/




























































































































































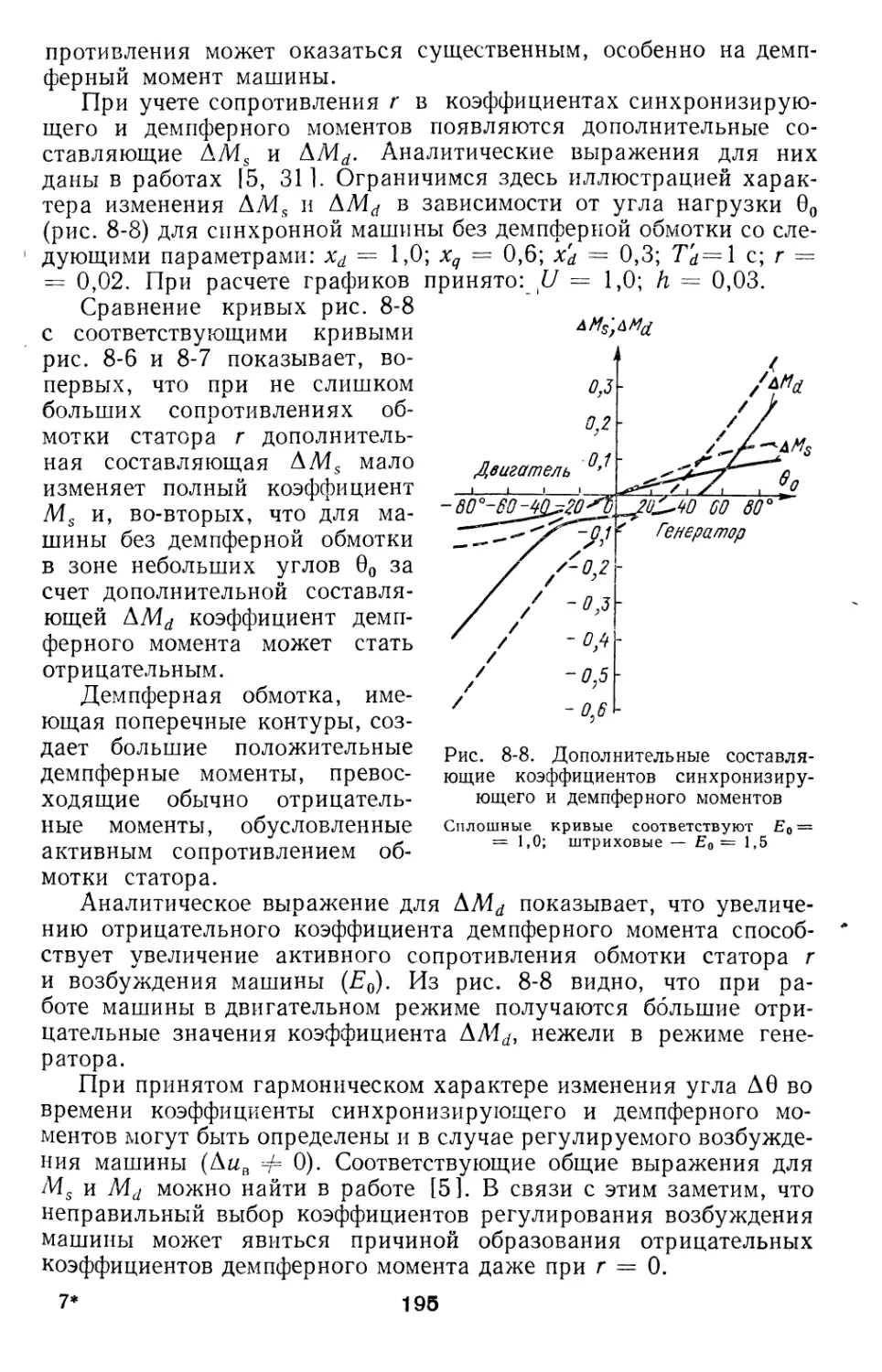



















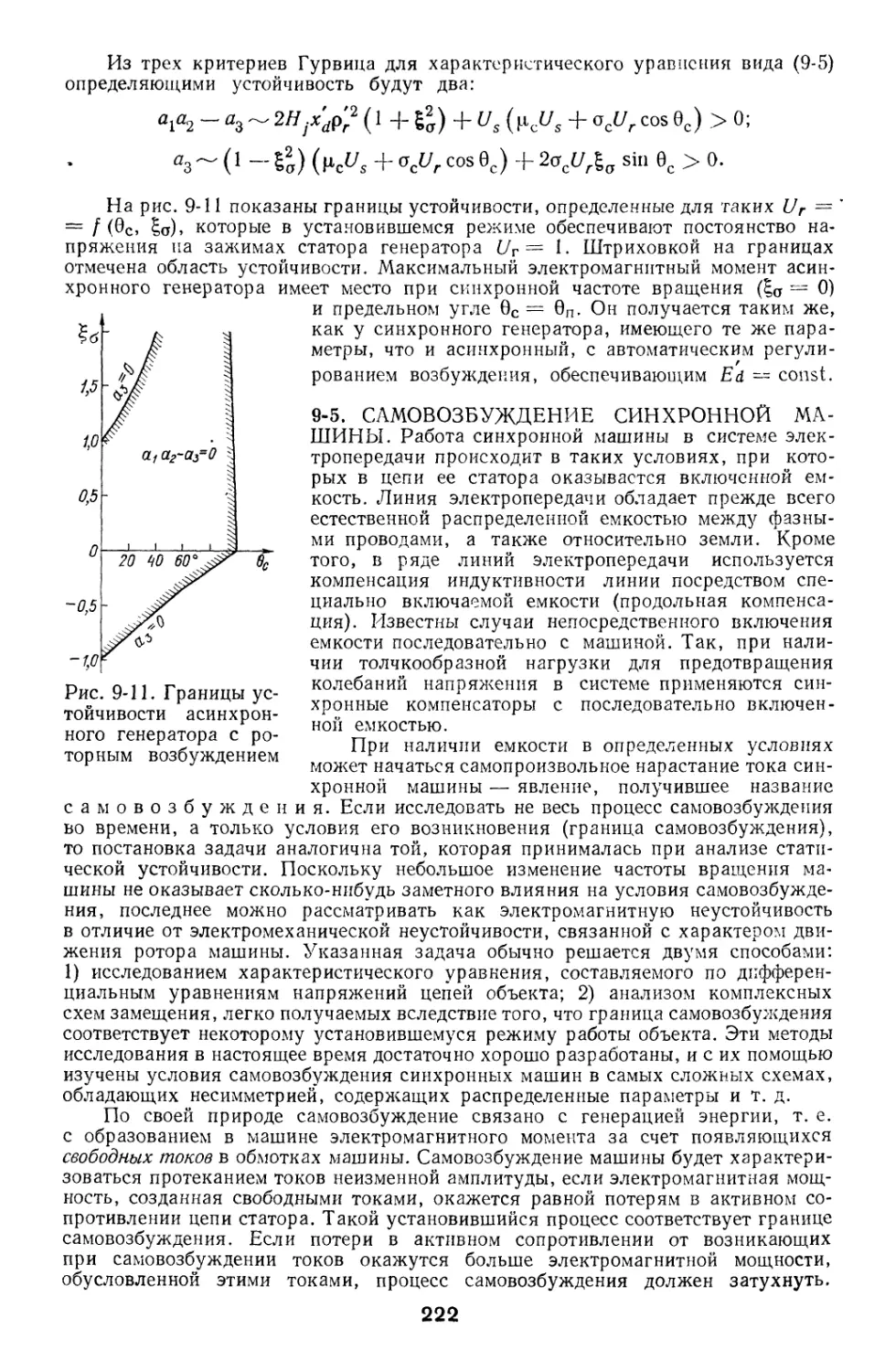

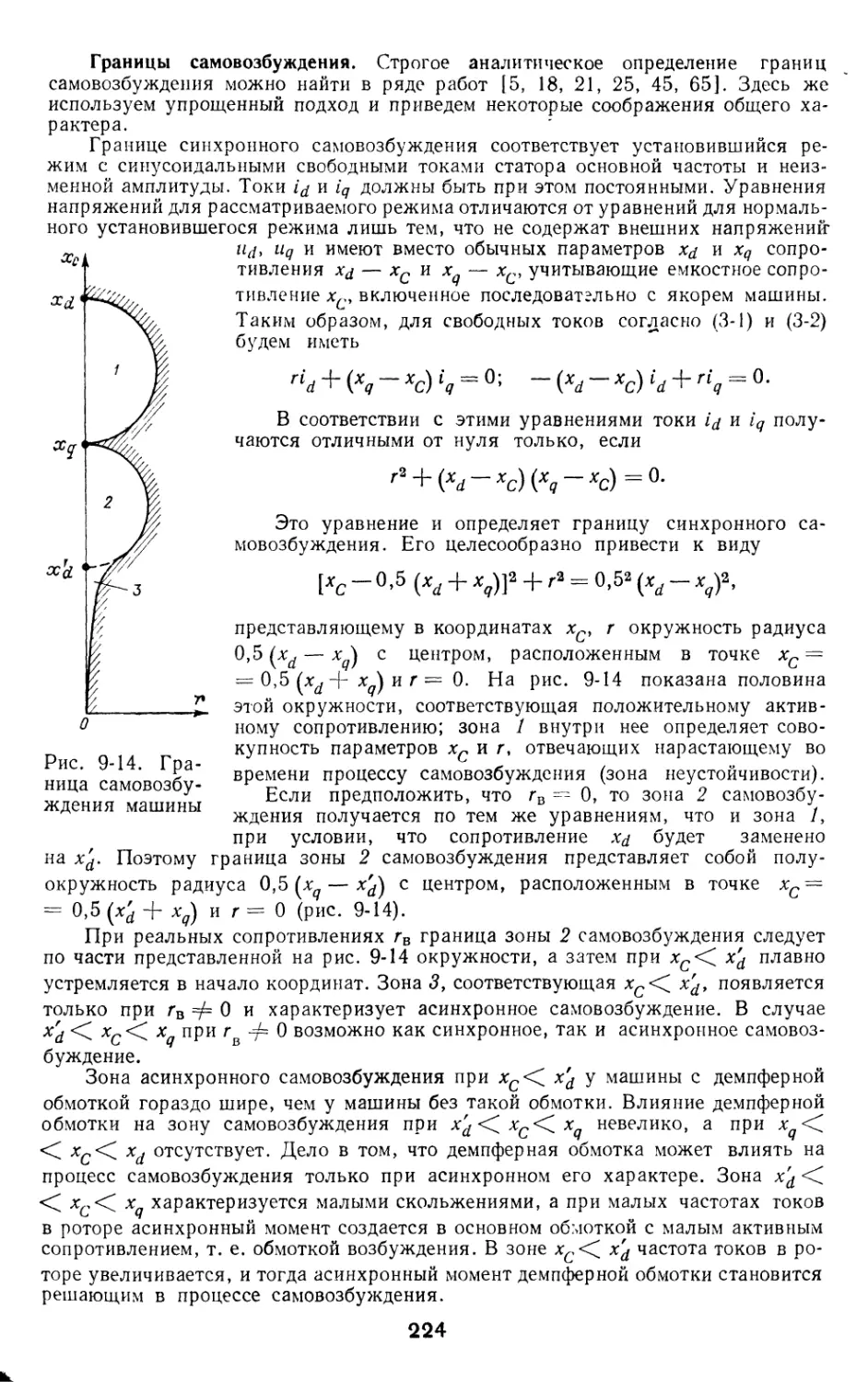


























Текст
А. И. ВАЖНОВ
переходные процессы
в машинах переменного тока
«анергия»
В 12
УДК 621,313.3.018.78
Рецензент И. И. Трещев
Александр Иванович Важное
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В МАШИНАХ ПЕРЕМЕННОГО ТОКА
Редактор Л. М. Пархоменко
Художественный редактор Д. Р. Стеванович
Технический редактор А. Г. Рябкина
Корректор В. В. Румянцев
Оформление художника А. И. Бородина
ИБ № 695
Сдано в набор 22.10.79. Подписано в печать 09.01.80. М-32507.
Формат бумаги 60x90 Vie- Бумага тип. № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 16.0. Уч.-изд. л. 17,87. Тираж 5009. экз.
Зак. 1538. Цена 1 р. 30 к.
Ленинградское отделение издательства «Энергия».
191041, Ленинград, Д-41, Марсово поле, 1.
Ленинградская типография № 6 Ленинградского производственного
объединения «Техническая книга» Союзполиграфпрома
при Государственном комитете СССР по делам издательств, полиграфии
и книжной торговли. 193144, Ленинград, С-144, ул. Моисеенко, 10
Важное А. И.
В 12 Переходные процессы в машинах переменного тока.
Л.: Энергия. Ленингр. отд-ние, 1980. — 256 с., ил.
В пер.: 1 р. 30 к.
В книге приведены дифференциальные уравнения машин переменного тока
в форме А. А. Горева и в операторной форме Р. Парка. На их основе дано решение
некоторых практических задач, важных как для расчета машин, так и для обеспе-
чения их нормальной работы в системе переменного тока. Рассмотрены динами-
ческие свойства машин при малых и значительных возмущениях установивше-
гося режима работы.
Книга предназначена для инженеров и научных сотрудников, работающих
в области электромашиностроения
полезна студентам и аспирантам в|зов. 5ИБ ? ОТЕКА I
05,(01)-80 , - (•. г лмгни42злвтлГ8‘
© Издательство «Э н t р г и я», 1980
Предисловие
Книга рассчитана на читателя, начинающего осваивать теорию
переходных процессов машин переменного тока. Поэтому в ней
большое внимание уделено общим уравнениям машин и их пре-
образованиям, а также приближенным методам решения ряда
важных задач. Это поможет понять физическую сторону про-
цессов и составит основу для последующего знакомства с числен-
ными методами расчета сложных переходных процессов с помощью
вычислительных машин.
В книге изложены, по существу, лишь исходные положения
теории, анализ которых облегчит изучение многочисленной спе-
циальной литературы. Поэтому автор отказался от применения
единой для всех случаев системы относительных единиц и сохра-
нил различные подходы, встречающиеся на практике.
Из-за ограниченного объема в книге не рассматриваются
некоторые разделы теории, такие, например, как схемы замеще-
ния, частотный метод определения параметров и исследования
процессов, решение задач с помощью вычислительной техники.
По этой же причине список литературы весьма ограничен и не
включает в себя многих существенных работ.
При написании книги автор пользовался многочисленными
трудами по переходным процессам машин и вместе с тем стремился
к методическим обобщениям. Это дает возможность использовать
ее в качестве учебного пособия для студентов и аспирантов вузов,
специализирующихся в области электрических машин. Можно
надеяться, что книга будет также полезной для инженеров и на-
учных работников.
Замечания и пожелания по книге просьба направлять по
адресу: 191041, Ленинград, Д-41, Марсово поле, д. 1, Ленинград-
ское отделение издательства «Энергия».
Автор
Введение
К неустановившимся, или переходным, процессам в электрической машине ।
относят любые процессы, являющиеся следствием нарушения равновесного со-
стояния машины или возникновения в ней нового явления. Часто возникает
ситуация, когда нарушается равновесное состояние электромагнитных, электро-
механических или тепловых процессов и параметры режима — токи, мощности,
скорость, температура — начинают изменяться. Переходные процессы подобного
рода могут возникать в результате аварии в системе (например, короткие замы-
кания) либо являться следствием операций, требуемых эксплуатационными усло-
виями (например, пуск в ход, различного вида регулирование, торможение
машины, быстрое изменение нагрузки).
Возможны и такие переходные процессы, которые определяются явлениями,
не связанными с основным рабочим режимом. В качестве примера укажем на
волновой процесс, обусловленный подходом к машине волны перенапряжений. ]
В книге рассматриваются лишь электромагнитные и электромеханические
переходные процессы в машинах переменного тока: первые характеризуют изме-
нение электромагнитных параметров рабочего режима при заданной частоте вра-
щения машины; вторые являются более общими, так как отражают совместное
и взаимозависимое изменение электромагнитных характеристик режима машины
и частоты ее вращения.
ГВремя протекания переходного процесса обычно невелико. Так, например,
процесс внезапного короткого замыкания синхронных генераторов на практике
длится 0,1—0,3 с, некоторые переходные процессы могут длиться дольше — де-
сятки секунд. Однако возможны случаи, когда машина сколь угодно долго рабо-
тает, по существу, в переходном процессе, как, например, при устойчивых коле-
баниях (синхронный двигатель, работающий с компрессором).
Несмотря на обычную ограниченность во времени протекания переходного
процесса, последний оказывает глубокое влияние на работу машины. Во многих
случаях именно переходные процессы определяют значения параметров машины
при ее расчете, они оказывают также влияние и на конструктивные соотношения
в машине^ Так, для синхронных генераторов, работающих в энергосистеме, тре-
бования динамической устойчивости приводят к необходимости обеспечения над-
лежащего махового момента, что, в свою очередь, определяет соотношение основ-
ных размеров генератора — его длины и диаметра. Возможность возникновения
переходных режимов в таких генераторах в условиях несимметрии и при асин-
хронизме делает необходимым устройство в машине полной демпферной обмотки.
Переходные режимы в ряде случаев предъявляют достаточно жесткие требования
и к возбудителям синхронных генераторов в отношении их быстродействия и
максимальных напряжений возбуждения. ^Характер протекания переходного
процесса в электрической машине очень часто определяет поведение всей системы,
элементом которой является машина.
Переходные процессы могут сопровождаться появлением весьма больших
токов в цепях машины. Подобное положение возникает в первую очередь в ава-
рийных режимах. Например, при трехфазном коротком замыкании синхронного
генератора ударные токи в статоре могут в 7—10 раз превышать номинальные
значения. При однофазном коротком замыкании эти токи могут еще возрасти на
20—30%. Значительные токи появляются при неправильной синхронизации син-
хронных генераторов, в результате самовозбуждения при работе машины на ем-
кость и в других случаях. В результате этого отдельные части машины подвер-
гаются воздействию весьма больших сил. В частности, лобовые части обмоток
статора синхронного генератора значительной мощности могут испытывать уси-
лия, измеряемые сотнями килоньютонов. При коротких замыканиях генератора
через статор на фундамент передаются пульсационные моменты, в 5—6 раз пре-
вышающие номинальный электромагнитный момент. Значительный момент скру-
чивает вал машины, особенно если маховой момент первичного двигателя не очень
мал в сравнении с маховым моментом генератора. При несимметричных коротких
замыканиях и отсутствии полных демпферных обмоток на зажимах статора
синхронного генератора возможны значительные перенапряжения. Наконец,
в тех переходных режимах, где их продолжительность более или менее значи-
тельна (выпадение из синхронизма, пуск и т. п.), должна быть произведена оценка
теплового действия токов.
Эти примеры можно было бы умножить, но и из того, что сказано, очевидно,
что только ясное понимание явлений, происходящих в электрических машинах
при переходных процессах, и возможность количественной оценки их позволяют
осуществить рациональное проектирование электрической машины, произвести
надлежащий выбор оборудования, а также обеспечить надежную его работу.
Характер протекания переходных процессов зависит прежде всего от вида
электрической машины (коллекторная, бесколлекторная). Существенное значе-
ние имеет также соотношение между скоростью протекания чисто механического
процесса (изменение частоты вращения) и быстротой изменения электромагнит-
ного процесса (токи, электромагнитный момент)^ Если иметь в виду бесколлектор-
ные машины переменного тока, то для асинхронных машин ограниченной номи-
нальной мощности электромагнитный переходный процесс протекает настолько
быстро, что за это время частота вращения ротора машины не успевает существенно
измениться. Это позволяет в ряде случаев не учитывать сложного переходного
электромагнитного процесса в асинхронной машине, который быстро затухает, и
производить расчеты изменения частоты вращения с помощью статических харак-
теристик. Так, процесс пуска асинхронного двигателя во многих случаях можно
рассчитывать, исходя из статической зависимости электромагнитного момента
от частоты вращения. Вместе с тем корректное определение электромагнитных
Величин, например электромагнитного момента, требует учета ускорений машины.
[Наиболее глубоко разработаны переходные процессы для синхронной ма-
шины, являющейся одним из главнейших элементов энергосистемы, надежность
работы которой в различных режимах — дело первостепенной важности. Вместе
с тем их исследование сопряжено со многими трудностями, особенно в тех задачах,
где возникает необходимость совместного рассмотрения механического и элек-
тромагнитного процессов, когда они изменяются со скоростями одного порядка.
Эти трудности имеют место даже при изучении только одного электромагнитного
переходного процесса ввиду наличия многих контуров на роторе с различными
параметрами по продольной и поперечной осям, а также из-за усложняющегося
влияния магнитной асимметрии ротора (для машины явнополюсного типа).
Первоначально теория синхронной машины была разработана в основном
американскими и немецкими учеными — Парком, Догерти, Никлом, Дрейфу-
сом, Нитхаммером, Бирмансом и др. В дальнейшее развитие и углубление этой
теории и разработку новых методов исследования значительный вклад внесли
советские ученые — А. А. Горев, Д. А. Городский, Л. Н. Грузов, Е. Я. Казов-
ский, М. П. Костенко, Л. А. Ломоносова, Р. А. Лютер, И. М. Постников, Н. Н. Ще-
дрин и др.
Выше отмечалось многообразие переходных процессов, встречающихся на
практике. И хотя не существует строгой и исчерпывающей их классификации,
можно условно разделить все переходные процессы на две большие группы, при-
няв в качестве характерного признака степень отклонения частоты вращения
машины в рассматриваемом процессе от частоты вращения нормального режима.
Первую группу переходных процессов могли бы составить процессы, протека-
ющие при более или менее значительном изменении частоты вращения машины.
Это процессы, возникающие при включении машины в сеть (асинхронный пуск
двигателей и синхронных компенсаторов, самосинхронизация и повторное вклю-
чение синхронных генераторов, реверсирование асинхронных двигателей);
процессы при асинхронном ходе синхронной машины после выпадения из синхро-
низма. Во всех этих режимах важным является определение электромагнитных
величин — токов статора и ротора, электромагнитного момента. Нахождение
токов представляет интерес не только с точки зрения расчета механических уси-
лий, действующих на обмотки, но и для оценки нагрева обмоток при значитель-
ной продолжительности процесса.
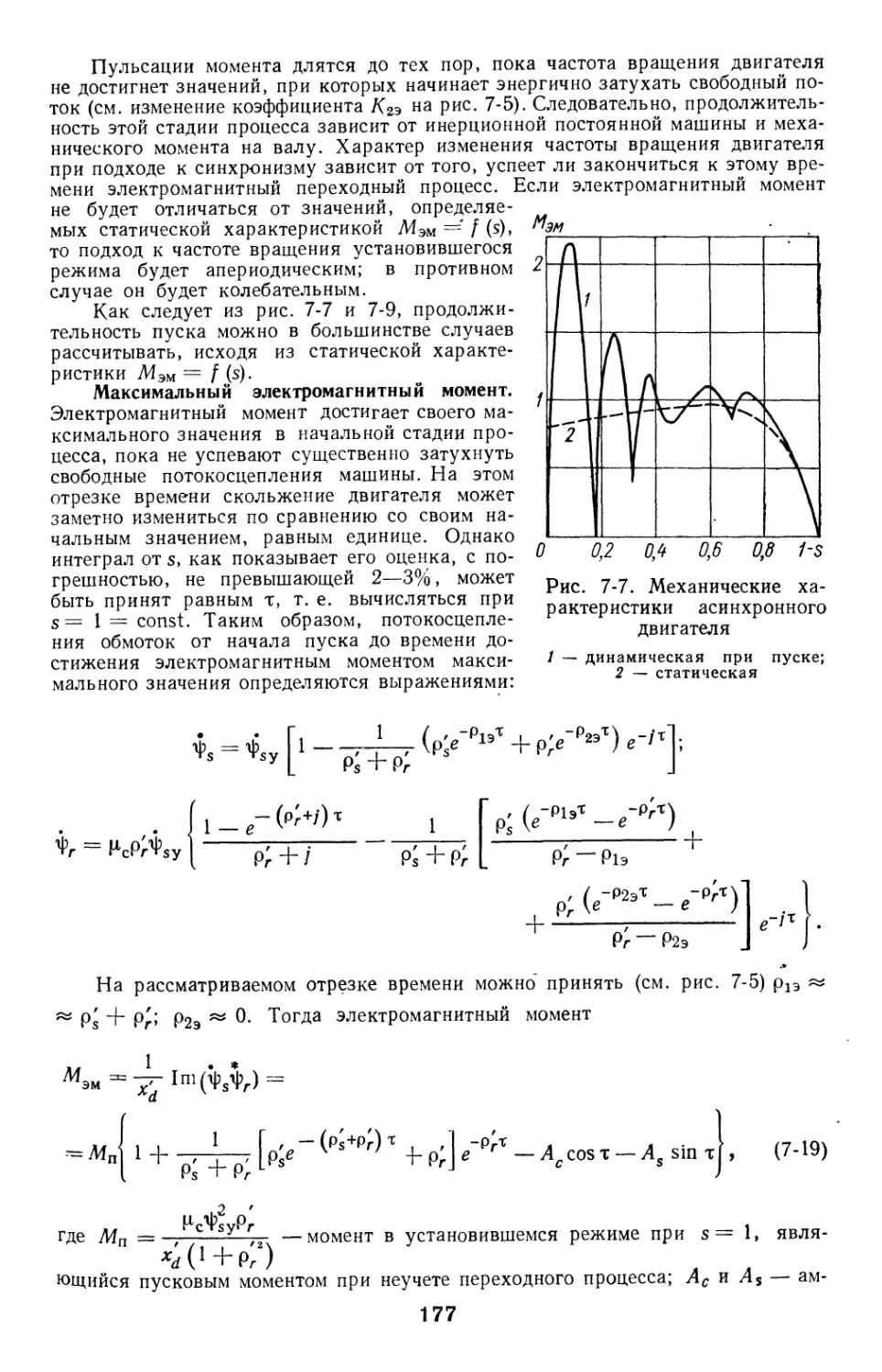
Важной характеристикой процесса является электромагнитный момент, опре-
деляющий, с одной стороны, ход процесса (например, разгон машины при асин-
хронном пуске и время пуска, возможность втягивания машины в синхронизм),
а с другой — механическую нагрузку на вал машины, ее фундамент и детали
крепления активной стали статора. Для синхронных машин существенное значе-
ние имеет также характер перехода от асинхронного режима к синхронному.
Строгое исследование указанной группы процессов весьма затруднительно,
поэтому иногда рассматривается задача для ряда постоянных значений скольже-
ния (квазиустановившийся режим). В этой книге первая группа процессов пред-
ставлена только асинхронным пуском машин и реверсированием асинхронного
двигателя.
Ко второй группе переходных процессов можно отнести такие процессы,
которые протекают при достаточно малых отклонениях частоты вращения машины
от нормального значения. Сюда относятся процессы при внезапных набросах
и сбросах нагрузки, внезапных коротких замыканиях с последующим их отключе-
нием, коммутационных переключениях в системе переменного тока. Исследова-
ние таких процессов проводится в двух направлениях: 1) решается задача о том,
сохраняет ли синхронная машина синхронизм с системой при данном возмущении
установившегося режима (проверяется динамическая устойчивость); 2) находятся
токи, электромагнитные моменты, а иногда и напряжения на обмотках для опре-
деления механической и электрической прочности элементов самой машины.
При исследовании динамической устойчивости можно ограничить величину
возмущения установившегося режима и, в частности, рассмотреть случай сколь
угодно малых возмущений. Решение такой самостоятельной задачи имеет большое
практическое значение, ибо оно позволяет установить, возможен или нет заданный
установившийся режим работы (проверяется статическая устойчивость). Это
важно для оценки предельных нагрузок машины, нахождения рациональной
системы регулирования, определения возможных статических режимов при
наличии емкости в статоре машины и т. д. Вопросы статической и динамиче-
ской устойчивости даны в книге только в своей основе.
Отметим, что в книге вообще рассмотрен только наиболее простой случай
работы машины на сеть бесконечной мощности, к которому сводится большое
число практических задач.
Итак, исследование и расчет переходного процесса в общем случае проводятся
с двух позиций: надежности самой машины (прочности отдельных ее узлов)
и поведения машины как элемента электрической сети при изменении условий ее
работы. В конкретных задачах один из указанных аспектов может иметь реша-
ющее значение.
При аналитических исследованиях переходных процессов машин перемен-
ного тока применяются такие методы, как преобразование координат, введение
комплексных величин (изображающих векторов) для мгновенных значений пере-
менных, схемы замещения для различных режимов машины, метод малых коле-
баний, методика, использующая теорему постоянства потокосцеплений обмоток,
и некоторые другие. Разработаны графоаналитические способы представления
переходных процессов. Однако для сложных задач, требующих решения нелиней-
ных дифференциальных уравнений машины, аналитических решений практически
не получить и приходится обращаться к численным решениям с помощью цифро-
вых вычислительных машин.
Большими возможностями обладает метод моделирования, имеющий две
разновидности — математическое и физическое моделирование.
Наконец, следует сказать о методе экспериментального исследования пере-
ходных процессов в реальных электрических системах.
Нетрудно предвидеть, что эффективность применения того или иного метода
при исследовании и расчете процесса зависит от условий конкретной задачи.
В предлагаемой читателю книге переходные процессы рассматриваются на
основе аналитических решений уравнений машин переменного тока.
оииия.
Общие сведения о машинах переменного тока
1-1. ОБЩИЕ ОПРЕДЕЛЕНИЯ. Машины переменного тока
делят на синхронные и асинхронные в зависи-
мости от того, как связана частота их вращения с частотой элек-
трической сети, к которой присоединена обмотка якоря машины.
Отличительным признаком синхронной машины является строгое
соответствие ее частоты вращения частоте сети. Когда подобного
соответствия нет, машину называют асинхронной.
Общая принципиальная электромагнитная схема машин энер-
гетического назначения, которые только и рассматриваются
в этой книге, показана на рис. 1-1. В пазах сердечников статора 2
и ротора /, являющихся симметричными магнитопроводами,
размещены трехфазные обмотки, присоединенные к сетям с на-
пряжениями Ult U2 и частотами /2. Примем для определенности,
что обмотка якоря расположена на статоре. Штриховыми линиями
схематически показаны магнитные трубки потока взаимной ин-
дукции обмоток статора и ротора в двухполюсной машине. В уста-
новившемся режиме частота токов в обмотках равна частоте соот-
ветствующей сети. Как известно, магнитный поток, создаваемый
гармоническими токами трехфазной обмотки, вращается относи-
тельно этой обмотки с частотой, определяемой частотой тока f
и числом пар полюсов обмотки рп. Частоты вращения потока
относительно обмоток статора (/ij и ротора (и2) соответственно
равны
= 60/т/рп; «2 = 60/2/рп.
Пусть частоты вращения ротора п и потока по отношению
к ротору п2 направлены в одну сторону. Тогда частота вращения
потока в пространстве (или относительно статора) равна пх —
= п + /?2, откуда
n = ftl_n2 ==В(;1_;). (1-1)
Ри
Обычно рассматривают еще один механический параметр —
скольжение s, под которым понимают частоту вращения
поля в зазоре машины по отношению к ротору (/г2), выраженную
в долях частоты вращения поля в пространстве (nx):
п2 —п f2
«Г ~ «1 ~ 7Г ‘
(1-2)
Если частоты fr и /2 остаются неизменными, то по определению
машина, показанная на рис. 1-1, является синхронной. Если
при заданной частоте /д частота f2 изменяется при изменении
режима машины, то последняя становится асинхронной.
Заметим, что приведенные терминологические определения
машин не являются единственными. Синхронную машину при
f2 =h 0 называют также машиной двойного питания, а асинхронную
при U2 =/= 0 — асинхронизированной синхронной машиной или
асинхронной машиной с роторным возбуждением. Преимуществен-
Рис. 1-1. Электромагнитная
схема машины переменного
тока
1 — ротор; 2 — статор
ное распространение среди синхронных
машин получила машина, возбуждаемая
постоянным током (f2 = 0). В таких
машинах достаточно иметь на роторе
одну обмотку возбуждения вместо трех
фазных обмоток, показанных на рис. 1-1.
В классе асинхронных машин наиболь-
шее применение нашли машины с ко-
роткозамкнутым ротором (U2 = 0).
В дальнейшем под термином «синхрон-
ная машина» будем понимать машину,
возбуждаемую с ротора постоянным то-
ком. Для синхронной или асинхронной
машины (на* рис. 1-1) оставим общий
термин «машина двойного питания».
1-2. МАГНИТНАЯ СИСТЕМА И ОБ-
МОТКИ МАШИН. Будем иметь в виду
нормальное исполнение синхронной машины с обмотками якоря,
расположенными на статоре, основное магнитное поле в котором
создается обмоткой возбуждения, размещенной на
роторе. Роторы синхронных машин, как известно, имеют два
различных конструктивных исполнения: явнополюсное
и неявнополюсное. [ * Л
Как магнитопровод явнополюсный ротор (рис. 1-2) имеет две
оси магнитной симметрии: ось полюса, называемую продоль-
ной осью (ось d), и ось, проходящую посредине межполюсного
пространства, — так называемую поперечную ось
(ось д). На рис. 1-2 показана пара осей d, q. Неявнополюсный ротор
(рис. 1-3) также имеет две оси магнитной симметрии — продоль-
ную d и поперечную д, однако в отличие от явнополюсного ротора
здесь магнитное сопротивление, обусловленное зазором, по осям d,
g практически одинаковое (зубчатость ротора мало влияет на
части его окружности).
Обмотка возбуждения в неявнополюсном роторе распределена
по части окружности ротора в отличие от явнополюсного, где
она имеет вид сосредоточенной обмотки. На явнополюсном ро-
торе, кроме обмотки возбуждения, часто размещается еще демп-
ферная обмотка (ее называют иногда демпферной клет-
кой). Она состоит из медных или латунных стержней, заложенных
в пазы, которые образованы в полюсных наконечниках вблизи
от их наружной поверхности, и замкнутых между собой по тор-
цам машины (рис. 1-4). Если перемкнуты стержни, расположен-
ные только в пределах каждого данного полюсного наконечника,
то демпферную обмотку называют частичной или неполной
d,
Рис. 1-3. Схематический попе-
речный разрез неявнополюсного
ротора синхронной машины
1 — статор; 2 — зазор; 3 — обмот-
ка возбуждения (показана частично)
Рис. 1-2. Схематический попе-
речный разрез явнополюсного
ротора синхронной машины
1 — статор; 2 — зазор; 3 — обмот-
ка возбуждения (показана частич-
но); 4 — вал; 5 — крепление полюса
(рис. 1-4, а). Стержни, соединенные по торцам машины коротко-
замыкающими кольцами, образуют полную демпферную обмотку
(рис. 1-4, б). Демпферная обмотка всегда устанавливается на син-
хронных двигателях и компенсаторах и является пусковой об-
моткой при асинхронном пуске таких машин. В синхронных
генераторах демпферная обмотка служит для успокоения коле-
Рис. 1-4. Демпферная обмотка в явнополюсной син-
хронной машине: а — неполная; б — полная
С — стержни; /</\ и КС — короткозамыкающие кольца и
сегменты
баний ротора, облегчения втягивания в синхронизм при синхро-
низации и асинхронных режимах с малым скольжением, а также
для устранения перенапряжений в обмотках статора при несим-
метричных коротких замыканиях. В некоторых явнополюсных
машинах (преимущественно двигатели и компенсаторы) полюсы
ротора или полюсные наконечники выполняют массивными.
Будучи соединенными по торцам короткозамыкающими кольцами,
они играют роль демпферной обмотки, так как при несинхронном
вращении магнитного поля и ротора в них возникают значитель-
ные вихревые токи. В неявнополюсных роторах эквивалентом силь-
ной демпферной обмотки являются металлические клинья и сплош-
ное стальное тело ротора. В машинах большей мощности в торце-
вых зонах ротора устанавливают демпферную систему, состоящую
из коротких демпферных стержней и короткозамыкающих колец.
Трехфазная синхронная машина имеет на статоре три фазные
обмотки якоря, соединенные в большинстве случаев в звезду.
Фазные обмотки представляют собой совокупности рас-
пределенных по окружности статора катушек, симметрично
размещенные в магнитном поле, т. е. со взаимным сдвигом 120° эл.
Хотя обмотки статора явно- и неявнополюсных машин конструк-
тивно могут несколько различаться (например, с целым и дробным
числом пазов на полюс и фазу 7), однако по основным электро-
магнитным процессам они практически идентичньь)
Трехфазная машина двойного питания оснащена упомянутыми
трехфазными обмотками и на статоре и на роторе. Аналогичная
обмотка размещается на статоре асинхронной машины. На роторе
такой машины применяется либо трехфазная обмотка (машины
с фазным ротором), либо короткозамкнутая клетка (машины с ко-
роткозамкнутым ротором). Нашли значительное применение двух-
клеточные асинхронные двигатели (с двумя короткозамкнутыми
обмотками на роторе) и двигатели со специальной конфигурацией
пазов для короткозамкнутой клетки (глубокопазные, с колбо-
видным пазом). В книге будут рассмотрены процессы в асинхрон-
ных машинах с фазным ротором. Результаты исследования можно
полностью отнести и к машинам с одной короткозамкнутой об-
моткой ротора, но лишь частично и с некоторыми оговорками —
к машинам с другими типами короткозамкнутых роторов.
Сердечники статора и ротора машин двойного питания и асин-
хронных машин можно считать в поперечном сечении симметрич-
ными в любом направлении (см. рис. 1-1).
1-3. МАГНИТНЫЕ ПОЛЯ И ИДЕАЛИЗАЦИЯ МАШИН.
Магнитное поле в машинах переменного тока, возбуждаемое
токами обмоток, весьма неоднородно вследствие сложной кон-
фигурации границ ферромагнитных сердечников, своеобразного
расположения проводников с токами и нелинейности магнитной
характеристики магнитопровода. Очевидно, в этих условиях
строгое определение поля представляет собой нелегкую задачу.
Поэтому в зависимости от характера исследуемых явлений задача
определения поля решается с различными исходными допуще-
ниями и более скрупулезно находится магнитное поле в той об-
ласти, с которой связано само исследование. Изучение электроме-
ханических переходных процессов основано на анализе и решении
дифференциальных уравнений машины^ При их составлении
необходима известная идеализация в определении магнитного
поля, которая позволила бы получить достаточно простые элек-
тромагнитные связи при правильном отражении основного элек-
тромагнитного процесса в машине. Эта идеализация сводится
к следующему.
1. Магнитная проницаемость сердечников машины цс при-
нимается равной бесконечности. Это предположение позволяет
не только однозначно определить картину поля от тока какой-
либо обмотки, но и использовать принцип наложения при опреде-
лении результирующего поля в зазоре при совокупном действии
токов всех обмоток машины. Иными словами, индукция в любой
точке зазора при одновременном протекании токов во всех обмот-
ках машины может быть определена как сумма индукций в этой же
точке, обусловленных теми же токами, но протекающими пооче-
редно в своих обмотках. В действительности рс является величи-
ной конечной и зависящей от значения магнитного потока. Для
некоторых задач разработаны методы учета насыщения магнитной
системы машины, однако здесь они не освещаются. Насыщение
сердечников будет учитываться соответствующим выбором индук-
тивностей машины («насыщенные» и «ненасыщенные» значения).
2. Распределение полей самоиндукции трехфазных обмоток
и взаимоиндукции обмоток статора и ротора вдоль окружности
машины считается синусоидальным с пространственным полупе-
риодом, равным полюсному делению. Таким образом, принимается
в расчет лишь первая (основная) гармоника указанных полей
и не учитывается влияние зубцовых полей в зазоре, обусловлен-
ных зубчатостью статора и ротора, а также высших и субгармоник
поля, вызванных соответствующими гармониками м. д. с. обмоток
статора и роторам Основанием для подобного упрощения является
способность трехфазной обмотки «фильтровать» высшие гармоники
поля в зазоре: в нормально спроектированной машине удается
получить высшие гармоники э. д. с., обусловленные рядом высших
гармоник поля, весьма малой амплитуды.
Магнитные поля тех высших гармоник трехфазных обмоток,
которые индуктируют э. д. с. основной частоты, относят к полям
рассеяния этих обмоток. Отметим также, что рассматриваемое
допущение означает пренебрежение участием высших гармоник
в образовании электромагнитного момента. Для машин энергети-
ческого назначения такое пренебрежение вполне допустимо.
Указанное проявление свойств высших гармоник учитывается при
расчетах добавочных потерь в машинах. Подробные сведения
о магнитных полях в машинах переменного тока можно получить
из работ [19, 39—41].
3. Принятая идеализация в картине магнитного поля пред-
полагает, что магнитопровод и обмотки машины симметричны.
Это значит, что магнитопровод имеет одинаковые очертания
на всех полюсных делениях, а в пределах полюсного деления
симметричен относительно осей d, q. Это также значит, что в трех-
фазной обмотке все фазные обмотки имеют одинаковые числа вит-
ков, активные сопротивления и взаимный сдвиг магнитных осей
и в синхронных машинах стержни демпферной обмотки симме-
тричны относительно осей d, q, а обмотка возбуждения идентична
на всех полюсах ротора.
При исследовании переходных процессов допустима идеали-
зация демпферной обмотки синхронной машины. В короткозам-
кнутых контурах демпферной обмотки нет приложенных напряже-
ний, в них э. д. с. могут индуктироваться только магнитными
Рис. 1-5. Схема образования демпфер-
ных контуров: а — поля в зазоре с не-
изменными магнитными осями; б —
продольные демпферные контуры; в —
поперечные демпферные контуры
полями, сцепляющимися с демп-
ферной обмоткой. Вращающееся
в общем случае относительно
этой обмотки магнитное поле
в зазоре можно по известному
принципу заменить двумя пуль-
сирующими полями. После за-
мены внешнего поля двумя по-
лями с неподвижными относи-
тельно демпферной обмотки ося-
ми последняя будет предста-
влять собой по отношению
к каждому полю совокупность
короткозамкнутых контуров,
магнитная ось которых совпа-
дает с осью рассматриваемого
поля. Целесообразно выбрать
две оси, вдоль которых ориен-
тируются упомянутые выше
поля, сдвинутые на угол л/2 и
совмещенные с продольной (d) и
поперечной (q) осями машины
(рис. 1-5, а). При этом демпфер-
ная обмотка распадается на две системы контуров: контуры
одной системы будут иметь магнитную ось, совпадающую с осью d
(рис. 1-5, б); магнитной осью контуров второй системы будет ось q
(рис. 1-5, в). На этих рисунках показаны два контура (/—1 и
2—2) в каждой из систем. Нетрудно видеть, что одни и те же
стержни входят как в продольные, так и в поперечные кон-
туры. Приняты?! выбор осей удобен потому, что между двумя
системами контуров демпферной обмотки отсутствует взаимная
индукция.
Если бы для различных частот пульсации внешнего гармони-
чески распределенного поля в зазоре первая гармоника поля
индуктированных токов в демпферных системах имела аналогич-
ную временную зависимость, то каждую из демпферных систем
в переходном электромагнитном процессе можно было бы за-
менить одним эквивалентным контуром. Это означало бы, что
реальную демпферную систему достаточно характеризовать одной
постоянной времени. С физической точки зрения указанное
свойство системы короткозамкнутых демпферных контуров ка-
жется достаточно правдоподобным, поскольку на первый взгляд
представляется, что индуктированные токи в демпферных конту-
рах данной системы совпадают по временной фазе. Однако де-
тальный анализ показывает, что это не так и в принципе система
демпферных контуров характеризуется числом постоянных вре-
мени, равным числу контуров. Наибольшее приближение к идеа-
лизированному представлению получается для равномерно рас-
пределенной беличьей клетки с достаточно большим числом стерж-
ней на одном полюсном делении. Тем не менее опыт показывает,
что замена реальных демпферных систем двумя эквивалентными
контурами при исследовании переходных процессов в синхронной
машине вполне допустима. Поскольку продольная и поперечная
системы демпферных контуров отличаются размерами и размеще-
нием во внешнем магнитном поле входящих в них реальных кон-
туров, электрические параметры двух эквивалентных контуров
будут различными.
В дальнейшем реальная демпферная обмотка синхронной ма-
шины будет представляться двумя эквивалентными демпферными
контурами — продольным и поперечным, магнитные оси которых
совпадают соответственно с осями d, q. Уравнения синхронной
машины с детальным учетом демпферной обмотки можно найти
в работах [5, 72]. Они представляют интерес при исследовании
электромагнитного процесса в самой демпферной обмотке.
1-4. ПОТОКОСЦЕПЛЕНИЯ И ИНДУКТИВНОСТИ ОБМОТОК
СИНХРОННОЙ МАШИНЫ. На основании принятой идеали-
зации при определении магнитного поля (см. § 1-3, п. 1) потоко-
сцепления с любой обмоткой машины можно вычислять в виде
суммы потокосцеплений самоиндукции и взаимной индукции со
всеми остальными обмотками. Ограничимся на первых порах
исследованием синхронной машины, которая имеет наиболее
сложную структуру магнитопровода и обмоток на роторе. Потоко-
сцепления трехфазных обмоток статора и ротора, размещенных
в симметричном магнитопроводе (машина двойного питания,
асинхронная машина), рассмотрим дальше, после преобразования
трехфазной машины в двухфазную (см. § 1-7).
Условимся для любой обмотки обозначать: L и М — соответ-
ственно ее индуктивность и взаимную индуктивность с другими
обмотками; г — активное сопротивление; /, ф, и — мгновенные
ток, потокосцепление и напряжение на зажимах обмотки. При-
надлежность величины к данной обмотке будем отмечать буквен-
ными индексами, которые для различных обмоток примем следу-
ющими: для фазных обмоток статора — а, Ь, с; для обмотки воз-
буждения — в; для продольного и поперечного эквивалентных
демпферных контуров — эй, эд.
Потокосцепления обмоток синхронной машины в общем виде
представляются следующими выражениями (для удобства принята
упрощенная индексация взаимных индуктивностей между демп-
ферными контурами и фазными обмотками):
Фа —• Laia ~F ^ab^b “F Made “~F -^ав^'в I' ^-ad^sd ~F Maqt3q\
Фб = Mbaia + Lblb + Mbcic M&BfB + Mbrfi3d + Mbql3q]
Фс MCaia ~F Mcbib “F Lcic ~F Л^св^'в “F ^cd^ad ~F MCql3q]
Фв + МвЬ1Ь “F MBC1C “F ^b^b ~F -44вэ^'э</»
Фэе? — ^-da^a F Mdbib F~ Mddc “F M3(jbiB ~F ^sd^sd^
Фэ</ — Mqaia ~F Mqbib F~ Mqcic ~F L3ql3q.
(1-3)
(1-4)
(1-5)
(1-6)
Поскольку pc = oo, то, согласно принципу взаимности, вза-
имные индуктивности с переставленными подстрочными индек-
сами равны, т. е. МаЬ = МЬа; Мва = Мав; Mad = Mda и т. д.
Некоторые индуктивности в (1-3)—(1-6) не зависят от положе-
ния ротора машины в пространстве и поэтому имеют постоянное
значение^ другие — изменяются при вращении ротора. Постоян-
ными будут индуктивности L и взаимные индуктивности М не-
подвижных относительно друг друга контуров, по отношению
к которым конфигурация магнитной системы остается неизменной
при любом положении ротора. В явнополюсных машинах это
будут индуктивности всех контуров ротора и взаимная индуктив-
ность обмотки возбуждения и продольного демпферного контура.
Остальные индуктивности будут изменяться в зависимости от
положения ротора в пространстве. Для взаимных индуктивностей
между обмотками статора и ротора это вполне очевидно. Индук-
тивность фазных обмоток и их взаимная индуктивность стано-
вятся функцией положения ротора вследствие того, что магнитная
проводимость зазора для полей, создаваемых токами указанных
обмоток, из-за явнополюсности ротора зависит от его положения.
И только в неявнополюсных машинах эти индуктивности оказы-
ваются постоянными.
Будем определять положение ротора в пространстве углом у,
на который продольная ось d отстоит от магнитной оси фазы а
(рис. 1-6). Условимся, что положительная поперечная ось q
отстает на 90° эл. от положительной продольной оси. Следует
заметить, что такое взаимное положение осей d, q не является
общепринятым. Но оно удобно для синхронной машины, работа-
ющей генератором. Что касается магнитных осей симметричных
фазных обмоток статора а, Ь, с, то они сдвинуты относительно
друг друга на 120° эл.
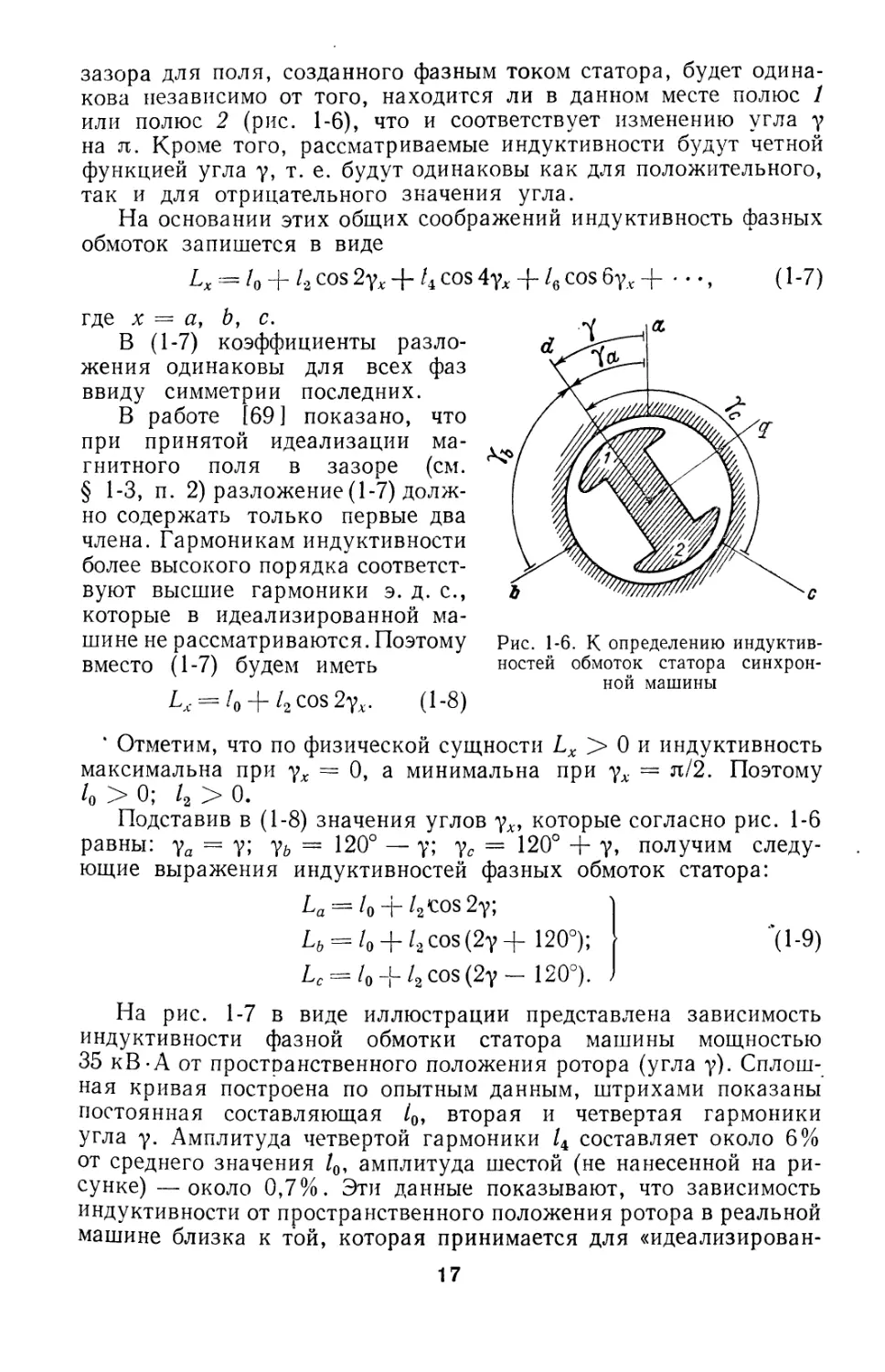
Очевидно, что зависимость индуктивностей от угла у будет
периодической.
Индуктивности фазных обмоток статора. Эти индуктивности
являются периодическими функциями угла между магнитной осью
фазы и продольной осью ротора d (углы уа, уь и ус на рис. 1-6)
с периодом, равным л. Действительно, магнитная проводимость
зазора для поля, созданного фазным током статора, будет одина-
кова независимо от того, находится ли в данном месте полюс 1
или полюс 2 (рис. 1-6), что и соответствует изменению угла у
на л. Кроме того, рассматриваемые индуктивности будут четной
функцией угла у, т. е. будут одинаковы как для положительного,
так и для отрицательного значения угла.
На основании этих общих соображений индуктивность фазных
обмоток запишется в виде
Lx = /0~r /2 cos 2ухcos 4уЛ-}-/в cos 6ух-|-, (1-7)
где х = а, Ь, с.
В (1-7) коэффициенты разло-
жения одинаковы для всех фаз
ввиду симметрии последних.
В работе [69] показано, что
при принятой идеализации ма-
гнитного поля в зазоре (см.
§ 1-3, п. 2) разложение (1-7) долж-
но содержать только первые два
члена. Гармоникам индуктивности
более высокого порядка соответст-
вуют высшие гармоники э. д. с.,
которые в идеализированной ма-
шине не рассматриваются. Поэтому
вместо (1-7) будем иметь
/о + к cos 2уЛ. (1-8)
Рис. 1-6. К определению индуктив-
ностей обмоток статора синхрон-
ной машины
‘ Отметим, что по физической сущности Lx > 0 и индуктивность
максимальна при ух = 0, а минимальна при уЛ. = л/2. Поэтому
/о > 0; /2 > 0.
Подставив в (1-8) значения углов ух, которые согласно рис. 1-6
равны: уа = у; уь = 120° — у; ус = 120° + у, получим следу-
ющие выражения индуктивностей фазных обмоток статора:
La=^l0 + l2>cos 2у;
Lb “F h cos (2У 120°);
’(1-9)
Lc = /0 + 4 cos (2у - 120°).
На рис. 1-7 в виде иллюстрации представлена зависимость
индуктивности фазной обмотки статора машины мощностью
35 кВ-А от пространственного положения ротора (угла у). Сплош-
ная кривая построена по опытным данным, штрихами показаны
постоянная составляющая /0, вторая и четвертая гармоники
угла у. Амплитуда четвертой гармоники Z4 составляет около 6%
от среднего значения /0, амплитуда шестой (не нанесенной на ри-
сунке) — около 0,7%. Эти данные показывают, что зависимость
индуктивности от пространственного положения ротора в реальной
машине близка к той, которая принимается для «идеализирован-
ной» машины. В неявнополюсных синхронных машинах 12 = О
и La = Lb = Lc = lQ = const.
Взаимные индуктивности фазных обмоток статора. Эти взаим-
ные индуктивности являются четной периодической функцией
угла между осью d и линией, проведенной между магнитными осями
рассматриваемых фаз. Например, взаимная индуктивность МаЬ
фаз а и b будет четной функцией угла уаЬ (рис. 1-8), так как на
основании принципа взаимности МаЬ = МЬа, а это значит, что
МаЬ не зависит от знака угла уаЬ. Очевидно, что при повороте ро-
тора на угол л взаимная индуктивность МаЪ будет иметь такое же
значение, как и в исходном положении ротора. Аналогично соб-
Рис. 1-7. Зависимость индуктивности фазной обмотки
от угла у
ственным индуктивностям фазных обмоток общее разложение
МаЬ и остальных взаимных индуктивностей в ряд Фурье для
«идеализированной» машины должно содержать только постоян-
ную составляющую и вторую гармонику угла:
МаЬ -=т04-т2 cos 2у^,
причем коэффициенты разложения в трех выражениях одинаковы
из-за симметрии фазных обмоток.
Взаимные индуктивности фазных обмоток отрицательны, по-
скольку углы между магнитными осями этих обмоток больше
90°. Они принимают максимальные и минимальные значения при
соответствующих значениях у. Например, МаЬ по абсолютному
значению минимальна при уаЬ = 0 и максимальна при уаЬ = 90°.
Для принятой формы записи это означает, что т0 <0; т2 > 0.
Между амплитудами вторых гармоник собственных и взаимных
индуктивностей фазных обмоток статора есть простая связь,
а именно 15]: 12 = т2. Учитывая также, что уаЬ = 60° — у;
уас = 60° + у; уьс = 180° — у (рис. 1-8), получим окончательно:
МаЬ + /2cos (2у — 120°); '
Мас т0 + Z2 cos (2у 120°);
Mbc = п?0 /2 cos 2у.
В неявнополюсных синхронных машинах МаЬ = Мас = МЬс =
= mQ = const.
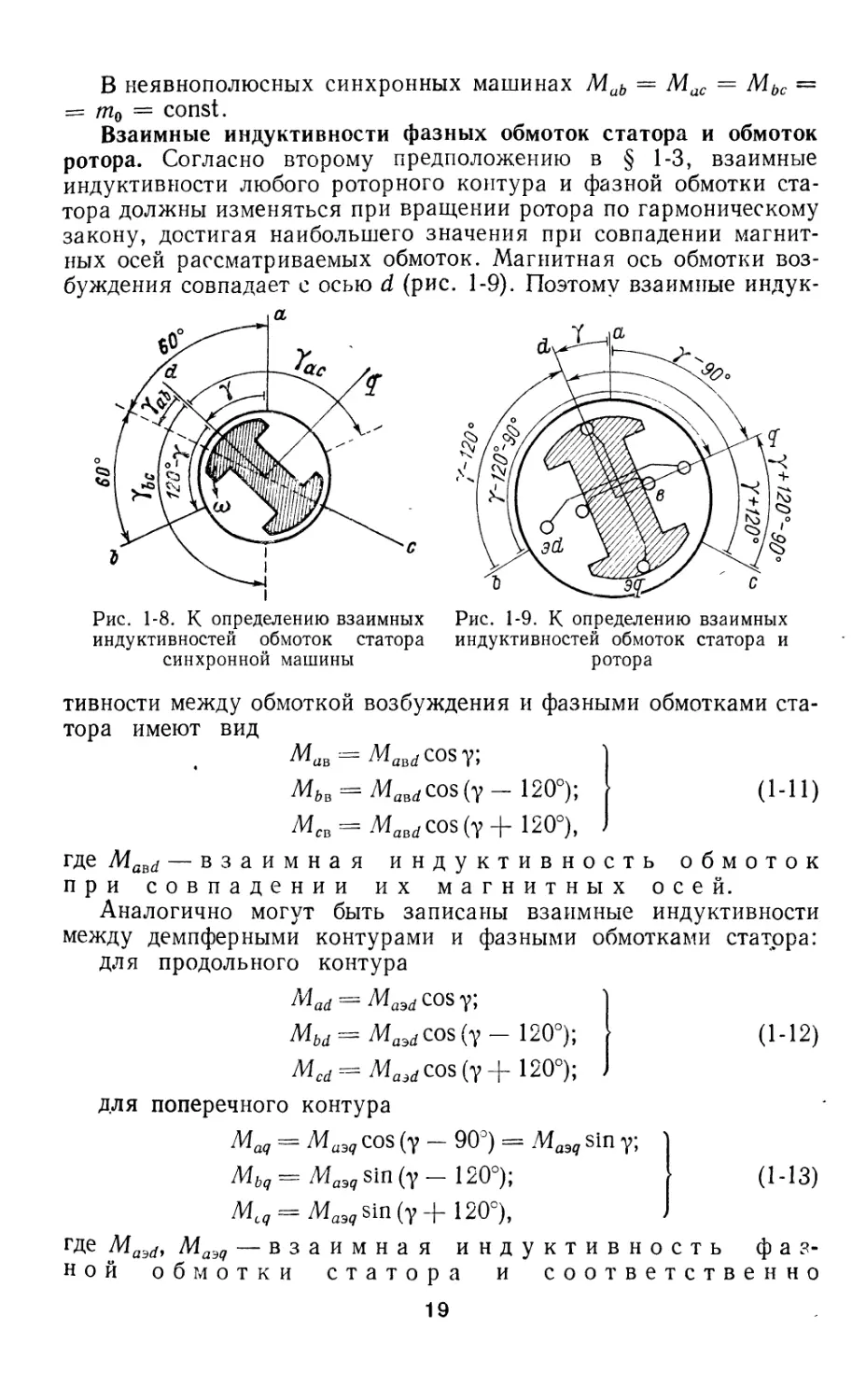
Взаимные индуктивности фазных обмоток статора и обмоток
ротора. Согласно второму предположению в § 1-3, взаимные
индуктивности любого роторного контура и фазной обмотки ста-
тора должны изменяться при вращении ротора по гармоническому
закону, достигая наибольшего значения при совпадении магнит-
ных осей рассматриваемых обмоток. Магнитная ось обмотки воз-
буждения совпадает с осью d (рис. 1-9). Поэтому взаимные индук-
а
।
Рис. 1-8. К определению взаимных
индуктивностей обмоток статора
синхронной машины
Рис. 1-9. К определению взаимных
индуктивностей обмоток статора и
ротора
тивности между обмоткой возбуждения и фазными обмотками ста-
тора имеют вид
мив = AlaBrfcosy;
= Maad cos (у - 120°);
MCB= cos (у-|- 120°), .
(1-Н)
где Мавс1 — взаимная индуктивность обмоток
при совпадении их магнитных осей.
Аналогично могут быть записаны взаимные индуктивности
между демпферными контурами и фазными обмотками статора:
для продольного контура
Mad Ma3d COS у,
Mw = Ma3dcos(y- 120°);
Mcd = Ma3d cos (y + 120°);
для поперечного контура
Maq = Ma3q cos (y — 90°) = Маэ9 sin y;
Mbq = Ma3q sin (y — 120°);
(1-12)
(1-13)
MLq = Ma3?sin(y+ 120°),
где Ma3d, Ma3q — взаимная индуктивность фаз-
ной обмотки статора и соответственно
продольного и поперечного демпферных
контуров при совпадении магнитных осей
роторного контура и обмотки статора.
Итак, целый ряд индуктивностей (1-9)—(1-13), определяющих
потокосцепления обмоток, оказался периодической функцией
угла у. При вращении ротора за время dt угол у изменяется на
dy = со dt, где со — мгновенная частота вращения ротора, изме-
ряемая в электрических радианах в секунду. К произвольному
моменту времени t угол у составляет
t
у = | со at + у0,
о
где у0 — значение у при t ~ 0.
Если частота вращения ротора постоянна, то у - со/ Ц- у0.
Таким образом, даже при постоянной частоте вращения ротора
индуктивности, зависящие от угла у, будут являться гармони-
ческими функциями времени. Дифференциальные уравнения на-
пряжений обмоток машины содержат э. д. с., определяемые
производной от потокосцеплений по времени. Поскольку потоко-
сцепления зависят от времени не только вследствие изменения
токов обмоток, но и за счет индуктивностей, являющихся функ-
цией времени, дифференциальные уравнения напряжений стано-
вятся уравнениями с переменными коэффициентами. Решение
таких уравнений весьма затруднительно, соответственно услож-
няется и анализ переходных процессов. Поэтому возникает задача
такого преобразования дифференциальных уравнений напряже-
ний, которое позволило бы существенно упростить их и, в част-
ности, получить уравнения с постоянными коэффициентами.
Эта задача решается с помощью так называемых линейных
преобразований. Поскольку линейные преобразования
играют существенную роль в теории машин переменного тока,
ниже дается их краткое изложение.
1-5. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ. Рассмотрим сначала
формальную сторону линейных преобразований. Предположим,
что уравнения, подлежащие решению, содержат некоторое число
переменных. Линейные преобразования уравнений состоят в том,
что исходные переменные в уравнениях заменяются новыми пере-
менными, линейно связанными с исходными; при этом число вво-
димых в рассмотрение новых переменных равно числу заменяемых
переменных. Так, вместо трех переменных — фазных токов ста-
тора ia, ib, ic — можно оперировать с новыми токами ix, iy, iz,
связанными с исходными токами линейными зависимостями:
^х ' tyxcja tyxlAb ~Ь
iy tyycda Ч- tyyb^b “h tyydc>
~ tyzcja 4“ ^zb^b “T~ tyzdc- '
(Ы4)
Коэффициенты ср в (1-14) называются коэффициентами линей-
ного преобразования.
После введения новых переменных решению подлежат уже
видоизмененные уравнения и искомыми становятся новые пере-
менные. Практика показывает, что такая замена переменных
при удачном выборе коэффициентов линейного преобразования,
который зависит от условий решаемой задачи, может существенно
облегчить исследование и решение преобразованных уравнений.
После того как в результате решения уравнений определены
новые переменные, осуществляется обратный переход к исходным
переменным, и задача оказывается полностью решенной.
Для того чтобы между исходными и новыми переменными
(в нашем случае между токами ia, ib, ic, с одной стороны, и токами
h — с другой) было однозначное соответствие, определи-
тель, составленный из коэффициентов линейного преобразования,
не должен быть равен нулю. Последнее требование выражаем
соотношением для определителя системы (1-14):
Фда Фас Фас
Фг/а фг/& Ф^с
Фга ф26 Фгс
Действительно, для окончательного решения задачи необхо-
димо по найденным значениям новых переменных (у нас iXf iy,
i2) определить исходные переменные задачи (у нас ia, ib, ic),
для чего система вида (1-14) должна быть разрешена уже относи-
тельно исходных переменных. Но, определяя любую исходную
переменную, например ia, обратно через новые переменные, по-
лучим в знаменателе выражения для ia определитель системы
(1-14), который поэтому и должен быть конечным. Следует под-
черкнуть, что коэффициенты линейного преобразования могут
являться функциями времени, лишь бы определитель системы
(1-14) в любой момент времени не равнялся нулю.
Продолжая рассмотрение примера линейного преобразования
трех фазных токов машины ia, ib, ic и замены их новыми токами
4, С» izt отметим, что один из новых токов, например iz, удобно
выбрать в виде r/3 (ia + ib + С) 1т. е. положить в (1-14) =
4zb = ф2с = 1/3]. Дадим этому току специальное обозначение
3 (с + ib “Т" с) “
и назовем нулевой составляющей тока. Удобство
такого выбора заключается в том, что часто iQ = 0 (для трехфаз-
ных обмоток, соединенных в звезду с изолированной нейтральной
точкой). Но даже если f0 Ф 0, то, как будет видно из дальнейшего,
этот ток не оказывает никакого влияния на движение ротора ма-
шины в переходном процессе. Поэтому в задачах, связанных с ис-
следованием устойчивости работы машины, с определением элек-
тромагнитного момента машины можно не рассматривать нулевую
составляющую тока. Вместе с тем этот ток необходимо учитывать
при определении фазных токов машины.
Дадим теперь линейному преобразованию геометрическую
интерпретацию. Вспомним с этой целью изображение токов па век-
торной диаграмме. Если фазные токи являются синусоидальными
функциями времени, то они могут быть представлены на диаграмме
тремя векторами, вращающимися вокруг некоторой точки (полюса)
Рис. 1-10. Определение мгновенных
фазных токов на векторной диаграмме:
а — вращающиеся векторы; б — непо-
движные векторы
с частотой вращения, равной
угловой частоте тока. Проек-
ции векторов на линию вре-
мени дают значения мгно-
венных токов (рис. 1-10, а).
Рис. 1-11. Определение -
мгновенных фазных токов
с помощью изображающего
вектора
Можно на диаграмме оставить векторы неподвижными, а вращать
линию времени в противоположную сторону с той же частотой
вращения; очевидно, результат будет тем же (рис. 1-10, б).
Диаграмму можно представить и иначе. С этой целью рассмо-
трим вначале частный случай, когда токи по фазам симметричны.
Возьмем вместо трех симметричных векторов три оси (а, &, с),
расположенные симметрично; из центра проведем вектор /, кото-
рый будем вращать с такой же частотой вращения, с какой ранее
вращалась на диаграмме линия времени (рис. 1-11). Если величина
вектора / равна амплитуде фазных токов, то его проекции на три
оси, очевидно, также дадут значения мгновенных фазных токов.
Таким образом, если вектор I имеет неизменную величину и вра-
щается с постоянной частотой, то с его помощью изображаются
симметричные синусоидальные токи. Конец вектора I будет при
этом описывать окружность.
Однако с помощью вектора I можно изобразить любые три тока
ic, как угодно изменяющиеся во времени, при одном только
условии, что
ia + h + h = 0. (1"15)
Это условие, накладываемое на токи, вытекает из принятого
способа изображения токов как проекций некоторого вектора на
три оси, сдвинутые на 120°, ибо сумма проекций как угодно из-
меняющегося вектора на такие оси всегда равна нулю: I cos а +
+ I cos (а — 120°) + I cos (а — 240°) = 0. Следовательно, ка-
ким бы образом ни изменялись во времени токи ia, ib, ic, удовле-
творяющие (1-15), для каждого момента времени проекции век-
тора на осях известны и поэтому вектор однозначно определен по
величине и положению относительно осей. Однако конец вектора
в общем случае будет описывать сложную кривую.
Рис. 1-12. Определение мгновенных несимметрич-
ных фазных токов: а — с помощью трех векторов;
б — с помощью изображающего вектора
На рис. 1-12 в качестве примера показаны два способа изобра-
жения синусоидальных, но несимметричных фазных токов, удо-
влетворяющих условию (1-15). На рис. 1-12, а представлено изо-
бражение токов тремя векторами Ia, Ib, Тс, вращающимися с ча-
стотой вращения, равной угловой частоте изменения токов;
положение векторов на рисунке соответствует со/ = 0. На
рис. 1-12, б те же токи изображены проекциями одного вектор’а I
на три оси. Вектор вращается уже с переменной частотой, и конец
его описывает эллипс (на кривой рис. 1-12, б указаны значения со/,
при которых конец вектора попадает в данную точку). Этот век-
тор называется изображающим вектором.
С помощью проекций вектора на оси можно представить
значения не только мгновенных токов, но и мгновенных потоко-
сцеплений и напряжений. Условимся изображающие векторы
тока, потокосцепления и напряжения обозначать соответственно /,
Y, U. Отметим, что если в частном случае изображающий вектор
имеет постоянный модуль, то амплитуда переменных, которые он
определяет, равна модулю этого вектора. Это значение переменная
приобретает в тот момент времени, когда изображающий вектор
совпадает с осью,' на которой откладывается рассматриваемая
величина.
Вернемся к токам ix, iy, iQ, которые были выбраны в качестве
новых переменных вместо действительных фазных токов. Усло-
вимся эти новые токи представлять на диаграмме с помощью
изображающего вектора тока /. Поскольку этот способ, как было
показано, справедлив только при условии ia + ib + ic = Зц = О,
то из трех новых токов ix, iy, iQ только два ix и iy могут графически
изображаться на диаграмме, а конечный по значению ток /0 ука-
занным способом
и у
изображен быть не может. Но если нужно изо-
бразить только два тока, то для этого
требуются всего две оси х, у. Естест-
венно выбрать их нормальными друг
другу (рис. 1-13). В общем случае
эти прямоугольные оси на диаграмме
вращаются. Пусть углы, составляе-
мые изображающим вектором тока 1
и вращающейся осью х с неподвиж-
ной осью а, равны соответственно 6
и бк (рис. 1-13). Можно убедиться,
что проекции изображающего век-
тора тока на оси х, у оказываются
линейно связанными с проекциями
того же вектора на оси а, 6, с зави-
симостями типа (1-14).
Предполагая сначала, что ia + ib + ic = 0, получим
токи как проекции I на оси а, Ь, с в виде
ru = /cos6;
i^ = /cos(6 — 120°);
zc = /cos(&+ 120°). .
Аналогично новые токи (рис. 1-13):
ix = / cos (6К -6); iy = I sin (6K - 6),
где 6К — координатный угол.
исходные
(1-16)
(1-17)
ic, чтобы
Выразим теперь в (1-17) токи ix. iy через токи ia, ib,
получить соотношения типа (1-14); при этом нужно исключить 6,
так как частота вращения вектора I неизвестна нам до решения
уравнений машины. Используя тригонометрические соотношения:
9 Г
cos (6К — 6) == -з- cos 6К cos 6 4- cos (6К — 120°) cos (6 — 120°) +
о L
+ cos (6К + 120°) cos (6 + 120°)];
sin (6К — 6) = -|- [sin6K cos 6 4- sin (6К — 120°) cos (6 — 120°) 4-
4- sin (6К 4- 120°) cos (6 4- 120°)],
с помощью (1-16) перепишем выражения (1-17) в виде
ix = 4- [ia cos 6К 4- cos (6K — 120°) + ic cos (6K + 120°)];
ly = 4 Sin 6'< + Sin & - 120°) + Sin (бк + 120°)l-
о
(1-18)
Напомним, что выражения (1-18) получены в предположении,
чт0 i0 = 0. Однако нетрудно' убедиться в том, что они остаются
в силе и тогда, когда i0 0. В этом случае можно рассмотреть
сначала вместо токов ia, ib, ic токи
ia — ia io> ib — ib io? ic — ic ~~ io* (1-19)
Поскольку i'a + i'b + i’c = 0, to (1-18) справедливо для этих
токов, т. е.
ix = 4 C0S C0S (SK — 120 ) + t‘cC0s(6K+ 120°];
о
ii, = 4[I’«sinSK + i&sin (6K — 120°)-Me sin (6K-}~ 120°)L
Подставляя сюда токи из (1-19), можно видеть, что для токов ix
и 1У снова получаются выражения вида (1-18), т. е. они оказы-
ваются справедливыми и при i0 =f= 0.
Сравнивая полученные для токов ix и iy выражения (1-18)
с общим выражением линейных преобразований (1-14), убеждаемся
в их полном соответствии. Коэффициенты линейного преобразо-
вания для ix и iy представляют собой в общем случае функции
времени (если 6К изменяется во времени). Однако нетрудно убе-
диться, что определитель системы (1-14) не зависит от угла 6К
и является постоянной величиной. Таким образом, линейные пре-
образования могут быть принципиально осуществлены при любом
временном характере изменения координатного угла 6К.
Итак, исходные фазные токи ia — Га + ib — i'b +
ic = i'c + io в общем случае могут рассматриваться как совокуп-
ность тока iQ и токов i'a, i'b, i'c, являющихся в геометрической
интерпретации проекциями изображающего вектора тока /.» на
неподвижные оси а, Ь, с. Новая система токов есть совокупность
тока /0 и токов ix, iy, являющихся проекциями того же изобража-
ющего вектора тока на новые оси х, у, вращающиеся в общем слу-
чае с некоторой частотой о)к. Поэтому линейное преобразование —
это, по существу, изменение системы координат, в которых про-
изводится отсчет величин. Это обстоятельство объясняет встре-
чающуюся в литературе терминологию — «переменные в таких-то
осях» или «переход к осям таким-то».
Уравнения напряжений обмоток статора машины переменного
тока содержат, кроме фазных токов ia, ib, ic, соответствующие
потокосцепления и напряжения. Если для фазных потокосцепле-
ний и напряжений выбрать такую же форму линейного преоб-
разования, как и для токов, то, согласно изложенному, они в со-
вокупности с нулевыми составляющими ф0 и щ могут измеряться
проекциями_ изображающих векторов потокосцепления ¥ и на-
пряжения U либо на координатные оси а, Ь, с, либо па оси х, у.
Тогда переход от трех исходных осей (а, Ь, с) к двум (х, у) озна-
чает замену трехфазной машины двухфазной, в которой магнит-
ные оси фазных обмоток сдвинуты на 90° эл. При этом вследствие
одинакового вида линейного преобразования токов и потокосцеп-
лений нарушаются некоторые физические представления при
сравнении исходной трехфазной и эквивалентной двухфазной
машин (см. § 1-5).
Связь между исходными переменными (в осях а, Ь, с) и новыми
переменными (в осях х, у) будет показана на примере фазных
токов. Независимо от вида осей х, у к системе токов L и iy должен
всегда добавляться одинаковый ток /0, так как он был выбран
независимо от вида токов ix и iy. Формулы линейного преобразо-
вания потокосцеплений и напряжений иа, иь, ис будут
точно такими же, как для токов iat ib, ic.
В современной теории электрических машин используется
ряд координатных осей, выбор которых позволяет упростить
уравнения, а в частных случаях исключить в них периодические
коэффициенты. С этой целью оси координат рекомендуется рас-
полагать неподвижно относительно того элемента машины (ста-
тора или ротора), где имеет место магнитная или электрическая
несимметрия. Наибольшее распространение получили три системы
осей х, у.
1. При анализе переходных процессов асинхронных машин,
а также несимметричных режимов синхронных машин удобно
использовать оси х, у, неподвижные в пространстве (сок = 0).
Такие оси носят название осей а, (3. Ось а при этом совмещают
с осью а исходной системы координат а, Ь, с (рис. 1-14). Соотно-
шения между исходными и новыми переменными могут быть
найдены из выражений (1-18), в которых нужно положить 6К =
= 90°. Они имеют вид
2 Ч
ia =-у [i0~ 0,5 (i6 + Q];
(1-20)
io = -у (ia + i& + ic)-
Токи ia и (p называют соответственно a- и P-составляющими
тока статора. Обратные соотношения имеют вид
С ^0 4“ ^а,
ib — io 0,5 (ia — 3fp),
ic = io ~ 0,5 (C 4" ]/"3i$)-
Если iQ = 0, to ia = ia.
(1-21)
2. Симметричные переходные процессы в синхронной машине
целесообразно исследовать в системе координат, вращающихся
вместе с ротором (ось х при этом совмещают с осью полюса). Это
так называемая система осей d, q (рис. 1-14). Удобство
системы координат, жестко связанных с ротором, для явнополюс-
ной машины заключается в том, что для наблюдателя, враща-
ющегося вместе с этими осями, машина в магнитном отношении
оказывается симметричной независимо от положения ротора.
Поэтому в системе координат d, q выражения для потокосцепле-
ний уже не содержат переменных индуктивностей, а дифферен-
сок — частота вращения осей Р и d, q
циальные уравнения напряжений при неизменной частоте враще-
ния машины имеют постоянные коэффициенты, что существенно
облегчает исследование. Преобразование к осям d, q является
практически единственным, приводящим дифференциальные урав-
нения синхронной машины с периодическими коэффициентами
к уравнениям с постоянными коэффициентами. Это делает преоб-
разование к осям d, q весьма важным, имеющим фундаментальное
значение в теории синхронной машины. Для определения соот-
ношений переменных в осях а, Ь, си d, q в (1-18) нужно положить
$к = 7» где 7 — угол между осью полюса d и осью фазы а. Тбгда
2
id = -3- [ia cos 7 4- ib cos (7 — 120°) + ic cos (7 + 120°)];
9
iq = -3- [ia sin T + ib sin (y — 120°) -4- ic sin (7 120°)];
(1-22)
i(> — “3" (ia + ib “Г i c) *
Токи id и iq называют соответственно продольным и попереч-
ным токами статора. Обратные соотношения имеют вид
ia = io + id cos 7 + iq sin 7;
ib = io + id cos (7 — 120°) + iq sin (7 — 120°);
ic = io + id cos (7 + 120°) + iq sin (7 + 120°). ,
(1-23)
3. Применяются также оси х, у, вращающиеся в пространстве
с синхронной частотой (о1е Эта система осей обычно используется
для асинхронных машин, а также при исследовании группы машин.
Линейные соотношения для синхронно вращающихся осей можно
получить из предыдущего случая, полагая там у = 4~ <рк.
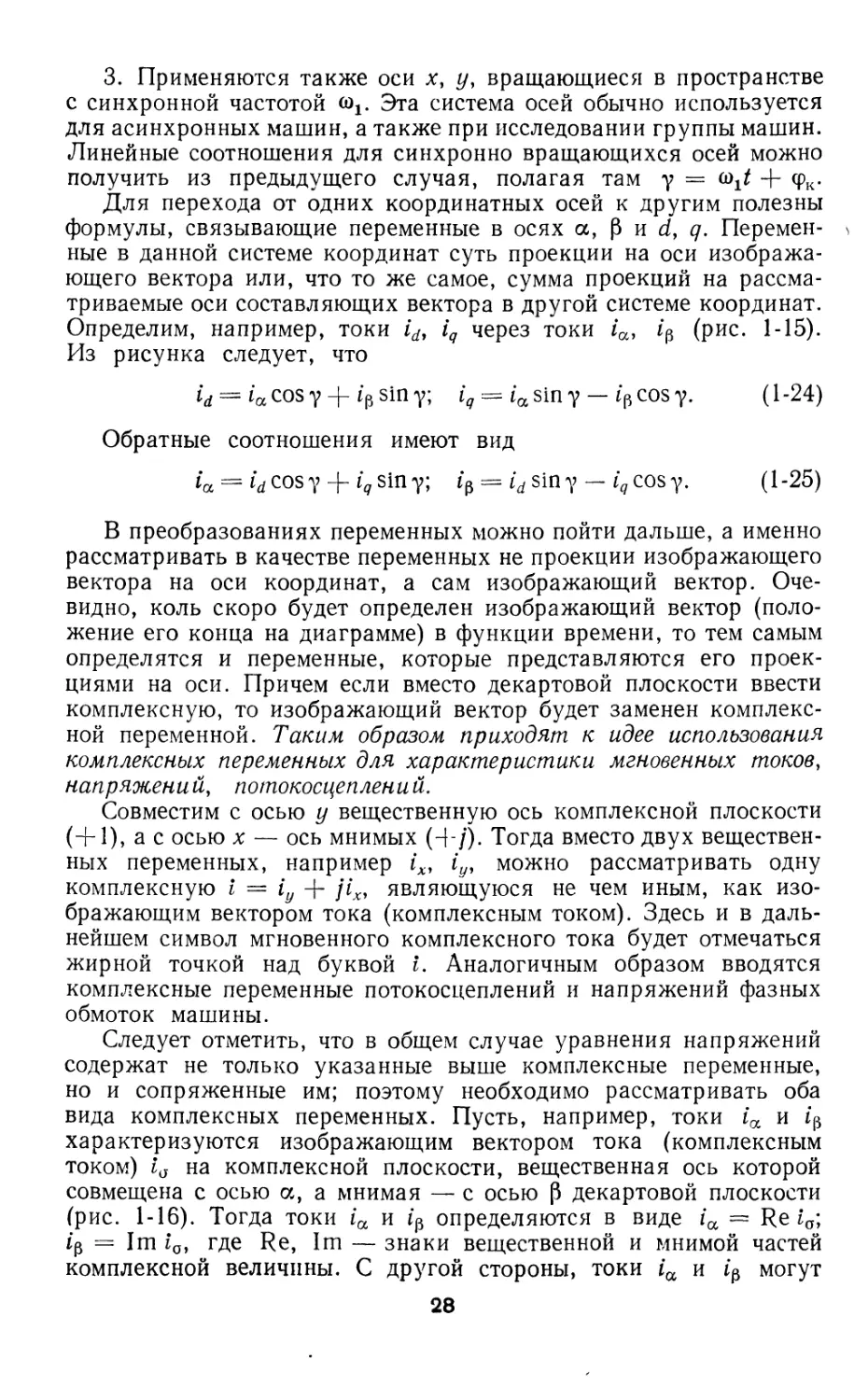
Для перехода от одних координатных осей к другим полезны
формулы, связывающие переменные в осях а, |3 и d, q. Перемен-
ные в данной системе координат суть проекции на оси изобража-
ющего вектора или, что то же самое, сумма проекций на рассма-
триваемые оси составляющих вектора в другой системе координат.
Определим, например, токи id, iq через токи /а, (рис. 1-15).
Из рисунка следует, что
id = cos у + sin Y’ Ч = sin Y — Ч>cos Y’ (1 '24)
Обратные соотношения имеют вид
ia = ^cosy igSiny; = Z^siny — f^cosy. (1-25)
В преобразованиях переменных можно пойти дальше, а именно
рассматривать в качестве переменных не проекции изображающего
вектора на оси координат, а сам изображающий вектор. Оче-
видно, коль скоро будет определен изображающий вектор (поло-
жение его конца на диаграмме) в функции времени, то тем самым
определятся и переменные, которые представляются его проек-
циями на оси. Причем если вместо декартовой плоскости ввести
комплексную, то изображающий вектор будет заменен комплекс-
ной переменной. Таким образом приходят к идее использования
комплексных переменных для характеристики мгновенных токов,
напряжений, потокосцеплении.
Совместим с осью у вещественную ось комплексной плоскости
(+1), а с осью х — ось мнимых (47)- Тогда вместо двух веществен-
ных переменных, например ix, iy, можно рассматривать одну
комплексную i = iy 4- jix> являющуюся не чем иным, как изо-
бражающим вектором тока (комплексным током). Здесь и в даль-
нейшем символ мгновенного комплексного тока будет отмечаться
жирной точкой над буквой I. Аналогичным образом вводятся
комплексные переменные потокосцеплений и напряжений фазных
обмоток машины.
Следует отметить, что в общем случае уравнения напряжений
содержат не только указанные выше комплексные переменные,
но и сопряженные им; поэтому необходимо рассматривать оба
вида комплексных переменных. Пусть, например, токи fa и i$
характеризуются изображающим вектором тока (комплексным
током) Zj на комплексной плоскости, вещественная ось которой
совмещена с осью а, а мнимая — с осью [3 декартовой плоскости
(рис. 1-16). Тогда токи ia и определяются в виде /а = Re to;
ip = Im iQ, где Re, Im — знаки вещественной и мнимой частей
комплексной величины. С другой стороны, токи и могут
быть определены через комплексный ток iG и сопряженный ему
i* с помощью диаграммы рис. 1-16 или непосредственно из выра-
жения io = ia + /7’р в виде
= 0,5 ( z*q -р- гр = 0,5/ (i(j — Га)»
Эти выражения показывают, что переменные ia, г‘р представ-
ляются двумя вращающимися в противоположные стороны век-
торами половинной длины. Подобное представление широко при-
меняется в теории электрических машин при исследовании уста-
новившихся процессов, например при
полей. Вводя вместо векторов iG и
векторы половинной длины, которые
обозначим llt i2, получим
ia 4 4“ Ч» 4) = / (Ч ч)- 0 ”26)
Обратные соотношения имеют вид
ч = о,5 (ta +/tp); ч = о,5 (ta -/tp).
(1-27)
Нетрудно показать, что перемен-
ные ц, 12 получаются в результате
линейного преобразования вида (1-14)
с комплексными коэффициентами ли-
нейного преобразования. Подставляя
в (1-27) выражения для токов га и г’р из
(1-20), после несложных преобразова-
ний получим
анализе пульсирующих
Рис. 1-16. Замена действи-
тельных токов комплексными
1'1 = -у + aib + а^'' = "Г + a2ib + aic^' <Ь28)
где комплексный коэффициент а = е'120°.
Присоединяя к этим уравнениям выражение для нулевой со-
ставляющей тока iQ = V3 (ia + ib + rj, видим, что токи г0, г15
г2 записываются аналогично симметричным составляющим тока.
Однако эта аналогия чисто формальная. Так, система синусо-
идальных симметричных трехфазных токов по методу симметрич-
ных составляющих создает только систему токов прямой последо-
вательности. Согласно преобразованию (1-28), эта же совокупность
токов обусловливает оба тока и i2. Если токи прямой и обратной
последовательности по методу симметричных составляющих имеют
в общем случае различную амплитуду, то амплитуда токов
и 12 всегда одинакова. Эти различия объясняются тем, что в ме-
тоде симметричных составляющих преобразования вида (1-28)
совершаются над комплексными токами /а, 1Ь, 1С, а здесь iai ib,
ic — вещественные величины.
Итак, в теории электрических машин применяется еще один
вид линейного преобразования переменных (1-28), дающий так на-
зываемые первую, вторую и нулевую составляющие токов 1Ъ i2,
iQ, потокосцеплении ф2, ф0 и напряжений ult и2, и0.
Подобные сопряженные комплексные переменные могут быть
введены на комплексной плоскости, совмещенной с осями d, q,
вращающимися вместе с ротором машины, а также с осями коорди-
нат, синхронно вращающимися в пространстве. Переход в ком-
плексных переменных от одних осей к другим чрезвычайно прост.
Если, например, переменные lo = ia + ji$ и = 1а — ji$ от-
считываются на комплексной плоскости, совмещенной с осями а
и р, то переменные lsr = iq + jid и i*r = iq — jid с отсчетом
в осях d и q приобретают с помощью (1-24) вид
hr = («а sin У - '₽ cos т) + / («а COS У + sln Т) =
,-* _ ,'Г
•'sr --- >
(1-29)
т. е. получаются из исходных переменных 1О (Q умножением на
координатный множитель e~i (v-9°°) (e/(v-9°°)), где — 99° — угол
между вещественными осями отсчета.
1-6. ПОТОКОСЦЕПЛЕНИЯ И ИНДУКТИВНОСТИ ОБМО-
ТОК СИНХРОННОЙ МАШИНЫ В РАЗЛИЧНЫХ СИСТЕ-
МАХ КООРДИНАТ. Рассмотрим сначала потокосцепления с об-
мотками синхронной машины. Это наиболее общий случай, по-
скольку ротор такой машины магнитно и электрически асимме-
тричен — по осям d и q магнитная проводимость зазора и пара-
метры обмоток ротора различны.
Потокосцепления с реальными обмотками синхронной машины
в общем виде определены выражениями (1-3)—(1-6). По существу,
эти потокосцепления измеряются в системе осей, связанных с рас-
сматриваемыми обмотками: потокосцепления фазных обмоток
статора — в осях а, Ь, с; потокосцепления обмоток ротора —
в осях d, q. Подставив в (1-3)—(1-6) значения индуктивностей из
(1-9)—(1-13), получим
фа = Go + k cos 2у) ia + [m0 + /2 cos (2у — 120°)] ib +
+ [™о + t2 cos (2у + 120°)] ic + MaBdiB cos у +
Ч~ i3d cos у i3q sin у,
Ф& = [^0 + 4 cos (2y — 120°)] ia + [Iq 4 /2 cos (2y + 120°)] ib-\-
+ (mo + ^2 cos 2y) ic + AfaBjiBcos (y — 120°) 4
+ Ma3di3d cos (y - 120°) 4- Ma3qi3q sin (y - 120°);
Фс = [^o + 4 cos (2y + 120°)] ia + (m0 + Z2 cos 2y) ib +
+ [/0 + h cos (2y - 120°)] ic + MQBdiB cos (у + 120°) +
+ Ma3di3d cos (y + 120°) 4- Ma3qi3q sin (y + 120°); j
(1-30)
4В - мов I l'a cos у -I- ib cos (у - 120°) + ic cos (y + 120°)] +
“1“ ^B^B 4“ ВЭ(1^3lb
$3d Ma3d 1Л cos Y + ib cos (y - 120°) + ie cos (y 4~ 120°)] +-
4“ MB3diB 4~ L3di3d,
фэ<7 = Ma3q Ua SiH Y + 4 (? ~ 120°) + ic SID (? + 120°)] -L
+ L3gi3g.
Как уже отмечалось, исходные выражения для потокосцепле-
ний обмоток машины содержат индуктивности, являющиеся
функциями времени.
Определим потокосцепления в системе осей d, q. Это значит,
что вместо реальных фазных потокосцеплений ф<п фс будем
оперировать с преобразованными потокосцеплениями ф^, ф7, ф0,
которые должны выражаться через преобразованные токи статора
id, iq> io и токи обмоток ротора. Это также значит, что выражения
для потокосцеплений обмоток ротора должны содержать не реаль-
ные токи статора ia, ib, ic, а преобразованные токи id, iq, iQ,
Сложив в (1-30) члены с одноименными токами, получим нулевую
составляющую потокосцеплений обмоток статора:
Фо == “з“ (Фа 4“ Ф& + Фс) — Л)*0, (1‘32)
где Lo = l0 + 2т0.
Произведя другие две операции над фазными потокосцепле-
ниями (1-30) в соответствии с линейными преобразованиями
вида (1-22), после тригонометрических преобразований найдем
'I’d = -у № cos у + cos (Y - 120°) + 'k cos (у + 120)] =
= Ldid -ф- MaBdiB Ma3di3d, (1-33)
~ h|>a sin у 4- г|>ь sin (у - 120°) 4~ г|>с sin (у 4-120°)] =
~ ^qiq + Ma3ql3q, (1 “34)
где новые индуктивности Ld = Zo — mQ + 3/2Z2; Lq = Zo — m0 —
— 3/2Z2- Введя в (1-30) продольный и поперечный токи статора
согласно (1-22), получим
Фв 2 MaBdid ~Р (1*35)
Фэ^ 2~ ^<23did Ч~ 4“ (1-36)
фэд 2 ^a^iq 4“ (1-37)
Система уравнений (1-32)—(1-37) определяет потокосцепления
обмоток синхронной машины в осях d, q. Отметим некоторые ха-
рактерные их особенности. Во-первых, они уже не содержат пере-
менных индуктивностей. Поэтому при вычислении производных
от потокосцепления по времени операция дифференцирования
будет относиться только к токам. Во-вторых, одно из преобразо-
ванных потокосцеплений, а именно ф0, обусловлено магнитным
полем, не проходящим через зазор машины и, следовательно, име-
ющим характер поля рассеяния обмотки статора. Действительно,
это потокосцепление определяется только током статора i0 и не
зависит от токов обмоток ротора; равным образом уравнения по-
токосцеплений обмоток ротора не содержат членов с током f0.
Поэтому поле, определяющее ф0, не является полем взаимной
индукции между обмотками статора и ротора. Индуктивность
обмоток статора £0 физически является индуктивностью рассея-
ния от полей, создаваемых током iQ. В общем случае эта индуктив-
ность не равна индуктивности рассеяния, определяемой полем
рассеяния от токов id или ig, вследствие различного характера
упомянутых полей рассеяния. Значение Lo достаточно мало, по-
скольку /0 >0, т0 < 0, а по абсолютному значению /0 и 2т0
отличаются мало. Заметим, что приведенные рассуждения спра-
ведливы лишь для первой пространственной гармоники поля,
созданного током i0, которая только и рассматривается в идеали-
зированной машине. Более детальное исследование показывает,
что трубки высших гармоник поля замыкаются через ротор.
Индуктивность статора Lo может быть определена в невоз-
бужденной машине (iB = 0), если в обмотках статора протекает
только нулевая составляющая тока i0, а токи id = ig = 0. Это
будет иметь место при условии, что во всех фазах протекает оди-
наковый ток f, т. е. ia = ib = ic = i. Тогда в соответствии с (1-22)
h = iq = 0- Кроме того, i3d = i3g = 0, поскольку магнитный
поток, обусловленный током /0, не проникает в ротор и не может
индуктировать э. д. с. в короткозамкнутых демпферных конту-
рах. Поэтому для рассматриваемых физических условий ipj =
= ф7 = 0 и согласно выражениям (1-23), справедливым как для
токов, так и для потокосцеплений, отношение любого фазного
потокосцепления к току этой фазы, т. е. индуктивность фазной
обмотки,
Lk = У/Ль = Ч’о^о = Lo, k = а, Ь, с.
Итак, Lo есть индуктивность фазной обмотки при протекании
по трем обмоткам нулевой составляющей тока. Поскольку индук-
тивность Lo не зависит от характера изменения тока во времени,
то можно принять его гармоническим. При этом ток iQ есть хорошо
известный из метода симметричных составляющих ток нулевой
последовательности. Таким образом, индуктивность Lo и индук-
тивное сопротивление xQ = со£о представляют собой и н д у к-
тивность и индуктивное сопротивление
нулевой последовательности.
Относительно полученных выражений (1-33)—(1-37) необхо-
димо также заметить следующее. Линейное преобразование от
осей а, Ь, с к осям d, q приводит к замене неподвижных фазных
обмоток якоря двумя эквивалентными контурами, обтекаемыми
токами id и ig; магнитные оси этих контуров направлены вдоль
осей d и q. На рис. 1-17 схематически показаны обмотки машин:
реальной (а) и преобразованной (б) к осям d, q. Эквивалентные
Рис. 1-17. Схематическое изображение обмоток реальной (а) и пре-
образованной (б) машин
обмотки якоря обозначены ad и aq. Так что по оси d синхронная
машина имеет три электромагнитно-связанных контура, т. е.
представляет собой трехобмоточный трансформатор, а по оси q
поля создаются двумя обмотками и машина по этой оси является
двухобмоточным трансформатором.
Вместе с тем потокосцепления продольных и поперечных
контуров имеют не совсем обычное написание для магнитно-
связанных цепей. Выражения (1-33)—(1-37) показывают, что для
взаимных индуктивностей контуров ротора по любой из осей
и контура статора по этой же оси не выполняется правило вза-
имности, согласно которому для магнитно-связанных контуров 1
и 2 взаимные индуктивности Л412 = Л121. Например, в выражении
для потокосцепления продольного контура статора взаимная
индуктивность, определяющая потокосцепление от тока обмотки
возбуждения, равна Mapd, а в выражении для потокосцепления
обмотки возбуждения фв потокосцепление взаимной индукции
со стороны продольного контура статора определяется величиной
t^Mapdid и, следовательно, взаимная индуктивность равна
^Mapd. Подобное различие во взаимных индуктивностях в 3/2 раза
2
Л. И. Важное
33
можно обнаружить и для демпферных контуров, сравнивая
(1-33), (1-34) и (1-36), (1-37). Появление множителя 3/2 в выраже-
ниях для индуктивностей, определяющих взаимную индукцию
полей статора и ротора, объясняется характером линейных пре-
образований вида (1-22). Физически контуры статора по осям d
и q не являются реальными контурами, а лишь эквивалентными
цепями, отражающими магнитное действие трех фазных обмоток
статора на контуры ротора по осям d и q. Вместе с тем, согласно
введенным линейным преобразованиям, собственные максималь-
ные токи и потокосцепления этих контуров равны амплитудам
аналогичных величин только одной фазной обмотки статора.
Поэтому э. д. с., индуктируемая в продольном контуре статора
потоком обмотки возбуждения, определяется взаимной индуктив-
ностью обмотки возбуждения и фазной обмотки статора MaBd;
э. д. с., индуктируемая в обмотке возбуждения продольным пото-
ком статора, определяется токами всех трех фаз, обусловлива-
ющих поле, в 3/2 раза большее, нежели создаваемое током одной
фазы или продольным током id (поскольку эти токи равны).
По тем же причинам не отвечают физическим представлениям
собственные индуктивности фазных обмоток и контуров ad, aq.
При переходе от трехфазной машины к двухфазной не должно
изменяться число витков обмоток якоря, а индуктивности этих
цепей, соответствующие полю реакции якоря, тем не менее от-
личаются в 3/2 раза.
Приведенная запись потокосцеплений с различными взаимными
индуктивностями двух контуров в зависимости от направления
взаимной индукции используется в уравнениях Парка—Горева.
Однако последующее развитие теории синхронной машины пока-
зало, что более удобной и наглядной формой записи потокосцеп-
лений является такая, которая полностью соответствует прин-
ципу взаимности в отношении индуктивностей магнитно-связан-
ных контуров [72]. При этом выражения для потокосцеплений
машины по продольной и поперечной осям полностью соответ-
ствуют таковым для многообмоточного трансформатора. Исходные
выражения (1-33)—(1-37) легко преобразуются к указанной
форме, если в них рассматривать вместо действительных токов
цепей ротора (i‘B, i3d, i3q) приведенные токи, уменьшенные в 3/2 раза
(/в = 2/з*й; = 2/3^; hq = 2/3^), и вместо действительных
индуктивностей цепей ротора (MaBd, LB, L3d, L3q, MB3d, Ma3d,
Ma3q) увеличенные в 3/2 раза (M'aBd = 3/2MaBd; Ц = 3/2^B; L'3d =
= 3!2L3d и т. д.). Поскольку уравнения синхронной машины за-
писываются в системе относительных единиц, кратко излагаемой
в гл. 2, необходимые преобразования могут быть сделаны одно-
временно с введением относительных единиц.
Уравнения для потокосцеплений ф^, ф^ содержат собственные
индуктивности продольного (Lrf) и поперечного (Lq) эквивалент-
ных контуров обмоток якоря. Формально эти потокосцепления
выражены через коэффициенты собственных и взаимных индук-
34
Рис. 1-18. Определение то-
ков id, iq с помощью изобра-
жающего вектора в устано-
вившемся режиме
тивностей фазных обмоток машины в (1-34). Будем для краткости
называть эти индуктивности продольной и поперечной индуктив-
ностями обмотки якоря. Они имеют простой физический смысл.
Положим, что невозбужденная машина (ц = 0) подключена
к трехфазной сети с симметричными напряжениями. Токи, про-
текающие по обмоткам статора, создадут вращающееся магнитное
поле. Если ротор машины привести во вращение с частотой, рав-
ной частоте вращения поля, то ротор и поле будут неподвижны
относительно друг друга, токи демпферных контуров равны нулю
и магнитное поле обусловлено только токами статора. При этом
амплитуда поля в зазоре может в об-
щем случае занимать любое положение
относительно осей ротора d, q. Пусть
симметричные фазные токи статора оп-
ределяются выражениями:
4 = cos + ф);
ib = hn c°s + Ф — 120°);
ic "= 4г COS (to/ + Ф + 1 20°).
Продольный и поперечный токи ста-
тора id и iq определяются выражениями
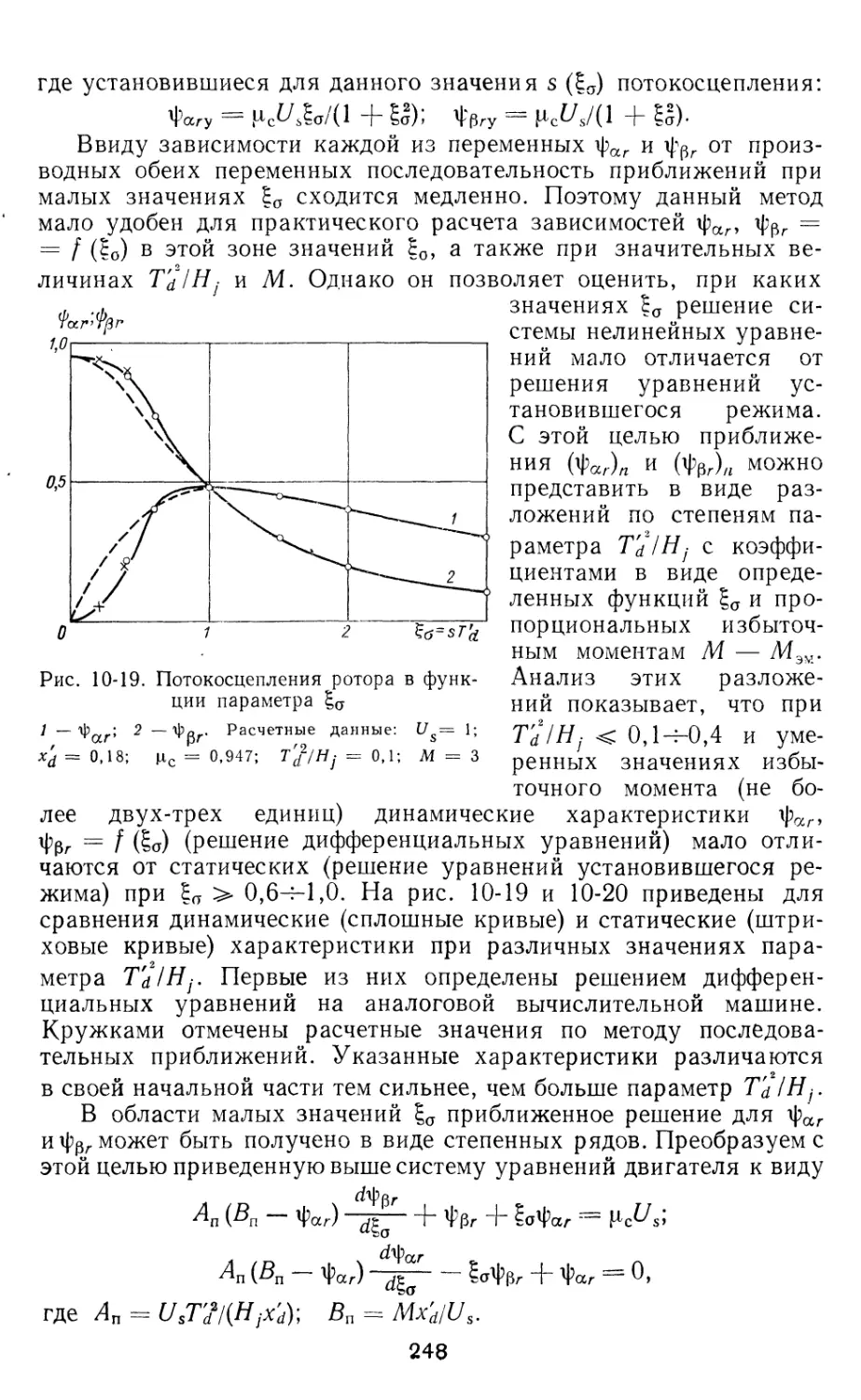
(1-22), в которых нужно положить
у = (ot 4- у0, так как частоты вращения ротора и поля токов
статора одинаковы. Тогда подстановка фазных токов в (1-22) дает
trf = 4cos(?o — ф); t<? = 4sln(To — ф)-
Этот же результат можно видеть на рис. 1-18, где дано графи-
ческое определение токов id и iq с помощью изображающего
вектора тока, модуль которого равен амплитуде фазных токов 1т.
Вектор тока I вращается с той же частотой, что и оси d, q; поэтому
система симметричных фазных токов прямой последовательности
дает постоянные по значению токи id, iq, определяемые ампли-
тудой фазных токов и углом у0 — ср. Допустим, что при синхрон-
ном вращении ротора и поля амплитуда последнего совпадает
с осью полюсов — осью d (рис. 1-19, а). В этом случае отсутствует
поле, направленное вдоль оси q, и, следовательно, потокосцепле-
ние с обмоткой якоря от такого поля ф7 = 0. Нулевая составля-
ющая потокосцепления ф0 также равна нулю, поскольку при
симметричных токах статора iQ = 0. Таким образом, в рассма-
триваемых условиях потокосцепление с обмотками статора будет
определяться только величиной ф^. Равенство ф7 = 0 согласно
(1-34) возможно в установившемся режиме (i3q = 0) только, если
iq = 0. Поэтому токи статора являются чисто продольными:
амплитуда м. д. с., создаваемой токами фазных обмоток, совпадает
с осью d. На рис. 1-18 этим условиям будут соответствовать изо-
бражающие векторы тока и потокосцепления якоря, совпадающие
с осью d (угол 70 — ср = 0). Для нашего случая (гв = 0; isd = 0)
из (1-33) определим
Ld^diid- (1-38)
Поскольку потокосцепление г|^ равно модулю изображающего
вектора потокосцеплений и, следовательно, максимальному зна-
чению потокосцепления с фазной обмоткой, а ток id равен ампли-
туде фазного тока, то их отношение (1-38) есть индуктивность
фазной обмотки. Это следует и из аналитических зависимостей.
Пользуясь (1-23) для токов фаз и аналогичными выражениями для
Рис. 1-19. Продольный (а) и поперечный (б) потоки об-
мотки статора
потокосцеплений, учитывая, что iq = 0; =• 0; z0 — 0; ф0 = 0,
получим для любой из фаз, например фазы а\
sin у
ia id cos у id ' d'
Однако нужно иметь в виду, что отношение дает не просто
индуктивность фазы а, а эквивалентную индуктивность, учиты-
вающую взаимную индукцию других фаз. Итак, Ld представляет
собой индуктивность фазной обмотки статора при протекании
по обмоткам статора симметричных синусоидальных токов пря-
мой последовательности, вращении ротора с синхронной частотой
и ориентации поля токов статора по продольной оси. Соответ-
ствующее индуктивное сопротивление xd — (dLd называется
синхронным сопротивлением по продоль-
ной оси. Измеряя при описанных условиях фазное напря-
жение U, ток I и мощность на фазу Р синхронной машины, можно
вычислить полное, активное и индуктивное сопротивления:
zd = UU-, r = p/p- Yz\~r\
Отметим, что на практике пользуются другими, более про-
стыми методами определения сопротивления xd. Аналогично
может быть определена поперечная индуктивность Lq с той лишь
разницей, что теперь ось поля в зазоре, созданного токами ста-
тора, должна совпадать с поперечной осью машины (рис. 1-19, б).
В этом случае = 0; id = 0 и Lq — отношение ампли-
туд потокосцепления и тока фазной обмотки. Таким образом, Lq
есть индуктивность фазной обмотки статора при протекании
по обмоткам статора симметричных синусоидальных токов пря-
мой последовательности, вращении ротора с синхронной частотой,
но при ориентации поля токов статора по поперечной оси машины.
Соответствующее индуктивное сопротивление xq = (&Lq назы-
вается синхронным сопротивлением по по-
перечной оси.
Синхронное сопротивление xd можно представить в виде
суммы двух составляющих — одной, которая соответствует полю
основной гармоники, проходящему через зазор (поле реакции
якоря), xad, и другой, соответствующей полю рассеяния обмотки
статора xsd. При этом предполагается, что поле реакции якоря
ориентировано по оси d. При ориентации поля реакции якоря
по оси q, когда фазная обмотка имеет сопротивление xq, последнее
подобным же образом распадается на две составляющие: xaq
и xsq. Практически xsd = xsq = xs. Поэтому xd = xad + х$,
xq = xaq + X'. В неявнополюсных машинах с практически сим-
метричным магнитопроводом ротора Ld = Lq; xd = xq.
Определим теперь потокосцепления обмоток статора в непо-
движных осях а, р. Для этого выполним линейное преобразование
с фазными потокосцеплениями г|^, по формулам вида (1-20),
используя соотношения для токов (1-20) и выражения потоко-
сцеплений (1-30). После несложных преобразований получим
Фа = Иа — °-5 (Фл L Фс)1 = °>5 )Ld + Lq + U-d ~ Lq) cos 2Т1 +
+ 0,5 (Ld - Lq) /р sin 2у 4- MmdiB cos у 4- Ma3di3d cos у 4-
+ Ma3qi3qs\ny-, (1-39)
Фр = = 0,5 ^Ld ~ Lq}ia sin 2v +
4- 0,5 [Ld + Lq~ (Ld - Lq) cos 2y] + MaBdiB sin у +
+ Ma,dysinу - Ma3qi3qcosy; (1-40)
Фо = (Фа 4~ Ф* “Г Фс) = Lni0. (1'41)
Здесь величины /0 — mQ и 3/2/2 заменены их выражениями через
широко применяемые параметры Ld, Lq — соответственно в виде
0,5 (L, + Lq) и 0,5 (L(/ - Lq).
Как следует из (1-39) и (1-40), в машине с несимметричным
в магнитном отношении ротором (Ld Lq) появляется взаимная
индукция между взаимно перпендикулярными обмотками статора
а и |3. Она отсутствует в машине с симметричным ротором (Ld =
= Lq). Это обстоятельство хорошо известно в теоретической элек-
тротехнике.
Уравнения для потокосцеплений роторных контуров должны
теперь содержать а- и p-составляющие токов статора. Необходи-
мую запись потокосцеплений можно получить, заменив в (1-35)—
(1-37) продольный и поперечный токи якоря их выражениями
(1-24) через токи ia и i$. В результате будем иметь
Фв = 4" M^Oacosy + sin у) + LBZB + MQjdi.dl (1-42)
Фэб/ ==' 2 G*a У “F Т) ^вэй^'в ~l~ (1 “43)
Фэ<? = ~~2~ M-aaq (ja У ^*[3 ^0$ Т) Ч~ ^aq^aq- (1-44)
Как видно из (1-39)—(1-44), коэффициенты, стоящие перед
токами, зависят от угла у, т. е., как и в системе осей а, Ь, с, яв-
ляются функциями времени.
1-7. ПОТОКОСЦЕПЛЕНИЯ И ИНДУКТИВНОСТИ ТРЕХ-
ФАЗНЫХ ОБМОТОК МАШИНЫ С СИММЕТРИЧНЫМ РО-
ТОРОМ. Речь идет о машинах, у которых и на статоре и на ро-
торе расположены трехфазные обмотки, а сердечник ротора сим-
метричен (см. рис. 1-1). К ним можно отнести синхронные и асин-
хронные машины двойного питания, а также асинхронные машины
с короткозамкнутой обмоткой ротора.
Выше отмечалась целесообразность применения линейных
преобразований, которые эквивалентны замене трехфазной ма-
шины машиной двухфазной с добавлением нулевых составляющих
тока, потокосцепления, напряжения. Поскольку трехфазные об-
мотки в рассматриваемых здесь машинах расположены и на ста-
торе и на роторе, можно говорить о переходе к различным коорди-
натным осям х, у для статора и ротора. Обозначим оси, жестко
связанные со статором, через as, |3S, а вращающиеся вместе с ро-
тором — ar, |3Г (рис. 1-20), причем оси as, ar совместим с магнит-
ными осями фазы а соответственно на статоре и роторе. Для экви-
валентных фазных обмоток двухфазной машины введем обозначе-
ния as, (3s (на статоре) и ar, (3г (на роторе). Условимся, что все
величины, относящиеся к этим обмоткам, будут иметь индекс,
аналогичный обозначению самой обмотки. Например, xpas — по-
токосцепление фазы as; i$r — ток фазы |3г и т. д. Потокосцепления
обмоток статора имеют вид (рис. 1-20)
4as = LsSias 4- Mmiar cos у + Mmi?r cos (y + 90°); (1-45)
4ps = LsSifr + Mmiar cos (Y - 90°) + M,niPr cos y, (1 -46)
где Lss — собственная индуктивность обмоток as, |3s; Мт — вза-
имная индуктивность между обмотками статора и ротора при
совпадении их магнитных осей.
Потокосцепления с обмотками ротора аг, |3г имеют аналогич-
ный вид:
обмоток аг, рг.
Рис. 1-20. Схема магнитных
осей обмоток и координатных
осей машины с симметричным
ротором
Фаг— ^/n^as cos Y Mmi$s cos (у 90 ) -j- Lrriar, (1-47)
фрг = Mmias cos (y + 90°) + Mmi&s cos у + Lrri^r, (1 -48)
где Lrr — собственная индуктивност
В приведенных выражениях от-
сутствуют потокосцепления взаим-
ной индукции между взаимно пер-
пендикулярными обмотками, по-
скольку при симметричном магни-
топроводе подобной взаимной ин-
дукции нет. Нетрудно убедиться,
что индуктивности двухфазной ма-
шины в (1-45)—(1-47) связаны с ре-
альными индуктивностями обмоток
статора и ротора исходной трехфаз-
ной машины следующими соотно-
шениями:
^ss == ^sl + ^rr ^s2 +
мт = s/2Msr,
где для трехфазной машины Lsl,
Ls2 — индуктивности рассеяния об-
моток статора и ротора; Msr—вза-
имная индуктивность фазных обмо-
ток статора и ротора при совпаде-
нии их магнитных осей; Lsm — составляющая собственной ин-
дуктивности фазы статора, соответствующая магнитному потоку
взаимной индукции с ротором; Lrm — аналогичная индуктив-
ность фазы ротора, обусловленная потоком взаимной индукции
со статором.
Для машин с симметричным магнитопроводом и трехфазными
обмотками на статоре и роторе в отличие от машин, имеющих
различное устройство статора и ротора (синхронные машины),
значительно проще оперировать не с отдельными фазными вели-
чинами преобразованной двухфазной машины, а с результирую-
щими величинами двух фаз. Иначе говоря, удобно рассматривать
непосредственно изображающие векторы тока, потокосцепления,
а не их проекции на оси as, |3S (или аг, |3Г), которые представляют
собой мгновенные соответствующие величины двухфазной машины.
Дело в том, что в машине с симметричным магнитопроводом
целесообразно рассматривать непосредственно вращающийся в за-
зоре магнитный поток, который определяется только токами об-
моток и не зависит от своего положения относительно магнито-
провода. В машинах же с несимметричным магнитопроводом поток
в зазоре зависит не только от токов обмоток, но и от того, какое
положение он занимает относительно осей магнитной симметрии d,
q. Поэтому вместо вращающегося потока целесообразно в этих
случаях рассматривать заменяющие его пульсирующие потоки по
осям d, q. Можно сказать, что общую теорию машин с симметрич-
ным магнитопроводом и одинаково симметрично размещенными
обмотками на статоре и роторе удобно строить на основе вращаю-
щегося поля в зазоре, а для машин с несимметричным ротором —
на базе пульсирующих полей, ориентированных вдоль осей сим-
метрии.
Представим изображающие векторы комплексными перемен-
ными, для чего совместим оси вещественную (+1) и мнимую (+/)
одной комплексной плоскости с осями as, |3S статора; оси +1, +/
другой комплексной плоскости — с осями ar, |3Г ротора (рис. 1-20).
Изображающие векторы потокосцепления = \pas + и тока
io = ias 4- ji^s обмоток статора на плоскости, связанной со ста-
тором, можно получить, складывая (1-45) с выражением (1-46),
предварительно умноженным на /. В результате получим
фа = CsC + (1-49)
где ip = iar + — изображающий вектор тока обмоток ро-
тора на комплексной плоскости, связанной с ротором.
Аналогично изображающий вектор потокосцепления обмоток
ротора % на комплексной плоскости, связанной с ротором, полу-
чим сложением (1-47) и умноженного на / уравнения (1-48):
Фр Фаг 4“ /Ф|3г = Mml(je 4" ^rr^p' (1-50)I
Для синхронных машин (см. § 1-6) удобной общей координат-
ной системой для обмоток статора и ротора являются лишь оси d,
q, привязанные к ротору. Для рассматриваемых в этом параграфе
машин общие для обмоток статора и ротора оси координат ак, |3К
могут вращаться с произвольной частотой сок. Однако для боль-
шинства задач наиболее целесообразными являются либо не-
подвижные, либо вращающиеся с синхронной частотой оси.
Для измерения переменных величин статора и ротора в одной
системе координатных осей ак, |3К следует, согласно § 1-5, изобра-
жающие векторы, определяемые по отношению к осям as, |33,
умножить на координатный множитель е~1&к, а изображающие век-
торы, характеризующие переменные в осях аг, рг, — на коорди-
натный множитель e-' !6*-7). Углами бк и у определяется поло-
жение осей ак и аг относительно неподвижной оси as (рис. 1-20).
Если оси ак, неподвижны, то 6К = 0; для осей, вращающихся
с синхронной частотой соь имеем 6К = + 60. Таким образом,
уравнения (1-49) и (1-50) в неподвижных осях принимают вид
Та " Фра “ L^pia, (1-51, 1-52)
где Трст, ?‘ра — изображающие векторы фр, fp, отнесенные к не-
подвижным осям.
Аналогичные уравнения для синхронно вращающихся осей:
Ts == ^ss^s “h Tr = Mmts 4" (1"53; 1-54)
где = 4V’7 (0)^+6°); Tr == — изображающие век-
торы потокосцеплений обмоток статора и ротора в синхронно
вращающихся осях; is = Zae"H<di/+6°); ir — ipe~j (®Ц+во-т)— изо-
бражающие векторы токов статора и ротора в тех же осях.
т
В приведенных выражениях у = [ со йт, где со — частота
б
вращения ротора в электрических радианах в секунду.
1-8. МОЩНОСТЬ И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ В РАЗ-
ЛИЧНЫХ СИСТЕМАХ КООРДИНАТ. Применение линейных
преобразований токов, потокосцеплений и напряжений обмоток
делает необходимым определение мощности и электромагнитного
момента машины в новых системах координат. Иными словами,
эти величины должны быть выражены через переменные, измеряе-
мые в той или иной системе координат. Рассматриваемые величины
являются инвариантными, т. е. не изменяют своего значения при
переходе от одной системы координат к другой.
Мгновенная мощность р трехфазной цепи (например, трех-
' фазного генератора) с фазными напряжениями иь, ис и токами
ib> ic равна
Р = tiaia + ubib + ucic. (1-55)
Выразим эту мощность, определяемую в исходных осях а,
Ь, с, через переменные в новой системе координат а, р. Для этого
подставим в (1-55) фазные токи и напряжения в виде линейных
соотношений (1-21). После подстановки получим
р = 1,5 (uafa 4- u^ip) + Зц/о, (1-56)
где Up, Uq представляют собой а-, р- и нулевую составляющие
фазных напряжений. Этот результат можно было предвидеть. Дей-
ствительно, в § 1-5 было отмечено, что переход от осей а, Ь, с
к осям а, р есть, по существу, замена трехфазной машины двух-
фазной с неизменными обмоточными данными и тем же потоком
в зазоре. При этом, если в трехфазной машине ia 4- ib + ic ~
= 3i0 =р 0, то к системе токов и напряжений двухфазной машины
нужно добавить независимо определяемые нулевые составляю-
щие тока и напряжения. Поскольку мощность инвариантна, то
ввиду того, что мощность двухфазной машины в 1,5 раза меньше
мощности трехфазной машины, выражение (1-56) имеет такой же
вид, как и (1-55), но с множителем 1,5. Кроме того, добавляется
утроенное значение нулевой составляющей мощности.
Мощность в осях d, q должна быть аналогична мощности
в осях а, р, так как в обоих случаях рассматривается одна и та же
двухфазная машина:
р = 1,5 (udid -|- uqiq) 3UqIq, (1 -57)
где ud, uq — продольная и поперечная составляющие фазных на-
пряжений.
Выражение (1-57) нетрудно получить и формальным путем,
подставив в (1-55) фазные токи и напряжения в виде линейных
соотношений (1-23).
Для системы осей 1, 2, Ос комплексными переменными мощ-
ность р может быть получена в результате подстановки токов ia,
ip из (1-26) и аналогичных выражений для напряжений иа,
в (1-56). Она оказывается равной
р = 3 (^1^2 ~1~ ~Ь ио*о) = 3 [2Re(u1n) -ф- UqIq], (1-58)
где их, и2, 11У 12 — первая и вторая составляющие напряжений и
токов; знак Re означает вещественную часть комплексной вели-
чины.
Одной из важных величин, определяющих режим машины,
является электромагнитный момент как мера электромагнитных
сил при вращательном движении. Электромагнитный момент, со-
гласно третьему закону Ньютона, действует на статор и ротор ма-
шины в противоположных направлениях, будучи одинаковым по
значению. Поэтому его можно определять по электромагнитным
силам взаимодействия магнитного поля в зазоре с элементами
либо статора, либо ротора. Известно, что электромагнитные силы,
действующие на контуры с током, определяются исключительно
мгновенными токами и не зависят от производных токов по вре-
мени. Следовательно, общее выражение для электромагнитных сил
и электромагнитного момента Л4ЭМ< может быть найдено при иссле-
довании любого режима машины, в частности при рассмотрении
установившегося симметричного режима работы, когда оно будет
наиболее простым. Полученное при этом выражение для Л4ЭМ бу-
дет одинаково справедливым как для установившегося, так и для
переходного режима при условии, что токи определены для дан-
ного момента времени соответственно рассматриваемому переход-
ному процессу.
В теории электрических машин [41 ] получено выражение
электромагнитного момента, определяемого как результат взаимо-
действия магнитного поля в зазоре машины с токовым слоем на
поверхности сердечника статора или ротора, которым заменяется
дискретное распределение по пазам проводников с токами много-
фазной обмотки. Для идеализированной машины достаточно счи-
таться с первыми пространственными гармониками индукции в за-
зоре и линейной нагрузки многофазной обмотки ЛЗ, являю-
щейся линейной плотностью токового слоя. Заметим, что рас-
считываемая таким способом электромагнитная сила, приложен-
ная к сердечнику в целом, полностью адекватна сумме реальных
сил, которые физически действуют на проводники обмотки и
зубцы сердечника.
Для трехфазной машины переменного тока, работающей в уста-
новившемся симметричном режиме, согласно работе [41 ]
<м = 2 rrJtn CQS Ф,
где = Фтш£об — максимальное потокосцепление с фазной об-
моткой; Фт — поток через зазор на одном полюсном делении;
и/, ^об — число последовательно соединенных витков фазной об-
мотки и ее обмоточный коэффициент по первой гармонике поля;
1п1 — амплитуда фазного тока; ф — фазовый пространственный
угол сдвига первых гармоник индукции В6 и линейной нагрузки;
рп — число пар полюсов.
Приведенное выражение можно записать и в другом виде, если
использовать изображающие векторы потокосцепления (W) и
тока (/) трехфазной обмотки, модули которых соответственно
равны и 1т. Известно, что Т совпадает на диаграмме с векто-
ром так как потокосцепление с фазной обмоткой достигает
максимума, когда ось поля (амплитуда на кривой индукции) сов-
падает с магнитной осью фазной обмотки. Пространственные гар-
моники линейной нагрузки ЛЗ и м. д. с. F трехфазной обмотки
также могут быть представлены изображающими векторами ЛЗ
и F. Поскольку м. д. с. определяется интегралом от ЛЗ вдоль
полюсного деления машины, изображающий вектор F отстает от
вектора ЛЗ на угол 90°. Наконец, векторы тока I и м. д. с. F сов-
падают по фазе — ведь максимум волны м. д. с. трехфазной об-
мотки совпадает с магнитной осью той фазной обмотки, в которой
ток принимает максимальное значение. На рис. 1-21 показано по-
ложение векторов в произвольный момент времени при заданном
фазовом сдвиге ф векторов В6 и AS, Обозначим угол сдвига век-
торов / и ¥ через а и примем его положительным, когда I отстает
по фазе относительно ¥. Из рисунка следует, что а = 90° 4 ф,
и тогда cos ф = sin а. Электромагнитный момент теперь
мэм=4 sin а=4 р» а-59)
т. е. он с точностью до постоянного множителя определяется
векторным произведением изображающих векторов тока и потоко-
сцепления трехфазной - обмотки.
Выражение (1-59) показывает, что электромагнитный момент
не зависит от нулевых составляющих потокосцепления (ф0) и
тока (/0), поскольку на диаграмме рис. 1-21 изображающие век-
торы их не отражают. Это соответствует и физическим представле-
ниям, если учесть, что нулевая составляющая потока в зазоре
отсутствует (см. § 1-5).
В переходном процессе I и Т могут быть сложными функциями
времени, однако при известных их значениях электромагнитный
момент и в этих условиях может вычисляться по (1-59).
Обратим внимание читателя на то, что в векторном произве-
дении (1-59) фигурирует потокосцепление с фазными обмотками,
обусловленное потоком в зазоре машины — потоком взаимной ин-
AS
Рис. 1-21. Изображающие векторы
для трехфазной машины
дукции статора и ротора. Однако
результат не изменится, если
в (1-59) использовать результиру-
ющее потокосцепление с обмот-
кой, которое включает в себя, по-
мимо упомянутого потокосцепле-
ния, еще составляющую от по-
тока рассеяния, пропорциональ-
ную току I. Поскольку векторы
и I всегда совпадают, их век-
торное произведение обращается
в нуль, и мы вновь приходим
к первоначальному виду фор-
мулы (1-59).
Уравнения напряжений машины содержат полные потокосцеп-
ления с обмотками. Такие потокосцепления проще рассчитывать,
поэтому в дальнейшем электромагнитный момент будет опреде-
ляться по полным (результирующим) потокосцеплениям обмоток
машины или их проекциям на координатные оси, используемые
в линейных преобразованиях.
Для машин с симметричным ротором в § 1-7 были введены
изображающие векторы (комплексные переменные) токов и потоко-
сцеплений обмоток статора и ротора. Выразим электромагнитный
момент через эти комплексные переменные. Если, например, ком-
плексы для статора, измеряемые в синхронно вращающихся осях,
представить в показательной форме
h = IG I el6i; is = |^s|ee’1’,
где углами 6Z, определено их положение относительно веще-
ственной оси, то угол а между is и равен 6^ — бд. Тогда не-
трудно проверить, что
| is | ф\ | sin а — Im(i’s ф5)
и
Мэм = l,5pn Im (цфя). (1-60)
Аналогично получается выражение для Л1эм через комплекс-
ные переменные статора, отнесенные к другим осям. Так, для не-
подвижных осей (см. § 1-6)
Мзм = 1,5рп Im ОафД (1-61)
Заметим, что выражения (1-60) и (1-61) справедливы и для ма-
шин с несимметричным ротором.
Совершенно идентично записываются выражения Л4ЭМ для ма-
шин с симметричным ротором через комплексные переменные об-
мотки ротора фг, Zr, фра,
МЭм = — 1,5рп Im (irtyr) = — 1,5рп Im (/рафра). (1-62)
В (1-62) поставлен отрицательный знак, поскольку считаем,
что момент Л4ЭМ, определяемый через статорные и роторные вели-
чины, приложен к одной и той же части машины, например к ро-
тору.
Подстановка в (1-60)—(1-62) выражений потокосцеплений че-
рез токи (1-51)—(1-54) приводит к еще одной форме записи элек-
тромагнитного момента, если учесть при этом,' что произведение
двух сопряженных комплексных переменных представляет собой
вещественную величину:
Л4ЭМ = 1 ,bpnMm Im (is\) = — 1 $pnMm Im =
— I $PnMm Im (/(jipa) = l,5/?nAlm Im (iaipa)» (1-63)
Для машин с несимметричным ротором (синхронные машины)
в большинстве случаев предпочтительной формой записи элек-
тромагнитного момента оказывается не векторная (1-59) и не
комплексная (1-60), (1-61), а такая, которая содержит веществен-
ные переменные в осях а, р и d, q. В синхронной машине за ком-
плексный ток статора iG в неподвижной системе координат при-
нимается (см. § 1-4) ток ia + /7р. Аналогично определяется и
комплексное потокосцепление статора фа = фа + /фр. Подставив
в (1-61) комплексные /£, фа и выделив мнимую часть их произве-
дения, получим Л4ЭМ как функцию переменных в осях а, рГ
Мэм == 1,5рп (г|эр(а — (1-64)
При переходе в двухфазной машине от неподвижных осей а, р
к вращающимся осям d, q изменяется лишь система измерения
токов и потокосцеплений статора. Поэтому инвариантность мо-
мента позволяет вместо (1-64) написать его выражение через пере-
менные в осях d, q в виде
Af3M = 1,5рп (№’, — (1-65)
Этот результат можно получить и формально, подставив в (1-64)
токи ia, ip из (1-25) и аналогичные выражения фа, фр через потоко-
сцепления ф</, ф^.
Уравнения машин переменного тока
2-1. ИСХОДНЫЕ УРАВНЕНИЯ. Для исследования переход-
ных процессов необходима математическая модель машины, ко-
торая отвечала бы основным закономерностям, определяющим про-
цесс. При описании электромагнитных и электромеханических
переходных процессов целесообразно электрическую машину рас-
сматривать как некую электродинамическую систему, состоящую,
говоря абстрактно, из совокупности электрических цепей (обмо-
ток) и вращающейся массы (ротора). Поэтому ее поведение в пере-
ходном процессе описывается системой дифференциальных урав-
нений напряжений цепей и уравнения моментов сил, действую-
щих на ротор.
Уравнения напряжений фазных обмоток якоря (статора) в об-
щем виде запишем так, чтобы активная мощность, отдаваемая
этими обмотками, была положительной. Тогда для мгновенных
значений будем иметь
— «а = Pt^a + "а, 1
— ub Pi^Pb + rib',
(2-1)
— uc = pt^c 4- ric,
где ua, ub, uc — фазные напряжения на зажимах обмоток якоря;
Фа» Ф/>, Ф^» h — соответственно потокосцепления и токи
фазных обмоток; г — активное сопротивление этих обмоток; pt —
знак дифференцирования по времени t.
Для обмоток ротора, потребляющих активную мощность от
внешнего источника (обмотка возбуждения синхронной машины,
трехфазная обмотка машины с симметричным ротором в ряде ре-
жимов), при условии сохранения положительного знака у актив-
ной мощности применим форму записи уравнений, отличающуюся
от (2-1) знаком левой части. Так, для обмотки возбуждения син-
хронног! машины
Р/Фв “Ь (^"^)
где — напряжение, приложенное к цепи возбуждения; фв,
— потокосцепление и ток обмотки возбуждения; гв — актив-
ное сопротивление обмотки. Для короткозамкнутых демпферных
контуров синхронной машины уравнения напряжений имеют вид
Т^фэб? 4“ === 0? Р/Фэ<? Ч- ^эд^эд ==z (2“3, 2-4)
где индексами sd и sq отмечена принадлежность величин к про-
дольному и поперечному контурам.
Дифференциальное уравнение моментов, действующих на ро-
тор машины:
где (Fz) — сумма моментов внешних сил Fit приложенных
к ротору; J — момент инерции вращающихся частей; Q — ча-
стота вращения ротора, измеряемая в радианах в секунду. Пра-
вую часть уравнения иногда называют динамическим моментом.
На ротор машины действуют следующие моменты сил т (FJ
(рис. 2-1):
1. Момент механических сил М', приложенный со стороны
вала машины. При работе машины генератором момент М' яв-
ляется моментом первичного
в режиме двигателя М' пред-
ставляет собой момент механи-
ческой силы рабочего механиз-
ма, приводимого в движение
двигателем. В режиме генера-
тора момент М' является дви-
жущим, а в режиме двигате-
ля — тормозящим. Момент М'
в границах исследуемого про-
цесса часто остается постоян-
ным, однако в общем случае
он может быть некоторой функ-
двигателя. При работе машины
Рис. 2-1. Моменты, действующие на
ротор машины в режимах: а — генера-
тора; б — двигателя
цией скорости и времени.
2. Момент электромагнитных сил 7ИЭМ (электромагнитный мо-
мент), обусловленный взаимодействием токов обмоток и маг-
нитного поля в зазоре машины. Момент 7ИЭМ в генераторе яв-
ляется тормозящим, в двигателе — движущим.
3. Момент механических сил Д40, имеющих характер трения
(трение в подшипниках, ротора об охлаждающую среду в зазоре
и т. п.), называемый моментом холостого хода. В идеализирован-
ной машине, которая здесь рассматривается, потери в стали сер-
дечников равны нулю. В реальной машине в момент 7И0 входит
составляющая, соответствующая потерям в сердечнике. Этот мо-
мент всегда является тормозящим. Момент 7И0 может быть принят
постоянным, если скорость ротора изменяется в небольших пре-
делах.
В соответствии со сказанным относительно характера действия
моментов (движущий, тормозящий) и принимая электромагнитный
момент 7ИЭМ и момент на валу М' положительными в режиме ра-
боты машины генератором, получим дифференциальное уравне-
ние движения ротора, или просто — уравнение моментов, в виде
(2-5).
где М = М' — /Ио — момент механических сил.
Выше уже отмечалось (см. § 1-4), что непосредственное реше-
ние исходных уравнений (2-1)—(2-4) затруднительно ввиду того,
что они содержат переменные коэффициенты. Поэтому большое
значение имеет их линейное преобразование к виду, наиболее
удобному для исследования данного переходного процесса.
2-2. ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ НАПРЯЖЕНИЙ
СИНХРОННОЙ МАШИНЫ. Преобразование уравнений (2-1)
к неподвижным осям а, |3 означает, что новые уравнения должны
содержать вместо реальных фазных величин их а- и Р-составляю-
щие. Формальная связь между исходными и новыми перемен-
ными дана для токов в выражениях (1-20) и (1-21). Аналогичные
уравнения справедливы для потокосцеплений и напряжений. По-
скольку коэффициенты линейного преобразования не зависят от
времени, преобразование одинаково для самой переменной (токи,
напряжения) и для производной (производная от потокосцепле-
ния). Производя линейные преобразования по формулам типа
(1-20) одновременно всех одноименных членов (2-1), получаем
-«« = ^+4; — «п = лФ₽ + гг’₽; (2-6; 2-7)
—«о = Р/Фо + п'о, (2-8)
где индексами а, р, 0 отмечены а-, р- и нулевая составляющие
фазных величин. К этим уравнениям должны быть добавлены
уравнения напряжений обмоток ротора (2-2)—(2-4). Во всех урав-
нениях напряжений потокосцепления должны быть функциями
токов fa, fp, f0, ZB, i3d, i3q. Эти зависимости даны выражениями
(1-39)—(1-44). Нетрудно видеть, что уравнения напряжений в
осях а, р являются уравнениями с переменными коэффициентами.
Преобразование исходных уравнений (2-1) к осям d, q, яв-
ляющимся осями магнитной симметрии синхронной машины,
можно произвести с помощью формул линейного преобразования
вида (1-23). Подставив в одно из уравнений (2-1), например в пер-
вое, фазный ток ia, напряжение иа, потокосцепление фп, связан-
ные с d-, q- и нулевой составляющими однотипными выражениями
вида первого уравнения в системе (1-23), и выполнив дифферен-
цирование получим ряд слагаемых слева и справа от знака
равенства. Некоторые из них не содержат угла у, а другие имеют
множителями гармонические функции cos у и sin у. Поскольку
получившееся уравнение должно удовлетворяться тождественно
при любом значении угла у, оно распадается на три отдельных
уравнения: с членами, у которых общим множителем является
функция cos у; с членами, имеющими множителем sin у, и, нако-
нец, с членами, не содержащими угла у. Эти три уравнения, за-
писанные в указанном порядке, имеют вид
-«</ = Pt$d + Ф?“ + rid, —Uq = —^d^ + Pt^q-^riq’ (2'91 2’10)
— «0 = Р/Фо + По, (2-11)
где со = pty — частота вращения ротора в электрических радиа-
нах в секунду. Индексами d, q и 0 отмечены d-, q- и нулевая состав-
ляющие фазных напряжений, потокосцеплений и токов.
К этим уравнениям должны быть добавлены уравнения на-
пряжений обмоток ротора (2-2)—(2-4). Во всех уравнениях на-
пряжений потокосцепления должны быть функциями токов id,
iq, Ц, k, hd, hq- Эти зависимости даны выражениями (1-32)—
(1-37). Нетрудно видеть, что уравнения напряжений в осях d, q
являются при переменной частоте вращения ротора уравнениями
нелинейными, но с постоянными коэффициентами.
Уравнения обмоток якоря (2-6), (2-7) в осях а, р и (2-9), (2-10)
в осях d, q можно получить и с помощью изображающих векторов
напряжения U, потокосцепления Ч7 и тока / для рассматриваемых
обмоток, когда исходная система (2-1) заменяется двумя урав-
нениями:
—U = Ptw -р г7; — щ -= р>фо + riQ.
Предоставим возможность читателю самому сделать необходи-
мые выкладки. Указанным способом уравнения (2-9) и (2-10) по-
лучены в работе [6].
При изложении линейных преобразований (см. § 1-5) было
отмечено, что среди переменных в любой системе координат не-
изменно присутствуют их нулевые составляющие. Полученные
выше уравнения напряжений в двух системах координат также
показывают, что среди них всегда будет однотипное уравнение для
нулевых составляющих. При этом потокосцепление ф0 зависит
только от тока i0 (см. § 1-5) и уравнение для нулевой составляю-
щей (2-8) или (2-11) может решаться самостоятельно, независимо
от остальной системы уравнений машины. Поэтому в дальнейшем
это уравнение рассматриваться не будет.
Уравнения напряжений синхронной машины в осях а, р и
в осях d, q могут быть получены и другим путем, наглядно иллю-
стрирующим линейное преобразование координат и физический
смысл э. д. с., входящих в уравнения. Поскольку уравнение нуле-
вых составляющих может решаться самостоятельно, рассмотрим
из соображений удобства в качестве исходной не трехфазную,
а двухфазную двухполюсную синхронную машину, притом в обра-
щенном варианте — с вращающимся якорем и неподвижным по-
лем (с точки зрения электромагнитных процессов безразлично,
что вращается — обмотка якоря или поле). На рис. 2-2 в виде
окружности схематически изображена двухфазная обмотка кольце-
вого якоря, выведенная на две пары контактных колец. Магнит-
ные оси двух фазных обмоток а и Р нормальны друг к Другу и
вращаются вместе с якорем.
Потокосцепления любого контура ф в электрической машине
в самом общем случае, как известно, можно считать функциями
времени t и координаты ав, определяющей взаимное положение
поля и контура. Поэтому приращение потокосцепления с конту-
ром и э. д. с., индуктируемая им, соответственно равны:
Дф
дав в 1 dt
dty __
~dT~"
дф
т2- а>н
дав ri
дф> .
где со3 — относительная
частота вращения поля и контура.
Рис. 2-2. Схема двух-
фазной машины, ма-
гнитные оси обмоток
а, р которой вращают-
ся относительно по-
Рис. 2-3. Схема двухфазной
машины, магнитные оси об-
моток которой совпадают с
осями d, q
люсов
Следовательно, э. д. с., индуктируемая в контуре, определяется
суммой так называемых э. д. с. вращения ев и э. д. с. трансфор-
мации ет.
Когда уравнения напряжений машины записываются в осях а,
(3, это значит, чтоэ. д. с. индуктируются в обмотках якоря потоко-
сцеплениями фа, фр, ориентированными по осям а, (3. Из рис. 2-2
нетрудно видеть, что потокосцепления фа, фр не создают э. д. с.
вращения, поскольку они не перемещаются относительно якоря
(<ов = 0). Э. д. с. трансформации, возникающие в обмотках а, |3,
будут создаваться только тем полем, которое по направлению сов-
падает с магнитной осью рассматриваемой обмотки; от нормально
направленного поля э. д. с. трансформации в обмотке равна нулю.
Поэтому на одной паре контактных колец напряжение
^ат ri а ~ P/Фа Па,
а на других контактных кольцах
- Пр = — Лфр - Пр,
что соответствует уравнениям (2-6) и (2-7).
Перейдем к осям d, q, жестко связанным с полюсами магнитной
системы (рис. 2-3). Магнитные оси двухфазной обмотки якоря
теперь должны совпадать с осями d, q. Но вращающаяся обмотка
якоря может создать поле, неподвижное относительно полюсов,
только если она соединена с коллектором и щетками. Для обра-
зования полей, ориентированных вдоль осей d и 7, необходимы
две пары щеток. На двух системах щеток, расположенных на
осях d, q (рис. 2-3), измеряются напряжения якоря в этих
осях ud, uq.
В системе осей d, q э. д. с. в якоре индуктируются потокосцеп-
лениями ф^, фд, обусловленными магнитными полями, направ-
Рис. 2-4; Направления положительных токов id, iq и э. д. с.
вращения в якоре двухфазной машины
ленными вдоль осей d, q. Поскольку потокосцепления (поля) ф^,
ф7 и обмотка якоря перемещаются относительно друг друга
с частотой вращения якоря (озБ = со), то уравнения напряжений
ud, uq будут содержать как э. д. с. трансформации, так и э. д. с.
вращения и, следовательно,
— Cdn 1 Uq 6qT -j- 3qQ riq.
На рис. 2-4 показаны направления токов id, iq в обмотке
якоря, принимаемые за положительные (id > 0; iq > 0), создаю-
щие положительные потокосцепления ф^ > 0, ф^ > 0. Эти.» по-
следние обусловлены полями, направленными соответственно
вдоль положительных осей d и q. По рис. 2-4 нетрудно проверить,
чтоэ. д. с. трансформации е^т, измеряемая на щетках dd, создается
только за счет изменения потокосцепления ф^, а э. д. с. е7т на щет-
ках qq — только за счет изменения потокосцепления ф^, так что
~ p$d, eqT -= — prfq.
Э. д. с. трансформации на щетках от полей, направленных нор-
мально к оси щеток, равны нулю. Нетрудно также видеть, что
э. д. с. вращения обмотки якоря, измеряемые на щетках, будут,
как в обычной машине постоянного тока, создаваться только по-
лями, нормально направленными к оси щеток, а от полей, совпа-
дающих с линией размещения щеток, э. д. с. вращения равна
нулю. На рис. 2-4 нанесены направления э. д. с. вращения в об-
мотке якоря, найденные с помощью известного «правила правой
руки»: э. д. с. индуктированной поперечным потоком, и э. д. с.
обусловленной продольным потоком. Эти э. д. с. могут быть
рассчитаны по общему выражению для э. д. с. вращения, приве-
денному выше. Но можно воспользоваться готовым результатом,
известным в теории машин постоянного тока: э. д с. вращения
равна произведению частоты вращения якоря со (в электрических
радианах в секунду) и потокосцепления с обмоткой якоря от потока,
нормально направленного к линии щеток. При этом э. д. с. враще-
ния принимается положительной или отрицательной в зависимости
от того, согласно или противоположно она направлена по отно-
шению к положительному току в обмотке якоря. В нашем случае
= —Ф/о; ^в = ^со,
так как э. д. с. edB направлена противоположно току id > О,
а э. д. с. eqB и ток iq > 0 имеют одинаковые направления.
Подставив найденные значения э. д. с. трансформации в об-
щие уравнения напряжений, получим
ud = — Pttyd — — rid, uq = — p$q + ф/о — riq.
Эти уравнения совпадают с полученными ранее формально
уравнениями (2-9) и (2-10).
На основании изложенного можно сделать вывод о том, что
1) дифференциальные уравнения синхронной машины оказываются
справедливыми и для коллекторных машин; 2) моделью идеали-
зированной машины, электромагнитные процессы которой иссле-
дуются в осях d, q, служит коллекторная машина (см. рис. 2-3).
Следует заметить, что в такой машине пренебрегают коммутацион-
ными процессами.
На модельной коллекторной машине наглядно получаются не
только уравнения напряжений обмоток синхронной машины
в осях d, q, но и выражение для электромагнитного момента. С по-
мощью известного «правила левой руки» по рис. 2-4 можно уста-
новить, что действующие на ротор электромагнитные силы от
взаимодействия одноименных токов и потокосцеплений (потоков)
обмотки якоря (id и ф^, iq и ф7) равны нулю. Электромагнитный
момент возникает от взаимодействия разноименных токов и потоко-
сцеплений; при этом момент, обусловленный id и ф^, действует
на ротор в направлении его вращения, а момент, определяемый iq
и ф</, направлен противоположно.
Как известно из теории машин постоянного тока, электромаг-
нитный момент в таких машинах равен произведению тока якоря
и потокосцепления с обмоткой якоря. Примем также во внимание,
что в генераторном режиме машины (рис. 2-4) положительный
электромагнитный момент направлен в сторону, противополож-
ную вращению якоря. Поэтому с учетом направления действия
двух составляющих электромагнитного момента в коллекторной
модельной машине будем иметь
^эм = tyqid'
Этот момент Л4ЭМ относится к двухфазной двухполюсной син-
хронной машине. При переходе к трехфазной машине с произ-
вольным числом пар полюсов рп следует полученное выражение
увеличить в 1,5 рп раза, что приводит к уже известному резуль-
тату в виде (1-65).
Возвращаясь к вопросу о преобразовании уравнений напряже-
ний, отметим, что приведенная выше трактовка э. д. с., индукти-
руемых в какой-либо обмотке машины, как э. д. с. трансформации
и вращения, позволяет безошибочно определять вид уравнений
напряжений обмоток при применении той или иной системы
координат. Если рассматриваются оси координат, неподвижные
относительно обмотки, то уравнение напряжений этой обмотки
будет включать только трансформаторную э. д. с.; если оси коор-
динат вращаются относительно обмотки с некоторой частотой озв,
то к трансформаторной э. д. с. должна быть добавлена э. д. с.
вращения, пропорциональная сов.
2-3. ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ НАПРЯЖЕНИЙ МА-
ШИН С ТРЕХФАЗНЫМИ ОБМОТКАМИ И СИММЕТРИЧ-
НЫМ РОТОРОМ. Уравнения напряжений для двухфазных об-
моток статора и ротора в осях, связанных с самими обмотками,
должны из э. д. с. содержать только э. д. с. трансформации. Для
обмоток якоря в системе неподвижных осей as, ps уравнения
повторяют полученные выше для синхронной машины уравне-
ния (2-6) и (2-7). Для обмоток ротора в системе осей ar, j3r, свя-
занных с ротором, общий вид уравнений сохранится, однако со-
гласно § 2-1 у внешних напряжений будет изменен знак. Ранее
было обусловлено (см. § 2-2), что уравнение нулевой состав-
ляющей в общей системе записываться не будет.
’ Итак, в рассматриваемых координатных осях:
для статора
—«as = P/lfas + /Vas; —»₽s = Wfos +
, для ротора
Наг = Pl^ar + Гг1аг\ Ufr = ptty,r + Г/р.,,
где uasi и war, u$r — фазные напряжения статора и ротора
Двухфазной машины; rs, rr — активные сопротивления обмоток
статора и ротора.
Введем изображающие векторы (комплексные переменные) на-
пряжений обмоток, определяемые в осях, связанных с обмот-
ками:
«о = Mas + /Mps; Мр = Uar + /Мр,.
Приведенные уравнения напряжений можно свести к уравне-
ниям для изображающих векторов:
—Ug = рЛя + гЛ', ^р = гг1р, (2-12; 2-13)
где комплексные потокосцепления и токи определены в § 1-7.
Для приведения этих уравнений к общей системе координат ак,
|3К согласно § 1-7 нужно (2-12) умножить на координатный мно-
житель е”/6к, а (2-13) — на Тогда в неподвижной си-
стеме координат (6К = 0) уравнение (2-12) сохранит общий вид
(таким образом, э. д. с., индуктируемая в обмотке статора, по-
прежнему имеет характер э. д. с. трансформации). Уравнение же
(2-13) будет содержать, кроме э. д. с. трансформации, еще э. д. с.
вращения, так как по отношению к неподвижному потоку (потоко-
сцеплению фра) обмотка ротора вращается с частотой со. Фор-
мально этот результат получается после умножения (2-13) на
и подстановки очевидного соотношения
e'^Ptip = Pt (%e'V) — i^p^Pty = (Pt — /®)ФРо-
В результате получим
—+ rsio = pt (LssiG + Mmipo) + rsZQ; (2-14)
UpG ~ (Pt fa) Фра 4“ rPpQ “ (Pt fa) ^rP'po) 4" (2-15)
где up(5 — upe}\ фра = фре/?; 4а = — изображающие век-
торы напряжения, потокосцепления и тока обмоток ротора, из-
меряемые в неподвижных осях.
Для перехода к синхронно вращающимся осям (бк = +
+ 60) используем соотношения:
Pt (фое”'бк) = e~l&Kpttya —
Pt ['Фре~1 <бк~?) ] = е“' p/фр — / ((ох — ю) фре~'
Тогда после умножения (2-12) на e_/(“^+eo), а (2-13) на е_/'(и? + бо_т)
будем иметь
—us — {pt 4~ Ml) Фб + rsh = (Pt 4" Ml) (Ms4 4“ Mmtr) 4~ rsb', (2“ 1 6)
= [pt + / Ml - «)] 4- rrir = [pt + j («! - co)] (Mmis +
+ МГ)4-^Л, (2-17)
где us = +6°); ur = upe~i (®i/+$o-v) — изображающие
векторы напряжений обмоток статора и ротора в синхронно вра-
щающихся осях; i])s, фг, Zs, lr — аналогичные векторы потокосцеп-
лений и токов, определенные по (1-53) и (1-54).
Уравнения (2-16) и (2-17) содержат не только э. д. с. трансфор-
мации —pttys\ —р$п но также и э. д. с. вращения —/^1Ф5;
—j (wi — co) определяемые скоростями перемещения обмоток
относительно магнитного потока, вращающегося с синхронной
частотой tOi (именно с такой частотой вращается координатная
система, в которой измеряются и фг).
2-4. УРАВНЕНИЯ МАШИН, СОДЕРЖАЩИЕ ПЕРЕМЕН-
НЫЕ С ФИЗИЧЕСКОЙ РАЗМЕРНОСТЬЮ. Переходный про-
цесс в машине всегда сопровождается изменением частоты враще-
ния ее ротора. В тех случаях, когда изменение частоты вращения
начинает влиять на протекание процесса, возникает необходи-
мость совместного исследования процессов в электрических цепях
и механического движения ротора. Таким образом, полная си-
стема дифференциальных уравнений машины включает в себя
уравнения напряжений обмоток и уравнение движения ротора
(уравнение моментов). Обычно рассматривается не абсолютное
движение ротора в пространстве, характеризуемое, скажем, ча-
стотой его вращения Q (со), а относительное движение по отноше-
нию к некоей координатной системе, чаще всего вращающейся
с постоянной синхронной частотой Qi («i).
Дело в том, что типичным условиям работы машины перемен-
ного тока отвечает включение ее обмотки якоря параллельно
с сетью. Лишь в сравнительно редких случаях машина работает
генератором на автономную нагрузку. Пусть мощность сети зна-
чительно превосходит номинальную мощность машины. Идеали-
зируя такую сеть, принимают ее бесконечно мощной. Очевидно,
что напряжение и частота сети бесконечной мощности остаются
неизменными, что бы ни происходило в исследуемой машине.
Поэтому изображающий вектор U напряжения сети бесконечной
мощности на диаграммах имеет неизменный модуль и вращается
с постоянной синхронной частотой сор Электромагнитные харак-
теристики синхронной машины в установившемся режиме опре-
деляются, как известно, взаимным положением ротора и век-
тора U. В переходном процессе оно изменяется во времени, но
именно возникающее движение ротора относительно вектора U
является фактором, формирующим электромагнитное состояние
машины. Последнее относится не только к синхронной, но и
к асинхронной машине, для которой указанное относительное дви-
жение ротора является основополагающим и при описании уста-
новившихся режимов работы. Легко представить, что и в системе
машин соизмеримой мощности электромагнитные характеристики
определяются взаимным относительным движением роторов.
Имея в дальнейшем в виду работу машины параллельно с сетью
бесконечной мощности или случаи, приводящиеся к этим усло-
виям, будем рассматривать движение ротора машины относи-
тельно некоторой оси, вращающейся с синхронной частотой. По
существу, это вращение ротора относительно результирующего
магнитного поля обмотки якоря. В теории машин такое относи-
тельное движение ротора характеризуют скольжением s, под ко-
торым понимают относительную частоту вращения ротора, выра-
женную в долях синхронной частоты вращения:
S
со — (ох _______ Q — Qi
(01 Qi
(2-18)
Исторически сложилось так, что это определение скольжения
используется обычно в теории синхронной машины, для которой
наиболее важным является режим генератора. В теории асин-
хронной машины, исследуемой в основном в качестве двигателя,
скольжение определяют так, что оно отличается от приведенного
в (2-18) знаком [ср. с (1-2)1. Для единообразия в уравнениях ма-
U
Рис. 2-5. Определение угла 0
синхронной машины
ОрЪ+СС
a
шин примем скольжение согласно (2-18),
т. е. будем считать его положительным
в режиме вращения ротора с частотой,
большей, чем синхронная частота (s>0
при Q > Qj). Положение ротора ма-
шины в пространстве (абсолютное дви-
жение) характеризуется углом у пово-
рота оси d относительно неподвижной
оси фазы а (см. рис. 1-9 ”и 1-20). Для
характеристики относительного движе-
ния ротора введем угол 0 между по-
перечной? осью машины q и изобража-
ющим вектором напряжения сети U (рис. 2-5). Примем 0 > 0,
когда ось q опережает U. Если сеть обладает бесконечной
мощностью, то U вращается с постоянной частотой сох и, как сле-
дует из рисунка,
0 — у _ (о1/ — а — л/2.
Дифференцирование этого соотношения и подстановка pty =?
= со с учетом (2-18) дает
pfo = PtX ~ G)i = (ois- (2-19)
Интегрируя (2-19), получим
t
е = СО! J s + е0, (2-20)
о
где 0О — начальное (при i 0) значение угла 0.
Соотношения (2-19) и (2-20) связывают механические пара-
метры относительного движения — угол 0 и скольжение s.
Из (2-18) определим параметры абсолютного движения ротора
машины со и p,Q через скольжение:
СО ;= COi (1 —s), р
Система уравнений машины, как отмечалось выше, состоит
из уравнений напряжений обмотою и моментов, действующих на
ротор. Приведем системы уравнений синхронной машины в осях d,
q и машины с симметричным ротором в синхронно вращающихся
осях. Для других координатных осей система уравнений может
быть составлена аналогично по данным § 1-8, 2-1—2-3.
Система уравнений синхронной машины в осях d, q в общем
виде включает в себя уравнения (2-9), (2-10), (2-2)—(2-5), (1-66).
Подставив в них (о и pzQ, выраженные через скольжение, получим
—ud prf>d 4 (1 b s) -4 rid, (2-21)
—uq = — ф/Щ (1 4- s) Ь p^q 4- riq\ (2-22)
UB = Р/Фв 4“ Pi^sd 4~ ^3d^sd 0, (2-23, 2-24)
Pttysq “F = 0, (2-25)
M = 1,5pn ($diq - tyqid) 4- J^pts. (2-26)
Уравнения синхронной машины в осях d, q были получены
независимо друг от друга американским инженером Парком и со-
ветским ученым А. А. Горевым.
Система уравнений машины с симметричным ротором и трех-
фазными обмотками статора и ротора, записанная в синхронно
вращающихся осях, состоит из уравнений (2-16), (2-17), (2-5),
(1-64). Подставив в них (о и pzQ, выраженные через скольжение,
получим
“ (Р/ “F /Wl) 4~ ^rrJ'r) ^*s4» (2-27)
“г = (Pt ~ /М (Mmis + ^rrlr) + Гг1г\ (2-28)
M 1,5pflA4m Im (iir) + J^ptS. (2-29)
2-5. СИСТЕМА ОТНОСИТЕЛЬНЫХ ЕДИНИЦ. Уравнения ма-
шины обычно записываются не в абсолютных значениях, а в от-
носительных единицах. Это значит, что все величины, входящие
в уравнения машины, выражены не в физических единицах (на-
пряжение в вольтах, ток в амперах и т. д.), а как доли некоторых
количеств, имеющих ту же физическую размерность. Последние
носят название базисных количеств или базисных величин. От-
носительные значения величин будут, естественно, безразмер-
ными. Пусть, например, такие переменные, относящиеся к ста-
тору, как напряжения ud, uq и токи id, iq, измеряются соответ-
ственно в вольтах и амперах. Если принять в качестве базисных
величин для напряжения и тока статора U6 и /б, также измеряе-
мые в вольтах и амперах, то относительные значения рассматри-
ваемых переменных определятся отношениями: С
UdlU U,q/U ft, iql^G’
Подобным образом могут быть представлены и любые другие
величины.
В дальнейшем базисные величины будут записываться с ин-
дексом «б», а эти же величины для роторных цепей — с допол-
нительным индексом, обозначающим рассматриваемую цепь. На-
пример, базисное напряжение обмотки возбуждения синхронной
машины имеет обозначение £/вб. При последующем изложении
до § 2-7 включительно все величины в относительных единицах
имеют черту снизу, а те же величины, имеющие физическую раз-
мерность, обозначаются аналогичным символом, но без черты.
Например, индуктивность, измеряемая в генри, обозначается L,
а та же индуктивность в относительных единицах L. В остальной
части книги, после § 2-7, где преимущественно используются ве-
личины в относительных единицах, они будут обозначаться сим-
волом без черты, т. е. так же, как и величины с физической раз-
мерностью, но использование последних будет специально ого-
вариваться, чтобы не было путаницы в обозначениях.
Система относительных единиц обладает рядом положительных
свойств. Переход к системе относительных единиц упрощает
запись уравнений, освобождая их от некоторых постоянных коэф-
фициентов, облегчает вычисления, поскольку переменные выра-
жаются удобными числами (долями единицы), а также делает
возможным сравнение результатов, получаемых для машин раз-
личной мощности.
Для того чтобы перейти от физических величин к их относи-
тельным значениям, выраженным в долях базисных величин,
нужно прежде всего однозначно определить всю совокупность
базисных величин. В современной теории электрических машин
большая часть базисных величин является общепринятой, однако
некоторые из них различны у разных авторов. Общепринятыми
базисными величинами являются следующие:
1. Ток статора /б — за базисный ток статора принимается
амплитуда номинального фазного тока статора.
2. Напряжение статора U6 — за базисное напряжение ста-
тора принимается амплитуда номинального фазного напряжения
статора.
3. Угловая частота соб — за базисную угловую частоту при-
нимается синхронная угловая частота = 2л/н (Д, — номиналь-
ная частота).
4. Потокосцепление статора Тб — за базисное потокосцепле-
ние статора принимается потокосцепление, индуктирующее в об-
мотке статора при базисной угловой частоте базисное напря-
жение: Yg = (7б/соб.
5. Базисное сопротивление статора z6 = Uб//б.
6. Мощность статора Рб — за базисную мощность прини-
мается номинальная мощность машины SH (в киловольт-амперах):
рб = зн = з(/н/н= 1,5(/б/б,
где 17н, IH — действующие номинальные фазные напряжение и
Ток статора.
7. Базисный момент Мб = Рбрп/а)б, где рп — число пар по-
люсов машины.
8. Базисная индуктивность статора L6 = z6/(o6.
9. Базисное время t6 — время, соответствующее повороту ро-
тора синхронной машины при базисной угловой частоте на 1 рад
эл. [t6 = 1/cOi = 1/(2зт/н) с]. Время, выраженное в долях /б, бу-
дем в дальнейшем обозначать т. Согласно определению,
т — t/t^ — toj.
Время т называют иногда синхронным временем.
Базисные величины для роторных цепей синхронной машины,
к сожалению, не являются общепринятыми. Это положение сло-
жилось исторически, так как по мере
развития теории синхронной машины
различные авторы использовали наи-
более удобную для исследования си-
стему базисных величин роторных це-
пей. Удобство того или иного выбора
базисных величин для роторных цепей
определяется в основном числом этих
цепей. Если иметь в виду физическую
наглядность, то наиболее целесооб-
разной следует признать такую систему
базисных величин, при которой ура-
Рис. 2-6. Схема замещения
двухобмоточного трансфор-
матора
внения напряжений синхронной машины, записанные в общем
виде через потокосцепления, сохраняют форму при переходе от
физических величин к относительным, а уравнения потокосцепле-
ний магнитно-связанных контуров, представленные в относитель-
ных единицах, удовлетворяют принципу взаимности. Оказывается,
что в подобной системе существует определенная связь между
отдельными базисными величинами.
Рассмотрим для примера статический двухобмоточный одно-
фазный трансформатор (рис. 2-6). Уравнения напряжений пер-
вичной (1) и вторичной (2) обмоток трансформатора с физическими
величинами имеют вид
ui — Pt (ДЛ ~г М12/2) + rirn
= Pt (^12*1 ^2^) Г2*2>
(2-30)
где Lb L2, г2 — индуктивности и активные сопротивления об-
моток; Л412 — взаимная индуктивность обмоток; ulf ц2, f15 i2 —
напряжения, приложенные к обмоткам, и токи в них.
Чтобы уравнения напряжений в относительных единицах со-
хранили форму уравнений, имеющих физическую размерность
(2-30), необходимо подчинить базисные величины первичной и
вторичной обмоток следующим условиям:
^б = ^б; У1б = А1б/1б; (2-31; 2-32)
^16 ~ ^16^6’ ^2б ” ^2бС0б> (2-33; 2-34)
^2б “ ^26^26’ 4б “ (2-35; 2-36)
Р1б = -?2б ИЛИ ^1бЛб ~ ^26^26* (2-37)
Разделив первое уравнение (2-30) на (2-31), а второе уравне-
ние — на (2-34) и имея в виду соотношения (2-32)—(2-36), полу-
чим в относительных единицах:
«1 = Рг (Alii + 4% 7Т+ г1г‘1:
— \-- Чо 116 - ' —
/ ^^12 4 б • I т • \ I
^2= ~Т^ L1 + / 4” 44 ’
где рх — символ дифференцирования по времени т.
На основании условий (2-37) в уравнениях (2-38)
4б 4б
МбЛб ^2б4б
(2-38)
(2-39)
Поэтому уравнения (2-38) окончательно принимают форму урав-
нений (2-30):
4t = Рх (Ai£i + М12ц) + 44’>
н2 = Рх; (Л4124 + ^24) + 44,
где относительное значение взаимной индуктивности
(2~40>
а относительные значения параметров вторичной цепи трансфор-
матора с помощью (2-39) и (2-36) могут быть записаны в виде
4 _____ / 4б \2.
-4б ^16 \ 4б /
_4_ = 4 ( Ic& V
4б ^1б \ 4б '
(2-41)
(2-42)
Выражения (2-40)—(2-42) имеют простой физический смысл.
Для того чтобы установить его, напомним операцию приведения
параметров вторичной обмотки трансформатора к первичной. Это
приведение состоит в умножении взаимной индуктивности двух
обмоток Л412 на коэффициент трансформации &12, а параметров
вторичной обмотки — на ^12; при этом
А12 == wjw2 = /2Н//1Н,
где w2, /1Н, I2l{ — соответственно числа витков первичной и
вторичной обмоток и номинальные токи этих обмоток.
Таким образом, приведенные значения параметров гг, Л^,
Ло равны:
М12 = Л112^12 — Л412/2н/Лн'? ^2 = ^2^12 = ^АА
г2 == /2^12 =
Сравнивая полученные выражения с (2-40)—(2-42),видим,что
в последних параметры сначала приведены к первичнойцепи,аза«
тем отнесены к базисным величинам первичной же цепи, что дает
их относительные значения. Отметим, что если базисная мощ-
ность первичной цепи Р1б выбрана травной номинальной мощ-
ности SH, то
^2н/Лн’
в случае произвольного выбора Р1б
^26^16 ^2н/Лн>
и это будет означать, что приведение параметров трансформатора
к первичной цепи в выражениях (2-40)—(2-42) производится
с коэффициентом трансформации, отличным от общепринятого
в теории трансформаторов.
Если необходимо получить уравнения напряжений в относи-
тельных единицах, сохраняющие вид уравнений с физическими
величинами, для многообмоточного трансформатор,то соотно-
шения между базисными величинами (2-31)—(2-37) должны бьпъ
распространены на все обмотки трансформатора. Таким образом,
для любой х-й обмотки будем иметь
U хв ~ (2-43; 2>{4)
^хб -^хб^б’ хб:==' Uгхб1хб ^16’ ^45,2»4б)
Относительные значения параметров всех обмоток (кроме пер-
вичной) определяются, как и в двухобмоточном трансформаторе,
делением приведенного к первичной обмотке параметра на фа-
зисную величину первичной обмотки. Например, взаимная ин-
дуктивность второй и третьей обмоток /И23, приведенная к пер-
вичной обмотке, равна
м'23 = м23М13 = м23 ((-М =
\ Л1Н / \ * 1Н / 1,
где k12, k13 — коэффициенты трансформации между первичной и
соответственно второй и третьей обмотками. Относительное зна-
чение этой индуктивности
лд ^23 ^гб^зб
-23 “ Ь1б - £1б Р1б
Таким образом, относительные значения параметров для х-й об-
мотки и взаимных индуктивностей k-й и х-й обмоток равны:
^Х — Lxk\x/Гх = fх^\х!^16 > Mkx ” M-kx^lk &1х /^16 >
где klx - /Аб//1б; kik = he'he — коэффициенты трансформа-
ции между первичной и соответственно х-й и k-й обмотками;
Лб> 1/гб — базисные токи х-й и k-й обмоток.
Возвратимся к синхронной машине. Вдоль осей d и q она мо-
жет рассматриваться как многообмоточный трансформатор, при-
чем роль первичной обмотки трансформатора играют продольный
и поперечный контуры статора, а остальные обмотки трансформа-
тора — это роторные контуры по осям d и q.
Если обратиться к общепринятым базисным величинам, то
можно заметить, что они удовлетворяют условиям (2-43)—(2-45).
Сложнее дело обстоит с роторными базисными величинами.
Широкое применение до сих пор имеет система базисных ве-
личин, введенная Парком. В этой системе в качестве базисных
величин тока, напряжения и потокосцепления любого роторного
контура выбраны такие значения, которые, существуя в данном
контуре, обусловливают на статоре в режиме холостого хода но-
минальное напряжение по спрямленной характеристике холостого
хода (напомним, что идеализированная машина имеет прямоли-
нейную характеристику холостого хода).
Имея в виду, что за базисное напряжение на статоре принято
его номинальное значение, в соответствии с определением Парка
получим, например, для базисных величин обмотки возбуждения
следующие выражения:
С^б ^ав</&Ь/вб’ ^вб ^в^вб» ^вб -^в^вб’
Ясно, что эти соотношения не подчиняются условиям (2-43)—
(2-46). Следовательно, уравнения напряжений роторных конту-
ров и потокосцепления машины в таких относительных единицах
принимают форму, отличающуюся от обычной для индуктивно-
связанных электрических цепей. Несмотря на это, система базис-
ных величин Парка достаточно проста для машины с одним кон-
туром на роторе — обмоткой возбуждения. Однако уже при на-
личии в машине по одному демпферному контуру в каждой из осей
(d, q) эта система становится мало удобной, сохраняя свой недоста-
ток — физическую ненаглядность уравнений в относительных еди-
ницах, получаемых с ее помощью.
Чтобы уравнения напряжений синхронной машины, записан-
ные в относительных единицах, сохраняли физическую ясность
при любом числе контуров на роторе, нужно выражения для по-
токосцеплений контуров машины преобразовать к виду, при ко-
тором выполняется принцип взаимности в отношении индуктив-
ностей, а затем базисные величины роторных цепей подчинить
условиям (2-43)—(2-46). Сделаем необходимые преобразования
для потокосцеплений продольных контуров машины, которые
можно рассматривать как обмотки многообмоточного трансфор-
матора. Выше, в § 1-6, уже указывалось, что для соблю-
дения принципа взаимности необходимо токи всех цепей ротора
уменьшить в 3/2 раза, а индуктивности этих цепей увеличить
в 3/2 раза. Тогда выражения потокосцеплений продольных конту-
ров (1-33), (1-35), (1-36) принимают вид
tya = Ldid + Мпзб?) (у *в) + (у (у > (2-47)
=(4 мав(/) id+(4 ) (4 i’B) + (4 (4 ; <2-48)
=(4 +(4 (4 ) + (4М (4 ч • <2-49>
Пусть для продольного и поперечного контуров статора базис-
ными током, потокосцеплением и индуктивностью будут вели-
чины /б, Тб, £б, соответственно для обмотки возбуждения /вб,
Твб, а Для демпферных контуров /эб, Тэб, £эб. Будем счи-
тать, что эти базисные величины подчиняются соотношениям
(2-43)—(2-46). Тогда выражения (2-47)—(2-49) в относительных
единицах принимают вид
Ф^ — Ldid 4~ МQBfif^B 4“ Maddhdi I
Фв ’ ^aBd^d 4’^в^в “Г ^Bad^sdt
Фэе? M-gadid 4“ ^вэ4в 4“
(2-50)
где в соответствии с формулами, полученными для многообмоточ-
ного трансформатора:
. м ________ 3Ma3d 1 .
2Lq ^св’ — 2Lg
ДЛ , ____ b b - I — 3L& b2 . Т _____________________ SL3d /2
_ВЭ6? — 2L6 св*сэ, ^В 2L6 -3d ~' 2L6 сэ’
коэффициенты трансформации: kC3 = 2/вб/(3/б); kC3 = 2/эб/(3/б).
Аналогичная з-апись для потокосцеплений и индуктивностей
может быть сделана для поперечных контуров машины на осно-
вании выражений (1-34), (1-37):
Ф<7 ["gig -j- Маэд1эд'^ ф эд М дэд1 д ~|~ (2»51)
где
. , _ ЗМаэд у . 37э<? /,2
1™аэд 2£б ^сэ’ = 2L$ ^сз*
Подчинение базисных величин условиям (2-43)—(2-46) позво-
ляет установить связь между базисными величинами роторных
цепей и обмотки статора. Поскольку для синхронной машины
в (2-46)
Р1б = Рб= 1,5й’б/б = 1,5гб/2б,
то из (2-43)—(2-45) получим
^б=1,5^Л; ^б=1,5ТЛ; ]
Лхб=1,5Лс^; 2ХЪ = 1,5гб^, i
где kx = /б//Аб.
Уравнения напряжений роторных контуров в относительных
единицах на основании изложенного должны иметь такой же вид,
как и уравнения с физической размерностью, т. е.
= М + £в£в;
+ , (2-53)
РтФэ<7 4“ £э<?£э<7 = 0, j
где
Фв Фв'^Вб Фв^св/^б, _£в Гв/^вб 1 ,^/*в^св/^б»
Фэ</ ~ фэс? / Ч'эб “ фэ^^сэ/Ф"б> Gd ” /?эб 1 »5лэй^сэ/Мэ»
Фэ? — фэ^/^эб ~ фэ^сэ/Ф'б} ~эд “ ^эд/2эб “ 1,5гэ^Сэ/^б*
Все базисные величины роторных цепей (2-52) определяются
при выбранных базисных величинах статора лишь отношениями
/вб//б, Лб^б» т- е- ПРИ известном базисном токе статора /б зави-
сят от выбора базисных токов обмотки возбуждения /вб и демп-
ферных контуров /эб. Ввиду того что в синхронной машине коэф-
фициент приведения обмоток ротора к статору не получается та-
ким определенным, как в трансформаторе, так как обмотка ста-
тора распределена более сложно, нежели обмотка трансформатора,
базисные токи роторных цепей у различных авторов оказались не-
одинаковыми. Но коэффициенты приведения, или, что то же самое,
отношения базисных токов роторных цепей к базисному току ста-
тора, у различных авторов отличаются не очень сильно и близки
к тому значению, которое принимается в трансформаторах
(/хн//1н = W4). Эго позволяет получать все индуктивности це-
пей в относительных единицах, как и в трансформаторе, вели-
чинами одного порядка.
Рассмотрим наиболее важные из числа применяемых отношения базисных
токов /вб//б; WAs [72].
1. За базисный ток обмотки возбуждения /Bg принимается такой ток, при
котором поле обмотки возбуждения индуктирует в фазной обмотке статора напря-
жение с амплитудой, равной ха^б- Иными словами, базисный ток возбуждения
/Вб создает в зазоре такое же поле первой гармоники, как и продольная реакция
якоря при токе /$, так как последняя индуктирует в статоре напряжение Ха^б-
Отношение /вб//б легко определяется из условия равенства указанных выше
первых гармоник индукций в зазоре. Амплитуда первой гармоники поля обмотки
возбуждения при токе возбуждения /Вб
D Iвб^вНо /,
в1’
Где § — зазор; — коэффициент зазора; wB — число витков обмотки возбужде-
ния на полюс; |10— проницаемость воздуха; &В1 = ВВА/В§т— отношение ам-
плитуды первой гармоники индукции поля обмотки возбуждения к максималь-
ному ее значению.
Амплитуда первой гармоники поля реакции якоря при амплитуде тока ста-
тора
D 1,35/б^об1 р0
й1~
где w, &об1 — число витков и обмоточный коэффициент обмотки статора; ==
= BailB^tn — отношение амплитуды первой гармоники индукции поля реакции
якоря к максимальному ее значению.
Из условия £В1 = Ва1 находим
^вб __ J g । ^061 ^dl
’ 2рп^в £В1 ’
За базисный ток эквивалентных демпферных контуров /Эб принимаем ток,
который, протекая в эквивалентном демпферном контуре, создает поле основной
гармоники, индуктирующее в статоре напряжение Xadlfr Таким образом, получим
аналогичное соотношение базисных токов 1Э$ и Iq:
/эб___191 krfi
/б “ ’ 2рпшд £Д1 ’
где — число витков демпферного контура (практически шд = 1); &Д1 — от-
ношение амплитуды первой гармоники индукции поля возбужденного демпфер-
ного контура с шагом, равным полюсному делению, к максимальному значению
индукции этого поля (практически &Д1 » &в]).
Для таких базисных токов ротора MaBd = xad- Назовем определенную
описанным способом систему базисных токов роторных цепей «система
2. Определим базисный ток /Вб как ток обмотки возбуждения, при котором
м. д. с. этой обмотки на полюс равна амплитуде м. д. с. реакции якоря при токе
по прямоугольной волне (в 4/зт раз меньшей амплитуды первой гармоники м. д. с.).
Пусть базисный ток демпферного контура определяется аналогичным образом.
В этом случае
/вб l,5^feo61 . /эб 1,5^рб1
/б 2рп^в ’ /б " 2/?п^д
Такая система базисных токов ротора называется «система м. д. с.».
3. При анализе синхронных машин с помощью схем замещения удобной
является система базисных токов, для которой взаимные индуктивности контура
статора, обмотки возбуждения и эквивалентного демпферного контура равны
между собой. При равенстве взаимных индуктивностей цепей схема замещения
составляется наиболее просто. Для этого случая соотношения токов имеют вид
Iвб ___Ь5^об1_ ^Д1 . ‘ эб _ 1,5^^061 kB±
Iб 2рпвув k^Q Iб 2рпауд Лдо ’
где &до определяем аналогично коэффициенту &Д1, но полагая, что поток первой
гармоники поля равен действительному потоку, возникающему при возбуждении
эквивалентного демпферного контура.
В дальнейшем для синхронной машины с одним контуром на
роторе — обмоткой возбуждения, а также для машины с сим-
метричным ротором и трехфазными обмотками будет использована
система относительных единиц, принятая Парком. Для синхрон-
ной машины с демпферными контурами — «система xad».
2-6. УРАВНЕНИЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ ДЛЯ
МАШИН С ОДНОЙ ОБМОТКОЙ НА РОТОРЕ. Уравнения
синхронной машины с одной цепью на роторе — обмоткой возбу-
ждения и машины с симметричным ротором и трехфазной обмот-
кой на нем даются в форме, предложенной А. А. Горевым [21].
Синхронная машина. При наличии на роторе только обмотки
возбуждения из всех уравнений машины (2-21)—(2-26) остаются
лишь первые три уравнения напряжений и уравнение моментов.
Подставив в них выражения потокосцеплений (1-33)—(1-35), в ко-
торых токи демпферных контуров должны быть положены равными
нулю, получим
—ud == (fttLd + г) id + (1 + s) iq +
—uq = — Д/ац (1 + s) id (ptLq 4~ И iq — (1 s) iB;
Pt * 1 J&MaBdid 4” (PtLb -i~ Гв)
A4 = JQipfS 4- 1,5pn [(Ldid 4- AfaB^fB) iq Lqiqid].
Введем в эту систему индуктивные сопротивления Ld(d1 =
= xd; Lq®! = xq\ Mabd^1 = xa3d\ = xB; коэффициенты,
характеризующие рассеяние энергии в контурах, pj = rlxd\
3 %? d
Pq =rlxq\ pB = rjx* и некоторый коэффициент р = — ,
смысл которого будет пояснен ниже. Тогда приведенные уравне-
ния принимают вид
~~ud = + Pd) Xdh + (1 + s) xqiq + “ (2-54)
‘~—Uq = ( 1 4- S) Xdid = I- Pq^ Xqiq (1 4~ *$) ^ub^'b’ (2-55)
«в = P ~r*did + + Рв ) WB; (2-56)
ЛВ IL) 1 \ LL)£ /
MЙ1 = Js + 1,5 [(xdid 4- xaadiv) iq — xqiqid}. (2-57)
Переведем все величины в этих уравнениях в относительные
единицы. Напомним, что для обмотки возбуждения за базисный
ток /вб принимается такой ток, который создает на холостом ходу
поток, индуктирующий при номинальной частоте вращения ро-
тора номинальное (базисное) напряжение в статоре, а базисное
напряжение /7вб — это напряжение, создающее в обмотке возбу-
ждения ток /вб. На основе этих определений получаем
= XhbJ вб* ^вб = ^вбГв, (2-58)
и, следовательно, базисные напряжения находятся в соотношении
U ^d=u = (2-59)
'В ЛвРв
Базисное потокосцепление для обмотки возбуждения Твб со-
здается в режиме холостого хода базисным током ротора; следо-
вательно,
Чв6 = Ьв1в6. (2-60)
Отметим также, что в системе относительных единиц
Р6 = 1,5(7б/б = M6oVpn = МД. (2-61)
В уравнениях (2-54)—(2-57) ptl^i = did (ZcoJ = dldx обозна-
чает дифференцирование по синхронному (относительному) вре-
мени т. Будем обозначать символ дифференцирования по т бук-
вой р%.
Разделив (2-54) и (2-55) на U6 согласно (2-58) или равную ему
величину ?б/б, уравнение (2-56) — на соотношение (2-59) и урав-
нение (2-57) — на соотношение (2-61), а также введя обозначения:
р _ г . р _ у _ _£о_ _ Wb _ ; . и _ ^1^1
получим для синхронной машины без демпферной обмотки систему
уравнений в относительных единицах:
ud — (р? + р4 e_d 4~ (1 4" 5) £<? “Ь P*fo’, (2-62)
uq — (1 + S) £d 4“ (Рт + Р?) £<7 “ (1 4“ s) £ol (2-63)
Рв^в = №?d + (рГ 4- Рв) £oi (2-64)
M HfpTS + ~ " 4- ( ) £deq • 4 z<7 -d 7 “ “ _ (2-65)
Потокосцепления в относительных единицах равны:
^=^+^0=^+5; % = (2-66; 2-67)
Фв = № + е0 — + £в. (2-68)'
Постоянная называется инерционной постоянной и имеет
простой физический смысл. Пусть ротор отсоединенной от сети
машины разгоняется из неподвижного состояния (Q = 0; s = —1)
моментом, равным базисному. Тогда время в электрических радиа-
На* т, необходимое для достижения ротором синхронной частоты
вращения (s = 0), и будет равно инерционной постоянной. В са-
мом деле, для рассматриваемых условий уравнение (2-65) прини-
мает вид 1 = HjPxS. Интегрируя его, получим Нj = т. Если инер-
ционная постоянная Hj измеряется в секундах, то
Hj = JQ1/P6 = 2,74GD2n2. 1(Г6 /Рб,
где GD2 — маховой момент вращающихся частей, кг-м2; Рб —
в киловольт-амперах; п± — синхронная частота вращения, об/мин.
Отметим еще раз, что в принятой системе базисных величин
для ротора относительное значение э. д. с., индуктируемой в ста-
торе полем обмотки возбуждения е0, численно равно относитель-
ному значению тока возбуждения /в. Можно в качестве пере-
менных рассматривать не напряжения ed, eqj е0 (токи id, iq, fB),
а потокосцепления i|^, %, фв. Определим напряжения из (2-66)—
(2-68) через потокосцепления машины:
£</ = — (Ф в — Ф<Ж eq = %; е0 = (фв — [Xih)/a, (2-69)
где 0—1 — pi.
Подставив напряжения (2-69) в систему (2-62)—(2-65), будем
иметь
—Ud = (рт + р^)ф</ + (1 4- s) ф? — р^фв; (2-70)
—= — (1 "T s) Фа + (pt + Р?) %’ (2-71)
('в «в = (рт + Рв) фв — РРвфгЬ (2-72)
М = HjPxs + Г -^2- — ( -----------ф^
— 1 oxd \ oxd xq /
(2-73)
ГДе pd — Pd/@i Рв — рв/o'-
Выражение в квадратных скобках в (2-73) представляет собой
электромагнитный момент.
Формально введенные в уравнения коэффициенты it и о имеют простой физи-
ческий смысл.
Нетрудно убедиться, что коэффициент р, представляет собой коэффициент
магнитной связи продольного контура статора и обмотки возбуждения.
Если имеются два трансформаторно-связанных контура с индуктивностями
Lx и L2 и взаимной индуктивностью М12, то для оценки степени электромагнитной
связи контуров обычно используются коэффициент магнитной связи k ==
= и полный коэффициент рассеяния двух контуров а = 1 — k. При
полной связи, когда не имеется полей рассеяния, = Л2 = ^12 и k = 1, а о = 0.
Для синхронной машины с одним контуром на роторе можно рассматривать
в трансформаторной связи два контура по продольной оси — реальный контур
обмотки возбуждения и некоторый эквивалентный контур статора по продольной
оси. Потокосцепления этих контуров в физических величинах равны:
фв — Lftift
Ф</=- Ldtd+MaBdiB-
Таким образом, в рассматриваемом случае индуктивности контуров равны Ld
й Lq, sl взаимные индуктивности, как уже отмечалось, оказываются неодинако-
выми и равны 1 ,ЬМава и Л4ав^. Следовательно, по общему определению, коэф-
фициент магнитной связи контуров в синхронной машине равен
3 ^azd _____ 3 xand
2 LftLd x-B^d
т. e. представляет собой величину, ранее обозначенную р; коэффициент рассея-
ния рассматриваемых контуров о = 1 — ц.
Выражения коэффициентов р и о через эквивалентные пара-
метры обмотки статора машины приводятся в § 3-2.
Машина с трехфазной обмоткой на симметричном роторе.
Введем в систему (2-27)—(2-29) индуктивные сопротивления
L дсц = xd\ Lrrm1 = xr\ Мпг^1 = ха\ коэффициенты, характери-
зующие рассеяние энергии в обмотках, ps = rjxd, рЛ = rr/xr и
коэффициент магнитной связи рс = Ха/(л^хг). Тогда исходная си-
стема уравнений принимает вид
— Us = (рх 4" /) (Xd'ls + XPr) 4 ’ PsXdh J
ХаЦг1хт (рт /s) (PcXdls 4“ Р/Лс/г»
MQi = 1,5.^ Im (tsir) 4- «/QicoiPtS.
Примем ту же систему базисных величин Парка, которая была
выбрана для синхронной машины. Обозначим базисные величины
напряжения, тока, потокосцепления ротора соответственно через
Ur6, 1гб, ¥гб. Для них можно повторить соотношения (2-58)—
(2-61) в обозначениях, принятых для рассматриваемого типа ма-
шин:
= = (2-74)
= 4Лб. (2-75; 2-76)
Лгрг
Разделив уравнение напряжений обмотки статора на U6 со-
гласно (2-74) или равную ему величину зб/б, уравнение напря-
жений обмотки ротора — на соотношение (2-75) и уравнение мо-
ментов — на соотношение (2-61), а также введя обозначения:
Xdls., хai r!!Uб I
получим систему уравнений в относительных единицах, содержа-
щую переменные в синхронно вращающихся осях:
—js = (Р* 4- /) (fs + jo) 4- Р js; (2-77)
рЛ (Pt — /s) (Pcjs 4- jo) 4- P jo! (2-78)
M = H pxs = -X- Im (ese0). (2-79) .
-- ----------------------
Потокосцепления в относительных единицах:
i = + % = + (2-80; 2-81)
Систему (2-77)—(2-79) можно переписать относительно пере-
менных ф5, фг. Выполнив операции, аналогичные тем, которые
совершались при подобном видоизменении уравнений синхронной
машины, получим
, Щ — (Рг + Ps + /Уфх ps^r > (2-82)
prUr = (рт -и рг “ Mjv — р;рЛ; (2-83)
М = Н jPxS + -2— Im (4>s4>r), (2-84)
-- ОгЛ/7 --------
Рис. 2-7. К определению изо-
бражающего вектора в раз-
личных осях координат
где ps = ps/crc; Рг = Pr^ci полный коэффициент рассеяния ос =
= 1 — р,. Последнее слагаемое в (2-84) представляет собой элек-
тромагнитный момент машины.
Уравнения машины в системе координат ак, (Зк, вращающихся с произволь-
ной частотой сок, можно получить из уравнений в синхронно вращающихся осях
(2-77), (2-78) или (2-82), (2-83). Переход от од-
них осей к другим в отношении комплексных
переменных рассматривался в § 1-7. На рис. 2-7
показан в качестве примера изображающий
вектор (комплексная переменная) потокосце-
плений обмотки статора. Аргумент ’ комплекс-
ного потокосцепления определяется углом,
на который он 'сдвинут относительно вещест-
венной оси а. На рисунке также показаны
оси as, ps, неподвижные в пространстве; оси
ак, (Зк, вращающиеся с произвольной часто-
той сок, наконец, оси otK1, pKi, вращающиеся
с синхронной частотой (0Р Изображающий век-
тор потокосцеплений статора i|)s в осях аК!, (Зк1
может быть представлен согласно рис. 2-7 в виде
Этот же вектор ipSK в осях ак, Рк
•ф4к = J I ='W/Vk1>
где ук1 = gK — £ = (Oj/ + 60 — бк.
Итак, комплексные переменные в осях ак, рк
получаются умножением комплексных перемен-
ных в синхронно вращающихся осях на координатный множитель е/?к1.
Обозначим переменные в осях ак, рк в подстрочном индексе буквой «к».
Они равны:
u_SK ; йгк = ^SK = 'Ьк = W?K1.
Для перехода в уравнениях к переменным в осях ак, [Зк умножим (2-82)
и (2-83) на е^к1. Учитывая, что
Pt (WVk1) = е/?к1рД + / (рт?к1Же/?к1;
Рт$к = 0)к/(0г; = 1 — ®к/®1 =1 — (Ок
И, следовательно,
e'?K1 (рЛ) = [Рт — / (1 — «кН iSK’
а также аналогичные соотношения для потокосцеплений и фгк, вместо (2-82)
и (2-83) получим
2fSK ~ (Рх Ps ^к) Ф$К Р$Фгк>
PrJ^rK ~ [Рт “Ь Рг I'О —К + S)1 ФгК PrPc^SK’
Произведение комплексных потокосцеплений, определяющее электрома-
гнитный момент, остается неизменным при переходе от одних осей к другим:
* • * /V • — fv * •
ФвФг ~ к1Фгке К —~Ф$кФгк-
2-7. УРАВНЕНИЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ ДЛЯ
СИНХРОННОЙ МАШИНЫ С ДЕМПФЕРНОЙ ОБМОТКОЙ.
В общем случае на роторе синхронной машины, кроме обмотки
возбуждения, располагается еще демпферная обмотка. Наличие
этой обмотки усложняет анализ процессов в синхронной машине:
в системе дифференциальных уравнений машины дополнительно
появляются уравнения напряжений демпферных контуров по
продольной и поперечной осям. Уравнения с переменными, име-
ющими физическую размерность, составляют систему (2-21)—
(2-26), (1-33)—(1-37). Следуя ранее избранному пути, используем
систему относительных единиц и приведем уравнения к виду,
при котором о/.и будут содержать безразмерные величины. В от-
личие от рассмотренного случая для машины с одним контуром
на роторе, когда была использована система относительных еди-
ниц, предложенная Парком, применим теперь другую, достаточ-
но распространенную систему — «систему xad» (см. § 2-5), как
более ясную и удобную для машины с демпферными обмотками.
Напомним, что в этой системе базисные величины, относящиеся
к статору, остаются такими же, как и в системе Парка; роторные
базисные величины связаны со статорными величинами соотно-
шениями вида (2-52). Разделим уравнения напряжений статорных
цепей (2-21) и (2-22) на базисное напряжение статора U6 = =
= уравнение обмотки возбуждения (2-23) — на базисное
напряжение этой цепи (7вб = = zb6Iвб, уравнения экви-
валентных демпферных контуров (2-24) и (2-25) — на иэб =
= ^эб09! = 2эб/Эб и» наконец, уравнение моментов (2-26) — на
базисный момент Мб = Рб/Йг = 1,5 = 1,54^7^.
В результате получим систему уравнений синхронной машины
в относительных единицах:
—^d = P^d + (1 + 5)Ф</ (2-85)
= (1 4“ S) + pT^q 4~ r[q\ (2-86)
= Ртфв 4~£b£bJ (2-87)
Pi$3d [sdhd = 0; /М’э? + r_sq4q = (2-88; 2-89)
м = Hfp?s + ($dig — ф^); (2-90)
~dh ~4~~ M-a3di3d % did + ^авб/^в + Xcndhdi (2-91)
Ф<7 = Lqiq -p Маэд13 g = Xqiq -J" ^аздЬд’» (2-92)
Фв ^-aBd^d ~h ^B_LB MB3di3d z==' ^jiBdid Ч- ^в^'в 4“ ^вэ^эйЬ (2-93)
Фэл? ^-a3d^d ~i~~ ^вэ^'в ~>C^3d^3d ^_a3dh ~Ь ^вэгЛв ~\~^3d^3di (2-94)
Фэ<7 ~ ^-азд^д ~Ь ^эд[зд ~ ^азд\д Ч~ ^зд^зд* (2-95)
Относительные значения потокосцеплений и индуктивностей
определены выражениями (2-50) и (2-51). Соотношения (2-91)—
(2-95) представлены двумя равноценными формами записи, так
как относительные значения индуктивностей и соответствующих
индуктивных сопротивлений равны друг другу.
Следует подчеркнуть, что полученные уравнения в относитель-
ных единицах справедливы не только для базисных величин
«системы xad», но и для любой другой системы, если только ро-
торные базисные величины связаны со статорными соотношениями
(2-52). Ведь в последних отношения базисных токов статора и
роторных цепей могут быть заданы не единственным способом.
Рассмотрим один частный, но чрезвычайно важный случай, ,
ггппттрео£_плтпп впяш^етгя с. постоянной па« ।
стотой. Строго говоря, это нереальный случай, однако для ряда
задач допустима подобная идеализация в отношении частоты вра-
щения машины. При этом s = const, вследствие чего дифференци-
альные уравнения напряжений (2-85) и (2-86) становятся линей-
ными.
Любую переменную, входящую в уравнения, можно предста-
вить в общем виде суммой двух членов — значения этой перемен-
ной в исходном установившемся режиме и отклонения переменной
от этого начального значения, возникающего в переходном npov
цессе. Например,
U_d ~ Udo 4~ Дад Ф</0 ~Ь А Ф<4 [d — ho + kid И Т. Д.,
где ад, ад, ido — значения переменных ад ад h в исходном
установившемся режиме или начальные значения переменных при
т = 0; Дад Дад Д^ — отклонения переменных от исходных
значений. Последние являются функциями времени, но при т = 0
все искомые величины (изменения потокосцеплений, токов) равны
нулю. Лишь изменения «внешних сил» — напряжений на зажимах
обмоток (по крайней мере, некоторых из них) — при т = 0 от-
личны от нуля, так как они являются причиной возникновения
переходного процесса.
Подставив в (2-85)—(2-89) все переменные в указанной форме
и исключив величины установившегося режима, тождественно
удовлетворяющие уравнениям, получим уравнения для прира-
щений переменных в виде
—AMd = ptA^d4-(l +s)A%4-M{rf; (2-96)
—buq — —(1 + s) Ai)\, + Рхa4, + r biq, (2-97)
Дмв = px Агрв + _гв А_£в; (2-98)
PrAq^ + oA^ = 0; РтД^э94-{эЛ[э<7= °- (2-99; 2-100)
Приращения потокосцеплений и токов связаны соотношениями
вида (2-91)—(2-95).
2-8. ОПЕРАТОРНЫЕ УРАВНЕНИЯ СИНХРОННОЙ МА-
ШИНЫ. В современной практике широко' используются опера-
торные уравнения машин переменного тока. Такие уравнения
представляют интерес не только в отношении экономичной за-
писи и быстроты решения конкретных задач, но и оказываются
весьма удобными при исследованиях параметров машины, по-
строении схем замещения, а также для применения частотных ме-
тодов анализа переходных процессов.
Ниже на примере синхронной машины кратко излагается опе-
раторный метод решения дифференциальных уравнений.
Следует заметить, что при переходе от исходной функции —
оригинала ср (т) к его изображению ф (р) используется преобра-
зование Карсона—Хевисайда:
со
ф(р) = Р | е~ргф(т)с!т.
о
Будем ориентироваться на такие задачи, в которых скольжение
постоянно. При этом решению подлежат только уравнения на-
пряжений — либо (2-85)—(2-89), либо (2-96)—(2-100). Предпочти-
тельнее последние, так как искомые переменные в них при т = 0
обращаются в нуль и поэтому операторные уравнения получа-
ются наиболее простыми: они должны иметь вид исходных диф-
ференциальных уравнений (2-96)—(2-100) с той лишь разницей,
что вместо переменных (оригиналов), являвшихся функцией вре-
мени т, будут их изображения, являющиеся функцией р, а знак
Дифференцирования рх должен быть заменен на символ р, который
становится обыкновенным множителем. В дальнейшем изображе-
ния переменных обозначаются так же, как и оригиналы, но с до-
бавлением знака (р), показывающего функциональную зависи-
мость от р. Например, Ai(/ (р) есть изображение тока \id.
Начиная с этого параграфа будем для простоты опускать черту
6 обозначениях относительных величин, поскольку в дальнейшем
преимущественно используются безразмерные величины. Приме-
нение величин с физической размерностью будем специально ого-
варивать.
С учетом сделанных замечаний запишем операторные уравне-
ния синхронной машины в виде
—А«Др) = рА1МР)4-(1 4-s) Агр, (р) 4-гMd(p)\ (2-101)
—Ам, (р) = — (1 + s) Aif>rf (р) 4- р Ai|>, (р) 4- г Мч (р); (2-102)
А«в (р) = Р Ахрв (р) + г0 AiB (р); (2-103)
pAif3d(p)4-r9dAi9(/(p) = 0; (2-104)
рА1|?э,(р)4-гэ,А»э,(р) = 0, (2-105)
где
A^d (p) = xd Md (p) + xaad AiB (p) + xa3d M3d (p); (2-106)
АЧ4 (P) = Xq Alg (p) -|- Xa3q &i3q (p)j (2-107)
Афв (p) = xaBd Aid (p) 4- xB MB (p) 4- M3d (p); (2-108)
A'l’gd (p) = Xa3d Md (p) 4- Агв (p) 4- x3d M3d (p); (2-109)
А^эд (P) = Xa3q klq (jj) 4~ X3q ki3q (p). (2-110)
Во многих случаях исследование переходного процесса требует
лишь определения токов в обмотках статора машины, непосред-
ственно включенных в энергосистему. Поэтому, рассматривая
синхронную машину как элемент энергосистемы, удобно опери-
ровать только с уравнениями напряжений статорных обмоток.
При этом, конечно, токи роторных контуров, содержащиеся в вы-
ражениях для потокосцеплений якоря, должны быть исключены
с помощью уравнений роторных цепей (2-103)—(2-105).
Исключим сначала роторные токи продольных контуров в вы-
ражении потокосцепления статора по продольной оси (2-106).
Зависимость A'ipj(p) только от тока Л^(р) может быть получена
из уравнений (2-106) и операторных уравнений напряжений ро-
торных контуров по продольной оси (2-103), (2-104), которые после
подстановки в них изображений потокосцеплений (2-108), (2-109)
принимают вид
Амв (р) = pxa&d Md (р) + (рхв + rB) AiB (р) + pxB3d M3d (р); |
pxa3d Aid (р) + рх-.эа AiB (р) + (px3d + гэй) Ai3d (р) = 0. /
(2-111)
Из указанной системы трех алгебраических уравнений нахо-
дим изображение тока
Md (р) = > (2112)
где D (р) — определитель системы:
О(р) =
рхавл
P^asd
%аъ(1
pxBdd
P%v3d (P^sd Гsd)
a Afx (p) и Af2 (p) — миноры системы, равные:
Afi (p) = (pxB + rB) (P^d + r3d) — р24эа;
(p) = % and kP%3d ”4~ P^aad %Bad*
Из уравнения (2-112) определяется изображение потокосцеп-
ления:
(р) = xd (р) Md (р) 4- G (р) Д«в (р), (2-113)
где
/ s __ О (р) __ Р [xadxaBd ^XB3dxasd xa$d 4” ХъХаэ^} .
Xi Р- Mt (р) d pl (x3dxB - x2^) + p (x3drB + xBT3d} + rBr3d
_______________р(4в/э^ + 4э/в)________________
P2 (хэА - 4>d) + P \.X3drB + V3tf) + rBr3d
Q (rj\__ ___ _______P (xsdxaBd — xaadx&ad) 4~~ xaBdr3d_
M1 (p) P2 (x3dxB - xLd) + P ( Wb + V3d) 4- rBr3d ’
Аналогично из уравнений (2-107) и операторного уравнения
напряжений поперечного демпферного контура (2-105) после
подстановки в него (2-110) найдем
где
(р) = xq (р) Mq (р),
(2-114)
хч (Р) = XQ
О
Рхазя
px3q + r3q '
Функции оператора р: xd (р), xq (р) и G (р) в (2-113) и (2-114) —
называются соответственно операторными сопро-
тивлениями по продольной и поперечной
осям и операторной проводимостью. Вводя
(р), (р), представленные уравнениями (2-113), (2-114),
в (2-101), (2-102), получим операторные уравнения синхронной
машины:
— \ud (р) = [pxd (р) + г] Md (р) 4- pG (р) Див (р) 4-
+ (1 +s)xq(p-)Mq(p)-,
-Auq (р) = — (1 4- S) xd (р) Md (р) — (1 Н- s) G (р) Диь (р) 4-
+ [РХЧ (Р) + Г] Mq (/>)•
Из этих уравнений нетрудно найти изображения Токоё:
л ; _ — “rf (Р) \РХЧ (р) + d + Д«<? (р) ( 1 + S) Хд (р)
dW К(Р)
(р) G (Р) f [р2 + ( 1 + s)2] Xq {р) + рг} '
А'(р) ’ (
Л-/Ч A«1?(P)[P^(P)+'-]+Aw1i(p)(l 4-s)xd(p)
4,«W“--------------------Ш---------------------
Лцв (p)G(p)r(l -f-s) ,9 .
К(Р) ’ (
где К (р) = [pxd (р) + г] [рХд (р) + г] + xd (р)хч (р) (1 + s)2.
При отсутствии регулирования возбуждения синхронной ма-
шины — ив = const; Аив = 0 и, следовательно, Амв (р) = 0 —
уравнения (2-115), (2-116) упрощаются:
.. , . —A«d(p)[P^(P) + d + Au9(p)(l-}-s)x9(p)
Л hi (р) =-----------------; (2-117)
Дi (р) = — &Uq {pXd + Г1 + ^ud (р) 0 + $) Xd (р) (2-118)
При необходимости вычисления роторных токов последние
могут быть найдены по изображениям, определяемым из оператор-
ных уравнений. Так, для изображений токов продольных конту-
ров ротора из уравнений (2-111) при известном изображении
(р) получим
К; (гЛ _ Р2 (x3dxaBd xasdxB3d) Рхавйг 3d д : / i
---------------м^р)-----------w +
+ ^i^AuB(p); (2-119)
д(р) = P2(XBXa3rf-^^+PXaXrg д id (р) _ дИв (р)'
(2-120)
Аналогично найдем изображение тока поперечного демпфер-
ного контура:
A i3g (Р) =---Мд (Р) . (2-121)
Если в переходном процессе возбуждение машины не регули-
руется, в уравнениях (2-119) и (2-120) следует положить Дць (р) =
= 0. Очевидно, общий вид операторных уравнений потокосцеп-
лений (2-113), (2-114), а следовательно, и операторных уравнений
напряжений обмотки статора сохранится при любом числе демп-
ферных контуров на роторе машины, однако значения оператор-
ных сопротивлений xd (р), xq (р) и операторной проводимости
G (р) будут изменяться в зависимости от числа этих контуров.
Так, для машины с одним контуром на роторе — обмоткой воз-
буждения — операторные функции xd (р), xq (р), G (р) могут
быть получены, если в выражениях (2-113) и (2-114) положить
r3d == r3q = оо, что будет соответствовать размыканию демпфер-
ных контуров. В зтом случае они оказываются равными:
Xd (р) =xd-
Р^авЛ
р*в + г в
С (гЛ = Xa®d • (2-122)
° {Р) рхв + Гв ’
Xq (Р) = Xq.
Итак, для изображений приращений токов получены готовые
выражения (2-117)—(2-121). С их помощью определяем токи
обмоток статора и ротора в любом переходном процессе, который
может рассматриваться при постоянной частоте врашения машины.
Конкретный переходный процесс описывается прежде всего на-
чальными условиями, из которых устанавливаются изменения
напряжений (или какого-нибудь из них) на зажимах обмоток
машины, являющиеся причиной возникновения переходного про-
цесса. По этим значениям приращений напряжений — ориги-
налам — находим соответствующие изображения. Таким образом,
после задания изображений Ktid (р), \uq (р), Див (р) изображения
токов (2-117)—(2-121) становятся определенными функциями р.
Затем по известному изображению находим оригиналы — токи
Д^, &iq, \ir>, \i3d, &i3q — как функции времени. Перейти от
изображений к оригиналам можно либо с помощью табличных
данных (при простом виде изображений), либо применяя те-
оремы операторного исчисления. Практически для определения
токов достаточно применения хорошо известной теоремы раз-
ложения, поскольку (2-117)—(2-121) имеют общий вид
ф(р) = Я(рЖ(р),
где Н (р), 1F (р) — полиномы от р.
Согласно теореме разложения, оригинал <р (т), изображение
которого ср (р) представляет собой отношение полиномов, имеет
вид
ф Г (0) 1 Zj PiW' (Pi)
(2-123)
Здесь р,- — корень уравнения W (р) = 0; W (pz) — производная
°т W (р) по р, вычисленная при р = pz.
Добавив к найденным изменениям токов Aid, Aifl, AiB, Ai3d,
начальные значения токов idQ, iqq, iB>> (i3do = hqo — 0 ПРИ
синхронной скорости), получим токи id, ig, iB, i3d, i3q- Наконец,
с помощью формул линейного преобразования (см. § 1-5) по из-
вестным токам id, iq определим фазные токи машины ia, it,, ic,
и задача оказывается полностью решенной.
2-9. ДИНАМИЧЕСКИЕ ПАРАМЕТРЫ ОБМОТОК МАШИН.
В § 1-6 было дано определение синхронных индуктивных сопро-
тивлений (xd, xq) и соответствующих им индуктивностей (Ldl
Lq). Там было показано, что эти параметры являются эквивалент-
ными параметрами фазной обмотки якоря в том смысле, что они
определяются потокосцеплением не только от тока данной фазы,
но и от токов других фазных обмоток. Для принимаемых обычно
базисных величин индуктивностей (Лб) и сопротивлений (гб),
связанных соотношением z6 = Абсо1, относительные значения ин-
дуктивностей обмоток якоря и соответствующих им индуктивных
сопротивлений равны друг другу.
Рассмотрим электромагнитные связи по продольной оси в синх-
ронной машине без демпферной обмотки. Потокосцепление якоря
по этой оси ф^ при отсутствии тока в обмотке возбуждения опре-
деляется только продольным током якоря id и равно
tyd ’ Ldid % did’
Таким образом, сопротивление xd может рассматриваться как
собственное индуктивное сопротивление якоря, соответствующее
потокосцеплению от продольного магнитного поля.
При наличии тока в обмотке возбуждения потокосцепление
ф^ определяется уже в виде
'I’d = xdid + «о,
т. е. является функцией токов id и tB.
Если бы обмотка возбуждения синхронной машины имела
гь = 0 и напряжение на ее зажимах не регулировалось, то потоко-
сцепление с этой обмоткой фв в переходном процессе оставалось
бы неизменным и равным его начальному значению фв0. Это свой-
ство потокосцепления фв можно установить формальным путем
по уравнению напряжений цепи возбуждения (2-64). Поэтому
для указанных условий
№did + = фво — const,
и токи idy (е0) оказываются однозначно связанными. Подставив
последнее соотношение в выражение для ф^, получим
Фг/ = GXdid 4- фв0,
так как о + Ц = 1,0.
Таким образом, потокосцепление ф^ становится функцией
только тока id, хотя и зависит от постоянной величины фв0. Из-'
менение потокосцепления ф^ от своего начального значения ф^0
(обозначим его Дф^) будет равно
Дф^ := QXd
где Aid — изменение тока id от своего начального значения id0.
Изменение потокосцепления якоря Дф^ определяется только из-
менением тока якоря Aid. Очевидно, что отношение Дф^ и &id
определяет эквивалентную собственную индуктивность или ин-
дуктивное сопротивление в относительных единицах якоря в рас-
сматриваемых условиях, учитывающие потокосцепление взаим-
ной индукции со стороны обмотки возбуждения. Обозначим это
сопротивление x'd и назовем его переходным индук-
тивным сопротивлением якоря по продоль-
ной оси. По определению и полученному выше соотношению
будем иметь
Дф^/А/^ = x'd = axd.
Поскольку собственное сопротивление якоря xd связывает
приращения продольных потокосцеплений и тока якоря, его
можно считать динамическим сопротивлением
обмотки якоря.
Итак, при гв = 0 изменение продольного потокосцепления
обмотки якоря может быть найдено только по приращению про-
дольного тока якоря, если принять в качестве собственного ди-
намического сопротивления обмотки якоря переходное сопротив-
ление по продольной оси xd- При этом автоматически учитывается
реальное воздействие на Аф^ изменяющегося тока в обмотке воз-
буждения. Подчеркнем еще раз, что обмотка статора по продоль-
ной оси при переходном процессе обладает динамическим сопро-
тивлением x'd только в случае, если гв = 0 или если гв 0, но
на таком отрезке времени, на котором значение этого сопротив-
ления еще не сказывается на токах в переходном процессе. По-
скольку — р, < 1, то x'd Qxd <Xd- Это соотношение
параметров соответствует физической картине явлений.
Продольный поток в машине создается совместным намагничи-
вающим действием продольного тока якоря id и тока возбуждения
iB. Система эквивалентного контура якоря ad с током id и обмотки
возбуждения с током iB (см. рис. 1-17) может рассматриваться
как двухобмоточный трансформатор. Параметры x'd и xd — это
параметры «первичной» обмотки трансформатора, определяемые
соответственно при короткозамкнутой и разомкнутой «вторичной»
обмотке — обмотке возбуждения машины, так как по определению
x'd = Дф^/Д^ при iB 0;
xd = Дф^/Д^ = при iB = 0.
На рис. 2-8 показаны состояние обмоток машины (а) и услов-
ная картина магнитного поля (б) при фг0 = 0 и гв = 0 после
установления в статоре тока Д^, соответствующие собственному
сопротивлению обмотки якоря, равному x'd. На рис. 2-9 представ-
лены аналогичные схемы для случая, когда собственное сопротив-
ление обмотки якоря равно xd. Таким образом, сопротивления
xd и х^ аналогичны индуктивным сопротивлениям трансформатора
при холостом ходе и коротком замыкании.
Нетрудно выразить через широко употребляемые параметры xd
и x'd коэффициенты р, и о. Из полученных выше соотношений най-
дем
О — Xd/Xd] }i — 1 — о = (xd — xd)/xd.
В нормальной синхронной машине обмотка возбуждения соз-
дает поток только вдоль продольной оси. Поэтому аналога сопро-
тивлению xd по поперечной
оси машины нет.
В машине с трехфазными
обмотками на симметричном
роторе понятие переходного
сопротивления при гг = О
Рис. 2-8. Магнитное состояние машины, когда обмотка якоря
обладает динамическим сопротивлением x'd
сохраняется. Однако это сопротивление якоря является ди-
намическим при любом положении магнитного потока относи-
тельно ротора. Сохраняя его обозначение xd, получим те же
выражения коэффициентов ос, р(
сопротивления, что и для
синхронной машины.
В синхронной машине
с демпферной обмоткой ди-
намические индуктивные со-
противления обмотки якоря,
о) 0—П I---0
о - ' '---о
через синхронное и переходное
Рис. 2-9. Магнитное состояние машины, когда обмотка якоря
обладает собственным сопротивлением Xd
определяемые при условии равенства нулю активных сопротивле-
ний обмоток ротора, естественно, отличаются от сопротивлениях^.
Это объясняется тем, что индуктируемые в демпферной обмотке
токи оказывают влияние на магнитные потоки по продольной и
поперечной осям машины. В случае изменения продольного тока
якоря \id при определении Афб/ синхронную машину по продоль-
ной оси можно рассматривать как трехобмоточный трансформатор
(см. рис. 1-17) с «первичной» обмоткой в виде эквивалентной обмотки
якоря (ad) и двумя короткозамкнутыми «вторичными» обмотками,
представляющими собой продольный демпферный контур машины
(эй) и обмотку возбуждения (в). Последняя принимается коротко-
замкнутой ввиду того, что при гв = 0 и отсутствии регулирования
возбуждения (Ацв = 0) изменение потокосцепления с этой об-
моткой Афв = 0.
Назовем динамическое индуктивное сопротивление якоря по
продольной оси сверхпереходным сопротивле-
нием по продольной оси и обозначим его xd, По
определению
Xrf = Aipj/A^ при rB = r3d = 0.
Рис. 2-10. Схема замещения сопротивления х'^: а — точная; б — приближенная
Значение этого сопротивления может быть определено через
параметры обмоток машины из уравнений для Аф^, Афв и Афэ^.
Напомним, что уравнения синхронной машины с демпферной
обмоткой записаны в системе относительных единиц, отличной
от той, которая была принята для машин без демпферной обмотки.
Поэтому теперь на основании уравнений (2-91), (2-93), (2-94)
с учетом того, что при rB = r3d = 0 будет Афв = Афэ^ = 0, по-
лучим
Afe xd Xavd ^в Xa,3d ^sd*
0 ' Xa,Bd '^в ^в “И '^"вэй? ^dd)
0 ’ Xci3d ^d XBsd А^'в ~Ь Xsd ^sd’
(2-124)
Из этой системы уравнений можно определить \id через Аф{/
и параметры обмоток, а затем и xd = Аф^/Aij.
Обычно для сопротивления x"d строят схему замещения, отве-
чающую уравнениям (2-124). Вид ее и значения сопротивлений
схемы зависят от принимаемой системы относительных единиц..
Например, для «системы xad» (см. § 2-5), когда xad = xaBd
xa3d^ схема имеет вид, представленный на рис. 2-10, а. Сопро-
тивления хв — хвэг/; x3d — хв3d являются сопротивлениями рас-
сеяния обмоток по продольной оси ротора. Часто на схеме прене-
брегают сопротивлением x33d — xad ввиду его малости, и она
становится такой, как показано на рис. 2-10, б, где сопро-
тивления рассеяния обмоток ротора xSB хв — xad;
xS3d x3d — *ad и статора xs = xd — xud. Заметим, что
для указанной системы относительных единиц схема замещения,
определяющая переходное сопротивление xd, может быть полу-
чена размыканием на схеме рис. 2-10 демпферного контура.
Получающаяся схема приведена на рис. 2-11.
В случае изменения поперечного тока якоря &iq при опреде-
лении Дф7 синхронную машину по поперечной оси можно рассма-
тривать как двухобмоточный трансформатор (см. рис. 1-17)
с «первичной» обмоткой в виде эквивалентной обмотки якоря aq
и короткозамкнутой «вторичной» обмоткой, представляющей со-
бой поперечный демпферный контур машины эд.
x'd
Рис. 2-11. Схема замеще-
ния сопротивления x'd
Рис. 2-12. Схема замещения
сопротивления x"q
Назовем динамическое индуктивное сопротивление якоря по
поперечной оси сверхпереходным сопротивле-
нием по поперечной оси и обозначим его xq. По
определению
x"q=.K^qlMq при гэ<7--=0.
Значение этого сопротивления можно определить через па-
раметры обмоток машины из уравнений для Дф7 и Дфэ<7 = 0,
записываемых на основании (2-92) и (2-95). По ним строится схема
замещения, которая для xa3q = xaq приведена на рис. 2-12.
Сопротивление xS3q = x3q — xaq представляет собой сопро-
тивление рассеяния поперечного демп-
ферного контура.
Отметим полезную при решении практических задач связь
между динамическими сопротивлениями якоря машины и числен-
ными значениями операторных сопротивлений при р = оо. Об-
ратимся к параметрам по продольной оси. Операторное сопро-
тивление xd (р) при отсутствии регулирования возбуждения ма-
шины (Див = 0; Див (р) = 0) по (2-113) равно
Xd (р) = (р)М (Р)-
Оно определено при г, =/= 0; г-зЛ 7= 0. Если бы rB = r3d = 0, то
ДфР = Дфв (р) = 0; = Дфэй (р) = 0. В этом случае урав-
нения (2-106), (2-108,) (2-109), по которым находится xd (р), были
бы внешне идентичны уравнениям (2-124), по которым определялся
параметр x'd = At|W&id. Таким образом, должно быть равенство
xd = xd (р), если операторное сопротивление рассчитано при
rB = r3d = 0. Но тот же результат для операторного сопротивле-
ния получится, если в его выражении положить р = оо. Действи-
тельно, разделив уравнения (2-103) и (2-104) на р и положив затем
р = сю, получим независимо от значений сопротивлений гА и rAd
тот же результат, что и при rB = r3d = 0, а именно Афв (р) =
= Дфэ^ (р) = 0. Поэтому искомое соотношение будет иметь вид
x'd = Xd (р) — Xd (оо).
Аналогично может быть установлено соотношение для пара-
метров поперечной оси: x'q = xq (сю). В синхронной машине без
демпферной обмотки xd (оо) = x'd, xq (сю) = xq.
До сих пор определялись эквивалентные сопротивления конту-
ров статора. Но аналогично можно определить эквивалентные
индуктивные сопротивления контуров ротора, полагая остальные
магнитно-связанные контуры (ротора и статора) короткозамкну-
тыми. Так, эквивалентное сопротивление продольного демпфер-
ного контура x"3d при наличии короткозамкнутых обмоток статора
и возбуждения определяется по схеме рис. 2-10, б, если на ней
замкнуть накоротко внешние зажимы и разомкнуть контур с со-
противлением х,Э£/; сопротивление x'3d получается на зажимах
этого разомкнутого контура.
Эквивалентное сопротивление продольного демпферного кон-
тура x'3d при наличии короткозамкнутой обмотки возбуждения,
но разомкнутой обмотке статора может быть определено по схеме
рис. 2-10, б, если на ней разомкнуть контур с сопротивлением
xS3d и измерить индуктивность на его зажимах.
С помощью схем замещения легко получить и другие экви-
валентные индуктивные сопротивления контуров. Между отдель-
ными сопротивлениями существует определенная связь. Напри-
мер, можно показать, что
x"3dlx'3d — x'd!x'd, 4/хв -= x'dlxd,
где Хв — индуктивное сопротивление обмотки возбуждения при
замкнутой накоротко обмотке статора и разомкнутой демпферной
обмотке.
В заключение обзора эквивалентных 'сопротивлений обмоток
машин следует сказать о том, что относительные значения сопро-
тивлений обмотки якоря x'd, x'd, x'q не зависят от выбора базисных
величин роторных цепей, хотя они и связаны с параметрами по-
следних. Это положение можно подтвердить формальными выклад-
ками, но оно очевидно и так, поскольку речь идет о сопротивле-
ниях обмотки якоря, определяемых для тех или иных электро-
магнитных условий в машине.
Решение уравнений при синхронной
или почти синхронной частотах вращения машины
3-1. УСТАНОВИВШИЙСЯ РЕЖИМ. Синхронная машина.
По полученным дифференциальным уравнениям напряжений
в осях d, q может быть построена известная из общего курса элект-
рических машин векторная диаграмма синхронной машины для
установившегося симметричного режима работы. Для этого доста-
точно использовать уравнения (2-21) и (2-22) с физической размер-
ностью величин, так как для рассматриваемых условий нулевые
составляющие тока, потокосцепления и напряжения отсутствуют:
i0 = Фо = = О-
При наличии в статоре симметричных синусоидальных токов
продольный и поперечный токи id и iq, как было показано в § 1-6,
оказываются постоянными. В установившемся симметричном ре-
жиме токи в демпферной обмотке отсутствуют, а ток возбуждения
= const. Поэтому в уравнениях (2-21) и (2-22) pttyd ~ p$q = О,
a s = 0, так как ротор вращается с постоянной синхронной ча-
стотой, и они принимают вид
—= ф^ + rid = xqiq 4- rid\ (3-1)
—uq = —ф/сц + riq = — xdid ~ £0 + riq, (3-2)
где MaBd(o1iB = xaBdiB = £0 обозначает э. д. с., индуктируемую
в обмотках статора магнитным потоком возбуждения (большая
буква в обозначении э. д. с. применена для установившегося ре-
жима).
Нанесем на плоскость оси: фазы а. продольную d и попереч-
ную q (рис. 3-1, а). Чтобы определить положение изображающих
векторов напряжения и тока на диаграмме, рассмотрим предвари-
тельно холостой ход возбужденной синхронной машины (iB + 0;
id = iq = 0). Потокосцепление в этом режиме, например с фа-
зой а, равно
Фа - MaB(liB COS у — ф^ COS у
и вектор ф^о направлен по оси d. Э. д. с., индуктируемая полем
обмотки возбуждения в той же фазе,
еа = —Лфа = Ф^1 cos (у — л./2) = Ео cos (у — л/2),
И, следовательно, вектор £0 совпадает с положительным направ-
лением оси q. Если при холостом ходе фазное напряжение статора и
изменяется во времени одинаково с э. д. с. от поля обмотки воз-
буждения, то при нагрузке синхронной машины э. д. с. £0 и на-
пряжение и будут по фазе различаться.
В § 2-4 был введен в рассмотрение угол 6 — угол между
осью q и вектором и. Теперь можно видеть, что это угол между
векторами £0 и и. Будем обозначать его в установившемся ре-
жиме 0О и считать положительным, если Ео опережает и. Токи
Рис. 3-1. Векторная диаграмма синхронной машины для установившегося ре-
жима работы: а — положение изображающих векторов; б — диаграмма на
комплексной плоскости
idi iq легко определяются из (3-1) и (3-2). Пренебрегая активным
сопротивлением обмоток статора (г = 0), которое мало влияет
на значение тока, получим
L i ^Uq~~E° - иcos ео ~~ £0 - [ — ud и sin 0О , .
d *d Xd ’ q Xq Xq * ’
Таким образом, знак тока id зависит от соотношения величин
Ео и U cos 0О: ток id > 0 при Ео < U cos 0О (режим недовоз-
буждения) и id < 0 при £0 > U cos 0О (режим перевозбуждения).
Знак тока iq определяется знаком 0О: ток iq положителен в гене-
раторном (0О > 0) и отрицателен в двигательном (0О < 0) ре-
жимах. Изображающий вектор тока статора I определяется вы-
ражениями (3-3).
Обычно при построении диаграммы пользуются комплексной
плоскостью. Совместим оси q, d соответственно с осями +1, +/
комплексной плоскости. Обозначим Ео = Ео; iq = Iq\ jid = Id;
U = Ue~iQ°. Умножив (3-1) на —j и (3-2) на —1 и сложив полу-
чившиеся уравнения, получим известный результат:
и = Ё0~ jxdid - jxqiq ~ ri,
Рис. 3-2. Видоизмененная векторная
диаграмма синхронной машины для
установившегося режима работы
где 1 ~ Id + I q. По этому уравнению на рис. 3-1, б построена
векторная диаграмма на комплексной плоскости. Отметим, что
иногда бывает удобной модификация векторной диаграммы, пред-
ставленная на рис. 3-2. Суть ее состоит в том, что вводя в рассмо-
трение э. д. с. Eq, однозначно определяемую через параметры
машины и данные режима, синхронную машину можно уподобить
неявнополюсной с синхронным сопротивлением, равным xq,
и э. д. с. Eq (вместо Ео в реальной машине).
Уравнения (3-1), (3-2) и выражения для токов (3-3) останутся
такими же и для величин, выраженных в относительных едини-
цах. При этом лишь в (3-1) и (3-2) нужно положить
Электромагнитный момент
синхронной машины был опре-
делен в общем виде формулой
(1-65). Если (1-65) разделить на
базисный момент М6=Р6рп/ыг=
= 1,5Чгб7брп, то получим
^эм = (3”4)
где все величины выражены
в относительных единицах.
Пренебрегая сопротивлением
г, из (3-1) и (3-2) получим в от-
носительных единицах
^==и9; Ф? = —«</• (3-5)
Подставив в (3-4) потокосцепления из (3-5), где uq = U cos Оо;
tzd = —U sin 0О, а также токи, представленные выражениями
(3-3), найдем электромагнитный момент машины в установившемся
режиме:
M3M = -^Sineo + -^(4--X)sin2O, (3-6)
z \ Xq xd /
На рис. 3-3 построены зависимости M3^xd!U2 от угла 0О,
рассчитанные по (3-6). Это так называемые угловые хара-
ктеристики. Максимум электромагнитного момента неявно-
полюсного генератора (xd = xq) имеет место при 0О = 90°, явно-
полюсного (xd > xq) — при угле Оо < 90°, зависящем от соот-
ношений EqIU И xd/xq.
Как следует из (3-6), электромагнитный момент представляет
собой нечетную функцию угла 0О. Поэтому угловая характери-
стика в двигательном режиме (0О < 0) повторяет зависимость
Л4ЭМ = f ($о) Для генератора, но при этом Л1ЭМ < 0.
Машина с трехфазными обмотками на симметричном роторе.
Уравнения установившегося режима можно получить из диффе-
ренциальных уравнений машины, полагая в них все производные
по времени равными нулю. Произведя эту операцию с уравнени-
ями (2-77), (2-78) и разделив последнее на рг, получим уравнения
установившегося режима в виде
us — гфз + rs4 — (rs 4“ iXd) h 4“ firi (3-7)
Щ == — ДФг + h = + (1 — /?) (3-8)
где g = s/pr.
В обмотке статора протекает ток основной частоты (например,
50 Ги), поэтому влияние активного сопротивления этой цепи не-
Рис. 3-3. Угловые характеристики синхронной машины
xd/xq = 1 и 1,5 (2)
велико и им можно пренебречь. Подобное упрощение для цепи
ротора возможно только, когда абсолютное значение скольжения s
не менее единицы, т. е. когда и в цепи ротора ток имеет частоту,
не меньшую основной. При малых скольжениях в расчетах уста-
новившегося режима пренебрегать сопротивлением гг нельзя.
Пусть в (3-7) rs = 0. Тогда из (3-7) и (3-8) найдем комплексные токи
статора и ротора:
Xd (О^съ + /)
• _____ ; U r
<Тс§ + /
(3-9)
(3-10)
Определим комплексные напряжения обмоток статора и ротора.
Пусть Us = Us, т. е. совместим Us с положительной вещественной
осью. Положение комплексного напряжения йг в синхронно
вращающихся осях будем характеризовать относительно Us
углом 0С + 90°, причем постоянная составляющая в этом угле
(90°) введена для удобства сопоставления рассматриваемой ма-
шины в режиме при s — 0 с нормальной синхронной машиной.
Подстановка комплексных напряжений в (3-9) и (3-10) приводит
к следующему результату:
h = last 4" Ppsl» '1Г = 4“ (3-11)
причем вещественные и мнимые составляющие комплексных токов
в синхронно вращающихся осях:
__ и г ( sin 0С 4" cos 0С) 4“ U s|lcfe .
Xd [1 4-(cTcg)2]
_47r((ycgsin0c-cos0c)4-^s (14-acg2).
psl *d [1 + (Oc?)2]
lari “ "Vasl> ^|3rl “ Us
По уравнениям (3-7) и (3-8) можно построить обычную схему
замещения машины. Однако для принятой системы относительных
единиц она будет содержать относительные параметры, отлича-
ющиеся от традиционного написания. Для построения схемы обыч-
ного вида следует уравнения (3-7) и (3-8) привести к такому виду,
когда сопротивление взаимной индукции будет одинаковым в обоих
уравнениях. Один из возможных вариантов уравнений (3-7) и
(3-8) имеет вид
—У= ks + / (xd — 1)] h + 1 (h +
— -fi— = Г+ / 1=^1 lr + j (ir + is).
L 1 licxd J r 1 J v 1 s/
Этим уравнениям соответствует схема замещения, приведенная
на рис. 3-4.
Характеристика фазовых сдвигов комплексных величин на-
гляднее всего может быть дана на векторной диаграмме. На
рис. 3-5 построены диаграммы для двух режимов генератора с оди-
наковыми напряжениями (t/s = 1,0; Uг = 1,7) и током статора
(|fs| 1,0), но различными частотами вращения машины: s = 0,
I = 0 (а) и £ = 1 (б). Данные режима рассчитаны по приведенным
выше уравнениям, т. е. в предположении rs = 0. При этом неза-
висимо от значения параметра £ уравнение (3-7) однозначно оп-
ределяет потокосцепление статора ф5. На рис. 3-5, а это уравне-
нение отражено также построением, обычным для нормальных
неявнополюсных синхронных машин. Активная составляющая
тока статора (тока fasl) в генераторном режиме совпадает по фазе
С напряжением статора Us.
Электромагнитный момент может быть найден по общим выра-
жениям (2-79) и (2-84):
Мэм = -J- Im (ese0) = Im (isij = —i— Im (^f).
xd Vcxd
Если ограничиться случаями, когда можно считать rs = О,
то для определения электромагнитного момента пригодны выра-
Рис. 3-4. Схема замещения машины двойного питания
жения для токов (3-11). Но, положив rs = 0, проще применить
другую процедуру для нахождения 7ИЭМ. Действительно, относи-
тельные значения электромагнитного момента Л4ЭМ и электро-
магнитной мощности Рэм машины равны, так как базисные вели-
Рис. 3-5. Векторная диаграмма машины двойного питания для
0 (а) и Ь 1 (б)
чины момента (Л4б) и мощности (Рб) связаны тем же соотноше-
нием, что и физические величины электромагнитного момента
и мощности. С другой стороны, при rs = 0 значения электромаг-
нитной и электрической мощности на зажимах обмотки якоря
совпадают. Поэтому при Us = Us
^эм Us Re (is) =* Уs^asl*
Подставив сюда ток iasl согласно (3-11), получим
Мэм = —- Д^г. - sin (0С + а) + -^1 -_/<-,
Xd /1 4- (ас|)2 С Г ’ Г Xd 1 + (Gcg)2
(3-12)
где а = arctg (аД) и является для данной машины функцией
только ее частоты вращения (£).
Первая составляющая 7ИЭМ представляет собой синхронный мо-
мент, обусловленный возбуждением машины ((7г=г0). Приз-0 она
совпадает с электромагнитным моментом нормальной неявнополюс-
Рис. 3-6. Угловые характеристики синхрон-
ной машины двойного питания
ной синхронной |машины.
Вторая составляющая А4ЭМ
идентична' электромагнит-
ному моменту _ асинхрон-
ной у машины с -коротко-
замкнутым ротором (Ur =
- 0).
Синхронный режим ма-
шины двойного питания
может иметь место при на-
личии роторного возбу-
ждения (Ur 0), причем
различным нагрузкам ма-
шины в установившемся
режиме отвечают задан-
ная и постоянная величи-
ны параметра £ и пере-
менная величина угла 0С.
Асинхронный режим такой
машины при UQ возни-
кает при автоматическом
изменении частоты напря-
жения Ur в соответствии
с изменением частоты вра-
щения машины (%^var).
При Ur = 0 машина стано-
вится обычной асинхрон-
ной машиной с коротко-
замкнутым ротором.
На рис. 3-6 представлены угловые характеристики синхронной
машины двойного питания при UrIUs = 1,5 и сгс = 0,2 для раз-
личных значений параметров Из рисунка видно, что за счет
асинхронного момента машина может иметь генераторный режим
(7ИЭМ > 0) при 0с < 0, а двигательный (7ИЭМ < 0) — при 0с > 0
в отличие от нормальной синхронной машины, которая работает
генератором только при 0 > 0, а двигателем — при 0 <0.
Этот рисунок также показывает, что наибольшие электромагнит-
ные моменты при заданном напряжении ротора развиваются в ге-
нераторном режиме при £ > 0, а в двигательном — при £<0.
В рассматриваемой машине действует еще одна составляющая
электромагнитного момента, пропорциональная rs и поэтому не
вошедшая в выражение (3-12), полученное в предположении rs =
= 0. Она представляет собой электромагнитный момент такой
асинхронной машины, у которой статор короткозамкнут (Us =
= 0), а обмоткой якоря служит обмотка ротора с напряжением Ur.
Для определения этой составляющей электромагнитного момента
по общим формулам необходимо предварительно найти токи
машины с учетом rs. Однако с достаточной точностью она может
быть получена с помощью схемы замещения (см. рис. 3-4). Из
общей теории установившихся режимов машин переменного тока
известно, что электромагнитная мощность (а следовательно, и
электромагнитный момент в относительных единицах) машины
с короткозамкнутой обмоткой равна потерям в активном сопро-
тивлении того контура схемы замещения, который представляет
эту обмотку. Согласно этому положению, при Us = 0
Д4 —• I I р /*
причем ток is, как уже отмечалось, можно вычислять, полагая
rs = 0, т. е. по формуле (3-11), в которой следует считать Us — 0.
В результате получим третью составляющую момента машины
Мэмг в виде
иЪ-
М =________—_____
ЭМГ ^Р+(^)2]
Оценим максимальное значение этой составляющей (при s = 0;
| = 0). При Ur = 1,5; xd = 1,0; rs = 0,02 имеем Мэмг = 0,045.
Этот пример показывает, что заметного значения Л4ЭМГ достигнет
только при больших значениях сопротивления rs, т. е. в машинах
сравнительно небольшой мощности.
3-2. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ МАШИНЫ. Система уравнений машины (см. § 2-6 и 2-7) содер-
жит нелинейные дифференциальные уравнения, причем нелинейность возникает
при изменении частоты вращения машины как в уравнениях напряжений (про-
изведения искомых токов и скольжения), так и в уравнении моментов, в кртором
электромагнитный момент определяется произведением токов. Последняя нели-
нейность остается и при заданной частоте вращения, однако в этом случае урав-
нение моментов решать не нужно. Нелинейность уравнений не позволяет решить
их аналитически в общем виде. К тому же следует иметь в виду, что в общем слу-
чае исследуются переходные процессы в нескольких машинах, электрически-
связанных между собой (в электрических системах), с регулируемым возбужде-
нием, с учетом переходных процессов в регуляторах, осуществляющих необхо-
димое изменение напряжения цепи возбуждения машин. В подобных задачах не-
обходимо решать несколько систем уравнений машин, уравнений их связей и регу-
ляторов. Поэтому для самых сложных задач расчета и исследования переходных
режимов при значительном изменении частоты вращения машин, когда необ-
ходимо совместное решение всех уравнений системы, применяются аппарат
численных методов (ЦВМ), математическое (аналоговые вычислительные машины)
и физическое моделирование.
При неизвестном характере изменения частоты вращения ротора можно
получить приближенное решение нелинейных уравнений, если изменение частоты
вращения достаточно мало. Приближенность решения связана с необходимостью
некоторых упрощений, например с неучетом активного сопротивления цепи воз-
буждения машины или при его учете с ограничением изменения угла нагрузки 0
во время переходного процесса. К задачам с указанными условиями может быть
отнесено исследование динамической устойчивости машины, т. е. поведения ма-
шины, работающей параллельно с сетью, при изменении «внешних сил».
Решение системы уравнений существенно облегчается при исследовании
переходных процессов с заданным характером движения ротора машины. В этом
случае скольжение s будет заданной функцией времени и решению подлежат лишь
уравнения напряжений, которые становятся линейными. Для подобных задач
электромагнитный момент машины без особого труда определяется после решения
уравнений напряжений, т. е. после нахождения токов в обмотках машины.
В этом классе задач наиболее простыми являются те, которые могут рассматри-
ваться при постоянной частоте вращения машины (s = const), так как они опи-
сываются линейными дифференциальными уравнениями с постоянными коэффи-
циентами. К упомянутому классу задач с заданной частотой вращения ротора
машины относятся исследования асинхронных режимов с постоянным скольже-
нием, режима малых гармонических колебаний, процессов самовозбуждения,
короткого замыкания обмотки якоря и некоторые другие.
Решение линейных дифференциальных уравнений с постоянными коэффи-
циентами формально отыскивается в виде суммы общего решения однородной
системы уравнений (с внешними напряжениями, равными нулю) и частного
решения полных уравнений, т. е. уравнений с внешними напряжениями. С физи-
ческой точки зрения частное решение дает значения переменных в режиме, опре-
деляемом внешними напряжениями («вынужденный» режим). Такой режим при
постоянных или периодических напряжениях является установившимся, и им
заканчивается переходный процесс. Решение однородной системы уравнений
показывает, что токи и потокосцепления обмоток машины непрерывны во времени
и не могут изменяться скачком. Токи и потокосцепления, полученные при реше-
нии однородной системы уравнений напряжений, называются свободными
или уравнительными. Их появление есть результат скачкообразного
изменения структуры цепи какой-либо обмотки машины (изменение внешнего
напряжения, параметров цепи) или, как говорят, результат коммутации цепи.
Очевидно, что временная зависимость свободных токов и потокосцеплений никак
не связана по виду с аналогичной функциональной зависимостью внешних на-
пряжений обмоток, поскольку первые находятся при отсутствии этих напряже-
ний. Характер изменения свободных токов и потокосцеплений определяется
структурой однородных дифференциальных уравнений напряжений, а также
параметрами обмоток и частотой вращения машины, т. е. данными, которые обу-
словливают значения коэффициентов уравнений. Рассмотрим его более подробно.
3-3. СВОБОДНЫЕ ТОКИ В ПРОСТЕЙШИХ ЦЕПЯХ. Для лучшего пони-
мания физической стороны явлений, связанных с возникновением свободных
токов и потокосцеплений при коммутации цепей машины, обратимся сначала
к простейшим задачам. В уединенной цепи свободный ток может появиться лишь
при изменении ее параметров или напряжения на ее зажимах, словом — при
изменении электромагнитного состояния цепи. Рассмотрим в качестве примера
цепь, состоящую из последовательно соединенных индуктивности L и активного
сопротивления г, находящуюся под действием постоянного напряжения (70
(рис. 3-7). Определим ток в цепи i после внезапного изменения значения напря-
жения с Uq на U. Дифференциальное уравнение напряжений для нового состоя-
ния цепи
U = (r + pxL)i. (3-13)
Ток i представляет собой сумму свободного тока ic (общее решение однород-
ного уравнения) и установившегося тока iy (частное решение полного уравнения):
* =^с4*
Очевидно, что iy == U/r = const, a ic = icoe~x^T, где Т = L/r, а —1/Т =
= —r/L — корень характеристического уравнения r + pL = 0.
Начальное значение свободного тока ic0 находится из начальных условий
задачи. Пусть при т = 0 (до изменения напряжения цепи) ток в цепи равен г0.
Тогда в соответствии с найденным решением получаем уравнение для определе-
ния гсо:
io = 1со ^у»
откуда
гсо — 1о — 1у
Окончательно
i = Цо — iy) е~х/т + iy.
При переходе цепи от исходного режима к новому установившемуся со-
стоянию ток не может измениться скачком, его непрерывность во времени обес-
печивается возникающим в цепи свободным током, за-
тухающим до нуля по экспоненциальному закону с по-
стоянной времени Т, определяемой параметрами цепи.
На рис. 3-8 приведены графики i = f (т) при
U > Uq и U < Uq. Штриховкой отмечен свобод-
ный ток.
Рассмотрим теперь свободные токи в магнитно-
связанных цепях. Определим ток в цепи 1, име-
ющей магнитную связь с короткозамкнутым конту-
ром 2 (рис. 3-9), при внезапном изменении постоян-
ного внешнего напряжения с (7]0 до U±. Короткозам-
кнутый контур примем идеальным (его активное
нулю). Дифференциальные уравнения цепей 1 и
Рис. 3-7. Схема про-
стой цепи
сопротивление равно
2:
и± — (о + Р^1) Й + Mpxi2\ 0 + L2Pt12>
где собственные индуктивности контуров
Li-Lsi+Л!; L2 = LS2+M.
Рис. 3-8. Временная зависи-
мость тока после внезапного из-
менения внешнего напряжения
цепи
1 — при U > Uq", 2 — при U < Uq
Рис. 3-9. Схема двух
магнитно-связанных
цепей
Подставив pxi2 из второго уравнения в первое, получим
U± — (Гх +РтЛ1э) й»
где £1э = = 1 — МР/ЩЦ).
Это уравнение идентично (3-13) и отличается лишь тем, что вместо собствен-
ной индуктивности контура L± содержит эквивалентную Ь1Э < L±. Свободный
гок в цепи
• _ • ~х/тэ
ki — 1с 1ос >
где Тэ = L13/r = Т1(У1, а Т1 = L-J гР
Следовательно, если рассматриваемая цепь магнитно-связана с короткозам-
кнутым идеальным контуром, то при определении свободного тока в цепи можно
рассматривать ее уединенной, но обладающей эквивалентной индуктивностью,
которая отличается от действительной в о раз, где о — коэффициент рассеяния
контуров. Свободный ток в такой цепи будет затухать быстрее, чем в цепи, не
имеющей магнитной связи с короткозамкнутым контуром, так как эквивалентная
постоянная времени цепи Т13 = L13lr1 = (\Ljry меньше собственной постоянной
Т. = Ljr,.
Рассмотрим еще одну задачу: определим токи в двух магнитно-связанных
цепях при внезапном изменении внешнего постоянного напряжения на зажимах
одной из них, причем обе цепи имеют взаимную индукцию с идеальным коротко-
замкнутым контуром. Схема цепей показана на рис. 3-10. Примем взаимную
индуктивность между всеми цепями одинаковой и равной М. Пусть изменяется
Рис. 3-10. Схема трех магнитно-
связанных цепей
исходное напряжение U2q цепи 2 до зна-
чения U2. Из уравнения напряжений
короткозамкнутого контура 3
МРх (Ч. 4~ Ч) + ^з/Мз =
в котором L3 = М + Ls3, определим
Рх1з —-----т— Рх (11 4- Ч)-
ьз
(3-14)
Подстановка pxi3 в уравнения напряжений цепей 1 и 2 позволяет исключить
ток /3 и записать их для нового состояния цепей в виде
= (ri 4- РтЛхэ) *1 4“ ^эРтг2’
U2— M3pxix 4- (г2 4“ Рт^2э) ^2»
где эквивалентные индуктивности цепей 1 и 2 равны £зэ = L23 — o2L2;
собственные индуктивности цепей = М 4“ Lsl; L2 — М 4“ Ls2; коэффициенты
рассеяния цепей и короткозамкнутого контура = 1 —AP/j^Lg); о2 = 1 —
— 7U2/(L2L3); эквивалентная взаимная индуктивность Л4Э = М (1 — MlL^.
Таким образом, задача для трех магнитно-связанных цепей, из которых одна
представляет собой идеальный короткозамкнутый контур, приводится к задаче
для двух связанных цепей с эквивалентными собственными и взаимной индук-
тивностями. Токи в цепях 1 и 2 представляют собой суммы свободных и устано-
вившихся токов. Последние очевидны: ily = f2y — Для определения
свободных токов составляем характеристическое уравнение, соответствующее
(3-14). После несложных преобразований получим его в виде
Р2 4~ Р (Pi 4" Р2) 4" аэР1Р2 ~
гДе Pi = '> Рг — '•> = 1 — А12/(ЛЗЭ£2Э).
Корни характеристического уравнения:
pi, 2 = -о,5 (р; + рг) [ 1 ± V1 — 4оэР1Р^/(Р; + р^)2 ].
Эти корни вещественны при любых значениях параметров цепей, так как
всегда аэ < 1,0. Два корня указывают на то, что свободные токи состоят из двух
составляющих, и общее решение будет
i — i 1 i" e~X^i2 I i •
Ч — ЧсОе ~гЧсОе п-Чу»
l2 — l2cOe 1 4- 4c0e 4“ 4y>
где T/i, Ti2 — постоянные времени затухания составляющих свободных токов.
Формально они определяются обратными величинами корней, взятыми с отри-
цательным знаком: Тц = —l/pL; Т= —1 /р2. Подкоренное выражение в урав-
ценйй рь2 зависит от отношения параметров р;/р2 = ^TV^i'C), гДе Л» —А
собственные постоянные времени уединенных контуров 1 и 2. Если это отношение
мало отличается от единицы (7\ и Т2 — одного порядка), то корни рх, р2, а сле-
довательно, и каждая из постоянных Тц, 7\2 сложным образом зависят от обеих
постоянных 7\ и 7*2- Если же р[ и р2 сильно различаются, то соотношения между
постоянными времени затухания свободных токов и постоянными цепей упро-
щаются. Пусть р2 pi (или pj > Рг — общее выражение корней симметрично
относительно pj и р2), что равносильно Т2 < Т1. Тогда получим
Pl — (Pl +р2) — Р2 = ~г2/(аэ^2э);
Р2 ~ —°эР1Р2/(р’1 + Рг) ~ —стэР1 = ~r-JLU-
Следовательно, Т\2 = L13li\ — T\3i т. е. одна постоянная времени затухания
тока равна эквивалентной постоянной времени той цепи, которая обладает наи-
большей собственной постоянной (7\). При этом 7\э определяется эквивалентной
индуктивностью L13 рассматриваемой цепи с учетом влияния идеального коротко-
замкнутого контура.
Для определения второй постоянной посмотрим, что представляет собой
o3L23. Превратим в схеме рис. 3-10 цепь 1 в идеальный короткозамкнутый контур,
т. е. положим = 0; 1\ = 0. Тогда, определив значение pxi± из первого уравне-
ния (3-14) и подставив его во второе, получим
U2 = (Г2 + /\Чэ) *2>
где Цэ = <т/2э.
Таки?л образом, индуктивность g3L23 есть эквивалентная индуктивность
цепи 2 при наличии ее магнитной связи с двумя идеальными короткозамкнутыми
контурами. Соответственно искомая постоянная времени Тц = v3L23lr2 =
= Т2э^г2 = ^2э’ т- е* вт0Рая постоянная времени затухания тока равна экви-
валентной постоянной времени той цепи, которая обладает наименьшей собствен-
ной постоянной (Т^). При этом Т2э определяется эквивалентной индуктивностью
Ь'2з указанной цепи в условиях, когда последняя магнитно-связана с двумя
идеальными короткозамкнутыми контурами. Не будем доводить решение этой
задачи до конца, а ограничимся определением постоянных времени затухания
свободных токов. Заметим только, что в магнитно-связанных цепях уравнитель-
ные токи возникают не только в коммутируемой цепи, но и в остальных цепях,
параметры и структура которых остаются неизменными.
3-4. СВОБОДНЫЕ ТОКИ И ПОТОКОСЦЕПЛЕНИЯ В МА-
ШИНЕ С ТРЕХФАЗНОЙ ОБМОТКОЙ НА СИММЕТРИЧНОМ
РОТОРЕ. Однородные уравнения для машины с трехфазной
обмоткой на симметричном роторе получаются, если в (2-77),
(2-78) или в (2-82), (2-83) заменить левые части нулями. Например,
однородные уравнения для потокосцеплений имеют вид
(Рт + ps + /) — Рзфг = 0;
—prMs + (Рт + рг " /$) фг = 0.
Решение однородных линейных уравнений с постоянными
коэффициентами—это сумма экспонент вида AzeP/T, где At—
начальное (при т = 0) значение Z-й составляющей, a — один
из корней характеристического уравнения, соответствующего
системе однородных дифференциальных уравнений. В свою оче-
редь, характеристическое уравнение есть приравненный нулю
(3-15)
определитель, составленный из коэффициентов дифференциальных
уравнений. Для системы (3-15) получаем характеристическое урав-
нение
р2 + р (ps 4- рР + j (1 — s)j + осР;Р; + s + j (Р; — $Р;) -= о. (3-16)
Характеристическое уравнение для однородной системы на
основе (2-77) и (2-78), содержащей в качестве переменных напря-
жения es, (или токи is, ir), будет таким же, как (3-16), хотя по-
стоянные At в решении станут уже другими, нежели в предыдущем
случае. Это соответствует обычным физическим представлениям
об одинаковом законе изменения во времени отдельных составля-
ющих свободных токов и потокосцеплений.
Два комплексных корня уравнения (3-16) имеют достаточно
громоздкие выражения:
р\ = — (ps + Рг) Ki + / [0,5 (1 — В//() (1 4"s) — 1];
Р2 - - (Р; 4- р;) + j [0,5 (14- ж) о 4- s) - и,
где
в - (Р; - Р;)/(Р; + Р;у, к, - о,5 (i + /<); к2 = о,5 (1 - ю;
к “ 1/°’5НЧл‘+4В,(^)!П;
4=1 — [4ocpspP + (14- s)2] (ps + Р;г2.
Для частного случая р$ = р, при (1 + s)2 > (р^ 4- Рг)2 —
— 4ocpsPr будет В = К = 0 и мнимые части корней должны
вычисляться по выражению
0,5 [ 1 4s + V (1 “4s)2 — (ps +Рг)24* 4<Tcpspr) — 1.
Каждый из корней plf р2 характеризует изменение во времени
пары составляющих в свободных токах — одной составляющей
в обмотках статора и другой, с ней связанной, в обмотках ротора.
В предыдущем параграфе уже отмечалось, что свободные токи
возникают в обеих магнитно-связанных цепях, даже если комму-
тация схемы происходит только в одной из них. Таким образом,
«связанная» пара составляющих свободных токов в статоре и
роторе имеет одинаковый закон изменения во времени. В магнит-
ном потоке в зазоре машины будут также два свободных потока;
изменение во времени одного из них определяется корнем ръ
другого — корнем р2.
Затухание свободных токов и потокосцеплений во времени
характеризуется вещественными частями корней, значение кото-
рых зависит от коэффициентов и К2- Из рис. 3-11 можно видеть,
как изменяются эти коэффициенты при увеличении параметра
(1 4- s) (Ps 4- Рг)-1, пропорционального частоте вращения ма-
шины. В неподвижной машине ($ = —1)
Ki «=> 1 — Стерег (р;+р;г2 «== 1; к-i о-ср:рг ф:+ргГ2;
Re (pi) — (ps + р;); Re (р2) — ffcP^pr (р^ + Рг)-1.
В машине, вращающейся с синхронной частотой (s = 0),
Re (pj —psi Re (p2) —Pr, если ps > Pr- При обратном
соотношении ps < Pr вещественные части корней и р2 меняются
местами. Коэффициенты Ki и К2, вычисленные для синхронной
частоты вращения машины, отмечены на рис. 3-11 штриховыми
прямыми. Как следует из этого рисунка и выражения корней,
вещественные их части можно принять равными —р^ и —р'г в зна-
Рис. 3-11. Коэффициенты, определяющие вещественную
часть корней характеристического уравнения, при
р;/р; =0,2 и 5 (/); 0,5 и 2 (2); 0,8 и 1,25 (<?); 1 (4)
относительном значении частоты 1 + s > 2 (ps + pr). При 1 +
+ s < 1,5 (ps + pr) вещественные части корней сильно зависят
от частоты вращения машины.
В асинхронных машинах параметры р^ и р^ могут быть при-
мерно равными. При ps = рР = р' для частот вращения 1 +
+ s > 2р'|ыс вещественные части корней становятся одинаковыми
и равными —р'.
Мнимая часть корней (3-16) представляет собой частоту вра-
щения свободных потоков (потокосцеплений) или системы трех-
фазных свободных токов (м. д. с.) по отношению к той системе
координат, в которой рассматриваются искомые переменные —
токи и потокосцепления. Напомним, что переменные в (3-15)
определены в синхронно вращающихся осях (<ок = 1). В § 2-6
показано, что для перехода к комплексным переменным, измеря-
емым в осях, вращающихся с произвольной частотой <ок, следует
исходную комплексную переменную в синхронных осях умножить
на координатный множитель ^/(1-сок)гф Поэтому для перехода
к неподвижным осям и к осям, вращающимся вместе с ротором,
нужно пользоваться соответственно координатными множителями
4 А. И. Важнов 97
eh и e"/‘sx. Следовательно, частота вращения свободных токов
и потокосцеплений относительно обмоток статора pi равна мнимой
части корней (3-16), увеличенной на единицу; аналогичная ча-
стота относительно обмоток ротора pi определяется суммой мни-
мой части корней (3-16) и величины —s.
На рис. 3-12 два свободных потока в машине условно представ-
лены двумя магнитами 1 и 2, вращающимися с различными ча-
стотами. Частоты вращения магнитов 1 и 2 в зазоре (т. е. относи-
тельно статора и его обмоток) равны:
Pis = Im (Р1) + 1 = 0,5 (I - Ж) (1 + S);
P's = Im (р2) + 1 = 0,5 (1 + Ж) (1 + s).
Частота вращения магнитов относительно ротора и его об-
моток:
far = Im (pi) — S = — p2S; ₽2r = Irn (р2) — s = —pis
В верхней части рис. 3-13 показана зависимость мнимых ча-
стей корней от частоты вращения машины 1 + s для диапазона
1 + s = 0 4-0,5, характерная для асинхронных машин (pi и
pi достаточно большие и близкие по значению). В нижней части
Рис. 3-12. Условная схема
свободных потоков (/; 2) в за-
зоре машины
С — статор; Р — ротор
рисунка представлены частоты враще-
ния двух свободных потоков — одного
относительно обмотки статора (PJS) и
другого относительно обмотки ротора
(Р2г), причем Pis = —р2г. Сплошные
линии относятся к случаю ps — pi,
штриховые — к pi = 0,8pi. Для послед-
него случая приведена зависимость
лишь при одном значении параметров:
Ps + pi = 0,2.
Можно видеть, что в неподвижной
машине свободные потоки «привязаны»
к обмоткам. Однако во вращающейся
машине они вращаются относительно
обмоток. При pi = pi = р' в диапа-
зоне примерно 1+ s = (0ч-2)р' свобод-
ные потоки вращаются в зазоре с оди-
наковой частотой, равной половине частоты вращения машины
(мнимые части корней одинаковы). С этой же частотой один поток
перемещается относительно обмотки статора, другой — относи-
тельно обмотки ротора, но в противоположном направлении.
При большей частоте вращения машины свободные потоки на-
чинают вращаться с различными частотами (мнимые части кор-
ней неодинаковы). При этом их частоты вращения относительно
обмоток ph = —р2г становятся меньше. При синхронной частоте
вращения машины один из свободных потоков практически не-
подвижен, т. е. «привязан» к обмотке статора; другой — практи-
чески вращается вместе с ротором, т. е. неподвижен относительно
обмотки ротора. Это состояние потоков возникает и при частотах
вращения машины, отличающихся от синхронной. Чем меньше
значения параметров р^ и рг, тем меньше частота 1 + s, при которой
можно считать потоки «привязанными» к своим обмоткам. Напри-
мер, pjs = —р^ < 0,01 получается в машине с р^ = рг =0,2 только
начиная с 1 + s = 0,6, тогда как для р^ = Рг =0,1 — уже
при 1 + s == 0,2.
Рис. 3-13. Частоты вращения свободных по-
токов в различных системах координат
2р' = 0,1 (/); 0,2 (2) и 0,3 (<?)
При несильно различающихся р^ и р^ мнимые части корней
р± и р2 сохраняют в общем ту же зависимость от 1 + s
(рис. 3-13), но при р^ > Pr и р^ <Рг меняются местами.
Для машины типа синхронной характерны значительная
разница в параметрах ps и рг и меньшие их значения, если иметь
в виду машины средней и большой мощности.
При различии параметров р^ и рг не менее чем в 5—6 разсво-
бодные потоки, как показывает анализ, практически неподвижны
относительно своих обмоток при любой частоте вращения ма-
шины (1 + $ = 0ч-1).
Независимо от соотношения параметров ps' и рг свободный по-
ток, практически неподвижный относительно обмотки статора,
затухает с постоянной времени, определяемой той же веществен-
ной частью корней (см. рис. 3-11), которая при 1 + s > 2 (ps +
+ Рг) стремится к —Ps. Обозначим «предельную» постоянную
времени Та\ она равна 1/ps. С другой стороны, свободный поток,
практически неподвижный относительно обмотки ротора, затухает
с постоянной времени, определяемой той вещественной частью
корней, которая при 1 + s > 2 (ps + Рг) стремится к —рг.
«Предельная» постоянная времени (обозначим ее 7^) равна 1/рг.
Подведем краткий итог. В общем случае свободные потоки и
токи трехфазных обмоток машины не являются просто апериоди-
ческими затухающими функциями времени, как это имеет место
в статических цепях: потоки и изображающие векторы тока враща-
ются относительно обмоток. В машинах с параметрами, характер-
ными для синхронных машин, практически один из свободных по-
токов неподвижен относительно обмотки статора (Pis 0); с ним
связан апериодический свободный ток в этой обмотке. Поскольку
рассматриваемый поток вращается с частотой относительно
обмотки ротора (при 1 + s =}= 0), в последней имеется гармониче-
ская составляющая свободного тока частоты pjr (при s = 0 зна-
чение Pir 1). Указанные составляющие свободных токов вза-
имосвязаны и определяют значение свободного потока. Все они
затухают во времени с постоянной Та, определяемой эквивалент-
ной индуктивностью и активным сопротивлением обмотки статора,
т. е. той цепи, в которой протекает апериодический свободный ток*
Понятие эквивалентная означает, что индуктивность находится
с учетом магнитной связи обмотки статора с короткозамкнутой
идеальной обмоткой ротора. Второй свободный магнитный поток
практически неподвижен относительно обмотки ротора (Р2г 0);
он обусловлен взаимосвязанной системой составляющих свободных
токов: апериодического в обмотке ротора и гармонического ча-
стоты P2S в обмотке статора, поскольку рассматриваемый поток
вращается относительно статора с частотой р^ (при s = 0 значе-
ние P2S 1). И поток, и соответствующие ему токи затухают
во времени с постоянной T'd, определяемой эквивалентной индук-
тивностью и активным сопротивлением обмотки ротора, т. е. той
цепи, в которой протекает апериодический ток. Эквивалентная
индуктивность рассчитывается для обмотки ротора, магнитно-
связанной с короткозамкнутой идеальной обмоткой статора.
В асинхронных машинах (параметры и рг могут достигать
значений 0,1—0,3) картина получается более сложной: свободные
потоки могут вращаться относительно обмоток с заметной частотой;
каждая из постоянных времени затухания потоков и токов зависит
от параметров и статора и ротора, а также от частоты вращения
машины, если 1 + s <2 (ps + рг).
3-5. СВОБОДНЫЕ ТОКИ И ПОТОКОСЦЕПЛЕНИЯ В СИН-
ХРОННОЙ МАШИНЕ. Рассмотрим только машину без демпфер-
ной обмотки. Однородные уравнения для такой машины полу-
чаются, если в (2-62)—(2-64) или в (2-70)—(2-72) заменить левые
части нулями. Пусть машина вращается с синхронной частотой.
Тогда однородные уравнения, например для потокосцеплений,
имеют вид
(Рт + pi) № + — р^в = 0; '
+ (Р* + Pg) Ч<7 =
—+ (Рт + pi) 'I’B == °-
(3-17)
Характеристическое уравнение, соответствующее (3-17), имеет
вид
Р3 + Р2 (Pd + Р? + Рв) + Р(1 + PdPq + Рв (^Рй + Р9)1 +
+ р; (1 +• ор;р?) = о. (з-18)
Любое из свободных потокосцеплений в (3-17) (или свободных
токов машины в осях d, q) представляется суммой трех экспонен-
циальных функций:
4- А2ePzX 4- 43e^T, (3-19),
где Pi, р2, Рз — корни уравнения (3-18); Ль Л2, Л3 — начальные
значения отдельных составляющих, определяемые из начальных
условий конкретной задачи.
Синхронная машина даже при отсутствии демпферной обмотки
из-за несимметрии ротора имеет систему дифференциальных урав-
нений третьего порядка, т. е. более высокого порядка, чем машина
с трехфазной обмоткой на симметричном роторе. Соответственно
этому получаем три корня характеристического уравнения вместо
двух для машины, рассмотренной в § 3-4. Вместе с тем можно
допустить, что для синхронной машины с несимметричным рото-
ром корни характеристического уравнения будут зависеть от
активных сопротивлений либо обмотки статора, либо обмотки воз-
буждения, как это было показано в § 3-4 для машины с симметрич-
ным ротором. Полагая вт(3-18) рв = 0, получим корни:
Pi, 2 = —0,5 (pi + р?) ± / [ 1 - (р'а - р"42]
—0,5 (pi + р9) ± /; ра = 0.
Если принять активное сопротивление статора равным нулю
(pi = = 0), то корни
pi,2=±j; Рз = —рв-
Итак, окончательные выражения для корней:
Pi, 2 = —0,5 (р^ 4- р7) ± /; pi = —pi.
Решение (3-19) относится к осям d, q, связанным с ротором
машины. Найденные корни показывают, что в машине образуются
три свободных потока: два вращаются относительно ротора с син-
хронной частотой в противоположных направлениях (они соот-
ветствуют корням /71}2 с мнимой частью ±1), третий — неподвижен
относительно обмотки возбуждения (соответствует корню р3).
Если рассматривать движение этих потоков относительно обмотки
статора (т. е. в неподвижном пространстве), то нетрудно устано-
вить, что из первых двух потоков один неподвижен, а другой вра-
щается с двойной синхронной частотой в сторону вращения
Ротора. Поток, неподвижный относительно ротора, вращается
в пространстве с синхронной частотой. Он затухает с постоянной
времени T'd = 1/рв, а первые два потока — с постоянной времени
Та = 2/(Pd + Pg). Указанные потоки обусловлены соответству-
ющими составляющими свободных токов в обмотках: апериоди-
ческим током в обмотке возбуждения и гармоническим током ос-
новной частоты в обмотке статора, затухающим с постоянной вре-
мени T'd] апериодическим током и гармоническим током удвоенной
частоты в обмотке статора, а также гармоническим током основной
частоты в обмотке возбуждения, затухающими с одной и той же
постоянной времени Та.
Несимметрия на одной из сторон машины (в данном случае на
роторе) явилась причиной появления в обмотке на другой стороне
свободного тока в виде гармонической составляющей удвоенной
частоты. В гл. 5 будет показано, что несимметрия и на статоре
и на роторе приводит к образованию бесконечного ряда гармони-
ческих свободных токов в обмотках машины.
3-6. ПРИБЛИЖЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ СИНХРОННОЙ МАШИНЫ. Частное решение
уравнений при синхронной частоте вращения машины и неизмен-
ных напряжениях определяет установившийся режим, которым
заканчивается переходный процесс, и оно может быть получено
в аналитической форме. Однако в большинстве переходных про-
цессов частота вращения машины не остается постоянной. При
весьма малом скольжении частное решение уравнений соответ-
ствует вынужденному режиму синхронной машины, определяемому
заданными напряжениями на зажимах ее обмоток. При незначи-
тельном скольжении уравнения напряжений остаются практи-
чески линейными, однако «внешние» продольное и поперечное на-
пряжения статора, являющиеся функцией угла нагрузки 0,
могут существенно изменяться: ведь несмотря на малость сколь-
жения, угол 0 в переходном процессе может претерпевать значи-
тельные изменения. И в том и в другом случае токи обмотки ста-
тора, соответствующие частному решению уравнений, либо явля-
ются гармоническими функциями времени основной частоты, либо
близки к ним [см. линейные преобразования токов (1-23)]. По-
этому токи и потокосцепления обмотки статора в частном решении
должны в малой степени зависеть от активного сопротивления этой
обмотки. Найдем частное решение уравнений напряжений обмотки
статора, полагая, что на ее зажимах действует постоянное по мо-
дулю напряжение U в течение всего переходного процесса. Будем
считать сначала г = 0, тогда решению подлежат уравнения (2-85)
и (2-86):
—Ud — P^d + (1 + s) %; —Uq == (1 + S) И"
где ud = —U sin 0; uq = U cos 0. Частное решение уравнений
^-=(7 cos 0; i[^ = £7sin0. (3-20)
В этом нетрудно убедиться, подставляя решения в уравнения
и принимая во внимание, что pxQ = s.
Как уже отмечалось, не следует ожидать заметной зависимости
ф^ и ф7 от активного сопротивления обмотки статора. Уточнение
в этих величинах, связанное с учетом сопротивления г, можно
сделать, приближенно определяя токи id и iq. Не учитывая влия-
ния демпферной обмотки и полагая обмотку возбуждения идеаль-
ной (гв = 0), будем иметь
id : = (Ф</ фво)/-^» iq '= tyq/Xqt
где фв0 — постоянное потокосцепление обмотки возбуждения,
равное его начальному значению при т = 0. Тогда уравнения
принимают вид
—Ud + pd'pBO = (Рх + Pd) + (1 - h 8)
—Uq = — (1 + S) Ipd + (px + p9)
Пусть теперь с учетом г
ф^ = U cos 0 + ad + bd sin 0; ф^ = U sin 0 + aq + bq cos 0,
где a, b — неизвестные константы. Подстановка предлагаемых
выражений ф^ и ф7 в уравнения и сравнение коэффициентов при
одноименных функциях, а также пренебрежение величинами вто-
рого порядка малости (малыми первого порядка являются pj,
р^, s) позволяют получить окончательные выражения:
ф^ = t/cos0 4- pqU sin0; ф^ = U sin 0 -ф- p'rf (фв0 — t/cos0). (3-21)
Действительные значения ф^ и ф7 представляют собой суммы
общего и частного решений. В § 3-5 было показано, что строгое
общее решение содержит для машины без демпферной обмотки
три экспоненциальные функции. Однако ввиду незначительного
влияния активного сопротивления обмотки статора на началь-
ные значения свободных потокосцеплений ф^ и ф7 достаточно ис-
пользовать приближенное общее решение однородных уравнений.
Оно сводится к тому, что сначала составляющие свободных потоко-
сцеплений определяются в предположении г •= 0, а затем сопро-
тивление г учитывается в затухании найденных свободных потоко-
сцеплений.
При г = 0 однородные уравнения при s 1,0 принимают вид
Md + 4? = °; М — vhd = о.
Решения этих уравнений:
td = + А2е-И- = — jA^ 4- jA2e~i\
Если сравнить эти решения при г = 0 со строгим решением
(3-19), то можно видеть, что здесь отсутствует экспоненциальная
функция е"₽вТ. При малом г следует ожидать в выражениях
ф</ и ф7 весьма малых слагаемых, имеющих множитель е'РвТ.
Действительно, эти апериодические экспоненциальные составля-
ющие соответствуют периодическим составляющим в фазных
потокосцеплениях. Производные же от последних равны падениям
напряжения в сопротивлении г от периодических токов, пропор-
циональных е~РвХ, и при малом г сами незначительны. Как
показывает (3-19), найденные здесь составляющие в потокосцепле-
ниях должны быть скорректированы умножением их на е~х/Та —
множитель, который определяет затухание при г =4 0. Таким об-
Рис. 3-14. Диаграмма потокосцеплений якоря: а — при т =
= 0; б — при т > 0
разом, окончательно приближенные значения свободных потоко-
сцеплений равны:
= (В cos т + С sin т) е~х/Та;
ф^ = (—С cos т + В sin т) е~х'Та,
где произвольные постоянные В = А1 + А2 и С = j (Дх — Д2)
нужно определить из начальных условий.
Итак, полные потокосцепления:
ф^ == U cos 0 + (В cos т 4- С sin т) е~х/Та',
ф^ = U sin 0 + (— С cos т + В sin т) е~х1Та.
Пусть в исходном режиме (т = 0) потокосцепления якоря
характеризуются изображающим вектором ¥нч, расположенным
под углом 0НЧ к оси d, а вектор напряжения статора U в начальный
момент времени после коммутации цепи якоря сдвинут относи-
тельно оси q на угол 0О (рис. 3-14, а). Начальные значения про-
дольного (ф^0) и поперечного (ф70) потокосцеплений:
Ф</о = ^нч COS 0НЧ, Ф<?о = Тнч sin 0НЧ,
где Тнч — модуль вектора Тнч.
(3-22)
Полагая т = 0 в полученных выражениях для i|^0 и i|^0, найдем
В Фб/о — U cos 0О; С = —-|- U sin 0О.
Подстановка этих постоянных и начальных значений
и в выражения и % приводит к следующим результатам:
= U cos 0 + [VH4 cos (т 4- 0НЧ) — U cos (т + 0О)] е~х1Та\
= и sin 0 + [¥нч sin (т + 0нч) - и sin (т + 0О)] e~x/Ta.
Эти выражения можно представить и иначе. Введем векторы
потокосцеплений якоря: ф — в переходном процессе после комму-
тации цепи якоря; фу — «вынужденных» потокосцеплений, обус-
ловленных напряжением U (при г = 0 вектор тру опережает на
90° вектор U, а их модули равны: Ту = (/); тре — «свободных»
потокосцеплений. Из изложенного выше следует векторное урав-
нение
Ф = Фу + Фс,
а составляющие векторов по осям d, q\
= U cos 0 + ¥с cos (т + лс) е~х11\
гр7 = U sin 0 4 Vc sin (т Лс) е~х1ТаУ
где ^Fc = |/"ipdco + гр^со —начальное значение модуля вектора
«свободных» потокосцеплений; трб/со — XFH4 cos ®нч — i/cos 0О и
ip7c0 — sin 0НЧ — U sin 0О — начальные значения продоль-
ной и поперечной составляющих «свободных» потокосцеплений;
Лс — начальный угол между вектором грс и осью d, так что
4</со ^Fc cos Лс» sin Лс
и, следовательно, т]с = arctg (%соА|^со)-
Приведенные соотношения иллюстрируются диаграммами на
рис. 3-14. Кстати, из диаграммы для т = 0 модуль можно
определить в виде
тс = + Т2НЧ - 2Ч\Тнч cos (0НЧ - Оо).
Выражения (3-22) справедливы и для машины с демпферной
обмоткой: нужно лишь подставить Та для такой машины (см.
§ 6-2).
Итак, коммутация цепи якоря, при которой потокосцепления
обмотки якоря должны измениться с Тнч до нового установивше-
гося значения Ту = U, сопровождается появлением свободного
потокосцепления, начальное значение которого равно Wc.
Простота определения свободного потокосцепления с обмоткой
якоря при ее коммутации объясняется тем, что обмотка возбуж-
дения может при этом рассматриваться короткозамкнутой, а все
роторные обмотки — идеальными, так как свободный поток ста-
тора индуктирует в них переменный ток основной частоты, а
к зажимам обмотки возбуждения приложено постоянное напря-
жение. Но тогда обмотку статора можно представить уединенной
и обладающей эквивалентной индуктивностью, которая учитывает
магнитную связь с идеальными короткозамкнутыми обмотками
ротора.
При нахождении свободного потокосцепления с обмоткой воз-
буждения последнюю рассматривать уединенной уже нельзя,
поскольку апериодический поток возбуждения обусловливает
в обмотке статора переменный ток основной частоты, а к зажимам
этой обмотки приложено напряжение этой же частоты, от которого
также будет зависеть значение тока. Поэтому определить потоко-
сцепление фв, по которому вместе с (3-22) можно найти токи ма-
шины, удается лишь в одном частном случае — при U ~ 0. Дей-
ствительно, решение уравнения (2-72) при UB = const практи-
чески имеет вид
фв = -ф £/во (1 — е~т/7^) -ф- рв[тТс [е sin (т 4- г|с) —
— e~xfT'd sin i]c] + p'Bp,Ue~x/T'd J ex/T’d cos 0 dr, (3-23)
0
где фв0 — начальное (при т = 0) значение потокосцепления фв;
Td = 1/рв-
Выражение (3-23) может быть вычислено только при известной
зависимости 0 =^ / (т), а для любого вида этой функции — при
U = 0. Для оценки влияния изменения 0 на фв воспользуемся
тем, что во многих переходных процессах угол 0 претерпевает
почти гармонические колебания. Если допустить, что угол 0 =
= 0у + Д0, где Д0 = —Д0т cos /it, т. е. изменяется по гармо-
ническому закону с относительной частотой колебаний, равной h~
а 0у — среднее значение угла на периоде колебаний (или
установившееся значение 0, если иметь в виду, что Д0 затухает
во^времени), то при некоторых ограничениях
pBpUe~x/T'd j ex/T'd cos 0 dr (A0m) cos 0y (1 - e~x/T'd),
где Jo (Д0т) — функция Бесселя нулевого порядка.
Приведенное соотношение справедливо при Д0т < 50 4-60°;
pB//i < 0,1 4-0,15; 0у < 50 4-60°. Тогда, пренебрегая в (3-23)
малым по значению третьим слагаемым, пропорциональным ^в,
с учетом соотношения фв0 — UBv — р¥нч cos 0НЧ = 0 будем
иметь
фв Фво - Р 1^нч cos 0НЧ — 17 Jo (A0m) cos 0у] (1 — e~x/Td). (3-24)
При отмеченных ограничениях изменение потокосцепления
фв в течение каждого пол у периода колебаний угла 0 происходит
по экспоненциальному закону с постоянной времени T'd. Если
Д0т < 25°, то /О(А0Щ) 1 и этот закон изменения фа будет иметь
место на протяжении всего переходного процесса.
Следует подчеркнуть, что указанный характер изменения фв
получается для принятой зависимости 0 = f (т). При наличии
экспоненциальной составляющей в этой функции постоянная
времени в (3-24) будет отличаться от T'd (см. гл. 9).
При коммутации обмотки якоря в машине с демпферной об-
моткой потокосцепления и фд в переходном процессе определя-
ются выражениями (3-22). Однако теперь необходимо решать урав-
нения (2-87)—(2-89) для трех обмоток на роторе. При определенных
ограничениях можно получить лишь приближенные их решения.
Для этой цели удобно в (2-91)—(2-95) выразить все токи через пото-
косцепления обмоток. Подставив соответствующие токи в (2-87)—
(2-89), получим уравнения, которые будут содержать только пото-
косцепления либо по продольной, либо по поперечной оси. Затем
для каждого из уравнений можно написать решение в общем виде.
Например, решение уравнения (2-88)
(т Т „ \
g3dB f $BePdX dx + g3lia f ^d6PdX dx ,
0 0 /
где фзг/0 — начальное значение фэг/; pj = r3dlx"3d', x'3d — индук-
тивное сопротивление продольного демпферного контура при ко-
роткозамкнутых обмотках возбуждения и якоря;
G ___ xdxB3d xa3dxaBd . G _____ xBxaad xaBdxB3d
tbsdb ’ &sda Y' y
xdXB xdXB
< Интегралы в решении для фЭ£/ можно приближенно определить,
если
Рв<р?» HfPd2 > 20 -ь 30; sw< 0,2ра,
где — максимальное скольжение в переходном процессе. При
этих условиях угол 0, а вместе с ним cos 0, входящий в выражение
Ф<ь а также потокосцепление фв изменяются во времени значи-
тельно медленнее, чем подынтегральная функция еРс?т. Тогда,
как показывает анализ, при определении первого интеграла в вы-
ражении фэ^ достаточно первого приближения, а при вычислении
второго интеграла — второго приближения, и, пренебрегая функ-
цией, пропорциональной малому параметру р^, окончательно по-
лучим
'i’sd+ gs</a(f/cos0 -I 4rcC0ST]ce~T/7dt/TtfSSinо), (3-25)
где T'd = 1/pd — постоянная времени продольного демпферного
контура.
Аналогично решается уравнение (2-89), если sm < 0,2р^;
Hjpq2 > 20-4-30, где p"q = r3q!x3q, a x3q представляет собой индук-
тивное сопротивление поперечного демпферного контура при ко-
роткозамкнутой обмотке якоря. Вводя постоянную времени по-
перечного демпферного контура T"q = 1/p'g, получим
грЭ9 2^ [и sin О + Ч'с sin т)се’т/Г’ - UT”qs cos о). (3-26)
В (3-26) пренебрегли функцией, пропорциональной малому
параметру p"q.
Уравнение (2-87) для цепи возбуждения машины после подста-
новки в него тока iB, выраженного через потокосцепления фв,
Фэ<ь принимает вид
/МЬ + Рвфв = «В + Рв 1|></ + Рвф (т), (3-27)
где Рв = гъ!х^\ хпв — индуктивное сопротивление обмотки воз-
буждения при короткозамкнутой обмотке якоря и идеальном про-
дольном демпферном контуре (r3d = 0); ср (т) — известная функ-
ция т, содержащая гармонические составляющие основной час-
тоты с амплитудами, затухающими по закону е 1 а, и апериоди-
ческие составляющие, пропорциональные e~xfTd.
Уравнение (3-27) отличается от аналогичного уравнения для
машины без демпферной обмотки (в принятой здесь системе отно-
сительных единиц) лишь слагаемым р^Ф (т). Поэтому решение этого
уравнения будет отличаться от решения аналогичного уравнения
для машины без демпферной обмотки членом
т
p^"PeT j ф (т) ерьх fa,
о
которым при малой величине рв (менее 0,01) и р'в/pj (менее 0,1)
можно пренебречь. В мощных машинах указанные ограничения
в параметрах рв, p'd выполняются.
Таким образом, независимо от того, имеется в машине демп-
ферная обмотка или нет, уравнение цепи возбуждения прибли-
женно может записываться как для машины без демпферной/
обмотки. И далее, либо оно решается численными методами, либо
используется приближенное решение вида (3-24). В последнем
случае в системе относительных единиц, принятых для машины
с демпферной обмоткой, будем иметь
~ Ч’во - (Тнч cos 0НЧ - UJ0 (Д0ОТ) cos 0у) (1 — е~х1т'Л. (3-28)
Полученные приближенные решения для потокосцеплений по-
казывают, что в машине с демпферной обмоткой в переходном про-
цессе образуются три свободных потока: один — неподвижный
в пространстве и два — «привязанные» к осям d и q ротора. Пер-
вый затухает с постоянной времени Та; второй, направленный
вдоль оси d, имеет две составляющие, пропорциональные
e~x/Td и e~x/Td\ третий, проходящий вдоль оси qy затухает с по-
стоянной времени Т"я. Гармонические составляющие основной
частоты в роторных потокосцеплениях, обусловленные свободным
потоком, неподвижным в пространстве, и затухающие в связи
с этим с постоянной времени Та, весьма малы, и поэтому отсут-
ствуют в (3-25), (3-26), (3-28). В потокосцеплении обмотки возбуж-
дения, обладающей значительной постоянной времени, практи-
чески отсутствует апериодическая составляющая, пропорциональ-
ная e~x/Td. Все свободные потокосцепления обязаны своим появ-
лением изменению потокосцепления с обмоткой якоря |tpH4 —
— гру | = Тс, происходящему вследствие коммутации обмотки
статора.
По известным потокосцеплениям (3-22), (3-25), (3-26) и пото-
косцеплению *ф8 можно из (2-91)—(2-95) найти приближенные зна-
чения токов. Приведем здесь без вывода лишь выражения для
токов id и iq статора:
U cos 0
7г- + -7^ е^!Т“ cos (т + Г]с) —
xd xd
— ( 4-----Ц (vc cos t]ce'T/^ + UTds Sin e); (3-29)
\ Xd Xd / \ >
. U sin 0 . ¥c -т/г . / . \
l4^~;------asin(T + T]c)-
xq xq
- (Ycsin r|ce’T/7’’ - UT'gS cos Q), (3-30)
где Ed = ty3xaBd/xB — так называемая э. д. с. за продоль-
ным переходным сопротивлением. В качест-
ве приближенного значения г|)в в (3-29) можно использовать (3-28).
По приближенным выражениям токов и потокосцеплений опре-
делим электромагнитный момент машины Мэм, который в общем
виде согласно (2-90) записывается как
<м 1 tydiq tyqid'
(3-31)
Подставив сюда (3-22), (3-29) и (3-30), получим
А1ЭМ ^эмО "4~
Где первое и второе слагаемые представляют собой соответственно
медленно и быстро изменяющиеся во времени составляющие мо-
мента:
Л4ЭМ0 = sin 0 - 0,5U2kdq sin 26 + (Dd sin2 0 4- Dq cos2 0) s; (3-32)
Xd
(arfp cos i]c sin 0e xlT"d — A,9p sin r]c cos Qe X/T^ -|-
t/ (X9P — cos 0 4
^--HTc^pCOS ilce-T/^-|-
xd
-j- U'kdpT'dS Sln0 sin (t -U T]c) — [U (Ktp + Kiq) Sin 0 4-
4- Yc^p sin т]се‘т/г<7 — U'kgpTqS cos 0] cos (t 4- t]c)| —
- sin 2 (t + i]c), (3-33)
где
- _ 1 1 . v _ 1 1 v _ 1 1 •
</p- *d~ *d'
Ки, = ^--±г\ Dd = U2kdpTd-, Dq = U^qpT'.
Xd *q
Когда переходный процесс вызван не коммутацией в цепи якоря
(Ye = 0), а изменением механического момента на валу машины,
составляющая 7ИэмТ = 0, а электромагнитный момент определя-
ется выражением (3-32). При этом первые два слагаемые в (3-32)
обусловлены обмоткой возбуждения и полем реакции якоря,
а третье — демпферной обмоткой машины. Эту составляющую
в Л4ЭМ поэтому называют демпферным моментом.
Величина Dd sin29 + Dg cos29 = 0,5 [Dd + Dq + (Dd — Dg) X
X cos 29] и при обычных значениях параметров машины может
быть приближенно принята постоянной и равной D 0,5 (Dd +
+ Dq). Тогда
Л1ЭМ = sin 0 - 0,5U2Xdq sin 20 -I- Ds. (3-34)
xd I
Рассматриваемый электромагнитный момент на ограниченном
отрезке времени, когда потокосцепление с обмоткой возбуждения
и, следовательно, э. д. с. E'd остаются практически неизменными,
является функцией параметров механического движения — угла 9
и скольжения s. При пренебрежении демпферным моментом Л1ЭМ
представляет собой явную функцию угла 9. При этом угловая
характеристика 7ИЭМ = f (9) в переходном процессе весьма зна-
чительно отличается от аналогичной характеристики для устано-
вившихся режимов. На рис. 3-15 приведены угловые характери-
стики для установившегося режима при постоянной э. д. с. £0 =
= 1,0 и в переходном режиме при постоянстве Ed = 1,0. В обоих
случаях принято: U = 1,0; xd = 1,0; xq = 0,6; xd = 0,3.
Когда переходный процесс вызван коммутацией в цепи якоря
(¥с 4= 0), электромагнитный момент будет содержать быстро из-
меняющуюся во времени составляющую Л1ЭМТ, в которой есть бы-
стро затухающие апериодические составляющие с малыми постоян-
ными времени демпферных контуров Td, Tq, первая и вторая вре-
менные гармоники (частоты 50 и 100 Гц), затухание амплитуд ко-
торых определяется постоянными
времени Та9 T"d и T"q.
Полагая в полученных выра-
жениях U = 0, получим электро-
магнитный момент машины при
внезапном трехфазном коротком
замыкании якоря машины.
Приближенные решения урав-
нений для потокосцеплений,токов
и электромагнитного момента, по-
лученные при некоторых ограни-
чениях, налагаемых на параметры
синхронной машины и величины
изменения угла нагрузки и сколь-
Рис. 3-15. Электромагнитный мо-
мент в функции угла 9
1 — при Ер ~ const; 2 — при Ed =
S= const] ; hg
жения в переходном процессе, еще
не являются полными: они представляют собой функцию не
только времени т, но и угла 0, а также скольжения $ = рт0.
Для окончательного приближенного решения задачи необходимо
еще решить уравнение моментов машины. В тех случаях,
когда приближенное определение потокосцепления обмотки воз-
буждения фв (Ed) оказывается недостаточным, приходится решать
и дифференциальное уравнение напряжений цепи возбуждения
машины. При этом для большого круга задач можно использовать
приближенное решение уравнений демпферных контуров, предста-
вленное в этом параграфе, а уравнение цепи возбуждения соста-
влять без учета влияния демпферной обмотки, если таковая име-
ется. В этом, более общем случае могут быть использованы при-
ближенные решения, приведенные выше, являющиеся функциями
E'd, 0, рт0 и т, после решения следующей системы уравнений:
pxE'd + p'BE'd = ив 4- рвц^; (3-3.5)
Л-В
М -= Hjpxs 4- Мэм; pT0 = s. (3-36; 3-37)
Уравнение (3-35) представляет собой уравнение цепи возбуж-
дения и получено умножением (3-27) на xaBd/xB при (р(т) = 0.
В уравнение моментов (3-36) следует подставить (3-32) и (3-33).
После решения этой системы для исследуемого переходного
процесса, т. е. определения функциональной зависимости пара-
метров режима 0, s от времени т, находятся потокосцепления
и токи цепей машины, и задача оказывается решенной полностью.
Конечно, система (3-35)—(3-37) с учетом полного выражения элек-
тромагнитного момента получается достаточно сложной, и для
получения простого решения необходимы упрощения. Следует
отметить, что эта система уравнений справедлива и при наличии
регулирования возбуждения (цв изменяется в переходном процессе).
Потокосцепление фв (E'd) и в этих условиях изменяется во времени
достаточно медленно. Поэтому приближенное решение для
(3-25) и вся остальная схема решения задачи остаются прежними.
Внезапное симметричное короткое замыкание
синхронной машины без демпферной обмотки
4-1. ОБЩИЕ ЗАМЕЧАНИЯ. Наиболее распространенной аварией в энерго-
системах является внезапное короткое замыкание на линиях электропередачи
или даже на шинах станций, сопровождающееся появлением весьма больших
токов короткого замыкания. Протекание этого явления во многом определяется
характером процесса в синхронных генераторах, работающих в энергосистемах.
Длительность процесса короткого замыкания синхронного генератора прак-
тически ограничена временем, равным 0,1—0,3 с, так как при большей продол-
жительности процесса генератор в большинстве случаев не сможет работать син-
хронно с системой после отключения короткого замыкания. Несмотря на кратко-
временность процесса, определение токов короткого замыкания в цепях машины
имеет важное значение. Ток в цепях статора генератора определяет силу, дей-
ствующую на лобовые части обмотки статора, и поэтому служит основой для
расчета их крепления. Знание значения этого тока необходимо для обеспечения
надежной работы выключателей, отключающих короткое замыкание, а также
трансформаторов тока, питающих цепи измерения и защиты. Наконец, значение
и характер изменения тока в цепях статора в линии передачи при коротком
замыкании определяют условия работы реле защиты.
Вычисление токов в цепи возбуждения синхронного генератора для рас-
сматриваемых условий позволяет оценить надежность работы возбудитель-
ной системы.
В процессе короткого замыкания токи достигают максимальных значений
весьма быстро, практически через один полупериод переменного тока (0,01 с).
Эти максимальные значения представляют собой так называемые ударные
токи короткого замыкания. Следует отметить, что в современных
синхронных генераторах применяется автоматическое регулирование возбужде-
ния, предусматривающее резкое увеличение напряжения возбудителя при корот-
ком замыкании (форсирование возбуждения). При значительной кратности напря-
жения возбудителя в режиме форсирования по сравнению с его номинальным,
значением и большой скорости нарастания этого напряжения во времени токи
Рис. 4-1. Цепь статора синхронной
машины при симметричном корот-
ком замыкании
короткого замыкания перед его отключением могут превзойти ударный ток в са-
мом начале процесса. Однако чаще всего в Кратковременном процессе короткого
замыкания влияние регулирования возбуждения на значения токов машины
невелико.
Ниже будут определены токи и электромагнитный момент машины без демп-
ферной обмотки в случае внезапного короткого замыкания при некоторых упро-
щающих предположениях, которые состоят в следующем.
1. Внешняя цепь якоря до точки симметричного трехфазного короткого
замыкания может быть замещена последовательно соединенными активным (гвн)
и индуктивным (хвн) сопротивлениями (рис. 4-1). Это условие позволяет ограни-
читься рассмотрением короткого замыкания непосредственно на зажимах машины,
параметры обмотки статора которой уве-
личены на гвн и хвн.
2. В процессе короткого замыкания
частота вращения машины не изменяется
и остается равной синхронной (s = 0).
Поскольку машина при трехфазном корот-
ком замыкании не связана с сетью ((7=0),
это предположение достаточно хорошо от-
ражает условия определения токов и
электромагнитного момента, так как
обычно s< 1,0 (см. § 3-6).
3. Возбуждение машины в процессе
короткого замыкания не регулируется.
4. Сопротивление дуги в месте ко-
роткого замыкания не учитывается.
Таким образом, рассматривается в из-
вестной мере идеализированное короткое
замыкание. Однако такое рассмотрение позволяет выяснить основные черты
процесса и является первой ступенью к изучению более сложных случаев.
Современная теория синхронной машины широко использует теорему о по-
стоянстве потокосцеплений контуров машины не только для описания физиче-
ской картины отдельных процессов, в частности внезапного короткого замыкания,
но и для аналитического исследования и расчетов. Методика определения токов
машины при коротком замыкании для нормальных значений активных сопротив-
лений цепей, основанная на постоянстве потокосцеплений контуров в первые
моменты короткого замыкания, является весьма плодотворной и используется
как при трехфазном симметричном, так и несимметричном коротких замыка-
ниях. Уточнения, которые могут быть сделаны путем строгого решения уравне-
ний, в большинстве случаев не имеют практического значения.
Результаты решения задачи об определении токов и электромагнитного
момента при трехфазном коротком замыкании в рамках принятых допущений
одинаково пригодны для машины, работающей как генератором, так и дви-
гателем.
4-2. ОБЩИЕ ФИЗИЧЕСКИЕ ПРЕДСТАВЛЕНИЯ. Короткое
замыкание фазных обмоток синхронной машины обусловливает
скачкообразное изменение напряжения статора до нуля, вслед-
ствие чего в машине возникают свободные магнитные потоки.
Один из них практически неподвижен относительно фазных обмо-
ток статора, другой — относительно обмотки возбуждения (см.
§ 3-5). Характер изменения и значения токов в начале процесса
короткого замыкания можно легко определить, полагая активные
сопротивления цепей машины равными нулю, т. е. рассматривая
контуры машины идеальными. В этом случае при внезапном изме-
нении состояния цепей в них должны протекать такие токи, при
которых потокосцепления со всеми короткозамкнутыми контурами
машины постоянны. Обмотка якоря по условиям рассматриваемого
режима становится короткозамкнутой. Обмотка возбуждения с по-
стоянным приложенным напряжением также может рассматри-
ваться короткозамкнутой, так как ее внешнее напряжение не
определяет индуктированных, изменяющихся во времени токов
в цепи возбуждения.
Постоянство потокосцеплений с контурами машины обуслов-
ливается прежде всего появлением постоянных составляющих в то-
ках контуров (свободные токи), так как именно такие составляю-
щие токов и могут сохранить потокосцепление неизменным.
Рис. 4-2. К определению тока статора, обеспечивающего постоянство
потокосцепления с фазной обмоткой: а — поле при у = 0; б — поле
при у == 90°; в — магнитная проводимость в функции у и ток в функ-
ции времени
Однако магнитная или электрическая асимметрия ротора (яв-
нополюсный сердечник, обмотка возбуждения по оси d) должна
вызвать дополнительные колебания постоянной составляющей
тока обмоток статора, относительно которых перемещается несим-
метричный ротор. Эти колебания происходят с удвоенной часто-
той, так как магнитная проводимость для неподвижного потока
статора изменяется периодически с двойной частотой, а при любом
положении ротора потокосцепление с обмотками статора должно
оставаться неизменным. На рис. 4-2, а, б изображен явнополюс-
ный ротор машины в двух положениях относительно неподвижного
постоянного магнитного потока Ф. Вследствие наличия замкнутой
через возбудитель обмотки возбуждения магнитная проводимость
Л для потока Ф будет наименьшей (Л^ для положения ротора
при у = 0 и наибольшей (Л2) при у = 90°. Между этими крайними
значениями проводимость Л изменяется по гармоническому за-
кону. В соответствии с этим составляющая тока в статоре, обеспе-
чивающая постоянство потокосцепления г|) с фазной обмоткой,
оказывается наибольшей при у = 0 и наименьшей (i2) при
у = 90°. Таким образом, постоянство гр при различной по осям
d и q проводимости Л обеспечивается совокупностью постоянной
составляющей и второй гармонической тока (рис. 4-2, в).
Взаимное перемещение контуров статора и ротора приводит
к возникновению еще одной составляющей в токах обмоток —
гармонического тока основной частоты, так как короткозамкнутые
контуры статора перемещаются в постоянном поле ротора и на-
оборот.
На рис. 4-3 схематически показаны составляющие токов, воз-
никающих в цепях статора и ротора при трехфазном коротком
замыкании, обеспечивающие постоянство свободных потоков ста-
тора и ротора. В качестве исходных приняты постоянные соста-
вляющие (/ = 0). Свободные постоянные
потоки индуктируют токи основной часто-
ты (f = /1). Такие токи в трехфазной об-
мотке якоря создают вращающееся поле,
неподвижное относительно ротора. Таким
образом, значение свободного потока ро-
тора определяют постоянный ток обмотки
возбуждения и гармонический ток частоты
в статоре. Эти токи образуют замкнутую
систему, являясь взаимосвязанными
(рис. 4-3, б). Ток частоты в роторе соз-
дает пульсирующее с такой же частотой
поле. Оно эквивалентно двум полям, вра-
щающимся в противоположных напра-
влениях с синхронной частотой относи-
тельно ротора. Одно из них будет непо-
движным относительно свободного по-
тока статора, другое индуктирует в ко-
роткозамкнутой обмотке статора токи
удвоенной частоты (/ = 2/\). Следова-
тельно, образуется вторая замкнутая си-
а)
б)
Сгтиткр Vomop
Рис. 4-3. Схема связей
свободных составляющих
тока, возникающих в об-
мотках статора и ротора
при постоянстве потоко-
сцеплений в статоре (а)
и в роторе (б)
стема токов, определяющая свободный поток статора: постоян-
ный ток и гармонический ток удвоенной частоты в обмотке ста-
тора, гармонический ток основной частоты в обмотке возбуждения
(рис 4-3, а).
Амплитуды дополнительных составляющих тока, возникших
в результате внезапного короткого замыкания, не остаются неиз-
менными. Под влиянием конечных по значению активных сопро-
тивлений контуров происходит затухание токов. С этой точки зре-
ния более правильно говорить не о постоянных составляющих
тока в цепях машины, а об апериодических составляющих или
токах постоянного направления. Апериодические составляющие
токов затухают с некоторой постоянной времени, которая практи-
чески определяется активным сопротивлением того контура, в ко-
тором затухает апериодический ток, и индуктивностью этого кон-
тура с учетом влияния других короткозамкнутых контуров.
С такой же скоростью вместе с апериодической составляющей зату-
хают составляющие токов в других контурах, связанные с рассма-
триваемым затухающим апериодическим током (рис. 4-3).
В синхронной машине с одним контуром на роторе имеются
две постоянные времени затухания апериодических токов: в ро-
торе Td и статоре Та. Апериодические токи в статоре затухают до
нуля, так как в статоре нет источников напряжений постоянного
знака, которые поддерживали бы эти токи. Следовательно, вторая
гармоническая тока в статоре и основная гармоническая тока в ро-
торе также затухают до нуля. Апериодическая составляющая тока
в роторе затухает до значения, которое определяется напряжением
возбудителя; при отсутствии регулирования возбуждения в про-
цессе короткого замыкания апериодический ток затухает до пер-
воначального значения постоянного тока. Поэтому в статоре основ-
ная гармоническая тока затухает до некоторого установившегося
значения.
Отметим, что более строгое рассмотрение процесса короткого
замыкания несколько отличается от приведенного выше. Однако
при практически встречающихся активных сопротивлениях кон-
туров машины это отличие несущественно.
4-3. ТОКИ В ЦЕПЯХ МАШИНЫ. При трехфазном корот-
ком замыкании линейные напряжения в точке короткого замыка-
ния равны нулю, фазные напряжения также равны нулю и, следо-
вательно, ud — uq = щ = 0. Таким образом, решению подлежит
система уравнений (2-62)—(2-64), в которой кроме указанных
напряжений будет равным нулю и скольжение машины $:
(Рг + pd) -ь eq + m = 0; '
—ed + (рх + Р9) - е0 = 0;
РРхРл + (Рх + Рв) е0 = Рв«в •
(4-1)
Формальное решение системы (4-1) относительно любой пере-
менной или тока ij, выражаемого через напряжение имеет вид
j. = AlteP^ + А^ + А^ + Л4/, / = d, q, в, (4-2)
где первые три члена соответствуют общему решению однородных
уравнений в (4-1), а четвертый член — частному решению полной
системы (4-1).
Поскольку ий = const, то А4/ — константа (в частном случае —
нуль). Коэффициенты plt р2, р3 — корни характеристического урав-
нения системы (4-1), имеющего третью степень. Они в принципе
могут быть либо все вещественными, либо два из них — комплекс-
ные и обязательно сопряженные, а третий — вещественный. Для
синхронной машины возможен только второй вариант, так как
любой из ее токов имеет гармонические составляющие. Кор/йи
характеристического уравнения уже определялись аналитически
в § 3-5:
Р1, 2 — —l/T’a ± /; Рз == —l/T'd,
причем Та и T'd, характеризующие затухание токов, должны по
смыслу обращаться в бесконечность, если активные сопротивления
цепей равны нулю (токи не затухают).
Для указанных значений корней выражение (4-2) получает вид
Ч = ijve-x/T- + A3je~x,T'd + Л4/, (4-3)
где гармоническая составляющая
i.iv = (А; + A2i) cos т + / (Л1у - Л3/) sin т.
Выше отмечалось, что ток в начальной фазе процесса можно
определять, пренебрегая активными сопротивлениями цепей, что
указывает на практическую независимость от них ijv и Д3/- в (4-3).
Обозначая токи, найденные при этих условиях, дополнительным
штрихом, из (4-3), в котором следует считать Та = T'd = оо, по-
лучим
Ч = 4v — Ча, (4-4)
где ijV = ijV\ i'ja = Дз/ + Д4/ — апериодическая составляющая
тока.
В установившемся режиме ij = и из (4-3) при т = оо по-
лучаем ijy = Д4/. С учетом этого и с помощью (4-4) находим окон-
чательное решение (4-3) в виде
Ч = Чу 4- 4jVe~xlTa -|- (i'ja — i/y)e'x/Td. (4-5)
Таким образом, для определения ij нужно найти i'j (4-4) при
равенстве нулю всех активных сопротивлений и установившееся
значение тока Z/y. При равенстве нулю активных сопротивлений
цепей (pj = р7 = рв = 0) система (4-1) упрощается. Вводя в нее
э. д. с. за продольным переходным сопротивлением Ed, которая
в принятой системе относительных единиц равна Ed — фв =
= iied + е0 и при Рв = 0 остается неизменной и равной исходному
значению Edo, получим
+ eq = 0; ~Ged + pxeq = Edo,
где о = xdlxd.
Если любое из этих уравнений продифференцировать, то вместе
с другим оно образует систему, из которой исключается одна пере-
менная, а для оставшейся переменной получается уравнение вто-
рого порядка. Решение имеет вид
ed = —Е'м/в + Sicos т + S2 sin т;
e'q = —Qpxe'd = (^1 sin т — S2 cos т).
Произвольные постоянные ВА и В2 находим из начальных усло-
вий. Пусть в предшествовавшем короткому замыканию режиме
машина работала при напряжении на якоре, равном У, и с углом
Нагрузки 0О. Токи якоря в этом режиме idQ и iqQ определяются
согласно (3-3). Тогда, приравнивая полученные переменные
e'd и e'q при т — О начальным их значениям xdidQ и xqiq^ найдем
oBi — E'dQ + xdidQ; оВ2 — —xqiq3.
Но при Е'ао = [ixaido + й и с учетом (3-3)
оВ1 = U cos 0О; ®В2 = —U sin 0О.
Подстановка этих постоянных дает окончательные выражения
для e'd и eq. Из них получаем токи i'd и i'q при нулевых активных
сопротивлениях. Учитывая, что э. д. с. £jo с помощью (3-3) вы-
числяется в виде E'dQ = [iXdidQ + Eq = gEq + [iU cos 0O, получим
i’d = ~x7 = —f? ~ (4- ~ 4) U cos 00 + 4 cos + 0°); (4'6>
xd xd \ xd xd / xd
g' IJ
^ = T- = 4sin(T+0»)- (4-7)
При определении i'B используем выражение для э. д. с. Edi
которая сохраняет свое начальное значение Edo. Тогда с учетом
(4-6)
i'B = ео = E'do — pe'd = Ео + U [cos 0О — cos (т 0О)]. (4-8)
Найдем теперь установившиеся значения токов idy, iqy, iBy
Из (3-3) при U = 0 получим
idy:=== Ejx^ iqy = 0. (4 -9)
При отсутствии регулирования возбуждения ток /ву будет
равен исходному (начальному) его значению Не-
окончательное выражение для токов найдем согласно (4-5),
в котором напряжения можно заменить пропорциональными им
токами. Так, например, продольный ток якоря (/ = d)
ld idy + Q'da — idy) e~x/Td — idve~x/Ta,
где idv и i'da — переменная (гармоническая) и постоянная со-
ставляющие тока id, найденного при равенстве нулю активных
сопротивлений; idy — установившееся значение тока id. Подста-
вив указанные составляющие тока из (4-6) и (4-9), получим
id=—- (4 - 4г)и cos 0oe~T/7rf+4 е’х/г°cos +е°>-
xd \ xd xd / xd
(4-Ю)
Поступая аналогично, для остальных токов находим
iq = т2- = 4 е~Х'Та sin (т + 0о); (4-11)
xq Xq
X — X' > 7
»В = = 1’во — -- и Г—cos 0ое“т/г<г -1 e~x/1 J cos (т -f- 0О)], (4-12)
xd L J
где — Eq*
Теперь остается найти фазные токи машины. Для этого исполь
зуем обратное линейное преобразование (1-23). Для фазы
пример, при помощи (4-10) и (4-11) получим
ia = id cos у + iq sin у = — cos (т + y0) -
- (-jr - 4: ) u cos 0ое’т/г</ COS (r + Y0) +
+ 0,5(/ + -J-) cos (Y0 - 60) +
H- cos (2t + Vo + Oo)l e~X/Ta-
\ xd xq 1 j
а, на-
(4-13)
Токи в Фазах b и с находятся из (4-13) заменой угла у0 на
у о — 120° и у0 + 120°.
Если короткое замыкание происходит на холостом ходу ма-
шины, то в (4-12) и (4-13) следует положить 0О = 0; Eq = 0.
О 2л Чя вл Юл 12л
Рис. 4-4. Ток возбуждения синхронной машины
без демпферной обмотки при трехфазном коротком
замыкании: а — составляющие тока; б — полный
ток
На рис. 4-4, а по выражению (4-12) построены кривые отдель-
ных составляющих тока iB в функции времени т: апериодическая
составляющая (/), затухающая с постоянной времени обмотки
возбуждения (при короткозамкнутом статоре) Т'л; гармоника ос-
новной частоты (4), затухающая с постоянной времени статора Та
(на рисунке показана также огибающая 3 этой гармоники), и, на-
конец, постоянный ток /в0 (2), значение которого определяется
напряжением возбудителя. Обычно T'd в несколько раз превы-
шает Та\ поэтому гармоническая составляющая тока гв затухает
гораздо быстрее, чем апериодический ток. На рис. 4-4, б произ-
ведено сложение отдельных составляющих тока возбуждения и
представлен полный ток в функции времени. Расчетные дан-
ные: U — Eq — 1,0; 0О = 0; Xd = 1,0; x'd = 0,3; xq = 0,6; T'd =
= 0,2 с; Ta = 0,02 с.
На рис. 4-5, а показаны отдельные составляющие фазного тока
статора в функции времени в соответствии с уравнением (4-13)
для одного частного случая, а именно при 0О = у0 = 0, т. е.
предположении, что короткое замыкание происходит на холо-
Рис. 4-5. Фазный ток статора синхронной машины без
демпферной обмотки при трехфазном коротком замыка-
нии: а — составляющие тока; б — полный ток
стом ходу и в такой момент времени, когда потокосцепление с фа-
зой а максимально. Расчетные данные приняты теми же, что и
при определении тока I.. (см. рис. 4-4). Апериодическая составляю-
щая тока (/) и гармоника двойной частоты (3) затухают с по-
стоянной времени Та\ гармоника основной частоты представлена
составляющей (2), затухающей с постоянной времени T'd, и уста-
новившимся током (4). Штрихами показаны огибающие гармоник,
которые затухают во времени. Кривые рис. 4-4 и 4-5 соответствуют
случаю, когда машина имеет малые значения постоянных вре-
мени Та и T'd (машина небольшой мощности); поэтому токи за-
тухают весьма быстро.
Решим в отношении токов еще одну частную задачу: найдем
их максимально возможные значения, которые носят название
ударных токов.
Из рис. 4-4 и 4-5 следует, что токи достигают максимальных
значений весьма быстро, примерно через 0,01 с (т л) после воз-
никновения короткого замыкания. Имея в виду машины значи-
тельной мощности (Та 1 с; Та 0,1 с), можно, вычисляя макси-
мальные токи, пренебречь затуханием тока, т. е. считать в (4-12)
и (4-13) экспоненциальные множители равными единице. При
этом упрощении элементарный анализ показывает, что токи до-
стигают максимума ко времени т = л —0О. Тогда из (4-12) по-
лучаем уравнение для максимального тока возбуждения /в.макс
в виде
iB. макс = *в0 + \ Х“ U (1 + COS %).
xd
(4-14)
Ток гв.Макс получается наибольшим при работе машины в ис-
ходном режиме с некоторой нагрузкой, так как при 0О 4= 0 ток гв0
обычно больше, чем в режиме холостого хода.
Если короткое замыкание происходит на холостом ходу ма-
шины (0О = 0; гв0 = = ^/), то
Отметим, что максимальный ток (как, впрочем, и ток /в) не
зависит от угла у0, т. е. от того, какое положение ротор занимает
в момент короткого замыкания. Фазный ток, напротив, зависит
от у0. Наибольшего максимума (максимум максиморум) фазный
ток достигнет при возникновении в процессе короткого замыка-
ния наибольшего возможного апериодического тока, т. е. при
у0 —0О =0, как это следует из (4-13). Физически это означает,
что короткое замыкание происходит в такой момент времени, когда
потокосцепление с рассматриваемой фазной обмоткой имеет макси-
мальное значение. Итак, полагая в (4-13) у0 — = 0 и т = л —
— 0О, найдем ударный ток в статоре:
1кз = irfo + -р- (1 + cos 0О), (4-15)
xd
где начальное значение продольного тока якоря
irfo = (Eo-t/cos0o)/xd.
Рассмотрим пример.
Пусть трехфазное короткое замыкание происходит на зажимах машины,
имеющей следующие параметры: xd = 1,0; x'd = 0,3.
Будем считать, что перед коротким замыканием машина работала на холо-
стом ходу с номинальным напряжением на зажимах. В этом случае 0О = 0; гв0 =
= Ео = U = 1,0.
Максимальное значение тока в обмотке возбуждения при коротком замыка-
нии, если пренебречь затуханием, равно
4?. макс ~ 1 1 + 2 —~ 5,7,
т. е. примерно в 5/^раза превышает ток установившегося режима.
Максимальный ток в фазе при пренебрежении затуханием
'»-2тг“2тга-“6-7-
т. е. в 6,7 раза превышает амплитуду номинального тока статора.
В заключение этого параграфа отметим, что на основе постоян-
ства потокосцеплений с контурами машины можно весьма просто
определить токи с помощью изображающего вектора потокосцеп-
ления якоря [5].
В тех случаях, когда значение активного сопротивления в цепи
статора до точки короткого замыкания оказывается заметным,
полученные уравнения для токов должны быть уточнены. По при-
нятой здесь методике определения токов необходимые уточнения
можно найти в работе [5].
4-4. ПОСТОЯННЫЕ ВРЕМЕНИ. Постоянные времени фор-
мально находятся в результате решения характеристического
уравнения исследуемой системы дифференциальных уравнений:
они равны обратной величине вещественной части корней харак-
теристического уравнения, взятой с отрицательным знаком (см.
§ 3-3). Для машины без демпферной обмотки постоянные времени
были получены решением уравнения (3-18).
Укажем теперь другой метод определения постоянных вре-
мени, основанный на общих физических представлениях и яв-
ляющийся полезным для приближенных решений задач по не-
симметричным коротким замыканиям [63].
Пусть имеется короткозамкнутый контур, в котором проис-
ходит затухание постоянного тока. Будем полагать, что других
короткозамкнутых контуров, неподвижных по отношению к рас-
сматриваемому, нет, но имеются контуры, вращающиеся относи-
тельно рассматриваемого. Если в таком контуре затухает ток по-
стоянного направления, не поддерживаемый внешним источником
напряжения, то уравнение напряжений относительно этой состав-
ляющей тока будет иметь вид
РтФп “Ь = О,
где фп —свободное потокосцепление с контуром, изменяющееся
вместе с затухающим током постоянного направления in; г — ак-
тивное сопротивление контура. Потокосцепление фп создается не
только током /п, протекающим в рассматриваемом контуре, но и
соответствующими составляющими токов других контуров. Оно
может быть в общем виде представлено соотношением
Фп =
в котором индуктивность L должна определяться с учетом взаим-
ной индукции от токов других контуров, которые, как и ток /п,
причастны к созданию потокосцепления фп. Следовательно, это
некоторая эквивалентная индуктивность контура.
В соответствии с приведенными уравнениями ток /п будет за-
тухать экспоненциально с постоянной времени Т = Ur. Экви-
валентная индуктивность контура L может быть определена как
L, = фпЛп-
По этому выражению кажется, что пока мы не продвинулись
в определении L. Но если учесть, что оно справедливо для любого
момента времени в переходном процессе, то, применив его для
самого начала процесса (т = 0), получим необходимый результат.
Дело в том, что при т 0 любой короткозамкнутый контур можно
рассматривать как идеальный, хотя его активное сопротивление
и не равно нулю. Но тогда в начале переходного процесса его по-
токосцепление не должно изменяться, и следовательно, фп равно
начальному значению потокосцепления с контуром, т. е. потоко-
сцеплению в момент возникновения переходного процесса. При
этом свободный постоянный ток in также должен быть определен
для момента времени т = 0. Такой ток найти нетрудно, так как
он может вычисляться при равенстве нулю активных сопротивле-
ний цепей машины.
Итак, эквивалентная индуктивность L определяется в виде
L = to/*no, (4-16)
где ф0 и zn0 — начальные значения потокосцепления с контуром
и постоянной составляющей тока в контуре в переходном про-
цессе.
Физическая концепция, лежащая в основе подобного опреде-
ления постоянной времени затухания свободных тока и потоко-
сцепления контура, сводится к тому, что затухание происходит
под влиянием активного сопротивления того контура, в кагором
протекает свободный ток. Энергия магнитного поля контура,
запасенная в момент возникновения переходного процесса, по-
степенно переходит в тепловую энергию, выделяющуюся в об-
мотке. Потери, связанные с возникающими переменными токами
в контурах, вращающихся относительно рассматриваемого-, по-
крываются за счет электромагнитного момента машины. Такая
концепция справедлива для характеристики затухания свобод-
ного тока, если нет других контуров, неподвижных относительно
р ассматр и в аемого.
Определим описанным методом найденные ранее постоянные
времени Та и T'd. Согласно (4-16) эквивалентная индуктивность
для апериодических токов в статоре L'a = фаО/4то, где —
потокосцепление с фазой а в момент короткого замыкания; ian0 —
постоянная составляющая тока фазы а в первый момент короткого
замыкания. С помощью линейного преобразования и соотношений
в установившемся режиме найдем
ФаО == COS у0 4- Sin у0 = U COS (у0 — 0^
Начальное значение апериодической составляющей тока
фазы а согласно (4-13) равно
г’апо = 0,5t/ (-Г- + cos (То - е0).
Таким образом,
La = Та = L'a/r = Х2/Г,
lano ~г xq
что и было получено ранее формальным путем. Отметим, что
символом х2 обозначается индуктивное сопротивление обратной
последовательности. Соотношение L'a = х2 показывает, что индук-
тивность статора при протекании по обмоткам постоянного тока
такая же, как и для токов обратной последовательности.
Определим теперь постоянную времени T'd. Эквивалентная ин-
дуктивность для апериодического тока обмотки возбуждения при
коротком замыкании машины по (4-16) равна
LB фвоД'впОэ
где фр0 — потокосцепление с обмоткой возбуждения непосред-
ственно перед коротким замыканием; 1вп0 — начальное значение
апериодической составляющей тока iB при коротком замыкании.
Из (4-8) или (4-12) следует /ьп0 = cos fy/0’- Потокосцеп-
ление фв0 = Ем = oEq + pt/ cos 0О. Тогда индуктивность LB
в относительных единицах равна о, а в генри Ь'ъ = а£Вб =
= oLB = LbXdlxd, так как базисная индуктивность LB6 цепи воз-
буждения равна собственной индуктивности этой цепи LB. Иско-
мая постоянная времени T'd — Td^Xd!xd. где 7^о = Ьъ1гъ — соб-
ственная постоянная времени обмотки возбуждения. Этот же ре-
зультат был получен ранее формальным путем.
В мощных машинах постоянная времени T'd достигает 1—3 с;
Тм = 5-4-10 с; Та = 0,1-4-0,4 с.
4-5. ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ПРИ КОРОТКОМ ЗА-
МЫКАНИИ. Электромагнитный момент, развиваемый маши-
ной при внезапном симметричном коротком замыкании, значи-
тельно превосходит номинальное значение. Поэтому его необхо-
димо учитывать при расчетах механической прочности отдельных
узлов и крепления машины, а также при уточненных исследова-
ниях динамической устойчивости генераторов.
При трехфазном коротком замыкании результирующее потоко-
сцепление с якорем можно найти с помощью уравнения (3-22),
в котором нужно положить U = 0, а Тс заменить напряжением
исходного режима t/0, поскольку при пренебрежении влиянием
активного сопротивления статора фу = 0, а Тс = ¥нч = UQ.
Из (3-22) с учетом того, что т]с = 0НЧ = 0О, получаем
cos (т + е0); = иое~х1Та sln (т + 0о) • (4-17)
Для полученных значений и потокосцепление с фазой а
i|>0 = cos (т + v0) + sin (т + Vo) = U{ye~XITa cos (у0 - 0О). (4-18)
Этот результат указывает на то, что полные потокосцепления
с фазными обмотками создаются неподвижным в пространстве
свободным магнитным потоком, затухающим во времени по экспо-
ненциальному закону.
Напомним, что взаимодействие свободных потоков в зазоре
машины с током статора создаст такой же электромагнитный мо-
мент, что и взаимодействие полных потокосцеплений якоря с его
током (см. § 1-8), проявляющееся между неподвижным потоком и
первой и второй гармониками тока короткого замыкания в ста-
торе. Поэтому электромагнитный момент должен представлять со-
бой сумму первой и второй временных гармоник.
Формальное выражение для электромагнитного момента при
трехфазном коротком замыкании ЛТк3 получим, подставив в (3-4)
токи id и iq из (4-10) и (4-11), а потокосцепления ф^ и ф7 в виде
(4-17). Опуская в последнем индекс 0 у символа напряжения, бу-
дем иметь
Л4к3 = Ue-X/T° + U cos 0О (А- - -1-) sin (т + 0о) -
- o,5t/2 (4- - 4-) e~2x,Ta sin 2 <т+0o)- <4-19)
X xd xq !
Если короткое замыкание происходит при работе машины на
холостом ходу, то при вычислении Л1к3 в (4-19) следует считать
9о - 0.
Аналитическое выражение для Л4к3 можно было бы написать
на основе полученной ранее общей формулы (3-33) для машины
с демпферной обмоткой.
На рис. 4-6 сплошной линией показан график A4k3a4z/£72 =
= / (т) для типовых значений параметров машины: xdlxd = 3,0;
xd/xq = 1,6. Принято также 0О ~ 0; EJU =1,3; Та = 0,1 с
(31,4 рад); Td = 1 с (314 рад). Штриховой кривой изображена
первая гармоника момента.
Максимального значения Л4к3макс момент при коротком замы-
кании достигает ко времени, несколько большему т = л/2 — %
(около 0,005 с). Поэтому при его определении можно не считаться
с затуханием, характеризуемым постоянной Tdi и приближенно
учесть влияние постоянной Та. Тогда
^кЗ макс (4-zO)
xd
где kM — максимальное значение функции
е-г/7а Гф sin + 0о) _ 0)5е-т/га / 1 _ 21) sin 2 (т + 0О)].
I С/ х Xq ' J
Несложный анализ показывает, что эта функция достигает
максимума в момент времени тм, определяемый из условия
cos (тм 4- 60) е — |/ е2 -|- 0,5 . При этом
{Е'
-jj- sin (тм + Оо)
1------COS(TM + 0o)
где е = £^о/[4(/ (1 — x'd/xg)].
Для типовых значений x'd/xq = 0,5; е = 0,5 величина kM
= 1,1-
0,5
Мкз x'd
иг
1,0
Рис. 4-6. Электромагнитный момент синхронной машины
в процессе трехфазного короткого замыкания
При определении 7Ик3 не учитывались малые составляющие
токов и потокосцеплений, пропорциональные активным сопро-
тивлениям цепей машины. Их учет дает возможность оценить со-
ставляющие момента, не меняющие знака. Возникновение таких
апериодических составляющих объясняется следующим образом.
Свободные магнитные поля, затухая во времени, остаются практи-
чески неподвижными относительно обмоток статора и ротора. При
вращении ротора свободное апериодическое поле ротора пересе-
кает короткозамкнутую обмотку статора, и наоборот — в свобод-
ном апериодическом поле статора вращается ротор с обмоткой воз-
буждения. Если активные сопротивления не равны нулю, то при
этом возникают асинхронные моменты, не изменяющие знака, но
убывающие по значению, поскольку свободные поля затухают во
времени.
Составляющая момента постоянного знака, обусловленная
активным сопротивлением статора Л4ка, определяется как электро-
магнитный момент в асинхронной машине; при этом роль вторич-
ной короткозамкнутой обмотки играет здесь короткозамкнутый
статор синхронной машины. Известно, что электромагнитная мощ-
ность в асинхронной машине Рэм определяется в виде Рэм = р2/$,
где р2 — потери во вторичной обмотке от токов, появляющихся
в результате наведения э. д. с. магнитным полем зазора; s — сколь-
жение, определяющее относительное вращение вторичной обмотки
и магнитного поля в зазоре. В нашем случае s = 1,0, так как апе-
риодическое поле ротора вращается с синхронной частотой отно-
сительно неподвижного статора. Поскольку в относительных еди-
ницах электромагнитные мощность и момент численно равны, иско-
мая составляющая момента равна потерям в обмотке статора син-
хронной машины от основной гармоники тока.
Используя (4-13), будем иметь
Л1^а = [-^-+('4-----Ц t7cose0]2r= (4-21)
[xd \x'd xd / u] \ xd )
Определение апериодической составляющей электромагнит-
ного момента ЛСа — асинхронного момента, обусловленного ак-'
тивным сопротивлением обмотки возбуждения, значительно слож-
нее. Это объясняется тем, что ротор машины имеет неодинаковые
параметры по осям d и q, и поэтому задача сводится к определению
момента асинхронной машины с несимметричным ротором. При-
ведем без доказательства выражение этой составляющей [51]:
М"ка = 0,5£72 е-^т- гр, (4-22)
xd Xq ]
где эквивалентное активное сопротивление ротора гр, учитываю-
щее потери в сердечнике ротора, а также изменение активного со-
противления цепи возбуждения от частоты, находится через сопро-
тивление обратной последовательности г2:
гр = 2(г2-г) (4-23)
loo
Здесь коэффициентами учитывается увеличение активного со-
противления при частоте 50 и 100 Гц по сравнению с сопротивле-
нием при f = 0. Таким образом, отношением ^бо^юо роторное
сопротивление, определенное по сопротивлению обратной после-
довательности, которое измеряется при частоте в ’роторе, равной
100 Гц, приводится к частоте 50 Гц. Эта частота имеет место в ро-
торе синхронной машины при образовании момента ЛСа- Экспо-
ненциальный множитель в (4-22) учитывает затухание гармониче-
ского тока в роторе, происходящее с постоянной времени Та.
4-6. ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ПОСЛЕ ОТКЛЮЧЕ-
НИЯ КОРОТКОГО ЗАМЫКАНИЯ. При отключении трехфаз-
ного короткого замыкания и восстановлении связи генератора
с электрической сетью происходит новая коммутация цепи якоря,
которая сопровождается образованием свободных потоков в ма-
шине. При внезапном коротком замыкании напряжение^ якоря
изменяется от исходного до нуля и начальное значение свободного
потокосцепления с якорем Чгс равно U, К моменту отключения
короткого замыкания (т = тк) оно уменьшается до значения
ие~хк1та.
Предположим, что при отключении короткого замыкания на-
пряжение на якоре становится прежним, т. е. равным напряже-
нию сети U. Отсчитывая время т от этого момента, будем иметь
начальное потокосцепление якоря ¥нч в новом переходном про-
цессе, равное Ue~x*lTa. В отличие от режима короткого замыка-
ния теперь в машине возникнет «вынужденный» поток (потоко-
сцепление фу), обусловленный внешним напряжением U, причем
Ту = U. Тогда свободное потокосцепление якоря в момент воз-
никновения нового переходного процесса Тс согласно (3-22) будет
равно
Чгс = U /1 + е~2^1та „ 2е"Тк/г^со5(0ич — 0О).
Значение его существенно зависит от начальных фазовых
углов 0НЧ и 0О. При 0НЧ — 0О = л, например, Ф‘с = U (1 +
-f- е~^Та), что в 1,6—1,8 раза больше начального свободного
потокосцепления якоря в процессе внезапного короткого замы-
кания.
Таким образом, после отключения короткого замыкания элек-
тромагнитный момент машины определяется двумя составляю-
щими: одна обязана своим появлением свободному потокосце-
плению, другая — вынужденному. Эта последняя в переходном
процессе может значительно превышать электромагнитный мо-
мент в установившемся режиме при тех же углах нагрузки 0.
При неблагоприятных условиях (0НЧ — 0О = л) свободное
потокосцепление Ф‘с > U и соответствующая составляющая элек-
тромагнитного момента также получается весьма существенной.
Поэтому электромагнитный момент, развиваемый машиной после
отключения короткого замыкания, оказывается большим, чем при
коротком замыкании [32].
Электромагнитный момент машины без демпферной обмотки
удобно определять через потокосцепления. Подставив в общее
выражение (3-4) токи из (2-69): id = (ф^ —фв)/ад iq = tyq/xq,
получим
«.»-<=- (4-24)
Потокосцепления ф^ и ф7 найдем по выражениям, приведенным
в § 3-6. Для определения начального угла т]с в (3-22) обратимся
к рис. 4-7. Вектор результирующего потокосцепления якоря
фк в процессе короткого замыкания остается на диаграмме непо-
движным и сдвинут относительно продольной оси di в момент
возникновения замыкания на угол 0Ои, являющийся углом на-
грузки в исходном установившемся режиме. К моменту отключе-
ния замыкания потокосцепление якоря % уменьшится до значения
YH4, которое представляет собой начальное потокосцепление
якоря в последующем переходном процессе. За время короткого
замыкания тк ось d, вообще говоря, поворачивается на угол, не
равный тк, так как в процессе короткого замыкания частота вра-
щения машины отличается от синхронной. Характер движения
ротора при трехфазном коротком замыкании генератора будет
рассмотрен в гл. 6, а пока примем, что ось d, совершив некоторое
число оборотов, оказывается к моменту отключения короткого за-
Рис. 4-7. К определению потокосцеплений якоря
при отключении короткого замыкания
мыкания повернутой относительно Тнч на угол 0НЧ (ось d2 на
рис. 4-7). Угол 0О зависит от мгновенных восстановленных фазных
напряжений или, что то же самое, от положения вектора U отно-
сительно оси d2. По известным углам 0НЧ, 0О и потокосцеплениям
Тнч, ¥у находим и т]с, как это показано в § 3-6. Ограничимся
рассмотрением случаев, когда при заданном тк начальное свобод-
ное потокосцепление якоря имеет минимальное и максимальное
значения. Это будет при разности 0ЯЧ — 0О, равной соответственно
Ойл, когда = CJJ, а Ск = 1 й= е~х^Та. На рис. 4-8 пред-
ставлены диаграммы потокосцеплений для рассматриваемых усло-
вий, из которых следует, что в обоих случаях угол т]с = % + я.
Тогда потокосцепления якоря после отключения короткого за-
мыкания согласно (3-22) будут равны:
ф^ = U [cos 0 — Ске~х/Та cos (т Ц- 0О)];
Ф7 = U [sin0 — CKe“T/?asin (т ф- 0О)].
Заметим, что в (4-25) гармонические члены основной частоты
записаны при пренебрежении скольжением машины.
В переходном процессе, возникающем после отключения корот-
кого замыкания, угол 0 будет медленно изменяться вследствие
того, что s + 0. Поставим ограниченную задачу определения мак-
симально возможного электромагнитного момента в рассматривае-
$ А. И. Важнов 129
(4-25)
мом процессе. Момент достигает своего максимума весьма быстро —
за время тм после отключения короткого замыкания, равное при-
мерно л радиан (0,01 с). За такой промежуток времени угол 0
незначительно изменится по сравнению со своим исходным зна-
чением 0О. Практически не изменится потокосцепление фв, и по-
этому в (4-24) можно оперировать с постоянным потокосцеплением
Фв = фво = Еао, равным в относительных единицах э. д. с. за
Рис. 4-8. Диаграмма потокосце-
плений якоря в момент отклю-
чения замыкания: а—при 0НЧ=
= 0О; б — при 0НЧ = 0О + л
продольным переходным сопротивле-
нием.
Подставим в (4-24) ф^ и ф^ из
(4-25), где можно заменить угол 0
на 0О, а фв на Е'ао- В результате по-
лучим
(4-26)
xd
где
/г Ес!0
Лто--у-
sin0o—Ске T|/7'asin (т-|-0о)—
— [sin 20о—2Ске“т/7’‘! sin (т 4~20о)+
Ос
+ Ске-2т/ т“ sin 2 (т 0О] j;
ники основной частоты и
обозначение е — см. § 4-5.
Составляющая в Л4ЭМ, зависящая
от Ск, обусловлена свободным маг-
нитным потоком статора; она вклю-
чает в себя первую и вторую гармо-
периодически изменяет свой знак.
При более строгом рассмотрении должен учитываться также асин-
хронный момент Л1ка, обязанный своим появлением свободному
потоку статора и пропорциональный гр. Он может вычисляться
по (4-22), где необходимо добавить множителем величину С£, так
как начальное значение свободного потокосцепления теперь
равно CKU. Другая составляющая в Л4ЭМ обусловлена нормальным
результирующим потоком машины; на малом отрезке времени она
принята постоянной, а вообще зависит от угла 0 и медленно изме-
няется вместе с ним.
При заданном угле 0О функция Дт0, а вместе с ней и Л4ЭМ до-
стигнут максимума в некоторый момент времени. Однако макси-
мально возможный момент 7Изм.макс возникает не при произволь-
ном, а вполне определенном значении 0О. Поэтому при определении
«максимума максиморума» момента следует рассматривать его
как функцию двух переменных 0О и т. Скрупулезное нахождение
экстремума /Ст0 приводит к громоздким выражениям. Однако, как
показывает анализ, достаточно воспользоваться приближенными
условиями, которые при нормальных значениях параметров ма-
шины обеспечивают вычисление макс с погрешностью, не пре-
вышающей 3%.
Можно принять, что максимально возможный электромагнит-
ный момент получается при 0О = 2л/3 и т = л независимо от ве-
личин Ск и 8 и, следовательно, равен
м — и2 ь
ЛЧЭм. макс у' ^м0>
xd
где согласно (4-26)
[1 +^ + С.г-”/Г'ф
Величина kMQ зависит от коэффициента Ск и для Ск = 04-1,6
практически линейна. Следовательно, максимально возможный
электромагнитный момент возникает при 6НЧ — 0О = л, когда
Ск = 1 + е~х^Та, и при наименьшей продолжительности корот-
кого замыкания. В этом случае после отключения короткого зш-
мыкания появляется наибольший свободный поток статора и элек-
тромагнитный момент в переходном процессе достигает большого
значения. Так, для тех же параметров 8 = 0,5; x'd/xq = 0,5, по
которым в § 4-5 вычислялся коэффициент kM в (4-20), определяю-
щий максимальный электромагнитный момент при трехфазном
коротком замыкании, и при Та = 0,1 с коэффициент kMQ 3,2
и 3,5 соответственно при Ск = 1,4 и 1,6. Таким образом, для Ск =
= 1,44-1,6 будем иметь
•^эм. макс/^кЗ макс “ 2,9 3,2.
Для мощных генераторов, обладающих постоянной времени
Та = 0,14-0,2 с, при минимальном времени отключения корот-
кого замыкания 0,1 с, коэффициент Ск < 1,4 4-1,6.
Внезапные несимметричные короткие замыкания
синхронной машины без демпферной обмотки
5-1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ- Наиболее частым видом корот-
кого замыкания является несимметричное короткое замыкание — однофазное,
Двухфазное, двухфазное на нейтраль (рис. 5-1).
Если с точки зрения динамической устойчивости системы наиболее тяжелым
является трехфазное короткое замыкание (правда, из-за малой вероятности оно
Не является определяющим в расчетах динамической устойчивости), то несим-
метричные короткие замыкания неприятны появлением больших знакоперемен-
ных моментов и значительных перенапряжений на свободной фазе при отсутствии
поперечной демпферной обмотки. Кроме того, при несимметричных коротких
замыканиях появляется полный спектр гармоник в токах, которые при наличии
соответствующей емкости в цепи статора могут значительно усилиться. Подобные
резонансные явления возможны, например, при работе генераторов через линию
передачи заметной протяженности. Наконец, следует отметить, что при однофаз-
ном коротком замыкании ударный ток в статоре превышает аналогичный ток при
трехфазном коротком замыкании.
Анализ несимметричных коротких замыканий будет произведен для случая,
когда внешняя цепь до точки короткого замыкания замещается последовательно
соединенными сопротивлениями гвн и хвн. Этим условиям, в частности, удовлетво-
ряет и случай, когда между точкой короткого замыкания и зажимами машины
Рис. 5-1. Схемы несимметричных коротких замыканий: а —
однофазное; б — двухфазное; в — двухфазное на нейтраль
включен трансформатор. Ограничимся рассмотрением только однофазного и двух-
фазного коротких замыканий, возникающих при работе генератора в режиме
холостого хода, когда он не имеет связи с электрической сетью.
5-2. ОБЩИЕ ФИЗИЧЕСКИЕ ПРЕДСТАВЛЕНИЯ. При однофазном и двух-
фазном коротких замыканиях физическая картина явления одна и та же. Объяс-
няется это тем, что в обоих случаях на статоре образуется однофазный коротко-
замкнутый контур, создающий пульсирующее магнитное поле, если по нему про-
текает переменный ток. Используя теорему постоянства потокосцеплений, можно
нарисовать следующую картину на примере однофазного короткого замыкания.
При возникновении короткого замыкания в цепи якоря генератора (при
коммутации цепи якоря) в машине образуются свободные магнитные потоки,
один из которых практически неподвижен относительно короткозамкнутого кон-
тура на статоре, другой — относительно обмотки возбуждения. Если активные
сопротивления контуров равны нулю, то эти потоки остаются неизменными по
значению. Постоянство потокосцеплений с однофазной обмоткой на статоре
обеспечивается в первую очередь постоянным током; поэтому в обмотке статора
появляется такой уравнительный ток. Неподвижный в пространстве свободный
поток статора индуктирует э. д. с. основной частоты в обмотке ротора, враща-
ющегося с синхронной частотой. Поскольку обмотка ротора замкнута через
возбудитель, в ней возникает ток основной частоты, обусловливающий пульси-
рующее поле. Это поле оказывает, в свою очередь, электромагнитное воздействие
на статор, определить которое можно проще всего, заменив однофазное пульси-
рующее поле двумя вращающимися полями. Известно, что однофазное пульси-
рующее поле обмотки можно разложить на прямо- и обратновращающиеся поля,
причем частота их вращения относительно обмотки равна угловой частоте пуль-
сирующего потока. Поэтому прямовращающееся поле обмотки возбуждения,
движущееся относительно ротора в направлении его вращения, индуктирует
в статоре вторую гармонику э. д. с., в результате чего в статоре образуется вторая
гармоника тока; обратновращающееся поле остается в пространстве неподвиж-
ным и, таким образом, участвует в создании свободного потока статора. Вторая
гармоника тока в однофазной обмотке статора создает свое магнитное поле,
пульсирующее с двойной частотой. Это поле, являясь полем взаимной индукции
обмоток статора и ротора, будет оказывать электромагнитное действие на об-
мотку возбуждения. Заменив это пульсирующее поле прямо- и обратновраща-
ющимися полями, которые перемещаются относительно обмотки статора с двой-
ной синхронной частотой, найдем, что первое из них неподвижно относительно
прямовращающегося поля обмотки возбуждения, а второе индуктирует в роторе
э. д. с. утроенной частоты. Таким образом, в обмотке возбуждения появляется
третья гармоника тока. Продолжая последовательное рассмотрение прямо-
и обратновращающихся полей, заменяющих однофазные пульсирующие поля,
создаваемые гармониками тока в обмотках, придем к выводу, что как в обмотке
статора, так и в обмотке ротора образуются новые гармоники тока, более высокого
порядка. При этом ток статора будет содержать гармоники четного, а ток ро-
тора — нечетного порядка.
На рис. 5-2, а схематически’показаны взаимные связи гармоник тока в об-
мотках статора и ротора, устанавливающиеся при постоянстве потокосцепления
а) б)
Статор Ротор Статор Ротор
| -Р = П | 1 /'-л I
I I 1 f 1
4 f =1 f'p 1 1 f'p 1= T у
I f=2ft | l —J ) A =1 1
f =L2=j^_j *" »———* L±^J= A V
1 l= A 4 =L±^_|
Рис. 5-2. Схема связей гармоник тока в обмотках статора и ро-
тора, возникающих при постоянстве потокосцеплений в ста-
торе (а) и в роторе (6)
обмотки статора. Уравнительный постоянный ток (/ = 0) статора и показанные
на рисунке уравнительные гармоники тока статора и ротора образуют замкнутую
систему. При конечном активном сопротивлении обмотки статора свободный поток
статора будет затухать до нуля с постоянной времени, определяемой этим сопро-
тивлением. Вместе с ним будут затухать с той же постоянной времени свободный
постоянный ток статора и вся замкнутая система токов, обусловленная им.
Аналогичные рассуждения, основанные на постоянстве потокосцеплений
с обмоткой ротора при равенстве нулю ее активного сопротивления, приведут
к выводу, что в роторе появятся уравнительные составляющие тока постоянного
направления (/ = 0) и четные гармоники, а в статоре — магнитно-связанные
с ними нечетные гармоники (рис. 5-2, б). Вся эта замкнутая система токов будет
затухать до установившегося значения, поскольку свободный поток ротора в конце
переходного процесса достигнет установившегося значения потока возбуждения.
Постоянная времени затухания указанной системы токов должна определяться
активным сопротивлением обмотки возбуждения, в которой протекает ток по-
стоянного направления.
Итак, при несимметричном коротком замыкании в однофазных контурах
статора и ротора возникают постоянные составляющие токов и полные спектры
гармоник, затухающие с двумя различными постоянными времени.
Теоретически бесконечный ряд гармоник тока обусловлен характером корот-
козамкнутых контуров статора и ротора: однофазные контуры создают физи-
чески пульсирующие, а не вращающиеся магнитные поля.
Отметим, что следствием общности физических процессов при однофазном
и Двухфазном коротких замыканиях является подобие аналитического их иссле-
дования: уравнения однофазного короткого замыкания могут быть получены
из уравнений двухфазного замыкания увеличением параметров машины на ве-
личину, равную 0,5хо.
5-3. ТОКИ ПРИ ДВУХФАЗНОМ КОРОТКОМ ЗАМЫКАНИИ.
Строгое решение дифференциальных уравнений напряжений при
несимметричных коротких замыканиях весьма сложно, так как
при этом приходится иметь дело с уравнениями, содержащими пе-
риодические коэффициенты, а не постоянные, как это было в слу-
чае симметричного короткого замыкания. Приближенное решение
может быть найдено с помощью теоремы постоянства потокосцеп-
лений контуров, т. е. по методике, уже использованной в задаче
о трехфазном коротком замыкании. Согласно этой методике, сна-
чала находим токи, полагая г = гБ = 0; затем определяем уста-
новившиеся токи короткого замыкания, также считая г — 0;
после этого составляем общее выражение для тока, имея в виду,
что разности между найденными токами затухают по экспонен-
циальному закону до нуля. Сравнение приближенного и строгого
решений задачи о токах несимметричного короткого замыкания
показывает, что при обычных значениях активных сопротивлений
цепей машины они весьма мало отличаются друг от друга. При
определении токов более удобными являются координаты а, (3.
Найдем токи при двухфазном коротком замыкании, происхо-
дящем на холостом ходу генератора, т. е. при начальных условиях
iB = 4о — ~ = 0 или, что то же самое,
i()0 “ *ссО = “ 0. (5-1)
Примем, что в процессе короткого замыкания скольжение
машины s = 0 и напряжение возбуждения не регулируется.
При двухфазном коротком замыкании короткозамкнутый кон-
тур на статоре образован фазами b и с. Постоянство потокосцепле-
ния с этим контуром может быть выражено условием
ф^ “ Фб = Ф&о — фсо = const или фз = фро = const, (5-2)
так как ф^ —фс = |/ Зф[3.
Постоянство потокосцепления с обмоткой возбуждения харак-
теризуется соотношением
фв = Фво = const. (5-3)
Потокосцепления фа, фр, фв в относительных единицах можно
получить из (1-39), (1-40), (1-42). Поскольку рассматривается ма-
шина без демпферной обмотки, в указанных выражениях следует
положить равными нулю токи демпферных контуров. Затем (1-39)
и (1-40) нужно отнести к базисному потокосцеплению якоря
определяемому через другие базисные величины якоря или базис-
ные величины обмотки возбуждения на основе (2-58) в виде
г1Гб “ “ ^бМ = Л1ап^1вб.
Уравнение (1-42) для перевода в относительные единицы сле-
дует разделить на базисное потокосцепление обмотки возбужде-
ния Чгвб, которое на основании (2-58), (2-60) и соотношения базис-
ных величин якоря может быть представлено несколькими равно-
значными выражениями:
^вб Л^'в^'б/'^ав^'
В результате указанной операции получим потокосцепления
в относительных единицах:
Я’а = (•$* + cos 2у) /а + Rxifi sin 2у + iB cos у; (5-4)
= RJa sin 2у + (5Л — Rx cos 2у) i₽ + iB sin у; (5-5)
= (*d — xd) (ia cos у + ip sin y) + iB, (5-6)
где Sx = 0,5 (Ld + Lq) = 0,5 (xd + x9); Rx = 0,5 (Ld — Lq) =
= 0,5 (xd — xq), причем индуктивности и индуктивные сопро-
тивления выражены в относительных еди-
ницах.
При двухфазном коротком замыка-
нии (рис. 5-1, б) ia = 0, /0 = х/3 (ia +
+ h + О = 0. Поэтому а-составляющая
тока якоря ia = ia — iQ = 0.
Отметим токи, определяемые при ра-
венстве нулю активных сопротивлений це-
пей машины, штрихами в верхней части
символа. Подставив в (5-2) и (5-3) пото-
косцепления в виде (5-5) и (5-6), в кото-
рых нужно положить ia = 0, и приняв во
внимание начальное условие (5-1), будем
Рис. 5-3. Взаимное поло-
жение координатных осей
и оси магнитного поля
статора при двухфазном
коротком замыкании
иметь
(Sx — Rx cos 2у) z’p Ц- i'B sin у = zb0 sin y0;
(xd — x'd) z’p sin у + z’b = z’bd,
где y0 — значение угла у при т = 0.
Для того чтобы в дальнейшем наиболее просто рассмотреть
случай однофазного короткого замыкания, введем в полученную
систему вместо угла у = т + То новый угол а = т + а0, который
будет составлен осью d с осью поля, создаваемого токами двух
короткозамкнутых фаз (рис. 5-3). Принимая за положительное
направление тока короткого замыкания is2 направление тока
ib в фазе /?, получаем ось поля Фк от токов двух фаз, располагаю-
щуюся нормально к оси фазы а. Из рис. 5-3 следует, что у = л/2 +
+ а; у0 = л/2 + а0, поэтому
siny0 = cosa0; sin у = cos a; cos2y = —cos 2а.
Подстановка этих соотношений в полученные уравнения дает
(Sx + Rx cos 2а) z’p zB cos a = zb0 cos a0;|
(xd — x'd) i'$ cos a 4- zB = zB0. j
Из этих уравнений находим оба тока:
i' = 2>во (cos «о — cos а) .
₽ xq + x'd~ (х? — *d)cos2a ’
>; =-2,.,-х-л- (5_9)
xq + xd — (Xq — Xd) C0S 2a
Ток короткого замыкания в статоре is2 — ib.
Из схемы рис. 5-1,6 следует, что ic = —i-ь- Поэтому
ip = (ib — icWS = 2is2/j/r и 1й = Г T ip/2.
Токи is2 и ia являются периодическими четными функциями
угла а, поэтому разложение их в ряд Фурье должно содержать
только косинусные члены. Эти разложения имеют вид
is2 = (1 4- 2bcos 2a ф- 2b2cos 4a 4~ • • •) —
2 V X'dXq
— — 3 E- (cos a -|- b cos3a b2 cos5a -f- • • •); (5-10)
хэ
iB — IbO 4“ (b0 (xd — xd) (1 4-
(ttt + cos2a + bcos4a +
+ b2 cos 6a -}- • • •)--(cos a b cos 3a b2 cos 5a + • • • ) ,
I/ XdXQ
(5-11)
где
b = ; 4 = 4 + V^x~q\ Eq = IqQ.
V *q + V xd
Эти выражения показывают, что отношение амплитуд любых
двух соседних гармоник тока большего и меньшего порядка оди-
наково и равно Ь. Значения постоянной составляющей и четных
гармоник, связанных с ней, в токе статора зависят от угла у0(а0),
т. е. от того, какое положение занимает ротор в момент короткого
замыкания. Они максимальны при а0 = 0, когда начальное пото-
косцепление с короткозамкнутым контуром статора максимально
(рис. 5-3).
Определим теперь токи в режиме установившегося короткого
замыкания. Этот режим можно характеризовать соотношениями:
/м|9ву^0. (5-12; 5-13)
Действительно, уравнение напряжений короткозамкнутого кон-(
тура на статоре имеет вид
Рт (фьу — 1рсу) + г {iby — icy) = 0 или рт1р3у + л3у = 0. 3
Ввиду малости г имеем 0, и так как постоянного по-
токосцепления в установившемся режиме с цепями статора нет,
то получаем выражение (5-12).
Для цепи возбуждения в установившемся режиме короткого за-
мыкания уравнение напряжений принимает вид
Мпу + ЛЛ- =0,
где — переменная составляющая установившегося тока fBy.
Ввиду малости гв можно считать rBiB^ 0, что и дает уравне-
ние (5-13).
Постоянная составляющая и четные гармоники тока в статоре,
а также связанные с ними нечетные гармоники тока в роторе за-
тухают до нуля; поэтому установившиеся токи:
/— °° 1
is2y = 'Ру = 2 1^2* л sin (2k — 1) а 4- Ac2k^ cos (2k - l)a];
k=l
iKy = 'B0 + S (Bs2k sin 2ka + Bc2k cos 2£a).
* k=i
(5-14)
Определить амплитуды токов в (5-14) можно следующим обра-
зом. В уравнения (5-12) и (5-13) следует подставить общие выра-
жения потокосцеплений (5-5) и (5-6), в которых нужно положить
ia = 0; fp = ipy; iK = fpy и установившиеся токи заменить их
разложениями (5-14). После выполнения операции дифференциро-
вания в (5-13) приравниваются нулю коэффициенты, стоящие при
синусах и косинусах в (5-12) и (5-13). В результате получается бес-
конечная система алгебраических уравнений, содержащих неиз-
вестные амплитуды гармоник токов. Решение этой системы и под-
становка амплитуд гармоник токов в общие выражения (5-14)
приводят последние к виду
is2y = —— (cos a + b cos 3a -j- b2 cos 5a + • • •);
(xd — хЛ(1+Ь)
[вУ = *во + ko ------------(c°s 2a 4- ft cos 4a 4- ft2 cos 6a 4- • • •),
ГДе Хэ Xd XdXq*
Отметим, что по методу симметричных составляющих ток уста-
новившегося двухфазного короткого замыкания (основная гармо-
ника) определяется по формуле
т _ /з Ео
s2y ^ + х2 ’
где^л-2 — сопротивление обратной последовательности. Сравнение
этой формулы с полученной выше для тока is2y показывает, что
при определении тока /s2y необходимо в качестве х2 лля машины
без демпферной обмотки принимать сопротивление х%2) — ]/~XdXq.
Амплитуда основной гармоники тока определяется аналогично
установившемуся току, только сопротивление xd нужно заменить
динамическим параметром xd.
Вернемся к определению токов в процессе короткого замыка-
ния. Под влиянием активных сопротивлений обмоток ротора и
статора разности между составляющими токов i'S2, *в и установив-
шихся токов затухают до нуля по экспоненциальному закону
(см. § 5-2). Поэтому общие выражения для токов будут иметь вид
. /3 £0(xd-4)
ls2 ^s2y /
хэхэ
У^ cos(2& —
- /г=1
КЗ Ео cos а0
1 + 2 bk cos 2ka
ы
(5-15)
1)а е~т/^2Н-
e X'T°2
t : xd~x'd [i । (xd-<)(’+6)
{b — *ву "Г 1в0 -- I "1-------------
хэ Хз
2 х
X cos 2ka е XIT'di — ib0
*d)(l + 6)cosa0
xcos(2& — l)a e X/T^, (5-16)
где T'di и Ta2 — постоянные времени роторной и статорной це-
пей при двухфазном коротком замыкании, определение которых
дается в § 5-5.
При практических расчетах токов не приходится иметь дела
с рядами Фурье столь внушительного вида, какими они предста-
влены в выражениях (5-15) и (5-16). В кривых токов is2 и fB из
высших гармоник имеют заметную амплитуду лишь вторая,
третья и четвертая, так как при среднем отношении xq/xd 2
коэффициент b = 0,17 и степени его с увеличением показателя
быстро уменьшаются (Ь2 0,03; Ь3 0,005 и т. д.).
Можно отметить также, что если машина будет иметь симме-
тричный ротор в двух осях, т. е. xd = xq (b — 0), то высшие гар-
моники в кривых тока будут отсутствовать, кроме второй гармо-
ники в роторе аналогично второй гармонике в статоре при трех-
фазном коротком замыкании.
На рис. 5-4 и 5-5 представлены в функции времени токи is2 и
рассчитанные по (5-15) и (5-16) для машины со следующими
параметрами: xd = 1,0; xq ~ 0,6; xd = 0,3; Та2 = 0,02 с; T’di =
— 0,1 с; Eq = = 1,0. Здесь приняты очень малые значения
постоянных времени, чтобы наглядно показать затухание на не-
большом отрезке времени. Предполагается, что короткое замы-
кание происходит при наличии максимального потокосцепления
с контуром статора (а0 = 0).
Оценим теперь в общем виде те максимальные значения токов,
которые вообще могут ожидаться при двухфазном коротком замы-
Рис. 5-4. Ток статора при двухфазном коротком
замыкании
кании. Наибольшие значения токов получаются, если а0 = 0,
т. е. в случае, когда потокосцепление с контуром статора в момент
короткого замыкания максимально. Их можно определять, не
учитывая затухания, так как максимальных значений токи дости-
гают через 0,01 с (т = л) после начала процесса короткого замы-
____।__।__।—।----1—1---1—
0 2л 4л 6л вл Юл 12л 74*
Рис. 5-5. Ток возбуждения при двухфазном коротком
замыкании
кания, а это время значительно меньше постоянных времени
7^2 и Тд2. Таким образом, ударные токи короткого замыкания
*к2 и Ц.макс можно найти из (5-8) и (5-9). Эти токи при а0 = 0
Достигают своего максимума при а = т + а0 = т — л. Учиты-
вая, что ток fs2 =0,5 / 3 и iBo = Ео, получим
„ Гз .
*к2 — ' > L
xd
/ X, —
в. макс = г'в0 I 1 4“ 2----;---
\ Xd
(5-17; 5-18)
Таким образом, максимальные токи при сделанных допуще-
ниях не зависят от несимметрии ротора по осям d и q (x'd 4= xq) и
определяются лишь параметрами по продольной оси xd и x'd.
Для оценки значений максимальных токов при двухфазном коротком замы-
кании рассчитаем их для машины с параметрами xd ~ 1,0; x'd = 0,3 при усло-
вии, что замыкание произошло при номинальном напряжении (/в0 = Ео = 1,0).
Согласно (5-17) и (5-18) iv2 ~ 5,8; /Ве макс ~ 5,7.
5-4. ТОКИ ПРИ ОДНОФАЗНОМ КОРОТКОМ ЗАМЫКАНИИ.
Будем считать, что короткое замыкание произошло на холостом
ходу генератора, т. е. при начальных условиях: iB = 1в0; f00 =
= До = До = 0. Определим сначала токи при пренебрежении
активными сопротивлениями цепей. Применяя теорему постоян-
ства потокосцеплений к короткозамкутой фазе а (см. рис. 5-1, а)
и обмотке возбуждения, получаем
= фа0 = const; фв = фв0 = const. (5-19; 5-20)
В процессе короткого замыкания ib = ic — 0, поэтому Д = 0;
Д = ДзД, ia = ia — iQ = 2/3Д. Потокосцепление фазы а согласно
линейному преобразованию равно
Фа = фо + Фа — х010 + Фа = О,5хоГа Д- фа.
Подставив сюда из (5-4), где нужно положить 1$ = 0, в соот-
ветствии с условием (5-19) получим
0,5 [xd Д- *xq Д- (xd — хД cos 2у] i'a Д- iB cos у = /в0 cos у0,
где xd = xd + О,5хо; xq = xq Д 0,5xo.
Уравнение (5-20) с помощью (5-6), в котором теперь = 0,
приводим к виду
(xd — x'd) i'a COS у Д- i'B == До,
где xd = x'd Д О,5хо, a *xd — xd = xd — x'd.
Два полученных уравнения полностью идентичны соответствую-
щим уравнениям при двухфазном коротком замыкании (5-7)
с тем лишь отличием, что вместо тока i'a и угла у ранее стояли
ток Д и угол а, а параметры не имели знака *. Поэтому можно вос-
пользоваться выражениями (5-10) и (5-11), чтобы по аналогии за-
писать токи при однофазном коротком замыкании. Обозначим ток
короткого замыкания в статоре через isl. Имея в виду, что Д2
= 0,5 V 3ip, a isl = ia = l,5ia, т. e. в последнем выражении по-
стоянный множитель в |/ 3 раз больше, будем иметь
== Sfocosjo 2£ cos 2у + 2Ь2 cos 4 у -) —
2 У xdxq
—(cos ? + b cos Зу 4" b2 cos 5у 4~ • • )>
х'э
(5-21)
* * *
Jb = 1'вО + 1’в0 (xd — X’d) (1 + Ь)
* * О
+ b cos 4у + b2 cos бу -(- • • •
где
cos 2у 4"
cos a0
-« г * *
V xdxq
(cos у 4-
4- b cos 3y 4- b2 cos 5y 4~ • • •)
(5-22)
' 1 / 1
Хэ \ 1 +*
Установившиеся токи isly и zBy находятся из условий
0; ртфву 0, аналогичных (5-12) и (5-13) при двухфазном замы-
кании, и подобным же методом. Поэтому получается сходный ре-
зультат:
zsly = — (cos у + b cos Зу + b2 cos 5у + • • •);
хэ
(хл — x'd) (1 + 6) * *
Ч = 1‘во + гво--------;--------- (cos 2у 4- b cos 4у 4- b2 cos 6y 4-),
хэ
* * i Г * *
где хэ = xd 4- у x’dxq.
Определяемый методом симметричных составляющих устано-
вившийся ток при однофазном коротком замыкании,как известно,
равен
I 3£о
sly Xd + х2 4- ха ’
Сравнение этого тока с амплитудой первой гармоники в токе
biy показывает, что при определении тока 1Лу необходимо счи-
тать сопротивлением обратной последовательности синхронной
машины без демпферной обмотки в режиме однофазного короткого
замыкания Х2} величину
4” = V(x'd 4- О,5хо) (Хд 4- О,5хо) — О,5хо.
Учитывая затухание токов, можно, согласно описанной выше
методике, представить токи в виде
Ха [ У b<k-Vcos(2k - 1) J е"т/7^ 4-
^ву I ^вО
3£р cos у0
Л 1 г * *
2 V XdXq
* *
xd~~xd
* г
хз
\xd — xd'(l +b)
*
хэ
1 2 У bk cos 2ky
k=4
У
ft=i
e х,тл\
(5-23)
х cos 2ky
e~XIT'dx
(xd — x'd)^ +%) cosVo
У fe(A’1>cos(2^— l)y
,ft=i
e-T/r«,
(5-24)
где T*d\ и Ta\ — постоянные времени роторной и статорной цепей
при однофазном коротком замыкании, определяемые далее в § 5-5.
*
Коэффициент &, характеризующий уменьшение амплитуд выс-
ших гармоник при однофазном замыкании, для нормального соот-
ношения параметров (xj < xQ) меньше аналогичного коэффициента
b при двухфазном замыкании. Поэтому, как и раньше, в токах
isl и iB наибольшие значения среди высших гармоник имеют лишь
вторая, третья и четвертая.
Оценить ударные токи при однофазном замыкании гк1 и /в.макс,
которые, как и раньше, получаются при наличии максимальной
постоянной составляющей в токе статора (у0 = 0), можно с по-
мощью (5-17) и (5-18). В этих выражениях нужно лишь заменить
УЗ на 3 и параметры Xd, x'd на Xd, x'd. Таким образом, при пре-
небрежении затуханием ударные токи в рассматриваемом случае
равны:
. ЗЕ0 _ 3£0 .
K1 k *d+O.5xo’
xd~xd \
x'd + о,5хо )
Как видим, эти токи не зависят от степени несимметрии цепей
ротора по осям d и q (x'd *?), однако на их значения влияет
сопротивление нулевой последовательности.
Определим ударные токи для машины, имеющей параметры:
Xd = 1,0; x'd = 0,3; х0 = 0,1, полагая, что короткое замыкание
произошло при номинальном напряжении (Ео = /ь0 = 1,0). Со-
гласно приведенным формулам fK1 8,6; гв.макс 5,0.
Отметим, что при расчете токов короткого замыкания в случае,
когда между точкой короткого замыкания и обмоткой статора ма-
шины с изолированной нейтралью включен трансформатор с за-
земленной нейтральной точкой, можно пользоваться приведенными
выше формулами. При этом вместо сопротивлений статора машины
следует подставлять их сумму с сопротивлением короткого замы-
кания трансформатора, а вместо сопротивления нулевой последо-
вательности машины — аналогичное сопротивление трансформа-
тора. Кроме того, в (5-15) и (5-16) необходимо заменить угол а
на у, а в (5-23) и (5-24) — угол у на у + л/2. Очевидно, что в этом
случае будут вычислены не токи статора машины, а токи в транс-
форматоре. Токи статора машины можно найти из соотношений:
^as “ ^(Зт> “ ^ат>
где ias, ips и гат, г‘|зт — а- и ^-составляющие соответственно токов
статора машины и трансформатора.
5-5. ПОСТОЯННЫЕ ВРЕМЕНИ. Определим постоянные вре-
мени затухания токов методом, указанным в § 4-4 и сводящимся
к нахождению эквивалентной индуктивности контуров при ко-
ротком замыкании.
Постоянные времени ротора. Согласно определениям, данным
в § 4-4:
Тd2 И Tdl — ^в1Ав»
где Lb2 и Lbi — эквивалентные индуктивности обмотки возбуж-
дения соответственно при двухфазном и однофазном коротких
замыканиях. Но
L>b2 == фвОЛ'вп2,
где — начальное значение потокосцепления с обмоткой воз-
буждения, равное LBfBo; г’вП2 — постоянная составляющая тока
в первый момент короткого замыкания. Согласно (5-11)
. ♦ xd ~ x 'd . Хэ
^вп2 — ^в0 j ^в0 77 — ^в0 ~7~ •
лэ лэ
Таким образом,
Ц2 = ЬВ^-; Td2 ==TdQ-^~-
Лэ Лэ
По аналогии
* г
T'di = Tdo~-
Ха
Постоянные времени статора. По общему правилу
Та2 = -^a2/(2/')j T’al = La\/r,
где Лд2 и Lai — эквивалентные индуктивности короткозамкну-
тых цепей статора соответственно при двухфазном и однофазном
коротких замыканиях. В знаменателе Тл2 стоит активное сопро-
тивление короткозамкнутого контура двух фаз. Индуктивности:
La'2 1=1 Ф$2оЛ*5п2> La\ = IpsloA'snb
где ф52Э и ф510 — начальные потокосцепления с контурами ста-
тора; /зП2 и fsni — постоянные составляющие токов статора в пер-
вый момент двухфазного и однофазного коротких замыканий.
Но
20 = ф/?о фсо “ 3 ф|3о — Р 3 I во COS OCq', 10 = фдо “ IqQ COS Yq.
Подставив в выражения индуктивностей указанные потоко-
сцепления и значения токов из (5-10) и (5-21), получим
L'ai = 2 V7^q = 242’; L'aX = 4 Vx'dxq = 24.
Таким образом, постоянные времени:
42) . 'г
^2- — > Jal— з7 •
Внезапное короткое замыкание синхронной машины
с демпферной обмоткой
6-1. ТОКИ ТРЕХФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ.
В качестве примера решения операторных уравнений синхронной
машины рассмотрим задачу нахождения токов в обмотке статора и
обмотке возбуждения машины при внезапном трехфазном коротком
замыкании якоря. Будем считать, что короткое замыкание про-
исходит на зажимах машины, несущей некоторую нагрузку,
которая характеризуется начальными значениями токов tj0,
f70, rF0. Поскольку в установившемся режиме токов в демпферных
контурах нет, начальные значения этих токов z3fZ0, /эд0 равны нулю.
Ток любого контура машины равен сумме начального значения
и той величины, которая явится решением операторных уравнений
§ 2-8. Положим, что в процессе короткого замыкания возбуждение
машины не регулируется (Дцв = 0). Поскольку в установившемся
режиме перед коротким замыканием ротор машины вращается
с синхронной частотой, то будем считать скольжение ротора во
время короткого замыкания равным нулю (s = 0).
Дадим приближенное решение задачи, используя те же приемы,
которые применялись для машины без демпферных контуров
(см. гл. 4). Сначала определим токи, принимая активные сопротив-
ления цепей равными нулю и учитывая конечные сопротивления
лишь в затухании токов. Затем найдем установившиеся токи
в обмотке якоря, полагая ее активное сопротивление равным нулю,
так как обычно влияние этого сопротивления ничтожно. По этим
данным можно записать общие выражения для токов как функций
времени.
Поскольку при трехфазном коротком замыкании напряжения
Ud = Uq = 0, то оригиналы &Ud = Ud — UdQ = —и dQ и \uq =
= uq — uqq = —UqQ определяются начальными значениями про-
дольного и поперечного напряжений якоря и потому постоянны.
Операционное изображение &ud и \uq как постоянных величин
(р) = —«do; (р) = — uq0.
Таким образом, изображения статорных токов (2-117)—(2-119)
при сделанных исходных допущениях принимают вид
Д,- (п\ [pXg (р) + Г] — UggXg (р) .
d' [PXd(p) +d [рХд(р) +r] +xrf(p)x?(p) ’
Д - _ «зд lP*d (P) + H + udoxd (p)
4 ' [PXd (P) + r] \PXq (p) + r] + xd (Р) Xq (P) ’
AiB (p) ==---pi - X^xB3d) + dxmdr3d
1. Токи при пренебрежении активными сопротивлениями цепей,.
Положим в изображениях токов все активные сопротивления
равными нулю. При этом операторные сопротивления становятся
равными сверхпереходным сопротивлениям x"d и x'q (см. § 2-9).
Применяя в обозначении искомых токов дополнительный индекс
в виде двойного штриха, будем иметь
ЛUd^ Л1" + Udb •
q{p} (р2 +W’
Ai; (p) = — A Md (p)- A = ^dX«Bd.-xa3dXB3d.. (
XBX3d~XB3d
где A = const.
Оригиналы, соответствующие этим изображениям, можно найти
в таблицах [46]:
Д^ = sinx — -^(1 — cost);
xd xd
\i"q = —7?-sinт — cost);
xq Xq
Дг’в = —A sin т -j- Л. sin t(1 — cos t).
xd xd
Прибавив к этим токам начальные значения iq0, ip0, опре-
делим полные токи id, iq, il, совпадающие с реальными в начале
процесса, пока не сказывается их затухание. Токи и iq$, выра-
женные через параметры исходного установившегося режима,
представлены в (3-3). Имея в виду, что = —U sin 0О и uqQ =
= U cos 0О, получим
~i)^cos0o+^c°s(T+0o); м
Xrf \ xd xd / xd
Iq = — ( — -j- } U Sin0o + Sln(T + 0o); (6-2)
\ xq Xq I xq
Ib = *b0 + A-^r COS 0O — A cos (t + 0O). (6-3)
xd xd
Сравнение токов id и iq с аналогичными токами для машины без
демпферной обмотки в (4-6) и (4-7) показывает идентичность их
формул; разница лишь, во-первых, в параметрах статорной об-
мотки: вместо индуктивных сопротивлений x'd и xq в (6-1) и (6-2)
фигурируют x'd и xq, т. е. динамические сопротивления, соответ-
ствующие новым магнитным связям контуров статора и ротора,
где теперь имеется демпферная обмотка. Второе отличие состоит
в появлении постоянной составляющей в токе i"q и объясняется
наличием поперечного демпферного контура, для которого в пер-
вый момент короткого замыкания должно обеспечиваться постоян-
ство потокосцепления.
2. Токи установившегося короткого замыкания. Эти токи
будут такими же, как в машине без демпферной обмотки [см.
(4-9)], поскольку в симметричном установившемся режиме токи
в демпферных контурах отсутствуют.
Таким образом,
idy ===: E^l^d* iqy ^ву ^в0*
3. Затухание токов короткого замыкания. Учтем теперь за-
тухание токов. Картина здесь в общем случае несколько сложнее,
нежели в машине без демпферной обмотки. В первые моменты
короткого замыкания, когда обмотки машины можно рассматри-
вать как идеальные контуры, характер токов в них определяется
условием постоянства потокосцеплений с контурами. Во всех
контурах возникают: 1) постоянная (апериодическая) составляю-
щая тока, обеспечивающая постоянство начального потокосцепле-
ния; 2) гармоника основной частоты, которая появляется в резуль-
тате вращения контура в поле апериодической составляющей тока
другого контура, перемещающегося относительно первого. Кроме
того, в фазах статора, относительно которого перемещается несим-
метричный ротор, возникает вторая гармоника тока. Так что физи-
ческая картина для первого момента короткого замыкания не
отличается от той, которая была дана для машины без демпферной
обмотки (см. § 4-2).
Апериодическая составляющая и вторая гармоника тока ста-
тора соответствуют гармоникам токов id, iq и взаимосвязаны с гар-
мониками токов роторных контуров. Все они затухают до нуля
с постоянной времени, определяемой эквивалентной индуктив-
ностью обмоток статора и их активным сопротивлением (Та).
Затухание апериодической составляющей тока в поперечном демп-
ферном контуре, а вместе с ней и апериодической составляющей
тока iq до нуля обусловливается активным сопротивлением этого
контура и происходит с постоянной времени контура T"q. Подобное
определение постоянных времени затухания токов было рассмот-
рено для машины без демпферной обмотки, подтверждено формаль-
ными выкладками (см. § 4-4) и является справедливым для затуха-
ния апериодического тока в таком контуре, который имеет магнит-
ную связь только с вращающимися относительно него контурами.
В машине с демпферной обмоткой это положение применимо
к поперечному демпферному контуру и к обмотке статора.
Что касается контуров на роторе по продольной оси, то здесь
имеются два самостоятельных контура — обмотка возбуждения и
продольный демпферный контур, магнитно-связанные друг с дру-
гом и неподвижные один относительно другого. Поэтому затухание
апериодических токов, возникающих для поддержания постоян-
ства потокосцепления с этими контурами в начальный момент
короткого замыкания, будет происходить более сложно, и в общем
случае постоянные времени затухания уже не могут определяться
указанным простым способом.
Вместе с тем можно утверждать, что на процесс затухания
апериодических токов в цепях ротора практически не влияет
активное сопротивление обмотки статора (см. § 3-4) и при рассмотре-
нии этого процесса его можно считать равным нулю. Таким обра-
зом, задача сводится к исследованию затухания апериодических
свободных токов в трех магнитно-связанных контурах, один из
которых — продольный контур статора — может считаться иде-
альным. Эта задача рассмотрена в § 3-3, где показано, что каждый
из апериодических токов содержит две составляющие, затухающие
с различными постоянными времени, и что последние совпадают
с постоянными времени двух контуров, если они сильно отличаются
Друг от друга по значению. Такое положение имеет и простое
физическое толкование. В явнополюсных машинах продольный
демпферный контур обычно имеет активное сопротивление, в де-
сятки раз большее, нежели у обмотки возбуждения, так что r3d^
> гв. При таком соотношении параметров быстрое затухание
апериодического тока в демпферном контуре можно рассматривать
как обусловленное только активным сопротивлением этого контура
r3d и считать при этом сопротивление гв = 0.
Поскольку потокосцепление с обмоткой возбуждения при гв = 0
должно сохраняться неизменным, при
Рис. 6-1. Апериодические токи при трехфаз-
ном коротком замыкании
1 — в обмотке возбуждения при разомкнутом дем-
пферном контуре; 2 — в обмотке возбуждения;
3 — в продольном демпферном контуре
быстром уменьшении тока
в демпферном контуре с
такой же скоростью будет
нарастать апериодический
ток в обмотке возбужде-
ния. Очевидно, что посто-
янную времени T"d этой
быстро изменяющейся апе-
риодической составляющей
тока в продольных конту-
рах ротора, а также в токе
id при сделанных допуще-
ниях можно определять
прежним методом, как от-
ношениеэквивалентной ин-
дуктивности демпферного
контура (при гв = г = 0)
к его активному сопроти-
влению. На рис. 6-1, где
представлено изменение
апериодических токов про-
в процессе короткого замыкания,
дольных контуров ротора
эта первая описанная фаза
процесса занимает отрезок времени от нуля до т = тг
Дальнейшее изменение токов происходит под влиянием конеч-
ного сопротивления гв. Ввиду его малости токи продольных
контуров будут содержать медленно изменяющиеся составляющие.
Такая составляющая тока в демпферном контуре очень мала, так
как э. д. с., индуктируемая в этом контуре, мала вследствие мед-
ленного изменения потокосцепления, а активное сопротивление
относительно велико. Пренебрежение этой составляющей тока
равносильно размыканию демпферного контура. Поэтому медленно
изменяющаяся составляющая в апериодическом токе обмотки
возбуждения и в токе id затухает с постоянной времени T'd, равной
постоянной времени обмотки возбуждения при короткозамкнутом
статоре. Эта постоянная по общему правилу определяется отноше-
нием эквивалентной индуктивности обмотки возбуждения (при
г = 0) к сопротивлению гв.
Если собственные постоянные времени обмотки возбуждения и
продольного демпферного контура различаются не очень сильно,
то каждая из двух постоянных времени затухания зависит от
постоянных времени обоих контуров. Подобные условия встреча-
ются в неявнополюсных синхронных машинах, имеющих мощные
скрытые демпферные контуры в теле ротора.
По окончании процесса затухания апериодические токи в про-
дольных контурах машины достигают установившихся значений.
Итак, при коротком замыкании апериодические токи в обмотке
возбуждения, продольном демпферном контуре и продольном
контуре статора представляют собой сумму трех составляющих:
одна из них, называемая переходной, затухает с постоянной
времени T'd, другая — так называемая сверхпереход-
ная — затухает с постоянной времени T'd, третья дает установив-
шееся значение апериодического тока:
Оа — ijy + Ij^e~Xll'd + Л'п^"т/Г^, / = В, ad, d, (6-4)
где //п и //п — начальные значения переходной и сверхпереходной
составляющих токов; ijy — установившееся значение тока.
Отметим, что установившееся значение апериодического тока
в обмотке возбуждения равно постоянному току /в0 в этой цепи до
короткого замыкания, так как принято, что возбуждение синхрон-
ной машины не регулируется, а установившийся апериодический
ток в демпферном контуре равен нулю.
Ограничимся случаем > гв, когда затухание апериодиче-
ских токов в продольных контурах статора и ротора определяется
постоянными времени T'd и T'd, равными постоянным времени
отдельных контуров ротора. Последнее обстоятельство позволяет
легко найти начальные значения переходной и сверхпереходной
составляющих и, следовательно, получить выражение для аперио-
дического тока в целом. Покажем это на примере апериодического
тока продольного контура статора, описываемого в общем виде
уравнением (6-4).
Если постоянная времени T'd равна постоянной времени демп-
ферного контура, то, полагая r3d = сю и T'd = 0, что будет соот-
ветствовать размыканию демпферного контура, из (6-4) при т =
= 0 получим
i-da “ tdy “I” dm
где i'da—апериодический продольный ток якоря в начальный
момент короткого замыкания. Определив этот ток в предположе-
нии, что демпферный контур отсутствует, и зная установившееся
значение апериодического тока, найдем
-du “ ida idy
Кроме того, для т = 0 уравнение (6-4) принимает вид
Ida tdy 'Г du
гДе i'da — апериодический ток для начального момента короткого
замыкания при наличии обоих продольных контуров на роторе.
Нетрудно видеть, что
I d п — d а id а •
Аналогичные выражения могут быть написаны для токов дру-
гих продольных контуров. Таким образом, начальные значения
переходной и сверхпереходной составляющих тока определяются
значениями апериодического тока при т = 0 для двух случаев:
при разомкнутом демпферном контуре и при наличии обоих конту-
ров на роторе, а также значением установившегося постоянного
тока в контуре.
Например, апериодический продольный ток статора при т = О
исходя из (4-6) и (6-1) равен
= — — — (—,-------М U cos0о,
xd V xd xd )
когда продольный демпферный контур разомкнут, и
irfa = —(v-— ^cos0o,
Xd ' xd xd '
когда по продольной оси имеются два короткозамкнутых контура —
демпферный и обмотка возбуждения.
Ток idy = —EQ/xd.
Начальные значения переходной и сверхпереходной составляю-
щих:
I’dn = - ( ± \ и cos е0; Idn = - - 4- W cos 00-
\ xd xd / \ xd xd /
Апериодический ток возбуждения г’ва в начальный момент ко-
роткого замыкания машины с демпферной обмоткой согласно
(6-3) равен
^ва “ ^в0 А -пт- COS 0о.
xd
Аналогичный ток 1Ва в машине без демпферной обмотки, для
которой А = Хав^в (в общем выражении А нужно положить
xa3d = xB3d = 0), равен
»;а = »во + ^-^-СО80О-
Хв Xd
По токам /ва, *ва и fBy = *вэ найдем начальные значения пере-
ходной (/вп) и сверхпереходной (/вп) составляющих:
Лш = *ва — ^ву ~х7~ C0S
лв Xd
= 1'вл и cos 00.
\ xd Vd /
4. Токи в процессе короткого замыкания. С учетом затухания
на основе (6-1), (6-2) и (6-4) продольный и поперечный токи статора
равны:
- 1г - G; “ г/с“ -
, - (Дг--7г)^со5 0ое"т/г<, + -^-е"т/г<’со5(т4-0о);
х xd xd ' xd
i = — %е~х/тч + А-е~х!Та sin (т + 0О).
\ Xq xq f xq
Эти выражения совпадают с (3-29) и (3-30), если в последних
положить U = 0,.$ = Ои заменить на напряжение якоря перед
коротким замыканием, а т]с на 0О.
Ток короткого замыкания в фазах статора, например в фазе а,
равен
ia == id cos (т + Yo) + iQ sin (r + Yo) = — ( ^7 +
+ U cos 0017 A- - A-\ e~XITd + f-L _ cos(r + To) -
I_ X xd xd f X xd xd ' J)
- - 7-) U sin 0oe-T/7? sin (r + Yo) + -A 17 A +
+ ) cos (Vo - 0O) 4- (Ar - A-) cos (2т + Yo + %) e-T/7’«. (6-5)
Токи в фазах b и с можно получить подстановкой в (6-5) вместо
угла у0 значений у0 — 120° и у0 120°.
Уравнение для тока возбуждения zB на основании (6-3) и (6-4)
с учетом затухания принимает вид
'e=4o+4^^cos0<<T/r;+
+ (4 - VF-) U <^oe-XIT"d - А ^ге-х/та cos(r + 0О). (6-6)
X xd XKXd / xd
Если короткое замыкание происходит на холостом ходу ма-
шины, то при определении токов в (6-5) и (6-6) нужно положить
% - 0.
Приведенный результат качественно не отличается от того,
что был получен для машины без демпферной обмотки. Ток статора
п°-прежнему содержит основную гармонику (правда, не только
косинусоидальную, но и синусоидальную), апериодическую состав-
ляющую и гармонику удвоенной частоты. В токе возбуждения со-
Л^Ржатся апериодическая составляющая и основная гармоника.
*\ак и раньше, ток /в не зависит от угла у0. На рис. 6-2 представ-
лена кривая тока короткого замыкания в статоре, рассчитанного
по (6-5) для следующих данных: U = Ео ~ 1,0; 0О = 0; xd = 1,0;
x'd = 0,3; xd = x"q = 0,2; Td - 2 c; T"d = 0,02 c; Ta = 0,2 c.
Предположено, что короткое замыкание происходит при у0 = 0,
т. е. когда с рассматриваемой
фазной обмоткой потокосцепле-
ние максимально. Штрихами по-
казана апериодическая соста-
вляющая тока.
На рис. 6-3 изображена кри-
вая тока возбуждения, вычис-
ленного по (6-6) для указанных
выше данных исходного режима
и параметров машины.
Отметим, что начальные зна
чения составляющих, затуха-
Рис. 6-2. Фазный ток при трехфаз- ющих с постоянными времени
ном коротком замыкании T'd и Td, зависят от соотношения
сопротивлений рассеяния про-
дольного демпферного контура и обмотки возбуждения
(xSB), так как коэффициент А в (6-6) в первом приближении оп-
ределяется отношением
А Xs3d ___________
xssd + X'SB 1 “Ь xsbIxs3d
Кривая тока на рис. 6-3 рассчитана при xSB= з (Л = 0,25).
Для отношения x5Jxs^d = 1 (Л = 0,5) и тех же остальных пара-
V'WVWw-
Установившийся
режим
0 2т 4т 6т 8т Ют 12т тт 1бт Ют 20 т
Рис. 6-3. Ток возбуждения при трехфазном корот-
ком замыкании машины с демпферной обмоткой, об-
ладающей малым рассеянием
метров зависимость /в = / (т) представлена на рис. 6-4. На этих
рисунках штриховыми кривыми показаны апериодические состав-
ляющие тока /в.
5. Ударные токи. Определение максимально возможных токов
при коротком замыкании для машины с демпферной обмоткой ока-
зывается в общем виде более сложным, чем для машины без такой
обмотки. Ввиду малых значений постоянных времени T'd и T"q уже
нельзя пренебрегать затуханием соответствующих составляющих
токов, так как значения e~XJTd и e~x/Tq начинают заметно отли-
чаться от единицы даже для моментов времени, равных л (0,01 с).
Вместе с тем можно считать, что максимально возможный ток
в статоре будет иметь место, если при коротком замыкании возни-
кает наибольшая по значению апериодическая составляющая.
Ограничимся случаем, когда короткое замыкание происходит на
холостом ходу машины. Тогда, полагая в (6-5) 60 = 0 и = U,
Рис. 6-4. Ток возбуждения при трехфазном коротком за-
мыкании машины с демпферной обмоткой, обладающей
большим рассеянием
найдем, что максимум тока Zk3 будет при у0 = 0 и в момент времени
т = л. При этом можно считать e~n/Tcl 1,0 и
,;3 = 4 Ге-я/г* + е^т° + 4(1- I.
К3 xd Xq J
Для средних значений параметров мощных машин, а именно
T'd = 0,024- 0,04 с; Та = 0,14-0,2 с; x"dlx"q 0,7, величина выра-
жения, стоящего в квадратных скобках, изменяется в пределах
1,75—1,90. Обычно принято считать этот коэффициент равным
1,8, и тогда ударный ток в статоре /к3 = 1,8(7/Xj.
Поскольку x'd < x'd, ударный ток статора в машине с демпфер-
ной обмоткой больше, чем в машине без такой обмотки.
Ударный ток возбуждения в машине с демпферной обмоткой при
прочих равных условиях меньше, чем в машине с одной обмоткой
возбуждения на роторе: демпферная обмотка в известной степени
экранирует обмотку возбуждения. При этом различие в ударных'
токах определяется в основном значениями параметров А, Та, T'd.
6-2. ПОСТОЯННЫЕ ВРЕМЕНИ ЗАТУХАНИЯ ТОКОВ. Фор-
мальное определение постоянных времени затухания различных
составляющих токов связано, как это следует из (2-123), с нахожде-
нием корней характеристического уравнения W (р) = 0, где
W (p) — полином p, являющийся знаменателем изображения
тока. Постоянная времени равна обратной величине вещественной
части корня (или вещественного корня), взятой с противополож-
ным знаком (см. § 3-3). При определении постоянной времени зату-
хания апериодического тока в статоре Та, как уже отмечалось
ранее, можно пренебречь активными сопротивлениями цепей
ротора. В этом случае xd (р) = x"d\ xq (р) = xq, и характеристи-
ческое уравнение получается в виде
(px'd + г) (рх" + г) + xdx" = 0.
Его корни равны
причем в мнимой части корней отброшено слагаемое, зависящее от
параметров машины и имеющее ничтожную величину при нормаль-
ных сопротивлениях г.
Постоянная времени Та = х2/г, где х2 = 2xdxql(xd + x"q) —
сопротивление обратной последовательности машины с демпферной
обмоткой.
Сравнивая этот результат с тем, который был получен для
машины без демпферной обмотки (см. § 4-4), можно видеть их
полную идентичность. При этом, конечно, нужно учитывать, что
в рассматриваемом случае наличие демпферных контуров в про-
дольной и поперечной осях машины приводит к изменению дина-
мических сопротивлений статора (x"d и x"q вместо x'd и xq для машины
без демпферных обмоток).
При определении постоянных времени затухания апериодиче-
ских токов в роторных цепях можно пренебречь активным сопро-
тивлением статора. При этом знаменатель изображения тока
(р) имеет вид (/?2 + 1) xd (р), и на основании (2-113) получим
характеристическое уравнение
(P2 + DW) = o.
Два корня р1>2 = — / соответствуют в выражении Лг^ незату-
хающим (при г = 0) периодическим составляющим тока. Вычисле-
ние корней уравнения D (р) = 0 позволяет определить искомые
постоянные времени. Приближенное решение этого уравнения дает
следующие значения корней:
_ 1 . _ Td + T'sd
р3- T'd-\-T’3d ’ CnT'dT'3d ’
где T'd = (x'd/ха) Tdo — постоянная времени обмотки возбуждения
при короткозамкнутом статоре и разомкнутой демпферной обмотке;
T'3d = x'3d/r3d', Tad = x'ad!r3d — постоянные времени продольного
демпферного контура при короткозамкнутом статоре и соответ-
ственно разомкнутой и замкнутой обмотке возбуждения; x3d =
= x3d — Xa3d!xd\ x3d = x'9dx"d/x'd — эквивалентные индуктивности
продольного демпферного контура для этих же условий; Сп =
= OBdX3d/x'3d\ = 1 — x2B3d/(xBx3d) — коэффициент общего рас-
сеяния обмотки возбуждения и продольного демпферного контура;
6bdx3d — эквивалентная индуктивность продольного демпферного
контура при короткозамкнутой обмотке возбуждения и разомкну-
той обмотке статора.
Таким образом, одна постоянная времени затухания равна
Td 4" Тad, Другая CnTdT3dl(Td 4“ T3d)-
Если r3d > Гв, то T'd > T3d и постоянные времени практически
равны T'd и T'd = CnT3d (причем обычно Сп близко к 1,0), т. е.
постоянным времени обмотки возбуждения и демпферного контура
при наличии соответствующих короткозамкнутых контуров.
Аналогично находится постоянная времени затухания апериоди-
ческого тока в поперечном контуре Tq. Знаменатель изображения
тока Mq (р) имеет вид (р2 4- 1) xq (р).
Уравнение для определения Tq с учетом (2-114)
Р (x3qXq — X2a3q) 4- XQr3q = 0.
Отсюда Tq = x3qlr3q, где = x3q — Xaaqtxq — эквивалентная
индуктивность поперечного демпферного контура при коротко-
замкнутом статоре.
Отметим, что нахождение постоянных времени отдельных кон-
туров, основанное на общих физических соображениях (см.
§ 4-4), дает те же результаты, что и формальное их определение,
изложенное выше.
6-3. ТОКИ ДВУХФАЗНОГО И ОДНОФАЗНОГО КОРОТКИХ ЗАМЫКА-
НИЙ. При рассмотрении несимметричных коротких замыканий машины с демп-
ферной обмоткой ограничимся определением токов статора при двухфазном и
однофазном коротких замыканиях, полагая, что последние, как это было принято
и для машины без демпферной обмотки, происходят на холостом ходу машины.
Для приближенного решения задачи воспользуемся теми положениями, которые
составляли основу методики определения токов короткого замыкания в уже рас-
смотренных случаях. Эти положения сводятся к следующему:
1. Определение токов короткого замыкания для первых моментов времени
производится в предположении, что активные сопротивления контуров машины
равны нулю. Это положение позволяет воспользоваться готовыми решениями
при несимметричных коротких замыканиях машины без демпферной обм'отки
[см. выражения (5-10) и (5-21)], заменив в них параметры x'd и xq на x"d и xq,
соответствующие эквивалентным динамическим индуктивностям статора по осям
d, q при наличии на роторе машины демпферной обмотки.
2. Постоянные времени затухания апериодических составляющих токов
статора и ротора равны постоянным времени отдельных обмоток: Та (статора),
(обмотки возбуждения), T"d (демпферной обмотки). Допустимость такого опре-
деления Td и Td была рассмотрена в § 6-1, п. 3. При этом отдельные затуха-
ющие составляющие апериодического тока ida (а следовательно, и основной гармо-
ники фазного тока статора) вычисляются в соответствии с уравнениями § 6-1, п. 3.
3. Затухание основной и высших гармоник тока происходит экспонен-
циально с постоянной времени той апериодической составляющей тока, с которой
магнитно-связаны рассматриваемые гармоники (см. § 5-2).
4. Для определения амплитуд основных гармоник тока статора как при
отсутствии активных сопротивлений, так и в режиме установившегося короткого
замыкания можно пользоваться формулами метода симметричных составляющих.
В соответствии с указанными положениями токи статора при двухфазном
(iS2) и однофазном (zsl) коротких замыканиях равны:
/52 — — У3 Eq
1
х'а + 42)
1
xd -i- 42)
е-Х/Т'^ +
____!______________!____\ e-xn’di , _J________
*d+42) *<z+*22) / ^ + 42)
X V b(k~1'> cos (2fe — 1) a + £»C)05 e~XlTai f 1+2 V bk cos 2ka \
AssJ I doaj I
k=l \ k=l >
isl = -3E0 Г ( .),---------' \ e^Tdi +
\ *d + 4 +*0 *rf + *2 +*0 /
, 1___________________1_______\
\ *d + *21)+xo xd + x^+x0 e
xd + x^ + x0
У cos(2fe — 1) у +
\ k—l
x’d = x'd + O,5xo; x" = x"q + O,5xo;
x22) = ]/"xdxq'< x^ = у(xd + O,5xo) (x" + O,5xo) - O,5xo
— сопротивления обратной последовательности машины с демпферной обмоткой
при двухфазном и однофазном замыканиях.
Постоянные времени T'd2> Tfd^ Та2, Та^ могут быть получены из уравнений
соответствующих постоянных для машины без демпферной обмотки (см. § 5-5)
заменой в выражениях индуктивных сопротивлений х^\ параметров xdl
Xq Xd, Xq.
Постоянные времени затухания сверхпереходных составляющих T"di и Td2
легко получаются из выражения для аналогичной постоянной при трехфазном
коротком замыкании, которая равна
T"d ~ Tsdx'd/xd,
где T'3(i — постоянная времени демпферного контура по продольной оси при
короткозамкнутом статоре и разомкнутой обмотке возбуждения.
Из приложений метода симметричных составляющих известно, что основные
гармоники токов несимметричных коротких замыканий можно находить по фор-
мулам, аналогичным для трехфазного короткого замыкания при условии, что
к индуктивностям, определяющим эти токи, будет прибавлена некоторая доба-
вочная индуктивность (правило Вагнера—Эванса). Для двухфазного короткого
замыкания эта добавочная индуктивность равна х£2), а для однофазного х£1) + *о
[63]. Поэтому постоянные времени T"d2 и T'dl могут быть получены из приведен-
ного выражения для если к индуктивным сопротивлениям xd и xd прибавить
добавочные сопротивления. Таким образом, постоянные времени затухания
сверхпереходных составляющих тока при двухфазном и однофазном коротких
замыканиях равны:
T'd*
x"d + x^ xd + x^+x0
T^xd + x^ Xd + X^+XQ
В заключение этого параграфа отметим, что на практике могут
встретиться случаи более сложного развития процесса внезапного
короткого замыкания, когда несимметричное (например, двух-
фазное) замыкание перерастает в симметричное трехфазное. По-
вторная коммутация цепи статора машины в переходном процессе,
связанная с возникновением свободных токов, может привести
к некоторым особенностям протекания процесса [20].
6-4. ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ПРИ ТРЕХФАЗНОМ
КОРОТКОМ ЗАМЫКАНИИ. Уравнения потокосцеплений якоря
при коротком замыкании имеют такой же вид, как и у машины без
демпферной обмотки [см. (4-17)]. Токи id и iq при коротком замы-
кании определены в § 6-1, п. 4.
Момент Л4к3 при трехфазном коротком замыкании найдем по
общему выражению для электромагнитного момента. Опустив
индекс 0 у напряжения в (4-17), получим
<з = Ud - Ud = +
+ и cos Оо [(А - 4") е’Т/Г</ + (4" ~ У) sin(T + 0о) -
-£7sin0o('^—^)e'x/7'?cos(T + eo)'i|-
_ 0,5^ (A 'V'4in2(Q90)- (6-7)
Xd Xq >
Это выражение можно было бы написать на основе полученной
ранее общей формулы (3-33) и приближенного значения э. д. с.
fd, определяемого из (3-28) умножением последнего на ха^!хъ.
Пусть при т = тм электромагнитный момент достигает макси-
мального значения Мк3макс. При определении времени тм можно
не считаться с затуханием токов, и тогда
(6-8)
^-k
y" **мд*
xd
Т4К3 макс
При обычных значениях параметров коэффициент^, опреде-
ляемый как для машины без демпферной обмотки (см. гл. 4), не
превышает 1,1.
Асинхронные моменты при коротком замыкании, пропор-
циональные активным сопротивлениям статора и ротора, опреде-
ляются так же, как и в машине без демпферной обмотки (см.
§ 4-5). Момент ТИка, равный потерям в обмотке статора от первой
гармоники тока, находим в виде, аналогичном (4-21):
А1Ка = G'da iqa) r,
где и iqa — апериодические составляющие токов id и iq, при-
веденных в § 6-1, п. 4. Эти составляющие образуют косинусоидаль-
ную и синусоидальную первые гармоники фазного тока.
Момент ТИка, пропорциональный роторному сопротивлению гр,
вычисляется по (4-22), если в последнее подставить динамические
сопротивления x"d и xq:
Этот момент может быть также рассчитан, как момент машины
с несимметричным ротором в асинхронном режиме (см. § 7-2).
Оценим момент машины с демпферной обмоткой при трехфазном
коротком замыкании, происходящем на холостом ходу (60 = 0)
с номинальным напряжением на якоре (U = Ео — Edo — 1,0).
Параметры генератора: xd = 1,0; xd = 0,3; xd = 0,2; xq = 0,7;
xq = 0,25; г = 0,006; r2 = 0,02; T'd - 2 c; Td = 0,06 c; Ta =
= 0,2 c; = 0,7. Определим no (6-8) наибольшее значение
знакопеременного момента: тм = 1,75 (0,0056 с); = 0,96;
Л4кзмакс == 4,8. Напомним, что момент выражен в долях базисного
момента Л4б, который связан с номинальным моментом соотноше-
нием 7Иб = 7WH/cos <рч, где cos <рн — номинальный коэффициент
мощности машины. Поскольку, как правило, cos ср < 1, крат-
ность момента по отношению к номинальному значению будет
еще больше.
Рассчитаем асинхронные моменты. Токи: ida=—1 —2,33e~0’0016T—
— 1,67^"°’053т; iqa = 0; начальные значения тока ida = —5 и
момента М^а = 0,15. К моменту времени т = 3T'd, когда сверх-
переходная составляющая тока ida практически затухнет до нуля,
ida = —3,12 и Л4ка 0,06.
Сопротивление гр по (4-23) равно 0,02. Момент Л4ка = 0,4е~°’032т.
Этот пример показывает, что из асинхронных моментов при
нормальном активном сопротивлении статора заметное значение
может иметь лишь тот, который зависит от активного сопротивле-
ния обратной последовательности.
6-5. ДВИЖЕНИЕ РОТОРА МАШИНЫ ПРИ ТРЕХФАЗНОМ
КОРОТКОМ ЗАМЫКАНИИ. Для расчета динамической устой-
чивости энергетических систем важное значение имеет характер
движения ротора синхронной машины в процессе короткого замы-
кания, в частности при трехфазном замыкании. Для определения
изменения скольжения и угла нагрузки машины воспользуемся
уравнением моментов
М — М-м = H^zs.
Интегрируя его во времени и принимая начальное скольжение
равным нулю, получим
т
S = -A_J (м-мэм)<и.
7 о
Поскольку s = рт9, то
0-°о = ^
1 о о
где 0О — начальное значение 9.
Составляющие в скольжении и изменении угла нагрузки,
обусловленные действием момента М внешней механической силы,
при постоянстве последнего на основе полученных выражений
равны:
Мт . п ч Мт2
S1— //. > (0-0о)1 —
При известном электромагнитном моменте как функции времени
не составляет труда определить соответствующие составляющие
в s и 9 — 90. В § 6-4 приведены выражения знакопеременного
электромагнитного момента Л4к3 и асинхронных моментов, обя-
занных своим появлением потерям в статоре (Му и роторе (ТИка).
При коротком замыкании генератора момент М (момент турбины)
создает положительное ускорение, и под его влиянием частота
вращения ротора увеличивается, т. е. возникает и растет скольже-
ние. Вследствие этого начинает увеличиваться и угол 9. Знако-
переменный момент 7Ик3 то ускоряет, то замедляет движение pojopa
и поскольку частота его изменения достаточно высока (для основ-
ной гармоники — 50 Гц, для второй — 100 Гц), может создаться
впечатление, что он не образует знакопостоянного скольжения.
Однако это не так: интеграл от 7Ик3 содержит указанную состав-
ляющую скольжения, которая имеет отрицательный знак. Она
появляется вследствие того, что в первые моменты после возникно-
вения короткого замыкания повышение энергии магнитного поля
происходит за счет кинетической энергии вращающегося ротора.
Это и приводит к уменьшению средней частоты вращения ротора
машины.
Асинхронные моменты Л4ка и Мка оказывают тормозящее
Действие на ротор, поэтому они вызывают отрицательное знако-
постоянное скольжение и приводят к уменьшению изменения
угла 0. Обычно более значительным оказывается влияние момента
Л4ка, который определяется (см. § 6-4) в виде
<а = /И''аОе-2т/Г“,
где ЛКао — начальное значение момента.
Изменения скольжения s2 и угла (0 — 0О)2, обусловленные
моментом Л4ка, равны:
S — __ Л1ка°7 а (1 __ р-2т/т4-
2~~ 2Hj 4 h
(О - 0о)2 = -0,5Та (^- * + *0 •
Подробное аналитическое определение s и 0 — 0О в процессе
трехфазного короткого замыкания можно найти в работах [8 и 31 ].
На рис. 6-5 показана временная зависимость указанных вели-
чин, рассчитанная для явнополюсного генератора с демпферной
обмоткой. Параметры генератора: Xd — 1,0; xq = 0,7; x'd = 0,3;
x"d = x'q = 0,2; r = 0,005; rp - 0,015; T'd = 2 c; T"d = T"q =
= 0,05 c; Ta — 0,2 c; = 6 с. Короткое замыкание происходит
в режиме номинальной нагрузки генератора (М = 0,8; (7 = 1,0;
£0 = 1,67; 0О - 22,7°).
6-6. ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ПРИ ОТКЛЮЧЕНИИ
ТРЕХФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ. Физическая
картина образования электромагнитного момента для такого
переходного процесса рассматривалась в § 4-6. Она справедлива и
для машины с демпферной обмоткой. Электромагнитный момент
можно рассчитать по общему выражению (3-33), полученному для
условий коммутации в цепи статора машины. В нашем случае
начальное потокосцепление статора Тпч равно Ue~x^Ta, где тк —
продолжительность короткого замыкания.
Ограничимся определением максимального момента, возникаю-
щего в начале процесса после отключения короткого замыкания
при т]с = 0О + Щ когда Ск = Wc/l/ = 1 + е~х^Та имеет наиболь-
шее для заданного тк значение. Не учитывая асинхронного момента
от «вынужденного» магнитного потока, пропорционального s,
принимая э. д. с. E'd и угол 0 неизменными на ограниченном
отрезке времени, т. е. полагая E'd = Е^ и 0 = 0О, где 0О — угол
между вектором U и осью q машины в момент отключения корот-
кого замыкания, и считая для упрощения задачи x'd = x"q и T'd =
= T"q — Т\ по (3-32) и (3-33) получим
UE'
Мэм = —Л [sin0О - Ске”т/7'а sin (т + 0О)] -
xd
- Q,bUh.'dq sin 200 - t/2CK (1 - Ске'т/Г") c’T/7“ x
X [%rfp cos 0O sin (t + 0O) — sin 0O cos (r + 0O)]
о
S
. Важное 161
1, 3,4, 5 -— составляющие, обусловленные соответственно
моментами М, 2Икз» 2Ика и Л1ка; 2 — результирующее зна-
чение переменной
-20'
Отметим, что это выражение не учитывает асинхронного мо-
мента, образуемого свободным потоком и пропорционального гр.
Рассматривая, как в § 4-6, момент Л4ЭМ в качестве функции двух
переменных 0О и т, найдем приближенные значения 0Ом и тм,
соответствующие максимуму момента, из выражений:
cos 0Ом = е — /е2 4- 0,5 ; тм = Зл/2 — 0Ом.
Расчеты максимального момента Л4эм.макс для т = тм и 0О =
= 0Ом показывают, что он больше максимального момента в про-
цессе трехфазного короткого замыкания. Например, при E'do =
= t/; xq = 2x'd\ x'd = 1,5ад T" = 0,05 с; Та = 0,2 с указанная
кратность моментов составляет 1,5 и 1,7 соответственно при Ск =
= 1,4 и 1,6. Вместе с тем эта кратность моментов значительно
меньше, чем у машины без демпферной обмотки, поскольку состав-
ляющая момента Л4ЭМ, обусловленная «вынужденным» магнитным
потоком, не зависит от наличия в машине демпферной обмотки,
а момент при коротком замыкании больше у машины с демпферной
обмоткой.
Процессы при несинхронной частоте вращения машины
7-1. ОБЩИЕ ЗАМЕЧАНИЯ. При работе синхронной машины
параллельно с сетью возможны асинхронные режимы, когда угол
0, характеризующий положение ротора машины относительно
синхронно вращающейся оси, во времени неограниченно возра-
стает.
Асинхронные режимы синхронного генератора имеют место
при включении машины в сеть по методу самосинхронизации,
когда частота вращения ротора может отличаться от синхронной
на 2—3% и даже более, при повторных включениях генератора
сразу же после его отключения из-за возникшей в сети аварии.
Они возникают при выпадении машины из синхронизма, например
при потере генератором возбуждения. В последнем случае неявно-
полюсные генераторы способны развивать значительные электро-
магнитные моменты при весьма малых скольжениях, измеряемых
десятыми долями процента.
Для синхронных двигателей и компенсаторов важное значение
имеет асинхронный режим, возникающий при асинхронном пуске
машины. Такой пуск, как известно, осуществляется путем включе-
ния обмоток статора либо непосредственно на шины переменного
тока, либо через устройство, позволяющее уменьшить пусковые
токи в статоре (реактор, автотрансформатор). По достижении
ротором частоты вращения, близкой к синхронной, цепь возбуж-
дения включается на возбудитель и машина синхронизируется.
В процессе пуска скольжение машины изменяется от 1 до 0.
Режимы, в которых скольжение изменяется в широких пре-
делах, характерны для асинхронных двигателей; это — пуск,
реверсирование, ударная механическая нагрузка.
В этой главе рассматриваются переходные процессы асинхрон-
ных двигателей, вызванные коммутацией в цепи якоря (пуск,
реверсирование).
Асинхронные режимы синхронных машин представлены лишь
асинхронным пуском, анализируемым упрощенно, без учета уско-
рения ротора. Это позволяет приближенно вычислять электро-
магнитный момент для мгновенного скольжения в предположении,
что оно постоянно и существует длительно. Таким образом, задача
сводится к рассмотрению установившегося асинхронного режима
с постоянным скольжением. Задаваясь различными значениями
скольжения s и определяя для них момент Л4ЭМ, получаем стати-
ческую механическую характеристику Л4ЭМ = f (s). С ее помощью
может быть рассчитана продолжительность пуска, так как пульса-
ции момента, возникающие в начале процесса, влияют на частоту
вращения машины. Максимальные же моменты в этой стадии пуска
могут быть приближенно оценены по выражениям, полученным для
асинхронных двигателей.
7-2. АСИНХРОННЫЙ РЕЖИМ СИНХРОННОЙ МАШИНЫ
ПРИ ПОСТОЯННОМ СКОЛЬЖЕНИИ. При рассмотрении
асинхронных режимов будем считать, как это принято в теории
асинхронных машин, скольжение s положительным при частоте
вращения машины со, меньшей синхронной частоты оц. Тогда при
постоянном значении со 4= ол угол между осью q машины и векто-
ром напряжения статора U будет увеличиваться пропорционально
времени, так как
т
0 = — J s dx = —sx 4- 0о-
о
Продольное и поперечное напряжения якоря в этих условиях:
ud = —U sin 0 = U sin (sr — 0О); 1
uq = U cos 0 = U cos (st — 0О), j (7 1)
т. е. являются гармоническими функциями частоты скольжения.
Пренебрежем при определении токов машины активным сопро-
тивлением статора, а также переходным процессом при установле-
нии асинхронного режима с заданным постоянным скольжением.
Рассматривая таким образом установившийся режим, нетрудно
определить характер токов в цепях машины. Пусть сначала цв =
= 0, т. е. обмотка возбуждения замкнута накоротко. В этом слу-
чае внешними напряжениями цепей машины являются напряже-
ния ud и uq, изменяющиеся во времени по гармоническому закону
с относительной частотой, равной s. Следовательно, продольный и
поперечный токи и потокосцепления якоря, а также токи в обмот-
ках ротора должны быть гармоническими функциями той же ча-
стоты, равной s. При отсутствии коммутации в цепи якоря и г = О
потокосцепления якоря определяются согласно (3-22) в виде
= U cos 0 = U cos (st — 0О); |
фд = U sin 9 = —U sin (st — 90). j
Поскольку все переменные в осях d, q являются гармоническими
функциями времени, удобно воспользоваться комплексным мето-
дом, для чего представим их вещественными частями соответствую-
щих комплексных величин. При этом, как следует из (7-1) и (7-2\
. . . (7-3)
= — Ud = jUei (s*-0») = j4d. J
Связь между потокосцеплением и током якоря по какой-либо
из осей d, q устанавливается с помощью общего выражения для
потокосцепления по данной оси и уравнений напряжений обмоток
ротора, расположенных по этой же оси. Например, соотношение
между ф^ и id определяется с помощью уравнений (2-87), (2-88) и
(2-91). Поскольку пока принято ив = 0, будем иметь
xd^d ~Н 4~ ХаэсАэй ФбЬ
Mask'd + Хв^в 4~ XB3d^3d) 4~ CJb 9,
Рх (Xasdid 4~ ^вэ^в 4~ 4~ ^sd^sd 9.
Для перехода к уравнениям в комплексной форме следует
мгновенные значения переменных заменить комплексными вели-
чинами и положить рх = js. Умножая затем для удобства первое
уравнение на j и деля два других на s, получим
jxd^d 4~ lXasd^в 4“ iXa3dI sd j^d*
!XaBd^d “1“ Mb/* 4“ Mb) ?b 4“ Mead^' sd 9,
Wadded + MeadAs 4“ (rad/s 4“ Mad) hd — ®-
(74)
Из этих уравнений нетрудно найти коэффициент пропорцио-
нальности между pVd и Id, это будет комплексная величина,
которую обозначим Zds = rds 4- jxds. Таким образом,
(7-5)
Отметим попутно, что связь между и Id можно установить
и с помощью операторных изображений (р) = xd (р) id (р).
Переходя к комплексным переменным, будем иметь
^d = xti(js)Id.
Более наглядно представить сопротивление Zds схемой замеще-
ния. Система (7-4) состоит из уравнений напряжений трех непод-
вижных магнитно-связанных контуров, из которых два — коротко-
замкнуты. Как и в теории асинхронных машин, различная ско-
рость перемещения магнитного поля в зазоре относительно обмо-
о)
JXs
Zds j xad
б)
j*s
J xat[
Рис. 7-1. Схемы замещения сопротивлений синхронной
машины: а — продольная ось; б — поперечная ось
ток статора и ротора находит отражение в значении активных
сопротивлений эквивалентных неподвижных контуров: они в 1/s
раз больше действительных сопротивлений.
В § 2-9 была построена схема замещения для сверхпереходного
сопротивления xd по уравнениям, структура которых аналогична
(7-4) при s — оо. Если в схеме для xd (см. рис. 2-10) включить
в ветви, обтекаемые токами обмотки возбуждения и демпферного
контура, сопротивления rjs и r3dls, то получится схема замещения
сопротивления Zds, которая представлена на рис. 7-1, а.
Аналогично определяется сопротивление Zqs = rqs + jxqs
в соотношении
r¥q = zqsiq. (7-6)
Исходными комплексными уравнениями здесь будут
]XqIq = ffiqt
jXa3q!q (fsq/S ~Г Мэ<?) 3q
Схема замещения для сопротивления Zqs отличается от схемы
Для сверхпереходного сопротивления x'q (см. рис. 2-12) наличием
активного сопротивления д^/s; она изображена на рис. 7-1, б.
Подставив (7-5) и (7-6) в (7-3), найдем
/. = e-^d = i JL_ei (^-V’W)•
Zds zds zds
I = e-'4’? =---— e< (ST-eo-'M,
Zqs zqs zqs
где
zms ==' У/'^ins “I" ? фт = STCtg (Xtnslrms)> Ш = Q-
Вещественные части комплексных токов Id и Iq представляют
собой мгновенные значения токов id и iq. Таким образом,
id =----г- sin (st — 0О — Td); iq =---cos (st — 0O — cpj.
zds zqs
Учтем теперь наличие постоянного напряжения ив на зажимах
обмотки возбуждения. Оно обусловит постоянный ток гк0 в этой
обмотке. С другой стороны, потокосцепления якоря (7-2) в уста-
новившемся режиме не зависят от характера токов в цепях машины
и не содержат постоянной составляющей. В демпферной обмотке
постоянной составляющей тока не может быть, так как в этой
цепи нет источника постоянного напряжения. Поэтому в соответ-
ствии с выражением для должна возникнуть постоянная состав-
ляющая в продольном токе якоря idn, которая определится из
условия
^d^dn ' Г -^ав^вО ’
откуда
idn ^BO^abd/^d E^l^d'
Таким образом, при наличии напряжения ив продольный ток
якоря
и . t п ч Ео
id = ——— sin (st - 0О — <prf) — -J ,
zds *d
а поперечный ток iq остается таким же, как и при ив = 0.
Фазные токи машины могут быть найдены по токам id и iq
с помощью линейного преобразования. Они содержат, помимо
основной, еще гармоники с относительной частотой, равной 1 — 2s
и 1 — s. Первые две определяются напряжением [/, третья —
возбуждением машины (£0).
Электромагнитный момент машины вычисляется по общему
выражению (3-31). Примем для удобства момент положительным
в режиме двигателя, а не генератора, как это было ранее. Тогда
в выражении (3-31) нужно изменить знаки на противоположные.
Подстановка в него потокосцеплений (7-2) и токов idi iq дает
^зм ^эм. a 4" Л4эм. с 4“ ^эм. р
(7-7)
где
м _ 6,2 ( С08Ф</ I cos Ф? \ •
/Иэм.а— 2 Zds 1- 29s />
M U2 Г cos (20 — <p9) cos (20 — <pd) I .
7Ws“- p - “2" [ Zqs Zds J ’
MiM.c=^sinO.
*d
Составляющая Л4ЭМ.a представляет собой средний асинхрон-
ный момент, сообщающий ротору машины при s > 0 положитель-
ное ускорение. Полученное выражение для Л4эм.а преобразуется
к виду
М9м. а = = 0,5 (iyd5 + 7fos).
: у zds zqs J
Таким образом, средний асинхронный момент определяется,
как и в асинхронной машине, потерями в роторных цепях.
Моменты Л4ЭМ.Р и Л4ЭМ, е являются знакопеременными, причем
частота изменения первого из них равна 2$Д а второго — sf,
где f — частота электрической сети. Момент 7Иэм.р, пропорцио-
нальный U2, фактически идентичен так называемому реактив-
ному моменту синхронной машины, возникающему при
синхронном вращении в случае неравенства синхронных сопро-
тивлений xd и xq и определяемому в виде
0,5t/2 (1/х9 — 1/Xj) sin 20.
При асинхронном вращении в обмотках ротора появляются
переменные токи, поэтому Л4ЭМ. Р определяется уже не синхрон-
ными сопротивлениями zds и zqs. Однако по-прежнему этот момент
образуется тяжением магнитных трубок, возникающим за счет
различных результирующих проводимостей для поля по осям
Й, q. Обычно, если исключить некоторую область малых скольже-
ний, углы q)d и близки к 90°, a zds xds\ zqs xqs, и тогда
МЭм. р o,5t/2 (1 /xqi - 1/Xds) sin 20.
Для машины с симметричным по осям d и q ротором, когда
zds = zq, и (prf = <pg, момент Л4ЭМ.Р = 0.
Момент 7ЙЭМ.С, обусловленный потоком возбуждения, имеет
при г = 0 такой же вид, как и в режиме синхронного вращения
машины, с той лишь разницей, что угол 0 при асинхронной частоте
вращения непрерывно увеличивается.
Знакопеременные моменты Л1эм. р и 7ИЭМ. с не оказывают
сколько-нибудь заметного влияния на изменение частоты вращения
машины, пока скольжение велико, так как их среднее значение
Даже за небольшой промежуток времени в этом случае равно нулю.
В области же малых скольжений, когда эти моменты изменяются
во времени медленно, их влияние на частоту вращения машины
становится значительным. Поэтому такие моменты играют суще-
ственную роль, например, при вхождении машины в синхронизм,
если исходный ее режим — асинхронный.
7-3. ВЛИЯНИЕ АКТИВНОГО СОПРОТИВЛЕНИЯ СТАТОРА НА АСИН-
ХРОННЫЙ РЕЖИМ СИНХРОННОЙ МАШИНЫ. Учтем теперь влияние
активного сопротивления цепи статора машины г на ее электромагнитный момент.
Известно, что при несимметричном роторе асинхронной машины возникает элек-
тромагнитный момент, обусловленный обратным полем ротора и пропорциональ-
ный сопротивлению г [39]. При скольжениях l,0>s>0,5 этот момент яв-
ляется движущим, в области 0,5>s>0— тормозящим, а при s = 0 и 0,5
он равен нулю. Значение его при заданном г определяется степенью несимметрии
Рис. 7-2. Асинхронные моменты син-
хронной машины
^эм. а> ^эм. к
ротора и обычно невелико. Поэтому
при обычных значениях сопротивле-
ния г моменты Мэм. а и Мэм. р, про-
порциональные U2, и не зависящие от
Eq, можно рассчитывать, как и при
г = 0.
Вместе с тем наличие этого сопро-
тивления требует более строгого опре-
деления постоянных составляющих
токов id и iq. Решение этой задачи
показывает [6], что под влиянием г,
во-первых, изменяется амплитуда
МЭм. с для скольжений s > 0,80ч-0,85
и, во-вторых, образуется новый асин-
хронный момент МЭм. к, пропорцио-
нальный Е%:
£2[x2+f2/(1_s)2] г
эм,к [V?42;'(H2i2 1 -S '
Момент Мэм. к представляет собой асинхронный момент, образованный
вследствие движения потока возбуждения относительно обмотки статора. По-
скольку относительная частота э. д. с. и токов в статоре, обусловленных этим
потоком, равна 1 — $, т. е. не совпадает (при s =j= 0) с частотой напряжения сети,
обмотка статора может рассматриваться короткозамкнутой по отношению к ука-
занным токам. Поэтому, если у машины х^, = xq, то момент МЭм. к определяется,
как в обычной асинхронной машине, с той лишь разницей, что вторичной корот-
козамкнутой обмоткой в рассматриваемом случае является обмотка статора,
а скольжение поля в зазоре относительно вторичной обмотки равно 1 — s. Асин-
хронный момент МЭм. к < 0, следовательно, он обусловливает отрицательное
ускорение ротора машины.
На рис. 7-2 показана зависимость асинхронных моментов от скольжения
машины. Штриховой кривой изображен момент Мэм. а при г = 0.
7-4. РЕШЕНИЕ УРАВНЕНИЙ АСИНХРОННОЙ МАШИНЫ
ПРИ ПЕРЕМЕННОМ СКОЛЬЖЕНИИ. Процессы в асинхрон-
ной машине с короткозамкнутым ротором, протекающие при пере-
менном скольжении, описываются дифференциальными уравне-
ниями (2-77)—(2-84); в них нужно лишь положить иг = 0. Для
переходных процессов, оканчивающихся режимом работы с часто-
той вращения, близкой к синхронной, предпочтительнее опери-
ровать с уравнениями (2-82)—(2-84), содержащими потокосцепле-
ния, а не токи обмоток машины. Полагая, как и в §7-2, положитель-
ними скольжение при ©<<»!, а момент на валу — в двигательном
режиме, получим систему уравнений в виде
(Pt + Ps + jHs — Ps4> = — (7-8)
(Рт + pr + /s) — pcPris = 0; (7-9)
Jr-1 m (V’lv) + HiP^s = м- (7-Ю)
xd
Система (7-8)—(7-10) нелинейна и не имеет точного аналити-
ческого решения; лишь в предположении постоянства ускорения
машины решение может быть получено с помощью интегралов
Френеля для комплексного аргумента [31 ]. Однако действительное
ускорение ротора в переходном процессе может сильно изменяться.
В связи с этим неясно, как установить среднее постоянное его
значение до решения задачи и насколько получаемый на этой
основе результат отличается от истинного в течение всего переход-
ного процесса. Другой путь состоит в применении численных мето-
дов, реализуемых на вычислительных машинах [36, 37].
Приближенное решение можно получить следующим путем.
Из (7-8) и (7-9) будем иметь дифференциальные уравнения для
каждого из потокосцеплений:
D (рт) is = — (pr + /s) t/s;
D (Рт) Ч'г = — PcprUs,
(7-11)
где дифференциальный оператор
D (At) = Рх + [Ps + Рг + j (1 + s)] рх (Ps + /) (Рг “Ь Is) — PcPsPr-
При постоянном скольжении линейные уравнения (7-11)
становятся уравнениями с постоянными коэффициентами и имеют
точное решение, представляемое суммой общего решения однород-
ного уравнения и частного решения неоднородного уравнения.
При s = var уравнения имеют переменные коэффициенты, но
по-прежнему решение является суммой двух решений указанного
типа. Попробуем искать решение однородного уравнения.. для
в таком же виде, в каком оно записывается для дифференциаль-
ного уравнения с постоянными коэффициентами, т. е. в виде суммы
двух экспоненциальных функций, но в показателях которых вместо
постоянных корней характеристического уравнения фигурирует
среднее за время т значение корней
(т \ т
— j pt dr т = j pt dr,
0/0
где pi — корень характеристического уравнения D (р) = 0, явля-
ющийся теперь функцией времени.
В качестве решения неоднородного уравнения для примем
«вынужденное» значение ipsy, определяемое из дифференциального
уравнения при рх — =’0, т. е. для условий установившегося
режима с постоянным скольжением s. Тогда
Т X
\ Рх dx j Рг dx
ф5^ф5у + ЛХ +л^о , (7-12)
где pi и р2 — корни уравнения D (р) = 0, a Xsl и As2 — произ-
вольные постоянные, определяемые начальными условиями задачи.
«Вынужденное» потокосцепление ipsy согласно сделанному пред-
положению получается равным
. = -»s (Рг+Л) _ — us
^sy (Ps + /) (Рг + /s) — PcPsPr ~ a <s) Ps + ! ’
(7-13)
где a (s) = (<rcpr“ + s2)/(pr + s2).
Функция a (s) изменяется в пределах от 1 (при s р^) Д° ас
(при s < рг), и ввиду малого значения параметра р^ потокосцепле-
ние ipsy практически от скольжения не зависит. Производные от
ф$у весьма малы, поэтому и правомерно искать решение для ф5у
в указанной выше форме.
Подстановка решения (7-12) в исходное уравнение (7-11)
показывает, что оно строго удовлетворяется лишь при условии
X X
J Рх dx J р2 dx
(рт/h) + Д2е° (ртр2) — О,
которое в общем случае не выполняется. Это значит, что в (7-12)
корни /?! и р2 должны содержать поправки, являющиеся функцией
времени. Оценка максимальных значений этих поправок показы-
вает незначительное изменение подынтегральных функций в урав-
нении (7-12), и его с достаточной точностью можно принять в каче-
стве приближенного решения для ф5.
Подобного решения для из (7-11) не удается получить,
поскольку частное решение неоднородного уравнения в значи-
тельной степени зависит от s, несмотря на простейший вид правой
части (7-11). Потокосцепление можно найти, решая уравнение-
7-9):
где ф,0 — начальное значение %.
Определим постоянные в (7-12) при известных начальных зна*
чениях потокосцепления ф50 и его производной (ртф5)0. Они
находятся согласно (7-12) из уравнений:
4*s0 — Фяу 4~ Xi 4" (p^s)o = PlO^sl 4" P‘2O^S2,
где p10 и p20 — начальные значения корней pt и р2. Из этих уравне-
ний получаем
л ____ Р20 (^Psy-^Pso) 4“ (Pr^Pslo .
/1 J - J
P10 — P20
Д ___ __ P10 (^Psy- 'Фзо) 4~ (Pr^Pslo ( )
s2 Pio P20
Корни pi и p2 уже определялись в § 3-4 при решении характе-
ристического уравнения (3-17). Следует только иметь в виду, что
в настоящей главе скольжение принято противоположного знака
по сравнению с тем, которое фигурирует в исходных уравнениях.
На рис. 3-11 и 3-13 можно видеть, как изменяются вещественные и
мнимые части корней рг и р2 в зависимости от частоты вращения
машины со. Заметим, что для со < 0 (например, при реверсе двига-
теля) аналогичные зависимости будут зеркальным отображением
кривых, показанных на рис. 3-11 относительно оси ординат, так
как параметры, определяющие вещественные части рг и р2, зависят
от квадрата частоты вращения со.
Если переходный процесс, протекающий при значительном
изменении скольжения, обусловлен не коммутацией в цепи якоря,
а изменением механического момента на валу, то потокосцепление
ф8 практически не содержит свободных составляющих. В этом
случае (ртф5)0 = 0; ф5у = = /^s, если пренебречь влиянием
активного сопротивления статора при определении в устано-
вившемся режиме, и согласно (7-15) /4sl = As2 = 0. Таким обра-
зом, в подобных условиях не требуется расчета
Если переходный процесс вызывается коммутацией в цепи
якоря, то вычисление потокосцепления как функции времени
по (7-12) сводится к расчету свободных его составляющих, а по
существу — интегралов от корней р± и р2. Временная зависимость
последних неизвестна, но их изменение со скольжением s определя-
ется формулами § 3-4 и графиками на рис. 3-11 и 3-13. Примем
упрощенную аппроксимацию для мнимых частей корней р± и р2:'
Im(A) = —s; Im(p2) = —1,
полагая р^ < р^. С физической точки зрения это означает, что
один из свободных потоков машины неподвижен относительно
обмотки статора, другой — относительно обмотки ротора. Такая
аппроксимация будет давать тем меньшую погрешность, чем
меньше активные сопротивления обмоток. При значительных
параметрах и р^ на ограниченном отрезке времени поворот
свободных потоков относительно обмоток сравнительно невелик,
а при более длительном процессе, когда указанным эффектом пре-
небрегать уже нельзя, сами свободные потоки становятся весьма
малыми.
Итак, в общем виде
т / т \ т
| = — р1эт + / j sdt ; j Мт = — (р2э +j)r,
О \ 0/0
где —р1э и —р2э — средние за время т значения вещественных
частей корней р± и р2 (см. § 3-4):
Т X
Р1Э = (Ps + Рг) —- J dr; р2э = (р; + р;) — j К2 dt.
о о
Теперь (7-12) получает более конкретную форму:
i + Але- ‘р^+/ф (х)’ + А^~ , (7-16)
X
где ф (т) = j s dx.
о
Судя по (7-14) и (7-16) решение задачи зависит в основном от
интегральной функции ф (т). Это положение позволяет оценить
решение, получаемое при условии постоянства ускорения машины.
Расчеты показывают, что в этом случае даже удачный подбор
ускорения не обеспечивает истинных значений ф (т) на всем
исследуемом интервале времени.
В переходных процессах при пуске и реверсах асинхронного
двигателя ускорение, испытываемое ротором машины, претерпе-
вает во времени весьма значительные колебания. Частота враще-
ния двигателя изменяется более монотонно, а ф (т) представляет
собой гладкую функцию времени. Это дает возможность исполь-
зовать простую аппроксимацию ф (т) отрезками прямых и вычис-
лять по участкам.
Пусть ф (т) заменена совокупностью отрезков прямых ф^ (т),
так что начиная с некоторого момента времени и до т£
J -T.-.i),
T/-i
где sz — некоторое постоянное скольжение, определяющее изме-
нение интеграла на рассматриваемом участке времени (рис. 7-3).
Очевидно, что
xz-l
J S di фа (T^j) = $т(Ут 4ri-l)»
0 m=l
Ф CO ~ Фа CO = Фа (Vl) + 5/ (T - vJ при T < Tz.
Тогда потокосцепление статора на участке tz-1 — tz
i = iy I- Al i-i*' (P1’+/S') Дт 4- Аг, i^e- At, (7-17)
где
Asl,
A2 i 1 = Аге (p2*+/)T‘-i; Ат = т — tz r
Потокосцепление ротора на участке tz_x — tz определяется
(7-14), где все интегралы вычисляются в пределах не от нуля, а от
т£_х до т и потокосцепление г|)г0
должно быть заменено на г|)г> z-1,
т. е. на % в конце предыдущего
участка времени (т = т^). Под-
ставив (7-17) в (7-14) и выполнив
операцию интегрирования в ука-
занных пределах (пренебрегая
при этом на ограниченном от-
резке времени производными ртр1э
и РФгэ), получим на этом уча-
стке
~ (р2э+/) - (Pr+/'s0 At
I л ±________________________~~ е_________________
-Г S2, 1-1 р' — р2э —/ (1 — S(.)
Рис. 7-3. Аппроксимированный ин-
теграл от скольжения
+ (7-18)
Вычисляя и по участкам, можно затем определить токи
is и 1Г из (2-80) и (2-81) и электромагнитный момент:
Мэм = 4- Im (ii).
xd
Общая схема численного определения и такова. По
исходным данным рассчитываем гр.у, Л51, As2, tyo- Затем, прини-
мая на первом участке (/ = 1) скольжение $х равным скольжению
исходного режима sH4, определяем для задаваемых моментов
времени Лт по (7-17) и (7-18) потокосцепления и 4^. При прибли-
женном учете затухания в качестве —р1э и — р2э можно принять
для первого участка значения вещественных частей корней рх и р2,
соответствующих sH4.
Параллельно с расчетом — f (Ат) при s2 = const опре-
деляем Мэм, скольжение s из уравнения моментов (7-10)
т
S SH4 . J (^эм ^0 &Х
1 о
т
и функцию ф (т) = j s dx.
о
Когда ф (т) и sxt начнут отличаться на некоторую задаваемую
величину, расчет при sx = const прерываем и задаемся новым
Рис. 7-4. Оси потоков, возникающих при включении
в сеть асинхронного двигателя
В — «вынужденный» поток; С2 — неподвижный и вра-
щающийся свободные потоки
значением s2, принимаемым на следующем интервале времени
постоянным. Для этого нового значения скольжения указанная
процедура расчетов повторяется, причем в качестве —р1э и —р2э
можно взять вещественные части корней р± и р2, соответствующие
скольжению s2.
Численный расчет по такой схеме отличается от обычного
расчета «шаг за шагом» тем, что обычно достаточно пяти-семи
значений sz = const, чтобы рассчитать весь переходный процесс
при большом числе координат времени.
7-5. ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ. Процесс пуска асинхронного
двигателя, будь то прямое включение машины в сеть или через токоограничива-
ющее устройство, начинается с подачи напряжения на обмотку статора — ком-
мутации этой цепи. В машине возникают не только гармонические токи и потоко-
сцепления, соответствующие приложенному к статору напряжению, но и свобод-
ные составляющие. При некотором упрощении, принятом в предыдущем пара-
графе, можно считать, что в процессе пуска один из свободных потоков все время
неподвижен, а другой вращается вместе с ротором; иными словами: один из
свободных потоков практически неподвижен относительно обмотки статора, дру-
гой — относительно обмотки ротора. «Вынужденный» поток вращается в зазоре
с синхронной частотой. При этом, как следует из (7-18), потокосцепление ротора,
обусловленное вращающимся свободным потоком, сложным образом затухает
-Р/г -Р1Эх
во времени, так как содержит составляющие, пропорциональные е и е
На рис. 7-4 показаны оси потоков, создающих потокосцепления с обмотками ста-
тора и ротора, и их частоты вращения в пространстве (относительно статора)
и относительно ротора (представлена величиной, заключенной в скобки).
Электромагнитный момент определяется взаимодействием всех потоков и по
характеру временной зависимости состоит из следующих составляющих: 1) мо-
мента «установившегося» режима при заданном скольжении (взаимодействие «вы-
нужденных» потокосцеплений); 2) апериодического момента, затухающего по
сложному закону (взаимодействие неподвижных в пространстве свободных
потокосцеплений между собой, а также вращающихся свободных потокосцепле-
ний); 3) затухающей гармоники основной частоты (взаимодействие «вынужден-
ного» и неподвижного свободного потокосцеплений); 4) затухающей гармоники
частоты s (взаимодействие «вынужденного» и вращающегося свободного потоко-
сцеплений); 5) затухающей гармоники частоты 1 — s (взаимодействие неподвиж-
ного и вращающегося свободных потокосцеплений).
Сложная картина образования электромагнитного момента находит отраже-
ние в громоздкости его расчетного выражения в общем виде. Потокосцепления
обмоток в процессе пуска определяются по уравнениям (7-17) и (7-18). В качестве
«вынужденного» потокосцепления можно согласно (7-13) принять afsy ~
« —ws/(Ps + /)> считая> что при любом скольжении a (s) = 1,0. Найдем далее
постоянные AS1 и AS2 по (7-15). Очевидно, что начальные потокосцепления в ма-
шине отсутствуют, т. е. ipso = фго =0, а из (7-8) для этих условий следует
* • ^cPsPr
(Ms)o = -«s- Кроме того, р10 = -(ps + Р; + /); Р20 = ~ ' так
что с небольшой погрешностью
л„-_
Ps + Рг
^syPr
р;+р;
—
Уравнения (7-17) и (7-18) при пуске двигателя приобретают вид
'Фа — ^Psy 1
-Pis’1 -14>а <х>
р;+р;
Рг
р;+р;
- (Р2э+/) т
= РсрАу
1 е— (₽r+/Sf) Дт
л' Р1Э Рг дт
е’р1эт<-1 -_______—__________е~^а (т> _
р; + Рг р'г~ Р1Э
—_________е- (Р2э+/) V
Ps Рг
- (Р2э+/) Дт _ - (p'r+isi) Дт‘
(р;- р2э)- /ч1 -
I •. — (pr+/s7)
+ 4>r, i-ie v г 17 .
При расчете ф$, фг и Л4Эм по изложенной в § 7-4 методике на первом отрезке
времени st — = 1, а все последующие значения s/< 1.
Если принять, что скольжение двигателя при пуске уменьшается во времени
в среднем линейно, то параметры р1э и р2Э можно представить в виде
Р1э (Ps Рг) *1э> Р2э (Ps Рг) ^2э,
где эквивалентные коэффициенты /С1э и К2Э рассчитываются по известной зави-
симости Ki, Къ~ f ($)• На рис. 7-5 сплошными линиями показана их зависимость
от параметра (1 — s)/(p' + р') при р' = р' (кривая 2) и р' = 0,5р' (кривая /).
Штриховыми линиями отмечены коэффициенты и К2. Согласно этому рисунку
коэффициент затухания р1Э несколько уменьшается в процессе пуска, тогда как
р2Э увеличивается в 10—15 раз по сравнению с р20 при s = 1 и затухание, обус-
ловленное этим коэффициентом, значительно усиливается при увеличении ча-
стоты вращения двигателя.
На рис. 7-6 и 7-7 представлены результаты расчета пуска двигателя при
М = 0. Параметры машины: x'd = 0,32; рс = 0,81; р' — 0,3; р' = 0,45; Н. =
= 40 рад. На рис. 7-8 и 7-9 показаны аналогичные характеристики двигателя,
1 ~ Мэм = f Ct); 2 -s = f (т); 3 - <р (т)
у которого x'd = 0,27; рс = 0,92; р' = 0,12; р' = 0,13; Н. = 157 рад. Кривые
Мэм = f (т) в некотором масштабе характеризуют ускорение ротора, поскольку
М = 0.
Приведенные графики иллюстрируют отмеченную ранее временную зави-
симость ускорения, скольжения и его интеграла (р (т).
Рис. 7-7. Механические ха-
рактеристики асинхронного
двигателя
1 — динамическая при пуске;
2 — статическая
Пульсации момента длятся до тех пор, пока частота вращения двигателя
не достигнет значений, при которых начинает энергично затухать свободный по-
ток (см. изменение коэффициента /С2э на рис. 7-5). Следовательно, продолжитель-
ность этой стадии процесса зависит от инерционной постоянной машины и меха-
нического момента на валу. Характер изменения частоты вращения двигателя
при подходе к синхронизму зависит от того, успеет ли закончиться к этому вре-
мени электромагнитный переходный процесс. Если электромагнитный момент
не будет отличаться от значений, определяе-
мых статической характеристикой Л1Эм == f ($)>
то подход к частоте вращения установившегося
режима будет апериодическим; в противном
случае он будет колебательным.
Как следует из рис. 7-7 и 7-9, продолжи-
тельность пуска можно в большинстве случаев
рассчитывать, исходя из статической характе-
ристики Л4ЭМ = f (s).
Максимальный электромагнитный момент.
Электромагнитный момент достигает своего ма-
ксимального значения в начальной стадии про-
цесса, пока не успевают существенно затухнуть
свободные потокосцепления машины. На этом
отрезке времени скольжение двигателя может
заметно измениться по сравнению со своим на-
чальным значением, равным единице. Однако
интеграл от $, как показывает его оценка, с по-
грешностью, не превышающей 2—3%, может
быть принят равным т, т. е. вычисляться при
s= 1 = const. Таким образом, потокосцепле-
ния обмоток от начала пуска до времени до-
стижения электромагнитным моментом макси-
мального значения определяются выражениями:
ts = tsy [1
- -7-^ (р?'Р1эТ + рХ^) e-ix
Ps "Г Рг
1 _е- (р'г+>')х
Рг+/
1 Гр; (е~Р1эТ-гр;т)
Ps + Рг _ Рг Р1Э
р; (е-^_е-Рг^
Рг Р2э
На рассматриваемом отрезке времени можно принять (см. рис. 7-5) р1Э
« р' + Рг'> Р2Э 0- Тогда электромагнитный момент
Мэм=^-1т(4>Д) =
=М„-
II 1 f -„-(ps+Pr)T , ,1 -РЛ . .
1 + o' + 0- [Pse 4-Prje — A cost —4S sin т
Г s I г Г ;
(7-19)
Pc^svPr
где Мп = ——---—у- —момент в установившемся режиме при s= 1, явля-
W+Pr)
ющийся пусковым моментом при неучете переходного процесса; Ас и As — ам-
плитуды гармоник, экспоненциально изменяющиеся во времени. Приближенные
их выражения:
- (Ps+Pr)t
Ps + Pr
р:+р^
1 _e~(Ps+₽r)T
л5 = -—е-^—,—
Ps +Pr
При упрощенном рассмотрении переходного процесса, когда активное со-
противление статора rs учитывается только в затухании свободных токов и пото-
косцеплений, а при определении их начальных значений принимается rs = О,
Рис. 7-8. Пусковые характеристики асинхронного двигателя
1 — Мэм = f 2 ~ 3 = f № з — ф (т)
потокосцепления имеют не две, а только одну свободную составляющую. При та-
ких потокосцеплени?1х электромагнитный момент
МЭм =ь Мп (1 + £~(Ps+Pr) х — Ас cos х — As sin т)> (7-20)
где
Ас = + е-р^; As = - е~^).
Pr~Ps
При р' = р' расчет по (7-19) и (7-20) дает близкие результаты.
Нахождение максимального электромагнитного момента при пуске Ммакс. Д
связано прежде всего с определением времени тм, при котором Мэм достигает
искомого максимума. Оно, а следовательно, и Ммакс. д не зависят от значения
механического момента при пуске и определяются лишь параметрами двигателя-
Приближенное уравнение для тм имеет общий вид
lS^M=f(p's, Рг, тм).
При заданных параметрах р' и уравнение имеет ряд решений, отвечающих
характеру зависимости Л4ЭМ = f (т). Согласно (7-19) на апериодическую состав-
ляющую накладывается колебательная составляющая момента, так что каждому
максимуму и минимуму момента соответствует свое значение тм. Интересующие
нас максимумы момента наступают примерно через 2л радиан, начиная с тм1 «
« 4,14-4,4 рад. Для реальных параметров р' и р' указанная функция в окрест-
ностях тМ1 находится в пределах 1,4—3,3. Однако при таком существенном изме-
нении тангенса его аргумент изменяется в достаточно узком диапазоне. После-
дующие экстремальные значения тм лежат в еще более узких областях, соответ-
ствующих различным параметрам р' и р'.
С достаточной для практики точностью в ка-
честве расчетных при любых значениях па-
раметров р' и р' можно принять время
Tmi = 4,3 рад, а последующие тм — отлича-
ющимися на 2л и кратными 2л.
Подставив в (7-19) т = 4,3 рад, получим
первый во времени максимум электромагнит-
ного момента Л4макс д в виде некоторой
функции параметровр' и р'. Выразим его
в долях максимального момента Л4Макс. с
статической характеристики Л4Эм = f (s).
Для этого воспользуемся соотношением
мп 2Pr(pS+]/~l +ps2 )
Ммакс.с (1 +р'2)(1 +р'2)
Умножив на него величину, стоящую вну-
три фигурных скобок в (7-19) и рассчитан-
ную для т = 4,3 рад, получим кратность
Ммакс. д/Ммакс. с. На рис. 7-10 показана
построенная на основе (7-19) зависимость
Ммакс. д/Ммакс. с от параметра р' в виде за-
штрихованной области /, верхняя граница
которой соответствует р' = 0, а нижняя —
р; = Рг- Этот график позволяет сделать вы-
вод о малом влиянии сопротивления rs на
кратность максимального момента при
Рис. 7-9. Механические харак-
теристики асинхронного двига-
теля
1 — огибающая динамической при
пуске; 2 — статическая; 3 — сред-
няя динамическая
пуске.
Выше отмечалось, что первый максимум момента не обязательно является
наибольшим. Анализ экстремальной задачи показывает, что решающее значение
в ней имеет параметр р'. На рис. 7-10 кривая 4 показывает зависимость от р' -
отношения /-го и первого максимальных моментов Л4макс. д//ЛТмакс. д, причем
практически i = 24-3. При р' 0,25 первый максимум момента является и наи-
большим; для двигателей, имеющих р'< 0,2, максимум максиморум А1мак
Достигается лишь после нескольких колебаний момента. Таким образом, увели-
чение параметра рг приводит к возрастанию кратности максимального момента
в переходном процессе. При пуске двигателя с фазным ротором в началь-
ной стадии процесса обычно рг = 1,0. При этом Л4маКс. д/А1макс. с ~ 2,34-2,4.
7-6. РЕВЕРСИРОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ- Рассматривав-
МЫЙ процесс состоит из двух этапов: на первом — двигатель отключается от сети;
на втором — на двигатель подается напряжение с обратным порядком следования
Фаз по сравнению с исходным.
В отключенном от сети двигателе is = 0, но lr 0 и согласно (2-80) и (2-81)
ф5 ~ фг — <7- Потокосцепление ф/- описывается уравнением (7-9), которое
теперь принимает вид
(Рт + рг + /S) 1’г = 0,
где рг = оср'. Его решение
% - V, ..е- 1,11
содержит начальное потокосцепление ротора фгнч, определяемое по данным
исходного установившегося режима.
Поскольку в отключенном двигателе Л4ЭМ = 0, то из уравнения моментов
(7-10) следует при М = const
S= SH4 + Mx/Hj,
где sH4 — скольжение исходного режима. Тогда интегральная функция
Ф (т) = sH4t + 0,5Л4т2/77/.
Таким образом, для заданной продолжительности перерыва в питании дви-
гателя рассчитываются фг — ф8, являющиеся начальными потокосцеплениями
Рис. 7-10. Кратности максимального
электромагнитного момента асинхрон-
ного двигателя
/; 4 — при пуске; 2\ 3 — при реверсе
¥/•0 = ¥s0 для второго этапа в пере-
ходном процессе. Расчет его произво-
дится так же, как и процесса пуска
двигателя. Новыми будут лишь исход-
ные данные: начальное скольжение
So, потокосцепления 4% = T’sq. Опре-
делим постоянные AS1 и AS2 по (7-15)
для рассматриваемой задачи. Из (7-8)
с учетом равенства = ¥s0 найдем
(ртф5)о = —— /фзо • Начальные зна-
чения корней:
Рю ~ — (Рг + iso)’ ?20 ~ - (Ps + /).
Тогда по (7-15)
• _ Ps^so
sl~~ (р;-р;)-н(*о-]) ’
5 Pr+Z^O-1) ;
где <psy « -ws/(Ps + /)•
Параметры р1э и р2э при линейном изменении частоты вращения во времени
рассчитываются так же, как и для процесса пуска двигателя. Их изменение
с частотой вращения можно видеть на рис. 7-11, где штриховкой отмечена область
для случая р' = рр, а сплошные кривые относятся к соотношению р' = 0,5р'.
В обоих случаях кривые 1 и 2 соответствуют р' + р' = 0,2 и 0,4. Эти графики
показывают, что от начала процесса реверса и почти до остановки двигателя
можно принять р1э ~ р' и р2э « р'. Таким образом, в этой части процесса зату-
хание свободных потокосцеплений машины происходит с постоянными времени
цепей ротора и статора.
Определим максимальный электромагнитный момент при реверсе сначала
в предположении, что so=2,O и фго — 'Фзо = т- е- чт0 частота вращения дви-
гателя мало изменилась за время перерыва его питания, но переходный эле-
ктромагнитный процесс за это время успел закончиться. Как и при пуске,
можно считать, что до времени достижения моментом максимума интеграл
от скольжения практически изменяется пропорционально т и теперь равен 2т.
При этих начальных условиях по (7-14) и (7-16) получим
=’i’sy П - е (р»+')т]; = jicP;tsy р,-_1.2- -
е~(р>')т (Р; + /)е-(р;+/2)т
р'г - р; + i+ (р; + /2) (Р;—Р; + /)
Рис. 7-11. Зависимость эквивалентных параметров р1э и р2э^при
реверсе от частоты вращения двигателя
Момент Мэм в начальной стадии процесса без труда вычисляется по приведен-
ным выражениям для потокосцеплений. В общем виде он получается достаточно
громоздким. Поэтому напишем приближенное его выражение для случая р' « р';
Мэм « (1 + рЛ Мп [о,5 + г2р’т - е-^ (1,5 +
+ 0,5е pfTj cost + 0,5е РгТсоз2т].
Максимальным момент становится при т л. Вычислив величину, стоящую
в выражении Мэм в квадратных скобках, для т ~ л и умножив ее на Мп/ММакс. с
(см. §7-5), получим кратность максимального момента Ммакс. д/Ммакс.с-
На рис. 7-10 она представлена в функции р' кривой 3. Отметим, что зависимость
кратности максимального момента при реверсе от активного сопротивления rs
существенна; при уменьшении rs кратность растет. Кроме того, при р' ~ р'
и принятых нулевыми начальных потокосцеплениях она значительно меньше,
чем при пуске двигателя. Это результат быстрого затухания свободного потока
статора под влиянием rs в процессе реверсирования даже на малом отрезке вре-
мени, равном л. При пуске же двигателя один из свободных потоков в начальной
стадии процесса практически не изменяется.
Однако при ненулевых начальных потокосцеплениях кратность максималь-
ного момента в начале реверса может оказаться большей, чем при пуске двига-
теля, всегда определяемом при нулевых начальных потокосцеплениях машины.
Приближенно оценим этот случай, учитывая активные сопротивления об-
моток лишь в затухании потокосцеплений. Тогда Л51 « 0; Л52 ~ ф$о — Ф§у-
Напряжение на дьйгатель подаетсй в произвольный момент времени. Поэтому
установившийся поток гр$у может быть сдвинут относительно исходного свобод-
• • • • —iv
ного потока Ч7™ = 4% на некоторый угол уг, так что x|)s0 = 47s0e r • Потоко-
сцепления в установившемся режиме с различной нагрузкой, т. е. с различным
соотношением токов статора и ротора, как видно из уравнений (2-80) и (2-81),
связаны выражением ф5у ~ фгу/рс- Допустим, что перерыв в питании двигателя
был незначительным и потокосцепление 4% осталось таким же, каким было
в исходном режиме нагрузки (фгнч)- Если реверс осуществляется при том же
механическом моменте на валу, который был в исходном режиме, то в новом
установившемся режиме гргу = 4% = ^so- Таким образом, при указанных усло-
виях if)sy ~ Vso/pc, а потокосцепление статора
V. - ~ -*41 + ^п' - 1)г ']
Нс 1 4 z J
Приближенное значение гр определяется по (7-14), в котором р' сохраняется
только в экспоненциальной функции:
По потокосцеплениям обмоток вычисляется момент, который при sQ 2
равен
Мэм = 2Л4макс. с r cos (2т 4- уг) 4-
+ ё~ (Ps+Pf) т [р,с sin т — sin (т + ?,)] }.
W Ч.акс. c~°>5Ms2y/xd =
Рассматривая Л4ЭМ как функцию двух переменных т и уг, нетрудно решить
задачу на экстремум и найти их значения тм и угм, соответствующие наибольшему
возможному моменту тИмакс. д и равные: угм = л; тм = 2л/3. Этому углу угм
отвечает максимальный свободный поток статора (г|\<0—tpsy) после подачи на дви-
гатель напряжения. Подставив приведенные значения тм и угм в выражение Л4ЭМ,
найдем
^макс. д/^макс. с — -|- (1 -|- рс) е s
При пренебрежении затуханием и рс ~ 1,0
Миакс. д/^макс. с 5,2.
Однако с учетом затухания кратность максимального момента заметно сни-
жается. Так, при р' = р' — 0,1 она составляет уже 3,6. При больших сопротив-
лениях на рис. 7-10 она представлена кривой 2, рассчитанной при р' = р'.
Отметим, что в этом приближенном анализе не учтены апериодические асин-
хронные моменты от свободных потоков, пересекающих короткозамкнутые об-
мотки с конечными активными сопротивлениями.
Продолжительность пульсаций момента в процессе реверса определяется
параметрами р', р' и не зависит от момента на валу и инерционной постоянной
двигателя. Практически ко времени т ~ (3-=-4)/р', где р' — меньший из параме-
тров р' и р', динамическая характеристика Мэм = f (s) совпадает со статической.
234SO8»
Режим малых колебаний
8-1. ОБЩИЕ ЗАМЕЧАНИЯ. Допустим, что синхронная ма-
шина работает генератором, будучи включенной в сеть бесконечной
мощности с напряжением U. Если одна из «внешних сил», опре-
деляющих режим генератора, изменится, в нем начнется переход-
ный процесс. Примем для определенности, что такая ситуация
возникает при увеличении на АЛ! момента внешней механической
силы, который затем остается неизменным и равным Л40. Очевидно,
что непосредственно после изменения механического момента
(Л!о > Л!эм) ротор генератора начнет испытывать ускорение,
частота вращения ротора будет увеличиваться, а угол 0 — расти
от своего начального значения 0НЧ. Вместе с ним будет увеличи-
ваться и электромагнитный момент Л4ЭМ генератора, так что при
некотором угле 0О > 0ЬЧ наступит равновесие моментов и, следова-
тельно, ускорение ротора обратится в нуль. Однако, поскольку
ротор в это время вращается с частотой, превышающей синхрон-
ную, угол нагрузки 0 будет продолжать увеличиваться (рис. 8-1).
При 0 > 0О момент Л!эм > Л10 и ротор под влиянием отрицатель-
ного ускорения начнет замедляться. При прохождении частоты
вращения через синхронную угол 0 достигнет максимального
значения 0т, а затем будет уменьшаться. Если генератор не имеет
демпферной обмотки, а его обмотка возбуждения обладает весьма
малым активным сопротивлением (положим для простоты гв = 0),
то угловая характеристика машины Л!эм = f (0) будет однознач-
ной функцией угла 0. В этом случае в рассматриваемом переходном
процессе угол 0 будет уменьшаться до значения 0НЧ, а затем снова
увеличиваться потому, что при 0 = 0НЧ момент Мо > Мэм и
ротор испытывает положительное ускорение. Таким образом,
будут происходить незатухающие колебания угла 0 между 0НЧ
и 0т относительно среднего (при достаточно малом значении АЛ!)
значения 0О.
Механические колебания ротора относительно его вращения
с синхронной частотой сопровождаются колебаниями электро-
магнитных величин — токов в цепях, электромагнитного момента
и мощности, отдаваемой генератором в сеть. Нетрудно представить
с общих физических позиций, что при наличии демпферной об-
мотки, а также при 0 дополнительная механическая энергия,
связанная с колебаниями и преобразованная в электромагнитную
энергию, будет постепенно рассеиваться, переходя в тепло, выде-
ляющееся в обмотках ротора. В описанных условиях колебатель-
ный процесс окажется затухающим и параметры режима генера-
тора будут стремиться к значениям, определяемым новым значе-
нием механического момента Мо. Следует сразу же оговориться,
что в некоторых специфических условиях электромагнитный
момент машины при колебаниях получает такой характер, что
колебания во времени не затухают, а, напротив, увеличиваются.
Но об этом речь пойдет позже.
Рассмотренный переходный процесс обусловлен однократным
изменением одной из «внешних сил». При этом в машине возникают
собственные колебания, частота которых должна определяться
Рис. 8-1. К определению
углов нагрузки в пере-
ходном процессе синхрон-
ной машины
параметрами машины и исходного режима.
Возможны также колебания вследствие
периодического изменения «внешних сил»,
например механического момента на валу
машины. Установившиеся в этих случаях
колебания заданной частоты имеют вы-
нужденный характер.
Режим колебаний как реакция на из-
менение «внешних сил» характерен не
только для обычной синхронной маши-
ны, но и вообще для машин переменного
тока. Особый интерес представляют уста-
новившиеся гармонические колебания,
так как они, во-первых, встречаются
в практических условиях, а во-вторых,
могут служить основой для оценки статической устойчивости
установившихся режимов машины (см. гл. 9).
8-2. МАЛЫЕ КОЛЕБАНИЯ СИНХРОННОЙ МАШИНЫ ПРИ
ПРЕНЕБРЕЖЕНИИ АКТИВНЫМИ СОПРОТИВЛЕНИЯМИ.
Обратимся к формальному анализу. Рассмотрим сначала простей-
ший случай — собственные колебания генератора без демпферной
обмотки при пренебрежении активными сопротивлениями обмоток
якоря и возбуждения. В этой задаче ограничимся лишь установле-
нием зависимости 0 = f (т). Изменение угла нагрузки 0 в пере-
ходном процессе (Д0) можно определять по отношению к постоян-
ным его значениям: либо 0НЧ, либо 0О. Очевидно, что оба представ-
ления справедливы и отличаются лишь начальными условиями
для угла А0. Примем
0 = 0О + А0, (8-1)
где 0О — угол нагрузки, соответствующий электромагнитному
моменту Л4эм0, равному новому значению механического момента
Мо, Соответственно и электромагнитный момент, являющийся
функцией угла 0, можно представить в общем виде суммой
Мэм- Мэм0 + Д/Иэм, (8-2)
в которой ДЛ4ЭМ обусловлен углом Д0.
После увеличения механического момента до значения 7И0,
остающегося в дальнейшем неизменным, уравнение моментов
генератора принимает вид
Л40 -^эм Н}Рх$
или с учетом того, что Мо = Л4эм0; s = рт0, а также соотношений
(8-1) и (8-2)
+ ДМэм = 0. (8-3)
При принятых допущениях Л1эм является функцией лишь
одной переменной — угла 0, и поэтому формально изменение его
ДМэм^<Д0, (8-4)
причем
Afs=(-T-') • (8‘5)
s \ д0 /е=е0 v 7
Величина Ms называется коэффициентом синхро-
низирующего момента.
Подстановка ДЛ1ЭМ в уравнение моментов (8-3) приводит по-
следнее к уравнению с одной неизвестной:
(рх 4- /I2) Д0 = 0,
в котором обозначено
h = VMjHj. (8-6)
Решение этого уравнения
де = + Л2е-'Лт,
где Аг и А2 — произвольные постоянные, определяемые из началь-
ных условий задачи (т = 0).
При т = 0 угол 0 = 0НЧ и в соответствии с (8-1) Д0 = 0НЧ — 0О.
Кроме того, начальное скольжение равно нулю, т. е. при. т = 0
имеем рт0 = ртД0 = 0.
Полагая в найденном решении для Д0 и производной /?ТД0
время т — 0 и заменяя сами функции их начальными значениями,
получим два уравнения для определения произвольных постоян-
ных:
Л1 А2 = 0НЧ — 0О; Лх — А2 = 0,
из которых следует Аг = А2 = —0,5 (0О — 0НЧ).
Таким образом, окончательно
Д0 = — (0О — 0Нч) cos hr; 0 = 0О -j- Д0 = 0О — (0О — 0НЧ) cos hr.
На рис. 8-2 представлен график 0 = f (hr).
(8-4), если учесть, что углу
в
Полученный результат показывает, что увеличение механи-
ческого момента приводит к возникновению незатухающих колеба-
ний угла нагрузки синхронной машины» Параметр h представляет
собой относительную частоту колебаний. Действительно, аргумент
косинусоидальной функции hr = h^t можно заменить величиной
сок/, где сок — угловая частота изменения функции (угловая
частота колебаний). Из равенства аргументов найдем h = сок/сох =
= fjfi> где /к и Л — частоты колебаний и сети в герцах.
Амплитуда колебаний угла 0О — 0НЧ определяется с помощью
Д0 = 0О — 0НЧ соответствует момент
Д7ИЭМ, равный изменению механиче-
ского момента ДЛ4. Поэтому
0О _ 0нч = AM/Afs.
Относительная частота собствен-
ных колебаний h вычисляется по
(8-6) и зависит от инерционной по-
стоянной и коэффициента синхрони-
зирующего момента машины.
8-3. МАЛЫЕ КОЛЕБАНИЯ СИН-
ХРОННОЙ МАШИНЫ С УЧЕТОМ
АКТИВНЫХ СОПРОТИВЛЕНИЙ
РОТОРА. Произведем теперь анализ
аналогичного переходного процесса
в генераторе с демпферной обмоткой, принимая во внимание актив-
ные сопротивления обмоток ротора машины. Уравнение моментов
в общем виде (8-3) справедливо и для этого случая. Однако измене-
ние электромагнитного момента ДЛ4ЭМ должно быть теперь опреде-
лено с учетом указанныхщовых факторов. С этой целью представим
все переменные в виде суммы двух слагаемых, из которых одно
соответствует постоянному углу, а другое — приращение перемен-
ной — изменяющемуся во времени малому углу Д0. Очевидно,
что последняя составляющая достаточно мала, если мал угол Д0.
Условимся составляющие, определяемые углом 0О, обозначать
индексом 0, а приращение переменных — знаком Д. Тогда, пре-
небрегая произведениями приращений переменных, будем иметь
Мэм = Ф^*<7 Ф<?^ “ Л4ЭМО -|- ДЛ4ЭМ,
причем
А^эмО = Ф</0^0 Ф<70^/0,
АА1ЭМ = IqQ Дф^ ф^о ^d “1“ Ф^О ^фд. (8“7)
<5?
О л/2 я Зх/2 2я hr
Рис. 8-2. Изменение угла 02ге"
нератора при внезапном увели-
чении механического момента
Пренебрегая, как и раньше, активным сопротивлением якоря,
получаем возможность воспользоваться приближенными уравне-
ниями напряжений якоря (3-20), в которых ввиду малости А0
примем cos А0 1; sin Л0 Д0:
ф</ = ф^0 Дф^ = U cos (0О + Д0) U cos 0О — U sin 0О Д0;
% = %о + = U sin (во + Аб) U sin 0О + U cos 0О Д0.
Из этих уравнений находим
Дф^ = —J7 sin 0О Д0; Дф7 = (7 cos 0О Д0. (8-8)
Для определения АМэм по (8-7) остается найти изменяющиеся
токи Aid и Д/7.
Сделаем одно допущение, которое впоследствии можно будет
оценить: положим, что угол Д0, а следовательно, и все переменные,
обусловленные им, изменяются во времени по гармоническому
закону с некоторой частотой /г, как это имело место при равных
нулю активных сопротивлениях обмоток генератора. Тогда для
определения приращения переменных можно воспользоваться
методом комплексных переменных, широко используемым в элек-
тротехнике. Как известно, по этому методу вместо гармонической
функции времени вводится в рассмотрение комплексная перемен-
ная; например, вместо переменной Aid = AIdni cos hx оперируют
с комплексной переменной Ald = AIdmeih\ так что действительная
часть ее Aid равна исходной функции Aid. Операция дифференци-
рования комплексной переменной заменяется умножением диф-
ференцируемой комплексной переменной на /7г, как, например,
pxAid = jhAIdmeihx = jhAid. Иными словами, символ дифферен-
цирования заменяется множителем jh. С другой стороны, опера-
торные уравнения машины, из которых определяются изображения
приращений переменных, имеют вид дифференциальных уравнений
машины для функций-оригиналов и отличаются лишь тем, что
вместо символа дифференцирования содержат алгебраический
множитель р. Следовательно, для определения комплексных пере-
менных можно использовать операторные выражения с заменой
в них операторных функций-изображений комплексными перемен-
ными, а символа р — на jh. Так, используя операторное соотноше-
ние (2-113) для машины с нерегулируемым возбуждением Aid \р) =
= Аф,/ (p)/xrf (р), получим для комплексных переменных Ald и Дф^:
Aid = Аф^(//г). (8-9)
Аналогично
Aiq = A^q!xq(jh). (8-10)
Принимая во внимание, что приращение любой переменной
представляет собой вещественную часть вводимой в рассмотрение
комплексной переменной, перепишем (8-7) с учетом (8-9) и (8-10)
в виде
ДМэм = Re {[<?0 — (jh)] Atj'd — (trfo — WM/71)]
Подставив сюда постоянные значения = U cos90; Ф70 — U sin 0О;
= (—£о + U cos М = U sin 0о/л'7, а также комплекс-
ные приращения потокосцеплений, которые согласно (8-8) равны
Аф^ = —U sin 0ОА0; Аф^ = U cos 0ОД0, получим
Д Мэм = Re (£|//cos9° + ий (---------Ц cos 20о +
ЭМ ( xd 1 \ Xq Xd ! 01
4-472Sin20 Г_i _ LI +t/2COS20 Г_L_- —1][ Д0.
°iXd(jh) Xd]’ ° L Xq (jh) Xq Jj
Обозначим комплексную величину, стоящую в фигурных скоб-
ках, через А и запишем ее в алгебраической форме:
А = Ms 4- jhMd,
так что величины Ms и hMd представляют собой соответственно
вещественную и мнимую части А.
Для предположенного характера изменения угла Д0 во времени
Д0 = Д0т cos (hx — ср); Pt Д0 = —Д0т/г sin (/it — ср);
Д0 = Д0те' = Д0т [cos (/it — ср) + /sin (^Т — ф)1-
Здесь Д0т — амплитуда изменения угла Д0, а ср — начальная
фаза.
Взяв вещественную часть от А Д0, найдем
ДЛ4ЭИAfs Д0 4-Д0, (8-11)
где
Ms = ReX = Ms0 + A4sfl; (8-12)
MsO = -^-cosOo + ^(4--^)cos20o; (8-13)
xd \ xq xd /
мзд = (/2 ReH—— 1 sin20o4 Г—L-~— 1 cos20o|; (8-14)
SA *d ] Q^l.XqW Xq J V
Md = ~ Im a = Im (Г-4^ - — I Sin2 0O +
a h h [[xd ()h) xd J 01
+ Гт77/П - 7-1 cos2M- (8’15)
L xq (/"J Xq J )
Выражение (8-11) показывает, что при учете активного сопро-
тивления обмоток ротора момент АЛ1ЗМ, обусловленный малыми
гармоническими колебаниями угла АО, имеет кроме составляющей,
пропорциональной углу отклонения А0, еще одну составляющую,
пропорциональную скорости изменения угла АО, т. е. скольжению
s. Они называются соответственно синхронизирующим
и демпферным моментами и характеризуются так
называемыми коэффициентами синхронизи-
рующего (Ms) и демпферного (Mj) моментов.
В предыдущем параграфе коэффициент 7MS был определен при от-
сутствии активного сопротивления обмотки возбуждения машины.
Подстановка (8-11) в (8-3) приводит к дифференциальному
уравнению, содержащему лишь одну переменную Д0,
(/?2 _ 2ррх -I-/I2) Д0 = О
с коэффициентами, определяемыми из выражений:
₽ = h = ГЖЖГ (8-16)
Корни характеристического уравнения: (3 zt /йк, причем hK =
= ]/h2 — (З2. Таким образом, решение дифференциального урав-
нения в двух возможных формах имеет вид
ЛО = (А^ + A.2e-ih^) = Детерх cos (Лкт - <р), (8-17)
где Ai, А2 или Д0т, <р — произвольные постоянные, определяе-
мые из начальных условий.
Вторая форма (8-17) указывает на характер изменения угла
Д0 во времени: это — гармонические колебания с относительной
частотой и экспоненциально изменяющейся амплитудой.
Для определения начальной амплитуды колебаний Д0т и угла
фазового сдвига <р с помощью начальных условий недостаточно
только уравнения (8-17): более детальный анализ (см. § 9-1) по-
казывает, что угол Д0 содержит, кроме приведенной колебатель-
ной составляющей, еще экспоненциальную вида и началь-
ные условия нужно рассматривать применительно к функции
де = ЛОтае“х + Д0те₽т cos (/гкт - <р). (8-18)
Поэтому удовлетворимся пока общим характером временной зави-
симости для составляющей угла Д0, определяемой (8-17). Частота
колебаний угла /гк отличается от частоты h согласно (8-16),
которая имеет место при пренебрежении активными сопротивле-
ниями обмоток ротора машины; теперь она зависит еще от коэффи-
циента Md. Кроме того, под влиянием указанных сопротивлений
амплитуда колебаний изменяется по закону экспоненты, а не
остается неизменной, как это было получено в § 8-2 и принято
в настоящем анализе. Комплексный метод определения прираще-
ний переменных, изменяющихся гармонически с частотой Л, поз-
воляет, как это отмечалось выше, заменять знак дифференцирова-
ния рх на /Л. Нетрудно проверить, что при комплексном представ
лении функции вида (8-17) знак рх должен быть заменен множите-
лем jhK + ₽. Поэтому, строго говоря, коэффициенты A4S и Md для
реальной зависимости Д0 — f (т) согласно (8-17) следует опреде-
лять по (8-12) — (8-15), в которых вместо xd (jh) и xq (jh) нужно
подставлять xd (jhK + (3) и xq (jhK + |3). Более того, если коэффи-
циенты Мs и Md вычислять указанным способом, то при изменении
Угла Д0 в соответствии с (8-17) коэффициентом синхронизирую-
щего момента, как показывает формальный анализ, становится
величина 2WS + (ЗЛ4 тогда как коэффициентом демпферного мо-
мента по-прежнему остается Md. Однако для мощных машин hK Л,
а коэффициенты синхронизирующего и демпферного моментов
можно вычислять, полагая (3 = 0. Как правило, погрешность при
этом не превосходит 5%.
В зависимости от знака коэффициента (3 угол ДО, как это сле-
дует из (8-17), будет иметь либо убывающую (|3 < 0), либо нара-
стающую ((3 >> 0) амплитуду. Но, судя по соотношению (8-16),
характер изменения амплитуды угла определяется в конечном
счете знаком коэффициента демпферного момента: положительный
Рис. 8-3. Развитие колебательного процесса во времени
Md указывает на затухание колебаний, отрицательный Md гово-
рит об увеличении амплитуды колебаний. На рис. 8-3 построены
графики Д0 = f (Лкт) при Md >> 0 (сплошная кривая) и Md <С 0
(штриховая кривая), рассчитанные по (8-17) для | (3 | = 0,04.
На рис. 8-4 приведена зависимость ДМэм = f (ДО) согласно
(8-11). Прямая 1—3 представляет собой синхронизирующий мо-
мент, пропорциональный углу ДО. Очевидно, что тангенс угла
наклона этой прямой к оси абсцисс характеризует коэффициент
синхронизирующего момента Л45. Демпферный момент выражается
ординатами, заключенными между кривой 1—2—3—4 и прямой
1—3. При незатухающих гармонических колебаниях максимумы
угла ДО и его производной сдвинуты на четверть периода колеба-
ний. Поэтому в точках 1 и 3 на рис. 8-4, а, соответствующих мак-
симуму угла ДО = Д0т, ртДО = 0 и демпферный момент равен
нулю. В аналогичных точках на рис. 8-4, б, относящемся к случаю
затухающих колебаний ((3 < 0), /7ТД0 = 0, но ДО 4= Д0те₽т, так
как амплитуды угла ДО и производной ртД0 сдвинуты во времени
более чем на четверть периода колебаний. В точках 1 и 3 ДЛ4ЭМ
представляет собой только синхронизирующий момент, а в точках
2 и 4 (ДО = 0) — только демпферный. На рис. 8-4 положитель-
ному значению угла Д0/п соответствует ДЛ4ЭМ >* 0; следовательно,
считается, что М5 > 0. Знак Md определяет направление движе-
ния по характеристике ДЛ15М = f (Д0) при изменении угла. Так,
если Md > 0, то при увеличении угла Д0, когда ртД0 > 0 (окрест-
ность точки 2 на рис. 8-4), демпферный момент положителен и
ДЛ4ЭМ откладывается на графике над прямой 1—3 (участок кривой
1—2—3). При уменьшении Д0, когда ртД0 <С 0 (окрестность
точки 4), демпферный момент отрицателен и ДЛ4ЭМ определяется
кривой 3—4—1 (или /'). Поэтому при Md >> 0 движение по кривой
1—2—3—4 будет происходить по часовой стрелке. Аналогично,
Рис. 8-4. Изменение электромагнитного момента, обусловленное
колебаниями в машине: а — при (3=0; б — при р < 0
если Md < 0, движение по кривой совершается против вращения
часовой стрелки.
Отметим, что обычно максимум демпферного момента состав-
ляет не более 7—10% от максимума синхронизирующего момента,
поэтому петля 1—2—3—4 на рис. 8-4 в действительности более
узка, чем это изображено.
Угловая характеристика машины Л4ЭМ = f (0) для рассматри-
ваемого переходного процесса имеет сложный вид. Действительно,
при внезапном изменении механического момента до значения Л40
угол 0О, соответствующий равенству Л40 = Л4эм0, в начале про-
цесса практически определяется по угловой характеристике, рас-
считываемой из условия гв — 0 или Ed = const (см. рис. 8-1).
Вместе с тем в новом установившемся режиме моменту Мо будет
соответствовать другое значение угла 0О, так как Л4эм0 должен
определяться в этом случае по статической угловой характеристике
(£0 = const). Это изменение угла 0О отражается апериодической
составляющей угла Д0, которая представлена в (8-18) первым сла-
гаемым. Рассматривая незатухающие гармонические колебания
около среднего угла 0О, определяемого статической угловой ха-
рактеристикой, получим зависимость Л4ЭМ = f (0) наложением на
Постоянный момент Л4эм0 дополнительного момента ДЛ4ЭМ, обус-
ловленного колебаниями (рис. 8-5). На этом рисунке кривая 1
представляет собой статическую угловую характеристику, а кри-
вая 2 — зависимость Л4ЭМ f (6) при гармонических колебаниях.
Начало координат О на рис. 8-4, а помещено на рис. 8-5 в точку
с координатами Л4эм0, 0О.
8-4. КОЭФФИЦИЕНТЫ СИНХРОНИЗИРУЮЩЕГО И ДЕМП-
ФЕРНОГО МОМЕНТОВ СИНХРОННОЙ МАШИНЫ. Из об-
щих выражений (8-12)—(8-15) следует, что коэффициенты Мь и Md
зависят от вида комплексных сопротивлений xd (jh); xq (jh), т. e.
от того, какие контуры имеет машина
на роторе. Отметим, что коэффициент
синхронизирующего момента содержит
так называемую основную со-
ставляющую Ms0, которая не за-
висит от вида роторных контуров и фи-
зически определяет момент ДЛ4ЭМ, когда
изменение угла Д0 происходит бесконечно
медленно. В этом случае h -> 0 и, сле-
довательно, xd (jh) -> xd и xq (jh) -> xq,
а потому A1sa -+ 0 и hMd -> 0. По смыслу
составляющая Л4з0 должна быть равна
производной от электромагнитного мо-
► мента по углу 0, взятой при Ео = const,
т. е. пропорциональна тангенсу угла на-
клона касательной к статической угловой
характеристике Л4ЭМ = f (0) при 0 = 0О.
Нетрудно убедиться, что формально най-
денная производная совпадает с (8-13).
демпферной обмотки согласно выражению
Рис. 8-5. Угловая харак-
теристика машины при
устойчивых колебаниях
Для машины без
(2-122) комплексные сопротивления равны:
xd (/й) — Xd + ; xq (jh) — xq.
Сопротивление xd (jh) нетрудно выразить через обычно исполь-
зуемые параметры в виде
/ /^dO (* * * * * * * * xd xd)
Xd № ~Xd 1 + jhTd0 ’
ГДе TdQ Xb//*b, a Xd Xd XaBdl%b*
Подставив значения сопротивлений xd (jh) и xq (jh) в выраже-
ния (8-14) и (8-15), после несложных преобразований получим
= £/2sin2e0pr—-) УЧ; (8-19)
V xd Xd /1 + hTd
Md = U2 sin2 0O f 4--Д-,2> (8-20)
\xd Xd}l+h2Tf
где T’d = Tdoxd/xd.
При hT'd >• 4-4-5, что характерно для мощных машин, значение
Л15д согласно (8-19) мало отличается от вычисленного при T'd = оо
(гь = 0). Поэтому для таких машин практически
Ms, = t/2 sin20oM-----
Д xd Xd
И
Е / 1 1 \
Ms = Ms0 Msa = cos e0 - U" ----------------- cos 20O)
xd \ xd хч I
что совпадает с производной по углу от электромагнитного мо-
мента, определяемой при постоянстве э. д. с. за продольным пере-
ходным сопротивлением (Edo = const). Такой же результат был
получен в выражении (8-5).
Если на роторе машины кроме обмотки возбуждения имеется
демпферная обмотка, но только по поперечной оси, то сопротивле-
ние xq (jh) имеет вид, аналогичный xd (jh), при наличии по про-
дольной оси одной обмотки возбуждения. В этом случае согласно
выражениям (8-14) и (8-15) к уже найденным значениям Л45Д и Md
добавятся члены, пропорциональные cos2 0О и имеющие такое же
строение, как найденные в (8-19) и (8-20), т. е. коэффициенты Л45Д
и Md будут равны:
Мs„ = U2 sin2 00 ( 4- - \xd 1 h2T2 ч xd / 1 4-h27’7 -;),+4?7.r (8-2i)
Md = U2 sin2 0О ( Д \xd xd У 1 + h2Td2
+ <8'22)
где T"q = T3qx"qlxq и T3q — постоянные времени поперечного демп-
ферного контура.
При наличии демпферной обмотки по обеим осям выражение
для сопротивления xd (jh) получается более громоздким, чем в рас-
смотренном выше случае, и поэтому выражения для A4S и Md здесь
не приводятся. Их можно найти, например, в работе [48].
Удобным является расчет коэффициентов Л45Д и Md с помощью
схемы замещения синхронной машины [56].
Иллюстрациями характера изменения коэффициента синхро-
низирующего и демпферного моментов в зависимости от нагрузки
машины служат рис. 8-6 и 8-7. На рис. 8-6 представлена зависи-
мость основной (A4s0) и добавочной (М5Д) составляющих коэффи-
циента синхронизирующего момента от среднего значения угла 0О.
Кривые построены по выражениям (8-13), (8-19), (8-21) для ма-
шины, имеющей следующие параметры: xd = 1,0; xq = 0,6;
x'd = 0,3; x'q = 0,25; T'd = 1 c; T"q = 0,5 с. Кривая 7 на рис. 8-6
изображает Л4$д для машины без демпферной обмотки (x"q = х7),
кривая 2 соответствует случаю, когда на роторе имеется, кроме
обмотки возбуждения, еще поперечный демпферный контур. На
рис. 8-7 представлена зависимость коэффициента демпферного мо-
мента Md от угла 0О Для машины с теми же параметрами, рассчи-
танная по (8-20) и (8-22). Из рисунка видно, что при отсутствии на
Рис. 8-6. Зависимость
коэффициента синхро-
низирующего момен-
та от угла нагрузки
Рис. 8-7. Зависимость коэффи-
циента демпферного момента от
угла нагрузки
роторе машины демпферной обмотки (кривая /) коэффициент Md =
= 0 при 0О = 0 и сравнительно мал при небольших значениях угла
0О. Напротив, наличие поперечной демпферной обмотки обуслов-
ливает высокие значения Md (кривая 2) в области обычных углов
0О. При расчете A4s0 возбуждение машины принималось одинако-
вым при различных углах 0О (Ео = 1,0). Относительная частота
колебаний h принималась постоянной и равной 0,03. Напряжение
шин U равно единице.
Коэффициенты 7WS и Md являются не только функциями угла
нагрузки 0О, но зависят от частоты колебаний ft, которая, в свою
очередь, определяется через коэффициент синхронизирующего
момента. Поэтому при нахождении частоты ft величина A4S рассчи-
тывается при некотором задаваемом значении ft, а затем расчеты
последовательно корректируются. Можно поступить и так: по-
строить в функции ft графики Н}К2 и Ms = f (ft) по (8-12) и
(8-14); точка их пересечения определит значения и ft.
Необходимо еще раз отметить, что выражения коэффициентов
синхронизирующего и демпферного моментов (8-12)—(8-15) по-
лучены в предположении равенства нулю активного сопротивле-
ния обмотки статора г. В отдельных случаях влияние этого со-
принято:
Рис. 8-8. Дополнительные составля-
ющие коэффициентов синхронизиру-
ющего и демпферного моментов
Сплошные кривые соответствуют Ео —
— 1,0; штриховые — Ео = 1,5
противления может оказаться существенным, особенно на демп-
ферный момент машины.
При учете сопротивления г в коэффициентах синхронизирую-
щего и демпферного моментов появляются дополнительные со-
ставляющие A/Ws и AAfj. Аналитические выражения для них
даны в работах [5, 311. Ограничимся здесь иллюстрацией харак-
тера изменения AAfs и AMd в зависимости от угла нагрузки 0О
(рис. 8-8) для синхронной машины без демпферной обмотки со сле-
дующими параметрами: xd = 1,0; xq = 0,6; xd = 0,3; Td=l с; г =
= 0,02. При расчете графиков
Сравнение кривых рис. 8-8
с соответствующими кривыми
рис. 8-6 и 8-7 показывает, во-
первых, что при не слишком
больших сопротивлениях об-
мотки статора г дополнитель-
ная составляющая AMS мало
изменяет полный коэффициент
Ms и, во-вторых, что для ма-
шины без демпферной обмотки
в зоне небольших углов 0О за
счет дополнительной составля-
ющей &Md коэффициент демп-
ферного момента может стать
отрицательным.
Демпферная обмотка, име-
ющая поперечные контуры, соз-
дает большие положительные
демпферные моменты, превос-
ходящие обычно отрицатель-
ные моменты, обусловленные
активным сопротивлением об-
мотки статора.
Аналитическое выражение для АЛ1^ показывает, что увеличе-
нию отрицательного коэффициента демпферного момента способ-
ствует увеличение активного сопротивления обмотки статора г
и возбуждения машины (Ео). Из рис. 8-8 видно, что при ра-
боте машины в двигательном режиме получаются большие отри-
цательные значения коэффициента &Md, нежели в режиме гене-
ратора.
При принятом гармоническом характере изменения угла А0 во
времени коэффициенты синхронизирующего и демпферного мо-
ментов могут быть определены и в случае регулируемого возбужде-
ния машины (Аив ф 0). Соответствующие общие выражения для
Ms и Md можно найти в работе [5]. В связи с этим заметим, что
неправильный выбор коэффициентов регулирования возбуждения
машины может явиться причиной образования отрицательных
коэффициентов демпферного момента даже при г = 0.
8-5. СИНХРОННАЯ МАШИНА ПРИ ПУЛЬСИРУЮЩЕМ МЕХАНИЧЕ-
СКОМ МОМЕНТЕ. Пусть момент механических сил на валу машины представ-
ляет собой сумму постоянной составляющей Af0 и ряда гармоник порядка v (v —
— 1; 2; 3 ...), так что
М = Мо 4- J] Mvtn cos (v/ibt 4- фу), (8-23)
v
т. е. выражается заданной периодической функцией времени с периодом, равным
1//гв. Подобный характер механического момента встречается, например, в ком-
прессорных установках, работающих с синхронными двигателями.
Не рассматривая переходного процесса, вызванного приложением к валу
машины указанного механического момента, обратимся к режиму установив-
шихся колебаний. Очевидно, что под влиянием периодически изменяющегося
механического момента ротор машины будет совершать вынужденные периоди-
ческие колебания относительно системы координат, вращающейся с синхронной
частотой. Следовательно, такие же колебания будут испытывать угол 0, а вместе
с ним токи, электромагнитный момент и мощность машины.
Определим пульсации электромагнитного момента и токов статора при задан-
ном механическом моменте'вида! (8-23). Будем считать, что колебания имеют
ограниченную величину и для них справедлива линейная постановка задачи,
примененная в § 8-3. Напомним, что в этом случае изменение электромагнитного
момента АМэм, обусловленное изменением угла АО, линейно относительно изме-
нений продольных и поперечных токов и потокосцеплений статора, а последние
пропорциональны ДО.
Периодически изменяющийся угол АО представим рядом Фурье:
АО = A0V = 2 A0vm cos 4- ?v)-
v v
Очевидно, что рядами Фурье выражаются потокосцепления Дф^, Дгр^, токи
Д/j, Kiq и, следовательно, электромагнитный момент
АА1Эм — У । АТИэму.
v
Поэтому уравнение моментов
M-M3W = HjPxs = H.p2x^
распадается на самостоятельные уравнения:
Мо-Мэмо = О; (8-24)
HjPt S A0V + L AM3MV = L Mvm cos (VV + <Pv)
V V V
или
HjP2x A0v + AAf3MV = Mvm cos (vV + <Pv)> V = 1; 2; 3 ... (8-25)
Поскольку A0v и ДМЭМу представляют собой временные гармоники v-ro
порядка, можно использовать комплексное представление переменных, а также
полученный в § 8-3 результат для ДМэм. Определяя по-прежнему комплексные
переменные так, чтобы их вещественная часть была равна мгновенному значению
переменной, и выражая изменение электромагнитного момента суммой синхрони-
зирующего и демпферного моментов, будем иметь
A6v = A0vm?(v%x+£v) = AW-v.V;
АМЭму = (Afs 4- A0y,
где комплексная амплитуда v-й гармоники угла A0vrn =
Заменим в уравнении моментов (8-25) мгновенные значения функций соответ-
ствующими комплексными величинами A0V; AM3MV; Mvtne}(vh^+(i)v). Деля
затем уравнение на И и учитывая, что p2A0v ——(v/ib)2 A0*v, получим
[Л2 - (vftB)2 - /2₽v/iB] A^vm = (8-26)
Здесь, как и в (8-16), обозначено: —Р = h = КMs!Hj.
В § 8-4 было показано, что коэффициенты Ms и Mj зависят от частоты коле-
баний; поэтому в рассматриваемой задаче они должны рассчитываться для ча-
стоты vhB. Параметр h представляет собой частоту собственных колебаний ма-
шины, но с оговоркой относительно определения коэффициента ЛД, зависящего
от частоты вынужденных (v/iB), а не собственных (Л) колебаний.
Представив левую часть (8-26) комплексной величиной в показательной
форме, найдем из сравнения левой и правой частей уравнения:
AO-v/72 — ky A0vmo; (8-27)
Sv = <Pv + arctg {1 > (8 -28)
где
ABymo — M-vm.1 ky = ------ . . _ ° , . . . .
Ms / [ 1 - (v/iB//z)a]2 + (2pv/zb/7j2)2
Угол A0vmo имеет простое физическое толкование: он представляет собой
изменение угла нагрузки под влиянием момента на валу Mvtn в статических усло-
виях, т. е. в соответствии с угловой характеристикой для установившихся режи-
мов. Действительно, в этих условиях демпферный момент отсутствует и изменение
электромагнитного момента определяется только синхронизирующим моментом;
при этом коэффициент становится равным основной его составляющей MSQ.
Тогда из равенства электромагнитного и механического моментов следует приве-
денное выше выражение для A0vmo. Коэффициент ky характеризует увеличение
угла за счет динамики процесса. В частности он указывает на возможное значи-
тельное увеличение амплитуды колебания угла нагрузки при vhB= h. Это —
известное состояние резонанса, возникающее при равенстве частот собственных
и вынужденных колебаний. При отсутствии демпфирующего действия обмоток
ротора (р = 0) коэффициент ky в условиях резонанса становится бесконечно
большим.
На рис. 8-9 показана зависимость коэффициента kyM&lMSQ от безразмерного
параметра vhBlh при различном демпфировании колебаний (р//г).
Итак, по формулам (8-27) и (8-28) для заданных Mvm и (pv рассчитываются
амплитуда и начальная фаза v-й гармоники угла A0V; суммируя гармоники, по-
лучаем угол А0. Средний угол 0О находим из (8-24). По известным значениям A0V
определяем гармоники электромагнитного момента:
AM3MV = Re (AA^mv) = Ais Re < ASV) - vhBMd Im (A0V) = Ms A0V + MdPx A0V)
суммируя которые, получаем ДМэм -- f (т).
Схема определения токов статора такова.
1. Гармоники продольного и поперечного токов якоря на основании (8-8)—
(8-10):
Airfv = Re (Aidv) = Re--^-' = -U sin 0O Re —;
v xd (jvhB) xd <jvhB)
Ai?v _ Re (Ai^) - Re -l/cos0oRe •
2. Изменения продольного и поперечного токов якоря:
= У, ^q ~ ^qv'
V V
3. Продольный и поперечный токи якоря:
Ч = Чъ + ^Ч'> iq = iqo + ^iq>
где токи и iqQ рассчитываются по формулам установившегося режима для
среднего угла нагрузки 0О.
4. Фазные токи якоря определяются по формулам линейного преобразова-
ния для найденных токов Ч и iq.
Рис. 8-9. Зависимость коэффициента усиления колебаний
от соотношения частот собственных и вынужденных коле-
баний
Пример. Приводной синхронный двигатель компрессора имеет номиналь-
ные данные: SH = 4650 кВ-A; cos фн = 0,9 (режим перевозбуждения); =
= 6 кВ; пг— 125 об/мин; мощность на валу 4000 кВт. Параметры двигателя:
xd = 0,92; xq - 0,58; xd = 0,26; х" = 0,18; T'd = 200 рад; Т" = 3 рад; -
= 2300 рад (при наличии на валу маховика с GD2 — 540 т- м2 и собственном GD2 —
= 260 т-м2). Параметры номинального режима (принимаем в двигательном
режиме механический момент и угол нагрузки положительными): U = 1,0;
I = 1,0; Ео = 1,6; 0О = 23°; амплитуды гармоник механического момента Mltn =
— 0,29; 442m ~ 0,29; Мзпг — 0,16; М4гп = 0,42 при Л40 = 0,9 и hB — 0,042.
Ограничимся расчетом амплитуд углов A0Wi-
Основная составляющая коэффициента синхронизирующего момента по
(8-13)
" W °-92 + ( W - <ЯГ ) = 2-м-
Для v = 1 дополнительная составляющая коэффициента синхронизирующего
момента по (8-21)
м _ПЭД2/ 1 1 \ (0,042-200)2
зд ’ \ 0,26 0,92 / 1 -|-(0,042-200)2
+ 0 922 М__________Ч <°-942-3)2.. =0 46-
h’ \ 0,18 0,58 / 1 +(0,042-3)а ’ ’
коэффициент демпферного момента по (8-22)
Md — 0,392 ( 0 26 0 92 )
200
1 + (0,042-200)2 +
+ °'922 (оЛ8
0,58 ) 1 +(0,042-3)2 ’ 10,8
Полный коэффициент синхронизирующего момента по (8-12)
Ms = 2,04 + 0,46 = 2,5.
Частота собственных колебаний
h = V Ms/H] = /2,5/2300 = 0,033.
Параметр —2р/Л = = 10,8 : (2300-0,033) = 0,142. Коэффициент
в (8-27)
k = - - ...- - = 1 27
У 2,5/[1 — (0,042 : 0,033)2]2 + (0,142-0,042 : 0>033)2
Углы по (8-27):
ЛОрпо Mi/n/Mso = 0,29: 2,04 =0,142 рад (8,1°); А91т = 1,27-8,1 « 10,3°.
Аналогично определяются и другие гармоники. Результаты расчета для
четырех гармоник сведены в таблицу, в которой приведены также данные для
компрессорной установки с Н < = 1680 рад при облегченном маховике, имеющем
®2 = 320 т-м2.
Таблица
V М& Md 0 Нj — 2300 рад Hj = 1680 рад
h ky 0 h ky 0
I 2,5 10,8 8,1 0,033 1,27 10,3 0,038 2,94 24
2 2,51 9,4 8,0 • 0,033 0,147 1,2 >0,038 0,22 1,8
3 2,58 8,6 4,5 0,033 0,058 0,3 0,039 0,084 0,4
4 3,10 7,9 12 0,037 0,034 0,4 0,043 0,046 0,6
Выполненные расчеты показывают, что высшие гармоники момента механи-
ческих сил, даже значительные по величине., обусловливают малые изменения
угла нагрузки машины. Решающее значение с этой точки зрения имеет соотно-
шение частот собственных и вынужденных колебаний. В рассмотренном примере
уменьшение инерционной постоянной агрегата приводит к недопустимым коле-
баниям угла 0 за счет первой гармоники.
8-6. КОЭФФИЦИЕНТЫ СИНХРОНИЗИРУЮЩЕГО И ДЕМП-
ФЕРНОГО МОМЕНТОВ МАШИНЫ С ТРЕХФАЗНОЙ ОБ-
МОТКОЙ НА СИММЕТРИЧНОМ РОТОРЕ. Электромагнит-
ный момент синхронной машины двойного питания согласно (2-79)
или (2-84)
Мэм = -77 Im (es<?0) = 4- Im СМД
Xd xd
где аналогично обозначениям для синхронной машины принято
x'd, хотя при симметричной обмотке ротора индекс, обо-
значающий продольную ось d, у параметров является излишним.
На основе приведенного выражения можно в общем виде полу-
чить изменение электромагнитного момента ДЛ4ЗМ, обусловленное
малыми колебаниями в машине. Выберем вторую форму записи
Л4ЭМ. Пренебрегая произведением малых изменений потокосцеп-
лений Дфг Дф5, будем иметь
АЛ4ЭМ = Д- Im (4>s0 Aipf + фг0 Aips). (8-29)
xd
Здесь и далее индексом 0 отмечаются постоянные величины, отно-
сительно которых происходит изменение соответствующих пара-
метров режима.
Малые изменения Дфг и Дф5 необходимо определить из диффе-
ренциальных уравнений напряжений обмоток машины (2-82) и
(2-83). Ограничимся случаем, когда обмотка статора машины вклю-
чена в сеть бесконечной мощности и, следовательно, Aus = О,
а влияние активного сопротивления этой обмотки незначительно.
Полагая rs = 0, получим из (2-82) и (2-83) уравнения для малых
изменений величин:
(рг + /)Дф^0; (8-30)
(рт + рг — jso) Дфг — РгЦс Дфя = Рг Д^г + /4>о Д$. (8-31)
Из (8-30) следует, что Дф5 = 0, так как начальное значение
этой переменной равно нулю. Для определения Дфг из (8-31) необ-
ходимо сначала найти изменение напряжения ротора Д^г в син-
хронно вращающихся осях. Напомним с этой целью, что взаимное
положение комплексных напряжений us и иг было определено
(см. § 3-1) углом 0С + л/2, так что
Ur Ur Л°с+л/2)
U3 Us
Принимая, как и раньше, и8 = Us, получим комплексное на-
пряжение ротора
иг^иге}^+л/2К
Поскольку при колебаниях машины Ur = const, то
kur — иг — ur0 ~ urQ (е/Л0с — 1) jurQ Д0с,
где
urO = [//(0co^2).
Угол Д0С, от которого зависит &иг, и скольжение As в (8-31)
взаимосвязаны. Образование угла Д0С при неизменных частотах
/1 и f2 обусловлено лишь изменением частоты вращения ротора
Део, так что
pt Д0С = Део или Aeo/coj = As = Д0С.
Последнее соотношение можно установить и формально, сопо-
ставляя отношение ur/us по данным § 2-3 с приведенным выше.
Подставив в (8-31) полученные выражения для \иг и As,
а также Atps = 0, получим дифференциальное уравнение относи-
тельно Д*фг и Д0С:
(Рт + рг — /So) Дфг — / (рЛо + фгОРт) А0С-
Очевидно, что установившимся гармоническим колебаниям
угла Д0С с заданной частотой h отвечает аналогичная временная
зависимость Дфг. Поэтому если применить, как это делалось ранее,
комплексные переменные во времени, то символ дифференцирова-
ния рх становится множителем jh. Однако в приведенном уравне-
нии уже фигурирует пространственная комплексная величина Дфг.
Для того чтобы избежать смешения временных и пространствен-
ных комплексных величин, оставим пока уравнение без изменения,
но будем считать в нем рх простым алгебраическим множителем,
имея в виду известную временную зависимость Дфг. Тогда
А^ = / . (8-32)
Рт + Рг - /'s0
Теперь остается выразить постоянную комплексную величину
фг0 через напряжения обмоток. Из уравнений (2-82) и (2-83) для
установившегося режима (рх = 0) при rs = 0 следует
%о = рг . (8.33)
Рг /s0
Момент АЛ4ЭМ при rs = 0, когда Ai|\ = Ai|?s = 0, согласно
(8-29) равен
AM3M = --^Re(AM
xd
поскольку в установившемся режиме ii?s0 = jUs = jUs.
Итак, подставив (8-33) в (8-32) и выделив вещественную часть
у Дф>г, найдем момент ЛЛ4ЭМ: он будет пропорционален Д0С. В об-
щем виде
где f (рт) — некоторая функция /а, 0сО, s0.
Вводя временные комплексные величины вместо мгновенных
значений переменных, будем иметь
ДМэм = /(/й)Д0с.
По аналогии с установившимися гармоническими колебаниями
синхронной машины
ДМэм = (М5 + /адД0с.
Следовательно, коэффициенты синхронизирующего и демпфер-
ного моментов синхронной машины двойного питания опреде-
ляются выражениями:
A4s = Re[f(/7i)];
Приведем для них готовые формулы:
Ms = Ms0 + Мьд; (8-34)
М = cos Все-go бсо . (8-35)
xd 1-На
MSA = и}
х2 (1 — 3£2 + х2) .
F (la, х)
(8-36)
Md = u2s (4-
\ xd
1 V 1 + x2 (1 4- £) -
d x)
(8-37)
где = s0/p'r = sQT'd\ к = hT'd\ T'd = 1/pP — постоянная времени
обмотки ротора при короткозамкнутой обмотке статора (см. § 3-4);
F (4 х) = (1 + Го) [(1 + Гз -х2)2 + 4х21.
Основная составляющая коэффициента синхронизирующего
момента Ms0, как и в обычной синхронной машине (см. § 8-4),
представляет собой 7WS при h = 0 и является производной по
углу 0С от той составляющей электромагнитного момента в усло-
виях установившегося режима, которая обусловлена совместным
действием напряжений Us и Ur [первое слагаемое в (3-12)].
Коэффициенты A4S и Md зависят от скольжения s0 в установив-
шемся режиме и при s0 = 0 совпадают со значениями для !обычной
синхронной машины, имеющей на роторе одну симметричную по
осям d и q обмотку.
На рис. 8-10 показана зависимость от параметра = sQTd
относительного значения коэффициента A4s0, выраженного в долях
этого коэффициента при s0 = 0. На рис. 8-11 представлена анало-
гичная зависимость для относительного значения коэффициента
коэффициента синхронизиру-
ющего момента машины двой-
ного питания
Рис. 8-11. Относительное значе-
ние дополнительной составля-
ющей коэффициента синхрони-
зирующего момента машины
двойного питания
MSA, выраженного в долях этого коэффициента при s0 = 0. По
этим рисункам видно, что начиная с некоторых скольжений s0
коэффициент Л15 становится отрицательным. Это говорит о том, что
при нарушении режима машины двойного питания колебательный
режим с частотой h = I/ MJHf не возникнет. Кстати, Л15Д обра-
щается в нуль согласно (8-36) при £а0 = ±0,58 J/ 1 + х2. Для ма-
шин небольшой мощности (х < 0,5) Sa0 ±0,6 и практически
не зависит от х; для машин большой мощности (х > 2,5) На0
±0,58х или s0 ± 0,58/г.
На рис. 8-12 приведена зависимость от параметра относи-
тельного значения Md, выраженного в долях этого же коэффи-
циента при s0 = 0. Согласно (8-37) Md < 0 при —V1 + х2 >
> > j/1 + х2- Следовательно, Md становится отрицательным
в машинах небольшой мощности практически при —l/T'd > s0 >
>> 1/Td, а в машинах большой мощности — при —h > s0 >> h.
Напомним, что отрицательный коэффициент Md означает нараста-
ние амплитуды колебаний во времени.
чение коэффициента демпфер-
ного момента машины двойного
питания
Весь предыдущий анализ колебаний рассматриваемого типа
машин был произведен при rs — 0. Коэффициенты синхронизи-
рующего и демпферного моментов
машины двойного питания с уче-
том активного сопротивления об-
мотки статора рассмотрены в рабо-
те [7].
Коэффициенты синхронизирую-
щего и демпферного моментов для
асинхронной машины с коротко-
замкнутым ротором можно было бы
получить из приведенных выражений
для машины двойного питания, по-
лагая в них Ur = 0. Однако из-за
значительного коэффициента затуха-
ния р в асинхронных машинах коэф-
фициенты Ms и Md, определенные
таким образом (при р = 0), сущест-
венно отличались бы от истинных
(при Р 0). Например, погрешность
в частоте колебаний h, рассчитанной по коэффициенту Ms, най-
денному при р = 0, достигает для двигателей небольшой мощ-
ности (единицы киловатт) 20—25%,
ИЩЖН
.. ' — - -
Динамические свойства машин
при малых возмущениях режима
9-1. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ МАЛЫХ ВОЗМУЩЕ-
НИЯХ УСТАНОВИВШЕГОСЯ РЕЖИМА. При малых изме-
нениях «внешних сил», определяющих режим работы машины:
момента механической силы на валу или напряжений на зажимах
обмоток, возникающий переходный процесс описывается линеари-
зованными дифференциальными уравнениями машины. Решение
этих уравнений будет определять истинное значение всех перемен-
ных, пока последние остаются достаточно малыми.
Представим каждую переменную z/z в виде суммы постоянного
ее значения yi(h соответствующего установившемуся режиму, и
отклонения Az/Z в течение переходного процесса:
Ус = &о + ktji- (9-1)
Заменив в нелинейных уравнениях все переменные указанными
суммами, исключим соотношения, удовлетворяющие установив-
шемуся режиму, и пренебрежем произведениями малых отклоне-
ний Az/Z и степенями Az/Z, начиная со второй. В результате полу-
чим линеаризованные уравнения машины — линейные уравнения
с постоянными коэффициентами. В зависимости от характера ис-
следуемой задачи основой получения линеаризованных уравнений
может служить либо полная, либо приближенная система исходных
уравнений машины. Так, при определении движения ротора ма-
шины после малого возмущения режима можно использовать при-
ближенные уравнения напряжений обмотки статора машины, не
учитывающие свободных потокосцеплений.
Синхронная машина. Указанные уравнения для машины без
демпферной обмотки получаются из системы (2-70)—(2-73), если
первые два уравнения в ней заменить на (3-22) и положить Тс = 0.
Тогда будем иметь
—ud = U sin 0 = uq-=U cos 9 =
рв«в == (pt + рв) - Рвр4\<;
М = Hjp^Q 4- — (1/х'а — l/xd) .
Заметим, что приведенная система уравнений достаточно точна,
если переходный процесс возникает при отсутствии коммутации
в цепи статора, когда Ч*. = 0. Пренебрежение свободным потоко-
сцеплением статора при ¥c 4 0 исключает, как это следует из (3-33),
эффект воздействия быстро изменяющегося электромагнитного
момента Л4змт на движение ротора машины.
После замены в исходной системе уравнений всех переменных
суммами вида (9-1) и выполнения указанных выше операций, по-
лучим линеаризованные уравнения:
А(/ sin 0О = А — U cos 0О А0;
А(/ cos 0О = Афб/ -ф U sin 0О А0;
Рв А^в (Рг + Рв) Афв - Р4Х Ai|)f/; j (9-2)
АЛ4 = НАф^ фво/^d) Аф<7 4“
+ (ф^о/-^) Афв.
Если в качестве установившегося режима, характеризуемого
постоянными фб/0, ф70, фв0, 0О, выбрать исходный режим до воз-
мущения, то начальные значения искомых переменных Аф^, Аф7,
Афв, А0 будут равны нулю. Однако можно рассматривать вели-
чины ф^0, ф^о, фто> 0о относящимися к новому установившемуся
режиму после окончания переходного процесса, если такой режим
возможен. В этом случае при постоянных значениях AU, Апв,
АЛ1 линеаризованная система уравнений становится однородной
(левые части уравнений равны нулю), но искомые переменные при
т-0 не равны нулю. Действительно, для указанных условий
«внешние силы» в переходном процессе постоянны, и поскольку
они соответствуют новому установившемуся режиму, то их при-
ращения в линеаризованных уравнениях должны отсутствовать,
что и делает уравнения однородными. Вместе с тем из (9-1) при
т = 0 следует, что начальное значение любой искомой переменной
(Лу/)0 отлично от нуля и равно разности значений у? в исходном и
новом установившихся режимах.
Однородную систему (9-2) можно переписать и в другом виде,
подставив АхЬб/ и Аф7 из первых двух уравнений в остальные. Имея
в виду, что ipd0 = U cos 0О; — U sin 0О; фв0 E'dQ (э. д. с. за
продольным переходным сопротивлением), получим
{Рх + Рв)М + P'BpU sin 00 А 0 = 0; 1
(U sin Q0/x'd) Афв + М' А0 + А0 = 0, J (9'3)
где M's = E'avU cos QJx'd — U2Kiq cos 20o — коэффициент син-
хронизирующего момента, вычисленный при E'd = E'do = const
(см. § 8-4).
Решение однородных линейных уравнений с постоянными
коэффициентами представляет собой сумму экспоненциальных
функций:
= S Aikepk\ (9-4)
где Aik — произвольная постоянная, a pk — один из корней ха-
рактеристического уравнения п-й степени.
Для системы (9-3) характеристическое уравнение есть прирав-
ненный нулю ее определитель:
Р + Рв РвР^ sin 90
t/sin0o/^ M's + HjP2
Раскрывая определитель по степеням р и деля уравнение на Н
получим
aQp* + Я1Р2 + а*Р “И 4 (9-5)
где а0 = 1; ai = р^; ш = M'sIHp аз = p'BMs0/EIp = M's —
— yU2 sin2 6Q/xd — коэффициент синхронизирующего момента,
вычисляемый по статической угловой характеристике, т. е. при
Eq = const [см. выражение (8-13)1.
В предельном случае, когда Рв = 0, один корень уравнения
(9-5) равен нулю, два другие — мнимые:
Р1 = 0; А,з= ±/ / M's/Hj.
Обычно параметр рв мал. Поэтому при рв =р 0 следует ожидать
малого изменения полученных корней:
Рз, з = Р±/^-
Поскольку коэффициенты а± и а2 одного порядка и не менее чем
на два порядка меньше коэффициента то с достаточной точностью
корень pi определяется из уравнения
a2Pi + «3 = 0,
откуда рх = а = —а3/а2 = — РвЛ-ЫМ'.
Согласно теореме Виета, дающей связь между корнями урав-
нения и его коэффициентами, имеем
рх + Р? + рз = а + 2р = —ах = —рв!
piPtPz = а (Р2 + Л2) = — а3 = —
Рис. 9-1. Относительные значения апериодической
и гармонической составляющих угла нагрузки
при малом возмущении режима синхронной машины
/ — лt/AGo; 2 — л2/део
Из этих уравнений находим
₽ — —0,5 (аг — б?з/ц2) = — 0,5рв (1 — Mso/M'); h Vа2 =
Таким образом, изменение любой переменной, например угла 9,
равно
Д0 Агеил -j- (Л2 cos hx -j- Л3 sin /гт) /т, (9-6)
где Ai — произвольные постоянные.
При т 0 имеем А0 = А0О; (рх А0)о 0 и (рх А0)о
tsMIHу —A4s0 А0/Яу. Используя 'начальные условия для
уравнения (9-6) и его первой и второй производных, получим
Л i = (1 — A4so/M s) ДОо; Л2 — (М so/ М 4 Д0о;
Л3 = -[ЗрМ5о/(ЛО)]А0о.
Соотношение отдельных составляющих в (9-6), как видим, зави-
сит от Mso/Ms. На рис. 9-1 приведены графики ЛЬ2/А0о в функции
угла нагрузки 0О: сплошные кривые относятся к явнополюсной
машине ,(Xd!x'd = 2,5; Xd!xq = 1,5; EJU = 1,5), штриховые —
к неявнополюсной (Xdlx'd = 5; Xd = xq\ EJU = 2). Составляю-
щая Л3/Д0о при рв/Л < 0,2 мала во всем рабочем диапазоне углов
0О- Кривые 2 одновременно выражают относительный параметр
Рис. 9-2. Угол нагрузки в переходном процессе син-
хронной машины при небольших 0О
1 — без демпферной обмотки; 2 — с демпферной обмоткой
—а/рв. Рис. 9-1 показывает, что в переходном процессе при неболь-
ших углах 0О изменение угла нагрузки происходит в основном
в виде колебаний; при значительных 0О — апериодически. Это
иллюстрируется рис. 9-2 и 9-3, на которых показан угол нагрузки
0 синхронного генератора, работающего параллельно с сетью бес-
конечной мощности, во время перехода к новому установившемуся
режиму. Штриховыми линиями 4ia рисунках представлены слабо
выраженные составляющие угла Д0, который рассчитывался по
(9-6) с помощью данных рис. 9-1 при Рв/Л = 0,2.
Отметим, что постоянная времени затухания апериодических
составляющих во всех переменных, например в Д1|?в, равна —Ш
и практически совпадает с постоянной обмотки ротора Td = 1/рв
только в области сравнительно небольших углов 0О. При больших
углах 0О она может в несколько раз превосходить постоянную Td.
Начиная с некоторого значения 0О коэффициент затухания а ста-
новится отрицательным (кривые 2 на рис. 9-1 пересекают ось абс-
цисс). При таких углах нагрузки переходный процесс сопровож-
дается монотонным увеличением Л0О.
В гл. 3 приведена приближенная система уравнений (3-35)—
(3-37) синхронной машины с демпферной обмоткой. Если ее лине-
аризовать и учитывать в моменте только медленно изменяющуюся
составляющую (3-32), то при отсутствии демпферной обмотки
(Dd = Dq = 0) однородные уравнения полностью совпадут с (9-3),
так как в принятой здесь системе относительных единиц E'd = фв-
Поэтому для машины с демпферной обмоткой (Dd 4 0; Dq Ф 0)
в (9-3) изменится лишь второе уравнение (уравнение моментов),
которое примет вид
(U sin 0o/Xz) &E'd 4 (Л^ 4 DQpx 4- Hfp*) Д0 = 0,
где Do — Dd sin2 0О 4 Dq cos2 0О, a Dd и Dq определены в (3-33).
Нетрудно проверить, что для машины с демпферной обмоткой
характеристическое уравнение остается в виде (9-5) с коэффи-
циентами:
#0=1; ^1 = рв + = (Л4; 4- аг = p'BMsQ/Hj.
Таким образом, наличие демпферной обмотки приводит к неко-
торому изменению коэффициентов и а2 характеристического
уравнения, и его корни теперь определяются величинами:
а — PbMso/Ms; Р = —0,5 [рв (1 — Л^о/Ж) 4 О0/Я;];
так как обычно pBD0 < M's.
Сопоставляя а, [3 и h с полученными ранее значениями, можно
заключить, что демпферная обмотка не имеет никакого отношения
к коэффициенту затухания а апериодических составляющих пере-*
менных, мало влияет на частоту колебаний /г, но весьма сущест-
венно увеличивает коэффициент затухания (3 периодических со-
ставляющих переменных (см. кривую 2 на рис. 9-2,построенную
для DqIHi = 1,5рв).
Асинхронная машина с короткозамкнутым ротором. Прибли-
женная система уравнений для рассматриваемых машин отли-
чается от точной (7-8)—(7-10) только первым уравнением, которое
при пренебрежении активным сопротивлением обмотки статора и
свободным потокосцеплением с этой обмоткой принимает вид
—«s = /ts- (9-7)
Это уравнение при отсутствии коммутации в цепи статора доста-
точно точно.
Рассматривая, как и ранее, отклонения переменных в переход-
ном процессе относительно величин нового установившегося ре-
жима (если таковой возможен) и считая изменение «внешних сил»
(us, Л4) постоянным, получим линеаризованные уравнения одно-
родными:
(рх + Pr + /Sy) Афг + /фгу As = 0; Us Im (/ Афг) + xdHjPx As = 0.
Параметры установившегося режима отмечены индексом «у».
В последнем уравнении учтено, что согласно (9-7)
Афз — 0 И = jus = jUs-
Заменяя уравнение с комплексными переменными двумя ве-
щественными уравнениями, будем окончательно иметь
(Рх + рг) Афаг — sy % — As = 0;
Sy Афаг (Px 4~ Pr) Aippr 4- i|)ary As = 0;
Z7S Axp
ar 4- xdHjpx As = 0,
где индексами аир обозначены соответственно вещественная и
мнимая части комплексных переменных Афг и фгу.
Потокосцепление ротора в установившемся режиме фгу опре-
деляется по (2-83), где нужно положить иг = 0; рх = 0; = jUs
и изменить знак у скольжения. В результате получаем
4Vy = = t2‘ = Sy/Pr-
1 ~г 1 т So
Характеристическое уравнение системы аналогично (9-5)
с коэффициентами:
Оо==1; ai = 2p;; a2 = r]c + pr2 + sy; а3 = Пс(рг2 —4)/Рп
где Пс (1+?2)х^. •
Корни характеристического уравнения при sy = 0 и sy = Рг
имеют точное выражение, а для скольжений 0 <С sy <С Рг — при-
ближенное. Они определяются формулами:
Pi = a = —Pr(l — Sa); P2,3 = p±//i; ₽ = — 0,5Р;(1 + Q;
Я = J/Лс + 2sj — 0,25рг2(1Са)2;
nc + 2sy Рг
Таким образом, любая из определяемых переменных, в част-
ности As, имеет общее выражение, аналогичное (9-6):
As = Areax 4~ Игcos + ^зsin ^т) (9-8)
Пусть переходный процесс вызван изменением -момента меха-
нической силы на валу, который становится равным 7Иу. Тогда на-
чальное ускорение согласно уравнению моментов равно
(Pt Д$)о (^ЭМ. НЧ у)/^i »
т. е. пропорционально разности электромагнитных моментов в ис-
ходном (7ИЭМ. нч) и новом (Л4ЭМ. у) установившихся режимах,
так как Л4ЭМ. у = Л4у. При ограниченном изменении скольже-
ния
^ЭМ. НЧ ^М. у
где As0 = sH4 — sy — начальное значение As;
i _ dM3M _ PZ Sy
ds (р;2+4Г
Окончательно (pT As)0 = — (kIHy) As0.
Для определения произвольных постоянных в (9-8) необходимо
еще знать начальное значение ускорения (р? As)0, которое согласно
линеаризованному уравнению моментов пропорционально
(/7Т Аг|?аг)0. Но очевидно, что в первый момент времени потокосцеп-
ление ротора сохраняется постоянным и (рт Аг|?аг)0 = 0. Следо-
вательно, (/7т As)0 = 0.
Рис. 9-4. Скольжение в переходном процессе асин-
хронной машины при небольшом sy
1 — при X = 1; 2 — при X = 2
Используя начальные условия для уравнения (9-8), а также для
его первой и второй производных, вычислим произвольные по-
стоянные At. Общее их выражение для интервала скольжений
0 < 8у < р; достаточно громоздко. Поэтому приведем приближен-
ные значения постоянных для скольжений sy, не превосходящих
номинального sH:
Л1 0; А2 Aso; Л3 — (^/Рг) As0 = —х As0.
При s0 —> рг имеем Ai -> As0; А2 -> 0; Аз —> 0.
Таким образом, изменение скольжения в переходном процессе
при sy < sH носит колебательный характер, при sy рР — апе-
риодический, экспоненциальный. На рис. 9-4 даны графики для
1 — As/As0= (sH4—s)/(sH4 — sy), построенные по (9-8) при sy<sH.
Параметр х = 1 характерен для машин небольшой номиналь-
ной мощности (единицы киловатт); х = 2 соответствует машинам
большой мощности (тысячи киловатт). Обращает на себя внимание
интенсивное затухание колебаний: даже в машинах большой мощ-
ности переходный процесс сводится практически к двум колеба-
ниям скольжения. Частота колебаний в двигателях с номиналь-
ной мощностью порядка единиц киловатт достигает 15 Гц; десят-
ков киловатт — 8—10 Гц; тысяч киловатт — 2,5—3 Гц.
Отметим, что sy = щ представляет собой скольжение, при ко-
тором асинхронная машина развивает в установившемся режиме
максимальный электромагнитный момент. Приведенные данные
говорят о том, что переходный процесс при скольжениях, близких
к указанному, характеризуется экспоненциальным изменением
переменных. Например, в этих условиях
As Агеах AsoeaT.
При этом коэффициент затухания a 0 при sy р^. Если раз-
ность sy — рг сколь угодно мала, но положительна, то 1,
a > 0 и As начнет неограниченно возрастать.
Выполненный анализ позволяет сделать общее заключение о ха-
рактере переходных процессов как в синхронных, так и в асин-
хронных машинах. В режимах с электромагнитными моментами,
значительно меньшими максимального, возникающий переходный
процесс имеет колебательный характер. Когда в установившемся
режиме момент близок к максимальному, параметры возмущенного
режима изменяются во времени монотонно, экспоненциально.
9-2. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ. ОБЩИЙ МЕТОД.
В предыдущем параграфе было дано аналитическое определение
переходного процесса в машинах, возникающего при малых воз-
мущениях установившегося режима. Можно поставить и более
ограниченную задачу: не рассчитывая самого процесса, определить
его общий характер, тенденцию его развития. Для этого доста-
точно считать, что возмущение режима сколь угодно мало. Пере-
ходный процесс при этом может развиваться двояко: либо он за-
канчивается переходом к новому установившемуся режиму с па-
раметрами, близкими к параметрам исходного режима, либо такой
переход невозможен. В связи с этим вводят понятие статиче-
ской устойчивости режима и говорят, что в первом слу-
чае исходный режим статически устойчив, во втором — стати-
чески неустойчив. При статической устойчивости возмущения
достаточно малы, поэтому устойчивость или неустойчивость ма-
шины однозначно определяется параметрами исходного режима.
Решение указанной ограниченной задачи имеет большое практиче-
ское значение, так как позволяет определить, возможен ли вообще
в данных условиях длительный установившийся режим или
неизбежные при эксплуатации сколь угодно малые изменения
«внешних сил» приведут к его существенному нарушению. Во-
просы статической устойчивости синхронных машин, работающих
в системе переменного тока, играют весьма важную роль в оценке
свойств машины и системы в целом, а иногда они становятся опре-
деляющими.
Завершением большого исторического этапа в развитии теории
устойчивости явилась ставшая классической работа академика
А. М. Ляпунова «Общая задача об устойчивости движения».
В этой работе Ляпунов прежде всего строго доказал, что устойчи-
вость движения в малом (статическая устойчивость), описываемого
системой нелинейных дифференциальных уравнений, в подавля-
ющем числе случаев определяется устойчивостью соответствующей
линеаризованной системы, т. е. по первому приближению. Иными
словами, для определения статической устойчивости вместо рас-
сматриваемых нелинейных дифференциальных уравнений доста-
точно исследовать эти уравнения в линеаризованном виде.
Сущность линеаризации уравнений была изложена в преды-
дущем параграфе. Там отмечалось также, что любая переменная
Az/Z, являющаяся решением линейных уравнений с постоянными
коэффициентами, имеет вид (9-4).
Движение устойчиво, если переменные Az/Z будут оставаться
во времени сколь угодно малыми, а это возможно, если все вещест-
венные корни и вещественные части комплексных корней будут
отрицательными («левые» корни на комплексной плоскости). В этом
случае согласно (9-4) при т оо переменные Az/Z -> 0. Если
хотя бы один вещественный корень или вещественная часть ком-
плексного корня положительны («правые» корни на комплексной
плоскости), то при тоо переменные Az/z->oo, и движение
становится неустойчивым.
Итак, для исследования статической устойчивости некоей си-
стемы, описываемой нелинейными дифференциальными уравне-
ниями, необходимо последние линеаризовать, составить по ним,
характеристическое уравнение и исследовать его корни. Условием
статической устойчивости является отсутствие травьт
корней. Для проверки указанного условия нет нужды определять
самые корни, а достаточно исследовать их знаки. Существуют ме-
тоды, которые позволяют установить отсутствие «правых» корней,
не производя их вычисления. Одним из них является метод, пред-
ложенный А. Гурвицем и основанный на том, что при определен-
ных соотношениях между коэффициентами алгебраического урав-
нения все его корни будут «левыми». Как показал Гурвиц, для
этого необходимо и достаточно, чтобы определители, составлен-
ные специальным способом из коэффициентов уравнения, так на-
зываемые определители Гурвица, были положи-
тельны.
Пусть имеется уравнение n-й степени
п ) п-1 । п-2 । ।
аоР + &1Р 4" а2р + • • • + ап. — О,
в котором aQ > 0.
Определители Гурвица порядка п составляются следующим
образом. Определитель n-го порядка Ал заполняется коэффициен-
тами уравнения так, что по его диагонали сверху вниз, слева на-
право размещаются подряд коэффициенты с аг по ап. В строках
определителя слева от диагонали записываются коэффициенты
с увеличивающейся нумерацией, а справа от нее — с уменьшаю-
щейся. За коэффициентами с предельной нумерацией а0 и ап сво-
бодные места в строках заполняются нулями. Таким образом,
определитель Гурвица и-го порядка имеет вид
«1 «0 0 0
а3 0
Д,; = й5 а4 а3
0 0 0 ^п
Последующие определители получаются из предыдущих за-
черкиванием крайнего правого столбца и нижней строки. Послед-
ний определитель Ах = а±.
Таким образом, условием отсутствия «правых» корней является
выполнение неравенств
Art>0; Д„_1>0; ...; Ах>0,
называемых критериями Гурвица.
Отметим, что поскольку Ал = ап и АДи1 > 0, то крите-
рий АЛ > 0 заменяется неравенством ап > 0. Так, если имеется
уравнение третьей степени
п0р3 4- аур2 + а.р + а3 — 0,
то критериями Гурвица будут
а3 > 0; а±а2 — aQa3 > 0; а± > 0.
Рассмотрим простейший пример исследования статической
устойчивости по изложенной методике — устойчивости нерегули-
руемой синхронной машины без демпферной обмотки. Часть необ-
ходимых операций была выполнена в предыдущем параграфе,
в результате чего найдено характеристическое уравнение (9-5).
Рассмотрим теперь критерии Гурвица. Последний из них
= Рв > 0 выполняется всегда. Второй критерий также
выполняется, так как а^2 — а0а3 = рв (M's — =
= рвр/72 sin2 0о/(/7ух^) > 0 для любого угла нагрузки 0О.
Первый критерий а3 > 0 удовлетворяется не для всех режимов.
Поэтому он и определяет зону статической устойчивости машины.
Предельный угол 0П, при котором машина находится на границе
устойчивости, определяется, следовательно, из условия а3 = О
или
Ms0 = (UE0/xd) cos 0П + i/2 (1/х7 - l/xd) cos 20п - 0.'"
При 0 > 0П (7Ws0 < 0 или аз < 0) режим машины статически
неустойчив. Характер возникающей при этом неустойчивости
можно установить, обращаясь к выражению (9-6). Когда A4s0 < 0,
коэффициент а > 0 и угол нагрузки имеют тенденцию к монотон-
ному и неограниченному
увеличению. При этом
вблизи а = 0 скорость
его изменения рх ДО
aAieax весьма мала.
Такой тип неустойчивости
называют сполза-
нием [21 ]. Граница
устойчивости этого рода
имеет простой физический
смысл: она отвечает та-
кому значению угла 0 =
= 0П, при котором стати-
ческое приращение мо-
мента ДЛ4ЭМ, вызванное
изменением угла Д0, рав-
но нулю и, следовательно,
статического равновесия
моментов М + ДА1 и 7ИЭМ
при новом значении угла
0О + ДО не наступает.
Иными словами, сползание
Рис. 9-5. Статические угловые характери-
стики явнополюсной синхронной машины
появляется в том случае, когда производная момента Л4ЭМ по углу
(по статической угловой характеристике) обращается в нуль. Эта
производная и равна основной [составляющей коэффициента син-
хронизирующего момента 7Ws0.
На рис. 9-5 приведены статические угловые характеристики
явнополюсной синхронной машины, имеющей xd/xq = 1,5. Штри-
ховая кривая, проходящая через максимумы характеристик, где
Als0 = dM3JdQ = 0, определяет совокупность значений 0П при
различных возбуждениях машины (Во).
Для неявнополюсной машины при г = 0 угол 0П = 90° неза-
висимо от значения £0.
Исследование статической устойчивости машины с учетом ак-
тивного сопротивления статора по полным дифференциальным
уравнениям показывает, что в угле ДО появляется гармоническая
составляющая с частотой, практически равной частоте сети [21].
Физически это объясняется действием знакопеременного электро-
магнитного момента основной частоты, не учитываемого при г = 0.
С математической точки зрения учет сопротивления г и переход-
ного процесса в цепях статора приводит к тому, что степень харак-
теристического уравнения системы увеличивается на две единицы—
получается уравнение пятой степени. При этом будет добавляться
пара сопряженных комплексных корней, что и обусловливает по-
явление в угле Д0 дополнительного колебания основной частоты.
Это колебание оказывается всегда затухающим, поскольку апе-
риодические переходные токи в обмотке статора будут под влия-
нием г затухать до нуля. Нетрудно представить, что ввиду большой
механической инерции ротора машины указанные колебания
должны иметь ничтожно малую амплитуду.
При г 0 может возникнуть еще один вид неустойчивости —
самораскачивание, характеризуемое увеличением
амплитуды колебательной составляющей в Д0 (см. § 8-3 и 8-4).
Для асинхронной машины с короткозамкнутым ротором харак-
теристическое уравнение совпадает с уравнение?^ (9-5), получен-
ным для синхронной машины. Предоставляем читателю возмож-
ность самому произвести необходимые выкладки и убедиться, что
определяющим устойчивость критерием Гурвица является нера-
венство $у < Рг. В предыдущем параграфе был показан характер
возникающей при sy > р'г неустойчивости.
9-3. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ. АНАЛИЗ КОЭФФИ-
ЦИЕНТОВ СИНХРОНИЗИРУЮЩЕГО И ДЕМПФЕРНОГО
МОМЕНТОВ. При сколь угодно малых возмущениях устано-
вившегося режима отклонения переменных определяются линей-
ными дифференциальными уравнениями и представляют собой
экспоненциальные функции времени вида (9-4). Отклонение
электромагнитного момента ДЛ4ЭМ в линеаризованном уравнении
моментов
ДМ-АМэм = Я;/?тАе (9-9)
также имеет вид (9-4), поскольку ДА4ЭМ линейно относительно
приращений токов и потокосцеплений. Поэтому каждой составляю-
щей в Д0 соответствует аналогичная составляющая в ДА4ЭМ. Иными
словами, при определении ДА4ЭМ правомерно применение принципа
наложения: функция ДА4ЭМ = f (т) есть совокупность частных зна-
чений, соответствующих отдельным составляющим угла нагрузки
Д0.
Комплексным корням характеристического уравнения вида
р = р ± jh отвечает гармоническое колебание частоты h с экспо-
ненциально изменяющейся амплитудой, пропорциональной е$х.
В § 8-3 отмечалось, что при такой временной зависимости угла Д0
момент
ДЛ4эм = МДР)Д0 + МДр)ргД0,
а в комплексном представлении
ДЯм - [Ms (Р) + (Р + /7г) Md (Р)] Д0,
где коэффициенты синхронизирующего и демпферного моментов
Ms (₽) и Md (Р) определяются с учетом р =р 0.
Из однородного уравнения моментов в комплексной форме
[#/ (Р + Я2 + Ms (Р) + (Р + jh) Md (Р)] А0 = 0
найдем
2р = —Md (р)/Я,; h2=[Ms (р) + $Md (Р)Ж + р2.
Вблизи границы устойчивости по самораскачиванию (Р весьма
мало)
MS(P)^<; ЛЗДЖ
т. е. коэффициенты синхронизирующего и демпферного моментов
определяются, как при Р = 0 (при устойчивых гармонических
колебаниях с неизменной ам-
плитудой). Следовательно, знак
коэффициента Р, от которого
Рис. 9-6. Изменение монотонной составляющей ускорения машины:
а — при Л45о > 0; б — при MSQ < 0
р2гд6>
0
зависит, устойчив (Р < 0) или неустойчив (Р > 0) режим, опре-
деляется знаком коэффициента демпферного момента Md. Условие
Md > 0 при любых значениях частоты является условием отсут-
ствия самораскачивания.
Второй возможный тип корней характеристического уравне-
ния машины — это вещественный корень р = а. Вблизи границы
устойчивости по сползанию (а весьма мало) скорость изменения
составляющей угла А0, определяемой корнем а, рх А0 —
весьма мала. При этом изменение момента АМэм определяется ста-
тической угловой характеристикой и равно
АМэм^МзОА0.
Монотонное изменение угла А0 во времени означает и моно-
тонное изменение ускорения машины рх А0 — а2еат. Из (9-9)
ускорение
Pi А0-(АЛ4-Л15оА0)/Я/.
По этому выражению на рис. 9-6 построены графики Ms0 А0 =
= f (0) (штриховая линия) и pl А0 = f (0). Возмущение исход-
ного режима при 0 = 0НЧ происходит под действием положитель-
ного (/) или отрицательного (2) механического момента АМ. От
своего начального значения ускорение | Д0 | в зависимости от
знака A4s0 либо монотонно уменьшается с изменением угла
0 (A4s0 >> 0), либо увеличивается (A4s0 << 0). В первом случае
исходный режим устойчив, во втором — неустойчив.
Итак, условиями устойчивости являются неравенства:
Als0>0; Я/>0.
Устойчивость или неустойчивость режима определяются по
знакам коэффициентов синхронизирующего момента при h=Q
и демпферного момента при любых значениях h (практически это
частота собственных колебаний и частота сети). Приведенные
Рис. 9-7. Принципиальная схема регулирования
возбуждения синхронного генератора
условия устойчивости формально есть не что иное, как частотный
критерий на основе амплитудно-фазовой моментной характери-
стики машины. Эти условия являются выражением того, что именно
электромагнитный момент, действующий на ротор машины, опре-
деляет характер движения его в переходном процессе. Поэтому
другие возможные вещественные корни характеристического урав-
нения машины, помимо корня, определяющего явление сползания
ротора, должны быть обязательно отрицательными.
9-4. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ РЕГУЛИРУЕМОЙ МАШИНЫ. Не-
прерывное автоматическое регулирование возбуждения машины позволяет не
только поддерживать неизменными определенные качественные показатели
режима (напряжение на зажимах генератора, требуемый коэффициент мощности
двигателя и т. п.). Оно дает также возможность расширить зону устойчивой
работы машины. Принципиальная схема регулирования возбуждения синхрон-
ного генератора представлена на рис. 9-7. Генератор СГ работает через линию
передачи ЛЭП на приемную систему ПС. На вход измерительного элемента регу-
лятора ИЭ подается напряжение, пропорциональное одному из параметров
режима — току I, напряжению статора UT, углу нагрузки 0. На измерительный
элемент регулятора может воздействовать также комбинация указанных величин
или их производных. В измерительном элементе регулятора производится сравне-
ние измеряемой величины с некоторым эталонным значением ее, и поэтому на
выходе этого элемента появляется напряжение, как только измеряемая регуля-
тором величина начинает изменяться. Маломощный импульс на выходе ИЭ
усиливается, и с помощью силового элемента СЭ производится соответствующее
воздействие на возбудитель В синхронного генератора.
Применение регуляторов без зоны нечувствительности, работающих, сколь бы
малым ни было отклонение измеряемого параметра, позволяет расширить область
статической устойчивости машины, т. е. увеличить значения предельных углов 0П>
соответствующих границе устойчивости. Действительно, при отсутствии регу-
лирования коэффициент Also, определяющий границу устойчивости, вычисляется
при постоянстве э. д. с. Ео (тока возбуждения). Например, для неявнополюсной
машины
Afso = dM3tt/dQ = (UE^/Xd) cos 0O.
При наличии указанного регулирования э. д. с. Ео является функцией угла 0
и изменяется, сколь бы мало ни отклонился угол от некоторого фиксированного
значения. Поэтому в данных условиях
= Sin 0о +£ocos0o) •
Рис. 9-8. Угловые характеристики неявнополюсной
синхронной машины
xd!xd ~ напряжение приемной системы U — 1
Очевидно, что во втором случае ЛД0 обращается в нуль при больших углах 0П,
чем в первом, если дЕ0/д® > 0. Дополнительные значения углов 0, при которых
машина оказывается статически устойчивой за счет автоматического регулиро-
вания возбуждения, образуют так называемую область искусствен-
ной устойчивости.
Допустим, что регулирование позволяет при возмущениях режима обеспе-
чить постоянство э. д. с. за переходным сопротивлением = const). На рис. 9-8
показаны угловые характеристики неявнополюсной машины (г = 0) при различ-
ных значениях э. д. с. EQ (сплошные линии) и постоянной Ed (штриховая линия).
Из рисунка видно, что максимальный электромагнитный момент (и соответ-
ственно 7Ms0 = 0) при E'd = const (точка а) достигается при значительно большем
угле 0О, нежели в условиях постоянства э. д. с. Ео (точка Ь). Если при предпола-
гаемом регулировании (Ed = const) не наступит самораскачивания машины,
то она сможет устойчиво работать до 0П « 115°, тогда как при Ео = const угол
Оп = 90°. Зона углов 90—115° в этом случае и составит область искусственной
устойчивости.
Наличие у регуляторов хотя бы небольшой зоны нечувствительности приводит
в области искусственной устойчивости к непрерывным колебаниям ротора, а сле-
довательно, тока и мощности генератора, что делает невозможной работу машины
в этой зоне углов 0.
Рассмотрим условия статической устойчивости синхронного генератора
без демпферной обмотки, включенного по схеме рис. 9-7. Будем считать, что
имеет место безынерционное регулирование, т. с. что изменение напряжения ре-
гулируемого возбудителя происходит без запаздывания по отношению к величине,
подаваемой на вход регулятора, а сам регулятор не имеет зоны нечувствитель-
Рис. 9-9. Предельные значения ко-
эффициента регулирования
Рис. 9-10. Предельные значения
коэффициента регулирования с
учетом инерции возбудителя
ности. Пусть регулирование производится, например, по углу 0 и его производ-
ной. При сделанных допущ ниях изменение напряжения возбудителя
д«в = (*в + VT) Д0.
где kQ и k'Q — коэффициенты регулирования. Тогда линеаризованная система на
основе приближенных уравнений машины будет отличаться от (9-3) лишь первым
уравнением напряжений цепи возбуждения. В его правой части, согласно третьему
уравнению в (9-2), теперь появится член рв Дг/В, и оно примет окончательный вид
(рт + Рв) Д% + (РвР^ sin 00 - Рв*0 — Рв^еРт) Л6 = °-
Характеристическое уравнение получается в виде (9-5) со следующими
коэффициентами:
ао = ь а1 = Рв; а2 = (X + Рвкеи sin Qolxd)lHr
аз = pL (Хо + keu sin еоХ)/нг
Рассмотрим критерии Гурвица. Неравенство аг > 0 выполняется всегда.
Второе и третье условия:
аА> - аоаз = (рв/%) [X - -Чо + (рв*0 - ke)и sin еоХ] > °;
аз = (рв/я/) (Хо + М7 sln °o/*d) > °-
Последнее условие определяет минимальное значение коэффициента k$ Мин:
мин > — Msf)xdHU sin 0О).
Второе условие ограничивает /?у сверху, и максимально возможный коэффи-
циент, равный
*0 макс ~ U (xd/xd ~ 1) Sin 60 + рХ
зависит не только от режима (угла 0О), но и от значения коэффициента регулир о.
вания kQ.
На рис. 9-9 представлены зависимости kQ макс и kQ мин от угла нагрузки" 0О.
Расчет коэффициентов производился при U = 1; xd!x'd — 2,5, а коэффициента
kQ мин — еще в предположении, что машина неявнополюсного типа и э. д. с.
E'd ~ 1 при любом угле 0О. Штриховыми кривыми отмечена область устойчивости.
Нетрудно проверить, что при k^ = 0 предельный угол 0П, достигаемый, если
kQ — ^0Макс = ^емин’ соответствУет условию Л1' = 0 и, следовательно, макси-
муму электромагнитного момента на угловой характеристике при E'd = const
(точка а на рис. 9-8). Из рис. 9-9 видно, что при kfQ > 0 регулирование по произ-
водной угла нагрузки несколько расширяет зону искусственной устойчивости,
однако это связано с заданием больших коэффициентов регулирования k§, так
как мерой влияния служит величина p'Z?g, а р' мало.
В § 9-1 коэффициенты затухания аир были определены через коэффициенты
характеристического уравнения а±, а2, а%. Сравнивая эти выражения для аир
со Вторым и третьим критериями Гурвица, из которых находились коэффициенты
регулирования /?оМин и &0Макс, можно установить, что за нижней границей
kQ мин = f (0о) на Рис- 9’9 нарушение устойчивости будет происходить в виде
сползания, а за верхней границей ^емакс— f ($о) — в виДе самораскачивания.
Если учитывать электромагнитную инерцию возбудителя, то к уже рассмо-
тренным уравнениям машины нужно добавить линейное дифференциальное урав-
нение цепи возбуждения возбудителя, обладающей не равной нулю постоянной
времени Тв, и произвести анализ критериев Гурвица для нового характеристи-
ческого уравнения. При регулировании по углу 0 он показывает [5, 21], что
максимально допустимые коэффициенты Аймаке в случае, когда 7В =f= 0, в широ-
ком диапазоне углов 0О значительно больше, чем у безынерционного возбудителя
(Тв = 0). Однако вблизи предельного по устойчивости угла 0П коэффициенты
&0макс при Тв = 0 и при Тв 0 отличаются мало. На рис. 9-10 показаны ^омакс
для различных значений постоянной Тв и коэффициент kQ мин> не зависящий от Тв.
Точки пересечения кривых kQ макс и kQ мин определяют предельный угол нагрузки.
Из рисунка видно, что уменьшение 0П за счет электромагнитной инерции воз-
будителя невелико.
Статическая устойчивость при регулировании возбуждения машины по лю-
бому из параметров режима может быть исследована также на основе анализа
коэффициентов синхронизирующего и демпферного моментов [5].
В заключение этого параграфа рассмотрим устойчивость асинхронного
генератора с роторным возбуждением, включенного по схеме рис. 9-7. Напряже-
ние возбуждения такого генератора при несинхронной частоте вращения должно
быть гармонической функцией времени и частоты скольжения машины. При этом
вектор иг в синхронно вращающихся осях будет неизменным, если только не
будет регулироваться амплитуда напряжения возбуждения. Поскольку у рас-
сматриваемого генератора \иг = 0, то его линеаризованные уравнения будут
такими же, как и у асинхронной машины с короткозамкнутым ротором (см.
§ 9-1). Наличие роторного возбуждения скажется лишь на значении потокосцеп-
ления ротора фгу в установившемся режиме. Из уравнения (2-83), где нужно
положить рх =0; = jUs, изменить знак у скольжения и принять иг —
= Ure*) (см. § 3-1), найдем
’Рагу = [Hct/Ja + CTct/r(^acos0c —sin Ml/O + 6a)i
'I’Pry = [Hc^s + °cUr (Cos0c + 6а Sin 0c)]/(1 + ^).
Рис. 9-11. Границы ус-
тойчивости асинхрон-
ного генератора с ро-
торным возбуждением
Из трех критериев Гурвица для характеристического уравнения вида (9-5)
определяющими устойчивость будут два:
- а3~2H.xdpr2 (1 + £) + Us (pcUs + аЩ cos 0C) > 0;
аз ~ (1 - (l*& + ocur cos 0C) 4- 2acUrla sin 0C > 0.
На рис. 9-11 показаны границы устойчивости, определенные для таких Ur — '
— f(Oc» So), которые в установившемся режиме обеспечивают постоянство на-
пряжения на зажимах статора генератора £/г = 1. Штриховкой на границах
отмечена область устойчивости. Максимальный электромагнитный момент асин-
хронного генератора имеет место при синхронной частоте вращения (£а — 0)
и предельном угле 0С = 0п- Он получается таким же,
как у синхронного генератора, имеющего те же пара-
метры, что и асинхронный, с автоматическим регули-
рованием возбуждения, обеспечивающим Ed ~ const.
9-5. САМОВОЗБУЖДЕНИЕ СИНХРОННОЙ МА-
ШИНЫ. Работа синхронной машины в системе элек-
тропередачи происходит в таких условиях, при кото-
рых в цепи ее статора оказывается включенной ем-
кость. Линия электропередачи обладает прежде всего
естественной распределенной емкостью между фазны-
ми проводами, а также относительно земли. Кроме
того, в ряде линий электропередачи используется
компенсация индуктивности линии посредством спе-
циально включаемой емкости (продольная компенса-
ция). Известны случаи непосредственного включения
емкости последовательно с машиной. Так, при нали-
чии толчкообразной нагрузки для предотвращения
колебаний напряжения в системе применяются син-
хронные компенсаторы с последовательно включен-
ной емкостью.
При наличии емкости в определенных условиях
может начаться самопроизвольное нарастание тока син-
хронной машины — явление, получившее название
самовозбуждения. Если исследовать не весь процесс самовозбуждения
во времени, а только условия его возникновения (граница самовозбуждения),
то постановка задачи аналогична той, которая принималась при анализе стати-
ческой устойчивости. Поскольку небольшое изменение частоты вращения ма-
шины не оказывает сколько-нибудь заметного влияния на условия самовозбужде-
ния, последнее можно рассматривать как электромагнитную неустойчивость
в отличие от электромеханической неустойчивости, связанной с характером дви-
жения ротора машины. Указанная задача обычно решается двумя способами:
1) исследованием характеристического уравнения, составляемого по дифферен-
циальным уравнениям напряжений цепей объекта; 2) анализом комплексных
схем замещения, легко получаемых вследствие того, что граница самовозбуждения
соответствует некоторому установившемуся режиму работы объекта. Эти методы
исследования в настоящее время достаточно хорошо разработаны, и с их помощью
изучены условия самовозбуждения синхронных машин в самых сложных схемах,
обладающих несимметрией, содержащих распределенные параметры и т. д.
По своей природе самовозбуждение связано с генерацией энергии, т. е.
с образованием в машине электромагнитного момента за счет появляющихся
свободных токов в обмотках машины. Самовозбуждение машины будет характери-
зоваться протеканием токов неизменной амплитуды, если электромагнитная мощ-
ность, созданная свободными токами, окажется равной потерям в активном со-
противлении цепи статора. Такой установившийся процесс соответствует границе
самовозбуждения. Если потери в активном сопротивлении от возникающих
при самовозбуждении токов окажутся больше электромагнитной мощности,
обусловленной этими токами, процесс самовозбуждения должен затухнуть.
При обратном соотношении процесс начнет развиваться, и нарастание токов
могло бы происходить неограниченно, если параметры цепей машины были бы
постоянны. Однако практически самовозбуждение развивается лишь до определен-
ных пределов, обусловленных нелинейностью в машине (насыщение).
Для первоначального появления свободных токов достаточно иметь в цепи
статора машины небольшое напряжение, например напряжение от остаточного
магнитного поля. Условия возникновения этих токов определяются единственно
соотношением параметров схемы и не зависят от внешних напряжений, прило-
женных к цепям машины. Это значит, что при нахождении условий самовоз-
буждения можно считать внешние напряжения равными нулю.
Виды самовозбуждения. Колебания тока при самовозбуждении происходят
с вполне определенной частотой, зависящей от соотношения параметров машины
и емкости в цепи ее статора. Трехфазные токи самовозбуждения в статоре обра-
зуют вращающееся магнитное поле. При этом возможны два случая: либо магнит-
Рис. 9-12. Ток статора при синхронном
самовозбуждении машины
Рис. 9-13. Ток статора при асинхрон-
ном самовозбуждении машины с несим-
метричным ротором
ное поле в зазоре вращается с синхронной частотой, т. е. остается неподвижным
относительно ротора, либо оно перемещается относительно ротора с некоторой
скоростью. В первом случае при самовозбуждении может возникнуть только
синхронный реактивный электромагнитный момент, если параметры машины
по осям d и q неодинаковы. Во втором случае образуется лишь асинхронный
момент. В соответствии с этим различают два вида самовозбуждения: син-
хронное и асинхронное.
Неравенство параметров по осям d и q может быть обусловлено не только
магнитной =/= Ху), но и электрической (x'd =f= х^ асимметрией ротора. При зам-
кнутой через возбудитель идеальной обмотке возбуждения (гв = 0) машина без
демпферной обмотки обладает по продольной оси сопротивлением x'd. Но и при
гь 0 динамическим сопротивлением по оси d будет практически параметр xd
если только продольное магнитное поле машины изменяется во времени, а не'
остается постоянным.
Поскольку при синхронном самовозбуждении магнитное поле токов статора
вращается с синхронной частотой, в статоре могут протекать токи только основ-
ной частоты (рис. 9-12).
При асинхронном самовозбуждении в обмотках ротора индуктируются
э. д. с. частоты скольжения 5(ох и возникают токи той же частоты. Если обмотки
ротора несимметричны по осям d и q, то магнитное поле от токов ротора можно
представить двумя вращающимися в противоположные стороны полями. При это^Г
частота вращения этих полей относительно ротора равна iscoj, а в пространстве,
т. е. относительно статора, (Di (1 ± s). Следовательно, при асинхронном самовоз-
буждении в обмотках статора должны в общем случае протекать токи двух ча-
стот: (01 (1 + s) и Wj (1 — s). Наложение этих токов обусловливает биение тока
статора (рис. 9-13).
Уместно отметить, что генерирование мощности при асинхронном самовоз-
буждении возможно лишь в том случае, когда ротор машины вращается с часто-
той, большей частоты вращения поля (асинхронный генератор).
Границы самовозбуждения. Строгое аналитическое определение границ
самовозбуждения можно найти в ряде работ [5, 18, 21, 25, 45, 65]. Здесь же
используем упрощенный подход и приведем некоторые соображения общего ха-
рактера.
Границе синхронного самовозбуждения соответствует установившийся ре-
жим с синусоидальными свободными токами статора основной частоты и неиз-
менной амплитуды. Токи id и iq должны быть при этом постоянными. Уравнения
напряжений для рассматриваемого режима отличаются от уравнений для нормаль-
ного установившегося режима лишь тем, что не содержат внешних напряжений*
Рис. 9-14. Гра-
ница самовозбу-
ждения машины
z/j, tiq и имеют вместо обычных параметров xd и xq сопро-
тивления xj — хс и xq — хс, учитывающие емкостное сопро-
тивление хСу включенное последовательно с якорем машины.
Таким образом, для свободных токов согласно (3-1) и (3-2)
будем иметь
rid+(хч - хс) - (xd - хс) ld+ri4 = °-
В соответствии с этими уравнениями токи id и iq полу-
чаются отличными от нуля только, если
г2+(^-*сж-~хс)=°-
Это уравнение и определяет границу синхронного са-
мовозбуждения. Его целесообразно привести к виду
[ХС - °’5 {Xd + Х9)]2 + ri = °>52 (Xd - Х9)2’
на x'd. Поэтому
представляющему в координатах хс, г окружность радиуса
0,5 (х^ — xq) с центром, расположенным в точке хс =
= 0,5 (х^ + xq} и г = 0. На рис. 9-14 показана половина
этой окружности, соответствующая положительному актив-
ному сопротивлению; зона 1 внутри нее определяет сово-
купность параметров хс и г, отвечающих нарастающему во
времени процессу самовозбуждения (зона неустойчивости).
Если предположить, что гв — 0, то зона 2 самовозбу-
ждения получается по тем же уравнениям, что и зона /,
при условии, что сопротивление хл будет заменено
граница зоны 2 самовозбуждения представляет собой полу-
окружность радиуса 0,5 (х^— х^) с центром, расположенным в точке хс =
= 0,5 (xd + xq) и г = 0 (рис. 9-14).
При реальных сопротивлениях гв граница зоны 2 самовозбуждения следует
по части представленной на рис. 9-14 окружности, а затем при xc<Z x'd плавно
устремляется в начало координат. Зона 5, соответствующая хс< xd> появляется
только при rB =f= 0 и характеризует асинхронное самовозбуждение. В случае
xd < XC<Z xq при гв -^= 0 возможно как синхронное, так и асинхронное самовоз-
буждение.
Зона асинхронного самовозбуждения при хс< xd у машины с демпферной
обмоткой гораздо шире, чем у машины без такой обмотки. Влияние демпферной
обмотки на зону самовозбуждения при xd<Zxc<Zxq невелико, а при xq<C
< xc<Z xd отсутствует. Дело в том, что демпферная обмотка может влиять на
процесс самовозбуждения только при асинхронном его характере. Зона x'd <С
хс<С xq характеризуется малыми скольжениями, а при малых частотах токов
в роторе асинхронный момент создается в основном обмоткой с малым активным
сопротивлением, т. е. обмоткой возбуждения. В зоне xc<Z xd частота токов в ро-
торе увеличивается, и тогда асинхронный момент демпферной обмотки становится
решающим в процессе самовозбуждения.
7 777 7 ® 710
Динамические свойства машин
при значительных возмущениях режима
10-1. ОБЩИЕ ЗАМЕЧАНИЯ. Термин «значительное возмуще-
ние режима» подразумевает такую ситуацию, когда переходный
процесс уже не может рассчитываться по линеаризованным диф-
ференциальным уравнениям машины, а должен определяться на
основе решения исходных нелинейных уравнений. Линеаризация
нелинейных уравнений (см. гл. 9) предполагает, что все отбрасы-
ваемые в нелинейных членах компоненты, кроме линейных, имеют
достаточно малую величину. Так, поперечное напряжение якоря
синхронной машины, являющееся одной из «внешних сил», при
постоянном напряжении сети U можно представить в виде
uq = и cos 0 = U cos (0О + А0) = U (cos 0О cos А0 — sin 0О sin А0),
где А0 — отклонение угла нагрузки 0 от некоторого постоянного
значения.
Линеаризованная нелинейная функция (cos 0)л cos 0О —
— А0 sin 0О незначительно отличается от истинного ее значения
cos 0, если А0 ограничено настолько, что с технической точностью
cos А0 1 и sin А0 АО. Пусть, например, 0О = 60°. Тогда для
А0, соответственно равных +15; —15; —30; —45; —60°, отноше-
ние (cos 0)+cos 0 принимает значения: 1,05; 1,03; 1,10; 1,22; 1,41.
Если 0О = 15°, то для А0 = —15; +15; +30; +45; +60° соответ-
ствующие отношения (cos 0)+cos 0 равны: 1,07; 1,03; 1,17; 1,52;
2,66. Этот пример, как и следовало ожидать, показывает, что Ио
мере увеличения АО растет погрешность представления cos 0 ли-
нейным компонентом и при заданном | А01 погрешность неодинако-
ва при различных 0О. Очевидно, что со значительной погрешностью
будет определяться также продольное напряжение якоря ud =
= —U sin 0 с помощью линеаризованной функции (sin 0)л
sin 0О + А0 cos 0О, если А0 в переходном процессе достигнет
больших значений.
Трудно сказать, с какой погрешностью будут определяться из
линеаризованных уравнений синхронной машины сами перемен-
ные — токи, угол 0, но очевидно, что погрешность будет зависеть
от угла 0О и степени изменения угла 0 в переходном процессе:
чем больше последняя, тем существеннее должны отличаться ре-
шения линеаризованных и исходных нелинейных уравнений.
в А. И. Важное 225
Аналогичная картина имеет место и в асинхронных машинах.
Уравнение напряжений ротора таких машин содержит нелиней-
ный член вида 5фг. Если изменение скольжения As или изменение
потокосцепления обмотки ротора Афг становятся в переходном
процессе соизмеримыми с постоянными значениями s0 и фг0, то не-
линейным компонентом А$Афг уже нельзя пренебрегать при опре-
делении члена 5фг.
В общем случае трудно провести четкую границу области при-
менимости линеаризованных дифференциальных уравнений ма-
шин для исследования переходных процессов. Но для крайних
по величине возмущений режима (сколь угодно малых и значитель-
ных, приводящих к радикальному изменению режима) не возникает
сомнений по поводу того, какими уравнениями следует пользо-
ваться для описания процесса с достаточной технической точ-
ностью.
При исследовании переходного процесса, определяемого нели-
нейными уравнениями, наиболее общая задача возникает при необ-
ходимости расчета переменных в виде непрерывной функции вре-
мени. Эта задача является и самой сложной, так как она требует ре-
шения нелинейных уравнений. В качестве примера можно ука-
зать на расчет пуска асинхронного двигателя с учетом его ускоре-
ния.
Важное значение имеет и постановка ограниченной задачи —
исследования характера движения ротора машины в переходном
процессе. Цель подобного исследования состоит в том, чтобы уста-
новить, закончится ли переходный процесс, возникающий в ре-
зультате возмущения исходного режима, новым установившимся
режимом или нет. Это — проблема устойчивости режимов, кото-
рая рассматривалась в гл. 9 при сколь угодно малых возмущениях
(статическая устойчивость, или устойчи-
вость в малом). При значительных возмущениях говорят
о динамической устойчивости, или устой-
чивости в большом. Таким образом, динамическая
устойчивость определяет поведение машин при конечных измене-
ниях параметров системы.
Простейшее возмущение — это однократное внезапное изме-
нение какого-либо параметра, остающегося в дальнейшем неиз-
менным. Так, например, внезапный наброс постоянной нагрузки
на двигатель приводит к изменению момента механических сил на
валу на постоянную величину А7И; другой пример — отключение
участка линии передачи между генератором и приемной системой
обусловливает скачкообразное изменение индуктивности цепи
статора от одного постоянного значения до другого.
Скачкообразное изменение параметра может быть и много-
кратным. Например, при внезапном коротком замыкании на ли-
нии передачи, через которую работает генератор, наступает пер-
вое изменение параметров цепи статора машины; при последую-
щем отключении поврежденного участка линии передачи парамет-
ры цепи снова изменяются скачком, принимая новые значения,
отличные от тех, которые были в исходном режиме, и определяю-
щие новый нормальный режим, если таковой возможен.
В практике встречается возмущение в виде одного или ряда
импульсов (кратковременная нагрузка двигателя). В общем слу-
чае возмущение может иметь сложный характер во времени. Так
в упомянутом выше процессе короткого замыкания генератора
может появиться еще одно возмущение, действующее на протяже-
нии всего переходного режима, — это непрерывное регулирова-
ние возбуждения машины.
Динамическая устойчивость связана со значительными воз-
мущениями, поэтому она зависит не только от параметров исход-
ного режима, но и от величины и характера возмущения. Задача
о динамической устойчивости требует либо решения нелинейных
дифференциальных уравнений, либо качественного их исследова-
ния. Интегрирование нелинейных уравнений производится мето-
дами последовательных интервалов и итераций вручную или с по-
мощью вычислительных машин. Качественный анализ можно вы-
полнить построением функций Ляпунова и применением «фазовой
плоскости» («фазовые траектории»).
Одним из важных методов исследования переходных процессов
в машинах при значительных возмущениях, и в частности исследо-
вания динамической устойчивости, является электродинамиче-
ское моделирование.
10-2. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ СИНХРОННЫХ
ГЕНЕРАТОРОВ. МЕТОД ПЛОЩАДЕЙ. Исследование динами-
ческой устойчивости синхронной машины состоит не только в про-
верке сохранения машиной синхронизма для заданного динамиче-
ского нарушения, но также в определении предельно допустимого
возмущения, соответствующего границе динамической устойчи-
вости. Это дает возможность оценить запас по динамической устой-
чивости при данном виде возмущения.
Наиболее простым методом исследования динамической устой-
чивости является метод площадей, который, по существу, сводится
к применению «фазовой плоскости» для рассматриваемой задачи.
Для того чтобы понять его сущность, обратимся к уравнению
моментов сихронной машины. Из этого уравнения прежде всего
определим ускорение ротора:
pxs^(M-M3M)/Hf. (10-1)
Производную от скольжения по времени можно представить
В виде
ds dQ ds
PxS ~ ~dQ lx ~ s •
Интегрируя уравнение моментов по углу 9, используя приве-
денное выражение для p%s и полагая скольжение исходного ре-
жима равным нулю, получим
о
s2=(S)2=f(УИ ~ dQ- (10-2>
1 °„ч
Рассмотрим особенности движения ротора с помощью урав-
нений (10-1) и (10-2). Предположим, что нам известна угловая ха-
рактеристика Л4ЭМ = / (0) после динамического нарушения режима
Рис. 10-1. Графическая интерпретация правила пло-
щадей. Исходный режим динамически устойчив
работы машины. Тогда с помощью (10-2) можно установить, сохра-
няет машина устойчивость или нет. Покажем это на примере син-
хронного генератора, работающего через двухцепную линию пере-
дачи на приемную систему бесконечной мощности (см. рис. 9-7).
Пусть исходный режим генератора характеризуется углом на-
грузки 0НЧ и моментом Л4ЭМ. нч- Момент механических сил на
валу генератора М в установившемся режиме равен электромагнит-
ному моменту Л4ЭМ.НЧ.
Предположим, что динамическим нарушением этого режима
является отключение одной параллельной цепи линии передачи и
что угловая характеристика генератора в переходном процессе
представляется кривой 2—7, изображенной на рис. 10-1. Допу-
стим также, что в течение рассматриваемого процесса момент М
остается постоянным (первичный двигатель генератора не регули-
руется). В первый момент после возмущения режима Л4ЭМ умень-
шается (точка 2), так как после отключения одной параллельной
цепи линии передачи индуктивное сопротивление последней скач-
ком возрастает в два раза и индуктивные сопротивления цепи
якоря генератора (до точки присоединения к системе бесконечной
мощности) увеличиваются. Разность М — Мэм (избыточный мо-
мент), выражаемая отрезком 1—2, сообщает ротору машины уско-
рение, которое определяется уравнением (10-1). Ротор начинает
вращаться с частотой, превышающей синхронную, и угол 0 воз-
растает от своего начального значения 0НЧ. В точке 3, где имеет
место равенство моментов М = Л4ЭМ, ускорение становится рав-
ным нулю, но ротор вращается с частотой, большей синхронной,
и угол 0 будет увеличиваться дальше.
На участке кривой 2—3 избыточный момент положителен и со-
вершает работу, идущую на увеличение кинетической энергии
ротора. После того как оказывается пройденной точка 3, избыточ-
ный момент становится отрицательным и соответствующая работа
совершается уже за счет кинетической энергии ротора, накоплен-
ной на участке 2—3. На участке 3—4 кривой (0) ротор испы-
тывает замедление (ускорение отрицательно), и когда кинетиче-
ская энергия, приобретенная ранее на участке 2—3, будет пол-
ностью израсходована, относительная частота вращения s — /?т0
станет равной нулю.
Работа, совершаемая избыточным моментом при изменении
угла 0, определяется интегралом в уравнении (10-2). Графически
же этот интеграл представляет собой площадь между кривой
7ИЭМ = f (0) и прямой М в пределах угла от 0НЧ до 0. При движе-
нии от точки 2 к точке 3, как видно из рис. 10-1, указанная пло-
щадь возрастает; она максимальна при угле 0, соответствующем
точке 3 (скольжение s максимально), а затем уменьшается, по-
скольку площадь на участке 3—4 отрицательна. Поэтому точка 4,
где s = 0, находится из условия, что площади между кривой Мэм=
= f (0) и прямой механического момента М на участках 2—3
(М — Мэм > 0) и 3—4 (М — Мэп << 0) равны. Эти площади на-
зываются соответственно площадями ускорения и
торможения. Они изображены на рис. 10-1 заштрихован-
ными равновеликими фигурами 1—2—3 и 3—4—8.
Далее происходит уменьшение угла 0, так как в точке 4 угло-
вой характеристики избыточный момент отрицателен и ротор ис-
пытывает замедление. При движении от точки 4 к точке 6 скольже-
ние pxQ становится отрицательным. На участке 4—5—6 процесс
совершается аналогично описанному выше: в точке 5 (М = Мэм)
скольжение имеет максимальное отрицательное значение; в точке 6
s == 0. Положение точки 6 определяется из условия равенства
площадей между угловой характеристикой и прямой 7И на участ-
ках 4—5 и 5—6.
После нескольких колебаний ротора, затухающих под воз-
действием демпферного момента, переходный процесс завершается
установлением нового нормального режима в точке 7 — точке
пересечения прямой М и статической угловой характеристики
машины для новых условий (одна цепь линии передачи отключена).
На рис. 10-1 показана лишь часть этой характеристики (кри-
вая аб).
Характер изменения угла 0 во времени в переходном процессе,
вызванном динамическим нарушением режима, показан на
рис. 10-2, а (ср. с рис. 10-1). На рис. 10-3, а представлена фазовая
траектория — зависимость /?т0 от угла нагрузки 0.
Исходный режим работы генератора при рассмотренном виде
возмущения оказался динамически устойчивым.
Рис. 10-2. Изменение угла 0 при возмущении режима. Исход-
ный режим: а — динамически устойчив; б — динамически
неустойчив
Характер процесса существенно изменится, если предполо-
жить, что генератор имеет угловую характеристику после возмуще-
ния режима в виде кривой 2—5, представленной на рис. 10-4.
Из этого рисунка видно, что площадь ускорения 1—2—3 больше
площади торможения 3—4, Следовательно, в точке 4 кинетическая
энергия, приобретенная ротором на участке разгона 2—3, не
израсходована полностью и скольжение в соответствии с уравне-
Рис. 10-3. Фазовая траектория при динамическом
нарушении режима. Исходный режим: а — динами-
чески устойчив; б — динамически неустойчив
нием (10-2) остается в этой точке больше нуля. Поэтому угол 0
будет продолжать увеличиваться. Однако за точкой 4 избыточный
момент снова становится положительным, ротор опять начнет
ускоряться, и это вызовет прогрессирующее увеличение угла 0,
т. е. потерю машиной синхронизма. На рис. 10-2, б и 10-3, б по-
казаны зависимости 0 = f (т) и s = f (0) для этого случая. На
рис. 10-3, б обращает на себя внимание то обстоятельство, что р?0
ни при каких значениях угла 0 не обращается в нуль (кроме,
естественно, начального угла 0НЧ).
Итак, теперь исходный режим работы генератора оказался ди-
намически неустойчивым.
Можно полагать, что если в результате постоянного возмуще-
ния угол 0 возрастает от начального значения ограниченно, т. е.
если в первом колебании машина оказывается динамически устой-
чивой, то последующие колебания не приводят к потере устойчи-
вости. Иными словами, при постоянном возмущении динамическая
устойчивость практически может оцениваться только по первому
колебанию. Однако при этом нужно иметь в виду следующее.
Угловая характеристика машины Мэм = f (0) при динамиче-
ских нарушениях режима существенно отличается от статической
характеристики в установившемся
режиме работы за счет наведенных
токов в цепях машины. Основное зна-
чение здесь имеет апериодическая со-
ставляющая в токе возбуждения син-
хронной машины, затухание которой
означает переход машины на статиче-
скую угловую характеристику. Поэ-
тому может оказаться, что до зату-
хания апериодических токов в цепи
возбуждения синхронной машины
колебания ротора будут происхо-
дить с ограниченным размахом и
машина сохранит синхронизм с сетью,
Рис. 10-4. Графическая интер-
претация правила площадей.
Исходный режим динамически
неустойчив
а после затухания этих токов, если
нагрузка превосходит предел статической устойчивости по
«сползанию», машина становится неустойчивой.
Таким образом, исходный режим оказывается динамически
неустойчивым, но это обстоятельство определяется единственно
тем, что в новом установившемся режиме, к которому стремится
машина, не обеспечивается статическая устойчивость. Так, если
в случае, представленном на рис. 10-1, статическая угловая харак-
теристика машины изображается кривой а’б', то рассмотренные
выше колебания по динамической характеристике закончатся йа
этой кривой, и поскольку на ней везде М > Л4ЭМ, ротор получит
ускорение (неизменного знака) и машина потеряет синхронизм.
Характер изменений угла 0 = f (т) и скольжения s = / (0) для
этого случая представлен на рис. 10-5 и 10-6.
Из приведенных рассуждений можно сделать два вывода. Во-
первых, при динамических процессах кратковременно, пока не
затухли апериодические токи в цепи возбуждения синхронной ма-
шины, последняя может выдерживать значительные нагрузки,
часто превосходящие предел ее статической устойчивости по пара-
метрам после динамического возмущения режима. Во-вторых,
машина будет динамически устойчивой при постоянном возмуще-
нии, если не только динамически устойчиво первое колебание ро-
тора, но также обеспечена статическая устойчивость в новом уста-
новившемся режиме. Таким образом, рассмотрение динамической
устойчивости по первому колебанию должно быть дополнено про-
веркой статической устойчивости в новом установившемся режиме.
Вышеприведенные рассуждения основывались на том, что угло-
вая характеристика машины после динамического нарушения ре-
жима известна. Однако точное ее определение представляет весьма
большие трудности. Дело в том, что даже при пренебрежении ак-
тивным сопротивлением цепей статора и переходным процессом
в этих цепях электромагнитный момент зависит от двух перемен-
ных: продольной переходной э. д. с. E'd и угла 6 [см. (3-34)].
Рис. 10-5. Изменение угла 9 при
динамическом переходе к стати-
чески неустойчивому режиму
Рис. 10-6. Фазовая тра-
ектория при динамиче-
ском переходе к стати-
чески неустойчивому ре-
жиму
При этом э. д. с. Ed сама является функцией 0 и поэтому может
быть точно определена только в результате решения всей системы
дифференциальных уравнений машины (3-35)—(3-37).
Вместе с тем, если ограничиться исследованием динамической
устойчивости по первому колебанию, то соответствующая часть
угловой характеристики в первом приближении определяется до-
статочно просто. Поскольку время достижения углом 0 своего
первого максимума (0т1 на рис. 10-2, а) обычно невелико (не пре-
восходит 0,3—0,4 с), в этой части процесса можно не считаться с из-
менением потокосцепления с обмоткой возбуждения и принять
фв = const (E'd = const). Тогда угловая характеристика в первом
колебании определяется выражением (3-34), в котором нужно
считать E'd = Ем = const.
Итак, согласно методу площадей режим динамически устойчив,
если площади ускорения и торможения на графике угловой характе-
ристики равновелики. Если же площадь торможения оказывается
меньше площади ускорения, то режим динамически неустойчив.
Оценка динамической устойчивости машины по первому коле-
банию может производиться и при многократных возмущениях, но
возмущение при последующих качаниях не должно изменяться.
Рис. 10-7 иллюстрирует применение метода площадей для
оценки динамической устойчивости генератора при следующих
условиях. Исходный режим работы генератора через линию пере-
дачи определяется углом 0НЧ и моментом Мэм, пч = М. (кривая
аб — статическая угловая характеристика для исходных усло-
вий). Первичный двигатель не регулируется, т. е. М = const. На
линии происходит несимметричное короткое замыкание (первое
возмущение), в процессе которого характеристика Л4ЭМ f (0)
имеет вид кривой а"б".
Под влиянием избыточных моментов М—Мэм ротор ускоряется
на участке 2—3 и угол 0 возрастает от 0НЧ до 0К. В этот момент
короткое замыкание отключается (второе возмущение), после чего
угловая динамическая характеристика принимает вид кривой а' б'.
На участке 5—6 ротор ис-
пытывает замедление. Ма-
ксимальный угол 0т1 в пер-
вом колебании определяется
точкой 6, причем площадь
торможения 4—5—6—7 рав-
на площади ускорения 1—
2—3—4. Из рисунка сле-
дует, что динамическая ус-
тойчивость по первому коле-
банию сохраняется.
Отметим, что метод пло-
щадей распространяется так-
же на случай работы двух
синхронных машин соизме-
римой мощности, но этим
числом машин исчерпывается
область его применения.
При использовании метода
правила площадей при двукратном воз-
мущении
площадей можно оперировать не
с площадями ускорения и торможения, а с отдельными интегра-
лами от моментов в (10-2).
Примем E'd = E'do = const, a D = 0. К учету демпферного мо-
мента мы вернемся в § 10-4, а пока заметим, что уменьшение E'd
и наличие демпферного момента оказывают противоположное влия-
ние на угловую характеристику машины.
Обозначая постоянную амплитуду первой гармоники электро-
магнитного момента Л4ЭМi = UE'dblxd\ Of5KdqxdU/Edo = тЭМ2, по-
лучим при М = const уравнение (10-2) в виде
0,5/f yS2 - М (0 - 0НЧ) - Мэм1/ (0), (10-3)
где F (0) = cos 0НЧ — cos 0 — 0,5тэм2 (cos 20нч — cos 20).
Построив графики функций правой части (10-3), получим воз-
можность судить о значении скольжения $: точка пересечения гра-
фиков соответствует s = 0.
Пример. В исходном режиме генератор работает через двухцепную линию
передачи на сеть бесконечной мощности. Параметры генератора: xd = 0,5; xq =
= 0,8 (сопротивления цепи якоря до приемной сети); Я/ = 1900 рад. Данные
исходного режима: М — 0,9; Я — 1,0; £^0 = 1,22; 0нч — 30°. Первое возмуще-
ние режима — трехфазное короткое замыкание на линии вблизи генератора,
в течение которого принимаем Л4ЭМ = 0, пренебрегая знакопеременной и асин-
хронными составляющими электромагнитного момента. По данным § 6-6 опреде-
ляем изменение угла в процессе короткого замыкания: 0К— 0НЧ = 0,5Мт^!Н
Для длительности замыкания тк = 0,15; 0,20; 0,25 с (47; 63 и 78,5 рад) угол
нагрузки 0К в момент отключения короткого замыкания составит соответственно
60; 84,5; 113°. Примем, что вслед за вторым возмущением — отключением замы-
кания вместе с поврежденным участком линии передачи — сопротивления при-
нимают значения xS = 0,6; х_ = 0,9, так что Л4 .. — 2,04 и m _ = 0,14.
и ч ЭМ J. ЭМ 2
На рис. 10-8 построены графики F (0) (штриховые кривые) и Л4ЭМ1Р (0)
(сплошные кривые) для тк = 0,15 (/); 0,20 (2); 0,25 с (3). Прямая 4 представляет
Рис. 10-8. К определению динамической устой-
чивости по видоизмененному правилу пло-
щадей
собой М (0 — 0НЧ). Из рисунка следует, что при тк = 0,15 и 0,20 с исходный
режим динамически устойчив, причем угол 0 достигает максимальных значений,
соответственно равных 89 и 127°. При тк = 0,25 с режим оказывается динами-
чески неустойчивым (кривые 3 и 4 не пересекаются, скольжение не обращается
в нуль).
10-3. ПОВЫШЕНИЕ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
РЕГУЛИРОВАНИЕМ ВОЗБУЖДЕНИЯ МАШИНЫ. В § 9-4 по-
казано, что непрерывное автоматическое регулирование воз-
буждения синхронных машин существенно увеличивает области
статической устойчивости. Столь же благотворным является регу-
лирование возбуждения и в отношении динамической устойчи-
вости машин. Оно позволяет при прочих равных условиях умень-
шить величину первого вылета угла 9W1 и ускорить затухание
колебаний ротора, возникающих в результате динамических воз-
мущений, т. е. увеличить запас динамической устойчивости ма-
шины.
Однако требования, которые предъявляются к системе регули-
руемого возбуждения, обеспечивающей повышение динамической
>т1 по методу площадей
it II
—i-------А—X---►
Внч ® к &т1 0
Рис. 10-9. Графическая ин-
терпретация правила площа-
дей для машины с регулируе-
мым возбуждением
устойчивости, отличаются от тех, которые диктуются условиями
увеличения статической устойчивости.
Ограничение угла 9 в первом колебании после динамического
нарушения режима по методу площадей будет тем значительнее,
чем сильнее удается сократить площадь ускорения и увеличить
возможную площадь торможения на диаграмме угловых характе-
ристик. Это можно видеть из рис. 10-9, где дано определение мак-
симального угла в первом колебании
для двух случаев, различающихся
лишь угловыми характеристиками ма-
шины в переходном режиме. Дина-
мическое нарушение здесь принято
двукратным, при этом второе возму-
щение наступает в обоих случаях при
одном и том же значении угла 0К.
На рисунке кривые представляют
собой угловые характеристики: аб —
в исходном режиме, а"б" — после пер-
вого возмущения, а'б' — после второго
возмущения. В одном случае площади
ускорения и торможения представлены
заштрихованными фигурами 1—2—3—4
и 4—5—6—7. Их равенство опреде-
ляет максимальный вылет угла 0т1. Во
втором случае равные площади ускоре-
ния и торможения обозначены 1—2—
3'—4 и 4—5'—6'—7'. Максимальный
угол равен 0^ь и он меньше угла 0mi.
Очевидно, что уменьшение угла 9т
увеличением электромагнитного момент
0 в условиях переходного режима.
Из выражения для момента (3-34) следует, что при заданных
параметрах и угле 0 момент Л4ЭМ можно увеличить только за счет
увеличения потокосцепления обмотки возбуждения фв.
Определим изменение этого потокосцепления Дфв из уравне-
ния напряжения цепи возбуждения синхронной машины (2-98).
Пренебрегая падением напряжения в сопротивлении гв и интегри-
руя уравнение, получим
т
о
Таким образом, в конечном итоге Л4ЭМ определяется интеграль-
ным значением изменения напряжения возбуждения за время т.
Для обеспечения надлежащих значений Дфв при сильных ди-
намических нарушениях режима напряжение возбуждения син-
хронной машины резко увеличивают. Возбуждение форсируется
путем воздействия на цепь возбуждения возбудителя синхронной
машины. Поскольку возбудитель обладает электромагнитной
может быть достигнуто
для данного угла
йнерцией, то напряжение Аив нарастает до максимально возмож-
ного значения — потолочного напряжения ивт — с определенной
конечной скоростью.
На рис. 10-10 показан характер изменения напряжения ив во
времени при форсировании возбуждения применительно к возбу-
дителям, обеспечивающим различную скорость нарастания напря-
жения. Кривая 3, показывающая почти мгновенное достижение
напряжением своего потолочного значения, характерна для ион-
ного возбудителя; кривые 1 и 2 соответствуют различным схемам
электромашинного возбуждения.
Интеграл, определяющий изменение потокосцепления Афв,
графически выражает площадь на графике uD = f (т), которая
Ue
£
Рис. 10-10. Напряжение воз-
буждения синхронной маши-
ны при его форсировании
показана штриховкой на рис. 10-10.
Очевидно, что эта площадь к задан-
ному моменту времени т0 будет тем
больше, чем выше потолочное напряже-
ние ивт по отношению к исходному ^в0 и
чем больше скорость нарастания на-
пряжения.
Таким образом, система возбужде-
ния, существенно повышающая динами-
ческую устойчивость синхронной ма-
шины, должна быть быстродейству-
ющей и обладать значительным пото-
лочным напряжением.
Отметим, что после форсирования
возбуждения, ограничивающего вылет
угла 0 в первом колебании, должно осуществляться непрерыв-
ное автоматическое регулирование возбуждения для успокоения
последующих колебаний ротора. Не рассматривая здесь этого
вопроса, укажем, что при этом возникает тем больше трудностей,
чем значительнее форсирование возбуждения.
Регулирование возбуждения синхронных машин является не
единственным средством повышения устойчивости. Для этой цели
может быть использовано кратковременное торможение ротора
машины путем включения в цепь статора нагрузочного сопротив-
ления (электрическое торможение).
10-4. СИНХРОННЫЙ ДВИГАТЕЛЬ ПРИ СИЛЬНО ИЗМЕНЯ-
ЮЩЕЙСЯ НАГРУЗКЕ. В некоторых установках с синхрон-
ным двигателем механический момент на его валу претерпевает
значительные и быстрые изменения. С подобными условиями встре-
чаются, например, при ударной нагрузке, т. е. при внезапном при-
ложении постоянного момента (рис. 10-11, а), а также при периоди-
чески изменяющейся нагрузке (рис. 10-11,6, в). Если пауза Т2
между следующими друг за другом постоянными моментами
(рис. 10-11, в) достаточна для затухания переходного процесса, то
такая нагрузка может рассматриваться как одиночный импульс.
Расчет режима двигателя при периодическом изменении меха-
нического момента с ограниченным отклонением угла нагрузки от
среднего значения рассматривался в § 8-5. Относительно неболь-
шое изменение угла нагрузки Д0 позволяет использовать для ана-
лиза линеаризованные дифференциальные уравнения машины.
Однако с ростом Д0 возникает неуверенность в результатах, полу-
чаемых на основе линейной постановки задачи. В дальнейшем из-
ложении примем угол нагрузки 0
положительным для двигательного #
режима машины. б7) —--------------
Периодические нелинейные ко-
лебания. При таких колебаниях
угол 0 содержит постоянную и
гармонические составляющие. По- ____________________________
\ ~ 0 т
М
б)
Рис.
о
10-11. Некоторые типы механической
б, в — периодические
добную временную зависимость имеют также продольные и по-
перечные потокосцепления и токи якоря. Электромагнитный мо-
мент определяется произведениями этих потокосцеплений и токов,
поэтому его постоянная составляющая есть результат взаимодей-
ствия не только постоянных составляющих, но и гармоник оди-
накового порядка токов и потокосцеплений. Точно так же основная
гармоника момента обусловлена взаимодействием двоякого рода:
1) постоянных и гармонических составляющих потокосцеплений
и токов; 2) гармоник тока и гармоник потокосцеплений соседнего
порядка. Вместе с указанными составляющими в моменте обра-
зуются и гармоники более высокого порядка. Из полных уравне-
ний машины можно показать, что дополнительные слагаемые в мо-
менте, появляющиеся только при нелинейности, зависят от раз-
ницы в параметрах по осям d и q. В этой сложной картине есть
одно обнадеживающее для анализа обстоятельство: высшие гар-
моники момента вызывают достаточно малые аналогичные гармо-
ники в угле 0. Поэтому изменение угла Д0 можно рассматривать
в виде гармонического колебания частоты h. Формальный анализ
случая, когда Д0 представляет собой совокупность трех гармоник,
показывает, что если амплитуда каждой из двух гармоник не пре-
вышает 10—15% амплитуды третьей, то погрешность от пренебре-
жения гармониками малой амплитуды незначительна. Указанный
Порядок соотношения гармоник угла ЛО характерен для большого
числа задач.
Для получения инженерной методики расчета введем еще два
ограничения. Во-первых, будем считать, что амплитуда гармоники
угла Д0т не превышает 60—70°. При Д9т = 90°, например, раз-
ложение функции sin Л9 в ряд должно содержать еще один член,
кроме принятого в настоящем анализе, иначе погрешность разло-
жения доходит до 15—20%. Но увеличение числа членов в раз-
ложении усложняет методику. Вместе с тем в редких практических
случаях приходится встречаться с Л0т > 70°. Во-вторых, будем
основывать анализ на уравнениях (3-34)—(3-47) синхронной ма-
шины, приближенно описывающих влияние демпферной обмотки.
Формально анализ показывает, что использование более полных
дифференциальных уравнений дает незначительные уточнения
в решении.
Итак, пусть
0 0О Д0 = 0О — Л0т cos hx. (10-4)
Электромагнитный момент, обусловленный обмоткой возбужде-
ния, равен
/Иэм= ££±sine-0,5t/2f-,--------'I sin20. (10-5)
xd \ xd I
В гармонических функциях
sin 0 = sin 0O cos Л0 -ф- cos 0O sin Л0;
sin 20 = sin 20o (cos2 Л0 — sin2 Л0) cos 20o 2 sin Д0 cos Л0
функции угла Л0 можно представить рядом Неймана [31]. При-
чем если Л9т < 60-4-70°, то с небольшой погрешностью достаточно
иметь аппроксимацию в виде
cos ДО JQ — 2J2 cos 2/it; sin Д0 --2J1 cos /it,
где Jo, Л, Л — функции Бесселя соответственно нулевого, пер-
вого и второго порядков первого рода, в которых аргументом слу-
жит амплитуда Л0т в радианах. При Л0т < 10-4-15° cos Л0 1
и sin Л0 Л0.
Подставив аппроксимации sin Л0, cos Л0 в функции sin 0,
sin 20 и опустив высшие по сравнению с основной частотой h вре-
менные гармоники, получим
sin 0 = JQ sin 0О — 2J± cos 0О cos Лт;
sin 20 = [Jo — 2 (Ji — J%)] sin 20o — 4Ji (Jo — Л) cos 20o cos hx.
Для угла 0, изменяющегося во времени согласно (10-4), урав-
нение цепи возбуждения машины (3-35) имеет аналитическое ре-
шение [ср. с (3-28)]:
Ed — Eda Д" &Ed~*
(10-6)
где
Eda Edo — pZ7 (cos 0НЧ — Jo COS 0O) 1
\E'd~ = 2pZ7Ji sin Go-----/ v;-2- (hT'd sin hx Д- cosЛт);
1 + \hT d)
E'do — начальное значение E'd, соответствующее начальному углу
0НЧ. В выражениях E'da и Д£^~ не учтены незначительные по ве-
личине слагаемые соответственно апериодического вида и гармо-
ника частоты 2h. Для установившихся колебаний
Еda Еdy == Еdi} [iU (cos 0нЧ Jо COS Go) •
С помощью представленных выражений для E'd, sin G, sin 20
и (10-4) электромагнитный момент (с учетом лишь основной гармо-
ники колебаний частоты h) приводится к виду
Л4эм = Л4эмО + Л45Д0 + Л4^Д0,
где
Мэмо = /о Sin 0о - 0,5 [4-2 (4 - 4)1 и2 (4-
xd \ xd
sin 20o;
'2^1
xd
COS 00 — JoWv-cos 20o ~
\xd xq /
; (Ю-7)
\xd d) 1 +\hTd) J
Md — MdB -|- D ;
(10-8)
коэффициент демпферного момента, обусловленный действием
обмотки возбуждения:
<7” + и' (i“ i')
Ki — 2/1/Д0т.
При малой амплитуде колебаний (Д0т < 15°) значения
Ki 1; JQ 1; J2 0 и приведенные выражения переходят в по-
лученные ранее на основе линейной теории (см. гл. 8).
Угол 0О определяется из условия равновесия постоянной состав-
ляющей механического момента и Л4эм0. При колебаниях со зна-
чительной амплитудой этот угол может заметно отличаться от ана-
логичного угла 0ОЛ, соответствующего равновесию моментов по
угловой характеристике машины, причем разница между ними
при заданной амплитуде колебаний тем значительнее, чем больше
угол 0О.
Коэффициент синхронизирующего момента для большин-
ства машин может рассчитываться без учета последнего слагаемого,
содержащего (hT'dy. Влияние амплитуды колебаний на значение
оценим, полагая Edy = U и задавая типичное соотношение
параметров xdlxq = 0,5. Для этих условий отношение частот соб-
ственных колебаний h = V MJHпри нелинейных (Лн) и линей-
ных (Лл) колебаниях равно
Ин/Ил = ]/ (cos 0О — 0,5 Jo cos 20o)/(cos 0о — 0,5 cos 20о).
Отношение коэффициентов демпферного момента MdB в нели-
нейной и линейной (Л^вл) задачах равно
М/вН/М/вл — (Jo + Л)-
На рис. 10-12 приведены в зависимости от амплитуды угла Л0т
относительные изменения частот собственных колебаний и коэф-
Рис. 10-12. Относительные изме-
нения MdB и h в нелинейной и
линейной задачах
^(^вл-^внЕ^вл; 2~5~
Рл - МЛл
фициентов демпферного момента MdB
в рассмотренной задаче по сравне-
нию с их значениями при линейных
колебаниях. Из рисунка видно, что
частота собственных колебаний при
Оо < 45° изменяется мало даже при
значительной амплитуде A0^. Коэф-
фициент демпферного момента MdB
с увеличением Л0т уменьшается.
Углы 0О и Д0т при нелинейных
колебаниях определяются последо-
вательными приближениями, так как
и момент Л4эм0 и коэффициенты 7WS,
Md являются функциями обоих уг-
лов.
Предел динамической устойчи-
вости двигателя при импульсной
нагрузке. Если механическая на-
грузка имеет характер одиночного
импульса, то предел динамической
устойчивости нерегулируемого дви-
гателя уменьшается вместе с увеличением продолжительности
импульса Ti вследствие затухания переходных токов в обмотке
возбуждения, приводящего к уменьшению э. д. с. и соответст-
венно момента /Иэм. На рис. 10-13 представлена зависимость
предельной нагрузки /Ип от ti для мощного синхронного дви-
гателя. Участки кривых, лежащие слева от абсциссы, примерно
равной (0,7-нО,8) Тс, где Тс — период колебаний, определяются
устойчивостью первого колебания. Как видно из рисунка, даже
при Ti 4ТС предельная нагрузка нерегулируемого двигателя
отличается от предельной по устойчивости первого колебания
при ri 0,8Тс всего на 7—10%. И лишь при весьма значительном
ri предел динамической устойчивости приближается к пределу
статической перегружаемости. Отметим, что при ri > 0,8Тс фор-
сирование возбуждения может увеличить предельную нагрузку
Мп лишь до предельной по устойчивости первого колебания. Та-
кой предел в первом приближении может быть найден в предполо-
жении D = 0 и ^E'd " 0 по уравнению (10-3). Изменение э. д. с.
Рис. 10-13. Предельная по устой-
чивости импульсная нагрузка
1 — нерегулируемый двигатель;
2 — возбуждение форсируется
Рис. 10-14. Дополнительная
предельная по устойчивости
механическая нагрузка дви-
гателя
°нч = °° И)- 15° и 30° <3)
E'd в переходном процессе связано, с одной стороны, с постоянной
времени T'd (Tdo), а с другой — с регулированием возбуждения,
если оно применяется.
На рис. 10-14 показано, как растет дополнительная предельная
по устойчивости первого колебания нагрузка ЛЛ4П для двигателя,
работающего с начальной нагрузкой Л4НЧ, при увеличении по-
стоянной Td0. Можно видеть, что предел устойчивости мало зави-
сит от постоянной Td(h если она больше 2—2,5 с, но при TdQ <<
< 1,5ч-2 с он существенно снижается с уменьшением Td0. Влияние,
постоянной TdQ на предел устойчивости двигателя при наиболее
эффективном регулировании — форсировании его возбуждения —
можно видеть из рис. 10-15: при значительной постоянной Td0 ре-
гулирование мало сказывается на пределе устойчивости по пер-
вому колебанию.
Влияние демпферной обмотки. Она создает демпферный мо-
мент Ds, и его учет в электромагнитном моменте машины приводит
к появлению в функции F (9) уравнения (10-3) дополнительного
слагаемого
0 т
А^(6) = ^Д- f sde = f s2dr.
v ’ Л1эм1 J Мэм] J
0НЧ °
После приложения к валу двигателя постоянного механиче-
ского момента угол 0 до достижения им максимального значения
0т1 в первом колебании изменяется практически в соответствии
с (10-4), при этом s = ptQ = h A0m sin Лт. Подставив это значе-
ние s в AF (9), найдем
AF (6) = 0,5£>/i2 Л02„ [т - sin 2/гт/(2/г)]/МЭМ1 •
Для угла 0 = 0т1 значение т = 0,5Тс и
&F (0ml) = nD (0ml - 0ЫЧ)2 /1/(8/Иэм1) = n2D (0ml - 0НЧ)2/(4Л4ЭМ1ТС),
так как Тс = 2n/h и А0т
Рис. 10-15. Кратность предель-
ного механического момента
(Л4Пф) двигателя с форсируемым
возбуждением по отношению к
аналогичному моменту (Мп) не-
регулируемого двигателя
ивт^ив0 ~ ~
= 0,5 (0W1 - 0НЧ).
Учет в (10-4) реального затуха-
ния колебательной составляющей
угла 0 на отрезке времени 0,5Тс
практически не отражается на полу-
ченном результате.
Расчеты показывают, что в зоне
углов 0, отличающихся на ±15%
от 0т1, функция AF (0) разнится от
AF (6mi) всего на 1 —1,5%. Поэтому
дополнительное приращение предель-
ной по устойчивости первого колеба-
ния нагрузки АМПД, обусловленное
демпферной обмоткой, равно
АЛ1Пд = А/7 (0П) Мэм1/(0П - 0НЧ) ~
«2,4О(0П-ОНЧ)/ТС,
где 0П — угол 0/п1, соответствующий
пределу устойчивости по первому
колебанию.
Предельные углы 0П для различных двигателей при 0НЧ = 0
обычно находятся в диапазоне 120—130°. Коэффициент D зависит
главным образом от параметров демпферной обмотки, которые вы-
бираются из условий обеспечения асинхронного пуска двигателя,
а период колебаний Тс для различных машин изменяется в основ-
ном из-за неодинаковых значений инерционной постоянной. При
обычно встречающихся параметрах двигателей для режимов
с 0НЧ = 0 демпферная обмотка повышает предел динамической
устойчивости на 3—12%.
Переходный процесс при ударной нагрузке. Этот вид нагрузки
характеризуется графиком на рис. 10-11, а. Зависимость 0 =
= f (т), ас ней и другие параметры процесса могут быть прибли-
женно рассчитаны последовательными приближениями на основе
результатов, полученных выше для нелинейных периодических
колебаний. Исходной предпосылкой является задание общего
вида функции 0 = f (т) или ее кусочно-линейной аппроксима-
ции [13].
Пусть, как и при малых постоянных возмущениях, после при-
ложения значительного неизменного механического момента М
G = 6у + А0аеат 4- А0„/т cos hr, (10-9)
где 0у — установившееся значение 0; Д0а и Л0Ш — начальные
значения апериодической и колебательной составляющих.
Коэффициент затухания а можно взять таким же, как в случае
линейных колебаний; коэффициент Р и частота h изменяются в про-
цессе колебаний. Определим углы Д0а и Д0т, полагая а, р и h
известными. В начале переходного процесса угол 0, увеличиваясь
от начального значения 0НЧ, станет равным 0О1, когда уравно-
весит М. Пусть это случится ко времени т = т0. Тогда из (10-9)
для т = 0 и т0 будем иметь
®нч “ 0у + + Д9/п’, 0Q1 = 0у + А^а 4“ AQ/n,
где ba = еаТо; = e₽To cos /гг0.
Отсюда найдем
Д0а = _ [0у (1 _ Ьр) _ 0О1 + Ь30нч]/(&а - &3); (10-10)
А0т = - [0О1 - Мнч — 0У (1 — Ьа)]/(Ьа - Ь£. (10-11)
Углу 0О1 соответствует равенство Л4ЭМ = М, т. е. p^s = 0 при
т = т0. Дифференцируя дважды (10-10), заменяя в полученном ре-
зультате т на т0 и приравнивая его нулю, получаем еще одно урав-
нение для определения произвольных постоянных. Несложный
анализ показывает, что при практически встречающихся параме-
трах двигателей это уравнение имеет вид
cos /гт0 —2р//г. (10-12)
Таким образом при известных а, р и 1г определяются т0, Ьа и
Остается найти угол 0Oi, поскольку расчет 0у по заданному мо-
менту М не составляет большого труда. Согласно (10-12) т0 не
превышает Тс/4, и на таком малом отрезке времени э. д. с. E'd изме-
няется совсем незначительно. Поэтому угол 0О1 можно вычислить
по уравнению Мэм = М, в котором Л4ЭМ представляется выраже-
нием (10-5) с постоянной э. д. с. E'd E'do- Наконец, по (10-10) и
(10-11) находится Д0а и Д0т.
Расчет угла 0 по (10-9) ведется на каждом полу периоде коле-
баний (hi = л) последовательными приближениями для найден-
ных значений 0у, 0О1 и а.
Покажем схему расчета на примере.
Пример. К двигателю прикладывается постоянный механический момент
М = 1,9. Параметры двигателя: xd — 0,844; xq = 0,574; x'd = 0,304;
= 0,218; xq = 0,276; 7^0 = 4 c; Td = 0,0067 с; T" = 0,0106 с; H. = 8,22 c.
Данные исходного режима: U — 1,0; Eo = 1,5; Ed() = 1,18; 0H4 = 0. Предвари-
тельные расчеты дают: 0y = 71°; 001 = 43° 30'. По данным § 9-1 для 0у = 71°
значение а = —0,00022. Коэффициент демпферного момента D в (3-34) рассчи-
тывается по приведенным параметрам двигателя и равен 4,3.
Первое полу колебание.
Первое приближение-. ba = 1; = 0.
1. По (10-10) Д0а = —27° 30'. 2. По (10-11) Д0т = 43° 30'. 3. Апериодиче-
ская составляющая угла 00 = 0у + Д0а = 43° 30'. 4. Функции Бесселя для
А0т = 43° 30': Jo = 0,85; = 0,36; J2 = 0,07. 5. По (10-7) (последнее слагае-
мое учитывать не нужно; вместо £';у следует подставить E'dQ^ Ms = 2,62. 6. Ча-
стота h = VMs!Н; 0,032. 7. По (10-8) MdB = 1,9; Md = 6,2. 8. Коэффициент
р = —0,bMdlHj = —0,0012. 9. Коэффициенты Ьа и Ь$: а) по (10-12) cos Лт0 =
= 0,075 и т0 47 рад; б) Ьа 0,99; 0,07.
Второе приближение: Ьа = 0,99; Ьр = 0,07.
1. деа = —24° 30'. 2. Д0т-—46°30'. 3. ео=46°ЗО'. 4. Jo = 0,84;
Л = 0,375; J2 = 0,07. 5. Ms = 2,49. 6. h ~ 0,031. 7. Mdti = 2,14; Md = 6,44.
8. p = —0,00125. 9. cos/гт0 = 0,081; t0 = 48 рад; ba = 0,99; b$ = 0,076.
Рис. 10-16. Угол нагрузки двигателя (/) и потоко-
сцепление его обмотки возбуждения (2) в начале
процесса ударной нагрузки при Td0 = 4 с
В третьем приближении практически дальнейшего уточнения нет. Таким
образом, на первом полуколебании 0--71—24,5^“°’00022г— 46,5^“0,00125x X
X cos (0,031т). Первый максимум угла (т = 101 рад) 0т1 = 87° 30'.
В расчетах последующих полуколебаний отпадает определение углов Д0а
и Д0т, но требуются приближения при нахождении э. д. с. E'd и фактической
амплитуды колебаний угла Д0тф, от которой зависят значения функций Бесселя.
Второе полуколебание.
Первое приближение. 1. ДОтф = 0,5 (0т1 — 0т2), где 0т2 — угол 0, вычис-
ляемый по предыдущему полуколебанию для т = Тс; 0т2= 11° 24' и А0тф =
= 38°. 2. 0О =: 0У + Д0а^а °’75?с, * где Тс = 2n/h; 00 = 47° 30'. 3. Функции
Бесселя для A0m*: Jo = 0,89; = 0,33; J2 = 0,05. 4. Для расчета Ms находим
среднее значение* E'd = E'da по (10-6) для т = 0,75Тс: Eda = 1,09. 5. =
= 2,53. 6. h « 0,031. 7. MdB = 2,45; Md = 6,75. 8. P = —0,0013.
Второе приближение практически дает те же результаты. Таким образом,
на втором полуколебании 0 — 71 — 24,5е“0,00022т —46,5е“0,0013тcos (0,031т). Ми-
нимальное значение угла 0т2 при т = 202 рад равно 10°48'.
Аналогично рассчитываются последующие колебания угла 0. При 0 0у
частота h изменяется мало в сравнении с начальными значениями, а (3 увеличи-
вается до —0,00164.
Рис. 10-17. Угол нагрузки двигателя (/) и по-
токосцепление его обмотки возбуждения (2)
в начале процесса ударной нагрузки при
TdQ = 0,7 с
С помощью (10-6) можно рассчитать E'd (фв) = f (т); на основе
найденного значения 0 = f (т) по (3-29) и (3-30)— токи машины,
по (3-34) — электромагнитный момент.
На рис. 10-16 приведены зависимости 9, фв = f (т) для процесса,
рассмотренного в примере. Сплошные кривые построены по дан-
ным решения уравнений на аналоговой вычислительной машине;
штриховые — расчетные по изложенной методике. Аналогичные
зависимости на рис. 10-17 относятся к тому же двигателю, но
с уменьшенной постоянной
= 1,8. Эти данные свиде-
тельствуют о том, что рас-
смотренный метод расчета
дает хорошие результаты
и в условиях значитель-
ного изменения э. д. с. E'd.
Отметим, что он также
пригоден для машин с фор-
сируемым возбуждением.
Предел устойчивости
при периодической удар-
ной нагрузке. При такой
нагрузке (рис. 10-11, в)
возможны резонансные ко-
лебания. Они возникают,
когда Ti и Т2 равны нечет-
ному числу полупериодов
собственных колебаний
двигателя Тс/2. Очевидно,
что если бы колебания угла 0 не затухали на протяжении ti и Т2, то
при указанных резонансных соотношениях двигатель быстро вы-
падал бы из синхронизма. В действительности колебания угла 0
затухают, и поэтому резонансные явления будут проявляться тем
сильнее, чем меньше ri и тг, удовлетворяющие условиям резонанса.
Кроме того, по мере увеличения амплитуды колебаний угла 0
период колебаний Тс изменяется и при неизменном периоде внеш-
него воздействия Ti ф- тг условия резонанса нарушаются. Это об-
стоятельство оказывает существенное влияние на развитие коле-
баний двигателя при периодической ударной нагрузке.
Процесс колебаний при нерезонансных условиях устанавли-
вается, начиная с третьего или четвертого циклов изменения на-
грузки. Значения максимальных углов 0W в этих циклах для нере-
гулируемого двигателя обычно несколько выше, чем в первом
цикле. Предельная нагрузка Л4П лежит между пределом статиче-
ской перегружаемости (при Т2 -> 0) и пределом динамической
устойчивости при импульсной нагрузке с той же продолжитель-
ностью, что и при периодической нагрузке. Последний достигается,
если тг —3/|3. При резонансных условиях предельная нагрузка
Л4П зависит не только от значений ti и тг: резонансные явления
в нерегулируемом двигателе при прочих равных условиях выра-
жены более резко в машине с большими постоянными Td0 и Ни
с меньшим коэффициентом Md.
На рис. 10-18 показана предельная по устойчивости нагрузка
в зависимости от Т2/Т1 для двигателя, параметры которого приве-
дены выше в примере. Отрезками прямых отмечены значения 7ИП
при импульсной нагрузке для указанных значений п. Графики
построены по результатам расчета процесса на АВМ.
Т1/Тс = 0,5 (/); 1,0 (2); 1,5 (3); 2,0 (4); 3,5 (.5)
Применение форсирования возбуждения в течение времени ti
позволяет при нерезонансных условиях и ti >> 0,8Тс повысить М.л
до предела устойчивости по первому колебанию для любых соот-
ношений Т2/тх. При наличии резонансных условий указанное ре-
гулирование эффективно лишь для значительных отрезков вре-
мени ti и Т2. При умеренных значениях ti и тг форсирование воз-
буждения неспособно ослабить резонансные колебания.
10-5. АСИНХРОННЫЙ ДВИГАТЕЛЬ ПРИ УДАРНОЙ НА-
ГРУЗКЕ. Для асинхронного двигателя с нормальными парамет-
рами процесс при ударной нагрузке во многих случаях может
рассматриваться по уравнениям установившегося режима работы.
Однако в начальной стадии процесса, пока скольжение двигателя
мало, действительные (динамические) характеристики, в частно-
сти зависимости потокосцеплений ротора фаг и от скольжения
s, заметно отличаются от статических. Это является причиной по-
грешности в определении динамических свойств асинхронного
двигателя с помощью статических характеристик.
При ударной механической нагрузке цепь статора двигателя
не претерпевает никаких изменений, поэтому уравнение напряже-
ний этой цепи становится весьма простым, если пренебречь влия-
нием ее активного сопротивления:
/<Л = 4’s-
Здесь в качестве комплексной переменной и5 принята веществен-
ная величина Us. Тогда система уравнений (7-8)—(7-10), записан-
ная для вещественных переменных, с учетом того, что +
/фрг, принимает вид
(Рт + Рг) + S'l’ar = s; (рт + Рг) Фаг — 5ф₽г = °;
U^ar/X'd + HjPxS = M.
Эта система может приближенно решаться способом, изложен-
ным в § 7-4. QflHaKO для рассматриваемого процесса функция
т
ср (т) = J s dx менее гладкая, чем, например, для процесса пуска
о
двигателя. Поэтому ее кусочно-линейная аппроксимация потре-
бует большого числа временных отрезков с постоянным скольже-
нием.
При ударной нагрузке импульсного типа ее предельные пара-
метры — механический момент 7ИП и продолжительность действия
Ti — зависят от допускаемого максимального скольжения sn дви-
гателя. В тех случаях, когда Мп больше максимального электро-
магнитного момента Л4макс. с на статической характеристике
Л4ЭМ = f (s), установившийся режим с таким значением механиче-
ского момента невозможен. Для подобных условий оказывается
совершенно непригодным решение линеаризованных уравнений
машины (см. § 9-1), которое можно было бы использовать для
ориентировочного представления переходного процесса. Поэтому
изберем здесь другой путь: будем искать приближенное выраже-
ние зависимостей фаг, = f (s), которые вместе с уравнением
моментов машины позволят определить параметры режима в виде
функций времени.
Для оценки приближенного решения используем метод после-
довательных приближений. Вводя в уравнения переменную =
= s/^r = sTd, найдем из них n-е приближение для потокосцепле-
ний:
/ War \ \
(ФаЛ = Фа,у - ' T'd
(Фрг)п = Ф₽гу---' - Ц -У T'd (P^a)n-P,
1 i 6(J
z c. >. ?d WarM-l
M---------,
ni L xd J
где установившиеся для данного значения s (Еа) потокосцепления:
Фагу — s?cf/( 1 4~ Ф(3гу — s/(1 4“ ?ст)-
Ввиду зависимости каждой из переменных фаг и от произ-
водных обеих переменных последовательность приближений при
малых значениях сходится медленно. Поэтому данный метод
мало удобен для практического расчета зависимостей фаг, =
= f (£0) в этой зоне значений ?0, а также при значительных ве-
личинах T'dlHj и М. Однако он позволяет оценить, при каких
значениях решение си-
стемы нелинейных уравне-
ний мало отличается от
решения уравнений ус-
тановившегося режима.
С этой целью приближе-
ния и (г|?рг)„ можно
представить в виде раз-
ложений по степеням па-
раметра T'd /Нj с коэффи-
циентами в виде опреде-
ленных функций и про-
порциональных избыточ-
ным моментам М — Мх.
Рис. 10-19. Потокосцепления ротора в функ- Анализ этих разложе-
нии параметра ний показывает, что при
t-Kr 2~^Г Расчетные данные: Us= 1; 7^///. < 0,1 Н~0,4 И уме-
xd ~ 0’18; нс = 0,947; т^/Яу = о,1; м = з ренных значениях избы-
точного момента (не бо-
лее двух-трех единиц) динамические характеристики фаг,
= f (ga) (решение дифференциальных уравнений) мало отли-
чаются от статических (решение уравнений установившегося ре-
жима) при > 0,6-5—1,0. На рис. 10-19 и 10-20 приведены для
сравнения динамические (сплошные кривые) и статические (штри-
ховые кривые) характеристики при различных значениях пара-
метра T'dlHj. Первые из них определены решением дифферен-
циальных уравнений на аналоговой вычислительной машине.
Кружками отмечены расчетные значения по методу последова-
тельных приближений. Указанные характеристики различаются
в своей начальной части тем сильнее, чем больше параметр T'd/Н,.
В области малых значений приближенное решение для фаг
ифргможет быть получено в виде степенных рядов. Преобразуемо
этой целью приведенную выше систему уравнений двигателя к виду
А-п (^п Фаг) F Ф|3г 4“ ?офаг ~
Дп (В„ - 1|>аг) + 1раг = 0,
где Ап = UsT’dl(Hjx'd}; Bn = Mx'd/Us.
Примем в качестве исходного режима двигатёля холостой ход
со скольжением, равным нулю (5ао = 0). Тогда начальные значе-
ния потокосцеплений: фаг0 = 0; = pct/s.
Представим и рядами:
фаг — 4" ^2?о 4“ + • • • J
Фрт — ’4 “Г + • • • •
Подстановка рядов в уравнения двигателя и сравнение коэффи-
циентов при одинаковых степенях дают следующие значения
постоянных:
fli °2 = 2Лп°Вп
и—2
---an-l + ^n-2 + Ап У| (kakan-k)
__ k=2
n — nAnBn ;
*2
3~ 34ПВП
bo = И J4; bi = ь2 = Ь3 = 0;
b*-^b^
ц3 ~Г ,74 . L
5АПВП ’ °"
П—Ч
Jn-i Ап у11 {kCLti-kbk)
__________k=4__________
nAnBn
Решение для фаг и фрг в виде рядов справедливо при Еа<1.
На рис. 10-19 и 10-20 расчетные значения отмечены крестиками.
Предельная импульс-
ная нагрузка. Выше отме-
чалось, что предельная
нагрузка 7ИП при задан-
ной продолжительности ti
не является однозначной,
а зависит от допускаемого
максимального скольже-
ния sn в момент снятия ее
с двигателя. Связь между
-Мп, Т1 и £оп - saT'd уста-
навливается с помощью
соотношения, получаемого
интегрированием уравне-
ния моментов двигателя:
HJ [• d^
т' J /Ип —м5М
d £
ьао
1 — 4>г; 2 — ^йг- Расчетные данные: С7, = 1;
р< 5
Xd =- 0,18; = 0,894; 7^2/^/ =0,25; М =3,3
причем Мэм = Usipar/x'd.
Статическая характеристика момента выражается уравнением
Мэм = 2Ммакс. с^/(1 + Й), (10-13)
где максимальный момент Л4макс.с = 0,5цсU^/x'd.
Обозначив JM = Л1макс. c^T^/T/J; tn — Л1п/Л4макс.с, получим
расчетное соотношение в виде
f _______^G ______
J tn — МЭм/Ммакс. с
^ао
(10-14)
Расчет JM, когда Л45М определяется уравнением (10-13), не
встречает трудностей, так как интеграл в (10-14) имеет аналитиче-
ское выражение. На рис. 10-21 сплошными линиями представлены
графики т = f (JM) для различных значений параметра £ап, рас-
Рис. 10-21. Относительная импульсная механиче-
ская нагрузка в функции параметра ./м
считанные по (10-14) при £а0 = 0. Эти графики позволяют оценить
возможное значение нагрузки (т) при заданных ее продолжитель-
ности Ti и £ап. Уточнение (10-13) при учете активного сопротив-
ления статора двигателя rs вносит соответствующее уточнение
в расчет *7М. Анализ погрешности в определении *7М при rs = 0
показывает, что она зависит главным образом от параметра т.
При т < 2 погрешность обычно не превосходит 4—5%.
Параметр JM, вычисленный согласно (10-14) с помощью дина-
мической характеристики = f (£а), отличается от приведен-
ного на рис. 10-21. Там штриховыми линиями отмечены границы,
на которых действительный параметр получается на 10%
меньше рассчитанного по статическим характеристикам. Слева от
этих границ (заштрихованная область для одной из границ) по-
грешность значительно возрастает, справа — быстро уменьшается,
не превосходя обычно ±3%. Границы 10%-ной погрешности опре-
делены с помощью аналоговой вычислительной машины для
T'dlHj = 0,1 (кривые /) и 0,25 (кривые 2).
При пользовании кривыми рис. 10-21 следует также иметь
в виду, что режимы с tn 0,9-4—1,0 могут оказаться неустойчи-
выми. При больших значениях JM (порядка 20—25) в этих случаях
возможен переход к параметрам Вап, большим тех, которые полу-
чены по статическим характеристикам.
При включении в цепь ротора двигателя дополнительного
активного сопротивления гд постоянная Td уменьшается, и по-
Рис. 10-22. Параметр J'M при различных актив-
ных сопротивлениях ротора
Сплошные кривые — т — 1,05; штриховые —
т = 1,25
этому при различных гд параметр 7М не определяет однозначно
время ti. В этом случае удобнее рассматривать параметры и
Ban, соответствующие постоянной T'd при гд = 0. На рис. 10-22
приведены зависимости J'M = f (kr), где kr = (гг + r^!rr. Из него
видно, что при значительных нагруз-
ках (т > 1,5) влияние сопротивле-
ния гд на возможную продолжитель-
ность действия нагрузки ti при за-
данном sn (Ban) весьма мало. При
уменьшении нагрузки влияние гд
начинает возрастать: для заданного
значения sn параметр J'M имеет ма-
ксимум при определенном значе-
нии kr. Вместе с тем при заданном
времени ti изменением коэффициен-
та kr можно уменьшить наибольшее
скольжение двигателя, которое полу-
чается в момент снятия нагрузки.
До сих пор речь шла об асин-
хронном двигателе с короткозамк-
нутой обмоткой ротора. Однако по-
Рис. 10-23. Предельная импульс-
ная нагрузка двигателя с ко-
роткозамкнутым ротором (/) и
при наличии роторного возбу-
ждения (2)
лученные выше результаты можно
распространить и на асинхронный двигатель с роторным воз-
буждением. Уравнения напряжений цепи ротора для такой
машины приводятся к аналогичным уравнениям для машины с ко-
роткозамкнутой обмоткой ротора изменением начальных значений
потокосцеплений ротора. Поэтому рассмотренные методы расчета
характеристик = f (Ba) остаются справедливыми для ма-
шины с роторным возбуждением. Что касается предельных им-
пульсных нагрузок машины с роторным возбуждением, то следует
иметь в виду, что ее электромагнитный момент согласно § 3-1
определяется при 0С = 0 в виде
Мэм
<0+й)
2Ммакс. cloA
1 + Й
где пе = 1 + gcUr/([icUs); Ur — напряжение ротора. Поэтому при
расчете параметров т и JM следует в рассматриваемом случае
вместо Л4макс.с подставлять Л4макс.Л-
Можно видеть, что роторное возбуждение асинхронного дви-
гателя (пе Д> 1) позволяет улучшить его динамические свойства
при ударной нагрузке: при заданном sn возбуждение в роторе
позволяет увеличить нагрузку Мп.
На рис. 10-23 приведены для сравнения графики Мп — f (ti)
при sn -= 0,15, относящиеся к двигателю с короткозамкнутым ро-
тором и с роторным возбуждением при Ur = 2,5. Параметры ма-
шины указаны в подписи к рис. 10-20.
Список литературы
1. Алябьев М. И. Параметры и переходные процессы синхронных машин. —
Л.: Изд-во ВМАКВ им. А. Н. Крылова, 1953.
2. Алябьев М. И. Общая теория судовых электрических машин. — Л.:
Судостроение, 1965.
3. Анормальные режимы работы крупных синхронных машин/Е. Я. Ка-
зовский, Я. Б. Данилевич, Э. Г. Катарский, Г. В. Рубисов. — Л.: Наука, 1969.
4. Ботвинник М. М. Асинхронизированная синхронная машина. — М.:
Госэнергоиздат, 1960.
5. Важное А. И. Основы теории переходных процессов синхронной ма-
шины. — Л.: Госэнергоиздат, 1960.
6. Важное А. И. Электрические машины. — Л.: Энергия, 1969.
7. Важное А. И. Самораскачивание машины двойного питания. — Труды
ЛПИ им. М. И. Калинина, 1953, № 3.
8. Важное А. И. Движение ротора синхронного генератора при внезапном
коротком замыкании. — Труды ЛПИ им. М. И. Калинина, 1958, № 195.
9. Важное А. И. Статическая устойчивость асинхронной машины с воз-
буждением в цепи ротора. — Электромеханика, 1959, № 12.
10. Важное А. И., Попов В. В. Динамическая устойчивость асинхронного
генератора с возбуждением в цепи ротора.—Электромеханика, 1960, № 11.
11. Важное А. И. Динамическая устойчивость синхронного двигателя при
ударной нагрузке. — Изв. АН СССР. Энергетика и автоматика, 1962, № 3.
12. Важное А. И. Динамическая устойчивость асинхронного двигателя
при ударной нагрузке. — Изв. АН СССР. Энергетика и автоматика, 1962, № 4.
13. Важное А. И. Метод расчета движения ротора синхронного двигателя
при больших колебаниях. — Изв. АН СССР. Энергетика и автоматика, 1962, № 5.
14. Важное А. И., Чернышев Н. Н. Развитие метода скольжения для опре-
деления параметров синхронной машины. — Труды ЛПИ им. М. И. Калинина,
1969, № 301.
15. Важное А. И. К вопросу о расчете переходного процесса асинхронного
двигателя при ударной нагрузке. — Труды ЛПИ им. М. И. Калинина, 1964,
№ 241.
16. Веников В. А., Иванов-Смоленский А. В. Физическое моделирование
электрических систем. — М.; Л.: Госэнергоиздат, 1956.
17. Веников В. А. Электромеханические переходные процессы в электриче-
ских системах. — М.; Л.: Госэнергоиздат, 1958.
18. Веников В. А. Самовозбуждение и самораскачивание электрических
машин. — М.: Высшая школа, 1964.
19. Вольдек А. И. Электрические машины. — Л.: Энергия, 1974.
20. Гордон И. А. Трехфазное короткое замыкание синхронного генератора
при неодновременном замыкании фаз. — Изв. НИИПТ, 1962, № 9.
21. Горев А. А. Переходные процессы синхронной машины. — Л.: Госэнер-
гоиздат, 1950.
22. Глебов И. А. Системы возбуждения синхронных генераторов с управ-
ляемыми преобразователями. — М.; Л.: Изд-во АН СССР, 1960.
23. Грузов Л. Н. Методы математического исследования электрических
машин. — Л.: Госэнергоиздат, 1953.
24. Данилевич Я- Б., Домбровский В. В., Казовский Е. Я. Параметры элек-
трических машин переменного тока. — Л.: Наука, 1965.
25. Долгинов А. И. Резонанс в электрических цепях и системах. — М.:
Госэнергоиздат, 1957.
26. Иванов-Смоленский А. В. Электромагнитные поля и процессы в электри-
ческих машинах и их физическое моделирование. — М.: Энергия, 1969.
27. Иосифьян А. Г. О линейных преобразованиях токов электрических
машин. — Бюл. ВЭН, 1940, № 8.
28. Казовский Е. Я- Исследование нелинейных колебаний синхронной
машины при набросе нагрузки. — В кн.: Электросила, 1950, № 7.
29. Казовский Е. Я. Некоторые вопросы переходных процессов в машинах
переменного тока. — М.; Л.: Госэнергоиздат, 1953.
30. Казовский Е. Я., Костенко М. П. Современные методы рассмотрения
переходных процессов в электрических машинах переменного тока. — Энерге-
тика и автоматика, 1959, № 4.
31. Казовский Е. Я. Переходные процессы в электрических машинах пере-
менного тока. — М.; Л.: Изд-во АН СССР, 1962.
32. Казовский Е. Я., Насибов В. А., Рубисов Г. В. Переходные процессы
при отключении кратковременных коротких замыканий синхронных машин. —
Изв. АН СССР. Энергетика и транспорт, 1972, № 5.
33. Кимбарк Э. Синхронные машины и устойчивость электрических си-
стем. — М.; Л.: Госэнергоиздат, 1960.
34. Ковач К. П., Рац И. Переходные процессы в машинах переменного тока.—
М.; Л.: Госэнергоиздат, 1963.
35. Конкордиа Ч. Синхронные машины. — М.; Л.: Госэнергоиздат, 1959.-*
36. Кононенко Е. В., Сипайлов Г. А., Хорьков К. А. Электрические ма-
шины. — М.: Высшая школа, 1975.
37. Копылов И. П., Мамедов Ф. А., Беспалов В. Я. Математическое модели-
рование асинхронных машин. — М.: Энергия, 1969.
38. Копылов И. П., Щедрин О. П. Расчет на ЦВМ характеристик асинхрон-
ных машин. — М.: Энергия, 1973.
39. Костенко М. П. Электрические машины. Специальная часть. — Л.;
М.: Госэнергоиздат, 1949.
40. Костенко М. П., Коник Б. Е. Определение основной и третьей гармоник
поля якоря и поля полюсов явнополюсной синхронной машины. — Электри-
чество, 1951, № 3.
41. Костенко М. П., Пиотровский Л. М. Электрические машины.—Л.:
Энергия, 1973. Ч. I и 2.
42. Куцевалов В. М. Вопросы теории и расчета асинхронных машин с мас-
сивными роторами. — М.; Л.: Энергия, 1966.
43. Лайбль Т. Теория синхронной машины при переходных процессах. —
М.; Л.: Госэнергоиздат, 1957.
44. Лайон В. Анализ переходных процессов в электрических машинах пере-
менного тока. — М.; Л.: Госэнергоиздат, 1958.
45. Левинштейн М. Л. Явление параметрического резонанса при работе
синхронной машины на емкостную нагрузку. — Труды ЛПИ им. М. И. Кали-
нина, 1948, № 3.
46. Левипштейн М. Л. Операционное исчисление и его приложения к зада-
чам электротехники. — Л.: Энергия, 1964.
47. Лютер Р. А. Теория переходных режимов синхронных машин с приме-
нением операторного анализа. — Л.: 1939.
48. Лютер Р. А. О моментах вращения синхронной машины при периоди-
ческих ее качаниях. — Электричество, 1940, № 2.
49. Лютер Р. А. Методика расчета токов короткого замыкания синхронной
машины с использованием теоремы о постоянстве потокосцеплений для сверх-
проводящих контуров. — В кн.: Электросила, 1947, № 4.
50. Лютер Р. А. Моменты вращения синхронной машины в асинхронном
режиме. — Вестник электропромышленности, 1948, № 10.
51. Лютер Р. А. Расчет моментов вращения синхронных машин при корот-
ких замыканиях. — В кн.: Электросила, 1950, № 7.
52. Лютер Р. А. Приближенный способ проверки устойчивости работы син-
хронной машины по угловым характеристикам синхронизирующего момента
вращения. — В кн.: Электросила, 1951, № 8.
53. Лютер Р. А. Параметры синхронной машины с учетом насыщения. —
В кн.; Электросила, 1951, № 10.
54. Ляпунов А. М. Общая задача об устойчивости движения. — М.; Л.:
ОНТИ, 1935.
55. Мамиконянц Л. Г. О переходных процессах в синхронных машинах
с успокоительными контурами на роторе. — Электричество, 1954, № 7.
56. Постников И. М., Важное А. И. Электромагнитный момент синхрон-
ной машины при малых качаниях.—Электричество, 1951, № 8.
57. Постников И. М. Обобщенная теория и переходные процессы электри-
ческих машин. — М.: Высшая школа, 1975.
58. Рюденберг Р. Переходные процессы в электроэнергетических системах. —
М.: Изд-во иностр, лит., 1955.
59. Страхов С. В. Переходные процессы в электрических цепях, содержа-
щих машины переменного тока. — М.; Л.: Госэнергоиздат, 1960.
60. Трещев И. И. Методы исследования электромагнитных процессов в ма-
шинах переменного тока. — Л.: Энергия, 1969.
61. Турбогенераторы/В. В. Титов, Г. М. Хуторецкий, Г. А. Загородная
и др. — Л.: Энергия, 1967.
62. Урусов И. Д. Линейная теория колебаний синхронной машины. — М.;
Л.: Изд-во АН СССР, 1960.
' 63. Щедрин Н. Н. Токи короткого замыкания высоковольтных систем. —
Л.; М.: ОНТИ, 1935.
64. Щедрин Н. Н. Простейшее истолкование явления параметрического
самораскачивания синхронной машины, соединенной с шинами постоянного
напряжения и постоянной частоты. — Труды ЛПИ им. М. И. Калинина, 1948, № 3.
65. Щедрин Н. Н. Некоторые методы расчета границ самовозбуждения
асинхронных и синхронных машин. К вопросу о емкостном самовозбуждении
синхронных и асинхронных машин. — Труды ин-та энергетики и автоматики
АН УзССР, 1958, вып. 11.
66. Электродинамическое моделирование энергетических систем: [Сб. статей]/
Под ред. М. Костенко. —М.; Л.: Изд-во АН СССР, 1959.
67. Янко-Триницкий А. А. Новый метод анализа работы синхронных дви-
гателей при резкопеременных нагрузках.—М.; Л.: Госэнергоиздат, 1958.
68. Янко-Триницкий А. А. Электромеханические переходные процессы
в синхронных машинах. — Электричество, 1957, № 8.
69. Doherty R. and Nickle С. Synchronous machines. — AIEE Trans.
Parts 1 and 2. An extension of Blondel's two reaction theory. Steady state
power angle characteristics, 1926.
Part 3. Torque-angle characteristics under transient conditions, 1927.
Part 4. Synchronous machines, single phase short circuit, 1928.
Part 5. Three-phase short circuit synchronous machines, 1930.
70. Kron G. Generalized Theory of Electrical Machinery. — AIEE Trans., 1930.
71. Park R. a) Definition of an ideal synchronous machine and formula for
the armature flux linkage. — GER, 1928; b) Тло-reaction theory of synchronous
machines—generalized method of analysis.—AIEE Trans. Part 1, 1929; Part 2, 1933.
72. Rankin A. a) The equations of an idealized synchronous machine.— GER,
1944; b) Per-unit impedances of synchronous machines. — AIEE Trans., 1945.
Parts 1 and 2; c) The direct- and quadrature-axis equivalent circuits of the syn-
chronous machine. — AIEE Trans., 1945.
Оглавление
Предисловие ................................................................. 5
Введение..................................................................... 6
ОБЩИЕ СВЕДЕНИЯ
О МАШИНАХ ПЕРЕМЕННОГО ТОКА
1-1. Общие определения . ................................................. 9
1-2. Магнитная система и обмотки машин ................................... 10
1-3. Магнитные поля и идеализация машин................................... 12
1-4. Потокосцепления и индуктивности обмоток синхронной машины............ 15
1-5. Линейные преобразования............................................. 20
1-6. Потокосцепления и индуктивности обмоток синхронной машины в различных
системах координат ................................................... 30
1-7. Потокосцепления и индуктивности трехфазных обмоток машины с симметрич-
ным ротором .......................................................... 38
1-8. Мощность и электромагнитный момент в различных системах координат 41
2* УРАВНЕНИЯ МАШИН ^ПЕРЕМЕННОГО ТОКА
2-1. Исходные уравнения .................................................. 46
2-2. Преобразование уравнений напряжений синхронной машины ............... 48
2-3. Преобразование уравнений напряжений машин с трехфазными обмотками и
симметричным ротором ............................................... 53
2-4. Уравнения машин, содержащие переменные с физической размерностью 55
2-5. Система относительных единиц ........................................ 57
2-6. Уравнения в относительных единицах для машин с одной обмоткой на роторе 66
2-7. Уравнения в относительных единицах для синхронной машины с демпферной
обмоткой.............................................................. 71
2-8. Операторные уравнения синхронной машины.............................. 73
2-9. Динамические параметры обмоток машин................................. 78
3* РЕШЕНИЕ УРАВНЕНИЙ ПРИ СИНХРОННОЙ
ИЛИ ПОЧТИ СИНХРОННОЙ ЧАСТОТАХ ВРАЩЕНИЯ МАШИНЫ
3-1. Установившийся режим............................................ 84
3-2. Общая характеристика системы дифференциальных уравнений машины 91
3-3. Свободные токи в простейших цепях............................... 92
3-4. Свободные токи и потокосцепления в машине с трехфазной обмоткой на
симметричном роторе .............................................. 95
3-5. Свободные токи и потокосцепления в синхронной машине........... 100
3-6. Приближенное решение дифференциальных уравнений синхронной машины 102
4* ВНЕЗАПНОЕ СИММЕТРИЧНОЕ КОРОТКОЕ ЗАМЫКАНИЕ
СИНХРОННОЙ МАШИНЫ БЕЗ ДЕМПФЕРНОЙ ОБМОТКИ
4-1. Общие замечания..................................................... 112
4-2. Общие физические представления ..................................... 113
4-3. Токи в цепях машины ................................................ 116
4-4. Постоянные времени ................................................. 122
4-5. Электромагнитный момент при коротком замыкании .................... 124
4-6. Электромагнитный момент после отключения короткого замыкания ... 127
5* ВНЕЗАПНЫЕ НЕСИММЕТРИЧНЫЕ КОРОТКИЕ ЗАМЫКАНИЯ
СИНХРОННОЙ МАШИНЫ БЕЗ ДЕМПФЕРНОЙ ОБМОТКИ
5-1. Предварительные замечания....................................... 131
5-2. Общие физические представления ................................. 132
5-3. Токи при двухфазном коротком замыкании.......................... 134
5-4. Токи при однофазном коротком замыкании.......................... 140
5-5. Постоянные времени ............................................. 143
6- ВНЕЗАПНОЕ КОРОТКОЕ ЗАМЫКАНИЕ
СИНХРОННОЙ МАШИНЫ С ДЕМПФЕРНОЙ ОБМОТКОЙ
6-1. Токи трехфазного короткого замыкания ........................... 144
6-2. Постоянные времени затухания токов.............................. 153
6-3. Токи двухфазного и однофазного коротких замыканий .............. 155
6-4. Электромагнитный момент при трехфазном коротком замыкании....... 157
6-5. Движение ротора машины при трехфазном коротком замыкании........ 158
6-6. Электромагнитный момент при отключении трехфазного короткого замыка-
ния .............................................................. 160
7- ПРОЦЕССЫ ПРИ НЕСИНХРОННОЙ
ЧАСТОТЕ ВРАЩЕНИЯ МАШИНЫ
7-1. Общие замечания................................................. 162
7-2. Асинхронный режим синхронной машины при постоянном скольжении 163
7-3. Влияние активного сопротивления статора на асинхронный режим синхрон-
ной машины........................................................ 168
7-4. Решение уравнений асинхронной машины при переменном скольжении 168
7-5. Пуск асинхронного двигателя .................................... 174
7-6. Реверсирование асинхронного двигателя .......................... 179
8- РЕЖИМ МАЛЫХ КОЛЕБАНИЙ
8-1. Общие замечания.................................................... 183
8-2. Малые колебания синхронной машины при пренебрежении активными
сопротивлениями .................................................... 184
8-3. Малые колебания синхронной машины с учетом активных сопротивлений
ротора.............................................................. 186
8-4. Коэффициенты синхронизирующего и демпферного моментов синхронной
машины ............................................................. 192
8-5. Синхронная машина при пульсирующем механическом моменте........... 195
8-6. Коэффициенты синхронизирующего и демпферного моментов машины с трех-
фазной обмоткой на симметричном роторе......................... 200
ДИНАМИЧЕСКИЕ СВОЙСТВА МАШИН
ПРИ МАЛЫХ ВОЗМУЩЕНИЯХ РЕЖИМА
9-1. Переходные процессы при малых возмущениях установившегося режима 204
9-2. Статическая устойчивость. Общий метод ............................ 212
9-3. Статическая устойчивость. Анализ коэффициентов синхронизирующего и
демпферного моментов............................................... 216
9-4. Статическая устойчивость регулируемой машины ..................... 218
9-5. Самовозбуждение синхронной машины .............................. 222
Ю. ДИНАМИЧЕСКИЕ СВОЙСТВА МАШИН
ПРИ ЗНАЧИТЕЛЬНЫХ ВОЗМУЩЕНИЯХ РЕЖИМА
10-1. Общие замечания ............................................ 225
10-2. Динамическая устойчивость синхронных генераторов. Метод площадей 227
10-3. Повышение динамической устойчивости регулированием возбуждения
машины........................................................ 234
10-4. Синхронный двигатель при сильно изменяющейся нагрузке ...... 236
10-5. Асинхронный двигатель при ударной нагрузке ................. 246
Список литературы .......................................... 252