-03)/04] = 1318 рад. ^
Амплитуда первой гармоники коллекторного тока пропорций- решите задачу 4
иальна функции Берга yt (9), которая изменяется в пределах от
Yi (9max) = A/л) (»m,x - sin Э^ cos »„,,) = 0.657
до
Yi (»min) - U/я) (»«m - sin »min cos »min) - 0.342.
Следовательно, коэффипиенг модуляыии выходного сигнала
0.657-0.342
' 0.657 +0.342:
:О315.
Аналитическое рассмотрение. Процесс получения АМ-сиг-
нала можно изучить аналитически, применив развитую выше
теорию комбинационных частот. Пусть на входе нелинейного
и элемента с характеристикой простейшего вида A1.29) дейст-
действует напряжение u,,(t) = Но + l7BMO,cosfi! + Umm cos шл при-
причем щ » П.
В составе тока, проходящего через даухполюсник, можно
выделить составляющие с частотами, близкими к о>о, которые
образуют амплитудно-модулированный ток
'AM (') = 1,Vmmc COS COot +
+ Яг^всс^мол cos (шо + П) t X а2И„т11пмт cos (щ, - П) t.
A1.43)
и Как известно (см. гл. 4), относительный уровень боковых
о-п йо\, + а колебаний по сравнению с несущим колебанием мМД
11.5. Получение модулированных радиосигнале»
COS@0(
Рис. 115. Структурная схема балансного модулятора
Из формулы A1.43) следует, что в данном случае коэффи-
коэффициент амплитудной модуляции выходного сигнала
М = Bа2/а1)итмол. A1.44)
Получение сигналов с балансной модулодней. Схему ампли-
амплитудного модулятора можно видоизменить таким образом, что
на выходе устройства будет получен сигнал с подавлением
несущим колебанием, т. е. сигнал с балансной модуляцией
(см. гл. 4).
Структурная схема балансного модулятора представлена
на рнс. 11.9.
Здесь несущее гармоническое колебание с частотой ю0
еннфазно подаодится к нижним входам двух одинаковых
амплитудных модуляторов АМХ и АМ2. Модулирующий сиг-
сигнал s{t) поступает на модулятор АМХ через инвертор И1г
имеющий коэффициент передачи, равный —1. Поэтому на
выходах модуляторов будут получены сигналы
vx (t) — А\\ —Ms (t)] cos Oot,
v2 (t) = A [1 + Ms (t)] cos o0r,
где A — постоянный коэффициент.
Инвертор И2 изменяет знак сигнала vt на противополож-
противоположный, так что выходной сигнал
A1.45)
= Щ — vx = 2AMs (t) cos o0t
A1.46)
представляет собой произведение модулирующего и несущего
колебаний, т. е. действительно является балансно-модулнро-
ванным колебанием.
Получение сигналов с угловой модуляцией. В ЗО-х годах
Армстронг предложил эффективный метод получения радио-
радиосигналов с угловой модуляцией (ЧМ- и ФМ-сигналов). Струк-
Структурная схема модулятора Армстронга изображена иа
рис. 11.10.
Здесь к одному из входов сумматора приложен сигнал
vt, поступающий с балансного модулятора БМ. На второй
вход сумматора подается, немодулированный сигнал v2 с вы-
выхода фазовращателя, изменяющего фазу гармонического сиг-
сигнала несущей частоты на 90° в сторону запаздывания.
Таким образом, сиснал на выходе данного модулятора
"Вых W = *Л»15 Ю cos dot + Um2 sin <oot, A1.47)
Спектр сигнала Vi
сигнала v2
¦ 111. о,
н колебания на вы-
выходе балансного
модулятора
Эдвин Армстронг
A890-1954)- нз-
.вестный американ-
американский радиоинженер
н изобретатель
где Uml и Um2 — некоторые постоянные амплитуды.
Глава 11. Преобразования сигналов в нелинейных цепях
*s(t)
cos<unr
Векторные диа-
диаграммы сигнала на
выходе модулято-
модулятора Армстронга в
дна последователь-
последовательных момента вре-
времени t\ И B
Рнс. 11.10. Модулятор Армстронга
Для того чтобы убедиться, что формула A1.47) действи-
действительно описывает сигнал с угловой модуляцией, рассмотрим
векторную диаграмму этого колебания. Немодулнрованной
составляющей Um2 sin юо* отвечает постоянный вектор ОВ
длиной Um2. Балансно-модулированный сигнал Umls (t) cos toot
отображается вектором В А. Длина этого вектора Umls{t)
непостоянна во времени, однако он всегда перпендикулярен
вектору ОВ. Ясно, что результирующий вектор ОА с тече-
течением времени будет поворачиваться, имея центр вращения в
точке О. Угол <р (г), входящий в выражение ф (t) = toot + <p (t)
полной фазы сигнала на выходе модулятора, очевидно,
можно иайти из соотношения tg<p(t) = Umls (t)/Um2.
Обычно стремятся получить линейную зависимость между
сигналом s{t) и фазовым углом <p(t). Для этого устанавли-
устанавливают такой режим работы модулятора, когда Uml <с Um2, так
что
Ф (t) к Umls (t)/Um2. A1.48)
В этом случае мгновенная частота выходного сигнала
приближенно пропорциональна производной низкочастотного
передаваемого колебания:
«W @ * «о + Vmls' (t) UM2. A1.49)
Итак, модулятор Армстронга согласно выражению A1.48)
должен работать с малым индексом модуляции, т. е. с ма-
малой девиацией частоты. Чтобы преодолеть этот недостаток,
в передатчиках ФМ- и ЧМ-сигналов после модулятора
предусматривают многократное умножение частоты. Если на
входе умножителя девиация частоты составляет До, то на
выходе она будет равна пДю, где п — кратность умножения.
11.6. Амплитудное, фазовое
и частотное детектирование
Объединяя нелинейные элементы с соответствующими
линейными частотно-избирательными звеньямн, можно.созда-
можно.создавать устройства для детектирования (демодуляции) радио-
радиосигналов. Ниже будет рассмотрена теория работы важней-
важнейших видов детекторов.
Прмнцив детектирования АМ-снгналов. Операция амплитуд-
амплитудного детектирования прямо противоположна амплитудной
модуляции. Имея на входе идеального детектора АМ^коле-
11.6. Амплитудное, фазовое н частотное детектирование
бание uBK(t) = t/mBK(l + M cos П1) cos fi>o(, следует получить на
выходе низкочастотный сигнал uBblx(t)— (/твых cos ?2t, пропор-
пропорциональный передаваемому сообщению. Эффективность ра-
работы детектора принято оценивать коэффициентом детекти-
детектирования
ЛДет = Umnaf(MUMKb, A1.50)
равным отношению амплитуды низкочастотного сигнала на
выходе к «размаху» изменения амплитуды высокочастотного
сигнала на входе.
Можно осуществить детектирование, подав АМ-сигнал на
безынерционный нелинейный элемент и предусмотрев после-
последующую фильтрацию низкочастотных составляющих спектра.
Рассмотрим схему так называемого коллекторного детек-
детектора, представляющего собой транзисторное устройство с
нагрузкой в виде параллельной RC-цепн. Для того чтобы
нагрузочная цепь выполняла роль частотного фильтра, по-
подавляющего высокочастотные спектральные составляющие,
потребуем выполнение неравенств
A1.51)
Это означает, что для сигнала с частотой модуляции П
нагрузка детектора практически резистивна и равна Лн, в то
же время модуль сопротивления нагрузки, а значит, и коэф-
коэффициент передачи системы на несущей частоте щ пренебрежимо
мал.
Пусть входное напряжение на базе транзистора
«БЭ W = ^0 + Vmax A + М COS Qt) COS (Oof,
причем амплитуда UmbX достаточно велика для того, чтобы
можно было воспользоваться кусочно-линейной аппроксима-
аппроксимацией вольт-амперной характеристики нелинейного элемента.
Положим также для простоты, что Uo = UH и угол отсечки
тока 8 = 90° независимо от изменения во времени амплитуды
входного сигнала. Процессы в коллекторном детекторе ил-
иллюстрируются графиками рис. 11.11.
1/(ш„Ся)«К„,
коэффициент де-
детектирования
Схема коллектор-
коллекторного детектора
Неравенства
A1.51) заведомо
могут выполнять-
выполняться, если входной
сигнал достаточно
узкополосеи, т. е.
П
Рис 11.11. Осциллограммы токов и напряжений в коллекторном
детекторе
Глава 11. Преобразования сигналов в нелинейных цепях
режим линейного
детектирования
иска-
искажения при детекти-
детектировании
Последовательность импульсов коллекторного тока ока-
оказывается промоделированной по амплитуде; нулевая состав-
составляющая тока медленно (с частотой fi) изменяется во вре-
времени, причем
1« (t) = SUmltx A + М cos ПО уо (90°) =
= O.318SUfnBX(l +M cos fit).
Выходное напряжение детектора
(l + Mcosfit),
откуда коэффициент детектирования
A1.52)
A1.53)
Существенио, что здесь амплитуды сигналов на входе и на
выходе связаны прямой пропорциональностью. Поэтому такой
режим работы детектора .принято называть линейным. Его
отличительная черта — отсутствие искажений передаваемого
сообщения.
Квадратичное детектирование. Рассмотрим отдельно саж-
сажный для приложений случай детектирования слабых сигна-
сигналов, когда вольт-амперная характеристика должна быть
аппроксимирована степенной зависимостью вида
,¦ (и) = оо + я, (ы„х - Uo) + а2 (ивх - U<& + ... A1.54)
Ограничимся лишь выписанными здесь членами и пред-
предположим, что на детектор подано напряжение АМ-сигнала
вместе с постоянным смещением Uo:
"их@= ^o+ UmBX(l + M cosn^cosoot. A1.55)
Подставив A1.55) в A1.54), обнаружим среди разнообраз-
разнообразных комбинационных колебаний, присутствующих в токе,
следующую низкочастотную составляющую:
fan W = а2и^М cos fit + ^U^Ul^M2 cos 2fit. A1.56)
Благодаря фильтрующему действию нагрузочной RC-цепи
выходной сигнал будет определяться именно этим током:
- Vi^RhUImM2cos2Qt. A1.57)
Полезный эффект детектирования пропорционален здесь
величине 1/2,„ поэтому детектирование АМ-сигналов с ма-
малыми амплитудами является квадратичным. Наличие в A1.57)
слагаемого, пропцрционального cos2Qt, говорит о том, что
квадратичное детектирование сопровождается искажениями
передаваемого сообщения. Введя коэффициент нелинейных
искажений кщ, равный отношению амплитуд выходных коле-
колебаний с частотами 20 и Д находим из A1.57), что *,„ = JW/4.
Нелинейные искажения оказываются весьма значительными
при глубокой амплитудной модуляции на входе. Поэтому в
радиоприемных устройствах желательно, чтобы амплитуда
11.6. Амплитудное, фазовое и частотное детектирование
несущего колебания АМ-сигнала, подаваемого на детектор,
составляла несколько вольт. При этом реализуется режим
линейного детектирования и нелинейных искажений не возни-
возникает.
Диодвьш детектор АМ-снгналов. Широко используется
диодный детектор, особенно пригодный для работы с сигна-
сигналами большого уровня. Такой детектор образован последова-
последовательным соединением диода и параллельной ЛС-цепи, кото-
которая выполняет роль частотного фильтра. Параметры ЛС-цепи
выбирают согласно условиям A1.51).
Будем считать, что диод имеет кусочно-линейную ВАХ
с нулевым напряжением начала г
и <0,
[Su, u>0.
Для нормальной работы детектора необходимо, чтобы
сопротивление резистора нагрузки RK значительно превышало
сопротивление диода в прямом направлении, т. е. чтобы
SRH » 1. Пусть на вход детектора подан немодулированный
гармонический сигнал uBX(t) = UmBXcos(uof. Конденсатор заря-
заряжается через открытый диод гораздо быстрее, чем разряжа-
разряжается через высокоомный резистор нагрузки. Поэтому осцилло-
осциллограмма выходного сигнала представляет собой пилообразную umtt
кривую с малой относительной высотой зубцов. Средний
уровень выходного напряжения близок к амплитуде входного
сигнала. Таким образом, днод ббльшую часть периода
оказывается запертым.
Пренебрежем указанным непостоянством выходного сиг-
сигнала и будем считать, что UBha — постоянная величина.
Заметим далее, что напряжение ивых приложено к диоду в
обратном направлении и служит для него напряжением
смещения Uo = — 11ВЫХ. Коэффициент детектирования данного
устройства
может быть сделан близким к единице, поскольку I
a; UniBM а значит, угол отсечки тока достаточно мал.
Угол отсечки находят из соотношения
- Uo = IoRu = SUmBXy0 (9) RH,
откуда следует трансцендентное уравнение
cos 8 = (SRJn) (sin 8 - 8 cos 9)
или
A1.58)
Выходное нанря-
жение в диодном
детекторе близко
к амплитуде вход-
входного сигнала
При SRu » 1 корень этого уравнения близок к нулю, так
что из A1.58) вытекает формула для расчета коэффициента
детектирования:
^гЩ (U.59)J
При малых. 9 име-
имеет место: tg 9 *
Глава 11. Преобразования сигналов в нелинейных цепях
Пример 11.5. Диодный детектор имеет параметры: RH = 18 кОм,
S = 10 мА/В. Определить коэффициент детектирования данного
устройства.
Безразмерное произведение SRH =180 достаточно велико, поэто-
поэтому можно воспользоваться формулой A1.59), которая дает
*„ = cos [^З.М- 3/180] = 053.
Если на вход диодного детектора поступает АМ-колебание, то
при выполнении условий A1.51) выходное напряжение детектора
«отслеживает» мгновенный уровень амплитуды входного сигнала.
Взаимодействие сигнала и помехи в амплитудном детекторе.
Предположим, что на входе идеального линейного детектора
АМ-сигнала с известным коэффициентом детектирования Л„
присутствует сумма полезного одиотонального АМ-колебания
н немодулироваиного колебания помехи:
«.х if) = fine (I + М cos fit) cos coot + 1/„„ cos ш„г;
частоты (i\i и ш„ в общем случае различны.
Выходной сигнал детекторя пропорционален физической
огибающей колебания и„(г). Чтобы вычислить этот сигнал,
воспользуемся понятием сопряженного сигнала ивх (г) (см. гл. 5),
который, очевидно, записывается так:
й\х (г) = Umc A + М cos fit) sin coot + Um sin oy,
откуда
С этими обстоя-
обстоятельствами при-
приходится считаться
при проектирова-
проектировании радионрием-
ных устройств,
обеспечивая тща-
тщательную частот-
частотную фильтрацию
номех в линейных
цепях до ампли-
амплитудного детектора
„яJ A + Ш COS fit + М2 COS2fit) +
+ 2 (UmJUmjt) A+M cos fit) cos (coo - to,,) t]1/2 - A1-60)
Рассмотрим случай, когда полезный сигнал значительно
слабее помехи, т. е. UmJUma -« 1. Будем интересоваться по-
полезной составляющей выходного колебания, которая изменя-
изменяется во времени пропорционально передаваемому сообщению
cosfit. Разлагая радикал, входящий в A1.60), в ряд по сте-
степеням малого параметра UmJUmn, убеждаемся, что данная
спектральная составляющая создает на выходе колебание
^пш@ - kanUndUnJU^M COS Sit. A1.61)
Видно, что с ростом амплитуды помехи происходит по-
подавление полезного сигнала. Это явление уже обсуждалось
ранее в настоящей главе.
Вредное действие помехи проявляется также в том, что
на выходе детектора может возникнуть большое число
комбинационных колебаний из-за нелинейного взаимодействия
сигнала и помехи.
Фазовое детектирование. Известно много схем фазовых
детекторов — устройств для демодуляции колебаний с полной
фазой v[/ (t) = aot + Ф @- промодулированных по фазовому
углу. Работа таких детекторов основана на нелинейном.
11.6. Амплитудное, фазовое и частотное детектирование
взаимодействия модулированного сигнала с немодулирован-
ным опорным колебанием, которое должно создаваться
вспомогательным внешним источником.
Пусть, например, к нелинейному безынерционному даух-
полюснику с ВАХ вида i (ы) = % + ащ + а2иг приложена
сумма даух напряжений:
и (t) = и, + и2 — Uml sin [©о* + ф (t)] + и„г cos Юо*.
Из-за квадратичного слагаемого характеристики в токе
будет присутствовать составляющая, которая описывает нели-
нелинейное взаимодействие колебаний:
Цз W = 2«2 Umi Vm2 sin [toof + ф (t)] cos toot —
= a2UmlUia2sin<p(t)+a2UmlUn2sml2xi>ot + <p(t)']. A1.62)
Второму слагаемому в последней части формулы A1.62)
отвечает высокочастотный сигнал со средней частотой 2ю0,
который без труда подавляется линейным фильтром нижних
частот (например, RC-цепью). Первое слагаемое в A1.62)
описывает низкочастотный ток
1НЧ(t) = a2UMl Un2 sin ф (t) к a2Umi Um2q> (t),
A1.63)
приближенно пропорциональный передаваемому сообщению
ф((), еслн девиация фазы (индекс модуляции) детектируемого
сигнала достаточно мала.
При создании фазовых детекторов неизбежны трудности,
связанные с требованием жесткой стабилизации фазы коле-
колебаний опорного генератора.
Частотное детектирование. При частотной модуляции, как
известно, полезное сообщение пропорционально отклонению
мгновенной частоты сигнала от частоты несущего колебания.
Рассмотрим некоторые способы демодуляции ЧМ-сигналов.
Частотную модуляцию можно превратить в неглубокую
амплитудную модуляцию, подавая демодулируемый сигнал
на линейный частотный фильтр, настроенный таким образом,
чтобы в разложении АЧХ
|Х(/ю)|«|Х(/Юо)| + |Х(/(Во)Г(ш-с^) + ...
коэффициент | К (/<о0) Г был отличен от нуля. Тогда, полагая,
что частота детектируемого сигнала to(t) — ю0 + AcocosOt,
получим на выходе фильтра сигнал со сложной амплитудно-
угловой модуляцией. Мгновенная амплитуда переменной
составляющей этого сигнала изменяется во времени по
закону
где Во — постоанный коэффициент, т. е. повторяет по форме
передаваемое сообщение.
Окончательная» обработка сигнала проводится обычным
АМ-детектором, включенным на выходе фильтра,
Рассмотренному способу частотного детектирования при-
присущ ряд недостатков — высокие требования к качеству огра-
\K(ja)\
Чтобы превратить
ЧМ в AM, доста-
достаточно расположить
несущую частоту
ь>о на «склоне» ам-
нлитудно-частот-
нон характеристи-
характеристики резонансного
контура
Глава 11. Преобразования сигналов в нелинейных цепях
Отметим, что АМ-
детектор принци-
принципиально нечувстви-
нечувствителен к непосто-
непостоянству во времени
мгновенной часто-
частоты сигнала, иода-
ваемого на его
вход
7
'L
Y«)
ничения возможной паразитной AM на входе фильтра,
а также недостаточная линейность характеристики детекти-
детектирования.
Лучшие результаты обеспечивает способ, основанный на
преобразовании ЧМ-сигнала в ФМ-сигнал при помощи ли-
линейного частотно-избирательного фильтрв с последующим
фазовым детектированием. При таком методе демодуля-
демодуляции фазочастотная характеристика избирательной узкополос-
узкополосной цепи (см. гл. 9) в малой окрестности частоты ю0
имеет вид
рк(ю) = рк(ю0)-(п>(ю-ю0), A1.65)
где tfj, — групповое время запаздывания.
Если ю(г) = юо + AracosQt, то узкополосный, сигнал на
выходе фильтра имеет полную фазу
Ф М = mot + Рк(ю0) - Aratrpcosfit,
т. е. действительно является ФМ-сигналом.
11.7. Воздействие стационарных
случайных сигналов на безынерционные
нелинейные цепи
Предположим, что на входе безынерционной нелинейной
системы присутствует случайный сигнал х(г), являющийся
одной из реализаций стационарного случайного процесса
X(t). Выходной сигнал y{t) связан с входным воздейст-
воздействием зависимостью вида y{t) = /[x(t)]; ансамбль реализа-
реализаций y(t) задает стационарный случайный процесс Y(t).
Ставится задача найти связь между статистическими харак-
характеристиками процессов X(t) н Y(t\ При этом возможны
даа частных подхода:
1. По известной п-мерной плотности вероятности вход-
входного случайного процесса р„х(хь х2 х„; tb t2,...,!,) ищут
аналогичную функцию pBU»CVi, У2,...,уг; ti, t2,...,tj, опреде-
определяющую выходной сигнал.
2. Исследование проводят в рамках корреляционной
теории — ищут математическое ожидание ту и функцию
корреляции Ry(l) выходного случайного процесса. Наряду
с функцией корреляции интерес может представлять спектраль-
спектральная плотность мощности Wy(d) выходного сигнала.
Плотность вероятности выходного сигнала после нелиней-
нелинейного преобразования. Первую из поставленных задач легко
можно решить теми приемами, которые были описаны
в гл. 6 при рассмотрении плотностей вероятности систем
случайных величин, подвергнутых функциональным преобразо-
преобразованиям. Если х,, х2, .... х„ — случайные значения, наблю-
наблюдаемые на входе в моменты времени гь 12,...,1Я соот~
ветственио, то, учитывая безынерционный характер преобразо-
преобразования, имеем ва выходе в те же моменты времени
У\
Уг =/(x2),...,J4, =
A1.66)
11.7. Воздействие случайных сигналов на нелинейные цепи
Применив обратную функцию x=g{y), получим
A1.67)
Тогда многомерная плотность вероятности на выходе
где D — якобиан преобразования A1.66).
Формула A1.68) решает поставленную задачу в самом об-
общем виде.
Если обратная
функция много- '
значна, следует
просуммировать
вклады в якобиая
от всех ветвей этой
фун
Прямер 11.6. На входе безынерционного нелинейного элемента
с кусочно-линейной характеристикой
х<0,
ах, х>0
действует гауссов случайный процесс X(t) с нулевым средним
значением и заданной дисперсией с\. Плотность вероятности
входного сигнала
1
Вычислить плотность вероятности сигнала на выходе.
При х > О обратная функция имеет вид х = у/а и, таким об-
образом, | dx/йу | = 1/| а |. Поэтому
г-
при у > О. Любому отрицательному значению х соответствует
единственное значение у = О. Чтобы обеспечить нормировку плот-
плотности вероятности на выходе, следует считать, что плотность
б ф
вероятности раь1Х{м прн y = i
фициентом, равным 1/2:
О при у < О,
у
имеет дельта-особенность с коэф-
коэфпри ^>0.
Принципиально важно, что, подав на вход нелинейной
системы гауссов сигнал, мы наблюдаем на выходе случайный
процесс негауссового вида; Мгновенные значения выходного сигнала
неотрицательны; в среднем с вероятностью 0.5 сигнал на выходе
равен нулю.
Среднее значение сигнала ва выходе нелинейной системы.
Простейшая статистическая характеристика стационарного
случайного процесса —его среднее значение, получающееся
путем усреднения по ансамблю реализаций или, если
процесс эргодический, по одной достаточно протяженной
реализации. Чтобы вычислить среднее значение сигнала
после нелинейного безынерционного преобразования, нужно
располагать одномерной плотностью вероятности plhuCv). На
Глава 11. Преобразования сигналов в нелинейных цепях
основания принципа усреднения (см. гл. 6)
у = т,= J ур
A1.69)
Таким образом, данная задача сводится к квадратуре.
С равным успехом можно найти среднее значение пре-
преобразованного сигнала, усреднив функцию /(х) с помощью
одномерной плотности вероятности входного сигнала:
У= J
A1.70)
Пример 11.7. Найти среднее значение выходного сигнала для
системы, описанной в примере НА.
По формуле A1.70)
|хехр( - -
J V
л = О.399аа„.
Отсюда следует возможность измерять дисперсию стационар-
стационарных гауссовых процессов с помощью нелинейного преобразова-
преобразователя и каскадно включенной линейной инерционной цепи,
выполняющей операцию усреднения по времени.
Вычисление функции коррелащш выходного сигнала. В соот-
соответствии с общим правилом функция корреляции сигнала
у (t) на выходе безынерционного нелинейного преобразо-
преобразователя
= Й /
A1.71)
Для того чтобы можно было воспользоваться фор-
формулой A1.71), необходимо располагать функцией р„(х, х,; т) —
даумерной плотностью вероятности входного сигнала для
двух сечении, разделенных промежутком времени т.
Вычисления по формуле A1.71) могут оказаться весьма
сложными. Окончательный результат в более или менее
обозримом виде удается получить лишь для нормального
процесса на входе, когда
1 - Г x2 + x?-2rxxxt"l
^ ** -I'
( }
) — коэффициент корреляции сигнала иа входе.
11.7. Воздействие случайных сигналов на нелинейные
295
Пример 11.8. Вычислить функцию корреляции выходного сигнала
применительно к условиям, сформулированным в примере 11Л.
Основная трудность заключается в нахождении ковариацион-
ковариационного момента
Выполнив замены переменных
запишем среднее значение произведения:
Интеграл / проще
Всего ВЫЧИСЛИТЬ,
перейдя к поляр-
иым координатам:
= р sin ф
решите задачи 6
и ^
Опуская несложные, ио громоздкие выкладки, приведем ре-
зультат:
Отсюда, используя формулу A1.71), находим функцию корре-
липни выходного сигнала:
(-rj - 1].
A1.73)
Поскольку при т = 0 величина г„@) = 1, дисперсия сигнала иа
выходе
A1.74)
Поэтому коэффициент корреляции случайного процесса иа выхо-
Де безынерционного нелинейного преобразователя с кусочно-лиией-
ной характеристикой описывается формулой
A1.75)
'jW - —i-rtl/l ~ rl + '¦«arcco»(-rj - 1].
я — 1
Можно видеть, что при больших сдвигах т коэффициент
корреляции выходного сигнала стремится к нулю.
Нелинейные иреобразования узкополосных случайных про-
процессов. Предположим, что входной сигнал нелинейного
безынерционного преобразователя является узкополосным
случайным процессом с гауссовым законом распределения.
Его реализации имеют вил квазигармонических случайных
колебаний с центральной частотой ш0. Функция корреляции
входного сигнала
<b0t. A1.76)
Найдем функцию корреляции выходного.сигнала приме-
применительно к конкретному виду нелинейного элемента с
Глава 11. Преобразования сигналов в нелинейных цепях
Л
О соо 2ыо 4{Uo бЫо
Интенсивности вы-
высокочастотных
спектральных со-
составляющих, как
правило, быстро
уменьшаются с
ростом их номера
кусочно-линейной характеристикой, который изучался в
предыдущих примерах. Непосредственная подстановка г„ из
A1.76) в A1.75), хотя и приводит к требуемому результату,
но такой путь лишен наглядности. Целесообразно не-
несколько преобразовать выражениеA1.75), разложив его правую
часть в бесконечный ряд по степеням величины гх(г). Для
этого воспользуемся тем, что
71 Г3
arccos(-rj = — + rx + -f-+...,
2. О
Поэтому
Воспользовавшись формулой A1.76), находим, что
ГуМ = A ^-p(T)COSUHT +
lLz -¦
'/зР2 (т) cos2 шот + '/24Р4 (т) cos4 <вот + .... A1.78)
Поскольку
cos2oHt =
3/e
7всо«4со0т,
из A1.78) следует, что
гу(г) к ОЛПр2 (т) + 0.007р4(т) + 0.733р(г) cos <вот +
+ [0.117р2(т) + 0.01p4(t)]cos2o)(,t + 0.002p4(T)cos4co0i.
A1.79)
Отсюда с помощью теоремы Винера — Ханчина можно
установить вид спектра мощности Fy(<jo) выходного слу-
случайного процесса. Оказывается, что спектр колебаний на
выходе нелинейного преобразователя разбивается на бесконеч-
бесконечную сумму составляющих, каждая из которых отображает
индивидуальный узкополосный случайный процесс. Максиму-
Максимумы спектральных плотностей мощности этих составляющих
наблюдаются на частотах Шо, 2ш0, 4ш0,... Помимо этого
в спектре выходного сигнала возникает низкочастотная
составляющая в окрестности нулевой частоты, которую можно
рассматривать как результат амплитудного детектирования
входного сигнала.
Интересно отметить, что в данном случае спектр
выходного сигнала не содержит составляющих с частотами
Зшо> 5и)о,... Безусловно, что при других видах характеристики
нелинейного элемента можно ожидать появления всех без
исключения гармоник центральной частоты входного случай-
случайного колебания.
Резул^аты
297
Результаты
qq Для аппроксимации реальных вольт-амперных характеристик безынерционных
нелинейных двухполюсников используют различные функции простого вида.
Наиболее распространены кусочно-линейная, степенная и показательная
(экспоненциальная) аппроксимации.
(V Ток в нелинейном безынерционном двухполюснике при гармоническом внешнем
воздействии содержит в общем случае постоянную составляющую и бес-
бесконечное число гармоник — колебаний с частотами, кратными частоте
входного сигнала.
qq Напряжение на выходе резонансного усилителя, работающего в нелинейном
режиме, синусоидально из-за частотно-избирательных свойств контура, не-
несмотря на негармонический характер тока, протекающего через колеба-
колебательный контур.
0(у При большой амплитуде входного сигнала в резонансном усилителе
возникает перенапряженный режим.
0Q Воздействие на нелинейный элемент суммы гармонических сигналов с раз-
различными частотами приводит к возникновению на выходе колебаний с комби-
комбинационными частотами.
Оф Фильтрация соответствующих комбинационных колебаний позволяет осущест- ^
вить амплитудную модуляцию, а также детектирование АМ-сигнала.
00 При безынерционном нелинейном преобразовании гауссова случайного процесса
возникает случайный процесс с негауссовой плотностью вероятности.
00 Для того чтобы вычислить функцию корреляции случайного процесса на
выходе нелинейного преобразования, необходимо знать двумерную плотность
вероятности входного сигнала.
Вопросы
1. При каком условии нелинейное пре-
преобразование сигнала можно считать безынер-
2. Можно ли так выбрать положение рабо-
рабочей точки иа ВАХ нелинейного двухполюсни-
двухполюсника, что в составе тока будут отсутст-
отсутствовать гврмоиики нечетных номеров?
3. Из каких соображений выбирают угол
отсечки тока в резонансном усилителе, ра-
работающем при больших уровнях входного
сигнала?
4. Каков физический принцип раббты не-
нелинейного умножителя частоты? Почему
трудно добиться высокой кратности умноже-
умножения?
5. Из каких соображений выбирают пара-
параметры нагрузки детектора АМ-колебаний?
6. В чем состоит отличие между ли-
линейным и квадратичным детектированием?
7. Чем определяется угол отсечки тока в
диодном детекторе?
8. На чем основан принпип детектиро-
детектирования ЧМ- и ФМ-сигналов?
9. Как вычисляются одномерная и много-
многомерные плотности вероятности случайного
процесса после нелинейного безынерционного
преобразования?
10. Чем характеризуется нелинейное пре-
преобразование узкополосных случайных процес-
процессов?
Задачи
1. Вольт-амперная характеристика не-
нелинейного двухполюсинка имеет вид Ци) =
= 10ы3, мА. Какова аналитическая запись
этой характеристнкн'В окрестности рабочей
точки Uo = 2 В?
2. Резонансный усилитель гармонических
колебаний создан по схеме, приведенной на
рис.. 11.6. Характеристика транзистора (мА)
аппроксимирована отрезками двух прямых:
э - 0.2), йбэ > 0-2 В,
с 0.2 В.
'К("БЭ)
f 50(иБЭ-<
1 0f ИБЭ<С
Сопротивление колебательного контура при
резонансе Rp^ = 0.8 кОм. Напряжение источ-
источника питания Ewtt,= 9 В. Рабочая точка
совпадает с точкой излома харахтеристшф.
298
Глава 11. Преобразования сигналов в нелинейных цепях
При какой амплитуде входного сигнала в
усилителе возникает перенапряженный ре-
режим?
3. Нелинейный безынерционный элемент
имеет вольт-амперную характеристику вида
Ци) = ап+ ахи + а+и*. К элементу приложено
напряжение u(t) = C/Mlcoscuit + C/m2coscu2<-
НаЙдите амплитуды и частоты всех комби-
комбинационных составляющих тока.
4. К нелинейному резистору с характе-
характеристикой вида i(u) =25u + 4и2, мА, прило-
приложено напряжение и = 5 + 2 cos fit + 1.5coso0f,
В. Найдите амплитуду несущего колебания
и глубину модуляции тока.
5. В диодном детекторе применен полу-
проволниковыйднодскругизноЙ5= 10 м А/В,
сопротивление резистора нагрузки RH =
= 20 кОм. На вход детектора подано
напряжение АМ-сигнала и (г) = 5A +
+ 0.6cosfi()coso0f, В. Найдите амплитуду
сигнала низкой частоты fi, выделяемого иа
нагрузке детектора.
Указание. При нахождении коэффициента
детектироваиня воспользуйтесь тем, что для
выбранных параметров схемы безразмерное
произведение SRH :» 1.
б. Нелинейное устройство представляет
собой ограничитель, характеристика у(х)
которого имеет вид
На входе устройства действует стационар-
стационарный гауссов случайный процесс X(t) с нуле-
нулевым математическим ожиданием и диспер-
дисперсией а*. Изобразите типичную реализацию
процесса иа выходе. Вычислите математи-
математическое ожидание и дисперсию выходного
сигнала.
7. На входе нелинейного безынерционного
элемента с характеристикой у(х)=а\х\ дей-
действует стационарный гауссов случайный про-
процесс с нулевым математическим ожиданием
и функцией корреляции Rx(z) = a%rx(x). Най-
Найдите функцию корреляции выходного сигна-
сигнала.
Более сложные задания
8. Исследуйте свободные колебания в не-
нелинейной системе, представляющей собой
параллельный колебательный LC-контур, за-
шунтированный диодом.
Характеристика диода задана в виде
9. Проанализируйте работу балансного
модулятора:
Колебательный контур в коллекторной цепи
настроен на частоту ш0- Покажите, что при
идеальной симметрия плеч схемы выходной
сигнал не содержит составляющей с несу-
несущей частотой.
10. Покажите, что диодный детектор,
собранный по схеме:
g -н^ВН 1—f—«а
К1 J f
имеет входное сопротивление RBX = rh/2- Под
входным сопротивлением понимается отно-
отношение амплитуды напряжения Vm к ампли-
амплитуде первой гармоники тока 1т1 иа входе.
11. Составьте программу для микрокаль-
микрокалькулятора или для ЭВМ, позволяющую ре-
решать трансцендентное уравнение, определяю-
определяющее угол отсечки тока в диодном детекторе,
методом последовательных приближений.
Исходными данными служат сопротивление
резистора нагрузки Ru (кОм), крутизна вольт-
амперной характеристики диода S (мА/В)
и абсолютное значение погрешности расчета
в * 10.
Глава 12
Преобразования сигналов
в линейных параметрических
цепях
Интересными и полезными для радиотехнических при-
приложений свойствами обладают линейные системы, которые
описываются нестационарными системными операторами
Т(г), зависящими от времени. Закон преобразования вход-
входного сигнала здесь имеет вид
* (О =
A2.1) Вхол
причем благодаря линейности системы
A2.2)
при любых постоянных Oi и oj.
Цепи, описываемые равенством A2.1), называются пара-
параметрическими. Термин связан с тем, что в составе таких
цепей обязательно присутствуют элементы, параметры которых
зависят от времени. В радиотехнических цепях находят
применение следующие параметрические элементы: резисторы
R(t), конденсаторы С(«) и индуктивности Ц<).
Отличительная черта линейной параметрической систе-
системы — наличие вспомогательного источника колебаний, управ-
управляющего параметрами элементов.
Важная роль, отводимая в радиотехнике параметри-
параметрическим цепям, обусловлена их способностью преобразо-
преобразовывать спектры входных сигналов, а также возможностью
создания малошумящнх параметрических усилителен.
12.1. Прохождение сигналов через резистивиые
параметрические цепи
Параметрическую цепь называют резистивной, если ее ф
системный оператор имеет вид числа <с(<), зависящего от резистивиая пара-
времени и служащего коэффициентом пропорциональности метрическая цепь
между входным и„(') и выходным щш{1) сигналами:
к.ы*« = *(<)«»(<)¦ A2.3) " 1
Простейшей системой такого вида служит параметри- щ,\ уг
ческий резистор с сопротивлением R(t). Закон, связываю- *Q
щий мгновенные значения напряжения и тока в этом |
двухполюснике, таков:
и(<) = К(<)|(<). A2.4) R
Параметрический резистивный элемент может описываться ,t &\ ¦-
также переменной'во времени проводимостью G(«) = l/i?(«). ¦ ¦*4$- i -*» '.
Реализация параметрических резистнввых элементов. На ' ''-• <<*':•¦•¦ '
практике параметрически управляемые резисторы создают 2л/<»
следующим образом. На вход безынерционного нелинейного ' i
Глава 12. Преобразования сигналов в параметрических цепях
Преобразование
частоты
двухполюсника с вольт-амперной характеристикой 1 = /(и)
подают сумму даух колебаний: управляющего напряжения
Uy(t) и напряжения сигнала ис(<). При этом управляющее
напряжение значительно превышает по амплитуде полез-
полезный сигнал. Ток в нелинейном двухполюснике можно за-
записать, разложив вольт-амперную характеристику в ряд
Тейлора относительно мгновенного значения управляющего
напряжения:
e'(uy)ul + ... A2.5)
Амплитуду сигнала выбирают столь малой, что в формуле
A2.5) можно пренебречь вторыми и более высокими степе-
степенями величины ис(<). Обозначив через ic(t) приращение тока
в двухполюснике, вызванное наличием сигнала, получим
A2.6)
Дифференциальная
крутизна характе-
характеристики определя-
определяется «большим»
управляющим на-
напряжением
промежуточная
часюг'а
Ниже будут изучены важные применения параметри-
параметрических резистивных элементов рассмотренного вида.
Преобразование частоты. Так называют трансформацию
модулированного сигнала, связанную с переносом его спектра
из окрестности несущей частоты оэс в окрестность некоторой
промежуточной частоты ш„р, совершаемую без изменения
закона модуляции.
Преобразователь частоты состоит из смесителя — пара-
параметрического безынерционного элемента, и гетеродина —
вспомогательного генератора гармонических колебаний с
частотой юг, служащего для параметрического управления
смесителем. Под действием напряжения гетеродина дифферен-
дифференциальная крутизна вольт-амперной характеристики смесителя
периодически изменяется во времени по закону
= So + S, cos <a,t + S2 cos 2oort +... A2.7)
Если на входе преобразователя частоты действует напряже-
напряжение АМ-сигнала ыс(() = С/мA + М cos fit) cos см, го в соответ-
соответствии с выражениями A2.6) и A2.7) в выходном токе
появляется составляющая
«с (<) = и„ A + М cos fit) [So cos су +
+ 1/tS1 cos (со, - сц)« + '/A cos (av + 00J t +
+ V2S2 cos Boor - сц)« + V2S2 cos Boor + 00J t + ...].
В качестве промежуточной принято выбирать частоту
<»пр = I в>, — е>с |; ток на промежуточной частоте
inp(<) = 1/г^и„A + Mcosfitjcoso),,,,* A2.8)
является АМ-колебанием с тем же законом модуляции, что
и входной сигнал.
Для выделения составляющих спектра с частотами,
близкими к промежуточной частоте, в выходную цепь
преобразователя включают колебательный контур, настроен-
настроенный на частоту сидр.
12.1. Прохождение
через реэистивные параметрические пели
Рис. 12.1. Структурная схема супергетеродинного приемника
Преобразование частоты широко используется в радио-
радиоприемных устройствах — так называемых супергетеродинах.
Структурная схема супергетеродинного приемника изобра-
изображена на рис. 12.1.
Сигнал, принятый антенной, через фильтрующие вход-
входные цепи и усилитель радиочастоты (УРЧ) поступает на
преобразователь. Выходной сигнал преобразователя является
модулированным колебанием с несушей частотой, равной
промежуточной частоте приемника. Основное усиление прием-
приемника и его частотная избирательность, т. е. способность
выделять полезный сигнал из помех с другими частотами,
обеспечиваются узкополосным усилителем промежуточной
частоты (УПЧ).
Большое достоинство супергетеродина — неизменность
промежуточной частоты; для настройки приемника прихо-
приходится перестраивать лишь гетеродин и в некоторых случаях
колебательные системы, которые имеются во входных цепях
и в УРЧ.
Отметим, что преобразователь частоты одинаково реаги-
реагирует на сигналы с частотами юс1 = (й, + о)яр и (оС2 = <й,—(оПр.
В радиотехнике говорят, что возможен прием как по
основному, так и по зеркальному каналу. Во избежание
неоднозначности настройки приемника требуется обеспечить
такую избирательность резонансных систем, включенных
между антенной и преобразователем частоты, чтобы практи-
практически подавить сигналы зеркального канала.
Крутизна преобразования. Эффективность работы преоб-
преобразователя частоты принято характеризовать особым пара-
параметром — крутизной преобразования Sm которая служит коэф-
коэффициентом пропорциональности между амплитудой тока
промежуточной частоты и амплитудой [смодулированного
напряжения сигнала, т. е.
соотношения A2.8),
/m4,/t/mc. Как следует из
A25)
Итак, крутизна преобразования равна половине ампли-
амплитуды первой гармоники дифференциальной крутизны пара-
параметрического элемента.
Предположим, что вольт-амперная характеристика нели-
нелинейного элемента, входящего в преобразователь частоты,
квадратична: i(u) = bu2. В отсутствие сигнала к элементу
приложена сумма напряжении смещения и гетеродина;
и, ш и0 + C/^cosov. Дифференциальная крутизна преобразо-
Схема преобразо-
преобразователя частоты
Подавление зер-
зеркального канала
крутизна преобра-
преобразования
Глава 12. Преобразования сигналов в нараметрачесхях цепях
решите задачи
2,3
вателя изменяется во времени по закону
$днф(«) = 2buy = 2bU0 + 2bf/mrcosov(. A2.10)
Обращаясь к формуле A29), видим, что в данном случае
$лр = bt/mr. A2.11)
Таким образом, при постоянном уровне полезного сигна-
сигнала на входе амплитуда выходного сигнала преобразо-
преобразователя пропорциональна амплитуде напряжения гетеродина.
Пример 12.1. В преобразователе частоты использован нели-
нелинейный элемент (транзистор) с характеристикой i = 20ы2, имею-
имеющей параметр b = 20 мА/Ва. Резонансное сопротивление колеба-
колебательного контура в коллекторной цепи Rp^ = 3 кОм. Амплитуда
смодулированного входного сигнала Umc = 50 мкВ, амплитуда напря-
напряжения гетеродина (Утг = 0.S В. Найти значение Umnp — амплитуду
напряжения промежуточной частоты на выходе преобразователя.
По формуле A2.11) вычисляем крутизну преобразования S^ =
= 20-0.5=10 мА/В. Амплитуда тока промежуточной частоты в цепи
коллектора /Жпр==51фС/тс=0.5 мкА. Полагая выходное сопротивле-
сопротивление транзистора достаточно высоким, гак что можно пренебречь
его шунтирующим действием иа колебательный контур, находим
и 1Н\5В
Смнхровное детектирование. Предположим, что в преобразо-
преобразователе частоты гетеродин настроен точно на частоту
сигнала, поэтому дифференциальная крутизна изменяется во
времени по закону
+ S2 C0S2(i>ct + ...
Подав на вход такого устройства АМ-сигнала uc(t) =
= Umc(l +A/cosfif)cos(cocf + фс), получаем выражение для
тока,, обусловленного сигналом:
ic(()= Umc(\ + A/cosfi()[S0cos(<ocf + фс) +
+ Vz^i cosBu)c( + Фс) + VzSiix^c + ...]. A2.12)
Схема синхронного
детектора
Выражение, стоящее здесь в квадратных скобках, содер-
содержит постоянную составляющую 1/2Si совфс которая зависит
от сдвига фазы между сигналом гетеродина и несущим
колебанием входного сигнала. Поэтому в спектре выходного
тока появится низкочастотная составляющая
*нч(«) = 1/2S1Umc(\+McosQt)cosfpc; ' A2.13)
этот ток пропорционален переменной амплитуде АМ-
сигнала.
Синхронным детектором называют преобразователь часто-
частоты, работающий при условии оог = сос; для выделения
полезного сигнала иа выходе включен ФНЧ, например,
параллельная ЯС-цепь.
При использовании синхронных детекторов на практике
между несущим колебанием входного сигнала я колеба-
колебанием гетеродина должно поддерживаться жесткое фазовое
12.1. Прохождение сигналов через резистивные параметрические цепи
соотношение. Наиболее благоприятен режим работы при
фс = 0°, если же <рс = 90°, то полезный выходной сигнал
отсутствует. Чувствительность сиихронного детектора к сдвигу
фаз позволяет использовать его для измерения фазовых
соотношений между двумя когерентными колебаниями.
Ниже показана конкретная методика расчета синхронного
детектора.
Пример 12.2. В синхронном детекторе использован транзистор,
характеристика ir = '(°бэ) которого аппроксимируется двумя отрез-
отрезками прямых. Параметры аппроксимации: S = 50 мА/В, [7„=О.З В.
Амплитуда напряжения гетеродина Umr = l В, постоянное напря-
напряжение смещения отсутствует (?70 = 0). Иемодулированное напря-
напряжение полезного сигнала с амплитудой Umc = 25 мкВ сдвинуто
по фазе относительно колебаний гетеродина на угол <рс — 45°.
Определить изменение уровня постоянного напряжения на выходе
синхронного детектора, вызванное полезным сигналом, если сопротив-
сопротивление резистора Ra — 1.2 кОм.
При данном виде вольт-ампериой характеристики нелинейного
элемента дифференциальная крутизна может принимать лишь два
значения:
JO,«y<Vm
~\ S,u,»U,.
Поэтому график изменения дифференциальной крутизны во вре-
времени представляет собой периодическую последовательность прямо-
прямоугольных видеоимпульсов. Угол отсечки тока 9, определяющий
длительность этих импульсов, найдем по формуле (см. гл. 2)
Э = arccos[(t7H - U0)/Umr\ = 72.5°.
Разлагая функцию 5шф(*) в ряд Фурье, вычисляем амплиту-
амплитуду первой гармоники крутизны:
-я -9 0 9 "
Следует обратить
внимание на то, что
оптимальным уг-
углом отсечки явля-
является угол, равный
90°
B/n)SsinS = 0.607S = 30.35 мА/В.
Полезный сигнал вызывает согласно A2.13) приращение тока
через транзистор на величину Ai = l/2StUmCcos <pc = 0.268 мкА.
Отсюда находим изменение уровня постоянного напряжения на
выходе синхронного детектора:
Д«аыл = -Л*КН = -0.32 мВ.
Спектр сигнала на выходе параметрического резшстивяого
элемента. Анализ работы преобразователя частоты и сиихрон-
сиихронного детектора убеждает, что в параметрическом резистив-
ном элементе возникают спектральные составляющие, кото-
которые отсутствуют на входе этого элемента.
Рассмотрим параметрическое преобразование вида A2.3)
с общих позиций спектрального анализа. Очевидно, пара-
параметрический резистивныи элемент функционирует как перемио-
житель входного сигнала и^Дг) и управляющего колеба-
колебания f{t).
304
Глава 12. Преобразования сигналов в параметрических цепях
О Т,
Периодическое уп-
управляющее колеба-
колебание
Запишем следующее соответствие между сигналами в их
преобразованиями Фурье:
Ц* W«-Vn(со),
(со), /(t)~F (со).
На основании теоремы о спектре произведения сигна-
сигналов (см. гл. 2) спектральная плотность выходного сигнала
представляет собой свертку
A2.14)
В прикладном отношении большой интерес представ-
представляет случай, когда управляющее колебание /(() является
периодическим с некоторым заданным периодом Ту в может
быть представлено рядом Фурье
AZ15)
t .
-2o>» -ш» 0 ш» 2ш,
где со, = 2п/Ту — угловая частота управляющего сигнала.
Как известно, подобный неинтегрируемый сигнал имеет
спектральную плотность, отличную от нуля лишь в дискрет-
дискретных точках на оси частот:
F(co)
С„8(ю - пю,).
A2.16)
плотность* viroaB- Подставив данное выражение в формулу A2.14), получим
ляюшего сигнал спектр сигнала на выходе параметрического элемента:
f.u«(co)= J ?/„(со-у ? С„8й-
С,
C.t/.x(co-i.co,).
A2.17)
стробнрование
Спектр стробнрованного сигнала. Анализ общей формулы
A2.17) удобно провести применительно к частному, во
широко распространенному на практике случаю. Пусть
управляющая функция /(г) ва протяжении каждого периода
равна единице в'пределах отрезка времени длительностью
ту; в остальные моменты времени функция f{t) равна
нулю.
В радиотехнике операцию умножения сигнала на функцию
подобного вида называют апробированием сигнала.
Легко убедиться, что коэффициенты комплексного ряда
Фурье A2.15) применительно к рассматриваемой строби-
рующей функции fit) выражаются следующим образом;
сл = —
12.1- Прохождение сигналов через резнстивные параметрические цепи
и»,
A2.18)
пк/q '
Tjxq = Ty/Xy — скважность стробирующей последовательности.
Подстановка этого результата в формулу A2.17) при-
приводит к выводу о том, что спектральная плотность
стробированного сигнала
A2.19)
Рнс. 12.2 иллюстрирует процесс трансформации спектра
при стробнровании идеального низкочастотного сигнала
(см. гл. 5). Графики изображены для случая, когда частота
Рис. 12.2. Стробнрование идеального низкочастотного сигнала:
а — временная диаграмма сигнала на выходе стробирующего устройства;
6 — спектральная плотность выходного сигнала
управляющего сигнала шу значительно превышает величину
Юв —верхнюю граничную частоту в спектре входного
сигнала.
Можно заметить, что -в спектре стррбированного
сигнала возникает бесконечное число «копий» спектра
исходного колебания. Каждая такая «копия» локализуется
на оси частот вблизв точек + жоу, л = 0, 1, 2,..., соответ-
соответствующих гармоникам основной частоты генератора, кото-
который управляет стробирующим устройством. С ростом номера
л интенсивность спектральных составляющих падает про-
пропорционально множителю sin(nn/q)/(nn/q).
Модуляторы в детекторы на базе параметрических
резястнвных элементов. Подав иа один из входов пере-
перемножителя сигнал s(t), пропорциональный передаваемому
сообщению, а на другой >** иемодулированное колебание
I
ТГ
Временные диа-
диаграммы, поясняю-
поясняющие процесс пре-
преобразования сигна-
сигнала в стробирую-
щем устройстве
Если длительность
¦пробирующего пм-
пульса стремится
к нулю, то интен-
интенсивности всех спек-
спектральных состав-
составляющих стаповят-
си одинаковыми и
спектр выходного
сигнала иерестает
пметь лепестковый
характер
Глава 12. Преобразования сигналов в параметрических целях
Параметрический
демодулятор, бу-
будучи, устройством
когерентной обра-
обработки радиосигна-
радиосигналов, в равной мере
прнгодеп для
детектирования
АМ-, ЧМ- и
ФМ-колебалнй
вида coscv, получим на выходе сигнал с балансной
амплитудной модуляцией
ИбмР) = SA)COS(»O1.
Такое устройство легко превратить в модулятор, создаю-
создающий АМ-сигнал с обеими боковыми полосами н с не-
неподавленным несущим колебанием, если к первому нз
сигналов добавить постоянную составляющую:
«am С) = [1 + Ms(()] cos(»0t.
Используя параметрический элемент-перемиожитель, мож-
можно создать устройство для получения любых модулиро-
модулированных сигналов — AM, ЧМ или ФМ. Работа параметри-
параметрического модулятора основана иа том, что модулированные
П,
П, •"И
Рис. 12.3. Структурная-схема параметрического модулятора
радиосигналы, будучи узкополоснымн колебаниями, до-
допускают представление (см. гл. 5) вида
«модЙ = ^(l)cos(»0i — B(t)sintoot. A2.20)
Структурная схема параметрического модулятора общего
вида представлена на рис. 12.3. Устройство состоит из
даух перемиожнтелей /Л и П2, инвертора И и сумматора.
Модулирующими сигналами служат синфазная .4A) и квадра-
квадратурная ВA) составляющие комплексной огибающей выход-
выходного сигнала.
Колебание несущей частоты е>0 в соответствии с выра-
выражением A2.20) должно подаваться на входы перемножн-
телей, имея взаимный фазовый сдвиг 90°. В простейшем
случае, когда требуется получить АМ-сигнал, в схеме
рис. 12.3 достаточно иметь только один, например верхний,
канал.
С параметрическим демодулятором мы уже познакоми-
познакомились на примере синхронного детектора. В общем случае
такой демодулятор представляет собой каскадное соедине-
соединение перемиожителя и фильтра нижних частот (ФНЧ).
К одному из входов перемиожителя приложен сигнал
и„A), подлежащий детектированию, на второй вход подано
периодическое управляющее напряжение
/М- ? Л, cos ноу.
12.2. Эя
эгетические соотношения в параметрических элементах
причем частота колебания управляющего генератора шу долж-
должна находиться в целократном отношении с несущей
частотой: шу = ао/к (к = 1, 2,...).
При этом условии в составе сигнала на выходе
перемножителя будет присутствовать низкочастотная состав-
составляющая, обусловленная fc-й гармоникой управляющего напря-
напряжения. Так, при демодуляпни АМ-сигнала и„(()= Vm\l +
+ Ms (t)] cos G)ot имеем
Если демодуляции подлежит сигнал с угловой моду-
модуляцией вида иВх@ — l/mcos[o0f + ww@]»
то
«нч@ = 1/iAkUmca6[ms(fi].
12.2. Энергетические соотношения
в параметрических реактивных элементах
цепи
Целым рядом особых свойств обладают параметрические
реактивные элементы, у которых либо емкость С(г), либо
индуктивность L(t) переменны во времени. Ниже на приме-
примере параметрически управляемого конденсатора будет пока-
показано, что в определенных условиях такие элементы могут
выступать в роли «посредников», передающих часть энергии
от внешних управляющих источников, так называемых
генераторов накачки, к цепям, несущим полезный сигнал.
На этом принципе основано параметрическое усиление
сигналов, которое будет изучаться в следующем параграфе.
Свнзь между етсостью конденсатора и запасенной энер-
энергией. Для уяснения физических основ процессов, происхо-
происходящих в реактивных параметрических цепях, рассмотрим
плоский конденсатор с емкостью С и расстоянием х0
между обкладками, заряженный до напряжения Uo. Конден-
Конденсатор несет разделенный заряд q = CU0-
Предположим, что зазор между обкладками механи-
механически увеличен до величины х0 + dx. Перемещение произ-
производится в направлении против силы электрического поля,
стремящейся сблизить обкладки. Поэтому внешние силы
совершают некоторую положительную работу и запас энер-
энергии поля в конденсаторе" возрастает.
Для того чтобы получить количественные оценки, заметим,
что исходная энергия конденсатора E = q2/BQ. Если ем-
емкость получила приращение dC, то приращение энергии
а2 6С
dE=-??6c=-E-c" (Ш1)
поскольку ток проводимости отсутствует и заряд q не-
неизменен. Вычисляя емкость С по известной формуле
плоского конденсатора С = e0S/x0 (S — площадь обкладки),
имеем следующее выражение для относительного приращения
генератор накачки
С увеличением за-
зазора емкость кон-
депсатора умень-
уменьшается
Электрическая по-
постоянная ?A =* 10-'/
/(Збп) = 8.842-10-12
Ф/м
Глава 12. Преобразования сигналов в параметрических цепях
емкости: dC/C — —dx/x0, откуда приращение энергии конден-
конденсатора
Гас/2
Учитывается, что
эиергпя иоступает
в контур дважды
за период собст-
собственных колебаний
Как н следовало ожидать, для увеличения запаса энергии
электрического поля в системе необходимо за счет внешних
факторов уменьшить емкость заряженного конденсатора.
Параметрическое возбуждение колебательного контура. Если
величина заряда q постоянна, то невозможно добиться
непрерывного притока энергии в изолированный конденса-
конденсатор, периодически изменяя его емкость вокруг некоторого
среднего значения. Внешний источник накачкн, совершив
положительную работу на отрезке времени, когда емкость
уменьшалась, получит от конденсатора обратно ровно такую
же порцию энергии в процессе увеличения емкости.
Поэтому усредненная за период мощность накачки будет
равна нулю.
Другая картина наблюдается а колебательной системе,
где напряжение на конденсаторе изменяет знак, переходя
через нуль.
Рассмотрим добротный колебательный контур, образо-
образованный постоянной индуктивностью L, параметрической ем-
емкостью С (г) н сопротивлением потерь R. Предположим, что
в контуре каким-либо образом возбуждены собственные
колебания. Пренебрегая незначительным уменьшением ампли-
амплитуды колебаний нз-за потерь, будем считать, что VmC —
амплитуда напряжения на конденсаторе, которое изменяет-
изменяется во времени с частотой собственных колебаний ш^б =
= 1/J/LCO. Здесь Со — среднее значение емкости.
Пусть емкость конденсатора периодически изменяется
следующим.образом: даажды за период собственных коле-
колебаний, в те моменты времени, когда напряжение на
конденсаторе экстремально, емкость скачком уменьшается на
величину ДС. Возвращение в исходное состояние, т. е. положи-
положительный перепад емкости наблюдается в моменты времени,
когда напряжение на конденсаторе проходит через нуль.
При такой накачке будет наблюдаться однонаправлен-
однонаправленный приток энергии в колебательный контур. Действи-
Действительно, работа внешних сил, выполняемая в моменты
отрицательных перепалов емкости, всегда положительна не-
независимо от знака напряжения иа обкладках. Возвращение
емкости в исходное состояние будет совершаться в моменты
времени, когда напряжение на конденсаторе равно нулю,
1. е. без затраты энергии. Если
В™ = 7Лс(Сс + ДС/2)* 'Л^^сСо
— максимальная энергия, запасаемая в конденсаторе, то,
согласно формуле A2.21), за период собственных колебаний
система получит энергию накачкн
UicAC. ..;¦ A2.22)
12,2. Энергетические соотношения в параметрических элементах
В то же время средняя мощность потерь в контуре
Принимается
внимание, что
A2.23) (*>„, = 1/С0
Энергия, рассеиваемая в резисторе за период колебаний
Т, составит величину
Q. A2.24)
Если выполняется равенство
?, = ?„„„ A2-25)
то за счет действия источника накачки происходит компен-
компенсация потерь в контуре. Если же Ея > ?пот, то система
становится неустойчивой и амплитуда колебаний в контуре
будет экспоненциально нарастать, т. е. произойдет пара-
параметрическое возбуждение колебательной системы. Из A2.22)
н AZ24) вытекает соотношение, определяющее критическое
значение относительного изменения емкости:
bCv/C0=n/Q. A2.26)
Значения АСкр, как правило, невелики. Так, для пара-
параметрического возбуждения контура с параметрами Со = 20 пф,
Q = 100 достаточно иметь ДС = 0.63 пф.
Анализ приведенного здесь частного примера системы
с управляемой емкостью проведен в предположении, что
сигнал накачки изменяет емкость конденсатора дважды за
период собственных колебаний. Однако легко видеть, что
эффект параметрического возбуждения колебательной системы
будет наблюдаться и тогда, когда основная частота не-
негармонического напряжения накачки со,, = ow/n, л = 1, 2
Важно лишь, чтобы в спектре сигнала накачки присут-
присутствовала составляющая с частотой 2а>соб-
Для работы параметрического генератора требуется также,
чтобы в процессе возбуждения между собственными коле-
колебаниями контура и колебаниями генератора накачки под-
поддерживались строгие фазовые соотношения. Достаточно
сдвинуть сигнал накачки по фазе иа половину периода,
как положительный перепад емкости будет приходиться на
те моменты времени, когла напряжение на конденсаторе
проходит через экстремумы. При этом параметрический
конденсатор уже не будет поставлять энергию в коитур, а
начнет выполнять роль дополнительной резисгнвнои нагрузки.
Связь между папряжеивем и током в параметрическом
конденсаторе. Рассмотрим цепь, образованную источником
напряжения сигнала «(() = {/„cosset + <Pc) и управляемым
конденсатором, емкость которого изменяется во времени
по гармоническому закону с частотой накачки:
требования к гене-
генератору накачки,
обеспечивающие
параметрическое
возбуждение коле-
колебательного конту-
решите задачу 4
С (г) = Со
A2.27)
Здесь р — коэффициент, характеризующий глубину модуляции
емкости.
310
Глава 12. Преобразования сигналов в параметрических цепях
Поскольку заряд в конденсаторе q = C(f)u, ток в цепи
AC du .
и+с
sm(coHt + <pB)cos(cocl + <pj —
Средняя мощ-
мощность, потребляе-
потребляемая двухполюсни-
двухполюсником:
P=UI/2cos<p,
где ф —угол сдви-
сдвига фаз между то-
током и иапряже-
Следует сравнить
этот результат с
полученным при
анализе параметри-
параметрического возбужде-
возбуждения контура
- sin [(о* - ю„) t + <pc - <p J},
A2.28)
Воспользовавшись известной формулой тригонометрии
cosxsinj; = '/г [sin(x + у) - sin(x - >)],
можно представить произведения, стоящие в первом и третьем
слагаемых правой части формулы A2.28), так:
A2.29)
A2.30)
, - юЛ + <P» - <pj -
A2.31)
Это выражение устанавливает вид спектральной диаграм-"
мы тока в параметрическом конденсаторе. Спектр, помимо
составляющей на частоте сигнала, содержит даа боковых
колебания с частотами at — со,, в а,. + со,,.
Средняя мощность, потребляемая параметрическим конден-
конденсатором на частоте сигнала. Из теории цепей известно, что
для существования некоторого среднего потока мощности
от источника к нагрузке требуется, чтобы в гармоническом
режиме сдвиг фаз между током н напряжением был
отличен от 90°.
Как видно нз формулы A2.31), в составе тока, проходя-
проходящего через параметрический конденсатор, всегда присут-
присутствует реактивная составляющая на частоте сигнала:
= lh {sinRot + ю„I + <pc + cpj -
- sin [(со„ - ot) t + <p, - (ft,]}.
Следовательно,
i(l) = -e>cC0Um sin
Этот ток, находясь во временной квадратуре с напря-
напряжением источника, в среднем ие выделяет мощности.
Однако прн соответствующем выборе частоты накачки можно
добиться появления еще одион составляющей тока с
частотой сигнала. Как видно из выражений A2.29) и A2.30),
для этого достаточно положить со„ = 2шс. Тогда ток через
параметрический конденсатор будет содержать составляющую,
которую назовем полезной:
МО - - V
. sin (<м + Ф. - <pj-
A2.32)
12.3. Принципы параметрического усиления
Мгновенная мощность полезной составляющей
= - 'APfOcCof I [sin Bад + <pj - sin B<pc - <pj].
Мощность полезной составляющей, усредненная за период
сигнала,
Р.ч,= =- pn(t)dt = \
if^sinB<pc-<i),,).
A2.33)
Схема замещения параметрического конденсатора. Формула
A2.33) свидетельствует о том, что в зависимости от соот-
соотношения между начальными фазами источника входного
сигнала и генератора колебаний накачки значение средней
мощности может быть как положительным, так и отрица-
отрицательным. Поэтому при соответствующем выборе углов ф,.
н фц возможен режим, когда параметрически управляемый
конденсатор ведет себя подобно активному элементу, не
потребляя, а поставляя в цепь мощность на частоте вход-
входного сигнала.
Введя угол Ф = 2<рс — <рн, запишем выражение средней
мощности колебательного процесса в конденсаторе в виде
Здесь
Среднее за период
значение гармони-
гармонической функции,
очевидно, равно ну-
нулю
решите задачу 5
A2.34)
— активное сопротивление, вносимое данным элементом в
цепь. Схема замещения параметрического конденсатора, уп-
управляемого источником накачкн с удвоенной частотой сиг-
сигнала, представляет собой параллельное соединение емкости
Со и сопротивления Кт. Для того чтобы этот элемент вел
себя подобно генератору, необходимо иметь отрицательное
значение вносимого активного сопротивления.
12.3. Принципы параметрического усиления
Способность управляемых реактивных двухполюсников
при определенных условиях играть роль активных элементов
цепи послужила основой для создания особого вида радио-
радиотехнических устройств, называемых параметрическими усили-
усилителями. Эти усилители нашли применение главным образом
в СВЧ-диапазоне как входные ступени высокочувствительных
радиоприемных устройств. Основное достоинство параметри-
параметрических усилителей — ннзкнй уровень собственных шумов, что
связано с отсутствием в них дробовых флуктуации тока.
Реализация параметрически управляемых реактивных эле-
элементов. Возможность параметрического усиления сигналов
была теоретически предсказана еще в начале века. Однако ¦
тактическое осуществление этой идеи стало возможным
4.
применение пара-
параметрических уси-
усилителей
Глава 12. Преобразования сигналов в параметрических цепях
варактор
воль i -ку. юнная
характеристика
лишь а 50-х годах после того, как были созданы первые
удачные конструкции параметрических полупроводниковых
днодов. Работа этих диодов, называемых также варакторами,
основана на следующем эффекте. Если к p-n-переходу диода
приложено напряжение обратной полярности, то разделен-
разделенный заряд q в запирающем слое является нелинейной
функцией приложенного напряжения и. Зависимость q{u) на-
называют вольт-кулонной характеристикой такого нелинейного
конденсатора. При изменении напряжения в запертом пере-
переходе диода возникает ток смещения
Реализация пара-
параметрически управ-
управляемой емкости
достигается за
счет нелинейных
свойств варактора
Кривая намагничи-
намагничивания ферромаг-
ферромагнитного материала
du
A2.35)
Здесь Сдпф (и) — дифференциальная емкость варактора, которая
приближенно описывается формулой
СдИф(«) = Мфк + I и I)/2, A2.36)
где к — размерный коэффициент; <рк я; 0.3 В - контактная раз-
разность потенциалов.
Чем сильнее заперт переход, тем меньше его диффе-
дифференциальная емкость.
Современные варакторы обладают весьма совершенными
характеристиками н способны работать вплоть до частот в
несколько десятков гигагерц, что соответствует миллиметро-
миллиметровому диапазону длин волн.
Может быть создан также элемент с параметрически
управляемой индуктивностью Цг). Он представляет собой
индуктивную катушку, имеющую сердечник из ферромагнит-
ферромагнитного материала с резко выраженной зависимостью индукции
В от подмагннчивающего тока /. Такие элементы не нашли
широкого применения иа радиочастотах из-за большой инер-
инерционности процессов перемагничивания материала.
Одноконтурный нара метрический усилитель. Рассмотрим
генератор сигнала, образованный параллельным соединением
элемента с активной проводимостью Gr н идеального источ-
источника гармонического тока с амплитудой 1„ и частотой е^.
К генератору подключена резистивная нагрузка, имеющая
проводимость GH. На зажимах генератора существует напря-
напряжение с амплитудой Um — l^(fjt + GH); в нагрузке выделя- .
ется активная мощность
Как известно из теории цепей, в режиме согласования
нагрузки с генератором, когда GH = Gr, величина Рн достигает
максимального значения:
A2.37)
Очевидно, мощность в нагрузке можно повысить, умень-
уменьшив каким-либо образом проводимость генератора. Этого
можно достичь, например, включив параллельно генератору
параметрический конденсатор (варактор). Емкость варактора
12.3. Принципы параметрического усиления
Рис. 12.4. Схемы одноконтурного параметрического усилителя:
а — принципиальная; б — эквивалентная
должна изменяться с частотой 2шс. Начальную фазу генера-
генератора накачки следует выбрать так, чтобы сопротивление RBU
[см. формулу A2.34)] было отрицательным.
На рис. 12.4, а, б изображены схемы простейшего одно-
одноконтурного параметрического усилителя, реализующего дан-
данный принцип.
Индуктивный элемент L вместе с конденсатором Со [см.
формулу A2.27)] образуют параллельный колебательный кон-
контур, настроенный на частоту сигнала. Входное сопротивление
этого контура настолько велико, что практически не шунтн-
рует отрицательную активную проводимость
GBH = l/i?BH = 1/2Ptt>cCosinO. A2.38)
вносимую варактором.
Обратившись к рис. 12.4,6, замечаем, что мощность, выде-
выделяемая в нагрузке, будет также максимальна в режиме сог-
согласования, т. е. при Сн = Gr + GBH < Gr:
Рнтах - lU\% (Gr + GBH)]. A2.39)
Отношение этой величины к той, которая определяется
формулой A2.37) в отсутствие параметрического элемента,
принято называть номинальным коэффициентом усиления
мощности'.
| КРном = KnJPumbx = СгДСг + G.J. A2.40)
Например, пусть Gr = 0.01 См, GBH =-0.008 См. Тогда
Крном = 0Ю1/0.О02 = 5, или в логарифмических единицах
Дрном = Ю lg 5 = 7 дБ.
Устойчивость параметрического усилителя. Если отрица-
отрицательная проводимость варактора полностью компенсирует
сумму проводимостей генератора и нагрузки, то параметри-
параметрический усилитель становится неустойчивым и самовозбужда-
самовозбуждается.
Из эквивалентной схемы, приведенной на рис. 12.4,6,
следует, что критическое значение вносимой отрицательной
проводимости
GBaKP = -(Gr + C^. A2.41)
Полагая, что фазовые соотношения колебаний сигнала и
накачки оптимальны в том смысле, что sinO = — 1, из фор-
формул A2.34), A2.41) находим критическую глубину модуляции
емкости:
A2.42)
Говорят, что при
выполнении ука-
указанных условий на-
раметрический уси-
усилитель работает в
синхронном режи-
режиме
номинальный ко-
коэффициент усиле-
усиления мощности
решите задачу 6
условие самовоз-
самовозбуждения параме-
трическо! о усили-
усилителя
Глава 12. Преобразования сигналов в параметрических цепях
Пример 12.3. Одноконтурный параметрический усилитель рабо-
работает на частоте 6 ГГц (X = 5 см), генератор сигнала и нагрузка
имеют одинаковые проводимости 0.005 См (Rr = RH = 200 Ом),
емкость варактора Со = 0.8 пФ. Определить предельные границы
изменения емкости, при достижении которых усилитель самовоз-
самовозбуждается.
По формуле A2.42) определяем
2-10"
' 6.28-6- lCP-8-ИГ"
= 0.66.
Таким образом, параметрический усилитель самовозбуждается,
если емкость варактора, изменяясь во времени по гармоническому
закону, колеблется в пределах от СтаХ = СЬ(И-ркр) = 1-33 пФ до
Cmin = Cb(l - Р«р) = 0.27 пФ.
Выходной сигнал
усилителя в асин-
асинхронном режиме
Параметрическое усиление в режиме расстройки. В реальных
условиях трудно, а порой и невозможно точно выполнить
условие синхронизма <оа = 2шс. Если частота сигнала несколько
расстроена относительно требуемого значения, т. е. сос =
= (f)J2 + So, то говорят, что параметрический усилитель ра-
работает в асинхронном режиме. При этом величина Ф, опре-
определяющая, согласно A2.34), активное вносимое сопротивление,
зависит от времени: Ф @ = 2фс - фн + 25юГ. Вносимое сопро-
сопротивление, изменяясь по закону
*вн(')= (HQ sin Ф (г)*
периодически приобретает разные знаки. Как следствие этого,
наблюдаются глубокие изменения уровня выходного сигнала,
аналогичные по характеру биениям. Этот недостаток одно-
одноконтурных усилителей в значительной степени препятствует
их практическому использованию.
Двухконтурньй параметрический усилитель. Работы, на-
направленные на улучшение эксплуатационных характеристик
параметрических усилителей, привели к созданию принципи-
принципиально иных устройств, свободных от указанного выше
недостатка. Так называемый двухконтурный усилитель спосо-
способен работать при произвольном соотношении частот сигнала
и накачки, причем независимо от начальных фаз этих коле-
колебаний. Такой эффект достигается за счет использования
вспомогательных колебаний, возникающих на одной из ком-
комбинационных частот.
Схема двухконтурного параметрического усилителя при-
приведена на рис. 12.5.
Усилитель состоит из двух колебательных контуров, один
из которых, называемый сигнальным контуром, настроен на
частоту сос, а другой, так называемый холостой контуру—
на холостую частоту <йх = а^ - сос. Связь между контурами
осуществляется при помощи параметрической емкости варак-
варактора, которая изменяется во времени по гармоническому
закону с частотой накачки со,,:
холостой контур и
холостая частота
12.3. Принципы параметрического усиления
Рис. 12.5. Схема двухкоитуриого параметрического усилителя
Обычно добротности сигнального и холостого контуров
велики. Поэтому в стационарном режиме напряжения иа этих
контурах достаточно точно описываются гармоническими
функциями времени:
A2.43)
с некоторыми амплитудами и начальными фазами.
Приняв во внимание знаки напряжений, указанные на
рис. 12.S, находим, что напряжение на варакторе и, = ц. — щ,
откуда ток через варактор
i(t) = С (I)
it '
ЛС
= СоA + pcoscoBt)[-rocC/Msm(roct + q>c) +
- Рт,С0 sin ш^ {Um cos (оу + 9J -
— Um cos (oy + 9O]. AZ44)
Проанализируем спектральный состав этого тока. Восполь-
Воспользовавшись уже встречавшейся формулой cos x sin у =
= l/2 [sin (х + у) — sin (х — у)"], убеждаемся, что ток содержит
составляющие на частоте сигнала co^ *= со,, — сои на холостой
частоте со, = | (Ц, — юс \, а также на комбинационных частотах
Для того чтобы найти проводимость, вносимую в сигналь-
сигнальный контур последовательным соединением варактора и хо-
холостого контура, следует прежде всего выделить в формуле
A2.44) составляющую тока на частоте сигнала:
ic (I) = - юсС0С/« sin (ю„1 + 9с) +
+ 72pa>cQ,C/_ sin (aj - 90. A2.45)
Здесь первое слагаемое находится во временной квадра-
квадратуре с напряжением uc(t) и поэтому не связано с внесением
в контур активной проводимости. Второе слагаемое пропор-
пропорционально амплитуде U,^ напряжения на холостом контуре.
Чтобы найти эту величину, выделим в A2.44) полезную
составляющую тока на холостой частоте, пропорциональную
амплитуде иш:
(pj. A2.46)
316 Глава 12. Преобразован» сигналов в параметрических цепях
Если Rpc x — резонансное сопротивление холостого кон-
контура, то напряжение на нем, вызванное колебаниями на
частоте сигнала,
Ц.М = - VaPto.CoC/moRp^^sintto,,» - 9с),
откуда следует, что
Ф* = я/2-фс- A2.47)
Подставив величины С7т„ и фх во второе слагаемое фор-
формулы A2.45), получим выражение полезной составляющей
тока на частоте сигнала, которая обусловлена влиянием
варактора и холостого контура:
<„.„ = - 'ЛРЧоъСои-сЯр..» cos (см + 9с). A2.48)
Таким образом, проводимость, вносимая в сигнальный
контур последовательным соединением варактора и холостого
контура, оказывается активной и отрицательной:
е„ = -
¦ Номинальный коэффициент усиления рассчитывают по
преимущества формуле A2.40). Анализ устойчивости проводят так же, как
двухконтуриого и в случае одноконтурного усилители.
усилятели Сопоставляя формулы A2.38) и A2.49), можно отметить,
что в двухконтурном усилителе вносимая отрицательная
проводимость ие связана с начальными фазами сигнала
и накачки. Кроме того, дяухконтурный параметрический уси-
усилитель некритичен к выбору частот юс и со,. Вносимая
проводимость будет отрицательна всегда, если со,, > сос.
Баланс мощностей в мюгоконтурных параметрических си-
системах. Нечувствительность параметрических усилителей, ис-
использующих комбинационные колебания, к соотношению фаз
полезного сигнала и накачки дает возможность изучать такие
системы на основе простых энергетических соотношений.
Обратимся к общей схеме, представленной на рис. 12.6.
Здесь параллельно конденсатору с нелинейной емкостью
C^ включены три цепи. Две из них содержат источники
сигнала и накачки, третья является пассивной и служит хо-
холостым контуром, настроенным на комбинационную частоту
со, = тас + ж>„ (т, и — целые числа). Каждая цепь снабжена
узкополосным фильтром, пропускающим лишь колебания
с частотами, близкими к сос, со„, co^ соответственно. Для
простоты считается, что цепи сигнала и накачки ие имеют
омических потерь.
Пусть один из источников (сигнала или иакачки) отсут-
отсутствует. Тогда в токе, протекающем через нелинейный
конденсатор, не будет составляющих с комбинационными
частотами. Ток холостого контура равен нулю и система
в целом ведет себя как реактивная цепь, не потребляя
в среднем мощности от источника.
Если имеются оба источника, то появляется составляющая
.тока иа комбинационной частоте; этот ток может замыкаться
12.3. Принципы параметрического усиления
Рис. 12.6. К выводу энергетических соотношений в двухконтуриой
параметрической системе
только через цепь холостого контура. Имеющаяся здесь
нагрузка в среднем потребляет мощность, а в цепи сигнала
и накачки вносятся положительные или отрицательные сопро-
сопротивления, значение и знак которых определяют перераспреде-
перераспределение мощностей между источниками.
Рассматриваемая система замкнута (автономна), и на осно-
основании закона сохранения энергии средние мощности сигнала,
накачки и комбинационных колебаний связаны соотношением
Рс + Р» + Ра = 0. A2.50)
Мощность, усредненную за период колебаний Т, можно
выразить через энергию ?, выделяемую в этот интервал
времени:
Приведенные рас-
рассуждения в равной
мере справедливы,
если система со-
содержит нелиней-
нелинейный индуктивный
элемент
(/— частота в герцах). Таким образом,
или, учитывая, что fx = mfc + n
/с (?с + raEJ +/„ (?„ + nEJ = 0.
A2.51)
Равенство A2.51) должно выполняться тождественно при
любых частотах /с и /„. Это возможно лишь в том случае,
если
A2.52)
Е„ + пЕ, = 0.
Переходя от энергий к мощностям, получаем два важных
соотношения, которые называют уравнениями Мэнли — Роу:
= 0.
A2.53)
Уравнения Мэили — Роу позволяют просто и наглядно
изучать закономериосги преобразования мощностей в много-
многоконтурных параметрических системах. Рассмотрим дяа типич-
типичных случая.
уравнения
Мэнли — Роу
Глава 12. Преобразования сигналов в параметрических цепях
Параметрическое усиление с преобразованием час
«вверх». Положив в формулах A2.53) т ~ п = 1, имеем
ц A2-54)
Как это принято, будем считать положительной мощность,
выделяемую в нагрузке, и отрицательной мощность, отда-
отдаваемую генератором. Из соотношений A2.54) видно, что
так как Р, > 0, то Рс < О и Р„ < 0. Итак, если холостой
контур усилителя настроен иа частоту /,=?+/„, то оба
источника (сигнала и накачки) отдают мощность холостому
контуру, где она потребляется в нагрузке. Так как Р« =
= — Рс —Рн, то коэффициент усиления мощности
KP = PJ(-P^ = \+fJfc=fJfc. A2.55)
Достоинство такого способа параметрического усиления
заключается в устойчивости системы, неспособной самовоз-
самовозбудиться ни при яаких мощностях сигнала и накачки.
Недостаток же связан с тем, что частота выходного сигнала
оказывается выше частоты сигнала иа входе. В диапазоне
СВЧ это вызывает известные трудности при дальнейшей
обработке колебаний.
Регенеративное параметрическое усиление. Пусть т = — 1,
Предполагается, что в = 1, т. е. частота настройки холостого контура /, =
fH >fc =/„ —/с. Уравнения Мэили — Роу принимают вид
0. AZ56)
Как следует из первого уравнения, в данном режиме
положительными являются обе мощности Рк и Рс. Таким
образом, некоторая часть мощности, отбираемая от генера-
генератора накачки, поступает в сигнальный контур, т. е. в системе
наблюдается регенерация на частоте сигнала. Выходную
мощность можно извлечь как из сигнального, так и из
холостого контура.
Уравнения A2.56) не дают возможности определить
коэффициент усиления системы, поскольку мощность Рс
содержит в себе как часть, потребляемую от устройств,
подключенных ко входу усилителя, так и часть, возникаю-
возникающую за счет эффекта регенерации. Можно отметить спо-
способность таких усилителей к самовозбуждению, поскольку при
определенных условиях в сигнальном контуре будет разви-
развиваться отличная от нуля мощность даже в отсутствие
полезного сигнала на входе.
12.4. Воздействие гармонических сигналов
нв параметрические системы
со случайными характеристиками
Большой теоретический и прикладной интерес представ-
представляет изучение прохождения сигналов через системы, парамет-
параметры которых случайно изменяются во времени. В простей-
12.4. Параметрические системы со случайными харахтериспашш
шем случае речь идет о случайной нестабильности коэф-
коэффициента усиления некоторого устройству приводящей к
флуктуациям амплитуды на выходе. В более сложной ситуа-
ситуации приходится рассматривать распространение сигналов в
различных средах, например, в плазме ионосферы Земли, при
наличии случайных изменений показателя преломления. Здесь
принятый сигнал искажен случайной угловой модуляцией,
поскольку набег фазы сигнала на трассе распространения
оказывается случайной функцией времени.
Подробное исследование статистических характеристик сиг-
сигналов на выходе линейных систем со случайно изменяю-
изменяющимися параметрами проведено в работе [22]. Здесь будут
изучены две простейшие задачи.
Случайная амплитудная модуляция. Рассмотрим сигнал на
выходе резистивной параметрической цепи, которая осуществ-
осуществляет умножение гармонического колебания Uo cos coot на функ-
функцию z(r), принадлежащую ансамблю реализаций стационар-
стационарного случайного процесса Z (г). Математическое ожидание тж
и функция корреляции RB (т) считаются известными. Методами
корреляционной теории исследуем статистические характе-
характеристики процесса У(г) на выходе такой цепи.
Поскольку реализация выходного сигнала у (г) =
= C/Oz(t)coscoot, то, очевидно, т, = у = 0.
Функция корреляции выходного сигнала
A2.57)
= Ulz(i)z(t + z)cosa0t coscoo(I + т).
Так как
cos юо? cos ю0 (I + т) =
В большинстве ре-
реальных случаев
одновременно име-
имеется случайная мо-
модуляция и но ам-
илитуде, и но фазе
U0COSb)ot
= l/2 [cos ю0 B1 + т) + cos юот] = '/г cos юот,
К» W = 'A V& @ z (( + т) cos юот.
Согласно определению, ковариационный момент
откуда получаем окончательную формулу, связывающую
функции корреляции выходного сигнала и случайного коэф-
коэффициента передачи z(t):
Ry W = Vi U$ №, W + mi\ cos coot. A2.58)
Дисперсия выходного случайного процесса
Характерный вид формулы A2.58) говорит о том, что
если реализации z(t) изменяются во времени медленно по
сравнению с входным сигналом, то выходное колебание
является реализацией узкополосиого случайного процесса.
Следует заметить, что если тжФ0, то функция Я,(т) не
стремится к нулю при т-»со. Для того чтобы понять
физические следствия этого свойства, обратим по Фурье
Глава 12. Преобразования сигналов в параметрических цепях
Я,
A 1 L
-<йо 0 «в
а 6
Рис. 12.7. Характеристики сигнала иа выходе случайного ампли-
амплитудного модулятора:
а — функция корреляции; б — спектральная плотность мощности
функцию Ry (т), т. е. найдем спектр мощности процесса Y(f):
И;(ю)= J R,(T)exp(-./o«)<ft =
= '/2U0G* I r,(T)cc*o>oTCos<ot<h +
Несложные преобразования позволяют представить эту
зависимость в виде
Чги1а1[ 1 rI(t)cos(co0-rCo)TdT
+ f rz (т) cos (ю0 — со) т <1т] +
+ lhU%т1ж [8 (ю + ю0) + 5 (ю -
A2.59)
I Таким образом, в спектре мощности процесса на выходе
характер спектра случайного амплитудного модулятора присутствуют две ком-
мощности выход- поненты: непрерывная, обусловленная случайными флуктуа-
ного сигнала при циями амплитуды, и дискретная, описывающая прохождение
случайной ампли- иа выход немодулированного несущего колебания; дискрет-
тудной модуляции ному спектру соответствуют две дельта-функции в частотной
области. Доля дискретной части тем значительнее, чем
больше величина пг| по сравнению с дисперсией ст*. При-
Примерный вид графиков функции корреляции и спектра мощ-
мощности для рассматриваемого случая изображен иа рис. 12.7.
Огибающая выходного сигнала. Если Z(t)— медленный
процесс, то можно считать, что мгновенное значение физи-
Огибающая ческой огибающей на выходе рассматриваемой системы
J"" ,,. пропорционально абсолютной величине его реализации:
*; /'" '.. ' 'u,(f) = \Uo*(f)i, A2.6O)
s? . , поскольку амплитудный детектор, создающий на выходе
огибающую, нечувствителен к фазе высокочастотного запол-
12.4. Параметрические системы со случайными характеристиками
Соотношение A2.60) указывает на то, что огибающая узко-
узкополосного процесса на выходе параметрической системы с
флуктуирующим коэффициентом передачи z(r) есть результат
нелинейного безынерционного преобразования случайного
процесса Z(t) в воображаемом устройстве с кусочно-линей-
кусочно-линейной характеристикой ивьа = | С/о».* \. Среднее значение, диспер-
дисперсия и функция корреляции огибающей могут быть вычисле-
вычислены с помощью методов, изложенных в гл. 11.
Случайная угловая модуляция. Пусть гармонический сиг-
сигнал t/0cosco0( подвергается параметрическому преобразова-
преобразованию, в результате которого возникает колебание }>(() =
= Uo cos [coot + 2 (()], промодулированное по фазовому углу
реализацией стационарного случайного процесса Z(f). Оче-
Очевидно, функция корреляции выходного сигнала
Ry М = Ul COS [coot + Z (I)] COS [COO (I + x) + Z (I + t)] =
= Чг Ul {cos pcoot + соот + z (I) + z (I + t)] +
+ cos[co0T + z(» + T)-z(r)]}. A2.61)
Первое слагаемое в фигурных скобках при усреднении
обращается в нуль, поэтому
R, М = ЧМ cos(co0t + z,-z) =
-1/2 Ul sin(z,-z)sin
A2.62)
(для сокращения записи аргумент функции z(t) опущен).
Если т -¦ 0, то lim cos (z, — z) = 1, lim sin (z, — z) = 0 и эф-
эффективная мощность сигнала, т. е. его дисперсия oj = Ul/2,
оказывается такой же, как мощность гармонического сигнала
с амплитудой UD.
Формула A2.62) дает полное описание свойств сигнала со
случайной угловой модуляцией в рамках корреляционной
теории. Так, она указывает на следующий факт: если процесс
Z(t) образован реализациями, медленными по сравнению с
гармоническими колебаниями частоты соо, то сигнал иа
выходе фазового модулятора является узкополосным слу-
случайным процессом с центральной частотой соо-
Угловая модуляция нормальным случайным процессом. Для
анализа формулы A2.62) необходимо найтн среднее зна-
значение входящих в нее тригонометрических функций от раз-
разностного аргумента. Это можно сделать, располагая дау-
мериой плотностью вероятности p(z, z,):
Здесь учтено, что
среднее значение
выходного сигнала
равно нулю
постоянство дис-
дисперсии сигнала пра
случайной угловой
модуляции
cos(z,-z)= JJ cos(z,-z)p(z, zjdzdz,,
sin(z, - z) = ff sin(z, - z)p(z, zjdzdz,.
Вычислить такие интегралы в общем случае весьма сложно.
Однако если случайный процесс Z{t) гауссов, то существует
Глава 12. Преобразования сигналов в параметрических цепях
изящный способ, сразу приводящий к окончательному ре-
результату. Этот способ основан на использовании дяумерной
характеристической функции гауссова процесса [см. формулу
F.32)]
© (»ь ) = exp [/ (z,u, + zt>2)] =
= exp {jmz (vt + v2) — 'A^i ["l + 2r« W viv2 + Й]} • A2.63)
ф Так как
усреднение с по- cos(z,-z) = {exp[/(z,-z)] + exp[-^(z,-z)]}/2,
рГическ^^нк: Sinfe-) = {expDfe-Z)]-exp[^(z,-z,]}/B;),
ПИИ то на основании формулы A2.63) находим средние значения:
cos(z,-z) = [0A, -
sin(z,-z) = [0A, -1)-в(-1,
Положив для определенности mz = 0, имеем
0A, -1) = 0(-1, 1) = ехр{-Ог2[1->-Лт)]},
поэтому
A2.64)
cos(z,-z) = exp {-с* [1 - г. (т)]},
sin(z, — z) = 0.
Подставив эти результаты в A2.62), найдем окончатель-
окончательное выражение функции корреляции сигнала, возникающего
при гауссовой угловой модуляции гармонического колебания:
R,М = l
- Mt)]}cosco0t.
A2.65)
С качественной точки зрения эта функция аналогична той,
которая была найдена ранее при анализе случайной ампли-
амплитудной модуляции. Поэтому полностью повторяется вывод
о том, что спектр мощности содержит две составляющие —
непрерывную и дискретную. Анализ показывает [22], что при
с| ¦» 1 случайная угловая модуляция оказывается широкопо-
широкополосной. Дискретная часть спектра практически исчезает, а не-
непрерывная часть вблизи частоты ю0 описывается гауссовой
функцией
A2.66)
Эффективная ширина спектра
Дю,ф = уЪаа, У-К @) A2.67)
возрастает с увеличением как дисперсии с|, так и величины
—К (О), пропорциональной скорости изменения модулирую-
модулирующей функции.
Результаты 323
Результаты
ОО Для реализации резистшного параметрического элемента на вход безынер-
безынерционного нелинейного двухполюсника подают сумму малого полезного сигнала
и большого управляющего сигнала.
ОО Преобразование частоты заключается в переносе спектра сигнала из окрест-
окрестности несущей частоты в окрестность промежуточной частоты без изме-
изменения закона модуляции.
ОО При синхронном детектировании частоты сигнала и гетеродина совпадают,
ОО Если сопротивление безынерционного параметрического элемента периодически
изменяется во времени, то в спектре выходного сигнала содержится, вообще
говоря, бесконечное число комбинационных составляющих с частотами
(йс±'к<йу, к=0, 1,2, ...
ОО Параметрические реактивные элементы могут передавать часть мощности
генератора накачки цепям, в которых присутствует полезный сигнал.
ОО При определенных фазовых соотношениях параметрически управляемый кон-
конденсатор может вызывать возбуждение колебаний в LC-контуре. Такой кон-
конденсатор эквивалентен отрицательной активной проводимости, вносимой в
контур.
ОО Различают одноконтурные и двухконтурные параметрические усилители;
последние содержат холостой контур, настроенный на одну из комбинацион-
комбинационных частот.
ОО Энергетические соотношения в многоконтурной параметрической системе
описываются уравнениями Мэнли — Роу.
ОО При случайной амплитудной модуляции в спектре выходного сигнала содер-
содержатся как непрерывная, так и дискретная составляющие.
ОО Если при угловой модуляции модулирующая функция является реализацией
нормального случайного процесса, то функция корреляции выходного сигнала
может быть выражена через характеристическую функцию сигнала на входе
модулятора.
Воп росы
1. Чем принципиально отличаются спект- 8. В чем состоит достоинство двухкои-
ры токов в резистнвиом параметрическом турных параметрических усилителей?
и нелинейном двухполюсниках? Оба элемента 9. Почему параметрическим усилителям
возбуждаются гармоническим входным сиг- свойствен низкий уровень собственных шу-
налом. мов? Целесообразно ли использовать одно-
2. Изобразите структурную схему супер- контурные или двухконтурные параметрн-
гетеродинного приемника. Что такое зеркаль- ческие усилители вместо обычных траизис-
иый канал приема? Как можно исключить торных усилителей напряжения в диапазоне
неоднозначность настройки приемника? умеренно высоких частот, не превышающих
3. Как определяется понятие крутизны нескольких десятков мегагерц?
преобразования? 10. Приведите пример физической систе-
4. Каковы достоинства и-недостатки син- мы, в которой входной сигнал подвергается
¦ хронного детектора? случайной амплитудной модуляции.
5. Можно ли добиться возбуждения коле- 11. Каковы характерные особенности
бательного контура с помощью параметри- спектра сигнала, получаемого при случайной
адского конденсатора, емкость которого угловой модуляции гармонического несущего
изменяется во времени с частотой, равной колебания? На каком основании можно ут-
резоиаисной частоте контура? верждать, что в спектре мощности выходного
6. Опишите физический принцип работы сигнала углового модулятора существуют
варактора. непрерывная и дискретная составляющие?
7. Какими явлениями сопровождается ра- 12. Обоснуйте физический механизм воз-
бота одноконтурного параметрического уси- иикиовения случайной угловой модуляции
лителя в асинхронном режиме? при отражении радиосигналов от ионосферы.
324
Задачи
Глава 12. Преобразования сигналов в параметрических цепях
1. Параметрическая активная проводи-
проводимость (См) изменяется во времени по закону
G (() = 10 + 5l0-4cosl0sf + 3-MT4cos2- lO5t.
К данному элементу приложено напряжение
(В) и (() = 5 cos lO6*. Найдите амплитуды и
частоты всех составляющих тока. Постройте
спектральную диаграмму тока.
2. Безынерционный нелинейный резистор
имеет вольт-амперную характеристику (мА)
вида i(u) = 5 + 2.5н + 1.5и2.
К резистору приложено напряжение (В)
ы (() = 3+0.5 cos fit. Выведите формулу, опре-
определяющую зависимость дифференциальной
крутизны во времени.
3. В преобразователе частоты применен
транзистор с характеристикой (мА)
иБЭ < 0.5 В,
,-0.5), иБЭ^0.5 В.
В отсутствие полезного сигнала на базу
подана сумма напряжений смещения и гете-
гетеродина (В): иБЭ =0.2 + 0.7cosrorr. Вычислите
крутизну преобразования.
Более сложные задания
7. Исследуйте процесс параметрического
возбуждения колебаний в 1,СЛ-коитуре, ем-
емкость которого изменяется во времени по
закону C(f) = СоA + PcoswhO- Покажите, что
в случае если частота иакачки юн=2Д/1,Со,
то критическое значение глубины модуляции
емкости Ркр = 2/Q, где Q = ]/l/Co/R — доб-
добротность колебательного контура.
8. Емкость параметрического конденсато-
конденсатора изменяется во времени по закону С (г) =
4. Емкость параметрического конденса-
конденсатора (пФ) изменяется во времени по закону
C(t) = 200 + 80cosA0s* + я/4) + 40cos5 ¦ 105(.
К конденсатору приложено напряжение (В)
и (t) = 30 cos 5 ¦ lO^r. Найдите аналитическое
выражение тока в конденсаторе.
Я Индуктивность колебательного конту-
контура равна 0.5 мГи, средняя емкость Со =
= 750 пФ, сопротивление потерь контура
12 Ом. Емкость контура изменяется скачко-
скачкообразно с одинаковыми приращениями в обе
стороны относительно среднего значения.
С какой частотой и в каких пределах сле-
следует изменять емкость, чтобы контур имел
результирующую добротность Q = 300?
б. Одноконтурный параметрический уси-
усилитель предназначен для усиления колебаний
с частотой 120 МГц. Усилитель содержит
катушку с индуктивностью 0.6 мкГи; собст-
собственная добротность контура усилителя равна
35. Определите частоту и пределы изменения
емкости конденсатора, при которых усиление
системы составляет 15 дБ.
= Соекр(—г/т)с((), где COt т —постоянные
величины. К конденсатору подключен источ-
источник линейно нарастающего наприжеиия u(t)=
= ate (г). Найдите момент времени (,, в ко-
который мгновенная мощность, потребляемая
конденсатором от источника сигнала, макси-
максимальна, а также момент времени f2, в кото-
который максимальной оказывается мощность,
отдаваемая конденсатором во внешнюю
цепь.
Глава 13
Элементы теории
синтеза линейных частотных
фильтров
Теорию цепей принято делить на две обширные области,
тесно связанные между собой, — анализ и синтез. Задачей
анализа является нахождение внешних и внутренних харак-
характеристик электрической цепи, структура которой задана зара-
заранее, например в виде принципиальной схемы. Задача синте-
синтеза цепи диаметрально противоположна — внешняя характе-
характеристика, такая, как частотный коэффициент передачи напря-
напряжения, входное или выходное сопротивление и т. д., счита-
считается известной. Требуется найти структуру цепи, реализую-
реализующую эту характеристику.
В отличие от анализа синтез цепи, как правило, явля-
является неоднозначной процедурой. Поэтому среди множества
структур с одинаковыми свойствами необходимо отыскать ту,
которая в некотором определенном смысле оптимальна. Так,
всегда желательно, чтобы синтезируемая цепь содержала
минимально возможное число элементов. Во многих случаях
нужно, чтобы цепь была малочувствительна к выбору номи-
номиналов входящих в нее элементов.
Синтез цепей является развитой областью современной
теоретической радиотехники. Разработан целый ряд методов
синтеза, порой весьма сложных, с которыми читатель может
познакомиться самостоятельно [35,36]. Методы синтеза цепей
приобрели исключительно большое значение в связи с внедре-
внедрением систем автоматизированного проектирования радиотех-
радиотехнических устройств на ЭВМ.
В данной главе будет изучаться простейшая задача син-
синтеза частотных фильтров, представляющих собой линейные
стационарные четырехполюсники, образованные элементами
L, С и R. Исходные данные для синтеза во всех случаях
будут задаваться амплитудно-частотными характеристиками.
13.1. Частотные характеристики
четырехполюсников
Четырехполюсниками называют электрические цепи,
имеющие вид «черного ящика» с двумя парами доступных
зажимов. Одна пара служит входом, другая — выходом
сигнала. В рабочем режиме ко входу подключен источник
сигнала, а выходные зажимы нагружены на
нагрузки ZH.
Предполагается, что читатель знаком с методами i
за четырехполюсников, которые излагаются в курсе теори_
цепей [3, 36]. Материал данного параграфа освещает лиикь
отдельные моменты, существенные для синтеза четырехпо-
четырехполюсников.
Излагаемые здесь
методы синтеза
применимы не
только к электри-
электрическим цеиям, ио и
к любым линей-
линейным системам, ко-
которые допускают
модельное пред-
представление в виде
четырехполюсни-
четырехполюсников с сосредото-
сосредоточенными парамет-
параметрами
Глава 13. Элементы теории синтеза линейных фильтров
Матри1иое описание. Важнейшее свойство линейного ста-
стационарного четырехполюсника состоит в том, что четыре
комплексные амплитуды Uu Л, U2, /2 при любой частоте
внешнего воздействия связаны двумя линейными алгебраи-
алгебраическими уравнениями. Две произвольно выбранные комплекс-
комплексные амплитуды можно принять за независимые величины, а две
другие должны определяться через них. Это служит основа-
основанием для матричного описания линейных четырехполюсников.
Так, часто используют матрицу передачи (ylBCD-матрицу),
полагая независимыми переменными напряжение и ток на
выходе. При этом
h = cii2 + Di2.
A3.1)
Коэффициенты А, В, С и D имеют разные физические
размерности и могут быть определены из опытов холостого
ходв и короткого замыкания. Матрицы передачи особенно
удобны для описания каскадного включения четырехполюсни-
четырехполюсников, поскольку результирующая матрица есть произведение
матриц отдельных звеньев.
• Если заданы матрица четырехполюсника и сопротивление
функции цепи нагрузки, то можно вычислить так называемые функции цепи,
к которым относят, например:
а) входное сопротивление ZM = V\(i\',
б) передаточное сопротивление Zn = u^h;
в) частотный коэффициент передачи напряжения К = Uz/Ui-
Функции цепи зависят в общем случае от частоты. Любая
функция цепи выражается через элементы матрицы четырех-
четырехполюсника и через сопротивление нагрузки. Так, деля левые
и правые части уравнения A3.1) друг на друга, находим,
что входное сопротивление
K + D). A3.2)
Коэффициенты
прямой и обратной
передач в общем
случае не сов-
совпадают
Аналогично, частотный коэффициент передачи напряжения
В). A33)
Обратим внимание на то, что функция К (/о>) зависит от
направления передачи энергии в системе. Если источник и
нагрузка поменялись местами, то вводят частотный коэффи-
коэффициент передачи в обратном направлении (нагрузка слева):
" A3.4)
Передато'иая функция четырехполюсника. В дальнейшем
в качестве аргумента частотного коэффициента передачи будет
использоваться не только переменная /о>, но и комплексная
частота р, т. е. наряду с функцией К (/о>) будет рассматри-
рассматриваться более общая характеристика — передаточная функция
К (р). Передаточная функция четырехполюсника обладает
всеми свойствами передаточных функций линейных стацио-
стационарных систем, рассмотренных в гл. 8. Так, линейному
четырехполюснику с постоянными параметрами отвечает
13.1. Частотвые характеристики четырехполюсников
функция
К[р)=К0
где Kq — постоянная величина. Если цепь устойчива, то по-
полюсы рь р2, ..., р„ должны располагаться в левой полу-
полуплоскости, образуя комплексно-сопряженные пары.
Обычно вводят дополнительное условие — число полюет
функции К (р) должно превышать число нулей, т. е. в беско-
бесконечно удаленной точке должен существовать ие полюс, а нуль
передаточной функции. Тогда импульсная характеристика
цепи
оказывается ограниченной, поскольку при бесконечно большом
радиусе контура интегрирования С экспоненциальный сомно-
сомножитель подынтегральной функции сможет «погасить» нитеграл
по дуге.
Расположение нулей передаточной функции. В отличие от
полюсов нули функции К(р) устойчивого линейного четы-
четырехполюсника могут располагаться как в левой, так и в пра-
правой полуплоскости переменной р. Действительно, если К(р) —
= 0, то это лишь означает, что при некотором Ul (p) Ф О
изображение выходного напряжения U2 (p) обращается в нуль.
Это не противоречит свойствам устойчивых систем.
Четырехполюсники, не имеющие нулей передаточной функ-
функции в правой полуплоскости, называют минимально-фазовы-
минимально-фазовыми цепями. Если же нули в правой полуплоскости имеют-
имеются, то такие четырехполюсники называют неминимально-
фазовыми цепями.
Данная терминология связана со следующими обстоятель-
обстоятельствами. Рассмотрим плоскость комплексной частоты, на
которой обозначены некоторые точки zi н z2 в левой и
правой полуплоскостях. Пусть эти точки являются нулями
передаточной функции четырехполюсника. Если цепь нахо-
находится под гармоническим внешним воздействием, так что
р = /о), то данным точкам соответствуют два вектора на
комплексной плоскости: Vi =_jo> — zt и V-i =j<a — z2, которые
отвечают соответствующим сомножителям в числителе фор-
формулы A3.5). Оба вектора поворачиваются и изменяют свою
длину при изменении частоты ш. Разница между ними
состоит в том, что вектор Vt с изменением частоты от
— со до +со увеличивает фазовый угол частотного коэффи-
коэффициента передачи на л радиан, в то время как вектор V2 при
тех же условиях уменьшает фазу на ту же величину.
Коэффициент передачи четырехполюсника является дробно-
рациональной функцией, изменение аргумента которой
расположение по-
полюсов передаточ-
передаточной функции четы-
четырехполюсника
Существование пу-
пуля передаточной
функции в беско-
бесконечно удаленной
точке обеспечивает
спад АЧХ цепи при
очень высоких час-
частотах
минимальио-фа-
зовые цепи
Д arg К О'ш) С^-2
г8 (числит.) — Д aig (знамеиат.).
Глава 13. Элементы теории синтеза линейных фильтров
Поэтому при одинаковом числе нулей и полюсов неми-
неминимально-фазовая цепь обеспечивает большее по абсолют-
абсолютному значению изменение фазы коэффициента передачи по
сравнению с минимально-фазовой цепью.
Расположение нулей функции К(р) связано с топологи-
топологической структурой цепи. В теории цепей показываетси, что
минимально-фазовым будет любой четырехполюсник со сле-
следующим свойством: передача сигнала с входа на выход может
быть полиостью прекращена путем разрыва единственной
ветви. В частности, мннимально-фазовыми цепями будут
любые четырехполюсники лестничной структуры.
Неминимально-фазовые четырехполюсники имеют, как
правило, структуру мостовых (скрещенных) цепей, в которых
сигнал на выход проходит по двум или более каналам.
Простейшая неминимально-фазовая цепь — симметричный
мостовой четырехполюсник, образованный элементами R и С.
Здесь, как нетрудно убедиться, передаточная функция по
напряжению
К (р) = (pRC - l)/(pRC + i). A3.6)
Данная функция имеет единственный нуль z = 1ДКС), кото-
который находится в правой полуплоскости.
Однако мостовая структура не гарантирует автомати-
автоматически принадлежность цепи к неминимально-фазовому классу.
В каждом отдельном случае следует проверять наличие или
отсутствие нулей передаточной функции в правой полу-
полуплоскости.
Связь между АЧХ и ФЧХ мвнимальио-фазового четырех-
четырехполюсника. Передаточная функция К (р,) любого устойчивого
четырехполюсника в правой полуплоскости переменной р
является аналитической функцией. Если к тому же этот
четырехполюсник принадлежит к числу цепей минимально-
фазового типа, то его передаточная функция в правой полу-
полуплоскости не имеет и нулей. Это значит, что аналитической
оказывается функция
lnK(p) = ln|K(p)|+jargK(p).
В соответствии с материалом гл. 5 граничные значения
веществениой и мнимой частей функции 1пК(р) на мнимой
оси, т. е. при p=j<a, связаны между собой парой преобразо-
преобразований Гильберта:
1 С ln|KI
я J % —
"« J
A3.7)
Таким образом, реализуя заданную АЧХ четырехполюс-
четырехполюсника минимально-фазового типа, невозможно получить при
1Э.1. Частотные характеристики четырехполюсников
329
этом любую ФЧХ. Основываясь на свойствах преобразова-
преобразований Гильберта, можно утверждать, например, что если АЧХ
минимально-фазового четырехполюсника на какой-нибудь
частоте достигает максимума, то ФЧХ в окрестности этой
частоты проходит через нуль.
Если же четырехполюсник принадлежит к классу цепей
неминимальной фазы, то АЧХ и ФЧХ независимы друг от
друга. Среди иеминимально-фазовых цепей особо важную
роль играют так называемые есепропускающие четырехполюс-
четырехполюсники, у которых модуль коэффициента передачи постоянен
и не зависит от частоты. Примером может служить симмет-
симметричный мостовой RC-четырехполюсник, для которого в соот-
соответствии с равенством A3.6)
| JC (jto) | = 1. <рк(о>)= -2arctgtoRC. A3.8)
Подобные четырехполюсники используются для фазовой
коррекции сигналов. Они позволяют частично компенсировать
искажения формы сигналов, прошедших через радиотехниче-
радиотехнические устройства.
Коэффициент передачи мощности. Как известно (см. гл. 8),
так принято называть квадрат модуля частотного коэффи-
коэффициента передачи четырехполюсника:
КР(со) = К t» К* t» = К (/о>) К (-jo)). A3.9)
В отличие от самого коэффициента передачи К(/о>)
функция КР((й) вещественна и поэтому особенно удобна для
задания исходных данных к синтезу четырехполюсника.
Как видно из формулы A3.9), коэффициент передачи
мощности — четная функция частоты, т. е. всегда может быть
представлен в виде отношения двух многочленов по степе-
степеням со2:
КР (со) = М (co2VN (ю2). A3.10)
Если подставить переменную р вместо переменной /<в, то
функция КР((?>) будет аналитически продолжаться с мнимой
оси /0) на всю плоскость комплексных частот:
>). A3.11)
Формула A3.11) устанавливает следующий факт: если
а + jb — особая точка (нуль или полюс) функции К (р), то
Кр (р) будет иметь такую же особую точку как при р =
= a+jb, так и при p=—a—jb. Принято говорить, что осо-
особые точки частотного коэффициента передачи мощности
имеют квадрантную симметрию, т. е. располагаются на комп-
комплексной плоскости, имея центр симметрии в начале коорди-
координат. Это свойство имеет большое значение в теории синтеза
четырехполюсников, поскольку оно дает возможность вос-
восстанавливать частотный коэффициент передачи по известной
функции Кр(р).
Этапы синтеза частотно-избирательных четырехполюсников.
I Синтез частотных фильтров обычно начинают е того, что
выбирают некоторую идеализироаавную функцию, которая
применение иеми-
нимально-фазо-
вых цепей
частотные свойст-
свойства коэффициента
передачи мощности
Расположение по-
полюсов, находящих-
находящихся в квадрантной
симметрии
Глава 13. Элементы теории синтеза линейных фильтров
описывает частотную зависимость коэффициента передачи
мощности, равную квадрату АЧХ. Никаких ограничений на
вид ФЧХ фильтра не налагают. Поэтому такой подход
называют синтезом фильтра по заданной АЧХ.
о Л Как правило, идеализированная частотная характеристика
является физически нереализуемой. Поэтому второй этап син-
синтеза состоит в аппроксимации этой характеристики такой
функцией, которая может принадлежать физически реализу-
реализуемой цепи.
^Л Далее по аппроксимированной частотной характеристике
-V передачи мощности находят передаточную функцию К(р)
фильтра.
/1 "~ Зная координаты нулей и полюсов этой функции, можно
/ провести реализацию цепи, т. е. получить принципиальную
схему фильтра вместе с номиналами входящих в него
элементов.
13.2. Фильтры нижних частот
В данном параграфе будут рассмотрены некоторые физи-
физически реализуемые характеристики фильтров нижних частот
(ФНЧХ Основное назначение таких устройств — с минималь-
минимальным ослаблением передавать на выход колебания, частоты
Ф которых не превосходят заданной граничной частоты, назы-
частота среза ваемой частотой среза фильтра сос. В то же время колеба-
колебания с более высокими частотами должны существенно
ослабляться.
Очевидно, для ФНЧ с частотой среза сос идеальная
частотная зависимость коэффициента передачи мощности
имеет вид
A3.12)
В общем случае
коэффициент пере-
передачи мощности мо-
может содержать про-
произвольный мас-
масштабный множи-
множитель
порядок фильтра
{1 0 sj со ^ со
О, со > сос
(имеются в виду физические частоты со > 0).
Такая частотная характеристика заведомо нереализуема.
Обращение в нуль функции Кр(со), а значит, и передаточной
функции К (р) противоречит известному критерию Пэли —
Винера (см. гл. 8).
Возникает задача-подбора допустимой аппроксимирующей
функции.
Максимально-плоская аппроксимация. Один из возможных
способов аппроксимации идеальной характеристики ФНЧ
построен на использовании коэффициента передачи мощ-
мощности
| КР(о>н) = 1Д1 + соЛ"), I A3.13)
I '
где соя = со/сос — безразмерная нормированная частота.
ФНЧ, имеющий такие частотные свойства, называют
фильтром с максимально-плоской характеристикой или фильт-
фильтром Баттерворта. Целое число п = 1, 2, 3, ... является
порядком фильтра. Сравнение выражений <13.10) и A3.13)
показывает, что при любом п такой фильтр реализуем.
1Э.2. Фильтры нижних частот
КР
0.5
1
т—
\ л-5
—г~
1.5
¦ ¦ 1
л-1
2.0
-
;
i —
0.25 -
Рис. 13.1. Частотные характеристики коэффициента передачи мощ-
мощности для фильтров Баттерворта при и = 1 и и = 5
В полосе пропускания фильтра, т. е. при 0 < Юд < 1, квадрат
модуля коэффициента передачи плавно уменьшается с ростом
частоты. На частоте среза (при Юд = 1) ослабление, вносимое
фильтром, составляет 101g0.5« — 3 дБ независимо от по-
порядка системы. Чем больше п, тем точнее аппроксимируется
идеальная форма частотной характеристики. На рис. 13.1
изображены графики, построенные по формуле A3.13) для
максимально-плоских характеристик различных порядков.
Порядок фильтра обычно подбирают, исходя из требова-
требований, предъявляемых к ослаблению сигналов с частотами
ю>юс.
решите задачу 1
Пример 13.1. Найти порядок фильтра Баттерворта с частотой
среза 105 с, который при ю = 3-Ю5 с обеспечивает ослабление
сигнала не хуже чем — 26 дБ по отношению к уровню при ю = 0.
Условие задачи определяет порядок л фильтра как целое число,
ближайшее (с избытком) к корню уравнения
или
1 + З2" =. 102-6 = 398.
Решая его, находим
2n=lg397/lg 3-5.45,
откуда п = 3.
Если частота сигнала значительно превышает частоту д
среза фильтра (га, ж> 1), то иэ формулы A3.13) получим решите задачу 2
т. е. ослабление, выраженное в децибелах,
A = 101gK,» -20nlgra,.
Отсюда следует, что при увеличении частоты вдвое
ослабление, вносимое фильтром Баттерворта, возрастает на
—20п-0.301 « — 6л дБ. Говорят, что для фильтра этого типа
скорость роста- ослабления вне полосы пропускания состав-
составляет .т6п дБ/октава.' . ....
Октава — интер-
интервал частот, гранич-
граничные точки которо-
которого ^отличаются в
два" раза
Глава 13. Элементы теории синтеза линейных фильтров
решите задачу 3
принцип отбора по-
полюсов передаточ-
передаточной функции
Передаточная функция фильтра с максимально-плоской
частотной характеристикой. Для того чтобы в дальнейшем
синтезировать структуру цепи, необходимо от коэффициента
передачи мощности, выбранного в форме A3.13), перейти
к передаточной функции К (р). С этой целью введем нормиро-
нормированную комплексную частоту pH=cH+ja>H и запишем фор-
формулу A3.13) так:
Кр (Р«) = 1/[1 + (- l)"pS"]. A3.14)
Отсюда видно, что на плоскости рн функция Кр (р„),
отвечающая ФНЧ с характеристикой Баттерворта л-го по-
порядка, имеет 2л полюсов, которые являются корнями урав-
уравнения
h +(_i)"p2" = o. I A3.15)
Все эти корни лежат на окружности единичного радиуса
с центром в начале координат.
Рис. 13.2. Полюсы коэффициента передачи мощности ФНЧ с ха-
характеристикой Баттерворта при и = 1, и = 2 и л = 3
При л = 1 полюсы коэффициента передачи мощности нахо-
находят из уравнения р% = 1, т. е.
P«i = 1, Рн2=-1. A3.16)
Если л = 2, то уравнение р* = — 1 имеет четыре корня:
Рн. = е*/4, Риз = е**4, рн3 = е***, рн4 = е™4. A3.17)
Наконец, для фильтра 3-го порядка необходимо решить
уравнение р* = 1, у которого имеется шесть корней:
Рн1 = 1, Рн2 = е*/3, pH3 = eJ2'1'3,
РН4 = -1, Рн5 = е*"'3, рнб = е**3. A3.18)
Расположение корней на комплексной плоскости для при-
приведенных случаев показано на рис. 13.2.
Общая закономерность при любом л такова: все полюсы
расположены на одинаковом угловом расстоянии! друг от
друга, равном л/л; если л — нечетное число, то первый
корень рн1 = 1, если же л четно, то ри1 =ехр(/я/л).
Теперь воспользуемся тем, что полюсы коэффициента
передачи мощности имеют квадрантную симметрию, т. е. их
число и конфигурация расположения в обеих полуплоскостях
одинаковы. Это позволяет считать, что только полюсы,
расположенные в левой полуплоскости, отвечают синтези^
13.2. Фильтры нижних частот 333
руемому фильтру. Их «зеркальные копии» в правой полу-
полуплоскости соотносятся с функцией К (—рн) и ие прини-
принимаются во внимание. Описанный здесь принцип является
главным в процедуре синтеза фильтров, поскольку имеиио
на ием в дальнейшем основана реализация цепи.
Пример 13.2, Определить передаточную функции} ФНЧ с ха-
характеристикой Баттерворта 2-го порядка.
Передаточная функция определяется двумя полюсами, лежащими
в левой полуплоскости [см. A3.17)]:
Тогда
Твким образом, для реализвции ФНЧ при п = 2 требуется
динамическая система 2-го порядка (колебательное звено).
Чебышевская аппроксимация. Широкое применение иаходит
также другой способ аппроксимации частотной характе-
характеристики идеального ФНЧ, получивший название чебышев-
ской аппроксимации. Коэффициент передачи мощности ФНЧ
такого вида задается формулой
A3.19) #
где е ^ 1 — постоянное число, называемое коэффициентом коэффициент не-
неравномерности характеристики в полосе пропускания; равномерности ха-
Т„(рИ) ~ многочлен Чебышева w-го порядка, определяемый рактеристики
выражением
Т„(х) = cos(narccosx). A3.20)
Функция Т„(х) прн любом и может быть найдена из
рекуррентного соотношения
7-„(х)=2хТ„-,М-7-„_2(х), A3.21)
причем Т0(х)=1 и Т,(х) = х.
Эти многочлены часто используются во всевозможных
задачах аппроксимации благодаря следующему свойству:
среди всех многочленов и-й степени с одинаковыми коэф-
коэффициентами при старшей степени аргумента они менее
всего отклоняются от нуля на интервале — 1 < х < 1. В то
же время при | х \ ^> 1 абсолютные значения многочленов
Чебышева весьма велики. Асимптотически при | х | » 1
7-„(х)*2"^х". A3.22)
С помощью таких функций можно удачио аппроксими-
аппроксимировать идеальную характеристику ФНЧ: из формулы A3.19)
видно, что в пределах полосы пропускания величина И
KF колеблется от 1 до 1/A+е2), если же ш»»1, то свойство многочле-
фильтр обеспечивает большое ослабление сигнала. J нов Чебышева
п у'п
Типичный
многочлена
Чебышева
A
11
1 X
график
334
Глава 13. Элементы теории синтеза линейных фильтров
решите задачу 4
Н 1
Рис. 13.3. Частотные характеристики ФНЧ чебышевского типа
На рис. 13.3 приведены типичные графики частотных
характеристик передачи мощности для двух чебышевскнх
фильтров прп и = 2 и и = 3.
Из графиков видно, что в полосе пропускания частотные
характеристики чебышевских фильтров немонотонны. Вели-
Величина пульсации ослабления тем выше, чем больше е.
Как следует из формулы A3.19), увеличение е ведет к
большему ослаблению сигналов вие полосы пропускания.
Подбором двух параметров и и е можно добиться
выполнения исходных условий, предъявляемых к синтези-
синтезируемому фильтру.
Пример 13.3. Фильтр с чебышевской характеристикой 3-го
порядка на частоте среза (со„ = 1) обеспечивает ослабление мощ-
мощности в два раза. т. е. такое же, как и фильтр с макси-
максимально-плоской характеристикой- Определить величину ослабления,
вносимого этим фильтром на частоте, в три раза превышающей
чистоту среза.
' Прежде всего найдем параметр с. Как следует из выражения
A3.20), Т„A) = 1 при любом п, поэтому Кр{1) = 0.5 в случае,
если с = 1.
Многочлен Чебышевв 3-го порядка
откуда ослабление, вносимое чебышевским фильтром с единичным
коэффициентом неравномерности иа частоте со = 3wo составит
Дч = 101й[1Д1 + 993)] = -39.9 дБ.
Отметим, что в аналогичных условиях фильтр Баттерворта
3-го порядка обеспечивает ослабление
ДБ = 101g[l/(l + З6)] = -28.6 дБ.
Таким образом, применение фильтра с чебышевской характе-
характеристикой позволяет существенно лучше подавлять сигналы, частоты
которых лежат вне полосы пропускания.
Передаточвая функция чебышевского ФНЧ. Как видно из
A3.19), полюсы коэффициента передачи мощности чебышев-
чебышевского фильтра являются корнями уравнения
0 A3.23)
[ср. с формулой A3.15)].
13.3. Реализация фильтре»
335
Метод его решения довольно громоздок и с ним чита-
читатель может ознакомиться в [35]. Практические расчеты
выполняют так. Прежде всего вычисляют параметр
A3.24)
1 ./1\ 1. (\ 1/1 Д
= — arshl — ) = — lnl — + / —+ I).
Затем находят полюсы передаточной функции фильтра
Баттерворта того же порядка и с той же частотой среза.
Чтобы перейти к полюсам передаточной функции чебышев-
чебышевского фильтра, абсциссу каждого полюса фильтра Баттер-
Баттерворта умножают иа sh a, а ординату — иа ch а.
В то время как полюсы фильтра Баттерворта рас-
располагаются на единичной окружности, полюсы фильтра с
чебышевской характеристикой лежат на эллипсе, уравнение
которого в плоскости рн = с„ + ./(он имеет вид
= 1.
Получив координаты полюсов, можно записать выражение
передаточной функции чебышевского ФНЧ:
Полюсы фильтров
с максимально-
плоской и чебы-
чебышевской характе-
характеристиками
Пример 13.4. Найти передаточную функцию чебышевского ФНЧ
2-го порядка с параметром ? = 1.
Здесь
решите задачу 9
\/2) = 0.4407.
Соответствующий фильтр Баттервортв имеет передаточную
функцию с двумя полюсами:
pHl = О.707(-1 +j), рк2 = О.707(-1 -Д
Абсциссы полюсов передаточной функции чебышевского фильт-
фильтра будут равны —0.707sha=—0.322; ординаты полюсов составят
±0.707 cha = ±0.777.
Из этого примера видно, что переход от максимально-плоской
к чебышевской характеристике осуществляется путем приближения
полюсов к мнимой оси; перемещение их по вертикали незначи-
незначительно. С физической точки зрения это означает, что колебв-
тельная система, образующая чебышевский фильтр, должна обла-
обладать меньшим затуханием.
13.3. Реализация фильтров
Окончательный этап синтеза фильтра состоит в нахожде-
нахождении принципиальной схемы устройства. В этом параграфе
будет рассмотрен так называемый структурный синтез, когдв
цепь образуется каскадным включением некоторого числа
звеньев, отделенных друг от друга идеальными развязываю-
развязывающими элементами (рис. 13.4).
Частотный коэффициент передачи такой цепи
структурный
тез
336
Глава 13. Элементы теории синтеза линейных фильтров
Широкое использо-
использование элементов
развязки характер-
характерно для современно-
современного синтеза актив-
активных цепей в микро-
электрониом ис-
исполнение
\ / од
Элементы развязки
Рис. 13.4. Структурная схема фильтра, образованного каскадным
включением звеньев (в качестве элементов развязки обычно исполь-
используются эмиттерные или истоковые повторители)
Коэффициенты передачи Ки. K2,...,KN должны быть
такими, чтобы они могли реалнзовывать те полюсы функции
К(р), которые были определены ранее иа этапе аппрокси-
аппроксимации.
Для создания ФНЧ требуются звенья двух видов — звено
1-го порядка с единственным вещественным полюсом и
звено 2-го порядка, имеющее пару комплексно-сопряжен-
комплексно-сопряженных полюсов.
Звено 1-го порядка. Простейшей цепью данного вида
является Г-образный четырехполюсник, для которого пере-
передаточная функция по напряжению
(Ш5)
координата полюса р, = —l/(RQ.
Отметим, что, задавая р,, получаем лишь произведение
RC. Один ю элементов, R или С, может быть выбран
произвольно.
Звено 2-го порядка. Два комплексно-сопряженных по-
полюса передаточной функции можно реализовать с помощью
Г-образиого четырехполюсника, схема которого приведена
на рис. 13.5.
Для этого звеиа легко вычислить передаточную функ-
функцию по напряжению:
решите задачу 6 К(р)
A3.26)
Желательно, что-
чтобы емкость С зна-
значительно превосхо-
превосходила входную ем-
емкость последующе-
последующего звена. При этом
снижается чувстви-
чувствительность частот-
частотной характеристи-
характеристики фильтра к не-
неточному выбору но-
номиналов элементов
р2 + 2ар + о>3 '
где ш0 = 1/j/iC; a = 1/B«С).
Передаточная функция имеет полюсы в точках с коорди-
координатами
A3.27)
Pi. 2= -а±]]/тг0-аг,
ш
-1 1—IS
Рис. 13.5. Звеио 2-го порядка:
а — принципиальная схема; б — расположение полюсов передаточной функции
- 13.3. Реализация фильтров
которые в зависимости от соотношения между соо и а
могут быть как комплексно-сопряженными, так и веществен-
вещественными.
Рассмотрим конкретные примеры реализации ФНЧ с по-
помощью звеньев, включаемых каскадно.
!¦
Пример 13.5. Реализовать ФНЧ с максимально-плоской харак-
характеристикой 3-го порядка при частоте среза 10s с'1. Нагрузкой
фильтра служит резистор с сопротивлением RH = 0.5 кОм.
Как было показано ранее, такой фильтр должен иметь три
полюса передаточной функции в точках с координатами
р, 2 = -105(cos60°±^sin600) = -5-10* ±/8.66-10* с.
Рз=-105 с-1
(здесь выполнен переход от нормированной переменной рн к встииной
комплексной частоте р = ЮсРн).
Пусть синтезируемый фильтр имеет вид квскадного соедине-
соединения звена 1-го порядка, которому отвечает полюс р3, развязы-
развязывающего устройства и звеиа 2-го порядка с полюсами р, и р2:
решите задачу 7
решите задачу 8
Звено 1-го порядка в соответствии с формулой A3.25) должно
иметь постоянную времени J?C = 1/шс = 10 с. Если выбрать
С = 10 иФ, то резистор, образующий это звено, будет иметь
сопротивление R = 10"s/C = 1 жОм.
Допустим, что роль резистора, входящего в звено 2-го порядка,
выполняет нагрузочное сопротивление. На основании соотношения
A3.27) пара комплексно-сопряженных корней будет иметь требуе-
требуемую вещественную часть, если 1/BJ?HC) = — Repi,2 = 5-104 с~*.
Отсюда С = 1Д106 ¦ Ки) = 0.02 мкФ. Наконец, индуктивность L =
= l/(a>lQ = 5 мГи.
Принципиальная схема синтезированного фильтра имеет вид
5мГн
ч
т
0-
1*Ом
10 нФ
ш
.Пример 13.6. Реализовать чебышевский фильтр нижних частот
2-го порядка, 'работающий на резистивную нагрузку с сопротив-
сопротивлением J?H <= 1 кОм. Исходные данные к синтезу: частота среза
<ас= 10s с*1, коэффициент неравномерности е = 1.
Для реализации частотной характеристики фильтра 2-го порядка
достаточно иметь одно Г-образное LCK-звеио. В примере 13.4
были получены координаты полюсов передаточной функции чебы-
шевского фильтра 2-го порядка при е = 1:
Рн1.2= -0.322 ±./0.777, ;
или после перехода к иеиормироввнной переменной р: * -fM-
Pi.i = -3.22-1 Ч |iiv
338
Глава 13. Элементы теории синтеза линейных фильтров
Емкость конденсатора С находим из A3.27), приравняв величину
а требуемой абсциссе полюсов: а= 1/BRHC) = 3.22 ¦ 104 с, откуда
С = 15.53 иФ.
Индуктивность ^определяется из уравнения для координат полю- ^
сов по мнимой осн: |/юЗ — а2 = 7.77-104 с. Решая его, находим оентте
cog =1/(LC) = 7.08 109 с, ^
L = 1/КО = 9.09 мГи.
Итак, заданная частотная характеристика фильтра реализуется
цепью, схема которой имеет вид
I
0-
Отметим, что на практике, особенно в СВЧ-диапазоне,
используются схемы фильтров, в которых развязывающие
элементы отсутствуют. С методами расчета таких цепей
читатель может познакомиться самостоятельно [35].
Реализация фильтров верхних частот. Фильтр верхних
частот (ФВЧ) предназначен для того, чтобы с малым ослаб-
ослаблением пропускать колебания, частоты которых превышают
частоту среза юс. Схема ФВЧ может быть получена
непосредственно, если синтезирован ФНЧ с такой же частотой
среза. Для этого в теории цепей используется прием, назы-
называемый преобразованием частоты.
Перейдем от переменной р, которая использована для
описания ФНЧ, к новой частотной переменной р', такой,
что
Здесь термин «пре-
«преобразование часто-
частоты» не следует сме-
смешивать с тем, ко-
который использует-
используется в теории нели-
нелинейных и парамет-
параметрических преобра-
преобразований сигналов
р=ю*/р'. A3.28)
При этом точке р = 0 будет соответствовать бесконечно
удаленная точка в плоскости р\ Двум точкам р1р2 = ±j'coc
на мнимой оси отвечают две точки р'1ш2 = + jco« отли-
отличающиеся от исходных лишь измененными знаками. Поэтому
можно ожидать, что АЧХ фильтра, синтезированного из
ФНЧ путем частотного преобразования A3.28), будет дей-
действительно соответствовать ФВЧ.
Каждый конденсатор, имевший в схеме ФНЧ проводи-
проводимость рС, должен быть заменен иа элемент с проводи-
проводимостью mlC/p', т. е. на катушку с индуктивностью
L = 1/(ю|С). Аналогично, катушка с индуктивностью L в
низкочастотном фильтре должна быть заменена иа конден-
конденсатор с емкостью С = Щт^Ц. Резистивные элементы фильтра
остаются без изменения. Описанный здесь переход изображен
на рис. 13.6.
Реализация полосоаых фильтров. Полосовой фильтр (ПФ)
с малым ослаблением пропускает лишь частоты в полосе,
прилегающей к некоторой точке ©о Ф 0. Если синтезирован
ФНЧ с заданной частотой среза, то можно непосредственно
перейти к схеме ПФ, выполнив замену переменной
р = р' + cog/j/. A3.29)
13.3. Реализация фильтров
339
Рис. 13.6. Переход от схемы ФНЧ к схеме ФВЧ
При этом точке р' = jcoq отвечает точка р=0 и, таким
образом, максимум АЧХ, наблюдавшийся в ФНЧ иа нулевой
частоте, будет возникать в ПФ иа частоте ю0. Поскольку
проводимости конденсатора, примененного в схеме ФНЧ,
отвечает в схеме ПФ проводимость параллельного колеба-
колебательного контура, образованного конденсатором С и катуш-
катушкой L = iftialQ. Заметим, что данный контур оказывается
настроенным иа частоту ш0.
Рис. 13.7. Переход от схемы ФНЧ к схеме ПФ
Аналогично, из равенства pL= p'L+ cogL/p' заключаем,
что катушка L превращается в последовательное соединение
катушки и конденсатора С = l/(o>oL), т. е. в последовательный
колебательный контур (рис. 13.7).
Рассмотренные здесь примеры показывают, что ФНЧ
при синтезе частотно-избирательных цепей служит так иазы- ™
ваемым фильтром-прототипом, параметры которого дают фпльтр-нрототнп
возможность перейти в дальнейшем к схемам любых других
фильтров.
Результаты
ОО Полюсы передаточной функции устойчивого четырехполюсника располагают-
располагаются только в левой полуплоскости.
ОО Нули передаточной функции устойчивого четырехполюсника могут находить-
находиться в правой полуплоскости (неминимально-фазовые цепи).
ОО Нули и полюсы частотного коэффициента передачи мощности размещаются
в квадрантной симметрии.
ОО Полюсы передаточной функции ФНЧ с максимально-плоской характеристи-
характеристикой находятся на окружности, радиус которой равен частоте среза.
ОО ФНЧ с чебышевской характеристикой имеет полюсы передаточной
функции, расположенные на эллипсе, эксцентриситет которого определяется
коэффициентом неравномерности АЧХ.
ОО Реализация фильтров верхних частот и полосовых фильтров проводится
на основании найденной заранее схемы ФНЧ, играющего роль фильтра-
прототипа.
Глава 13. Элементы теория синтеза линейных фильтров
Вопросы
1. Какими функциями цепи принято
описывать четырехполюсники?
2. Почему передаточная функция устойчи-
устойчивого четырехполюсника должна иметь нуль в
бесконечно удаленной точке?
3- Является ли четырехполюсник с лест-
лестничной структурой мииимальио-фазовой
цепью?
4. Какова связь между АЧХ и ФЧХ
четырехполюсника минимально-фазового ти-
типа?
5. Каково техническое назначение иемнии-
мально-фазовых пепей?
Задачи
1. Докажите, что первые п — 1 производ-
производных от частотного коэффициента передачи
мощности ФНЧ с характеристикой Баттер-
ворта и-го порядка при шн = 0 обращаются
в нуль.
2. Фильтр нижних частот с максимально-
плоской характеристикой имеет частоту среза
10 кГц. Ослабление гармонического сигнала
при переходе от частоты 80 кГц к частоте
160 кГц возрастает на 36 дБ. Найдите
порядок фильтра.
3- Вычислите передаточную функцию
ФНЧ с характеристикой Баттерворта 4-го
порядка.
4, Фильтр с чебышевской характеристи-
характеристикой имеет коэффициент неравномерности
е = 0.3. Какова неравномерность АЧХ этого
фильтра при ш„ < 1, выраженная в лени-
бела х?
5. Вычислите передаточную функцию
ФНЧ 2-^-0 порядка с чебышевской характе-
характеристикой при е = 0.5.
Более сложные задания
10. Докажите, что цепь, собранная по
схеме:
позволяет реализовать максимально-плоскую
характеристику ФНЧ 3-го порядка. Выведите
формулы для расчете номиналов элементов
цели по заданной частоте среза.
11. Система, осуществляющая идеальную
задержку сигналов на Т секунд, имеет
6. Как располагаются полюсы передаточ-
передаточной функции ФНЧ с характеристикой
Баттерворта?
7. Почему многочлены Чебышева удобны
для аппроксимации характеристик ФНЧ?
8. В чем заключается разница между
свойствами фильтра Чебышева и Баттер-
Баттерворта?
9. Каков пршщнп структурного синтеза
фильтров ?
10. Приведите формулы преобразования
частотной переменной, обеспечивающие пере-
переход от ФНЧ к ФВЧ и ПФ.
6. Покажите, что изменение сопротивле-
сопротивления резистора R, входящего в звено 2-го
порядка, ведет к перемещению комплексно-
сопряженных полюсов передаточной функции
вдоль окружности радиусом со0. Исследуйте
также случай а > со0.
7. Реализуйте ФНЧ с максимально-
плоской характеристикой 2-го порядка при
частоте среза со? = 10б с" \ Нагрузкой фильт-
фильтра служит резистор с сопротивлением
RM = 20 кОм. При нахождении номиналов
элементов фильтра обратите внимание на
практическую выполнимость цепи.
8. Найдите координаты полюсов пере-
передаточной функции чебышевского ФНЧ 3-го
порядка с параметрами; вдс = 4-104 с,
б = 0.5.
0. Реализуйте фильтр, рассмотренный в
задаче 8, путем каскадного включения
звеньев 1-го и 2-го порядков. Сопротив-
Сопротивление нагрузочного резистора J?H=2 кОм.
передаточную функцию
1
Исследуйте возможность приближенной заме-
замены этой характеристики дробио-рациоиаль-
иой функцией с различными степенями
знаменателя. Найдите полюсы передаточной
функции в 1-, 2- и 3-м приближениях.
12. Исследуйте фазочастотную характе-
характеристику ФНЧ с передаточной функцией
максимально-плоского типа. Выведите фор-
формулы для группового времени запаздывания.
13.' Вычислите импульсные характеристи-
характеристики ФНЧ 2-го порядка с максимально-
плоскими и чебышевскнми .АЯ& -
Глава 14
Активные цепи с обратной связью
и автоколебательные системы
В данной главе изучается особый класс активных линей-
линейных и нелинейных цепей, для которых характерно то, что
выходной сигнал или некоторая его часть снова поступает
на вход. Такие цепи принято называть цепями с обратной
связью.
Введение обратной связи, с одной стороны, позволяет
в ряде случаев существенно улучшить рабочие характе-
характеристики цепей, с другой, при определенных условиях такие
цепи становятся неустойчивыми и в них возникают авто-
автоколебания. На этом принципе построены различные авто-
автоколебательные системы, прежде всего автогенераторы гармо-
ническнх колебаний, которые являются неотъемлемыми
элементами любого радиопередающего устройства.
14.1. Передаточная функция линейной системы
с обратной связью
Для того чтобы последующий анализ можно было
применить к большому числу различных частных случаев,
рассмотрим проблему цепи с обратной связью в общей
постановке, не конкретизируя физический характер входных
и выходных сигналов.
Вывод основного соотношения. Будем изучать линейную
систему, структурная схема которой приведена иа рис. 14.1.
Рис. 14.1. Структурная схема линейной системы с обратной связью
Система состоит из двух звеньев. Активное звено с пере- •
даточной функцией К(р) называется основным элементом основной элемент
системы. Другое, как правило, пассивное звено с передаточ- и элемент обратной
иой функцией р(р) называется элементом обратной связи, связи
Стрелки иа рисунке указывают направления путей сигналов
с системе.
На входе основного элемента имеется устройство, сум-
суммирующее входной сигнал и выходную реакцию элемента
обратной связи. Если 1/„(р) и 17,ш(р) — изображения вход-
входного и выходного сигналов соответственно, то, как легко
видеть,
(Р)]- A41)
Глава 14. Активные пели и автоколебательные системы
Отсюда непосредственно следует формула, определяющая
передаточную функцию системы, охваченной обратной связью:
Здесь в дальней-
дальнейшем предполагает-
предполагается, что как основ-
основной элемент, так
и элемент обратной
связи являются не-
невзаимными устрой-
устройствами, пропус-
пропускающими сигналы
лишь в одном на-
направлении
решите задачу 1
Иногда не вводят
термины ООС и
ПОС и говорят о
более широком по-
понятии комплексной
ОС. В этом случае
указывается ве-
величина фазового
:двига сигнала в
•лементе обратной
ЖЯЗИ
A4.2)
В соответствии с этой формулой частотные свойства
системы в равной мере зависят как от функции К(р), так и
от характеристики р(р) элемента обратной связи. Поэтому
можно, оставляя неизменным основной элемент системы,
в широких пределах варьировать частотную характеристику
всего устройства, изменяя лишь параметры элемента обратной
связи.
Отрицательная и положительная обратные связи. Рассмотрим
формулу A4.2) при р =j(a. Частотный коэффициент передачи
системы с обратной связью
A4.3)
Если на заданной частоте ю выполняется неравенство
l-$(j(a)K(j(Q)\> 1, I A4.4)
то введение обратной связи уменьшает модуль коэффи-
коэффициента передачи системы и, следовательно, амплитуду
выходного сигнала. Такую связь принято называть отри-
отрицательной обратной связью (ООС). Если выполняется обрат-
обратное неравенство
~Т] A4-5)
то в системе реализуется положительная обратная связь
(ПОС).
Как отрицательная, так и положительная обратная связь
широко используются при создании радиотехнических
устройств. Однако следует иметь в виду, что положитель-
положительная обратная связь может явиться причиной неустойчи-
неустойчивости системы. Действительно, пусть, например, р = р\, и
К = Ко — положительные вещественные числа. Если JUO внача-
вначале равно нулю, а затем увеличивается, то в соответствии
с A4.3) при этом коэффициент усиления | КосI .возрастает;
если же р0 становится равным 1/Ко, то | Кос I = °°> что
означает самовозбуждение системы — появление выходного
сигнала в отсутствие сигнала иа входе.
Применение ООС двет возможность существенно улуч-
улучшить частотные характеристики усилительных устройств.
Продемонстрируем на конкретных примерах целесообраз-
целесообразность использования ООС.
Стабилизация коэффициента усиления. Предположим, что
имеется усилитель с большим, но недостаточно стабильным
коэффициентом усиления Ко. Требуется создать на его базе
усилительное устройство с меньшей нестабильностью коэф-
коэффициента усиления.
14.1. Передаточная функция системы с обратной связью
Охватив усилитель петлей ООС, т. е. взяв Р(/ю) =
= — Ро < 0, на основании A4.3) имеем Кос = /( Р^
откуда
dKOc
dK0
A4.6)
Если параметр ро^о ^** 1» то относительная нестабиль-
нестабильность результирующего коэффициента усиления падает при-
примерно в Ро^о Р&з- Правда, во столько же раз умень-
уменьшается и сам коэффициент усиления, но это, как правило,
ие вызывает дополнительных трудностей, так как всегда
можно получить нужное усиление за счет включения'
добавочных звеньев.
Подавление паразитных сигналов. Пусть основной элемент
усилителя представляет собой каскадное включение двух
звеньев, имеющих коэффициенты усиления напряжения Kt и
К2 соответственно; в точку их соединения подводится
некоторый нежелательный паразитный сигнал с амплитудой
напряжения 1/п. Усилитель в целом охвачен петлей ООС
с коэффициентом р. Требуется найти величину Кп = UBba/Un,
т. е. коэффициент передачи паразитного сигнала на выход.
Поскольку, очевидно, амплитуда выходного сигнала
Um = K2(Un - PK,t/Bblx), то
Kn=K2/(l + PKiK2). A4.7)
Отсюда видно, что паразитный сигнал, «проникающий»
в систему в точке, близкой к выходу, т. е. при К2 «зс Ки
будет существенно ослаблен. На этом эффекте основан
способ борьбы с нелинейными искажениями в многоступен-
многоступенчатых усилителях (рис. 14.2).
Как известно (см. гл. 11), из-за нелинейности характе-
характеристик активных элементов возникают высшие гармоники
частоты сигнала. Уровень гврмоник тем выше, чем больше
амплитуда сигнала. Мысленно можно представлять себе,
что паразитные сигналы гармоник как бы вводятся в
систему извне, причем главным образом в последних
мощных ступенях усилителя. Из формулы A4.7) следует
вывод о том, что ООС может значительно уменьшить
уровень гармоник на выходе. Поэтому практически лю-
Гармоники
Рис, 14.2. Подавление высших гармоник в многоступенчатом уси-
усилителе с ООС
Глава 14. Активные пели в автоколебательные свстемы
решите задачу 2
бые усилители, предназначенные для высококачественного
воспроизведения сигналов звуковых частот (радиовещание,
звукозапись), строят с применением ООС.
Коррекция частотной характеристики. Рассмотрим простей-
простейший транзисторный усилитель с резистивно-емкостиой
нагрузкой, имеюший передаточную функцию (см. гл. 8)
К(р)=-Ко/A+Рхэж), A4.8)
где K0 = SR3t; тэк = ЯЭ|[Сп.
На нулевой частоте передвточиая функция отрицательна:
К@)=-Ко.
Охватив этот усилитель петлей частотио'независимой
обратной связи с вешествеиным положительным параметром
р(со) = р0, на основании A4.2) получим
Рис, 14.3. Амплитудно-частотные характеристики усилителен с ре-
зистивно-емкостиой нагрузкой при различных уровнях ООС
Так как 1 + р0К0 > 1, то в данном случае обратная
связь будет отрицательной. Легко проверить, что отрица-
отрицательный характер обратной связи сохранится на всех часто-
частотах, поскольку
11 — ро1?(;ш>| =
1 +
>0
1 +./<№,«
при любом значении to > 0. Подставив A4.8) в общую формулу
A4.2), получим выражение дня передаточной функции уси-
усилителя с ООС:
Кос(р)-
откуда следует уравнение АЧХ:
A4.9)
A4.10)
На рис. 14.3 приведено семейство амплитудно-частотных
характеристик усилителей с различными уровнями ООС,
которые устанавливаются значением параметра
d = poKo. * A411)
14.1. Передаточная функция системы с обратной связью
Приведенный рисунок иллюстрирует главный эффект —
ООС приводит к «выравниванию» АЧХ за счет снижения
усиления на низких частотах. Вследствие этого расширяется
эффективная полоса пропускания усилителя. Так, в соответ-
соответствии с формулой A4.10) граничная частота, определяемая
по спаду АЧХ до уровня 0.707К0,
„ A4.12)
линейно возрастает с увеличением уровня ООС.
Чтобы создать ООС в простейшем усилителе, можно,
например, снабдить цепь эмиттера добавочным резистором
обратной связи Rqc. Увеличение входного напряжения вызы- -
вает рост тока эмиттера. Как следствие, возрастает напря-
напряжение Uoc на резисторе обратной связи и уменьшается
управляющее напряжение транзистора L/бэ = ^вх — ^ос> т. е.
в усилителе действительно возникает ООС.
Положительная обратная связь в резонансном усилителе.
Рассмотрим одноконтурный резонансный усилитель малых
колебаний с частотным коэффициентом передачи
-*»¦
A4.13)
где Крез = SRpeti тк = 2Bэ1(/с0рез — постоянная времени контура.
Представим, что усилитель охвачен цепью частотно-
независимой ПОС с параметром Ро, так что
A4.14)
Сравнивая выражения A4.13) и A4.14), видим, что при
РоКре, < 1 форма частотной характеристики усилителя с ПОС
такая же, как и усилителя без обратной .связи. Однако
в системе с ПОС резонансный коэффициент усиления
увеличивается в 1/A — р0Крез) раз; во столько же раз воз-
возрастает эквивалентная добротность колебательного контура
усилителя: бос — 6эк/A — Ро^рез) и соответственно сокращает-
сокращается полоса пропускания.
Эти явления связаны с тем, что в усилителе с ПОС
происходит регенерация, т. е. частичная компенсация потерь
в колебательном контуре за счет энергии источника питания.
Для создания ПОС в резонансном усилителе можно
применять катушку, включенную последовательно во входную
цепь и индуктивно связанную с колебательным контуром.
Несмотря на простоту, резонансные усилители с ПОС
применяют редко из-за их склонности к самовозбуждению
при р0Кв,-.1.
Запаздывающая обратная связь. На рис. 14.4 изображена
структурная схема системы, в которой цепь обратной
связи помимо масштабного усилительного звена с постоян-
решите задачи 3,
4 и 5
Рассматривается
только область по-
положительных час-
частот
Влияние ПОС на
АЧХ усилителя
регенерации
Глава 14. Активные цепи и автоколебательные системы
АЧХ гребенчатых
фильтров
Рис. 14.4. Структурная схема системы с запаздывающей обратной
связью
ным коэффициентом передачи р„ содержит идеальное устрой-
устройство задержки сигналов иа время т0.
Пусть коэффициент передачи основного элемента Ко ие за-
зависит от частоты. Тогда
Ко
A4.15)
Амплитудно-частотная характеристика данной системы
Ко
A4.16)
Если РоКо < 1, то система устойчива. Ее АЧХ описы-
описывается периодической кривой с чередующимися максиму-
максимумами и минимумами, т. е. характер обратной связи оказы-
оказывается различным на разных частотах.
Запаздывающая обратная связь позволяет создавать частот-
частотно-избирательные системы с периодическими АЧХ, так
называемые гребенчатые фильтры. Отметим, что системы
этого вида самовозбуждаются при р0К0 > 1-
14.2. Устойчивость цепей с обратной связью
В этом параграфе рассматривается теория устойчивости
состояния равновесия системы с обратной связью. Под-
Подтверждаются качественные рассуждения о возможности само-
самовозбуждения систем с ПОС, которые приводились выше.
Постановка задачи. Рассмотрим систему, включающую в
себя активный основной элемент с передаточной функцией
К{р); выход элемента соединен со входом звеном обратной
связи с передаточной функцией Р(р). Предполагается, что
внешний входной сигнал отсутствует, т. е. система автономна.
Уравнение состояния системы записывается на основа-
основании того, что изображение выходного сигнала [/„„(?) =
, откуда
(р) = 0. A4.17)
Поскольку и„(р)#A тождественно (в противном случае
система не была бы возбуждена), равенство A4.17) спра-
справедливо лишь при тех значениях р, которые являются кор-
корнями характеристического уравнения
0. ' A4.18)
14.2. Устойчивость цепей с обратной связью
Пусть pi, P2,--- — корни этого уравнения. Так как
рассматриваемая система линейна, то в общем случае выход-
выходной сигнал
«*«* @ = Ax&t + Аг&* +... A4.19)
Этот сигнал будет ограниченным, если все кории характе-
характеристического уравнения имеют отрицательные вещественные
части, т. е. располагаются в левой полуплоскости перемен-
переменной р. Цепь с обратной связью, обладающая такими
свойствами, будет устойчива (см. гл. 8).
При синтезе и анализе систем с обратной связью
возникают две проблемы. Если синтезируемая цепь, напри-
например усилитель, должна быть устойчивой, требуется критерий,
который позволил бы по виду функций р(р) и К{р) судить
об отсутствии корней характеристического уравнения в пра-
правой полуплоскости. Если, наоборот, обратная связь исполь-
используется для создания неустойчивой автоколебательной
системы, то следует знать корни уравнения A4.18), опре-
определяющие частоту возникающих колебаний.
В данном параграфе будет рассмотрена первая из
поставленных проблем. Полученные выводы будут касаться
не только устойчивости системы с обратной связью, но
также устойчивости любой линейной динамической системы.
Алгебраические критерии устойчивости. Предположим, что
как основной элемент, так и элемент обратной связи
являются цепями с сосредоточенными параметрами и, сле-
следовательно, передаточные функции
A4.20)
суть отношения многочленов по степеням р. Подставив
формулы A4.20) в A4.18), получим характеристическое
уравнение системы:
Q,{p)Qi(p)
= 0.
Отсюда следует, что система
устойчива, если все корни уравнения
характеристиче-
характеристическое уравнение сис-
системы с обратной
связью
A4.21)
с обратной связью
имеют отрицательные вещественные части. В алгебре
многочлены Н(р) с такими свойствами называют много-
многочленами Гурвица.
Рассмотрим частный случай многочлена Гурвица Н(р) =
~{р — Р\)(р — Рг)(Р — Рэ)> имеющего три корня, один из кото-
которых р1 = — ctt вещественный и отрицательный, а два других
/>2,з = — Р +Jtoo — комплексно-сопряженные с отрицательными
вещественными частями. Прямая подстановка показывает,
что данный многочлен
многочлены
Гурвица
Глаяа 14. Активные цепв и автоколебательные системы
содержит все степени переменной р, начиная со старшей, и
имеет коэффициенты одного знака. Этот признак указывает
лишь необходимые условия для того, чтобы многочлен был
многочленом Гурвица. Полное решение задачи было получено
w в конце прошлого века и иашло отражение в известном
критерий Рауса — критерии Рауса — Гурвица. Доказательство критерия можно
Гурвииа найти в [14]. Приведем окончательную формул вровку:
для того чтобы уравнение
<W>" + «»-iP""' H h а,р + «о = О
с вещественными коэффициентами имело корни, лежащие
лишь в левой полуплоскости переменной р, необходимо и
достаточно, чтобы были положительными следующие вели-
величины:
1) коэффициенты аа и а0;
2) определитель Гурвица
а„_1 а. О 0 ... О О
а,-з «»-2 o,-i а, ¦¦¦ О О
а,-5 «»-4 «»-з а,-г ..-О О
О 0 0 0 ... во а,
3) все главные миноры этого определителя.
Пример 14.1. Проверить с помощью критерия Рауса -
Гурвица устойчивость системы, характеристическое уравнение кото-
которой имеет вид р' + 2р* + 6р + 4 = О.
Убеждаемся, что а3 > О, ао> О. Составляем определитель:
2 1
4 б
= 8 > О; единственный главный минор 2 > О.
Таким образом, система устойчива.
Достоинство критерия Рауса — Гурвица — относительная
простота вычислений. Недостаток заключается в том, что
^ область применимости этого критерия ограничена цепями
решите задачу 6 с сосредоточенными параметрами, поскольку только в этом
случае передаточная функция является частным двух много-
многочленов.
Геометрические критерии устойчивости. Возвращаясь к харак-
характеристическому уравнению A4.18), заметим, что произведение
A4.22)
есть ие что иное, как передаточная функция каскадного
соединения двух звеньев — основного звена и звена обратной
связи. Обычно функцию w (р) называют передаточной
функций системы с разомкнутой обратной связью.
Формула A4.22) описывает отображение комплексной
плоскости р на другую комплексную плоскость w. Если
14.2. Устойчивость цепей с обратной связью
Ри Р2, ¦ ¦ ¦ — корни характеристического уравнения 1 — р (р)К (р)=
= 0, то, как легко видеть, на плоскости w всем этим точкам
будет соответствовать единственная точка w = 1. Отсюда сразу
вытекает принцип, позволяющий судить о возможности само-
самовозбуждения системы с обратной связью: если образ правой
полуплоскости .переменной р при отображении вида A4.22)
содержит точку w = 1, то система с замкнутой обратной
связью неустойчива.
Важную роль играет кривая на плоскости w, являющая-
являющаяся образом мнимой оси на плоскости р. Уравнение этой
кривой в параметрической форме таково:
A4.23)
амплитудио-фазо-
Роль параметра играет частота о), которая изменяется в
пределах от — оо до + оо. Данная кривая называется
амплитудно-фазовой характеристикой (АФХ) разомкнутой
системы. Во всех случаях, представляющих практический вая характеристн-
интерес, модули частотных коэффициентов передачи звеньев ка
стремятся к нулю с ростом частоты. Поэтому АФХ про-
проходит через точку w = 0. Кроме того, АФХ симметрична
относительно вещественной осн на плоскости w, поскольку
w(—jco) = w*(/<o). Ясно, что АФХ для рассматриваемых
систем представляют собой замкнутые кривые в плоскости w.
В теории функций комплексного переменного показы-
показывается [14], что при отображении вида" A4.22) образом
правой полуплоскости оказывается внутренняя область,
охватываемая кривой АФХ Критерий устойчивости, вытекаю-
щий из описанного построения, известен под названием •
критерия Найквиста: если АФХ разомкнутой системы
охватывает точку с координатами A, /0), то замкнутая
система неустойчива.
критерии
Найквиста
Пример 14,2. Исследование устойчивости одноступенчатого
усилителя с резистивно-емкостной нагрузкой, выход которого не-
непосредственно соединен со входом.
Здесь, очевидно, р(р) = 1, в то время как
К(р)=-К0/{\+рт),
где Ко =SR3I; т = R3KCn (см. гл. 8).
Уравнение АФХ имеет вид
w{j(Q)= /:—?!_- ехр [/(я - arctgtoT)].
A4.24)
j/l + to2t:
Вид амплитудно-фазовой характеристики, построенной в соот-
соответствии с уравнением A4.24), показан на рис. 14.S.
Как видно из рисунка; АФХ рассматриваемой системы пред-
представляет собой окружность с диаметром Ко. Верхней полу-
полуокружности соответствует положительная часть осн jca; по мере
роста частоты модуль частотного коэффициента передачи умень-
уменьшается, а фазоиый угол стремится к 90°.
Замкнутая кривая АФХ целиком находится в левой полу-
полуплоскости, и не охватывает точку w = 1. При ч соединении выхода
данного усилителя со входом система- устойчива.
350
Глава 14. Активные цепи и автоколебательные системы
2.0 i
1.0 <
<
<
L/ЮТ
VtYS
ГК
У1
щ.
®.
-к„
•f
Uf
1
A1
«¦(jo)
*
©
.©
©.
©
Рис, 14.5. Амплитудно-фазовая характеристика одноступенчатого
усилителя с резнстивно-емкостной нагрузкой (номера указывают
соответствие точек иа оси j<a и иа АФХ усилителя)
Пример 14,3. Исследование устойчивости замкнутого кольца
из двух усилительных звеньев с апериодическими нагрузками.
Передаточная функция каскадного соедниения звеньев
) = К1 (р) К2 (р) = К01К02/{1 + ртJ.
A4.25)
Здесь для простоты считается, что постоянные времени обоих
звеньев одинаковы; коэффициенты усиления на нулевой частоте
К01 и К02 в общем случае могут быть различными.
Проведя замену переменной р =j(n в A4.25), получаем уравнение
АФХ:
) = К01К02/{\ +/штJ =
A456)
Вид амплитудно-фазовой характеристики данного усилителя решите задачу 7
показан иа рис. 14.6.
Если коэффициент усиления разомкнутой системы иа нулевой
частоте Ко = К01К02 > 1, то при замыкании цепи обратной связи
система становится неустойчивой, так как точка w = 1 находится
внутри замкнутой крнвой АФХ.
Рис. 14.6. Амплитудно-фазовая характеристика двухступенчатого уси-
усилителя с апериодическими нагрузками
14.3. Активные ЯС-фильтры
351
Помимо критерия Найквиста известен рад других геометри- А
ческих методов исследования устойчивости линейных систем решите задачу 8
с обратной связью, например, критерий Михайлова и
критерий пересечений. Они широко применяются при анализе
систем автоматического регулирования.
14.3. Активные КС-фильтры
На современном этапе развития радиотехники и радио-
радиоэлектроники многие схемные решения, ранее применявшиеся
повсеместно, претерпели коренной пересмотр из-за широкого
внедрения микроэлектронных устройств. В значительной сте-
степени это коснулось теории и практики построения частотно-
избирательных фильтров.
Было выяснено, что создать катушку индуктивности в
микроэлектронном исполнении практически невозможно.
Однако для реализации обычных колебательных звеньев
2-го порядка необходимо располагать индуктивными элемен-
элементами (см. гл. 13). Выходом из этого положения явилась
разработка так называемых активных КС-фильтров. Они
представляют собой комбинации пассивных RC-цепей и
активных элементов — как правило, сложных транзисторных
устройств, которые передают в пассивные цепи некоторую
мощность от источника питания.
В этом параграфе будет рассмотрен один из возможных
принципов построения активных КС-фильтров, когда в качест-
качестве активного элемента используется операционный усилитель.
Оиерациоиньш усилнтель. Так принято называть усилитель-
усилительное устройство с большим коэффициентом усиления Ко
в широкой полосе частот, начиная с нулевой .частоты.
Входное сопротивление операционного усилителя весьма
велико (на практике 106 —1012 Ом), а выходное сопротив-
сопротивление достаточно мало (десятки ом). Поэтому приближенно
операционный усилитель (ОУ) можно рассматривать как
источник напряжения, управляемый напряжением. Такая
модель активного управляемого элемента часто исполь-
используется в теории цепей. Современные ОУ имеют значения
Ко а: 105 -т- 106. Как правило, микросхемы ОУ снабжены
двумя входами: инвертирующим (—) и иеиивертврующим
(+). Если uMi и иВх2 — напряжения входного сигнала на
неинвертирующем и инвертирующем входах соответственно,
то выходное напряжение
«•» = Ко(«„1 - и„2). A4.27)
Операционный усилнтель — одна из наиболее широко
применяемых аналоговых интегральных микросхем.
Устойчивость систем с операционными усилителями. Если
в системе, содержащей ОУ, имеется обратная связь, то
возможно появление неустойчивых режимов. Рассмотрим,
например, устройство, в котором выход ОУ соединен
с неинвертирующкм входом через резистор R. Пусть С„ —
паразитная емкость , входа усилителя. Поскольку влияние
Операционный уси-
усилитель
352
Глава 14. Активные цепи и автоколебательные системы
Сигнал иа инверти-
инвертирующем входе ра-
равен нулю
решите задачу 9
входного сопротивления усилителя пренебрежимо мало,
изображение входного напряжения Ui{p) связано с изобра-
изображением выходного напряжения U2 (p) простым соотношением
Но в то же время С/, = ?/2/К0. Одновременное выпол-
выполнение этих даух равенств возможно лишь тогда, если р
служит корнем характеристического уравнения
Здесь и в дальней-
дальнейшем ОУ считается
идеальным: его
входное сопротив-
сопротивление неограничен-
неограниченно велико, а вы-
выходное сопротивле-
сопротивление бесконечно ма-
мало
т. е. р = (Ко — 1)/(ЯСд). Таким образом, при Ко > 1 система
неустойчива; напряжения в ией нарастают во времени по
закону ехр ЦК0 - l)t/(RCJ].
Ясно, что устройство, в котором выход ОУ соединен
через резистор с инвертирующим входом, является устой-
устойчивым.
Активные ЯС-филыры е одиопетлсяой обратной свизью.
Рассмотрим в общей постановке один из способов
создания активных фильтров на базе операционных усили-
усилителей (рис. 14.7).
Рис. 14.7. Принципиальная схема активного фильтра с однопетлевой'
обратной связью
Здесь 1 и 2 — некоторые пассивные ЯС-двухлолюсиики,
характеризуемые операторными сопротивлениями Zx{p) и
Z2ip) соответственно. Элемент Z2 соединяет инвертирующий
вход ОУ с его выходом, образуя петлю обратной
связи. Состояние цепи описывается изображениями входного
и выходного напряжения 1/вх(р) и t/№x(p) соответственно.
Выведем формулу для передаточной функции фильтра
К{р)= t/BbIX(p)/t/BX(p). Пусть узел а имеет напряжение с не-
некоторым заранее неизвестным изображением Ua{p). Учтем,
что /i=/2, поскольку-входное сопротивление идеального
ОУ бесконечно велико и инвертирующий вход усилителя
ие потребляет тока. Отсюда следует, что
{Ua -
Разделив обе части этого равенства на изображение
1/в„ получаем
14.3. Активные ЛС-фильтры
353
откуда
-z,
Z2/Ko + Z, (l/K0 + 1)"
A4.28)
Считая Ko :» 1, получаем приближенное равенство
Z2ip)/Z1(p). A4.29)
Масштабный усилитель. Рассмотрим простейшую цепь
с ОУ, изображенную иа рис. 14.8, а и называемую
масштабным усилителем.
Здесь Zy = Ru Z2 — R2 и по формуле A4.29) находим
При достаточно
большом коэф-
коэффициенте усилении
ОУ передаточная
функции активного
фильтра зависит
исключительно от
параметров пассив-
пассивных элементов це-
цепи
Последняя формула объясняет термин «масштабный уси-
усилитель»: оказывается, что подбором резисторов Rt, R2
Рис. 14.8. Схемы масштабного усилителя (а) и аналогового интегра-
интегратора (б)
можно обеспечить заданный коэффициент усиления, ие зави-
зависящий от питающих напряжений и прочих дестабилизи-
дестабилизирующих факторов, свойственных активным элементам. Естест-
Естественно, что коэффициент передачи этой цепи ие зависит
от частоты.
Аналоговый интегратор. Если резистор К2 заменить иа
конденсатор С, то получим устройство, выполняющее опера-
операцию электрического интегрирования входного сигнала
(рис 14.8,6). Действительно, здесь Zt = R, Z2 = 1/(рС), поэтому
K(p)=-l/(pRQ.
Данной передаточной функции отвечает следующая связь
между мгновенными значениями напряжений на входе и
выходе цепи:
ш J"»
решите задачу 10
т. е. система действительно выполняет операцию интегри-
интегрирования.
Активные ЛС-фмльтры с двухпеглево* обратвой связью.
Рассмотренный однопетдевой активный фильтр ие дает воз-
Глава 14. Активные цепи и автоколебательные системы
Рис. 14.9. Схема активного фильтра с двухпетлевой обратной связью
можности получить цепь со свойствами колебательного
звена 2-го порядка. Дело в том, что в соответствии с
формулой A4.29) полюсы функций К(р) совпадают либо
с полюсами сопротивления Z2(p), либо с нулями сопро-
сопротивления Zt (p). В то же время известно [35], что нули и
полюсы пассивных RC-двухполюсниида могут располагаться
лишь иа отрицательной вещественной полуоси.
Активный фильтр со свойствами колебательного звена
2-го порядка можно получить, соединив инвертирующий
вход ОУ с выходом посредством двухпетлевой цепи об-
обратной связи (рис. 14.9).
Здесь в соответствии с первым законом Кирхгофа для
узла о имеем
/, =(U»-UJ/Z1 = /2 + /3 + /4, A4.30)
причем
/i = UJZ2, I, = (t/. - Ub)/Z3 » U./Z3,
U = (Va - t/.uJ/Z4, i5 = (Ub - U,UI)/Z5
A4.31)
Потенциал Ub зна-
значительно меньше,
чем [/„,„ и Ь„
из-за высокого
значения коэффи-
коэффициента усиления
При постановке выражений A4.31) в A4.30) следует
учитывать, что Is = 13. Кроме того, удобно перейти от
сопротивлений Z к проводимостям Y — 1/Z. Тогда из фор-
формулы A4.30) следует, что
1Чи„ = V.(Yi + Y2 + Y, + Yt) - YtU.^.
Исключив вспомогательную переменную Ua, приходим к
следующему выражению для передаточной функции по
напряжению в данной системе:
-Y,'
Y5{Y,-
A4.32)
По исходному условию все проводимости Yt — Ys долж-
должны быть реализованы с помощью пассивных RC-двух-
полюсников. В простейшем случае это либо проводимости
резисторов G, либо проводимости конденсаторов рС.
Синтез активного ФНЧ 2-го норндка. Задача синтеза
активной цепи с двухпетлевой обратной связью .сводится
к подбору проводимостей пассивных элементов, которые
14.3. Активные ЛС-фильтры
обеспечивают заданный вид амплитудно-частотной характе-
характеристики. Рассмотрим эту процедуру подбора иа примере
синтеза активного колебательного звена 2-го порядка,
имеющего частотные свойства ФНЧ.
Как известно (см. гл. 13), типичная передаточная
функция ФНЧ 2-го порядка должна иметь вид
где Ао, а, Ь, с — постоянные величины.
Обращаясь к формуле A4.32), видим, что для реали-
реализации такой функции необходимо, чтобы элементы У,,
У3, У а были резисторами, а элементы Y2, Y5 ~ конден-
конденсаторами. При этом передаточная функция по напряжению
A4.33)
Полюсы передаточной функции расположены в точках
С,+Сз + О,
Риг = ~
гс.
С%
GA2
Поскольку вещест-
вещественные части ко-
координат полюсов
отрицательны при
любом выборе па-
риметров, данная
цепь устойчива
A4.34)
Данная формула позволяет синтезировать колебательные
звенья 2-го порядка с установленным заранее расположе-
расположением полюсов.
Пример 14.4. Синтезировать активный RC-филътр нижних частот
2~го порядка с максимально-плоской характеристикой при частоте
среза сос = Ю3 с~1.
Как известие из гл. 13, подобный фильтр должен иметь два
полюса передаточной функции
р12 = сос(-0.707 ±/0.707).
A4.35)
Зададимся приемлемыми номиналами резисторов, положив их
одинаковыми: R, =R3 =Л4 = 1-8 кОм, т. е. d =G3=G4 =5.55-10"* См.
Приравнивая вещественные части выражений A4.34) и A4.35),
получаем формулу, определяющую емкость конденсатора С2:
(С, + С3 щ- С4)/BС2) = 0.707со0
откуда, подставляя известные значения величин, находим, что
С2 = 1.18 мкФ.
Чтобы найти емкость конденсатора С5, следует приравнять
мнимые части выражений A4.34) и A4.35):
G3G4
С2С5
С2
()
) 2 "
решите задачу 11
Решив это уравнение, находим, что С$ = 0.26 мкФ. Принци-
пиал{лая схема синтезированного активного фильтра изображена
«а рис. 14.10.
Глава 14. Активные цепи и автоколебательные системы
Рис. 14.10. Схема активного RC-фильтра, имеющего максимально-
плоскую характеристику при частоте среза Ю3 с
Заключительные замечания. В настоящем параграфе был
изучен один из возможных принципов построения актив-
активных КС-фильтров, основанный на применении операцион-
операционных усилителей, охваченных цепями отрицательной обратной
связи. Перечень средств современной интегральной схемо-
схемотехники далеко не исчерпывается этим принципом. Так,
большой интерес представляют фильтры на основе гира-
торов — активных четырехполюсников, обладающих тем свой-
свойством, что при подключении к их выходным зажимам
конденсатора реализуется чисто индуктивное входное со-
сопротивление. Тем самым удается создать фильтры, не
содержащие физических индуктивных элементов.
Со свойствами гираторов, а также других устройств,
применяемых в активных КС-фильтрах, читатель может
ознакомиться самостоятельно [38].
гиратор
Выдающийсн
вклад в теорию
автоколебаний
внесли советские
ученые акад. Алек-
Александр Александ-
Александрович Андронов
A901-1952), акад.
Леонид Исаакович
Мандельштам
A879-1944), акад.
Юрий Борисович
Кобзарев и многие
другие
14.4. Автогенераторы гармонических колебаний.
Режим малого сигнала
Часто в активных радиотехнических цепях возникают
периодические автоколебания. Так принято называть колеба-
колебательные процессы, существующие без внешнего периоди-
периодического воздействия. Устройства, генерирующие автоколеба-
автоколебания, называют автоколебательными системами, или- авто-
автогенераторами. Работа любого автогенератора основана иа
том, что энергия от источника питания через управляемый
элемент, например транзистор, подается в колебательную
систему. Сигнал, управляющий транзистором, снимается
с этой же колебательной системой и подается иа входной
электрод транзистора через цепь обратной связи.
При соответствующем выборе параметров такая система
становится неустойчивой. Амплитуды любых малых колеба-
колебаний, вызванных, например, тепловыми шумами, иеограни-
чено возрастают. Однако по мере роста амплитуды су-
существенную роль начинают играть нелинейные свойства
управляемого элемента. Это ведет к тому, что амплитуда
автоколебаний достигает некоторого установившегося значе-
значения и в дальнейшем остается практически постоянной.
Говорят, что при этом автогенератор работает в стацио-
стационарном режиме.
При анализе и расчете автогенераторов возникают две
14.4. Автогенераторы в режиме малого сигнала
357
В автогенераторе
можно применить
бннолнрнын тран-
транзистор, учтя до-
нолнителыюе зату-
затухание колебатель-
колебательной системы из-за
меньшего входного
сопротивления
Рис. 14.11. Схема автогенератора с трансформаторной связью
основные задачи:
1) выяснить, при каких условиях устройство с обратной
связью становится неустойчивым, т. е. самовозбуждается;
2) определить амплитуду и частоту автоколебаний в
стационарном режиме.
Первую из этих задач решить относительно несложно,
поскольку при малых амплитудах автоколебаний на начальном
этапе процесса нелинейный управляемый элемент может быть
эквивалентно заменен линейной схемой замещения. Намного
сложнее решить вторую задачу, состоящую в исследовании
системы с обратной свизью при условии, что нелинейными
эффектами пренебречь нельзя.
Самовозбуждение простейшего автогенератора. Исследова-
Исследование процессов в автогенераторах начнем с устройства
(рис. 14.11), называемого автогенератором с трансформатор-
трансформаторной свизью.
Колебательной системой здесь служит LCK-контур, эле-
элементом обратной свизи — катушка Ц.в, размещенная таким
образом, что создаваемый ею магнитный поток частично
пронизывает катушку L.
Пусть в устройстве каким-либо образом возбуждены
малые колебания. Если и — напряжение на конденсаторе (и
соответственно на управляющем электроде электронного при-
прибора), то по второму закону Кирхгофа можно составить
следующее дифференциальное уравнение, описывающее дан-
данную систему:
-+u=±M~, A4.36)
где i — ток в цепи обратной свизи. Знак в правой части
A4.36) зависит от того, каким образом (встречно или согласио)
включены катушки L и 1„
Сделаем основное предположение — будем считать управ-
управляющее напряжение и столь малым, что электронный
прибор вполне точно может быть заменен управляемым
источником тока, выходной сигнал которого линейно зависит
от управляющего напряжения:
i.= i0 + ЗмфК. ' A4.37)
Колебательный
контур в схеме
автогенератора с
трансформаторной
связью может
включаться также
в выходную цепь
электронного . при-
прибора
Глава 14. Активные цепи и автоколебательные системы
Отметим важное
обстоятельство —
уравнение A4.38)
является линей-
линейным дифференци-
дифференциальным уравнени-
уравнением с постоянными
коэффициентами
Здесь |'о — постоянная составляющая тока; S^ — дифферен-
дифференциальная крутизна вольт-амперной характеристики прибора
в фиксированной рабочей точке.
Объединив выражения A4.36) и A4.37), получаем сле-
следующее уравнение системы:
где ю0 = 1/j/Zc — частота собственных колебаний контура без
потерь.
Варьируя коэффициент взаимоиндукции М, можно изменять
коэффициент при производной Aujdt. Знак и значение этого
коэффициента, как известно, определяют характер свободных
колебаний в такой динамической системе.
Если в уравнениях A4.36) и A4.38) выбраны верхние зна-
знаки, то за счет обратной связи будет наблюдаться регене-
регенерация. Если величина М достигает критического значения
критическое значе-
значение коэффициента
взаимоиндукции
положительная об-
обратная связь в тео-
теории автоколеба-
автоколебательных систем
A4.39)
где Q — добротность контура без учета регенерации, то
уравнение A4.38) приобретает вид d2u/dt2 + (Ооы = 0, свой-
свойственный идеальной колебательной системе без потерь.
При М > Мир устройство становится неустойчивым. Введя
параметр
а = Va [ШдафАОД - R/L] > О,
получим дифференциальное уравнение
решение которого описывает гармонические колебания с экспо-
экспоненциально нарастающей во времени амплитудой:
и (t) = Ae" cos (/со2, — о21 + Be" sin (/со2, — о21 A4.40)
{Л и В — постоянные, зависящие от начальных условий).
Практически всегда а ¦<«: со0 и в соответствии с A4.40)
частота заполнения автоколебаний, возникающих в линейном
режиме, близка к частоте собственных колебаний контура.
Подчеркнем физический смысл правильного выбора знака
в уравнении A4.38), который обеспечивает неустойчивость
начального состояния автогенератора: для самовозбуждения
системы необходимо, чтобы любое возмущение колебатель-
колебательного контура приводило к появлению такого сигнала
положительной обратной связи, который, складываясь с перво-
первоначальным возмущением, увеличивал бы его. Именно таким
образом трактуется понятие положительной обратной связи
в теории автоколебательных систем.
Трехточечвые автогеиераторы. На практике вместо авто-
автогенераторов с трансформаторной связью чаще используют
так называемые автогенераторы-трехтонки, в которых
напряжение обратной связи снимается с части колебатель-
14.4. Автогенераторы в режиме малого сигнала
Рис. 14.12. Автогенератор по схеме индуктивной трехточки:
а - принципиальная схема (источники питания и смещения не показаны);
б — эквивалентная схема с разомкнутой цепью обратной связи
ного контура. На рис. 14.12, а, 6 изображены принци-
принципиальная и эквивалентная схемы индуктивной трехточки.
Наличие резистора R учитывает все виды потерь в
системе — иеидеальиость реактивных элементов, конечное (хотя
и достаточно большое) выходное сопротивление электрон-
электронного прибора, а также влиииие внешних цепей (нагрузок).
Найдем условия самовозбуждения индуктивной трехточки,
исследуя характеристическое уравнение этой системы с замкну-
замкнутой обратной связью.
Если Um и ивых — изображения сигналов на входе и
выходе при разомкнутой цепи обратной связи (рис. 14.12,6),
так что известна передаточная функция К(р) = VBblJUBXt
то характеристическое уравнение, описывающее замкнутую
цепь, как было выяснено, имеет вил [см. формулу A4.18)]
К(р)=1. A4.41)
Для того чтобы найти функцию К{р)у учтем, что напря-
напряжение Uab на зажимах контура возникает за счет тока —
5диф?/вх, проходящего через последовательно-параллельно
соединенные элементы Zu Z2 и Z3:
решите задачу 12
Поскольку UBblx = UabZ2l(Z2 + Z3), характеристическое
уравнение A4.41) приобретает вид
-Sm<bZxZ2j{Zx +Z2+ Z3) = 1. A4.42)
В данном случае
Zj = pL\Rf{pLi + Rfy Z2 ^ pL2l Z3 ^ l/(pC).
Подставив эти выражения в A4.42) и выполнив не-
несложные алгебраические преобразования, получим характе-
характеристические уравнения замкнутой системы:
Р3($ДИф + yR)L1L2C + p2(L1+L2)C + pL1/R + l =0. A4.43)
Цепь будет неустойчивой, если определитель Гурвица
отрицателей:
Глава 14. Активные цепи и автоколебательные системы
или
Изменяя емкость
контура, можно
легко осуществить
частотную или фа-
фазовую модуляцию
колебаний, созда-
создаваемых автогене-
автогенератором
Отсюда находим условие самовозбуждения данного
автогенератора:
|^диф>^/^2-1 A4.44)
Частота экспоненциально нарастающих собственных ко-
колебаний определяется корнями кубического уравнения A4.43).
Аналитическое решение здесь довольно громоздко. Однако
из физических соображений ясно, что трехточечный авто-
генератор самовозбуждается на резонансной частоте юрез =
= l/j/(Lt + L2) С. В самом деле, на этой частоте сопротив-
сопротивление нагрузки электронного прибора Z^ = Rp^ вещественно;
комплексная амплитуда напряжения ил = ~SJm^lJBfRvcl сдви-
сдвинута по фазе на 180° относительно UBX. В контуре
наблюдается резонанс токов, элементы Lt и L2 обтекаются
одним и тем же контурным током, поэтому ?/вш =
= -(L2/L1)Va, = (Lz/L1)S^RtmVBJi., Напряжения Um и €т
совпадают по фазе, так что при выполнении условия
A4.44) автогенератор действительно самовозбуждается.
Пример 14.5. Трехточечный автогенератор имеет колебатель-
колебательный контур, настроенный на частоту юрез = 6-106 с. Дифферен-
Дифференциальная крутизна проходной характеристики электронного прибора
в рабочей точке Sm/^ = 7 мА/В. Добротность контура Q = 40,
емкость конденсатора С = 400 пФ. Найти значения индуктивностей
Li и L2. обеспечивающие уверенное самовозбуждение автогенера-
автогенератора.
В данном автогенераторе роль шунтирующего резистора по-
потерь R выполняет резонансное сопротивление контура Rpe3. Харак-
Характеристическое сопротивление р = l/ftOp^C) = 416.6 Ом, откуда
Креч = pQ= *W кОм. Произведение RSnH$ = 7 ¦ 16.6 = 116.2, поэтому
на основании формулы A4.44) с некоторым запасом положим LJL2 =
= 100. Полная индуктивность контура Lj + L2 = lAeo^C) = 69.4 мкГн.
Из двух последних равенств получаем (округленно) Li = 68.7 мкГн,
L2 = 0.7 мкГн.
- Другим вариантом схемы трехточечного автогенератора
является так называемая емкостная трехточка, в которой
напряжение обратной связи снимается с емкостного делителя,
образованного конденсаторами С\ и С2- Анализ условий
самовозбуждения такой схемы проводится аналогично опи-
описанному ранее.
RC-авгогенсраторы гармоинческнх колебаний. На частотах
ниже нескольких десятков килогерц применять в качестве
колебательных систем автогенераторов резонансные LC-кои-
туры становится затруднительным, главным образом изтза
больших массогабаритных размеров индуктивных элементов.
Поэтому на этих частотах, как правило, используют RC-
автогеиераторы, представляющие собой комбинации активных
четырехполюсников (усилителей) и пассивных КС-цепей»
играющих роль элементов обратной связи.
14.4. Автогенераторы в режиме малого сигнала
Рис. 14.13. Автогенератор с двумя RC-цепями:
а — принципиальная схема; 6 — схема с разомкнутой цепью обратной связи
Пусть К{р) — передаточная функция некоторой разомкну-
разомкнутой цепи и К(р) = 1 —характеристическое уравнение, опи-
описывающее поведение системы с замкнутой обратной связью.
Для того чтобы такая система была неустойчивой и могла
генерировать гармонические колебания в стационарном
режиме, характеристическое уравнение должно иметь, по
крайней мере, одну пару комплексно-сопряженных корней
с положительной вещественной частью. Мнимая часть корней
будет при этом определять генерируемую частоту.
Получим условие самовозбуждения часто используемого
автогенератора с двумя КС-цепями (рис. 14.13, а).
Основой генератора является идеальный усилитель с ве-
вещественным и положительным коэффициентом усиления Ко.
Выход усилителя соединен с его входом через пассивный
ЛС-четырехполюсник, передаточная функция которого по
напряжению в соответствии с рис. 14.13,6 имеет вид
Р(р)=П^тат (R45)
Здесь введены следующие обозначения: ii = R\Clt
г2 = R2C2, т" = R2Ct. Характеристическое уравнение авто-
автогенератора K0Pi (р) = 1. очевидно, можно записать так:
P2iiT2 + р Ы + х2 - х'(К0 - 1)] + 1 = 0. A4.46)
Описываемая система становится неустойчивой при таком
выборе параметров, когда коэффициент при первой степени
р, проходя через нуль, меняет знак. Для самовозбуждения
автогенератора необходимо, чтобы выполнялось неравенство
Отсюда получаем условие, налагаемое на коэффициент
усиления активного звена:
Ко > 1 + :
R2C,
A4.47)
условие, налагае-
налагаемое на корни ха-
характеристнче-
ского уравнения
Таким свойством
обладает усили-
усилитель с четным чис-
числом ступеней
Это условие сле-
следует из критерия
Рауса — Гурвица
В частности, если обе RC-цепи идентичны, то система
самовозбуждается, когда Ко > 3.
Мнимая часть корней уравнения A4.46) зависит не только
от параметров Ru R2, Сь С2, но и от коэффициента
усиления Ко. Для оценки генерируемой частоты будем прибли- А
женно считать, что автогенератор работает на границе решите, задачу 13
Глава 14. Активные цепи и автоколебательные системы
Строго говоря, ге-
генерируемая часто-
частота зависит от ко-
коэффициента усиле-
усиления активного зве-
звена
i
энергетический ба-
баланс в автогенера-
автогенераторе
внутренняя обрат-
обратная связь
лазер
самовозбуждения и поэтому коэффициент при первой степени
р равен нулю. Тогдв из характеристического уравнения
Р2Х!Х2 +.1 =0 находим значение генерируемой частоты:
о™ = 1//Я1Л2С1С2. A4.48)
Отметим в заключение, что RC-автогенератор существен-
существенно уступает LC-автогенераторам с точки зрения качества
спектрального состава генерируемых колебаний. Это связано
с тем, что в них цепь обратной связи не содержит
колебательных контуров и не может в достаточной мере
отфильтровать нежелательные высшие гармоники. Удовлетво-
Удовлетворительная форма генерируемых колебаний достигается спе-
специальными схемотехническими мерами, например за счет
использования дополнительной цепи нелинейной инерционной
обратной связи.
Автогенераторы с внутренней обратит связью. Рассмот-
Рассмотренные ранее схемы автогенераторов содержат специально
созданные цепи положительной обратной связи. Однако
возможен и другой прицип построения автогенераторов,
когда в колебательный контур вводится отрицательная
активная проводимость.
Если, например, R^ — активная составляющая входного
сопротивления контура при резонансе, a G^ = Sm^ < 0 —
параллельно включенная отрицательная проводимость, вно-
вносимая электронным прибором, то условие самовозбуждения
системы заключается в компенсации потерь контура (см.
гл. 8):
Если это условие выполняется, то с ростом амплитуды
автоколебаний за счет нелинейности характеристики электрон-
электронного прибора будет наблюдаться постепенное уменьшение
скорости нарастания колебаний. В стационарном режиме
энергия, рассеиваемая в контуре за период собственных
колебаний, в точности равна энергии, которая поступает
в контур от внешних источников за данный отрезок вре-
времени. Такой механизм самовозбуждения и автоматического
регулирования" стационарной амплитуды получил в радио-
радиотехнике название внутренней обратной связи.
Автогенераторы с распределенной колебательной системой.
Очень важной в практическом отношении разновидностью
генератора с внутренней. обратной связью является авто-
автоколебательное устройство, в котором использован отрезок
линии передачи с распределенными параметрами. Типичным
примером служит лазер — автогенератор гармонических коле-
колебаний в оптическом и инфракрасном диапазонах (рис. 14.14).
Лазер обычно состоит из двух плоскопараллельиых
полупрозрачных зеркал, образующих распределенную колеба-
колебательную систему, так называемый резонатор Фабри — Перо.
Простраиство между зеркалами заполнеио активной средой,
например смесью газов Не и Ne. За счет внешней накачки
в среде создается избыточная концентрация атомов, находя-
14.4, Автогенераторы в режиме малого сигнала
Рис. 14.14. Устройство лазера:
/ — полупрозрачное зеркало; 2 — активная среда: 3 — генерируемый пучок
света
щихся в возбужденном состоянии. Эти атомы переходят в
более низкое энергетическое состояние не спонтанно, а под
воздействием электромагнитного поля в резонаторе. Поле в
резонаторе, в свою очередь, есть результат суммирования
индуцированных излучений огромиого числа атомов. Подоб-
Подобный способ взаимодействия поля и активной среды
приводят к высокой степени пространственно-временной
когерентности излучения лазера.
Для того чтобы лазер самовозбудился, мощность, излу-
излучаемая в резонатор активной средой, должна скомпен-
скомпенсировать суммарную мощность потерь в системе.
Рассмотрим модельную задачу о гармонических волнах
в активной линии передачи. Известно [34], что комплекс-
комплексные амплитуды напряжения и тока волны, распространяю-
распространяющейся в сторону возрастания координаты г, описы-
описываются функцией вида exp(yz), где комплексный коэффи-
коэффициент распространения
у = а
+JG>L1)(G1 +JaCt)
A4.49)
зависит от погонных активных (/?! и d) и реактивных
(Lt и Ci) параметров линии. Действие активной среды в
рамках теории распределенных цепей принято учитывать тем,
что погонная шунтирующая проводимость становится отри-
отрицательной: d = —gi.
Будем полагать, что параметры Rt и gt лишь незначи-
незначительно изменяют фазовую скорость волны, т. е. на рабочей
частоте со справедливы неравенства Rt •« coLlt gt •« wCx.
Тогда, переписав формулу A4.49) в эквивалентном виде:
принцип работы ла-
лазера
Волна в линии с
положительным
можно пренебречь третьим слагаемым подкоренного выраже-
выражения, малым по сравнению с первыми двумя, н получить
приближенное выражение
yaja].
Коэффициент фазы р в силу сделанных допущений
оказывается таким же, как и в идеальной линии без потерь:
Р =je>\/LlC,. Однако коэффициент ослабления а существенно
п с отрицательным
затуханием
Глава 14. Активные цепи и автоколебательные системы
зависит от модуля отрицательной погонной проводимости
\a=1f2\/L1Cl(R1/Lt~g1/Cl).
условие самовоз-
самовозбуждении распре-
распределенного автоге-
автогенератора
Выбранный злак
величины М обес-
обеспечивает возмож-
пость самовозбуж-
самовозбуждения системы
Очевидно, самовозбуждение системы наступит прн некото-
некотором критическом значении glKpt таком, что а = 0, откуда
giKP = RiCi/Li = RxjZ\, A4.51)
где ZB = \/Li /Ct — волновое сопротивление линии.
Из последней формулы следует, в частности, что чем
меньше волновое сопротивление, тем больше модуль отри-
отрицательной активной проводимости, необходимый для само-
самовозбуждения распределенного автогенератора.
14.5. Автогенераторы гармонических колебаний.
Режим большого сигнала
Данный параграф посвящен основам теории автоколеба-
автоколебательных систем, работающих в режиме большого сигнала,
когда уже нельзя пренебречь нелинейностью характеристики
электронного прибора. Метод исследования основан на прибли-
приближенном решении нелинейного дифференциального уравнения
автогенератора.
Метод укороченного уравнении. Обратимся вновь к простей-
простейшей схеме автогенератора с трансформаторной связью н
будем считать заданной вольт-амперную характеристику
активного элемента i = f(u). Поскольку di/dt = d//du • du/df,
запишем нелинейное дифференциальное уравнение A4.36),
характеризующее поведение автогенератора при любых
режимах, в виде
'л м 4Л* . , . (R52)
Способов точного решения таких уравнений прн любой
функции f(u) не существует. Приходится использовать те
илн иные дополнительные соображения физического характера
н отыскивать приближенные решения. В данном случае сле-
следует принять во внимание, что автогенератор содержит
высокодобротный колебательный контур. Поэтому, несмотря
на присутствие нелинейного элемента, напряжение на контуре
должно мало отличаться от гармонического колебания с
частотой «о-
Будем искать приближенное решение уравнения A4.52)
в виде
u(() = U if) cos см,
предполагая амплитуду U(t) медленной функцией времени
в том смысле, что | dU/dt | •« coo | U |. На этом основании
в выражении первой производной
du dU
14.5. Автогенераторы в режиме большого сигнала
сохраним только второе слагаемое:
du
-r-« -rool/sinroo*.
Таким же образом вторая производная
d2u d2l/ „ dU .
—-s-= . ¦. COS@0t — 2с0а —;—Sin
df dr. at
a —2ш0 —| sincoot — too
/ — COoUCOSCOot Л
A4.53)
A4.54)
Подставив выражения A4.53) и A4.54) в уравиение A4.52),
получнм так называемое укороченное дифференциальное
уравнение
Производная
d2f//dB мала в си-
силу предположения
о медленности из-
изменения амплиту-
амплитуды
at
L LC аи
A4.55) ф
приближенно описывающее процессы в автогенераторе с вы-
высокодобротным колебательным контуром.
Переход к укороченному уравнению значительно упро-
упрощает последующие этапы анализа, так как при этом порядок
дифференпиального уравнения снижается на единицу.
Средняя крутизна. Производная d//du, входящая во второе
слагаемое уравнения A4.55), является дифференциальной про-
проводимостью нелинейного элемента.
Ток i(t) есть периодическая функция времени, представ-
представляемая рядом Фурье
• = /(") = Л> + Ji coso)ot + hcos2a0t + ...
Поскольку выходной сигнал автогенератора лишь в малой
степени отличается от гармонических колебаний с частотой
Юо, отбросив все высшие гармоники, получим приближенно
/ а /0 + /, cos (Dot. В то же время и (г) = Ucostoof, поэтому
укороченное диф-
дифференциальное
уравпение автоге-
автогенератора
d/=d/ /аи _ Л
du ~ dt' dt ~ U'
По определению, коэффициент пропорциональности Si
между амплитудой первой гармоники тока и амплитудой
напряжения на управляющем электроде есть средняя крутизна
или крутизна по первой гармонике:
A4.56)
= 0. A4.57)
Для аналитического рассмотрения удобен случай, когда
вольт-амперная характеристика имеет форму степенного ряда:
>(и) = яо + а,и + O2U2 + ...
средняя крутизна
Введя среднюю крутизну, запишем укороченное уравнение
A4.55) в виде
Глава 14. Активные цепи и автоколебательные системы
А Как известно (см. гл. 11), при этом
решите задачу 14 J1(U) = a1U + 3/ла3 U3 +- 5/sa5 Vs +...,
так что
Si (U) =
уравнение для оп-
определения стацио-
стационарной амплитуды
автоколебаний
+ 3/лаъи2 + 5/Ba5U+ + ...
A4.58)
Подставляя данное выражение средней крутизны в укоро-
укороченное уравнение A4.57), получаем нелинейное дифферен-
дифференциальное уравнение 1-го порядка, которое всегда можно ре-
решить методом разделения переменных.
Стацнонарньй режим автогенератора. По определению,
в стационарном режиме амплитуда колебаний автогенера-
автогенератора постоянна Положив dU/dt = О, из A4.57) получаем
уравнение
A4.59)
положительные корни которого определяют стационарные
значения 17СТ амплитуды автоколебаний.
Пример 14.6. В автогенераторе использован активный элемент
со средней крутизной SiA0 = ах + Ъ1фз^2, где а± = Sm$= 15 мА/В,
аъ = — 4 мА/В3. Автогенератор имеет параметры: а>0 = Ю7 с, *
Q = 30, М = \ мкГн. Найти стационарную амплитуду автокоде- решите Задачу 15
баний.
Вычислим прежде всего величину
? = RC/M =1/(@0QM)~ 3J3-10"^ См.
На основании A4.59) стационарная амплитуда в даииом случае
удовлетворяет квадратному уравнению
решив которое получаем
В зависимости от того, в какой области ВАХ распола-
располагается рабочая точка нелинейного элемента, характеристика
Si (U) имеет одну нз двух форм, изображенных на
рис. 14.15.
Если средняя крутизна монотонно убывает с увеличением
амплитуды управляющего напряжения, то говорят, что авто-
автогенератор работает в мягком .режиме самовозбуждения.
Соответствующая зависимость изображена на рис. 14.15,о.
Здесь же проведена так называемая прямая обратной
связи — горизонтальная линия с ординатой RC/M. Точка
пересечения кривой Si A7) и прямой обратной связи
определяет единственную амплитуду стационарных авто-
• колебаний 1/ст.
мягкий я жесткий Сложнее обстоит дело, если автогенератор работает
режимы самовоз- в жестком режиме самовозбуждения. Здесь, как видно из
буждения автоге- рис. 14.15,6, возможны даа стационарных режима с различ-
иератора ными амплитудами 1/С|| и Сст;.
14.5. Автогенераторы в режиме большого сигнала
Рис. 14.15. Типичные зависимости средней крутизны от амплитуды
управляющего напряжения:
а — характеристика мягкого режима; 6 — характеристика жесткого режима
Устойчивость стационарных режимов. Говорят, что ста-
стационарный режим автоколебательной системы устойчив,
если прн малых отклонениях амплитуды гармонических
колебаний от стационарного значения система стремится
вновь вернуться к состоянию с той же стационарной
амплитудой. Наоборот, система, оказавшаяся в неустойчи-
неустойчивой стационарной точке, стремится так изменить свою
амплитуду, чтобы перейти в ту илн иную устойчивую
стационарную точку.
Устойчивость стационарного режима — понятие, специфи-
специфическое для нелинейных автоколебательных систем. Напомним,
что применительно к линейной динамической системе речь
может идти только об устойчивости или неустойчивостн
состояния покоя (режим малых колебаний).
Рассмотрим укороченное уравнение автогеиератора A4.57)
и предположим, что амплитуда автоколебаний V получила
малое отклонение V от стационарной точки:
U = Ua+V. A4.60)
При этом
различие между
понятиями устой-
устойчивости линейных
н нелинейных ав-
автоколебательных
систем
где А = 6St /dU — коэффициент наклона средней крутизны
в стационарной точке.
Подставив равенство A4.60) в A4.57), находим с учетом
A4.59) дифференциальное уравнение относительно приращения
амплитуды:
A4.61)
Из этого простого линейного дифференциального урав- ¦
иения следует, что знак производной dV/dt зависит лишь критеюнй устойчи-
от знака величины А. Так, если А < 0, то V и dV/dt л!^.тп „тв.„,п„„П11Л_
__,. В1Н.ТН и нциииаино-
имеют разные знаки. Поэтому если по тем или иным
причинам амплитуда автоколебании U стала больше и„,
т.е. V>0, то в силу уравнения A4.61) производная
dV/dt < 0. Это означает, что с течением времени авто-
автоколебательная система вернется в стационарное состояние.
Глава 14. Активные цепи и автоколебательные системы
решвте задачу 16
колебательный
IHCTt'DtUIC
Легко видеть, что описанным свойством устойчивости
обладает автогенератор, работающий в мягком режиме
самовозбуждения. Пусть коэффициент взаимоиндукции М
мал настолько, что прямая обратной связи 1 не пересекает
кривую Si A7). Единственное устойчивое состояние системы
прн этом — состояние покоя с нулевой амплитудой авто-
автоколебаний. Если коэффициент М увеличивать, то при
Мкр = ЯС/Бдиф (прямая 2) автогенератор самовозбуднтся прн
сколь угодно малой амплитуде стационарных автоколеба-
автоколебаний. Дальнейший рост М приведет к плавному увели-
увеличению амплитуды генерируемых автоколебаний, так как пря-
прямая 3 будет перемещаться вниз.
По-иному протекают процессы в автогенераторе, работаю-
работающем в жестком режиме самовозбуждения. Если система
первоначально находится в состоянии покоя, а прямая
обратной связи занимает положение 7, то автоколеба-
автоколебания не возникают, несмотря на то, что имеются две
точки стационарного режима — неустойчивая точка а и
устойчивая точка б. Однако если с помощью каких-либо
внешних источников в системе возбуждены гармонические
колебания с резонансной частотой н амплитудой, соответ-
соответствующей точке а, то, поскольку здесь А > О (средняя
крутизна возрастает с увеличением амплитуды), возникшие
автоколебания будут неустойчивыми. Амплитуда их будет
нарастать до тех пор, пока система не перейдет в
устойчивую точку 6, характеризующуюся постоянной ста-
цноиарной амплитудой l/CTi-
Автогенератор с такой характеристикой способен также и
к самовозбуждению. Для этого прямая обратной связи
должна занять положение 2, при котором неустойчивым
является стационарный режим с бесконечно малой амплиту-
амплитудой колебаний. Как следует из сказанного раиее, возбужден-
возбужденные автоколебания будут нарастать до тех пор, пока нх
амплитуда не достигнет в пределе стационарного уровня
1/ст2. Если же теперь уменьшать М, то амплитуда
автоколебаний будет плавно падать до тех пор,
пока не станет равной U^ и прямая обратной связи 3
не займет положение касательной к характеристике St(U).
Дальнейшее уменьшение М приводит к срыву автогенера-
автогенерации; амплитуда колебаний скачком падает до нуля.
Таким образом, в автогенераторе с жестким режимом
самовозбуждения колебания возникают н исчезают при различ-
различных значениях коэффициента обратной связи. Говорят, что
в таком автогенераторе имеет место колебательный
гистерезис.
Зависимость режима автогенератора от выбора рабочей
точки. Как отмечалось, мягкий режим самовозбуждения
отличается от жесткого тем, что в первом случае средняя
крутизна Si(U) при малых амплитудах падает с ростом I/,
а во втором — растет.
Пусть вольт-амперная характеристика нелинейного элемен-
элемента описывается степенным рядом н поэтому [см. формулу
14.5. Автогенераторы в режиме большого сигнала
A4.58)] прн малых U имеет место зависимость
Очевидно, автогенератор работает в мягком режиме
самовозбуждения, если а3 < 0, и в жестком режиме, если
а3>0.
Как известно,
1 d3i
причем производная вычисляется в точке, отвечающей
начальному напряжению смещения, поданному на нелинейный
элемент. Обычно зависимость i(u) представляется гладкой
кривой, которая монотонно возрастает от нулевого до
некоторого постоянного уровня. Проведя трехкратное диф-
дифференцирование этой зависимости графическим способом,
убеждаемся, что мягкий режим самовозбуждения будет
реализован в тех случаях, когда рабочая точка выбрана
в средней части характеристики.
Процесс установлении стационарной амплитуды. Метод
укороченного уравнения позволяет не только находить
стационарные режимы н исследовать их устойчивость, но
также изучать динамику процесса установления стационар-
стационарной амплитуды автоколебаний. В качестве примера найдем
закон изменения во времени амплитуды U(t) в автогенера-
автогенераторе с мягким режимом самовозбуждения, полагая, что ~
прн t = 0 в системе существуют гармонические колебания
с резонансной частотой и с некоторой известной амплиту-
амплитудой U о.
Задача сводится к решению уравнения
6U t I (R ахМ ЗаэМ(У2>
6t
ача сво
2 \ L
LC
4LC
с начальным условием U @) = Uo.
Введем сокращенные обозначения:
/ \
Определение гра-
границ мягкого п
жесткого режи-
режимов самовозбуж-
самовозбуждения'
Обе частв укороченного уравнения
~ = (а + pi/2) U A4.62) Данное нелинейное
"' . ¦ дифференциальное
можно умножить на U н получить эквивалентную форму уравнение имеет
л,:1 первый норядок п
~2- = dc. A4.63) может быть реше-
решено аналитически
Разлагая левую часть равенства A4.63) на элементарные
дроби, имеем
A4.64)
370
Глава 14. Активные цепи и автоколебательные системы
Аналогичным спо- Наконец, интегрируя и принимая во внимание начальное
собом рассматри- условие, получаем решение задачи в виде
вают ироцессы в ± U2(a + RU2)
автогенераторе с —In 2 ** ° = t,
жестким режимом ^°*а "*" Р^ '
^ откуда следует окончательный результат:
A4.65)
При t-»oo амплитуда автоколебаний стремится к по-
постоянному стационарному уровню
различие между ак-
активными и пассив-
пассивными колебатель-
колебательными системами
A4.66)
что совпадает с выводом, полученным в примере 14.6.
Важно отметить следующее: стационарная амплитуда авто-
автоколебаний не зависит от начальных условий. Если Uo=0, то
в соответствии с выражением A4.65) амплитуда U(t) равна
нулю при любых t > 0. Однако, поскольку при a > 0 режим
малых колебаний неустойчив, при любой сколь угодно малой
величине UG, возникающей, например, из-за тепловых шумов,
самовозбуждение автогенератора всегда будет иметь место.
Наконец, обратим внимание на то, что с повышением
добротности колебательной системы, когда R-+0, параметр
а увеличивается. Это, в свою очередь, означает, что установ-
установление стационарной амплитуды происходит тем быстрее,
чем выше добротность колебательного контура [см. фор-
формулу A4.65)]. Полезно вспомнить, что пассивные узкополос-
узкополосные системы, изученные в гл. 9, имеют диаметрально
противоположное свойство — прн нестационарных процессах
огибающая в них изменяется тем медленнее, чем больше
добротность системы.
Результаты
ОО
Введение обратной связи является широко распространенным способом
создания динамических систем с заданными частотными или импульсными
характеристиками.
ОО Различают системы с положительной и отрицательной обратными связями.
ОО Введя в усилитель отрицательную обратную связь, можно создать
систему с высокой стабильностью коэффициента усиления.
ОО Отрицательная обратная связь уменьшает уровень нелинейных искаже-
искажении, возникающих из-за нелинейности вольт-амперных характеристик актив-
активных элементов.
ОО Применение отрицательной обратной связи дает возможность за счет
снижения уровня усиления расширять полосу пропускания усилителя.
ОО ДЛЯ анализа устойчивости малых колебаний в системах с обратной
связью используют критерии устойчивости. Наиболее распространены кри-
критерии устойчивости Рауса — Гурвица и Найквиста.
Вопросы
371
Активные RC-филътры являются частотно-избирательными устройствами,
не содержащими индуктивных элементов.
Лр« введении в усилитель положительной обратной связи возможно
возникновение неустойчивости. Если в подобном устройстве содержится
колебательная система, то неустойчивый усилитель с положительной
обратной связью является автогенератором гармонических колебаний.
Для генерирования гармонических колебаний в низкочастотной области
находят применение КС-автогенераторы, не содержащие колебательных
контуров.
Установившаяся амплитуда колебаний в автогенераторе определяется видом
нелинейной характеристики электронного прибора, входящего в автогенератор.
Различают устойчивые и неустойчивые стационарные режимы автогенера-
автогенераторов, а также жесткий и мягкий режимы самовозбуждения.
Вопросы
1. Сформулируйте принцип классифика-
классификации обратных связей в динамических
системах. Возможен лн случай, когда в одной
и той же системе обратная связь на одной
частоте будет положительной, а на другой -
отрицательной?
2. Перечислите некоторые технические
применения отрицательной обратной связи
в усилительных устройствах.
3. Какова особенность частотных характе-
характеристик усилителя, охваченного обратной
связью с запаздыванием?
4. Приведите формулировки критериев
устойчивости Рауса — Гурвнца и Нанквиста.
5. Перечислите характерные свойства
операционных усилителей.
6. Почему соединение выхода операцион-
операционного усилителя с его неиивертирующим
входом приводит к неустойчивости усили-
усилителя?
7. Изобразите принципиальные схемы
масштабного усилителя н аналогового ин-
интегратора, построенных на базе операцион-
операционного усилителя.
Задачи
1. В системе с обратной связью основ-
основной элемент имеет коэффициент усиления
Ко = 1000, не зависящий от частоты. Цепь
обратной связи имеет постоянные коэф-
коэффициент передачи Ро = 5- 10~4ехр(—/45°).
Какой (положительной или отрицательной)
является обратная связь в данной сис-
системе?
2. Усилительноеустройствоимеет незави-
независящий от частоты коэффициент усиления
Ко = 10000. При изменении внешних условий,
например температуры окружающей ереды,
8. Имеется экспериментальный макет
автогенератора с трансформаторной связью.
Автогенератор не возбуждается, несмотря
на то, что он собран из заведомо исправ-
исправных деталей. С чего следует начать нала-
налаживание такого устройства?
9. Изобразите принципиальные схемы
автогенераторов, собранных по схемам ин-
индуктивной и емкостной трехточек. &'
10. Зависит лн частота автоколебаний,
генерируемых ЯС-автогенератором, от коэф-
коэффициента усиления активного звена?
11. Каково условие самовозбуждения
автогенератора с внутренней обратной
связью?
12. Как определяется понятие средней
крутизны электронного прибора?
13. В чем заключается принципиальное
отличие мягкого и жесткого режимов само-
самовозбуждения автогенератора?
14. Как, зная вольт-ампериую характе-
характеристику нелинейного активного элемента,
определить границу между мягким н жестким
режимами самовозбуждения?
наблюдается значительное изменение коэффи-
коэффициента усиления, * такое, что АК0/КС=02.
Для стабилизации параметров системы реше-
решено использовать отрицательную обратную
связь. Выберите величину р, при которой
нестабильность коэффициента усиления сни-
снизится в 10 раз, т.е. АКос/Кос = °-02-
Каково при этом значение коэффициента
усиления системы с замкнутой обратной
связью?
3. Покажите, что в усилителе, собранном ¦
372
Глава 14. Активные иепи и автоколебательные системы
<*¦
существует отрицательная обратная связь с
параметром р0 = —ЯОс/Ян-
Указание. Введите вспомогательное
напряжение v между базой и эмиттером
(см. рис.) и учтите, что переменная состав-
составляющая тока эмиттера i, = Sv.
4. Найдите коэффициент усиления напря-
напряжения К = ивых/иех эмиттерного повторителя:
0
Крутизна характеристики S транзистора
считается известной.
5. Одноступенчатый усилитель с резистнв-
но-емкостной нагрузкой имеет активное
сопротивление нагрузки RK = 1.6 кОм. Пара-
Паразитная емкость Сп, подключенная к кол-
коллектору транзистора, равна 50 пФ. Крутизна
характеристики транзистора S = 30 мА/В. В
цепь эмиттера включен резистор обратной
связи Rqc — 27 Ом (см. условие задачи 3).
Найдите граничные частоты усиления при
наличии н при отсутствии отрицательной
обратной связи.
6. Используя критерий Рауса — Гурвица,
исследуйте устойчивость мвлых колебаний
в динамических системах, описываемых
характеристическими уравнениями вида:
а) р4 + Ър3 + 2рг + р -Ы = О,
б) р4 + 2р3 + Зр2 +- р + 1 = 0.
7. Используя критерии Найквнста, иссле-
исследуйте устойчивость системы с запаздываю-
запаздывающей обратной связью (см. рис. 14.4).
Указание. При построении годографа
используйте безразмерную частотную пере-
переменную ют0. Цель исследования — найти пре-
предельно допустимое значение произведения
РоК„.
8. С помощью критерия Найквиста иссле-
исследуйте устойчивость замкнутой системы:
содержащей два идеальных усилительных
элемента с коэффициентами усиления напря-
напряжения Ко каждый.
9. Найдите передаточную функцию К [р) =
к системы:
Я,
Предположите, что операционный усилитель
на всех частотах имеет постоянный вещест-
вещественный коэффициент усиления напряжения
Ко- Входное сопротивление усилителя со сто-
стороны инвертирующего и ненивертирующего
входов неограниченно велико; выходное
сопротивление пренебрежимо мвло.
10. Аналоговый интегратор, собранный на
операционном усилителе (см. рнс. 14.8), имеет
следующие параметры: R=2.7 кОм, С =
= 1.8 нФ. Усилитель питается от источника
с напряжением 12 В. На вход интегратора
подается сигнал ц,х@ = O.l0(f) В. Вычислите
сигнал иа выходе и определите, через
какой промежуток времени выходное напря-
напряжение достигнет уровня напряжения источни-
источника питания.
11. Синтезируйте активный ЯС-фильтр
нижних частот с чебышевской характе-
характеристикой 2-го порядка при следующих
исходных данных: а>с=1.5-102 с"', е=0.75.
12. В автогенераторе с трансформатор-
трансформаторной связью (см. рис. 14.11) колебательный
контур настроен на частоту /р^ = 400 кГц.
Параметры контура: L = 15 мкГи, R — 8 Ом.
Дифференциальная крутизна характеристики
транзистора Sm^ = 1.5 мА/В. Определите
критическое значение коэффициента взаимо-
взаимоиндукции М, обеспечивающее самовозбужде-
самовозбуждение системы.
13. ЯС-автогенератор (см. рис. 14.13) гене-
генерирует гармонические колебания на частоте
250 Гц. Выберите параметры устройства,
обеспечивающие указанную частоту коле-
колебаний.
14. Характеристика транзистора аппрок-
аппроксимирована' двумя отрезками прямых:
Более сложные задания
•373
¦к.мА
/
/
!Г""ТЬ и./5
Постройте график зависимости средней кру-
крутизны от амплитуды высокочастотного напря-
напряжения Ur полагая, что напряжение сме-
смещения Uo = 0.75 В.
15. Автогенератор гармонических колеба-
колебаний собран по схеме
Более сложные задания
18. Покажите, что система с обратной
связью, изображенная на рис. 14.1, может
быть описана бесконечным соотношением
вида
связывающим изображения входного и выход-
выходного сигналов. Исследуйте вопрос об экви-
ввлентностн такого представления и форму-
формулы A4-2). Рассмотрите трактовку процессов
в системе с обратной связью как цирку-
циркуляцию сигналов по петле обратной связи.
19. Построив амплитудно-фазовую ха-
характеристику, исследуйте с помощью крите-
критерия Найквнста устойчивость трехзвеиного
усилителя с резистнвне-емкостнымн нагруз-
нагрузками, предполагая, что выход системы не-
непосредственно соединен с ее входом.
20. Исследуйте условия самовозбуждения
автоколебаний в RC-геиераторе, собранном
Использован транзистор с характеристикой,
приведенной в задаче 14. Параметры авто-
автогенератора: со0 = 10* с, Q = 50, М =
= 0.2 мкГн, 1/0 = 0.75 В. Определите ста-
цнонарную амплитуду автоколебаний.
16. В автогенераторе, схема которого
приведена в условии предыдущей задачи,
напряжение смещения выбрано равным 0.25 В.
Покажите, что система будет работать в
жестком режиме самовозбуждения.
17. В автогенераторе с трансформаторной '
связью применен электронный прибор, у
которого зависимость средней крутизны St
(мА/В) от управляющего напряжения U (В)
аппроксимирована многочленом 2-й степени
где «, = 1 мА/В, «з = —2-5 мА/Ва. Колеба-
Колебательный контур генератора имеет парамет-
параметры: соо = 6-Ю8 с, Q = 25. Определите,
прн каком минимальном значении коэффи-
коэффициента взаимоиндукции Mmin в системе воз-
возникнут автоколебания. Вычислите амплитуду
Vox в стационарном режиме, если М = 3Mmin,
Проанализируйте, как зависит стационарная
амплитуда автоколебаний от добротности
колебательного контура.
Найдите выражение для расчета генерируе-
генерируемой частоты.
21. Покажите, что передаточная функция,
отвечающая полосовому фильтру, реализует-
реализуется схемой цепи вида
Глава 15
Дискретные сигналы.
Принципы цифровой фильтрации
Дискретные сигналы естественно возникают в тех случаях,
когда источник сообщений выдает- информацию в фиксиро-
фиксированные моменты времени. Примером могут служить сведе-
сведения о температуре воздуха, передаваемые радиовещатель-
радиовещательными станциями несколько раз в сутки. Свойство дискрет-
дискретного сигнала проявляется здесь предельно ярко: в паузах
между сообщениями никаких сведений о температуре иет.
Фактически же температура воздуха изменяется во вре-
времени плавно, так что результаты измерения возникают
за счет дискретизации непрерывного сигнала — операции,
которая фиксирует отсчетные значения.
Техника дискрет- Дискретные сигналы приобрели особое значение в послед-
ных сигналов слу- ние десятилетия под влиянием совершенствования техники
жит основой таких связи и развития способов обработки информации быстро-
перспективных об- действующими вычислительными устройствами. Большие успе-
ластей, как цифро- хи достигнуты в разработке и использовании специализи-
вое радиовещание, рованных устройств для обработки дискретных сигналов,
цифровое телевиде- так называемых цифровых фильтров.
ние, цифровая зву- Настоящая глава посвящена рассмотрению принципов
козаннсь и т. д. математического описания дискретных сигналов, а также
теоретических основ построения линейных устройств для их
обработки.
15.1. Модели дискретных сигналов
интервал
тизацни
дискре-
Различие между дискретными и аналоговыми (непрерыв-
(непрерывными) сигналами подчеркивалось в гп. 1 при классифи-
классификации радиотехнических сигналов. Напомним основное свойст-
свойство дискретного сигнала: его значения определены ие во
все моменты времени, а лишь в счетном множестве
точек. Если аналоговый сигнал имеет математическую модель
вида непрерывной или кусочио-иепрерывиой функции, то
отвечающий ему дискретный сигнал хдA) представляет собой
последовательность (...,x-lt x0, хи х2,...) отсчетных значений
сигнала х (г) в точках (..., t _ ь г0, гь t2, ...) соответст-
соответственно.
Дискретнзнрующая последовательность. На практике, как
правило, отсчеты дискретных сигналов берут во времени
через равный промежуток Д, называемый интервалом (шагом)
дискретизации:
Д = Гт-Гт_, =fm_i -tm-2 =... A5.1)
Операцию дискретизации, т. е. переход от аналогового
сигнала x(t) к дискретному сигналу хд(г), можно описать,
15.1. Модели дискретных сигналов
введя в рассмотрение обобщенную функцию-
Л (() = X ^(' ~ ^), *
называемую дискретизирующей последовательностью.
Очевидно, дискретный сигнал хд(г) представляет собой
функционал (см. гл. 1), определенный на множестве всевоз-
всевозможных аналоговых сигналов х(() н равный скалярному
произведению функции x(t) н Г)(г):
Формула A5.3) указывает путь практической реализации
устройства для дискретизации аналогового сигнала. Работа
дискретизатора основана на операции стробирования (см.
гл. 12) — перемножения обрабатываемого сигнала х (() и «гре-
«гребенчатой» функции X] (г). Поскольку длительность отдельных
импульсов, из которых складывается дискретизирующая по-
последовательность, равна нулю, на выходе идеального дискре-
дискретизатора в равноотстоящие моменты времени возникают
отсчетиые значения обрабатываемого аналогового сигнала.
Рис. 15.1. Структурная схема импульсного модулятора
Модулированные импульсные иоследовательиостн. Дискрет-
Дискретные сигналы начали использовать еще в 40-х годах при
создании радиотехнических систем с импульсной модуляцией.
Этот вид модуляции отличается тем, что в качестве
«несущего колебания» вместо гармонического сигнала служит
периодическая последовательность коротких импульсов.
Импульсный модулятор (рнс. 15.1) представляет собой
устройство с двумя входами, иа один из которых подается
исходный аналоговый сигнал x(t). На другой вход посту-
поступают короткие синхронизирующие импульсы с интервалом
повторения Д. Модулятор построен таким образом, что в'мо-
в'момент подачн каждого синхронизирующего импульса происхо-
происходит измерение мгновенного значения сигнала х (г). На выходе
модулятора возникает последовательность импульсов, каж-
каждый из которых имеет площадь, пропорциональную соот-
соответствующему отсчетиому значению аналогового сигнала.
Сигнал хмнп@ на выходе импульсного модулятора будем
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
модулированная
импульсная после-
последовательность
АИМ
Важнейшее приме-
применение нмпульсно-
модулированных
сигналов — созда-
создание многоканаль-
многоканальных систем связи
с временным раз-
разделением каналов.
В ряде случаев сис-
системы с импульсной
модуляцией позво-
позволяют добиться
большей помехо-
помехоустойчивости по
сравнению с той,
которая может
быть достигнута
при использовании
в качестве несуще-
несущего колебания прос-
простого гармоническо-
гармонического сигнала
называть модулированной импульсной последовательностью
(МИП). Естественно, что дискретный сигнал является мате-
математической моделью МИП.
Отметим, что с принципиальной точки зрения характер
импульсов, из которых складывается МИД безразличен.
В частности, эти импульсы могут иметь одинаковую дли-
длительность, в то время как их амплитуда пропорциональна
отсчетным значениям дискретизируемого сигнала. Такой вид
преобразования непрерывного сигнала получил название
амплитудно-импульсной модуляции (АИМ). Возможен другой
способ — широтно-импульсная модуляция (ШИМ). Здесь
амплитуды импульсов на выходе модулятора постоянны, а их
длительность (ширина) пропорциональна мгновенным значе-
значениям аналогового колебания.
Выбор того или иного способа импульсной модуляции
диктуется рядом технических соображеиий, удобством схемной
реализации, а также характерными особенностями переда-
передаваемых сигналов. Например, нецелесообразно использовать
АИМ в случае, если полезный сигнал изменяется в очень
широких пределах, т. е., как часто говорят, имеет широкий
динамический диапазон. Для неискаженной передачи такого
сигнала требуется передатчик со строго линейной ампли-
амплитудной характеристикой. Создание такого передатчика —
самостоятельная, технически сложная проблема. Системы
ШИМ не предъявляют требований к линейности амплитуд-
амплитудных характеристик передающего устройства. Однако их схем-
схемная реализация может оказаться несколько сложнее по
сравнению с системами АИМ.
Математическую модель идеальной МИП можно получить
следующим образом. Рассмотрим формулу динамического
представления сигнала x(f) (см. гл. 1):
х@= J х(тN(г-т)<1т.
A5.4)
Поскольку МИП определена лишь в точках tk = кА (к =
= 0, ±1, ±2, ...), интегрирование в формуле A5.4) следует
заменить суммированием по индексу к. Роль дифференциала
dx будет играть интервал (шаг) дискретизации Д. Тогда
математическая модель модулированной импульсной после-
последовательности, образованной бесконечно короткими импуль-
импульсами, окажется заданной выражением
xkb(t~kA),
A5.5)
где хк = х (кА) — выборочные значения аналогового сигнала.
Спектральная плотность модулированной импульсной после-
последовательности. Исследуем спектр сигнала, возникающего иа
выходе идеального импульсного модулятора и описываемого
выражением A5.5). Заметим, что сигнал вида МИП с точ-
точностью до коэффициента пропорциональности А равен про-
произведению функции х (t) и дискретизирующей последователь-
15.1. Модели дискретных сигналов
377
ности г|(г):
Хмнп(О = Дх(()т|(г). A5.6)
Известно, что спектр произведения двух сигналов про-
пропорционален свертке их спектральных плотностей (см. гл. 2).
Поэтому если известны законы соответствия сигналов и
спектров:
Согласно данной
модели, значения
сигнала в паузах
условно считаются
равными нулю
то спектральная плотность МИП-сигнала
$мнп(<») = ^~~ snft>s*(°)~yd?-
Z7I J
A5.7)
Чтобы иайти спектральную плотность Sn(ra) днскретизи-
рующей последовательности, разложим периодическую функ-
функцию Т| (() в комплексный ряд Фурье:
„@
Коэффициенты этого ряда (и = 0, ±1, ±2, ...)
¦= д ] 8«>е~' ' d'= д-
-Д/2
Обратившись к формуле BМ), получаем
A5.8)
т. е. спектр дискретизирующей последовательности состоит
из бесконечной совокупности дельта-импульсов в частотной
области. Данная спектральная плотность является периоди-
периодической функцией с периодом 2я/Д с.
Наконец, подставив формулу A5.8) в A5.7) и изменив
порядок следования операций интегрирования и суммирова-
суммирования, находим
A5.9)
Итак, спектр сигнала, полученного в результате идеаль-
идеальной дискретизации бесконечно короткими стробирующими
импульсами, представляет собой сумму бесконечного числа
«копий» спектра исходного аналогового сигнала. Копии рас-
располагаются на оси частот через одинаковые интервалы
2я/Д, равные значению угловой частоты первой гармоники
дискретизирующей импульсной последовательности (рис.
15.2,0,6). '
Заметим, что моду-
модулированная нм-
нульсная последо-
последовательность явля-
является предельным
случаем стробнро-
ванного сигнала
(см. гл. 12). Здесь
длительность пря-
прямоугольных нм-
нульсов, форми-
формирующих выборки,
стремится к нулю
Глава 15. /Дискретные сигналы. Принципы цифровой фильтрации
1ЧИП.
-2к/Д -к/Д
к/Д 2я/Д
/У.Л. Л.
-2п/Д -я/Д
2п/Д
Рис. 15.2. Спектральная плотность модулированной импульсной
последовательности при различных значениях верхней граничной
частоты:
а — верхняя граничная частота велика; 6 — верхняя граничная частота мала
(цветом обозначена спектральная плотность исходного сигнала, подвергнутого
дискретизации) \
Восстановление непрерывного сыпала по модулированной
импульсной последовательности. В дальнейшем будем пола-
полагать, что вещественный сигнал x(t) имеет низкочастотный
спектр, симметричный относительно точки <а = 0 и ограни-
ограниченный верхией граничной частотой о>„. Из рис. 15.2,6 сле-
следует, что если о)в^71/Д, то отдельные копии спектра Sx(ca)
ие накладываются друг на друга.
Поэтому аналоговый сигнал с таким спектром, подверг-
подвергнутый импульсной дискретизации, может быть совершенно
точно восстановлен с помощью идеального ФНЧ, на вход
которого подана импульсная последовательность вида A5.5)-
При этом наибольший допустимый интервал дискретизации
Д = л/о)в = 1/BД), что согласуется с теоремой Котельникова.
Действительно, пусть фильтр, восстанавливающий непре-
непрерывный сигнал, имеет частотный коэффициент передачи
Jo,
U
О) ^ 0)в,
о) > <ав.
Импульсная характеристика этого фильтра описывается
выражением
sinra,t
Принимая во внимание, что МИП-сигнал вида A5.5) есть
взвешенная сумма дельта-импульсов, "находим отклик на
выходе восстанавливающего фильтра
Esi.
A5.10)
15.1. Модели дискретных сигналов
Данный сигнал с точностью до масштабного коэффи- Удовлетворитель-
циента повторяет исходное колебание с ограниченным ные результаты
спектром. можно получить,
Идеальный ФНЧ физически иереализуем н может служить используя в ка-
калишь теоретической моделью для объяснения принципа вое- честве восстанав-
становления сообщения по его дискретным импульсным ливающего фнльт-
отсчетам. Реальный фильтр нижних частот имеет АЧХ, кото- ра ФНЧ с харак-
рая либо охватывает несколько лепестков спектральной диаг- теристикон Бат-
раммы МИЛ, либо, концентрируясь вблизи нулевой частоты, терворта достаточ-.
оказывается значительно уже центрального лепестка спектра, но высокого поряд-
Для примера иа рис. 15.3,6—е приведены кривые, характе- ка (п > 5)
ризующне сигнал на выходе ЛС-цепи, используемой в каче-
качестве восстанавливающего фильтра (рнс. 15.3, а).
L
J> 4
л/Д
1Г/Д
Рис. 15.3. Восстановление непрерывного сигнала по его импульсным
отсчетам с помощью КС-цепи:
я —схема фильтра; б —дискретный входной сигнал; в, г — АЧХ фильтра и
сигнал на его выходе в случае RC :» Д; д, е — то же, для случая RC ¦« Д
Из приведенных графиков видно, что реальный восстанав-
восстанавливающий фильтр неизбежно искажает входное колебание.
Заметим, что для восстановления сигнала можно исполь-
использовать как центральный, так н любой боковой лепесток
спектральной диаграммы.
Определение спектра аналогового сигнала по совокушостн
отсчетов. Располагая МИП-представлением, можно ие только
восстановить аналоговый сигнал, но и иайти его спектраль-
спектральную плотность. Для этого следует прежде всего непосред-
непосредственно связать спектральную плотность МИП с отсчетны-
ми значениями:
$мип И = 1 хмнп @ е~*" dt =
A5.11)
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
формула суммир
шиш» ilv;ii*co№i
Выделенные отсче-
отсчеты относятся к ин-
интервалу периодич-
периодичности
С другой стороны, спектральная плотность SMMn (w) была
найдена ранее другим способом [см. формулу A5.9)].
Поэтому справедливо соотношение
1
?
х&~***= I S,(c)-2m/A),\
A5.12)
известное в математике как формула суммирования Пуас-
Пуассона.
Однозначно найти функцию Sx(w), зная левую часть ра-
равенства A5.12) из результатов" измерений, вообще говоря,
невозможно ввиду эффекта наложения копий спектра. Исклю-
Исключение составляет случай, когда заранее известно, что исходный
сигнал хA) имеет спектр низкочастотного вида, удовлетво-
удовлетворяющий условию теоремы Котельникова. Тогда очевидно,
что спектр аналогового сигнала
О,
<а < — п/Д,
—п/Д ^ ю ^ я/Д,
ю > п/Д.
A5.13)
Данная формула исчерпывающе решает поставленную за-
задачу'при указанном выше ограничении.
15.2. Дискретизация периодических сигналов
Модель дискретного сигнала вида A5.5) предполагает, что
отсчетные значения аналогового колебания х(г) могут быть
получены в неограниченном числе точек иа оси времени.
Практически получить столь обширные сведения о сигнале,
безусловно, невозможно, Поскольку обработка всегда ведется
на конечном интервале времени.
Изучим особенности спектрального представления дискрет-
дискретного сигнала, который задан иа отрезке [О, Т]| своими
отсчетами х0, х1( х2, ..., Xjv-i, взятыми соответственно
в моменты времени О, Д, 2Д, ..., (TV—1)Д; полное число
отсчетов N = Т/А. Массив этих чисел, вещественных или
комплексных, является единственным источником сведений о
спектральных свойствах сигнала х(().
Методика изучения таких дискретных сигналов состоит
в том, что полученная выборка отсчетных значений мыслен-
мысленно повторяется бесконечное число раз. В результате сигнал
становится периодическим (рис. 15.4).
fall
01234 AT—1
Рис. 15.4. Дискретное представление-периодического сигнала
15.2. Дискретизация периодических сигналов
Сопоставив такому сигналу некоторую математическую
модель, можно воспользоваться разложением в ряд Фурье
и иайти соответствующие амплитудные коэффициенты. Сово-
Совокупность этих коэффициентов образует спектр дискретного
периодического сигнала.
Двскретное преобразование Фурье. Воспользуемся моделью
в виде последовательности дельта-импульсов и сопоставим
исходному колебанию x(t) его дискретное МИП-представле-
ние:
Хмип@ = A V*»$(i " *Л>" <15Л4>
ь = о
Представим дискретную модель A5.14) комплексным
рядом Фурье:
хмип@ = Д I Сйе>2«"*г A5.15)
с коэффициентами
г
С„ = ^- [хм„„ (() e-fi'»l4t. A5.16)
О
Подставляя формулу A5.14) в A5.16) н вводя безразмерную
переменную ? = t/Д, получим
NAN- I
с"= Ж" I /
О *0
О fc=O
N - 1
Наконец, используя-фильтрующее свойство дельта-функ- решите задачу 2
ции, имеем
A5.17)
Формула A5.17) определяет .последовательность коэффи-
коэффициентов, образующих дискретное преобразование Фурье (ДПФ)
рассматриваемого сигнала. Отметим некоторые очевидные
*** дпф. .¦¦.
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
1. Дискретное преобразование Фурье есть линейное преоб-
преобразование, т. е. сумме сигналов отвечает сумма нх ДПФ.
3, Число различных коэффициентов Со, Сь С2, .... Слг-ь
вычисляемых по формуле A5.17), равно числу N отсчетов
за период; при п = N коэффициент CN = Со.
3. Коэффициент Q (постоянная составляющая) является
средним значением всех отсчетов:
шскреi-
ора кша-
4. Если N — четное число, То
ЛГ-1
5. Пусть отсчетные значения хк — вещественные числа
Тогда коэффициенты ДПФ, номера которых располагаются
симметрично относительно N/2t образуют сопряженные пары:
N- 1
к=0 к=0
Поэтому можно считать, что коэффициенты CN/2+1..... Cfj-i
отвечают отрицательным частотам. При изучении амплитуд-
амплитудного спектра сигнала они не дают новых сведений.
Пример 15.1. Дискретный сигнал на интервале своей перио-
периодичности задан шестью равноотстоящими отсчетами {хк} =
= A, 1, 1, 0, 0, 0). Найти коэффициенты ДПФ этого сигнала.
Используя основную формулу A5.17), непосредственно вы-
вычисляем:
Сг = 7е (
С2 = 7e(
я13) = О,
Последующие коэффициенты находят на основании свойства 5:
Итак, располагая дискретным сигналом с числом отсчетов
N =6, можно найти постоянную составляющую, а также комплекс-
комплексные амплитуды первой, второй н третьей гармоник исходного не-
непрерывного сигнала. Ясно, что при любом четном N число находи-
находимых гармоник составляет половину числа отсчетов. Это положение
непосредственно вытекает из теоремы Котельникова. Действительно,
верхнюю граничную частоту в спектре дискретизируемого сигнала
следует находить из соотношения fB = 1/BД) =(N/2)/i, где/, = 1/Т—
частота первой гармоники.
Заранее предпола-
предполагается, что исход-
исходный сигнал удов-
удовлетворяет услови-
условиям теоремы Ко-
Котельникова
чн1ло вычисляе-
вычисляемых гармоник
1S.2. Дискретизация периодических сигналов
Восстановление исходного сигнала по ДПФ. Бели на осно-
основании совокупности отсчетов хс, хь х2, ..., xK_i некоторого
сигнала найдены коэффициенты ДПФ С„, Си С2, ..., СК/2,
то по ним всегда можно восстановить исходный сигнал х (г)
с ограниченным спектром, который был подвергнут диск-
дискретизации. Ряд Фурье такого сигнала принимает, очевидно,
вид конечной суммы:
х (г) = Со + 21 Ct | cos Bjtf/T + фО +
+ 21 Сг | cos D7Й/Т+ ф2) + ...
... + | CK/2|cos(Nm/T+ фда), A5.18)
где фс = arg С; — фазовый угол коэффициента ДПФ.
1.0
Рис. 1S.S. Сигнал, восстановленный по коэффициентам ДПФ
В качестве примера иа рнс. 15.5 изображен сигнал х(г), вос-
восстановленный по своим отсчетам в соответствии с данными
примера 15.1. На основании формулы A5.18) этот сигнал
имеет вид
х (г) = Чг + 7з cos Bи/Г- Tt/З) + 7е cos (би/Г).
Следует подчеркнуть, что восстановление непрерывного
сигнала по формуле A5.18) есть не приближенная, а точная
операция, полностью эквивалентная получению текущих зиа-
чеиий сигнала с ограниченным спектром по его отсчетам.
Однако процедура, использующая ДПФ, в ряде случаев
предпочтительна. Она приводит к конечным суммам гармо-
гармоник, в то время как ряд Котельникова для периодического
сигнала принципиально должен содержать бесконечное число
членов.
Обратное дискретное преобразование Фурье. Задача диск-
дискретного спектрального анализа может быть поставлена и
по-иному. Допустим, что коэффициенты Ст образующие
ДПФ, заданы. Положим в формуле A5.15) t — kA и учтем, *
что суммируется лишь конечное число членов ряда, которые решите задачу 3
отвечают гармоникам, содержащимся в спектре исходного
сигнала. Таким образом, получаем формулу для вычисления
отсчетиых значений:
N-l
и = 0
A5.19)
384 Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
выражающую алгоритм обратного дискретного преобразо-
преобразования Фурье (ОДПФ).
А Взаимно дополняющие друг друга формулы A5.17) и A5.19)
реши if т юч> -J являются дискретными аналогами обычной пары преобразо-
преобразований Фурье для непрерывных сигналов.
В настоящее время дискретный спектральный анализ явля-
является одним из наиболее распространенных методов исследо-
исследования сигналов с помощью ЭВМ. В Приложениях дана
программа иа ФОРТРАНЕ для вычисления ДПФ.
Геометрическая трактовка дискретного преобразования
. Фурье. Следует подчеркнуть, что МИП-сигнал вида A5.5)
представляет собой лишь одну из возможных моделей диск-
дискретного сигнала. Такие модулированные последовательности
естественно применять для описания импульсных колебаний
АИМ или ШИМ. Прн обработке же радиотехнических сиг-
сигналов с помощью вычислительных устройств дискретный
сигнал выступает не как последовательность импульсов, а как
упорядоченная последовательность чисел. Роль времени прн
этом играет целая переменная — номер соответствующего
отсчета.
Дискретному преобразованию Фурье можно придать инте-
интересную и глубокую интерпретацию, если последовательность
х = (хо, Хь ..., х№ i) рассматривать как вектор в JV-мерном
евклидовом пространстве. В таком пространстве имеется N
линейно-независимых векторов
ео = A, 0, 0, ...,0),
e::i°:1:°:"r0): <15-2о>
е«-1=@,а0,..., 1),
® образующих базнс, который будем называть естественным
ot ,-v i-.,ii(ib(ii п-ой*, базисом. Прн этом очевидно, что
N-1
х = ? хкеку
к = 0
т. е. отсчетные значения хк служат проекциями вектора х на
соответствующие базисные векторы.
Поскольку рассматриваемое пространство является евкли-
евклидовым, норма этого вектора
(N-1 \1/2
в то время как скалярное произведение двух векторов х и у
вычисляется по формуле
N-1
ix,y)= I xkyf.
к = 0
Векторы х и у ортогональны, если (х, у) = 0.
Наряду с естественным базисом в JV-мерном евклидовом
пространств можно ввести много других базисных систем.
1S.2. Дискретизация периодических сигналов
Среди них особую роль играет базис Фурье, элементами
которого служат векторы
/о=A, 1, 1 1),
/, =A, е»"'к, е**1'", ..., ePC-'W),
/i = (l, »W, e»"'K, ..., e*<K-1|*"v), A5.21)
Скалярное произведение элементов базиса Фурье
(А. Л) =Т е*2"»-»*"• = {Wl m = '' A5.22)
/_, (О ф\
(О, тф\.
откуда
С„ =
базис Фурье
Очевидно, что к-й
компонентой л-го
базисного вектора
является число
exp(j2nnklN). При
любых пак это
число является од-
одним из возможных
значений корня
N-й степени из еди-
Здесь верхнее равенство очевидно; сумма обращается в нуль
при тф I, поскольку все слагаемые являются комплексными
числами с единичным модулем и линейно нарастающим
аргументом. При суммировании соответствующие векторы
всегда образуют на комплексной плоскости правильный
замкнутый многоугольник.
Итак, базис Фурье ортогонален, но не нормирован на
единицу, поскольку
UmV = K m = 0, I, 2, ..., N-l. A5.23)
Найдем коэффициенты разложения некоторого вектора х
по элементам базиса Фурье:
х= Е с*Л- A5-24)
Для этого умножим обе части равенства A5.24) скалярно
на базисный вектор /„ с фиксированным номером п:
N- 1
(*,/„)= I с,(Л,/»)-
Так как базис Фурье ортогонален, то в правой части
отличным от нуля окажется лишь слагаемое с номером
к = п:
что полностью совпадает с формулой A5.17), полученной на
основе модели МИП-сигнала.
Алгоритм быстрого |феобразов11ння Фурье. Как видно из
формулы A3.17) или A5.19), чтобы вычислить ДПФ или
принцип разбиения
входной последо-
последовательности
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
ОДПФ последовательности из N элементов, требуется вы-
выполнить N2 операций с комплексными числами. Если длины
обрабатываемых массивов имеют порядок тысячи или более,
то использовать этн алгоритмы дискретного спектрального
анализа в реальном масштабе времени затруднительно
из-за ограниченного быстродействия вычислительных уст-
устройств.
Выходом из положения явился алгоритм быстрого пре-
преобразования Фурье (БПФ), предложенный в 60-х годах. Суще-
Существенно сократить число выполняемых операций здесь уда-
удается за счет того, что обработка входного массива сводится
к нахождению ДПФ (илн ОДПФ) массивов с меньшим числом
членов.
Будем предполагать, и это существенно для метода
БПФ, что число отсчетов N = 2Р, где р — целое число.
Разобьем входную последовательность *{х^ на две части
с четными н нечетными номерами:
k = 0, I, 2, ..., /V/2-1
A5.25)
н представим n-й коэффициент ДПФ в виде
N/2-1
Непосредственно видно, что первая половина коэффициен-
коэффициентов ДПФ исходного сигнала с номерами от 0 до N/2—1
выражается через коэффициенты ДПФ даух частных последо-
последовательностей:
A5.26)
Теперь учтем, что последовательности коэффициентов,
относящихся к четной н нечетной частям входного массива,
являются периодическими с периодом JV/2: ,
СИЧТ — Си + К/2ЧТ > СвНЧ — С„ + К/2ИЧ ¦
Кроме того, входящий в формулу A5.26) множитель при
п > JV/2 можно преобразовать так:
1S.2. Дискретизация периодических сигналов
Отсюда находим выражение для второй половины мно-
множества коэффициентов ДПФ:
A5-27)
Формулы A5.26) н A5.27) лежат в основе алгоритма БПФ.
Далее вычисления строят по итерационному принципу: после-
довательностн отсчетов с четными и нечетными номерами
вновь разбивают на. две части. Процесс продолжают до тех
пор, пока не получится последовательность, состоящая из
единственного элемента. Легко видеть, что ДПФ этого
элемента совпадает с ним самим.
Можно показать, что число операций, необходимых для
вычисления БПФ, оценивается как Nlog2N.
Дискретная свертка. По аналогии с обычной сверткой
двух сигналов
вводят дискретную свертку — сигнал, отсчеты которого свя-
связаны с отсчетами дискретных сигналов xn(t) н ya(t) соотно-
соотношением Г
N-l
*0
2> •••¦ n~
<ш8)
Выигрыш в ско-
роста вычисле-
ннн по сравнению
с традиционным
ДПФ достигает со-
теи и даже тысяч
при достаточных
длинах входных
массивов
Нацдем связь между коэффициентами дискретной свертки
н ДПФ сигналов xa(t), ya(iy. Для этого выразим текущие
значения отсчетов хк и >"„-* как ОДПФ от соответствую-
соответствующих спектров:
а затем подставим этн величины в формулу A5.38):
N-lN-i N-I
У У
N Lj Lj Lj
k~0 it-0 1-0
Изменив порядок сумА4ирования, получим
A5.29)
388
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
Описанный здесь
алгоритм свертки
периодических сиг-
сигналов иногда назы-
называют круговой или
циклической сверт-
сверткой
Нетрудно заметить, что внутренняя сумма может быть
вычислена на основании формулы A5.22), отображающей
свойство ортогональности элементов базиса Фурье. Восполь-
Воспользовавшись этим, получаем
/»
A5.30)
Поскольку формула A5.30) есть ОДПФ, приходим к вы-
выводу, что коэффициенты преобразования Фурье свертки
являются произведениями коэффициентов ДПФ свертываемых
сигналов:
' A5.31)
1, 2 ЛГ-1.
Этот результат имеет большое значение в теории диск-
дискретных сигналов и цифровых фильтров. Оказывается, что
если сигналы достаточно длинны (например, содержат не-
несколько тысяч отсчетов), то для вычисления свертки целе-
целесообразно вначале иайти их ДПФ, перемножить коэффици-
коэффициенты, а затем воспользоваться формулой A5.30), применив
алгоритм БПФ. Такой способ вычислений часто более эко-
экономичен, чем прямое использование формулы A5.28).
15.3. Теория z-преобразовання
При анализе н синтезе дискретных и цифровых устройств
широко используют так называемое z-преобразование, играю-
играющее по отношению к дискретным сигналам такую же роль,
как интегральные преобразования Фурье н Лапласа по отно-
отношению к непрерывным сигналам. В данном параграфе изла-
излагаются основы теории этого функционального преобразова-
преобразования и некоторые его свойства.
Определение г-преобразовашш. Пусть {х,} = (х„, х,, х2,...)—
числовая последовательность, конечная или бесконечная, со-
содержащая отсчетные значения некоторого сигнала. Поставим
ей в однозначное соответствие сумму ряда по отрицатель-
отрицательным степеням комплексной переменной z:
-I'
A5.32)
В математике z-
преобразование на-
называют также про-
производящей функ-
функцией исходной по-
последовательности
Назовем эту сумму, если она существует, z-преобразова-
нием последовательности {хк}. Целесообразность введения
такого Математического объекта связана с тем, что свойства
дискретных последовательностей чисел можно изучать, нссле-
дуя их z-преобразоваиия обычными методами математиче-
математического анализа.
На основании формулы A5.32) можно непосредственно
иайти z-преобразоваиия дискретных сигналов с конечным
числом отсчетов. Так, простейшему дискретному сигналу с
единственным отсчетом {х*} == A, 0, 0, ...) соответствует
1S.3. Теория z-преобразования
X(z) = 1. Если же, например, {х,} =A, 1, 1, 0, 0, 0, ...), то
J_ 1 _ г2 + 2 + 1
2 ~? ? '
Сходимость ряда. Если в ряде A5.32) число слагаемых
бесконечно велико, то необходимо исследовать его сходи-
сходимость. Из теории функций комплексного переменного [14]
известно следующее. Пусть коэффициенты рассматриваемого
ряда удовлетворяют условию
\xk\<MBi A5.33)
прн любых к>0. Здесь М > 0 н Ro>0 — постоянные ве-
вещественные числа. Тогда ряд A5.32) сходится прн всех зна-
значениях 2, таких, что 121 > Ro. В этой области сходимости ¦
сумма ряда представляет собой аналитическую фуикпию
переменной z, не имеющую ни полюсов, нн существенно
особых точек.
Рассмотрим, например, дискретный сигнал {xt} =A,1,1,...),
образованный одинаковыми единичными отсчетамн н служа-
служащий моделью обычной функции включения. Бесконечный ряд
X (z) — 1 + 1/2 -t 1/22 + ... является суммой геометрической
прогрессии и сходится при любых z в кольце | z \ > 1. Сум-
Суммируя прогрессию, получаем
X(Z) = 1/A- 1/2) = 2/(Z"l).
На границе области аналитичности прн 2 = 1 эта функция
имеет единственный простой полюс.
Аналогично получается г-преобразование бесконечного дис-
дискретного сигнала {xj}=A, о, а2, ...), где а —некоторое
вещественное число. Здесь
решите задачу 5
Данное выражение имеет смысл в кольцевой области
I z | > а.
2-преобразование непрерывных функций. Полагая, что от-
отсчеты {хк} есть значения непрерывной функции x(t) в точках
t = кЛ, любому сигналу х (I) можно сопоставить его 2-преобра-
зование прн выбранном шаге дискретизации:
Ж (г)
A5.34)
решите задачу 6
Например, если х (г)*= ехр(аг), то соответствующее 2-преоб-
разование
X B)
-I-
г — екр(аД)
является аналитической функцией при |z|>axp(aA).
Обратим г-преобрязошше. Пусть X B) — функция ком-
комплексной переменной z, аналитическая в кольцевой области
|z|>R0. Замечательное свойство z-преобразования состоит
Глава IS. Дискретные сигвалы. Принципы цифровой фильтрации
Обход контура ий-
тегрировання про-
водитси в положи-
тельном иаправле-
нин т. е. против
часовой стрелки
в том, что функция X(z) определяет всю бесконечную
совокупность отсчетов (х0, хь х2, ...).
Действительно, умножим обе части ряда A5.32) на
множитель г":
г"-'Х(г) = хог--' + х,г"-2 +... + xmz~l +..., A5.35)
а затем вычислим интегралы от обеих частей полученного
равенства, взяв в качестве контура интегрирования прош-
вольную замкнутую кривую, лежащую целиком в области
аналитичности и охватывающую все полюсы функции X(z).
При этом воспользуемся фундаментальным положением,
вытекающим из теоремы Кошн:
= Г 2щ, если п = -1,
~ jo, если пф -1.
Очевидно, интегралы от всех слагаемых правой части
обратятся в нуль, за исключением слагаемого с номером т,
поэтому
обратное г-преоб-
разование
A5.36)
Данная формула называется обратным z-преобразованием.
Пример 15*2. Задано z-преобразование вида X{z) = (г + 1)/г. Найти
коэффициенты дискретного сигнала [хк], отвечающего этой функции.
Прежде всего отметим, что функция X{z) аналитична во всей
плоскостя, за исключением точки z = Q, поэтому она действитель-
действительно может быть z-преобразованием некоторого дискретного сигнала.
Обращаясь к формуле A5.36), находим, что
paim
e задачу
при любых т ^ 2. Таким образом, исходный дискретный сигнал
имеет вид A, 1, 0, 0, 0, ...).
Связь с преобразованиями Лапласа и Фурье. Определим при
г > 0 сигнал вида идеальной МИП:
Преобразовав его по Лапласу, получим изображение
(Р) = 4 1>»ехр(-р1сД), » AS.37)
1S.3. Теория z-преобразоваяия
которое непосредственно переходит в z-преобразование, если
выполнить подстановку г = ехр(рД). Если же положить г =
= ехр(;о)Д), то выражение
A5.38)
будет преобразованием Фурье импульсной последова-
последовательности.
Установленный здесь факт дает возможность проводить
формальную аналогию между спектральными свойствами
непрерывных н дискретных сигналов.
Важнейшие свойства z-преобразования. Рассмотрим некото-
некоторые свойства z-преобразования.
1. Линейность. Если {хк} я {yt} — некоторые дискретные
сигналы, причем известны соответствующие z-преобразования
X (z) н У(г), то сигналу {щ} — {ох* + Ру*} будет отвечать
преобразование V (г) = аХ{г) + рУ(г) при любых постоянных
а н р. Доказательство проводится путем подстановки суммы
в формулу A5.32).
2. z-преобразовшше смещенного сигнала. Рассмотрим дис-
дискретный сигнал {у*}, получающийся из дискретного сигнала
{хц} путем сдвига на одну позицию в сторону запаздыва-
запаздывания, т.е. когда у» = х,_!. Непосредственно вычисляя z-npe-
образование, получаем следующий результат:
Таким образом, символ z ' служит оператором единич-
единичной задержки (на один интервал дискретизации) в z-области.
3. z-преобразование свертки. Пусть x(t) н y(t) — непре-
непрерывные сигналы, для которых определена свертка
/(()= Jx(T)y(t-T)dT= ] y(z)x(t-z)dz. A5.40)
Применительно к дискретным сигналам по аналогии с
A5.40) принято вводить дискретную свертку {fk} — последова-
последовательность чисел, общий член которой
x,j>m_, =
= 0, 1, 2, ...
A5.41)
Перечисленные
здесь свойства име-
имеют прямую анало-
аналогию со свойст-
свойствами преобразова-
преобразований Фурье и Лап-
Лапласа аналоговых
сигналов
Подобную ди-
дискретную свертку в
отличие от круго-
круговой иногда назы-
называют линейной
сверткой
Вычислим z-преобразование дискретной свертки:
A5.42) свойство дискрет-
дискретной свертки
Итак, свертке двух дискретных сигналов отвечает произ-
произведение z-преобразований.
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
15.4. Цифровые фильтры
В настоящее время широко используются методы обра-
обработки радиотехнических сигналов с помощью микроэлект-
роиных вычислительных устройств н систем. В данном
параграфе рассматривается простейший, наиболее изученный
н внедренный класс систем дискретной обработки сигналов —
так называемые линейные стационарные цифровые фильтры.
Выполняя, подобно аналоговым цепям, операцию частотной
фильтрации, цифровые фильтры (ЦФ) обладают рядом суще-
существенных преимуществ. Сюда относятся, например, высокая
стабильность параметров, возможность получать самые раз-
разнообразные формы АЧХ и ФЧХ. Цифровые фильтры не тре-
требуют настройки н легко реализуются на ЭВМ программны-
программными методами.
Принцип цифровой обработки сигналов. На рис. 15.6 приве-
приведена основная структурная схема цифровой обработки сиг-
сигналов.
А" (О
Рис. 15.6. Структурная схема цифровой обработки непрерывных
сигналов
Непрерывный входной сигнал x(t) поступает в аналого-
цифровой преобразователь (АЦП), управляемый снихроннзн-
9 рующимн импульсами от генератора, задающего частоту днс-
апало( о-цнфровой кретизации. В момент подачи синхронизирующего импульса
преобразователь на выходе АЦП возникает сигнал, отображающий результат
измерения мгновенного значения входного колебания в виде
двоичного числа с фиксированным количеством разрядов.
В зависимости от особенности построения устройства этому
числу соответствует либо последовательность коротких им-
импульсов (передача в последовательном коде), либо совокуп-
совокупность уровней напряжений на сигнальных шинах отдельных
разрядов (передача в параллельном коде). Преобразованный
таким образом сигнал поступает в основной блок устрой-
устройства, так называемый цифровой процессор, состоящий из
процес- арифметического устройства и устройства памяти. Арифме-
Арифметическое устройство выполняет над цифрами ряд операций,
таких, как умножение, сложение и сдвиг во времени на
заданное число интервалов дискретизации. В устройстве
памяти может храниться, некоторое число предшествующих
1S.4. Цифровые фильтры
отсчетов входного и выходного сигналов, которые необходимы
для выполнения операций обработки.
Цифровой процессор преобразует поступающие в него
числа в соответствии с заданным алгоритмом фильтрации
и создает иа выходе последовательность двоичных чисел,
представляющих выходной сигнал. Если в дальнейшем необ-
необходимо иметь информацию в аналоговой форме, то исполь-
используется цифро-аналоговый преобразователь (ЦАП). Однако это
устройство может и отсутствовать, если сигналы подверга-
подвергаются только цифровым преобразованиям.
Основной технический показатель ЦФ — быстродействие —
зависит как от скорости протекания переходных процессов
в микроэлектронных компонентах, так и от сложности алго-
алгоритма фильтрации.
Если в начале 70-х годов предельные частоты сигналов,
обрабатываемых с помощью ЦФ, составляли несколько
килогерц, то достижения современной микроэлектроники
непрерывно расширяют этот диапазон. Цифровая фильтрация
сигналов получила новый стимул развития с появлением
относительно недорогих и надежных микропроцессоров, а
также устройств памяти, выполненных по технологии больших
интегральных схем (БИС).
Квантование сигналов в ЦФ. Специфика любого цифрового
устройства — представление сигналов в виде последова-
последовательности чисел с ограниченной разрядностью. Поэтому мгно-
мгновенное зиачение сигнала дискретизируется по уровню таким
образом, что интервалом дискретизации (минимальной раз-
разностью между двумя соседними уровнями) служит единица
младшего двоичного разряда.
Точное значение отсчета сигнала в двоичной форме
имеет вид
*= I ая2~", A5.43)
и = 0
где а„ = 0 или 1. При ограничении длины числа х некоторым
количеством разрядов N вместо точного значения получается
его округленное (машинное) представление:
N -I
х= X a«2~" + P«2 W. A5.44)
цифро-аналоговый
преобразователь
машинное пред-
представление чисел в
цифровом фильтре
причем коэффициент р„ равен либо а„ либо а„ + 1 в зави-
зависимости от того, нуль или единица содержится в {N + 1)-м
разряде.
В радиотехнике дискретные сигналы, уровни которых
могут принимать лишь счетное множество значений, назы-
называют квантованными сигналами. Квантование сигналов при-
приводит к специфической погрешности при обработке, которая
получила название шума квантования. Прямой- путь снижения
этой погрешности — использование двоичных чисел с большим
количеством разрядов. Однако при этом неизбежно снижа-
снижается быстродействие ЦФ из-за увеличения времени выполнения
квантованные
сигналы
394
Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
п
Квантование уров-
уровней находит приме-
применение н в анало-
аналоговой технике, осо-
особенно при создании
систем помехоус-
помехоустойчивой импуль-
импульсной модуляции
операций над многоразряднымв числами. Поэтому иа прак-
практике в микропроцессорных системах для цифровой обработки
сигналов и дискретного управления обычно применяют двоич-
двоичные числа с количеством разрядов от 4 до 16.
Алгоритм линейной цифровой фильтрации. Математическая
теория цифровых фильтров переносит на случай дискретных
сигналов все основные положения теории линейных систем,
преобразующих непрерывные сигналы.
Как известно, линейная стационарная система преобразует
непрерывный входной сигнал х(г) таким образом, что на ее
выходе возникает колебание y{t), равное свертке функции
x(t) и импульсной характеристики h(t):
y(t)= J х (т) * (t - т) dr.. A5.45)
Линейный цифровой фильтр, по определению, есть дис-
дискретная система (физическое устройство или программа для
ЭВМ), которая преобразует последовательность {х*} числовых
отсчетов входного сигнала в последовательность {ук} от-
отсчетов выходного сигнала:
(х0, хь х2, ...)=>{у0, Уи Уг, -••)» A5.46)
или сокращенно
Линейный цифровой фильтр обладает тем свойством, что
сумма любого числа входных сигналов, умноженных иа
произвольные коэффициенты, преобразуется в сумму его
откликов иа отдельные слагаемые, т. е. из соответствий
i
w
следует, что
«I D"} + - + «я Mf} => {
A5.47)
при любых коэффициентах аь а2 а„.
Для того чтобы обобщить формулу A5.45) иа случай дис-
дискретных сигналов, вводят понятие импульсной характеристики
ЦФ. По определению, оиа представляет собой дискретный
сигнал {hk}, который является реакцией ЦФ иа «единичный
импульс» A, 0, 0, 0, ...):
|A, 0, 0, 0, ...)=>№q, h,,h2, h3,...). \ A5.48)
Линейный ЦФ стационарен, если при смещении входного
единичного импульса иа любое число интервалов дискрети-
дискретизации импульсная характеристика смещается таким же
образом, ие изменяясь по форме. Например:
(О, 1, 0, 0, ...)=»@, К, hlt h2, ...),
(О, 0, 1, 0, ...)=>@, 0, ho, hu ...), A5.4^
1S.4. Цифровые фильтры
Рассмотрим, каким образом из свойств линейности и ста-
стационарности'вытекает наиболее общий алгоритм линейной
цифровой фильтрации. Пусть {х,}=(х0. *ь *2> ...) —неко-
—некоторый сигнал на входе ЦФ с известной импульсной харак-
характеристикой. Используя соотношения A5.47) и A5.49), можно
записать m-й отсчет выходного сигнала {ук}:
Ут =
,-, + ¦¦• +
A5.50)
Формула A5.50), играющая ведущую роль в теории линей-
линейной цифровой фильтрации, показывает, что выходная после-
последовательность есть дискретная свертка входного сигнала и
импульсной характеристики фильтра. Смысл этой формулы
прост и нагляден: в момент каждого отсчета ЦФ проводит
операцию взвешенного суммирования всех предыдущих зна-
значений входного сигнала, причем роль последовательности
весовых коэффициентов играют отсчеты импульсной харак-
характеристики. Иными словами, ЦФ обладает некоторой «па-
«памятью» по отношению к прошлым входным воздействиям.
Практический интерес представляют лишь физически реа-
реализуемые ЦФ, импульсная характеристика которых ие может
стать отличной от нуля в отсчетных точках, предшест-
предшествующих моменту подачи входного импульса. Поэтому для
физически реализуемых фильтров коэффициенты /i_b /]_2, ...
обращаются в нуль и суммирование в A5.50) можно распро-
распространить на все положительные значения индекса к:
импульснаи харак-
характеристика цифро-
цифрового фильтра
общий алгоритм
цифровой филы ра-
рации
принцип физиче-
физической реализуемос-
|И цифрового
фильтра
= 0, 1, 2, ...
A5.51)
Дискретные гармонические последовательное™. Как извест-
известно, в теории линейных систем особую роль играют комп-
комплексные сигналы вида x(t) = А ехр [/(cot + <р)], отображающие
гармонические колебания. При дискретизации такого сигнала
по времени получается так называемая гармоническая после-
последовательность
{**} = М ехр [/(cofcA + <р)]}, A5.52)
такая, что
Re {xk} = {A cos (cofcA + q>)}. A5.53)
Следует иметь в виду, что последовательности A5.52) и
A5.53) представляют дискретизированные гармонические сиг-
сигналы неоднозначно. Действительно, эти последовательности
ие изменятся при замене частоты со иа ш + 2яи/Д =
= со + гкод, где и — любое целое число, соп — угловая частота
дискретизации.
Частотный коэффициент передачи ЦФ. Предположим, что
на вход линейного стационарного цифрового фильтра подана
гармоническая последовательность {хА} вида A5.52), неограни-
неограниченно протяженная во времени, т. е. с индексом к, прини-
гармоническаи по-
слелова гельиость
неоднозначный
характер дискрет-
дискретного представле-
представлении гармонических
сигналов
396
Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
Принципиально не-
невозможно отли-
отличить два дискре-
тизнроианных гар-
гармонических коле-
колебания, разность
частот которых иа-
ходвтся в цело-
кратиом отноше-
отношении с частотой
двскретизацин
структура выход-
выходного сигнала циф-
цифрового фильтра
периодический ха-
характер частотного
коэффициента пе-
передачи цифрового
фильтра
связь между сис-
системной функцией и
импульсной харак-
характеристикой
мающим значения 0, ±1, +2, ... Для того чтобы вычислить
выходной сигнал фильтра {ук}, воспользуемся формулой
свертки A5.50) и найдем m-й отсчет на выходе:
Выполнив тождественные преобразования, получим
Введем новый индекс суммирования п = т—к. Тогда
A5.54)
В соответствии с формулой A5.54) выходной сигиал
имеет структуру дискретной гармонической последователь-
последовательности с той же частотой, что и входной сигнал. Выходные
отсчеты получаются из входных умножением на комплекс-
комплексную величину
A5.55)
называемую частотным коэффициентом передачи ЦФ, зави-
зависящую от частоты ш, а также от шага дискретизации Д
и от совокупности коэффициентов {hn} импульсной характе-
характеристики ЦФ. Формула A5.55) позволяет сделать выводы:
1. Частотный коэффициент передачи ЦФ является периоди-
периодической функцией частоты с периодом, равным частоте
дискретизации шд = 2тс/Д.
2. Функция К (/со) есть преобразование Фурье импульсной
характеристики ЦФ, представленной в форме последователь-
последовательности дельта-импульсов:
[ср. с формулой A5.38)].
Системная функция ЦФ. Расчет важнейшей характеристики
ЦФ — частотного коэффициента передачи — удобно прово-
проводить, используя методы z-преобразований. Сопоставим диск-
дискретным сигналам {хк}, {ук}, {hk} их z-преобразоваиия X{z\
Y(z), H (z) соответственно. Выходной сигиал фильтра {>^} есть
свертка входного сигнала и импульсной характеристики,
поэтому [см. формулы A5.42), A5.50)] выходному сигналу
отвечает функция
Y{z) = H{z)X{z). A5.56)
Системной функцией стационарного линейного ЦФ назы-
называют отношение z-преобразования выходного сигнала к
z-преобразованию сигнала иа входе. Соотношение A5.56)
устанавливает, что системная функция фильтра
A5.57)
H(z)=Y(z)/X(z)-
1S.S. Реализация алгоритмов цифровой фильтрации
397
есть z-преобразование импульсной характеристики. Сравнивая
выражения A5.55) и A5.57), приходим к следующему выводу:
чтобы получить частотный коэффипиеит передачи ЦФ из его
системной функции, в последней нужно сделать подстановку
2 = ехр(/шД).
Пример 15.3. Цифровой фильтр имеет импульсную характе-
характеристику, состоящую из двух ненулевых отсчетов: {ft^}»
= A, —1, 0, 0, ...). Вычислить частотный коэффициент передачи
K(j<a) фильтра.
Здесь системная функция
Уравнение АЧХ фильтра имеет вид
1К О'ю) | = |/A - cos юДJ + sin2 юД = 21 sin (<оД/2) |,
в то время как ФЧХ описывается выражением
. sin со Д it юД
Фк(Ш)=агс«1_со!гщД=т-—.
д Амплитудно-частотная характеристика фильтра является перн-
пешите задачу 8 одической функцией, но практически оиа имеет смысл лишь в
v _¦ д J интервале частот от 0 до ю = п/Л. На верхней частоте этого
интервала каждому периоду дискретизнроваииого гармоинческого
сигнала соответствуют два отсчета. По теореме Котелышкова, это
есть предельное значение частоты сигнала, который может быть
однозначно восстановлен по своим отсчетам.
Заметим, что если иа вход такого фильтра поступает гармо-
иическнй сигнал с частотой, значительно более низкой, чем частота
дискретизации, так что <оД -«г 1, то
Поэтому такая система приближенно выполняет операцию
дифференцирования относительно медленных входных сигналов.
15.5. Реализация алгоритмов цифровой фильтрации
Физически осуществимые ЦФ, которые работают в реаль-
иом масштабе времени, для формирования выходного сигна-
сигнала в i-й дискретный момент времени могут использовать
следующие данные: а) значение входного сигнала в момент
i-ro отсчета, а также некоторое число «прошлых» входных
отсчетов х?-ь х,-2. ••¦> я.-»; б) некоторое число предшест-
предшествующих отсчетов выходного сигнала у,-у, у{-2> •¦¦» Уг-п-
Целые числа тип определяют порядок ЦФ. Классификация
ЦФ проводится по-разиому в зависимости от того, как
используется информация о прошлых состояниях системы.
Трансверсальные ЦФ. Так принято называть фильтры,
которые работают в соответствии с алгоритмом
у, = aoxt + uiXi^i + а2х^г + ••• + fl^-w. A5.58)
где oo,?iu a2, .... t^ — последовательность коэффициентов.
порядок цифрового
фильтра
Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
вид системной фун-
функции трансверсаль-
ного цифрового
фильтра
Число т является порядком трансверсального цифрового
фильтра. Как видно из формулы A5.58), трансверсальный
фильтр проводит взвешеииое суммирование предшествующих
отсчетов входного сигнала и ие использует прошлые отсчеты
выходного сигнала. Применив z-преобразованне к обеим
частям выражения A5.58), убеждаемся, что
У(г) = (а0 + atz-' + aiz~2 + • • • + amz'") X (г).
Отсюда следует, что системная функция
H(z) = ао + 0,2"' + о^г + •¦¦ + amz'm =
_ о0тГ + а.г""' + а2г"-2 + — + о„ ^
является дробно-рациональной функцией z, имеющей т-крат-
ный полюс при z = 0 и т нулей, координаты которых
определяются коэффициентами фильтра.
Алгоритм функционирования трансверсального ЦФ пояс-
поясняется структурной схемой, приведенной на рис. 15.7.
В цифровом про-
процессоре операция
задержки выполня-
выполняется особым бло-
блоком — так назы-
называемым регистром
сдвига
Рнс. 15.7. Схема построения траисверсальиого ЦФ
Основными элементами фильтра служат блоки задержки
отсчетных значений на один интервал дискретизации (пря-
(прямоугольники с символами z), а также масштабные блоки,
выполняющие в цифровой форме операции умножения на
соответствующие коэффициенты. С выходов масштабных
блоков сигналы поступают в сумматор, где, складываясь,
образуют отсчет выходного сигнала.
Вид представленной здесь схемы объясняет смысл термина
«трансверсальный фильтр» (от англ. transverse — поперечный).
Программюя реализация трансверсального ЦФ. Следует
иметь в виду, что структурная схема, изображенная иа
рнс. 15.7, ие является 'принципиальной схемой электрической
цепи, а служит лишь графическим изображением алгоритма
обработки сигнала. Используя средства языка ФОРТРАН,
рассмотрим фрагмеит программы, реализующей трансверсаль-
иую цифровую фильтрацию.
Пусть в оперативной памяти ЭВМ образованы два одно-
одномерных массива длиной М ячеек каждый: массив с именем X,
в котором хранятся значения входного сигнала, и массив с
именем А, содержащий значения коэффициентов фильтра.
Содержимое ячеек массива X меняется каждый раз с полу-
чен-хм нового отсчета входного сигнала. Предположим, что
15.5. Реализация алгоритмов цифровой фильтрации
этот массив заполнен предыдущими отсчетами входной
последовательности, н рассмотрим ситуацию, возникающую
в момент прихода очередного отсчета, которому в про-
программе просвоеио имя S. Данный отсчет должен разместиться
в ячейке с номером 1, ио лишь после того, как предыду-
предыдущая запись будет сдвинута иа одну позицию вправо, т. е.
в сторону запаздывания.
Элементы сформированного таким образом массива X
почленно умножаются иа элементы массива А и результат
заносится в ячейку с именем У, где накапливается отсчетиое
значение выходного сигнала. Ниже приводится текст програм-
программы траисверсальной цифровой фильтрации:
DO1 К = 1, М - 1
1 Х(М-К + 1) = Х(М-К)
XA) = S
С МАССИВ X СФОРМИРОВАН
Y = 0.
DO2 К = 1, М
2 Y = Y + X(K)«A(K)
Импульснан характеристика. Вернемся к формуле A5.59) и
вычислим импульсную характеристику трансверсальиого ЦФ,
осуществив обратное z-преобразование. Легко видеть, что
каэкдое слагаемое функции H{z) дает вклад, равный соответ-
соответствующему коэффициенту а„, смещенному иа и позиций
в сторону запаздывания. Таким образом, здесь
[К] =(я0, вь а2, .... aj. A5.60)
К такому выводу можно прийти и непосредственно, рас-
рассматривая структурную схему фильтра (см. рис. 15.7) и пола-
полагая, что иа его вход подан «единичный импульс» A,0,0, 0,...).
Важно отметить, что импульсная характеристика трансвер-
сального фильтра содержит конечное число членов.
Частотная характеристика. Если в формуле A5.59) провести
замену переменной г = ехр(/'шД), то получим частотный коэф-
коэффициент передачи
К (до)
A5.61)
Предполагается,
что отсчеты вход-
ного сигнала н ко-
эффицненты филь-
тРа представляют-
ся вещественными
числами
вид импульсной ха-
рак герметики
грансверсального
цифрового фильтра
При заданном шаге дискретизации Д можно реализовать
самые разнообразные формы АЧХ, подбирая должиым обра-
образом весовые коэффициенты фильтра.
Пример 15.4. Исследовать частотные характеристики трансвер-
трансверсальиого цифрового фильтра 2-го порядка, выполняющего усреднение
текущего значения входного сигнала и двух предшествующих от-
Говорят, ЧТО ПО- счетов по формуле
«сглаживания
тройками»
Системная функция этого фильтра
над - */, A + г + г'2).
400 Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
1.0 '*' 0 90 180 270
, -0.5
-360
О 60 120 180 240 300
Рнс. 15.8. Частотные характеристики трансверсального ЦФ из приме-
примера 15.4:
а - АЧХ; б - ФЧХ
откуда находим частотный коэффициент передачи
К (/©) = 7э A + е-*4 + e-J2a&) =
= 7э Ш + c°s ©Д + cos 2©Д) — /.(sin ©Л + sin 2©Д)].
Элементарные преобразования приводят к следующим выраже-
выражениям для АЧХ в ФЧХ данной системы:
<pK(©) = -arctg
3 + 4cos©A + 2cos2©A,
sin ©A + sin 2ю А
—©А.
1 + cos ©A + cos 2юА
Соответствующие графики представлены иа рис. 15.8, о, б, где
по горизонтальным осям отложена величина юА — фазовый угол
интервала дискретизации при текущем значении частоты.
Предположим, например, что ©А = 60°, т. е. иа один период ^
гармонического входного колебания приходится шесть отсчетов, решите задачу 9
При этом входная последовательность будет иметь вид
...,0,1,1,0,-1, -1,0,1,1,...
(абсолютные значения отсчетов не играют роли, поскольку
фильтр линеен). Используя алгоритм A5.62), находим выходную
последовательность:
Можно заметить, что ей отвечает гармонический выходной
сигнал той же частоты, что и на входе, с амплитудой, равной
2/з = 0.66 от амплитуды входного колебания и с начальной фазой,
смещенной иа 60° в сторону запаздывания.
При ©Л < 120° рассматриваемый фильтр сглаживает входную
последовательность и может играть роль ФНЧ. Однако частотная
характеристика фильтра периодична и немонотонна. Если исходный
аналоговый сигнал не был подвергнут предварительной частотной
фильтрации н в ием присутствуют составляющие, для которых
©Л > 180° (условия теоремы Котельвикова не выполняются), то они не
будут ослабляться данным Цф. Более того, из-за наличия
высокочастотный составляющих цифро-аналоговый преобразователь
восстановит некоторое низкочастотное колебание, которое совсем не
содержалось во входном сигнале. Это паразитное явление (эффект
«наложения» или «маскировки» высокочастотных составляющих
спектра) в принципе присуще любым дискретным системам.. Оно
заставляет уделять серьезное внимание предварительной обработке
сигнала, подвергаемого цифровой фильтрации.
эффект наложения
1S.S. Реализация алгоритмов цифровой фильтрации
Рекурсивные ЦФ. Этот вид цифровых фильтров характерен
тем, что для формирования i-ro выходного отсчета исполь-
используются предыдущие значения ие только вкодного, ио и
выходного сигнала:
у, = пцх, + а,х,-, +¦¦¦ + а„х,_„ +
+ biji-i + ЬгЛ-2 + — + Ь„у,-„, A5.63)
причем коэффициенты (Ь,, Ь2,--,Ь^, определяющие рекур-
рекурсивную часть алгоритма фильтрации, ие равны нулю одно-
одновременно. Чтобы подчеркнуть различие структур двух видов
ЦФ, траисверсальные фильтры называют также нерекур-
нерекурсивными фильтрами.
Системная функция рекурсивного ЦФ. Выполнив z-преобра-
зование обеих частей рекуррентного соотношения A5.63),
находим, что системная функция
H(z) =
XB)
aoz* + Oi:
Рекурсив — мате-
математический прием,
состоящий в цик-
циклическом обраще-
обращении к данным, по-
полученным на пред-
предшествующих эта-
этапах
вид системной фун-
функции рекурсивного
цифрового фильтра
A5.64)
описывающая частотные свойства рекурсивного ЦФ, имеет иа
z-плоскости и полюсов. Если коэффициенты рекурсивной
части алгоритма вещественны, то эти полюсы либо лежат
на вещественной оси, либо образуют комплексно-сопряжен-
комплексно-сопряженные пары.
Структурная схема рекурсивною ЦФ. На рис. 15.9
изображена схема алгоритма вычислений, проводимых в соот-
соответствии с формулой A5,63). Верхняя часть структурной
схемы отвечает трансверсальной (нерекурсивной) части ал-
алгоритма фильтрации. Для ее реализации требуется в общем
случае т + 1 масштабных блоков (операций умножения) и
т ячеек памяти, в которых хранятся входные отсчеты.
Рекурсивной части алгоритма соответствует нижняя часть
структурной схемы. Здесь используются и последовательных
значений выходного сигнала, которые в процессе работы
фильтра перемещаются из ячейки в ячейку путем сдвига.
Ряс. 15.9. Структурная схема рекурсивного ЦФ
402
Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
Рис. 15.10. Структурная схема канонического рекурсивного ЦФ
2-го порядка
Недостатком данного принципа реализации является по-
потребность в большом числе ячеек памяти, отдельно для
О рекурсивной и нерекурсивной частей. Более совершенны
каноническая схе- канонические схемы рекурсивных ЦФ, в которых исполь-
via цифрового зуется минимально возможное количество ячеек памяти,
фильтра равное наибольшему из чисел m и и. В качестве примера
на рис. 15.10 изображена структурная схема канонического
рекурсивного фильтра 2-го порядка, которой отвечает систем-
системная функция
Щг)
а0
A5.65)
Для того чтобы убедиться в том, что эта система
реализует заданную функцию, рассмотрим вспомогательный
дискретный сигнал {wk} на выходе сумматора 1 и запишем
два очевидных уравнения:
yl = aowt + a,w,,-l+a2wi-2. A5.67)
Выполнив z-преобразование уравнения A5.66), находим, что
W(z) = X(г)/A - Ь,2-» - Ьгг-1). A5.68)
С другой стороны, в соответствии с выражением A5.67)
У (г) = @0 + 0,0-' + W) W(z). A5.69)
Объединив соотношения A3.68) и A5.69), приходим к задан-
заданной системной функции A5.65).
Устойчтость рекурсивных ЦФ. Рекурсивный ЦФ является
дискретным аналогом динамической системы с обратной
связью, поскольку в ячейках памяти хранятся значения его
предшествующих состояний. Если заданы некоторые началь-
начальные условия, т. е. совокупность значений у,-,, yi-2 И-» т°
в отсутствие входного сигнала фильтр будет образовывать
элементы бесконечной последовательности ytt yi+1, Уг+г*-",
играющей роль свободных колебаний.
Цифровой фильтр называется устойчивы^, если возни-
возникающий в нем свободный провесе, есть иевозрастающая
1S.S. Реализация алгоритмов цифровой фильтрации
403
последовательность, т. е. значения | у„ | при п -* со не пре-
вышают некоторого положительного числа М независимо от
выбора начальных условий.
Свободные колебания в рекурсивном ЦФ на основании
алгоритма A5.63) являются решением лииейного разностного
уравнения
у, = biy,-1 + Ьгу,-! Ч \- Ь„)>1-„. A5.70)
По аналогии с принципом решения линейных дифферен-
дифференциальных уравнений будем искать решение A5.70) в виде
показательной функции
У1 = а' A5.71)
с неизвестным пока значением а. Подставив A5.71) в A5.70)
и сократив на обшнй миожитель, убеждаемся, что а является
корнем характеристического уравнения
а" - Ь^" - Ь2аГ~2 Ь, -а A5.72)
На основании A5.64) это уравнение в точности совпадает
с уравнением, которому удовлетворяют полюсы системной
функции рекурсивного ЦФ.
Пусть система корней аь а2 а„ уравнения A5.72)
найдена. Тогда общее решение разностного уравнения A5.70)
будет иметь вид
y, = A1atl+A1A + - + AA A5.73)
Коэффициенты Аи А2,..., А„ должны быть подобраны так,
чтобы удовлетворялись начальные условия.
Если все полюсы системной функции Н(г). т. е. числа
zt = оь z2 = а2 г„ = а„. по модулю не превосходят единицы,
располагаясь внутри единичного круга с центром в точке
г = 0, то иа основании A5.73) любой свободный процесс
в ЦФ будет описываться членами убывающих геометрн-
ческих прогрессий и фильтр будет устойчив. Ясно, что
практически применяться могут только устойчивые цифровые
фильтры.
определение поня-
тии устойчивости
цифрового фильтра
Трансверсальиые
цифровые фильтры
ие являются дина-
мическими систе-
мами и устойчивы
при любом выборе
коэффициентов
Пример 15.5. Исследовать устойчивость рекурсивного цифро-
цифрового фильтра 2-го порядка с системной функцией Я (г) •=
= л„Л1 — Ъ.*~1 — h-г*2.
Характеристическое уравнение
г2 - bl2 - Ьг = 0
имеет корни
Кривая, описываемая уравнением Ь\ + АЬ2 = 0, на плоскости
(bi, b2) коэффициентов есть граница, выше которой полюсы
системной функции вещественны, а ниже — комплексно сопряжены.
Для случая комплексно-сопряженных полюсов |z12|2=—Ь2,
поэтому одной из границ области устойчивости является прямая
b2fc— 1. Рассматривая вещественные полюсы при bt > 0, имеем
Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
Рис. 15.11. Область устойчивости рекурсивного фильтра 2-го порядка
(полюсы фильтра комплексно сопряжены в области, отмеченной
цветом)
условие устойчивости в виде
Возведя в квадрат обе части этого неравенства, видим, что
границей области устойчивости является прямая Ь2 = I ~ bt. Анало-
Аналогично исследуется случай bt < 0.
В результате приходим к выводу, что данный рекурсивный
фильтр устойчив, если значения коэффициентов Ьг и Ь2 лежат
внутри треугольной области, изображенной на рис. 15.11.
Критерий устойчивости рекурсивного ЦФ. Задачу об
устойчивости рекурсивного ЦФ произвольного порядка можно
решить, связав данную проблему с расположением корней
многочленов (см. гл. 14). Дня этого заметим, что пре-
преобразование вида
z = (w + l)/(w - 1) ' A5.74)
изанмио-одиозначно отображает левую полуплоскость
комплексной переменной w на единичный круг в комплекс-
комплексной плоскости 2 с центром в точке z — 0. Действительно,
точке w = — 1 соответствует точка z = 0. В то же время
мнимая ось в w-плоскости, т. е.. совокупность точек с
координатами w=ja (a — произвольное вещественное число),
отображается в множество точек единичной окружности
z = — exp(/*2arctga).
А Возьмем характеристическое уравнение ЦФ
решите задачу 10 *"- Ьх?~1- Ьг^~г 6я = 0 A5.75)
и подставим в него переменную z, выраженную через
переменную w, согласно формуле A5.74):
Приведя это выражение к общему знаменателю (w — 1)",
получим характеристическое уравнение относительно перемен-
IS.S. Реализация алгоритмов цифровой фильтрации 405
ной w: Отметим, что мио-
—-b.-Uw- l)"-1(w+ l)-bn{w- 1Г = 0. A5.76) вой плоскости. По-
Еслн многочлен по степеням w, образующий левую Э*ОМУ приведение к
часть последней формулы, имеет корми лишь в левой общему знамеиате-
полуплоскости, то исходный характеристический многочлен лю правомерно
вида A5.75) имеет кории, располагающиеся лишь в единич-
единичном круге на z-плоскости. Как следствие, анализируемый
рекурсивный ЦФ будет устойчивым.
Пример 15.6. Исследовать устойчивость рекурсивного цифро-
цифрового фильтра 3-го порядка с характеристическим уравнением
г3 + 0.4z2 - 0.5г +1=0.
В соответствии с формулой A5.76) получаем преобразованное
уравнение
(w + IK + 0.4(w - I)(w + If - 0.5 (w - lJ(w + 1) + I =
= 0.9w3 + 3.9w2 + 3.1w + I.I - 0.
Здесь все коэффициенты положительны и в то же время
(см. гл. 14) ata2 — а3а0 =* ИЛ > 0. По критерию Рауса — Гурвица,
данный многочлен устойчив. Значит, устойчив и анализируемый
цифровой фильтр.
Импульсная характеристика рекурсивного ЦФ. Характер-
Характерная черта, отличающая рекурсивный ЦФ, состоит в том,
что из-за наличия обратной связи его импульсная характе-
характеристика имеет вид неограниченно-протяженной последова-
последовательности. Покажем это иа примере простейшего фильтра
1-го порядка, описываемого системной функцией
H{z) = аЦ\ - bz~l) = az/(z - b).
Данный фильтр устойчив, если | b \ < 1. А
Известно [см. формулу A5.57)], что импульсную характе- решите задачу 11
ристику можно иайти с помощью обратного z-преобразо-
вания, примененного к системной функции. Используя
формулу A5.36), находим m-й член в последовательности
ы
A577)
Интегрирование осуществляется по единичной окружности,
внутри которой располагается точка полюса z = b.
Поскольку вычет подынтегральной функции в точкеполю-
са равен, как легко видеть, abm, искомая импульсная
характеристика фильтра представляет собой убывающую
геометрическую прогрессию
2..")-. .• .- ¦ - ч A5.78)
406 Глава IS. Дискретные сигналы. Принципы цифровой фильтрации
15.6. Синтез линейных цифровых фильтров
Важное практическое значение имеют методы синтеза
ЦФ, обеспечивающие заранее заданные свойства, например,
требуемый вид импульсной или частотной характернстнки
[40]. Ниже будет идти речь о тех приемах синтеза,
которые существенным образом опираются на свойства
аналоговых цепей, служащих модельными аналогами (прото-
(прототипами) цифровых устройств
Метет инвариантных импульсных характеристик. В ос-
основе этого простейшего метода синтеза ЦФ лежит предполо-
И жение о том, что синтезируемый ЦФ должен обладать
принцип полоиня импульсной характеристикой, которая является результатом
импульсных харак- дискретизации импульсной характеристики соответствующего
¦ ериешк ана. ю- аналогового фильтра-прототипа. Имея в виду синтез физи-
гового и цифрово! о чески реализуемых систем, для которых импульсная характе-
филь i ров ристнка обращается в нуль при t < 0, получим следующее
выражение импульсной характеристики ЦФ:
A5.79)
**%¦¦-
Следует обратить внимание иа то, что число отдель-
отдельных членов в выражении импульсной характеристики ЦФ
может быть как конечным, так и бесконечным. Это
определяет структуру синтезируемого фильтра: импульсной
характеристике с конечным числом отсчетов отвечает
трансверсальный фильтр, в то время как для реализации
неограниченно протяженной импульсной характеристики тре-
требуется рекурсивный ЦФ.
Связь между коэффициентами импульсной характеристики
и структурой ЦФ особенно проста для трансверсального
фильтра. В общем случае синтез структуры фильтра осу-
осуществляется путем применения z-преобразования к последо-
последовательности вида A5.79). Найдя системную функцию Н(г)
фильтра, следует сравнить ее с общим выражением A5.64) и
определить коэффициенты трансверсальной и рекурсивной
частей.
Степень приближения амплитудно-частотной характеристи-
характеристики синтезированного ЦФ к характеристике аналогового
прототипа зависит от выбранного шага дискретизации Д.
При необходимости следует вычислить частотный коэффи-
коэффициент передачи ЦФ, осуществив в системной функции
i/(z) замену переменной по формуле z = ехр(/шА), и затем
сравнить результат с частотным коэффициентом передачи
аналоговой цепи.
Прямер 15.7. Рассмотреть синтез трансверсального цифро-
цифрового фильтра, подобного динамической системе 1-го порядка (напри-
(например, интегрирующей RC-uenu) с импульсной характеристикой вида
Г О, КО,
МО-
. ехр(-(/т),
A5.80)
15.6. Синтез линейных цифровых фильтров 407
(несущественный для задачи синтеза амплитудный множитель в
импульсной характеристике положен равным единице).
Пусть импульсная характеристика аппроксимируется последова-
последовательностью из трех равноотстоящих отсчетов:
(М-(!.«"**. е4")- A5-81)
ТраисверсальныЙ ЦФ с такой импульсной характеристикой
описывается разностным уравнением
Ук . Хк + в"***-* + е-***-.. A5"82)
Применив z-преобразованне к последовательности A5.81), нахо-
находим системную функцию ЦФ
H(z) = I + e^z + c~ZA"z'\ A5.83)
откуда частотный коэффициент передачи
К(/ш) = 1 + е-^Ле"*4 + e-""e-'2"A. A5.84)
Пример 15.8. Рассмотреть случей, когда импульсная характе-
характеристика A5.80) аналоговой цепи аппроксимируется бесконечной
дискретной последовательностью
{К} =A, е"** еА/\...). A5.85)
Выполвив z-преобразование импульсной характеристики A5.85),
получим системную функцию
fl(z) - 1 + e-^'z + e-JYz-2 + — = =&-=Г- A5Щ
Данной системной функции отвечает рекурсивный ЦФ 1-го
порядка, содержащий, помимо сумматора, один масштабный блок
и один элемент задержки.
Частотный коэффициент передачи фильтра
Сраввенне трансверса.тьных я рекурсивных ЦФ. Жела-
Желательно, тгобы АЧХ синтезируемого ЦФ достаточно точно
аппроксимировала АЧХ аналогового прототипа. Выбор того
или иного варианта структуры ЦФ в рамках метода ин-
инвариантной импульсной характеристики существенно сказы-
сказывается на точности приближения.
Сравним частотные характеристики даух ЦФ, рассмот- А
ренных в примерах 15.7 и 15.8. Оба эти фильтра соот- решите задачу 12
ветствуют аналоговому прототипу с частотным коэффи-
коэффициентом передачи: >
KQa) = 1/A + рп). A5.88)
Положим для конкретности, что отношение т/Д = 5. На
основании формул A5.88), A5.84) и A5.87), сделав несложные
тфеобразования, запишем выражения нормированных АЧХ
аиалфового н двух цифровых фильтров, 'рекурсивного н
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
трансверсального:
J/1.6703 — 1.6375 cos шД
K(ja>) I |/2.120 + 2.7351 cos coA + 1.3406 cos 2mA
')Lp
A5.89)
A5.90)
A551)
Результаты расчета величин \K(je>)/K(jO)\ по данным
формулам сведены в табл. 15.1.
Таблица 15.1
0.0
OS
1.0
IS
2.0
2.S
3.0
|К(/С0)/К(Д>>|
Тип фильтра
аналоговый
1.0000
0.3714
0.1961
01322
00995
0.0797
0.0665
цифровой
рекурсивный
1.0000
0.3754
0.2046
0.1454
0.1182
0.1050
0.1000
ЦИФРОВОЙ
трансверсальиый
1.0000
0.9201
0.7005
0.3990
0.1305
0.2234
0.3360
Из приведенных данных видно, что как рекурсивный, так
и траисверсальный ЦФ действительно обладают характе-
характеристиками фильтров нижних частот. Однако рекурсивный
фильтр по своим частотным свойствам оказывается гораздо
ближе к аналоговому прототипу.
Синтез ЦФ на основе дискретизации дифференциаль-
дифференциального уравнения аналоговой цевн. К структуре ЦФ, прибли-
приближенно соответствующего известной аналоговой цепи, можно
прийтн, осуществив дискретизацию дифференциального урав-
уравнения, описывающего аналоговый прототип. Как пример
использования этого метода рассмотрим синтез ЦФ, отве-
отвечающего колебательной динамической системе 2-го порядка,
для которой связь между выходным колебанием y(t) и
входным колебанием x(t) устанавливается дифференциальным
уравнением
x(i). A552)
Предположим, что шаг дискретизации равен Л и рас-
рассмотрим совокупности дискретных отсчетов {у^} и {xjj. Если
в A5.92) заменить производные их конечно-разностными
выражениями, то дифференциальное уравнение превратится в
разностное уравнение
х» A553)
15.6. Синтез линейвых цифровых фильтров
Перегруппировав слагаемые, отсюда получаем
* 1-2«Д + ЮоД' ¦ A554)
Разностное уравнение A5.94) задает алгоритм рекурсивного
фильтра 2-го порядка, который- моделирует аналоговую коле-
колебательную систему. Такой ЦФ принято называть цифро-
цифровым резонатором. При соответствующем выборе коэффи-
коэффициентов цифровой резонатор может выполнять роль частотно-
избнрательного фильтра, подобного колебательному контуру.
Метод инвариантных частотных характеристик. Принци-
Принципиально невозможно создать ЦФ, частотная характеристика
которого в точности повторяла бы частотную характе-
характеристику некоторой аналоговой цепи. Причина состоит в
том, что, как известно, частотный коэффициент передачи ЦФ
является периодической функцией частоты с периодом,
определяемым шагом дискретизации (рис. 15.12).
IKI
цифровой
тор
резона-
.31
•¦«№
г ;*.<5&.-..<
*\ ц. 1- ¦-¦*< ¦ ¦ ...
Рис. 15.12. Амплитудно-частотные характеристики фильтров:
а — аналогового; б — цифрового
Говоря о подобии (инвариантности) частотных характе-
характеристик аналогового н цифрового фильтров, можно требо-
требовать лишь то, чтобы весь бесконечный интервал частот
<йа, относящихся к аналоговой системе, был преобразован *
в отрезок частот юд цифрового фильтра, удовлетворяющих принцип
неравенству
-п/Л<(йц<п/А ' A555)
при сохранении общего вида АЧХ.
Пусть Ка(р) — передаточная функция аналогового фильт-
фильтра, задаваемая дробно-рациональиым выражением по степе-
степеням комплексной частоты р. Если воспользоваться связью
между переменными z и р: z = exp(pA), то можно записать
p=<l/A)lnz. A556)
Однако с помощью этого закона связи нельзя полу-
чдаь физически реализуемую, системную функцию ЦФ, по-
подобия
частотных харак-
характеристик аналого-
аналогового и цифрового
фильтров
410
Глава 15. Дискретные сигналы. Принципы цифровой фильтрация
скольку подстановка A5.96) в выражение Кл(р) приведет к
системной функции, не выражающейся в виде частного
даух многочленов. Требуется найти такую дробио-рацио-
нальиую функцию от z, которая обладала бы основным
Функцию вида свойством преобразования A5.96), а именно переводила бы
A5.97) называют точки единичной окружности, лежащей в плоскости z, в точки
билинейным преоб- мнимой оси иа плоскости р.
разованием
Среди прочих способов для синтеза фильтров нижних
частот получила распространение связь вида [40]
A5.97)
связь между час-
частотными перемен-
переменными аналогового
и цифрового филь-
фильтров
устанавливающая однозначное соответствие между точками
единичной окружности в z-плоскости со всей мнимой осью
в р-плоскости. Характерная особенность этого закона пре-
преобразования состоит в следующем. Пусть в A557) выпол-
выполнена замена переменной z = ехр(/ЮцД). Тогда
/ш. = B/Д) [ехр(М,Д) - ЩехрОшдД) + 1],
откуда вытекает соотношение между частотными перемен-
переменными соа и <оп аналоговой и цифровой систем:
2. а„Д
A558)
Если частота дискретизации достаточно велика (<одД ¦*: 1),
то, как легко видеть из формулы A558), е>а да о„. Таким
образом, иа низких частотах характеристики аналогового
и цифрового фильтров практически совпадают. В общем слу-
случае нужно принимать во внимание трансформацию масштаба
по оси частот цифрового фильтра, описываемого формулой
A558).
Практически процедура синтеза ЦФ состоит в том, что в
функции Кл(р) аналоговой щт выполняется замена пере-
переменной по формуле A557). Полученная при этом системная
функция ЦФ оказывается дробно-рациональной и поэтому
позволяет непосредственно записать алгоритм цифровой
фильтрации.
Пример 15.9. Синтезировать цифровой фильтр с частотной
характеристикой, подобной характеристике аналогового ФНЧ 2-го
порядка типа Баттерворта. Частота среза для ЦФ <am = 1500 с.
Частота дискретизации <од = 10000 с~*.
Прежде всего определяем шаг дискретизации Д = 2л/ид =
= 6.2832- Ю с. По формуле A5.98) находим частоту среза
аналогового фильтра, подобного синтезируемому ЦФ:
Как известно, передаточная функция аналогового ФНЧ 2-го
порядка типа Баттерворта, рассматриваемая относительно иормн-
15.6. Синтез линейных цифровых фильтров
рованиой комплексной частоты р№ имеет вил (см. гл. 13)
Й + 1/2Р.+ 1
или при перехода к истинной комплексной частоте
Кя(р) - - "й A5Л00)
р2 + 1/2@^ + (О2,
Выполнив в A5.100) замену переменной вида A5.97), находим
системную функцию ЦФ:
Н(г) = ш2.(г + IJ {[B/ДJ + 1^B/Д)(о„ + <]г2 +
+ 2[(о2а-B/ДJ]г + B/ДJ-|^B/Д)<оса + (о2са}-». A5.101)
решше задачу 13 Подставив в эту формулу числовые значения, получим еле-
дуюший результат:
Влияние квантования сигнала на работу цифрового фильтра.
При проектировании ЦФ в ряде случаев следует учиты-
учитывать специфические погрешности их работы, возникающие
за счет квантования сигналов, т. е. вследствие представ-
представления всех величин,'как постоянных, так и изменяющихся
во времени, в виде даоичных чисел с конечной разряд-
разрядностью.
Квантованный характер сигналов приводит к целому ряду
явлений, описанных в литературе по цифровой фильтрации
[39]. Здесь будет рассмотрен простейший эффект — возникно- 9
вение так называемого шума квантования. шум квашовании
Пусть и,„а| — наибольшее значение аналогового сигнала
иа входе АЦП, которое еще не вызывает переполнения
арифметических устройств фильтра. Если т — число двоичных
разрядов, отводимых для представления чисел в фильтре,
то очевидно, что квантование сигнала происходит с шагом
4.-Ц-./2". (Ш03)
Квантованные отсчеты описывают мгновенные значения
аналогового сигнала не точно, а с некоторой погрешностью,
тем меньшей, чем меньше шаг квантования. Иными сло-
словами, отсчеты входного сигнала хк фильтра являются сум-
суммами истинных значений х\ и отсчетов пк некоторого дискрет-
дискретного случайного процесса, называемого шумом квантования: А
х» = х, + пк. A5.104) решите чадачу 14
Теоретически и экспериментально показано, что в большин-
большинстве случаев, интересных для практики, последовательность
{пк} образована статистически независимыми случайными
величинами, казкдая из которых равномерно распределена на
интервале от — qn/2 до qa/2 н поэтому имеет нулевое
математическое ожидание и дисперсию alx = q2a/l2 (см. гя. б).
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
Шум квантования, присутствующий иа входе ЦФ, пре-
преобразуется этим устройством. Пусть {и,,»} — дискретная
последовательность, соответствующая входному шуму кванто-
квантования. Для того чтобы найти 1-6 отсчет выходной
последовательности {«„„*}> следует вычислить дискретную
свертку входного шумового сигнала и импульсной характе-
характеристики фильтра:
Отсюда определяем функцию корреляции шума квантова-
квантования на выходе:
Проводится сум-
суммирование по ин-
индексу (
решите задачу 15
1
j=o
A5.106)
Положив т = 0, получим дисперсию шума на выходе:
A5.107)
Таким образом, выходной шум квантования оказывается
тем больше, чем медленнее уменьшаются отсчеты импульс-
импульсной характеристики фильтра.
Результаты
ОО
оо-
ОО
оо
оо
оо
оо
оо
В отличие от аналоговых сигналов дискретные сигналы описываются
последовательностями отсчетных значений в дискретном множестве точек
Спектр дискретного сигнала состоит из бесконечного числа «копий»
спектра исходного аналогового сигнала.
Восстановление исходного сигнала из дискретной последовательности отсче-
отсчетов реальным частотным фильтром неизбежно связано с искажениями.
Число амплитудных коэффициентов гармоник, находимых с_ помощью
дискретного преобразования Фурье, составляет половину числа отсчетов.
Использование z-преобразования позволяет изучать дискретные последова-
последовательности методами математического анализа непрерывных функций.
Выходная последовательность цифрового фильтра (ЦФ) есть результат
дискретной свертки входного сигнала и импульсной характеристики фильтра.
Частотный коэффициент передачи ЦФ является преобразованием Фурье
импульсной характеристики фильтра и представляет собой периодическую
функцию частоты с периодом, равным частоте дискретизации.
Системная функция ЦФ является г-преобразованием импульсной характе-
характеристики. ' . .Ж
Вопросы
413
ОО С точки зрения реализации алгоритма фильтрации принято различать
трансверсальные и рекурсивные ЦФ.
ОО Рекурсивный ЦФ устойчив в том случае, если все полюсы его системной
функции лежат внутри единичного круга с центром в точке z = 0.
ОО При синтезе ЦФ используют импульсную или частотную характеристику
аналогового фильтра-прототипа.
ОО Представление данных в виде двоичных чисел с конечным числом разрядов
приводит к специфическому источнику погрешности работы ЦФ, называе-
называемому шумом квантования.
Вопросы
1. Изобразите структурную схему им-
импульсного модулятора. В чем состоит
характерное отличие сигналов вида АИМ и
ШИМ?
2. Какой вид имеет спектральная плот-
плотность дискретизнрующей последователь-
последовательности?
3. В чем заключается причина искаже-
искажений сигнала на выходе восстанавливаю-
восстанавливающего фильтра нижних частот, если его
частота среза значительно превышает частоту
дискретизации входной импульсной последо-
последовательности?
4. Дискретный сигнал на интервале
периодичности задан с помощью 16 отсче-
отсчетов. Каков номер наивысшей гармоники, кото-
которую можно вычислить с помощью ДПФ
по этим данным?
5. На каком принципе основан алгоритм
быстрого преобразования Фурье (БПФ)?
6. Как формулируются условия сходимос-
сходимости г-цреобразования?
7. Каково число двоичных разрядов, при-
применяемых обычно в ЦФ для представления
чисел?
8. Перечислите свойства импульсной ха-
характеристики стационарного линейного ЦФ.
Какому условию должна удовлетворять
Задачи
1. Аналоговый сигнал х(Г) имеет вид
прямоугольного видеоимпульса с длитель-
длительностью ти = 2 мс. Данному колебанию со-
сопоставлена модулированная импульсная по-
последовательность (сигнал вида АИМ), состоя- .
щая из 10 равноотстоящих видеоимпульсов
длительностью S мкс каждый. Найдите
спектральную плотность данной последо-
последовательности.
2. Дискретный сигнал на интервале своей
периодичности задан четырьмя равноотстоя-
равноотстоящими отсчетами: {х*} =A, 0,-1, 0). Вычяс-
лрп коэффициент ДПФ этого сигналя,
импульсная характеристика физически реали-
реализуемого ЦФ?
9. Почему представление гармонических
аналоговых сигналов с помощью последо-
последовательности равноотстоящих отсчетов яв-
является неоднозначным?
10. Как определяется понятие системной
функшш цифрового фильтра?
11. В чем состоят характерные отличия
системных функций траисверсальных н ре-
рекурсивных ЦФ?
12. Почему траисверсальные ЦФ являют-
являются устойчивыми системами?
13. Чем принципиально отличаются им-
импульсные характеристики трансверсальных и
рекурсивных фильтров?
14. В чем состоят достоинства ЦФ,
реализованных по каноническим схемам?
15. На чем основан синтез ЦФ по
методу инвариантных импульсных характе-
характеристик?
16. Почему невозможно создать ЦФ,
частотная характеристика которого в точнос-
точности повторяла бы частотную характеристику
аналогового фильтра-прототипа?
17. Как влияет вид импульсной характе-
характеристики ЦФ на дисперсию выходного шума
квантования?
3. Найдите формулу, описывающую ана-
аналоговый сигнал хA), восстановленный по
коэффициентам ДПФ в соответствии с дан-
данными задачи 2.
4. Дискретный периодический сигнал
имеет следующие коэффициенты ДПФ:
Со = 0.5, Ci = 1.5. Коэффициенты с более
высокими номерами образуют бесконечную
периодическую последовательность. Найдн-
те отсчетные значения сигнала, взятые в
пределах интервала периодичности.
5. Цифровой сигнал {хк} задан четырьмя
отсчетами:
Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
L
Найдите z-преобразование этого сигнала.
6. Вычислите z-преобразование, отвечаю-
отвечающее аналоговому сигналу x{t) = at (t>О),
где а — постоянная величина.
7. Пусть г-преобразование дискретного
сигнала {хк} имеет вид X(z) = (z2+2z+l)/r.
Найдите отсчетные значения этого сигнала.
8. Импульсная характеристика ЦФ задана
тремя ненулевыми отсчетами: {hk} =
= A, 0.5, 0.25). Вычислите системную функ-
функцию н частотную характеристику данного ЦФ.
9. Изобразите структурную схему ЦФ, ра-
работающего в соответствии с алгоритмом
Вычислите системную функцию и частотный
коэффициент передачи.
10. Рекурсивный ЦФ работает в соответ-
соответствия с алгоритмом
yi^Xi+O.Syt-t -0.75>>,_2.
Исследуйте устойчивость данного ЦФ.
11. Вычислите н постройте импульсные
характеристики цифровых фильтров, описы-
описываемых разностными уравнениями:
а) yt = 2.5х, - 0.8>v-,,
б) л ?
12. Используя метод инвариантных им-
импульсных характеристик, синтезируйте транс-
версальный ЦФ, подобный интегрирующей
ЯС-цепи. Импульсную характеристику фильт-
фильтра представьте четырьмя равноотстоящими
отсчедами. Вычислите АЧХ сиитезироваиного
фильтра, положив ДДЛО = 0.5.
13. Используя метод инвариантных час-
частотных характеристик, синтезируйте ЦФ,
амплитудно-частотная характеристика кото-
которого подобна АЧХ аналогового ФНЧ
Чебышева 2-го порядка с параметрами:
соса = 2-1О3 с, е = 0.8. Частота дискре-
дискретизации Год = 1.5-10* с.
14. Аналоговый сигнал на входе АЦП
цифрового фильтра имеет максимальную
амплитуду Ummx = 50 В. Для представления
отсчетов использованы восьмиразрядные
двоичные числа. Вычислите дисперсию шума
квантования на выходе АЦП.
15. На входе рекурсивного ЦФ с алго-
алгоритмом >>!=0.45х(+0.95j»i -i действует шум
квантования, шаг которого qKB = 0.5 мВ.
Определите дисперсию шума квантования на
выходе фильтра.
Более сложные задания
16. Рассмотрите возможность представ-
представления периодического дискретного сигнала
с помощью преобразования Фурье — Уолша,
в котором, в отличие от обычного ДПФ,
базисные функции вида exp(—j2nnk/N) заме-
заменены функциями Уолша.
17. Предложите способ цифровой фильт-
фильтрации, основанный на прямом использо-
использовании алгоритмов ДПФ и ОДПФ.
18. Запишите на ФОРТРАНе фрагмент
программы, реализующей алгоритм рекур-
рекурсивной цифровой фильтрации.
19. Применив метод инвариантных им-
импульсных характеристик, синтезируйте ЦФ,
соответствующий аналоговому колебательно-
колебательному контуру с потерями, импульсная харак-
характеристика которого имеет вид h (t) =
= ехр(—ar)cosco0t.
20. В математике последовательностью
Фибоначчи называют совокупность чисел
{хк}, связанных соотношением х( = х{-х +
+ х,-_2. Найдите первые 10 чисел Фибоначчи,
положив х0 = 0, хх = I. Предложите анали-
аналитический способ нахождения этих чисел с
любым номером. Свяжите данную задачу с
проблемой устойчивости рекурсивных ЦФ.
Убедитесь, что члены последовательности
Фнбоначчн нарастают экспоненциально.
Глава 16
Некоторые вопросы теории
помехоустойчивости
радиоприема
Борьба с шумами и помехами является основной
задачей во многих областях радиотехники. Обеспечить
высокую помехоустойчивость систем передачи информации -
можно разными путями. Например, создают такие устройст-
устройства для обработки, которые некоторым наилучшим образом
выделяют сигнал, искаженный присутствием помехи. Другой
путь заключается в совершенствовании структуры переда-
передаваемых сигналов, использовании помехоустойчивых способов
кодирования и модуляции. Примерами таких помехо-
помехоустойчивых сигналов служат коды Баркера и сигналы
с линейной частотной модуляцией, изученные в гл. 3, 4.
16.1. Выделение полезного сигнала
с немощью линейного частотного фильтра
Чтобы выделить полезный сигнал, искаженный наличием
шума, можно прибегнуть к частотной фильтрации. Пусть
частотный коэффициент передачи К (/?¦>) линейного стацио-
стационарного фильтра выбран так, что значения величины
\K(j(o)\ велики в области частот, где сконцентрирована
основная доля энергии сигнала, и малы там, где велика
спектральная плотность мощности шума. Следует ожидать,
что, подав на вход такого фильтра сумму сигнала и
шума, на выходе можно получить знметное увеличение
относительной доли полезного сигнала.
Отношение снгнал/шум. Придадим данному положению
количественную формулировку. Пусть на входе линейного
фильтра присутствует входной сигнал
«.At) = s»W + M4 A6.1)
являющийся суммой полезного сигнала sM(f) и шума
Пвх(')* Здесь и в дальнейшем предполагается, что оба эти
сигнала являются узкополосными с одинаковыми централь-
центральными частотами ш0. Считается, что сигналы sm и и„
некоррелированы в том смысле, что среднее значение
произведения
A6.2)
Используется
свойство эргодич-
эргодичности сигналов
Будем также предполагать стационарность этих сигна-
сигналов на неограниченно протяженном интервале времени.
Интенсивность колебаний на входе фильтра можно харак-
характеризовать величиной среднего квадрата (средней мощности)
входного сигнала, которая в силу равенства A6.2) есть сумма
Глава 16. Воцросы теорви помехоустойчивости радиоприема
средних квадратов полезного сигнала и шума:
<«L> + о2„„, A6.3)
ф где cjJ.» — дисперсия входного шума.
отношение сигнал/ Д'1Я описания относительного уровня сигнала принято
шум вводить так называемое отношение сигнал/шум на входе
фильтра по формуле
A6.4)
или в логарифмических единицах (дБ)
«„ = lOlgKsD/fJ2,»). ' A6.5)
Отметим; что безразмерное число бм характеризует
уровень сигнала по отношению к уровню шума весьма
приближенно и неполно. Пользоваться этим отношением
целесообразно лишь тогда, когда заранее известно, что
реализации сигнала и шума в каком-нибудь содержатель-
содержательном смысле «схожи» между собой. Так, входной шум
обычно хорошо описывается моделью нормального узко-
узкополосного случайного процесса. Отдельные реализации дан-
данного шума представляют собой квазигармонические коле-
колебания. Естественно, что в этом случае можно пользоваться
формулой A6.4) для оценки уровня полезных модулиро-
модулированных сигналов вида AM или ЧМ.
Пример 16.1. На входе фильтра присутствует однотональный
АМ-сигнал sM(t) = U^il + McosSlf)cosco0r и гауссов шум nM(t),
односторонний спектр мощности которого
f(()) = i ' о, «о - 2fi < со < со„ + 2П,
О при прочих значениях со.
Найти отношение сигнал/шум на входе фильтра.
Среднюю мощность сигнала получим, усредняя его квадрат по
времени:
1 О и;
iaiimu omi
Среднюю 1
гни:
<s|x> = lim — I 1/^A +McosS102cos2co0rdr=I/2^2mc(l+A'2/2)-
Г-оо TJ
Здесь первое слагаемое соответствует средней мощности не-
несущего колебания, которое не содержит информации о пере-
передаваемом сообщении. Поэтому при расчетах помехоустойчивости
принято опускать эту составляющую н считать, что
Дисперсия шума на входе фильтра
Отношение сигиал/шум
оказывается прямо пропорциональным квадрату коэффициента мо-
модуляции и обратно пропорциональным частоте модуляции.
16.1. Выделение полезного сигнала с помощью линейного фильтра
Отношение сигнал/шум на выходе фильтра. Линейный
фильтр подчиняется принципу суперпозиции. Сигнал и шум
обрабатываются таким фильтром независимо н создают на
выходе сигнал u,ul(() = «,„(() + п,ых(() со средним квадратом
A6.6)
Это дает возможность ввести отношение сигнал/шум на
выходе фильтра:
A6.7)
A6.8) ф
Будем называть выигрышем фильтра по отношению выигрыш фильтра
сигиал/шум величину
I Щ = б.их/б.» I A6.9)
которая также может быть выражена в децибелах:
m* = e,u»-e.8. A6.10)
Ясно, что если Мф > 1, т. е. тф > 0, то фильтрация суммы
сигнала и шума приводит к благоприятному результату
в смысле принятого нами критерия — повышению относи-
относительного уровня полезного сигнала на выходе.
Ответ на вопрос о том, какое отношение сигнал/шум'
следует считать достаточным для нормального функциони-
функционирования радиосистемы, целиком зависит от назначения этой
системы и всей совокупности предъявляемых технических
требований.
Средняя мощность узкополосяого сягнала. Понятие средней
мощности целесообразно вводить только по отношению к
узкополосным сигналам, неограниченно протяженным во вре-
времени. Удобной и достаточно общей математической мо-
моделью такого сигнала является сумма
»„(') = ? 4iC0sK( + q>»), A6.11)
к=0
в которой амплитуды Ак и фазы <р» произвольны, а все
частоты ш, сосредоточены в узкой полосе вокруг опорной
частоты ю0. Мгновенная мощность такого сигнала
Среднюю мощность полезного сигнала можно получить,
проведя усреднение по времени:
те в) t T
VV 1 Г
> > 4t/4, Дт — cos(<B
418
Глава 16. Вопросы теории помехоустойчивости радиоприема
Из выражения
A6.12) должен
быть исключен
член, соответст-
вуюошй вемодули-
ли спели частот
со присутствует не-
ст яя частота)
Очевидно, что вклад в сумму дадут только слагаемые
с совпадающими индексами, когда к =. I Отсюда следует, что
A6.12)
<s|x)
°™оше™е сигнал/шум. Если сигнал вида A6.11) проходит
через лниейныи фильтр с частотным коэффициентом переда-
переда1), то средняя мощность сигнала на выходе
Дисперсия выходного шума
Отсюда находим выражение для отношения сигнал/шум
на выходе фильтра:
A6.13)
Данная формула содержит полное решение поставленной
задачи и позволяет в принципе, зная спектры сигнала и
шума, так подобрать АЧХ фильтра, чтобы получить ощути-
ощутимый выигрыш. Следует, однако, иметь в виду, что полезный
сигнал, как правило, сам претерпевает некоторые, порой зна-
значительные искажения.
Пример 16.2. Полезный сигнал представляет собой двухтональ-
двухтональное АМ-колебание sM (Г) = Иж A + Mt cos Я it + Мг cos fiaO cos юо' с
параметрами: Umc = 5 мкВ, А/, = 0.8, М2 - 0.5, ?1, = 10* с, ?12 =
= 2-10* с, со0 = 107 с. Шум n(t) имеет спектр мощности с
постоянной плотностью FM =3.33-10"" В2-с в полосе частот
(со0 — 1.5?12, ю0 + 1.5fi2) u с нулевой плотностью на остальных час-
частотах. Смесь сигнала и шума пропускается через идеальный поло-
полосовой фильтр, имеющий центральную частоту со0 и коэффициент
усиления | К (/со) | = 0.3 в полосе частот (со0 — 1.Ю„ со0 + 1.Ш,).
Определить выигрыш Мф данного фильтра.
Входной сигнал имеет спектральные составляющие с амплиту-
амплитудами U^Mt/2, и^Мз/2 соответственно на частотах со0 ± Пь со0 ± П2.
По формуле A6.11) находим, что <s?,> = Ulc(Mj + A/|)/4 =
= 5.561О-'2 В2.
Дисперсия шума на входе
о5»ж=^.о-ЗОа=2-10-" В2.
16.2. Оптимальная фильтрация сигналов известной формы
Таким образом,
См = 5.56 • 10" 12/2 • 102 = 2.78 или qn = 4.44 дБ.
В полосе пропускания фильтра оказывается только одна пара
боковых частот, так что
<4ьп> = I К \2ULMi/4 = 3.6 ¦ 103 В2.
Дисперсия шума иа выходе получается существенно меньше, чем
на входе:
о?вых = IК \2Fk0 • 2.211, = 6.59 • 104 В2.
Отсюда
Свых = 5-46 или qBba = 7.37 дБ.
Применительно к рассматриваемым сигналу и шуму выигрыш
фильтра
А/ф = 5.46/2.78 = 1.96 или щ « 3 дБ.
16.2. Оптимальная линейная фильтрация сигналов
известной формы
Частотно-избирательную систему, выполняющую обра-
обработку суммы сигнала и шума некоторым наилучшим обра-
образом, называют оптимальным линейным фильтром.
Проблема оптимальной обработки суммы известного по
форме сигнала и шума возникает, например, в радиолокации.
Здесь принятый полезный сигнал 5^A) есть точная масштаб-
масштабная копия переданного сигнала snep (t), т. е.
xI A6.14)
причем постоянное число Л «*: 1.
Амплитуда принятого сигнала может оказаться весьма ма-
малой и сопоставимой с эффективным напряжением шума,
действующего на входе приемника.
Приемное устройство радиолокатора выполняет следую-
следующие операции:
а) обнаруживает сигнал, т. е. устанавливает сам факт при-
присутствия отраженного сигнала в принятом колебании;
б) измеряет время задержки т, пропорциональное рас-
расстоянию до цели.
При работе радиолокационной системы не требуется
сохранять форму полезиого сигнала. Более того, в процессе
обработки желательно трансформировать полезный сигнал
таким образом, чтобы подача его на вход фильтра приводила
в некоторый момент времени к значительному «всплеску»
мгновенных значений выходного колебания. Шумовой сигнал,
будучи, как правило, гауссовым, характеризуется малой вероят-
вероятностью больших выбросов. Поэтрму если выходной сигнал
в некоторые моменты времени существенно превосходит
эффективное напряжение шума, то это с большой ве-
вероятностью свидетельствует о присутствии полезиого сигнала
на входе приемника.
JktoJlvvA/
о
«Всплеск» полезно-
полезного сигнала над
уровнем шума
роль предположе-
предположения о гауссовом
характере шума
Глава 16. Воцросы теорви помехоустойчивости радиоприема
Согласованный линейный фильтр. Пусть системой, осу-
осуществляющей обработку суммы сигнала и шума, является
стационарный линейный фильтр с импульсной характеристи-
характеристикой h(t). Детерминированный полезный сигнал sa(t) создает .
на выходе фильтра отклик
Зафиксируем некоторый, пока произвольный момент вре-
времени to и постараемся так выбрать функцию h(t), чтобы
величина 1s8m (f0) I достигала максимально возможного зна-
значения. Если такая функция действительно существует, то
отвечающий ей линейный фильтр называют фильтром, согла-
V сованным с заданным входным сигналом или согласованным
согласованный фильтром.
фильтр Итак, пусть
s—M= Js«<T)fc.<«b-*)<h A6.15)
— отклик на выходе фильтра, подлежащий максимизации по
модулю. На основании неравенства Коши — Буняковского
< [ J s|s (т) dt ] h1 ((с - т) dr]1'2. A6.16)
Знак равенства имеет место тогда, когда сомножители
в подынтегральном выражении пропорциональны друг другу:
A6.17)
где к — произвольный коэффициент.
Выполнив формальную замену переменной t = f0 — т,
отсюда получаем
A6.18)
Таким образом, импульсная характеристика согласованно-
согласованного фильтра представляет собой масштабную копию входного
сигнала, которая, однако, располагается в зеркальном порядке
вдоль оси времени [об этом говорит отрицательный знак
при t в формуле A6.18)]. Помимо этого импульсная характе-
характеристика согласованного фильтра смещена относительно сиг-
сигнала sBX(—г) на отрезок f0.
Рис. 16.1 иллюстрирует принцип построения функции
Леогл(') применительно к некоторому импульсному сигналу
s,, (г) длительностью т„, возникающему при (= 0.
Анализируя построение, приведенное на рис. 16.1, можно
сформулировать необходимое (но не достаточное) условие
16.2. Оптимальная фильтрация сигналов известной формы
Рис. 16.1. Построение импульсной характеристики согласованного
фильтра
физической реализуемости согласованного фильтра: промежу-
промежуток времени t0 между началом импульса на входе и момен-
моментом возиикновения максимальной выходной реакции должен
быть не меньше длительности выделяемого импульса. В про-
противном случае импульсная характеристика системы была бы
отличной от нуля при t < О, т. е. до момента поступления
дельта-импульса на вход фильтра.
Смысл этого условия таков: для создания максимально
возможного мгновенного значения сигнала на выходе согла-
согласованный фильтр должен предварительно провести обработку
всего входного сигнала.
Согласованный фильтр как коррелятор. Пусть и., ({) — не-
некоторый входной сигнал, в общем случае не совпадающий
с сигналом sm((), по отношению к которому рассматри-
рассматриваемый линейный фильтр является согласованным. Отклик
фильтра на данное входное воздействие
условие физиче-
физической реализуемос-
реализуемости согласованного
фильтра
--к J uM(T)sm[T-((-F)]<b.
A6.19)
Легко заметить, что последний интеграл представляет
собой взаимокорреляционную функцию сигналов ии(г) и
8„(() (см. гл. 3), т.е.
",ы, W
A6.20)
В момент времени {0 мгновенное значение выходного
сигнала с точностью до коэффициента пропорциональности
оказывается равным скалярному произведению обоих сиг-
сигналов:
«Vx Со) = *: J
A6.21)
Глава 16. Вопросы теории помехоустойчивости радиоприема
2..
Следует обратить
внимание на то, что
при согласованной
фильтрации формы
сигналов на входе
п на выходе могут
сильно различать-
различаться
Рис. 16.2 Построение сигнала да выходе фильтра, согласованного
с прямоугольным видеоимпульсом:
а —сигнал на входе; б —его автокорреляционная функция; в —сигнал на
выходе для случая, когда максимум выходного колебания достигается
в момент-окончания импульса на входе
Предположим теперь, что и„ (() = s.» ((), т. е. на входе
фильтра присутствует сигнал, по отношению к которому
этот фильтр согласован. Из формулы A6.20) следует, что
в этом случае
|s.™.W = fcBs(f-f0), I A6.22)
т. е. выходной сигнал пропорционален автокорреляционной
функции входного сигнала, сдвинутой во времени на отрезок
to. В качестве примера на рис. 16.2 изображено построение
сигнала на выходе конкретного согласованного фильтра.
Частотный коэффициент перадачи согласованного фильтра.
Поскольку импульсная характеристика и частотный коэф-
коэффициент передачи линейной стационарной системы связаны
между собой преобразованием Фурье, на основании формулы
A6.18)
J s»(@-t)e-J»(d(.
A6.23)
Введя новую переменную интегрирования ?, = to — t, отсю-
отсюда получаем
К^, (/ш) = -fas-** f
-fas-**
A6Л4)
Последнюю формулу можно записать следующим обра-
образом^
[*««»(ft»)-*Sb(m)e-**.| A6.25)
Итак, частотный коэффициент передачи согласованного
фильтра выражается через спектральную плотность полезного
сигнала, для выделения которого этот фильтр предназначен.
Множитель пропорциональности к в формуле A6.25) опреде-
определяет уровень усиления,^ вносимого, фильтром. Значение мо-
16.2. Оптимальная фильтрация сигналов известной формы
мента времени t0 входит лишь в выражение фазовой ха-
характеристики фильтра. При этом сомножитель ехр(—joot0)
описывает смещение выходного отклика фильтра по оси
времени на величину t0.
Физическая интерпретация частотного коэффициента пере-
передачи согласованного фильтра. Фильтр, выделяющий известный
сигнал из смеси с шумом, должен с малым ослаблением
пропускать гармонические колебания, частоты которых отве-
отвечают лишь тем участкам спектра, где спектральная плот-
плотность полезного сигнала отлична от нуля. Прн этом, естест-
естественно, модуль частотного коэффициента передачи должен
быть пропорционален модулю спектральной плотности сиг-
сигнала, т. е. тому вкладу в выходной сигнал, который вносится
каждым малым участком на оси частот. Если спектр
полезного сигнала имеет дискретную структуру (например,
сигнал является периодическим), то данный принцип приводит
к фильтрам с гребенчатой формой АЧХ, широко приме-
применяемым в радиотехнике.
Согласованный фильтр действует подобно гребенчатому
фильтру. Однако здесь удается добиться еще большей эф-
эффективности обнаружения сигнала путем использования
свойств фазового спектра. Действительно, сигнал на выходе
согласованного фильтра [см. формулу A6.22)] достигает
максимума
.— I |S.,(o))l2do)
A6.26)
ill
1Я
I
Л АЛ
(?, — энергия выделяемого сигнала) в момент времени t0,
когда все элементарные составляющие спектра входного
колебания складываются на выходе когерентно, имея один
и те же фазовые сдвиги.
Таким образом, эффект согласованной фильтрации связан
с коррекцией фазовых сдвигов между отдельными спект-
спектральными составляющими выделяемого сигнала.
Прохождение суммы сигнала и шума через согласованный
фильтр. Рассмотрим случай, когда на входе фильтра, согла-
согласованного с некоторым известным сигналом s.,(t), присут-
присутствует сумма этого сигнала и стационарного белого гауссова
шума п(г), характеризуемого двусторонней плотностью спек-
спектра мощности Wo. Согласованный фильтр, будучи линейной
стационарной системой, обрабатывает сигнал и шум незави-
независимо друг от друга.
Условимся характеризовать эффективность действия филь-
фильтра отношением сигнал/шум на выходе
A6.27)
равным отношению пикового значения мощности полезного
сигнала в момент максимального отклика к средней мощ-
мощности выходного шума. Числитель этой дроби определяется
Глава 16. Вопросы теория помсхоустоВ<шво?та радиоприема
выражением A6.26). Дисперсия шума на выходе фильтра
СТ = 1ST
A6'28)
на основании A6.25) не зависит от формы частотного коэф-
коэффициента передачи фильтра, а определяется спектром мощ-
мощности входного шума Щ н энергией сигнала на входе Es:
_, к Wn
Если белый шум
задан односторон-
односторонним спектром мощ-
мощности с плотнос-
плотностью #0(В2/Гц), то,
как легко видеть,
&,, = 2E,/N0.
Эта формула часто
встречается в лите-
литературе
A6.29)
j
-со
С учетом выражений A6.26) и A6.29) приходим к выводу,
что отношение сигнал/шум на выходе согласованного фильтра
I Q«*x = EJWQ- I * A6.30)
I 1 ^
Поскольку числитель в формуле A6.27) представляет собой
предельно достижимый отклик, ясно, что согласованная
фильтрация обеспечивает максимально возможное отношение
сигнал/шум на выходе системы.
По этой причине согласованный фильтр является опти-
оптимальным фильтром, выделяющим известный сигнал из смеси
с белым гауссовым шумом при максимально возможном
отношении сигнал/шум.
Пример 16.3. Полезный сигнал представляет собой прямоуголь-
прямоугольный радиоимпульс с некоторой амплитудой t/0 и длительностью
ти = 10 мкс Белый шум на входе фильтра характеризуется спект-
спектральной плотностью мощности Wo = 3-1O~1B В2-с. Определить
минимальное значение Uo, при котором возможно надежное обна-
обнаружение этого сигнала, если приемник уверенно индицирует при-
присутствие сигнала при отношении сигнал/шум 2 дБ.
Требуемую величину бвых найдем из условия 10 lg бвых = 2,
откуда @вЫХ = 1.58. Так как энергия прямоугольного радиоимпульса
Е. = Vlxjl, то
х 1 мкВ.
^ Замечательная особенность согласованного фильтра со-
решите задачу 2 стоит в том, что возможность обнаружения сигнала ока-
оказывается зависящей от его энергии, а не от формы.
В частности, всегда можно добиться надежного обнаружения
сигнала малой амплитуды, если соответствующим образом
увеличивать длительность импульса. Однако при этом,
естественно, будет снижаться скорость.передачи информации
по радиоканалу.
ъ 16.3. Реализация согласованных фильтров
16.3. Реализация согласованных фильтров
Полученные ранее выражения, определяющие частотную
и импульсную характеристики согласованного фильтра, дают
возможность найтн физическую структуру устройства для
оптимальной фильтрации сигнала известной формы. Ниже на
конкретных примерах будут показаны некоторые приемы
такого синтеза.
Согласованный фильтр для прямоугольного видеоимпульса.
Рассмотрим импульсный сигнал sB> (г), представляющнй собой
видеоимпульс прямоугольной формы с известной длитель-
длительностью ти и произвольной амплитудой 170. Чтобы найтн
структуру фильтра, согласованного с таким сигналом, исполь-
используем спектральный метод. Прежде всего вычислим спект-
спектральную плотность полезного сигнала:
= t/0|e-*».
( = -т^-A - e-J««).
A6.31)
Отсюда на основании выражения A6.25) находим час-
частотный коэффициент передачи согласованного фильтра, поло-
положив для конкретности to = тя, т. е. что отклик фильтра мак-
максимален в момент окончания импульса:
A6.32)
Полученный результат позволяет синтезировать согласо-
согласованный фильтр. Действительно, в соответствии с выраже-
выражением A6.32) такой фильтр должен представлять собой кас-
каскадное соединение трех линейных звеньев: а) масштабного
усилителя с коэффициентом усиления к; б) идеального
интегратора; в) устройства с коэффициентом передачи
К' (/ш) = 1 — ехр (—УшТи)- Последнее устройство реализуется
с помощью звена задержки сигнала на иремя тЯ). инвертора,
изменяющего знак сигнала, и сумматора. Структурная схема
фильтра изображена на рис. 16.3.
Здесь частотный
коэффициент пере-
передачи не является
дробно-рациональ-
дробно-рациональной функцией и
иоэтому соответст-
соответствующий фильтр не
может быть цепью
с сосредоточенны-
сосредоточенными параметрами
Выход
Инвертор
Рис. 16.3. Структурная схема согласованного фильтра для прямо-
прямоугольного видеоимпульса
Глава 16. Вопросы теории помехоустойчивости радиоприема
Согласованный фильтр для пачкв одинаковых видеоим-
видеоимпульсов. В радиолокации часто, стремясь увеличить энергию
полезного сигнала, обрабатывают импульсы отдельными
пачжамн. Предположим, что на выходе амплитудного детек-
детектора приемника имеется пачка из N одинаковых видеоимпуль-
видеоимпульсов длительностью ти каждый; интервал между импульсами
равен Т. Если S0(eo) — спектральная плотность отдельного
импульса, то спектральная плотность пачхи импульсов
N
¦1
Применение слож-
сложных сигналов вида
пачек импульсов,
естественно, сни-
снижает темп выдачи
данных г» сравне-
сравнению с использо-
использованием одиночных
импульсов
& (ш) = So (ш) [1 + е~
т + е-
A6.33)
Синтезируя структуру согласованного фильтра для пачхи
импульсов, потребуем, чтобы максимальный отклик возникал
в момент окончания последнего импульса пачки, откуда
t0 = (ЛГ — 1) Г+ т,. Применив формулу A6.25), находим частот-
частотный коэффициент передачи согласованного фильтра:
х [1 + е*>т + е'2»г + ¦ • • + е""- ПаТ] е-л«- '>шТ =
= Косо™ (/о) [1 + е-*°т + e-'w + • ¦ ¦ + е-Л"-"»7],
A6.34)
где Косогл (/с0) ~ коэффициент передачи согласованного фильт-
фильтра для одиночного видеоимпульса.
Рис. 16.4. Структурная схема согласованного фильтра для пачки
видеоимпульсов
Формула A6.34) непосредственно определяет структурную
схему согласованного фильтра, изображенную на рис. 16.4.
На входе размещен согласованный фильтр для одиноч-
одиночного видеоимпульса. Основой устройства служит многоотвод-
многоотводная линия задержки, обеспечивающая запаздывание сигналов
на отрезки времени % 2Т, ..., (N—l)T. Сигналы со всех
отводов поступают в сумматор. Легко видеть, что макси-
максимальный отклик на выходе сумматора будет наблюдаться
тогда, когда полезные сигналы от всех импульсов пачки
одновременно окажутся на всех его входах. Эффективность
работы устройства тем выше, чем длиннее пачка.
Практически выполняемые обнаружители радиолокацион-
радиолокационных -сигналов содержат также специальный нелинейный
пороговый элемент, вход которого соединен с выходом
сумматора согласованного фильтра. Уровень порога несколь-
16.3. Реализация согласованных фильтров
ко превышает средиеквадратяческое значение шума в отсут-
отсутствие полезного сигнала. Если всплеск выходного сигнала
фильтра достигает порогового уровня, то на устройство
индикации поступает управляющий сигнал, свидетелъствую-
щнй о наличии импульса, отраженного от цели.
Согласованный фильтр для прямоугольного радиоимпульса.
Пусть выделяемый сигнал представляет собой радиоимпульс
вида
».„(«)
Го, «о,
= -\ l/osinoof,
(.0, t>v
A6.35)
Синтезируем согласованный фильтр для такого сигнала,
используя сведения об импульсной характеристике фильтра.
Как было показано, импульсная характеристика согласо-
согласованного фильтра /loo™ (г) = fcsm (t0 — г). Положим t0 = т, и будем
считать для простоты длительность импульса кратной пе-
периоду высокочастотного заполнения, так что sintOoTH =0.
Тогда
*сог„@
fo, t<0,
= *\ к sin (uqI , 0 ^ t ^ тн
(.0, (>ти,
A6.36)
Звено Фазо —
задержки вращатель
Рис. 16.5. Структурная схема согласованного фильтра для прямо-
прямоугольного радиоимпульса
т. е. импульсная характеристика согласованного фильтра с
точностью до амплитудного множителя повторяет входной
сигнал.
Такую импульсную характеристику можно приближенно
реализовать с помощью системы, структурная схема которой
приведена на рис. 16.S.
На входе фильтра размещается колебательное звено
(например, высокодобротный колебательный контур) с им-
импульсной характеристикой
f0, КО,
где Ь — постоянная величина..
При высокой доб-
добротности колеба-
колебательного звена
можно пренебречь
экспоненциальным
спадом амплитуды
во времени
Глава 16. Вопросы теории помехоустойчивости радиоприема
Для того чтобы импульсная характеристика согласованно-
согласованного фильтра равнялась нулю при t > т„ предусмотрены сум-
сумматор, на один их входов которого сигнал с выхода коле-
колебательного звена подается непосредственно, а на другой -
через звено задержки на х„ секунд, н фазовращатель, изме-
изменяющий фазу сигнала на 180°. При таком включении эле-
элементов начиная с момента времени t = хи ко входам сумма-
сумматора приложены даа гармоническнх колебания с одинаковыми
амплитудами и противоположными фазами, что обращает
в нуль сигнал на выходе сумматора.
Согласованный фильтр дла сигнала Баркера. В гл. 3 под-
подчеркивалось достоинство сигналов Баркера — высокое зна-
значение главного лепестка автокорреляционной функции и
предельно низкий уровень боковых лепестков.
фазоврашатели
Рис. 16.6. Структурная схема согласованного фильтра для сигнала
Баркера
Возможны сигналы На рис. 16.6 изображена структурная схема согласован-
Баркера с числом ного фильтра, предназначенного для обнаружения М-йози-
иознцнй М = 2, 3, ционного сигнала Баркера с фазовым кодированием. Такой
4, 5, 7, 11 и 13 сигнал имеет вид последовательности отрезков гармонических
колебаний с фазовыми сдаигами <рь tfc, ..., <рм, равными О
или 180° (см. рис. 3.7).
При синтезе исходят из того, что импульсная характе-
характеристика согласованного фильтра должна представлять собой
«зеркальную» копию выделяемого сигнала с обращенным во
времени порядком следования отдельных позиций.
На входе устройства имеется вспомогательный фильтр
^ Фь согласованный по отношению к одной позиции сложного
решите задачу 3 фазоманшгулированного сигнала, т. е. к прямоугольному ра-
радиоимпульсу. На выходе этого фильтра под воздействием
входного дельта-импульса возникает радиоимпульс с огибаю-
огибающей прямоугольной формы. Этот импульс подается на ли-
линию задержки с отводами, представляющую собой обычно
волновую (распределенную) систему. Задержка во времени
между отводами равна длительности Т каждой позиции
сигнала.
Для правильного функционирования устройства необхо-
необходимо, чтобы последовательность фазовых сдвигов <р№ <рде-ь ...
..,, <Pi (см. рис. 16.6) отвечала значениям фаз в отдельных
16.3. Реализация согласованных фильтров
позициях сигнала Баркера при счете от конца сигнала к
началу.
Прямоугольный радиоимпульс, перемещаясь вдоль линии
задержки, поочередно возбуждает входы сумматора, на
выходе которого возникает «зеркальная» копия выделяемого
сигнала.
Согласованный фильтр для ЛЧМ-иигульса. На практике
обычно требуется не просто обнаружить сигнал, но одно-
одновременно измерить некоторые из его параметров, например
положение во времени или мгновенную частоту. В этом
случае предпочтение отдают сигналам с резко выраженным
максимумом автокорреляционной функции.
Среди прочих сигналов, обладающих таким свойством,
широко используют радиоимпульсы с линейной частотной
модуляцией (ЛЧМ-импульсы). Теория таких сигналов была
изложена в гл. 4. Было показано, в частности, что если
ЛЧМ-импульс вида
f 0, ( < — T.J2,
sbx (г) = i Ue cos (coot + ц'2/2), — Тц/2 ^ ( ^ Тн/2,
(.0, г>т„/2
характеризуется большой базой (цт2 ¦» 2п), то его спект- Базой сигнала на-
ральная плотность S,x (ш) = | S,x (ш) | ехр \]Ф (и)] в пределах зывают нроизведе-
полосы частот шириной Дш = цти имеет практически постояи- ние его длитель-
длительный модуль ности на ширину
A6.37)
и аргумент, квадратично зависящий от частоты:
Ф (ш) = -(ш - шоJ/Bц) ¦
Отсюда вытекает требование к частотной характеристике
фильтра, согласованного с ЛЧМ-сигналом: для обеспечения
максимального отклика на выходе в некоторый момент
времени t0 фильтр должен иметь постоянное значение АЧХ
в полосе частот (со0 — Дсо/2, ю0 + Дсо/2) и ФЧХ, описываемую
формулой
4>к (ш) = -coto + (ш - ШоJ/(ЗД ¦ A6-38)
Первое слагаемое в правой части выражения A6.38)
обусловливает запаздывание выходного сигнала как единого
целого на величину @, второе, квадратичное слагаемое ком-
компенсирует фазовые сдвиги между отдельными спектральными
составляющими сигнала и, таким образом, обеспечивает
условие их когерентного сложения на выходе.
Квадратнчность фазоиой характеристики согласованного
фильтра для ЛЧМ-сигнала можно вывести из следующих
качествеииых соображений. В процессе внутриимпульсной
модуляцин мгновенная частота сигнала изменяется по линей-
ному закону ш (г) = шо + м' иа отрезке времени [—tJ2, \J2\
Каждому моменту времени t в пределах длительности
импульса отвечает свой узкополосный (квазнгармоническяй)
вид фазовой харак-
теристики согласо-
ванного фильтра
дли ЛЧМ-импуль-
ca
Глава 16. Вопросы теории псмеяоустовчивоста радиоприема
сигнал, который задерживается в фильтре на отрезок вре-
времени, равный групповому времени запаздывания (см. гл. 9):
-t0--
'to-t.
A6.39)
Для того чтобы найти момент появления отдельных
спектральных составляющих на выходе, к этому времени
следует прибавить величину t, т. е. момент появления спект-
спектральных составляющих на входе. Отсюда приходим к выводу,
что все спектральные составляющие ЛЧМ-сигнала появляются
на выходе фильтра одновременно в момент времени г0.
Полезный сигнал на выходе согласованного фильтра с
точностью до произвольного амплитудного множителя к
повторяет по форме автокорреляционную функцию ЛЧМ-
импульса [см. формулы D.54) и A6.22)]:
решите задачу 4
коэффициент сжа-
сжатии импульса
График, отвечающий такому сигналу, был приведен на
рис. 4.10. Нетрудно видеть, что ширина главного лепестка
этого сигнала, отсчитываемая по нулевым точкам, твь„ =
Поэтому коэффициент сжатия ЛЧМ-импульса, обеспечи-
ваемый согласованным фильтром:
A6.41)
В качестве мате-
материала для линий
задержки обычно
используют
миниевый сплав
пропорционален базе ЛЧМ-сигнала.
Для аппаратурной реализации рассматриваемых фильтров
часто используют физическое явление дисперсии упругих
ультразвуковых волн в твердых телах — зависимость скорости
распространения волн от частоты. Подбором соответствую-
соответствующего закона дисперсии волн в ультразвуковой линяя
задержки удается получить требуемую фазовую характеристику
вида A6.38). Эскиз конструкции фильтра и дисперсионная
характеристика изображены на рис. 16.7, о, б.
Согласованная фильтрация ЛЧМ-импульсов, в отличне от
оптимальной обработки пачек видеоимпульсов, проводится,
'го
Вход Выход
^ . ,.
I
J
б
Рис. 16.7. Распределенные фильтр, согласованны» с ЛЧМ-сигналом:
а - схематическое устройство (i - звукопровод, 2 - аиектромеинические пре-
преобразователи): б — частотная зависимость группового времени запаздывания
колебаний в звукопроводе
16.3. Реализация согласованных фильтров
как правило, на основной несущей илн на промежуточной
частоте приемника, т. е. до амплитудного детектора. Прн
этом удается избежать нежелательного подавления слабого
сигнала сильной помехой, которое неизбежно возникает при
нелинейном преобразовании суммы сигнала н шума.
Квазшитгимальные фильтры. В ряде случаев можно достичь
удовлетворительных результатов, применив фильтры более
простой конструкции по сравнению с оптимальными фильт-
фильтрами. Подобные устройства принято называть квазиоптималь-
ными фильтрами.
Рассмотрим ЯС-четырехполюсиик интегрирующего типа,
на входе которого одновременно действуют белый шум со
спектральной плотностью мощности Wo и прямоугольный
видеоимпульс, имеющий амплитуду Vo и длительность хи.
Полезный сигнал на выходе максимален в момент окон-
окончания импульса:
Приняв во внимание, что энергия рассматриваемого видео-
видеоимпульса Е, = С/^т„. запишем равенство A6.42) в виде
_ Е, [1 - е
lc(x) =
t«/BRQ •
Первый сомножитель в правой части этого выражения
задает отношение сигнал/шум, реализуемое согласованным
фильтром. Второй сомножитель оценивает проигрыш в отно-
отношении сигнал/шум КС-фильтра по сравнению с согласо-
согласованным фильтром.
Введя безразмерный параметр x = zJ(RC), рассмотрим
функцию, отображающую этот сомножитель:
[l-exp(-x)]2
х/2
Соответствующий график приведен на рис. 16.8.
Из графика видно, что при х = 1.2S значение величины
fc(x) достигает максимума, равного 0.814.
Таким образом, выбирая подходящее значение постоянной
времени КС-цепи, получаем простой квазиоптимальный
фильтр с отношением сигнал/шум, лишь на 20% меньшим,
чем в согласованном фильтре (проигрыш около 0.9 дБ).
Заметим, что квазиоптимальные фильтры с приемлемыми
характеристиками удается реализовать только для простых
сигналов, базы которых невелики. В частности, для квазиоп-
тимальиого выделения прямоугольного радиоимпульса дли-
преимущество до-
детектормой обра-
обработки сигналов
В то же время дисперсия шума на выходе КС-цепи,
возбуждаемой со стороны входа белым шумом, описывается
выражением (см. гл. 10) о|„ = Щ2КС).
Отсюда максимальное значение отношения сигнал/шум
на выходе КС-цепи
" - -^ ~~е * ¦ —L. A6.42)
A6.43)
Теорию квазиопти-
квазиоптимальной фильтра-
фильтрации радиосигналов
разработал чл.-
корр. АН СССР
Владимир Ивано-
Иванович Снфоров
Основное требова-
требование к квазиопти-
квазиоптимальному фильт-
фильтру — пропускать
без ослабления ко-
колебания из области
частот, где сосре-
сосредоточена основная
доля энергии саг-
Глава 16. Вопросы теории помехоустойчивости радиоприема
к I
08 f
—
/
/
/
1
1 1.25
1
Рис. 16.8. Ухудшение отношения сигнал/шум для КС-фильтра по
сравнению с согласованным фильтром
тельностью гн можно применить полосовой фильтр с
гауссовой частотной характеристикой, настроенный на несу-
несущую частоту. Полосу пропускания такого фильтра следует
выбирать из соотношения
A6.44)
7 = 0.72/тн.
Можно показать, что проигрыш в отношении сигнал/шум
по сравнению с оптимальным фильтром составит около
1 дБ.
16.4. Оптимальная фильтрация случайных
сигналов
На практике точная форма полезного сигнала часто зара-
заранее неизвестна. Поэтому реальный сигнал, поступающий
в радиоканал от микрофона, передающей телевизионной
камеры и т. д., можно в некотором приближении рассмат-
рассматривать как типичную реализацию из стационарного зргоди-
ческого ансамбля. Если плотность вероятности такого слу-
случайного процесса известна (чаще всего ее считают гауссовой),
то единственная информация о всей совокупности возможных
сигналов заключена в спектре мощности или в функции
корреляции.
В радиоканале, помимо случайных полезных сигналов,
присутствуют помехи. Как правило, спектры мощности полез-
полезных сигналов и помех в той или ниой -степени различаются
прежде всего своим расположением на частотной оси. Это
позволяет найти стационарный линейный фильтр, который
выделяет случайный полезный сигнал некоторым наилучшим
образом.
Постановка задачи н критерий онтямальности. Предполо-
Предположим, что на вход фильтра с частотным коэффициентом
передачи К (/ю) одновременно поданы даа гауссовых случай-
случайных сигнала. Реализации этих сигналов обозначим символами
и (t) и v{t). Пусть и (*) — полезный сигнал, в то время как
и @ — помеха. Эти сигналы являются реализациями стацио-
16A Оптимальная фильтрация случайных сигналов
нарных случайных процессов 1/@ и V(t) соответственно.
Допустим далее, что данные случайные процессы взаимно
некоррелированы и заданы своими спектрами мощности
Hi(co), Hi (со).
Реализация y(t) выходного сигнала фильтра не является
точной копией полезного сигнала u(f), а отличается от
него на величину случайного сигнала ошибки
«(«) = и («)-*(«). A6.45)
Будем называть оптимальным фильтр, частотный коэффи-
коэффициент передачи которого выбран таким образом, что диспер-
дисперсия сигнала ошибки оказывается минимальной.
Связь дисперсия сигнала оишбкя со спектрами мощное™.
Если We (ю) — спектр мощности сигнала ошибки, то дисперсия
этого сигнала
а2 = ^г— W.<fD)ua.
Говорят, что по-
подобный фильтр
обеспечивает г
мум среднеквадра-
тической ошибки
воспроизведения
сигнала
A6.46)
Свяжем функцию W, (со) со спектрами (К (со) и И?(со).
Для этого рассмотрим структурную схему воображаемого
устройства, позволяющего получать на выходе реализации
сигнала ошибки e(t) (рис. 16.9).
Поскольку, по условию, случайные процессы U(t) и V(t)
некоррелированы, мощности случайных сигналов, поступаю-
поступающих на выход по каждому из двух возможных каналов,
складываются, откуда
W, (со) = | К (/со) |2 Щ, (со) + 11 - К Ош) I2 W. (со). A6.47)
Представим частотный коэффициент передачи фильтра в
показательной форме:
и рассмотрим выражение 11 — К (/ю) |2, стоящее в правой
части формулы A6.47). Очевидно, что
Эта величина минимальна при ерк (со) = 0. Таким образом,
оптимальный фильтр должен вносить нулевой фазовый сдвиг
t" fc
Рис. 16,9. Прандип получения сигнала ошибки
Глава 16. Вопросы теории помехоустоитавосл радиоприема
на всех частотах. Приняв это во внимание; получим формулу,
палагае- определяющую дисперсию сигнала ошибки:
фазовую
^ | A6.48)
Мншмнзацш дислерсп ошшбкя. Выполнив простые тожде-
тождественные преобразования, представим формулу A6.48) так:
Модуль частотного коэффициента передачи |К(/ш)| вхо-
входит только в одно из слагаемых подынтегрального выра-
выражения. Это слагаемое неотрицательно, поэтому минимум
дисперсии ошибки будет обеспечен, если
- И?(га)Д/и?(ш)+
откуда
И{,(га)
Wu (га) + W, (ю)'
A6.50)
Полученная формула не только решает поставленную
задачу, но и дает возможность вычислить на основании
выражения A6.49) предельно достижимую дисперсию сигнала
ошибки:
1 Г
=arJ
W. (га) W, (га)
A6.51)
или, переходи от И^,(га), И^(га) к односторонним спектрам
f f
rd/.
A6.52)
Смысл полученного результата таков: модуль частотного
коэффициента передачи оптимального фильтра, минимизи-
* рующего среднеквадратическую ошибку, должен быть значи-
фнзнческая нитер- телен на тех частотах, где сосредоточена основная доля
лретация частот- мощности полезного сигнала. Там, где велика спектральная
ных саойств оптн- плотность мощности помехи, коэффициент передачи опти-
оптимального фильтра мального фильтра должен уменьшиться. , . ,-:
16.S. Сравнение помехоустойчивости радиосистем
/.кГц
Пример 16.4. Случайный процесс U(t) (полезный сигнал) харак-
характеризуется ограниченным по частоте спектром мощности Nu =
= 5 ¦ 10~* Ва/Гц в полосе частот 1—3 кГц, равным нулю на
остальных частотах. Случайный процесс V(t) (помеха) имеет
аналогичный вид частотной зависимости одностороннего спектра
мощности NK=2.5-10 В2/Гц в полосе частот 2—4 кГц. Опре-
Определить частотный коэффициент передачи оптимального фильтра
и минимальную среднеквадратическую ошибку воспроизведения по-
полезного сигнала.
С помощью формулы A6.50) находим, что модуль частотного
коэффициента передачи оптимального фильтра отличен от нуля
только в пределах интервала частот 1—3 кГц, где сосредоточен
спектр мощности выделяемого сигнала, причем
1 кГц</<2 кГц,
2кГц</<з,Гц.
Дисперсия полезного сигнала, равная произведению спектраль-
спектральной плотности мощности на занимаемую полосу частот.а2 =
= 51(Гб-2-103 = 1(Г2 В2. В го же время по формуле A6.52)
находим, что
L00
0.66
-
-
„,1
"Л
1 1 ./.кГц
0 1 2~~~3 4
Итак, прн оптимальной линейной фильтрации двух рассмотрен-
рассмотренных случайных процессов относительная среднеквадратическая ошиб-
ка воспроизведения полезного сигнала оказывается не менее 16.6%.
Проведенный в настоящем параграфе анализ не дает
никаких сведений о физической реализуемости оптимальиого
фильтра данного класса. Тем не менее ценность полученных
результатов состоит в том, что найдены закономерности,
которым подчиняются частотные характеристики любых
фильтров, предназначенных для эффективного выделения
случайных сигналов.
16.5. Сравнение помехоустойчивости радиосистем
с амплитудной и частотной модуляцией
Заканчивая краткий обзор некоторых вопросов помехо-
помехоустойчивости радиоприема, рассмотрим очень важную в прак-
практическом отношении задачу о сравнительных характеристи-
характеристиках дяух наиболее распространенных видов модуляции анало-
аналоговых радиосигиалов — амплитудной и частотной [17, 27].
Амплитудные и частотные детекторы (демодуляторы)
являются нелинейными устройствами, в которых происходит
взаимодействие полезиого сигнала и помехи. В частности
(см. гл. 11), сильный сигнал подавляет в детекторе слабую
помеху. Возможна и другая ситуация — сильная помеха может
практически полиостью подавить слабый сигиал. Эти явления
существенным образом сказываются на отношении сигиал/
шум.
Амшнтудиыа детектор в режяме сального сягшиш. Пусть
после линейной частотной фильтрации на вход идеального
решите задачу 5
Глава 16. Вопросы теории помехоустойчивости радиоприема
амплитудного детектора огибающей поступает смесь полез-
полезного АМ-сигнала sM(t) и узкополосного нормального шума
«вх @ = smx @ + «их (О = ^жс A + Af COS fit) COS
+ */„ (t) cos [coot + Фй (О]. A6.53)
Шумовая составляющая сигнала имеет заданную диспер-
дисперсию (среднюю мощность) ajjBX. Огибающая Un(t) распреде-
распределена по закону Рэлея, начальная фаза шума ф„@ имеет
равномерное распределение на интервале @,271) (см. гл. 7).
Найдем и сравним между собой отношения сигнал/шум
на входе и выходе амплитудного детектора. Для этого
прежде всего, пользуясь приемом, показанным в примере
16.1, определим среднюю мощность составляющей полезного
сигнала на входе (без учета мощности несушей):
и отношение сигнал/шум на входе:
Q., = Vl№1№ln). A6.54)
Идеальный АМ-детектор создает на выходе сигнал, в
точности повторяющий физическую огибающую входного
колебания:
«.„ @ = [UL A + М cos fitJ +
+ 2l/mc V, A + М cos fit) cos ср„ + l/J]. A6.55)
Для того чтобы определить отношение сигнал/шум на
выходе, необходимо представить выходной сигнал детектора
в виде суммы двух слагаемых, одно из которых обуслов-
обусловлено только полезным сигналом, а другое — только шумом.
Формула A6.55), отображающая нелинейный характер преоб-
преобразования сигнала и шума в дете«торе, такой возможности
в общем случае не дает. Исключением является режим
сильного сигнала. Если l/mc ;&-17„, то, разложив радикал в
степенной ряд и ограничившись первыми двумя членами^
получим
«.„(!)» IVU + McosfiQ + lMOcoscMQ- A6.56)
Второе слагаемое [/„(t)coscp,,(t) представляет собой син-
синфазную амплитуду An(t) шума, присутствующего на входе
демодулятора. Ранее было показано, что дисперсия синфаз-
синфазной амплитуды и самого узкополосного нормального про-
процесса совпадают [см. формулу G.53)]. Средняя мощность
полезного низкочастотного сигнала на выходе
т
<«L,> = lim 4; I UlJU2 cos2 fit d« =
16.5. Сравнение помехоустойчивости радиосистем
Тогда
откуда
Итак, при сильном входном сигнале выигрыш в отноше-
отношении сигнал/шум, обеспечиваемый АМ-детектором, составляет
3 дБ.
Пороговьй эффект при детектировании. Рассмотрим другой
предельный случай, когда уровень полезного АМ-сигнала
существенно ниже уровня шума. Полагая в A6.53) 1/жс <s: VK,
имеем следующее приближенное выражение сигнала на выхо-
выходе амплитудного детектора:
«еы* @ « Un (t) + Umc A + М COS fit) COS ф„ (Г). A6.58)
Видно, что полезного колебания, пропорционального пе-
передаваемому сообщению cos ?lt, в выходном сигнале демоду-
демодулятора не содержится. Причиной этого является случайный
сомножитель cos(pn(r), целиком определяемый свойствами
помехи.
Такое явление, обусловленное подавлением слабого сиг-
сигнала сильной помехой, наблюдается в любых демодулято-
pax, использующих нелинейные преобразования. Принято го- * ™
ворить о пороговом эффекте при демодуляции. Конкретное пороговый эффект
значение пороговой величины QBX зависит от статистических
свойств передаваемых сообщений н обычно устанавливается
на основе экспериментов.
Причина высокой помехоустойчивости имрокополосвых
ЧМ-систем. Известно, что радноснстемы, использующие ЧМ-
сигналы, в ряде случаев обеспечивают гораздо более высо-
высокую помехоустойчивость по сравнению с той, которая
достигается в системах с АМ-сигналами. Причина такого
свойства ЧМ-колебаний определяется спецификой обработки
суммы сигнала н шума частотным детектором. Дело в том,
что полезное сообщение заключено здесь в мгновенной
скорости углового перемещения сигнального вектора Uc на
комплексной плоскости относительно вектора немодулироваи-
ного несущего колебания. Если к вектору UQ добавить
вектор помехи Un, имеющий в общем случае другую час-
частоту, то с течением времени результирующий вектор изме-
изменяет свое положение. Однако при сильном сигнале,, когда
I tfc I » I UB |, возникающая шумовая девиация фазы будет
весьма малой, скажем, порядка нескольких градусов. В то же
время полезная девиация фазы, численно равная индексу
модуляции, составит в широкополосных системах сотни или Все сказанное
даже тысячи градусов. Отсюда следует, что уровень шумовой здесь в равной ме-
составляющей сигнала на выходе демодулятора падает как ре относится как
с уменьшением относительной амплитуды помехи, так и к ЧМ-, так и к
с ростом индекса модуляции передаваемого сообщения. ФМ-сигиалам
Аналитическое рассмотрение помехоустойчивости систем с
ЧМчягшлам. Частотный демодулятор обычно состоит из
Глава 16, Вопросы теории помехоустойчивое^ радиоприема
двух блоков — собственно частотного детектора и амплитуд-
амплитудного ограничителя.
Пусть на входе ограничителя действует сумма одното-
однотонального ЧМ-сигнала и узкополосного шума:
"«(')'
Амплитудный
ограничитель
Частотный
детектор
Выход
Амплитудный
ограничитель слу-
служит для подавле-
пии паразитной
AM, возникающей
в радиоканале по
разным причинам
¦ Um cos (torf + m sin fit) + и„ (r) cos [torf + ср„ (г)].
A6.59)
Амплитуда полезного ЧМ-сигнала неизменна во времени;
это означает, что <s^K> = V^J2, поэтому отношение сигнал/
шум на входе
u»-^U2oiJ. . A6.60)
Колебание вида A6.S9) представляет собой сложный
АМ/ЧМ-сигнал и„(г) = l/raBI([)cos[too? + m sin fit + 9 (г)], ам-
плнтуда и начальная фаза которого в равной мере зависят от
полезного сигнала и помехи. Однако амплитудная модуля-
модуляция уничтожается ограничителем. Поэтому потребуется найти
явное выражение только функции 9 (г).
Введем в рассмотрение величину i|»c (г) = ©of + m sin fir —
полную фазу полезного сигнала Тогда полная фаза помехи
ф„ (г) = шог + (р, (() = фс (г) + ср„ (г) — т sin fit. Воспользовав-
Воспользовавшись этими вспомогательными функциями, перепишем фор-
формулу A6.59) в виде
«и М = и», cos \|/с (г) + Ur (г) cos фс (г) cos [ср„ (г) - т sin fit] -
- U, (г) sin ф,. (г) sin [ср„ @ - т sin fit] =
Из этой формулы можно исключить несущественную
амплитуду l/mBX(f), приравняв в обеих частях выражения,
содержащие cos i|»c (г) и sin i|»c (г), а затем разделив одно
равенство на другое. В результате получим шумовую до-
добавку к полной фазе полезного сигнала:
Э(й »arctg 4W«info.@-msinnt] (,661)
и„с + Un (i) cos [(р„ (г) — т sin ?u]
Выделить отдельно вклады от сигнала н шума в общем
случае не представляется возможным [ср. с формулой
A6.55)].
Частотный детектор в режиме сильного сигнала. Ситуация
значительно упрощается, если QBS ;&-1. Тогда приближенно
можно записать
9(г)* arctg и.У)™Ыт-пчапО*1 х
Um
- sin [ср„ (J) — т sin fit].
A6.62)
Если вспомнить, что функция 9 (г) представляет собой
разность между полными фазами сигнала на выходе
амплитудного ограничителя, с одной стороны, и полезного
входного сигнала — с другой, то можно прийти к выводу,
16.S. Сравнение помехоустойчивости радиоснсгем
что слагаемое man 12с в аргументе синуса формулы A6.62)
может быть опущено. Тогда
Э(г) * U.(()an ср„(О/1/„с - B.(f)/U^, A6.63)
где В, (г) — квадратурная амплитуда узкополосного входного
шума.
Итак, приходим к желаемому результату — сигнал на
выходе частотного детектора, равный производной от полной
фазы, оказывается разделенным на сумму сигнальной н
шумовой составляющих:
¦w W - iw W + ц™» И = "« cos fit + в; (о/и„с. A6.64)
При этом средняя мощность сигнальной составляющей
<«к„> - (<"ПJ/2 _ (ДшO2, A6.65)
где Дсо — девиация частоты, отвечающая полезному сооб-
сообщению.
Квадратурная амплитуда шума В, (г) —низкочастотный
нормальный случайный процесс, спектральную плотность
мощности которого можно обычно считать равномерно
распределенной в полосе частот от нуля до (m + l)fi
шириной П„р„/2 [см. формулу D.33)]. Эго значит, что в
указанной полосе частот односторонний спектр мощности
квадратурной составляющей
Поэтому спектр мощности помехи на выходе частотного
детектора
Следует иметь в виду, что в состав частотного демодуля-
демодулятора входит ФНЧ с частотой среза fi. Тогда средняя
мощность помехи на выходе
Отсюда с учетом формулы A6.65) получаем отношение
сигнал/шум на выходе:
A6.66)
Таким образом, найдена фундаментальная закономер-
закономерность — выигрыш, обеспечиваемый широкополосной ЧМ-
системой, зависит только от индекса угловой модуляции:
е»ы«/е.»-= Зт2 (т + 1).
A6.67)
Этот выигрыш может быть весьма ощутимым. Например,
если Дю = 1.5-10* с, 0 = 10* с, то т = 15, так что
Мчи = Ю800.
440 Глава 16. Вопросы теории помехоустойчивости радиоприема
Все сказанное справедливо лишь при следующем усло-
условии: амплитуда полезного сигнала на входе частотного
детектора должна значительно превышать эффективное напря-
напряжение шума. В противном случае неизбежен пороговый
эффект. Может оказаться, что ЧМ-система при малом
отношении сигнал/шум на входе будет функционировать хуже,
чем аналогичная система с АМ-сигналами.
Результаты
Q0 Согласованный фильтр, выделяющий полезный сигнал известной формы из
смеси с нормальным белым шумом при наибольшем отношении
сигнал/шум, должен иметь частотный коэффициент передачи, пропор-
пропорциональный комплексно-сопряженной спектральной плотности сигнала.
Q0 Импульсная характеристика согласованного фильтра является «зеркальной»
копией выделяемого сигнала.
qq Выходная реакция согласованного фильтра на выделяемый сигнал про-
пропорциональна сдвинутой во времени автокорреляционной функции данного
сигнала.
QQ Отношение сигнал/шум на выходе согласованного линейного фильтра
зависит лишь от энергии сигнала и от спектральной плотности мощ-
мощности шума.
qq При обнаружении сигналов с малым значением базы можно получить
хорошие результаты, применяя вместо оптимальных фильтров более
простые квазиоптимальные фильтры.
qq Линейный фильтр, выделяющий гауссов случайный сигнал из смеси с гаус-
гауссовой помехой при наименьшей среднеквадратической ошибке, должен иметь
АЧХ, принимающую максимальные значения в области частот, где велика
спектральная плотность мощности полезного сигнала, и минимальные значе-
значения там, где велика спектральная плотность мощности помехи.
Вопросы
1. Как в радиотехнике привито опреде- кнм образом связаны между собой спект-
лять отношение сигнал/шум? Что такое ральиая плотность выделяемого сигнала н
выигрыш фильтра? Почему отношение сиг- частотный коэффициент передачи согласо-
нал/шум целесообразно использовать для ванного фильтра?
оценки уровней полезных сигналов с амплн- 4. Какова должна быть автокорреляцнон-
тудной или угловой модуляцией лишь в том ная функция полезного сигнала для того,
случае, если шум представляет собой pea- чтобы обеспечивалось высокоэффективное об-
лизацню узкополосного нормального слу- наруженне этого сигнала с помощью согла-
чайного процесса? сованного фильтра? Напишите формулу,
2. Объясните принцип когерентного ело- определяющую предельно достижимое отно-
жения спектральных составляющих прн согла- шение енгнал/шум, которое реализуется
сованной линейной фильтрации. Чем разлн- согласованным" фильтром. Зависит лн это
чаются между собой гребенчатый и согла- отношение от формы сигнала?
сованный фильтры? Можно лн использовать 5. Как реализуются технически согласо-
гребенчатый фильтр для выделения из смесн ванные фильтры для ЛЧМ-нмпульсов?
с шумом узкополосного радиоимпульса, 6. Как связана минимально достижимая
имеющего, например, экспоненциальную дисперсия сигнала ошибки при оптимальной
форму огибающей? ' фильтрации случайного гауссова сигнала со
3. Какому условию должно удовлетворять спектрами мощности сигнала и помехи?
время задержки t0 прн обработке извест- 7. Чем объясняется высокая помехо-
ного сигнала оптимальным согласованным устойчивость широкополосных ЧМ-систем?
фильтром? Как построить импульсную ха- Какой уровень полезного сигнала называют
рактеристику согласованного фильтра? Ка- пороговым?
Задач!
Задачи
1. Постройте импульсную характеристику
фильтра, согласованного с входным сигна-
сигналом траугольиой формы:
О
Укажите минимальное значение времени
задержки t0.
2. Эквивалентным источником белого
шума на входе фильтра служит резистор
с сопротивлением R = 500 Ом, находящийся
прн температуре Т= 300 К. Какова должна
быть энергия выделяемого сигнала для того,
чтобы согласованный фильтр мог обеспечить
отношение сигнал/шум, равное пяти?
3. 13-позициокный сигнал Баркера с фазо-
фазовым кодированием имеет амплитуду 10 мкВ
и длительность каждой позиции 5 мкс. Прн
какой спектральной плотности мощности
белого шума на входе отношение сигнал/шум
на выходе будет равно единице?
4. ЛЧМ-вмпульс с прямоугольной фор-
формой огибающей имеет девиацию частоты
Дш — 3 -107 с е длительность т„ =
=3.5 ¦ 10" 3 с. Определите длительность основ-
основного лепестка колебания на выходе фильт-
фильтра, согласованного с данным сигналом.
5. Полезный сигнал является реализацией
гауссова случайного процесса С/(t), имеющего
односторонний спектр мощности Nu =
= 8ИГ3 В2/Гц в полосе частот 0</<
< 300 Гц; на остальных частотах Nu = 0.
Данный сигнал складывается с белым гаус-
гауссовым шумом V(t), спектр мощности кото-
которого N„ = 2-ИГ6 В2/Гц на всех частотах.
Найдите дисперсию ошибки выделения полез-
полезного сигнала с помощью оптимального
фильтра.
Более сложные задания
6. Изобразите структурную схему согласо-
согласованного фильтра, предназначенного для опти-
оптимального выделения сигнала граугольной
формы (см. условие задачи 1).
7.' Рассмотрите возможность уменьшения
уровня боковых лепестков автокорреляцион-
автокорреляционной функции сигнала с внутриимпульсиой
частотной модуляцией за счет применения
нелинейного закона изменения частоты во
времени.
8. Выведите формулу, определяющую
частотный коэффициент передачи оптималь-
оптимального фильтра, который позволяет наилучшим
образом (в среднеквадратнческом смысле)
находить мгновенные значения Сигнала
u(t +10), т. е. экстраполировать «будущие»
значения выделяемого случайного сигнала,
искаженного присутствием белого гауссова
шума.
Заключение
Наш курс подошел к концу. Подведем некоторые итоги,
с тем чтобы читатель мог оценить пройденный материал
н наметить для себя путь дальнейшей работы.
Курс «Радиотехнические цепи н сигналы» посвящен
теоретическим основам радиотехники н с полным основа-
основанием его следует отнести к числу фундаментальных
радиотехнических дисциплин. При этом термин «фундамен-
«фундаментальность» нужно трактовать не как синоним закончен-
законченности и самодостаточности. Это слово означает скорее, что
в данном курсе излагаются те научные понятия и методы,
на основе которых постоянно развивается и совершенст-
совершенствуется теоретический арсенал, а также многочисленные
прикладные направления радиотехники.
Современная теоретическая радиотехника насыщена поня-
понятиями и методами из разных научных областей, прежде
всего математики, физики, теории цепей, инженерной
электродинамики. Читателю следует иметь в виду, что все
этн понятия и методы образуют взаимосвязанное единство
н должны рассматриваться как одно целое в рамках
системного подхода, принятого современной наукой. Основ-
Основной концепцией, позволяющей говорить о системном ха-
характере теоретической радиотехники, является концепция
математической модели.
В этой книге был рассмотрен целый ряд математи-
математических моделей сигналов и устройств — детерминированных
и случайных, аналоговых н дискретных. Все эти модели
таковы, что позволяют с той или иной степенью полноты
осуществлять две основные взаимосвязанные операции —
анализ и синтез.
Теоретическая радиотехника, как и многие другие научно-
технические области, развивалась так, что методы анализа
часто обгоняли методы синтеза. В последнее время это
положение начало коренным образом изменяться, главным
образом под влиянием широкого внедрения ЭВМ в практику
научного поиска.
Стиль и последовательность изложения, принятые в дан-
данной книге, продиктованы во многом соображениями педаго-
педагогического характера, а также традициями, которые сложились
в радиотехнике на протяжении последних десятилетий. Эта
книга, написанная в соответствии с программой курса
«Радиотехнические цепи -н сигналы», безусловно, не ставит
целью дать исчерпывающее изложение всех вопросов, которые
можно отнести к области теоретической радиотехники.
Например, вне поля внимания остались такие важные и
интенсивно развивающиеся области, как теория информация,
методы нелинейной фильтрации случайных сигналов, статисти-
статистическая теория оценки и измерения параметров сигналов и
многие другие. Однако хочется надеяться, что внимательный
читатель, проработав материал этой книги, сможет, исполь-
используя литературные источники, самостоятельно продолжить
работу в интересующем его направлении.
Приложения
1. Функции Уолша я их некоторые свойства
В настоящее время известен ряд способов определения функций
Уолша [31]. Наиболее удобен путь, использующий рекуррентное
уравнение
wal Bп + р, 3) = (- 1)ИМ+*{та1 (л, 2» + 7а) +
Здесь символ [л/2] означает наибольшее целое число, меньшее
или равное п/2; число р может принимать значения 0 или 1.
При выполнении итераций следует иметь в виду, что функция
wal (О, S) постоянна на отрезке -1/2 < & < 1/2:
{О, 3<-1/2,
1. -1/2 «в «1/2, (П.1.2)
О, Э > 1/2.
Например, положив п = 0, р = 1, из уравнения (П.1.1) получаем
wal (I, S) = - wal @, 2» + 7а) - wal @,2» - 1/2)-
Интересное свойство функции Уолша состоит в том, что
walfm, S)wal(n, S) =wal(/, 3), (П.1.3)
где индекс I является суммой индексов т и и по mod 2
(читается «по модулю два» и обозначается 1 = т@п). Для того
чтобы выполнить такое сложение, следует представить числа тип
в двоичной форме, а затем сложить их без переносов в старшие
разряды, используя правило:
1@0 = 0@1 = 1,0@0=1@1=0.
Например, если т — 5 = 101 (двоич.) и л = б = ПО (двонч.),
то 101 @ ПО = 011 (двоич.) = 3 (десятнч.). Таким образом,
wal E, S)walF, S) = walC, &).
В литературе наряду с функциями Уолша wal (л, S) часто
встречаются две связанные с ними системы: четные функции
cal (л, S) (аналогичные косинусам) и нечетные функции sal (л, 8)
(аналогнчные синусам). Связь между этими функцяямн такова:
cal (л, Щ = wal Bл, S), sal (л, &) = wal Bп - 1, S). (П.1.5)
2. Таблица знач
8°
0
10
20
30
40
50
60
70
80
90
То
0.000
0.000
0.004
0.015
0.034
0.065
0.109
0.166
0.236
О.М9
тЛ фужюй Берга то(»), Т,(») и Тг(»)
Tl
0.000
0.001
0.009
0.029
0.066
0.121
0.196
0.288
0.390
0.500
т2
0.000
0.001
0.008
0.027
0.056
0.095
0.138
0.176
0.203
0.212
8°
100
ПО
120
130
140
150
160
170
180
То
0.411
0.509
0.609
0,708
0.801
0.881
0.944
0.985
1.000
у,
0.611
0.713
0.805
0.878
0.934
0.969
0.989
0.997
1.000
т2
0.203
0.176
0.138
0.095
0.056
0.027
0.008
0.001
0.000
Даннан операция
выполняется в по-
полусумматоре ЭВМ
Приложения
3. Подпрограмма вычислении функнин Берга
SUBROUTINE BERG (N, T, G)
PI = 3.1415926
A = N
IF(N.EQ.0)GOTOl
IF (N. EQ. 1) GO TO 2
G = 2. * (SIN(A * T) * COS(T) - A * COS
* (A * T) * SIN(T))/(PI * A * (A * A - 1.))
RETURN
1 G=(SIN(T)-T*COS(T))/PI
RETURN
2 G = (T-SIN(T)*COS(T))/PI
RETURN
END
Обращение к данной подпрограмме осуществляется с помощью
оператора CALL BERG (о, р, у). Здесь а и р - фактические
значения номера гармоники п и угла отсечкн S соответственно.
Вычисленное значение функции y,(S) заносится в ячейку памяти
с именем у.
4. Подпрограмма вычисления коэффициентов
дискретного преобразования Фурье
SUBROUTINE TRFUR (X, А, В, N, G)
DIMENSION X(N), A(N), B(N)
G = 0.
Al-0.
AN = N
DO1 I = 1, N
* *I*X(I)
G=G/AN
A(N/2) - Al/AN
M = N/2 - 1
DO2 I = 1, M
AI=I
A(I)-0.
B(I) - 0.
DO3 J = 1, N
AJ = J
T = 6.2832 * AI * AJ/AN
С - COS(T)
S = SIN(T)
A(i) = A@ + X(J)*C
a)a) ()
A(I) = A(I)*2./AN
2 B(I) - Bfl) * 2./AN
RETURN
END
Аргументы данной подпрограммы таковы: X — вещественный
массив обрабатываемых чисел; А и В — соответственно массивы
вещественных и мнимых частей ДПФ, N — длина входного массива,
G — имя пераыенной, которой отвечает постоянная составляющая
ДПФ.
Список рекомендуемой литературы
Учебники н учебные нособии по ряднотехннке
1. ГоноровскиВ И. С. Радиотехнические цепи н сигналы. —
М.: Радио н связь, 1986.
2. Радиотехнические цепи н сигналы/Под ред. К. А. Са-
мойло.—М.: Радио н связь, 1982.
3. Понов В, П. Основы теории цепей. — М.: Высшая школа,
1985.
4. Статистическая радиотехника. Примеры и задачи/Под ред.
В. И. Тихонова.- М.: Советское радио, 1980.
5. Задачник по курсу «Радиотехнические цепи и сигналы»/
В. П. Жуков, В. Г. Карташев, А. М. Николаев.— М.: Высшая школа,
1986.
6. Баскаков С. И. Радиотехнические цепи и сигналы. Руководство
к решению задач.—М.: Высшая школа, 1987.
Книги ио математике
7. Колмогоров А. Н., Фомин С. В. Элементы теории функций и
функционального анализа.—М.: Наука, 1972.
8. Канторович Л. В., Акилов Г. П. Функциональный анализ.—
М.: Наука, 1977.
9. Тихонов А. Н., Васильева А. Б., Свешников А. Г. Дифферен-
Дифференциальные уравнения. — М.: Наука, 1980.
10. Гахов Ф. Д. Краевые задачи.—М.: Физматгнз, 1963.
11. Феллер В. Введение в теорию вероятностей н ее прн-
ложения/Пер. с англ., т. 1.—М.: Мир, 1984
12. Понтрагин Л. С Математическая теория оптимальных про-
процессов.— М.: Наука, 1986.
13. Бромермав Г. Распределения, комплексные переменные н
преобразования Фурье: Пер. с англ./Под ред В. С Владимирова.—
М.: Мир, 1968.
14. Лаврентьев М. А., Шабат Б. В. Методы теории функций
комплексного переменного.—М.: Фнзматгиз, 1958.
15. Прудников А. П., Брычков Ю. А., Марнчев О. И. Интегралы
н ряды.-М.: Наука, 1981.
16. Корн Г., Корн Т. Справочник по математике для научных
работников и инженеров: Пер. с англ./Под ред. И. Г. Арамано-
вича.— М.: Наука, 1970 н последуют, изд.
Литература по отдельным разделам курса
17. Котельников В. А. Теория потенциальной помехоустойчи-
помехоустойчивости.— М.—Л.: Госэиергонздат, 1956.
18. Шеннон К. Работы по теории информации и кибернетике:
Пер. с англ./Под ред. Р. Л. Добрушина. и О- Б. Л у Панова.- М.:
ИЛ, 1963.
19. Мандельштам Л. И. Лекции по теории колебаний.— М.:
Наука, 1972.
20. Боголюбов Н. Н., Митропольскнй Ю. А. Асимптотические
методы в теории нелинейных -колебаний. — М.: Фнзматгиз, 1958.
21. Рытов С. М. Введение в статистическую радиофизику. Ч. I.—
М.: Наука, 1976.
22. Левин Б. Р. Теоретические основы статистической радио-
радиотехники. Книга первая.— М.: Советское радио, 1974.
23. Тихонов В. И. Статистическая радиотехника.— М.: Радио
и связь, 1982.
Список рекомендуемой литературы
24. Тихонов В. И. Оптимальный прием сигналов,—М.: Радио
и связь, 1983.
25. Стретт Д. (Рэлей). Теория звука. Т. I,- M: Гостехнздат, 1955.
26. Френке Л. Теория сигналов: Пер. с англ./Под ред.
Д. Е. Вакмяоа,— М: Советское радио, 1974.
27. Стейн С, Джонс Дж. Принципы современной теории
связи и их применение к передаче дискретных сообщений: Пер.
с англ./Под ред. Л. М. Финка,-М: Связь, 1971.
28. Кук Ч., Бернфельд М. Радиолокационные сигналы: Пер.
с аигл./Под ред. В. С Кельзопа.— М.: Советское радио, 1971.
29. Варакнн Л. Е. Свстемы связи с шумоподобными сигна-
сигналами.— М.: Радио и связь, 1985.
30. Папулнс А. Теория систем и преобразований в оптике:
Пер. с англ./Под ред. В. И. Алексеева.-М.: Мир, 1971.
31. Хармут X. Ф. Передача информации ортогональными функ-
функциями/Пер. с англ.— М.: Связь, 1975.
32. Харкевич А. А. Борьба с помехами. — М.: Наука, 1965.
33. Боде Г. Теория цепей и проектирование усилителей с об-
обратной связью/Пер, с англ.—М.: ИЛ, 1948.
34. Баскаков С. И. Радиотехнические цепи с распределенными
параметрами.— М.: Высшая школа, 1980.
35. Матханов П. Н. Основы синтеза линейных электрических
цепей. — М.: Высшая школа, 1976.
36. Лосев А. К. Теории линейных электрических цепей. — М.:
Высшая школа, 1987.
37. Андреев В. С Теория нелинейных электрических цепей. — М.:
Связь, 1972.
38. Хьюлсмян Л. Теория н расчет активных ЛС-цепей: Пер.
с англ./Под ред. А. Е. Знаменского и И. Н. Теплюка.— М: Связь,
1973.
39. Хеммннг Р. В. Цифровые фильтры: Пер. с англ./Под ред.
А. М. Трохтмана.—М.: Советское радио, 1980.
40. Рабннер Л., Гпулд Б. Теория и применение цифровой обра-
обработки сигналов: Пер. с англ./Под ред. Ю. И. Александрова.— М: Мир,
1978.
41. Букнвгем М. Шумы в электронных приборах и системах/Пер.
с англ.-М.: Мир, 1986.
42. Прикладные математические методы анализа в радиотех-
радиотехнике/Под ред. Г. В. Обрезкова.— М.: Высшая школа, 1985.
Предметный указатель
Автогенератор
— жесткий режим 366
— мягкий режим 366
— стационарная амплитуда ко-
колебаний 368
— с внутренней обратной связью
362
— с трансформаторной связью
357
— типа RC 360
— трехточечный 358
— условие самовозбуждения 357
— устойчивость стапионарных
режимов 367
Автокоррелякнонная функция
— — определение 74
— — дискретного сигнала 80
ЛЧМ-сигнала 109
— — неограниченно протяжен-
протяженного сигнала 77
Автокорреляционная характерис-
характеристика системы 210
Амплитуды синфазная и квадра-
квадратурная 121
Ансамбль реализаций 149
Аппроксимация характеристик
— — кусочно-линейная 269
— — показательная 270
— — степенная 269
База сигнала 107
Базис
— естественный 384
— ортонормированный 29
— — сигналов с ограниченным
спектром 116
— — оптныалыюсть 33
Баркера сигналы 82
Безынерционное» условия 266
Балый шум 164
Берга функции 41
Билинейное преобразование 410
Быстрое преобразование Фурье
(БПФ) 385
Варактор 312
¦ Величины случайные
— — определение 138
незавненыость 145
— — преобразования 141
Вероятность
— определение 137
— эмпирическая 137
Взаимодействие сигнала и поме-
помехи в детекторе 282
Видеоимпульс
— гауссов 49
— прямоугольный 47
— экспоненциальный 48
Винера - Хинчина теорема 160
Выбросы случайного процесса
169
Гармоники 39
Генератор накачки 307
Гильберта преобразование 128
Гиратор 356
Гистерезис колебательный 368
Группа узхополосная 242
Групповое время запаздывания
Гурвнца мвогочлев 347
Девиация
— фазы 97
— частоты 98
Дельта-коррелированность 159
Дельта-функция
— определение 19
— физический смысл 20
"Детектирование
— синхронное 302
— фазовое 290
— частотное 291
Детектор АМ-сигнала
— — диодный 289
— - коллекторный 287
Дискретизирующая последова-
последовательность 375
Дискретные сигналы 15
— — принцип кодирования 80
Дисперсия
— случайной величины 139
— случайного процесса 151
— физический смысл 160
Дюамеля интеграл 188
Емкость дифференциальная 312
z-преобразование
— непрерывных функций 389
— обратное 389
— определение 388
— свертки дискретных сигналов
391
— условие сходимости 389
Импульсная характеристика
— — определение 188
— — физический смысл 188
— — цифр°вого фильтра 394
Импульсный сигнал 14
Индекс модуляции 98
Интегратор
— идеальный 54, 168
— на операционном усилителе
353
Интервал
— дискретизации 374
— корреляции 163
Интермодуляция 282
Искажения нелинейные 274, 288
Квазиоптимальный фильтр 431
Квазичастота 170
Канал зеркальный 301
Когерентность 44
Колебание несушее 88
Контур
— колебательный 214, 218
— холостой 314
Корреляция случайного пронесса
и его производной 167
Котелышкова
— ряд Ц6
— теорема 117
Коэффициент
— амплитудной модуияцин 89.
— детектирования 287
— корреляции 145
— нелинейных искажений 275
— неравномерности АЧХ
— передачи мощности 208, 329
— сжатия импульса 430
Крутизна
— преобразования 301
— дифференциальная 300
— средняя 365
Лазер 362
Линия задержки дисперсионная
430
Математическое ожидание
— — случайной величины 139
случайного пронесса 150
Матрица
— импульсных характеристик 190
— частотных коэффициентов пе-
передачи 192
Матричная экспонента 202
Медленно меняющихся амплитуд
метод 240
Модель математическая
— — сигнала 12
— — системы 185
Модулятор Армстронга 285
Модуляция
— амплитудная 88
— — случайная 319
— балансная 94
— импульсная
— однополосная 95
— угловая 96
— — случайная 321
— фазовая 96
— частотная 97
Момент '
— ковариационный 144
— корреляционный 144
Моментные функини 150
Мэнли — Роу уравнения 317
Найквиста
— критерий 349
— формула 256
Неопределенности соотношение
51
Норма сигнала 25
Нормализация случайного сиг-
сигнала линейной цепью 255
Обратная связь
— — запаздывающая 345
— — коррекция частотных ха-
рахтеристик 344
— — отрицательная 342
— — положительная 342, 345
Обращения формула 213
Огибающая
— комплексная 122
— радиоимпульса 14
— суммы гармонического сигна-
сигнала и узкополосного шума 179
— физическая 123
Оператор системный 185
Оптимальный фильтр 419
Отклонение среднеквадратичен
ское при оптимальной фильт-
фильтрации 433
Парсеваля равенство 56
Передаточная функция
— — нули и полюсы 212
— — определение 211
свойства 211
Предметный указатель
Перемодулация 90
Переходная характеристика 191
Плотность вероятности
гауссова 140
— — многомерная 143
— — огибающей и начальной
фазы узкополосного пронесса
175
— - определение 138
— — процесса на выходе нели-
нелинейного элемента 292
— — суммы случайных величин
148 •
Плотность спектральная
— — гармонического колебания
57
— — дельта-функции 49
— - детерминированного сиг-
сигнала 45
— интеграла 53
— произведения 54
— производной 53
— случайная 158
— радиоимпульса 59
— условие существования 47
— функции Хевисайда 58
Полоса цепи шумовая 254
Порядок
— комбинационной частоты 281
— динамической системы 194
Преобразование Лапласа 61
Преобразование Фурье
быстрое (БПФ) 385
дискретное (ДПФ) 381
— — обратное дискретное
(ОДПФ) 383
определение 45
— — свойства 51
Преобразование частоты
— - в параметрических элемен-
элементах 300
— — при синтезе фильтров 338
Приемник супергетеродинный
301
Пространство
— сигналов 23
гильбертово 28, 208
— — линейное 23
— — метрическое 26
— — нормированное 25
— — свойство полноты 33
— состояний 202
Процессор цифровой 392
Пэли - Винера критерий 193
Радиоимпульс 14, 59
Размерность пространства сиг-
сигналов 120
Распределение
— Пуассона 259
— Раиса 180
— Рэлея 176
Расстройка обобщенная 218
Рауса — Гурвица критерий
Регенерация 345
Режим перенапряженный 276
Резонатор цифровой 409
Ряд Фурье
— - комплексная форма 42
— — обобщенный 29
Свертка
— аналоговых сигналов 55
" — круговая 387
— линейная 391
Сигнал
— аналитический 126
— аналоговый 14
— дискретный 15
— импульсный 14
— квантованный 393
— периодический 38
— случайный 13
— сопряженный 126
Симметрия квадрантная 329
Система
— линейная 186
— — динамическая 194
— математическая модель 185
— нелинейная 186
— параметрическая 185
— устойчивость 347
Скалярное произведение 28
Случайный процесс
дифференцируемый 166
— — измерение характеристик
153
— — интегрирование 168
— — сопряженный 172
— — стационарный 151
— — определение 149
— — узкополосный 171
Согласованный фильтр
для ЛЧМ-импульса 429
— — для прямоугольного видео-
видеоимпульса 425
Спектр
— АМ-сигнала 90
— аналитического сигнала 127
— комплексной огибающей 124
— сигнала с угловой модуля-
модуляцией 99
— тока в нелинейном двухпо-
двухполюснике 270
Спектральная плотность ыощ-
ности случайного процесса
— на выходе линейной системы
249
— односторонняя 161
— определение 159
Спектральное разложение
— — детерминированных сигна-
сигналов 39,
— — случайных сигналов 158
Угол отсечки
в диодном детекторе 289
— — определение 41
— — оптимальное значение 278
Узкополосный случайный про-
процесс
— — — нелинейное преобразо-
преобразование 295
— — — функция-корреляции 171
Умножение частоты 277
Уравнение
— укороченное 365
— характеристическое 347
Усилитель
— малых колебаний с апериоди-
апериодической нагрузкой 199
— — резонансный 220, 227
— — — воздействие белого шу-
шума 250
— — — частотная характеристи-
характеристика 221
— нелинейный резонансный 275
— операционный 351
— параметрический
— — двухконтурный 314
одноконтурный 312
Фаза полная 96
Физической реализуемости усло-
условия 190
Фильтр
— активный 351
— Баттерворта 330
— гауссов 224
— гребенчатый 346, 423
— Чебышева 333
Формула
— Найквиста 256
— Рэлея
— — в узком смысле 70
— — обобщенная 55
Функция
— взаимной корреляции детер-
детерминированных сигналов 83
— включения 17
— корреляции случайного про-
процесса
— — взаимная 167
— - нормированная 152
— — определение 151
— распределения 138
— Уолша 30
— характеристическая 142
Характеристика
— амплитудно-фазовая 349
— амплитудно-частотная 12 192
— колебательная 276
— фазочастотиая 192
Цепь
— лестничная 328
— минимально-фазовая 327
Цифровой фильтр
— — алгоритмы 394
— — методы синтеза 406
— — порядок 397 ,
— - принцип построения 392
— — рекурсивный 401
— — траисверсальный 397
Частота
— боковая 90
— граничная усиления 200
— комбинационная 281
— комплексная 61
— мгновенная 123
— промежуточная 300
— среза фильтра 330
— холостая 314
Частотный коэффициент переда-
передачи 191
Ширина спектра
— — при угловой модуляции lOl
Шум
— дробовой 259
— квантования
— тепловой 256
Энергетический спектр
взаимный 68
— - детерминированного сиг-
сигнала 70
Эквивалент низкочастотный уэ-
кополосной цепи 225
Эргодачеекое свойство случай-
случайного чр&цесса 152