/































































































































































































































































































































































































































































































Автор: Даджион Д. Мерсеро Р.
Теги: электротехника электрическая связь радиотехника математика цифровая обработка сигналов информатика компьютерные науки
ISBN: 5—03—000402—5
Год: 1988




Текст
MULTIDIMENSIONAL
DIGITAL SIGNAL PROCESSING
DAN E. DUDGEON
Lincoln Laboratory, M. I. T.
RUSSELL M. MERSEREAU
School of Electrical Engineering
Georgia Institute of Technology
Prentice-Hall, Inc., Englewood Cliffs
1984
Д. Даджион, Р. Мерсеро
Цифровая
обработка
многомерных
сигналов
Перевод с английского канд. физ.-мат. наук
В. А. ГРИГОРЬЕВА,
канд. пед. наук К. Г. ФИНОГЕНОВА
под редакцией
д-ра физ.-мат. наук Л. П. ЯРОСЛАВСКОГО
Москва «Мир» 1988
ББК 32.88
ДИ
УДК 621.301
Даджион Д., Мерсеро Р.
Д14 Цифровая обработка многомерных сигналов: Пер. с
англ.—М.: Мир, 1988.— 488 с, ил.
ISBN 5—03—000402—5
Книга известных американских ученых содержит последовательное изло-
изложение основных аспектов теории цифровой фильтрации многомерных сигналов
(изображений и волновых полей), многомерных дискретных фурье- и г-преобра-
зований, синтеза и устойчивости двумерных рекурсивных и нерекурсивных циф-
цифровых фильтров, быстрых алгоритмов многомерной цифровой фильтрации.
Для специалистов по информатике и вычислительной технике, а также сту-
студентов соответствующих специальностей вузов.
1502000000-086
Д 041@1)-88 °01-88' ч- > ББК 3288
Редакция литературы по информатике и робототехнике
ISBN 5—03—000402-5 (русск.) © 1984 by Prentice-Hall, Inc.
ISBN 0—13—604959—1 (англ.) © перевод иа русский язык, «Мир», 1988
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Данная книга входит в серию «Обработка сигналов», выпускаемую издатель-
издательством «Прентис-Холл». Многие из книг этой серии уже были переведены на
русский язык и широко используются советскими специалистами.
Что нового содержит эта книга? С общей точки зрения, казалось бы, не
существует принципиальной разницы между цифровой обработкой одномерных
и многомерных сигналов (изображений и полей). В любом случае обработка вклю-
включает в себя дискретизацию, квантование, выполнение различных ортогональных
преобразований и сверток. Однако более глубокий анализ показывает, что пе-
переход от одномерного случая к многомерному является не только количествен-
количественным, но и качественным. Многие проблемы, с которыми приходится сталкива-
сталкиваться при обработке многомерных сигналов, просто не существуют в обработке
одномерных сигналов и, наоборот, многие трудности цифровой обработки
сигналов отсутствуют или легко снимаются при переходе от одномерных сиг-
сигналов к многомерным. Достаточно упомянуть о том, насколько содержательнее
теоремы отсчетов для многомерных сигналов по сравнению с известной тео-
теоремой отсчетов (теоремой Котельникова) для одномерных сигналов, а также о
том, что алгоритм быстрого преобразования Фурье и другие быстрые алго-
алгоритмы умножения матриц, без которых не было бы современной цифровой
обработки сигналов, по существу основаны на трактовке одномерных преобра-
преобразований как многомерных. Поэтому изучать цифровую обработку многомерных
сигналов полезно не только специалистам, имеющим дело с обработкой изобра-
изображений и полей различной физической природы, но и специалистам, занимаю-
занимающимся обработкой одномерных сигналов в радиоэлектронике и акустике.
Книга охватывает практически весь традиционный круг проблем обработки
сигналов применительно к многомерному случаю: дискретное описание много-
многомерных сигналов и систем, многомерный дискретный фурье-анализ, синтез и ре-
реализация многомерных цифровых фильтров (нерекурсивных и рекурсивных), при-
применение цифровой обработки многомерных сигналов на примере задач антенной
техники, спектрального анализа, способы решения многомерных обратных за-
задач. У авторов много методических находок, из которых особо следует упомянуть
векторио-матричную трактовку аргументов многомерных сигналов. Благодаря
им, а также набору упражнений к каждой главе книга послужит хорошим под-
подспорьем преподавателям, читающим курс лекций по цифровой обработке сигна-
сигналов. Задуманная авторами как учебное пособие, она поможет в постановке со-
соответствующих самостоятельных курсов в наших вузах, где цифровая
обработка сигналов пока еще запрятана в недрах традиционных (но уста-
устаревающих) курсов по теории цепей, теоретическим основам радиотехники и
других.
Книга дополнена списком работ советских авторов.
Перевод выполнен К. Г. Финогеновым (предисловие, введение, гл. 1,
3, 5) и В. А. Григорьевым (гл. 2, 4, 6, 7).
Л. П. Ярославский
6 Предисловие редактора перевода
Литература
1. Цифровая обработка сигналов и *ее применения.—М.:, Наука, 1982.
2. Быстрые алгоритмы в цифровой обработке изображений: Пер. с англ./Под
ред. Т. Хуанга. —М.: Радио и связь, 1984.
3. Василенко Г. И., Тараторин А. М. Восстановление изображений.—М.:
Радио и связь, 1986.
4. Компьютеры в оптических исследованиях./Под ред. Б. Фридеиа. — М.:
Мир, 1983.
5. Варичеико Л. В., Лабунец В. Г., Раков М. А. Абстрактные алгебраиче-
алгебраические системы и цифровая обработка сигналов. — Киев: Наукова думка,
1986.
6. Сороко Л. iM. Интроскопия. —М.: Энергоатомиздат, 1983.
7. Ярославский Л. П., Мерзляков Н. С. Цифровая голография. — М.: Наука,
1982.
8. Ярославский Л. П. Цифровая обработка сигналов в оптике и голографии:
Введение в цифровую оптику. —М.: Радио и связь, 1987.
Посвящается Джуди и Линдсею,
а также Марте, Адаму и Давиду
Предисловие
Эта книга создана по инициативе проф. Алана В. Оппенгейма, который
руководил нашей работой над докторскими диссертациями в Массачусетском тех-
технологическом институте и который является редактором серии книг по обра-
обработке сигналов, выпускаемой издательством «Прентис-Холл». А. В. Оппен-
гейм предложил нам написать учебник по цифровой обработке многомерных сиг-
сигналов для студентов старшего курса и аспирантов первого года обучения. Книга
предназначена для использования в односеместровом курсе, который следует за
начальным курсом по цифровой обработке сигналов, базирующемся на такой
книге, как «Цифровая обработка сигналов» Оппенгейма и Шафера, выпущенной
Идательством «Прентис-Холл» в 1975 г.
Эта книга дает студенту начальные сведения по теории обработки много-
многомерных сигналов с акцентом на сходстве и различии между одномерным и много-
многомерным случаями. Мы попытались написать пособие, которое способствовало бы
развитию интуиции и обоснованных суждений студента в этой области и в
то же время не слишком утомляло его длинными формальными выводами, тео-
теоремами и доказательствами. Математический формализм занимает, конечно,
свое место в книге, но нам кажется, что он должен вытекать из интуитивного по-
понимания сути дела, а не наоборот. Мы надеемся, что читатели со склонностью
к математике с пониманием отнесутся к нашему неформальному подходу и из-
извлекут из него пользу.
Имеется несколько хороших книг по цифровой обработке изображений,
и мы не сочли нужным повторять материал по этому частному вопросу в нашей
книге. Вместо этого мы попытались развить теорию обработки многомерных сиг-
сигналов, которая не только является основой обработки изображений, но исполь-
используется и в других областях, таких, как обработка сигналов антенных решеток
(например, обработки сигналов в радио- и гидролокации, сейсмологии, радио-
радиоастрономии).
Чтение книги предполагает знакомство читателя с теорией цифровой об-
обработки одномерных сигналов, включая линейные инвариантные к сдвигу си-
системы, дискретное преобразование Фурье (ДПФ), быстрое преобразование
Фурье (БПФ), линейную фильтрацию, г-преобразование, устойчивость, оценку
спектра мощности. Все эти понятия не описываются здесь подробно, а только
вводятся применительно к двумерному случаю по мере необходимости.
В гл. 1 даются основные понятия, связанные с многомерными сигналами
и системами, причем особое внимание уделяется двумерным сигналам и линей-
линейным инвариантным к сдвигу (ЛИС) системам. В качестве одного из способов
описания ЛИС-системы вводится понятие импульсного отклика. Для вычисления
частотного отклика двумерных ЛИС-систем определяется и используется много-
многомерное преобразование Фурье. Обсуждаются также методы дискретизации
двумерных непрерывных сигналов.
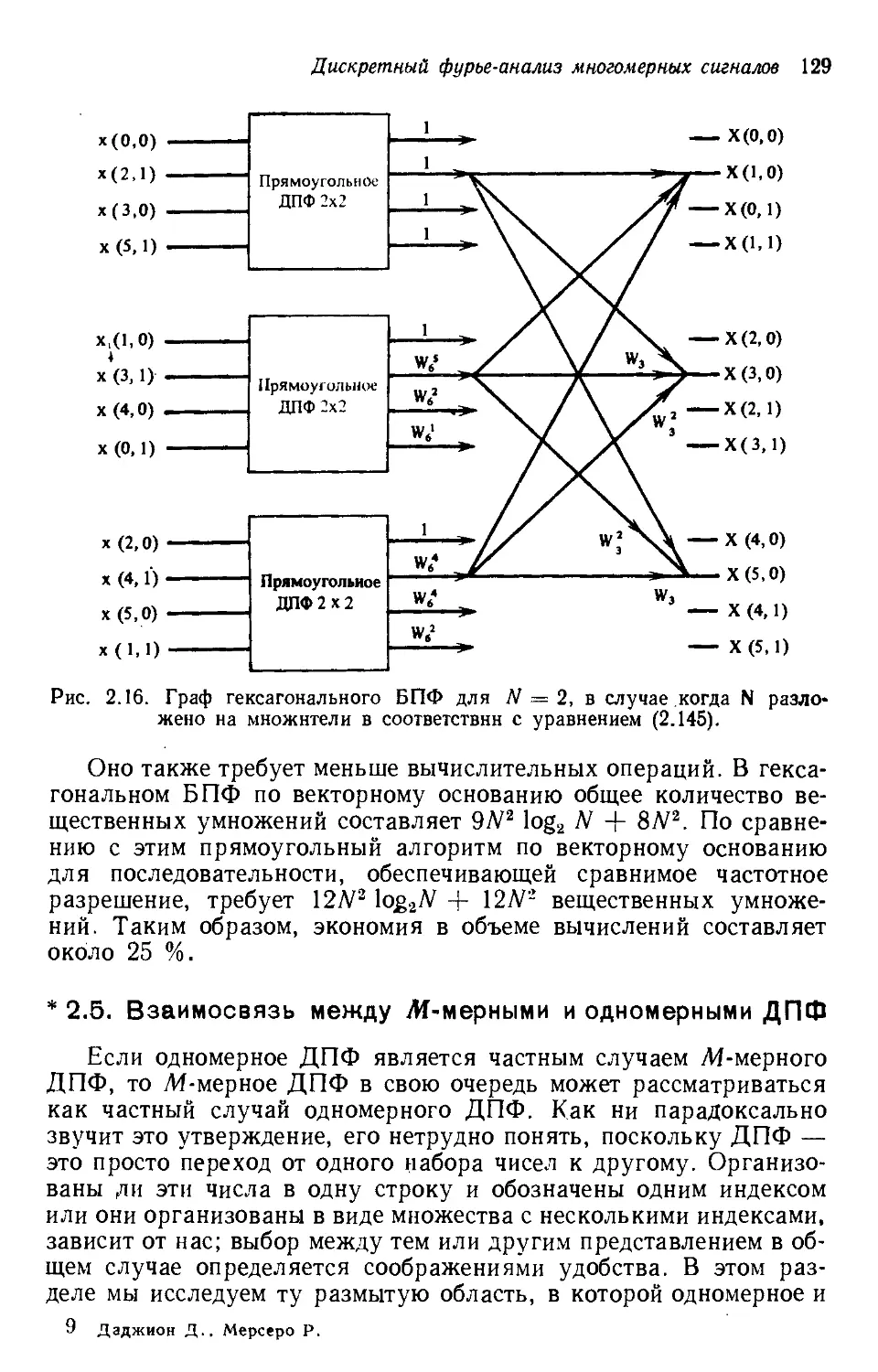
В гл. 2 вводится многомерное дискретное преобразование Фурье и детально
описаны эффективные алгоритмы для его вычисления. Показано, что алгоритмы
быстрого преобразования Фурье можно использовать при произвольном периоди-
8 Предисловие
ческом растре дискретизации сигналов. Обсуждается также взаимосвязь между
одномерным н многомерным ДПФ.
Глава 3 посвящена проектированию и реализации двумерных фильтров
с конечной импульсной характеристикой (КИХ-фильтров). Обсуждаются раз-
различные способы реализации этих фильтров — прямой, в частотной области и
с помощью секционированной свертки, а также алгоритмы проектирования, та-
такие, как метод окон, методы получения оптимальных фильтров и метод преоб-
преобразования.
В гл. 4 и 5 рассматриваются фильтры с бесконечной импульсной харак-
характеристикой (БИХ-фйльтры), которые можно описать с помощью двумерных раз-
разностных уравнений с постоянными коэффициентами. В гл. 4 с помощью по-
понятий двумерного разностного уравнения, z-преобразования, устойчивости и
комплексного кепстра заложены основы этого рассмотрения. Вслед за этим
в гл. 5 обсуждаются приемы реализации и методы проектирования двумерных
БИХ-фильтров, включая способы их стабилизации.
Глава 6 посвящена использованию методов обработки многомерных сиг-
сигналов применительно к сигналам, снимаемым с решеток датчиков. Эта обширная
прикладная область используется как средство для пояснения формирования
пучков и оценивания энергетического спектра. Задача формирования пучка
представляет собой подход с позиций линейной фильтрации к задаче определе-
определения величины и направления распространения энергии излучения, а задача
оценивания энергетического спектра иллюстрирует другой подход к решению
той же задачи — с помощью моделирования и параметрической оценки. В главе
обсуждаются как классические методы оценки спектра, так и более современные,
такие, как метод сверхразрешения, многополюсной метод и метод максимума
энтропии. Выявляются важные теоретические различия между одномерным
И двумерным случаями.
В гл. 7 обсуждаются обратные задачи, когда по результатам ограниченных
измерений и априорной информации делается попытка восстановить или рекон-
реконструировать исходный сигнал. Рассматриваются три примера: обратная свертка
с ограничениями, распространение сейсмических волн и реконструкция сигнала
по проекциям.
В процессе работы над книгой мы старались включать вопросы и примеры,
иллюстрирующие фундаментальные принципы обработки многомерных сигналов.
(Разделы, в которых представлен особенно сложный, передовой материал, по-
помечены звездочками). Поскольку мы не пытались создать энциклопедическое
руководство по этой все еще развивающейся отрасли знаний, наша книга поне-
поневоле неполна. Некоторые воспримут это как недостаток, однако нашей целью
было скорее широкое, чем глубокое изложение предмета; тем самым мы надея-
надеялись заинтересовать студентов перспективами исследовательской работы в этой
области. Мы постарались скомпенсировать недостаточную глубину изложения
включением ссылок на значительные работы, чтобы дать читателям отправные
точки для изучения технической литературы.
На протяжении пяти лет, потребовавшихся на размышления, наброски, на-
написание, переписывание н шлифовку, мы неизменно встречали со стороны окру-
окружающих одобрение и поддержку. Большое понимание и терпение проявили наши
семьи; время, потраченное на работу над книгой, было в основном отнято у ннх.
Значительное влияние оказал на эту книгу Эл Оппенгейм в роли редактора
всей серии. Еще большее влияние он н Рон Шафер имели на авторов, высту-
выступая в роли учителей, наставников, усилителен идей, коллег, друзей, которые
служили нам примером для подражания.
В процессе нашей научной деятельности мы имели счастье встречаться с не-
некоторыми замечательными коллегами, внесшими заметный вклад в методы циф-
цифровой обработки многомерных сигналов н стимулировавшими наши собственные
размышления н исследования в этой области. В некоторых случаях их научный
вклад представлен в этой книге в явной форме; в других случаях их влияние но-
снло более тонкий характер. Среди этих коллег, которых мы считаем также сво-
Предисловие
ими друзьями, находятся: проф. Деметриус Парис и Монсон Хейес, д-р Марк
Ричарде и магистр наук Тереза Спик из Технологического института шт. Джорд-
Джорджия, д-ра Гэри Шоу, Томас Кватиери и Стивен Похлиг из Линкольновскои
лаборатории, д-р Джеймс Мак-Клеллан из фирмы Шлюмберже, проф. Джи
Лим из Массачусетского технологического института и проф. Дон Джонсон
из Университета Раиса. Мы также должны выразить благодарность нашим
родным коллективам Линкольновскои лаборатории Массачусетского технологи-
технологического института и Технологическому институту шт. Джорджия соответственно
за создание интеллектуальной обстановки, поощряющей поиски совершенства
в области обработки сигналов, а также в других областях науки и техники.
Дэн Э. Даджион
Рассел М. Мерсеро
ВВЕДЕНИЕ
Одним из сопутствующих факторов компьютерной революции
оказалось появление совершенно новых областей исследования.
С каждым годом по мере увеличения быстродействия, уменьшения
стоимости и размеров ИС растут возможности решения задач все
возрастающей сложности. К ним относится цифровая обработка
многомерных сигналов, требующая значительных объемов цифро-
цифровой памяти и соответствующего количества арифметических опера-
операций и поэтому получившая развитие лишь в последнее время. Не-
Несмотря на сложность, цифровая обработка сигналов уже позволила
найти решение ряда важных задач, начиная с компьютерной то-
томографии (методики, позволяющей по проекциям рентгеновского
изображения, полученным при различных ориентациях детекто-
детекторов, выполнять трехмерную реконструкцию органов человеческого
тела) и кончая проектированием полей пассивных акустических дат-
датчиков и исследованием ресурсов Земли с помощью спутников.
В дополнение к многочисленным блистательным и скромным при-
приложениям цифровая обработка многомерных сигналов имеет также
прочное математическое обоснование, позволяющее не только по-
понять уже достигнутое, но и эффективно исследовать новые про-
проблемы по мере их возникновения и успешно их решать.
Не вдаваясь в подробности, можно сказать, что сигнал — это
некоторое средство для передачи информации, а целью обработки
сигналов является извлечение этой информации. Так, ансамбли
изменяющихся во времени электрических потенциалов, плотность
зерен серебра фотографической эмульсии или массивы чисел в
памяти ЭВМ представляют собой примеры сигналов. Обычно об-
обработка сигналов включает в себя перенос информации с одного
сигнала на другой. Например, с фотографии за счет сканирования
можно собрать информацию, дискретизировать ее и записать в па-
память ЭВМ. В этом случае информация переносится с сигнала в виде
переменной плотности зерен серебра на пучок видимого света, за-
затем на электрический сигнал и наконец на последовательность чи-
чисел, которые в свою очередь характеризуются определенным рас-
расположением областей намагниченности на диске ЭВМ. Сканирую-
Введение 11
щее устройство компьютерного томографа представляет собой бо-
более сложный пример; информация о структуре исследуемого объ-
объекта сначала переносится на электромагнитные волны, которые
после дискретизации преобразуются в совокупность чисел, послед-
последняя в свою очередь обрабатывается вычислительным алгоритмом
и наконец эта информация представляется на экране электронно-
электроннолучевой трубки (ЭЛТ) или фотографической пленке. Цифровая
обработка не может увеличить объем информации, однако она
может преобразовать ее в такую форму, что наблюдатель (чело-
(человек) сможет легко расшифровать информацию; вместо того чтобы
смотреть на многочисленные теневые изображения, наблюдатель
может изучать поперечные сечения объекта.
Независимо от своей физической сущности сигналы представ-
представляют интерес только благодаря содержащейся в них информации.
Рискуя быть обвиненным в излишнем обобщении, можно сказать,
что обработка сигналов включает в себя две основные задачи —
преобразование способа представления информации в сигнале
и сокращение ее объема. Мы уже приводили два примера преобразо-
преобразования способа представления информации в сигнале—компьютер-
сигнале—компьютерную томографию и сканирование изображений. К ним легко можно
добавить и другие примеры — улучшение визуального качества .
изображений, коррекция смаза изображений, спектральный анализ
и т. д. Сокращение объема информации заключается в удалении не-
ненужной информации. Оператора, наблюдающего радиолокационное
изображение, обычно интересуют лишь отдельные конкретные
ответы на вопросы: есть ли на нем что-нибудь; если есть, то что;
свой или чужой; с какой скоростью движется и куда направ-
направляется? Однако приемник РЛС предоставляет оператору еще и
информацию о погоде, радиопомехах, птицах, местных предметах,
шуме приемника и т. д. Оператор должен отделить существенное
от несущественного, и здесь обработка сигналов может оказать
неоценимую помощь. Другими примерами обработки сигналов
с потерей информации являются подавление шума, оценка пара-
параметров и выделение признаков.
Цифровая обработка сигналов касается обработки сигналов,
которые можно представить в виде последовательности чисел,
а цифровая обработка многомерных сигналов — обработки сиг-
сигналов, представленных в виде многомерных массивов чисел, на-
например массивов, получаемых после дискретизации изображений
или результатов дискретизации непрерывно изменяющихся во
времени сигналов, поступающих одновременно от нескольких дат-
датчиков. Преобразование непрерывных сигналов в цифровые по-
позволяет использовать для их обработки цифровые процессоры и
описывать операторы как алгоритмы или процедуры.
Причины использования цифровых методов вряд ли нуж-
нуждаются в перечислении. Цифровые методы отличаются одновремен-
12 Введение
но мощностью и гибкостью. Цифровые системы могут быть адап-
адаптивными, и их просто перестраивать. Цифровые алгоритмы
легко перенести с оборудования*одного изготовителя на оборудо-
оборудование другого или их можно реализовать с помощью специализи-
специализированных цифровых процессоров. Они с равным успехом могут
использоваться для обработки сигналов, представляющих собой
как временные, так и пространственные функции, и их легко
сочетать с логическими операторами, такими, как операторы клас-
классификации образов. Цифровые сигналы можно хранить в неизмен-
неизменном виде неограниченное время. Для многих приложений цифро-
цифровые методы оказываются дешевле по сравнению с другими метода-
методами, а в ряде случаев они просто незаменимы.
Велико ли различие между обработкой многомерных и одно-
одномерных сигналов? Если подходить абстрактно, то невелико.
Многие операции при обработке многомерных сигналов исполь-
используются и при обработке одномерных сигналов, например дискре-
дискретизация, фильтрация и вычисление преобразований. Если же
рассматривать более подробно, то придется признать, что обра-
обработка многомерных сигналов может иметь существенные отли-
отличия. Это объясняется тремя факторами: 1) обычно для решения
двумерных задач необходимо использовать значительно больший
объем данных, чем при решении одномерных; 2) математические
методы описания многомерных систем не отличаются той за^
вершенностью, которая характерна для математических методов
описания одномерных систем; 3) многомерные системы обладают
значительно большим числом степеней свободы, в результате чего
проектирование приобретает гибкость, несвойственную одномер-
одномерным системам. Так, все рекурсивные цифровые фильтры реали-
реализуются с помощью разностных уравнений, но в одномерном слу-
случае эти уравнения упорядочены полностью, а в многомерном слу-
случае — лишь частично. Эту дополнительную гибкость можно ис-
использовать. Дискретное преобразование Фурье в одномерном слу-
случае можно вычислить с использованием алгоритма быстрого пре-
преобразования Фурье, а в многомерном случае имеется множество
ДПФ, и для вычисления каждого можно использовать множество
алгоритмов БПФ. В одномерном случае выбирается только ча-
частота отсчетов, а в многомерном — не только частота отсчетов,
но и форма растра дискретизации. С другой стороны, многомерные
полиномы в отличие от одномерных не разлагаются на множители.
Поэтому в многомерном случае мы не можем говорить об изоли-
изолированных полюсах, нулях и корнях. Это значит, что цифровая
обработка многомерных сигналов может существенно отличаться
от цифровой обработки одномерных сигналов.
В начале 60-х годов многие методы цифровой обработки од-
одномерных сигналов разрабатывались с целью использования циф-
цифровых систем для моделирования аналоговых. В результате зна-
Введение 13
чительная часть теории дискретных систем строилась по образцу
теории аналоговых систем. С течением времени обнаружилось,
что хотя цифровые системы могут очень хорошо моделировать
аналоговые системы, они способны на гораздо большее. Под влия-
влиянием этого обстоятельства, а также мощного толчка, обусловлен-
обусловленного технологией изготовления аппаратных средств, методы циф-
цифровой обработки сигналов получили интенсивное развитие, и мно-
многие из этих методов, широко используемых в настоящее время,
не имеют эквивалентов в аналоговой технике. Такие же тенден-
тенденции наблюдаются в развитии цифровой обработки многомерных
сигналов. Поскольку теория двумерных аналоговых систем от-
отсутствует, первые многомерные системы основывались- на одно-
одномерных системах. В конце 60-х годов обработка двумерных сигна-
сигналов выполнялась большей частью с использованием разделимых
двумерных систем, что фактически сводилось к применению
одномерных систем для обработки двумерных данных. С тече-
течением времени были разработаны специальные двумерные алго-
алгоритмы, которые соответствуют логической экстраполяции одно-
одномерных алгоритмов. Это был вынужденный шаг. Из-за того что
для решения многих двумерных задач требуются большие объемы
данных, а также из-за отсутствия теоремы о разложении много-
многомерных полиномов на множители многие одномерные методы не
обобщаются на случай многомерной задачи. В настоящее время
мы находимся на пороге уверенного решения этих проблем. Раз-
Развитие вычислительной техники, уменьшение и удешевление элек-
электронных компонентов помогли разрешить проблему объема дан-
данных, и мы начинаем сознавать, что, хотя нам всегда будет мешать
ограниченность вычислительных возможностей, многомерные
системы обеспечивают нам и большую свободу проектирования.
Исследование таких систем является перспективным и интерес-
интересным делом.
В книге описываются многие успешные разработки, выполнен-
выполненные в этой интересной и быстро развивающейся области. Методы
цифровой обработки сигналов тесно связаны с развитием тех-
технологии. Хотя мы приводим много примеров прикладного харак-
характера, мы все же стремились к тому, чтобы рассматриваемый ма-
материал не слишком опирался на технологию и не оказался в ре-
результате технологически устаревшим. Наоборот, мы старались
выделять фундаментальные концепции, чтобы читатель не только
понял, что уже сделано, но и смог сам развить описанные методы
применительно к новым конкретным задачам.
Достижение этих целей предполагает некоторую начальную
подготовку читателя, в частности его знакомство с теорией од-
одномерных линейных систем и представление о цифровой обра-
обработке сигналов (в объеме книги Оппенгейма и Шафера [П,
гл. 1—6).
14 Введение
Данная книга посвящена обработке любых сигналов с размер-
размерностью ^2. В то время как теории обработки одномерных и
двумерных сигналов существенно различаются, дальнейшее повы-
повышение размерности не приводит к заметным отличиям от двумер-
двумерного случая, кроме повышения сложности вычислений. Поэтому,
чтобы не усложнять рассуждения, математические выражения и
иллюстрации, мы рассматриваем в основном двумерные задачи,
которые получили широкое распространение на практике. В боль-
большинстве случаев обобщение осуществляется достаточно просто.
Если же это не так, обобщение на случай большего числа изме-
измерений рассматривается в книге специально. Руководствуясь тем
же правилом, мы не останавливаемся на результатах, являющихся
очевидным обобщением одномерного случая.
Мы надеемся, что читатель придет к тем же выводам, к ко-
которым пришли и мы, когда впервые начали заниматься цифровой
обработкой многомерных сигналов. Это та область знаний, в ко-
которой многое может дать интуиция, перенесенная из мира одно-
одномерных сигналов; вместе с тем окончательный результат часто
оказывается неожиданным и противоречащим интуитивным сооб-
соображениям. Ход рассуждений, приводящий к обобщению некото-
некоторых одномерных понятий на многомерные, может дать читателю
более глубокое представление о существе операций обработки
как многомерных, так и одномерных сигналов.
Глава 1
Многомерные сигналы и системы
Многомерный сигнал можно описать функцией М независимых
переменных, где М ^ 2. Такие сигналы могут быть непрерыв-
непрерывными, дискретными или смешанными. Непрерывный сигнал опи-
описывается функцией независимых переменных, принимающих не-
непрерывное множество значений. Например, яркость / (х, у) изо-
изображения является двумерным непрерывным сигналом. В про-
противоположность этому дискретный сигнал описывается функцией,
определенной только на множестве точек, например на мно-
множестве целых чисел. Смешанный сигнал — это многомерный сиг-
сигнал, который описывается функцией некоторого количества неп-
непрерывных переменных и некоторого количества дискретных.
Например, ансамбль изменяющихся во времени сигналов, снимае-
снимаемых с набора электрических преобразователей, представляет
собой смешанный сигнал. Ансамбль описывается одной непрерыв-
непрерывной переменной (временем)" и одной или несколькими дискретными
(номерами преобразователей).
В этой главе речь будет идти главным образом о многомерных
дискретных сигналах, а также о системах, выполняющих их
преобразование. Поскольку обсуждаемые здесь свойства сигналов
и систем являются, как правило, простым распространением свой-
свойств одномерных дискретных сигналов и систем, то в большинстве
случаев мы ограничимся лишь кратким их рассмотрением. Чи-
Читателя, интересующегося деталями, можно отослать к превосход-
превосходным руководствам, посвященным одномерным системам [1—3].
Однако, как будет показано, многие известные одномерные про-
процедуры не обобщаются простым способом на многомерный слу-
случай, и многие важные вопросы, связанные с многомерными сиг-
сигналами и системами, не возникают в частном случае одного изме-
измерения. В таких случаях наше рассмотрение будет, естественно,
более полным.
1.1. Двумерные дискретные сигналы
Двумерный дискретный сигнал (его также называют последо-
последовательностью или массивом) — это функция, определенная на
совокупности упорядоченных пар целых чисел. Так,
х=\х(пи п2), — сх><п1, л2<оо}. A.1)
16 Глава I
Отдельные элементы последовательности будем называть отсче-
отсчетами. Тогда х (пъ п2) представляет собой отсчет последователь-
последовательности х в точке (п±, п2). Значения отсчетов могут быть веществен-
вещественными или комплексными. Если Пг и п2 считать переменными вели-
величинами, выражение х (п±, п2) можно рассматривать как обозначе-
обозначение всей последовательности. Хотя такое обозначение некорректно,
оно широко используется в технической литературе и не должно
приводить к недоразумениям.
У * / 1 / 1 /~i У У У
У У У У У У У'
Рис. 1.1. Графическое представление двумерной последовательности.
Иногда может оказаться полезным рассматривать сигнал х
не просто как функцию, определенную на множестве целочислен-
целочисленных значений ее аргументов, а как совокупность его отсчетов.
При такой интерпретации не возникает соблазна определить х
для каких-то значений пг и п2, не являющихся целыми числами.
Графическое изображение двумерной последовательности пред-
представлено на1 рис. 1.1.
В соответствии с приведенным выше определением двумерные
последовательности имеют бесконечную протяженность, посколь-
поскольку «! и п-2 могут принимать любые целочисленные значения. Од-
Однако на практике для большинства двумерных последовательно-
последовательностей значения отсчетов известны только в конечной области пло-
плоскости («!, гц). Например, при сканировании черно-белой фото-
фотографии за ее краями отсчеты не берутся. Вместо того чтобы огра-
Многомерные сигналы и системы 17
ничивать область определения такой двумерной последователь-
последовательности, мы просто будем считать, что все значения отсчетов за пре-
пределами определенной области равны нулю 1).
1.1.1. Некоторые особые последовательности
Некоторые последовательности настолько важны, что удо-
удостоились специальных названий или символов. К ним принадле-
принадлежит двумерный единичный импульс б (пъ п2), называемый также
единичным отсчетом. Единичный импульс определяется следую-
следующим образом:
1 при Пу = п2 = О,
,0 в остальных случаях. ' '
Если определить одномерный единичный импульс как
A при п = 0,
б(л) = L ^Л A.3)
v ' @ при пфО, v '
то двумерный единичный импульс можно записать в виде произ-
произведения двух одномерных единичных импульсов:
б (ль Щ) = б (щ) б (л2). A.4)
На рис. 1.2 приведено стилизованное графическое представление
двумерного единичного импульса.
Двумерный линейный импульс — это последовательность, име-
имеющая постоянное значение в одном направлении и импульсная —
в другом. Последовательности
х {tii, п2) = б (лх) A.5а)
и
у {пъ п2) = б(л2), A.56)
показанные на рис. 1.3, являются примерами линейных импуль-
импульсов. Очевидно, что для Af-мерного случая мы можем определить •
не только Af-мерные единичные импульсы, но и Af-мерные линей-
линейные импульсы, Af-мерные плоскостные импульсы и т. д.
х) Следует указать, что такое предположение соответствует тезнсу о том,
что за пределами выбранной области нулю равны значения непрерывного сиг-
сигнала, совокупностью отчетов которого является данный дискретный сигнал.
Ясно, что такое доопределение сигнала за пределы области, в которой произво-
производилось его измерение, является достаточно произвольным н далеко не всегда
верным. Правильнее было бы рассматривать также другие возможные способы
доопределения, например доопределение четным продолжением, не дающее
разрывов в значениях сигнала на краях области определения. — Прим. ред.
2 Даджион Д., Мерсеро Р.
18 Глава I
Другой особой последовательностью является двумерная еди-
единичная ступенька и (tii, п2), представленная на рис. 1.4. Ступенька
определяется следующим образом:
A при /1x5=0 и п2^0.
u(nv п2) = A.6)
10 в остальных случаях. ч '
Можно также рассматривать и (nlt п2) как произведение
и (tii, na) = и (tii) и (п2), A.7)
в котором
f 1 при п^О,
и(л) = L ^Л A.8)
10 при п<0 к '
представляет собой одномерную единичную ступеньку. Двумер-
Двумерная единичная ступенька отлична от нуля в одном квадранте
(пи Пг)-плоскости.
Экспоненциальные последовательности определяются следую-
следующим образом:
сх><п1) л2<оо,
A.9)
-t
Рис. 1.2. Двумерная единичная импульсная
функция б (i%i, rtj).
Большим кружком обозначен отсчет со значением 1,
маленькими кружками — отсчеты со значением 0.
г
Г
Рис. 1.3. Два примера двумерных линейных импульсов.
а — х (пи П|) = б (fij); б —• х (пь п,) = в (п,).
Многомерные сигналы и системы 19
г
nt
Рнс. 1.4. Двумерная единичная ступенька и (п±, пг).
где а и Ь — комплексные числа. Если абсолютные значения а и b
равны единице, их можно записать в виде
а = ехр (/©х), Ь = ехр (/о2).
В этом случае экспоненциальная последовательность становится
комплексной синусоидальной последовательностью:
х (пх, п2) = ехр (/©хПх + /©2/ij) =
= cos (охПх + (o2n2) + /sin (охПх + (о2п2). A.10)
Экспоненциальные последовательности представляют особый ин-
интерес, так как они, как будет показано далее, являются собствен-
собственными функциями двумерных линейных систем, инвариантных
к сдвигу.
1.1.2. Разделимые последовательности
Все описанные до сих пор особые последовательности можно
представить в виде
х (Пх, /ц) - хг (Пх) х2 (Па). A.11)
Любую последовательность, которую можно представить в виде
произведения одномерных последовательностей, называют раз-
разделимой.
Хотя среди встречающихся на практике сигналов лишь очень
немногие оказываются разделимыми, любое двумерное множество
с конечным числом ненулевых отсчетов можно записать в виде
суммы конечного числа разделимых последовательностей:
N
x(nlt Па)= 2] xa(ih)Xtt(t4}, A.12)
20 Глава 1
где N — число ненулевых строк или столбцов. Простейшее пред-
представление такого рода можно получить, выразив х в виде суммы
отдельных строк последовательности. Для этого надо принять
Хц («i) = х (rti, i), A.13a)
xt,(nt) = 6(nt — i). A.136)
Возможны и другие разложения такого рода. Иногда они оказы-
оказываются чрезвычайно полезными.
Разделимые последовательности с успехом используются в ка-
качестве тестовых входных сигналов при оценке характеристик и
настройке экспериментальных систем.
1.1.3. Последовательности конечной протяженности
Другим важным классом дискретных сигналов являются дву-
двумерные последовательности конечной протяженности. Слова «ко-
«конечная протяженность» означают, что эти сигналы равны нулю
вне области конечной протяженности в (лх, п2)"пл°скости. Эта
область называется опорной областью сигнала. Одна из типичных
последовательностей конечной протяженности, изображенная на
рис. 1.5, отлична от нуля только внутри прямоугольника
0<n1<N1, 0<n2<N2. A.14)
Хотя области прямоугольной и квадратной форм чаще других
используются в качестве опорных областей последовательностей
конечной протяженности, вполне можно представить себе опорную
область и другой формы.
Внимательный читатель, возможно, обнаружит неоднознач-
неоднозначность определения опорной области двумерной последовательно-
последовательности конечной протяженности. Очевидно, что если последователь-
последовательность равна нулю вне области R, она также равна нулю вне любой
более протяженной области, со-
содержащей в себе R. Часто мо-
можно упростить представление по-
последовательности с опорной об-
областью неправильной формы, а
также операции над ней, если
1 включить ее опорную область
»••••• внутрь прямоугольной области
»••••• большего размера.
* V, ' Рис. 1.5. Последовательность конечной
»•••>• 1 протяженности с опорной областью
прямоугольной формы.
Многомерные сигналы и системы 21
1.1.4. Периодические последовательности
Другой важный класс двумерных последовательностей со-
составляют периодические дискретные сигналы. Двумерную перио-
периодическую последовательность, как и ее одномерный аналог,
можно рассматривать как сигнал, регулярно повторяющийся
в пространстве. Однако, если учесть, что двумерный сигнал дол-
должен повторяться сразу в двух направлениях, формальное опреде-
определение периодической двумерной последовательности оказывается
сложнее определения периодической одномерной последовательнос-
последовательности. Формулировку общего определения начнем с частного случая.
Рассмотрим двумерную последовательность х (п^, п2), удовле-
удовлетворяющую следующим условиям:
x(nlt n2 + N2) = x{nlt n2), A.15а)
X (rtx + Nlt П2) = X («!, Щ). A .156)
Эта последовательность обладает двойной периодичностью; ее зна-
значения повторяются, если переменная nt увеличивается на Nt или
если переменная щ, увеличивается на N2. На рис. 1.6 приведено
изображение такой последовательности. Величины Nx и N2, пред-
представляющие минимальные положительные целые числа, для кото-
которых справедливы выражения A.15), назовем горизонтальным и
вертикальным интервалами периодичности последовательности х.
Из всех отсчетов только Л^Л^2 отсчетов последовательности х
оказываются независимыми; остальные отсчеты определяются ус-
условиями периодичности. Будем называть периодом последователь-
последовательности х любую связную область плоскости (пъ п2), содержащую
точно Nt N2 отсчетов, если значения этих отсчетов независимы.
Часто наиболее удобной формой периода является прямоуголь-
прямоугольник \(пъ л2), 0 < пх < Nx — 1, 0 < п2 < N2 — 1\, однако это
не единственная возможность. Например, область, заштрихован-
заштрихованную на рис. 1.7, также можно рассматривать как один период пе-
периодической последовательности.
Теперь рассмотрим двумерную п»
последовательность х (nlt n2), ко-
которая удовлетворяет более общим
условиям периодичности:
1ъ п2),
A.16а)
ii, п2),
A.166),
= х
= х
N,
Рис. 1.6. Двумерная
последовательность с
периодическая
x = N2 = 3.
< >-*—¦
N,
22 Глава 1
причем
D^NnN22- N12N21=?0. A.17)
Упорядоченные пары (Nn, N2f)' и (jV12, jV22)' можно рассматривать
как векторы Nt и N2, представляющие собой смещения от любого
отсчета к соответствующим отсчетам двух других периодов (штрих
обозначает операцию траиспоиироваиия, преобразующую упоря-
упорядоченную пару в вектор-столбец). Один период такой последова-
последовательности заключен в области, имеющей форму параллелограмма,
смежиые стороиы которого образоваиы векторами Nx и N2. Чита-
ЧитаРис. 1.7. Двумерная периодическая последовательность с периодом неправиль-
неправильной формы.
телю предлагается доказать, что число отсчетов в этой области
равно \D\. На рис. 1.8 представлена двумерная периодическая
последовательность с N, = G,2)' и N2 = (—2,4)'.
Понятие периодичности легко обобщается иа случай М-мер-
иых сигналов. Для простоты обозначим через п упорядоченную
группу из М целочисленных переменных (пг, п2, ..., пм)'¦ Тогда
х (п) представляет собой М-мерную периодическую последователь-
последовательность при условии, что существуют М таких линейно независи-
независимых М-мериых целочисленных векторов Nb ..., NM, что
Зс(п + 1Чг) = x(n), i = l,...,M A.18)
Векторы N,- называются векторами периодичности; их можно ис-
использовать в качестве столбцов матрицы N размерностью МхМ,
называемой матрицей периодичности:
N = [N1|NS|...|NM]. A.19)
Многомерные сигналы и системы 23
Требование линейной независимости векторов периодичности эк-
эквивалентно требованию наличия у матрицы N ненулевого опреде-
определителя. В частном случае, когда N — диагональная матрица,
можно сказать, что последовательность х (п) прямоугольно перио-
периодична. Именно этот частный случай был рассмотрен выше.
Если х (п) периодична с матрицей периодичности N, то для
любого целочисленного вектора г
A.20)
• . • 1
• • •
...
••••¦•••
Рис. 1.8. Периодическая последовательность с векторами периодичности G,2)'
и (-2,4)'.
Отсюда следует, что если Р — некоторая целочисленная матрица,
то NP также будет матрицей периодичности для х (п). Таким
образом, любая периодическая последовательность имеет не един-
единственную матрицу периодичности. Между прочим, можно отме-
отметить, что абсолютное значение определителя матрицы периодич-
периодичности дает число отсчетов последовательности Jc(n), содержащееся
в одном периоде. Это обстоятельство будет использовано в гл. 2,
в которой рассматривается Af-мерное дискретное преобразование
Фурье.
1.2. Многомерные системы
Системы служат для преобразования сигналов. Формально
система — это оператор, отображающий один (входной) сигнал
на другой (выходной). На рис. 1.9 это простое положение проил-
24 Глава 1
Рис. 1.9. Графическое изображение системы.
люстрировансГна примере системы, отображающей х на у. Опера-
Оператор, воплощенный в этой системе, обозначен через Т [• ],-поэтому
можно написать
у=Т[х]. A.21)
Оператор Т [ • ] может представлять собой правило или набор
правил, по которым происходит отображение входного сиг-
сигнала на выходной, или даже таблицу соответствия выходных
сигналов различным входным сигналам.
В этом разделе мы рас-
рассмотрим несколько прос-
простых, но весьма полезных
многомерных систем. В
частности, мы обратим
особое внимание на свойст-
свойства линейных систем, ин-
х — входная последовательность; у — выходная /-.
последовательность. ВарИЭНТНЫХ К СДВИГу. Од-
нако перед этим мы обсу-
обсудим некоторые простые операции, которые можно выполнять над
многомерными дискретными сигналами.
1.2.1. Основные операции над многомерными сигналами
Сигналы можно объединять или изменять с помощью множе-
множества операций. Здесь мы опишем несколько основных операций
над сигналами, которые выступают в качестве «кирпичиков» при
разработке более сложных систем.
Пусть w и х — двумерные дискретные сигналы. Эти сигналы
можно сложить и получить третий сигнал у. Сложение выпол-
выполняется поэлементно, так что значение каждого отсчета у (nlt п2)
получается путем сложения двух соответствующих отсчетов
w (nlt п2) и х (nlt nt)
У (nlt п2) = х (nlt /i2
w
n2).
A.22)
Умножая двумерные последовательности на константу, можно
также получать новые последовательности. Если с — константа,
мы можем образовать двумерную последовательность у из ска-
скаляра с и двумерной последовательности х, умножив значение каж-
каждого отсчета х на с:
У К. п2) = сх (пъ п2). A.23)
Двумерную последовательность х можно подвергнуть линей-
линейному сдвигу, что также приведет к образованию новой последова-
последовательности у. Операция сдвига попросту переносит всю последова-
последовательность х на новый участок плоскости (nlt n2). Значения отсче-
Многомерные системы и сигналы 25
тов у связаны в этом случае со значениями отсчетов х соотноше-
соотношением
У
= х (пг — тъ
-Щ), A.24)
где (тъ т2) — величина сдвига. Пример сдвига двумерной после-
последовательности приведен на рис. 1.10.
Используя базовые операции, сложения, скалярного умноже-
умножения и сдвига, можно разложить любую двумерную последователь-
llj
i • »
-1,п, -2)
X(n,n2)
а б
Рис. 1.10. Операция сдвига двумерной последовательности xfa, na).
ность на сумму взвешенных и сдвинутых двумерных единичных
импульсов
x(rii, п2) = 2j Zj х(къ k2)b(ti\ — ki, n2 — k2). .A.25)
ki——00 kt=—00
Здесь б fa — klt )Ц — k^) представляет собой единичный импульс,
сдвинутый так, что его ненулевой отсчет находится в точке (klt
k2); значения х (klt k2) можно рассматривать как скалярные мно-
множители для соответствующих единичных импульсов.
Стоит упомянуть еще о двух основных операциях над двумер-
двумерными последовательностями. Одну из них, которую мы назовем
пространственным маскированием, можно рассматривать как об-
обобщение скалярного умножения. Значение каждого отсчета дву-
двумерной последовательности х умножается на число с (nlt n^),
значение которого зависит от положения соответствующего от-
отсчета
У (пъ tit) = с (пъ 1ц) х (пъ
A.26)
Совокупность чисел с (пъ п^) можно также рассматривать как
двумерную последовательность. Тогда правая часть равенства
A.26) представляет собой поэлементное произведение двух после-
последовательностей.
26 Глава 1
Двумерные последовательности могут подвергаться также дей-
действию нелинейных операторов. Важный тип нелинейных опера-
операторов, называемый безынерционной нелинейностью, характерен
независимым воздействием на значение каждого отсчета двумерной
последовательности. Рассмотрим, например, последовательность,
образованную возведением в квадрат значения каждого отсчета
двумерной последовательности х:
у(пъ п2)= [х(пъ п2)\\ A.27)
Операция возведения в квадрат является безынерционным нели-
нелинейным преобразователем, поскольку вычисление выходного зна-
значения в точке (пх, п2) зависит от единственного входного значения
в той же точке.
1.2.2. Линейные системы
Систему называют линейной в том и только том случае, когда
она удовлетворяет двум условиям: 1) если ее входной сигнал яв-
является суммой двух последовательностей, то выходной сигнал
является суммой двух соответствующих выходных последователь-
последовательностей; 2) пропорциональное изменение входного сигнала приво-
приводит к пропорциональному изменению выходного сигнала. Таким
образом, если преобразование L [¦] описывает действие линейной
системы и
уг = L [х-,], у„ — L [х«],
то j_ и Y г . и 1 A-28)
о-У\ + Ьу2 — L [ахх +0*2]
для всех входных сигналов хг и х2 и любых комплексных кон-
констант а и Ь.
Линейные системы подчиняются принципу суперпозиции. От-
Отклик линейной системы на взвешенную сумму входных сигналов
равен взвешенной сумме откликов на отдельные входные сигналы.
В соотношении A.25) произвольная двумерная последователь-
последовательность была представлена линейной комбинацией сдвинутых еди-
единичных импульсов. Если использовать эту последовательность
в качестве входной для двумерной дискретной линейной системы'
L [¦], то выходная последовательность будет иметь вид
[оо оо ~|
Zj 2j X (^i> ^г) в (fli — ki, fl2 — &2) ¦
ki——00 ht=—00 J
Поскольку система линейна, это выражение можно переписать
следующим образом:
оо оо
У (Пъ п2) = 2 2 х (й1э k2) L [б {пх - kx, n2 - k2)] =
t——оо kt~—оо
о о
S S x(ku k2)hklk,(nu n2), A.29)
,=—оо к,——оо
Многомерные сигналы и системы 27
где hkvk, •— отклик системы на единичный импульс, расположен-
расположенный в точке (klt k2). Если для каждой точки (klt k2) известен им-
импульсный отклик htnk, (яь яг) на произвольно расположенный
входной импульс, то отклик системы на любой входной сигнал
можно найти с помощью суперпозиции.
1.2.3. Системы, инвариантные к сдвигу
Системой, инвариантной к сдвигу, называется такая система,
для которой сдвиг входной последовательности приводит к соот-
соответствующему сдвигу выходной последовательности. Если
У («1. п2) = Т [х (ль п2)],
то система Т [•] является инвариантной к сдвигу в том и только
том случае, когда
Т 1х (пх — mlt п2 — пг2)] = у (пх — mlt п2 — т2) A.30)
для всех последовательностей х и для всех целочисленных сдви-
сдвигов (тъ т2).
Линейность и инвариантность к сдвигу являются независимыми
свойствами системы; ни одно из этих свойств не подразумевает
обязательного наличия другого. Например, пространственное
маскирование
L [х (ль п2)] = с (пи п2) х (пи п2), A.31)
приводящее к умножению входной последовательности на с (п1г
п2), линейно, но не инвариантно к сдвигу. С другой стороны,
система
Т h(nu п2)] = [х(пи п2)]2 A.32)
инвариантна к сдвигу, но не линейна.
1.2.4. Линейные системы, инвариантные к сдвигу
Для облегчения изучения многомерных систем необходимо ог-
ограничиться определенными классами операторов, обладающих об-
общими свойствами. Линейные инвариантные к сдвигу дискретные
системы (ЛИС-системы) — это наиболее часто изучаемый класс
систем для обработки дискретных сигналов любой размерности.
Эти системы отличаются простотой как при разработке, так и
при анализе, но в то же время они обладают достаточными воз-
возможностями для решения многих практических задач. Поведение
этих систем во многих случаях можно изучать безотносительно
к конкретным характеристикам входного сигнала. Класс линей-
линейных инвариантных к сдвигу систем, безусловно, не является наи-
28 Глава 1
более общим классом изучаемых систем, однако он может служить
хорошей отправной точкой.
Ранее мы получили выражение A.29) для выходной последо-
последовательности линейной системы при входном сигнале х. Если
система еще и инварианта к сдвигу, можно сделать дальнейшие
упрощения. Импульсный отклик на произвольно расположенный
входной импульс описывается выражением
hklkt(ni, n2)±L[b(n]-ku n2-k2)]. A.33)
Для частного случая kx = k2 = 0 имеем
Лоо (*i, л») = L [б (ль п2)]. A.34)
Используя принцип инвариантности к сдвигу, описываемый ра-
равенством A.30), получим
hklk,(ni' ) = hoo(ni - ku n2—k2). A.35)
Импульсный отклик на произвольно расположенный входной им-
импульс равен сдвинутому импульсному отклику на входной им-
импульс, расположенный в начале координат. Введя обозначение
h (пъ п2) 4 ^оо ("i. ). можно выразить выходную последователь-
последовательность следующим образом:
оо оо
л2)= 2j ? x(klt k2)h(ni — k1, n2 — k2). A.36)
Это соотношение известно под названием двумерной дискретной
свертки. В сущности здесь выполняется разложение входной по-
последовательности х (rii, n2) на взвешенную сумму сдвинутых им-
импульсов в соответствии с равенством A.25). ЛИС-система преобра-
преобразует каждый импульс в сдвинутую копию импульсного отклика
h (nx, п2)- Суперпозиция этих взвешенных и сдвинутых импульс-
импульсных откликов образует выходную последовательность, причем
весовыми коэффициентами являются значения отсчетов входной
последовательности х (nlt п2). Равенство A.36) записано в пред-
предположении, что ЛИС-система полностью характеризуется своим
импульсным откликом h (tii, п2).
Выполнив замену переменных пх — К = h и п2 — k2 = 12,
равенство A.36) можно записать в другой форме:
оо оо
y(ni, п2)= 2 S h(llt 12)х(пг-1ъ л,-/,). A.37)
7,=—оо 7j=—00
Отсюда видно, что свертка — это коммутативная операция. Будем
использовать двойную звездочку (* *) для обозначения двумер-
двумерной свертки [одиночная звездочка (*) будет обозначать одномер-
одномерную свертку]. Тогда уравнения A.36) и A.37) примут вид
у = х* *h = h* * х. A.38)
Многомерные сигналы и системы 29
С помощью векторных обозначений выходную последователь-
последовательность М-мерной ЛИС-системы можно представить как М-мерную
свертку выходной последовательности и импульсного отклика
?-к). A.39)
Двумерная свертка принципиально не отличается от ее одно-
одномерного аналога. Как и в одномерном случае, возможна следую-
следующая вычислительная интерпретация операции свертки. Будем
i
• •••••'
kj
Рис. 1.11.
а — последовательность ft (*i, kt); б — последовательность
nt — 2, rti = 3.
— fti, n, — k,) прн
рассматривать x (kt, k2) и /i (nx — klt n2 — k2) как функции kt
и k2. Чтобы из последовательности h (kl7 k2) образовать последо-
последовательность h {nx —kl7 n2 — k2), сначала выполняем отражение h
относительно обеих осей kx и k2, а затем сдвигаем последователь-
последовательность так, чтобы отсчет h @, 0) попал в точку (пъ п2), как показано
на рис. 1.11. Последовательность-произведение х (kly k2) h {nx — kl7
п2 ^- k2) образована; для нахождения значения выходного отсчета
У {пъ "г) складываем ненулевые значения отсчетов последователь-
последовательности-произведения. При изменении значений пх и п2 последова-
последовательность h {пг — kly п2 — k2) сдвигается по плоскости (kl7 k2),
давая другие последовательности-произведения и соответственно
другие значения выходных отсчетов. Если используется другая
возможная форма записи дискретной свертки [выражение A.37I,
в приведенном описании вычислений х (пъ п2) и h (nl7 n2) меняются
местами.
Пример 1
Рассмотрим двумерную дискретную ЛИС-систему, выходной
отсчет которой в точке (пъ п2) характеризует вклад значений
30 Глава 1
входных отсчетов, расположенных в точках ниже и левее точки
(Лх, л2). Грубо говоря, система представляет собой один из видов
двумерного цифрового интегратора; ее импульсный отклик — это
двумерная единичная ступенчатая последовательность и (п1г п2),
описанная в разд. 1.1.1.
В качестве входной последовательности х (пъ п2) выберем дву-
двумерную последовательность конечной протяженности, значения
отсчетов которой равны 1 внутри прямоугольной области 0 <
<¦ пх < Nlt 0 <: п2 < N2 и 0 вне ее.
Для вычисления значения выходного отсчета у (пъ п2) с по-
помощью выражения A.36) образуем последовательность-произведе-
последовательность-произведение х (&!, k2) h (nx — klt n2 — k2). В зависимости от конкретного
значения (пъ п2) ненулевые области последовательностей х (klt k2)
и Л (пх — klt п2 — k2) перекрываются в различной степени. Можно
выделить пять случаев, представленных на рис. 1.12, где ненуле-
ненулевые области каждой последовательности заштрихованы, а нуле-
нулевые отсчеты просто не показаны.
Случай 1.пх < 0 или п2 < 0. Из рис. 1.12 видно, что для таких
значений (пи п2) последовательности h (щ — къ п2 — k2) и х (klt
k2) не перекрываются. Поэтому их произведение, как и значения
таких отсчетов свертки, равны нулю.
Случай 2. 0 < пх < Ыъ 0 <: пг < N2. Имеет место частичное
перекрытие. Вклад ненулевых значений отсчетов в последователь-
последовательность-произведение имеет вид
(nlt л2)= ? ]§ l=(*i-
*|=0 *!=0
Случай 3. Пх 5з Nlt 0 <¦ п2 < N2. Здесь можно написать
0-41)
Случай 4. 0 <; пх < Nt, n2 ^ N2. По аналогии со случаем 3
имеем
у (пъ п2) = N2 К + 1). A.42)
Случай 5. пх ^ Nx, n2 ^* N2. В этом последнем случае отражен-
отраженная сдвинутая ступенчатая последовательность h (nx — kx, п2 — k2)
полностью перекрывает импульс х (kx, k2). Тогда
У К, nt)' = NtNt. A.43)
Многомерные сигналы и системы 31
х(к,,к2)
h (n, -к,.п2 - к2)
Случай 1
Случай 1
Случай 3
Случай 4
Случай 5
'ис. 1.12. Свертка квадратного импульса с двумерной ступенчатой последо-
последовательностью.
[енулевые области каждой последовательности отмечены одной штриховкой; последо-
ательность-произведение х (ku kt) ft (n4 — ku n, — k,) отлична от нуля лишь в областях
с двойной штриховкой.
32 Глава 1
В итоге полная свертка имеет вид
п2) =
О
при
при
при
при
при
«152
«15г
;0 или
:Nlt 0 .
n1<N1
:NU tl2
«2<0,
., 0 <: n2 < N2,
^ n2 < Л^2,
, n2-^N2,
^N2.
A.44)
Ее графическое изображение приведено на рис. 1.13.
Можно заметить, что в рассмотренном примере их, uh представ-
представляют собой разделимые последовательности, поэтому их свертка
также разделима, поскольку мы можем написать
У (пъ п2) =
(О
A.45)
о
у2 (п2), где
при «1<0,
при 0 <: «1<Л^1,
при пх 5г Л^1,
при /г2<0,
при 0 <: п2 <; Л^2>
при п2 ^N2-
Это свойство обладает общностью: свертка двух разделимых
последовательностей всегда разделима (упр. 1.9).
Пример 2
В ряде, случаев нас может интересовать только протяженность
ненулевой области результата операции свертки. Рассмотрим,
например, свертку сигнала конечной протяженности х (пъ п2),
Рис. 1.13. Свертка двух последовательностей, рассмотренная в примере 1.
Многомерные сигналы и системы 33
представленного на рис. 1.14, а, с импульсным откликом конеч-
конечной протяженности h (пъ п2), представленным на рис. 1.14,6
[пока не будем принимать в расчет значения ненулевых отсчетов
х {пъ п2) и h («!, п2)]. Очевидно, что результат этой свертки,
который мы назовем у {пъ п2), также будет сигналом конечной
протяженности. Определим опорную область этого выходного
сигнала.
Действуя, как и раньше, образуем двумерную последователь-
последовательность h («! — kl7 п2 — &2) в виДе функции от {къ k2). Начав с (пъ
п-2) ¦= @, 0), сдвигаем h (п-^ — klt п2 —&2) по последовательности
х (klt k2). Когда две последовательности начинают перекрываться,
получаем (потенциально) ненулевую точку в выходной последо-
последовательности у (пъ п2). На рис. 1.14, в показано перекрытие для
точки (пъ п2) = A, 1,), а на рис. 1.14, г — опорная область для
у(пъ п2).
Даже внутри этой области некоторые отсчеты у (пи п2) могут
иметь нулевые значения, поскольку слагаемые в правой части
x(n,n,)
l^^^y• • •
• • • • 4
Рис. 1.14. Графическое представление свертки, рассмотренной в примере 2.
а — входная последовательность; б — импульсный отклик; в — последовательность-
произведение в точке (Hi, nt)=(l,l); г — опорная область свертки.
3 Даджион Д., Мерсеро Р.
34 Глава 1
равенства A.36) могут взаимно уничтожаться для каких-то кон-
конкретных значений (nlt п2). Однако в общем случае последователь-
последовательность у (пъ п2) будет иметь ненулевые значения в этой области,
за пределами же ее значения у (nlt п2) всегда будут нулевыми.
В качестве упражнения читатель может вычислить значения
отсчетов у (пъ п2) в опорной области для простого случая, когда
х (nlt /г2) и h (nlt п2) равны 1 в своих опорных областях (рис. 1.14, а
и б).
В этом разделе мы рассмотрели два относительно простых при-
примера выполнения двумерной свертки. Читатель, несомненно, заме-
заметил, что эти вычисления требуют определенных усилий. К счастью,
такого рода вычисления редко приходится выполнять вручную.
Однако знакомство с основными операциями необходимо для на-
написания соответствующих машинных программ и для интерпре-
интерпретации результатов. Действительно, невозможно правильно вы-
выполнить операцию двумерной свертки, не определив предвари-
предварительно все случаи, требующие рассмотрения. Это всегда должно
быть первым шагом при выполнении свертки.
1.2.5. Последовательное и параллельное соединение
систем
Одним из достоинств линейных инвариантных к сдвигу систем
является простота анализа соединенных друг с другом систем.
Частично это связано со свойствами оператора свертки. Мы уже
видели, что свертка обладает свойством коммутативности:
х * *h = h* * х. A.46)
Свертка обладает также свойством ассоциативности. Если резуль-
результат свертки х и h свернуть с g-, результат будет тем же, что и при
свертке х с результатом свертки hug:
(х * * К) * * g = х * * (h * * g). A.47)
В силу свойства ассоциативности при описании многократной
свертки скобки можно опускать.
Наконец, свертка обладает свойством дистрибутивности по
отношению к операции сложения
х* *(h + g) = (x* *h) + (x* *g). A.48)
Ассоциативные и дистрибутивные свойства оператора свертки
достаточно наглядны. Читателю предлагается провести их дока-
доказательство в качестве упражнения (упр. 1.4).
Две системы считаются соединенными последовательно, или
каскадно, если выходной сигнал первой системы служит вход-
входным сигналом для второй, как это показано на рис. 1.15. Если
две системы линейны и инвариантны к сдвигу, то, как можно по-
Многомерные сигналы и системы 35
казать, их каскадное соединение также линейно и инвариантно
к сдвигу. Если w обозначает выходной сигнал первой системы кас-
каскада, то
w = х * * h,
у = w * * g = (x* * И) * * g. A-49)
С учетом свойства ассоциативности выражение A.49) можно пере-
переписать следующим образом:
у = х * *(h* *g). A.50)
Рис. 1.15. Каскадное соединение двух систем.
Если обе системы лииейиы и иивариаитиы к сдвигу, порядок систем в каскаде ие имеет
значения, и с точки зрения преобразования входного сигнала в выходной обе схемы
эквивалентны.
Отсюда эквивалентный импульсный отклик каскадной системы
имеет вид
*g.
A.51)
Продвинувшись еще на шаг и использовав правило коммутатив-
коммутативности, получим, что эквивалентный импульсный отклик не изме-
изменяется, если системы в каскаде поменять местами. Таким обра-
образом, две каскадные ЛИС-системы, которые отличаются только
порядком входящих в них подсистем, а в остальном идентичны,
являются эквивалентными; они формируют одинаковые выходные
сигналы при возбуждении одним и тем же входным сигналом.
Если N ЛИС-систем образуют каскадную комбинацию, то эквива-
эквивалентный импульсный отклик представляет собой УУ-кратную сверт-
свертку их индивидуальных импульсных откликов. Далее, эти системы
можно соединить каскадно в любом порядке, и это не повлияет
на эквивалентный импульсный отклик.
На рис. 1.16 показаны две системы, соединенные параллельно.
У них общий вход, и общий выходной сигнал формируется путем
суммирования выходных сигналов систем. Можно непосредственно
показать, что если обе эти системы линейны и инвариантны к
сдвигу, то вся система в целом также линейна и инвариантна
36 Глава 1
к сдвигу. Для нахождения эквивалентного импульсного отклика
заметим, что
у = (х* *h) + (x* *g). A.52)
Применив правило дистрибутивности, получим
у = х * * (h + g), A.53)
откуда следует, что
hWB = h + g. A.54)
Это правило очевидным образом обобщается на параллельное сое-
соединение более двух ЛИС-систем.
h(a,
g(ni
.п2)
,п2)
1
$
т
Рис. 1.16. Параллельное соединение двух систем.
Иногда оказывается полезным разложить импульсный отклик
на несколько компонент, в частности если импульсный отклик
имеет хотя и ограниченную, но причудливой формы опорную об-
область, которую можно представить комбинацией меньших по раз-
размеру областей более правильной формы. В этом случае входную
последовательность можно свернуть с импульсными откликами —
компонентами и получить искомую выходную последовательность
(суммируя результаты). В результате путем параллельного сое-
соединения более простых систем образуется интересующая нас
система.
1.2.6. Разделимые системы
Разделимой системой называется ЛИС-система, импульсный
отклик которой является разделимой последовательностью. При
этом ни входной сигнал, обрабатываемый разделимой системой,
ни ее выходной сигнал не обязаны быть разделимыми. Как и для
любой другой ЛИС-системы, выходной сигнал можно получить
из входного, используя двумерную дискретную свертку. Однако
в случае разделимой системы свертка факторизуется. Как будет
показано в гл. 3 и 5, указанное свойство делает такие системы
весьма эффективными. Посмотрим, как происходит факторизация
Многомерные сигналы и системы 37
свертки. Пусть импульсный отклик системы описывается следую-
следующим выражением:
h {пъ п2) = hx (лО h2 (n2). A.55)
Тогда выходной сигнал системы имеет вид
оо оо
, п2) = 2 ? * («1 — *i. «2 — k2) Ъ (h) h2 (k2) =
oo oo
= 2 M*i) E Jf(/»i-*i, /г2-*2)Л2F2)- A.56)
kk
Внутренняя сумма представляет собой двумерный массив чисел.
Если определить g- {пъ п2) в виде
оо
g(nlt /г2)Л 2 x(nlt n2-k2)h2(k2), A.57)
fts=—оо
то можно переписать выражение A.56) как
оо
У Oh, th)= 2 /ii(^i)^r(«i-^i. th).
Массив g (tii, n2) можно вычислить, выполняя одномерную
свертку каждого столбца х (пх = const) с одномерной последова-
последовательностью h2. Тогда выходной массив у вычисляется путем
свертки каждой строки g (n2 = const) с одномерной последова-
последовательностью кх. Можно поступить и наоборот, выполнив сначала
свертку по строкам, а затем по столбцам; в любом случае полу-
получится один и тот же выходной сигнал. Здесь важно то, что выходной
сигнал можно получить посредством нескольких одномерных
сверток.
М-мерный случай мало отличается от двумерного. И здесь
разделимую систему можно реализовать с помощью одномерных
сверток, однако число операций свертки быстро растет с увеличе-
увеличением размерности сигнала. Рассмотрим, например, Af-мерную
входную последовательность х (nlt n2, ..., пм), определенную на
N xN xNx .. xAf-мерном гиперкубе. При свертке этого сигнала
с разделимой последовательностью вида h (пъ п2, ...,пм) =
== hx (rix) h2 (n2) ... hM(nM) для получения выходной последова-
последовательности потребуется выполнить MNM~l одномерных сверток.
1.2.7. Устойчивые системы
Как и в одномерном случае, представляют интерес лишь устой-
устойчивые системы. Естественно, например, потребовать, чтобы при
ограниченной входной последовательности выходная последова-
последовательность была также ограничена. Чтобы отличить этот тип устой-
38 Глава 1
чивости от других, будем называть такие системы системами
с ограниченными входом и выходом (ОВВ-системами). Для таких
систем при \х(пу, п2) | < В должно существовать такое В', что
\у {п-ъ пг)\ <: В' для всех (пи п2). Необходимым и достаточным
условием принадлежности ЛИС-системы к классу ОВВ-систем яв-
является абсолютная суммируемость ее импульсного отклика
оо оо
= S1<OO. A.58)
Доказательство этого положения такое же, как и в одномерном
случае [1].
Более слабой формой устойчивости является среднеквадратич-
среднеквадратичная устойчивость. ЛИС-система устойчива в среднеквадратичном
смысле, если
оо оо
\ 1 \ 1 I k (** ** \ 12 С ^-^ /1 CQ\
ОВВ-система является устойчивой и в среднеквадратичном смысле,
но обратное утверждение не обязательно справедливо. Если мы
будем просто называть систему устойчивой, то будет подразуме-
подразумеваться ОВВ-система.
Приведенные выше определения могут навести на мысль, что
многомерная устойчивость весьма похожа на одномерную. Как
будет показано в гл. 4, это совершенно не так. Многомерная устой-
устойчивость значительно сложнее одномерной и для понимания, и с
точки зрения испытаний системы на устойчивость.
1.2.8. Опорные области
При изучении одномерных систем оказалось полезным харак-
характеризовать систему как казуальную, если ее выходной сигнал не
мог предшествовать входному х). Такие системы полезны при об-
обработке сигналов, для которых в качестве независимой перемен-
переменной выступает время, поскольку указанное ограничение физиче-
физически обосновано и к тому же позволяет создавать системы, работаю-
работающие в реальном масштабе времени.
Для большинства двумерных систем независимые перемен-
переменные не связаны с временем, и казуальность не является
естественным ограничением для таких систем. Однако при рас-
рассмотрении реализации систем мы вынуждены обратиться к обоб-
обобщению понятия физически реализуемой системы.
х)- Такие системы обычно называют физически реализуемыми системами.
Этой терминологии мы и будем придерживаться в дальнейшем. — Прим. перев.
Многомерные сигналы и системы 39
Импульсный отклик h (n) физически реализуемой одномерной
ЛИС-системы равен нулю при п < 0. Соответственно обобщением
понятия физической реализуемости может быть требование, чтобы
импульсный отклик был равен нулю вне некоторой опорной об-
области.
Выше мы обсуждали частный случай последовательностей с
опорной областью конечной протяженности. Последовательности,
отличные от нуля только в одном квадранте плоскости (пъ п2),
• • • •
Ф • • • •
• • • •
• • •
• • •
Рис. 1.17.
а — последовательность с опорной областью в виде сектора; б — последовательность
с опорной областью в виде квадранта, полученная из последовательности а путем ли-
иейиого преобразования переменных при значениях (Nn. N2t) = B,1) и (N., N,,) =
= A.2); маленькие кружки обозначают отсчеты с нулевыми значениями.
представляют собой другой важный частный случай. О таких по-
последовательностях можно сказать,что они имеют опорную область
в виде квадранта. Понятие опоры на квадрант можно обобщить
включением опорных областей в форме сектора. Говорят, что по-
последовательность имеет опорную область в виде сектора, если она
имеет ненулевые значения только в пределах сектора, ограничен-
ограниченного двумя прямыми, исходящими из начала координат, при ус-
условии что угол между двумя прямыми строго меньше 180°. При-
Пример последовательности с опорной областью в виде сектора при-
приведен на рис. 1.17, а.
Любую последовательность, опирающуюся на сектор, можно
отобразить в последовательность, опирающуюся на квадрант, пу-
путем линейного преобразования переменных [4]. Например, пред-
предположим, что векторы
Ni = (tfu, N21)', N2 = (W12, W22)' A.60)
расположены вдоль границ секторной области (Nn, N21, N13
и N22 — целые числа). Предположим далее, что пары чисел Nn
40 Глава 1
и N21, а также N12 и N22 не имеют общих множителей. Поскольку
Nx и N2 не коллинеарны, то
D = NuNa »- N12N21 Ф 0. A.61)
Тогда замена переменных
— N12n2, m2 = Л^Л -f Nltn2 A.62)
отобразит наш сектор на первый квадрант. Приведенное преобразо-
преобразование не является единственным. В данном случае вектор Nx ото-
отображается на (?), 0)', а вектор N2 — на @, D)'. На рис. 1.17, б
показан результат отображения сектора из рис. 1.17, а на первый
квадрант. Поскольку в данном примере D = 3, не каждая точка
первого квадранта рис. 1.17, б лежит в области линейного преоб-
преобразования A.62). В плоскости (тъ m2) будут иметься отсчеты, на
которые не получит отображения ни один отсчет из плоскости {пъ
п2). Это — следствие использования дискретных сигналов: мы
выполняем отображения целочисленного вектора {пъ п2)' на другой
целочисленный вектор (тъ т2)'. Можно показать, что необходимым
и достаточным условием того, чтобы каждая целочисленная упоря-
упорядоченная пара из первого квадранта плоскости (тъ т2) лежала
в области линейного преобразования, является условие \D\ = 1.
*1.2.9. Системы с векторными входом и выходом
В некоторых приложениях весьма важны системы с несколь-
несколькими входами и (или) несколькими выходами. Очень кратко оста-
остановимся на этих системах и на том, как они связаны с многомер-
многомерными ЛИС-си стемами.
Рассмотрим систему для обработки сигналов, поступающих
от совокупности датчиков, расположенных равномерно вдоль пря-
прямой. От произвольного t-ro датчика в систему поступает одномер-
одномерный дискретный по времени сигнал, возбуждающий некоторое
число одномерных дискретных по времени выходных сигналов. Обо-
Обозначим 1-й входной сигнал через xt (n), а /-й выходной сигнал че-
через у} (п). Для простоты будем считать, что рассматриваемая си-
система линейна и инвариантна к сдвигу по времени, отражаемому
дискретной переменной п. Если t-й входной сигнал представляет
собой одномерный единичный импульс б (п), а все остальные вход-
входные сигналы равны нулю, то /-й выходной сигнал будет импульс-
импульсным откликом hi] (n). В общем случае, разумеется, на каждом
входе системы будут действовать произвольные дискретные по
времени сигналы, поэтому /*-й выходной сигнал будет иметь вид
У](п)= Е EM*i(i- m)- A.63)
Многомерные сигналы и системы 41
Можно соотнести уравнение A.63) с двумерной дискретной сверт-
сверткой, которая обсуждалась в разд. 1.2.4. Для этого необходимо
определить двумерные последовательности
p(i, m)^Xi{m), q(J, n)Ay}(n). A.64)
Теперь для простоты предположим, что последовательности р
и q связаны соотношением двумерной цифровой свертки
Я (/. л) = 2 2 / ('- т) р (i - /, л - т). A.65)
i m
Выполнив замену переменных, получим
Я (/. л) = 2 2 / 0" - /. т) р (/, п - т). A.66)
Из сравнения уравнений A.66) и A.63) видно, что линейную ин-
инвариантную к сдвигу по времени систему с векторными входом
и выходом можно рассматривать как двумерную ЛИС-систему,
если
hl}(m) = f(i-j,m). A.67)
Это условие существенным образом предполагает инвариантность
к сдвигу по переменным, соответствующим индексам входа и вы-
выхода. Если равенство A.67) не выполняется, система с векторными
входом и выходом по-прежнему может рассматриваться как ли-
линейная двумерная система, а не как двумерная ЛИС-система.
1.3. Характеристики сигналов и систем в частотной
области
В предыдущем разделе было показано, что для получения откли-
отклика двумерной ЛИС-системы на входной сигнал необходимо вы-
выполнить операцию свертки входного сигнала с импульсным откли-
откликом системы. Если представить входной сигнал в виде суперпози-
суперпозиции сдвинутых импульсов, то и выходной сигнал можно предста-
представить как суперпозицию сдвинутых импульсных откликов. Пред-
Представление ЛИС-систем в частотной области также использует прин-
принцип суперпозиции, однако в этом случае элементарные последова-
последовательности являются комплексными синусоидами. Рассмотрим
прежде всего отклик ЛИС-систем на синусоидальные входные сиг-
сигналы.
1.3.1. Частотный отклик двумерной ЛИС-системы
Рассмотрим двумерную ЛИС-систему с единичным импульсным
откликом h (nlt n2) и входным сигналом, представляющим собой
комплексную синусоиду вида
х (nv л,) = ехр (/©х/гх + /ю2/г2), A.68)
42 Глава 1
где &>! и cojj — вещественные числа, называемые горизонтальной
и вертикальной пространственными частотами соответственно.
Выходной сигнал можно получить с помощью свертки
У («1. П2) = 2 И ехР [М (П1 - *i) + М («2 -
?i=—оо ?2——°°
[ОО ОО "I
2 2 ^ (*i. *г) ехр (—/co^i - /со2Л2) =
*,=—оо *,=—оо J
= ехр О'Ю1«1 + г'ю2п2) Я (со^ ю2). A.69)
Выходной сигнал представляет собой комплексную синусоиду с
теми же частотами, что и у входного сигнала, но с измененными
амплитудой и фазой за счет комплексного множителя Я (со^ ю2).
Множитель Я (щ, ю2) носит название частотного отклика (частот-
(частотной характеристики) системы и описывается выражением
#(«1. «2)^,2 2M"i> ni) exP (~M"i —/co2n2). A.70)
ЛИС-система обладает способностью различать синусоидальные
сигналы в зависимости от их частот. Если для какого-то конкрет-
конкретного значения упорядоченной пары (со^ ю2) значение | Я (со^ о^) |
приблизительно равно 1, то синусоидальные сигналы этой частоты
будут проходить через систему без ослабления. С другой стороны,
если для некоторой пары (со^ ю2) | Я (щ, ю2) | близко к нулю, сину-
синусоиды этой частоты будут подавляться системой.
Прямыми выкладками можно показать, что частотный отклик
Я (щ, ю2) периодичен с периодом 2я по обеим (горизонтальной и
вертикальной) частотным переменным
Я (coj. + 2я, со2) = Я (&>!, ш2),
Я (©!, ю2 + 2я) = Я К, w2). A.71)
Оставляем доказательство этого утверждения читателю (см. упр.
1.12).
Пример 3
В качестве простого примера вычислим частотный отклик си-
системы с импульсным откликом
h (Пъ П2) = б («! + 1, П2) + б («! — 1, П2) +
+ б (л!, я2 + 1) + б (nlt п2 — 1). A.72)
Многомерные сигналы и системы 43
п2
Рис. I. IS. Импульсный (а) и частотный (б) отклики, рассмотренные в примере 3.
Эта. последовательность изображена на рис. 1.18, а. Частотный
отклик имеет вид
Я(соь
оо оо
i^: ОО /12= ОО
("i. "г) ехр (—
ОО ОО
j = ОО /lj=—ОО
4- б («ь п2 — 1I ехР (— M"i — /^гПг) = е1®1 + е~/й>1 4-
+ е1щ + е-/ш> = 2 (cos щ 4- cos w2). A.73)
Этот частотный отклик показан на рис. 1.18, б в виде простран-
пространственного графика.
44 Глава 1
Пример 4
Рассмотрим систему с имнульсным откликом вида
и2 = ±
h («!, п2) =
0,125 при «!=• ± 1,
0,25 при «1 = ± 1,
0,25 при пх = 0,
0,5 при пх = и2 = 0,
О в остальных случаях.
= ±1, A.74)
Рис. 1.19. Частотный отклик простого фильтра нижних частот, рассмотренный
в примере 4.
Используя определение частотного отклика, получим
оо оо
Я(ю1, со2)= ? 2j я («i, n2) exp (—/со^! —/co2n2) =
rt1=—оо rt2=—оо
= 0,5 + 0,25 (еЧщ + е/ш' + еч<** + е/Мг) +
0,125
= 0,5A -f cos coi)(l + cos (o2). A.75)
Частотный отклик изображен на рис. 1.19. Система является при-
примером простого фильтра нижних пространственных частот. Коэф-
Коэффициент передачи фильтра приблизительно равен двум в начале
координат и уменьшается практически до нуля при (^«fn или
(О,
'2 ~ 3Z
Я.
Система из примера 4 обладает разделимым импульсным откли-
откликом, а из A.75) видно, что и ее частотный отклик является
Многомерные сигналы и системы 45
разделимой функцией. Это справедливо и в общем случае.
Если
), то A.76)
Я = (&>!, ю2) = F (&>!) G.((o2), где
F (щ) = 2 / ("О ехр (— /
G (со2) = U g(n2) ехр (— /со2п2). ¦ A.77)
Доказательство оставляем читателю (упр. 1.13).
Если входная последовательность М-мерной ЛИС-системы яв-
является комплексной синусоидой вида
м
х(пи п2, ... , пм)~ nexpO'«i"i). A-78)
i
то и выход системы представляет собой такую же комплексную си-
синусоиду, умноженную на комплексный коэффициент передачи.
Используя векторные обозначения, перепишем уравнение A.78)
в виде
*(п) = ехр(/ш'п), A.79)
где п = (п1у я2, ..., пм)' и со = (%, (о2, ..., юм)'. Выходной сиг-
сигнал М-мерной ЛИС-системы описывается выражением
1/(п) = Я(ш)ехр(/(й'п), A.80)
где М-мерный частотный отклик Я (со) определяется как
Я (<в) = L h (n) ехр (— /ш'п). A.81)
п
1.3.2. Определение импульсного отклика
по частотному отклику
Как следует из определения A.70) для Н (alt (o2), частотный
отклик дискретной ЛИС-системы в общем случае представляет
собой непрерывную двумерную периодическую функцию, которую
можно выразить в виде линейной комбинации гармонически свя-
связанных комплексных синусоид. Соотношение A.70) не только опре-
определяет Я (&>!, (о2), но и описывает разложение Я (со^ ю2) в дву-
двумерный ряд Фурье. Коэффициентами разложения служат значения
отсчетов импульсного отклика h (%, п2). Поэтому неудивительно,
что импульсный отклик ЛИС-системы можно получить из частот-
частотного отклика.
46 Глава 1
Искомая зависимость может быть получена путем умножения
обеих частей уравнения A.70) на комплексную синусоиду и инте-
интегрирования в пределах квадратной частотной области:
л л
-?р- \ \ Н (щ, со2) ехр (/со!
—я —я
л л
—л —л nt пг
X ехр (/о
ъъ1*
пъ n2)\-~ j ехр [— /со!(rtx - *!)]dco! =
= -^j- J exp [- /to, (я, - A01 d»2 •
L _я J
A -82)
Нетрудно показать, что
л
~ J ехр [— /со (п - A)] dco = б (л - А), A.83)
—я
поэтому двойная сумма в правой части выражения A.82) просто
преобразуется в h (A1( k2). Это дает возможность вычислить зна-
значение импульсного отклика в точке (Ai, k2).
Переписав полученное выражение с использованием более
привычных целочисленных переменных (л1( л2), получим
dcoidco2. A.84)
Область интегрирования в A.84) в точности совпадает с одним
периодом функции Я (со1( со2). Хотя в приведенных выкладках
использовался период, расположенный вокруг начала координат,
с таким же успехом можно было использовать любой другой период.
Пример 5
Воспользуемся полученным результатом для нахождения им-
импульсного отклика идеального фильтра нижних частот, определяе-
определяемого частотным откликом
A, если |coi|<a<n, |со2|<Ь<я,
Я(со1, со2) = {Л A.85)
4 ' 1,0 в остальных случаях,
Многомерные сигналы и системы 47
изображенным на рис. 1.20. Пример тривиален, поскольку рас-
рассматриваемая система разделима. Поэтому
а Ь
h (rti, «2) = 4^г J J exP (M«i +
—a —b
а Ь
=i J exP G"^ dai ^ Jexp (/<°2) 2 =
sin on3
(-86)
Пример 6
В качестве несколько более сложного примера рассмотрим за-
задачу вычисления импульсного отклика идеального кругового
фильтра нижних частот, описываемого частотным откликом вида
1, если (о? + с»>2<Я2<л2, ,j 87)
в остальных случаях. v "
Рис. 1.20. Частотный отклик иде-
идеального прямоугольного фильтра
нижних частот, рассмотренный в
примере 5,
7Г
Рис. 1.21. Частотный отклик идеаль-
идеального фильтра нижних частот с круго-
круговой симметрией, рассмотренный в при-
примере 6.
48 Глава 1
Этот частотный отклик, показанный на рис. 1.21, не является
разделимым. В данном случае
A.88)
h («!, и2) = -±p j j exp (/&)!«! + /(o3n2) dco! dco2.
A
Для упрощения вычисления интеграла по круговой области А за-
заменим щ и ю2 переменными в полярных координатах. Определим.
• ill
¦II
1 1
1 1 1
II1 ""
1
-16 0 гц 16
Рис. 1.22. Сечение вдоль оси nt импульсного отклика фильтра нижних частот
с круговой симметрией, рассмотренного в примере 6.
Тогда уравнение A.88) преобразуется следующим образом:
h («!, п2) = -^ \ \ со ехр|/со У~п* 4- «2 cos (б — ф)] dq> da» =
ч) ч)
о о
da» ^
A.89)
где Уо (л:) и Jx (х) — функции Бесселя I рода 0-го и 1-го порядков
соответственно. Полученный импульсный отклик является диск-
дискретной функцией с круговой симметрией. Ее сечение вдоль оси пг
имеет вид
^1(n1R). A.90)
Это сечение представлено на рис. 1.22.
Многомерные сигналы и системы 49
1.3.3. Многомерное преобразование Фурье
В разд. 1.21 было показано, что произвольная двумерная по-
последовательность может быть выражена в виде суммы взвешенных
и сдвинутых импульсов [см. A.25)]. ЛИС-система отзывается на
каждый импульс своим импульсным откликом, взвешенным соот-
соответствующим образом. Поэтому выходная последовательность мо-
может рассматриваться как суперпозиция взвешенных и сдвинутых
импульсных откликов.
В настоящем разделе будет показано, что двумерная последо-
последовательность в большинстве практически важных случаев может
быть представлена взвешенной суммой комплексных синусоид, для
чего следует использовать многомерное преобразование Фурье.
Поскольку отклик ЛИС-системы на синусоидальный входной сиг-
сигнал нам известен, мы можем представить выходную последователь-
последовательность как суперпозицию синусоидальных откликов ЛИС-си-
ЛИС-системы.
Если внимательно посмотреть на оператор обратного преобра-
преобразования частотного отклика A.84), можно заметить, что он не толь-
только дает формулу для вычисления h (щ_, п2), но и представляет
последовательность h как суперпозицию комплексных синусоид.
Используем аналогичное представление для входной последова-
последовательности
я я
*(«!> п2) = -|^2- J J Я(«>1> w2)exp0'»in1 + /w2n2)dco1dco2. A.91)
Комплексная функция X, известная как двумерное преобразование
Фурье функции х, определяется следующим образом:
оо оо
Х(щ, ю2) = J] J] x(nlt л2)ехр(—/&)!«! —/&Jл2). A.92)
i=—оо rt2=—оо
Видно, что с учетом этого определения частотный отклик ЛИС-
системы представляет собой преобразование Фурье импульсного
отклика системы.
Пусть дана двумерная ЛИС-система L [. ] с импульсным от-
откликом h (пх, л2) и частотным откликом Н {(ах, (о2). Известно, что
L [exp (/&V4 + /ю2л2)] = Н (щ, (о2) ехр (/со^ +
+ /«Via). A.93)
50 Глава 1
Используя свойство линейности, а также представление х (nlt n2)
в виде интеграла от взвешенных комплексных синусоид [выра-
[выражение A.91)], получим
= L [x(nlt n2)] = L U^ J j X (<ob co2) x
L —Я —Я
«1 I /М2«г) dwl dw2 =
X exp
4n2
я я
[ lx (о)!, ш2) L [expO'co^! | -/co2n2)] dcoi doJ. A.94)
Наконец, с помощью A.93) получим
я я
( Л~Х \ \
я я
¦ ¦ ж ж i \ »х ^ \ - ш
X ехр (/оо!^! [ /ш2п2) do)! do).,. A.95)
При этом молчаливо предполагается, что функции X (d)v ш2)
и Я (&>!, ю2) определены так, что можно изменять порядок опера-
операций интегрирования и выполнения оператора L [¦ I в A.94) на
противоположный.
Выражение A.95) дает новый способ описания выходной после-
последовательности ЛИС-системы. Относительные веса комплексных
синусоидальных компонент, входящих в состав входной последо-
последовательности, здесь заменены умножением на частотный отклик
системы Я (о)!, ш2). Естественно, что выходная последовательность,
вычисленная по формуле A.95), идентична выходной последователь-
последовательности, полученной с помощью A.36) и A.37), использующих дис-
дискретную свертку (см. упр. 1.18).
Выходную последовательность у (nlt n2) можно также записать
с помощью ее преобразования Фурье:
у{пъ п2) = -?р j j К((йь со») exp (/&>!«! [- /(o2n2) d®! йщ. A.96)
Из сравнения уравнений A.95) и A.96) видно, что
Y К, ш2) = Н (<о„ ш2) X (Wl, ш2), A.97)
если у = h* *x. Этот результат, часто называемый теоремой о
свертке, исключительно важен: преобразование Фурье свертки
Многомерные сигналы и системы 51
двух двумерных последовательностей равно произведению их пре-
преобразований Фурье.
Можно показать, что преобразование Фурье, определяемое
A.92), существует, если последовательность х (п1г п2) абсолютно
суммируема
A.98)
п,——оо п.——оо
Если преобразование Фурье существует, оно непрерывно и ана-
литично. Это означает, что частотный отклик ЛИС-системы суще-
существует, если только система устойчива. Иногда оказывается полез-
полезным рассмотрение некоторой системы, например идеального филь-
фильтра нижних частот, у которой частотный отклик не непрерывен,
а импульсный отклик не удовлетворяет условию A.98). Хотя такой
импульсный отклик не является абсолютно суммируемым, он
квадратично суммируем.
Последовательности, удовлетворяющие более слабому, чем
A.98), условию
S Sl*(«i. п2)|2 = 5а<оо, A.99)
могут не иметь непрерывного преобразования Фурье, но послед-
последние вполне определены всюду, за исключением точек разрыва
непрерывности.
1.3.4. Другие свойства двумерных преобразований Фурье
Будем использовать обозначение
х~Х A.100)
для указания на то, что х (пи и2) и X (щ, ш2) — пара функций,
связанных преобразованием Фурье. С использованием этого
обозначения теорема о свертке приобретает форму
y--=h** x^Y = HX. A.101)
Оператор двумерного преобразования Фурье обладает рядом по-
полезных свойств, которые являются прямым обобщением свойств
одномерного преобразования. Ниже дан краткий обзор этих
свойств.
Линейность. Если
х1^Х1 и х2 — Х2,
то для любых комплексных чисел а и Ь
ахх + Ьхг ** аХх + ЬХг. A.102)
52 Глава 1
Пространственный сдвиг. Если
х (nlt /г2) <-* X (<о1( (о2), то
х («! — т1} пг — пц) «->¦ exp {—{щту — /<o2m2) X (щ, <о2).
A.103)
Сдвиг последовательности х (nlt n2) на величину (mlt тг) соответ-
соответствует умножению ее преобразования Фурье X (ы1} <о2) на мно-
множитель с линейной фазой ехр (—j(a1m1 — j(d2m2).
Модуляция.
х (nlt пг) ехр (/е^! + /e2n2) *- х (он — е1( w2 — е2). (i. 104)
Умножение последовательности на комплексную синусоидальную
последовательность соответствует сдвигу ее преобразования Фурье.
Умножение. Справедливо соотношение
я я
с (nt, п2)х(nlt n2) ^-^- J J X(Qlt 62) СК — е^ ©2—¦6a)d81d6a =
—л—я
л л
= таг J J х К - 61. «2 - е2) с (е1( е2) dex de2. A.105)
—л —л
Перемножение двух последовательностей приводит к свертке их
преобразований Фурье, как это видно из A.105). Заметим, что
интеграл свертки имеет особый вид; подынтегральное выражение
обладает двойной периодичностью, а область интегрирования
точно соответствует одному периоду подынтегрального выраже-
выражения. Свойство модуляции A.104) можно рассматривать как част-
частный случай перемножения двух последовательностей.
Дифференцирование преобразования Фурье. Осуществляется сле-
следующим образом:
i, )~aX(^;Ma), A.106а)
-jn2x (nv п2)~дХ{**щщ) , A.1066)
.flO-*^"'*. A.106b)
Транспонирование. Характеризуется соотношением
х(п2, /гЛ ~ X (а„ (Oi). A.107)
Зеркальное отражение. Его описывают соотношения:
х (—пъ л,) — X (— щ, щ), A.108а)
х {пъ — п,) — X (©!, — (о2), A.1086)
л; (—«!, —/г2) «¦ X (—(оь —(о2). A.108в)
Многомерные сигналы и системы 53
Комплексное сопряжение. Имеем
х* (Я!, л,) «- X* (— щ, —©,). A.109)
Вещественная и мнимая части. Разделяются следующим образом:
Re [х (/ц, л2)] — Vi [X К, о>2) + X* (- ©!, - (о2)], A.1 Юа)
/Imlxfa, л,)]*- l/i[^(©i, w2)-X*(— щ, - щ)], A.1106)
Vi [* («i. «я) + ** (— «1. — "г)] — Re [X (©!, ш2)], A.111а)
Vi [л: («!, п2) - дг* (— Л!, - п2)]« / Im [X (alt (о2)]. A.1116)
В частном случае, когда х (л^ /г2) является последовательностью
с вещественными значениями, из приведенных выражений следует,
что
X (щ, (о2) = X* (—©!, -<о2), A.112а)
Re [X (tolt ©,)] = Re [X (~~ш1} —©,)], A.1126)
Im [X (©!, ©,)] - —Im [X (—щ, —<o,)J. A.112в)
Вещественная часть преобразования Фурье обладает четной сим-
симметрией по отношению к началу координат, мнимая часть —
нечетной. Если х (nv n2) состоит из вещественных чисел, левые
части соотношений A.111а) и A.1116) отображают четную и не-
нечетную составляющие х (nlt /г2) соответственно.
Теорема Парсеваля. Если
х (пг, п2) «->¦ X (шъ щ) и w (%, /г2) -н- W («н, w2), то
я я
lt П2) = -^ J J ^@)!, (О2) X
X №*((»!, (O2)d(o1dw2. A.113)
Это замечательное соотношение можно интерпретировать и исполь-
использовать различными способами. Левая часть выражения A.113)
определяет скалярное произведение двух двумерных последова-
последовательностей; правая часть определяет скалярное произведение
их преобразований Фурье. Теорема Парсеваля утверждает, что
скалярное произведение инвариантно относительно операции
преобразования Фурье.
Равенство A.113) сводится к теореме о свертке, если w (nlt /гг)
принимается равным h* (тг — nlt пц — /гг), как в упр. 1.19.
54 Глава 1
Другой важный частный случай возникает, если w (nlt п2) =
= х (nlt n2), так что уравнение A.113) переходит в уравнение
E j \щс1щ. A.114)
и, пг —я —я
Левую часть уравнения A.114) можно рассматривать как полную
энергию дискретного сигнала х (nlt п2). Функция \Х (щ, w2)|2
определяет спектральную плотность энергии, поскольку интеграл
от этой функции равен полной энергии сигнала.
1.4. Дискретизация непрерывных двумерных сигналов
Почти все дискретные последовательности получаются как
результат представления некоторых реальных непрерывных сиг-
сигналов. Существует много различных способов представления
непрерывных сигналов — разложение в ряды Фурье и Тейлора,
разложение по нетригонометрическим ортогональным функциям
и т. д., однако значительно чаще других способов используется
периодическая дискретизация, что частично связано с просто-
простотой ее реализации. В настоящем разделе будет рассмотрена взаимо-
взаимосвязь характеристик непрерывных сигналов и получаемых из
них путем периодической дискретизации дискретных последова-
последовательностей. Мы сделаем это дважды—сначала для частного случая
периодической дискретизации по прямоугольному растру, а затем
в более общем случае использования других растров дискрети-
дискретизации.
1.4.1. Периодическая дискретизация по
прямоугольному растру
Из нескольких способов обобщения одномерной периодиче-
периодической дискретизации на двумерный случай наиболее простым яв-
является периодическая дискретизация в прямоугольных коорди-
координатах, которую мы будем для простоты называть прямоугольной
дискретизацией. Если ха (tlt t2) — двумерный непрерывный сиг-
сигнал, то дискретный сигнал х (tii, n2), полученный из него путем
прямоугольной дискретизации, имеет вид
х (ль п2) = ха {niTlt n2T2), A.115)
где Г|И Г2 — положительные вещественные константы, известные
как горизонтальный и вертикальный интервалы дискретизации.
Расположение отсчетов на плоскости (tlt t2) показано на рис. 1.23.
Исходя из вида сформированной таким образом последователь-
последовательности, необходимо ответить на два вопроса: можно ли по значе-
значениям х (tii, n2) восстановить сигнал ха (tlt t2) и как связаны фурье-
преобразования сигналов х и ха?
Многомерные сигналы и системы 55
Прежде всего определим двумерное преобразование Фурье
для непрерывных сигналов:
^, A.116)
dQ2. A.117)
Xa(Qlt Й2)Д j j xa(tlt f
00 OO
OO OO
a (h, k) = -^ j j Xa (Qlt Q2) exp (/0
—OO —OO
• T,
• ¦ • •
Рис. 1.23. Расположение отсчетов на плоскости (tlt t2) для случая прямо-
прямоугольной дискретизации.
Поскольку х (пъ п2) ,Д
можно записать
(«1. п2) = -±r
. «2^2). то, используя A.117),
j dQ2
—ОО ОО
A.118)
Далее преобразуем это выражение так, чтобы получить обратное
преобразование Фурье для дискретных сигналов. Начнем с под-
подстановки щ = пгТг и (о2 = Q2T2; это даст нам правильную
форму экспоненциальных множителей. Получим
1
X
—ОО —ОЭ
х exp O'ftvt! + /ю2п2) йщ dw2. A.119)
Двойной интеграл по всей плоскости (©!, w2) можно разложить
на бесконечную последовательность интегралов, каждый из ко-
которых имеет квадратную область интегрирования площадью
4л2. Пусть SQ (klt k2) представляет собой квадратную область
56 Глава 1
—я + 2nki < й] < л + 2nklt —я + 2яй2 < щ < я + 2яй2.
Тогда A.119) можно записать следующим образом:
Yin „b-VV 'ff —l—X (-^- -^Л х
x(nlt n2)- 4я2 ^j ?j JJ т1т2Ла\т1' тг) x
ft, ft2 SQ (ft,, ft2)
X exp (jaxnx + /<D2n2) do)! dw2.
Заменяя Wi на Wj — 2яйх и w2 на w2 — 2яй2, можно устранить
зависимость пределов интегрирования от kx и k2 и получить
f f Г ' W.Y fMi-2jI*i m,-2jrt,\-|
J J Ti7,2 ^j ^j a V Гх ' Г2 Л
— Я ~Я L ftl *2 J
X exp (/Wirtj + /W2«2) exp (—j2nk1n1 — /2лй2/г2) йщ dw2. A.120)
Второй экспоненциальный множитель в A.120) равен 1 для всех
значений целочисленных переменных пъ къ п2 и k2. Теперь выра-
выражение A.120) записано в форме, совпадающей с обратным пре-
преобразованием Фурье, откуда можно заключить, что
\(м ,л\ - * W .Y
а к, (о2) - y-f- 2 2 A
иначе
*, ft2
A.122;
Выражение A.122) и дает нам искомую взаимосвязь между пре-
преобразованиями Фурье непрерывного и дискретного сигналов.
Правую часть этого выражения можно рассматривать как перио-
периодическое продолжение, или дополнение функции Ха (Qlt Q2),
дающее периодическую функцию X (QiTj, Q2r2).
Если непрерывный сигнал ха (tlt t2) является 'сигналом с огра-
ограниченным спектром1), выражение A.122) допускает дальнейшее
упрощение. Преобразование Фурье Ха (Qlt Q2) сигнала с ограни-
ограниченным спектром имеет нулевые значения вне некоторой конечной
области на плоскости (Qlt Q2). Для простоты предположим, что
периоды дискретизации Т1 и Т2 выбраны достаточно малыми,
так что
Ха (пъ Qs) = 0 для | Qj | ^ я/Г!, | Q21 ^ я/Г3. A.123)
Тогда выражение A.122) упрощается:
X (QJi, Q2r2) = -Дг- Ха (Qb Q2) при | Qx | < n/TL
1 1* 2
и |&2|<я/Г2. A.124)
х) То есть его спектр занимает участок ограниченной протяженности в ча-
частотной плоскости. — Прим. ред.
Многомерные сигналы и системы 57
Значения X (QiTly Q2T2) вне этой области определяются периодич-
периодичностью X (QjT!, Q2T2).
На рис. 1.24, а представлено изображение преобразования
Фурье сигнала с ограниченным частотным спектром. Периодиче-
Периодическое повторение преобразования Фурье дает периодическую функ-
функцию, показанную на рис. 1.24, б.
Пока Ха (йъ Q2) удовлетворяет уравнению A.123), его
можно восстановить по X {QiTlt Q2T2), обратив выражение
A.124):
Xa(Olt «s) =
\, Q2T2) при
в остальных случаях.
A.125)
Рис. 1.24.
преобразование Фурье непрерывного сигнала с ограниченным частотным спектром;
б — периодическое повторение этого преобразования.
Следовательно, в данном случае непрерывный сигнал ха (t1; t2)
можно восстановить по дискретному сигналу. Для иллюстрации
этого положения выразим ха (tlt t2) через его преобразование
Фурье
оо оо
ха (*i, U) = -^ j j Xa (Q'lt Q2) exp (jQ^ + jQ2t2) dQ, dQ2 =
—oo —oo
1 1
-W, -W,
A.126)
58 Глава 1
Здесь для удобства использованы обозначения W1 ^ я/7\ и
W2 Д я/Г2. Выразим теперь X {пгТъ п2Т2) через х {пъ п2):
*а (к, к) = -JL J j TjT, Г 2 S ^ ("Ь "*) X
X ехр (—/QiTirt!— /Q2T2rt2)l exp (/
j j exp [/Q (^ -
sin
Вместе взятые выражения A.115), A.125) и A.127) образуют
основу двумерной теоремы отсчетов. Эта теорема утверждает,
что непрерывный сигнал с ограниченным спектром может быть
восстановлен по значениям его отсчетов. Для обеспечения усло-
условия A.123) интервалы дискретизации 7\ и Т2 должны быть доста-
достаточно малыми, либо, что то же самое, частоты дискретизации
2Wx и 2W2 должны быть достаточно велики.
Непрерывный сигнал с неограниченным частотным спектром
также можно подвергнуть дискретизации, однако в этом случае
выражения A.124) и A.125) несправедливы, так как при периоди-
периодическом повторении A.122) в область | Qx7i | < я, |Q2T2|<^
будут вносить вклад и другие копии Ха (Qj, Q2). Это явление,
как и при обработке одномерных сигналов, носит название эф-
эффекта наложения, поскольку высокочастотные компоненты
Ха (Qlt Q2) будут «маскироваться» под низкочастотные компоненты
X (QjTx, Q2T2).
1.4.2. Периодическая дискретизация при
произвольном растре дискретизации
Понятие прямоугольной дискретизации легко обобщить. Опре-
Определив два линейно независимых вектора Vj = (vn, v21)' и v2 =
— (yi2> ^22I можно описать расположение двумерного периоди-
периодического множества отсчетов на плоскости (*i, t2) следующим
образом:
v12n2, A.128a)
v22n2. A.1286)
Многомерные сигналы и системы 59
С использованием векторных обозначений эти соотношения при-
примут вид
t=Vn, A.129)
где t = (tx, t2)', n = (tii, n2)', a V — матрица, образуемая век-
векторами дискретизации Vj и v2
V = [v,|v2]. A.130)
Поскольку мы условились, что Vj и v2 лийейно независимы, опре-
определитель матрицы V не равен нулю. Будем называть V матрицей
дискретизации.
4
Рис. 1.25. Расположение отсчетов на плоскости (tlt t2), определяемое векто-
векторами vj и v2, образующими матрицу дискретизации V.
Дискретизация непрерывного сигнала ха (t) образует дискрет-
дискретный сигнал
x(n)^xa(Vn). A.131)
На рис. 1.25 показано расположение отсчетов. По-прежнему
можно спросить: как связаны преобразования Фурье сигналов
х (п) и ха (t) и при каких условиях можно реконструировать
ха (t) по значениям отсчетов х (п)? Будем рассуждать, как и
раньше, прежде всего определяя двумерное преобразование Фурье
со
Ха (О) й J xa (t) exp (-/fl't) d\
A.132а)
и отмечая, что
сю
@ = 4^- J *a (O)exp (jii't)dQ,
A.1326)
60 Глава 1
где вектор частот ft задается (Qb Q2)'. [Заметим, что интегралы
в A.132) — это двойные интегралы, так как дифференциалы dt
и dft представляют собой векторы. ]
Преобразование Фурье сигнала х (п) в векторных обозначениях
имеет вид
X ((о) а 2 х (п) ехр (—/ю'п), A.133а)
п
где (о = (щ, со2)'. Тогда
я
jt(n) = JL j X((o)exp(/(o'n)d(o. A.1336)
—я
Поскольку х (п) получается из ха (t) дискретизацией, можно
написать
сю
х (n) = xa (Vn) = J^ j Xa (ft) exp (/ft'Vn) dft.
—сю
Подстановка <о = V'ft приводит к выражению
Vn)d©. A.134)
Как и раньше, интегрирование по плоскости <о представляется
как бесконечная сумма интегралов по квадратным областям.
Результат аналогичен выражению A.120). Далее
я
J
2як)) х
/2як'п) d<o,
X ехр (/Vn) exp (—/2як'п) d<o, A.135)
где к — вектор целочисленных значений. Второй экспоненци-
экспоненциальный множитель, как и раньше, всегда равен 1, поэтому сравне-
сравнение A.135) и A.1336) приводит к виду
или A-136)
(L137)
к
где U — матрица, удовлетворяющая условию
= 2nI, A.138)
Многомерные сигналы и системы 61
а I —единичная матрица размера 2x2. Выражение A.137)
содержит искомую связь между преобразованиями Фурье сигна-
сигналов х (п) и ха (t).
В случае прямоугольной дискретизации матрицы V и U при-
принимают вид
Г1
о
О *
1 a J
о
[ О 2W2
и выражение A.137) сводится к A.122).
X (V'ft) можно рассматривать как периодическое продолже-
продолжение Ха (ft), но теперь периодичность задается матрицей U, кото-
которая представляет собой набор из двух векторов периодичности
их и и2:
U = [Ul|uJ. A.139)
Поскольку функция X (ю) периодична как по (о1( так и по ш2
с периодом 2я, можно заключить, что X (V'ft) периодична по ft
с матрицей периодичности U
X (V (ft + Uk)) = X (V'ft + 2nk) = X (V'ft).
Рассмотрим непрерывный сигнал ха (t) с преобразованием
Фурье, показанным на рис. 1.24, а. Если дискретизацию ха (t)
производить согласно матрице дискретизации
ч: -'.]•
A.140)
которая соответствует расположению отсчетов, показанных на
рис. 1.25, то функция Ха (ft) будет периодически повторяться
согласно следующей матрице периодичности U:
A.141)
Следовательно, X (V'ft) как функция от ft, определяемая A.137),
будет выглядеть, как показано на рис. 1.26.
Теперь опять следует рассмотреть важный случай непрерыв-
непрерывного сигнала ха (t) с ограниченным спектром. Преобразование
Фурье Ха (Q) тождественно равно нулю вне области конечной
протяженности В, которую мы будем называть полосой частот.
Изменяя матрицу дискретизации V, можно матрицу периодич-
периодичности U подобрать так, чтобы не было перекрытий периодически
повторяемых копий Ха (ft) в правой части выражения A.137).
62 Глава 1
Подбирая значения U таким образом, мы обеспечиваем от-
отсутствие наложений. Тогда для значений VQ, лежащих в квадрате
со сторонами длиной 2л и с центром в начале координат, выраже-
выражение A.137) упрощается:
^ .(")• A.142)
I det V I
Рис. 1.26. Периодическая функция X (VQ) с матрицей .дискретизации V,
определяемой выражением A.140).
Следовательно, функцию Ха (Q) можно восстановить по функции
X (VQ), а непрерывный сигнал ха (t) — по последовательности
х (п). Можно записать
¦Ха (П) =
| det V|-X(V"fi), il ? В,
0 в остальных случаях.
A.143)
Выполнив обратное преобразование Фурье функций, стоящих
слева и справа от знака равенства, и выразив X (VQ) через
значения отсчетов х (пъ п2), получим выражение, аналогичное
A.127):
A.144)
Многомерные сигналы и системы 63
Здесь интеграл берется по полосе В в плоскости частот. Перепи-
Перепишем выражение A.144) в виде
ха (t) = Ц х (n) / (t - Vn), где A.145)
п
/(t) = i^L Jexp(/Q't)dQ. A.146)
в
Интерполяционная функция f (t) дает возможность реконструи-
реконструировать значения ха (t) в точках, расположенных между положе-
положениями отсчетов t = Vn.
Подведем итоги рассмотрения этого более общего случая.
Пусть имеется непрерывный сигнал ха (t) с ограниченным спек-
спектром. Преобразование Фурье этого сигнала Ха (Q) имеет нулевые
значения вне области В плоскости частот Q. Требуется предста-
представить ха (t) последовательностью значений отсчетов х (п). Для
этого следует найти соответствующую матрицу дискретизации V,
которая позволит восстановить ха (t) no x (п) с помощью равен-
равенства A.145).
Из A.137) видно, что преобразование Фурье дискретного
сигнала х (п) дает последовательность взвешенных и периоди-
периодически повторенных копий Ха (Q). Матрица периодичности U
определяет два линейно независимых направления, в которых
происходит повторение Ха (Q). Для решения поставленной задачи
следует выбирать U таким образом, чтобы не было перекрытий
отдельных копий Ха (Q) и соответственно отсутствовало наложе-
наложение. В этом случае Ха (й) удовлетворяет равенству A.143).
Выбор матрицы периодичности U определяет матрицу дискре-
дискретизации V, поскольку U и V связаны соотношением A.138). В об-
общем случае выбор U неоднозначен; при соответствующей плот-
плотности отсчетов на плоскости t любой сигнал с ограниченным спек-
спектром можно представить по различным растрам дискретизации.
Однако часто желательно представить ха (t) минимальным числом
отсчетов. Можно показать, что плотность отсчетов (количество
отсчетов на единицу площади) составляет l/|detV|. Минимиза-
Минимизация этой величины эквивалентна минимизации |detU|. По-
Поэтому, желая достичь эффективной формы растра дискретизации
сигнала с ограниченным спектром, необходимо выбрать матрицу
периодичности U с минимальным значением | det U |, при котором
обеспечивается отсутствие наложения для конкретной формы
полосы частот В нашего сигнала.
Доказательство обобщенной теоремы отсчетов легко распро-
распространяется на случай Л1-мерных сигналов. Поскольку мы исполь-
использовали векторные обозначения, единственное отличие в выраже-
выражениях будет состоять в замене константы 4л2 на более общую
Bл)".
64 Глава 1
Пример 7
Составление морских сейсмических карт может дать резуль-
результаты, которые подвергаются дискретизации несколько необычного
вида. На рис. 1.27 судно, буксирующее цепочку датчиков, дви-
движется со скоростью В узлов в направлении, перпендикулярном
океанскому течению, имеющему скорость С узлов A морской
узел = 1,87 км/ч). Датчики расположены равномерно вдоль пря-
прямой линии с интервалом D; все датчики периодически опраши-
. ваются и их показания фиксируются. Временной интервал опроса
датчиков (период отсчета) обозначим через Т. Как происходит
дискретизация изучаемого процесса в пространстве?
Рис. 1.27.
а — схема для примера 7; б — результирующий растр дискретизации; R = D cos 6;
S = D sin 6.
В первом приближении датчики остаются расположенными
вдоль прямой линии, однако эта линия отклоняется от направле-
направления движения судна на угол 8 = arctg (С/В). Результирующий
растр показан на рис. 1.27, б. Этот растр соответствует матрице
дискретизации
"~ BD
[ВТ —Dcos0]
V =
L о
ВТ —
о
У в2 + с2
CD
У в2 + с2
1.4.3. Сравнение прямоугольной и гексагональной
дискретизаций
Для любого сигнала с ограниченным спектром можно пред-
предложить бесконечное количество матриц периодичности U и матриц
дискретизации V. Однако из всего этого многообразия практи-
практически используются только два варианта — прямоугольная и
гексагональная дискретизация. Прямоугольная дискретизация
была описана в разд. 1.4.1. Для нее характерна диагональная
матрица дискретизации V.
Гексагональной дискретизации соответствует матрица дискре-
дискретизации вида
~т\ -Тт]\- (М47)
Многомерные сигналы и системы 65
Растр отсчетов для гексагональной матрицы дискретизации пока-
показан на рис. 1.28. Строки растра повторяются через одну, при
этом нечетные строки сдвинуты относительно четных на пол-
полпериода. Термин «гексагональный» используется потому, что при
То = 7\ J 3 каждый отсчет будет иметь шесть ближайших со-
соседей 1).
Т--Н
Рис. 1.28. Гексагональный растр дискретизации.
Нетрудно видеть, что соответствующая матрица периодичности
имеет вид
U
-н..
A.148)
где tii = л,7\, а п., = л/7\>.
Можно предложить несколько областей различной формы,
которые, периодически повторяясь в соответствии с выражением
A.137). покрывают плоскость (Q,, Q,,) без перекрытий. Четыре
примера таких областей приведены на рис. 1.29. Особый интерес
представляет показанная на рис. 1.30 шестиугольная область
с параметрами Wit W» и Wa [6]. Эти параметры связаны с пара-
параметрами периодичности «х и и3 следующим образом:
u1=-W1—\2W3, A.149а)
и, =¦- W,. A.1496)
Сравним относительную эффективность прямоугольного и
гексагонального растра дискретизации двумерного непрерывного
г) Следует добавить: равноудаленных соседей. — Прим. ред.
66 Глава 1
@,2и,)
@.-2U,)
("l.-Uj)
Рис. 1.29. Четыре примера областей, которые покрывают плоскость частот при
лериодическом продолжении в шести направлениях.
Многомерные сигналы и системы 67
сигнала с частотным спектром, ограниченным круговой областью
частот. Двумерное преобразование Фурье такого сигнала удо-
удовлетворяет условию
Xa(Qu Q2)
для
A.150)
Круговую область частот (например, показанную на рис. 1.24, а)
можно вписать в квадрат со стороной 2W или в шестиугольник
Рис. 1.30. Полоса пропускания сигнала с ограниченным частотным спектром
в виде шестиугольника.
(с любезного согласия Расселла М. Мерсеро, Proc. IEEE, © 1979 IEEE.)
со стороной 2№/'уЛ3. Следовательно, частотный диапазон сигнала
можно считать ограниченным либо квадратным, либо шести-
шестиугольным участком частотной плоскости.
Периодическое повторение квадратного участка соответствует
дискретизации на прямоугольном растре. В этом случае матрица
дискретизации V имеет вид
— 0
о —
U W J
IdetV
пр|
A.151)
A.152)
68 Глава 1
С другой стороны, можно использовать матрицу гексагональной
дискретизации
*гекс —
л
туз
л
TF
и" Уз
л
W
ДЛЯ KOTOpOIt
I det VreKE I =
U Уз ¦
A.153)
A.154)
Поскольку плотность отсчетов пропорциональна 1 | det V |, то из
отношения выражений A.152) it A.154) видно, что для представ-
Таблица 1.1. Отношения
эффективности .И-мерной
кубической решетки
к гнперсферпческой
в функции М
м
I
2
3
4
о
6
7
8
Эффективность
1.000
0.S66
0.705
0.499
0.353
0,217
0,125
0.062
ления одного it того же сигнала, спектр которого ограничен кру-
кругом, гексагональная дискретизация требует на 13,4 "и меньше
отсчетов по сравнению с прямоугольной. В самом деле, можно
показать to], что для сигнала с круговым частотным диапазоном
гексагональная дискретизация является наиболее эффективной.
Понятия гексагональной и прямоугольной дискретизации
можно обобщить на .W-мерный' случаи. Прямоугольная дискре-
дискретизация соответствует выборкам на гнперкубггческон решетке.
Положениям отсчетов в случае .И-мерного обобщения гексаго-
гексагональной дискретизации соответствуют центры плотноупакован-
ных .U-мерных гиперсфер. В табл. 1.1 для различных значений М
приведены значения эффективности гексагональной дискретиза-
дискретизации по отношению к прямоугольной [51. Следует заметить, что
в одномерном случае как прямоугольная, так н гексагональная
дискретизации переходят в одномерную периодическую дискре-
дискретизацию. В разд. 1.5 будут рассмотрены некоторые свойства
сигналов и систем с гексагональной дискретизацией.
Многомерные сигналы и системы 69
* 1.5. Обработка непрерывных сигналов
дискретными системами
Преобразуя непрерывный сигнал в дискретную периодиче-
периодическую последовательность отсчетов, мы получаем удобную воз-
возможность обработки сигналов цифровыми системами, Хотя в пре-
предыдущем разделе было показано, что для дискретизации много-
многомерных сигналов можно использовать различные формы растра,
большинство алгоритмов цифровой обработки основано на пред-
предположении, что значения отсчетов берутся на прямоугольном
растре. Это достойно сожаления, поскольку, как было показано
выше, правильный выбор растра дискретизации часто приводит
к снижению плотности отсчетов и, следовательно, к уменьшению
объема цифровой памяти, необходимой для хранения представ-
представления сигнала, Кроме того, меньшая плотность отсчетов влечет
за собой снижение объема вычислений, требуемых для реализации
операций фильтрации.
1.5.1. Взаимосвязь между входным и выходным
сигналами системы
Рассмотрим систему, показанную на рис. 1.31. Сигнал с огра-
ограниченным спектром ха (t) преобразуется в соответствии с матри-
матрицей дискретизации V в дискретный сигнал х (п). Дискретный
сигнал обрабатывается одной из обсуждавшихся в разд. 1.2
многомерных ЛИС-систем, характеризуемой импульсным откли-
откликом h (n). В результате формируется выходная последователь-
последовательность у (п), описываемая дискретной сверткой
у(п)= 2 *(k)ft(n-k)= 2 ft(k)*(n -k). A.155)
Эта выходная последовательность используется для реконструк-
реконструкции непрерывного сигнала уа (t) с помощью интерполяционной
формулы A.145). Таким образом, можно использовать дискретную
ЛИС-систему для обработки непрерывного сигнала с ограничен-
ограниченным спектром.
Матрица дискретизации U связана с матрицей периодичности U
соотношением V — 2:tU-1. Матрица периодичности в свою оче-
,'Ыскре
in iaiuiH
согласно
Niaipiiuc V
xfn)
ЛИГ-систсма
с импульсным
01КЛ11КОМ
У («О
Интер-
Интерполяция
функцией
'0)
Рис. 1.31. Дискретная многомерная система, которую можно использовать для
обработки непрерывных сигналов с ограниченным спектром.
70 Глава 1
редь выбирается так, чтобы функция Ха (&), равная нулю вне
некоторой ограниченной области В, могла быть восстановлена
по своему периодическому представлению. Матрицу U следует
выбирать из условия минимальности ее определителя. В опти-
оптимальном случае периодическое повторение области В покроет
плоскость Q без зазоров или перекрытий.
Комбинируя выражения A.145) и A.155), запишем непрерыв-
непрерывный выходной сигнал в виде
= Е E*(k)*(n-k)/(t- Vn) =
n k
= E*(k)*e(t-Vk). A.156)
k
Равенство A.156) определяет связь между непрерывным входным
сигналом ха (t) и выходным сигналом уа (t). Хотя и заманчиво
было бы определить импульсный отклик всей системы, показан-
показанной на рис. 1.31, однако импульсный сигнал нельзя использовать
в качестве входного, так как он имеет неограниченный спектр.
Вместо этого подадим на вход системы интерполяционную функ-
функцию / (t), определенную в A.146). Частотный диапазон функции
/ (t) ограничен областью В, и после дискретизации в соответствии
с матрицей V эта функция преобразуется в единичную импульсную
последовательность б (п). Если на входе системы действует функ-
функция / (t), то непрерывный выходной сигнал будет описываться
формулой
Уа (t)= E *(k)/(t - Vk) = Mt)- A-157)
k
Отклик ha (t) можно рассматривать как частотно-ограниченный
импульсный отклик системы. Используя определение ha (t),
можно получить другую форму соотношения A.156), характери-
характеризующую связь входного и выходного сигналов:
y«(t)=E*0OMt-Vk). A-158)
к
Вид дискретной свертки A.155) не зависит от матрицы дискре-
дискретизации V. Если эту сумму рассматривать как способ реализации
фильтра, что можно делать, если импульсный отклик фильтра
h (n) имеет ограниченную область определения, то .одно и то ;же
аппаратное или программное обеспечение можно использовать
для вычисления сверток последовательностей, представляющих
сигналы с ограниченным спектром при дискретизации по прямо-
прямоугольному, гексагональному или другим периодическим растрам.
Однако объемы вычислений в этих случаях могут существенно
Многомерные сигналы и системы 71
различаться. Если, например, х (п) представляет собой отсчет
сигнала с круговой полосой частот при гексагональной дискре-
дискретизации, то каждая из последовательностей х (п) и у (п) требует
на 13,4 % меньше отсчетов, чем в случае прямоугольной дискре-
дискретизации. В результате при вычислении дискретной свертки число
выполняемых операций сложения и вычитания уменьшится
на 25 %.
1.5.2. Частотный отклик системы
Возникает очевидный вопрос: чему равен выходной сигнал
системы, показанной на рис. 1.31, для входного сигнала в виде
комплексной синусоиды? Примем
xa(t) = exp(/O't), О ? Б. A.159)
Тогда
x(n) = exp(/O'Vn) и A.160)
У(«) = ? Л(к)д:(п - к) = exp (/Q'Vn) ГЦ Л(к)ехр(-/О'УкI =
к L к J
= exp (/QVn) H (VQ). A.161)
Наконец, интерполируя значения у (п), имеем
ya(t) = H(V'Q)exp(jQ't), Q?B. A.162)
Отклик системы на комплексную синусоиду представляет собой
комплексную синусоиду той же частоты, но умноженную на
комплексный весовой коэффициент Н (V'ft).
Поскольку функцию Н (V'Q) часто изображают как функцию
от Q, удобно определить
HV(Q) Atf(V'O) = ? h (k) exp (—/Q'Vk). A.163)
Используя это определение совместно с A.156), получим связь
преобразований Фурье непрерывных входного и выходного сиг-
сигналов
Ya(Q) = Hv(Qi)Xa(Q) для О?В. A.164)
Таким образом, Ну (Q) можно рассматривать как частотный
отклик системы, показанной на рис. 1.31.
1.5.3. Другое определение преобразования Фурье
для дискретных сигналов
Имея дело с дискретными сигналами и системами, мы обычно
используем определение преобразования Фурье
72 Глава I
которое было рассмотрено в разд. 1.3. Если нас интересует взаимо-
взаимосвязь между непрерывными сигналами и получаемыми в резуль-
результате их дискретизации дискретными сигналами, то иногда удобнее
использовать другую форму преобразования Фурье, которое полу-
получается при подстановке м VQ:
Ху(П)й Ц л-(п)ехр (—/Q'Vn) = X (V'Q). A.165)
п
Выражение для обратного преобразования можно получить сле-
следующим образом;
л
х (п) = IF" 1 х №ехр (/A)'n)dw =
\
l) exp(jil'\n)dil =
exp (/Q'Vn) dii. A.166)
Область В, по которой вычисляется интеграл, получается при
отображении квадратной области —л <: «j <: л, —л <: ш2 <: л
на плоскость О при замене переменных w = V'fi.
Функция Ху (Q) периодична и характеризуется матрицей
периодичности U, причем, как и ранее,
Это легко показать, записав
Xv(O-t-Uk)= Ц х(п)ехр(—/Q'Vn-/k'U'Vn) =
п
= Ц х(п)ехр(—/Q'Vn) ехр (—/2лк'п). A.167)
п
Поскольку кип — целочисленные векторы, второй экспонен-
экспоненциальный сомножитель всегда равен 1, поэтому
Xv (Q -г Uk) -= Xv (Q).- A.168)
В силу отмеченной периодичности интеграл в выражении A.166)
можно с равным успехом вычислить по любой области в плоско-
плоскости Q, которая включает точно один период Xv (Q).
Из-за тесной связи Xv (Q) и X (м) свойства X (to) отражаются
в свойствах Ху (Q). Ниже для примера приводится список неко-
некоторых из этих свойств. Их доказательство предоставляется чи-
читателю.
Линейность. Если
х(п)<- Ху(п) и w(n)*-+Wv(Q),
Многомерные сигналы и системы 73
то для любых комплексных константа и b справедливо соотношение
ах (п) -• bw (n) ~ aXv (О) -f &ЦГ„ (Q).
Свойство сдвига, х (п — т) <->- Ху (Q) ехр (—/Q'Vm).
Теорема о свертке, х (п) * * /г (п) *-> Ху (Q) Яу (Q).
Теорема Парсеваля. ^ х (п) ц'* (п) = [ ^7[ J Xv (Q) X
п В
х Щ (Q) dQ.
Упражнения
1.1.а) Найдите матрицу периодичности, описывающую пе-
периодичность решетки, показанной на рис. У1.1.
• А А
п,
Рис. У 1.1.
б) Найдите для того же множества вторую матрицу перио-
периодичности.
в) Покажите, что абсолютные значения определителей этих
матриц равны.
1.2. Для каждой из описанных ниже систем определите,
является ли система 1) линейной и 2) инвариантной к сдвигу.
а) «/(«!, п2) = х(п1, n^xfa-N, пг)\
00
б) y(nlt пг)= I] х{пъ k2);
ks= —00
1
В) «/(«!, Пг) = 2 X(nlt k2).
?1
1.3. Рассмотрите последовательность х, заданную следую-
следующим образом:
f 1 при rii^O, n2 2гиг,
х(пъ п2) — \ п
v [0 в остальных случаях
Вычислите свертку последовательности с собою.
74 Глава 1
1.4. Используя дискретную свертку» докажите, что опера-
операция свертки
а) коммутативна, т. е. х * •* у = у * * х;
б) ассоциативна, т. е. (х * * у) * * z = х * * (у * * г);
в) дистрибутивна, т. е. х * * (у + г) = х * * у + х * * г.
1.5. Пусть х и h — две последовательности конечной протя-
протяженности, показанные на рис. 1.14. Считая, что значения после-
последовательностей равны 1 в опорных областях и 0 вне этих областей,
вычислите свертку х с h. Форма опорной области для этой свертки
определена в разд. 1.2.4.
1.6.а) Вычислите свертку последовательности х (nlt n2) =
= аП1ЬПги («!, ги) с последовательностью
00
у (пх, пг) = ? б («! - rNu пг — rN2).
г= — оо
б) Вычислите свертку последовательности х (п. «а») с после-
последовательностью, показанной на рис. У 1.6 (черные кружки пред-
представляют отсчеты со значением 1, точки — со значением 0). (Ука-
(Указание: используйте результат п. «а»).
п2
.... П1
1
Рис. У 1.6.
1.7. В этой главе было показано, что произвольную двумер-
двумерную последовательность можно представить в виде линейной
комбинации сдвинутых импульсных последовательностей. Исполь-
Используя такое представление, мы затем показали, что выходной сигнал
линейной системы, инвариантной к сдвигу, можно представить
в виде той же линейной комбинации импульсных откликов си-
системы. Аналогичный результат получается и при использовании
ступенчатых откликов.
а) Рассмотрите произвольную последовательность х (пъ п2).
Покажите, что х можно представить в виде бесконечной линейной
комбинации двумерных ступенчатых функций.
б) Предположим теперь, что х — входной сигнал линейной
системы, инвариантной к сдвигу, со ступенчатым откликом
s (пъ п2). Выразите выходной сигнал системы через значения
отсчетов s и х.
Многомерные сигналы и системы 75
в) Является ли операция «свертка со ступенькой» коммута-
коммутативной? Другими словами, будет ли ответ на п. «б» тем же, если
поменять местами последовательности s и х?
1.8. а) О последовательностях х (пъ и2) и у (пъ и2) известно
лишь, что их опорной областью является первый квадрант, т. е.
х («!, и2) = 0, если rii < 0 или и2 < О,
у («i, и2) = 0, если tit < 0 или я2 < 0.
Покажите, что опорной областью их свертки также является
этот квадрант.
б) Повторите п. «а» для случая, когда опорной областью х
и у является третий квадрант, т. е. {(пи и2) : nt < 0, и2 < 0}.
в) Представьте теперь, что х и у — последовательности, от-
отличные от нуля в одном квадранте, но их опорные области не
совпадают. Можно ли что-либо утверждать, и если можно, то
что именно, об опорной области их свертки?
J.9. Рассмотрите две двумерные разделимые последователь-
последовательности:
а (пъ п2) = а (пг) Ь (/ц), Р (nlt п2) = с (tii) d (n2).
а) Покажите, что свертка является разделимым сигналом.
б) Выразите свертку через а, Ь, с и d.
J.JO.а) Две линейные инвариантные к сдвигу системы соеди-
соединены параллельно, как показано на рис. У1.10, а. Покажите,
что система в целом линейна и инвариантна к сдвигу.
x(hi,n2)
тм
SM
Рис. У 1.10.
76 Глава 1
б) Две линейные инвариантные к сдвигу системы соединены
последовательно, как показано на рис. У 1.10, б. Покажите,
что система в целом линейна if инвариантна к сдвигу.
1.11. Докажите следующее утверждение: разделимая ЛИС-
система с импульсным откликом h (п1, п2) = f (n^ g (п2) устой-
устойчива в том и только том случае, когда / (я^ и g (n.2) являются
абсолютно суммируемыми последовательностями.
1.12. Покажите, что двумерный частотный отклик периоди-
периодичен, т. е. что
Н
4"
= Н
@2)
для любой упорядоченной пары целых чисел (kx, k2).
1.13.а) Покажите, что частотный отклик разделимой системы
является разделимой функцией, т.е. если
h(nu n2) = \{n1)g{n2), то
Н (соц ы2) = F (м:) G (cu2), где
F (w) = ? / (n) exp (—jam) и
п
G(w) = J]g(n)exp(—j(jm).
п
б) Покажите, что это свойство справедливо и для Л4-мерной
системы.
в) Выразите преобразование Фурье импульсного отклика
h {пъ пъ п3) = f (rij) g (пг, п3)
через F (о^) и G (оJ. со3).
1.14. Найдите импульсный отклик фильтра с частотным
откликом (один период)
A ПрИ | 0)! | < W, | 0J \<W, | 0K | < W,
Н (ы,, оJ, Wo) = i .
[0 в остальных случаях.
1.15. Найдите фурье-преобразования последовательностей:
а) х{пъ п,) = а2п^п> и (пи п2), |а|<1,
б) х{пх, п2) = ап<Ьп*Ь Dпг — п2)и{пх),
в) x(nv n2, n3) = anw(n.2, n3)«(«i). IUI
где
Ь\<\,
1 при 0
п2
N — 1, 0
М — 1,
в остальных случаях.
Многомерные сигналы и системы 77
1.16. Считая, что л'(©!, со2) — преобразование Фурье после-
последовательности х («!, п2), найдите преобразование Фурье последо-
последовательности
х (atii — brin, crii ~ dn-i), Q-d — be = 1,
при условии что а, Ь, с и d — целые числа.
1.17. На рис. VI.17 изображены опорные области некоторых
последовательностей. Считая, что отсчеты последовательностей,
отмеченные кружками, имеют значение 1, а отмеченные точ-
точками — 0, укажите, для каких последовательностей соблюдаются
условия:
-9-1
• •
И
Рис. У 1.17.
III
а) X (сй1( On) состоит из вещественных значений;
б) X ((x>lt йь) = X (Ms. Wj);
В) X ((й1( (Оо) = Л' (— @1( @а).
1.18. Пусть"
У ("к «-) =
i. k,)h{nx — kv n, —
Используя преобразование Фурье последовательностей ,v (n1? n2)
и /i («i, пг), покажите, что
. «•') = ^r I I
1.19.а) Если h-^ H представляют собой пару функций, свя-
связанных преобразованием Фурье, как выглядит преобразование
Фурье функции Л* (т1 — пъ т.2 — tin), где т1 и тг — целочислен-
целочисленные константы?
б) Докажите теорему Парсеваля
V ^ , х{пх п2)и<* (rtx. п.:) =
4л2
f f X (wj. ш2) IV'*
(Vl. 19)
78 Глава 1
в) Как изменится правая часть равенства (У 1.19), если
w (п1} п2) = h* (qii — пъ т2 ~ п2)?
1.20. Пусть h («i, п.2, п3) — импульсный отклик, соответ-
соответствующий идеальному сферическому фильтру нижних частот,
для которого один период.частотного отклика
Я ((!)!, @2, (Од) =
1 при о? + «г + (Оз <
0 в остальных случаях.
Определите значение S, если 5 — J] J] J] h% (nlt пъ п3).
«1 П2 Па
1.21.а) Рассмотрите последовательность х (пъ п2) вида
N— 1
х(п1} n2) = U б (n^ — pnii, п2 — рт2).
Изобразите эту последовательность графически. Отметьте на
рисунке значения параметров тг и т2.
б) Найдите и изобразите фурье-преобразование этой после-
последовательности.
в) Теперь рассмотрите двумерный цифровой ЛИС-фильтр,
частотный отклик которого показан на рис. У1.21, а (заштрихо-
(я, я)
1023
(-*,-*)
1023 п.
Рис. У1.21.
ванная область соответствует значению 1, светлая — значению 0).
Входным сигналом системы является дискретизованное изображе-
изображение, представляющее собой сплошной белый фон (значение отсче-
отсчетов равно 0) с несколькими черными линиями (значения отсчетов
равно 1), как показано на рис. У1.21, б. Изобразите выходной
сигнал. (Указание: рассмотрите преобразование Фурье фигуры
на рис. У1.21, б.)
Многомерные сигналы и системы 79
1.22. Рассмотрите аналоговый сигнал с ограниченным спек-
спектром. Пусть его преобразование Фурье имеет ненулевое значение
в заштрихованной области рис. У1.22.
, (рад/м)
(рал/м)
а) Для случая прямоугольной дискретизации найдите мини-
минимальную плотность отсчетов (в числе отсчетов на I м2), допускаю-
допускающую точную реконструкцию аналогового сигнала.
б) Выполните п. «а» для случая гексагональной дискрети-
дискретизации.
в) Минимальная плотность отсчетов (при любых способах
дискретизации) составляет 12 отсчетов на 1 м2. Изобразите растр
отсчетов, соответствующий этому оптимальному случаю.
1.23. Аналоговый сигнал с ограниченным спектром харак-
характеризуется преобразованием Фурье с опорными областями, пока-
показанными на рис. У 1.23. Для каждой области найдите МИНИМаЛЬ-
fi, (рад'м)
Рис. У 1.23.
80 Глава 1
ную плотность отсчетов (в числе отсчетов на 1 и2), допускающую
точную реконструкцию аналогового сигнала. Изобразите также
оптимальные растры отсчетов,.
1.24. Найдите свертку гексагонально дискретизованного сиг-
сигнала, изображенного на рис. У 1.24, с самим собой.
Рис. У1.24.
1.25. Найдите импульсный отклик идеального гексагональ-
гексагонального фильтра нижних частот, определяемого следующим образом:
[ 1 При 0)? -|-(|J < W2,
Н («!, СОо) = 0 При СОТ -f- 0)! > №2 @,0J) G Rh,
I периодична в остальных случаях,
где RH — область фурье-плоскостн, представленная на рис. У 1.25.
Рис. У 1.25.
1.26. Обобщением класса линейных систем служит билиней-
билинейная система (рис. У 1.26). Хотя в таких системах действуют одпо-
х(п)
Билинейная
система
h (h,,n2)
У(п)
Рис. У 1.2fi.
Многомерные сигналы и системы 81
мерные входные и выходные сигналы, эти системы весьма напо-
напоминают двумерные. Выходной сигнал билинейной системы можно
выразить следующим образом:
00 00
Уп '= 2 2 х (mi) х (т2) h(n- тъ п — тг).
mi= — оо m2^= — оо
Найдите отклик билинейной системы на входной сигнал
х (п) = а ехр (/(!)!«) + Ь ехр (/'@2«),
считая, что система характеризуется двумерным преобразованием
фурье-отклика h (иц w2), обозначенным через Н (щ, о2).
Глава 2.
Дискретный фурье-анализ
многомерных сигналов
Фундаментальный прогресс в области цифровой обработки
сигналов был достигнут в середине 60-х годов с открытием эффек-
эффективного алгоритма вычисления с помощью ЭВМ дискретизован-
ного спектра сигнала [1, 2]. Открытие алгоритма быстрого пре-
преобразования Фурье (БПФ) сделало возможным применение для
фурье-ан'ализа сигналов цифровых технических средств и цифро-
цифровых ЭВМ. Экономия в вычислениях, ставшая возможной благодаря
БПФ, более существенна в многомерном случае, когда решаемая
задача сложнее, а используемый объем данных больше. В настоя-
настоящей главе обсуждается многомерное дискретное преобразование
Фурье (ДПФ) и его связь с обычным преобразованием Фурье.
Разрабатываются также некоторые алгоритмы БПФ для вычисле-
вычисления дискретного преобразования Фурье применительно к после-
последовательности конечной протяженности.
Многомерное ДПФ является одновременно точным представ-
представлением преобразования Фурье для последовательности конечной
протяженности, а также разложением в ряд Фурье многомерной
периодической последовательности. Эта двойственная природа
преобразования очень важна: из нее следуют многие свойства,
которыми обладает ДПФ. Кроме того, скрытая периодичность
преобразования может быть использована для разработки эффек-
эффективных в вычислительном отношении алгоритмов его вычисления.
Мы начнем изучение ДПФ с рассмотрения многомерных периоди-
периодических последовательностей и их представлений рядами Фурье.
В гл. 1 было показано, что существуют различные варианты
периодического продолжения многомерных последовательностей.
Как будет видно из дальнейшего, из этого вытекает существование
многих возможных алгоритмов ДПФ. Для простоты мы начнем
с рассмотрения прямоугольно-периодических сигналов и прямо-
прямоугольного ДПФ. Затем будет рассмотрен более общий случай.
2.1. Представление прямоугольно-периодических
последовательностей в виде дискретных рядов Фурье
Двумерная последовательность х (пъ п2) прямоугольно-пе-
прямоугольно-периодична, если
х («х, п\) = х («г + Nlt «г) = х («х, /г, -(- N2) B.1)
Дискретный фурье-анализ многомерных, сигналов 83
для всех (tii, «2); Л^1. М2 — положительные целые числа. Если
эти числа являются наименьшими из возможных положительных
целых чисел, для которых справедливо равенство B.1), то они
называются горизонтальным и вертикальным периодами х. Любая
периодическая последовательность с Горизонтальным и вертикаль-
вертикальным периодами Nt и N2 полностью описывается Л^Л^ независи-
независимыми отсчетами. Это легко видеть из того факта, что каждый
отсчет в периодической последовательности х (пъ га2) равен одному
из отсчетов в области 0 <: пх <. Nx — 1, 0 < п% «: N2 — 1. Эту
прямоугольную область мы будем называть фундаментальным
периодом и обозначать символом Rn,n2- Формально определим
это следующим образом:
RNlN,u\(nu Яг):0<я, <ATi - 1, 0 < щ < N2 - 1}. B.2)
Периодическая последовательность и ее фундаментальный период
показаны на рис. 2.1.
Любую периодическую последовательность х («1( п2) с горизон-
горизонтальным и вертикальным периодами Nt и N2 можно представить
в виде конечной суммы комплексных синусоид с кратными часто-
частотами. Это соотношение, представляющее собой двумерный дискрет-
дискретный ряд Фурье, можно записать следующим образом:
Nt—i N,—1
х (tii, пг) = -дд^ 2 S ^ (kl> ^ 6ХР О ~^Г Hlkl ~'~ ' "^7 ^) '
B.3)
Комплексная синусоида
2л , , . 2л
ехР V Ж"П1 х + ; Ж"
прямоугольно-периодична с горизонтальным периодом Nx и вер-
вертикальным периодом N2 для всех целых значений параметров kx
и k2. Числа X (ku k2) называются коэффициентами ряда Фурье.
Их можно найти для х с помощью равенства
X(ku kt)= j У] х(пъ n2)exp(-/^-ii*i-/-|^*2)- B-4)
Доказательство того, что равенства B.3) и B.4) математически
тождественны, предлагается читателю в качестве упражнения
(см. упр. 2.1).
Представление многомерной периодической последователь-
последовательности ввиде ряда Фурье по форме похоже на выражение для пре-
преобразования Фурье последовательности, введенное в гл. 1, однако
содержит несколько существенных отличий. Во-первых, необхо-
необходимо помнить, что периодическая последовательность (за исключе-
84 Глава 2
• • ••• •••
а л> а а л. а а а
N2'
{
{
1
• • •
• • •
> • • ¦
] ^
Рис. 2.1.
а — периодическая двумерная последовательность; б — основной период этой последо-
последовательности.
нием последовательности с нулевыми значениями) даже не имеет
фурье-преобразования в формальном смысле, поскольку она не
является абсолютно суммируемой. В противоположность сумме,
определяющей преобразование Фурье, пределы суммирования
в выражении B.4) конечны, и частотные переменные kx и k2 —
целые числа. Более того, для описания х {пъ п2) необходимы
лишь NtN2 значений X (klt k2). Таким образом, дискретный ряд
Фурье — это преобразование, поддающееся вычислению. Исполь-
Используя определение"B.4), его можно вычислить путем N2\N\ операций
умножения и сложения комплексных чисел.
Дискретный фурье-анализ многомерных сигналов 85
Из выражения B.4) видно, что X (klt k2) сама по себе является
периодической последовательностью с горизонтальным перио-
периодом N1 и вертикальным периодом N2. Операцию вычисления
коэффициентов ряда Фурье можно, следовательно, интерпрети-
интерпретировать как преобразование одной периодической последователь-
последовательности в другую с той же периодичностью.
Пример 1
Рассмотрим определение коэффициентов дискретного ряда
Фурье для последовательности с периодами Л/х = 5 и N2 — 4,
которая описывается выражением
х (tii, «г) = 6 («1. «г). О < «! <: 4, 0 < п2 <¦ 3. B.5)
Этот периодический сигнал представлен на рис. 2.2.
Для вычисления коэффициентов ряда Фурье подставим B.5)
в B.4)
4 3
х (klt *о = 2 2 6 ^Пъ "•)ехр (~у "Т"nikl ~ i ^t
для всех (klt k2). B.6)
Поэтому можно записать х (пъ «г) как двумерный ряд Фурье
4 3
2 2ехр (/-tt«i*i + /-t-«•
-То Л
п2
Рис. 2.2. Периодический сигнал, использованный в примере 1.
86 Глава 2
2.2. Многомерное дискретное преобразование Фурье
2.2.1. Определения
Периодическую последовательность можно легко построить из
последовательности конечной протяженности. Например, пусть
х («х, п2) — последовательность конечной протяженности, имею-
имеющая опорную область /?w,w,, определяемую выражением B.2).
Тогда х («!, п2) можно определить как последовательность
00 00
х{пъ п2) — Jj Jj x(tii — rtNv n2 — r2N2). B.8)
Г.— OO
Этот сигнал прямоугольно-периодичен с горизонтальным периодом
Л/х и вертикальным периодом N2 и, кроме того, обладает тем свой-
свойством, что в области /?a,w, последовательности х(пь п2) и
х («ь п2) равны. Последовательность х{пъ п2) называется пе-
периодическим продолжением х {пъ п2). Поскольку
\х(т,п2), (пи п2) е Rn,n,>
x(tuy п2) = \ . B.9)
' ( 0 в остальных случаях,
ясно, что любая последовательность конечной протяженности
полностью определяется своим периодическим продолжением и
опорной областью.
Можно также рассматривать периодическую последователь-
последовательность X (ki, k2) как периодическое продолжение последователь-
последовательности конечной протяженности из коэффициентов ряда Фурье
X (kly k2). Следовательно,
X [К k2) = 2 S X (^ - rtNlt k2 - r2N2) и B.10)
<Л/2-1,
в остальных случаях.
Поскольку х («ь щ) и X (ki, k2) связаны равенствами B.3) и
B.4), можно вычислить х (%, п2) и X (kly k2) одну из другой путем
обратимой последовательности операций:
х{пъ п2)*-*х(пи n2)*-+X(klt k2L-*X(k!, k2). B.12)
Используя равенства B.3), B.4), B.9) и B.11), можно выписать
дискретное преобразование Фурье
X(ku k2)= j J^xfa, n2)exp {-} -^n^- j^-ntkl) B.13)
Дискретный фурье-анализ многомерных сигналов 87
для 0 < kx <: Nx — 1, О «: k2 <s Nz — 1 и
Л/,-1 N,-1
х (nlt п) = -^- ^ S Х ^ ^ 6ХР О "Ж"
B.14)
для О <: пх <: Л^х — 1, О «: п2 <: N2 — 1 •
В действительности все, что надо сделать, — это убрать значок
«тильда» с соотношений для дискретного ряда Фурье. Тот факт,
что дискретный ряд Фурье и дискретное преобразование Фурье
(ДПФ) — это в сущности одно и то же, означает, что многие свой-
свойства ДПФ имеют смысл только в том случае, если мы понимаем
его как ряд Фурье. Например, если выражение B.14) применяется
для вычисления отсчетов х вне области /?л/,л/2, получаются не
отсчеты х, а отсчеты х.
Фурье-преобразование последовательности конечной протя-
протяженности с опорной областью /?w,w2 описывается выражением
JV,—I Ns—I
Х(соь @2)= 2 ? х(пъ п2)ехр (—/«!«! -/@2«2). B.15)
Л,=0 П2=О
Из сравнения B.15) и B.13) видно, что ДПФ состоит из отсчетов
фурье-преобразования
X(ki, ?г) = Х(@1, ^U^inkjNi, wt=2nk!/N!- B.16)
Выражение B.16) содержит некоторую путаницу в обозначениях,
поскольку величина X используется как для непрерывного, так
и для дискретного фурье-преобразования. В последующих об-
обсуждениях станет ясно, какое из этих двух преобразований имеется
в виду, так что недоразумений быть не должно х).
Из рассмотрения теоремы отсчетов в гл. 1 известно, что сиг-
сигналы с ограниченной полосой частот можно точно описать зна-
значениями их отсчетов в пространственной области. Здесь мы видим,
что сигналы, ограниченные в пространстве (т. е. последователь-
последовательности конечной протяженности) можно точно представить отсче-
отсчетами их фурье-преобразования. Далее, мы знаем, что дискрети-
дискретизация сигнала с неограниченной полосой частот приводит к на-
наложению его спектра. Аналогично дискретизация фурье-преоб-
фурье-преобразования пространственно неограниченного сигнала для получе-
получения X (&!, k2) и последующее вычисление х {пъ п2) с помощью
]) Авторы пользуются терминами ДПФ и БПФ как для обозначения про-
процесса выполнения преобразования Фурье, так и для обозначения его результата.
Однако читатель легко поймет из текста, что имелось в виду в каждом конкрет-
конкретном случае. — Прим. перев.
88 Глава 2
B.3) приводят к пространственному наложению сигнала, описы-
описываемому как
ОО ОО*
х(пип2) = 2 2 х{пг, — rtNt, n, — r2N2). B.17)
г.—— оо г- ——оо
Последовательность х {пъ п2) можно восстановить из х (пъ п2),
только если она пространственно ограничена областью, не боль-
большей чем Rn.n,- Таким образом, ДПФ представляет собой другой
вариант применения теоремы отсчетов, когда производится дискре-
дискретизация фурье-преобразования сигнала, а не самого непрерыв-
непрерывного сигнала.
Определение ДПФ можно распространить на многомерные
последовательности. Пусть имеется УИ-мерная последовательность
с опорной областью Rn, определяемой как
/?м = {п : 0 <n, < Ni- I, i = 1, 2, ..., М\. B.18)
Пусть N — диагональная матрица с t-м диагональным элементом,
равным Nt:
Nj О
N =
О
N
м_
B.19)
= TdiTNT 2
При этом условии УИ-мерное ДПФ можно записать в виде
2 x(n)exp[—jk'BnN~1)n]t B.20)
B.21)
(Как и раньше, к' — транспонированная векторная переменная к.)
Пример 2
Вычислим трехмерное ДПФ JV, X JV2 x Л/3-точечной после-
последовательности, определенной следующим образом:
( 1, 0 <: «j <: N1 — 1, п., = 0, п3 = 1,
x(nlt л„ «з)= п " B-22)
I 0 в остальных случаях.
ДПФ этой последовательности можно найти, принимая во вни-
внимание, что в области RN последовательность эквивалентна
X (Пи П2, П3) = 6 (tl2, П-Л — 1), (rti, П2, П3) 6 ¦Rn-
Дискретный фурье-анализ многомерных сигналов 89
Используя выражение B.20) и вводя сокращенное обозначение WN
для комплексной экспоненты exp (—j2n/N), получим
X(ku k2, k3) = if 2 Е 6 («2, «з- l)WnN^WfW"^' =
л,=0 n2=0 na=0
k E Ё «Ы wtf'wtf- = n?fo if Щ1,*1,
i=0 n,=0 nt=0
X (ft,, ft,, iW = { ^' 'I = 0' <*•.****€*.., .B>23)
v ; ^ 0 в остальных случаях. v ;
Пример З
Рассмотрим обратное двумерное ДПФ Л^х X М2-точечной по-
последовательности, заданной соотношением
( 1, O^kt^Mi — l, 0«: k2<z. Мг— 1,
X (klt k2) = { . B.24)
v ; @ в остальных случаях, v ;
где N1 ^ Mi и Л/2 ^ 7И2.
Последовательность л; (пъ п2) выражается следующим образом:
*,=о
1 l-
X
sin (nnMjNj) sin (nn2MjNz)
sin (nnJNJ
Элементы этой последовательности являются комплексными чис-
числами из-за комплексного экспоненциального множителя в выра-
выражении B.25). Отбросим на время этот множитель и представим
оставшийся множитель как функцию (пъ п2) на рис. 2.3. Можно
показать, что рис. 2.3 представляет собой вариант импульсного
отклика идеального фильтра нижних частот [равенство A.86)]
с пространственным наложением.
90 Глава 2
Рис. 2.3. Амплитуда сигнала
х{щ, п2), приведенного в примере3,
для случая Мг = Ыг = 32, М
= м2 =
2.2.2. Свойства дискретного преобразования Фурье
На примере двумерного случая кратко рассмотрим свойства
многомерного ДПФ.
Линейность. Из определения ДПФ ясно, что если две последова-
последовательности имеют опорные области на /?#,#„, то ДПФ их суммы
будет суммой их ДПФ. В более общем случае, если х1 (ль п2)
и х2 («х, п2) — произвольные последовательности конечной про-
протяженности и если а и b — произвольные комплексные константы,
то
п2) + Ьх2 (пи пг)
г (klt
ЬХ2
k2). B.26)
Справедливо также обратное утверждение: если сложить два ДПФ,
обратное ДПФ суммы будет суммой двух отдельных обратных
ДПФ. Единственное предостережение по применению этого свой-
свойства состоит в том, что все ДПФ должны быть одного размера.
Далее, размер должен быть достаточным, чтобы включать всю
опорную область последовательности ах^ {пъ п2) + Ьх2 (пи п2).
Это означает, что хх и х2 должны иметь одну и ту же опорную
область, поскольку опорная область любой из последовательностей
может быть расширена за счет присоединения отсчетов с нулевым
значением.
Например, пусть хх определена в опорной области Rm,m,
и пусть Х2 имеет опорную область Rn,n2- Пусть Р\ = max (Mi, N\),
Р2 = max (M2, N2). Определим две расширенные последователь-
последовательности следующим образом:
х\(пи п2) =
п2), (п{, п2) ? Rm.m,,
(«1. П2) 6
п2), (пи п2) 6
(«I.
(«ь n2)(?RMlM,,
B.27а)
B.276)
Дискретный фурье-анализ многомерных сигналов 91
Последовательности х\ и х'2 имеют опорную область на Rp^, и
ах\ -\- Ьх2 =-- ах\ -\- Ьх2. B.28)
.Размер области /?я,/>, в данном случае определяет параметры
ДПФ.
Циклические сдвиги. В гл. 1 было показано, что если сигнал ли-
линейно сдвинуть по координате, то его фурье-преобразование умно-
умножается на комплексную экспоненту. ДПФ имеет аналогичное
свойство: если последовательность конечной протяженности под-
подвергнуть циклическому сдвигу, то ее ДПФ умножается на ком-
комплексную экспоненту.
Рассмотрим периодическую последовательность х(пъ п2) с го-
горизонтальным и вертикальным периодами N1 и N2 и с дискретными
коэффициентами ряда Фурье X (klt k2). Пусть у — результат
сдвига х
У («1, п2) = х («! — ти п2 — т2). B.29)
Коэффициенты дискретных рядов Фурье последовательностей х
и у связаны соотношением
Y(ku k2)=W7tklWN\ktX(kl, k2). B.30)
Поскольку у и х связаны равенством B.29), последовательность
конечной протяженности у, определенная как
П2), (пи п2) ? RNlN2,
п B.31)
(^ 0 в остальных случаях,
получается путем циклического сдвига х (nlt n2), т. е.
У («I. п2) = х (((щ - mi))Nl, ((п2 - m2))N2), («i«a) 6 Rn,n2, B.32)
где обозначение ((n))N соответствует тому, что целочисленная
переменная п взята по модулю N. [Если р — ((n))N, то 0 < р <
<: N — 1 и существует целочисленная величина /, такая что
п == р ~г IN. ] Понятие циклического сдвига взято из термино-
терминологии одномерной цифровой обработки сигналов: оно выражает
идею, что значения отсчетов, которые выдвигаются из опорной
области слева (или сверху), снова появляются на ее правом (или
нижнем) краю.
ДПФ Y (ku k2) определяется для Fi, k2) ? Rn^n2 следующим
образом:
Y(ku k2) = Y{ku k2) =
^WZklW^X(ku k2). B.33)
Объединяя выражения B.32) и B.33), получим
х (((m - т,))дг„ ((П2 - m2))Nt) - W7*1 W7tk'X (ku k2). B.34)
92 Глава 2
Свойства симметрии вещественных х (п,, п2). До сих пор при об-
обсуждении ДПФ, не предполагалось, что последовательность ко-
конечной протяженности содержит только отсчеты с вещественными
значениями. Действительно, все полученные результаты спра-
справедливы как для вещественных, так и для комплексных х. Однако,
как и в случае одномерного дискретного преобразования Фурье,
если известно, что х (пи п2) является последовательностью веще-
вещественных чисел, ДПФ удовлетворяет определенным соотношениям
симметрии. Если х (пъ п2) вещественно, то
X' (ku /52) = S" S x (nu п2) ( Wtf\ WnNf }', B.35)
«i=0 n2—0
где звездочка обозначает операцию комплексного сопряжения.
Поскольку
[Wtf]' = W^nk = WVN~k\ то
= X(((Ni-k1))Nt, ((N2-k2))N2). B.36)
Таким образом, если сигнал является чисто вещественным, то
его ДПФ обладает эрмитовой симметрией в указанном смысле.
Равенство B.36) означает, что
Re [X (ku k2)] = Re [X (((JV, - ?,))„„ ((N2 - k2))N,)], B.37a)
Im [X (ku /t2)] = -Im IX (((Nt - kt))Nl, ((N2 - k2))N,)]. B.376)
Тем же путем можно определить эрмитово-симметричные и анти-
антисимметричные компоненты комплексной последовательности ко-
конечной протяженности следующим образом:
х(пи п2) +x*(((N, -n,))Wl, ((N2 - п2))ыЛ B.38а)
ха(пи п2)к11Лх(пи n2)-x*(((N{ - m))Nl, ((N2 - n2))Nt)]. B.386)
Поскольку
x* (((JV, - п,))л/„ ((N2 - n2))Nt) - X* (ku k2) B.39)
(см. упр. 2.7), отсюда следует, что
xs (n,, n2) ** 1/2 [X(kv k2) + X* (къ k,)] = Re [X (klt k2)], B.40a)
xa («i, «2) — 1/2 [X (ku k2) - X* (klt k2)] = / Im [X (klt k2)]. B.406)
Таким образом, эрмитово-симметричная часть сигнала преобра-
преобразуется в вещественную часть ДПФ, а эрмитово-антисимметричная
часть сигнала преобразуется в умноженную на /' мнимую часть
ДПФ.
Дискретный фурье-анализ многомерных сигналов 93
Отражение. Эти свойства в основном такие же, как аналогичные
свойства преобразования Фурье в гл. 1, если принимать во вни-
внимание периодичность ДПФ. Легко можно показать, что если
х{пъ n2)*-*X(k1, k2), то
х(п2, пО — X(k2, kx), B.41а)
x(((W, -m))Nt, n2)~X{{{Nl-kl))Nt, k2), B.416)
х(пи ((N2 - n2))N,)~X(ki, ((N2 - k2))Nt), B.41b)
*(((#,-m))*,,, ((N2-n2))N,)-X(((N1-k1))Nl, ((N2-k2))N,).
Теорема Парсеваля:
Л/,—1 Л/2 —1 .V,—1 N, — l
j] 2 x(nlt n2)y*(nlt n2) = -^ 2 2X (/5l> *г) Г* ^' ki)-
n,=0 n2=0- A,=0 A2=0
B.42)
Дуальность. Если X (k^ k2) — ДПФ х (nlt n2), то что такое
ДПФ X (п1? п2O В силу подобия прямого и обратного выражений
для ДПФ можно ожидать, что результат будет тесно связан с х.
Умножим обе части равенства B.14) на NtN2 и возьмем комплексно-
сопряженные величины. Тогда получим
ЛГ,ЛГ2х* (п„ п2) = 2 ЕХ'(А„ ^)Г/'П*'. B.43)
Равенство B.43) теперь имеет такой же вид, как и B.13). Тогда
если
х (пъ п2) «-¦ X (klt k2), то
X* (rti, n2) — ^^2x* (/ti, k2). B.44)
Это свойство известно как свойство дуальности *).
Модуляция. Свойство модуляции состоит в том, что если после-
последовательность умножается на комплексную экспоненту, ее ДПФ
испытывает циклический сдвиг. Раскрывая обе части равенства
B.34), получим
W-N1lllW^'''x(nu n2)-X(((kl-ll))Nl, ((Л2 -/2)Ь,). B-45)
2.2.3. Циклическая свертка
В гл. 1 было показано, что фурье-нреобразование свертки
двух последовательностей есть произведение их фурье-преобра-
зований.
х) При нормировке ДПФ на ]/'NlN2, а не на единицу, как в B.13), пря-
прямое и обратное ДПФ совпадают с точностью до знака экспоненты, а свойство
дуальности становится тривиальным. — Прим. ред.
94 Глава 2
В этом разделе мы выведем эквивалентное утверждение для
ДПФ. Зададимся вопросом, какая последовательность является
обратным ДПФ для произведения двух ДПФ?
Предположим, что имеются две последовательности конечной
протяженности х (щ, Яг) и h (щ, по) с опорной областью 7?^,^.
Каждая из этих последовательностей имеет ДПФ х (щ, п2) •<-••
•<-•• X (къ k2) и h (пъ «2) *-" И (^i. Ю соответственно. Пусть Y (ku
k2) является Nx X Л^2-точечным дискретным спектром, построен-
построенным следующим образом:
Y (ku *а) = Н (ku k2) X (къ кг). B.46)
Найдем теперь у (п1з п.г). Начнем с рассмотрения периодически
дополненных последовательностей х, h, у, X, Н и Y. Поскольку
Y (К k2) = H (ku Л2) X (klt kt), B.47)
то можно использовать обратный дискретный ряд Фурье B.3)
и записать
Ni — l N2 — l
2 S b2)W^W-Nnf*. B.48)
Выразив X (къ k2) в виде
X(kuk2)=fi ? x(mh m2)WmN\k<W'Zk* B.49)
nil—0 m2=0
и подставив это выражение в B.48), получим
Л',—1 Nt—l
У {пи п2)= 2 2 *^m т^
t=0 m2=0
/Vi—1 N,—l
x V V H(ku k2)w^1(tli~mi) ^WN1{n>-m') k> =
yV,—1 ,V2—1
За исключением пределов суммирования, это выражение имеет
форму обычной (линейной) суммы двумерной свертки. Вместо
суммирования по всем отсчетам произведения достаточно склады-
складывать только те отсчеты результирующей последовательности, ко-
которые лежат в области к.ы,ыг- Последовательность у (п\, по) пря-
прямоугольно-периодична с периодами Nx и Af,.
Поскольку
), (Пь пЛ ? Rn.v.i
Дискретный фурье-анализ многомерных сигналов 95
можно записать г)
У («1. «г) = Ij Ij * (mi. m°) К («l — tn2, n2 — m2)
nii=O тг—О
ДЛЯ (rtl, П2) 6 RNtN, =
л/,—i л/2— i
= S ? Jt(ffii, /Я2)Л(((п, -mi))*,, ((П2-т2))ы,). B.52)
m,=O ms=O
Назовем t/ циклической сверткой Лил;. Выражение «циклическая
свертка», также взятое из цифровой обработки одномерных сигна-
сигналов, означает, что Л испытывает циклический сдвиг по отношению
кхв противоположность обычной линейной свертке, где h просто
линейно сдвигается относительно х. Циклическая свертка может
быть также записана в ином виде:
Л/,—1 Nt—1
у(пи я2)= ? ? h(mu m2)x(((nt-mi))Nl, (n2—m2))N,). B.53)
m,=0 ms=0
Как и обычная свертка, циклическая свертка обладает свойством
коммутативности, ассоциативности и дистрибутивности относи-
относительно сложения. Используя символ * * для обозначения опера-
операции двумерной циклической свертки, можно записать
y = h** x = x ** h~H (klt k2) X (klf k2). B.54)
Заметим, что результат циклической свертки зависит не только
от двух сворачиваемых последовательностей конечной протяжен-
протяженности, которые сворачиваются, но также и от периодов Nt и Ыг,
определяющих размер ДПФ.
ДПФ имеет преимущество перед преобразованием Фурье,
поскольку может быть подсчитано путем N\Nl комплексных
умножений и сложений, как уже упоминалось ранее. К сожале-
сожалению, произведение двух ДПФ соответствует циклической свертке
двух последовательностей, а в моделировании и конструиро-
конструировании ЛИС-систем нас интересует линейная свертка двух после-
последовательностей. Однако, как и в одномерном случае, существует
простое средство, позволяющее использовать циклическую свертку
для вычисления линейной свертки.
Предположим, что х (пъ п.г) имеет опорную область Rptpt,
a h (пь пт) — Rq.q,. Обозначим через w (rti, n2) результат линей-
линейной свертки
w(nly rt2) = J] Sn(mi, mi)x(n1 — m1, n» — m2). B.55)
') Теорему о циклической свертке проще выводить из определения ДПФ,
не обращаясь к периодическому продолжению последовательностей. — Прим.
ред.
96 Глава 2
Последовательность до (nlt п2) имеет опорную область
0<n1<P1+Q1-l,
О < п2 < Р2 + Q2- 1. К '
Используя ДПФ размером Nx ^ max (Ръ QJ я N2 ^ max (P2,
Q2), можно найти циклическую свертку у = h * * х, которая
записывается следующим образом:
у(пи п2)= ? ? h(mx; т2)х(п1—ти п2 —
mt=0 m2=0
для (m, /12) 6 ^-v,^- B.57)
Периодическое продолжение х (п.! — ти п2 — т2) последователь-
последовательности конечной протяженности х (пъ п2) можно записать в виде
- тъ пг - m2) = S J] х (/*! — тх
B.58)
Подставив это выражение в B.57) и сделав соответствующие
преобразования, получим
У («1. «а) = 2j 2j 2j Hi h (mu m2) x (пг — m^ — r1N1,
rt r2 Lmi=0 m2=0
П2-ГП2 — r2N2)\ для (Пи п2) ? RNtN,- B.59)
Благодаря ограниченным размерам /i (пъ п2) выражение в скоб-
скобках есть линейная свертка, которую можно обозначить как
•до («1, п2). В результате получим
У(пи п2)= I] I] ДО (ni —riNu n2 — r2N2) для (пь «2) € fljv.w,-
B.60)
Последовательность у (пъ п2) равна пространственно наложен-
наложенной копии последовательности до (т, «г) в области RNtN2- Однако
поскольку w (rti, n2) — последовательность ограниченной протя-
протяженности, то, выбрав Ni и N2 достаточно большими, а именно
N1^P1 + Q1-\, N2 ^ Рг + Q2 — 1, B.61)
получим, что копии до (rti, n2) B равенстве B.60) не будут пере-
перекрываться, и равенство B.60) превращается в равенство
У (пи пч) = ДО(«ь п->) Для (пи п2) ? RNlN,. B.62)
Следовательно, результат циклической свертки равен результату
линейной свертки, что и требовалось.
Из этого вытекает следующая процедура вычисления линей-,
ной свертки с использованием ДПФ.
Дискретный фурье-анализ многомерных сигналов 97
1. Выбрать Nx и N2, удовлетворяющие условию B.61).
2. Дополнить h (nv п2) необходимым количеством нулей для
заполнения области /?w,,v2-
3. Дополнить х (пи пг) таким же образом.
4. Вычислить (Nx х М2)-точечное ДПФ h {пг, п2) и х (щ, п2).
5. Найти произведение Я (ku k2) X (ku k2).
6. Вычислить (Wj x М2)-точечное обратное ДПФ для Я (klt
k2) X (klt k^). Результат этого вычисления и есть искомая линейная
свертка.
В этой процедуре, как понимает читатель, шаги 4—6 обеспе-
обеспечивают выполнение круговой свертки у = h * * х, которая
равна линейной свертке w = h * * х благодаря правильному
выбору Nj и N2.
Пример 4
В качестве численного примера рассмотрим особенно простой
случай, когда х (п^ п2) и h (nu п2) представляют собой последо-
последовательности размера 2x2
x(nv пг) =
1 О
2 1
h(nlt n2) =
1 О
1 1
B.63)
Мы имеем явное выражение последовательностей как множества
значений отсчетов, причем пх — индекс столбца, а п2 — строки.
Отсчет @, 0) находится в нижнем левом углу.
ДПФ размера 2x2 можно записать следующим образом:
X @, 0) = х @, 0) + х A, 0) + х @, 1) + х A, 1),
X A, 0) = х @, 0) — х A, 0) + х @, 1) — х A,
X @, 1) = х @, 0) + х A, 0) - х @, 1) - х A,
1),
1),
B.64)
X A, 1) = х @, 0) - х A, 0) - х @,
Подставив числа в B.64), получим
х A, 1).
х (К, k2)
H(klt k2)
2 0
4 2
Н(къ к
7 Даджион Д., Мерсеро Р.
B.65)
B.66)
B.67)
98 Глава 2
Взяв обратное ДПФ размера 2x2, получим циклическую свертку
размера 2x2:
у(п1у п2) =
3 2
4 3
B.68)
Теперь рассчитаем линейную свертку тех же двух последователь-
последовательностей с использованием D х4)-точечного ДПФ. Линейная свертка
двух B х 2)-точечных последовательностей будет C х 3)-точечной
последовательностью. Поскольку размер ДПФ в каждом измере-
измерении больше ожидаемого размера линейной свертки, Dх4)-точеч-
ная циклическая свертка и линейная свертка будут идентичны.
Дополняя х и h до заполнения опорной области 4x4, получим
п2) =
0
0
1
2
0
0
0
1
0
0
0
0
0
0
0
0
Рассчитаем Dх4)-точечное ДПФ:
X(klt К) =
0
0
1
1
0
0
0
1
0
0
0
0
0
0
0
0
3 + / 2 1 + / 2 + 2/
2 1_/ 0 If/
Q ; о о; i ; о
4 3-/ 2 3+/
2
2
+ /
1
—/
3
1
2
1
—/
2/
j
—1
—/
1
1
2
+ 2/
j
1
+ /
B.69)
k2)X(klt k2) =
5+5/
2
5-5/
12
2
-1-/
-2-6/
5-5/
—1+/
0
—1 -/
2
-2 + 6/
—1 + /
0
5 + 5/
Дискретный фурье-анализ многомерных сигналов 99
Взяв обратное ДПФ размера Dx4) от Н (klt k2) X (klt kt), по-
получим
w(nu /i2) =
0
1
3
2
0
0
2
3
0
0
0
1
0
0
0
0
B.70)
Если эту последовательность преобразовать в последовательность
размера Bx2) путем пространственного наложения, результат
будет идентичен B.68).
Если вы проверяли числа в этом примере, то вие сомнения
убедились, что расчеты очень утомительны и что потрачено го-
гораздо больше усилий, чем это было бы необходимо для прямого
вычисления линейной свертки. В разд. 2.3 мы рассмотрим быст-
быстрый эффективный алгоритм выполнения Af-мериого ДПФ, который
позволяет вычислить свертку с меньшим числом арифметических
операций, чем это требуется для прямого расчета свертки в виде
суммы.
2.3. Вычисление дискретного преобразования Фурье
ДПФ имеет несколько важных приложений благодаря тому,
что существуют эффективные алгоритмы его вычисления. Напри-
Например, поскольку отсчеты ДПФ равны отсчетам фурье-преобразо-
вания, ДПФ можно использовать для спектрального анализа мно-
многомерных сигналов. Как было показано в предыдущем разделе,
ДПФ можно также применить для вычисления линейной свертки,
если принять специальные меры, чтобы избежать пространствен-
пространственного наложения. Далее, ДПФ можно использовать для моделиро-
моделирования и реализации дискретных линейных систем, инвариантных
к сдвигу. Эта возможность будет обсуждена в гл. 3. В настоящей
разделе мы рассмотрим три алгоритма вычисления многомерного
ДПФ, значительно отличающихся по своей вычислительной слож-
сложности.
2.3.1. Прямое вычисление
Прямое вычисление двумерного ДПФ — это просто вычисле-
вычисление двойной суммы
X(*i,fe)= S f *(ль nAWtf'Wtf* B.71)
для 0 < kx <: Ny — 1 и 0 <: k2 < JV2 — 1,
где, как и прежде, Wл Д,
7*
—i-&
100 Глава 2
Если принять, что комплексные экспоненты в выражении
B.71) вычисляются заранее и сводятся в таблицу, то прямой
способ вычисления одного отсчета N (&,, k2) потребует NtN2
операций комплексного умножения и примерно столько же опе-
операций комплексного сложения. Поскольку полное ДПФ содер-
содержит NiN2 результирующих отсчетов, общее количество комплекс-
комплексных умножений и комплексных сложений, необходимых для пря-
прямого способа вычисления ДПФ, составляет N\n\. В УИ-мерном
случае общее количество операций комплексного умножения и
сложения равно N\n\ ¦¦¦ N2M.
Однако этот подход достаточно наивен, поскольку теперь
известно, что Af-точечное одномерное ДПФ можно вычислить за
число операций, гораздо меньшее, чем N2, с помощью алгоритма
быстрого преобразования Фурье (БПФ). Как будет показано ниже,
быстрые алгоритмы существуют и для вычисления ДПФ более
высоких размерностей.
2.3.2. Разбиение на строки и столбцы
Сумму ДПФ в B.71) можно переписать в виде
X(ku /52)= S [ Ё'*("ь n2)WnNt] №#*'. B.72)
«1=0 |_л2=0 J
Величина в квадратных скобках — это двумерная последователь-
последовательность, которую мы обозначим G (nlt k2). Тогда выражение B.72)
можно записать в виде пары соотношений
G(nu /5г)= S х(щ, n2)WNf, B.73а)
л,=0
X(ku /s2) = ? G(m, /s2) Wtf1. B.736)
rt,=0
Каждый столбец последовательности G — одномерное ДПФ соот-
соответствующего столбца х, а каждая строка последовательности
X — одномерное ДПФ соответствующей строки G. Таким образом,
двумерное ДПФ можно вычислить, разбив его на ДПФ столбцов
и строк; сначала вычисляется ДПФ каждого столбца х, резуль-
результаты записываются в виде промежуточного массива, после чего
вычисляется ДПФ каждой строки этого промежуточного массива.
Можно также сначала вычислить ДПФ строки и затем ДПФ
столбца.
М-мерное ДПФ можно выполнить тем же путем. Сначала вы-
вычисляется одномерное ДПФ по одной из переменных (например,
пм) для каждого значения остальных переменных. Это требует
в общей сложности М^2 ... #м-1 одномерных ДПФ. Затем одно-
одномерные ДПФ вычисляются по переменной плг_! для всех значений
Дискретный фурье-анализ многомерных сигналов 101
остальных М — 1 переменных (пх пм_г, kM). Эта процедура
повторяется до тех пор, пока не будут найдены одномерные ДПФ
по всем пространственным переменным.
Какая экономия в объеме вычислений достигается благодаря
этой процедуре? Мы уже видели, что при прямом вычислении
требуется
С„рЯМое = N\Nl ... N2M B.74)
комплексных умножений и сложений. Если в методе разложения
на столбцы и строки для вычисления одномерного ДПФ приме-
применяется прямое вычисление, то вычисление многомерного ДПФ
требует
Сс/с прямое = NrN2 ... ЛГд, (ЛГ, + ЛГ2 -f- •:- •. + NM) B.75)
комплексных умножений и сложений. Если каждое из чисел Nj
записывается в виде степени двух, чтобы использовать одномерное
БПФ, то количество комплексных умножений можно еще умень-
уменьшить до ¦" (
Г МММ
Ьс/с БПФ = «1^2 • • • N
Количество комплексных сложений вдвое больше этого числа.
Можно также использовать и другие быстрые алгоритмы вычисле-
вычисления одномерного ДПФ, если для выполнения многомерного ДПФ
применен метод разбиения на столбцы и строки.
Чтобы получить представление об экономии в численном вы-
выражении, рассмотрим затраты на выполнение A024Х 1024)-точеч-
ного двумерного ДПФ с помощью каждого из этих подходов.
Для этого случая мы получим СпрЯмое = 240 « 1012 комплексных
умножений, Сс/с прямое = 231 « 2.109 комплексных умножений,
Сс/сбпф= Юх220 « 107 комплексных умножений.
Для этого примера разбиение на столбцы и строки уменьшает
количество арифметических операций почти в 500 раз. Использо-
Использование одномерного БПФ уменьшает объем вычислений примерно
в 105 раз. (Заметим, что в одних сутках около 105 с.)
2.3.3. Алгоритм быстрого преобразования Фурье
по векторному основанию
Алгоритм одномерного быстрого преобразования Фурье дости-
достигает своей вычислительной эффективности благодаря стратегии
divide et impera. Если длина ДПФ выражается, например, сте-
степенью двух, то ДПФ можно представить как комбинацию двух
ДПФ половинной длины, каждое из которых в свою очередь
можно заменить комбинацией двух ДПФ в одну четверть длины
и т. д. Двумерный алгоритм ДПФ по векторному основанию по
102 Глава 2
существу идентичен этому подходу. Двумерное ДПФ разбивается
на последовательно меньшие двумерные ДПФ до тех пор, пока
в конечном счете не остаются тривиальные двумерные ДПФ, кото-
которые и следует выполнить.
Можно вывести вариант алгоритма «прореживания» во времени,
.выражая (Л/\ X /У2)-точечное ДПФ через четыре (NJ2 X Л/2/2)-то-
чечных ДПФ (если Nt и N2 делятся на 2). Для простоты предполо-
предположим, что \\ = N2 = N. Процесс суммирования ДПФ выражения
B.71) можно разбить на 4 суммирования: первое по отсчетам х для
пх и я2 четных; второе — для пх четных, а п2 нечетных; третье —
для лх нечетных, а п2 четных; четвертое — для п± и п2 нечетных.
Это дает
X (*,, k2) = Soo(*i, k2) + So, (ku k2) Wkhf +
+ Sio(ku k2) WkNl + Su (ku k2)№*v1+4' где B.77a)
JV/2—1 Л'./2-l
S00(kuk2)A S S xBmu2m2)W2,Tlkl+2m2k\ B.776)
ГТ 0 0
ka) Д
k2) A
*2) A
N/2—\
m,=0
JV/2—1
N/2-1
N12-1
N12—\
N/2-l
Bm,,
Bm.
Bm.
2m2
fl,
fl.
+ 1)
2m2)
2m2-
>oi (.«,. «2j ^ Zj Zj я^лл,, 4rri2-fL)WN " "> B.77b)
B.77r)
' B'77a)
Множества Soo, Sol, S10 и Sn периодичны по (/гх, &2) с горизонталь-
горизонтальным и вертикальным периодами N/2. Используя этот факт,
а также то, что W%/2 = —1, можно из выражения B.77а) вывести
следующие тождества:
X (ku k2) = Soo (k\, k2) -f Wn2Sm (ku k2) -f
+ Wi?Sw(ku k2) + WNl+k'Su (ku k2), B.78a)
Xh \ h \ с (ь ь \ j_ ну.2с /ь. c»Л^
— W^Sio(*i, Л2) — Ww^'SiiC*,, Л2), B.786)
(*i, *2)-W^SOi(*i, ^2) +
Sio(,«ii «2) + ** V оц («1, k2), (/Лов)
/Sio(*i, *2> -f WkNl+k'Sn (ku k2). ¦ B.78r)
Дискретный фурье-анализ многомерных сигналов 103
Эти соотношения показывают, каким образом вычислить четыре
точки ДПФ X (klt 1%), X (kj. + N/2, k2), X {kly k2 + N/2) и
X (/jj -f N/2, k2 + N/2) для конкретных значений (klt k2) из че-
четырех точек 500 (klt k2), S01 (klt k2), S10 (klt k2) и Sn (klt k2).
Мы также видим, что необходимые отсчеты 500 (klt k2) (и анало-
аналогично остальные массивы 5,-7) можно получить путем (N/2 X N/2)-
точечного ДПФ. Таким образом, выражение B.77) описывает от-
отсчеты (N X /У)-точечного ДПФ X (klf k2) через четыре (N/2 X
X Л^/2)-точечных ДПФ. По аналогии с одномерным случаем схема
вычислений по формуле B.78) называется «бабочкой», или, более
правильно «бабочкой» по основанию 2x2. Отдельно «бабочка»
по основанию 2x2 показана на рис. 2.4. Каждая «бабочка» тре-
требует выполнения трех комплексных умножений и восьми ком-
комплексных сложений (см. упр. B.11), а для вычисления всех отсче-
отсчетов X через 500, 501, 510 и Sn необходимо вычислить Л'2/4 «бабо-
«бабочек». На рис. 2.5 представлена графическая схема последователь-
последовательности, этих операций.
Если N/2 само делится на 2, то же самое разложение можно
применить для вычисления N/2 X jV/2-преобразований 500, 501,
510 и 5U. Этот процесс «прореживания» может продолжаться до
тех пор, пока не останутся только массивы 2x2, подлежащие
преобразованию; его можно выполнить, используя выражение
B.64), где вообще не требуется умножений. Полное преобразова-
преобразование массива 4x4 по векторному основанию показано на рис. 2.6.
Если N представляется в виде степени 2, то процедуру «про-
«прореживания» можно повторить log2 N раз. Каждый этап «проре-
«прореживания» содержит jV2/4 «бабочек», а каждая «бабочка» включает
¦S.e(k,.k,) —О » Qr -^р—X(k,.k2)
S,o (k, ,k») —О
4.k2)
Рис. 2.4. «Бабочка» по основанию BX2).
Вычисление выходных данных по входным требует трех комплексных умножений и
восьми комплексных сложений.
104 Глава 2
Рис. 2.5. Первая стадия «прореживания» БПФ по осиованию BX2).
Для простоты показана только одна нз четырех «бабочек».
Дискретный фурье-анализ многомерных сигналов 105
Х(о,о)
Рис. 2.6. Полное DX4)-точечное ДПФ по основанию BX2).
На втором этапе показана лишь одна из четырех «бабочек».
106 Глава 2
три комплексных умножения и восемь комплексных сложений.
Таким образом, число комплексных умножений при выполнении
(N X Л^-точечного БПФ по основанию Bx2), составляет
CB.o<2x2) = ^-log2Ar, B.79)
что на 25 % меньше, чем необходимо при разбиении на столбцы и
строки в сочетании с одномерным БПФ. Алгоритм по векторному
основанию требует также 2N2 log2 N комплексных сложений —
столько же, сколько и алгоритм разбиения на столбцы и строки.
@,7)
@,3)
@,5)
@,1)
@,6)
@.2)
@,4)
@,0)
D,7)
D,3)
D,5)
D, 1)
D,6)
D,:j
D,4)
D,0)
B,7)
B,3)
B, 5)
B, 1)
B,6)
B,2)
B,4)
B,0)
F,7)
F,3)
F, 5)
F,1)
F,6)
F,2)
F,4)
F,0)
A.7).
A,3)
A,5)
A.1)
A,6)
A,2)
A,4)
A,0)
E,7)
E,3)
E,5)
E,1)
E,6)
E,2)
E,4)
E,0)
C,7)
C,3)
C,5)
C, 1)
C,6)
C,2)
C,4)
43,0)
G,7)
G.3)
G,5)
G,1)
G,6)
G.2)
G.4)
G,0)
Рис. 2.7. Двумерная последовательность с двоично-инвертированным порядком
расположения отсчетов для N = 8.
Схема рис. 2.6 иллюстрирует операции, которые необходимо про-
произвести при выполнении преобразования. Делая еще один шаг
вперед, можно предположить, что она показывает также порядок,
в котором следует располагать данные. В этом отношении мы свя-
связаны необходимостью изображать графическую схему таким об-
образом, чтобы входные и выходные массивы выглядели одномер-
одномерными, хотя на самом деле они двумерны. Выходной массив на
схеме —¦ это двумерный массив, имеющий обычный порядок.
Из-за последовательных делений на группы с четными и не-
нечетными индексами данные в одномерном ДПФ воспринимаются
в двоично-инвертированном порядке. Например, для N = 16 ин-
индекс п — 12 при последовательном «прореживании» будет класси-
классифицирован как четный, четный, нечетный, нечетный, поскольку
остатками от деления 12 на 2 последовательно будут 0, 0, 1 и 1.
Разумеется, ООП —всего лишь двоично-инвертированное 4-бито-
4-битовое представление числа 12 A100). В двумерном случае из-за по-
последовательного разделения (kv, k2) на четно-четные, нечетно-чет-
нечетно-четные и т. д. выходные данные будут получаться в порядке с инвер-
инверсией расположения битов по обоим индексам &х и k2. Этот порядок
показан на рис. 2.7.
БПФ по векторному основанию BX2) представляет собой про-
процесс, вычисления с замещением. Выходные результаты любой
«бабочки» можно разместить на месте входных данных той же
Дискретный фурье-анализ многомерных сигналов 107
«бабочки», поскольку эти входные данные никогда больше не по-
понадобятся. Поэтому и выходные данные всего БПФ можно распо-
расположить на месте входных. Операция инвертирования двоичных
чисел также является операцией с замещением.
Разбиение по векторному основанию можно обобщить не-
несколькими способами. Если N\ = R\, N2 = R2 для некоторого
целого i, разбиение можно провести по отношению к векторному
основанию (RiXRz)- В этом случае базисный счетный модуль
(или «бабочка») является (Rt X /?2)-точечным БПФ. Эту концеп-
концепцию можно распространить на Л1-мерный случай, в котором «ба-
«бабочка» является (Rx X R2 X ...X #м)-точечным БПФ. Если не
все Nt есть одинаковые степени их корней, то возможны также
разбиения по смешанным основаниям. В этом случае на разных
ступенях разложения применяются разные «бабочки». Вместо
того чтобы выводить подробные алгоритмы для каждого из этих
обобщений, просто отметим, что они в свою очередь являются част-
частными случаями обобщенного алгоритма БПФ, рассматриваемого
в разд. 2.4.
2.3.4. Вычислительная сложность ДПФ
Существует ряд методов измерения сложности алгоритма М-
мерного БПФ. Можно, например, подсчитать количество умноже-
умножений и сложений, измерить объем памяти или машинное время,
необходимое для выполнения конкретного ДПФ. Последнее, по-
пожалуй, наиболее информативно, но оно зависит от типа ЭВМ и от
программиста. Вместо поиска единой определяющей меры слож-
сложности мы просто сравним алгоритм по нескольким разным мерам.
Для целей анализа предположим, что нам необходимо выполнить
УИ-мерное ДПФ (N X N X ...X /У)-точечного множества, где
N — некоторая степень 2.
Преобразование с использованием разбиения по строкам и
столбцам требует выполнения Л1Л/М~^-точечных одномерных
ДПФ. В приложениях, где применяется матричный процессор,
это является критической мерой. Если для вычисления преобра-
преобразований с разбиением по строкам и столбцам будет использован
одномерный алгоритм БПФ по основанию 2, мы получим всего
Сс/с бпф = M/2NM log2 N комплексных умножений и B.80)
Ас/с бпф = MNM log2N комплексных сложений. B.81)
Для преобразования по векторному основанию Bx2 ... Х2)
каждая «бабочка» требует 2м — 1 умножений, и на каждой стадии
имеется (N/2)M «бабочек». Это дает
^Lg9N B.82)
108 Глава 2
комплексных умножений и
Лв.ОBх2> ==МЛГМ \og2N B.83)
комплексных сложений. Таким образом, алгоритм по векторному
основанию требует столько же сложений, но меньше умножений.
Выигрыш как функция М приведен в табл. 2.1.
Количество операций, необходимых для вычисления Л1-мер-
ного ДПФ, можно также несколько уменьшить путем применения
Таблица 2.1. Сравнение
количества комплексных
умножений, необходимых
для М-мерных алгоритмов
БПФа>
м
сВ.0Bх2)/сс/с БПФ
0,75
0,58
0,47
0,39
а) Предполагается, что
опорная область рассма-
рассматриваемого множества —
гиперкуб.
большего основания. Например, если N представляет собой сте-
степень числа 4, то можно использовать разложения строка—столбец
с основанием 4 или алгоритм вектор-основания Dx4) для вычис-
вычисления (N X Л0-точечного ДПФ. «Бабочки» этих алгоритмов будут
включать лишь тривиальные умножения на +1, +/, —1 и —/, и,
поскольку количество «бабочек» уменьшено по сравнению с алго-
алгоритмом по векторному основанию 2, общее количество операций
также уменьшится (см. упр. 2.13).
Для обоих алгоритмов БПФ количество комплексных чисел,
размещаемых в памяти, равно размеру массива данных, т. е.
NM. Для многих практических задач, представляющих интерес,
эта величина1) превышает объем основной (оперативной) памяти
мини-ЭВМ. Следовательно, сигнал должен располагаться на до-
дополнительном устройстве памяти, например на диске, и воспри-
восприниматься по частям. Возникающие проблемы ввода-вывода очень
сильно влияют на эффективность алгоритма БПФ.
Рассмотрим в качестве примера обработку с помощью двумер-
двумерного алгоритма с разбиением по строкам и столбцам БПФ
1) Очевидно, имеется в виду количество ячеек памяти для хранения комп-
комплексных чисел. — Прим. ред.
Дискретный фурье-анализ многомерных сигналов 109
A024 X 1024)-точечного изображения на мини-компьютере с объе-
объемом памяти, доступным для записи данных, 16К (К = 1024) ком-
комплексных слов. Допустим, что полный сигнал записан на диске
и что, хотя «блоки» диска могут располагаться произвольно, при
обмене данными между диском и памятью ЭВМ должен быть запи-
записан или считан по крайней мере один полный блок. В нашем при-
примере блок будет иметь размер в 1024 комплексных слов. В дейст-
действительности блоки могут быть и короче, но практически все ди-
дисковые ЗУ имеют такое свойство, что количество переданных слов
должно быть не меньше некоторой величины. (Даже если это не
так, наложение подобного ограничения поможет заметно умень-
уменьшить накладные расходы на ввод-вывод — одну из самых емких
по времени операций.)
Если сигнал запоминается строка за строкой, т. е. отсчеты
сигнала для (i + 1) строки следуют непосредственно за j-й стро-
строкой, можно считывать строки поодиночке, выполнять БПФ для
строки и затем записывать результат обратно на диск. В нашем
конкретном случае, поскольку у нас имеется память на 16К слов,
мы можем одновременно разместить в памяти 16 строк данных.
Передача данных с диска и обратно может быть осуществлена
секциями длиной по 16 блоков. Часть программы, которая вычис-
вычисляет БПФ по строкам, будет состоять из повторяющегося 64 раза
цикла: считывание 16 строк с диска, выполнение 16 одномерных
БПФ и записи результатов обратно на диск.
Однако здесь возникает серьезная проблема. После этого необ-
необходимо выполнить преобразование по столбцам, но, поскольку
данные записаны строками, выделение n-го столбца означает вы-
выделение только n-го слова из каждого блока размером 1К, что за-
запрещено. К счастью, существует эффективный алгоритм Эклунда
[5] транспонирования матрицы, записанной во внешней памяти.
После выполнения преобразования строк массив промежуточных
данных транспонируется, в результате чего получается массив
данных, организованный в виде столбцов, по которому может быть
произведено вычисление столбцовой части ДПФ. Теперь массив
результатов получится в виде столбцов. Если это неудобно, можно
выполнить транспонирование еще раз.
Алгоритм транспонирования Эклунда основан на стратегии
divide et impera. Обозначим двумерную последовательность, под-
подлежащую транспонированию, через А. Если А по размеру зани-
занимает 2ах2а точек, ее можно разбить на 4 меньшие последователь-
последовательности размером 2а~1х2а~1 точек каждая:
A= »" /" • B-84)
110 Глава 2
(А представляет собой двумерную последовательность, поэтому
ее начало располагается в левом нижнем углу).
Транспонирование А можно записать через составляющие
в виде
_ ¦ \'2\ А22
Аи А12
B.85)
Каждая из составляющих сама транспонирована, а верхняя левая
и правая нижняя составляющие поменялись местами. Каждое из
меньших транспонирований теперь можно выполнить путем повто-
повторения того же алгоритма. Очевидно, что полный алгоритм потре-
потребует а подобных разбиений. Этапы транспонирования массива
8x8 показаны на рис. 2.8.
Главное требование этого алгоритма состоит в том, что в па-
памяти должно хватить места по крайней мере на две полные строки
данных. В этом случае надо будет прочесть и записать полный мас-
массив а раз. БПФ по строкам можно объединить с первым этапом
алгоритма транспонирования, а БПФ по столбцам — с последним
этапом, так что потребуется а = log2 N циклов записи-считывания
для полного двумерного БПФ, причем результаты будут записаны
столбцами. Количество проходов данных, конечно, можно умень-
уменьшить, если в памяти хватает места для одновременной записи бо-
более чем двух строк. Например, пусть число С будет наибольшей
степенью числа 2, такой что С строк данных можно одновременно
разместить в оперативной памяти ЭВМ. Тогда количество прохо-
проходов, необходимых для транспонирования массива N X N, можно
снизить до наименьшего целого числа, большего log2 N/\og2 С.
Выше рассмотрен случай транспонирования массива N X N,
где N представляет собой степень 2. В общем случае можно анало-
аналогичным образом вывести алгоритм для числа N, являющегося
степенью произвольного основания R. Если N не является сте-
степенью целого числа, можно, как и в случае БПФ, представить
себе составной алгоритм транспонирования, основанный на фак-
факторизации по простым множителям N.
Проблема транспонирования массивов становится еще более
серьезной для Л1-мерного разбиения по строкам и столбцам. Рас-
Рассмотрим конечную стадию такого алгоритма, на которой выпол-
выполняется N (М — 1)-мерное ДПФ. Данные должны быть организо-
организованы таким образом, чтобы последние NM~[ одномерных ДПФ
можно вычислить из данных, расположенных в последовательных
ячейках внешней памяти. Эта перегруппировка требует NM~2
двумерных транспонирований, как показано на рис. 2.9 для трех-
трехмерного случая. Если обозначить через TN (M) количество дву-
двумерных транспонирований, необходимых для выполнения Л1-мер-
@.7)
@,«)
@,5)
@,4)
@,3)
@,2)
@, 1)
@,0)
A,7)
0,6)
A,5)
A,4)
A,3)
A,2)
A,1)
A.0)
B.7)
B,6)
B, S)
B,4)
B,3)
B,2)
B, 1)
B,0)
C,7)
C,6)
C,5)
C,4)
D,7)
D,6)
D,5)
D,4)
C,3)
О, 2)
C, 1)
C,0)
D,3)
D,2)
D, 1)
D,-0)
E,7)
E,6)
E,4,
(S, 3)
E,2)
E, 1)
E.0)
F,7)
F,6)
F,5)
F, 4)
F,3)
F,2)
F,1)
F,0)
G,/)
G,6)
G,5)
G,4)
G,3)
G,2)
G,1)
G,0)
D, 3)
D,2)
D, 1)
D,0)
@,3)
@,2)
@,1)
@,0)
F, IV
F,0)
(S, 3)
E,2)
E.1)
E,0)
A,3)
A,2)
A,1)
A,0)
G,1)
G, 0)
D,1) E,1)
D,0) ^E.0)
B,0)
@, 1)
@,0)
G,0)
F,0)
E,0)
D.0)
C.0)
B,0)
A,0)
@.0)
C,1)
"*"C, 0)
A,1)
-Ni.o,
G.1)
F,1)
E,1)
D,1)
C,1)
B,1)
A,1)
@,1)
F,3)
F,2)
F. I)
F,0)
B,3)
^ ' л
B,2)
B,1)
B,0)
F,3)
F,2)
D,3)
D,2)
B. 3)
B,2)
@,3)
@,2)
G,2)
F,2)
E.2)
D,2)
C,2)
B,2)
A,2)
@,2)
G,3)
\ G,2)
G,1)
G,0)
C,3)
\ C, 2)
C, 1)
C,01
G,3)
^V. 2)
E.3)
C,3)
^C, 2)
A,3)
G,3)
F,3)
E,3)
D.3)
C.3)
B,3)
A,3)
@,3)
D,7)
D,6)
D,5)
D,4)
@,7)
@,6)
@,5)
@,4)
6
F, 5)
F.4)
D,4)
B. 5)
B,4)
@, 5)
@,4)
в
G,4)
F,4)
E,4)
D,4)
C,4)
B,4)
0,4)
((
),4)
E,7)
E,6)
E,5)
E,4)
A,7)
A,6)
A,5)
A.4)
G,5)
^G.4)
E,5)
^E.4)
C,5)
^C,4,
A,5)
G,5)
F,5)
E,5)
D,5)
C,5)
B,5)
A,5)
@,5)
F, 7) G, 7)
(б7б)\ G, 6)
F, 5) G, S)
F, 4) G, 4)
B, 7) C, 7)
B,6)^ C,6)
B, 5) C, 5)
B,4) C,4)
F, 7) G, 7)
F,6) ^G,6)
D.7) E.7)
D, 6) E, 6)
B, 7) C. 7)
B,6) ^C,6)
@, 7) A, 7)
@,6) A,6)
G,6) G,7)
(«. 6) F, 7)
E,6) E,7)
D, 6) D, 7)
C,6) C,7)
B,6) B,7)
A,6) A,7)
@, 6) @, 7)
Рис. 2.8. Алгоритм траиспоиироваиия Эклунда для массива 8X8 [5].
а — исходная последовательность и обмены иа первом этапе; б — результаты первого
этапа и обмены на втором; s — результаты второго этапа и обмены на третьем; г —
результаты третьего этапа.
112 Глава 2
ного ДПФ, то должно удовлетворяться следующее рекурсивное
соотношение:
TN(M) = NTN(M — 1) + #м-2 B.86)
с начальным условием TN B) = 1.
Решая это рекурсивное уравнение, получим, что общее количество
двумерных транспонирований, необходимых для М-мерного БПФ
по алгоритму строка-столбец, составляет
Гдг (М) = (М - 1) NM~2. B.87)
Поскольку для каждого двумерного транспонирования доступно
только N2 отсчетов данных, число циклов записи-считывания пол-
полного массива данных (NM точек), необходимых для М-мерного
разбиения строка-столбец, равно
B.88)
где, как и раньше, С — количество строк, которые одновременно
можно расположить в памяти.
Многомерное БПФ по векторному основанию требует одного
цикла записи-считывания полного массива данных для выпол-
выполнения двоичной инверсии данных и, кроме того, log2 N дополни-
дополнительных циклов записи-считывания для выполнения log, N ста-
стадий прореживания по алгоритму векторного основания, что
в сумме дает 1 + log2 N циклов записи-считывания. Однако М-
мерное БПФ по векторному основанию требует также, чтобы одно-
Двумерное
транспониро-
транспонирование
Двумерное
транспониро
вание
Двумерное
транспониро-
транспонирование
S
Двумерное
транспониро-
транспонирование
—*^
Рис. 2.9. Иллюстрация необходимости N двумерных транспонирований для
выполнения БПФ по строкам для трехмерного БПФ (М == 4) с разбиением
по строкам и столбцам.
Дискретный фурье-анализ многомерных сигналов 113
временно в оперативной памяти ЭВМ были размещены 2М~1 строк
данных с тем, чтобы эффективно вычислить «бабочку». Если этот
объем памяти доступен для БПФ по алгоритму строка-столбец, мы
можем положить С = 2М~1 в выражении B.88), подразумевая, что
для выполнения БПФ по алгоритму строка-столбец необходимо
только log2 N циклов записи-считывания, что меньше, чем количе-
количество, необходимое для выполнения БПФ по векторному основанию.
В зависимости от значений преобразуемых параметров, относи-
относительной скорости выполнения арифметических операций и опе-
операций ввода-вывода конкретной ЭВМ вычислительные преимуще-
преимущества разбиения по векторному основанию могут быть сведены
на нет необходимостью выполнения дополнительных циклов за-
записи-считывания.
* 2.4. Дискретные преобразования Фурье для общего
случая периодической дискретизации сигнала
В разд. 1.5 было показано, что можно вывести различные
алгоритмы обработки применительно к сигналам, полученным
с использованием различных растров периодической дискрети-
дискретизации.
В этом разделе мы используем тот же подход, который привел
нас к алгоритмам ДПФ и БПФ, к общему случаю периодической
дискретизации сигналов. Будет показано, что такие сигналы
можно представить дискретными рядами Фурье и дискретными
представлениями преобразования Фурье. Мы свяжем эти ДПФ
с дискретизацией непрерывного преобразования Фурье и выведем
также общее семейство алгоритмов быстрого преобразования
Фурье, которое включает алгоритмы разбиения на строки и столб-
столбцы и разбиения по векторному основанию как частные случаи.
2.4.1. ДПФ для общего случая периодической
дискретизации сигналов
Рассмотрим периодическую последовательность х (п) с матри-
матрицей периодичности N. Для такой последовательности
х (п) = х (n + Nr) B.89)
для любого целочисленного вектора г. Обозначим через /n об-
область плоскости (%, п2), содержащую в точности один период этой
последовательности. Будем называть эту область основным перио-
периодом последовательности. Она содержит | det N | отсчетов х (Is яв-
является обобщением RNtN2, упоминавшимся ранее).
По аналогии с прямоугольным случаем выскажем гипотезу,
что х (п) можно единственным образом представить в виде конеч-
конечной суммы комплексных синусоид с кратными периодами
¦с(п)= 2 a(k)exp(/k'R'n), B.90)
8 Даджиои Д., Мерсеро Р.
114 Глава 2
где к — целочисленный вектор, a 7n — область конечной протя-
протяженности в k-области. Поскольку последовательность к перио-
периодична, то
Jc(n) = Jc(n + Nr)= 2 a(k)exp[/k'R'(n + Nr)] =
= 2 a(k)exp(/k'R'Nr)exp(/k'R'n). B.91)
k^N
Так как правые части B.90) и B.91) должны равняться при всех
значениях п и г, необходимо, чтобы
exp(/k'R'Nr)= 1 B.92)
для всех целочисленных векторов гик11. Из этого следует, что
для нетривиальных значений R' и N R'N = 2л/ или
R' = 2nNTl.
Если сделать подстановку для R' и положить а (к) = A/| det N |) X
X X (к), можно прийти к следующему выражению:
х (") = WnT 2 Я (к) ехр ljk' BлГП n]l B>94)
k^N
Поскольку комплексные экспоненты в этой сумме периодичны как
по п (матрица периодичности N), так и по к (матрица периодич-
периодичности N'), видно, что самое большее ] det N | из отсчетов X (к) мо-
могут быть независимыми. Таким образом, область JN, так же как и
/n, будет содержать только | det N| отсчетов. Если X (к) опреде-
определяется как
Х(к)Д 2 х(п)ехр[—jk'BnN-1)n], B.95)
то можно констатировать существование разложения в ряд Фурье
для любой периодической последовательности. Легко проверить,
что выражения B.94) и B.95) идентичны. Нетрудно также устано-
установить единственность B.95) благодаря ортогональности комплекс-
комплексных экспонент ехр [—/k' BnN-1) n ] в области /N. Заметим также,
что X (к) периодична с матрицей периодичности N'
X(k) = X(k + N'r). B.96)
Если х (п) является последовательностью ограниченной про-
протяженности с опорной областью, ограниченной 1ц, можно приме-
х) Справедливость этого утверждения основана на ортогональности комп-
комплексных экспонент с кратными периодами в пределах одного периода.
Дискретный фурье-анализ многомерных сигналов 115
нить следующие соотношения для рядов Фурье для определения
дискретного преобразования Фурье:
B.97)
B.98)
Х(к)= ? x(n)exp[— jk'BnN-1)n]t
Эти соотношения подобны выражениям B.20) и B.21). Единствен-
Единственная разница состоит в том, что матрица N не обязательно должна
быть диагональной.
Рис. 2.10. Последовательность конечной протяженности с прямоугольной дис-
дискретизацией и два периодических дополнения этой последовательности.
Напомним, что N — матрица периодичности в пространствен-
пространственной области. Она связывает последовательность конечной протя-
протяженности с ее периодическим продолжением. Периодическое про-
продолжение х — не единственное; любая последовательность конеч-
конечной протяженности может иметь несколько периодических про-
продолжений, из которых ее можно восстановить. Рассмотрим, на-
например, сигнал с (Л\ X Двуточечной опорной областью на прямо-
прямоугольном растре, показанной на рис. 2.10, а. Его можно периоди-
периодически продолжить в прямоугольной системе координат (рис. 2.10, б)
с помощью матрицы периодичности
0
B.99)
116 Глава 2
или в гексагональной системе координат (рис. 2.10, в) с помощью
матрицы
N1 Nj. I
ад -ад]' B100)
предполагая, что N2 делится на 2 [6]. Читатель может найти и
другие способы периодического продолжения.
Каждая матрица N приводит к различным периодическим про-
продолжениям и тем самым к различным ДПФ. Насколько они по-
подобны? Все они —• преобразования одной и той же последователь-
последовательности, и, следовательно, все соответствуют отсчетам интеграль-
интегрального преобразования Фурье этой последовательности. Чем они
отличаются? Они отличаются способом, которым берутся отсчеты
преобразования Фурье. Сравнивая B.97) с A.133а), которое опре-
определяет преобразование Фурье X (со), можно увидеть, что
>'k=Rk. B.101)
Матрица R A^ BJIN)' — матрица дискретизации в пространстве
преобразования Фурье.
При выводе теоремы отсчетов в гл. 1 мы определили две ма-
матрицы U и V, связанные соотношением U'V = 2л1. Матрица V
являлась матрицей дискретизации, показывающей, где должны
быть взяты отсчеты аналогового сигнала с ограниченным частот-
частотным спектром, а матрица U показывала, каким образом фурье-пре-
образование исходного сигнала периодически дополняется для
получения преобразования Фурье сигнала после дискретизации.
Одна из интерпретаций ДПФ состоит в том, что оно представляет
собой результат дискретизации фурье-преобразования. Матрица,
определяющая отсчет спектра R, является, таким образом, анало-
аналогом матрицы V, за исключением того, что частотные и пространст-
пространственные области обращены. Точно так же матрица N, удовлетворя-
удовлетворяющая условию N'R = 2я1, аналогична матрице U. Она показы-
показывает, как следует периодически продолжить (или наложить) после-
последовательность в другой области, в данном случае в пространствен-
пространственной области.
Если ха (t) — непрерывный сигнал с ограниченным спектром,
имеющий непрерывное фурье-преобразование Ха (Q), то дискрет-
дискретный сигнал х (п) может быть образован дискретизацией ха (t) с ис-
использованием матрицы V. Как было показано в гл. 1, если
х(п)=ха(уп), то B.102)
*H=WvTXe(V'~I|B)> BЛ03)
Дискретный фурье-анализ многомерных сигналов 117
[Допущение, что сигнал ха (t) имеет ограниченный спектр, сни-
снимает проблему наложения.] Используя равенство B.101), полу-
получим
Х № = JtivyX^ (VN)'-1 k). B.104)
ДПФ X (к) соответствует, таким образом, сведенным к определен-
определенному масштабу отсчетам фурье-преобразования исходного непре-
непрерывного сигнала по частотам Q = 2п (VN)' k. Матрицу S Д^
? 2л (VN)' можно интерпретировать как матрицу дискретиза-
дискретизации, определяющую, каким образом осуществляется дискретиза-
дискретизация непрерывного фурье-преобразования Ха (Q).
В общем случае N и R являются матрицами размера М X М,
где М — размерность рассматриваемых сигналов. Матрица N
должна быть обратимой, а элементы матрицы N (но не R) должны
быть целыми числами. С учетом этого обстоятельства все формулы
этого раздела равно справедливы для сигналов любой размерности.
2.4.2. Алгоритм быстрого преобразования Фурье
для общего случая периодической дискретизации
сигналов [7]
В этом разделе рассмотрим эффективные алгоритмы ДПФ сле-
следующего вида:
X(k)= E x(n)exp[-jk'BnN-1)n]. B.105)
Алгоритмы быстрого преобразования Фурье всегда сущест-
существуют, если N является составной матрицей, т. е. когда N можно
факторизовать на нетривиальное произведение целочисленных
матриц. Это согласуется с условием существования одномерного
БПФ, которое требует, чтобы длина одномерного ДПФ была со-
составным целым числом. Как и в одномерном случае, мы увидим,
что чем больше сомножителей можно найти для N, тем больше
экономия в вычислениях.
В дальнейшем в этом разделе мы будем считать, что все исполь-
используемые матрицы состоят только из целочисленных элементов.
Любая матрица Е, для которой | det Е| = 1, будет называться
унимодульной матрицей. Следует заметить, что Е тоже является
унимодульной матрицей. Унимодульные матрицы — единствен-
единственные целочисленные матрицы, у которых обратные матрицы также
являются целочисленными.
Если | det N| является простым числом, мы будем говорить, что
N является простой матрицей. Если N — не простая и не унимо-
дульная матрица, будем называть ее составной. [Необходимо пом-
помнить, что | det N| — всегда целое число и что он равен количеству
отсчетов в /n опорной области х (n).J
118 Глава 2
Если N — составная матрица, то ее можно разложить на про-
произведение двух матриц
N = PQ, B.106)
где ни Р, ни Q не являются унимодульными. Следует заметить,
что такое разложение на сомножители не является единственно
возможным, поскольку
N = [PE][E-1Q] B.107)
обеспечивает другой способ разложения N с помощью любой уни-
модульной матрицы Е.
Будем говорить, что два целочисленных вектора тип кон-
конгруэнтны (т = п) по матричному модулю N, если для некото-
некоторого целочисленного вектора г
m = n + Nr. B.108)
Введем обозначение m = ((n))N, которое означает, во-первых,
что m = п и, во-вторых, что m ? /N. Любой вектор п в периоди-
периодическом продолжении IN конгруэнтен вектору в In ¦
Любой вектор п в области /N можно однозначно представить
как
n = ((Pq + p))N, B.109)
где р(/р, q G /Q.
Множество /р содержит |detP|, а множество /Q содержит
Idet Q | целочисленных векторов. Далее, любая пара векторов
(по одному из /р и из /q) определяет единственный элемент из IN.
Вектор q можно интерпретировать как «частное» при «делении»
п на Р, а р — как «остаток».
Таким же образом можно определить
к'= ((!' +m'Q))N, B.110)
где m ? JP и i ? JQ.
Имея в виду эти определения, выражение B.105) можно переписать
следующим образом:
B.111)
Раскрывая экспоненту, эту сумму можно разбить на две части:
С(р, i)= E x(((Pq + p))N)exp[-/i'BnQ-1)q], B.112а)
X(Q'm + i)= E C(p, i)exp[-/i'BnN-1)p]exp[-im'BnP-1)p].
B.1126)
Дискретный фурье-анализ многомерных сигналов 119
Эти соотношения представляют собой первый уровень разбиения
по алгоритму Кули—Тьюки прореживания БПФ во времени.
Полезно рассмотреть по отдельности оба выражения. Последова-
Последовательность С (р, i) периодична по i с матрицей периодичности Q'.
Таким образом, сумма в выражении B.112а) представляет собой
двумерное ДПФ массива х ( ((Pq -f P))n) по матрице периодич-
периодичности Q. Опорную область этой последовательности IQ необхо-
необходимо выбирать равной одному периоду х ( ((Pq -f p))N), рассма-
рассматриваемому как функция q. Для каждого значения вектора р
нужно вычислить свое ДПФ по матрице Q. Это означает, что всего
должно быть выполнено | det P| таких преобразований.
Суммирование в выражении B.1126) показывает, каким обра-
образом эти результаты ДПФ по матрице Q следует объединить для
получения ДПФ по матрице N. Числа С (р, i) сначала необходимо
умножить на множители exp l—ji' BnN-1) p ] (их иногда назы-
называют «поворачивающими множителями»), а произведения объеди-
объединяются в ряды ДПФ по матрице Р, или «бабочки».
Количество умножений на поворачивающие множители равно
det N
det Q
а количество «бабочек», соответствующих матрице Р, —
Если векторы Р или Q являются составными, возможно
соответствующее дальнейшее разбиение на меньшие ДПФ.
Векторы
n = ((Pq))N, ябЛь B.113)
образуют то подмножество из опорной области, которое создает
дискретизация IN с матрицей дискретизации Р. Для фиксирован-
фиксированного значения р отсчеты
Q<E/q B.114)
образуют соподмножество по отношению к этому подмножеству.
Поскольку каждое соподмножество имеет тот же размер, что и
само подмножество, всего имеется | det N |/| det Q | = | det Р |
соподмножеств. Члены любого из соподмножеств конгруэнтны
друг другу по модулю Р. Область /Р необходимо выбрать таким
образом, чтобы она содержала по одному члену каждого сопод-
множества — всего | det P | элементов.
Области /Р и 7q можно выбрать аналогичным образом. По-
Поскольку дискретное преобразование Фурье периодично по к с ма-
матрицей периодичности N' и
N'=:Q'P\ k=((Q'm + l))N., B.115)
ясно, что в частотной области Q' играет роль, аналогичную Р,
а Р' — роль, аналогичную Q в пространственной области. Тогда
можно определить отсчет вида
k = ((Q'm))N-, пкЕУр, B.116)
120 Глава 2
f
? О • A
• ADO
? О • A
• A ? О —*n,
Рис. 2.11. Пространственная опорная область /N для БПФ 4X4, разбитая на
четыре соподмножества выборок.
Каждое соподмножество выделено определенным символом. (С любезного согласия
Р. М. Мерсеро и Т. К. Спик, IEEE Trans. Acoustics, Speech, and Signal Processing,
© 1981 IEEE.)
как подмножество отсчетов из частотной области. Множество JP
нужно выбирать таким образом, чтобы оно содержало множество
| det P | векторов, которые и образуют это подмножество. Для
фиксированных значений i векторы вида
B.117)
можно рассортировать на | det Q| соподмножеств. Jq необходимо
выбирать так, чтобы оно содержало по одному члену из каждого
соподмножества.
Сейчас, пожалуй, следует пояснить некоторые из этих резуль-
результатов простым примером. Рассмотрим расчет прямоугольного
Dх4)-точечного ДПФ с матрицей периодичности
Г 4 0]
B.118)
используя разложение на множители
2 2
2]
_2J-
На рис. 2.11 показана область /N, разбитая на четыре сопод-
соподмножества матрицей дискретизации Р; члены одного соподмно-
Дискретный фурье-анализ многомерных сигналов 121
жества обозначены одним символом. Обратите внимание, что все
четыре соподмножества при периодическом продолжении распола-
располагаются одинаково. Для определения /q нам необходим набор из
четырех векторов, удовлетворяющий B.113); другими словами,
нам необходим набор из четырех векторов, которые благодаря
B.109) охватят одно из соподмножеств. Один из наборов векторов,
который позволяет это сделать, имеет вид
/Q ={@,0)', A,0)', B,0)', C,0)'}. B.120)
ОАО
? • ?
О ^ О
• ? • ? —•>к,
Рис. 2.12. Частотная часть опорной области JN для БПФ 4X4, разбитая иа че-
четыре соподмножества отсчетов.
Каждое соподиножество выделено определенным символом. (С любезного согласия
Р. М. Мерсеро и Т. К. Спнк, IEEE Trans. Acoustics, Speech, and Signal Processing,
© 1981 IEEE.)
Этот набор не является единственным. Множество 1Р следует
выбирать таким образом, чтобы оно содержало по одному члену из
каждого соподмножества. Так, одна из возможностей для /р
имеет вид
/Р = {@, 0)', A, 0)', B, 0)', C, 0)'}. B.121)
На рис. 2.12 показана опорная область JN для БПФ, разделен-
разделенная на четыре соподмножества с помощью матрицы дискретиза-
дискретизации в частотной области Q'. Рассматривая этот рисунок, мы видим,
что возможными вариантами выбора JP и Jq являются следующие:
Ур = {@, 0)', A, 0)', B, 0)', C, 0)'}, B.122)
JQ = {@, 0)', @, 1)', @, 2)', @, 3)'}. B.123)
122 Глава 2
Для выбранных четырех множеств можно нарисовать часть
блок-схемы алгоритма, как это сделано на рис. 2.13. Каждое
ДПФ по матрице Q действует на одно из соподмножеств входных
данных, которые были показаны на рис. 2.11, образуя промежу-
промежуточное множество С (ти т2). [Это то же множество, что и С (р, i)
в B.112а), но оно выражено через два действительных индекса
вместо двух векторных. ] Это множество умножается на поворачи-
поворачивающие множители (которые для этого БПФ все равны 1) и ре-
результаты передаются на вход ДПФ по матрице Р. Каждое из ДПФ
по матрице Р образует одно из выходных соподмножеств, пока-
показанных на рис. 2.12.
Четыре выходных результата ДПФ по матрице Q можно вы-
вычислить- непосредственно по данным четырех входов. Если входы
обозначить через w, х, у и z, а выходы — через А, В, С и D, то
прямое вычисление этих ДПФ дает
A = w+x + y + z, B.124а)
В = w — jx + у + jz, B.1246)
C=w — x + y — z, -B.124в)
D = w + jx — у — jz. B.124г)
С другой стороны, поскольку вектор Q является составным, мы
могли бы использовать разложение на множители:
2] Г 1 1 I Г 1 01
Схема четырехточечного ДПФ, основанного на этом разложении,
приведена на рис. 2.14.
Для этого конкретного примера ДПФ по матрице Р очень
похожи. Если входные данные для этих преобразований обозначить
через ш, х, у и z, а выходные — через А, В, С и D, то прямое вы-
вычисление результатов дает те же уравнения B.124), что и для ДПФ
по матрице Q. В этом примере входы и выходы могут быть орга-
организованы таким образом, что схема на рис. 2.14 будет описывать
ДПФ как по матрице Q, так и по матрице Р.
Если обозначить через Сц вычислительную сложность алго-
алгоритма БПФ по матрице N, характеризуемую количеством необхо-
необходимых комплексных умножений, то
CN <: | det Р | CQ + | det Q | СР + | det N |. B.126)
Первое слагаемое описывает количество комплексных умножений
| det Р | в ДПФ по матрице Q, второе — вклад | det Q | от ДПФ
по матрице Р, а последнее — вклад за счет умножения на повора-
поворачивающие множители. Это выражение представлено в виде нера-
неравенства, поскольку в некоторых случаях необходимое число ком-
Дискретный фурье-анализ многомерных сигналов 123
х@
х?2
х@
хB
0).
•и
.2)
'Л
ДПФ
по матрице Q
С @,0)
С@,1)
С@,2)
С@,3)
с
с
с
с
@,
A
B
C
0)
0)
0)
.0)
1
1
1
1
ДПФ
но матрице Р
Х@,0)
ХA,2)
ХB,0)
ХC,2)
хA,0)
xC,l)
x(l,2)
xC,3)
ДПФ
по матрице Q
С
с
с
с
@,
A,
B,
C.
1)
1)-,
1)
1
1
1
1
ДПФ ,
по матрице Р
ХC,3)
хB
хB
х@
.2)
.3)
ДПФ
по матрице Q
СB,0)
СB,1)
СB,2)
СB.3)
С@
СA
СB
СC
.2)
2)
.2)
,2)
1
1
1
1
ДПФ
по матрице Р
Х@.2)
ХA,0)
ХB,2)
ХC,0)
хC,0)
хC,2)
ДПФ
по матрице Q
С
С
С
С
@,
A.
B.
C,
3),
3)>
3)
1
1
1
1
ДПФ
по матрице Р
Х(О.З)
ХB,3)
Рис. 2.13. Блок-схема DХ4)-точечного БПФ для примера, описываемого урав-
уравнением B.119).
(С любезного согласия Р. М. Мерсеро и Т. К. Спик, IEEE Trans. Acoustics, Speech,
and Signal Processing, © 1981 IEEE.)
124 Глава 2
плексных умножений может быть меньше. Это происходит, если
некоторые коэффициенты в алгоритме равны 1, —1, / или —/.
В приведенном выше пример^ не было умножений, связанных
с поворачивающими множителями. (Фактически в этом преобра-
преобразовании вообще не было умножений — только комплексные сло-
сложения и вычитания.)
Этот результат можно обобщить на случай, когда N содержит
более двух простых сомножителей. Если
то
(=1
B.127)
CN<v|detN|+2]Cpin |detP/|.
i=\
B.128)
Часто при | det P( | = 2, 4, 8 или 16 числа СР( = 0.
Описанные ДПФ являются алгоритмами прореживания во
времени. Похожий, но другой класс алгоритмов, который соот-
соответствует одномерным алгоритмам прореживания по частоте,
можно вывести аналогичным образом, используя альтернативные
подстановки:
n = ((Qp + q))N, B.129а)
k = ((P'i + m))N.. B.1296)
D
Рис. 2.14. Блок-схема расчета БП* по матрице Q с использованием разбиения
согласно уравнению B.125).
(С любезного согласия Р. М. Мерсеро и Т. К. Спик, IEEE Trans. Acoustics, Speech,
and Signal Processing, © 1981 IEEE.)
Дискретный фурье-анализ многомерных сигналов 125
2.4.3. Некоторые частные случаи
Два алгоритма БПФ, рассмотренные в разд. 2.3 (алгоритм с
с разбиением по строкам и столбцам и алгоритм по векторному
основанию), можно вывести как частные случаи общего алгоритма
ДПФ. Прямоугольное ДПФ, определение которого было дано
ранее в этой главе, соответствует диагональной матрице периодич-
периодичности N.вида
Г ^1 0 1
N=[0 N2\'
BЛ30)
Алгоритмы с разбиением по строкам и столбцам соответствуют
разложению на множители
Г Nt 0 I Г 1 0 1
N = P^ = [0 iJlo N2\> <2Л31>
<2Л32>
о
При первом разложении преобразования по столбцам выполняются
перед преобразованиями по строкам, при втором — наоборот.
Для первого разложения любой целочисленный вектор (пи п2)'
в области
/N = \(пи п2)': 0<.nl<Nl и 0 < п2 < N2\
можно записать в виде
Таким образом, множество /q содержит N2 векторов
/Q = 4@, п2)' :0<n2<N2).
Аналогично мы можем определить множество /р в виде
Если N1 и N2 являются степенями 2, можно разложить Р и Q да-
далее и получить
2 0 1 Г 2 01 Г2 01 Г1 01 Г 1 ОТ Г 1 0 1
iJlo i J -" ¦ Lo ij[o 2J[o 2J-[o 2I <2-134>
Это разложение соответствует использованию одномерного БПФ
по основанию 2 для выполнения преобразований по строкам и
столбцам.
126 Глава 2
Если Л^ и N2 делятся на 2, можно также выполнить разложе-
разложение N = PQ следующим образом:
Г Nt. О 1 Г 2 О 1 Г NJ2 О 1
[О JvJ = lo 2j[ 0 nA BЛ35)
Тогда любой целочисленный вектор в множестве /N можно выра-
выразить в виде
2 01
0 2 Ч + Р- B.136)
В этом случае множество /р = J? содержит четыре элемента
@, 0)', @, 1)', A, 0)' и A,1)', а множество /Q = JQ состоит из
NxN2/4 векторов вида (пи п2)', где 0 <: ях < NJ2 и 0 < п2 <
< NJ2.
Это разложение N на множители соответствует первой стадии
прореживания в алгоритме по векторному основанию, выведен-
выведенному в разд. 2.3.3. Если Nt = N2 = N и N является степенью 2, то
полным разложением N на множители для БПФ по основанию
Bx2) будет разложение
Г 2 0 1 Г2 0 1 Г 2 0П
N=[о 2JLo 2J- io 2J- <2Л37>
Данный подход легко можно применить к случаям других осно-
оснований, смешанных оснований или преобразований более высокой
размерности.
В гл. 1 мы видели, что после прямоугольно-дискретизованных
сигналов следующим наиболее важным классом последовательно-
последовательностей является класс сигналов с гексагональной дискретизацией.
ДПФ, связывающее сигналы с гексагональной дискретизацией
с гексагональными отсчетами их фурье-представления [6], опи-
описывается выражением
3N—1 N — 1
^ v /м я Vovn I i 11 vfi fi \ b I , Чи p I
*ь ifvxj fV2/ — / / " v'^1 * '^2/ *^"M ' I q w 11?*шул '^2/ 1 l-"^2 21 I *
n,=0 n,=0
B.138)
Оно соответствует матрице периодичности
2N N 1
B.139)
Если двумерный дискретный сигнал получен в результате дискре-
дискретизации функции с ограниченной полосой ха (tu t2) с помощью
гексагональной матрицы дискретизации
'гек —
Дискретный фурье-анализ многомерных сигналов 127
то матрица S, связывающая X (klt -k2) и Ха (Qly Q2), описывается
выражением
2я
S имеет вид гексагональной матрицы дискретизации
и 52 = n/NT2.
Матрицу периодичности N можно разложить следующим об-
образом:
2N N Л Г 2 О I Г Л^ Л^/2
J[ \[ N
Это разложение приводит к алгоритму типа алгоритма по вектор-
векторному основанию для гексагонального ДПФ.
Полная схема алгоритма показана на рис. 2.15, а. Области /Р
и /Q для первой стадии этого алгоритма таковы:
/р ={@, 0)', @, 1)', A, 0)' A, 1)'}, B.142)
i. q2)-0<q1<~-l, O<<72<-^-- lj. B.143)
Если Л^ является степенью 2, можно получить более полное раз-
разложение:
Г2 01 Г2 0] Г2 0"! Г2 1 1
N=[o 2 J Lo 2 J- -' L 0 2J[l 2j- (
«Бабочки» для всех этапов, за исключением первого, аналогичны
друг другу и содержат четыре входа и четыре выхода. Первый
этап содержит «бабочку» с треля входами и тремя выходами;
одна из них показана на рис. 2.15, в.
Матрицу N можно также представить в виде сомножителей
следующим образом:
Г2 lit N 01 Г 1 ОТ
N=[l 2 J L 0 1 J Lo И' <2-145>
Это приводит к алгоритму с разбиением по строкам и столбцам,
показанному на рис. 2.16. Три (N х М)-точечных ДПФ, идентич-
идентичные прямоугольным ДПФ, выполняются после того, как данные
рассортированы на три группы и переобозначены. Таким образом,
эти ДПФ можно выполнить или с помощью прямоугольного алго-
алгоритма с разбиением по строкам и столбцам, или с помощью прямо-
прямоугольного алгоритма по векторному основанию. Результаты этих
ДПФ объединяются затем с использованием одной ступени «бабо-
«бабочек» с тремя входами и тремя выходами. Разница между гексаго-
128 Глава 2
*@,0)
xB
Х(О.О)
Х(М)
Рис. 2.15.
а — полная графическая схема гексагонального БПФ для N = 2, когда N разложено
на множители в соответствии с уравнением B.141); б — одна из трехточечиых сба-
бочек» первой стадии и выполняемые в ией умножения. (С любезного согласия
Р. М. Мерсеро и Т. К- Спик, IEEE Trans. Acoustics, Speech, and Signal Processing,
© 1981 IEEE.)
нальным ДПФ и прямоугольным ДПФ состоит в количестве от-
отсчетов в их опорных областях. Гексагональное ДПФ есть преобра-
преобразование по 3N2 комплексных значений отсчетов в каждой частот-
частотной или пространственной области. Эти опорные области можно
выбрать таким образом, чтобы они имели гексагональную форму
с радиусом N отсчетов. Прямоугольное ДПФ со сравнимым ча-
частотным разрешением требует AN2 комплексных значений отсчетов.
Таким образом, преимущество гексагонального ДПФ перед прямо-
прямоугольным состоит в том, что оно требует на 25 % меньшего объема
памяти.
Дискретный фурье-анализ многомерных сигналов 129
х@,0)
"B,1)
хC,0)
X E,1)
X C, 1)
хD,0)
х (О,1)
х D,1) •
х E,0) •
Прямоугольное
ДПФ 2x2
Прямоугольное
ДПФ 2x2
Прямоугольное
ДПФ2Х2
Рис. 2.16. Граф гексагонального БПФ для N = 2, з случае когда N разло-
разложено на множители в соответствии с уравнением B.145).
Оно также требует меньше вычислительных операций. В гекса-
гексагональном БПФ по векторному основанию общее количество ве-
вещественных умножений составляет 9jV2 log2 N -f- 8jV2. По сравне-
сравнению с этим прямоугольный алгоритм по векторному основанию
для последовательности, обеспечивающей сравнимое частотное
разрешение, требует 12jV2 1o?2jV + 12ЛГ2 вещественных умноже-
умножений. Таким образом, экономия в объеме вычислений составляет
около 25 %.
* 2.5. Взаимосвязь между Af-мерными и одномерными ДПФ
Если одномерное ДПФ является частным случаем М-мерного
ДПФ, то М-мерное ДПФ в свою очередь может рассматриваться
как частный случай одномерного ДПФ. Как ни парадоксально
звучит это утверждение, его нетрудно понять, поскольку ДПФ —
это просто переход от одного набора чисел к другому. Организо-
Организованы ли эти числа в одну строку и обозначены одним индексом
или они организованы в виде множества с несколькими индексами,
зависит от нас; выбор между тем или другим представлением в об-
общем случае определяется соображениями удобства. В этом раз-
разделе мы исследуем ту размытую область, в которой одномерное и
9 Даджион Д.. Мерсеро Р.
130 Глава 2
М-мерное представления смешиваются. Сначала рассмотрим М-
мерное ДПФ, которое в самом деле является одномерным ДПФ,
а аатем интерпретацию одномерного ДПФ как М-мерного ДПФ.
2.5.1. Кусочные ДПФ [8]
Преобразование Фурье дискретного сигнала конечной протя-
протяженности с прямоугольной опорной областью описывается выра-
выражением
ЛГ,—1 Ыг—1
Х(щ, со2)= ? ? x(nlt n2)exp(— /&>!«! — /со2п2). B.146)
«,=0 0
Это двумерный тригонометрический полином степени Nt — 1 по
переменной о>х и степени N2 — 1 по переменной <»>,. Двумерное
ДПФ состоит из множества NtN2 независимых отсчетов этого поли-
полинома; изменяя матрицу периодичности N, мы можем изменять
положение этих отсчетов.
Особенно интересное множество отсчетов преобразования Фурье
возникает при использовании матрицы периодичности
[ #i - 1 1
Но мЛ' BЛ47)
которая определяет дискретизацию преобразования Фурье в точ-
точках
«>1=-7^; из = ^, * = о, 1,..., ад2-1. B.148)
Это множество представлено на рис. 2.17. Видно, что отсчеты ле-
лежат на одной прямой в фурье-плоскости, составляющей угол
0 = arctg (l/N2) с осью coi и обрывающейся через несколько пе-
периодов X (сох, со2). Однако, если принять во внимание лежащую
в основе преобразования Фурье периодичность, эти отсчеты можно
считать лежащими на множестве N2 отрезков параллельных пря-
прямых. Тем самым эти отсчеты одновременно являются отсчетами
двумерного преобразования Фурье и отсчетами одномерной функ-
функции.
Обозначая эти отсчеты ДПФ, которое мы будем называть «ку-
«кусочным», одним индексом k, получим
^PW= S 23 xК, tu) exp — /-y-y (Л^ -Ь л2)
/fe = 0, 1, . . ., #!#2- 1. B.149)
Если обозначить новую переменную п через
л4#2«1 + Л2. B.150)
то поскольку пг принимает значения от 0 до Nx — 1, а п2 от 0 до N2 —
— 1, то л будет пробегать значения отО до NtN2 — 1. Далее, любое
Дискретный фурье-анализ многомерных сигналов 131
Рис. 2.17.
о — отсчеты двумерного преобразования Фурье, соответствующие «кусочному» ДПФ;
б — периодическое дополнение х (л,, л,), использованное для получения «кусоч-
«кусочного» ДПФ.
значение п в этом промежуткесвязано с единственной упорядоченной
парой {пъ п2). Тем самым можно однозначно определить после-
последовательность
*р(^2«1 + «2) = *(«1, п2) B.151)
и признать, что хр (я) и Хр (k) образуют одномерную пару ДПФ
xp(n)~Xp(k).
B.152)
Поскольку последовательность х (пъ п2) имеет конечную протя-
протяженность, ее можно восстановить из хр \п) единственным образом.
По существу, одномерная, последовательность является сцепле-
сцеплением Nt столбцов двумерной последовательности х (пъ п2). Сле-
Следовательно, если столбцы двумерной последовательности сцеплены
таким образом, что образуют одномерную последовательность,
а затем вычисляется одномерное ДПФ этого сцепления, резуль-
результирующие значения одномерного ДПФ можно интерпретировать
как отсчеты двумерного преобразования Фурье на наборе отрез-
отрезков параллельных прямых.
Можно непосредственно распространить это ДПФ на сигналы
более высокой размерности. Рассмотрим М-мерный сигнал, кото-
который принимает ненулевые значения только при 0 <: nt < N,- — 1,
i = 1, 2 М- ЛЪожно построить одномерный сигнал, приняв,
что
(я) =
пв,
пм),
B.153)
132 Глава 2
где
п = (. . . {{nxN2 + п?) N3 + /!,)#<+...+ лм). B.154)
Тогда, так же. как и в двумерном случае,
ЛГ2_1 NM-l
exp("'TTt)' BЛ55)
что определяет отсчеты М-мерного непрерывного преобразования
Фурье в точках
_ 2nk _ 2nk _ Ink § <k<c\\Ni.
B.156)
2.5.2. Алгоритм простых множителей Гуда
для разбиения одномерного ДПФ [9, 10]
Выше был показан один способ приведения модифицированного
М-мерного ДПФ к одномерному. То, что ДПФ в некотором смысле
не зависит от размерности, можно показать и другим способом,
рассмотрев метод Руда [9] для факторизации одномерного ДПФ.
Рассмотрим ДПФ JV-точечного сигнала хх (п)
N-1
Xl(k) = I] xi(n)WnNk, B.157)
/1=0
где N можно выразить произведением взаимно простых целочис-
целочисленных множителей N = Л^Л^ ... NM. Согласно китайской тео-
теореме об остатках из теории чисел, любое целое число, лежащее
в диапазоне [0, N — 1 ], можно единственным способом предста-
представить упорядоченным множеством из М чисел (пи п2, ..., плг), где
щ = ((я))*., 1 = 1,..., М. B.158)
(Вспомним, что двойные скобки означают, что п взято по модулю
Nt.) Целое число п можно выразить посредством остатков, полу-
полученных в результате его деления на каждый из сомножителей N.
Аналогичным образом частотный индекс k можно также предста-
представить упорядоченным набором из М чисел (ku k2, .... kM), где
ki = {{k))N.- Выражая целочисленные переменные п и k этим спо-
способом, мы переводим их из одномерного пространства в М-мерное.
Дискретный фурье-анализ многомерных сигналов 133
Эти М-мерные представления обратимы. Один из способов
вывести формулу обращения состоит в том, чтобы постулировать
существование множества «синтезирующих» чисел ц{, таких что
, если i — j,
, если 11
Если числа с таким особым свойством существуют, можно сразу же
показать, что величина п находится из его М-мерного упорядо-
упорядоченного представления (пъ п2, ..., пм) по формуле
. B.160)
Из теории чисел следует, что числа \it действительно существуют
и их можно выразить следующим образом:
Иг - ущ) • B.1Ы)
где ф (Nt) — функция Эйлера, равная количеству целых чисел
в множестве 1, 2, .... Nt — 1, не имеющих с Ni общих множите-
множителей. Например, ср B) = 1, ср C) = 2, ср E) = 4, а ф G) = 6.
В общем случае ф (р) = р — 1, если р — простое число. Для N =
= 210 = 2x3x5x7 мы получили бы
210 \i .„(. / 210 \2 .п
) = Ю5, м-2 = \—) = 900'
= 3111 696, ц4 = (^-N = 729 000 000.
Очевидно, что \it могут быть весьма большими. Однако на прак-
практике эти числа можно заменить остатками их деления на N, что
дает меньшие значения:
jii = ((Ю5)J10 = 105, ц2 = (D900)J10 - 70,
Из = (C 111 696)J10 = 126, ц4 = (G29 000 000)J10 = 120.
Продолжая наш пример, можно видеть, что число п = 111 пред-
ставимо множеством A, 0, 1, 6) и восстановимо следующим обра-
образом:
п = @х 105 + 0х 70 + 1х 126 + 6х 12О))„о= ((951)J1о= 111.
Не будем углубляться слишком далеко и применим теперь
эти идеи к первоначальной задаче представления одномерного
ДПФ как М-мерного. Начнем с выражения
Xi(k)= ? Xi(ri)WnN- B.162)
п=0
134 Г лат 2
Используя М-разрядное упорядоченное представление для п и k
при определении Л1-мерных множеств, соответствующих входу и
выходу, получим
N I N-l NM-l.
м(&1- &2> • • •» kM) = 2 2 • • - 2 Хм(ПП rt2> • • •. Пм) X
0
M \ / M \
1 / ^=' ; B.163)
Однако поскольку W™ = U^(^m))jv, то показатель степени в B.163)
можно найти, записав
/ / М М \\ .'/ММ
SS((
(()). B.164)
Так как по определению щ произведение щ^ — целое число,
кратное JV при i Ф /, то член ]х\ можно записать в виде
где Ri определяется из
Тогда B.163) записывается следующим образом:
NM-l
... 2 ^w(«i. «a. • •.. пм)х
Если обозначить
mi^((Ri/ii))N., то получим B.167)
u k2, . . ., kM) = 2 2 • • ¦ 2 ^мЦ. m2, . . ., тЛ;) x
0 0
?*...WN%kM B.168)
Поскольку /?t- и Nt взаимно простые для каждого i, a nt принимает
все значения в диапазоне от 0 до JV,- — 1, то т, также принимает все
значения в этом диапазоне, и последовательность ЛЛГ — это просто
переиндексированная последовательность хЛ1.
Дискретный фурье-анализ многомерных сигналов 135
Для нашего примера значения {Rt} составляют:
= 343 000; ((R2))N, = 1,
R3 = (~-O = 230 539 333 248; ((/?s))jv, = 3,
= 17 714 700 000000 000; ((/?4))yv« = 4.
В итоге для преобразования 210-точечного одномерного ДПФ
в 2хЗх5х7-точечное четырехмерное ДПФ необходимо выпол-
выполнить следующую последовательность шагов:
1. Найти Ri (#! = R2 = 1, R3 = 3, R4 = 4).
2. Найти [ii (щ = 105, ц2 = 70, ц3 = 126, ц4 = 120).
3. Использовать Rt для вычисления индексов /лг из одномер-
одномерных индексов п
(mlt т2, /л3, /«4) = (((Rin)J, ((Rtn))a, ((R3n))&, ((Rtn)O).
Например:
n = 1 -* (/nb /n2, /n3. /) = A, 1. 3, 4),
n = 17 -> (/nx, /n2, /n3, /n4) = A, 2, 1, 5),
n = 198 -*¦ {tnlt m2, m3, /n4) = @, 0, 4, 1).
Это переводит хх (п) в Jf4 (/nx, /n2, /n3, /n4).
4. Выполнить четырехмерное ДПФ ?4 (mlt m2, m3, /л4) для
получения X4 (fex, fe2, fe3, fe4).
5. Перевести X4 (fe1( k2, k3, fe4) в Хх (k) согласно формуле
k = ((цЛ + ц2/г2 + ц3/г3 + цА))лг =
= (A05fex + 70fe2 + 126fe3 + 120*.)) S1O.
Так например,
(*i, К К К) = (l, l, l, l) -fe= 1,
(fex, k2, k3, kt) = @, 2, 0, 5) -*= 110.
Упражнения
2.1. Проверить, что коэффициенты ряда Фурье X (ku k2),
определенные согласно B.4), при подстановке в формулу B.3)
дают последовательность х (пъ п2).
2.2. Пусть х (пи п2) — прямоугольно-периодическая последо»
А^ 0 1
ГА1 1
вательность с матрицей периодичности л/ и КОЭФФИ"
р
л/ и
136 Глава 2
циентами дискретного ряда Фурье X {kx, k2). Найти коэффициенты
ряда Фурье для следующих последовательностей:
а) х (пг — тъ п2 — т2), щ, т2 = const;
б) х(п2, tii) (принимая во внимание, что Nj = N2 — N);
в) х* (nlf ла);
г) х(—пи —п2).
2.3. Предположим, что х2 (nlf n2) — прямоугольно-периоди-
прямоугольно-периодическая последовательность, как в упр. 2.2. Последовательность
х2 (п, п) является в таком случае одномерной периодической по-
последовательностью.
а) Чему равен период последовательности хх (п) = х2 (п, /г)?
Зависит ли ответ от наличия каких-либо простых сомножителей,
общих для Ni и N2?
б) Если Nx и N2 — взаимно простые, а коэффициенты ряда
Фурье двумерной последовательности равны Х2 (/г,, /г2), найти
коэффициенты ряда Фурье для Л*! (/г).
2.4. Найти коэффициенты ряда Фурье для последователь-
последовательностей, изображенных на рис. У2.4.
к
• • • • • • • 1
• • • • ¦ • •
• • • • • • •
.......
•¦••••¦
¦ • • • • . •
¦ ••••¦•
• •¦••••
Рис. У2.4.
2.5. Вычислить дискретное преобразование Фурье следую-
следующих последовательностей:
а) х (пи п2) = а"»-"», 0 < пъ л2 < N;
б) х(пъ п2, п3) = а"«-п>, 0</гх, щ, n3<N;
в) x(nv n2)= 2 у(пи /г), 0<лх, n2
[принимая во внимание, что Y (klt k2) известна]
Дискретный фурье-анализ многомерных сигналов 137
2.6. Преобразование Фурье сигнала х (пи п2) = а"хР х
х и (пъ п..) подвергается дискретизации в точках
(шх, ш2) = (^ klt -^- k.2j при 0 <: kr < 3, 0 < k2 < 7.
Затем выполняется обратное ДПФ этих отсчетов. Определить
результирующий пространственный сигнал.
2.7. Доказать, что ДПФ обладает следующими свойствами:
а) х* (л,, п2) ~ X* (((#, - kl))Nl, ((N2 - k2))N,);
б) х* (((JV, - «,Ж, ((N2 - n2))Nt) - X* (fe,, fe2);
в)
2.8.а) Вычислить цилиндрическую свертку двух последова-
последовательностей
xl{nl> n2) = б(/гх), 0<n1<JV1, 0<rt3<JV2)
х2(/гХ) /г2) = б(/г2), 0 </гх < ЛГ2, 0</г2<Я2.
б) Вычислить линейную свертку этих последовательностей.
в) Повторить пп. «а» и «б», заменяя х2 (пъ п.2) на х3 {пъ п2) —
= б (/гх — п2) и принимая Nx = N2 = N.
2.9.а) Две двумерные последовательности, каждая размером
Cx4) точек, циклически сворачиваются с использованием Fx6)-
точечного двумерного ДПФ. Какие отсчеты (бхб)-точечного вы-
выходного множества идентичны отсчетам линейной свертки двух
входных множеств и какие отличны от них?
б) Повторить п. «а», взяв одну из входных последовательно-
последовательностей размером 3x4 точек, а другую — размером 4x3 точек.
2.10,Рассмотрим последовательность х (пи п2) = ап\ 0 <:
< пх < Ni, 0 < п2 < N2.
а) Рассчитать ДПФ, вычислив вначале одномерное ДПФ
по каждой строке х. Затем вычислить одномерное ДПФ по каждому
столбцу полученного массива.
б) Повторить процедуру, начав вычисления со столбцов.
Проверить, что получился тот же результат.
2.11. Показать, что «бабочку» по векторному основанию Bx2),
показанную на рис. 2.4, можно вычислить путем только трех
комплексных умножений и восьми комплексных сложений. Изоб-
Изобразить более детальный граф, на котором в явном виде указать
эти сложения. (Указание: «бабочка» в действительности является
B х2)-точечным ДПФ. Рассмотреть разбиение по строкам и столб-
столбцам.)
2.12.а) Изобразить в общем виде «бабочку» по векторному
основанию Bx2x2).
б) Чему равно минимальное количество комплексных сложений
138 Глава 2
и комплексных умножений, которые необходимо выполнить для
вычисления всех восьми выходов «бабочки»?
2.13.а) Сколько комплексных умножений и комплексных сло-
сложений необходимо для вычисления М-мерного ДПФ строка-
столбец, если используется одномерное БПФ по основанию 4
(входной размер равен N х N х ...х N, где N является сте-
степенью 4)?
б) Сколько комплексных умножений и сложений необходимо
для выполнения по основанию Dх4х..х4) Л4-мерного БПФ по
векторному основанию? (Приняв, что N X N х...х N — вход,
где N — степень числа 4.)
* 2.14. Записать на Фортране или другом языке высокого
уровня программу, реализующую двумерный алгоритм БПФ по
основанию Bx2). Принять, что входной массив записывается в
оперативную память и что преобразование необходимо получить
в той же области памяти, что и исходные данные.
2.15.а) Мы хотим выполнить двумерное (N х УУ)-точечное
БПФ с разбиением по строкам и столбцам, где N ~ R2. Принимая,
что в оперативную память можно занести по крайней мере R
строк данных, обобщить процедуру транспонирования Эклунда.
б) Проверить работоспособность вашей процедуры на множе-
множестве
x @,8)
x @,7)
x @,6)
x @,5)
x @,4)
x @,3)
ж @,2)
лс @,1)
х @,0)
*0
* A
х A
*0
хA
,8)
,7)
,6)
,5)
,4)
х A,3)
*0
хA
* A
,2)
,1)
,0)
х B,8)
х B,7)
ж B,6)
х B,5)
ж B,4)
ж B,3)
х B,2)
х B,1)
х B,0)
ж C,8)
* C,7)
х C,6)
х C,5)
х C,4)
ж C,3)
ж C,2)
х C,1)
ж C,0)
х D,8)
* D,7)
ж D,6)
х D,5)
ж D.4)
х D,3)
ж D,2)
х D,1)
х D,0)
-V E,8)
х E,7)
х E,6)
х E,5)
х E,4)
х E,3)
х E,2)
* E,1)
х E,0)
х F,8)
х F,7)
х F,6)
х F,5)
х F,4)
х F,3)
х F,2)
лс F,1)
х F,0)
х G,8)
х G,7)
х G,6)
х G,5)
х G,4)
х G,3)
х G,2)
х G,1)
х G,0)
х (8,8)
х (8,7)
х (8,6)
х (8,5)
х (8,4)
х (8,4)
х (8,2)
ж (8,1)
х (8,0)
2.16. Определить матрицу периодичности, описывающую пе-
периодичность множества, показанного на рис. У2.16.
Рис.
Дискретный фурье-анализ многокамерных сигналов 139
2.17. Сигнал х (яъ я2) с конечной опорной областью можно
точно восстановить из ДПФ, взятого по матрице периодичности
2N N
а) Определить верхний предел числа ненулевых отсчетов
х{пъ Яг).
б) Определить ДПФ х (п^ я2), если
х(пг, я2) = б(Яц), 0 < /гх <: 3jV — I, 0 < я2 «: N — I.
2.18. Если сигнал является разделимым в том смысле, что
х (яь я2) = *i (ях) х2 (я2), можно ли что-нибудь сказать о разде-
разделимости его ДПФ, взятого по произвольной матрице периодич-
периодичности
2.19. Последовательность х (я1т я2) имеет конечную опорную
область, заключенную в пределах 0 «: яг «: 2, 0 < я2 «: 1. Она
обладает ДПФ X (kv fe2), определенным по матрице периодичности
О"
2.
ДПФ заключено в области 0 <: kx <?. 2, 0 <: /г2 «: 1 и выполняется
с помощью двухступенчатого БПФ и использованием разложения
на множители N = PQ, где
3 —31 Г2 2'
-1 2J* Q = [l 2.
Изобразить граф для этого алгоритма БПФ.
2.20. Предположим, что мы хотим вычислить ДПФ X (к) после-
последовательности х (п) по матрице периодичности N. Пусть N можно
выразить в виде произведения
N = EDF,
где D — диагональная матрица, | det Е | = 1, |detF|= 1
Показать, что ДПФ можно выполнить за следующие три шага:
1) перестановка элементов входной последовательности в соот-
соответствии с условием n = E~xn;
2) вычисление ДПФ последовательности х (п) по строкам и
столбцам [назвать результаты вычисления X (к)];
3) перестановка элементов последовательности X (к) для по-
получения X (к) в соответствии с условием к = F'k'. (Замечание:
подобное разложение существует для любой целочисленной ма-
140 Глава 2
трицы N. Таким образом, этим устанавливается алгоритм с раз-
разбиением по строкам и столбцам для любой матрицы периодич-
периодичности.)
2.21. Рассмотрим следующий алгоритм двумерной линейной
свертки. Предположим, что необходимо свернуть две последова-
последовательности х (пи п2) и h (пи п2). Пусть х (пи п2) содержит Nх х
х Nх точек, a h (nlt п2) — NH x NH точек.
1) Определим
/*(«i, я2) 0 <с п1г п2 < Nх,
X (/1-1 • tin I \ _ — ж г I ж г
(^ 0 в других случаях, 0 </?!, n2<.Nx-\- Nti.
2) Определим
{h(nu гц) 0 < пх, п2 < NH,
11 2' ~~ \ 0 в других случаях, 0 <: nlt n.2<.Nx + NH.
3) Построим из х и h одномерную последовательность, при-
присоединяя их друг к другу; другими словами, определим
Px(q) = PX (/»!# + ГЦ) й ? («!, П2),
Рн (Я) = Рн {>hN + n2) ?h(nlt n2),
где N й Nx + ^н-
4) Выполним одномерную свертку pY (q) и рн (<7)
5) Определим у (пъ п2) соотношением
[ pY (пгЫ + п2), 0 <: «!, /г2
f/l i' 2J_| q в ДруГИХ случаях.
6) Утверждается, что результат является двумерной сверткой
х и h.
а) Используя этот алгоритм, свернуть две последовательности
d] Г2 4"
\ [
и сравнить ответ с двумерной сверткой, полученной более обыч-
обычным путем.
б) Провести сравнение преобразования Фурье для рх (с/)
с двумерным преобразованием Фурье х (пь /г2).
в) Показать, что этот метод применим во всех случаях,
когда N достаточно велико. (Это доказательство легче провести
для частотной области.) Насколько большим должно быть JV?
Дискретный фурье-анализ многомерных сигналов 141
г) Объяснить, как можно выполнить этот расчет, используя
одномерное ДПФ с предложенным алгоритмом.
2.22. Нам необходимо вычислить одномерное ДПФ двадцати-
двадцатиточечной последовательности х (п), используя алгоритм разло-
разложения на простые сомножители Гуда. Это сделано отображением
исходной последовательности в двумерное Eх4)-точечное мно-
множество х-2 {пъ п2), вычислением ДПФ Х2 (ku k2) этого множества
и отображением его в одномерное ДПФ X (k).
а) Определить двумерную последовательность х2 (пъ п2) через
отсчеты х (п). Использовать Nx = 5, N2 = 4.
б) Определить одномерное множество X (k) через отсчеты
Х2 (klt k2).
Глава 3
Синтез и реализация двумерных КИХ-фильтров
Синтез двумерных цифровых фильтров существенно отли-
отличается от синтеза одномерных. В одномерном случае задачи син-
синтеза фильтра и его схемной реализации четко разделены. Сначала
выполняется синтез фильтра, а затем с помощью соответствующих
преобразований передаточной функции определяются коэффи-
коэффициенты, необходимые для построения конкретной схемной реали-
реализации. В двумерном случае ситуация совершенно иная из-за того,
что многомерные полиномы в общем случае нельзя разложить на
множители. Это значит, что нет возможности в общем случае ме-
менять форму произвольной передаточной функции для согласова-
согласования ее с требованиями схемной реализации. Если мы в состоянии
реализовать только передаточные функции, разложимые на мно-
множители, то и метод синтеза должен приводить только к фильтрам
этого класса. Это обстоятельство усложняет задачу проектиро-
проектирования фильтров и сокращает число практически приемлемых реа-
реализаций.
3.1. КИХ-фильтры
КИХ-фильтр (фильтр с конечной импульсной характеристикой),
называемый также нерекурсивным, — это фильтр, импульсный
отклик которого содержит лишь конечное число ненулевых от-
отсчетов. Такой импульсный отклик всегда абсолютно суммируем,
и, следовательно, КИХ-фильтры всегда устойчивы. КИХ-филь-
КИХ-фильтры имеют также то преимущество, что их работу легче понять как
в одномерном, так и в многомерном случае.
БИХ-фильтр (фильтр с бесконечной импульсной характери-
характеристикой), или рекурсивный, — это фильтр, входной и выходной
сигналы которого удовлетворяют многомерному разностному
уравнению конечного порядка. Такие фильтры могут быть как
устойчивыми, так и неустойчивыми, однако во многих случаях
они оказываются проще в реализации, чем эквивалентные КИХ-
фильтры. Синтез двумерного рекурсивного фильтра радикально
отличается от синтеза одномерного фильтра. Отчасти это связано
с возрастанием сложности обеспечения устойчивости. Разностные
уравнения и БИХ-фильтры составляют предмет гл. 4 и 5.
Синтез и реализация двумерных КИХ-фильтров 143
Одно из важнейших преимуществ КИХ-фильтров перед
БИХ-фильтрами заключается в возможности синтеза и практи-
практической реализации КИХ-фильтров с чисто вещественными частот-
частотными откликами. Такие фильтры называются фильтрами с нулевой
фазой 1). В частотной области условие нулевой фазы можно вы-
выразить следующим образом:
Н (щ, со2) = Я* (соь (оа). C.1)
Выполнив обратное преобразование Фурье от обеих частей равен-
равенства C.1), для импульсного отклика фильтра с нулевой фазой
получим требование симметрии в пространственной области
h (nlt щ) = h* (—nlf —nt). C.2)
Очевидно, что КИХ-фильтр может удовлетворять этому условию,
если центр его опорной области совпадает с началом координат.
Фильтры с нулевой фазой важны для многих приложений циф-
цифровой обработки многомерных сигналов. Например, при обра-
обработке изображений фильтры с ненулевой фазой могут привести
к разрушению линий и границ. Чтобы понять, почему это так,
вспомним из нашего обсуждения преобразований Фурье, что любой
сигнал можно представить в виде суперпозиции комплексных
синусоид. Линейный инвариантный к сдвигу фильтр с нетри-
нетривиальным частотным отликом будет избирательно усиливать или
ослаблять некоторые из этих синусоидальных компонент, а также
задерживать некоторые компоненты по отношению к другим. На
любой частоте величина задержки зависит от значения фазового
отклика. Нелинейный фазовый отклик приводит, таким образом,
к рассеянию строго согласованных синусоидальных компонент
сигнала, составляющих контрастные точки, линии и границы.
Фильтр с нулевой фазой имеет и другие преимущества. В силу
вещественности его частотного отклика упрощается синтез филь-
фильтра. К тому же симметрию импульсного отклика фильтра можно
использовать при его реализации для уменьшения требуемого
числа умножений.
3.2. Реализация КИХ-фильтров
3.2.1. Прямая свертка
Из гл. 1 известно, что выходной сигнал любого ЛИС-фильтра
можно получить из входного с помощью свертки по формуле
скользящего суммирования
У («ъ >к) =1 ^ (*i, **) х (гц - Jfej, n, - ?,). C.3)
') Строго говоря, чисто вещественный частотный отклик может содержать
отрицательные значения амплитуды на некоторых частотах, что соответствует
значению фазы л, а не 0. Несмотря на это, термин «фильтр с нулевой фазой»
традиционно включает все чисто вещественные частотные отклики.
144 Глава 3
Импульсный отклик КИХ-фильтра содержит лишь конечное
число ненулевых отсчетов, и пределы суммирования в C.3) ко-
конечны. В этом случае формула скользящего суммирования пред-
представляет собой алгоритм, позволяющий вычислить последователь-
последовательные выходные отсчеты фильтра. Если, например, предположить,
что фильтр обладает опорной областью \(пь п2): 0 < % < Nlt
О < п.г < N.2\, то для вычисления выходных отсчетов можно вос-
воспользоваться соотношением
Л', —1 Л'2 —I
</(«!, »3) - ? ?
*i=--0 *2^=
Если в наличии имеются все входные отсчеты, то выходные
отсчеты можно вычислять в любом порядке; их можно вычислять
и одновременно. Если требуются только определенные отсчеты
выходного сигнала, то можно ограничиться вычислением лишь
этих отсчетов. Однако для получения каждого выходного отсчета
требуется выполнить A/'1jV2 умножений и NxN.2 — 1 сложений.
При вычислении у (пи п.,) используются значения входных
отсчетов из yvx — 1 «предыдущих» столбцов и N., — 1 «предыду-
«предыдущих» строк. Если входные отсчеты поступают строка за строкой,
требуется память, достаточная для хранения N2 строк входной
последовательности. Если, наоборот, на вход поступают столбец
за столбцом, необходима память для хранения Nx входных столб-
столбцов.
Фильтр с нулевой фазой с вещественным импульсным откли-
откликом удовлетворяет условию h (п^ п2) — h (—nlt —п2), т. е. каж-
каждому отсчету соответствует парный ему отсчет с тем же значением.
В этом случае, воспользовавшись свойством дистрибутивности
•сложения, можно поменять местами некоторые операции умно-
умножения и сложения в формуле C.3), чтобы уменьшить их число,
однако количество умножений, требуемых для реализации филь-
фильтра, все еще остается пропорциональным порядку фильтра. Если,
например, опорная область фильтра прямоугольна и ее центр
расположен в начале координат, то
У («1. ла) =? ? h {kv k,) x (»! - kv n, - k.,) = C.5)
/V, Nt
= ? Ц h (ku k,) [x (»x - /Ц, n, - k.) -r
x(n1-Jrk1, n,-'rk,)},- I] h(kv0)[x(ti1 — ki,n.,) j-
x (rax + Ax, «a)] + h @, 0) x (nlt h2). C.6)
Синтез и реализация двумерных КИХ-фильтров 145
Реализация КИХ-фильтра на' основе выражения C.6) требует
приблизительно вдвое меньше умножений, чем при использовании
выражения C.5), хотя в обоих случаях выполняется одно и то же
число сложений и требуется тот же объем памяти. Если импульс-
импульсному отклику КИХ-фильтра присущи другие формы симметрии,
ими можно воспользоваться для дальнейшего уменьшения числа
требуемых умножений.
3.2.2. Реализация КИХ-фильтров с помощью
дискретного преобразования Фурье (ДПФ)
Реализация любого КИХ-фильтра возможна также с помощью
дискретного преобразования Фурье. Этот подход особенно заман-
заманчив при реализации фильтров высокого порядка, поскольку
имеется ряд алгоритмов быстрого преобразования Фурье, позво-
позволяющих эффективно вычислять ДПФ.
Пусть w (пъ п2) — линейная свертка последовательности ко-
конечной протяженности х (п^ п2) с импульсным отликом h {nu п2)
КИХ-фильтра
w {пъ п2) = х (пи п2)* *h (nlt n2). C.7)
Выполнив преобразование Фурье обеих частей этого выражения,
получим
W {щ, со2) = X (щ, со2) Я (соь со2). C.8)
Как было показано в гл. 2, имеется много возможных определений
двумерного дискретного преобразования Фурье, соответствую-
соответствующих множеству форм растра дискретизации двумерного спектра
Фурье; все эти ДПФ можно использовать для вычисления свертки,
если только принятые для них опорные области включают в себя
опорную область для1 w (пъ п2). Примем для определенности,
что дискретизация W ((alt co2) выполнена по прямоугольному рас-
растру объемом jVt X jV2 отсчетов и пусть
W (ku k2) — W (О),, GJ) |a)l=23tft1/JV1, «>1=2nkllN,- C-9)
Тогда
W (klt k2) = X (kb k2) H (klf k2). C.10)
Будем считать, как и в разд. 2.2.3, что последовательность
У (пъ п2) является результатом обратного ДПФ-произведения
Я (klt k2) X (ku k2). В этом случае у (пъ п2) в соответствии с вы-
выражениями B.52) и B.53) представляет собой циклическую свертку
h {tii, n.2) и х (пъ п2). Если jVx и Л^2 выбраны достаточно большими,
то, как и требуется, у (пь п2) — w (я1( п2). Для выполнения
(jVj X УУ2)-точечных преобразований Фурье последовательностей
х я h опорные области обеих этих последовательностей должны
быть расширены и дополнены отсчетами с нулевыми значениями.
10 Даджион Д., Мерсеро Р.
146 Глава 3
Реализация КИХ-фильтров с помощью дискретных преобра-
преобразований Фурье эффективна с точки зрения вычислений, но тре-
требует значительных объемов памяти. Кроме того, надо еще запом-
запомнить отсчеты отклика фильтра Я (klt k2), что удваивает требуемый
объем памяти. При непосредственном вычислении свертки коли-
количество входных строк, которые требуется хранить в памяти, за-
зависит от порядка фильтра. Реализация с помощью ДПФ требует
запоминания всей входной последовательности независимо от
порядка фильтра.
Чтобы определить число умножений, необходимых для вычис-
вычисления значений всех выходных отсчетов, предположим, что коэф-
коэффициенты Я (kb k2) вычислены заранее и хранятся в памяти. Тогда
для вычисления значений отсчетов выходного массива требуется
выполнить два ДПФ (одно прямое и одно обратное). При исполь-
использовании алгоритма разбиения на строки и столбцы с учетом веще-
вещественности значений х (пъ п2) и у (пг, п2) общее число веществен-
вещественных умножений для вычисления у (пъ п2) составит
2ВД, log2 NXN2 + 2NXN2 C.11)
в предположении, что Nt и jV2 являются степенями числа 2. Для
опорной области линейной свертки w (nlt n2), представляющей
собой прямоугольник размером Мг X М2 отсчетов, потребуется
2NxNt log, NiNi + 2NXN%
вещественных умножений на каждый отсчет импульсного отклика
фильтра. Если протяженность импульсного отклика фильтра
незначительна по сравнению с протяженностью входного сигнала,
это число не зависит от порядка фильтра х).
3.2.3. Секционированная свертка
В предыдущем разделе было показано, что сложность арифме-
арифметических операций при реализации КИХ-фильтров с помощью
ДПФ не зависит от порядка фильтра, в то время как сложность
реализации с непосредственным вычислением свертки пропорцио-
пропорциональна порядку фильтра. Если порядок фильтра мал, можно ожи-
ожидать, что более эффективной будет реализация методом прямой
свертки, однако по мере увеличения порядка фильтра реализа-
реализация с ДПФ станет в конце концов более эффективной. Для филь-
фильтров очень высоких порядков выигрыш может достигать десятков
и сотен раз.
-1) Это утверждение неточное. При использовании ДПФ для вычисления
свертки количество арифметических операций никогда не зависит от протяжен-
протяженности импульсной реакции фильтра. — Прим. ред.
Синтез и реализация двумерных КИХ-фильтров 147
С другой стороны, реализация с ДПФ требует значительных
объемов памяти. Методы секционирования свертки являются ком-
компромиссным решением. Суть их заключается в том, что операция
свертки выполняется над секциями или блоками данных с исполь-
использованием ДПФ. Ограничение размера секций уменьшает объем
требуемой памяти, а использование ДПФ сохраняет вычислитель-
вычислительную эффективность процедуры.
Простейший для понимания метод секционированной свертки
носит название метода перекрытия с суммированием. Разделим
n2,
3N2
2N2
N2
I
__ i _
1
1
1
1
J
1
1
N,
1
-+—
1
1
I
i
i
i
2N,
1
-1—
1
¦*"
1
1
3N,
1 1
-t—+
1 1
1 1
-t 1
—{- x21 [
л—т
I ! ,
4N, SN, n
Рис. З.1. Метод перекрытия с суммированием.
а — секция входной последовательности дгг1 (п,, пг); б — опорная область результата
свертки этой секции с Л.
двумерный массив х (nlt п2) на (Nt X Двуточечные секции, опре-
определив секцию с индексами (klt k») следующим образом:
х (пи п2), &!#! < пг < (kt + 1) Nv
xklkl («ь п2) а Аг2Л^2 < п2 < (k2 + I) N2, C.12)
О в остальных случаях.
Опорная область для -одной такой секции изображена на
рис. 3.1, а. Опорные области секций не перекрываются, и все
вместе покрывают всю опорную область массива х (пг, п2); поэтому
Х(П,, П2) =
|, П2).
C.13)
В силу того что операция дискретной свертки дистрибутивна
по отношению к сложению, можно записать
У («1. пг) = х (nv п2) * * h (nv n2) =
= ( И S Хкгкг (tli, П2)\ * * tl (Я|, П2) =
t *, *, I
= И И [Хк.к, (ль п2) * * h (nh п2)} =
к,
к,кг (щ, п2).
C.14)
10'
148 Глава 3
Выходная секция yklk2 (яь Яг) представляет собой результат
свертки h (nlt п2) с секцией (klt k2) последовательности х (nlt п2).
Для получения полного выходного сигнала фильтра у (nlt n2)
эти частичные результаты нужно сложить. Поскольку опорная
область секции yk,k2 (яь я2) больше опорной области секции
x*,*2 (П|, Яа). выходные секции должны перекрываться, хотя сте-
степень перекрытия ограничена. На рис. ЗА, б изображена такая
опорная область одной из выходных секций.
Свертки Х/цк, (п\, th) с h (яг, я?) можно вычислить с помощью
дискретных преобразований Фурье, при условии, что размер
N2 - М2
М2
—>-| м, |*—
Рис. 3.2. Метод перекрытия с накоплением.
Заштрихованная область содержит отсчеты у, для которых циклическая свертка с пе-
периодом NiXN2 и лииейиая свертка к с h дают идентичные результаты.
преобразования достаточно велик для обеспечения опорной области
yttik, (яь ягI . Контролируя размер секций, мы тем самым
ограничиваем размер ДПФ, сокращая объем требуемой памяти.
Однако на практике это сопровождается некоторой потерей эффек-
эффективности.
Другой разновидностью секционированной свертки является
метод перекрытия с накоплением. Взглянув еще раз на рис. 3.1,
можно заметить, что если размер секции существенно превышает
размер опорной области отклика h, то отсчеты у в центре каждой
секции не перекрываются отсчетами из соседних секций. Точно
так же при циклической свертке последовательности х с другой
последовательностью h, имеющей гораздо меньшую опорную
область, только часть отсчетов циклической свертки будет испы-
испытывать эффект пространственного наложения. Остальные отсчеты
будут идентичны отсчетам линейной свертки. Расположение этих
отсчетов показано на рис. 3.2. Таким образом, если выполнить
}) Здесь имеется в виду, что секции входного сигнала дополняются нуле-
нулевыми отсчетами в ширину и высоту на размеры импульсной реакции фильтра, —
Прим. ред.
Синтез и реализация двумерных КИХ-фильтров 149
циклическую свертку (Л^ X Двуточечной секции последователь-
последовательности х {п1у я2) с {Мг X уИ2)-точечным импульсным откликом
с использованием (Nx X Л^2)-точечного ДПФ, результат этой
свертки будет содержать область, состоящую из (Л^ — Мг + 1) X
х (Л^ — М2 + 1) отсчетов, идентичных отсчетам линейной
свертки у. Полный выходной массив можно составить из этих
«хороших» отсчетов при правильном выборе опорных областей
входных секций. Если входные секции перекрываются, можйо
добиться того, чтобы «хорошие» области соседних секций примы-
примыкали друг к другу. Таким образом, метод перекрытия с накопле-
накоплением требует перекрытия входных секций, в то время как при
использовании метода перекрытия с суммированием перекрыва-
перекрываются выходные секции.
Для процедур перекрытия как с суммированием, так и с на-
накоплением выбор размеров секций сильно влияет на эффектив-
эффективность реализации. Прежде всего этот "выбор очевидным образом
влияет на объем требуемой памяти, а также и на объем вычислений.
Из рис. 3.2 видно, что доля полезных отсчетов циклической свертки
возрастает по мере увеличения размеров секции по отношению
к размерам импульсного отклика. Хотя какие-то общие утвержде-
утверждения относительно того, сколь велики должны быть входные сек-
секции, затруднены из-за сильной зависимости результатов от кон-
конкретной ЭВМ, эксперименты Тугуда и др. [1] показали, что для
фильтров с размерами опорной области от 30 х 30 до 80 X 80
выборок требуется размер секций 256 X 256. Это слишком много
для большинства мини-ЭВМ. Таким образом, получается, что
быстродействие алгоритма ограничивается доступной памятью.
Если это так, то следует выбирать входные секции максимально
возможного размера.
3.3. Синтез КИХ-фильтров с использованием окон
3.3.1. Описание метода
Метод окон, используемый при синтезе многомерных КИХ-
фильтров, принципиально не отличается от своего одномерного
аналога. Этот метод работает в пространственной области и на-
направлен на аппроксимацию не идеального частотного, а идеального
импульсного отклика. Пусть i (nlt п2) и / (ш1( со2) — импульсный
и частотный отклики идеального фильтра, a h (nlt п2) и Н (щ,
со2) — импульсный и частотный отклики синтезированного
фильтра. Ненулевые отсчеты h (nlt n2) расположены в некоторой
опорной области конечной протяженности R. При использовании
метода окон коэффициенты h {nly л2) определяются соотношением
h К, пг) = i (nlt n2) w (nu nt) C.15)
150 Глава 3
Последовательность w (nlt п2) носит название функции окна*)
Ограничив w (nlt п2) опорной областью R, мы тем самым огра-
ограничим h (щ, п2) той же областью. Поскольку h образуется как
произведение i и w, частотный отклик Я(со1> со2) связан с
I (щ, <в2) соотношением свертки в частотной области, а именно
я я
Я (со,, со2) = -J— j j / (Q,, fi2) W (со, - Qlt co2 - Q2)dQ1 dQ2,
—л —л
C.16)
где W (a>i, co2) — фурье-преобразование функции окна. Частот-
Частотный отклик Я (©1, со2) представляет собой сглаженный идеаль-
идеальный частотный отклик, причем сглаживающей функцией является
фурье-преобразование функции окна.
Часто в процессе синтеза фильтра его требуемые свойства
описываются с помощью / (coj, со,), а не i {щ, п2). В этих слу-
случаях нужно либо вычислить i (n1, п2) аналитически, либо аппро-
аппроксимировать путем дискретизации / (coj, co2) и выполнить обрат-
обратное ДПФ. Поскольку опорная область i (nlt n2) в общем слу-
'чае имеет бесконечную протяженность, это приводит к искаже-
искажению функции i (п1У п2) вследствие пространственного наложе-
наложения. Для уменьшения погрешности наложения необходимо, чтобы
размер опорной области обратного ДПФ в несколько раз превышал
опорную область R.
3.3.2. Выбор функции окна
Выбор функции окна обусловливается тремя требованиями.
Во-первых, окно должно иметь опорную область R. Во-вторых,
чтобы отклик Я (соц со2) хорошо аппроксимировал / (щ, со2),
функция W (<»1, со2) должна аппроксимировать двумерную им-
импульсную функцию. Наконец, если требуется получить отклик
h (nlt n2) с нулевой фазой, окно должно удовлетворять условию
нулевой фазы
w (п1у п2) = w * (—п-у, —п2). C.17)
Все эти требования не отличаются от требований к одномер-
одномерным окнам, поэтому последние часто служат основой для выбора
двумерных окон. Обычно для этого используется один из двух
способов. В первом способе двумерное окно с квадратной или
1) Этот дословный перевод с английского, к сожалению, прижился в лите-
литературе на русском языке, хотя иногда используется и другое название — ве-
весовая функция. —Прим. ред.
Синтез и реализация двумерных КИХ-фильтров 151
прямоугольной опорной областью формируется как прямое про-
произведение двух одномерных окон:
wR(nlt пг) = wi (ni) W2 ("г)- C.18)
Второй способ, предложенный Хуангом [2], предусматривает
формирование двумерного окна с помощью дискретизации поверх-
поверхности, полученной вращением вокруг своей оси одномерной не-
непрерывной функции окна ..
Wp (Пи П2) = W (]/"л? + «2 )• C.19)
Формируемые таким образом двумерные окна характеризуются
почти круговой опорной областью.
Фурье-спектр функции wR (%, п2) равен произведению фурье-
спектров функций wt (лх) и w2 (n2):
WR (©!, со2) = W1 К) W2 (щ). C.20)
Фурье-спектр функции wc (nlt n2) напоминает поверхность, полу-
полученную вращением вокруг своей оси одномерного фурье-спектра
функции w (/), хотя и отличается от него в деталях.
Если w (t), wx (nt) и w2 (n2) являются хорошими (т. е. удов-
удовлетворяющими всем нашим критериям) одномерными окнами,
то wc и wR также будут хорошими окнами. Практически можно
использовать целый ряд одномерных окон. Однако наиболее попу-
популярны прямоугольное окно
1 при I /! < т,
л C-21)
0 в остальных случаях, v J
окно Хэннинга
w (t) = \ т С1 + cos я//т) при \t\<r, C.22)
в остальных случаях
и окно Кайзера
C.23)
0 в остальных случаях.
где /0 (а) — модифицированная функция Бесселя нулевого по-
порядка. Все эти окна являются непрерывными с опорным интер-
интервалом [—т, т].
На рис. 3.3 представлен фурье-спектр типичного одномерного
окна, нормированный к единичной площади в частотной области.
Видно, что значительная часть энергии окна сосредоточена в низко-
низкочастотной области; на высоких частотах наблюдаются пульсации.
На этом рисунке Д — ширина главного низкочастотного лепестка,
а б — высота максимального из боковых лепестков. Чем меньше
152 Глава 3
Рис. 3.3. Фурье-спектр типичной одномерной функции окна.
эти величины, тем выше качество окна и тем точнее функция
H((olt со2) аппроксимирует отклик / (a^, co2). Однако для окна
с фиксированной опорной областью уменьшение одной из этих
величин приводит к увеличению другой; единственный способ
улучшения обеих характеристик окна заключается в увеличении
количества отсчетов в области R. Параметр а в выражении для
окна Кайзера [уравнение C.23) ] служит для выбора компромисс-
компромиссного соотношения между А и б. Наличие этого параметра делает
окно Кайзера практически универсальным.
3.3-3. Пример синтеза
В качестве простого примера рассмотрим синтез A1 X 11)-
точечного КИХ-фильтра, аппроксимирующего идеальный частот-
частотный отклик:
,. П при (D? + (D|<@,4ny,
1 (СО,, СОо) — \ п -
{0 в остальных случаях в области —п < щ, щ < п.
C-24)
Поскольку идеальный отклик чисто веществен, следует синтези-
синтезировать фильтр с нулевой фазой. Это значит, что начало координат
должно быть центром симметрии в области R. Возьмем в качестве R
множество точек
# = {(«1- п2): —5 < щ, п2 <: 5}. C.25)
Синтез и реализация двумерных КИХ-фшьтров 153
Синтезируем фильтр с использованием обоих упомянутых выше
способов формирования двумерного окна, взяв в качестве про-
прототипа одномерное окно Кайзера [3]. Для окна, полученного
вращением, фактической опорной областью будет круговая под-
подобласть, входящая в R.
Идеальный импульсный отклик i (nlt п2) можно найти, выпол-
выполнив обратное преобразование Фурье функции / (щ, со2). Это
уже было сделано в гл. 1, где был получен результат
C.26)
Vn\
Здесь Jx (x) — функция Бесселя первого порядка. Выражения
для окон будут иметь вид
/о [а У\ - Qii/S)« ] /р [а У\ - (п,/5)» ]
wR(nx, п2) =
/о N
О
при | «х | < 5, | п21 < 5,
в остальных случаях,
C.27)
при п] + п\ < 25,
в остальных случаях.
C.28)
Умножив затем C.27) или C.28) на C.26), получим оба искомых
фильтра. Частотные отклики фильтров изображены на рис. 3.4
для случая а = 0,0 [4]. Для каждого фильтра частотный отклик
представлен в перспективной проекции и в форме линий равных
значений. Перспективная проекция дает наглядное представление
о качестве фильтра, в то время как линии равных значений удоб-
удобнее для оценки круговой симметрии полос пропускания и непро-
непропускания. Фильтр, синтезированный с использованием окна
wR (пъ п2), характеризуется максимальной погрешностью аппро-
аппроксимации в полосе пропускания 0,2914, а в полосе непропуска-
непропускания — 0,1341. Максимальная погрешность фильтра, синтезиро-
синтезированного с использованием окна wc (nlt n2), составляет в полосе
пропускания 0,1468, а в полосе непропускания — 0,1105.
Частотные отклики синтезированных фильтров отличаются
от идеального отклика по двум признакам. Отклик не является
плоским ни в полосе пропускания, ни в полосе непропускания,
а срез фильтра не абсолютно острый. Первый недостаток обусло-
обусловлен наличием боковых лепестков в фурье-спектре функции окна,
второй — конечной шириной главного лепестка фурье-спектра.
Изменение параметра окна а в выражении для окна Кайзера позво-
154 Глава 3
Рис. 3.4. Частотные отклики двух (ИХ Поточечных КИХ-фильтров нижних
частот, синтезированных методом окон.
а — перспективная проекция отклика, построенного с использованием прямого произ-
произведения одномерных окон; 6 — контурное изображение; в — перспективная проекция
отклика, построенного с использованием вращающегося окна; г — контурное изображе-
изображение. Контуры проведены через одинаковые значения Н с интервалом 0,1 в пределах
от —0,1 до 1,1. (С любезного согласия Расселла М. Мерсеро [4], © 1981 Springer-
Verlag.)
ляет находить компромиссное решение для остроты среза и глад-
гладкости частотного отклика в полосах пропускания и непропускания.
На рис. 3.5 представлен отклик фильтра нижних частот с кру-
круговой симметрии. В идеальном случае отклик имеет значение 1
в полосе пропускания и 0 в полосе непропускания, однако на
практике действительные значения будут отличаться от номи-
номинальных. Пусть Ьр — максимальная ошибка аппроксимации в по-
полосе пропускания, a 6S — максимальная ошибка аппроксимации
в полосе непропускания. Сами полосы пропускания и непропу-
непропускания определяются граничными частотами пропускания тр и
непропускания a>s. По мере того как величины бр, 8S и cos — а>р
Синтез и реализация двумерных КИХ-фильтров 155
уменьшаются, качество фильтра улучшается. Один из основных
мотивов ограничить наше обсуждение круговыми фильтрами
нижних частот связан с тем, что качество таких фильтров описы-
описывается лишь тремя числами. Сложность фильтра мы будем
характеризовать порядком фильтра X.
Следуя подходу Кайзера [3] для одномерного случая, можно
экспериментально получить формулу для вычисления порядка X
(площадь импульсного отклика равна N X N) через характери-
характеристики фильтра бр, 85 и До = CDs — сор [5]. Порядок фильтра,
использующего произведение окон, оценивается формулой
я~
-20
2,10Дсо
а фильтра, использующего вращение окна, — формулой
с —
2,18Дсо
C.29)
C.30)
156 Глава 3
Переходная полоса
Рис. 3.5. Характеристики фильтра нижних частот.
Видно, что с точки зрения требований к порядку фильтра оба
способа практически эквивалентны.
Параметр окна а можно оценить, исходя из требуемого коэф-
коэффициента ослабления фильтра АТТ (англ. ATTentiation), опреде-
определяемого следующим образом:
C.31)
Для методики с произведением окон экспериментально было полу-
получено следующее выражение для а:
а ~
J 0,42 (АТТ- 19,3)о.« +0,089 (АТТ- 19,3) при 20 < АТТ < 60,
\ 0 при АТТ < 20.
C.32)
Синтез и реализация двумерных КИХ-фильтров 157
Для методики с вращением окна параметр а приблизительно
равен
10,56 (АТТ - 20,2)°>4 + 0,083 (АТТ - 20,2) при 20< АТТ<60,
а~@ при АТТ < 20.
C.33)
Практически оба способа формирования окна приводят к од-
одному и тому же значению порядка кругового фильтра нижних
частот. Это дает некоторые преимущества методике вращения
окна, поскольку образуемая в этом случае круговая опорная
область содержит меньше отсчетов, чем квадратная опорная
область окна, полученного с помощью прямого произведения одно-
одномерных окон. Уменьшение числа коэффициентов можно использо-
использовать для сокращения объема вычислений при реализации фильтра.
Однако следует заметить, что для фильтров, не обладающих
круговой симметрией, это утверждение, возможно, и не спра-
справедливо.
3.3.4. Пример обработки изображения
Окна можно использовать не только при проектировании
цифровых фильтров, но и в других приложениях, связанных с об-
обработкой сигналов. Например, метод улучшения визуального
качества изображений, разработанный Мак-Клелланом [6], пре-
предусматривает использование окон для уменьшения артефактов,
возникающих в процессе обработки. Метод Мак-Клеллана яв-
является модификацией известного метода обработки [7], заклю-
заключающегося в возведении в степень а (а < 1) амплитуды фурье-
спектра изображения при сохранении истинного значения фазы.
Эта операция сокращает динамический диапазон амплитуд фурье-
спектра, усиливая спектр в области с малой энергией по отноше-
отношению к области с большей энергией. Для большинства изображений
это приводит к подчеркиванию пространственных высокочастот-
высокочастотных составляющих и деталей изображения. Однако этому методу
присущ один недостаток: в выходном результирующем изображе-
изображении возникают артефакты, коррелированные со структурой обра-
обрабатываемого изображения. Это видно из примера, приведенного
на рис. 3.6, для которого а = 0,5.
Описанный метод можно рассматривать как операцию фильтра-
фильтрации, в которой частотный отклик фильтра зависит от входного
изображения. Поэтому она дает тот же результат, что и фильтра-
фильтрация х (я1( п2) двумерным фильтром с частотным откликом
Н (со1( со2) = | X (<olf co2) !«-¦'. C.34)
Хотя обработка выполняется в частотной области, тот же конеч-
конечный результат можно получить, выполняя свертку х (пх, п.г)
158 Глава 3
Рис. 3.6. Пример обработки изображения методом извлечения корня степени а
из спектра изображения.
а — исходное изображение; б — результирующее изображение после обычиой обработки
со сглаживанием; в — изображение после обработки с использованием метода Мак-
Клеллааа. (С любезного согласия Джеймса Мак-Клеллана [б], © 1980 IEEE.)
с фурье-преобразованием C.34). Однако это циклическая свертка,
так как описанная обработка обычно выполняется в частотной
области с использованием ДПФ. Собственно говоря, неприятные
артефакты, отчетливо видимые на рис. 3.6, б, можно объяс-
объяснить действием циклической, а не линейной двумерной
свертки.
Поскольку а < 1, любые нули в спектре X (щ, о>2) стано-
становятся пиками в |Х (о)!, (O2)|a-'. Вследствие этого фурье-преоб-
разование функции C.34) затухает медленно, и циклическая
свертка х с h эквивалентна линейной свертке с большими на-
Синтез и реализация двумерных КИХ-фильтров 159
Вход
Преобразо-
Преобразование
Фурье
Обрлпос
преобразо-
преобразование
Ф>рьс
Преобразо-
Преобразование
Фуры;
Обратное
преобразо-
преобразование
ВыхоД
Рис. 3.7. Структурная схема процессора для обработки изображений методом
Мак-Клеллана.
(С любезного согласия Джеймса Мак-Клеллана [б], © 1980 IEEE.)
ложениями, что и создает артефакты в выходном изображе-
изображении.
Метод Мак-Клеллана [6] использует окно, чтобы обеспечить
конечную опорную область для h (nx, п2). Эта модификация тре-
требует дополнительных вычислений, поскольку необходимо полу-
получить h (nx, п2) в ЯВ.НОЙ форме. Ход модифицированной процедуры
изображен на рис. 3.7. Частотный отклик формируется из х (пъ п2)
с помощью ДПФ. Затем, пользуясь обратным ДПФ, можно обра-
образовать последовательность h (nx, пг). Эта последовательность
умножается на функцию окна; полученная последовательность
конечной протяженности й (пх, п2) после свертки с входным
сигналом х (пи п2) дает окончательный результат. На рис. 3.6, в
показан типичный результат, полученный с использованием
гауссова окна.
* 3.4. Синтез оптимальных КИХ-фильтров
Частотные отклики фильтров с конечной опорной областью
могут только приблизительно соответствовать требуемым частот-
частотным характеристикам 1К Обычно реальный частотный отклик
отличается от заданного на величину ошибки
= Н
%, (о3).
C.35)
Один из подходов к синтезу фильтра заключается в таком выборе
коэффициентов фильтра, при котором минимизируется какой-либс
') Бывают, однако, случаи при согласованной фильтрации, когда требуе-
требуемый фильтр имеет конечную опорную область, — Прим. ред.
160 Глава 3
функционал этой ошибки, например ее ?2-норма (среднеквадра-
(среднеквадратичное значениеIJ
Л Я»
?2 = -^- | J | ? (©!, со2) |» йщ йщ, C.36)
—я —л
ее Lp-норма
^p
p /
1
или норма Чебышёва (Loo)
?оо = шах | Е (a^, а>2)|. C.38)
@,, @2
Поскольку фильтры, построенные с использованием разных
критериев ошибки, могут заметно различаться, мы рассмотрим
в этом разделе несколько примеров. При этом мы ограничимся
рассмотрением фильтров с нулевой фазой [с вещественным откли-
откликом Н (%, (л2)].
Частотный отклик КИХ-фильтра с опорной областью R имеет
вид
Н (ох, оJ) = ? ? h(nx, п2) ехр (— /о)^! - /оJл2). C.39)
Подставив C.39) в C.35), получим
? (ft)!, 0J) = Г ? 1] Л («!, П2) ехр (—/0)!П1 — /0>2Я2I — / («!, 0J).
L(n,.n«)e« J
C.40)
Видно, что ошибка является линейной функцией неизвестных
коэффициентов фильтра. Это делает общую задачу синтеза КИХ-
фильтров относительно проще задачи синтеза фильтров для неко-
некоторых специальных способов реализации обсуждаемых в разд. 3.5,
или задачи синтеза БИХ-фильтров, о которой будет идти речь
в гл. 5.
Для вещественного фильтра с нулевой фазой величины h (n^ п2)
и h (—nlt —п2) равны, что позволяет записать уравнение C.39)
в виде
C.41)
J) Для полного соответствия другим нормам ошибки следовало бы опреде-
определить L2-nopn«y как корень из среднего квадрата. Однако на практике обычно
используется выражение для ошибки в виде среднего квадрата, так как его част-
частные производные имеют простой вид.
Синтез и реализация двумерных КИХ-фильтров 161
Здесь /?' содержит приблизительно вдвое меньше отсчетов, чем R.
Чтобы можно было выполнить линейную аппроксимацию, упро-
упростим уравнение C.41), записав его в виде
F
Н («!, со2) = ? а @ Фг («!, о>2), C.42)
где i — индекс, определяющий порядок отсчетов (nlt п2) в /?',
a F — число независимых отсчетов в импульсном отклике, т. е.
число степеней свободы аппроксимации. Коэффициенты а (I) —
это просто значения импульсного отклика, которые требуется
найти
а @ = А К, «2), C.43)
а функции {ф; (щ, оJI, часто называемые базисными функциями
аппроксимации, определяются как
B cos («!«! -)- (о2п2) при (пх, я2) =5^= @, 0),
ф; («!, ОJ) = { " C-44)
11 при («!, /г2) = @, 0). v '
Такая запись позволяет накладывать линейные ограничения на
коэффициенты импульсного отклика. Например, если мы хотим
наложить ограничения a (i) = a (/), мы просто заменяем в C.42)
q>i (а1, оK) на фг (щ, о>2) + ф^ (а>1, а>2) и опускаем член, содер-
содержащий а (/). Это равносильно уменьшению числа степеней сво-
свободы на 1. Точно так же можно легко ввести ограничение a (i) = k,
заменив / ((йь (о3) на / (a>lt w2) — k<pt (а^, оJ) и опустив член
a (i) в сумме, определяющий Н ((Oj, w2). Это также равносильно
уменьшению числа степеней свободы на 1. Теперь читатель в со-
состоянии проверить возможность введения также ограничения
вида a (i) + а (/) = k. При этом, как и раньше, число степеней
свободы уменьшится на 1.
В качестве примера того, как можно уменьшить число степе-
степеней свободы, рассмотрим 1BМ -\- 1) X B/V + 1)]-точечный К.ИХ-
фильтр с 8-кратной симметрией. Ее можно обеспечить, наложив
условия
h (nt, n2) = h (±п1У ±п2) = h (±n2, ±rti) C.45)
Частотный отклик такого фильтра запишется в виде C.42), причем
i = "l(ni2+1) -f ла + 1 при о < пь < N, 0 < л2 < пи
ф, ((Oj, (й2) = COSCOirti COSOJ«2 г COSCOjAJ.^COS COj«j, C.46)
Г ~ 2
11 Даджион Д., Мерсеро Р.
162 Глава 3
3.4.1. Синтез методом наименьших квадратов
В настоящем разделе мы рассмотрим алгоритмы такого выбора
h {nx, п2), при котором минимизируются ошибка Е2 в выражении
C.36) и некоторые связанные с ней функционалы ошибки. Эти
алгоритмы, как правило, очень просты и практически ничего не
требуют, кроме решения нескольких линейных уравнений.
Коэффициенты фильтра, минимизирующие Е2, можно полу-
получить с помощью уже известного нам метода окон, если взять
функцию окна, постоянную в R. Чтобы убедиться в этом, начнем
с определения Е2:
я я
E
Используя теорему Парсеваля, можно выразить ?2 через величины,
определенные в пространственной области
Е, = ? ? [Л (ях, п2) - / (щ, п2)? =
л, л2
i. «г) — » («1, «2)F h
(л,, n2
? ? [Л (пх, п2) - t («!, «2)f -f ? ? f (nv пг). C.47)
(«i. лгN« (л, ^
В последнем выражении учтено, что отклик h {пг, пг) равен 0
при любых (пу, п2) вне области R. Поскольку обе суммы в выра-
выражении C.47) положительны и только первую можно изменять
подбором коэффициентов фильтра h (n1? п2), то Е2 достигает
минимума при
,. . f i («i, rig) для (nlt n2)?R,
h (nlt n2) = \ „ , . . _ C.48)
4 ' @ для (пи п2) Ф R, v '
т. е. для фильтра, который получается при использовании метода
окон с постоянной в области R функцией окна.
В несколько более общем случае, когда наложены линейные
ограничения и частотный отклик фильтра описывается выраже-
выражением C.42), имеем
2°
Для минимизации Е2 найдем производные этого выражения по
каждому из a (k), приравняем их нулю и решим полученные
Синтез и реализация двумерных К И Х-фильтров 163
уравнения. Поскольку частные производные \dEJda (k)\ яв-
являются линейными функциями неизвестных коэффициентов, это
потребует в худшем случае решения F линейных уравнений, кото-
которые можно записать в виде
л
д 1 |
—л
я
1 Г
— h>
л
—л
л
Г . ,
, ©о<
1, 2,.
'2) Фй (<
Pft («1.
где
C.49)
, C.50а)
C.506)
В распространенном частном случае, когда \ц>г (щ, ю2)} ортого-
ортогональны ((fih = 0 для i Ф k), решением C.49) будет просто a (i) =
----- Ii/ifa- Число линейных уравнений, требующих совместного
решения, определяет верхний предел допустимого числа степеней
свободы.
Мера ошибки Е2 в равной степени учитывает ошибки на всех
частотах. Из опыта синтеза методом окон мы знаем, что фильтры
с минимизацией по Е2 не всегда оказываются удовлетворитель-
удовлетворительными: для них характерны значительные пульсации в полосах
пропускания и непропускания. Кроме того, если зависимость
/ (щ, оJ) сложна, вычисления интегралов в выражении C.506)
может представить значительные трудности. Указанные недо-
недостатки можно частично устранить, если заменить ошибку Ег
ошибкой Е'2, имеющей вид
Eh U ? Wm [Н (©,„,, Щт) - I (<O,m, С>2т)]2- C-51)
Совокупность частот \((о1т, со.2т)Ь называемых ограничивающими
частотами Х), соответствует конечному числу дискретных позиций
на двумерной частотной плоскости, а положительные числа Wm
обозначают весовые коэффициенты. При такой мере ошибки мы
можем в тех областях частотной плоскости, где ошибка должна
быть мала, увеличить плотность ограничивающих частот и (или)
увеличить их веса. На практике число ограничивающих частот
должно в несколько раз превышать число степеней свободы.
г) В оригинале constraint frequencies. — Прим. перев.
И*
164 Глава 3
Нахождение коэффициентов \а (k)\, минимизирующих Е'2,
по-прежнему требует решения F линейных уравнений с F неиз-
неизвестными:
F
Еа@<Г«* = Л,. *=¦¦!, 2,..., F, C.52)
<Pifc = E ^m<Pi Olm, <02m) ф/, (Wim, «2m)> C.53a)
m
Ih= E №m/(colm, co2m) <p/t (wlm, M2m). C.536)
m
Хотя точно так же можно синтезировать фильтры с миними-
минимизацией нормы ошибки Lv (p Ф 2), получающиеся в этом случае
уравнения нелинейны, и их решение связано со значительными
трудностями. В этом случае чаще используют итерационный ал-
алгоритм, например метод наискорейшего спуска, позволяющий
получать значения коэффициентов фильтра, последовательно
приближающиеся к требуемым. Коэффициенты \a(k) (i)\ на k-й
итерации метода наискорейшего спуска определяются из урав-
уравнения
Параметр ah известен под названием размера шага. Для его
выбора существуют различные приемы.
3.4.2. Синтез КИХ-фильтров с нулевой фазой
и равновеликими пульсациями
Выше уже отмечалось, что ширина переходной полосы фильтра
и величина ошибки аппроксимации в полосах пропускания и
непропускания связаны таким образом, что улучшение одного
параметра приводит к ухудшению другого. При заданной конфи-
конфигурации полос пропускания и непронускания наименьшие пуль-
пульсации в этих областях достигаются при синтезе фильтров с рав-
равновеликими пульсациями. Синтез проводится с минимизацией кри-
критерия ошибки Чебышева
?оо = max | Я (щ, щ) - I (щ, ш2) |. C.55)
Здесь /( представляет собой компактную область частотной пло-
плоскости, которая обычно выбирается так, чтобы она включала
в себя полосы как пропускания, так и непропускания фильтра
(вместе с их границами). Как и прежде, рассматривается КИХ-
фильтр с нулевой фазой, частотный отклик которого записывается
в виде
Я (cuj, со2)--;. 2j 2j h(nJy /ь) exp [—/«!«!- /wan2). C.56)
Синтез и реализация двумерных К И' Х-фильтров 165
В силу симметрии или других ограничений не все коэффициенты
фильтра будут независимыми. Выделим независимые параметры
и запишем частотный отклик в виде
F
Н (%, со2) = ? а @ (fi («!, щ), C.57)
1—1
где базисные функции \(р} (coj, co2)} вещественны.
Фильтры с минимизацией критерия ошибки Чебышева назы-
называются минимаксными, поскольку для них минимально макси-
Рис. 3.8. Отклик A1X 11)-точечного КИХ-фильтра с нулевой фазой и равновели-
равновеликими пульсациями.
(С любезного согласия Девида Б. Харриса и Расселла М. Мерсеро [11], © 1977 IEEE.)
мальное значение ошибки. Их также называют фильтрами с равно-
равновеликими пульсациями, так как функция ошибки Е = Н—/ со-
содержит много пиков, или пульсаций, одинаковой величины.
На рис. 3.8 приведен пример фильтра с равновеликими пульса-
пульсациями с A1 X Поточечным импульсным откликом [11]. Полоса
пропускания этого фильтра представляет собой диск радиусом
0,4я, а полоса непропускания — пространство вокруг диска
с радиусом 0,6л. Максимальная погрешность составляет 0,0569,
а номинальный коэффициент передачи в полосе пропускания
равен 1.
Задачу оптимизации можно решить с помощью итерационных
алгоритмов, обеспечивающих сходимость за конечное число шагов.
Эти алгоритмы являются двумерными аналогами одномерного
алгоритма Паркса—Мак-Клеллана [8], который в свою очередь
является модификацией второго алгоритма Ремеза [9]. В одно-
одномерном случае решение с равновеликими пульсациями, как это
166 Глава 3
можно доказать, единственно, вычислительные трудности не
ограничивают порядок фильтра, и алгоритм обеспечивает быструю
сходимость. В многомерных, случаях, главным образом из-за
отсутствия теоремы факторизации, алгоритмы сходятся более
медленно, они сложнее в понимании и несколько ограничены в воз-
возможностях [10, 11].
Экстремальная точка — это точка со = (сох, со2)' в области
аппроксимации К, в которой функция ошибки \Н—/| принимает
максимальное значение. Множество экстремальных точек — это
совокупность всех таких точек. В общем случае оно содержит
F + 1 членов. Это множество является критическим множеством,
если ошибки в точках множества удовлетворяют определенным
знаковым условиям. Свободные параметры фильтра [a (i)\, мини-
минимизирующие Ех, полностью определяются критическим множе-
множеством, и оптимальное значение ?«, равно значению ошибки в каж-
каждой точке этого множества.
Если область аппроксимации К содержит конечное число
частотных отсчетов, то аппроксимация может состоять в поиске
критического множества. Этот поиск облегчается двумя положе-
положениями, которые обычно формулируются как теоремы [11 ]. Во-пер-
Во-первых, если Я (со) — наилучшая аппроксимация к / (со) на /(,
а С — критическое множество, отвечающее ошибке Я—/, то
Я — наилучшая аппроксимация к / на С. Во-вторых, если С
содержит F + 1 точку, то Я — аппроксимация, минимизирующая
максимальную ошибку среди всех наилучших аппроксимаций к /
на подмножествах К, содержащих F 4- 1 точку.
Эти два положения составляют основу алгоритма подъема,
эквивалентного симплексному методу линейного программирова-
программирования. Алгоритм подъема состоит в многократном нахождении
наилучших аппроксимаций на множествах F + 1 точек. В каждом
следующем приближении очередное множество F + 1 точек выби-
выбирается так, чтобы ошибка Чебышева была на нем больше, чем на
множестве предыдущего приближения. Согласно второму из
высказанных выше положений когда эта норма достигнет своего
максимального значения на множестве F -f- 1 точек, будет най-
найдено наилучшее приближение Чебышева в области К- На этом
аппроксимация заканчивается. С деталями алгоритма подъема и
доказательством его сходимости можно познакомиться в ряде
работ, посвященных теории аппроксимации, например [9, 12].
Алгоритм подъема требует выполнения большого числа итера-
итераций, причем на каждой итерации необходимо вычислять функцию
ошибки по всей области К- Это приводит к огромным затратам
машинного времени. Алгоритмы Кэмпа и Тирана [10], а также
Херси и Мерсеро [11 ], разработанные специально для проектиро-
проектирования КИХ-фильтров, обеспечивают более быструю сходимость
(на порядок величины). В алгоритме Кэмпа и Тирана изменены
Синтез и реализация двумерных К ИХ-филыпров 16Т
некоторые внутренние детали алгоритма подъема, а именно способ
обработки информации об ошибках. В алгоритме Херси и Мерсеро
вводится промежуточная редкая сетка частотных отсчетов G,
содержащая больше чем F + 1 отсчетов, но значительно меньше
чем К,- Алгоритм подъема позволяет достаточно быстро найти
наилучшее приближение на сетке G, которая периодически моди-
модифицируется. Детали алгоритма описаны в [11]. Здесь мы больше
не будем касаться внутренних деталей этих алгоритмов.
Синтез фильтра с минимизацией Lp-нормы в пределе (при
р -*¦ оо) дает фильтр с равновеликими пульсациями. Лодж и
Фахми [13] использовали этот подход для получения весьма хоро-
хороших аппроксимаций фильтров с равновеликими пульсациями.
Их алгоритм, использующий для минимизации ошибки метод
параллельных касательных, значительно эффективнее описанных
выше алгоритмов синтеза «истинно» равновеликих пульсаций и
может с успехом использоваться для синтеза фильтров при боль-
большом значении F.
3.5. Синтез КИХ-фильтров для специальных
способов реализации
Мы уже отмечали во введении к этой главе, что вопросы син-
синтеза и реализации многомерных фильтров тесно связаны между
собой. В то время как любой КИХ-фильтр, если только известен
его импульсный отклик, можно реализовать с помощью либо
прямой свертки, либо ДПФ, другие (часто весьма эффективные)
способы реализации обычно ограничивают класс реализуемых
фильтров и требуют специальных алгоритмов синтеза. В этом
разделе мы рассмотрим некоторые из этих специальных алгорит-
алгоритмов синтеза и реализации.
Простейшим из методов реализации является каскадное соеди-
соединение фильтров. Для тех, кто имеет опыт работы с одномерными
фильтрами, отнесение каскадной структуры к специальным спо-
способам реализации может показаться странным, однако следует
напомнить, что многомерные полиномы обычно не разлагаются на
множители. Так что каскадирование многомерных фильтров —
это, действительно, весьма специальный способ реализации!
3.5.1. Каскадные КИХ-фильтры
Рассмотрим одномерный физически реализуемый КИХ-фильтр
h (n) длины N с частотным откликом
Я(м) = ? h (л) ехр (—/<ал). C.58)
0
168 Глава 3
Поскольку Я (ю) — полином (N — 1)-й степени от переменной
ехр (—/ю), его можно разложить на множители. Обозначим пер-
первый шаг факторизации полиндма Я через
Я (ш) = F (©) G (ш), C.59)
где сами F (ю) и G (ю) — полиномы от переменной ехр (—/со)
степени, меньшей чем N — 1. Тогда можно сказать, что исходный
фильтр эквивалентен двум КИХ-фильтрам с откликами F (ю)
и G (ю), соединенными последовательно. Если протяженность
/ (п) составляет М отсчетов, то протяженность g (n) составит
N — М + 1 отсчетов.
Для сравнения прямого и каскадного способов реализации
фильтра вспомним, что прямая реализация требует одного умно-
умножения каждого отсчета импульсного отклика на один выходной
отсчет или всего N умножений на один выходной отсчет. В случае
каскадной реализации число умножений на один выходной отсчет
составит М -j- (N — М -f- 1) = Л7 -f- 1 [это число можно умень-
уменьшить на 1, если / (п) или g (n) выбрать так, чтобы коэффициент
при первом члене равнялся 1]. В одномерном случае каскадный
и прямой способы реализации'требуют одного и того же числа
арифметических операций.
В двумерном случае дело обстоит по-другому. Рассмотрим
факторизуемый двумерный КИХ-фильтр, частотный отклик кото-
которого можно записать в виде
Я (©!, ю2) = F (©!, ox,) G (©!, <о2). C.60)
Если / (пг, п2) — (М X М)-точечный массив, a g (nlt n2) —
[(Af — М -j- 1) X (N — УИ + 1)]-точечный массив, то мы полу-
получим (N X Лг)-точечную опорную область. Реализация h (nlt n2)
в виде прямой свертки потребует N2 умножений на один выходной
отсчет, в то время как при каскадной реализации фильтра в соот-
соответствии с выражением C.60) понадобится лишь М2 + (N —
М -f 1J умножений. Выигрыш может достигать 50 %. В тех
случаях, когда возможна дальнейшая факторизация или мы имеем
дело с сигналами более высокого порядка, выигрыш может быть
еще больше. Частотный отклик вида C.60) имеет лишь М2 -f-
+ (N — М -f- IJ — 1 степеней свободы. Поскольку произволь-
произвольный частотный отклик размера N X N имеет N2 степеней свободы,
неудивительно, что частотные отклики не всегда разлагаются
на множители. Многомерные полиномы, фактически разлагаемые
на множители, представляют собой частный вырожденный случай.
Чтобы синтезировать фильтр в каскадной форме, необходимо
сначала выразить частотный отклик в виде произведения сомно-
сомножителей
Н (щ, ю2) = П [ ? ? hi (nv п2) ехр ( -tWi/ij. - /<о2л2I. C.61)
i I. «i n2 J
Синтез и реализация двумерных КИ Х-фильтров 169
После этого коэффициенты фильтра \ht (nx, n2)\ можно выбрать
из условия минимальности функционала ошибки, например
взвешенной нормы ошибки Lp
/ ((olh, (o2h) [", C-62)
которая похожа на нормы ошибки, рассмотренные в предыдущем
разделе. Поскольку ошибка является нелинейной функцией неиз-
неизвестных коэффициентов, минимизацию Ер обычно выполняют
итерационно. Коэффициенты на /-й итерации определяются через
коэффициенты на (/ — 1)-й итерации следующим образом:
дЕи~1)
Начальный выбор коэффициентов фильтра в известной степени
произволен, хотя желательно чтобы он был как можно более
точным.
Другой итерационный метод синтеза каскадных фильтров
заключается в том, что на каждой итерации фиксируются все
каскады, кроме одного, и оптимизируется оставшийся каскад.
На следующей итерации полученные таким образом коэффициенты
фиксируются, и оптимизируется другой каскад. Хотя'эта проце-
процедура проста, она не обеспечивает сходимости и может сходиться
к локальному минимуму.
3.5.2. Параллельные КИХ-фильтры
Два КИХ-фильтра с импульсными откликами hx (пх, п2) и
К (ni> пг)> соединенные параллельно, эквивалентны одному
фильтру с импульсным откликом
h (пх, пг) = hx (пх, пг) + h% (nlt пг). C.64)
Легко видеть, что справедливо и обратное: любой фильтр с им-
импульсным откликом h {nx, п2) можно представить в виде парал-
параллельного соединения фильтров с импульсными откликами Лх и
h%. В общем случае естественно ожидать, что опорная область
для h будет объединением опорных областей для hx и 1ц, однако
она может быть и меньше, если два фильтра hx и h% гасят друг друга.
К сожалению, такое разложение редко приводит к сокращению
объема вычислений; фактически объем вычислений может уве-
увеличиться.
Однако сокращения объема вычислений можно добиться, если
наложить на hx и h% некоторые ограничения, например если потре-
потребовать, чтобы hx и h% были разделимыми фильтрами. Разделимые
фильтры отличаются высокой эффективностью реализации, но
с их помощью можно точно аппроксимировать только разделимые
170 Глава 3
импульсные отклики. Однако при параллельном соединении двух
разделимых фильтров образуется неразделимый фильтр. Это дает
возможность аппроксимации неразделимых переходных характе-
характеристик с помощью легко реализуемых фильтров. Эта идея была
первоначально предложена Трейтелем и Шэнксом [14], которые
назвали такие фильтры многоступенчатыми разделимыми филь-
фильтрами.
Напомним (гл. 1), что разделимый фильтр — это такой фильтр,
импульсный отклик которого можно представить в виде произве-
произведения функций горизонтальных и вертикальных индексов. Так,
функция
h (пи п2) = г (tij) с (п2) C.65)
является импульсным откликом разделимой системы. Частотный
отклик такого фильтра равен прямому произведению двух одно-
одномерных частотных откликов:
Я К, со2) = R К) С (со2). C.66)
Этот фильтр можно реализовать путем свертки каждой строки
входной последовательности с г («J, а затем каждого столбца
результата с с (п2). Если импульсный отклик h (itx, п2) содержит
h\N2 отсчетов, соответствующих Л^-точечной последователь-
последовательности г (ftj) и Л72-точечной последовательности с (п2), то вычисле-
вычисление каждого выходного отсчета потребует Л^ операций умножения
и сложения для вычисления сверток столбцов. Общее число опе-
операций Nt -f- N2 намного меньше числа операций NXN2, кото-
которые потребовались бы, если бы h не была разделимой функ-
функцией.
В качестве обобщения рассмотрим фильтр, представляющий
собой параллельное соединение нескольких разделимых фильтров,
как это показано на рис. 3.9. Импульсный отклик такого фильтра
имеет вид
к
Л(«1. >h)= E rh{th)ch{th), C.67)
а частотный отклик — вид*
к
Н (ш,, ш2) = 1] Rh (щ) Ch (ш2), C.68)
&—1
где К — число разделимых фильтров, объединяемых таким обра-
образом. Если каждая последовательность rk («j) имеет длину Л^
точек, а каждая последовательность ck (п2) — vV2 точек, то вычи-
вычисление одного выходного отсчета потребует К, (Nx + N2) опера-
Синтез и реализация двумерных КИХ-филыпров 171
ций умножения и сложения. Такие фильтры дают экономию при
реализации, если при прочих равных условиях
K(Nl-^N2)<N1Nl). C.69)
Разделимым фильтрам соответствует частный случай /( = 1.
Задача синтеза заключается в нахождении таких rh (%),
ck (n2) для k = 1, 2, ..., К, чтобы отклик фильтра аппроксими-
аппроксимировал идеальный отклик при умеренных значениях К, (если К,
становится сравнимым с Nx или N2, реализация неэффективна).
Трейтель и Шэнкс выполняли аппроксимацию в пространственной
Рис. 3.9. Многоступенчатый разделимый КИХ-фильтр с К разделимыми сту-
ступенями.
области; другими словами, они аппроксимировали (Nt X Л^-то-
чечный требуемый импульсный отклик i (пг, п2) откликом h (л1(
п2) вида C.67).
Рассматриваемая аппроксимация сводится к разложению
i (п1У п2) по собственным векторам. Предположив (без потери
общности), что JV8 ^ JVt и что столбцы i (л1( п2) линейно незави-
независимы, мы можем записать
, П2) =
Гк (tit) Ch (tl2),
C.70)
где \ки\ — собственные значения (вещественные и положитель-
положительные) матрицы
(пи я,) = Ц i (rax, k) i (га,, k). C.71)
k=0
х) Это оценка сверху. На самом деле это условие, как правило, менее стро-
строгое. — Прим. ред.
172 Глава 3
Последовательности гк (пх) представляют собой нормированные
собственные вектор-строки, соответствующие Хк, a ch (п2) — нор-
нормализованные собственные вектер-столбцы матрицы
Q («к "*) = 2 i (k, лО i (k, n2). C.72)
Матрица S размером Л^ X N1 имеет N1 собственных значений.
Матрица Q размером N2 X N2 имеет N2 собственных значений,
из которых только N1 — ненулевые. Ненулевые собственные зна-
значения равны собственным значениям матрицы S. Собственная
вектор-строка из S и собственный вектор-столбец из Q, которые
принадлежат одному и тому же собственному значению, объеди-
объединены в C.70) в пару. При реализации фильтра для некоторого
уменьшения числа арифметических операций коэффициенты V"kh
можно отнести к rk (пх) или ck (n2). Указанное разложение будет
точным, если К — Nlt но в этом случае отсутствует выигрыш
в числе операций.
Пусть собственные значения Kit K2, ..., Яуу, записаны в по-
порядке убывания, так что Хх является наибольшим, и Xt ;>= Яг+1.
Все повторяющиеся собственные значения должны быть записаны
отдельно. Если Ео — сумма квадратов элементов i (nlt n2),
а Ек — сумма квадратов элементов множества, определяющего
ошибку и образованного как разность между требуемым откликом
и откликом, получаемым при аппроксимации фильтра /(-вет-
/(-ветвями, то нормированная ошибка описывается формулой
ЕК _ , Ч + *а+ ¦¦¦+V - 7оч
~Ё7~ ~ К+К++К^'' ( }
Имеется несколько возможностей обобщения этого результата.
Можно рассмотреть разложения, в которых не все rh (nx) и ch (n2)
имеют одну длину или для определения свободных параметров
фильтра используются критерии ошибки в частотной области.
Можно также распространить эту методику на синтез многосту-
многоступенчатых разделимых БИХ-фильтров. Насколько известно авто-
авторам, эти возможности пока не реализованы.
Пример 1
В качестве очень простого примера рассмотрим двумерный
отклик вида
i @, 0) = 0,2; i A,0) = 0,2; i @, 1) = 2,3; i A, 1) = 1,2,
C.74)
который можно записать в форме матрицы
Г0,2 0,2]
= 1.2.3 .1.2} C-75)
Синтез и реализация двумерных КИХ-фильтров 173
Построим разделимую аппроксимацию этого фильтра. Соответ-
Соответствующие матрицы S и Q имеют вид
5,33 2,801 Г0,08 0,70
S=42,80 l,48j' Q = [0J0 6,73j- C76)
Собственные значения Хг, Х2 должны удовлетворять одному из
двух уравнений
det [XhI - S] = 0 или det [Х,1 - Q] = 0. C.77)
Отсюда Х1 — 6,803 и Xt — 0,007. Собственные вектор-строки и
вектор-столбцы удовлетворяют соотношениям
flS - Хл, C.78а)
r2S = Х2г2, C.786)
QCl = Х&, C.78в)
Qc, = Х,с, C.78г)
Решая эти уравнения при условии, что собственные векторы
нормализованы и имеют единичную длину, получим
гх - @,885, 0,466), C.79а)
г2 = @,466, — 0,885), C.796)
сх = @,Ю4, 0,994)', C.79b)
с, = @,994, —0,104)'. C.79г)
Аппроксимируя затем / (пг, n2) функцией V'^-ih («x) сх (п2), полу-
получим коэффициенты разделимого фильтра
Г0.240 0,1261
= 1.2,294 l,208J
с нормированной ошибкой
EJE0 -0,001. C.81)
Прибавление yfX<j^ (n^) с, (п.2) даст точную реализацию заданного
отклика.
Аппроксимация B х 2)-точечного разделимого фильтра не
дает выигрыша в количестве требуемых арифметических опера-
операций х>. Однако фильтры большего порядка не поддаются ручному
расчету.
3.5.3. Синтез КИХ-фильтров с использованием трансформаций
Идея преобразования одномерного КИХ-фильтра с нулевой
фазой в многомерный с помощью замены переменных весьма при-
привлекательна по целому ряду причин: упрощается реализация,
Так как 2X2 = 2 + 2. — Прим. ред.
174 Глава 3
одномерные фильтры легче трактовать, наконец можно надеяться,
что использование оптимальных одномерных фильтров позволит
синтезировать оптимальные многомерные фильтры. По этим при-
причинам синтез многомерных КИХ-фильтров методом трансформаций
стал весьма популярным. Впоследствии обнаружилось еще одно
преимущество этого метода — эффективная реализация. Реализа-
Реализация фильтров умеренного порядка может быть существенно более
эффективной, чем при использовании прямой свертки и ДПФ.
Метод синтеза был разработан Мак-Клелланом [15] и носит
его имя, но существование эффективной реализации было обна-
обнаружено только через несколько лет Мекленбрёкером и Мерсеро
[16, 17]. Описываемая в следующем разделе улучшенная реали-
реализация предложена Мак-Клелланом и Чэном [18]. Поскольку
замена переменных, выполняемая в данном методе, не очевидна,
мы начнем с обсуждения одномерных КИХ-фильтров с нулевой
фазой.
Импульсный отклик одномерного фильтра h (л) обладает эрми-
эрмитовой симметрией
h (л) = h* (—л). C.82)
Поскольку отсюда следует, что опорная область такого фильтра
должна иметь центр в начале координат и содержать нечетное
число отсчетов, примем в качестве опорной области h (л) интер-
интервал —./V < л < N. Будем также считать, что все отсчеты h (л)
имеют вещественные значения, а их фурье-преобразование есть
Н (со).
Тогда можно записать
N N
Н (со) = h @) + ? h (л) [exp (—/con) + exp (jam)] = J] a(n)cos(con).
n—\ n=0
C.83)
В последнем выражении введено определение
h @) при п = 0,
п(п) при „>0. <3-84)
Функцию cos сол можно выразить в виде полинома степени п от
переменной cos со. Это будет полином Чебышёва Тп [•] п-го
порядка. Несколько первых полиномов Чебышёва и соответ-
соответствующие обратные соотношения приведены в табл. 3.1 и 3.2.
Таким образом, имеем
cos сол = Тп [cos со]. C.85)
Подстановка этого соотношения в выражение C.83) дает возмож-
возможность записать Н (со) в форме
N
Н (со) = 2 а (л) Тп [cos со]. C.86)
п=0
Синтез и реализация двумерных КИХ-фильтров 175
Записав частотный отклик в такой форме, можно сделать
замену переменных. Например, подстановка
F (щ, со2) -»- cos со C.87)
дает двумерный частотный отклик
Н (о)!, со2) = ? а (п) Тп [F (щ, со2)].
0
C.88)
Функция F (coj, со2) называется трансформирующей функцией.
Если вместо cos со подставить Af-мерную трансформирующую
функцию, получим Af-мерный частотный отклик.
Таблица 3.1. Первые семь
полиномов Чебышева
Таблица 3.2. Инверсии первых
пяти полиномов Чебышева
To
7\
т3
Тъ
тв
т
[х
[х
[х
[х
[х
[х
[х
1 = 1
= X
= 2л;2-
= 4л;3-
= 8х*-
= \6xi
= 32л;6
] = 2л;Г
- 1
-Зл;
-8л;2 +
— 20л;3
-48^
n-i [х]
1
+ 5л;
+ 18л;2
-7'п-2
—1
[х]
1 =
х —
X2 =
X* —
+ Tt
то\
ТА
V,
v4
V.
[х
х]
х]
(Tolx] +
(ЗТАх]~
(ЗТ0[х] -
1)
Tt[x]
hT3[x
f 4Гг[
)
])
х] +
Как необходимо выбирать трансформирующую функцию
F (coj, со2)? Во-первых, функция F (щ, со2) сама должна быть
частотным откликом двумерного КИХ-фильтра, тогда и функция
Н (coj, щ) будет частотным откликом двумерного фильтра. Во-
вторых, требуется, чтобы, зная характеристики Н (со) и F (щ, (о2),*
можно было предсказать характеристики Н (щ, щ). И наконец
должна существовать какая-то процедура выбора конкретных
функций Н (со) и F (щ, со2), приводящая к получению требуемой
частотной характеристики Н (щ, со2). Очевидно, что выполнение
всех этих условий невозможно без наложения некоторых ограни-
ограничений на класс допустимых трансформирующих функций.
В простейшем случае в качестве F (щ, со2) можно взять частот-
частотный отклик C X 3)-точечного фильтра с нулевой фазой. В этом
случае можно записать
F (%, со2) = А + В cos сох + С cos со2 + D cos (сох —
- со2) + Е cos (со! + со2), C.89)
где А, В, С, D и Е — свободные параметры. Поскольку Тп [х] —
полином от х степени п, то Н (щ, щ) будет полиномом от F сте-
176 Глава 3
пени Nf Отсюда следует, что фильтр с частотным откликом Н (щ,
со») можно представить в виде последовательно-параллельной ком-
комбинации подсистем с частотнйм откликом F (щ, со»). В качестве
примера на рис. 3.10 представлена структура фильтра с результи-
результирующим откликом
Н К, со») = 7» [F К, со»)] + 47\ [F К, со2)] +
+ 2Т0 [F (щ, со»)] = 2Я (со!, со») + 4F К, (^ + 1. C.90)
В пространственной области умножению на F (%, со») соответ-
соответствует свертка с функцией / (nlt я»), являющейся обратным пре-
преобразованием Фурье функции F (%, со»). Если опорная область
Вход
Выход
Рис. 3.10. Структура фильтра с частотным откликом в виде квадратичной функ-
функции от F.
(С любезного согласия Расселла М. Мерсеро [4], © 1981 Sprjnger-Verlag.)
содержит BЯ + 1) X BЯ + 1) отсчетов и центр области совпадает
с началом координат, то Af-кратная свертка функции / (и1( я»)
с самой собой будет обладать BNP + 1) X BNP + 1)-точечной
опорной областью. Такой же будет и опорная область фильтра
h (я1( я»). Отсюда видно, что если / (пх, л2) — импульсный отклик
КИХ-фильтра, то и Л (и1( пг) будет соответствовать КИХ-фильтру.
Кроме того, если / (и1( л») — функция с нулевой фазой и соответ-
соответственно F (coj, co2) имеет вещественные значения, то и Я (со^ %)
будет вещественной функцией, поскольку коэффициенты полино-
полиномов Чебышёва вещественные. Поэтому если / (и1( п2) — фильтр
с нулевой фазой, то h (п1У п2) будет фильтром с нулевой фазой.
Рассмотрим геометрическое место точек на (со^ со»)-плоскости,
для которых выполняется условие F (со^ со2) = const. По ана-
аналогии с линиями постоянного электромагнитного потенциала
в теории поля назовем наши контуры эквипопгенциалями. Контур-
Контурная диаграмма есть не что иное, как изображение нескольких
эквипотенциалей. Любая эквипотенциальная функция F (%, со2)
является также эквипотенциалью функции Н (щ, со2). Поэтому,
если не принимать в расчет абсолютных значений, приписывае-
приписываемых эквипотенциалям, контурные диаграммы Н (щ, со2) и F (%,
со2) совпадают. Далее, легко заметить, что для преобразования
первого порядка, определенного в C.89), форма эквипотенциалей
Н (соь щ) зависит только от пяти параметров Л, В, С, D и Е
Синтез и реализация двумерных К,ИХ-фильтров 177
независимо от того, насколько большим мы делаем порядок одно-
одномерного прототипа. С другой стороны, значение функции Н (щ,
щ) на конкретной эквипотенциали зависит и от значения F (со1(
©а), и от параметров {а (п)\ фильтра-прототипа. Если F (щ, со2)
удовлетворяет условию | F (со1( со2)| < 1, то Н (со1( caj) может
принимать только те значения, которые принимает Н (со). Синтез
с использованием преобразования распадается на два этапа.
На первом с помощью трансформирующей функции устанавли-
устанавливается форма эквипотенциалей, на втором с помощью частотного
отклика-прототипа определяются значения эквипотенциа-
эквипотенциалей.
Пример 2
Рассмотрим в качестве примера трансформацию первого по-
порядка при значениях параметров А = —У2, В = С — 1/i, D =
= Е = г1А. Именно такую трансформирующую функцию предло-
предложил Мак-Клеллан [15]. Картина эквипотенциалей для этой
трансформации показана на рис. 3.11. Эквипотенциали вблизи
центра имеют форму, близкую к окружности, а по мере прибли-
ОмО
(-».-*).
Рис. 3.11. Линии постояииого зиачеиия для траисформации первого порядка при
А = —1/2, В = С= 1/2, ?) = ?•= 1/4.
Оии проведены с приращением 0,1л по величине со.
(С любезного согласия Расселла М. Мерсеро [4] , © 1981 Springer-Verlag.)
12 Даджион Д., Мерсеро Р.
178 Глава 3
1,0
0,8
0,6
0,4
0,2
nn
* \
\
\
(-*,-»)
(it, it)
Рис. 3.12.
о и в — одномерные прототипы фильтра нижних частот и полосового фильтра соответ-
соответственно; б и г — двумерные фильтры, полученные с помощью трансформирующей функ-
функции из рис. 3.11, использованной с прототипами а и в. (С любезного согласия Рас-
Расселла М. Мерсеро [4]. © 1981 Springer-Verlag.)
жения к краям становятся все больше похожими на квадраты. Для
этбго примера
F (щ, (д2) — 7а (—1 + cos cox + cos co2 + cos (djCOs <o2). C.91)
Положив со2 — 0,
0) = Н К).
получим F (%, 0) = cos cot. Отсюда Н (щ,
C.92)
Для такой трансформирующей функции частотный отклик-про-
отклик-прототип становится поперечным сечением двумерного частотного
отклика. Поэтому одномерный фильтр нижних частот преобра-
преобразуется в двумерный фильтр нижних частот; одномерный полосо-
полосовой фильтр преобразуется в двумерный фильтр с «кольцевой»
полосой пропускания, как это показано на рис. 3.12. Далее,
пульсации в полосах пропускания и непропускания прототипа
преобразуются без изменения амплитуды в пульсации результи-
результирующего фильтра.
Синтез и реализация двумерных КИХ-филыпров 179
(-Я, -7Г>
GГ.7Г)
Рис. 3.12
Пример 3
В качестве второго примера рассмотрим синтез фильтра с час-
частотным откликом, напоминающим лопасти вентилятора: в квад-
квадрантах I и III частотный отклик должен иметь единичное значение,
а в квадрантах II и IV — нулевое (см. задачу 1.21). Требуемый
отклик представлен на рис. 3.13, а. Для аппроксимации такой
функции с использованием трансформации нам потребуется
трансформирующая функция F (ы^ со2). эквипотенциалями кото-
которой служат две оси координат. Одной из функций, которая обла-
обладает этим свойством, является функция
F (&>!, со2) =
= Va [cos
sin
— со2) — cos
C.93)
В = С = О, D =
Это трансформация первого порядка при А
= 1/2, Е = —1/2; трансформирующая функция положительна в
квадрантах I и III и отрицательна в квадрантах II и IV. По-
Поскольку требуется выполнить подстановку cos со =-- F (a^, coa) =
= sin o^sin со2, а функция cos to положительна при |со| < я/2
и отрицательна при я/2 < | со] < л, значения отклика-прото-
отклика-прототипа для Iсо| < я/2 будут отображены на квадранты I и III, а для
180 Глава 3
I и»
щщшш
Амплитуда частотного откпика
1.0-
(л, л)
Рис. 3.13.
я — требуемый частотный отклик; б — контурная диаграмма функции F (*>i, <лг). ко-
которую можно использопать для решения данной задачи; в — частотный отклик одно-
Мерного фильтра-прототипа; ¦¦ — результирующий частотный отклик цифропого E3 X
Х53)-точечиого КИХ-фнльтра. (с любезного согласия Расселла М. Мерсеро, IEEE
. Trans. Acoustics, Speech, and Signal Processing, © 1980 IEEE")
Синтез и реализация двумерных КИХ-фильтров 181
я/2 < | со| <я — на квадранты II и IV. Таким образом, прото-
прототип должен быть фильтром нижних частот с частотой среза я/2 рад,
как это показано на рис. 3.13, в для /V = 26. E3 X 53)-точечный
импульсный отклик результирующего двумерного фильтра пред-
представлен на рис. 3.13, г [19].
Имеется ряд алгоритмов выбора наилучшей для конкретного
применения трансформирующей функции. Их обзор приведен
в работе [16]. Поскольку трансформирующие функции сами
являются частотными откликами КИХ-фильтров с нулевой фазой,
допустимо использование различных методов синтеза фильтров,
в частности метода окон. Если одномерный фильтр-прототип
является фильтром нижних частот, то идеальная трансформирую-
трансформирующая функция должна приближаться к 1 там, где должна быть
полоса пропускания результирующего фильтра, и к —1 там, где
должна быть полоса непропускания.
Поскольку в частотном отклике одномерного фильтра-про-
фильтра-прототипа функция F (сох, со2) заменяет функцию cos со, она должна
удовлетворять неравенству
— 1 < F (щ, со2) < 1 ' C.94)
в области — я < щ, со2 < я. Однако это условие не должно услож-
усложнять процесс выбора преобразующей функции, так как если
F (со!, со2) = CXF' К, со2) + С2) C.95)
то F и F' будут иметь одни и те же эквипотенциали. Если функция
F' (%, со2) выбрана с нарушением условия C.94), то можно опре-
определить ее максимальное и минимальное значения, а затем исполь-
использовать для синтеза фильтра трансформирующую функцию вида
F (СО!, С02) = 2__ F' (СО1( С02) - ^ax + ^min ^ ^ щ
rmax rmin rmax min
которая имеет те же эквипотенциали, что и функция F' (сох, со2),
и удовлетворяет условию C.94).
3.5.4. Реализация фильтров, спроектированных
с использованием трансформаций
КИХ-фильтры, разработанные методом трансформации, так
же, как и любые другие КИХ-фильтры., можно реализовать либо
методом прямой свертки, либо методом ДПФ. Кроме того, для
них существует третий метод реализации, связанный с особенно-
особенностями их структуры. Для фильтров умеренного порядка этот
метод часто оказывается наиболее эффективным и сам по себе
может служить/достаточным основанием для использования метода
трансформации в ряде приложений.
182 Глава 3
Возможность третьего метода реализации следует из выраже-
N
ния C.88), т. е. Н (щ, со2) ^ ? а (п) Тп [F (со-,, co2)]. Для реа-
/i-=0
лизацни этого частотного отклика можно построить цифровую
схему, пользуясь рекуррентной формулой для вычисления поли-
полиномов Чебышёва
Т, [х] = х,
Тп [х] = 2хТп.у [х] - Гп_а [х].
C.97а)
C.976)
C.97в)
Tn-1
—©
Tn [F
Рис. 3.14. Схемная реализация чебышевской рекурсии.
Если заменить х на F
тает следующий вид:
1, со2), то рекуррентная формула приобре-
приобреТп [F (щ, со,)] =- 2F (cuj, co2) rn_! [F ((о,, со2)] - Тп_2 [F (щ, со,)].
C.98)
Используя это соотношение и имея сигналы, фурье-спектры кото-
которых описываются функциями Тп,Л [F (со!. со2) ] и Тп.2 =
— [F (co1; (Ojj)], можно образовать сигнал, фурье-спектр которого
равен Тп [F (а*!, со2)]. Соответствующая схема приведена на
рис. 3.14. Поскольку каждый из входных сигналов в свою очередь
может быть образован из двух сигналов более низкого порядка,
можно построить ступенчатую схему с N выходами так, чтобы
импульсный отклик части схемы между входом и п~и выходом
равнялся Тп [F (wlt щ)]. Взвесив выходные сигналы в соответ-
соответствии с выражением C.88), получим реализацию для фильтра
с откликом Н (со1; со2). Эта реализация воплощена в структуре,
изображенной на рис. 3.15.
¦Блок этой схемы с частотным откликом F представляет собой
КИХ-фильтр нижних частот с нулевой фазой. Для трансформации
Синтез и реализация двумерных КИХ-фильтров 183
первого порядка C.89) C X 3)-точечный импульсный отклик этого
фильтра будет иметь вид
А при пх = n-i — О,
5/2 при «х = ± 1, л2 = 0,
С/2 при rt!=-0, л2 = ±1, C.99)
D/2 при Л1 = ±1, п2 = Лц
Е/2 при /ii=±l, л2 — —%•
Такой фильтр можно реализовать непосредственно, причем для
этого потребуется выполнить 5 умножений и 8 сложений на один
-1
2hF)
Рис. 3.15. М-мерный фильтр, синтезированный с помощью трансформации.
Коэффициенты h (n) являются коэффициентами одномерного фильтра-прототипа. Филь-
Фильтры F определяют трансформирующую функцию, (с любезного согласия Дж. X. Мак-
Клеллана и Д. С. К- Чэиа [18], © 1977 IEEE.)
выходной отсчет. Поскольку вся схема содержит N фильтров,
в целом на каждый выходной отсчет потребуется 6jV + 1 умноже-
умножений и IOjV — 2 сложений.
Важной чертой рассмотренной схемы является ее модульность.
Для изменения одномерного фильтра-прототипа достаточно взять
другие весовые коэффициенты \h (n)\, а для изменения трансфор-
трансформирующей функции — изменить коэффициенты фильтра в каждом
блоке. При реализации фильтра, спроектированного с помощью
Л1-мерной трансформации, можно заменить / (nlt n2) на импульс-
импульсный отклик, соответствующий Л1-мерной трансформирующей
функции. Мак-Клеллан и Чэн [18] показали, что эти фильтры
обладают хорошими свойствами по отношению к эффектам кванто-
квантования, когда фильтр реализуется с использованием арифметиче-
арифметических устройств конечной точности.
Оценка требуемой памяти осложняется из-за того, что как
весь фильтр в целом, так и фильтры отдельных блоков обладают
фазовыми характеристиками с нулевой фазой. Поскольку обычно
проще выполнить реализацию фильтра в первом квадранте, рас-
рассмотрим использование операторов вида g (nlt n2) ~ f (лх :— Р,
п2 — Р) для реализации импульсного отклика
ft (пг, п2) = h («! — NP, п2 — NP),
C.100)
184 Глава 3
где Р — порядок трансформации. Такая структура приведена
на рис. 3.16. Ветви, помеченные zYPz^p, соответствуют задержке Р
отсчетов по координате пг и Р*отсчетов по координате п2. Каждый
из трансформирующих фильтров требует памяти емкостью немного
больше 2Р строк. Кроме того, каждая ветвь, помеченная
—zJ~2Pz^~2P, требует памяти приблизительно на 2Р строк. Таким
образом, суммарная требуемая емкость составляет 5NP — 6NP
строк, что приблизительно в два раза больше, чем в случае реали-
реализации при помощи свертки.
В М-мерном случае при трансформации первого порядка F
становится М-мерным фильтром с пространственной протяжен-
протяженностью 3 X 3 X ... X 3, а остальная часть структуры не изме-
изменяется. Выходной сигнал такого фильтра требует [Cм -f 3)/2]jV -f
+ 1 умножений и [3м -f 11 Л' сложений на один отсчет. Кроме
этого необходимо хранить в памяти 5jV гиперстрок входного
массива размерностью (М — 1) каждая. Это значит, что для гипер-
гиперкуба с длиной каждой стороны L точек необходимо запомнить
5NLM~l слов. Требования к объему памяти приблизительно
вдвое больше, чем в случае прямой свертки, но количество умно-
умножений на один выходной отсчет растет только линейно с ростом Л'.
Как и при реализации прямой сверткой, каждый входной отсчет
нужно извлечь и поместить во вторичную память только один
раз. Рассматриваемая реализация имеет очевидные преимущества
перед прямой сверткой в двумерном случае, а по мере роста раз-
размерности задачи выигрыш становится еще больше.
В табл. 3.3 приведено число умножений на один выходной
отсчет в предположении, что фильтрации подвергается A024 X
X 1024)-точечный входной массив BN + 1) X BN + ^-точеч-
^-точечным КИХ-фильтром при реализации фильтра прямой сверткой,
БПФ и методом трансформаций [4].
Таблица 3.3. Число операций умножения на один
выходной отсчет, требующееся для пропускания
A024 X 1024)-точечного входного множества через
lBN + 1) X BN -\- 1)]-точечный фильтр с нулевой
фазой, реализованный методом прямой свертки,
БПФ и методом трансформаций. (С любезного
согласия Рассела М. Мерсеро [4], © 1981
Springer-Verlag.)
N
5
10
20
40
Прямая
свертка
36
121
441
1681
ДПФ
46
46
46
46
Метод
трансформаций
31
61
121
241
-2P ,-2P
l r2 "
h@)
2h(l)
КЭ
,tP ,-P ^ ,-P
Рис. 3.16. Схема фильтра с линейной фазой, построенного с помощью физически реализуемой трансформирующей функции IS:
с линейной фазой. ><
186 Глава 3
3.5.5. Фильтры с малыми генерирующими ядрами
Фогерас и Абраматик [20] предложили для реализации КИХ-
фильтра с нулевой фазой последовательную структуру с отводами
(рис. 3.17). Частотный отклик таких фильтров имеет вид
к
Н (cu! со2) = ? A,ftF<*> (юь со2), C.101)
ft=0
где Я») (соъ со3) „4 1 и
t=i
, ю,). C.102)
Хо1
Xi
*—4 kkC'ji .)
¦ч
Вхад
Рис. 3.17. Схема МГЯ-фильтра [20].
а — обычный вариант; б — транспонированный вариант.
Каждый из фильтров Ft {щ, со2) линеен по фазе, а в его [BР +
+ 1) X BР + 1)]-точечном импульсном отклике Р предпола-
предполагается небольшим, откуда и название «фильтр с малым генерирую-
генерирующим ядром» (МГЯ-фильтр).
Как каскадные фильтры, так и трансформирующие функции
Мак-Клеллана представляют собой частные случаи МГЯ-фильтров.
Каждая реализация соответствует частному случаю, когда Kh = 0
для k < К. Трансформации Мак-Клеллана соответствуют част-
частному случаю, когда все функции Ft (c^, со2) идентичны и каждая
из них совпадает с трансформирующей функцией. (В этом част-
частном случае структура на рис. 3.17 обладает плохой чувствитель-
чувствительностью к шуму арифметического округления. По этой причине
такие структуры не рассматривались в предыдущем разделе.
Однако если все функции {/^-(coi, co2)} отличаются друг от друга,
то острота этой проблемы существенно меньше).
Если Р = 1, в описываемой схеме затрачиваются 6/С + 1
умножений на каждый выходной отсчет (столько же, сколько
Синтез и реализация двумерных КИХ-фильтров 187
в трансформации Мак-Клеллана) и память немного более чем
3N строк сигнала (меньше, чем в трансформации Мак-Клеллана).
Кроме того, в силу модульности МГЯ-фильтров и малого размера
ядер, участвующих в операциях свертки, эта схема весьма привле-
привлекательна для аппаратной реализации.
Трудным вопросом является синтез таких фильтров. Их частот-
частотный отклик является существенно нелинейной функцией пара-
параметров фильтра, вследствие чего необходимо использовать итера-
итеративные методы синтеза. Предложено несколько алгоритмов син-
синтеза МГЯ-фильтров [20], но мы не будем их здесь рассматривать.
* 3.6. КИХ-фильтры для случая гексагональной
дискретизации сигналов
С принципиальной точки зрения КИХ-фильтры для гексаго-
гексагональной дискретизации сигналов не отличаются от КИХ-фильтров
для прямоугольной дискретизации; и в том и другом случае отсчеты
выходной последовательности являются линейной комбинацией
входных отсчетов. Однако в деталях имеются отличия в эффек-
эффективности и в виде результирующих формул и выражений.
Частотный отклик гексагонального фильтра можно предста-
представить в виде
И (щ, со2) = ^ У| h (nlt- п2) ехр Г -/ ( 2"* Г щ + п2ы.М.
C.103)
Область суммирования простирается на всю область импульсного
отклика фильтра. Если И {щ, со2) — чисто вещественная функ-
функция, то мы имеем фильтр с нулевой фазой. В этом случае
h (n1; n2) = h* (—п.!, —п2). C.104)
3.6.1. Реализация гексагональных КИХ-фильтров
Два способа реализации КИХ-фильтров (прямая свертка и
использование ДПФ) легко распространяются на случай гекса-
гексагональной дискретизации. Действительно, выражение для свертки
У («1, п2) =SJ/i (*!, k.2) х (пг - klt n2 - k2) C.105)
выглядит так же, как и для прямоугольной дискретизации. Если
импульсный отклик h («!, п2) симметричен, то, как и в случае
прямоугольного фильтра, это можно использовать при реализации
свертки для сокращения числа требуемых операций умножения.
Преимущество гексагональных систем проявляется в тех
случаях, когда требуется отклик с круговой симметрией. Прямо-
188 Глава 3
угольная система может иметь импульсный или частотный отклики
с симметрией 8-го порядка (относительно обеих частотных осей
и обеих диагоналей). Гексагональная же система может обладать
симметрией импульсного и частотного откликов 12-го порядка
(относительно всех шести вершин шестиугольника и биссектрис
всех шести центральных углов). Поэтому при прочих равных усло-
условиях симметричный гексагональный КИХ-фильтр требует по
Таблица 3.4. Полное число коэффициентов и число различающихся
коэффициентов для прямоугольного и гексагонального
КИХ-фильтров с различными радиусами их опорной области а>.
(С любезного согласия Рассела М. Мерсеро, Proc. IEEE,
© 1979 IEEE.)
Радиус
N
0
0
1
1
2
2
3
3
4
4
Тип фильтра
Прямоугольный
Гексагональный
Прямоугольный
Гексагональный
Прямоугольный
Гексагональный
Прямоугольный
Гексагональный
Прямоугольный
Гексагональный
Полное
число
коэффи-
коэффициентов
1
1
9
7
25
19
49
37
81
61
Число раз-
различающихся
коэффи-
коэффициентов
1
1
3
2
6
4
10
6
15
g
Нормиро-
Нормированная
ошибка
0,804
0,773
0,200
0,214
0,158
0,166
0,098
0,102
0,084
0,090
а) Идеальным является низкочастотный фильтр с круговой сим-
симметрией.
сравнению с прямоугольным лишь около 2/з операций умножения.
Однако прочие условия не равны. Входной и выходной сигналы при
гексагональной дискретизации также содержат меньшее коли-
количество отсчетов. В результате выигрыш в числе операций для
гексагонального фильтра может доходить до 58 %. В табл. 3.4
приведены значения нормированной среднеквадратичной ошибки
для прямоугольного и гексагонального КИХ-фильтров нижних
частот, синтезированных с использованием плоского окна [21].
Ошибка уменьшается по мере увеличения радиуса фильтра, при
этом ошибки фильтров обоих типов оказываются сравнимыми по
величине. Однако количество коэффициентов фильтра, пропор-
пропорциональное числу сложений, для гексагонального фильтра при-
примерно на 25 % меньше. Используя симметрию импульсного откли-
отклика (идеальным здесь является фильтр нижних частот с круговой
симметрией), можно уменьшить число различающихся коэффи-
коэффициентов фильтра, пропорциональное числу требуемых операций
умножения. Для гексагонального фильтра число различающихся
Синтез и реализация двумерных КИХ-фильтров 189
коэффициентов асимптотически в два раза меньше, чем для пря-
прямоугольного.
Для реализации гексагональных КИХ-фильтров можно ис-
использовать также ДПФ (либо выполнив два преобразования по
всей протяженности сигнала, либо с помощью секционированной
свертки). Заинтересованный читатель сможет сам разработать
необходимые детали.
3.6.2. Синтез гексагональных КИХ-фильтров
Большинство алгоритмов синтеза, разработанных для дву-
двумерных прямоугольных КИХ-фильтров, можно.адаптировать для
синтеза гексагональных фильтров. Например, нетрудно перенести
на этот случай метод окон. Если i (nlt n2) — требуемый гексаго-
гексагональный отклик, то для синтеза гексагонального фильтра необ-
необходимо положить
h (nlt n2) = i (nlt n2) w (nlt n2), C.106)
где последовательность -w (nlt n2), описывающая функцию окна,
имеет ту же опорную область, что и синтезируемый фильтр. Функ-
Функцию w можно образовать из одномерного окна v (n) двумя спосо-
способами: с помощью прямого произведения
w (nlt п2) .= v (tij) v (n2) v (пг — л2) C.107)
и путем вращения
w
, п2) = v B Ynf + %~nin2) ¦ C.108)
(Во втором случае используется непрерывное одномерное окно).
Первое окно имеет гексагональную опорную область, второе —
круглую. Какой способ лучше для синтеза гексагонального фильт-
фильтра, пока неизвестно. На рис. 3.18 приведен пример фильтра, син-
синтезированного с использованием гексагонального окна, которое
было сформировано с помощью прямого произведения одномерных
окон.
Гексагональный КИХ-фильтр с равновеликими пульсациями
также можно синтезировать с непосредственным использованием
тех же принципов, которые были предложены для синтеза прямо-
прямоугольных КИХ-фильтров с равновеликими пульсациями, по-
поскольку аппроксимирующий частотный отклик линейно зависит
от неизвестных параметров фильтра. Поэтому аппроксимация
по-прежнему имеет форму C.42), но базисные функции ф(- (щ, со2)
будут, очевидно, не такими, как в прямоугольном случае. Их
конкретная форма будет зависеть от наличия и вида симметрии,
присущей импульсному отклику.
Для синтеза гексагональных КИХ-фильтров можно адапти-
адаптировать и метод трансформации. В отличие от того, что описано
190 Глава 3
Рис. 3.18. Отклик КИХ-фильтра нижних частот, синтезированного с использо-
использованием прямоугольного окна с опорной областью гексагональной формы.
Гексагональный фильтр содержит 363 отсчета и обладает симметрией 12-го порядка.
а — перспективная проекция; б — контурная диаграмма. (С любезного согласия Расселла
М. Мерсеро [21], © 1979 IEEE.)
Синтез и реализация двумерных КИХ-фильтров 191
Рис. 3.19. Линии постоянного значения для трансформирующей функции C.109)
при А = —1/3, B = C = D = 4/9.
(С любезного согласия Расселла М. Мерсеро [21, © 1979 IEEE.)
Рис. 3.20. Частотный отклик гексагонального КИХ-фильтра с N = 26, синте-
синтезированного с использованием гексагональной трансформации, изображенной
на рнс. 3.19.
(С любезного согласия Расселла М. Мерсеро [211, © 1979 IEEE.)
192 Глава 3
в разд. 3.5.3, в качестве трансформирующей функции следует
использовать частотный отклик гексагонального фильтра низкого
порядка с нулевой фазой, а не отклик прямоугольного фильтра.
В случае 1-го порядка эта функция принимает вид
cos a> = FH {щ, со2) =
C.109)
Выбрав А = —7з> В = С = D — 4/я. можно для малых значений
((О!, со2) получить почти круговые эквипотенциали, как это пока-
показано на рис. 3.19. На рис. 3.20 изображен частотный отклик гекса-
гексагонального фильтра нижних частот с N = 26, при синтезе кото-
которого в качестве прототипа использовался одномерный фильтр
нижних частот. Фильтр предназначен для пропускания частотных
компонент со? + со| <: л4/4 и подавления компонент вне этой
полосы. Такие фильтры также допускают эффективную реализа-
реализацию [21].
Упражнения
3.1. Если импульсный отклик h (nlt п2)двумерного КИХ-фильтра
удовлетворяет условиям симметрии h (nlt п2) = h (—щ_, —п2),
то Н ((&!, (о2) является чисто вещественной функцией, и мы имеем
фильтр' с нулевой фазой. Это обстоятельство можно использовать
при реализации фильтра.
а) Предположим, что КИХ-фильтр удовлетворяет условиям
нечетной симметрии h (п^ п2) = —h(—nlt —п2). Что можно ска-
сказать о его частотном отклике?
б) Покажите, как можно использовать эту симметрию для
модификации непосредственной реализации фильтра.
в) Выполните пп. «а» и «б» для КИХ-фильтра, удовлетво-
удовлетворяющего условиям симметрии 1) h (%, п2) = h (—nlt n2), 2) h (nu
гц) = —h (nlt — л2).
3.2. Пусть имеется массив данных объемом 340x340 точек.
Требуется пропустить этот массив через КИХ-фильтр с нулевой фа-
фазой протяженностью BN + 1) X BN + 1) точек.
а) Сколько надо выполнить комплексных умножений и ка-
какой потребуется объем памяти для реализации фильтра с помощью
ДПФ, вычисляемого на основе алгоритма разбиения на строки
и столбцы, при N = 50? (Считайте, что размерность БПФ должна
составлять степень числа 2.)
б) Сколько потребуется вычислительных операций и каков
требуемый объем памяти с учетом условия нулевой фазы, если
фильтр реализуется методом прямой светки?
Синтез и реализация двумерных КИХ-фильтров 193
в) Если бы имелся неограниченный объем памяти и един-
единственная проблема заключалась в числе умножений, для какого
минимального "значения N предпочтительной является исполь-
использование БПФ?
3.3. Пусть требуется выполнить фильтрацию C40х340)-точеч-
ного массива B3 X 23)-точечным КИХ-фильтром с нулевой фазой.
Наличная первичная память ЭВМ для хранения отсчетов вход-
входного массива позволяет записывать до 4096 комплексных слов.
Как вы будете реализовывать фильтр? Обоснуйте ваш ответ.
3.4. Пусть требуется выполнить фильтрацию B56 X 256)-точеч-
ного изображения A6Х 16)-точечным вещественным КИХ-фильт-
КИХ-фильтром. Если реализовывать этот фильтр с помощью секционирован-
секционированной свертки методом перекрытия с накоплением, то можно рас-
рассмотреть использование: 1) C2 X 32)-точечных ДПФ; 2) F4x64)-
точечных ДПФ; 3) A28Х 128)-точечных ДПФ; 4) B56X256)-то-
чечных ДПФ; 5) E12х512)-точечных ДПФ.
а) Определите для каждого случая, сколько потребуется
выполнить ДПФ. (Считайте, что каждая свертка требует двух ДПФ.)
б) Сколько комплексных умножений потребуется в каждом
из пяти случаев? Для того' чтобы выполнить вычисления, при-
примите, что (N X Л0-точечное ДПФ требует N2 log2 N комплекс-
комплексных умножений.
в) Чему равен оптимальный размер секции в данном при-
примере? Сравните число умножений при использовании секций
оптимального размера и при реализации методом прямой свертки.
3.5. Функция двумерного окна получена с помощью прямого
умножения одномерного окна на себя:
Щ («1. «г) = Щ («i) Щ (fh)-
Фурье-спектр одномерного окна имеет главный лепесток шири-
шириной А, а высота самого большого из боковых лепестков равна 6.
Каковы будут ширина главного лепестка и высота бокового
двумерного окна?
3.6. Пусть требуется синтезировать двумерный КИХ-фильтр
с использованием вращающегося окна Кайзера, частотный отклик
которого составляет (приблизительно)
f 1,0 db 0,1 при со? + <»| < @,4яJ,
Ж ) (
Используя формулы, представленные в этой главе, а) определите
порядок фильтра; б) определите значение параметра а окна
Кайзера; в) найдите выражение для импульсного отклика фильтра.
Можете ограничиться выражением ответа через соответствую-
.щие функции Бесселя.
3.7. Пусть Я (сох, со2) обозначает частотный отклик [BN + 1) X
X BN + 1) 1-точечного фильтра с нулевой фазой. Этот фильтр
13 Даджнон Д.. Мерсеро Р.
194 Глава 3
используется в схеме, показанной на рис. УЗ.7, для построения
другого фильтра с нулевой фазой, имеющего частотный отклик
G ( )
Г"
1
!
¦ -»
1*
1
1
н
н
C-2Н)
I
J Выход
1
1
1
Рис. У3.7.
а) Каков размер импульсного отклика g {пъ п2)?
б) Пусть требуется, чтобы частотный отклик фильтра G (щ, со2)
удовлетворял следующим условиям:
0,99 < G(co,, со2) < 1,01 при со2 + со2<@,4лJ,
—0,01 < G(«V <">2) < 0,01 при
о>2>@,6лJ.
Если Я синтезируется методом окон с использованием вращаю-
вращающегося одномерного окна Кайзера, каков должен быть порядок
фильтра Я, чтобы фильтр G удовлетворял написанным выше
условиям? [Указание. Для решения этой задачи определите, как
ошибки в полосах пропускания и непропускания отклика Я (щ, со2)
влияют на G (щ, со2).]
в) Предположим теперь, что с помощью вращающегося окна
Кайзера строится одиночный фильтр G' с тем же числом умноже-
умножений, что и в приведенной выше каскадной схеме. Каковы будут
ошибки в полосах пропускания и непропускания при той же
ширине переходной полосы, что и для фильтра G?
3.8. Пусть требуется синтезировать Eх5)-точечный фильтр
с нулевой фазой методом наименьших квадратов. Частотный от-
отклик фильтра I (coj, со2) изображен на рис. УЗ.8, где заштрихован-
«2
Рис. У3.8.
Синтез и реализация двумерных КИХ-фильтров 195
ные участки соответствуют значению частотного отклика, равному
1, а светлые — равному 0. Для уменьшения числа степеней сво-
свободы аппроксимации зададимся следующими условиями для
аппроксимирующей функции: 1) Я (щ, со2) чисто действительна;
2) Я (©!, со2) = Я (— щ, со2); 3) Я (щ, со2) = Я (сох, — со2).
Фильтр h (tti, Пг) должен иметь опорную область — 2 < пъ п2 <¦ 2.
а) Фильтр имеет всего 25 коэффициентов. Сколько из них
линейно независимы? Выразите зависимые коэффициенты через
независимые.
б) Выразите частотный отклик аппроксимирующего фильтра
Н ((Ох, со2) в виде линейной комбинации только независимых коэф-
коэффициентов импульсного отклика с соответствующим набором
базисных функций.
в) Найдите выражение для оптимальных значений незави-
независимых коэффициентов фильтра, если они выбираются так, чтобы
минимизировать среднеквадратичную погрешность. Сами инте-
интегралы не вычисляйте.
3.9. Частотный отклик семейства КИХ-фильтров можно вы-
выразить в виде
F
Н ((Ох, со2) — 2 a (t) фг (сох, со2).
Требуется найти член этого семейства, который оптимально ап-
аппроксимирует заданный отклик / (сох, со2) при ограничении а (I) +
+ а (т) = К- Покажите, что эта задача аппроксимации с огра-
ограничением может быть решена путем нахождения отклика
Я' (соь ю2) = S а' (С) <р|- (соь со2),
который оптимально аппроксимирует /' (щ, со2) без ограничений.
Найдите a' (i), ф|- (соь сог), F' и /', выразив их через нештрихо-
ванные величины.
3.10. Рассмотрите задачу аппроксимации идеального филь-
фильтра нижних частот с откликом
A | (Ох | < а < я, | со21 < b < я,
/ ((Ох, (О2) = 1 л
' [0 в остальных случаях
фильтром с импульсным откликом
А при tii — п2 ~ 0>
В при tii~ ±\, п2 = 0,
С при «1 = 0, п2 = ±1,
0 в остальных случаях.
13*
196 Глава 3
Какие значения А, В и С минимизируют ошибку
я я
Е = j j | / (щ, *со2) — Н (сох, со2) I2 d»! dco2?
—л —л
3.11. Итерационные алгоритмы синтеза фильтров, как, на-
например, алгоритм, определенный выражением C.54), часто тре-
требуют вычисления частных производных функции ошибки по
неизвестным параметрам.
а) Определим ошибку следующим образом:
ЕР й L Wm [H (colm, со2т) - / (со1т, (о2т)]2".
т
Вычислите градиент Ер по независимым коэффициентам \а (i)},
если
F
Н (щ, (о2) = 2 а @ фг (©!, со2).
б) Повторите эти вычисления для коэффициентов ht (nlt n^
при каскадной реализации фильтра
Я (щ, со2) = П Г 2j S ^ («1, п2) ехр (—/Чп! - /со2п2)].
3.12. Рассмотрим Bх2)-точечный массив х @, 0) = 0; х A, 0) =
= 2; *@, 1) = 9; х A, 1)= 1.
а) Сформируйте разделимую аппроксимацию этого массива,
как это описано в разд. 3.5.2.
б) Какова нормализованная среднеквадратичная ошибка та-
такой аппроксимации?
3.13. Рассмотрим многоступенчатый разделимый фильтр, по-
показанный на рис. 3.9. Пусть протяженность каждого из откликов
rt («i) и Ci (n2) равна N точек.
а) Сколько требуется слов памяти для реализации фильтра,
если входная последовательность имеет протяженность LxL?
Считайте, что входной сигнал доступен только построчно.
б) Какая потребуется емкость памяти, если реализовать
фильтр непосредственно как двумерный КИХ-фильтр?
3.14. Хотя для выбора трансформирующей функции разрабо-
разработаны специальные процедуры, часто хорошие результаты дости-
достигаются эвристическими приемами, так как трансформирующие
функции обычно содержат небольшое число свободных параметров.
Такие приемы могут состоять в определении отображений для
отдельных ключевых частот. В качестве примера рассмотрим
синтез фильтра, аппроксимирующего отклик, показанный на
рис. УЗ.8, с помощью трансформации первого порядка вида
F (со1( со2) = А + В cos щ + С cos со2 + D cos «i cos co2.
Синтез и реализация двумерных КИХ-фильтров 197
а) Найдите подходящие значения для А, В, С и D. Обоснуйте
свой ответ.
б) Изобразите отклик одномерного фильтра-прототипа, ис-
используемого с этой трансформацией.
3.15. Пусть требуется синтезировать трехмерный сферически-
симметричный фильтр нижних частот с нулевой фазой, используя
метод трансформации с трансформирующей функцией первого
порядка вида
F ((Ох, щ, со3) = А -\- В cos щ -\- С cos щ-\- D cos co3 +
+ Е cos щ cos co2 + F cos o^ cos со3 + G cos co2 cos co3 +
+ Я cos щ cos оJ cos оK.
Эта трансформация после подстановки
F ((Ох, 0J, 0K) -*• COS 0)
превратит частотный отклик G (со) одномерного фильтра-прото-
фильтра-прототипа с нулевой фазой в трехмерный отклик Я (щ, со2, со3). Выбе-
Выберите параметры трансформации А, В, ... , Я так, чтобы транс-
трансформация имела следующие свойства:
1. со — л отображалось на (а^ щ, со3) = (л, л, л).
2. F (щ, со2, со3) = F (со2, со3, coj) = F (co3, Wj, со2) = F (щ,
0K, 0J) = F @J, 0)ь 0K) = F @K, 0J, 0)!).
3. F (со, 0, 0) — cos со. (Это обеспечит равенство откликов
по осям отклику прототипа.)
4. f (йц оJ, л) = — 1.
3.16. Трансформирующей функцией для трансформации 2-го
порядка является частотный отклик Eх5)-точечного фильтра
с нулевой фазой. Пусть эта функция используется с BN + 1)-
точечным одномерным фильтром с нулевой фазой для реализации
двумерного фильтра.
а) Сколько потребуется умножений для вычисления значе-
значения одного отсчета выходной последовательности?
б) Сколько потребуется умножений на один выходной отсчет,
если тот же частотный отклик реализован прямой сверткой?
в) Какой объем памяти потребуется для реализации этого
фильтра?
3.17. Покажите, что любой фильтр, синтезированный с по-
помощью трансформации Мак-Клеллана, можно реализовать в кас-
каскадной форме.
3.18. Абраматик и Фогерас [20] предложили схему двумер-
двумерного КИХ-фильтра, изображенную на рис. УЗ. 18. Пусть f, g и h
являются C X 3)-точечными импульсными откликами двумерных
КИХ-фильтров с нулевой фазой (с центрами в начале координат)
198 Глава 3
x(n,,n,)
f(n,,n2)
h(n,,n2)
Рис. УЗ. 18.
У(n,.n,)
а) Какой размер имеет эквивалентный импульсный отклик
всей системы?
б) Сколько требуется умножений на один выходной отсчет?
в) Сколько потребуется умножений на один выходной отсчет,
если система реализуется с использованием прямой свертки
с эквивалентным импульсным откликом?
3.19. Пусть требуется синтезировать гексагональный КИХ-
фильтр с нулевой фазой и равновеликими пульсациями. При этом
желательно максимально возможное приближение к круговой
симметрии. Это значит, что импульсный отклик должен удовлет-
удовлетворять условиям симметрии
h (пи п2) = h (— пъ — п2) = h {щ — гц, tij) = h (п2 — пъ
— «i) = h (n2,
= h (—
п2) = h (—
— п2) =
= h (ni, Пг — п2) = h (— п2, — tiy) = h (гц, п2 — щ) =
= h (tiy — пг, — п2) = h (— пъ п2 — tiy).
Эта задача может быть сформулирована как линейная задача
аппроксимации вида
F
Н (сох, щ)= ^а (i) <pi (щ, со2).
Определите коэффициенты a (i) через коэффициенты импульс-
импульсного отклика фильтра и найдите набор {срг (щ, и>2)\, при котором
минимизируется число параметров, определяемых при синтезе.
Получите отношение числа степеней свободы F к размеру фильтра.
[Эквивалентные результаты для прямоугольного фильтра даны
¦в C.46). 1
3.20. Метод трансформации, нашедший применение при син-
синтезе КИХ-фильтров с нулевой фазой, можно использовать при
синтезе как прямоугольных, так и гексагональных фильтров.
Это делается с помощью подстановки
Fff (@i, (o2) -> cos со
Синтез и реализация двумерных КИ'X-фильтров 199
в частотный отклик одномерного фильтра-прототипа с нулевой
фазой. В случае трансформации 1-го порядка трансформирующая
функция имеет вид
FH (щ, со2) = А + В cos-^- + С cos (-^ + *>2) +
(
а) Найдите импульсный отклик гексагонального КИХ-филь-
тра с нулевой фазой, частотный отклик которого равен FH (щ, о>2).
б) Если этот фильтр используется в схеме, показанной на
рис. 3.15, сколько потребуется операций умножения на каждый
отсчет выходного сигнала? Считайте, что отклик одномерного
фильтра-прототипа имеет протяженность 2N + 1 точек.
в) Сколько отсчетов содержится в импульсном отклике всего
фильтра в целом?
Глава 4
Многомерные рекурсивные системы
Линейные системы, инвариантные к сдвигу, в общем случае
реализуются с помощью разностных уравнений. Хотя многомер-
многомерные разностные уравнения представляют собой обобщение одно-
одномерных разностных уравнений, мы увидим, что они существенно
сложнее и фактически существенно отличаются от одномерных.
Некоторые важные вопросы, связанные с многомерными разност-
разностными уравнениями, такие, как направление рекурсии и соотно-
соотношения упорядочения, в одномерном случае не возникают. Другие
проблемы, такие, как устойчивость, хотя и имеются в одномерном
случае, в многомерном случае более сложны для понимания.
Однако, несмотря на эти трудности, многомерные разностные
уравнения вполне можно и нужно изучать, поскольку они носят
фундаментальный характер.
В этой главе мы определим и обсудим многомерные рекурсив-
рекурсивные системы и рассмотрим большое число вопросов, связанных
с многомерными разностными уравнениями. Мы также определим
многомерное г-преобразование и обсудим вопрос об устойчивости
многомерных систем. Глава 5 будет также посвящена некоторым
особенностям рекурсивных систем. В ней наше внимание будет
сосредоточено на проектировании и реализации многомерных
рекурсивных цифровых фильтров.
4.1. Разностные уравнения конечного порядка
Разностное уравнение — это неявное соотношение между вхо-
входом х и выходом у линейной инвариантной к сдвигу системы.
Оно имеет вид
? ? ь (klt k2) у («! — klt n2 — k2) =
= S Ей (rlt r2) x («! - rlt n2 - r2). D.1)
Ti r,
Если выходные отсчеты ЛИС-систем можно найти по значениям
входных отсчетов с помощью конечного числа вычислений, то эти
вычисления можно выразить в форме D.1) с конечными пределами
суммирования. Последнее условие означает, что массивы коэффи-
Многомерные рекурсивные системы 201
циентов а и b имеют конечные размеры. В этом случае мы говорим,
что разностное уравнение имеет конечный порядок.
Далее, если b @, 0) Ф 0, можно нормализовать коэффициенты
а и Ь, разделив обе части D.1) на b @, 0). Это позволяет принять
b @, 0) = 1 без потери общности рассмотрения. Такая нормали-
нормализация упрощает некоторые последующие выражения.
Порядок разностного уравнения является мерой протяженно-
протяженности опорной области массива b (klt k2). Чем выше порядок, тем
больше степень сложности. К сожалению, не существует точного
определения порядка, поскольку массив b может иметь любую
форму. Порядок определяется численно только после того, как
установлена форма массива Ь. Например, в частном .случае,
когда b (klt k2) имеет прямоугольную форму, так что D.1) можно
записать в виде
2 2 b(kn k^y{ni — klt n2-k2) =
ft,=0 ft,=0
= 2j 2j a 0i. r2) x («! - rt, n2 - r2), D.2)
г, гг
мы можем сказать, что порядок равен Nx X N2.
Важным частным случаем является класс разностных уравне-
уравнений порядка «ноль на ноль». Для этих систем массив b (klt k2)
состоит из одного отсчета в начале координат, и мы можем записать
У («1. п2) = 2 2 а (/-!, г2) х (tii - гъ п2 — г2). D.3)
Сравнивая это разностное уравнение с выражением для свертки,
мы видим, что выходной массив у (пх, п2) является сверткой вход-
входного массива с массивом коэффициентов а (гь г2) и что а (гь г2)
можно отождествить с импульсным откликом фильтра. Поскольку
а (гх, г2) содержит только конечное число ненулевых значений,
мы видим, что разностное уравнение порядка «ноль на ноль»
соответствует КИХ-фильтрам, подобным тем, которые обсужда-
обсуждались в гл. 3. Разностные уравнения конечного порядка, отличного
от нуля, соответствуют БИХ-фильтрам (фильтрам с бесконечной
импульсной характеристикой).
4.1.1. Реализация ЛИС-систем с помощью
разностных уравнений
Разностные уравнения важны не только для описания опреде-
определенных ЛИС-систем, но также и потому, что они определяют ал-
алгоритмы вычислений при реализации этих систем. Это можно уви-
увидеть, переписав выражение D.1) в виде
У («к п2) = 2 2 а (Гх, г2) х (пх - Гх, п2 — г2) —
— S 2j b (ki> h) У («1 -- h> «2 — k2). D.4)
(ku кг)Ф@, 0)
202 Глава 4
В этой форме записи разностное уравнение описывает алгоритм
вычисления отсчета у в точке {пъ п2) при допущении, что в нашем
распоряжении имеются необходимые входные отсчеты и что те
отсчеты у, которые появляются в правой части D.4), либо были
вычислены заранее, либо определены как начальные условия.
Мы будем говорить, что системы, для которых выходные от-
отсчеты могут быть вычислены таким способом, являются рекурсивно
вычислимыми. Не все системы, описываемые разностными уравне-
уравнениями конечного порядка, обладают таким свойством. Является
система рекурсивно вычислимой или нет, зависит от опорной об-
области массива коэффициентов b {kx, k2), положения отсчетов вы-
выходного массива, которые заданы как начальные условия, и по-
порядка, в котором необходимо вычислять выходные отсчеты.
(В некоторых случаях входная последовательность конечной про-
протяженности может не позволить произвести рекурсивное вычисле-
вычисление выходной последовательности.) Только часть необходимых
сведений (опорная область множества Ь) фактически обеспечивается
разностным уравнением. Для полного описания системы остальная
информация должна быть задана разработчиком системы. Более
полно мы обсудим эти вопросы в последующих разделах.
4.1.2. Рекурсивная вычислимость
Выражение D.4), определяющее способ вычисления отсчета
У (пъ "г)> можно переписать следующим образом:
У («1- «а) = 2j 2j a (% - гъ п, - л.) х (гх, гг) -
— S S b (пх - &!, «2 — k2) у (&!, k2). D.5)
A, k2
(klt к2)Ф(п1г п,)
Графическая интерпретация этого выражения приведена на рис. 4.1
Входная маска, или окно конечной площади, форма которой опре-
определена массивом а {гъ г2), наложена на входное множество в точке,
определяемой значениями {пъ nz). Маской накрывается только
конечное число входных отсчетов. Отсчеты х, которые накрыты
маской, умножаются на соответствующие коэффициенты а (гъ гг)
и результирующие произведения складываются. Аналогично и
синхронно выходная маска, определяемая массивом b (klt k2),
перемещается над выходным массивом. Все выходные отсчеты,
накрытые этой маской, за исключением одного при (пь /г2), взве-
взвешиваются с помощью коэффициентов b (kv k2), складываются и
вычитаются из суммы, полученной с помощью входной маски;
в результате получается значение у {щ, пг). Это число заносится
в выходной массив, обе маски перемещаются в новое положение,
и процесс повторяется. То место на выходной маске, где распо-
Многомерные рекурсивные системы 203
лагается точка (пъ л2), графически показано кружком (отверстием)
маски. Это обозначение показывает, что данный отсчет не исполь-
используется в вычислениях и что на его место надо поместить вычислен-
вычисленное значение.
Для вычисления значения конкретного выходного отсчета,
выходная маска должна накрывать только известные значения
отсчетов (конечно, за исключением отсчета, отмеченного кружком).
Это означает, что определенные отсчеты следует вычислять ранее
других. Если не существует способа упорядочивания, позволяю-
позволяющего последовательно вычислить выходные данные по набору
начальных условий, система не является рекурсивно вычислимой.
Если существует несколько различных способов упорядочивания,
у нас появляется выбор; некоторые из этих способов упорядочи-
упорядочивания могут оказаться лучше других. Количество возможных спо-
способов упорядочивания зависит как от формы выходной маски,
так и от положения выходного отсчета в этой маске.
Входной t
сигнал
'2
-#—
-4-
—•—•—>¦
Взвеши-
Взвешивание и
сложе-
сложение
Выходной ;
сигнал
Взвеши-
Взвешивание и
сложе-
сложение
Рис. 4.1. Использование входной и выходной масок для вычисления последо-
последовательных отсчетов на выходе рекурсивного фильтра.
204 Глава 4
Nj строк
ООООО
0 0 0 0 0
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
ООООО
-е-
ООООО
ООООО
ООООО
ООООО
0000000000000000000
0000000000000000000
0000000000000000000
0000000000000000000
Рис. 4.2. Выходная маска, соответствующая рекурсивно вычислимому фильтру
первого квадранта.
Темными кружками отмечены выходные отсчеты, которые уже вычислены; светлыми круж-
кружками отмечены начальные условия, а точками — отсчеты, которые предстоит вычис-
вычислить. Выходная маска имеет размеры (ЛГ, + 1) X (Na + О точек.
Простейшим примером двумерной выходной маски, позволяю-
позволяющей'провести рекурсивное вычисление выходные данных, является
фильтр первого квадранта, или «каузальный» фильтр. В этом
случае коэффициенты b {kly k2) имеют ненулевые значения в конеч-
конечной области {0 < &! <: Л^, 0 ¦< k% ¦< N%\. Форма выходной маски
представлена на рис. 4.2. Если значения выходного массива даны
как граничные условия в области, имеющей форму буквы L,
обозначенной на рисунке светлыми кружками, выходная маска
может перемещаться вверх столбец за столбцом, позволяя вы-
вычислить оставшиеся члены выходного массива и никогда не пере-
перекрывая ни одного неизвестного значения. Однако для этой маски
такой путь не является единственным возможным способом упо-
упорядочивания. Мы можем также вычислять выходные отсчеты
строка за строкой слева направо, начиная с нижних строк и дви-
двигаясь наверх. Кроме того, выходной массив можно сканировать
также по диагонали. В общем случае эта маска скользит вдоль
любого семейства параллельных прямых, при условии, что они
имеют отрицательный наклон, как показано на рис. 4.3.
Важно понять, что выходные сигналы, вычисленные для любого
из этих направлений перемещения, идентичны. При этом для
вычисления одних и тех же выходных отсчетов выполняются
одни и те же арифметические операции; с изменением направле-
Многомерные рекурсивные системы 205
ния перемещения меняется только порядок вычисления выход-
выходных значений.
На рис. 4.4 изображены две маски, не допускающие рекур-
рекурсивное вычисление. Как и маска на рис. 4.2, эти маски имеют
прямоугольную форму, но отверстие в обоих случаях расположено
не в углу маски. Для маски с отверстием в середине начальные
условия или предварительно вычисленные выходные отсчеты дол-
должны полностью заполнять пространство маски вокруг вычисляе-
отсчетов
N, + 1
отсчетов
Рис. 4.3. Допустимые направления рекурсии для выходной маски первого квад-
квадранта (показана темными кружками).
Сплошными линиями указаны допустимые направления, штриховыми — недопусти-
недопустимые.
мой точки. Таким образом рекурсия не может самоподдерживаться.
Аналогичная ситуация возникает, когда отверстие находится на
границе маски. В этом случае рекурсия возможна вдоль строки
или столбца, но невозможен переход от строки к строке или со
столбца на столбец.
Маска с отверстием в угловой точке и расположенная в од-
одном квадрате не является, однако, единственной, соответствую-
соответствующей рекурсивно вычислимой системе. Рассмотрим маску, показан-
показанную на рис. 4.5 для несимметричного полуплоскостного фильтра
[1, 2]. Этот фильтр имеет импульсный отклик, простирающийся
на сектор плоскости (пи п2), имеющий угол меньше 180°. Точ-
Точное значение угла сектора зависит от размеров маски. Естественное
упорядочение для вычисления выходных отсчетов с этой маской со-
состоите перемещении вдоль каждой строки слева направо, начиная
со строки, находящейся непосредственно' над начальными усло-
условиями, и в повторении этой процедуры вверх строка за строкой.
206 Глава 4
и б
Рис. 4.4. Два примера выходных масок, не являющихся рекурсивно вычисли-
вычислимыми.
а — маска с отверстием в центре; б — маска с отверстием на краю (но не в углу).
«с tg (I/N, )
N, +1
отсчетов
Рис. 4.5. Допустимые направления рекурсии для несимметричной полуплоскост-
полуплоскостной выходной маски (показана темными кружками).
Как и на рис. 4.3, сплошные линии соответствуют допустимым направлениям, штри-
штриховые—недопустимым.
n2j
; з#.'.'.'..'!!.'.' \
Nj строка ######## • *^o о
(OOOOOOOOOOOO n
i-o-o-o-o-o-o-o-o-o-o-o-o
N, +N3
отсчетов
Рис. 4.6. Выходная маска, соответствующая рекурсивно вычислимому НПП-
фильтру.
Светлыми кружками отмечен допустимый набор начальных значений.
Многомерные рекурсивные системы 207
Однако возможны и другие направления перемещения, как пока-
показано на рис. 4.5. Начальные условия, необходимые для этого
конкретного несимметричного полуплоскостного фильтра (НПП-
фильтра), приведены на рис. 4.6. Заметим, что форма зоны началь-
начальных условий зависит от порядка фильтра. НПП-фильтры можно
обобщить с помощью отражения или вращения выходной маски,
а также комбинации этих операций.
НПП-фильтр является обобщением фильтра одного квадранта
и очень тесно связан с ним, поскольку любой НПП-фильтр можно
отобразить на фильтр одного квадранта с помощью линейного
отображения, введенного в разд. 1.2.8. Например, выходную маску,
приведенную на рис. 4.5, можно отобразить в маску фильтра
одного квадранта преобразованием
; пц, =
D.6)
Это преобразование приводит к маске одного квадранта, показан-
показанной на рис. 4.7.
ХХХХХХХХ
хххххххх
ХХХХХХХХ
хххххххх
хххххххх
хххххххх
хххххххх
хххххххх
хххххххх
т,
Рис. 4.7. Выходная маска, приводимая на рис. 4.5 и 4.6 и отображенная на
первый квадрант (или маска одной четверти плоскости).
Светлые кружки соответствуют ненулевым коэффициентам, точки — нулевым коэффи-
коэффициентам, а крестики — выходным отсчетам, подлежащим вычислению. Начальные усло-
условия рис. 4.6 отображаются в заштрихованную область в форме буквы L, заключенную
между осями координат и штриховыми линиями.
208 Глава 4
4.1.3. Граничные условия
До этого момента почти не говорилось о граничных (началь-
(начальных) условиях, принималось лишь, что эти условия в случае необ-
необходимости можно получить в удобном виде. На самом деле здесь
нужно проявить осторожность: нельзя выбирать произвольно
граничные условия, если мы хотим иметь линейную инвариантную
к сдвигам систему. Например, если известно, что система линейна,
она удовлетворяет условию
Т [ах («!, п2)] = аТ [х (пи щ)] D.7)
при всех значениях параметра а, включая а = 0. Это означает,
что откликом на нулевой входной сигнал будет нулевой выход-
выходной. Начальные условия нельзя выбрать так, чтобы нарушалось
это условие, а система оставалась линейной. Единственное явное
значение, которое можно приписать граничным условиям линей-
линейной системы, — это нулевое значение.
Если задано, что линейность требует равенства нулю всех гра-
граничных значений, то где должны быть расположены эти отсчеты?
Чтобы ответить на этот вопрос, обратимся к свойству инвариант-
инвариантности системы к сдвигу. Рассмотрим в качестве простого примера
неустойчивое разностное уравнение
У (пи п2) = у (tix—l, п2) + у («! + 1, /г2 — 1) + х (пи п2). D.8)
Результаты фильтрации пары идентичных входов с двумя различ-
•ными наборами граничных условий показаны на рис. 4.8 и 4.9.
В части а каждого рисунка представлены использованные гра-
граничные условия, в части б — отклик на вход х (пъ п2) = б (пи п2)
и в части в — отклик на вход х (пъ п2) = б (nt — 1, щ, — 1).
Из анализа этих рисунков можно сделать несколько важных
выводов. Во-первых, несмотря на то, что применялось одно и то
же разностное уравнение, различные граничные условия привели
к весьма различным выходным сигналам. Во-вторых, граничные
условия рис. 4.8 не позволили получить систему, инвариантную
к сдвигам, а условия на рис. 4.9 к такой системе приводят. В чем
разница между этими двумя случаями?
Если полная система линейна и инвариантна к сдвигам, то
выходная последовательность у (nv /ц) должна быть сверткой вход-
входной последовательности и импульсного отклика системы. Опор-
Опорную область этого выхода системы, которая определяется сверт-
сверткой, можно найти с помощью методов, рассмотренных в гл. 1.
Если обозначить Ry опорную область у (пх, п2), то
у (nlt п2) = 0, (пи п2) ф Rr D.9)
Это" выражение показывает, как следует выбирать граничные
условия. Если они выбраны так, что обращают некоторые отсчеты
Многомерные рекурсивные системы 209
• • • • •
• • • • •
• • • • •
о о о о
-t i -t :
О 5 14 28 48 75 О 2 5 9 14 20
O259I4 20 О12345
I —I
О12345 OOllll
I I
-O 1 1 1 1 1—*¦ —О О О О О О—
I - I
оооооо оооооо
б
I
Рис. 4.8.
а — набор граничных условий, используемый в разностном уравнении D.8); б — отклик
на х (rii, rij) = б (n,, rij); в — отклик на х («,, п2) = б (rii — I, п2 — I).
О .
о
о
'.: i
О 1
о
4
1
О
"t
10 20
1
3 6
1
1 2
1
— О 1-
1
О
.IS
10
3
— 1 —
о
56
15
4
О
8-4
21
5
—1 —
О
120
28
6
— 1—
О
165 О
36
7
-1—*-
О
О
о
о
о
о
г
1
О
о
1
1
1
1
1
о
1
6
2
1
10
3
1
15
4
1
21
S
1
28
6
1 •••
1
—О—О—О—О—О—О 0—»-
1 "•
1
о
о
о
О
0
О
Рис. 4.9.
лови
. п2)
14 Даджион Д., Мерсеро Р.
о — ДРУой набор граничных условий, используемый в разностном уравнении D.8);
б — отклик на х (rci. п2) = б (n,, nt)\ » — отклик иа х (rii, пг) = 6 (я, — I, пг — I).
210 Глава 4
внутри Ry в нуль, как на рис. 4.8, в то время как свертка дает
значения этих отсчетов, отличные от нуля, то система становится
неинвариантной к сдвигу.
Для фильтров конечного порядка достаточно определить гра-
граничные условия в зоне конечной ширины, имеющей форму буквы V.
Зона граничных условий должна быть вне области Ry, в то время
как точное значение ширины зоны и ориентация буквь! V зависит
от формы выходной маски. Для несимметричной полуплоскостной
выходной маски инвариантность к сдвигу требует, чтобы зона
граничных условий была подобна той, что показана на рис. 4.6,
т. е. она должна очерчивать тупой угол, примыкающий к началу
координат. Даже при фильтрации последовательности, располо-
расположенной в первом квадранте, нужно вычислять отсчеты выходной
последовательности во втором квадранте, как это сделано на
рис. 4.9. Это одна из причин ограниченного использования НПП-
фильтров.
В некоторых случаях ненулевые граничные условия могут быть
очень полезны, и мы не утверждаем, что их не следует применять
вообще. Однако в случае их применения следует помнить, что
результирующая система не будет ни линейной, ни инвариант-
инвариантной к сдвигу.
4.1.4. Упорядочивание вычислений выходных
отсчетов
В предыдущих разделах мы видели, что существенная разница
между одномерными и М-мерными разностными уравнениями
состоит в том порядке, в котором могут быть вычислены выходные
отсчеты. Для одномерной системы с заданной выходной маской
имеется самое большее один способ упорядочивания, с помощью
которого можно определить выходные отсчеты, и вычисления,
таким образом, являются полностью упорядоченными. Однако
в двумерном случае выходные отсчеты можно найти с помощью
любого из нескольких возможных способов упорядочивания, и
вычисления в этом случае являются лишь частично упорядочен-
упорядоченными. Это частичное упорядочивание может быть представлено
с помощью графа упорядочивания [3], например, показанного
на рис. 4.10 для нашего первого примера с фильтром первого
квадранта. Каждый выходной отсчет, подлежащий определению,
соответствует вершине графа. Каждый отсчет можно вычислить
в том случае, если уже вычислены два отсчета, лежащие над ним.
Так, для фильтра первого квадранта первым должен быть вычислен
отсчет @, 0). Если его значение известно, можно вычислить отсчет
A, 0), или @, 1), или, если позволяет аппаратура, оба отсчета
одновременно. То же утверждение справедливо и для других
уровней графа.
Многомерные рекурсивные системы 211
Граф упорядочивания воплощает частичное упорядочивание
выходных отсчетов. Для осуществления любого реального фильтра
мы должны определить полное упорядочивание. Одним из средств
выполнения этой процедуры является функция отображения
индексов или соотношение упорядочивания [4] вида п — I (пъ п%).
Если п = / (п\, п'г,) то неравенство п < п означает, что выход-
выходной отсчет (п\, п2) должен быть вычислен раньше отсчета (п\, щ).
Соотношение упорядочивания должно согласовываться с частич-
частично)
/ \
@,1) A,0)
/ \ / \
@,2) A,1) B,0)
/ \ / \ / \
г • •
/ '¦ \
@,п2) .* '. (п,,0)
/ \ / \ / \
A,п,) (п,,1)
• * • *
• • » *
Рис. 4.10. Граф упорядочивания для рекурсии в первом квадранте [3].
Индексы в узлах соответствуют отсчетам выходного массива.
ными соотношениями упорядочивания. Существование соотно-
соотношения упорядочивания означает, что система является рекурсивно
вычислимой.
Рассмотрим фильтр первого квадранта, частичное упорядочи-
упорядочивание которого показано на рис. 4.10. Предположим, что необхо-
необходимо вычислить выходные отсчеты только в диапазоне [0, Nx —
— 1 ] X [0, Л^2 —• 1 ]. В качестве первого примера можно исполь-
использовать функцию отображения индексов, которой является функция
п - I («j, пг) = N2nx + n2. D.10)
Это соответствует вычислению выходного сигнала по столбцам,
начиная с @, 0) и кончая @, Af2 —¦ 1), затем начиная с A, 0) и
кончая (I, N2 — 1) и т. д. В качестве второго примера рассмотрим
вычисление выходных отсчетов по строкам, при котором можно
было бы применить функцию
n = nx+^ins. D.11)
14*
212 Глава 4
В качестве третьего примера можно рассмотреть вычисление
выходных значений вдоль диагоналей (пх + п2 = const). Соот-
Соответствующей этому случаю функцией отображения индексов будет
функция
п= 1/2 (пг+па) (п! + па+ 1L-щ. D.12)
Эта функция отображения будет порождать такой порядок индек-
индексов: @,0), @,1), A,0), @,2), A, 1), B,0), @,3), A,2), B, 1),
.... Кажется очевидным, что для одного разностного уравнения
часто можно использовать несколько различных функций отобра-
отображения индексов. Однако различные полные упорядочивания могут
иметь существенные преимущества или недостатки по сравнению
друг с другом. Поясним это утверждение рассмотрением двух
наиболее общепринятых упорядочиваний: «столбец за столбцом»
(или строка за строкой) и «диагональ за диагональю». Чтобы
сделать пример максимально конкретным, допустимым, что мы
хотим реализовать фильтр первого квадранта с квадратной Cx3)-
точечной выходной маской и с Aх1)-точечной входной маской.
Пусть, далее, нам необходимо получить выходные данные в квад-
квадратной области N х N;
При реализации упорядочивания «столбец за столбцом» нам
необходимо помнить значения текущего столбца, лежащие ниже
выходной точки, вычисляемой в настоящий момент, выходные
значения предыдущего столбца и те выходные значения столбца,
предшествующего предыдущему, которые накрываются выходной
маской или лежат выше ее. Как показано на рис. 4.11, количество
выходных значений, которые необходимо занести в буферную
память, составляет 2N + 2. Если входные отсчеты поступают
столбец за столбцом, никакого промежуточного хранения входных
отсчетов не требуется. Для вычисления всех jV2 выходных значе-
значений требуется 9N2 умножений. В выходной маске выполняется
восемь умножений на одну выходную точку, а девятое требуется
для нормировки входных значений.
При реализации упорядочивания «диагональ за диагональю»
необходимо помнить четыре вычисленные перед этим диагонали.
Детальный подсчет согласно рис. 4.12 показывает, что в самом
худшем случае необходимо занести в буферную память 4jV — 4
выходных значения. Хотя эта реализация требует большего объема
памяти, чем реализация упорядочивания «столбец за столбцом»,
ее важное преимущество состоит в том, что выходные отсчеты
вдоль любой диагонали можно вычислять независимо. Следова-
Следовательно, если позволяют технические возможности, все выходные
отсчеты вдоль каждой диагонали можно вычислять одновременно.
Хотя по-прежнему необходимо выполнить 9N2 умножений, в том
случае, если имеется jV параллельных процессоров, время, необ-
необходимое для реализации упорядочивания «диагональ за диаго-
Многомерные рекурсивные системы 213
N-1
X X
Рис. 4.11. Иллюстрация 2Л' ¦+- 2 выходных значений (выделенных штриховкой),
которые необходимо занести в буферную память при реализации рекурсивного
фильтра размером CX3) точек и рекурсии по столбцам.
N-1
X X
N-1
Рис. 4.12. Иллюстрация 4/V—4 выходных значений (максимум), которые не-
необходимо занести в буферную память при реализации рекурсивного фильтра
CX3) точек и рекурсии «диагональ-за диагональю».
налью», примерно равно времени, необходимому для выполнения
9 BN — I) умножений. В этом случае имеет место обмен допол-
дополнительного объема памяти на возможность выполнения парал-
параллельных вычислений.
214 Глава 4
4.2. Многомерное z-преобразование
В гл. 1 рассматривался .отклик линейных инвариантных к
сдвигу систем на синусоидальное возбуждение, что естественным
образом привело к преобразованию Фурье. z-Преобразование яв-
является обобщением преобразования Фурье, позволяющим иссле-
исследовать экспоненциальные входные сигналы. Благодаря этому оба
преобразования имеют много общего, но в способах их применения
имеется существенное отличие. Преобразование Фурье преимуще-
преимущественно используется для описания сигналов и воздействия
систем на эти сигналы. z-Преобразование используется для опи-
описания систем и обеспечивает дополнительные средства обращения
с разностными уравнениями. Оно также приносит неоценимую
пользу при решении таких задач, как анализ устойчивости фильт-
фильтров. Если сравнить двумерное z-преобразование с его одномер-
одномерным аналогом, также обнаружатся глубокие различия между
г-преобразованием и преобразованием Фурье. По этим причинам
мы постараемся провести достаточно полное рассмотрение этого
преобразования.
4.2.1. Передаточная функция
Экспоненты вида х (ti\, n2) = zf'z"' являются собственными
функциями двумерной линейной инвариантной к сдвигу системы.
Это можно показать, описав выходной массив с помощью свертки
У (пи п2) = 2 2 z^-k'zV~k'h {ku k2) = D.13)
•= z"lzn2' 2 2 h (*„ k2)z7k'zTki = D.14)
= zllzn2>Hz(zu Zo), D.15)
где Нг(г1,г2)й 2 2 h (ku ?2)z7"V*!- D.16)
Hz (zi. гг) является собственным значением, соответствующим
собственной функции z^z"'. Будем называть ее передаточной
функцией или системной функцией системы. Как и импульсный
отклик, она полностью описывает линейную систему. В общем
случае сумма в выражении D.16) может не сходиться для всех
значений комплексных переменных z1 и г2, но, если фильтр ус-
устойчив, она будет сходиться при zt = е'и>, г2 = с'и«. Для этих
значений •г1 и г2 передаточная функция становится частотным
откликом, поскольку
Нг (е'и-, <?/">.) = Н (coj, со,). D.17)
Многомерные рекурсивные системы 215
4.2.2. г-Преобразование
Теперь формально определим двумерное г-преобразование
дискретного массива х в виде
ОО 00
Y /-, -, \ V V v /и и \ -.—"i-.—пг (Л 1 О\
л2(г[, Zi)— ?j ?j x \ti\, ti2)Z\ z? • (^.loj
При таком определении видно, что передаточная функция является
г-преобразованием импульсного отклика. Если положить zx =
= е'ч°', г2 = е'и*, то г-преобразование переходит в преобразо-
преобразование Фурье. Для удобства назовем поверхность в г-пространстве,
описываемую функциями zx = е*а*, г2 = е!а*, двумерной единич-
единичной поверхностью или единичной биокружностью.
Сумма D.18) не обязательно сходится для всех (или некоторых)
значений zx и г2. Значения гх и г2, при которых г-преобразование
абсолютно сходится, составляют область сходимости, или область
аналитичности в (гъ г2)-гиперплоскости. Внутри этой области
сходимости функция Xz (zx, z2) является аналитической функцией.
Область сходимости состоит из тех точек (гх, г2), для которых
ХЗ ХЗ I х (пх, п2) | | гг \-"< | г2 |-"« = 5Х < оо, D.19)
что в свою очередь означает, что
| Хг (zx, г2) | < оо. D.20)
Лежит или не лежит точка (гь г2) в области сходимости, зависит
только от величин | zx \, \ г2 |, а не от фазовых углов комплексных
переменных. Следовательно, в одномерном случае область схо-
сходимости г-преобразования представляет собой кольцо, как пока-
показано на рис. 4.13. Эквивалентным образом область сходимости
может быть обозначена в виде отрезка на прямой. Двумерным
аналогом кольца является область Рейнхардта. Если точка
(гь г2) лежит в области Рейнхардта R, точки {e'l]Xzx, e'vz2) должны
тоже лежать в области R для всех действительных значений ц и v.
Хотя область Рейнхардта для двумерного г-преобразования яв-
является четырехмерной фигурой, она может быть полностью опре-
определена двумерной фигурой, аналогичной показанной на рис. 4.14.
Как и в одномерном случае, определение г-преобразования
какой-либо последовательности не является полным и определен-
определенным без одновременного определения области сходимости. Рас-
Рассмотрим несколько примеров типичных областей сходимости,
с которыми нам впоследствии придется сталкиваться, соотнесен-
соотнесенных с опорными областями последовательности х (пх, п2).
Последовательность с конечной опорной областью. Для после-
последовательности, опорная область которой заключена в конечной по
216 Глава 4
площади части плоскости (пх, п2), z-преобразование можно запи-
записать в виде
Хг(гиг2)= ? Е *(«ь n2)zTn>z^n'. D.21)
Поскольку пределы суммирований, а также суммируемые величины
конечны, видно, что г-преобразование сходится для всех конечных
\ъ
Рис. 4.13.
а — типичная область сходимости z-преобразования одномерной последовательности;
б — эквивалентное представление кольца в виде отрезка прямой линии.
In Iz2| ]
Рис. 4.14. Графическое представление двумерной области сходимости.
Для .упрощения последующих построений область показана в координатах In |2,| и
In|z2|. Единичная окружность соответствует началу координат и плоскости <ln I za |,
1п|22|).
Многомерные рекурсивные системы 217
значений гх и г2, за исключением, может быть, точек z1 = О или
г2 = 0.
Последовательность с опорной областью в виде квадранта.
Вследствие аналогии с одномерными физически реализуемыми по-
последовательностями важный класс последовательностей состав-
составляют двумерные последовательности, равные нулю вне первого
квадранта.
In Iz2 I
Рис. 4.15. Область сходимости двумерной последовательности с опорной областью
в первом квадранте, лежащая в плоскости (!п | zx |, In | z2|) выше и правее штри-
штриховой линии.
Для последовательности этого класса двумерное г-преобразо-
вание можно записать в виде
Л|=0
fj x(nu
0
D.22a)
Можно непосредственно показать, что если точка (г01, г02) лежит
в области сходимости суммы D.22а), то все точки (гь г2), удовлет-
удовлетворяющие условиям
I | | | | г21 2» | г021, D.226)
г01
также лежат в области сходимости. Графически это представлено
на рис. 4.15. Пользуясь этими условиями, можно сделать несколько
утверждений относительно границы области сходимости для по-
последовательностей первого квадранта. Наклон этой границы,
указанной штриховой линией на рис. 4.15, не может быть положи-
положительным. Если бы это было не так, можно было бы найти точки,
удовлетворяющие достаточным условиям и все же лежащие вне
218 Глава 4
области сходимости, как это показано на рис. 4.16. Из возникаю-
возникающего противоречия следует, что граница не может иметь положи-
положительного наклона.
In I z2 I ,
Точки,
удовлетворяющие
достаточному условию,
но лежащие вне области
сходимости
(zo
In Iz.
Рис. 4.16. Область сходимости с указанной на рисунке границей для последо-
вательйостей первого квадранта на практике возникнуть не межет.
Поскольку точка (zOt. 202) лежит внутри области сходимости, то все точки B,, г2), удов-
удовлетворяющие неравенствам | z, | > |20i| и \гг\ > I z02 |. также должны лежать внутри
области сходимости. Если предположить, что в каком-то месте у границы имеется по-
положительный наклон, возникает противоречие. Это место отмечено на рисунке двой-
двойной штриховкой.
В качестве простого примера рассмотрим двумерную последо-
последовательность первого квадранта
X («!, п2) = а б (tli — «г) « («1. «г). D-23)
г-преобразование которой описывается функцией
Можно непосредственно показать, что область сходимости со-
содержит точки (гъ г2), удовлетворяющие неравенству
I a I < I zi 1*1 г21. или, что то же самое, D.24а)
\n\a\<\n\z1\-[-\n\z.2\. D,246)
Таким образом, граница области сходимости является прямой
линией с наклоном в плоскости (In \zt\, In j z2 j), равным —1.
Многомерные рекурсивные системы 219
Для последовательностей с опорной областью на втором,
третьем или четвертом квадрантах можно привести аналогичные
соображения, накладывающие ограничения на форму области
сходимости.
Наклон*!*
lnlr.l
Рис. 4.17.
о — двумерная последовательность с опорной областью на секторе; б.— область схо-
сходимости ее 2-преобразования. Если точка (zOi, zM) лежит внутри опорной области, то
все точки Bt, z2), такие, что In | zt | > In | z011 и In | гг | > L In | 2, | + {in I *ог I —
— L ln|zO||}, также лежат внутри области сходимости (отмеченной двойной штрихов-
штриховкой).
Последовательность с опорной областью на секторе. Область
сходимости для последовательности с опорной областью на секторе
несколько более сложна. Предположим, что последовательность
имеет опорную область, показанную на рис. 4.17, а. г-Преобразо-
г-Преобразование такой последовательности можно записать в виде
x(nlt
D.25)
Определив новую переменную / = пг + Ln2, можно записать
предыдущую сумму следующим образом:
Xz (г,, г2) = ? 2 * (/ - Ln2, n2)zT!+Ln'z7n' = D.26)
л,=0 /=0
= 2 %
л2=0 /=0
- Ln2
D.27)
Ясно, что если сходится сумма D.27), то сходится и сумма D.25).
Последовательность х (I — Lti\, n2) имеет опорную область, огра-
ограниченную первым квадрантом. Таким образом, если точка (г01, г02)
лежит внутри области сходимости, то точка (гь г2) также будет
лежать внутри области сходимости при условии, что
\г1\^\г01\ и D.28а)
'02
D.286)
220 Глава 4
Неравенства D.28а), D.286) можно переписать следующим образом:
In | zr | зг In | z01 | ц, D.29а)
In | z21 ^ In | zr | + {In | z02 | - L In | 201 ||. D.296)
Эта область показана на рис. 4.17, б. Эти условия также можно
использовать для наложения ограничений на наклон границы
области сходимости.
Последовательность с опорной областью на полуплоскости.
Предположим, что последовательность х (пъ п2) имеет опорную
Обласль
сходимости
Рис. 4.18. Для двумерной последовательности с опорной областью в верхней полу-
полуплоскости принадлежность точки (zOi, z02) к области сходимости z-преобра-
зования означает, что все точки fa, z2), такие, что | z, | = \z011 и | z2 | > | z021,
также лежат в области сходимости.
область только на верхней полуплоскости. Тогда х {пъ п2) — 0
для п2 < 0 и
Xz{zu 22) =
0
x=—00 r%2=0
Если (z01, 202) лежат внутри области сходимости Хг, то точки
(ги гг)> удовлетворяющие условиям | zx \ = | г01 | и | г2 | ^ | г02 |,
также лежат внутри области сходимости. Следовательно, граница
области сходимости должна быть однозначной функцией | zx \
(или In | zx |), как показано на рис. 4.18.
Последовательность с опорной областью на всей плоскости.
Область сходимости z-преобразования последовательности с опор-
опорной областью на всей плоскости {пъ п2) может быть разнообразной
по размеру и форме. Например, z-преобразование последователь-
Многомерные рекурсивные системы 221
ности х (tti, П2) = ехр (— til — tit) сходится при всех значениях
(гъ z2). Напротив, г-преобразование последовательности х (пъ
п2) = 2' "* '21 "а' не сходится ни при каких значениях (zlt г2).
Однако нередко г-преобразоаание с опорной областью на всей
плоскости сходится в области конечных размеров.
Последовательность с опорной областью на всей плоскости
можно записать в виде суммы четырех последовательностей с опор-
опорной областью на квадранте. Например:
х (tii, ti2) = Xi (tii, ti2) + x2 (tii, ti2) + x3 (tii, ti2) + Xi (tii, n2), где
x (tii, ti-i) для tii > 0> ti2 > 0,
1/2x (nu ti2) для % = 0, n2 > 0
или tii>0, n2 = 0, D.30)
V4-* («1, п-i) Для tii = ti2 = 0,
0 ДЛЯ «!<0 ИЛИ tl2<i0.
i
Последовательности х2 (tii, n2), x3 (tii, n2) и xt (пъ п2) опреде-
определяются аналогично и имеют опорные области на втором, третьем
и четвертом квадрантах соответственно. Следовательно, г-преоб-
г-преобразование Хг (гх, г2) можно записать в виде суммы четырех г-пре-
образований последовательностей с опорной областью на квад-
квадранте. Областью сходимости г-преобразования Хг (гъ г2) является
пересечение областей сходимости четырех составляющих г-пре-
образований.
4.2.3. Свойства двумерного г-преобразования
г-Преобразование имеет ряд свойств, полезных для вычисле-
вычисления, решения задач и доказательства теорем. Доказательства
очевидны и оставляются в качестве упражнений для интересую-
интересующегося читателя.
Разделимые сигналы. Если
х (tii, ti2) = v (tii) w (n2), то D.31a)
Xz(zb z2)=V2(Zi) Wz(z2). D.316)
Таким образом, последовательность Xz (zu z2) разделима тогда
и только тогда, когда последовательность, из которой она полу-
получена, разделима. В этом случае Vz (zx) и Wz (z2) являются одно-
одномерными г-преобразованиями и (пх) и w (n2) соответственно. Точка
(гх, г2) будет областью сходимости последовательности Хг тогда
и только тогда, когда гх лежит в области сходимости г-преобразо-
г-преобразования Vz, а г2 лежит в области сходимости г-преобразования Wz.
222 Глава 4
Линейность. Если
х (л1( л2) = av (n1? л2) -j- ^ («1» «2). TO D.32а)
Xz (Zl, z2) = aVz (zlf z2) + bWz (zlt z2) D.326)
для любых комплексных констант а и Ь. В общем случае область
сходимости Xz — пересечение областей сходимости Vz и №2,
хотя в отдельных случаях она может быть несколько больше.
Это свойство полезно при представлении сложной системы в виде
параллельного соединения более простых систем или при построе-
построении сложной системы из более простых.
Сдвиг. Если
*(«!, п2) = f(«i + ту, «2 + т2), то D.33а)
Xz (z,, z2) = zT'z^V, (z,, za). D.336)
Область сходимости Xz та же, что и область сходимости У2, за
исключением, может быть, точек, для которых \zt\ = 0 или
|*|=0.
Модуляция. Если
х{пх, п2) = ап^Ьп'Ы) (пх, п2), то D.34а)
Хг (zx, 22) = Wz (a-lzlt b-%). D.346)
Область сходимости Хг имеет такую же форму, как и область
для Wz, за исключением того, что ее масштаб изменен в \а\ раз
по переменной г: и в \Ь\ раз по переменной z2.
Дифференцируемость. Если
х («х, п2) = n1n2w (n1( n2), то D.35а)
Xz (zlf г2) = zl22 -^- Wz (zlf 22). D.356)
Области сходимости Xz и Wz одинаковы.
Комплексная сопряженность. Если х (пъ п2) является комп-
комплексным сигналом с 2-преобразованием Xz (z1? 22), то
х*(пи n2)~Xi(z?, zl), ¦ D.36)
Re [х (яь па)] — V2 [^ (zi, z2) + XI (zf, 22*)], D.37)
Im [x (я„ яа)] - Vy [Хг (z,, z2) - X| (zf, z|)]. D.38)
Все эти 2-преобразования имеют ту же область сходимости, что
и Xz (zlt 22).
Зеркальное отражение. Если
х («!, п2) -<- Xz {zx, 22), то D.39)
х{-пип2)~Хг{?Т\г2), D.40)
х(пи -п2)**Хг(ги 2Г1)» D-41)
дг(—я„ —п2)~Хг(гТ\ 2Г1)- D-42)
Многомерные рекурсивные системы 223
Свертка. Если
У («1. «а) = Sj И х («1 ™ *i> «2 — k2) h (kv k2), D.43a)
то Г2 (Zl, z2) = X2 (zlt z2) Я2 (zlt 22). D.436)
Двумерное z-преобразование свертки двух последовательностей
равно произведению их 2-преобразований. Область сходимости \YZ
является пересечением областей сходимости Xz и #2.
Перемножение. 2-Преобразование произведения двух после-
последовательностей есть комплексная свертка их 2-преобразований. Так
D.44)
Теорема Парсеваля. Теорема Парсеваля устанавливает соот-
соотношение между скалярными произведениями двух последователь-
последовательностей и их 2-преобразованиями
—оо пг=—оо
Контуры интегралов должны быть замкнутыми, охватывать начало
координат соответствующих переменных против часовой стрелки
и лежать полностью в области сходимости.
Теоремы о начальных значениях. Если х {пъ п2) = 0 для пг <
< 0 и п2 < 0, то
lim Хг B,, 22) = ? х (о, п2) z7n>, D-46)
Z,-*oo П2
}iraXt(zu z2).= ? Х(пи 0)zTn\ D-47)
Кг(ги z2)=x@, 0). D.48)
Линейное отображение. Предположим, что два двумерных
массива х и w связаны соотношением линейного отображения
так, что
V 1. «/. 1 IT 2. 2 IT 2, 49
0 в остальных случаях, v
где /, J, К и L — целые числа и /L — KJ ф 0. Тогда
Х\(ги 22) = Wz(z[z«, z\z\). D.50)
224 Глава 4
4.2.4. Передаточные функции систем, описываемых
разностными уравнениями
Рассмотрим двумерную линейную инвариантную к сдвигу
(ЛИС) систему, описываемую разностным уравнением
? ? Ь(кг, fc2) t/("i - &!, п2 - k2) =
= ? ? a(rv r2)x(rtj - rlt n2 - r2). D.51)
Поскольку система линейна и инвариантна к сдвигу, последова-
последовательность х (п\, «г) = z"'Z2! является ее собственной функцией,
и выходной сигнал, соответствующий этому входному сигналу,
имеет вид у (пи п2) = Нг (zu z2) znxlz"'. Подставив его в D.50),-
получим, что
Яг(г„ г2) ? ? b{ku ?2)zr*'z7*2 =«
a, k,
= ? Sa(ri, г^гГ'гГ2 D.52)
ИЛИ
Таким образом, передаточная функция системы, описываемой раз-
разностным уравнением, является отношением г-преобразований
коэффициентов а {гъ г2) и b (къ k2). Поскольку каждый из этих
массивов имеет конечную опорную область, их г-преобразования
являются полиномами. Для маски первого квадранта, показан-
показанной на рис. 4.2, передаточная функция дается выражением
!• '2)г
Г"гГ1
D.54)
? S*
ft,=0 ft!=0
при условии, что входная маска имеет тот же размер, что и вы-
выходная. Несимметричный полуплоскостной фильтр, аналогичный
приведенному на рис. 4.5, имеет передаточную функцию вида
W, N, W,
? ? в С • г2) 2Г1 v" + ? в Ci • °) гГГ1
Hz{zx,z2)=r^>%x ^ , D.55)
? ? 4*1 • *2)z7*'z7*2 + ? *(*i• °JГ*'
ft,=-W, ft,=l . ft^O
Многомерные рекурсивные системы 225
где снова принято, что входная маска имеет ту же форму, что и
выходная. Эта передаточная функция содержит только положи-
положительные степени zVx, а также положительные и отрицательные
степени переменной z~l.
В случае одномерной передаточной функции чрезвычайно по-
полезно иметь возможность определить ее полюсы и нули. Это можно
сделать также и в двумерном случае. Мы будем говорить, что
Hz имеет нуль в точке {гъ z2), если Az (гъ г,) = 0 и Bz (гъ г2) ф 0.
Аналогично будем говорить, что Hz обладает особенностью в точке
(Zl z2), если Bz (Zl z2) = 0. Хотя мы часто будем называть такую
особенность полюсом, следует признать, что такой термин не
является законным, так как многомерные полюсы и нули совер-
совершенно отличны от своих одномерных аналогов. Нули одномерных
полиномов появляются в изолированных точках z-плоскости,
в то время как многомерные нули являются в общем случае непре-
непрерывными поверхностями. Например, рассмотрим простой полином
Bz{zu z2) - 1 - bzTlz7l. D.56)
Нули этого полинома определяются соотношением
= b D.57)
и образуют непрерывную поверхность в четырехмерном простран-
пространстве. Так, если zx перемещается по единичной окружности в пло-
плоскости 2,, соответствующие значения z2, для которых В2 (zu г.г) = 0,
очерчивают окружность радиуса \Ь\ в плоскости z2.
В качестве более общего примера рассмотрим передаточную
функцию, описываемую выражением D.54),
Н (? 7\ Az (Zl' г"-} А [Zl] (гг)
г2) " В [г,] (г2)
Обозначения, принятые в последнем выражении, нуждаются
в комментарии. Функция Bz (гь г.) является полиномом с постоян-
постоянными коэффициентами от двух переменных. Можно также интер-
интерпретировать Bz (zj, г.,) как полином от одной переменной, скажем
22, коэффициенты которого в свою очередь являются одномерными
полиномами от параметра zx. Чтобы подчеркнуть такую интерпре-
интерпретацию, мы будем применять обозначение В l21]B2). Bz (z1> z2)
можно также интерпретировать как В \гЛ (zi), являющуюся
полиномом от переменной г,, с коэффициентами, представленными
в виде полиномов переменной г,. Если гх фиксирована, стоящий
в знаменателе полином В \zy \ (г.,) можно разложить на множители.
Это дает N2 корней, причем каждый корень соответствует особой
точке, в которой Bz (zu г,) --= 0. Если зафиксировать другое зна-
значение zu то В (zil (г.>) снова можно разложить на множители.
Это даст другие особые точки. Таким образом, положение полю-
15 Д;;Джион Д., Мерсеро Р.
226 Глава 4
сов и нулей Hz (zlt z2) по отношению к переменной z2 является
функцией 2Ь и наоборот.
Диаграмма корней является двумерным графом, очень полез-
полезным для исследования устойчивости ЛИС-систем. Она состоит из
двух частей — одна часть изображает траектории корней В [z1 ] (z2)
при движении параметра zx по единичной окружности z1 = e'a*
для — д <; wi <: д, другая часть изображает траектории корней
В [z2] (zx) при движении параметра г.г по единичной окружности
22 = е/ш«. Если рассматривать условие В (z1? z2) = О как алгебра-
алгебраическое отображение Zj-плоскости в г2плоскость, то можно счи-
считать, что диаграмма корней дает изображение единичной окруж-
окружности Zj в плоскости z2, и наоборот. На рис. 4.19 приведено не-
несколько примеров диаграмм корней полиномов в знаменателе
передаточной функции двумерных фильтров нижних частот [17].
[Поскольку для этих фильтров В (Zj, z2) = В (z2, Zj), обе части
каждой из диаграмм корней идентичны.] Протяженность выход-
выходных масок менялась от Cx3) до Fx6) точек. Даже для этих про-
простых полиномов диаграммы корней могут быть весьма сложными.
»•¦['»!
Рис. 4.19. Некоторые примеры диаграмм корней (каждая из них соответствует
полиному в знаменателе передаточной функции фильтра нижних частот).
а — маска CX3) точки; б — маска DX4) точки: в — маска EX5) точек (фильтр не-
нестабилен); г — маска Fx6) точек. (С любезного согласия Гэрн А. Шоу и Расселла М.
Мерсеро [17 1.)
Многомерные рекурсивные системы 227
Если не существует полинома (отличного от константы), на
который делятся одновременно полином-числитель и полином-зна-
полином-знаменатель рациональной передаточной функции, мы будем называть
числитель и знаменатель взаимно простыми. Если двумерный
полином нельзя разложить на произведение полиномов низшего
порядка, полином называют несводимым. Двумерный рациональ-
рациональный полином Hz (Zj, 22) является несводимым, если его полином-
числитель и полином-знаменатель взаимно простые. Однако за-
заметим, что это не означает несводимость отдельно взятых поли-
полиномов Аг (Zlf 22) И Bz BЬ 22).
Даже если передаточная функция Нг (гъ 22) несводима, могут
существовать отдельные значения (гъ 22), при которых Аг и Вх
одновременно равны нулю. Такие точки называются несуществен-
несущественными особенностями второго рода. В одномерном случае аналога
этого типа двумерной особенности нет. Полезность полюсов в одно-
одномерном случае частично связана с основной теоремой алгебры,
гласящей, что любой одномерный полином степени N можно
разложить на произведение N полиномов степени 1. Это позволяет
рассматривать любую передаточную функцию высокого порядка
как последовательное соединение N систем первого порядка,
каждая из которых может быть описана своим полюсом. В этом
случае каждый полюс можно рассматривать изолированно. К со-
сожалению, для многомерных полиномов подобной основной тео-
теоремы не существует. Редко бывает, чтобы многомерный полином
поддавался разложению на множители. Поэтому в двумерном слу-
случае, вообще говоря, невозможно выделить особенности, если пере-
передаточная функция специально не сконструирована так, чтобы она
раскладывалась на множители.
4.2.5. Обратное z-преобразование
Как и в одномерном случае, двумерное 2-преобразование может
быть обращено с помощью формулы, имеющей вид контурного
интеграла
х(пи п2) = (^-J| ф X2(zu z^'-'^'-'dz, dz2. D.59)
С 2 Cl
Каждый интеграл вычисляется по контуру, который должен быть
замкнут, лежать полностью в области сходимости Хг и обходить
начало координат против часовой стрелки в плоскости, соответ-
соответствующей переменной.
В качестве примера рассмотрим вычисление обратного 2-пре-
образования передаточной функции
Н & 2) J
J, _, , D.60)
az1 ' — bz2 '
15*
228 Глава 4
где \а\ + \Ь\ < 1 и область сходимости включает двумерную
единичную поверхность, по которой выполняется интегрирование.
В этом случае
с, с,
Выполним сначала интегрирование по С1. При этом z2 можно рас-
рассматривать просто как параметр. Этот интеграл является обрат-
обратным одномерным 2-преобразованием с простым полюсом при
az2/(z2 —'- b). Поскольку контур интегрирования соответствует
|zj|= I, \z2\ = 1, то можно показать, что \az2/(z2 — b)\ < 1
и, следовательно, полюс находится внутри контура интегриро-
интегрирования. Применяя теорему Коши о вычетах, получим, что.
h(«l яО = -щ
[Последовательность и (п^ является одномерной ступенчатой
функцией, рассмотренной в гл. 1. ] Интеграл по области С2 можно
рассматривать как обратное z-преобразование одномерной системы
с полюсом порядка {пг -j- 1) при z2 = b, который лежит внутри
контура интегрирования. Применяя еще раз теорему о вычетах,
получаем окончательный результат:
h(nlt n2) = о"»bn' (^+n"f! и Ыи (я2). D.63)
Хотя пример был достаточно простым, процедура вычисления
оказывается довольно запутанной. Для более сложных передаточ-
передаточных функций становится крайне трудно, если вообще возможно,
вычислить обратное z-преобразование в явном виде. В одномер-
одномерном случае проблему обращения передаточной функции высокого
порядка можно решить с помощью разложения на составляющие
множители и последующего выражения обратного z-преобразо-
вания в виде суммы простых компонент. Это невозможно в много-
многомерном случае, если нельзя разложить полином на множители.
По этим причинам обратное z-преобразование многомерных пере-
передаточных функций почти никогда не вычисляется аналитически.
Если передаточная функция и ее область сходимости соответ-
соответствуют рекурсивно вычислимому разностному уравнению, то из
Многомерные рекурсивные системы 229
передаточной функции можно вывести разностное уравнение
и с его помощью получить численное представление импульсного
отклика как отклика на единичный импульс б (пъ п2).
4.2.6. Двумерные направленные графы
Ранее в этой главе мы ввели входную и выходную маски для
объяснения способа выполнения рекурсивного вычисления вы-
выходных отсчетоа разностного уравнения. Маски полезны при
определении того, является ли разностное уравнение рекурсивно
вычислимым, какие начальные условия требуются для рекурсии и
какие способы частичного упорядочивания обеспечивают рекур-
рекурсивную вычислимость. Направленный граф является другим спо-
способом графического описания двумерных ЛИС-систем. Направлен-
Направленный граф можно вывести из z-преобразования; он особенно поле-
полезен для описания схемной реализации. Если, например, z-преоб-
разование поддается разложению на множители, то этот факт
отчетливо отражается на направленном графе. Более того, по-
поскольку направленный граф является графом, над ним можно про-
производить операции, изменяющие описание ЛИС-систем. Направ-
Направленный граф полезен для анализов сложности системы, чувстви-
чувствительности системы к изменениям значений коэффициентов, влия-
влияния ошибок арифметического округления на выход системы. Ни
способ входной и выходной масок, ни способ направленного графа
не обеспечивают полного описания системы, поскольку ни один
из них не определяет метода упоря- с
дочивания при реализации системы. • » • а
Однако оба способа полезны для по-
понимания многомерных рекурсивных _,
систем. 9 г}я 9 б
Направленный граф представляет
собой набор ветвей, изображающих
направленные соединения между узлами z,
сигналов. Для любого значения упо- • >¦ в "
рядоченной пары (пъ п2) каждому
узлу можно присвоить числовое значе-
значение, определяемое ветвями, входящими z^ г
в узел, и несколькими очевидными
правилами. Имеется пять типов ветвей,
которые представлены на рис. 4.20 в Zj
виде диаграммы. Каждая ветвь прини- »¦ » • d
мает входную величину из узла, на- Рис. 4.20. Типы ветвей, ис-
ходящегося в начале ветви, и выдает пользуемых в двумерном иа-
некоторую величину на своем конце. правленном графе.
ВеЛИЧИНа, Связанная С Любым уЗЛОМ, ? ^г вправо^оризоитальиа7
еСТЬ Сумма ВеЛИЧИН, ВНОСИМЫХ ВХОДЯ- задержка); в — сдвиг влево; г —
щими в нее ветвями.
230 Глава 4
Простейшей ветвью является оператор усиления. Величина
на выходе ветви есть просто величина на входе, умноженная на
коэффициент усиления ветв». Остальные четыре типа ветвей яв-
являются операторами сдвига. Если на входе имеется отсчет/ (пь п2),
то на выходе будет отсчет/ (п1 — 1, п2), / (п1 + 1, п2), / (п1, п2 — 1)
или / (пъ п.* + 1) в зависимости от типа ветви. Это можно рассмат-
рассматривать как усиление в z-области, причем коэффициентами усиле-
усиления являются г~х, Z\, zT и Za соответственно, как это показано на
рис. 4.20. Чэн [5] рассмотрел применение более общих ветвей
сдвига, которые можно получить из описанных посредством линей-
линейных преобразований. Это часто может оказаться полезным в тех
случаях, когда выходные отсчеты вычисляются не в порядке
«строка за строкой» или «столбец за столбцом», а в ином порядке.
Пример 1
В качестве простого примера рассмотрим передаточную функ-
функцию
D.64)
az.
- bzr
которая соответствует разностному уравнению
У («1, п2) = х (пь пг) + ау («! — 1, п2) + by {пъ п2 — 2). D.65)
Это уравнение можно представить направленным графом, пока-
показанным на рис. 4.21.
х(п,,л2)
У (п,,п2)
У (п,,п2 -1)
Рис. 4.21. Представление системы, приведенной в примере 1, в виде направ-
направленного графа.
Пример 2
В качестве более сложного примера рассмотрим фильтр с пе-
передаточной функцией
ЯBь 22) = -2 -2 L D.66)
1- J] 23 с (я,. пг) z-n'z~n-
0
(«1. «
Многомерные рекурсивные системы 231
которая соответствует разностному уравнению
2 2
У («1, п2) = х(пъ л2) + 2 2 с (*lt &2) г/ (rtj - klt л, - k2). D.67)
*=0ft0
Нетрудно понять, что это уравнение можно представить на-
направленным графом, показанным на рис. 4.22.
x(nI(h2) 1 У(п!,п2)
.0) '
5,1)
\,
y>
2,1)
.2)
• УГ.,..
i y(n,,n
2-0
2-2)
B,2)
Рис, 4.22. Представление системы, приведенной в примере 2, в виде направ-
направленного графа.
В случае одномерных физически реализуемых фильтров на-
направленный граф можно непосредственно использовать для их
практической реализации, поскольку оператор сдвига можно рас-
рассматривать как выборку из отдельной ячейки памяти. Однако
в двумерном случае реализовать оператор сдвига гораздо сложнее.
Рассмотрим направленный граф, представленный на рис. 4.22.
Например, если выбран порядок вычислений столбец за столбцом,
выходные значения будут вычисляться в порядке у {пъ п2 — 2),
У (щ, п-2 — 1), у (ль п2). Следовательно, оператор сдвига zjl
можно реализовать в виде выборки из одного слова памяти.
Однако оператор сдвига z{x требует промежуточного запомина-
запоминания значений сигналов объемом в целый столбец, поскольку
выходом ветви zf1 является величина w (щ — 1, п2), если на ее
входе задана величина w {пъ п2). Направленный граф из-за своей
простоты оставляет неясным способ реализации горизонтальных
и вертикальных операторов сдвига, и по этой причине его приме-
применение ограниченно.
232 Глава 4
4.3. Устойчивость рекурсивных систем
Понятие устойчивости вводится для описания поведения систем
при всех разумных значениях входных сигналов. Любой переход-
переходной процесс, вызванный резкими изменениями во входном множе-
множестве, должен быть ограниченным по своей протяженности, и
установившееся поведение системы (т. е. отклик при больших
значениях индексов nL и п2) должно быть предсказуемым. Для
формализации этой концепции исследователи определили не-
несколько различных типов устойчивости, но для ЛИС-систем все
они так или иначе, естественно, связаны с импульсным откликом.
Наиболее подробно изученным критерием устойчивости является
критерий ограниченного входа и ограниченного выхода (ОВОВ),
который мы и рассмотрим более детально. Система устойчива
по этому критерию, если любая ограниченная входная последо-
последовательность дает ограниченную выходную последовательность, т. е.
если входной сигнал удовлетворяет неравенству
I *(«1, «2>l < Л D.68)
выходной сигнал должен удовлетворять неравенству
\у(пи n2)\<Q, D.69)
где Р и Q — положительные числа. Как установлено в гл. 1,
из этого следует, что линейная инвариантная к сдвигу система
будет устойчивой тогда и только тогда, когда ее импульсный от-
отклик является абсолютно суммируемым, т. е.
оо оо
2 I! lAfai, n.2)\ = S1<oo. D.70)
j = —оо /22~—°
Хотя условие D.70) является и безусловно верным, и носит
фундаментальный характер, его применимость ограничена. При
использовании его для проверки на устойчивость необходимо
вычислять бесконечные суммы. Простое усечение суммы неприем-
неприемлемо, поскольку усеченная сумма всегда будет конечной. Более
того, условие D.70) требует, чтобы импульсный отклик был изве-
известен. Однако алгоритмы синтеза фильтров обычно позволяют
получить коэффициенты разностного уравнения либо передаточ-
передаточную функцию фильтра. Поэтому желательно иметь возможность
определить устойчивость фильтра непосредственно по передаточ-
передаточной функции.
4.3.1. Теоремы об устойчивости
Если двумерная последовательность абсолютно суммируема,
ее г-нреобразование аналнтично на единичной поверхности | гх | =
= |гг| = 1. Обратное утверждение также справедливо: если
Многомерные рекурсивные системы 233
г-преобразование последовательности аналитично на единичной
поверхности, то последовательность является абсолютно сумми-
суммируемой, а фильтр — устойчивым. Для практически важного
случая рациональных передаточных функций
требование аналитичности Hz для |zi| =. \z2\ =1 эквивалентно
требованию, чтобы В2ф0 для \гг\ = |г2| = 1. Это в свою
очередь требует, чтобы единичная поверхность \z1\ = \z2\ = 1
лежала в области сходимости передаточной функции.
Хотя выполнение этого условия легко проверить, область схо-
сходимости передаточной функции редко задана в явном виде. Наобо-
Наоборот, чаще всего приходится иметь дело с передаточной функцией,
заданной в виде функционала, и с опорной областью импульсного
отклика. В общем случае импульсный отклик для рекурсивно
вычислимого фильтра имеет опорную область только на секторе.
Ранее мы видели, что любую последовательность с опорной об-
областью на секторе можно линейно отобразить на другую после-
последовательность с опорной областью в первом квадранте. Поскольку
отображение обратимо, исходная последовательность будет абсо-
абсолютно суммируемой тогда и только тогда, когда отображенная
последовательность абсолютно суммируема [6]. Устойчивость
любого фильтра, импульсный отклик которого имеет опорную
область в виде сектора, можно, таким образом, свести к устойчи-
устойчивости фильтра с опорной областью в первом квадранте. Поэтому
мы на время ограничимся рассмотрением устойчивости ЛИС-
систем с рациональной передаточной функцией, импульсный от-
отклик которых имеет опорную область на первом квадранте плоско-
плоскости (л1; п2).
Устойчивость одномерного рекурсивного фильтра зависит от
положения его полюсов. Аналогично в многомерном случае устой-
устойчивость зависит от набора нулей полинома-знаменателя Bz (гъ z2).
Однако иногда на стабильность может влиять и полином-числи-
полином-числитель. Это может случиться, если на единичной биокружности
имеются несущественные особенности второго рода. Этот вопрос
мы отложим до разд. 4.3.3, а сейчас обойдем эту трудность, при-
приняв, что Az (г17 г2) = 1.
Первая из предложенных теорем об устойчивости, принадле-
принадлежащая Шэнксу [7, 8], обобщает метод проверки расположения
полюсов на двумерный случай.
Теорема (Шэнкс)
Пусть Hz (zlt z2) = \/Bz (zlt z2) является рекурсивным фильт-
фильтром в первом квадранте. Такой фильтр устойчив тогда и только
234 Глава 4
тогда, когда Bz (z1( z2) ф О для любой точки (гх, г2), такой, что
I г1 I S= 1 или |г2 I 5г 1-
Теорему Шэнкса нетрудно*понять, но трудно использовать.
Она требует, чтобы все внешнее пространство единичной биокруж-
ности было исследовано на особые точки. Эквивалентный, но
менее известный результат был также получен Шэнксом [7].
(См. также работу [17].)
Теорема (Шэнкс)
Пусть Нг (г1( г2) == \jBz (гь г2) является рекурсивным фильт-
фильтром первого квадранта. Функция Hz (zx, г2) устойчива тогда и
только тогда, когда выполняются следующие условия:
а) Вг(гъ z2)^0, ^1^1, |г2| = 1,
б) Вг(гх, z2)^0, |2!| = 1, |г2|^1.
Подобная же теорема была сформулирована Хуангом [9].
Доказательства можно найти в работах [10, 11].
Теорема (Хуанг)
Пусть Нг (Zj, z2) = \/Bz (zx, z2) является рекурсивным фильтром
первого квадранта. Этот фильтр устойчив тогда и только тогда,
когда Bz (Zj, z2) удовлетворяет следующим двум условиям:
а) В,(гъ z2)^0, \гх\^\, \z,\ - 1,
б) Bz(a, z2)=7^0, |г2|5г1 для любого а, такого что
Второе условие теоремы Хуанга является одномерным условием
устойчивости; первое условие двумерно, но z2 находится на своей
единичной окружности. Роли z1 и z2 в этой теореме можно менять
местами. Большинство практических реализаций тестов на устой-
устойчивость с 1972 по 1977 г. основывалось на тесте Хуанга. Де Карло
и др. [12] и Стринтцис [13] независимо друг от друга показали,
что тест Хуанга также можно упростить. Этот третий критерий
сформулирован ниже.
Теорема (Де Карло—Стринтцис)
Пусть Н (z1; z2) = \/Bz (z1( z2) является рекурсивным фильтром
первого квадранта. Такой фильтр устойчив тогда и только тогда,
когда В (гх, z2) удовлетворяет следующим трем условиям:
а) Вг(гъ z2)=t^0 для |zx| = l и |z|=l,
б) Bz(a, z2)=t^0 для |z2|s=l для любого а,
такого, что \а\= 1,
в) Bz{z1, Ь)фО для IzJ^l для любого Ь,
такого, что b I = 1.
Многомерные рекурсивные системы 235
Здесь опять пп. «б» и «в» соответствуют одномерным условиям
устойчивости, в то время как п. «а» — двумерному условию.
Де Карло и др. [12], а также О'Коннор [14] предложили некото-
некоторые альтернативные критерии устойчивости с измененными усло-
условиями пп. «б» и «в», однако они являются очевидными модифи-
модификациями условий, сформулированных выше. В частности, мы
можем выбрать для теоремы Де Карло — Стринтциса а = Ь = 1.
Следует отметить, что условие п. «а» просто требует вычисления
г-преобразования по единичной биокружности, которое сводится
к преобразованию Фурье. Таким образом, этот тест можно интер-
интерпретировать как обобщение одномерного критерия устойчивости
Найквиста.
Хотя для доказательства этой теоремы потребовался довольно
сложный математический аппарат, некоторое эвристическое пред-
представление о том, как она работает, можно получить, просто глядя
на диаграмму корней Bz (гг, z2). Вспомним, что диаграмма корней
есть изображение единичной окружности одной переменной (ска-
(скажем, Zj) в плоскости другой переменной при неявном отображении
Вг (гъ 22) = 0. Каждый полином имеет две диаграммы корней —
одна является изображением в плоскости zx, другая — изображе-
изображением в плоскости г2. Условие теоремы Шэнкса (во второй форме)
будет удовлетворяться в том случае, когда изображение корней
полинома на каждой из диаграмм корней лежит внутри единичной
окружности.
На рис. 4.23 изображены две возможные формы, которые мо-
может принимать диаграмма корней, а соответствующие полиномы-
знаменатели разбиты на два класса — класс А (слева) и класс Б
(справа). Для полиномов класса А по крайней мере одна из диа-
диаграмм корней пересекается с единичной окружностью. Для поли-
полинома класса Б ни одна из диаграмм корней не пересекается с еди-
единичной окружностью, эти диаграммы (которые должны быть
lm[z2]
О
Рис. 4.23. Диаграмма корней двух классов двумерных полиномов.
236 Глава 4
замкнутыми кривыми) либо полностью лежат внутри единичной
окружности, либо вне ее. Ясно, что диаграммы корней класса А
соответствуют неустойчивым системам.. Чтобы система была устой-
устойчивой, она должна принадлежать к классу Б, и все, диаграммы
корней должны лежать внутри единичной окружности. Условие
п. «а» теоремы Де Карло — Стринтциса требует, чтобы полином-
знаменатель принадлежал к классу Б. Кроме того, условия пп. «б»
и «в» требуют, чтобы диаграммы корней находились внутри соот-
соответствующих единичных окружностей на обеих диаграммах. Если
диаграмма корней не пересекает единичную окружность, все ее
точки находятся либо внутри единичной окружности, либо вне
ее. Следовательно, необходимо исследовать только одну точку
каждой диаграммы корней для определения того, находятся ли
они внутри единичной окружности. Это можно сделать, например,
исследуя корни двух одномерных полиномов Bz (zlt 1) и Bz A, г2).
Пример 3
В качестве примера рассмотрим фильтр первого квадранта
с передаточной функцией
В разд. 4.2 было показано, что импульсный отклик этого фильтра
имеет вид
D.73)
Для этого фильтра В {щ, со2) = 1 — ae~'ai — be~ia*. Первое
условие теоремы Де Карло — Стринтциса требует, чтобы
| 1 - аеЧь>1 - ЬеЧщ | > 0. D.74)
Второе и третье условия требуют, чтобы 2-преобразования Bz A, z2)
и Bz (zlt 1) не имели корней вне единичной окружности. Это дает
|&|<|1-а|, D.75)
Несложные преобразования этих неравенств приводят к утвержде-
утверждению, что неравенства D.75) и D.76) являются частными случаями
неравенства D.74) и что последнее эквивалентно требованию,
чтобы
М + |&|<1. D.77)
Многомерные рекурсивные системы 237
4.3.2. Проверка устойчивости
В предыдущем разделе были сформулированы четыре теоремы
об устойчивости. Эти теоремы сами по себе имеют косвенную цен-
ценность, если с их помощью нельзя создать численного алгоритма
проверки устойчивости. О'Коннор [14] и Юри [15] тщательно
исследовали возможности реализации тестов на устойчивость.
Мы ограничимся здесь реализацией теста, основанного на теореме
Де Карло—Стринтциса. В этом отношении мы будем следовать
работе Шоу [16, 17].
Тест на устойчивость, который мы детально рассмотрим,
состоит из трех частей, соответствующих условиям пп. «а», «б»
и «в» теоремы Де Карло—Стринтциса. Условие п. «б» заключается
в исследовании расположения корней одномерного полинома
Рг(г2) А Bz(\, г2) - Е Г ? Ъ(пи п2)} zjn' D.78)
с целью убедиться в том, что Pz (z2) Ф О для \z2\ <: 1. Это можно
сделать, использовав таблицу Мардена—Юри [6, 18] или обра-
обратившись к принципу аргумента [16, 17]. Принцип аргумента
в своей общей формулировке утверждает, что полное приращение
аргумента (фазы) Рг (z2) при обходе z2 по единичной окружности
в направлении против часовой стрелки равно нулю тогда и только
тогда, когда все корни Pz (z2) находятся внутри единичной окруж-
окружности [как и раньше, предполагается, что b {nlt п2) имеет опорную
область в первом квадранте]. Условие п. «в» теоремы Де Карло—
Стринтциса состоит в применении аналогичного теста к одно-
одномерному полиному
Qz(z,) д Вг(ги 1) = Е Г Е Ь(пи п2)) z~n\ D.79)
Наконец, полагая, что полином Bz (zlt z2) прошел два одномер-
одномерных теста, мы должны отыскать нули на единичной биокруж-
ности, или, что то же самое, отыскать нули спектра Фурье В (щ,
со2). Одним из способов, которым это можно сделать, является
применение принципа аргумента для поиска траекторий корней,
пересекающих единичную окружность 22 на диаграмме корней.
Зафиксируем zx = e'Mi и исследуем одномерный параметрический
полином В UJ (г2). Поскольку В [1] (г,) = Рг (г2), все корни
В [1] (г2) находятся внутри единичной окружности. Тогда при
некотором наборе дискретных значений % (и, следовательно, 2t)
можно проверить распределение нулей В [zt ] B2), применяя
принцип аргумента. Фактически это означает дискретизацию
траектории на диаграмме корней г2. Если полное приращение
фазы В [zt ] z2 не равно нулю после одного оборота z2 по единич-
единичной окружности, то по крайней мере один корень оказался вне
238 Глава 4
единичной окружности. Для этого он должен был пересечь еди-
единичную окружность в некоторой точке, что означает в некоторой
точке В (щ, <в2) --- 0. Следовательно, фильтр неустойчив. Если
мы тщательно исследовали таким способом В [z1] (г2), то нет
нужды исследовать и В [22 1B!), поскольку пересечение траек-
траектории корня и единичной окружности 22 означает пересечение
траектории корня и единичной окружности z1 (и наоборот). На
практике в качестве значений coj принимают значения 2nk1/N1,
так что коэффициенты параметрического полинома В [z1 ] (z2)
можно вычислить с помощью быстрого преобразования Фурье.
N1 следует выбирать достаточно большим с тем, чтобы точки дискре-
дискретизации диаграммы корней были расположены довольно часто.
Это необходимо для того, чтобы не пропустить траекторию корня,
которая пересекает единичную окружность и тут же уходит об-
обратно. Описанный тест все же оставляет невыявленным гипотети-
гипотетический случай, когда траектория корня подходит по касательной
к единичной окружности, так что в какой-то точке В (coj, w2) = 0,
хотя фактического пересечения окружности не происходит [16, 17].
Для обращения к принципу аргумента необходимо вычислить
фазу одномерного полинома Рг (г2) при движении 22 по единичной
окружности, или, что то же самое, фазу одномерного спектра
Фурье Р (ю2)- Обычно фазовую функцию можно определить
в виде
ARG [P (w2)] Д arctg ^Ipgjj D.80a)
или
ARG[P(co2)] Д=1т[1пР(со2)]. D.806)
В обоих приведенных выражениях берется главное значение
аргумента, поскольку функции арктангенса и комплексного ло-
логарифма многозначны. Однако использование главного значения
может привести к искусственному нарушению непрерывности
при переходе ARG [Я(«в2)] через 2я, что делает невозможным
определение полного приращения фазы Р (<в2) при изменении «и2
в пределах 0—2я.
Эту трудность можно обойти, определив развернутую фазовую
функцию ф (со2) в виде интеграла производной фазы. Для удобства
обозначений определим PR (со2) = Re [Я(«в2)], Pt (<в2) =
=6Лт [Я(со2)]. Затем, формально вычислив производную пра-
правой части выражения D.80а) или D.806) и приравняв ее произ-
производной от ф (<в2), получим
dPr(a>,) dPn(a>9)
d(f (соа) _ д W rfcoa i У V йа>г D.81)
Многомерные рекурсивные системы 239
Развернутая фазовая функция ф (v2) при частоте v2 вычисляется
путем интегрирования
Поскольку Р (со2) — тригонометрический полином, производная
от ф (со2) и, следовательно, сама ф (со2) будут непрерывными, если
Р (со2) = 0. Триболе [19] разработал эффективный алгоритм для
выполнения этих вычислений.
Теперь для исследования устойчивости l/Bz (z1( г3) можно
применить принцип аргумента. Условие п. «б» теоремы Де Карло—
Стринтциса будет выполняться, если полное приращение развер-
развернутой фазы полинома Р (со2) = В @, со2) будет равно нулю при
изменении значения со2 в пределах 0—2л. Это эквивалентно утвер-
утверждению, что развернутая фазовая функция периодична. Анало-
Аналогично условие п. «в» будет удовлетворяться, если, периодична
развернутая фаза полинома Q (ша) = В (coj, 0). Наконец, условие
•п. «а» будет удовлетворяться, если развернутая фаза параметри-
параметрического тригонометрического полинома В [щ] (со2) периодична
при любом вещественном значении щ.
В случаях когда В (со1( со2) очень близко подходит к нулю,
алгоритм развертывания одномерной фазы может не дать резуль-
результата. В подобной ситуации алгоритм проверки устойчивости,
разработанный Шоу [16, 17], выполняет локальный поиск мини-
минимума |В(со1( со2)|, чтобы определить, достигает ли он нуля.
Если это не так, то фильтр теоретически является устойчивым,
хотя на практике он может оказаться чувствительным к ошибкам
в коэффициентах или к ошибкам округления, связанным с конеч-
конечной длиной машинного слова, что делает его непригодным к упо-
употреблению.
Этот ряд одномерных тестов периодичности фазы можно рас-
рассматривать как вычисление двумерной развернутой фазовой функ-
функции для В (со1( со2) и проверку ее непрерывности и двойной пе-
периодичности [6, 14]. Двумерную развернутую фазовую функцию
можно определить в виде
где частные производные описываются формулами, аналогичными
формуле D.81). Эта функция будет непрерывна, если В (о^,
ш2) ф 0. Если она также периодична, т. е. если
Ф {щ + 2л, со2) = ф (coj, co2), D.84а)
Ф (щ, со2 -f 2л) = ф (щ, со2), D.846)
240 Глава 4
то условие п. «б» теоремы Де Карло—Стринтциса выполняется,
поскольку оно эквивалентно условию
Ф @, со2 + 2л) = ф @, со2). D.85)
Аналогично выполняется условие п. «в», поскольку оно эквива-
эквивалентно условию
Ф (щ + 2л, 0) = ср (coj, 0). D.86)
Условие п. «а» выполняется, если функция ф (сох, со2) непрерывна,
что возможно только при В (сох, со2) = 0. Эта непрерывность
в свою очередь проверяется применением принципа аргумента
либо к параметрическому полиному В [сох] (со2), либо к полиному
В [со2] (сох) для проверки нарушения условия D.84а) или D.846).
Следовательно, теорему об устойчивости можно сформулировать
с использованием понятия фазовой функции следующим образом
[6, 14]:
Теорема (О'Коннор)
Двумерный рекурсивный фильтр с частотным откликом Н (сох,
со2) = \/В (сох, со2) устойчив, если развернутая фазовая функция
Ф (coj, co2) непрерывна и дважды периодична.
Эта теорема не требует, чтобы последовательность Ь (п1> /г.>)
имела опорную область только в первом квадранте. Если b (ях, /г.2)
можно однозначно отобразить в первый квадрант с помощью
линейного отображения, теорема остается справедливой, поскольку
линейное отображение не изменяет непрерывности или периодич-
периодичности развернутой фазы.
Подобная реализация теста на устойчивость требует выпол-
выполнения ряда необходимых условий. Может случиться, что неста-
нестабильный фильтр пройдет этот тест, если дискретизация траектории
корней не является достаточно подробной, чтобы не пропустить
пересечения с единичной окружностью, или если траектория
корня касается единичной окружности, но не пересекает ее.
Однако степень уверенности, что фильтр действительно устойчив,
определяется пользователем, выбирающим частоту дискретизации
в тесте.
Тесты на устойчивость, использующие алгебраические ме-
методы [15] проверки на положительную определенность, теорети-
теоретически, однозначно определяют устойчивость фильтра. Однако на
практике эти тесты трудно реализовать, и, кроме того, они чувстви-
чувствительны к шуму округления, связанному с конечной длиной ма-
машинного слова, что может поставить под сомнение выводы, полу-
полученные с их помощью [6, 14, 16. 17|.
Многомерные рекурсивные системы 241
4.3.3. Влияние полинома-числителя
на устойчивость
В одномерном случае, если полином-числитель и полином-
знаменатель передаточной функции не имеют общих множителей,
устойчивость фильтра зависит только от расположения его по-
полюсов. Однако в случае двумерных фильтров числитель может
влиять на устойчивость фильтра. В качестве примера рассмотрим
следующие три передаточные функции [201:
' D'87)
»•<*¦»-t%t:?-
Как было показано в предыдущем разделе, фильтр Fz нестабилен.
Функции Gz и Hz имеют такой же полином-знаменатель, как и
Fz, тем не менее фильтр Gz стабилен, a Hz нет. При внимательном
рассмотрении можно видеть, что единственной точкой на биокруж-
биокружности или внутри ее, в которой полиномы-знаменатели равны нулю,
является точка z1 = z2 = 1. Полиномы-числители функций Gz
и Hz также равны нулю в этой точке. Таким образом, как Gz,
так и Hz обладают несущественной особенностью второго рода
на единичной биокружности. Эта ситуация графически изображена
на рис. 4.24. Одно из изображений полюса и одно из изображений
нуля на соответствующих диаграммах корней касаются в точке,
находящейся на единичной биокружности. Интуитивно кажется,
что устойчивость фильтра связана со степенью касания. В на-
настоящее время не имеется общих и прямых средств для определе-
определения, является ли устойчивой передаточная функция, не имеющая
полюсов вне единичной биокружности и имеющая несущественную
особенность второго рода на единичной биокружности. Однако
Гудмен [20] установил устойчивость фильтра D.88) и неустой-
неустойчивость фильтра D.88). Теоремы об устойчивости, сформулирован-
сформулированные в предыдущих разделах, являются просто достаточными
условиями устойчивости для случаев нетривиального полинома
в числителе. Они являются необходимыми условиями устойчи-
устойчивости только в случае отсутствия несущественных особенностей
второго рода на единичной биокружности.
16 Даджиои Д., Мерсеро Р.
242 Глава 4
lm[z
Изображение
нуля
Изображение
полюса
Рис. 4.24. Несущественная особенность второго рода на единичной биокруж-
ности.
4.3.4. Многомерные теоремы об устойчивости
Все теоремы об устойчивости предыдущего раздела можно
обобщить на многомерный случай. Хотя формулировка этих тео-
теорем очевидна, их практическое использование далеко не очевидно.
Объем вычислений и необходимость сохранения точности вычисле-
вычислений делают практическое использование теорем об устойчивости
более высокого порядка серьезной проверкой искусства програм-
программиста. Как и в двумерном случае, следует рассмотреть много-
многомерные аналоги тестов на устойчивость только для первого ква-
квадранта, поскольку любой М-мерный фильтр с опорной областью
в виде сектора можно отобразить на фильтр с опорной областью
на Л1-мерном аналоге первого квадранта.
Теорема (Джастис и Шэнкс [8J). Пусть Hz (zly z2, ..., zv) ¦¦¦-
= \/Вг (zlt z2, ..., zu) является рекурсивным фильтром первого
квадранта, т. е. h (nlt n2, ..., nu) — 0 везде, кроме гсх rgs 0, tu ;>
^ О, ..., я,г 5:0. Этот фильтр устойчив тогда и только тогда,
когда В (zx, z2, ..., zlf) Ф 0 для любой точки {гъ z2, ..., z_u),-
такой, что- \zl | ^s 1, или |z2| ^ 1, или .... или \ziT\ ^ 1.
Двумерная теорема об устойчивости Хуанга была обобщена на
многомерный случай Андерсоном и Юри [21 ].
Теорема (Андерсон и Юри). Пусть Hz (zx, z2, ..., z_v) ---
= \/Bz (гъ z2, ..., zM). является рекурсивным фильтром первого
Многомерные рекурсивные системы 243
квадранта. Такой фильтр устойчив тогда и только тогда, когда
выполняются следующие условия:
Bz(zlt 0, ... , 0)^0 при IzJssO,
fi,(zlf z2, ... ,0)^=0 при | z? | = 1 и |г2|2з0
Bz (Zv Z.2, ... , 2,u_!, 0) ф 0 ПРИ I Zl I = • • • = I ZM_2 | = 1
и I znr_! | 2э 0,
И I 2nf | ^s 0.
Af-мерный вариант теста Де Карло—Стринтциса очень похож на
двумерный. Он был открыт одновременно Де Карло и др. [12]
и Стринтцисом [131.
Теорема (Де Карло—Стринтцис). Пусть Hz (zlt z2, ..., z.v) =
= l/Bz (zj, z2, ..., гЛГ) является рекурсивным фильтром первого
квадранта. Такой фильтр устойчив тогда и только тогда, когда
выполняются следующие условия:
а) Bz (zj., z2, . . . , zu) Ф 0 для | zx | = 1, | га | = 1, .. . , | zu | = 1,
б) ВД1, 1, . . . , zh 1, . . . , 1) =7^ 0 для | zh | 2г 1 для каждого
fe= 1, 2, ..., М.
Эквивалентное утверждение состоит в том, что развернутая фазо-
фазовая функция ф ((Оц ..., шЛ/) должна быть периодической и не-
непрерывной.
Согласно этой теореме, тест на устойчивость состоит из М
одномерных тестов на устойчивость и исследования нулей на
М-мерной единичной поверхности \zt\ — |г.>| = ... = |гЛГ| = 1.
Если функция Hz (zi, z2, ..., zM) имеет полином-числитель
Az (zu za, .... гЛГ), взаимно простой с В (г1р г», ..., г„), то эти
теоремы являются достаточными условиями устойчивости. Они
являются необходимыми в том случае, если на М-мерной единич-
единичной поверхности не имеется несущественных особенностей второго
рода.
4.4. Двумерный комплексный кепстр
Рассмотрим теперь многомерный комплексный кепстр. Подобно
своему одномерному аналогу [221, многомерный комплексный
кепстр сигнала является последовательностью, полученной путем
обратного z-преобразования комплексного логарифма г-преоб-
разования сигнала. Термин «кепстр» был введен в работе [23]
16*
244 Глава 4
как обозначение того, что он является инверсией логарифмического
спектра. Комплексный кепстр (или для краткости просто кепстр)
потенциально полезен при многомерной фильтрации и для обра-
обращения линейных систем, но, что более важно, он дает аналитиче-
аналитические средства, которые оказались полезными при анализе устой-
устойчивости и факторизуемости многомерных передаточных функций.
4.4.1. Определение комплексного кепстра
Пусть х (п1, п2) — двумерная последовательность с z-преоб-
разованием Xz (zx, z2), сходящимся в некоторой области сходи-
сходимости R. Тогда двумерный комплексный кепстр, обозначаемый
через St (пъ п2), определяется как обратное г-преобразование
In Nz.(zu z2), т. е.
* К- "*) = j^kr $ $ln Xz(Zb Z2)z~'z22~'dz' dz* D-90)
Заметим, что выражение In Xz (гь г2) содержит комплексный
логарифм, который является многозначной функцией вследствие
того, что фаза комплексного числа определяется по модулю 2я.
Чтобы можно было вычислить обратное г-преобразование, функция
In Xz (Zj, z2) должна быть аналитична в некоторой области.
Для этого необходимо определить комплексную логарифмическую
функцию таким образом, чтобы In Xz (zx, z2) был однозначным,
непрерывным и дифференцируемым. Эту проблему мы рассмотрим
в разд. 4.4.2.
Комплексный кепстр свертки двух сигналов является суммой
комплексных кепстров двух сигналов. Например, пусть
y(nlt л2) = Б ? h(klt *2)*("i - klt n, - k2). D.91)
Тогда Yz(Zl, г,) = Я2B1, z2)Xz(zlt г2), D.92)
поэтому In Yzfa, z2) = \nHz(zlt z2)-\-\nXz(z1, z.2). D.93)
Отсюда, используя обратное z-преобразование, получим, что
х, п2). D.94)
Благодаря этому свойству комплексный кепстр полезен при изуче-
изучении передаточных функций, являющихся произведением некото-
некоторых сомножителей. Например, если
Hzfr, zt)~ ВАг^ 4)Dz(^ ч) , то D.У5)
h («!, л,) = а (п1, По) -- Ъ (ль л.,) }- с {пъ л2) — d (лх, л2). D.96)
Многомерные рекурсивные системы 245
Для разделимой передаточной функции типа
Hz(zl,z2) = Fz(z1)Gz(z2) D.97)
можно показать, что комплексный кепстр имеет вид
й («1, п2) = Г К) б (л2) + й М б Ы- D.98)
4.4.2. Существование комплексного кепстра [24]
Не каждая двумерная последовательность х (гс1; гс2) имеет
комплексный кепстр. Чтобы комплексный кепстр существовал,
необходимо, чтобы функция In Xz (zlt z2) была аналитичной
в некоторой области сходимости R. Это означает, что функция
In Xz (zlt z2) должна быть непрерывной, дифференцируемой и
периодической при движении z1 и z2 по замкнутому контуру. Раз-
Разберем частный случай, когда контурные интегралы в выражении
D.90) берутся по единичной биокружности \z1\ = |z2| = 1.
Тогда выражение D.90) принимает вид
2л 2л
х (пи п2) = -г^г J J In X («!, щ) ехр Ow^i + /ш2я2) dc^ dw2.
; о о
D.99)
Функция X (т1, ш2) = In X (ш1; ш2) должна быть непрерывной,
дифференцируемой и дважды периодичной по переменным ю1
и (Og. Записав функцию X (а1г ш2) в полярных координатах,
получим, что
X(wlt щ) = 1п\Х(щ, со2)|+/ф((о1, со2), D.100)
Функция X (о)!, ш2) будет непрерывной и дифференцируемой,
если в качестве ср (щ, ш2) взята развернутая фазовая функция
(разд. 4.3.2) и если функция X (ш1; ш2) конечна и не равна нулю.
Требование двойной периодичности X (щ, ш2) эквивалентно,
таким образом, требованию, чтобы развернутая фазовая функция
Ф (щ, ш2) была дважды периодичной. Мы покажем, что если это
не так, то ее можно записать как сумму периодической и линейной
фазовых компонент. Линейную компоненту можно устранить
путем формирования новой последовательности у (п1г гц), являю-
являющейся просто сдвинутой копией х (nlt rc2). Поскольку развернутая
фазовая функция последовательности у (пъ п2) периодична и не-
непрерывна, для у (п1, п2) можно определить комплексный кепстр.
Для простоты предположим, что х (пъ п2) — последователь-
последовательность конечной протяженности, так что функция X (а1г ш2)
является просто тригонометрическим полиномом. Примем, что
X (а)]., ш2) Ф 0. Тогда, рассматривая параметрическую функцию
X [ш2 Ион), можно попытаться определить полное приращение
246 Глава 4
развернутой фазы при изменении переменной <aL в пределах
О—2я при фиксированном значении переменной ш2. Принцип
аргумента дает, что полное 'изменение будет равно 2nKi («i),
где Кх (о)]) — целое число, зависящее от количества корней
Хг [е''*» \ (zj) внутри единичной окружности zr. Поэтому
cp.v Bл, со2) = фЛ @, coj) + 2nKt К). D.101)
Аналогично можно получить выражение
фЛ- К, 2я) = ц>'х {щ, 0) + 2я/С2 К). D.102)
Если К\ (<л2) KaK функция ш2 не является константой, то с изме-
изменением переменной щ количество корней Xz [е'м> I \z^) внутри
единичной окружности zl должно изменяться. Это может произойти
только в том случае, когда корень перемещается изнутри единич-
единичной окружности наружу или наоборот. В любом случае траек-
траектория корня должна содержать точку, лежащую на единичной
окружности, поскольку перемещение корня при изменении пере-
переменной ш2 носит непрерывный характер. Однако это противоречит
первоначальному допущению, что X ((й1, ох2) Ф 0. Следовательно,
Ki (to,) и аналогично /С2 (wj — целочисленные константы, кото-
которые мы обозначим просто через Ki и /С2. Теперь рассмотрим по-
последовательность
у К, п2) йх(П1- Кг, п2 - Кг), D-103)
являющуюся просто сдвинутой копией х (пъ п2). Преобразова-
Преобразование Фурье последовательности у (пи п2) описывается выражением
Y ((й1? ш2) -= X (ш1( ш2) ехр (—jtuiKi — /w2/C2)- D.104)
Следовательно, развернутую фазу Y ((й1, ш2) можно записать
в виде
фу («!, Ш2) = фх («!, Ш2) — (Oi/Ci — W2/C2,
причем фу ((%, ш2) удовлетворяет соотношениям
Фу Bя, ш2) — фу @, ш2), D.105а)
Фу («!, 2я) = фу («!, 0). D.1056)
В общем случае можно показать, что фу ((а1, ш2) непрерывна и
дважды периодична, так что функция Y (iolt w2) удовлетворяет
необходимым условиям определения комплексного кепстра
У К. пг)
л л
У (пъ по) = -^ \ \ |1п | У (wj., ш2) | f /фу (ыъ ш2)} х
— я —я
X ехр (/о)^ + /w2n2) du>i dw2. D.106)
Многомерные рекурсивные системы 247
4.4.3. Каузальность, минимальная фаза
и комплексный кепстр
При обработке одномерных сигналов весьма плодотворной
является концепция сигнала с минимальной фазой (или сигнала
с минимальной задержкой [22]). Такие сигналы имеют некоторые
интересные свойства: они каузальны, все их полюсы и нули
лежат внутри единичной окружности, большая часть их энергии
сосредоточена вблизи начала координат (задержка минимальна),
они абсолютно суммируемы, для них существуют сигналы с об-
обратным спектром, которые также каузальны и абсолютно сумми-
суммируемы. Можно показать, что для одномерного сигнала с мини-
минимальной фазой существует комплексный кепстр, и этот кепстр
также каузален и абсолютно суммируем.
Можно ввести и определение сигналов с максимальной фазой.
Это просто сигналы с минимальной фазой, обращенные во вре-
времени. Сигнал с максимальной фазой антикаузален, его инверсия
и комплексный кепстр также антикаузальны.
В общем случае любой абсолютно суммируемый сигнал, сдви-
сдвинутый соответствующим образом во времени, можно записать
в виде свертки сигнала, имеющего минимальную фазу, с сигналом,
имеющим максимальную фазу. Следовательно, его комплексный
кепстр будет суммой каузальной и антикаузальной частей и,
таким образом, будет абсолютно суммируемым.
Каузальность и антикаузальность связаны с одномерными
опорными областями. В одномерном случае можно утверждать,
что если абсолютно суммируемый сигнал обладает абсолютно
суммируемой инверсией, занимающей ту же опорную область,
комплексный кепстр будет тоже занимать ту же опорную область.
Следовательно, абсолютно суммируемый кепстр, имеющий неко-
некоторую опорную область, соответствует абсолютно суммируемым
сигналу и инверсии с той же опорной областью. Для сигналов
с минимальной фазой эта область соответствует неотрицательной
части оси времени, для сигнала с максимальной фазой — непо-
неположительной части оси времени.
Соотношения между опорными областями сигнала, его инвер-
инверсии и кепстра непосредственно распространяются на двумерный
случай [25]. Пусть X (ю1( со2) = In X (ci^, co2). Тогда
дХ (<*>!> <"г) ^ 1 ЭХ ((Ot, <aa) D.107)
da>i X (%, (в2) dft>i '
Выполнив обратное преобразование Фурье выражения D.107),
можно найти, что
пх^(п1( п2) = U U M(&i> *2)^(«i — ku щ — k2), D.108)
248 Глава 4
где и (nlt п2) является инверсией х (пъ п2), полученной путем
обратного преобразования Фурье функции 1/Х (шь ш2). Ана-
Аналогично можно получить выражение
п2?{пъ «2)=SS k2x(klt fe2)^(«i — К n2 — k2). D.109)
При внимательном рассмотрении выражений D.108) и D.109)
можно убедиться, что опорная область ? (гсь п2) определяется
опорными областями х {пъ п2) и его инверсией и (пъ п2). Напри-
Например, если и х (п1, п2), и и (пъ п2) имеют опорную область только
в первом квадранте, ту же опорную область будет иметь и ? (пъ п2),
поскольку свертка последовательности из первого квадранта с дру-
другой последовательностью из того же квадранта дает последова-
последовательность из первого квадранта. Аналогичные геометрические
соображения, касающиеся опорной области свертки двух сигна-
сигналов, можно привести для других квадрантов и полуплоскостей,
а также для опорных областей в форме сектора.
Нетрудно также показать, что опорная область комплексного
кепстра заключает в себе опорные области сигнала и его инверсии
[2, 25]. Поскольку
X К, со2) = ехр [X (col со»)], D.110)
то разложением экспоненты в ряд можно получить следующее
выражение:
оо
2T^Vi> «2). D.111)
Выполнив обратное преобразование Фурье обеих частей уравне-
уравнения, получим
оо
2r^(nit )> DЛ12)
где 6h(rii, n2) — последовательность, полученная k раз повторен-
повторенной сверткой ? (пъ п2) со своей копией. Следовательно, опорная
область ? (nlt п2), свернутая со своей копией бесконечное коли-
количество раз, является опорной областью х (пъ п2). Поскольку
V 0°ь Ш*) = X (coi, со2)
то опорную область и (гсь п2) можно получить тем же способом.
Можно определить многомерный сигнал с минимальной фазой
как абсолютно суммируемый сигнал, инверсия и комплексный
Многомерные рекурсивные системы 249
кепстр которого также абсолютно суммируемы и имеют ту же
опорную область. Последняя должна быть открытой областью,
такой, как квадрант, клин, несимметричная полуплоскость или
правильная полуплоскость. В задачах обработки многомерных
сигналов опорная область должна входить в любое определение
минимальной фазы.
4.4.4. Разложение спектра на множители [2]
Кепстр полезен как средство решения трудной задачи факто-
факторизации двумерных спектров. Эта задача возникает при синтезе
и реализации БИХ-фильтров, которые детально будут рассмо-
рассмотрены в гл. 5. Задачу факторизации спектра можно сформулиро-
сформулировать разными способами. В пространственной области можно
описать ее с помощью вещественной симметричной автокорре-
автокорреляционной последовательности конечной протяженности г (п^ гс2),
фурье-спектр которой R ((%, ш2) является положительно опреде-
определенной функцией. В идеале необходимо отыскать вещественную
последовательность конечной протяженности и с минимальной
фазой Ь (п±, гс2), такую, что
г (nlt гс2) = b (nlt гс2) * * b (—nlt —па). D.114)
Аналогично в частотной области отыскивается такая функция
В (wl7 ы2), что
ЯК, «2) = |ЯК, оJ)|2. D.115)
Если бы не существовало ограничения, что Ь (п^ гс2) должна
быть последовательностью с минимальной фазой, можно было бы
положить
В (а)!, ш2) = ¦/# (а)!, ш2) ехр [/ф (а)!, ш2)], D.116)
где ф (ш1, ш2) — произвольная фазовая функция. Однако с учетом
указанного ограничения необходимо выбирать фазовую функцию
так, чтобы она была функцией с минимальной фазой фМф ((%, ш2).
Но даже и это в общем случае не гарантирует, что Ь (п1, м2) будет
иметь конечную протяженность. Можно также сформулировать
задачу факторизации спектра в области г-преобразования, выпол-
выполнив г-преобразование выражения D.114). В результате получим
уравнение
R2(zu z2) = B2(zu z2)Bz(zTl, zVl), D.117)
для которого отыскивается решение Вг (г1т г2), являющееся дву-
двумерным полиномом с минимальной фазой.
Проблему факторизации спектра в одномерном случае можно
сформулировать подобным образом, но в отличие от ее двумерного
250 Глава 4
аналога ее можно решить с помощью основной теоремы алгебры.
Кратко остановимся на этом вопросе, поскольку здесь отчетливо
проявляется существенная разница между одномерными и дву-
двумерными случаями цифровой обработки сигналов. В одномерном
случае мы имеем дело с симметричным полиномом вида
"?' n)z-n D.118)
со следующими свойствами: Rz (г) = Rz (г) и Rz (е'и) •> 0.
Необходимо найти такой полином с минимальной фазой Bz (г)
вида
N—1
Вг(г)= И b(n)z~n, что D.119)
Rz(z) = Bz(z)Bz(z-i). D.120)
Основная теорема алгебры позволяет записать Rz (z) в виде
произведения
Rz(z)=A ПA-?(ОA-?,г), D.121)
где А — положительная вещественная константа, а корни \qt\
удовлетворяют неравенству
|?i|<1. D.122)
Искомый одномерный спектральный множитель Bz (z) с мини-
минимальной фазой получается простым выбором корней уравнения
D.121), лежащих внутри единичной окружности |г| = 1. Таким
образом,
В:(г) = ^1'ПA-гЫ D.123)
I- 1
что удовлетворяет условию D.120). Заметим, что последователь-
последовательность b (л), соответствующая обратному г-преобразовапию функ-
функции D.123), является каузальной, минимально-фазовой и обла-
обладает конечной протяженностью, как и требуется. В общем случае
из-за невозможности разложить двумерный полином и получить
его сомножители, описанный выше метод разложения спектра
нельзя распространить на два измерения. Например, рассмотрим
двумерную положительную вещественную функцию
R (щ, со2) = 5 + 2 cos щ + 2 cos co2 > 0 D.124)
или соответствующий полином в г-области
Rz(?u z2) = 5 4 z, f гГ' i z2 + z7'. D.125)
Многомерные рекурсивные системы 251
Например, такой двумерный полином вида
Вг(ги z-S) = a \- bzT1 \-czT1 + dzj]V. D.126)
что Rz(zu z2) = Bz(zu г2)Вя(гГ1, Ч'), D.127)
так же как и любое другое аналогичное конечное выражение,
найти невозможно. Однако существует разложение Rz (zlt z2)
на трансцендентные множители, удовлетворяющие условию
D.127), но при этом множитель В2 (zb z2) будет содержать беско-
бесконечное число членов.
Разложение Rz (zlt z2) на трансцендентные множители можно
получить путем перехода от выражения D.114) к кепстрам с ис-
использованием описанных выше свойств комплексного кепстра.
Мы видим, что кепстр последовательности г (п1, п2) можно записать
следующим образом:
г (л!, пг) = Ъ (пи п2) + б (— лх, — п2), D.128)
где г («!, л2) можно вычислить по формуле
г («!, п2) = -jij- J | In [R (cu!, (o2)] exp O'toirti +
D.129)
Поскольку R ((Oj, ш2) — вещественная и положительная функция,
то при вычислении ее логарифма неопределенности не возникает;
проблемы развертывания фазы, связанной с комплексным лога-
логарифмом,, в этом случае также не возникает.
Как было показано в разд. 4.4.3, двумерная последователь-
последовательность b (n1, п2) с опорной областью в одном квадранте является
последовательностью с минимальной фазой, если ее кепстр Ъ (пъ п2)
имеет опорную область в одном квадранте. Подобный результат
можно получить и для последовательности с опорной областью
в несимметричной полуплоскости. Например, если
bip.^ n.2)—0 для п2<с0
и для пг = 0, п1<0, D.130)
то b (nlt n2) является такой последовательностью с минимальной
фазой, что
Ь{пг, п2) = 0 для л2<0
и для я2 = 0, П1<0. D.131)
Если мы потребуем, чтобы последовательность Ь (л1т п2) имела
форму несимметричной полуплоскости согласно D.130), то после-
252 Глава 4
довательности Ъ («1( п2) и Ъ (—nlz —п2) будут перекрываться
только в начале координат. Из выражения D.128) видно, что
пх, п2) для п2 >• О
и для п2 = 0, г
b (nlt п2) =
0) для
0 в остальных случаях.
Последовательность b (nlz n2), соответствующая кепстру Ъ (nlz n2),
заданному выражением D.132), будет последовательностью с ми-
минимальной фазой с опорной областью в несимметричной полу-
полуплоскости, однако гарантии, что она будет иметь конечную про-
протяженность, нет. С другой стороны, если г (пъ п2) построить как
автокорреляционную функцию последовательности конечной про-
протяженности b (nlz п2) с минимальной фазой, то процедура разло-
разложения двумерного спектра на множители, описанная выше,
будет точно воспроизводить последовательность b (nlt n2) из по-
последовательности г (nlz п2).
Заметим также, что если b (nlz n2) является последователь-
последовательностью конечной протяженности с минимальной фазой и опорной
областью только в первом квадранте, то кепстр г (nlt n2) автокор-
автокорреляционной функции последовательности b (пг, п2) будет тожде-
тождественно равен нулю во втором и четвертом квадрантах:
г (nlt п2) = 0 для п2 > 0, пх < 0
и для пх > 0 и п2 < 0. '
Следовательно, выражение D.133) является необходимым усло-
условием существования спектрального множителя, соответствующего
последовательности b (nlt n2) конечной протяженности с опорной
областью в первом квадранте. Поскольку опорные области в форме
сектора можно отобразить на первый квадрант с помощью линей-
линейных преобразований, существуют аналогичные необходимые усло-
условия того, что b («!, п2) является последовательностью конечной
протяженности и минимальной фазы с опорной областью на
секторе.
*4.4.5. Вычисление двумерного комплексного
кепстра [26]
Рассмотрим два метода вычисления комплексного кепстра
двумерного дискретного сигнала х (nlt n2). Первый метод прибли-
приближенного вычисления прямого и обратного z-преобразований
с интегрированием по контуру единичной биокружности | гд_ | ^=
= \z2\ = 1 использует дискретное преобразование Фурье, реа-
реализованное посредством алгоритма БПФ. Кроме того, во избежа-
избежание искусственных разрывов, возникающих при использовании
Многомерные рекурсивные системы 253
основного значения фазы, необходим алгоритм развертывания
фазы. Вследствие использования ДПФ этот метод дает прост-
пространственно-наложенное приближение истинного комплексного
кепстра.
Второй рассматриваемый метод использует рекурсивную фор-
формулу для точного вычисления комплексного кепстра последова-
последовательности х (nlt п2) в том случае, когда она является последова-
последовательностью с минимальной фазой и опорной .областью в первом
квадранте. Если последовательность х (пх, п2) не является после-
последовательностью с минимальной фазой, то результат рекурсив-
рекурсивного вычисления неограниченно возрастает.
Первый метод вычисления двумерного комплексного кепстра
является попыткой непосредственного численного решения урав-
уравнения D.99). Реализация необходимых прямых и обратных пре-
преобразований Фурье требует двумерного БПФ, которое вычисляется
по алгоритму строка—столбец. Допустим, что последовательность
х (nlf п2), кепстр которой требуется найти, имеет конечную про-
протяженность. Ее опорной областью является прямоугольник
О <: пх < Mlf О <: п2 < М2. Добавляя к последовательности
х («!, п2) дополнительные отсчеты с нулевым значением, построим
последовательность с опорной областью 0 < пх < Nx, О < п2 <
< N2. Выполним (Л^ X Л^-точечное ДПФ этой дополненной
последовательности, получив в результате Л^Л^ отсчетов фурье-
спектра последовательности х (nlt n2). Как и раньше, обозначим
эти отсчеты следующим образом:
X(kj, k2) = X @)ь 0J) \e>l=2nkl/Nl . (
a2nk/N y
после этого нужно найти развернутую фазу X (klt k2) так, чтобы
соответствующим образом получить In X (klf k2). Если отсчеты
развернутой фазовой функции, обозначаемые ц>х (klt k2), будут
содержать линейные фазовые множители, их следует отбросить.
Отсчеты развернутой фазовой функции можно найти следую-
следующим образом. Во-первых, по формуле
где, очевидно, X — @, 0) = ? ? х(пх, п2),
находится начальное значение фазовой функции ц>х @, 0). Если
х (nlz n2) — чисто вещественная последовательность, то обычно
фаза (fx @, 0) принимается равной нулю. [В конечном счете так
или иначе возникает фазовая неопределенность, поскольку в фор-
формуле D.135) используется основное значение функции арктан-
арктангенса, однако эта неопределенность несущественна.]
254 Глава 4
Во-вторых, для разворачивания двумерной фазовой функции
применяется одномерный алгоритм, например алгоритм Триболе
[19]. Его можно рассматривать как «черный ящик» с одномерной
последовательностью х (п), .имеющей начальное значение фазы
фл- @) на входе и одномерным ДПФ X (k) с дискретной разверну-
развернутой фазовой функцией ц>х (k) на выходе. Алгоритм Триболе можно
использовать для разворачивания двумерной фазовой функции
вдоль линии k2 = 0, подав на вход одномерную последователь-
последовательность
%x(nlt щ) D.136)
0
с начальным значением фазы фА- @, 0). В результате на выходе
получим ^-точечное ДПФ X (k1, 0) и дискретную развернутую
фазовую функцию <рл- (klt 0), включая отсчет <рЛ- (Nlt 0). Теперь
можно получить значение линейной фазы в направлении klt
вычислив разность фаз
2л/Ci - Фл- (#1, 0) — Фл. @, 0). D.137)
После этого сформируем набор одномерных последовательностей
путем выполнения ДПФ-строк х (nlt м2). Это даст
Л1, —1
S(ku щ)А 2 а (я,, и,)^"^1. D.138)
/1,-0
Для каждого kx от нуля до А^ — 1 в качестве входных данных
для одномерного алгоритма развертывания фазы используется
S (&!, п2) (как функция п2) с начальным значением фазы фЛ- (klt 0).
На выходе получим X (klt &2) и дискретную развернутую фазу
фЛ- (klt k.z), включая отсчеты для k.2 ¦=- jV2. Развернутая фаза
исследуется на наличие линейной фазы в направлении k2. Раз-
Разность фаз
2л/С2 =-фЛ-(*1, ЛЛ.) q>.Y(*i. 0) D.139)
не должна зависеть от klt если фурье-спектр X (tOj, oJ) не обра-
обращается в нуль во всей области определения.
Теперь можно вычислить фазовую функцию
фу(*1. Л*) = Фл-(*1. kJ-^Кг-^Кг D.140)
для устранения линейных фазовых компонент, а также логарифм
амплитуды спектра
\n\Y(klt fe,)|- In | Л: (/Elt k2)\. D.141)
Многомерные рекурсивные системы 255
Наконец, выполнив обратное двумерное ДПФ, реализуем дискрет-
дискретный вариант формулы D.106)
9sa(nu П.2) ==^ ? ? {1П|У(*Ь W + №(kl, Щ X
/V1/V2 ft ,_-_() ft, --0
X W*1,1'*1 №*?•*'. D.142)
Индекс «so» при ysa (пъ «.,) служит для напоминания, что эта
последовательность является пространственно-наложенной ап-
аппроксимацией комплексного кепстра у (nlt п2), описываемого
выражением D.106). Две последовательности, ysa и у , связаны
соотношением
Уы(Пи rto) = Е Ц #(«1 f -jlNl, «2+/2^2). D.143)
Даже если л: (лх, л2) и, следовательно, г/ (пх, /г2) = * (^l — ^Сц
п2 — /С2) являются последовательностями с конечной опорной
областью, в общем случае комплексный кепстр у (пъ пг) будет
иметь бесконечную опорную область. Очевидно, что уяа (пъ п2)
будет хорошей аппроксимацией у (п1, /г2) только тогда, когда
у (tii, n-i) стремится к нулю при /гх -> Nx и пг-*¦ N2-
Если х (tii, >h) — сигнал с минимальной фазой и опорной
областью в первом квадранте, то комплексный кепстр можно
точно найти с помощью рекурсивной формулы. Рекурсию можно
выполнить, переписав D.107) в следующем виде:
DЛ44)
После обратного двумерного преобразования Фурье обеих частей
этого выражения получим
оо оо
2j 2j x(ni - ^i. п., - k.,) kiX (ki, k.,)~tiiX(ni, n.,). D.145)
{i i - -- — ОО k2™ ОО
Поскольку х (tii, n.2) имеет минимальную фазу и опорную об-
область в первом квадранте и, следовательно, х («х, п2) также имеет
опорную область в первом квадранте, то бесконечные суммы
в уравнении D.145) можно заменить конечными суммами. Тогда
получим
2] I! х (tii — ku «2 — k,) kiX (ki, k2) = tiiX (tii, пг). D.146)
/г,— 0 ft,-=0
Для упрощения выражений допустим теперь, что х (пъ п2) нор-
нормализована таким образом, что х @, 0) — 1. [Изменение масштаба
х (iii, п2) повлияет только на величину х @, 0) в комплексном
кепстре]. Тогда слагаемое при Aгъ k2) - (пъ п2) можно вынести
256 Глава 4
из-под знака суммы, а остальные члены вычесть из обеих частей
уравнения. В результате получим
л (**Х, '^2/ — \ 1' Я«>1 7 / X (*ti — "*Х> Я9 — ^*2/ '^
X kxx (к,ъ й2) для я1т^=0. D.147)
Аналогичным образом можно получить
«1 «2
? (Ях, я2) = х (Яц я3) / > л: (ях — klt п.2 — k.2) X
у b ? Ib b \ пп<я n =tfl /4 14Я\
Значение i @, 0) можно найти с помощью двумерной теоремы
о начальном значении, которая дает
х @, 0) = In* @, 0).
Ввиду использования комплексного логарифма фазовая часть
х @, 0) будет иметь неоднозначность, кратную 2я. Это та же
самая суммарная неоднозначность, что и при вычислении началь-
начальной фазы отсчета фх @, 0) в методе вычисления комплексного
кепстра с помощью ДПФ.
После того как найдено значение х @, 0), значение х @, я2)
можно получить рекурсивно из D.148), а значения х (пъ 0) —
из D.147). После этого оставшиеся значения х (пъ я2) для ях >0
и я2 > 0 можно определить по любой из рекурсивных формул.
Рекурсивный метод вычисления двумерного комплексного
кепстра имеет то преимущество, что он дает теоретически точный
результат, а не аппроксимацию с наложением, которую дает
метод ДПФ. Его очевидным недостатком является то, что он при-
применим только тогда, когда сигнал имеет минимальную фазу.
В общем случае заранее неизвестно, является ли на самом деле
сигнал сигналом с минимальной фазой. Если к сигналу с немини-
неминимальной фазой, имеющему опорную область в первом квадранте,
применить рекурсию вслепую, то найденный кепстр будет неогра-
неограниченно возрастать.
Упражнения
4.1. Двумерная система описывается разностным уравнением
у (яь я2) — 0,9г/ (Ях, и2 — 1) + 0,5г/ (пх - 1, щ — 1) =
= X (Ях, По).
Многомерные рекурсивные системы 257
Найдите у (nlt п2) для 0 <: nY < 3, О <: п2 <: 3, если х (%, п2) —
= б (rtj, n2), принимая во внимание,.что у (п1, п2) ~ 0 для пх < О
или п2 < О.
4.2. Рассмотрим рекурсивно вычислимый цифровой фильтр
с выходной маской, изображенной на рис. У4.2. Эта маска соот-
соответствует разностному уравнению
У («1. «г) + аУ («1 — 1, «2 — 1) + by («I, n2 — 1) +
— 1) = х (п1г
Рис. У4.2.
а) Определите все допустимые для этой маски направления
рекурсии.
б) Определите опорную область импульсного отклика филь-
фильтра.
в) Найдите набор начальных условий, обеспечивающий ли-
линейность, инвариантность к сдвигу и рекурсивную вычислимость
этой системы.
4.3. Повторите задание предыдущего упражнения для филь-
фильтра с выходной маской, показанной на рис. У4.3.
Рис. У4.3.
258 Глава 4
4.4. Рассмотрим рекурсивно вычислимый двумерный фильтр,
выходная маска которого заключена в некотором секторе, а от-
отверстие маски находится в вершине сектора, как показано на
рис. У4.4.
Рис. У4.4.
а) Найдите опорную область результирующего фильтра для
тривиальной входной маски.
б) Найдите все возможные направления рекурсии.
в) Влияет ли (и если влияет, то как) форма заднего края
маски на результаты ответов пп. «а» и «б»?
4.5. На рис. У4.5 изображена несимметричная полуплоско-
полуплоскостная выходная маска.
а) Найдите такое преобразование переменных, чтобы в новой
системе координат этот фильтр можно было реализовать в виде
маски одного квадранта.
Рис. У4.5.
Многомерные рекурсивные системы 259
б) Постройте преобразованную выходную маску.
в) Найдите обратное преобразование, которое переводит маску,
определенную в п. «б», в маску, показанную на рис. У4.5.
г) Используя результат предыдущего пункта, определите, ка-
какие отсчеты на преобразованной выходной плоскости следует
вычислить, а какими можно пренебречь.
4.6. Рассмотрим несимметричный полуплоскостной фильтр
с выходной маской, представленной на рис. У4.5. Начальные
условия для этой маски приведены на рис. 4.6.
а) Изобразите граф упорядочивания, соответствующий этой
рекурсии. Ваш результат должен быть аналогичен графу на
рис. 4.10. за исключением маркировки узлов.
б) Граф упорядочивания, полученный в п. «а», можно полу-
получить из рис. 4.10 с помощью преобразования переменных. Найдите
это преобразование и покажите, что оно является преобразова-
преобразованием, обратным тому, которое отображает выходную несимме-
несимметричную полуплоскостную маску на маску одной четверти пло-
плоскости.
в) Используя результат п. «б», покажите, что граф упоря-
упорядочивания любого фильтра с опорной областью на секторе экви-
эквивалентен графу на рис. 4,10.
г) Для исходной маски, показанной на рис. У4.5, определите
соотношение упорядочивания, которое позволяет одновременно
вычислить максимально возможное количество выходных от-
отсчетов.
4.7. Найдите z-преобразование следующих двумерных мас-
массивов и определите связанные с ними области сходимости,
а) 6(aix,
в) х («!,
б)
п.);
пЛ ¦--
( 0 в остальных случаях.
4.8. Рассмотрим последовательность х {п1, л2), опорная об-
область которой представляет собой заштрихованную часть пло-
плоскости («J, п.,) на рис. У4.8.
Рис. У4.8.
17*
260 Глава 4
Пусть Xz (zx, z2) является двумерным z-преобразованием по-
последовательности х («х, /г2).
а) Если точка (z0,, z02) находится внутри области сходимости
Xz (zx, z2), какие еще точки обязательно будут находиться в об-
области сходимости?
в) Что можно сказать о наклоне границы области сходимости?
4.9. Одномерной последовательности h (n) соответствует z-
преобразование Hz (z), сходящееся при a <|z| < Ь. Определите
z-нреобразование и область сходимости последовательности
g (/?!, /72) = h («! + Л3) h (Пу — «,).
4.10. Некоторые свойства z-преобразования были сформу-
сформулированы в настоящей главе без доказательств.
а) Выведите следующие свойства z-преобразования Xz (гъ z2)
последовательности х (п1у п2):
1. х* (пи n2)<-XZ(zU z'j).
zr, z2*)].
2.
3.
4.
5.
6.
7.
Re[x(«b «г)]*-*
lm[x(ti\, П2)] •>->
V ^f? i f7 ^ d > 3
л l't]i 2/ ' ¦*
Л 1 """~'/Z|^ *^2/ *~~
б) Выведите теорему
¦ M-Mzi.
U(*u zTl).
»хМ\ zi
z2, zx).
Парсеваля
x(«l, «2) f/ (rtl, «2) —
/ij= — 00 /12=^ — 0°
C2 c,
4.11. Рассмотрим двумерную передаточную функцию
Яг (Zj, Z2) = -: n ^1 гггт ,
1 tZ2j O2o CZ| 2.,
где a, b и с — действительные коэффициенты.
Многомерные рекурсивные системы 261
а) Напишите алгебраическое выражение для траектории корня
в плоскости z2, т. е. найдите такое выражение вида
чтобы знаменатель Hz (е'ш'} z2) был равен нулю.
б) Покажите, что для устойчивости Hz (zx, z2) необходимо, чтобы
Ь — с
1 —а
<1 и
1
в) Сможете ли вы найти какие-либо другие необходимые ус-
условия? (Указание. Рассмотрите траекторию корня в плоскости zv)
4.12. Предположим, что двумерное z-преобразование после-
последовательности h (п1} п2) равно Hz (zlt z2) = \/Bz (zx, z2). В этом
случае диаграмма корней Н (zx, z2) описывается алгебраическими
соотношениями
Bz(zlt ?/«*¦) = 0; Вг(е1^, z2) - 0.
а) Определите новую последовательность g (п1, п2) = h (nlt
п2) anibn', где а и b — комплексные константы.' Напишите выра-
выражение для Ьг (zx, z2) через Bz (zlt z2).
б) Предположим, что Hz (zlt z2) = 1/A + z1 + z2). Изобразите
диаграмму корней для Gz (z1} z2). Укажите точки на диаграмме
корней плоскости z2, соответствующие о^ — 0, и аналогичные
точки на диаграмме корней плоскости zl, соответствующие ю2 = 0.
в) Примем, как и в п. «б», что Hz (zlt z2) = 1/A + zx + z2).
Постройте диаграмму корней Gz (zlt z2), указав, как это делалось
в п. «б», точки, в которых щ — 0 (г2-плоскость) и ш2 = 0 (zt-
плоскость), для следующих значений а и Ь:
1) а = 1, b = Vs! 2) а - 2, b = у; 3) а = у^, 6 = -3//4.
4.13. Определите обратное z-преобразование указанных ниже
передаточных функций, принимая во всех случаях, что область
сходимости включает двумерную единичную биокружность:
а) #Л*1- г2) = 7_^-__ ;
б) я,Bk, г,) = 1_
в) Яг(^, gg) = 1._агг
4.14. Одним из способов определения передаточной функции
системы из направленного графа является следующий: определяют
последовательность на выходе каждого суммирующего узла,
в каждом узле записывают соответствующее выражение в области
262 Глава 4
z-преобразования и затем, объединяя эти выражения, исключают
все переменные, кроме входных и выходных. Используя этот
подход, найдите передаточные функции двух систем, изображен-
изображенных на рис. У4.14.
Рис. У4.14.
4.15. Каждый направляющий граф соответствует разностному
уравнению или семейству разностных уравнении. Эти разностные
уравнения можно найти путем определения последовательностей
на выходе каждого узла суммирования и записи разностного
уравнения в каждом узле суммирования. Используя этот метод,
определите разностные уравнения, соответствующие двум схемам
упр. 4.14.
4.16. Докажите, что двумерный разделимый рекурсивный
фильтр первого квадранта Н. (Zj, г.,) --- И1 (г,) Н2 (г2) устойчив
тогда и только тогда, когда Их (zt) и Н2 (г2) соответствуют пере-
передаточным функциям устойчивых каузальных одномерных
фильтров.
4.17. Установите, устойчивы или нет следующие фильтры:
а) На (гх. z2) - -rrjnn
1+0,927l
I. *г) =- -т
+0,9гг' — 0,81г7'27-
х. г2) = -Г-^-т—^-^__-
б) Нь\
в) Н,, |
4.18. Предположим, что импульсный отклик h (пг, я3) рекур-
рекурсивного фильтра имеет опорную область только в первом ква-
квадранте и что Н. (z1; z2) = \/B, {zx, г.,). Чтобы последовательность
h {ny, яй) представляла собой импульсный отклик устойчивого
фильтра, необходимо и достаточно, чтобы
ВЛе'40», е'^АфО, BJz,, \')ФО для |г, \::> 1 и
для
Многомерные рекурсивные системы 263
а) Предположим, что с помощью следующего линейного
отображения:
1. _
сформирован новый импульсный отклик g (т1, т.г) = h {nx, »2).
Постройте опорную область g Ц, т2).
б) Пусть Gz (wlt w2) й-. \/С: (wlt w2). Как связаны между собой
С- (wlt w,,) и Б, (гт, г2)?
в) Каким условиям должна удовлетворять Сг (w1, w2), чтобы
отклику (щ, щ) был импульсным откликом устойчивого фильтра?
4.19. Предположим, что х (nlt n.,) = a"'bn'u (nr, п„), где
\а\ < 1 и \Ь\ < 1.
а) Напишите выражение для X, (г^ г2). Начертите область
сходимости X. (г1? г2) в плоскости (In | ^j |, 1п|г2|).
б) Определите г/(т^ т2) =х{п1, п2), если координаты^, т2)
и (пх, п2) связаны следующим линейным отображением:
2 1
т.,
1 1
По
Постройте опорную область у (т1, т.г).
в) Пусть
Выведите уравнение, связывающее Yz (wlt x',2) и Хг Bt, г2). Начер-
Начертите в плоскости (In j и-'i |, in I w2 \) область сходимости Yz (wx, w2).
r) Пусть X (u\, uJ) '>- Xz (e'10», e'bi^) и q^ (%, ю2) — развер-
развернутая фазовая функция. Покажите, что (fx (щ, оJ) можно запи:
сать в виде ц>± (щ) -f ц.2 (ш2). Покажите, что ср* (©j, ш2) является
непрерывной, нечетной и дважды периодичной.
д) Пусть Y (л'-l, v2) 4 Fz (e'vi, c'v2) и rpy (vt, v2) — развернутая
фазовая функция. Выведите соотношение, связывающее сру (vb v2)
и фх (coj, co2). Покажите, что фу (v,, v2) непрерывна, нечетна и
периодична.
4.20. В разд. 4.4.1 указано, что если
/г («!, пг) --¦= f (nj g(n2),
то кепстр Л («!, /г2) описывается выражением
h (л!, п2) = f («г) б (n2) -I- g (nt) б (п,),
где f (ftj) — одномерный комплексный кепстр / (п-^), a g (ai2) —
одномерный комплексный кепстр g (п2). Докажите правильность
этого утверждения.
264 Глава 4
4.21. Пусть &(tii, n'.,) — комплексный кепстр последователь-
последовательности х (пъ По). Определите комплексный кепстр g (тх, пг2),
где g (тх, т.У) — х (nlt п2); т1 = Апх -f Вп„; т2 = Спг + D«2
и AD — БС =- 1.
4.22. В этой главе не рассматривались рекурсивные системы
для вычисления последовательностей с гексагональной дискрети-
дискретизацией. Тем не менее такие системы можно определить. Они ока-
оказываются совершенно подобными своим прямоугольным анало-
аналогам. На рис. У4.22 приведены две выходные маски для рекурсив-
рекурсивных систем с гексагональной дискретизацией. Система, показан-
показанная на рис. У4.22, а, называется маской одной трети плоскости,
а показанная на рис. У4.22, б, — маской одной шестой плоскости.
Рис. У4.22.
а) Определите все возможные направления рекурсии для
маски одной трети плоскости.
б) Определите опорную область импульсного отклика филь-
фильтра, приняв во внимание, что система линейна и инвариантна
к сдвигу и что во входную маску попадает только один отсчет
в начале координат (т. е. что числитель системной функции —
ненулевая константа).
в) Проделайте задания пп. «а» и «б» для выходной маски
одной шестой плоскости.
г) Найдите линейное преобразование координат, превращаю-
превращающее маску одной трети плоскости, представленную на рис. У4.22,а,
в фильтр одной шестой плоскости.
4.23. г-Преобразование гексагонально-дискретизованного сиг-
сигнала можно определить следующим образом:
х(т,
i~~—оо П2=:—
а) Используя это определение, установите связь между
г-преобразованием и преобразованием Фурье Xv (Qx, Q2) сигнала
с гексагональной дискретизацией.
Многомерные рекурсивные системы 265
б) Две ЛИС-системы (прямоугольная и гексагональная) имеют
одну и ту же передаточную функцию
Я (г г ) = Лг (Zl' ^
Как связаны между собой частотные отклики этих систем?
в) Известно, что прямоугольная система, рассмотренная
в п. «б», устойчива. Достаточно ли этого для устойчивости гекса-
гексагональной системы? Объясните свой ответ.
4.24. Рассмотрите сигнал первого квадранта
ln^n'U(tlx, П2),
где \а\ + \Ь\ < 1. Покажите, что комплексный кепстр St (пх, n2s)
описывается выражением
(nlt пДФ@, 0),
0, («!, п2) = @, 0), «!<0 или п2<0.
При доказательстве используйте следующую последовательность
этапов:
а) Выведите замкнутое выражение для Xz (zx, 22).
б) Покажите, что для произвольной последовательности s (%,
n2) nxs (пх, п2) ~ — zx -щ- Sz {zx, г2).
д —
в) Выведите выражение для —Zj-j-Xz (zx, z2), используя
тот факт, что X.z (zx, г2) — In [Xz (zx, г2)].
г) Вычислите пх& (пх, п2), п%? (пх, п2) и наконец k (nv n2).
Глава 5
Синтез и реализация
двумерных БИХ-фкльтров
В этой главе рассматриваются способы реализации двумерных
БИХ-фильтров (цифровых фильтров с импульсной характеристи-
характеристикой бесконечной протяженности), а также некоторые приемы
определения параметров фильтра, соответствующих заданным
характеристикам. Как было показано в гл. 4, входной и выходной
сигналы двумерного БИХ-фильтра удовлетворяют линейному
разностному уравнению с постоянными коэффициентами, кото-
которое дает возможность вычислить значение выходного отсчета по
значениям входных отсчетов и ранее вычисленных выходных
отсчетов. Поскольку в определении значений последующих вы-
выходных отсчетов используются значения предшествующих им
отсчетов, двумерные БИХ-фильтры, как и их одномерные ана-
аналоги, могут быть неустойчивыми.
К достоинствам БИХ-фильтров относится возможность сокра-
сокращения объема вычислений по сравнению с соответствующими
им КИХ,-фильтрами. Использование значений выходных отсчетов
позволяет уменьшить число коэффициентов (и сократить объем
вычислений) при реализации фильтрации. С другой стороны,
при создании БИХ-фильтров можно столкнуться с некоторыми
проблемами реализации и потери устойчивости, не характерными
для КИХ-фильтров. По этой причине, прежде чем перейти к во-
вопросам синтеза двумерных БИХ-фнльтров, мы рассмотрим методы
их реализации. Нет смысла заниматься синтезом фильтров, кото-
которые нельзя реализовать, а при реализации в двумерном про-
пространстве, как мы вскоре увидим, можно столкнуться с опреде-
определенными трудностями.
5,1. Классические схемы двумерных БИХ-фильтров
Имеется целая группа хорошо изученных способов реализации
одномерных БИХ-фильтров, включая прямые формы реализации,
а также построение каскадных и параллельных схем [1]. Класси-
Классические способы реализации двумерных БИХ-фильтров, рассма-
рассматриваемые в настоящем разделе, являются развитием этих одно-
одномерных способов, однако для них характерны некоторые особен-
особенности, отсутствующие в одномерном случае. Например,
Синтез и реализация двумерных БИХ-фильтров 267
в разд. 4.1.4 мы рассматривали порядок вычисления значений
выходных отсчетов. В одномерных разностных уравнениях поря-
порядок вычисления обычно определен однозначно. В двумерном же
случае имеется известная свобода при решении вопроса о том,
в каком порядке будут выполняться вычисления значений очеред-
очередных отсчетов.
Это проявляется и при построении блок-схем фильтров. В блок-
схемах обычно подразумевается, что данные проходят через
схему последовательно, в заранее определенном порядке. Однако
в двумерном случае порядок прохождения данных не определен
однозначно, хотя на него и наложены ограничения соотноше-
соотношениями предшествования. Этот вопрос детально рассматривается
в разд. 5.3.
5.1.1. Прямые формы реализации
БИХ-фильтр можно реализовать в прямой форме, если пре-
преобразовать разностное уравнение таким образом, чтобы значение
выходного отсчета выражалось через значения входных отсчетов,
а также уже найденных выходных отсчетов. В разд. 4.1 были
детально рассмотрены разностные уравнения, в частности такие
вопросы, связанные с прямой формой реализации, как порядок
вычислений, рекурсивная вычислимость, использование входных
и выходных масок. В данном разделе мы продолжим изучение
прямых форм реализации и рассмотрим случай, когда входная
маска имеет ненулевую протяженность.
Для фильтра первого квадранта входной сигнал х {пх, п2)
связан с выходным сигналом у (nlt п2) соотношением
Z.,-1 L2-l
У («1. "¦,) = J] S аAъ 12)х(п1 - 1Х, п2 — 12) -
/,=0 /,=0
К,—1 К2-\
— 2 2 ЬAгъ kjyfa-kn пг--ft2). E.1)
*!=--<) kz--0
(fti. fti) Ф @. 0)
IБез нарушения общности здесь принято Ъ @, 0) = 1.] Поскольку
отклик фильтра на импульс б (ni, n2). по определению равен
импульсному отклику h (nlt n2), то можно получить соотношение
К,-1 К2~ 1
/фь п.2) = a(ni, п.2) - 2 2j b (kv k2) h (ni — kx, n.2 — k.2).
ft,-=0 А.-----0
(ft,, kt) Ф @, 0)
E.2)
268 Глава 5
Выполнив двумерные г-преобразования выражений, стоящих
слева и справа от знака равенства, решим это уравнение отно-
относительно Нг (г1; г2):
/7
Иz
Z.,-1 Z.,-1
S S
/
S S
t. Z2)
Можно считать, что полученное отношение описывает каскад
из двух фильтров, КИХ-фильтра с передаточной функцией
Аг (zv г2) и чисто рекурсивного фильтра с передаточной функцией,
равной \/Bz (zx, г2), как это показано на рис. 5.1.
х(п,,л2)
Az(z,,z,)
Рис. 5.1. Представление фильтра с передаточной функцией Hz(zu z2) =
Предположим, что входная маска имеет размер Lx X L2 точек,
обработка выполняется столбец за столбцом и в каждом столбце
желательно получить М2 выходных точек. В этом случае потре-
потребуется хранить (Lx — 1) jV2 -f L2 — 1 входных отсчетов, т. е.
немного более Lx ¦— 1 столбцов. Такой объем памяти как раз
необходим для размещения входной маски, соответствующей
КИХ-ступени в каскаде, показанном на рис. 5.1.
Вторая ступень каскада представляет собой БИХ-фильтр
с постоянным числителем. Если его выходная маска содержит
Ki X К2 точек и имеет отверстие в правом верхнем углу, то при
фильтрации столбец за столбцом потребуется (/Ci — \) Ы2 +
+ К2 — 1 ячеек памяти. В результате суммарный объем требуе-
требуемой памяти для прямой формы реализации по столбцам составит
(Lx + Кх — 2) N2 + L2 + К2 — 2 отсчетов.
Поскольку мы рассматриваем Нг (г^ г2) как передаточную
функцию каскада из двух ЛИС-фильтров, возникает возможность
изменить порядок следования фильтров, как это показано на
рис. 5.2; причем функция Нг (zlt z2) останется при этом той же.
Получившаяся реализация, которую мы будем называть двумер-
двумерной прямой формой II, аналогична одномерной форме II [1].
В схеме, соответствующей двумерной форме II, объем требуемой
памяти сокращен, поскольку память используется совместно
Синтез и реализация двумерных БИХ-фильтров 269
в петлях обратной и прямой связи. Система, представленная на
рис. 5.2, соответствует реализации уравнения
W
х, П2) ~ X {tli, П2)
Кг-1 К„—I
I
ft.=0 ft a----О
i. *8) *= (С 0)
i, k2) W
«2 —
E.4)
и формированию затем выходного сигнала у {nt, п2) путем филь-
фильтрации w {tii, n2> КИХ-фильтром с передаточной функцией
Az (г,, г2):
Z.,-1 1.2-1
у {tii, п,)= 1] ? a(/lt /а)^^! —/х, п2 —/2). E.5)
При этом нет необходимости одновременно хранить в памяти весь
промежуточный выходной массив w {пц пг). В памяти должна
находиться только часть массива w {nx, п2), требуемая для вы-
вычисления последующих значений w {пг, пг) и у {п±, п2) по форму-
формулам E.4) и E.5).
Рис. 5.2. Другая реализация функции Нг (zlt г2), называемая «прямой фор-
формой II».
Рассмотрим (/Ci X /Сг)-точечную выходную маску, соответ-
соответствующую формуле E.4) и показанную на рис. 5.3. Маска сколь-
скользит по массиву w {пх, п2) (столбец за столбцом) и в соответствии
с E.4) формирует выходные значения w {nlt n2). Входная маска,
соответствующая передаточной функции фильтра Аг {zly г2),
покрывает прямоугольную область шириной Lx точек и высотой L2
точек. Ограничимся пока случаем Lx < Ki и L2 < Кг. Если
мы только что закончили вычисление выходного значения w {пх, п2)
для конкретной точки {пг, п2), то можно сразу вычислять у {пг, п2)
в соответствии с формулой E.5), поскольку, как это показано на
рис. 5.3, все требуемые для этого отсчеты w {nlt n2) имеются.
В этом случае для реализации числителя передаточной функции
фильтра дополнительная память не требуется.
В более общем случае Lx может быть больше Ki- Тогда для
реализации формулы E.5) потребуется сохранять в памяти Lt—Ki
дополнительных столбцов массива w (nlf n2). Таким образом, при
использовании прямой формы II и обработке по столбцам тре-
требуется объем памяти max [{Lx — 1) М2 + L2 — 1, {Ki — 1) zV2 +
+ K2 — 1I, т. е. приблизительно N2 max (/Ci. Lx).
270 Глава 5
N,-1
Рис, 5.3, (^Х^-точечная выходная маска (сплошная линия) и
точечная входная маска (штриховая линия) могут накладываться в случае ре-
реализации прямой формы II, что обеспечивает экономию памяти.
— ранее вычисленные выходные значения; О — выходное значение, вычисляемое в
настоящий момент; х — выходные значения, которые будут вычисляться в дальнейшем.
5.1.2. Каскадная и параллельная реализации
Как было показано в гл. 1, ЛИС-системы можно конструи-
конструировать с помощью последовательного и параллельного соединений
более простых ЛИС-систем. Поэтому, соединяя последовательно
или параллельно простые двумерные БИХ-фнльтры, можно по-
построить более сложный двумерный БИХ-фильтр, Рассмотрим,
например, фильтр, представленный на рис. 5.4, в виде каскада
из N двумерных БИХ-фильтров. Если принять, что передаточная
функция г-го фильтра в каскаде имеет вид
E.6)
Синтез и реализация двумерных БИХ-филыпров 271
то результирующая передаточная функция Исг (z(, z2) определяется
следующим произведением:
,, z2)? I ] Я<:) (г,,
E.7)
Поскольку функция Яг (zi, z2) имеет форму отношения дву-
двумерных полиномов, то она представляет собой передаточную
функцию двумерного БИХ-фильтра. Однако из-за того, что поли-
н?)
H2(N)
Рис. 5.4. Каскад из N простых двумерных БИХ-фильтров.
номы в числителе и знаменателе входят в произведения в качестве
сомножителей, функцию H'z (zt, z2) нельзя использовать для пред-
представления передаточной функции произвольного двумерного БИХ-
фильтра (за исключением тривиального случая, когда N = 1).
В противоположность этому любую одномерную рациональную
передаточную функцию можно представить в факторизованной
форме, соответствующей последовательному соединению простых
фильтров первого порядка.
Хотя в общем случае разложить произвольный двумерный
БИХ-фильтр в цепочку последовательно соединенных более
простых фильтров и нельзя, мы можем синтезировать двумерный
БИХ-фильтр, соединяя каскадно более простые фильтры. Рас-
Рассмотрим, например, рис. 5.5. Для построения полосового фильтра
фильтр нижних частот с круговой симметрией соединен последо-
последовательно с фильтром верхних частот. Полосы пропускания филь-
фильтров нижних и верхних частот обозначены на рисунке наклонной
штриховкой, а области их пересечения представляют собой по-
полосу пропускания результирующего полосового фильтра. Коста
и Венецанопулос 12] использовали более совершенный вариант
этого общего подхода для синтеза двумерного БИХ-фильтра
с круговой симметрией путем каскадного соединения повернутых
копий одномерных фильтров.
Архитектуру каскадного фильтра, показанного на рис. 5.4,
можно трактовать двояко. Если каждый блок обозначает отдель-
отдельный фильтр, то вся структура представляет собой вычислитель-
272 Глава 5
ный конвейер, аналогичный заводской сборочной линии. Резуль-
Результирующая скорость вычислений этого конвейера может быть
очень высокой, так как вычиеления в каждом фильтре конвейера
выполняются одновременно. Общий объем требуемой памяти
складывается из объемов памяти, требуемых каждым фильтром
С другой стороны, рис. 5.4 можно рассматривать как струк-
структурную схему алгоритма. Сначала входной сигнал фильтруется
элементом Hi^ (zu z2); затем результирующий сигнал фильтруется
элементом Н{г2) (ги г2) и т. д. Для реализации любого фильтра
Н[1) (z\, z2) можно использовать одну-единственную подпрограмму,
написанную соответствующим образом. Если эту подпрограмму
вызывать повторно и передавать ей при каждом вызове соответ-
соответствующие коэффициенты и данные, то можно реализовать каскад-
каскадный фильтр в соответствии с рис. 5.4. Естественно, результирую-
результирующая скорость вычислений будет ниже, чем в случае конвейерной
реализации, поскольку вычисления выполняются последова-
последовательно, а не параллельно. С другой стороны, для реализации ка-
каскадного фильтра путем последовательной обработки требуется
меньше памяти, чем в случае использования конвейера. Подпре-
ПодпреРис. 5.5. Полосовой фильтр, полученный путем последовательного соединения
фильтров нижних и верхних частот.
Синтез и реализация двумерных БИХ-фильтров 273
грамме потребуется лишь столько первичной памяти, сколько
нужно для фильтра Hil) (zlt z2) с максимальным требованием
к памяти. Однако весь сигнал придется хранить во внешней
памяти (например, на магнитном диске).
Сложный двумерный БИХ-фильтр можно также построить
с помощью параллельного соединения фильтров, как это пока-
показано на рис. 5.6. В этом случае результирующая передаточная
функция имеет вид
E.8)
Используя выражение E.6) и преобразуя сумму E.8) в выражение
с общим знаменателем, получим расширенную форму:
иР t. - ч Д
АР(г 2v S n
Д Лг (г1' г2) _ /=1 1Ф1
=
/г Оч
1=1
7 \
Как и в случае каскадного фильтра, полином-знаменатель
выражения для НР (гь г2) можно разложить на множители.
Рис. 5.6. Параллельное соединение jV простых двумерных БИХ-фильтров, даю-
дающее более сложный двумерный БИХ-фильтр с передаточной функцией
18 Даджион Д., Мерсеро Р.
274 Глава 5
Таким образом, параллельная форма не годится для реализации
произвольной двумерной рациональной передаточной функции.
Тем не менее полезные двумерные БИХ-фильтры с помощью
параллельной архитектуры синтезировать можно. Она, например,
удобна для построения многополосового фильтра.
Параллельная архитектура также может оказаться полезной
при реализации двумерных БИХ-фильтров, у которых импульс-
импульсный отклик не ограничивается одним квадрантом, например,
симметричных фильтров. В этом случае импульсный отклик
с опорной областью на всей (nlt /г2)-плоскости можно разбить на
четыре отдельных импульсных отклика, по одному на каждый
квадрант. Затем можно построить фильтры, соответствующие
отдельным квадрантам, и, соединив все четыре фильтра парал-
параллельно, получить требуемый 4-квадрантный импульсный отклик.
Ниже в разд. 5.4, в котором обсуждается методика синтеза филь-
фильтров в пространственной области, будет приведен пример такого
решения.
Параллельную архитектуру (рис. 5.6) так же, как и последо-
последовательную можно трактовать двояким образом. Если каждый
блок отвечает отдельному фильтру, то входные данные дубли-
дублируются и поступают на каждый из N параллельных фильтров.
Вычисления выполняются одновременно во всех фильтрах, а пол-
полный объем требуемой памяти равен сумме объемов памяти, исполь-
используемой каждым фильтром. С другой стороны, можно использо-
использовать подпрограмму, реализующую фильтр в общем виде, как это
было и в случае последовательного соединения фильтров. При
параллельной реализации эта подпрограмма запускается N раз
с одними и теми же входными данными, но с различными коэффи-
коэффициентами, и затем N выходных сигналов складываются. В этом
случае вычисления выполняются последовательно, поскольку
выходные сигналы отдельных фильтров вычисляются по очереди,
а суммарный объем требуемой памяти уменьшается.
5.2. Итерационные методы реализации двумерных
БИХ-фильтров [3, 4]
Рассмотрим другой подход к решению проблемы реализации
двумерного цифрового фильтра с рациональной передаточной
функцией. Во многих приложениях, например в обработке изобра-
изображений, все отсчеты сигнала имеются одновременно; другими сло-
словами, весь сигнал хранится в памяти ЭВМ и может полностью
использоваться в процессе вычислений. (В противоположность
этому при обработке одномерных сигналов реального времени
в вычислениях могут участвовать лишь значения отсчетов, отно-
относящиеся к прошлому.) В этом случае представляется целесообраз-
целесообразным обрабатывать выходной сигнал совместно с входным для
Синтез и реализация двумерных БИХ-фильтров 275
формирования новой итерации выходного сигнала. Такая итера-
итерационная реализация использует известную концепцию обратной
связи для последовательного формирования все лучших и лучших
аппроксимаций требуемого выходного сигнала.
5.2.1. Базовая итерационная схема
Одним из побудительных мотивов использования принципа
итерации является стремление получить БИХ-фильтры с импульс-
импульсными откликами, которые нельзя реализовать в рекурсивной
форме. В одномерном случае передаточную функцию БИХ-фильтра
можно разложить на множители так, что в ней выделяются каузаль-
каузальная и антикаузальная части, которые можно реализовать раз-
раздельно с помощью разностных уравнений. Однако в случае двух
и более измерений отсутствие основной теоремы алгебры о раз-
разложении на множители затрудняет использование такого под-
подхода, вынуждая нас либо прибегать к приближенной фактори-
факторизации, либо синтезировать лишь передаточные функции, факто-
ризуемые явным образом. Итерационная реализация представляет
третью возможность и, кроме того, как это будет показано ниже,
дает нам способ учитывать граничные условия (разд. 5.2.3).
Чтобы сделать обозначения несколько менее громоздкими,
опишем итерационную реализацию с помощью частотного отклика
КИХ-фильтра Н («л, ы2), а не его передаточной функции Нг (zt, z2).
В общем случае Н (озх, ы2) можно представить как
? 2j a Ci> ^) exP ( -/«Mi —
, оJ) й ApiJ?iL = -J±-? , E.Ю)
где a (/j, /2) и b (k1< k2) являются последовательностями конечной
протяженности. Как и ранее, будем считать, что отношение нор-
нормировано, так что b @, 0) = 1.
Определим теперь новый тригонометрический полином С (ых, ы2)
С ((Ох, @2) = 1 — В ((Ох, @2). E-И)
Тогда можно записать
Н (ых, ы2) := А (сох, ы2)/[1 — С (сох, ы2)]. E.12)
Если считать, что X (ыл, ы2) — спектр входного сигнала л: (пъ пг),
а У (юх, со2) — спектр выходного сигнала у (пъ п2) и что | Y (а>и
ю2) | и | X (сох, ы2) | ограничены, то
(о)х, ы2) = л (щ, ы2) А ((Ох, ы2) = — —^-——— . E.13)
8*
276 Глава 5
Умножив выражения справа и слева от знака равенства на [1 —
— С (щ, ы2) 1 и переставив сомножители, получим неявное соот-
соотношение
Y (wj, (о2) -- А (члъ го2) X («!, ы2) 4-
4- С (о>ь ы2) Y (о)ь щ). E.14)
В пространственной области это выражение принимает вид
у (л1? л2) = а (пъ л2) * *х (л1? л2) 4-
-\- с (rii, л2) * *у (пи n.z), E.15)
где, как и ранее, две звездочки означают двумерную свертку.
Выражения E.14) и E.15) определяют неявное соотношение
между входным и выходным сигналами и коэффициентами БИХ-
фильтра, однако они совсем не обязательно указывают удобный
или даже осуществимый способ вычисления последовательности
у (Л], л2) по данному сигналу х (п1, п2). Предположим, однако,
что мы располагаем хорошей оценкой значения выходного сиг-
сигнала. Подставив это значение в правую часть выражения E.15)
вместо у fa, л2), можно получить лучшее приспособление к у (nlt
л2). Естественно, этот процесс можно продолжить. Пусть у;_г (лц
л2) представляет собой (/ — 1)-е приближение к истинному вы-
выходному сигналу у (ль л2). Тогда /-е приближение можно найти
из соотношения
Hi (nli ni) ~ О (Пи fl") * * Х(П1} Л,) г С(Пи П.,) * * уг_х (Лх, Л.>).
E.16)
В частотной области этому соотношению соответствует
Yt (wj, ы2) = A (coj, ы2) X (coj, ы2) 4-
+ C(<olf ы2) Y^iau «2). E.17)
Зададимся теперь вопросом: сходится ли последовательность
приближений \yt (Л], л2)} к истинному выходному сигналу у (пг,
л2)? Ответить на этот вопрос легче, рассматривая частотную
область. Для удобства будем считать, что Y_± (ш1} ы2) = 0, тогда
Yo (Wj, ы2) -- А (ыь ы2) X (coj, ы2), E.18а)
Yt (ы1( ы2) = [А («!, ы2) 4- С (coj, ы2) А (щ, ы2)] X
X X (щ, щ) E.186)
и т. д. На /-й итерации получим
Г ' 1
Y, (щ, со.,) = А (щ, ы,) 2] С ((ои со,) \Х(@и ы2). E.19)
Синтез и реализация двумерных БИХ-фильтров 277
Поскольку
i=0
У,(щ, со2) = Л
Далее, если принять, что
| С (саг, ы2) | <1, то E.22)
lim Y, К, со2) = ^Г!^^^ = У К. <*), E-23)
что и требовалось. В сущности, каждая итерация уравнения E.17)
порождает новый член бесконечной геометрической прогрессии.
Если условие E.22) выполняется, то прогрессия сходится. В этом
случае можно доказать, что при i —>- оо Yt (щ, ы2) равномерно
сходится к Y ((Ох, ы2), а #г (ль л2) равномерно сходится к у (пъ п2).
Поскольку а (пъ п2) и b (пъ п2) — массивы конечной протя-
протяженности, вычисления, выполняемые на каждой итерации, яв-
являются операциями КИХ-фильтрации. Таким образом, рацио-
рациональный частотный отклик Н (щ, (о2) двумерного БИХ-фильтра
можно получить с помощью бесконечного числа операций КИХ-
фильтрации.
Можно представить себе описанную итерационную процедуру
E.16) как фильтрацию простым цифровым фильтром первого по-
порядка, обрабатывающим не последовательность значений отсче-
отсчетов, а последовательность сигналов. Чтобы лучше пояснить эту
аналогию, слегка обобщим входной сигнал, рассматривая его как
функцию номера итераций i, т. е. в виде xt (nly п2). Для рассмо-
рассмотренного выше частного случая можно считать, что xt (пъ пг) —
одномерная ступенчатая функция переменной I, умноженная на
х (Ль л2):
xt (Ль л2) --¦¦ х (ль л2) и (I). E.24)
При такой обобщенной трактовке входного сигнала выражение
E.16) принимает вид
ili (Ль л.-,) = а (Ль л.,) * * xt (Ль' л.,) ¦- с(пъ л2) * * t/Ul (лх, л2).
E.25)
Этой формуле соответствует структурная схема, приведенная на
рис. 5.7. На каждой итерации оценка выходного сигнала посту-
поступает в цепь обратной связи. Оператор ПАМЯТЬ сохраняет ре-
результаты предыдущей итерации; он аналогичен одномерному опе-
оператору сдвига, которому в структурных схемах одномерных циф-
цифровых фильтров обычно соответствует блок z~1. Однако в данном
278 Глава 5
случае оператор ПАМЯТЬ сохраняет не значение одного отсчета,
а весь сигнал.
Условие сходимости итераций | С (щ, со2) | < 1 является очень
сильным ограничением. (В следующем разделе мы рассмотрим
некоторые возможности ослабления или снятия этого ограниче-
ограничения.) Не все устойчивые двумерные БИХ-фильтры удовлетворяют
этому условию сходимости. Если С («!, со2) Ф 1, БИХ-фильтр
устойчив в смысле ОВВ. Очевидно, что условие сходимости ите-
итераций | С (и>1, со.,) | < 1 является гораздо более сильным ограни-
ограничением, чем условие устойчивости.
1
(
n \
/
/
/—
s
)
/ /
Lj
П
M
я
T
ь
/
/
Уi(ni>
У i_l (п,,п2)
Рис. 5.7. Структурная схема итерационной реализации отклика Н (со1, со2).
(С любезного согласия Дэна Е. Даджиона [3]. ©1980 IEEE.)
Проведение бесконечного числа итераций требует бесконечного
объема вычислений. На практике ограничиваются конечным чис-
числом итераций, в результате чего сигнал yr (nlt ru) оказывается
лишь аппроксимацией требуемого сигнала у (nlt n2). Естественно
рассмотреть величину ошибки аппроксимации. Это легче сделать
в частотной области. Фурье-спектры сигналов ут (nlt п2) и у (п1, пг)
связаны формулой
Y, К, со.,) = Y (щ, со2) [1 - - С- ' (col со,)]. E.26)
В идеале отношение комплексных функций К7 (и,, w2)/K (соь ы2)
должно равняться единице; поэтому абсолютное значение раз-
разности этого отношения и единицы можно принять в качестве меры
ошибки вследствие ограничения вычислений /-ми итерациями.
Приняв, что Е (а)], (о.,) описывает спектральную ошибку как
функцию от частоты, получим
Е (щ, io2) =
У/ (щ,
У
- 1
С К, со.) К- E-27)
Если задать допустимый уровень спектральной ошибки в неко-
некоторой полосе частот Q с помощью условий
Е (@], со2) < е для (СО], со2)
E.28)
(е является малой положительно!! константой), то, используя
выражение E.27), можно определить необходимое число итераций
Синтез и реализация двумерных БИХ-фильтров 279
для обеспечения заданной ошибки. И наоборот, если задано число
итераций /, формулу E.27) можно использовать для определения
ограничений, накладываемых на \С (щ, (о2)|.
Если процесс вычислений заканчивается после /-й итерации,
эффективный частотный отклик описывается формулой
/
Н, (б»!, (о2) = A (Wj, щ) ? С (б»!, (о2), E.29)
что соответствует частотному отклику КИХ-фильтра, аппро-
аппроксимирующему требуемый рациональный частотный отклик
Н )
5.2.2. Обобщения итерационной схемы
Пожалуй, самым неприятным ограничением итерационной
схемы, описанной в предыдущем разделе, является существование
устойчивых БИХ-фильтров, не удовлетворяющих условию схо-
сходимости E.22). Такие фильтры нельзя реализовать с помощью
итерационных вычислений. В этом разделе мы обсудим некоторые
обобщения, позволяющие выполнять итерационную реализацию
любого устойчивого БИХ-фильтра.
Для упрощения выкладок рассмотрим частный случай, когда
полином-знаменатель В (щ, ы2) является чисто вещественной и
строго положительной функцией
В (й)ь (о2) > 0. E.30)
Требуемый частотный отклик БИХ-фильтра можно записать сле-
следующим образом:
„, v А (сох, со2) Ы (сох, со2) /к oi\
Н^> Й2>= 5 (со,, со8) = ХА(щ, «,)' <5-31>
где константа Я — параметры, которые требуется определить.
Теперь можно переопределить С ((alt (o2) в виде
С (й>!, (о2) ^ 1 — KB ((оь й2). E.32)
Как и выше, построим итерационное выражение для нахождения
частотного отклика ЯЛ (щ, йJ)/ЯВ ((и17 (о2)
Y( (Wj, (lJ) = ЯЛ ((!)!, (lJ) X (©!, (lJ) +
+ С (й)ь (о2) Yi_j, (to!, (o2). E.33)
Условие сходимости | С (щ, о>2) | < 1 остается без изменения,
однако теперь функция С (шг, (о2) содержит свободный параметр Я.
Поскольку мы приняли, что функция В (©!, (о2) строго положи-
положительна, то получается, что С ((аг, (о2) < 1 для положительных
значений Я. Для выполнения условия сходимости остается потре-
280 Глава 5
бовать, чтобы выполнялось условие С (щ, ы2) > —1. Этого можно
добиться, выбирая константу К в интервале
°<^< шах В (сох, со2) • E-34)
@),, Ш2)
В результате обеспечивается выполнение условия | С (ых, ы2) | <
< 1. Случай, когда функция В ((o1; ы2) вещественна и положи-
положительна, имеет определенную практическую ценность, поскольку
он включает в себя некоторые симметричные двумерные БИХ-
фильтры, используемые в обработке изображений.
В более общем случае В (щ, ы2) представляет собой комплекс-
комплексную тригонометрическую полиномиальную функцию, которая для
устойчивого двумерного БИХ-фильтра удовлетворяет условию
В ((о1; ы2) Ф 0. E.35)
Для этого общего случая отклик Н (щ, ы2) можно записать в виде
\ _ A ((Ql со2) кВ* (сох, (о2) А (сох, (о2) /с оа\
В (щ, со2)
Здесь в знаменателе стоит вещественная и положительная функ-
функция | В (щ, ы2) |2, что дает возможность повторить приведенные
выше выкладки. Переопределив функцию С (щ, (о2)
С (щ, ы2) й 1 _ X | В (аI( ы2) |2, E.37)
получим новое итерационное выражение:
Yt (ы1( ы2) =^ Я,В* ((o1; ы2) Л (ыь ы2) X (coj, ы2) +
+ С К, со2) К,_! (и,, и,). E.38)
Как и ранее, функция С (<о1( ы2) должна удовлетворять условию
сходимости | С (юь ы2) | < 1. Это обеспечивается выбором кон-
константы X в интервале
0<А,< ~ п-2. E.39)
max | В (сох, со2) |2 v '
Итерационное выражение E.38) позволяет реализовать любой
устойчивый двумерный рациональный частотный отклик и, кроме
того, обладает еще некоторыми интересными свойствами. Напри-
Например, легко показать, что фаза спектра сходится к нужному зна-
значению после первой же итерации. Это можно выразить следующим
образом:
ц> [Y (щ, ш2)] = ц> [Yi (щ, щ)] для *2г0 E.40)
с учетом Y_x (щ, ю2) = 0.
Синтез и реализация двумерных БИХ-филыпров 281
Этот интересный факт объясняется тем, что фаза В* (щ, а>2)
совпадает с фазой 1/В (щ, (о2). Поэтому
Ф [^о (©i> ©2I = ф W (©i> ©2I + Ф LB* (©1. ©гI +
+ Ф [X (tt»i, (о2)] = ф [А (иь (о2) 1 — ф tS (©1, ю2) I +
+ ф IX (©1, ©2I = ф [Y (©!, щ)]. E.41)
Последующие итерации лишь уточняют амплитуду спектра.
Итерационное выражение E.38) обладает большей общностью
по сравнению с более простым выражением E.17) в том смысле,
что позволяет реализовывать более широкий класс частотных
откликов. С другой стороны, оно требует большего объема вы-
вычислений. Входной сигнал х (пъ п2) должен подвергаться филь-
фильтрации последовательно соединенными фильтрами %В* (щ, ю2)
и А (щ, (о2), а не одним фильтром А (щ, (о2). КИХ-фильтр, соот-
соответствующий функции С (©x, (о2), также оказывается более слож-
сложным, он требует примерно вдвое больше вычислений по сравнению
с реализацией прямой сверткой.
Переопределение функции С (щ, (о2) не изменило соотношение
между ошибкой Е (щ, ю2) и функцией С (щ, (о2). Повторим для
удобства это соотношение:
Е(щ, @2) = |С (©!, аг)\'+1. E.42)
Если в какой-то полосе частот функция \С (щ, ф2) | близка
к нулю, то ошибка Е (их, (о2) в этой полосе частот будет быстро
приближаться к нулю по мере увеличения номера итерации.
Наоборот, если для некоторой спектральной области функция
| С (и1? (о2) | близка к 1, то ошибка в этой области будет оставаться
значительной даже после нескольких итераций.
Иногда желательно иметь возможность перераспределять
ошибки в частотной плоскости, например, для того, чтобы распре-
распределить их более равномерно по всей полосе частот или, наоборот,
чтобы уменьшить ошибки в пределах более важной полосы частот
за счет относительно менее важной полосы. Этого можно добиться
с помощью еще одного обобщения. Вместо множителя %В* (щ, ю2)
в выражениях E.36) и E.37) можно использовать более общую
частотно-зависимую функцию релаксации X (a»i, w2). Тогда можно
записать
Я (сох, со2) = М. ".MfPi.-*.)
и снова переопределить функцию С ((оь ю2) следующим образом:
С (a>i, (о2) = 1 — X (а>,, ю2) В (щ, щ). E.44)
282 Глава 5
Тогда итерационное выражение примет вид
Yt (й!, со2) = к (й!, cog) А (сйь со2) X (щ, со2) +
+ С (сйь со2) Yi_! (сйь со2). E.45)
Теперь следует так выбрать % (соь со2), чтобы в важной для нас
полосе частот выполнялось условие | С (соь со2) | =; 0. [Теорети-
[Теоретически можно было бы выбрать функцию к (щ, со2) = В-1 (щ, со2)
и ограничиться одной итерацией, но реализовать В-1 (<йи со2)
непосредственно невозможно. ] Из практических соображений мы
ограничиваемся функциями к (сох, со2), которые являются частот-
частотными откликами КИХ-фильтров. Расширив пространственную
протяженность обратного преобразования Фурье функции % {щ,
со2), можно принудительно уменьшить | С (а>и щ)\. Однако чем
больше пространственная протяженность, тем больше объем вы-
вычислений на каждой итерации выражения E.45); таким образом,
приходится идти на компромисс между объемом вычислений на
каждой итерации и числом итераций, требуемых для снижения
ошибки Е {щ, со2) до допустимого значения в заданной полосе
частот.
*5.2.3. Усечение, граничные условия
и ограничения сигнала [4]
Оператор ПАМЯТЬ на рис. 5.7, который должен хранить весь
сигнал, имеет конечную емкость. Однако по мере продолжения
итераций протяженность сигнала yt (пъ п2) растет. В какой-то
момент она превысит имеющийся объем памяти, и информация,
необходимая для последующих итераций, будет потеряна.
Поэтому возникает естественный вопрос: как повлияет на ко-
конечный результат усечение оценки сигнала на каждой итерации?
Рассмотрим более простое итерационное выражение E.16). Для
входного сигнала х (пь п2) можно (в принципе), используя это
выражение, найти сигнал у (nx, n2), удовлетворяющий неявному
соотношению E.15), которое для удобства приводится еще раз:
у (пх, п2) = а (пь п2) * * х (пь п2) + с (пь п2) * * у (nlt n2). E.46)
Из-за ограниченной емкости оператора ПАМЯТЬ в действи-
действительности выполняется итерация
9t («1. п2) = Т [a(nv п2) * * х(пи л,) f с(пи ги) * * yui (nv л2)],
E.47)
где функция Т \f (ль л2) ] равна функции / (лх, л2) в пределах
некоторой области / и равна нулю вне этой области. Можно
Синтез и реализация двумерных БИХ-фильтров 283
доказать [4], что существует сигналу (пъ п2), который удовлетво-
удовлетворяет следующему соотношению:
y(nv п2) = T[a(nv п2) * * x(nv n.2)-f-c(n4, п2) * * y(nv n2)].
E.48)
Разность между функциями у (пх, п2) и у (nv n2) составляет
ошибку усечения. Определив сигнал ошибки в виде
e(nv n2) = y(nv n2) — y(nv n.2), E.49)
можно получить неявное выражение для е (rii, п2), воспользо-
воспользовавшись тем, что оператор усечения линеен, дистрибутивен по
отношению к сложению и идемпотентен (Т [Т [х]] — Т [х]):
Т [е (nv п,)] = Т [у (nv п.г) - у (nv n2j] =
= T[a(nv п2) * * x(nv n2) -f c(nx, n2) * * y(nv n2)} —
— T[a (nv n2) * * x (nx, n2) + с (nv n2) * * у (nv n2)] =
= T [C {nv П,) * * у (nv ГЦ)} — T [С{ПХ, П2)**у {Пу, П2)} =
= T [c (nv /i3) * * \y (nv n2) - у (nv n2)\] =
= T [c(nv n2) * * e(nv n,)]. E.50)
Таким образом, в области / сигнал ошибки удовлетворяет вьи
ражению
е (пъ п2) ^= с (nv n2)* *e (nx, п2) для (пъ щ) ^ /. E.51)
Вне области / сигнал ошибки просто равен у (пь п2), поскольку
У («к п2) = 0.
Сигнал ошибки е (пъ п2) можно получить итеративным путем
с учетом граничных условий, а именно:
} с (пъ п.) * * ег_х (п1( п2) для (nx, n2) ^ /,
e«("i. пч) =' / ч / ч -l r E-52)
{ У ("-V n-i) Для (nv n2) ф\. v '
Это выражение можно рассматривать как частный случай более
общего итерационного выражения
а (пх, п2) * * х (nv п2) + с (пх, п2) * * Д-_х (пх, п2)
ft («1, п2) = для (пх, п2) ? I, E.53)
be (nv п2) для (пх, п2) <? I,
где ft (пх, п2) — /-я оценка выходного сигнала; х (пх, п2) — вход-
входной сигнал, a be (nx, п2) представляет граничные условия. Гра-
Граничные условия определены в области /, которая в общем случае
охватывает область /, как это показано на рис. 5.8. Ширина
области зависит от пространственной протяженности множества
коэффициентов с (пи п2). Вообще говоря, область / должна быть
достаточно широкой, чтобы вместить множество с (пх, п2), когда
284 Глава 5
функция fi (/2Ь п2) вычисляется для значений (nb n2), находя-
находящихся на краях области /.
Поскольку у (пь п2) = у (nj п.г) + е (пь п2), можно показать,
что у (пъ п2) — решение итерационного уравнения
a(nv п2) * * x(nv n2) + cXnv п2) * * f/;_x(«1, п2)
для (пг, п2) ? /, E.54)
«/(«!, п2) для (nlt п2)(?1.
Таким образом, несмотря на эффекты усечения, истинный сигнал
по-прежнему можно вычислить, если известны его значения вне
Уi («1. п-г) =
Рис. 5.8. В общем случае область J охватывает область / в (щ, я2)-плоскости.
Ширина области J зависит от протяженности последовательности коэффициентов
с (пи п2).
области /. [Если требуется получить ответ только внутри об-
области /, то значения у (пь п2) должны быть известны лишь в об-
области /, а не вне области / + /. ]
Для демонстрации использования граничных условий с целью
уменьшения эффектов усечения рассмотрим очень простой одно-
одномерный пример. Пусть итерационное уравнение
yt (л) - А8 (п) -\ byi_± (л - 1) -|- Ьуи1 (п + 1) E.55)
имеет решение
у(л) = а1. E.56)
Параметры А и Ь связаны с константой а следующим образом:
А =
1—а2
Ь =•
1+а2
E.57)
Синтез и реализация двумерных БИХ-фильтров 285
На рис. 5.9, а показана функция у (п) для случая а = 0,5. Пред-
Предположим теперь, что имеет место усечение, так что выражение
E.55) принимает вид
А6(п) -\-byt_!(n-¦l)-\-byi_1(n+l) при |п|<4,
0 при |«|^4.
E.58)
На рис. 5.9, б показаны значения у (п), полученные итерирова-
итерированием E.58) до получения сходимости. Разность у (п) — у (п)
представлена на рис. 5.9, в.
Истинные значения у (п) можно получить, используя усечен-
усеченную итерацию, если ввести корректирующие граничные условия
11
LJi^
-4 -3-2-1 О
2 ¦ 3
-4 -3 -2 -1 О
6
1 I I T T ! I t 1,
-4-3-2-10 1 2 3 4 я
Рис. 5.9.
а — истинное решение; б — решение с усеченной итерацией; в — сигнал разности для
простой итерационной реализации.
в точках п = ±4, а именно: у (±4) = а4 = 0,0625. Для иллю-
иллюстрации процесса сходимости к истинному решению на рис. 5.10
показан выходной сигнал после i = 2, 10, 20 и 50 итераций.
В процесс итераций можно также включить ограничения, на-
накладываемые на сигнал, хотя этот вопрос детально мы рассматри-
рассматривать не будем. Наложение граничных условий можно рассматри-
рассматривать как наложение на выходной сигнал одного из видов ограни-
ограничения. В некоторых приложениях заранее может быть известно,
что на истинный выходной сигнал наложены ограничения дру-
другого рода, например что сигнал должен быть строго положителен
или иметь ограниченную полосу. В таких случаях использование
оператора ограничения на каждой итерации обеспечивает соот-
соответствие выходного сигнала, если он существует, этим условиям.
(В гл. 7 ограничения сигнала обсуждаются в связи с итерацион-
итерационными алгоритмами решения обратных задач.)
286 Глава 5
it. ,ь ti: nil 1
-4 -3 -2 -1 О
111
и
111 ill
_4 -3 -2-1
-4 -3 2 -1
11
Рис. 5.10. Получение истинного решения у (п) с усеченной итерацией, используя
граничные условия.
а — 2 итерации; б — 10 итераций; в — 20 итераций; г — 50 итераций.
5.3. Направленные сигнальные графы и реализация
с помощью переменных состояния
В этом разделе мы кратко рассмотрим направленные сигналь-
сигнальные графы для двумерных БИХ-фильтров. Двумерные направ-
направленные сигнальные графы, как и их одномерные аналоги, служат
для изображения в виде диаграмм тех преобразований, которые
испытывают двумерные сигналы в процессе их прохождения через
двумерные фильтры. В разд. 4.2.6 мы уже обсуждали направлен-
направленные графы и их связь с г-преобразованием. Сначала мы кратко
рассмотрим типичные элементы, используемые в направленных
сигнальных графах, и их практическую реализацию. Затем уста-
установим связь направленных сигнальных графов с реализациями
двумерных БИХ-фильтров с помощью переменных состояния.
5.3.1. Элементы сигнальных графов и их
реализация
Рассмотрим передаточную функцию простого двумерного БИХ-
фильтра, описываемую выражением
Hi. ~\ Qqo + Qio2! "г aoiz2 +auziZ.j -\-а.п2\-гг —
E.59)
zg)
Блок-схема, соответствующая передаточной функции Hz (zu z2),
представлена на рис. 5.11. Входной сигнал х {пъ п2) проходит
через фильтр, соответствующий передаточной функции числителя
Az (Zi, z2). Результирующий сигнал складывается с сигналом
Синтез и реализация двумерных БИХ-фильтров 287
w (tii, ) и формирует выходной сигнал у (tii, n2). Знаменатель
передаточной функции 1 — Cz (гъ z2) получен с помощью петли
обратной связи, содержащей Cz (zu z2).
Чтобы блок-схема на рис. 5.11 была действительно полезной,
ее нужно разложить в направленный сигнальный граф, содержа-
содержащий канонические элементы, определенные в разд. 4.2.6 (сумма-
(сумматоры, операторы усиления и операторы сдвига). Поскольку мы
имеем дело с двумя измерениями, существуют два фундаменталь-
фундаментальных оператора сдвига, которые могут встретиться на пути сиг-
сигнала, — горизонтальный сдвиг, обозначаемый z~\ и вертикаль-
вертикальный сдвиг, обозначаемый zjl. [Мы опустим из рассмотрения опе-
Рис. 5.11. Блок-схема, соответствующая передаточной функции
Hz (Zl, z2) = Az (Zl, z2)/[l - Cz (Zl) z2)].
Узлы схемы, к которым подходят более одного сигнального пути, считаются суммиру-
суммирующими. Все сигнальные пути, выходящие из одного узла схемы, несут одни и тот же
сигнал.
раторы обратного сдвига гх и г2. В большинстве практически важ-
важных случаев от них можно избавиться, умножая полиномы в чис-
числителе и знаменателе функции Нг (z\, z2) на 'z~x и гг в соответ-
соответствующей степени.]
Рассмотрим представленный на рис. 5.12 направленный сиг-
сигнальный граф, описывающий полином-числитель
Аг(z\, z2) = а00 + aiozr1 + amzjl + anzVlzTl + a2\Z~2z^x. E.60)
На нем имеется цепочка из двух направленных вниз операто-
операторов гГ1 слева и один направленный вверх оператор z^1 справа.
Узлы, расположенные на этих вертикальных путях, соединены
ветвями с соответствующим усилением. Если мы обозначим узлы
в обеих цепочках гГ1 и zjl номерами 0, 1, 2 и т. д. (сверху вниз),
то i-й узел в цепочке гГ1 будет связан с /-м узлом в цепочке гг"
ветвью с коэффициентом усиления а.ц.
Аналогичный направленный сигнальный граф для полинома
Cz (гъ z2) показан на рис. 5.13. Поскольку член с00 отсутствует
(с00 = 0), то между входным и выходным узлами этого графа
непосредственное соединение также отсутствует. Поэтому любой
путь от входного узла к выходному будет содержать по меньшей
мере один оператор сдвига z~l или гг. Это обстоятельство стано-
288 Глава 5
вится важным в тех случаях, когда функция Сг (zu z2) располо-
расположена в петле обратной связи, как на рис. 5.11.
Теперь уместно обсудить реализацию двух операторов сдвига
z\ и z~2 . В простейшем случае операторы сдвига просто выби-
выбирают «предыдущее» значение отсчета в горизонтальном или вер-
вертикальном направлении. Если входным сигналом для опера-
оператора гГ1 служит отсчет х (п\, п2), то выходным сигналом будет
х (щ — 1, пг). Аналогично, если на входе оператора zj] действует
сигнал х (пь п2), выходным сигналом будет х (пх, п2 — 1). Поэтому
реализация любого из операторов сдвига должна предусматри-
предусматривать соответствующий объем памяти, чтобы хранить «предыду-
«предыдущий» отсчет в нужном направлении.
Направленный граф так же, как входная и выходная маски,
не указывает в явной форме порядок изменения индексов сиг-
сигнала (пъ л2), равно как и диапазон "значений пх и п2. К сожале-
сожалению, конкретный выбор соотношения упорядочивания (разд. 4.1.4)
влияет на способ реализации операторов z~l и zjl [5]. Например,
пусть мы движемся по индексам строка за строкой, и длина каж-
каждой строки равна N отсчетов. Тогда упорядоченная пара (пь п2)
принимает значения @,0), A,0), ..., (Л/" —г 1,0), @,1), A,1),...
..., (N— 1, 1), @, 2), как показано на рис. 5.14. В этом случае
Вход
Выход
Рис. 5.12. Направленный сигнальный граф, описывающий передаточную функ-
функцию Az(z1, zjj).
Вход
Выход
Рис. 5.13. Направленный сигнальный граф, описывающий полином Cz(zi, г2).
Синтез и реализация двумерных БИХ-фильтров 289
оператор z~l может быть реализован просто в виде регистра сдвига
единичной емкости, выдающего значение х (пх—1, л2) при за-
занесении в него нового значения х (пи щ). Однако в конце каждой
строки в регистр z~l необходимо заносить начальное значение
для следующей строки так, чтобы значением отсчета «предшеству-
«предшествующего» х @, п2) было исходное значение х (—1, п2), а не фак-
фактическое предыдущее значение х (N — 1, л2 — 1).
Оператор zjl для этого примера еще более сложен. Поскольку
мы приняли порядок обхода строка за строкой, между отсчетами
0 N-1
Рис. 5.14. Сканирование отсчетов строка за строкой (в каждой строке N отсчетов.)
х (rii, «2 — 1) и a: (rii, Пъ) располагается точно N отсчетов. Поэтому
оператор zTl должен обеспечить буферизацию N значений отсче-
отсчетов по алгоритму «первым вошел, первым вышел», как это де-
делается, например, в сдвиговом регистре. Сначала в сдвиговый
регистр следует загрузить исходные значения х (пъ —1) для
Ь < n-i < N. Затем значения отсчетов поступают в сдвиговый
регистр zi и покидают его просто по порядку независимо от гра-
границ строк.
Очевидно, что изящная простота одномерных фильтров на
основе направленных сигнальных графов теряется в двумерном
случае. Одномерный оператор сдвига z~l всегда соответствует
регистру единичной емкости (одной ячейке памяти). Как мы
только что увидели, оператор z~l при сканировании сигнала
строка за строкой также можно реализовать с помощью одной
ячейки памяти (если принять меры к сбросу регистра в исходное
состояние в конце каждой строки), однако для оператора zi тре-
требуется N ячеек памяти. Естественно, что при сканировании стол-
столбец за столбцом оператор z~x занимает место оператора zTx с точки
19 Даджион Д.. Мерсеро Р.
290 Глаза 5
зрения требуемой памяти, и наоборот. Наконец, объем памяти,
требуемый для реализации оператора гг~\ определяется числом
отсчетов в каждой строке. Следовательно, схема оператора гг
для случая Л^ = 64 будет недостаточна для случая N = 75.
Мы рассматривали направленный граф как аналог схемного
решения, показывающий, какие элементы следует соединить друг
с другом. Однако может оказаться плодотворной другая интер-
интерпретация направленного графа, в частности как схемы алгоритма
вычисления требуемых значений отсчетов. Вернемся, например,
к направленному графу для Az (гъ г2), показанному на рис. 5.12,
и напишем выражение для вычисления значения отсчета в каждом
узле. Пусть х (nt, п2) обозначает входной сигнал, а у (пъ п2) —
выходной. Сигналы узлов в цепочке гГ1 обозначим через go («i. «2),
gi («1. «2) и gz ("i> ) Для узлов 0, 1 и 2 соответственно (сверху
вниз). Аналогично сигналы узлов в цепочке гг обозначим через
v0 (ri\, п2) и их (tii, п2). Тогда можно записать:
& («1. п2) = gi («1 — 1, «2), E.61а)
gi («1, «2) = ?о ( — 1» "г). E.616)
go («1. «2) = х (nlt п2), E.61в)
v0 («1, «2) = aoo?o («1. «2) + aiogi («1. «2) +
+ г>1 («i, «г— 1). E.61 r)
i>i («i, th) = aolgo (nlt n2) + aug! (nlt n2) + Ог&2 (nlt n2), E.
У («l. n2) = v0 (nlt n2). E.61 e)
Причина такого расположения формул сейчас станет понятной.)
Обходя заданный набор упорядоченных пар (п1у п2), мы можем
для формирования значений выходных отсчетов использовать
формулу E.61). Естественно, что последовательность значений
(nlt n2) должна выбираться таким образом, чтобы исключить
ситуации, когда для вычисления требуется знать еще не найден-
найденное значение отсчета сигнала узла.
В качестве примера рассмотрим программную реализацию фор-
формул E.61) для случая, когда выходные отсчеты поступают строка
за строкой, как на рис. 5.14, и требуется получить значения вы-
выходного сигнала в области NxN. На рис. 5.15 представлен с ис-
использованием обобщенного языка высокого уровня вариант про-
программной реализации фильтрации (в некоторой условной форме).
Задержимся некоторое время на рис. 5.15. Рассмотрев детально
последовательность команд, можно видеть, что порядок формул
E.6La), E.61е) выбран с целью предотвращения введения допол-
дополнительных рабочих ячеек для хранения значений отсчетов в про-
Синтез и реализация двумерных БИХ-фильтров 291
цессе модификации сигналов узлов. Ввиду того что входной
сигнал поступает строка за строкой, для представления каждого
из сигналов узлов в цепочке z~l (Ло, /ti и h2) требуется только
одна ячейка памяти. Однако для реализации оператора сдвига гТ1
требуется N ячеек; поэтому для хранения значений отсчетов,
которые потребуются при вычислении выходных отсчетов следу-
следующей строки, используется массив v^ (tix). Начальные значения
массива v± (rii) являются горизонтальными начальными значе-
значениями, обычно это нули. В начале каждой строки переменные Ло
и /tj также обнуляются. Это соответствует упоминавшемуся выше
сбросу в исходное состояние операторов сдвига гГ1.
; решение уравнений E.61) для входного потока, идущего
; строка за строкой
массив vt @ : N — 1); выделить память под сдвиг zj1
скаляр о0, /i0; выходной и входной узлы
скаляр Л1( h2; выделить память под сдвиги zj
индекс /»!, я2; индексные переменные
константы а00, а10) а01, аи, ац, коэффициенты фильтра
{команды обнуления массива Vj)
ЦИКЛ ПО /Ц ОТ /Ц = О ДО W — 1
{ Ло*-0
ЦИКЛ ПО Пх ОТ /Jj = О ДО N — 1
{ Л2 -«- Лх ; уравнение E.61а)
/ix <- h0 ; уравнение E.616)
/to *- следующий _ входной _ ; уравнение E.61в)
отсчет
Щ *- °оо1и> + "loAi + iV1! ; уравнение E.61г)
vi ("i) ¦- Ooi/»o + auAi + ; уравнение E.61д)
+ a^hi
следующий _ выходной _ ; уравнение E.61е)
} } отсчет *- v0
Рнс. 5.15. Возможная программная реализация уравнений E.61).
В нынешний век микропроцессоров и сверхбольших интеграль-
интегральных схем стоит упомянуть об одной возможности реализации
направленного графа, в частности использовании не одного,
а нескольких процессоров. Вкратце идея состоит в том, что для
вычисления значений отсчетов сигналов каждого узла графа
предусматривается отдельный процессор. Естественно, все узло-
узловые процессоры должны быть запрограммированы в соответствии
с порядком следования индексов в упорядоченных парах (nlt n2)
и моментами сброса в исходное состояние всех элементов памяти.
В принципе рассматриваемая реализация должна включать
два чередующихся этапа обработки: этап связи и этап вычисле-
вычислений. На этапе связи каждый узловой процессор передает текущее
значение отсчета его узлового сигнала всем процессорам, кото-
которым этот отсчет предназначен. На этапе вычислений каждый про-
19*
292 Глава 5
цессор вычисляет следующее значение своего узлового сигнала
на основании информации, полученной им на этапе связи. Каж-
Каждый узловой процессор обеспечивает буферизацию значений от-
отсчетов, полученных от других процессоров и требуемых для вы-
выполнения текущих вычислений. Этим способом реализуются опе-
операторы сдвига г~х и гТ1.
5.3.2. Минимизация числа операторов сдвига
Вернемся к исходной задаче настоящего раздела — получению
детализированного направленного сигнального графа передаточ-
передаточной функции Нг (Zx, z2), определяемой выражением E.59). Это
можно сделать достаточно просто, объединив графы, показанные
на рис. 5.12 и 5.13, в соответствии со схемой на рис. 5.11. Резуль-
Результат такого объединения представлен на рис. 5.16. Этот направ-
направленный граф можно упростить. Учитывая, что оператор сдвига
дистрибутивен относительно сложения, можно объединить два
оператора zj в один (рис. 5.17). При этом уменьшается число
требуемых операторов сдвига и, следовательно, сокращается
объем требуемой памяти.
Можно предложить и другие направленные сигнальные графы,
позволяющие получить требуемую передаточную характеристику
Hz (zj, z2). Например, можно изменить порядок следования филь-
фильтра Аг (zb z2) и цепи обратной связи, содержащей функцию
Cz (Zi, z2), в результате получится блок-схема, приведенная на
рис. 5.18. Если затем подставить в эту блок-схему, как и ранее,
графы из рис. 5.12 и 5.13, то две цепочки операторов гГ1 будут
содержать одни и те же данные, и их можно совместить. В резуль-
результате получается направленный сигнальный граф, представленный
на рис. 5.19. Этот граф содержит всего четыре оператора сдвига,
и в нем число операторов гГ1 минимально.
Другой направленный сигнальный граф с минимальным числом
операторов г~1 можно получить из рис. 5.19, применяя теорему
о двумерном транспонировании и строя транспонированную
схему. Теорема о двумерном транспонировании, как и ее одно-
одномерный аналог [1], утверждает, что транспонированная схема,
которая получается изменением направления всех стрелок в на-
направленном сигнальном графе, будет иметь ту же передаточную
функцию, что и исходная схема. Если изменить направление
всех стрелок на рис. 5.19 и перестроить граф так, чтобы входной
порт был слева, а выходной — справа, то получится направлен-
направленный граф, показанный на рис. 5.20. Такой транспонированный
граф может иметь преимущества при использовании машинного
слова ограниченной длины, так как ослабление благодаря «нулям»
функции Нг (гъ z2) происходит здесь перед усилением благодаря
Синтез и реализация двумерных БИХ-фильтров 293
Вход
Выход
Рис. 5.16. Детализированный направленный сигнальный граф передаточной
функции Hz (zlt zs).
Вход
Выход
Рис. 5.17. Улучшенный направленный сигнальный граф функции Нг (zj, za).
Вход
Cz(z,,z2)
Az(z,,z2)
Выход
Рис. 5.18. Возможная блок-схема функции Hz (zlt z2).
Вход _ 1 Л «оо ~ Выход
Рис 5.19. Детализированный направленный сигнальный граф функции Нг (zf, z2)
с минимизацией числа операторов сдвига zj1.
294 Глава 5
«полюсам», что до некоторой степени уменьшает вероятность ариф-
арифметического переполнения в промежуточных вычислительных
операциях.
Используя операцию транспонирования как для направлен-
направленного графа, так и для блок-схемы (заметим, что рис. 5.18 является
транспозицией рис. 5.11), можно модифицировать направленный
граф с целью минимизации числа операторов сдвига. Однако,
как было показано выше, при обходе входных отсчетов строка
за строкой оператор z^1 требует существенно больше памяти,
Вход
Выход
Рис. 5.20. Другой направленный сигнальный граф, представляющий функцию
»г (Zi, Z2).
Граф получен транспонированием графа на рис. 5.19.
чем оператор zi~'. Поэтому может оказаться более выгодным ми-
минимизировать не полное число операторов сдвига (как в одно-
одномерном случае), а число операторов zj.
Если фильтр реализуется с использованием отдельных микро-
микропроцессоров для вычисления значений отсчетов сигнала в каждом
узле, то экономия памяти может не иметь большого значения.
В этом случае целесообразно минимизировать число узлов графа,
чтобы уменьшить количество микропроцессоров.
По мере развития технологии цифровых схем относительная
стоимость памяти, вычислений и внутрисхемных связей изме-
изменяется. В будущем разработчики цифровых систем будут, воз-
возможно, пользоваться совершенно иными критериями оптимиза-
оптимизации схем фильтров.
5.3.3. Реализации с переменными состояния
В теории одномерных линейных систем и в теории управления
большую роль играет понятие состояния фильтра. В принципе
состояние фильтра в любой момент времени содержит всю инфор-
информацию, необходимую для вычисления оставшейся части выход-
выходного-сигнала фильтра для данного входного сигнала. Реализацию
одномерного фильтра с одним входом и одним выходом, базирую-
Синтез и реализация двумерных БИХ-фильтров 295
щуюся на модели с переменными состояния, можно записать
в виде
E.62а)
E.626)
Эти уравнения связывают входной сигнал х (п) с выходным сигна-
сигналом у (п) с помощью вектора состояния s (n). Вектор состояния
изменяется во времени в соответствии с выражением E.62а). Ма-
Матрицы А, В и С, а также матрица D размера 1X1 определяют
конкретную форму взаимосвязи входа и выхода. (В общем слу-
случае эти матрицы могут изменяться при изменении индекса п,
а входной и выходной сигналы также могут быть векторами.)
Очень часто в качестве компонент вектора состояния берутся
выходные значения операторов задержки z-1 в направленном
графе, описывающем одномерный фильтр. Классическая задача
в теории переменных состояния состоит в нахождении матриц А,
В, С и D, которые дают требуемую передаточную функцию Нг (z)
с минимальным числом переменных состояния.
Аналогичный подход можно использовать при построении
двумерной модели с переменными состояния. Мы кратко опишем
модель, предложенную Рёссером [6] и получившую дальнейшее
развитие в работах Кунга и др. [7]. Модель Рёссера использует
два типа переменных состояния: переменные состояния горизон-
горизонтального распространения, которые мы будем обозначать через
g0, glt ..., и переменные состояния вертикального распростране-
распространения, обозначаемые v0, vlt ... . Переменные состояния горизон-
горизонтального распространения, взятые в совокупности, образуют век-
вектор g (rti, n2); аналогично образуется вектор v (пъ п2). Тогда
модель с переменными состояния двумерного ЛИС-фильтра с одним
входом и одним выходом принимает вид
Гв(«1 + 1. я.) 1 fAi А, 1 Г g (nlt я,) 1 Г Bt
1, я,)]_ГА1
1+1)J~LA8
п2
E.63а)
[ I j^ ?j ]
, л,) = [Cx С,] [ I j^ ?j ] + Dx (nu nt). E.636)
Заметим, что, согласно E.63a), g (nlt n2), распространяясь в го-
горизонтальном направлении, образует g («i + 1, n2), a v (пь /ц),
распространяясь в вертикальном направлении, образует v (nb
пг + 1).
Для этого класса фильтров можно найти передаточную функцию
tz(Zl' Z2>- Хг{гг,гг) >
296 Глава 5
выполнив двумерное г-преобразование выражений E.63) и раз-
разрешив результат относительно YJXZ. Это дает
i 0 1 *fAi АЛХ-
J-[A; A;J)
Подматрица Ъх — это просто умноженная на гг единичная ма-
матрица соответствующего размера. Аналогично Z2 — это единич-
единичная матрица, умноженная на z2. Цель задачи реализации с исполь-
использованием переменных состояния заключается в нахождении ма-
матриц А, В, С и D, которые дают функцию ?г (zlt 2г). точно или
Х(п,,п2)
Рнс. 5.21. Направленный граф нз рнс. 5.20 с системой условных обозначений.
Заметим что метки go (it я>) относятся к выходам ветвей с операторами сдвига а н
Заметим, что метки
(it, я>) относятся к выходам ветвей с операторами сдвига, а не
к узловым сигналам.
приблизительно равную требуемой передаточной функции Hz (zlt
z2). В сущности, выражения E.63) определяют способ реализации,
для которой следует найти алгоритм синтеза. Недостаток места
не позволяет нам вдаваться в подробности задачи синтеза; инте-
интересующиеся отсылаются к работе Кунга и др. [7], а также к ли-
литературе по теории управления [8]. Ниже мы обсудим вопросы
реализации с использованием переменных состояния на основе
направленных сигнальных графов.
Одна из возможностей состоит в выборе в качестве переменных
состояния выходных сигналов операторов сдвига. В этом случае
g {п\, Пъ) — вектор, содержащий выходные сигналы операторов г~1,
a v (tti, fh) — вектор, образованный выходными сигналами опе-
операторов ггх. (Заметим, что выходной сигнал ветви оператора сдвига
не обязательно совпадает с сигналом в узле, на котором заканчи-
заканчивается ветвь сигнала.) Если переменная состояния соответствует
выходу оператора сдвига, следующее значение этой переменной
должно соответствовать входу оператора сдвига. Чтобы получить
подматрицы Alf A2, А8 и А, в выражении E.63а), нужно выра-
выразить входной сигнал каждого оператора сдвига через выходы
всех.операторов сдвига, следя за тем, чтобы включить все ветви
от выхода ко входу, не содержащие сдвигов.
Синтез и реализация двумерных БИХ-фильтров 297
Вернемся к направленному сигнальному графу на рис. 5.20
и получим для него реализацию с использованием переменных
состояния. Присвоим выходу верхнего оператора г~1 обозначение
go (п\, П2), выходу нижнего оператора г~х обозначение g{ (щ, П2),
выходу левого оператора z^x обозначение у0 (ль Яг) и выходу
правого оператора zi обозначение V\ (ti\, Яг), как это показано
на рис. 5.21. Для этого примера выражения E.63) принимают
следующий вид:
(«1 +
l,n2)
Сю
C20
0
1
«10
1
0
0
0
+
1
«11 + «01^10
«21 + «01^20
0
«01
«00C10
20
«00
?o (tiv n2y
П2)_
i, n2),
E.65а)
У(п» пг) = [1 0 а01 с01]
go(ni, П2)
foK- «г)
flool*(«i. «г)- E.656)
Эти два векторно-матричных выражения представляют собой
алгоритм вычисления значений отсчетов выходного сигнала по
значениям отсчетов входного сигнала. Как и в предыдущем раз-
разделе, объем памяти, требуемой для хранения переменных состоя-
состояния, зависит от порядка, в котором вычисляются значения выход-
выходных отсчетов. Можно представить себе четырехпроцессорное
устройство для решения уравнения E.65а), где на каждый про-
процессор возлагается задача вычисления следующего значения
конкретной переменной состояния по текущему входному значе-
значению и текущим значениям переменных состояния. Уравнение
E.656) можно реализовать с помощью пятого микропроцессора,
который вычисляет требуемые значения выходного сигнала. При
использовании такой архитектуры минимизация числа микро-
микропроцессоров соответствует минимизации числа переменных со-
состояния, что представляет собой задачу, глубоко разработанную
в литературе по теории управления [7, 8]. Можно найти и дру-
другие структуры с тем же числом переменных состояния, приводя-
приводящие к реализации той же передаточной функции Нг (zb z2), но
отличающиеся меньшей чувствительностью к погрешностям коэф-
коэффициентов или меньшим шумом округления [7, 9].
298 Глава 5
В частном случае двумерных БИ-Х-фильтров, обладающих
только полюсами, т. е. фильтров с передаточной функцией вида
«00
z2)
za)
E.66)
где а00 — константа, a Bz (zlt z2) — двумерный полином, можно
показать, что реализации с использованием переменных состоя-
состояния, основанные на направленных сигнальных графах, когда
в качестве переменных состояния выбираются операторы сдвига,
требуют минимального числа переменных состояния. Они являются
минимальными реализациями [7].
Х(П!,П,)
У(п1(п,)
Рис. 5.22. Представление передаточной функции в виде направленного сигналь-
сигнального графа.
Заметим, что ветвь ат отсутствует.
Любопытно отметить, что в более общем случае, когда поли-
полином Аг (zlt z2) не является константой, реализации с использова-
использованием переменных состояния, основанные на обычных направлен-
направленных сигнальных графах, наподобие представленного на рис. 5.20,
могут и не оказаться минимальными. Рассмотрим такой пример.
Пусть
'" ' _ E>67)
На рис. 5.22 показано представление этой передаточной функции
в виде направленного сигнального графа с тремя операторами
сдвига.
Кунг и др. [7] показали, что функцию Нг (zv z2) можно реали-
реализовать с помощью следующих выражений с использованием пере-
переменных состояния, в которых фигурируют только два оператора
сдвига:
[v(nlt
С\0 Р
Ц с01
[g (Пц П2) I
v(nv /ц) J
п2), E.68а)
E.686)
Синтез и реализация двумерных БИХ-фильтров 299
Константы р и q определяются из совместного решения нелиней-
нелинейных уравнений:
pq = сп + с1ОсО1, E.69а)
awP2 — (а01с10 + а1ОсО1 + an) P +
+ (aoiCu + аО1с1ОсО1) = 0. E.696)
Используя уравнения E.64) и E.69), можно показать путем
очевидных, но громоздких выкладок, что функция
~ с10 —р И—» Г 1 И
_q Z2^J [J E.70)
действительно равна функции Hz (zly z2), описываемой уравне-
уравнением E.67). С помощью выражений E.68) можно построить на-
направленный граф сигналов, имеющий только два оператора сдвига
(рис. 5.23).
Рис. 5.23. Другой направленный сигнальный граф функции Нг (гъ 22), исполь-
использующий только два оператора сдвига.
В общем случае коэффициенты р и q — комплексные числа.
Кунг и др. [7] показали, что принцип реализации с использо-
использованием переменных состояния в форме уравнений E.68) можно
обобщить на любую передаточную функцию Hz (z1; z2), если она
удовлетворяет следующим трем условиям. Константа аа0 в числи-
числителе должна быть равна нулю, наибольшие степени z~l в полино-
полиномах числителя и знаменателя должны совпадать и наибольшие
300 Глава 5
степени z^~l в полиномах числителя и знаменателя также должны
совпадать.
В реализациях этого типа с использованием переменных со-
состояния возникает одна потенциальная сложность. При решении
нелинейных уравнений значения констант р и q могут оказаться
комплексными. Если, например, а10 = а01 = 1, аи = 0, с10 =
= с01 = 2 и сп = 1, то вычисления дадут р = q* = 2 ± /. Вве-
Введение комплексной арифметики и расход памяти для комплексных
сигналов могут свести на нет всю экономию (аппаратную, вы-
вычислительную и памяти), полученную от использования выраже-
выражения E.68) в форме с двумя переменными состояния. Проектиров-
Проектировщик фильтра должен сам решить, какой подход предпочтительно
использовать в каждом конкретном случае.
5.4. Методы синтеза в пространственной области
В этом разделе мы рассмотрим несколько способов синтеза
двумерных БИХ-фильтров, основанных на минимизации функ-
функционалов ошибки в пространственной области. В общем случае
цель состоит в определении коэффициентов a (nlt п2) и Ь (пъ п2)
двумерного рекурсивного фильтра так, чтобы отклик фильтра
У (ni< Яг) на определенный входной сигнал х (пъ п2) был хорошей
аппроксимацией некоторого определенного требуемого выходного
сигнала d (nlt n2). Обычно в качестве определенного входного
сигнала берется дельта-функция х (пъ п2) = б (пъ п2), так что
d (nlt n2) является требуемым импульсным откликом. Однако
в том или ином конкретном случае может оказаться удобнее
выбрать в качестве х (пъ п2) другой сигнал, например единичную
ступеньку или единичную наклонную плоскость.
Способы синтеза в пространственной области полезны в тех
случаях, когда в конкретном приложении требуется синтезиро-
синтезировать фильтр, отклик которого на определенный входной сигнал
аппроксимирует заданную функцию. В других случаях, когда
характеристики фильтра определены в частотной области, более
полезны методы, описанные в разд. 5.5.
При аппроксимации в пространственной области чаще всего
используется среднеквадратичная норма ошибки, отличающаяся
простотой выполнения математических операций, хотя, безусловно,
возможно и применение других норм ошибки. Среднеквадратич-
Среднеквадратичная ошибка е2 обычно определяется следующим выражением:
?2= fl fl [y(th, nj-dfa, n2)f. E.71)
oo П2=
(Мы предполагаем, что у и d являются сигналами с вещественными
значениями.) Используя теорему Парсеваля, можно показать,
Синтез и реализация двумерных БИХ-фильтров 301
что е2 совпадает со среднеквадратичной ошибкой в частотной
области
л л
J J
E.72)
Важность этого соотношения состоит в том, что зависимость функ-
функции у от параметров фильтра а (п1у п2) и Ь (пь п2) легче описать
в частотной области
К (©!, С02) в ((Ol, (о2) . ^57cJ)
где ^(о)!, со2) = 2 5ja(n!, л2) ехр (—/ovh — /<»2«2)» E.74а)
п, п,
и В (col со2) = 2 2 ft (rti, n2) ехр (—/co^i — /»2«2)- E.746)
я, я,
В большинстве алгоритмов синтеза предполагается, что опор-
опорной областью а (пъ п2), b (nlt n2), x (пъ п2), у {пъ п2) и d (пъ п2)
является первый квадрант. Хотя мы сделаем аналогичное пред-
предположение, ясно, что можно было бы использовать и другие
опорные области. Более серьезное допущение связано с выбором
пределов суммирования в выражении E.71). Чтобы суммирова-
суммирование можно было осуществить практически, оно должно выпол-
выполняться в конечных пределах. Однако если область суммирования
достаточно велика, то ошибки вне этой области (для устойчивого
фильтра) будут незначительны.
Теоретический минимум ошибки е2 можно найти, приравнивая
нулю ее частные производные по параметрам \а {nly n2), b (nlt n2)\.
Прежде всего определим сигнал ошибки:
е(пи п2) й у (nlt n2) — d {пъ п2). E.75)
Тогда ^2 = S S в* («1. «г) и» следовательно, E.76)
я, п,
да (л, а) - Ь Ь 2е{П1' П2> da(Pl, p2)
П1' П2>
Аналогично
det _ V V 9р(п п \ дУ ("i' "а)
Частные производные в правой части уравнений E.77) можно
получить следующим образом. Предположив, что все рассматри-
302 Глава 5
ваемые сигналы и коэффициенты имеют опорные области, огра-
ограниченные первым KBaflpaHTOMj можно выразить у (л1( п2) с по-
помощью рекурсивного соотношения
Nt—l N,—\
у («1. п2) = 2 ? a (Pi. л) * ( - л. «2 - р2) -
Pi=0 Р2=0
Mi—I Ms—I
- 2j 2j b (qlt q2) у (^ - qv n2 - q2) E.78)
(Я1.Яг)Ф @. 0)
[приняв b @, 0) = 1]. Тогда можно непосредственно получить
[10] рекурсивные соотношения для ду (л1( п2Iда (р1( р2) и ду {пъ
п2)/дЬ (qlt q2):
М,_1 Мг—I
- 2j 2j
m,=0 m,=0
(mlt m,Lfc@. 0)
Af,—I M,—I
2 dbDl, qt) • (
mt=0 mj=0
<m,, m,) gfc @, 0)
Эти рекурсивные вычисления начинаются с нулевыми началь-
начальными условиями. Кроме того, можно показать, что частные произ-
производные связаны друг с другом соотношениями
яг —
(Я1, яг)
— ft. я, —
аТ(оГТ)
Ei80b)
Таким образом, нужные частные производные можно численно
определить с помощью двух рекурсивных соотношений.
Аналитическое решение уравнений для нахождения значений
коэффициентов {a (p1( p2), b (qu q2)\, минимизирующих е2, в общем
случае невозможно. Поэтому мы вынуждены рассмотреть алго-
алгоритмические методы минимизации е2. В последующих разделах
детализируются три алгоритма, используемые при проектирова-
проектировании двумерных БИХ-фильтров с помощью критерия ошибки
в пространственной области.
Синтез и реализация двумерных БИХ-фильтров 303
5.4.1. Метод Шэнкса
Один из первых методов проектирования двумерных БИХ-
фильтров был предложен Шэнксом и др. [11]. Чтобы избежать
описанных выше трудностей, связанных с нелинейностью, авторы
минимизировали модифицированную функцию ошибки. Если счи-
считать, что Е (©ь ©2) представляет собой двумерный фурье-спектр
сигнала ошибки е {пъ л2), то
Е К, щ) й ^ffiffi'*0 - D К, ©2). E.81)
Спектр модифицированной ошибки Е' (ац, ©2) получается путем
умножения Е (©ь ©2) на В (©ь ©2);
Е' (©ь ©2) = А ((оь ©2) X (©ь ©2) —
— В (©ь ©2) D (©ь ©2). E.82)
Это соответствует сигналу ошибки
е' (пъ п2) = а (%, п2) * * х {nlt 1ц) —
— Ь (пъ n2)**d (пъ п2), E.83)
который линеен относительно коэффициентов фильтра {а {пъ пг),
b (nu /ц)\.
Суммарная ошибка e? получается суммированием квадратов
значений модифицированной ошибки
б2=? SK(«i. п2)]\ E.84)
Шэнкс минимизировал е2 следующим образом. Прежде всего он
принял, что входной сигнал х (пь п2) является дельта-функцией
6 («1, пг). Затем, поскольку коэффициенты а (пи л2) в числителе
равны нулю вне прямоугольника 0 < пх < Nlt 0 < л2 < N2,
выражение E.83) принимает простой вид
М1—\ Мг—1
е' (пъ /ц) = — 2 2j ъ fan Я*)d ("l - Ян "г - ft)
«1=0 ?>=0
для Пх^Ых или пг^Ыг. E.85)
Теперь можно подставить этот результат в E.84), при условии
что суммирование в E.84) выполняется по области R, показанной
на рис. 5.24. (Верхние пределы К\ и /С2 указывают пределы сум-
суммирования при вычислениях.)
Если теперь продифференцировать е2 по коэффициентам знаме-
знаменателя b (<7i, <72), подставив, как и выше b @, 0) = 1, то получится
следующая система линейных уравнений:
304 Глава 5
Mt-l M,-l
? S b {тъ m2) r (mv m2; qv q2) = 0
для 0<m1<M1, 0 < /n2« M2, но (mlf m2) Ф @, 0), E.86)
где функция г (тъ т2; qlt q2) имеет вид
г (mlf /п2; ^1, ^2) = ? ? d(«i - mi, /ц - /Пг)^^! - ^lf л2 - ^,
(«1. «2)€^
E.87)
а суммирование выполняется по области R, показанной на
рис. 5.24. Поскольку b @, 0) = 1, эти выражения можно пере-
переписать с тем, чтобы получить систему из МХМ2 — 1 нормальных
уравнений с МХМ2 — 1 неизвестными:
Рис. 5.24. Область R, по которой выполняется суммирование квадрата модифи-
модифицированной ошибки в методе Шэнкса.
2j Zj b{ml, т2)г(тъ /п2; qlt q2) — —г @, 0; qlt q2)
(m,, m,) ф{0, 0)
для 0<ql<Ml, 0<^2<М2, но (qv q2)^@, 0). E.88)
Решение уравнений E.88) дает нам коэффициенты знаменателя
\Ь (пъ п2)}. Чтобы найти коэффициенты числителя {a (nlt n2)},
можно воспользоваться тем, что
а («1, «г)* *х (пи п2) = b (ль п2)**у (пъ п2). E.89)
Поскольку х (яь п2) = б (пъ п2) и г/ («!, п2) « d (nlt /ц), то можно
записать
а («ь п2) ~ Ь (ль л2)* *d (пъ п2). E.90)
В общем случае протяженность массива а (пи п2), найденного
таким образом, будет превышать протяженность прямоугольника
0 <. пг < Nu 0 < п2 < N2. В этом случае протяженность мае-
Синтез и реализация двумерных БИХ-фильтров 305
сива a (nlt п2) можно ограничить с помощью окна до нужной ве-
величины. Если требуемый отклик d (nu п2) можно достаточно
хорошо аппроксимировать двумерным БИХ-фильтром, то опи-
описанная методика дает хорошие результаты [11].
Основное достоинство метода Шэнкса заключается в том, что
для нахождения коэффициентов прямой формы реализации тре-
требуется лишь решить систему линейных уравнений. С другой сто-
стороны, этот способ минимизирует не истинное, как требуется,
а модифицированное среднеквадратичное значение разности у (пи
п2) и d (nlt п2). Более того, синтезированные этим способом БИХ-
фильтры могут оказаться неустойчивыми.
5.4.2. Методы спуска для синтеза
в пространственной области
Для решения задачи синтеза двумерных БИХ-фильтров можно
использовать общие методы нелинейной оптимизации. Ограничен-
Ограниченность объема книги не позволяет нам привести здесь общее сравне-
сравнение и оценку всех известных методов. Заинтересованному чита-
читателю хорошую отправную точку дадут работы [10, 11]. В этом
разделе мы отметим несколько методов оптимизации, часто исполь-
используемых при проектировании как одномерных, так и двумерных
БИХ-фильтров.
Для удобства определим вектор параметров р как набор коэф-
коэффициентов фильтра {а (пи п2), Ь(пип2)\. Возмущения вектора
параметров обозначим через Др. В общем случае алгоритмы
нелинейной оптимизации итеративны по своей природе. На каж-
каждой итерации заданием возмущений текущих значений параметров
делается попытка уменьшить ошибку аппроксимации. Обозначим
функциональную зависимость ошибки от вектора параметров
е2 (р). Тогда на каждой итерации отыскивается вектор возмуще-
возмущений Др, для которого
е2 (р + Др)< е2 (р). E.91)
(На практике Др можно умножить на положительный скаляр X.
Тогда можно считать, что Др определяет направление поиска,
а К — размер шага.)
В методе наискорейшего спуска вектор направления Др вы-
выбирается равным градиенту функционала ошибки, взятому со зна-
знаком минус:
[|?] E.92)
Частные производные е2 связаны с частными производными вы-
выходного сигнала у (пъ п2) выражениями E.77).
Метод наискорейшего спуска относительно прост в использо-
использовании, но отличается медленной сходимостью [10, 13]. Поэтому
20 Даджион Д., Мсрсеро Р.
306 Глава 5
часто его используют лишь на нескольких первых итерациях
минимизации.
Метод Ньютона аппроксимирует функционал ошибки е2 (р +
+ Др) с помощью ряда Тейлора второго порядка вида
е2 (Р + Ар) <* е2 (р) + Ve2- Др rf V2Ap'HДр, E.93)
где Н — матрица Гессе, ij-я компонента которой представляет
собой частную производную второго порядка d2ejdpidpj, a pt
и р] — г'-я и /-я компоненты вектора параметров р. Чтобы найти
вектор возмущений Др, необходимо продифференцировать выра-
выражение E.93) по Др и приравнять результат нулю. Это приводит
к системе линейных уравнений
Н Др = — Ve2, E.94)
которая решается на каждой итерации для нахождения Др.
Теоретически этот метод обеспечивает квадратичную сходи-
сходимость, если вектор параметров р близок к оптимальному. Однако
метод требует для нахождения Н вычисления частных производ-
производных второго порядка. Это, конечно, связано с дополнительными
вычислительными расходами. Несмотря на потенциально быструю
сходимость, метод Ньютона часто вообще не сходится при миними-
минимизации в пространственной области, потому что при векторе р,
близком к оптимальному, матрица Гессе может иметь отрицатель-
отрицательные собственные значения [10]. Тем не менее, как мы увидим
в разд. 5.6.1, метод Ньютона используется с определенным успе-
успехом при минимизации в частотной области.
Для синтеза прямых форм двумерных БИХ-фильтров успешно
использовался [13] алгоритм минимизации Флетчера—Пауэлла
[14]. Этот алгоритм получил название «алгоритма наискорейшего
спуска с ускоренной сходимостью», поскольку в нем для вычисле-
вычисления частных производных второго порядка используются частные
производные первого порядка плюс информация, полученная на
предыдущих итерациях. Алгоритм Флетчера—Пауэлла, как и
алгоритмы наискорейшего спуска и Ньютона, требует начальной
оценки вектора параметров. Обоснованный выбор этой начальной
оценки помогает ускорить сходимость, а также избежать при
поиске глобального минимума локальных минимумов. Часто
в качестве хорошей начальной оценки используется алгоритм
Шэнкса [11].
При синтезе одномерных и двумерных БИХ-фильтров успешно
применялся также метод линеаризации [10, 15, 16]. В этом ме-
методе используется разложение в ряд Тейлора первого порядка
вариации выходного сигнала у (пъ п2) как функции вектора пара-
параметров р1'. Чтобы подчеркнуть эту функциональную зависи-
х) -Имеется в виду, что в ряде Тейлора оставлялись только первые два члена
[см. ниже выражение E,96)]. — Прим. ред.
Синтез и реализация двумерных БИХ-фильтров 307
мость, а также для некоторого упрощения обозначений будем
использовать индекс р и опустим указание на зависимость от
(tii, пг)> т- е- определим
УРйу(П1, «2)|р. E.95)
Запишем ряд Тейлора первого порядка
t/p+др ~ «/p+Vt/p-Др, E.96)
в котором компоненты градиентного вектора уур представляют
собой частные производные ур по коэффициентам фильтра, обра-
образующим вектор параметров р. Теперь функционал ошибки можно
приближенно выразить в виде
е2(р + Др)=? ? («/р+др - df ~ ? SO/p + Vt/p-Ap-dJ.
t%l tig t%x t\%
E.97)
Дифференцируя это выражение по вектору возмущений Др и при-
приравнивая производные нулю, получим
0 = 2 ? S 0/р + V«/p- Др - d) Vt/p = 0. E.98)
Эти нормальные уравнения следует разрешить относительно Др.
Используя соотношение
Ve2(p)=2? SO/p-d)Vt/p, E.99)
их можно записать в более сжатом виде. Подставив E.99) в E.98),
получим систему линейных уравнений
Ve2 (р) + 2QP Др = 0, E.100)
где Qp — матрица, ij-й элемент которой имеет вид
««-2 2 ¦?¦¦&• <5-10|>
Поскольку на первой итерации значение вектора р известно,
можно вычислить величины ур — d и V«/P. Из них легко полу-
получить Ve2 (р) и Qp и нормальные уравнения E.100), которые
затем разрешаются относительно Др.
Строго говоря, все эти способы не могут гарантировать устой-
устойчивости [ни в смысле ограниченности входа и выхода (L^, ни
в среднеквадратичном смысле (L2)], поскольку на практике ква-
квадратичная ошибка суммируется только по области конечной про-
протяженности в плоскости {tii, n2). Однако если требуемый сигнал
d (nlt щ) квадратично суммируем и область суммирования ошибки
выбрана достаточно протяженной, то фильтр будет скорее всего
устойчив в обоих упомянутых выше смыслах.
20*
308 Глава 5
В интересах полноты упомянем алгоритм минимизации Левен-
берга—Марквардта [17], который использовался для синтеза
двумерного БИХ-фильтра в частотной области [18]. Этот алго-
алгоритм можно рассматривать как компромисс между методами
Ньютона и наискорейшего спуска. Поэтому он итеративен и
обеспечивает решение системы линейных уравнений относительно
вектора направления Ар на каждой итерации. В варианте метода,
использованном в работе [18], необходимые частные производные
вычислялись не с помощью явных формул, а численно.
5.4.3. Итеративный метод синтеза
с предварительной фильтрацией
Шоу и Мерсеро [13] предложили другой метод синтеза дву-
двумерных БИХ-фильтров по минимуму среднеквадратичной ошибки.
Он является развитием метода идентификации одномерных си-
систем [19] и состоит в том, что норма ошибки записывается в форме
системы линейных уравнений, решаемых на каждой итерации
относительно параметров фильтра {а (пь п2), b {пъ п.г)\. Выра-
Выражение E.72) можно переписать в виде
4л2
А(щ,
(о2)
—я —я
я я
ш2)
dw1dw2 =
= Т J J
D
j, со2) В
я я
о!, со2)
—я —я
— D (cDi, co2) 5 (cDi, co2) |2 dcDi dco2,
где использовано определение
E.102)
E-юз)
В пространственной области выражение E.102) принимает вид
ег= S Se2^, nj), E.Ю4)
л, пг
причем
е (лх, п2) = ^ («!, л2) * * [a (nlt п2) * * х (nlt n.2) -
— d (nlt л,) * * b (пи п.,)]. E.105)
Пока, еще задача минимизации не модифицирована, так как
g (rti, л2) — функция коэффициентов знаменателя \Ь (л1( л2)}.
Синтез и реализация двумерных БИХ-фильтров 309
Однако если бы последовательность g (ль п2) не зависела от
b (яь п2), то минимизация E.104) привела бы к решению системы
линейных уравнений. При итерационной оптимизации для вы-
вычисления последовательности g (пъ п2) в текущей итерации можно
использовать b (nu п2) из предыдущей итерации. После этого
можно решить систему линейных уравнений для получения новых
значений {а (пи щ), b (nu п2)\.
Приравнивая нулю частные производные выражения E.104),
получим
Нетрудно проверить, что частные производные выражения E.105),
используемые в E.106), имеют вид
d*^ pj = g («i - Pi, n2 - р2) * * х (пг - plt n2 - р2), E.107а)
%{^ "j = — g Oi - <7i> n2-q2)** d («i - qlt n2 - q2), E.1076)
предполагая, что последовательность g {пъ п2) не изменяется
во время текущей итерации. Последовательность g (nlt n2) для
текущей итерации, обозначенная g (nlt п2), находится из Ьг_± (ль
п2) с использованием рекурсивного выражения
Mi—l M2—l
gt («i, п2) = б (nlt п2) — Jj Li bt_i (<7i, q2) g, («i — qit n2 — q2).
E.108)
В точке сходимости ошибки, вычисленные из выражений E.105)
и E.75), будут идентичны. Однако эта величина может не быть
истинным минимумом [13, 19], так как истинные частные произ-
производные от е (пъ п.г) по коэффициентам фильтра \Ь (пи п2)\ не равны
выражению E.1076), где g (nlt n2) считалось константой. Поэтому
при равенстве нулю выражения E.1066) истинные градиенты
могут отличаться от нуля, указывая направление дальнейшего
уменьшения е2.
Истинные частные производные от е {пъ п2) по b (qlt q2) имеют
вид [13]
%[% g =»(«i- Qi, n2 - q2), E.109)
где v («!, гц) — результат обратного преобразования Фурье функ-
функции
310 Глава 5
После того как итеративные вычисления, основанные на вы-
выражениях E.106) и E.107), сошлись, мы можем использовать
результирующие параметры фильтра \а (пъ п2), Ь (пъ п2)\ в ка-
качестве начального приближения для вторичных итеративных вы-
вычислений, в которых вместо выражения E.1076) используется
выражение E.109). Уравнения, решаемые на каждой итерации,
по-прежнему будут линейными [13].
Итеративный метод проектирования с предварительной филь-
фильтрацией на практике сходится гораздо быстрее, чем более общие
методы оптимизации, например метод Флетчера—Пауэлла [14].
Однако может случиться, что на некоторой конкретной итерации
фильтр окажется неустойчивым, что обычно приводит к серьезным
трудностям при вычислении последовательности g (пъ п2) для сле-
следующей итерации. Хотя устойчивость фильтра нельзя доказать
аналитически, представляется, что если метод на практике схо-
сходится, то он всегда дает устойчивый фильтр [13].
Пример 1 [13]
Итерационный метод проектирования с предварительной филь-
фильтрацией был использован для синтеза двумерного фильтра ниж-
нижних частот. Требуемый отклик d (nlt п2) был откликом B3х23)-то-
чечного КИХ-фильтра первого квадранта, синтезированного ме-
методом окон с номинальной частотой среза 0,5л и шириной пере-
переходной полосы 0,225л. Номинальное усиление в полосе пропу-
пропускания равнялось 1,0 с максимальным значением пульсаций 0,017.
Максимальное значение пульсаций в полосе непропускания рав-
равнялось 0,0076. Поскольку использовался только первый квадрант
импульсного отклика, последовательность d (nlt п2) отличалась
от нуля только в области плоскости (пи п2) размером 12 X 12 точек.
Результирующий отклик с круговой симметрией был получен
с помощью четырех одноквадрантных фильтров, соединенных
параллельно.
Для аппроксимации последовательности d (пъ п2) с помощью
итерационного метода проектирования с предварительной филь-
фильтрацией был синтезирован двумерный БИХ-фильтр. Порядок
фильтра как в числителе, так и в знаменателе равнялся 4X4.
Полная среднеквадратичная ошибка по 144 отсчетам в (щ, п2)
равнялась в точке сходимости 7,33- 10"в, причем она была достиг-
достигнута лишь за четыре итерации (по две каждого типа). Пульсации
результирующего составного фильтра в полосе пропускания рав-
равнялись 0,015, а в полосе непропускания — 0,0072; ширина пере-
переходной полосы равнялась 0,258л.
Для сравнения тот же фильтр был синтезирован с использо-
использованием общего алгоритма оптимизации Флетчера—Пауэлла [14].
Сходимость была достигнута приблизительно за 80 итераций.
Синтез и реализация двумерных БИХ-филыпров 311
В данном случае итерационный метод синтеза с предварительной
фильтрацией существенно более эффективен с точки зрения
вычислений.
б.б. Методы синтеза в частотной области
В предыдущем разделе мы изучили некоторые способы синтеза
двумерных БИХ-фильтров с использованием критериев ошибки
в пространственной области. В настоящем разделе рассмотрим
методы синтеза по критериям ошибки, заданным в частотной
области. В силу теоремы Парсеваля среднеквадратичная ошибка
одинакова в обеих областях, т. е.
я, л,
я я
J I Y (Ш1« ^ - D (й>1' ^
= IF
—я —я
Это соотношение позволяет просто переходить от одного типа
критериев ошибки к другому.
Конечно, возможны и другие способы измерения ошибки, как
это было показано в гл. 3. Ошибка L«, (или чебышевская ошибка)
в частотной области описывается выражением
?«, A max | Y (а)х, со2) - D (с^, со2) |, E.112)
а норма ошибки Lp — выражением
я я
4л2
—я —л
. E.
Если величина р выбрана относительно большой, например 20,
то норма LA становится хорошей аппроксимацией нормы ?«,.
Методы синтеза в частотной области популярны по ряду при-
причин. Во-первых, аппроксимирующую функцию Y (щ, щ) легко
записать в виде функции от параметров фильтра \а (пь л2)>
b (nu п2)\, позволяющей легко вычислять любые частные произ-
производные. Во-вторых, часто бывает, что заданными оказываются
не все характеристики требуемого отклика. Например, нас может
интересовать только получение необходимой амплитуды отклика,
а его фазовые характеристики могут не иметь значения. Такому
частичному описанию гораздо легче удовлетворить в частотной
области, чем в пространственной.
312 Глава 5
5.5.1. Общие методы минимизации
Общие методы минимизации, упомянутые в разд. 5.4, можно
использовать и для минимизации ошибки в частотной области.
Обычно ошибка суммируется по конечному числу отсчетов в частот-
частотной области вместо интегрирования по квадрату —п < <х>ъ oJ <
< п. Далее, обычно отсчеты распределены равномерно, поэтому
для вычисления Y (со(, (о2) по {а (пи п2), b (nu п.2)\ можно исполь-
использовать двумерное БПФ. Наконец, если проектировщик хочет
указать частоты, на которых особенно важно обеспечить малость
ошибки аппроксимации, в функционал ошибки можно включить
неотрицательную весовую функцию. Таким образом, для случая
среднеквадратичной ошибки задача сводится к минимизации
функционала ошибки аппроксимации
/¦ й% W К„ щк) [ АВ\1\Ц^ -ДК, Щи)}', E.114)
где W (<ог, ш2) — весовая функция; (a>lh, со2й) — значения частот,
для которых должна быть проведена минимизация, и, как и ранее,
мы молчаливо предположили для удобства, что X (аъ со2) = 1.
Для решения этой задачи можно использовать идею линеари-
линеаризации, которая обсуждалась в предыдущем разделе. Для обозна-
обозначения параметров фильтра мы, как и ранее, используем вектор р,
а для обозначения их возмущений — вектор Др. Вводя обозна-
обозначение
у _ ЛР д А ((Ох, С02)
E.115)
для описания отклика фильтра, если значения его параметров
определяются вектором р, можно провести линеаризацию
Fp + vrp.Ap, E.116)
где у Yp — вектор градиента, состоящий из частных производных
dY (щ, со2) _ ехр (—/сохрх — /ш2р2) ,_
да(ри Pt) В(щ, со2)
dY ((ох, (о2) —Л ((Ох, (»2) ехр (
db(qi,gt) B2(cox,co2)
Теперь значение /о [выражение E.114)], отвечающее набору
параметров р + Ар, можно приблизительно записать в виде
И W {Ур + VYp-Ap^D]2. E.118)
к
Синтез и реализация двумерных БИХ-фильтров 313
Если продифференцировать это выражение по Ар и приравнять
результат нулю, то мы получим систему линейных уравнений
вида
V/o(p) + 2QpAp = 0, E.119)
которую необходимо решить относительно Др. В этом случае
VJa (p) определяет градиент функции E.114), а ij-и элемент
матрицы Qp равен
F,20)
где pi и pj представляют /-й и /-й компоненты вектора параме-
параметров р соответственно. На каждой итерации решается уравнение
E.119) с целью нахождения нового вектора возмущений Ар.
[На практике вектор Ар умножается на положительный скаляр-
скалярный параметр размера шага А,, подобранный так, чтобы обеспечить
условие Ja (р + А, Ар) < Ja (p).] Для минимизации функцио-
функционала Ja можно использовать и другие методы оптимизации.
В некоторых случаях может оказаться удобным выполнять
операции минимизации последовательно на подмножествах пара-
параметров фильтра на каждой итерации. Например, в рамках одной
итерации можно с целью уменьшения Ja варьировать коэффи-
коэффициенты числителя {а (пъ п2)\ при постоянных коэффициентах
знаменателя \Ь (пъ п2)\, а затем варьировать коэффициенты зна-
знаменателя \Ь (пъ п2)\ при постоянных коэффициентах числителя
{a (nv n2)\. В результате уменьшается число параметров, изме-
изменяемых в каждый данный момент времени, что может привести
к снижению числа арифметических операций и погрешности
вычислений.
Используя эти методы синтеза в частотной области, нельзя
быть уверенным в том, что результирующий фильтр будет устой-
устойчив. Если в результате получился неустойчивый фильтр, его
следует либо стабилизировать способами, описанными в разд. 5.7,
либо от него отказаться. Чтобы избежать такой ситуации, были
предложены алгоритмы синтеза с учетом условия устойчивости
в качестве ограничения. Один из таких алгоритмов будет рас-
рассмотрен в разд. 5.5.3.
5.5.2. Алгоритмы синтеза по амплитуде и квадрату
амплитуды
Функционал Ja в выражении E.114) является мерой отличия
между двумя комплексными функциями: требуемой функцией
отклика D (oil, (о2) и фактическим откликом фильтра Y (щ, о>2)-
Однако в некоторых приложениях нас может интересовать лишь
соответствие амплитуды (или квадрата амплитуды) отклика создан-
314 Глава 5
ного фильтра характеристикам требуемого вещественного отклика
D (©х, (о2). Сформулировав задачу аппроксимации таким образом,
мы перестаем интересоваться фазовой характеристикой или ха-
характеристикой групповой задержки фильтра, обосновывая это
тем, что для данного приложения фазовая характеристика несу-
несущественна, или тем, что мы собираемся использовать реализацию
с нулевой фазой.
В общем случае можно определить некоторую функцию от
Y («х, (о2). которая должна аппроксимировать требуемый отклик
D («х, (о2)- Тогда задача оптимизации сводится к минимизации
некоторого функционала разности f (У)—D. Если при этом
используется норма ошибки L2, то можно построить следующую
меру ошибки".
[ (ilZZi) ~ D (^- ^
Теперь для нахождения коэффициентов фильтра \а {пъ п2), b (пъ
п2)\, минимизирующих функционал Ja, можно воспользоваться
общими алгоритмами оптимизации, такими, как алгоритмы Флет-
чера—Пауэлла [14] и Левенберга—Маркардта [17] или мето-
методами, описанными в предыдущих разделах, например методом
линеаризации. Такой подход обеспечит синтез фильтра, реализуе-
реализуемого разностным уравнением конечного порядка; однако при
этом нет гарантии, что синтезированный фильтр будет устойчив
и, кроме того, вычисление необходимых частных производных
dflda (рг, р2) и dfldb (qu q2) может оказаться (в зависимости от вида
функции /) сложным или трудоемким.
5.5.3. Синтез по амплитуде с учетом условия
устойчивости
Можно так поставить задачу синтеза фильтра, чтобы вместе
с обычной ошибкой аппроксимации минимизировать и «ошибку
устойчивости» Js [18]. Эта ошибка устойчивости, являющаяся
грубой мерой неустойчивости фильтра, представляет своего рода
штрафную функцию. Она должна равняться нулю для устойчи-
устойчивых фильтров и принимать большие значения для неустойчивых.
Тогда можно синтезировать фильтр, минимизируя выражение
JuJa + aJs, E.122)
где положительная константа а (весовой множитель) определяет
относительную важность Ja и /s. Для минимизации функцио-
функционала J Экстрой и др. [18] использовали методы нелинейной
оптимизации. Их ошибка устойчивости основывалась на разности
множества коэффициентов знаменателя и минимально-фазового
множества с той же автокорреляционной функцией.
Синтез и реализация двумерных Б И Х-фильтров 315
Для нахождения упомянутого здесь минимально-фазового мно-
множества прежде всего необходимо вычислить автокорреляционную
функцию множества коэффициентов знаменателя b (tti, n2) по не-
несимметричной полуплоскости
Гь («1. Яг) = ? 2j b (Яи 'Яг) b (<7i + «и Щг + «г)- E.123)
Затем необходимо разделить фурье-спектр функции гь, обозна-
обозначенный через Rb (щ, щ), на минимально-фазовую и максимально-
фазовую компоненты. Это выполняется путем разложения спектра
на множители с использованием комплексного кепстра (разд. 4.4.4).
Для этого формируется кепстр tb (щ, п2) автокорреляционной
функции и он умножается на окно w (ях, п2), соответствующее
несимметричной полуплоскости [выражение D.132)]
Ътр{п1, n2)=-fb(nx, n2)w(ni, п2). E.124)
Индекс тр напоминает о том, что этот кепстр принадлежит мини-
минимально-фазовой последовательности Ьтр (пъ п^Х).
Если синтезированный фильтр устойчив, множество коэффи-
коэффициентов знаменателя Ь {пъ п2) представляет собой минимально-
фазовое множество с опорной областью на несимметричной полу-
полуплоскости. В этом случае b (tii, п2) равно Ьтр (ях, п2); в против-
противном случае равенство не имеет места. Таким образом, в качестве
ошибки устойчивости можно использовать функционал
Js = L S \Ь («х- п2) - Ьтр (щ, n2)f. E.125)
На практике из-за численных ошибок при нахождении кепстра
?ь (пъ "г) редко получают функционал Jа равным нулю. В общем
случае гь (nlt n2) имеет бесконечную протяженность, и при вы-
вычислении Гь (fii, n2) с помощью БПФ возникает пространственное
наложение. Как указывалось в разд. 4.5.5, степень наложения
можно контролировать, увеличивая размер БПФ.
5.5.4. Методы синтеза БИХ-фильтров с нулевой
фазой в частотной области
Часто (особенно при обработке изображений) требуется филь-
фильтрация сигнала фильтром с симметричным импульсным откликом.
Такие фильтры обладают частотным откликом с вещественными
значениями, или с нулевой фазой. Ранее БИХ-фильтры с нулевой
фазой реализовывались обычно двумя способами — последова-
последовательным (каскадным) или параллельным.
При каскадном способе организации фильтр с импульсным
откликом h (tii, n2) включается последовательно с фильтром,
') тр — от minimum phase (минимальная фаза).—Прим. перев.
316 Глава 5
имеющим импульсный отклик h (—nlt —л2)- Результирующий им-
импульсный отклик такого каскада имеет вид h (пъ п2)* *h (—пъ
—п2), а результирующий частотный отклик — вид вещественной
неотрицательной функции
С(щ, щ) = |//(©lf (О2)|2- E.126)
Как показывает это выражение, частотный отклик каскада огра-
ограничен классом неотрицательных функций (ц>ъ о>2)- Кроме того,
в этом случае возникают некоторые вычислительные трудности
из-за переходных процессов. Выходные отсчеты второго фильтра
каскада вычисляются рекурсивно, причем рекурсия выполняется
в направлении, противоположном направлению для первого
фильтра. Если h (/гь п2) — отклик БИХ-фильтра, то его выходной
сигнал имеет бесконечную протяженность, и теоретически перед
тем, как начать фильтрацию h (—пъ —п2), следует вычислить
бесконечное число значений выходных отсчетов первого фильтра,
даже если в конце требуется получить сигнал в ограниченной
области. Усечение вычислений в первом фильтре может привести
к появлению ошибки. На практике следует вычислять выходной
сигнал первого фильтра по достаточно протяженной области,
чтобы переходные процессы на выходе второго фильтра за счет
начальных отсчетов в достаточной степени затухли в интересу-
интересующей нас области выходного сигнала.
При параллельном способе организации результирующий вы-
выходной сигнал представляет собой сумму выходных сигналов
двух БИХ-фильтров с опорной несимметричной полуплоскостью
(или четырех фильтров с опорными четверть плоскостями). Как и
в случае каскадного способа, второй фильтр представляет про-
пространственно-инверсную копию первого, так что результирующий
частотный отклик описывается выражением
Р (a>i, а>2) = Н («к «г) + Н* (©!, @2) =
= 2Re [//(©!, со,)]. E.127)
Такой подход позволяет устранить трудности реализации филь-
фильтров с нулевой фазой, характерные для каскадной структуры,
но наилучшим образом его можно использовать при синтезе
БИХ-фильтров в пространственной области, где требуемый отклик
фильтра d {tii, n2) можно разделить по соответствующим опорным
областям.
В разд. 5.2 детально обсуждался относительно новый итера-
итерационный метод реализации БИХ-фильтров с нулевой фазой.
Описываемые ниже методы синтеза в частотной области позволяют
получать фильтры, реализуемые итерационным методом.
Синтез и реализация двумерных БИХ-фильтров 317
Частотный отклик двумерного БИХ-фильтра с нулевой базой
можно записать в виде
и / \ А- (Ш1> Щ)
Н^ ^)= В (щ, а,,)"
W,—1 N,—1
2 2 a("i. п») ехр (—/со^ —/(о2п2)
У Д+'
2 S 6 (mi-m*) ехР (—1щщ —
т,=—Aft+1 т2=—M2-f-l
[Как и ранее, принимается, что Ь (О, 0) = 1.] Поскольку
а (пи п2) = а (—пи —п2) и E.129а)
Ь (щ, lit) = b (—nlt —п2), E.1296)
функции А (©!, (о2) и В ((i)lt (o2) можно записать проще:
Л (©!, (о2) =.S S а' («1- «г) cos ((Oj/ij + Ю2Л2). E.130а)
В (щ, (о2) = 2 S ^' (mi' ^2) cos ((Ox/Hj + (o2m2), E.1306)
/711 /71 j
где
fl'@HLfl@,0Ia'(nI1 п2)й2а(п1, п2) для (nlf л2) ф @, 0),
E.131а)
fc' @, 0) й b @, 0) = 1, b' (tnv m2) й 2b {mx, m2) для {т^ т2) Ф @, 0).
E.1316)
[Суммирование в выражении E.130) выполняется по соответ-
соответствующим несимметричным полуплоскостям конечной протя-
протяженности.] Теперь можно построить функционал среднеквадра-
среднеквадратичной ошибки, который поддается минимизации описанными
ранее методами. В результате минимизации мы получим коэффи-
коэффициенты {a' (nu n2), b' (nlt n2)} фильтра с нулевой фазой, из ко-
которых с помощью выражений E.131) легко получаются коэффи-
коэффициенты {a (tii, n2), b (tii, n2)}. Затем для реализации синтези-
синтезированного фильтра можно воспользоваться приемами, описан-
описанными в разд. 5.2.
Можно поступить и по-другому, минимизируя функционал
ошибки в виде
^, со,) II
(о2)-
й max
v «s) II ~
1. Юг)
л и \уиъ ш2) ls-rr:
@),, I
Это задача оптимизации с высокой степенью нелинейности, однако
имеется итерационный метод, названный дифференциальной кор-
В((о1, со2) - Ао Ml> щ\ ¦ E.132)
v х> 2> В(щ, щ) v >
318 Глава 5
рекцией [20—24], позволяющий минимизировать Е, решая на
каждой итерации задачу линейного программирования. Заметим,
что А, В и D — функции с вещественными значениями.
Предположим, что после k итераций мы получили аппрокси-
аппроксимацию требуемого вещественного частотного отклика D (щ, оJ).
Обозначим эту аппроксимацию через
Далее найдем ошибку Loo этой аппроксимации:
Ek = \\D (oj, со2) - Hk (©!, (о2)|| =
= max
@),. Ы2)
Теперь можно определить функционал дифференциальной кор-
коррекции:
б д max lp(Mi' щ)В(щ, щ) — А (соъ щ)\ — ЕкВ(щ, щ) „.
k "( ) Bfe(wl шг) ' V •
,, и,)
Этот функционал через посредство Л (щ, щ) и fi ((Ol щ) в чис-
числителе E.135) зависит от параметров фильтра \а (пц пг), b' (tii,
п2)}. Подбирая эти параметры, можно минимизировать функцио-
функционал 8и, который обычно меньше нуля. Итерации выполняются
до достижения условия 8к+1 ^ 0; полученная функция Нк (щ, щ)
является наилучшей аппроксимацией отклика D (щ, м2)- Мини-
Минимизацию бА на каждой итерации можно выполнять методами
линейного программирования (см., например, работу [25]). Алго-
Алгоритм дифференциальной коррекции, отличаясь математической
элегантностью, может потребовать значительного количества
вычислений, поскольку на каждой итерации надо решать задачу
линейного программирования.
Синтез двумерных БИХ-фильтров с нулевой фазой можно
выполнить с помощью описанного в разд. 3.5.3 преобразования
Мак-Клеллана, применяемого к полиномам в числителе и зна-
знаменателе одномерного БИХ-фильтра с нулевой фазой. Пусть,
например,
N—l N—1
JJ а' (п) cos (an) JJ a' (n) Tn [cos со]
Н(и>)= в (со) ^^ =-Ж=1 E-136)
^ Ь' (m) cos (com) ?j b' (m) Tm [cos со]
m-^a rn--0
где Т„ \x] — rt-й полином Чебышева. Тогда можно, заменив
cos со двумерным тригонометрическим полиномом малого порядка
с нулевой фазой F ((оь со2), получить двумерный частотный
Синтез и реализация двумерных БИХ-фильтров 319
отклик
N—1
? а' (п) Тп [F (Ш1, ш,)]
и (ю ю \ _ "^о Л (а> м)
п (Щ, Щ) - лт —
— в(Ш1, со2) *
^ 6' (m) Гт [F (сох, ш,)]
т=0
Например, в качестве отклика симметричного одномерного
фильтра можно выбрать квадрат амплитудной характеристики
одномерного цифрового фильтра Баттерворта нижних частот.
Этот частотный отклик описывается функцией
+ I. tg (co,/2) J
где (ос — частота среза [1]. Используя тригонометрические тож-
тождества, можно выразить Н (о) как функцию cos о
EЛ39)
Я(Ш) =
A + cosco)A +осA— cosco)^
где
(^JAf('+C0S^\\ E.140)
& 2 / \ 1 — cos сос
Теперь можно подставить вместо cos о двумерную функцию
F (щ, (о2) = -g- Г — 1 +COS0)! + coso).2 + (cos(ox) x(coso2)] E.141)
и получить частотный отклик почти кругового симметричного
БИХ-фильтра нижних частот.
На каждом шаге итерационной реализации необходимо филь-
фильтровать сигнал фильтром с частотным откликом вида
С (ah, и2) = 1 — ХВ (©!, (о2), E.142)
причем В (oh, оJ) — функции с вещественными положительными
значениями. Как указывалось в разд. 5.2, это — двумерная
КИХ-фильтрация, которую можно выполнить с помощью мето-
методов, описанных в гл. 3. В частности, если фильтр с откликом
В (сох, (о2) синтезирован с использованием преобразования Мак-
Клеллана, то частотный отклик С (cot, (o2) можно реализовать,
используя модифицированный вариант схемы, описанной
в разд. 3.5.4.
5.5.5. Частотные преобразования
В интересах полноты обсудим кратко некоторые простые
преобразования в частотной области, с помощью которых выпол-
выполняется отображение одномерных и двумерных БИХ-фильтров
320 Глава 5
на другие двумерные БИХ-фильтры. Эти преобразования могут
оказаться полезными при синтезе фильтров нижних и верхних
частот, а также полосовых я многополосовых фильтров. Чита-
Читателя, интересующегося деталями, можно отослать к работам
[26, 27] ».
Обсуждение этих преобразований удобнее всего провести,
используя обозначение передаточной функции
Hz(zv г2)й Авг%'?\ , E.143)
аг (zl гч)
где Az (zlt z2) и Bz (Zi, z2) — двумерные полиномы. Целью частот-
частотных преобразований является отображение устойчивой рацио-
рациональной передаточной функции на другую устойчивую рацио-
рациональную передаточную функцию. В общем случае проектиров-
проектировщику фильтра хотелось бы также сохранить некоторые из ха-
характеристик фильтра-прототипа, например ослабление в полосе
затухания и пульсации в полосе пропускания, но изменить дру-
другие характеристики, например расположение и число полос про-
пропускания.
Для преобразования одномерного БИХ-фильтра-прототипа
#2 (г) в двумерный БИХ-фильтр Gz (zlt г2), можно выполнить
подстановку
г-1 = Fz(zv z2). E.144)
Тогда
Gz (zi, z2) = Hz (F;(z,, z2)). E.145)
Чтобы фильтр Gz был устойчив, необходима устойчивость Hz
и Fz [26, 27]. Кроме того, мы хотим отобразить единичный круг
г = ei® на частотную плоскость (гь z.2) = (ei'w\ е1'ы*). В резуль-
результате амплитуда функции Fz (zx, z2) будет удовлетворять равенству
|M*i, z2)|==l. E-146)
Таким образом, функция отображения Fz должна описывать
устойчивый фильтр с пропусканием на всех частотах.
Чакрабарти и Митра [27] указали, что единственное допусти-
допустимое преобразование для отображения одномерных БИХ-фильтров
на двумерные БИХ-фильтры имеет вид
Fz (z,, z2) = zVPz7\ E.147)
где р и q — положительные рациональные числа. Рассмотрим,
например, простой одномерный БИХ-фильтр
11 Читатель должен иметь в виду, что в этих работах двумерное z-преобра-
зование выражается через положительные степени Z] и z2. Поэтому формы за-
записи выражений в этих работах и у нас различаются.
Синтез и реализация двумерных БИХ-фильтров 321
с импульсным откликом
h (л) = а"и (л),
где и (л) — одномерная ступенчатая функция.
Воспользуемся теперь преобразованием
для получения двумерного БИХ-фильтра
h(n)
11
iiii
E.149)
E.150)
E.151)
g 1
n 7
/
/
7 / /
' /
/ /
/
i 7
* /
/ /
/
/ / /
' /
/ /
Л / j j
/ у / /
/ / /
' / /
/ /
/
Рис. 5.25. Преобразование Fz(zlt гЛ — г{ 'г2 2отображаетh (n)(а) на g(np n2)
(б).
Выполнив двумерное обратное г-преобразование функции G2,
получим импульсный отклик в виде
g (ль л,) - а"'б (л, - 2т) и (щ, /ц). E.152)
На рис. 5.25 показаны импульсные отклики Л (л) и g (ль «г).
В общем случае двумерно-двумерное преобразование характе-
характеризуется двумя функциями отображения:
zrVf^z,, г2), zr'-e-Mzi, z2). Eл53>
Обе функции /^ и ^ должны описывать двумерные стабильные
фильтры с полным пропусканием. В общем случае фильтры пер-
первого квадранта будут иметь вид
А/1—1 Ni—1
/="i («i, *2) = ± =0 "V"-. „,_. Для f = 1, 2.
п.=0 п.=0
E.154)
Синтез Fi и ^а для требуемого частотного преобразования является
непростой задачей, даже если Nt и N2 невелики [26].
21 Даджион Д., Мерсеро Р.
322 Глава 5
Общее преобразование можно упростить и специализировать,
если принять, что Fx не зависит от г2, a F2 — от гх. Тогда преобра-
преобразование принимает вид
В этом случае оси частот масштабируются независимо. Fx и F2
можно определить, отобразив небольшое число точек частотной
плоскости (обычно одну или две в зависимости от порядка преоб-
преобразования) [26]. В общем случае преобразование такого рода
можно рассматривать как наложение на частотный отклик с двои-
0
щ
§
@.-7Г)
@,-тг)
б
Рис. 5.26. Двумерный фильтр нижних частот с круговой симметрией (а), пре-
преобразованный в многополосный фильтр (б).
Для преобразования используется функция третьего порядка F, и функция второго
порядка Р„ соответствующие фильтрам с полным пропусканием. Заштрихованные об-
области обозначают полосы пропускания.
ной периодичностью Я (щ, оJ) окна, размер которого опреде-
определяется порядком Ft и F2- В зависимости от значений параметров
функций Fx и ^ отклик Я (щ, йJ) может локально растягиваться
или сжиматься, а центр окна может располагаться в точках @, 0),
@, я), (я, 0) или (я, я). На рис. 5.26 представлен двумерный
фильтр нижних частот с круговой симметрией, который с по-
помощью функции Fx третьего порядка и функции F2 второго по-
порядка преобразован в многополосный фильтр.
5.6. Методы синтеза некоторых специальных схем
В этом разделе мы изучим три метода синтеза; предназначен-
предназначенные для трех специальных видов реализации — каскадных филь-
фильтров, фильтров с разделимым знаменателем и решетчатых фильтров.
В силу отсутствия основной теоремы алгебры для многомерных по-
полиномов алгоритмы синтеза обычно приходится приспосабливать
Синтез и реализация двумерных БИХ-фильтров 323
к требованиям конкретных реализаций. В последующих разделах
мы познакомимся с тремя примерами специальных алгоритмов
синтеза.
5.6.1. Синтез каскадных фильтров
Как было показано в гл. 3, каскадные схемы в двух измере-
измерениях следует рассматривать отдельно. Каскадная реализация
предполагает формулировку задачи синтеза в каскадной форме.
Например, можно потребовать, чтобы частотный отклик проекти-
проектируемого фильтра имел вид
N
Я К, со2) = р П Я, (&>!, со,), E.155)
где р — полный коэффициент усиления и
N,-1 N,-1
Hi (со,, со2) = «ff «Д . E.156)
2 2] *< (%. «») ехр(—/cojmj — /соат2)
Обычно значения Ыг, N2, Mt и Af2 невелики (равны 2 или 3),
а а; @, 0) и bt @, 0) нормализованы к единице [28]. Соответ-
Соответственно каждый множитель Я; (a>ls co2) будет иметь не более 16
свободных параметров, а полный частотный отклик — не более
\6N + 1 свободных параметров. Для уменьшения числа пара-
параметров можно также наложить различные ограничивающие усло-
условия, например условие симметрии или условие постоянного чис-
числителя.
Если Я (coi, co2) имеет вид выражения E.155), то очевидна
постановка задачи минимизации L2 или Lp, которая решается
с помощью процедур оптимизации, описанных в предыдущих
разделах. Например, Мариа и Фахми [28] использовали для ре-
решения задачи аппроксимации оптимизацию типа ньютоновской
с функционалом ошибки в виде
к
Ja=l>i\H К*. Щн) I - D (щк, co2ft)]". E.157)
Каскадная форма имеет определенные преимущества, важные
для некоторых практических применений. Во-первых, как и
в одномерном случае, частотный отклик двумерного БИХ-фильтра
с каскадной структурой менее чувствителен к возмущениям коэф-
коэффициентов, чем при прямой форме организации. Во-вторых,
поскольку проверка устойчивости фильтров низкого порядка,
входящих в каскад, относительно проста [28], такую проверку
21*
324 Глава 5
можно включить в процедуру синтеза. Наконец, оптимизацию
можно выполнить по ступеням. На каждой итерации коэффициенты
всех последовательных фильтров, кроме одного, считаются по-
постоянными, а коэффициенты оставшегося фильтра варьируются
с целью уменьшения функционала Ja. На следующей итерации
варьируются коэффициенты другого фильтра.
Реализация каскадных фильтров выполняется методами, опи-
описанными в разд. 5.1.2.
5.6.2- Синтез фильтров с разделимым
знаменателем
Разделимые фильтры, представляя собой прямое произве-
произведение двух одномерных фильтров, обладают рядом достоинств,
проявляющихся как при синтезе, так и при реализации. В ра-
работах [13, 29] был предложен интересный компромиссный подход,
в котором используется комбинация неразделимого полинома-
числителя с разделимым полиномом-знаменателем. Это сохра-
сохраняет значительную долю гибкости синтеза неразделимых систем
и в то же время обеспечивает преимущества реализации, прису-
присущие разделимым БИХ-фильтрам.
Частотный отклик двумерного фильтра с разделимым знаме-
знаменателем имеет вид
Ь-- <5Л58>
Мы можем рассматривать отклик Н (щ, со2) как отклик каскада,
состоящего из двумерного неразделимого КИХ-фильтра А (<йь ю2)
и двумерного разделимого БИХ-фильтра 1/Bi (a>i) B2 (ю2) без
нулей. Поскольку по мере увеличения числа свободных пара-
параметров А (сох, со2) может аппроксимировать требуемый частотный
отклик сколь угодно точно, то и отклик Н (&>!, со2) можно исполь-
использовать для сколь угодно точной аппроксимации D (coi, со2). Вве-
Введение члена l/?i (щ) В2 (ю2) можно рассматривать как попытку
улучшения аппроксимации способом, влекущим за собой более
эффективную с вычислительной точки зрения реализацию, чем
просто увеличение числа свободных параметров многочлена
А(шъ со2).
Фильтры с разделимым знаменателем обладают с точки зре-
зрения их реализации некоторыми преимуществами. Если пренебречь
числителем, который можно реализовать отдельно в виде КИХ-
фильтра, то оставшаяся часть фильтра представляет собой раз-
разделимый фильтр с частотным откликом в виде l/Bt (щ) В2 (со2).
Реализацию этой части фильтра можно выполнить с помощью на-
набора одномерных сверток (реализуемых разностным уравнением),
выполняемых над строками входного сигнала, за которым следует
Синтез и реализация двумерных БИХ-фильтров 325
другой набор одномерных сверток над столбцами результирую-
результирующего сигнала. Полная реализация фильтра с разделимым знаме-
знаменателем, как показано на рис. 5.27, имеет вид
/ («1, «г) = 2j 2j
Pi Рг
l р2) х («! - plt п2 — р2), E.159а)
S («!, П2) = —
ЛГ>—1
S («! — ft, П2) + f («!, rt2), E.1596)
/K «г - <7г) + s (rti, n2). E.159в)
"Выражение E.159а) представляет собой реализацию отклика
знаменателя А (®ъ со2). Хотя оно записано в форме непосред-
непосредственной свертки, здесь можно использовать любой подходящий
алгоритм реализации КИХ-фильтров (гл. 3). Выражение E.1596)
описывает набор одномерных операций фильтрации по строкам,
а выражение E.159в) — одномерных операций фильтрации по
столбцам. С целью повышения производительности одномерные
операции фильтрации в каждом наборе можно выполнять парал-
параллельно, используя многопроцессорную систему.
x(ni,n,)
f(n,,n,)
Рис. 5.27. Каскадная реализация фильтра А (соь coa)/5i (co1M2(co2) с раздели-
разделимым знаменателем.
Поскольку выражения E.159) и рис. 5.27 описывают схему,
которую можно рассматривать как каскад из трех фильтров,
порядок следования этих фильтров можно изменить, не изменяя
результирующий частотный отклик. Предпочесть какой-то один
порядок другим могут заставить практические соображения,
например снижение шума округления.
Частотный отклик фильтра с разделимым знаменателем, вы-
выраженный через параметры фильтра \а (nlt n2), 6X («i), b2 (п2)\,
имеет вид
со2) = М1_Г'м2-
E-160)
М1_Гм2-. = .
S 2] К (Щ) Ь2 (т2) ехр {—iu>1m1 — /co2m2)
m,=0 m2=0
где b\ @) = b2 @) = 1. Естественно, полином-знаменатель можно
представить в виде произведения двух одномерных полиномов,
однако запись, использованная в выражении E.160), удобнее
в дальнейших рассуждениях. Поскольку знаменатель должен
326 Глава 5
быть разделимым, число свободных параметров знаменателя,
определяемых при проектировании, уменьшается от (MiM2 — 1)
до (Л^! -\- М2 — 2). С другой стороны, задача синтеза становится
более нелинейной вследствие того, что перемножаются свободные
параметры \bi (nix), b2 (щ)\ в выражении E.160). Поэтому алго-
гитм оптимизации потребует решения задачи минимизации с мень-
меньшим числом параметров, но более нелинейной.
Шоу и Мерсеро [13] разработали метод синтеза фильтров
с разделимым знаменателем, в котором минимизируется ошибка 1а
в пространственной области. Их алгоритм проектирования
является вариантом итерационного метода с предварительной
фильтрацией (разд. 5.4.3), видоизмененного так,- чтобы учесть
дополнительную нелинейность, внесенную разделимым знамена-
знаменателем. Вспомним, что в соответствии с итерационным методом
проектирования с предварительной фильтрацией мы стремимся
минимизировать ошибку в пространственной области
ег= Е Ee^ni. ti2), где E.161)
е (пх, п2) = g {пъ п2)* * [а (пи п2)**х (пъ п2) —
— d (nu n2)**b(nu п2)]. E.162)
Последовательность g (n-i, n2) получается в результате обратного
преобразования Фурье функции 1/В (щ, щ). В случае раздели-
разделимого знаменателя В (щ, щ) = Bt (щ) В2 (со2). так что b (nu п2) =
= Ьг (пг) Ь2 (п2) и g (пи п2) = gt («i) g2 (n2). Для упрощения рас-
рассуждений примем, что входной сигнал х (пъ п2) представляет
собой двумерную дельта-функцию. Тогда выражение E.162)
преобразуется следующим образом:
е (ii, п2) = [gi (ni) g2 (n2)] * * \a(tii, n2) — d(tii, n2) * * [bt (rii) x
Xb2(n.2)]\. E.163)
Если предположить, как в разд. 5.4.3, что ^и^ — константы,
то частные производные от е (пъ п2) по коэффициентам числи-
числителя \а (ръ р2)\ будут иметь вид
pj = 81 (пг - Pi) g> (n2 - л). E.164)
а частные производные по коэффициентам знаменателя — вид
М,-1
^(- "а) _ V h
?2
X \lgi(n1-q1)g2(n2-q2)]**d(n1-q1, n2-q2)\, E.165a)
Mt—1
де (»i. п2) _
ЛЯъ)
?,=0
X \[g! (ni - ft) ^2 («2 -q2) ** d (tii - 4i, ti2 - q2)}. E.1656)
Синтез и реализация двумерных БИХ-фильтров 327
Поскольку de/dbi и de/db2 зависят от bi и Ь2 соответственно, то
уравнения, полученные дифференцированием ег и приравнива-
приравниванием нулю полученных производных, будут по-прежнему нели-
нелинейными. Шоу и Мерсеро [13] устраняют эту проблему, исполь-
используя для вычисления частных производных в выражениях E.165)
значения \bi (qi), b2 (q2)\, полученные на предыдущей итерации.
Последовательности gt (rii) и g2 (п2) также вычисляются с по-
помощью предыдущих значений \bi (ft), b2 (ft)} путем одномерных
итераций
ft Ы = б Ы - ? bi (ft) fo (rtl - ft), E.166a)
i
M,l
?2 Ы = б (n2) - 2] ft2 (ft-) g2 (n2 - ft). E.1666)
i
Как уже отмечалось в разд. 5.4.3, вычисление частных произ-
производных в предположении, что g (rii, n2) или, в нашем случае,
gi («i) ёг («г) — константы, приводит к тому, что градиент ошибки
отличен от нуля. Как и в случае неразделимого фильтра, после
того, как первичные итерации закончены, можно перейти к этапу
вторичных итераций. На этом этапе частные производные в выра-
выражениях E.165) заменяются на
=M%-ft. n2), E.167а)
Г = М«1. «2-ft), E.1676)
где Vx (пи п2) — результат обратного преобразования Фурье
функции
w' EЛ68а)
a v2 {п,\, п2) — результат обратного преобразования Фурье
функции
Ввиду разделимости полинома-знаменателя проверка устой-
устойчивости фильтра выполняется просто путем проверки устойчи-
устойчивости двух одномерных БИХ-фильтров 1/Вх {щ) и 1/Б2 (а>2).
Пример 2 [13]
Для аппроксимации КИХ-фильтра нижних частот из примера 1
в конце разд. 5.4.3 был спроектирован квадрантный фильтр с сим-
симметричным разделимым полиномом-знаменателем В (<alt a2) =
= i?! (ai) B2 (щ). Числитель одноквадрантного фильтра имел 25
независимых параметров, а знаменатель был ограничен четырьмя
328 Глава 5
независимыми параметрами. После 13 первичных итераций ошибка
составляла 1,90-10~5; после трех первичных итераций и восьми
вторичных—немного менее Ь,78-10~ь. Было высказано предпо-
предположение, что ошибка отличается столь незначительно из-за того,
что из 29 параметров лишь на четыре повлияло использование
выражений E.165) вместо E.167) [13]. Полный четырехквадрант-
ный частотный отклик имел пульсации полосы пропускания
0,0034, пульсации полосы непропускания 0,021, а ширину пере-
переходной полосы 0,233я.
*5.6.3. Решетчатые структуры
Решетчатые структуры существуют как для одномерных,
так и для двумерных цифровых фильтров без полюсов (К.ИХ-
фильтров) и фильтров без нулей. Начнем рассмотрение с одно-
одномерного случая, а затем обобщим полученные результаты на дву-
двумерный случай.
Пусть b (п), п = 1, 2 N, является последовательностью
длины N и пусть
N
B{ZN) (г) = 1 + ? b (n) г~". E.169)
Функцию B{ZN) (г) можно трактовать либо как передаточную
функцию КИХ-фильтра с весами ответвлений \Ь {п)\, либо как
знаменатель передаточной функции БИХ-фильтра без нулей.
Мы можем установить взаимное соответствие между \Ь (п)\ и
другим набором N чисел {k (р), р = 1, 2 N], известным
под названием коэффициентов отражения [30], с помощью сле-
следующей итерационной процедуры. Для p=N, N—1 1
примем
k{) b(){p), E.170а)
(Р) [В*Р) ® ~k^ г~"В*Р> (г~1Н- <5-1706)
По мере выполнения итераций порядки полиномов уменьшаются.
Число 6(р> (р) — коэффициент при г~р в В^ (г), т. е. последний
коэффициент этого полинома. Рекурсивные вычисления, согласно
выражению E.170), можно выполнять и в обратном порядке,
так что коэффициенты \Ь (п), п = 1, 2 N] получаются из
\k (р), р = 1, 2 N\. Это приводит к рекурсивному соотно-
соотношению
B^(z)=l, E.171а)
В[р) (г) = Blzp-l) (г) + k(p) z-pB{zp-l) (г)- E.1716)
Выражение E.1716) повторяется для р — 1, 2 N.
Для реализации фильтра можно использовать как \Ь {п)\,
так и \k (р)\. В первом случае мы имеем прямую форму реализа-
Синтез и реализация двумерных БИХ-филыпров 329
ции. Во втором случае мы имеем решетчатый фильтр. На
рис. 5.28, а представлена решетчатая реализация фильтра с пе-
передаточной функцией BzN)(z),a. на рис. 5.28,6— решетчатый
фильтр с передаточной функцией l/B{zN) (z)>
Одномерным решетчатым фильтрам присущи две привлека-
привлекательные черты, которые хотелось бы сохранить при обобщении
на многомерный случай. Во-первых, эти фильтры обладают хо-
Вход
Выход
Рис. 5.28. Решетчатая форма одномерного КИХ-фильтра прогнозирования N-ro
порядка (а) и инвереного фильтра (б).
рошими характеристиками квантования коэффициентов, т. е.
частотный отклик не особенно чувствителен к возмущениям в зна-
значениях коэффициентов \k (p)\. Во-вторых, если |?(р)| <1 для
\ <¦ р <¦ N, то B(ZN) (г) будет минимально-фазовым полиномом.
Марзетта [31, 32] и Харрис [33] распространили эти идеи на
двумерный случай, хотя сделали это весьма различными спосо-
способами. Подход Марзетты состоял в определении двумерной после-
последовательности коэффициентов отражения, подход Харриса —
в определении одномерной последовательности функции отра-
отражения. Мы начнем со способа Марзетты.
Пусть \Ь (пъ я2), 0 <: щ < N, 0 < п% < N2, (пи гц) Ф
= @, 0)}—множество коэффициентов двумерного КИХ-фильтра и
BltN»™(zu z2)=l+ if if Ь(пи n2)z7niz7n: E.172)
Л,=0 ЛЁ=0
<n». n,)=*«>. 0)
330 Глава 5
Мы хотим определить набор из Nt x N2 коэффициентов отра-
отражения \k (/?!, р2)\, позволяющий дать другое представление
фильтра, причем при выполнении \k (ръ рг) | < 1 для 0 <: рх <:
<¦ N\, 0 <: р2 < N2 функция B{zNu Nt) (гь г2) является двумер-
двумерным минимально-фазовым полиномом. Марзетта [31, 32] пока-
показал, что в общем случае этого, к сожалению, нельзя сделать.
Далее, он показал, что для сохранения свойств минимальной
фазы требуется, чтобы бесконечный набор коэффициентов отра-
отражения {k (ply р2)} был определен на «бесконечной опорной области»
#л/,л/,> показанной темными кружками на рис. 5.29.
Рис. 5.29. «Бесконечная опорная об-
область» двумерных фильтров прогнози-
прогнозирования, обозначенная через RNlNi.
(С любезного согласия Томаса Л. Мар-
зетты [32], © 1980 IEEE.)
Хотя последовательность конечной протяженности \Ь (пъ
порождает бесконечную последовательность коэффициентов отра-
отражения, обратное, к счастью, не имеет места. Если полином опре-
определен конечной последовательностью коэффициентов отражения
{k (pi, p2)}, то он по-прежнему будет полиномом конечной сте-
степени. Более того, если k (ръ р2) < 1 для всех (ри р2), то этот
полином будет иметь минимальную фазу. Полином можно найти
из {k (plt p2)\ с помощью следующих рекурсивных соотношений,
которые являются обобщением выражений E.171):
Bfl0)(zi, z2)=l, E.173a)
+ k (ри P2)z7Plz7PlBlp'- "'-'> (гГ1, zTl), E.1736)
t.—>(Zii Z2)=B<p'-l-->(Zll z2).
Рекурсивные вычисления повторяются для всех значений (plt p2),
для которых k (ри р2) Ф 0.
Синтез и реализация двумерных БИХ-филыпров 331
Пример 3 [32]
Пусть последовательность коэффициентов отражения k (plt рг)
имеет вид
k (О, 1) = 0,8, k A, —1) = —0,6, k A, 0) = 0,2,
k(l, 1) = 0,1, k{pu pt) = 0 E.174)
для всех остальных значений {ръ рг).
Тогда с помощью уравнений E.173) можно получить полино-
полиномиальное представление
В{г' l)(zu z2) = 1 + 0,7гГ' - 0,14гГ2 - 0,048гГ3 -
- 0,4496гГ1гГ1 + 0,268гГ' + O.lzrV- E.175)
Заметим, что опорная область коэффициентов полинома больше
опорной области последовательности коэффициентов отражения.
Эквивалентность представления двумерного фильтра с ми-
минимальной фазой и четверть плоскостной или несимметричной
полуплоскостной опорной областью с помощью коэффициентов
отражения или полинома дает возможность синтезировать филь-
фильтры в форме l/Bz (zlt z2) путем определения последовательности
их коэффициентов отражения. Далее, если амплитуды коэффи-
коэффициентов отражения меньше 1, устойчивость фильтра обеспечена.
Процедура синтеза усложняется из-за того, что взаимосвязь
между параметрами {к {ръ р2)} и функцией знаменателя Вг (zlt z2)
носит итерационный характер. Хотя и предпринимались некото-
некоторые попытки синтеза двумерных БИХ-фильтров с помощью пред-
представления через коэффициенты отражения [34], эта проблема
еще не решена.
Двумерные КИХ- и БИХ-фильтры, описываемые множеством
коэффициентов отражения k {ръ р2), можно реализовать с по-
помощью двумерной решетчатой структуры. Двумерную решетча-
решетчатую структуру, являющуюся непосредственным обобщением одно-
одномерной решетчатой структуры, можно получить из рекурсивных
соотношений E.173).
Харрис [33] разработал другую решетчатую структуру,
трактуя поставленную задачу как задачу- одномерной фильтра-
фильтрации вектора. Этот подход особенно удобен для обработки после-
последовательностей, у которых количество отсчетов в одном измерении
(например, пространственном) невелико по сравнению с коли-
количеством отсчетов в другом измерении (например, во временном).
Для описания этого подхода необходимо ввести понятие сим-
симметричного полуплоскостного фильтра. Это такой двумерный
БИХ-фильтр, у которого выходная маска, симметричная отно-
относительно одной из своих переменных, характеризуется конечным
числом коэффициентов и имеет отверстие на краю. Если последо-
332 Глава 5
X
X
X
X
fx
M строк <
Iх
X
X
X
X (
X (
X (
X с
X (
X <
X (
х :
X )
{
i О
> о
1 О
1 О
X
X
о о
о о
о о
р
X X
X X
Ni отсчетов
к
О
о
о
р
—•¦
X
X
о
о
о
§
X
X
о
о
о
-•-
X
X
о
о
о
о
X
X
о
о
о
о
X
X
о
о
о
о
X
X
X
X
X
X X X X
X
X
X
X
X
X X X X
«ч
X
X
Рис. 5.30. Выходная маска симметричного полуплоскостного фильтра.
• — вычисленные выходные значения; О — выходные значения, которые необходимо
вычислить; X — граничные условия.
вательность конечной протяженности b (nx, п^) удовлетворяет
услови'ям
b (nlt n2) = 0 для п2 < 0 и
b (ni, п2) = b (-~tii, Пг) для п 5г 0, E.176)
то фильтр l/Bz (гъ г2) является симметричным полуплоскостным
фильтром. (Для упрощения мы будем считать, что полином-числи-
полином-числитель является просто константой.)
Симметричный полуплоскостной фильтр, пример выходной
м^ски которого представлен на рис. 5.30, не вычисляется рекур-
рекурсивно в том смысле, как это понималось в гл. 4. Однако мы можем
представить такой фильтр в виде одномерного векторного про-
процессора, который вычисляет всю строку выходных значений на
основание входного сигнала и предыдущих N строк выходных
значений. Если граничные условия на правом и левом краях
рис. 5.30 определены, обычное двумерное разностное уравнение,
связывающее входной сигнал х с выходным сигналом у, можно
записать в матрично-векторной форме
N
ш=0
b (m) у (п — т) = х (п), или, что то же самое, E.177)
b @) у (л) = х (л) - ? b (m) у (п — т). E.178)
m=I
Синтез и реализация двумерных БИХ-фильтров 333
В этой записи х (п) представляет собой п-ю строку входного сиг-
сигнала, у (п) — n-ю строку выходного сигнала и (в предположении
нулевых граничных условий), b (n) — матрицу, описывающую
влияние n-й строки коэффициентов числителя. Она имеет форму
матрицы Теплица. Элемент матрицы b (n) с номерами (/, /) пред-
представляется в виде
[Ь (п)]ц = b(i- /, п) для 0 < t, / < N. E.179)
Если матрица b (.0) совпадает с единичной матрицей I, то для
вычисления у (п) можно использовать одномерное векторное
рекурсивное соотношение E.178). Это условие, как видно из
E.179), имеет место, когда
Ь (пъ 0) = б (П1),
E.180)
что соответствует выходной маске для рекурсивных вычислений,
показанной на рис. 5.31.
В более общем случае вектор у (п) вычисляется путем инвер-
инвертирования матрицы b @) и умножения ее на вектор в правой части
выражения E.178). Харрис [33] предлагает при вычислении инвер-
инверсии пользоваться треугольной факторизацией b @), поскольку
в этом случае сохраняется полосовая структура b @) и возможна
относительно эффективная реализация.
Можно показать, что любой минимально-фазовый симметрич-
симметричный полуплоскостной полином Bz (гъ г2) с конечной протяжен-
протяженностью можно представить в виде множества функций коэффи-
коэффициентов отражения \КР (z)\ [33]. Каждая функция коэффициента
отражения удовлетворяет условию
Кр(*)|<1 Для |г| = 1. E.181)
Если дано представление в виде функций коэффициентов отра-
отражения {/Ср (г)}, то соответствующий полуплоскостной полином
оооооооооо
1 О
•
1 •
1—•—
о
1
—•—
о
1
-•—
о
¦
-•—•—
о
1
о
f
о
о
•
•
—•—
о
•
•
-• >-
Рис. 5.31. Пример выходной маски симметричиого пол у плоскостного фильтра,
вычисляемого рекурсивно.
334 Глава 5
можно построить с помощью обобщенного рекурсивного соотно-
соотношения
В[р) (z,, z2) = B[p-l) (z,, z*2) + Кр {z,)zTpВ[р~1) (zlt гГ1),
р= 1, .... W. E.182)
Рекурсивные вычисления начинаются с одномерного ненулевого
полинома переменной
BT{zu z2) = Qz(Zl), где E.183)
Q2(z)#O для \z\ = \. E.184)
Функции коэффициентов отражения можно получить -с помощью
обратной рекурсии, аналогичной в принципе выражению E.170)
[33].
При практическом синтезе фильтров в большинстве случаев
в качестве Кр (z) берутся симметричные полиномы вида
Кр(г)= Б К (я) z-« = Кр (г), E.185)
п=—М
причем kp (га) = kp (—га), однако можно пользоваться также
и рациональными полиномами переменной г, если они получаются
из произвольного симметричного полуплоскостного полинома
Bz(Zi, z2). В любом случае, если функции коэффициентов отра-
отражения удовлетворяют ограничивающим условиям E.181), фильтр
1/#2 (zi. z^) будет устойчивым в смысле ограниченности входа и
ограниченности выхода.
Предположим, что мы получили набор функций коэффициен-
коэффициентов отражения \КР (z); р = 1, N), представляющий симметрич-
симметричный полуплоскостной полином Bz (zl7 z2); инверсию этого поли-
полинома мы хотим реализовать в решетчатой форме. Чтобы получить
структуру решетки, определим вспомогательные функции [33]
a
(JP
Затем из выражений E.182) и E.186) можно получить следующие
рекурсивные соотношения:
Fp-i (zi, г2) = Fp (zi, г2) - Кр (zi) z^'Gp-i (гь г2), E.187а)
GP (zi, z2) = zF'Gp-i (zi, z2) + Kp (zi) Fp_, (z,, z2). E.1876)
Требуемую результирующую передаточную функцию \]BZ (zv z2)
можно записать в виде
1 Fо (г1> гг) /с 1 оо\
B*fe. ч) ~ а^°Чг1-г2)" ( }
Синтез и реализация двумерных БИХ-фильтров 335
Используя уравнения E.187) и E.188), Харрис [33 J получил
одномерную векторную решетчатую схему для реализации сим-
симметричного полуплоскостного фильтра l/Bx (zlf z2). Эта схема
показана на рис. 5.32.
Интерпретация рис. 5.32 во многом упрощается, если рас-
рассматривать переменную пг как пространственную переменную,
а переменную п2 — как временную. Тогда входной и выходной
сигналы являются последовательностями векторов, в которых
каждый вектор представляет все пространственные отсчеты в дан-
данный момент времени. Аналогично внутренние сигналы в узлах
Рис. 5.32. Одномерная векторная решетчатая схема для реализации двумерного
симметричного полуплоскостного фильтра \IBZ fo, z2).
решетчатой структуры также являются последовательностями
векторов. Каждый из операторов сдвига zi на нижнем ребре ре-
решетки соответствует задержке на единичный временнбй интер-
интервал, достаточный для хранения одной целой строки простран-
пространственных отсчетов (т. е. одного вектора).
Операторы усиления на перекрестных связях решетки в дей-
действительности являются одномерными пространственными филь-
фильтрами с постоянными во времени параметрами. Они производят
умножение в гх-области, что, конечно, соответствует свертке эле-
элементов вектора с результатом обратного г-преобразования функ-
функции коэффициентов отражения. Последний фильтр перед выход-
выходным узлом, обозначенный через 1/5г0) (г\, гг), также в силу вы-
выражения E.183) является одномерным пространственным филь-
фильтром с постоянными параметрами. Метки узлов на рис. 5.32 [на-
[например, FN_x (zlf г2) и Gtf.i (zlt Za) J обозначают передаточные
функции от входного узла к узлу с данной меткой.
В некотором отношении реализация в форме одномерной
векторной решетки близка к итерационной реализации, описан-
описанной в разд. 5.2 (рис. 5.7). Действительно, переменную итерацию
можно было рассматривать как временную переменную, а различ-
различные операции фильтрации интерпретировать как постоянные во
времени пространственные фильтры, аналогично функциям коэф-
коэффициентов отражения в векторной решетчатой структуре. В неко-
некоторых приложениях, особенно при обработке сигналов, посту-
поступающих от совокупности распределенных в пространстве датчи-
датчиков, представление многомерйых операций фильтрации в виде
336 Глава 5
одномерных векторных операций вполне разумно. Харрис [33]
использовал свою векторную решетчатую структуру для синтеза
и реализации двумерных цифровых фильтров, применяемых при
обработке геофизических сигналов.
Ввиду недостатка места мы не будем в деталях описывать
алгоритмы синтеза, предложенные Харрисом [331 для векторной
решетчатой структуры. Вместо этого дадим общее описание одного
подхода к синтезу и упомянем некоторые любопытные аспекты
этого подхода.
В подходе Харриса к задаче синтеза для минимизации функцио-
функционала ошибки
J = Ja+Js E.189)
используется алгоритм итерационной оптимизации, аналогичный
методу наискорейшего спуска. Функционал Ja является мерой
ошибки аппроксимации частотного отклика, а величина Js —
ошибка устойчивости.
Харриса интересовал простой случай синтеза фильтра, у ко-
которого амплитуда отклика была равна единице в некоторой по-
полосе пропускания РВ, нулю в некоторой полосе непропускания
SB и произвольной величине в^ остальных областях частотной
плоскости. Использованная им мера ошибки аппроксимации
интересна тем, что ошибки в полосах пропускания и непропуска-
непропускания учитываются не одинаково. А именно, функционал ошибки
аппроксимации имеет вид
В
-?т Я 1Я to- *>2) I2 d«>i Лщ. E.190)
(и,,
(и,, @г)
С помощью весового параметра а можно учитывать относитель-
относительную важность ошибок полос пропускания и непропускания.
Этот функционал ошибки обеспечивает дифференцируемость Ja
[33], и его использование объясняется тем, что значение А в по-
полосе непропускания дает вклад в подынтегральное выражение,
равный А2, а значение 1 + А в полосе пропускания дает вклад
в подынтегральное выражение, приблизительно равный 4А2.
Таким образом, если не обращать внимание на коэффициент
пропорциональности, который можно изменить с помощью пара-
параметра а, ошибки порядка А как в полосе пропускания, так и
в полосе непропускания дают вклад в Ja порядка А2.
Ошибка устойчивости Js может принимать форму либо штраф-
штрафной, либо барьерной функции [35]. Штрафная функция — это
такая функция, значение которой равно нулю, если параметры
фильтра соответствуют устойчивому фильтру, и возрастает по
Синтез и реализация двумерных БИХ-фильтров 337-
мере того, как фильтр становится все более и более неустойчивым.
Ошибка устойчивости, обсуждавшаяся в разд. 5.5.3, является
одним из примеров штрафной функции. Применительно к рас-
рассматриваемому вопросу возможная штрафная функция для функ-
функций коэффициентов отражения дана в работе [331 в виде
N л
1
2
где ц — коэффициент пропорциональности.
С другой стороны, барьерная функция — это функция, опре-
определенная на классе устойчивых фильтров, но стремящаяся к беско-
бесконечности по мере приближения к границе между классами устой-
устойчивых и неустойчивых фильтров. Применительно к рассматривае-
рассматриваемому вопросу подходящая барьерная функция дана в работе [33]
в виде
<5192>
Если любая из функций коэффициентов отражения Кр (е1®)
приближается к единице на какой-либо частоте, то ошибка устой-
устойчивости растет. Используя барьерную функцию, следует позабо-
позаботиться о том, чтобы начальные оценки значений параметров
фильтра соответствовали устойчивому фильтру. В этом случае
барьерная функция предохранит нас от перехода к неустойчивому
фильтру при последующих итерациях.
Минимизация функционала J в E.189) градиентными алго-
алгоритмами обычно требует вычисления частных производных от J
по параметрам \kp (n)\. Эти вычисления несложны, но трудоемки
вследствие того, что \kp (n)\ рекурсивно влияют на передаточ-
передаточную функцию знаменателя. Детали этих вычислений даны в ра-
работе [33].
Харрис ['33] использовал этот метод для синтеза фильтра,
характеристики которого представлены на рис. 5.33, а. Фильтр
имеет 55 независимых параметров — 25 для квадрантно-симметрич-
ного полинома-числителя А (щ, о>2) и 30 для симметричного полу-
полуплоскостного полинома-знаменателя Л (щ, оJ). Ширина пере-
переходной полосы равнялась я/8, пульсации в полосе пропускания
составляли менее 0,01, а ослабление в полосе непропускания —
приблизительно 34 дБ. На рис. 5.33, бив приведены контурная
диаграмма и перспективная проекция частотного отклика филь-
фильтра, а на рис. 5.33, г представлены пять функций коэффициентов
отражения, использованных в фильтре.
22 Даджион Д., Мерсеро Р.
338 Глава 5
Рнс. 5.33.
а — характеристики лопастного фильтра; 6 — линейная контурная диаграмма ампли-
амплитуды лопастного фильтра с 55 коэффициентами (контуры проведены с интервалом 0,1)
Синтез и реализация двумерных БИХ-фильтров 339
1,0
0,5
0,0
-0,5
-1,0
P/
/Y
/\\
V
1 1
1 |
/ \\ "
/ , \
Рис. 5.33.
в — перспективная проекция; г — функции коэффициентов отражеиия для лопастного
фильтра с 55 коэффициентами. (С любезного согласия Девида Б. Харриса [33].)
22*
340 Глава 5
* 5.7. Методы стабилизации
В этом разделе мы кратко опишем два метода, с помощью
которых можно попытаться сделать устойчивым (стабилизиро-
(стабилизировать) неустойчивый двумерный БИХ-фильтр. В идеале в методах
стабилизации не было бы необходимости, если бы все алгоритмы
синтеза БИХ-фильтров давали только устойчивые фильтры.
Некоторые из алгоритмов, которые обсуждались в настоящей
главе, включают проверку на устойчивость или минимизацию
ошибки устойчивости, что обеспечивает устойчивость проекти-
проектируемых фильтров. Однако исторически ранние алгоритмы проек-
проектирования двумерных БИХ-фильтров не контролировали устой-
устойчивость фильтров, и возникала необходимость в специальных
методах стабилизации для преобразования неустойчивого фильтра,
полученного в результате синтеза, в полезный устойчивый фильтр.
В общем случае целью любого метода стабилизации является
такое преобразование неустойчивого БИХ-фильтра с откликом
Ни {щ, со2) в устойчивый БИХ-фильтр с откликом Н (щ, со2),
чтобы сохранялся модуль отклика •>
\Ни{щ, со2) | = | Я К, щ)\. E.193)
За исключением редкого случая несущественной особенности
второго рода (гл. 4), полином-числитель не влияет на устойчи-
устойчивость БИХ-фильтра. Поэтому, чтобы БИХ-фильтр был устойчив,
последовательность коэффициентов его знаменателя должна обла-
обладать свойством минимальной фазы. Далее, если мы хотим реали-
реализовать фильтр с помощью рекурсивно вычислимого двумерного
разностного уровня конечного порядка, величина Ъ (пъ п2)
должна быть последовательностью конечной протяженности с со-
соответствующей опорной областью (например, четверть плоскост-
плоскостной или несимметричной полуплоскостной).
5.7.1. Кепстральный метод стабилизации
Кепстральный метод стабилизации основан на том сообра-
соображении, что комплексный кепстр сигнала с минимальной фазой
•имеет ту же опорную область, что и сам сигнал (разд. 4.4.3).
В разд. 4.4.4 мы уже видели, как из произвольной последователь-
последовательности можно так сформировать последовательность с минималь-
минимальной фазой, чтобы сохранилась амплитуда спектра. Прежде всего
построим (в обозначениях разд. 4.4.4) автокорреляционную функ-
') Можно сформулировать задачу стабилизации по-другому, потребовав
сохранения других характеристик, таких, как фаза спектра или групповая
задержка. Насколько известно авторам, практической потребности в решении
таких задач стабилизации не возникало.
Синтез и реализация двумерных БИХ-филыпров 341
цию массива Ьи (пи п2), характеризующего неустойчивый зна-
знаменатель
гь (/??!, т2) = 2 ? Ьч (пг, п2) Ьи (пх — ти п2 — т2). E.194)
Затем вычислим фурье-спектр ^ь (щ, со2) от функции гь (тъ т2),
который будет вещественным и неотрицательным. Далее возьмем
логарифм от Яь (если эта функция строго положительна) и вы-
выполним обратное преобразование Фурье. В результате получим
кепстр tb (nlt п2), который обладает свойством
h (nlt n2) = гь (—пъ — п2). E.195)
После этого можно получить кепстр требуемой последователь-
последовательности с минимальной фазой, умножив ?ь на несимметричную
полуплоскостную функцию окна
Ь(пъ n2) = w(nlt n2)tb(nlt n2). E.196)
Наконец, с помощью вычислений, обратных тем, которые выпол-
выполняются для нахождения кепстра, из Ъ (пъ п2) получается b (nx, п2).
В идеальном случае Ь (пи п2) будет последовательностью
с минимальной фазой и, следовательно, соответствовать знаме-
знаменателю устойчивого двумерного БИХ-фильтра. На практике
имеется несколько потенциальных трудностей. Во-первых, этот
метод не позволит стабилизировать фильтр, если Ви (а>и о>2)
равно нулю на какой-то частоте. Во-вторых, b (nlt n2) обычно
содержит бесконечное число ненулевых значений, что исключает
реализацию фильтра путем вычислений конечного объема.
В-третьих, использование ДПФ для выполнения необходимых
преобразований Фурье приводит к наложениям в вычисленных
значениях ?ь, Ъ и Ь. В результате полученный набор коэффициен-
коэффициентов b (пь п2) может в действительности соответствовать неустой-
неустойчивому фильтру!
Несмотря на эти потенциальные трудности, метод стабилиза-
стабилизации с использованием кепстра оказался полезным. Проблему
пространственных наложений можно в какой-то степени устра-
устранить увеличением размеров используемых ДПФ. Это, конечно,
увеличивает объем вычислений. Пространственную протяжен-
протяженность множества b (nu п2) можно ограничить с помощью окна [36]
и, если множество b (nlt n2) все еще-дает неустойчивый фильтр,
придать окну экспоненциальную форму, чтобы любые потен-
потенциально опасные корни полинома Bz (гъ z2) попали внутрь еди-
единичной биокружности. Ограничение множества b (nlt n2) окном
приведет к несохранению спектральной амплитуды, однако во
многих случаях вносимые отклонения несущественны.
342 Глава 5
5.7.2. Метод стабилизации Шоу [13]
Этот метод стабилизации основан на интерпретации двумер-
двумерного полинома-знаменателя Вг (zlt z2) как параметрического одно-
одномерного полинома В [zx] (z2) (гл. 4). Для фильтров с опорной
областью в виде полуплоскости п2 ^ О теорему устойчивости
из гл. 4 можно записать следующим образом.
Теорема [13]. Фильтр с откликом \IBZ (zlt z2) устойчив в смысле
ограниченного входа и ограниченного выхода в том и только
в том случае, если
а) Вг (zx, z2) = 0 для | Zl | = | z, | = 1, E.197а)
б) Bz(l, г2)ф0 для |z2|>l, E.1976)
в) Вь (zb 1) имеет непрерывную, нечетную и периодическую
фазу при zt = exp [fai ]. (Линейная компонента фазы отсутствует.)
Опорная область {(nlt п2) : п2 ^ 0} включает в себя в ка-
качестве частных случаев первый и второй квадранты, две несим-
несимметричные полуплоскости, а также, разумеется, полуплоскость.
Следуя работе Шоу [13], 'рассмотрим сначала набор коэффи-
коэффициентов Ьи \пъ п2) неустойчивого знаменателя с опорной областью
на первом квадранте, удовлетворяющий условиям пп. «а» и «б»
и не удовлетворяющий условию п. «в» теоремы. Простым сдвигом
bu ("ь ) на соответствующее число отсчетов (скажем, /пх) по
оси nt можно избавиться от линейной компоненты фазы и полу-
получить набор, соответствующий устойчивому знаменателю
b (пи п2) = Ьи (пх — тъ пг) E.198)
в общем случае с опорной областью в виде полуплоскости. (Дву-
(Двумерный БИХ-фильтр, опорной областью коэффициентов знаме-
знаменателя которого является полуплоскость, можно реализовать
с использованием итерационных методов, описанных в разд. 5.2,
либо с помощью обобщения полуплоскостной реализации из
разд. 5.6.3. Однако здесь мы предполагаем, что пользователю
желательно реализовать фильтр в виде классического решения
двумерного разностного уравнения.)
Множество b (nu пг) можно изменить, образовав устойчивое
множество bns (nl7 n2) с опорной областью на несимметричной
полуплоскости. Будем считать первую строку последователь-
последовательности b (пь п2) одномерной последовательностью b [0] (nt). Те-
Теперь мы можем вычислить одномерное z-преобразование последо-
последовательности b [0] (/li), отразить корни, находящиеся вне единич-
единичной окружности, внутрь последней и выполнить обратное z-пре-
z-преобразование, чтобы получить физически реализуемую минимально-
Синтез и реализация двумерных БИХ-филыпров 343
фазовую последовательность bns [0] (%). Эта операция порождает
одномерный фильтр с полным пропусканием
где MPZ (zx) — максимально-фазовый полином, корни которого
совпадают с теми корнями г-преобразования b [0 ] (rii), которые
находятся вне единичной окружности. В частности, для первой
строки мы имеем
bns [0] Ы = ар (Л1) * Ь [0] (л,) E.200)
и в общем случае
bns Oh, пг) = ар (%) * Ь (пъ /г2). E.201)
Множество bns {пъ пг) соответствует устойчивому фильтру с нуж-
нужной амплитудной характеристикой и опорной областью на несим-
несимметричной полуплоскости. К сожалению, это множество может
иметь бесконечную протяженность по переменной п^. Поэтому
получение пригодного для использования множества коэффициен-
коэффициентов знаменателя требует наложения окна того или иного вида.
В общем случае неустойчивый полином-знаменатель может
и не удовлетворять условиям E.197а) или E.1976). Рассмотрим
случаи, когда условие E.197а) удовлетворяется, а условие E.1976)
нет. В этом случае неустойчивый полином-знаменатель Вги) (zu e2)
можно записать в виде одномерного параметризованного поли-
полинома Вги) [e/mi] (z2). Тогда теоретически для каждого значения иц
в пределах 0—2я можно представить B(zu) [e'] (г2) в.виде произ-
произведения минимально-фазового и максимально-фазового полино-
полиномов. Максимально-фазовый полином можно преобразовать в ми-
минимально-фазовый путем отражения его корней внутрь единич-
единичной окружности по переменной г2. Коэффициенты устойчивого
знаменателя В2 [е1а* ] (г2) получаются путем перемножения этих
двух минимально-фазовых полиномов. Найденный таким обра-
образом массив Ь (пи пг) будет иметь опорную область на симметрич-
симметричной полуплоскости и может быть подвергнут описанному выше
преобразованию для получения множества с опорной областью
на несимметричной полуплоскости.
Если полином B(zu) (гь г2) не удовлетворяет также условию
E.197а), то описанная процедура не годится из-за наличия ну-
нулей на единичной окружности по г2. Однако корни полинома
g(u) [е/щ1] (^ находящиеся строго вне единичной окружности
по попеременной г2, можно отразить внутрь с образованием по-
полинома
(г2) ф 0 для всех ©i и | z21 > 1. E.202)
344 Глава 5
Затем, введя для коэффициентов V (пь п2) соответствующие
веса
w (п2) = ап', 0 < а < 1, E.203)
можно отразить корни B'z внутрь единичной окружности по пере-
переменной г2.
Таким образом,
Ь{пъ п2) = а»'Ь' (пъ л,). E.204)
В общем случае для получения коэффициентов устойчивого филь-
фильтра с опорной областью на несимметричной полуплоскости необ-
необходимо, как и ранее, подвергнуть b (пъ п2) фильтрации фильтром
с полным пропусканием.
На практике, конечно, B(zu) [е/@'] (г2) вычисляется с использо-
использованием ДПФ для конечного числа значений <ut. Это обстоятель-
обстоятельство вместе с другими эффектами численной обработки повлечет
за собой появление в стабилизированном множестве коэффициен-
коэффициентов знаменателя пространственного наложения, которое можно
уменьшить увеличением размера ДПФ. Шоу и Мерсеро [13]
обсуждают в деталях последствия численной реализации этой
стратегии стабилизации и приводят несколько примеров.
Упражнения
5.1. Рассмотрим трехмерный БИХ-фильтр с передаточной
функцией
Kl Kl Кэ
- 2 И И с
A1=0 ft,=0 k,=0
к)Ф. 0,0)
И Су у у \ —
П2 (Zly Z2, Z3) —
Выходные значения этого фильтра нужны в диапазоне значений
(пъ п2, п3), 0 <:«!¦<: Nt — 1; 0 <: п2 < N2 — 1; 0 <: п3 *?
< N3 — 1, и выходные отсчеты вычисляются в таком порядке,
что индекс rii изменяется наиболее быстро, а п3 — наиболее мед-
медленно. Другими словами, выходные отсчеты вычисляются в по-
порядке г/@, 0, 0), г/A, 0, 0), у B, 0, 0), .... y(N1— 1, 0, 0),
г/@, 1, 0), г/A, 1, 0)
а) Сколько потребуется слов памяти для хранения всех от-
отсчетов входного и выходного сигналов, которые необходимы
для последующих вычислений, если фильтр реализуется в пря-
прямой форме I? Считайте, что входные отсчеты поступают в том же
порядке, в котором вычисляются выходные отсчеты.
б) "Сколько потребуется слов памяти, если реализовать фильтр
в прямой форме II?
Синтез и реализация двумерных БИХ-филыпров 345
в) В каком порядке следует организовать вычисления, если
Nly N2 и N3 не равны друг другу и единственным критерием
является экономия памяти?
5.2. Пусть мы имеем каскадный двумерный БИХ-фильтр
с передаточной функцией
-—-г-, где
Nt—\ N,—\
?5Z (Z\, Z2) = 2j 2j " (.ЛЬ П2J\ Z? , 0 (U, U) = 1,
/l!=^0 12=0
M,-l M2—1
C2(z,, z2) = S S с(т„ т2)гГт'г7т', . с @, 0) ^ 1
m,=o m2=o
и а — вещественное число. [Предполагается, что коэффициенты
{b (ль л2), с (ть /п2)| также вещественны.]
а) Составьте систему из двух разностных уравнений, которую
можно использовать для нахождения выходного сигнала каскада
из двух фильтров с результирующей передаточной функцией
Hz (zi, z2) при поступлении на вход сигнала х (пи пг). Обозначьте
выходные сигналы первого фильтра каскада через s {пъ п2),
а всей системы — через у {nlt пг).
б) Сколько операций умножения и сложения потребуется
для нахождения каждого отсчета из s (nlt n2) в предположении,
что как входные отсчеты, так и коэффициенты фильтра вещест-
вещественны? Сколько арифметических операций потребуется на каж-
каждый отсчет из(/(л1р л2)?
в) Теперь предположите, что разностные уравнения из п. «а»
реализуются строка за строкой. Какая емкость памяти потребуется
для вычисления s (п1у п2) при 0 < nt < К и 0 < п2 < К2? (Счи-
(Считайте, что Кх > Nly Кх > Мъ Кг > N2, iB > М2 и памятью,
требуемой для граничных условий, можно пренебречь.) Какая
емкость потребуется для вычисления у (п1у п2) при тех же значе-
значениях (пъ л2)?
г) Пусть Dz (zu z2) = Bz (zlt z2) Cz (zlt z2). Тогда Dz (zu z2)
можно записать в виде
Nl+Ml—2 Nt+Mt—2
я,=0 «i=0
Составьте уравнение, связывающее d (nlt n2), b (nly п2)ис(п1, п2).
Какое значение имеет d @, 0)? Составьте, используя коэффи-
коэффициенты \d (п1у п2)}, разностные уравнения, связывающие х (пи п2)
и у{пъ пг).
д) Сколько потребуется умножений и сложений для вычисле-
вычисления каждого отсчета из у {пъ пг) при использовании разностного
346 Глава 5
уравнения из п. «г»? Сколько потребуется памяти для вычисле-
вычисления у (пъ п2) при 0 <: Пх < Къ 0 <: п2 < К2 с использованием
разностного уравнения из п. «*г»? (Снова памятью, требуемой для
граничных условий, можно пренебречь.) Какая форма реализа-
реализации Нг {гъ z2) более эффективна, каскадная или прямая?
5.3. Хотя итерационные методы реализации, описанные
в разд. 5.2, предназначены для реализации не вычисляемых ре-
рекурсивно БИХ-фильтров, мы тем не менее можем использовать
этот прием для реализации каузальных одномерных и двумер-
двумерных БИХ-фильтров, чтобы лучше понять его сущность. Начнем
с простого одномерного случая.
а) Предположим, что Hz (г) = 1/A — az'1). Напишите соот-
соотношение, связывающее явным образом г-преобразование входа
Хг (г) и г-преобразованйе выхода Yz (г) с учетом
Если Cz (г) = 2j с (л)
п
то что собой представляет последовательность с (я)?
б) Составьте итерационное уравнение во временной области,
отвечающее явному соотношению г-преобразований из п. «а».
Выполните все операции свертки, не ограничиваясь обозначе-
обозначением свертки значком «*».
в) Пусть tji (n) обозначает выходной сигнал после / итераций
по формуле в п. «б». Предположив, что у0 (п) = х (п) = б (п),
найдите ух (п), уъ (п), yt (п) и у (п) = ух (п). Получите выраже-
выражение для ошибки
Ч = L [У (я) - Уг (л)]2-
п
5.4. Пусть Нг (zi, z2) = 1/ A — V4 гГ1 — V2 zj"'). Найдите со-
соответствующую итерационную реализацию в пространстве сиг-
сигнала.
а) Чему равно множество с (пъ л2)?
б) Пусть уг (пи п2) обозначает выходной сигнал после /-й
итерации и у0 (пи п2) = х (nt, п2) = б (пи п2). Найдите у1 (пи п2)
и Уз (. п2).
в) Правильное решение у (пи п2) = г/«, (пи п2) имеет вид
Если для получения оценки yt (nu п2) используется итерацион-
итерационная.реализация, то для каких точек первого квадранта справед-
справедливо равенство уг (пи п2) = у (пъ п2)? Постройте графическое
изображение этой области.
Синтез и реализация двумерных БИХ-фильтров 347
5.5. В разд. 5.2.1 было показано, что итерационную реали-
реализацию рекурсивного фильтра можно интерпретировать как си-
систему с обратной связью первого порядка, в которой в цепь обрат-
обратной связи подается весь многомерный сигнал. Можно рассматри-
рассматривать также системы с обратной связью более высоких порядков.
а) Воспользовавшись итерационным выражением, получите
формулу, в которой yt (nlt пг) выражается через у^г ("i, n2).
Такие рекурсивные вычисления потребуют по сравнению с исход-
исходным рекурсивным выражением лишь половины итераций для
достижения той же степени сходимости.
б) Обобщите результат п. «а», чтобы найти рекурсивное
выражение, которое потребует лишь 1/N итераций по сравнению
с исходным.
в) Как соотносится сложность вычислений по рекурсивному
выражению, полученному в п. «б», и по исходному уравнению
E.16)? За меру сложности примите число умножений, требуемых
для вычислений эквивалента N итераций исходного алгоритма.
5.6. Пусть Нг (zlt z2) = \IBZ (zlt z2), где
Bz (z,, z2)= 1 —
а) Для каких значений ct и c2 наблюдается устойчивость
Hz (zi, гг) при условии, что опорной областью h (nlt n2) является
только один первый квадрант?
б) Пусть Cz (zlt' z2) = 1 — Вz (гъ z2). Можете ли вы найти
какие-либо значения ct и с2, при которых соблюдается устойчи-
устойчивость Нг (гь г2), но Сг (гх, г2) не удовлетворяет критерию схо-
сходимости \Cz(zlt z2)| < 1 для \z1\ = |z2| = 1? (Для простоты
можно рассмотреть случай ct = с2).
в) Можете ли вы найти такое вещественное положительное
значение, что переопределенная функция
Сг (zlf z2) й, 1 _ ХВг {ги г2)
удовлетворяет критерию сходимости для всех значений сг и с2,
соответствующих устойчивости Hz (гъ г2)?
5.7. В разд. 5.2.2. было показано, что использование постоян-
постоянного параметра релаксации К расширяет класс фильтров, для ко-
которых можно найти сходящееся итерационное выражение. Этот
параметр влияет также на скорость сходимости. Пусть, как- и
ранее,
и i \ A- (tt>i,<o«)
Н (^ Ю*) = B(Z щ)
И ПОЛОЖИМ, ЧТО С ((их, @2) = 1 — KB ((OX, @2) ДЛЯ ПОСТОЯННОЙ
величины X. Предположим для простоты, что функция В (wj, ш2)
чисто вещественна и заключена в пределах
О < Во < В (<йъ ш2) < Вг.
348 Глава 5
а) Получите выражение для ошибки 1-й итерации через X
и В (©!, щ).
б) Если В (оии ю2) удовлетворяет указанным выше гранич-
граничным условиям, как следует выбрать величину X, чтобы миними-
минимизировать ошибку?
5.8. Рассмотрите разделимую КИХ-систему с передаточной
функцией
Нг (zi. z2) = (b0 + Ь,гГ'
Найдите направленный граф, который описывает эту систему
и содержит только коэффициенты Ьо, Ьъ Ьъ съ с2 и с3.
5.9.а) Составьте систему разностных уравнений, соответ-
соответствующих направленному графу, приведенному на рис. 5.20.
Уравнения напишите в таком порядке, чтобы вычисление тре-
требуемых переменных выполнялось с минимальным объемом про-
промежуточной памяти. Считайте, что выходной сигнал вычисляется
строка за строкой.
б) Позволят ли эти уравнения вычислять выходной сигнал
столбец за столбцом?
5.10.а) Напишите последовательность разностных уравнений,
реализующих схему, показанную на рис. У5.10.
Рис. У5.10.
б) Какова передаточная функция этой схемы?
в) Постройте направленный граф другой схемы с той же
передаточной функцией.
5.11. Рассмотрите направленный граф, представленный на
рис. У5.11.
Рис. У5.П
Синтез и реализация двумерных БИХ-фильтров 349
а) Получите выражение для передаточной функции
Н (z z ) = Yz ^*' г^
б) Составьте соответствующее двумерное разностное уравне-
уравнение, связывающее входной х (пи п2) и выходной у (пъ п2) сигналы.
в) Составьте для этого графа систему уравнений с перемен-
переменными состояния. Пусть g0 (nu п2) обозначает горизонтальную
переменную состояния, представляющую собой выход ветви гГ1
в середине графа, a v0 (nu п2) и vt (nu п2) обозначают две верти-
вертикальные переменные состояния: v0 соответствует выходу левой
ветви zfl, a V\ — правой ветви zjx.
г) Используя выражение E.64), покажите, что функция
Рг 0*1, Z2>, вычисленная по матрицам, полученным в п. «в» (пред-
(представление с переменными состояния), в сущности равна передаточ-
передаточной функции Hz (zu z2) (п. «а»).
д) Можете ли вы найти другую реализацию для функции
Hi (zu z2) с помощью переменных состояния, использующую
только две такие переменные? Если можете, получите ее. {Указа-
{Указание. Рассмотрите данный направленный граф как пример реали-
реализации в прямой форме. Как будет выглядеть соответствующий
граф для прямой формы II?) Убедитесь в том, что функция Fz {гъ
z2) для этой формы с двумя переменными действительно равна
функции Hz (zu z2).
5.12. Пусть имеется двумерная система с двумя входами
и двумя выходами, описанная с помощью переменных состояния
следующим образом:
[A» At\ [v{nlt n2)\ ^[B3 fl4JL^(n1,n^J'
("Ci C2~\ [g(nlt n2)l rDx D21 piCrtx, л2I
«a)J ~" [C3 C4J L"(ni. n2)\ + [D3 Di\ [x2(n1, ti2)\'
Здесь xt и x2 — два входных сигнала, yt и у2 — состояния. Пусть
коэффициенты Аъ ..., Л4, Въ ..., В4, Съ ..., С4, Du ..., D4
являются скалярами с вещественными значениями. Определим
теперь Хх (гъ г2), Х2 (гь г2), Yt (гъ г2) и Y2 (zlt z2) как г-преобра-
зования х1 {пъ л2), х2 (пи п2), yt (пъ п2) и у2 (пъ п2) соответ-
соответственно. Можно также определить матрицу передаточных функ-
функций F (гх, г2) в виде
1. г2)".
где
и h)- Xj{Zu 2г). i, /-1,2.
350 Глава 5
Получите выражение для F (zx, z2) через константы \АЪ А2, ¦ ¦•,
D4|, использованные в написанных выше выражениях с пере-
переменными состояния, и комплексные переменные zf1 и zj1.
5.13. Большинство алгоритмов синтеза, описанных в настоя-
настоящей главе, требуют, чтобы последовательности коэффициентов
числителя а (пи п2) и знаменателя Ъ (пъ п2) имели опорную
область в первом квадранте. В данной задаче мы покажем, что
любой фильтр с опорной областью на секторе можно синтезиро-
синтезировать с помощью алгоритма синтеза фильтров первого квад-
квадранта.
Предположим, что требуется аппроксимировать идеальный
отклик i (tii, ) импульсным откликом h (пъ п2), который в ка-
качестве опорной области имеет сектор W. Используем следующий
метод:
1. Находим линейное преобразование, которое отобразит сек-
сектор на первый квадрант.
2. Используем это преобразование для отображения после-
последовательности i (пъ п2) на новую последовательность / (ти т2).
3. Используем алгоритм синтеза фильтров первого квадранта
для аппроксимации функцией g (тъ т2) функции / (тъ
т2).
4. Используем обратное преобразование для отображения
функции g(mlf mB) на h(nu n2).
а) Если
] (щ, т2) =
i, n2) при ttii ~ Atii -\~ Bn2,
в остальных случаях,
где А, В, С и D — целые числа и AD Ф ВС, как связаны / (щ, щ)
и / ((ох, ш2)?
б) Определите А, В, С и D, если выходная маска фильтра
имеет форму, показанную на рис. У5.13.
Рис. У5.13.
Синтез и реализация двумерных Б И Х-фильтров 351
5.14. В разд. 5.4 мы показали, что
Л) - х C"i - Л» п* - Л) -
Aft—1 M2—\
У (^1 "*1» ^2 '
j 2
-22
да (Pi, рг)
т,=0 т2=0
(т,, тг)=?!=@, 0)
ду
Af,—1 Af,—1
(т,, т2)=?!=@, 0)
Покажите, что ^^ Л) ^^^^ и
dy("i. я») _ dyfa — ft+ 1, пг — дг) _ dyfa — qlt nt — qt+ 1)
a* (ft. ft) *(i. 0) db(o, i)
5.15. а) Обобщите процедуру проектирования Шэнкса, чтобы
можно было синтезировать БИХ-фильтр на несимметричной
полуплоскости с передаточной функцией вида
2 2 «(*,- ^г^'^Ч- ? а@. *^)^*«
"z \Zl, Z2) д^ Wt : j^ .
б) Опишите возможный выбор области /?, в которой необхо-
необходимо минимизировать ошибку. Является ли этот выбор области R
единственным?
5.16. При синтезе фильтра с откликом h {пъ п2) минимизи-
минимизируется ошибка Е = J] J] [Л (пх, ла) — d («i, л2) ]2, где сумма
п,
2^!, л2) конечна. Покажите, что отклик h(nu гц) будет
устойчив в среднеквадратичном смысле, если суммирование вы-
352 Глава 5
полняется по всей (nv пг)-плоскости. [Указание. Полезно исполь-
использовать неравенство Шварца
5.17. Часто синтезируемый рекурсивный фильтр должен быть
симметричным. Один из подходов заключается просто в использо-
использовании симметричного идеального отклика и алгоритма без огра-
ограничений. Такой подход обычно дает положительные результаты,
но требует слишком большого объема вычислений для оптимиза-
оптимизации синтеза (больше, чем необходимо). Другой подход предпо-
предполагает наложение ограйичений в самом начале, чтобы уменьшить
число степеней свободы при проектировании.
Рассмотрите синтез в частотной области с минимизацией функ-
функционала
j [4S-d <«¦¦•¦
и использованием метода линеаризации из разд. 5.5.1. Определите
градиент функции Ja, если выполняются требования:
a<(ki, k2) = a (k2, kx) для 0 <: kx, k2 < N — 1,
b (kt, k2) = b (k2, kx) для 0 «: ku k2 < N — 1.
5.18. Фильтр имеет отклик h (пъ п2), опорной областью
которого является первый квадрант. Составной отклик, полу-
полученный параллельной реализацией четырех откликов, получен-
полученных вращением отклика h (n1, п2), имеет вид
й («1. «г) = h (nv п2) + h (—пи п2) +
+ h (—пи —п2) + h (nx — п2).
а) Выразите составной частотный отклик Н (а>и а>2) через
Н (щ, (о4). Считайте отклик h (пъ п2) вещественным.
б) Покажите, что результирующая реализация имеет нулевую
фазу.
5.19. фильтр с откликом Нг (гъ г2) имеет характеристики
пропускания в области нижних частот, показанные на
рис. У5.19, а. Найдите частотные преобразования Ft (гх, г2) ->¦
Синтез и реализация двумерных БИХ-фильтров 353
Z'
Z
, F2(z\, ?2)->-Z2 t которые позволят получить отклики,
показанные на рис. У5.19, б—г.
1
R
т
__R/2
Рис. У5.19.
5.20. Пусть последовательность двумерных коэффициентов
отражения k (plt p2) имеет вид
k-@, 1) = 0,7; k (I, —1) = 0,5; k A, 0) - —0,3;
k{\, 1) = 0,1; к (/?!, /?2) = 0 для всех остальных
значений (рь /?2)-
Определите полином Вг (ги г2),-соответствующий последователь-
последовательности k (pi, p2).
23 Даджион Д., Мерсеро Р.
Глава б
Обработка сигналов, передаваемых
с помощью распространяющихся
в пространстве волн
Мы постоянно получаем сигналы, которые передаются с по-
помощью распространяющихся в пространстве волн. Эти сигналы
несут информацию о событиях, происходящих от нас на некотором
удалении. Наши уши воспринимают акустические волны, про-
проходящие сквозь них, наши глаза —сигналы от узкого диапазона
электромагнитного спектра. Эти органы чувств позволяют нам
воспринимать и интерпретировать события, в возникновении ко-
которых мы физически не участвовали.
Чтобы больше узнать об окружающей его физической среде,
человечество существенно расширило свои сенсорные возмож-
возможности. Типичными современными примерами расширения сенсор-
сенсорных возможностей являются использование радиолокаторов, со-
сонара и обработка сейсмических сигналов. Эти примеры включают
в себя прием и обработку распространяющихся сигналов с по-
помощью как пассивных, так и активных систем. Пассивный прием-
приемник принимает сигналы, излучаемые удаленным событием и до-
достигшие его с помощью распространяющихся волн: он просто
«смотрит» или «слушает». В противоположность ему активная
система сама испускает излучение обычно акустической или
электромагнитной природы, которое можно сфокусировать
в определенном направлении в виде луча. Это излучение отра-
отражается объектами (фактически разрывами непрерывности среды
распространения) и возвращается к приемнику, где оно анали-
анализируется.
Основное содержание этой главы касается цифровой обработки
сигналов, принимаемых набором датчиков, расположенных опре-
определенным образом в пространстве. Мы обсудим некоторые основ-
основные аспекты этой темы в первую очередь как пример использова-
использования многомерной цифровой фильтрации и спектрального анализа
в задачах извлечения информации из распространяющегося излу-
излучения. Однако наше изложение не будет исчерпывающим спра-
справочником по применению методов многомерной обработки сигна-
сигналов в сонарах, радиолокаторах, геофизических и прочих прило-
приложениях [1 ].
Часто обработка сигналов, передаваемых с помощью распро-
распространяющихся в пространстве волн, ставит своей целью выделение
Обработка сигналов, передаваемых с помощью волн 355
сигнала на фоне шума, помех или даже других сигналов. Следо-
Следовательно, эту задачу можно интерпретировать как локализацию
энергии сигнала во времени, по частоте, направлению распро-
распространения или по какой-либо другой переменной. Многомерную
цифровую фильтрацию можно применять для извлечения инфор-
информации из сигнала, передаваемого с помощью распространяю-
распространяющихся в пространстве волн, поскольку она дает в руки механизм
выделения из других сигналов сигналов с конкретным набором
значений параметров.
В разд. 6.2 мы рассмотрим задачу формирования луча или
диаграммы направленности, т. е. избирательного приема излу»
чения в пространстве с разных направлений: сигналы, принадле-
принадлежащие лучу, пропускаются, а сигналы, ему не принадлежащие,
ослабляются. Таким образом, формирование луча аналогично
полосовой фильтрации.
Многомерный спектральный анализ можно также использо-
использовать применительно к задачам выделения сигнала. Измеряя мно-
многомерный спектр, можно выделять компоненты сигнала в различ-
различных частотных диапазонах и оценивать их интенсивность. В после-
последующих разделах мы более детально рассмотрим, каким образом
оценку многомерных сигналов можно использовать в задачах
подобного типа.
6.1. Анализ пространственно-временных сигналов
Распространяющиеся в пространстве волны и сигналы, кото-
которые они переносят, можно представить в виде пространственно-
временных функций; их можно анализировать методами много-
многомерного фурье-анализа. Если s (x, t) представляет собой сигнал,
являющийся функцией пространственных координат х и времени t,
то для получения четырехмерного спектра по частоте и волно-
волновому числу S (к, о)) можно использовать непрерывное четырех-
четырехмерное преобразование Фурье [2 I
оо оо
S(k, со) ^ j | s(x, /)exp [ -/(со/ - k'x)]d\dt. F.1)
—оо —оо
Следует обратить внимание на знаки в экспоненте. Мы специально
определили функцию S (к, со) таким образом, чтобы последующие
выражения отражали наше интуитивное понимание процесса
распространения волн. Переменная со представляет собой знако-
знакомую нам временную частоту. Аналогично волновой вектор к
представляет собой пространственную частоту. Это — векторная
величина, поскольку она показывает количество волн, уклады-
укладывающихся в единичной длине каждого из трех ортогональных
направлений в пространстве. Скалярный член к'х, стоящий
23*
356 Глава 6
в экспоненте выражения F.1), является скалярным произведе-
произведением волнового вектора k = (kx, ky, kz)' и пространственного
вектора х.
6.1.1. Элементарные сигналы
Элементарные сигналы вида
е (х, О А ехр Ц (cou/ - kjx)] F.2)
представляют собой плоские волны. Используя четырехмерное
преобразование Фурье
оо оо
s (х, /) = -~- J J S (к, со) ехр [} (со/ - к'х)] dk dco, F.3)
ОО ОО
легко убедиться, что любой сигнал s (x, t) можно представить
как суперпозицию плоских волн. Определив вектор а0 в виде
«»А^, F.4)
можно записать выражение F.2) следующим образом:
е (х, 0 = ехр [усоо (t ~ а'ох)]. F.5)
Таким образом, функцию е (х, t) можно рассматривать как
плоскую волну, распространяющуюся в направлении а0 со ско-
скоростью, равной 1/| а0 \. Поскольку величина | а01 обратна вели-
величине скорости распространения, то вектор а0 иногда называют
вектором замедленности !).
Выполнив преобразование Фурье F.1) элементарного сигнала
е (х, 0. получим
?(к, «) = 6 (к - к0) 6 (со - (о0), F.6)
представляющий собой четырехмерный импульс (дельта-функцию
Дирака) в пространстве (к, <о) в точке к = к0 и о = ©0. Таким
образом, каждая точка пространства (к, со) соответствует плоской
волне в пространстве (х, t) с определенной ориентацией и часто-
частотой [2, 3].
Рассмотрим упрощенные изображения пространства (к, со)
на рис. 6.1. Переменная со представляется вертикальной осью,
а переменные kx и ky — горизонтальной плоскостью. (Для упро-
упрощения рисунков мы на время пренебрегаем переменной kz.) Из
рис. 6.1, а видно, что все компоненты сигнала при одной и той же
частоте со лежат в плоскости, параллельной плоскости (kx, ky).
Компоненты сигнала с одной и той же скоростью распростране-
распространения с будут лежать на поверхности конуса, как показано на
рис. 6.1, б, поскольку с —- со/1 к |. Компоненты сигнала, распро-
:) Насколько известно, это не общепринятый термин. Поэтому приводим
для читателя это название в оригинале: slowness vector. — Прим. ред.
Обработка сигналов, передаваемых с помощью волн 357
w
/«>
k,/lkl=cosy
Рис. 6.1. Расположение точек в (к, (о)-пространстве, соответствующее сигналам
с одинаковыми частотой щ (а), скоростью (б) и направлением (в) распр остранепия
358 Глава 6
страняющиеся в одном и том же направлении, расположены на
полуплоскости, перпендикулярной плоскости (kx, ky), поскольку
направление распространение указывается направлением век-
вектора к (рис. 6.1, б). В некоторых случаях нас также будут инте-
интересовать сигналы, лежащие на пересечении этих поверхностей.
Например, компоненты сигнала с одной и той же скоростью и
одним и тем же направлением распространения лежат на линии,
образованной пересечением конуса, изображенного на рис. 6.1, б,
и полуплоскости, изображенной на рис. 6.1, в.
6.1.2. Фильтрация в пространстве волновое
число—частота
При обработке сигналов, являющихся пространственно-вре-
пространственно-временной функцией, нас часто интересует выделение компонент
сигнала с определенными частотами и скоростями распростра-
распространения (как по величине, так и по направлению). Эту задачу можно
сформулировать как задачу многомерной фильтрации [3]; она
аналогична разделению частотных компонент одномерного сиг-
сигнала с помощью полосовых фильтров. Предположим, например,
что спектр сигнала s (x, /) по волновому числу и частоте описы-
описывается функцией S (к, со), определяемой выражением F.1). Пред-
Представим себе, что мы пропускаем этот сигнал через четырехмерный
линейный инвариантный к сдвигу фильтр с импульсным откли-
откликом h (х, /) и получаем выходной сигнал / (х, /). Импульсный
отклик фильтра выбирается таким образом, чтобы пропустить
интересующие нас компоненты сигнала и подавить ненужные,
например компоненты аддитивного шума. Входной и выходной
сигналы связаны между собой непрерывным четырехмерным
интегралом свертки
оо оо
/ (х, 0 = j \h (x - |, t-f)s A, т) dE dx. F.7)
—oo —oo
В пространстве волновое число — частота выходной спектр ра-
равен произведению входного спектра и отклика фильтра по волно-
волновому числу и частоте
F (к, <о) = Я (к, со) S (к, ©). F.8)
Для выделения искомых компонент сигнала необходимо по-
построить отклик фильтра Я (к, со) по волновому числу и частоте
таким образом, чтобы он был близок к единице в выбранных обла-
областях пространства (к, со) и к нулю во всех остальных. Таким обра-
образом, если мы хотим пропустить компоненты сигнала в некото-
некоторой узкой полосе частот вокруг юп независимо от значения ско-
скорости и направления распространения, то функция Я (к, со)
примет вид одномерного полосового частотного отклика, не за-
Обработка сигналов, передаваемых с помощью волн 359
висящего от к. Если мы хотим выделить компоненты сигнала с за-
заданной частотой, скоростью и направлением распространения,
то функция Я (к, со) будет иметь вид четырехмерного полосо-
полосового фильтра, центр полосы пропускания которого соответствует
заданным значениям (к0, со0).
Этот общий подход к фильтрации осложняется двумя основ-
основными обстоятельствами: сигнал s(x, t) обычно известен не для
всех точек пространства х, а значение отфильтрованного сигнала
/ (х, t) обычно необходимо знать только для одной точки про-
пространства. Тем не менее общий подход полезен как некая общая
схема изучения систем, обрабатывающих сигналы, передаваемые
с помощью распространяющихся в пространстве волн.
6.2. Формирование луча
Формирование луча относится к одному из типов фильтрации,
который удобно использовать применительно к сигналам, пере-
передаваемым с помощью распространяющихся в пространстве волн.
Назначение системы формирования луча состоит в выделении
компонент сигнала, распространяющихся в определенном направ-
направлении. Обычно полагают, что все волны распространяются с одной
и той же скоростью с, так что интересующие сигналы лежат на
поверхности конуса со = с j k | в пространстве (к, со). В идеале
полосой пропускания формирователя луча является пересечение
этого конуса с плоскостью, содержащей вектор требуемого на-
направления, как это показано на рис. 6.2.
Полоса
пропускания
формирователя
луча
Рис. 6.2. Полоса пропускания идеального формирователя луча лежит на пере-
пересечении конуса со = с | k | с плоскостью, содержащей выбранное направление
распространения к0.
360 Глава 6
6.2.i. Формирователь, использующий метод
взвешенного сложения с задержкой
Формирование луча можно реализовать с помощью обработки
сигналов, принятых решеткой приемников. Предположим, что
у нас имеется решетка из N приемников, расположенных в про-
пространстве таким образом, что i-й приемник расположен в точке
X; (i = 0, I, ..., N — 1); обозначим принятый сигнал через
/¦; (t). Поскольку положения приемников фиксированы, они осу-
осуществляют пространственную дискретизацию сигнала s (x, /).
Если предположить, что эта дискретизация является идеаль-
идеальной, то сигнал /-го приемника rt (t) описывается выражением
rt @ = s (x,., 0- F.9)
Одна из простейших систем формирования луча называется
формирователем по методу взвешенного сложения с задержкой. Вы-
Выходной сигнал bf (t) формирователя образуется путем усреднения
взвешенных и.задержанных копий сигналов приемников
^eO ()
iv (=0
Вес и относительная задержка сигнала i'-ro приемника обозна-
обозначаются через wt и т* соответственно. Задержки xt выбираются таким
образом, чтобы центр полосы пропускания формирователя рас-
располагался вдоль какого-либо определенного направления в про-
пространстве (к, со). (Это часто называют «наведением луча»). Напри-
Например, если все приемники лежат в одной плоскости и мы хотим на-
направить луч перпендикулярно этой плоскости, то значения xt
для всех приемников должны равняться нулю. Плоские волны,
идущие из перпендикулярного направления, будут складываться
в фазе, в то время как волны, идущие из других направлений, будут
складываться с различными фазами и преимущественно гаситься.
Для пропускания плоских волн, двигающихся в определенном на-
направлении с вектором замедленности, равном а0, задержки должны
равняться
Т,: = — OoXt. F.11)
6.2.2. Диаграмма направленности
В идеальном случае формирователь луча должен пропускать
компоненты сигнала с вектором замедленности а0 и подавлять все
остальные компоненты. На практике этого достичь невозможно.
Диаграмма направленности, выведенная ниже, показывает, на-
насколько можно приблизиться к этому идеалу. Предположим, что
луч направлен по а0, так что задержки приемников определяются
Обработка сигналов, передаваемых с помощью волн 361
выражением F.11). Пусть, далее, пространственно-временной сиг-
сигнал s (х, t) является плоской волной, распространяющейся в раз-
различных направлениях а. Тогда
s (х, 0 = ехр [/со (t - a'x)]. F.12)
Выход формирователя луча будет описываться выражением
bf(f) = l/N Ц Wtrt (t - т,) = l/N Ц wts(xt, t
(=0 (=0
? ^; exP [/<•> С I- «Л- - a'x,)] = F.13)
= l/N S ^i exp [— /о (a - a0)' хг] ехр (/«О =
I i=o J
= W (о (a - ao)) exp O'arf) = W (k - ko) exp 0®0-
Функция W (k) 4 l/N Ц шг ехр (—/k'xf) F.14)
i=0
называется диаграммой направленности (решетки). Очевидно, она
является преобразованием Фурье весовой функции приемника wt
с учетом положения приемников хг. Диаграмма направленности
W (к — к0) показывает величину ослабления плоской волны, рас-
распространяющейся с вектором замедленности а, или, что эквива-
эквивалентно, с волновым вектором к = ©ое, когда луч наведен в направ-
направлении, параллельном вектору к0.
В более общем случае сигнал s (x, t) содержит большое количе-
количество компонент плоских волн с различными временными частотами
и направлениями распространения. Как и раньше, мы можем ис-
использовать спектр по волновому числу и частоте S (к, о), записав
состав этого сигнала в следующем виде:
оо оо
s (х, 0 = -^jr J J S (к, о) ехр [/ И - к'х)] dk do.
—ao —оо
Далее, подставив это представление в выражение F.10), мы полу-
получим, что выход формирователя луча можно записать следующим
образом:
N — I оо оо
bf(f) = l/N ^ Wl -j~- J J S (к, о) ехр [-/ (к - ©во)' Х|] X
(%=() —OO -OO
X exp (/wO dk do». F.15)
362 Глава 6
Наконец, используя определение диаграммы направленности,
можно преобразовать F.15) к виду
оо оо
Ц@ = 72SF J J s (k- w)w
j exf
—oo —oo
Это выражение представляет собой широкополосный отклик [4 ]
формирователя луча по методу взвешенного сложения с задержкой.
Оно показывает, как ослабляются различные компоненты плоских
волн до их суммирования, образующего выходной сигнал форми-
формирователя.
Рассмотрим частный случай, когда все компоненты s (x, t)
распространяются в одном направлении. Тогда
s(x,t) = v(t-a'x), F.17)
где v (t) — некоторая функция, описывающая форму сигнала.
Спектр по волновому вектору и частоте описывается выражением
S (к, со) = V (со) б (к - соа), F.18)
где V (со) — преобразование Фурье функции v (t), а б (к) — трех-
трехмерная импульсная функция. Подставляя F.18) в F.16), получим
оо оо
bf @ = -JL- J J V (со) б (к - соа) W (к - соао) ехр (/со/) dk dco ---=
—оо —оо
. F.19)
Если распространяющаяся волна v (t — а'х) пересекает решет-
решетку точно в том направлении, для которого был создан формирова-
формирователь луча, то а = а0 и
оо
bf (f) = -l-W @) j V (со) ехр (у'соО Ло = W @) v (t). F.20)
—оо
В этом случае формирователь луча не искажает формы волны сиг-
сигнала.
Если а Ф а0, величина аргумента W (•) в выражении F.19)
линейно растет с частотой. В этом случае высокочастотные компо-
компоненты волны, как правило, будут ослабляться сильнее низкоча-
низкочастотных. Понять, почему это происходит, можно, проанализиро-
проанализировав рис. 6.3, на котором дан вид сверху на плоскость (kx, ky).
(В иллюстративных целях мы оиять пренебрегаем переменной k2.)
Поскольку предполагается, что все компоненты сигнала распро-
распространяются с одной и той же скоростью с, то они лежат на конусе
к = соа пространства (к, со). Все компоненты сигнала с одной и той
Обработка сигналов, передаваемых с помощью волн 363
же частотой на этом конусе будут проектироваться на окруж-
окружность в плоскости (kx, ky). Таким образом, на этом рисунке частота
измеряется в единицах расстояния от начала координат, умножен-
умноженных на скорость с. Если диаграмма направленности W (к) такова,
что ее значение близко к единице только тогда, когда величина ее
аргумента мала, а в остальных случаях она.близка к нулю, то ос-
основной лепесток диаграммы направленности занимает заштрихован-
заштрихованную область на рисунке, ограниченную линиями, параллельными
k" * Wa° Полоса
пропускания
W<k-k0)
Линии постоянной частоты
Рис. 6.3. Проекция (к, (о)-пространства на плоскость (kx, ky), показанная для
демонстрации эффекта низкочастотной фильтрации луча, не совпадающего с на-
направлением наведения.
линии k = wa0. Если приходящий сигнал направлен по лучу
(а = а0), то, как видно из рисунка, все частоты лежат в основном
лепестке луча. Однако, если к = а>а Ф а>а0, мы видим, что BbicoKq-
частотные компоненты вдоль линии к выпадают из полосы пропу-
пропускания формирователя луча. Следовательно, широкополосные сиг-
сигналы, проходящие через решетку в направлении, отличном от на-
направления наведения, подвержены искажениям, аналогичным тем,
которые происходят при низкочастотной фильтрации.
Выражение F.16) можно также интерпретировать как много-
многомерную фильтрацию. Чтобы показать это, выпишем еще раз выра-
выражение F.7)
со со
/(х, /)= J jA(x-g, /-t)s(|, %)&%&%.
—оо —оо
Применив к этому выражению теорему о свертке, получим
СО 00
/ (х, 0 - -^«- J J Н (к, о) 5 (к, о) ехр [/ (<of — к'х)] dkrfo. F.21)
—оо —оо
364 Глава б
Если определить выходной сигнал формирователя луча в виде
bf (t) = f @, t), F.22)
то, сравнивая уравнения F.16) и F.21), можно сделать вывод, что
эффективный частотный отклик определяется выражением
Н (к, и) = № (к - (ооо). F.23)
Диаграмма направленности, вычисленная при к — а>а0, является
комплексной амплитудой частотного отклика фильтра, использо-
использованного для обработки пространственно-временного сигнала s (x, t).
6.2.3. Пример диаграммы направленности
Диаграмма направленности W (к) показывает, насколько селек-
селективной является та или иная система формирования луча. Рассмо-
Рассмотрим детально очень простой случай линейной решетки, состоящей
3D (N-l) D
Рнс. 6.4. Расположение приемников для примера формирования луча, приве-
приведенного в разд. 6.2.3.
из равновзвешенных приемников, равномерно расположенных по
схеме, показанной на рис. 6.4. N приемников расположены в точ-
точках х,- = (Ш, 0, 0)' при 0 < i < N — I, a Wi равны единице для
каждого i. Используя определение диаграммы направленности со-
согласно F.14), мы видим, что для этого случая
W (к) = A/N) 2 exp (-/k'x,) =
exp (-
^-]. F.24)
_ sin (NkxD/2)
Nsin(kxD/2) ^
Эта диаграмма направленности представлена на рис. 6.5, а. Хотя
диаграмма направленности является, вообще говоря, функцией
k = \kx, ky, kz)', в этом примере она зависит только от kx, по-
поскольку все приемники расположены на оси х.
Обработка сигналов, передаваемых с помощью волн 365
Если сигналы приемников задерживаются для наведения луча
согласно выражению F.11), мы получим
т( = оох/ = —«6 • (Ш, 0', 0)' = —aoxlD, F.25)
и отклик решетки будет описываться функцией W (к — <оа0),
амплитуда которой показана на рис. 6.5, б. Заметим, что диаграмма
направленности периодична вдоль kx с периодом 2n/D. Ширина лу-
луча, которая является шириной основного лепестка диаграммы на-
направленности, обратно пропорциональна произведению ND. Это
произведение можно назвать длиной апертуры решетки. Из-за
периодичности функции W (к — <оа0) основной лепесток повто-
повторяется через интервалы 2я/?>. Эти повторяющиеся основные ле-
1» i
Ш> D
2тг
D
Рис. 6.5.
а — диаграмма направленности для равновзвешенной и равномерной решетки прием-
приемников: б — отклик решетки в случае, когда для наведения луча использованы за-
задержки во времени.
366 Глава 6
пестки иногда называют дифракционными максимумами решетки,
поскольку они аналогичны дифракции высших порядков на оптиче-
оптической дифракционной решетке.
На рис. 6.6 показан один из возможных способов изображения
диаграммы направленности в координатах волновой вектор —
частота. Поскольку функция W (к — <оа0) зависит только от х-
компонент векторов к и а0, то ось kuna рис. 6.6 направлена перпен-
перпендикулярно странице, так что мы можем изобразить диаграмму
направлен
пнутрь страниц*
Рис. 6.6. Эффект дифракционных лепестков в координатах волновое число —
частота.
Высокочастотные компоненты сигнала, распространяющегося с вектором замедленно-
замедленности а, не будут ослабляться при попадании внутрь лепестков.
направленности как функцию kx и со. Заштрихованные области
соответствуют основному лепестку и дифракционным максимумам.
Сигнал, распространяющийся с вектором замедленности а, будет
иметь компоненты, лежащие вдоль линии kx --- юах. При низких
частотах эти компоненты сигнала будут лежать внутри основного
лепестка (или полосы пропускания) диаграммы луча и поэтому не
будут ослабляться. Однако с увеличением а> компоненты сигнала
будут выпадать из основного лепестка и ослабляться формировате-
формирователем луча. При еще больших частотах компоненты сигнала могут
попасть в дифракционные максимумы и проходить на выход фор-
формирователя луча. Чтобы избежать этого, сигналы приемников не-
необходимо пропустить через низкочастотные фильтры для ограни-
ограничения высокочастотных компонент сигнала, которые в противном
случае могут пропускаться дифракционными максимумами.
Поскольку приемники располагаются в дискретных точках,
они фактически производят пространственную дискретизацию
Обработка сигналов, передаваемых с помощью волн 367
приходящей плоской волны. Следовательно, наличие дифракцион-
дифракционных максимумов может выражаться через частотное наложение
в пространстве, которое возникает из-за того, что интервал про-
пространственной дискретизации D слишком велик. Рассмотрим пло-
плоскую волну с временной частотой w и длиной волны А = 2л/| к |,
проходящую через решетку приемников. При наблюдении вдоль
оси х в любой момент времени плоская волна изменяется с расстоя-
расстоянием по синусоидальному закону. Период этой синусоидальной
волны составляет Хх = Х^'т у, где у — угол падения, отсчитывае-
отсчитываемый от перпендикуляра, проведенного к линии приемников. Эта
схема была изображена на рис. 6.4. Минимальное значение Хх, со-
соответствующее максимальной пространственной частоте, воспри-
воспринимаемой решеткой приемников, достигается при значениях у =
— ±90°. В этом случае Хх = А. Следовательно, пространственное
частотное наложение может возникнуть в том случае, если не вы-
выполняется условие
D < К/2. F.26)
Если расстояние между приемниками D удовлетворяет условию
F.26) для наименьших длин волн, принимаемых решеткой приемни-
приемников, то дифракционные максимумы не влияют на принимаемый сиг-
сигнал.
Ранее мы видели, что ширина луча и, следовательно, угловое
разрешение формирователя луча зависят от размера апертуры ре-
решетки ND. Когда приходится иметь дело с узкополосными сигнала-
сигналами плоских волн, то удобно измерять величину апертуры в еди-
единицах длины волны А. Если диаграмма направленности построена
как функция sin у, а не kx, то ширина основного лепестка обратно
пропорциональна отношению D/X. Величина апертуры конкретной
решетки будет равна небольшому числу длин волн для низкоча-
низкочастотного сигнала и большому числу длин волн — для высокоча-
высокочастотного. Следовательно, можно ожидать, что ширина лепестка
будет большой в случае низкочастотных сигналов и малой— в слу-
случае высокочастотных.
6.2.4. Влияние весовой функции приемника
Выбор весов приемников w-t существенным образом влияет на
форму диаграммы направленности и, следовательно, на селектив-
селективность формирователя луча. Если приемники хг равномерно распо-
расположены вдоль оси х, как на рис. 6.4, то задача выбора весов эквива-
эквивалентна задаче выбора коэффициентов одномерной функции окна
конечной протяженности. При отсутствии каких-либо специальных
ограничений применение стандартного одномерного окна [5] для
взвешивания сигналов приемников приводит к диаграмме направ-
направленности с обычным соотношением между шириной основного ле-
368 Глава 6
пестка и высотой боковых лепестков. Уровни боковых лепестков
можно понизить, а стало быть, и бблее надежно исключить сиг-
сигналы, не входящие в луч, только ценой увеличения ширины основ-
основного лепестка и уменьшения углового разрешения.
Для двух- и трехмерных решеток приемников, образующих
в пространстве регулярную структуру, весовые функции можно
выбрать с помощью той же методики, которая применялась в гл. 3
для получения многомерных окон [6, 7]. В качестве примера рас-
рассмотрим трехмерную задачу расчета значения весов приемников wit
расположенных в точках хг — (xh уг, Z;)'. Чтобы в явном виде вы-
выразить трехмерную природу весовой функции, слегка изменим
обозначения и запишем весовую функцию как w (х;, г/,-, zt). Можно
получить разделимую весовую функцию, записав
w (*„ уь г,) - / (jrf) g (у,) h (г«), F.27)
где /, g и h — одномерные окна, выбранные таким образом, чтобы
получить приемлемую ширину основного лепестка и удовлетвори-
удовлетворительные уровни боковых лепестков при каждом значении перемен-
переменной (волнового числа). Разделимые весовые функции, такие, как
в выражении F.27), обычно дают диаграмму с примерно прямо-
прямоугольным основным лепестком. В противоположность этому, диа-
диаграмму направленности, близкую к сферически симметричной,
можно получить при использовании функции
w(xlt yt, z,) = /(/*?-[ yi !-4), F.28)
где снова / — соответствующим образом выбранная непрерывная
одномерная функция окна.
Можно также сконструировать весовые функции из функций
окна и для случаев, когда решетки представляют собой набор при-
приемников, расположенных на каких-либо периодических структу-
структурах другого типа. Например, весовые функции для гексагональной
решетки можно получить при помощи гексагональных функций
окна, рассмотренных в гл. 3. В том случае, когда приемники рас-
расположены нерегулярно, выбор весовых функций приемников ус-
усложняется. Эта задача аналогична задаче разработки одномерного
КИХ-фильтра с импульсным откликом, состоящим из неравномерно
расположенных ненулевых отсчетов.
6.2.5. Формирование луча методом фильтрации
и суммирования
Формирователь, построенный по принципу взвешенного сло-
сложения и задержки, можно обобщить. Например, в некоторых
приложениях желательно, чтобы весовая функция приемника за-
зависела от частоты. Компонента сигнала, принятая на определен-
определенной частоте, обрабатывается с помощью набора весов, отличного
Обработка сигналов, передаваемых с помощью волн 369
от того, с помощью которого обрабатывается компонента, принятая
на другой частоте. Компоненту сигнала при частоте и> = щ для
г-го приемника можно записать в виде R-t (<о0) ехр (/<о0/), где Rt (<о)—
спектр Фурье сигнала приемника rt (t). Используя частотно-зави-
частотно-зависимую весовую функцию Wt (а>), можно найти выход формировате-
формирователя луча, построенного на принципе суммирования и задержки,
для компоненты сигнала при <о = w0 следующим образом:
bf (t, щ) = 1/Л/ 23 Wt (и0) Ri К) ехр [/и0 (/ - т,)]. F.29)
1=0
Теперь для применения операции частотно-зависимого формирова-
формирования при всех частотах одновременно заменим параметр <о0 перемен-
переменной (о и выполним интегрирование. Это дает нам значение выхода
формирователя, использующего метод фильтрации и суммирова-
суммирования:
оо /V—I оо
"". X
/s@ й J- J bf{t, (o)dco = 1/Л/^ -^ J
X ехр [/со (/ — тг)] d<o. F.30)
Для упрощения обозначений определим сигнал
оо
@ = IF J ^г (с°) ^г ^ ехр
N—\
поэтому fs(t)= 1/Л/ 2] <7г(/-т,-). F.32)
(—0
Применяя теорему о свертке к выражению F.31), мы видим,
что функцию c]i (t) можно записать в виде свертки
</, @ - wt @ * rt @, F.33)
где шг @ — обратное преобразование Фурье весовой функции
Wt ((о), зависящей от частоты. Функцию wt (t) можно интерпрети-
интерпретировать как импульсный отклик фильтра, действующего на прини-
принимаемый приемником сигнал гг (t) и дающего на выходе значение
<7г(/).Этот отфильтрованный сигнал используется затемдляфор-
мирования луча F.32), отсюда и название формирователя по методу
фильтрации и суммирования.
Выход формирователя по методу фильтрации и суммирования
можно также записать в виде четырехмерной свертки
fs(t) = h(x, t)*s(x, 0.,о- F.34)
24 Даджион Д., Мерсеро Р.
370 Глава 6
Нетрудно проверить, что эффективный отклик такого формиро-
формирователя по параметрам волновое число — частота описывается вы-
выражением
Н (к, со) = 1/N ? Wt (со) ехр [—/ (к - соа0)' х,-], F.35)
;=о
где вектор замедленности а0, указывающий направление луча, как
и прежде, связан с временной задержкой тг соотношением
т,- — — a0Xj. F.36)
Для плоских волн, распространяющихся с вектором замедленно-
замедленности а0, выполняется условие k = соа0, так что экспоненциальный
множитель выпадает. В этом случае отклик по волновому числу—
частоте Н (<оа0, -а») представляет собой просто среднее от частотно-
зависимых весов Wt (со).
6.2.6. Формирование луча в частотном
пространстве
Оба рассмотренных формирователя (формирователь по методу
взвешенного суммирования и задержки и формирователь по методу
фильтрации и суммирования) выполняют операции над сигналами
как функциями времени. Сигналы индивидуальных приемников
задерживаются, фильтруются и складываются друг с другом.
В противоположность этому формирователь в частотном простран-
пространстве создает диаграмму луча путем выполнения необходимых за-
задержек, фильтрации и операций суммирования в частотной обла-
области с использованием преобразования Фурье. Например, если обо-
обозначить через Ri (ш) спектр Фурье сигнала приемника гг (t), то за-
задержку rx (t) на тг можно реализовать в частотной области умноже-
умножением спектра Ri (ш) на вектор на комплексной плоскости
ехр (—/(от,-). Аналогично взвешивание гг (/) с помощью w-t можно
осуществить с помощью операции умножения wtRi (со) или, в более
общем виде, фильтрацию rt (t) с помощью импульсного отклика
wt (t) можно выполнить путем умножения Wt (a») Rt (со). Исполь-
Используя эти операции в частотной области, мы можем сформировать
(по крайней мере в принципе) спектр Фурье выхода формирователя
луча по методу взвешенного суммирования и задержки в виде
BF (ю) = 1/N Ц wtRi (ю) ехр (—/<">*«)¦ F-37)
1=0
а спектр Фурье выхода формирователя луча по методу фильтрации
и задержки в виде
N— 1
FS (о) = 1/N Ц W; (со) Ri (о)ехр (—/сот,-)- F.38)
1=0
Обработка сигналов, передаваемых с помощью волн 371
Компонента выхода формирователя луча при частоте w описы-
описывается функцией BF (<о) ехр (/©/), а полный выход формирователя
луча получается путем интегрирования всех компонент по частоте
оо
&/ @ = "йГ \ BF (со) ехр (/©/) d(o. F.39)
—оо
Если применить те же соображения к выражению F.38), получим
оо
fs W = -гт J f 5 (w) ехР 0"®0 d». F.40)
На практике спектр Rt (<o) нам недоступен, его вычисление тре-
требует интегрирования по всей временной оси. Однако можно вы-
вычислить преобразование Фурье для сегмента rt (t), наложив на
rt (t) окно конечной ширины v (t). Определим текущий спектр
Фурье [8] в виде
оо
#г (t, а)й J v (t - т) гг (т) ехр (—/сот) dx. F.41)
—оо
Пределы интегрирования здесь фактически конечны, поскольку
функция окна v (t— т) затухает вне ограниченного интервала.
Функция Rt (t, (о) будет хорошим приближением к спектру /?,- (<о),
если спектр Фурье V (<о) функции окна относительно узок.
Выход формирователя луча в частотной области определяется
следующим образом:
fd(t, и) ? 1/Л/ 2] wtRi (t, и) ехр [/и (t - т,-)]. F.42)
1=0
Его можно интерпретировать как некоторую аппроксимацию ком-
компоненты формирователя луча BF (<о) ехр (j(nt). Тогда аппроксима-
аппроксимацию выходного сигнала формирователя луча можно получить пу-
путем интегрирования функции fd (t, w) по частоте. [Более общее вы-
выражение для выходного сигнала формирователя луча в частотном
пространстве можно получить из выражения F.38), но мы этого
здесь делать не будем.] При зафиксированном параметре <о функ-
функцию fd (t, w) можно рассматривать как выходной сигнал операции
формирования луча, выполненной по отношению к компонентам
сигнала приемника при частоте <о. В этом формирователь луча
в частотной области подобен формирователю по методу фильтрации
и суммирования с фиксированными узкопблосными фильтрами.
Ниже в разд. 6.3.3 будет показано, что реализация в частотном
пространстве имеет вычислительные преимущества при одновре-
одновременном формировании нескольких лучей [9].
24*
372 Глава 6
С помощью алгебраических преобразований можно выразить
fd (t, со) через спектр по волновому числу и частоте S (к, со). Ис-
Используя соотношения
оо оо
S (к, со) 4 J [ s (х, 0 ехр (/к'х - jat) dx dt, F.43)
—оо —оо
г, @ us(xt, t),
Л1—1
W (к) й \/N ? wt exp (—jaf)dt
iO
F.44)
F.45)
F.46)
u j о@ехр(—
F.47)
можно получить
оо оо
fd (t, со) = -JL- f f W (к - coao) V (9 - со) S (к, 9) exp (jQt) dk d&.
F.48)
—oo —oo
Если мы положим диаграмму направленности W (к) и спектр
окна V ((о) равными нулю всюду, за исключением узкой области,
где их относительные аргументы близки к нулю, множитель W(k —
— соао) V (9 — (о) в уравнении F.48) будет равен нулю всюду, за
исключением области (к, 9)-пространства, где к =: wa0 и 9 =* со.
Это качественно иллюстрируется рис. 6.7, на котором горизонталь-
к
* г
W(k-cja0)
S(k,
VF -
в)
из)
Рис..7. Вклад в выход формирователя луча в частотной области дает небольшая
область (к, 0)-пространства, обозначенная заштрихованным прямоугольником.
Обработка сигналов, передаваемых с помощью волн 373
ная полоска представляет собой область ненулевых значений мно-
множителя W (к — соа0), а вертикальная — область ненулевых зна-
значений множителя V (9 — со). Пересечение этих двух полосок, обо-
обозначенное заштрихованным прямоугольником, является единствен-
единственной областью (к, 9)-пространства, в которой компоненты s(x, /)
не ослаблены операцией формирования луча. Компоненты, содер-
содержащиеся внутри этого прямоугольника, как раз и дают вклад
в выход формирователя луча fd (t, со).
6.3. Формирование луча в дискретном времени
До сих пор во всех наших выкладках мы рассматривали время
как непрерывную переменную. Однако, если системы формирова-
формирования луча реализуются с помощью цифровой техники, необходима
дискретизация сигналов во времени. Следовательно, нужно ис-
исследовать смысл выполнения операций формирования луча на
дискретных по времени сигналах. Мы будем использовать обозна-
обозначения, аналогичные обозначениям первой части настоящей главы.
Например, сигнал, принятый j-м приемником, будет обозначаться
через /j (/). Разница состоит в том, что переменная / будет рассма-
рассматриваться как целочисленная величина из набора значений, опре-
определяемых периодом дискретизации: t = nT, так что rL (t) является
сигналом с дискретным временем. Для простоты в некоторых слу-
случаях мы будем полагать Т й \. Другие переменные, зависящие от
времени, например скорость распространения с, будут также пере-
переопределены с использованием в качестве единицы времени не се-
секунды, а периода дискретизации Т.
Естественно, остаются в силе предосторожности, относящиеся
к дискретным по времени сигналам и системам. Скорость дискре-
дискретизации должна быть достаточно большой, чтобы не возникло на-
наложения. Спектры дискретных временных сигналов будут перио-
периодичными и т. д.
6.3.1. Формирование луча во временной области
для сигналов, дискретных во времени
Когда сигнал приемника rt (t) дискретен по времени, задержки
наведения тг, используемые во временном формирователе луча,
должны быть целыми числами, кратными периоду дискретиза-
дискретизации Т. Следовательно, дискретизованный во времени вариант фор-
формирователя луча по принципу взвешенного суммирования и за-
задержки можно в дискретном времени описать функцией
ЛЛ-1
bf (nT) = 1/N ? wtr, (пТ - щТ), F.49)
i-=0
где П{Т — задержка наведения (-го датчика.
374 Глава 6
Конечно, в идеальном случае задержки наведения должны быть
равны — аохг в соответствии с выражением F.11). Однако, посколь-
поскольку числа nt обязаны быть целыми, идеальные задержки наведения
в общем случае будут квантованными. Если обозначить через {xt}
идеальные задержки, то можно определить ошибки, связанные
с квантованием по времени:
Атг = щТ -т.;. F.50)
Эти ошибки приводят к возмущению диаграммы направленности.
Из-за квантования задержек отклик формирователя по принципу
взвешенного суммирования и задержки на плоскую волну с вектором
замедленности а0, определяемый выражением F.23), принимает вид
N—\
Я (к, со) = \/N Л Wt exp [— y(k — coao)' xt] exp (—/со Атг). F.51)
i=0
Понять влияние квантования задержек наведения поможет упрощен-
упрощенный пример. Как и раньше, примем, что приемники равномерно рас-
расположены по оси х, так что вектор положения хг- задается упорядо-
упорядоченным триплетом (('?>, 0, 0) и что w-t = 1 для всех N приемников.
Если луч наведен перпендикулярно решетке (аОх = 0), то зна-
значения как тг, так и я,- будут равны нулю для всех приемников.
Следовательно, значения Дтг также равны нулю, а функция Н (к,
(о) не возмущена. Аналогично, когда луч наведен так, что аОх =
— T/D, мы получим
т,- = —aox,- = —aOxiD = —iT, F.52)
при этом tit — —(' и значения Ат,- вновь равны нулю для всех
приемников.
Однако если луч наведен так, что аох = T/2D, то т,- = —(Т/2
и «j равны наибольшему целому числу, меньшему или равному
i/2. В этом случае ошибки наведения равны:
f Т/2 для нечетного i,
Лт, = . F.53)
( 0 для четного, v
как показано на рис. 6.8.
Для этого случая сумму в выражении F.51) можно разделить
на четные и нечетные слагаемые:
(JV/2)—1
Я(к,со)=1/Л/ j
(N/2) -1
(N/2)-l
1=0
exp[-jlBkxD-o>T)]\ll \-exp (-jkxD)]. F.54)
Обработка сигналов, передаваемых с помощью волн 375
После некоторых алгебраических преобразований получим
Я (к, со) = Ях(к, со)Я2(к, со),
где
Ях(к, co) =
X
sin
Я2(к, co) = exp(-/-
Рис. 6.8. Квантованные задержки на-
наведения.
идеальные задержки наведения;
квантованные задержки наведения.
X
-со772)]
sin (kxD — шГ/2)
-2Т
_ЗТ
1 2 3 4 5б'7
I I Г
F.55)
F.56а)
F.566)
Рис. 6.9. Пример влияния квантования задержек наведения на формирование
луча по волновому числу и частоте.
а — кпаптопанныИ формирователь луча; б — идеальный формирователь луча.
Амплитуда Я (к, со) как функция kx представлена на рис. 6.9, а
для выбранных параметров N = 8, D = \, 7=1 и ю = л/2.
На рис. 6.9, б показано значение идеального частотного отклика
с псквантованными задержками наведения. Идеальный отклик
описывается выражением
Я (к, со) ., 1/^ехр [-/ (^±) (^.D-if)] х
X
sin [(/V/2) (kxD - 0O72)]
sin V2
> — соГ/2)
F.57)
376 Глава 6
Отклик меняется для каждого значения со. Поскольку функция
Hi (к, (о) зависит от kxD — (оГ/2, то она будет сдвигаться вправо
или влево с увеличением или уменьшением со соответственно. Од-
Однако функция #2 (к, со) с изменением ш не сдвигается. Следова-
Следовательно, диаграмма направленности Я (к, со) = Нг (к, со) Я2 (к, со)
как функция kx может существенно отклоняться от идеальной при
различных значениях ш.
Этот пример иллюстрирует еще одно положение. Благодаря
применению дискретных задержек наведения датчики с одинако-
одинаковыми задержками наведения можно объединить. Датчики 0 и 1
имеют нулевую задержку, датчики 2 и 3 задержаны на один отсчет
(Т с), датчики 4 и 5 задержаны на два отсчета и т. д. Следовательно,
решетку можно представить себе состоящей из N/2 приемников,
расположенных в точках @,0,0)', B,0,0)', D,0,0)' и т. д. Каждый
приемник состоит из двух всенаправленных датчиков, сигналы ко-
которых складываются без относительной задержки во времени.
Решетка из N/2 приемников обладает диаграммой направлен-
направленности, описываемой выражением
1() ? w, exp [—j (kx - (шох) 2iD]. (b-58)
i=0
Вспомним, что в этом примере wt = 1 и аох = T/2D. Тогда
W2) -1
t (k - (оао) = 2/N JJ ехр [—/ BkJD - ЫТ)] =
1=0
Каждый приемник в свою очередь представляет собой субрешетку
из двух датчиков, выходы которых складываются без какой-либо
относительной задержки. Поэтому каждый приемник имеет диа-
диаграмму направленности, описываемую выражением
W2 (к - <ва„) = V. И Щ ехр (—jkJD) =
0
1=0
= V. [1 + ехр (r-jkxD)) = Н.г (к, (о). F.60)
Таким образом, результирующая диаграмма направленности
есть произведение диаграмм направленности N/2 приемников
F.59) и субрешетки F.60).
Это свойство имеет практическую ценность, поскольку реальные
сейсмические и сонарные решетки зачастую выполняются из суб-
субрешеток датчиков, соединенных между собой непосредственно.
Кроме того, реальные датчики не обязательно должны быть иде-
Обработка сигналов, передаваемых с помощью волн 377
ально всенаправленными, их частотный отклик в (к, со-простран-
стве помогает сформировать суммарную диаграмму направленности
надлежащим образом.
Ранее при вычислении сигнлла формирователя луча bf (t) мы
полагали, что сигнал приемника rt (t) равен s(x;, /). Однако в при-
приведенном выше примере, как и в общем случае, сигнал каждого
приемника описывается выражением
оо
''«(*)= \g(xt, x)s(xt, t-x)dt, F.61)
—оо
где g (x, /) — обратное преобразование Фурье отклика датчика
по волновому вектору—частоте G (к, со). Применяя к этому выра-
выражению многомерную теорему о свертке, получим
оо оо
гi (t) = -щг \ \ S (к, со) G (к, со) ехр (—/к'х,) ехр (/со/) dk dco.
— ОО —ОО
F.62)
Выход формирователя луча по-принципу взвешенного сумми-
суммирования и задержки по-прежнему описывается выражением
bf (!) = l/N S win (t + oox(). F.63)
i=0
Объединяя эти две формулы, получим
оо оо
) J J
—оо —оо
X
N—1
,J
1/N V Wi ехр [—/ (к - сооо)' хг] ехр (jaf) dk dco. F.64)
1=0
Выражение в фигурных скобках—это диаграмма направленности
Я (к, со), которая получилась бы для всенаправленных прием-
приемников, т. е. если бы функция G(k, со) равнялась единице. Тог-
Тогда выход формирователя луча можно записать в виде
00 ОО
bj (t) = —L- J J S(k, co)G(k, со)Я(к, со) ехр (/W)dkdco. F.65)
—00 —ОО
Сравнивая этот результат с формулой F.16), мы видим что ре-
результирующая диаграмма направленности есть произведение
Я (к, co)xG(k, со).
378 Глава 6
6.3.2. Формирование луча интерполяцией
Один из путей обойти проблему квантования задержек наведе-
наведения— это интерполяция сигналов приемников \rt (nT)\. Для
оценки значений сигналов приемников в промежутках времени ме-
между моментами дискретизации (и уменьшения благодаря этому
ошибки квантования в любое желаемое число раз) можно использо-
использовать методы цифровой интерполяции сигналов, хорошо разработан-
разработанные авторами работ [10, 11]. За это приходится платить свою
цену в виде дополнительных вычислений. Поскольку интерполя-
интерполяционное формирование луча детально изучено [12, 13], мы огра-
ограничимся кратким обсуждением интерполяции в основной полосе,
предшествующей формированию луча.
Интерполяция, предшествующая формированию луча, требует,
чтобы были найдены отсчеты сигналов отдельных приемников,
взятые с большей частотой дискретизации. Это приводит к умень-
уменьшению значения Т и более точному согласованию задержек на-
наведения. Повторная дискретизация выполняется цифровым спо-
способом с использованием первоначально дискретного сигнала при-
приемника. Обозначим через Т период дискретизации основной систе-
системы перед интерполяцией, а через Т — эффективный период ди-
дискретизации интерполируемого сигнала. Для простоты примем,
что / = Т/Т — целое число (это допущение приводит и к более
простой реализации). Выход формирователя луча описывается
выражением
JV-1
bf(nf) = i/jv ? w,7, [(n - nt) f], F.66)
где задержка наведения для г'-го приемника равна ntf. Интерпо-
Интерполятор находит отсчеты rt (mf) из отсчетов г-г (пТ) по формуле
h (mf) = ? г, (nT)g [(m - nl) f]. F.67)
Функция g (mT) является импульсным откликом интерполяци-
интерполяционного фильтра.
Для синтеза фильтра g (mf) полезно изобразить интерполятор
в виде каскадного соединения двух подсистем, как это сделано на
рис. 6.10. Первая подсистема, называемая умножителем частоты
дискретизации, растягивает входную последовательность, добав-
добавляя к каждому ее отсчету / — 1 отсчет с нулевым значением. Вто-
Вторая подсистема является ЛИС-фильтром с импульсным откликом
g {mf). Действие умножителя в частотной области состоит в сжа-
сжатии спектра таким образом, чтобы в интервале от —я до я поме-
помещалось / периодов спектра, как это показано на рис. 6.11.
Обработка сигналов, передаваемых с помощью волн 379
Умножитель
частоты
дискретизации
Линейный фильтр
Рис. 6.10. Разбиение цифрового интерполятора на умножитель частоты дискре-
дискретизации и линейный фильтр.
Я (а)
F,(W)
I I
I I I.I
I
n
Рис. 6.П. Преобразование Фурье для некоторого сигнала приемника Ri (со),
выхода умножителя частоты дискретизации ^((о) и идеально интерполированного
сигнала приемника Rt (со).
380 Глава 6
Поскольку в идеале спектр интерполированного сигнала яв-
является сжатой копией основного сигнала, g (mT) должна представ-
представлять собой импульсный отклик идеального фильтра нижних частот
с нормализованной частотой среза при л// и усилением /. На прак-
практике этот низкочастотный фильтр не будет совершенным, часть
сигнала rt (mT), лежащая в основной полосе, будет слегка иска-
искажена, и небольшая часть энергии других частот просочится через
полосу затухания.
Сигнал формирователя луча bf (mT) образуется путем сложе-
сложения взвешенных, задержанных интерполированных сигналов при-
приемников rt (пТ) и описывается следующим выражением:
~ л-—i
bf (mT) = l/N ? w~rt (mT - ntf) =
.V—1
= UN ? wt ? rt (pT) g ((m -pi- щ) Т). F.68)
r 0 p
Здесь дискретизация сигнала формирователя луча производится
с большей степенью разбиения, чем это необходимо для сохранения
самых высоких частот, присутствующих в сигнале. Следовательно,
можно уменьшить эту степень дискретизации -без потери каких-
либо компонент сигнала. Для простоты мы примем, что новый ин-
интервал дискретизации равен исходному интервалу дискретизации
приемника Т. Если положить m — и/, выражение F.68) примет
вид
bf (nlf) = bf (пТ) --= MN Ё Щ U П (pT)g((n - р) Т - п,Т) =
1=0 р
= UN %wt\%ri (pT)gi ((n - р)Т)\ F.69)
i=o L р J
где gt (пТ) ugfrT- ntf) - g ((н/ - щ) Т). F.70)
Выражение в квадратных скобках можно понимать как разбиение
интерполирующего фильтра g (пТ) на субфильтры [13]. Таким об-
образом, gi (пТ) представляет собой каждый 1-й отсчет импульсного
отклика g (пТ), смещенный на nt отсчетов относительно начала
координат. Выражение F.69) можно понимать как уравнение, опи-
описывающее формирователь луча но принципу фильтрации и сумми-
суммирования: каждый сигнал приемника перед добавлением к общей
сумме свертывается с импульсным откликом wtgi (пТ).
Интерполяция после формирования луча очень похожа на
описанную выше, за исключением того, что операции формирова-
формирования луча и фильтрации меняются местами. Формирование луча
Обработка сигналов, передаваемых с помощью волн 381
выполняется непосредственно из растянутых сигналов \ft (mf)\,
а затем выход формирователя луча фильтруется. Методы очень по-
похожи друг на друга, однако, если количество приемников заметно
больше /, второй метод сулит значительную экономию в объеме
вычислений.
6.3.3. Формирование луча в частотной области
для сигналов с дискретным временем
Нетрудно вывести уравнение для формирователя луча в ча-
частотной области с использованием дискретизованных по времени
сигналов премников. Как и прежде, пусть rt (nT) представляет
собой п-й отсчет сигнала i-ro приемника, но для краткости обозна-
обозначения положим Т = 1. Дискретный по времени выход формиро-
формирователя луча в частотном пространстве описывается выражением
1 V
fd (п, ю) - -jj- 2j WiRi (п, ю) ехр [/ю {п - т,)], F.71)
которое аналогично формуле F.42). Дискретное текущее преобразо-
преобразование Фурье дается соотношением [8]
Ri {п, (о) = V гг (m) v(n — т) ехр (—/ют), F.72)
где v (n) является импульсным откликом узкополосного цифрового
фильтра низких частот. Будем считать, что v (п) = 0 для значе-
значений п, лежащих вне интервала 0 < п < М.
Множитель Ri (n, со) ехр (/<оя) в выражении F.71) можно эф-
эффективно вычислить для большого числа значений со с помощью
алгоритма одномерного БПФ [8]. Например, если положить w =
= 2nl/M для 0 < / < М, то можно записать
Rt [п, лг)ехр^ж п) = ^iri(m)v(n-m)exp ^_(л _m)J =
м-\
= 2lrt(n-p)v(p)exp(i2-?p). F.73)
За исключением знака в экспоненте, эта формула выглядит так
же, как М-точечное ДПФ, которое можно вычислить с помощью
алгоритма БПФ, если число М является степенью числа 2.
Выход дискретного формирователя луча в частотном простран-
пространстве можно вычислить с помощью формулы F.71). Поскольку луч
сформирован в частотном пространстве, задержки наведения тг
не должны квантоваться. Однако в частном случае линейной
382 Глава 6
решетки с равномерно расположенными приемниками, когда за-
задержки наведения имеют вид
*! = —*?'. F-74)
выражение F.71) превращается в формулу
[N-l "I
1 V4 г, I 2я'\ / • 2то7 Л / .2я/ \
1=0 -I
F.75)
За исключением знака в экспоненте, выражение в скобках имеет
форму одномерного ДПФ по индексу приемника i.
Для этого частного случая выход дискретного формирователя
луча в частотном пространстве можно вычислить, непосредственно
применив двумерное ДПФ к сигналам приемника г,- (л) [9]. Под-
Подставляя F.73) в F.75), получим
N-1 М-[
1=0 р=0
F.76)
Теперь, если определить двумерную последовательность
хп(р, i)±Wlv(p)rt(n-p), F.77)
где на время зафиксировать п, и обозначить через Хп (I, q) (M X
X Я)-точечное ДПФ последовательности хп (р, i), то можно по-
получить
fd (п, ^) = -L Хп (М - I, N - q). F.78)
Обозначение fd (n, 2nl/M) не указывает явно на направление, по
которому наведен луч. Ограничение, что задержки наведения т;
должны удовлетворять соотношению F.74), означает, что х-ком-
понента выбранного вектора замедленности описывается выраже-
выражением
«ох = (Mq)/(NID). F.79)
Величины М, N и расстояния между приемниками D фиксиро-
фиксированы, однако частотный индекс / может изменяться в пределах
0 — М—1 в зависимости от интересующей нас полосы частот.
Использование ДПФ приводит к ограничению возможных направ-
направлений наведения величиной N в соответствии со значениями q,
изменяющимися в пределах 0 — jV — 1.
Используя двумерное ДПФ, мы одновременно вычисляем вы-
выходы дискретного формирователя луча в частотной области для М
Обработка сигналов, передаваемых с помощью волн 383
значений частотного индекса I и N значений индекса наведения q.
Наши попытки извлечь компоненты сигнала, фильтруя S (к, со)
с помощью формирователя луча в частотной области, приводят
к формулировке, которая отделяет компоненты сигнала с помощью
двумерного преобразования Фурье. В разд. 6.5 мы рассмотрим ме-
метод оценки многомерного спектра мощности | S (к, со) |2. В этом
случае формула F.78) является «мостиком», связывающим подход
формирования луча с методом оценки спектра выделения энергии,
переносимой распространяющимися в пространстве волнами.
6.4. Дальнейшее обсуждение приложений обработки
сигналов, полученных
с помощью решетки приемников
В этой главе мы используем обработку сигналов, полученных
с помощью некоторой решетки датчиков, как основу для обсужде-
обсуждения вопросов формирования луча, многомерной цифровой филь-
фильтрации и оценки многомерного спектра мощности. Наши резуль-
результаты будут достаточно общими и могут быть применены и для дру-
других приложений. В настоящем разделе мы кратко рассмотрим,
каким образом некоторые приемы, предложенные в этой главе,
можно конкретно использовать в задачах обработки сигналов,
полученных с помощью решетки приемников.
Мы уже видели, каким образом производится дискретизация
пространственно-временного сигнала s(x, t) по времени и в про-
пространстве для получения сигналов приемников
ri(n) = s(xi, n). F.80)
Это обозначение подчеркивает различие в обращении с простран-
пространственными переменными во многих практических задачах обработ-
обработки. В общем случае временных отсчетов намного больше по сравне-
сравнению с пространственными отсчетами. Дополнительные отсчеты во
времени можно получить, если увеличить длительность наблюде-
наблюдений (полагая, что исследуемый сигнал стационарен во времени).
Однако, чтобы получить дополнительные пространственные от-
отсчеты, мы должны построить более протяженные решетки датчи-
датчиков либо расположить дополнительные датчики в других точках
пространства. Здесь уже сказываются стоимость и иные инженер-
инженерные ограничения.
Таким образом, во многих практических задачах нам необхо-
необходимо обрабатывать сигналы с большим запасом временной инфор-
информации при скудной пространственной информации. Иногда дис-
дисперсию ограниченных по количеству пространственных оценок
можно снизить усреднением во времени, как, например, в случае
оценки коэффициента автокорреляции с большим пространствен-
пространственным отставанием. Часто для получения необходимого временного
384 Глава 6
разрешения во временной области можно применить традицион-
традиционную технику спектральной оценки, в то время как в пространствен-
пространственной области необходимы методы с высоким разрешением. Кроме
того, в большинстве приложений к сонарам и радиолокаторам ин-
интересующие нас сигналы имеют относительно узкий временной диа-
диапазон частот по сравнению со значением частоты в центре диапа-
диапазона. Следовательно, с временной частотной переменной со и про-
пространственной переменной (волновым вектором) к необходимо об-
обращаться по-разному.
6.4.1. Анализ узкополосного формирователя луча
Вновь рассмотрим формирователь луча по принципу фильтра-
фильтрации и задержки из разд. 6.2.5
N-\
fs (я) = 4г S Яг (« - т»), где F.81)
/v o
f(.(co)tfi(co)exp(/cort)dco. F.82)
Как и прежде, Rt (со) — спектр Фурье сигнала t-ro приемника
П (п), Wt (со) — частотный отклик фильтра, примененного к rt («)>
a {%i\ —задержки наведения. Можно выполнить преобразование
Фурье обеих частей выражения F.81) и получить новое выражение
FS (со) = ± t V, (со) Rt (со) ехр (-/ют,). F.83)
/v i=o
С целью некоторого упрощения определим отклик фильтра в виде
Ft (со) A _L W. (СО) ехр (-/©т.), F.84)
так что выражение F.83) можно переписать в следующей форме:
FS (со) = f,F, И Я* (со). F.85)
1=0
Благодаря относительно высокому разрешению по временной
частоте и поскольку во многих приложениях используются только
узкополосные сигналы, мы можем рассматривать это выражение
как операцию формирования луча на единственной частоте а>.
Для некоторых приложений необходимо вычислять мощность
сигнала на выходе формирователя, использующего принцип филь-
фильтрации и суммирования па частоте со, которую мы обозначим через
PFS' (со). Для этого можно найти автокорреляционную функцию
Е \fs (ti) fs* (n — т)\ и выполнить се преобразование Фурье. Для
Обработка сигналов, передаваемых с помощью волн 385
начала определим взаимную корреляционную функцию ф^- (т)
сигналов t-ro и /-го приемников. Она описывается следующим вы-
выражением:
Ф„ (т) А Е \rt (л) г] (п- т)\. F.86)
Спектр Фурье этой функции обозначим через Ф^- (со). (Е {¦) обо-
обозначает математическое ожидание.)
Теперь нетрудно показать, что
Pfs И - Z! Z! F} (со) Ф|;- Фи (со) Fj (со). F.87)
1=0 /=0
Отметим разницу в обращении с пространственными и временными
переменными. Благодаря большому количеству временных вы-
выборок математическое ожидание оператора в выражении F.86)
для q>ij (m) можно с достаточной степенью точности аппроксими-
аппроксимировать средним по времени, если сигнал является эргодическим.
Однако из-за ограниченного количества датчиков для каждой пары
вычисляется отдельная взаимная корреляционная функция. Вы-
Выражение F.87) можно записать в матричной форме следующим
образом:
/Vs(co) = f+Of, где F.88)
ГФ00(со) ... Фо.^-iH
Ф= I L F.89)
_Флг_1, о («>) ••• Флг-1,лг-1(«>)]
f = [/ro(») /ViHl'. F.90)
a t означает транспонирование с комплексным сопряжением.
(Для удобства мы опустили любое явное выражение зависимости Ф
и f от со.)
До этого мы не касались вопроса искажения шумами сигналов,
получаемых датчиками. Разумеется, в практических приложениях
шум может исходить как от среды, так и от самих датчиков; он
может иметь вид случайных некоррелированных флуктуации или
нежелательных мешающих сигналов. Предположим, что сигналы
приемника состоят из идеальной компоненты и аддитивной шумо-
шумовой компоненты, некоррелированной с сигналом. Тогда корреля-
корреляционную матрицу Ф можно записать в виде
<b = aW-\-olE. F.91)
Вектор s представляет собой идеальную компоненту сигнала на
частоте со, принимаемую каждым приемником. Тогда
s = [S0(co) Sff-i(<»)]'. F.92)
25 Даджион Д., Мерсеро Р.
386 Глава 6
где Si (со) — одномерное преобразование Фурье во времени
S,(<d)^^[s(x,, л)], F.93)
a s (хг, я) представляет собой отсчеты идеального сигнала. Вектор s
нормализован ограничением
s+s = N, F.94)
так что а\ в F.91) является средней по N датчикам мощностью
сигнала на частоте со [14].
Матрица Е является корреляционной матрицей шума, нормали-
нормализованной таким образом, что ее след равен N. Величина of пред-
представляет собой среднюю мощность шума на частоте со. Тогда ij-n
элемент матрицы Е определяется выражением
F.95)
где г( (я) является шумом t'-ro приемника. Используя формулу
F.87), спектр мощности PFS (ю) можно записать в следующем
виде:
PFS (со) = aff+Ef + at | f+s |2. F.96)
Отношение Gi=-L^ F.97)
f+Ef '.
можно рассматривать как коэффициент усиления узкополосного
формирователя луча по принципу фильтрации и суммирования [ 14 ]
в процессе обработки. Наряду с разрешением он является важной
характеристикой фильтра.
Кратко рассмотрим усиление в процессе обработки и выходной
спектр мощности для трех векторов f, которые мы обозначим \х,
f2 и f3. Однако вначале определим вектор наведения v, необходи-
необходимый для определения вектора f при рассмотрении конкретного
идеального сигнала. Если s — вектор сигнала, определяемый фор-
формулой F.92), то вектор v должен равняться вектору s. Следователь-
Следовательно, вектор v удовлетворяет условию
v+v = N. F.98)
Когда v = s, говорят, что формирователь луча соответствует иде-
идеальному сигналу. (Кокс [14] рассмотрел качество работы несколь-
нескольких оптимальных формирователей луча при условиях несоответ-
несоответствия, когда реальный сигнал отличен от идеального.) Для случая
одной плоской волны вектор наведения v описывается следующим
образом:
v = [ехр (усото), . .., ехр(/сот^)]', F.99)
где \хг\ — уже упоминавшиеся задержки наведения. Конечно,
идеальный сигнал может быть сложнее одной плоской волны, на-
Обработка сигналов, передаваемых с помощью волн 387
пример он может быть сферической волной, излучаемой из точки,
находящейся вблизи решетки.
Теперь можно рассмотреть случай, когда вектор описывается
выражением
h = v/N, F.100)
что соответствует формирователю луча по принципу суммирования
с задержкой и сигналу в виде плоской волны. В этом случае коэф-
коэффициент усиления обработки, согласно F.97), описывается выраже-
выражением
f F.101)
Если шум пространственно некоррелирован, т. е. Е = I, то усиле-
усиление Gj становится равным N, т. е. числу датчиков. Однако в об-
общем случае спектр мощности описывается соотношением
Pfs Иы, = о2 + ot ^. F.102)
(Хотя в явном виде это и не обозначено, величины Е, v, a| и а| яв-
являются функцией со.)
Другой интересный случай возникает, когда вектор задается
в виде
f- = TW FЛ03)
гдеЕ — матрица, обратная корреляционной матрице шума. Этот
фильтр возникает как оптимальное решение нескольких задач об-
обнаружения и оценивания [14], включая оценку сигнала операции
фильтрации и суммирования по методу максимального правдопо-
правдоподобия, максимизации выходного отношения сигнала к шуму и ми-
минимизации дисперсии выходного шума [15]. Если шум простран-
пространственно некоррелирован, т. е. Е = Е = I, то вектор f2 сводится
к вектору fj. Усиление обработки для вектора f2 описывается вы-
выражением
-4 F.104)
а спектр мощности — выражением
Pfs (<o)|f=», = o2s + ol -^-. F.105)
vTE v
Оценка спектра с высоким разрешением, проведенная Кэпо-
ном [21], записанная в соответствующих обозначениях [14], дает
вектор фильтра в виде
f8 = 43r- FЛ06)
уТф 'у
25*
388 Глава 6
Отметим аналогию между векторами f3 и f2, разница состоит в ис-
использовании обратной корреляционной матрицы суммы сигнала
и шума вместо обратной корреляционной матрицы шума. Усиление
для вектора f3 описывается выражением
= _Jv+o_4f_ F.107)
а спектр — выражением
" — 2 ' ^Ф~1ЕФ^. F.108)
Последнее выражение можно заметно упростить, записав функцию
PFS (со) в виде, определяемом соотношением F.88):
PFS (©)!,=,, = f JOf з = -^~-. F.109)
Можно вывести соотношения и для других оптимальных узко-
узкополосных формирователей луча, включая формирователи, основан-
основанные на винеровском подходе к фильтрации по минимуму средне-
среднеквадратичной ошибки между действительным выходом формиро-
формирователя луча и требуемым выходом формирователя [15]. Кроме того,
многие приложения обработки сигналов антенных решеток тре-
требуют систем формирования луча, которые могут адаптироваться
к медленно изменяющимся свойствам или статистике входных
сигналов и шума. В этих случаях вектор фильтра периодически
корректируется с помощью алгоритма адаптации для отражения
изменений, происходящих в окружающей среде [15].
6.5. Оценка многомерных спектров
Если мы столкнулись с одномерной задачей определения нали-
наличия синусоиды неизвестной частоты на фоне шума, мы можем вос-
воспользоваться несколькими различными подходами. Один из них
состоит в создании набора узкополосных фильтров, настроенных на
различные частоты. Измеряя энергию выходных сигналов этих
фильтров, можно определить наличие или отсутствие синусоиды
в полосе частот. Другой подход состоит в том, чтобы выделить от-
отрезок сигнала, вычислить его спектр Фурье и использовать послед-
последний для оценки спектра мощности всего сигнала. Здесь снова на-
наличие синусоиды можно установить по концентрации энергии. Еще
одна возможность состоит в том, чтобы принять гипотезу о наличии
синусоиды и затем попытаться оценить ее амплитуду и частоту по
наблюдаемому сигналу во времени.
Если мы имеем дело с многомерным аналогом этой задачи, а
именно определением наличия плоских волн на фоне шума, то
существуют те же возможности выбора. Эквивалентом набора по-
Обработка сигналов, передаваемых с помощью волн 389
лосовых фильтров является набор формирователей луча, аналогич-
аналогичных рассмотренным в предыдущих разделах настоящей главы.
Два других подхода включают в себя оценку параметров'стационар-
ного случайного процесса и использование методов оценки много-
многомерного спектра. В оставшейся части этой главы мы рассмотрим
четыре подхода к задаче оценки многомерного спектра: классиче-
классическую оценку спектра, оценку спектра с высоким разрешением,
чисто полюсное моделирование спектра и оценку спектра по макси-
максимуму энтропии. Первые два метода являются прямым развитием
одномерных методов, тогда как чисто полюсное моделирование и
методы оценки по максимуму энтропии, как будет видно, имеют
в многомерном случае некоторые отличия.
6.5.1. Классическая оценка спектра
Классические подходы к оценке одномерного спектра, рассмо-
рассмотренные в работах [16—19], хорошо известны уже более двух де-
десятилетий; они обобщены в гл. 11 книги Оппенгейма и Шафера
[20]. Обобщение этих методов на два или более измерений доста-
достаточно очевидно.
В простейшей формулировке задача оценки спектра состоит в
оценке спектра мощности Р (к, со) сигнала s (x, t) по измерениям ве-
величины rt (nT). Существует несколько определений спектральной
плотности мощности случайного процесса. Хотя естественно было
бы определять его как квадрат модуля спектра Фурье регистрируе-
регистрируемого процесса, обычно этот спектр Фурье не существует. В качестве
альтернативы определим его через спектр Фурье автокорреляцион-
автокорреляционной функции. (Для детерминированного случая эти определения
эквивалентны.) Тогда
00 оо
Р(к, со) A j j cpss(x, t)exp[-j(at-k'x)]dxdt, F.110)
—CO —CO
где cpss (x, t) = E[s (|, т) s* (| - x, т - t)], F.111)
a E [. ] обозначает математическое ожидание по ансамблю случай-
случайного процесса.
Количество данных, доступных для оценки Р (к, со), ограни-
ограничивается целым набором факторов. Во-первых, статистика s (x, t),
которую в задачах анализа обычно предполагают стационарной
в широком смысле, на самом деле может изменяться во времени.
Во-вторых, набор приемников ограничен, а их выходные сигналы
подвергаются дискретизации. Наконец обычно имеется только ре-
реализация случайного процесса ограниченной протяженности, что
затрудняет оценку среднего по ансамблю. По этим причинам в даль-
дальнейшем мы примем, что результаты измерений г,- (пТ), используе-
390 Глава 6
мые в оценке Р (к, со), доступны только для 0 < i < N; 0 <: п <
< М, а также, что эти измерения свободны от шума и что Т = 1,
так что
ri(n) = s(xh n). F.112)
Одну из простейших оценок Р (к, со) можно получить путем
многомерного преобразования Фурье rt (n) и возведения в квадрат
его квадрата модуля, что дает
Р(к, со) =
1
MN
N-\ M-\
(п) ехр Qk'xt - /со/г)
F.113)
1=0 n=0
Эта величина называется периодограммой. (Для обозначения оценки
мы будем использовать значок «~» над Р.) Нормализующий мно-
множитель 1/MN возникает при дискретизации выражения F.111).
В случае линейной решетки с х; = (i, 0, 0) выражение F.113) при-
приводится к виду
P(kx, со) =
1
MN
N-\ M-\
rt(n)exp(jkxi-jom)
F.114)
i=0 п=0
дискретную копию которого можно получить применением дву-
двумерного ДПФ.
Можно несколько обобщить оценку периодограммы, получив
модифицированную периодограмму Рм (kx, со), если сначала ум-
умножить rt (п) на двумерную функцию окна gt (n). Рассмотрим част-
частный случай, когда функция gt (n) выбирается в виде
gt (n) = (l/N)wtv(M -l-n), F.115)
где wt не равны нулю лишь в интервале 0 <: i < N, a v (n) не
равно нулю лишь в интервале 0 < п < М. Для этого конкретного
двумерного окна оценка спектра выглядит следующим образом:
(kx, со) =
MN
N-\ M-\
И И gi in) Гг in) ехр (jkxi - /con)
i=0 n=0
1
MN
N-\
M-\
-77- Л w{ exp (jkj) Л rt (n) v {M — 1 — n)exp(—/con)
1=0 п=0
F.116)
В этом случае модифицированную периодограмму можно связать
с выходом формирователя луча в частотной области, описываемым
выражением F.76)
M(kx, со) = -jjjj-1fd(M — I, со)J. F.П7)
На периодограмму как способ оценки спектра накладывается
целый ряд ограничений, но наиболее серьезным является то об-
Обработка сигналов, передаваемых с помощью волн 391
стоятельство, что спектральные оценки имеют большую статисти-
статистическую дисперсию и что они являются сильно изрезанной (т. е.
негладкой) функцией частоты. Отсчеты периодограмм, выделенные
на частотах 2п/М или при волновых числах 2зх/ЛГ, некоррелирова-
ны, и с возрастанием значений М и N эти некоррелированные спек-
спектральные отсчеты все теснее сближаются, что приводит к большим
изменениям ь амплитуде при малых изменениях частоты или вол-
волнового числа. Это явление приводит к большому разбросу в оцен-
оценках спектра для различных спектральных отсчетов.
Этот разброс можно уменьшить различными способами: выбо-
выбором различных окон g( (n), сглаживанием оценки периодограммы
по частоте и волновому числу, усреднением нескольких спектраль-
спектральных оценок или применением одновременно нескольких из перечис-
перечисленных процедур. При применении любой из этих процедур всегда
приходится искать компромисс между спектральным разрешением
и «разбросом» спектральных оценок.
Рассмотрим сначала уменьшение дисперсии спектральной оцен-
оценки путем усреднения нескольких оценок. Это будет попыткой реа-
реализовать операцию нахождения математического ожидания
в F.111). Хотя в нашем распоряжении имеется лишь одна реали-
реализация случайного процесса, но если этот процесс эргодический, то
мы можем разбить набор измерений \rt (n)\ на несколько сегмен-
сегментов, каждый из которых может обеспечить оценку спектра. На-
Например, определим периодограмму 1-го сегмента измерений сле-
следующим образом:
л N-l M-\ 2
MN
д
Jj Jj rt (я + IM) exp (jkj — /con)
i=0
F.118)
Всего имеется L = M/M таких периодограмм, усреднение которых
дает
PB(kx, 0)L-iS^fe ») =
ь 1=0
1 У
MN
1=0
N-\ M-\
Jj S rt (n + IM) exp (jkj — jam)
=0 n
2
F.119)
где индекс В поставлен в честь Бартлетта, первым предложившего
этот подход к оценке спектра в одномерном случае [ 16 ]. Поскольку
измерения были разделены на сегменты длиной М по временной
переменной, разрешение по временной частоте уменьшилось в L
раз. За счет этого уменьшения разрешения мы получили более
стабильную в статистическом смысле оценку спектра, т. е. оценку
спектра с меньшей дисперсией.
Можно было бы также рассмотреть уменьшение разрешения по
волновому числу, разбив г{ (п) по индексу приемника i. Это при-
392 Глава 6
ведет к еще большему количеству спектральных оценок, подлежа-
подлежащих усреднению, и еще более уменьшит дисперсию окончательной
оценки спектра. Однако во многих приложениях N гораздо меньше,
чем М, и дальнейшее ухудшение разрешения по волновому числу,
возникающее при разбиении по индексу i, недопустимо.
Метод, исследованный Уэлчем [19] для оценок спектра, ис-
использует тот же метод сегментации данных, что и процедура Барт-
летта, но в нем к каждому сегменту данных перед вычислением спек-
спектра Фурье применяется окно gt (п). Допускается также, чтобы сег-
сегменты данных перекрывались. Величина перекрытия, длина и ко-
количество сегментов, а также форма окна данных выбираются с
целью уменьшения дисперсии спектральной оценки обычно за
счет некоторой потери в разрешении. (Мы отсылаем читателя к ра-
работе [5], в которой содержится представительный обзор окон для
одномерных спектральных оценок.) Поскольку модифицированная
периодограмма тесно связана с выходом формирователя луча в
частотном пространстве, оценку Уэлча можно интерпретировать
как среднюю мощность, содержащуюся в выходе формирователя
луча в частотной области.
Для более стабильной оценки спектральной мощности можно
пожертвовать спектральным разрешением, вычисляя сглаженную
периодограмму, в виде
я я
Ps(kx, «0 = -^ j J P(xx, Q)C(kx-xx, (u-8)dxxd8. F.120)
-я -я
Здесь для получения сглаженной оценки исходная периодограмма
свернута со сглаживающей функцией С (kx, to). Это эквивалентно
умножению оценки автокорреляционной функции на последова-
последовательность окна с (/, т) со спектром Фурье С (kx, w). Чем шире ос-
основной лепесток С (kx, w), тем выше степень сглаживания, более
стабильна спектральная оценка и хуже разрешение. Заметим
также, что если спектр С (kx, w) не выбран всюду положительным,
то может случиться, что сглаженная периодограмма будет отри-
отрицательной при некоторых значениях (kx, w).
Чтобы посмотреть, что происходит в пространственной области,
слегка изменим обозначения и запишем последовательность измере-
измерений в следующем виде:
/•(I, П) :?=/-, (П). F.121)
Поскольку эти измерения являются отсчетом двумерного дискрет-
дискретного случайного процесса с нулевым средним, автокорреляционную
последовательность можно записать как среднее по множеству
Ф (/, т) = Е [г (i, n) r* (i — I, п — т)}. F.122)
Если процесс r(i, n) стационарен в широком смысле, то функция
Ф (/, т) не зависит от индексов (i, n). Тогда оценку автокорреля-
Обработка сигналов, передаваемых с помощью волн 393
ционной последовательности можно вычислить, перемножив г (i,
п) и г* (i — I, n — т) и усреднив произведение по всем возможным
значениям упорядоченных пар (i, n). В результате получим
. JV-1 М-\
И Н г (i, п) г* (| -I, п- т). F.123)
(Пределы суммирования справедливы только для / > 0 и т > 0.
Для других значений / и т необходимо брать другие пределы сум-
суммирования.)
Поскольку измерения г (i, n) имеются лишь для области 0 <:
< i < N; 0 < п < М, то оценка автокорреляционной функции
ф (/, т) будет иметь ненулевые значения лишь для (/, т), лежащих
в области
—N <l < N; —М <т< М. F.124)
Далее, с ростом значения / или т оценка автокорреляционной функ-
функции основывается на все меньшем количестве отсчетов г (i, n)
и поэтому статистически менее достоверна, чем для значений /
и т, расположенных ближе к началу координат.
Оценку периодограммы, описываемую выражением
JV-1 М-\
Р (kx, (о) =
1
Hi rt (n) exp (jkj - jam)
F.125)
,=0 п=0
можно записать также как спектр Фурье оценки автокорреляцион-
автокорреляционной функции
Л N—l M—1 Л
P(kx, (o)= H S ФA, m)exp(jkxl — j(um), F.126)
/=—N+l m=—M+l
а сглаженную спектральную оценку Ps (kx, w) можно записать
в виде
Л N—1 М—1 Л
Ps(kx, оз) = Н Н сA< ^)ф(Л m)exp(jkxt — jotm),
l=—N+l m——M-\-l
F.127)
где функция окна с (I, т) является обратным преобразованием
Фурье С (kx, (о), с которой мы уже сталкивались в выражении
F.120):
я я
с(I, т)= ,п ., | [ C(kx, w)exp (—tkd Л-'mm)dkxd(u. F.128)
-я -я
Использование корреляционного окна (отличного от окна дан-
данных, с которым мы встречались в модифицированной периодограм-
периодограмме и оценке Уэлча) можно рассматривать как уменьшение веса,
394 Глава 6
приписываемого коэффициентам автокорреляции ф (/, т), у ко-
которых \1\ ~ N или \т\ ~ М. Это те же отсчеты ф (/, т), которые
имеют большую дисперсию ив-за малого количества измерений,
участвующих в их вычислении. Окно в выражении F.127) служит
для уменьшения вклада этих ненадежных значений в оценку спек-
спектра.
Мы использовали задачу обработки сигналов, принятых ре-
решеткой распределенных сенсоров, как повод для рассмотрения
классических методов оценки спектральной плотности мощности.
Обозначения, принятые в этой главе, несколько отличаются от обо-
обозначений, введенных в предыдущих главах. По этой причине по-
полезно подвести итог результатам настоящего раздела с использова-
использованием обозначений, принятых в предыдущих главах.
Рассмотрим многомерный случайный процесс х (п), автокорре-
автокорреляционная функция которого имеет вид
<р(т) = Е{х(п)х*(п-т)\. F.129)
Мы хотим оценить спектральную плотность мощности Р («), фор-
формально описываемую выражением
Р И = ? Ф (т) ехР (—/*»'т). F.130)
т
но при этом ограниченную конечным числом измерений. Для кон-
конкретности примем, что у нас имеются значения х (п) в области
F.131)
или в более компактной форме
0<n<N. F.132)
Одним из способов оценки спектра Р («) является вычисление пре-
преобразования Фурье результатов измерений
Х(о>) = ? *(п)ехр (—/<» п). F.133)
п
и затем оценки периодограммы по формуле
v ' det N ' v ¦" v '
где N = diag (Л^ь Л^2, ..., Л^м). Статистическую устойчивость
оценки спектра можно улучшить за счет ухудшения спектраль-
спектрального разрешения, разбив набор измерений на сегменты, рассчитав
оценку периодограммы для каждого сегмента и усреднив эти оцен-
оценки. Эта оценка, называемая оценкой Бартлетта, описывается вы-
выражением
Ш)ехр(—/ю'п)
F.135)
Обработка сигналов, передаваемых с помощью волн 395
В модифицированной периодограмме используется окно дан-
данных g (n) для умножения данных измерений перед вычислением
преобразования Фурье. В этом случае
1
detN
/w'n)
2
F.136)
Оценку Уэлча можно рассматривать как комбинацию процедуры
Бартлетта и модифицированной периодограммы
2. F.137)
Можно сделать оценку автокорреляционной функции ф (т), вы-
вычислив ее по формуле
1 ^ „ ,_ч ..* ,п _ т^ F.138)
п
Тогда оценку периодограммы, описываемую формулой F.133),
можно записать в виде
Р (<•>) = Jj Ф (m) exp (—/w'm). F.139)
т
Сглаженную оценку периодограммы можно вычислить путем на-
наложения окна на оценку автокорреляционной функции перед вы-
вычислением преобразования Фурье. Это позволяет уменьшить вклад
тех оценок коэффициентов автокорреляции, которые имеют боль-
большую дисперсию. Сглаженную периодограмму можно записать сле-
следующим образом:
Ps (<•>) = ? с (т) ф (т) ехр (—;«'т). F.140)
6.5.2. Оценка спектра с высоким разрешением
Термин «оценка спектра с высоким разрешением» можно при-
приписать любому из тех разнообразных методов, которые позволяют
получить лучшую оценку спектра с частотным разрешением по
сравнению с классическими оценками, рассмотренными в предыду-
предыдущем разделе. В настоящем разделе мы рассмотрим одну из этих
методик, предложенную Кэпоном [14, 21]. Эту процедуру иногда
ошибочно называют «методом максимального правдоподобия»,
поскольку форма оптимального фильтра, используемого в данной
процедуре, подобна той, которая была найдена в методе оценки по
максимальному правдоподобию амплитуды синусоидальной волны
известной частоты в гауссовом случайном шуме [14, 15, 22].
Для начала примем, что коэффициенты автокорреляции ф (/,
т) двумерного дискретного случайного процесса г (i, n) известны
396 Глава 6
для —N < I < N, —М < т < М. Одним из способов оценки спек-
спектральной мощности Р (kx, (о) при конкретном значении волнового
числа и частоты (kOx, w0) является фильтрация процесса узкопо-
узкополосным фильтром, коэффициент пропускания которого равен еди-
единице для (kx, (о) = (kOx, (о0) и мал для всех других значений. Можно
выбрать этот фильтр с минимальной выходной мощностью с учетом
ограничения, что его коэффициент пропускания равен единице
при (kOx, (o0). Среднюю мощность выхода этого фильтра можно
использовать как оценку Р (kOx, w0), которую мы обозначим через
Рс (Кх, «о)-
Вместо использования пропускающего фильтра для оценки
Р (кох, щ) можно демодулировать г (i, n), умножив его на комплекс-
комплексную экспоненту и затем пропустив результат через узкополосный
фильтр нижних частот. Пусть функция
re (i, n) Ar(i, n) exp (jkj - /<on) F.141)
обозначает демодулированный сигнал, а функция g (i, n) — им-
импульсный отклик низкочастотного фильтра с коэффициентом про-
пропускания при нулевой частоте, равным единице. Допустим, что
функция g (i, n) является вещественным импульсным откликом
конечной протяженности, равным нулю вне области 0 < i < jV;
О < п < М. В таком случае ограничение на коэффициент пропу-
пропускания g (i, n) можно записать в виде
Ы-1 М-\
И ЕгО". я)= 1. F.Н2)
1=0 п=0
Если сигнал re (i, n) пропускается через этот низкочастотный
фильтр, то выходной сигнал у (/, п) записывается следующим об-
образом:
Ы-1 М-1
y(i, п) = 2 2 g(l, m)re{i -l,n- m), F.143)
i=0 m=0
а средняя мощность выходного сигнала будет равна
ш-\ м-1
[1=0 т=0
Ы-1 М-1 ) Ы-1 М-1 Ы-1 М-1
\ N-1 М-\ Ы-1 М-\
, n-q) =Ц I] ? %
) 1=0 т=0 р=0 д=0
р=0 д=0 ) 1=0 т=0 р=0 q=0
xE\re(i — I, п — т)г*е (i - р, п - q)\ =
Ы-l М-1 Ы-1 М-1
= ? S H H g(l> m)g{p, q)<pe(p-l, q — m)> гДе F.144)
/=0 m=0 p=0 q=0
<pe(l; m)AE \re(i, n)r*e(i — l, n — m)) =
= q>(/, m)exp(jkxl — jam). F.145)
Обработка сигналов, передаваемых с помощью волн 397
Нам необходимо минимизировать Е \\у (/, п)\2\, варьируя коэф-
коэффициенты импульсного отклика g (i, n) с учетом ограничений, за-
заданных выражением F.142). Сделав это, мы полностью пропустим
необходимую компоненту с заданной частотой и волновым числом
и минимизируем вклад в выходную мощность всех других компонент.
Минимизацию с учетом ограничений можно осуществить мето-
методом множителей Лагранжа. Вначале составляется квадратичная
форма
\ Г N-\ M-l -|
Я)|| г " ' — Zj Zj §\l' m) > @.14b)
L /=0 m=0 J
в которую входит постоянный, но пока неизвестный множитель
Лагранжа X. Используя выражение F.144), продифференцируем Q
по коэффициентам g (l, m) и приравняем результат к нулю. Тогда
получим
^=2 2?^ q)Ve(p-l, q-m)^X = O, F.147)
или, что то же самое,
yv-i м-\
2 2 g(P> q)cVe(p — U q — т) = X. F.148)
р=0 q=0
Для отыскания оптимальных коэффициентов g (p, q) постули-
постулируем существование обратной функции \))е (/, а; т, Р), удовлетво-
удовлетворяющей условию
yv-i м-\
2 2 Фе(р — U q — т)-$е{1, а; т, Р) = б(р —а; q — Р). F.149)
;=0 т=0
Затем, умножая обе части уравнения F.148) на т|)е, производя
суммирование по / и т и применяя уравнение F.149), определим,
что
yv-i м-i
g(a, p) = A,2 2 г|>в(/, а; т, Р). F.150)
1=0 т=0
Неизвестный параметр X можно легко найти применением ограни-
ограничения F.141) к выражению для g (a, P). В этом случае
^ = N-l M-\ N-\ M-l • F.151)
2 2 2 2 *«('• «; т< Р)
а=1 р=1 /=о
398 Глава 6
Комбинируя этот результат с уравнением F.150), получим коэффи-
коэффициент оптимального импульсного отклика:
? ? *•('• а< т> Р>
8 («. Р) = „-, 1Й Г? м-, • (б-152)
И Е И И *е('.'«; m- P)
а=0 р=0 /=0 т=о
Подставив этот результат в уравнение F.144), читатель может
убедиться, что средняя мощность выхода фильтра (рассматривая
в качестве спектральной оценки с высоким разрешением функцию
Рс (?о*. «о) 1 описывается выражением
~ yv-i м-\ n-\ м-\ * F.153)
2j Zj Zj Zj ™ \ ' • m> v)
a=0 p=0 /=0 m=0
Поскольку величина tye явно зависит от выбранной точки (kOx,
to0), для которой производится оценка спектра, сначала может по-
показаться, что для оценки спектра в любой другой точке необходима
новая величина %. К счастью, это не так. Мы можем определить
всего одну обратную функцию т)) (/., a; m, P) в виде
«; т, p) = i|>e(/, а; т, р)ехр [—jkx(l - а) + /<о(/п - Р)],
F.154)
поэтому
S I ф(Р ^ )^С. а; т, р) = 6(р — а; m — 0).
/=0 т=0
F.155)
В этом случае величину \() можно вычислить один раз и использо-
использовать в уравнениях F.154) и F.153) для получения оценки спектра
с высоким разрешением в любой точке (kx, (о) пространства волно-
волновое число — частота:
Рс («*. w) = yv-i м-\ n-\ м-\ •
5j 23 S I] *('. «: «. P)exp[/Ax(/-o)-/e(m-p)]
a=0 D=0 1=0 m—0
F.156)
Это выражение можно несколько упростить, выполнив суммирова-
суммирование по тем значениям \j) (/, a; m, Р), для которых разности / — a
и га — р постоянны. Определим множество -у (р, q), элементы ко-
Обработка сигналов, передаваемых с помощью волн 399
торого состоят из сумм т() (/, а; т, (J), когда / — а = р и т — (J =
N-\ N-\ M-\ M-\
Y(P, 0=23 23 23 23
р
23 23 23 23
/=0 а=0 т=0 р=0
1—а=р т—р=?
пИп(ЛГ—1, Л— 1+р) min(M—I, М—1+р)
23 23
/=max @, р) m=max @, ?)
-p'. «. «-?)• F-1б7)
Поскольку 0 < I, а < JV и 0 < т, Р</И, переменные р п q
лежат в пределах —N < р < N и —М < q < М соответственно.
Используя выражение F.157), оценку с высоким разрешением мож-
можно переписать в следующем виде:
Рс (**, со) = -ад Ш ¦ • (б-158)
Знаменатель этого выражения можно рассматривать как оценку
инверсной спектральной мощности Q (kx, со) = \IP (kx, со). Коэф-
Коэффициенты 7 (р. я) играют роль оценок коэффициентов автокорре-
автокорреляции в оценке периодограммы Q (kx, со). Если известны значения
V (р, q) для —N < р < N и —М < q < М,то соотношение F.158)
сразу дает оценку Рс (k , со).
Теперь следует обратиться к проблеме определения у (р, q)
из коэффициентов автокорреляции ф (/, т), которые мы считаем
известными для —N < / < N', —/И < т < М. Это эквивалентно
нахождению инверсии NM X ДМ блочной тёплицевой матрицы,
для которого существуют эффективные алгоритмы [23].
Чтобы показать, каким образом наша задача сводится к инвер-
инверсии блочной тёплицевой матрицы, запишем сначала составную
матрицу
Фо
ф-1
Фо
Ф,ч
'О J
F.159)
в которой каждая субматрица есть матрица N X N. Субматрицы
вдоль любой диагонали идентичны. Далее, каждая из субматриц
является тёплицевой матрицей вида
"ф@, т) ф(— 1, т) ... ф(—N-\-l, m)'
I, т) ф@, т) ... ф(—N-\-2,m)
_<?(N - 1, т) tp(N -2,'т)
Ф@, /га)
. F.160)
400 Глава 6
Такая матрица с тёплицевыми субматрицами называется блочной
тёплицевой матрицей. Числа ф G, т) в матрице F.160) — это из-
известные коэффициенты автокорреляции.
Определим матрицу, обратную Ф, как Ф и запишем ее в сле-
следующем виде:
ф-1 А
т,
ЦТ
ю
F.161)
где субматрицы имеют вид
4@, 0; т, Р)
, N -\\т, Р)
- 1, 0; т, р) ... -*р (V - 1, N - 1; т, р)_
F.162)
Теперь можно непосредственно показать, что матричное тождество
= Г F.163)
эквивалентно соотношению между <р (/, т) и ^ (/, а; т, р), описы-
описываемому выражением F.155). Поэтому значения ф можно вычислить
из значений ф с помощью матрицы Фи ее обращения. Затем
7 (р, q) легко вычисляются из формулы F.157), а Рс (kx, w) — из
формулы F.158).
На практике коэффициенты автокорреляции ф (/, т) неиз-
неизвестны, и их необходимо определить из набора измерений {гг (i,
/г)}. Для оценки спектра с высоким разрешением интересно вос-
воспользоваться методами непосредственной оценки коэффициентов
7 (р, q) в выражении F.158) из набора измерений.
6.5.3. Чисто полюсное моделирование спектра
Этот подход к оценке многомерного спектра является прямым
обобщением одномерного метода, известного под названием авто-
авторегрессивной (АР) спектральной оценки. В нем делается предпо-
предположение, что анализируемый случайный процесс является выходом
фильтра, на входе которого действует шум с равномерным спек-
спектром (белый шум). Этот фильтр обычно задают как рекурсивно вы-
вычислимый БИХ-фильтр с передаточной функцией, имеющей по-
постоянный числитель, как это показано на рис. 6.12, поскольку
такое допущение сильно упрощает алгоритм вычисления. В той
Обработка сигналов, передаваемых с помощью волн 401
мере, в какой справедлива эта модель, энергетический спектр
РА (kx, (о) сигналов r (i, n) описывается выражением
1 \ где F.164)
Pa (kx, «) = Ре (kx, (о)
1 — A (kx, со)
JV—1 M—\
Hi S a(p, q)exp(jkxp — j(aq), F.165)
p=0 0=0
(P, 0)=?t(O, 0)
1 A(kx, tj)
Рис. 6.12. Двумерный случайный процесс r(i, n) можно моделировать в виде
выходного сигнала чисто полюсного БИХ-фильтра, на вход которого поступает
последовательность е (i, n), являющаяся белым шумом.
а Ре. (kx, w) — энергетический спектр случайного процесса е (t,
п). Если е (i, n) — белый шум, то получим
PB(kx, ю) = а! и F.166)
F.167)
А \ X' ) | 1 — Л (kx, СО) Р
Оценка Яд (/гх, w) сводится к оценке коэффициентов {а (р, ^)|
из коэффициентов автокорреляции случайного процесса
ф(/, т), которые считаются известными для —N <l < N, —М <
< т < М. Однако есть некоторые существенные отличия в свой-
свойствах таких одномерных и двумерных оценок спектров, связанные
с фундаментальными математическими различиями между функци-
функциями одной и двух переменных. Мы рассмотрим эти различия в конце
настоящего раздела.
Начнем с допущения, что множество коэффициентов а (р, q)
равно нулю вне области
О < р < N; 0 < q < М. F.168)
Тогда г (i, n) удовлетворяют следующему соотношению:
r(i,n)= 2j Ij a(p, q)r(i — р, n — q)-\-t(i, n). F.169)
p=0 0=0
(P. 0)^@, 0)
Можно переписать это соотношение, используя известные коэф-
коэффициенты автокорреляции ф (/, т) путем умножения обеих частей
25 Даджиои Д.. Мерсеро Р.
402 Глава 6
на г* (i — /, л — т) и вычисления математического ожидания.
Тогда получим
N—1 М—\
Ф (/, т) = Е 2 а С°> Я)Ч>A — р> т — Я) +
р=0 ,7=0
(р, ?)^=@, 0)
+ ? |r*(t - /, п-т)г (t, л)}. F.170)
Второй член в правой части можно раскрыть, выразив г* (i — /,
п — гп) через импульсный отклик h (i, л) БИХ-фильтра
оо оо
г* (i — /, л — т)= 2 2 /i* (p, q) г* (i — I — р, п — т — q).
р=—оо <7=—оо
F.171)
Отсюда видно, что
оо оо
Е \r* (i — I, п — т) г (t, л)} = 2 2 /i* (p, G) x
р=—оо q=—оо
X Е \г (i, n)E*(i-l-p, n-m~ q)\. F.172)
Вновь используем тот факт, что е (t, n) — белый шум. Из этого
следует, что
Е {е (i, п) е* (i -I, п- т)\ = а^б (/, т), F.173)
что позволяет упростить выражение F.172)
Е {г* (i - U п - т) в (t, л)} = ? ? /I* (p, q) X
р=—оо д——оо
Ха^б(/ + р, m + q) = o'lh* (—/, —m) F.174)
и записать выражение F.170) в виде
W—1 М—1
Ф (/. т) = ? ? а (р, ?) Ф (/ - р, т - q) + а|А' (-/, -т).
р=0 17=0
(Р, ?)9«=@, 0)
F.175)
Поскольку коэффициенты фильтра \а (р, q)\ равны нулю вне пер-
первого квадранта, допустим теперь, что h (i, n) также равно нулю вне
первого квадранта. Если мы ограничимся рассмотрением случая
О <: / < Af; 0 <: т < М, то второе слагаемое в правой части
выражения F.175) будет равно нулю, за исключением случая / =
Обработка сигналов, передаваемых с помощью волн 403
= т = 0. Поскольку для этого фильтра Л @, 0) = 1, то оконча-
окончательно получим
<р(/, /п)= 23 23 а(р, q)y(l — p,m — q)-iro\b{l,m)
Р=0 «=0
(Р. Ч)Ф@, 0)
для 0 «г KN и 0 <: т<М. F.176)
После вычитания двойной суммы из обеих частей это соотношение
можно записать в матричной форме, используя матрицу Ф, опре-
определенную в выражении F.159). При этом получим
Фа = р, F.177)
где векторы определяются следующим образом:
а?[1, -аA, 0), ..., -a(N-l, 0),
—а@, 1), . ..,—a(N - 1, М - 1)]' F.178>
и р±[о1, 0, 0,..., 0]'. F.179)
Как и раньше, Ф— это матрица NM x NM, а каждая матрица а
и р содержит по NM элементов.
Решением уравнения F.177) является
а - ф-»р, F.180)
где Ф — матрица, описанная ранее в выражении F.161). Благо-
Благодаря простой структуре матрицы р мы можем записать решение
в виде
а = [ог1Ч> @, 0; 0, 0), аЫр A, 0; 0,0), . .., aft (N - 1, 0; М - 1,0)]'.
Тогда коэффициенты фильтра задаются уравнением
а (р, q) = -aft (p, 0; q, 0), F.181)
где
Теперь, имея коэффициенты фильтра, мы можем использовать ра-
равенство F.167) для оценки энергетического спектра
1 — 2j 2j а(Р'Ч) exP (/***> — /°>9)
p=0 в=0
(P. Ч)Ф(О, 0)
F.183)
Уравнение F.177) для коэффициентов вектора фильтра а является
также результатом постановки задачи как задачи линейного пред-
предсказания. В этой постановке мы стараемся минимизировать средне-
среднеквадратичную ошибку между действительным значением г (t, л)
26*
404 Глава 6
и предсказанным значением г (i, n), полученным из линейной ком-
комбинации предыдущих значений г (i, n). Предсказанное значение
описывается равенством
N—1 М—1
r(i, п)= 2 S a(j>, q)r(i-p, n-q). F.184)
(Р, «)=#=«>, 0)
Коэффициенты предсказания а (р, q) выбираются из условия
минимизации величины
al = E{\r(i, n)-r(i, л) |2}. F.185)
Задачу линейного предсказания можно интерпретировать как
синтез КИХ-фильтра для удаления предсказуемой части сигнала.
Этот фильтр выполняет операцию «разбеливания» спектра. Если
процессы г (i, n) действительно возникли в результате прохожде-
прохождения белого шума через фильтр, обладающий только полюсами,
как это показано на рис. 6.12, то становится возможным восста-
восстановить белый шум применением обратного фильтра. Это именно то,
что реализуется линейным предсказанием.
Метод чисто полюсного спектрального моделирования имеет
смысл при оценке энергетического спектра случайного процесса
г (i, n), порождаемого при пропускании белого шума через чисто
полюсный физически реализуемый БИХ-фильтр. Что случится,
если применить этот метод к набору автокорреляционных измере-
измерений ф (/, т), не удовлетворяющих принятой модели?
В одномерном случае можно подобрать набор коэффициентов
фильтра, приводящий к оценке энергетического спектра, обратное
преобразование Фурье которого равно известным отсчетам авто-
автокорреляционной функции даже в том случае, когда случайный
процесс не удовлетворяет чисто полюсной модели. (Это утвержде-
утверждение сделано при допущении, что заданные значения коэффициен-
коэффициентов автокорреляции, записанные в матричном обозначении, обра-
образуют положительно определенную матрицу.) Это свойство назы-
называется свойством автокорреляционного согласования. Результиру-
Результирующие коэффициенты фильтра можно использовать для продол-
продолжения автокорреляционной функции при обеспечении свойства
положительной определенности. В формулировке одномерного
линейного предсказания имеется 2N — 1 известных коэффициентов
автокорреляции, из которых только N являются независимыми,
а также N неизвестных параметров. Это приводит к N линейным
уравнениям с N неизвестными, которые всегда можно решить,
поскольку автокорреляционная матрица положительно опреде-
определенная.
В двумерном случае эти утверждения не справедливы. Авто-
Автокорреляционное согласование не всегда возможно. Число изве-
Обработка сигналов, передаваемых с помощью волн 405
стных автокорреляционных отсчетов равно BМ — 1) X BN — 1)
(из них лишь 2MN — М — N -\- 1 независимы), а число искомых
параметров — всего лишь NM. Набор NM параметров недоста-
недостаточен для согласования 2MN — М — N -\- 1 независимых коэф-
коэффициентов автокорреляции.
Далее, если даже матрица Ф является положительно опре-
определенной, положительно определенное продолжение может не
существовать [24, 25]. Это означает, что произвольный набор
коэффициентов ф (/, т), удовлетворяющих равенству ф (/, т) =
= ф* (—/, —т), который приводит к положительно определенной
матрице Ф, в общем случае не является отсчетами какой-либо
автокорреляционной функции. (Это находится в разительном кон-
контрасте с одномерным случаем.) Согласно результатам работ [24—
26], отсутствие положительно определенного продолжения свя-
связано с невозможностью записать двумерный положительный
полином в виде суммы квадратов полиномов. Наоборот, одномер-
одномерный положительный полином всегда можно записать в таком
виде.
В одномерной формулировке задачи линейного предсказания
инверсный фильтр имеет свойство минимальной фазы, из чего
следует, что соответствующий фильтр, обладающий только полю-
полюсами, в задаче моделирования всегда устойчив. (Мы опять пола-
полагаем, что матрица корреляционных измерений является положи-
положительно определенной.) Однако это не всегда так в двумерном
случае. Можно найти примеры, когда двумерный фильтр
вида
1 - ^ ^ alp.q)
р=0 17=0
((ОО)
-186)
с опорной областью в первом квадранте неустойчив, если даже
матрица Ф является положительно определенной [27]. Хотя эта
проблема не так существенна в задачах оценки энергетического
спектра, она составляет потенциальную опасность при модели-
моделировании сигнала в прикладных задачах синтеза.
В начале этого раздела мы вывели чисто полюсную модель
для случая, когда коэффициенты фильтра а (р, q) имеют опорную
область в первом квадранте. Естественно, можно построить такую
модель для других опорных областей коэффициентов фильтра.
Например, можно допустить, что опорная область лежит в третьем
квадранте, т. е.
а3 (р, q) = 0, кроме случаев, когда —Л/^<р<0, — M<Cq<0.
F.187)
406 Глава 6
Цифра «3» подчеркивает, что эти коэффициенты отличны от коэф-
коэффициентов первого квадранта а (р, q). Благодаря сопряженной
симметрии автокорреляционной функции
Ф(/, т) = Ф*(-Л -т) F.188)
можно сделать вывод, что
as(p,q) = a*(-p, -q). F.189)
В этом случае результирующая оценка энергетического спектра
РлЛкх> <•>) =
F.190)
I1— 2 1j аз (Р- Ч) exp (jkxp — jaq)
(P, «)=jt@, 0)
будет точно такой же, как и РА (kx, со), описываемая выражением
F.183). Если мы изменим задачу, приняв, что опорной областью
коэффициентов фильтра является второй квадрант, то мы получим
другой ответ. Можно также записать матричное уравнение, ана-
аналогичное уравнению F.177), но вектор а2 теперь должен отражать
опорную область во втором квадранте:
а2 = [—Оа (-N + 1, 0), ..., —02 (—1, 0), 1, —at (-N + 1, 1), ...,
—Oj @, М — 1)] F.191)
Вектор р тоже необходимо преобразовать таким образом, чтобы
его N-Pi элемент равнялся а\, а остальные — нулю. Продолжая
эту процедуру, можно показать, что
а2 = Фр2 F.192)
или
(р, Я) = -о\Ц (p + N-l, N-l; q, 0)
для — N<p<0 и 0<q<M, (p, q) ф @, 0), F.193)
™ <* =¦(*-!, AT-l; 0,0) • FЛ94>
Результирующая оценка спектра РАг (kx, со) в общем случае
не равна РА (kx, со), как это будет показано в последующих при-
примерах.
На рис. 6.13, а приведена контурная диаграмма оценки энер-
энергетического спектра чисто полюсным методом в первом квадранте
для двух плоских волн в белом шуме. (Крестиком отмечены истин-
истинные волновое число и частота.) Для этого примера коэффициенты
автокорреляции ср (/, т) можно вычислить в явном виде и исполь-
использовать для получения РА (kx, со). Для построения этих диаграмм
принято М = N = 3. Чисто полюсная оценка дала два пика,
Обработка сигналов, передаваемых с помощью волн 407
узко вытянутых вдоль линии, соединяющей подлинные макси-
максимумы спектра, но очень широкие в направлении, перпендикуляр-
перпендикулярном этой линии. Фактически в этом примере пики настолько
широки вдоль линии 45°, что они по существу являются гребнями.
Периодичность спектра по волновому числу и частоте привела
к появлению на рисунке третьего гребня.
На рис. 6.13, б приведена соответствующая диаграмма для
чисто полюсной оценки во 'втором квадранте РАг (kx, со). Она
существенно отличается от оценки в первом квадранте. Два спек-
спектральных пика разрешены, но разрешение вдоль линии 45° го-
гораздо лучше, чем разрешение вдоль линии, соединяющей истинные
0,1 -
0,0
-0,5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
0,0
-0,5 -0,4
-0,3 -0,2 -0,1 0,0 0,1
cj/2ff
Рис. 6.13.
а — чисто полюсная оценка спектра в первом квадранте двух плоских волн в белом
шуме; б — чнсто полюсная оценка спектра во втором квадранте. + — истинные по-
положения спектральных пиков. Контуры соответствуют постоянному уровню (в дБ).
408 Глава 6
пики. Однако положение пиков в оценке спектра определено
неправильно. Они оказываются несколько сближенными вдоль
линии, соединяющей истинные»спектральные пики.
Чтобы уменьшить зависимость разрешения от направления,
можно объединить РА (kx, со) и РАг (kx, со). Джексон и Чьен [28]
предложили для получения новой обратной спектральной оценки
усреднять существующие обратные спектральные оценки. Так,
!'] F-195)
Pj (kx, и) 2 lPA (kx, w) ' Pa, (kx, w)
0,0
3,5 -0,4 -0,3 -0.2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
ш/2тг
Рис. 6.14. Комбинированная чисто полюсная оценка спектра Джексона и Чьена.
На рис. 6.14 приведена диаграмма ?_, для того же примера двух
плоских волн в шуме при М — N = 3. Разрешение оценки спек-
спектра по крайней мере в этом простом примере гораздо ближе
к равномерному, а положения пиков — правильные.
Для формулировки чисто полюсной модели можно также ис-
использовать и другие опорные области, например клин. Пред-
Представляется, что основным ограничением является рекурсивная
вычислимость фильтра с одними полюсами, так чтобы слагаемое
Е {г* (i — I, п — т) г (i, n)\ в формуле F.170) можно было свести
к а|6 (/, т.). Пэндрелл [29] исследовал метод чисто полюсного
моделирования к оценке спектра для масок фильтра различной
формы.
*6.5.4. Оценка спектра по максимуму энтропии
Метод одномерной оценки спектра по максимуму энтропии
изучался многими исследователями. Успех и популярность этой
методики применительно к задаче анализа речи [30] и обработки
геофизических сигналов [22 ] привели к ее обобщению на дву-
Обработка сигналов, передаваемых с помощью волн 409
мерные случаи [31—36]. Однако здесь опять между одномерным
и двумерным решениями этой задачи имеются некоторые прин-
принципиальные отличия.
Концепция оценки спектра по максимуму энтропии относи-
относительно проста. Примем, как и раньше, что нам известны значения
коэффициентов автокорреляции ф (/, т) в области —N < I < N,
—М < m < М. Будем искать оценку спектра таким образом,
чтобы ее обратное преобразование Фурье соответствовало изве-
известным коэффициентам автокорреляции и в то же время принима-
принималось как можно меньше допущений о неизвестных коэффициентах
автокорреляции. Следовательно, мы стремимся максимизировать
случайность или энтропию оценки спектра при ограничениях,
заданных известными коэффициентами автокорреляции. Следуя
результатам работ [31, 32, 34, 35], определим энтропию Я слу-
случайного процесса с энергетическим спектром Р (kx, со) в виде
я я
Я * -^г j j lg P (kx, со) dkx dco. F.196)
Часто масштабный множитель 1/BлJ опускают; мы оставим его
для сохранения нормировки.
В терминах теории оптимизации [37] эту задачу оптимизации
при наличии ограничений можно сформулировать4 как задачу
такого выбора Р (kx, со), чтобы Я была максимальной, при усло-
условии что
я я
Ф С. т) = -щг \ \ Р (kx, со) ехр (— jkj + /com) dkx du>
—я —я
для |/| < N, \т\ < М. F.197)
Эту задачу можно переформулировать, разложив Р (kx, со) в ряд
Фурье и затем отыскивая максимум энтропии Я путем дифферен-
дифференцирования ее по неподверженным ограничивающим условиям
коэффициентам ряда Фурье. Начнем с записи энергетического
спектра в виде суммы двух слагаемых: одного, построенного по
известным коэффициентам автокорреляции, а другого — по не-
неизвестным
N—1 М-1
Р (kx, со) = 2j Jj Ф С- т) ехР QkJ — /com) +
/Л/+ m=—M+l
+ И ? Ф(Р- q) txp (jkxp - j<*q). F.198)
р я
Л или |
Подбирая значения ср (р, q), для которых \р\^ N или \q\ ^ М,
мы можем максимизировать энтропию Я. Если мы продиффе-
410 Глава 6
ренцируем Я по этим ср (р, q) и приравняем полученные частные
производные нулю, мы увидим, что энтропия Я принимает макси-
максимальное значение при выполнении следующего условия [32 J:
J J P-1 (kx, со) exp (—jkxp + /со?) dkx dco = 0
для \p\^N,\q\^M. F.199)
Из этого следует, что обратное преобразование Фурье l/P (kx, со)
должно быть последовательностью конечной протяженности. От-
Отсюда в свою очередь следует, что оценка энергетического спектра
по максимуму энтропии имеет вид
ме
К, со) =
2 2 А, (Л m) exp (/W — jam)
l=—N+[ m=—M+l
= 7Г77Г Г. F.200)
Q (kx, w) ч '
где Я, (/, т) = %* (—/, —т). Параметры {к (/, т)\ должны вы-
выбираться таким образом, чтобы выполнялось условие согласова-
согласования с известными коэффициентами автокорреляции, т. е. ф (/, т) =
= ф (/, т) для | /| < N, \т\ < М, где
я я
Ф (/, т) = -т^-п- f f РМЕ (А*, со) ехр (—/?ж/ + jam)dkx da>.
F.201)
Вид оценки спектра по максимуму энтропии не зависит от размер-
размерности [32]: как одномерная, так и /И-мерная оценки обратно
пропорциональны усеченным рядам Фурье, аналогичным F.200).
Однако определение параметров % в двумерном случае гораздо
сложнее, чем в одномерном.
То же решение задачи на максимум энтропии можно получить
методом множителей Лагранжа, с тем чтобы перейти от оптимиза-
оптимизации с ограничениями к оптимизации без ограничений [35]. Ока-
Оказывается, что множители Лагранжа — это те же параметры
{К (/, т)\, что и в формуле F.200). Следовательно, любой подход
к задаче на максимум энтропии приводит к проблеме дуальной
оптимизации [37].
В одномерном случае оценка спектра по максимуму энтропии
идентична чисто полюсной оценке спектра [30]. Благодаря воз-
возможности разложения одномерных полиномов на множители
оценку спектра по максимуму энтропии всегда можно записать
в виде произведения частотного отклика с минимальной фазой,
обладающего только полюсами, на его комплексное сопряжение.
Обработка сигналов, передаваемых с помощью волн 411
Эта форма записи идентична записи одномерной чисто полюсной
спектральной модели. Эффективный в вычислительном отношении
алгоритм расчета одномерной чисто полюсной модели спектра
дает также спектральную оценку по максимуму энтропии со
свойством автокорреляционного согласования.
В двумерном случае оценка спектра по максимуму энтропии
и чисто полюсная оценка спектра не совпадают. Как уже упоми-
упоминалось в предыдущем разделе, чисто полюсная спектральная
модель не имеет достаточного количества степеней свободы, чтобы
согласовать известные коэффициенты автокорреляции. Поскольку
согласование является условием оценки по максимуму энтропии,
ясно, что чисто полюсную оценку спектра нельзя рассматривать
как решение задачи на максимум энтропии.
Вудс [33] доказал, что спектральная оценка по максимуму
энтропии существует и является единственной в том случае, когда
известные коэффициенты автокорреляции ср (/, т.) соответствуют
отсчетам какой-либо автокорреляционной функции. В одномерном
случае если матрица Ф, построенная из известных коэффициентов
автокорреляции, является положительно определенной, то су-
существует и автокорреляционная функция, содержащая известные
коэффициенты автокорреляции. Однако в двумерном случае поло-
положительная определенность матрицы Ф недостаточна для гарантии
существования автокорреляционной функции, содержащей изве-
известные коэффициенты автокорреляции [24—26], что уже упомина-
упоминалось в предыдущем разделе. Следовательно, в доказательстве
существования и единственности, упомянутом выше, необходимо
допустить, что известные коэффициенты автокорреляции ср (/, т)
действительно являются отсчетами двумерной автокорреляцион-
автокорреляционной функции.
Такой результат несколько неудобен в практических при-
приложениях, когда коэффициенты автокорреляции измеряются или
рассчитываются по результатам измерений случайного процесса.
Из-за ошибок измерений или расчетов набор чисел, принятый
в качестве «известных» коэффициентов автокорреляции, может
не соответствовать любой двумерной автокорреляционной функ-
функции, что в свою очередь означает, что не существует оценки
спектра по максимуму энтропии, соответствующей этим числам.
Простым и понятным подходом к задаче поиска спектральной
оценки по максимуму энтропии является запись уравнения, свя-
связывающего энтропию Я с энергетическим спектром Р (kx, со)
и применение к энтропии Я нелинейного алгоритма оптимизации
с целью установления его максимального значения при одновре-
одновременной минимизации расхождения между известными коэффи-
коэффициентами автокорреляции и коэффициентами, соответствующими
спектральной оценке ЯМЕ (kx, со) [31]. [На практике отсчеты
Р {kx, со) берутся с высокой частотой, и значения отсчетов варь-
412 Глава 6
ируются с целью максимизации дискретной аппроксимации Н.
Следовательно, результатом решения будут отсчеты РМЕ (kx, со).]
Этот подход имеет то преимущество, что при этом можно учесть
ошибки измерения или расчета «известных» коэффициентов авто-
автокорреляции, поскольку не требуется точного соответствия. Не-
Недостатком этого подхода является наличие большого количества
вычислений, необходимых для выполнения процедуры нелинейной
оптимизации, в особенности в тех случаях, когда число отсчетов
по частотам и количество коэффициентов автокорреляции, которым
необходимо найти соответствие, велики.
Задачу на максимум энтропии в дуальном пространстве можно
сформулировать как задачу минимизации [35]. Например, Бург
[38 ] предложил следующую оптимизационную задачу для отыска-
отыскания двумерной спектральной оценки по максимуму энтропии:
( JV-1 М—1 \
min|//(a,)+ E ЕМ*. т)ц>*A, тЦ. F.202)
Вектор к применен для удобства обозначений и представляет пара-
параметры \к (I, т)\, а функция Н (К) напоминает нам, что функци-
функционал энтропии Н связан с этими параметрами соотношением
л л
U (к) = -=j}- J J In [Q {kx, со)] dkx dco, F.203)
—л —л
где Q (kx, со) описывается выражением F.200). Благодаря дуаль-
дуальности задача максимизации Н (Ц при ограничениях на корреля-
корреляционное соответствие обращается в задачу минимизации. Если
продифференцировать выражение в скобках в уравнении F.202)
по [к (/, т)\ и приравнять полученные частные производные
нулю, получим уравнение
л л
™ п ~л — ! f 'f exp(—jkxl + j<x>m)dkxd<x> __
Q(kx, со)
—л —л
= ф (/, т) для | / | < N, | т \ < М, F.204)
что, разумеется, является условием корреляционного соответ-
соответствия. Для решения задачи минимизации F.202) можно исполь-
использовать оптимизационные алгоритмы (например, метод Ньютона),
что позволяет получить спектральную оценку, максимизиру-
максимизирующую энтропию и удовлетворяющую ограничениям корреля-
корреляционного соответствия.
Задачу оценки спектра по максимуму энтропии можно также
свести к задаче минимизации с ограничениями [36]. Определим
вектор ф, компонентами которого являются известные коэффи-
Обработка сигналов, передаваемых с помощью волн 413
циенты автокорреляции \ц> (/, т)\, и образуем скалярное произ-
произведение
JV—1 М—1
<Ф. *> - 1> 1> Ф* (/. т) к (/, т). F.205)
l=—N+l m=—M+l
Равенство F.205) будет выполняться в случае, если параметры
\к (/, т)} соответствуют искомой спектральной оценке по макси-
максимуму энтропии. Тогда скалярное произведение (<р, к) принимает
следующий вид:
JV-1 АГ—1
Л'—1 М —1
2j
f
2j 2j h J q(kx,(o) ¦
/=—N+l m=—M+l L _я _л
—1 A(—1
л Jj 2j ^C' m)exP (/*«' — /(om)
f Г /
J J
= _ f Г ^ dco
4я2 J J Q (*x> @) л
—л —я
Поскольку числитель подынтегрального выражения есть не что
иное, как определение Q (kx, со), согласно F.200), подынтеграль-
подынтегральное выражение равно единице, и, следовательно,
<q>, Ц = 1. F.207)
Это равенство должно выполняться для спектральной оценки по
максимуму энтропии. Его можно рассматривать как ограничение,
накладываемое на параметры \% (I, т)\. Тогда дальнейшей целью
является минимизация энтропии Н (к) при линейном ограничении
(ф, X) — 1. И снова, поскольку мы решаем дуальную задачу,
минимизация энтропии Н (к) дает спектральную оценку по ма-
максимуму энтропии.
Эту задачу минимизации с ограничениями можно переформу-
переформулировать в задачу минимизации без ограничений, если использо-
использовать линейное ограничение F.207) для устранения параметра
к @, 0) [35, 36]. Используя определение скалярного произведе-
произведения, можно решить уравнение F.207) относительно к @, 0),
в результате чего получим
к @, 0) =
JV—1 М—\
ер @,0)
" -JV + 1 т-—М-\-1
(/, т)ф@, 0)
|
ф*(/-т) К (/> т) F-208)
I
I
J
Затем задача минимизации решается для параметров \к (/, т):
\l\ <N, \т\ <М, (I, т)Ф @, 0)}.
414 Глава 6
5 -0,4 -0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
-0,5-0,4-0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
и/ 2тг
б
-0,5 _0,4 _0,3 -0,2 -0.1
Рис. 6.15.
а — оценка спектра по пернодограмме; б — оценка спектра с высоким разрешением;
в — чисто полюсная оценка спектра в первом квадранте; г — чисто полюсная оценка
спектра во втором квадранте; д — комбинированная чисто полюсная оценка спектра;
е — оценка спектра по максимуму энтропии, вычисленная по итеративному алгоритму.
+ — истинные положения спектральных пиков. Контуры соответствуют постоянному
уровню (в дБ). (Рнс. е — с любезного согласия Джей С. Лнма н Навнда А. Малнка
[341 F) 1981 IEEE.)
Обработка сигналов, передаваемых с помощью волн 415
-0,5-0,4 _0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4
0,0
-0,5-0,4-0,3 -0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5
0)/2)г
д
' 0,5
-0,4
-0,3
/?»
-0,2
-0,1
0,5 -0,4 _0,3 -0,2 -0,1
0 О
е
0,1 0,2 0,3 0,4 0.S
416 Глава 6
Вычисление спектральной оценки по максимуму энтропии
можно также сформулировать как итеративную процедуру [34].
Вид РМЕ (kx, о), заданный уравнением F.200), требует, чтобы
выполнялось условие
А,(/,т) = 0 Для \l\^sN или \т\^М. F.209)
Аналогично свойство автокорреляционного соответствия требует
выполнения условия
ф (/, т) = ф (/, т) для \1\<N и | т | < М. F.210)
Эти два ограничения могут накладываться поочередно до получе-
получения сходимости.
Пример 1
На рис. 6.15 дается сравнение результатов применения не-
нескольких методов оценки спектра, обсуждаемых в настоящей
главе. В качестве входа были использованы 25 коэффициентов
корреляции вида
Ф (/, т) = Ь (/, т) + cos Bnall + 2nfi1m) + cos Bяа2/ + 2nfi2m)
для — 2 <: / <: 2, — 2 < m «? 2.
Эта корреляционная функция соответствует двум плоским волнам
в белом шуме. (Из-за симметрии из 25 коэффициентов независимы
только 13.) Для этого примера (ах, (JjJ = @,1; 0,1) и (а2, (}2) =*
= @,2; 0,3125).
На рис. 6.15, а приведены результаты оценки энергетического
спектра по периодограмме. Из-за малого количества отсчетов
функций корреляции периодограмма не разрешает два пика.
(Действительное положение пиков помечено крестиками.)
На рис. 6.15, б приведена оценка этого спектра с высоким
разрешением. Хотя два пика не разрешаются этим методом, вдоль
линии, соединяющей оба пика, образуется гребень.
На рис. 6.15, в показан результат чисто полюсной оценки
спектра в первом квадранте. Множество коэффициентов а (р, q)
имеет ненулевые значения для 0<р<2и0<</<2. Оценка
спектра дает два явных пика, но они далеки от расположения
истинных пиков. Чисто полюсная оценка спектра во втором
квадранте приведена на рис. 6.15, г. Она не позволяет разрешить
пики, но дает узкий гребень в общем направлении линии, соединя-
соединяющей действительное положение двух пиков. На рис. 6.15, д
приведен результат комбинации чисто полюсных оценок спектров
в первом и втором квадрантах по F.195). Комбинированная оценка
также не позволяет разрешить пики, но чувствуется, что оценка
спектра несколько улучшилась в случае комбинированной оценки
по сравнению с оценками в каждом из квадрантов.
Обработка сигналов, передаваемых с помощью волн 417
Наконец, на рис. 6.15, е приведена оценка спектра по макси-
максимуму энтропии. В этом случае оба пика явно разрешены. При этом
для сходимости потребовались 43 итерации, а в расчете исполь-
использовалось F4 X 64)-точечное БПФ [34].
*6.5.5. Задача продолжения
В разд. 6.5.4 обсуждалась задача определения, соответствует
или не соответствует набор значений {ф (/, /л)} отсчету некоторой
автокорреляционной функции. Эта задача была названа «задачей
продолжения», и в одномерном случае к ней можно было подойти,
записав тёплицеву матрицу из известных значений коэффициен-
коэффициентов корреляции и исследовав ее на положительную определен-
определенность. К сожалению, этот подход неприемлем в двумерном случае.
Задача продолжения конечного набора отсчетов многомерной
корреляционной функции в более общей постановке исследовалась
Лэнгом и Мак-Клелланом [36]. Мы кратко обрисуем их подход
для двумерного случая, когда отсчеты {ф (/, т)} заданы на прямо-
прямоугольнике |/| < N, \т\ <М.
Набор отсчетов {ф (/, т)} может быть дополнен двумерной
автокорреляционной функцией, если отсчет можно записать в виде
я я
Ф (/, т) = -J^- J J Ф (kx, со) exp (-jkj + /com) dkx dco, F.211)
—я —я
где Ф (kx, со) — неотрицательная вещественная функция. Не
вдаваясь в детали, рассмотрим подход, когда набор Е допуска-
допускающих дополнение корреляционных отсчетов может быть описан
с помощью скалярного произведения. Введем вектор р =
= \р (/, т) : |/| <N, \т\ < М\, где р (-/, —т) = р* (/, /л).
Для каждого вектора р можно определить тригонометрический
полином с вещественными коэффициентами
N—1 М—1
P(kx,®)= S S p (I, m) exp (jkj - /com). F.212)
/=—N+l m=—Af+1
Будем использовать несколько нечеткий, но зато емкий термин,
что вектор р «положителен» тогда и только тогда, когда полином
Р (kx, со) неотрицателен [361. Можно показать, что вектор q> =
= {ф (I, т)\ допускает дополнение в том и только в том случае,
если
N—1 М—[
<Ф, Р>= S Е Ф* (*. т) р (/, т) ^ 0 F.213)
для всех «положительных» векторов р [36].
27 Даджион Д., Мерсеро Р.
418 Глава 6
Из этого описания набора допускающих дополнение функций
через скалярное произведение Лэнгом и Мак-Клелланом [36]
был выведен тест на дополнимость. В основе теста лежит решение
следующей оптимизационной задачи с ограничениями: пусть
a = min((p, p), F.214)
р
где р — «положительный» вектор, удовлетворяющий линейным
ограничениям
<Ч>, Р>=1- F.215)
Вектор^ состоит из набора коэффициентов корреляции, о котором
известно, что он допускает дополнение. В частности, мы можем
взять в качестве вектора i|) вектор, соответствующий белому шуму
i|>(/, /л) = 8 (/) б (т), F.216)
так что равенство F.215) превращается просто в равенство
р (О, 0) = 1. Если a 5= 0, коэффициенты корреляции {ср (/, т)}
допускают дополнение.
Упражнения
6.1. Пусть у нас имеется сигнал s (x, t) = cos (kxx— at).
а) Представьте s (x, t) как функцию х при t — 0.
б) Чему равно расстояние Кх вдоль оси х между последова-
последовательными положительными пиками s (x, t)?
в) Начертите s (x, t) как функцию х при t — At. Пусть Ах
обозначает величину, на которую должен быть сдвинут этот гра-
график, чтобы он совпал с графиком, построенным в п. «а». Чему
равно значение сх = Ах/At, выраженное через величины kx и со;
через величины Кх и со?
6.2. Пусть s (x, t) — распространяющийся в пространстве такой
сигнал, что
s (х, t) = cos (k'x — со?) = cos (kxx -f- kyy -j- кгг — co?).
а) Каково наименьшее положительное значение такого век-
вектора Ах, что s (x, t) = s (х + Ах, t) для фиксированного значе-
значения t, скажем t = 0? Величина Ах называется длиной волны к.
б) Найдите выражение для К через величины Кх, Ку и Xz. Ве-
Величина %х была определена в упр. 6.1, п. «б»; аналогичным обра-
образом определяются и величины Ку и Xz.
в) Скорость распространения с можно определить как длину
волны к, поделенную на время, необходимое для того, чтобы один
Обработка сигналов, передаваемых с помощью волн 419
период волны прошел через фиксированную точку, скажем х = 0.
Каково минимальное положительное значение At, для которого
s (x, t) = s (x, t + At)? Как запишется с = К/At через величины Я
и со; через величины |к| и со?
г) Значение сх, полученное в упр. 6.1, п. «в», называется
фазовой скоростью в направлении х. Выведите выражение для
скорости распространения с через величины сх, су и cz.
6.3. Предположим, что плоская волна проходит через четы-
четырехмерный линейный инвариантный к сдвигу фильтр с импульс-
импульсным откликом h (x, t). Покажите, что выходом является плоская
волна, распространяющаяся в том же направлении и с той же
частотой.
6.4. Рассмотрим решетки датчиков, приведенные на рис. У6.4.
Все веса датчиков равны единице.
• • •
• • •
• • •
II
к
Y<
i—(
)
/
/
D D
III
Все сенсоры
расположены
на расстоянии D
друг от яруга
V
Рис. У6.4.
а) Найдите диаграмму направленности для каждой из реше-
решеток. (Правильный выбор положения начала пространственных
координат упростит ваши выкладки.)
б) Найдите задержки для каждого элемента для наведения
каждой из решеток в направлении а0 = (аОх, аОу, aOz).
27*
420 Глава 6
6.5. Рассмотрим решетку датчиков, изображенную на
рис. У6.5. Она содержит пять датчиков, расположенных по оси х
на расстоянии D друг от друга.
Рис. У6.5.
а) Постройте диаграмму направленности, приняв вес каждого
датчика равным единице.
б) Может ли решетка различить два распространяющихся
в пространстве сигнала, направления распространения которых
заданы единичными векторами u = (cos 0, sin 0, 0) h.v = (cos 0,
—sin 0, 0)? Объясните свой ответ.
в) Предположим, что добавлен шестой датчик с координатами
(х, у, г) = @, —D, 0). Какова будет новая диаграмма направлен-
направленности?
г) Пусть решетка из шести датчиков построена для пропуска-
пропускания элементарного сигнала вида exp (jatt — /k'x) с волновым
вектором @, со/с, 0)'. Каков будет отклик на сигнал exp (jat —
— jkvy); на сигнал exp (jcut + jkyy)?
6.6. Обычно существует несколько форм записи расположе-
расположения датчиков, образующих решетку в пространстве. Рассмотрим
решетку, изображенную на рис. У6.6. Датчики расположены
в точках х = ±3D, ±4D, +5D, ±6D и ±1D.
• •
Рис. У6.6.
а) Постройте диаграмму направленности, принимая вес каж-
каждого датчика равным единице.
б) Решетка, показанная на рис. У6.6, представляет собой при-
пример «нарушенной решетки», т. е. регулярной решетки, в которой
Обработка сигналов, передаваемых с помощью волн 421
недостает части датчиков. Следовательно, эту решетку можно
рассматривать как регулярную взвешенную решетку с w (i) = О
для |/| < 2 и w (i) = 1 для 3 < i < 7. С другой стороны, мы
можем рассматривать диаграмму этой решетки как разность двух
диаграмм решеток с весами w (i) = 1 только для \i\ < 7 и w (i) =
= 1 только для \i\ <: 2. Постройте диаграмму направленности,
используя каждый из этих альтернативных подходов.
в) Нарушенную решетку можно представить как решетку из
двух подрешеток по пять датчиков в каждой. Постройте диаг-
диаграмму направленности для одной из этих подрешеток. Какой будет
суммарная диаграмма направленности, если каждую из под-
подрешеток заменить на один всенаправленный датчик? Какой будет
суммарная диаграмма направленности для случая двух под-
подрешеток? Постройте результирующую диаграмму направленности.
6.7. Предположим, что имеется плоская поверхность датчи-
датчиков, лежащих в узлах правильного прямоугольного растра,
например как на рис. У6.7. Каким условиям должны удовлетво-
удовлетворять веса датчиков, чтобы формирователь луча по принципу
взвешенного суммирования и задержки имел разделимую диаг-
диаграмму направленности?
Ц
I | Dx I
I I 1
— + — 4—4~
I I 1
Рис. У6.7.
6.8. Предположим, что дана решетка из JV датчиков, располо-
расположенных в xt = (xt, yt, zt)' при i — 0;..., N—1. Диаграмма
направленности описывается выражением
^(к) = ^г % w, exp i-jk'xt).
а) Предположим, что решетка смещена, т. е. i-й датчик рас-
расположен теперь в точке (х( + dx, yt -f- dy, zt + d2). Какой будет
новая диаграмма направленности? Как она связана с приведенной
выше формулой?
б) Предположим, что решетка растянута в D раз, так что
координатами датчиков теперь стали \(Dxt, Dyt, Dzt)\. Как новая
диаграмма направленности будет связана с W (к)?
422 Глава 6
в) Пусть коэффициент растяжения различен для каждого
из направлений, например положения датчиков будут (Dxxit
Dyyt, Dzzt). Как будет записываться новая диаграмма направлен-
направленности?
6.9. Покажите, что эффективный отклик по волновому век-
вектору и частоте Н (к, со) для формирователя луча по принципу
фильтрации с суммированием описывается выражением
И (к, со) = -L ,2 Wt (со) ехр [-/ (к - соа0)' х,].
6.10. В разд. 6.2.6 было выведено преобразование Фурье для
формирователя луча по принципу фильтрации с суммированием.
Компонента выхода формирователя при частоте со описывается
соотношением
FS (со) е/«< = \/N 2 W, (со) R, (со) ехр [/со (/ - т,)].
Можно построить вариант формирователя луча по принципу
фильтрации с суммированием для частотного пространства, если
аппроксимировать Rt (со) в записанном выше выражении текущим
преобразованием Фурье R{ (t, со)
N—\
fdfs{t, со) = l/N 2 W,((a)Rt(t, co)exp [/©(/ - т,)],
i=0
где
со
Rt (t, со) = j v (t — т) rt (т) ехр (—/сот) dr.
а) Запишите дискретные по времени варианты формулы для
R, (t, со) и fdfs (t, со).
б) Принимая, что задержки наведения имеют вид т,- =
= (—Mqi)/(Nl), выведите формулу для fdfs (n, 2nl/M) через
W, Bnl/M), v (п) и г,- (л).
в) Объясните, как fdfs (n, 2nl/M) можно эффективно реализо-
реализовать с помощью одномерного БПФ. Чем эта реализация отли-
отличается от реализации fd (n, 2nl/M), выведенной в разд. 6.3.3?
6.11. Покажите, что выход формирователя луча в частотной
области
N—1
fd(t, a)ul/N 2 wtRt(t, со) ехр [/со (/- т,)]
i=0
можно выразить через спектр в координатах волновое число —
частота в следующем виде:
оо оо
fd (t, to) = -~- | | W (k - coa0) V (9 - со) 5 (k, 9) ехр (/со/) dk t?9.
—со —со
Обработка сигналов, передаваемых с помощью волн 423
6.12. Рассмотрим двумерную N X N решетку дискретного во
времени формирователя луча, изображенную на рис. У6.12. Веса
всех приемников равны единице. Луч наведен так, что аОж =
= аОу — T/BD), где Т — интервал дискретизации. Как будет
выглядеть диаграмма направленности этой решетки?
N
D
• •< >• •
Id
• • 4 •
N
Рис. У6.12.
6.13. а) Изобразите блок-схему формирователя с дискрети-
дискретизацией по времени, в котором до формирования выполняется
интерполяция.
б) Постройте блок-схему формирователя с дискретизацией
по времени, в котором используется интерполяция после форми-
формирования луча.
в) Допустим, что и повышение, и понижение частоты дискре-
дискретизации происходит в / раз, и пусть протяженность импульсных
откликов фильтров, использованных в сочетании с интерполя-
интерполяцией, будет составлять М отсчетов. Сравните вычислительную
сложность и необходимый объем памяти для этих двух формирова-
формирователей луча, если решетка содержит N приемников.
6.14. Предположим, что имеются следующие отсчеты дву-
двумерной автокорреляционной функции:
Ф@,0)= 1, ф A, 0) = ср(-1,0) = а,
Ф @, 1) = Ф @, -1) = Ъ, ф A, 1) = ф A, -1) = ф (-1, 1) =
= ф (—1, —1) = 0,
где а и Ь — параметры с вещественными значениями. Вычислите
периодограмму оценки спектра мощности Ф (kx, со).
6.15. В этом упражнении необходимо найти оценку спектра
с высоким разрешением для -тех же коэффициентов автокорреля-
автокорреляции, что и в упр. 6.14. В частности, пусть
Ф @, 0) = 1, фA,0) = ф (—1,0) = а, ф @, 1) = ф @, -1) =
= Ь, ф A, 1) = ф (-1, 1) = ф A, -1) = ф (-1, -1) - 0,
где а и Ь — параметры с вещественными значениями.
424 Глава 6
а) Запишите матрицу Ф, определяемую уравнением F.159).
б) Вычислите обратную матрицу W = Ф. Эта матрица имеет
вид
7
g
h
g
f
I
h
h
f
где /, g, h и i — переменные с вещественными значениями.
с) Запишите спектральную оценку с высоким разрешением
Рс (kx, со) =
2 2
ехР
где у (р, q) заданы уравнением F.157).
6.16. В этом упражнении вычисляется чисто полюсная оценка
спектра для тех же значений коэффициентов автокорреляции,
что и в упр. 6.14 и 6.15. Пусть
Ф @, 0) = 1, Ф A, 0) = ф (—1, 0) = а, ф @, 1) = ф @, -1) = Ь,
Ф A, 1) = ф (Г1, 1) = ф A, -1) =.ф (-1, -1) = 0,
где а и Ь — параметры с вещественными значениями.
а) Вычислите чисто полюсную оценку спектра РА (kx, со)
в первом квадранте.
б) Вычислите чисто полюсную оценку спектра Ра2 (kx, со)
во втором квадранте. Чем она отличается от Рд (kx, со)?
в) Вычислите Р4 (kx, со) согласно уравнению F.195).
(Указание. Используйте матрицы Ф и Ч1", выведенные
в упр. 6.15.)
*6.17. В этом упражнении рассматривается вопрос о допол-
нимости. Предположим, что у нас имеются следующие отсчеты
двумерной функции:
Ф @, 0) = 1, ф A, 0) = ф (—1, 0) = ф @, 1) = ф @, -1) = а,
Ф A, 1) = ф (-1, -1) = Ф A, -1) = Ф (-1, 1) = 0,
где а—параметр с вещественным значением. Спрашивается,
какие значения а согласуются с существованием двумерной авто-
автокорреляционной функции?
а) Сформулируйте задачу минимизации
а = гшп(ф, р)
при ограничении р @, 0) = 1, где р — «положительный» вектор.
Обработка сигналов, передаваемых с помощью волн 425
Для простоты примите, что коэффициенты \р (/, т)} — веществен-
вещественные и симметричные. [Заметим, что благодаря принятой сим-
симметрии нам необходимо рассмотреть только коэффициенты р A, 0),
р@, 1), р(\, 1)ирA, -1).]
б) Положительный полином Р (щ, а>2) имеет вид1
Р {щ, со2) = 1 + 2р @, 1) cos со2 + 2р A, 0) cos аг +
+ 2р A, 1) cos (щ + со2) + 2р (I, —1) cos (а»! — со2) ^= 0.
Проверьте, что Р (a>lt а>2) ^ 0 для двух случаев:
1) р @, 1) - р A, 0) - V*. Р A. 1) = Р A, -1) = 74.
2) р @, 1) = р A, 0) = -72, р A, 1) = р A, -1) = 74-
[Указание. Проверьте разделимость р (/, т).]
в) Какие условия необходимо наложить на \р A, 0),.р @, 1),
р A, 1), р A,—1)}, чтобы обеспечить выполнение неравенства
Р (л, л/2) ^ 0; чтобы обеспечить выполнение неравенств
Р (л/2, я) :э= 0, Р @, л/2) ^ОиР (л/2, 0) > 0?
г) Решив уравнения пп. «б» и «в», вы получите возможность
выполнить минимизацию, сформулированную в п. «а», имея
в виду, что коэффициенты \р (/-, т)\ должны соответствовать
неотрицательному полиному Р (щ, а>2). Какими будут ограниче-
ограничения на параметр а, с тем чтобы минимальное значение а было
неотрицательным? (Рассмотрите как положительные, так и отри-
отрицательные значения а.)
*6.18. Предположим, что известные отсчеты заданы следую-
следующим образом:
Ф @, 0) = 1, Ф @, 1) = ф A, 0) = ф @, —1) = ф (—1, 0) = а,
где а — параметр, имеющий вещественные значения. (В противо-
противоположность упр. 6.17, где были заданы девять отсчетов, здесь
известны только пять.)
а) Как и в упр. 6.17, п. «а», сформулируйте минимизацию
а = min ( ф, р), принимая во внимание, что р @, 0) = 1.
р
б) Напишите выражение для положительного полинома Р (а^,
со2), приняв, что р @, 1) = р @, —1) и р A, 0) = р (—1, 0). Будет
ли он таким же, как в упражнении 6.17, п. «б»?
в) Какие ограничения следует наложить на р @, 1) и р A, 0)
для обеспечения выполнения неравенства Р (щ, &>2) ^ 0?
г) Какие ограничения следует наложить на параметр а, чтобы
минимальное значение а было неотрицательным?
Глава 7
Обратные задачи
Большое число физических задач можно описать моделью
вида
У К. 'h) = D [х (%, п2)], G.1)
где D [¦] — искажающий оператор, действующий на входную
последовательность х (%, п2) и дающий выходную последователь-
последовательность у (%, п2). Эта задача может выглядеть по-разному в зави-
зависимости от того, что известно и что необходимо определить. Если
входной сигнал и искажающий оператор известны, а выходной
сигнал необходимо определить, то задача относится к классу
задач реализации системы. Реализация систем была основным
предметом рассмотрения в первых шести главах. Если известны
вход и выход и необходимо определить искажающий оператор, то
задача относится к классу задач идентификации системы. На-
Наконец, задача, в которой необходимо определить входной сигнал
'по известному искаженному выходному, известна как обратная
задача (среди обычных примеров обратных задач можно указать
задачи подавления шума, обращения свертки и экстраполяции
сигнала).
В этой главе рассматривается несколько примеров обратных
задач. Наш подход не будет исчерпывающим, да такой подход
и невозможен. Мы попытаемся лишь рассмотреть возможные
подходы, которые оказались полезными при решении некоторых
многомерных и одномерных обратных задач. Наш подход позволит
также использовать некоторый материал предыдущих глав.
Начнем с рассмотрения итерационных методов ограниченного
восстановления сигнала при наличии ограничений. Привлечение
ограничений часто необходимо для уменьшения числа возможных
решений, поскольку многие обратные задачи не имеют единствен-
единственного решения. Для ряда итерационных процедур это можно
сделать достаточно просто. Мы рассмотрим задачу миграции
сейсмических волн, в которой сделаем попытку устранить иска-
искажения волнового фронта, вызванные самим процессом распро-
распространения волны. Одним из подходов является математическое
обращение волны во времени и в пространстве с помощью фазо-
фазового фильтра. В заключение мы рассмотрим восстановление много-
Обратные задачи 427
мерных сигналов по их проекциям. Эта задача возникает в компью-
компьютерной томографии, как, впрочем, и в некоторых других при-
приложениях.
7.1. Итерационное восстановление сигналоь
с наложением ограничений
Можно попытаться решить уравнение G.1) для х^, п2),
отыскивая такой обратный оператор D'1, что
х (nlt n2) = D'1 [у (nlt n2)}. G.2)
Однако во многих практически важных случаях отыскать и реа-
реализовать такой оператор бывает трудно или вообще невозможно.
В других случаях нередко бывает, что мы знаем оператор D
только приближенно, и обратный оператор, основанный на не-
неточном знании D, может оказаться совершенно неудовлетвори-
неудовлетворительным. Даже если удается построить аппроксимацию и реализо-
реализовать оператор D'1, то результат действия его на сигнал у (пъ п2)
может привести к большим погрешностям, если сигнал у (%, п2)
известен неточно из-за ошибок измерения или шумов кванто-
квантования.
По этой причине интересно рассмотреть методы, альтернатив-
альтернативные поиску обратного оператора для восстановления сигнала.
Одним из альтернативных методов, особенно привлекательных
при реализации на ЭВМ, является метод последовательных при-
приближений. Он основывается на итерационном уравнении вида
Xk+i («I, «a) = F (*fc («I. "a)L G-3)
где F — соответствующим образом подобранный оператор. Однако
вовсе не требуется, чтобы оператор F зависел только от D. В не-
некоторых случаях ограниченную априорную информацию о свой-
свойствах сигнала х (nlt n2) в процесс итерации можно вовлечь в форме
ограничений, накладываемых на сигнал. Обычно оператор не
является единственным; для данного искажающего оператора
и для данного набора ограничений можно вывести много раз-
различных итерационных уравнений.
Удобным способом использования априорных знаний или
известных ограничений, связанных с сигналом х (п1, п2), является
введение такого оператора ограничений С, что
х (п1} п2) = С [х (пь п2) ] G.4)
тогда и только тогда, когда х (пх, п2) удовлетворяет ограничениям.
Например, если известно, что х (nlt n2) — неотрицательный сигнал,
оператор С можно определить с помощью оператора положитель-
положительности Р
д ( x(nlt п2), если *(/гь /г2) ^ О,
С \Х (/Zi, tlo)I = г ГX (tl-i, tlo)\ = \ -
7 @ в остальных случаях.
428 Глава 7
Оператор ограничений должен иметь свойство не менять сигналы,
удовлетворяющие заданным ограничениям, и превращает в тако-
таковые сигналы, не удовлетворяющие ограничениям.
Используя оператор ограничений, можно записать уравне-
уравнение G.1) в следующем виде:
У К. п2) = DC [x(nlt n2)]. G.5)
Подставив G.4) в G.5), получим
х (пи п2) = С [х (п1г п2) ] + К \у (nlt п2) — DC [х (nlt п2) ]}, G.6)
где к может быть константой, функцией (пъ п2) или функцией
х (nlt n2). Применение метода последовательных приближений
приводит к итерационным соотношениям вида
х0 (п1г п2) = ку (п1г п2),
xk+i К, пг) = Ъу К, пг) + (С — №С) [хк К, п2)]. G.7)
Параметр X можно выбрать таким образом, чтобы обеспечить
сходимость и увеличить ее скорость. Свойства сходимости и един-
единственности конечного результата такой итерационной про-
процедуры — основная проблема в большинстве практических
приложений. Эти вопросы более детально рассмотрены в ра-
работе [ 1 ].
Сигнал х (п1, п2), получающийся в результате решения урав-
уравнения G.7), называется фиксированной точкой итерации. Если
существует сигнал х (пх, п2), удовлетворяющий-выражениям G.1)
и G.4), то он будет фиксированной точкой итерации G.7).
7.1.1. Цтеративные методы обращения свертки
при наличии ограничений
Если искажающий оператор линеен и инвариантен к сдвигу,
можно записать
У (пк пг) = х К. п2) ** h (пи п2). G.8)
В этом случае задача восстановления сводится к задаче обращения
свертки, и итерационное соотношение можно записать в следу-
следующем виде:
хо(п1г п2)=Ъу{п1, пг), G.9а)
xk+i (%. п-г) = ty (fti. n2) + q (пц n2) * * С [xh (ft!, ft2)], G.96)
где q(«!, ft2) = 6(fti, n2) — kh(nlt n2). G.9b)
Для нахождения фиксированной точки уравнения G.96) рассмо-
рассмотрим систему без ограничений, в которой С [¦] — просто тожде-
тождественный оператор. Выполнив преобразование Фурье, получим
^ft+i(»i. щ) = 'кУ(а1, cog) +-X* (<i>i. со2) — kXk((ui, а2)Н(щ, и2).
G.10)
Обратные задачи 429
Это одномерное разностное уравнение первого порядка по ин-
индексу k с коэффициентами, являющимися функциями (о^, а>2).
В этой интерпретации входом разностного уравнения является
«последовательность» KY (щ, а>2) и (k), импульсным откликом —
функция [1 —кН (ох, а>2) ]* и (k), а выход записывается в виде
{2^ (к), G.11)
где и (k) — одномерная ступенчатая последовательность, опре-
определенная в гл. 1. В пределе, когда k -*¦ оо, получим
X»(a>i, со2)-Я((й1) ^ , G.12)
при условии что |1 —кН (щ, а>2) | < 1. G.13)
Выход получается таким же, как и при использовании инверсного
фильтра, но на самом деле реализации инверсного фильтра не
требуется. Одним из преимуществ итерационной процедуры яв-
является то, что ее можно прекратить после конечного числа итера-
итераций в точке, когда выход, полученный в результате итерации,
субъективно будет выглядеть лучше, чем выход инверсного
фильтра.
Использование подобной итерации для вычисления обратной
свертки было предложено Ван Циттертом в 1931 г. [2]. Исследо-
Исследование условия сходимости G.13) показывает, что процедура не
сходится при Н (©!, а>2) = 0 для любых (щ, а>2). По существу
критерий сходимости G.13) эквивалентен условию
Re [H (щ, щ)] >0. G.14)
Если функция Н (щ, а>2) удовлетворяет условию G.14), то можно
найти такое К, что будет выполняться условие G.13). Есть два
способа расширения этого критерия сходимости. Первый связан
с введением нетривиального оператора ограничений С [¦], а вто-
второй — с модификацией итерации. Сначала кратко рассмотрим
второй способ.
Если мы свернем обе части уравнения G.8) с h* (—nt, —n2),
то получим
«г) * * h*{—nlt —n2) = х (пъ пг) * *
* * А(ль п2) * * h*(—nlt —n2), G.15)
или у' (пъ /г2) = х(п1г п2) * * ti {пъ п2), G.16)
где Я'(соь ©2) = |Я(©1, со2)|2. О
х) Подразумевается, что Н' (щ, щ) — спектр Фурье функции К (пъ п2) =
= h (nv n2)* *h* {—nx, n2). — Прим. ред.
430 Глава 7
Сигнал у' (/ij, п2) является искаженным входным сигналом, но
теперь частотный отклик искажающего оператора удовлетворяет
условию G.14) при Я ((Oj, щ)*Ф 0. Таким образом, итерация,
основанная на уравнении G.16), безусловно, сходится, если
Н (щ, щ) Ф 0. Это очень похоже на модификацию, которая была
выполнена для итеративной реализации рекурсивных фильтров
в гл. 5.
Поскольку основная схема итерации без ограничений сходится
к решению для инверсного фильтра, она обладает большей частью
нежелательных свойств, присущих инверсной фильтрации. В ча-
частности, результат операции обращения свертки не является
единственным при Н (щ, щ) -> 0. Оператор ограничений часто
позволяет обойти эту трудность. В некоторых приложениях,
например, естественно предположить, что сигнал х (щ, п2) имеет
опорную область конечной протяженности и в этой опорной об-
области положителен. Ограничения положительности и конечной
опорной области можно включить в алгоритм вычислений путем
введения оператора ограничений следующего вида:
Г xh (пь п2), если Рг <. пх <:(?!, Р2 < п2 < Q2
С [xh (nlt n2)] = и xh(nlt л3) 5= 0,
[ 0 в остальных случаях.
G.17)
Реализация итерации G.96) относительно проста как в одно-
одномерном, так и в двумерном случаях. При этом требуемую свертку
можно выполнить, используя стандартные методы дискретного
преобразования Фурье.
Пример применения этого метода приведен на рис. 7.1 [1].
В этом случае двумерная гауссова последовательность, определя-
определяющая смаз
h(nlt „2) = ехр[-(-^У^-)], G.18)
свернута с последовательностью вида
х («1, Щ) = [б (я, - 24) + б (л, - 34)] б (л, - 32), G.19)
в результате чего возникает двумерная последовательность у (п^
п2), изображенная на рис. 7.1, б. На рис. 7.1, б приведен результат
обращения свертки после 65 итераций согласно уравнению G.9)
при К = 2 и с ограничением положительности.
Во многих практических приложениях искажения не ин-
инвариантны к сдвигу. В одномерном случае соответствующий иска-
искажающий оператор дисторсии можно описать в виде
У(п)= S x(m)h(n, m), G.20)
Обратные задачи 431
Рис. 7.1. Обращение двумерной свертки с ограничением на положительность
модельных входных данных.
а — гауссова функция рассеивания h (гц, п2); б — последобательность у ( л, пг). по-
полученная в результате свертки h (м,, п,) с парой импульсов; в — оценка пары нмпуль-
сов, полученная после 65 итераций при К = 2. (с любезного согласия Рональда В. Ша-
Шафера, Расселла М. Мерсеро и Марка А. Ричардса, Proc. IEEE, © 1981 IEEE.)
1,5-
0,5 -
0,0.
x(n)
250 n
2,0-
1,5-
1,0 -
0,5 -
0,0
00 (")
1ШЛЛла ч
250 n
о
§
Рис. 7.2. Восстановление с ограничением на положительность после смаза, не инвариантного к сдвигу.
а — исходная последовательность импульсов х (п); б — смазанная последовательность у (п); е — результат, полученный после 500
итераций при допущении, что смаз инвариантен к сдвигу; г — результат, полученный после 500 итераций с использованием точного
описания, ие инвариантного к сдвигу смаза. (С любезного согласия Рональда В. Шафера, Расселла М. Мерсеро и Марка А. Ричардса,
Proc. IEEE, © 1981 IEEE. Впервые рисунок опубликован в работе Маруччи C].)
Обратные задачи 433
где h (п, т) — отклик системы на единичный импульс в точке т.
Например, функция h (n, т) может описываться выражением
h(n, m) = exp[-(^LJ]. G.21)
В этом случае откликом искажающей системы на импульс 8 (п — т)
является импульс гауссовой формы со стандартным отклонением
а (т) и максимумом при п = т. Например, если на вход системы,
не инвариантной к сдвигу со стандартным отклонением
а(т) = 2 + ^кГ-, G.22)
поступает сигнал (рис. 7.2, а)
15
х(п)= Е 6 (л - 50 - 10й), G.23)
то мы получим выходной сигнал, показанный на рис. 7.2, б.
Если у (п) вычисляется по итерационному алгоритму с огра-
ограничениями положительности и конечной опорной области и
в предположении (неправильном), что искажение инвариантно
к сдвигу и имеет импульсный отклик
J] G.24)
то после 500 итераций получается результат, приведенный
на рис. 7.2, в. Видно, что первые четыре или пять импульсов
восстановлены неплохо, однако последующие импульсы, смаз
которых значительно сильнее, чем по формуле G.24), не восста-
восстанавливаются. При использовании истинного, не являющегося
инвариантным к сдвигу искажающего оператора получается
результат, приведенный на рис. 7.2, г. Следует заметить, что для
импульсов с наибольшей степенью смаза восстановление является
менее точным [1, 3]. Для полного восстановления этих импульсов
требуются дополнительные итерации.
Родственный этому методу метод итерационного восстановле-
восстановления, основанный на стохастическом подходе, описан Трассе-
лом [4]. Этот метод также дает хорошие результаты.
7.1.2. Итерационные методы экстраполяции сигнала
Общую схему итерации, согласно уравнению G.7), можно
применить и к задаче экстраполяции сигнала. В этом случае
D [¦ ] соответствует ограничению опорной области сигнала путем
умножения его на функцию окна. Типичным ограничением при
итерациях может быть допущение, что исходный сигнал имеет
ограниченный частотный диапазон. Алгоритм, основанный на
28 Даджион Д.. Мсрсеро Р.
434 Глава 7
общей схеме итерации G.7) для подобной задачи, был опубликован
Гершбергом [5] и Папулисом [6].
Хаддлстон [7] использовал метод экстраполяции сигнала для
измерения электромагнитных полей, излучаемых направленными
антеннами. Диаграмма направленности антенны в дальней зоне
пропорциональна (векторному) преобразованию Фурье электри-
электрического поля, измеренного в ближней зоне (т. е. очень близко
-35 h
-40
-3 -2 -1 0 1
Расстояние, длины иолн
Рис. 7.3.
диаграмма поля антенны в ближней зоне, вычисленная нз усеченной диаграм-
диаграммы поля в дальней зоне без экстраполяции; .... — после 55 экстраполяцнонных
итераций. (С любезного согласия Г. К. Хаддлстона [7].)
к антенне). Для больших антенн на высоких частотах, когда
рассматриваемые расстояния слишком велики для прямых изме-
измерений в дальней зоне, косвенный метод измерений, состоящий
в измерении поля в ближней зоне и в вычислении преобразований
Фурье, может дать вполне удовлетворительные результаты. В про-
противоположность этому в задачах, связанных с анализом обтека-
обтекателей антенн, имеется возможность измерить поле не в ближней,
а в дальней зоне из-за наличия обтекателя.
Во всех подобных задачах практические соображения зачастую
приводят к тому, что наблюдаемые поля измеряются только
на ограниченной части плоскости. Это ограничивает разрешение
при вычислении полей. Если, например, поле в дальней зоне
измеряется на ограниченной площади и предполагается, что
распределение поля в ближней зоне имеет конечную опорную
область, можно, перед тем как проводить обратное преобразование
Обратные задачи 435
Фурье, использовать алгоритм итерационного восстановления
сигнала для экстраполяции результатов измерений поля в даль-
дальней зоне за область измерений.
На рис. 7.3 приведены результаты применения этого метода
к задаче анализа обтекателя, в которой распределение поля
в ближней зоне вычисляется по усеченному распределению поля
в дальней зоне. Подлинная диаграмма поля в ближайшей зоне
должна быть плоской вплоть до расстояний 0,75 длины волны
и равняться нулю на больших расстояниях. Сплошной линией
на рисунке показана диаграмма, полученная без экстраполяции,
а штриховой — с использованием итерационной процедуры с 55
итерациями.
7.1.3. Восстановление сигнала по значениям
только фазы или амплитуды
В большом числе задач (особенно в оптике) физический про-
процесс излучения сигнала накладывает определенные ограничения
на наблюдаемый сигнал и его спектр Фурье. Например, в оптиче-
оптических системах можно измерить амплитуду сигнала и его спектра
Фурье, но измерение фазы того и другого весьма затруднительно.
В подобной ситуации искажение и ограничения тесно связаны
друг с другом. Например, согласие с амплитудой известной
спектральной функции является ограничением, а неизвестную
фазу можно представить себе как результат зависящего от сигнала
искажения. Гершберг и Сэкстон [8J предложили итерационный
алгоритм для восстановления комплексного или биполярного
сигнала по его амплитуде и амплитуде его спектра Фурье. Фьенап
[9, 10] рассмотрел итерационные алгоритмы восстановления
сигнала по амплитуде его спектра Фурье при ограничении, что
сигнал положителен. Хайес [11, 12) проанализировал алгоритмы
восстановления сигналов с конечной опорной областью как по
фазе, так и по амплитуде спектра Фурье.
Чтобы проиллюстрировать этот класс алгоритмов, предполо-
предположим, что или амплитуда, или фаза спектра Фурье сигнала х
известны, но не обе величины одновременно. Примем также, что
априорные знания о свойствах сигнала можно выразить в форме
оператора ограничений (например, известно, что сигнал х поло-
положителен, или имеет конечную опорную область, или то и другое
одновременно). Таким образом, искажение можно интерпретиро-
интерпретировать в Фурье-области как
Y = D-X, G.25)
где X и Y — спектры Фурье сигнала х и искаженного сигнала у
соответственно. Если известна только амплитуда X, то оператор D
определяется следующим образом:
У = DX = \Х\ = X ехр (—/ arg IX\), G.26a)
28*
436 Глава 7
а если известна только фаза, то
T!T. G-266)
Ясно в обоих случаях, что искажения нелинейны и зависят от
самого сигнала. Оператор ограничений С удобно представить
(и реализовать) как каскадное соединение оператора ограничений
в фурье-области CF и оператора ограничений в пространственной
области Cs. Оператор ограничений в пространственной области
описывает такие ограничения как конечную опорную область
или положительность (или то и другое одновременно).
Если известна амплитуда преобразования Фурье [соответ-
[соответствующая искажениям согласно выражению G.26а)], то огра-
ограничение в фурье-области можно записать в следующем виде:
Vh = CFUh = | X | exp (/ arg [Uh]), G.27a)
где \X\ —известная амплитуда спектра Фурье, a ?/ft — спектр
Фурье входа оператора ограничений в фурье-области. Если
известна фаза, то оператор ограничений в фурье-области можно
записать в виде
Vh = CFUh = \Uh\ exp (/ arg [X]), G.276)
где arg [X ] — известная фаза.
Если определить С = Ф~~1СЕ§~С8, где &~ — оператор преобра-
преобразования Фурье, то общую схему итерации в частотной области
можно представить в следующем виде:
Хо = KY, G.28а)
G.286)
где Xh —спектр Фурье выхода оператора ограничений, т. е.
Xk = 3~Cxh = CF3~Csxh. G.28 в)
В случаях когда известна как амплитуда, так и фаза, не имеет
значения, с чего начинается итерация, и независимо от номера
итерации член kDXh в уравнении G.286) можно выразить следу-
следующим образом:
A.DXft = \DCFTCsxh = W, G.2 9)
поскольку искажения и ограничения в фурье-области тесно
связаны для обоих типов искажений. Например, если ограни-
ограничением в фурье-области является фаза, то комбинированные
операции DCF будут всегда давать спектр Фурье с единичной
амплитудой и фазой, равной известной фазе.
Обратные задачи 437
Подставив решение уравнения G.29) в уравнение G.286)
и записав итерационное уравнение через величины в простран-
пространственной области,, получим
х0 = Ц, G.30а)
xh+i
= Cxh =
G.306)
Операции, описываемые уравнениями G.30), иллюстрируются
рис. 7.4.
При решении уравнения G.29) или уравнений G.30) необхо-
необходимо реализовать операторы Фурье g~\i §r~x. В случае дискретных
Рис. 7.4. Блок-схема алгоритма вос-
восстановления по значению амплитуды
или фазы преобразования Фурье при
наличии ограничений.
(С любезного согласия Рональда В. Ша-
Шафера, Расселла М. Мерсеро и Марка А. Ри-
чардса, Proc. IEEE, © 1981 IEEE.)
uk
"k
f
r\
vk
cXk,
c X
1
4
~ X0=XY
сигналов часто эти операторы можно адекватно аппроксимировать
дискретными преобразованиями Фурье. Действительно, в ра-
работе [11] было показано, что, если известно, что сигнал имеет
конечную опорную область, с помощью дискретного преобразо-
преобразования Фурье можно теоретически точно восстановить сигнал.
Операторы ограничений в фурье-области и пространственной
области можно применять в обратном порядке, положив в общей
формуле итерации С = Сз^Г^Ср. Это приводит к другому итера-
итерационному уравнению, которое требует дополнительных вычисле-
вычислений, но, по-видимому, не имеет каких-либо преимуществ [1].
В задачах подобного типа, когда ограничения накладываются
независимо как в пространственной области, так и в фурье-обла-
фурье-области, очевидно, эти ограничения должны быть согласованы, и дол-
должен существовать единственный сигнал, удовлетворяющий этим
ограничениям. Например, рассмотрим случай с известной фазой
и с ограничением в пространственной области, заключающимся
в том, что опорная область сигнала конечна. Ясно, что имеется
бесконечное число сигналов, спектры Фурье которых имеют
заданную фазу, и, по-видимому, имеется бесконечное число
сигналов, имеющих ненулевое значение в данной опорной области.
Ограничения согласованы, если есть по крайней мере один сигнал,
удовлетворяющий обоим ограничениям. С другой стороны, огра-
ограничения могут быть согласованы, но они могут определять сигнал
438 Глава 7
Рис. 7.5. Примеры восстановления только по амплитуде и знаку и только по
фазе.
а — изображение, полученное только по значению амплитуды и знаку с использованием
точной амплитуды преобразования Фурье и 1 бит информации о фазе- б - изобра-
изображение, полученное после 20 итераций; в - изображение, полученное только по зна-
значению фазы (амплитуда преобразования Фурье постоянна); г — изображение, полу-
полученное после 20 итераций. (С любезного согласия Хайеса [11], © 1982 IEEE.)
Обратные задачи 439
не единственным образом. В этом примере, если известная фазовая
функция содержит линейную компоненту, соответствующую од-
одному или более набору из четырех нулей обратной дроби ее г-пре-
образования, невозможно восстановить сигнал х только по его
фазе и конечной опорной области, поскольку любой набор из
четырех нулей обратных дробей будет давать такую же линейную
фазовую компоненту. Эта проблема подробно проанализирована
Хайесом [11, 12], определившим условия восстановления сигнала
единственным образом по его фазе. Однозначное восстановление
возможно в том и только в том случае, если ни один из этих нулей
обратной дроби не содержится в г-преобразовании сигнала.
На рис. 7.5 приведен результат итерационной процедуры
восстановления изображения по информации об амплитуде и фазе
спектра Фурье. На рис. 7.5, а показано изображение с точным
значением амплитуды спектра Фурье и информацией о квантован-
квантованной фазе в 1 бит. На рис. 7.5, б приведен результат после 20 ите-
итераций. На рис. 7.5, в показан результат восстановления только
по значению фазы при постоянной величине амплитуды спектра
Фурье, а на рис. 7.5, г — результат восстановления также после
20 итераций. При попытке восстановления только по одной ам-
амплитуде без какой-либо оценки фазы итерации не сходятся. Во
всех случаях в качестве ограничений использовались конечная
опорная область изображений и положительность их значений.
7.2. Миграция сейсмических волн [13, 14]
Термин «миграция» относится к методу обработки, исполь-
используемому при анализе сечений сейсмических данных для компенса-
компенсации некоторых нежелательных геометрических эффектов распро-
распространения волн. Если взглянуть на этот метод с другой точки
зрения, то он является удачным способом применения много-
многомерных цифровых фильтров для точного решения дифференциаль-
дифференциальных уравнений в частных производных. Эта идея принадлежит
Клербуту [15], однако изложение этого вопроса в настоящем
разделе следует работам Гариботто [13] и Харриса [14]. Мы
рассмотрим эту задачу в ее абстрактной математической форме.
Что касается непосредственной связи этой задачи с сейсмическими
исследованиями, она очень хорошо освещена в приложении
к диссертации Харриса [14].
Идеализированная геометрическая постановка этой задачи
представлена на рис. 7.6. Переменная х задает положение на
поверхности земли, которая принимается плоской, а переменная z
задает глубину внутрь земли. Предполагается, что акустическая
сейсмическая волна s (x, z, t) распространяется вверх сквозь
землю с постоянной во всех точках скоростью с. Ее распростра-
440 Глава 7
нение описывается двумерным гиперболическим волновым урав-
уравнением
Г ,-)yi r>
Решетка сейсмометров измеряет значения s (x, О, t) на поверх-
поверхности земли, что дает граничные условия для дифференциального
уравнения в частных производных. Нашей целью является опре-
определение функции s (х, z0, i), т. е. профиля волны, на глубине z0.
Поверхность земли
Направление
распространения
Рис. 7.6. Геометрическая трактовка задачи о миграции.
Обратное распространение акустической волны из глубины 0
до глубины z0 известно под названием миграции. Обычно волновое
поле вычисляется рекурсивным способом для большого количества
дискретных значений глубины z = / Az из значения поля на
предыдущей глубине. Операция экстраполяции волнового поля
s (л:, z0, t) к s (x, z0 + Az, t) является операцией линейной филь-
фильтрации.
Согласно Харрису [14] и Гариботто [13], определим дву-
двумерное преобразование Фурье волнового поля на глубине z0
следующим образом:
S(kx, z0, й)= JJs(*, z0, 0exp[—j(Qt -kxx)]dxdt. G.32)
Осуществляя преобразование Фурье обеих частей волнового
уравнения G.31), получим
**<%'¦ Q> =(%--?)Sikx,z,Q). G.33)
Это уравнение является обычным дифференциальным уравнением
второго порядка по переменной z. Можно решить это уравнение
Обратные задачи 441
для поля при 2 = 20 + Дг с начальными условиями при г = г0:
S (kx, г0 + Дг, Й) = [А ехр (/ Дг<2) + В ехр (-/ A2Q)] S (kx, z0, Q),
G.34)
где
-~k\. G.35)
Положительная экспонента соответствует волне, распространя-
распространяющейся вверх, а отрицательная — волне, распространяющейся
вниз. Поскольку предполагается, что волна распространяется
вверх, можно положить В = 0. Далее, нетрудно заметить, что
уравнение G.34) можно записать в виде
S (kx, z0 + Дг, Q) = АН (kx> Q) 5 (kx, г0, Q), G.36)
где
Н (kx, Q) - ехр (/ Дг ]/-§- - k\ ). G.37)
Теперь видно, что, как и утверждалось выше, оператор экстра-
экстраполяции является линейным фильтром, инвариантным к сдвигу.
Если волновое поле представлено в дискретной форме как
s (пх Д*, / Дг, п2 ДО. то можно выполнить операцию экстраполя-
экстраполяции, используя цифровой фильтр. Пусть х (nlt п2) = s (пг Ах,
г0, п2 ДО и у (п1г п2) = s (nx Д*, г0 + Дг, п2 ДО. тогда частотный
отклик идеального цифрового фильтра описывается следующей
функцией:
Н (coi, со2) = ехр (/ У~а2D - со2), G.38)
где coi — фактически волновое число kx, со2 — временная частота
й, а а = A/с) (Az/At).
В области |асо2| > |coi| передаточная функция имеет единич-
единичную амплитуду и поэтому полностью характеризуется фазовой
функцией
ф(сох, со2) = ]Дх2сог - со?. G.39)
Физически эта область соответствует частотам и волновым числам
распространяющейся волны. В области |асо2| <. \ щ |, изве-
известной как область затухания, волны не распространяются, а ослаб-
ослабляются. Эти области показаны на рис. 7.7. Целью разработки
миграционного фильтра является аппроксимация уравнения G.39)
в области распространения. Только в этой области аппроксимация
должна быть точной, поскольку полагают, что данные для об-
области затухания имеют малую или нулевую энергию.
442 Глава 7
Поскольку искомая передаточная функция имеет единичную
амплитуду для области распространения и может быть выбрана
произвольным образом для области затухания, для НА (соъ со2)
удобно выбрать структуру фазового фильтра как реализуемую
аппроксимацию Н (сох, со2)- Тогда
N
(«Р «Г1)
Таким образом, мы свели задачу к задаче разработки фильтра.
Рис. 7.7. Области затухания и распространения функции Н (<ог, со2).
(С любезного согласия Девида Б. Харрнса.)
Как Гариботто [13], так и Харрис [14] рассмотрели в своих
работах вопросы проектирования для этих приложений много-
многомерных фазовых фильтров. Пример реализации миграционного
фильтра приведен на рис. 7.8 [14]. На рис. 7.8, а модель Земли
показана сплошными наклонными линиями, наложенными на
искусственные сечения сейсмической волны, измеренные на по-
поверхности. На рис. 7.8, б приведен результат после миграции.
Необходимо отметить, что в этом случае миграционное сейсми-
сейсмическое сечение точно описывает модель Земли.
Обратные задачи 443
3200 it»
2500m.. '" '>
3200 m
2500 m--
Рис. 7.8. Пример миграции сейсмической волны, полученный по данным моде-
моделирования.
а — модель Земли (сплошные линии) и смоделированное сейсмическое сечеиие; б —
результат, полученный в результате миграции. (С разрешения Девида Б. Харриса.)
444 Глава 7
7.3. Восстановление сигналов по их проекциям
Задача восстановления многомерного сигнала по его проек-
проекциям — исключительно многомерная задача, не имеющая одно-
одномерного аналога. Приложения этой задачи охватывают широкую
сферу от компьютерной томографии до обработки геофизических
сигналов. Эту задачу можно анализировать с различных точек
зрения — как задачу обращения свертки, как задачу моделиро-
моделирования, как задачу оценки или как интерполяционную задачу.
Каждая точка зрения позволяет по-своему подойти к решению
этой задачи.
В своей основе эта задача скорее непрерывная, чем дискретная,
и поэтому мы сначала сформулируем задачу как непрерывную,
а затем приведем несколько алгоритмов для ее приближенного
решения. В конце будут рассмотрены некоторые обобщения
задачи.
7.3.1. Проекции
Проекция является математической операцией, подобной фи-
физической операции получения изображения в рентгеновских
лучах с помощью коллимированного источника излучения. В ре-
результате получается тень, т. е. трехмерная структура неизвестного
объекта сводится к двумерному изображению, которое можно
измерить. Математически можно описать проекцию любой раз-
размерности, но для упрощения выкладок целесообразно рассмотреть
одномерные проекции двумерных объектов. Геометрическая схема
моделирования процесса получения проекции приведена на
рис. 7.9. Пусть облучаемый объект описывается неизвестной
функцией плотности х (иъ и2). Предположим далее, что пучок
излучения направлен перпендикулярно линии, составляющей
угол 8 с осью их. Введем новую систему координат (йъ й2), по-
повернутую относительно первоначальной:
йг = иг cos 8 -j- и2 sin 8, G.40а)
й2 = —иг sin 8 + и2 cos 8. G.406)
В этой системе координат пучок излучения параллелен оси й2
и перпендикулярен оси йг.
Процессы рассеяния и поглощения приводят к экспоненциаль-
экспоненциальному ослаблению пучка фотонов при прохождении через слой
материала толщиной / до величины выходной интенсивности
/ = /ое-р'. G.41)
Коэффициент поглощения х) р зависит как от энергии рентгенов-
х) В физике этот параметр принято называть коэффициентом линейного
ослабления. — Прим. перев.
Обратные задачи 445
ских лучей, так и от физических характеристик материала. Если
материал имеет гетерогенную структуру, простое произведение р/
следует заменить на линейный интеграл, и тогда интенсивность
выходного сигнала записывается следующим образом:
/ («О = /0 («О ехр - { х (ulf u2) du2 . G.42)
оо
Величина рв (йг) ^ - log -^g- = j x (ult щ) du2 = G.43)
оо
= j л:(Й!cose —fl4sine, Й!sine+ йаcos9)dua G.44)
—оо
называется проекцией х под углом 9. Она соответствует семейству
линейных интегралов, взятых вдоль ряда линий, параллельных
пучку и друг другу. Различным углам 9 в диапазоне 0 < 9 < л
соответствуют различные ориентации пучка и различные про-
проекции.
Задача восстановления сводится к решению конечного числа
уравнений вида G.44) при различных значениях угла 9 для полу-
получения оценки х (иъ и2). Эта процедура может либо включать,
Неизвестный
объект
Проекция
Рис. 7.9. Схема сканирования коллимированным пучком.
446 Глава 7
либо не включать априорную информацию об х (иъ и2). Задача
точного восстановления х (иъ и2) при заданном континууме
проекций для всех углов в пределах 0 —-л была решена в начале
нашего века Радоном [16]. Подобная задача возникает в самых
различных практических приложениях. Например, в компьютер-
компьютерной томографии осуществляется восстановление изображения
сечения человеческого тела с использованием облучения рентге-
рентгеновскими лучами под различными углами. Вначале этот метод
применялся для обнаружения опухолей и других подобных
патологических нарушений мозга пациента, поскольку в этом
случае положение пациента легко контролировать, однако с раз-
развитием более быстрых алгоритмов и более быстрых процессоров
этот метод стал применяться и для получения сечений торса. На
рис. 7.10 приведено типичное изображение поперечного сечения
торса человека, полученное с помощью современного сканиру-
сканирующего компьютерного томографа. Современное состояние техники
позволяет получать кинематические изображения бьющегося
сердца. В случаях когда функция поглощения рентгеновского
излучения нечувствительна к патологическим изменениям в ткани,
применяются другие источники излучения, например позитроны
и у-лучи. В немедицинской сфере эту методику можно использо-
использовать для неразрушающего контроля материалов.
Аналогичные проекции можно получить при проведении гео-
геологических исследований с помощью скважин [17], как это
показано на рис. 7.11. По обе стороны исследуемой области про-
просверливаются две скважины. В одну из скважин на глубину hT
опускается акустический или микроволновый излучатель, а в дру-
другую на глубину hR — приемник. При допущении что единственным
принимаемым сигналом является сигнал, распространяющийся
по прямой линии от излучателя, мы получим один отсчет проекции
функции запаздывания или функции ослабления акустической
(или электромагнитной) волны. Меняя значения hR и hT, можно
получить набор интегралов по сечениям интересующей области.
Этот метод был предложен для оконтуривания залежей угле-
углеводородов, измерения фронта горения в процессе подземной
газификации угля и поиска подземных полостей для захоронения
радиоактивных отходов.
Есть и другие задачи, в которых требуются алгоритмы вос-
восстановления по проекциям. Электронные микроскопы дают про-
проекции исследуемых образцов, радиотелескопы — проекции меж-
межзвездного пространства, граничные плотности вероятностей яв-
являются проекциями плотности вероятности многих переменных,
а отклик линейной инвариантной к сдвигу оптической системы на
линию является проекцией точечной функции рассеивания (им-
(импульсным откликом). Все эти задачи можно решить с помощью
алгоритмов, рассматриваемых в настоящем разделе.
Обратные задачи 447
Рис. 7.10. Восстановление (с помощью компьютерной томографии) • поперечного
сечения грудной клетки пациента.
(С любезного согласия Department of Radiology, Brigham and Women's Hospital, Bos-
Boston.)
Наземная система
управления
Приемник
Излучатель
Скважины
Рис. 7.11. Использование скважин для получения информации о подземных
геологических структурах с помощью акустических волн.
7.3.2. Теорема о проекционном срезе
К настоящему времени предложено большое количество алго-
алгоритмов восстановления. Некоторые из них реализованы в про-
пространственной, другие — в частотной области преобразования
Фурье. Независимо от того, как реализован тот или иной кон-
конкретный алгоритм, полезно рассмотреть, как осуществляется
операция проецирования в обоих случаях.
Функция проецирования, определяемая уравнением G.44),
является одномерной. Если х (иъ и2) имеет спектр Фурье X (Q^
Q2), существует и одномерный спектр Фурье функции ре (#i)-
448 Глава 7
Обозначим этот спектр Фурье через 5е (со). Тогда можно запи-
записать
оо
(«О = J Ре (их) ехр (—/юй,) dux =
G.45)
= J J .*:(#! cos 8 — u2 sin 8, ux sin 8 -\- й2 sin 8) X
X exp (—jatui) du2 &йх. G.46)
—оо —оо
, \
П, .
г.р„
Рис. 7.12. Связь между проекцией двумерной функции и срезом ее спектра
Фурье.
(С любезного согласия Расселла М. Мерсеро [18]. Proc. IEEE, © 1974 IEEE.)
Возвращаясь к неповернутой (исходной) системе координат,
получим
оо оо
5е((о)= J J х(иъ ы2)ехр[—/«(«jCose + UaSine^dUidua, G.47)
—оо —оо
или
5в (со) = X (со cos в, со sin 9). G.48)
Таким образом, получается следующий довольно интересный
результат: спектр Фурье проекции, полученной под углом 8,
является сечением двумерного преобразования Фурье неизве-
неизвестной функции вдоль линии, проходящей через начало координат
плоскости (Qj, Q2) и составляющей угол 8 с осью Qt. Эту функ-
функцию сечения мы будем называть срезом X (Qu Q2) П°Д углом 8.
Уравнение G.48) известно как теорема о проекционном срезе.
Геометрическое пояснение этой теоремы приведено на рис. 7.12.
Из теоремы о проекционном срезе следует, что значение несколь-
нескольких проекций объекта обеспечивает значение преобразований
Фурье вдоль выбранных радиальных линий в фурье-плоскости.
Таким образом, задача восстановления или оценки х (ии м2)
эквивалентна задаче интерполяции преобразования Фурье в це-
Обратные задачи 449
лом на основе этих радиальных сечений. При интерполяции можно
также использовать и априорные знания об х (и1у и2). Например,
если известно, что х (ии ы2) обладает конечной протяженностью,
то X (fib fi2) аналитична. Последнее в свою очередь дает в руки
соответствующий способ интерполяции в частотной области пре-
преобразования Фурье.
Используя теорему о проекционном срезе, можно непосред-
непосредственно вывести формулу обращения Радона [161 для частного
случая, когда известны все проекции в интервале 0 < 8 < я.
Неизвестную функцию х (ии и2) можно найти из ее спектра Фурье
X (Яь Я2) с помощью обратного преобразования Фурье
оо оо
—оо —оо
Если перейти в двумерной спектральной плоскости к полярным
координатам (<о, 8), то получим
Л оо
x(ult «2) = -4^- [ [ ^(«cos8, (osin8)x
О —оо
х ехр [/(о (ых cos 8 + sin 8)] | со | dco d8 =
Л оо
= 1Н5" I | 5е («) ехр [/со (ых cos 8 + ы» sin 8)] | со | do> dQ. G.49)
О —оо
Внутренний интеграл представляет собой обратное одномерное
преобразование Фурье произведения 5е (<о) и | © |. Таким обра-
образом, он соответствует отфильтрованной функции проецирования.
В этом случае частотный отклик | © | является производной от
преобразования Гильберта функции ре ("i cos 8 + и2 sin 6).
Тогда можно переписать уравнение G.49) в пространственной обла-
области следующим образом:
G-5°)
о
где
G.52)
Функция k (t) — это ядро Радона, которое является обратным
преобразованием Фурье | (о |, существующим только в виде об-
обобщенной функции. Мы рассмотрим некоторые его аппроксимации
в разд. 7.3.5 при обсуждении реализации алгоритмов восстанов-
восстановления.
V229 Даджиои Д., Мерсеро Р.
450 Глава 7
7.3.3. Дискретизация задачи восстановления
Первым шагом на пути разработки алгоритмов численного
восстановления является задача дискретизации. В любой прак-
практической ситуации можно построить лишь конечное количество
проекций. Более того, каждая проекция известна только в ко-
конечном числе отсчетных точек, и поэтому вычисленные преобра-
преобразования могут быть известны только на наборе дискретных точек.
Если неизвестная плотность х {uv и2) имеет ограниченный
частотный диапазон и ее преобразование Фурье заключено в об-
области R, то все ее проекции тоже будут иметь ограниченный
частотный диапазон (это следует из теоремы о проекционных сре-
срезах). Обратное утверждение также справедливо: если все проек-
проекции х (ыь и2) имеют ограниченный частотный диапазон, то х (uv и2)
тоже имеет ограниченный частотный диапазон. Допустим, нам
известно, что х (иъ и2) имеет ограниченный частотный диапазон,
так что X (йь йг) = 0 при fi? -f Ql ^ R.I. Из этого вытекают
два важных следствия. Во-первых, достаточно восстановить или
оценить отсчеты х {и\, и2). Например, мы могли бы оценить зна-
значения отсчетов на прямоугольном растре, определяемом соот-
соотношением
(«ь )=:(-^L. "Tp-)» ~ °°<«i, п.2<<х>. G.53)
Во-вторых, это означает, что можно выполнить дискретизацию
каждой из проекций без потери информации, если эти отсчеты
берутся с шагом, не большим чем n/R0. Тот факт, что количество
отсчетов бесконечно, на практике не вызывает каких-либо серьез-
серьезных затруднений. Хотя предположение, что х (ult ы2) обладает
ограниченным частотным диапазоном, подразумевает, что х (ui, u2)
должна иметь бесконечную опорную область, это скорее является
ограничением математической модели, чем физической реаль-
реальностью. На практике • обычно можно принять, что х (nW/?0.
n2n/R0) имеет конечную протяженность, а если этого нельзя
сделать, восстановление можно выполнить только в конечной
области.
Если мы можем иметь только конечное количество проекций
N, то какое количество их необходимо? Это в большой степени
зависит от того, что заранее известно о восстанавливаемом сиг-
сигнале и насколько точно необходимо его восстановить. Например,
если заранее известно, что сигнал аксиально симметричен, все
его проекции идентичны, и для восстановления х (uit ы2) доста-
достаточно одной из них. С другой стороны, если заранее о сигнале
абсолютно ничего не известно, то из теоремы о проекционном
срезе следует, что потребуется бесконечное количество проекций.
В качестве компромиссного решения естественно предположить,
Обратные задачи 451
что х («!, ы2) имеет эффективный диаметр d и что для восстановле-
восстановления необходимо обеспечить разрешение деталей величиной г,
где г С d. Из двумерной теоремы отсчетов известно, что если функ-
функция х (ии и2) ограничена кругом диаметром d, то она полностью
характеризуется отсчетами ее спектра Фурье, отстоящими на
2n/d no Qx и п2. При таком расположении отсчетов ни одна из
точек квадратного растра в частотной области не будет отстоять
далее чем на л V~%ld от какого-либо из этих отсчетов. Если по-
потребовать, чтобы дискретизация в частотной плоскости преобра-
преобразования Фурье, выполняемая с помощью теоремы о проекцион-
проекционном срезе, удовлетворяла тем же ограничениям, мы получим, что
(л/N) Ro < л/d. Тогда число проекций N должно удовлетворять
неравенству
N > Rod, G.54)
где RQ — самая высокая пространственная частота, которую мы
хотим оценить в преобразовании Фурье. Из требования разре-
разрешения следует, что
/?» Е> я/г, G.55)
откуда следует
N > nd/r. G,56)
Эта формула является разумным практическим правилом. Заме-
Заметим, что, как и следует быть, количество проекций растет с улуч-
улучшением разрешения.
7.3.4. Алгоритмы восстановления в пространстве
Фурье
Допустим, что имеется N проекций х (ии и2) при равноотстоя-
равноотстоящих углах 8г = ni/N, i = 0, 1, ... , iV— 1, дискретизация про-
проекции выполнена с одной и той же частотой и что вычислено Ло-
Лоточное ДПФ каждой дискретной проекции. Эти значения ДПФ
можно трактовать как отсчеты преобразования Фурье по регу-
регулярному полярному растру, показанному на рис. 7.13, а. Если
далее предположить, что х (иъ и2) имеет конечную опорную об-
область и что она обладает в некотором приближении ограничен-
ограниченным частотным диапазоном, так что может быть адекватно пред-,
ставлена (iV X Л^-точечным дискретным преобразованием Фурье,
задача восстановления сводится к интерполяции преобразования
Фурье. Можно провести интерполяцию от известных значений
преобразования по полярному растру к неизвестным значениям
452 Глава 7
по квадратному растру ДПФ, выполнить обратное ДПФ и исполь-
использовать эти результаты для оценки отсчетов х.
Требуемую интерполяцию можно выполнить либо как интер-
интерполяцию нулевого порядка, либо как линейную интерполяцию *).
В частотной области большинство точек (щ, щ) растра ДПФ
«2
rn
п.
f—~»-
1 Г-
f 11 I
i T i i
^M4-
iit«
#—•-
: V-i I
-•—
Рис. 7.13.
a — полярный растр отсчетов в частотной области преобразования Фурье, полученный
путем дискретизации всех проекций с одной и той же частотной дискретизации:
б — растр в виде концентрических квадратов, полученный путем изменения частоты
дискретизации с нзмененнем угла проецирования. (С любезного согласия Расселла М.
Мерсеро [18], ©1974 IEEE.)
г) Естественно, можно воспользоваться более совершенными, хотя и более
сложными в вычислительном отношении, методами интерполяции, соответству-
соответствующими двумерной теореме отсчетов. — Прим. ред.
Обратные задачи 453
окружены четырьмя полярными отсчетами, как это показано
на рис. 7.14. При интерполяции нулевого порядка каждому
отсчету ДПФ приписывается значение ближайшего полярного
отсчета, а при линейной интерполяции ему приписывается взве-
взвешенное среднее четырех ближайших полярных выборок, веса ко-
которых меняются обратно пропорционально евклидовому расстоя-
расстоянию между точками.
п. /
Полярные
отсчеты
/ X Ж
PlJT^*»
/ ^^ \c "*-^-___ Прямоугольный
^NV\/ отсчет
Полярные
отсчеты
Рис. 7.14. Параметры, определяющие интерполяцию нулевого порядка и
линейную интерполяцию.
(С любезного согласия Расселла М. Мерсеро [18], © 1974 IEEE.)
Если мы можем свободно' выбирать частоту дискретизации
в отдельных проекциях, можно изменить форму полярного растра
ДПФ для облегчения процесса интерполяции. Например, растр,
изображенный на рис. 7.13, б, возникает в том случае, если шаг
между отсчетами в проекции под углом 9 составляет п/Wq,
где
max (| cos 6 |, | sine |) "
G-
При таком растре интерполяция производится по строкам и столб-
столбцам прямоугольной решетки ДПФ и является, таким образом,
одномерной. Это не только снижает объем вычислений, но и
уменьшает ошибки интерполяции [18].
Некоторые результаты применения подобных алгоритмов по-
показаны на рис. 7.15 и 7.16. Видно, что восстановление с исполь-
использованием линейной интерполяции предпочтительно по сравнению
с использованием интерполяции нулевого порядка, а также что
модифицированный растр дает лучшее восстановление по сравне-
сравнению с обычным полярным растром. Из рис. 7.16 можно получить
представление о том, как связано качество восстановления с ко-
количеством проекций. Более подробное описание подобных алго-
алгоритмов можно найти в работах [18, 191.
29 Длджион Д., Мерсеро Р.
454 Глава 7
Рис. 7.15.
а — восстановленне исходного изображения, полученное по 64 итерациям под равнг-
отстоящими углами с нспользованиен различных алгоритмов интерполяции; б — интег-
поляция нулевого порядка, полярный растр; « — линейная интерполяция, полярньи-
растр; г — линейная интерполяция, растр в виде концентрических квадратов. (С лк-
безного согласия Расселла М. Мерсеро [18], © 1974 IEEE.)
Обратные задачи 455
**?
Рис. 7.16. Восстановление с использованием линейной интерполяции и растра
в виде концентрических квадратов.
а — по 16 проекциям; б — по 32 проекциям; в — по 64 проекциям; г — по 128 про-
проекциям, (с любезного согласия Расселла М. Мерсеро [18], © 1974 IEEE.)
456 Глава 7
7.3.5. Алгоритм обратной проекции
Интерполяционные алгоритмы восстановления в предыдущем
разделе были получены довольно очевидным образом из теоремы
о проекционном срезе. Аналогично путем дискретизации формулы
обращения Радона G.50) можно вывести алгоритмы обратной
проекции. По разным причинам, не последней из которых яв-
является простота реализации, они представляют собой наиболее
широко используемый класс алгоритмов. Их отличительной осо-
особенностью является возможность реализации полностью в про-
пространственной области.
Предположим, что заданы проекции под углами 90, 9Х, ...
.... QN-i и что
де^е^-е,.!, i = i n-\, G.58a)
де0 4 е0 — ew_! + л. G.586)
Из равенства G.50) следует, что неизвестный сигнал х (иъ и2)
можно аппроксимировать следующим образом:
JV—1
х («!, и2) = -^ ^ AQtgi («! cos 9г + и2 sin 9,-), G.59)
1=0
где gt(t) = Pe{ (t)*k(t), G.60)
F\k(t)\ = \a\. G.61)
Эти равенства можно интерпретировать следующим образом. Од-
Одномерная проекция под углом 9; пропускается через одномерный
фильтр с импульсным k (t) и частотным | оэ | откликами. Заметим,
что все проекции пропускаются через один и тот же фильтр.
Выходом этого фильтра является функция gt (t). Используя
повернутую систему координат (ult й2), получим
gi («! cos 9 + «2 sin 9) = gi («!). G.62)
Тогда сигнал g, (t) в сумме G.59) можно представить себе как
двумерный сигнал, отфильтрованный по переменной йх и одно-
однородный по переменной й2. Поскольку операция вычисления этой
функции начинается с одномерной функции для получения дву-
двумерной, эта операция называется обратной проекцией. Функция
gi («! cos 9j + «2 sin 9() получается из gt (t) обратной проекцией
этой функции в направлении й2 (т- е- параллельно первоначаль-
первоначальным линиям интегрирования, определяющим проекцию). По-
Поскольку ориентация координатной системы (йи й2) различна для
каждого из проекционных углов, то каждая из отфильтрованных
обратных проекций будет иметь свою ориентацию.
При реализации этого алгоритма необходимо принять во вни-
внимание еще два момента. Во-первых, фильтр, описываемый равен-
Обратные задачи 457
Рис. 7.17. Восстановление изображения по 64 равноотстоящим по углам проек-
проекциям и с использованием метода обратной проекции.
а — проецирование по концентрическим квадратам; б — полярное проецирование;
в — оригинал. (С любезного согласия Расселла М. Мерсеро [18], © 1974 IEEE.)
458 Глава 7
Рис. 7.18. Восстановление с использованием метода обратной проекции в ..^,
менении к проецированию по концентрическим квадратам.
а — 16 проекций; 6—32 проекции; в — 64 проекции; г — 128 проекций. (С любе-
ного согласия Расселла М. Мерсеро [18], ©1974 IEEE.)
Обратные задачи 459
ством G.61), не передает постоянную составляющую. В резуль-
результате средний уровень восстановленного сигнала равен нулю.
Во многих приложениях это явление нежелательно, поскольку
восстанавливаемая плотность не может быть отрицательной.
Однако это не является серьезной трудностью, поскольку озна-
означает, что к восстановленному сигналу надо всего лишь добавить
постоянную составляющую. Уровень постоянной составляющей
всегда можно выбрать таким, чтобы средний уровень восстанов-
восстановленного сигнала совпадал со средним уровнем неизвестного
сигнала. Эти уровни можно измерить из самих проекций.
Второй момент касается выбора фильтра обратной проекции
k (t). В идеале этот фильтр должен иметь частотный отклик | ш|,
однако, если все проекции имеют ограниченную полосу частот,
поведение фильтра при высоких частотах не имеет значения.
Поскольку коэффициент передачи фильтра растет с увеличением
частоты, то при этом будет усиливаться высокочастотный шум.
Поэтому для ограничения связанных с этим эффектом искажений
фильтр k (t) обычно выбирают таким, чтобы его отклик был при-
приблизительно линейным вплоть до некоторой граничной частоты,
после которой отклик спадает до нуля х). Точная форма частотного
отклика также определяется удобством вычислений [20, 21 ].
Некоторые примеры восстановления с использованием данного
алгоритма приведены на рис. 7.17 и 7.18. В этих случаях разре-
разрешение заметно лучше, чем в случаях применения линейной интер-
интерполяции г). Однако необходимо заметить, что шум здесь выше,
поскольку при проведении восстановлений не делалось попыток
оптимального выбора фильтра k (t).
7.3.6. Алгоритм итерационного
восстановления [22)
Третий класс алгоритмов восстановления составляют итера-
итерационные алгоритмы, подобные рассмотренным в разд. 7.1. Эти
алгоритмы являются далеко не самыми эффективными в вычисли-
вычислительном отношении, но они (и только они) в состоянии учесть
априорную информацию о функции х (uly иг).
Пусть оператор искажения D( соответствует комбинирован-
комбинированной операции проекции объекта под углом 6,- и операции обрат-
обратной проекции, проведенной тоже по отношению к углу 9г. Для
каждого угла проекции должен быть свой искажающий оператор.
Как и раньше, положим, что число проекций равно N. Поскольку
процедура является итеративной, обозначим через хк (ult u2)
2) Это по существу упрощенная оптимальная линейная фильтрация для
подавления шума в сигнале. —• Прим. ред.
2) Это следствие того, что линейная интерполяция далека от оптимальной
(см. сноску в разд. 7.3.4). — Прим. ред.
460 Глава 7
оценку х («ь и2) после k-и итерации. Итеративную процедуру
можно определить следующим образом:
N
х0 («1, и0) = ? hPe, (й(), G.63а)
i=i
M2) + ll К [Pet (<M — ?>jAfft_i («i, H2)], G.636)
где {Л.,} — набор параметров, необходимых для обеспечения
сходимости итераций и оптимизации скорости сходимости. Если
существует функция х («1; и2), удовлетворяющая равенствам
G.63) для каждого I, то существует фиксированная точка ите-
итерации. Как и в случае однократного искажения, рассмотренного
в разд. 7.1, набор {Л.,-} можно выбрать в качестве функций «х и
и2. Сигнал, используемый для нулевой итерации, выбирается более
или менее произвольно. Одним из возможных вариантов может
быть восстановление с помощью алгоритма обратной проекции.
Предположим, кроме того, что нам известны априорные огра-
ограничения, накладываемые на х. Пусть С — такой оператор огра-
ограничений, что
х = Сх. G.64)
В этом случае рекурсию можно привести к виду
Г N 1
1, м2) = С S Я.ЛьОМ , G.65а)
L i=i ' J
х
0
*й(«1. «г) = *ft-i("i. «г) + II h [Ре,-ОМ - ?>jCjfft_! («!, и2)]. G.656)
*7.3.7. Методы восстановления при использовании
веерных пучков
Восстановление сигналов по проекциям (в особенности в при-
приложении к компьютерной томографии) является областью актив-
активных научных изысканий. В предыдущих разделах мы скорее
пытались очертить круг возможностей этих методов, чем дать
развернутое представление о состоянии проблемы. Существуют
более сложные варианты всех трех типов алгоритмов, дополняю-
дополняющие и развивающие рассмотренные нами простые алгоритмы. Од-
Однако прежде чем закончить рассмотрение этих вопросов, следует
сказать несколько слов по поводу обобщения задачи восстановле-
восстановления, особенно важной в компьютерной томографии, а именно:
рассмотреть случай восстановления при использовании веерных
пучков.
Обратные задачи 461
Проекция
Исследуемый
объект
Положение
источника
Рис. 7,19. Проекции в веерном пучке.
До этого момента мы полагали, что проекции получены с по-
помощью коллимированного пучка излучения. В математическом
выражении это означало, что проекции получены путем интегри-
интегрирования вдоль набора параллельных прямых. Однако коллими-
рование рентгеновских лучей приводит к увеличению времени
облучения для накопления необходимого объема данных. Большое
время измерений приводит к появлению побочных эффектов в за-
задачах восстановления в области сердца и легких из-за движения
объектов. Выходом из положения является применение неколли-
мированных веерных пучков, как показано на рис. 7.19. Как и
ранее, такие проекции можно описать наборами линейных инте-
интегралов по прямым линиям, которые в данном случае непарал-
непараллельны друг другу. Использование веерных пучков вместо колли-
мированных заметно усложняет задачу восстановления. Во-пер-
Во-первых, проекции с использованием веерных пучков должны быть
получены в полном диапазоне углов, равном 360 °. В случае
коллимированного пучка достаточно измерения проекций в диапа-
диапазоне 180 °, поскольку противоположные проекции под углом 180 °
несут одну и ту же информацию. Восстановление при веерном
проецировании усложняется также и тем, что в этом случае неспра-
несправедлива теорема о проекционном срезе. Поэтому для случая
веерных пучков не существует обобщения интерполяционных
462 Глава 7
алгоритмов. Правда, другие два подхода — итерационный и
обратной проекции — допускают такое обобщение.
Итерационные равенства G.&5), которые использовались для
случая коллимированного пучка, можно использовать для веер-
веерных пучков, если просто переопределить оператор Dt. Этот опе-
оператор следует выбрать таким, чтобы можно было вычислить
проекцию в веерном пучке под углом 0Ь а затем выполнить об-
обратное проецирование для веерного пучка.
Херман и др. [23] обобщили алгоритм обратной проекции на
случай расходящегося пучка путем вывода соответствующего
этому случаю варианта формулы обращения Радона. Рассмотрим
их подход, для чего удобно использовать схему, изображенную
на рис. 7.20. Центр исследуемого объекта располагается в точке О.
Источник рентгеновского излучения расположен в точке S,
которая лежит на описанной вокруг точки О окружности радиуса D.
Как и в случае коллимированного пучка, положение, или ориен-
ориентация источника, будет обозначаться буквой 0. Любую проекцию
под углом 0 можно описать с помощью параметра к, равного рас-
расстоянию OQ. Линия OQ параллельна решетке детекторов и про-
Линия
расположения
детекторов
Положения
источника
Рис. 7.20. Иллюстрация параметров алгоритма восстановления в веерном пуч-
пучке [23].
Обратные задачи 463
ходит через центр объекта, изображение которого требуется
восстановить. Для описания объекта х воспользуемся полярными
координатами г и ср, а буквой Р обозначим центр координатной
системы при восстановлении.
Как и в случае параллельного пучка, восстановление осу-
осуществляется в два этапа. Сначала проекции фильтруются, затем
осуществляются обратное проецирование, взвешивание и сумми-
суммирование. Для проведения фильтрации данные исходной проекции
р0 (пАк) вначале взвешиваются с помощью функции / (л), а затем
сворачиваются с последовательностью-ядром k (n). В результате
получится
со
ge(n)= ? J(m)Pe(mAK)k(n-m), G.66)
где / (п) = —=АЯ и G.67)
W V\ + (пДЛ/Z)J
1 _„
8 ДЯ2 ' П ~ '
«-нечетное,
G.68)
! О в остальных случаях.
Параметр ДА, является шагом дискретизации по переменной к.
Весовая последовательность / (п) необходима для внесения попра-
поправок, связанных с естественным уменьшением интенсивности рас-
расходящегося пучка. Ядро k (n) аналогично дискретному ядру
Радона для случая параллельного пучка. Следует отметить, что
как весовая функция / (п), так и импульсный отклик фильтра
k (n) не зависят от ориентации проекции 0.
Неизвестную плотность можно восстановить путем обратного
проецирования и взвешивания ge
^(Лф)=Е(».Лф)гв»[/(А-)]. G-69)
[Функция f (к) символизирует операцию интерполяции, которую
надо осуществить по отношению к параметру к. I Обратное про-
проецирование должно осуществляться таким образом, чтобы оно
было согласовано с исходным расходящимся пучком. Абсцисса
ge(- должна быть линейно растянута или сжата, а при конкретных
вычислениях необходимо осуществить интерполяцию отфильтро-
464 Глава 7
ванных проекций. Весовая функция w описывается следующим
выражением:
<иО\ЛФ) = -^г, G.70)
где U = 1 -[ —г sin (Э; — ср). G.71)
Это обеспечивает взвешивание обратной проекции в любой точке
с весом, обратно пропорциональным квадрату расстояния этой
точки от текущего положения источника рентгеновских лучей.
7.4. Проекция дискретных сигналов
В предыдущем разделе рассматривались проекции непрерыв-
непрерывных многомерных сигналов. Можно также определить и проекции
дискретных сигналов. В некоторых случаях такое проецирование
равносильно обратимой перестановке отсчетов из Л^-мерной по-
последовательности конечной протяженности в М-мерную последо-
последовательность. Это в основном делается из соображений удобства
реализации.
Можно определить оператор проецирования для двумерного
множества как двумерный цифровой ЛИС-фильтр с импульсным
откликом
h(nlt п2) = S 6(/i! — рти По — рт2). G.72)
Этот фильтр изображен на рис. 7.21 для частного случая т1 = 3,
т2 = 2. Пара целых чисел (т1( т2) определяет ориентацию про-
проекции, которая может быть также задана углом 0:
0 = arctg (— mjm2). G.73)
В противоположность непрерывному случаю дискретная проекция
определена не для всех углов, поскольку тг и т2 должны быть
целыми числами.
Проекция двумерного множества на самом деле является одно-
одномерной последовательностью. Обозначим через g (tii, n2) резуль-
результат проецирования двумерного сигнала х («ь п2) под углом 6,
описываемым выражением G.73). Тогда
g(nu п2) = х(п1у щ) * * h(nu n2) = G.74)
со со со
= Л Л Л x(n1—ki,n2—k2)8(k1—pm1,k2—pm2)= G.75)
р= —.оо ?j — — со fc2 — -со
= Л х^Пх — рпг^ п2 — рт2). G.76)
р=-оо
Обратные задачи 465
Из равенства G.76) видно, что
g (/ii — qmlt n2 — qm2) = g (п1г п2) G.77)
для любого целочисленного q. В этом случае
S («1.
=,? @, т2пх —
("Vh —
G.78)
G.79)
В последнем выражении проекция g записана как функция одной
переменной.
Рис. 7.21. Импульсный отклик, соответствующий оператору проецирования
при т1 = 3, /п2 = 2.
Проекции дискретных сигналов с конечной опорной областью
интересны тем, что они часто бывают обратимыми. Пусть после-
последовательность х («1, п.,) имеет опорную область, заключенную
в диапазоне \(tii, п2) : 0 < /ii < Nlt 0 < пг < N2}. Рассмотрим
проекцию этого множества (т1г т2) — (— 1, N2). При этом
п2), 0</ti<iV1—1, 0</г2<Л^2 — I. G.80)
g
= х
Последовательность g(n) является просто результатом присоеди-
присоединения друг к другу (конкатенацией) столбцов последовательности
х, поэтому обратимость g очевидна. В общем случае проецирова-
проецирование может привести к тому, что несколько отсчетов х отображаются
на один и тот же отсчет g. В этом случае проекция не является
обратимой.
466 Глава 7
Рассмотрим теперь z-преобразование отображения проециро-
проецирования, описываемого выражением G.80):
z() Е ё(Р) S Е^лЬ^
Р=0 Л1 = 0 п2=0
JV.-1 Л2-1
= Ё Ъ х(пх,пг)тгы^г-п'=Хг{^;г). G.81)
п,=0 яг=0
Таким образом, z-преобразование проекции является многомер-
многомерным z-преобразованием, вычисленным по конкретному контуру.
В еще более общем случае, когда проекция определяется парой
взаимно простых целых чисел Ц, т2), можно показать, что
G2B) = X,(zmsrm-)- G.82)
Это равенство является теоремой о проекционном срезе для дис-
дискретных проекций. Если вместо рассмотрения z-плоскости ограни-
ограничиться рассмотрением фурье-плоскости zx = exp (/©i), z2 =
= exp (/<о2), то равенство G.82) переходит в выражение
G (ш) = X (т2ы, — /т?!©). G.83)
Поскольку X (©!, ш2) дважды периодична по (©i, <о2), то функция
G (ш) соответствует вычислению X вдоль набора параллельных
прямых, образующих угол 0 = arctg (— mjm2) с осью о^. Этот
случай для обратимой проекции при тх = — 1, тг = N2 показан
на рис. 7.22 [24].
Для случая обратимой проекции задание величины g экви-
эквивалентно заданию величины х. Поэтому функции G и X являются
эквивалентными представлениями Фурье последовательности х,
но функция X — двумерное преобразование Фурье, а функция
G — одномерное преобразование Фурье, из которого можно вы-
вычислить х.
Если х является (N1 X Двуточечным массивом, то (N1N2)-
точечная последовательность*^/?), полученная конкатенацией
столбцов х, обладает дискретным спектром Фурье, из которого
она может быть восстановлена. Это ДПФ состоит из NtN2 равно-
равномерно расположенных отсчетов G (ш) и, согласно теореме о про-
проекционном срезе, одновременно состоит из отсчетов X (ыъ ш2).
Этот набор отсчетов, показанный на рис. 7.23 [24], представляет
собой еще один вид ДПФ двумерного множества и может быть
записан следующим образом:
2\ |
2 |
п,=0 л2=2 L J
0 <*!<#!-!, 0<ki<Na-l. G.84)
Обратные задачи 467
Очевидно, что такое ДПФ является тем самым кусочным ДПФ,
которое рассматривалось в разд. 2.5.1. Оно является обобщенным
ДПФ с матрицей периодичности
N =
N
G.85)
и может быть вычислено через одно (Л^Л^)-точечное одномерное
ДПФ.
Рис. 7.22. Линии плоскости Фурье, соответствующие одномерному преобразо-
преобразованию Фурье; проекции под углом 6 = arctg A//V2).
(С любезного согласия Расселла М. Мерсеро и Дэна Е. Даджнона [24],© 1974
IEEE.)
Можно также определить проекции многомерных массивов,
которым соответствует непрямоугольный растр. Это сделано
в работе [251.
Дискретные проекции можно также обрабатывать по схеме
с линейной фильтрацией, показанной на рис, 7.24. По этой схеме
можно записать
0 («) = jt (n) * й («). G.86)
468 Глава 7
В фурье-области это эквивалентно записи
?(©) = Х(<»)Н (©) или G.87)
Y (т2ю, — mi©) = X (m2©, — гпхы) Я (т2®, — щы), G.88)
где h — обратная проекция функции h, а Я — преобразование
Фурье функции h. Для реализации двумерной- системы необхо-
необходимо, чтобы выполнялось равенство
Y (©!, ю2) = X (©!, ©2) Я (©1, ш2) G.89)
для всех (ю1( ш2). Равенство G.89) будет выполняться, если про-
проекция при ориентации (ти т2) будет для последовательности у
обратимой. Это позволит сконструировать двумерную последо-
Oil /
2n
1
я
¦
л
• •••••
ф
ф • • • *
• • • •
> • • •
> • • • *
• • • •
• • • •
' *
ф ••****
• •••****
• • * # #
• • »
• •••***
ф • • * * #
ф •••***
• ••***
1
Я
1
• • • +
1
1
1
1
1
• • • т
1
1
• • • т
1
1
• • • т
1
1
• • • т
1
• • • т
1
Рис. 7.23. Растр отсчетов в плоскости Фурье, соответствующий B0Х 10)-точеч-
ному модифицированному двумерному ДПФ.
(С любезного согласия Расселла М. Мерсеро и Дэиа Е. Даджиона [24], © 1974
IEEE.)
Обратные задачи 469
вательность у (пъ п2) из одномерной последовательности у (я)
без потери информации. Когда три рассматриваемые последова-
последовательности имеют конечную протяженность, всегда можно найти
удобную для решения этой задачи ориентацию.
х(п,,п,)
Проекция
h(n)
Обратная
проекция
Рис. 7.24. Двумерная ЛИС-система, реализованная с использованием проекций.
Упражнения
7.1. Найдите оператор ограничений С для каждого из следую-
следующих наборов последовательностей:
а) набора последовательностей конечной протяженности с
опорной областью, ограниченной некоторой областью R;
б) набора последовательностей с ограниченным частотным
диапазоном, преобразование Фурье которых имеют ненулевое
значение только в некоторой области W;
в) набора ограниченных последовательностей, удовлетворяю-
удовлетворяющих условию L<.x(nlt п2) <: U для всех {пъ п2).
7.2. Рассмотрим простую итерацию вида
для случая
«L «а) = F [xh (nv «2)J
F lx] = ax+ b.
а) Выведите выражения для хх {пъ n2), x2 (nlt n2) и х3 (nv n2),
если xQ («!, n2) = b.
б) Какие условия надо наложить на а и Ь, чтобы итерации
сходились?
в) К какой последовательности хх (пъ п2) будут сходиться
итерации?
7.3. Пусть F является оператором, используемым в итерации
**+i («1. «а) = F [xh (пъ п2)]. (У7.3а)
Оператор F называется стягивающим отображением (или просто
стягиванием), если
:/-||^-^-|| при 0<г<1
для любых Xi и Xj, для которых || Xi || и || X; || конечны. Норма /2
последовательности определяется следующим образом:
470 Глава 7
Если это неравенство выполняется только для г = 1, оператор
называют нерасширяющим. Если F — стягивание, то итерация,
согласно уравнению (У7.3а), сходится к единственному решению
при любом выборе начальной последовательности с конечной
нормой /2.
а) Рассмотрим итерацию
}. (У7.36)
Покажите, что итерация сходится, если оператор G = (/ — XD) С
является стягиванием, а / — тождественным оператором. (Ука-
(Указание. Найдите оператор F и потребуйте, чтобы он являлся опе-
оператором стягивания.)
б) Используя результат п. «а», покажите, что итерация,
согласно равенству (У7.36), сходится, если
A) С является стягиванием, а (/ — XD) является нерасши-
нерасширяющим оператором;
B) С является нерасширяющим оператором, a (I — XD) яв-
является стягивающим;
C) как С, так и (/—\D) являются стягивающими операторами.
7.4. В разд. 7.1.1 было показано, что итерацию Ван Цит-
терта для обращения свертки без условий ограничения можно рас-
рассматривать как разностное уравнение первого порядка по k
с коэффициентами, являющимися функциями (©i, щ).
а) Где находится «полюс» этого разностного уравнения?
Какое значение А, дает максимальную скорость сходимости, если
0 < Н ((Ли ю2) < 1.
б) Используя аналогию с разностными уравнениями, можно
построить итерацию второго порядка, которая дает новую оценку
неискаженного сигнала, используя обе предыдущие оценки.
Эта итерация имеет вид
Xft+i К> Щ) = AY (©!, щ) + BXh (io1(
Какими условиями должны быть связаны А, В и С, если потре-
потребовать
*_i(©i, ю2) = 0» *о(юь «г)
Х00((о1,(о2)= я(шхш2)?
7.5. Итерация Ван Циттерта сходится, если
\1-%Н(щ, ©2)|<1. (У7.5)
Это условие накладывает жесткие ограничения на допустимые
значения, которые может принимать функция Н (ю1( ю2).
а) Начертите область комплексной 2-плоскости, описывае-
описываемую неравенством (У7.5) для 2 — Н(щ., ю2).
Обратные задачи 471
б) Параметр А, может быть выбран <;амим пользователем.
Покажите, что если Re [H (ю1( ю2)] > 0, то всегда можно найти
такое к, чтобы выполнялось условие (У7.5).
7.6. В упр. 7.3 был определен нерасширяющий оператор.
а) Покажите, что оператор ограничений, обеспечивающий
конечную опорную область, является нерасширяющим.
б) Покажите, что оператор положительности является нерас-
нерасширяющим.
в) Альтернативным вариантом оператору положительности,
приведенному в тексте, является оператор ABS, определяемый
следующим образом:
ABS [х («1, «2) ] = | х (пъ 1ц) \.
Покажите, что этот оператор тоже является нерасширяющим.
7.7. В качестве еще одного возможного подхода к решению
задачи нахождения входа х (я1( щ) по заданному выходу у («i, 1ц)
(рис. У7.7) рассмотрим решение для последовательности х {пъ п2),
минимизирующее функционал
J = ЕЕ [y(ii, п2) - (х * * Щ{пъ n2)f.
х(п,,па)
У(п1(па)
Рис. У7.7.
Это решение можно найти итерационным способом, используя
метод быстрого спуска.
Согласно этой процедуре
а) Запишите выражения для каждой итерации, выразив гра-
градиент в явном виде.
б) Чем эта итерация отличается от итерации согласно соот-
соотношениям G.9)?
*в) Двигаясь в обратном направлении, можно считать, что
равенства G.9) эквивалентны операции минимизации функцио-
функционала методом быстрого спуска. Каков исходный функционал?
[Примите, что h {пх, щ) = h (— пъ — п2). ]
7.8. Соотношение, связывающее вход и выход одномерной
линейной не инвариантной к сдвигу системы, описывается супер-
суперпозицией в виде следующей суммы:
00
У(п) = Ц h(n,m)x(m).
472 Глава 7
Если х и у — последовательности конечной протяженности, их
можно записать в векторном виде, а сумма, описывающая супер-
суперпозицию, примет вид
У = Нх.
Если размер х равен размеру у, то можно восстановить сигнал х,
используя матричную итерацию
а) Найдите выражения для х1; х2 и х3, если х0 = Ху.
б) Каким должен быть множитель X, чтобы обеспечить схо-
сходимость итерации? Всегда ли можно найти такое Я,? (Рассмотрите
разложение Н по собственным векторам.)
*в) Решая п. «б», вы должны были обнаружить, что есть
такие Н, для которых итерация не сходится. Измените итерацию
таким образом, чтобы она сходилась для любых Н, имеющих
ненулевые собственные значения.
7.9. Итерация для восстановления сигнала х (пъ п2) по его
фазе была описана в разд. 7.1.3 следующим образом:
х0 (пц п2) = 1& {ехр )/ arg [X (щ, щ)]\},
xh+i («1. Щ) = Cxh (nv п2) = T'lCFTCsxh («j, п2),
где $Г и @~~х — операторы прямого и обратного преобразований
Фурье соответственно; С — оператор ограничений в простран-
пространственной области и
CF [Xh (щ, щ)] = | Xh (щ, щ) | ехр )/ arg [X (щ, ы.г)]\,
а) Покажите, что оператор С является нерасширяющим, если
нерасширяющим является оператор Cs (определение нерасширяю-
щего оператора дано в упр. 7.3).
б) Если, напротив, мы хотим восстановить сигнал х (щ,п2)
по его амплитуде, то необходимо использовать оператор
CF [Xk (щ, ы2)) = | X (щ, щ) | ехр {/ arg [Xft (щ, ы2)]\.
Покажите, что в этом случае оператор С не обязательно является
нерасширяющим.
7.10. Пусть s (х, у, z, t) — акустическая сейсмическая волна,
распространяющаяся вверх сквозь землю с одинаковой во всех
точках скоростью с. Определим частичное преобразование Фурье
волнового фронта в виде
оо оо оо
S (kx, ky, z, п) й J J j s (х, у, z, t) ехр [-/ (Ш -
— ОО —ОО —00
— kxx — kyy)} их cly dt.
а) Найдите выражение для частичного преобразования Фурье
функции ds (х, у, z, t)/dt через S (kx, ky, z, Q), где S (kx, ky, z, Q) —
Обратные задачи 473
частичное преобразование Фурье волны s (x, у, z, t). Ваше выра-
выражение не должно содержать никаких интегралов.
б) Выведите подобное же выражение для ds (x, у, z, t)/dx.
в) Гиперболическое волновое уравнение требует, чтобы вы-
выполнялось соотношение
д-s , Ps { d-s __ 1 cPs
дх2 '" дуг '" дг- ~~ с1 dt2 '
Преобразуйте это уравнение в частных производных в обычное
дифференциальное уравнение, осуществляя частичное преобра-
преобразование Фурье обеих частей уравнения.
7.11. Покажите, что следующие передаточные функции соот-
соответствуют фазовым системам (т. е. амплитуда их преобразования
Фурье постоянна):
а) Нц (zlt z.>) = -~2—т—^ —'——,
где
W, —I N2—1
Аг (Z\, Z2) = 2j 2j OL (tt\, /I2) Z\ lZ2
и {a(n!, n2)\ — вещественные величины.
б) я22 (Zl, г2) - z' lA&';гг),
Nt—l N
где Az{z\, г2) = S S a(ti\, n.2)z~"lZ2~n'
"i=0 =—Л1
и {a(/ii, n2)\ — действительные величины, причем
a{nv n2):=a(n1, —По).
7.12. а) Найдите одномерную проекцию двумерного одно-
однородного кругового диска с радиусом R.
б) Каким будет непрерывное преобразование Фурье этой
проекции?
7.13. Выведите следующее свойство двумерного непрерыв-
непрерывного преобразования Фурье: если объект поворачивается на угол
0О, то его спектр Фурье поворачивается на тот же угол 0О.
7.14. Двумерная аксиально-симметричная функция полностью
определяется ее сечением, либо ее проекцией. Фактически эти
две одномерные функции можно определить одну из другой.
Брэйсвелл [26] называет эту взаимосвязь преобразованием
Абеля.
а) Выведите интегральное уравнение, описывающее проек-
проекцию через поперечное сечение.
б) Выведите интегральное уравнение, описывающее попереч-
поперечное сечение через проекцию.
474 Глава 7
7.15. Покажите, что неизвестный, но разделимый сигнал
х {иъ ы2) .= / (иг) g (и2)
можно точно восстановить по двум проекциям. Как следует вы-
выбирать углы проекции?
7.16. Изменяя частоту дискретизации в различных проек-
проекциях, можно менять положение тех точек, для которых в соответ-
соответствующих проекциях вычисляются преобразования Фурье. Какой
должна быть дискретизация проекций, чтобы получить эллип-
эллиптический растр, показанный на рис. У7.16?
\
Рис. У7.16.
7.17. При фильтрации проекций в случае реализации дискрет-
дискретного алгоритма обратной проекции теряется информация о сред-
среднем уровне постоянной составляющей восстанавливаемого сиг-
сигнала. Одним из способов восстановления этого среднего уровня
является простое прибавление постоянного сигнала к резуль-
результату восстановления так, чтобы исходный и восстановленный
сигналы имели одинаковое среднее значение. Как определить
средний уровень постоянной составляющей неизвестного сигнала
по его проекциям?
Обратные задачи 475
7.18. Рассмотрим двумерный массив конечной протяженно-
протяженности Nx X N2, где Л^ = 3, N2 = 4.
i
g
d
a
k
h
e
b
I
i
f
с
[т. е. отсчет (n1( n2) = @, 0) имеет величину а, отсчет (м1( тг2) =
= A,0) — величину b и т. д. I. Определите одномерную проекцию
при следующих ориентациях:
a) rrii = — 1. Щ — 4, б) /П! == —4, /«2=1,
в) ni! = 3, m2 = 4 и приведите порядок меченых отсчетов
(а - 0-
7.19. Рассмотрим проекцию трехмерного (Л^ X N2 X Л^8)-то-
чечного сигнала на одномерную последовательность, определяемую
соотношением
g (NzNstii + N3n2 + п3) = х (nlt пг, п3),
0 <: «! < Nt — 1, 0 <: «2 < yv2 - - 1, 0 «: м3 <: N3 — 1.
а) Выразите отсчеты одномерного Л^Л^Л^-точечного ДПФ
последовательности g (п) как отсчеты X (ш1( w2, w3). Где распо-
расположены эти отсчеты?
б) Модифицированное трехмерное ДПФ можно определить
с помощью отсчетов G (k), если эта трехмерная последователь-
последовательность отображается согласно равенству
Хм (*i, kt, k3) ^G(kl + k2N, -f WM
0 <. ki< Ni — l, 0 < k2 < N2-l, 0 <.k3 <. N3~l.
Найдите матрицу периодичности, определяющую ДПФ и связы-
связывающую х (пъ п2, п3) и Хм (klt k2, k3).
7.20. Проецирование двумерного дискретного сигнала яв-
является частным случаем линейного преобразования с пониже-
понижением размерности. Линейное преобразование с понижением раз-
размерности — это преобразование отсчетов /^-мерного сигнала /д (п)
конечной протяженности в S-мерный сигнал gs (m) (R 5» S)
с помощью отображения вида
gs (Тп) = /в (п),
где Т — матрица S X R. Как связано преобразование Фурье
Gs (<!>) сигнала gs (m) с преобразованием Фурье FR (Q) сигнала
/л (п)?
Литература
К введению
1. Oppenheim А. V.. Schafer R. W., Digital Signal Processing, Englewood
Cliffs, N. J., Prentice-Hall, Inc., 1975. [Имеется перевод: Оппенгейм А. В.,
Шафер Р. В. Цифровая обработка сигналов. — М.: Связь, 1979. ]
К главе 1
1. Oppenheim А. V., Schafer R. W., Digital Signal Processing, Englewood
Cliffs, N. J., Prentice-Hall, Inc., 1975. [Имеется перевод: Оппенгейм А. В.,
Шафер Р. В. Цифровая обработка сигналов. — М.: Связь, 1979. ]
2. Rabiner L. R., Gold В., Theory and Applications of Digital Signal Processing,
Englewood Cliffs, N. J., Prentice-Hall, Inc., 1975. [Имеется перевод: Раби-
нер Л. Р., Гоулд Б. Теория и применение цифровой обработки сигналов. —
М.: Мир, 1978.]
3. Oppenheim А. V., Willsky A. S., Young I. Т., Signals and Systems, Engle-
Englewood Cliffs, N. J., Prentice-Hall, Inc., 1983.
4. O'Connor В. Т.. Huang Th. S., Stability of General Two-Dimensional Recur-
Recursive Filters, IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP—26,
No. 6, 550—560 A978).
5. Petersen D. P., Middleton D., Sampling and Reconstruction of Wave-Number
Limited Functions in Af-Dimensional Euclidean Spaces, Information and Cont-
Control, 5, 279—323 A962).
6. Mersereau R. M., The Processing of Hexagonally Sampled Two-Dimensional
Signals, Proc. IEEE, 67, No. 6, 930—949 A979). [Имеется перевод: ТИИЭР,
июнь 1979, т. 67, № 6, с. 34—55.]
К главе 2
1. Cooley J. W., Tukey J. W., An Algorithm for the Machine Calculation of
Complex Fourier Series, Mathematics of Computation, 19, No. 90, 297—301
A965).
2. Cooley J. W., Lewis P. A. W., Welch P. D., Historical Notes on the Fast
Fourier Transform, IEEE Trans. Audio Electroacoustics, AU-15, No. 2, 76—
79 A967).
3. Harris D. В., McClellan J. H., et al., Vector Radix Fast Fourier Transform,
Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, 548—551
(May 1977).
4. Rivard G. K-, Direct Fast Fourier Transform of Bivariate Functions, IEEE
Trans. Acoustics, Speech, and Signal Processing, ASSP-25, No. 3, 250—252
A977).
5. EklundhJ.O., A Fast Computer Method for Matrix Transposing, IEEE Trans.
Computers, C-21, 801—803 A972).
6. Mersereau R M., The Processing of Hexagonally Sampled Two-Dimensional
Signals, Proc. IEEE, 61, No. 6, 930—949 A979).
7. Mersereau R. M., Speake Th. C, A Unified Treatment of Cooley—Tukey
Algorithms for the Evaluation of the Multidimensional DFT, IEEE Trans.
Acoustics, Speech, and Signal Processing, ASSP-29, No. 5, 1011—1018 A981).
8. Mersereau R. M., Dudgeon D. E., The Representation of Two-Dimensional
Sequences as One-Dimensional Sequences, IEEE Trans. Acoustics, Speech,
and Signal Processing, ASSP-22, No. 5, 320—325 A974).
9. Good I. J., The Interaction Algorithm and Practical Fourier Analysis, J. Royal
Statistical Society B, 20, 361—372 A958).
Литература 477
10. McClellan J. H., Rader Ch. M., Number Theory in Digital Signal Processing,
Englewood Cliffs, N. J., Prentice-Hall, Inc., 1979. [Имеется перевод: Мак-
клеллан Дж., Райдер Ч. Применение теории чисел в цифровой обработке
сигналов. —М.: Радио и связь, 1983.]
К главе 3
1. Twogood R. E., Ekstrom M. P., Mitra S. K-, Optimal Sectioning Procedure
for the Implementation of 2-D Digital Filters, IEEE Trans. Circuits and Sys-
Systems, CAS-25, No. 5, 260—269 A978).
2. Huang Th. S., Two-Dimensional Windows, IEEE Trans. Audio and Electro-
acoustics, AU-20, No. 1, 88—90 A972).
3. Kaiser J. F.. Nonrecursive Digital Filter Design Using the /„-sinh Window
Function, Proc. IEEE Int. Symp. Circuits and Systems, 20—23 A974).
4. Mersereau R. M., Two-Dimensional Nonrecursive Filter Design, in Two-Di-
Two-Dimensional Digital Signal Processing I, ed. Thomas S. Huang, Topics in Ap-
Applied Physics Series, Vol. 42, New York, Springer-Verlag, 11—40 A981).
5. Speake Th. C, Mersereau R. M., A Note on the Use Of Windows for Two-
Dimensional FIR Filter Desing, IEEE Trans. Acoustics, Speech, and Signal
Processing, ASSP-29, No. 1, 125--127 A981).
6. McClellan J. H., Artifacts in Alpha-Rooting of Images, Proc. IEEE Int.
Conf- Acoustics, Speech, and Signal Processing, 449—452 (Apr. 1980).
7. Pratt W. K., Digital Image Processing, New York, John Wiley & Sons, Inc.,
1978 (See Figure 12.5-1). [Имеется перевод: Прэтт У. Цифровая обработка
изображений: В 2-х книгах. — М.: Мир, 1982.]
8. Parks Th. W., McClellan J. H., Chebyshev Approximation for Nonrecursive
Digital Filters with Linear Phase, IEEE Trans. Circuit Theory, CT-19, No. 2,
189—194 A972).
9. Cheney E. W., Introduction to Approximation Theory, New York, McGraw-
Hill Book Company, 1966.
10. Kamp Y., Thiran J. P., Chebyshev Approximation for TwoDimensional
Nonrecursive Digital Filters, IEEE Trans. Circuits and Systems, CAS-22,
No. 3, 208—218 A975).
11. Harris D. В., Mersereau R. M., A Comparison of Algorithms' for Minimax
Design of Two-Dimensional Linear Phase FIR Digital Filters, IEEE Trans-
Acoustics, Speech, and Signal Processing, ASSP-25, No. 6, 492—500
A977).
12. Rice J. R., The Approximation of Functions, Vol. 2, Nonlinear and Mul-
tivariate Theory, Reading, Mass., Addison-Wesley Publishing Company,
Inc., 1969.
13. Lodge J. H., Fahmy M. M., An Efficient /„ Optimization Technique for
the Design of Two-Dimensional Linear-Phase FIR Digital Filters, IEEE Trans.
Acoustics, Speech, and Signal Processing, ASSP-28, No. 3, 308—313
A980).
14. Treitel S., Shanks J. L., The Design of Multistage Separable Planar Fil-
Filters, IEEE Trans. Geoscience Electronics, GE-9. No. 1, 10—27 A971).
15. McClellan J. H., The Design of Two-Dimensional Digital Filters by Trans-
Transformations, Proc. 7th Annual Princeton Conf. Information Sciences and Systems,
247—251 A973).
16. Mersereau R. M., Mecklenbraukcr W. F. G., Quatieri Л г., Th. F., McClellan
Transformation for 2-D Digital Filtering: 1-Design, IEEE Trans. Circuits
and Systems, CAS-23, No. 7, 405—414 A976).
17. Mecklenbrauker W. F. G., Mersereau R. M., McClellan Transformations for
2-D Digital Filtering: ll-lmplementation, IEEE Trans. Circuits and Systems,
CAS-23, No. 7, 414—422 A976).
18. McClellan J. H., Chan D. K., A 2-D FIR Filter Structure Derived from the
Chebyshev Recursion, IEEE Trans. Circuits and Systems. CAS-24, No. 7,
372—378 A977).
478 Литература
19. Mersereau R. M., The Design of Arbitrary 2-D Zero-Phase FIR Filters Using
Transformations, IEEE Trans. Circuits and Systems, CAS-27, No. 2, 142—
144 A980).
20. Faugeras O. D., Abramatic J. F.,*2-D FIR Filter Design from Independent
'Small' Generating Kernels Using a Mean Square and Tchebyshev Error Cri-
Criterion, Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, 1—4
(Apr. 1979).
21. Mersereau R. M., The Processing of Hexagonally Sampled Two-Dimensiona,
Signals, Proc. IEEE, 67, No. 6, 930—949 A979). [Имеется перевод: ТИИЭР,
июнь 1979, т. 67, № 6, с. 34—55.]
К главе 4
1. Merserean R. M., Dudgeon D. E., Two-Dimensional Digital Filtering, Proc.
IEEE, 63, No. 4,610—623A975). [Имеется перевод: ТИИЭР, апрель 1975,
63, № 4, с. 79—95.]
2. Ekstrom M. P., Woods J. W., Two-Dimensional Spectral Factorization with
Applications in Recursive Digital Filtering, IEEE Trans. Acoustics, Spech,
and Signal Processing, ASSP-24, No. 2, 115—128 A976).
3. Chan D. S. K-, A Novel Framework for the Description of Realization Struc-
Structures for 1-D and 2-D Digital Filters, 1976 IEEE Electronics and Space Con-
Convention Record, pp. 157 (A—H).
4. Manry M. Т., Aggarwal J. К , Picture Processing Using One-Dimensional
Implementations of Discrete Planar Filters, IEEE Trans. Acoustics, Speech,
and Signal Processing, ASSP-22, No. 3, 164—173 A974).
5. Chan D. S. K-, Theory and Implementation of Multidimensional Discrete
Systems for Signal Processing, Ph. D. thesis, Department of Electrical Engi-
Engineering and Computer Science, Massachusetts Institute of Technology A978).
6. O'Connor В. Т., Huang Th. S., Stability of General Two-Dimensional Recur-
Recursive Digital Filters, IEEE Trans. Acoustics, Speech, and Signal Processing,
ASSP-26, No. 6, 550—560 A978),
7. Shanks J. L., Treitel S., Justice J. H., Stability and Synthesis of Two-Di-
Two-Dimensional Recursive Filters, IEEE Trans. Audio and Electroacoustics, AU-20,
No. 2, 115—128A972).
8. Justice J, H., Shanks J. L., Stabibity Criterion for yV-Dimensional Digital
Filters, IEEE Trans. Automatic Control, AC-18, No. 3, 284—286 A973).
9. Huang Th. S., Stability of Two-Dimensional Recursive Filters, IEEE Trans.
Audio and Electroacoustics, AU-20, No. 2, 158—163 A972).
10. Goodman D., An alternate Proof of Huang's Stability Theorem, IEEE Trans.
Acoustics, Speech, and Signal Processing, ASSP-24, No. 5, 426—427 A976).
11. Davis D. L., A Correct Proof of Huang's Theorem on Stability, IEEE Trans.
Acoustics, Speech, and Signal Processing, ASSP-24, No. 5, 425—426 A976).
12. DeCarlo R., Murray J., Saeks R., Multivariate Nyquist Theory, Int. J. Cont-
Control, 25, 657—675 A977).
13. Strintzis M. G., Test of Stability of Multidimensional Filters, IEEE Trans.
Circuits and Systems, CAS-24, No. 8, 432—437 A977).
14. O'Connor В. Т., Techniques for Determining the Stability of Two-Dimensio-
Two-Dimensional Recursive Filters and Their Application to Image Restroration, Ph. D. the-
thesis, School of Electrical Engineering, Purdue University (May 1978),
15. Jury E. I., Stability of Multidimensional Scalar and Matrix Polynomials,
Proc. IEEE, 66, No. 9, 1018—1048 A978). [Имеется перевод: ТИИЭР, сен-
сентябрь 1978, 66, № 9, с. 33—69,]
16. Shaw G. A. An Algorithm for Testing Stability of Two-Dimensional Digi-
Digital Recursive Filters, Proc. IEEE Int. Conf Acoustics, Speech, and Signal
Processing, 769—772 (Apr. 1978).
17. Shaw G. A., Mersereau R. M., Design, Stability, and Performance of Two-
Dimensional Recursive Digital Filters, Technical Report E21-B05-1, Georgia
Institute of Technology School of Electrical Engineering (Dec. 1979).
Литература 479
18. Jury E. I., Theory and Application of the z-Transjorm Method, New York,
John Wiley & Sons, Inc., 1964.
19. Tribolet J. M., A New Phase Unwrapping Algorithm, IEEE Trans. Acous-
Acoustics, Speech, and Signal Processing, ASSP-25, No. 2, 170—177 A977).
20. Goodman D., Some Stability Properties of Two-Dimensional Linear Shift-,
Invariant Digital Filters, IEEE Trans. Circuits and Systems, CAS-24, No. 4,
201—208 A977).
21. Anderson B. O. O., Jury E. I., Stability of Multidimensional Digital Fil-
Filters. IEEE Trans. Circuits and Systems, CAS-21, No. 2, 300—304 A974).
22. Oppenheim A. V., Schafer R. W., Digital Signal Processing, Englewood
Cliffs, N. J., Prentice-Hall, Inc. 1975. [Имеется перевод: Оппенгейм А. В.
Шафер Р. В. Цифровая обработка сигналов. — М. : Связь, 1979.]
23. Bogert В. P.. Healy M. J. R., Tukey J. W., The Quefrency Analysis o,
Time Series for Echoes: Cepstrum, Pseudo-autocovariance, Cross-Cepstrum
and Saphe Cracking, Time Series Analysis (Proc. Symp.), M. Rosenblatt, ed.,
New York, John Wiley & Sons,- Inc., 209—243 A963).
24. Dudgeon D. E., The Existence of Cepstra for Two-Dimensional Rational
Polynomials, IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP-23,
No." 2, 242—243 A975).
25. Dudgeon D. E., Two-Dimensional Recursive Filtering, Sc. D. thesis, Depart-
Department of Electrical Engineering and Computer Science, Massachusetts Institute
of Technology (May 1974).
26. Dudgeon D. E., The Computation of Two-Dimensional Cepstra, IEEE Trans.
Acoustics, Speech, and Signal Processing, ASSP-25, No. 6, 476—484 A977).
К главе 5
1. Oppenheim A. V., Schafer R" W., Digital Signal Processing, Englewood Cliffs,
N. J., Prentice-Hall, Inc., 1975. (Имеется перевод: Оппенгейм А. В.,
Шафер Р. В. Цифровая обработка сигналов. — М.: Связь, 1979.]
2. Costa J. M., Venetsanopoulos A. N., Design of CircularTy Symmetric Two-
Dimensional Recursive Filters, IEEE Trans. Acoustics, Speech, and Signal
Processing, ASSP-22, No. 6, 432—443 A974).
3. Dudgeon D. E., An Iterative Implementation for 2-D Digital Filters, IEEE
Trans. Acoustics, Speech, and Signal Processing, ASSP-28, No. 6, 666—671
A980).
4. Quatieri Th, F., Dudgeon D. E., Implementation of 2-D Digital Filters by
Iterative Methods, IEEE Trans. Acoustics, Speech, and Signal Processing,
ASSP-30, No. 3, 473—487 A982),
5. Manry M. Т., Aggarwal J. K-, Picture Processing Using One-Dimensional
Implementations of Discrete Planar Filters, IEEE Trans. Acoustics, Speech,
and Signal Processing, ASSP-22, No. 3, 164—173 A974).
6. Roesser R. P., A Discrete State-Space Model for Linear Image Processing,
IEEE Trans. Automatic Control, AC-20, No. 1, 1—10 A975).
7. Kung Sun-Yuan, Levy В. С, et al., New Results in 2-D Systems Theory.
Part II: 2-D State—Space Models — Realization and the Notions of Control-
Controllability, Observability, and Minimality, Proc. IEEE, 65, No, 6, 945—961
A977). [Имеется перевод: ТИИЭР, июнь 1977, 65, № 6, с. 157—175.]
8. Willsky A. S., Digital Signal Processing and Control and Estimation Theory:
Points of Tangency, Areas of Intersection, and Parallel Directions, Cambridge,
Mass.: The MIT Press, 1979.
9. Chan D. S. K., A Simple Derivation of Minimal and Near-Minimal Realiza-
Realizations of 2-D Transfer Functions, Proc. IEEE, 66, No. 4, 515—516 A978).
(Имеется перевод: ТИИЭР, апрель 1978, 66, № 4, с. 177—179.)
10. Cadzow J. A., Recursive Digital Synthesis via Gradient Based Algorithms,
IEEE Trans. Acoustics, Spech, and Signal Processing, ASSP-24, No. 5, 349—
355 A9/6).
480 Литература
11. Shanks J. L., Treitel S., Justice J. H., Stability and Synthesis of Two-
Dimensional Recursive Filters, IEEE Trans. Audio and Electroacoustics, AU-20,
No. 2, 115—128A972).
12. Ortega J. M., Rheinboldt W. C, 'iterative Solution of Nonlinear Equations
in Several Variables, New-York, Academic Press, Inc., 1970. [Имеется перевод:
Ортега Дж., Рейнболдт В. Итерационные методы решения нелинейных си-
систем уравнений со многими неизвестными. — М.: Мир, 1975.]
13. Shaw G- A., Mersereau R. M., Design, Stabibity, and Performance of Two-
Dimensional Recursive Digital Filters, Technical Report E21-B05-1. Georgia
Institute of Technology School of Electrical Engineering (Dec. 1979).
14. Fletcher R., Powell M. J. D, A Rapidly Convergent Descent Method for
Minimization, Computer J., 6, No. 2 July, 163—168 A ОГ.З).
15. Bertran M. S., Approximation of Digital Filters in One ;md Two Dimensi-
Dimensions, IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP-23, No. 5,
438—443 A975).
16. Nowrowzian В., Ahmadi M., King R. A., On the Space-Domain Design
Techniques of iV-Dimensional Recursive Digital Filters, Proc. IEEE Int.
Con]. Acoustics, Speech, and Signal Processing, 531—534 (Apr. 1977).
17. Brown K. M., Dennis, Jr., J. E., Derivative-Free Analogues of the Leven-
berg—Marquardt and Gauss Algorithm for Non-Linear Least-Squares Appro-
Approximation, Numerische Mathematik, 18, 289—297 A972).
18. Ekstrom M. P., Twogood R. F., Woods J. W., Two-Dimensional Recursive
Filter Design — A Spectral Factorization Approach, IEEE Trans. Acoustics,
Speech, and Signal Processing, ASSP-28, No. 1, 16—26 A980).
19. Steiglitz K., McBride L. E., A Technique for the Identification of Linear
Systems, IEEE Trans. Automatic Control, AC-10, 461—464 A965).
20. Cheney E. W., Introduction to Approximation Theory, New York, McGraw-
Hill Book Company, 1966.
21. Barrodale I., Powell M. J. D., Roberts F. D. K., The Differential Correc-
Correction Algorithm for Rational loo Approximation, SIAM J. Numerical Analy-
Analysis, 9, 493—504 A972).
22. Dudgeon D. E., Two-Dimensional Recursive Filtering, Sc. D. thesis, Depart-
Department of Electrical Engineering and Computer Science, Massachusetts Institute
of Technology (May 1974).
23. Dudgeon D. E., Recursive Filter Design Using Differential Correction, IEEE
Trans. Acoustics, Speech, and Signal Processing, ASSP-22, No. 6, 443—448
A974).
24. Dudgeon D. E., Two-Dimensional Recursive Filter Design Using Differential
Correction, IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP-23,
No. 3, 264—267 A975).
25. Garvin W. W., Introduction to Linear Programming, New York, McGraw-
Hill Book Company, 1960.
26. Pendergrass N. A., Mitra S. K., Jury E. 1., Spectral Transformations for
Two-Dimensional Digital Filters, IEEE Trans. Circuits and Systems, CAS-23,
No. 1, 26—35 A976).
27. Chakrabarti S., Mitra S. K.. Design of Two-Dimensional Digital Filters via
Spectral Transformations, Proc IEEE, 65, No. 6, 905-914 A977). [Имеется
перевод: ТИИЭР, июнь 1977, 65, № 6, с 107—120.]
28. Maria G. A., Fahmy M. M., An lp Design Technique for Two-Dimensional
Digital Recursive Filters, IEEE Trans. Acoustics, Spech, and Signal Proces-
Processing, ASSP-22, No. 1, 15-21 A974).
29. Abramatic J. F.. Germain F., Rosencher E., Design of 2-D Recursive Fil-
Filters with Separable Denominator Transfer Functions, Proc. IEEE Int. Conf.
Acoustics, Speech, and Signal Processing, 24—27 (Apr. 1979).
30. Markel J. D., Gray A. H., Linear Prediction of Speech, Berlin, Springer-
Verlag, 1976.
Литература 481
31. Marzetta Th. L., A Linear Prediction Approach to Two-Dimensional Spectral
Factorization and Spectral Estimation, Ph. D. thesis. Department of Electri-
Electrical Engineering and Computer Science, Massachusetts Institute of Technology
(Feb. 1978).
32. Marzetta Th. L., Two-Dimensional Linear Prediction: Autocorrelation Arrays,
Minimum-Phase Prediction Error Filters, and Reflection Coefficient Arrays,
IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP-28, No. 6, 725—
733 A980).
33. Harris. D. В., Design and Implementation of Rational 2-D Digital Filters,
Ph. D. thesis, Department of Electrical Engineering and Computer Science,
Massachusetts Institute of Technology (Nov. 1979).
34. Marzetta Th. L., The Design of 2-D Recursive Filters in the 2-D Reflection
Coefficient Domain, Proc. IEEE Int. Conf. Acoustics, Speech, and Signal
Processing, 32—35 (Apr. 1979).
35. Luenberger D. G., Optimization by Vector Space Methods, New York, John
Wiley & Sons, Inc., 1969.
36. Ekstrom M. P., Woods J. W., Two-Dimensional Spectral Factorization with
Applications in Recursive Digital Filtering, IEEE Trans. Acoustics, Speech,
and Signal Processing, ASSP-24, No: 2, 115—128A976).
К главе 6
1. Applications of Digital Signal Processing, A. V. Oppenheim, ed. Englewood
Cliffs, N. J., Prentice-Hall, Inc., 1978. [Имеется перевод: Применение циф-
цифровой обработки сигналов./Под ред. Э. Оппенгейма.—М.: Мир, 1980.]
2. Kelly E. J., The Representation of Seismic Waves in Frequency — Wavenum-
ber Space, M. I. T. Lincoln Laboratory Technical Note 1964—15 (Mar. 6,
1964).
3. Halpeny O. S., Childers D. G., Composite Wavefront Decomposition via
Multidimensional Digital Filtering of Array Data, IEEE Trans. Circuits
and Systems,'CAS-22, No. 5, 552—63 (June 1975).
4. Kelly E. J., Response of Seismic Arrays to Wide-Band Signals, M. I. T.
Lincoln Laboratory Technical Note 1967—30 (June 29, 1967).
5. Harris F. J., On the Use of Windows for Harmonic Analysis with the Discrete
Fourier Transform, Proc. IEEE, 66, No. 1, 51—83 (Jan. 1978). [Имеется
перевод: ТИИЭР, январь 1978, 66, № 1, с. 60—96.]
6. Huang Th. S., Two-Dimensional Windows, IEEE Trans. Audio and Electro-
acoustics, AU-20, No. 1, 80—90 (Mar. 1972).
7. Speake Th. C, Mersereau R. M., A Note on the Use of Windows for Two-
Dimensional FIR Filter Design, IEEE Trans. Acoustics, Speech, and Signal
Processing, ASSP-29, No. 1, 125—127 (Feb. 1981).
8. Portnoff M. R., Time-Frequency Representation of Digital Signals and Sys-
Systems, IEEE Traus. Acoustics, Speech, and Signal Processing, ASSP-29, No 1,
55—69 A980).
9. Dudgeon D. E., Fundamentals of Digital Array Processing, Proc. IEEE, 65,
No. 6, 898—904 (June 1977). [Имеется перевод: ТИИЭР, июнь 1977, 65,
№ 6, с. 99—107.]
10. Schafer R. W., Rabiner L. R., A Digital Signal Processing Approach to
Interpolation, Proc. IEEE, 61, No. 6, 692—720 (June 1973). [Имеется
перевод: ТИИЭР, 1973, 61, № 6, с. 5—18.]
11. Oetken G., Parks Th. W., Schussler H. W., New Results in the Design of
Digital Interpolators, IEEE Trans. Acoustics, Speech, and Signal Processing,
ASSP-23, No. 3, 301—309 (June 1975).
12. Pridham R. G., Mucci R. A., A Novel Approach to Digital Beamforming,
J. Acoustical Society of America, 63 C), 425—434 (Feb. 1978).
13. Pridham R. G., Mucci R. A., Digital Interpolation Beamforming for Low-
Pass and Bandpass Signals, Proc. IEEE, 67, No. 6, 904—919 (June 1979).
[Имеется перевод: ТИИЭР, июнь 1979, 67, № 6, с. 29—47.]
482 Литература
14. Сох Н., Resolving Power and Sensitivity to Mismatch of Optimum Array.
Processors, J. Acoustical Society of America, 54, No. 3, 771—785 (Mar.
1973).
15. Monzingo R. A., Miller Th. W., Introduction to Adaptive Arrays, New York,
John Wiley & Sons, Inc., 1980.
16. Bartlett M. S., An Introduction to Stochastic Processes with Special Reference
to Methods and Applications, New York, Cambridge Univerisity Press, 1953.
Имеется перевод: Бартлет М. Введение в теорию случайных процессов. —
М.: Мир, 1958.]
17. Blackman R. В., Tukey J. W., The Measurement of Power Spectra, New York,
Dover Publications, Inc., 1958.
18. Jenkins G. M., Watts D. G., Spectral Analysis and Its Applications, San Fran-
Francisco, Holden-Day, Inc., 1968. [Имеется перевод: Дже^киис Г., Ватте Д.
Спектральный анализ и его приложения. — М.: Мир, 197?.]
19. Welch P. D., The Use of Fast Fourier Transform for the Estimation of Power
Spectra: A Method Based on Time Averaging over Short, Modified Periodograms,
IEEE Trans. Audio and Electroacoustics, AU-15, No. 2, 70—73 (June 1967).
20. Oppenheim A. V., Schafer R. W., Digital Signal Processing, Englewood Cliffs,
N. Y., Prentice-Hall, Inc., 1975. [Имеется перевод: Оппенгейм А. В.,
Шафер Р. В. Цифровая обработка сигналов. — М.: Связь, 1979. ]
21. Capon J., High-Resolution Frequency — Wavenumber Spectrum Analysis,
Proc. IEEE, 57, No. 8, 1408—1418" (Aug. 1969).
22. Lacoss R. Т., Data Adaptive Spectral Analysis Methods, Geophysics, 36, No. 4,
661-675 (Aug. 1971).
23. Justice J. H., A Levinson-Type Algorithm for Two-Dimensional Wiener
Filtering Using Bivariate Szego Polynomials, Proc IEEE, 65, No. 6, 882—
886 (June 1977).
24. Dickinson B. W., Two-Dimensional Markov Spectrum Estimates Need Not
Exist, IEEE Trans. Information Theory, IT-26, No. 1, 120—121 (Jan. 1980).
25. Rudin W., The Extension Problem for Positive Definite Functions, Illinois
J. Mathematics, 7, 532—539 A963).
26. Newman W. I., Notes on Multidimensional Power Spectral Analysis, Astronomy
and Astrophysics (Germany), 70, No. 3, pt. 1, 409—410 (Nov. 978).
27. Genin Y., Kamp Y., Counterexample in the Least-Squares Inverse Stabilisa-
Stabilisation of 2D Recursive Filters, Electronics Letters, 11, No. 15, 330 (July 24, 1975).
28. Jackson L. В., Chien H. C, Frequency and Bearing Estimation by Two-
Dimensional Linear Prediction, Proc. Int. Conf. Acoustics, Speech, and Signal
Processing, Washington, D. C, 665—668 (Apr. 1979).
29. Pendrel J. V., The Maximum Entropy Principle in Two-Dimensional Spectral
Analysis, Ph. D. thesis, York University, Ontario, Canada (Nov. 1979).
30. Makhoul J., Linear Prediction: A Tutorial Review, Proc. IEEE, 63, No. 4,
561—580 A75).
31. Wernecke S. J., D'Addario L. R., Maximum Entropy Image Reconstruction,
IEEE Trans. Computers, C-26, No. 4, 351—364 (Apr. 1977).
32. Newman W. I., A New Method of Multidimensional Power Spectral Analy-
Analysis, Astronomy and Astrophysics (Germany), 54, No. 2, pt. 2, 369—380 (Jan.
1977).
33. Woods J. W., Two-Dimensional Markov Spectral Estimation, IEEE Trans.
Information Theory, IT-22, No. 5, 552—559 (Sept. 1976).
34. Lim J. S., Malik N. A., A New Algorithm for Two-Dimensional Maximum
Entropy Power Spectrum Estimation, IEEE Trans. Acoustics, Speech, and
Signal Processing, ASSP-29, No. 3, 401—413 (June 1981).
35. McClellan J. H., Multi-dimensional Spectral Estimation, Proc. IEEE, 70,
No. 9, 1029—1039 (Sept. 1982).
36. Lang S. W., McClellan J. H., Spectral Estimation for Sensor Arrays, Proc.
1st ASSP Workshop on Spectral Estimation, 1, 3.2.1—3.2.7 (Aug.
1981).
Литература 483
37. Luenberger D. G., Introduction to Linear and Nonlinear Programming, Rea-
Reading, Mass.: Addison-Wesley Publishing Company, 1973.
38. Burg J. P., Maximum Entropy Spectral Analysis, Ph. D. thesis, Stanford
University (May 1975).
К главе 7
1. Schafer R. W., Mersereau R. M., Richards M. A., Constrained Iterative Re-
Restoration Algorithms, Proc. IEEE, 69, 432—450 (Apr. 198!). [Имеется перевод: .
ТИИЭР, апрель 1981, 69, № 4, с. 34—55.]
2. Van Cittert P. H., Zum Einfluss der Splatbreite auf die Intensitatswerteilung
in Spektrallinien II, 1. fur Physik, 69, 298—308 A931).
3. Marucci R., Signal Recovery from the Effects of a Non-invertible Distor-
Distortion Operator, M. S. thesis, School of Electrical Engineering, Georgia Insti-
Institute of Technology A981).
4. Trussel H. J., Maximum Power Signal Restoration, IEEE Trans. Acoustics,
Speech, and Signal Processing, ASSP-29. No. 5, 1059—1061 A981).
5. Gerchberg R. W., Super-resolution through Error Energy Reduction, Optica
Ada, 21, 709—720 A974).
6. Papoulis A., A New Algorithm in Spectral Analysis and Bandlimited Extrapo-
Extrapolation, IEEE Trans. Circuits and Systems, CAS-22, No. 9, 735—742 (Sept.
1975).
7. Huddleston G. K., Aperture Synthesis of Monopulse Antenna for Radome
Analysis Using Limited Measured Pattern Data, Proc. IEEE Southeastcon
'81 Conf., 350—354.
8. Gerchberg R. W., Saxton W. O., A Practical Algorithm for the Determi-
Determination of Phase from Image and Diffraction Plane Pictures, Optic, 35, 237—
—246 A972).
9. Fienup J. R., Reconstruction of an Object from the Modulus of Its Fourier
Transform, Optics Letters, 3, 27 -29 A978).
10. Fienup J. R., Iterative Method A plied to Image Reconstruction and to Com-
Computer-Generated Holograms, in P oc. Soc. Photo-optical Instrumentation Engi-
Engineers, Session 207—202, Applications on Digital Image Processing III A979).
11. Hayes M. H., The Reconstruction of a Multidimensional Sequence from the
Phase or Magnitude of Its Fourier Transform, IEEE Trans, Acoustics, Speech,
and Signal Processing, ASSP-30, No. 2, 140—154 (Apr. 1982).
12. Hayes M. H. Ill, Signal Reconstruction from Phase or Magnitude, Sc. D.
thesis, Department of Electrical Engineering and Computer Science, Mas-
Massachusetts Institute of Technology (June 1981).
13. Garibotto G., 2-D Recursive Phase Filters for the Solution of Two-Dimensional
Wave Equations, IEEE Trans. Acoustics, Speech, and Signal Processing, ASSP-27,
No. 4, 367—372 (Aug. 1979).
14. Harris D. В., Design and Implementation of Rational 2-D Digital Filters,
Ph. D. thesis, Department of Electrical Engineering and Computer Science,
Massachusetts Institute of Technology (Nov. 1979).
15. Claerbout J.„ Fundamentals of Geophysical Data Processing, New York, McGraw-
Hill Book Company, 1976.
16. Radon J., On the Determination of Functions from Their Integrals along
Certain Manifolds, Ber Saechs. Akad. Wiss. Leipzig, Math. Phys. KI-, 69, 262—
277 A917) (in German).
17. Dines K- A., Lytle R. J., Computerized Geophysical Tomography, Proc.
IEEE, 67, No. 7, 1065—1073 (July 1979).
18. Mersereau R. M., Oppenheim A. V., Digital Reconstruction of Multidimen-
Multidimensional Signals from Their Projections, Proc. IEEE, 62, No. 10, 1319—1338
(Oct. 1974). [Имеется перевод: ТИИЭР, октябрь 1974, 62, № 10, с. 29—51.]
19. Mersereau R. M., Direct Fourier Transform Techniques in 3-D Image Reconst-
Reconstruction, Computers in Biology and Medicine, 6, 247—258 A976).
484 Литература
20. Shepp L. A., Logan B. F., The Fourier Reconstruction of a Head Section,
IEEE Trans. Nuclear Science, 21, 21—43 A974).
21. Horn В. К. P., Density Reconslruction Using Arbitrary Ray-Sampling,
Schemes, Proc. IEEE, 66, No. 5, 551—562 (May 1978). [Имеется перевод:
ТИИЭР, май 1978, 66, № 5, с. 27—40.]
22. Herman G. Т., Lent A., Iterative Reconstruction Algorithms, Computers in
Biology and Medicine, 6, 273—294 A976).
23. Herman G. Т., Lakshminarayanan A. V., Naparstek A., Convolution Re-
Reconstruction Techniques for Divergent Beams, Computers in Biology and Me-
Medicine, 6, 259—271 A976).
24. Mersereau R. M., Dudgeon D. E., The Representation of Two-Dimensional
Sequences as One-Dimensional Sequences, IEEE Trans. Acoustics, Speech,
and Signal Processing ASSP-22, No. 5, 320—325 (Oct. 1974).
25. Mersereau R. M., Dimensionality-Changing Transformations with Non-rec-
Non-rectangular Sampling Strategies, Transformations in Optics, W. T. Rhodes et
al., eds., Seattle: Society of Photo-optical Instrumentation Engieers, 1983.
26. Bracewell R. N., The Fourier Transform and Its Applications, New York
McGraw-Hill Book Company, 1978.
Предметный указатель
Алгоритм восстановления в пространстве
Фурье 451
— итерационного восстановления 459
— Кэмпа и Тирана 166
— обратной проекции 456
— Паркса — Мак-Клеллана 165
— подъема 167
— простых множителей Гуда 132
— Ремеза 165
— синтеза по амплитуде и квадрату
амплитуды 313
— транспортирования Зклунда 109
— Флетчера—Пауэлла 306
— Херси и Мерсеро 166
— Шэнкса 306
Анализ простраиствеиио-времеииых сиг-
сигналов 355
«Бабочка» по основанию 2X2 103
Биокружиость единичная 241
БИХ-фильтр (фильтр с бесконечной им-
импульсной характеристикой) 8, 142,
143, 160, 201. 249, 270, 279, 280, 286,
300, 306, 311, 316 — 320, 341, 344
— двумерный 266. 273, 274, 308, 311
— с нулевой фазой 318
Вектор замедленности 356
Векторы конгруэнтные 118
Ветви 229
Восстановление изображения по 64 проек-
проекциям 457
— исходного изображения 454
— сигнала по значениям фазы или ампли-
амплитуды 435
— сигналов по их проекциям 444
— — с наложением ограничений 427
— с использованием линейной интерпо-
интерполяции 455
Граф сигиальиый 286
— — элементы 286
Дельта-фуикция 300
Диаграмма корней 226
— иаправлеииости 360, 376
— — пример 364
Дискретизации интервалы 54
— матрица 59
— периодическая 58
— произвольный растр 58
— прямоугольная 54
— сравнение 64
Задачи обратные 426
Импульс (отсчет) единичный 17
Интервал периодичности вертикальный 21
— — горизонтальный 21
Информация априорная 446, 459
Кепстр двумерный комплексный 243
— — — вычисление 252
— комплексный 244, 247
— — существование 245
КИХ-фильтр (фильтр с конечной импульс-
импульсной характеристикой) 8, 142, 143,
145, 146, 160, 167. 181, 192, 201, 310
— гексагональный 187, 189
— двумерный 142. 175. 311
— импульсный отклик 144
— каскадный 167
— нижних частот 188
— — — отклик 190
— оптимальный 159
— параллельный 169
— проектирование 166
— прямая свертка 143
— реализация с использованием ДПФ 187
— — — — прямой свертки 187
— синтез 159, 164, 167, 173
— с нулевой фазой 186
— — — — синтез 164
— A1 X 11)-точечиый 152
— \BN + 1) X BN + 1)]-точечиый 184
— частотный отклик 181
КИХ-фильтрация 319
Коэффициент отражения 328
Предметный указатель 485
Линии постоянного значения 177
ЛИС-система (линейная инвариантная к
сдвигу система) 7, 27, 36, 38, 201,
226, 270
— двумерная 49, 469
частотный отклик 41
— дискретная 45
— каскадная 35
— Af-мериая 29
— отклик 45. 49
ЛИС-фильтр 143. 378, 464
Максимум дифракционный 366, 367
Маска входная 202, 203
— выходная 202, 203, 205—207
— с отверстием 205
Маскирование пространственное 25
Матрица диагональная 139
— дискретизации 116
гексагональная 126, 127
— периодичности 135
— простая 117
— составная 117
— уиимодульиая 117
Метод восстановления при использовании
веерных пучков 460
— исследованный Уэлчем 392
— Мак-Клеллана 159
— множителей Лагранжа 410
— Ньютона 306
— окон 149. 181
— перекрытия с накоплением 148
— синтеза в частотной области 311
— спуска 305
— стабилизации Шоу 342
— трансформаций 174
— Флетчера — Пауэлла 310
Методы итеративные обращения свертки
428
— итерационные экстраполяции сигнала
433
— минимизации общие 312
— синтеза БИХ-фильтров 315
— синтеза фильтров 181
— стабилизации 340
кепстральиые 340
Миграция 440
— сейсмических воли 439
— трактовка задачи 440
Множество критическое 16&
— М-мериое 134
Нелинейность безынерционная 26
Норма Чебышева 160
— Lp 160, 311
Область затухания 442
— опорная 38
в виде квадранта 39
сектора 39
— распространения 442
— Рейнхардта 215
— сходимости (аналитичности) 215
Обработка сигналов 354
Окно Кайзера 152, 193
одномерное 153
параметр а 153
— стандартное одномерное 367
Особенности второго рода 227
Отклик импульсный 170, 300
— — определение 70
— — частотио-ограиичеииый 70
— частотный 153, 159
двумерный 178
— — М-мерный 175
— — системы 71
Отклнк-прототип частотный 178
Оценка спектра классическая 389
многомерного 388
по максимуму энтропии 408
Ошибка максимальная 166
— Чебышева 164
Перекрытие с суммированием 147
Период вертикальный 38
— горизонтальный 83
Периодограмма 390
— сглаженная 392
Поверхность двумерная единичная (еди-
(единичная биокружиость) 215
Полином несводимый 227
Полоса иепропускаиия 336
— пропускания 336
— частот 64
Порядок фильтра 146
Последовательность конечной протяжен-
протяженности 20
— М-мерная 464
— JV-мериая 464
— периодическая 21
— прямоугольно-периодичная 23, 82, 135
— разделимая 19
— с вещественными значениями 53
конечной опорной областью 215
опорной областью в виде квадрата
217
— иа всей плоскости 220
полуплоскости 220
— секторе 219
— эквипотенциальная 18
Преобразование Фурье 88
быстрое (БПФ) 7, 12. 82, 100, 193
алгоритм 101, 108, 113, 122,
125, 381
¦ — эффективность 108
двумерное 119, 253
— двухступенчатое 139
многомерное 112
одномерное 101, 106, 109. 125,
381
опорная область 121
по векторному основанию BX2)
106
— — — трехмерное 112
• — М-мериое 112
• — D X 4)-точечиое 123
(N X #)-точечиое 106, 138
(Ri X Я,)-точечиое 107
дискретное (ДПФ) 7. 12, 82. 88,
90—92, 94, 96, 99, 122, 158, 159. 167.
193, 253, 256, 341, 452, 453, 467
¦ алгоритм 113
— вычислительная сложность 107
— гексагональная дискретизация
126
гексагональное 128
двумерное 89, 99, 102, 119
— длина 101
• — для общего случая 113
дуальность 93
— круговые сдвиги 91
— кусочное 130
At-мериое 99, 100, 107, 108, ПО,
112. 129
(М — 1 (-мерное ПО
модуляция 93
одномерное 100, 102. ПО, 129,
132, 133, 135, 137
— отражение 93
— по матрице Р 122
— прямое вычисление 99. 100
— — — прямоугольное 127, 128
486 Предметный указатель
разбиение иа строки и столбцы
100
— размер 98
— свойство симметрии 92
— теорема Парсеваля 93
— B X 2)-точечиое 137
D X 4)-точечное 98, 105
М-точечное 381
{N X ЛО-точечиое 108, 127, 451
^-точечное 254
(JV, X ^(-точечное 97, 253
— четырехмерное 135
— — двумерное 49, 131
— вещественная и мнимая части. 53
— дифференцирование преобразо-
преобразования Фурье 52
— зеркальное отражение 52
— — — комплексное сопряжение 53
— — — линейность 51
— модуляция 52
— пространственный сдвиг 52
— — — теорема Парсеваля 53
— — траиспоиировання 52
A024 X 1024)-точечиое 101
— — линейность 72
— — многомерное 7, 49
обратное 253, 309, 341
— — свойство сдвига 73
— — теорема Парсеваля 73
— — — о свертке 73
г-Преобразоваиие 7, 215, 235, 249, 466
— двумерное 221
— диффереицируемость 222
— зеркальное отражение 222
— комплексная сопряженность 222
— линейное отображение 223
— линейность 222
— многомерное 214
— модуляция 222
— обратное 227, 243
— перемножение 223
— свертка 223
— сдвиг 222
— сигналы разделимые 221
— теорема о начальном значении 223
— — Парсеваля 223
Проекция дискретных сигналов 464
Разбиение по строкам и столбцам М -мер-
-мерное 1 1 0
Реализация каскадная 27
— параллельная 270
Рекурсия чебышевская 182
Ряд Фурье дискретный двумерный 83
коэффициенты 83, 135, 136
Свертки графическое представление 33
— двух последовательностей 32
— дискретная 147
— линейная 28
— квадратного импульса 31
— М-мериая 29
— секционированная 146
— циклическая 93
Сигнал дискретный 15
двумерный (последовательность) 15
— М-мериый 131
— ограничение 282
— одномерный 131
— опорная область 20
— смешанный 15
— эрмитово-аитисимметричиая часть 92
Сигналов взаимосвязь 69
— элементарные 356
Синтез каскадных фильтров 323
— методом наименьших квадратов 162
— фильтров с разделимым знаменателем
324
Система, инвариантная к сдвигу 27
— линейная 26
— с векторным входом и выходом 4 0
Системы разделимые 36
— рекурсивно вычислимые 202
— устойчивые 37
Соединение параллельное 34
— последовательное 34
Спектр чисто полюсной 400
Ступенька единичная 18
Таблица Mapdena — Юри 237
Теорема Андерсона и Юри 242
— Де Карло — Стричтциса 234, 235,
237, 239, 240, 243
— Джастиса и Шзнкса 242
— об устойчивости 232
— О'Коннора 240
— о проекционном cpe.ie 147
свертке 50
— Парсеваля 162
— Хуанга 234
— Шэнкса 233 — 235
Точка экстремальная 166
— — множество 166
Транспонирование А 110
Трансформация Мак-К.'еллана 186
— Af-мериая 183
— первого порядка 177, 184
— порядок 184
Узлы 229
Уравнение разностное 200
Фильтр М -мерный 183
— минимальный 165
— многоступенчатый разделимый 170
— несимметричный полуплоскостиой
(НПП-фильтр) 207
— нерекурсивный 142
— рекурсивный 142, 203
— симметричный полуплоскостиой 331
— с малым генерирующим ядром (МГЯ-
фильтр) 186
— — нулевой фазой 143, 144
— — равновеликими пульсациями 165
— — частотным откликом 176
Фильтра коэффициент ослабления 156
Фильтрация в пространстве волновое чис-
число—частота 358
Форма 11 двумерная 268
— одномерная 268
— прямая 268
Формирование луча 359, 360
— — в дискретном времени 373
— — — частотном пространстве 370, 381
— — во временной области 373
— — интерполяцией 378
— — методом фильтрации и суммирова-
суммирования 368
Формирователь по методу взвешенного
сложения с задержкой 360
Функции весовой влияние 367
Функция Бесселя модифицированная 151
— — первого порядка 153
— отображения (соотношение упорядочи-
упорядочивания) 211
— передаточная (системная) 214, 224
— пространственно-временная 355
— трансформирующая 175, 178
М-мерная 183
— Эйлера 133
Фурье-спектр функции 151
Частоты ограничивающие 163
Оглавление
Предисловие редактора перевода 5
Предисловие 7
Введение 10
Глава 1. Многомерные сигналы и системы 15
1.1. Двумерные дискретные сигналы 15
1.2. Многомерные системы 23
1.3. Характеристики сигналов и систем в частотной области 41
1.4. Дискретизация непрерывных двумерных сигналов 54
*1.5. Обработка непрерывных сигналов дискретными систе-
системами 69
Упражнения 73
Глава 2. Дискретный фурье-анализ многомерных сигналов 82
2.1. Представление прямоугольно-периодических последователь-
последовательностей в виде дискретных рядов Фурье 82
2.2. Многомерное дискретное преобразование Фурье 86
2.3. Вычисление дискретного преобразования Фурье 99
*2.4. Дискретные преобразования Фурье для общего случая пе-
периодической дискретизации сигнала 113
*2.5. Взаимосвязь между М-мерными и одномерными ДПФ . . 129
Упражнения 135
Глава 3. Синтез и реализация двумерных КИХ-фильтров 142
3.1. КИХ-фильтры 142
3.2. Реализация КИХ-фильтров 143
3.3. Синтез КИХ-фильтров с использованием окон 149
*3.4. Синтез оптимальных КИХ-фильтров 159
3.5. Синтез КИХ-фильтров для специальных способов реали-
реализации 167
*3.6. КИХ-фильтры для случая гексагональной дискретизации
сигналов 187
Упражнения 192
Глава 4. Многомерные рекурсивные системы 200
4.1. Разностные уравнения конечного порядка 200
4.2. Многомерное г-преобразование 214
4.3. Устойчивость рекурсивных систем 232
4.4. Двумерный комплексный кепстр 243
Упражнения 256
Глава 5. Синтез и реализация двумерных БИХ-фильтров 266
5.1. Классические схемы двумерных БИХ-фильтров 266
5.2. Итерационные методы реализации двумерных БИХ-фильт-
БИХ-фильтров 274
488 Оглавление
5.3. Направленные сигнальные графы и реализации с помощью
переменных состояния 286
5.4. Методы синтеза в пространственной области 300
5.5. Методы синтеза в час/потной области 311
5.6. Методы синтеза некоторых специальных схем .... 322
5.7. Методы стабилизации 340
Упражнения 344
Глава 6. Обработка сигналов, передаваемых с помощью распространя-
распространяющихся в пространстве волн 354
6.1. Анализ пространственно-временных сигналов 355
6.2. Формирование луча 359
6.3. Формирование луча в дискретном времени 373
6.4. Дальнейшее обсуждение приложений обработки сигналов,
полученных с помощью решетки приемников 383
6.5. Оценка многомерных спектров 388
Упражнения 418
Глава 7. Обратные задачи 426
7.1. Итерационное восстановление сигналов с наложением ог-
ограничений 427
7.2. Миграция сейсмических волн 439
7.3. Восстановление сигналов по их проекциям 444
7.4. Проекция дискретных сигналов 464
Упражнения 469
Литература 476
Предметный указатель 485
Монография
Дэн Э. Даджион, Расселл М. Мерсеро
ЦИФРОВАЯ ОБРАБОТКА МНОГОМЕРНЫХ СИГНАЛОВ
Заведующий редакцией проф., д-р. техи иаук, Ю. И. Топчеев
Зам. зав. редакцией Э. Н. Бадиков
Старший научный редактор В. С. Соболев
Младший научный редактор В. Н. Соколова
Художник Н. И. Василевская
Художественный редактор Н. М. Иванов
Технический редактор Е. Н. Прохорова
Корректор Т. П. Пашковская
И Б \v 02 43
Сдано в набор 19.03.87. Подписано к печати 29.10.87. Форм.it НОхКЧ- ..
Бумага книжно-журиальная. Печать офсетная. Гарнитур,! литературная.
Объем 15.25 бум. л. Усл. печ. л. 30.50. Усл. кр.-отт. 30.50.
Уч.-изд. л. 29.46. Изд. № 6/5162. Тираж 12500 экз. Зак. 548. Цеиа 2 р. 10 к.
ИЗДАТЕЛЬСТВО «МИР» 129820, ГСП, Москва. II-1 10, 1-й Рижский пер., 2
Набрано в Ленинградской типографии № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союэполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
193144. г. Ленинград, ул. Моисееико, 10. Отпечатано по офсету в Ленинградской
типографии № 4 ордена Трудового Красного Зиамеии Ленинградского объединения
«Техническая книга» им. Евгении Соколовой Союзполиграфпрома при Государственном
комитете СССР по делам издательств, полиграфии и книжной торговли.
191126. Ленинград. Социалистическая ул.. 14.